/


































































































































































Текст
t А
К- -ЛЪбЯ'
ПРЕДИСЛОВИЕ
Пятое издание учебного пособия
«Курсовое проектирование по теории ме-
ханизмов и машин» по объему и содержа-
нию незначительно отличается от чет-
вертого.
Наиболее существенные изменения,
внесенные в пятое издание, состоят в
следующем:
1) написана заново гл. I «Структур-
ный анализ плоских механизмов»;
2) с целью улучшения методики из-
ложения материал некоторых глав час-
тично переработан;
3) добавлен § 5 в гл. X «Определе-
ние момента инерции маховика методом
средних мощностей».
Кроме того, при подготовке этого из-
дания к печати весь материал был тща-
тельно пересмотрен и замеченные в пре-
дыдущих изданиях опечатки и неточности
устранены.
Авторы выражают глубокую призна-
тельность сотрудникам кафедры при-
кладной механики Одесского политехни-
ческого института (зав. кафедрой докт.
техн, наук К- И. Заблонский), сделав-
шим в своей обстоятельной рецензии
ценные предложения и замечания, кото-
рые по возможности были учтены авто-
рами при окончательной подготовке ру-
кописи.
3
Работа по составлению настоящего
учебного пособия выполнена под общим
руководством и при научном редактиро-
вании А. С. Кореняко и распределена
между авторами следующим образом:
А. С. Кореняко написаны: введение, гла-
вы III, VIII, IX, § 4 гл. V; Л. И. Кре-
менштейном—главы I, II, §4—9, 13,
16, 17 гл. VII, § 4,5 гл. X; С. Д. Петров-
ским— гл. IV, § 1—3 гл. V, § 1—3, 10—
12, 14, 15 гл. VII, § 1—3 гл. X, приложе-
ние V; Г. М. Овсиенко — гл. XI, § 1—18
гл. XII, приложение I (задания 1—28),
приложения II, III; В. Е. Бахановым —
гл. VI, § 18 гл. VII; П. М. Емцем — § 19,
20 гл. VII, § 19—26 гл. XII, приложение
I (задание 29), приложение IV.
Все пожелания и замечания, направ-
ленные на улучшение книги, просим на-
правлять по адресу: Киев-54, Гоголев-
скал, 7, издательство «Вища школа».
ВВЕДЕНИЕ
В свете задач, стоящих перед советским машиностроением, особое
значение приобретает качество подготовки высококвалифицированных
инженеров. Советский инженер-конструктор должен владеть современ-
ными методами расчета и конструирования новых быстроходных авто-
матизированных и высокопроизводительных машин. Рационально спро-
ектированная машина должна удовлетворять социальным требовани-
ям — безопасности обслуживания и создания наилучших условий для
обслуживающего персонала, а также эксплуатационным, экономиче-
ским, технологическим и производственным требованиям. Эти требова-
ния представляют собой сложный комплекс задач, которые должны
быть решены в процессе проектирования новой машины.
Решение этих задач на начальной стадии проектирования состоит
в выполнении анализа и синтеза проектируемой машины, а также в раз-
работке ее кинематической схемы, обеспечивающей с достаточным при-
ближением воспроизведение требуемого закона движения.
Для выполнения этих задач студент — будущий инженер — должен
изучить основные положения теории машин и общие методы кинемати-
ческого и динамического анализа и синтеза механизмов, а также приоб-
рести навыки в применении этих методов к исследованию и проектиро-
ванию кинематических схем механизмов и машин различных типов.
Поэтому наряду с изучением курса теории механизмов и машин
в учебных планах предусматривается обязательное выполнение сту-
дентами курсового проекта по теории механизмов и машин. Проект со-
держит задачи по исследованию и проектированию машин, состоящих
из сложных и простых в структурном отношении механизмов (шарнир-
но-рычажных, кулачковых, зубчатых и др.). Курсовое проектирование
способствует закреплению, углублению и обобщению теоретических
знаний, а также применению этих знаний к комплексному решению
конкретной инженерной задачи по исследованию и расчету механизмов
и машин; оно развивает у студента творческую инициативу и самостоя-
тельность, повышает его интерес к изучению дисциплины и прививает
некоторые навыки научно-исследовательской работы.
Приступая к составлению настоящего руководства, авторы стреми-
лись привести содержание, объем и методику изложения учебного ма-
териала в соответствие с указанными задачами курсового проектиро-
вания по теории механизмов и машин. Учебная и инженерная ценность
курсового проекта определяется в значительной степени комплексно-
стью проектного задания и реальностью объектов проектирования.
Поэтому помещенные в руководстве проектные задания в виде кинема-
тических схем механизмов и машин, применяемых в различных от-
раслях промышленности, по своему объему и содержанию отвечают
указанным задачам и требованиям в отношении их комплексности и
реальности.
При решении задач проектирования кинематических схем механиз-
мов необходимо учитывать структурные, метрические, кинематические
и динамические условия, обеспечивающие воспроизведение проектируе-
мым механизмом заданного закона движения.
Современные методы кинематического и кинетостатического анали-
зов, а в значительной степени и методы синтеза механизмов увязаны
с их структурой, т. е. способом образования. Поэтому в руководстве
основам учения о структуре механизмов и методам структурного ана-
лиза их уделено значительное внимание.
В каждом из проектных заданий представлены преимущественно
плоские механизмы, включающие и низшие и высшие пары.
В руководстве приведены схемы наиболее распространенных в тех-
нике видов шарнирно-рычажных механизмов, принадлежащих ко II
и III классам.
Каждый из этих классов имеет свои особые методы кинематического
и динамического анализа и синтеза.
Наиболее ответственным этапом в проектировании машины является
разработка структурной и кинематической схем машины, которые в зна-
чительной степени определяют конструкцию отдельных узлов и дета-
лей, а также эксплуатационные качества машины.
Ввиду того, что студент, приступающий к выполнению первого
проекта, не имеет еще систематических специальных знаний и опыта, и
потому не может учесть влияния различных факторов на общую схему
проектирования и найти оптимальное решение поставленной перед ним
задачи, авторы считают целесообразным в качестве проектного задания
выдавать студенту разработанную кинематическую схему существую-
щей машины.
Первая задача, требующая самостоятельного разрешения, состоит
в подборе недостающих параметров по некоторым наперед заданным
условиям, вытекающим из требований технологического процесса либо
из других рациональных условий (повышения износоустойчивости,
уменьшения размеров, времени холостого хода и т. п.). Так, например,
при синтезе кинематической схемы рабочей машины или двигателя тре-
буется по заданному коэффициенту изменения скорости хода машины
или по заданному значению угловой скорости ведущего звена и макси-
мальному или минимальному значению угловой скорости ведомого зве-
на, а также по другим данным определить недостающие основные раз-
меры и т. д. В состав большинства проектных заданий входят, кроме
шарнирно-рычажных механизмов, также кулачковые и трансмиссион-
ные механизмы-приводы, предназначенные для передачи движения
к исполнительным органам. В руководстве рассмотрены лишь меха-
низмы с жесткими звеньями, кинематические цепи которых образованы
в основном зубчатыми и червячными колесами; эти механизмы, как
6
обеспечивающие постоянство заданных передаточных отношений, наи-
более распространены в машинах и приборах самого разнообразного
назначения.
При исследовании привода уделено значительное внимание анали-
тическим и графическим способам, а также методам подбора по заданно-
му передаточному отношению числа зубьев рядового соединения колес
и планетарного соосного редуктора.
Вопросы синтеза и анализа привода увязаны с вопросами геомет-
рического синтеза зубчатого зацепления (геометрия и кинематика зу-
бчатых передач).
Определение основных элементов зацепления приведено для нор-
мального и для исправленного (корригированного) эвольвентного за-
цепления. Расчет исправленной передачи, имеющей своей целью не
только устранение подрезания и заострения зуба, но и улучшение экс-
плуатационных качеств эвольвентного зацепления, производится по
системе, разработанной советскими учеными и ЦКВР.
Задача построения профилей эвольвентного зацепления по найден-
ным параметрам сопряженных колес решается графическим путем
(лист 1 приложений II, III и IV); кроме того, на листе 1 приведены ки-
нематическая схема редуктора и выполненные графические построения
картины скоростей и плана угловых скоростей редуктора.
В современных машинах и приборах широкое применение получи-
ли также кулачковые механизмы. При проектировании по заданной
схеме кулачкового механизма рабочего профиля кулачка студент, ис-
ходя из технологических, динамических и других требований, предъ-
являемых к машине, задается законом движения ведущего и ведо-
мого звеньев, выраженным уравнением движения или диаграммами.
Закон движения может быть представлен как диаграммой переме-
щения ведомого звена в функции угла поворота ведущего при его рав-
номерном вращении, так и графиком скорости, или графиком танген-
циальных ускорений в функции того же угла. Характер этих уравнений
или диаграмм может быть различным в зависимости от заданных усло-
вий движения. Исходя из соображений динамической целесообразности
(отсутствие ударов в механизме), обычно в качестве закона движения
ведомого звена задаются кривой тангенциальных ускорений и по ней
методом последовательного графического интегрирования при заданных
начальных условиях строят диаграмму скоростей и диаграмму переме-
щений, являющуюся исходным графиком для построения профиля ку-
лачка. Проектирование профиля кулачка можно осуществить общими
приемами построения взаимоогибаемых кривых (лист 2 приложений II,
При проектировании кулачкового механизма, кроме задачи профи-
лирования кулачка, обеспечивающего воспроизведение заданного за-
кона движения (кинематический синтез), приходится определять еще
и рациональные размеры механизма (динамический синтез). Выбор этих
размеров, т. е. определение области возможного расположения центра
вращения кулачка, обусловливается не только конструктивными со-
ображениями, но и предельными значениями заданного угла передачи,
7
при которых создаются благоприятные условия работы проектируемого
кулачкового механизма. Для оценки работы механизма и проверки от-
дельных его параметров спроектированный кулачковый механизм дол-
жен быть подвергнут анализу с целью установления динамических
свойств, а также степени точности и правильности воспроизведения
им заданного закона движения.
Кроме построения графика углов передачи в функции положения
кулачка, целесообразно для двух-трех характерных положений (точки
сопряжения кривых, образующих профиль кулачка, и др.) найти ско-
рости и ускорения ведомого звена; по этим скоростям и ускорениям
можно судить об имеющихся отклонениях от заданного закона движе-
ния ведомого звена.
По заданной диаграмме перемещений [$ = $(/)] диаграммы скоро-
стей и тангенциальных ускорений в любом случае можно построить ме-
тодом графического дифференцирования. Однако во избежание воз-
можных искажений, сопровождающих процесс графического диффе-
ренцирования ^особенно в диаграмме тангенциальных ускорений ш* =
= , для двух-трех положений в целях получения более точных ре-
зультатов следует пользоваться методами планов скоростей и ускоре-
ний, заменяя высшие пары кулачкового механизма кинематическими
цепями с низшими парами при сохранении кинематической эквивалент-
ности.
Имея расчетные размеры звеньев отдельных механизмов и составив
круговую циклограмму движения, можно приступить к компоновке
машины и построению ее кинематической схемы (лист 1 приложения II
и лист 2 приложения III), обеспечивающей выполнение требуемой по-
следовательности в работе отдельных механизмов.
Выполняя эту часть проекта, студент приводит технологическую
задачу к кинематической, что и является основной целью проектиро-
вания.
Прежде чем приступить к дальнейшей задаче — кинематическому
анализу шарнирно-рычажного механизма, необходимо произвести его
структурный анализ, т. е. выяснить характер кинематических пар,
подсчитать число их и число подвижных звеньев и определить описывае-
мые точками этих звеньев траектории. В результате этого анализа
после отбрасывания всех цепей наслоения должен получиться механизм
I класса (начальный механизм), содержащий неподвижное и начальное
звено, закон движения которого задан в предположении однократной
степени подвижности механизма.
Структурный анализ дает возможность определить порядок и ме-
тоды кинематического исследования. Задачи кинематики комплексно
связаны с задачами кинетостатики. Произведенный структурный ана-
лиз позволяет решить задачу кинетостатического расчета в последо-
вательности, обратной порядку кинематического исследования, т. е.
начиная расчет с последней, считая от ведущего звена, ассуровой груп-
пы и кончая ведущим звеном.
а
Пространственная задача кинетостатического расчета в примене-
нии к плоским механизмам пока еще не решена. Поэтому авторы дают
приближенное решение, которое для большинства технических задач
вполне удовлетворяет требованиям практики.
В первом приближении расчет производится без учета сил трения.
Учитывая затем силы трения, возникающие в кинематических парах,
вносят изменения в методику расчета, применяя способ последователь-
ных приближений. Для большинства технических расчетов вполне
достаточно ограничиться вторым приближением. Определив силы и мо-
менты трения в парах за один полный цикл установившегося движения,
можно найти приближенное значение коэффициента полезного действия
проектируемой машины.
Кинетостатический расчет дает возможность определить реакции
в кинематических парах, уравновешивающий момент или уравновеши-
вающую силу на ведущем звене и усилия, действующие на отдельные
звенья механизма. Эти усилия необходимы при расчете звеньев на проч-
ность и определении их рациональных конструктивных форм. Для конт-
роля правильности графических построений по определению величины
уравновешивающей силы, произведенных методом планов сил, для
одного-двух положений механизма целесообразно найти величину этой
силы также по методу Н. Е. Жуковского и определить относительную
величину расхождения в обоих случаях. В методах исследования боль-
шое внимание уделено кинематическим и динамическим диаграммам
как ортогональным, так и полярным (листы 3 и 4 приложений II, III я
IV). Диаграммы дают наглядное графическое изображение изменения
одной величины в зависимости от другой; закономерность в характере
изменения подлежащих рассмотрению параметров просто и наглядно
выясняется путем сопоставления их между собой на построенных гра-
фиках.
Проект должен заканчиваться определением мощности двигателя,
если проектируется рабочая машина, и махового момента. В некоторых
случаях для спроектированной машины вместо момента инерции ма-
ховика целесообразно определить коэффициент 6 неравномерности дви-
жения механизма.
В процессе выполнения курсового проекта составление объяс-
нительной записки по каждому разделу должно предшествовать
оформлению графической части проекта. В начале объяснительной за-
писки студент на основе исходных данных составляет по этапам проек-
тирования план проведения анализа расчета механизмов и необходи-
мых графических построений, а также указывает те способы и мето-
ды, которыми он предполагает пользоваться при решении поставленной
перед ним задачи.
В записке должны быть помещены вспомогательные построения,
схемы, графики, таблицы, а также приведены структурные формулы,
кинематические и кинетостатические расчеты отдельных звеньев, групп
и механизмов проектируемой машины и указаны те соображения, ко-
торые легли в основу этих расчетов.
В записке должно быть уделено значительное внимание подбору
9
и определению числовых масштабов планов сил, скоростей, ускорений
и диаграмм. Диаграмму можно использовать для характеристики зако-
номерности процесса, ею изображаемого, только в том случае, если оп-
ределены числовые масштабы всех величин, характеризующих процесс.
В записке должны быть изложены вопросы, не нашедшие отражения
в графической части проекта, например, вопрос о подборе уравновеши-
вающих масс. Содержание вопросов всех разделов записки излагается
в определенной системе, их взаимосвязи с вопросами структуры, ки-
нематики и динамики механизмов. Изложение должно быть сжатым,
четким, технически грамотным.
Теоретические сведения излагаются в записке лишь в том объеме,
который необходим для расчетов и уяснения свойств и структурных
особенностей механизмов.
Искомые величины, рассчитываемые по известным формулам, необхо-
димо вычислять в соответствии с точностью заданных параметров (коэф-
фициентов сдвига, моментов инерции и т. д.) по правилам приближенных
вычислений и с точностью, допускаемой графическими построениями.
При защите проекта, являющейся особой формой проверки его вы-
полнения, студент должен дать исчерпывающие объяснения по всем
вопросам, связанным с анализом и расчетом проектного задания. В от-
ветах на задаваемые вопросы студент должен показать, что он овладел
методами исследования механизмов и приемами графических построе-
ний. Знание студентом общих методов исследования и проектирования
кинематических схем механизмов является необходимым условием
удовлетворительной оценки проекта.
Для ознакомления студентов с общей схемой и последовательностью
проектирования, а также с методикой исследования и расчета конкрет-
ных механизмов в конце руководства помещены подробно разработан-
ные три типовых проекта (механизма поперечно-строгального станка,
механизма четырехтактного двигателя внутреннего сгорания и меха-
низма пресса-автомата с плавающим ползуном). Каждый из этих про-
ектов за время, отведенное по учебному плану на курсовое проектиро-
вание, не может быть полностью выполнен студентом. Поэтому объем
отдельных листов (например, 3 и 4-го) может быть уменьшен путем
сокращения количества исследуемых положений механизма (можно по-
строить, например, планы скоростей и ускорений механизма, а также
произвести силовой расчет его для двух-трех положений).
Объем и содержание курсового проекта должны отвечать уровню
подготовки студента и времени, отведенному по учебному плану на
курсовой проект.
В зависимости от специализации вуза и объекта проектирования
может оказаться необходимым уделить большее внимание одному ме-
ханизму проектного задания, сокращая работы по проектированию
другого. Таким образом, один из вопросов темы проекта на основе об-
щего решения задачи может быть разработан подробнее, чем другие.
Объем и содержание курсового проекта в каждом отдельном случае
определяются руководителем курсового проектирования и утверж-
даются кафедрой.
ГЛАВА 1
СТРУКТУРНЫЙ АНАЛИЗ
ПЛОСКИХ МЕХАНИЗМОВ
§ 1. СТЕПЕНЬ ПОДВИЖНОСТИ МЕХАНИЗМА
В приложениях, помещенных в конце книги, приведены схемы ме-
ханизмов различных машин. Подробное исследование механики этих
машин составляет содержание проекта студента по теории механизмов.
В соответствии с общепринятыми программами изучению подле-
жат в основном плоские механизмы, однако в заданиях встречаются
и пространственные цепи, включающие высшие кинематические пары
(например, коническая зубчатая или червячная передача). Теория
этих зацеплений изучается в курсе теории механизмов и, следовательно,
их проектирование не должно встречать затруднений.
Сознательное выполнение задания требует от проектирующего
четкого понимания работы всей машины в целом. Поэтому, приступая
к выполнению задания, следует прежде всего разобраться в структуре
исследуемой системы, т. е. определить число кинематических пар,
выяснить характер их и подсчитать число подвижных звеньев.
После такого разбора можно уяснить метод образования механизма,
а вместе с тем и схему передачи движения от ведущего звена к рабоче-
му органу.
Напомним приступающим к проекту, в каком порядке и как необ-
ходимо выполнять курсовой проект.
В плоском механизме предварительно наложенные общие связи
лишают каждое из звеньев трех степеней свободы, а именно: вращения
вокруг двух координатных осей, лежащих в плоскости движения ме-
ханизма и скольжения вдоль оси, перпендикулярной этой плоскости.
Поэтому кинематические пары могут наложить на относительное дви-
жение звеньев, образующих кинематическую пару, либо одно, либо два
условия связи. Таким образом, в плоском механизме могут быть только
следующие пары:
а) высшие кинематические (например, сопрягающиеся профили
зубчатых цилиндрических колес или система профиль кулачковой
шайбы — толкатель.) Число этих пар механизма будем обозначать
б) вращательная (шарнир) или поступательная (ползун в направ-
ляющих). Число таких пар механизма будем обозначать р2.
В заданиях на проект приведены механизмы, в которых пассивные
связи отсутствуют. Поэтому, подсчитав число звеньев механизма, чи-
сла р± и р2 кинематических пар, можно по структурной формуле
П. JI. Чебышева для плоского механизма подсчитать его степень
11
подвижности
W Зп — 2p2 — pP
(1.1)
В приведенной записи п обозначает только число всех подвижных
звеньев механизма; стойка, следовательно, приведенной формулой не
учитывается. Точно также при подсчете степени подвижности системы,
имеющей в своем составе кулачковый механизм, обычно в число звеньев
Рис. 1
не следует включать ролик. При этом условии во всех наших заданиях
на проект будем иметь W == 1, т. е. положение механизма определяется
заданием одного параметра, например, угловой координаты звена, за-
Рис. 2
кон движения которого задается.
Здесь уместно напомнить, что при под-
счете степени подвижности с учетом
ролика получаем W = 2 — факт хо-
рошо известный и легко объясняю-
щийся теорией. Однако для упроще-
ния задачи анализа и синтеза меха-
низмов не следует принимать во вни-
мание наличие ролика на первом эта-
пе исследования, так как он не ме-
няет характер движения рабочего ор-
гана (звена, выполняющего техноло-
гический процесс).
Пример 1. Степень подвижности меха-
низма двигателя с компрессором, показан-
ного на рис. 1, а, определяем по формуле
(1.1). Здесь п == 7, р2 — Ю, Pl = 0. Следо-
вательно,
^ = 3-7 — 2-10 = 1.
Пример 2. На рис. 2, а представлена схема транспортера швейной машины 4-го
класса ПМЗ. Здесь п = 7, р2 = 9, = 2 (II и XI — высшие кинематические па-
ры). Отсюда по формуле (1.1) имеем
№ = 3- 7 — 2-9 — 1 -2 = 1.
12
www.vokb-la.spb.ru - Самолёт своими
§ 2. МЕТОД ОБРАЗОВАНИЯ ПЛОСКИХ МЕХАНИЗМОВ
Во всех заданиях на проект указываем неподвижное звено (под-
штриховкой) и непосредственно связанное с ним вращательной либо
поступательной парой ведущее звено (стрелка показывает направление
движения).
Совокупность указанных двух звеньев образует так называемый
нулевой, или начальный, механизм (механизм 1-го класса). Легко убе-
диться, что эта система обладает одной степенью подвижности. В са-
мом деле, здесь п = 1; р2 = 1 и поэтому по формуле (1.1) получаем
Г = 3- 1-2- 1 = 1.
Более сложные схемы механизмов получаются последовательным
присоединением к начальному механизму ряда кинематических цепей.
Для того, чтобы получаемый сложный механизм также обладал одной
степенью подвижности, нужно, чтобы эти последовательные наслоения
не изменяли степень подвижности начального механизма, равную еди-
нице. Это значит, что степень подвижности присоединяемых цепей
должна равняться нулю. Такие простейшие цепи, степень подвижности
которых равна нулю, называют нормальными цепями, или группами
Ассура. Число звеньев и число кинематических пар таких групп, как и
способы их образования, весьма различны.
В заданиях встречаются только группы двух типов: двух- и четырех-
звенные, присоединяемые свободными элементами кинематических пар
к механизму, либо их структурные видоизменения.
Механизм, образованный наслоением одних только двухзвенных
групп, называют механизмом 2-го класса; механизм, в состав которого
входят и четырехзвенные группы, называют механизмом 3-го класса.
Последние получают из нормальных групп упрощением их струк-
туры, которое состоит в том, что одно звено с двумя низшими кинема-
тическими парами заменяют одной высшей кинематической парой.
Такая замена не меняет степени подвижности нормальной цепи. В са-
мом деле, звено с двумя низшими парами налагает на систему одну
связь: Зп — 2р2 = 3 — 4 = — 1.
Высшая кинематическая пара также налагает одну связь и, следо-
вательно, не только нормальная цепь, нои ее видоизменение обладает
нулевой степенью подвижности. Таким образом, с точки зрения струк-
туры двухзвенная группа, состоящая из двух звеньев и трех низших
кинематических пар, может быть заменена группой, состоящей из од-
ного звена, одного элемента высшей кинематической пары и одного эле-
мента низшей пары. Четырехзвенная группа, состоящая из четырех
звеньев и шести низших кинематических пар, может быть с точки зре-
ния структуры заменена цепью, состоящей из трех звеньев, четырех
низших кинематических пар и одной высшей пары.
На рис. 2, б четырехзвенной группой является цепь, состоящая
из 4 звеньев а, 3, 4, 5, а ее видоизменение представлено на рис. 2, а
звеньями 3, 4, 5 с низшими кинематическими парами ///, IV, V, VI и
высшей парой II.
J3
На рис. 1,аи2, а изображены схемы двух механизмов: двигателя
с компрессором и транспортера швейной машины 4-го класса ПМЗ,
а на рис. 1, б и 2, б — соответственно их структурные схемы. Отличие
последних схем от первых состоит в том, что структурные видоизменения
заменены соответствующими нормальными группами, в которых доба-
вочные звенья обозначены буквами вместо цифр, а поступательные пары
заменены условно вращательными.
Таким образом, легко усмотреть, что механизм, показанный на
рис. 1, а, образован последовательным присоединением трех двухзвен-
ных групп следующим образом:
а) к нулевому механизму присоединена группа 3, 4\
б) к звеньям 3 и 1 присоединена группа 5, б;
в) к звеньям би/ присоединена группа 7, 8.
Механизм, изображенный на рис. 2, а, образован так: на звене
2 нулевого механизма 1, 2 жестко закреплен круглый эксцентрик, со-
единенный с бугелем 7 вращательной парой VIII. Таким образом, пер-
вым наслоением является двухзвенная группа 7, 8; вал 8 соединен вра-
щательной парой X со стойкой 1. Следующим наслоением является
видоизменение четырехзвенной группы (3, 4, 5), о котором упомина-
лось. Оно присоединено высшей кинематической парой II к кулачко-
вой шайбе, жестко закрепленной на звене 2 и образующей с ним, сле-
довательно, одно твердое тело, и вращательной парой VI к стойке.
И, наконец, последним наслоением является звено б с двумя элемента-
ми кинематических пар. Это звено входит во вращательную пару VII
со звеном бив высшую пару XI со звеном 8.
Работа рассматриваемого механизма сводится к следующему: от
вала 2 звено б, на котором расположена транспортирующая гребенка
(на рис. не показана) через группу 7,8 получает почти вертикальное пе-
ремещение; с другой стороны, то же звено б с гребенкой от вала 2 через
группу 3, 4, 5 получает перемещение, близкое к горизонтальному.
В результате сложения указанных движений гребенка описывает
растянутый в горизонтальном направлении овал. При этом зубья гре-
бенки захватывают обрабатываемую деталь и перемещают ее за один
оборот главного вала на один шаг, равный длине шва.
§ 3. ПОСТРОЕНИЕ СТРУКТУРНОЙ СХЕМЫ МЕХАНИЗМА
Методы исследования механики машины находятся в прямой зави-
симости от типа наслаиваемых ассуровых групп. Следовательно, встре-
чающиеся в заданиях двух- и четырехзвенные группы исследуются раз-
личным образом. Поэтому, приступая к проектированию механизма,
изображенного в задании, для выяснения метода исследования механи-
ки этого механизма, следует предварительно начертить его структур-
ную схему. Наиболее простым является метод прямого изучения струк-
туры, который начинается с нулевого механизма и идет в порядке на-
слоения ассуровых групп:
1. Выделяется нулевой механизм.
2. Поскольку ассуровы группы должны присоединиться своими
свободными элементами к различным звеньям имеющегося механизма,
14
www.vokb-la.spb.ru - Самолёт своими руками
то наслаиваемая группа не может быть присоединена только к одному
звену. В последнем случае она образовала бы одно твердое тело с этим
звеном. Таким образом, первое наслоение может быть присоединено
только к стойке и ведущему звену. Поэтому двухзвенная группа каж-
дым свободным элементом присоединяется к другому звену, а три сво-
бодных элемента четырехзвенной группы присоединяются двумя эле-
ментами к одному звену и одним — к другому.
3. Следующая нормальная группа может быть присоединена к об-
разовавшейся схеме подобным же образом, т. е. свободными элемента-
ми к звеньям нулевого механизма и первого наслоения (только не к
одному звену). Аналогично все следующие наслоения присоединяются
указанным способом к звеньям нулевого механизма и ранее присоеди-
ненных групп.
Наслоения в виде двухзвенных групп находятся легко, так как два
звена, из которых каждое связано с ранее присоединенными группами,
должны быть связаны непосредственно друг с другом. Если такая груп-
па отсутствует, то в заданиях следует искать четырехзвенную группу
так: выбирая два звена, связанные со звеньями уже существующей
схемы, но не соединенные между собой непосредственно, надо отыскать
между ними еще два звена так, чтобы в образовавшейся из четырех
звеньев группе было шесть низших кинематических пар.
4. Встречающиеся видоизменения ассуровых групп заменяются
нормальными группами заменой высшей кинематической пары доба-
вочным звеном с двумя низшими парами.
5. Для большего единообразия структурной схемы поступательные
пары условно заменяются вращательными. При такой замене число
условий связи не меняется, так как поступательные пары, как и враща-
тельные, тоже налагают по две связи на относительное движение
звеньев.
При построении структурной схемы для избежания ошибок и об-
легчения чтения чертежа рекомендуется:
а) сохранять на ней те же буквенные обозначения в местах сочле-
нения звеньев и ту же нумерацию звеньев и кинематических пар, ко-
торые имеются на заданном чертеже;
б) двухчленные звенья (звенья, включающие только два элемента
кинематических пар) изображать отрезками прямых, трехчленные —
в виде заштрихованных треугольников, четырехчленные — в виде
заштрихованных четырехугольников и т. д.
ГЛАВА II
СИНТЕЗ ПЛОСКИХ МЕХАНИЗМОВ
С НИЗШИМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ
Одна из задач проектирования механизмов состоит в таком подборе
размеров звеньев (точнее— расстояний между осями шарниров), при
котором за все время работы механизма удовлетворялись бы некоторые
15
наперед поставленные требования, а именно: чтобы определенные точ-
ки звеньев перемещались по заданным траекториям или по определен-
ному закону.
Ф
§ 1. СИНТЕЗ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
Примем следующие условные обозначения (рис. 3):
г — длина кривошипа;
Ф — угол поворота, отсчитываемый от направления AM против
движения часовой стрелки;
Ф/ и ф// — острые углы, образованные кривошипом с направлением
AM в крайних положениях ползуна;
I — длина шатуна;
е — смещение (дезаксиал);
1 — величина, равная отношению ~ ;
Н — ход ползуна;
k — коэффициент изменения скорости хода, определяемый
180° + 0 /-ч foi
как отношение 18q<L д-, где ® = фц — ф! 121;
е = 18о°-4х-г; (2.1)
АС„ = 1 — г; (2.2)
АС, =1 + г, (2.3)
vc — скорость ползуна в положении механизма, определяемом
углом <р;
Устах — наибольшая скорость ползуна.
Для построения кинематической
схемы механизма в положении,
заданном углом <р, достаточно
знать г, I и е. Последователь-
ность построения по этим дан-
ным такова:
1) выбирают произвольно на-
правление КМ (рис. 3);
2) проводят прямую LN па-
раллельно КМ на расстоянии е
от КМ;
3) из произвольно выбранной на прямой КМ точки А радиусом
АВ = г описывают траекторию точки В;
4) траекторию точки В размечают в соответствии с заданным зако-
ном движения кривошипа <р = <р (t). Обычно <» = const и потому удоб-
но делить окружность на п равных частей, т. е. на участки, пропорцио-
нальные истекшему времени;
5) из полученных точек деления Во, Blt В2, Вп (на рис. 3 пока-
зана только одна точка В) радиусом, равным ВС = I, делают засечки
на прямой LN в точках Со, Съ С2,..., Сп (на рис. 3 показана только одна
16
www.vokb-la.spb.ru - Самолёт своими
точка С). Эти точки определяют положения шарнира ползуна, соот-
ветствующие различным положениям кривошипа.
Для облегчения дальнейшего исследования нужно, чтобы в число
размеченных точек входили точки В/, В//, С/, С//, соответствующие
крайним положениям ползуна;
6) соединяя последовательно точки Во, Вь В2, Вп с точкой А
и с соответствующими точками Со, Сх, С2, ...» Сп, получают t кинемати-
ческую схему механизма в различных положениях.
Рассмотрим несколько простейших задач синтеза кривошипно-пол-
зунного механизма.
Задача 1. Дано: Н, е и К.
Для построения схемы следует определить недостающие размеры г и Z. Из — ==
= X находим
г _ X -f- I (9 4)
АСп ~ l — r X— 1 ’
Таким образом, в треугольнике ACZ/CZ (рис. 3) известны: основание Cf/Cf == Н9
высота е, опущенная из вершины А на основание СцС[9 и отношение сторон
АС1 Х+1
АСЦ “ X—1 ‘
Построение такого треугольника производим следующим образом (рис. 4):
1. Строим отрезок СцС^ Н.
2. Проводим прямую ММ параллельно Cjfii на расстоянии е от нее.
3. Так как геометрическое место точек, отношение расстояний которых от двух
заданных точек (С/7 и Cz) остается постоянным (2.5), есть окружность (так называе-
мая окружность Аполлония), то для ее построения поступаем так: находим на прямой
С/С7/ точки D и Е, удовлетворяющие равен-
ству (2.4), т. е. делим в точках D и Е от-
резок С^Сц так, чтобы
___ X + 1
CjjD С цЕ X— 1
Рис. 4
4. На отрезке DE как на диаметре строим окружность. Искомая точка А лежит
на пересечении окружности с прямой ММ. Теперь можно определить по длине сторон
полученного треугольника AC^Cj неизвестные размеры г и I:
l + r^ACf,
l—r = АСц. ЛИудова
Задача 2. Задано: Н, X и k. Определению подлоМРфШ^м/р^м^е^ !
I <OAiTexRi.tHvr* 1
1. Находим величину 0 по уравнению (2.1).
2. Находим по уравнению (2.4) отношение
1г X 4~ 1
l — r “ X—1’
3. Строим по хорде Н— дугу CjjDCj (рис. 5), стягивающую вписанный
угол 0 (2.1).
4. Строим геометрическое место точек (окружность ZJQ, отношение расстояний
которых от точек Cz и Cz/ постоянно (см. предыдущую задачу). Точка пересечения
(рис. 5) дуги сегмента CJJDCl с дугой Аполлониевой окружности (показана штрихо-
вой линией) определяет третью вершину А треугольника АСцСр
По-прежнему
ACj = 14- г;
АСП^1 — г.
Высота этого треугольника AD' =» е.
Задача 3. Задано: И, е и k. Найти / иг.
1. Находим 0 по уравнению (2.1).
2. Строим на хорде С7СП = Я (рис. 5) дугу СцКСр стягивающую вписанный
угол О.
3. Проводим прямую ММ параллельно С7Сп на расстоянии е от нее. Этим по-
строением определяют положение точки А и значения АС^ /+ г и АС/7= I —
— г (рис. 3). Дальнейшее решение приведено выше.
Задача 4. Задано: е, срz,<рzz. Найти / иг.
Из чертежа, приведенного на рис. 3, видно, что
Из последних двух уравнений находим / иг.
Задача 5. Задано: г, <р z, ср z/. Найти Z и е.
Из чертежа, представленного на рис. 3,
1 + г 1—г
sincpyy sincpy ’
откуда определяем I.
Затем находим из уравнения
е = (Z + г) sin <pz.
Задача 6. Задано: г, Я, ср z. Найти Z и е.
Из чертежа, представленного на рис. 3,
l+r l — ?__ Н
sin sin <pz sin (<pzz — <pz) >
отсюда
Я 2r
sin(<pzz—(pz) sin <pzz — sin<pz
После некоторых элементарных преобразований находим
яп(ф„ + ЧЭ=--51---, (2.5)
18
www.vokb-la.spb.ru - Самолёт своими руками
где
tgT =
2r sin <pz
Я — 2r cos <pz
Найдя ф7/ из уравнения (2.5), приводим задачу к известному уже варианту
(см. задачу 5).
Задача 7. Задано: г, e^s в положении, определяемом углом <р, и угловая ско-
рость со кривошипа. Найти I.
Строят для заданного положения повернутый план скоростей (рис. 6) в «масшта-
бе кривошипа».
Пусть <*= ЛЕ • 1%,
где — числовой масштаб плана скоростей.
Рис. 7
Проведем прямую BE до пересечения с NN в точке С. Отрезок ВС = I.
Задача 8. Задано: г, a, vc max и со. Найти I.
Строим повернутый план скоростей в «масштабе кривошипа» (рис. 7).
ПУсть0Стах = ЛЕ -
Проведем касательную BE к траектории точки В — пальца кривошипа и про-
должим ее до пересечения в точке С с NN.
Отрезок ВС — I.
Рис. 8 Рис. 9
Задача 9. Задано: г, k, —угол передачи движения от шатуна к ползуну в момент,
соответствующий крайнему левому положению ползуна. Найти / и е (рис. 8).
1. Находим 0 по уравнению (2.1).
2. Из треугольника АС{Сц
sin[-^---(?/+ 8)|
19
или
/+1 cos?/
X — 1 cos(yz + 6) ’
отсюда находим X.
Из равенства А = находим I.
г
3. Из прямоугольного треугольника ACjD находим е:
CjD — е — (1 — г) cos
Задача 10. В коромыслово-ползунном механизме (рис. 9) задано: ход ползуна
— Н\ к = —, е и максимальный уголф качания коромысла г. Требуется опре-
делить длины звеньев г и I,
Установим механизм в такое положение, чтобы хорда BjBn была параллельна
траектории точки С ползуна. В отличие от‘кривошипно-ползунного механизма в край-
них положениях ползуна г и I не лежат на одной прямой.
По рис. 9. видно, что прямоугольные треугольники BjDjCj и BnDuCn равны,
так как BjCj = В^Сц и BjDj — Ви&п. Следовательно, равны и углы: 0/= 0у/.
Таким образом, четырехугольник CjBjBjjCjj есть параллелограмм. Поэтому В^Вц ==
«= CjCjj = н.
Отсюда
или
Н
2 sin -2-
и, значит,
2 sin-2-
§ 2. СИНТЕЗ ШАРНИРНОГО ЧЕТЫРЕХЗВЕННИНА
Примем следующие условные обозначения (рис. 10):
«1 — длина ведущего звена АВ;
а2 — длина шатуна ВС;
а3 — длина ведомого звена CD;
а4 — длина стойки AD;
<р — угол поворота ведущего звена, отсчитываемого от направления
AD против движения часовой стрелки;
ф — угол поворота ведомого звена, отсчитываемого от направления
AD против движения часовой стрелки;
k — коэффициент изменения скорости, равный -^0 ® , где 180° +
+ 6 — угол В1АВц поворота звена АВ при переходе звена
20
CD из крайнего правого положения С/D в крайнее левое по-
ложение CuD. Из формулы (2.2) 0 = 180° *- [3].
Для построения кинематической схемы механизма в положении,
заданном углом ср, достаточно знать длины четырех его сторон: а19 а29
а39 Порядок построения по этим данным будет следующим:
1) выбирают произвольно направление ММ и на нем отмечают от-
резок AD = а4;
2) из точек А и D соответствующими радиусами аг и а3 строят
окружности (или дуги окружностей, если эти звенья
мыслами, а не кривошипами);
3) в соответствии с заданным за-
коном движения ср = <р (/) разме-
чают траекторию точки В. Если о =
=const, то удобнее всего делить эту
траекторию на п равных частей. В
этом случае длины участков деления
пропорциональны времени;
4) из полученных точек деления
Во, В19 В29 ...» ВП9 лежащих на
траектории пальца В кривошипа АВ9 радиусом ВС = а2 делают засеч-
ки на траектории точки С. Таким образом, на этой дуге получают ряд
точек Со, С/, Сц, Сп.
Соединяя последовательно точки на траектории пальца кривошипа
В с точкой А, точки на траектории шарнира С с точкой D и точки Bt
и Ct с одинаковыми индексами, получаем кинематические схемы меха-
низма в п положениях.
Если ведомое звено а3 является коромыслом, то необходимо в про-
цессе разметки траектории найти два его крайних положения. Эти по-
ложения определяются засечками дуги окружности радиуса DC9 сде-
ланными из точки А радиусами, соответственно равными а2 + и
а2 — at.
являются коро-
Задача II. Задано: положение координатной системы и три положения шатуна
ВС плоского шарнирного четырехзвенника ABCD:
Bt(xlt yj, C1(xlt yt) — первое положение;
В2 Уг)» У г = (В2С2, х) — второе положение;
В3 (*з> Уз)» Уз = (В3С3х) — третье положение.
Найти at, а2, а3, а4 (рисунок для этой задачи не приводится, так как его нетруд-
но построить по тексту). Длину шатуна ВС находим из уравнения
аг = V («I — *i)2 +(У1 — У1)2-
После того как определено а2, выбрав положение координатной системы, можно по-
строить три положения шатуна В^, В2С2, В3С3.
Точка А пересечения перпендикуляров, восстановленных к отрезкам BtB2 и
В±В3 через их середины, является центром вращения звена АВ.
21
Длина этого звена АВ1. Аналогично находят положение точки D на пересе-
чении перпендикуляров к отрезкам СгС2 и СХС3, восстановленных из середин этих
отрезков. Величины а3 и а4 находят по чертежу [2]:
DC± = с8; AD = ал.
Задача 12. Задано два положения шатуна ВС (см. предыдущую задачу), угол ct
поворота звена АВ при переходе шатуна из первого положения во второе (рис. 11)
и направление скорости точки Сх шатуна в первом положении. Найти alt а3, а4.
Строим два положения шатуна В^С^ъ В2С2. Положение точки А определяется
построением равнобедренного треугольника
ВГВ2А по основанию ВгВ2 и углу а при
вершине.
и,
К
Рис. 11
Рис. 12
Точка D лежит на пересечении перпендикуляра К К к отрезку СХС2, проведенного
через его середину, с перпендикуляром LL к направлению скорости vc , проходящим
через точку Сх.
Задача 13. Задано: а3, аА и два крайних положения звена CD (рис. 12), определя-
емые углами и Найти alt cl2.
Строим точки A, D, С7, Сп по заданным условиям. Тогда
АС} = о2 -}- ах; AC у = а2 — а±.
Из последней системы уравнений находим и а2.
Задача 14. Задано: д3, Vx, W2, k. Найти а2, а4.
По заданному k находим 0 из формулы (2.1). Строим затем по данным условиям
CfD и CnD (рис. 12). На хорде CjCu строим сегмент, вмещающий угол 0. Пересе-
чение дуги сегмента с прямой ММ определяет положение центра вращения А звена
АВ (рис. 10) и длину AD = аА. Тогда ACj = а2 + ох; АСП = а2 — ах.
Дальнейшее решение известно.
Задача 15. Задано: значение угловой скорости ведущего звена АВ (рис. 13) а>х=*
«= const; coextr з — максимальное или минимальное значение угловой скорости ведо-
мого звена CDt длины звеньев о4, ах, а также уголф, определяющий положение звена
АВ в момент, когда звено CD имеет наибольшую (или наименьшую) угловую скорость.
Определению подлежат размеры а2, а3.
Допустим, что задано (omin3
По равенству х =а4----—-------,[20] и заданным условиям строим (рис. 13)
(0х ®min,3
последовательно точки А, В, D, отрезок АЕ =* х и прямую BE. Через точку Е про-
водим перпендикуляр ES к прямой BE до пересечения с продолжением прямой АВ в
точке Р. JX&neo. соединяем прямой точки D и Р и продолжаем ее до пересечения в точ-
ке С с прямой BE.
Четырехзвенник ABCD и будет искомым, в котором ВС — а2 и CD = а3. Если
задается <отах, то точка Е строится справа от точки D.
Задача 16. Задано: ах => 1, три значения углов поворота ведущего и ведомого зве-
ньев: фх, 4*7; ф г, Ч^2;Фз» Т3, соответствующие трем положениям механизма.
Требуется найти a2t а3, ал (рис. 14).
22
www.vokb-la.spb.ru - Самолёт своими
Из трех уравнений
cos = Ро cos Yf + Pi cos (Tz — <pj 4- p2; (i = 1; 2; 3)
находим неизвестные p0, р1э pa, которые связаны с искомыми величинами при at = 1
следующим образом [2]:
а3 + аз + 1 — а2
Ро = «3; Pi = — — '> Pi ~ 2а^
При дх 1 остальные величины а2, а3, а4 возрастают пропорционально вели-
чине ах.
Задача 17. Построить шарнирный четырехзвенник ABCDE (рис. 15) из условия,
что точка Е шатуна описывает на некотором участке траекторию, весьма близкую к
прямой.
Примем АВ = ах; BE = /.
Строим кривошипно-ползунный механизм с такими размерами: кривошип г ==
= АВ — at; шатун BE = I; смещение е — произвольное, например е = 0.
Рис. 15
Соединим жестко с шатуном несколько точек: Сх, С2, ..., С{ и построим траекто-
рии этих точек по п положениям механизма.
В качестве третьей точки С шатуна выберем ту из них (Ct), которая описывает на
части своей траектории дугу MN, весьма близкую к дуге окружности. Найдем гра-
фически радиус /? этой дуги и ее центр D. Освободим теперь точку Е от связи с ползу-
ном и введем два звена ВС и CD с двумя вращательными парами в точках С и D. При
этом получается четырехзвенник A BCD, у которого точка Е шатуна на некотором
участке описывает с достаточным приближением отрезок прямой, параллельный LL.
В полученном механизме длцны сторон будут
АВ = ах; CD — = а3; AD — BE = Z;
длина ВС = 02 может быть принята произвольной, лишь бы точка С лежала на дуге
MN, Ее, следовательно, нужно подобрать таким образом, чтобы обеспечить возмож-
ность проворота звена DC на возможно большей части дуги MN. Таким образом, вы-
бор длины ВС = а2 определяет и длину СЕ [8].
§ 3. СИНТЕЗ КУЛИСНОГО МЕХАНИЗМА
На рис. 16 представлена схема кулисного механизма с двумя кри-
вошипами. Условие провор ачиваемости кривошипа ЛС и кулисы ВС
состоит в том, чтобы длина стойки была меньше длины кривошипа, т. е.
а < г, а длина шатуна DE была больше кривошипа BD, т. е. с > Ь.
Положению Ci пальца кривошипа соответствует крайнее левое
23
положение ползуна Ei (например, резца строгального станка), положе-
нию Си — крайнее правое положение Ец.
Повороту кривошипа г на угол 2<рх из положения АС и в положение
ACj соответствует холостой ход, а повороту на 360° — 2<рх из положе-
ния ACi в положение АСц — рабочий ход машины.
Для построения механизма в произвольном положении достаточно
знать величины а, г, bt с.
Рис. 17
На рис. 17 представлена схема качающейся кулисы. Условие не-
проворачиваемости кулисы ВС состоит в том, что длина кривошипа г
должна быть меньше длины стойки а.
Задача 18. Задано: длина кривошипа г, ход резца Я, — = X и коэффициент из-
Ъ
ыенения скорости
360^2^
2<pi ’
Определить длину стойки а вращающейся кулисы.
и >80°
Находим <рх = и затем а = г cos фх.
Л —р 1
Остальные размеры, т. е. b и с определяются так же, как в задачах синтеза кри-
вошипно-ползунного механизма, так как двухповодковую группу (шатун DE и ползун
Е) вместе с кривошипом BD можно рассматривать как кривошипно-ползунный ме-
ханизм.
350°___2(р
Задача 19. Задано: г; k = ------— . Определить длину стойки а качаю-
щейся кулисы (рис. 17).
180°
Определяем фх == - • ..» . Крайние положения кулисы ВСj и ВСп определяются
величиной угла Чг1, образованного осью кулисы со стороной В А. Но по рис. 17 видно,
что в крайних положениях кулисы ее ось перпендикулярна к кривошипу. Поэтому
^ = 90°-Ф1;
Г _ г
sin Ух ~~ cos <рг '
24
www.vokb-la.spb.ru - Самолёт своими
ГЛАВА III
ЗУБЧАТЫЕ ПЕРЕДАЧИ
§ 1. КИНЕМАТИКА МНОГОЗВЕННЫХ ЗУБЧАТЫХ МЕХАНИЗМОВ
Зубчатая передача является одним из наиболее распространенных
приводов, предназначенных для передачи вращения от одного вала
к другому с заданным отношением угловых скоростей. Передача
вращения сопровождается передачей крутящего момента, а следова-
тельно, передачей механической работы и мощности. В большинстве
рабочих, транспортирующих и других машин ведущим звеном является
вал двигателя, передающий движение ведомому звену данной машины.
Двигатель работает более экономично при больших скоростях враще-
ния, между тем как скорость ведомого звена обычно бывает значитель-
но ниже, что обусловливается требованиями технологического про-
цесса, выполняемого машиной, или в транспортирующих машинах —
допускаемыми скоростями перемещения масс. Так, например, вал элек-
тродвигателя тележки мостового крана, приводящий в движение меха-
низм подъема груза, вращается со скоростью 960 об/мин, а барабан
этого механизма 10—20 об/мин.
Поэтому между электродвигателем и барабаном ставится промежу-
точная зубчатая передача, состоящая из нескольких пар зубчатых ко-
лес и носящая название зубчатого редуктора. Зубчатые передачи в виде
пары сцепляющихся колес (так называемая одноступенчатая передача)
могут воспроизвести лишь небольшие значения передаточных отноше-
ний. Передаточное отношение пары зубчатых колес выражается
формулой
следовательно, с конструктивной стороны величина о,2 зависит от
числа зубьев zx и z2. Чтобы получить компактную и легкую переда-
чу, число зубьев zx на меньшем колесе должно быть наименьшим. Наи-
меньшее (предельное) число зубьев ограничивается явлением подре-
зания и наименьшей допустимой величиной коэффициента перекрытия
е. В среднем можно принять
min = 12 20.
При выборе числа зубьев z2 на большем колесе следует исходить
из ограничений в отношении габаритных размеров и веса конструкции.
В металлообрабатывающих станках, подъемно-транспортных и других
машинах принимают
max = 125 V 150.
Таким образом, в среднем можно принять предел передаточного от-
ношения для одной пары зубчатых колес imax ~ 10.
В практике машиностроения для механических (от электродвига-
теля) передач принимают еще меньшие значения и,2, примерно i\,2 =
= 14-6, а для ручных /1,2 < 10 4- 12.
25
Если по условиям работы требуется воспроизвести большее переда-
точное отношение, то передача движения от ведущего вала к ведомо-
му осуществляется при помощи нескольких промежуточных валов.
На каждый промежуточный вал насаживаются обычно два зуб-
чатых колеса, из которых одно является ведущим, а другое — ведомым.
Такое соединение зубчатых колес, валы которых вращаются в непо-
движных подшипниках, называется последовательным кратным
(рис. 18). В этом соединении каждый
из промежуточных валов соединяется
с предыдущим и последующим валами
при помощи особой пары цилиндри-
ческих колес. Таким образом, на пер-
вом
одно колесо, на втором, третьем, ...
... (п — 1)-м валу — по два колеса и
последнем ведомого n-м валу — одно
колесо.
Обозначим буквами <ох, со2, ...,
cozt угловые скорости вращения ва-
лов /, 2, ..., п, ведущее колесо на
валу 1 — через z19 а ведомое колесо
на валу п — через Zn. На промежуточных валах обозначим ведущие
колеса через z2, z3, ..., zn-i, ведомые — через Z2, Z3, ..., Zn. Пусть
число зубьев каждого колеса выражается теми же буквами z19 z2, z3, ...
... , zn-\ и Z2, Z3, ..., Zn. Отношение угловой скорости сох от первого
(ведущего) вала 1 к угловой скорости соЛ последнего (ведомого) вала п
называется общим передаточным отношением i\,n всего механизма:
ведущем валу будет находиться
i\tn —
(Оп
(3.2)
Общее передаточное отношение ij.n последовательного кратного
соединения выражается следующей формулой:
йл = = 11.212.3, .... = (- l)ft • , (3.3)
ZiZs» • • • » zn— 1
где k — число точек касания начальных окружностей колес с внешним
зацеплением.
Таким образом, передаточное отношение последовательного крат-
ного соединения зубчатых колес равно произведению частных переда-
точных отношений, а по абсолютной величине равно отношению произ-
ведения чисел зубьев ведомых колес к произведению чисел зубьев
ведущих колес. Так, например, при передаче вращения от вала элек-
тродвигателя, вращающегося со скоростью = 960 об/мин, к рабоче-
му валу транспортера (п2 = 16 об/мин) общее передаточное отношение
й,2 = -21 = 60.
26
www.vokb-la.spb.ru - Самолёт своими руками?!
указанного передаточного от-
с паразитными шестернями,
Одноступенчатый зубчатый редуктор, включенный между электро-
двигателем и транспортером, получился бы очень громоздким, так как
диаметр большего колеса должен быть в 60 раз больше диаметра мень-
шего колеса. Для воспроизведения
ношения целесообразно установить
трехступенчатый зубчатый редуктор
со ступенями
I й,21 = 4, 11*2,з |=5 и | f3,41 == 3;
| *1,4 I = *1,2*2,3*3,4 = 60.
Если на каждом из параллель-
ных валов насажено только одно зуб-
чатое колесо (последовательный ряд
рис. 19), то общее передаточное отношение i\,n в этом случае
й,„ = -£- = (-1)*.-^. (3.4)
<ол zi
§ 2. ПОСТРОЕНИЕ РЯДА ЗУБЧАТЫХ КОЛЕС
ПО ЗАДАННОМУ ПЕРЕДАТОЧНОМУ ОТНОШЕНИЮ
Задача составления ряда зубчатых колес по заданному или опреде-
ленному расчетом общему передаточному отношению допускает
в общем случае большое число решений. Выбор решения, однако, при-
ходится ограничивать конструктивными и технологическими требова-
ниями. Одним из условий проектирования ряда, удовлетворяющего
этим требованиям, является наличие возможно меньшего числа п ва-
лов. Это число п валов определяется по допустимому наименьшему zmin
и наибольшему zmax числу зубьев на колесе, т. е. по наибольшему пере-
даточному отношению
Gnax = (3-5)
Zmin
для двух смежных валов.
Рассмотрим решение задачи в общем виде. Пусть общее передаточ-
ное отношение i\,n в последовательном кратном соединении зубчатых
колес представляет собой несократимую дробь
Разлагая числитель и знаменатель этой дроби на множители
. G-tCln. .... Qfi ... .
, • • •. t(n-Dn,
комбинируем эти множители таким образом, чтобы каждое из частных,
входящих в состав i\.n, удовлетворяло указанному выше требованию
ОТНОСИТеЛЬНО Imax* При определении чисел зубьев часто предпочитают
27
брать для значений £ 1,2, /2,з»...» дробные числа; в этом случае каждый
зуб меньшего колеса входит в зацепление нес одними и теми же зубьями
большего колеса, а с разными (вразбивку), поэтому износ зубьев более
равномерен.
Если рассматриваемая задача не имеет точного решения, то можно
ограничиться приближенным, так как в практике машиностроения не-
большие отклонения от заданного i\,n вполне допустимы. Общее пе-
редаточное отношение можно представить в следующем виде:
- а А ± и
h-n ~ -
где и по сравнению с b невелико, А и Ь удобно разлагаются на мно-
жители.
В результате замены передаточного отношения 1\,п приближенным
значением
А
допускаемая погрешность
Д£ =
Для достижения большей точности в решении задачи можно вос-
пользоваться свойствами непрерывных дробей. Метод приближенного
решения задачи при помощи непрерывных дробей заключается в следу-
ющем. Заданное общее передаточное отношение =
£
я
обращаем
в непрерывную дробь и определяем подходящие дроби
Р1 Рч Рз
Я1 * Яч ’ Яз ’ ’
и Р« _ Р
9„-1 Чп Я '
Последняя подходящая дробь ~ равна точному значению — непрерыв-
ной дроби.
Первая — и вторая —— подходящие дроби вычисляются непосред-
Я\ Яч
ственно. Все остальные дроби вычисляются по формуле
Pi Pi—\ai + Pt 2
+ Яс-2 9
где — неполное частное непрерывной дроби.
Затем составляем ряд следующих дробей:
Рп + Рп-1 Р/г—1 Р/г—1 + Рл—2 Р/г-2
Яп + Яп-\ ’ Яп-1 * Яп—\ + Яп—2 ’ Яп—2
Рз + Рч Р2 Рч + Pi и _Р1_
Яз + Яч 9 Яч ’ Яч + Я1 Я1 ’
(3.7)
28 .
www.vokb-la.spb.ru - Самолёт своими
Пробуем разложить числитель и знаменатель каждой из этих дро-
бей, начиная с первой, на такие множители, каждый из которых пред-
ставлял бы собой число zlt удовлетворяющее требованию в отношении
его наибольшего и наименьшего значений
Зтах ^min-
Чем ближе к началу ряда (3.7) будет лежать та дробь, числитель
и знаменатель которой могут быть разложены на указанные выше мно-
жители, тем с большей точностью будет решена поставленная задача.
Пусть задано, например, общее передаточное отношение
. _ р _ 2767
Ц'п~ q ~ 1219 ’
Обращая эту дробь в непрерывную, получаем
gg- = (2, 3, 1, 2, 2, 1, 1, 4, 4),
де числа, помещенные в скобках, представляют собой неполные част-
ные непрерывной дроби. Таким образом, получим значения следующих
подходящих дробей:
Pi _ 2 Ра _ о . JL — 7 Рз 9 Рд _ 25 Ps „ 59
<71 1 ’ % 3 3 ’ q3 4 ’ q4 11 ’ qt 26 ’
Pt _ 84 p7 _ 143 pg _ 656 p^ ______ p ___ 2767
qe 37 ’ q, 63 ’ qs 289 ’ qa q 1219
Составляем ряд дробей согласно формуле (3.7)
3423 656 799 143
1508 ’ 289 ’ 352 ’ 63 И Т‘ J
Из этих дробей вторая дает решение, так как
., 656 41 • 16 . . Z3Za
*«Л = 289 ~ 17-17 ~ '1.2 «2,3— •
X с
Ошибка, получаемая от замены истинного передаточного отношения
i\,n приближенным i'in,
hi — —_р д 7 — —Н. —
1219 • 289 ’ 352 291
§ 3. ЭПИЦИКЛИЧЕСКИЕ ПЕРЕДАЧИ
Зубчатые механизмы с подвижными осями некоторых зубчатых ко-
лес называются эпициклическими. Эпициклическая передача, в которой
на отдельные звенья наложена дополнительная кинематическая связь,
называется планетарной. Эта связь может быть осуществлена закреп-
лением одного из центральных колес передачи или соединением двух его
звеньев замыкающей цепью (замкнутая планетарная передача). Эпи-
циклическую передачу, не имеющую дополнительной кинематической
связи, принято в технике называть дифференциальной.
29
Эпициклические передачи дают возможность при небольшом числе
колес воспроизводить большие передаточные отношения. Поэтому они
получили широкое распространение в современном машиностроении.
При помощи эпициклических механизмов можно осуществить передачу
движения одному валу от вращающихся независимо двух других валов.
Существует несколько методов определения передаточных отношений
Рис. 20
эпициклических механизмов.
Рассмотрим аналитический ме-
тод, основанный на принципе
обращения движения, и графи-
ческий метод картин скоростей.
На рис. 20 показана схема
простейшего дифференциально-
го механизма. В этом механизме
три зубчатых колеса /, 2 и <?.
Центральные колеса 1 и 8 вра-
щаются вокруг неподвижной
ОСИ О С угловыми скоростями G)!
и о)3. Вал А вместе с закрепленным на нем колесом (сателлитом)
2 вращается с угловой скоростью в подвижном подшипнике, закреп-
ленном на водиле S и вместе с этим водил ом вращается независимо
от колес 1 и 3 с угловой скоростью со$ вокруг общей оси О механизма.
Находим по структурной формуле (1.1) число W степеней подвижности
механизма:
W= Зп — 2р2— рг — 3 =15 — 8 — 2 — 3 = 2.
Таким образом, дифференциальный механизм имеет две степени по-
движности. Следовательно, для получения определенности движения
механизма необходимо задаться законами движения двух звеньев
(иметь два ведущих звена). Можно, например, задаться угловыми ско-
ростями cot центрального колеса и со$ водила S. Тогда угловая ско-
рость со3 центрального колеса 3 будет вполне определенной.
Для того чтобы найти угловую скорость какого-либо звена диффе-
ренциального механизма по заданным угловым скоростям двух других
звеньев, обратим механизм, сообщив ему дополнительное вращение с
угловой скоростью, равной (— со$), вследствие чего звено (водило) S
станет неподвижным, и дифференциальный механизм превратится
в обыкновенный зубчатый механизм с неподвижными осями. В этом об-
ращенном механизме вследствие добавления ко всем звеньям угловой
скорости (— со$) угловая скорость соколеса 1 равна (coj — cos), а уг-
ловая скорость oof колеса 5 равна (со3— cos). Поэтому передаточное
отношение if,3 такого механизма:
о wf «1 —Ms «1-«S ,оох
h з = —с- =-------—---------•
со? юз — — ns
О
В этой формуле индекс S при угловых скоростях <of и со| показывает,
что в данном случае рассматриваются угловые скорости колес 1 и 3
30 г // _ h > - > ~ Lt- -f- И Ч
I..-, ' — -
www.vokb-la.spb.ru - Самолёт своими
в предположении, что звено S неподвижно; передаточное же отношение
/1,з представляет собой не отношение действительных угловых
скоростей и ©з центральных колес 1 и 3 рассматриваемого диффе-
ренциального механизма, а отношение угловых скоростей этих колес
в обращенном механизме. Величину и знак передаточного отношения
ii,3 определяют в соответствии со схемой механизма по формуле (3.3)
или (3.4). Если жестко закрепить одно из центральных колес, например,
колесо 3 (и3 = 0), то такой механизм называется планетарным и фор-
мула (3.4) для него принимает такой вид:
•S “1 — “s , ©! , -
»1,з =---—— =1-------— = 1 —li,s
ИЛИ
l-if.3, (3.9)
где h,s — передаточное отношение планетарного механизма с непо-
Л СО!
движным колесом 3, равное .
Таким образом, для определения передаточного отношения пла-
нетарной передачи необходимо из единицы вычесть передаточное от-
ношение if,3 обращенного механизма. Планетарный механизм имеет,
очевидно, одну степень подвижности. Передаточное отношение Zs,i
в том случае, если ведущим звеном является водило S, а ведомым ко-
лесо /,
. __ 1 __ 1 __ *3.1
*1,3 '1—<f,3 <1-1
Для определения передаточных отношений планетарных передач
можно применить также весьма удобный и наглядный метод картин
скоростей, предложенный Л. П. Смирновым. Определим этим методом
передаточное отношение рассматриваемого планетарного механиз-
ма (со3 = 0). Проводим прямую линию ОГС19 параллельную линии
центров ОС (рис. 20), и проектируем на эту прямую точки О, Р, А, С.
Из точки Pt откладываем скорость ир точки Р колеса 1 в виде отрезка
Ptp, представляющего собой в масштабе скорость vp, т. е.
Так как скорость точки О равна нулю, то, соединив прямой линией
ее проекцию с точкой р, получим картину скоростей колеса 1 в виде
треугольника О^р. Закон распределения скоростей точек колеса 1,
лежащих на прямой ОР, будет изображаться прямой линией Оур. Точ-
ка Р является общей для колес 1 и 2, поэтому скорость точки Р колеса 2
Судет также равна vP. Скорость же точки С колеса 2 равна нулю, так
как это колесо находится в зацеплении с неподвижным колесом <3. Сле-
довательно, закон распределения скоростей колеса 2 изображается
прямой Сгр. Отрезок представляет собой в масштабе скорость
31
(3.10)
иА центраЛ колеса 2. Эту же скорость будет иметь и центр Л подвиж-
ного подшипника водила S. Так как водило вращается вокруг оси О,
то закон распределения скоростей водила представится прямой линией
Ota, проходящей через точку а. Передаточное отношение i\,s этого
планетарного механизма:
1пл- - -ру (3.11)
Так как векторы Pjp и направлены в одну сторону, то передаточ-
ное отношение положительно.
§ 4. ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ СООСНЫХ
ПЛАНЕТАРНЫХ ПЕРЕДАЧ
В практике машиностроения и приборостроения одной из наиболее
важных проблем является подбор чисел зубьев планетарного меха-
низма.
Для разгрузки центральных подшипников и возможности передачи
большей мощности в планетарных редукторах устанавливается не-
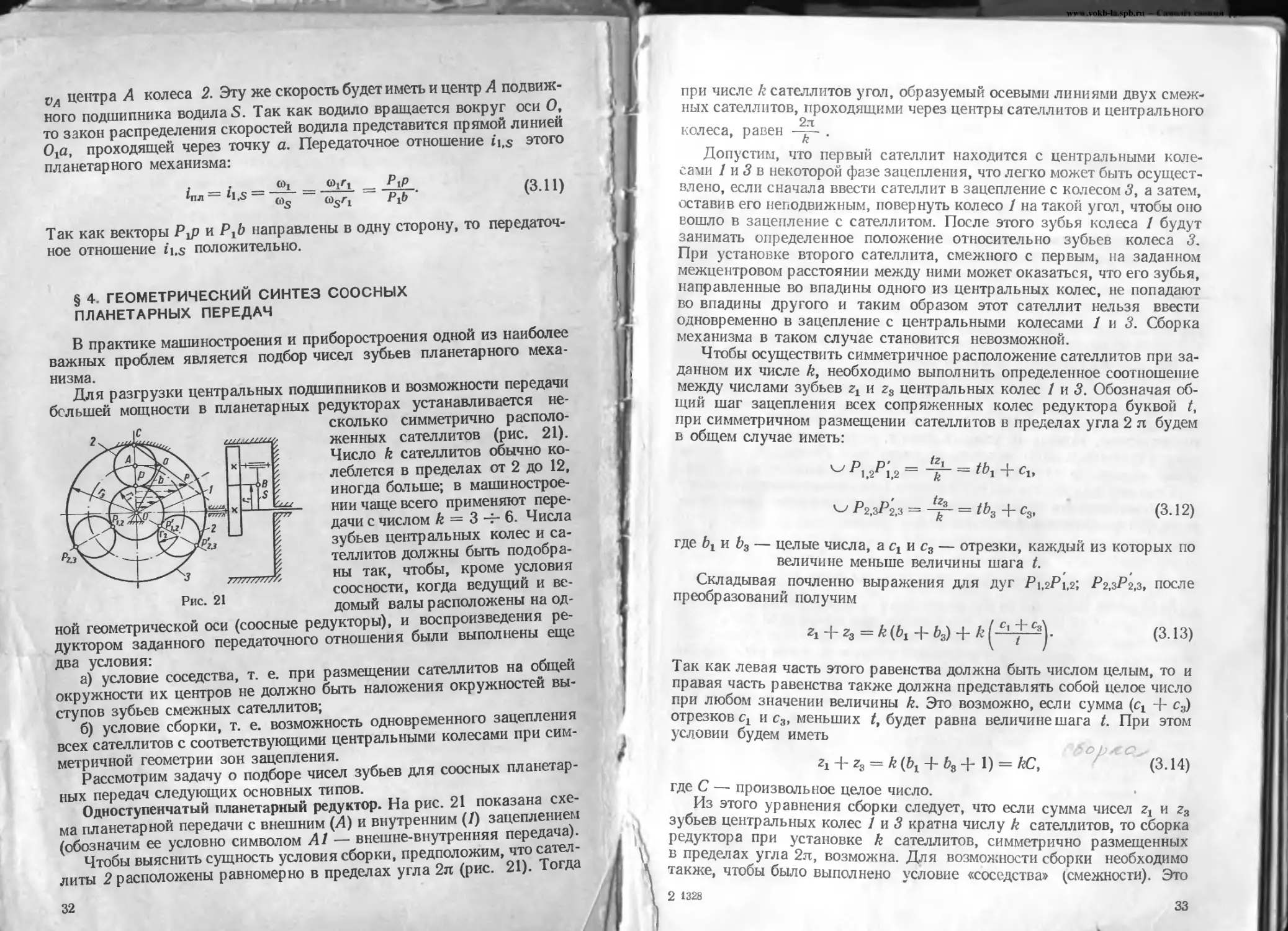
сколько симметрично располо-
женных сателлитов (рис. 21).
Число k сателлитов обычно ко-
леблется в пределах от 2 до 12,
иногда больше; в машинострое-
нии чаще всего применяют пере-
дачи с числом k = 3 -г- 6. Числа
зубьев центральных колес и са-
теллитов должны быть подобра-
ны так, чтобы, кроме условия
соосности, когда ведущий и ве-
домый валы расположены на од-
ной геометрической оси (соосные редукторы), и воспроизведения ре-
дуктором заданного передаточного отношения были выполнены еще
два условия:
а) условие соседства, т. е. при размещении сателлитов на общей
окружности их центров не должно быть наложения окружностей вы-
ступов зубьев смежных сателлитов;
б) условие сборки, т. е. возможность одновременного зацепления
всех сателлитов с соответствующими центральными колесами при сим-
метричной геометрии зон зацепления.
Рассмотрим задачу о подборе чисел зубьев для соосных планетар-
ных передач следующих основных типов.
Одноступенчатый планетарный редуктор. На рис. 21 показана схе-
ма планетарной передачи с внешним (Л) и внутренним (/) зацеплением
(обозначим ее условно символом А1 — внешне-внутренняя передача).
Чтобы выяснить сущность условия сборки, предположим, что сател-
литы 2 расположены равномерно в пределах угла 2п (рис. 21). Тогда
32
при числе k сателлитов угол, образуемый осевыми линиями двух смеж-
ных сателлитов, проходящими через центры сателлитов и центрального
2я
колеса, равен .
Допустим, что первый сателлит находится с центральными коле-
сами /нЗв некоторой фазе зацепления, что легко может быть осущест-
влено, если сначала ввести сателлит в зацепление с колесом 3, а затем,
оставив его неподвижным, повернуть колесо 1 на такой угол, чтобы оно
вошло в зацепление с сателлитом. После этого зубья колеса 1 будут
занимать определенное положение относительно зубьев колеса 3.
При установке второго сателлита, смежного с первым, на заданном
межцентровом расстоянии между ними может оказаться, что его зубья,
направленные во впадины одного из центральных колес, не попадают
во впадины другого и таким образом этот сателлит нельзя ввести
одновременно в зацепление с центральными колесами 1 и 3. Сборка
механизма в таком случае становится невозможной.
Чтобы осуществить симметричное расположение сателлитов при за-
данном их числе Л, необходимо выполнить определенное соотношение
между числами зубьев и zs центральных колес 1 и 3. Обозначая об-
щий шаг зацепления всех сопряженных колес редуктора буквой /,
при симметричном размещении сателлитов в пределах угла 2 л будем
в общем случае иметь:
= tbs + с3, (3.12)
К
где Ь± и Ь3 — целые числа, а сх и с3 — отрезки, каждый из которых по
величине меньше величины шага t.
Складывая почленно выражения для дуг Pi,2^1,2; Р2,3^2.3, после
преобразований получим
zi + 2з = k (bi + 63) + k ( 3
(3.13)
Так как левая часть этого равенства должна быть числом целым, то и
правая часть равенства также должна представлять собой целое число
при любом значении величины k. Это возможно, если сумма (сх + с3)
отрезков сх и с3, меньших t, будет равна величине шага t. При этом
условии будем иметь
Z1 + ZS = k (&х + b3 + 1) = kC, (3.14)
где С — произвольное целое число.
Из этого уравнения сборки следует, что если сумма чисел гх и z3
зубьев центральных колес 1 и 3 кратна числу k сателлитов, то сборка
редуктора при установке k сателлитов, симметрично размещенных
в пределах угла 2л, возможна. Для возможности сборки необходимо
также, чтобы было выполнено условие «соседства» (смежности). Это
2 1328 „о
условие будет выполнено в том случае, если расстояние между осями
двух смежных сателлитов будет больше диаметра окружности их выс-
тупов, т. е.
2 (/1 + r2) sin ~ > 2 (г2 + fjn) .
или
(*i + z2) sin - г2 > 2/', (3.15)
где /о — коэффициент высоты головки зуба сателлита.
Для внутреннего зацепления условие «соседства» выражается фор-
мулой
(г3 — г2) sin Л- — z2 > 2/', (3.16)
С
где г3 — число зубьев коронки 5;
?2 — число зубьев сателлита 2.
Из условия соосности получим равенство
z2 = Щ (3.17)
Поэтому неравенства (3.15) и (3.16) для рассматриваемого механизма
тождественны. Исходя из условий сборки, соседства и соосности пере-
дачи, а также заданного значения передаточного отношения, составим
общее уравнение для определения чисел зубьев данного редуктора.
Если ведущим звеном является колесо /, то передаточное отношение
/пл = *i,s от первого колеса к водилу S рассматриваемого планетарно-
го редуктора (коронка 3 неподвижна)
/пл = Л.5=^-=^- = 1-^ (3-18)
где ff,3 = — ----передаточное отношение от колеса 1 к колесу 3
в обращенном движении (в предположении неподвижности водила S).
Из формул (3.18) следует, что планетарные механизмы могут вос-
производить очень большие и очень малые передаточные отношения.
В этом случае передаточное отношение редуктора в его обращенном
движении должно быть близким к единице.
Значение передаточного отношения рассматриваемого механиз-
ма всегда положительно, поэтому колесо 1 и водило S вращаются в
одном направлении. Так как fj.s > 1, то передача этого типа при веду-
щем звене 1 служит для уменьшения скорости вращения ведомого
звена — водила S и при ведущем звене S — для увеличения скорости
вращения ведомого звена — колеса 1.
Из формулы (3.18) получим
23 = z1(i1.s-l)- (3.19)
Подставив это значение Z3 в уравнение (3.17) соосности и уравнение
(3.14) сборки, соответственно будем иметь
2г2 = г1(йл-2) (3.20)
34
www.vokb-la.spb.ru - Самолёт своими руками?!
И
-^- = С. (3.21)
Сопоставляя уравнения (3.19), (3.20) и (3.21), получим общее урав-
нение для определения чисел зубьев редуктора:
____________ 1 , (^1,S ^) /• 1\ try QQX
2^ : 22.2g . С? — 1 • 2 • Ci““ 0 * * (3.22)
Решение этой задачи возможно в неопределенном числе вариантов, так
как при трех неизвестных числах зубьев имеем два уравнения с допол-
нительными условиями сборки и «соседства».
Исходя из требований наименьших габаритов передачи и условий
отсутствия подрезания, выбираем возможно наименьшее число zr зубь-
ев центрального колеса / и по заданному передаточному отношению
fl,s находим из уравнения (3.22) числа г2 и z3 зубьев сателлитов 2 и
коронки <?.
Условие «соседства» выражается неравенством (3.15). Подставляя
в эту формулу значение г2 из уравнения (3.17) соосности и значения z3
из уравнения (3.19), после элементарных преобразований получим
2-^-
£
A.s< ——Чг- (3.23)
1 — sin —
k
Принимая и,2 = 4, по диаграмме Фогеля [2] находим число z± =
= 15 зубьев на центральном колесе / редуктора. Это число является
минимальным, допустимым при нарезании колеса без сдвига исходного
контура (/о — 1, стандартный угол зацепления а0 = 20°); для полу-
чения возможно меньших габаритов принимают наибольшее число
зубьев zY = 50; изменению числа зубьев в интервале 50 > z1 15
соответствуют изменения передаточных отношений i\ts редуктора
(3.23) в следующих интервалах:
14,3>ti.s>13 (/г = 3); (3.24)
6,6>fi.s>6 (fe = 4); (3.25)
4,6 >h,s>4,2 (6 = 5) и т. д. (3.26)
При числе сателлитов k = 2 условие соседства всегда удовлетворяется.
Задача подбора чисел зубьев решается в следующем порядке: по
заданному передаточному отношению в соответствии с неравенства-
ми (3.24—3.26) выбираем число k сателлитов и по формуле (3.22)
находим возможное число зубьев; если это число при проверке по фор-
муле (3.15) или (3.23) не удовлетворяет условию «соседства», то, прини-
мая меньшее на единицу число сателлитов, по формуле (3.22) опреде-
ляем в окончательном варианте возможное число зубьев. Если z2<C z±,
т. е. iitS 4, то условия «соседства» для А = 3, А — 4 и А = 5 всег-
да удовлетворяются.
2* 35
е
Пример 1. Подобрать числа зубьев, если задано передаточное отношение редук-
тора (рис. 21)
q s = 4,5, т. е. 4,6 > 5 > 4,2.
Принимаем соответствующее этому неравенству число сателлитов k = 5 и по формуле
(3.22) определяем числа зубьев:
z, = 20; z2 = 25; z3 = 70.
Это число зубьев не удовлетворяет условию «соседства» (3.15), поэтому, приняв £—4,
находим
— 16; z2 = 20; z3 = 56.
Схема четырехзвенного планетарного редуктора с двумя внешними
зацеплениями и с двухрядными сателлитами показана на рис. 22.
Редуктор состоит из двух пар колес /, 2, <?, 4 и водила 3. Централь-
ное колесо 4 закреплено. Для определения передаточного отношения
Zi,$ от колеса 1 к водилу S вос-
пользуемся формулой (3.9):
U = = 1 - ifv <3-27)
С05
ГДе 2 2
^4=-^. (3-28)
Таким образом, задача подбора
чисел зубьев рассматриваемого ре-
дуктора заключается в составлении четырех уравнений для определе-
ния четырех неизвестных — чисел зубьев z19 z2, z3, z4 — колес меха-
низма. Этих уравнений можно составить только два — уравнение
(3.27) для определения передаточного отношения /пл механизма и урав-
нение соосности:
‘ mt 2 (z, + z2) = m3,4 (z3 + zj,
(3.29)
где ahi,2 — модуль сопряженных колес 1—2\
тз,4 — модуль сопряженных колес 3—4.
Следовательно, решение задачи возможно в неопределенном числе
вариантов, так как при четырех неизвестных числах зубьев мы имеем
два уравнения; однако при подборе числа зубьев, как указывалось
выше, должны быть приняты во внимание требования наименьших
габаритов механизма, отсутствия подрезания зубьев, а также условия
сборки и «соседства» сателлитов.
Как видно из формулы (3.27), передаточное отношение механиз-
ма в зависимости от величины числового значения и,4 может быть и
положительным и отрицательным, т. е. водилоS и центральное колесо 1
могут вращаться либо в одном и том же, либо в противоположном на-
правлении.
В первом случае будет неравенство
i\,s > 0
(3.30)
и при ведущем колесе 1 передача будет являться ускоряющей, т. е.
ведомое звено S будет вращаться с большей угловой скоростью, чем
36
www.vokb-la.spb.ru - Самолёт своими р;
ведущее колесо /, а во втором случае неравенство
h,s < 0, (3.31)
т. е. абсолютная величина |n,s| может принимать любые значения;
поэтому в зависимости от абсолютного значения передаточного отно-
шения | | передача может быть как ускоряющей при |Л,$| < 1, так
и замедляющей при |Л,$] > 1.
Обозначим отношение величины модуля mi,2 к величине модуля
тз,4 буквой q\
т} 9
^=9, (3.32)
а отношение — чисел зубьев колес / и 2 и — колес 4 и 3 соответст-
г2 z3
венно буквами х и у:
-Г = -Г = у- (з.зз)
<2 z3
Уравнение соосности запишем так:
+ ?2) <7 = + г4 = (х + 1) z2q. (3.34)
Отношение
х .s
У г2г4 4Л’
Задаваясь значением х, определяем из этого равенства величину //:
У = ATf4. (3.35)
При подборе количества зубьев планетарного механизма необходи-
мо, как указано выше, учитывать уравнение сборки [131:
или
• ?3 - С. (3.37)
При выборе в этой формуле значения х необходимо исходить из усло-
вия «соседства» для обеих пар колес
« (zi + z2)sin^—z2>2f'o; (3 38)
, (z3 + г4) sin — г3 > 2f'o (3.39)
или
(x+l)sin-p —1 > — (3.40)
(^+l)sin^—1>^-. (3.41)
3
37
Принимаем число сателлитов k = 3; 4; 5; бит. д., а возможное макси-
мальное и минимальное число z зубьев на каждом из них — 150 и 15;
подставив в формулы (3.40) и (3.41) соответствующие величины z и k,
получим нижние минимальные (z = 150) и максимальные (z = 15)
пределы значений х и у, удовлетворяющие условиям соседства:
* > У > eky
где ek, в зависимости от числа k сателлитов, принимает следующие
значения:
е3 > 0,17 4- 0,31; е4 > 0,43 4- 0,6; е- > 0,72 4- 0,92;
е6 > 1,03 4-1,25 и т. д. (3.42)
Наибольшая величина передаточного отношения i)« для одной
зубчатой пары «==6 4-10 в зависимости от числа зубьев z^-i)
меньшего сопряженного колеса.
Таким образом, при подборе чисел зубьев редуктора рассматривае-
мого типа задаемся вначале параметром х, ограничивая его величину
указанными выше предельными значениями,
при И.4 > 1
1)« х ek\ у < (о.43)
•S
при И,4 < 1
\п~\)п У 1)«* (3.44)
Для того чтобы получить простые числовые соотношения в расчет-
ных формулах и, следовательно, уменьшенные габариты передачи,
необходимо задаваться в указанных выше пределах таким значением
параметра х, числитель или знаменатель которого имел бы общие де-
лители соответственно со знаменателем или числителем сомножителя
•S S
И,4 произведения хг1,4 = у\ это же условие по возможности должно
быть выполнено и в отношении сомножителей (х + 1) и q произведе-
ния (% + 1) q. Сокращение сомножителей указанных произведений
на их общие делители приводит к простым соотношениям в расчетных
формулах и вследствие этого к наименьшим габаритам и компактности
планетарной передачи.
Если х > 1 и у > 1, то при числе сателлитов k — 3; 4; 5 условия со-
седства всегда удовлетворяются.
Задачу подбора чисел зубьев рассматриваемого редуктора следует
выполнять в следующем порядке:
1) в соответствии с формулами (3.43) и (3.44) подбирают значение
параметра х9 определяя его нижний предел при возможно наибольшем
числе k сателлитов;
2) определив по формуле (3.35) значение у = -ф-,из уравнения
сборки (3.37) находят величины, пропорциональные количествам z3
зубьев сателлита 3 и г4 = z3y центрального колеса 4\
3) составляют уравнение (3.34), из которого определяют коэф-
фициент пропорциональности а и затем числа зубьев колес /, 2, 3, 4\
38
4) расчет заканчивают проверкой по уравнению «соседства» (3.15)
найденного числа зубьев и по формуле (3.27) — полученного переда-
точного отношения ii.s редуктора.
Если вместо задано передаточное отношение iSt\, т. е. ведущим
звеном является водило S, то задачу решают аналогично рассмотрен-
ной в соответствии с формулой
1
= -
is
4,1
1.S - 1
(3.45)
Подобрав числа зубьев редуктора и зная угловую скорость во-
дила S, можно легко определить угловую скорость со2 = со3 сателли-
тов 2 и 3. Так как скорость va точки А водила и скорость центров сател-
литов равны, а точка С является мгновенным центром вращения коле-
са 3, можно написать:
• ОА^ — со3 •
или
«s fe + г4) = о3г3,
откуда определяют величину со3.
(3.46)
Пример 2. Подобрать числа зубьев редуктора, если дано:
4,5 = — Н; 9=1,6; f0=l.
Так как 4 = 12, то величина х должна быть меньше 1.
16 2.2 - 2 - 2
Число 12 = 2 • 2 • 3, а -=
10
следовательно, можно предварп-
2 • 5
тельно задаться величинами
х =* 3/8, Vz, 2/з, 3/а и др.
Принимаем:
а) х = 3/8; по формуле (3.35) находим у — 9/2,
у — х 33
k 2з ~
г3 = С; z3 = 8tz; = 36а?
(?i + z2) <7 = (* + I) г2 • 1,6 = г3 + z4, или и/8 г2 - 1,6 = 44а,
откуда г2 = 20 а, а — 1; 2; 3; 4 ... Принимаем а = 2, тогда будем иметь
z2 = 40; гг — xz2 = 15; z3 = 16; z4 — 72.
б) х = Ч2, у = 6;
' гз ~ ~2—з” * гз ~ гз ~ ^4 = 36а;
(х + 1) ?2 • 1>6 = 42а, z2 = 35 • , а = 2; 4; 6; 8...
При а = 4 числа зубьев
г2 = 70; гх — xz2 = 35; z3 = 24; z4 = 144;
2
в) х = —; у = 8;
39
и — х 22 5 CA
---z3 = -J7-4- • z3 = C; z3 = 6a; z4 = 48a; -g- z2q = 54a;
z2 = - - = z2; « = 4; 8; 16...
При a 4 имеем:
г1 — xz2 — 54; z2 = 81; z3 = 24; z4 = 192;
3
г) x = — ; у = 9;
у — х 33 „ 1ЛА 400а _ 1А О1
~~k~ ’ гз == -4-7 j~ • ?з = С; z3 = 16a; z4=144a; z2 =—у—; а = 7; 14; 21...
При а = 7 получаем:
zr = .300; z2 = 400; z3 = 112; z4 = 1008.
Приняв число сателлитов k = 3, получим редуктор с меньшим числом зубьев
zx = 75; z2 = 100; z3 = 28; z4 = 252.
Во всех рассмотренных вариантах подобранные числа зубьев удов-
летворяют условиям «соседства», сборки, наименьшим габаритами вы-
численное передаточное отношение равно заданному.
Пример 3. Определить числа зубьев колес, если дано передаточное отношение
редуктора
rlS = 0,l; /0=1; <7=1,5.
Рассмотрим несколько вариантов решения этой задачи.
Учитывая числовые значения передаточного отношения= 0,9 и 1,5, на
основании изложенного выше задаемся следующими значениями параметра х:
1 2 5 у — х
Х~ 3 ’ т: “3": 2;5; k гз~С’
принимаем
а) k = 3, х = —-. Следовательно, z3 = 90a; z4 = 27a. Из уравнения
О
117 а
(х4- 1) z2 <7= (z3+ z4) определяем z2 = —где a = 2; 4; 6... Таким образом, при
наименьшем значении коэффициента a = 2 получаем наименьшее число зубьев редук-
тора:
zx = 39; z2=117; *3 = 180; z4 = 54;
2 б) х = —- ; у = 0,6; k = 4; 0
гг = 128; z2 = 192; = 300; z4 = 180;
при k = 3 числа зубьев уменьшаются:
2'i = 96; z2=144; 2'3 = = 225; z4 = 135.
в) х = б/3; у = 3/2; k = 6;
Zi — 75; z2 = 45; 2^3 = = 72; z4 = 108.
II do II сч II
z1=112; z2 = 56; 2'3 = 90; z4 = 162;
Д) х = 5; у = »/2; k = 6;
г1=110; гг = 22; *3 = 36; z4 = 162.
40
www.vokb-la.spb.ru - Самолёт своими руками?!
Схема планетарного редуктора с двухрядными сателлитами, с внеш-
ним и внутренним зацеплениями показана на рис. 23; справа построе-
на картина скоростей механизма. Передаточное отношение гПл = Л,з
рассматриваемого редуктора при ведущем звене 1 и ведомом S опре-
деляется по формуле (3.18):
= (3.47)
где
*2*4
V3*
Таким образом,
1ПЛ = »1>5 = 1+^. (3.48)
Z1Z3
Из этого уравнения следует, что
h,s > 1 и следовательно, эта переда-
ча при ведущем звене 1 является за-
медляющей и направление угловой
скорости водила совпадает с направ-
Рис. 23
лением ведущего звена (колеса /.) Уравнение соосности
q (*1 + г2) = z4 — z3 = (х + 1) z2q.
(3.49)
z z
Задаваясь величиной х = определяем величину у = - из
Z2 г3
равенства
х Z1Z3 iS
У чч 4Д’
т. е.
У= — xif4. (3.50)
Напишем уравнение сборки [13] этой передачи по аналогии с уравне-
нием (3.36):
Z4 | Z1Z3 __
k ‘ kz2
или
±^--za = с.
k 3
(3.51)
(3.52)
Предельные значения входящих в это уравнение х и у для колес
с внешним и внутренним зацеплением определяются из условий сосед-
ства, выражаемых неравенствами
(x+l)sin-^-l >4^; (3.53)
ft; ^2
G/-l)sin^-l (3.54)
41
по формулам
Чп^\)п> ek, (3.55)
Чп—i)n У fk» (3.56)
где fk по аналогии с неравенствами (3.42), (3.43) и (3.44) принимает
в зависимости от числа k сателлитов следующие значения:
/з> 2,17 4-2,3; /,>2,43 4-2,6; /5 > 2,724-2,93; /6 > 3,03 4-3,27.
Подбор чисел зубьев колес рассматриваемой передачи проводится
в изложенном выше порядке.
Пример 4. Подобрать числа зубьев редуктора по заданному передаточному отно-
rz 5
шению ij s = 12; /0= 1,0; q~ 1,1. Задаваясь значением х = —, находим величину
£/ = х (— if 4) = 5; в соответствии с формулами (3.55) и (3.56) принимаем число сател-
у 4" х
литов k = 3; по формуле —----z3 = С определяем количество зубьев г3 на сател-
k
лите 3: z3=lla; z4 = yz3 — 55а; из равенства (x+l)z2^=z4— z3 находим
55а
величину z2 = — , где а = 2; 4; 6 ... Принимая а = 2, получаем г4 = 25; z2 = 55;
z3 = 22; г4 — ПО.
Полученные числа зубьев удовлетворяют условиям соосности, соседства и сборки,
а также требованиям наименьших габаритов механизма.
ГЛАВА IV
ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ
ПРЯМОЗУБОГО ВНЕШНЕГО ЗАЦЕПЛЕНИЯ
§ 1. ЗАДАЧА ГЕОМЕТРИЧЕСКОГО СИНТЕЗА ЗУБЧАТОГО
ЗАЦЕПЛЕНИЯ
Задачей геометрического синтеза зубчатого зацепления является
определение его размеров, а также качественных характеристик (ко-
эффициентов перекрытия, относительного скольжения и удельного
давления), зависящих от геометрии зацепления.
Ниже мы рассмотрим геометрический синтез внешних прямозубого,
косозубого и конического зацеплений, внутреннего прямозубого за-
цепления, а также реечного зацепления.
Подробно мы остановимся на геометрическом синтезе внешнего пря-
мозубого зацепления.
§ 2. ОПРЕДЕЛЕНИЕ РАЗМЕРОВ ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ
Размеры колес, а также всего зацепления, зависят от чисел zY и z2
зубьев колес, от модуля т зацепления (определяемого из расчета зуба
колеса на прочность), общего для обоих колес, а также от метода их
обработки.
42
www.vokb-la.spb.ru - Самолёт своими руками?!
Предположим, что колеса изготовляются по методу обкатки (огиба-
ния) инструментом реечного типа (инструментальной рейкой, червяч-
ной фрезой), который профилируется на основе исходного контура
(ГОСТ 3058—54).
Приступая к изготовлению колес, образующих зубчатое зацепле-
ние, нужно для каждого из них выточить заготовку радиуса ^(ра-
диус окружности выступов), об определении которого будет сказано
ниже, а также подсчитать ради-
ус гд делительной окружности
и общий для обоих колес шаг t
на делительных окружностях по
формулам
гд
mz
(4.1)
t = тл. (4.2)
Все остальные размеры каждо-
го из колес определяются гео-
метрическими параметрами ин-
струментальной рейки, а также
положением ее по отношению к обрабатываемому колесу в процессе
его изготовления.
Ознакомимся с размерами инструментальной рейки (рис. 24), а
также с процессом обработки колес по методу обкатки.
Прямая линия, делящая высоту зубьев рейки пополам, называется
средней (модульной) прямой. Прямые, параллельные средней прямой,
называются делительными. Расстояние между правыми или левыми
профилями двух соседних зубьев, измеряемое по любой делительной
прямой, называется шагом рейки. Для обработки колеса нужно взять
рейку, шаг которой равен шагу t колеса на его делительной окружности,
определяемому формулой (4.2).
Ширина впадины и толщина зуба равны между собой только на сред-
ней прямой. На делительных прямых они не равны, причем чем ближе
делительная прямая к линии выступов, тем ширина впадины бочьше,
а толщина зуба меньше. Ширину впадины обозначим буквой $д. Высота
Ло зуба рейки состоит из отрезка Лоз и двух равных отрезков с0. Отре-
зок Лоз — глубина захода рейки, с0 — радиальный зазор, а0 — про-
фильный угол рейки. У основания и у вершины зуба имеется закругле-
ние радиуса рн. Все размеры рейки зависят от модуля т:
t = тл; (4.3)
^оз = 2/от; (4.4)
с0 = цт; (4.5)
ри = 0,38m, (4.6)
где fo — коэффициент высоты зуба рейки;
* c'Q — коэффициент радиального зазора.
43
Для образования угла заострения, необходимого при снятии струж-
ки, боковые грани зубьев рейки скошены (пунктир на рис. 24).
Процесс изготовления зубчатого колеса (рис. 24) инструментальной
рейкой по методу обкатки заключается в том, что рейка в движении
по отношению к обрабатываемому колесу перекатывается без скольже-
ния одной из своих делительных прямых или средней прямой по дели-
тельной окружности колеса (движение обкатки) и одновременно совер-
шает быстрые возвратно-поступательные перемещения вдоль оси ко-
леса, снимая при этом стружку (рабочее движение).
Для осуществления такого перекатывания нужно рейке сообщить
поступательное движение влево со скоростью v, определяемой по фор-
муле
v = ГдЮ, (4.7)
где со — угловая скорость колеса.
Расстояние между средней прямой рейки и той делительной прямой,
которая в процессе обкатки перекатывается по делительной окружно-
сти колеса, называется смещением b рейки. Очевидно, что смещение b
равно расстоянию, на которое отодвинута средняя прямая рейки от де-
лительной окружности колеса. Смещение считается положительным,
если средняя прямая отодвинута в направлении от центра нарезаемого
колеса. Величина смещения b определяется формулой
b = gm, (4.8)
где g — коэффициент смещения, который может иметь положительное
или отрицательное значение. О выборе коэффициента смещения рейки
при изготовлении колес будет сказано ниже.
Анализируя изготовление зубчатых колес инструментальной рей-
кой по методу обкатки, приходим к следующим выводам:
1. Делительная прямая рейки и делительная окружность изготов-
ляемого зубчатого колеса являются центроидами в относительном дви-
жении рейки и колеса. Следовательно, делительная окружность из-
готовляемого колеса является начальной окружностью при зацеплении
этого колеса с инструментальной рейкой (станочное зацепление).
2. Шаг t инструментальной рейки должен уложиться на делитель-
ной окружности ровно z раз, так как шаг рейки равен шагу колеса
на делительной окружности.
3. Какая бы делительная прямая ни перекатывалась по делитель-
ной окружности колеса, она делит ее на шаги t одной и той же длины.
4. Толщина зуба изготовляемого колеса на его делительной окруж-
ности равна ширине впадины рейки на той ее делительной прямой,
которая перекатывается по делительной окружности колеса. Такая же
связь существует между шириной впадины колеса и толщиной зуба
рейки.
5. Все зубчатые колеса, независимо от числа зубьев, имеющие один
и тот же модуль т, могут быть изготовлены одной и той же инструмен-
тальной рейкой.
44
www.vokb-la.spb.ru - Самолёт своими
6. Профильный угол а0 рейки является углом зацепления рейки
и всех колес, которые изготовляются при помощи этой рейки.
7. Радиус го основной окружности изготовляемого зубчатого колеса
определяется из треугольника ONP (рис. 24) по формуле
ro = ON = OP cos а0 = гд cos а0. (4.9)
Зубчатые колеса, изготовленные без смещения инструментальной
рейки, называются нулевыми; изготовленные при положительном сме-
щении рейки — положительными, при отрицательном смещении —
отрицатель ными.
Для любых зубчатых колес, изготовленных одной и той же инстру-
ментальной рейкой, могут образовать правильное плотное зубчатое
зацепление, т. е. зацепление без боковых зазоров между зубьями.
Основной величиной, характеризующей зацепление, является угол
зацепления а, который определяется по формуле
inv а = —+ inv а0. (4.10)
2с
Здесь
inva = tga— а; (4.11)
inv а0 = tg а0 — а0; (4.12)
= + % (4-13)
zc = z1 + z2. (4.14)
Из формулы (4.10) видно, что угол а зависит только от отноше-
ния — .
2С
Так как zc =£ 0, то а ф а0, если gc 0. Если же = 0, то a = a0-
В зависимости от значения £с зубчатые зацепления классифици-
руются следующим образом:
1. Если — 0, причем = g2 = 0, то зацепление называется
нормальным (нулевым).
2. Если gc = 0, причем = £ > 0» то зацепление назы-
вается равносмещенным (компенсированным).
3. Если ф 0, то зацепление называется неравносмещенным, при-
чем при £с > 0 зацепление называется положительным неравносме-
щенным, а при gc<0— отрицательным неравносмещенным.
В табл. 1 помещены формулы, необходимые для определения раз-
меров всех перечисленных зацеплений. При пользовании таблицей нуж-
но учесть, что
а0 = 20°; /о = 1; = 0,25 и z2 > zx.
В последней графе даны формулы для подсчета размеров нулевого зуб*
чатого зацепления. Следует обратить внимание на характерные особен-
ности этого зацепления: делительные окружности колес являются
* Индекс 1 принадлежит меньшему колесу, индекс 2— большему.
45
о Таблица 1
Формулы для подсчета размеров элементов зубчатого цилиндрического зацепления с прямым зубом
Что тр буется найти Зацепление
Наименование Обозначение Неривносмещенное 0 а 0; 4f>0; Равносмещеппос 5С — 0 S, = - ’2 > 0; а = Т = 0 Нулевое <c = 0 £1 = ?2 = 0 а=Ф =0
Шаг зацепления по делительной окружности t V t = тл t = тп t = mn
ч Радиус делительной окружное- ти ъ mt* г == L Д1 2 r - Д1 2
ГД2 \| mz<> ГЛ2 2 _ mz2 Д2 2 _ mz2 Д2 2
Радиус основной окружности \j Го, = Ч C0S “•> Ч =гд1 cos«o ГО1=ГД1 cosao
Ч\| ГО2 ~ гд2 cos а0 4 = fa!cosao ro2 = rfl2COSao
Толщина зуба по делительной окружности 5Д1 V s3t~4'z+2^OTtga° «д, = -j-1 + 2g tg a0 5Д1 = ~2 1
ч sAs=4’/+2^mtgao Sas = 4'/ + 252,"tga,> ®дг = TZ
Радиус окружности впадин М /?<-.==гД1~т^о + со-^) = rRi~m Vo + co~ — m(/o + co)
R: l2 ^•2=гд — m(fo + cO — &) Ri, =rni-m(f0 + cQ-l2) ^*2= r^m (^o + co)
Межцентровое расстояние А\ А = ml 'Sfe _L„\ Л+ ) тге A~ 2 ) л=—
Радиус начальной окружности rl \| ri = гд. | гс J Г1 = ГД. Г1 = ГД.
r2 = гд, 1 й+— Г2 = Гдг = 4
Глубина захода зубьев й3 \) h3 = (2/0 — 'О т h3 = 2mf3 hs = 2mf о
Высота зуба Л \/ 7l = СцШ h = h3 + cQm h =s h3 + Cq m
Радиус окружности выступов UCV Re^Rti + h Ret = Rlt + ^3 Г5> 1 +
1 II >3 ьэ + а* Re2 = Re = Rt + h ^4 l2 *
Lb-Ia.spb.ru - Самолёт
Примечание. Индекс 1 относится к размерам колеса, имеющего меньшее число зубьев, а индекс 2 — к размерам ко-
$3 леса, имеющего большее число зубьев.
S
» 2
также начальными окружностями, т. е. центроидами в относительном
движении колес, угол зацепления равен профильному углу а0 инстру-
ментальной рейки, толщина зуба и ширина впадины равны каждая
, высота зуба h = (2/0 + с') т, высота головки равна модулю т,
а высота ножки равна т (Д, + с^.
Равносмещенное зацепление имеет много общего с нулевым зацепле-
нием. В нем делительные окружности также играют роль начальных,
угол зацепления а равен углу а0, высота зуба h = (2/0 + с'о) От-
личие от нулевого зацепления заключается в том, что зуб у меньшего
колеса (g2 > 0) располагается дальше (на расстоянии ^т) от центра
колеса, чем в нормальном зацеплении, а у большего (g2 < 0) — на рас-
стояние |g2| m ближе. Поэтому высота головки йГ1 у меньшего колеса
увеличивается на ^т, а высота ножки /гН1 уменьшается на ту же вели-
чину. У большего колеса, наоборот, высота головки уменьшается
на | 1 т, а высота ножки hHlt увеличивается на ту же величину. Отли-
чие от нулевого зацепления заключается также и в том, что каждое
из колес имеет ряд размеров, зависящих от того смещения инструмен-
тальной рейки, которое было сделано при его изготовлении. Сюда от-
носятся размеры радиусов окружностей впадин (/?,/, T?t-2), толщин
зубьев по делительным окружностям («Д1; «Д2), радиусов окружностей
выступов (Z?C1; Re2). В зависимости от положительного смещения ин-
струментальной рейки, которое задают при изготовлении меньшего
колеса, размеры %; Rit- R€1 оказываются большими, чем такие же раз-
меры у нулевого колеса, имеющего тот же модуль т и то же число
зубьев zx. У большего колеса в связи с отрицательным смещением про-
исходит уменьшение размеров $Д2; Ri2\ Re£.
Неравносмещенное зацепление во многом отличается от нулевого.
В нем, как и в равносмещенном зацеплении, имеются (см. табл. Г)
величины, зависящие только от того смещения, которое было сделано
при изготовлении каждого из них. Сюда относятся толщины $Д1 к
зубьев по делительным окружностям, радиусы Rit и Rit окружностей
впадин. Помимо этого, имеется ряд величин, зависящих от двух сме-
щений инструментальной рейки. Этими величинами являются: угол
зацепления сс, радиусы и г2 начальных окружностей, межцентровое
расстояние Л, глубина захода й3, высота зуба h и радиусы RCt и RPt
окружностей выступов. Неравносмещенное зацепление изображено
на рис. 25. Формулы, приведенные в табл. 1 для подсчета размеров Л,
гь г2, А3, взяты из [22].
В этих формулах введены коэффициенты а (отклонения межцентро-
вого расстояния) и Т (обратного смещения). Коэффициент а опре-
деляет расстояние ат между делительными окружностями на линии
центров, а коэффициент Ч'— уменьшение Vm высоты h зуба по сравне-
нию с высотой зуба в нормальном и равносмещенном зацеплениях.
Об определении этих коэффициентов будет сказано ниже.
Характерной особенностью неравносмещенного зацепления являет-
ся также и то, что в нем угол зацепления а не равехЧ углу а0 и что дели-
тельные окружности не являются начальными. Угол зацепления а
48
www.vokb-la.spb.ru - Самолёт своими руками
можно определить по формуле (4.10), для чего следует воспользоваться
таблицами инволют (эвольвентных функций), приводимыми в справоч-
никах. Проще 122] можно опреде-
лить угол а по номограмме (рис. 26).
Если, например, zc = 59 и
£с = 1,75, то, определив величину
---с = 29,7, находим по номо-
грамме против числа 29,7 значе-
ние угла а = 26° 36'.
Следует заметить, что радиусы
делительных и основных окружнос-
13
12
II
10
23W
23°10'
23°0'
26
25
26
22°50
22°66‘
23
22°30'
22
39
-28°0
'~25°5ff
38
25°60
37
-25°30‘
-25°20'
36
35
52
.27*50
-27°60‘
51
50
27°30' 69
29°50'
-29°60'
-29°30‘
ог
Рис. 25
к
Е
д
'-^О'
\22°Ю'
^22°0'
}г2Г50'
\-21°40‘
{г2Г30'
^21о20'
\-2ГЮ*
\2/°0'
\20°50
\?0°60'
120о30’
f20W
[гоЮ
l20°0'
-25°Ю'
21
20
19
18
17
16
15
16
13
-25с0
36
-27°20‘
-27°10‘
68-
47
66
29°20'
-29°Ю'
--26°6О,32
z-26°30
Ъ-26°2Г
31
30
29
-23^29
^23%0'
-23°30'
ад
О С
27
26
27°0‘
65-
-26°50
66
-26°6О‘
63-
~-26°30
62
-2fT2tf
61
-26°Ю'
-26°0
60-
39
-29°0i
28°50'
28°60'
-28^30'
28°20'
28°!0'
Рис. 26
9
в
7
6
5
4
3
2
^6*0'
о
тей подсчитываются по одним и тем же формулам для всех типов зуб-
чатого зацепления и от смещений не зависят.
§ 3. ВЫЧЕРЧИВАНИЕ ЭЛЕМЕНТОВ ЗУБЧАТОГО ЗАЦЕПЛЕНИЯ
Подсчитав все размеры элементов зацепления по формулам, приве-
денным в табл. 1, и определив для неравносмещенного зацепления угол
а по формуле (4.10) или по номограмме, приведенной на рис. 26, при-
ступаем к вычерчиванию зубчатого зацепления.
Масштаб построения выбираем таким образом, чтобы высота зуба
на чертеже была не менее 50 лш.
Профили зубьев вычерчиваем в такой последовательности (рис. 27).
1. На линии центров колес от точки Р (полюса зацепления) откла-
49
дываем радиусы гх и г2 начальных окружностей и строим эти окруж-
ности.
2. При больших размерах зацепления построение основных окруж-
ностей и касающейся их прямой N±N2 (рис. 27) затруднительно. Для
Рис. 27
облегчения построений можно использовать два способа. По перво-
му способу (рис. 28) из точки Р проводим дугу радиуса РА = 2r\ sin а
и засекаем начальную окружность 1-го колеса в точке А. Очевидно,
прямая АР образует угол а с касатель-
ной КР. Соединяя середину отрезка
РА с центром 019 получаем радиус 0^
основной окружности 1-го колеса. Если
точка В пересечения прямой АР с на-
чальной окружностью 2-го колеса по-
лучилась в пределах чертежа, то, со-
единяя середину N2 отрезка РВ с цент-
ром 02, получаем радиус 02N2 основной
окружности 2-го колеса. После этого
строим обе основные окружности. Если
же точка В получается за пределами
чертежа, то откладываем отрезок PN2 =
Рис. 28 = r2 sin а от точки Р и определяем радиус
О2Л^2 основной окружности 2-го колеса.
Второй способ следует применить, когда точка А также оказывается
за пределами чертежа. В этом случае сначала строим угол а. Для этого
откладываем (рис. 28) отрезок РК = 1004-200 мм; подсчитываем
отрезок KL = РК tg а и, отложив его на перпендикуляре к РК9 про-
водим прямую LP. Тогда X.KPL = а. Затем подсчитываем отрезки
РЛ\ = sin a; PN2 = r2 s’na и откладываем их от полюса Р. Очевидно,
50
www.vokb-la.spb.ru - Самолёт своими руками?!
отрезки 0^! и О2ДГ2 являются радиусами основных окруж-
ностей.
3. Строим эвольвенты, которые описывает точка Р прямой
при перекатывании ее по основным окружностям. При построении 1-й
эвольвенты откладываем на основной окружности 1-го колеса от точки
Д\ (рис. 27) дугуД\Р', равную длине отрезка Д\Р, пользуясь извест-
ным построением (рис. 29). Отрезок Д\Р (рис. 29) делим на четыре
равные части (N±B = ВС = CD = DP) и из точки В проводим дугу
радиуса р = ВР до пересечения в точке Р' с основной окружностью;
тогда ^N±P' = N±P. После этого (рис. 27) отрезок PN± снова делим
на произвольное число равных частей (Р/ = 12 = 23 =...) длиной
15 — 20 мм (число делений целесообразно взять
четным). Дугу NrP' также делим на такое же
число равных частей (<-> Р'Г = о Г2' =
== о 2'3' = ...). На прямой PN± заточкой Д\ от-
кладываем отрезки (45 = 56 =...), равные Р/,
а на основной окружности — дуги (о4'5' =
= 5'6' — ...), равные дуге Р'Г.
Через точки 2'; 3’\ 4'... проводим перпен-
дикуляры к соответствующим радиусам 0х/';
0х2’\ (\3' На этих перпендикулярах (они ка-
саются основной окружности) откладываем отрезки
соответственно равные отрезкам IP, 2Р, ЗР...
Соединяя последовательно точки Р'; 2"; 3" ... плавной кривой,
получаем эвольвенту для первого колеса. Таким же способом строиМ
эвольвенту для второго зубчатого колеса.
4. Строим окружности выступов обоих колес. Для более точного
их построения целесообразно предварительно подсчитать высоты голо-
вок РК и PL зубьев по формулам /гГ1 = ~ rx; ^г2 =
а затем отложить их в масштабе на линии центров ит’тбчкиТ. Очевид-
но, 0]К и 02Ь — радиусы RC1 и Res. Построив окружности выступов,
найдем точки пересечения их с соответствующими эвольвентами —
крайние точки на профилях головок.
5. Строим окружности впадин обоих колес. Здесь также целесооб-
разно предварительно подсчитать высоты РК' и PL' ножек зубьев по
формулам йН1 = — Ptl; йН2 = а затем отложить их в мас-
штабе от точки Р. Очевидно, OJC и 02L' — радиусы Pfl, Pf2.
Следует заметить, что радиус окружности впадин может быть боль-
ше, равен и меньше радиуса го основной окружности. Это зависит от
числа z зубьев колеса и от коэффициента смещения %:
Ri Ль если
2,5-2g .
г 0,06 ’
Pt<r0, если
2,5-2g
0,06 ’
(4.15)
(4.16)
51
для нулевых колес Ri го, если
2 S
(4-17)
Rt < г0 если
z < 42. (4.18)
Независимо от того, какое положение занимает окружность впадин,
полный профиль ножки зуба состоит из эвольвентной части и переход-
D
Рис. 30
ной кривой (галтели), которая соединяет эвольвентную часть с окруж-
ностью впадин. Переходная кривая образуется автоматически в
процессе изготовления колеса инструментальной рейкой. Построение
переходной кривой и определение положения крайней нижней точки
эвольвентного участка профиля показано на рис. 30. На касательной
к делительной окружности размечаем равные отрезки Ро/, 12, ...» 56.
На делительной окружности с помощью построения, приведенного на
рис. 29, откладываем дугу PQ6', равную длине отрезка Р06, и делим ее
на такое же число дуг Ро/'; /'2';...; 5'6', как и отрезок Р06. Через точ-
ки деления 2', ..., 6' проводим касательные ГР^ 2'Р2; 6'Р6
к делительной окружности (они перпендикулярны к радиусам 01',
02', ..., 06', которые на рис. 30 не показаны). На касательных откла-
дываем отрезки ГРХ\ 2'Р2, ..., б'Р&, соответственно равные отрезкам
/Ро, 2Р0,..., 6Р3. Далее строим профиль DFE зуба инструментальной
рейки так, чтобы делительная прямая, определяемая заданным коэф-
фициентом смещения Н, совпала с касательной PQ6 к делительной
окружности. При перекатывании без скольжения делительной прямой
Р$ по делительной окружности центр закругления головки профиля
рейки опишет удлиненную эвольвенту Оо, Ог,.... О6. Положение точки Ог
определяется пересечением дуг радиусов Р0О0 и /О0, проведенных соот-
ветственно из центров Рг и Г. Положение точки О2 определяется пе-
ресечением дуг радиусов Р0О0 и 20Q, проведенных соответственно
52
www.vokb-la.spb.ru - Самолёт своими руками?!
из центров Р2 и 2'. Точки 03, 04, 05 и 06 строятся аналогично.
Из точек О0, Ор..., 06 проводим окружности радиуса ри = 0,38 т, а затем
строим кривую ЛК, их огибающую. Через точку F, ограничивающую
прямолинейный участок профиля зуба рейки, проводим прямую ЕС,
параллельную касательной Р06, до пересечения в точке С с касатель-
ной PqN к основной окружности. Из центра О колеса дугой радиуса ОС
засекаем огибающую Л К в точке В. Участок В А огибающей между точ-
кой В и точкой Л касания огибающей и окружности впадин является
искомой переходной кривой. Переходную кривую нужно снять на шаб-
лон, которым следует воспользоваться при вычерчивании профилей но-
жек зубьев на рис. 27. Чтобы определить па рис. 27 точку эвольвенты,
от которой начинается переходная кривая, следует засечь эвольвенту
дугой радиуса ОС, взятого с рис. 30.
Профиль ножки у основания зуба можно построить упрощенно. Если
Ri го, то получают точку пересечения окружности впадин с эволь-
вентой, а затем у основания делают закругление дугой радиуса 0,2 tn.
Если RL < го, то от основания эвольвенты до окружности впадин прово-
дят радиальный отрезок, а затем у основания зуба делают закругление
радиуса 0,2 т. Если разность го — Ri < 0,2 m, то радиального отрез-
ка не проводят и окружность впадин сопрягают с эвольвентой дугой
радиуса 0,2 т. Упрощенное построение профиля ножки зуба не отра-
жает истинного его очертания, а является только чертежным приемом.
6. Подсчитав отрезок РА (рис. 27) по формуле РА — гг— гД1, стро-
им делительную окружность первого колеса и получаем точку D пе-
ресечения ее с соответствующей эвольвентой. От точки D откладываем
на делительной окружности (пользуясь построением, показанным на
рис. 29) дуги: влево vyDE, вправо ^>DF, равные каждая длине шага /.
От точек £, Z), F влево откладываем (пользуясь тем же построением)
дуги ER, DM, FH, равные каждая толщине $Д1 зуба.
Делим дуги DM, ER и FH пополам в точках Т, Y, Q. Соединяя
эти точки с центром Olt получаем оси симметрии зубьев. После этого
вырезаем из твердой бумаги шаблон половины зуба, которым пользу-
емся для построения остальных зубьев. Обязательным является по-
строение трех зубьев — первого, профиль которого построен по точ-
кам, и двух, находящихся справа и слева от первого.
Аналогично строим три зуба для второго колеса.
§ 4. ПОСТРОЕНИЕ АКТИВНОЙ ЧАСТИ ЛИНИИ ЗАЦЕПЛЕНИЯ,
ДУГ ЗАЦЕПЛЕНИЯ И РАБОЧИХ УЧАСТКОВ ПРОФИЛЕЙ ЗУБЬЕВ
Линия зацепления. Различают теоретическую линию зацепления
и активную часть линии зацепления.
Теоретической линией зацепления называют отрезок N1N2 касатель-
ной к основным окружностям, заключенный между точками касания
(рис. 31).
Активной частью линии зацепления называют отрезок ab теорети-
ческой линии зацепления, заключенный меж чу точками пересечения ее
с окружностями выступов колес. Активная часть линии зацепления
53
является геометрическим местом точек зацепления (касания) профилей
зубьев на неподвижной плоскости.
Если колесо является ведущим и вращается по направлению вра-
щения часовой стрелки, то зацепление зубьев начинается в точке а
и заканчивается в точке Ь. При этом точка касания на профиле первого
колеса (ведущего) перемещается от основания к вершине, на профиле
второго колеса (ведомого) — от вершины к основанию.
Если первое колесо (ведущее) вращается против направления вра-
щения часовой стрелки, то теоретической линией зацепления будет
Рис. 31
отрезок М1М2, а активной частью линии зацепления — отрезок
В этом случае точка касания на профиле ведущего колеса (первого)
также перемещается от основания к вершине, а на профиле ведомого
колеса (второго) — от вершины к основанию.
Сопряженные точки профилей зубьев. Сопряженными точками на-
зывают две точки соприкасающихся профилей, которые встречаются
(зацепляются) на активной части линии зацепления.
Чтобы найти те сопряженные точки, которые зацепляются в данной
точке d активной части линии зацепления (рис. 31), нужно из центра
02 провести через точку d дугу радиуса 02d до пересечения с профилем
второго колеса в точке D2 и через ту же точку d провести дугу радиуса
0rd из центра 0х до пересечения с профилем первого колеса в точке
Dr. Точки Dr и D2 являются сопряженными точками профилей.
Если задана точка на профиле первого колеса и требуется найти
сопряженную точку на профиле второго колеса и точку зацепления,
то нужно из центра 0г через точку Dr провести дугу радиуса 01D1
др пересечения с активной частью линии зацепления в точке d, а за-
тем через точку d провести дугу радиуса 02d из центра 02 до Пересе-
54
www.vokb-la.spb.ru - Самолёт своими
чения с профилем второго колеса в точке £)2. Точка D2 является сопря-
женной с точкой Dlt а точка d — точкой зацепления.
Рабочие участки профилей зубьев. Те участки профилей зубьев,
которые участвуют в зацеплении, называют рабочими. Чтобы найти эти
участки, нужно на профиле зуба первого колеса найти точку, сопря-
женную с крайней точкой головки второго колеса, а на профиле зуба
второго колеса — точку, сопряженную с крайней точкой головки пер-
вого колеса. Для этого через точку а из центра 0± проводим дугу ра-
диуса 0±а до пересечения в точке А1 с профилем зуба первого колеса
и через точку b из центра 02 проводим дугу радиуса 02Ь до пересече-
ния в точке В2 с профилем зуба второго колеса. Участки и А2В2
профилей зубьев являются рабочими участками профилей. Чтобы обо-
значить на чертеже эти участки, нужно провести линии, параллельные
ЛхВх и А2В2 на расстоянии 1,5—2 мм и заштриховать получив-
шиеся полоски. Так как сопряженные профили зубьев не являются цен-
троидами, то они перекатываются друг по другу со скольжением. По-
этому длины рабочих участков профилей зубьев неравны между собой.
При вычерчивании профилей зубьев нужно помнить следующее:
а) профили зубьев могут касаться только на активной части линии
зацепления;
б) наличие зазора на активной части линии зацепления между про-
филями, пересекаемыми линией зацепления, свидетельствует о непра-
вильном выполнении чертежа;
в) так как рассматриваемое зацепление является плотным, т. е.
без боковых зазоров, то сказанное в предыдущих пунктах относится
также к зацеплению зубьев на линии Л/11М2.
Дуга зацепления. Каждую из дуг начальных окружностей, которые
перекатываются одна по другой за время зацепления одной пары со-
( пряженных профилей, называют дугой зацепления. Так как начальные
окружности перекатываются друг по другу без скольжения, то дуги
зацепления для обоих зацепляющихся колес равны между собой.
Можно дать другое определение: дугой зацепления называют дугу
начальной окружности, которая проходит мимо полюса Р за время
зацепления одной пары сопряженных профилей.
Построение дуги зацепления производится следующим образом.
Через крайние точки А± и Вг рабочего участка профиля первого колеса
проводим в направлении вогнутости нормали A^i и Bjbi к этому про-
филю (они являются касательными к основной окружности первого
колеса). Находим точки aL и Ьг пересечения этих нормалей с начальной
окружностью первого колеса. Дуга а1Ь1 является дугой зацепления
на начальной окружности первого колеса.
Аналогичным построением находим дугу зацепления а2Ь2 на на-
чальной окружности второго колеса.
Длину k дуги зацепления определяют по формуле
k= —1—, (4.19)
cos а ’ '
где I — длина активной части линии зацепления.
55
На основании этой формулы можно графически определить длину k
дуги зацепления. Для этого через крайние точки аиЬ активной линии
зацепления проводим перпендикуляры к ней до пересечения в точках
а и Ь' с общей касательной (в точке Р) к начальным окружностям.
Отрезок а'Ь' равен длине k дуги зацепления.
§ 5. ОПРЕДЕЛЕНИЕ КАЧЕСТВЕННЫХ ПОКАЗАТЕЛЕЙ
ЗАЦЕПЛЕНИЯ
Качественными показателями зацепления являются коэффициенты
перекрытия 8, относительного скольжения Л и удельного давления у.
Коэффициент перекрытия в. Коэффициентом перекрытия называют
отношение длины k дуги зацепления к длине шага /н по начальным
окружностям колес:
k I
е = — = —---------.
tu cos a
Формула неудобна для подсчетов, так как в нее входит шаг /н, ко-
торый не задан. Так как
/Hcosa = tcosaG = to, (4.21)
где to — основной шаг, т. е. шаг зацепления на основных окружно-
стях, то
(4.20)
е — £_____— ____L____— JL (л op)
t cos а0 /ил cos а0 to \ • /
Формулой (4.22) удобно пользоваться тогда, когда зацепление
двух колес уже вычерчено. В этом случае длину Z можно измерить
непосредственно на чертеже и значение ее подставить в формулу.
Коэффициент перекрытия можно подсчитать также по формуле
R2 — г2 — г2 —A sin а
е = -—------°" -- -------- (4.23)
/лл cos а0 4 7
Формулой (4.23) целесообразно пользоваться до того, как зацепле-
ние вычерчено.
Коэффициент перекрытия 8 дает возможность определить число
пар профилей зубьев, находящихся одновременно в зацеплении. Для
этого нужно воспользоваться теми целыми положительными числами,
между которыми находится числовое значение коэффициента 8. Эти
целые числа определяют те числа пар профилей зубьев, которые попе-
ременно участвуют в зацеплении. Если, например* 8 = 1, 3, т. е.
2 > е > 1, в зацеплении попеременно находятся одна или две пары
профилей.
Коэффициент перекрытия е не должен быть меньше единицы, так
как это приводит к перерывам в передаче движения от ведущего ко-
леса к ведомому и к ударам зубьев колес. При проектировании зацеп-
ления коэффициент перекрытия берут не меньше 1,1.
Коэффициент перекрытия 8 позволяет определить (при равномер-
ном вращении колес) те промежутки времени, в течение которых
56
www.vokb-la.spb.ru
Самолёт своими
руками
t
происходит зацепление соответствующих чисел пар профилей зубьев.
Например, если е = 1,3 и время, в течение которого мимо полюса про-
ходит шаг /н зацепления, равно т, то промежутки времени и т2 за-
цепления одной и двух пар профилей определяются по формулам
— (2 — е) т = 0,7т; )
т2 = (s — 1) т == 0,3т. /
(4.24)
При помощи коэффициента перекрытия а можно определить тот
участок активной части линии зацепления, на котором происходит за-
цепление одной пары профилей зубьев, а также те участки, на которых
происходит одновременное зацепление двух пар профилей (имеется
в виду внешнее зацепление колес). Для этого (рис. 32) откладываем
от крайних точек а и Ь активной
части линии зацепления ab отрезки
аВ, ЬС, равные длине to основного
шага (/о = t cos а0) и получаем
участки аС, СВ и ВЬ. Так как
ab = &tO9 то будем иметь
аС = ВЬ=(е— 1)/о; (4.25)
СВ= (2 — 8) to. (4.26)
а. Ыо b
4?
в
С, Р
Рис. 32
В то время, когда точка зацепления одной пары профилей переме-
щается на участке аС, точка зацепления второй пары перемещается
на участке ВЬ. Следовательно, на участках аС и ВЬ происходит одно-
временное зацепление двух пар профилей. На участке СВ зацепляется
одна пара профилей, причем одновременно с ней никакая другая пара
в зацеплении не находится. Если, например, 8 = 1,3, то аС == ВЬ =
- 0,3?о и СВ = 0,7/о.
При помощи коэффициента 8 можно также определить, какую часть *
активной части линии зацепления ab составляют участки аС, ВЬ и СВ.
Очевидно,
аС = ВЬ = ab; (4.27)
СВ = • ab. (4.28)
3 7
В нашем примере аС = ВЬ = ab и СВ ab.
Коэффициенты относительного скольжения. Так как рабочие уча-
стки профилей зубьев перекатываются друг по другу со скольжением,
то на этих участках возникают силы трения и происходит процесс из-
нашивания. Характеристикой вредного влияния скольжения являют-
ся коэффициенты и Х> относительного скольжения, которые опре-
деляют по формулам
= 1 + *2,1---------— ' 12.Г,
— 1 0,2 —
(4.29)
57
где е — NjN2 — длина теоретической линии зацепления, а
«* __ Z1 .
19 i = -- = ,
101 Z2
x — расстояние от точки касания теоретической линии зацепления
с основной окружностью первого (меньшего) колеса, отсчитываемое
в направлении к точке Лг2.
Пользуясь формулами (4.29), составим табл. 2 значений и Л2.
Для этого измеряем длину е на рис. 31, подставляем полученное зна-
чение в формулы (4.29), а затем подсчитываем ряд значений и Х2,
изменяя х в границах от 0 до е с интервалами 15-4-30 мм.
Необходимо знать, что в полюсе зацепления Р коэффициенты
и К2 равны нулю.
Таблица 2
Значения коэффициентов и 1.2
X 0 N±P е
>1 — оо 0 1
к2 1 0 — оо
Пользуясь данными, приведенными в табл. 2, строим диаграммы
для значений коэффициентов и Z2 в прямоугольной системе коорди-
нат (рис. 31). Через какую-либо точку О линии проводим ось
абсцисс Ох, параллельную прямой N±N2. Тогда линия ONr будет осью'
ординат. Пользуясь табл. 2, строим диаграммы для и Х2 (кривые
и QPiU).
Необходимо отметить, что таблица значений и Х2 составлена
в предположении, что окружности головок колес проходят через точки
и N2, т. е. зацепление зубьев происходит по всей теоретической ли-
нии зацепления отточки Л\ до точки N2 и что рабочие участки профилей
зубьев кончаются у соответствующих основных окружностей. Поэто-
му построенные диаграммы для и Z2 дают значения коэффициентов
удельного скольжения также для тех участков профилей на ножках
зубьев (участки ЛХС и В2Е), которые не участвуют в зацеплении,
а также и для тех участков профилей на головках, которые в действи-
тельности отсутствуют.
Для того чтобы выделить те части диаграмм, которые дают значе-
ния и Л2 для фактически имеющихся на зубьях рабочих участков
профилей, нужно через точки а и b провести перпендикуляры к ли-
нии зацепления, которые отсекут на диаграммах интересующие нас
участки (заштрихованы на рис. 31).
58
www.vokb-la.spb.ru - Самолёт своими руками?!
Далее строим круговые диаграммы, откладывая от соответствую-
щих точек рабочих участков профилей зубьев на концентрических
окружностях дуги, равные (или пропорциональные) ординатам пря-
моугольных диаграмм.
На рис. 31 приведены круговые диаграммы Л1В1 и Л2З2.
Для уяснения техники построения круговых диаграмм покажем
построение ординаты D1D1 круговой диаграммы А \В\, которая соответ-
ствует ординате у{ прямоугольной диаграммы RS. Продолжая ординату
уъ находим точку d, являющуюся точкой зацепления, в которой име-
ет значение, определяемое ординатой уг. Засекая профиль АХВ\, в точ-
ке D\ дугой dD\ радиуса 0±d находим точку D\ профиля зуба, для ко-
торой имеет значение, определяемое ординатой уг. На дуге dDi
отложим от точки D\ дугу D\Di, равную (или пропорциональную)
ординате уг.
Аналогичным построением находим дугу D2D2, которая является
ординатой круговой диаграммы А2В2, соответствующей ординате у2
диаграммы QU.
Коэффициент удельного давления. Этот коэффициент имеет значе-
ние при расчете зубьев колес на контактную
прочность и определяется по формуле
т (4.30)
Здесь
0 — - Р1Р2 РпР Pi + Рг ’ (4-31)
где рх и р2 — радиусы кривизны профилей
зубьев в точке зацепления k
(рис. 33).
Имеем
Pi + Р2 == NxN2 = е.
Отсюда получаем окончательно
(4.32)
__ те
Pi(e —Pi)
Рис. 33
(4.33)
На рис. 33 представлена диаграмма изменения коэффициента у в
зависимости от радиуса кривизны рР Коэффициенту имеет минималь-
ное значение в середине теоретической линии зацепления Л\/У2.
При расчете зубьев на прочность особенно важное значение имеет
коэффициент ур в полюсе зацепления Р:
mN pV2 _______ 2zc
^р ~ NJP Л Р~ ~~ гхг2 cos oto tg а ’
(4.34)
59
§ 6. ВЫБОР КОЭФФИЦИЕНТОВ СМЕЩЕНИЯ
При заданных числах зубьев колес качественные характеристики
зубчатого зацепления (коэффициенты перекрытия, относительного
скольжения, удельного давления) зависят от величины коэффициентов
смещения и £2 инструментальной рейки.
Изменение этих коэффициентов, способствующее улучшению одной
из характеристик зацепления, ухудшает некоторые другие его харак-
теристики.
Стойкость и долговечность зубчатого зацепления, работающего
в определенных условиях, в значительной мере обусловливается от-
дельными характеристиками этого зацепления. Отсюда возникает
задача такого подбора величин коэффициентов смещения и £2> в Ре’
зультате которого предельно улучшились бы характеристики зубчатого
зацепления, обусловливающие его стойкость и долговечность в данных
условиях работы, при одновременном сохранении в допускаемых пре-
делах величины других характеристик.
Среди характеристик имеются такие, которые должны удовлетво-
рять определенным требованиям, обязательным для всех зацеплений,
независимо от условий их работы.
Во-первых, не должно быть подрезания зубьев колес при обработке
их инструментальной рейкой. Суть явления подрезания заключается
в том, что зуб инструментальной рейки, проворачиваясь во впадине
изготовляемого колеса, срезает своей режущей кромкой часть эволь-
вентного профиля зуба. В результате этого уменьшается прочность
зубьев у основания. Помимо этого, подрезание может уменьшить ко-
эффициент перекрытия в и даже сделать его меньшим единицы, если
оказывается срезанной часть рабочего участка профиля зуба. Под-
резание имеет место в том случае, если делительная прямая АВ рейки
пересекает теоретическую линию зацепления в станочном зацеплении
за точкой N (см. рис. 24). Коэффициент смещения рейки, при котором
прямая АВ проходит через точку N, обозначается £min и определяется
по формуле (при а0 = 20°)
Smin — [у • (4.35)
Отсюда следует, что подрезание будет устранено, если коэффициент
смещения g, принятый при обработке данного колеса, удовлетворит
неравенству
g > gmin. (4.36)
В настоящее время считают возможным [8] в некоторых случаях
допустить такое подрезание зубьев, при котором остается нетронутым
рабочий участок профиля зуба.
Во-вторых, нельзя допустить чрезмерного заострения зубьев ко-
лес, так как при этом уменьшается прочность головок зубьев. Заост-
рение зубьев колеса усиливается вместе с увеличением коэффициента
смещения, принятого при его изготовлении. Заострение зуба обычно
60
www.vokb-la.spb.ru - Самолёт своими руками
характеризуется его толщиной se на окружности выступов. Во многих
случаях расчета требуется, например, чтобы величина se удовлетворяла
неравенству
se > 0,3m. (4.37)
Коэффициент смещения, при котором se = 0,3 т, обозначают $о,з.
Следовательно, коэффициент смещения, принятый при обработке ко-
леса в этом случае, должен удовлетворять неравенству
(4.38)
Из формул (4.36) и (4.38) следует, что коэффициент смещения,
задаваемый для обработки данного колеса, должен быть выбран в гра-
ницах, определяемых неравенствами
?0,3>g>gmin. (4-39)
В-третьих, должно быть выполнено требование, чтобы коэффициент
перекрытия е удовлетворял неравенству
8 >1,1. (4.40)
Так как величина коэффициента перекрытия зависит от двух ко-
эффициентов смещения, то третье требование приводи^ к необходимо-
сти такого подбора этих коэффициентов, при котором они, удовлетво-
ряя каждый в отдельности неравенствам (4 39), обеспечили бы не-
равенство (4.40).
В-четвертых, должна быть исключена возможность заклинивания
зацепления, при котором головка зуба одного из колес упирается
своей крайней точкой в галтель другого колеса. При заклинивании
зуб одного колеса не может вывернуться во впадине другого*колеса
и работа колес становится невозможной. Коэффициенты смещения
и g2 нужно выбрать таким образом, чтобы исключить возможность
заклинивания.
Подбор коэффициентов смещения, удовлетворяющих всем перечис-
ленным требованиям, представляет собой сложную задачу. Эта задача
еще более усложняется при выполнении дополнительных требований
к зацеплению, обусловленных спецификой его работы в определенных
условиях.
Рассмотрим два способа подбора коэффициентов смещения: 1) при
помощи «блокирующих контуров», 2) при помощи специально состав-
ленных таблиц.
Блокирующие контуры. Определение коэффициентов смещения при
помощи блокирующих контуров является наиболее удобным и уни-
версальным способом, позволяющим удовлетворить любые требования,
предъявляемые к зацеплению условиями его работы. В настоящее
время имеются [7] альбомы, содержащие блокирующие контуры для
большинства встречающихся в практике комбинаций чисел зубьев
и г2.
Построение блокирующего контура рассмотрим на рис. 34. Здесь
имеется координатная система с осями и Og2. Каждая точка на
плоскости определяет пару коэффициентов смещения и g2.
61
На рисунке имеется ряд кривых, подштрихованных с одной сто-
роны. Часть плоскости, расположенная от кривой в сторону подштри-
ховки, является «запретной» при выборе точек, определяющих коэф-
фициенты смещения. Точки, расположенные в сторону подштриховки
от кривой А А, определяют коэффициенты смещения, при которых е <
< 1. Точки, расположенные в сторону подштриховки от пересекаю-
щихся пар кривых (ВВ и СС) и (DD и ЕЕ), определяют соответственно
коэффициенты, при которых будет
иметь место заклинивание зубьев
2-го (большего) колеса или 1-го
(меньшего). Точки, расположенные
в сторону подштриховки от кривых
FF и К7С, определяют соответ-
ственно коэффициенты, при кото-
рых будет срезана часть рабочего
участка профиля 1-го или 2-го коле-
са. Кривые LL и NN определяют
границы заострения (se = 0) для
1-го и 2-го колес. Пересекаясь меж-
ду собой на плоскости, подштрихо-
ванные кривые образуют контуры
офу6г]а и брлтб, внутри которых
Рис. 34
можно выбирать точки для опре-
деления коэффициентов смещения («разрешенная зона»). Эти кон-
туры называются «блокирующими». Они очерчены толстыми
линиями.
На рис. 34 имеются также неподштрихованные кривые и прямые.
Прямые kk и тт дают границы подрезания соответственно для 1-го
и 2-го колес. Прямая qq и другие (на рис. 34 их нет), образующие углы
45е с координатными осями, являются каждая геометрическим местом
точек плоскости, дающих определенное постоянное значение Кри-
вая dd — геометрическое место точек, определяющих выравненные
наибольшие коэффициенты относительного скольжения на ножках
обоих колес.
Заметим, что контур оэРуоФ'со ограничивает часть плоскости, точ-
ки которой определяют коэффициенты смещения, исключающие под-
резание зубьев обоих колес.
Прежде чем воспользоваться блокирующим контуром для подбора
коэффициентов смещения, необходимо ознакомиться с конкретными
условиями работы зацепления и установить наиболее вероятный вид
разрушения его зубьев.
Основные виды разрушения зубьев следующие:
а) усталостное выкрашивание поверхностного слоя (питтинг),
вызываемое действием переменных контактных напряжений;
б) усталостный излом зуба, вызываемый действием переменных
напряжений изгиба у корня;
в) абразивный износ — истирание поверхности зуба в результате
действия сил трения;
62
www.vokb-la.spb.ru - Самолёт своими руками
г) заедание зубьев, возникающее от разрыва масляной пленки
под действием высоких контактных напряжений.
При выборе коэффициентов смещения можно руководствоваться
следующими общими соображениями. Если зубчатое зацепление рабо-
тает в закрытой масляной ванне, то для него опасны контактные на-
пряжения. Эти напряжения уменьшаются с увеличением угла зацеп-
ления а, т. е. с увеличением коэффициента Ес. В этом случае точку
для определения и g2 нужно выбирать на наклонной линии с наиболь-
шим gc.
Если зубчатое зацепление открыто и возможно его загрязнение,
причем поверхности зубьев не упрочнены (цементация, азотирование,
поверхностная закалка), то опасен абразивный износ. В этом случае
точку следует выбирать на линии dd, где Ai = Х2. Если в открытой пе-
редаче поверхности зубьев уплотнены, то опасен излом зуба. В этом
случае для каждого из колес нужно получить наибольший «коэффи-
циент формы» у (о нем будет сказано в курсе деталей машин), который
увеличивается для каждого из колес вместе с увеличением коэффици-
ента смещения
Заедание опасно для быстроходных и сильно нагруженных зубча-
тых передач. В этом случае следует по возможности ,уменьшить кон-
тактные напряжения, увеличивая угол а, который растет с увеличе-
нием £с.
Во всех случаях подбора коэффициентов смещения при помощи бло-
кирующего контура нужно избегать точек, лежащих вблизи контура.
Когда коэффициенты и Е2 выбраны, определяется угол а или
по формуле (4.10) или по номограмме на рис. 26. Коэффициент Q (от-
клонения межцентрового расстояния) и Т (обратного смещения) можно
найти двумя способами:
а) по формулам (с помощью таблиц инволют)
V = ЕС — а, (4.42)
б) при помощи номограммы проф. В. Н. Кудрявцева^ (рис. 35)
определяют V. Например, если zc = 64, Ес = 1,75, то ..10^с- = 27,4.
тт 1000 ¥ о ™ ~ w с zc • 3,69
На номограмме находим —-----= 3,69. Отсюда т = - - —
= 0,236. После этого коэффициент а определяют по формуле
(4.43)
Имея zx; ?2; /и; Er; g2; £с; а иТ, подсчитываем размеры зацепления по
формулам табл. 1. В приложении V приведены блокирующие контуры
для таких комбинаций чисел зубьев колес:
?! ..............................12 12 13 13 14 15 15 15 16
z2 ............ 42 46 42 46 42 25 38 42 46
63
Wq 2/,On :-Q70 J IF : 2ft0 : UfiO ГППфТППфГП § § £ 1‘h.uj 10,00 9.Q0
io,oi : 20,0- '-4,3040ft-. 9,80
-0.60 • 16,80 9.70
? 12,10 1 14.20 \б.7О } 9,60
9.0} 1 ' 1 | 1 1 Н I н । Sf § n 1J l.JJ d П711И I| 1 If ПГПТ [‘II ч 1J.J.I.I. 1 И..1 1 1 WO j '~3ft0 : Ц60 49,- 1630 j rw : 9.50 -9.40 \9,30
8ft} : 18,01 ~0,40 : \t8028,0-- 1380 \б.30^> 1 [9.20 9,10
- - : 130 : 1370 ~ \62o : 9,00
11111111 L 17,01 }(№ j 1 111111 & §. Ilinnllllll 1 III II 1 I 1 г г к § r 1 HI TV 4 § 45 |||1|||||и||||1|П! j 8,90 8,80
11,50 1 \5,90 ’ -8.70
6,0-. W Llx. - 26ft-. l^°360:. rW 46,r 8,60
- 11.40 j 13.30 : 15,70 8,50
Лл 1 1 1,1 U 1 "11 Illi в* S $2 Сэ* С$ 1 -L» 1 1№?5.q1 13.20 - 33.0- § § § US in tuiuliuuuul, 840 = 6,30
- 1 1 1 1 Л Л -J-t 1 11 । ' ТПТ § uLuixlii f3.!0 13.00 : Ы г 6,20 6.10
4,о-. -0./2 1 14,0~ Г 24ft- : 34ft. : Hb- : 8,00
-0.10 : - 72,90 ; 7,90
-OJ06 : 11,10 i -2.60 : \5,10 1 -7,60
з,о-. ~0,06130:. ll0023ft:. = 33ft. rZ70 - Цоо4^ 7,70
-0,04 j ; - i - 1430 - У,60
-0JJ3 : -0,90 f2.60 : 7,50
2ft} -0.021Щ [ 22ft-. rZso32,0! W°4Z^- - 7,40
Li 11 1 и S- JL_ -030 i 21,0.- 12,40 \ = 31,^ § §• §- 111IIH11111 ’ l u 7,30 7,20
•И. lb ih ihih frlh tHHlHih
9,0-i F r 25,0-1 I 5Ж ^6.8041,0^ t-70/0
[130 : t4.00 1670 - 40,00
: - 13,90 ~ \6ft0 - 1990
8,0 F 16,0} \i,80 : 1 2^. 4jo : ri Ч1 *"* § Й oj o-j UlLHlllUlllildltl k6fo 79.80 :r9.70 19.60
7.0- Eo/z? 7 15,0\ k/0 : тгпртгпттпртпп /Й 8 & l^f.l 1 1 l.l.l \bOHl \6,20 \б,Ю S 8 « « a c lllllllllllllllll
1 1 11111 11 1U-IU-L.I-1 "i । 1 1 । । । । 1 • > 1 1 < < 1 Ш11111Ш11111|||||Ц WOs^q- 1590 : ?5,80 : 3 s В ft <05 w ад jjjJuxduulu
6,0- 223-. }3,20303-. 157038fti 16,80
- '-1.30 13jo 2 1530 - 18.70
111 1 11111 -0,20 : : 133- -1,20 : L 21ft-. 13,00 • \-2,902^ ГПЩШ11ПП|ТП111111]1ТП1 18,60 16,50 1840 18,30
- -1,10 J \2ft0 : \5,20 - 18,20
C5> - 12,0- -0,10 : т0,09 ~ 4.00203- \2,60 : l5j0 = 36} 1500 14,90 18,10 18.00 17,90 17.80
i 1 1 | 1 I 1 1 1 1 70.08 - -0,05 : ZO,O4 - 1 "i' ‘” a JU-LU lU.Lt II II tLJ t ^2,50 : \2.30 - Im ; 147035,0~- 1460 j 14 1111| |111|гптрп JSJ >3 .>3 >J S
-0,63 \ WO 17,30
2fi- ~6f02i0,^ t0J018,01 -2,202&. 143034ft! 17.20
- - z 14,30 tVO
— -0,01 1 Izio - 1420 17.00
1,0- 1 £0^1 -rOfiO L 17,0s Izoo b 253! '^ЗЗЦг 16,90
ihfrih si si S| s| s ГМ ii^
Рис. 35
Таблица 3
Значения коэффициента Ч7 для неравносмещенного внешнего зацепления
2 > > 1
11 12 13 14 15 16 17
0,127 0,145 0,160 0,175 0,190 0,202 0,215
zi 18 19 20 21 22 23 24
0,227 0,239 0,250 0,257 0,265 0,272 0,278
64
www.vokb-Ia.spb.ru - Самолёт своими
Специальные таблицы. В настоящем руководстве приведены
табл. 3—6 для неравносмещенного зацепления, составленные проф.
В. Н. Кудрявцевым, и табл. 7 для равносмещенного зацепления, со-
ставленная ЦКВР (Центральным конструкторским бюро редукторо-
строения).
Таблицы проф. В. Н. Кудрявцева содержат значения коэффициен-
тов и g2, сумма которых Ес является максимально возможной при вы-
полнении изложенных выше основных требований.
Данными, приведенными в этих таблицах, нужно пользоваться
таким образом:
1. Если 2 > <1,2 > 1, то сначала в табл. 3 по заданному zr находят
коэффициент Чг. Затем в табл. 4 по заданным и z2 находят коэффи-
циенты gi и g2. Коэффициенты gc и а определяют по формулам (4.13)
и (4.43). Угол зацепления а определяют по номограмме, приведенной
на рис. 26. После этсго все размеры зацепления подсчитывают по фор-
мулам, приведенным в табл. 1.
2. Если 5 > > 2, то сначала в табл. 5 по заданному zr находят
коэффициенты Т и Затем в табл. 6 по заданным zr и z2 находят
коэффициент g2. Далее поступают так, как описано в первом случае.
Табл. 7 содержит коэффициенты смещения для'равносмещенного
зацепления. При подборе этих коэффициентов, помимо основных тре-
бований, выполнено требование, чтобы наибольшие значения коэффи-
циентов Zi и Х2 на ножках были достаточно малы, а также равны
между собой. При использовании табл. 7 нужно помнить, что должно
выполняться условие zc 34.
§ 7. ПОСЛЕДОВАТЕЛЬНОСТЬ ВЫПОЛНЕНИЯ РАБОТЫ
Вариант 1 (используют блокирующий контур). В этом случае
работу выполняют в такой последовательности:
а) по заданным zr и г2 выбирают блокирующий контур и на нем под-
бирают коэффициенты и Е2, пользуясь указаниями параграфа 6;
б) определяют угол зацепления а, пользуясь номограммой на
рис. 26 или формулой (4.10);
в) определяют коэффициент обратного смещения Т, пользуясь
номограммой на рис. 35;
г) определяют коэффициент отклонения межцентрового расстоя-
ния а по формуле (4.43);
д) определяют размеры зацепления по формулам табл. 1;
е) определяют коэффициент перекрытия по формуле (4.23);
ж) вычерчивают зацепление, пользуясь указаниями § 3;
з) строят активную часть линии зацепления, рабочие участки про-
филей зубьев, дуги зацепления и выпрямленную дугу зацепления,
пользуясь указаниями § 4;
и) определяют коэффициент е по формуле (4.22);
к) составляют таблицу значений коэффициентов и Х2, а затем
строят прямоугольные и круговые диаграммы этих коэффициентов,
пользуясь указаниями § 5;
3 1328 65
Значение коэффициентов и |2 для неравно
Значе
11 I 12 13 1 14 15 1 16 | 17
8, 8» 8. 8, 8, 8, 8» 8» 8,
11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 0,395 0,432 0,464 0,490 0,513 0,534 0,551 0,568 0,584 0,601 0,617 0,630 0,395 0,372 0,354 0,341 0,330 0,322 0,317 0,312 0,308 0,303 0,299 0,297 0,444 0,479 0,515 0,543 0,566 0,589 0 609 0,626 0,646 0663 .0,679 0,693 0,706 0,444 0,423 0,400 0,386 0,376 0,365 0,358 0,353 0,345 0,341 0,337 0,334 0,333 0,486 0,524 0,557 0,588 0,614 0,636 0,659 0,676 0,694 0,714 0,730 0,745 0,758 0,773 0.486 0.462 0.443 0.426 0,414 0.405 0,394 0,389 0,384 0.376 0,372 0,369 0,368 0,365 0,525 0,565 0.600 0.631 0,661 0.686 0,706 0,726 0,745 0,763 0,780 0,796 0,813 0,826 0,840 0.525 0.506 0,485 0.468 0,452 0,441 0,433 0,426 0,419 0,414 0,409 0,405 0,400 0,399 0,397 1 i 0-571 0,609 0,644 0.677 0,706 0,371 0,754 0,775 0,792 0,813 0,830 0,848 0,862 0,881 0,894 0,908 1 0,571 0.547 0,526 0,508 0,492 0,481 0,472 0,463 0,458 0,449 0.445 0,440 0,438 0,431 О,43о 0,428 0,608 0,644 0,678 0,716 0,744 0,766 0,793 0,815 0,834 0,854 0,869 0,892 0,907 0,921 0,936 0,951 0,967 0,608 0,586 0,566 0.542 0.528 0,519 0,507 0.497 0,491 0.483 0,480 0,470 0,467 0,465 0,462 0,459 0,455 0,646 0,683 0,720 0,756 0,781 0,809 0,833 0,856 0,878 0,898 0,916 0,936 0,952 0,968 0,981 0,999 1,014 1,030
л) составляют таблицу значений коэффициента у, а затем строят
диаграмму, пользуясь указаниями § 5.
Вариант 2 (используют табл. 3—7). В этом случае работа выполня-
ется в таком порядке:
а) на основании известных и г2 и заданного преподавателем вида
зацепления (неравносмещенное, равноемещенное) находят в табл. 3—7
66
www.vokb-la.spb.ru - Самолёт своими руками?!
Таблица 4
мещенного внешнего зацепления при 2 > llti i > 1
ние при zt
18 19 20 21 22 23 24
5, 6. Bi 6. 6. 6. 6,
— — —
- — —_ -— — — — — —
— — — — —— — — — •— — — — —
0,646
0,624 0,684 0,684 0,720
0,601 0,723 0,658 0,720 0,755 0,755
0,580 0,756 0,639 0,756 0,699 0,782 0.782
0,568 0,792 0,617 0,793 0,676 0,793 0,731 — — -— —- — —
0 554 0,814 0,609 0,830 0,652 0,831 0,707 0,821 0,758 0,812 0,812 — —— — —
0*543 0,849 0,588 0,860 0,636 0,866 0 686 0,861 0,732 0,850 0,787 0,839 0,839 — —
0’534 0 526 0,871 0,579 0,888 0,622 0,893 0673 0,892 0,715 0,884 0,767 0,872 0,820 0,865 0,865
0,898 0,566 0,915 0,609 0,926 0 654 0,925 0,696 0,924 0,742 0,913 0,793 0,898 0,845
0Д17 0,916 0,561 0,937 0,601 0,948 o’645 0,951 0,683 0,950 0,729 0,946 0,774 0,934 0,822
0,511 0,937 0,552 0,959 0,592 0,976 0,632 0,976 0,672 0,984 0,708 0,973 0,755 0,966 0,804.
0Д04 0,958 0,543 0,q80 0,583 0,997 0 624 1,000 0,662 1,007 0,700 1,010 0,737 1,000 0,784
0,500 0,976 0,537 0,997 0,578 1,018 0;615 1,023 0,651 1,031 0,689 1,038 0,723 1,033 0,764
0,496 0,994 0,532 1,017 0,571 1,038 0 608 1,045 0,641 1,051 0,681 1,055 0,718 1,060 O,75o
0,495 1,011 0.528 1,038 0,562 1,056 0 602 1,065 0,634 1,075 0,659 1,084 0,701 1,081 0,741
0,490 1,026 0,525 1,054 0,559 1,076 0 594 1,082 0,629 1,094 0,662 1,101 0,696 1,105 0,729
0,487 1,041 0,522 1,071 0,554 1,093 0>9 1,102 0,622 1,114 0,655 1,121 0,689 1,127 0,720
0,483 1,059 0,516 1,088 0,550 1,110 0,584 1,122 0,614 1,131 0,650 1,145 0,678 1,149 0,710
1,079 0,515 1,102 0,547 1,127 0,580 1,140 0,608 1,154 0,639 1,163 0,672 1,170 0,702
1,088 0,511 1,117 0,545 1,141 0,578 1,157 0,603 1,172 0,634 1,180 0,667 1,188 0,696
1,131 0,542 1,159 0,573 1,171 0,601 1,187 0,631 1,200 0,659 1,206 0,690
1,145 0,540 1,173 0 570 1,186 0,599 1,204 0,626 1,218 0,653 1,223 0,685
- 1,187 0,568 1,201 0,595 1,222 0,622 1,232 0,651 1,241 0,680
1,201 0,567 1,218 0,591 1,233 0,621 1,249 0,647 1,260 0,673
— — — —— — 1,231 1,247 0,589 0,586 1,250 1,266 0,616 0,612 1,265 1,279 0,643 0,640 1,276 1,291 0,669 0,665
— — — — — — — -— — 1,279 1,293 0,611 0,609 1,295 1,310 0,636 0,634 1,306 1,321 0,662 0,659
— — — 1,325 0,631 1,336 0,657
— — — — — — —— — — 1,338 0,629 1,350 1,365 1,379 0,654 0,651 0,649
Таблица 5
Значения коэффициентов 4е и для неравносмещенного внешнего зацепления
при 5 2 ________________________________________________
21 11 12 13 14 15 I6 17 18 19 20 l_2L_
MJ) 0,16 0,66 0,17 0,73 0,18 0,80 0,19 0,86 0,20 0,92 0,21 0,98 0,22 1,04 0,23 1,10 0,24 1,16 0,25 1,22 0,25 1,27
67
3*
Таблица 6
Значения коэффициента £2 для неравносмещенного внешнего зацепления при
5>Л2>2
z. Значение при zt
П 12 13 14 15 16 17 18 1 1 19 1 | 20 21
25 0,442 0,425
30 0,501 0,486 0,471 0,463 — — — — — — —
35 0,556 0,542 0,528 0,522 0,518 0,512 0,505 — — — —
40 0,610 0,596 0,582 0,577 0,575 0,569 0,564 0,560 0,553 — —
45 0,661 0,648 0,635 0,632 0,628 0,624 0,620 0,616 0,611 0,606 0,566
50 0,709 0,696 0,685 0,684 0,682 0,677 0,674 0,671 0,667 0,662 0,623
55 0,754 0,745 0,734 0,732 0,731 0,728 0,727 0,722 0,720 0,716 0,677
60 0,789 0,782 0,780 0,779 0,778 0,777 0,773 0,772 0,769 0,729
65 —. 0,822 0,825 0,826 0,827 0,825 0,823 0,821 0,820 0,778
70 0,866 0,870 0,872 0,874 0,871 0,869 0,868 0,828
75 - — 0,909 0,914 0,917 0,920 0,919 0,916 0,876
80 - - — — 0,954 0,957 0,961 0,962 0,965 0,924
85 —— — — 0,998 0,101 1,003 1,008 0,964
90 — — — 1,042 1,046 1,048 1,005
95 — — .— 1,086 1,088 1,045
100 1,129 1,087
105 — — — — — — — — — — 1,131
коэффициенты смещения £i и £2 а для неравносмещенного зацепления
также коэффициенты а и Т, пользуясь указаниями § 6;
б) определяют угол зацепления а (для неравносмещенного зацепле-
ния), пользуясь номограммой на рис. 26 или формулой (4.10). Дальше
работа выполняется в соответствии с пунктами д, е, ж, з, и, к, л
варианта.
§ 8. «ВПИСЫВАНИЕ» В ЗАДАННОЕ МЕЖЦЕНТРОВОЕ
РАССТОЯНИЕ
В некоторых случаях задают передаточное отношение i 1,2, межцент-
ровое расстояние А и модуль зацепления т. Требуется «вписаться»
в заданное межцентровое расстояние А.
Прежде всего выясняют, нельзя ли так подобрать числа зубьев
22 колес, чтобы зацепление было нормальным (нулевым). Для этого
пользуются формулами:
; (4.44)
%
11,2 = —
Z1
(4.45)
68
www.vokb-la.spb.ru - Самолёт своими руками?!
Таблица 7
Значения коэффициента | = ^ = |2>0 для равносмещенного внешнего зацепления с выравненными коэффициентами
относительного скольжения
см см со —< —'оосоь.о-^счсч’-'оо । । 1 । — I 1 1 1 о со со со со со со' о о со со со
см о со СО СМ СЛ С- СП О О О СП ю I I I lOOCOCOCDCO — —< — — III «к *ч ак а. О О О О О О О О О о о о о
о см оюг^г^ю—1 Ю ОО О О О О оо . . О СМ О ОО О —' CM vF К) О Г- СГ> о со о о о —- —< —* — —. —. —. ii, со со o' о со со' со о' О О О CD о о
о w—I ONCMCOCMCDIOOQCM СО 00 СО СМ О Ю । .ОСМ1ЛГ*СЛСОСМСОЮСОЬ-ООСЛСО— | С О О О О — -1 —1 ~ « СМ СМ о о о о' о о о о со' о' о о' о' о о'
е при Zf 17 18 О О О О —’ о CD ОО ОО СП СП ОО СО хГ1 00 . СО СО Ю ОС О —1 СО Ю СО Г- ОО СП о — см со 1 СООСОО———* -И см см см см о о со со' со о о со о со о о со о о со осмосоо—«слюо—со со ю^со ♦— ю осрсооо—.СО^СОООСЛО —' см со ю со СО СО О СО 1 —* СМ см см см см см см со' о о" о о со о" со о о о о о' со' со о со
S к а» св К со О OtFO^FlOCOCTJCOCOOQ СП О0 CD Tf см со 1 СО см со оо см со Ю со оо СП 1 ОО*-*—1—СМ СМ см см см см со со о' со о со со' о' СО СО о' о' со со со со
lO СП —t — СП ш оо СО —< —* —* О оо Ю СП I 1СМ10000—•ООтГСОГ-ОООСО-^СМ 1 1 ~ СМ см см см см см см см со со СО СО со со о' со' со' со' со' о' со о' со о со о со
СМ О СП со —1 ID N оо оо н- ш со со Ьо I . |00СМС0иЭ1^.00СЛО—^CMCOtFLOcO 1 1 l^.csi°lciclcicicQc?cfic?coco^’ о о' о' о' о о' со' о' со' со о' о о' о'
СО СО СТ) ОО CD N Ь О Tf см СП L0 О 1 1 1 I’^'OOCTJ—iCMCO’sflOCDb-r^OOCn 1 I 1 1 °i °? °? °? 03 03 о' о' со' со со со о' о о о со о' о'
см сооооаооооооо 1 I I |C0Ti<LQLQLDLOmLOLOLOlOLQ 1 1 1 1 со'со'соосо'оооссосо
оооооооооосоо 1 1 1 1 1 iinOCOOOOOOOO со со со' о' со о со со' о со со'
< е* Ч Г" СО С О - CM СО Tf LO О Г- ОО СП о —• см —* —н*^СМСМСМСМСМСМСМСМ см см со со со со 1
69
Продолжение табл.
Значение при zx S Й Й S2 £3 г* S2 2 03 ° °о to о см cd о t^OCMCM^FlDt^COO —' (N О1 СС Th V1 LC CM CM CM CM CM CM CO CO CO CO CO CO CO CO CO ООО о о о о о о о о о о о о о о
СМ Х*£г£*£?<21/Э1^сл100осо'^о1ог^.~^ с^2£1^ог^°осг>^с^со’^1^1ююоо СМ СМ СМ СМ СМ СМ СМ СО^ СО СО СО СО СО СО СО СО 0000000000000*0000
о CS О CD О О Г4* СМ Ю CD *-ч ^F СО О Ю О СО CD СГ> •—iQMxfCOr^C^O^—iCOxfLOOOt^r^-r-r- СМ СМ СМ СМ СМ СМ СО СО СО СО СО СО СО СО СО СО СО о* о' со со о о о’ со о со о о со со о о~ о'
о •—< о со о Ob-CMrFxFCD—«ОСОСМОООСОСО СртНОООО’-чСМСО^СОГ-Г'.ООСОООО С^СМСМСМСМСОСОСОСОСОСОСОСОСОСОСОСО оооооооооосоооооосо
СО VMi COcDCM—CDCMCOCOCDOOt^^FOCDOO’—’’tF КО CD ОО CD —•COTfUDOt^.QOOOOO^’^ CM CM CM СО СО СО СО СО СО СО СО СО XT Tf тР тГ ’tF оосооооооооооооооо**
О СО СО LQ —trfTF^fCOCOr^’TFC^lOOC — СО г-оосм'е'юоь^сосоо^т-.смсмсосо CMCMCOCOCOCOCOCOCOCQxFtF’^xFtF’^’^ о о о" о о о о" о о' о* о о' о** о со' о" со'
<£> О СМ СО О CD 00 О Iх* О »—« О СО О СО СО О СМ OCMCOincOr^CnCDOCMCOCO^F'TFTFlOLO COCOCOCOCOCOCOCOXFXF ’tF tF tF 'sF tF tF xF ooocTooooococSoooooo
to —^COCOCOCMI’tF’tFCOL'OIO'tFCOCOOOOCO TFlOCOr^CDfO’-’CMCO'TFLOLOcOCOCOCOCO CO CO co CO CO TF -4F ’CF 'чГ ^F ”^F Tf tF XF xF o' o' co' о' о'/ о' о' о' о' о' о' о' о' о' о' о' о
32 vomroocMOOoooooooooo CO О ^0 CM CO CO CO CO CO CO CO CO CO CO CO CO CO CO CO XF^ xF, -^F xF о' о о о о о о о о' о о о о' о' о о' о
СО w"M ооооооооооооооооо 010000000000000000 c4c^cQLc^c2lc^cQ.c4cr?c/:lcQlc^c^c^c2c^c? ооооооооооооооооо
<М ооооооооооооооооо LQ LO LQ Ш LO LQ Ю Ш Ю LQ Ю Ю tn LO Ш Ш LO CQCOCOCOCOCOCOcqcOCOCOCOCOCqCQCOCD о' о' о о' о' о о о о о о о' о о о о' о
ооооооооооооооооо ооооооооооооооооо TF TF ’V 'TF XF vF ^F, ' TF XF о' о' о о' о о' о о' о' о о o' o' o' o' o' o'
N CDCOO-^OOCMCDOCDCMOOTFOCDOIDO COCO’^F’^’^FmmcDCDr-r^OOOOOO — •—< —( •—<
70
www.vokb-la.spb.ru - Самолёт своими руками?!
Решая совместно уравнения (4.44) и (4.45), получают значения 2ц
22. Если эти значения оказались целыми числами, то задача решена.
Если же оба значения (или даже одно из них) оказались неправильны-
ми дробями, то оставляют только целые числа и в пределах этих чисел
подбирают Zi и г2 так, чтобы они удовлетворяли равенству (4.45).
Далее можно применить два способа: аналитический и графоанали-
тический.
Аналитический способ. 1. Подсчитывают по формуле
л _ m(z1 + zz) _ mzc
— 2 2
2. Определяют по формуле коэффициент
3. Определяют угол зацепления а по формуле
(4.46)
(4-47)
(4.48)
(4.49)
(4.50)
4. Определяют по формуле
zc (inv а — inv а0)
5. Определяют по формуле
6. Для разбивки найденного коэффициента на слагаемые |х и £2,
удовлетворяющие всем перечисленным ранее требованиям, находят
в справочнике блокирующий контур для чисел зубьев Zi и z3, чертят
в осях |х и £3 прямую, образующую с осями углы 45° и соответствую-
щую найденному значению (прямая qq на рис. 34), выбирают на этой
прямой точку внутри блокирующего контура и определяют коэффи-
циенты смещений и £3.
7. После этого подсчитывают все размеры зубчатого зацепления,
пользуясь формулами (табл. 1), затем вычерчивают зацепление, руко-
водствуясь указаниями §§ 3—5.
Графоаналитический способ. Пункты 1 и 2 совпадают с такими же
пунктами для аналитического способа.
3. По номограмме (рис. 35, б) находят коэффициент Т.
4. Определяют коэффициент по формуле
gc=a + ¥. (4.51)
5. По номограмме (рис. 26) находят угол а. Пункты 6 и 7 совпадают
с такими же пунктами для аналитического способа.
ГЛАВА V
ГЕОМЕТРИЧЕСКИЙ СИНТЕЗ
ВНУТРЕННЕГО, КОСОЗУБОГО,
РЕЕЧНОГО ЗАЦЕПЛЕНИЙ
И КОНИЧЕСКИХ ЗУБЧАТЫХ КОЛЕС
§ 1. ВНУТРЕННЕЕ ЗАЦЕПЛЕНИЕ
Рассмотрим геометрический синтез только нулевого внутреннего
зацепления. В этом зацеплении (рис. 36) центры зубчатых колес рас-
положены по одну сторону от полюса Р зацепления, что приводит,
в отличие от внешнего зацепления, к сопряжению выпуклого профиля
меньшего колеса с вогнутым профилем большего.
Все размеры зацепления определяют по формулам крайней правой
графы табл. 1, за исключением Ri2t Re2 и А, которые подсчитываются
по следующим формулам:
= Гд2 + tn (f0 + с’о); (5.1)
Ret = Ri—h-, (5.2)
Л = (5.3)
Построение профилей зубьев, активной части линии зацепления,
выпрямленной дуги зацепления и рабочих участков профилей произ-
водят так же, как и для внешнего зацепления.
Коэффициент перекрытия 8 определяется по формуле (4.22). Для
его предварительного определения пользуются следующей формулой:
е = ~ -17 К - < + Л sin а°. (5.4)
/пл cos а0
72
www.vokb-la.spb.ru - Самолёт своими руками?!
Коэффициенты относительного скольжения подсчитывают по фор-
мулам:
Xi = 1 —1’2,1 —— • *2,1;
Лк
^2 = 1 ------*1.2 + е^.х ’ 112»
(5.5)
где е = А^^Д^2, (рис. 36);
х — расстояние от точки Л\ касания линии N±N2 с основной
окружностью первого (меньшего) колеса, отсчитанное в направ-
лении к точке Р.
Таблица 8
Значения коэффициентов и Х2
X 0 N±P + ОО
Аа — оо 0 1 — *2,1
Х2 1 0 4 I ~“*1,2
При составлении табл. 8 значений коэффициентов и 12 нужно
иметь в виду, что х в даннохМ случае можно изменять в границах от О
до оо. При этом значения коэффициентов и Х2 будут асимптотически
приближаться соответственно к значениям 1 — t*2,i и 1 — й,2. При
подсчете значений и Х2 достаточно ограничиться изменением х (с ин-
тервалами 10—30 мм) от 0 до его значения, немного превышающего
N.a,
Построение прямоугольных и круговых диаграмм для и Х2 про-
изводится так же, как при внешнем зацеплении.
Выполнение работы по геометрическому синтезу внутреннего ну-
левого зацепления можно производить в последовательности, приве-
денной в § 7 гл. IV, если учесть следующие изменения:
1) исключить пункты а, б, в и г;
2) в пункте д принять во внимание формулы (5.1), (5.2), (5.3);
3) в пункте е вместо формулы (4.23) использовать формулу (5.4);
4) в пункте к помимо указаний, приведенных в § 7 гл. IV, исполь-
зовать указания, приведенные в настоящем параграфе.
§ 2. КОСОЗУБОЕ ВНЕШНЕЕ ЗАЦЕПЛЕНИЕ
В косозубом зацеплении оси колес параллельны. Боковые поверх-
ности зубьев каждого из колес являются эвольвентными винтовыми
поверхностями, которые в пересечении с основным, делительным и
начальным цилиндрами этого колеса, а также с любыми другими со-
осными цилиндрами дают винтовые линии, имеющие один и тот же шаг,
но наклоненные к оси колеса под разными углами. Угол, который
73
образует с осью колеса винтовая линия, лежащая на поверхности дели*
тельного цилиндра, обозначают через рд. Два косозубых колеса, об-
разующих зубчатое зацепление, имеют одинаковые углы скручивания,
но направление винтовых линий у них разное: у одного колеса правое,
у другого — левое. Если колеса, образующие косозубое зацепление,
пересечь плоскостью, перпендикулярной к осям, то в сечении получится
эвольвентное зацепление (торцовое), о параметрах которого будет ска-
зано ниже.
Косозубые колеса изготовляют при помощи инструментальной рей-
ки (рис. 24), причем движение обкатки осуществляется перекатыва-
нием одной из делительных плоскостей
Рис. 37
мальный шаг tn (рис. 37),
рейки по делительному цилиндру колеса
(так же, как при изготовлении колес с
прямым зубом). Однако рабочее возврат-
но-поступательное движение, при кото-
ром снимается стружка, происходит не
параллельно оси изготовляемого колеса
(как при изготовлении прямозубых ко-
лес), а под углом рд к этой оси. При
этом рейка нарезает на делительном ци-
линдре обрабатываемого колеса нор-
равный ее шагу /. Если рейку пере-
сечь плоскостью, параллельной торцовой плоскости обрабатываемого
колеса, то получатся размеры рейки, формирующие зубья колеса в тор-
цовом сечении. Основные размеры рейки и колеса в их станочном
торцовом зацеплении будут:
СОБрд ’
(5.6)
ms
т
COS рд ’
tg «о
tg ------------ё—
b os cos рд
(5.7)
(5-8)
Здесь ms, ts, соответственно торцовый модуль, торцовый шаг
и угол зацепления колеса и рейки в торцовом сечении.
На рис. 37 изображена схема нормального (нулевого) косозубого
зацепления двух колес.
Угол рд берут в пределах 8—25°.
При исправлении косозубого зацепления коэффициенты g, и g2
выбирают, руководствуясь изложенными в § 6 гл. IV соображениями,
но не для действительных чисел зубьев z, и z2, а для чисел зубьев г,
и 22 на «эквивалентных колесах», которые подсчитывают по формулам:
у =______'____•
1 COS3 ₽д ’
2 COS3 Рд
(5.9)
(5.10)
74
www.vokb-la.spb.ru - Самолёт своими руками
Коэффициенты |is; J2s; 4's и as для торцового сечения зубчатого
зацепления определяются по формулам:
Eis= lx cos Рд; (5.И)
U = l2cospA; (5.12)
U = lis + ?2S; (5.13)
Ys = Ycospfl; (5.14)
(5-15)
После этого все размеры зубчатого зацепления можно подсчитать
по формулам табл. 1, если в них вместо т\ а0; /; g2; a; W вставить со-
ответственно ms\ ts\ Sis и ^2s, подсчитанные по формулам (5.6) —
— (5.8) и (5.11)— (5.15). Помимо этого нужно в формулы табл. 1
вместо со и /о вставить cos и fos, подсчитанные по формулам:
4 = С0СОЗРд.' (5-16)
fos=foCOSpfl. (5.17)
Угол зацепления^ колес в торцовом сечении определяют по форму-
ле (4.10), которая перепишется в данном случае так:
inv as = 2gcstgKos + inv aOs. (5.18)
zc
Здесь
zc = zt + z2. (5.19)
При подсчете по формуле (5.18) нужно воспользоваться обязательно
таблицами инволют.
Остановимся на преимуществах, которыми обладает косозубое за-
цепление по сравнению с прямозубым. Первое преимущество заклю-
чается в увеличении коэффициента перекрытия косозубого зацепления
по сравнению с коэффициентом перекрытия такого же прямозубого
зацепления. Это увеличение связано с тем, что в косозубом зацеплении
к обычной длине kx дуги зацепления добавляется длина Л2 вследствие
смещения торцовых профилей одного и того же зуба по отношению
друг к другу.
Коэффициент перекрытия в для косозубого зацепления подсчиты-
вают по формуле
Е==е +е =_1+ (5.20)
1 1 2 /scosaos 1 ts 4 7
где
I — длина активной части линии зацепления в торцовом сечении;
b — толщина зубчатого колеса;
— обычный коэффициент перекрытия (торцовый);
82 — добавочный коэффициент перекрытия (осевой).
Второе преимущество косозубого зацепления заключается в возмож-
ности значительно уменьшить минимальное число зубьев на меньшем
колесе, при котором исключается возможность подрезания зубьев при
75
изготовлении колеса инструментальной рейкой. Это обстоятельство
позволяет сделать зубчатую передачу более компактной. Приводим без
вывода формулу, по которой можно определить zimin для косозубой
передачи при нарезании колес рейкой с профильным углом <х0, рав-
ным 20°:
min = 17 COS3 Рд. (5.21)
В табл. 9 приведены значения zimin, подсчитанные для ряда значе-
ний угла скручивания рд в градусах.
На основании заданных т, z19 г2, рд и типа зацепления (неравно-
смещенное, равносмещенное, нулевое) геометрический синтез косозу-
бого внешнего зацепления производят в такой последовательности:
1) подсчитывают по формулам (5.9) и (5.10) числа z\ и Zi зубьев
эквивалентных колес;
Таблица 9
Зависимость min от угла скручивания
о 1tc со. 12 16 21 25 28 32 35 38 41 44 47
2lmin 16 15 14 13 12 11 10 9 8 7 6
2) находят в табл. 3—7 или с помощью блокирующих контуров
коэффициенты для чисел зубьев zi и z2, воспользовавшись методикой,
описанной в § 6 гл. IV;
3) по формулам (5.11) — (5.17) определяют соответствующие коэф-
фициенты для торцового сечения;
4) по формулам табл. 1 вычисляют все размеры зацепления в тор-
цовом сечении, пользуясь указаниями, сделанными выше;
5) определяют угол зацепления as по формуле (5.18);
6) вычерчивают зубчатое зацепление в торцовом сечении, руковод-
ствуясь указаниями § 3 главы IV;
7) строят активную часть линии зацепления, рабочие участки про-
филей зубьев, дуги зацепления, выпрямленную дугу зацепления, вос-
пользовавшись указаниями, приведенными в § 4 гл. IV;
8) определяют коэффициент перекрытия по формуле (5.20);
9) составляют таблицу значений коэффициентов и л2, а затем
строят прямоугольные и круговые диаграммы для этих коэффициентов
в соответствии с указаниями, приведенными в § 5 гл. IV.
§ 3. РЕЕЧНОЕ ЗАЦЕПЛЕНИЕ
Реечное зацепление, изображенное на рис. 38, применяется для пре-
образования вращательного движения в прямолинейное поступатель-
ное. При числе zx зубьев на колесе больше 17 применяется нормаль-
ное (нулевое) реечное зацепление, а при zt < 17 — исправленное.
76
www.vokb-la.spb.ru - Самолёт своими руками
Размеры зацепления подсчитывают по формулам:
а0 = 20°; t = тл; гД1 = гх = ;
Го, = Гд, cos а0; 5д< = -|- + 2^т tg а0; Лг, = (f0 4- - ¥,) т;
йн. = (f0 + с'о — gj) т\ ht = (2/0 + Сд — Ч\) т;
R,t = Ъ ~ (fo + < - Ei) ni- Re, = гд, + (/0 + - Ti) m;
«дг = 4 — 2^im a°; hr, = (f0 — Ei) m;
Лн» = (/o + co "J" £i)m'> ^2 = (2fo + Co)m-
Рис. 38
Коэффициенты и берут из табл. 10, предложенной проф.
В. Н. Кудрявцевым. Если гх > 17, то = 0.
Таблица 10
Значения коэффициентов и для реечного зацепления
8 9 10 11 12 13 14 15 16
11 0,76 0,78 0,44 0,42 0,40 0,37 0,35 0,33 0.31
*1 0,24 0,20 0 0 0 0 0 0 0
Когда зацепление вычерчено, то коэффициент перекрытия определя-
ют по формуле (4.22). Для его предварительного подсчета используют
формулу
_ 2 (К — r2^ sin а0 — гД1 sin2 а0 + ЛГг)
тп sin 2а0
(5.23)
77
Коэффициенты относительйого скольжения и Х2 определяют
по формулам:
'Д| s»n «о
х
Х2 = 1---------*----
гД1 Sin а0 ’
(5.24)
где х отсчитывают от точки А\ в направлении к точке Р. При составлении
табл. 11 значений коэффициентов Хх и Х2 величину х можно менять
в границах от 0 до оо. При этом кривая %х асимптотически приближает-
ся к прямой X = 1. Диаграмма для коэффициента Х2 является прямой
линией. При подсчете значений Лх достаточно изменять х (с интервала-
ми 10—30 мм) от 0 до значения, немного превышающего Nra.
Таблица 11
Значения коэффициентов и Х2
X 0 NtP + оо
^1 — оо 0 1
Х2 1 0 — оо
Работу следует выполнять в соответствии с указаниями § 7 главы
IV (вариант 1), внеся такие изменения:
1) пункты а, б, в, г и л — пропустить;
2) в пункте д использовать вместо табл. 1 формулы (5.22);
3) в пункте е использовать формулу (5.23);
4) в пункте к использовать формулы (5.24) и указания настоящего
параграфа.
§ 4. КОНИЧЕСКИЕ ЗУБЧАТЫЕ КОЛЕСА
Конические зубчатые колеса (рис. 39) применяют для передачи вра-
щательного движения между пересекающимися осями. Передаточное
отношение и,2 будет сохраняться постоянным в том случае, если на-
чальные конусы будут катиться один по другому без скольжения.
Для этого достаточно, чтобы скорости точек соприкасания, принадле-
жащих обоиАм конусам, были равны между собой, т. е.
• РjC = (02 * Р2П.
Поэтому передаточное отношение
Й.2 = V- = Т- <5-25)
С0а /*!
78
www.vokb-la.spb.ru - Самолёт своими
Все основные размеры конического колеса принято относить к на-
ружному торцу. Из треугольников ODP и ОСР следует:
г2 sin 62
7^ sindr ’
откуда
__ °! _____ sin62
со2 sinfij
(5.26)
конусности начальных конусов вос-
Рис. 39
D. Аналогичное
Для определения углов и 62
пользуемся равенством
62 = 6-fiv
После подстановки в форму-
лу (5.26) значения 62 получим
tg6x = . sjn6 (5.27)
& 1 4,2 + C0S$ 4 7
Точка касания зубьев, оста-
ющаяся во все время вращения
конических колес на постоян-
ном расстоянии ОР от точки О,
находится на поверхности сферы
радиуса OP = Р. С колесом 1
точка Р описывает на этой сфе-
рической поверхности окруж-
ность радиуса СР с центром в
точке С, а с колесом 2 та
же точка Р описывает на той
же поверхности окружность
радиуса DP с центром в точи
дет совершать любая другая точка Рх касания зубьев, остающаяся
все время на сферической поверхности радиуса ОРГ. Поэтому точные
профили зубьев сопряженных конических колес следовало бы строить
на сферических поверхностях с центром в точке О, имеющих соответ-
ственные радиусы ОР, 0Рг и т. д. По аналогии с эвольвентными профи-
лями на плоскости на сферической поверхности могут быть построены
сферические эвольвентные профили.
Таким образом, точная теория зацепления конических колес сво-
дится к изучению условий зацепления двух сопряженных криволиней-
ных контуров, начерченных на поверхности сферы. Однако профилиро-
вание точного эвольвентного конического зацепления представляет
собой целый ряд практических трудностей, так как сферическая поверх-
ность не развертывается без искажения на плоскость, а выполненный
профиль трудно было бы осуществить в производстве.
Поэтому на практике при построении профилей зубьев заменяют
сферическую поверхность радиуса Р поверхностями двух дополнитель-
ных конусов; эти конусы касаются указанной сферической поверхности
79
по окружностям, проектирующимся на плоскость проекций Q,
содержащую оси начальных конусов в виде прямых РСА и PDB.
Получаемая при этом на развертках дополнительных конусов
пара цилиндрических колес имеет основные параметры зацепления,
весьма близкие к параметрам заменяемой пары конических колес.
Ввиду того, что высота h зуба конического колеса незначительна по
сравнению с радиусом R сферы, неточность, происходящая от замены
сферической поверхности поверхностями дополнительных конусов,
весьма невелика. Таким образом, сложная задача построения про-
филей на сферической поверхности условно сводится к приближенно-
му, но простому графическому решению этой задачи на плоскости.
На рис. 39 проекции начальных конусов на плоскость проекций Q
изображаются в виде треугольников ОАР и ОВР. При точном постро-
ении профилей зубьев на поверхности сферы конус головок зубьев
колеса 2 будет проектироваться на плоскость Q в виде треугольника
Оаа, а конус ножек зубьев в виде треугольника Obb. Дуги ab, распо-
ложенные на проекции сферы радиуса R, представляют собой при точ-
ном профилировании сечения торцовых поверхностей зубьев плос-
костью проекций. Конусы, на поверхности которых будут лежать
торцовые поверхности приближенных профилей зубьев, должны ка-
саться сферы по начальным окружностям; поэтому для построения
проекций этих конусов через точку Р (рис. 39) проводим перпендику-
лярно РО прямую 0г02, в пересечении которой с осями начальных
конусов получим вершины 0х и 02 искомых дополнительных конусов.
Треугольники АРО± и ВРО2 будут представлять собой проекции до-
полнительных конусов первого и второго колес. Соответствующие
сечения торцовых поверхностей зубьев вместо кривых ab будут изо-
бражаться прямыми агЬъ расположенными на дополнительных конусах.
Заменяя сферу в пределах построения сферических профилей поверх-
ностью дополнительных конусов (рис. 39) с вершинами в точках С\
и 02 (кривая ab заменена прямой допускаем незначительную
ошибку. Эта ошибка будет тем меньше, чем больше будет отношение
радиуса сферы к модулю зубьев. Так как дополнительные конусы мо-
гут быть развернуты на плоскость, то построение профилей торцовых
поверхностей зубьев не встретит никаких затруднений.
На рис. 39 дополнительные конусы О±АР и О2ВР развернуты
на плоскость. Эти развернутые конусы изображаются дугами EPF и
KPL окружностей радиусов п и гг с углами и (32 зубчатых
секторов:
Так как начальные окружности конических колес лежат на допол-
нительных конусах, то при развертке этих конусов шаг и модуль за-
цепления остаются без изменения. Поэтому дуги окружностей радиу-
сов г\ и г2 -могут быть приняты за начальные окружности с центрами
в точках и 02 цилиндрических колес, шаг и модуль зацепления
80
www.vokb-la.spb.ru - Самолёт своими
которых одинаковы с шагом и модулем конических колес. Эти цилин-
дрические колеса называются эквивалентными цилиндрическими
зубчатыми колесами. Далее по общим правилам, указанным выше, на по-
лученных начальных окружностях эквивалентных колес строим эволь-
венУнке поофили зубьев. Для определения коэффициента перекры-
тия в, скорости скольжения и других параметров конической переда-
чи можно использовать формулы для эквивалентных цилиндрических
зубчатых колес. При этом в указанные формулы нужно подставлять
числа z\ и z2 зубьев, соответствующие полной длине начальных окруж-
ностей радиусов л и л на развернутых дополнительных конусах,
так как они определяют профили зубьев. На неполных же окружностях
разверток разместится то же число z± и z2 зубьев, что и на соответст-
вующих конических колесах. Формулы, опре;>еляющие соотношения
между числами зубьев z19 z2 и z\, z2 легко вывести, рассмотрев рис. 39.
Имеем
-Д = cos 6Х и -Д = cos 62.
г, Г2
Из условия, что модуль зацепления т будет общим для зубчатых
секторов и колес, получаем
откуда
-Д = cos 6Х и -Д- = cos б2,
г1 *2
z'. = —Д- и Z' = —Д—
1 COS Ojl 2 cos о2
(5.29)
Таким образом, зацепление пары конических зубчатых колес с числами
zt и z2 зубьев, углом зацепления а и модулем т можно приближенно
заменить зацеплением пары эквивалентных цилиндрических колес
с большими числами z\ и z2 зубьев и теми же а, т.
В практике машиностроения широкое распространение получили
конические колеса не только с прямыми зубьями, но и с зубьями дру-
гих форм (косые зубья, зубья в форме круговых дуг и др.). При нареза-
нии конических колес по методу обкатки путем придания режущему
инструменту различных движений можно получить различные формы
зубьев.
Геометрические расчеты исправленного зацепления прямозубых
конических колес производят на тех же основаниях, что и эквива-
лентных цилиндрических зубчатых колес, образованных путем раз-
вертки дополнительных конусов на плоскость. Исправление можно
выполнять как в виде неравносмещенного зацепления (угловая коррек-
ция) при 2с.э = 21Э + 32э < 60, так и в виде равносмещенного зацеп-
ления (высотная коррекция) при гс.э > 60. При малых значениях сум-
мы 2с.э чисел z\3 и 22э зубьев эквивалентных цилиндрических колес
высотная коррекция не применяется.
81
ГЛАВА VI
МЕТОДЫ КИНЕМАТИЧЕСКОГО
ИССЛЕДОВАНИЯ ПЛОСКИХ МЕХАНЦ^МОВ
§ 1. ЗАДАЧА КИНЕМАТИЧЕСКОГО ИССЛЕДОВАНИЯ МЕХАНИКОВ
Задача кинематического исследования механизма состоит в опре-
делении:
1) положений механизма в различные моменты времени;
2) траекторий некоторых точек звеньев;
3) величины и направления линейных скоростей и ускорений точек,
угловых скоростей и ускорений звеньев.
Для механизмов с одной степенью подвижности задаются законом
движения одного из звеньев, обычно главного вала машины. Это звено
называют ведущим.
Определение перечисленных кинематических характеристик про-
изводится в пределах одного периода (цикла) установившегося движе-
йия~механизма для нескольких"гюложений^Х что дает возможность
^достаточным прибЛЮкенйем решить поставленную задачуГЪез зна-
ния~упомяиуты5Гкинематических параметров конструктор не может
* решать дальнейшую задачу о рациональном подборе размеров. Так,
например, траектории некоторых точек механизма нужны для опре-
деления хода звеньев, очертания контура машин, а также для уста-
новления соответствия движения рабочих звеньев машины правиль-
ной последовательности технологического процесса.
В некоторых машинах (в долбежных и строгальных станках) не
допускаются большие изменения скорости рабочего звена, так как
от этого зависит стойкость режущего инструмента. Из сказанного вид-
на необходимость знания скоростей точек некоторых звеньев и умения
для наглядности удобно представлять их в виде графиков.
С помощью планов скоростей определяют приведенную массу
(без знания которой нельзя определить момент инерции маховика),
закон движения машины и т. д.; планы ускорений нужны для нахож-
дения сил инерции звеньев.
Кинематическое исследование механизмов производят в предпо-
ложении, что ведущие звенья вращаются с постоянной угловой ско-
ростью, несмотря на то, что в действительности угловая скорость вра-
щения кривошипа не является постоянной. Такое допущение делается
ввиду небольшого расхождения между средней и действительной
угловой скоростью кривошипа, а также технически облегчает построе-
ние планов ускорений.
Рассмотрим построение планов положений, скоростей и ускорений
механизмов II и III классов (по классификации И. И. Артоболевского).
§ 2. ПОСТРОЕНИЕ ПОЛОЖЕНИЙ ЗВЕНЬЕВ МЕХАНИЗМА
Для решения этой задачи должны быть заданы:
1) кинематическая схема механизма;
2) закон движения ведущего звена.
82
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 40
по дуге окружности р—р ра-
этой дуге. Ее положение В19
П)сть требуется определить положения механизма (кинематическая
схема его изображена на рис. 40, а) через равные промежутки времени
движения ведущего звена 0А9 если заданы координаты неподвижных
точ^О, С и положение оси направляющей х—х9 расположенной
в nWracTH чертежа, длины звеньев 10а, 1ав9 1св и lDE. Примем, что
ведущее звено О А вращается с постоянной угловой скоростью.
Построив структурную схему (рис. 40, б), устанавливаем, что дан-
ный механизм следует отнести к механизмам II класса, так как к на-
чальному механизму 0—1 при-
соединены две двухповодко-
вые группы: 2—3 и 4—5.
По заданным координатам
определяем на чертеже поло- *S
жение неподвижных точек О, /х
С и направляющей х—х. За-
тем проводим окружность ра- К/
диуса ОА и отмечаем на ней
несколько положений (Лх,
Л2, А8) точки А ведущего с
звена, для которых требует-
ся определить положение всех
звеньев механизма. Положе- j
ния остальных звеньев меха-
низма, соответствующие за-
данным положениям ведуще-
го звена ОА9 определяем ме-
тодом засечек. Точка В движется
диуса СВ и всегда находится на
соответствующее заданному положению звена ОА19 получим на пересе-
чении дуги р—р с дугой окружности б—6 радиуса АВ9 описанной
из точки АТ. Соединив точку BL с точками А± и С, получим положение
звеньев 2 и 3 первой структурной группы.
Для построения положения звеньев 4—5 второй структурной груп-
пы отметим на звене АГВ1 положение центра шарнира Dr. Положение
точки Ег движущейся по оси х—х9 получим на пересечении оси х—х
с дугой окружности у—у радиусом DE9 описанной из точки Dx. Со-
единив точку с точкой Е19 получим положение поводка и пол-
зуна Е19 составляющих вторую присоединенную группу.
При вычерчивании нужно указать числовой масштаб чертежа.
Напомним, что под масштабом понимают число, показывающее, ско-
лько единиц некоторой величины изображает один миллиметр чер-
тежа.
Условимся действительные длины звеньев обозначать буквой I
с индексами названия звена, т. е. 1оа\ 1ав\ 1св и т. д., а длины этих же
звеньев, отложенные на схеме в масштабе, через 0А9 АВ9 СВ
и т. д.
Тогда, очевидно, масштаб чертежа можно выразить, поделив дей-
ствительную величину на длину отрезка в мм, изображающего эту
83
величину на чертеже, т. е.
и — *ол *лв /с и
ОА АВ *61'
Линейные масштабы схем должны соответствовать ГОСТ 2302-68
на линейные размеры.
В дальнейшем все масштабы будем обозначать буквой р с индек-
сом величины, изображаемой на чертеже, например, р — масштаб
длины, рп — масштаб скорос-
тей, р^ — масштаб ускорений.
Соответственно их размернос-
ти будут:
[pj = м/мм;
[pj = м • се к,-1/мм;
[pj = м • сек-2/мм.
Рассмотрим еще один при-
мер. На рис. 41, а, б изобра-
жены соответственно кинема-
Рис. 41 тическая и структурная схе-
мы кулисного механизма III
класса. В его состав, кроме начального механизма, состоящего
из стойки и ведущего звена ОАВ, входят: а) трех поводковая группа
с базисным звеном 5 и поводками 2, 3,'4; б) двухповодковая группа
6—7. Требуется определить положение золотникового штока 7 при
повороте ведущего звена О АВ на угол <р.
Начертим ведущее звено в новом положении ОА^^. Точка С в но-
вом положении будет находиться на дуге а—а, описанной из точки At
радиусом ACi, точки D — на дуге (3—р, описанной из точки Вг радиу-
сом BD, и точка Е — на дуге 6—6 радиуса GE, описанной из точки G.
Далее изготовим шаблон в форме базисного звена CDE и будем
передвигать его на чертеже так, чтобы его точки Сх и Dr все время на-
ходились на кривых а—а и р—р. Тогда точка Е шаблона опишет не-
которую траекторию у—у, пересечение которой с дугой 6—б опреде-
лит новое положение Ег точки Е. После этого методом, изложенным
в первой задаче, определим положения всех звеньев механизма, изо-
браженные на рис. 41, а штриховыми линиями.
§ 3. ПОСТРОЕНИЕ ТРАЕКТОРИЙ ОТДЕЛЬНЫХ ТОЧЕК
МЕХАНИЗМА И ОПРЕДЕЛЕНИЕ КРАЙНИХ ПОЛОЖЕНИЙ
ВЕДОМОГО ЗВЕНА
Построение траектории точки производят в такой последователь-
ности:
1) вычерчивают механизм в нескольких положениях в пределах
одного цикла его работы;
2) в начерченных положениях механизма отмечают положения точ-
ки, траектория которой должна быть построена;
84
www.vokb-la.spb.ru - Самолёт своими
3) найденные положения точки соединяют последовательно между
собой плавной кривой.
На рис. 42, а приведен пример построения траектории точки С,
принадлежащей шатуну АВ четырехзвенного механизма ОАВО^
Задавшись рядом положений точки А на окружности а, определяем
соответствующие положения точки В. Положение точки С определяем,
Рис. 42
делая засечки на прямых Alf Blf А2В2... дугами радиуса АС из точек Alf
Л2, As... Соединив последовательно полученные точки Со, С1?..., С7 плав-
ной кривой, получим траекторию точки С за один оборот кривошипа.
В некоторых случаях траекторией точки является дуга кривой,
по которой она двигается сначала в одном, а затем в обратном направ-
лении. Расстояние между крайними положениями точки на ее траек-
тории в этом случае называют ходом точки. На рис. 42, а траекторией
точки В является дуга окружности радиуса ОГВ, а на рис. 42, б —
отрезок прямой BQB^. Крайние положения Во и В4 точки В соответст-
вуют тем положениям механизма, при которых шатун АВ и кривошип
ОА лежат на одной прямой; эти крайние положения можно определить,
делая засечки на траектории точки В из центра вращения кривошипа
85
дугами радиусов (АВ 4- ОЛ) и (АВ — ОЛ). В большинстве случаев
бывает полезно за начальное (нулевое) положение механизма выбирать
то его положение, в котором ведомое звено занимает одно из крайних
положений.
Иначе определяют ход точки звена в более сложных случаях.
Определим, например, ход поршня D (рис. 42, в).
Построив траекторию точки С, делаем на ней засечки дугами Г,
2', 3', ..., 1Г радиуса DC из произвольно выбранных положений 1,
2, ..., 11 точки D.
Через середины дуг Г, 2', ..., 1Г проводим кривую С'С" и полу-
чаем точки С' и С" ее пересечения с траекторией точки С.
Засекая траекторию точки D дугами радиуса CD с центрами в точ-
ках С' и С", получим крайние положения D', D" точки D.
Расстояние D' и D" равно ходу Н ползуна D.
§ 4. ПОСТРОЕНИЕ КИНЕМАТИЧЕСКИХ ДИАГРАММ
Кинематическая диаграмма представляет собой графическое изо-
бражение изменения одного из кинематических параметров (переме-
щения, скорости и ускорения) точки либо звена исследуемого механизма
в функции времени, угла
поворота или перемещения
ведущего звена этого меха-
низма.
Пусть требуется пост-
роить кинематическую диа-
грамму изменения рассто-
яний точки С ползуна ме-
ханизма строгального стан^
ка (рис. 43) от ее левого
крайнего положения Со.
Кривошип О А вращает-
ся с постоянной угловой
скоростью, равной обо-
ротов в минуту.
Для этого:
1) вычерчиваем схему
механизма в масштабе р/
в нескольких, например,
двенадцати пол ожени ях,
соответству ющи х поел едо-
вательным поворотам кри-
вошипа ОА на 30°. За на-
чальное положение кривошипа принимаем ОА0, при котором ползун
С занимает крайнее левое положение Со;
2) строим оси координат sc — t (рис. 44, а) и на оси абсцисс откла-
дываем отрезок / = 00 в мм, изображающий время одного полного
оборота кривошипа в масштабе р/.
86
www.vokb-la.spb.ru - Самолёт своими руками?!
Тогда
7 = — =
П1 к ’
где Т — время одного оборота кривошипа, сек\
pz — масштаб времени:
(6.2)
Рис. 44
Ш
г
Pz = сек/мм. (6.3)
Отрезок I делим на 12 равных частей и в соответствующих точках
1, 2, 3... по оси ординат откладываем расстояния sC() sCf, ..., пройден-
ные точкой С от ее крайнего левого положения Со.
До крайнего правого положения С?- расстояния возрастают, а на-
чиная с положения Ст, они будут уменьшаться; когда кривошип
87
придет в начальное положение Ло, ордината кривой (sc—убудет
равна нулю;
3) соединяем последовательно плавной кривой полученные точки
О, Г, 2', 3', ... . Полученная кривая и будет диаграммой расстояний
точки С (рис. 44, а).
При построении кривой пути, пройденного точкой С, нужно,
начиная от положения 7', к ординате прибавлять расстояния СтС%\
СтСд ит. д.; на рис. 44, а часть этой кривой показана штриховой ли-
нией.
Если величины расстояния sC1; sCj!; sCs... откладывать прямо со схе-
мы (рис. 43), то масштаб ^диаграммы (sc— /) будет равен pz; если же
эти расстояния приходится уменьшить в т раз; то pis соответственно
увеличивают в т раз, т. е.
Рх = (6-4)
При равномерном вращении кривошипа можно считать, что по оси
абсцисс отложено не время /, а путь «л точки А; при этом масштаб
по оси
2зт/?-) л
pz = —— м/мм. (6.5)
где значение I должно быть взято с чертежа, мм.
Если же по оси абсцисс откладывать углы поворота кривошипа <р,
отсчитывая их по ходу часовой стрелки от начального положения ОЛ0,
то данная диаграмма представит функциональную зависимость sc =
== sc (<р) и масштаб по оси абсцисс
\/мм. (6.4а)
§ б. ПОСТРОЕНИЕ ДИАГРАММ СКОРОСТЕЙ И УСКОРЕНИЙ
МЕТОДОМ ГРАФИЧЕСКОГО ДИФФЕРЕНЦИРОВАНИЯ
Для построения диаграммы скорости (ис — /) поступаем так:
1) под диаграммой (sc — /) строим оси координат O^Vc, O±t
(рис. 44, б) и на продолжении оси Ох/ влево откладываем отрезок 0±р —
= Н± мм\
2) из точки р проводим лучи р/; р2; рЗ, ... параллельно хордам
кривой (sc— /) на участках О/'; /'2'; 2'3'...
Эти лучи отсекут на оси 0±ис отрезки Ог1\ 0г2\ (\3, .... пропорцио-
нальные средней скорости vc на соответствующем участке диаграммы;
3) отложим эти отрезки на средних ординатах соответствующих
участков;
4) соединим ряд полученных точек /; //; III. ... плавной кривой;
эта кривая будет диаграммой скорости (ис — /).
Следует иметь в виду, что участки, на которых кривая имеет экс-
тремум (как, например, участок 7—8 на рис. 44, а и 9—10 на
рис.. 44, б), следует разделить дополнительно на два участка каждый,
на протяжении которых кривая не имеет экстремума.
88
www.vokb-la.spb.ru - Самолёт своими руками?!
Имея диаграмму скоростей (гс — /)> аналогично строим диаграмму '
тангенциальных ускорений (wl — t), представленную на рис. 44, в.
При построении диаграмм (ус— /) и (Wc— t) описанным методом
нельзя получить те участки этих диаграмм, которые соответствуют
половине крайних участков оси абсцисс. Чтобы закончить построение
диаграмм, нужно дополнительно построить средние значения vc и wc
для одного-двух участков следующего цикла. Соединив плавной кривой
точки, соответствующие последним участкам первого цикла и первым
участкам следующего цикла, отсечем на крайней правой оси ординат
отрезок, который следует отложить на крайней левой оси ординат
цикла. После этого окончательно достраиваем всю кривую, как это
указано на рис. 44, б, в штриховыми линиями.
Масштаб р/ диаграмм (ис — О и (wc — I) остается таким же, как
и раньше; масштабы по осям ординат определяются по формулам:
для диаграммы скоростей
pv = м • сек~г/мм; (6.5я)
для диаграммы ускорения
рта = м • сек-2/мм, (6.6)
где Ну и Н2 — отрезки, взятые с чертежа, мм.
Если по оси абсцисс отложено не время t, а угол поворота криво-
шипа ср = cojf, то в формулах (6.5) и (6.6) нужно поставить вместо р/
Рф гр
величину = р/. Тогда получим:
и
где
р0 = —ту- м • сект1! мм, (6.7)
1
2
= -*77- = 777 • * сек~21мм, (6.8)
Рф"2 Рф^1^2
~тт* Нсек.
Из формул (6.5) и (6.6) видно, что величины масштабов дифферен-
циальных кривых зависят от соответствующего полюсного расстояния
(Нг или Н2), которое выбирают так, чтобы дифференциальная кривая
вместилась на отведенном для нее месте чертежа.
На рис. 44, б показано, что для диаграммы (ис — I) нужно иметь
на листе бумаги площадку ВЫСОТОЙ h (/lmax + t/2max. Но
^/imax == Hi tg (Xj И t/2max — Hi tg 0t2, (6.9)
где ax и a2 — наибольшие углы наклона хорд (или касательных) на вос-
ходящем и нисходящем участках интегральной кривой (sc — /);
определение их величины указано на рис. 44, а.
89
Подставив значения угтах в уравнение (6.9), получим
tga2),
откуда
Н1<.----.
tgaj+ tga2
(6.10)
Расстояние между осями абсцисс диаграмм (sc — t) и (vc — t)
должно быть ОХО > yr = Hr tg 04.
Аналогичным способом определяют необходимую высоту площад-
ки для диаграммы (шс — Z) и расстояние О±О2 между осями абсцисс.
§ 6. СООТВЕТСТВИЯ МЕЖДУ ДИАГРАММАМИ ПЕРЕМЕЩЕНИЙ,
СКОРОСТЕЙ И КАСАТЕЛЬНЫХ УСКОРЕНИЙ
ПОСТРОЕНИЕ ДИАГРАММ (v — s) ИЛИ (a/ —s)
Укажем на некоторые характерные зависимости между интегральной
и дифференциальной кривыми.
1. Экстремальным значениям ординат интегральной кривой со-
ответствуют нулевые значения ординат дифференциальной кривой.
2. Точкам перегиба интегральной кривой соответствуют экстре-
мальные значения ординат дифференциальной кривой.
3. Возрастающим ординатам интегральной кривой соответствуют
положительные значения ординат дифференциальной кривой, а убы-
вающим — отрицательные.
4. Ординаты дифференциальной кривой, соответствующие началу
и концу периода установившегося движения, равны между собой.
5. Касательные, проведенные к дифференциальной кривой в точ-
ках, соответствующих началу и концу периода установившегося дви-
жения, одинаково направлены (параллельны).
Иногда при расчетах необходимо знать изменение скорости v или
тангенциального ускорения wl точки звена в зависимости от величины
ее перемещения s. Для этого нужно построить диаграмму (у—s)
или (w* — s).
Чтобы построить диаграмму (v — s) или диаграмму (w* — s),
нужно графически исключить переменную t из диаграмм (и — Z)
и (s — t) в первом случае и из диаграмм (w( — t) и (s — Z) — во
втором.
Рассмотрим этот метод на примере построения диаграммы (v — s).
Для этого:
1) вычерчиваем диаграммы (и — t) и (s — Z) одну под другой
(рис. 45). Масштабы времени р/ у обеих диаграмм берем равными;
2) начало координат О' новой диаграммы (у — s) помещаем на про-
должении оси OZ диаграммы (и — Z) и продливаем ее ось O'v до пере-
сечения с осью Ot диаграммы (s — Z) в точке О2;
3) через точку О2 проводим прямую MN под углом 6 = 45° к
оси OXZ;
90
www.vokb-la.spb.ru - Самолёт своими
4) отмечаем на кривой (s — f) ряд точек 1,2,3, ...и через эти точки
проводим вертикали до пересечения с кривой (v — t) и горизонтали
до пересечения с прямой MN-, соответствующие точки пересечения обо-
значим теми же цифрами, что и на кривой (s — t);
5) из полученных точек на прямой MN проводим вертикали до пе-
ресечения с соответствующими п
именных точек кривой (у — t);
6) соединив полученные точ-
ки I, II, III, ... плавной кри-
вой, получим диаграмму (у — s').
Масштабы p,s и p,v диаграм-
мы (у — s) будут равны мас-
штабам исходных диаграмм (s —
/) и (у — /).
Если новую диаграмму (у —
s) требуется построить не в мас-
штабе исходной диаграммы, а
в каком-либо ином, например р.[>,
то прямую MN нужно провести
под углом б' к оси (\t\ величина
, проведенными из одно-
Рис. 45
угла определяется из уравне-
ния
(6.11)
§ 7. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМОВ
И КЛАССА МЕТОДОМ ПЛАНОВ СКОРОСТЕЙ И УСКОРЕНИЙ
Построение кинематических диаграмм создает возможность изу-
чить изменение кинематических параметров какой-либо одной точки
или звена механизма за время одного оборота ведущего звена. Метод
планов скоростей и ускорений дает возможность определить линейные
скорости и ускорения всех точек механизма, угловые скорости и уско-
рения всех звеньев механизма в данном его положении.
Кинематическое исследование механизмов методом построения
диаграмм при всей его простоте и наглядности имеет следующие не-
достатки:
1) неточность, особенно при дифференцировании кривых с большой
кривизной (при повторном дифференцировании неточность возрастает
и кривая (о/ — t) часто получается неудовлетворительной);
2) невозможность полностью исследовать криволинейное движе-
ние, так как дифференцированием кривой скоростей получаем диаграм-
мы изменения только тангенциальных ускорений (се/ — /);
3) диаграммы дают лишь численные значения векторов, направле-
ние которых можно установить лишь после некоторых дополнительных
построений.
Метод планов скоростей и ускорений не имеет упомянутых недо-
статков, поэтому его широко применяют при исследовании различных
механизмов.
91
Кинематическое исследование этим методом производим в такой по-
следовательности :
1) производим структурный анализ заданного механизма;
2) вычерчиваем механизм в положениях, для которых требуется
построить планы скоростей и ускорений;
3) строим планы скоростей и ускорений сначала для ведущих звень-
ев, а затем для всех ассуровых групп в порядке их наслоения;
4) по планам скоростей и ускорений строим годографы и или w
для некоторых точек, графики угловых скоростей и ускорений звеньев,
если это требуется для исследования. Планы
скоростей и ускорений можно строить в любом
масштабе, в зависимости от площади чертежа.
Для упрощения подсчетов нормальных и
поворотных (кориолисовых) ускорений удобно
строить планы скоростей и ускорений в масшта-
бах кривошипа, т. е. следует выбирать масштабы
планов скоростей и ускорений такими, при ко-
торых модули векторов скоростей и ускорений
точки А пальца кривошипа изображались бы от-
у
ро
Рис. 46
резками (рис. 46), полученными путем умножения длины кривошипа
О А в мм на некоторые числа щ и р2, выбираемые в зависимости от
того, в крупном или мелком масштабе желательно получить планы.
Следовательно, длины отрезков ра и па, изображающие эти векторы
в каких-то масштабах, будут равны ра = • ОА, мм и па =
=[i2-OAt мм.
Действительные значения скорости и ускорения точки А опреде-
ляются по формулам:
VA = ®^ОА М!сек:> WA = ^ОА м/се^2-
Отсюда получим масштабы упомянутых векторов:
VA ^ = -=~ = Ра ^ОА _ PiOA м • сект1! мм-, (6.12)
Т.,П II - А - r 2Z 1ОА “Ь11/ 2/ м • сект2 мм. (6.13)
па р2 • ОА
где coj — угловая скорость кривошипа.
Приведем пример построения планов скоростей и ускорений для
механизма II класса.
§ 8. ПРИМЕР ПОСТРОЕНИЯ ПЛАНОВ СКОРОСТЕЙ
И УСКОРЕНИЙ МЕХАНИЗМА II КЛАССА
На рис. 47, а представлена в масштабе р/ м/мм кинематическая схема механизма
двигателя внутреннего сгорания с компрессором.
Требуется: а) построить планы скоростей и ускорений механизма в заданном его
положении, если известно, что кривошип ОА вращается с постоянной угловой
92
www.vokb-la.spb.ru - Самолёт своими
скоростью сох---; б) определить радиус и центр кривизны траектории точки С
сек
шатуна АВС в этом же положении механизма.
Произведя структурный анализ, устанавливаем, что данный механизм состоит
из механизма I класса (звенья 0 и 1) и трех присоединенных двухповодковых групп,
включающих звенья 2—5, 4—5 и 6—7.
Построение планов скоростей для ведущего звена
ОЯизвеньев 1-й присоединенной группы (2—3). Выбираем по-
Рис. 47
люс плана скоростей р и откладываем перпендикулярно к О А в сторону вращения
кривошипа отрезок ра= р^ОЛ, изображающий скоррсть vA в масштабе
J —1
__ м • сек
~~ Mi мм
Для определения скорости точки В (центра среднего шарнира) раскладываем
\плоскопараллельное движение звена АВС на поступательное вместе с точкой А и на
^лщательное вокруг точки Л. Тогда, как известно из теоретической механики,
Xv Чв = *>Д = vba-
С, *ой формуле известны величина и направление вектора vAl а также направле-
но!^* \в и v£A, а именно:
DC VBII уу, vBA ± АВ. гдх
93
Для определения этих векторов через точку а (рис. 47, б) проводим прямую линию,
перпендикулярную АВ, а через полюс р — прямую^араллельную оси уу\ точка b
пересечения этих прямых определяет векторы аЪ и pb, изображающие искомые ско-
рости vBA и vB.
Скорость точки С звена АВС определим на основании теоремы о подобии, по-
строив на отрезке аЬ треугольник аЬс, подобный треугольнику АВС и сходственно
с ним расположенный. Для этого через точки а и b проводим прямые, перпендикуляр-
ные соответственно АС и ВС. Соединяя точку с их пересечения с полюсом, получаем
вектор ре, изображающий скорость точки С.
Птаном скоростей звена ОД является отрезок ра, а звена АВС — фигура раЬс.
Построение планов скоростей для звеньев 4—5вто-
рой присоединенной группы. Для определения скорости центра D
среднего шарнира разложим плоскопараллельное движение звена CD на поступа-
тельное вместе с точкой С и на вращательное вокруг точки С.
Тогда vD= vc + vDC.
В этом уравнении скорость vc известна полностью, вектор vD перпендикулярен
к ED, а вектор vDC перпендикулярен к DC. Проводя через точки рис перпендикуля-
ры соответственно к ED и CD, получаем точку их пересечения d, определяющую век-
тор pd скорости точки D. Отрезок pf на продолжении прямой dp, изображающий ско-
рость vF, на основании теоремы о подобии находим из пропорции
pd _ ЕР
pf ~ EF ‘
Планом скоростей звена CD является треугольник ped, а звена DF — отре-
зок dpf.
Построение планов скоростей для звеньев 6—7 тре-
тьей присоединенной группы. Для определения скорости точки G
используем векторное уравнение vG = vF + vGF и условие vG || уу. Через точку f
проводим прямую, перпендикулярную к GF, а через полюс р — прямую, параллель-
ную У У До пересечения их в точке g. Вектор pg изображает скорость vG.
Планом скоростей звена GF является треугольник pgf.
Имея план скоростей и зная закон движения ведущего звена ОА = const),
можно построить план ускорений механизма; при этом необходимо придерживаться
той же последовательности, что и при построении плана скоростей механизма.
Построение планов ускорений для ведущего звена
1 и звеньев 2—3 первой присоединенной группы. Так как
о*! = const, то ускорение точки А определим по формуле == 1ОА&\-
Из полюса л плана ускорений (рис. 47, в) отложим отрезок па= в направле-
нии от А к О. Этот отрезок изображает ускорение в масштабе
WA
~ ла ~ (х2
Для определения ускорения точки В используем векторное уравнение, основан-
ное на идее разложения плоскопараллельного движения звена АВС:
_ WA + WBA + WBA
и условие, что wB || уу.
Здесь wB — вектор абсолютного ускорения точки В;
иРВА— вектор нормального ускорения точки В в ее вращательном относите ль/
ном движении вокруг точки А, направленный от точки В к точке /
wBA — вектор тангенциального ускорения точки В в том же движении, п/
пендикулярный АВ. /Й
м
/
/
www.vokb-la.spb.ru - Самолёт своими pyi
Величину нормального ускорения ыВА определяют по формуле
Wba " 1лв ~ АЁ
где АВ и ab — отрезки, взятые с чертежа, мм.
Длину отрезка апВА мм, изображающего ускорение ^А на плане ускорений
в масштабе определяют по формуле
ц’вл
м ^2
— т • —5-,
Ml
(6.14)
т —
где
АВ ’
(6.15)
Отрезок апв4 можно определить графически. Для этого на обеих сторонах про-
извольного угла (рис. 47, г) откладываем от его вершины отрезок ab, взятый из плана
скоростей, а на одной из сторон — отрезок АВ, взятый из кинематической схемы.
Соединяем концы отрезков ab и АВ, лежащих на разных сторонах угла, прямой MN,
а затем проводим прямую KL | MN. Прямая /(X отсекает на стороне угла отрезок т.
Умножая его на отношение получаем отрезок апВА. Отрезок апВА откладываем
К
на плане ускорений от точки а в направлении от точки В к точке А. Через точку пВА
проводим перпендикуляр к АВ, а через полюс л — линию, параллельную уу, и в пе-
ресечении получаем точку Ь. Вектор пВАЬ изображает ускорение wBA, а вектор ыЬ —
ускорение wB Соединяя точки а и Ь, получаем вектор ab, изображающий ускорение
швл. Для определения ускорения точки С строим на отрезке ab треугольник abc,
подобный треугольнику АВС и сходственно с ним расположенный. Соединяя точку с с
полюсом, получаем вектор ле, изображающий ускорение wc.
П чаном ускорений звепа О А является отрезок ля, звена АВС — фигура itabc,
звена В (поршня) — прямая пЬ.
Построение планов ускорений звеньев 4и5второй
присоединенной группы. Для определения ускорения точки D (центра
среднего шарнира) используем векторные уравнения
= wc + + w‘DC; wD = WnD + W*D.
Ускорение wc известно. Ускорения wBC и wB направлены соответственно от D к С и
otD к Е. Отрезки cnDC и zinDE, изображающие эти ускорения в плане ускорений,
подсчитывают по формулам:
Г„ _ VDC _ Ц2
‘ (de)2
где m==~CD-’
VD FX2
ЛИ г\ р — , -— Я2 • о ’
DE Ide^ Hi
Отрезки cnDC и л/гр^ можно определить графически при помощи построения, описан-
ного выше. Касательные ускорения wBC и wB перпендикулярны соответственно к
DC и DE.
95
Построения ведем в такой последовательности. От точки с плана ускорений в на-
правлении DC откладываем отрезок сп^с, а от точки л в направлении DE — отрезок
MDE' Через точки nDC и nDE проводим прямые, соответственно перпендикулярные к
DC и к DE, и получаем в их пересечении точку d. Вектор nd изображает ускорение
точки D. Векторы nDCd и nDEd изображают ускорения u/DC и i^D. Соединяя точки с
и d, получаем вектор cd, изображающий ускорение wDC.
Для построения точки /, лежащей на продолжении отрезка dn, воспользуемся
пропорцией
ref __ EF
nd “ ED *
Прямая df является планом ускорений звена DF, а фигура ncd — планом уско-
рений звена DC.
Построение планов ускорений звеньев 6—7 третьей
присоединенной группы. Для определения ускорения точки G разложим
плоскопараллельное движение звена GF на поступательное движение вместе с точкой
F и вращательное вокруг точки F. Тогда получим
wc = wF + wnCF + t?GF; wc || yy.
Отрезок fnGE, изображающий ускорение и имеющий направление от G к F, опре-
деляем по формуле
г ^GF (fe)2Pv (fg)2 g,
fnGF = ------- = ~=------- — ~ * “Hr"
1gfV"w GF • FG pf p|
На рисунке отрезок fnGF не изображен ввиду его малости. Проводим прямые, первую
через точку f перпендикулярно к GF, а вторую через полюс л параллельно уу до пе-
ресечения их в точке g. Вектор ng изображает ускорение wG.
П паном ускорений звена FG является треугольник nfg, а планом ускорений
поршня 7 вектор ng.
Определение радиуса кривизны траектории точки
Сзвена 2 в данном положении механизма. Для определения
радиуса рс и центра кривизны траектории точки С (рис. 47, а) в данном ее положе-
нии нет необходимости вычерчивать эту траекторию. Для этого разложим вектор
пс, изображающий абсолютное ускорение точки С, на направления, перпендикуляр-
ное к вектору рс и параллельное ему. В результате получим векторы ппс и п^с,
изображающие соответственно нормальное wG и касательное wG ускорения точки С.
Направление вектора ппс определяет направление радиуса кривизны траектории точ-
ки С.
Радиус кривизны определяют по фор^муле
fc (Рс)2 Р-с
рг — ---- =---------- мм.
Графическое построение производим в такой последовательности: проводим че-
рез точку С (рис. 47, а) прямую NN, параллельную вектору ппс и, отложив на ней
Рс
величину —- от точки С в направлении вектора ппс, получим точку Oj — центр
И/ ь
кривизны траектории точки С в данном положении.
96
www.vokb-la.spb.ru - Самолёт своими pyi
§ 9 ПОСТРОЕНИЕ ПЛАНОВ СКОРОСТЕЙ
И УСКОРЕНИЙ МЕХАНИЗМОВ III КЛАССА
На рис. 48, а представлена кинематическая схема кулисного меха-
низма строгального станка в масштабе р/ м/мм, на рис. 48, б — струк-
турная.
Данный механизм состоит из механизма I класса (звенья 0 и /)
й присоединенной группы III класса (звенья 3, 2, 4 и 5). В этой группе
звено 3 является базисным, а звенья 2, 4 и 5 — поводками.
Рис. 48
Требуется построить планы скоростей и ускорений механизма
в заданном его положении, если известна угловая скорость coj веду-
щего звена О А.
При построении планов скоростей и ускорений механизма восполь-
зуемся методом особых точек (точек Ассура).
Особой точкой называется точка, определяемая пересечением осей
любых двух поводков группы III класса (3-го порядка).
Осью поводка является прямая, проходящая через центры шарни-
ров поводка, которыми он соединяется с другими звеньями. Если вме-
сто двух шарниров поводок образует один шарнир и одну поступатель-
ную кинематическую пару, то ось поводка проходит через центр
”жпа перпендикулярно к направлению относительного прямоли-
херемещения в поступательной кинематической паре. В
97
разбираемом примере одна ось определяется точками D и В, дру-
гая (CS) проходит через точку С перпендикулярно линии хх, а третья
(AS) — через точку А перпендикулярно АВ.
Для построения планов скоростей и ускорений данного механизма
воспользуемся особой точкой S, которая получается в пересечении осей
CS и AS. Точку S жестко связываем с базисным звеном 3.
Построение плана скоростей ведущего зве-
н а (рис. 48, в). Выбираем на плоскости полюс р и откладываем перпен-
дикулярно к ОА в сторону вращения кривошипа отрезок раг = ра* =
= • ОА, изображающий скорость va3 = va3 в масштабе pv =
Hz • Cl)i м - сек”1
Pj мм
Построение планов скоростей звеньев группы
III класса 3-го порядка. Прежде всего определяем ско-
рость точки S звена 3. Для этого воспользуемся уравнениями:
= + = + = (6.16)
Из уравнений (6.16), получим
^ = ^, + ^3л, + ^л3. (6.17)
В уравнении (6.17) последние два вектора объединены стрелкой
сверху, так как они оба перпендикулярны оси AS. В уравнении (6.16)
оба вектора правой части перпендикулярны оси CS, поэтому они также
объединены стрелкой сверху.
Точку S в плане скоростей получим в соответствии с уравнениями
(6.16) и (6.17) на пересечении прямых, из которых первая проходит
через полюс р перпендикулярно оси CS, а вторая — через точку а19 а2
перпендикулярно оси AS. Вектор ps изображает скорость vs.
Для определения скорости vb воспользуемся уравнением
vb = vs + vbs. (6.18)
Здесь vb перпендикулярна DB и vbs перпендикулярна SB.
В соответствии с уравнением (6.18) через полюс р проводим прямую,
перпендикулярную/)#, а через точку# — прямую, перпендикулярную
SB. Точка b пересечения этих прямых определяет конец вектора pb,
изображающего скорость ив-
Чтобы определить точку с, т. е. конец вектора рс, изображающего
скорость vc, на отрезке bs строим треугольник bsc, подобный треуголь-
нику BSC, для чего через точки b и s проводим прямые, соответственно
перпендикулярные ВС и SC. Пересечение этих прямых определяет
точку с. Соединив точку с с полюсом, получим вектор рс, изображающий
скорость vc- Точку а3 — конец вектора ра3, изображающего скорость
va3, находим на основании теоремы о подобии, как основание а3 перпен-
дикуляра, опущенного из точки s на прямую Ьс. Соединив точку а3
с полюсом, получим вектор ра3.
48
www.vokb-la.spb.ru - Самолёт своими руками?!
В результате построений получены планы скоростей для всех звень-
ев механизма. Отрезок ра± — план скоростей звена 1, фигура psbc —
план скоростей звена 3, pb — план скоростей звена 4, рс — план ско-
ростей звена 5.
Выбираем на плоскости полюс я (рис. 48, г) и откладываете в направ-
лении АО отрезок па± = ла2 = р2 * ОА, изображающий ускорение
wA1 == wAs в масштабе
_ V4 • м • сек~~2
мм
Переходим к построению планов ускорений звеньев группы III
класса 3-го порядка.
Определение ускорения точки S звена 3.
Составляем уравнения:
^ = ®а3 + ^а3 = ^аэ + ^а3 + ^а3; (6.19)
= ™a. + ^.а, + ^д3д2; (6.20)
^>s = ^c + ^sc = ^c + Ъс + ^nsc. (6.21)
Соединяя уравнения (6.19) и (6.20), получаем:
^3 = ^Д2 + ™A,A, + ^А3 + ™ГА3Аг + (6-22)
В правой части уравнения (6.21) первые два вектора объединены
стрелкой сверху, так как они оба перпендикулярны CS. В правой части
уравнения (6.22) второй и третий векторы объединены общей стрелкой,
так как они параллельны AS; четвертый и пятый векторы также объ-
единены, так как они перпендикулярны оси AS.
В уравнениях (6.21) и (6.22) ускорения wa2 = wa, — известны,
ускорения wsc, wa3as и wsa3 можно определить следующим способом.
Вектор wsc направлен от S к точке С. Изображающий его отрезок
nnsc определим так:
_ _ ^SC __ _ (sc)3 Иг _ w Иг
SC~ ~ Vw-tsc ~ SC ' pf р* ’
(sc)2 .
где m = sc определяют графически.
Ускорение wsa3 направлено от точки S к точке Л3. Изображающий
его отрезок knsA3 определим из равенства:
_ vsAt _ (sa3y р2 _ щ
SA х‘ 9
(S(Z3)2 .
где m1 = —— определяют графически.
Направление ускорения wa,a2 определим, поворачивая вектор от-
носительной скорости va,a, на 90° в направлении вращения переносной
4* 99
среды (камня), помня, что направление вращения камня совпадает
с направлением вращения кулисы 3. Направление вращения кулисы 3
определим, перенеся вектор Ьс в точку С механизма.
Величину отрезка a2k, изображающего ускорение определим
из равенства
„ А _ ^гА, _ 2а‘^А3Аг _ 2а2а3 а3Ь Мг________ р2
и'2к ~~ " — — ол ~ ' -2“ »
где отрезок т2 = “ —— определяем графически (рис. 48, д).
Построения на плане ускорений, связанные с определением точки S,
проводим в соответствии с уравнениями (6.21) и (6.22); от полюса л от-
кладываем отрезок raise, а через конец отрезка msc проводим к нему
перпендикуляр nscs.
По уравнению (6.22) от точки а2 откладываем отрезок a2k; от точки
k откладываем отрезок knsA2 в известном направлении; через точку
tisA3 отрезка krtsA* проводим к нему перпендикуляр nsA^s. Пересечение
прямых rises и rtsA^s определяет точку s. Соединив полюс л с точкой
s, получим вектор л$, изображающий ускорение ws-
Определение ускорения точки В звена 3.
Составляем уравнения:
^в = + ™BS = + ^bs + ™BS; (6.23)
™b = ™b + ^s. (6.24)
Ускорение wbs направлено от точки В к точке S; величину отрезка
shbs, его изображающего, определим по формуле
______rfis _ (Ъф М2 _ т _Мг_
BS Mw /BS-Mw SB ’ и2 ~m- g2 .
(fcs)2 ,
где отрезок m = - ' - определяем графически.
ОО
Ускорение wbd направлено от точки В к точке D. Изображающий
его отрезок лпво определим по формуле
_ ^BD _ v2B _ (pby М2 _ т М2
Pw ^BD * Bw BD pij Pj
(pb}2
Отрезок m1 = определяем графически.
Построения на плане ускорений проводим в соответствии с урав-
нениямиЦ6.23) и (6.24). По уравнению (6.23) от точки s откладываем
вектор snBs\ через точку nBs проводим к нему перпендикуляр tiBsb-
По уравнению (6.24) от полюса л откладываем отрезок япво\ через
точку riBD проводим к нему перпендикуляр пввЬ. Пересечение прямых
tiBsb и пвоЬ определяет точку Ь. Соединив точку b с полюсом л, полу-
чим вектор nb, изображающий ускорение wb>
100
www.vokb-la.spb.ru - Самолёт своими
Определение ускорений точек Си Д3 звена 3.
Точки С и А3 в плане ускорений находим на основании теоремы о по-
добии, для чего на отрезке sb строим треугольник sbc, подобный и сход-
ственно расположенный с треугольником SBC. В треугольнике sbc
из вершины s опускаем перпендикуляр на сторону Ьс. Основание пер-
пендикуляра определяет точку а3. Соединив полюс л с точками с и а3,
получим векторы яс и ла3, изображающие ускорения wc и wa3.
В процессе построения плана ускорений звена 3 были построены
планы ускорений звеньев 4 и 5. Планом ускорений звена 4 является
вектор л&, а звена 5 — вектор яс.
§ 10. ПОСТРОЕНИЕ МГНОВЕННЫХ ЦЕНТРОВ СКОРОСТЕЙ
И УСКОРЕНИЙ ЗВЕНЬЕВ
Звено механизма, совершающее вращательное или плоскопарал-
лельное движение, в каждом положении имеет точку, жестко с ним
связанную, скорость которой в данном положении равна нулю. Эта
точка называется мгновенным центром скоростей
(вращения) звена. На плане скоростей звена ей соответствует полюс р.
У звена, вращающегося вокруг неподвижной точки, мгновенный
центр скоростей совпадает с этой точкой. Для звена, имеющего плоско-
параллельное движение, мгновенный центр скоростей находят, поль-
зуясь теоремой о подобии. Например, для звена ВС (рис. 48, а)
нужно на отрезке ВС построить треугольник РВС, подобный треуголь-
нику pbc (рис. 48, в) и сходственно с ним расположенный. Точка Р
треугольника РВС является мгновенным центром скоростей звена ВС
в данном его положении. Аналогично можно найти точку звена, аб-
солютное ускорение которой в данном положении равно нулю. Эта
точка называется мгновенным центром ускорений
звена. На плане ускорений этой точке соответствует полюс л плана.
Мгновенный центр ускорений звена ВС (рис. 48, а) определим, построив
на прямой ВС треугольник лВС, подобный и сходственно расположен-
ный с треугольником яЬс. Точка л является мгновенным центром уско-
рений звена ВС в данном его положении. ^Мгновенный центр ускорений
используется в кинетостатике.
§ 11. ПОСТРОЕНИЕ ПЛАНОВ СКОРОСТЕЙ И УСКОРЕНИЙ
МЕХАНИЗМОВ С ВЫСШИМИ КИНЕМАТИЧЕСКИМИ ПАРАМИ
На рис. 49, 50, 51 представлены схемы кулачковых механизмов.
Ведущими звеньями в этих механизмах являются кулачки /, вращаю-
щиеся с некоторой угловой скоростью о1.
Пусть со! = const; требуется построить планы скоростей и уско-
рений для этих механизмов.
Эта задача значительно упростится, если заменить высшие пары
звеньями, входящими только в низшие пары [20].
101
Обозначим цифрой 3 добавочное звено. На рис. 49, а заменяющим
механизмом будет кривошипно-ползунный механизм ОАВ с кривоши-
пом ОА, где точка А (здесь и далее) является центром кривизны кри- <
вой теоретического профиля кулачков в точке В. Скорость и ускорение
точки В толкателя определим, построив планы скоростей (рис. 49, б)
и ускорений (рис. 49, в) по векторным уравнениям
^в = ^а + ^ва и ° в IIУУ>
WB = WA^T WnBA + w‘BA И WB || уу.
Для кулачкового механизма с качающимся толкателем ВС
(рис. 50, а) заменяющим механизмом будет четырехзвенник ОАВС,
скорость vb и ускорение wb точки В которого определим из следующих
уравнений:
VB ~ VA + VBA » VB — |
™B = ™A + ™BA + ™‘bA KWB = WnB + w‘B
Построение планов скоростей (рис. 50, б) и ускорений (рис. 50, в)
производится изложенным выше методом.
Для механизма с плоским толкателем (рис. 51, а) заменяющий ме-
ханизм ОАВС будет состоять из кривошипа ОА и двухповодковой
группы АВС
Так как звенья 2 и 3 движутся поступательно, то их угловые *
скорости
6)2 ~ С03 =; 0.
Скорость центра шарнира Л, соединяющего звенья / и 5, va. = va, =
(Oi/од, а ускорение= шАз = (rfloA (так как кривошип вращается
равномерно), причем va, перпендикулярно ОА, a wa3 параллельно
0.4 и направлено к центру О. Раскладывая абсолютное движение
102
А
www.vokb-la.spb.ru - Самолёт своими рук;
звена 3 на переносное поступательное вместе со звеном 2 и на относи-
тельное поступательное по отношению к звену 2, получаем уравнения
WA3 = WA, + ™А3Аг.
Здесь
vAjyy> ~va,a.Jxx'
&А3 = ^А.’ ™Аг II УУ- ™А3Аг II ХХ-
В соответствии с этими уравнениями на рис. 51, б и 51, в построены
планы скоростей и ускорений механизма. Точность построения пла-
нов зависит от точности определения центра А кривизны кривой про-
филя кулачка. Поэтому в тех случаях, когда центр кривизны профиля
кулачка не задается, его положение следует определить с особой тща-
тельностью.
ГЛАВА VII
СИНТЕЗ ПЛОСКИХ КУЛАЧКОВЫХ
МЕХАНИЗМОВ
§1. ТИПЫ ПЛОСКИХ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Плоские трехзвенные кулачковые механизмы состоят из стойки
и двух подвижных звеньев, причем подвижные звенья образуют с ней
низшие кинематические пары (вращательные или поступательные),
а друг с другом — высшую кинематическую пару.
Ведущее звено в кулачковом механизме называют кулачком, ве-
домое — толкателем. Элемент высшей кинематической пары, принадле-
жащий кулачку, называют профилем кулачка, а элемент, принадлежа-
щий толкателю, называют профилем толкателя.
Рассмотрим синтез кулачковых механизмов, представленных на
рис. 49, а\ 50, а и 51, а.
Кулачковый механизм типа I (рис. 49, а) состоит из кулачка 1 и
толкателя 2, совершающего прямолинейное возвратно-поступательное
движение. Во все время движения механизма толкатель касается ку-
лачка одной и той же точкой В. Если центр вращения кулачка лежит
на продолжении прямолинейной траектории точки В толкателя, то
кулачковый механизм называют центральным. Если же центр враще-
ния не лежит на этой прямой, то кулачковый механизм называют вне-
центренным. Расстояние е от центра вращения кулачка до траектории
точки В толкателя называют эксцентриситетом.
Кулачковый механизм типа II (рис. 50, а) называется рычажным
(коромысловым) и состоит из кулачка 1 и толкателя 2 (рычага, коро-
мысла), который касается кулачка во все время движения одной и той
103
же точкой В и совершает колебательное вращательное движение во-
круг неподвижной точки С. Расстояние ВС — I называют длиной
толкателя. Буквой d обозначают расстояние ОС между центрами
вращения кулачка и толкателя.
Кулачковый механизм типа III (рис. 51, а) состоит из кулачка 1
и толкателя 2. Толкатель совершает прямолинейное возвратно-посту-
пательное движение и касается кулачка во время движения различ-
ными точками своего прямолинейного профиля хх. Буквой а обозна-
чен жесткий угол между профиле^м толкателя и направлением переме-
щения толкателя.
§ 2. ФАЗОВЫЕ УГЛЫ
В большинстве случаев полный цикл работы толкателя в кулачко-
вых механизмах соответствует времени Т одного оборота кулачка
7 = — сек, где п — число оборотов в минуту кулачка).
Промежутки времени, соответствующие удалению толкателя из
самого близкого (по отношению к центру вращения кулачка) положе-
ния в самое дальнее, выстою в самом дальнем положении, возвраще-
нию из самого дальнего в самое близкое положение и выстою в самом
близком положении, обозначают Ту\ Тъ\ Тб. Углы поворота кулачка,
соответствующие этим промежуткам времени, называют углом удале-
ния, углом дальнего стояния, углом возвращения и углом ближнего
стояния и обозначают фу; <рд; фв; фб (фазовые углы).
Очевидно:
Ту + Тд + Тв + Тб = Т-, (7.1)
Фу + Фд + Фв + Фб = 2л. (7.2)
Сумму ФУ + Фд + фв называют рабочим углом и обозначают фр. Сле-
довательно,
Фу + Фд + Ф₽ = фр- (7-3)
§ 3. УГОЛ ПЕРЕДАЧИ ДВИЖЕНИЯ
Углом передачи движения называют острый угол, образуемый
прямыми, на которых расположены векторы v2 и v0Th абсолютной и от-
носительной (по отношению к кулачку) скоростей той точки толкателя,
которая находится в точке контакта А (рис. 52, а, б). Если пренебречь
силой трения между кулачком и толкателем, то силой, приводящей
в движение толкатель (движущей силой), является давление Q кулач-
ка, приложенное к толкателю в точке А и направленное по общей нор-
мали пп к профилям кулачка и толкателя. Разложив силу Q на взаимно
перпендикулярные составляющие QL и Q2t из которых первая направ-
лена по направлению скорости v2, получим силы и Q2 в зависимости
от угла у:
Qi = Qsiny;
Qz — Q cos y-
(7-4)
(7-5)
104
www.vokb-la.spb.ru - Самолёт своими руками?!
Сила Qx перемещает толкатель, преодолевая при этом все полезные
(связанные с выполнением технологических задач) и вредные (силы тре-
ния) сопротивления, приложенные к толкателю. Сила Q2 увеличива-
ет силы трения в кинематической паре, образованной толкателем и
стойкой.
Как видно из формул (7.4) и (7.5), с уменьшением угла у сила Q±
уменьшается, а сила Q2 увеличивается. При некотором значении угла
Рис. 52
у может оказаться, что сила не сможет преодолеть все сопротивле-
ния, приложенные к толкателю, и механизм не будет работать. Такое
явление называют заклиниванием механизма, а угол у, при котором
оно имеет место, называют углом заклинивания узаКл.
При проектировании кулачкового механизма задают минимальное
допускаемое значение угла у, обозначаемое Ymin и значительно пре-
восходящее узакл> и требуют, чтобы угол Y НИ в одном положении ку-
лачкового механизма не был меньше Ymin, т. е. требуют выполнения
неравенств
Т Ymin > ?закл- (7.6)
Как показано на рис. 52, в, в кулачковом механизме с плоским
толкателем угол у передачи движения равен углу а между профилем
толкателя и направлением его движения и остается постоянным во
все время движения механизма. Поэтому при проектировании кулач-
кового механизма этого типа нужно, чтобы
T = a>Ymin- (7.7)
Для кулачковых механизмов можно рекомендовать уПпП = 60°
(рис. 52, а) и ymin = 45° (рис. 52, б).
Методы определения углов передачи в различных положениях
механизма изложены в § 17 этой главы.
105
§ 4. ЗАДАЧА ПРОЕКТИРОВАНИЯ КУЛАЧКОВЫХ МЕХАНИЗМОВ
Задача синтеза кулачковых механизмов состоит в том, чтобы по-
строить профиль кулачковой шайбы, удовлетворяющий поставленным
технологическим процессом требованиям. Для этого задаются:
1. Закон движения кулачка в форме <р = <р (/).
Дифференцируя это уравнение последовательно дважды по времени,
определяем угловую скорость и угловое ускорение кулачка:
®к = -^ = юк(0;
ек=Т=£к(0.
Для упрощения поставленной задачи в заданиях на проект при-
нимаем:
т рад ,
CCL = ------= const,
к 30 сек ’
где п — среднее число оборотов в минуту кулачка и при t = 0
Ф = 0.
При этих условиях ф = (Ок/ И 8К = 0.
2. Закон движения ведомого звена (толкателя) в форме уравнения
S=S(/),
если толкатель перемещается поступательно, либо в форме
Т = ¥ (/),
если толкатель (коромысло) вращается вокруг неподвижной оси.
3. Некоторые линейные размеры, позволяющие выбрать из мно-
жества решений одно — вполне определенное.
Получаемые при таких данных решения могут оказаться неудов-
летворительными в динамическом отношении (например, в смысле
износа). Поэтому иногда задаются дополнительно некоторыми дина-
мическими условиями.
Ниже будут рассмотрены случаи, когда задается допускаемое ми-
нимальное значение угла у передачи движения. Решение таких задач
известно под названием «динамический синтез кулачковых механизмов».
Напомним еще раз, что существует бесчисленное множество ку-
лачковых механизмов, удовлетворяющих заданным законам движения.
Наивыгоднейшим же решением задачи следует считать, очевидно, то,
при котором механизм имеет наименьшие размеры и в то же время яв-
ляется приемлемым как с конструктивной точки зрения, так и в от-
ношении прочности. Поэтому в так называемых задачах кинемати-
ческого синтеза обычно задаются наперед значением rmin минимального
радиуса-вектора кулачка. При динамическом синтезе следует пред-
варительно, пользуясь данными задачи, например, заданным мини-
мальным углом Ymin передачи движения, найти неизвестное значение
Пшп. Этим самым приводим решение к уже известной задаче кинемати-
ческого синтеза.
106
www.vokb-la.spb.ru - Самолёт своими руками?!
Выше мы указали, что в законе движения толкателя аргументом
функции пути (линейного либо углового) является время /. Однако
такое задание функции не является единственно возможным. В ка-
честве аргумента можно взять также угол поворота ср кулачка, посколь-
ку связь между параметрами <р и / задается (например, при (ок = const,
имеем: <р = сок/). Таким образом, закон движения толкателя может
быть задан в параметрической форме: S = S (<р) либо Т — V (ср),
где <р = (р (/).
При таком способе задания закона движения толкателя радиус-
вектор кулачка и, следовательно, профиль последнего строится непо-
средственно по углу поворота <р.
§ б. ГРАФИЧЕСКОЕ ИНТЕГРИРОВАНИЕ
При (ок = const имеют место такие соотношения:
dS dS
A dt dtp к’
d2S d2S
(7.8)
(7.9)
WA — d? ~ dtp* ’
если толкатель перемещается прямолинейно (рис. 52, а, в); если же
толкатель колеблется вокруг неподвижной оси (рис. 52, б), то
(От = -и- = • СОк; (7.10)
1 dt d(p к '
Для обеспечения режима технологического процесса к закону из-
менения скорости или ускорения толкателя часто предъявляются
определенные требования. Поэтому в таких случаях вместо функцио-
нальной зависимости S = S (t) при поступательном движении толка-
теля задаются значениями
dS dS . х z- 1оч
-ЛГ = W(<р) (7Л2)
или
d*S <PS . . „ . о.
d^ d<p2 (7-13)
в функции <р, а вместо V ~ Т (<р) при колебательном движении тол-
кателя задается
Ж / Ч /7 1ЛЧ
<7Л4>
или
dtp2 d(p2 (7-15)
Но для построения профиля кулачка достаточно иметь зависимости
S = S (/) или V = Y (/). Поэтому в указанных случаях приходится
107
интегрировать один раз заданные зависимости (7.12) или (7.14) или
дважды интегрировать, если заданы зависимости (7.13) или (7.15).
На рис. 53, а представлена кривая у" = у" (х), выражающая,
108
www.vokb-la.spb.ru - Самолёт своими
от типа кулачкового
d2S
механизма, либо г (ф), «либо
в зависимости
d2¥ . ч
~d^ (<р)-
Площади и F2, а также Ft и Fi должны быть равны между собой,
поскольку скорость толкателя в начале и конце углов удаления и воз-
вращения равна нулю. Проинтегрируем дважды графически заданную
зависимость. Для этого:
1) построим ординаты ab, cd, ..., соответствующие серединам ин-
тервалов 01, 12, ..., и отложим отрезки Ob'= ab, Od' = cd на оси
ординат;
2) соединим произвольно взятую точку Р± на продолжении оси х
с точками b', d', ...;
3) на рис. 53, б из точки 0± проводим отрезок 0±Ь" в интервале 0J
параллельно лучу РгЬ', отрезок b"d' в интервале 1—2 параллельно
лучу Р^' и *г. д.
Полученная ломаная линия (в пределе — кривая) в графической
форме представляет собой первый интеграл заданной зависимости,
т. е. кривую у' у' (х) и, значит, с учетом масштабов, либо =
dS . . . dW dW z .
= (ф)> либо —7— — — (ф).
dtp dtp dtp VY/
Аналогично, интегрируя кривую у' = у' (х), получаем вторую
интегральную кривую у = у (х), с учетом масштабов S = S (ф)
(рис. 53, в), либо 4е = ¥ (<р).
109
Для определения произвольных постоянных интегрирования при-
ходите ;адавсГ’»ся некоторыми начальными условиями. В дальней-
ш л б\дем полагать, что в нижнем положении толкателя его скорость
(линг । iiioo угловая) должна равняться нулю. Естественно также
начало отсчета времени t относить к этому моменту. Таким образом,
получаем следующие нач<- тьные условия для кулачковых механизмов:
а) с юст пательно движущимся толкателем
/0 0; оСо - 0; So = 0;
б) с вращающимся толкателем
/о = 0; сот = 0; 4% - Ч%„.
§ 6. РЕКОМЕНДУЕМЫЕ МАСШТАБЫ ВЕЛИЧИН,
ОТКЛАДЫВАЕМЫХ НА ОСИ АБСЦИСС
Пусть по оси х (рис. 53) отложен отрезок длиной L мм, представля-
ющий собой угол поворота кулачка, равный 2 л (или 360 ). В этом слу-
чае масштаб углов поворота
2л рад /7
^ = —ЛГГ’ <7-16)
либо
______________________________ 360 град
л/лг
При принятом нами законе движения ср == сок/ из последних ра-
вс ств можно определить масштаб времени, если на оси х откладывать
не углы поворота ср кулачка, а соответствующие им значения времени.
Тогда
л/г
РФ = = ~3Q- • И/
отсюда
-Р(р ‘30 2-30 60 . С7 J71
।. = = — = — сек! мм. (' •1 О
гг лп Ln Ln
Равенства (7.16) и (7.17) показывают, что масштабы времени и углов
поворота кулачка определяются выбранной величиной отрезка L (это
и понятно), представляющего собой один оборот кулачка (либо один
период его вращения). Так как обычно при исследовании движения
период делится на / равных частей, где I для удобства вычерчивания
принимается кратным 12, то, очевидно, и отрезок, равный L мм, вы-
годно брать также кратным 12. Поэтому в зависимости от величины
вычерчиваемой диаграммы можно рекомендовать значения L = 120,
180, 240, 300, 369 мм.
Пример. L = 360 мм
360° град 2л, рад
Тогда Мф0 = 36Q- = 1 — • или = -geo ® 0.0174 —•
. 60 1 сек
При этом масштао времени и, оудет: и, =-«= --------» где п — число
1 г 1 J r z п • 360 6п мм
оборотов в минуту кулачка,
НО
www.vokb-la.spb.ru - Самолёт своими руками
Из приведенных формул видно, что масштабы и обратно пропорциональны
длине L. Поэтому, уменьшая в предыдущем примере значение L в 2, 3, 4,..., k раз,
тем самым увеличиваем соответствующим образ ом значения масштабов и р*. Напри-
мер, при L =« 180 чм будем иметь рфЬ = 2 - - или рф л? 0,035 “—р
(7.18)
(7.19)
I от-
max
§ 7. ЗАВИСИМОСТЬ МЕЖДУ МАСШТАБАМИ ЛИНЕЙНЫХ
И УГЛОВЫХ ПУТЕЙ, СКОРОСТЕЙ И УСКОРЕНИЙ ТОЛКАТЕЛЯ
ПРИ ГРАФИЧЕСКОМ ИНТЕГРИРОВАНИИ
Поступательное перемещение ведомого звена (толкателя). Из Kjp-
са теории механизмов известно, что между масштабами диаграмм
при графическом интегрировании существуют такие зависимости
(рис. 53): .
ds
К ds “ d*s
В заданиях на проект закон движения толкателя дается всюду
в форме кривой -------ср без указания масштабов, в которых эта
L dS
кривая построена. Интегрируя эту кривую, получаем кривую —
— ф. Масштабы обеих кривых связаны равенством (7.19), но в нем не-
известными являются значения Нъ р ds ир^.
dtp dtp2
Для того чтобы построенные диаграммы были удобочитаемыми,
d2S dS
следует обеспечить такие значения ординат и которые
были бы достаточно большими и вместе с тем не выходили за пределы
участков, отведенных для этих диаграмм на чертеже. В наших зада-
ниях, например, можно рекомендовать для ординаты
резок у^ах, равный 60—80 мм. Значения определяются также ве-
личиной полюсного расстояния Нг. В заданиях на проект можно брать
величину отрезка Нг в пределах 40—60 мм. Приблизительно в тех же
границах (или несколько меньших) можно выбрать и Н2. Таким обра-
зом, все три кинематические диаграммы строятся в неопределенном
масштабе. Но в заданиях на проект обычно задается (либо может быть
без труда определен из простейших геометрических соображений)
ход толкателя й. На кривой S — ф он представлен максимальной
ординатой утъх, величина которой определяется непосредственно на этой
кривой. Зная h и утах, можно найти масштаб а именно: ps = —
(рис. 53). Определив таким образом можно затем по равенствам
(7.18) и (7.19) найти pf/s и
7/ф
Ш
Вращение вокруг неподвижной оси ведомого звена (коромысла).
d2S
В этом случае вместо диаграммы -т-р в заданиях на проект дается
диаграмма -------ф. Интегрируя ее последовательно дважды, по-
dW
лучаем кривые ------ф и V — ф, масштабы которых связаны между
собой так:
Ptjr = jgy, (7.18, fl)
dtp
Р jijr = 4*4? • (7.19, fl)
dtp dtp*
Значения Нг и H2 выбирают здесь в пределах 40—60 мм. Максималь-
ный угол поворота коромысла Ртах = ^тах — ^min обыЧНО ЗЯДаеТСЯ,
либо легко определяется из условий задания на проект. Поэтому и
здесь масштаб находится так:
ц___^гпах — ^mtn рад
Утак мм
После этого определяют масштабы и р ^из равенств (7.18, а)
dtp dtp*
и (7.19, а). Зная масштабы всех кинематических диаграмм^ можно оп-
ределить значения пройденного пути, скорости и ускорения толкателя
/о dS dS dW dW d2S d2S d2W d2'V \ .
|S, --t—,-T-т ,-из-,в любом положе- I
I ’ ’ dtp 9 dt ’ dtp dt 9 dtp2 9 dt2 * dtp2 9 dt* I
нии механизма. Эти значения вписывают затем в форме таблиц а объ-
яснительную записку к проекту.
§ 8. СИММЕТРИЧНЫЕ И НЕСИММЕТРИЧНЫЕ
КИНЕМАТИЧЕСКИЕ ДИАГРАММЫ ТОЛКАТЕЛЯ
На рис. 53, а кривая на участке фу — фд — фв имеет ось симметрии
ММ, параллельную оси ординат и делящую, следовательно, этот
отрезок абсциссы пополам. При таком задании, очевидно, должны
иметь место следующие условия: площади F\ == Fi и F2 = F2.
Вместе с тем, по абсолютной величине должны равняться между
собой площади: Fx = |F2 |; |F2 | = Fi, так как по условиям работы ско-
рость толкателя как в начале и конце подъема, так в начале и в конце
опускания должны равняться нулю. По аналогичным соображениям
имеет место и равенство: F3 = |FJ, что вызывается тем обстоятельст-
вом, что величина подъема толкателя должна быть равна величине
его опускания за время одного периода. Из этого следует, что в симмет-
ричных диаграммах угол фу поворота кулачка, соответствующий пол-
ному подъему толкателя, должен быть равен углу фв поворота ку-
лачка, соответствующему возвращению толкателя из верхнего (даль-
него) положения в нижнее (ближнее): фу = фв.
Однако очень часто приходится проектировать кулачковые меха-
низмы, в которых фу #= фв. Это имеет место в тех случаях, когда подъем
112
www.vokb-la.spb.ru - Самолёт своими
толкателя, например, соответствует рабочему ходу, а опускание —
холостому (или наоборот). Естествен**), что на холостой ход желатель-
но тратить меньше времени, и, следовательно, соответствующий ему
угол поворота кулачка следует брать возможно меньшим. На рис. 53
также показаны два варианта построения кинематических диаграмм,
соответствующих условию <ру > <рв.
На рис. 53, е кривая подъема и кривая возвращения толкателя
начерчены только с сохранением равенств: F2 =—FL и F2 = —Fi,
но не связаны между собой условием <ру = <рв. Поэтому, вообще го-
воря, Ft Ф Fi и значит, после первого интегрирования не получится
Е4 = —Е3. Допустим для конкретности, чтоЕ3 > |Г4|. В этом случае
при дальнейшем интегрировании кривой у' — х (рис. 53, д) кривая
в конце периода не коснется оси х, т. е. значение ординаты у в указан-
ном положении будет больше нуля, что не соответствует условиям
задачи. Следовательно,#тах1 левой части диаграммы будет больше утак2
правой части в то время, как величина хода толкателя на обоих эта-
пах движения (подъема и опускания) должна быть одинакова.
Отсюда следует, что масштабы диаграммы в левой и правой частях
h h Ртах
разные, а именно: и$, — ------ и и? =-------, либо иг. = ——— и
{/maxi {/тах2 {/maxi
Ртах
Очевидно, что и масштабы кривых на рис. 53, г, д в соответствии
с масштабами p-si и jis2, и также будут различаться между собой.
Само собой разумеется, что применение двойных масштабов к ки-
нематическим диаграммам представляет известные неудобства и яв-
ляется трудоемким.
В примерном расчете предлагается способ, позволяющий построить
всю диаграмму в одном масштабе в случае, когда <ру ¥= <р8 и получить,
следовательно, на следующей диаграмме F3 — —/4, а значит, и yt =
= у2. Таким образом, можно избежать неудобства применения двух
масштабов. Этот способ справедлив, однако, лишь в тех случаях, когда
оба участка диаграммы (рис. 53, ж) заданы одноименными кривыми.
Способ состоит в том, что наибольшие ординаты hr и h" обоих участ-
ков диаграммы — — (<р) берутся в отношении, обратно про-
порциональном квадратам углов фу и <рв, т. е.
h' ф!
или Я'<р2 = /Гф*.
Покажем справедливость последнего равенства на частном приме-
ре, когда оба участка кривой ----------Ф представлены, например,
синусоидами.
Для этого напомним, что площадь синусоиды в интервале (Ол)
равна двум квадратным единицам при высоте, равной единице. При
других высоте и основании площадь синусоиды изменяется пропорцио-
нально им.
113
Поэтому
Л = Л = 2 f-i- <p,J Л'|
л-';;=2(4-ф.)'>'.
где <ру и <рв в радианах.
Тогда по абсолютной величине
F3<Py^i
F“ фХ
После подстановки значений и А в последнее равенство получим
Л"ф1
но, как видно из предыдущего, правая часть равенства равна единице.
Следовательно,
ВЫБОР ЗАКОНА ДВИЖЕНИЯ ТОЛКАТЕЛЯ
В наших заданиях на проект предлагаются четыре варианта
(см. диаграммы А, Б, В, Г) закона движения толкателя. В соответствии
с условиями работы машины студент должен выбрать наиболее благо-
приятный из них вариант.
В курсе теории механизмов исследуются достоинства и недостатки
типовых кинематических диаграмм толкателя и, в частности, тех, ко-
торые приведены в заданиях.
Большинство технологических процессов различных производств
требует безударности хода рабочего органа и постоянства его ско-
рости в течение определенного отрезка времени. Однако установление
закона движения толкателя при синтезе кулачкового механизма за-
трудняется тем, что эти требования в совокупности с некоторыми дру-
гими, более частного характера, вытекающими из условий конкрет-
ного технологического процесса, часто приводят к противоречиям,
проявляющимся, например, в несовместности системы уравнений ре-
шаемой задачи. В частности, безударность в движении толкателя тре-
бует непрерывности диаграмм скоростей и ускорений, в то время
как постоянство скоростей либо ускорений толкателя приводят к раз-
рыву непрерывности этих кривых. Отсюда ясно, что нужное движе-
ние толкателя редко осуществляется с помощью единого закона дви-
жения, например, синусоидального, трапецеидального и т. п. В таких
случаях задачу можно решить удовлетворительно, приняв диаграм-
му движения толкателя в виде некоторой комбинации простейших
кривых.
114
www.vokb-la.spb.ru - Самолёт своими руками
Поясним сказанное примером. Допустим, что для повышения про-
изводительности толкатель выполняет нужную работу как при прямом,
так и при обратном ходе. Таким образом, вследствие отсутствия
холостого хода, рабочий процесс заканчивается в течение каждого
полуоборота кулачка и, значит, кинематические диаграммы толкателя
достаточно строить на интервале 0 < ф < я.
Разобьем ход Н толкателя на три этапа, которые по аналогии
б>дем называть разгоном, рабочим ходом и выбегом.
На участке разгона скорость должна возрастать от нуля до требуе-
мой величины Ораб, на рабочем ходу — оставаться постоянной: орЯб =
= const, на участке выбега — падать
до нуля.
Естественно потребовать, чтобы на
этапах разгона и выбега кривые были
конгруэнтны и симметрично располо-
жены относительно центральной точ-
ки С диаграммы (рис. 54). Таким об-
разом, имеем
фразг — фвыб»
Фразг + фра б фвыб — Я.
Из перечисленных требований вы-
ясняется форма кривых на участке
Фраб (рис. 54, ау б, в). Остается, сле-
довательно, выяснить вид кривых
только на участке разгона, так как
участок выбега симметрично располо-
жен. На рис. 54, е представлены два
варианта решения (хотя в действи-
тельности число вариантов может
лико): ускорение толкателя меняется
быть неограниченно
по линейному закону а'А
ве-
и по закону косинуса — по дугеаЛ". Для того чтобы в обоих вариантах
скорость толкателя в точке Л' равнялась требуемой ураб, нужно, чтобы
площадь прямоугольного треугольника Д"СГа' была равна площади
криволинейного треугольника Л"О"а.
Отсюда выясняется, что в рассматриваемой задаче гармонический
закон оказывается более приемлемым, так как максимальная ордината
0”а этой диаграммы меньше максимальной ординаты 0"а', значит,
наибольшее значение сил инерции при косинусоидальном законе в на-
шем случае окажется меньшим, чем при линейном законе.
На рис. 54, а, б, в представлены все три кинематические диаграммы
толкателя. Нами разобрана здесь задача об установлении закона дви-
жения толкателя в простейшем случае. Разумеется, более сложные
требования к технологическому процессу усложняют и методы выбора
закона движения.
115
§ 10. ДИНАМИЧЕСКИМ СИНТЕЗ КУЛАЧКОВЫХ
МЕХАНИЗМОВ ТИПА I
Предположим, что все три диаграммы движения толкателя постро-
ены и все масштабы определены.
Эксцентриситет е, угол ymin и направление вращения кулачка
заданы.
Задачей динамического синтеза в данном случае является опреде-
ление такого минимального радиуса-вектора профиля кулачка г0,
при котором переменный угол у передачи движения ни в одном поло-
жении кулачкового механизма не будет меньше ymin. Построения, свя-
занные с динамическим синтезом, приведены на рис. 55, а (враще-
ние кулачка направлено против вращения часовой стрелки).
Рис. 55
произвольную точку Т на плоскости, откладываем от нее от-
Взяв
резок TR, равный ходу h толкателя. Этот отрезок размечаем в соот-
ветствии с графиком s2—<pA. Через точки деления проводим перпенди-
куляры к линии TR. От точек деления на перпендикулярах откла-
дываем влево при подъеме и вправо при опускании толкателя отрезки
г.. ds2 , ds2 ~
— = взятые из графика ------------ф1в Эти отрезки нужно откла-
дывать в том масштабе, в каком отложен отрезок TR. Соединяем
плавной кривой концы этих отрезков и получаем кривую s2 —
Проводим под углом ymin к горизонтали две касательные НМ и CF
к построенной кривой.
В курсе теории механизмов и машин доказывается, что острый
угол СЕН (заштрихован) определяет на плоскости геометрическое ме-
сто точек, каждую из которых можно принять за центр вращения
кулачка, причем при таком выборе угол у передачи движения ни в
одном положении механизма не будет меньше ymin. Соединив выбранный
116
www.vokb-la.spb.ru - Самолёт своими рук
центр вращения кулачка с точкой До, получим искомый минимальный
радиус-вектор г0 кулачка.
Если эксцентриситет не задан, то, чтобы получить кулачок с наи-
меньшими размерами, следует центр вращения кулачка поместить
в точке Е. Тогда г0 = £Л0. Если задан эксцентриситет е, то на рас-
стоянии е от прямой Q7? нужно провести прямую NO, параллельную
QR, до пересечения в точке О со стороной СЕ угла СЕН. Отрезок ОДо
является ми нимальным ради усом г0 кулачка при данномэксцентриситете.
Следует отметить, что чем ниже располагать центр вращения ку-
лачка внутри угла СЕН, тем большим будет угол передачи движения,
тем лучше будут условия работы механизма. Однако, одновременно
с улучшением условий работы будет увеличиваться радиус г0 и, сле-
довательно, будут увеличиваться размеры кулачка.
§11., ДИНАМИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВЫХ
МЕХАНИЗМОВ ТИПА II
Предполагаем, что все три диаграммы, о которых говорилось выше,
построены и все масштабы определены. Длина I толкателя, угол ym(n
и направление вращения кулачка заданы. Вращение кулачка направ-
лено по часовой стрелке.
Задачей динамического синтеза в данном случае является опреде-
ление такого минимального радиуса-вектора г0 профиля кулачка и та-
кого расстояния d между центрами вращения кулачка и толкателя,
при наличии которых переменный угол а передачи движения у ни в
одном положении кулачкового механизма не будет меньше Ymin.
Построения, связанные с динамическим синтезом, приведены на
рис. 55, б. Точка С — центр вращения толкателя. ДугаХ/? радиуса I
является ходом толкателя h = Zp^fx. Эта дуга размечена в соответст-
вии с осью ординат диаграммы s2 — (технические приемы разметки
приведены в примерном расчете шестизвенного механизма).
Через точки деления дуги S/? из точки С проводим лучи СД0; CAt
и т. д. На этих лучах от точек откладываем отрезки AlLi и A^Ll,
изображающие в масштабе p,$z величину причем направление от-
резков определяется поворотом вектора скорости точки А толкателя
на 90° в сторону вращения кулачка. Через концы этих отрезков про-
водим прямые, образующие с соответствующими лучами углы yniin.
Получаем два семейства прямых: прямые первого семейства начина-
ются в точках Li и идут слева направо (если смотреть с концов пря-
мых к точкам Li); прямые второго семейства начинаются в точках Li
и идут справа налево. Часть плоскости RDN, ограниченная пересе-
чением двух кривых QDN и R'DT, из которых первая сгибает край-
ние левые прямые первого семейства, а вторая — крайние правые
прямые второго семейства, определяет геометрическое место точек,
каждую из которых можно принять за центр вращения кулачку, при-
чем при таком выборе угол передачи движения у ни в одном положе-
нии не будет меньше утщ.
117
Поместим центр вращения кулачка в точке О, находящейся внутри
области RDN. Тогда отрезок ОА0 определяет минимальный радиус г0
кулачка, а отрезок ОС — расстояние d между центрами вращения
толкателя и кулачка.
Рисунок 55, б позволяет определить действительный угол у передачи
движения для любого положения механизма. Подробно об этом будет
сказано ниже.
Чем дальше от точки О внутри области R'DN находится центр
вращения кулачка, тем лучше становятся условия работы механизма,
так как углы у увеличиваются. Однако при этом размеры механизма
также увеличиваются, так как возрастает минимальный радиус г0
кулачка и расстояние d.
ДИНАМИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВОГО
МЕХАНИЗМА ТИПА III
Для осуществления динамического синтеза кулачкового механизма
типа III достаточно потребовать, чтобы угол а (рис. 52, в) удовлетворял
условию
a>Tmin-
^13- МЕТОД ОБРАЩЕНИЯ ДВИЖЕНИЯ
Решение задачи кинематического синтеза кулачковых механизмов
связано с определенными трудностями. Эта задача значительно упро-
щается, если при ее решении пользоваться так называемым методом
обращения движения, состоящим в следующем. Если движущейся
системе, состоящей из нескольких тел, сообщить добавочное, общее
для всех тел, входящих в систему, движение, то относительное движе-
ние системы тел, несмотря на изменившееся абсолютное движение каж-
дого из них, останется неизменным. Так, например, изменение движе-
ния вагона, связанное с изменением движения поезда, не отражается
на относительном движении пассажиров, находящихся внутри вагона.
В применении к задаче кинематического синтеза кулачковых ме-
ханизмов этот метод выражается в следующем виде: мысленно при-
даем всему механизму, т. е. кулачковой шайбе, толкателю и стойке,
вращение вокруг центра вращения кулачка с угловой скоростью (—сок),
равной, но противоположно направленной угловой скорости кулачка.
Тогда угловая скорость кулачка становится равной сок+ (—сок) = О,
т. е. кулачок как бы становится неподвижным. Толкатель, если он
в прямом движении перемещался поступательно, помимо своего аб-
солютного движения приобретает вместе со своими неподвижными па-
раллелями добавочное движение — вращение вокруг оси О2 кулачка
(см. рис. 60) с угловой скоростью, равной (—сок). При этом, однако,
относительное расположение толкателя и кулачка не нарушается»
а именно, абсолютная траектория центра ролика (отрезок прямой),
бывшая ранее неподвижной, вращаясь теперь вокруг центра О2, ПР°“
должает касаться окружности радиуса, равного эксцентриситету е.
118
www.vokb-la.spb.ru - Самолёт своими рук:
Точно так же и в случае кулачкового механизма с коромыслом (рис. 60)
при обращении движения останавливаем кулачок, но придаем доба-
вочное движение толкателю. При этом точка В его подвеса перестает
оставаться неподвижной: она описывает в обращенном движении
окружность радиуса 02В в направлении, обратном абсолютному враще-
нию кулачка, а центр ролика С (ролик не показан), помимо переме-
щения по дуге радиуса ВС, получает добавочное в каждый момент вре-
мени вращение вокруг центра 02. Но при этом его относительное
расположение в системе не нарушается, а именно, в произвольно выбран-
ных положениях ролик всегда касается профиля шайбы и, следова-
тельно, расстояние центра ролика от центра вращения кулачка оста-
ется в обращенном движении равным тому же расстоянию, что и в
прямом. Таким образом, метод обращения движения позволяет при про-
ектировании рассматривать вместо абсолютного движения толкателя
его движение относительно кулачка; сам же кулачок становится как
бы неподвижным звеном. В какой мере при этом упрощается решение
задачи кинематического синтеза кулачковых механизмов, можно видеть
из способов решения, изложенных в следующих параграфах.
§ 14. КИНЕМАТИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВЫХ
МЕХАНИЗМОВ ТИПА I
Считаем заданными все величины, перечисленные в § 5, а также
минимальный радиус г0 теоретического профиля кулачка, найденный
на основании динамического синтеза.
А. Случай, когда е = 0 (рис. 56, а) (центральный кулачковый ме-
ханизм). Предполагаем, что кулачок вращается противоположно вра-
щению часовой стрелки. Все построения ведем в масштабе pS2, в ко-
тором отложены ординаты на графике s2 — фг. Через произвольную
точку Ао (рис. 56, а), лежащую на продолжении оси абсцисс графика
s2 — Ф1, проводим вертикаль J40F, траекторию точки А толкателя и раз-
мечаем ее в соответствии с диаграммой s2 — фх. Для этого через точки
ал\ а2, ... проводим горизонтальные прямые до пересечения в точках
Af, А2 и т. д. с прямой A0F. От точки Ао откладываем вниз отрезок АоО,
изображающий в масштабе pS2 минимальный радиус г0 кулачка. Точ-
ка О — центр вращения кулачка. Обратим движение механизма.
Для этого на прямой A0F выберем произвольную точку Во, выделим
из плоскости отрезок ОВ0 и сообщим ему по отношению к неподвиж-
ной плоскости вращательное движение вокруг точки О с угловой ско-
ростью сох в сторону, противоположную вращению кулачка. При этом
сохраним по отношению к этому отрезку заданные движения кулачка
и толкателя.
В результате сложения относительного поступательного движения
толкателя вдоль отрезка ОВ0 и переносного вращательного движения
вместе с отрезком ОВ0 кулачок будет представляться неподвижным
и мы получим относительное движение толкателя по отношению к ку-
лачку, которое будет восприниматься как абсолютное.
119
Рис. 56
www.vokb-la.spb.ru - Самолёт своими
Для построения ряда последовательных положений точки А тол-
кателя в обращенном движении поступаем следующим образом:
1. Строим окружность радиуса ОВо;
2. Откладываем от прямой 0BG в направлении, противоположном
вращению кулачка, заданные фазовые углы <ру; <рд; <рв; фб и получаем
точки В4; В5; В9 пересечения сторон этих углов с окружностью ра-
диуса О Во.
3. Дуги BqB^ и В5В9, соответствующие углам фу и фв, делим на части
в соответствии с делениями оси абсцисс диаграммы s2 — фх (точки Вх;
Вз; В6; В7; В8).
4. Засекаем радиусы 0Bt; 0В2 и т. д. дугами окружностей радиу-
сов ОЛХ; 0А2 и т. д. в точках Аг, А2 и т. д.
Соединяя плавной кривой точки Ло; Аг, А2 и т. д., получаем тео-
ретический профиль кулачка. Участки теоретического профиля (дуги
Л4Л5, ЛдЛ0), соответствующие фазовым углам фд и фб, описывается
дугами окружностей радиусов 0А4 и ОА0.
Для получения практического профиля кулачка нужно построить
огибающую дуг радиуса г ролика, имеющих центры на теоретическом
профиле. На участках KL и DC практический профиль описываются
дугами радиусов (0Л4 — г) и (ОЛ0 — г).
Для устранения самопересечения профиля кулачка, а также из кон-
структивных соображений длина г радиуса ролика должна удовлетво-
рять двум условиям: г < 0,8 pmin и г < (0,4 4- 0,5)го. Здесь pmin —
минимальный радиус кривизны профиля кулачка.
Б. Случай, когда е 0 (рис. 56, б). Предположим, что кулачок
вращается противоположно вращению часовой стрелки. Все построе-
ния выполняем в масштабе pS2.
Через произвольную точку Ло, лежащую на продолжении оси абс-
цисс диаграммы s2 — <Pi> проводим вертикаль AGF — траекторию
точки А толкателя,— и размечаем ее в соответствии с диаграммой
s2 — Фь Для чего через точки ах\ а2 и т. д. проводим горизонтальные
прямые до пересечения с прямой A0F в точках Лх; А2 и т. д. Слева от
прямой AqF на расстоянии эксцентриситета е проводим прямую ЕО
и засекаем ее из точки Ао дугой радиуса А0О, равного (в масштабе pS2)
заданному радиусу г0 теоретического профиля кулачка. Точка О яв-
ляется центром вращения кулачка. При заданном вращении кулачка
против часовой стрелки эксцентриситет откладывается влево от тра-
ектории точки Ло, а при вращении кулачка по направлению вращения
часовой стрелки — вправо (см. § 10).
Из точки О опускаем перпендикуляр ODG на прямую AGF. Обратим
движение механизма. Тогда кулачок будет представляться нам не-
подвижным.
Траектория абсолютного движения точки А толкателя (прямая
DqBq) в ее обращенном движении все время будет касаться окружности
радиуса е в точках Df, D2, D3 и т. д. Для построения последовательных
положений (Л1; А2 и т. д.) точки А толкателя в обращенном движении
поступаем следующим образом:
121
1) строим окружность радиуса ОВ0;
2) откладываем от прямой ОВо в направлении, противоположном
вращению кулачка, заданные фазовые углы фу; фд; <рв; фб и получаем
точки В4; В5; В9 пересечения сторон этих углов с окружностью радиуса
ОТ? ;
3) дуги BQB± и В5В9, соответствующие углам фу и фв, делим на части
в соответствии с делениями оси абсцисс диаграммы s2 — фх (точки Вх;
^2» & В&В
4) проводим из точек Вх; В2 и т. д. касательные к окружности ра-
диуса е (BXDX; B2D.2 и т. д.);
5) засекаем касательные дугами окружностей радиусов ОА^
ОА2 и т. д. в точках Ли А2 и т. д. Соединяя плавной кривой точки Ао;
Л>; Л2 и т. д. получаем теоретический профиль кулачка.
Определение радиуса г ролика и построение практического профиля
производим так же, как и в случае, когда е = 0.
>43. КИНЕМАТИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВЫХ
МЕХАНИЗМОВ ТИПА II (рис. 67)
Считаем заданными диаграмму s2 — Ф1 или ₽ — фх движения толка-
теля (р$ = /рр) и длины: — минимального радиуса теоретического
профиля кулачка, I — толкателя и d — расстояния между центрами
вращения толкателя и кулачка.
Предполагаем, что кулачок вращается противоположно вращению
часовой стрелки. Все построения ведем в масштабе р$2, в котором от-
ложены ординаты на диаграмме s2 — <рх. На произвольной прямой
OF откладываем отрезок ОВ0, изображающий расстояние d в масштабе
pS2. Из точек.С и Во соответственно дугами радиусов г0 и I засекаем
точку Ло—положение точки А толкателя, самое близкое к центру ку-
лачка. От прямой BqAq откладываем (по направлению вращения ча-
совой стрелки) угол Ртах и засекаем его сторону BQDQ в точке Do дугой
AqE радиуса I. Очевидно, что дуга Л0О0 является траекторией точки
Л, а длина ее — ходом h толкателя. Размечаем траекторию точки А
(точки Aif Л2; Л3 и т. д.) в соответствии с законом изменения ординат
диаграммы s2 — фь для чего откладываем от точки Ао дуги, равные
ординатам этой диаграммы (^ЛОЛХ = 1ах; ^Л0Л2 == 2а2 и т. д.).
Метод разметки траектории точки А приведен в примерном расчете ше-
стизвенного механизма.
Для решения поставленной задачи воспользуемся методом обра-
щения движения механизма.
В результате сложения движений кулачок будет представляться
нам неподвижным, а точки А а В перемещающимися соответственно
по профилю кулачка и окружности радиуса ОВ с центром в точке О.
Для построения последовательных положений (Л1; Л2 и т. д.)
точки Л толкателя в обращенном движении поступаем следующим
образом:
122
www.vokb-la.spb.ru - Самолёт своими
1) строим окружность радиуса ОВ0;
2) откладываем от прямой ОВ0 в направлении, противоположном
вращению кулачка, заданные фазовые углы (ру; фд; фв; фб и получаем
точки пересечения сторон этих углов с окружностью радиуса ОВо
(точки В4; В5; В9);
3) дуги В0В4 и В569, соответствующие углак фу и фв, делим на части
в соответствии с делениями оси абсцисс диаграммы s2 — фх (точки
^3» ^6» ^7» ^fi)»
4
Рис. 57
4) из точек В2 и т. д. проводим дуги радиуса I и засекаем их в точ-
ках Аг, А$ и т. д. дугами радиусов 0Аг; 0А2 и т. д.
Соединяя плавной кривой точки Ло; Ai и т. д. получаем теоретиче-
ский профиль кулачка.
Определение радиуса г ролика и построение практического профи-
ля производим так же, как и для кулачка типа I.
§ 16. СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА С ПЛОСКИМ
ТОЛКАТЕЛЕМ
Геометрический синтез. Для решения поставленной задачи должны
быть заданы:
1) закон движения кулачка ф = <р (/); примем сок = const и, зна-
чит, ф = (ок/;
123
2) закон движения толкателя в форме трех кинематических диа-
грамм:
е_ dS dS / ч. d2S d2S / ч
dtp d(p dtp1 2 3 4 5 6 d(p2
В наших заданиях дана диаграмма
d2S
dq>2
— <р; поэтому первые две
диаграммы следует предварительно построить путем последователь-
ного двухкратного интегрирования заданной диаграммы;
3) Amin ~
4) форма толкателя (т. е. угол у).
Требуется построить профиль кулачковой шайбы, удовлетворяющий
заданным условиям:
Рис. 58
1) радиусом Гнпп (с учетом принятого масштаба) строим окружность
с центром в точке Л (рис. 58, а)\
2) отмечаем, как и ранее, углы (ру, <рд> фв, фб;
3) делим углы фу и фв на несколько частей в соответствии с заданной
диаграммой S (ф);
4) нумеруем точки пересечения окружности радиуса ЛшпСо сторо-
нами построенных углов в направлении, обратном вращению кулачка
(на рис. 58, а нумерация не показана). Заметим (рис. 58, а), что рассто-
яние от центра А до плоскости толкателя равно rmin + sin у в любом
положении последнего. При этом плоскость толкателя во все время
движения должна касаться профиля кулачка. Поэтому такая же кар-
тина имеет место и в обращенном движении. Отсюда вытекает дальней-
шее решение задачи;
5) соединяем центр А с точками деления окружности радиуса rmin
и на этих лучах от центра А откладываем, пользуясь диаграммой S (ф),
соответствующие значения rmin + sin у;
6) через концы полученных отрезков проводим перпендикуляры
к ним. Эти перпендикуляры представляют собой положения плоскос-
ти 1(глпкателя в его обращенном движении.
Огибающая построенных перпендикуляров и будет искомым прак-
тическим профилем кулачка.
124
www.vokb-la.spb.ru - Самолёт своими руками?!
Два способа решения задачи, когда минимальный радиус-вектор
кулачка наперед не задан. Первый способ (метод Я. Л. Геронимуса).
d2S
1. Из диаграмм^ (<р) И--7-2- исключается графически параметр ср.
4 d2S
При этом на получаемой диаграмме S------(рис. 58, б) масштабы
на обеих осях должны быть между собой равны:
P's ““ Р d*s •
d<p2
(d2S \
(рис. 58, б) расположится в пер-
вом и втором квадрантах координатной системы.
2. Проводим касательную АВ к той части кривой, которая лежит
во втором квадранте, под углом 45° к оси s. Несколько увеличенный
отрезок ОВ с учетом масштаба является минимальным радиусом ку-
лачка
rmin = OB1pssinv.
Построение профиля Кулачка производится в такой последователь-
ности:
а) из произвольно выбранной точки А (рис. 58, а), принимаемой за
центр вращения кулачка, строим окружность радиуса rmin;
б) делим эту окружность на п равных частей и нумеруем точки де-
ления в направлении, противоположном вращению кулачка;
в) через точки деления проводим лучи из центра вращения кулач-
ка и откладываем на них от точки А соответственно расстояния
'•min + Sisiny;
г) через конечные точки полученных отрезков проводим к ним
перпендикулярные прямые, которые определяют положения плоскости
толкателя при его движении относительно кулачка;
д) строим огибающую всех упомянутых перпендикуляров; эта
кривая и будет искомым профилем кулачка.
Что касается направляющих, в которых перемещается стержень
толкателя, то положение их, очевидно, может быть взято произвольно
при одном лишь условии, что они образуют заданный угол у с плоскос-
тью толкателя.
Второй спбРоб. Из курса теории механизмов и машин известно, что
в кулачковом механизме с плоским толкателем имеет место неравенство
Gnin > J Siny,
где у — угол, образованный направлением движения толкателя с его
плоскостью (касательной к профилю кулачка).
Отсюда вытекает такой способ определения:
Лтйп = ^min*
125
Наложим диаграммы (S — (р) и ------(рис. 59) одну на дру-
гую и просуммируем их. Разумеется, для этого необходимо предвари-
тельно вычертить их в одном масштабе, т. е. нужно, чтобы
И dsS
dtp3
На рис. 59, в приводится уже просуммированная диаграмма при
у =90 °. Заметим, что /min = Smin всегда больше
Рис. 59
нуля и поэтому приведенное выше неравенство
показывает, что должно быть больше наи-
большей отрицательной ординаты, полученной
при наложении диаграмм. Это обеспечивает су-
ществование приведенного неравенства во всех
положениях механизма. Обозначим наибольшее
абсолютное значение отрицательной ординаты
через а. Тогда, гарантируя «запас», берем с
некоторым увеличением найденное значение, а
именно:
Gnin = ^min = (# “Ь б) р5,
где б определяется из равенства » 10 лш.
§ 17. ГРАФИЧЕСКИЕ МЕТОДЫ ОПРЕДЕЛЕНИЯ
УГЛА ПЕРЕДАЧИ ДВИЖЕНИЯ
В РАЗЛИЧНЫХ ПОЛОЖЕНИЯХ КУЛАЧКОВОГО МЕХАНИЗМА
Угол передачи движения меняется с положением механизма. Его
величина характеризует в известной мере качество механизма, поэто-
му практически важно для оценки работы механизма иметь диаграмму
у — <р изменения угла передачи в зависимости, от положения даже и в
том случае, когда при проектировании профиля некоторые размеры
ВЗЯТЫ ИЗ условия у > Ymin.
Значение угла у в различных положениях можно определить как ана-
литически, так и графически.
В курсах теории механизмов и машин приводятся формулы для
определения значений у в зависимости от угла ф поворота кулачка.
Поэтому ограничимся графическим определением у.
Это можно сделать двумя способами: либо воспользовавшись тео-
ретическим определением угла передачи движения, либо используя
построения, приведенные на рис. 55.
В первом случае по различным положениям толкателя в его обра-
щенном движении (рис. 60) находим острые углы, образованные лини-
ями относительной и абсолютной скоростей центра ролика.
На рис. 60, а показаны углы у3 и у4 передачи движения, соответству-
ющие третьему и четвертому положениям теоретического профиля ку-
лачкового механизма с эксцентриситетом, а на рис. 60, б — механизма
с коромыслом.
126
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 60, а
Рис. 60, б
Во втором случае (рис. 61, а), соединяя любую точку В овала с цент-
ром 02 вращения кулачка механизма с эксцентриситетом, получаем
С^02 = Xi. Найдем, например, угол С3В302. Заметим, что по по-
строению
’ P'S
ед • н® - dq,
Hs —• HdS ‘
127
Тогда tg С3В3О2 = а
—т— —е
Сф
это и есть формула для опреде-
ления угла уз- Следователь-
но, -^С3В3О2 — Тз*
Точно так же, соединяя центр
вращения кулачка О2 механизма
с коромыслом с точкой Ь( (на
рис. 61, 6*i = 3; 4), получаем,
что -^СДО2 равен либо у£, либо
л — Yi- Докажем это.
Предварительно заметим, что
нормаль NiNi (рис. 62) к про-
филю кулачка в точке С£ пере-
секает линию центров О2В в точ-
ке Ki9 которая является мгно-
венным центром относительно
вращения кулачка и толкателя
в данном положении. Вспомним
Рис. 62 далее, что
С£&£ • р£ = -^-ВС • р,£;
_ От __
d<p BKi
Отсюда и, следовательно, 02bt II
Но по рис. 62 видно, что как углы с
взаимно перпендикулярными сторонами. Поэтому = yt, а
значит, в силу параллельности сторон <;С£й£02 = У(- Определив зна-
чения у в п положениях механизма, можно построить диаграмму у — <р
изменения угла передачи в зависимости от положения кулачковой
шайбы.
§ 18. АНАЛИТИЧЕСКИЙ МЕТОД ОПРЕДЕЛЕНИЯ МИНИМАЛЬНОГО
РАДИУСА г0 КУЛАЧКОВОЙ ШАЙБЫ МЕХАНИЗМА
С ПЛОСКИМ ТОЛКАТЕЛЕМ,
СОВЕРШАЮЩИМ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ
Графический метод определения г0, который является трудоемким
и дает приближенный результат, описан в § 16. Более точный резуль-
тат можно получить, пользуясь аналитическим методом.
128
www.vokb-la.spb.ru - Самолёт своими руками?!
Законы движения толкателя
Таблица 12
Графическое изображение Аналитическое выражение Примечание
d2S _ ^max
Ф2У
ds _ 4Srnax<Pz
на интервале 0 гр. <
ds _ _ л„ (Фу-Ф?
dtp ф*
<р
на интервале < <ру
сл
Е
О
S
В
на интервале О С ф^ С
s2 —$щах ^max
Фу — Ф, \2
%’ /
2
Фу /
на интервале С ф, Фу
Z I У
d2s . 24$п,ахф^
Фу
ds _ 12'^max<T2
<*ф _ 2‘ ~ ф’’
на интервале 0 < ф(<
А= 125;т1ах (фу-?,)2
<?Ф 22 <рЗ
Фу _ /
на интервале —< <ру
/ Ф \3
5i = 4Smaxl-^
Vy /
на интервале О С Ф/ С —~
Ф
на интервале —С ф,- С фу
5 1328
129
Продолжение табл. 12
Аналитическое выражение
Примечание
Графическое изображение
на интервале О С <РХ фу
2
r
к
о
S
к
S
В
d2s ___ у 2JiSmax
<р2
ds ^max
— — Z — ----
<Py
[ф.
ГО
Fy
• sin
/ ф/\
cos 2л—
k Ф/J
-TT-Sin
2л
при 0 < ф, < <РУ
s
В
130
www.vokb-la.spb.ru - Самолёт своими руками?!
Как отмечалось выше, профиль кулачка будет выпуклым лишь в том
случае, когда радиус г0 удовлетворяет неравенству
'-o>-(s + ^-)sinY, (7.20)
где s — перемещение толкателя;
у — заданный угол передачи движения.
Из формулы (7.20) видно, что для определения величины г0 нужно
вставить наибольшее по модулю отрицательное значение суммы s +
+ кот°р°е
в дальнейшем будем обозначать буквой а:
(7.21)
Наибольшую величину а можно получить, используя аналитиче-
ские выражения законов движения толкателя, приведенные в табл. 12:
1. При движении толкателя с постоянным ускорением (см.
табл. 12, 1) имеем:
с _ ОС I и — — 4^тах
S — ZOmax j И d(p2 — ср2 >
где Smax — максимальное перемещение толкателя.
. (pv
Максимальное значение величины а будет при <р£ = т. е. при
„ _ Smax
S ~ ~2~'
Тогда
Л_<, Фу~8_е h
& —^гпах о 2 ^тах^»
2<Гу
где
(7.22)
фу
2. Если ускорение толкателя изменяется по закону, представлен-
ному в табл. 12,2, то
dls = 24S
— z‘^c’max
dtp2
пг и s = 4Smax
Фу
’ ф< V
—. " I •
, Фу)
Здесь максимальное значение а будет при <р£ = т. е. когда
_ ___________________ -Snax „ d?s ____ 12Smax
S “ — ’ 3 ~ ср* ’
Подставив эти значения в уравнение (7.21), получим
п ___ _ ( *$max iSSmax^ ___ о ( Фу 24 \ ________
~ 9-------2 ] — ° max I ^2 I — ^max^»
\ Фу / V 2Фу J
5*
131
где
3.
мой,
6 =
2<Р*
При движении толкателя с ускорением, определяемым диаграм-
изображенной в табл. 12, 3 имеем:
Фу — 2(jp/
‘Ру
Максимальное значение а будет, тогда ф£ = фу. При этом
_ С . ^2s _ ^max ,
dq2 ~~ ф2 ’
2- a
Фу —6
«Ру
______ Г О /
dtyF — °°тзх I
И S — 5тах
2
S
а =
^max
где
%
(7.23)
(7-24)
4. При изменении
(табл. 12, 4)
ускорения толкателя по закону косинуса
d2s
dtp2
л2
~2
^^cosfji •
<fy v
^max
2
1 / Ф/ \1
1 — cos л • —- •
\ Фу /]
Максимальное значение а будет, когда <p£ = <py. При этом
фу —4,93 \
Фу )
s =
d*s = —4,93^™
'Ру
dtp2
» S — ^тах И П — ^шах
— *^тах^>
где
, фу — 4,93
b = —2----------------
*P>-
(7.25)
5. Если ускорение
(табл. 12, 5), то
d2s
dtp2
толкателя изменяется по закону синуса
= 2л -
п s — Sm
L Фу
^max
«Ру
1
sin f2л •
\ %,
2л
• sin
<Р/ Л I
Фу Я
132
www.vokb-la.spb.ru - Самолёт своими руками?!
Максимальное значение а будет, когда <р< = 0,75 <ру. При этом
= 6 28 • ; s=0,915max;
( 0,91фу —6,28 с
С — Smax I —I = <$таЛ
где
0,91<р2 — 6,28
Ь =-------Ф*-----' (7‘26)
В рассмотренных законах движения толкателя значение функции
b зависит от величины фазового угла <р поворота кулачка: чем меньше
Ф, тем больше Ь. Поэтому при расчете величин b в формулы (7.22) —
(7.26) следует подставлять наименьшее значение из заданных углов
фу или фв.
Подставив в уравнение (7.20) значение функции Ь, получим форму-
лу для определения минимального радиуса кулачка
г0 = fc5rnax Т + (5 Ч- Ю) мм. (7.27)
Чтобы легче определить величину Ь, построены кривые зависимости
этой функции от фазовых углов фу или фв (рис. 63).
По оси абсцисс отложен фазовый угол <ру или фв движения толкате-
ля, по оси ординат — функция Ь.
Для различных законов движения функция b выражается следую-
щими уравнениями:
1) ь = (кривая I) — толкатель движется с
ускорением;
1 w2 — 24 . ттч
2) b = — (кривая II) —толкатель движется с
прямоугольному треугольнику;
3) b = — (~-6- (кривая III) — толкатель движется с
наклонной прямой;
гр2________4 93
4) Ъ = -2-'— (кривая IV) — толкатель движется с ускорением
косинусоиде;
5) b = 0,91(рЛ~-^2^ (кривая V) — толкатель движется с уско-
рением по синусоиде.
Минимальный радиус г0 шайбы кулачка определяют по формуле
г0 = ф0 = | Ь | S sin у + (5 4- 10) мм,
где5 — ход толкателя, мм\
у — угол передачи движения.
Пример использования кривых для определения /0, если задано
S = Ю; у = 90 и ф = 40°:
постоянным
ускорением
по
по
по
ускорением
133
° 1
9ч- *
о
www.vokb-la.spb.ru - Самолёт своими
1) из точки на оси абсцисс, соответствующей ср = 40°, проводим
вертикальную линию, пересекающую кривые в точках a, b, с, d, е;
2) против этих точек на оси ординат получаем значения функции
fej = 7,7; fen = 24,1; 6Ш = П,3; feiv = 9,1; fev - 12;
3) подставив эти значения в формулу для г0, для упомянутых зако-
нов движения получим:
Го1 = 7,7 • 10 • 1 + 8 = 85 мм;
гои = 24,1 • 10 + 9 = 250 мм;
Гош = 11,3 • 10 • 1 “4“ 7 = 120 мм;
Го1 v = 9,1 • 10 • 1 + 9 = 100 мм;
rov = 12 • 10 • 1 + 10 = 130 мм.
При определенных значениях ср функция b < 0. Это обстоятельство
указывает на то, что при таком значении фазового угла <р радиус шайбы
кулачка можно выбирать произвольно, так как профиль кулачка будет
выпуклым при любом значении г0.
§ 19. ПОСТРОЕНИЕ ЦИКЛОВЫХ ДИАГРАММ
В большинстве машин рабочие процессы представляют собой сово-
купность многих операций, каждая из которых выполняется соответ-
ствующим исполнительным механизмом. В состав последнего входит
рабочий орган, находящийся в непосредственном взаимодействии с
обрабатываемым объектом.
Для обеспечения правильной технологии процесса рабочие органы
должны иметь вполне определенный закон движения, а перемещения
их должны происходить в требуемой производственным процессом
последовательности и должны быть увязайы между собой (синхронизи-
рованы) во времени и в пространстве.
Некоторые рабочие органы машины имеют непрерывное движение,
а некоторые из них — прерывистое. В том и в другом случае необхо-
димо по заданным производственным процессом условиям построить
так называемую цикловую диаграмму машины, которая устанавливала
бы требуемую синхронизацию перемещений рабочих органов за один
цикл движения. Различают два цикла: рабочий и кинематический.
Рабочим циклом машины называется промежуток времени /ц по
истечении которого начинается обработка следующей поданной в ма-
шину детали или изделия.
Кинехматический цикл машины измеряется временем /к, по истече-
нии которого все рабочие органы машины, совершив заданные пере-
мещения, приходят в положение, занимаемое в начале цикла.
Рабочий цикл машины может быть равен нескольким кинемати-
ческим циклам (в частных случаях кинематический и рабочий циклы
совпадают). Так, например, кинематический цикл полуавтомата 27
класса ПМ.З для пришивки пуговиц соответствует одному обороту
главного вала, а рабочий цикл соответствует 21 обороту главного
135
вала, так как за это время происходит полностью выполнение операции
по пришивке пуговицы. В четырехтактном двигателе рабочий цикл
соответствует двум оборотам главного вала, т. е. равен двум кинема-
тическим циклам.
Кинематический цикл включает периоды рабочих и холостых
перемещений и периоды остановки ведомого звена (рабочего органа).
Число периодов, длительность и последовательность их расположения
внутри кинематического цикла механизма могут быть различными и
определяются требованиями той производственной операции, которую
выполняет данная машина.
Кинематический цикл машины удобно измерять от начального
положения одного из исполнительных механизмов, который в этом
механизм п
Механизм!
О Л.
4
21| 2л
2J 4
О л Z Ал*- Sir4л
4 2 4 4 2 4
Рис. 64
Xirzn
4 21 4 i
а
я
случае обычно называют цикловым механизмом. В качестве циклового
рекомендуется выбирать механизм, выполняющий в машине основную,
наиболее энергоемку ю, операцию.
Кинематический цикл может соответствовать одному или несколь-
ким оборотам ведущего вала. Так, например, ведущий вал насоса с
кривошипно-шатунным механизмом в течение цикла делает один обо-
рот. У четырехтактного двигателя в течение цикла ведущий вал делает
два оборота. В некоторых машинах один цикл соответствует и больше-
му числу оборотов ведущего вала.
Цикловая диаграмма машины (циклограмма) — это графическое
изображение последовательности взаимодействия рабочих органов
машины или синхронности движения их за время одного кинематиче-
ского цикла при выполнении технологической операции.
Циклограммы машины выполняются в полярных либо в прямоу-
гольных координатах. Первые называются круговыми, вторые — пря-
моугольными циклограммами.
Прямоугольные циклограммы строятся в виде прямоугольни-
ков с условными обозначениями рабочих и холостых перемещений
(рис. 64, а). Длина этих прямоугольников пропорциональна времени /к
кинематического цикла механизма.
136
www.vokb-la.spb.ru - Самолёт своими
Отрезок оси абсцисс делится на части, пропорциональные времени,
затрачиваемому на рабочие, холостые перемещения и остановы рабо-
чих органов. Обозначим время и углы поворота главного вала, соответ-
ствующие рабочему перемещению рабочего органа, через /р и фр, холос-
тому перемещению его — через /х и <рх и останову — to и <ро.
Иногда циклограммы машины строятся в виде графиков S = /(<р)
перемещений рабочих органов (рис. 64, б) в определенном масштабе,
отнесенных к одной оси абсцисс. Эта диаграмма отражает, кроме углов,
соответствующих началу и концу срабатывания механизмов, также и
величины максимальных перемещений ведомых звеньев и дает полнее
представление о характере относительных движений рабочих органов
механизма на протяжении всего кинематического цикла машины.
Предположим, что в состав машины входят три исполнительных ме-
ханизма. Механизмы I и II имеют рабочие и холостые перемещения, а
механизм III — только рабочее перемещение. Время /р и /х нам извест-
но. Производственный процесс, выполняемый данной машиной, требует,
чтобы рабочее перемещение рабочего органа, выполняющего последую-
щую операцию, начиналось лишь после того, как рабочий орган, выпол-
няющий предыдущую операцию, вернулся в свое начальное положение,
осуществив как рабочее, так и холостое перемещение. Тогда периоды
рабочих и холостых перемещений органов рассматриваемой машины
должны занимать на циклограмме положение, показанное на рис. 64.
Для любого механизма /к = /р + /х + /о или Фк = Фр + Фх + Фо-
Из рисунка видно, что для выполнения исполнительными механизмами
заданной последовательности работы нужно, чтобы кинематические
циклы механизмов I и II имели периоды /о останова:
(^Р + ^х)-
Период останова механизма III: /о == /к—
Таким образом, прямоугольная цикловая диаграмма указывает,
в какой последовательности и в какие моменты кинематического цикла
отдельные механизмы машины включаются в работу и когда их работа
заканчивается, т. е. полностью представлен ход одновременного вы-
полнения производственного процесса отдельными механизмами маши-
ны, последовательность и характер перемещения ее рабочих органов
за время кинематического цикла.
В тех случаях, когда кинематический цикл машины равен одному
обороту главного вала, циклограмму удобно изображать в виде кон-
центрических круговых колец (круговая циклограмма), каждое из
которых изображает собой цикл механизма, входящего в состав маши-
ны. Круги колец делятся на секторы, центральные углы которых равны
углам поворота главного вала за период каждого из рабочих, холостых
перемещений и остановки рабочего органа (рис. 64, в).
При последовательном согласовании действия механизмов удли-
няется кинематический цикл машины и снижается ее производитель-
ность. Для уменьшения длительности кинематического цикла смещают
фазы действия механизмов, добиваясь их одновременного движения.
Однако параллельное действие и движение всех инструментов (рабочих
137
органов) не всегда можно осуществить; тогда решают задачу о
степени совмещения действий механизмов, обеспечивающей возможно
меньшую длительность кинематического цикла.
Предположим, что на машине обрабатывается изделие при помощи
двух инструментов, закрепленных в точках В и С колеблющихся
рычагов (рис. 65, а). На рис. 65, б представлены циклограммы работы
механизмов при последовательном со-
гласовании действия инструментов.
Совмещаем действия их.
Чтобы траектории движения инст-
рументов не пересекались, нужно,
чтобы координаты точки М инстру-
мента В находились в следующем со-
отношении с координатами инстру-
мента С в момент встречи:
ХВ<ХС И У В > У С'
Эти координаты аналитически трудно
найти, поэтому чаще всего пользуют-
ся графическим методом.
Графический метод предваритель-
ного нахождения точек пересечения
траекторий основан на совмещении
цикловых диаграмм, изображенных в
виде графиков перемещений рабочих
инструментов машины. Для решения
этой задачи на рис. 65, а находим точ-
ку М пересечения и определяем угол
<Рв„ соответствующий повороту инст-
румента В при отходе его от изде-
лия, и угол (рс,- Эти углы определя-
ются графическим построением. Одна-
ко, чтобы не было пересечений в точ-
ке Л4, нужно, чтобы инструмент В в определенный момент времени рас-
полагался выше инструмента С. Относительное угловое смещение
инструмента В — <рв2 (рис. 65, в) определяется законами движения,
размерами и формой рабочих инструментов, зазорами в кинемати-
ческих парах механизма, деформациями звеньев, регулировкой и на-
стройкой механизмов. Для построения циклограммы машины нужно
определить степень смещения периодов (фаз) действия одного меха-
низма относительно другого при наименьшей продолжительности
общего кинематического цикла машины.
На рис. 65, в представлена совмещенная циклограмма работы ма-
шины. В этом случае продолжительность кинематического цикла будет
меньше, чем при последовательной работе инструментов.
(^к, > Л<2)«
Таким образом, не изменяя времени движения отдельных рабочих
138
www.vokb-la.spb.ru - Самолёт своими руками
инструментов и механизмов, но, смещая фазы их действия, можно
уменьшить продолжительность кинематического цикла.
Циклограмма машины отражает все происходящие в механизме
процессы. Пользуясь циклограммой, легко определить положение, в
котором находится каждый рабочий орган при заданном положении
ведущего звена циклового механизма. Кроме того, построение совме-
щенных циклограмм дает возможность сократить кинематический
цикл работы машины, а значит повысить производительность ее.
§ 20. КОМПОНОВКА СХЕМЫ МАШИНЫ
Заданная цикловой диаграммой последовательность работы испол-
нительных органов должна быть исключительно точно согласована,
что достигается в основном надлежащим размещением ведущих зве-
ньев на главном валу и таким креплением, которое исключало бы
возможность их произвольного .смещения. Начальные положения
ведущих звеньев определяются фазовыми углами исполнительных ме-
ханизмов [5].
Фазовым углом исполнительного механизма называется угол
поворота ведущего звена циклового механизма, отсчитываемый от на-
чального его положения до положения, соответствующего начальному
положению рассматриваемого исполнительного механизма.
Величины фазовых углов можно определить по цикловой диаграмме.
Чтобы фазовые углы были выдержаны, необходимо ведущие звенья
исполнительных механизмов закреплять на ведущем валу под опреде-
ленными углами закрепления а.
С. И. Артоболевский рекомендует [5] определять углы закрепле-
ния по заданному фазовому углу графическим построением. Покажем
это на примерах.
1. На главном валу швейной машины 22 класса Подольского меха-
нического завода закреплены ведущие звенья (кривошипы) двух меха-
низмов — механизма игловодителя, представляющего собой централь-
ный кривошипно-ползунный механизм ОАВ, принятый за цикловой, и
механизма нитепритягивателя, представляющего собой шарнирный
четырехзвенный механизм ОСЬог (рис. 66, а). Вычерчиваем эти ме-
ханизмы в их начальном положении — ОЛ0В0 и OC0DGO1 (за началь-
ное положение механизма игловодителя принимаем положение, когда
игла — ползун находится в верхнем крайнем положении; начальное
положение механизма нитепритягивателя на рис. 66, а показано пунк-
тиром). От линии ОС0 в направлении, обратном вращению вала, откла-
дываем фазовый угол Y механизма нитепритягивателя. Угол СОАо
будет углом закрепления а, под которым следует закрепить кривошип
ОС механизма нитепритягивателя по отношению к кривошипу ОА
механизма игловодителя.
Как видно из рис. 66, а, в начальном положении механизма игло-
водителя (циклового механизма) кривошип механизма нитепритягива-
теля занимает положение ОС,
139
При повороте главного вала на угол W кривошип ОС совпадает с
ОС0, а вместе с этим механизм нитепритягивателя OCDO1 займет свое
начальное положение, как это и следует из определения фазового угла.
На рис. 66, а показана также скомпонованная схема механизма
и OC1DiOl в произвольном положении.
2 Рассмотрим механизм поперечно-строгального станка, состоя-
щий из кулисного механизма, принятого за цикловой, и кулачкового
механизма.
Вычертим оба механизма в начальном положении (кулачковый
механизм, изображенный на чертеже пунктиром, представлен в виде
центрового профиля кулачка Ко и коромысла О(]0г без ролика). Тре-
буется найти угол закрепления а, который образует минимальный
радиус-вектор 0D кулачка с кривошипом ОЛо. Отложим фазовый
угол Т в направлении, обратном вращению вала. Тогда угол AQOD и
будет искомым углом закрепления. В самом деле, когда вал О повер-
нется на угол ¥ из заданного начального положения ОЛ0, то 0D сов-
падет с OD0 и кулачковый механизм окажется в начальном положении.
Чтобы не строить дважды кулачковую шайбу, можно определение
угла а вести от начального положения OD0 кулачкового механизма.
В этом случае фазовым углом кулисы (рис. 66, б) будет, очевидно,
угол 360° - ¥.
www.vokb-la.spb.ru - Самолёт своими руками?!
ГЛАВА VIII
I СИЛОВОЙ АНАЛИЗ МЕХАНИЗМОВ
§ 1. СИЛЫ, ДЕЙСТВУЮЩИЕ НА МЕХАНИЗМ
При силовом расчете механизмов обычно предполагаются задан-
ными законы движения ведущих звеньев хотя бы в первом прибли-
жении и часть внешних сил.
Основными силами, определяющими характер движения механизма,
являются движущие силы, совершающие положительную работу, и
силы полезного (производственного) сопротивления, возникающие в
процессе выполнения механизмом полезной работы и совершающие
отрицательную работу. К движущим силам относятся: сила давления
рабочей смеси на поршень цилиндра двигателя, момент, развиваемый
электродвигателем на ведущем валу насоса или компрессора, и т. д.
Силы полезного сопротивления — это те силы, для преодоления кото-
рых предназначен механизм. Такими силами являются: силы сопротив-
ления резанию в токарном станке, сопротивления ткани проколу иглы
в швейной машине и т. д. Кроме этих сил необходимо учитывать также
силы сопротивления среды, в которой движется механизм, и силы
тяжести звеньев, производящие положительную или отрицательную
работу в зависимости от направления движения центра тяжести зве-
ньев — вниз или вверх.
Все эти силы принято называть задаваемыми. При расчете меха-
низма все движущие силы и силы полезного сопротивления должны
быть заданы. Эти силы обычно задаются в виде так называемых механи-
ческих характеристик.
Механической характеристикой двигателя или рабочей машины
называют зависимость момента, приложенного к ведомому валу двига-
теля или к ведущему валу рабочей машины, от одного или нескольких
кинематических параметров. Механические характеристики опреде-
ляют экспериментальным путем или же при помощи различных мате-
матических зависимостей.
При работе механизма в результате действия всех приложенных к
его звеньям указанных сил в кинематических парах возникают реак-
ции, которые непосредственно не влияют на характер движения меха-
низма, но на поверхностях элементов кинематических пар вызывают
силы трения. Эти силы являются силами вредного сопротивления.
Реакции в кинематических парах возникают не только вследствие
воздействия внешних задаваемых сил на звенья механизма, но и вслед-
ствие движения отдельных масс механизма с ускорением. Составляю-
щие реакций, возникающих в результате движения звеньев механиз-
ма с ускорением, могут быть названы дополнительными динамическими
давлениями в кинематических парах.
Основная задача кинетостатического расчета состоит в определении
реакций в кинематических парах механизмов или, иначе говоря, дав-
лений, возникающих в местах соприкосновения элементов кинемати-
141
ческих пар, а также в определении уравновешивающих моментов или
уравновешивающих сил. Под последними обычно понимают те неиз-
вестные и подлежащие определению силы или моменты, приложенные
к ведущим звеньям, которые уравновешивают систему всех внешних
сил и пар сил и всех сил инерции и пар сил инерции.
Если механизм имеет несколько степеней свободы, то для его рав-
новесия необходимо столько уравновешивающих сил или пар сил,
сколько имеется степеней свободы. В механизме, обладающем одной
степенью свободы, уравновешивающей силой является сила или пара
сил, приложенная к ведущему звену.
В теории механизмов и машин весьма широкое применение полу-
чил так называемый кинетостатический метод силового расчета меха-
низмов. Этот метод, как известно из курса теоретической механики,
состоит в следующем. Если к точкам несвободной системы вместе с
задаваемыми силами приложить мысленно фиктивные для этой систе-
мы силы инерции, то совокупность этих сил уравновешивается реак-
циями связей. Этот прием, несмотря на свою условность, обладает тем
важным для практики преимуществом, что позволяет свести решение
задач динамики к решению задач статики. Это имеет место, когда по-
ставленная задача относится к типу первой задачи д и н а -
м и к и, т. е. задачи об определении сил по заданному движению.
Переходим к определению сил инерции в механизмах.
§ 2. СИЛЫ ИНЕРЦИИ
Так как звено механизма состоит из отдельных материальных то-
чек, ускорения которых в общем случае различны, то необходимо
определить те силовые параметры, к которым приводится.в общем
случае сумма сил инерции материальных точек звена. Предположим,
что звено имеет материальную плоскость симметрии, параллельную
плоскости движения.
Система сил инерции звена, как и всякая плоская система сил,
приложенная к твердому телу, в общем случае приводится к одной
силе Ри. Ее модуль равен массе звена, умноженной на модуль ускоре-
ния центра масс звена, а направлена она в сторону, противоположную
этому ускорению. Выясним положение прямой АВ линии действия
силы Ри (рис. 67). Из дифференциальных уравнений плоскопараллель-
ного движения твердого тела, находящегося под действием некоторых
сил, видно, что это движение может быть осуществлено, если в центре
S масс тела приложить силу, равную главному вектору системы, и
пару, момент которой
M = Jqe, (8.1)
где Js — момент инерции тела относительно оси, проходящей через
точку S перпендикулярно плоскости движения;
е — угловое ускорение тела.
142
www.vokb-la.spb.ru - Самолёт своими ру»ф
В таком случае система сил инерции, как условно уравновешиваю-
щая заданную систему сил, также приводится к силе
Ри=— mws, (8.2)
приложенной в точке S и направленной в сторону, противоположную
направлению вектора ^ускорения центраS масс, и к паре с моментом
М,л = - Js8, (8.3)
направление которого противоположно угловому ускорению е. Мы
привели силы инерции материальных точек звена к силе и к паре.
Однако параллельным переносом в точку К вектора Ри силу и пару
можно заменить одной силой. Момент присоединенной пары:
Mi = - PJi.
Отсюда следует, что ’
Ри/г = Js8
и, следовательно,
Итак, система сил инерции звена, находящегося в плоскопарал-
лельном движении, в общем случае может быть приведена либо к одной
силе __ (_
Рп=— mws, (8.5)
приложенной в некоторой ючке Л, либо к главному вектору сил инер-
ции
Рн = — niwSl (8.6)
приложенному в центре S масс звена и к паре сил инерции с моментом
Л1И = - Js8. (8.7)
Если звено движется поступательно, то его угловое ускорение 8
равно нулю и в этом случае систему сил инерции его материальных
точек приводят к одной силе (8.5), линия действия которой проходит
через центр S масс.
ш
При вращении звена вокруг неподвижной оси О (рис. 68) глав-
ный вектор и главный момент сил инерции его материальных точек мож-
но определить из равенств (8.6) и (8.7). Основываясь на равенстве (8.4),
главный вектор и главный момент сил инерции можно привести к од-
ной силе.
Разложим силу инерции Ри, приложенную в точке Д', на две состав-
ляющие: нормальную Рп и тангенциальную Р*п, модуль которой
Ри = тг$г.
Так как момент нормальной составляющей относительно центра S
масс равен нулю, то вместо равенства (8.4) можно написать
J s
(8.8)
h = ------
— Р* — mrse mrs
Точка Д’, через которую проходит линия действия результирую-
щей сил инерции звена, называется центром качаний.
Таким образом, силы инерции материальных точек звена можно
привести к одной силе, линия действия которой в случае поступатель-
Рис. 69
ного движения проходит через центр масс,
в случае вращательного движения — че-
рез центр качаний и при плоскопарал-
лельном движении звена — через точку,
смещенную относительно центра масс на
расстояние, определяемое равенством (8.8).
Задачу об определении почки приложе-
ния равнодействующей силы инерции звена
можно решить также способом, основанным
на разложении плоскопараллельного дви-
жения звена на поступательное с уско-
рением, равным ускорению произвольной
точки звена, и на вращательное вокруг оси,
проходящей через эту точку и перпендикулярной к плоскости
движения. Пусть закон распределения ускорений точек звена АВ
(рис. 69, а) задан планом ускорений (рис. 69, б).
Сила инерции Plh в переносном поступательном движении равна
произведению массы т звена на ускорение любой точки звена, напри-
мер, точки В, и приложена в центре тяжести S звена.
Сила инерции Р„2 в относительном вращательном движении звена
вокруг точки В, складываясь с парой сил инерции, дает результирую-
щую силу, которая приложена в центре качания /<0 звена, в предполо-
жении, что точкой подвеса звена является точка В. Положение точки
До определяется по формуле (8.8) Isk0= Направление силы РИ1
lBS
противоположно ускорению wb точки В, т. е противоположно вектору
лЬ, а направление силы инерции Pih противоположно ускорению wsb>
т. е. противоположно вектору bs плана ускорений. Точка пересечения
144
www.vokb-la.spb.ru - Самолёт
линий действия сил РИ1 и PHs, т. е. прямых, проведенных через точку
S параллельно лЬ и через точку Ко параллельно bsy определит точку
Т, через которую проходит линия действия результирующей силы
инерции Ри. Величину и направление силыРи определяют по формуле
(8.5).
§ 3. КИНЕТОСТАТИЧЕСКИЙ РАСЧЕТ МЕХАНИЗМОВ
Кинетостатический метод расчета позволяет, как указано выше,
находить реакции в кинематических парах, или, иначе говоря, опре-
делять те давления, которые возникают в местах соприкосновения
элементов кинематических пар, а также находить уравновешивающую
силу или уравновешивающий момент пары сил.
. При решении задач кинетостатики механизмов закон движения
ведущего звена, а также массы и моменты инерции звеньев механизма
предполагаются заданными, внешние силы и моменты сил также будем
считать в каждом положении механизма известными.
Силовой расчет механизмов будем вести в предположении, что
трение в кинематических парах отсутствует и все силы, действующие
на звенья механизма, расположены в одной плоскости. При отсутствии
сил трения сила взаимодействия между двумя звеньями всегда направ-
лена по нормали к поверхности их касания. В поступательной паре все
элементарные силы взаимодействия и их равнодействующая будут
расположены перпендикулярно направляющей поступательной пары.
Наиболее удобным методом силового расчета механизмов является
метод планов сил. При силовом расчете механизм расчленяется на
отдельные группы; при этом необходимо придерживаться общеизвест-
ного из статики сооружений положения об установлении порядка
расчета, который будет обратным порядку кинематического исследо-
вания, т. е. силовой расчет начинается с группы, присоединенной
последней в процессе образования механизма, и заканчивается расчетом
ведущего звена начального механизма. Если плоский механизм имеет
одну степень свободы, то начальный механизм состоит из двух звеньев:
неподвижного (стойка) и начального звена. Эти звенья образуют либо
вращательную кинематическую najjy (кривошип — стойка), либо по-
ступательную. пару (ползун — направляющие). Звено, к которому
приложена уравновешивающая сила Ру, будем считать при силовом
расчете начальным звеном механизма. Реакция в начальном враща-
тельном механизме зависит от способа передачи энергии начальному
звену источником энергии.
При исследовании механизмов двигателей кривошип условно
принимают за начальное звено. В этом случае реакция в начальном
вращательном механизме зависит от способа передачи энергии криво-
шипом рабочему звену. Если кривошипный вал приводится во враще-
ние парой, например, непосредственно от электродвигателя, то в этом
случае к валу приложен уравновешивающий момент (рис. 70)
Му = Rszh н • м (8.9)
145
и реакция в опоре О вала (звено 1) будет равна действию звена 3 на
звено 2 (кривошип)
/?lt2 = -7?3.2. (8.10)
Если же кривошипный вал приводится во вращение одной силой,
например, через зубчатый редуктор (рис. 71), то на зубчатое колесо 2,
сблокированное с кригошипом, дей-
ствует со стороны сопряженного ко-
леса уравновешивающая сила Ру,
расположенная под углом у =
Рис. 70
^12
= (90° — а) к линии центров колес (а — угол зацепления); величину
уравновешивающей! силы определяют из равенства
(8-11)
Для определения давления ₽i,2 звена 1 на звено 2 напишем урав-
нение равновесия сил, действующих на звено 2:
Рис. 72
/?3,2 +/?1,2 + Ру = 0. (8.12)
Реакцию Pi,2 можно полу-
чить непосредственно из урав-
нения построением силового тре-
угольника.
Рассмотрим на примере двух-
поводковой группы с тремя шар-
нирами два способа силового
расчета, основанные на методе
планов сил. Пусть звенья АС и
ВС (рис. 72, а) составляют по-
следнюю двухповодковую груп-
пу в механизме и пусть звено АС
(звено 2) нагружено силой Р2 и
парой с моментом М2, а звено ВС
(звено 5) нагружено силой Р3
и парой с моментом М3; линии действия, величина и точки приложе-
ния обеих сил заданы. Приложенные силы откладываем на чертеже в
масштабе рр. При выделении из механизма группы или отдельного
звена необходимо действие отсоединенной части механизма заменить
реакциями, приложенными к соответствующим элементам кинема-
146
www.vokb-la.spb.ru - Самолёт своими
тических пар. Условимся силу, действующую на звено i со стороны
звена k, обозначать через Ru. Требуется найти силы взаимодействия
звеньев между собой, т. е. реакцию /?2,з либо ₽3.2 в шарнире С и давле-
ния отсоединенных звеньев 1 и 4 механизма на звенья 2 и 3, т. е. реак-
ции Rt,3 в шарнирах А и В.
Прикладываем в точках А и В неизвестные реакции Rit2 и Р4,3 и со-
ставляем уравнение равновесия группы АСВ, т. е. приравниваем
нулю сумму всех сил, действующих на группу:
Я1.2 + Р2 + Ps + ^4,3 = 0. (8.13)
В этом уравнении известны: величина, направление, точка прило-
жения сил Р2 и Р3, а также точки приложения реакций Pi,2 и Р4|3.
Таким образом, написанного векторного уравнения с четырьмя неиз-
вестными для решения задачи недостаточно. Поэтому для определения
величины реакций Ri,2 и /?4,з выражаем как по первому, так и по вто-
рому способу каждую из реакций двухшарнирного звена в виде геомет-
рической суммы двух составляющих. При этом по первому способу
одну из составляющих R",z реакции /?1,2 и RZs реакции Р4,з направ-
ляем по осям АС и ВС звеньев 2 и 3, а другую составляющую Pi,г
реакции Rlt2 и Р4.з реакции Р4(3 направляем перпендикулярно этим
осям; (линии действия составляющих Ri,2, Ri,2> Р“з и Я4,з на рис. 72, а
показаны пунктирными линиями). Получаем
/?4,3=<з + <3. J
Величины Ri,2 и R\,3 можно получить из уравнений равновесия
составленных для звеньев 2 и 3 в отдельности. Для этого рассмотрим
сначала равновесие звена 2. Звено 2 находится под действием следую-
щих сил и пар: силы Р2, пары с моментом М2, составляющих R"2 и
R\,2 реакции T?i.2 и реакции Р3,2. Составляем уравнение моментов Мс(Р,)
всех сил относительно точки С. Так как направление составляю-
щей Р{,2 пока неизвестно, то при составлении уравнения моментов
задаемся произвольным направлением ее. Если после определения
величина этой составляющей окажется отрицательной, то ее истинное
направление будет противоположно выбранному. Так как
= О и = а (^1,2) ~ ^1,2 Gc*
то уравнение моментов напишется так:
Мс (Pi) = Мс (Р2) + Р'1>21АС + м2 = о,
откуда
---М2±Мс№' (815)
1АС
147
Из этой формулы ясно, что направление показанное на
рис. 72, а пунктирной линией, нужно изменить на обратное (пока-
зано сплошной линией).
Аналогично из условия равновесия звена 3 имеем уравнение мо-
ментов
Мс (Ps) + М.з/вс + я = О,
откуда
истинное направление /?4>3 показано на чертеже сплошной линией.
Полученные выражения для 2 и Т?4,з подставляем в уравнение
(8.13)
Ra,2 + -Ri.2 + Р% 4~ Р$ 4" ^4,з 4~ ^?4,з = о. (8.17)
В это векторное уравнение входят только два неизвестных скаляра —
величины составляющих и Т?4,з реакций Rh2 и Т?4,з» направленных
по осям АС и ВС звеньев 2 и 3. Поэтому задачу можно решить графи-
чески методом построения плана сил. Для этого из любой точки а плос-
кости (рис. 72, б) откладываем в произвольном масштабе состав-
ляющую /?1,2 реакции Z?i,2 в виде вектора ab. К вектору ab геометри-
чески прибавляем вектор Ьс, изображающий в том же масштабе рр
силу Р2. Продолжая далее геометрическое сложение в порядке, указан-
ном в уравнении (8.17), получаем последовательно вектор cd, изобра-
жающий силу Р3, вектор de, изображающий составляющую ₽4,з реак-
ции __
Далее через начало а вектора ab проводим прямую в направлении
действия второй составляющей R\,2 реакции /?1,2,_т. е. параллельно
оси АС звена 2, а через конечную точку е вектора de прямую в направ-
лении действия составляющей /?4,3 реакции 7?4,3, т. е. параллельно
оси ВС звена 3. Точка f пересечения этих прямых определяет начало
вектора fa составляющей Ri^ и конечную точку вектора ef составляю-
щей R”'3. Полные реакции R\^ и 7?4,з можно получить согласно урав-
нениям (8.14). Соединив точку f с точкой Ь, получим реакцию T?i,2 в
виде вектора fb. Величину реакции /?4,3 в виде вектора df определим,
если соединить точки d и f. Таким образом, определены величины и
направления искомых реакций R\,2 и /?4,з.
Для определения давления R^z звена 3 на звено 2 напишем уравне-
ние равновесия сил, действующих на звено 2:
Ri,2 + Р2 4~ Rs,2 = 0.
Единственной неизвестной по величине силой в этом уравнении явля-
ется сила /?з,2- Величину ее можно получить непосредственно из урав-
148
www.vokb-la.spb.ru - Самолёт своими
нения построением силового треугольника. Для этого в плане сил
(рис. 72, б) достаточно соединить точки с и f. Очевидно, что реакцию
/?2,з> равную по величине реакции Т?з,2, но противоположную ей по
направлению, можно определить из уравнения равновесия звена 3:
/?4,3 + Р3 + ^2,3 = 0.
В плане сил вектор Т?2,з представлен тем же отрезком (Jc), что и
реакция /?3>2, но противоположно направлен. При определении реак-
ций по второму методу будем полагать, что все внешние силы и пары
сил, приложенные к звену, а также силы инерции и пары их заменены
одной равнодействующей силой. Этот метод заключается в следующем.
Реакцию приложенную в центре шарнира Л, разлагаем на две
составляющие таким образом, чтобы одна из них была направлена па-
раллельно линии действия равнодействующей сил, приложенных к
звену, а другая — по оси звена. Величину первой из них определяем
непосредственно из условия равновесия звена. Так, выделяя из двух-
поводковой группы звено 3, раскладываем силу Р3 на две составляющие
Rb и Rc, параллельные линии действия силы Р3 и приложенные соответ-
ственно в центрах В и С шарниров. Таким образом, одна из составляю-
щих реакций в каждом из шарниров В и С полностью известна; другая
составляющая Rbc обеих реакций, направленная по оси ВС звена, неиз-
вестна по величине. На рис. 72, а показано разложение силы Р3, при-
ложенной к звену 3. Для этого в центре шарнира С или В параллельно
линии действия силы Р3 откладываем отрезок CD, изображающий в
масштабе рр силу Р3. КонецD отложенного отрезка соединяем прямой
DB с точкой В. Через точку F пересечения линии действия вектора
Р3 и прямой DB проводим параллельно оси СВ звена прямую FE,
которая и разделит отрезок DC на части, обратно пропорциональные
расстояниям между точками приложения слагаемых сил и равнодей-
ствующей. Таким образом, одна из составляющих Rb~ ED реакции
/?4.з, приложенной в центре шарнира В, и Rc = СЕ реакции /?2>3, npib
ложенной в центре шарнира С, известна по величине и направлению;
вторые составляющие Rcb и Rbc этих реакций направлены по оси звена
ВС в противоположные стороны. Аналогично раскладываем также и
силу Р2 на составляющие Ra и Rc, приложенные в центрах шарниров
Л и С (рис. 72, а). Тогда получаем
Rb + Rbc — Ri&
Rc + Rcb = ^2,3;
Ra + Rac = Riz-
(8.18)
Для определения реакций R\t2 и /?4,з применяем способ, вытекаю-
щий из условия равновесия рассматриваемой группы. Из этого усло-
вия следует, что
Rac + Ra + P2 + P3 + R~b+ Rbc = 0. (8.19)
149
Величины составляющих Rвс и Rac можно легко определить из
построения по указанному выше способу плана сил в соответствии с
векторным уравнением (8.19). Рассмотрим примеры применения мето-
дов силового расчета.
Пример 1. На рис. 73, а изображена кинематическая схема механизма двигате-
ля внутреннего сгорания с компрессором. Начальное звено О А вращается с заданной
угловой скоростью о1. На звенья механизма действуют следующие силы и моменты:
сила Р3, приложенная в точке В звена 5, являющаяся равнодействующей движущей
силы, силы инерции и веса звена 5, сила Р-, приложенная в точке G звена 7,— рав-
нодействующая полезного сопротивления, силы инерции и силы веса звена 7, силы
инерции звеньев 2 и 6\ звено 4 нагружено силой Р4, приложенной в точке Н звена 4
и являющейся результирующей внешних сил и силы инерции, и моментом М4, пред-
ставляющим собой сумму моментов всех внешних пар сил и пары силы, инерции;
звено 5 нагружено силой РБ, приложенной в точке N звена 5,— результирующей
всех сил и пар сил. Веса звеньев и их моменты инерции относительно осей, проходя-
щих через центры тяжести, полагаем известными.
Требуется определить уравновешивающий момент Л1у и давления в кинематиче-
ских парах. Планы скоростей и ускорений рассматриваемого механизма построены
на рис. 73, б, е. Находим величину и точки приложения результирующих сил инерции
звеньев 2, 4 и 6. В технических расчетах кривошип О А считают уравновешенным,
и потому в этом случае сила инерции Ри его равна нулю.
Силы инерции звена 2 могут быть сведены к силе инерции Ри*9 приложенной в
центре тяжести S2 звена, и к паре сил инерции, момент которой равен Сила инер-
ции РИв = где G2 — вес звена 2; g — ускорение силы тяжести (g =
= 9,8! м/сек2); л$3 — масштабное значение ускорения центра тяжести S2 звена 2*
— масштаб ускорений. По способу, изложенному выше, результирующую силу
инерции РИг и пару сил инерции с моментом заменяем одной равнодействующей
Р^, параллельной и равной и приложенной к точке /<2 на расстоянии h2 от центра
тяжести S2 звена:
A! Js е2
р р ’
и2 и2
Для определения точки Те приложения равнодействующей Ри<? силы инерции
звена 6 применим способ, изложенный выше и основанный на разложении плоскопа-
раллельного движения звена на поступательное и на вращательное. Определение поло-
жения точки Те ясно из построений (рис. 73, а). В точке Тв и может быть приложена
сила РИв, величину и направление которой определяют по формуле (8.5). Точкой при-
ложения силы Р может быть выбрана любая точка, лежащая на прямой tty прохо-
дящей через точку Т6. Силу Р4 и момент М4 пары сил заменяем равнодействующей
Р4, приложенной в точке Q, причем сила Р4 расположена от силы Р4 на расстоянии
Переходим теперь к определению давлений в кинематических парах и уравно-
вешивающего момента Му. Определение давлений в кинематических парах начинаем
с последней группы в порядке ее присоединения, т. е. с двухповодковой группы, об-
разуемой звеньями 6 и 7.
Составляем уравнение равновесия этой группы:
+ Р8.7 + Рив + Р5,6 = о. (8.20)
150
В этом уравнении силы Р7 и Рщ полностью известны, т. е. известны их точки при-
ложения, величина и направление. Известны также линия действия реакции /?8>7 и
точка приложения реакции Т?5 6. Для определения величины реакций Т?8 7 и /?5 6 рас-
кладываем реакцию на две составляющие R$ 6 и Rt^ по первому способу, из-
ложенному выше. Величину составляющей R^ G можно получить из уравнения момеп.
тов всех сил, действующих на звено 6, относительно точки G. Уравнение (8.20) можно
теперь записать так:
*5,б+*5.б + *И. + *7 + *8.7 = °-
В этом уравнении неизвестны только величины составляющей PG6 реакции /?56,
направленной по оси FG ззена 6, и реакции Rs 7, расположенной перпендикулярно
направляющим звена 7. Эти величины можно легко определить из построения плана
сил (рис. 73, г). Реакция R5 б на плане сил получится, если соединить точки е и Ь\
Реакция /?8 7 на плане сил будет представлена в масштабе отрезком (de), а
реакция R7 6 — отрезком (се), получаемым из условия равновесия звена 6. Сила Р7,
приложенная к звену 7, проходит через точку G — центр шарнира. В этой же точке
приложена рсакция/?6 7. Поэтому и последняя сила R$ 7 из числа действующих на зве-
но 7 также должна проходить через точку G.
Рассмотрим группу, состоящую из звеньев 5 и 4 (рис. 73, д). К звену 4 в точке
Q приложена равнодействующая Р4, а на звено 5 действует сила Р5, приложенная в
точке N. _
Для определения давления Р8>5 в шарнире Е разложим его на две составляющие
(рис. 73, е): одну, RE, направим параллельно линии действия приложенной к звену
5 силы Ръ, а другую, RED,— по направлению ocmFD эгого звена; давление /?2 4 также
разложим на составляющие Rc, параллельную линии действия Р4, и RcE, направ-
ленную по оси CD звена 4. Составляем общее уравнение равновесия группы:
~REd + К + *6,5 + *5 + P't + Rc + RCD = °-
Силы R£t Pg, 5, p5t p^nRc известны. Сила RED известна по направлению и па-
раллельна оси ED звена 5, а сила HCD параллельна оси CD звена 4. Для определе-
ния величины сил RED, Rcd строим план сил (рис. 73, е).
Реакция Т?85 изображается в виде отрезка bg, а реакция /?2,4 — в виде отрезка
eg. Определение реакции R- 4 или /?4 5 не представит теперь никаких затруднений.
Рассмотрим последнюю группу, состоящую из звеньев 2 и 3 (рис. 73, ж).
На звено 3 действует сила Р3, приложенная в точке В, а на звено 2— равно-
действующая Рц сил инерции, приложенная в точке К2- Аналогично предыдущему
раскладываем реакцию о на составляющие: RA, параллельную линии действия
равнодействующей сил Рк , Р4 2, и РдЕ, параллельную оси звена А В.
Уравнение равновесия всех действующих на рассматриваемую группу сил име-
ет следующий вид:
^АВ + Яд + P4i2 + Р„2 4- + ^8,3 = °'
Реакцию /?83 и составляющую RAB реакции R} 2 определяют аналогично преды-
дущему построением плана сил (рис. 73, з). Полную реакцию /?1>2 можно получить
Г52
www.vokb-la.spb.ru - Самолёт своими
как результирующую согласно уравнению
^1,2 = Кд + КДВ'
Реакция Т?12 на плане сил будет представлена в масштабе рр отрезком fb, а реак-
ция Rs з — отрезком ef.
Переходим к начальному звену — кривошипу О А (рис. 73, и). На него действу-
ет сила /?2д, равная по величине и противоположно направленная силе 7?j 2. Если пе-
редача энергии кривошипом рабочему звену осуществляется парой сил, то к валу
кривошипа в этом случае приложен уравновешивающий момент
Му = — P2(1ftpZ.
Реакция /?8д в опоре О вала: Rs j = — R2 t. Если же передача энергии криво-
шипом осуществляется одной силой, например, зубчатой передачей, то на звено /
Действует уравновешивающая сила Ру.
Рис. 74
Величину силы Ру можно определить из равенства (8.11), а реакцию Р8 j находят
построением силового треугольника согласно векторному уравнению (8.12) равнове-
сия кривошипа.
При анализе условий работы подшипников и шеек вала обычно строят полярную
диаграмму давлений на шейку вала, дающую возможность определить среднее и наи-
большее удельные давления. Рассмотрим построение этой диаграммы на примере
кривошипно-ползунного механизма, применяя следующий метод.
Разносим массу шатуна статически в две точки: Л и В (рис. 74, а). Сила 7, дей-
ствующая по направлению оси шатуна механизма, определяется выражением
г Р н Рив
COS Р
где Р — давление газа па поршень двигателя;
Рцв— сила инерции поступательно движущихся масс, сосредоточенных в точке В,
и части массы шатуна, отнесенной к этой точке.
На шатунную шейку вала действуют силы Т и РвА — сила инерции части массы
шатуна, отнесенной к точке А. Полное давление j на шатунную шейку находим
153
как геометрическую сумму двух составляющих Т и РпА. На рис. 74, б показано по-
строение диаграммы давлений R2A Для РяДа положений механизма.
Относительное движение звеньев не изменится, если всему механизму сообщить
дополнительное вращение с какой-либо общей угловой скоростью. Сообщим всему
механизму дополнительное вращение с угловой скоростью о>, равной по величине, но
противоположной по знаку угловой скорости кривошипа. Тогда кривошип О А ста-
нет как бы неподвижным, а ось ОВ цилиндра будет вращаться относительно криво-
шипа с угловой скоростью (—(о). Через точку О проводим под угломф к линии О А
ряд лучей ОВ (на чертеже(р =15°, 30°, 60Q, 90° и так далее). Из центра А шатунной
шейки проводим окружность а — а радиусом, равным длине шатуна АВ. Точка В
пересечения этой окружности с проведенными лучами определяет положение оси
Рис. 75
ОВ цилиндра и шатуна АВ по отношению к колену О А вала. Для какого-нибудь зна-
чения угла поворота ф вала, например ф = 60°, и соответствующего положения точки
В откладываем от точки А в виде отрезка АС величину силы инерции РиА. От конеч-
ной точки вектора АС откладываем параллельно оси АВ шатуна отрезок CD, представ-
ляющий собой в выбранном масштабе силу 760. Тогда вектор AD представит собой по
величине и направлению давление R2A на шатунную шейку вала в данном положении
механизма. Выполняя аналогичные построения для нескольких положений механиз-
ма, получим ряд значений давления Р2>1. Соединяя последовательно конечные точки
векторов давлений R2 j плавной кривой, получим полярную диаграмму давлений
на шатунную шейку вала.
Пример 2. На рис. 75 изображена схема кулисного механизма III класса попереч-
но-строгального станка. Начальное звено О А вращается с заданной угловой скоростью
cdj. К звеньям механизма приложены следующие силы: к звену 5 приложена сила Ръ —
равнодействующая силы давления обрабатываемого изделия на резец, силы веса и
силы инерции. К звену 3 в точке D приложена результирующая Р3 всех сил и пар сил
и к звену 4 — Р4. Станок приводится в движение электродвигателем, от вала которо-
го вращение при помощи ременной передачи передается звену /. Раскладываем по вто-
рому способу реакции /?б>4 и /?3>4 на составляющие Z?Oj, РО1Б и RB, RBOit приложен-
ные в точках Oj и В. Реакцию R5 3 раскладываем на две составляющие: одну, 3,
параллельную оси xxt и другую, /?|3, перпендикулярную к ней. Затем находим по
предыдущему (глава VI, § 10) особую точку S и составляем уравнение моментов
154
www.vokb-la.spb.ru - Самолёт своими pyi
всех сил, действующих на звено 5, относительно найденной точки S:
MS(RB) + Ms (PS) + Als (^t3) + MS(RBO) = 0. (8.21)
Так как звено 2 не нагружено, то реакция R2 3 приложена в точке А и направлена
перпендикулярно к оси ВС звена 3. Величина составляющей /?£ 3 реакции 3 оче-
видно, равна величине силы Р5 cos а, но направлена в сторону, противоположную ей,
что следует из условия равновесия звена 5 (уравнения проекций на ось хх).
Моменты сил R2 3 и Р| 3 относительно точки S равны нулю. После определения
из уравнения (8.21) величины реакции RB0 составляем общее уравнение равновесия
звена 3 (кулисы), приравнивая нулю геометрическую сумму всех сил, действующих
на ззено:
^BOi + + ^3 + ^2,3 + ^5,3 + ^5.3 = °*
Для определения входящих в это уравнение неизвестных сил R23 и Rf3 строим
план сил. Определение реакций R65 и R64 после этого не представит затруднений.
Точку приложения реакции RQ 5 на направляющей хх находят из уравнения моментов
сил, действующих на звено 5 относительно точки С. В этом уравнении неизвестным
будет только плечо h реакции R$ 5, которое и будет определено. Из условия равнове-
сия звена 2 получим
+ ^1,2 ~
Сила R2 1 = — Ri 2 = ^32 будет являться внешней для начального звена L
Рассматривая условия равновесия этого звена, легко найти Му и реакцию 7?61.
§ 4. ТЕОРЕМА Н. Е. ЖУКОВСКОГО
Соотношение между силами, приложенными к механизму (включая
и силы инерции), можно получить с помощью вспомогательного рычага
Жуковского. Теорема Жуковского может быть сформулирована так.
Рстти vaEvH-лнбе мёкацч?м/РАА^рйствием системы сил, приложен-
ных к_ этому механизму, находится в равновесии, то „повернутый на
90° в какую-либо сторону план скоростей механизма, рассматриваемый
как твердое тело (неизменяемая система), вращающееся вокруг полюса
плана и нагруженное теми же сидамщ приложенными в соответствую-
щих изображающих точках плана, также находится в равновесии.
Теорему ЖУК^ВСКОГО МОЖГ-у гримишть и к гистгме: ж- р я холящей-
ся в равновесии. Для этого достаточно, кроме действлсюншх-^илг-нр>ь
дожить и силы инерции. Получающаяся при этом система сил условно
находится в равновесии, и потому к ней можно применить указанную
теорему. Для доказательства теоремы воспользуемся принципом воз-
можных перемещений. Для системы, обладающей стационарными
связями (т. е. связями, не зависящими от времени), возможные переме-
щения совпадают с действительными элементарными перемещениями.
Математическое выраженйёттринципа^возлюжных перемещений в этом
155
случае получает такой вид:
2 Pi • cos (Ph 6s£) = О
или, разделив на dt,
п ______ п
2 PiVi COS (Ph vt) = 2 Л\- = 0>
1 1
где Pt — задаваемые силы;
Vi — скорости точек приложения сил Рр9
Vi cos &i — проекции скоростей тех же точек на линии действия сил Р£;
Ni — мощности сил Pt,
Предположим, что в точке J звена АВ приложена сила Р£ (рис. 76, а)9
перенесенная параллельно самой себе в изображающую точку i повер-
нутого на 90° плана скоростей звена (рис. 76, б).
Мощность Ni силы Pt можно выразить следующим образом:
7V. = р^ cos а£ = Pi • pi - cos а£ = Р^^9
где — перпендикуляр, опущенный из полюса р плана скоростей на
линию действия силы Р£. Угол между pi и Л£ равен а£.
Так как полученное выше уравнение, определяющее величину Ni9
имеет место для всех сил Р£, действующих на другие звенья механизма,
то будем иметь:
п п
1 1
Поскольку ф 0, то
п
2 Pihi = о,
1
. (8.22)
что и является доказательством теоремы.
Метод Жуковского можно применить для нахождения величины
какой-либо силы, если точка приложения и линия действия этой силы
заданы, а также известны линии действия, величины и точки приложе-
ния всех остальных сил, действующих на разные звенья механизма.
При исследовании движения механизма, находящегося под действием
приложенных сил, удобно все силы, действующие на механизм, заме-
нить силами, приложенными к одному из звеньев механизма. При этом
необходимо, чтобы работа заменяющей силы на рассматриваемом воз-
можном перемещении была равна сумме работ всех сил, приложенных
к механизму. Заменяющие силы, удовлетворяющие этим условиям,
называют приведенными. Величина приведенной к точке силы, заме-
няющей всю действующую на механизм систему сил, по величине равна
уравновешивающей силе, но по направлению приведенная и уравно-
вешивающая силы противоположны. Применим метод Жуковского к
нахождению приведенной Ра или уравновешивающей Ру силы. Пусть
156
www.vokb-la.spb.ru - Самолёт своими руками?!
на звенья 2 и 3 изображенного на рис. 77, а механизма действуют силы
Р2 и Р3, приложенные в точках С и D. Силы Р2 и Р3 представляют собой
равнодействующие всех действующих на звенья 2 и 3 сил, включая и
силы инерции. Очевидно, что в общем случае под действием произволь-
но выбранных сил механизм не будет находиться в равновесии. Для
приведения механизма в равновесное состояние необходимо в ка-
кой-либо точке механизма приложить уравновешивающую силу Ру,
задаваясь ее линией действия, или уравновешивающий момент Му
пары сил. За точку приложения
уравновешивающей силы Ру при-
нимаем точку А ведущего звена,
направляя ее перпендикулярно к
ОрД. Строим в произвольном масштабе повернутый план скоростей
механизма (рис. 77, б) и переносим векторы Р2 и Р.3 сил, а также урав-
новешивающую Ру параллельно самим себе в изображающие точки с,
d и а плана скоростей. Принимая план скоростей за рычаг, нагружен-
ный силами Р2, Р3 и Ру, составляем уравнение моментов этих сил отно-
сительно полюса р плана скоростей, причем знаки у моментов выбираем
в зависимости от направления их вращения:
— Pyhy. 4- Pshs — P2h2 = 0.
Из этого уравнения определяем величину уравновешивающей силы
Г) Р3^3 2^2
У —
Если правая часть уравнения после численного подсчета окажется
положительной, то направление силы Ру было выбрано правильно.
При отрицательном значении правой части направление силы Ру необ-
ходимо изменить на противоположное. Определив уравновешивающую
силу Ру и изменив направление ее на противоположное, получим при-
веденную силу Рл. Приведенная сила является условной и пользовать-
ся ее величиной можно лишь при решении вопросов, связанных с опре-
делением мощности или работы машины.
157
§ 5. УЧЕТ СИЛ ТРЕНИЯ В ШАРНИРНО-РЫЧАЖНЫХ
МЕХАНИЗМАХ
При рассмотрении вопросов кинетостатического расчета механиз-
мов предполагалось, что трение в кинематических парах отсутствует.
Для учета сил трения реакцию Z?i,2 в поступательной паре следует
направлять, как известно, под углом трения р к нормали (рис. 78),
а во вращательной паре реакция jRi,2 должна быть направлена по каса-
тельной к кругу трения (рис. 79). Эта касательная должна быть прове-
дена так, чтобы реакция
/?1,2 препятствовала враще-
нию тела 2 с угловой ско-
ростью (0 2,1- Радиус а кру-
га трения будет прибли-
женно равен rf, т. е.
rf, где г — радиус ци-
линдрического элемента па-
ры, a f — коэффициент тре-
ния во вращательной паре.
Полный учет сил трения в механизмах чрезвычайно усложняет
все силовые расчеты и графические построения. Поэтому на практике
часто пользуются приближенным методом, по которому первый расчет
делается без учета сил трения. Найдя давления в шарнирах и задава-
ясь величиной коэффициента трения, определяют соответствующие
Рис. 80
силы трения в шарнирах, после чего весь расчет повторяют снова, вво-
дя найденные силы трения в число внешних сил, приложенных к рас-
сматриваемым звеньям. Новые значения найденных этим методом давле-
ний обычно мало отличаются от действительных значений. Рассмотрим
простую методику статического исследования кривошипно-ползунного
механизма с учетом сил трения (рис. 80, а). К механизму приложены
результирующая сила Р3, действующая па ползун, и момент на валу,
представленный парой (Т—Г); силами инерции шатуна и кривошипа
158
www.vokb-la.spb.ru - Самолёт своими
пренебрегаем. Шатун, как не нагруженный внешними силами,
подвергается только действию двух реакций, приложенных в точках
А и В; эти реакции должны идти по касательной к соответствующим
кругам трения. Так как сил, приложенных к шатуну, всего две, то
они должны быть направлены по одной прямой в разные стороны; этой
прямой при учете сил трения в парах А и В будет являться касательная
к обоим кругам трения. Из четырех возможных общих касательных
надо взять одну в соответствии с направлением движения. На рис. 80, б
построен план скоростей механизма, из которого видно, что угловая
скорость со2 шатуна при заданном направлении (ot кривошипа в данном
положении механизма направлена по движению часовой стрелки
(направление со2 показано на рис. 80, а стрелкой). Угловые скорости
(оз,2 ползуна 3 относительно шатуна 2 и со 1,2 кривошипа / относи-
тельно шатуна 2:
ЮЗ,2 = С03 — (02; (01,2 = сох — (02,
так как (о3 = 0, то угловая скорость (оз,2? как видно из первого уравне-
ния, направлена против движения часовой стрелки; угловая скорость
<01,2, согласно написанному выше второму уравнению, направлена
также против движения часовой стрелки (направления (03,2 и (0i,2 по-
казаны на рисунке стрелками).
Реакции /?2,з и j?2,i = — /?2,з лежат на одной прямой, которая,
как указано выше, при направлении силы Р3 влево к центру О вала
должна касаться круга трения на шарнире В сверху, а на шарнире
А — снизу.
Для определения величины реакций Т?2,з и /?4,з напишем уравнение
равновесия сил, действующих на звено 3:
/?2,з + Р3 + ^4,3 = 0,
где /?2,з — реакция шатуна, направленная по найденной общей каса-
тельной к обоим кругам трения;
/?4,з — реакция направляющих, образующая с нормалью угол
трения р (рис. 80, а).
Величину реакций /?2,з и /?4,3 можно получить непосредственно
из этого уравнения построением силового треугольника (рис. 80, в).
Реакция /?4>3 ^должна проходить через точку С пересечения линий
действия сил Р3 и Т?2,з. Определяем общее давление на кривошип-
ный вал (рис. 80, г) как геометрическую сумму двух известных состав-
ляющих:
Я1=Я2,1 + С,
где Q — вес вала и всех деталей, вращающихся вместе с ним.
Так как к кривошипному валу механизма приложена пара (Т, Т),
то реакция Z?4.i подшипников будет равна но направлена в про-
тивоположную сторону и касается круга трения на опоре О сверху.
159
Пара сил (7?р A?4.i) (рис. 80, п) должна быть уравновешена парой
(Т~Т).
Для определения коэффициента полезного действия механизма
подсчитываем для ряда положений м анизма мощность Л п . затрачи-
ваемую на преодоление сил трения за один полный цикл времени уста-
новившегося движения. Общая мощность А\. сит трения в каждый
момент времени:
Л’ТР - ZA\- = No А 1 ЛВ1 - Л’в,
Мощности, затрачиваемые на тре ше в кип матических парах, вы-
ражаются так:
i (01 I’ А А ~ f Д ^1.2 I’
В, ~ fsJ\l°B'
Реакции /?,, /?314 в кинематических парах для каждого
положения механизма можно определить; г< , г a и r7 i — радиусы цапф
соответствующих шарниров, а также/о,/д fBx и fBn — коэффициенты тре-
ния в соответствующих шарнирах и направляющей ползуна заданы.
Угловые скорости звеньев и скорость vB ползуна по направляющей
определяют из плана скоростей. Построив график изменения мощности
Л\Р за один полный цикл, можно определить среднее значение Л\р.Ср
мощности, затрачиваемой на преодоление сил трения. Аналогично по
заданным силам полезных (производственных) сопротивлений опреде-
ляют мощность /Vn.c, затрачиваемую на преодоление этих сил сопро-
тивлений в каждый данный момент времени. По графику изменения
мощности Лгп.с находят среднее значение А7п.с.Ср мощности сил произ-
водственных сопротивлений. Средняя мощность движущих сил
Ад.ср Ап. с. ср -ф А'тр.ср*
Общий коэффициент полезного действия механизма
7] = 1 - (8.23)
Лд.ср
§ 6. КИНЕТОСТАТИЧЕСКИЙ РАСЧЕТ КУЛАЧКОВЫХ
МЕХАНИЗМОВ
На рис. 81, а изображена схема коромыслового кулачкового меха-
низма, план ускорений которого построен на рис. 81, б. При равно-
мерном вращении кулачка (сщ = const) его сила инерции PUl направле-
на по радиусу 0Sp где Si — центр тяжести кулачка:
РИ1 = AZZjG)|
Сила инерции ролика РНо = m2wB и направлена в сторону, обратную
ускорению wB центра ролика. Звено 3 совершает колебательное движе-
ние относительно точки Ох, Силы инерции звена 3 можно привести к
силе РИз, приложенной в центре тяжести З3 звена:
= — ni3ws^
160
www.vokb-la.spb.ru - Самолёт
и к паре сил с моментом
Л43 = — ^s-Лз-
Сила Р на рис. 81, а соответствует величине натяжения пружины.
Определим давления в кинематических парах механизма. Давление
Т?1,2 в кинематической паре Е направлено, если не учитывать трения
в паре, по нормали к профилю кулачка и проходит через центр В ро-
лика. Величину давления T?i,2 можно найти из сравнения моментов
Рис. 81
всех сил, действующих на ролик и звено 5, относительно точки Ох.
Согласно обозначениям, принятым на рис. 81, ау
Ри2?2 + Ри39з + PQ1------ R\t2h2 + — О,
откуда
П + ^3
Я’*2 ~ л;
Давление /?4,з определяем из уравнения геометрической суммы
сил, действующих на звенья 2 и 3:
Ри2 4~ Ри3 Ч" Р + ^?4,3 + Я1.2 — О-
Графическое решение этого уравнения показано на рис. 81, в в
виде силового многоугольника abcde. Замыкающий вектор еа этого
многоугольника представляет собой в выбранном масштабе давле-
ние /?4>з. Для определения /?4,1 звена 4 на кулачок напишем уравне-
ние равновесия сил, действующих на кулачок:
+ Piii + /?4,1 ~ 0.
Величину реакции T?4j в виде вектора fb можно получить непо-
средственно из уравнения построением силового треугольника fba
6 1328
161
(рис. 81, в). Давление 7?з,2 звена 3 на ролик находят из уравнения,
выражающего равенство нулю суммы сил, действующих на ролик:
/?1,2 + Рщ + ^3,2 = 0.
Это давление определится, если на плане сил (рис. 81, в) соединить
точки с и а; тогда вектор са в масштабе представит реакцию /?з,2-
ГЛАВА IX
УРАВНОВЕШИВАНИЕ МЕХАНИЗМОВ
§ 1. ОБЩИЕ СВЕДЕНИЯ
При движении механизма в кинематических парах кроме стати-
ческих возникают дополнительные усилия, так называемые динами-
ческие давления. Эти давления, будучи переменными по величине и
направлению, являются причиной вибраций отдельных звеньев меха-
низма. Станина механизма также испытывает динамические давления,
которые передаются на связанный с ней фундамент, оказывая вредное
действие на его крепления и нарушая тем самым связь станины с фун-
даментом; кроме того, возникающие при движении механизма динами-
ческие давления увеличивают силы трения в точках опоры вращаю-
щихся валов, увеличивают износ подшипников и создают в отдельных
частях механизма добавочные напряжения. Поэтому в процессе проек-
тирования механизмов ставится задача полного или частичного пога-
шения указанных динамических давлений. Эта задача называется за-
дачей об уравновешивании масс механизмов или об уравновешивании
сил инерции механизмов.
Звено механизма является уравновешенным, если главный вектор
и главный момент сил инерции его материальных точек равны нулю.
Каждое звено механизма в отдельности может быть неуравновешенным.
Однако даже при неуравновешенных звеньях механизм в целом может
быть уравновешен полностью или частично. Для этого в первом случае
необходимо, чтобы главный вектор и главный момент относительно
произвольного центра приведения динамических (возникающих от сил
инерции) опорных реакций фундамента механизма были равны нулю,
во втором случае не превосходили определенных, наперед заданных
величин. Поэтому проблему уравновешивания сил инерции в механиз-
мах можно разделить на две задачи: 1) об уравновешивании давлений
в кинематических парах механизма и 2) об уравновешивании дав-
лений механизма в целом на фундамент.
Большое практическое значение имеет уравновешивание вращаю-
щихся звеньев. Даже незначительная неуравновешенность (дисбаланс)
быстро вращающихся роторов турбогенераторов и электродвигателей
большой мощности вызывает большие динамические давления на под-
шипники.
162
www.vokb-la.spb.ru - Самолёт своими руками?!
§ 2. УРАВНОВЕШИВАНИЕ ВРАЩАЮЩИХСЯ ТЕЛ
Задача об уравновешивании вращающихся тел заключается в таком
подборе их масс, который обеспечил бы полное или частичное погаше-
ние добавочных инерционных давлений на опоры. Вращающееся тело
состоит из бесконечно большого числа элементарных масс mh удален-
ных на расстояние г£ от оси вращения у и на расстояние at от плоскости
xz, проходящей через центр 3 масс тела; поэтому результирующая цен-
тробежная сила инерции Ри и результирующий момент Ми всех сил
инерции тела относительно плоскости, проходящей через центр 3 масс:
Ри = со22/п£г£ = co2mrs;
Д, = = со27га,
гдет — масса всего тела, rs — расстояние центра S масс тела от оси
вращения; Jra—центробежный момент инерции относительно оси вра-
щения и плоскости, перпендикулярной к оси вращения и проходящей
через центр 3 масс тела.
При вращении тела угол между векторами Ри и 7Ии сохраняет все
время одно и то же значение а. Тело считается полностью уравновешен-
ным, если результирующая сила инерции Ри и результирующий момент
7Ии сил инерции равны нулю и, следовательно, вращающееся тело не
оказывает никаких динамических давлений на опоры.
В этом случае имеем
mrs = 2mzr£ = 0; (9.1)
Jra = 2zn£r£a£ = 0. (9.2)
Условия (9.1) и (9.2) будут удовлетворены только тогда, когда
центр масс тела будет лежать на оси вращения, являющейся одной из
его главных осей инерции. Если одновременно удовлетворяются ра-
венства (9.1) и (9.2), то центробежный момент инерции Jra относитель-
но оси вращения и любой плоскости, перпендикулярной к оси враще-
ния, равен нулю. Тело считается уравновешенным статически, если
выполняется только условие (9.1), и уравновешенным динамически,
если выполняется только условие (9.2), т. е. когда тело вращается во-
круг одной из главных осей инерции, но эта ось не является главной
центральной осью инерции.
Статическая неуравновешенность, или статический дисбаланс Дс,
характеризующий оставшуюся неуравновешенность, измеряется ста-
тическим моментом
Дс — Grs н • м, (9.3)
где G — вес вращающегося тела, н.
Динамическая неуравновешенность, или динамический дисбаланс
Дд вращающегося тела измеряется величиной
Дд = SG£r£fl£ н лА (9.4)
Неуравновешенное тело на практике чаще всего уравновешивают
при помощи добавочных масс (противовесами). Вращающиеся тела, у
6*
163
которых общая длина а значительно меньше их диаметра (шкивы,
маховики, зубчатые колеса и др.), имеют незначительные центробеж-
ные моменты инерции Jга\ поэтому такие тела достаточно уравновесить
только статически.
Допустим, что тело А (рис. 82) статически неуравновешено. В
простейшем случае противовес помещают на линии, проходящей через
центр тяжести S, по другую сторо-
ну от оси вращения на расстоянии
гпр от нее.
Массу тпр противовеса находим
из уравнения (9.1):
тпр = т • (9.5)
гпр
Вместо установки противовеса
можно удалить часть массы, как
это показано на рис. 82 штриховкой.
Величина удаляемой массы опре-
деляется по формуле (9.5). Иногда плоскость крепления противовеса
не может быть выбрана конструктивно в той плоскости вращения, в
которой расположены неуравновешенные массы. В этом случае можно
установить два противовеса в двух перпендикулярных к оси вращения
плоскостях, обычно называемых плоскостями исправления, но при
этом необходимо исключить возможность появления давления на опоры
не только от результирующей силы инерции, но и от моментов сил
инерции. Массы т\ и /л и противовесов определяем в соответствии с
формулами (9.1) и (9.2) из уравнений
mrs = mirnp + ^i/np
и
пр^[J == О,
откуда
rsal
тл = т ——т—; и ти — т • --------т-—. <
1 /пр (а, + flu) 11 /"пр (fli + ац)
(9.6)
Сложив массы этих противовесов, получим
mi + = т
rS
гпр
-- ^пр»
а из их отношения найдем
т\ «п
Из приведенных формул следует, что один противовес с массой тпр
всегда может быть заменен двумя противовесами с массами mi и ти,
расположенными на линии, параллельной оси вращения тела, и подо-
бранными так, чтобы их суммарная масса равнялась массе длпр, а их
общий центр S масс совпадал с положением противовеса дипР.
164
www.vokb-la.spb.ru - Самолёт своими рук
Полное уравновешивание (статическое и динамическое) вращающе-
гося тела может быть достигнуто также при помощи двух противове-
сов, расположенных в произвольно выбранных плоскостях I и II и на
произвольных расстояниях от оси вращения.
Вращающиеся тела обычно выполняют так, чтобы они были уравно-
вешены сами по себе. Чаще всего вращающиеся тела выполняют в
и
О д
форме одного или нескольких цилиндров, имеющих общую ось, совпа-
дающую с осью вращения тела. Однако во многих случаях такая форма
не может быть выполнена и вращающееся тело без противовесов являет-
ся неуравновешенным. Для определения величины и положения проти-
вовесов необходимо по чертежу выделить уравновешенную часть тела
и определить для оставшихся частей — колен, кулачков и т. д. центры
тяжести их, считая, что в них сосредоточены массы этих частей.
Предположим, что для какого-либо тела все его неуравновешенные
массы свелись к трем неуравновешенным массам (рис. 83, а). Пользу-
ясь методом приведения вектора к заданному центру, можно любое
число вращающихся в различных плоскостях масс уравновесить двумя
противовесами. Пусть центры тяжести масс т2 и т3 расположены
в трех плоскостях, перпендикулярных к оси вращения. Условия от-
сутствия давления на подшипники от главного вектора и главного
момента относительно центра приведения Ог центробежных сил инер-
ции выражаются уравнениями
п ___
2 rn^i = 0;
1
п _ ____
У сц * mlri = 0.
1
165
Строим многоугольники векторов сил (рис. 83, г) и векторов моментов
(рис. 83, д). Уравновешивающим в первом случае является вектор
30 (рис. 83, г), изображенный в плоскости // вектором От (рис. 83, в),
а во втором — вектор гО (рис. 83, д), изображающий повернутый
момент пары векторов On, расположенного в плоскости / (рис. 83, б),
и Оп19 расположенного в плоскости II. Каждый из них равен по вели-
чине — . Таким образом, заданные массы т19 т2 и т3 будут полностью
уравновешены двумя массами, расположенными вдоль On в плоскости
I и вдоль равнодействующей 0k в плоскости II. Из изложенного сле-
дует, что:
1) любое количество вращающихся масс, расположенных в одной
плоскости вращения, уравновешивается одним противовесом, нахо-
дящимся в той же плоскости, при соблюдении условия равновесия
п ___
2 rniri = 0; (9.7)
1
2) любое количество масс, лежащих в разных плоскостях вращения,
уравновешивается двумя противовесами, установленными в двух про-
извольных плоскостях, перпендикулярных к оси вращения, при соблю-
дении двух условий равновесия:
п 2 = 0;
1 п _ 2 = °- 1 (9-8)
§ 3. УРАВНОВЕШИВАНИЕ МЕХАНИЗМОВ НА ФУНДАМЕНТЕ
Для уравновешивания плоского механизма на фундаменте необхо-
димо и достаточно так подобрать массы звеньев этого механизма, чтобы
общий центр масс движущихся звеньев его оставался неподвижным:
у == const; 1
. (9.9)
ys = const J v '
и центробежные моменты инерции масс звеньев относительно осей х
и z, у и 2 были постоянными:
= const; Jyz = const. (9.10)
При соблюдении этих условий будут уравновешены главный
вектор сил инерции и главные моменты сил инерции относитель-
но осей х и у. Главный момент сил инерции относительно оси г,
перпендикулярной к плоскости движения механизма, уравновешивае-
тся моментом движущих сил и сил сопротивлений на главном валу
машины.
166
www.vokb-la.spb.ru - Самолёт своими руками?!
Рис. 84
На практике при уравновешивании механизмов указанные ус-
ловия (9.9) и (9.10) выполняются только частично. Пусть, например,
дан механизм шарнирного четырехзвенника A BCD (рис. 84) и требует-
ся уравновесить только главный вектор сил инерции. Обозначим массы
звеньев Л В, ВС и CD соответственно через тъ т2 и т3; длины звеньев —
через 119 12 и /3, а расстояния центров тяжести S2 и S3 этих звеньев
от точек Л, Ви С — через s2 и s3. Для удовлетворения условия
(9.9) необходимо, чтобы общий центр S масс механизма находился
на прямой Л D, либо меж-
ду точками Л и D, либо
за ними. В этом случае
центр S масс механизма
при его движении будет
оставаться неподвиж-
ным и, следовательно,
главный вектор сил
инерции механизма бу-
дет уравновешен.
Массы звеньев и по-
ложения центров тяжес-
ти их должны быть подобраны
так, чтобы
/72 о/т /« у
/71^ =-----—«г);
*2
(9.П)
(9.12)
Если механизм состоит из п подвижных звеньев, то при решении
задачи о подборе масс механизма, удовлетворяющих условию уравно-
вешенности главного вектора сил инерции механизма, имеем 2п неиз-
вестных величин; уравнений же, связывающих эти величины, можно
составить (п — 1). После произвольного выбора (n + 1) величин ос-
тальные величины получают определенные значения. В исследуемом
механизме количество подвижных звеньев п = 3, количество подби-
раемых величин 2п = 6, число же независимых уравнений и — 1 — 2.
Таким образом, задаваясь, например, значениями т3 и s3, из уравнения
(9.12) получаем значение m2s2, в котором можно задаваться одним из
неизвестных и получать другое. Подставляя полученные значения в
уравнение (9.11), определяем значение т^, в котором также можно
задаться одной величиной. Из уравнений (9.11) и (9.12) при различ-
ных исходных заданиях можно получить три варианта схем уравнове-
шенного четырехзвенного механизма (рис. 84, а, б, в). Следовательно,
если считать, что расположение центра тяжести звена за его шарнира-
ми соответствует как бы установке противовеса, то можно сказать, что
задачу уравновешивания главного вектора сил инерции механизма шар-
нирного четырехзвенника можно решить путем установки противо-
весов на двух его звеньях.
Аналогичным образом можно решить задачу подбора масс отдельных
звеньев для уравновешивания шарнирного шестизвенника и любого
167
механизма, образованного путем наслоения двухповодковых групп.
Два уравнения (9.9) можно заменить одним векторным уравнением
rs = const, (9.13)
где rs— вектор, определяющий положение общего центра масс. Усло-
вие (9.13) удовлетворяется, в частности, когда rs = 0; это условие
приводит к способу подбора механизмов с симметрично расположенны-
ми звеньями равных масс, вследствие чего получается самоуравнове-
шивание механизма в целом.
На рис. 85 показаны схемы симметричных кривошипно-ползун-
ного и шарнирного четырехзвенного механизмов. В тех случаях, когда
размещение звеньев в симмет-
ричных механизмах очень гро-
моздко или подбор масс кон-
структивно нецелесообразен,
применяется метод установки
Рис. 86
противовесов. Пусть, например, требуется уравновесить только глав-
ный вектор сил инерции кривошипно-ползунного механизма, схе-
ма которого изображена на рис. 86, а. Обозначим массы кривошипа
/, шатуна 2 и ползуна 3 через т2 и т3 и будем считать их сосредото-
ченными соответственно в центрах тяжести Slt S2 и В звеньев. Устанав-
ливаем на линии АВ в точке D противовес и определяем его массу тПр2
из условия, чтобы центр тяжести масс mnp2, tn2 и т3 совпадал с точкой
А. Из уравнения статических моментов относительно точки А имеем
т3Ь-\- т2а = тПр2с,
откуда
шпр£ = J- (m3L + т2а).
Массу mnP1 противовеса, установленного в точке С кривошипа, опре-
деляем из условия, чтобы центр тяжести масс тпР1, т1 и тд = тПр2 +
+ т2 + т3 совпадал с точкой О. Из уравнения статических моментов
относительно точки О находим
168
www.vokb-la.spb.ru - Самолёт своими
Радиусы s и с противовесов выбираются произвольно. После уста-
новки противовесов центр масс механизма во всех его положениях
будет совпадать с точкой О и, следовательно, будет во все время работы
механизма оставаться неподвижным. Таким образом, два противовеса
гяПР1 и тПр2 полностью уравновешивают все силы инерции рассматри-
ваемого механизма. Однако подобное полное уравновешивание сил
инерции кривошипно-ползунных механизмов на практике применяют
редко, так как при малом значении радиуса с масса тПр2 получается
весьма большой, что ведет к появлению добавочных нагрузок в кине-
матических парах и звеньях механизма. При большом значении радиу-
са с сильно увеличиваются габаритные размеры всего механизма- По-
этому часто ограничиваются лишь приближенным уравновешиванием
сил инерции. Так, в кривошипно-ползунных механизмах метод уста-
новки противовеса на кривошипе является наиболее распространен-
ным методом приближенного уравновешивания сил инерции. В этих
механизмах на практике часто применяют уравновешивание только
массы кривошипа и части массы шатуна.
Пусть, например, имеется кривошипно-ползунный механизм
(рис. 86, 6). Массу кривошипа, сосредоточенную в его центре тя-
жести Sx, статически приводим к точке А:
(9.14)
Массу т2 шатуна АВ разносим статически в две точки А и В. Массы
т2А и т2в, сосредоточенные в точках А и В, будут соответственно:
b
т2А =
а
т2в = т2 • .
Полная масса ша, как бы сосредоточенная в точке А,
, е . Ь
tnA = /п1Л + т2А = т, • + тх • т-
Соответствующая этой массе центробежная сила инерции
Рп = mAu2R = 1тг . + т1• со2/?.
(9.15)
(9.16)
(9.17)
Для уравновешивания этой силы инерции необходимо установить
(рис. 86, б) в точке С на продолжении линии ОА кривошипа с противо-
положной стороны от оси вращения О противовес массы /ппр, опреде-
ляемой из условия
mnpsco2 = Ри,
или
R
(9.18)
где s — расстояние центра тяжести противовеса от оси вращения О.
169
Подбирая таким образом массу тпр и расстояние s, можно уравно-
весить все силы инерции от вращающихся масс механизма. Силы инер-
ции поступательно движущихся масс остаются в этом случае неурав-
новешенными, т. е. на фундамент двигателя будет действовать в гори-
зонтальном направлении сила инерции
^-cos2cpj,
Рив mB^R ^cos ф 4
где
тВ = т2В + тзв = тг' Т- + т3-
§ 4. УРАВНОВЕШИВАНИЕ МНОГОЦИЛИНДРОВЫХ ДВИГАТЕЛЕЙ
В многокривошипных (многоцилиндровых) двигателях или ком-
прессорах полное или частичное уравновешивание можно получить
соответствующим подбором величины и расположения движущихся
масс. Вращающаяся масса тл характеризуется силами инерции только
1-го порядка. Сила инерции массы т, совершающей возвратно-nociyna-
тельное движение, представляет собой бесконечную сумму периоди-
ческих сил порядков 1, 2, 4-го и т. д.
Ограничиваясь членом 2-го порядка, можно написать следующую
формулу для проекции силы инерции Ри поступательно движущихся
масс на ось, направленную от оси вращения по траектории ползуна:
Ри = mu?R (cos ф + , (9.19)
где ф — угол, образованный кривошипом с указанной осью; k = —
отношение длины шатуна к длине кривошипа.
Предположим, что в многоцилиндровом двигателе вес поршней и
шатунов, а также длина кривошипов и шатунов во всех кривошипно-
ползунных механизмах, работающих на общий вал, одинаковы. Если
кривошипы образуют с первым кривошипом углы а, 0, у и т. д., то
проекция главного вектора РИ1 сил инерции 1-го порядка на указан-
ную выше ось всех поступательно движущихся масс двигателя выра-
зится следующей формулой:
РИ1 = mwPR [cos ф + cos (ф + а) + cos (ф + ₽) + cos (ф + у) + --.]==
= muPR[cosф(I + cos а 4- cos0 + cosy+ • • •) —
— sin ф (sinа + sin 0 + sin у + •••)!-
Аналогично проекция главного вектора Р^2 сил инерции 2-го по-
рядка выразится так:
РИг = тсо2--р [cos2ф(1 4-cos2а + cos20 + cos2у4- •••) —
— sin2ф (sin2а 4-sin20 + sin2у 4- ♦ ••)].
170
www.vokb-la.spb.ru - Самолёт своими ру
Таким образом, для уравновешивания главного вектора сил инер-
ции 1 и 2-го порядков необходимо, чтобы соблюдались следующие усло-
вия:
1) 1 + cos а + cosp + cosy+ ...=0;
2) sina + sinp + siny + • •• = 0;
3) 1 + cos 2а + cos 2|3 + cos 2y + • • • = 0;
4) sin2а + sin2p + sin2y + ••• = 0.
(9.20)
Для двухцилиндрового двигателя (рис. 87, а) кривошипы располо-
жены под углом 180°:
1) 1 + cos а = 0; 2) sin а = 0;
3) 1 + cos 2а = 2; 4) sin 2а = 0.
Рис. 87
Следовательно, в этом двигателе главный вектор сил инерции 1-го
порядка будет уравновешен, но сила инерции 2-го порядка, проекция
р
которой равна то2 • • 2cos 2<р, не будет уравновешена.
Для трехцилиндрового двигателя (рис. 87, 6), кривошипы которого
расположены под углом 120° (а = 120°, (3 = 240°, = 2а + Ь\ х2 =
= а + Ь; х3 = Ь), главный вектор сил инерции 1 и 2-го порядков
уравновешивается (условия 1—4 удовлетворяются).
Для полного уравновешивания необходимо добавочное условие,
чтобы главный момент сил инерции поступательно движущихся
масс относительно оси О?, проходящей через точку О перпендикуляр-
но к плоскости осей цилиндров, равнялся нулю. Это условие можно
171
выразить в виде следующего уравнения:
Ми = tna?R [хг [cos <р + -С0;,2<р-') 4-
Г. , ч . cos2(<p4~a)l . ] п
cos(<p + a)4-----7 ' 1+ =
Из этого уравнения получаем следующие дополнительные условия
уравновешивания главного момента сил инерции 1 и 2-го порядков:
5) ах + х2 cos a + хз cos ₽ + • • • = 0;
6) x2sina + x3sinP+ • •• = 0;
7) xr + х2 cos 2а -|- х3 cos 2₽ + • • • = 0;
8) х2 sin 2a + х3 sin 2р + • • • - = 0.
Подставляя значения параметров трехцилиндрового двигателя в
левые части уравнений (9.21), получаем следующие величины:
3 Уз з 1<3 Л
.2 а’ 2 а’ 2 а И 2 й'
Таким образом, неуравновешенный момент сил инерции
М' = mtfR a cos <р--------a sin + та2 • a cos 2<р -|-
И \ / R, \ Л
4~ -^-asin2<p) = (-Kp-coscp----sin ф +
/3 о , 1 . „
—— COS 2<р + - sin 2<р \ г
+ —---------г—----------/ = ma>2R VЗа I cos (<р + 30 ) +
R ‘ I
+ -r-cos(2<p — 30°) •
На основании уравнений (9.20) и (9.21) нетрудно показать, что в
четырехцилиндровом двигателе (рис. 87, в) главный вектор и главный
момент сил инерции 1-го порядка будут уравновешены, а главный
вектор и главный момент сил инерции 2-го порядка не будут уравно-
вешены; в шестицилиндровом же двигателе (рис. 87, г) главный вектор
и главный момент сил инерции 1 и 2-го порядков будут уравновешены.
Если массы mv /и2, т3 ... поступательно движущихся звеньев ме-
ханизма не равны между собой, то условия (9.20) и (9.21) напишутся
так:
1) /^1 + m2 cos a + m3 cos Р + • • • =0;
2) /n2sina 4- /7?3sinp -f- = 0;
3) fnr + m2 cos 2a + cos 2p + • • • = 0;
4) m2sin2a +/n3sin2p + ••• =0;
5) m1x1 + m2x2 cos a 4- m3x3 cos p + • • • =0;
6) m2x2 sin a + m3x3 sin p + • • • =0;
7) + m2x2 cos 2a 4- аи3х3 cos 2p 4~ • * - =0;
8) m2x2 sin 2a + /n3x3 sin 2p 4- • • • =0.
172
www.vokb-Ia.spb.ru - Самолёт своими
ГЛАВА X
НЕКОТОРЫЕ ЗАДАЧИ ДИНАМИКИ
УСТАНОВИВШЕГОСЯ ДВИЖЕНИЯ
МАШИНЫ
В настоящей главе будут рассмотрены следующие задачи.
1. Определение момента инерции маховика и его махового момента.
2. Определение переменной мгновенной угловой скорости главного
вала.
3. Определение коэффициента неравномерности хода машины.
§ 1. ОСНОВНЫЕ СВЕДЕНИЯ
Приведенные моменты инерции. Приведенным к главному валу
(звену приведения) моментом инерции J„. какого-либо i-ro звена назы-
вается такой условный момент инерции относительно оси вращения
главного вала, обладая которым главный вал имеет в данном положе-
нии машины кинетическую энергию, равную кинетической энергии
Et i-ro звена в том же положении.
Из определения следует:
£( = 47"Х’ <101)
где «о — мгновенная угловая скорость главного вала машины.
Из формулы (10.1) получаем
В случае плоскопараллельного движения звена
Ei = .4" miV\+Jsi^' <10,3)
где nii — масса г-го звена;
vs — скорость центра тяжести f-го звена;
со* — угловая скорость i-ro звена;
JSi — момент инерции i-ro звена относительно центральной оси,
перпендикулярной к плоскости движения.
В формулу (10.2) подставляем значение Et из формулы (10.3):
(Ю.4)
Угловые скорости со и со£ выражаем через линейные скорости точек
соответствующих звеньев, а эти последние и скорость vs. — через от-
резки, взятые из плана скоростей, который должен быть предваритель-
но построен для данного положения машины.
В результате преобразований формулы (10.4) в нее войдут отноше-
ния отрезков, взятых из плана скоростей. В теории доказывается, что
173
эти отношения зависят только от положения машины и изменяются пе-
риодически.
Следовательно, приведенный момент инерции Jn. является перио-
дической функцией положения машины. Следует заметить, что планы
скоростей, используемые для определения приведенных моментов
инерции, можно строить в неопределенном масштабе.
Если f-e звено совершает поступательное движение или вращатель-
ное вокруг неподвижной оси, то вместо формулы (10.3) в формулу (10.2)
нужно вставить соответственно одно из следующих выражений для
кинетической энергии:
(10-5>
= (10-6)
где Jq. — момент инерции t-го звена относительно оси его вращения Ог
Сумму приведенных к главному валу моментов инерции всех звеньев
машины обозначим через Jc. Следовательно,
= (Ю.7)
Учтем отдельно момент инерции (относительно оси вращения главно-
го вала) так называемого маховика — твердого тела, закрепляемого
жестко на валу и имеющего форму диска или обода со ступицами. Мо-
мент инерции — постоянная величина. О назначении маховика
будет сказано ниже.
Сумму приведенных к главному валу моментов инерции всех звеньев
машины (включая маховик) обозначим через J и назовем приведенным
к главному валу моментом инерции машины. Следовательно,
7 = 4 + 4. (10.8)
Приведенные моменты инерции Jc и J являются периодическими
функциями положения машины.
Кинетическая энергия. На основании определения приведенного
момента инерции получаем формулы:
е=4--^3; 0 °-9)
EC=±..JC^, (10.11)
&
где Е — кинетическая энергия всей машины (включая маховик);
£м — кинетическая эйергия маховика;
174
www.vokb-la.spb.ru - Самолёт своими pyi
Ес — кинетическая энергия всех звеньев машины (без маховика).
Очевидно,
£ = £М + ЕС. (10.12)
Так как со, J и Jc — величины переменные, то в уравнениях (10.9)
и (10.11) Ей Ес являются функциями двух переменных величин. В от-
личие от этого Ем является функцией одной переменной величины —
угловой скорости co, так как — величина постоянная.
Приведенные моменты сил. Приведенным к главному валу (звену
приведения) моментом каких-либо сил (движущих, полезного сопро-
тивления и т. д.), приложенных к звеньям машины, называют момент
пары сил, условно приложенный к главному валу, мгновенная мощ-
ность которого в данном положении машины равна сумме мгновенных
мощностей этих сил в том же положении машины.
Из сказанного следует, что для любого положения машины каждый
из приведенных моментов можно определить из условия равенства
мгновенных мощностей этого приведенного момента и соответствующей
группы сил.
Уравнение для определения приведенного момента 7ИД движущих
сил имеет вид:
Л4д(о = cos (Рд., vB^}, (10.13)
где Рд. — Z-я движущая сила;
— скорость точки приложения f-й движущей силы.
Из формулы (10.13) получим
(vB \
) cos (РдvB). (10.14)
Для упрощения подсчета приведенного момента Л4Д угловую ско-
рость со главного вала следует выразить через линейную скорость
какой-либо его точки. После этого все линейные скорости, входящие
в формулу (10.14), выражают через отрезки, взятые из плана скоростей.
Приведенные моменты Л4П.С, Л4в.с, Mg сил полезного, вредного сопро-
тивлений и сил тяжести звеньев определяют аналогично. Для опреде-
ления приведенных моментов сил можно использовать также рычаг
Жуковского.
Алгебраическую сумму всех приведенных моментов сил называют
избыточным моментом и обозначают через М. Следовательно,
М = Мд — Л1п,с — Мв.с ± Л1е. (10.15)
Уравнение движения машины. Будем пользоваться уравнением
движения машины в форме уравнения, выражающего закон изменения
кинетической энергии машины,
<р
ДЕ = А = Ад - Л.с - А.с ± Ло = f ЛИ<р; (10.16)
б
175
Д£ = £ —£0, (10.17)
где Д£ — приращение кинетической энергии машины,
соответствующее повороту главного вала из по-
ложения, принятого за начальное, в положе-
ние, определяемое углом <р;
£0 — кинетическая энергия машины в начальном
положении;
£—кинетическая энергия машины в положении,
определяемом углом <р.
А, Лд, Лпх, Лв.с, Ав — соответственно работа приведенных моментов
/И, ТИд, 7ИП.С, 7Ив.с, Mg при повороте главного
вала из начального положения в положение,
определяемое углом ср.
В некоторых случаях для упрощения расчетов пренебрегают ра-
ботой сил тяжести звеньев и вредных сопротивлений.
Основные характеристики установившегося движения машины.
Периодом установившегося движения машины называется такой наи-
меньший промежуток времени, по истечении которого положения и
скорости всех точек машины начинают изменяться в той же последо-
вательности, в какой они изменялись в течение этого промежутка
времени.
Из этого определения следует на основании уравнения (10.16),
что: 1) приращение кинетической энергии машины за период устано-
вившегося движения равно нулю; 2) алгебраическая сумма работ всех
сил, действующих на звенья машины в течение периода установивше-
гося движения, равна нулю.
Угловая скорость ш главного вала машины изменяется в течение
периода установившегося движения машины, колеблясь около некото-
рого *е среднего значения сосР, и возвращается в конце периода к пер-
воначальному значению.
Здесь
<»ср=-§г, (10.18)
где п — число оборотов в минуту главного вала.
Разность между наибольшим сотах и наименьшим шmin значениями
угловой скорости, которые она принимает в течение периода устано-
вившегося движения, связана с коэффициентом 6 неравномерности
хода машины такой зависимостью:
6 = «лих—«min (10.19)
«ср
Обычно принимают, что сотах, со min и со Ср связаны зависимостью:
(0Ср = Ь)тах + и™!-п- (10.20)
4^
176
www.vokb-Ia.spb.ru - Самолёт своими
Отсюда
(10.21)
(10.22)
§ 2. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВИКА
И ЕГО МАХОВОГО МОМЕНТА
Постановка задачи. В курсе теории механизмов и машин доказы-
вается, что при заданных силах и средней угловой скорости соср глав-
ного вала коэффициент неравномерности хода машины 6, выражаемый
формулой (10.19), зависит от величины постоянной составляющей
приведенного момента инерции J машины. Чем больше эта составля-
ющая, тем меньше коэффициент 6.
Практикой установлены значения коэффициента 6 для различных
типов машин:
Насосы ............................. 1/5—1/30
Сельскохозяйственные машины .... 1/10—1/50
Металлообрабатывающие станки .... 1/20—1/50
Ткацкие, полиграфические машины . . 1/20—1/50
Судовые двигатели...................1/20—1/100
Двигатели внутреннего сгорания, ком-
прессоры ...........................1/80—1/150
Электрические генераторы постоянного
тока ............................... 1/100—1/200
Электрические генераторы переменного
тока ............................... 1 /200—1 /300
Авиационные двигатели ..............1/100 и меньше
В процессе проектирования машины определяют все параметры ее
звеньев, позволяющие подсчитать значение приведенного момента
инерции Jc для всех положений машины. Однако этот момент инерции
часто оказывается недостаточным для обеспечения (при заданном
значении соср) границ колебания угловой скорости со главного вала,
заданных коэффициентом 6. В этом случае возникает задача подобрать
дополнительно маховик с таким моментом инерции JM (см. § 1), при
котором эти границы обеспечиваются.
Способы определения момента инерции маховика разделяют на
приближенные и точные в зависимости от того, делают ли при решении
задачи какие-либо допущения, упрощающие решение, или нет. Ниже
мы рассмотрим два приближенных способа — профессоров Н. И. Мер-
цалова и К. Э. Рериха и метод средних мощностей (см. § 5), а также
два точных — проф. Е. М. Гутьяра и проф. Ф. Витенбауэра.
При рассмотрении этих способов воспользуемся известным приемом
динамики машин, в соответствии с которым исследование движения
всей машины заменяется исследованием движения одного звена (звена
177
приведения), обладающего переменным приведенным моментом инер-
ции (см. § 1), под действием приложенных к нему приведенных момен-
тов сил (см. § 1). В качестве звена приведения примем главный вал
машины.
Предполагаем, что машина имеет степень подвижности, равную
единице. Поэтому положение машины задается одним параметром. В
качестве такого параметра выберем угол ср поворота главного вала
машины, отсчитанный от какого-либо его положения, принятого за
начальное.
Приступая к определению момента инерции маховика, считаем за-
данными следующие величины:
1) размеры всех звеньев машины;
2) веса G£ всех звеньев машины;
3) моменты инерции Js. звеньев машины относительно центральных
осей, перпендикулярных к плоскости их движения;
4) коэффициенте неравномерности хода машины;
5) число оборотов в минуту п главного вала машины;
6) движущие силы и силы сопротивления в функции положения
машины для периода установившегося движения.
Способ профессоров Н. И. Мерцалова и К. Э. Рериха. Теорети-
ческое обоснование. На основании уравнения (10.12) получаем очевид-
ное равенство
ДЕ = ДЕМ + ДЕС. (10.23)
Здесь ДЕ, ДЕМ, ДЕС — приращения кинетической энергии всей машины,
маховика и машины без маховика, соответствующие повороту глав-
ного вала (звена приведения) из положения, принятого за начальное
(при ф = 0), в положение, определяемое углом ф.
Для определения момента инерции маховика нужно знать закон
изменения приращения ДЕМ кинетической энергии маховика в зави-
симости от угла ф. Для получения этой зависимости поступаем следую-
щим образом.
Из уравнения (10.23) получаем
ДЕМ = ДЕ —ДЕС. (10.24)
В равенстве (10.24) величину ДЕ определяют на основании формулы
(10.16). Величина Д£с определяется по формуле
А£с = Ес-ЕСо = Л. <$• (W.25)
Здесь Jc, <л — приведенный момент инерции машины и угловая ско-
рость главного вала в положении, определяемом углом <р, a JCo, <оо —
те же величины в начальном положении (при <р = 0),
Однако для периода установившегося движения задана только со ср-
Поэтому при подсчете величины Д£с по формуле (10,25) примем
а> = (оо = <оСр. (10.26)
178
www.vokb-la.spb.ru - Самолёт своими
Тогда приближенное значение величины &ЕС, которое обозначим через
ДЕс, определится по формуле
AE*=4-(Jc-JCo)^p. (10.27)
Подставляя в формулу (10.24) вместо величины ДЕС ее приближен-
ное значение по формуле (10.27), получим не точное значение величины
ДЕМ, а приближенное, которое обозначим через ДЕМ. Следовательно
ДЕ* = ДЕ —ДЕ*. (10.28)
Пользуясь уравнением (10.25), подсчитываем ряд значений ДЕс и
строим диаграмму ДЕС — <р (рис. 88, б, кривая 0). Вычитая ординаты
этой диаграммы из соответствующих ординат диаграммы ДЕ — ф
(рис. 88, а, кривая а), получаем диаграмму ДЕм — ф (кривая у). Диа-
граммы ДЕс — ф и ДЕ — <р строят в одних и тех же масштабах
и iiE.
На основании диаграммы, приведенной на рис. 88, а, получаем урав-
нение
Д^ max” min = W = FH^. (10.29)
Получим другое выражение для левой
части уравнения (10.29). Для этого возь-
мем равенства
др* — £* __Е* •
м max м max м0’ _ _
др* — Р* — £* (W.dU)
м min м min м0* ,
Здесь через E^max, E^min. Е’,о Обозна-
чены соответственно максимальное, мини-
мальное и начальное приближенные зна-
чения кинетической энергии маховика.
Подставляя значения ДЕ„ тах и ДЕ*, min
Рис. 88
из уравнения (10.30) в левую часть уравнения (10.29), получаем
ДЕ
м max
— ДЕ
*
м min
м max
___ Р*
м min*
(10.31)
Но £м тах 2 *^м®тах’
. (10.32)
F — 1 1 m2 ' '
м min — -J- "мшт1п*
Здесь JM — приближенное значение момента инерции маховика.
Подставляя значения ДЕмтах и ДЕмт1п, из уравнения (10.32) в
уравнение (10.31), получаем
00-33)
На основании выражения (10.22) получаем
Д-^м max Д^м mln ~ ^ы^Ыср-
(Ю.34)
179
Сравнивая уравнения (10.23) и (10.34), получаем
м МР ’
или
900F//|.i£
М Л2Л26
(10.35)
(10.36)
Отрезок FH изображает в масштабе наибольшее изменение ки-
нетической энергии маховика в течение периода установившегося дви-
жения машины.
Последовательность выполнения работы. Рассмотрим два типичных
случая задания сил.
Случай А. Заданы движущие силы и силы тяжести звеньев.
Приведенный момент 7ИС всех сил сопротивления — постоянная ве-
личина.
1. Строим планы скоростей машины для ряда ее положений в про-
извольном масштабе (12—36 планов скоростей для одного оборота
главного вала).
2. Пользуясь указаниями, приведенными в § 1, определяем для
этих положений приведенные моменты Л4Д и MG.
3. Определяем алгебраическую сумму Л1д ± MG этих моментов
для тех же положений машины.
4. Выбрав масштабы рф и р,м, строим диаграмму (Л1д ± MG) — <р
(рис. 89, а, кривая а в системе осей х и у).
5. Графическим интегрированием (при полюсном расстоянии Н)
переходим от диаграммы (Л1Д ± AIg) — <р к диаграмме (Ад ± Ag) — <р
с масштабом рл — по оси ординат (рис. 89, б, кривая р).
6. Так как приведенный момент Мс постоянен, то его работа про-
порциональна углу поворота <р. С другой стороны, его работа за период
установившегося движения должна численно равняться сумме работ
Ад ± AG, изображенной на рис. 89, б отрезком ВС. Соединив точки О
и С прямой, получим диаграмму Ас — <р.
7. Графическим дифференцированием (при том же полюсном рас-
стоянии Н) переходим от диаграммы Ас — ср к диаграмме Л4С — <р
(рис. 89, а, прямая х' в системе осей х и у). Очевидно, кривая а в систе-
ме осей хну является диаграммой М — ср избыточного момента.
8. Откладываем разность ординат диаграмм (Ад ± AG) — <р и
Ас — <р вверх или вниз от оси абсцисс (в зависимости от ее знака) и
строим диаграмму ЛЕ — <р (рис. 89, в). Масштаб р£ этой диаграммы
по оси ординат равен, очевидно, масштабу рл. Дальнейшее построение
выполняем в соответствии с рис. 88, на котором кривая а изображает
ту же диаграмму ЛЕ — ср в новом масштабе по оси ординат. О вы-
боре масштаба рЕ изложено ниже.
9. Пользуясь уравнением (10.25), строим диаграмму ДЕС — <р (кри-
вая р на рис. 88, б) в масштабах и
180
www.vokb-la.spb.ru - Самолёт своими
10. От точек кривой а откладываем вниз соответствующие положи-
тельные ординаты диаграммы ЛЕс — <р и вверх соответствующие отри-
цательные ординаты. Конечные точки этих ординат соединяем плавной
кривой у (рис. 88, а). Кривая у в осях х и у дает диаграмму ДЕМ — <р
в масштабах и рф.
И. Проводим две горизонтальные прямые, касающиеся кривой у
в точках наибольшего максимума (В) и наименьшего минимума (D) и
отсекаем этими прямыми отрезок FH на оси ординат (рис. 88, я)."
Рис. 90
12. Подсчитываем приближенное значение момента инерции ма-
ховика по уравнению (10.36), в котором используем масштабы и рф.
Случай Б. Заданы силы полезных и вредных сопротивлений и
силы тяжести звеньев. Приведенный момент Л1Д движущих сил —
постоянная величина.
В этом случае выполнение работы начинаем с подсчета приведенных
моментов Мп.с, 7Ив.с и Mg в соответствии с указаниями, приведенными
в § 1, после чего строим диаграмму (Л4п.с + Мв.с ± Mg) — <р. Даль-
нейшая последовательность выполнения работы аналогична порядку,
описанному'для первого случая. Все построения приведены на рис. 90
и 88.
Примечание. Диаграммы на рис. 88 можно было бы строить в масштабе ря ==
— рл= рфр Я, полученном для диаграммы ДЕ —<рна рис. 89, в. Однако при боль-
шом численном значении этого масштаба ординаты диаграммы ДЕС — <р на рис. 88, б
могут оказаться очень малыми, и тогда кривые а и у на рис. 88, а расположатся очень
близко одна к другой, что затруднит дальнейшие построения. Поэтому, прежде
чем строить диаграммы на рис. 88, следует тщательно подобрать для них новый мас-
штаб р^. по оси ординат.
Способ проф. Е. М. Гутьяра. Теоретическое обоснование. Составим
две новые функции Ем и Ем в соответствии с уравнениями
(10.37)
Е"ы — Е — Е"е (10.38)
Здесь Ес == g «^с^тах И Ес == “g
181
Сравнивая уравнения (10.37) и (10.38) с уравнением(10.24), заклю-
чаем, что функция Ем имеет одно и то же наибольшее значение с функ.
цией Ем (в положении, когда со = сотах) и одной то же наименьшее зна-
чение с функцией Ем (в положении, когда со = comin).
На основании сказанного
^мтах = max’ (10.39)
= (10.40)
На основании уравнений (10.37) и
(10.38) получаем равенства:
ДЕ; = ДЕ — ДЕс'; (10.41)
де; - де—де;. (ю.42)
Напишем формулы для подсчета
величин ДЕС и ДЕС:
Д£; = £'-£; = 4 (Jc- Л.) ®2 ах; (10.43)
Л£; = е; - е; = 4 ( jc - <in. (i o.44)
Пользуясь уравнениями (10.43) и (10.44), подсчитываем ряд зна-
чений величин ДЕС и ДЕс и строим диаграммы ДЕС — <р и ДЕС — ф
(рис. 91, б, кривые Р и у).
Вычитая соответственно ординаты этих диаграмм из ординат диа-
граммы ДЕ — ф (рис. 91, а, кривая а), получаем диаграммы ДЕМ — ф
и ДЕМ — ф (кривые о и е). На основании этих диаграмм получаем:
(10.45)
(10.46)
Вычитая уравнение (10.46) из уравнения (10.45), получаем
- (ЛВ + CD) Ь = FH (10.47)
Диаграммы ДЕ — <р, ДЕ^ — ср и ДЕС — ср строят в одних и тех же
масштабах и
Получим другое выражение левой части уравнения (10.47). Для
этого возьмем равенства
ДЕ'
м max
£'
м max
ДЕ" . =Е" .
м min м min
(10.48)
Вычитая равенства (10.48) одно из другого, получаем
max - min = max ~ min) + (Е^ - Е'ы).
(10.49)
182
www.vokb-la.spb.ru - Самолёт своими
На основании выражений (10.39) и (10.40) имеем:
^итах Еы min — Да max min 2 (®max “inn)’ (Ю-50)
Вычитая равенство (10.37) из равенства (10.38), получаем
Е’—Е'^Е’ — Е'
М м с с
(10.51)
Применяя равенство (10.51) к начальному положению, имеем
Е',. - -Г «X - <,.) <1 о. 52)
Подставляя (10.50) и (10.52) в (10.49), получаем
„„ - лс „™, = 4 <'«+1у «х - < <1 °-53>
Подставляя (10.22) в (10.53), имеем
Д£' — ЕЕ" . = (Л-Ь Л)««2 • (10.54)
Сравнивая уравнения (10.47) и (10.54), получаем
(,О55)
или
_ 900F//p£ __
л2п2д Jc°*
(10.56)
Последовательность выполнения работы. Последовательность вы-
полкения в пунктах 1—8 совпадаете последовательностью, описанной
для способа Мерцалова — Рериха.
Далее поступаем так:
9. Пользуясь уравнениями (10.43) и (10.44), подсчитываем ряд зна-
чений ДЕс и ДЕС, затем строим в масштабах и диаграммы ДЕС —•
— <р и ДЕс — ф (кривые Р и у, рис. 91, б).
10. От точек кривой а (рис. 91, а) откладываем соответствующие
ординаты диаграммы ДЕС — <р (вниз — положительные, вверх — отри-
цательные). Соединяя конечные точки отложенных ординат плавной
кривой а, получаем диаграмму ДЕМ — ф (рис. 91, а}.
11. Аналогично строим диаграмму ДЕМ—.ф (кривая е, рис. 91, а),
используя ординаты диаграммы ДЕС — ф.
12. Проводим (рис. 91, а) горизонтальные прямые ВН и DF, каса-
ющиеся: первая — кривой а в точке В наибольшего максимума, вто-
рая — кривой е в точке D наименьшего минимума. Прямые отсекают
на оси ординат отрезок HF.
13. Подсчитываем момент инерции маховика по формуле (10.56).
Способ проф. Ф. Виттенбауэра. Теоретическое обоснование этого
способа можно найти в [16]. Поэтому ограничимся изложением порядка
выполнения работы согласно этому способу (рис. 92).
183
1. Строим в масштабах ре и рф диаграмму ЛЕ — <р. Построение
этой диаграммы описано при изложении способа Н. И. Мерцалова и
К Э. Рериха и приведено на рис. 89 и 90.
2. Под диаграммой ДЕ — ср в масштабах pj и рФ строим диаграмму
Jc — ф-
3. Графически исключая угол ср, строим диаграмму ДЕ —Jc (кри-
вая а). Для исключения угла ср нужно через какую-либо точку Е на оси
ординат диаграммы Jc —ф, рассто-
0 1 2 3 6 5 6 7 8 X
Рис. 92
BD. Этот отрезок изображает в
кинетической энергии маховика
яние которой от оси ср больше наи-
большей ординаты этой диаграммы,
провести прямую EF под углом
45° к оси ф, затем сделать для ря-
да положений построения, подобные
тем, которые указаны стрелками
для положения 5. Очевидно, диа-
грамма ДЕ — Jc будет построена в
масштабах ре и pj.
4. Проводим касательные АВ и
CD к кривой а соответственно под
углами фтах И К ОСИ Jc И ОТСС-
каем ими на оси ординат отрезок
масштабе р^ наибольшее изменение
в течение периода установившегося
движения машины.
Углы Ч'тач и 4rmin определяем по формулам*:
1g 4'™=^ 4,(1+ 0;
(10.57)
tg«=„(! S). (10.58)
5. Определяем момент инерции маховика по формуле
, ‘ Не О 2 » «“ср (10.59)
или
900BD • р£ — 6л2л2 ’ (10.60)
где п —• число оборотов в минуту главного вала.
* При подсчете углов Чгтах и 4fmin по формулам (10.57) и (10.58) может оказаться,
что эти углы будут достаточно велики: тогда пересечение касательных АВ и CD с
осью ординат диаграммы ЛЕ — JQ получится внизу, вне пределов чертежа. В связи
с этим рекомендуется до начала вычерчивания диаграмм на рис. 92 так подобрать мас-
штабы р£ и р7, чтобы углы Чгтах и Tmin, обычно мало отличающиеся один от другого
были каждый не больше 45°—60Q. Для этого следует в формуле (10.57) задаться жела-
емым значением угла Фтах, затем из полученного уравнения определить отношение
pz
----. Этим отношением нужно воспользоваться при подборе масштабов р^ и pj.
Ре
184
www.vokb-la.spb.ru - Самолёт своими
Определение махового момента. Маховым моментом называют про-
изведение GD2, где G — вес обода маховика, я; D — средний диаметр
маховика, м.
Пренебрегая массой спиц и втулки маховика, можно написать
4 = -^-. (Ю.61)
где g — ускорение силы тяжести, м!сек\
Из формулы (10.61) получим
GO2 = 4gJM.
Воспользовавшись уравнениями (10.36), (10.56), (10.60), получим
следующие уравнения для определения махового момента:
Л „ 36007// . uF
GD2 =-------н-м2;
n2o
/360077/ • iiF
= (-...~4^.
3600BD • lip
GD2 =-------h-m2.
n2o
н л2;
(10.62)
(10.63)
(10.64)
Зная маховый момент, можно задаться диаметром D из конструк-
тивных соображений, затем определить вес маховика или, наоборот,
задавшись весом маховика, определить его диаметр.
§ 3. ОПРЕДЕЛЕНИЕ УГЛОВОЙ СКОРОСТИ ГЛАВНОГО ВАЛА
МАШИНЫ
Теоретическое обоснование. При кинематическом исследовании ма-
шины (гл. IV) предполагалось, что главный вал вращается равномер-
v ЗТМ у-ч и
но с угловой скоростью со ср = “эд-- В действительности угловая ско-
рость со главного вала является переменной величиной.
Зная момент инерции маховика, а также то положение машины, в
котором со = сотах либо со = comin, можно определить значения угло-
вой скорости главного вала для любых положений машины внутри
периода установившегося движения. Напишем уравнение (10.17) для
двух положений машины: для положения, в котором угловая скорость
главного вала имеет значение сотах» и для произвольного положения:
ДЕ1 = Е1—Ео; (10.65)
ДЕ = Е-Е0, (10.66)
где Егм Е — кинетическая энергия машины для положения, в кото-
ром угловая скорость главного вала равна сотах, и для
произвольного положения;
ДЕХ и ДЕ — соответствующие приращения кинетической энергии
машины.
185
Вычитая уравнение (10.66) из уравнения (10.65), имеем
^ — кЕ^Е^Е. (10.67)
На основании уравнения (10.9) имеем
(10.68)
(10.69)
где и JC1 — приведенные моменты инерции всей машины и машины
без маховика для положения, в котором со — сотах.
J и Jc — приведенные моменты инерции всей машины и машины
без маховика для произвольного положения.
На основании уравнений (10.67) Ч- (10.69) получаем
<0 = 1/
Г Лм -Г «/с
Последовательность выполнения работы. 1. Пользуясь диаграммой
ДЕ — ф (рис. 88, а или рис. 91, а), определяем значение ДЕХ для по-
ложения машины, в котором со = сотах, а также значения ДЕ для
ряда положений машины внутри периода установившегося движения.
На рис. 88, а и 91, а ординаты, измеряющие величину ДЕХ на диаграм-
мах ДЕ — ф, соответствуют абсциссам ОА (эти ординаты на рис. 88, а
и 91, а начерчены неполностью).
2. Воспользовавшись указаниями § 1 настоящей главы, подсчиты-
ваем ряд значений Jc для тех положений машины, для которых подсчи-
таны значения ДЕ в пункте 1. Для этого можно также использовать те
значения Jc, которые ранее были определены при подсчете значений
ДЕс по формуле (10.27) (способ Мерцалова — Рериха), или значений
ДЕС и ДЕС по формулам (10.43) и (10.44) (способ Гутьяра).
3. Определяем значения со для тех же положений по форму-
ле (10.70).
4. Строим диаграмму со — ф.
§ 4. ГРАФИЧЕСКОЕ ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА
НЕРАВНОМЕРНОСТИ ХОДА МАШИНЫ (РИС. 93)
Одной из задач динамического анализа машины является определе-
ние коэффициента б неравномерности ее хода. Эта задача имеет практи-
ческое значение, так как позволяет установить, нуждается ли дан-
ная машина в добавочных маховых массах для нормального течения
технологического процесса.
Если вычисленное значение б окажется больше допускаемого для
рассматриваемой машины, то во избежание нарушения ее нормальной
186
www.vokb-la.spb.ru - Самолёт своими руками
работы требуется увеличить приведенный момент инерции Jc ма-
шины до некоторой величины J = Jc + JM, где значение JM маховика
можно определить методом, описанным выше.
Опишем метод определения 6.
Заданы: а) силы, приложенные к машине; б) распределение масс
в виде переменной величины Jc, зависящей от положения машины
в) средняя угловая скорость звена
приведения
__ лп рад
30 сек
Требуется определить коэффици-
ент б неравномерности хода машины.
Строим диаграмму ДЕ — Jc в мас-
штабах ре и pj (кривая а в осях х и
у на рис. 93).
Будем искать такое положение но-
вой оси абсцисс этой диаграммы, при
котором ординаты кривой ау отсчи-
танные от этой оси, изображают пол-
ную кинетическую энергию Е машины в различных положениях,
соответствующую заданному значению соСр- Зная положение этой оси,
можно определить коэффициент б.
Для этого проведем горизонтальные прямые 0гх' и 02х"у отстоящие
соответственно от нижней В и верхней А точек кривой а на расстояниях,
равных отрезкам D0t и С02, изображающим величины у Jmaxcoep и
y«/minCDcpB масштабе р£. Очевидно, оси 0хх'и О^х" расположены соот-
ветственно ниже и выше искомой оси абсцисс.
Через точку Oj — середину отрезка 0г02 проводим горизонтальную
ось 0\х"' и касательные С^Е'и OiK' к кривой а, касающиеся ее в точках
F' и К'. Касательные OiF'; 0{К' и ось 0{х'" пересекают прямую f'l',
параллельную оси у и произвольно расположенную справа от оси у,
в точках f, k' и Г. Обозначим углы наклона касательных O^F' и
к оси 0{х"' через'Ртах и Wmin- Тогда, как известно, максимальная wmax
и минимальная «min угловые скорости главного вала, соответствующие
оси Oix"', определяем из уравнений:
J’ = ' 16 (10.71)
(Ю-72)
Так как
(>о-73)
187
tgV'. =
& min
(10.74)
то
2u
((й--)2 = ът^г 7'Г; <10*75)
«1п)2 = k'l'. (10.76)
L/jt • [Lj
Очевидно, отрезки f’l' и k'l' изображают соответственно («)2 и
(comin)2 в масштабе pw, определяемом равенством
_.2>tg . . (10.77)
OjZ' • pt у мм
Следовательно,
«ах)2 = Но. • f'l'-, (10.78)
«in)2 = Но. • k'l'- (Ю.79)
Отложим от точки Г вниз отрезок Гп' = k'l' и разделим отрезок f'n'
пополам в точке tn'. Из точки т' радиусом т'п' построим полуокруж-
ность f'q'n' и найдем точку q' пересечения этой полуокружности с
осью OiX"'.
Очевидно,
(д'/')2 = fl' • Гп' = fl' • k'l'. (10.80)
Умножим равенство (10.80) на квадрат масштаба .
(q'l' • 1М2 = (П' * FW) (k'l' • FW)-
Из равенств (10.78) и (10.79), получим
(<7'r-Hj2=«ax)2«in)2.
или
4’1' • Нш. = <ах«п- (10.81)
Определим среднюю угловую скорость <иСр главного вала, соот-
ветствующую оси О1Х'”:
/ > \2 l^max "Н t0minl2 (штах)” Т" (0,min)2 4“ 2<^max^min /1ЛСО\
(соср) — ——- —— — д . (10.82)
4
На основании равенств (10.78), (10.79) и (10.81) получим
и,чг ат + k’v + 2?'/')
«)2 = ---4- • (10-83)
Если (мер)2 = (Оср, то ось О\х"’ совпадает с искомой осью. Тогда
коэффициент б можно подсчитать по формуле
«ах)2 - «in)2
2 «>2
(10.84)
• 1S8
www.vokb-la.spb.ru - Самолёт своими
Подставляя вформулу (10.84) значения (co max)2, («min)2, ИЗ формул
(10.78), (10.79) и (10.83) получим
g 2 (/,/z ~~k'l')_2f'k' /in gg\
- p'+ a//'+ “ Гл' + 2?'Г * (Ш.ёй)
Если (coep)2 > (Оср, то ось О\ХГ" лежит ниже искомой оси. В этом
случае нужно провести новую ось через середину отрезка 0102, снова
проделать описанные выше построения и подсчитать новое значение
квадрата средней угловой скорости. Если же (соСр)2 < со ср, то ось О^х'"
лежит выше искомой оси. Поэтому новую ось следует провести через
середину отрезка O\OY и т. д. Подобные построения нужно повторять
до тех пор, пока разность между (соСр)2 и соответствующим значением
квадрата средней угловой скорости не будет превышать 2—3%. После
этого искомый коэффициент б неравномерности можно подсчитать по
формуле (10.85).
Графическое определение б, изложенное выше, можно несколько
упростить, исходя из таких соображений.
Принятое значение средней угловой скорости
______ (1)max + ®min
шср — g
является только приближенным, сильно отличающимся во многих
случаях от его действительного (планиметрического) значения:
<Го4-Ф
1 С л
©ср.пл — ф J «ф,
<Го
где Ф —’угол поворота звена приведения, соответствующий одному
периоду установившегося движения. С другой стороны, принятое сред-
нее значение соср дает
/1 , 6 \ л б \
^max ^ср I 1 Н” 2 ) ’ ^ср I 1 2 /
Поэтому
^max^min ^ср I 1 4 Г
Отсюда следует, что при малом значении б можно принять
ИЛИ _______
^ср == V^max^min, (10.86)
т. е. средняя угловая скорость приблизительно равна среднему
геометрическому наибольшего и наименьшего значений угловой скорос-
ти внутри периода установившегося движения.
Из сказанного видно, что нет оснований предпочитать среднее ариф-
метическое наибольшего и наименьшего значений угловых скоростей
189
tomax и tomin ик среднему геометрическому, тем более, что разность
между ними невелика. Так, например, при б = 0,5 (что мало вероятно)
относительная погрешность при замене среднего арифметического зна-
чения средним геометрическим составляет около 3,5%, при 6 = 0,2;
6 = 0,1 и т. д. относительная погрешность соответственно равна
0,5%, 0,1% и т. д. Таким образом, из сравнения (10.81) и (10.86) полу-
чается, что отрезок q'V в принятом масштабе представляет собой вели-
чину (®ср)2.
Поэтому в соответствии с выражением (10.84) можно найти б по
формуле
6=6'= (t°max)2-(<in)2 =
~ 2(W;p)3 ’
или окончательно:
6 = 6' = (10.87)
Порядок выполнения работы. 1. Пользуясь методом, описанным в
§ 2, строим диаграмму Д£ — Jc в масштабах и pj (кривая а в осях
х и у на рис. 93).
2. Проводим горизонтальные прямые 01х,,02х№, отстоящие соответ-
ственно от нижней В и верхней А точек кривой а на расстояниях, рав-
ных отрезкам£>0г и СО2, изображающим величины ~JmaxCOcp и -g-JmmCOcp
в масштабе р^.
3. Через точку Oi — середину отрезка ОхО2 проводим горизонталь-
ную ось OiXf" и касательные OyF' и Oi/C к кривой а, наклоненные к
ОСИ OiX'" ПОД углами и Wmin.
4. Проводим произвольную прямую f' Г 9 параллельную оси орди-
нат и находящуюся справа от нее, и отмечаем точки f', k' и V ее пересе-
чения с касательными O\F' , 0{К' и осью Oix"'.
5. От точки Г на продолжении прямой f'l' откладываем отрезок
Гп' = k'l'. Из середины т' отрезка f'n' радиусом т'п' проводим по-
луокружность f q'n' и отмечаем точку q' ее пересечения с осью О\х"\
6. Подсчитываем значение (соСр)2 по формуле (10.82) или (10.83).
7. Если полученное значение (соСр)2 отличается от заданного зна-
чения (дер не более чем на 2—3%, то по формуле (10.85) или (10.87) под-
считываем коэффициент 6.
8. Если (соср)2 отличается от соср более чем на 3%, причем (соср)2 >
> (соср)2, то через середину отрезка Oi 02 проводим новую ось, повто-
ряем все построения и подсчитываем новое значение квадрата средней
угловой скорости.
9. Если (соср)2 отличается от соср более чем на 3%, причем (соср)2 <
< со ср» то через середину отрезка О\ (\ проводим новую ось, повторяем
все построения и подсчитываем новое значение квадрата средней угло-
вой скорости.
190
www.vokb-la.spb.ru - Самолёт своими
Подобные построения нужно повторять до тех пор, пока полученное
значение квадрата средней угловой скорости не будет отличаться от
со ср менее чем на 3%.
§ б. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВИКА
МЕТОДОМ СРЕДНИХ МОЩНОСТЕЙ
Приведенные выше методы определения момента инерции маховика
достаточно громоздки. В большом числе случаев, однако, эту задачу
можно решить приближенно более просто. Это можно сделать тогда,
когда развиваемые в процессе движения машины мощности не меняют-
ся заметно по величине и, следовательно, их можно считать постоян-
ными. Кроме того, как это весьма часто бывает, приведенный момент
инерции Jc машины без маховика мал по сравнению с моментом инер-
ции JM маховика и им можно пренебречь.
В заданиях силы трения в расчет не принимаются и поэтому силы
сопротивления на холостом ходу машины отсутствуют. Таким образом,
движущие силы производят работу во все время установившегося дви-
жения, а силы сопротивления только на рабочем ходу. Обозначим вре-
мя рабочего хода внутри периода установившегося движения /р, время
одного периода Т. Тогда за один период работа сил сопротивления
Лс = /р Nc, а работа движущих сил
Лд = TNK.
Здесь N означает соответствующую среднюю мощность. Работа движу-
щих сил за время рабочего хода
4ц. р = ^р^д-
Следовательно, избыток работ на рабочем ходу будет:
ЛИзб = Ас Лд.р.
Но за период установившегося движения |ЛС| = Лд. Поэтому по
заданной диаграмме одной из приведенных сил^ (движущих или сопро-
тивлений) и по заданным углам поворота <р и срр звена приведения
можно определить и другую приведенную силу.
С другой стороны-известно, что работа сил на некотором переме-
щении системы равна приращению кинетической энергии на том же
перемещении:
| Лизб | =
Отсюда
т _ ^“"^д.р
м ~ &о2„ ’
ср
Пример. Найти момент инерции маховика шестизвенного механизма (исследу-
емого в примерном расчете II (гл. XII, § 18, приложение III, лист V). Д а н о:бз
1 11
6=5 30 ’ Пср = об!мин\ ф = 2л; фр = — л. По данным кинетостатического иссле-
дования (табл. 40) среднее значение приведенного момента сил полезного сопротивле-
ния
191
7ИПХ = 208 н • м.
Решение.
“сР = 7-78 ; Мс| = дя = мпс<рр = 600 н.м.
Фо
Л = Лд . —- = 275 к • м.
д-р ф
Следовательно,
JM = 161 кг м2.
Более точное решение, приведенное в примерном расчете, дает /м = 159 кг л«2.
Следовательно, расхождение между двумя произведенными расчетами моментов
инерции маховика не превышает 1,25%.
ГЛАВА XI
ЗАДАНИЯ ПО КУРСОВОМУ ПРОЕКТУ
§1. КРАТКИЕ УКАЗАНИЯ К ЗАДАНИЯМ
В предлагаемых заданиях (приложение I, стр. 298—325) приняты
следующие условные обозначения:
/лв, /со, ABt EF и т. д. — длина соответствующего звена;
Н — ход рабочего звена (ползуна);
D — диаметр цилиндра двигателя;
k — коэффициент изменения скорости хода;
е — смещение оси движения ползуна отно-
сительно оси вращения кривошипа;
% — отношение длины шатуна к длине кри-
вошипа;
— масса ьго звена;
Jsi — момент инерции г-го звена относитель-
но оси, проходящей через центр масс;
Jo. — момент инерции ьго звена относитель-
но оси вращения;
пл — число оборотов в минуту r-го звена;
б — коэффициент неравномерности хода
машины;
mi, тц и т. д.— модуль соответствующей зубчатой пары;
zL — число зубьев Г го зубчатого колеса;
h — ход толкателя кулачка;
ес — смещение оси движения t-ro толкателя
относительно оси вращения кулачка;
Ртах — угол качания (размах) коромысла ку-
лачкового механизма;
у — угол передачи;
Ymin — минимальный угол передачи;
Фу» Фд» Фв» Фб — углы поворота кулачка, соответствую-
щие удалению, дальнему стоянию, воз-
вращению и ближнему стоянию тол-
кателя.
192
www.vokb-la.spb.ru - Самолёт
Выдавая студенту задание, преподаватель должен задать число
оборотов в минуту ведущего вала и, в большинстве заданий, ведомого,
масштаб |Лр диаграммы движущих сил или величину силы полезного
сопротивления Рп.с, вариант диаграммы функции (ср),
указать зубчатую пару, зубья которой следует профилировать (реко-
мендуется профилировать зубья последней пары), вид зацепления дан-
ной пары (нулевое, равносмещенное, неравносмещенное), а также объем
проекта.
Задание №1. Двигатель внутреннего сгорания (см. первый
примерный расчет). Рекомендуется недостающие в задании величины
принимать в следующих пределах: рр = 0,054-0,15^-^—;яод = 5004-
4- 2500 об!мин.
Опережение открытия: впускного клапана 10—20°, выпускного
25—50°.
Задание №2. V-образный двигатель внутреннего сгорания.
При синтезе основного механизма требуется определить гол, 1ав, исходя
из величины хода Н± = 2г поршня В и Л = —Рекомендуется при-
ГОА
нимать |Лр = 0,08 4- 0,15; п1 = 20004-- 4000 об/мин\ п2 = 500 4-
4- 1000 об!мин.
Задание № 3. Паровая машина. Длину Гоа кривошипа опре-
деляют по величине хода Н поршня: Н = 2г, длину 1ав шатуна — из
отношения X = п0А = 1504-400 об/мин\ рр = 0,054-0,1^^—
гоа мм
Задание № 4. Компрессорный двигатель. Длину кривоши-
па гоа и шатуна 1Ав определяют аналогично предыдущему заданию.
Длины остальных звеньев определяют из соответствующих соотноше-
ний: пол = 800 ~ 1200 об/мин; ^=0,084-0,12^4“’ № = 0,02 4-
0,03^^.
ММ
Задание №5. Топливный насос авиадизеля. Последователь-
ность работы механизма:-от кулачкового вала Ot приводится в колеба-
тельное движение рычаг О2А с роликом. По криволинейной канавке
катится ролик В, который шарнирно закреплен на конце шатуна BD,
перемещающего плунжер D. Шатун связан также серьгой С03 с конеч-
ной точкой рычага 0304, переставляемого регулятором. При увеличе-
нии скорости регулятор поворачивает рычаг О4О3 вправо, вследствие
чего уменьшается подача топлива. Синтез механизма сводится к опре-
делению положения оси Ох. Последнее определяется при динамическом
синтезе кулачкового механизма при п = 2000 4- 3000 об/мин\ ymin =
= 45 4- 60°; Р - 500 4- 1000 н.
Задание №6. Поперечно-строгальный станок (см. второй
примерный расчет). ^=*1000 4- 1500 об1мин\ = 50 4-200 н/м\
по2а = 60 4- 150 об/мин.
7 1323
193
Задание №7. Поперечно-строгальный станок. Требуется
определить го2а, (То3в)тах, пользуясь величиной k. Величины nlf
пола, рр такие же, как в задании № 6.
Задание №8. Долбежный станок. Размеры г01д, 1о3в, 1вс
определяют подобно тому, как при синтезе кулисного механизма II
примерного расчета. Величины п0,а и рР такие же, как в задании
№ 6.
Задание № 9. Механизм подачи станка-автомата. Требуется
определить 1о2а и взаимное положение 02А и штанги х — х. Величи-
ну 1о£а определяют по величине хода Н и углу качания а.
Движение звена 0<А рекомендуется принять симметричным отно-
сительно перпендикуляра, опущенного из точки 02 на ось штанги
х — х. При этом условии проекция на ось х — х амплитуды коле-
бания точки А будет равна половине хода положение оси О вра-
щения кулачка определяют при динамическом синтезе кулачкового
механизма.
Скорость вращения кулачка определяют по времени его оборота
t = + t2 + t3 + /4. Рекомендуется принимать п = 200 4-500 об!мин,
Р = 500 4- 1000 н.
Задание № 10. Пресс двойного действия предназначен для
штамповки изделий из листового материала методом глубокой вытяж-
ки. Заготовка прижимается ползуном С к матрице, помещенной на сто-
ле пресса, после чего к заготовке подходит пуансон, укрепленный в
вытяжном ползуне, и производится вытяжка. Требуется определить
гогА и 1ав по величинам Н = 2го2а и А.
Рекомендуется принимать пОгА = 30 4- 60 об!мин; п = 1000 4-
4- 1500 об! мин; рр = 250 -4 150 н!мм.
Задание № II. Горизонтально-ковочная машина.
Машина представляет собой кривошипный пресс, предназначенный
для горячей штамповки в разъемных матрицах, укрепленных в непо-
движном блоке III и боковом ползуне//, который приводится в движе-
ние кулачками от рычагов DE, EF, EL и др. После введения прутка
в штамп боковой ползун подходит к прутку и зажимает его; затем глав-
ный ползун / с установленными на нем пуансонами совершает рабочее
движение.
По величине Н = 2го2д хода ползуна I определяют Го2а, а 1ав —
из отношения Z = - Ав. Ю004- 1500 об!мин; по а= 504-75 об!мин;
го2а
Рр = 100 4- 200 н1мм.
3 а д а н и е № 12. Одноударный холодновысадочный автомат с цель-
ной матрицей. Автомат предназначен для высадки головок заклепок,
винтов и других видов подобных стержневых деталей с полукруглой,
полупотайной и потайной головками.
Длины кривошипа го,а и шатуна 1ав высадочного механизма определяют
по величине Н = 2 г01д хода высадочного ползуна и отношению
rOLA
194
www.vokb-la.spb.ru - Самолёт своими
Синтез механизма подачи производят в соответствии с задачей
13 (гл. II, § 2). Угол качания (<р5тах — 4>5min) звена 02Е определя-
ют ПО величине подачи прутка Н2 — (<р5тах— <P5min) -£• Длину й2
поступательно движущегося кулачка определяют методом динамическо-
го синтеза. Для всех вариантов задания № 12 (см. стр. 309)6 = 1/15;
= о,17; ДД- = 0,29; = 0,29;-^. = 0,5; = 0,5; /В5з =
(дв ^се ^о2е се
= 0,25/лв при п = 1500 4- 3000 об/мин; nOlA = 150 4- 250 об/мин;
Мс = 5 4- Юн • м; рР = 150 4- 250 н/мм.
3 а д ан и е № 13. Выталкивающий механизм пресса СП-2. Дли-
ну 1вс И lo3B определяют так же, как и длины кулисы и шатуна в пример-
ном расчете (см. cip. 252). Величину 1оаа определяют из отношения-^;
п = 1000 4- 1500 об/мин; п' = 70 4- 120 об/мин; рР = 1804- 120 н/мм.
Задание № 14. Механизм для подрезания шипа черепицы авто-
мата СМ-84. Положение центра вращения 03 кулачка определяют при
динамическом синтезе кулачкового механизма. Угол качания рычага ОВ
определяют графически посте построения рычажного механизма в двух
крайних положениях, обеспечивающих размах точки F, равный ве-
личине Н; п = 1000 4- 1500 об/мин; п' — 100 4- 150 об/мин; рР =
= 50 4- 150 н/мм.
3 а д а н и е № 15. Камнедробилка. Длины 1о2в и 1ва определяют
путем подбора таких длин, которые обеспечивают величины углов ка-
чания ртах звена 2 и Р' = <р4тах — ср4гПт звена 4.
Положение центра Ох вращения кулачка определяют при динами-
ческом синтезе кулачка; п == 10004- 1500 об/мин; рР = 504- 150 н/мм;
п' = 100 4- 150 об/мин.
Задание № 16. Механизм игловодителя и нитепритягивателя
универсальной машины 4-го класса ПМЗ. Данный механизм является
составной частью швейной машины. Он состоит из кривошипно-ползун-
ного механизма OJ3D (механизма игловодителя) и четырехзвенного
коромыслового механизма O1CFO2 (нитепритягивательного). Длину rotB
определяют по величине хода Н — 2rOlB игловодителя D, Ibd— из
о в *
отношения a lo.c и Icf — в соответствии с задачей 13 (гл. II,
§2).
Рекомендуемые величины п = 10004-1500 об/мин; рР = 14-5 н/мм.
3 а д а н и е № 17. Механизм нижнего натяжного ролика машины
строчки подошвы (МПС). Положение центра вращения О кулачка опре-
деляют при динамическом синтезе кулачкового механизма. Угол кача-
ния звена О±ВС определяют графически после построения механизма
в положениях, соответствующих двум крайним положениям звена
OJDE. п = 2000 4- 2500 об/мин; рР = 5 н/мм.
Задание № 18. Гвоздеподающий механизм обтяжной машины
(ОМ) обувного производства. Механизм обеспечивает автоматическую
подачу гвоздей из барабана, соединенного с шестерней 6.
7*
195
Положение оси 0t определяют при динамическом синтезе кулачко-
вого м еханизма; п' = 20 4-40 об/мин; п = 2504-500 об/мин; Л4п.с=
= 54- 15 н • м.
Задание № 19. Механизм привода качающегося конвейера (гро*
хота). Требуется определить 1АВ, 10*в. 1ВС. Длины 1АВ и 1о2в определяют по
минимальному значению угловой скорости comin звена О2В (см. задачу 15,
гл. II, § 2), а длину 1ВС — из заданного отношения X = п =
1о2в
= 10004-1500 об/мин; Р = 10004-2000 н.
Задание № 20. Механизм привода качающегося конвейера.
Первоначально определяют длину 1о2с по величине Н хода ползуна
и углу р качания звена О2С (pmax= <р2 — (ft) см. § 13, гл. XII.
Длины /о2в и Icd определяют из заданных отношений и Вели-
1о2с 1о2с
чины 1АВ и го.л находят в соответствии с задачей 13 (гл. II, § 2); и —
= 1000 4- 1500 об/мин; Р = 1000 4- 2000 н.
Задание № 21. Механизм грабельного аппарата сеноворо-
шилки. Служит для ворошения скошенной травы. Длины звеньев гв^А
и 1АВ определяют в соответствии с задачей 3 (гл. II, § 2). Числа зубьев
zx, г2 зубчатых колес и г3, z4 звездочек цепной передачи подбирают так,
чтобы было обеспечено требуемое передаточное отношение i} 4; v =
- 6 4-Ю км/ч; z\4 = 6 4- Ю; Р = 50 4- 200 н.
3 а д а н и е № 22. Механизм грабельного соломотряса комбайна.
Механизм, являющийся частью молотилки комбайна, служит для
отделения зерна и половы от соломы. При этом требуется, чтобы в
соломе, удаленной из комбайна при помощи данного механизма,
не оставалось зерно. Грабельный соломотряс состоит из двух механиз-
мов, работающих самостоятельно от одного привода: механизма —
02ВС03, служащего для выделения мелкого вороха и передачи его на
последующую очистку, и механизма граблин O±EFOby служащего для
ворошения соломы.
При ворошении солома будет находиться над ворохом и переносить-
ся граблинами к выходу из комбайна. При этом мелкий ворох (сбоина,
полова, зерно) проваливается сквозь поверхность решетки, кото-
рая совершает плоскопараллельное движение.
Синтез механизма О^АВО^ производят в соответствии с задачей 14,
а механизма О2ВСО3— в соответствии с задачей 12 (гл. II, §2).
Числа зубьев zx, z2, z3 и z4 зубчатых колес подбирают из условия
и,4 = n/tiolA\ п = 8004- 1200 об/мин; nBiA = 1504-200 об/мин; Р
= 500 1000 н; Мс = 20 4- 40 н • м.
3 а д а н и е № 23. Зевообразовательный и батанный механизмы.
Являются основными механизмами ткацкого станка. Процесс обра-
зования ткани протекает следующим образом: нити 2 основы, сматы-
ваемые с навоя /, огибая скало 3, проходят сквозь глазки галев
ремизок 4 и между зубьями берда 6. Ремизки, перемещаясь в вертика-
льных плоскостях, образуют свободное пространство 5, называемое
зевом.
196
www.vokb-la.spb.ru - Самолёт своими
Введенная в зев при помощи челнока 7 уточная нить прибивается к
опушке Q ткани 8 бердом. Одновременно происходит закрытие зева и
образование нового зева, при котором ремизки и пробранные в них
нити основы меняют свое положение, в результате чего прибитая к
опушке ткани уточная нить закрепляется у опушки. Во вновь образо-
ванный зев вводится новая уточная нить, которая снова прибивается к
опушке. Наработанная ткань отводится медленно вращающимся валь-
яном 9 и наматывается на товарный валик 10.
Зевообразовательный механизм 0102СЕ предназначен для пере-
мещения ремизок в вертикальной плоскости. Батанный механизм О А В03
направляет движение челнока с уточными нитями и удерживает его
во время покоя; он же прибивает введенную челноком нить к опушке Q
ткани.
Длины кривошипа год и шатуна 1ав батанного механизма определяют
в соответствии с задачей 13 (гл. II, § 2). Произведя динамиче-
ский синтез кулачкового механизма, определим положение оси враще-
ния 02 рычага 02С; п = 1000 4- 1500 об[мин\ Поа = 150 4- 250 об/мин\
/Ис — 3 4- 6 н • м; Ml1 = 5 4- Ю н- м.
3 а д а н и е № 24. Механизм нитеводителя мотальной машины.
Данный механизм предназначен для перемещения нити вдоль оси ка-
тушки при перемотке нитей с початка на катушку. Нить перемещается
штангой АВ, нижний конец которой 'соединен гибкой связью с бло-
ком 04. При наматывании гибкой связи на блок штанга поднимается,
при сматывании — опускается.
Вращательное движение сообщается блоку с помощью шестерни
21 и зубчатой рейки. Последняя приводится в движение кулачком 03,
получающим движение от главного вала при помощи зубчатых пар
zi—г2» и червячной передачи z3—z4.
Величину хода штанги EF определяют в зависимости от хода штан-
ги АВ, равного длине I катушки.
Время одного оборота кулачка равно времени, затрачиваемому на
намотку двух рядов нитей пряжи; п — 200 4- 300 об/мин; Р = 1 4- 4 н.
Задание № 25. Механизм валиковой подачи. Предназначен для
подачи материала в штамповочных прессах. Металлическая лента за-
жимается валиками б, которые, вращаясь, протягивают ее через штамп
пресса. На одном валу в валиками насажены зубчатые колеса z7, zs,
z9, гю> получающие вращение от зубчатой рейки NL. Последняя при-
водится в возвратно-поступательное движение кулисой ОгВ. Кача-
тельное движение кулисы образуется при вращении кривошипа ОЛ,
находящегося на валу О.
Вращение вал О получает от кривошипного вала О' пресса через
две пары z3—z4 и z5—z6 конических зубчатых колес. Во время штам-
повки валики автоматически приподнимаются и подача ленты прекра-
щается. Подъем валиков осуществляется при помощи кулачка, нахо-
дящегося на валу О, рычагов С02М и С0'2М', E03F и E'O$F' и тяг
ME и М'Е’. Изменением положения пальца А кривошипа можно
регулировать величину подаваемого материла. При синтезе механизма
197
длины (lotB)max и гОа определяют по коэффициенту k и величине хода Нг
рейки NL (гл. XII, § 13). Последнюю определяют по формуле
где Н — величина подачи материала;
— диаметр начальной окружности зубчатого колеса z7;
А — толщина металлической ленты.
Длину 1МЕ = 1м'е‘ тяги подбирают при компоновке механизма.
Задаваемые величины рекомендуется принимать в следующих
пределах: п = 10004- 1500 об[мин\ Поа= 604- 150 об[мин\ ==
= 5-4-20 н[мм.
Задание № 26. Дифференциальный механизм подачи. Дви-
жение от зубчатого колеса z± передается зубчатому колесу z2, ось кото-
рого проходит через центр В вращательной пары шатуна АВ.
С зубчатым колесом z2 жестко связано зубчатое колесо z2t передающее
вращение зубчатому колесу z3, от которого с помощью зубчатого коле-
са движение передается зубчатому колесу z5, а от него цепной пере-
дачей — ведущему валу транспортера.
Звено получает движение от кулачка, жестко скрепленного с
зубчатым колесом z19 и звеньев СОА и АВ.
Минимальный радиус кулачка и расстояние ООг определяют при
динамическом синтезе кулачкового механизма, а длину 1ав звена АВ под-
бирают при компоновке механизма из условия обеспечения максималь-
но возможных углов передачи движения между звеньями О А —АВ и
АВ — ВОЪ а также отсутствия заклинивания колеса z2 с колесом z4.
Задаваемые величины рекомендуется принимать в пределах: п =
= 750 4- 1000 об/мин; 7ИП.С = 100 4- 250 н • м.
3 а д а н и е № 27. Фрикционный механизм подачи. При вращении
эксцентрика 02А в направлении, указанном стрелкой, происходит по-
дача изделия а. Величину Iq2a эксцентриситета определяют по заданному
межцентровому расстоянию 10,о2 и углу яр качания кулисы, который
определяется через коэффициент k изменения скорости хода по формуле
(2-1).
Размеры кулисы подбирают при компоновке механизма из усло-
вия обеспечения контакта между кулисой и подаваемым материалом при
рабочем ходе.
Задаваемые величины рекомендуется принимать в следующих пре-
делах: п = 10004- 1500 об/мин; Погл = 1504-200 об/мин; Рп <4=300 4-
4- Ю00 н.
Задание № 28. Механизм привода печатного цилиндра и талера.
При вращении кривошипа ОА кулиса ОГЛ качается относительно не-
подвижной оси Ох. На кулисе имеется зубчатый сегмент, передающий
движение зубчатому колесу z2, находящемуся на валу печатного ци-
линдра и жестко связанному с зубчатым колесом z3, которое передает
движение талеру (столу). Зубчатое колесо z6 служит дополнительной
опорой талеру.
198
www.vokb-la.spb.ru - Самолёт своими р
Длину 10А кривошипа определяют по заданному межцентровому
расстоянию /oot и коэффициенту k изменения скорости хода (гл. XIL
§ 13). Другие недостающие размеры определяют при компоновке
механизма из условия обеспечения требуемого движения звеньев ме-
ханизма.
Задаваемые величины рекомендуется принимать в следующих пре-
делах: пол = 30 — 60 об/мин, Рп,с = 200 400 н.
3 а д а н и е № 29. От электродвигателя через зубчатую передачу
(zx, z2) вращение при помощи фрикционной муфты передается на
главный вал О пресса-автомата. Механизм высадочного ползуна в
основе своей представляет собой шарнирный четырехзвенник ОЛСО1Х
длину кривошипа и коромысла которого можно изменять в определен-
ных пределах (рис. 110).
К шатуну Л С на середине его длины в точке В присоединен высадоч-
ный ползун (звено 5), который при своем движении описывает траекто-
рию, представляющую собой эллиптическую кривую, вертикальная ось
которой соответствует ходу ползуна, а горизонтальная — подаче матери-
ала. Ползун перемещается по направляющим колонкам, соединенным
вверху и внизу горизонтальными салазками, образующими поступа-
тельно-движущиеся направляющие. На нижних салазках помещается
матрица I, пуансон II крепится к ползуну в нижней части его. Горизон-
тальное перемещение ползуна вместе с направляющими используется для
подачи материала. Для подачи материла применяются клещи подвижные
III и неподвижные (на схеме показаны). Подвижные клещи переме-
щаются вместе с подвижными направляющими 6. Неподвижные клещи
установлены на станине и удерживают ленту при движении ползуна
в исходное положение.
Механизм ножниц приводится в движение от эксцентрика, располо-
женного на главном валу О. Кулачок 8, установленный на ведомом
валу 02, приводится в колебательное движение от эксцентрика шату-
ном DE, поднимая или опуская нож (звено 9). Движение подвижного
ножа вниз соответствует отрезанию материала.
§ 2. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ВЫПОЛНЕНИЮ
КУРСОВОГО ПРОЕКТА
Задание на курсовой проект, объем и содержание проекта опреде-
ляет руководитель курсового проектирования.
В соответствии с программой курса теории механизмов и машин
для машиностроительных специальностей высших технических учеб-
ных заведений курсовой проект должен состоять из 5 листов формата
24 ГОСТ 2301—68 и расчетно-объяснительной записки.
Тематика листов проекта.
Лист 1. Синтез зубчатой передачи.
Лист 2. Синтез кулачкового и шарнирно-рычажного механизма.
Лист 3. Кинематическое исследование шарнирно-рычажного меха-
низма.
199
Лист 4. Кинетостатическое исследование шарнирно-рычажного меха-
низма.
Лист 5. Определение момента инерции маховика.
При выполнении курсового проекта рекомендуется придерживать-
ся следующей последовательности.
Изучение задания. 1. Изучить проектное задание, выяснив назна-
чение машины в целом и каждого механизма ее в отдельности, а также
разобраться во взаимодействии между этими механизмами. Для этого
следует воспользоваться краткими указаниями к заданиям, имеющими-
ся в XI главе, или специальной литературой той отрасли промышлен-
ности, в которой применяется предложенная в задании машина.
2. Составить кинематические схемы механизмов, входящих в со-
став машины.
3. Пользуясь данными проектного задания, определить параметры
механизмов, подлежащих определению при проектировании.
Синтез и анализ механизма привода. 1. Определить общее переда-
точное число механизма привода и каждой ступени его в отдельности.
2. Подобрать числа зубцов колес механизма привода.
3. Определить скорость вращения каждого зубчатого колеса.
4. Определить радиусы начальных окружностей зубчатых колес.
5. Начертить кинематическую схему механизма привода.
6. Построить картину скоростей и диаграмму угловых скоростей
механизма привода.
7. Определить размеры зубчатой пары, зубья которой подлежат
профилированию.
8. Начертить элементы зубчатого зацепления. На чертеже нужно
построить, как минимум, три пары зубьев, находящихся в зацеплении,
активную часть линии зецепления, рабочие участки профилей зубьев
и дуги зацепления. Все вспомогательные линии построения должны
быть четко видны на чертеже.
9. Составить таблицу значений коэфициентов относительного сколь-
жения для обоих колес и на основании этой таблицы построить
прямоугольные и круговые диаграммы этих коэффициентов.
10. Подсчитать коэффициент перекрытия двумя способами:
а) аналитическим, б) по данным, полученным из чертежа зубчатого
зацепления.
11. Оформить чертеж (лист 1). Кроме графических построений,
требуемых пп. 5, 6, 8, 9 на листе, необходимо в таблицах представить
параметры механизма привода и зубчатого зацепления, а также ско-
рости вращения зубчатых колес.
Синтез кулачкового механизма. 1. На листе 2 построить в неопре-
d2s d2s
деленном масштабе по оси ординат заданную диаграмму == ((f)
ds ds . .
или dqT = ~dqT для тслкателя кулачкового механизма.
2. Методом графического или аналитического интегрирования по-
строить диаграммы (ф) и s = s ((f).
200
www.vokb-la.spb.ru - Самолёт своими
3. Определить масштабы построенных диаграмм по оси ординат.
4. Пользуясь предельным углом передачи ymin или методом Геро-
нимуса, в случае плоского толкателя, определить габаритные раз-
меры кулачкового механизма.
5. Спрофилировать кулачок. На чертеже выделить фазовые и про-
фильные углы кулачка.
6. Определить величину угла передачи при ра' ичных положениях
кулачка и построить диаграмму его изменения.
Синтез шарнирно-рычажного механизма. Используя методы син-
теза механизмов с низшими парами, изложенные в гл. II, а также
краткие указания к заданиям данной главы, определить размеры
шарнирно-рычажного механизма, которые не даны в проектном зада-
нии и которые необходимы для построения кинематической схемы
этого механизма.
Компоновка механизмов. 1. Составить циклограмму движения ве-
домых (рабочих) звеньев комплекса механизмов данной машины.
2. Начертить кинематическую схему комплекса механизмов в по-
ложении, в котором четко видно взаимное расположение всех звеньев.
Ведущие звенья отдельных механизмов расположить одно относитель-
но другого так, чтобы движение рабочих звеньев осуществлялось в
точном соогветствии с циклограммой. На чертеже указать углы закли-
нивания ведущих звеньев.
3. Шарнирно-рычажный механизм рекомендуется изобразить также
в положениях, отвечающих границам фаз движения рабочего звена
на циклограмме и двум крайним положениям этого звена.
Все построения, связанные с компоновкой механизма, выполнить
на листе 1 или 2.
Структурный анализ и классификация шарнирно-рычажного ме-
ханизма. 1. Построить структурную схему механизма.
2. Определить степень подвижности механизма.
3. Расчленить механизм на структурные группы и определить их
класс и порядок.
4. Написать формулу строения механизма.
Кинематическое исследование шарнирно-рычажного механизма
(лист 3). 1. Построить кинематическую схему механизма в положениях,
соответствующих 12 равноотстоящим положениям ведущего звена. За
начальное (нулевое) принять положение, в котором рабочее звено
находится в начале рабочего хода, т. е. в самом крайнем положении.
Если среди построенных положений механизма не оказывается поло-
жение, соответствующее второму крайнему положению рабочего зве-
на, то нужно достроить его.
В том случае, когда ведущим звеном шарнирно-рычажного меха-
низма является кулачок, кинематическую схему построить в поло-
жениях, соответствующих 12 положениям толкателя, которые он
занимает при повороте кулачка на одинаковые доли фазовых углов
во время удаления и возвращения толкателя. Сам кулачок можно
изобразить лишь в положении, соответствующем началу удаления тол-
кателя.
201
2. Начертить траектории центров масс звеньев механизма.
3. Построить диаграмму перемещений s = s (ф) какой-либо точки ра-
бочего звена за цикл движения механизма. Необходимо помнить, что
ось абсцисс делится на части, пропорциональные углам поворота ве-
дущего звена.
4. Методом графического дифференцирования построить диаграммы
v = v (0 и тангенциального ускорения о/ = и/ (/) точки, для кото-
рой построена диаграмма s = s (ф).
5. Построить диаграммы v = v (s) и uf = w1 (s), исключив из вы-
шеуказанных диаграмм общий параметр t.
6. Определить масштабы всех построенных диаграмм.
7. Построить планы скоростей для всех начерченных положений
механизма.
8. Построить планы ускорений для положений, указанных руко-
водителем курсового проекта.
9. Определить величину и направление угловых скоростей и уско-
рений для всех звеньев механизма в положениях, для которых имеют-
ся планы скоростей и ускорений. Значение величин скоростей и уско-
рений представить в таблице.
10. В таблице дать численные значения линейных скоростей и
ускорений шарнирных точек и центров масс звеньев механизма, опре-
делив их с помощью планов скоростей, ускорений и диаграмм.
Кинетостатическое исследование шарнирно-рычажного механизма
(лист 4). 1. Построить на листе заданную диаграмму сил (моментов)
производственных сопротивлений или движущих сил (моментов).
2. Ось абсцисс построенной диаграммы разметить в соответствии
с положениями механизма, построенными при кинематическом иссле-
довании, и определить величину заданных сил (моментов) в этих по-
ложениях механизма. Значение величин сил (моментов) представить
в таблице на чертеже.
3. Определить силы инерции звеньев в положениях механизма, для
которых построены планы ускорений. Значение величин сил инерции
представить также в таблице.
4. Определить точки приложения результирующих сил инерции
звеньев в положениях механизма, для которых производится силовой
расчет.
5. Определить давления во всех кинематических парах механизма в
положениях, указанных руководителем проекта.
Примечание, Масштабы планов сил [ip следует выбирать так, чтобы все планы
были четкими и занимали максимально возможную площадь чертежа. Векторы сил,
которые при принятом масштабе р,р изображаются отрезками, меньшими 2 мм, на
плане сил откладывать не следует.
6. С помощью «жесткого рычага» Н. Е. Жуковского определить
уравновешивающую силу Ру для всех исследуемых положений.
7. Сопоставить уравновешивающие моменты, полученные при си-
ловом расчете и по методу «жесткого рычага».
202
www.vokb-la.spb.ru - Самолёт своими
8. По полученным результатам построить диаграммы, указанные
руководителем проекта.
Определение момента инерции маховика (лист 5). 1, Построить
диаграмму приведенных моментов заданных сил (моментов) для пе-
риода установившегося движения машины, предварительно определив
величину этих моментов.
2. Методом графического интегрирования построить диаграмму ра-
бот заданных сил (моментов).
3. Построить диаграмму работ движущих сил (для рабочей машины)
или сил сопротивления (для двигателя), приняв, что приведенный
момент движущих сил (сил сопротивления) является величиной по-
стоянной.
Методом графического дифференцирования построенной диаграммы
начертить диаграмму приведенных моментов движущих сил (сил со-
противления).
4. Построить диаграмму приращения кинетической энергии машины.
5. Определить приведенный момент инерции механизма и построить
диаграмму его изменения.
6. Определить момент инерции маховика одним из методов, из-
ложенных в гл. X или в учебниках по курсу, выполнив необходимые
графические построения.
7. Начертить эскиз маховика, указав его размеры.
8. Построить диаграмму изменения угловой скорости кривошипа
шарнирно-рычажного механизма.
9. Определить веса противовесов для приближенного уравнове-
шивания сил инерции, а также давление на фундамент.
Заключение. На основании проведенного кинематического и ки-
нетостатического исследования механизма отметить достоинства и
недостатки заданного механизма, пригодность его в использовании
для выполнения проектируемого технологического процесса, дать ре-
комендации по усовершенствованию механизма.
Оформление чертежей. Графическую часть проекта выполняют на
листах формата 24 (594 х 841) карандашом или тушью.
Все рисунки и таблицы на чертежах должны быть подписаны
стандартным, шрифтом согласно ГОСТ 2304—68. На чертеже обяза-
тельно должны быть указаны масштабы построений. При выборе
масштабов кинематических схем и других построений, связанных
с синтезом и анализом механизмов, допускается отклонение
от ГОСТ 2302—68.
Вспомогательные линии, связанные с выполняемыми построения-
ми, должны сохраняться на чертеже. Обозначения на фигурах чер-
тежа применять только общепринятые в учебниках или учебных по-
собиях.
Оформление расчетно-объяснительной записки. Объяснительную за-
писку пишут чернилами на одной стороне листа формата 11 (297 X
X 210). Страницы должны быть пронумерованы и иметь поля шири-
ной 40 мм, на которых выписывают полученные в результате расчета
окончательные значения искомых величин.
203
На заглавном листе записки указывают название института и
курсового проекта, фамилию студента, факультет, курс, группу или
учебный шифр студента.
В записке необходимо кратко и четко изложить все этапы выпол-
нения проекта с обоснованием выбора тех или иных методов синтеза
и анализа заданных механизмов, а также привести расчет параметров
механизмов и определение всех величин, необходимых для выполне-
ния требуемых построений.
При определении расчетных величин рекомендуется придержи-
ваться следующей системы записи. Сначала записывают формулу, по
которой производят расчет. Затем приводят числовые значения вели-
чин, входящих в формулу с указанием их размерности. После этого
числовые значения вставляют в формулу и получают конечный ре-
зультат с указанием размерности полученной величины. Промежу-
точные вычисления следует опускать. Если вычисления повторяются
для нескольких положений механизма или нескольких значений
аргумента, то вычисления следует дать в виде таблицы значений вели-
чин, входящих в формулу, а также значений конечного результата.
Все вычисления, за исключением расчета элементов зубчатых колес,
следует выполнять с помощью логарифмической линейки. Степень
точности расчетов должна быть равна степени точности исходных
данных.
Объяснение выполняемых построений необходимо сопровождать
эскизами, а также указанием на лист, где эти построения выполнены.
В записке обязательно должен быть приведен список использован-
ной литературы. При его составлении следует придерживаться сле-
дующей общепринятой системы записи: указывать порядковый но-
мер литературного источника в составляемом списке, затем фамилию
и инициалы автора, наименование книги или журнальной статьи, наи-
менование издательства и год издания, а для журнальной статьи наи-
менование журнала, его номер и год издания. При ссылке в тексте
на тот или иной литературный источник указывают лишь порядко-
вый номер, под которым он значится в прилагаемом списке. Объяс-
нительная записка должна заканчиваться оглавлением.
ГЛАВА XII
ПРИМЕРНЫЕ РАСЧЕТЫ
(Расчетно-объяснительные записки)
I. Расчет четырехзвенного механизма
Спроектировать и исследовать механизм четырехтактного двига-
теля внутреннего сгорания (задание № 1. вариант VI) по следующим
данным:
Ход поршня (ползуна) Н = 200 мм.
Диаметр цилиндра D= 180 мм.
201
www.vokb-la.spb.ru - Самолёт своими
Смещение оси цилиндра относительно оси коленчатого вала (кри-
вошипа) е = 40 мм.
Коэффициент изменения скорости хода k = 1,035.
Расстояние lAS центра 5 масс шатуна АВ от головки А шатуна
lAS— Q,381ab- Масса поршня т3= 19,4 кг. Масса шатуна т2 = 11,72 кг.
Масса неуравновешенной части кривошипа тх = 14,3 кг.
Расстояние l0Sl центра Sx масс неуравновешенной части кривошипа
от оси вращения кривошипа losx » гоа-
Радиус инерции шатуна относительно оси, проходящей через его
центр масс pi == 0,17 1Ав-
Момент инерции коленчатого вала относительно оси вращения
Jo =0,1 кг • м2.
Числр оборотов в минуту коленчатого вала пОа = 650 об [мин.
Коэффициент неравномерности хода двигателя 6 = .
Масштаб индикаторной диаграммы = 0,05 —•
Число зубьев колес привода распределительных валиков (кулач-
ков) zx = 36; ?2 = ?2 = 14; ?3 = ?з = 72.
Модуль зубчатых колес т = 3,5лш.
Зацепление зубчатых колес исправленное (равносмещенное).
Величина подъема толкателей клапанов h ~ 10 мм.
Смещение оси толкателя клапана относительно оси вращения ку-
лачка: правого клапана (впускного) ех = 0, левого клапана (выпуск-
ного) е2 = 5 мм.
Минимальный угол передачи движения ymin = 60°.
Угол поворота кулачка, соответствующий подъему толкателя, <ру =
= 50°.
Угол поворота кулачка, соответствующий дальшему стоянию тол-
кателя, фд = 10°.
Угол поворота кулачка, соответствующий опусканию толкателя
Фв = 50°.
Опережение открытия:
впускного клапана 10°;
выпускного клапана 32°.
Изменение ускорения толкателя при его поднятии и опускании
происходит по закону наклонной прямой линии.
§ 1. СИНТЕЗ КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
Основой данного двигателя является четырехзвенный кривошипно-
ползунный механизм. Длину г кривошипа и / шатуна определяем в
соответствии с задачей 3 (§ 1 гл. II).
По заданному коэффициенту k вычисляем, пользуясь формулой
(2.1), угол ©:
е = ио • -^4-= 180° • зс Об'.
205
На произвольно выбранной прямой хх (рис. 94, а) откладываем
в масштабе^ отрезок В]Вц = Ну а на расстоянии е — параллельную
ему прямую х1х1. На этой прямой должен лежать центр О вращения
кривошипа.
На отрезке BjBn строим окружность — геометрическое место вер-
шин вписанного угла 0. На дуге В^МВц этой окружности должна
лежать точка О. Следовательно, центр О вращения кривошипа лежит
на пересечении прямой х±хг с указанной дугой.
Точку О соединяем с Bf и Вц. Полученные отрезки ОВ[ и ОВц
изображают в масштабе соответственно величины I — г и I + г.
Рис. 94
Если из отрезка ОВц вычесть отрезок 0В\ и полученную разность
КВц разделить пополам, то полученные отрезки LBn и 0L в масштабе
представляют собой соответственно искомые величины г и /.
Величины г и / более точно можно определить аналитически.
Из треугольника CDB\\ имеем:
d о В 200 200 1 о л о л
R. — СВа — 2sin0 — 2 sin 30 06, = 2.0 0541 ~ 1848,4 мм.
Величина
I + Г = ОВ„ = V (OF)2 + (FBu)2 =
= V(OE + EF)2 + (FBh)2 = У (OE + 4)2 + e2‘
Длину отрезка OE определяем из треугольника ОСЕ:
ОЕ = ]/(0С)2 — (СЕ)2 = /(ОС)2 — (CD — ЕЕ)2 =
= /Е2 —(Ecos© —е)2 = /1848.42 — (1848,4 cos 3° 06' —40)2 =
= /1848.42 —(1848,4 • 0,9985 —40)2 = 395,4 мм.
206
www.vokb-la.spb.ru - Самолёт своими
Таким образом
1 + г = ]/" (395,4 4- 402 = 497 мм;
l — r=0BI = 2Rsin-^-,
где б = у — 0;
ОЕ ОЕ 395,4 noiQO
sin Y = -ос = ~R~ = 18484 = °’2139
ИЛИ
' у = arc sin 0,2139 — 12°2Г, 6 = 12° 21'—3° 06'= 9° 15'.
После подстановки значений R и 6 в уравнение I — г получим
Z — г = 2 • 1848,4 sin = 2 1848,4 • 0,0806 « 298 мм.
Длину I шатуна и г кривошипа определяют из системы уравнений
I + г = 497;
I — г = 298.
Решив эти уравнения, получим:
г = 99,5 мм; I = 397,5 мм.
Кинематическую схему механизма (рис. 94, б) вычерчиваем на лис-
те 1 (приложение II) в масштабе pz ~ 0,002 м/мм.
Впускной клапан располагаем справа под свечой зажигания, а
выпускной — слева от оси цилиндра двигателя.
Положение осей распределительных (кулачковых) валиков уста-
навливают при конструктивной разработке двигателя. А пока пред-
варительно задаемся следующими координатами этих осей по отноше-
нию к оси вращения О± кривошипа (120; 162), О2 (195; 125) (расстояние
между осью распределительного вала и осью вращения кривошипа
должно быть больше 2г).
Положение центров О' и О" паразитных колес 2 и 2' определяем
при помощи засечек из центров О, Оги О2радиусами, равными Межцен-
тровым расстояниям Л1,2 и А2,з (см. ниже). Углы между линиями
центров зубчатых колес определяем непосредственно по чертежу:
z OO'Oi = 113°; z 00" О2 = 148°.
§ 2. СИНТЕЗ ПРИВОДА РАСПРЕДЕЛИТЕЛЬНЫХ ВАЛИКОВ
Привод распределительных валиков состоит из центральной шес-
терни (?j = 36 зубьев, т = 3,5), расположенной на оси вращения О
кривошипа О А (оси коленчатого вала, приложение II, лист 1), двух
паразитных шестерен (z2 = z2 = 14 зубьев) и двух зубчатых колес
207
(z3 = г’з — 72 зубца), расположенных на распределительных валиках.
Передаточное отношение t1>3 привода:
ii.3 = — = — - (— I)2- = 2
п3 П/г ' 3 4 * * 7 36
откуда находим скорость вращения nk распределительного валика
(кулачка)
Расчет элементов зубчатых колес. Параметры зуборезной рейки
f0-= 1; с' = 0,25; осо = 20°.
По табл. 7 (гл. IV) выбираем коэффициенты смещения заданного
вида исправления для пары сопряженных колес, имеющих наимень-
шую сумму чисел зубьев (пара 1—2)
£1 = £з = -0,375; g2 = 0,375.
Расчет элементов зубчатых колес производим по уравнениям, пргь
веденным в табл. 1 (гл. IV).
1. Шаг зацепления по делительной окружности:
t =тзг = 3,5 х 3,14 = 10,99 мм.
2. Радиусы делительных окружностей:
mz, = 2 3,5 X 36 = ——н — 63 мм;
_ mz2 “ 2 3,5 X 14 о . е • = — = 24,5 мм;
_ mz3 гд* " 2 3,5 X 72 ion = g = Izb ММ.
3. Радиусы основных окружностей:
гО1 = гД1 cos осо = 63 cos 20е = 63 • 0,939 = 59,15 мм;
rOi = cosoc0 = 24,5 cos 20° = 24,5 • 0,939 = 23,0 мм;
гОз = гДчсо5а0 = 126 cos 20 = 126 0,939 = 118,31 мм.
4. Толщина зуба по делительной окружности:
8д. = 4 + 2^mtga0 = —2 0,375 • 3,5tg20° =
= Д— — 2 • 0,375 • 3,5 • 0,364 = 4,54 лш;
8Л = 4 + tga0 = + 2 • 0,375 • 3,5tg20° =
= + 2 - 0,375 • 3,5 • 0,364 = 6,45 мм;
£
208
www.vokb-la.spb.ru - Самолёт
sAa = 4 + 2^ tg а0 = 4г- - 2 • °>375 • 3’5 20° =
= 4=4 — 2 • 0,375 • 3,5 • 0,364 = 4,5 мм.
£
5. Радиусы окружностей впадин:
7?=, = rRi _ т (f0 + с'о — = 63 — 3,5 (1 + 0,25 + 0,375) = 57,31 мм;
Rit = гд, — т(f0 + < — ?2) = 24.5 - 3,5 (1 + 0,25 — 0,375) = 21,44 мм;
Ri, = гЛз - т (f0 + с’ - U = 126 - 3,5 (1 + 0,25 + 0,375) =
= 120,31 мм.
6. Межцентровые расстояния:
/nzCf п о с
Л1.2 = ~ (36 + 14) = 87,5 мм;
« о г
Л2,3 = = — (14 + 72) = 150,5 мм.
7. Начальные окружности для колес равносмещенною зацепления,
как известно, совпадают с делительными окружностями, поэтому* их
радиусы равны:
Г1 = гД1 = 63 мм;
г2 = Гд2 = 24,5 мм;
г3 = гДз =126 мм.
8. Глубина захода зубьев:
/13 = 2т[0 ~ 2 • 3,5 -1=7 мм.
9. Высота зуба:
h = h.< + с'т = 7 + 0,25 • 3,5 = 7,87 мм.
10. Радиусы окружностей выступов:
Я, = R t + h - 57,31 + 7,87 = 65,18 мм;
Re2 = Ri2+h =21,44 + 7,87 = 29,31 мм;
Re3 = Ri3 +h = 120,31 + 7,87 = 128,18 мм.
Профилирование зубчатых колес (приложение II, лист 1). Про-
фили равносмещенного зацепления пары 1—2 строим в последо-
вательности, изложенной в гл. IV, § 3 (масштаб построения ==
= 0,0002 м!мм).
Построив профили зубьев, выделяем активную часть’ линии зацеп-
ления, дуги зацепления и рабочие участки профилей зубьев. Точки
Л и В пересечения теоретической линии зацепления MN с окружнос-
тями выступов ограничивают активную часть АВ линии зацепления.
Дуги AF± и BF*, проведенные из центров О и О' радиусами ОА
209
и О'В, отсекают на профилях зубьев их рабочие участки и F2E2.
Точки пересечения нормалей (касательных к основным окружностям)
F±CU DiElf F2D2, С2Е2, проведенных к профилям зубьев в крайних
точках их рабочих участков, с соответствующими начальными окруж-
ностями определяют начальные и конечные точки дуг зацепления
Ci-Di и С2Е)2*
Эпюры относительных скольжений сопряженных профилей зубьев
для данной пары колес строим по формулам (4.29) применительно к
выбранной системе координат X, х:
^1=1+ *2,1- *2,1 = 1 + у-
& * Л ^2
е______51_.
е — х z2 ’
Z2 = 1 + *1,2-------------*1,2 = 1 + -~
Л Zi
е z2
х zx
Длина теоретической линии зацепления MN: е = 150 мм; величи-
ны^ иХ2 приведены в табл. 13.
Таблица 13
Значения коэффициентов относительных скольжений пары 1—2
X 13,5 21 31,5 42 51 60 69 78 90,5
0,746 0,582 0,317 0 —0,325 -0,715 • —1,19 —1,79 —2,9
^2 —2,65 —1,39 —0,47 0 0,24 0,415 0,54 0,64 0,745
На профилях зубьев строим круговые диаграммы скольжений (гл. IV,
§ 5). Коэффициент перекрытия определяем по формулам (4.22) и (4.23):
= 1ав = № • Н/ 77 » 0,2 = 15,4 = 1 4Q.
1,2 /?mcosa0 /zwcosa0 3,5-л-cos20° 3,5 • л • 0,939 ’ ’
е' = К. ~ г°. + ~ 4 ~ Л1-2 sin а =
Ь2 /ял cos
_ У 65,182 — 59,152 4- V 29,312 — 232 — 87,5 sin 20э ,
“ 3,5-л-cos20° — 1,01.
Профилированные пары 2—3 (приложение II, лист 1). Из центра О'
проводим линию центров 0'02 в соответствии с ее направлением,
установленным выше (см. § 1 данной главы), т. е. под углом 113° к
линии О'О,. Отметив на ней положение центра О2, строим соответству-
ющие окружности для колеса 3.
Так как в зацеплении пары 2—3 колесо 2 является ведущим, а
не ведомым, как в паре 1—2, то через полюс зацепления Р2,з про-
водим теоретическую линию зацепления M'N', нормальную к ле-
вому профилю вычерченных профилей зубьев второго колеса. Профили
210
www.vokb-la.spb.ru - Самолёт своими
зубьев третьего колеса строим методом, изложенным в гл. IV, § 3.
Выделяем активную часть линии зацепления А'В', дуги зацепления
C2D2 и C3D3 и рабочие участки профилей F2E 2 и F3ES.
Эпюры относительных скольжений строим по формулам:
Длина е' = 258 мм\ величина Х2 и Х3 приведены в табл. 14.
Таблица 14
Значения коэффициентов относительных скольжений пары 2—3
х' 11 21 31 42 51,5 61 71,5 82 90,5
к'2 • • • • —2,36 —1,19 -0,42 0 0,22 0,37 0,49 0,58 0,63
^3 0,77 0,54 0,29 0 —0,28 —0,59 —0,97 — 1,34 -1,76 1
Коэффициент перекрытия определяегл по формуле (4.22):
_ Л7Г - щ _ 79,5.0,2 _ 1
62,3 ттс cos а0 3,5 • л cos 20э ’
Проверяем полученное значение е2,з по формуле (4.23):
, R2e — й + V — Го — А2 з sin а
g* е2___°2 _____е3____°8__________ __
2Д = тл cos а0
_ у 29,ЗР — 23^4-1^128,182 — 118,3^ — 150,5 sin 20
3,5л cos 20°
§ 3. ДИНАМИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА
Построение диаграмм движения толкателя (приложение II, лист
2). По оси абсцисс системы координат ---<р в произвольном мас-
штабе рф откладываем углы фу = 50°, <рд = 10°, <рв = 50°. Диаграмму
d2s d2s , ч
_ ==-----(ф) строим в соответствии с заданным законом изменения
этой функции, для чего через середины отрезков фу и <рв проводим на-
клонные прямые с максимальными ординатами
произвольной длины, причем О—О' = 17—17' >
<ру = <рв. Для построения диаграммы-^—- = — (ф) графически интегря-
0—0' и 17—17'
так как по заданию
211
d2s d2s
руем график —(<p) методом, изложенным в § 5 гл. VII.
Диаграмму перемещений толкателя s = s (<р) строим как интеграль-
ную кривую функции = — (Ср).
По формулам (7.16), (7.17) определяем масштабы диаграмм.
Масштаб оси абсцисс диаграмм движения толкателя:
л .110°
.. _ <Гр 180" 11и ЛА11СО Р^
Р<£ - 7i-Г7~ ~ ---- = 0,0 1 1 63 - ,
0—-17 16а ’ мм
где
<Рр = <Ру + <Гд + <Рв = 50+ 10 + 50 = 110°.
Масштаб оси ординат диаграммы перемещений:
Ps = я —ёа = -sr =0,192 мм/мм = 0,192 • 10~3 м/мм.
О--- О OZ
Масштаб оси ординат диаграммы — = (<р):
’ * = ТГн ~ о он kT- зо ~ ^’55 мм/мм = 0,55 • Ю-3 м/мм.
dq> 1
s d^ s
Масштаб оси ординат диаграммы (<р):
В ds
., _ 0 5о _________________ Q ММ q п—з м
И ” 0,01163.20 “ Z’dZ ~ Z’6Z * 1U
dq>* -
Пренебрегая незначительными периодическими колебаниями угло-
вой скорости кривошипа (см. § 8 данной главы), можно принять
угловую скорость распределительных валиков постоянной (со*=
= const). При этом условии ф = со/ и оси абсцисс диаграмм движения
являются осями времени, а диаграммы (ф) и (ср)
являются диаграммами скорости и ускорения толкателя.
Масштаб времени:
И/ = = 0,342 • 10-3 сек/мм,
* * 0Д> о4,1о
где
= -ж- = = 34’16 Рад1сек-
Ov OU
Масштаб скорости:
Ре = = 0,55 • 10-3.34Л6 =18)7 . 10-3
dq>
212
I
www.vokb-la.spb.ru - Самолёт своими pl
Масштаб ускорений:
|ЛЮ == р Л. 4 = 2,37 • 10-3 • 34,1 б2 = 2,75 *'сек~2-
r w ft мм
tgd ’
в t-м положении
Определение минимального радиуса кулачка (приложение II, лист2).
Отложив на оси у± — у± отрезок Со — VIII, равный величине хода h
толкателя в масштабе pz = 0,192 делим его на части Со/,
CqII, CqIII, C0XVI, пропорциональные ординатам 1—Г', 2—2",
3—5",..., 16—16" диаграммы s = s (ф). В данном случае C0Z — 1—1",
CJ7 = 2—2", Cjll - 3—3",..., C^XVI = 16—16", так как pz - ps.
На каждом перпендикуляре к оси уг — у19 проведенном через точки
I, II, III,..., XVI, откладываем отрезок z, который в z-м положении:
У1 • И ds
<?ф _ dtp
1 Hz W
ds ds . 4
где yt — ордината диаграмм (<p)
1б^ = -7~=—=^i-
-Ar
dtp Mq> “1
Отрезки z определяем графически, для чего через точку О' пе-
« ds ds # \
ресечения осей yt — уг и О — <р диаграммы — = (ф) проводим
наклонную прямую MN под углом О = arctg j.icp/7± = arctg 0,01163 х
X 30- arctg 0,3489 « 19°.
Через конечные точки Г, 2', 3',..., 16' ординат у проводим пря-
мые, параллельные оси О — ф, до встречи с прямой MN, и параллельные
оси уг — yL, до пересечения с соответствующими перпендикулярами
к оси у± — уА. Отсекаемые отрезки 1 — 1,11 —2, III— 3,..., XVI — 16
равны отрезкам z в точках разметки положений толкателя. Точки /,
2, 3, ..., 16 отрезков z соединяем плавной кривой^ которая и будет
представлять собой график функции (s). Под углом ymin — 60э
к оси отрезков z проводим прямые АВ и СД, касательные к кривой
графика Область, ограниченная углом BOJD, будет об-
ластью возможных центров вращения кулачка.
За центры вращения кулачков принимаем точку О1 для впуск-
ного клапана и точку О2 для выпускного клапана. Последняя нахо-
дится па расстоянии = 26 мм справа от оси уг —yL при
вращении кулачка в направлении вращения часовой стрелки.
Величины минимальных радиусов кулачков:
го, = = 136 • 0,192 «26 мм;
гОя = О^0 • р, = 187 • 0,192 « 36 мм.
213
Величины углов передачи
Значение параметра
Параметр 0 1 2 3 4 5 6 7 8
Ф 0 6°15' 12° 30' 18° 45' 25° 31° 15' 37° 30' 43° 45' 50°
90° 74° 64° 61° 61° 63° 69° 78° 90°
у" 82° 85° 77° 72° 72° 74° 79° 85" 84°
Профилирование кулачка впускного клапана (приложение II, лист 2).
Из центра проводим прямую — ось движения толкателя и из
того же центра описываем радиусом гО1 в масштабе = 0,0005 м!мм
окружность; от точки пересечения Со окружности с осью О^К^ откла-
дываем величину подъема толкателя Со<8 = — = 20 мм. Разметку
Pz
траектории С08 центра ролика производим в соответствии с графиком
s = s (ф), для чего слева от оси Os под произвольньш углом про-
водим прямую OQ и на ней откладываем отрезок 08 = С08, конечную
точку которого соединяем с конечной точкой VIII проекции наибольшей
ординаты 8—8". Через конечные точки /, II, III, ..., VII проекций
ординат диаграммы s = s (ф) проводим прямые 1—I [] 8—VIII, 2—П\\
II 8—VIII, 3—III |[ 8—VIII и т. д. Полученные отрезки О—1, 1—2,
2—3, ..., 7—8 переносим на траекторию центра ролика.
Далее от оси в сторону, противоположную вращению кулач-
ка, проводим дугу 8—17' радиусом Ог8 и откладываем углы / 8О\8' =
= фу = 50°, / 8'0у9' = фд — 10°, / 9'0^17' = фв = 50°. Каждую из
дуг 8—8' и 9'—17' соответствующих центральных углов фу и фв де-
лим на восемь равных частей в соответствии с разметкой оси абсцисс
диаграммы s = s (ф). Точки делений Г, 2', 3', ..., 16' соединяем
с центром Ох.
Если снести дугами окружностей, описываемых из центра Оп точ-
ки разметки пути толкателя на лучи ОгГ, Ог2', О^З',..., OJ6',
0±17', то получаем точки 1", 2", 3",..., 17".
Соединяя последовательно эти точки, получим центровой профиль
кулачка для подъема и опускания толкателя. Части профиля кулачка,
соответствующие выстою толкателя в поднятом и начальном положе-
ниях, будут ограничены дугами окружностей, описанными из центра Ог
радиусами Ог8' и ОгС0.
Практический профиль строим как огибающую окружностей,
проведенных из центров, расположенных на центровом профиле,
радиусом, равным радиусу г ролика. Принимаем радиус ролика
г= 0,8 pmin =0,8-8^6 мм, где pmin — радиус кривизны центро-
вого профиля на участке наибольшей кривизны. Радиус кривиз-
ны pmin определяем как радиус окружности, вписанной в участок
214
www.vokb-la.spb.ru - Самолёт своими
Таблица 15
в положении
9 10 И 12 13 14 15 16 17
60° 66° 15' 72° 30' 78° 45' 85° 91° 15' 97° 30' 103° 45' 110°
90° 78° 69° 63° 61° 61° 64° 74° 90°
84° 74° 67° 62° 60° 30' 60° 30' 63° 70° 82°
профиля наибольшей кривизны (см. § 12, гл. XII, приложение III,
лист 2).
Профилирование кулачка выпускного клапана (приложение II, лист 2).
Профилирование данного кулачка отличается от профилирования ку-
лачка, описанного выше, лишь тем, что разметку пути С08 центра ро-
лика сносим не на радиальные прямые, а на касательные к окружности
радиуса 02Г, равного величине е2 смещения оси движения толкателя
С*о/С2 относительно оси 02 вращения кулачка 02Т = = 10 мм.
Касательные проводим из точек 2', 3',..., 17' деления дуг,
стягивающих углы <ру и <рв.
Радиус ролика кулачка принимаем равным радиусу ролика пер-
вого кулачка (d = 12 мм}.
Построение диаграммы изменения* угла передачи (приложение II,
лист 2). Для определения минимальных радиусов на чертеже точки Д
2, 3, ...,16 отрезков г соединяем с центрами 0х и 02 вращения кулачков
(штриховые линии соединяют эти точки с центром 02) и измеряем острые
углы у!, у2, •••> Ть ?2 и т. д., образуемые проведенными линиями и
отрезками z. Эти углы по величине равны углам передачи в соответст-
вующих положениях кулачков.
Величины углов передачи даны в табл. 15.
Строим графики I и II изменения углов передачи в функции" угла
поворота кулачка.
Кривая у' построена для кулачкового механизма впускного кла-
пана, а кривая у" (пунктирная) — для выпускного клапана. Масштаб
построения pv = 1 град [мм.
§ 4. КОМПОНОВКА МЕХАНИЗМА
Составим циклограмму движения механизмов двигателя (рис. 95).
Рабочий процесс двигателя происходит в течение двух оборотов кри-
вошипа.
При повороте кривошипа на угол от 0 до (180° — 0)» 177° совершает-
ся первый такт — всасывание (впуск рабочих газов); от 177 до 360° —
второй такт — сжатие; от 360° до 360° + (180° — 0) = 537° — третий
такт — расширение (рабочий ход); от 537° до 720° — четвертый такт —
215
выпуск. Распределительные ва-
лики за это время совершают
один оборот. Учитывая опереже-
ние открытия, на циклограмме
показываем, что открытие впуск-
ного клапана происходит за 10°
до начала всасывания, а откры-
тие выпускного — за 32° до на-
чала выхлопа.
рис д5 Чтобы определить положение
кулачков, соответствующее вы-
бранному промежуточному положению кривошипно-ползунного меха-
низма (в нашем случае за 40° до начала следующего цикла) на цикло-
грамме основного механизма (ф = 720° — 40°), проводим прямую EF
(рис. 95),которая отсекает на циклограммах для кулачков соответству-
ющие углы поворота их. В этих положениях и изображаем кулачки на
кинематической схеме механизма (приложение II, лист 1), т. е. в положе-
ниях, когда кулачок I не довернулся до 15° до начала открытия клапана,
а кулачок II повернулся на 87° 30' после начала открытия клапана.
На кинематической схеме механизма изображены следующие по-
ложения кривошипно-шатунного механизма;
OAjBi — нижнее крайнее положение;
О АВ — промежуточное положение, которому соответствуют поло-
жения кулачков;
0АцВи — верхнее крайнее положение;
ОА'В' — положение механизма, соответствующее открытию вы-
пускного клапана;
ОА "В" — положение механизма, соответствующее открытию впуск-
ного клапана.
§ 5. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
Кривошипно-ползунный механизм (рис. 96) состоит из четы-
рех звеньев: О — стойки; 1 — кривошипа О А; 2 — шатуна АВ; 3 —
ползуна (поршня) и четырех кинематических пар: I — стойка — кри-
вошип ОА; II — кривошип О А —шатун АВ; III —шатун
! АВ — ползун В; IV — ползун В — стойка.
ГЛ # Все кинематические пары — низшие. Таким образом,
LjJ имеем число подвижных звеньев п = 3; число низших
\ кинематических пар р2 — 4 и высших pt = 0. Степень
\у2 подвижности определяют по формуле Чебышева (1.1)
\ Й7 = 3п-2р2 — р1 = 3-3 —2-4=1.
А I ©4 Согласно классификации И. И. Артоболевского дан-
Z ный механизм (рис. 96) состоит из механизма 1-го клас-
0 d ' са (стойка-кривошип ОА) и структурной группы 2-го
класса 2-го порядка (шатун АВ — ползун В). Поэтому
О механизм является механизмом 2-го класса.
Рис. 96 Формула строения механизма — I (0— 1) -> П2 (2, 3).
216
www.vokb-la.spb.ru - Самолёт
§6. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ
КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
Планы механизма (приложение II, лист 3). Из центра О — оси вра-
щения кривошипа О А —радиусами, равными по длине I + г и I — г,
в масштабе pz = 0,0025 м[мм (АП : 2,5) на оси х — х движения пол-
зуна отмечаем — верхнее и В5 — нижнее крайние положения пол-
зуна В. Прямые ОАоВ0 и OA'qBq — положения механизма, соответствую-
щие крайним положениям Во и Bq ползуна. Траекторию пальца А
кривошипа от точки Ао дрлим на 12 равных частей и из полученных
точек А19 Л2, А3,..., Л1Х радиусами АВ = ~ = 00025 = мм от‘
мечаем положения Вх, В2, В3,..., Вхх ползуна на линии B{}Bq. Соеди-
нив точки Лх, Л2, Л3, ..., Лхх с центром О и соответствующими точ-
ками В19 В2, B3i ..., В1Х, получим планы механизма. Кривая, после-
довательно соединяющая центры So, Sx, 82,...,8Х1 масс шатуна в раз-
личных его положениях, будет траекторией точки S.
Планы скоростей. Построение планов скоростей и ускорений рас-
смотрим для 1-го положения. Из полюса р (рис. 97, б) плана скоростей
в направлении вращения кривошипа перпендикулярно к ОА отклады-
ваем вектор скорости va = pa^v точки Л, т. е. ра _1_ОА и ра = рх (ОЛ),
где рх — масштаб условных кривошипов плана скоростей (принимаем
Pi = 2).
Масштаб плана скоростей определяем по формуле (6.12):
и = А = 68 ' °’0025 = 0,085
рг 2 ’ мм ’
где со — угловая скорость кривошипа
лп л • 650
<*> == 'зо- = —зо—68 рад/сск.
Скорость точки В определяем по формуле
ВА
и условию
С’в||х —X,
где Vba= (flb) pD — вектор скорости точки В в ее вращательном дви-
жении относительно точки Л, перпендикулярный к оси звена АВ
(рис. 97, а). Скорость точки S находим по теореме подобия — =
откуда as = • ab = 0,38 ab.
Величины as приведены в табл. 16. Соединив точку s с полюсом р,
получим скорость точки s:
vs = ps • IV
Планы скоростей для остальных 12 положений строят аналогично.
217
Таблица 16
Величины отрезков, изображающих в масштабе относительные скорости vBA и vSA
Отре- зок Значение отрезка в положении
0 1 2 3 4 5 6' 6 7 8 9 10 11
ab, мм 80 74 48 6,5 37 68,5 80 81 72 46 6,5 35,5 67
as, мм 30 28 18 2,5 14 26 30 31 27,5 17,5 2,5 13,5 25,5
Если из произвольной точки О отложить вектор vs и соединить их
конечные точки плавной кривой, получим годограф скорости точки s.
Планы ускорений. Из полюса л (рис. 97, в) откладываем вектор
Wa = ла • pw нормального ускорения точки А кривошипа, который
направлен по кривошипу к центру вращения О
па || АО 0; па = р2 (ОЛ) = 2 (ОЛ).
Угловую скорость кривошипа принимаем постоянной (<о = const).
Масштаб плача ускорений определяем по формуле (6.13):
со2р/ 682 • 0,0025
= щ =------------2-----
На х
= 5,785 м • сек~2!мм.
Рис. 97
Ускорение точки В находим по урав-
нению
™В = + ™ВА + ^ВА
И условию WB II х — X.
В соответствии с написанным уравнени-
ем через точку а (рис. 97, в) проводим пря-
мую, параллельную оси звена АВ. и от-
кладываем на ней в направлении от точки
В к точке Л отрезок ап, представляющий
собой в масштабе ускорение Wba- Через
точку п проводим прямую nb, перпендику-
лярную к оси звена Л В, которая будет иметь
направление ускорения Wba- Затем через
точку п проводим прямую в направлении
ускорения Wb, т. е. параллельно направ-
ляющей х — х. Точка b пересечения двух
проведенных прямых и будет изображе-
нием точки В.
Отрезок ап, изображающий на плане
218
www.vokb-la.spb.ru - Самолёт своими
ускорений величину нормального ускорения, определяем по уравнению
ап = = vh = (а6)2^ = W . ь = _W_
Mw ’ P'/P'W АВ |Л| С 9
159 • 2а о1о
где с =----------=------к---= 318 мм.
^2 *
Величины отрезка ап даны в табл. 17.
Таблица 17
Величины отрезков, изображающих в масштабе относительную скорость vBA
и в масштабе нормальное ускорение wBA
Отрезок Величина отрезка в положении
0 1 2 3 4 5 6' 6 7 8 9 10 11
ab, мм 80 74 48 6,5 37 68,5 80 81 72 46 6,5 35,5 67
ап, мм 20 17 7 0,13 4 15 20 20,5 16 6,5 0,13 4 14
Ускорение ws = srs • точкиЗ определяем аналогично определению
скорости точки 3.
Значения as приведены в табл. 18.
Таблица 18
Величины отрезков, изображающих в масштабе относительные ускорения
WB4> WSA
Отрезок Величина отрезка в положении
0 1 2 3 4 5 6' 6 7 8 9 10 11
ab, мм 22 36 67,5 85,5 75 45,5 22 21 38 66 81 72,5 47,5
as, мм 8,5 13,5 25,5 32,5 28,5 17 8,5 8 14,5 25 31 27,5 18
Из точки О откладываем векторы и, соединив их конечные точ-
ки плавной кривой, получим годограф ускорений точки 3. Действитель-
ные величины скоростей и ускорений, определяемые из планов, даны
в табл. 19.
Диаграммы движения ползуна (поршня). Строим диаграмму пере-
мещений Sb = sb (0 ползуна В (приложение II, лист 3).
Масштаб перемещений ps = pz = 0,0025 м]мм.
219
61 е •“•4 4,08 5,23 454 440 оо 260
Ef S *5 \D о 6,54 । 6,58 3,02 173,5 321 23,8 416
c3 о 6,80 6,80 । 0,55 107 295 0,75 469 1
со 5,18 5,95 3,91 ! 263 456 37,6 379
г- 2,97 ОО 6,12 321 405 92,5 661
S к к <и о о 0,29 4,21 6,88 347 420 118 23,8
ч о с я <у со 6,80 о 4,21 6,80 463 350 422 117 46,3
ce s M S я c3 Значен! to со со 4,84 5,82 364 411 87,7 249
X CJ s be o> 5,18 5,03 3,14 < 315 359 23,8 434
О * 3 со 7,02 6,88 0,55 136 289 0,75 495
X Ct о ье rt Ct a X эХ s s сч 6,88 6,54 4,08 185 333 40,5 391
— 4,21 5,1 6,29 474 457 со ОО LO СО г—<
CJ Ct о Ьй о >> о О 4,21 6,80 584 509 116 со СП ХГ
тельное значение скоростей и Параметр м/сек у5, м/сек у5, м/сек о сз § ч В ье £ В ujs, м/сек2 ‘ье В ез 04 в
Действи
220
www.vokb-la.spb.ru - Самолёт своими
Масштаб времени определяем по формуле (6. 3):
•*< = -5=тГ=" °'00077
где Т — время одного оборота кривошипа, определяется по форму-
ле (6.2).
Диаграмму скорости vb — vb (О строим методом графического диф-
ференцирования диаграммы sB = sB (f) (см. гл. VL § 5).
Полюсное расстояние 0л1 = HL выбираем так, чтобы масштабы
планов скоростей и диаграммы скорости vb = ^в(0 были крат-
ными.
В нашем случае
р,' = 2ра = 2 • 0,085 = 0,17 м • сект1/мм.
Тогда по формуле (6.5 а):
гт us 0,0025 . п
// = . «* = - - д 19 мм.
1 v 0,000/7 «0,17
Продифференцировав диаграмму vB = vB (t), получим диаграмму
wB = <^(0- Масштаб оси ускорений этой диаграммы рш = =
= 2 • 5,785 = 11,57 м • сек"2/мм.
Полюсное расстояние Н2 определяем по формуле (6.6):
/у _ _Ле_ — °»17____= 19
2 “ ня/ “ 0,00077 • 11,57
Диаграммы vb = vb (sb) и wb — wb (sb) строим методом графиче-
ского исключения общего параметра t из диаграммы sb = Sb(/) и vb =
= vB (/); sB = sB (t) и Wb = &b (/)•
§ 7. НИНЕТОСТАТИЧЕСКОЕ ИССЛЕДОВАНИЕ
КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
Определение избыточного давления Р рабочих газов на поршень
(приложение II, лист 4). Избыточное давление
Р = PiF,
где F — площадь поперечного сечения цилиндра,
= = л • 0.18Д = о 025434 м2.
4 4
Pi — избыточное индикаторное давление
Pi = Р^'р>
~~р. — ордината индикаторной диаграммы (приложение II, лист 4
или 5), измеренная от линии атмосферного давления до кривой изме-
нения давления в цилиндре;
221
р.р — масштаб индикаторной диаграммы:
Рр = 0,05-------------
г мм
Подсчет величины Р приведен в табл. 20.
Знак «минус» перед значением Р указывает на то, что давление
направлено против движения поршня. В положениях 6 и 7, в нача-
ле такта сжатия, давление внутри цилиндра еще не превышает
атмосферного, и избыточное давление на поршень направлено в сто-
рону движения его.
Определение результирующих сил инерции»: Результирующую
силу инерции шатуна определяем по формуле (8.2):
Р„2 = — m2ws = — = — qjrs;
сила инерции поршня
Ри3 = — Ш^В = — = — С2пЬ>
где т2, т3 — массы шатуна и поршня;
ws — ускорение центра масс шатуна;
wB — ускорение поршня;
ns, яЬ — масштабные значения указанных ускорений;
— масштаб плана ускорений;
q, с> — постоянные
уравнений:
Рис. 98
q = m2u^r = 11,72 • 5,785 « 67,8;
с2 = = 19>4 * 5,785 « 112.
Результаты вычислений резуль-
тирующих сил инерции сведены
в табл. 21.
Силу инерции кривошипа не
определяем, так как он уравновешен
(см. дальше § 9) и центр масс его на-
ходитсянаоси вращения Офис. 98,в).
Момент пары сил инерции кривоши-
па согласно (8.3): /ИИ1 = так-
1же равен нулю, так как нами при-
НЯТО (0ОЛ = const И бол = 0.
Результирующая сила инерции
Р„2 шатуна проходит через полюс
•инерции Т шатуна, положение ко-
торого определяем так (рис. 98, а).
Приняв точку В за точку подвеса
шатуна АВ, определяем центр ка-
чания /<0, для чего в точке X вос-
станавливаем перпендикуляр SN, через конечную точку которого пер-
пендикулярно BN проводим линию Л7<0 до пересечения с осью BS.
Длина отрезка
Ps 0,165 И1
— 41 мм,
цг ~ 0,004
222
www.vokb-la.spb.ru - Самолёт своими ру
х* 1 d 6 л и ц а 20 величины избыточного давления Р Значение в положении । 17 —0,85 —21 620 Сжатие , Значение в положении । ее см -0,02 : —509 Выхлоп Таблица 21 Величины сил инерций ползуна и шатуна Значение в положении 11 23 76 5150 78,5 8790
21 | 22 -0,02 О о ю 1 0 01 —< см 55,5 3760 30 | j 3360
о <D со О 1 7630
-0,02 60S— см 51 3460 18,5 2070
о сч о 1 —2544
о см —0,02 —509 ООО см 61,5 4170 45,5 5100
СО 0,5 —0,025 CD СО CD 1
о —0,02 60S— 70 4750 | 56,5 6330
г- 0,02 509
со •—1 —0,05 —1272 О со 72,5 4920 60 6720
о 0,02 509
оо •—4 V—4 0,05 1272 Расширение со 73 4950 60,5 6780
к со —0,02 —509 Всасывание
•—4 СО 0,15 3815 71 4810 63 7060
to о о 1 —509 СО со СО о 7630 62 4200 54,5 6100
сч о о 1 -509 ш со ^*4 0,65 16 530 сою 50 3390 23,5 2630
29 1,45 36 890 см 57,5 о о о со 32 3580
со -0,02 —509
ее 56 2,8 71 230 -«со 79 5350 82 9180
см сч о о 60S—
см 56 2,8 71 230 ОСМ Tf — см 00 оо 1 5960 101 11 300
—1 СЧ о -509
1 Параметр ns, ММ еч к См лД мм к о.
Параметр Pi, мм if* £ ' Рабочий процесс
о о о
Параметр =5 «‘<7 Рабочий про- цесс
1 § с £ Звено 2 (шатун) 3 (ползун)
223
где ps— радиус инерции шатуна относительно оси, проходящей через
центр S масс,
Ps = ]/0Д7Р = j/6,17 • 0,3975? «0,165 м.
Полюс инерции Т будет расположен на пересечении прямых, па-
р аллельных ускорениям wb и w5b, проведенных соответственно через
точки S и /Со; STiftb, fA'oTj bs.
Определение сил тяжести. Сила тяжести шатуна
G2 = m2g = 11,72 • 9,81 = 115 и;
Сила тяжести поршня
G3 = тзё == 19»4 • 9,81 = 190 н.
Здесь g — ускорение силы тяжести.
Определение давлений в кинематических парах. Определение давле-
ний в кинематических парах начинаем с рассмотрения равновесия двух-
поводковой группы: шатун АВ — ползун В. На звенья этой группы
действуют силы: давление Р газов на поршень, силы тяжести G3, G2,
результирующие силы инерции РИз, давление /?0.з направляющих
на ползун и давление кривошипа на шатун R\t2.
Условие равновесия группы выражается следующим образом:
ЯЬ2 + G2 + PKt + РИз +G3 + Рпс+ Р0,з = 0. (12.1)
Так как в данном уравнении три неизвестных, а именно: величина
RQV величина и линия действия силы 2, то для решения этого урав-
нения давление 7?j 9 раскладываем на две составляющие R{ 2 = R“2 +
+ R\ 2, действующие: Т?"2 — вдоль оси звена и R*i2— перпендику-
лярно к оси звена АВ.
Составляющую Rf[2 определяем из уравнения моментов всех сил,
действующих па шатун АВ, относительно точки В:
£МВ (Р) = Мв (^ 2) + МВ(Р„,) + MB(G3) = 0.
Применительно к рис. 98, а, .это уравнение можно записать так:
2МВ (Р) = R\ 2АВ - P„2ht + G.2h2 = 0,
откуда
д1.2 “ АВ
Результаты вычислений сведены в табл. 22.
Знак перед величиной G2 учитывает направление момента этой силы
тяжести.
После этого уравнение (12.1) принимает вид:
<2 + ^.2 + ё2 + А,г + Ж, + Р7 ч-Ро.з = о, (12.2)
где
Р' = Р + G3.
224
www.vokb-la.spb.ru - Самолёт своими
Величины составляющей 7?i,2
то
Е*
S
VD
ТО
Значение в положении — СО — см 5150 34,5 —115 CO о о —< 1780 Таблица 23 Величины уравновешивающего момента Му Значение в положении | —• со с-> О Ю со о о см —< О 1
10 22 1 3760 76 —115 oo 100 | 2850 о хф —, — id о in спосч0^0? СО —' СМ О 1
Л— СМ 09^8 84,5 SII— CD 100 2910 О xf тр _ tn о см г- 8 о,- ° '7 CD — — О 1
00 О см 4170 54,5 -115 CD о о > 1 2200 оо Xf О го О(Г) ю о lo c2ll? CD — о |
г-о 4750 I 27 -115 «Mf 100 1280 Г- xf CD Ю — О СО см о <4°? Ю СМ ОО О |
сооо W—< 4920 | со 115 b- 100 155 со хф CD юоюом Ю СМ О О 1
к. К ооо 4950 о ю w—f oo 100 о 7 ю хГ с§ о to см о о о
юь- 4810 20 ю 7 tO 100 J45 ю xf О g ID ОО О -CM ID СМ Ь- О СО
х}> О 4200 49,5 Ю «—« 7 20 100 2060 X* X* о о go О О xf H-CD О ID
сою 3390 ; 85,5 to 7 20,5 100 2880 со xf О g СМ О ID -ОО xf —- — о см
CMXh 3900 75 to < 7 Ю CO 100 2900 см xf О О ° 92 ОО О 00 CD •—i »—« О J
— сО 5350 ю со in w—I 7 12,5 100 1860 — xf О O^g£> СО О СМ - | г- см — о |
О CM xf> — см 5960 Ю 1 4,5 100 «о ю о xf Чо § CD О Я. оо см о о о
Параметр i w tZnj •хГ W *'£) Zz2, MM 0Q W Параметр (R2.i), мм Pj»» н/мм h3, мм ц., м/мм М„ н • м У’
Значение в положении оо см ХСГ О gtD xf О CM ’-<-х CD CM — О (D
см ем х^ O^g о СО О ID -CM ю —< —< o co
см X^ О ° о о г- 4. °? ID — —< О I
О см X±> CD to — О CD x^OiD <=>-? O — — O 1
ст> X±> X±. ° ° oo О ^O-°? ID CM OO О J
со xf ID О - -CD CD CM О О CO
со xf og ° CD CM О О О
L^‘° ID О 00 оою.Чоо oo CM о
CD о ° о go СО О CD Н.— о см —< о
ю о ° —X о xf • —« см см о см
— о *^g со ФО^Г -CN CD Ю СМ О СО
ео 00 О lC-g S — OLD -CD —xlD—x О СО
см xf ООО g О О - — to О О О
Параметр №,1), ММ Цр, н/мм Ьз, мм- ц/, ^/мм Му, н-м
8 1328
225
В соответствии с уравнением (12.2) строим план сил.
Через начало вектора /?it2 (рис. 98, б) проводим линию действия
составляющей /?"2 до пересечения с линией действия силы 7?0.з, про-
веденную через конечную точку Р' на листе 4 приложения II, в не-
которых положениях 7?£2 проведена через конечную точку а
Ro,3 — через начальную точку Р'.
Точка пересечения линий действия /?"2 и /?о,з определяет их вели-
чину.
Соединив начало вектора /?it2 с концом T?t2, получим давление
Я1,2 в кинематической паре А.
Планы сил строим в масштабе:
= 500 н]мм (для положений 12—14),
Рр= 200 н/мм (для положений 0,/, 5—7, 11, 15—19, 23),
100 н[мм (для положений 2, 3, 4, 8—10, 20—22).
Силу тяжести б2 ввиду того, что длина масштабного вектора ее
меньше 2 мм, на плане сил не откладываем.
Давление Яг.з в паре шатун — ползун определяем из условия рав-
новесия ползуна:
Ж,з + + Р' + Яо,з = 0. (12.3)
Точкой приложения /?^з будет точка В, так как силы Р, РИз и
G3, действующие на ползун, проходят через эту точку.
Давление в паре О кривошип — стойка и уравновешивающий
момент Л1у определяем из условия равновесия кривошипа ОА
(рис. 98, в) — вес кривошипа и противовеса не учитываем, так как в боль-
шинстве положений он незначителен по сравнению с величиной T?2,i:
-R2.1 + = 0; 7?o,i = — /?2.ь R2,\H3 + Му = 0;
Му = — R2,\Hs = — №,1) нАН/,
где (Т?2,1) — масштабная длина вектора Т?2д с плана сил;
рР — масштаб плана сил;
h3 — плечо силы jR2>i относительно точки О на схеме механизма;
pz — масштаб длин кинематической схемы.
Результаты вычислений Му сведены в табл. 23.
Строим диаграмму 7ИУ = Му (ср). Принимаем за положительное
направление момента, противоположное вращению кривошипа. Мас-
штаб моментов рм = 50 н • м!мм, а масштаб углов поворота кривошипа
Нф = -0^24 = -W = °’0349 Рад,ММ-
При выборе места подвода смазки к кинематическим элементам
вращательной пары пользуются полярной диаграммой давлений —
годографом давлений. С помощью этой диаграммы определяют наиме-
нее нагруженный участок поверхности элемента пары. Следовательно,
векторы давлений на годографе должны соответствовать тем участкам
226
www.vokb-la.spb.ru - Самолёт своими руками?!
поверхности, на которые они действуют. Так как планы сил на чер-
теже построены относительно неподвижной системы координат, свя-
занной со стойкой, то полученные векторы давлений совпадают с
нормалями к поверхностям элемента пары, принадлежащего стойке,
и не совпадают с ними, если элемент пары принадлежит подвижному
звену, так как он непрерывно меняет свое положение относительно
стойки. Поэтому для построения годографа давлений на элемент пары,
принадлежащей стойке, достаточно из одной точки отложить векторы
давлений, взятые с планов в одном и том же масштабе сил рр. Так,
в частности, строят годограф давлений Z?i,0 на коренной подшипник О.
На чертеже (см. приложение^ II, лист 4) из произвольной точки О
отложены векторы 7?i,o = —7? 1,0 в масштабе рР = 500 н[мм и концы
их последовательно соединены плавной кривой.
При построении годографа давлений для элементов пар подвиж-
ных звеньев необходимо учитывать взаимное расположение звеньев
в их относи1ельном движении, чтобы
определить, на какой участок поверх-
ности элемента пары действует данное
давление. Взаимное положение звеньев
в относительном движении определяют
методом обращения движения. Так, для
построения годографа давлений /?2,1 на
шейку коленчатого вала изображаем кри-
вошипно-ползунный механизм ОАВд в
положении О, выбирая масштаб uz = Рис* 99
=0,01 м[мм. Всему механизму мыслен-
но сообщаем вращение с угловой скоростью (—со). При этом
кривошип ОА становится как бы неподвижным, а шатун АВ и пол-
зун В будут занимать последовательно положения ABlf АВ2, АВ3
иъд. Из точки А, как из полюса, под углом к оси шатуна АВ
откладываем векторы Т?2Л, взятые с плана сил. Соединив конечные
точки отложенных векторов /?2Л плавной кривой, получим годограф
давления К2д на шейку коленчатого вала. Масштаб сил годографа
рьр = 500 н/мм. Угол а£ равен углу, заключенному между векторами
jRi 2 и /?"2 на планах сил.
Диаграмму давления 7?3>О = 7?3>О (S) на стенки цилиндра строим в
прямоугольной системе координат, выбирая масштабы:
|1р = 200 н/мм\
р7 = 0,004 м/мм.
С целью проверки правильности силового расчета механизма урав-
новешивающий момент Му определяем с помощью «жесткого рычага»
Жуковского (приложение II, лист 3).
Для этого на план скоростей в изображающие точки переносим все
заданные силы, включая силы инерции и уравновешивающую силу,
повернутые на 90° в одном направлении (рис. 99). Из условия равнове-
227
сия плана скоростей, как «жесткого рычага», определяем уравновеши-
вающую силу Ру; последнюю прикладываем в точке а, считая ее как
бы приложенной в точке Л кривошипа, и направляем ее перпендикуляр-
но линии кривошипа ОЛ.
Таким образом
= Р^ра + Р„г ht — G.2h2 — (Р' — P„a) pb = О,
откуда
р = —р,.3)Р6
у ра
Результаты вычислений сведены в табл. 24. Знак «—» перед зна-
чением силы показывает, что момент данной силы отностельно полюса
плана скоростей направлен по часовой стрелке.
Величину уравновешивающего момента определяем по уравнению
М' = Р г
у ГУОА-
За положительное направление уравновешивающего момента, как
и в предыдущем случае, принимаем направление, противоположное
вращению кривошипа.
Сопоставляя полученные по первому и второму способам значения
Му (табл. 23) и 714у (табл. 24), получим величину расхождения
д _у~^у . Ю0%,
Му
которая составляет менее 5% во всех положениях механизма.
Величины давлений в кинематических парах, определяемые из пла-
нов сил, даны в табл. 25.
§ 8. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВОГО КОЛЕСА
Момент инерции маховика (приложение II, лист 5) определяем по
способу проф. Н. И. Мерцалова (гл. X).
Приведенные моменты движущих сил и сил тяжести определяем
по формуле
М ,Г=М'+М'' +м:,
д+G Д1 63 1 62’
где Л1д — приведенный момент силы давления газов на поршень,
= Ргоа -^7COS(?. =Рг0А ^-cos(p> ^);
Mg. — приведенный момент силы тяжести поршня,
М03 = С3ГОА cos («з> °в) = G3r0A -g-cos (G3, vBY,
228
www.vokb-la.spb.ru - Самолёт своими
СМ
Я
S
Величины уравновешивающего момента Му, вычисленные с помощью «жесткого рычага» Жуковского
>» Tf — CM t— СО^Ш СМ^ ^l| ^^cnocn^o
Значение составляющих параметров 5* О к ю LT Ю 1Л Ю LC in Ю lO ЛЛЛ IO LO Ю Ю LO LO Ю Ю LO l? ю L.O ОООООООООООООООООООООООО ОООООООООООООООООООООООО о О О О о о О О О О О о о О О^СЭ сэ о_о о_°_°_с1 ° о о о о о о о о о о" о о о о o' o' o' o' о o' о" o' o'
а: оГ „ о о о о о r—co in см о о OOOOO^O—' C''ISO_QinOOO^OCMcnM’b-in О О сП N lO CD СП —’OO'iinLTO^uOM’^OO^OiNM’CMO t— CO О О Ш —' CT M’ l'- СПЬТ Ю Ь _, Tf । со ю со со со ь т? CI ю СП 1 СО Ln LO сП О Г— СМ СО — . . . II 1 1 i 1 1 1 1 1 1
pb, мм ОШ to LO Ш Осм —• О СОШ СМ О г- оо ОО — СМ — О гХш СМ О р- ор ’^•OOOOOCM COOOOb-’^f ’C0300O(M(-JcnOCCb^
X Q. оооооооосооооооооошоооооо cn — — — — — — — смсо — — смсмоосмсмооооооо — cncncncncncncncONOOOO't^OHQOOM'COCDOO 1 СМГ- — — 1 1 1 см с- с- со —
* W X 0. оооооооооооооооооооооооо ОООоОсОССОСМСООГ-ОСПОСОООСООШСМСООЬ-ШО СО — ШШ — 0 1—0—ОСОГ^СО — ШО—ОГ-СО—ОСОГ- __ О СП см о t— ooiqcmcooo_^cococmcoi— о СО LO см со оо =11 1111 =11 1111
h 2, мм О СМ — 00 СТ) СО *5-2* ’~1 ° °’ ~ °0 00 tp. хГ Г— оо О СО *_Q 00 Г- Xt< t— 00 О СО *2 г£ °О Г— СО СО 4hJ
Ggt н Ш) ш LO LO Ш Ш Ш i n LO Ю Ш Ш Ш иО Ю 1.0 Ш) Ш Ш Ш Ш L0 Ю 1Л „ [7777
з: 5: *4 •С «‘П.^О.СО ес OI — « —1 — О‘И — 10-"И СО СОО — СО—• —*0)^ -0-0.- -о. о -0-0.- -о. О
X Q. оооооооооооооооооооооооо О in О О О —I СМЮГ— ООШОЮООО—’ 04 Ю 1— СО о ш ОСООСОСМОООГ——« М*Ь- — О СП CD СП 04 со ст ь. —« хГ Г— —< ьП1ПСПсПМчМ<М,^М4СПСП1П1ПьОСПСОМ,^’еМ<М4СПСП1О II i 1 1 1 II 1111
ра, мм оооооооооооооооооооооооо OOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOOQOOOOOOOOOOOOO
Положе- ние СМ I — СМСО^ВЛОГ— ОО О О — СЧСП^Ш оь оооо — СМ со о
229
сч
С5
Я
О
сП
Ь»
Величины давлений в кинематических парах
о
о о о
—* о со ОО о со о о ф
с о LO
о Tf у
со -ф сч
о о о О LO о Ю
СО со о о ю ’Ф О о О ^ф о о
о о ю со
Q о о
LQ о о
О Г—4 СП ю сч Я—4
S о
к о о О
я ф <0 "и о со о
* о ^“4 со •“Ч1
Ч О о о о со
К. сч о о
СП со 'Ф >•4
»-"4 со
CJ я—4
Я
к О
си о о О
р со о о
я со •—4 О ОО СО ОО ^-41
о о О
о ю о
о о СО W—» сч
— Я—4 о о о
о ю Ш
сч LO
*Ф сч
О о О
о о о
со •ф ОО
СО -ф ^-4
О
О о О
СО о о
ОО LO
я—4 о СП с сч
о о о
о со СО со
•—4
•—1 »—4
а. ®2
ь <и 2 св О. гЧ СХ II « CJ а? со о
1 се С ОД сх
1
Значение в положении СО сч 1 12 800 8000 500
сч сч О О о ю 52 со со }Р ю сч 1
сч 5000 2850 100
о сч О О ю ш S . ^ф ос X? СП LO 00
СП И 600 7100 1100
СО ООО ООО со сч со «— оо —'
СО 13 200 8300 1300
о о ООО —• СО о S = “
о ООО О со о со -ф 5 Я—4 •—<
»о О о ООО о^о сч О О CJ сч
’•г 33 000 34 750 10 000
со ООО о о ю о о сч о ’ф сч LO CD '
сч 54 000 60 000 4750
Параметр 3 » » * а а 0? ic
230
www.vokb-la.spb.ru - Самолёт своими
ж лт
Mg2 — приведенный момент силы тяжести шатуна,
vs /7^ “ X pscos(G2, ?s) h2
MGs: 6zr0A ’ Va cos (^2» Vs^ ^2год ’ pa — OfoA ’ pa ’
где P — давление газов на поршень (берем из табл. 20 или по
развернутой индикаторной диаграмме, приведенной в
приложении II, лист 5);
G2, G3 — соответственно сила тяжести шатуна и поршня;
va, vb, Vs —скорости точек Л, В и S;
ра, pb, ps — масштабные значения этих скоростей, определяемые по
плану скоростей, мм;
h 2 — плечо силы тяжести G2 на плане скоростей, мм;
гоа — длина кривошипа;
cos (Р, Vb) = ± 1; cos (G3, Vb) = ± 1 -
Результаты вычислений сведены в табл. 26.
По значениям MR±G строим диаграмму 7Ид+с= MR^G (ср) приведен-
ных моментов движущих сил и сил тяжести в функции угла поворота
<р звена приведения (приложение II, лист 5). Принимаем масштаб
рм моментов равным 20 н • м/мм, а масштаб рф углов поворота
звена приведения:
Нф = = ’W’= °,0523 рад!мм.
Интегрируя графически диаграмму= /Ид+С (ср), получаем ди-
аграмму Лд-j-g = Лд+0 (ср) работ движущих сил и сил тяжести.
Принимаем масштаб рд диаграммы AR±G= А д+с (ф) равным рд —
= 40 дж[мм.
Тогда полюсное расстояние
т j М" А 40 q
г/ =-------= ~ 38 2 мм.
Р-лгРф 20 * 0,0523 ’
Полагаем, что приведенный момент Мс сил сопротивления имеет
постоянную величину во всех положениях главного звена. Величину
постоянного приведенного момента сил сопротивления определяем на
основании закона передачи работы при установившемся движении ма-
шины: за период установившегося движения (в данном случае период
равен времени двух оборотов кривошипа), работа движущих сил равна
работе сил сопротивления. При этом условии диаграмма Ас = Лс (ср) ра-
бот сил сопротивления будет представлять собой наклонную прямую,
соединяющую начало координат с конечной точкой ординаты 24—24'.
Продифференцировав диаграмму Ас = Ас (ф) по ф, получим на диа-
грамме /Ипр — ф прямую, параллельную оси абсцисс, которая являет-
ся диаграммой моментов сил сопротивления.
Вычитая из ординат диаграммы ЛДВ4-о= Лдв_р7 (ф) соответствующие
ординаты диаграммы Ас = Ас (<р) и откладывая разность на соответст-
вующих ординатах, получаем график приращения кинетической энер-
гии всей машины вместе с маховиком: &Е = ДЕ (ф).
231
о
OJ
го
а
s
Величины приведенных моментов движущих сил и сил тяжести
и • н И ру t2 g <n 14 o> o 5 5 . О ю- C> oi co о o 55 ©1 ч ч ©1 X §2 8 8 8 °? £ «<N « s g 2 fc - £ 8 g g$ S-8 g g 8S ^7111 i°—777 i=-j'co-s~° i i i i i i
«г • н ‘*DMw m.rs CO _ CD CD —- CD й CO _ CD CD —• c£) £ 2 “.«Ifcejg Чл <N--- “5“ й 2®ь 'Cic °1-- o *777 1^«2=«“9о,7 1777 i
w н ,jv CO co r- co TJ* co co r- _ CO oo CM CD to о o <Ч^Ч“1А102оо^2«?-Г ° —< CO Ci co ° О 1 — 1—' O^OO^ CD°O 1-7 1’77* -—- 1 1 1 1 1 1 1 1 1 1 1 1
и • LO N 0 -rf cm 0 -H t n CC N _ К
Значение составляющих параметров 1 м *9 Ю W ЮЮ IO ЮЮ Ю Ю Ю LOW IO Ю ЮЮ LO Ю Ю Ю Ю Ю Ю ЮЬОЮ •—< •—I —< •—< —< *—« —< .—1 <—< •—« « •—< •—« •—« •—> »-4 •—< •—’ • r—< •—< •—< •—< •—‘ •—1
W*(&fl‘®£))SO3® Г) OOOOCDCDOOOOOOOCOOOOCDOOOOaOO 0 О C D О О О D D О Ci D 'D D C D 0 0 0 0 D С О C D О *“ 1 1 1 1 1 1 1 1 1 1 1 1
и *(sa*d) SO3J gg§ggggg83§§§§§8ot2<>1{NSgggg OiDLQLOiDUOiDiDlDCD CM g 00 04 Ol
иг lVOj LC tn Ю in LO »O in VO LCiQ Ю Ш Ш Ю L.C Ю tn Ю L? L? LO in Ю LO LO LO Ci Ci D С О О О С. О О О О О О О О О D О О О Ci О О О 0. DOOODCOOCCiDCiOOCiOCiCiOiCiDCiCiCiCiC 00000 00000000 0 0 0 0 0 0 o~o 0 0 0^0 0 0 0 00 0'd- o' 6 o' 0’ o' 00000000 o' 000000
ww ‘(sn2£) ) soo sd = sy
ww *qd LD LO *Л _ ID 0 CD—« CM — 0 ° fXW CM О r- °o О О —' CM <-« 0 0 co S £* 22 00 00 CD CM 00 CO CD co xf CO 00 CD CM L J CO C CO N
mv lvd rmocDOOOOOOOOOOOOOOOOOOOOOOO SSSSSS§§^OOWOOOOOOOOQOODOOCCOOOCOOOOOOCOCO
ЭИНЭЖО1ГОЦ O^CMCOxflDrOcDb-0000—CMCO’^rtDCDb-OOOOOO— CMOO
232
www.vokb-la.spb.ru - Самолёт своими
Приближенное значение кинетической энергии звеньев машины без
маховика определяем из уравнения (10.11):
£* = 4- Лео2 .
с 2 с ср-
Средняя угловая скорость
пп0А П-650
соср = ———- = —ла = 68 рад/сек.
OU Ov
Значение приведенных моментов инерции находим по формуле
(10.7):
< = + tn2r2OA ) + ЛЦ (~^г) + т^0А (“^г) ’
где JOl = 0,1 кг • лг — момент инерции коленчатого вала относитель-
но его оси вращения;
т2, тз — массы звеньев 2 и 3;
Js2 — момент инерции шатуна относительно осп,
проходящей через центр масс;
JSs = ™2р2 = 11,72- 0,17 • 0,39752 = 0,315 кг • м2,
где год — длина кривошипа;
1ва — длина шатуна; v
va, ив, Vs — скорости точек А, В hS;
vab — относительная скорость.
Если в написанном выше уравнении отношение действительных
величин скоростей заменим отношением их масштабных значений,
взятых из планов скоростей, то получим
Л = Jot + т2г2ОД
ГОА
lAB
Результаты вычислений приведены в табл. 27.
Строим в масштабе Це = 20 дж[мм диаграмму кинетической энер-
гии Ес = Ес (ф) машины без маховика. Если через точку К' (наимень-
шее значение £с) проведем новую ось абсцисс k' — ф', то получим
диаграмму Д£с= Д£с (ф)« Ординаты диаграммы Д£с = Д£с (<р) вычитаем
из ординат диаграммы Д£ = Д£ (ф), изображенной в масштабе р£ =
= 20 дж[мм, и конечные точки полученных отрезков соединяем плавной
кривой, которая и характеризует изменение кинетической энергии ма-
ховика за период установившегося движения. Затем проводим две
горизонтальные прямые, касающиеся кривой диаграммы Д£^ = Д£м (ф)
в точках наибольшего максимума (В) и наименьшего минимума (С),
до пересечения их с осью ординат в чочкахВи D (приложение II,
лист 5). Момент инерции маховика определяем по формуле (10.35):
4 = = -228,5 ‘4-°— = 98,8322 « 98,8 кг м\
со, 1
233
Таблица 27
Величины приведенных моментов инерции и кинетической энергии звеньев механизма
Положение Значение
составляющих параметров приведенных моментов инерции звеньев Е*с,дж, кинетической энергии
ра, мм ps, мм ab, мм pb, мм ^4 сч а* S СЧ «. сл । е я: о к. о» £ «* » •е> I <3 e|cL сч •Я DQ О К « «ч • й СЧ - Л I Q О с® Е 1 Jbt кг-м*
0 80 50 80 0 о,1 0,0453 0,0197 0 0,1650 382
1 80 60 74 49,5 0,1 0,0653 0,0169 0,0736 0,2558 592
2 80 77 48 81 0,1 0,1078 0,0071 0,1968 0,4117 951
3 80 81 6,5 82,5 0,1 0,1190 0,00015 0,2043 0,4234 979
4 80 71 37 61 0,1 0,0916 0,0042 0,1117 0,3075 711
5 80 57,5 68,5 29 0,1 0,0601 0,0145 0,0253 0,1999 462
6' 80 50 80 0 0,1 0,0453 0,0197 0 0,1650 382
6 80 50 81 3,5 0,1 0,0453 0,0202 0,00037 0,1659 383
7 80 57 72 35 0,1 0,0591 0,0160 0,0368 0,2119 490
8 80 70 46 62 0,1 0,0890 0,0065 0,1156 0,3111 719
9 80 80 6,5 80 0,1 0,1160 0,0001 0,1921 0,4082 945
10 80 77 35,5 77 0,1 0,1078 0,0039 0,1781 0,3898 901
11 80 62 67 48 0,1 0,0697 0,0138 0,0692 0,2527 584
Т
Принимаем средний диаметр обода маховика D = 1 м.
Тогда масса обода маховика
„ 4 • 98,8_ogr
Wlo6 — £)2 — [2 Кг.
С учетом массы спиц и ступицы масса маховика
ты = 1,3/nrf = 1,3 • 395»500 кг.
Индикаторная мощность двигателя
NH = = кет,
65
где Ад — работа движущих сил за период установившегося движения?
Т — время периода установившегося движения, т. е. время двух
оборотов кривошипа:
Т-2-^-2 “ =4 сек.
пОА 650 65
Определение размеров маховика. По полученной массе обода махо-
вика и его среднему диаметру определяем площадь поперечного се-
чения обода
s“^ = -r™--°.0557 *
где р — плотность материала маховика (для чугуна р = 7100 кгрл?).
234
www.vokb-la.spb.ru - Самолёт своими
Таблица 28
Значения угловой скорости со/ кривошипа
Положе- ние Величины составляющих параметров р ad j сек
JM. кгм* Jc?> кгмг JCj кгмг сотах, рад! сек ДГ17, дж Д£р дж
0,24 98,8322 0,1999 0,1650 68,37 1330 0 68,18
1 98,8322 0,1999 0,2558 68,37 1330 —170 68,13
2 98,8322 0,1999 0,4117 68,37 1330 —360 68,04
3 98,8322 0,1999 0,4234 68,37 1330 —530 68,02
4 98,8322 0,1999 0,3075 68,37 1330 —700 68,03
5 98,8322 0,1999 0,1999 68,37 1300 —860 68,04
6 98,8322 0,1999 0,1659 68,37 1330 —1020 68,03
7 98,8322 0,1999 0,2119 68,37 1330 —1170 67,99
8 98,8322 0,1999 0,3111 68,37 1330 —1330 67,94
9 • 98,8322 0,1999 0,4082 68,37 1330 —1580 67,87
10 98,8322 0,1999 0,3898 68,37 1330 —20 КО 67,81
11 98,8322 0,1999 0,2527 68,37 1330 —2730 67,75
12 98,8322 0,1999 0,1650 68,37 1330 —3330 67,69
13 98,8322 0,1999 0,2558 68,37 1330 —2130 67,83
14 98,8322 0,1999 0,4117 68,37 1330 —350 68,05
15 98,8322 0,1999 0,4234 68,37 1330 920 68,23
16 98,8322 0,1999 0,3075 68,37 1330 1300 68,33
17 98,8322 0,1999 0,1999 68,37 1330 1330 68,37
18 98,8322 0,1999 0,1659 68,37 1330 1190 68,34
19 98,8322 0,1999 0,2119 68,37 1330 1030 68,32
20 98,8322 0,1999 0,3111 68,37 1330 840 68,26
21 98,8322 0,1999 0,4082 68,37 1330 590 68,19
22 98,8322 0,1999 ' 0,3898 68,37 1330 360 68,13
23 98,8322 0,1999 0,2527 68,37 1330 80 68,16
При высоте сечения обода маховика h = 200 мм ширина обода
»_ S 0,0557 л «л пол
Ь = — = ’ ^0,23 м = 230 мм.
IL
На листе 5 приложения II представлен эскиз маховика. Диаметр
отверстия под вал принят ориентировочно б/~год« 100 мм, диаметр
ступицы dr = 2d = 200 мм. Окончательную форму маховика определяют
при выполнении рабочего проекта двигателя.
Определение истинной угловой скорости. Истинную угловую ско-
рость кривошипа определяем по формуле (10.70):
ж / (7м _ 7С17) со^ах 2 (ДЕ17 ДЕ,-)
у 7м + 7q
где со£—истинная угловая скорость кривошипа в х-м положении-
7М — момент инерции маховика;
Л17 — приведенный момент инерции звеньев механизма в поло-
жении, соответствующем максимальной угловой скорости,—
в нашем случае в положении 17;
235
Jc. — приведенный момент инерции в положении i (берем по данным
табл. 27),
сотах — максимальная угловая скорость кривошипа, определяемая
по формуле (10.21):
— д_ 6 - т°А (1 -L 6 1 -
^тах — ®ср U ' 2/ 30 \ * * 2 '
= (’ + 2ПоТ = 68’37 Рад'сек>
ДЕ17 — приращение кинетической энергии всей машины, соответ-
ствующее максимальной угловой скорости кривошипа: ДЕ17 =
= УпНе;
i/17—ордината диаграммы ДЕ = ДЕ(<р), соответствующая ДЕ17
(ордината в 17-м положении);
р,Е — масштаб оси ординат диаграммы ДЕ =ДЕ (<р), це = 20 дж/мм;
— величина приращения кинетической энергии в Z-м положении,
равная //£|ле;
— ордината диаграммы ДЕ = ДЕ (<р).
Результаты вычислений приведены в табл. 28.
По значениям истинной угловой скорости на листе 5 приложения
II строим диаграмму изменения угловой скорости кривошипа со =
= со (<р) за период установившегося движения в масштабе
= 0,02 = 0,0523 рад/мм.
§ 9. УРАВНОВЕШИВАНИЕ СИЛ ИНЕРЦИИ
КРИВОШИПНО-ПОЛЗУННОГО МЕХАНИЗМА
Определение массы противовеса для приближенного уравновешива-
ния сил инерции рассматриваемого механизма производим методами,
описанными в гл. IX.
Массу т2 шатуна 4 В (рис. 100) разносим статически в две точки А
и В. Массы т2А. тъв, сосредоточенные в точках Л и В, определяем по
формулам (9.15):
/.с 0,38/л я
т2В = т2 • = т2 • =0,38 • 11,72 = 4,45 кг;
1АВ 1АВ
т2Л = т2 • lAB ~~ lAS = тг = 0,62 • 11,72 = 7,266 кг. 2 1АВ
1АВ
Масса, сосредоточенная в точке А от неуравновешенной части ко-
ленчатого вала (кривошипа), по формуле (9.14):
т —тл' - °-L = 14,3 кг,
1А 1 г ’
так как по условию lost = /*•
236
www.vokb-la.spb.ru - Самолёт своими
Полная масса
гпа = tn.. tn„. = 14,3 + 7,266 = 21,566 кг.
1/1
Массу противовеса определяем по формуле (9.18):
/иг = тА • — = гпа • тгг — 2/лл — 2 • 21,566 » 43,13 кг,
С1
где а — расстояние центра С масс противовеса от оси вращения О;
принимаем а = 0,5 г.
Определение давлений на фундамент, вызванных силами инерции.
После установки подобранного противовеса силы инерции вращающей-
ся массы ша будут уравновешены, но останутся не-
уравновешенными силы инерции поступательно дви-
жущейся массы тв, которые будут передаваться на
фундамент. Наибольшую величину они имеют
тогда,когда поршень находится в положениях В() и
В5, так как в этих положениях ползун имеет наи-
большие ускорения (приложение II, лист 3).
Определим величину сил инерции, соответству-
ющую массе тв, в указанных положениях.
Масса тв = т2в + я*3.= 4,45 + 19,4 » 23,85 кг;
силы инерции
Р' = mBwBo =23,85 • 584» 13900 я;
Р” = mBwB = 23,85"- 364» 8650 н.
Сила инерции РИ направлена вверх, а Ри — вниз.
Воздействие сил инерции на фундамент сводится к
давлению Q, равному силам инерции Q = РИ, и
опрокидывающему моменту М = Р„е, который воз-
никает вследствие смещения оси цилиндра относи-
тельно оси вращения кривошипа:
Q' = p't = 13 900 н (направлено вверх); М' =РИе =
= 13900» 0.04 = 556 н • м (направлено по вра-
щению часовой стрелки); Q" — Рп = 8650 я (на-
правлено вниз); Л7 " = Рие = 8650 • 0,04 = 346 я • м
тив вращения часовой стрелки).
Рис. 100
(направлено про-
II. Расчет шестизвенного механизма
Требуется спроектировать и исследовать механизм поперечно-
строгального станка (задание 6, вариант VI).
Дано:
Ход резцовой призмы (ползуна) Н = 400 мм.
Коэффициент изменения скорости k = 1,5.
Длина стойки О2О3а 350 мм.
237
Отношение длины с шатуна BF к длине b кулисы О3В:
X = 4 = 0,34
ь
Расстояние центра тяжести S3 кулисы от оси вращения О3 равно у Ь.
Расстояние центра тяжести 34 шатуна от точки В равно ±-с.
Координата центра тяжести резцовой призмы Xs = 180 мм.
Масса кулисы т3 = 12,23 кг.
Масса шатуна т4 — 3,06 кг.
.Масса резцовой призмы тъ == 46,9 кг.
Момент инерции кулисы относительно оси, проходящей через ее
центр масс, Js3 = 0,442 кг • м2.
Момент инерции шатуна относительно оси, проходящей через его
центр масс, = 0,011 кг • м2.
Усилие резания определяют по диаграмме Рп.с = Рп.с (S).
Масштаб диаграммы: = 75 н!мм.
Координата точки приложения усилия резания: Yp = 185 мм.
Коэффициент неравномерности хода станка: 6 = 1/30.
Скорость вращения ведущей шестерни 1 привода станка =
= 1440 обIмин.
Скорость вращения кривошипа О2А механизма По2а — 72 об!мин.
Модуль зубчатой передачи планетарного редуктора: mi = 4 мм.
Модуль зубчатой пары г4 — z5 : тц мм, числа зубьев этой
пары: z4 = 11; 30.
Для колес планетарного редуктора принимаем нулевое зацепле-
ние с углом зацепления а = 20°.
Для пары z4 — z5 — зацепление неравноемещенное.
Угол качания коромысла механизма поперечной подачи стола стан-
ка Ргпах = Ь .
Длина / коромысла О4С равна 120 мм.
Минимальный угол передачи движения ymin = 60°.
Угол поворота кулачка, соответствующий удалению коромысла,
<ру = 60°.
Угол поворота кулачка, соответствующий дальнему стоянию
коромысла, <рд = 20°.
Угол поворота кулачка, соответствующий возвращению коромыс-
ла, <рв = 50°.
Принимаем закон изменения ускорений коромысла — косинусои-
дальный (вариант В).
§ 10. СИНТЕЗ ПРИВОДА МЕХАНИЗМА
Расчет привода станка. Общее передаточное отношение равно произ-
ведению передаточных отношений отдельных ступеней передачи, со-
ставляющих привод (рис. 101):
Ь,5 = ИМ4.5-
238
www.vokb-la.spb.ru - Самолёт своими
Здесь
1
U.5 =---------~
г4
30
11
Так как в строгальных станках кривошипом служит последнее зуб-
чатое колесо привода, то
п5 = По2а — 4% об[мин\
Определим знак 11,5, для чего воспользуемся фор-
мулой (3.47):
' i =1________is
li,s 1 1.3-
Здесь
Рис. 101
следовательно iis > 0.
На основании (12.4) получаем 1’1,5 < 0, т. е. = — 20.
Тогда
‘1,5 —20 22
’ 1*Л“ ‘4,5 “ 3
11
И
Л* 1 1 — ™
О,з = 1 — h.s -----------5—
Подбор чисел зубьев планетарного редуктора производим, поль-
зуясь методами, изложенными в § 4 гл. III.
Принимаем: число двойных сателлитов редуктора = 3, коэф-
фициент высоты головки зубьев /о = 1 и минимальное число зубьев
сателлитов (z2)min = 20 и (?2)т1П = 25, чтобы избежать явления под-
резания.
По условиям соседства выражений (3.53) и (3.54), определяем пре-
дельные значения величин х = — и у = Д:
г2 Z2
х>^ + г- — 1 _г-'+20 —1 =0,27;
л . л
z2 sin — 20 sin —
К о
тг 1 л ’
z2 sin —- 25 sin ——
z k 3
Задаемся x = Тогда по уравнению (3.50) находим величину
•s 9
У = — Л11.3 =-----и
19
~_________ 57
3 ) ” 13 *
13
Как видим, при принятом значении х величина у удовлетворяет
условию соседства, так как она больше его предельного значения.
Из уравнения (3.52)
57 , _9_
- > • _ - Тз" J _ 22 _ г
k 3 ’ г2 — 13 ’ 22 “
где С, как указывалось выше, произвольное целое число. Следовательно,
’ -ттт- = 1 За; z. — z2y ~ 13а- = 57а.
Уравнение (3.49) соосности с учетом значения х запишется так:
(х + 1) z9a — z« — z' = 44а.
всех зубчатых колес редук-
Так как по условию задания модуль
тора одинаков, то q — 1 и
44а _ 44(7
?2 ” т+г “ тт
13
9
z. = z9x = 26а • -гт- = 1 За.
1 z 13
= 26а;
Принимая а = 2, находим:
г, = 36; г2 = 52; г'г = 26; г3 = 114.
Радиусы делительных окружностей зубчатых колес редуктора:
wiZi 4-36
*' — ---— =------- — ММ,
“2 2
г2 = -Ц^- = 104 мм;
4 -26
г — —г— = 52 мм\
2 2
г = = 228 мм.
d 2
Фактическое передаточное отношение htS планетарного редуктора по
уравнению (3.47):
h.s ~ 1 — г?,з “1 —
52 • 114 = 22
36-26 ““ 3
Таким образом, фактическое передаточное отношение редуктора
соответствует расчетному.
Расчет элементов зубчатой пары 4—5. Параметры зуборезной
рейки:
/0=1; с' -0,25; ао = 2Ол
240
WWW?
>.ru - Самолёт
По таблицам 5 и 6 гл. IV находим для данной зубчатой пары коэф-
фициенты смещения и коэффициент обратного смещения:
Е4 = 0,66; = 0,501; V = 0,16.
Элементы зубчатой пары рассчитываем по уравнениям, приведен-
ным в табл. 1.
1. Сумма коэффициентов смещения
+ = 0,66 4-0,501 = 1,161.
2. Сумма зубьев
гс = г4 + г5 = 11+^0 = 41.
3. Коэффициент отклонения межцентрового расстояния
о = Ес — Т = 1,161 —0,16= 1,001.
4. Угол зацепления (по графику рис. 26, стр. 50)
1000Ч- = = 28,3; а = 26° 22'.
гс 41 ’ ’
5. Радиусы делительных окружностей:
_ ю <11
^Дз — 2 — 2
/* = — = -г = 150 /4
2 2
6. Радиусы основных окружностей:
гс?4 = гд cos а0 = 55 cos 20° = 55 • 0,939 = 51,6 мм;
t = г cosan = 150 cos20 — 150 • 0,939 = 140,8 мм.
7. Радиусы начальных окружностей:
'«='«. ( + 44)=“ (‘ + -ЧЧ) =@
+44)" 15+ +ЧЧ-)“157.3 "
8. Межцентровое расстояние
Л = т(-^-+а) = 10/'-^- +1,001) = 215 лш.
9. Радиусы окружностей впадин:
Rit = Гд4 - т (f0 + с’ - g4) = 55 - 10 (1 + 0,25 - 0,66)« 49,1 мм;
R =гД5-п?(/0 + <-и = 150-Ю(1 +0,25-0,501) ® 142,5 мм.
10. Глубина захода зубьев
Л3 = 2(/о—V)m= (2 • 1 —0,16) • 10= 18,4 мм.
241
11. Высота зуба
h = h3 + сот = 18,4 + 0,25 • 10 = 20,9 мм.
12. Радиусы окружностей выступов:
Re, = Rit + h = 49,1. + 20,9 = 70 мм;
Re, = Я,. + h = 142,5 + 20,9 = 163,4 мм.
13. Шаг зацепления
t = ят =3,14 • 10 =31,4 мм.
14. Толщина зуба по делительной окружности:
sRt = + 2%4т tg а0 = + 2 • 0,66 • 10 tg 20° = 20,5 мм;
~ + 2£5m tga0 = + 2 • 0,501 • 10 tg20° = 19,3 мм.
Профилирование пары 4—5 зубчатых колес (приложение III, лист 1).
Данная зубчатая пара представляет собой внешнее неравносмещенное
эвольвентное зацепление. Профилируем его методом, описанным в
гл. IV, § 3.
При профилировании зецепления на чертеже выделяем следующие
элементы зубчатого зацепления: активный участок АВ линии зацеп-
ления — отрезок MN теоретической линии зацепления, заключенный
между окружностями выступов колес; рабочие участки E±FX и £2F2
профилей зубьев, отсекаемые дугами AFX и ВЕ2 радиусов и 02В;
дуги зацепления C1D1 и дуги начальных окружностей C2D29 ограни-
ченные нормалями Е^, О±Р19 С2£2, F2D2 к профилям зубьев, которые
проведены через крайние точки рабочих участков профилей.
Эпюры относительных скольжений сопряженных профилей в пре-
делах активного участка линии зацепления АВ строим в системе коор-
динат X — х, где оси Ох || АВ и ОХ 1 АВ.
Величины относительных скольжений профилей зубьев определяем
по уравнениям (4.29):
7 II/ е*5-4 . а _ 1 । ; et^,5
Л4 == 1 + 15,4--— , Л5 ~ 1 М.5-- Т--- ,
Л L -Л
значения которых в зависимости от величины х при е = 97 мм,
г5 30 „ . 1 п
l4-5=V = TT и 15-4=-^г = ^б-
приведены в табл. 29.
По эпюрам Х4 и Л5 строим круговые диаграммы относительных
скольжений непосредственно на рабочих участках сопряженных про-
филей зубьев.
При этом за базу круговой диаграммы принимаем профиль; ве-
личины относительных скольжений, взятые с эпюры, откладываем на
дугах, проведенных через соответствующие точки профиля.
242
www.vokb-la.spb.ru - Самолёт своими
Таблица 29
Значения коэффициентов относительных скольжений пары 4—5
X 13 18 22 26 30 35 40 47
—1,36 —0,61 —0,25 0- 0,18 0,35 0,477 0,605
^5 0,57 0,38 0,2 0 —0,12 —0,545 —0,91 —1,58
Коэффициент перекрытия определяем по уравнению (4.22) и для
проверки точности проведенных построений находим его по уравнению
е~ <cosao~ 31,4cos20 31,4-0,94 1,1
£ t cos cz0
1/702 —51,62 + V 163,42 — 140,82 — 215 sin 26° 22'
31,4 cos 20
§ 11. ИССЛЕДОВАНИЕ ПРИВОДА
Аналитическое
пл
6,5 = -7Г =
исследование. Передаточное отношение привода
п1 t : (_ z5 \ / ^0 \ __ __20
ПН ' п5 \ г0 3 * * * * * * * I 11 /
Знак «минус» указывает на то, что колесо 5 будет вращаться в
сторону, противоположную вращению колеса 1.
Число оборотов в минуту водила
п$ — 196 об!мин\
*i,s —
3
я4 = ns ~ 196 об/мин.
Скорость вращения сателлитов определяем по уравнению (3.8):
гз-гг 1од 114-26
п2 = п = — п$ • —т— = -196 • —2g— ,
г2
откуда ~ ~ -
п2~ —665 об/мин.
Следовательно, сателлит вращается в сторону, противоположную
вращению первого колеса.
Находим скорость вращения и5 колеса 5
= ---— 196— 72 об/мин.
\гь/ о0
Графическое исследование. На чертеже (приложение III, лист 1)
изображаем кинематическую схему зубчатой передачи привода в двух
проекциях. На схеме оси зубчатых колес помещаем в одной плоскости.
243
Выбираем масштаб М схемы, равный М 1 : 10 или числовой мас-
штаб р7 — 0,001 • 10 = 0,01 м/мм.
Построение картины скоростей и диаграммы угловых скоростей
производим методами, изложенными в гл. III, § 3.
Из полюса зацепления Р\ 2 (рис. 102) откладываем вектор линей-
ной скорости зубчатых колес 1—2 в масштабе
лп
"Зб~ ‘ Г1 _ л - 1440 • 0,072 _ п апо м • сек-1
Р1,2Ч,2 30-36 мм
Соединив конец вектора /^2^1,2 с центром О± и мгновенным центром
вращения Р2\з» получаем треугольники А,2^1,201 и Pi,2^1,2^2',з, ко-
торые представляют собой картины скоростей первого зубчатого ко-
леса и сателлитов 2', 2 соответственно.
Чтобы определить скорость O'vs цен-
тра О' сателлита 2, восстанавливаем в
его центре О' перпендикуляр O'vs к
линии О'ОХ до пересечения с линией
П1,2Р2',з. Затем проводим прямую vs0L
до пересечения с направлением вектора
скорости P4,5V4,5 колес 4—5 в их полю-
се зацепления Р4.5 и точку v4,5 соединя-
ем с центром 02 колеса 5.
Треугольник O'vsOr — картина ско-
ростей водила и колеса 4, а треуголь-
ник Р4>5П4,5О2 — картина скоростей ко-
леса 5.
Для построения диаграммы угловых
скоростей на продолжении линии цент-
ров 0г0.2 откладываем отрезок ро — h.
Из полюса проводим лучи р\ || 0^1.2,
р2 jj vi.2P2',3, pS II O±vs, || O2v4.5 до пересечения с перпендикуляром
к линии р04, проведенным через точку О.
Отрезки 01, 02, 05, OS изображают соответственно в масштабе
рл = 40 скорость вращения зубчатых колес 1, 2, 5 и водила S.
Полюсное расстояние определяем по формуле
< 30 Hv 1 зо • 0,302 1 „
П = --- • ------= -----7Г-:---тт- 7 ММ.
л И/ Рп л • 0,1 40
§ 12. ДИНАМИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА
Построение диаграмм движения (приложение III, лист 2). Синтез
кулачкового механизма начинаем с построения диаграмм движения ве-
домого звена-корохмысла 04С, исходя из заданной диаграммы —=
244
www.vokb-la.spb.ru - Самолёт
= -^4- (ф)- Так как функция (ф) изменяется по косину-
d2p
соиде, то строим косинусоиды в системе координат -------ср на участ-
ках углов фу и фв.
Косинусоиды строим методом, известным из курса технического чер-
чения. За величину амплитуды косинусоиды на участке угла фу при-
нимаем отрезок h' произвольной длины, в данном случае h' = 15 мм.
Вследствие того, что углы фу и фв по проектному заданию не равны
между собой, величины амплитуд косинусоид обоих участков также
будут разными.
Для определения амплитуды h” косинусоиды на участке угла фв
воспользуемся уравнением (см. стр. 114).
h'
h" ~ ’
откуда
9
h" = h' • = 15 • = 21,6 мм.
Фв °0'
Интегрируя графически диаграмму (ф), получаем гра-
фнк (<р). Интегрирование производим методом, изложен-
ным в гл. VII, § 5. Принимаем полюсное расстояние Н2 — 8 лш.
Проинтегрировав диаграмму функции ~ (ф) таким же
образом, получаем диаграмму угловых перемещений £ = £ (<р); по-
люсное расстояние 16 мм.
Определяем масштабы диаграмм по формулам §7 гл. VII. Мас-
штаб углового перемещения коромысла 04С:
__я . 150
= JUx = J80 ---------= 010125 д/
р 6 — 6' 21
масштаб оси абсцисс диаграмм движения толкателя:
31 . 13ПЭ
рф = • =----------= 0,0349 рад!мм,
о —13 65
Фр
где
ФР = фу + фд + фв = 60° + 20° 4- 50° = 130э.
Масштаб оси ординат диаграммы ~ (<р)^
Из 0,0125 ПЛОО„
И ~ ~ 16 • 0,0349 ~ рад/мм,
Рр,
245
масштаб оси ординат диаграммы (<р):
Р</₽
«г<р 0,0223 л г'тпо л/
= 0ДО49 ."в = °’0798 рйд/ММ-
Принимаем, что кулачок вращается равномерно, т. е. со = const.
В этом случае угол поворота кулачка <р = со/ и ось абсцисс является
также осью времени, а графики функции (<р) и (гр) —
графиками угловой скорости со2 = со2(О и углового ускорения s2 =
= е2 (/) коромысла О4С. Масштабы этих диаграмм:
масштаб времени
Н/ = —г = = 0,00463 сек мм,
1 со /,ооо
где
to = = я‘-- = 7,536 рад!сек\
<JV ои
п — число оборотов в минуту кулачка, равное числу оборотов в мину-
ту зубчатого колеса 5, так как они закреплены на одном валу; с^до-
вательно, п == п5 = 72 об/мин*,
масштаб угловой скорости:
р№ = Р dp to = 0,0223 • 7,536 = 0,168 .
dtp
масштаб углового ускорения:
ре = р <?₽ to2 = 0,0798 • 7,5362 = 4,54
--------- мм
d<pz
Эти же диаграммы являются диаграммами пути, линейной скорос-
ти и касательного ускорения центра ролика коромысла в соответ-
ствующем масштабе:
масштаб перемещений
Hs = Р₽/ = 0,0125 • 0,12 = 0,0015 м/мм,
где I — длина коромысла 04С, равная 0,12 м;
масштаб линейной скорости
= 0,168 - 0,12 = 0,02
масштаб касательного ускорения
__2
= ре/ = 4,54 • 0,12 = 0,545 .
Определение минимального радиуса кулачка (рис. 103, а).
Из произвольной точки 04 проводим дугу радиусом, равным дли-
не коромысла / в масштабе = 0,0025 м/мм (приложение III, лист 2).
На этой дуге отмечаем точку Со — начальное положение центра ро-
лика коромысла. От точки Со откладываем величину хода центра ро-
лика С0С6 = 4Smax = /ртах- Можно также от начального положения ко-
ромысла О4С0 отложить угол качания.
246
www.vokb-la.spb.ru - Самолёт своими
Путь центра ролика С0Св размечаем в соответствии с диаграммой
перемещений 0 = 0 (/) [s=s(Z)]. Для этого на продолжении пря-
мой О4Со откладываем отрезок 04О = 50 мм (если позволяет масштаб
чертежа, то лучше отложить 0tD — 100 мм), к которому в точке
D восстанавливаем перпендикуляр. Отметив точку пересечения
перпендикуляра с продолжением прямой O4Ce,i на D/Ce откладываем
отрезки DKi, DK2, ..., DKi2, соответствующие тангенсам углов кача-
ния коромысла и определяемые по диаграмме ₽ = ₽(/):
DKi = OiDtgPi; 0<=0£14
где 0г — ордината диаграммы 0 = 0 (t) i-ro положения, мм;°
рр — угловой масштаб перемещения, град/мм, рр, = град/мм.
Рис. ЮЗ
Лучи 04Кь О4/<2.....04Я12 представляют собой как бы мгновенные
положения коромысла при его перемещении в соответствии с заданным
законом движения, а точки пересечения этих лучей с дугой С0Се
определяют положения центра ролика.
На лучах 04/Сь О4К2.....О4А13 от точки пересечения их с дугой
С0Св откладываем отрезки zit изображающие соответствующие значения
величины ~ в масштабе р£.Величину этих отрезков в мм определяем
по формуле
ds d0
247
ds <»
где — — величина первой производной линейного перемещения цен-
тра ролика коромысла по углу поворота кулачка;
dB
— величина первой производной углового перелмещения ко-
ромысла по углу поворота кулачка;
I — длина коромысла:
pz — масштаб длин чертежа;
р dfi — масштаб диаграммы функции -Ф- = -Ф- (ср).
Длины отрезков z определяем графически методом пропорциональ-
ного деления. С этой целью определяем наибольший отрезок при уда-
л ен и и кор омыс л а:
^тах ~ ^/тахН dfl * “ (3 3 ) Н dfl ’ ’ ~
dtp г’* dtp
= 18 • 0,0223 19 мм.
Полученный отрезок откладываем на стороне произвольного угла
(рис. 103, б и приложение III, лист 2) pz3 = zmax.
На второй стороне угла откладываем ординаты участка <ру диаграммы
= (ф):
dtp dtp v r/
Wi.5=/ —РУъд=2 — 2'\ РУ3 = 3 — 3'.
Через конечные точки отрезков ру\$, руы проводим прямые, парал-
лельные прямой, соединяющей точки отрезка zmax и максимальной
ординаты t/max, т- е. параллельно z3y3. Отрезки pzi>5, pz-A и т. д. явля-
ются искомыми отрезками z при удалении коромысла.
Аналогично определяем величины отрезков z при возвращении
коромысла. Наибольшее значение при возвращении коромысла:
4.x = = 20,5 • 0,0223 о^5-22 мм.
dtp
Направление вращения кулачка принимаем противоположным на-
правлению вращения коромысла при его удалении. Поэтому отрезки z
откладываем на промежуточных положениях коромысла вправо от ду-
ги С0С6 при удалении коромысла и влево — при возвращении его.
Соединив последовательно конечные точки отрезков zx, z2, z3...
плавной кривой, получим геометрическое место концов отрезков zlz —
= z(s)l. Для более точного определения области центра вращения
кулачка проводим дополнительные положения коромысла OJ и OJI.
Кривая z =z(s) отсекает на прямых OJ и OJI отрезки z допол-
нительных положений.
Через крайние точки отрезков z проводим прямые под минимальным
углом передачи утш = 60° к данным отрезкам. Областью центра вра-
щения кулачка будет заштрихованный участок (рис. 103, а и прило-
жение III , лист 2), являющийся общим для областей возможных центров
ащения кулачка всех положений коромысла.
I
www.vokb-la.spb.ru - Самолёт
Поместим центр вращения кулачка в вершине 02 заштрихованного
участка. Длина минимального радиуса кулачка будет равна отрез-
ку О2Со,
го = О2С0 • pz = 31 • 0,0025 = 0,077 м = 77 мм.
Расстояние между центрами вращения кулачка и коромысла
L = 0204 . pz = 59 • 0,0025 = 0,1475 м = 147,5 мм.
Профилирование кулачка (приложение III, лист 2). Профилиро-
вание кулачка проводим методом обращения движения (см. гл. VII,
§§ 13, 15).
Строим треугольник О2О4Со со сторонами L, /, г0 в масштабе pz =
= 0,0025 м/мм. Радиусом, равным О4С0, проводим дугу С0С6. стяги-
вающую угол СоО4С6 = Ртах =15°. Эту
дугу делим на части, пропорциональ-
ные ординатам диаграммы s = s (/). В
сторону, противоположную вращению
кулачка, от 0,04 откладываем углы
Z О4О26' = <ру = 60°;
Z6'O27'= фд =20°;
Z7'02/3'=\pB = 50°
и проводим дугу радиуса О2О4. Дуги,
стягивающие отмеченные углы, делим
на части, соответствующие делениям
оси абсцисс диаграммы s = s (/), т. е. О4/' = о 1'2' = ... = v/ 5'6'
и 7'8' = о 8'9' = ... = 12' — 13'. Из точек 2', ..., 13' радиу-
сом, равным длине 04С, делаем засечки 1", 2", ..., 13" на соответ-
ствующих дугах, проведенных из центра 02 через точки деления душ
С0С6. Соединив плавной кривой точки Со, 2", ..., 13", получим цен-
тровой профиль кулачка. Профилем кулачка на участке 6" — 7"
и Со —13" будут дуги окружностей, описанных радиусами О26" и О2Со.
Практический профиль вычерчиваем как огибающую семейства
дуг радиуса, равного радиусу ролика, которые проведены из центров,
расположенных на центровом профиле кулачка.
Для обеспечения заданного закона движения коромысла радиус г
ролика должен быть меньше минимального радиуса pmin кривизны
центрового профиля кулачка. Радиус кривизны участка наибольшей
кривизны центрового профиля кулачка определяем приближенно сле-
дующим образом.
Из средней точки Е участка наибольшей кривизны (рис. 104) опи--
сываем окружность произвольного радиуса. Отмечаем точки пересе-
чения GI этой окружности с профилем кулачка и из них описываем
новые окружности тем же радиусом.
Через точки М и N, Р и Q взаимного пересечения описанных
окружностей проводим прямые до пересечения их в точке О. Э1у
точку и можно принять за центр кривизны данного участка.
249
Если из точки О провести окружность радиусом ОЕ, то она впи-
шется в участок, радиус которого (ОЕ) нужно было определить.
Сделав > казанные построения для участка наибольшей кривизны,
получим
Pmin = PminPz == 17 • 0,0025 = 0,0425 м = 42,5 лш.
Принимаем радиус ролика г = 15 мм.
Для того чтобы не нарушалось соприкосновение между кулач-
ком и роликом коромысла, применяем пазовый кулачковый механизм.
Профиль паза вычерчиваем как огибающую окружностей роликов,
описанных из точек центрового профиля. Паз при изготовлении ку-
лачка будет выфрезерован в диске радиуса R = 130 мм.
Таблица 30
Значения угла передачи движения
Угол Значение в положении
0 1 2 3 4 5 6 7 8 9 10 н 12 13
поворота кулач- ка <р,° 0 10 20 30 40 50 60 80 88° 20' 96° 40' 105° 113° 20' 121°40' 130°
передачи движе- ния у,° 85 76 63 60 62 69 80 80 85 76 61 61 69 85
Синтез кулачкового механизма заканчиваем построением диаграм-
мы изменения угла передачи у = у(<р) (приложение III, лист 2);
найденные по чертежу значения угла передачи движения приведены
в табл. 30. В каждом положении кулачкового механизма угол пере-
дачи равен углу между отрезком г и прямой, соединяющей конечную
точку этого отрезка с центром вращения 0.2 кулачка (соединяющие
прямые на чертеже не показаны). Диаграмма у = у (<р) построена
в масштабе = 2 град!мм.
§ 13. СИНТЕЗ КУЛИСНОГО МЕХАНИЗМА
По заданной конструктивной схеме механизма составляем кине-
матическую схему (рис. 105). Кинематическую схему механизма изоб-
ражаем в трех положениях: в одном промежуточном и двух край-
них. В крайних положениях ось кулисы О3В является касательной
к траектории центра пальца кривошипа (приложение III, лист 2).
Отмечаем ход F1F2= Н ползуна F. Угол качания V = Z/B1O3B2
кулисы определяем по заданному значению коэффициента изменения
скорости хода согласно формуле (2.1):
4-= 180"= 180° .^=1 = 36".
250
www.vokb-la.spb.ru - Самолёт своими
Так как ось симметрии 03Е угла качания кулисы перпендикуляр-
на к оси хх движения ползуна F, то длина хорды равна ходу
ползуна. Из прямоугольных треугольников 03DB! и 0^0.2 опреде-
ляем длину Ъ кулисы 03В и длину г кривошипа 02А по формулам:
, // 400 400 сс„
b--------ф“ ~ 2 sin 18° ~ 2 • 0,309 6°0 ММ’
2sinT
XT
г = 020, • sin 4- = 350 • 0,309 « 108 мм.
Длина шатуна BF : с =
= М = 0,34 - 650 ^220 мм.
Ось хх движения ползу-
на F располагаем посредине
стрелы прогиба DE дуги B±B2,
радиуса 03Вп так как в этом
случае направляющие ползу-
на будут испытывать наи-
меньшее нормальное давле-
ние. Тогда расстояние оси хх
от оси вращения кулисы:
h=03M = 03B-^-
ф
b — 6 cos -у
=6—
d Zi I
-g-11 + eos
2
При выборе направления вращения кривошипа исходим из сле-
дующих соображений.
Для того чтобы шатун BF работал на растяжение при строгании,
последнее должно производиться в направлении слева направо.
При рабочем ходе (строгании) кривошип поворачивается на больший
угол, чем при холостом (фг > ср2), поэтому кривошипу сообщаем
вращение по направлению вращения часовой стрелки, а так как
общее передаточное отношение Zi>5 привода отрицательное, то двига-
тель должен вращаться в противоположном направлении.
В начале и в конце рабочего и холостого ходов резца имеются
перебеги, т. е. части общего хода резца, когда последний не нахо--
дится в контакте с обрабатываемой деталью.
В нашем задании задний и передний перебеги равны. Каждый
в отдельности равен 0,05// = 0,05 • 400 = 20 мм.
Определим углы поворота 0Г и 02 кривошипа, соответствующие
перебегам резца. Для этого изображаем положение механизма в
конце переднего перебега и начале заднего. Углы поворота
251
кривошипа, соответствующие переднему перебегу при рабочем ходе
= ©1 = 30°, а переднему перебегу при холостом ходе
©1= = 24°; заднему перебегу при рабочем ходе ©2 =
= / АчО^Аг ~ 25° и заднему перебегу при холостом ходе 02 =
= Х^2О2^2=24°. Углы, соответствующие перебегам при холостом
ходе, определены графически без учета того, что резец немного от-
стает от резцовой призмы при его обратном движении по обраба-
тываемой поверхности.
§ 14. КОМПОНОВКА МЕХАНИЗМА
вошипа, при котором резцовая
Рис. 105
Составим круговую циклограмму движения резцовой призмы и
коромысла кулачкового механизма, осуществляющего поперечную
подачу стола (рис. 106).
Углы поворота кривошипа будем отсчитывать от положения кри-
ризма занимает крайнее левое по-
ложение. При повороте кривоши-
па от 0 до 216° (поворот на угол
Ф1 = 180° + ЧЭ происходит рабо-
чий ход резцовой призмы.
При повороте от 216° до 360°
(поворот на угол ф2 = 180° —
— Чг) — холостой ход. '
При повороте кривошипа от
©1 = 30° до — 02 = 191° произ-
водится строгание, а при повороте
его от фх + 02 = 240° до 360° — ©\ =
= 336е, происходит скольжение
резца по обрабатываемой поверх-
ности.
Кулачок на оси О2 устанавли-
ваем так, чтобы начало удаления
коромысла СЦС (начало поперечной
подачи стола) совпадало по вре-
мени с окончанием резания при строгании. Тогда при повороте кри-
вошипа от срх — ©о = 191° до — ©2 + Фу = 251° происходит уда-
ление коромысла (поперечная подача стола), от фх — ©2 + <ру =
— 251° до ф! — ©2 + <ру + <РД = 271° —дальнее стояние коромыс-
ла, ОТ <Pi — ©2 + фу + фд = 271° до ф1 — ©2 + фу + фд + Фв =
= 321° — возвращение его в исходное положение.
Коромысло начнет удаляться тогда, когда будет соприкасаться
с началом участка профиля кулачка переменного радиуса, т. е. ког-
да начальный радиус-вектор О2Со кулачка совпадет с прямой О2С,
соединяющей центр С ролика с центром О2 вращения кулачка (при-
ложение III, лист 2). В этот момент кривошип О2А займет положе-
ние O242. Угол = Z-A'zO2C = а = 105° является углом
252
www.vokb-la.spb.ru - Самолёт своими
заклинивания, т. е. углом относительного расположения кривошипа
и кулачка.
На листе 2 (приложение III) изображена кинематическая схема
строгального станка и кулачкового механизма. Произвольную точ-
ку чертежа принимаем за центр зубчатого колеса 4, действительное
положение центра Ох устанавливаем при конструктивной разработке
станка. Числовой масштаб кинематической схемы pz = 0,005 м!мм.
§ 15. СТРУКТУРНЫЙ АНАЛИЗ КУЛИСНОГО МЕХАНИЗМА
Примем следующие условные обозначения звеньев механизма:
О — стойка; 1 — кривошип ОЯА; 2 — камень А кулисы; 3 — кули-
са 03В; 4 — шатун BF\ 5 — ползун F (рис. 105).
Количество подвижных звеньев п = 5.
Кинематические пары: 1) стойка — кривошип 02А; 2) кривошип
О2А — камень А; 3) камень А — кулиса 03В; 4) кулиса 0лВ —
стойка; 5) кулиса 03В — шатун BF; 6) ша-
тун BF — ползун F; 7) ползун F — стойка; \В
все пары низшие, плоские, накладывающие по у |
2 связи на относительное движение звеньев; ко- \с?2
личество пар р2 = 7.. 1
Степень подвижности механизма проверяем # > т
по формуле (1.1): А
VIZ = 3п —2р.3 = 3 - 5 —2 - 7 = 1. F в \
—-рГ]-'---Q ।
Составим структурные группы механизма и \О3
определим класс и порядок: g g
1) стойка — кривошип О2А — механизм I
класса (рис. 107, а); 2) камень А — кулиса рис ю7
03В — группа II класса 2-го порядка (рис.
107, б); 3) шатун BF — ползун F — группа II класса 2-го порядка
(рис. 107, в).
Таким образом, исследуемый механизм, обладающий одной сте-
пенью подвижности, можем рассматривать как образованный путем
последовательного присоединения к стойке 0 и ведущему звену 1
двух групп, состоящих из звеньев 2, 3 и 4, 5. По классифика-
ции И. И. Артоболевского он должен быть отнесен к механизмам
II класса.
Формула строения механизма: I П2 П2.
ин/и 001
§ 16. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ ШЕСТИЗВЕННОГО
МЕХАНИЗМА
Кинематическое исследованйе кулисного механизма (приложе-
ние III, лист 3) производим методами, изложенными в гл. VI.
Планы механизма. В масштабе р; = 0,005 м!мм строим планы
механизма, начиная с построения положений ведущего звена — кри-
вошипа О2А. Кривошип изображаем в 15 положениях: 12 — через
253
каждые 30°, начиная с положения, соответствующего левому край-
нему положению ползуна F (О2Ао X О3В0), и в трех его характерных
положениях — двух вертикальных (О2А3, О2Аэ) и одном, соответ-
ствующем правому крайнему положению ползуна F (О2А'7 X О3В'7).
Затем изображаем все остальные звенья механизма в положениях,
соответствующих указанным положениям кривошипа. Положение
Рис. 108
звеньев на каждом плане механизма
определяем методом засечек.
Планы скоростей. Планы скорос-
тей строим для всех 15 положений
механизма в масштабе — 1 услов-
ных кривошипов.
Масштаб плана скоростей опреде-
ляем по формуле (6.12):
ГСП
II — — "30" ‘ R —
Pi Pi
= — 7Л'в,00° = 0,0377 •
30-1 ’ мм
Поел едовател ьн ость постр оен и я
плана скоростей и ускорений данно-
го механизма рассмотрим на приме-
ре построения этих планов для 5-го
положения (рис. 108, а). Построе-
ние планов скоростей и ускорений
начинаем от ведущего звена, закон
движения которого задан. Последовательно переходя от двухпо-
водковой группы, присоединенной к механизму I класса, к после-
дующим группам в порядке их наслоения, определяем скорости и
ускорения всех точек звеньев механизма.
Из точки р, принятой за полюс плана скоростей (рис. 108, б) от-
кладываем в направлении вращения кривошипа вектор скорости
точки Ах кривошипа:
pai.2 = Hi (02А)\ ра{'2 X О2А.
Так как звенья 1 и 2 механизма соединяются между собой вращатель-
ной парой, то скорости точек Аг и А2, лежащих на оси этой пары,
равны:
^=^=(^1.2)^.
Скорость точки А3 кулисы, совпадающей с точкой А2 камня, опре-
деляем по уравнению
\ == Ч + °А,А,
ИЛИ
ра2 = ра3 + a3as,
254
www.vokb-la.spb.ru - Самолёт
где \
ра3 ± 03А, а а3а2 || 03А.
Скорость точки В кулисы определяем на основании теоремы
о подобии:
-7 — 03В . о с 130 о„
pb — ра3 • о — 18,5 • 87 J. ~27 мм.
Величина pb для других положений механизма дана в табл. 31.
Чтобы определить скорость точки F ползуна, воспользуемся
условием, что vf II хх, и векторным уравнением:^
vf = vb+v^ или pf=Tb+bf,
где
pf || хх и bf ± BF.
Скорость центров масс S3 кулисы 3 и S4 шатуна 4 находим по тео-
реме о подобии:
ps3 = pb'- = 27 • -g- = 13,5 мм-,
у ^^4 д 22 Q
b$4 — bf = 4 • = 2 мм.
(Значения ps3 и Z?s4 для всех положений даны в табл. 31.
^Соединив точку $4 на плане скоростей с полюсом, получаем век-
тор абсолютной скорости точки S4.
СУгловая скорость кулисы в данном положении
vb (pb) 27 • 0,0377 i га
со3 = I— = = ion алпё" = 1,56 рад сек.
3 k)3B (О3В) • И/ 130 • 0,005 ’ г
Если вектор pb перенести в точку В кулисы, то он укажет на-
правление вращения кулисы относительно оси 03, а следовательно,
и направление <о3. В табл. 32 представлено вычисление угловой
скорости со3 кулисы для всех положений механизма. За положитель-
ное направление принято вращение кулисы в направлении вращения
часовой стрелки.
Планы скоростей для всех остальных положений строят анало-
гично. В положениях О и Т вследствие того, что кривошип перпен-
дикулярен к кулисе, скорость точки А3 кулисы относительно кам-
ня по модулю равна скорости камня кулисы, но противоположно
ей направлена: ^1,2^3 = — поэтому скорость точки А3 равна
нулю, а следовательно, и скорости точек В, F, S3, S4 тоже равны
нулю.
В положениях 3' и Р'^кривошип 02Л и кулиса О3В по направлению
совпадают, поэтому скорость точки А камня и точки Л3 кулисы рав-
ны. Также равны скорости точек В, F и S4, так как 03В j_ хх
Планы ускорений. Планы ускорений строим в масштабе р2 = 1
условных кривошипов для всех положений механизма, за исключе-
255
со
СО
\о
со
Н
Величины отрезков, мм, изображающих в масштабе li-j скорости точек звеньев механизма
— 56,5 12,2 28 ь- СО а 32 — 28 см со 1
о ю 1О lO rzf S 1
CD о см 54 27 LO см Ч ю со
CD 48,4 21,5 58 29 О о СЗ о 54 со 1
О 50,5 19,5 50 ю см 6,6 3,3 о> 58 -3,365
оо
со 58 СП 22 •—« СО со о ю -2,9
ю 1
о со О о о о О о СО
см
X 69,5 2,1 см ч—< ю о X X ОО 22 1
о си
*-» о с ю ю LQ * о г- о о
е о о cd см СП »—i CD ю см • о U-, ’СГ см СО
о о ю Ю Ш И о о
СП to со ’•—4 об оо *“4 i27 со •—4 см X X а> СТ CD LO CD СО V—4
ю оо Ю СО СО с*5 »—4 W—
•—1 CD •—< см »—4 со IO •—4 о »О С4 СО LO
СО см ш ч—4
г> ‘16 см см СО in г—4 о о <г СО 795
СО —
СП см 30 Ю см СО LO г-4 оо см 00
см ю СО •—4
сч 98 26 со ю см СО 30
Ю ю со ю W—4
гб о •—м со" г—• оо ю см' О S сч 26 R '-4 LO
СО >> S о &
см со со О о о о о ш СО СО Ш О
О
S о 12е о О
Отрезок 03 со о ч с? ео О. -CD сх. со со CL ^сГ со* О Величина угловой Параметр pb, мм со3, рад/сек,
256
www.vokb-la.spb.ru - Самолёт своими
наем положений 8, 9, 10, 11, для которых выбираем масштаб Ц2 =
=."Ф условных КривбШипов.
Масштаб планов ускорений 'определяем по формуле (6.13)
„ = • 0,005 = 0,284 - •
|Л2 302 ’ ’ мм
Масштаб плана ускорений для положений 8, 9, 10, 11 меха-
низма:
о
= Л2 - . 0,005 = 0,568 - • ---
302. ’
Построение плана ускорений также рассмотрим для 5-го поло-
жения механизма (рис. 108, в). Принимая, что кривошип вращается
с постоянной угловой скоростью, точка Аг кривошипа будет иметь
только нормальное ускорение. Поэтому от произвольной точки л
полюса плана ускорений по направлению от Л5 к О2 откладываем
параллельно Л502 отрезок представляющий собой ускорение
wa точки А± кривошипа:
. .,( ЛЯ1.2 = ц2 • (02Л).
Ускорения точек Ах и Л2, как и их скорости, будут равны.
Движение точки Л2 камня кулисы рассматриваем как сложное:
вместе с кулисой (переносной средой) и относительно нее.
Поэтому
Was = w'a3O. + WA3O + &АгА3 + WAtA3
ИЛИ __ ___
ЛЯ1.2 = + kd\t2-
Данное уравнение решаем в следующем порядке (см. рис. 108, в).
От начальной точки результирующего вектора (полюса л) от-
кладываем вектор нормального ускорения лип а к его конечной
точке «1,2 прикладываем вектор ускорения Кориолиса ka\t2 так, что-
бы конечные точки этих векторов совпадали. Затем через конечную
точку вектора ппу проводим тангенциальное ускорение пла3 до пере-
сечения в точке а3 с относительным ускорением «3/е, проведенным
через начальную точку вектора ka\t2. При этом лп^ || ЛО3 и одина-
ково направлены ; пга3 1 Л03, a3k || Л03 и ka _1_ Л03. Если точку
а3 соединим с полюсом л плана ускорений, то получим абсолютное
ускорение точки А3 кулисы was = (яа3) Hw
Отрезок fozi.o, изображающий в масштабе ускорение Кориоли-
са, определяем графически (рис. 108, а). Для этого из точки ЛБ от-
кладываем вектор ра3, взятый из плана скоростей. Точку а3 соеди-
няем прямой с точкой С — серединой отрезка О3Л6. Из точки С
з/49132Ь . е 257
\ К \
в направлении относительной скорости ил2дя откладываем отрезок
CF = a3ai,2. В точке F восстанавливаем перпендикуляр до пересе-
чения его в точке D с продолжением линии а3С. Направление уско-
рения Кориолиса совпадает с направлением вектора FD, а его мас-
штабная величина ka\^ = FD • —= FD [21]. Также графически
Нь
определяем длину отрезка —масштабное значение нормального
ускорения Ша3о3- Для этого воспользуемся уже отложенной скорос-
тью ра3. Точку а3 соединяем с О3 и проводим через точку а3 прямую,
перпендикулярную к а3О3.
Точку пересечения этой прямой с прямой О3АЬ обозначаем бук-
вой N.
Тогда масштабное значение нормального ускорения
ллх = A.N • -Ь. = A.N.
Pi
Ускорение точки В определяем на основании теоремы о подобии:
, О,В о 130 1О
лЬ — ла., — 8 • -37-F- = 12 мм.
3 OSA 87,5
Для других положений механизма определение лЬ дано в
табл. 33.
Ускорение точки F определяем графическим построением век-
торного уравнения
Wf = WB + WFB + ^FB
или
л/ = л& -|- bn2 + n2f.
При этом bii2n FB параллельны и одинаково направлены, nJ _ FB
и л[ II хх. Масштабное значение Ьп2 нормального ускорения опре-
деляем аналитически, так как относительная скорость bf настолько
мала, что графически определить Ьп2 практически невозможно:
Ьп2 =
№ = W • щ = 4 _0 .
(BF) • gjgK, (Bf) . р2 44
Значения Ьп2 для всех положений механизма приведены в
табл. 34.
Отложить отрезок такой длины очень трудно. Поэтому пренебре-
гаем им и из точки b плана ускорений проводим вектор в направлении
тангенциального ускорения до пересечения его в точке f с направ-
лением вектора л/ ускорения точки F.
Ускорение центров масс S3 и S4 звеньев 3 и 4 определяем на
основании теоремы о подобии, аналогично тому как определяют
скорости. Определение положения изображающих точек s3 и s4 на
плане ускорений дано в табл. 33.
258
www.vokb-la.spb.ru - Самолёт своими
Таблица 33 Величины отрезков, изображающих в масштабе ускорения точек звеньев механизма 1 Длина, мм, в положении “К со 8 2 8 3 л =’ Таблица 34 Величины отрезков, изображающих в масштабе нормальное ускорение ш'рВ Значение в положении [ о 2,5 | 7 0,5 0,07 1 0,55
о 2 (< о о о СЧ —ч —’ КО
о № СТ) W С СО СЧ —< СЧ ~ сг> О — О
о ко ю о ео g ® я = ® « о 1 6,6 ,5 0,5
СО оэ сс о ' ю —« СЧ со со ОО О - 5
?- ко сч <© со ио ~ со о СМ 'Ф СМ ь- о о
t- ко о о со о °0 ом со ь- сч —< о о
о О Ю СЧ кО “ £ 2 g S » " <£> ко ко о
ю ко сч и 00 а « оГ ш 1 4 0,36 |
TJ- КО со со сч со ° со г-' СО ТФ «я - 3 о
со О О Ю кО S г" СО о о
со со со со со со КО 1< СО СО со СО 04 о
С1 ю со Ч г- ко со об 23 00 С1 КО о
*-1 КО ^г- t< е*ч —Г см г- Z. сч « — •О КО о
ОО! ко сч со с§ сч с^ S3 ° о £2 о о
Отрезок в3 (5s к К g -° -8 Параметр 1 bf, мм Ьп2, мм
3/49*
259
Угловое ускорение е3 кулисы находим по формуле
_ _ _ (”ig8) • Hw _ 6.5 • 0,284
3 (ОзА,)-Н/ 87.5 - 0.005
= 4,22 рад! сек1.
Чтобы определить направление этого ускорения, необходимо
вектор касательного ускорения nYa9 перенести в точку Л3 кулисы.
В положении 5 механизма угловое ускорение направлено в сторону,
противоположную вращению часовой стрелки. Величины углового
ускорения г3 кулисы для всех положений ее даны в табл. 35. За его
положительное значение принято направление ускорения, совпа-
дающее с направлением вращения часовой стрелки.
Для остальных положений механизма планы ускорений строят
аналогично (графическое определение масштабных величин Wa^a,
и ч)а^о для этих положений на листе 3 приложения III не показано).
Отличительной особенностью планов ускорений для положений
О и 7' является то, что
^0,=°; wa2a3-°’ ^=0’
так как скорости, по которым определяют эти ускорения, равны
нулю.
В положениях 3' и 9' механизма
№л^=°’ ^э0,=°; ^в=°-
Действительные величины абсолютных скоростей и ускорений
характерных точек механизма, определяемых по планам скоростей
и ускорений приведены в табл. 36.
Диа1раммы движения резцовой призмы. Построив планы ме-
ханизма, мы тем самым размечаем путь ползуна F в соответствии
с углами поворота кривошипа или временем движения ползуна.
Расстояния F0Fi, F0F.2, F0F3, ... ползуна от его крайнего левого
положения откладываем на ординатах в соответствующих точках
диаграммы sF(t). Соединив конечные точки ординат, получим диа-
грамму перемещений резцовой призмы sF = sF (/).
Масштаб перемещений |xs диаграммы sF == sF (t):
= 2pz = 2 0,005 = 0,01 м!мм,
0 V&?
так как на ординатах откладываем расстояния, измеренные на пла-
нах механизма и уменьшенные в два раза.
Масштаб оси времени определяем по формуле (6.3):
Г 60 60 1 Л ОЛ /
и# = -= = — хи- = ж0,0139 сек мм,
rt 0—12 п(О — 12) 72-60 72
где Т — время одного оборота кривошипа.
Дифференцируя методом хорд диаграмму перемещений, получаем
диаграмму скорости резцовой призмы в функции времени (см. гл. VI,
§ 5) vF = vF (/).
Для удобства сравнения скоростей, измеренных на плане и на
диаграмме vF = vF (t), выбираем полюсное расстояние Н± при
260
Величины углового ускорения кулисы
www.vokb-la.spb.ru - Самолёт своими р Lmh?! 1 к 1
Значение в положении 1 — Ю Щ 52 о in ОО in ОД со _ Таблица 36 Величины скоростей и ускорений характерных точек механизма . Значение в положении *• С14-- Tt* ~1 Of) СМ I4* 00 со см 1О ю СП LO О г* тг in о О СП < г/ о о —< -Г о °° — —1 ~
о о> 0 6 0,284 0,Е 48,4 49,5 0 13,78 о см с- io см °о 52 ю Ь: rr £2 СО см со цэ СО СП СО г*- о о о о - - " • - о - с4 cJ <N = 01
о о - S “i °5 о |[ г? 1 1 ^li 1 1 1 1 -5. 1 L 1 1/, 1 Fl 1 1 “ 1 1 н 1
ст> | 8,5 68 50,5 —19,15 О in см in in in —. ю lq СО rf оо 00 оо in LO ’ С- СП 00^ 00 00 о- со 22 22 о о — — —1 22
ос о ю | 2 1 6,5 1 12,5 | 21,5 | 21,6 13 0,5 91,5 87,5 79,5 69,5 66,5 58 —1,24 —4,22 —8,93 —17,6 —18,5 —25,5|- ОС о ю 0,815' 0,815 0,824 0,697 0,453 0,079 0 0,370 0,594 0,584 0,508 0,367 0,075 0 0,414 1,188 1,168 1,017 0,735 0,151 0 0,829 1,188 1,168 0,998 0,716 0,151 0 0,810 1,188 1,160 0,998 0,716 0,151 0 0,792 6,15 1,42 1,703 2,27 3,46 5,68 6,02 7,38 0,995 1,22 1,7 2,84 5,40 5,91 8,24 1,990 2,44 3,4 5,68 10,8 11,82 16,48 0,995 1,36 3,265 5,68 10,79 11,36 16,37 0,284 0,995 3,12 5,68 10,79 11,08 16,48
СО СО 3 | 0 0,284 91,3 91,6 1,87 0 CM in О О О in ~ О0 о о со СО со in « m Н, ~ см о о" ——Г _Г’-'См — й с? ОО ОО СП О СП о п о S 8 8 8 ‘Q °> *> ч. ® о о о о о см со со со — СМ О О £4 СО СП СО СО CD CD CD ^0, ^П о о О О О со СО CD CD CD
OI СП 00 оою'
Параметр 0 12 1 /ца3, мм 21,6 | 11,5 м!сек2/мм 0:>А, мм 66,5 77,5 °3, рад/сек2 18,5 8,43
о2 oi СМ о оо о о о о о о о °2. °? О СО 1П ~
Параметр vA^ = vA, м/сек vA з м/сек us’t м/сек vB, м/сек vs , м/сек vp, м/сек wAi = а>Аг, м/сек2 wA f м/сек2 ws, м/сек2 ^в3’ м/сек2 ws , м/сек2 wF, м/сек2 Л— -~1
261
дифференцировании так,чтобы числовое значение масштаба ^Диаг-
раммы скорости было в два раза больше числового значения ц,„ пла-
нов скоростей (если позволяет масштаб чертежа, то целесообразно
принимать = pj:
= 2ц0 = 2 • 0,0377 = 0,0754 ;
Гу ™ > мм »
и _ Hs__________0,01____~ Q 5 мм
П1 Htliv ~ 0,0139 • 0,0754 У’° ММ-
Значения ординат диаграммы для положений 3' и 9' берем из
соответствующих планов скоростей и откладываем на диаграмме
vF = vF (0:
3'-3"=-^-(pf)^
Дифференцируя диаграмму vF = vF (t), получаем диаграмму wF =
= wF (t) ускорений резцовой призмы. Принимаем
= 2pw = 2 • 0,284 = 0,568 .
Полюсное расстояние
w ________________ Llv________0,0754 __q г
”2 “ IUU “ 0,0139 • 0,568 — У’° ММ-
Значения ординат 0 — 0", 8 — 8\ 11 — 1Г\ 12 — 12" берем из пла-
нов ускорений и откладываем на диаграмме 0—0" = 12—12" =
= положения 0; 8 — 8" = л/ положения <8; 11 — 11" = л/ положе-
ния //. Диаграмму vF = vF (sF) строим способом графического ис-
ключения из диаграмм sF == sF (/) и vf = vF (t) параметра време-
ни t.
Масштаб перемещений оставляем без изменения — вспомога-
тельную прямую OR проводим под углом 45° к оси абсцисс.
§ 17. КИНЕТОСТАТИЧЕСКОЕ ИССЛЕДОВАНИЕ
ШЕСТИЗВЕННОГО МЕХАНИЗМА
Кинетостатическое исследование (приложение III, листы 4 и 4а)
проводим методами, изложенными в гл. VIII.
Определение силы Рпс полезного сопротивления. Силу Рп.с опре-
деляют по заданной диаграмме Рп.с = Рп,с (S). Эту диаграмму пере-
черчиваем с бланка задания на 4-й лист (приложение III). Чтобы
облегчить разметку оси абсцисс этой диаграммы в соответствии
с исследуемыми положениями механизма, размещаем ее над осью
движения звена, на которое действует сила Рп.с-
Численное значение масштаба ftp воспроизводимой диаграммы
будет во столько раз меньше заданного рр, во сколько раз ординаты
диаграммы на листе больше ординат диаграммы на бланке задания.
262
f
www.vokb-la.spb.ru - Самолёт своими
Из диаграммы Р„.с = Рп.с (s) видно, что на звено 5 действует
сила полезного сопротивления лишь в положениях 1—6, причем
во всех положениях она постоянна:
Рп с = y\Fp = 15- 100 = 1500 н,
где у — ордината диаграммы Рп.с = Pn.c (s),
р.р — масштаб сил этой диаграммы.
Определение результирующих сил инерции звеньев. Результирую-
щая сила инерции кулисы 03В:
p„s = — m3ws, = —т3 (ns3) p w;
результирующая сила инерции шатуна BF:
P»t = — = — m4 (ns4) • pw;
сила инерции ползуна F:
P„5 = — mbwF = —ma (nf) • p^,
где m3, m4, m5 — массы соответствующих звеньев;
K's. — ускорения центров масс;
wF—ускорение ползуна;
ns3, ns4, nf — масштабные значения тех же ускорений;
рш — масштаб плана ускорений.
Таблица 37
Величины сил инерции звеньев 3, 4 и 5
Звено 3 | Звено 4 | Звено 5
Поло- 3* д
жение к: е» ке к: м * ki Я? аг
£ т «О к о? Е К 3^. =1 3 S о. 10 £ К 3^. S*
0 12,23 20,8 0,284 73 3,06 40 0,284 35 46,9 39 0,284 520
1 12,23 11,7 0,284 40 3,06 23 0,284 20 46,9 23 0,284 306
2 12,23 6,7 0,284 23 3,06 13 0,284 11 46,9 13 0,284 176
3 12,23 3,8 0,284 13 3,06 5,5 0,284 5 46,9 4,5 0,284 60
4 12,23 4,3 0,284 15 3,06 4,8 0,284 4 46,9 3,5 0,284 46
5 12,23 6 0,284 21 3,06 11,5 0,284 10 46,9 11 0,284 149
6 12,23 10 0,284 35 3,06 20 0,284 17 46,9 20 0,284 264
7 12,23 19 0,284 66 3,06 38 0,284 35 46,9 38 0,284 505
8 12,23 14,5 0,568 100 3,06 28,8 0,568 50 46,9 29 0,568 760
9 12,23 11,5 0,568 80 3,06 22 0,568 38 46,9 22 0,568 580
10 12,23 10 0,568 70 3,06 17,5 0,568 32,5 46,9 16,5 0,568 440
11 12,23 15 0,568 104 3,06 29,5 0,568 51,4 46,9 29 0,568 774
Числовые значения результирующих сил инерции даны в
табл. 37. Так как сила тяжести камня кулисы по сравнению с силой
тяжести других звеньев незначительна, то при кинетостатическом
исследовании механизма сила тяжести и сила инерции камня не учи-
тываются. Результирующую силу инерции PUa прикладываем в
8/4+91328 263
точке К — центре качания кулисы. Центр качания кулисы опреде-
ляем следующим образом (рис. 109, б).
В центре масс S3 кулисы восстанавливаем перпендикуляр S3V
к 03В. На перпендикуляре откладываем величину радиуса инер-
ции р$3 кулисы в масштабе р7 изображения кулисы:
Рис. 10Э
Точку V соединяем с центром вращения О3 кулисы и восстанав-
ливаем к O3Af в точке N перпендикуляр Точка К пересечения пер-
пендикуляра NK с осью OsSs кулисы и будет центром качания ку-
лисы. В точке К прикладываем вектор РНз, направленный^ в сторо-
ну, противоположную направлению вектора ускорения ns3 центра
масс кулисы. Радиус инерции р§3' определяем по значению момента
инерции J$a кулисы: ____
Задачу об определении точки приложения (полюса инерции) ре-
зультирующей силы РН1 инерции шатуна BF решаем способом, осно-
ванным на разложении сложного движения звена на поступатель-
ное и вращательное (см. гл. VIII).
Находим указанным выше способом центр качания Ко шатуна
в предположении, что точкой подвеса шатуна является точка F.
264
www.vokb-la.spb.ru - Самолёт своими руками?!
Ради} с инерции шатуна:
/*^s4 ч /* 0,011 Л пс
"^7" — ]/ ~W ~ 0,06 м'
а его масштабная длина
0,06
s*N = W “ 6 мм-
Точка Т пересечения прямой, проведенной через точку 7<0 па-
раллельно вектору Tf плана ускорений, и прямой, проведенной че-
рез центр масс S4 звена параллельно вектору nf плана ускорения,
и будет полюсом инерции, через который проходит линия действия
результирующей силы инерции Р„е
Сила инерции ползуна приложена в центре масс S5 ползупа.
Определение сил тяжести звеньев. Выше отмечалось, что в стро-
гальном станке кривошипом (звеном 1) служит зубчатое колесо 5,
сила тяжести которого
Gi ~ т&
где — масса зубчатого колеса 5;
g — ускорение силы тяжести.
Массу "tnt определяем через массу тв венца зубчатого колеса
(она на 30% превышает массу тв, т. е. = 1,3 тв). Массу венца
определяем приближенно по формуле
тв — aD^Sp кг,
где DiS — диаметр окружности впадин колеса 5, равный 0,285 м;
р — плотность материала колеса; считая, что колесо чугун-
ное, принимаем р = 7100 кг/м3’,
S — площадь поперечного сечения венца колеса.
Приняв ширину колеса равной Ь — 40 мм и высоту сечения
венца h = 3 тц, определим площадь S сечения венца:
S = Зтп6 = 3 • 10 • 40 = 1200 мм2 = 0,0012 м2,
где гпц — модуль колеса 5.
Масса венца:
тв = л • 0,285 • 0,0012 • 7100 = 7,63 кг,
а масса всего колеса с учетом массы спиц и ст? пицы:
т1= 1,3 7,63 — 10 кг.
Сила тяжести колеса 5: ,
Gx = mtg = 10 • 9,81 — 98 н\
сила тяжести кулисы OSB:
Gs = mAg = 12,23 • 9,81 = 120 н;
сила тяжести шатуна BF:
= mtg = 3,06 • 9,81 == 30 н;
8А 1-9*
265
I
сила тяжести резцовой призмы
05 = = 46,9 • 9,81 = 460 н.
Определение давлений в кинематических парах. Определение дав-
лений в кинематических парах механизма начинаем с анализа по-
следней (считая от ведущего звена) присоединенной группы и за-
канчиваем последовательным переходом от одной группы к дру~
гой силовым анализом ведущего звена. Порядок силового расчета
проследим на примере определения давлений в кинематических па-
рах в 7-м положении механизма. Решение данной задачи начинаем
с рассмотрения условий равновесия структурной группы, состоящей
из ползуна 5 и шатуна 4 (рис. 109, а и приложение III, лист 4).
Для этого раскладываем реакцию Т?3>4, действующую в паре В, па
составляющие R^ Rsa - Rs,4 = Язл + Язл-
Составляем уравнение моментов всех сил, действующих на зве-
но 4, относительно точки F:
(Р{) = ОД + P^h2 - $.4 • (BF) = 0,
откуда получаем
D< + Ри h2 30 • 11 + 35 • 1 _
*\3,4 — — - — — г, о
(RF\ 22
Результаты вычислений А’зд для всех положений сведены в
табл. 38.
Таблица 38
Величины .
Параметр Значение в положении
0 12 1 2 3 4 5 6 7 8 9 10 11
G4, н 30 30 30 30 30 30 30 30 30 30 30 30
hlt ММ 11 11 11 11 11 11 11 11 11 11 11 11
рН1> н 35 20 —11 —5 —4 —10 17 35 50 —38 —32,5 51,4
hb мм 3 2,5 2 8 10 3 1 1 1 2 5 4
BF, мм 22 22 22 22 22 22 22 22 22 22 22 22
^3,4 н 20 17 14 13 13 13,5 15,5 16 17 11,5 7,5 24
Затем составляем общее уравнение равновесия всей группы, при-
равнивая нулю векторную сумму всех сил, действующих на группу:
R0.5 + f\ + G-a +Р„, + 6. +^з.4 + ^.4 =0; (12.5)
la + ab -f- be -j- cd + de + ef + ft = 0.
Сила резания Рп.с в положении 7 не действует; силы Р„й, G5,
Ра , Git и 7?з,1 известны; сила /?з,4 известна по направлению, она
266
www.vokb-la.spb.ru - Самолёт своими
параллельна оси звена BF, а сил£ Т?о,5 перпендикулярна к оси хх
поступательной пары
Для определения величин сил /?з,4 и i?o.5 строим план сил
(рис. 109, в). Задаемся масштабом плана сил = 20 н/мм и склады-
ваем векторы сил в порядке, указанном в уравнении (12.5). Затем через
начало вектора PIIs (точку а) проводим прямую, параллельную линии
действия реакции /?о,5> а через конец вектора /?з,4 (точка f) — пря-
мую, параллельную линии действия /?зд. Точка i пересечения
этих прямых определит начало вектора силы_#0,5 и конечную точку
вектора силы R^. Соединив начало вектора 7?зл (точка е) с конечной
точкой i вектора /?з,4» получим полную реакцию R^, в паре 3—4.
Давление /?5,4 в паре 4—5 (шарнир F) определяем из условия
равновесия шатуна BF-.
Р и, + + /?3,4 4~ /?5,4 — 0;
cd 4- de + ei 4- ic = 0.
Чтобы решить данное уравнение, достаточно па построенном
плане сил конец вектора /?з,4 (точка i) соединить с началом вектора
Ри< (точка с). Это п будет искомый вектор Рзл-
Для определения точки приложения реакции /?о,з находим точ-
ку О пересечения линий действия сил /?4.5 (прямая FO) и = G5 4-
4- Рц. (прямая S5O) (рис. 109, а). Через эту точку и будет проходить
реакция так как известно, что для равновесия тела, находяще-
гося под действием трех непараллельных сил, лежащих в одной
плоскости, необходимо, чтобы их линии действия пересекались в
одной точке.
Плечо х реакции Т?о,5 относительно точки F можно определить
также аналитически. Для этого следует решить относительно к урав-
нение равновесия звена 5: ^Мр(Р^ =0.
Рассмотрим группу, состоящую из звеньев 2 и 3. На звенья этой
группы, кроме силы тяжести G3 и результирующей силы инерции
РИ(, действуют еще реакции/?о,з и Реакция приложе-
на в точке В и равна по величине силе /?3,4, но противоположно ей
направлена. Реакция /?о.з проходит через центр шарнира О3, она
неизвестна ни по величине, ни по направлению. Реакция Rit2 при-
кладывается в центре вращательной пары А. Направление ее опре-
деляется из условия равновесия камня кулисы А:
R1.2 4“ = 0,
где Rs,2 — давление со стороны кулисы на камень.
Так как кулиса и камень образуют поступательную пару, то
вектор 7?з>2 будет направлен перпендикулярно к оси кулисы, если
не учитывать сил трения. Следовательно, вектор /?1,2 тоже будет
267
направлен перпендикулярно к оси кулисы и
^1,2 = -------/?3.2 = /?2,3'
Величина силы Rii2 определится из уравнения моментов всех
сил, действующих на группу 2—3 относительно точки О3,
ZM0> (Р() = Gshs 4- P„Ji& + R^h, - tft.2 (03Л) = О,
откуда получим
G3/i3 + Ри/5 4- Ri3ht 120.10 + 66.43 + 540-63 11ОЛ
0&А — 34 — 1120 н.
Величины /?1,2 представлены в табл. 39.
Таблица 39
Величины Rlf2
Параметр Значение в положении
о 12 1 2 3 4 6 1 6 1 7 8 9 10 1 11
G3, Н 120 120 120 120 —120 —120 —120 120 120 120 120 120
h3l мм 10 9 6 2 2 5 8,5 10 9,5 2 4 9
Ри4* « 73 40 23 13 —>15 —21 —35 66 *00 80 70 104
Й5, ММ 43 43 39,5 24 15 37,5 43 43 43 40,5 34 43
Я4,3> Н 560 1800 1725 1550 1425 1350 1225 540 800 575 425 800
Й4, ММ 60 61 62,5 64 64 63,5 62,5 63 62,5 64 64 60,5
03А, мм 33 38,5 42,5 45 45 43 39 34 28 24 23,5 27,5
^1,а» W 1150 2930 2580 2220 2010 1960 1900 1120 1980 1680 1280 1960
Знак «—» перед величинами С3 и РИ4 учитывает направление
моментов этих сил.
Приравнивая к нулю векторную сумму всех сил, действующих
на группу 2—3, и построив план сил, находим силу /?о,з:
/?4,з + Р и3 + G3 + 12 + Ро,з = 0;
ie -}- ek kl + Im -J- mi = 0.
Рассмотрим равновесие ведущего звена — кривошипа О2А
(рис. 109, г).
В строгальном станке рассматриваемого типа роль кривошипа
выполняет зубчатое колесо с закрепленным на нем пальцем.
На зубчатое колесо действуют следующие силы: давление /?2,1
камня кулисы на палец колеса, давление Z?o,i опоры, сила тяжес-
ти Gi колеса и уравновешивающая сила Ру.
Линия действия уравновешивающей силы Ру совпадает с направ-
лением линии зацепления зубчатой пары 4—5. Поэтому на рисунке
плечо го силы Ру относительно оси зубчатого колеса О2 равно мас-
штабной величине радиуса rOR основной окружности колеса;
•268
www.vokb-la.spb.ru - Самолёт своими
Величину уравновешивающей силы Ру определяем из уравнениг
2Л1о?(Р£) = /?2.1Л6-Руго = 0;
_ 7?2,1.fie_ 1120-1
г0 14 ~ 6U Н-
Величины Ру для всех положений механизма приведены в
табл. 4)
Таблица 40
Величины Ру
Параметр Значение в положении
° 1 12 | I 2 1 3 4 1 1 5 6 7 18 9 10 11
1150 2930 2580 2220 2010 1960 1900 1120 1980 1680 1280 1960
Лб, мм 0 5 8,5 10,5 10,5 9 6 1 5 10 10,5 6
Го, ММ 14 14 14 14 14 14 14 14 14 14 14 14
Ру> Н 0 1050 1570 1670 1510 1260 815 80 707 1200 960 840
Для определения .давления Po.i в паре О2 решаем графически
векторное уравнение равновесия всех сил, действующих на веду-
щее звено-
Ру + GT + P2J + Po.i = 0;
nq + qm -f- ml + In — 0.
Давление в кинематических парах в остальных положениях про-
изводится аналогично. Планы сил в положениях 0 и 7 построены
в масштабе рр = 20 н/мм, а в положениях 1—6 и 8—11 в масштабе
рР= 50 н!мм. В положениях 1—6 и 8—11 масштабные длины век-
торов сил G4 и Р„4 в принятом масштабе меньше 1 мм, поэтому
на плане сил их не откладывают. Направление реакции Рзл на пла-
нах сил для этих положений совпадает с направлением оси зве-
на BF.
В положениях 1—6 на- резцовую призму действует еще сила Рп.о
полезного сопротивления, но наличие ее ничего нового в методику
расчета не вносит. Способ построения плана сил остается прежним.
Точку приложения Ро,5 по-прежнему находим способом сведения
системы сил к трем силам. Через центр масс <S5 проводим линию
S-Д, параллельную вектору Ry — РВъ + GB до пересечения с век-
тором Рп.с (приложение III, лист 4). _
Затем проводим линию LO, параллельную вектору R2 — Рп,с +
+ Р3, до пересечения с линией действия реакции R4,5. В точке О
пересекаются три вектора: Р4.5, R2, Ro,s-
По найденным давлениям в кинематических парах строим годо-
графы давлений в опорах О2 и О3.
Из произвольно выбранной точки О2 откладываем последователь-
но по величине и направлению реакции Род. Концы построенных
2G9
векторов соединяем плавной кривой. Последняя и будет годографом
давлений /?о,ь
Аналогично строим годограф давлений /?о,з- Годографы построе-
ны в масштабе р,Р = 100 н!мм.
Величины давлений в кинематических парах во всех положениях
механизма даны в табл. 41.
Таблица 41
Величины давлений в кинематических парах
Параметр Значение в положении
120 | 1 1 2 3 4 5 6 7 8 9 1 10 и
Яо’Г « 1275 3525 3620 3550 3300 3000 2640 1220 1475 1000 1050 1700
’2 “ ==Р2>3> 1150 2930 2580 2220 2010 1960 1900 1120 1980 1680 1280 1960
Ро,в» К 620 1225 850 700 635 725 850 475 1050 985 750 1025
#4,3» « 560 1800 1725 1550 1425 1350 1225 540 800 575 425 800
7?4,5> Я 520 1800 1725 1550 1425 1350 1225 490 750 575 425 750
Ро.5, Н 520 525 450 375 400 450 525 420 425 475 425 525
В заключение кинетостатического исследования механизма опре-
деляем уравновешивающую силу также методом рычага Н. Е. Жу-
ковского. Для этого на плане скоростей (приложение III, лист 3)
к конечным точкам векторов скоростей точек приложения сил при-
кладываем повернутые на 90° все задаваемые силы, действующие
на звенья механизма (плечи сил не чертеже не показаны); уравно-
вешивающую силу прикладываем в точке ai>2 перпендикулярно к
ра\г2. Из уравнения равновесия рычага
ZMp(P) = Gs/?j ф- G4ft2 + Рwjh + Рк J1* +
+ Pn.c ± pf — P'ypaXt2 = 0,
находим уравновешивающую силу
p, = ‘ + + + + (Pn.c * Pf
У pa12
Определение величины Py для всех положений механизма дано
в табл. 42. Знак «—» перед значением силы показывает, что момент
данной силы относительно полюса плана скоростей совпадает по
знаку с моментом вектора Ру.
Уравновешивающие силы Ру и Ру, представленные в табли-
цах 35 и 37, не равны потому, что приложены в различных точках. Си-
ла Ру является действительной: эю мгновенная сила, с которой одно
зубчатое колесо действует на второе. Сила же Ру— некоторая услов-
ная сила, которую необходимо приложить к пальцу кривошипа,
чтобы уравновесить все другие силы, действующие на кривошип.
270
www.vokb-la.spb.ru - Самолёт своими
Таблица 42
Величины Р'у
Параметр Значение в положении
12о 1 > 2 3 4 5 6 1 8 9 10 11
03, н 120 120 120 120 —120 —120 —120 120 120 120 120 120
ftp мм 0 2 2,5 1,5 1 2 2,5 0,5 3 3 2 3,5
н 30 30 30 30 —30 —30 —30 30 30 30 30 30
й2, мм 0 2,5 2,5 1,5 1 2 2,5 0,5 3 3 2,5 3,5
н 73 40 23 13 —15 —21 -35 66 100 80 70 104
Л3, мм 0 11,5 15 10,5 7 16 13 2 24 30 29 18
н 35 20 11 5 —4 —10 —17 35 50 38 32,5 51,4
h4, мм 0 16 24 23 29 25 19 4 21,5 48 49,5 26,5
^пс 520 1806 1676 1560 1454 1351 1236 505 760 580 440 774
+ Р и > Н
pf, мм 0 16 25,5 30 30,8 26,5 19 4 21 50 54,3 26,3
ра мм 21,6 21,6 21,6 21,6 21,6 21,6 21,6 21,6 21,6 21,6 21,6 21,6
Р^ « 0 1340 1985 2150 2040 1586 * 1032 109,7 920 1530 1265 1103
Уравновешивающий момент на зубчатом колесе от силы Ру, опре-
деляемой по рычагу Жуковского:
М' = Р'г
1 У УГо2Л-
Уравновешивающий момент от силы Ру, определяемой из плана
сил:
*Л1у = РуГО/,.
Относительная величина расхождения определяемого момента в
обоих случаях:
ДМ = • 100.
У Му
Величины уравновешивающих моментов от сил Ру и Ру приведены
в табл. 43.
Расхождение в величинах моментов незначительно. Оно вызвано
неточностью построений.
По полученным значениям уравновешивающего момента Му стро-
им диаграмму уравновешивающих моментов в системе координат
Му— <р; масштаб построения = Ю нм/мм. За положительное
направление момента принято направление момента, совпадающее
с направлением вращения кривошипа.
§ 18 ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВОГО КОЛЕСА
Момент инерции маховика определяем по способу проф. Н. И. Мер-
цалова (см. гл. X).
Расчет начинаем с определения приведенного момента силы по-
лезного сопротивления по формуле
271
Величины уравновешивающих ’моментов
и ц а 44 7 о goo СЧ О
«=2 \о н ь Ч о g 2 ~ 5 ~ ю - сч о
со м 2 5 j 2
ю ч ч ° S 8 —О Щ —< сч сч о
положении 4 °- Ч о g « 8 5 2 "
Значение в 3' ч ч § g й Tl Ш 04 СЧ СО q
СО о со о to . о о сч 8 5 2 °*
СМ ч S ч ч 8 g 8 »—< to —< L0 __ сч СЧ о
О и о я о S о <п оо О ( О ~ о о сч —< О —’ LQ —< м - Ь -
S и 3 _ я о я О) <U о S о о о* о*
Абсолютная величина прив Параметр * о 5 к’
272
www.vokb-la.spb.ru - Самолёт своими
Мп.с — Рп с^О.Л ‘ COS (Рп.с, VF)---^л.сГО2А ' ~ ’
где Рп.с — сила полезного сопротивления. Величина ее задана в ви-
де диаграммы Рп.с = Рп.с (S) (приложение III, лист 4);
го2д — длина кривошипа;
va — скорость пальца кривошипа А;
Vp — скорость ползуна Р;
pf — масштабное значение скорости ползуна F звена, к кото-
рому приложена сила Рп.с-»‘
— масштабное значение скорости пальца кривошипа; ра и
pf берем из плана скоростей (приложение III, лист 3).
Знак «—» указывает на то, что приведенный момент сил полез-
ного сопротивления направлен в сторону, противоположную враще-
нию кривошипа.
Результаты вычислений приведены в табл. 44.
Строим диаграмму 7ИП.С = 7ИП.С (ф) приведенных моментов сил
полезного сопротивления в функции угла поворота ф звена приве-
дения (приложение III, лист 5), откладывая для удобства построе-
ния отрицательные значения Л4П.С вверх от оси абсцисс. Принимаем
масштаб моментов |ы=5я - м!мм и масштаб углов поворота кри-
вошипа
Мф = -7^79 = = °.0872 рад!мм.
Интегрируя графически диаграмму Л1п.с = /Ип.с (ф), получаем
диаграмму Лп.с = ^п.с (ф) работ сил полезного сопротивления. Мас-
штаб |лд диаграммы Дп.с = Лп.с (ф)
р,л = = 5 • 0,0872 • 30 = 13,08 дж/мм.
Для простоты предположим, что приведенный момент Л4ДВ дви-
жущих сил имеет постоянную величину во всех положениях глав-
ного звена. Величину постоянного приведенного момента движущих
сил определяем на основании закона передачи работы при установив-
шемся движении машины (за период одного оборота кривошипа
работа движущих сил равна работе сил сопротивления). При этом
условии диаграмма Лдв = Лдв (ф) работ движущих сил будет пред-
ставлять собой наклонную прямую, соединяющую начало коорди-
нат с конечной точкой ординаты 12—12'.
Продифференцировав диаграмму Лдв = Лдв (<р), получим прямую,
параллельную оси абсцисс, которая является диаграммой приве-
денных моментов движущих сил.
Складываем алгебраически положительные ординаты диаграммы
^дв = Алв (ф) и отрицательные * диаграммы Лп.с = Лп.с (ф), по-
лученные отрезки откладываем вниз и вверх от оси, строго соблю-
* Необходимо помнить, что работа сил сопротивления является отрицательной
величиной, поэтому все ординаты диаграммы .4ПС = Лпс(ф) в нашем случае явля-
ются отрицательными.
273
дая их знаки. Соединив конечные точки полученных ординат, полу-
чим график приращения кинетической энергии ДЕ = ДЕ (ср) маши-
ны с маховиком. Масштаб диаграммы |1я= 13,08 дж!мм.
Кинетическую энергию машины без маховика определяем по > рав-
Е7* 1 г 2
нению Ес = -«- /cwcp-
£
Средняя угловая скорость
“ср = "ТТ = Ячп2, = 7>54 рад/сек.
OU uU
Значения приведенных моментов инерции находим по формуле
(Ю.7)
msv2F
где Л4 и JZ5 — моменты инерции зубчатых колес 4 и 5;
Jo3 — момент инерции кулисы 03В относительно
оси вращения О3;
J$4 — момент инерции шатуна BF относительно оси,
проходящей через центр масс его;
т4 и /л5 — массы звеньев 4 и 5;
со/, со3, со4, <о24 — угловые скорости звеньев /, 3, 4 и зубчатого
колеса 4.
Если в данном уравнении отношение действительных скоростей
заменить отношением их масштабных значений, взятых из планов
скоростей, а отношение угловых скоростей зубчатых колес 4 и 5—
отношением чисел зубьев г4 и z5 этих колес, то получим
Момент инерции JZi зубчатого колеса 4 определяем приближенно
как момент инерции сплошного диска с наружным диаметром, рав-
ным Од4 (диаметру делительной окружности) и шириной b колеса,
равной 40 мм:
J &Л. я£)16Р
7 — т .______ — „..г4 . __1- — --------
~ "% 8 4 8 32
л • 104 • II4- 40 • 7103
32 • 10*5
^0,0041 кг-м2.
274
www.vokb-la.spb.ru - Самолёт своими
Момент инерции Л3 колеса 5 определяем как момент инерции
колеса со сплошным ободом, радиус инерции которого приближенно
равен радиусу Ri„ окружности впадин:
JZs = mbRl = 7,63 ^Д_4252 «0,15 кг • л2.
Определение массы венца колеса 5 рассмотрено выше.
Момент инерции Jo., кулисы относительно ее оси вращения
Jo = Js 4- mJ2 <. = 0,442'4*12,23 • 0,3252 = 1,732 кг м2.
Значения pai,2, pb, ps4, bf и pf для каждого положения берем
из планов скоростей, а величины
JSt — 0,011 кё м2; mi = 3,06 кг; тъ = 46,9 кг;
гл.=0,108лг, 1п д==0,65 м; lBF = 0,22 мм; z4 = ll; г3 = 30
известны из предыдущих расчетов.
Величины кинетической энергии Ес машины без маховика при-
ведены в табл. 45.
Строим диаграмму кинетической энергии Ес — Ес (ф) машины
без маховика. Чтобы диаграмма получилась более рельефной, при-
нимаем для нее масштаб Ре = 4,36 дж/мм, кратный масштабу |Ле =
= 13,08 диаграммы ДЕ = ДЕ (ф), построенной прежде. Для удоб-
ства построения диаграммы приращения кинетической энергии махо-
вика 1ДЕл4 = ДЕд;((р)1 перестраиваем диаграмму ДЕ = ДЕ (ф) так,
чтобы она имела одинаковый масштаб с диаграглмой Ес = Ес (ф).
Так как численное значение масштаба ре в три раза меньше масштаба
Ре, то ординаты перестраиваемой диаграммы будут в три раза длин-
нее ординат исходной диаграммы.
Ординаты диаграммы Ес = Е*с (ф) вычитаем из ординат ДЕ =
= ДЕ (ф) и конечные точки полученных отрезков соединяем плав-
ной кривой, которая и характеризует изменение кинетической энергии
маховика за период установившегося движения. Далее проводим две
горизонтальные прямые, касающиеся кривой диаграммы &Ем =
== Д£д1 (ф) в точках наибольшего максимума (В) и наименьшего ми-
нимума (С), до пересечения их с осью ординат в точках F и D.
Момент инерции маховика определяем по формуле (10.36):
900 . DF . 900.69 • 4,36 . 2
Jn =------—2-^—— =------------Г” «159 кг • Л(2.
6 • 722 • —
а 30
Маховой момент маховика:
mD2 = 4JM = 4 • 159 636 кг • л/2.
Маховой момент маховика, приведенный к валу двигателя:
г глчл/ т^2 036 . 2
[т£)“] = «2— — "20Г” ~ 1 >59 кг • лг.
275
Таблица 45 Величины кинетической энергии машины без маховика । 1 Значение составляющих параметров WQ 7> 00—« CS CO О CO CS —« —' co CS °° <3. о Л 6 с? c5 - о? c? 'J cs § £2 *£ in—< CO CO Th Th CO ~< ID Ш CS 2 2 2 00
9w • еэ/ <3f OOCOtOCTi—«ОСОГ^ООЭООСО oo CS •— inoooin’tf1—< CO —• —* 1П •— •— о о ——? —Г —Г т-7 о о о о со хг —Г
A J Bw . гу VzO*flui CD in 1П О —< CS CS ' CS СО О СО N О -< —ч СО О 1П со СП со оо«—Г-Гооо о О CS со со о
zw • ex [Z'XV(]\ 1 JQj \ t * 1 !q I / Sf г\ Jz\ ! Th CS —« СТ» ’Tf СО ю оо —’ —< О О О —« О CSCS —• CS ООО О О О О ОО о о ООО о о о о о о оо ООО о о о о оо оо о о о о о о" о о о о о о о о о
A ’sd J ztV • 2У VzOsJu CS CN in N г> N СО 7! СО О in CS ю О О О О~ О О О~ g О —CS^ CS^ о оооооооо^ о о о о о о
ZW • 2* / < тр£Л 1 g£ty\ e 1 qd 1 \ Vz°jl z\ lz\ / СО СОГ'-ОООГ^’-^ОГ ЩЩтфООО OOO-t^OOg О CS СО со о о о о о о о о о~ о о о о о" о"
zw • 4 ? 4 N w N - • X S inininmminminin m in m in in ш ОООФООООО о' о о о о" о СОСОСОСОСОСОСОСОСО со СО со со со со оооооооо^ооооооо ооооооооо о о о о о о
ww ’/d ww *jq ш ю оо ш со со о £ £ я J5 © со 2 * <= s s з з О СО со ОЮЮСМО^тЬЮ - О СО со о in
ww **sd in to LO ^СОСОО—Г-'гг?^’^ О _г о со ОО ° —< CS СО СО ю in in CS
WK ‘qd WK ,s‘lDd аинэуко1гоц in in to Осо'сОО—^’-чЬ'О'тГ О CS О оо 00 —t CS со СО СО CS —х CSIOIOLQCS СОСОСОСОСОСОСОСОСО со со со со со^ со IV—•—*>-< »—< —« —’' —’ —J —* CSCSCSCSCSCSCSCSCS CS CS CS cs cs CS О —1 CS CO XT in CD b- 00 co CO 2
376
www.vokb-la.spb.ru - Самолёт своими
Место установки маховика и его размеры определяют при кон-
структивной разработке станка после выбора электродвигателя для
привода станка.
Полезная мощность станка
лп.с (12—12') Нд 40-13,08 „оо
М = — =----------------- = — 0,834 = 628 вт>
где Лп.с— работа полезного сопротивления за период установивше-
гося движения;
Т — время периода установившегося движения
' 'Г 60 60 Г\ QQ Л
Т =------= ____ = 0,834 сек.
по2а
III. Механизм пресса-автомата
с плавающим ползуном
Рассчитать и исследовать кинематическую схему механизма вы-
садочного ползуна и механизма ножниц (рис. 110) по следующим
данным (задание 29, вариант VI):
Рис. ПО
Горизонтальное перемещение ползуна 6: Н = 200 мм.
Длина кривошипа О А: г = 100 мм.
Длина шатуна АС: I = 1270 мм.
Длина коромысла ОХС: 4 = 490 мм.
Расстояние от точки закрепления ползуна к шатуну до шарни-
ра А: 1А/3 = 635 мм.
Масса шатуна АС: т3 =11,2 кг.
277
Масса коромысла ОХС: т± = 6,1 кг.
Масса ползуна 5: т5 = 41,8 кг.
.Масса подвижных направляющих: mQ — 20,5 кг.
Момент инерции шатуна относительно оси, проходящей через
его центр тяжести перпендикулярно плоскости движения: Js3~-
= 0,22 кг • лг2.
Момент инерции коромысла OLC относительно оси, проходящей
через центр тяжести: Jst = 0,06 кг • м\
Число оборотов электродвигателя в минуту
= 1430 об!мин.
Коэффициент неравномерности движения механизма: 6 = 0,15.
Число зубьев зубчатых колес привода механизма: = 15;
г2 = 42.
Модуль зубчатого зацепления: т = 18 ли/.
Величина хода толкателя: h = 14 мм.
Минимальный угол передачи движения: ymin = 55°.
Угол поворота кулачка: <р = 40 .
Центры тяжести звеньев находятся посредине длин звеньев.
§ 19. СИНТЕЗ МЕХАНИЗМА ВЫСАДОЧНОГО ПОЛЗУНА
Механизм высадочного ползуна (рис. ПО) представляет собой
шарнирный четырехзвенник OACOL. Посредине шатуна (точка В)
к нему шарнирно присоединен ползун 5, перемещающийся в подвиж-
ных направляющих.
Горизонтальное перемещение ползуна 5 равно длине хорды дуги
отклонения коромысла OLC. Угол колебания коромысла сим-
Рис. 111
метричен относительно вертикаль-
ной оси.
Задача синтеза данного меха-
низма заключается в определении
длины стойки OOi по заданным
х длине кривошипа ОА, шатуна АС
и коромысла ОГС. Эту задачу лег-
ко решить графически (рис. 111).
Радиусами, равными I -J-r и Z —
— г, из точки О как из центра на-
ходим крайние положения Св и Со
точки С коромысла ОгС на линии х — х. Затем на стороне С6С0
строим равнобедренный треугольник CqO^Cq. Это построение опре-
деляет положение Ог шарнира.
Вычерчиваем произвольное положение механизма OACOt. Меха-
низм ножниц (рис. НО) также представляет собой шарнирный че-
тырехзвенник ODEO2, длины звеньев которого определяем в соот-
ветствии с третьей задачей гл. II, §2.
278
www.vokb-la.spb.ru - Самолёт своими
i
§ 20. СИНТЕЗ ПРИВОДА ПРЕССА-АВТОМАТА
(ПРИЛОЖЕНИЕ IV, ЛИСТ 1)
Привод пресса-автомата состоит из зубчатой передачи и муфты.
Зубчатое колесо Zj посажено на вал электродвигателя, который
делает 1430 об/мин, а зубчатое колесо z2 — на вал муфты.
Передаточное отношение привода:
1,.? = —2,8.
12 п2 п0А zx 15
Число оборотов в минуту главного вала:
л, = = — 510 об/мин.
“ — z,o
Расчет элементов зубчатой передачи. Проектируем неравносмс-
щенное зацепление: гА = 15; z2 = 42; т = 18 мм. Параметры зубо-
резной рейки: /о = 1; с0 = 0,25; а0 = 20°.
Предполагаем, что зубчатая передача работает в закрытой мас-
ляной ванне. В соответствии с указаниями § 6 гл. IV выбираем на
блокирующем контуре (см. приложение V) для указанного зацепле-
ния наибольший возможный коэффициент gc при условии, что все
остальные характеристики будут вполне удовлетворительными.
Выбираем gc = 1,4. Пусть = 0,8, тогда
£2 = gc-^ = l,4-0,8 = 0,6.
Коэффициент обратного смещения определяем по номограмме,
приведенной на рис. 35. Подсчитав величину
ЮООЕс = 1000 • 1.4 = 24 5б
гс 57 ’ ’
на номограмме находим
- з,05.
ZC
Отсюда
цг_ 3,05гс _ 3,05 » 57 _.
1000 “ 1000
В этом случае коэффициент межцентрового расстояния:
а = Ес — Т = 1,4 —0,174 = 1,226.
Определив все коэффициенты, элементы зубчатой пары рассчи-
тываем по уравнениям, приведенным в табл. 1 (гл. IV).
Профилирование зубчатых колес (приложение • IV, лист 1). Рас-
чет производим в последовательности, изложенной в гл. IV, § 3,
приняв масштаб чертежа М 1 : 2. Значения удельных скольжений
и коэффициентов удельных давлений сведены в табл. 46 и 47.
Масштабы построенных графиков приняты:
Их = 0,0251 рад/мм-, щ, . = 0,48 — ; pv = 0,011 рад/мм.
СК ММ
279
Таблица 46 Величины удельных скольжений 470 1—, 8
320 0,84 10* 1
270 0,73 —2,78
240 0,65 см см 1
210 0,55 см 1
о 00 т—, 0,43 —0,66
150 0,24 СО o' 1
см см о о
О о f—t со О 1 0,24
о 00 —0,63 ^F о~
I О со —1,45 СО о
о vF —2,81 00 о
О 8 1
X <-г СТ
Таблица 47 Величина коэффициента удельного давления 470 7520 ‘ 48 000 00
о 8 § S с. !2 ° °- ю °
О g ОО Q см g со g 10 О CM LO - 10 °
О g СТ) о CM g со Т-, 10 о CM XF -С 10 °
_ О g см о CM g г- оо LO О Г- СМ (-Г 10 °
О g оо о см g Г- »0 10 ° О г- QO —- TF °
122 7520 42 456 0,088
100 7520 37 000 0,11
g О см g s « w —< о со
О СО о со g 10 СО — Г- TF о см
о _ о о см § й " L: °
0 7520 0 оо
Pi, мм ml, мм2 Pl (I — Pl). ЛЛ2 У
Таблица 48 Длины отрезков, изображающих скорости точек Длина, мм, в положении •—< см —> СО СО М4 О см
о 10 — 10 СО , - О СО со СО —* оо
о о о о о 00 ^F
оо 00 ео - О
ь- СО <м —. СЧ
о О О О О оо TF
СО QQ со со со см
TF Г- со
ОО см » о о ОО TF
см 10 СО Tt N ' М4 СМ СО g
— со О СО 0 Г- СО СО —4
о о О О о оо ’е1
Параметр Г ч. f \ <3 *§ а £
280
www.vokb-la.spb.ru - Самолёт
Л”
§ 21. ДИНАМИЧЕСКИЙ СИНТЕЗ КУЛАЧКОВОГО МЕХАНИЗМА
Механизм ножниц, в который входит кулачковый механизм, пред-
ставляет собой шарнирный четырехзвенник, на валу коромысла
которого закреплен кулачок (аналогичный «горке»), приводящий
в движение поступательно-движущийся толкатель — нож.
Синтез кулачкового механизма (приложение IV, лист 2) произ-
водим в порядке, описанном в гл. VII.
§ 22. КОМПОНОВКА СХЕМЫ МЕХАНИЗМА
Рис.
112
По заданной цикловой диаграмме опреде-
ляем фазовый угол Чг механизма ножниц. За
цикловой принят механизм высадочного пол-
зуна: V = 80°.
Вычерчиваем оба механизма (рис. 112) в на-
чальном положении. За начальное положение
высадочного ползуна принимаем такое, при ко-
тором ползун (звено 5) находится в крайнем
верхнем положении (в этом положении шатун
АС расположен перпендикулярно к кривошипу
ОА). Механизм ножниц займет начальное
положение О£>0Е0Оа тогда, когда кривошип 0D
и шатун DE будут расположены на одной пря-
мой. От линии ODo в направлении, обратном
вращению вала, откладываем фазовый угол
Чг = 90° механизма ножниц. Угол DOAo
и будет углом закрепления а, под которым
следует закрепить кривошип OD механизма
ношению к кривошипу О А механизма высадочного
ножниц по от-
ползуна.
§ 23. СТРУКТУРНЫЙ АНАЛИЗ МЕХАНИЗМА
ВЫСАДОЧНОГО ПОЛЗУНА
Механизм высадочного ползуна является плоским и, как видно
из рис. 113, состоит из следующих звеньев: 1 — стойки, 2 — криво-
шипа О А, 3 — шатуна АС, 4—коромысла OjC, 5 — высадочного
ползуна, 6 — прямолинейно-движущейся направляющей и семи ки-
нематических пар: / — стойки — кривошипа О А; II — кривошипа
О А — шатуна AC; III — шатуна АС — коромысла ОХС; IV — шату-
на АС — ползуна В; V — ползуна В — прямолинейно-движущей-
ся направляющей у—у; VI — прямолинейно-движущейся направ-
ляющей— стойки; VII — коромысла — стойки.
Все кинематические пары являются низшими (I, II, III, IV,
VII — вращательные; V и VI—поступательные) и относятся ко
2-му классу. Степень подвижности механизма определяем по форму-
ле Чебышева:
W = 2>п — 2рг — Pi — 3.
281
В данном механизме п = 6; р2 = 7; = 0:
«7 = 3-6 —2-7 —3 = 1.
Определим класс механизма по классификации И. И. Артобо-
левского при условии, что ведущим звеном является кривошип О А.
Этот механизм состоит из следующих групп:
а) начального механизма (стойка — кривошип ОЛ), или механиз-
ма I класса (рис. 114, а);
Рис. ИЗ Рис. 114.
б) II класса 2-го порядка — шатун АС — коромысло 0±С
(рис. 114, б);
в) II класса 2-го порядка — ползун В — прямолинейно дви-
жущаяся направляющая (рис. 114, в).
По классификации И. И. Артоболевского механизм высадочно-
го пресса-автомата с плавающим ползуном является механизмом
II класса.
Формула строения механизма имеет вид: I -> П2 -> П2.
§ 24. КИНЕМАТИЧЕСКОЕ ИССЛЕДОВАНИЕ МЕХАНИЗМА
Построив планы положений механизма, приступаем к построе
нию планов скоростей в порядке наслоения ассуровых групп (прило-
женпе IV, лист 3).
Планы скоростей. Определяем скорость точки А кривошипа О А:
vA = ^2l0Ay va±.OA.
Скорость точки С определяем из таких соображений: рассматри-
вая движение точки С звена 3 как составное (вместе с точкой А и
относительно нее), можно написать:
vc=^a + ^ca> Vca^AC-
С другой стороны, точка С вращается вместе с коромыслом во-
круг оси Ор Следовательно,
vc ± ОГС.
282
www.vokb-la.spb.ru - Самолёт
V
Скорость точки В3 звена 3 и точки S4 звена 4 находим из отноше-
ний отрезков:
ab- АВ - ас • АВ ~ г
= -АС' ^з=-лс- = 0.5^.
рс ~~ ОгС ' PS<1 О/? ~ ^Ърс.
Величины отрезков ab3 и ps4 приведены в табл. 48.
Скорость точки В5 звена 5 будет равна скорости точки В3 шатуна
АС, так как эти звенья соединены между собой в точке В шарниром:
Скорость точки В6 звена 6 (прямолинейно движущейся направ-
ляющей) определяем из уравнения
vBe = vbs + vb6b^
рассматривая движение точки В6 как сложное (вместе с точкой
Во и относительно нее). Так как относительное движение является
поступательным (вдоль оси у—у), то vBeB5 II УУ-
С другой стороны, абсолютное движение звена 6 является также
поступательным (вдоль оси х—х), поэтому vBq II хх.
Планы ускорений. Ускорение точки А кривошипа О А:
WA = WA + WA.
Касательное ускорение точки A wA = 0, так как угловая скорость
кривошипа является постоянной величиной (со2 = const). Таким
образом,
= WA —
Из произвольно выбранного полюса л откладываем вектор-уско-
рение точки А кривошипа. Он направлен по кривошипу к центру
вращения: зга || О А 0.
Ускорение точки С определяем по следующим уравнениям:
О “'с = ^са\\АС' ^са^АС’
2) wr = wnr 4- w*- wnr | O.C; w*r I O.C.
Ускорение точки B3 шатуна АС и ускорение точки S4 определяем
из отношений:
аЬч АВ 1 ас АВ г
-^ = ^4С’ А = -лс“=0.^.
~ OiC ’ 3XS4“ orC — U’bJXC
Ускбрение точки В5 звена 5 равно ускорению точки В3 шатуна:
283
Ускорение точки Вв звена 6 определяем по формуле
— Wb, + №въВь
и условию, что
Ыв, || хх, a W6B51| УУ,
так как движение звена 5 относительно звена 6 и абсолютное дви-
жение звена 6 являются поступательными.
Значения линейных скоростей и ускорений точек звеньев меха-
низма, угловых скоростей и ускорений этих звеньев определены
при помощи планов скоростей и ускорений и сведены в соответствую-
щие таблицы (табл. 48—53).
§ 25. КИНЕТОСТАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМА
Кинетостатический расчет механизма (приложение IV, лист 4)
выполняем в порядке, обратном порядку, принятому при кинема-
тическом расчете.
Определим главные векторы и главные моменты сил инерции
звеньев.
Главный вектор сил инерции шатуна АС:
РВз = — m3wSi = —т3 (йь3) • IV
Главный вектор сил инерции коромысла OjC:
= — triiWs, = — (ns4) • |1W.
Главный вектор сил инерции ползуна:
(л&5) • рю.
Главный вектор сил инерции подвижной направляющей:
Ри. = — m6wBll — —т6 (л£6) • IV
где /и3, m4, m5, тб — массы соответствующих звеньев;
^s4, wsA — ускорения центров тяжести;
wB„ wb3 — ускорения точки В звеньев 5 и 6;
Л54, л&з, л65, nbe — соответствующие длины отрезков, взятые из
планов ускорений;
— масштаб планов ускорений.
Если главные векторы сил инерции считать приложенными в
центрах тяжести звеньев, то главный момент от сил инерции шату-
на АС:
^п3 — — ^S3e3>
а главный момент от сил инерции коромысла ()£:
Л4114 = — *^s4e4»
где J$3, — моменты инерции звеньев относительно осей, про-
ходящих соответственно через центры тяжести звень-
ев перпендикулярно к плоскости их движения;
е3 и е4 — угловые ускорения звеньев (табл. 54).
284
www.vokb-la.spb.ru - Самолёт своим
— 80 5,36 41 2,75 20,5 оо СО см оо со Ю 43 2,88 62 4,15 [ ц а 50 21,48 со to са Cf s CM co CM CO to CM Г- CO
о 80 5,36 . 69 34,5 СО см 74 4,96 70 4,69 33 2,21 ч \О сз н о 50,12 rb to C3 H о CM CO CO co CO CO CM
о 80 5,36 80 5,36 о ГЬ ОО О см со со OlO 00 со со о id 00 ОО о 57,28 со —ч о CM 00 CT) CD CO—*
1 80 ! 5,36 73 4,89 1 36,5 | 2,44 'О о Ю LO 70 4,69 34 2.28 СО 53,7 Ю W—«Ч CO О О оо СТ) CD СО СО —
S 2 Г- 1 80 5,36 42 2,81 см о rb см ст> со Ю СО ю оо со о см rb см см со rb со S к ж ь- 21,48 СО к s я w r- rb см о ю rb СМ Г- со
Ч ГК ж <о 3 5,36 о о о о 1 40 2,68 о о 80 5,36 Q) * О о Е о о О о о c CQ о 00 СТ) см —* СО rb
1 иШ со сз (V 00 Длина, мм,
Зяачез 0 5,36 6 3,08 СО 1,54 ю LO СО СО 3 со см 76 5,09 S S ст 65 ю rb см СО Ю СО оо оо rb со —< со со
со ГЬ СМ ю ГЬ см
'S- 0 5,36 4 4,96 2,48 1 74 4,96 72 4,82 7 3,15 чг со Ю rb о о см со 00 rb СО—<
СО со гь яия точек
СО со со О LO со СО OLQ о 2,68 9S‘9 0 0 5,36 СО СМ о СО 53,7 ш CO ООООСТ) ою —• —<
оо ОО rb ОО ОО СО О CX Q
см !0 5,36 6^ . L LQ со" 2,25 1 70 4,69 7 4,49 3 3,22 S см ст> см rb см Jxi О >> X s cm СО ООО ю г- со ю см
СО со со со X <У Q. см S' 2
— 80 5,36 38 2,55 со •—< см 50 3,35 39 2,61 78 5,23 О О >< —• СО гь »—< rb C3 £ C3 i •—' ою см со СО —1 Ь- СО
о 80 5,36 о о о о 40 2,68 О о 80 5,36 Значения нормально о о о s CQ О X о 00 СТ) rb см —' 00 ГЬ
___ ра, мм vA, м/сек рс, мм vc, м/сек PS4, мм м/сек pbs, мм vBgt м/сек pb%, мм vBgf м/сек ас, мм VCA, м/сек 1 Параметр Vi 1 3Tnx 1 о 3 X s 5 Параметр
285
Таблица 52
ьо
00
о
Значение в положении
Параметр 0 1 2 3 4 5 6 7 8 9 10 11
ла, мм 80 80 80 80 80 80 80 80 80 80 80 80
лЬ, мм 82 75 54 34 48 72 81 72 56 48 58 73
лс, мм 84 72 50 18 32 68 82 70 38 18 46 72
ns4, мм 42 36 25 9 16 34 41 35 19 9 23 36
ас, мм 18 30 76 100 80 36 18 44 60 64 63 52
пс, мм 0 72 47 9 34 68 82 70 36 4 45 72
лЬ& мм 80 70 44 5 38 70 80 70 38 2 44 70
wA, м/сек? 286,4 286,4 286,4 286,4 286,4 286,4 286,4 286,4 286,4 286,4 286,4 286,4
wB^, м/сек2 293,56 268,5 193,32 121,72 171,84 257,76 289,98 257,76 200,48 171,84 207,14 261,34
wc, м/сек? 300,72 257,76 179,00 64,44 114.56 243,44 293,56 250,6 136,04 64,44 164,68 257,76
ws, м/сек? 150,36 128,88 89,5 32,22 57,28 121,72 146,78 125,3 68,02 32,22 82,34 128,88
wCA, м/сек? 64,44 107,4 272,08 358 286,4 128,88 64,44 157,52 24,8 229,12 225,54 186,16
wB*, м/секъ 286,4 250,6 157,52 17,9 136,04 250,6 286,4 250,6 136,04 7,16 157,52 250,6
w*c, м/сек? 0 257,76 168,26 32,22 121,72 243,44 293,56 250,6 128,88 14,32 161,10 257,76
Таблица 53
Значения и подсчитанные при помощи графиков
Параметр Значение в положении
1 2 3 4 5 6 7 8 9 10 И 12 ,
у£, ММ 30 48 59’ 56 30 0 27 46 56 46 27 0
vB*, м/секГх 2,79 4,46 5,49 5,2 2,79 0 2,51 4,28 5,2 4,28 2,51 0
у'£, мм 63 40 4 35 60 72 64 37 0 40 64 72
wB*, м/сек~2 251,5 158,4 15,8 138,6 239,6 285,1 253,4 146,5 0 158,4 253,4 285,1
Значения <о3, со4, е3, е4
Таблица 54
Параметр 0 Значение в положении
1 2 3 4 5 6 7 8 9 10 11
со3, рад /сек 4,2 4,11 2,53 0,1 2,48 4 4,2 3,32 1.8 0 1,74 3,27
(о4, рад /сек 0 5,1 8,98 10,72 9,92 6,16 0 5,62 9,78 10,72 9,24 5,5
я3, рад/сек2 50,74 84,56 214,23 282 225,51 101,48 50,74 124 169,13 180,41 177,6 202,73
е4, рад/се к2 601,44 515,52 358 128,88 229,12 486,88 587,12 501,2 172,08 128,88 329,36 515,52
LD m 03 Ef 3,58 11,2 73 2927 rs 36 \ 786 41,8 73 10 937 S‘03 о 5137
К
Ю 03 H о 3,58 11,2 58 2326 6,1 23 502 ОО 58 8689 20,5 44 3229
о 3,58 11,2 48 1924 6,1 о 197 ОО । 48 . 7192 20,5 367
co 3,58 11,2 56 1 2245 i 6,1 ст । 415 °0 56 8390 20,5 38 2789
о- 3,58 11,2 72 2887 I 1*9 35 764 °0 72 10 782 20,5 70 5137
s s a Ш * о R CD 1 3,58 11,2 СО 3247 1‘9 895 оо W—< оо 12 135 20,5 80 5871
E И fl) a a ш B* Ю 3,58 11,2 72 2887 6,1 34 743 оо 72 10 782 20,5 70 5137
C3 a co ху 3,58 11,2 48 1924 I Г9 О •—1 349 41,8 48 7092 20,5 38 2789
cc <D л СО 3,58 СЧ 34 1363 6,1 о 197 оо 34 5094 ( 20,5 367
s O) ca CO s •v* см 3,58 11,2 54 2165 6,1 25 546 41,8 54 8085 20,5 44 3229
s
<D s s 4 S Q 3,58 11,2 75 о о оо 6,1 36 786 41,8 75 11 236 20,5 70 5137
Cfl
S. £ S ca о 3,58 11,2 82 3288 Г9 42 917 41,8 82 12 350 20,5 ст 00 5871
x 3
S CQ rt ^3 К s x fl) ST Ci X co 1 Параметр M/cen^lMM т3, кг я.Ь3, мм S си т4, кг л$4, мм о. г» 1О •е> £ S mc, кг WW ‘9^1Г сГ 0,
288
1
www.vokb-la.spb.ru - Самолёт
Знак «—» показывает, что направление М„ противоположно е.
Числовые значения главных векторов и главных моментов сил
инерции приведены в табл. 55 и 56.
Определение давлений в кинематических парах выполняем мето-
дом, изложенным в §3, гл. VIII.
Найденные значения сведены в табл. 57, 58, 59.
§ 26. ОПРЕДЕЛЕНИЕ МОМЕНТА ИНЕРЦИИ МАХОВОГО КОЛЕСА
Момент инерции маховика (приложение IV, лист 5) определяем
по способу Ф. Виттенбауэра.
Заданы силы полезных сопротивлений и тяжести звеньев. Опре-
деляем приведенные силы по формуле
PnP = G4 • -^-cos(G4, ^ + G3. -^cos(G8, UBa) +
/УС* /УС*
+ Gs cos (G5, vb,) + Pn.c cos (Pn.c, vB),
где Pn.c — сила полезного сопротивления, величина ко-
торой задана в виде диаграммы Рп.с =
= Рп.с (ф) (приложение IV, лист 5);
G3, G4, G5 — веса соответствующих звеньев;
Vbb, vb^ Vs4 — скорости точек звеньев S4, В3; В5;
ра, pb& рЬз, psz — отрезки, представляющие на плане скорос-
тей соответствующие значения скоростей.
Результаты вычислений приведены в табл. 60.
Имея величину приведенной силы в каждом положении механиз-
ма, строим диаграмму
-Рпр “ -Рпр ($д) или 7ИПр = Л4Пр (ср).
Выбираем масштаб моментов = 50 -—* и масштаб углов
поворота кривошипа О А:
__ 2л ____ 2 • 3,14 р. г\олс> рад
q_________12_180 мм
Интегрируя графически диаграмму Л1Пр = Alnp (ф), получаем диа-
грамму Ас = Ас (ф) работ сил полезных сопротивлений и сил тя-
жести.
Полюсное расстояние Н принимаем равным 20 мм.
Масштаб цд на диаграмме работ:
Hm-W,»-34’3
Пусть приведенный момент движущих сил будет постоянной
величиной Мд — const. Согласно закону передачи работы машиной
при установившемся движении работа сил сопротивлений за полный
289
Значения моментов от сил инерции звеньев
Параметр Значение
0 1 1 2 3 1 4
JsSi кг-лГ2 е3, pad/cet# Ми3, н-м Л4> кг- м2 е4» рад/се к2 Mhv н-м 0,22 51 11,2 0,06 601 36 0,22 84 18,5 0,06 515 31 0,22 214 47,1 0,06 358 21,5 0,22 282 62 0,06 129 7,7 0,22 225 49,5 0.06 229 13,7
Величины составляющей R( и полной реакции R,3
23
Значение
0 1 2 3 4
%3. « hlt мм н Рп-с» к hiy мм Mi3, н-м РВ3, н /!3, ММ АС, мм R1 , Н • 23 | Ra, н 18 200 6 НО 0 127 +11,2 3288 15 254 301 22 200 16 000 18 ПО 0 126 +18,5 3007 35 254 1508 19 600 12 000 38 ПО 0 125 +47,1 2165 65 254 2332 18 600 4850 120 110 0 125 +62 1363 124 254 2951 5300 9375 61 НО 0 125 +49,5 1,924 86 254 2849 14 200
Величины составляющей R* и полной реакции R^
Параметр Значение
0 1 2 1 з 4
Ри4> Н /z5, ММ G4, н мм Л/и), н-м OYC, мм R‘ Н 11» Н 917 48 60 10 +36 95 477 1700 786 47 60 9 +31 95 318 1500 546 46 60 6 +21,5 95 215 2900 197 25 60 0 +7,5 95 36 7100 349 45 60 5 —13,7 95 133 3500
290
www.vokb-Ia.spb.ru - Самолёт своими
Таблица 56
в положении
5 6 7 8 9 10 П
0,22 0,22 0,22 0,22 0,22 0,22 0,22
102 51 124 169 180 178 203
22,4 11,2 27,3 37,2 39,6 39,2 44,7
0,06 0,06 0,06 0,06 0,06 0,06 0,06
487 587 501 172 129 329 515
29,2 35,2 30,1 10,3 7,Г 19,7 31
Таблица 57
в положении
1 5 6 7 8 9 10 11
15 500 18 000 16100 11 000 8 200 11 700 16200
28 6 27 83 123 62 20
ПО ПО ПО ПО ПО ПО ПО
0 0 0 0 25 000 0 0
126 127 126 125 125 125 126
+22,4 ’ —11,2 —27.3 —37,2 —39,6 —39,2 —44,7
2887 3247 2887 2245 1924 2326 2927
48 15 34 96 123 80 29
254 254 254 254 254 254 254
2138 572 1141 4526 7566 3673 551
1 18 800 21 700 18 400 10 700 7400 12 200 19 000
Таблица 58
В положении
5 6 7 8 9 10 11
743 895 764 415 197 502 786
47 48 47 44 13 46 47
60 60 60 60 60 60 60
10 10 10 5 2 6 10
—29,2 —35,2 —30,1 —10,3 4-7,7 4-19,7 +31
95 95 95 95 95 95 95
299 374 309 170 11 201 316
2400 500 3700 2 4800 8000 4200 3000
291 '
Т а б л и ц a 59
Величины уравновешивающей силы Ру и реакции Т?12
Параметр Значение в положении
0 * 2 3 4 5
/?32, Н h, мм ОМ, мм Ру, Н Му, н * м р/, м/мм G2, н ^?12> W 22 200 1 72 308 110,9 0,005 40 22 500 19 600 9 72 2450 882 0,005 40 21 900 18 600 14 72 3617 1302 0,005 40 23 300 5300 12 72 883 317,9 0,005 40 6900 14 200 14 72 2761 994 0,005 40 17 200 18 800 9 72 2350 846 0,005 40 20 700
Параметр Значение в положении
6 1 1 1 8 9 1 10 11
н h, мм ОМ, мм Ру, н Му, н • м Р/, м/мм G2, н Z?12, Н 21 700 1 72 301 108,4 0,005 40 22 700 18 400 11 72 2881 1037 0,005 40 15900 10800 13 72 1950 702 0,005 40 8700 7 600 2 72 211 76 0,005 40 7600 12 100 10 72 1685 608 0,005 40 11200 18 900 9 72 2363 850 0,005 40 17 000
оборот кривошипа равна работе движущих сил. Так как приведенный
момент Мд движущих сил является величиной постоянной, то его
работа пропорциональна углу поворота ф. Поэтому, соединив на-
чало координат (точку О) с точкой С прямой линией, получим диаграм-
му работ движущих сил. Но за полный период Ад = Лс, поэтому
Л4Д = “Sr = На Диаграмме согласно условию Мд представляет-
ся прямой, параллельной оси абсцисс. Алгебраическая сумма работ
Ад — Ас равна приращению кинетической энергии машины. Поэтому,
откладывая соответствующие разности ординат на координатной
системе, получаем новую диаграмму приращения кинетической энер-
гии ДЕ = ДЕ (ф).
Масштаб рЕ, таким образом, будет равен масштабу рл-
Величину Jnp приведенного к пальцу кривошипа момента инер-
ции звеньев машины определяем по уравнению
где J2 — момент инерции главного вала со всеми закрепленными на
нем деталями относительно его оси вращения.
292
www.vokb-la.spb.ru - Самолёт своими
Величины приведенных моментов т ’ Л . Таблица 60 du to — to ~ oi <o to n _, о Ь2 ° g s s ~ S 2 Й S !2 8 « io 2 S III 1 1 1 1 1
dud о co г--< to to toiocoZ^°iQ^.S CD О о CO СЧ co CM —< - О 04 О LO CO b] °p tO —< ю 1 1 1 ~ S 2 8 £ s 1 1 | |
О О О О О О О О О CD LQ О О О О tO СМ со см со
( э ud) soo?qd ОСМСО^СОООО^Ь^ООООтРО СО 1—< -м со со 03 «—• »у оз со
oud оооооооооооо о о ООО ио о о 04 LO to • 04 OJ
LOxfOJ*-OlxfLOOCOt'-’—нО~-«СОО OCOOO^-OOLQOOOlQOtO OJ О CN --< I — 03 03 —< I •—< 03 1 1 1 1 1 1
5 <7 ( Я *’о) soo’Qd о о -чг О' 1 1 1 । 1 1
W *SO ооооооооооооооо
( SO3^-.S/) - — eqd 03 CD оо IO xf оз оз —Г Ш СО со СО СО О —«О' ЮМ«СЧ~м 04 UQ LQ СО 03 «—« »—< С( III II CD 5 CO D to 1
( -Л <so) SOO ' S со - ’"‘сооос^^г-оосс |jj *”' со со оз —« | > о 1 6€—
*. 110 но но но но но но но по 110 но но но по по
<*'« ‘’2> sea^-’o ио о to to с 04 о Г- 03 С О 04 со о" 04 о 1 1 > LQ to о LO О О LQ ) 04 CM LO tO О CM ЗОСМСМ’-^ОО’уСОСМ
(rsa ‘^) soo*sd ОСО^—«СО^1 ОСОСООЗ’-’ООЗ^СО II III
w *»0 ооооооооооооооо CDCOCOCDCOCDCDCDCDCDCDCOCDOCD
WVt *Dd ооооооооооооооо СОСОООООООООСЮООСОООСЮООООСОСХЭ
ЭИНЭЖО1ГОЦ o»-'Q4co'e|iDcDb'.cooocoooo^
293
Величина приведенного момента инерции
Положение ра, мм рс, мм сх pb9, мм ас, мм * о *** 'эхо W ] о ч ег ио,с / 1 ' 1 С1 — « a |g.
0 80 0 40 0 80 0,1 0,49 1,27 0 0,042 0,25 1
1 80 38 50 39 78 0,1 0,49 1,27 0,226 0,042 0,39 0,95
2 80 67 70 67 48 0,1 0,49 1,27 0,71 0,042 0,77 0,36
3 80 80 80 80 2 0,1 0,49 1,27 1 0,042 1 0,0006
4 80 74 74 72 47 0,1 0,49 1,27 0,86 0,042 0,86 0,355
5 80 46 53 43 76 0,1 0,49 1,27 0,33 0,042 0,43 0,90
6 80 0 40 0 80 0,1 0,48 1,27 0 0,042 0,25 1
7 80 42 55 40 63 0,1 0,49 1,27 0,276 0,042 0,47 0,62
8 80 73 75 70 34 0,1 0,49 1,27 0,83 0,042 0,88 0,18
9 80 80 80 80 0 0,1 0,49 1,27 1 0,042 1 0
10 80 69 74 70 33 0,1 0,49 1,27 0,74 0,042 0,86 0,17
11 80 41 57 43 62 0,1 0,49 1,27 0,21 0,042 0,44 0,6
Отношения действительных скоростей заменим отношением соот-
ветствующих отрезков, взятых из планов скоростей:
Момент инерции коромысла относительно оси вращения OxJ
jOi = jSt 4- m4Po s = o,O6 + 11,2 • 0,252 = 0,76 кг • м2.
Значения Jnp приведенного момента инерции в разных положениях
приведены в табл. 61.
Строим диаграмму приведенного момента в масштабе р./ =
~ 0,01 кг • м2/мм для одного оборота кривошипа ОА.
294
www.vokb-la.spb.ru - Самолёт свойч
Таблица 61 |
/z2±Y VZC / fl* ' J2, ca as у Д1 * ’xl U ca M * о о N x- &la V fc ca <u ca "Sig" CO ca у 5 ca ca -olg cj.| °- £ Cl 5? у Cl _ cl а a.|ci £ sW«?3/‘dL1f
0,002 0 0,15 0 0,028 0,0004 0,105 0 0,283
0,002 0,025 0,15 0,007 0,044 0,0004 0,163 0,05 0,414
0,002 0,71 0,15 0,021 0,086 0,0002 0,322 0,146 0,725
0,002 1 0,15 0,029 0,112 0 0,418 0,205 0,914
0,002 0,81 0,15 0,025 0,096 0,0002 0,359 0,166 0,7962
0,002 0,3 0,15 0,01 0,048 0,0004 0,180 0,062 0,451
0,002 0 0,15 0 0,028 0,0004 0,105 0 0,283
0,002 0,25 0,15 0,008 0,053 0,0003 0,196 0,05 0,457
0,008 0,77 0,15 0,024 0,098 0,0001 0,368 0,158 0,799
0,002 1 0,15 0,029 0,112 0 0,418 0,205 0,914
0,002 0,77 0,15 0,022 0,096 0,0001 0,359 0,158 0,285
0,002 0,29 0,15 0,006 0,049 0,0003 0,184 0,059 0,448
И, наконец, построим так называемую диаграмму «энергия —
масса» ДЕ — ДЕ (Jnp) методом исключения параметра ср из диаграмм
ДЕ = ДЕ (<р), JnP == Jnp (<р)- Эта диаграмма построена в масштабах
|Л/ = 0,01 = 34,3 —.
ММ г мм
По заданным значениям коэффициента б ==0,15 неравномерности
Движения и соер = 53,38 рад/сек средней угловой скорости соср опре-
делим tg Ymax, tg vFmin из следующих равенств:
tg ^max = “L (1 + 6) = 53,38* (1 4-0,15) = 0,4776;
tg^min = (0^(1 -6) = • 53,382 (1 -0,15) =0,353.
295
Зная тангенсы углов tg4rmax, tgYmm, построим соответствующие
углы Чгтах= 25° 30' и Фтщ = 19° 30'; переместим стороны этих
углов АВ и АС (приложение IV, лист 5) параллельно самим себе до
момента касания их с кривой ДЕ (Jnp). Эти касательные отсекут на
оси ординат отрезок ab = 48 мм.
По величине отрезка ab можно определить момент инерции махо-
вого колеса по формуле
аЬ\кЕ
Подставляя значение юср = средней угловой скорости и
ои
, D2 ________„„„„„
значение момента инерции маховика Jm — т • —> предполагая,
что вся масса маховика распределена по ободу диаметра D,
пол\чим
Принимаем (из конструктивных соображений) средний диаметр
маховика D = 0,7 м.
Тогда масса обода маховика:
Учитывая массу спин и ступицы, определяем массу маховика:
тм — 1,3/и = 40,7 кг,
М 9 99
а затем и вес маховика:
GM = 40,7 • 9,81 = 401 н.
www.vokb-la.spb.ru - Самолёт своими руками
CQ
native
«г=Ег / О CD -!*<£> CO x: хг x_- CO 'O
/ 21 H H 21 и
lz G? X* CM ООО гм см c-i — —
кп *ги 1 m io
1 pcda ,a(b 55 50 GO 55 55
Qvds -“Л O KO OIC о
QVdc ‘^1* tCOOQin иСйОХЛ
! Кулачок И Д1
@zd? К:ШЛ c io ю e о ClClCCa
ww ‘sa CiCOOO
WW ‘s!{ ; OCCCiN J
Кулачок 1 Л1
cvd2 *и1шЛ ЮОЮОЮ 1 1ССОЮСО LO
ww ,T3 IOC CO О о
WW ‘*’J odSocs
9 о oo о о о — oo — e v—»
юж!до *VOu
2У1 *ZIU о — CO co о CM <N CM '
2Х tZUl 12 13,5 14 11 12
Bvz’ о CO Г- 00 О о ООО о
CM r0 Cl
SVj »о ОСО ю со СО СО xj* СО ОО ООО
SV 1
ZW • 2X *10 f т—СЧ ю ооооо
гл liui 11R 17 19 12 14
WK *3 Ю О О Ю 1ft тЮГ»ЮО
ьи* *(7 ооооо CI ,л 1С о x-<(N<M»—-X
ww ‘/7 LO о ° bft о ’-fZCMCO —< СЧ СЧ СО —сч
4 •J-LOCN оо с О о о о «—7 —я —X • »—’
jLiivudvg 11! IV V '
297
NO
Т«Ги мтгин3’ V-ОБРАЗНЫЙ ДВИГАТЕЛ^ВНУТРЕННЕГО Проектант Руководитеть
мов и машин СГОРАНИЯ Лата выдачи задания Срок защиты
а
Вариант 3 ? 2 2,5 3 3,5 3 N 14 12 13 11 15 м N 28 24 26 22 30 Зацепле- ние 1 ё" 3 4 4,5 5 6 3 £ 150 180 220 260 300 1 q 120 140 180 200 240 1 60 50 55 60 50 3 3,5 3 3,5 4 CQ 3 3 3 3 4 ,2 ,5 1 са. 60 55 60 55 50 5; ьС 180 245 270 350 480 и со 0,3 0,3 0,3 0,3 0,3 01 .3 'а 15 2 J3’ 0,4 0,4! 0,4 0,4. 0,4 3 5 5 Л) !*е е> Е 4,5 6 7 9 12 £ 0,04 0,1 0,13 0,3 0,75 £ 7 9 10,5 13,5 18 * Е 2,5 3,5 3 4 5 3 те 0,015 0,03 0,04 0,08 0,2 £ 7 9 10,5 13,5 18 £ 6 7 8 9 12 *1 те э 0,05 0,06 0,09 0,10 0,11 та по 65 75 80 75 h.MM -о а Го 55 G0 55 Go 65 1 s? 5 0 0 5 0 £ К В- 55' 60 55 60 65
Теория механиз-
мов и машин
О,
Схема кулачковых механизмов
1 CJ
О
N
-
*
51
<р
S5
1
п
ш
IV
V
4
4,5
5
5,5
6
4
5
4,5
5
6
20
22
26
28
30
3
W А
кулачки
4>у
Диаграмма ускорений
Схема привода к распределительному валику
Кулачок /
О
3
со 2
2=
О
О
Е
©
Е
е-
е-
е-
3
Я?
со
CQ
те
О
8-
в
Е
со
О
и
е-
«V
Ьс
5-
*ав
Задание № 3
ПАРОВАЯ МАШИНА
Проектант
Дата выдачи задания
Руководитель
Срок защиты
d2S/df2
з:
Р‘
Индикаторные диаграммы
Кулачок //
<Ц
N
N
55
5!
N
3
„ сх
КЗ те
СО с
12 15 25 280 350 6 0,85 0,38 175 12 24 170 0,1 0,17 1/100 15 0 30 20 30 60 8 0 ,35 50 35 60
13 13 22 320 400 5,5 0,9 0,36 180 14 30 250 0,15 0,17 1/90 16 0 30 20 35 58 10 0 40 40 40 СО
14 21 39 380 450 5 0,95 0,35 210 16 40 400 0,2 0,17 1/100 18 0 25 40 25 56 12 5 45 45 40 58
16 12 21 400 500 4,5 1 0.35 250 18 50 480 0,3 0*17 1/90 22 5 35 20 35 55 14 8 40 45 40 50
15 14 28 500 600 4 1 0,35 300 20 80 775 0,4 0,17 1/80 25 10 35 •20 30 50 15 10 40 50 35 50
г.vokb-la.spb.ru - Самолёт своими руками'
Теория механизмов
и машин
КОМИРЕССОРнТиГдБИГЛТЕЛЬ | Да^™.. ,ад.,т | gp”"^
БвК
Форсунка
Холодильник
Топливный
насос
в
3
со
г?
5?
8
о2 г<
'ЧЪспредеятьный вомк^
3
26
Рабочий баллон
°з'
tfs
1№-
Мц
%
?5
jnn
W Л
В
4>,t
1
II
Ш
IV
V
3
4
4,5
4
3
3
3,5
3,5
3
3
2,5
2,5
3
3
3
18
16
20
12
18
24
22
30
14
27
24
22
'15
21
18
36
32
40
24
36
420
470
530
580
625
350
380
420
470
500
180
200
220
230
250
4
4,5
5
4,5
4
I
§
21
SB
Диаграмма ускорений толкателя Индикаторная диаграмма
двигателя
пш-...о5/мин^< 3
Схема привода
распределительного
валика и насоса
I
5
*
=5
сГ
G
0,68
0,65
0,7
0,66
0.68
310
335
400
435
460
210
235
265
290
310
160
170
200
220
230
'2
р^...Мн-м'г/мм
Примечание-. Для веек вариантов
yr- =o,2i nij =12кг'>т2^ 15кг»
L ел 1ер г
сп3^20кг\т4=^5кг>т5=Юкг',[п^7кг ^икоторнол диаграмма
и т7=12кг компрессора
о
2,1
2,05
2
2,1
0,9
1
и
1
0,9
3
3
3,5
3,75
4
с/Г. S
со cq
0,8
0,85
0,9
0,95
0,35
0,36
0,35
0,38
0,36
0,05
0,08
0,1
0,16
0,2
0,45
0,42
0,4
0,4
0.38
Теория механиз-
мов и машин
Проектант
Дата выдачи задания
Руководитель
Срок защиты
Задание № 6
ПОПЕРЕЧНО-СТРОГАЛЬНЫЙ СТАНОК
Диаграмма ускорений коромысла оис
Вариант "СМ- об! млн ПЦ, ММ 1 Е N Зацепле- ние ле И, мм 1о,Ое Л!М S' 5” •м £ ? В В U. °1 _в> S сс oq oq £ гя **ui •ms, кг ww *sy Ypf мм «о г§ & и Е СО, Vrnin. гра<> § д Фу, град рорг *vj> 1 ffl &
I И Ш IV V 3 3,5 4 4,5 5 12 13 14 15 16 16 14 15 16 14 60 55 48 50 40 1,2 1,4 1,5 1.6 1,8 320 430 500 550 600 650 450 430 400 370 0,5 0,5 0,5 0.5 0,5 1,6 1,1 1,2 0,7 0,9 16 18 20 15 22 0,25 0,35 0,32 0,3 0,3 0,5 0,5 0,5 0,5 0,5 0,03 0,04 0,025 0,025 0,015 4 5 3 4 3 68 72 62 58 52 250 180 150 160 210 160 170 180 175 165 1/25 1/30 1/35 1/40 1/30 15 18 15 16 18 45 50 45 50 45 120 135 150 140 130 75 70 65 75 65 10 10 10 0 5 75 70 65 70 60
*
/ Теория механиз-
' мов и машин
Задание № 7
ПОПЕРЕЧНО-СТРОГАЛЬНЫЙ СТАНОК
Проектант ’ I Руководитель
Дата выдачи задания I Срок защиты
2.
(fa
'2"0.
РдС
Ъ.
с5я
otyMUH..
2:
со
о
СО
0.05Н
0,05Н Sf
Диаграмма силы полезного сопротивления
^|е
dtp
%
-J диаграмма ускорений коромысла о4с
Прибой станка
h я то к р, «5 CQ 3 г 1 Е 1 в N* £ Зацепление ле 1 з: 1 о <N О ° tv * *я ? 8 Е £ Е 3 £ 3 £ «о пэ Q & X то Е со. Q сх то Й Е 1 ч со ПЭ с & >» & пэ £ пэ а сх то а е- п02А‘ об/мин
I 2 2,5 10 15 65 1,2 350 680 0,5 2,5 26 70 180 140 1/25 18 45 150 75 5 75
II 3 3,5 9 16 60 1,5 450 380 0,5 1,1 20 62 160 152 1/30 16 50 142 70 10 70
III 2,5 3 8 14 52 1,6 500 360 0,5 1,1 20 65 180 164 1/35 20 45 128 65 10 65
VI 3,5 4 7 13 55 1,8 600 350 0,5 1,3 22 76 170 186 1/40 15 50 118 60 5 55
V 4 5 6 15 58 2 700 360 0,5 0,9 19 68 150 198 1/30 18 45 НО 65 0 60
.vokb-la.spb.ru - Самолёт своими руками?!
4
г
.1 П}
У
t
£
Теория механиз-
мов и машин
Проектант
Дата выдачи задания
Задание № 8
ДОЛБЕЖНЫЙ СТАНОК
Руководитель
Срок защиты
Вариант п02А’ об/мин мм 5; n Зацеп- ление Н, мм 3 „о ww **S*Oj с £ % $ •?|о" ZBS4 1вс * £ т4, кз £ S S с, мм «о X я Е ах Vmin* гРа& 1 я .о Фу, град фд, град Фв> град 1
I II III IV 3 3,5 4 3,5 5 9 10 8 8 ’ 7 13 14 15 14 15 46 40 45 52 58 2 2,4 1,5 1,8 1,6 100 150: 2С0 150 160 150 185 160 200 220 125 130 130 160 180 50 65 50 70 80 16 21 22 25 28 0,14 0,31 0,35 0,4 0,45 1 0,8 0,75 0,6 0,75 0,5 0,5 0,5 0,5 0,5 0,002 0,002 0,0022 0,002 0,002 2 2 2,5 2 2 32 36 41 40 45 50 70 80 86 95 120 160 172 182 210 1/25 1/30 1/35 1/40 1/35 15 14 12 15 16 50 45 45 45 50 125 150 140 150 160 60 65 55 65 70 0 10 5 0 5 60 65 55 60 65
а
Вариант Н, мм а, град ti, сек /2, сек уээ ,CJ /4, сек Х5, мм кг 1 I eSsOl I
I II IV V 50 80 120 150 200 30 40 45 50 60 0,15 0,3 0,5 1,2 0,7 0,5 1 1,6 2,4 1,4 0,15 0,3 0,5 0,6 0,5 0,4 0,8 1 1,2 1 ПО 125 136 145 160 10 12 15 16 18 0,5 0,45 0,45 0,42 0,4
т3, кг % й tvw *B'Oj /OjB гл 4, кг J$ , кг -и2 Vmln, гРад ГПц мм г? ч S
3 3,5 4,5 5,5 6 0,0025 0,004 0,009 0,014 0,02 120 150 174 162 155 0,2 0,25 0,21 0,18 0,2 6 7 8 8,5 7,5 0,03 0,04 0,08 0,07 0,06 45 50 55 50 45 5 6 7 8 9 4 5 4,5 3,5 4
2
со
о
С5
Теория механиз-
мов и машин
Задание № 10
ПРЕСС ДВОЙНОГО ДЕЙСТВИЯ
Проектант
Дата выдачи задания
Руководитель
Срок защиты
о*
поижим^
ДаВлонм на бытяж-
ной ползун (Pt )
Давление на
прижимной
. ползун (Рг)
/ДГ- зю
О' 90' 180 "270'^
Диаграмма сил сопротивления
<р
Циклограмма дбижения ползуноб
С
3
cq
£
£
£
£
к>
3
3
d2S
d(pz
*
3
a
s
o.
C3
CQ
§
S’ <y
kj a
oo s
I
•eT
C-ZJ
t.<P
270°
К т
Прибой пресса 1
s*
£*
Кинематическая схема "г
ГПл
*1
П-.,..об/мин 2'г
р
Ур^н/мм.
*
$
J-
48
42 1
38
46
50
з
з
00°
50
70
90
120
150
55
60
55
50
50
42
50
60
70
80
з
4
5
6
150
200
250
300
350
7
9
12
14
16
I
II
III
IV
18
21
28
32
38
15
14
12
13
16
0,03
0,07
0,25
0,24
0,37
1/20
1/20
1/25
1/25
1/20
Диаграмма ускорений
прижимного ползуна
0,35
0,3
0,32
0,35
0,4
10
11
12
3
3
13
14
Теория механиз-
мов и машин
Проектант
Дата выдачи задания
Руководитель
Срок защиты
Задание №12
ОДНОУДАРНЫЙ ХОЛОДНО-ВЫСАДОЧНЫЙ
АВТОМАТ С ЦЕЛЬНОЙ МАТРИЦЕЙ
лхрапМ
механизм
Ролики
-------- " ;П
Вытитель эксцентрик/у
112---------
1 Лисадочний
Г ползун
'/г
Кинематическая схема
высадочного механизма
5
Кинематическая схема автомата
.....и/ин
Кинематическая схема
механизма подачи
(Г 30* 60* 90* 120* ISO9180*210*240*2ЯЭ*ЗО(РЗЗ^360'
Высадочный ползуь
НОЖ
Механизм подачи \
Выталкиватель
...лЪ/мин
ж-------
УШ______
Обратней ход ползуна
ш в
Циклограмма а&помата
о* too9 зво
Диаграмма сил полезного
сопротивления
Диаграмма^
р
Вариант /лр мм >пц, мм WW •IIIlZ/ N * N Н, мм Н >, мм D, мм 1 kJ „о а? О min« град ®’|5 KVj ~8sv7 чс<Г| Ц, о" 1 о mlt кг ах * w я /п2, кг Л) « кг £ «о Б Jqi, г-си* JO1- е'см‘ 3 Vmin» град d, мм
I II III IV V 2 2,5 3 3,5 4 10 И 12 13 14 2 2 2,5 3 3 40 45 48 50 60 12 13 14 15 16 30 40 45 50 60 4 3,5 4 3,5 3 10 18 22 25 28 40 55 46 55 СО 30 40 42 45 40 120 180 170 190 175 60 65 65 65 60 0,8 0,85 0,9 0,95 1 0,35 0,35 0,35 0,32 0,33 0,2 0,25 0,2 0.15 0,2 0,4 0,45 0,5 0,6 0,7 0,3 0,25 0,35 0.4 0,5 1,5 1,8 2 2.5 3 5 5.5 6 7 8 1,5 2 2,5 2,8 3 0,9 1 1,2 1,5 1,5 6 13 20 40 65 0.5 1 5 8 10 15 26 35 40 42 45 50 55 60 55 20 30 40 50 60
Теория механизмов
и машин
Задание № 13
ВЫТАЛКИВАЮЩИЙ МЕХАНИЗМ ПРЕССА СП-2
_____________(для кирпича)_________
Проектант
Дата выдачи задания
Руководитель
Срок защиты
Примечание: Угол качания рычага АВ симметричный
относительно горизонтальной оси
Диаграмма ускорения толкателя
Вариант Z71J, ММ 3 S W9 N Зацепле- ние Н, мм 1 ^гпах» град .о" К1 .9” «3 « .о 1ВС со N I О Л со *** £ т3, кг ax ltiu at а "и zw ах *9Sp Vmin, град Фу, град Фд, град Фв, град со «о
I 4 14 12 42 130 15 с ) 1 0,25 0,5 12 3 15 0.6 0,06 45 100 60 100 1/15
11 5 13 13 45 130 20 1 1 0 0,5 10 4 16 0,46 0,05 50 НО 50 но 1/20
III 6 11 14 48 190 18 1,5 1,6 0,15 0,5 15 4,5 18 1,25 0,05 45 120 50 120 1/15
IV 7 12 15 50 190 16 1,2 2 0,25 0,5 16 4 20 2 0,04 50 НО 80 105 1/20
V 8 15 16 52 190 18 1,2 1,25 0,25 0,5 12 3 21 0,84 0,04 45 105 70 100 1/15
.vokb-la.spb.ru - Самолёт своими руками
Теория механизмов
‘ и машин
Задание № 15
КАМНЕДРОБИЛКА
Проектант
Дата выдачи задания
Руководитель
Срок защиты
Примечания: 1 Центр масс эбена 2 принять
6точке пересечения медиан ДАОгв.
2. центр масс эбена 3 принять,
посередине его длины.
д.бгР=0,д02А.
Кинематическая схема механизма
Диаграмма углобого ускорения эбена 2
Вариант £ 1 ЁГ * к? Зацепле- ние 3 а? ч о ^тах» град Ф1У. град Ф1Д, град & & *3 & с « £ СМ Й с/Г ‘ЭЯ ] т3, кг JS,’ K2'M* а, мм 3 ww *Э*О<1 1 8 g ае й •?' «о ^«тах, град 1 Ф4т|п, j град
т 0 А 15 14 13 12 11 48 520 14 170 10 170 45 42 3,5 120 4,8 0,006 65 750 470 294 58 3,2 1/20 19 10
1 тт 4 2,5 <э ‘Г е 40 45 49 542 15 170 0 170 50 44,5 4,15 125 5 0,0062 70 750 505 302 59,5 3.5 1/25 22 12
11 III IV |’ 0 с 565 16 180 0 180 55 47 4,95 132 5,3 0,0084 70 765 515 316 62 3.8 1/20 12 15
о 3,5 4 О 7 40 592 15 200 10 140 45 48 5,24 145 5,8 0,01 80 810 528 320 64 4,1 1/25 26 16
8 36 625 14 220 0 140 50 49,5 5,72 150 6 0,011 85 825 532 325 65 4,3 1/20 19 10
1.vokb-la.spb.ru - Самолёт своими рукам
co
bo
'----—— -------
Теория механизмов
и машин
Проектант
Дата выдачи задания
Руководителе
Срок защиты
Кинематическая схема
Задание №? 16
МЕ^АНИЗМ ИГЛОВОДИТЕЛЯ И НИТЕПРИТЯГИВАТЕЛЯ
УНИВЕРСАЛЬНОЙ МАШИНЫ 4-го КЛАССА ПМЗ
Примечания:
1. (Ps и (p's-пределы изменения
угла (Psfcpsxpsxp's).
2. Центры масс$1 и звеньев 1 и
U принять на пересечении ме-
диан,
3. Центры масс звеньев 2и5
принять посередине их длин
и .Для всех вариантов <р6М80';
(ру Н80-; (рд =ов; z3 м; Zq --135 и
^120:
ниток на катушку
механизма
Теория механизмов
и машин
Задание № 17
МЕХАНИЗМ НИЖНЕГО НАТЯЖНОГО РОЛИКА МАШИНЫ
СТРОЧКИ ПОДОШВЫ (МПС)
90°
Пе...об/мин -г..
а
3.
1
Проектант
Дата выдачи задания
| Руководитель
I Срок защиты
Рп.с
р?*... н/мм
%тах
%
djfy Диаграмма силы сопротивления
0*2 А
7
-О
1
2Я
%
%
Кинематическая
схема механизма
Примечаниям. % и пределы изменения угла качания % звена ВОгЕ(Щ*<Я^ у>%).
^Положение центров масс S? и 3^ звеньев 0,вс и РОгЕ принять на пересечении медиан.
в. Сила рп_с действует при движении звена вогЕ против направления вращения часовой
стрелки.
Схема привода
Диаграмма ускорений звена 2
«! S О. 3 цепле- е пары -Z , град , град а * й 1 6 Щ 4 6 * Ц) а? 6 5* 6 Д. мм а? 5- * * S* 2* * г-см2 м 5? <у> 1 tW э г ‘ п, град град град град а
03 М S сч s | СО В N - * ©• 9- .о О •м ***» и **> cj *** CQ О •*4 О **4 « д Е ? § & « ©• 9- е
I 2 25 73 96 30 115 38 19 78 60 52 81 44 0,75 0,06 0,56 1,36 0,59 44 45 80 190 90 500
11 2.5 20 70 115 38 145 46 21 98 75 65 102 55 0.92 0,075 0,72 25,0 1,3 80 50 75 190 95 650
III 3 30 75 144 45 180 58 28 116 90 78 120 65 1,1 0,09 0,84 38,0 2,5 147 48 85 175 100 700
IV 1,75 25 80 80 28 108 32 17 63 52 45 72 38 0,7 0,05 0,5 11,0 0,5 27 45 90 180 90 800
V 1,5 20 75 72 24 96 28 15 58 45 36 62 32 0.6 0,045 0,42 8.0 0,3 17 50 80 180 100 720
W
www.vokb-la.spb.ru - Самолёт своими рукам
co
СП
Теория механизмов Задание № 19 Проектант
и машин механизм привода качающегося конвейера Дата выдачи задания
1 С Р=...Н
'Кинематическая схема механизма.
Руководитель
Срок защиты
Примечания--L ч>-уеол,опреде-
ляющий положение звена О, А,
когда звено 0гв имеет наимень-
шую угловую скорость шзт,п. :
2.иентры масс звеньев можно
принять посередине их длины
з.р=const.
Вариант 1 8 ww t? Зацепле- ние а, мм ww *q 1 о «е S м £ tn2, кг 3 о? S* ео S кг • м2 о3, т4» кг •> 2 m.-t кг nOtAt об] мин ф, град °зт1п* рад/сек «о
I 3,5 5,5 16 45 25 30 60 6 3 0,001 3 0,003 7,5 0,006 12 0,36 62 60 250 3 1/20
II 2,5 4,5 15 42 20 40 75 7 3,5 0,0015 4 0,002 9 0,006 15 0,9 78 90 240 4 1/20
III 3 5 14 40 40 50 90 6,5 4,5 0,003 3 0,0015 9,5 0,007 16 1,0 72 75 260 2,5 1/25
IV 2 4 13 39 45 60 100 8 5 0,004 5 0,009 10 0,01 22 2,6 83 80 240 3,5 1/30
V 4 6 12 46 35 70 120 8 6 0,007 4 0,001 9 0,012 25 2,8 86 100 260 4,5 1/25
г.vokb-la.spb.ru - Самолёт своими рукам
CO
►—
С-з
Теория механизмов Задание №21 Проектант
и машин механизм грабельного аппарата сеноворошилки Дата выдачи задания
Руководитель
Срок защиты
Комплексная кинематическая схема
450 300 400 16 40
570 375 500 18 45
625 400 530 15 40
780 500 665 16 42
950 600 800 15 42
0,4
0,4
0,4
0,4
0,4
0,8 0,5
0,8 0,5
0,8 0,5
0,8 0,5
0,8 0,5
h Я 03 а «Я э rfl ь. 1© 1 со Q CM N 8 3 3 О «1 ь, cq ^”1 § .ф «?| ° ъе
g 51-9 .о 1.9 £ £ £ £ £ о. о. 1й. О. 1st Q. |St
I II 0,5 0,5 0,5 1,0 4 2,0 4 2,5 0,0025 0,29 0,29 0,29 0,29
0,5 0,5 0,5 1,3 5 2,5 5 3,0 0,004 0,29 0,29 0,29 0,29
ш 0,5 0,5 0,5 1,5 7 3,0 7 3,5 0,006 0,29 0,29 0,29 0,29
IV 0,5 0,5 0,5 1,8 8 4,0 8 4,5 0,01 0,29 0,29 0,29 0,29
V 0,5 0,5 0,5 2,0 9 4,5 9 5,0 0,02 0,29 0,29 0,29 0,29
Кинематические схемы составных механизмов
.vokb-la.spb.ru - Самолёт
г
Теория механизмов
и машин
W
00
Задание № 22
МЕХАНИЗМ ПЛАТФОРМЕННОГО ГРАБЕЛЬНОГО
СОЛОМОТРЯСА КОМБАЙНА
Примечания:
1.Центры масс звеньев
принять посредине их длины.
2. Радиусы инерции звеньев
принять равными
3. O^=D5F=0^0^ =ВС; DJ=DZ,
о
Оз
*4
Кинематическая схема
механизма
Проектант
Дата выдачи задания
%тах
02
Руководитель
I Срок защиты
К синтезу механизма
02ВС03
'2
Z,
т
Схема привода
Вариант -•* О ко £ о ги, мм Зацепле- ние пары •ь» Фя min, град Ф3ГНЗХ, град =5 04 3 и S т2, кг та, кг т4, кг т&, кг та=тя. кг т7г кг
I II Ш IV V 8 9 10 И 12 1,08 1,09 1,075 1,1 1,07 16 20 18 12 15 56 65 60 60 55 300 320 360 390 460 * 1500 1600 1800 2100 2350 2 2,5 3 3,5 4 6 7,5 9 10,5 12 2,5 3 3,5 4 5 25 28 32 35 40 2,8 3,2 3,8 4,5 5,5 2,2 2,6 3 3,6 4 8 9 10 12 14
i
С
60
60
75
85
00
3?
Теория механизмов
и машин
Задание №23 ЗЕВООБРАЗОВАТЕЛЬНЫЙ И БАТАННЫЙ МЕХАНИЗМЫ ТКАЦКОГО СТАНКА Проектант Дата выдачи задания
Руководитель
Срок защиты
Примечание: Для всех вариантов
^-о,2д^ -Ц24и-&-
1ав %в * о2е
0°
360°
%" 720°
пттшттпптгэттггптп Раоочии ход\ батана Холостой ход батана >1 и । HiTjimr ।Il run ci г г1 Рабочий ход батана] Холостой ход батана
1 1 1 1J 1 1 1 11111 1,11 iilll i у^^выстойремизок выстой ремизок ШШ
% _ . % _ ~ <&L
6
7
Циклограмма
ог
8
т.
тД
M,5S^
Схема привоза
"7^
о &
.... <№*
6 4
НОМ
\Р>.
№
%
Диаграмма ускорений рычага Огсс
Мс=...н-м
Схема механизма
| Вариант ww ‘'OOj mj, мм *4 •К ^тах, град (p3m in, град Л *ч о5 о •** а, мм Ь, мм wx ‘3z0j 4J сч о •** и о" **а а, град 1 со с> VOj К •**> 1АВ 05 с **> CQ СЧ mlt кг тг, кг /п3, кг т5, кг к Фу, град j Фд, град Фв, град 1 е max "“Earnin’ град •о
I 210 3 10 100 80 650 635 245 140 2 22 0,8 0,5 0,7 0,5 4 3 7 4,5 0,025 120 120 120 52 16 1/20
II 270 3,5 12 98 82 720 690 270 165 1.85 24 0,9 0.5 0,75 0,5 4,5 3,5 8,5 5 0,028 140 80 140 50 15 1/18
III 264 4 11 95 80 800 780 300 180 1.8 20 0,85 0. 5 0,68 0,5 5 4 9 5,5 0,03 135 90 135 48 14 1/20
IV 252 3,5 10 92 80 860 845 320 200 1.9 22 0,95 0, 5 0,65 0,5 5,8 4,5 10 6 0,03 130 100 130 46 12 1/15
V 358 4 12 95 85 910 880 350 230 2 25 1 0, 5 0,7 0,5 6,5 5 11 6.5 0,03 125 110 125 45 10 1/16
.vokb-la.spb.ru - Самолёт своими руками?
со
ND
I
*
u-
F
=•
Теория механизмов
и машин
Задание № 26
ДИФФЕРЕНЦИАЛЬНЫЙ МЕХАНИЗМ ПОДАЧИ
Проектант
Дата выдачи задания
Руководитель
Срок защиты
Примечание: массу'звеньев СОА,АВ,О,В подсчи-
тать по формуле m=ql, радиусы
инерции этих звеньев Р3~^‘
положение центров тяжести.
Диаграмма ускорений звена ОС
Я at 3 'Ъ
Я S сх .1 л 5 м 5 = 7 * о * <\Г 3’niin* град St 1 §• 1» . зе
И S •> N * к? « 33 • tn a n 6 ,0 5 О й е? ^ma град е* £ -к to е • 5 5!
1 3 3.5 Л 14 18 35 о г» 16 33 18 40 50 1,75 0,001 45 14 50 20 50 1/3 1/3
тп зь 16 38 20 57 65 1,8 0,002 48 16 60 0 60 1/3 1/4
IV V ч 4,5 е 22 20 24 44 60 17 27 49 53 25 30 75 80 100 105 2,1 2 0,003 0,004 50 48 15 18 70 70 0 15 50 60 1/4 1/2 1/3 1/2
О 72 48 48 Зо 75 140 1,8 0,005 46 16 80 20 80 1/3 1/2
Теория механизмов Задание № 27 Проектант 1 Руководитель
и машин ФРИКЦИОННЫЙ МЕХАНИЗМ ПОДАЧИ Дата выдачи задания Срок зашиты
г.vokb-la.spb.ru - Самолёт своими рукам
Теория механизмов
и машин
Задание № 29
МЕХАНИЗМ ПРЕССА-АВТОМАТА С ПЛАВАЮЩИМ
ПОЛЗУНОМ
Проектант
Дата выдачи задания
(Руководитель
Срок защиты
О
!Л
Отрезка
Ножницы
Прижим!
Ползун!
Прижима
Ползун а
Циклограмма
Штамповка
о>
i
Ef О
св К
СП Л
I
я
Холостой юд
зм° &
. н/№
Варианты • N* я 3 VO С е 1, мм СП е- II е- е е р- ДС, мм АВ, мм OtC, мм 3 О OD, мм DE, мм 1 « S Л) £* 3 i S тя, кг т4, кг i' *Sf zW2y й a «о
1 2 3 4 5 17 13 16 14 17 48 45 50 48 44 1430 1500 1200 1600 1250 1 0 20 10 25 15 40 50 60 45 55 60 55 55 50 52 1270 1100 1300 1400 1200 635 550 650 700 600 490 420 505 520 500 100 90 120 200 ПО 80 70 90 150 75 1120 1100 1150 1200 1000 230 210 240 270 200 20 18 28 30 35 41 40 64 80 50 11 10 20 18 22 6 7 10 12 12 0,22 0,2 0,25 0,3 0,25 0.06 0.1 0.08 0,1 0,08 » 0,02 0,025 0,035 0.03 0,03 ! 0,012 0,01 0.015 0,02 0,016 1 0,15 0,2 0,18 0,2 0,17 1
14
20
25
18
30
16
10
15
12
18
т.vokb-la.spb.ru - Самолёт своими
Литература
1. Артоболевский И. И., Л е в и т с к и й Н. И., Черкудинов С. А.
Синтез плоских механизмов. М., Физматгиз, 1959.
2. Артоболевский И. И. Механизмы. Т. Ill, М., АН СССР, 1959.
3. Артоболевский И. И. Теория механизмов. М., изд-во «Наука», 1965.
4. Артоболевский И. И. Новый метод определения маховых масс. Труды
семинара по теории машин и механизмов. Изд-во АН СССР, вып. I, М., изд-во
АН СССР, 1947.
5. Артоболевский С. И. и др. Курсовое проектирование по теории меха-
низмов и машин. М., Изд-во «Советская наука», 1955.
6. Артоболевский С. И. Машины и автоматы. М., Машгиз, 1949.
7. А с с у р Л. В. и Р е р и х К. Э. Графические методы определения момента
инерции маховиков. Спб. 1913.
8. Б а р а н о в Г. Г. Курс теории механизмов и машин. М., Машгиз, 1958.
9. Болотовская Т. П., Болотовский И. А. иСмирнов В. Э. Спра-
вочник по корригированию зубчатых колес. М.— Свердловск, Машгиз, 1962.
10. Г а в р и л е н к о В. А. Цилиндрическая эвольвентная зубчатая передача. М.,
Машгиз, 1956.
11. Г р о м а н М. Б. Подбор коррекции зубчатых колес.— «Вестник машинострое-
ния», 1955, № 2.
12. Гутьяр Е. М. Уточнение расчета массы маховика по методу Мерцало-
ва Н. И.— «Вестник металлопромышленности», 1939, № 3.
13. Д и к е р Я. И. Эвольвентное зацепление с прямым зубом, М., Оргметалл, 1935.
14. Добровольский В. В. Подбор шестерен для редукторов с несколькими
сателлитами.— «Вестник инженеров и техников», 1937, № 3.
15. Добровольский В. В. Теория механизмов. М., Машгиз, 1951.
16. 3 и н о в ь е в В. А. Курс теории механизмов и машин. М., Физматгиз, 1960.
17. Картавов С. А. Основы рационального проектирования машин. Гостехиз-
дат УССР, 1954.
18. К о ж е в н и к о в С. Н. Теория механизмов и машин. М.— К., Машгиз, 1954.
19. Колчин Н. И. Механика маш ih. Т. I, М.— Л., Машгиз, 1962.
20. Колчин Н. И. Механика машин. Т. II. М.— Л., Машгиз, 1963.
21. Кореняко А. С. иКременштейнЛ. И. Теория механизмов и машин.
Гостехиздат, 1955.
22. К о с т ю к Д. И., Г о л д а е в а О. И. и Я к о в л е в Ю. В. Руководство к
курсовому проектированию по теории механизмов и машин. Изд-во Харьковско-
го университета, 1959.
23. К У д р я в ц е в В. Н. Зубчатые передачи. М.— Л., 1957.
24. Кудрявцев В. Н. Зубчатые и червячные передачи. М., Оборонгиз, 1951.
25. Л е в е н с о н Л. Б. Теория механизмов и машин. М., Машгиз, 1954.
26. М е р ц а л о в И. И. Динамика механизмов. М., Машгиз, 1914.
27. Р у д е н к о Н. Ф. Планетарные передачи. М., Машгиз, 1947.
28. С е м е н о в М. В. Структура механизмов. М., Физматгиз, 1959.
29. Юдин В. А. Проектирование кинематических схем механизмов. М., Изд-во
«Искусство», 1963.
30. Ю д и н В. А., П ет р о к а с Л. В. Теория механизмов и машин. М.,Изд-во
«Высшая школа», 1967.
326
www.vokb-la.spb.ru - Самолёт своими
-ЙР-
Предисловие ..........................• 3
Введение .............................. 5
Глава I. Структурный анализ плоских механизмов 11
§ 1. Степень подвижности механизма............ • 11
§ 2. Метод образования плоских механизмов. • • . 13
§ 3. Построение структурной схемы механизма « . 14
Глава II. Синтез плоских механизмов с низшими
кинематическими парами............................ 15
§ 1. Синтез кривошипно-ползунного механизма , . 16
§ 2. Синтез шарнирного четырехзвенника . . . « • 20
§ 3. Синтез кулисного механизма........... . . 23
Глава III. Зубчатые передачи •................. 25
§ 1. Кинематика многозвенных зубчатых механизмов 25
§ 2. Построение ряда зубчатых колес по заданному
передаточному отношению......................... 27
§ 3. Эпициклические передачи................. • 29
§ 4. Геометрический синтез соосных планетарных
передач ...................................... 32
Глава IV. Геометрический синтез прямозубого
внешнего зацепления............................. 42
§ 1. Задача геометрического синтеза зубчатого за-
цепления ...................................... 4
§ 2. Определение размеров зубчатого зацепления . 42
§ 3. Вычерчивание элементов зубчатого зацепления 49
§ 4. Построение активной части линии зацепления,
дуг зацепления и рабочих участков профилей
зубьев........................................... 33
§ 5. Определение качественных показателей зацеп-
ления ..................................... ч ♦ 36
§ 6. Выбор коэффициентов смещения 60
§ 7. Последовательность выполнения работы • < • 65
§ 8. «Вписывание» в заданное межцентровое рас-
стояние ...................................
327
Глава V. Геометрический синтез внутреннего,
косозузого, реечного зацеплений н ко-
нических зубчатых колес ....................... 72
§ 1. Внутреннее зацепление...................... 72
§ 2. Косозубое внешнее зацепление............... 73
§ 3. Реечное зацепление......................... 76
§ 4. Конические зубчатые колеса ................ 78
Глава VI. Методы кинематического исследования
плоских механизмов ............................. 82
§ 1. Задача кинематического исследования меха-
низмов .......................*................. 82
§ 2. Построение положений звеньев механизма . . 82
§ 3. Построение траекторий отдельных точек меха-
низма и определение крайних положений ве-
домого звена.................................... 84
§ 4. Построение кинематических диаграмм .... 86
§ 5. Построение диаграмм скоростей и ускорений ме-
тодом графического дифференцирования ... 88
§ 6. Соответствия между диаграммами перемеще-
ний, скоростей и касательных ускорений.
Построение диаграмм (у — s) или (W —$) . . 90
§ 7. Кинематическое исследование механизмов II
класса методом планов скоростей и ускорений 91
§ 8. Пример построения планов скоростей и уско-
рений механизма II класса ...................... 92
§ 9. Построение планов скоростей и ускорений ме-
ханизмов III класса............................. 97
§ 10. Построение мгновенных центров скоростей и
ускорений звеньев...............................101
§11. Построение планов скоростей и ускорений ме-
ханизмов с высшими кинематическими парами . 101
Глава VH. Синтез плоских кулачковых механизмов 103
§ 1. Типы плоских кулачковых механизмов .... 103
§ 2. Фазовые углы...............................104
§ 3. Угол передачи движения.....................104
§ 4. Задача проектирования кулачковых механизмов 106
§ 5. Графическое интегрирование ................107
§ 6. Рекомендуемые масштабы величин, откладывае-
мых на оси абсцисс.............................110
§ 7. Зависимость между масштабами линейных н уг-
ловых путей, скоростей и ускорений толкателя
при графическом интегрировании..................Ill
§ 8. Симметричные и несимметричные кинематичес-
кие диаграммы толкателя ........................112
§ 9. Выбор закона движения толкателя............114
§ 10. Динамический синтез кулачковых механизмов
типа I .........................................116
§11. Динамический синтез кулачковых механизмов
типа II.........................................117
§ 12. Динамический синтез кулачкового механизма
типа III...................................118
§ 13. Метод обращения движения..................118
§14. Кинематический синтез кулачковых механиз-
мов типа I .....................................119
328
www.vokb-la.spb.ru - Самолёт своими рукаг
§15. Кинематический синтез кулачковых механиз-
мов типа II..............................122
§ 16. Синтез кулачкового механизма с плоским тол-
кателем .....................................123
§ 17. Графические методы определения угла пере-
дачи движения в различных положениях ку-
лачкового механизма...........................126
§ 18. Аналитический метод определения минималь-
ного радиуса го кулачковой шайбы механизма
с плоским толкателем, совершающим возврат-
но-поступательное движение ...................128
§ 19. Построение цикловых диаграмм.............135
§ 20. Компоновка схемы машины..................139
Глава VIII. Силовой анализ механизмов ... 141
§ 1. Силы, действующие на механизм.............141
§ 2. Силы инерции ..............................Н2
§ 3. Кинетостатический расчет механизмов .... 145
§ 4. Теорема Н. Е. Жуковского..................155
§ 5. Учет сил трения в шарнирно-рычажных меха-
низмах.........................................158
§ 6. Кинетостатический расчет кулачковых меха-
низмов ........................................160
Глава IX. Уравновешивание механизмов . . .
§ 1. Общие сведения ...........................162
§ 2. Уравновешивание вращающихся тел...........163
§ 3. Уравновешивание механизмов на фундаменте . 166
§ 4. Уравновешивание многоцилиндровых двигателей 170
Глава X. Некоторые задачи динамики установив-
шегося движения машины ............173
§ 1. Основные сведения ......................173
§ 2. Определение момента инерции маховика и его
махового момента.............................177
§ 3. Определение угловой скорости главного вала
машины .................................... 185
§ 4. Графическое определение коэффициента нерав-
номерности хода машины.......................186
§ 5. Определение момента инерции маховика мето-
дом средних мощностей........................191
Глава XI. Задания по курсовому проекту .... 192
§ 1. Краткие указания к заданиям ............192
§ 2. Методические указания к выполнению курсо-
вого проекта .............................199
Глава XII. Примерные расчеты (Расчетно-объяс-
нительные записки)...........................204
I. Расчет четырехзвенного меха-
низма ....................................204
§ 1. Синтез кривошипно-ползунного механизма . . 205
§ 2. Синтез привода распределительных валиков . 207
§ 3. Динамический синтез кулачкового механизма . 211
§ 4. Компоновка механизма....................215
Я .
329
§ 5. Структурный анализ механизма.........216
§ 6. Кинематическое исследование кривошипно-пол-
зунного механизма .........................217
§ 7. Кинетостатическое исследование кривошипно-
ползунного механизма.......................221
§ 8. Определение момента инерции махового колеса 228
§ 9. Уравновешивание сил инерции кривошипно-
ползунного механизма ..................236
II. Расчет шестизвенного меха-
низма ..................................237
§ 10. Синтез привода механизма............238
§11. Исследование привода................243
§12. Динамический синтез кулачкового механизма 244
§13. Синтез кулисного механизма ..........250
§14. Компоновка механизма.................252
§ 15. Структурный анализ кулисного механизма 253
§ 16. Кинематическое исследование шестизвенного
механизма.............................253
§ 17. Кинетостатическое исследование шестизвен-
ного механизма ...........................262
§ 18. Определение момента инерции махового колеса. 271
III. Механизм пресса-автомата с
плавающим ползуном......................277
§ 19. Синтез механизма высадочного иолзуна . . . 278
§ 20. Синтез привода пресса-автомата (приложение
IV, лист 1) ..........................279
§ 21. Динамический синтез кулачкового механизма 281
§ 22. Компоновка схемы механизма..........281
§ 23. Структурный анализ механизма высадочного
ползуна...................................281
§ 24. Кинематическое исследование механизма . . 282
§ 25. Кинетостатический анализ механизма . . . 284
§ 26. Определение момента инерции махового колеса 289
Приложения .................. 297
Приложение 1 .............................297
Литература................................326
Приложения II—V (прилагаются)
www.vokb-Ia.spb.ru - Самолёт своими рука
Кореняко Александр Степанович
Кремениипейн Лев Исаакович
Петровский Сергей Дмитриевич
Оесиенко Григорий Михайлович
Баханов Василий Ефимович
Емец Павел Мокиевич
Курсовое проектирование по теории
механизмов и машин
Издательство «Вища школа»
Редактор Р. С. Деловая
Обложка художника В. 17. Соуховского
Художественный редактор С. П. Духленко
Технический редактор Л. И* Швец
Корректор И. П. Зборовец