/

















































































































































Текст
Г. М. Розенблат
СУХОЕ ТРЕНИЕ
И ОДНОСТОРОННИЕ
СВЯЗИ
В МЕХАНИКЕ
ТВЕРДОГО ТЕЛА
URSS
06 авторе
Григорий Маркович РОЗЕНБЛАТ
В 1972 году окончил
механико-математический факультет МГУ им. М. В.
Ломоносова, кафедру прикладной механики.
Кандидат физико-математических наук,
доцент кафедры теоретической механики
Московского автомобильно-дорожного
института (МАДИ (ГТУ)).
Наше издательство предлагает следующие книги:
9214 ID 117169
"785 3 97 "0 1 53 1 8'
Любые о-Эо вы о нас'СРшем иэрании
а гакже обнаруженные опечатки присылайте
го адресу URSS@URS5.ru
Ваши замечания и предложении oyflyi pie-ны
и огранены на we Ь-о границе а той книги
E-mail:
URSS@URSS.ru
Каталог изданий
в Интернете:
ннааюг.'ингеонет-магаэг-не http:NURSS.4i URSS http://URSS.rU
URSS
НАШИ НОВЫЕ ^^^^,+7(499)724-25-45
КООРДИНАТЫ 117292, Москва, Нахимовский пр-т, 56
Содержание
Предисловие 6
Введение 7
Литература к Введению 12
Глава 1. Равновесие твердого тела на плоскости
с анизотропным сухим трением 14
1. Постановка задачи о равновесии, описание модели
анизотропного трения и основные уравнения 14
2. Формулировка и обоснование результатов в случае п = 1 . . 18
3. Формулировка и обоснование результатов
для случая п = 2 20
4. Формулировка и обоснование результатов
для случая п = 3 28
Приложение. Сведение поиска экстремума функции Ф
к алгебраической задаче 36
Литература к Главе 1 46
Глава 2. О динамическом (обязательном) равновесии
твердого тела, опирающегося одной точкой
на шероховатую плоскость 47
1. Постановка задачи 47
2. Вывод основных уравнений начального движения 49
3. Формулировка результата 52
4. Обоснование результата 52
Литература к Главе 2 57
4
Содержание
Глава 3. Равновесие абсолютно твердого тела при опирании
на две шероховатые плоскости 58
1. Описание модели и постановка задачи 58
2. Уравнения равновесия и их преобразование 60
3. Формулировка и обоснование результатов 63
4. Обсуждение результатов 65
Литература к Главе 3 69
Глава 4. К постановке задач в динамике несвободного движения
твердого тела и парадоксы Пэнлеве 70
1. Основные принципы 71
2. Плоское твердое тело, контактирующее с шероховатой
плоскостью одной своей точкой 75
3. Задача Пэнлеве—Аппеля 79
4. Твердое тело, опирающееся о шероховатую плоскость
двумя своими точками 82
Литература к Главе 4 92
Глава 5. О безотрывных движениях твердого тела
по плоскости 93
1. Движение по абсолютно шероховатой плоскости 93
1.1. Постановка задачи 93
1.2. Формулировка результатов 95
Литература к п. 1 Главы 5 98
2. О безотрывных движениях волчка на гладкой плоскости ... 99
2.1. Уравнения движения и постановка задачи 99
2.2. Формулировка результата для сферического волчка ... 102
2.3. Обоснование результата 105
Литература к п. 2 Главы 5 108
3. Метод определения параметров безотрывного движения
волчка на гладкой плоскости 109
3.1. Постановка задачи и уравнения движения
для гладкой плоскости 109
3.2. Формулировка и обоснование результатов 111
Литература к п. 3 Главы 5 124
Содержание
5
Глава 6. О движении тела, опирающегося на шероховатую
плоскость тремя точками 125
1. Описание модели, вывод уравнений движения
и постановка задачи 125
2. Вращательные движения тела вокруг вертикальной оси,
проходящей через центр масс 128
3. Поступательные движения тела 130
4. Движения тела, близкие к поступательным 132
5. Произвольные движения тела 134
6. Обсуждение результатов 139
Литература к Главе 6 140
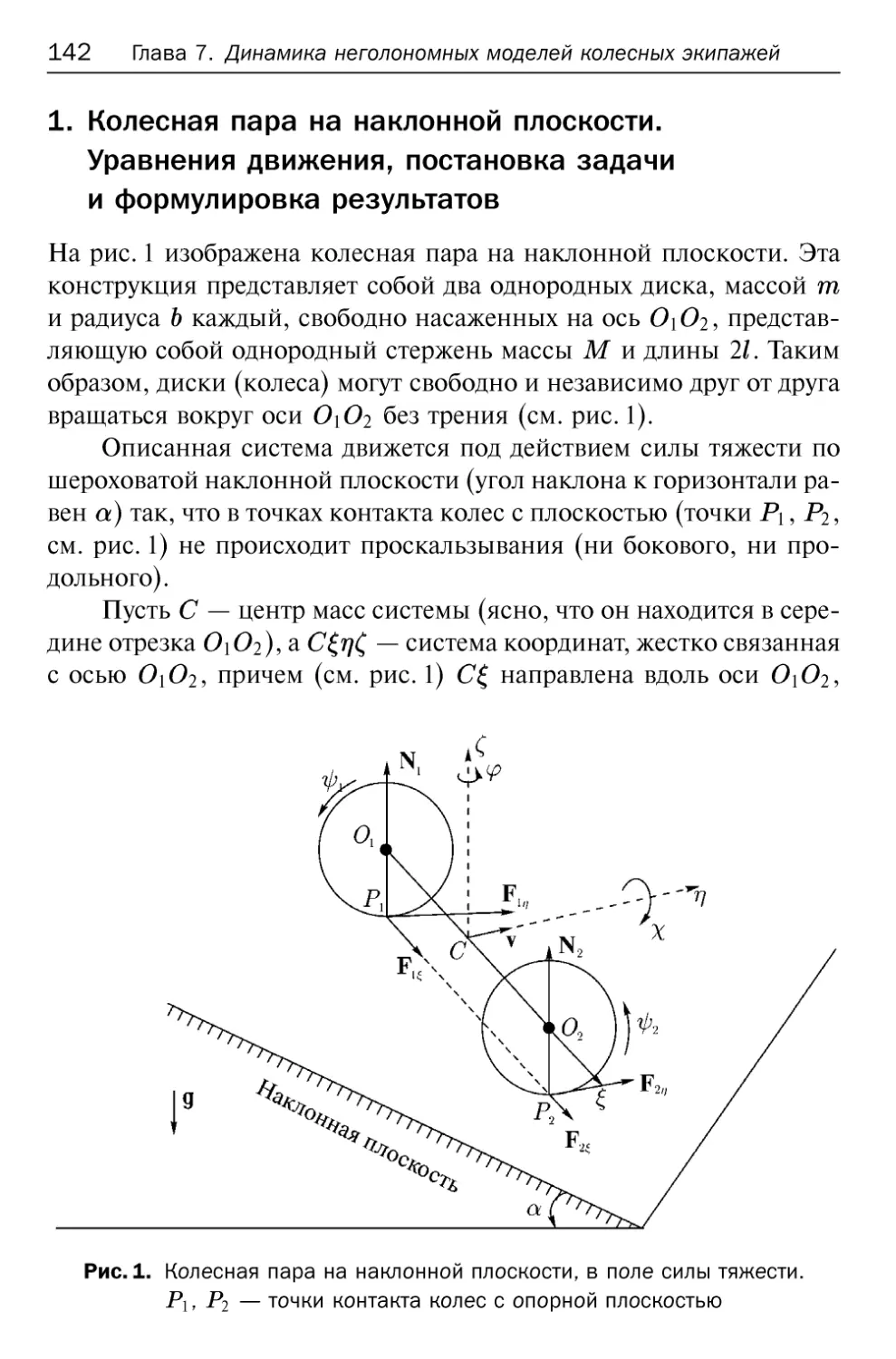
Глава 7. Динамика неголономных моделей колесных экипажей . .141
Введение 141
1. Колесная пара на наклонной плоскости.
Уравнения движения, постановка задачи
и формулировка результатов 142
2. Динамика плоской колесной модели (скейтборд) 150
Литература к Главе 7 156
Глава 8. Некоторые учебные задачи с сухим трением
и односторонними связями 157
Введение 157
1. Задача Р. Фейнмана 159
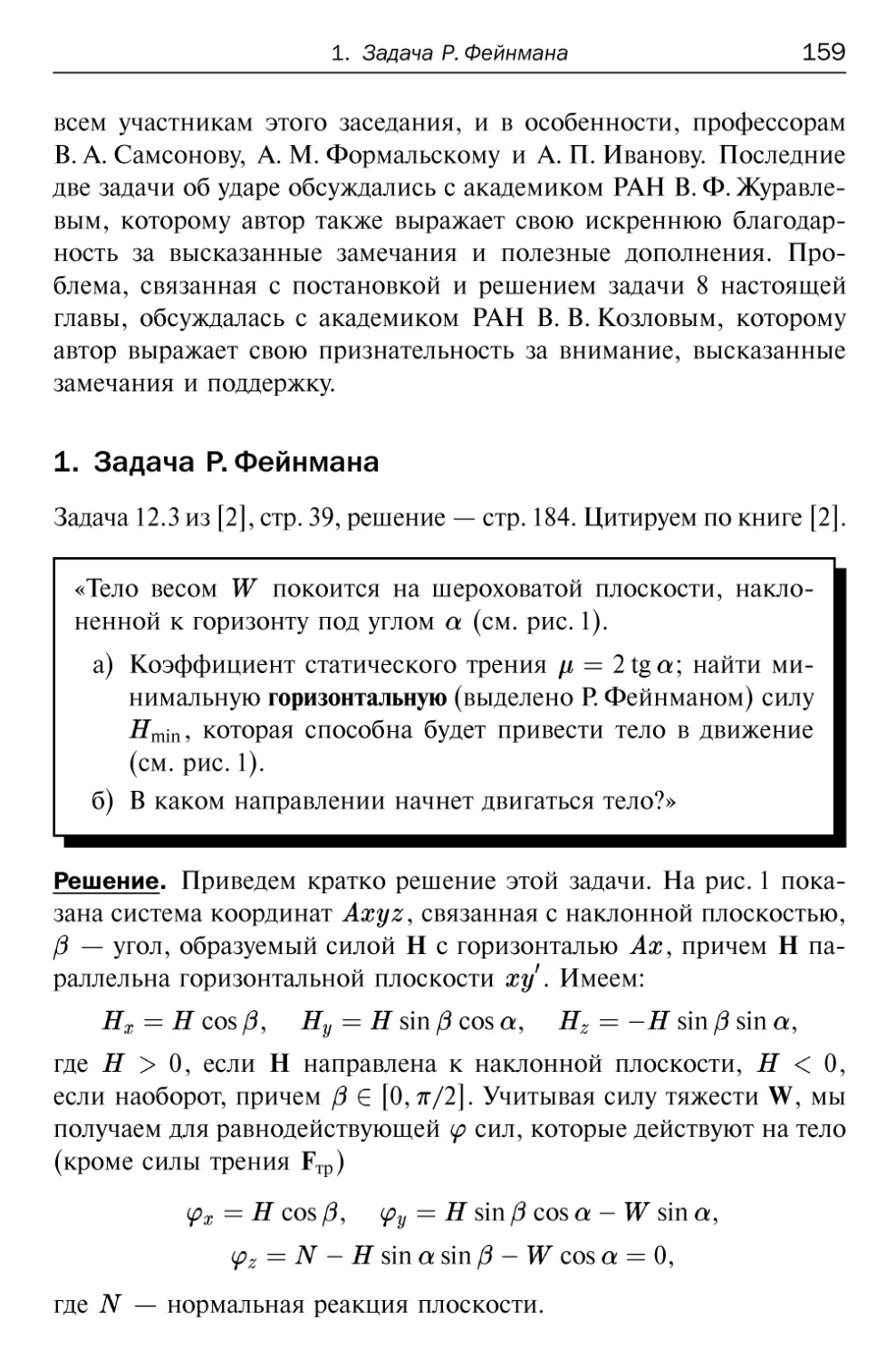
2. Задача С. П. Тимошенко 162
3. Задача Л. Б. Левенсона 164
4. Задача о вынужденном движении точки
по двум шероховатым поверхностям 167
5. Задача Пэнлеве—Рауса 173
6. Задача Зоммерфельда 176
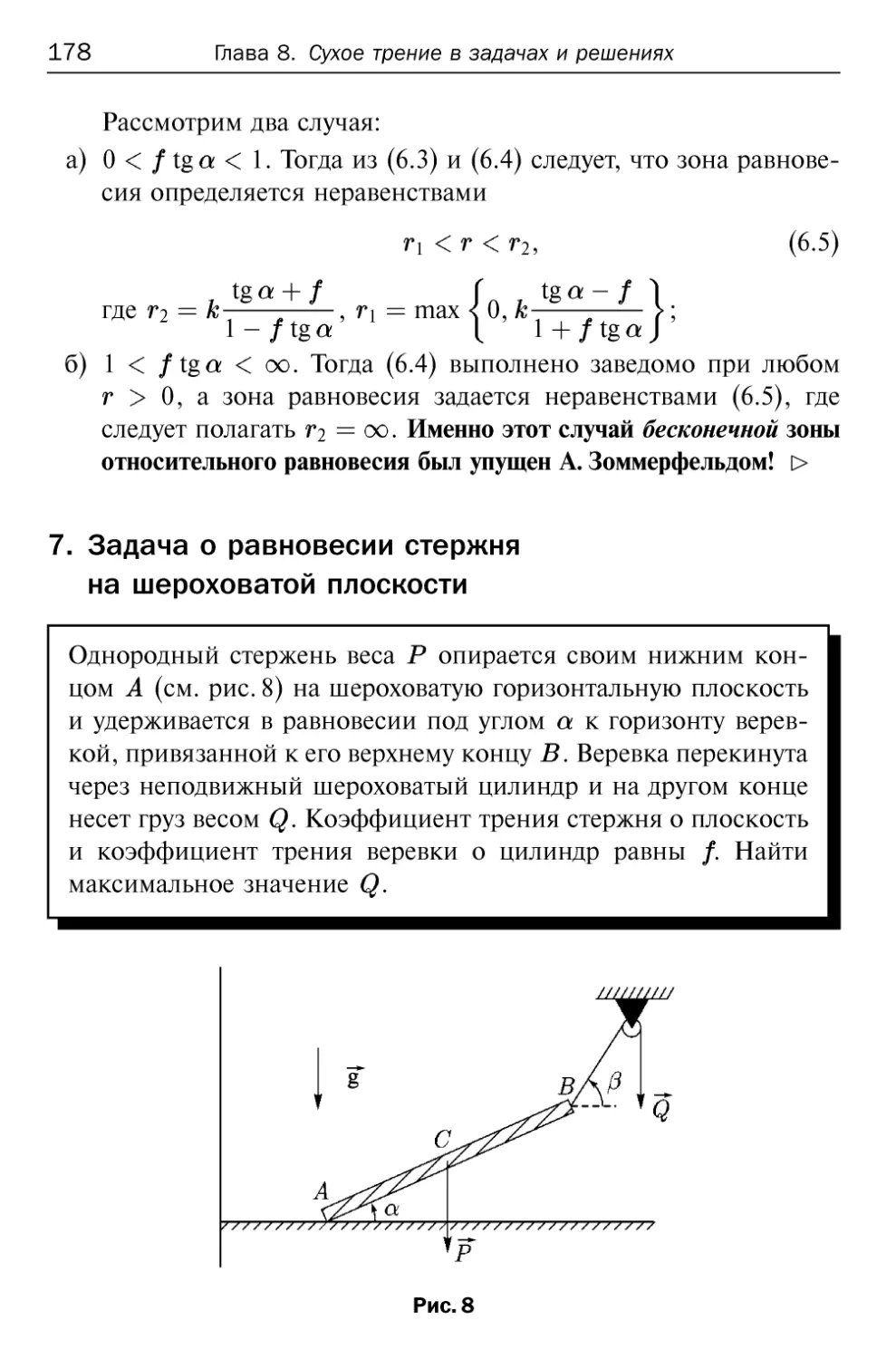
7. Задача о равновесии стержня на шероховатой плоскости . . . 178
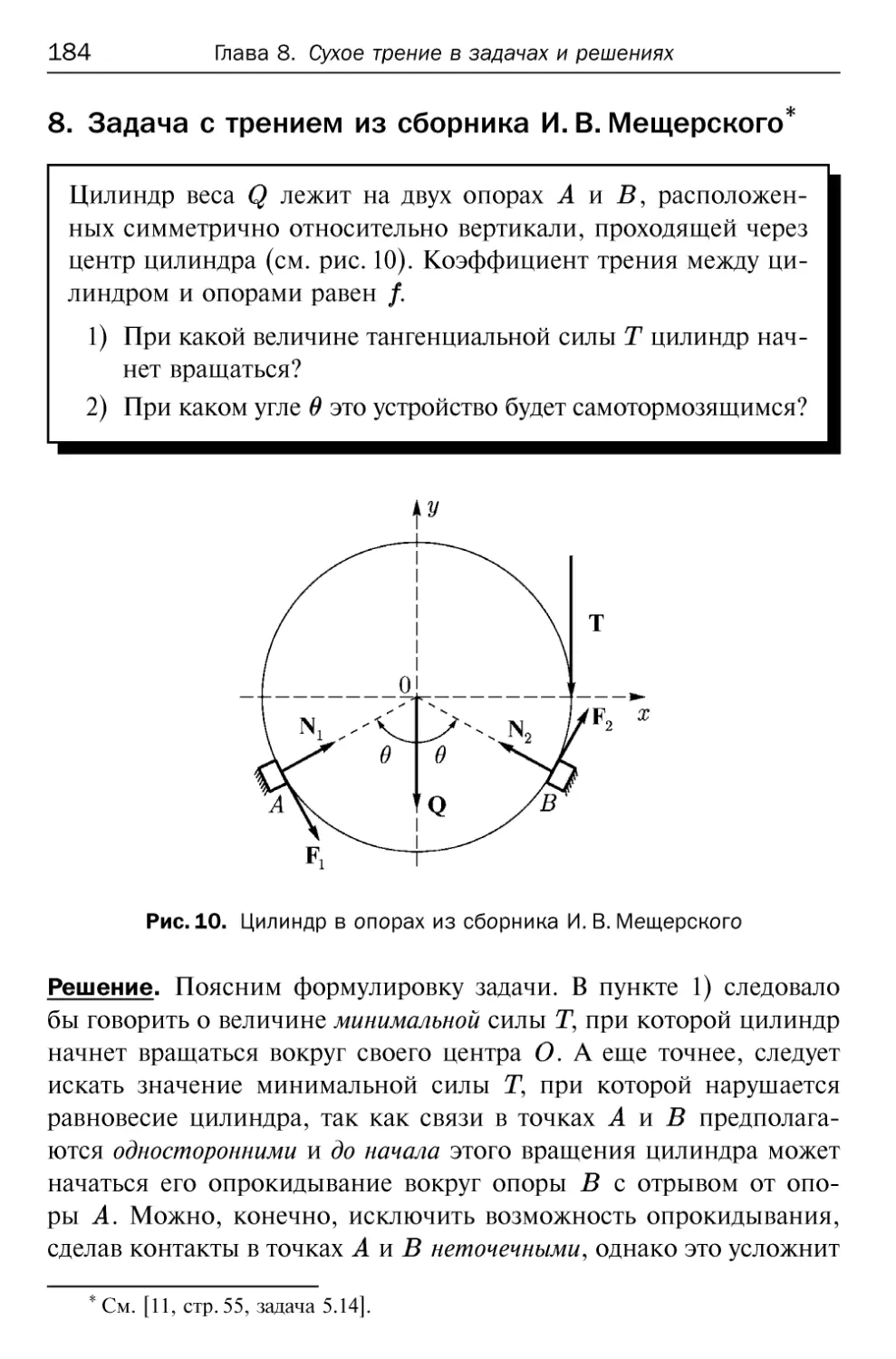
8. Задача с трением из сборника И. В. Мещерского 184
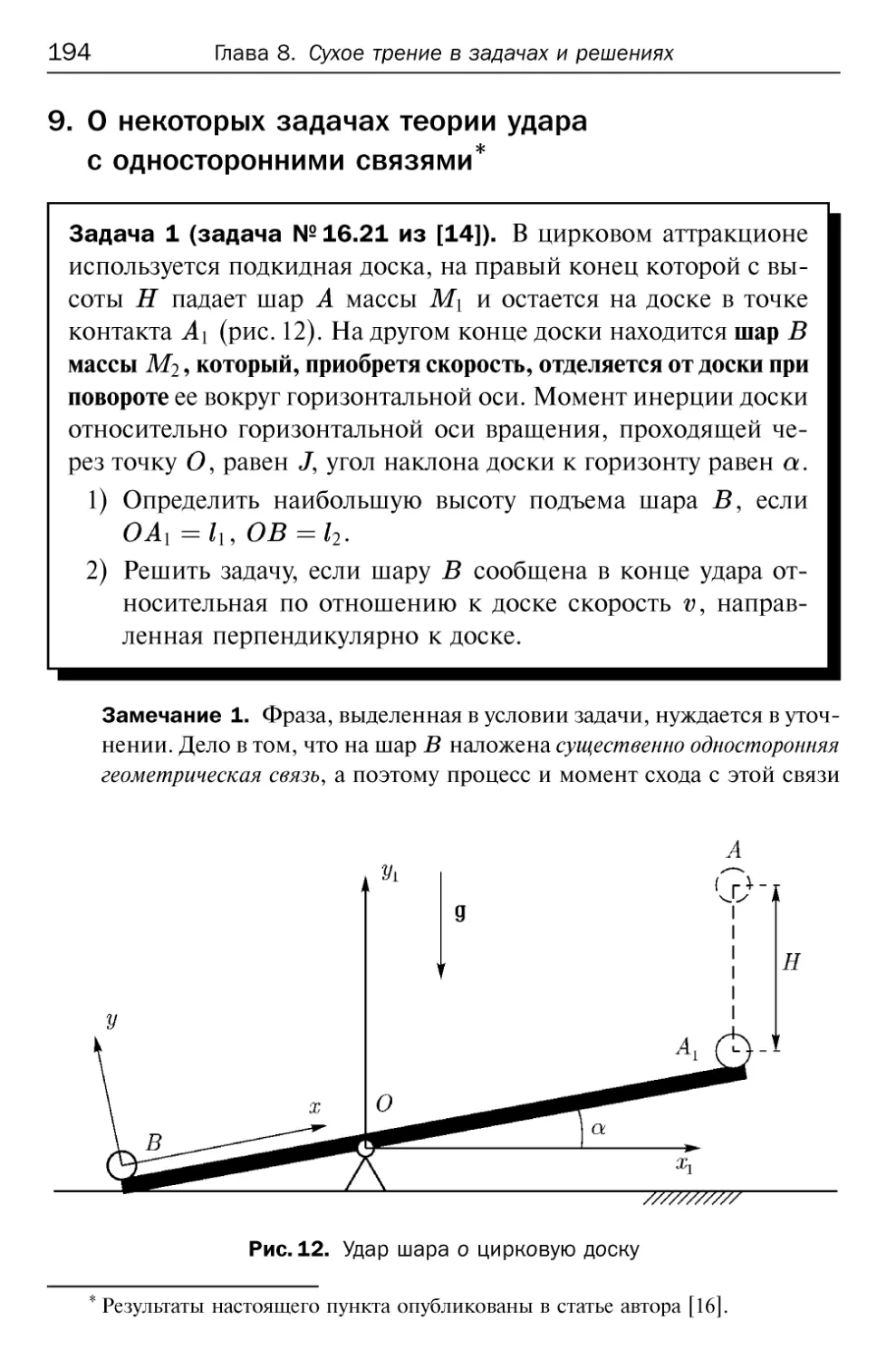
9. О некоторых задачах теории удара
с односторонними связями 194
Литература к Главе 8 204
Предисловие
Настоящая работа является продолжением и развитием результатов,
опубликованных в изданных ранее книгах автора: «Динамические системы
с трением» (2005 год), «Динамические системы с сухим трением» (2006 год).
Большая часть изложенных в настоящей книге результатов
докладывалась автором на следующих научных заседаниях и семинарах:
1. Заседание Научно-методического совета по теоретической механике
при Минобрнауки РФ (март 2009 года, председатель академик МАН
ВШ, профессор Мартыненко Ю. Г.);
2. Семинар по механике систем твердых тел имени акад. А. Ю. Ишлин-
ского при ИПМех имени А. Ю. Ишлинского РАН (октябрь 2009 года,
руководители: академики РАН Д. М. Климов, В. Ф. Журавлев);
3. Семинар по аналитической механике и устойчивости движения
имени акад. В. В. Румянцева при механико-математическом
факультете МГУ имени М.В.Ломоносова (апрель 2010 года, руководители:
член-корр. РАН В. В. Белецкий, профессор А. В. Карапетян,
профессор I
Я. В.Татариновр.
Автор выражает благодарность всем руководителям и участникам
перечисленных семинаров за полезные критические замечания, высказанные
во время этих докладов. В процессе написания настоящей книги автор
постарался учесть (в меру своих возможностей) указанную критику.
Особую признательность автор хотел бы выразить рецензенту —
академику РАН Виктору Филипповичу Журавлеву,
благожелательно-конструктивная и отрезвляющая критика которого способствовала улучшению
содержания настоящей книги.
Кроме того, автору хотелось бы поблагодарить Доминго Марина Ри-
коя и сотрудников издательства, принявших участие в оформлении и
издании настоящей книги.
Г. М. Розенблат
г. Москва, июль 2010 года
Введение
«Когда мы ставили перед собой какую-нибудь
задачу, я всегда прежде всего стремился понять
ее физический и даже инженерный смысл».
Н. Винер
Настоящая работа посвящена исследованиям автора в области
решения некоторых задач статики и динамики твердого тела при
наличии сил сухого трения и односторонних связей. История
исследования таких задач насчитывает не одну сотню лет и восходит
к работам Леонардо да Винчи (Средние века), Д. Морена, Л.
Эйлера, Ш. Кулона, Дж. X. Джеллетта и т. д. В ХТХ-ХХ веках к этим
задачам обращались П. Пэнлеве, Ф. Клейн, Р. Мизес, Л. Прандтль,
Л. Лекорню, П. Контенсу, Н. Н. Шиллер, Н. Е. Жуковский, Е. А.
Болотов, Г. К. Пожарицкий и др.
В настоящее время такими задачами занимаются немало
исследователей, как на Западе (А. Руина, Ф. Пфейфер, М. Шегельский,
Р. Лейн, С. Глоккер и др.), так и в России (В. А. Самсонов, А. В. Ка-
рапетян, Ф. Л. Черноусько, А. П. Иванов, В. Ф. Журавлев, В. В.
Андронов, Н. А. Фуфаев, В. В. Козлов, В. М. Матросов, П. Е. Товстик,
Н. Н. Болотник и др.). Разумеется, этот список далеко не полон,
и мы перечислили фамилии наиболее значительных (по нашему
мнению) ученых, которые внесли (и вносят, в настоящее время)
существенный вклад в развитие теорий сухого трения и
односторонних связей для задач механики твердого тела.
I. Задачи статики для твердого тела, опирающегося односторонним
образом несколькими своими точками на шероховатые плоскости
Такие задачи восходят к Дж. X. Джеллетту и были рассмотрены
в его известном трактате [1]. Здесь были введены, пожалуй впервые,
понятия «возможного» и «обязательного» положений статического
8
Введение
равновесия тела в условиях сухого трения. Под «возможным»
равновесием подразумевается существование таких допустимых сил
реакций в точках контакта тела с опорами, которые
уравновешивают приложенную к телу систему активных сил, т. е., удовлетворяют
шести уравнениям статики твердого тела. Под «обязательным»
равновесием, помимо указанного условия, подразумевается еще и
выполнение условий отсутствия каких-либо начальных движений тела
(из рассматриваемого положения равновесия), связанных со
скольжением и/или отрывом точек контакта. В [1] получение таких
условий продемонстрировано на нескольких простейших примерах.
Изотропная сила трения покоя, возникающая при статическом
равновесии в точке контакта тела с плоскостью, ограничена по
модулю величиной fN (/ — коэффициент трения, N > О —
нормальная реакция), но направление ее в плоскости контакта, вообще
говоря, неизвестно. Направления и модули этих сил являются
такими, чтобы удовлетворить условиям статического («возможного»)
равновесия тела. Всякий раз, когда уравнениям равновесия тела
можно удовлетворить положительными нормальными реакциями
и соответствующими силами трения покоя, именно это
предположение принимается за действительное, даже если, может быть,
не соблюдены условия «обязательного» равновесия. Однако, как
отмечал Е.А.Болотов [2], это предположение не имеет
достаточного обоснования. Это вполне понятно, так как рассматриваемая
задача о равновесии является, вообще говоря, статически
неопределимой. При этом надо иметь в виду, что при опоре тела на одну,
две или три свои точки на одной и той же шероховатой плоскости
задача статически определима для нормальных реакций (они
зависят только от внешних активных сил). Касательные же реакции
(силы трения покоя) однозначно определяются только при опоре
на одну точку. При опоре на две или три точки этих
касательных реакций (в рамках рассматриваемой модели) будет уже целое
множество, и для них задача является статически неопределимой.
Целью исследования в этом случае (см. Главу 1 настоящей книги)
является получение условий, которым следует подчинить систему
внешних активных сил и геометрические параметры
расположения опор, чтобы это множество сил трения покоя было непусто.
А чтобы определить однозначно эти силы трения покоя, необходи-
Введение
9
мо уточнять и усложнять постановку исходной задачи, например,
вводя упругость (податливость) опор, превращать точки контакта
в небольшие площадки, решая соответствующие контактные задачи
с трением (И. Г. Горячева [3], И. И. Аргатов [4]). Аналогичная
ситуация возникает и в случае опирания тела на шероховатую плоскость
четырьмя и более своими точками, когда статически
неопределимыми становятся также и нормальные реакции опор. В этом случае
задачу можно рассматривать как задачу о гарантированном
равновесии, понятие которого было введено Ф. Л. Черноусько в [5].
Если статическая неопределимость для нормальных реакций
снята путем введения каких-либо дополнительных гипотез (например,
путем введения податливости в точках контакта), то нормальные
реакции можно считать известными. Однако, как было
отмечено в упомянутой работе [5], полученные величины нормальных
реакций сильно зависят от жесткостей различных элементов тела
и опоры, а также от геометрических неидеальностей (погрешностей
изготовления). В [5] было показано, что задача гарантированного
равновесия (т. е. статического равновесия при любом допустимом
распределении нормальных реакций) сводится к проверке условий
статического равновесия при опоре на любые три точки из
рассматриваемого множества точек опоры. Таким образом, задача о
равновесии тела при опоре на три точки является здесь определяющей
при исследовании условий гарантированного равновесия при опоре
на произвольное количество точек на одной шероховатой
плоскости. В Главе 1 настоящей книги, в частности, сделана попытка
аналитического решения задачи о статическом равновесии при опоре
на три точки на одной шероховатой плоскости.
Если тело опирается двумя, тремя или более своими точками
на разные шероховатые плоскости, то задача становится уже
статически неопределимой по всем составляющим опорных реакций
(как по нормальным, так и по касательным). Исследование
статического равновесия здесь уже имеет свои особенности:
возникают варианты «заклинивания» или «самоторможения». Кроме того,
важными в этой задаче обстоятельствами являются: 1) величины
начальных напряжений (нормальных реакций в точках контакта);
2) предыстория состояния и нагружения системы (см. предисловие
Р. В. Гольдштейна к книге [6]). В общем виде для двух точек опоры
10
Введение
эта задача исследуется в Главе 3, а конкретный пример
подробно рассмотрен в п. 8 Главы 8. Отметим, что задача о статическом
равновесии тяжелого абсолютно твердого тела в шероховатом
вертикальном цилиндре рассматривалась в статье [7].
В Главе 2 исследуется задача о нахождении условий
«обязательного» равновесия твердого тела, опирающегося одной своей
точкой на шероховатую плоскость. Найдены все случаи, когда условия
«обязательного» равновесия совпадают с условиями «возможного»
(т. е. статического) равновесия. Однозначная разрешимость
уравнений динамики для движения такого тела исследовалась в работе [8].
П. Задачи динамики для твердого тела, опирающегося
односторонним образом одной, двумя или тремя своими точками на
шероховатую плоскость
Здесь возникает необходимость решения следующих задач:
Задача 1. Определение области начальных условий, при которых
возможно однозначное решение уравнений динамики
твердого тела для безотрывного его движения
(парадоксы Пэнлеве).
Задача 2. Определение области начальных условий и параметров
тела, при которых происходит его безотрывное
движение, т. е. исследование знака нормальной реакции в
точках контакта тела с плоскостью.
Задача 3. Исследование отрыва тела от опоры (ослабление связи)
в момент, когда нормальная реакция меняет свой знак.
Задача 4. Непосредственное исследование и интегрирование
уравнений движения тела в условиях его контакта с опорной
плоскостью (напряженная связь).
Задача 1 подробно рассматривалась в работе автора [9] для
плоского тела (пластинки), движущегося по шероховатой прямой
(см. работу Е.А.Болотова [2], а также статью [10], посвященную
Е.А.Болотову). В работе [9] было введено понятие корректных
начальных условий, которые реализуются в результате движения
тела при напряженной связи. Если тело в рассматриваемый момент
времени t = tо удовлетворяет уравнению односторонней связи как
по координатам, так и по скоростям, то классический удар (по
нормали к связи) здесь не реализуется, однако может происходить
Введение
11
касательный «удар трением». Такая ситуация была подробно
рассмотрена для стержня в работе [11], где для обоснования явления
касательного удара использовались податливость опоры, а также
другие предположения теории вязкоупругости. Эффект «удара
трением» также исследовался для задачи динамики тормозной колодки
в работе [12].
Если же связь при t = to — О была напряжена, и движение
тела реально происходило по этой связи (что означает также
положительность соответствующей нормальной реакции в ближайшем
прошлом), то, как было показано в [9], продолжение движения при
t = tо + 0 происходит однозначно и без каких-либо парадоксов.
Можно выразиться так: если мы учитываем ближайшее прошлое
при классическом (нормальном) заходе в данный момент t = to
на одностороннюю связь (помимо других дополнительных
предположений), то почему бы это ближайшее прошлое не учитывать
и для безударного или безотрывного захода на связь.
Изложенные обстоятельства подробно обсуждаются и
иллюстрируются на известных классических задачах в Главе 4.
Задача 2 рассмотрена в Главе 5 для тела (волчка),
контактирующего одной своей точкой с абсолютно шероховатой плоскостью
(неголономная связь, п. 1 Главы 5) и с абсолютно гладкой
плоскостью (пп. 2, 3 Главы 5). Для случая абсолютно гладкой плоскости
получены простые аналитические формулы для необходимых и
достаточных условий безотрывного движения волчка. Для абсолютно
шероховатой плоскости такие условия удалось получить в
некоторых частных случаях движения волчка.
Отметим, что исследование знака нормальной реакции при
решении задач механики твердого тела с односторонними связями
является необходимым (а может, даже и обязательным)
дополнением при интегрировании соответствующих уравнений движения,
которые были получены из общих теорем динамики путем
исключения реакций связей. Игнорирование этого обстоятельства может
приводить к курьезам, которые, к сожалению, нередко встречаются
как в учебной литературе по теоретической механике (см.,
например, [13], стр.418, пример 42), так и в серьезных научных
математических статьях механикоподобного содержания (см.,
например, [14]: стр. 236, п. 3.3; стр. 260, п. 9; стр. 267, п. 11).
12
Введение
Далее, в Главе 5 исследуется задача 3, т. е. движения тела,
которые происходят после обнуления нормальной реакции (ослабление
связи). Наиболее просто и однозначно этот вопрос решается для
случая гладкой плоскости. В случае же абсолютно шероховатой
плоскости возникают парадоксальные ситуации, разрешить
которые, оставаясь в рамках модели абсолютно шероховатой плоскости,
невозможно. Более подробно эти вопросы исследуются и
обсуждаются в недавних статьях А. П. Иванова [15,16].
Глава 6 посвящена решению задачи 4 для движения тяжелого
тела, опирающегося тремя своими точками на шероховатую
горизонтальную плоскость («тренога»). Получены некоторые новые
результаты, касающиеся качественного описания движения
«треноги». Кроме того, в некоторых частных случаях удается
проинтегрировать уравнения движения такого тела. Подобного типа задача,
пожалуй, впервые была рассмотрена в работе [17]. Приведенные
в Главе 6 результаты являются уточнением и развитием
результатов, полученных в недавней работе [18].
Глава 7 посвящена исследованию неуправляемых движений
колесных экипажей в неголономной постановке. Решение уравнений
движения удается свести к простым квадратурам. Кроме того,
показано, что в неголономной постановке возможный отрыв колеса
экипажа (при обнулении соответствующей нормальной реакции)
имеет парадоксальный характер, что свидетельствует об
ограниченной области применимости модели неголономной связи.
Глава 8 рассматривает некоторые новые результаты,
полученные автором в решении классических учебных задач с сухим
трением, односторонними связями и ударами. Эта глава имеет в
основном учебно-методический характер.
Литература к Введению
1. Jellett J. H. A Treatise on the theory of friction. Dublin: Hodges, Foster, and
Co., publishers to the university; London: MACMILLAN AND CO? 1872.
220 p.
2. Болотов Е.А. О движении материальной плоской фигуры, стесненном
связями с трением. М.: Университетская типография, Страстной
бульвар, 1906. 147 с.
Литература к Введению
13
3. Горячева 77. Г. Механика фрикционного взаимодействия. М.: Наука,
2001. 478 с.
4. Аргатов 77. 77. Асимптотические модели упругого контакта. СПб.:
Наука, 2005. 448 с.
5. Черноусъко Ф. Л. Условия равновесия тела на шероховатой плоскости //
Изв. АН СССР. Механика твердого тела. 1988. № 6. С. 6-17.
6. Джонсон К. Механика контактного взаимодействия. М.: Мир, 1989.
509 с.
7. Болотник 77. 77., Кумакшев С А. О равновесии абсолютно твердого тела,
опирающегося на внутреннюю шероховатую поверхность цилиндра //
Изв. РАН. Механика твердого тела. 2000. № 1. С. 58-69.
8. Иванов А. 77. Условия однозначной разрешимости уравнений динамики
систем с трением // Прикладная математика и механика. 2008. Т. 72.
Вып. 4. С. 531-546.
9. Розенблат Г. М. О движении плоского твердого тела по шероховатой
прямой // Нелинейная динамика. 2006. Т. 2. № 3. С. 293-306.
10. Самсонов В. А. К 100-летию результата Е. А. Болотова // Проблемы
машиностроения и надежности машин. 2007. №2. С. 100-102.
11. Zhen Zhao, Caishan Liu, Bin Chen. The Painleve Paradox studied at a 3D
Slender Rod. Multibody System Dyn., 2010 (in press).
12. Самсонов В. А. Динамика тормозной колодки и «удар трением» //
Прикладная математика и механика. 2005. Т. 69. № 6. С. 912-921.
13. Яблонский А. А., Никифорова В. М. Курс теоретической механики:
Учебник для вузов. 14-е изд., исправленное. М.: Интеграл-Пресс, 2007.
608 с.
14. Борисов А. В., Мамаев 77. С Законы сохранения, иерархия динамики и
явное интегрирование неголономных систем // Нелинейная динамика.
2008. Т. 4. №3. С. 223-280.
15. Иванов А. П. Геометрическое представление условий отрыва в
системе с односторонней связью // Нелинейная динамика. 2008. Т. 4. № 3.
С. 303-312.
16. Иванов А. П. Об условиях отрыва в задаче о движении твердого тела
по шероховатой плоскости // Нелинейная динамика. 2008. Т. 4. № 3.
С. 287-302.
17. Field P. On the motion of a disk with Three supports on a rough plane //
Phys. Rev. (Series 1). September 1912. 35. P. 177-184.
18. Иванов А. 77. Динамически совместная модель контактных напряжений
при плоском движении твердого тела // Прикладная математика и
механика. 2009. Т. 73. Вып. 2. С. 189-203.
Глава 1
Равновесие твердого тела на плоскости
с анизотропным сухим трением
Рассматривается задача об условиях статического равновесия
тела, опирающегося на шероховатую плоскость одной, двумя или
тремя точками. Предполагается, что к телу приложена
произвольная система активных сил, а трение на шероховатой опорной
плоскости является анизотропным. Эта модель обобщает известную
изотропную модель сухого кулоновского трения. Получены явные
аналитические формулы, выражающие необходимые и
достаточные условия статического равновесия. Методика исследования
использует понятие анизотропной силы трения покоя, что позволяет
существенно облегчить получение аналитических результатов для
условий равновесия.
Содержание настоящей главы опубликовано в статье автора [8].
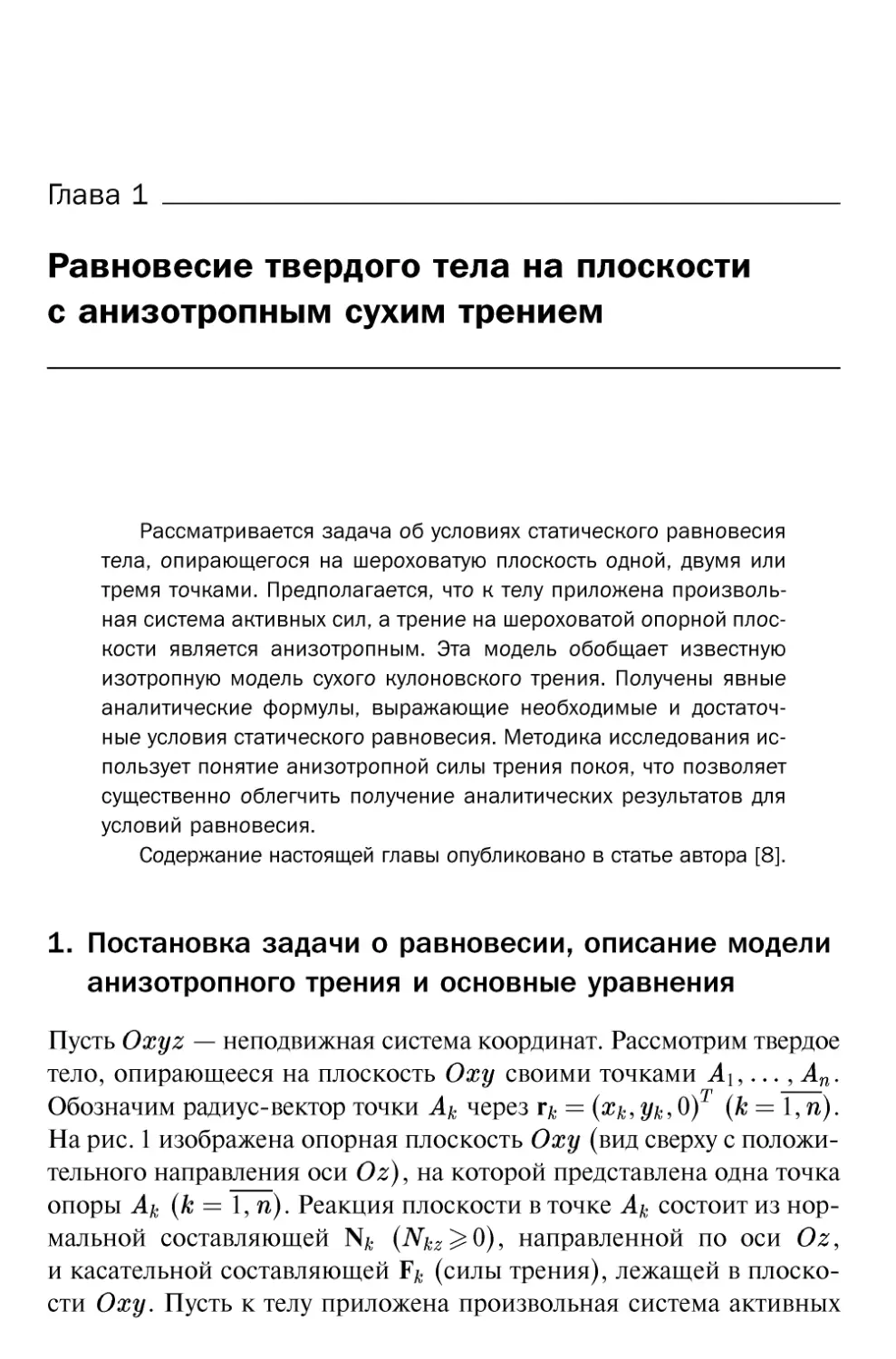
1. Постановка задачи о равновесии, описание модели
анизотропного трения и основные уравнения
Пусть Oxyz — неподвижная система координат. Рассмотрим твердое
тело, опирающееся на плоскость Оху своими точками А\,..., Ап.
Обозначим радиус-вектор точки А^ через г& = (ж&, у&, 0) (к = 1,п).
На рис. 1 изображена опорная плоскость Оху (вид сверху с
положительного направления оси Oz), на которой представлена одна точка
опоры Ак (к = 1,п). Реакция плоскости в точке А^ состоит из
нормальной составляющей N& (iV^^O), направленной по оси Oz,
и касательной составляющей F& (силы трения), лежащей в
плоскости Оху. Пусть к телу приложена произвольная система активных
1. Постановка задачи о равновесии
15
сил, имеющая главный вектор F = (Fx, Fy, Fz) и главный момент
относительно точки О М<э = (Мх, Му, Mz) . Требуется определить
условия на величины F, М<э, координаты точек Ак и
характеристики трения в точках Ак (к = 1, п), при которых существуют такие
реакции N* = (0, 0, Nkf, F* = (Fkx, Fky, 0)т (к = Т~п), что
удовлетворяются условия статического равновесия тела:
F +
(N* + Г*) = О,
к
(l.i)
(1.2)
Кроме того, должны выполняться условия Nkz ^ 0 (к = 1, п) и
соответствующие неравенства для сил трения покоя F& при
анизотропном сухом трении. Опишем, следуя [1], модель анизотропного
сухого трения, которая обобщает обычный закон Кулона
(изотропное сухое трение).
Пусть точка контакта Ак приобрела скорость \к в
плоскости Оху, направленную под углом в к положительной оси Ох
(см. рис. 1).
Тогда анизотропная сила трения скольжения определяется
формулой
Pfr
-ВДо
Vjfe
(1.3)
где Щ ^ О — нормальная реакция опорной плоскости, Ф<э —
матрица тензора трения: Ф0 = ||/^IL'j=i- Матрица Ф<э предпола-
О
Рис.1
16 Глава 1. Равновесие твердого тела на плоскости с сухим трением
гается положительно определенной, поскольку мощность силы Ffr
при любой скорости v должна быть отрицательна, т. е. (v Ф<эу) > 0.
Следовательно, необходимо выполнены следующие условия: /и > 0,
/22>0, Д = /11/22-/12/21 >0.
Отметим, что необходимыми и достаточными условиями
положительной определенности матрицы Ф<э являются неравенства
/и > 0, /22 > 0, /и/22 - 0, 25(/i2 + /21)2 > 0, которые совпадают
с приведенными лишь при fyi = /21 •
При классическом законе изотропного сухого трения (закон
Кулона) имеем Ф0 = fE, где Е — единичная матрица, / —
коэффициент трения. Проецируя векторное равенство (1.3) на оси х, у,
получаем:
Ffrx = -Nk(fn cos (9 + /12 sin(9),
(1.4)
Fuy = -Nk(f21 cos (9 + /22 sin 0).
Формула (1.3) для анизотропной силы трения при движении
(при начальном движении) подразумевает наличие
соответствующей анизотропной силы трения покоя F&, которая определяется
при помощи следующего принципа.
Сила трения покоя F&, направленная под углом а к
положительной оси Ох, по модулю не превосходит модуля той возможной
силы трения движения, которая также направлена под углом a
к оси Ох. Ясно, что соответствующее возможное начальное
скольжение точки А]« происходит в этом случае под таким углом в к оси
Ох, который определяется при помощи формул (1.4) и равенств
*« = ¥ = ¥• d-5)
Тогда получаем:
, a /ntga-/2i
/22 - /12 tg a
Подставляя (1.6) в (1.4), имеем:
2 2 2 2 1 + ^ О-
Ffrx + Ffry = A Nk a2 + 62 >
где a = /22 - /12 tg а, Ъ = fn tg a - f2\.
1. Постановка задачи о равновесии
17
Тогда для составляющих сил трения покоя F^, с учетом
последнего равенства, сформулированного выше принципа и
соотношений (1.5), мы получим следующие неравенства:
(fnFky - fuFkx) + (fuFkx - fl\Fky) ^ 6; = A Nk,
k = 1, n,
где Д = /ц/22 - /12/21 > 0, Nk ^ 0 — нормальная реакция в точке Ak.
Совершенно аналогично определяются условия для сил трения
покоя и при других законах анизотропного трения скольжения,
которые были указаны в [2].
Если трение ортотропно, т. е. оси Ох и Оу являются главными
направлениями тензора Ф<э, то fn = /21 = 0 и ограничение (1.7)
принимает вид
rkx , ky 1
(fnNk)2 (f22Nkf
т.е. это эллипс трения. Если трение изотропно (закон Кулона), то
/и = /22 = / и мы получим:
Fkx + Fky < (/JVjfe) ,
т. е. это круг трения.
Таким образом, поставленная задача формулируется следующим
образом. Определить условия на величины Fx, Fy, Fz, Мх, Му, Mz,
(xk, Ук) (к = 1, п) и коэффициенты трения fy (i, j = 1,2), при
которых существуют такие реакции Nk = (0,0, Nk)T, F^ = (Fkx, Fky, 0)T
(к = 1, п), что удовлетворяются уравнения равновесия (1.1), (1.2) и
выполнены неравенства (1.7) и Nk ^ 0 (к = 1, п), т. е. силы
реакции плоскости являются допустимыми.
В данной работе рассматриваются случаи п = 1, п = 2, п = 3,
т. е. число точек опоры не превосходит трех. Эти случаи являются
статически определимыми для нормальных реакций и могут быть
рассмотрены в рамках модели абсолютно твердого тела. Случаи
п > 3 рассматривались в работах [3, 4], где, в частности, были
исследованы условия гарантированного равновесия. Ф. Л. Черноусько
в [3] было показано, что условия гарантированного равновесия (при
п > 3) сводятся к исследованию задачи о равновесии при опоре
на какие-либо три из заданных п точек опоры. Таким образом,
18 Глава 1. Равновесие твердого тела на плоскости с сухим трением
случай п = 3 является определяющим при исследовании задач
о гарантированном равновесии тела с произвольным числом точек
опоры в рамках модели абсолютно твердого тела.
Отметим, что поставленная в данной работе задача касается
только поиска условий, при которых может быть реализовано
равновесие. Вопросы устойчивости этих равновесий здесь не
рассматриваются. Такие задачи требуют привлечения динамических
уравнений движения твердого тела по шероховатой плоскости и в
некоторых случаях были исследованы А. П. Ивановым [5].
2. Формулировка и обоснование результатов
в случае п = 1
Пусть А\ — единственная точка опоры. Без ограничения
общности будем считать ее совпадающей с началом координат О, т. е.
#1 = У\ — 0- Уравнения равновесия (1.1) и (1.2) тогда сводятся
к следующим:
Fx + Flx = 0, Fy+Fly = 0, Fz + Ni=0,
Mx = My=Mz = 0.
Неравенство (1.7) для допустимых сил реакции при к = 1 имеет вид
(fnFiy - f2iFlx)2 + (f21Flx - fnFly)2 ^ A2N2,
N1 = -Fz>0.
Из (2.1) и (2.2) мы сразу получаем следующий результат.
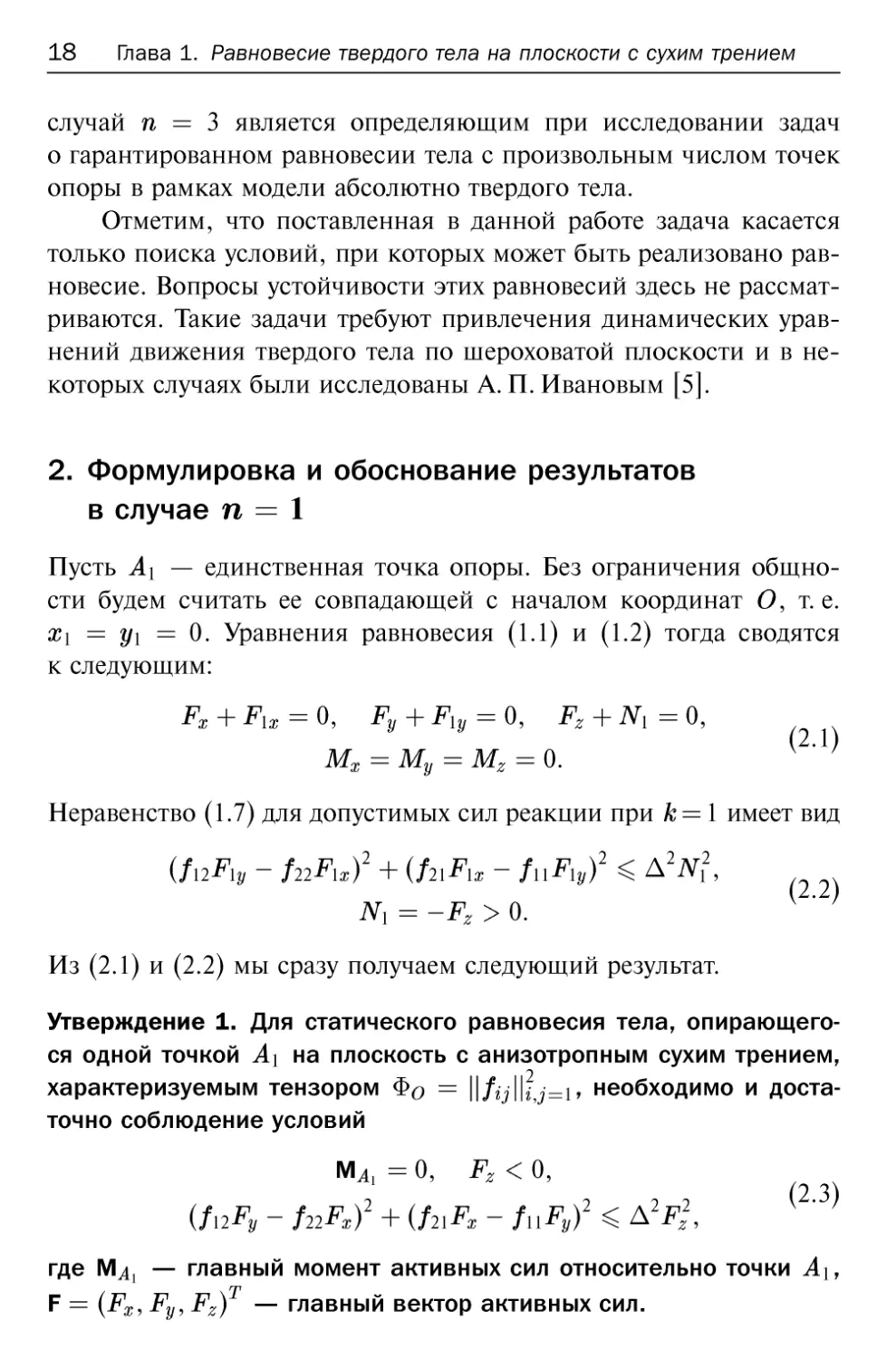
Утверждение 1. Для статического равновесия тела,
опирающегося одной точкой А\ на плоскость с анизотропным сухим трением,
характеризуемым тензором Ф0 = ll/*jlli,j=ii необходимо и
достаточно соблюдение условий
М^ = О, Fz < О,
(fnFy - f22Fx)2 + (f21Fx - fnFy)2 ^ A2F2,
где М^1 — главный момент активных сил относительно точки А\,
F = (Fx, Fy, FZ)T — главный вектор активных сил.
2. Формулировка и обоснование результатов в случае п = 1 19
Доказательство получается непосредственной подстановкой (2.1)
в (2.2). □
Следствие. В случае изотропного сухого трения /i2 = /2i = 0? /и —
— fn — f и условия (2.3) имеют вид
М^=0, i^<05 F2+F2^f2F2 = f2N2,
т. е. получаем обычный кулоновский конус трения.
< Пример. Тяжелая точка массы т на шероховатой
анизотропной наклонной плоскости. Пусть (ро — угол наклона плоскости
к горизонту, а система координат Oxyz, в которой задан тензор
трения Фо, такова, что ось Oz нормальна к плоскости, а ось Ох
образует угол ^ с прямой наибольшего ската. Тогда
Fx = mg sin (po cos ^ь Щ = mS sin <£o sin ^0? Fz = -mg cos <^o,
а условие равновесия имеет вид
tg(p^7^W'
где
л = /i2 sin гр0 - /22 cos гр0, Ъ = /2i cos гр0 - fn sin ^0,
Д = /ll/22 ~ /l2/21-
В частности, для изотропного сухого трения это условие
приобретает хорошо известный вид: tg^o ^ /? ГДО / — коэффициент
трения. ►
Замечание. В работе [6] был исследован частный случай
рассматриваемой задачи: о начале движения материальной точки по плоскости
с ортотропным трением (/12 = /21 = 0). Начало движения — это
первый момент выхода точки из состояния статического равновесия.
Нарушение последнего неравенства в (2.3) и означает возможность
начала движения материальной точки под действием активной
силы F, так как первые два условия выполнены заведомо (при Fz < 0).
Таким образом, для ортотропного трения нарушение
равновесия точки, т. е. ее начальное движение, происходит при
fll^x + /ll^/ > fllfllFz-
20 Глава 1. Равновесие твердого тела на плоскости с сухим трением
Если Fz зафиксировано, то минимальная сила, действующая в
плоскости Оху под углом д к оси х и нарушающая равновесие точки,
дается формулой
^ /11/221^1
yftl
fl2 cos2 5 + f\x sin2 5
Этот же результат в [6] был получен методом предельного
равновесия, который восходит к Кулону, Желле, Жуковскому и другим
классикам теоретической механики. Этот метод основан на
предположении, что возникает начало движения точки из состояния
покоя (равновесия). В результате такого предположения
становятся известными модуль и направление силы трения, в соответствии
с формулами (1.3), (1.4). Затем выводятся условия, которым должна
удовлетворять сила F, чтобы это движение могло быть реализовано
для какого-либо угла 0, образуемого вектором скорости
возможного скольжения с положительной осью х. Невыполнение этих
условий для всех углов в приводит условиям равновесия. Отметим,
что строгое применение этого метода для рассматриваемой задачи
достаточно громоздко и здесь не приводится.
3. Формулировка и обоснование результатов
для случая п = 2
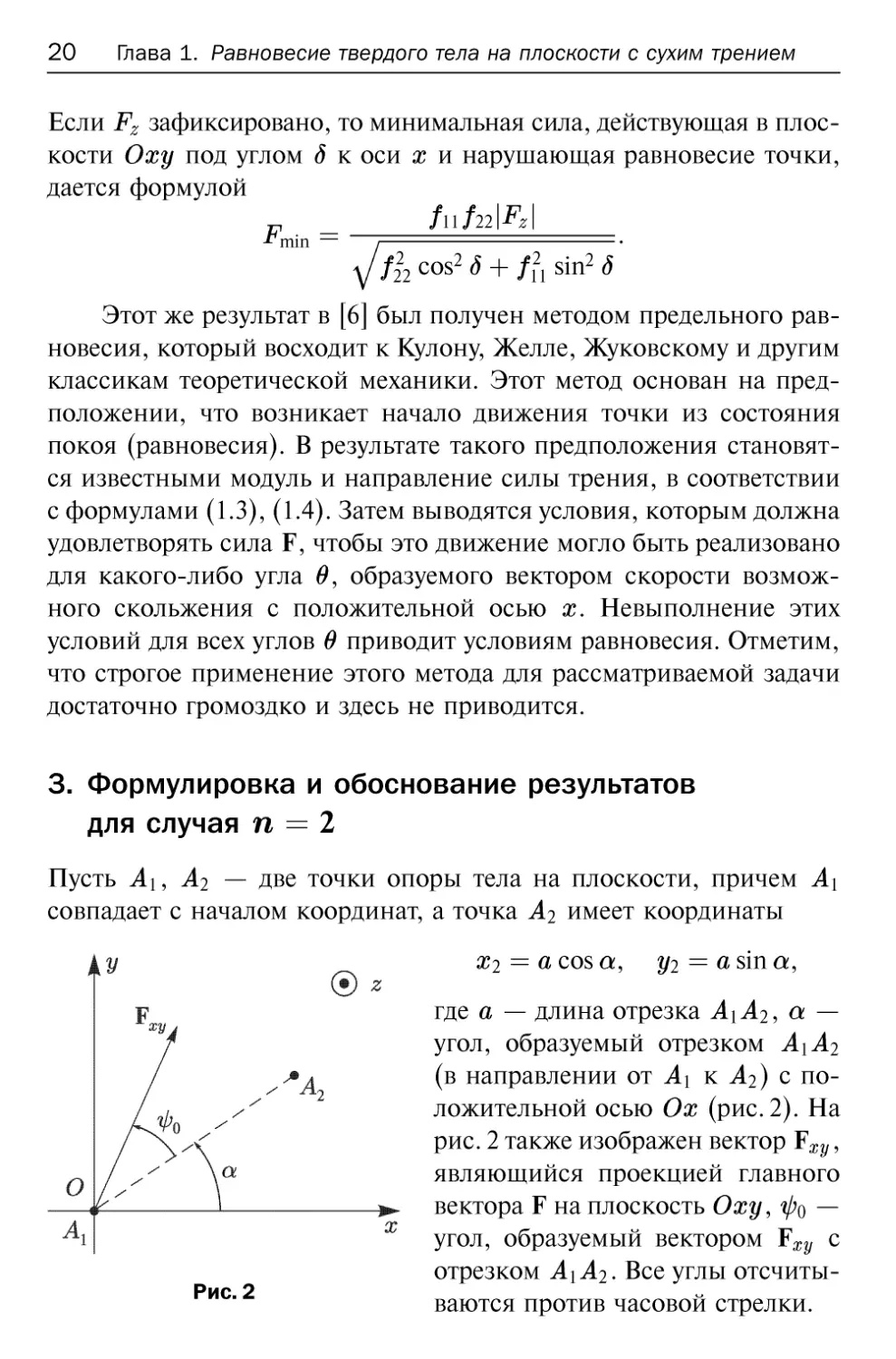
Пусть А\, А^ — две точки опоры тела на плоскости, причем А\
совпадает с началом координат, а точка А^ имеет координаты
Х2 = a cos a, yi = a sin а,
где a — длина отрезка А1А2, a —
угол, образуемый отрезком А1А2
(в направлении от А\ к Ai) с
положительной осью Ох (рис.2). На
рис. 2 также изображен вектор ¥ху,
являющийся проекцией главного
вектора F на плоскость Оху, ipo —
угол, образуемый вектором ¥ху с
отрезком А\А2. Все углы отсчиты-
ваются против часовой стрелки.
Рис.2
3. Формулировка и обоснование результатов для случая п = 2 21
В данном случае уравнения равновесия (1.1) и (1.2) имеют вид
Fix+F2x + Fx = О, Fly+F2y + Fy = О, Nx+N2 = -FZ9 (3.1)
Мх +N2a sin a = 0, M, - N2a cos a = 0, , ч
" (3.2)
^ + F2ya cos a _ F2xa sin a = 0.
Первые два уравнения системы (3.2) налагают связь на Мх
и Му\
Мх cos a + Му sin a = 0, (3.3)
которая означает отсутствие условий для вращения тела вокруг
оси А\А2. Следовательно, из (3.1) и (3.2) получим выражения для
нормальных реакций N\ и N2:
Mw Mw , ч
JVi = -F, 2— > 0, iV2 = y— > 0. (3.4)
a cos a a cos a
Таким образом, здесь в состоянии статического равновесия
нормальные реакции зависят только от заданных активных сил,
их моментов и геометрических параметров. Поэтому в дальнейшем
будем считать N\ и N2 заданными положительными
величинами, которые определяются формулами (3.4), причем N2 ^ N\, что
не нарушает общности. Для решения задачи об условиях равновесия
необходимо, используя уравнения равновесия (3.1), (3.2),
удовлетворить неравенствам (1.7) при к = 1, 2 для сил трения покоя.
Вводим обозначения:
9(Ф) = /22 cos <р - /i2 sin <p, h(<p) = /и sin <p - f2l cos <p,
^(v) = 92(<p) + h2((p), 7 = a + ^o, Д = /ц/22 - /12/21,
x = 9(<*)9(i) + M«)%)> Fo = Fx + Fj, m=-^> (3.5)
9 9 9
^01 = ^0 sin ^0? F02 = F0—-, ^00 = ^01 + F02,
\k = Nka(a), к =1,2.
Справедливы следующие утверждения.
Утверждение 2. Для статического равновесия твердого тела,
опирающегося двумя точками на шероховатую поверхность с
анизотропным сухим трением с тензором Ф<э, необходимо и достаточно
22 Глава 1. Равновесие твердого тела на плоскости с сухим трением
соблюдение условия (3.3), неравенств (3.4), а также неравенств
|m|<A2, |m-F01|<Ab F02 < ^\\ - т2 + yj\\ - (т - F0i)2,
(3.6)
где Ль А2, га, F0i, F02 определяются из (3.5).
Утверждение 3.
1) Если F020 > (Ai + А2)2, то неравенства (3.6) решений не имеют
и статическое равновесие не является возможным.
2) Если F00 ^ (Ai + A2) , то статическое равновесие возможно
только при га Е [гаь га2], где rai и га2 вычисляются по
следующим правилам (напомним, что А2 ^ Аь так как по
предположению iV2 ^ iVi).
Пусть F0i > 0 (т.е. sin^0 > 0). Тогда:
2.1) если Fqo ^ А2 - \\ + 2AiF0b то
mi,2 = i Ы& ± FvJA\\F&-vA ,
Zjroo ч / (3.7)
^ — ^оо — Ах + А2;
2.2) если \\ - А2 + 2A2F0i < F020 < A2 - \\ + 2AiF0b то rai =
= F01 - Ai, a ra2 дается формулами (3.7), где берется
знак плюс;
2.3) если 0 < F020 < \\ - А2 + 2A2F0b то тх = F0i - Аь
|А2
\*о:
V2 при F0i > А2 - Аь
voi+Ai при 0<F0i<A2-Ai.
2.4) если Fq0 ^ A2-A2-2Aii^)b то rai и га2 даются формулами
Пусть Fqi < 0 (т.е. sin^0 < 0)- Тогда:
если J
(3.7);
2.5) если \\ - А2 - 2A2,F0i < F020 < A2 - \\ - 2AiF0b то га2 =
= Fqi + Ai, a rai дается формулами (3.7), где берется
знак минус;
2.6) если 0 < Fq0 < А2 - А2 - 2A2F0i, то га2 = F0i + Аь
при Foi < Ai - A2,
rai = §
" ч при Ai - А2 < Fqi < 0.
3. Формулировка и обоснование результатов для случая п = 2 23
Доказательство утверждения 2. Без ограничения общности будем
полагать cos a > 0. Обозначим x = F2x. Тогда из (3.1), (3.2) получим:
Чх
-х - Fq cos 7,
m m
Fiy = -x tg a - F0 sin 7 H , F2« = x tg a .
cos a cos a
Подставляя найденные выражения в неравенства (1.7) (к = 1,2)
и используя обозначения из формул (3.5), получаем следующие
квадратичные по х неравенства:
Qi(x) = x2a2(a) + 2xm[fug(a) - fnh(a)] +
+ m2(/122 + /121)-dcos2a^0, (3.8)
Q2(x) = Q{ (x) + 2xF0x cos a + (rf0 + tl ~ tl) cos2 a < 0, (3.9)
где обозначено
«0 = ^[/(7) + /.;(7)l+2mFal/u!"7)-/"'l(7)1. (ЗЛО)
cos a
а остальные параметры определены в (3.5).
Для возможности равновесия необходимо и достаточно, чтобы
неравенства (3.7) и (3.9) имели хотя бы одно общее действительное
решение х. Так как коэффициент при х в Q\ и Q2 положителен,
то для этого нужно: во-первых, чтобы Q\(x) и Q2(x) имели только
вещественные корни х2 < Х\ — для Q\(x), X4 < х^ — для Q2(x),
а во-вторых, чтобы отрезки [х2, Х\] и [ж4? #з] имели непустое
пересечение, т. е. должны одновременно выполняться два неравенства:
Х4 < Х\, Х2 < Жз- (3-П)
Несложные алгебраические вычисления, которые мы здесь
опускаем, дают согласно (3.7)—(ЗЛО) следующие выражения для корней
хк (fc = I~4):
_ -m(fug(a) - fnh(a)) ± л/А7
a2 (a)
_ -m(fng(a) - fnh(a)) - F0x cos a ± л/А^
#3,4 — о/ \ ;
(3.12)
24 Глава 1. Равновесие твердого тела на плоскости с сухим трением
где Ai и Д2 даются формулами
Ах = iW(a) cos2 a - m2A2 cos2 a, £ = A2N^
A2 = iW(a) cos2 a - (m - F0 sin ipo)2A2 cos2 a, £ = A2N2.
Используя формулы (3.12), нетрудно установить, что
неравенства (3.11) и условия вещественности корней функций Q\(x) и
<32(ж) эквивалентны неравенствам
Ai > О, Д2 > 0, \F0k cos a\ < л/а~1 +л/А^,
которые после простых преобразований и использования
обозначений из (3.5) приводят к соотношениям (3.6). Утверждение 2
доказано. □
Доказательство утверждения 3. Рассмотрим функцию ip(m):
iP(m) = у/\\ - га2 + ^-(m-Foi)2.
Несложное исследование этой функции показывает, что ip'^i <0,
т. е. график ее является выпуклым кверху, она имеет точку
максимума
если только |i<oi | < Ai + A2. Но это неравенство обязательно должно
выполняться, так как только тогда существуют решения первых двух
неравенств из (3.6). Действительно, из (3.6) мы имеем:
-А2 < га < А2, -Ai +F0i <m < Xi+ F0\.
Чтобы эти интервалы имели непустое пересечение, необходимо
и достаточно выполнение условий
—А2 < Ai + Fq\, — Ai + Fq\ < A2 =^ |i*oi| < Ai + A2.
Таким образом, точка га = га* принадлежит области
определения функции гр(т), причем тах^(га) = ^(га*) = д/(Ai + А2)2 - F^.
Далее мы исследуем корни уравнения ip(m) = i<o2. Ясно, что
при Fq2 > ip(m*) = у (Ai + A2)2 - FqX уравнение не имеет корней,
3. Формулировка и обоснование результатов для случая п = 2 25
т. е. при Fq2 + Fqi > (Ai +A2)2 решений неравенств (3.6) нет и
равновесие невозможно. Остальные пункты устанавливаются
непосредственной проверкой (легче всего это сделать графически).
Утверждение 3 доказано. □
Замечание. Для изотропного трения Ф0 = fE, неравенства (3.6)
из утверждения 2 имеют вид
|га| < fN2, \m - F0 sin ^01 < fNu
Folcos^ol < \/f2N22 -m2 + y/pNl - (m - F0 sin^o)2,
а утверждение З дает результат, который был получен в [7] методом
предельного равновесия.
М Пример. Применим результаты утверждения 3 для случая N\ =
= N2 = Щ. Тогда Ai = A2 = Ло = Ща(а) (см. обозначения из (3.5)).
Будем полагать F0i > О, т. е. sin^0 > 0- Обозначая в дальнейшем
Ы\ 1
Hi = — => к2 + sin^o = -^<r2(a)a2(j),
будем иметь:
Foi = F0 sin гр0, F02 = F0Xi,
F020 = F2M + sin2 ^0) = ° \i •
Согласно утверждению З, при равновесии реализуются лишь
пункты 2.1 и 2.3. ►
2Ло 2Ло sin ipQ
Обозначим Fn = — ^, Fu =
Тогда получаем следующий результат.
1) При Fq > Fn равновесие невозможно.
2) При F0G[Fi2,Fn] равновесие возможно только при mG[mbm2],
где
^1,2 = - (*о sin ^0 ± щ yjF^ - F^j
3) При 0 ^ F < Fn равновесие возможно только при га Е [тп\, mi],
где mi = F0 sin^0 - А0, m2 = А0.
26 Глава 1. Равновесие твердого тела на плоскости с сухим трением
Из приведенных выражений мы видим, что граница области
равновесия в плоскости параметров {i<o, га} при фиксированных ^0
и а состоит из прямых и эллипсов, и ее легко изобразить на чертеже.
Начертим такую границу для главного момента тс относительно
центра отрезка A\Ai. Ясно, что
1
me = ra- -F0sin^o.
Тогда получаем:
1 1
если F0 е (0, Fn), то -F0 sin ip0 - А0 < mc < --F0 sin ^0 + A0;
если F0 G (F12,Fn), то -у yV^ - F02 < mc < yy^-if.
На рис. З представлена полученная симметричная область
равновесия в плоскости параметров {Fq, га^}. Отметим, что на рис. 3
представлена область равновесия при фиксированных параметрах
ipo и а. При изменении этих параметров область равновесия также
изменяется. Рассмотрим два простейших случая: ^?0 = 0 и ^0 = я"/2.
Будем предполагать, что трение ортотропно, т. е. fn = /21 = 0.
(12) — прямая,
(2 3) — эллипс,
(3 4) — эллипс,
(4 5) — прямая.
Рис.3. Область равновесия при фиксированных гр0 v\ a
3. Формулировка и обоснование результатов для случая п = 2 27
1) ^о = 0- Тогда F\2 = 0, т.е. границы областей равновесия
при a Е (0,7г/2) состоят только из эллипсов (см. рис. 4) с полуосями
*11 = 7 , ШСХ = ^Vo/O, /О = Л/ /22 C0S a + /ll Sm «•
/о v
Таким образом, мы видим, что обе полуоси эллипсов
существенно зависят от угла a — наклона отрезка А\А2 к оси х, причем
одна из полуосей монотонно возрастает, а другая убывает с
изменением угла а. Схематично эти области представлены на рис. 4.
2) ipo = 7г/2. Тогда
2N0fnf22 2N0fnf22
tn — —ТИ—> Л° ~~ iVo/(h ^11 — z ,
/0/00 /00
где /оо = у /22 sin2 а + /п cos2 a-
Здесь области равновесия при различных а состоят из отрезков
прямых и гладко сопряженных с ними эллипсов (см. рис. 5), причем
так как Fn и Ло являются одновременно монотонно убывающими
или возрастающими функциями угла а, то эти области вложены
друг в друга. Схематично это представлено на рис. 5.
Отметим, что области равновесия, представленные на рис. 4, 5,
существенным образом отличаются от аналогичных областей
равновесия, приведенных на стр. 227 книги [1].
Рис.4. Области равновесия Рис.5. Области равновесия
при гр0 = 0 и изменении а при гр0 = 7г/2 и изменении а
28 Глава 1. Равновесие твердого тела на плоскости с сухим трением
В этой книге аналогичная задача о равновесии ортотропного
трения (/i2 = /21 = 0) решалась методом предельного равновесия,
строгое применение которого для получения аналитических
результатов является несколько громоздким и здесь не приводится.
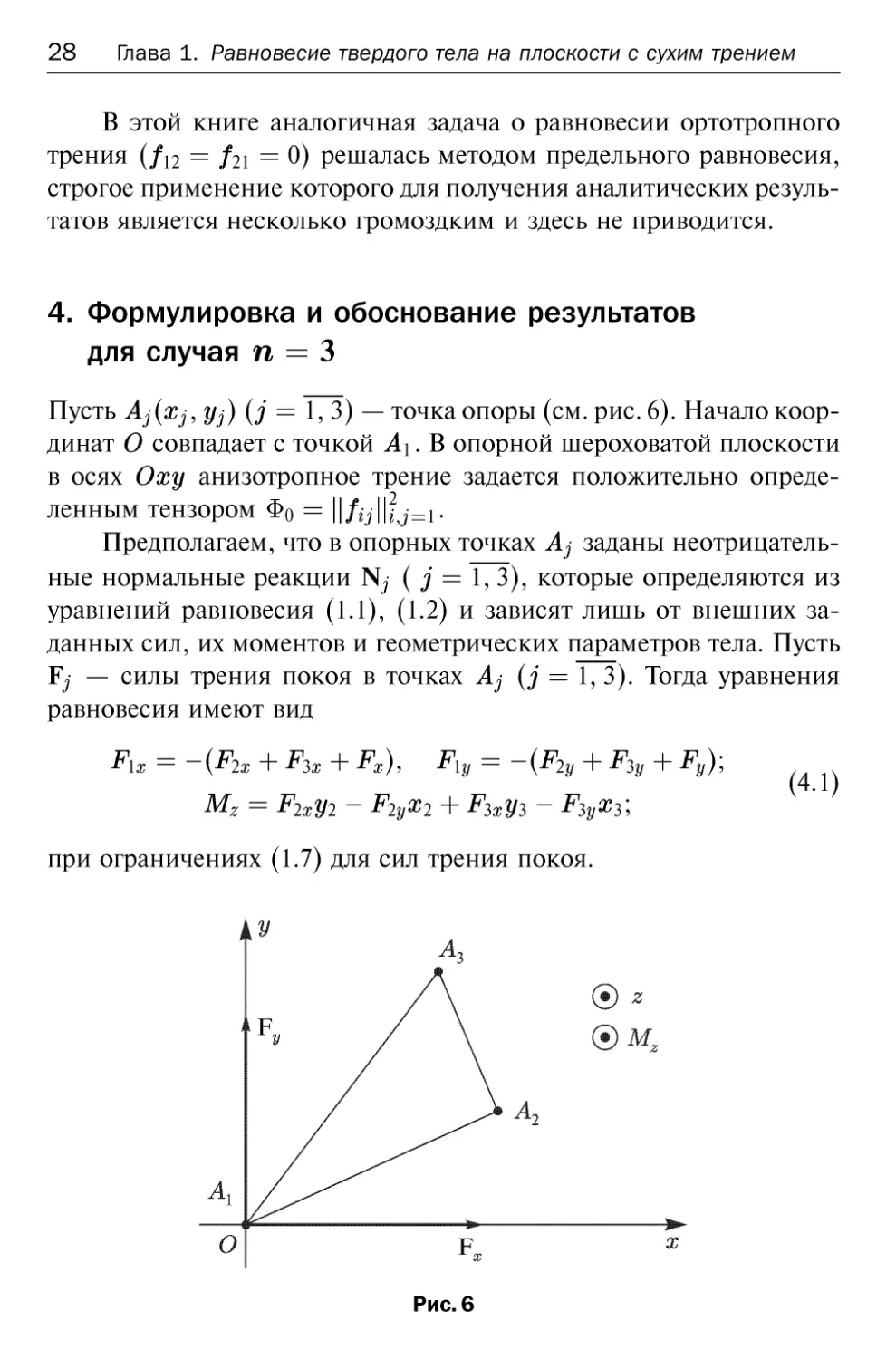
4. Формулировка и обоснование результатов
для случая п = 3
Пусть Aj(xj, yj) (j = 1, 3) — точка опоры (см. рис. 6). Начало
координат О совпадает с точкой А\. В опорной шероховатой плоскости
в осях Оху анизотропное трение задается положительно
определенным тензором Фо = ||/Zj||ZJ=1.
Предполагаем, что в опорных точках Aj заданы
неотрицательные нормальные реакции Nj ( j = 1, 3), которые определяются из
уравнений равновесия (1.1), (1.2) и зависят лишь от внешних
заданных сил, их моментов и геометрических параметров тела. Пусть
Fj — силы трения покоя в точках Aj (j = 1, 3). Тогда уравнения
равновесия имеют вид
Fix = -(Fix + Fix + Fx), F\y = —{Fiy + F3y + Fy)\
Mz = F2xy2 - F2yx2 + F3xy3 - F3yx3;
при ограничениях (1.7) для сил трения покоя.
(4.1)
Рис.6
4. Формулировка и обоснование результатов для случая п = 3 29
Введем матрицу Ф1 и переменные {uj, Vj} (j = 1, 3), {Рь Р2}
по формулам:
РЛ = Ф ^
Используя введенные обозначения и (4.1), для главного
момента Mz мы получим следующее выражение:
Ф = MZA = M2«2 + ^2&2 + ^зйз + ^3^3,
где обозначено:
<Ч = fnVj ~ h\Xj, bj = -fnVj + fnXj, j = 2, 3;
A = /11/22-/12/21 >0.
Ограничения (1.7) примут вид
(«2 + ИЗ + Pi)2 + {V2 + V3+ P2)2 < d,
«2 + »2<d»
t*3 + v32 <^.
(4.2)
(4.3)
(4.4)
(4.5)
Поставим задачу определения экстремумов функции Ф из (4.2)
при ограничениях (4.3)-(4.5).
Решив эту задачу, мы получим условие возможности
статического равновесия в терминах параметров {Mz, Рь Р^ £ь ^2? £з>
^2, &2 5 ft3 5 ^з} 5 которые нетрудно сформулировать и для исходных
параметров (Fx, Fy, x2, y2, %з, Уз)-
Пусть Q\,Q2,Q3 — множества (выпуклые) в 4-мерном
пространстве {u2, V2, щ, Vi}, определяемые, соответственно,
неравенствами (4.3)-(4.5).
Тогда в силу линейности функций Ф ее максимум и минимум
достигаются лишь на границе пересечения множеств Q\,Q2,Q3-
Поэтому поиск экстремума заключается в переборе всех вариантов
границ пересечения указанных множеств. Рассмотрим эти
возможные случаи.
30 Глава 1. Равновесие твердого тела на плоскости с сухим трением
1 случай. Пусть множество D\ = Q\ П Q2 Г) <3з непусто. Исследуем
значения функции Ф на его границе.
Здесь справедливо следующее утверждение.
Утверждение 4. 1) Множество Г\ точек границы множества D\,
в которых неравенства (4.3)-(4.5) обращаются в равенства, непусто
тогда и только тогда, когда
Р = А/р12 + Р|еКо1^о2], (4.6)
где
£oi = max{£i - £2 - 6, 6 - 6 - 6, 6 - 6 - 6Ь 4ч)2 = 6 + 6 + 6-
2) Функция Ф из (4.2) на множестве Гх задается формулой
Ф(^) = 6(«2 cos ^ + Ь2 sin ^) + — Utfi ± q^Jilqi - z2), (4.7)
q2\ v /
где обозначено:
Р2 2
q2 = 1 + —у + —(Pi cos ^ + Р2 sin <p),
Сз £з
1 ,
qi = а2 cos ^ + b2 sin ^ + -г(о>гР\ + Ь2Р2),
Сз
1 ,
qo = а2 sin <р - Ъ2 cos ^ + —\a2P2 - b2Pi),
7 л л • 7 SI — S2 _ S3
z = До - Pi cos <p - Р2 sm <p, ft0 = —
(4.8)
26
а параметр <р изменяется так, что
Pi cos <p + Р2 sin <p e [Рои Рог],
где
р (6 ~ б)2 ~ si ~ -Р2 р _(6+6)2"s1"P2
МП — TI ' ^02
26 26
(при выполнении (4.6) множество изменения параметра <р непусто!).
Таким образом, здесь исходная задача об экстремуме сводится
к исследованию корней уравнения d4*/d(p = 0, где функция Ф(^)
дается формулами (4.7), (4.8), а параметр <р изменяется в указанных
пределах.
4. Формулировка и обоснование результатов для случая п = 3 31
Доказательство утверждения 4 заключается в совместном
решении четырех уравнений (4.2) и (4.3)-(4.5) (где неравенства
заменены на равенства). Пусть щ = £3 cos<£, v^ = £3 sin<£. Тогда (4.4)
удовлетворено. Из оставшихся трех равенств имеем:
a2u2 + b2v2 = Ф - £з(аз cos ф + h sin <р),
РЛ ( Р2\
cos <р + — I u2 + I sin <р + — I v2 = (4.9)
= ho - (Р\ cos (р + Р2 sin у?),
«2 + »2=d> (4-10)
где ft о определено в (4.8).
Решим линейную (относительно u2, v2) систему (4.9) и
результаты подставим в (4.10). Получим следующее квадратное
относительно Фх, Фх = Ф - ^з(^з cos <£ + 63 sin <p), уравнение:
Ф?</2 - 2*izgi + (a\ + b£)z2 - ilql = 0, (4.11)
где q\,q2,Q3,z определены в (4.8).
Используя нетрудно проверяемое тождество
q\-q2(a22 + b22) = -q20,
мы получаем из (4.11) формулу (4.7).
Справедливость п. 1 утверждения 4 следует из условия
положительности подкоренного выражения в (4.7). Действительно, мы
имеем:
ilqi-z2=il
Р2 2Ло 2z
'+Й+1Г-6
- z2 > 0.
Следовательно, мы имеем:
z е [zi,z2],
где ^ = --*(£+&), *2 = —^(6-6)-
£з €з
Кроме того, z, согласно обозначениям (4.8), должно лежать
в пределах
h0 - Р < z < h0 + Р.
Объединение этих неравенств и дает неравенства (4.6).
Утверждение 4 доказано. □
32 Глава 1. Равновесие твердого тела на плоскости с сухим трением
Замечание. Делая подстановку t = tg (ip/2) в уравнении (4.11), мы
получим алгебраическое уравнение (многочлен) 6-го порядка
относительно t, коэффициенты которого являются алгебраическими
функциями от величин ^,Pi,P2 (а также других параметров системы).
Экстремальность функции Ф по ^ означает, что полученный
многочлен имеет кратный вещественный корень при t Е (—оо, +оо). Тогда
граница области равновесия (и экстремальное значение Ф)
находится аналитически из условия равенства нулю определителя результанта
полученного многочлена и его производной. Более подробно такой
способ обсуждается в Приложении.
2 случай. В этом случае мы исследуем функцию Ф на границе
множества D2 = Qi П Qj (i Ф j), причем эти точки должны
принадлежать внутренности множества Q^ (к Ф г, к Ф j). Если на таком
множестве функция Ф имеет точки локального экстремума, то эти
точки являются, в силу ее линейности, также и глобальными
экстремумами. Справедливо следующее утверждение.
Утверждение 5. Рассмотрим границу Г2 множества D2 = Q2 П <J3,
т. е. в (4.4), (4.5) неравенства обращаются в равенства. Тогда
функция Ф имеет локальный экстремум на Г2, который является
внутренней точкой множества Q\, в том и только том случае, если
(Р Р \ i2 — i2 — i2 — Р2
cos^+-cos72 + ^cos73 < l id t > (4Л2)
S3 Q / ^Ыз
где знак «плюс» — для точки максимума, знак «минус» — для точки
минимума; А — угол между векторами r2 = (a2,b2), г3 = (а3,&3),
72> 7з — углы, составляемые соответственно вектором Р = (Рь Р2)
с векторами \2 и г3.
Доказательство утверждения 5 следует из таких рассуждений.
Граница Г2 задается формулами
Uj = ^ cos <pj9 Vj = ^ sin <ру, j = 2, 3 (<pj e (О, 2тг)).
Тогда экстремальные точки для функций Ф из (4.2) даются
равенствами
4. Формулировка и обоснование результатов для случая п = 3 33
Подставляя эти выражения в неравенства (4.3), получим (4.12).
Утверждение 5 доказано. □
Отметим, что для множеств Q\ П <3з и Q\ П Q2 получаются
аналогичные (4.12) неравенства циклической перестановкой индексов.
3 случай. Этот случай относится к той ситуации, когда множество
Q\ П Q2 Г) <3з является пустым, т. е. равновесие заведомо невозможно.
Здесь справедливо следующее утверждение.
Утверждение 6. Неравенства (4.3)-(4.5) не имеют решения тогда
и только тогда, когда Р > 62 = 6 + 6 + 6-
Доказательство утверждения 6 следует из таких рассуждений. Ясно,
что неравенства (4.3)-(4.5) не имеют общего решения тогда и тогда,
когда
Ф = min [(u2 + щ + Pi)2 + (v2 + v3+ P2f] > i\
при условиях (4.4), (4.5). Применяя, например, метод
неопределенных множителей Лагранжа, можно вычислить, что
Ф = (Р-6"6)2 при Р>£2 + £ъ,
Ф = 0 при 0<Р<6 + 6-
Таким образом, если Р > 6 +6> то неравенства (4.3)-(4.5)
несовместны при
Р-£г-£ъ>£х =* Р> 6+6+6-
Утверждение 6 доказано. □
4 случай. Этот случай относится к той возможной (и уже
последней) ситуации, когда Q\ D [Q2 П <ЗзЬ т«е- множество Q\ содержит
(«поглощает») пересечение множеств Q2 и Q3. Другие возможные
аналогичные ситуации получаются циклической перестановкой
индексов. Здесь справедливо следующее утверждение.
Утверждение 7. Пусть среди чисел 6~6~6> 6 ~6 ~6> 6 ~6~6
есть одно положительное, например 6 _ 6 ~~ 6 > О (двух
положительных, очевидно, быть не может при £j > 0, j = 1, 3). Тогда, если
О ^ Р < 6 - 6 ~~ 6» то Qi ^ [Qi ^ ЯЛ и экстремум Ф вычисляется
34 Глава 1. Равновесие твердого тела на плоскости с сухим трением
так же, как в утверждении 5 (точка экстремума заведомо
принадлежит внутренности множества Q\). Другие возможные ситуации
получаются циклической перестановкой индексов.
Доказательство утверждения 7 получается так. Ясно, что
включение Q\ D [Q2 П <3з] выполнено тогда и только тогда, когда
Ф = тах[(гг2 + Щ+ Pxf + (v2 + v3 + P2f] < £
при условиях (4.4), (4.5). Значения Ф можно вычислить при помощи,
например, метода неопределенных множителей Лагранжа.
Несложный анализ дает
ф = (р + £2 + £3)2 < il ^ р < б - б - 6.
Утверждение 7 доказано. □
Ч Пример. В качестве примера рассмотрим применение
полученных результатов к случаю Fx = Fy = 0. Тогда будет Р\ = Р2 = Р = 0.
Здесь следует различать два случая.
1°. Значения £i, & > £з не образуют треугольник. Тогда из чисел
6 - 6 - £з, 6 - 6 - £з, 6 - 6 - 6 есть одно положительное,
и можно применить результат утверждения 7. Пусть, например,
6 _ & - £з > 0- Тогда мы имеем:
Фэкстр =MZ-A = ± (б\/а2 + Ь2+ 6\/аЗ+Ьз) •
Остальные возможные ситуации получаются циклической
перестановкой индексов. Например, если £2 - 6 - £з > 0? то
Фэкстр = MZ-A = ± (& у^ + &i + ^з \Аа2 " <*з)2 + (&2 " &з)2) •
2°. Значения £ь ^2? 6 образуют треугольник. Тогда все числа
6 _ & _ 6 5 £2 — £i — £з 5 6 _ 6 _ & отрицательны, и мы находимся
в условиях утверждений 4 и 5. Здесь следует различать два случая:
если выполнено неравенство (4.12) (или подобное ему при
циклической перестановке индексов), то экстремум функции Ф находится
так же, как и в утверждении 7 (с соответствующей циклической
перестановкой индексов); если неравенства (4.12) не выполнены, т. е.
±cos^>—— , cosB>—— , cos О——— ,
Ц>2& ЦЛЯЪ 2Я\Ь
4. Формулировка и обоснование результатов для случая п = 3 35
то следует применять утверждение 4, которое в данном случае
сводит поиск экстремума функции Ф к исследованию функции
+
где h0 =
Щ<р) = cos (р(б«2 + Мз =F hyjil - К)
+ sin <p(б&2 + hah ± a3у £32 - щ),
, у>£(0,2тг). ►
(4.13)
26
Ясно, что |/&о| < 6> так как это неравенство сводится к
неравенствам для сторон треугольника из 6> 6> 6- Таким образом,
функция Ф(у>) из (4.13) определена корректно на всем интервале
<р 6 [0, 2ж]. Экстремумы функции Ф(у>) из (4.13) даются формулами
Фэкстр = ±V Ф2,
где
Ф2 = [б«2 + Мз =F *>з дДз - hl] + [б«2 + Л063 ± «з ^£з2 " h\
= \ \й 01+1\ -1\)+d (*?+*22 - г32)+d Оз2+*? - *22)] +
+ 2|&2аз-М2|бА/ £
26
6 +
Й " Й " б3
26
(4.14)
где ^ = (а2 - а3)2 + (62 - &з)2, ll = a22 + b\, l] = a] + b].
Использование формулы Герона для треугольника из вели
чин 6, 6, 6 и того факта, что |62«з - ha2\ = 2Sab, где Sab
площадь треугольника, образованного векторами х2
гз = («з, &з) , дает следующий результат:
(a2,b2)T,
Ф
1 г
гДе %66
6,6-
+ 6 {h + h ~ h)\ + SSabSfrfrfr,
площадь треугольника, составленного из величин 6 >
36 Глава 1. Равновесие твердого тела на плоскости с сухим трением
Замечание 1. Отметим, что полученные результаты существенно
зависят от ориентации треугольника АгА2А3 и главного вектора ¥ху
относительно осей координат Оху, так как матрица тензора
анизотропного трения Ф0 зависит от выбора системы координат Оху.
Можно оси хну направлять по главным осям тензора Ф0, и
если они взаимно перпендикулярны, то мы будем иметь ортотропное
трение, а условие равновесия будут зависеть также и от ориентации
AiA2A3 и ¥ху относительно этих главных осей.
Замечание 2. Аналогичные результаты для изотропного трения были
получены при помощи метода предельного равновесия в книге [7].
Задача гарантированного равновесия на плоскости с ортотропным
трением при опоре на произвольное число точек рассматривалась
в статье [4].
Приложение
Сведение поиска экстремума функции Ф
к алгебраической задаче
Рассматриваем для сокращения выкладок изотропное сухое трение.
Пусть система координат Оху выбрана так, что точка опоры А\
лежит в начале координат, точка А2 имеет (безразмерные)
координаты (1, 0), а точка А3 имеет (безразмерные) координаты (ж, у)
(т. е. все длины мы относим к длине стороны А1А2). Обозначим
через а, 6, с максимальные силы трения в контактах соответственно
А\, А2, Аз и примем с = 1 (это суть соответствующие нормальные
реакции, умноженные на коэффициент трения, а все силы мы
относим к максимальной силе трения в контакте А^). Пусть Р\, Р2 —
(безразмерные) проекции главного вектора внешней системы сил
на оси Ох, Оу, а Рз — (безразмерная) проекция на ось Oz главного
момента внешней системы сил относительно точки О (т. е.
соответствующий главный момент, отнесенный к длине стороны А\А2).
Пусть (щ, Vk) — сила трения покоя в точке А^, к = 1, 2, 3. Имеем
следующие уравнения равновесия:
Pi + щ + и2 + щ = 0,
Р2+^1+^2 + ^3 = 0, (П.1)
Рз +v2 - щу + v^x = 0
Приложение
37
при соблюдении неравенств
щ + v\ ^ a2, u\ + г^ ^ Ь2, ^2 + г;2 ^ 1. (П.2)
Тогда задача о возможном равновесии, с учетом (П.1) и (П.2),
сводится к следующей задаче на экстремум. В 4-мерном пространстве
U: {u2, v2,u3,v3} определить min и max линейной функции
Рз = ЩУ ~ v3x - v2 (П.З)
при следующих квадратичных ограничениях:
Qi: (Pi + u2 + щ)2 + (Р2 + v2 + v3)2 ^ a2,
Q2: u22+v22^b2, (П.4)
Q3: u23+vl^l.
В (П.4) через Qk, к = 1,2,3, мы обозначаем множества в
пространстве U, задаваемые соответствующими квадратичными
неравенствами. Ясно, что множества Qk, к = 1, 2, 3, являются
выпуклыми, а значит выпукло и их пересечение, которое является, очевидно,
ограниченным и на границе которого находятся единственные min
и max линейной функции Р3 из (П.З) (гиперплоскость в
пространстве U).
Рассмотрим сначала случай, когда границы множеств (J&,
к = 1, 2, 3, имеют непустое пересечение, которое, согласно (П.4),
дается равенствами
u2(P\ + cos ф) + v2{P2 + sin ф) = Я,
2 2 2 \ /
u2 + v2 = b , щ = cos у?, ^з = sin ^5
где
(а2 - Ъ2 - 1 - Р2)
Н = h - z, z = Р\ cos <£ + Р2 sin <p, h = ,
Р2 = Р!2 + Р2, ре(0,2тг).
Решим уравнения (П.5) относительно u2, v2, обозначив
Si=Pi+cos<p, s2 = P2 + sin<p, s2 = sl + s22 = P2 + l + 2z. (П.6)
Имеем:
H-v2s2 Hs2±SiVb2s2-H2 t ч
u2 = , v2 = . (П.7)
S\ Sz
38 Глава 1. Равновесие твердого тела на плоскости с сухим трением
Вещественное решение (П.7) существует только тогда, когда
&V > Н\ или Ь2(\ + Р2 + 2z) > (h - zf.
Последнее квадратное неравенство, с использованием обозначения
для h из (П.5), соблюдается только тогда, когда
z = Р\ cos <р + Pi sin <p £ (z-, z+),
(a±b)2-(l+P2) (П.8)
Z± = 2 •
Кроме того, согласно обозначению из (П.5), z G (—Р,Р) при
<р G (0, 27г). Следовательно, для непустоты множества значений z
из (П.8), необходимо и достаточно соблюдения неравенств
(a + b)2-(l+P2)
-Р <z+ =
Р> Z- =
2
(a-b)2-(l+P2)
(П.9)
2
Неравенства (П.9) можно переписать в виде неравенств
\1-Р\<а + Ь, 1 + Р>\а-Ь\,
которые эквивалентны неравенствам
pg(p_,p+),
Р_ = тах{1 -а-Ъ, а-Ь-1, Ь-а-1}, (П. 10)
Р+ = а + Ь+ 1.
Далее будем предполагать неравенства (П. 10) выполненными.
В рамках рассматриваемого случая возможны две ситуации.
1) Включение (П.8) выполнено для всех <р G (0, 2п) (т. е.
рассматриваемое множество пересечения границ замкнуто и
экстремум функции Рз достигается исключительно в стационарных
точках этой функции на этом множестве). Тогда неравенства (П. 10)
дополняются неравенствами —Р > Z-, Р < z+, которые, в
совокупности с (П. 10), эквивалентны условиям
Р<а + Ь-\ и либо Р > \ + \а-Ь\,
(ПЛ1)
либо Р < 1 - \а - Ъ\.
Приложение
39
2) Включение (П.8) выполнено не для всех <р Е (0, 2тг) (т. е.
рассматриваемое множество пересечения границ незамкнуто). Тогда
существуют корни уравнений z = z±, соответствующие граничным
точкам рассматриваемого множества. Эти корни также необходимо
принимать в расчет при поиске экстремумов функции Рз (помимо
стационарных ее точек). Нетрудно показать, что при
|1-(о + 6)| <Р< 1 + а + Ь (П.12)
существуют два корня уравнения z = z+, и даются они формулами
cosp+ = у2 [p1(z+)±P2^/p2-(z+)2
где z+ = ^[(a + b)2-(l + P2)],
(П.13)
а при
\\-{а-Ь)\ <Р< 1 + а-Ь (П.14)
существуют два корня уравнения z = z_, и даются они формулами
1
COS (ft* = —2
{Z-)±Piy/p>-{Z-y],
(П.15)
где Z- = ^[(a-bf-(l + P2)].
Рассматриваем сначала случай 1, т.е. выполнены неравенства
(П.11). Подставим решения щ из (П.7) и г/з, Щ из (П.5) в формулу
(П.З) для Р3. Получим следующее выражение:
$2 $1 / Т
Рз = у cos<p - х sin <£ - if— =f — \b2s2 - H2,
где H = h- z, s2 = 1 + P2 + 2z;
(П.16)
отсюда имеем:
[Рз - (j/ cos <p — x sin ^)] 5 + Я52 = T^i \b2s2 — H2.
9
Возводя обе части последнего равенства в квадрат и сокращая на s ,
получим:
[Рз - (у cos <p — х sin у?)] 5 +
+ 2Я$2 [Рз - (2/ cos <£ - х sin ^)] + Н2 - b2s\ = 0.
40 Глава 1. Равновесие твердого тела на плоскости с сухим трением
В полученном уравнении делаем замену t = tg (<p/2) и приходим,
используя обозначения из (П.5), к следующему алгебраическому
уравнению 6-го порядка по t:
[P3(l+t2)-y(l-t2) + 2xt]2x
х [(1 + P2)(l + t2) + 2Pi(l - £2) + 4P2t] +
+ 2[P3(l + £2) - 2/(1 - *2) + 2ж«] [Л(1 + t2) - Pi(l - £2) - 2P2t] x
x [P2(l + t2) + 2*] + (1 + £2) [ft(l + t2) - Pi(l - £2) - 2P2«]2 -
- b2(l + *2) [Pi(l + t2) + 1 - *2]2 = 0. (П.17)
В алгебраическом уравнении (П.17) t G (—oo,+oo). Если
функция P3 (при фиксированных Рь Р2, удовлетворяющих
неравенствам (П. 11)) удовлетворяет при некотором t уравнению (П. 12)
и имеет при этом же t стационарное свое значение (т. е. dP^/dt = 0),
то и производная по t от уравнения (П. 12) (при этих же Р\, Р2,
Рз) также обращается в нуль. Таким образом, при стационарном
значении Рз алгебраическое уравнение (П.17) и его производная
по t имеют общий вещественный корень t = t* (другими
словами, уравнение (П.17) при экстремальном Рз имеет кратный
вещественный корень t = £*). Из алгебры известно, что в этом случае
необходимо, чтобы определитель D результанта R многочлена 6-го
порядка по t из (П.17) и его производной по t, являющейся
многочленом 5-го порядка по t, был равен нулю. Этот результант (матрица
11-го порядка), как и его определитель D являются функциями
коэффициентов этих двух многочленов, т. е. трех параметров Рь Р2, Рз
(и, конечно, а, 6, ж, у). Следовательно, уравнение D(PU Р2, Рз) = О
задает границу области равновесия в пространстве переменных
{Рь Р2, Рз} при Рь Р2, удовлетворяющих неравенствам (П. 11).
Запишем многочлен (П. 12) в виде
к=6
$>*** = О, (П. 18)
к=0
где коэффициенты а& даются следующими формулами:
а0 = (Р3 - у)\\ + Р2 + 2Pi) + 2Р2(Р3 - y)(h - Рх) +
+ (ft-Pi)2-b2(l + Pi)2,
Приложение
41
в1 = 4ж(Р3 - у)(Р2 + 1 + 2Р0 + 4Р2(Р3 - У? +
+ 2JP2 [2ж(Л - Pi) - 2Р2(Р3 - у)] + 2(Р3 - y)(h - Рх)) -
-4P2(h-P1),
а2 = [Ах2 + 2(Р32 - у2)] (Р2 + 1 + 2Р0 + 16жР2(Р3 -у) +
+ (Р}-у)2(Р2 + 1-2Р1) + 2{р2[(Рз + у)(к-Р1)-4хР2 +
+ (Р3 - y)(h + РО] + 2 [2x(h - РО - 2Р2(Р3 - у)] +
+ Р2(Р3 - y)(h -Pl)} + (h-Pl)2 + 4P22 + 2(h2 - Pf) -
-62[2(Р2-1) + (Р1 + 1)2],
а3 = 4ж(Р3 + у)(Р2 + 1 + 2Р0 + 4Р2 [4ж2 + 2(Р32 - у2)] +
+ 4х(Р3 - у)(Р2 + 1 - 2Pi) + 2JP2 [2x(h + Pj) - 2Р2(Р3 + у)] +
+ 2 [(Р3 + y)(h - Pt) + (Р3 - y)(h + Pj) - 4жР2] +
+ Р2 [2x(h - РО - Р2(Р3 -у)]}- SP2h,
а4 = (Р3 + у)2(Р2 + 1 + 2Р0 + 16жР2(Р3 + у) +
+ [4ж2 + 2(Р32 - у2)] (Р2 + 1 - 2Р0 + 2{Р2(Р3 + y)(h + РО +
+ 2 [2x(h + Pj) - 2Р2(Р3 + у)] + Р2 [(Р3 + y)(h - РО +
+ (Р3 - y)(h + Д) - 4Р2х] } + (h + РО2 + 4Р22 + 2(h2 - Pf) -
-b2[(P1-l)2 + 2(P2-l)],
а5 = 4Р2(Р3 + у)2 + 4х(Р} + у)(Р2 + 1 - 2Р0 + 4(Р3 + y)(h + Py)-
- 4Р22(Р3 + у) + 4xP2(h + Р^ - 4P2(h + Р^,
a6 = (P3 + y)2(P2 + l-2Pl) +
+ 2P2(P3 + y)(h + Pl) + (h + Pl)2-b2(Pl-l)2. (П.19)
Далее, берем производную многочлена (П. 18) по t и получаем
многочлен 5-го порядка
к=5
^2bktk = 0, где Ьк = (к + 1)ак+и fc = 0,...,5. (П.20)
к=0
42 Глава 1. Равновесие твердого тела на плоскости с сухим трением
11 А; 7 = 11
Из полученных формул формируем матрицу R = ||г^||^'':=1
результанта многочленов (П. 18), (П.20) по следующим правилам:
rkj = as, s = 6 - j + k, если s G [0, 6],
иначе rkj = 0; Л = 1,..., 5, j = l,...,ll;
Tkj = bs, s = k — j, если 5G [0,5],
иначе r^=0; & = 6, ...,11, j = l,...,ll.
Далее считаем определитель D полученной матрицы R = ||r&j||.
Этот определитель является функцией параметров Р\, Р^, Рз (а
также и других параметров системы). Тогда уравнение D(P\, Р2, Р3) = 0
будет определять границу области статического равновесия (при
выполнении неравенств (П. 11)). Вычисление граничных точек
указанной области возможно, в общем случае, только численным
способом.
Укажем два частных случая, когда эти граничные точки можно
вычислить аналитически.
1. Р\ = Р2 = 0 т. е. главный вектор внешних сил равен 0.
Пусть числа а, 6, 1 образуют треугольник, т. е. выполнены условия
утверждения 4, где мы полагаем £х = а, £2 = Ь5 £з — 1- Тогда
уравнение (П. 17) имеет, после сокращения на общий множитель
1 + t , следующий вид:
Ф2 + 4hm + h2(l + t2)2 - b2(l - t2)2 = 0,
' 9 (П.21)
где 4> = P3(l + t2)-y(l-t2) + 2xt.
Решая это квадратное уравнение относительно Ф, мы получим
следующее квадратное уравнение относительно t:
t2(P3 + y±\/b2-h2)+2t(x + h)+(P3-yTVb2-h2) = 0. (П.22)
Согласно изложенному выше, при экстремальном Р3
уравнение (П.22) должно иметь кратный корень, а это дает следующее
равенство:
Р2 = (х + hf + y2 + b2 -h2± 2y\/b2 - h2,
где h=-(a2-b2-l),
Приложение
43
которое в точности совпадает с равенством (4.14) из примера, где
О 0 0 0 0 0 0
следует полагать 1Х = (х - 1) + у , /2 = 1, /з = х + у , £\ = а,
Ь = ъ, 6 = 1.
2. Р2 = 0, ж = 1/2, а = 6, т. е. внешние силы действуют лишь
вдоль стороны А1А2 в опорном треугольнике А\А^ = А^А^ (он —
равнобедренный), и нагрузки в точках А\, А^ одинаковы. Тогда,
при использовании обозначения для Ф из (П.21), уравнение (П.17)
приобретает вид
4>2[(l + P?)(l + t2) + 2Pl(l-t2)]+4m[h(l + t2)-Pl(l-t2)] +
+ (i + f2){[Mi + ^2)-Pi(i-^)]2-b2[Pi(i + ^) + i-^]2} = o,
(П.23)
где h = -\(l + Pi)-
0,0 I . 1 1 1 I
0,0 0,2 0,4 0,6 0,8 1,0
Pi
Рис.7. Сечение области равновесия плоскостью Pi = О
44 Глава 1. Равновесие твердого тела на плоскости с сухим трением
Непосредственной проверкой можно убедиться в том, что t = О
является кратным корнем уравнения (П.23) при
{P,-yf = b2-l-{i+pY)\
Из неравенств (П. 11) следует, что выполнено неравенство | \+Р\ \ < 26,
поэтому экстремумы Р3 даются формулами
P^ = y + \IV--A(\ + Px)\
3 min — У
V-l-{i+pYf.
Таким образом, здесь область равновесия в плоскости {Рь Р^}
параметров представляет собой эллипс
(Д + 1)2 , (Р3-у)2
{2ЪУ
+
Ъ2
1,
точнее, ту его часть, которая удовлетворяет неравенствам (П. 11).
Более полный анализ всех случаев для рассматриваемой ситуации
1,8
1,6
1,4
1,2
1,0
0,8
0,6
0,4
0,2
00
Р2 = 0,0
III llllllllllllll
lllllllllllll
lllllllllllllllllllll^
1 1 1 1
0,0
0,2
0,4
0,6
0,8
1,0
Рис.8. Сечение области равновесия плоскостью Р2 = 0
Приложение
45
2,0
1,5
1,0
0,5
«®МШФ&*
..-К'-
*m0^
0,2
J> °'4 °>6 0,8
0,4
0,6
0,8 P,
0,2
Рис.9. Область равновесия в пространстве {Pi,P2,P3}
2,0
«• • • * • • • * *
Р::,г.%ч
Рис. 10. Другой ракурс области равновесия в пространстве {РъРъРъ}
46 Глава 1. Равновесие твердого тела на плоскости с сухим трением
содержится в работе автора [7], где это исследование было основано
на методе предельного равновесия.
В других, более общих, случаях было проведено численное
построение области равновесия, основанное на приведенном выше
алгоритме. Результаты для случая a = 1,6= 1,01, ж = 0,5, у = л/3/2
представлены на рис. 7-10.
Литература к Главе 1
1. Apeamoe И. И., Дмитриев И. И. Основы теории упругого дискретного
контакта. СПб.: Политехника, 2003. С. 233.
2. Ванторин В. Д. Движение по плоскости с анизотропным трением //
Трение и износ в машинах. 1962. Т. 16. С. 81-120.
3. Черноусъко Ф. Л. Условие равновесия тела на шероховатой плоскости //
Изв. РАН. Механика твердого тела (МТТ). 1988. № 6. С. 6-17.
4. Дмитриев И. И., Товстик П. Е. К условиям равновесия тела на
шероховатой плоскости // Изв. РАН. МТТ. 1998. №6. С. 22-28.
5. Иванов А. П. Об устойчивости равновесия в системах с трением //
Прикладная математика и механика. 2007. Т. 71. Вып. 3. С. 427-438.
6. Дмитриев Н. Н. Начало движения тел по плоскости с ортотропным
трением // Динамика и устойчивость механических систем. СПб.: Изд-
во Санкт-Петербургского университета, 1995. С. 14-20.
7. Розенблат Г. М. Динамические системы с сухим трением. М.; Ижевск:
НИЦ «Регулярная и хаотическая динамика», 2006. С. 204.
8. Розенблат Г. М. Равновесие твердого тела на плоскости с
анизотропным сухим трением // Прикладная математика и механика. 2009 Т. 73.
Вып. 2. С. 204-218.
Глава 2
О динамическом (обязательном) равновесии
твердого тела, опирающегося одной точкой
на шероховатую плоскость
Рассматривается задача об определении условий
обязательного равновесия твердого тела, опирающегося на шероховатую
плоскость одной своей точкой, когда условия его возможного
(статического) равновесия выполнены.
1. Постановка задачи
Пусть (см. рис. 1) Oxyz — прямоугольная декартова система
координат, а твердое тело опирается в точке О на шероховатую
плоскость Оху с коэффициентом трения / и находится в
состоянии статического (возможного или необязательного, по
терминологии Джона X. Джеллетта [1]) равновесия. Это означает, что
на тело действует система активных сил, имеющая
равнодействующую F = (Fx, Fy, Fz) , приложенную в точке опоры О, причем
выполнены условия
Fz = -N0 < О, F02 = F2X + F2y < f2Fl (1.1)
где Nq > 0 — статическая нормальная реакция односторонней
связи в точке О. Условие (1.1) геометрически означает, что
равнодействующая F лежит внутри конуса трения, построенного в точке О.
Пусть С — центр масс тела, а систему координат Oxyz будем
выбирать так, что координаты точки С суть хс = 0, у с = у > О,
Zc = z > 0. Ясно, что это не нарушает общности. Кроме того, будем
48 Глава 2. О равновесии твердого тела, опирающегося одной точкой
Рис.1. Тело, опирающееся на шероховатую плоскость одной точкой
предполагать, что тензор инерции J тела имеет диагональный вид
в системе координат Cx'y'z, начало которой совпадает с точкой С,
а оси параллельны соответствующим осям x,y,z системы Oxyz.
Будем в дальнейшем обозначать Jxtxt = al5 Jytyt = g^, JZ'Z' — ft3-
Поставим задачу об определении необходимых и достаточных
условий, которым должны удовлетворять коэффициент трения /
и параметры твердого тела у, z, a\, a^, аз, чтобы неравенства (1.1)
являлись также и обязательными условиями статического
равновесия. Это означает (см. [1]), что кроме указанного состояния
статического равновесия не существует других возможных безотрывных
движений тела с началом скольжения в точке опоры О. О
движениях с отрывом или без скольжения точки опоры О будет сказано
ниже, в пункте 3 (формулировка результата). Отметим, что
рассматриваемая задача примыкает к задаче об однозначной разрешимости
относительно ускорений общих уравнений динамики твердого тела
при наличии сил сухого трения, которая рассматривалась, в
частности, в [2].
Для силы трения, возникающей при начальном скольжении
точки О, мы рассматриваем два типа моделей:
1) классическая (одномерная) модель трения Кулона:
FTp = -/iV^, (1.2)
где а<э Ф 0 — вектор ускорения точки О, лежащий (для
безотрывного движения) в плоскости Оху\
2. Вывод основных уравнений начального движения 49
2) комбинированная (двумерная) модель трения
Контенсу—Журавлева:
FTp = -<r/iV-—г, 0"=7"П?' <* = /*-;—Г' (°)
|ао| ! + <> |ао|
где а<э ^ 0 ~~ вектор ускорения точки О (как и в пункте 1),
ez — угловое ускорение тела по оси z (ускорение верчения),
г — радиус малой круглой площадки контакта с центром в
точке О, ji — коэффициент, вычисляемый из
соответствующих аппроксимаций Падэ (см. [3]). Этот коэффициент зависит
от вида распределения нормальных напряжений,
возникающего в площадке контакта. Например (см. [3]), в случае контакта
по Герцу fi = 8/(37г). Отметим, что лишь при ez = О
(отсутствует начальное верчение) комбинированная модель (1.3)
переходит в классическую модель Кулона (1.2). Из формулы (1.3) мы
видим, что при нарушении статического равновесия и ненулевом
ускорении верчения эффективный коэффициент трения меньше
обычного классического коэффициента / из формулы (1.2).
Поясним, что мы понимаем под необходимыми и
достаточными условиями обязательного равновесия. Если эти условия
выполнены (достаточность), то при любой силе F, лежащей внутри конуса
трения для точки О и проходящей через эту точку, не существует
начальных возможных безотрывных движений тела со
скольжениями в точке О в рамках модели (1.2) или (1.3). Если же эти условия
нарушаются (необходимость), то найдется такая сила F из
внутренности конуса трения для точки О, проходящая через упомянутую
точку, при которой существует безотрывное движение тела с
начальным скольжением в точке О в рамках модели (1.2) или (1.3).
Ниже рассматривается решение поставленной задачи для
классической модели Кулона (1.2).
2. Вывод основных уравнений
начального движения
Пусть в некоторый момент времени из состояния покоя (т. е. при
нулевых начальных скоростях) начинается безотрывное движение
тела с ненулевыми ускорениями. Обозначим a<? = (ax,ay,0)T —
50 Глава 2. О равновесии твердого тела, опирающегося одной точкой
вектор ускорения точки О, е = (ех, еу, ez) — вектор углового
ускорения тела. Возникающую при этом реакцию R опорной
плоскости запишем в виде
R = N + FTp,
где N = (О, О, NZ) — нормальная реакция плоскости, FTp = (FTpx,
Ftp у, 0) — сила трения, подчиняющаяся закону (1.2). Далее будем
обозначать Nz = N > 0 (так как связь имеет односторонний
характер).
Введем переменные а, /3, />, F0 по следующим формулам:
ах = р cos а, ау = р sin а,
Fx = F0cosp, Fy = F0 sin /3, (2.1)
p>0, F0>0, а,/3е [0,2тг).
Отметим, что в соотношениях (2.1) величина Fq удовлетворяет
второму из неравенств (1.1), угол /3 задает ориентацию главного
вектора внешних сил F в опорной плоскости Оху, а угол а —
ориентацию соответствующего вектора ускорения а<э скольжения
точки О. Используя обозначения (2.1) и соотношение (1.2),
получаем для проекций силы трения FTp:
FTvx = -fN cos a,
P J (2.2)
Ftp у = -fN sin a.
Предполагая массу тела единичной, запишем теоремы о
движении центра масс и кинетического момента тела относительно
точки С в осях Сх'у z для начального момента движения с учетом
формул (2.1), (2.2):
р cos a + SyZ — ezy = Fq cos /3 - fN cos a,
p sin a - exz = Fq sin /3 - fN sin a, (2.3)
exy = N + Fz;
a»\£x = —Ny - Fzy - fNz sin a + F0z sin /3,
^2% = fNz cos a - Fqz cos /3, (2.4)
a^ez = —fNy cos a + FqJ/ cos /3.
2. Вывод основных уравнений начального движения 51
Вводим далее следующие безразмерные параметры:
А = —— е(1,оо), к0 = — , ki = — + —. (2.5)
*о fyz a3 a2
Из последнего уравнения (2.3) и первого уравнения (2.4)
находим
N + FZ 2 2
ех = , N(a{+y + fyzsma) = -Fz(ax+y ) + F0yz sin (3.
У
Предполагая в дальнейшем, что а\ + у + fyz sin а ф 0
(противоположная ситуация является вырожденной), и используя
обозначения (2.5), получим следующее выражение для нормальной
реакции:
Fpyz
' ai + У2 + fyz sin a
Подставляя полученные соотношения во второе уравнение из (2.3),
получим после небольших преобразований:
N = (sin /3 + Хк0) | ^ ^_._ > 0. (2.6)
psma = (sinn - Asm a) z . (2.7)
v 7 ai + y2 + fyz sin a v 7
Исключая из оставшихся уравнений еу, ez по формулам
fzN cos a-zFq cos/3 - fyN cosa + yF^ cos/3
Sy = , ez = , (2.8)
a2 a3
получим из первого уравнения (2.3) с использованием соотношения
(2.6):
Г 1
р cos a = cos /3-Х cos a H (cos /3 sin а - cos а sin /3)
L &o
х (l + fciKoi+p2)^
«i + 2/2 + /У^ sin ^
Таким образом, вопрос о существовании безотрывных движений
со скольжениями точки контакта сводится к вопросу о
существовании решений уравнений (2.7), (2.9) при а, /3 Е [0, 2тг), р > 0 и
соблюдении неравенства (2.6).
52 Глава 2. О равновесии твердого тела, опирающегося одной точкой
3. Формулировка результата
Пусть параметры ко, к\ определяются формулами из (2.5). Тогда
справедливо следующее утверждение.
Утверждение.
1. Если ко Е (О,1) (т.е. / > (a\ + y2)/(yz)), то обязательное
(динамическое) равновесие невозможно, т. е. при этих условиях
существует такая сила F из внутренности конуса трения для
точки О, которая проходит через эту точку и при которой
возможно начальное движение тела со скольжением точки опоры.
2. Если ко е (1, оо) (т. е. О < / < (ах + y2)/(yz)), то:
2.1) при —-—(ai + у2) < z2 < ос реализуется обязательное
(динамическое) равновесие;
2.2) при 0 < z2 < —-—(ai + у2) (если к\ > 1) обязательное
(динамическое) равновесие реализуется лишь при
2^/(al+y2 + z2)[kl(al+y2)-z2] ai+y2
(l + ki)yz yz
Замечание. Сформулированное утверждение касается только
безотрывных движений со скольжениями точки опоры О. Однако нетрудно
установить, используя динамические уравнения (2.3), (2.4), что
движения с отрывом (при которых a0z > О, N = FTpx = FTpy = 0)
реализуются лишь в условиях пункта 1 данного утверждения, т. е. при
fyz > di + у2, а движения без скольжения (при которых а0 = 0, и
FTp — сила трения покоя) вообще не реализуются при е2х + е2у + е] Ф 0.
4. Обоснование результата
Исключая из уравнений (2.7) и (2.9) переменную р и обозначая
£ = sin а, получим следующее уравнение для /3:
Asin/3-Bcos/3 = C, (4.1)
4. Обоснование результата
53
где обозначено:
А{ В{
А =-}-, В = ±- 1
М = (1 + *\)fyzi + a{+y2 + z2,
2\
Bi = (1 + h)fyzi + (1 + кМсц + yz),
(4.2)
С = X(A, - В,) = -AC,
Со = fci(ai + у2) - z2 = со:
Решения уравнения (4.1) имеют вид
AC±BVA2 + B2-C2 ill
sin/3= -=—-= при А = А2 + В2-С2>0. (4.3)
Причем должны быть соблюдены неравенства р > О, N > О,
которые, как это следует из (2.6) и (2.7), можно записать так:
ч а\ + у2 + z2 /sin/5 \
p = Fo(l + kl)-!—Z- -Г-А >0,
1 V * У (4-4)
ч V^^ / sin в Хко \
N = F0(l + kl)^[-^L + -^)>0.
Введем, для сокращения выкладок, переменные u, v по
следующим формулам:
n = Al^=^9 v = Bx—L= € е (-1, 1). (4.5)
Тогда, используя обозначения (4.2) и (4.5), получим из (4.3),
(4.4):
Д = (и + v)2 - (А2 - 1)С02 > 0,
F0(l + k1)(a1+y2+z2)/.[ иЛгКп (4-6)
/> = 6 -А(« + v)± v Д > 0,
(42 + Б2)^у^Г?
iV = F0(l + fci)j/zx
х{ — * Г-Л(ц + р)±\/А]+-^-(^ + *о)1>0. (4.7)
54 Глава 2. О равновесии твердого тела, опирающегося одной точкой
Далее решаем неравенства (4.6), (4.7). Первое неравенство из (4.6)
дает
о о Cl + (u + v)2 / ч
1<А2<А2 = ^-^ '-. (4.8)
Из второго неравенства в (4.6) получаем:
±^ + г,)2-(А2-1)С2 > £\(и + v). (4.9)
Если £ G (0, 1), то, согласно (4.5), имеем: и > 0, v > 0 (так как
из (4.2) А\ > 0, Bi > 0). Тогда в (4.9) нужно выбирать знак «+»,
и мы приходим к неравенству
-(А2 - \)Cl > (А2 - l)(ti +1;)2, (4.10)
которое противоречиво при А > 1.
Если £ Е (-1, 0), то (4.9) превращается в неравенство
±^/(u + v)2-(\2-l)C2 < Х(и + v). (4.11)
Рассмотрим здесь два случая:
1) и + v < 0. Тогда (4.10) превращается в неравенство
-y/(u + v)2-(\2-l)C% < -Х\и + v\,
которое совпадает с неравенством (4.10), т.е. противоречиво
при А > 1.
2) u+v > 0. Тогда (4.11) при А > 1 выполнено заведомо для любого
знака в левой части. Посмотрим, когда возможно и + v > 0.
Из (4.2) и (4.5) получим:
u + v = —
^%/W1 (4.12)
Р(0 = Со^2 + (1 + ky)fyzi + (О! + J/2 + Д
Для того чтобы и + v могло принимать положительные
значения, необходимо, чтобы (так как £ < 0) квадратный трехчлен <р(£)
мог принимать отрицательные значения при £ Е (-1,0). Имеем:
<p(0) = al+y2 + z2>0,
(P(-l) = fyz(l + k1)(k0-l).
4. Обоснование результата
55
Рассмотрим пункт 1 утверждения, в котором ко < 1. Тогда, в
соответствии с (4.13), будет <р(0) > 0, <^(-1) < 0, т.е. <р(£) принимает
отрицательные значения при £ Е (—1,£*), где £* — больший
корень квадратного уравнения <р(£) = 0. Отметим, что этот корень
зависит лишь от параметров самого тела и не зависит от параметра
А, который определяется равнодействующей F. Таким образом,
выполнение неравенств (4.6) может быть обеспечено при £ Е (— 1, £*),
A Е (1, Ai), где Ai определяется в (4.8) и зависит от параметра £.
Посмотрим, когда может быть обеспечено выполнение
неравенства (4.7) для положительности соответствующей нормальной
реакции N. Из (4.7) следует неравенство
_А_
-_^i^^
Вспоминая определения для ко из (2.5) и для В\ из (4.2), получим
следующее неравенство:
±^{u + vf-{X2-\)Cl > Xw,
, , A2 + Bl / 7 (4Л4)
w = (w+v)-(TTw^v^-
Если w < 0, то (4.14) заведомо выполнено при выборе знака
«+» в левой его части. Если же w > 0, то имеем 0 < w < u + v,
а неравенство (4.14) выполнено при выборе знака «+» в левой его
части и
1 < А2 < А2 - (м + г,)2 + С°2 < А2 - (м + г,)2 + С°2 f4 15)
1<А <А2" w^ + Cl <Al" Cg • (4Л5)
Таким образом, мы можем удовлетворить всем неравенствам (4.6)
и (4.7) и установить тем самым существование возможных
начальных движений со скольжениями в условиях пункта 1 утверждения.
Следовательно, справедливость этого пункта установлена.
Рассмотрим теперь пункт 2 утверждения, когда ко > 1, т. е.
°>\+У > fvz- Покажем, что в этом случае нормальная реакция N
всегда будет положительной. Действительно, из второй формулы
(4.4) имеем:
JVr = F0(l + fei)^(sin/3 + Afe0).
56 Глава 2. О равновесии твердого тела, опирающегося одной точкой
Вспоминая выражение для В\ из (4.2), имеем:
Bi = (1 + fei)(oi + у2 + fyz£) > (1 + fei)(oi + у2 - /yz) > О,
так как ai + у > fyz. Тогда неравенство N > 0 эквивалентно
неравенству sin/З + Л&о > 0, которое выполнено заведомо, так как
А > 1, ко > 1. Таким образом, нам следует исследовать лишь
неравенства (4.6), которые выполняются только при наличии
отрицательных значений квадратного трехчлена <р(£) из (4.12) на интервале
£ 6 (-1, 0). В рассматриваемом случае из (4.13) получаем <р(0) > 0,
<р(—1) > 0. Будем искать минимум функции <р(£) при £ Е (—1,0).
Рассматриваем два случая:
1) Cq = ki(a,i + у ) — z < 0, тогда минимум функции <р(£)
реализуется на концах интервала (-1, 0), т. е. <р(£) > 0 при £ Е (—1, 0),
следовательно, решений нет при любых £ и А > 1 и реализуется
обязательное равновесие.
2) Со > 0. Тогда минимум функции <£>(£) может (и должен)
находиться где-то внутри интервала (-1,0). В противном случае
функция <р(£) является монотонной на интервале (—1,0) и,
следовательно, положительной. Точка минимума и минимальное
значение функции даются формулами
(1 +кх) fyz 2 2 (l + fci)2(/y*)2
2Со 4Со
Итак, отрицательные значения функции <р(£) на интервале (—1,0)
заведомо существуют в этом случае при выполнении следующих
неравенств:
, 2С0 . ^ 2С0 /oi + у2 + z2
^TTv fyz>TTh]j со •
Кроме того, в условиях данного пункта соблюдаются
следующие неравенства:
<*i + У2 > /У*, *i(ai + У2) " z1 > 0.
Множество параметров, определяемое этими неравенствами,
непусто лишь при выполнении следующих неравенств:
oi + у2 + z2 < Со = fei(oi + у2) - z2,
Литература к Главе 2
57
2 2С0 al+y2 + z2
При этом нужные отрицательные значения функции <р(£)
реализуются при
izduii), \<\1<к =
г2
где £ь & — корни уравнения <р(£) = 0, которые в данном случае
являются вещественными и оба принадлежат интервалу (—1,0).
Объединение полученных неравенств для параметров тела
приводит к результату пункта 2 утверждения. Утверждение полностью
доказано.
Литература к Главе 2
1. Jellett J. 77. The theory of friction. London: Macmillan and Co., 1872. 220 p.
2. Иванов А. 77. Условия однозначной разрешимости уравнений динамики
систем с трением // Прикладная математика и механика. 2008. Т. 72.
Вып. 4. С. 531-546.
3. Журавлев В. Ф. О модели сухого трения в задаче качения твердых тел //
Прикладная математика и механика. 1998. Т. 62. Вып. 5. С. 762-767.
Глава 3
Равновесие абсолютно твердого тела при
опирании на две шероховатые плоскости
Рассматривается задача об условиях равновесия абсолютно
твердого тела, опирающегося двумя своими точками на две
шероховатые поверхности. Опорные контакты предполагаются
точечными, а взаимодействие их с опорными поверхностями происходит
по закону изотропного сухого трения и имеет односторонний
характер. К телу приложена произвольная пространственная система
активных сил, а его равновесие понимается в статическом смысле.
Полученные результаты включают в себя:
• условия равновесия тела при приложении фиксированной
системы активных сил;
• условия равновесия тела при приложении произвольной
системы активных сил (условия «заклинивания» или
«самоторможения»).
Приведены примеры, иллюстрирующие полученные результаты.
Содержание настоящей главы опубликовано в [8].
1. Описание модели и постановка задачи
Рассматривается твердое тело, опирающееся точкой А\ на
поверхность S\, а точкой А^ — на поверхность S^. Введем систему
координат Oxyz, начало которой находится в точке А\, ось у проходит
через отрезок А1А2 (в направлении от А\ к Aj), направление осей
х, z произвольно и такое, что Oxyz — прямоугольная правая
система осей (см. рис. 1). Отметим, что возможно также опирание
тела своей поверхностью на угловую точку опорной поверхности
(например, стержень опирается об угол ступеньки).
1. Описание модели и постановка задачи
59
С тело
__ и2х\
Опорная ^__^ 1
поверхность Si / ^~~^~~~~~~^~~—^
I / Опорная
/ поверхность S2
Рис. 1. Тело на двух шероховатых опорах
На рис. 1 изображены также единичные векторы п1? П2,
представляющие собой, соответственно, векторы нормалей к
поверхностям Si, S2 в точках А\, А2, направленные в сторону ослабления
соответствующих связей (или нормалей к общей касательной
плоскости поверхностей взаимного контакта тела с опорой).
К телу приложена произвольная система сил, которая при
приведении к точке А\ имеет главный вектор F = (Fx, Fy,Fz) и
главный момент М^1 = (Мх, Му, MZ)T. Пусть уо — длина отрезка А\А2.
При взаимодействии тела с поверхностями Si, S2 возникают силы
реакции Ri, R2, которые можно представить в виде
RZ- = NZ- + FZ-, г = 1,2, (1.1)
где Nz- = Niiii — нормальная реакция поверхности Sz-, причем
Ni > О (г = 1, 2), F8- — сила трения покоя, лежащая в касательной
плоскости и удовлетворяющая неравенствам Кулона, т. е.
(Fbnz-) = 0, \Fi\^fNi9 Ni>0, г = 1,2, (1.2)
где / — коэффициент трения покоя, который мы полагаем
одинаковым для обеих опорных поверхностей.
60 Глава 3. Равновесие твердого тела при опирании на две плоскости
Рассматриваются следующие задачи.
1) Определить необходимые и достаточные условия, которым
должны удовлетворять параметры {F, М^1? уо, /, Пь пг}, чтобы
существовали такие реакции опор Ri, R2, удовлетворяющие
соотношениям (1.1), (1.2), которые статически
уравновешивают исходную систему активных сил. Таким образом, должны
быть выполнены условия статического равновесия:
F + Ri + R2 = 0, М^ + MAl (R2) = 0. (1.3)
2) Определить необходимые и достаточные условия для
параметров {уо, /, Пь пг}, при которых поставленная в п. 1 задача
может быть разрешимой при любых F, М^1, т. е. имеет место так
называемое явление «заклинивания» («самоторможения»).
2. Уравнения равновесия и их преобразование
Всюду далее мы будем предполагать, что щу Ф 0, щу ф 0, т. е.
проекции векторов нормалей опорных поверхностей на прямую,
соединяющую опорные точки, не равны нулю. Случаи, когда щу = 0
или щу = 0 (или обе проекции равны нулю), соответствуют либо
опиранию тела двумя своими точками на одну и ту же плоскость,
рассмотренному ранее в статье автора [2], либо опиранию тела своей
плоской поверхностью на какие-либо точечные контакты, либо,
наконец, смешанному опиранию (например, опирание стержня своей
плоской поверхностью об угол ступеньки). Такие случаи должны
быть рассмотрены отдельно.
Соотношения (1.2) и (1.3) перепишем в скалярном виде:
Fx + Flx + F2x + Nxnlx + N2n2x = 0,
Fy + Fiy + F2y + Niniy + N2n2y = 0, (2.1)
Fz + Flz + F2z + Nxnlz + N2n2z = 0;
Mx + N2n2zy0 + F2zy0 = 0, (2.2)
My = 0, (2.3)
Mz - N2n2xy0 - F2xy0 = 0, (2.4)
2. Уравнения равновесия и их преобразование 61
Flxnix + Fiytiiy + Flzniz = О, (2.5)
F2xn2x + F2yn2y + F2zn2z = О, (2.6)
Fl + Fty + Fl^f2Nl Ni>0, г =1,2. (2.7)
Уравнение (2.3) есть ограничение на внешнюю систему
активных сил, которая не должна опрокидывать (вращать) тело вокруг
оси А\А2 (ось у). Оставшаяся система равенств (2.1), (2.2) и (2.4)-
(2.6) представляет собой систему семи уравнений для
определения восьми неизвестных {Fix, Fiy, Fiz, F2x, F2y, F2z, Nu N2},
которые должны еще удовлетворять неравенствам (2.7). Обозначим
Л^2 = ^ > 0 и решим систему (2.1), (2.2), (2.4)-(2.6). Имеем из (2.2):
Мх + £n2zy0
(2.9)
(2.10)
*2z =
Из (2.4) получим:
Mz- £п2ху0
*2х — •
2/о
Из (2.6), с учетом (2.8) и (2.9), получим:
1
F2y =
п2у
1 7
— (Mzn2x - Mxn2z) - £(1 - n2y)
2/о
(2.11)
Далее, умножая каждое из уравнений системы (2.1) соответственно
на П\х, П\у, n\z и складывая их, с использованием (2.5), (2.8)—(2.10),
получим:
Wi = —^ + pi>0,
п2у
1 Л, nlzn2y-nlyn2z щуп2х-щхп2у\
Ч>\ = —\ мх \~MZ -(F,n!).
Уо V п2у П2у J
Далее, из системы (2.1), с учетом (2.8)—(2.11), получим:
г, Щхщу Mz
Fix = Н ~ п\хЧ>\ ~FX ,
п2у Уо
1 - п2
F\y = ~i ~ Щуфх + <р2, (2.12)
П2у
»1г»1» f „ , Мх Mzn2x - Mxn2z
F\z = £-niz<pi-Fz + , (p2 = Fy.
n2y Уо y0n2y
62 Глава 3. Равновесие твердого тела при опирании на две плоскости
Для сокращения выкладок будем обозначать слагаемые в
выражениях для F\, F2, не содержащие £, маленькими буквами g с
соответствующими индексами. Так, например, для F\x из (2.12) будем
иметь
П\хп\у Mz
Fix = i+9\x, 9\x = -nix(pi -Fx .
П2у УО
Тогда неравенства (2.7) для сил трения покоя принимают
следующий вид:
МО = Ы2 + 2Ы + 8к^0, £>0, к =1,2, (2.13)
где введены обозначения
. (1 ~ п\у) - fn\y 1 - п\у
m — 2 ' п2 — -J И 5—'
п2у п2у
/1 2 4 , /Vl^ly
дыгихЩу - giy(i - щ) - giznizniy н
/ П2у
п — ,
П2у
1 -п\
h = -92хП2х + 92у 92zri2z,
П2у
*i = #L + 9\у + 9\z ~ /Vb *2 = glx + 92y + 9ъ>
Mz
9\x = -nixVi - Fx , giy = -niy<pi + <p2,
Уо
(2.14)
мх
9\z = -n\z<p\ -Fz + —,
Уо
Mz Mzn2x - Mxn2z
9lx = , 9ly = ,
00 yW2z
92z
_м1
Уо
В формулах (2.14) величины <pi, (р2 определяются из (2.11),
(2.12). Таким образом, исходная задача о статическом равновесии
сводится к задаче о разрешимости (совместности) неравенств (2.13)
и (2.11) при £ Е (0, оо). Если существует такое £ > 0 (хотя бы
одно), что одновременно выполняются неравенства (2.11) и (2.13),
то статическое равновесие будем считать возможным. В противном
случае такое статическое равновесие не реализуется.
3. Формулировка и обоснование результатов
63
3. Формулировка и обоснование результатов
В настоящем пункте приведем основные полученные результаты
и их обоснование.
Предложение 1. Пусть выполнены следующие условия:
п\уП2у < О, / > /о = max
Тогда статическое равновесие реализуется при любой системе
внешних сил, т.е. может осуществляться «самоторможение».
Доказательство. Если первое из неравенств (3.1) выполнено, то
коэффициент при £ в (2.11) положителен, т. е. (2.11) выполнено при
всех достаточно больших £ > 0. Если к тому же выполнено второе
из неравенств (3.1), то коэффициенты при £ в обоих квадратичных
неравенствах (2.13) отрицательны, что гарантирует их выполнение
при всех достаточно больших £ > 0. Предложение 1 доказано. □
Предложение 2. Условия (3.1) являются необходимыми и
достаточными для осуществления «самоторможения» (в указанном выше
смысле этого слова).
Доказательство заключается в проверке того, что при нарушении
хотя бы одного из неравенств в (3.1) существует такая система
внешних активных сил, при которой неравенства (2.11), (2.13)
неразрешимы (несовместны), т.е. не реализуется статическое
равновесие тела. Действительно, пусть нарушено первое из неравенств
(3.1). Тогда в неравенстве (2.11) коэффициент при £ будет
отрицательным, и при <^i ^ 0 неравенство (2.11) всегда будет нарушено
при любых £ > 0. Для этого можно взять, к примеру, Мх = Mz = 0,
F _L ni, что, согласно обозначению в (2.11), дает (р\ = 0. Если
нарушено второе неравенство в (3.1), то следует рассмотреть два случая.
1)0</<
Тогда при выборе Мх = Mz = 0 будет, согласно обозначениям
из (2.14), Q2X = giy = giz — 0, и при любом £ будет нарушаться
неравенство из (2.13) при к = 2.
64 Глава 3. Равновесие твердого тела при опирании на две плоскости
2)0</<V-1+i-
Выберем опять Мх = Mz = О, F _L щ. Тогда <р\ = 0, <р2 = —Fy,
и из (2.14) мы получим:
-Fxnlxnly + Fy(l - n\y) + Fznlznly
L\ — , S\ — tx + b4 + tz.
n2y
Нетрудно показать, перебирая различные случаи, что всегда можно
выбрать Fx, Fy, Fz так, чтобы удовлетворить условиям
5i > 0, Zi^O, (F,m) = 0.
Тогда при любом положительном £ будет нарушаться неравенство
из (2.13) при к = 1. Предложение 2 доказано. □
Далее рассмотрим случаи, когда условия (3.1) нарушены.
Предложение 3. Пусть выполнено условие
ЩуП2У > 0. (3.2)
Тогда:
1) если (р\ < 0 (<р\ определено в (2.11)), то статическое равновесие
не реализуется;
* n2v
2) если <pi > 0, / > /о, то, обозначая £ = —-^ и £о — положи-
Щу
тельный корень уравнения гр2(0 = 0 (который всегда существует,
так как ^(0) > 0, ip2(+oo) < 0), имеем следующие случаи:
2.1) если £* < £о» т0 статическое равновесие не реализуется;
2.2) если £* > &» т0 ПРИ ^* = ™n{^i(£*), ^(£о)} > 0
статическое равновесие не реализуется, а при ip* < 0 статическое
равновесие может быть реализовано.
Доказательство осуществляется следующим образом. Если <р\ < 0,
то неравенство (2.11) нарушается при всех £ > 0, т. е. равновесие
невозможно. Если (р\ > 0, то (2.11) справедливо при £ Е [0,£*).
Тогда утверждения пункта 2 предложения 3 следуют из
элементарного рассмотрения графиков выпуклых вверх по £ парабол ip\(£),
ip2(i) на интервале 0 < £ < £*. Предложение 3 доказано. □
4. Обсуждение результатов
65
Замечание 1. Отметим, что величины £*, £0> фигурирующие в
формулировке предложения 3, зависят только от моментов Мх, Mz, а
значение величины гр* определяется также и силами Fx, Fy, Fz.
Замечание 2. Случай niyn2y > 0, рассматриваемый в предложении 3,
является достаточно «экзотическим» на практике: тело при этом
должно опираться на внутренность одной поверхности и внешность другой.
Замечание 3. Можно перечислить и другие случаи, когда реализуется
или не реализуется статическое равновесие. Однако эти случаи легче
(и практичнее) выписывать при решении конкретных задач.
4. Обсуждение результатов
4.1) Задача о равновесии, рассматриваемая в настоящей статье,
является статически неопределимой в рамках механики абсолютно
твердого тела, так как есть свобода в выборе параметра £ > 0,
представляющего собой значение нормальной реакции N2, а также
допустимых сил трения покоя. Поэтому для полного решения задачи
необходимо принять и использовать дополнительные допущения,
выходящие, вообще говоря, за рамки механики абсолютно твердого
тела. Например, можно предполагать податливость опор в точках
контакта с некоторыми коэффициентами упругости С\,С2, которые
затем устремлять к бесконечности, как предлагалось в трактате [1].
Однако, как было указано в работе Ф. Л. Черноусько [3],
полученные величины нормальных реакций сильно зависят от жесткостей
различных элементов тела и опор, а также от геометрических не-
идеальностей (погрешностей изготовления).
4.2) Более приемлемым (по мнению автора) представляется подход,
при котором постановка задачи уточняется, а тело и опоры
остаются абсолютно твердыми. В этом подходе учитываются величины
начальных напряжений (нормальных реакций в точках контакта),
а также предыстория состояния и нагружения системы [4].
Цитируем из введения к упомянутой книге [4]: «В контактных задачах
с трением важна история нагружения, а не только значения
нормальных и сдвиговых нагрузок...»
М Пример. Рассмотрим следующий пример из задачника [5].
Цилиндр веса Q лежит на двух опорах А\ и А^, расположенных сим-
66 Глава 3. Равновесие твердого тела при опирании на две плоскости
Рис.2. Задача Мещерского о цилиндре в шероховатых опорах
метрично относительно вертикали, проходящей через центр
цилиндра (рис. 2). Коэффициент трения между опорами и цилиндром
равен /. К цилиндру по вертикали приложена тангенциальная
сила Т. Прямые, соединяющие центр цилиндра и опоры, составляют
угол в с вертикалью. 1) При какой величине силы Т цилиндр
начнет вращаться? 2) При каких углах в это устройство будет
самотормозящимся?
Для данного случая в системе координат A\xyz (ось у проходит
через точки контакта, ось х направлена вертикально вниз, ось z —
перпендикулярно плоскости чертежа, на читателя) имеем:
П\х = — со$9, П\у = sin в, n\z = 0,
п2х = _ cos #> n2y = _ Sin в, ri2z = 0.
Условия (3.1) предложения 1 таковы:
niyn2y = - sin2 в < 0, / > /о = ctg в.
Таким образом, при / tg в > 1 реализуется самоторможение. Это
означает, что для любой силы Т, приложенной к цилиндру, можно
указать такие положительные нормальные реакции Ni, N2 и
допустимые силы трения покоя Fi, F2 в точках, соответственно, А\, А^,
что будут соблюдаться условия (уравнения) статического
равновесия цилиндра. При этом оказывается, что силы трения покоя Fi,
4. Обсуждение результатов
67
F2 в точках А\, А2 направлены по соответствующим касательным
к цилиндру и, вообще говоря, в разные стороны, что и обеспечивает
при / > /о равновесие цилиндра при больших значениях силы Т.
Принцип, по которому обычно решают эту задачу (см.,
например, [6]), заключается в следующем. Рассматривается самое начало
движения цилиндра, которое (априори) полагается вращением
вокруг точки О (центра цилиндра) по часовой стрелке и без отрыва
от точек контакта. В этом случае в точках контакта возникают уже
силы трения скольжения, направленные строго против вращения
цилиндра, причем модули этих сил совершенно однозначно
выражаются через коэффициент трения и соответствующие нормальные
реакции. В такой ситуации из уравнений равновесия находят
выражение для силы Т, которая объявляется ответом к пункту 1)
поставленной задачи:
Если такой силы Т\ не существует (она является отрицательной),
а это происходит при
cos^T^' <4-2)
то приходят к выводу о самоторможении. Таким образом, при таком
рассуждении неравенство (4.2) является условием самоторможения.
Однако условие (4.2) означает только, что равновесие цилиндра
реализуется при любой силе Т > О и силах трения покоя в точках
контакта, которые обе направлены строго против часовой стрелки.
Если же направления сил трения покоя в точках контакта разные
(например, сила трения покоя в точке А2 ориентирована по часовой
стрелке, что можно реализовать до начала приложения силы Т), то
равновесие может быть обеспечено как с нарушением неравенства
(4.2), так и при большей силе Т > Т\ (где Т\ дается формулой (4.1)).
В таких ситуациях логичнее применять принцип, использованный
в настоящей статье. Для реализации этого принципа необходимо
составлять уравнения равновесия для тела в предположении, что
в точках контакта действуют силы трения покоя, имеющие
неопределенные (априори) направления, и только модули этих сил
стеснены неравенствами Кулона. ►
68 Глава 3. Равновесие твердого тела при опирании на две плоскости
Постановку задачи в рассматриваемом примере можно
интерпретировать как процесс постепенного («квазистатического») на-
гружения лежащего на двух опорах цилиндра касательной силой
T(t), которая меняется от нуля при t = О до, вообще говоря,
бесконечности. Задача тогда заключается в том, чтобы определить
условия, при которых цилиндр всегда будет находиться в
равновесии. Оказывается, решение этой задачи (помимо прочих условий)
зависит от начальных значений сил реакций, действующих на
цилиндр (при t = 0). Подробное изложение этого решения
содержится в книге автора [7], а также в настоящей книге на стр. 185.
Сформулируем здесь полученные результаты для случая, когда Q = 0.
Предложение 4. Пусть Q = 0, А/ > 1, А = tg#, а сила T(t)
монотонно и непрерывно возрастает от Т(0) = 0 до сю. Тогда:
1) если при t = 0 начальное состояние цилиндра является
напряженным и он находится в равновесии (т. е. при t = 0 связи в
опорах А\, А2 напряжены и мы имеем iVi(O) = iV2(0) > 0 (строго),
Fi(0) = -F2(0) = JVi(0)/A), то при всех t > 0 сохранится
равновесие при любом непрерывном изменении силы T(t) в
интервале (0, оо) и любых непрерывных законах изменения реакций
Nk(t) > 0, Fk(t), \Fk(t)\ < fNk(t), k = 1, 2,
предписываемых какой-либо реализацией односторонних связей
в опорах Аи А2;
2) если при t = 0 начальное состояние цилиндра является
ненапряженным и он находится в равновесии (Nk(0) = Fk(0) = 0,
k = 1, 2), то при t > 0 может быть либо равновесие, либо
движение, причем:
а) при выполнении (4.2) обязательно сохранится равновесие
(при указанных в п. 1 условиях для реализации связей);
б) при нарушении (4.2) обязательно (сразу) будет движение
(либо вращение цилиндра вокруг точки О, либо поворот
его вокруг точки^2 с отрывом от точки А\ и с возможным
проскальзыванием в точке А2).
Предложение 5. Пусть <2 = 0и0<А/< 1. Тогда при t = 0 в
равновесии цилиндра напряженного его состояния быть не может, и сразу
Литература к Главе 3
69
после приложения силы Т возникнет одно из движений, описанных
в п. 2.2 предложения 4, т. е. равновесия цилиндра в этом случае быть
не может.
Доказательства приведенных предложений осуществляются
непосредственной проверкой, т. е. перебором всех возможных ситуаций
при непрерывном изменении силы T(t) и сил реакций в уравнениях
равновесия. Здесь эти доказательства опущены, в силу их
громоздкости. Отметим только, что для корректности п. 1 предложения 4
необходимо соблюдение условия cos# ф //(1 + / ). □
В заключение автор хотел бы выразить свою благодарность
академикам РАН В. В. Козлову и В. Ф. Журавлеву за полезное
обсуждение полученных результатов.
Литература к Главе 3
1. Джеллетт Дж. X. Трактат по теории трения. М.; Ижевск: НИЦ
«Регулярная и хаотическая динамика»; Институт компьютерных
исследований, 2009. 264 с.
2. Розенблат Г. М. Равновесие твердого тела на плоскости с
анизотропным сухим трением // Прикладная математика и механика. 2009. Т. 73.
Вып. 2. С. 204-218.
3. Черноусъко Ф. Л. Условия равновесия тела на шероховатой плоскости //
Изв. РАН. МТТ. 1988. №6. С. 6-17.
4. Джонсон К. Механика контактного взаимодействия. М.: Мир, 1980.
509 с.
5. Мещерский И. В. Сборник задач по теоретической механике. М.: Наука,
1986. 448 с.
6. Теоретическая механика. Руководство к решению задач / Под ред.
проф. С. К. Слезкинского. СПб.: Изд-во «Политехника», 2007. 487 с.
7. Розенблат Г. М. Сухое трение в задачах и решениях. М.; Ижевск: НИЦ
«Регулярная и хаотическая динамика», 2009. 52 с.
8. Розенблат Г. М. Равновесие абсолютно твердого тела при опирании
на две шероховатые плоскости // Вопросы строительной механики
и надежности машин и конструкций. Сборник научных трудов
Московского автомобильно-дорожного государственного технического
университета (МАДИ) / Под ред. д. т.н., проф. И. В. Демьянушко. 2010.
С. 127-139.
Глава 4
К постановке задач в динамике
несвободного движения твердого тела
и парадоксы Пэнлеве
...Пэнлеве не прав, называя Кулоновы законы
«logiquement inadmissibles» (логически
недопустимыми), он, однако, прав, утверждая, что эти законы
в пределах механики твердого тела с чисто
логической точки зрения нуждаются в дополнении.
Р.Мизес [1]
Рассмотрены основные принципы постановок задач в
механике твердого тела при наличии связей (с сухим трением и без).
Основное внимание уделено предыстории начальных условий
задачи, которая должна быть корректно определена таким образом,
чтобы не требовалось введения дополнительных гипотез и
допущений, выводящих исследование за рамки динамики твердого тела
без ударов. Тогда динамика движения (и/или равновесия) твердых
тел может быть описана однозначно и без каких-либо
парадоксальных ситуаций (парадоксов Пэнлеве). Эта методика иллюстрируется
на трех известных задачах механики:
• опирание твердого тела на одну точку при наличии сухого
трения;
• движение стержня с ползунами в направляющих с сухим
трением;
• опирание твердого тела на две точки с сухим трением
(«скамейка»).
Содержание настоящей главы автора опубликовано в статье
автора [9]
1. Основные принципы
71
1. Основные принципы
Все системы материальных точек разделяются на два класса:
а) системы свободных точек, взаимодействующих между собой и
с другими точками;
б) системы несвободных (связанных) точек, взаимодействующих
между собой и с другими точками (системы со связями).
Для систем класса (а) постановка задач динамики
заключается в следующем: для произвольно заданных начальных условий
при t = О (положений и скоростей точек) определить последующее
движение, т.е. положения и скорости точек при t > 0. Эта задача
сводится к задаче Коши для систем обыкновенных
дифференциальных уравнений и при «приемлемом» аналитическом описании сил
взаимодействия имеет однозначное аналитическое решение. Здесь,
однако, возможны затруднения, связанные с соударением точек
(т.е. совпадение координат каких-либо S (S ^ 2) точек). Эти
затруднения снимаются соответствующими гипотезами и теоремами
классической теории удара, которые, конечно, имеют
ограниченную область применимости.
Для систем класса (б) затруднения появляются сразу и касаются
они способа выбора начальных условий. Это вызвано тем, что связи в
механике допускают двойственное толкование и определение. С
одной стороны, они являются некоторыми функциональными
зависимостями между координатами (и, возможно, временем и
скоростями) точек. Это удобный формально-математический метод,
который приводит к понятию обобщенных координат и
уравнениям Лагранжа (Гиббса—Аппеля и т. п. для неголономной механики).
С другой стороны, по аксиоме связей последние реализуются
соответствующими силами (силами реакций), которые призваны
обеспечивать выполнение указанных функциональных
зависимостей, и, кроме того (и это самое важное!), эти силы реакций должны
удовлетворять определенным условиям, следующим из физической
и механической сущностей рассматриваемой задачи. Например,
если мы считаем тела, взаимодействующие (контактирующие) между
собой, абсолютно твердыми, то силы реакции, реализующие эти
связи, могут быть, вообще говоря, как угодно большими. Если мы
допускаем односторонность связи (функциональная зависимость
72 Глава 4. Динамика несвободного движения твердого тела
в виде неравенства), то реакция направлена всегда в сторону схода
связи (адгезия исключается).
Отметим, что мы здесь не касаемся вопроса о реализации
связей, который рассматривался в работах [2].
Рассмотрим вначале связи класса (6i): удерживающие
(двухсторонние) идеальные связи (связи без трения). В этом случае
начальные условия задаются так, что выполнены уравнения связей,
или, если мы перейдем к обобщенным координатам, задаются (при
t = 0) начальные значения обобщенных координат и скоростей.
Тогда обобщенные координаты как функции времени и начальных
условий определяются из уравнений Лагранжа, которые, так же как
и задача Коши для систем класса (а), однозначно (как правило)
разрешимы. Заметим, что уже здесь мы предполагаем, что движение
системы при t < 0 было или состоянием покоя, или движением
по связи. В любом из этих двух случаев мы должны указать
источники, приводящие при t > 0 к изменению состояния системы,
которое было при t < 0. В частности, если при t < 0 система
покоилась и при t ^ 0 ничего не меняется (силы и другие
геометрические и механические параметры системы), то покой будет
сохраняться и при t ^ 0. Если же при t < 0 было движение по связи
и мы хотим знать, какое движение будет при t > 0, то при t = 0
мы должны брать такие начальные условия, которые являются
результатом некоторого движения по связи, реально существовавшего
в «прошлом», т. е. при t < 0!
Если же для каких-то начальных условий мы не можем
подобрать (указать) такое движение в «прошлом», то прежде чем решать
эту задачу при t > 0, нам следует сначала разобраться с тем, как
и каким образом система могла очутиться в таких начальных
условиях (например, это мог быть «заход» системы на связь, что
реализуется для односторонних при t < 0 связей, которые при t ^ 0
сразу становятся двухсторонними).
В любом случае, чтобы решать задачу дальше (при t > 0) с
этими нестандартными («парадоксальными») начальными условиями,
нам следует запастись некоторым набором допущений (гипотез),
которые будут приемлемо и правдоподобно описывать такой,
вообще говоря, ударный процесс.
1. Основные принципы
73
Заметим, что сам Пэнлеве, отвечая на критику своих
оппонентов, очень подробно описывает способы, которыми можно было бы
реализовать такие «парадоксальные» начальные условия. Иногда
эти способы являются достаточно искусственными и
хитроумными, усложняющими исходную постановку задачи и механическую
модель. Кроме того, и здесь требуется введение новых
(дополнительных) гипотез и допущений.
Используя последнее рассуждение, мы можем рассмотреть
принципы задания начальных условий для связей класса (62):
идеальные связи с трением. В этом случае силы трения создают
ненулевую работу на возможных перемещениях системы, и поэтому
для использования метода обобщенных координат Лагранжа
силы трения включают в число внешних или внутренних (активных)
сил. Связи остаются идеальными, однако введенные силы трения
зависят как от сил (нормальных) реакций связей, так и, вообще
говоря, от кинематического состояния системы в данный момент.
Отсюда следует, что выбор начальных условий в данной задаче для
ее последующего (при t > 0) решения сопряжен с еще
большими осложнениями, чем для систем класса (6i). Более того, если
силы трения являются кулоновыми (сухими), то обращение в нуль
скорости соответствующего фрикционного контакта приводит к
неопределенности, связанной с возникновением силы трения покоя,
и, как следствие, к эффекту «заклинивания» и (или) «зонам застоя».
Выходом из создавшейся ситуации является более
аккуратный выбор начальных условий, связанный с требованием того,
чтобы они (эти начальные условия) являлись результатом
некоторого предыдущего реального движения системы по связи и силами
реакций, совместимыми с физической сущностью этих связей. Если
начальные условия (по тем или иным причинам) не удовлетворяют
указанному требованию, то следует уточнить (расширить)
постановку задачи (например, приняв какие-либо допущения теории
удара с трением и т. п.). По сути, здесь речь идет о более четкой
и точной постановке задачи, рассматривающей процесс движения
диалектически, как переход от «прошлого» (t < 0) к «настоящему»
(t = 0) и затем в «будущее» (t > 0)!
Отметим еще следующее обстоятельство. Системы с трением
из-за разрывного характера силы сухого трения являются, вооб-
74 Глава 4. Динамика несвободного движения твердого тела
ще говоря, системами с запаздыванием (может быть, малым). Этот
факт и приводит к необходимости получения информации о
поведении системы в ближайшем «прошлом», т.е. при t < 0. Можно
привести несколько примеров:
1) начало движения автомобиля в момент трогания из состояния
покоя или состояния небольшого движения («раскачка»);
2) движение автомобиля в момент переключения направления его
движения с прямого на обратное (в этот момент скорость его
равна нулю);
3) буксировка автомобиля с помощью троса (ударная или
безударная) и т. д.
Заметим, кроме того, что автомобиль, колесный экипаж («робот»)
и колесная пара (колесо, в частности) являются яркими и
практическими примерами рассматриваемых задач с сухим трением.
Обсудим еще часто рассматриваемые в литературе так
называемые «нулевые начальные скорости». Если при t = 0 скорости
всех точек системы равны нулю, то мы должны выяснить, как это
произошло, т. е. что было при t < 0?! Если был покой, и значит
нормальные силы реакции, силы трения покоя, другие активные
силы и параметры системы удовлетворяли условиям равновесия, то
ясно, что покой останется и при t > 0 (конечно, если нет
источников для изменения сил или других параметров системы). Таким
образом, как при t < 0, так и при t ^ 0 ускорения точек остаются
также нулевыми.
Если же при таких начальных условиях существует еще одно
(новое дополнительное) решение при t ^ 0 с ненулевыми
(конечными) ускорениями при тех же активных силах, но с другими
нормальными реакциями и силами трения (уже не покоя, а,
вообще говоря, скольжения!), то это означает только одно: система при
t < 0 была в движении, которое при t = 0 пришло в состояние
(вообще говоря) мгновенного покоя. Если такое исходное решение
по связи реально существует, то именно оно может перейти при
t > 0 в это новое решение. Если же удается показать, что такого
исходного решения по связи не существует, то это новое
(дополнительное) решение следует отбросить и полагать, что при t > 0
система будет покоиться. Однако, возможно, что существует
исходное движение нового типа (например, «заход» на связь, «мягкий»
2. Тело, контактирующее с шероховатой плоскостью одной точкой 75
или «жесткий»), которое может быть продолжено
рассматриваемым дополнительным решением. Такая ситуация требует введение
дополнительных гипотез и допущений, усложняя исходную
постановку задачи о безотрывных движениях системы по связи.
Отметим, что «нулевые» скорости всех точек системы для
реальных движений являются, вообще говоря, труднореализуемыми
и маловероятными (уникальными) обстоятельствами. Однако для
состояния равновесия, т. е. при отсутствии движения, «нулевые»
скорости являются обязательным свойством системы!
Далее мы приводим некоторые примеры, иллюстрирующие
изложенные принципы.
2. Плоское твердое тело, контактирующее
с шероховатой плоскостью одной своей точкой
Рассматривается задача о равновесии плоского твердого тела,
опирающегося одной точкой о шероховатую плоскость с
коэффициентом трения /. Пусть О — точка контакта, в которой реализуется
односторонняя связь, С — центр масс тела, Оху — система
координат, причем Ох направлена по опорной плоскости, Оу —
по перпендикуляру к ней в сторону тела, N — нормальная реакция
плоскости, причем Nx = 0, Ny > О, Ff — сила трения (покоя или
скольжения).
Пусть при t = О все скорости точек тела равны нулю, а
приложенная плоская система активных сил удовлетворяет условиям
статического равновесия. Это означает, что система приводится
к одной силе F = (Fx, Fy) , приложенной в точке контакта О и
лежащей внутри конуса трения, т. е. выполнены условия
Fx+Ff= О, Fy + Ny = 0, Ny > О,
Из этих уравнений и неравенств мы получаем следующие условия
статического равновесия:
</, Fy<0. (2.1)
N
</•
76 Глава 4. Динамика несвободного движения твердого тела
Поставим задачу выяснить, какое движение тела будет при
t > О? Таким образом, мы хотим определить, будет ли при t > 0 и
выполнении условий (2.1) покой или возможно какое-либо
движение по связи. По терминологии Желле [8] условия (2.1) являются
условиями «возможного» равновесия, а мы хотим установить,
является ли оно также и «обязательным».
Основной результат сформулируем в виде следующей теоремы.
Теорема 1. Если:
а) при t = О скорости всех точек тела равны нулю;
б) выполнены неравенства (2.1);
в) при t < О движение тела было каким-либо безотрывным
движением по связи,
то при t > О тело будет находиться в состоянии равновесия (может
быть, неустойчивого).
Замечание 1. Условие в) теоремы означает, что рассматриваемые
начальные условия являются результатом некоторого исходного
(безотрывного) движения по связи.
Замечание 2. При невыполнении условия в) исходная задача,
вообще говоря, усложняется, а для ее решения требуются дополнительные
допущения и гипотезы.
Доказательство теоремы осуществляется перебором различных
случаев безотрывных движений (как при t < О, так и при t > 0) и
непосредственной проверкой их реализуемости. Сначала рассмотрим,
что может быть при t > 0. Обозначим (хс, ус) — координаты центра
масс С, причем, без ограничения общности, будем считать хс ^ 0,
ус ^ 0; р — центральный радиус инерции тела; га = 1 — масса тела.
1. Точка О не скользит, т. е. ао = 0, где ао — ускорение точки
О, но е Ф 0 — угловое ускорение тела. Применяя теорему
кинетического момента относительно точки О (с учетом того, что скорость
центра масс С равна 0) получим:
(р2 + х2с + у])е = 0 ^ е = 0.
Это противоречие, т. е. такого движения быть не может.
2. Тело, контактирующее с шероховатой плоскостью одной точкой 77
2. Точка О скользит, т. е. ао ф О, причем a$y = 0 (нет отрыва),
аох ф 0. Принимая за е угловое ускорение тела, запишем уравнения
динамики (при нулевых скоростях!):
a>0x ~ еус = Fx- fNa, sxc = Fy + N,
(p2 + x2c+ y])e - a0xyc = 0; (2.2)
N = Ny > 0, a = sgna0x.
Третье уравнение из (2.2) есть уравнение кинетического
момента относительно точки О, записанное с учетом того, что скорость
точки С равна нулю.
Решение системы (2.2) имеет вид
-(Fx + fvFy),
А
1 / „ р2 + х2
^kK-V" ^
р1 + х\ + ^
где
р2 + X2 + /<7ЗДС
sgna0a; = sgne.
3fc
Перебирая два варианта для a (a = +1 или <т = -1), мы получим
следующий результат (см. [6]). Если выполнены неравенства
Р2 + х2с Fx о2 + xl ,
0 < < /, -/ < -^ < < 0, (2.4)
%сУс \-Ру\ %сУс
то из состояния с нулевыми скоростями (при t = 0) возможно (при
t > 0) движение с ненулевыми и конечными ускорениями точек
тела, а именно, со скольжением точки контакта О влево (а$х < 0)
и поворотом тела по часовой стрелке (е < 0). Ясно, что других
движений (при t > 0), кроме покоя, быть не может.
Положим теперь, что (2.4) (а также и (2.1)) выполнены, и
рассмотрим различные виды исходных (при t < 0) движений по связи,
в результате которых тело могло прийти в рассматриваемое
состояние с «нулевыми» скоростями. Возможны 4 типа таких исходных
движений:
78 Глава 4. Динамика несвободного движения твердого тела
1) движение со скольжением точки О вправо
(v0x = 0, щх = а0х < 0);
2) движение со скольжением точки О влево
(v0x = 0, щх = а0х > 0);
3) движение чистого качения (vqx = 0, щх = а^х = 0);
4) состояние чистого покоя (равновесие).
Отметим, что во всех этих движениях предполагается безотрыв-
ность, т. е. положительность нормальной реакции, а все функции
и их производные рассматриваются в момент t = -0.
Покажем, что движение 1) не реализуется. Действительно,
выписывая для этого случая при t < 0 уравнение динамики, мы
получим, по аналогии с (2.3), следующие решения:
Fx(xcyc) - Fy(p2 + х\)
N
р2 + х2с + fxcyc
р2 + х2с + у2с
аох = v0x = 2 , 2 , 4 (Fx + fFy).
р2 + х2с + fxcyc
В силу неравенств (2.1) и (2.4) имеем:
Рх(ХсУс) ~ Fy(p2 + Хс) = \Fy\ ( р2 + Х2С + Т^тХсУс ) < 0,
V 1^1 /
следовательно, N < 0.
Аналогично покажем, что не реализуется движение 2). Для
него имеем:
Fx(xcyc) - Fy(p2 + х2)
N =
р2 + х2- fxcy(
с
pz + xzc + у
а<0х — Щх — ~^—х—5 ~£ (^ ~ f^y)-
р2 + х2- fxcy
с
В силу неравенств (2.1) и (2.4) здесь мы получим аох < 0. Но
для рассматриваемого движения должно быть аох > 0, т. е. имеем
противоречие.
Для исходного движения 3) мы получим, применяя теорему
моментов относительно точки О, е = 0, т. е. помимо скоростей
в рассматриваемом состоянии обнуляются также и ускорения всех
3. Задача Пэнлеве—Аппеля
79
точек тела. Тогда будем иметь состояние равновесия (может быть,
и неустойчивого), а дальнейшее исследование движения требует
дополнительной информации о силах Fx, Fy и параметрах тела.
Таким образом, справедливость теоремы при выполнении
неравенств (2.4) установлена. Если условия (2.4) нарушаются, то
исчезает дополнительное (при t > 0) движение, т. е. при t > 0 может
быть только покой. Зато появляются дополнительные
безотрывные исходные движения по связи (при t < 0), которые при t ^ 0
завершаются состоянием покоя (остановка тела). Рассмотрение
соответствующих исходных движений здесь аналогично уже
рассмотренным случаям, и мы его опускаем.
Таким образом, теорема полностью доказана. □
Аналогичная задача о движении при произвольных начальных
условиях и произвольной плоской системе активных сил
рассматривалась в работе [3].
3. Задача Пэнлеве—Аппеля [1,4]
Цитируем постановку задачи:
«...Рассмотрим две материальные точки М и М\ массы 1,
связанные невесомым твердым стержнем ММ\ длины г. Точка М
скользит с трением по неподвижной горизонтальной прямой
Ох, с которой она не может сойти, и система ММ\ движется
в вертикальной плоскости хОу, проходящей через Ох. Найти
движение, предполагая, что система находится под действием
только силы тяжести...» [4, с. 117, Т. 1].
Пусть / — коэффициент трения, N — нормальная реакция
связи, которая направлена параллельно оси Оу и может иметь
любой знак (в силу двухсторонности связи), Ff — сила трения,
направленная вдоль оси Ох, х — абсцисса точки М, в — угол
между стержнем ММ\ и осью Ох, система координат Оху выбрана
так, что ось Оу направлена вертикально вниз, а ось Ох — по связи.
Составим уравнения динамики:
2х + r(cos 6) = Ff, r(sin 6) =2g + N, (3.1)
80 Глава 4. Динамика несвободного движения твердого тела
—в= -(Ff sine-N соьв). (3.2)
Так как связь удерживающая, то мы не накладываем
ограничений на знак N, для силы сухого трения Ff принимаем формулу
Ff = -fNa, a = sgn (xN), хфО, N ф 0. (3.3)
Решая уравнения (ЗЛ)-(З.З) относительно N, 0, х, мы получим
(так же, как и у Аппеля):
DN = -(2g +re2 sine),
Dr§ = (2g + r<92 sin 0)(cos e + af sin 0), (3.4)
Dx = re2(cos e + af sin 0) + g(cos в sin 0 + <r/(l + sin2 (9)),
где
D = 1 + cos2 e + af sin (9 cos (9.
«Парадоксальные» начальные условия, описанные Аппелем,
получатся тогда, когда при t = 0 выполняется неравенство
D0 = 1 + cos2 0o - / sin 0o cos 0O < 0, (3.5)
предполагая, что 0q G (0,7г), из первого уравнения системы (3.4)
имеем
N(0) [1 + cos2 0О + / sin 0O cos 0O sgn (x(0)N(0))] < 0. (3.6)
1. Пусть ±о > 0. Тогда если JV(0) > 0, то из (3.6) получим JV(0) < 0
— противоречие. Если JV(0) < 0, то из (3.6) с учетом (3.5)
получаем JV(0) > 0 — опять противоречие!
2. Пусть xq < 0. Тогда система (3.4) имеет непротиворечивое
решение как при JV(0) < 0, так и при JV(0) > 0, т. е. два решения
(неоднозначность).
На основании приведенных рассуждений делается вывод либо
об отсутствии движения (для t > 0) при выполнении (3.5) и х(0) > 0,
либо о двузначности движения (для t > 0) при выполнении (3.5)
и х(0) < 0. Однако исследование исходных (при t < 0) движений,
которое могли бы привести систему в рассмотренные начальные
условия, приводит к следующему результату.
3. Задача Пэнлеве—Аппеля
81
!
Теорема 2.
а) Если для определенных начальных условий выполнено
неравенство (3.5) и х(0) > 0, то в рамках рассматриваемых
связей эти начальные условия нереализуемы, т. е. они не
являются результатом никакого «прошлого» (исходного)
движения и соответственно не продолжаются в «будущее» (при
t > 0). Для решения задачи с такими условиями необходимы
дополнительные предположения (гипотезы удара, упругость
связей и т. п.).
б) Если для определенных начальных условий выполнено
неравенство (3.5) и х(0) < 0, то в рамках рассматриваемых
(двухсторонних) связей эти начальные условия реализуются
двумя способами: к ним можно прийти, скользя с
трением точкой М либо по верхней, либо по нижней границе
рассматриваемой связи. Соответственно этому «прошлому»
(исходному) движению осуществляется продолжение
решения в «будущее» (при t > 0), т. е. со скольжением точки М
либо по верхней, либо по нижней границе связи.
в) Если неравенство (3.5) не выполнено, т. е. Do > 0, то в силу
(3.4) всегда (при #о £ (О?7*")) будет N < 0, т.е. движение
происходит так, что точка М скользит по нижней границе
связи. Здесь при х(0) Ф 0 движение (при t > 0) происходит
однозначно и никаких «парадоксальных» ситуаций не
возникает.
г) Если х(0) = 0, то рассмотрение всех ситуаций также
возможно, однако это достаточно громоздко и осуществляется
совершенно так же, как это сделано в статье [3].
Доказательство теоремы устанавливается непосредственной
проверкой и здесь опускается (осуществляется так же, как и в статье [3]). □
Отметим, что результаты сформулированной теоремы были
частично указаны в критических статьях Лекорню, Де Спарра, Клейна
и Прандтля (см. [1]). Однако не было сформулировано требование
о корректности начальных условий, которые должны являться
результатом какого-либо реального исходного движения по связи.
82 Глава 4. Динамика несвободного движения твердого тела
В противоположность этому Пэнлеве, отвечая на такую
критику, предлагал различного рода хитроумные способы осуществления
«парадоксальных» начальных условий (введение гибких и упругих
нитей, дополнительных сил, которые потом внезапно исчезают,
и т. п.). Ясно, что эти способы только затушевывают исходную,
естественную постановку задачи о равновесии или движении
твердого тела.
В заключении, приведем высказывание П. Аппеля то поводу
рассмотренного примера: «...Различные авторы пытались устранить
эти противоречия, допуская, что связи имеют зазор, и принимая
в расчет упругость. Но когда / достаточно велико, движения,
полученные при разных начальных условиях, могут как раз зависеть
от предположений, сделанных о характере связей, и от зазора,
которым они обладают, в то время как при / достаточно малом этой
трудности не возникает...» [4, с. 120].
Можно согласиться с этим высказыванием в том, что
касается упругости. Однако зазор в двухсторонней связи — совершенно
естественное предположение, так как трудно представить себе
механическое устройство, которое в совершенной точности реализует
связь в виде равенства. Кроме того, все приведенные рассуждения
для этого примера нетрудно перенести также и на тот случай, когда
связь в точке М является односторонней.
4. Твердое тело, опирающееся о шероховатую
плоскость двумя своими точками*
Рассмотрим задачу о равновесии (и возможном движении) твердого
тела типа «скамейки», которое опирается точками А я В о
шероховатую горизонтальную плоскость с коэффициентом трения /.
На тело действует сила тяжести, приложенная в его центре масс G,
и произвольная плоская система сил, расположенная в опорной
плоскости.
Выберем прямоугольную систему координат Axyz с началом
в точке опоры А, причем Ах направлена по отрезку АВ, длина
которого АВ = 2/, а ось Az — против силы тяжести g. Таким об-
* «Скамейка», см. [5].
4. Твердое тело, опирающееся о шероховатую плоскость 83
разом, плоскость Аху является опорной плоскостью. Пусть центр
масс G имеет координаты
xg = h, Ус = 0, zg = h > О, he (О, 21).
Используя обозначения статьи [6], примем, что проекции
главного вектора приложенной плоской системы сил на оси х я у суть:
Qi, Q2, а (Зз = Мс/1, где Мс — главный момент этой системы сил
относительно точки С — середины отрезка АВ.
Пусть в рассматриваемый момент времени t = О скорости всех
точек тела равны нулю. Требуется определить движение тела при
t > 0, в частности установить условия его равновесия.
Обозначим через N^, N5 — нормальные реакции, F^, FB —
силы трения в точках А и В соответственно, причем N^, N5
параллельны оси Az, Fa, Fb лежат в опорной плоскости Аху.
Рассматриваем безотрывные движения тела и полагаем
NA = NAz > О, NB= NBz > О,
а силы сухого трения в точках А и В подчиняются обычным
соотношениям Кулона для сил трения покоя или скольжения. В
дальнейшем используем термин «нулевое состояние» для начальных
условий с нулевыми скоростями всех точек тела.
Пусть т = 1 — масса тела, а матрица тензора инерции тела в
осях GX'y'Z' (параллельных Axyz) является диагональной:
J = diag{Jz, Jy, Jz}.
Рассмотрим какое-либо начальное безотрывное движение тела
из нулевого состояния. Обозначаем W\, w^ — проекции ускорений
точек А, В соответственно на ось Ay, w^ — общую проекцию
ускорений точек А, В па ось Ах (общую, так как длина отрезка
АВ не меняется), s = (ех, еу, ez) — вектор углового ускорения
тела в системе Axyz. В силу теорем кинематики твердого тела и
безотрывное™ движения имеем соотношения:
Тогда для ускорения центра масс G получим:
aGx = Щ, Q>Gy = wi + —(w2 - wi) - exh, aGz = 0.
84 Глава 4. Динамика несвободного движения твердого тела
Уравнения для движения центра масс G имеют вид
w3 = FAx+FBx + Qu
щ + Yi^W2 ~ Wl"> ~£xh = Fax + Fbx + ^2' (4Л)
0 = NA + NB-g.
Учитывая, что скорость центра масс G равна нулю, запишем
три уравнения об изменении кинетического момента в системе
координат Сх'у" z" (оси х\ у"', z" параллельны осям х, у, z, С —
середина отрезка АВ):
Jxex - ( w{ + tj(w2 -w{) -exh)h = 0,
hw3 = (NA-NB)l+g(ll-l), (4.2)
W2 - Wi li - I
^z—т/2 ^ aGy—1— = Рву ~ FAy + ^3*
Кроме того, в (4.1) и (4.2) мы полагаем для сил трения:
W3
Ах — J ^А i ,
yjw\ + w\
Wi
Ay J1}IA I
Jw\ + w\
?Ax + FAy ^ f Na
W3
*nr = -fNn
V wl + wl
w2
%. = -fNn
\jw\ + w\
при
при
при
w\ + w\ ф 0,
w\ + w\ = 0,
w\ + w\ ф 0,
(4.3)
F2Bx+F2By^f2N2B при w22 + wj = 0.
Определим сначала «зону застоя», т. е. условия статического
равновесия. Задача здесь следующая: определить, каким условиям
должны удовлетворять Qj (j = 1, 3), чтобы уравнения (4.1), (4.2)
и соотношения (4.3) имели решение для неизвестных FAx, FAy,
FBx, FBy, NA, NB при wj = 0 (j = T73), ex = 0.
4. Твердое тело, опирающееся о шероховатую плоскость 85
При указанных условиях имеем из (4.1) и (4.2) следующие
равенства:
g 21 — h g h
"*=2-Г- "'=2Т
FAy = ~(Яз - Qi), FBy = -^(Qi + Яз),
Fbx — —Q\ — Fax-
Используя полученные соотношения и неравенства из (4.3) для
сил трения покоя, получим:
-^f2N2A--4(Q3-Q2)2^FAx^^pN2A-l-(Q3-Q2)2,
Для того чтобы полученные интервалы для изменения Fax
имели непустое пересечение, необходимо и достаточно выполнение
двух неравенств:
-Qt - yJpNl - l-(Q2 + Q3)2 < yJf2N2 - l-(Q3 - Q2)2,
-yjpNl-^{Qi-Q2)2 < -Qi + ^Jf2N2-l-(Q2 + Q3)2,
которые эквивалентны следующему неравенству:
\Qi\< ]/f2N2A-l-(Q3-Q2)2 + ^f2N2B-l-(Q2 + Q3)2. (4.4)
Неравенство (4.4) совместно с очевидными неравенствами
\Q3 - Q2\ < 2fNA, \Q2 + Q3\^ 2fNB (4.5)
и определяют «зону застоя». В соотношениях (4.4), (4.5) мы
полагаем
g 2/ - l\ gl\
NA = - -, NB = --.
2 I 2 I
Знак равенства в (4.4) определяет границу «зоны застоя» в
пространстве параметров {Qi,Q2,Qi}- Отметим, что полученное
соотношение не совпадает с границей «области застоя», приведенной
86 Глава 4. Динамика несвободного движения твердого тела
в работе [6], где эта граница дается уравнением
1<?з1 = \JfN2A-Q\ + y/f2Nl-Ql
Далее будем решать динамические уравнения (4.1) и (4.2) при
условиях (4.3) в предположении, что скользят обе точки А я В, т.е.
w\ + wl^ о, w\ + w\ Ф 0.
Тогда уравнения (4.1), (4.2) с условиями (4.3) представляют
собой 10 уравнений для определения 10 неизвестных {w\ ,W2,w^,ex,
Na, Nb, Fax, Рлу, Fbx, Рву}, причем должны соблюдаться условия
NA > 0, NB > 0.
Введем новые переменные u\,U2,a\, a^ по формулам
w\ = щ sinai, W2 = щ sina2, w^ = Щ cosa\ = u^ cos a^.
Тогда получим следующие равенства:
Щ COS OL\ + /Na COS OL\ + fNB COS OL2 = Ql,
sinaj егщ1 1 - -у J + fNAJ +sina2f г^2^ + fNB\ = Q2,
/ 1 /Л / 1 21-h
sinai -S2-^i - /^y +sina2 e2-u2 + fNB
(4.6)
'2 ' I J \ 2 ' I
= <2з - V2—"—,
^i cosai = U2 cosa2,
1 / 2/ - h \ If h
NA = -lg—-— + рщ cosa{ J, NB = - lg- - рщ cos ax
где ei = JX/(JX + ft2), £2 = Jz/l2, p = h/l.
Уравнения (4.6) необходимо решать относительно 6
неизвестных {щ, щ, а\, (*2, Na, Nb}, причем щ >0, щ >0, Na >0, Nb >0,
aje [0,2тг], j = l,2.
Отметим, что уравнения (4.6) являются определяющими для
всех безотрывных, скользящих в двух точках А ж В, решений,
выходящих из нулевого состояния. Следуя основному принципу,
мы должны также рассмотреть безотрывные движения, входящие
4. Твердое тело, опирающееся о шероховатую плоскость 87
в нулевое состояние (т. е. при t < 0). Если такие движения
осуществляются со скольжением в двух точках А и В, то они также
определяются уравнениями (4.6), где надо заменить / на (-/), так
как силы трения Fa и Fb для таких движений направлены вдоль
векторов ускорений соответствующих точек (сонаправлены).
Покажем, как применять уравнения (4.6) для очень низкой
скамейки, т. е. при h —> 0 (тогда и /3 —> 0). Будем считать, что это —
невесомый стержень длины 2/ с двумя точечными массами mb тп2
на концах {т\ + т2 = 1), который прижимается к опорной
плоскости посредством силы тяжести. В этом случае имеем: l\ = Im^l,
Jz = mi(2m2l)2 + m2(2mil)2 = 4mim2l2, NA = rriig, NB = m2g,
E\ = 1, e2 = 4mim2.
Тогда из (4.6) получаем:
smai(miUi + fNA) + sin a2(m2u2 + fNB) = Q2,
sinai(-2mim2ui - fNA2m2) + sma2(2mim2u2 + fNB2mi) =
= Яъ- Q2(2m2 - 1).
(4.7)
Из этих уравнений получаем равенство
smai(-miUi - fNA) +sma2(m2u2 + fNB) = Q3. (4.8)
Эти уравнения можно получить и непосредственно,
рассматривая три уравнения плоского движения стержня с массами
мз = Qi +FAx + FBx,
mxwi + m2w2 = Q2+ FAy + FBy,
m2w2 - miwi = Q3+ FBy - FAy.
Используя переменные Uj, otj (j = 1, 2), отсюда получим:
щ cos ot\ = u2 cos a2 = Qi - fNA cos ot\ — fNB cos a2,
m\U\ sin ot\ + m2u2 sin a2 = Q2 - fNA sin ai - fNB sin 0:2,
7722^2 sin a2 - ШхЩ sin a\ = Q3 - fNB sin #2 + JNA sin аь
последние два уравнения дают соответственно (4.7), (4.8), а
используя первое соотношение, мы получим:
Q\u2 Q\U\ , ч
cos cl\ = , cos a2 = , Д = щи2 + f(NAu2 + NBu\).
(4.9)
88 Глава 4. Динамика несвободного движения твердого тела
Исключая аь а2 из соотношений (4.7)-(4.9), имеем следующие
два уравнения:
Q\u\ a2 _ Q\u\ Ъ2
"д2" + (mini + fNA)2 " lj "д2" + (m2u2 + /iV5)2 " lj
(4.10)
где о = (Q2 - <Эз)А b = (Q2 + Q3)/2.
Используя тождество Д = ^(^i^i + /^) + щ(т2и2 + fNB),
из (4.10) получаем соотношение
|Qi| = ^Цщ + №)2 - a2 + ^/(m2ii2 + /iVs)2 - b2. (4.11)
Отсюда мы видим, что при выполнении неравенства (4.4) для
статического равновесия уравнение (4.11) при щ > 0, и2 > 0
решений не имеет.
Этот результат был получен ранее в статье [7]. Отсутствие
движений с вращением вокруг точки А или В обеспечивается
неравенствами (4.5).
Отметим, что, меняя в (4.10) / на (-/), мы получим
уравнения для определения входящих в нулевое состояние движений,
которое, как нетрудно убедиться, имеют решения всегда, т. е. при
любых Qj (j = 1,3)! Таким образом, при выполнении условий
(4.4), (4.5) приход тела в нулевое состояние означает и полную его
остановку. Если же (4.4), (4.5) не выполнены, то полной остановки
не происходит в такой ситуации.
Рассмотрим далее случай /3 Ф 0 (h ф 0). Пусть тело
симметричное, т. е. 1\ = /. Тогда уравнения (4.6) примут вид
(щ
Щ + fNA + fNB —
u2
Q2 = sin ax I fNA + -ехщ J + sin a21 fNB + -exu2
( 1 \ / 1 \ (4.12)
Q3 = sin ax I -fNA - -е2щ I + sin a21 fNB + -e2u2
NA = -(g + /Зщ cos ai), NB = -(g - /Зщ cos ax),
щ cosai = u2 cos #2.
4. Твердое тело, опирающееся о шероховатую плоскость 89
Рассмотрим простейший случай: вся масса скамейки
сосредоточена в точке G, тогда е\ = е2 = 0 и уравнения (4.12) сводятся
к следующим. Обозначим Na = х, тогда NB = g — х, х Е (0,g).
Исключая из (4.12) ot\ и а2, получим три уравнения:
/2(g-z)2 \ /3u2 J ' /2z2 V 0«i
/3 \ щ и2
где a = (Q2 + Q3)/2, b=(Q2- Q3)/2, щ>0,и2>0,хе (0,g).
Без ограничения общности будем считать Q\ > 0, тогда должно
быть 2х — g > 0, т. е. х Е (g/2,g). Из полученных соотношений
имеем одно уравнение
Ql = ^f1 + х//2ж2"ь2 + \/'2<*-ж>2-а2' Ж(Е (!'*)•
(4.13)
Искомое движение реализуется тогда и только тогда, когда
уравнение (4.13) имеет решение при х Е (g/2,g).
Обозначим через ip(x) функцию в правой части уравнения (4.13):
гр(х) = ^^ + Vf2x2 - V + y/f2(g-xy-a\ (4.14)
Область определения функции ip(x) из (4.14) есть отрезок
g ± a /
6-^x^x*=g-- (4.15)
Ищем максимум и минимум функции tj)(x) на отрезке (4.15).
Имеем:
, 2 /2ж f(g-x) , ч
^; = - + __ * — J ys ' => 4.16
/9 ^/V - б2 V/'fe-^-e2
90 Глава 4. Динамика несвободного движения твердого тела
В силу неравенства (4.17) функция ip(x) является выпуклой
кверху, т. е. она имеет единственный максимум, который находится
из решения уравнения ip'(x) = 0, а минимум достигается на концах
отрезка (4.15). Разберем два случая.
1. Уравнение ij)'(x) = 0 не имеет корней на интервале [g/2, ж*].
Для этого в силу монотонного убывания функции ip'(x) должно
выполняться неравенство
^)U/2<0,
т.е.
р2„2
\
<о
«V
или так:
2 2 / 1 1
й+*Ч-?7гГ^Ш--?ТгГ^!) <0- (4Л8)
Р V V/V - 462 V/V - 4а2/
Тогда максимум и минимум *ф(х) достигаются на концах
отрезка (4.15):
max ip(x) = max < tp ( - ), гр(х*) >,
min ip(x) = min < ip ( - ), tp(x*) >.
2. Уравнение ijj{x) = 0 имеет корень х = ж** на интервале [g/2, ж*].
Для этого должно выполняться неравенство, противоположное
неравенству (4.18). Ясно, что корень ж** — единственный и
всегда существует, так как 1р'(х)\х=х* = —оо! Тогда имеем:
\х=х*
тах^(ж) = ^(ж ),
min tp(x) = min < tp I - ), гр(х*) >.
Итак, мы получим следующий результат.
4. Твердое тело, опирающееся о шероховатую плоскость 91
Теорема 3. Исходящие из пулевого состояния движения
существуют тогда и только тогда, когда
где
<фг = min<^( - j,^(z*) >, x* =g
a
<ф2
где
I max < tp ( - I, ip(x*) > при выполнении (4.18),
I ip(x**) при невыполнении (4.18),
х-- корень уравнения *(,) _ 0,, 6 (§,*•) ,
I : I
Замечание 3. Условие статического равновесия имеет вид (см.
неравенство (4.4))
0<Qi<V\ 2
поэтому в этих условиях теорема дает, что дополнительное движение
существует лишь тогда, когда
#**)<tf(§). #**)<Qi <<*(§)•
Замечание 4. Если Qi > ^2, то, согласно теореме, движений со
скольжениями в точках А и В, исходящих из нулевого состояния, не
существует. Если неравенства (4.5) соблюдены, то нереализуемы также
и вращения вокруг точки А или В. Физический смысл такого
эффекта заключается в том, что при больших Q\ может осуществляться
только движение с отрывом одной из опор, которые мы здесь не
рассматриваем.
92 Глава 4. Динамика несвободного движения твердого тела
Литература к Главе 4
1. Пэнлеве П. Лекции о трении. М.: Гостехиздат, 1954. 316 с.
2. Козлов В. В. Динамика систем с неинтегрируемыми связями. 1-5 //
Вестник Моск. ун-та. Серия «Математика, механика». 1982. № 3. С. 92-100;
1982. №4. С. 70-77; 1983. №3. С. 102-111; 1987. №5. С. 76-83; 1988.
№6. С. 51-54.
3. Розенблат Г. М. Движение плоского твердого тела по шероховатой
прямой // Нелинейная динамика. 2006. Т. 2. № 3. С. 293-306.
4. Аппелъ 77. Теоретическая механика. М.: ГИФМЛ, 1960. Т. 2. 487 с.
5. Жуковский 77. Е. Условие равновесия твердого тела, опирающегося
на неподвижную плоскость некоторой площадкой и могущего
перемещаться вдоль этой плоскости с трением // Собрание сочинений. Т. 1.
М.: Гостехтеориздат, 1949. С. 339-354.
6. Иванов А. 77. Условия однозначной разрешимости уравнений динамики
систем с трением // Прикладная математика и механика. 2008. Т. 72.
Вып. 4. С. 531-547.
7. Пожарицкий Г. К. Распространение принципа Гаусса на системы с
сухим трением // Прикладная математика и механика. 1961. Т. 25. Вып. 4.
С. 391-406.
8. Jellet J. 77. A Treatise on the Theory of Friction. London: Macmillan, 1872.
9. Розенблат Г. М. К постановке задач в динамике несвободного движения
твердого тела и парадоксы Пэнлеве // Вестн. Удм. ун-та. Серия
«Математика. Механика. Компьютерные науки». 2009. Вып. 2. С. 75-88.
Глава 5
О безотрывных движениях
твердого тела по плоскости
1. Движение по абсолютно
шероховатой плоскости
Рассматривается задача о движении осесимметричного твердого
тела по горизонтальной плоскости в поле силы тяжести. Контакт
тела с плоскостью является точечным, а плоскость либо абсолютно
шероховатая, либо абсолютно гладкая. Для интегрируемого случая
производится вычисление силы нормальной реакции, действующей
на тело во время его движения, а затем исследуется ее знак.
Рассматривается также вопрос о том, что происходит с телом после
того, как нормальная реакция обращается в нуль: получены
конкретные формулы, дающие однозначный ответ, оторвется ли тело
от плоскости или начнет скользить.
Результаты данного параграфа опубликованы в статье автора [8]
1.1. Постановка задачи
Пусть твердое тело вращения движется по абсолютно шероховатой
плоскости в поле силы тяжести, т. е. наложена неголономная связь,
заключающаяся в том, что скорость точки касания тела с
плоскостью равна нулю. 0*xyz — неподвижная система координат с осью
0*z, направленной по вертикали против силы тяжести, и
плоскостью ху, совпадающей с опорной горизонтальной плоскостью.
G — центр масс тела, G£ri( — система координат, которая
движется в пространстве и в теле так, что G£ все время лежит в плоскости
вертикального меридиана и перпендикулярна оси симметрии тела,
94 Глава 5. О безотрывных движениях твердого тела по плоскости
G( направлена по оси симметрии тела, Grj перпендикулярна £, £
и образует с ними правую систему координат. Пусть в — угол между
положительными направлениями оси ( и вертикалью z, <р — угол
между вертикальным меридианом G£( и какой-либо
фиксированной меридианной плоскостью тела, гр — угол между
горизонтальной касательной к меридиану ££ в точке касания тела с плоскостью
и неподвижной осью 0*х. Положение тела вполне описывается
этими тремя углами 0,<p,ip и координатами х, у точки касания.
Ясно, что для осесимметричного тела координата z его центра
масс является функцией только угла в:
z = №.
Нормальная реакция дается формулой
N=g + f'e + f"e\ (1.1)
где принято m = 1 для массы тела, а штрихом обозначается
производная по в.
Пусть p,q,r — проекции вектора угловой скорости тела на оси
системы G£ri(, а £, 7/, ( — координаты точки касания в этой же
системе. Тогда в соответствии с [1] имеем:
£ = -/(0)sin0-/'(0)cos0, т, = О,
£ = -/(0)cos0 + /'(0)sin0, '
p = ip sin в, q = —09 r - pcigO = ф. (1.3)
В работе [2] показано, что рассматриваемая задача
интегрируется в квадратурах. Для функций риг получены линейные
дифференциальные уравнения первого порядка, а функция в
определяется при помощи интеграла энергии (который есть в данной
задаче). Этот интеграл энергии определяет также область
возможных движений тела. Решение задачи осуществляется при начальных
условиях для углов 0,<p,tf и их производных по времени. В силу
симметрии тела начальные условия <р(0), ip(0) несущественны,
кроме того, учитывая соотношения (3), мы получаем следующий набор
начальных условий:
0(0) = 0<ь 0(0) = 0О, Р(0)=Ро, г(0) = г0. (1.4)
1. Движение по абсолютно шероховатой плоскости 95
Поставим следующие задачи.
Задача 1. Найти все такие наборы начальных условий (1.4),
чтобы соответствующие решения рассмотренной задачи
обеспечивали во все время движения неотрицательность
нормальной реакции N, вычисляемой по формуле (1.1).
Задача 2. Для наборов начальных условий (1.4), при которых
во время движения реакция N меняет знак, выяснить
возможность отрыва тела от опорной плоскости.
1.2. Формулировка результатов
Пусть поверхность тела, контактирующая с плоскостью, есть сфера
радиуса R, центр которой находится в точке О, лежащей на оси
симметрии. Пусть центр масс G также находится на оси симметрии.
Обозначим OG = d. Тогда в соответствии с (1.2) имеем:
f(0) = R + dcos0, £ = -R sin 0, ( = -d-R cos 0.
Следуя [1], запишем в этом случае три первых интеграла:
Apy/l - и2 + Cr I u + — J = Ah\ = const, (1.5)
г2
С 2 С( dxl
1?+1-u+a{u+r
<2
= h2 = const, (1.6)
(А + R2 + d2 + 2Rdu)62 = 2h - 2gRn + — J - S(u) ^ 0, (1.7)
где обозначено А, С — моменты инерции тела относительно центра
масс G, соответственно экваториальный и осевой; u = cos в, h\,
h,2, h — константы, определяемые начальными условиями;
S(u) = Ap2 + Cr2 + (p(-r02-
Дифференцируя по t соотношение (1.7), мы находим в и далее
из (1.1) получим N как функцию в и начальных условий задачи.
96 Глава 5. О безотрывных движениях твердого тела по плоскости
Несложно показать, что при h\ Ф О, ft 2 = 0 или h\ = 0, ft 2 ф 0
исследование сводится к исследованию кубического уравнения от и,
коэффициенты которого зависят от начальных условий и
параметров тела. Покажем, как решить задачу 1 при h\ = ft 2 = 0 . В этом
случае из (1.5) и (1.6) следует р = г = 0и движение тела
происходит так, что его фиксированная плоскость симметрии остается
вертикальной. При этом S(u) = 0 и вычисление нормальной
реакции приводит к формуле
4R2N г ? / чп 1 + <г , ч
= М-& (1 + о-)] + 2у + &6&—2~, (1.8)
g У
где
(7 = -2—, б2 = ^ + R2 + d2, a\ = 4R2 - 2Ь2 > О,
£о = Ь2 + 2dRu0, ix = b2- 2Rd, & = b2 + 2Rd, y = b2- 2dRu,
Несложное исследование функции (1.8) с учетом соотношения (1.7)
приводит к следующему результату.
Утверждение 1. Нормальная реакция из (1.8) в процессе
движения обращается в нуль только в случаях:
1) 0 < ш\ < £о _ З(^обб)1 /3 ПРИ любом a > О, причем при
a < £2/6 _ 1 обнуление происходит в колебательном режиме
(тело не успевает сделать полный оборот), а при a ^ £2/£i - 1
обнуление происходит в режиме качения (ротационном);
2) £o-3(£o£i6)1/3 < о;? < -2--3& при 0- > е*-1, где £* — корень
уравнения
w? - &£ + ЗИо66)1/3 = О
на интервале е Е [1,оо); этот корень при данных условиях
существует и является единственным; здесь обнуление
происходит в режиме качения;
оч Й .> . 2 ^ . 6 ^[+26 1
3) — - 3£2 < и\ < 00 при <т ^> — — 1.
Начальные условия, не удовлетворяющие условиям 1), 2), 3)
утверждения 1, являются искомыми и решают задачу 1.
1. Движение по абсолютно шероховатой плоскости 97
Сформулируем утверждение, касающееся решения задачи 2.
Пусть р = OG.
Утверждение 2. Пусть при t = t\ имеем N(t\) = 0. Введем
величину к по формуле
ft = -d sin01 (<9Г -6>i+), (1.9)
где 6\ = 6(t\), §i вычисляется из (1.7) при t = t\, 6^ вычисляется
из формул для регулярной прецессии Эйлера—Пуансо с
начальными условиями, которые реализовались для тела в момент t = t\.
Тогда при к > 0 происходит отрыв; при к < 0 отрыв невозможен
и допустимо только скольжение. Случай к = 0 требует
дополнительного исследования.
Доказательство основано на следующем рассуждении. Если отрыв
произошел, то при t = 11 + 0 должно быть uqz ^ 0? где uqz —
проекция ускорения геометрического центра О на вертикаль z.
Вычисляя aoz, приходим к формуле
aoz = [(е~ - е+) х р] \z,
где £~, £+ — угловое ускорение тела при, соответственно, t = t\—0,
t = t\ + 0. Вычисляя £~, £+, приходим к (1.9). □
Рассмотрим предельный случай: R —> 0. По аналогии с [3],
переходя к пределу в (1.5)—(1.7), мы получим классические уравнения
движения волчка на очень острой ножке. Здесь получен следующий
результат.
Утверждение 3. При движении волчка нормальная реакция N и
величина к из (1.9) даются формулами
— = и2— - и [аг] + -± + егго + — , (1.10)
ad рх \ рх) \ р2/
-^— = - \ш\(\ - и2)+р0гор2у1 -и20 + ар0гъ(щ - иЦ , (1.11)
где введены обозначения
С С PxPl 2 S 2 о 2 , / 2 , л2\^1
//! = —, Р2 = -г, (г = ; , &>! = -, о;2=2а;1^о + (ро + ^о) —,
бг A Pi+P2 d a
£1=ру1 — и1 + (тгощ, u = cos6, щ = соьво.
98 Глава 5. О безотрывных движениях твердого тела по плоскости
Замечание 1. Знаки функций N и к из (1.10) и (1.11) определяются
знаками квадратных трехчленов относительно и с коэффициентами,
зависящими от начальных условий и параметров тела. Эти
функции нетрудно исследовать на перемену знака в интервале и Е [0, 1).
В частности, при г0 = 0 или щ = 1 из (1.11) следует, что к < 0,
т. е. отрыва в момент обнуления нормальной реакции быть не может.
Отметим, что эффект обнуления нормальной реакции волчка
рассматривался в трактате [4, п. 208,с. 175], где утверждалось, что волчок
подпрыгнет. Как видим, это не всегда так. Кроме того, для плоских
движений (р0 = г0 = 0, т. е. к < 0) твердого тела с качением такого
рода заблуждения встречаются во многих учебниках, учебных
пособиях и задачниках по теоретической механике. Подробное обсуждение
этих вопросов приведено в [5-7].
Замечание 2. Результаты, полученные в настоящей работе, без труда
переносятся на движение тела на абсолютно гладкой плоскости.
Получаемые формулы для нормальной реакции и критерия отрыва
значительно проще. В этом случае получается такой результат. Если
N(0) > 0 и N{U) = 0, то k(U) > 0 (отрыв), а если N(0) < 0, то
я(0) < 0, т. е. отрыв происходит сразу.
Литература к п. 1 Главы 5
1. Марке ее А. 77. Динамика тела, соприкасающегося с твердой
поверхностью. М.: Наука, 1992, 335 с.
2. Чаплыгин С. А. О движении тяжелого тела вращения на плоскости //
Тр. отд-ния физ. наук О-ва любителей естествознания, антропологии
и этнографии. 1897. Т. 9. Вып. 1. С. 10-16.
3. Козлов В. В. Симметрии, топология и резонансы в гамильтоновой
механике. Ижевск: Изд-во Удмурт, гос. ун-та, 1995. 429 с.
4. Раус Э.Дж. Динамика системы твердых тел. М.: Наука, 1983. Т. 2. 543 с.
5. Розенблатп Г. М. Об одной задаче динамики твердого тела при наличии
сил сухого трения // Теоретическая механика. Сборник
научно-методических статей. М.: Изд-во МГУ, 2006. Вып. 26. С. 113-120.
6. Розенблат Г. М.О движении плоского твердого тела по шероховатой
прямой // Нелинейная динамика. 2006. Т. 2. № 3. С. 293-306.
7. Розенблат Г. М. Динамические системы с сухим трением. М.; Ижевск:
Научно-исследовательский центр «Регулярная и хаотическая
динамика», 2006. 204 с.
8. Розенблат Г. М. О безотрывных движениях твердого тела по
плоскости // Доклады РАН. 2007. Т. 415. № 5. С. 622-624.
2. О безотрывных движениях волчка на гладкой плоскости 99
2. О безотрывных движениях волчка
на гладкой плоскости
Рассматривается задача о безотрывных движениях тяжелого
волчка на гладкой горизонтальной плоскости. В случае, когда
поверхность волчка является шаровой (волчок Томсона), приведены
необходимые и достаточные условия для параметров, начальных
положений и скоростей тела, при которых его движение является все
время безотрывным. Эти условия представлены явными
аналитическими формулами, пригодными для практического использования.
Результаты данного параграфа соответствуют работе автора [4].
2.1. Уравнения движения и постановка задачи
Рассмотрим движение динамически и геометрически
симметричного твердого тела по гладкой горизонтальной плоскости в поле
силы тяжести. Тело ограничено выпуклой поверхностью вращения,
ось симметрии которой совпадает с осью его динамической
симметрии, а центр тяжести G тела лежит на этой оси.
Пусть Oxyz — неподвижная система координат, причем ось
Oz направлена по вертикали, против силы тяжести, а плоскость
Оху совпадает с опорной. Введем систему координат G£ri(, жестко
связанную с телом, начало которой совпадает с центром тяжести
тела, а оси направлены по его главным осям инерции, причем ось
G( направлена по оси симметрии. Положение тела определяется
тремя координатами х,у, z его центра тяжести G и тремя углами
Эйлера в,(р,1р, где в — угол нутации (угол между осью симметрии
G( и вертикалью Oz), (p — угол собственного вращения, <ф —
угол прецессии. В силу симметрии, координата z, представляющая
собой расстояние от центра тяжести G до опорной плоскости Оху,
является функцией только угла в:
z = f(6), (2.1)
где /(#) будем считать известной функцией угла в. Уравнение (2.1)
представляет собой голономную (одностороннюю, в случае знака
неравенства) связь в данной задаче. Таким образом, в случае
безотрывного движения тела его положение (конфигурация)
определяется пятью обобщенными координатами {х,у,в, <p,ip} и связью
(2.1). Начальными условиями при изучении движения, следова-
100 Глава 5. О безотрывных движениях твердого тела по плоскости
тельно, является набор
{х(0), у(0), 0(0), <р(0), ^(0), х(0), у(0), 0(0), ф(0), ф(0)}.
Внешними силами, приложенными к телу во время его
безотрывного движения по плоскости, являются: 1) сила тяжести rag,
направленная вертикально вниз и приложенная в его центре
тяжести G\ 2) сила нормальной реакции N, направленная вертикально
вверх и приложенная в точке контакта тела с опорной плоскостью.
Поэтому, полагая в дальнейшем га = 1 для массы тела, имеем
следующее уравнение для движения центра масс по вертикали:
z = N-g.
Отсюда, учитывая (2.1), получим для силы нормальной реакции N:
N = g + f"(0)(e)2+l-f'(0)[(e)2]', (2.2)
где штрихом мы обозначаем дифференцирование по 0.
Следуя [1], запишем функцию Лагранжа в данном случае:
L = ^[(x)2 + (y)2 + (A + f'2)(ey + A^)\m2e + C&+ipcos9)2]-gf,
(2.3)
где А = В — главные центральные моменты инерции тела
относительно осей G£, Gr)\ С — главный центральный момент инерции
тела относительно оси G(. Из (2.3) следует, что ж, y,<p,tp —
циклические координаты, т. е. имеем следующие четыре интеграла:
Х=рх, У=Ру,
Aip sin2 в + С(ф + ф cos в) cos в = pu (2.4)
С(ф + 1р cos в) =р2,
где рх, ру, р\, р2 — константы, определяемые начальными
условиями. Без ограничения общности можно предполагать, что рх=Ру = ®,
т. е. центр тяжести G движется только по вертикали. Кроме того,
в данном случае имеется еще пятый интеграл — интеграл энергии,
который имеет вид (функция Гамильтона)
Рх& +PyV+Pii>+ Р2Ф + -гтО -L = H, (2.5)
2. О безотрывных движениях волчка на гладкой плоскости 101
где Н — константа полной механической энергии. Интеграл (2.5),
с учетом (2.4) и высказанных предположений относительно рх, ру,
приводится к такому виду:
Из (2.6) мы находим следующее уравнение для функции 6:
p = 2hl-lgf-P(u)
А + (Я2 '
Р\и) = ~ТГл тГ> и = cos (9, hx=H - — = const.
A\l — Uz) 2C
(2.7)
Отметим, что константа h\ в соотношении (2.7) определяется
равенством
2ft! = (A + [fm2)el + Р(щ) + 2gf(90)9
90=9(0), 90 = 9(0), щ = со$в0,
которое с необходимостью следует из (2.7) при t = 0.
Из (2.7) следует, что область возможных движений по углу в
определяется неравенством
2gf(e)+P(u)-2hl^0, (2.9)
где fti дается формулой (2.8).
Таким образом, для изучения безотрывного движения тела
необходимо задать начальные условия
{в(0),9(0),ф(0),ф(0)}, (2.10)
по которым определяются, в соответствии с (2.4) и (2.8), константы
(параметры) р\, р2, fti, а затем уже решать дифференциальное
уравнение (2.7) в области возможных движений (2.9). Пользуясь тем, что
параметры ф(0), ^(0) линейно и однозначно (при 0(0) Ф 0,7г)
выражаются через параметры р\,р2, мы можем вместо набора начальных
значений (2.10) использовать такой набор начальных условий:
{0(0), 0(0),рь ft}.
(2.11)
102 Глава 5. О безотрывных движениях твердого тела по плоскости
В настоящей статье решается следующая задача.
Найти все такие наборы начальных условий (2.11) (или же (2.10)),
чтобы при всех 0, удовлетворяющих неравенству (2.9) (т.е. из
области возможных движений), нормальная реакция,
определяемая уравнениями (2.2) и (2.7), являлась неотрицательной
величиной.
Решение этой задачи определяет область безотрывных движений
в пространстве параметров (2.11) (или же, соответственно, (2.10)).
Замечание 1. Явное интегрирование уравнений движения тяжелого
симметричного волчка на гладкой горизонтальной плоскости
восходит к С. Д. Пуассону, А. Курно, В. Пюизье и Ф. Клейну Подробный
библиографический список этих работ приведен в книге [1].
Замечание 2. Задача об определении области параметров
безотрывных движений волчка рассматривалась в статье [2] для некоторых
частных случаев задания начальных условий.
Замечание 3. Отметим, что начальные условия (2.10) (или же (2.11))
являются «наблюдаемыми», в отличие от задания в качестве
начального условия константы полной механической энергии Н, которая,
вообще говоря, трудно «наблюдаема» в реальных условиях.
Обсуждение этих вопросов содержится в учебнике [3].
2.2. Формулировка результата для сферического волчка
Аналитические результаты в решении поставленной в п. 1 задачи
удается получить для сферического тела (волчок Томсона, или «тип-
топ»). В этом случае, следуя [1], имеем:
/(#) =R-dcose,
f'(0) = d sinfl,
f"(9) = d cos 0,
где R — радиус сферической поверхности волчка, d —
расстояние от центра тяжести G до геометрического центра сферической
поверхности волчка. Для упрощения записи дальнейших выкладок
2. О безотрывных движениях волчка на гладкой плоскости 103
введем безразмерные время и параметры по формулам:
/g ^r 2h 1 рх „ р2
T = tA/-, 2hi
a
gd'
Pi
dy/gd
P2
dJgd
(2.12)
Далее знак ~ будем опускать, а дифференцирование по т также
обозначать точкой. Тогда формула (2.7) принимает вид
9 2h + 2u - P(u) . . (Pi - Piu)2
*= A+i-* ■ '*=cose' ^=Угг' (2ЛЗ)
где h = h\ - R = const определяется формулой
2h = (A + l- Mq)0q + -P(mo) - 2tt0, «0 = cos 6>0. (2.14)
Область возможного движения (2.9) дается неравенством
Ф(«) = Р(и) - 2м - 2h < 0, M = cos0€ [-1,1]- (2.15)
Вычислим нормальную реакцию JV, используя (2.2) и (2.13). Имеем
из (2.2) в данном случае:
.. 1 . Н.(й\2
N= 1+«Г--(1-и2)
Из (2.13) получим:
(pi - p2u)(upi - р2)
dO2 _ 1
~2du~~S
1
4(1-и2)2
+
S2
6ta
2h + 2u-
(2.16)
(^l-^2«)2'
" 4(1-и2) .
?
S = ii + l-tr >0.
Подставляя последнее выражение в (2.16) и используя выражение
Д2
для 0 из (2.13), находим:
N = S-l{u\A2-plP2)+u[2hA4plHl+A)pl]^A+l)(A2-p^
Таким образом, неотрицательность нормальной реакции N
обеспечивается неравенством
<р(и) = a2u + a\u + ао ^ О,
(2.17)
104 Глава 5. О безотрывных движениях твердого тела по плоскости
где обозначено:
a0 = (A+l)(A2-pip2), 01 = 2hA2+pi+(l+A)pi а2 = A2-Plp2.
Основной результат содержится в следующей теореме.
Теорема. Для безотрывного движения сферического волчка при
начальных условиях (2.11) необходимо и достаточно соблюдения
следующего неравенства:
Ф(гг*)^0, (2.18)
где Ф(^) дается формулой из (2.15), а щ Е [—1,1] — формулой
Явное выражение условия (2.18) имеет вид
(А + 1- u])6l + Р(щ) - 2щ <:
р]-р] + л/А ЦА2 - pip2)
Fl ^2 _± PIF2) 2 20
2А р2+^2 + Л/д
где Р(и) определяется из (2.13), а А из (2.19).
Доказательство сформулированной теоремы приведено в
следующем п. 2.3.
М Пример. Положим 0О = 0, щ = 0 (во = ±тг/2). Тогда
неравенство (2.20) принимает вид
2^-Pm)^ + 2A+Pm) Q
Aipi+pj + VA) ' У }
В силу положительности знаменателя дроби неравенство (2.21)
эквивалентно следующему двойному неравенству:
-(А2 + 2А)^р1р2^А2.
Таким образом, область безотрывных движений в пространстве
параметров (р\,р2) ограничена двумя гиперболами: 1) р\р2 = А ;
2) VxVi — — (А + 2А), причем вне второй гиперболы отрыв
происходит не в начальный момент, а вне первой — в начальный момент
2. О безотрывных движениях волчка на гладкой плоскости 105
(нормальная реакция становится отрицательной уже в начальный
момент времени). ►
Если #о = 0, ^о Ф 0? то> как нетрудно показать, неравенство (2.20)
приводит к результату, полученному для этого случая в статье [2].
Замечание. Из формул (2.12) следует, что при d —>- 0 (центр тяжести
совпадает с геометрическим центром волчка) неравенство (2.20)
выполнено заведомо при любых начальных условиях.
2.3. Обоснование результата
Доказательству теоремы из п. 2.2 предпошлем следующие три
леммы.
I 7 ~7 '
Лемма 1. Пусть рх ф р2 и функция Ф(^) задается формулой
из (2.14). Тогда график функции Ф(^) является выпуклым книзу
и справедливы следующие утверждения:
1. Если 2hA > ръ то уравнение Ф(гг) = 0 имеет на отрезке
[-1, 1] два корня щ < 0, щ > 0, и область возможных
движений задается неравенствами щ ^ u ^ и2.
2. Если 2hA ^ pi, то уравнение Ф(^) = 0 имеет на отрезке
[-1, 1] два корня щ ^ и2, и область возможных движений
задается неравенствами 0<^i ^и ^ и2 ^ 1 при щ > 0 или
-1 < щ < и < ^2 < 0 при гг0 < 0.
Доказательство леммы 1 следует из соотношений
Ф(+1) = +оо, Ф(-1) = +оо,
v2 - 2Ah (2-22)
Ф(ио) = -(А + 1- и])в1 < О, Ф(0) = ^—А .
Кроме того, нетрудно установить выпуклость книзу графика
функции Ф(^) на отрезке [—1, 1]. Действительно, несложные
вычисления приводят к следующим формулам:
}_<№_ _ (Р\ ~Piu){p\u -р2) _
2du~ A(l - и2)2
Ш = Ж^у W+pl){l + Зи2) ~ 2р^{и3 + 3^ •
106 Глава 5. О безотрывных движениях твердого тела по плоскости
Квадратичная форма по переменным рх, р2 в выражении для
второй производной является положительно определенной, так как
выполнено условие Сильвестра
(1 + Зи2)2 > и2(3 + и2)2 & 1 + Ъи > \и\(3 + и2).
Последнее неравенство эквивалентно неравенству
(i-M)3>o,
выполненному при и Е (— 1, 1). Таким образом, Ф^2 ^ 0, и
выпуклость доказана.
Если Ф(0) < 0, то, в соответствии с соотношениями (2.22),
имеет место случай 1), а если Ф(0) > 0, то — случай 2) леммы.
Лемма 1 доказана. □
I Лемма 2. Если функция <р(и) из (2.16) имеет нуль на интервале |
I (-1, 1), то она является монотонной на этом интервале. I
L I
Доказательство леммы 2. Корни квадратного уравнения <р(и) = О,
в соответствии с (2.16), даются формулами
а\ - 4а22(А + 1)
Отсюда следует, что при существовании корня обязательно будет
выполнено неравенство
^- > VXTl> 1. (2.23)
С другой стороны, производная квадратичной функции Ф(гг) меняет
знак именно в точке и* = —а\/(2а2), которая, в соответствии с
неравенством (2.23), лежит вне интервала (-1, 1). Лемма 2 доказана. □
I -—2 I
Лемма 3. Пусть при Р\^Р2, Щ,Щ — корни уравнения Ф(^) = О
на отрезке [—1, 1]. Тогда для безотрывного движения необходимо
и достаточно соблюдение следующих неравенств:
<р(щ) > 0, <р(и2) > 0. (2.24)
2. О безотрывных движениях волчка на гладкой плоскости 107
Доказательство леммы 3 следует непосредственно из утверждений
лемм 1, 2. Действительно, если <р(и), а значит и N, обращается в нуль
на интервале (—1, 1), то, в соответствии с леммой 2, эта функция
является монотонной на этом интервале, и выполнение неравенств
(2.24), очевидно, является необходимым и достаточным условием
безотрывного движения на отрезке [^ь^]- Если же <р(и) не
обращается в нуль на интервале (—1, 1), то выполнение (2.24) также
является необходимым и достаточным условием безотрывного
движения на отрезке [щ, ^]- Лемма 3 доказана. □
Доказательство теоремы. Пусть щ (к = 1, 2) — корень уравнения
Ф(^) = О на отрезке [-1, 1] (при рх ф р2 эти корни существуют,
в соответствии с леммой 1). Тогда имеем равенство:
*(«*) = iPlA-P2U*]2 - 2uk -2h = 0. (2.25)
А{\ - ulk)
В соответствии с леммой 3, для безотрывного движения необходимо
и достаточно соблюдения неравенств
фк) = (и* + А + \){А2 - Plp2) + щ [2hA2 + р\ + (А + 1)^] > О,
к = 1,2. (2.26)
Выразим 2h из (2.25) и подставим в (2.26), получим:
(р(ик) = (А + \-и\)
j 2 /2 2\ ^к 1 Н~ ^ь
1 + (Pi +Plh J " Р№\ 2
1-Щ 1 - Щ
>0.
(2.27)
Из (2.27) следует, что для безотрывного движения необходимо и
достаточно соблюдения неравенств
Х(Щ)>0, к =1,2,
Х(и) = -и2(А2 + PiP2) + u(pl + р\) + {А2 - Plp2).
Для функции х(и) из (2.28) имеем:
X(-1) =-(Pi + Р2)2 < О,
хЫ) = (pi - pi)2 > о-
Следовательно, функция xiu) заведомо имеет корень на интервале
(-1,1). Нетрудно видеть, что этот корень и = щ дается формулой
108 Глава 5. О безотрывных движениях твердого тела по плоскости
из (2.18). Второй корень квадратного уравнения х(и) = 0, для
которого перед радикалом в выражении (2.18) стоит знак «+», по модулю
(как это нетрудно установить) больше 1. Таким образом, функция
х(и) обладает следующим свойством:
Х(и) < О, если u e [-1, щ),
Х(и) ^ 0, если u e [щ,1].
Покажем, что для выполнения неравенств (2.28) необходимо
и достаточно, чтобы Ф(^*) ^ 0, как это утверждается в
формулировке теоремы. Действительно, функция Ф(^), в соответствии
с леммой 1, обладает следующими свойствами:
Ф(гг) > 0, d^/du < 0, если u G [-1, ^i),
Ф(гг) > 0, d^/du > 0, если и G (и2, 1], (2.30)
Ф(гг) < 0, если и Е (щ, щ).
Тогда, если Ф(^*)<0, то, в соответствии с (2.30), будет щ Е
G (щ, U2), и по первому из неравенств (2.29) в этом случае получим
Х(щ) < 05 т-е- (2.28) при к = 1 нарушается. Если же Ф(^*) > 0,
то в результате несложных вычислений мы убеждаемся, что d^/du
при и = щ является отрицательной величиной, а поэтому, в
соответствии с (2.30), имеем щ G [—l,^i), а тогда второе из
неравенств (2.29) влечет заведомое выполнение неравенств (2.28).
Теорема полностью доказана. □
Литература к п. 2 Главы 5
1. Маркеев А. П. Динамика тела, соприкасающегося с твердой
поверхностью. М.: Наука; Гл.ред. физ.-мат. лит., 1992. 336 с.
2. Розенблат Г. М. Метод определения параметров безотрывного движения
волчка на гладкой плоскости // Нелинейная динамика. 2008. Т. 4. № 1.
С. 87-98.
3. Журавлев В. Ф. Основы теоретической механики. 3-е изд., перераб. М.:
Физматлит, 2008. 304 с.
4. Розенблат Г. М. О безотрывных движениях волчка на гладкой
плоскости // Известия РАН. Механика твердого тела (МТТ). 2010 (в печати).
3. Метод определения параметров движения волчка 109
3. Метод определения параметров безотрывного
движения волчка на гладкой плоскости
Рассматривается задача о движении осесимметричного твердого
тела по горизонтальной плоскости в поле силы тяжести. Контакт
тела с плоскостью является точечным, а сама плоскость —
абсолютно гладкая. Для известного и интегрируемого случая
(симметричное тело) производится вычисление силы нормальной реакции,
действующей на тело во время движения, а затем исследуется
ее знак. В некоторых случаях удается получить простые формулы
для силы нормальной реакции (полином второго порядка), а затем
выписать аналитические условия, которым должны удовлетворять
начальные данные и параметры тела, обеспечивающие его
безотрывное движение.
Результаты данного параграграфа опубликованы в работе
автора [14].
3.1. Постановка задачи и уравнения движения
для гладкой плоскости
Пусть динамически и геометрически симметричное твердое тело
движется по гладкой горизонтальной плоскости в поле силы
тяжести. Предположим, что тело ограничено выпуклой
поверхностью вращения, причем ось симметрии поверхности тела совпадает
с осью его динамической симметрии, на которой расположен центр
тяжести тела. 0*xyz — неподвижная система координат, причем
ось 0*z направлена по вертикали, против силы тяжести, а
плоскость 0*ху совпадает с опорной плоскостью. Пусть G — центр
масс тела, a G£ri( — система координат, жестко связанная с телом
и направленная по его главным осям инерции, причем ось G(
направлена по оси симметрии тела.
Положение тела описываем тремя координатами x,y,z его
центра масс G и тремя углами Эйлера 0,<p,ip, где в — угол нутации
(угол между осью симметрии G( и вертикалью Oz), <p — угол
собственного вращения, гр — угол прецессии. В силу симметрии
координата z является функцией только угла 0, т. е.
z = f(0), (3-1)
где /(#) будем считать известной функцией в. Уравнение (3.1)
является голономной связью в данной задаче. Таким образом, дви-
110 Глава 5. О безотрывных движениях твердого тела по плоскости
жение системы описывается пятью обобщенными координатами
{х,у,(р,гр,в}. Поэтому начальными условиями для движения тела
является набор:
{х(0), у(0), 0(0), <р(0), ^(0), х(0), у(0), 9(0), ф(0), ф(0)}.
Внешними силами, приложенными к телу во время движения,
являются: сила тяжести, направленная вертикально вниз, и сила
нормальной реакции, направленная вертикально вверх. Поэтому
имеем уравнение движения центра масс по вертикали, полагая
га = 1 для массы тела:
z = N-g.
Учитывая соотношение (3.1), получим:
f'e + f"e2 = N-g,
где штрихом обозначаем дифференцирование по в. Таким образом,
имеем следующее выражение для силы нормальной реакции:
N=g + f'9 + f"e1. (3.2)
Для получения уравнения для 9(t) выпишем, следуя [1],
функцию Лагранжа в данном случае:
L=^(x2 + y2)+l-(A + f,2)0^ + ^ASin20i>2 + ^C(<p + i>cos0)2-gf,
(3.3)
где А = В — моменты инерции тела относительно осей G£ и Gtj,
С — момент инерции относительно оси G(. Из (3.3) видим, что
х, y,<p,ip — циклические координаты, т. е. имеем интегралы:
х=рх, У=ру, С(ф + 1р cos в) =р2,
A sin2 в ф + С(ф + ф cos в) cos в = A sin2 в ф + р2 cos в = р\,
где px,Py,P2,Pi — константы, определяемые начальными
условиями. Без ограничения общности можно предполагать рх = ру = О,
т. е. центр масс G движется только по вертикали. Используя
полученные соотношения и интеграл энергии, который в данном случае
имеет место, мы получим следующее уравнение для в:
■ 2 2h-2gf-P(u)
9 ~ A + (f>y ' (3'4)
3. Метод определения параметров движения волчка 111
D/ ч (Pi - P2U)2
где Р(^) = —— j—, гг = cos#, h — константа энергии,
определяемая формулой
h = 1-{А + [/'(0о)]2)0о + ^Ы +g№), Щ = cos0o. (3.5)
Из уравнения (3.4) следует, что область возможных движений
по углу в определяется неравенством
2gf(9) + P(cos9) ^2h. (3.6)
Учитывая, что х,у, <p,ip — игнорируемые координаты и х(0) =
= 2/(0) = 0, мы получаем следующий набор начальных условий
данной задачи:
{9(0),9(0),ф(0),ф(0)};
или, так как ф и ip, в соответствии с циюгическими интегралами,
выражаются через в, р\, Р2, имеем такой набор начальных условий:
{9(0),9(0),РиР2}. (3.7)
Поставим задачу: найти все такие наборы начальных условий
(3.7), чтобы при всех в, удовлетворяющих неравенству (3.6),
нормальная реакция, определяемая уравнениями (3.2) и (3.4),
являлась положительной величиной. Это и будет обеспечивать
безотрывное движение твердого тела по плоскости. Кроме того,
необходимо ответить на вопрос о том, что происходит с телом
после того, как нормальная реакция обратилась в нуль (если
такое обнуление возможно).
Замечание. Явное интегрирование уравнений движения тяжелого
симметричного волчка на гладкой горизонтальной плоскости
восходит к С. Д. Пуассону, А. Курно, В. Пюизё и Ф. Клейну. Подробный
библиографический список приведен в [1], а также в недавно
вышедшей монографии [2].
3.2. Формулировка и обоснование результатов
Дифференцируя (3.4) по t, мы получим в как функцию в.
Подставляя полученное выражение в (в) и в2 (в) из (3.4) в (3.2), имеем
112 Глава 5. О безотрывных движениях твердого тела по плоскости
следующее выражение для нормальной реакции N:
(А + (f)2)2 ■ N = [gA(A + f) + 2Af"(h - gf)] +
Pi - Piu
A{\ - u2)
-Af"(pi-P2u) + f'(A + f'2)
l2^sm9(plu-p2)
1-й2
. (3.8)
Полагая в этом выражении 9 = #о и требуя, чтобы N(9q) > О, мы
получим следующее необходимое условие безотрывного движения:
*//л2 , /о sin fl0(pi - р2щ)(рхщ - р2)
g + m+'^^r^Z '>*> (3-9)
которое, конечно, не гарантирует безотрывность движения для всей
области, даваемой неравенством (3.6).
Полный анализ безотрывных движений удалось сделать для
сферического тела (волчок Томсона). В этом случае имеем:
/(#) = R + d cos 0, /' = -d sin 0, /" = -d cos 0,
где R — радиус сферы, d — расстояние от центра масс G до
геометрического центра сферы. В этом случае формула (3.8) упрощается
и приобретает вид
(А + d2 sin2 в)2 • N = Xa0u2 - axu + а0(А + 1),
а0 = A2g + dpip2, ai = 2h0dA + d [\p\ + (1 + A)^]
d2
A = —-, и = cos0,
A
2h0 = 2gdu0 + (A + d2 sin2 0o)#o + " ^
(3.10)
Причем область возможных движений дается неравенством,
которое следует из (3.6):
Щи) = 2gdu + ^A\~P2Ul - 2h0 ^ 0, |и| ^ 1. (3.11)
А(1 — и1)
Таким образом, нахождение области возможных движений сводится
к исследованию кубического неравенства
Ф^и) = 2gAdu(l - и2) + (рх - р2и)2 - 2h^A(\ - и2) ^ 0, (3.12)
3. Метод определения параметров движения волчка 113
а безотрывность движения обеспечивается квадратным
неравенством из (ЗЛО)
(р(и) = uqXu — a\u + ао(А + 1) ^ 0. (3.13)
Несложное исследование неравенства (3.12) приводит к
следующему утверждению.
Утверждение 4.
1) Пусть 2hoA > р\. Тогда уравнение *i(^) = 0 на интервале
(-1, 1) имеет два корня щ, щ, причем щ < 0, щ > 0, и
область возможных движений задается неравенствами
щ ^ и ^ и2.
2) Пусть 2hoA ^ р\. Тогда уравнение Ч*\(и) = 0 на интервале
(-1, 1) имеет два корня щ, щ, а область возможных движений
задается неравенствами
Ъ <П\^п^щ^\ при щ > 0,
-1^^1^гг^^2^0 при щ < 0.
Исследование неравенства (3.13), обеспечивающего
безотрывность движения, приводит к следующему результату.
Утверждение 5. Пусть начальные условия (3.7) и параметры тела
таковы, что
(р(щ) > 0, (р(и2) > 0, (3.14)
тогда (3.13) выполнено во всей области допустимых движений и
отрыва не происходит. А если
<р(щ) < 0 или (р(и2) < 0, (3.15)
то обязательно происходит отрыв (возможно, и в начальный момент
времени!). В (3.14) и (3.15) <р(и) дается формулой (3.13), щ, щ —
корни кубического уравнения ^\{и) = 0 на интервале [-1, 1], где
^\{и) определяется формулой из (3.12).
Доказательство утверждения 5 следует из специфического вида
функции <р(и) из (3.13). А именно, точка и = щ = a\/(2\ao)
является экстремумом функции <р(и), причем при ао > 0 это точка
114 Глава 5. О безотрывных движениях твердого тела по плоскости
минимума, а при ао < 0 это точка максимума. Корни уравнения
<р(и) = 0 даются формулами
Щ,4 = Щ ±
п\
А + 1
1) Если |гг*| < д/(А+ 1)/А, то уравнение <^(гг) корней не имеет,
и выполнение (3.14) необходимо и достаточно для
безотрывное™ движения.
2) Если |^*| ^ Л/(А+ 1)/А, то можно утверждать, что функция
if (и) монотонна на интервале [-1, 1] (точка и = щ перемены
знака производной лежит вне интервала [-1, 1]!). Тогда
неравенства (3.14) опять являются необходимыми и достаточными
для безотрывное™ движения. □
Рассмотрим теперь некоторые частные случаи задания
начальных условий.
Утверждение 6. Пусть начальные условия таковы, что р\ = р2
^0^0 (плоско-параллельное движение тела). Обозначим
ц2 = e20(A + d2sm2e0).
0,
1) Если соблюдено неравенство
2gd
1 / 1+А
^ - 1 +
2 V А
(3.16)
то движение происходит без отрыва.
2) Если соблюдено неравенство
Щ +
Е-
2gd
1/ 1+А
>2 1 + ^Г
(3.17)
то обязательно происходит отрыв. Причем если щ < 0, то отрыв
происходит при щ Ф щ. А если щ > 0, то при
2gd
1/ 11+А
<i «о + ;—
2 \ Щ X
3. Метод определения параметров движения волчка 115
отрыв происходит при щ Ф щ, а при
2gd
^ 1/ 1 1 + А
> :% + —
2 \ Щ Л
отрыв происходит при и = щ, т-е- в начальный момент.
Доказательство утверждения 6 следует из исследования неравенств
(3.11) и (3.13), которые в данном частном случае имеют вид
Ф(и) = 2gd( u
Щ
2gd
<0,
<p(u) = A g\
«-2«U + —J+ —
Объединение неравенств (3.14) и (3.15) из утверждения 5
приводит к неравенству (3.16). При выполнении же неравенства (3.17)
происходит ротационное движение тела (т. е. областью возможных
движений по и является весь интервал [—1, +1]). Кроме того, при
выполнении (3.17) имеем (р(-1) > 0, <р(+1) < 0, т.е.
происходит отрыв тела. Остальные неравенства устанавливаются
непосредственной проверкой. □
Утверждение 7. Пусть начальные условия таковы, что #о = 0 (Рх>
Pi, Щ — произвольны). Введем безразмерные параметры q\, q2
по формулам
Р\ Р2 ЙА
л/2/jLo y/2fio
Обозначим
/30 = arctg (щ) = arctg (cos 0O), /30 G
7Г 7Г
4' 4
Введем в пространстве параметров {qu q2} полярные координаты
(<7, <р) по формулам
v <h
Тогда отрыва не будет при
(К дЧ р\ч>),
116 Глава 5. О безотрывных движениях твердого тела по плоскости
где функция р ((р) определяется по формулам
А<Р) = {
рШ
1 + ещ
\(е - щ)
е(1 + 2А - 2Ati§) + щ yjl + 4А(1 -е2)(1 + А- Ли§)"
^ л 37Г
при /30<(р<--/30, тг+ /30<(р< у~Аь
/>2(*>)
А(^0 - е)
7Г
при - -/30 <^<7г + /30,
Зтг
■Po<<p^2ir, 0 ^ ^ </30,
где £
sin 2(p - щ
I - щ sin 2(p
Если же q2 > р2((р), то происходит отрыв, причем при р2
Рг{Ф)
отрыв происходит в начальный момент (и = щ), а ПРИ Р = />i(^)
отрыв происходит при и фщ.
Замечание. Результаты утверждения 7 представлены на рис. 1, 2, где
заштрихованы области начальных условий, при которых движение
является безотрывным. Границы этих областей состоят из кривых
типа 1 и типа 2 (см. рис. 1,2), имеющих прямолинейные асимптоты:
qi/q2 = tg/30 = щ и q\/q2 = ctg /?0 = 1Mb При этом кривая типа 2,
которая в полярных координатах имеет уравнение р = р2(<р), в
прямоугольных координатах qx, q2 может быть представлена в виде
(qi ~ u0q2) q
1
-42
1-Цр
2\щ
т. е. является гиперболой.
Кривая типа 1 напоминает гиперболу, однако в прямоугольных
координатах qx, q2 является кривой 4-го порядка. Нетрудно видеть,
1
что прямые q\ = u§q2 и q\ = —q2 являются асимптотами этих кривых.
щ
Отметим также, что внутри заштрихованной области на рис. 1, 2
лежит кривая типа 3, уравнение которой
р\(ч>)
1 +ещ
Х(е - щ)
(1 — «g),
3. Метод определения параметров движения волчка 117
Обнуление и отрыв
в начальный момент
Обнуление и отрыв
не в начальный момент
Обнуление и отрыв
не в начальный момент
/
Ь
Обнуление и отрыв
Qi = <h
1-\-£Щ AiE+AzUq
1 + sup
\(щ - е)'
Ai = 1 + 2Л - 2А^;
А2 = у/\ + 4А(1 -е2)(1 + А - Aug);
/Зо = arctguo > 0.
Рис.1. Области начальных условий, при которых происходит безотрывное
или отрывное движение (щ > 0)
или, в прямоугольных координатах,
(q\ - UoQi) q\ qi = ——
V Щ J 2Хщ
Это — гипербола регулярных прецессий [1].
Доказательство утверждения 7 основано на следующем факте. При
#о = 0 уравнение 9\(и) = 0 заведомо имеет корень и = щ, а тогда
118 Глава 5. О безотрывных движениях твердого тела по плоскости
Обнуление и отрыв V^VvX/
в начальный момент г^^й^д
J^y^K^1^1
^*^**^L^>£^*~s^'^ >/ j^\y^T jr\ j^\
^^7/yy
Обнуление и отрыв \^
не в начальный момент
ф'
Обнуление и отрыв
не в начальный момент
yo^/W^ © р = Pi (<л>
sr^<^^>^>4^ (2) р2 = р/Ы
/^ \K\J Обнуление и отрыв
VJCI в начальный момент
V* 1 N
VV\ N
/?0 = arctg wft < 0
Рис.2. Области начальных условий, при которых происходит безотрывное
или отрывное движение (щ < 0)
функция Фх(ге) из (3.12) имеет вид
Фх(и) = 2gdA(u0 - и) [и2 - 2v2u - (1 + 2щи2 - а)],
где обозначено
Р\Р2
2 Pi + Р2 ~ 2и0Р\Р2
4//0(1 - ul)
Рассмотрим функцию
/*0
//о = gdA.
х(и) = и — 2v и — (1 + 2^о^ - 0")-
Тогда при %(^о) < 0 областью движений является интервал
Щ ^ \и\ ^ щ, а при х(ио) > 0 — интервал щ ^ и ^ щ, где щ —
меньший по модулю корень уравнения х(и) — 0;
3. Метод определения параметров движения волчка 119
Далее применяем утверждение 5, т. е. проверяем неравенства
<р(щ) > 0 и <р(щ) > О для безотрывности. Нарушение одного из этих
неравенств (т. е. при <р(щ) < О или (р(щ) < 0) приводит к отрыву
Для сокращения выкладок удобно ввести безразмерные
переменные <7i и ^2 и полярные координаты, как это указано в
формулировке. Тогда получим соотношения:
а0 = Hodl - +q2sma),
( V / 2 Л
a\ = Hod I 2щ -\ j (1 + A - Хщ - щ sin a) I,
V 1^ ^o /
i*i
^o sin a
1
щ
q sin a, a = 2<p.
x(u) = u - 2u
q2(l - Uq sin a)
о ■
2(1 - «g)
„2
9 щ - sin a
«4——+ 1
i - «о
Х(щ) = -(1 - «о)
1
%
[2щ - sina(l + tt0)],
iV(«) =
= (1 + A + Am2)
- u
\ Q2
L i-«o
+ <7 sin a
(l + A - A^0 - ^o sin a)
iV(tio) = (1 + A - Atio) J ^ + у^2 [(1 + tig) sina - 2u0] 1.
Используя полученные выражения и высказанные выше
соображения, мы получаем результат утверждения 7. Подробные
выкладки здесь опускаются. □
Утверждение 8. Пусть начальные условия таковы, что
0О = 0, ^(0) = е, ф(0) = щ,
где 0, ij), <p — углы Эйлера. Таким образом, в начальный момент
мы задаем угловую скорость собственного вращения о;о и угловую
скорость прецессии е. Тогда в начальный момент нормальная
реакция вычисляется по формуле
(А + d2 sin2 в0) • N(90) =
120 Глава 5. О безотрывных движениях твердого тела по плоскости
= ш0ще [(1 + А - А«о)(1 - u])dCA] + A2g(l + A - \u20) +
+ е2 • Ad(l - uo) [С(I + А - Xul + 2Аг*о) - Ащ(1 + A - Л«о)] •
(3.18)
Из формулы (3.18) следует, что при ще < О всегда можно выбрать
wq > О настолько большим, что iV(0o) < 0, т. е. тело сразу начинает
подпрыгивать на плоскости.
Доказательство утверждения 8 устанавливается непосредственной
проверкой с использованием формул (ЗЛО) и соотношений
рх = ф cos в + ^(^4 sin2 0 + С cos2 0), р2 = С(ф + ^ cos в),
где р\, Р2 — константы. □
Рассмотрим теперь вопрос о движении тела, которое происходит
после обнуления нормальной реакции. Пусть О — центр сферической
поверхности волчка, которая контактирует с плоскостью в точке Р.
Предположим, что при t = t \ нормальная реакция обратилась в нуль
(N(ti) = 0), причем ti >
Несправедливо следующее утверждение.
Утверждение 9.
1) Если t\ — точка локального минимума функции N(t), то при
t > t\ продолжается безотрывное движение тела по плоскости.
2) Если t\ не есть точка локального минимума функции N(t)
(т.е. в любой малой ее окрестности происходит смена знака
функции N(t) с плюса на минус), то происходит отрыв тела
от плоскости и для вертикальной координаты точки О
справедливы соотношения:
01 =0(*i+O)<O, z0(ti+0) = R,
zo(tl+0) = z0(tl+0) = 09 (3.19)
■i"0(*i+0) = -ft sin 0! -0i > 0,
где
i)\t! + 0) sin2 0! + в\ + ^ J d, 0i G [0, тг).
3. Метод определения параметров движения волчка 121
Доказательство утверждения 9 основано на следующих
рассуждениях. Если нормальная реакция в процессе движения обнуляется,
то в соответствии с утверждением 5 обязательно нарушается
неравенство (3.14), т. е. мы имеем:
Причем непосредственной проверкой, используя формулы из (3.10),
можно показать, что:
щ ^ у (1 + А)А > 1 при а0 > 0,
щ ^ - J(1 + А)А < -1 при а0 < 0.
Основываясь на формуле (3.10) для нормальной реакции N и
полученных неравенствах, можно утверждать, что N обнуляется в такой
точке щ = cos 6\, для которой
_ dN
du
<0,
U — U\
причем неравенство строгое. Далее имеем:
dN
dt
t=ti ~l
1) Если t\ — точка локального минимума N(t), то N\,_, = 0,
NU > °-
Тогда (cos9)I = 0, (cos^)l < 0, т.е. t\ — точка макси-
мума функции cos в, и движение пойдет в ту сторону, где cos в
уменьшается, а нормальная реакция строго положительна. Ес-
ли N\t=t = 0, то рассуждения аналогичны с привлечением
производных высших порядков.
2) Если 11 не есть точка локального минимума и функция N(t)
в окрестности точки t = t\ меняет знак с плюса на минус, то
мы имеем
N\t=tl=n(cose)\t=t < 0 -^ (cos0)\t=t > 0.
122 Глава 5. О безотрывных движениях твердого тела по плоскости
Ясно, что продолжение контакта тела с плоскостью в
дальнейшем невозможно и происходит отрыв. Предположим, что отрыв
произошел, и покажем его корректность, т. е. возрастание
вертикальной координаты zo(t) точки О при t > t\. Движение тела при
t ^ 11 + 0 (т. е. отсутствие контакта с плоскостью) представляет
собой свободное падение точки G в поле силы тяжести и регулярную
прецессию вокруг постоянного вектора кинетического момента
тела относительно центра масс G, приложенного в точке G (случай
Эйлера—Пуансо). В момент отрыва сохраняются координаты точек
тела и их скорости. Покажем, что сохраняется также и величина 9,
т. е. 9(t\ — 0) = 9(t\ + 0). Действительно, выпишем уравнение
кинетического момента относительно оси Gtj:
-А9 + (~P2ip sin 9 + Аф2 sin 9 cos 9) = -Nd sin 0,
где р2 = С(ф+1р cos в). Отсюда видно, что при N = 0 это уравнение
переходит в соответствующее уравнение для регулярной прецессии
случая Эйлера—Пуансо, а значит, 9 сохраняется. Далее, так как
при t = t\ + 0 имеем zq = —g и сохраняются координаты, скорости
и величина 9, то имеем:
zo(t) = zo(t) - d cos 9 = R,
zQ(t) = zG(t) + d sin 9 • 9 = 0, (3.20)
z0(t) = 2g(*) + d cos 9 • 02 + d sin (9 • 6* = 0.
Вычисляем 9(9) и 9(9) при £ ^ £i +0, т. е. для регулярной прецессии
Эйлера—Пуансо:
й2 - М. _ (ft2 ~ ff2 COS 9f
A2 A2 sin2 9 '
(Й2 COS 0 - P2)(fl2 - Pi COS 9)
в= A2 sin3 0 '
где
ft 2 = Alp sin 0 + £>2 cos 9 = pi = const,
Л2 = A292 + ^2^2 sin2 (9 = const.
Формулы (3.21) получены из соответствующих формул для случая
Лагранжа движения твердого тела вокруг неподвижной точки при
3.21
3. Метод определения параметров движения волчка 123
устремлении в последних расстояния между неподвижной точкой
и центром масс к нулю. Подставляя (3.21) в формулу для £0 из (3.20)
и используя равенство zq = —g при t^t\+0, получаем:
z0 = -g+^-^^cos6-—)d.
Дифференцируя по t последнее равенство, получаем:
-z'Q = 1 ,/2 (cosfl) > 0 при t = ti+0,
a A2
так как было показано, что при N\ < 0 имеем (cos0)\ > 0. Ана-
логично производится доказательство в том случае, если 7V | ^^^ = 0.
Тогда берем первую ненулевую производную нечетного порядка
функции N(t), которая должна быть отрицательной (для того чтобы
N(t) в точке обнуления меняла знак). На этом доказательство
утверждения завершено. □
Замечание 1. Первое из уравнений (3.21) можно проинтегрировать
и получить формулу:
h2Pi hiy/hl+p$-hl :
h\+p22 h\+p22
cos [0(т)\ = 2 2 Н 2 2 sin (о;ог + /30), т = t-tu
где о;0 = — v//ii + j?2' a константа /30 выбирается из начального
условия cos [0(0)] = cos в\. Тогда для координаты 20(т) мы получим
следующее выражение:
gr" (La cos ДД £а r -,
z0(r) = Я + — + ( —— ) т - -р-j [sin (щт + /30) - sin/30J
2
hiy/hl+pl-h]
где L = 5 5 . Используя это выражение, можно вычис-
лить момент г = ri, когда z0(ti) = i2, т. е. момент приземления тела
и начало ударного процесса.
Замечание 2. Вопросы схода с неудерживающей голономной связи,
которых касается утверждение 9, в общем виде рассматривались в
работах [3-12].
Замечание 3. Некоторые результаты о безотрывных движениях
твердого тела по абсолютно шероховатой плоскости приведены в работе [13].
124 Глава 5. О безотрывных движениях твердого тела по плоскости
В заключение автор выражает свою признательность
академикам РАН В. Ф. Журавлеву, Д. М. Климову, Ф. Л. Черноусько за
полезные критические замечания, которые способствовали
улучшению настоящей работы, а также профессору А. П. Иванову и всем
участникам семинаров в Институте проблем механики РАН.
Литература к п. 3 Главы 5
1. А. П. Маркеев. Динамика тела, соприкасающегося с твердой
поверхностью. М.: Наука, 1992. 335 с.
2. Борисов А. В., Мамаев И. С. Динамика твердого тела. Гамильтоновы
методы, интегрируемость, хаос. М.; Ижевск: Институт компьютерных
исследований, 2006. 576 с.
3. Аппелъ П. Теоретическая механика. М.: ГИФМЛ, 1960. Т. 11. 516 с.
4. Остроградский М. В. Общие соображения относительно моментов сил //
В сб.: Остроградский М. В. Избранные труды. Изд-во Академии наук
СССР, 1958. С. 205-229.
5. Суслов Г. К. Теоретическая механика. М.; Л.: ГИТТЛ, 1946. 655 с.
6. Жуковский И. Е. Теоретическая механика. Собрание сочинений. М.; Л.:
ГИТТЛ, 1949. Т. 5. С. 596-600
7. Козлов В. В., Трещёв Д. В. Биллиарды. Генетическое введение в
динамику систем с ударами. М: Изд-во МГУ, 1991. 168 с.
8. Дерябин М. В., Козлов В. В. К теории систем с односторонними связями
// Прикладная математика и механика. 1995. Т. 59. Вып. 4. С. 531-539.
9. Дерябин М. В. Общие принципы динамики и теория односторонних
связей // Вестник Московского университета. Серия 1. «Математика,
механика». 1998. № 1. С. 53-59.
10. Иванов А. П. О безударных движениях в системах с неудерживающими
связями // Прикладная математика и механика. 1992. Т. 56. Вып. 1. С. 3-15.
11. Иванов А. П. Об уравнениях движения неголономной системы с не-
удерживающей связью // Прикладная математика и механика. 1985.
Т. 49. Вып. 5. С. 717-723.
12. Иванов А. П. Динамика систем с механическими соударениями. М.:
Международная программа образования, 1997. 336 с.
13. Розенблат Г. М. О безотрывных движениях твердого тела по
плоскости // Доклады РАН. 2007. Т. 415. № 5. С. 622-624.
14. Розенблат Г. М. Метод определения параметров безотрывного
движения волчка по гладкой плоскости // Нелинейная динамика. 2008. № 1.
С. 87-98.
Глава 6
О движении тела, опирающегося
на шероховатую плоскость тремя точками
Рассматривается задача о движении тяжелого твердого тела,
опирающегося на шероховатую горизонтальную плоскость тремя
своими точками. Контакты в точках опоры предполагаются
односторонними и подчиняются закону сухого трения. Изучается
динамика возможных движений такого тела под действием сил тяжести
и сухого трения. В случае плоского тела удается получить интегралы
уравнений движения.
Результаты настоящей главы опубликованы в работе автора [8].
1. Описание модели, вывод уравнений движения
и постановка задачи
Рассмотрим твердое тело, опирающееся своими точками А^ (к = 1,3)
на шероховатую горизонтальную плоскость 7Г (см. рис. 1). Будем
считать, что при своем движении в поле силы тяжести тело не
отрывается от опорной плоскости 7г, т. е. совершает плоскопараллельное
движение. Ниже получим уравнения движения такого тела в единой
системе координат и замкнутом виде, удобном для теоретического
(а также численного) исследования.
Введем систему координат Oxyz, жестко связанную с твердым
телом, причем точка О — центр масс тела, ось Oz направлена
вертикально и против силы тяжести, а плоскость Оху, соответственно,
параллельна опорной плоскости 7г. Везде далее, если не оговорено
иное, индекс к принимает значения 1, 2, 3. Пусть г& = ОА^ —
радиус-вектор опорной точки А^, r& = (xk, Ук, —h)T, где h — высота
126 Глава 6. Движение тела, опирающегося на плоскость тремя точками
Рис. 1. Тело на трех опорах
возвышения центра масс О тела над опорной плоскостью 7Г.
Обозначим далее v, ш, соответственно, векторы скорости центра масс О
и угловой скорости тела. Тогда, в силу условия безотрывное™
рассматриваемого плоскопараллельного движения тела, мы получим
соотношения
Y=(vx,vy,0)T, u; = (0,0,a;)T.
В опорной точке Ак реализуется сила реакции R^ такая, что
R& = N& + Fu, где Nk = (0, 0, Nk)T — нормальная реакция (Nk > 0),
F& = (Fkx> Fky, 0) — касательная реакция (сила трения) опорной
плоскости, причем соблюдаются следующие соотношения закона
Амонтона—Кулона:
Ы
если \к ф 0;
коэффициент трения, \к
(l.i)
если
v* = 0,
где / — коэффициент трения, \к = v+ [u; x r&] — скорость опорной
точки Ак. Отметим, что при \к = 0 направление силы ¥к является,
1. Описание модели, уравнения движения и постановка задачи 127
вообще говоря, неопределенным (сила трения покоя). Для
скорости \к точки Ак в проекциях на оси системы Oxyz имеем формулы:
Vkx
vx -шук, vky = vy +шхк,
W = \fu2k
Vkz
о,
ukx
+ v
(1.2)
ky
Предполагая для массы тела m = 1 и используя формулы (1.1),
(1.2), запишем уравнения теоремы о движении центра масс О тела
в проекциях на оси системы Oxyz:
U)Vi,
-/Е"*-
Щк
vv + ojv
'x = -fJ2N>
ы '
vv + шхк
ы
(1.3)
о = Е^*-*>
где |vjfe| дается формулой из (1.2), причем мы предполагаем, что
|vjfe| Ф 0 (случаи v& = 0 должны быть рассмотрены отдельно).
Для проекций кинетического момента тела на оси системы
Oxyz, в условиях рассматриваемого безотрывного
плоскопараллельного движения, имеем следующие формулы:
К{
Ох
-JxzM, К{
Оу
JyZ&, К{
Oz
JbJ,
(1.4)
где Jxz, Jyz — центробежные моменты инерции, J — осевой
момент инерции тела (относительно оси Oz) в системе координат
Oxyz. Используя формулы (1.1), (1.2) и (1.4), запишем уравнения
теоремы об изменении кинетического момента тела относительно
его центра масс О в подвижных осях Oxyz:
-JxzLO + Jyz&
т • т 2
-JyZLO — JxzLO
E"*
- E"*
Jo,* = -fY,Nh
где |vfc| дается формулой из (1.2).
Vk-fh
xk- fh
vy + wxk
Ы
(1.5)
(xkVy - VkVx) + u{x\ + yl)
m\
128 Глава 6. Движение тела, опирающегося на плоскость тремя точками
Полученные шесть уравнений (1.3), (1.5) определяют шесть
неизвестных функций vx, vy, и, N\, N2, Щ, причем относительно
функций Nk эти уравнения являются алгебраическими
(линейными), и, кроме того, мы предполагаем, что N^ > 0, v& Ф 0.
В [статье рассматривается задача исследования возможных
(безотрывных) движений тела, описываемых системой
дифференциально-алгебраических уравнений (1.3), (1.5), а также случаев, которые
допускают явное интегрирование.
Более точная постановка задачи здесь следующая. Пусть
заданы начальные условия
Vx(0) = Vxo, М°) = %ь Ц0) = щ. (1.6)
Требуется определить такие функции vx(t), vy(t), cv(t) и
неотрицательные функции Nk(t), которые удовлетворяют начальным
условиям (1.6) и уравнениям (1.3), (1.5). Отметим, что мы не задаем
начальные условия для нормальных реакций Nk(t) — они
определяются начальными условиями (1.6) и требованиями реализуемости
безотрывного движения тела.
2. Вращательные движения тела вокруг
вертикальной оси, проходящей через центр масс
Следуя работе [1], рассмотрим сначала вращательные движения
тела вокруг его центра масс. Пусть 0\ — проекция точки О (центра
масс) на опорную плоскость 7Г. В данном пункте выясним
возможность существования чисто вращательных движений вокруг оси
0\Oz, проходящей через центр масс. Везде далее, если не оговорено
иное, будем предполагать, что точка 0\ лежит строго внутри
контура, ограниченного опорным треугольником А\А2А^. Это условие —
вполне естественно и, как нетрудно установить, обеспечивает
статическую уравновешенность рассматриваемого опирания тела.
Начальные условия (1.6) здесь такие:
vxo = vy0 = 0, Ц0) = и>0 ф 0.
Справедливо следующее утверждение.
9 9
Предложение 1. Если Jxz + Jyz ф 0 (несбалансированное тело), то
вращательные движения тела вокруг центра масс не реализуются.
2. Вращательные движения тела вокруг вертикальной оси 129
Доказательство. При рассматриваемом вращательном движении
справедливы равенства
v, = v, = 0, vkx = -.qk^ak,
Vky = uqkcosak, \\k\ = uqk,
где обозначено:
xk = qk cos ak, yk = qk sin ak, qk = yj x\ + ^. (2.2)
Подставляя формулы (2.1) в уравнения (1.3), (1.6), мы получаем
следующую систему уравнений:
^2Nksinak = 0, ^2Nkcosak = 0, ^Nk=g, (2.3)
-Jxzwm + Jyzu2 = ^2 Nk(Qk sin ak - fh cos ak), (2.4)
-Jyzu)m - Jxzu2 = - ^2 Nk(qk cos ak + /Л sin a^> (2*5)
Ju0 = -f^2Nkqk. (2.6)
Система (2.3) для рассматриваемого случая (расположения точки
0\ строго внутри опорного треугольника) однозначно определяет
положительные нормальные реакции Nk, которые к тому же
являются постоянными величинами. Действительно, будем нумеровать
вершины А\, А2, А3 опорного треугольника против часовой
стрелки (если смотреть с положительной части оси Oz). Тогда (так как
точка 0i лежит внутри треугольника AiA2A3) будут выполняться
неравенства
О < 73 = &2 - <*i < 7Г,
О < 71 = а3 - а2 < тг, (2.7)
71 +72 = «3 -OL\ > 7Г.
Непосредственное решение линейной системы (2.3) приводит
к формулам
лг sin7i лг sin (7i+72) лг sin 7з ,0fiv
iVi=g^—, N2 = -g , N3=g—^-, (2.8)
где обозначено:
Д = sin 7i + sin 7з - sin (71 + 73) > 0.
130 Глава 6. Движение тела, опирающегося на плоскость тремя точками
Неравенства (2.7) обеспечивают положительность реакций,
даваемых формулами (2.8). Отметим, что значения реакций Щ,
получаемые из решений уравнений (2.3), определяются соответствующими
разностями углов а&.
Далее, из уравнения (2.6) следует, что о;* является
отрицательной константой, т. е. о; — квадратичная (убывающая) функция
времени. Следовательно, левые части уравнений (2.4) и (2.5), как
и их правые части, должны быть константами, что возможно только
при Jxz = Jyz = 0. Таким образом, предложение 1 доказано. □
Замечание 1. Предложение 1 не совпадает с соответствующим
утверждением из [1] (см. предложение 8 на стр. 202 статьи [1]), где
утверждалось, что в некоторых (двух) случаях вращательные движения вокруг
центра масс несбалансированного тела могут быть реализованы.
Замечание 2. Можно показать, что предложение 1 справедливо
также и тогда, когда проекция центра масс тела на опорную плоскость
лежит вне контура треугольника AiA2A3.
Замечание 3. Отметим, что при Jxz = Jyz = 0 (сбалансированное тело)
и Ч\ = 42 = Чъ, как показано в [1], вращательное движение тела
реализуется. Можно также показать единственность такого вращательного
движения при рассматриваемых начальных условиях.
3. Поступательные движения тела
В данном пункте, следуя работе [1], рассмотрим поступательные
движения тела, т. е. движения с нулевой угловой скоростью.
Пусть начальные условия (1.6) таковы, что
vQ = v(0) = ^vl0 + v2y0^0, w(0) = w0 = 0. (3.1)
Справедливо следующее утверждение.
Предложение 2. Если начальные условия для тела подчиняются
соотношениям (3.1), то:
1) при f <fo = J/yJxz + Jyz может быть реализовано
единственное поступательное движение тела (при постоянных и
положительных нормальных реакциях), причем в любом направлении
на опорной плоскости 7г;
3. Поступательные движения тела
131
2) при / > /о существуют два направления на опорной плоскости п,
по которым поступательное движение не является единственным
решением системы уравнений (1.3), (1.5), причем эти
направления находятся из уравнения
J
т
где a — угол, образуемый вектором начальной скорости центра
масс с осью 0\Х.
Jyz sin a + Jxz cos a = — — , (3.2)
Доказательство. Вычислим г;*(0), г^(0), о>*(0), Nk(0), исходя из
уравнений (1.3), (1.5), при начальных условиях (3.1). Обозначая
х = Y^ Nk*k, Y = Y1 NkVk,
мы получим из (1.3), (1.5), (3.1) следующие соотношения:
^(0) = -fg—, vy(0) = -/g-f-, w (0) = -/^— ,
-Jxzu>*(0) = Y- fgh^9 -Jyzu>*(0) = -X + fgh^. (3.3)
Обозначая далее sin a = vyo/vo, cos a = vxo/vq , мы получим
следующую систему линейных уравнений для X,Y:
Х№,*.«)-г|Л. «.« + £!=-*»*.«,
J
7
Определитель этой системы равен
1)1
(3.4)
X [ Jyzsina + — \ - Y(Jyz cos a) = Jgft cos a.
A= [ Jyz sin a + Jxz cos a + - ) -.
Если этот определитель не равен нулю при любом а (что имеет
место при / < /о), то система (3.4) имеет единственное
решение X = fgh cos a, F = fgh sin a, для которого (как это следует
из уравнений (3.3)) будет обязательно о;Ф(0) = 0, т.е. по любому
направлению может быть реализовано единственное
поступательное движение тела (если, конечно, положительны получаемые при
132 Глава 6. Движение тела, опирающегося на плоскость тремя точками
этом нормальные реакции). Тем самым доказан п. 1 предложения 2.
Если же этот определитель Д равен нулю (что может иметь место
лишь при выполнении неравенства / > /о и соотношения (3.2)),
то, применяя теорему Кронекера—Капелли, можно показать, что
система (3.4) имеет бесконечно много решений, одно из которых
реализует чисто поступательное движение, а другие могут
реализовать непоступательные движения, для которых о;*(0) Ф 0.
Предложение 2 доказано. □
Замечание 1. Для сбалансированного тела (при Jxz = Jyz = 0)
реализуется только п. 1 предложения 2, т. е. поступательные движения
тела возможны во всех направлениях опорной плоскости 7Г и
являются единственными такими движениями при начальных условиях (3.1)
и любых коэффициентах трения.
Замечание 2. Предложение 2 дополняет соответствующее
предложение статьи [1], где утверждалось, что поступательные движения тела
реализуются в любом направлении на опорной плоскости 7Г, однако
не была исследована единственность такого движения при начальных
условиях (3.1).
Замечание 3. Нормальные реакции, которые возникают при
рассмотренном в предложении 2 поступательном движении тела,
удовлетворяют системе уравнений
^2Nk0xk = fgh cos a, ^2Nk0yk = fghsina, ^2Nk0=g. (3.5)
4. Движения тела, близкие к поступательным
В данном пункте, следуя работе [1], рассмотрим движения тела
с малыми начальными угловыми скоростями.
Пусть начальные условия из (1.6) задаются следующим
образом:
vx(0) = v0, vy(0) = 0, и(0) = щ^0, (4.1)
где величина о;о достаточно мала. Точнее это предположение
можно сформулировать, следуя [1], так. Пусть q$ = max{gi, q^, q{\,
Qk = \/ xl +Ук- Вводим безразмерный параметр е = о>о9оМь
который будем предполагать достаточно малым (по сравнению с 1).
4. Движения тела, близкие к поступательным 133
Во всех дальнейших вычислениях будем пренебрегать членами
порядка е . Для начальных условий (4.1) подсчитаем значения
ускорений г;*(0), г^(0), ш*(0) с точностью до членов порядка е . Из
уравнений (1.3), после простых преобразований, мы получим
следующие выражения:
vl(0)*-fg-e-Y, ^(O)^-^o-e-I, У>*=& (4.2)
где обозначено:
х = Y1 NkXk> Y = Y1 N^^
Далее, из уравнений (1.5) аналогично получим:
Ju)9(0)^fY-e^-^2Nkx2k9
2_ Jh
(4.3)
-Jxzu>*(0) + Jyzut « Y - eJ—X, (4.4)
-Jyzu*(0) - Jxzu20 и -X + fgh. (4.5)
Рассмотрим случай сбалансированного тела, т.е. Jxz = Jyz = 0.
Справедливо следующее утверждение.
Предложение 3. Вектор скорости центра масс тела при указанном
почти поступательном движении отклоняется в сторону,
противоположную начальному вращению.
Доказательство. В данном случае из уравнений (4.4), (4.5) получаем:
Х = ^2 Nkxk = fgh, Y = ^2 NkVk = e^^. (4.6)
Присоединяя к полученным уравнениям (4.6) третье уравнение
системы (4.2), мы видим, что их решения Nk отличаются от
соответствующих решений Nko системы (3.5) при a = 0 на величины
порядка е.
Далее, пусть a — угол наклона вектора скорости центра масс v
к подвижной оси Ох, а <р — угол, образуемый этой подвижной осью
с неподвижной осью в опорной плоскости (т. е. и = <£>*). Тогда угол,
образуемый вектором v с неподвижной осью, равен <ф = a + <р,
134 Глава 6. Движение тела, опирающегося на плоскость тремя точками
а второе из уравнений системы (4.2) при a = 0 (в соответствии
с начальными условиями (4.1)) принимает вид
, • , .ч ,. fgh
v(a + if ) = vip = —e
Qo
(здесь было использовано первое из уравнений системы (4.6)).
Вспоминая что знак е, согласно введенному обозначению,
совпадает со знаком о;о, мы получаем результат предложения 3. Таким
образом, предложение 3 доказано. □
Замечание 1. Результат предложения 3 аналогичен результату из [2],
который был получен для плоского тела, опирающегося на две точки
(симметричный стержень). Однако там описанное отклонение
вектора скорости зависело от его начальной ориентации по отношению
к стержню (начальная скорость должна была быть направлена вдоль
стержня). Как видим, здесь подобный эффект имеет место при
произвольной начальной ориентации вектора скорости центра масс.
Замечание 2. Полученный результат без труда распространяется и на
случай несбалансированного тела, если в уравнениях (4.4), (4.5)
пренебречь величиной си0, как величиной второго порядка по отношению
к е. В этом случае, как показано в [1], в зависимости от значений
центробежных моментов инерции угловая скорость тела может как
убывать по абсолютной величине, так и возрастать.
5. Произвольные движения тела
В настоящем пункте рассмотрим некоторые более сложные
движения твердого тела, которые могут происходить при о; Ф 0. Введем
новые переменные v,a, p по формулам
v
vx = vcosa, vy = vsma, p=— • (5.1)
to
Кроме того, для координат точек опорного треугольника
будут использоваться обозначения (2.2) из п. 2. В обозначениях (5.1)
v — модуль скорости центра масс тела, a — угол наклона вектора
5. Произвольные движения тела
135
этой скорости к подвижной оси Ох, р — расстояние от точки
0i (проекции центра масс на опорную плоскость) до текущего
положения мгновенного центра скоростей опорного треугольника.
Уравнения (1.3)и(1.5)изп.1в переменных р, w, а, после простых
преобразований, принимают следующий вид:
up* = -ко ^2 п* [(J ~ <&)р ~ (J ~ P2)Qk sin/За] > (5-2)
шра = -ш2р - / ^2 nkQk cos /3k, (5.3)
u* = -ко ^2 n*(** " Pte sin A)' (5-4)
w2z2 = 2n* [**«* cos ph - fh(p - qk sin/3k) -
-k0zi(q2k- pqk sin(3k)], (5.5)
-u2Zl = ^2,nk [skqk sin/3k - fhqk cos ft -
- koZ2(ql ~ PQk sin^jfe)], (5.6)
X>*=*> (5.7)
где введены следующие обозначения:
щ = JVife/^, 5jfe = \Jp1 + q\~ 2pqk sin pk, /3k = ak - a,
^i — Jxz sin a - J^ cos a, Z2 = J^ cos a + Jyz sin a,
(5.8)
fco = //J > 0.
Уравнения (5.5)—(5.7) являются алгебраическими и определяют
значения нормальных реакций Nk как функций от р, ш, а, которые
затем подставляются в уравнения (5.2)-(5.4), являющиеся
дифференциальными для определения изменения переменных р, ш, а как
функций времени. При этом необходимо должны быть соблюдены
неравенства Nk > 0.
Рассмотрим вопрос о существовании вращательных движений
тела вокруг вертикальной оси, не проходящей через его центр масс
и опорные точки. В этом случае р = ро = const Ф 0, а = const, т. е.
мгновенный центр скоростей опорного треугольника зафиксирован
и не совпадает ни с точкой 0\ (проекцией центра масс на опорную
плоскость), ни с одной из опорных точек Ак. Справедливо
следующее утверждение.
136 Глава 6. Движение тела, опирающегося на плоскость тремя точками
Предложение 4. Для сбалансированного тела (при Jxz = Jyz = 0)
не существует его вращательных движений вокруг вертикальной оси,
не проходящей через центр масс или опорные точки.
Доказательство. При указанных предположениях уравнения (5.2)-
(5.7) имеют вид
^2Пк [p°(J ~q2^ ~(J ~ pfa*sin а] = °>
f^2nkqk cos /Зк = -u2po,
u* = -ко У2 nkQk(qk ~ Ро sin Д),
v^ (5-9)
2^ nk [skqk cos/3k - fh(p0 - qk sin /3k)] = 0,
^2 nk{skqk sin/?* - fhqk cos/3k) = 0,
Все коэффициенты при пк в системе (5.9) (а следовательно, и
при Nk) являются, при рассматриваемых предположениях,
постоянными величинами. Последние три уравнения системы (5.9)
однозначно определяют постоянные нормальные реакции Nk (если,
конечно, определитель этой системы не равен нулю, что
свидетельствует о неединственности или несуществовании решения).
Согласно третьему уравнению системы (5.9), функция oo(t) является
линейной функцией времени, а это противоречит второму
уравнению системы (5.9), в котором левая часть постоянна, а правая
является переменной (кроме случая ро = 0, рассмотренного ранее
в п. 2). Предложение 4 доказано. □
Замечание. Утверждение предложения4, по-видимому, является
справедливым также и для несбалансированного тела, однако автору не
удалось найти достаточно убедительного доказательства этого факта.
Далее приведем случай, в котором уравнения движения (5.2)-
(5.7) допускают интегрирование в квадратурах. Справедливо
следующее утверждение.
Предложение 5. Пусть тело представляет собой пластину,
параллельно движущуюся по горизонтальной плоскости на трех точках опоры,
5. Произвольные движения тела
137
т. е. Jxz = Jyz = 0, h = 0. Тогда если ее центр масс лежит в центре
описанной вокруг опорного треугольника окружности, причем qk = ^fj
и начальное условие для p(t) имеет значение />(0) = ро = VJ, то при
любых начальных условиях для ЦО) = о;о, a(t) = ао имеют место
интегралы
/>(£) = Ро = const, | w2(0 + F(a(i)) | \/w(t) = Щ = const,
где обозначено:
F(a) = :J ^N^^==^ fa = ak-a
{Nko — нормальные реакции опорных точек, которые в данном
случае являются постоянными положительными величинами).
Доказательство. В указанных предположениях уравнение (5.2)
удовлетворяется тождественно при p(t) = ро, а другие уравнения будут
тогда иметь следующий вид:
9 х-^ч COS/3fr
шо? + w2 = -/ ]Г Nko—^-, 5.10
^ Sk
i уг~^ 1 — sin Д
ы = -hpl Yl N*o ~> (5Л1>
^ Sk
Y Nk0 cos (3k = 0, Yl Nk0 sin /3k = 0, Yl Nko = S> (5-12)
где
Sk = Poу 2(1 - sin/?*). (5.13)
Из уравнений (5.12) следует, что Nk$ являются постоянными
положительными величинами (см. формулы (2.8) п. 2). Далее, обозначая
и = ш и вводя новую независимую переменную <р по формуле
dtp = uj dt, перепишем уравнения (5.10) и (5.11) в виде
da x-^v cos Яь
u—+u = -klY^Nk0—===, (5.14)
«*> Vl-Sin^fc
ЧТГ = ~*i X) JVjfcoVl-sin/3*, *! = -^=. (5.15)
Продифференцируем уравнение (5.14) по (р:
(du da d2a du\ da -*-^ ,
2U*+V + *)=4Sjwi",,,,a- P.i«)
138 Глава 6. Движение тела, опирающегося на плоскость тремя точками
Умножая обе части уравнения (5.15) на da/dip и складывая с
уравнением (5.16), получим соотношение
5 du dp du da
-p— + 2u— + 2— =0, p = —.
2 dip dip dip dip
Разделяя переменные в последнем уравнении, получим:
const. (5.17)
\du I dp ' <^,|4/5
u dip 1 + 5p/4 dip
5 da
4 dip
Отметим, что здесь мы предполагаем р = da /dip Ф -4/5. Нетрудно
проверить, что da/dip = -4/5 является решением системы (5.10),
(5.11) при особо выбранных начальных условиях для о;, а, которые
зависят от коэффициента трения. Находя из полученного
интеграла (5.17) da/'dip и подставляя результат в уравнение (5.14), приходим
к утверждению предложения 5. Предложение 5 доказано. □
Замечание 1. Можно показать (доказательство здесь не приводится),
что в условиях предложения 5 и р(0) ф р0 = vJ имеет место
предельное соотношение p(t) —» р0.
Замечание 2. Результат, полученный в предложении 5, вполне
аналогичен результату из [2] для плоского симметричного стержня с двумя
опорами на шероховатой горизонтальной плоскости.
Замечание 3. Из интеграла, полученного в предложении 5, в
частности, следует, что процесс движения тела при Н0 ф 0 всегда
заканчивается вращением вокруг одной из его опорных точек. Действительно,
при ш —» 0 из полученного интеграла следует, что F(a) —» оо, а
этого быть не может, так как F(a) является ограниченной функцией
(ее можно записать в виде
F(a) = -с > Nk0 cos 7^ • (sign sin 7*), с = —, jk = .
^^ Po 4
Таким образом, указанный в предложении 5 интеграл справедлив
вплоть до того момента, пока мгновенный центр скоростей опорного
треугольника не совпадет с одной из опорных точек. В этом случае
нужно проверять возможность вращения пластины вокруг этой
опорной точки (при реализации в ней допустимой силы трения покоя)
так же, как это было сделано в [2, 3] для стержня с двумя опорами.
6. Обсуждение результатов
139
В конце концов, такая возможность, при достаточно малой угловой
скорости, окажется реализуемой и процесс движения закончится
указанным вращением.
Замечание 4. Отметим, что полученные результаты можно
распространить и на тот случай, когда точки контакта являются небольшими
площадками, жестко укрепленными на теле. В такой ситуации для
сил и моментов сил трения следует применять более точную модель
Контенсу—Журавлева [4, 5].
6. Обсуждение результатов
1) Задача о движении тела, рассматриваемая в настоящей
статье, исследовалась также в работах [6, 7]. В этих работах
аналитические результаты были получены только для вычисления
нормальных реакций в точках контакта, которые являются решениями
системы трех линейных алгебраических уравнений (методом
Крамера). Дифференциальные уравнения движения интегрировались
численно. В работе [6], кроме того, исследовалась аналогия между
распределением нормальных реакций в треноге и соответствующим
распределением нормальных напряжений для тела, опирающегося
на непрерывную кольцевую площадку.
2) Существенной особенностью рассматриваемой задачи о
треноге, как это отмечалось в статье [1], является зависимость
нормальных реакций в точках контакта тела с плоскостью от характера
движения тела. Этот факт затрудняет исследование и
интегрирование уравнений движения тела. Тем не менее, результат, полученный
в предложении 5 настоящей статьи для плоского тела (где
нормальные реакции являются постоянными величинами), является
первым шагом в решении этой сложной задачи и может быть
использован при исследовании движения плоских роботов,
перемещающихся по шероховатой горизонтальной плоскости.
3) В предложении 1 настоящей статьи показано, что
несбалансированная тренога (Jxz + Jyz^0) no может ни при каких
условиях совершать вращательных движений вокруг вертикальной оси,
проходящей через ее центр масс. В случае же сбалансированной
треноги (Jxz = Jyz = 0), как показано в [1], такие движения, при
некоторых условиях (ось вращения проходит через центр описан-
140 Глава 6. Движение тела, опирающегося на плоскость тремя точками
ной вокруг опорного треугольника окружности), могут быть
реализованы. В предложении 4 настоящей статьи установлено, что
для сбалансированной треноги не существует также вращательных
движений вокруг любой другой вертикальной оси, не проходящей
через центр масс и опорные точки.
4) В предложении 2 настоящей статьи установлены границы
для коэффициента трения опорной плоскости, при которых
поступательные движения треноги являются единственными
возможными движениями для соответствующих начальных условий.
Оказывается, что при больших коэффициентах трения для некоторых
направлений в опорной плоскости такая единственность нарушается.
5) В предложении 3 настоящей статьи показано, что при почти
поступательных движениях треноги (при малых ее угловых
скоростях) траектория ее центра масс отклоняется в сторону,
противоположную ее собственному вращению. Этот факт был подтвержден
численными расчетами в работе [6].
Литература к Главе 6
1. Иванов А. П. Динамически совместная модель контактных напряжений
при плоском движении твердого тела // Прикладная математика и
механика. 2009. Т. 73. Вып. 2. С. 189-203.
2. Розенблат Г. М. Динамические системы с сухим трением. М.; Ижевск:
НИЦ «Регулярная и хаотическая динамика», 2006. 203 с.
3. Ишлынскый А. Ю., Соколов Б. Н., Черноусъко Ф. Л. О движении плоских
тел при наличии сухого трения // Изв. АН СССР. МТТ. 1981. № 4.
С. 17-28.
4. Журавлев В. Ф. О модели сухого трения в задаче качения твердых тел //
Прикладная математика и механика. 1998. Т. 62. Вып. 5. С. 762-767.
5. Журавлев В. Ф. Закономерности трения при комбинации скольжения
и верчения // Изв. РАН. МТТ. 2003. № 4. С. 81-88.
6. Shegelski M. R.A., Goodvin G. L., et al Exact normal forces and trajectories
for a rotating tripod sliding on a smooth surface // Canadian J. Phys. 2004.
Vol. 82. P. 875-890.
7. Xi F., Angelico 0., and Sinatra R. Tripod dynamics and its inertia effect //
Journal of Mechanical Design. 2005. Vol. 127. № 1. P. 144-149.
8. Розенблат Г. М. Об интегрировании уравнений движения тела,
опирающегося на шероховатую плоскость тремя точками // Доклады РАН,
2010 (в печати).
Глава 7
Динамика неголономных
моделей колесных экипажей
Рассматриваются две задачи негол оном ной механики:
• движение без проскальзывания колесной пары по наклонной
плоскости в поле силы тяжести;
• движение плоской колесной модели типа скейтборда.
Результаты данной главы опубликованы в работе автора [10].
Введение
При составлении уравнений движения используются основные
теоремы динамики и кинематические соотношения,
характеризующие неголономные связи. Эта методика дает возможность, наряду
с определением движения системы, получать также и выражения
для сил, реализующих движение (нормальные и касательные силы
реакции опорной плоскости). Таким образом, реализуется
известный принцип Ньютона о неразделимости сил и движения. Отметим,
что в большинстве недавних работ [1-4] при составлении уравнений
движения используются такие известные уравнения, как уравнения
Аппеля, Гамеля—Больцмана и т. п. Помимо аналитической
сложности этих уравнений, в них также отсутствуют реакции связей, что
снижает их ценность для практических задач.
142 Глава 7. Динамика неголономных моделей колесных экипажей
1. Колесная пара на наклонной плоскости.
Уравнения движения, постановка задачи
и формулировка результатов
На рис. 1 изображена колесная пара на наклонной плоскости. Эта
конструкция представляет собой два однородных диска, массой т
и радиуса Ъ каждый, свободно насаженных на ось 0102,
представляющую собой однородный стержень массы М и длины 2/. Таким
образом, диски (колеса) могут свободно и независимо друг от друга
вращаться вокруг оси 0\0^ без трения (см. рис. 1).
Описанная система движется под действием силы тяжести по
шероховатой наклонной плоскости (угол наклона к горизонтали
равен а) так, что в точках контакта колес с плоскостью (точки Р\, Р^,
см. рис. 1) не происходит проскальзывания (ни бокового, ни
продольного).
Пусть С — центр масс системы (ясно, что он находится в
середине отрезка O1O2), а С^С — система координат, жестко связанная
с осью 0102, причем (см. рис. 1) С£ направлена вдоль оси 0102,
Рис.1. Колесная пара на наклонной плоскости, в поле силы тяжести.
Рь Р2 — точки контакта колес с опорной плоскостью
1. Колесная пара на наклонной плоскости
143
С( — нормально наклонной плоскости вверх, а Сц —
перпендикулярна С£ и Сц и образует с ними правую систему координат.
Движение колесной пары происходит под действием силы
тяжести и сил реакции плоскости, возникающих в точках контакта Р\
и Р^. Эти силы изображены на рис. 1: Ni, N2 — нормальные силы
реакции, причем значения их проекций на ось С£ должны быть
неотрицательными (N^ ^ О, N2( ^ 0), Fi£, F2£ — поперечные, a F^,
F2?7 — продольные силы сцепления (силы трения покоя). В
дальнейшем будем предполагать, что отрыва не происходит и ЛГ^, ЛГ2£
существенно положительные величины. Кроме того, пусть
коэффициент трения опорной плоскости настолько велик, что в точках Р\,
Р^ отсутствуют проскальзывания, т. е. \р1 = \р2 =0.
Пусть ipi, ip2 — собственные углы поворота колес
относительно оси 0102, (р — угол поворота оси 0102 в наклонной плоскости,
отсчитываемый от линии наибольшего ската против часовой
стрелки (если смотреть с положительного конца оси С().
Таким образом, угловая скорость оси 0102 (а значит, и системы
С&О в проекциях на оси £, 7/, £ есть:
w = (0,0,p). (1.1)
Угловая скорость каждого из колес, в проекциях на те же оси:
Ш1 = (Ъ,0,<Р), 3 = h2. (1.2)
Вычислим скорость точки 0i, считая ее принадлежащей колесу 1:
voi =vpi + [wi xPiOi].
Отсюда, поскольку \р1 = 0, получим:
vo!i = 0, v0ir) = -bipu vOl( = 0. (1.3)
С другой стороны, так как точка Oi принадлежит оси 0102, то
получим:
voi =ус + [wi х COi],
или, в проекциях на оси £, 7/, £, имеем:
VOxi = VC£, Voir} = VCrj - 1ф, V0l( = VC(. (1.4)
Из (1.3), (1.4) следуют соотношения
0С£ = vC( = 0, г;^ - 1ф = -Ь^ь
144 Глава 7. Динамика неголономных моделей колесных экипажей
Аналогичные рассуждения для точки 02 приводят к соотношениям
vc( = vC( = 0, vCrj +1ф = -Ъгр2-
Таким образом, условия непроскальзывания приводят к следующим
выводам:
1) скорость точки С имеет ненулевую проекцию только на
продольную ось С г/, будем обозначать ее в дальнейшем через v,
т. е
vc( = 0, vcn = v, vC( = 0; (1.5)
2) выполняются два соотношения:
{V + 1ф = ~blp2,
(1.6)
v - 1ф = —Ъф\.
Переходим к записи уравнений динамики для колесной пары.
Уравнения движения центра масс системы в осях С^т/С с учетом
(1.1) и (1.5), имеют вид
m^{—V(p) = F\£ + F2£ + mog sin a sin <p,
mov = FiTj + F2ri + mog sin a cos <p, (1.7)
0 = Ni + N2 - mog cos a,
где mo = M + 2m — общая масса системы.
Для составления уравнений изменения кинетического
момента в осях C£rj( вычислим сначала сам кинетический момент К^
в этих осях. Обозначим через J^, J^ соответственно осевой и
экваториальный моменты инерции колеса (J^ = mb /2, J^ = mb /4),
Ji — момент инерции стержня 0\02 относительно оси С( (или
Cri) (Ji = Ml2/3). Используя симметрию системы и формулы (1.1)
и (1.2) для угловых скоростей, мы получим:
Kci = Jii^i + ф2), КСг} = 0, Кс( = ЗоФ, (1.8)
где Jo = J\ + 2 J£ + 2m/ . Отметим, что равенство Кс( = 0 следует
из того, что нет вращения колесной пары вокруг продольной оси
Crj (т.е. колеса не отрываются от опорной плоскости). Используя
(1.8) и соотношение (1.1) для угловой скорости системы C£ri(,
1. Колесная пара на наклонной плоскости
145
получим уравнения теоремы об изменении кинетического момента
Кс в осях C£ri(:
Mi)i+^) = b(Flr) + F2r)),
Jtffa + ф2) = № - N2)l - b(F4 + F4), (1.9)
J0<£ = l(F2r] - Flr]).
Далее запишем уравнения для изменения кинетического
момента для каждого из колес в отдельности относительно оси £
в предположении, что они вращаются свободно на оси £ и нет
поворотов вокруг оси С г/, т. е. отрывов:
Jtfj = bFjri9 j = 1,2. (1.10)
Таким образом, мы получили замкнутую систему 10 уравнений
(1.6), (1.7), (1.9), (1.10) для определения 10 неизвестных: v, <p, ip\,
ip2, N\, N2, F\£, F2£, F^, F2rj. Отметим, что 7/i и rj2 являются
циклическими переменными (решение зависит только от их
производных).
Задача, которую мы будем в дальнейшем рассматривать,
заключается в следующем. Пусть заданы начальные условия
К(0)^(0)^(0),^(0),^2(0)},
такие что удовлетворены равенства (1.5) и (1.6) при t = 0 (т. е. в
начальный момент мы «запускаем» колесную пару по плоскости так,
что не нарушаются условия неголономной (кинематической)
связи). Требуется определить решение системы (1.6), (1.7), (1.9), (1.10),
которое удовлетворяет условию безотрывности: Nj > 0, j = 1, 2.
В более точной постановке, если задан коэффициент трения /
плоскости с колесами, требуется также в процессе движения
удовлетворить неравенствам Кулона:
FJt + FJ^fN], j = 1,2.
Такого рода задача рассматривалась для саней Чаплыгина на
наклонной плоскости с трением в работе [5].
Приступим к решению поставленной задачи. Отметим, что в
уравнения движения неизвестные F^, F2^ входят только в виде
суммы F^ = F\£ + F2£, так что на самом деле неизвестных всего девять.
146 Глава 7. Динамика неголономных моделей колесных экипажей
Однако, как будет видно из дальнейшего решения, независимых
уравнений также ровно девять (сумма двух уравнений из (1.10) дает
первое уравнение (1.9)!).
Решаем систему (1.6), (1.7), (1.9), (1.10) последовательным
исключением неизвестных.
1. Исключаем из первого уравнения (1.7) и второго уравнения
(1.9) неизвестную F% = F^ + F2^. Получим уравнение:
j£<fi(ipi + *фг) = {N\ - N2)l - bmo(v(p + gsinasm(p).
2. Исключаем ipu ip2, F^, F2r]:
b2
b2
В итоге имеем систему:
2v bmo
- Ф • Jt-rr = Ni - N2 -\ — (v(p+gsmasm(p),
01 l
23i
тф = ^-Ь + mogsinasin^,
0 = N\ + N2 - mog cos a,
b2
(1.11)
Jo + J(— )Ф = 0.
Мы получили систему четырех уравнений для определения
четырех неизвестных: <р, v, N\, N2. Решения системы (1.11) нетрудно
получаются:
ф = щ = const = <£>(0),
v = kg sin a cos (u>ot + <po), k =
1 + 2p2/b2'
2Ni = ra0
2N2 = mo
b b b (2g2
gcosa-g-sinasin<£- -vuq - -vuq[ —r
/ / I \bl
b b b (2g2
gcosa+g-sinasin^ + -t;a;o + -t;a;o —r
/ / I \ bL
(1.12)
(1.13)
где р = J^/гщ.
1. Колесная пара на наклонной плоскости
147
Интегрирование второго соотношения (1.12) приводит к
формуле
я sin ol
v(t) = г;0Н т ^ГТ^НП (<*>о* + <£о) -sin^0]. (Ы4)
Пусть х — координата центра масс С по линии наибольшего ската
(вниз по наклонной плоскости), у — перпендикулярная ей
координата, тогда имеем:
х = v cos <p, у = v sin (p.
Несложное интегрирование последних равенств приводит к выводу,
что центр масс движется по циклоиде, перпендикулярной линии
наибольшего ската, т. е. колесная пара не скатывается вниз.
Исследование формул (1.12), (1.13) приводит к заключению,
что безотрывное движение, т. е. положительность нормальных
реакций N\, N2, реализуется при выполнении неравенства
OJqVo ( 2/>2\ /
I 1 Н — < - cos а - 2 sin a + sin a sin <p0. (1.15)
g \ b2 / b
Например, при vo = 0, (po = 0 имеем tg a < I/(2b), т. е.
опрокидывание может случиться при достаточно больших a: tg a > //(26).
Пусть неравенство (1.15) нарушено, тогда обязательно
наступит такой момент времени, что произойдет обнуление нормальной
реакции, например реакции N\. Итак, пусть N\(ti) = 0 и
дальнейшее движение возможно только с отрывом колеса 1 (при
сохранении контакта колеса 2). Рассмотрим начало такого отрыва, т.е.
возникающий поворот колесной пары вокруг оси С if].
Будем определять такой поворот углом %, отсчитываемым
против часовой стрелки, если смотреть с положительной части оси Ст)
(см. рис. 1). Рассматривая дальнейшее движение, будем считать, что
X ~ 0, х ~ 0> но X Ф 0- Тогда имеем:
VC( = 0, Vcrj = V, VC( = lX\
Ка = МФ\ + ipi), KCr} = JoX> Kc( = Jo<P,
ь>о = (0,Х>Ф).
Тогда уравнения движения (1.7), (1.9), (1.10) имеют вид:
mo(—v<p) = i<2£ + mog sin a sin (p,
148 Глава 7. Динамика неголономных моделей колесных экипажей
mob = F2r) + mog sin a cos <p, mo(xl) = N2 - m^g cos a,
J^2 = bF2r), Jqx + J&(ipi + Ф2) = ~N2l - bF2i,
J0<p = lF2r], J^i=0, Ji?2 = bF2r].
Кроме того, (1.6) превратится в одну кинематическую связь:
v + 1ф = -bip2 -> v + 1ф = -bty2.
Последовательно исключая неизвестные F2^, F2rj, N2, ipi, ip2, мы
получим три уравнения
( Р2\ Р2 / ч
vl mo + mo-3- J +m0-3-/^ = m0gsinacos^, (Ы6)
2 2^^
%(Jo + moZ ) = J^+ 6mot;^ + mog(bsinasin^-/cosa), (1.17)
Jofi - molv = -mog/sinacos^ (^-Щ
для определения трех неизвестных <p,v,x-
Учтем теперь, что в момент отрыва N\ = 0, т. е. в соответствии
с (1.13) имеем:
Ъ Ъ Ъ 2р2
gcosa —g- sin a sin <p - -vu>o - -vw$—-r- = 0.
I lib1
Тогда и правая часть равенства (1.17) будет равна нулю, т. е. х — 0-
Дифференцируя (1.17), вычисляем X:
2ч '•• 2V(£ 2v
(Jo + ra0Z ) X = —г- Jt + — Jt(p + bmo(v(fi + v(p) + ra0g& sin a cos <рф.
b b
(1.19)
Из (1.16) и (1.18) находим:
p2gl sin a cos ^ . (/>q62 + p2l2)g sin a cos <p
* = ~p2pl+plb2 + p2l2' V= pip2 + p2b2 + p42 >
где p2 = J^/mo, />2 = Jo/m0.
Подставляя полученные выражения для ^ и г; в (1.19), находим:
Jo + m0/2 \ ... _
га0 /
/ 2р2\ ( 2р2\
Ьф\ Ъ+ —— \ +vфlb + —— I + gbsmacos(pф = 6>g sin a cos <£ х
1. Колесная пара на наклонной плоскости
149
2р2
,2а2
<Р
+Рч
2/2
/>2'
Г/ 2р2\ф{р2Ь2+р212)-юр21
frgsinacosJ ( 1 + -£- ) ^2—^/ Л + ф
W ъ ) р2р2+р2ь2+рЧ2 г.
где р = J^/rriQ, р0 = Jo/mo.
Возьмем, к примеру, такие начальные условия:
v0 = О, <р0 = 0, ф(0) = ш0^0.
Тогда имеем, в соответствии с формулой (1.14):
gsina
+ ф\ =
(1.20)
v(t) =
ш0
2р2
sin (uot).
Для нормальной реакции N\ из (1.13) получим:
2 Ь , ч /
—N\ = g cos a - 2g- sin a sin (ш0Ь) = g cos a[ 1 -
m0 / V
26
T
tg a sin (u>ot)
Обнуление JVi происходит первый раз при t = t\, таком что
/ / /
sin(a;o^i) =
Тогда при t = t\ имеем:
v(U) =
2btga
gcosa
*«>-!
щ
2p2
26
Ясно, что, выбирая ujq достаточно малым, мы можем добиться
больших значений v(t\), а формула (1.20) нам тогда дает X < 0, т. е.
возникает парадоксальная ситуация при отрыве! Эти рассуждения
приводят нас к выводу, что в случаях, когда могут быть обнуления
нормальной реакции (нарушение неравенства (1.15)), необходимо
учитывать конечный коэффициент трения и рассматривать процесс
движения колесной пары с возможными переходами к ситуации
проскальзывания колес, что, конечно, усложняет решение задачи.
Замечание 1. Нетрудно обобщить решение задачи на тот случай,
когда к колесной паре приложены другие внешние силы (помимо силы
150 Глава 7. Динамика неголономных моделей колесных экипажей
тяжести). Например, тяговая сила (колесная пара — автомобильный
прицеп) или управляющий момент на оси 0\02 (колесная пара
автомобиля или робот-тележка). Отметим, что рассматриваемая задача
изучалась еще классиками теоретической механики [6].
2. Динамика плоской колесной модели (скейтборд)
На рис. 2 изображена модель скейтборда в плане (т. е. вид сверху).
Это — две колесные пары А\А2, В\В2, соединенные в своих
центрах масс жестким стержнем АВ. Шарниры в соединениях А и
В предполагаются идеальными
и цилиндрическими, а качение
колес А\, А2,В\, В2 по опорной
плоскости происходит без
проскальзывания, т. е. наложена не-
голономная связь.
В данной модели мы
предполагаем (так же как и в [1-4]),
что эта связь реализуется
только поперечными силами F^ и ¥в,
приложенными соответственно
к А\А2 и В\В2 (см. рис. 2). Учет
продольных сил
рассматривался, например, в статье [7].
Наличие неголономной связи дает право считать, что скорости
центров масс колесных пар, обозначаемых как у а и \в, направлены
всегда перпендикулярно соответствующим осям, т.е. у a _L А\А2,
Ув -L В\В2 (см. рис. 2).
Далее введены следующие обозначения: 9\, 92 — углы
отклонения колесных пар А\А2, В\В2 от продольной оси £ скейтборда,
причем 9\ отсчитываем по часовой стрелке, а 92 — против оной;
АС = а, С В = 6, С — центр масс всей системы, который мы
предполагаем неизменным, т. е. а = const, Ъ = const; <p — угол
поворота стержня АВ относительно неизменно ориентированной
оси Сх, отсчитываемый против часовой стрелки; Р —
мгновенный центр скоростей стержня АВ, который, в силу неголономных
связей, является пересечением прямых А\А2 и В\В2\ глав, w,a,
Плоская колесная модель
(вид сверху)
2. Динамика плоской колесной модели (скейтборд) 151
тв — массы соответственно стержня АВ, колесных пар А\А2,
В\В2\ Зав — момент инерции стержня АВ — вместе с
сосредоточенными массами тпа и тв на его концах относительно точки С, J а,
J в — моменты инерции колесных пар соответственно А\А2, В\В2
относительно собственных центров масс А и В; С^г/ — система
координат, жестко связанная со стержнем АВ.
Для трех углов <р, 9\, 92 мы можем составить три уравнения
динамики, которые не содержат неизвестных сил F\, Fb и сил
реакций в шарнирах А и В:
KPz + m[ypxyc]z = 0, (2.1)
Ja((P-0i) = MAz9 (2.2)
ЫФ + 02) = МВг. (2.3)
Уравнение (2.1) — это уравнение кинетического момента
относительно подвижной точки Р (см. [8]); а уравнения (2.2) и (2.3) —
уравнения кинетических моментов колесных пар относительно их
собственных центров масс. В этих уравнениях введены обозначения:
га = гпав+™>а+™>в — общая масса системы; KPz — кинетический
момент системы относительно точки Р, v^ — скорость точки Р (как
геометрической относительно неподвижной системы координат),
\с — скорость центр а масс С; Maz, Mbz — управляющие
моменты в шарнирах А и В (если таковые имеются). Пусть D — проекция
точки Р на стержень АВ (см. рис.2). Обозначим CD = £o- Тогда
имеем, в соответствии с теоремой Кёнига (см. [9]):
KPz = Kcz + m(vci • PD + vcr) • CD);
Kcz = Jab<P + Jb(<P + 02) + Ja(<P ~ 0i).
Далее, из кинематических и геометрических соображений получаем:
[ур х Vch = vpivcr] - vpr}vci, vci = <p- PD, vcr] = <Jp- CD,
PD = (a- &) ctg 0i = (6 + &) ctg 02,
где £o = CD. Тогда
b = CD = aige2-bige\ PD а + Ь
tg0!+tg02 tg0i+tg02
152 Глава 7. Динамика неголономных моделей колесных экипажей
Абсолютная скорость точки Р, в соответствии с теоремой о
сложении скоростей при сложном движении (см. [9]):
v _ „(г) , „(e) _ (г) , , (e)
УР — yP * yP — yP t'ct Vpc -
Но так как P — мгновенный центр скоростей, то у у = \с + у у .
Тогда получаем: vP£ = -(CD), vprj = —(PD), т.е.
_ a + b Mtgfl2 _ ^2 tg ^i \
^ " (tg 01 + tg 02)2 V COS2 0! COS2 02 7 '
a + 6
v.
^17
01 02
(tg 0i + tg 02)2 V cos2 0i cos2 02 / '
Используя приведенные формулы, мы получим следующие
соотношения:
_ (о + Ь)у
[V;?XVcb"(tg0i+tg02)3
1 (atg2 02 - 6tg0i tg02 + a + 6) +
cos2 0
+ —^—(-atg0i tg02 + 6tg2 0i + a + b)
COS2 02
[(a + fr)2 + (atg02-frtg0i)2] +
+
2тф(а + b)
2 (-atg01tg02 + 6tg201+a + 6)-
COS2 $2
0i
-(atg26»2-&tg6'1tg6'2 + e + 6)
COS2 0]
Kcz = 3ab4> + Jb(<P + B2) + Ja(<P ~ 0i) = Jab<P + MBz + M^.
Таким образом, уравнение (2.1) принимает вид
^^ + Ml +W [(й + &)2 + {аШв2 ~ btS0l)2] } ~
тф(а + Ь)
+
(tg 6»! + tg 6>2)3
01
2 (a + 6-atg01tg02 + 6tg201) +
COS2 01
COS2 02
(a + 6 + atg202-&tg0itg02)
-MAz - MBz. (2.4)
2. Динамика плоской колесной модели (скейтборд) 153
Уравнения (2.2), (2.3), (2.4) образуют замкнутую (относительно
<р, 61,62) систему уравнений.
Рассмотрим частные случаи.
1°. Закрепим колесную пару А\А2 жестко, т. е. полагаем 6\ = О
=4> Maz = Ja4>- Тогда уравнение (2.4) будет иметь вид
ф\ Jab +Ja + ^j [(a + Ъ)2 + a2 tg2 в2] \ -
т(а + Ъ)ф
tg3#2
02
COS2 02
(а + Ь)
= ~MBz;
(2.5)
получаем модель [1,4].
2°. Управление скейтбордом, т.е. Maz и MBz, подбираем так,
что 9\= 02 = 9 (одинаковые отклонения колесных пар, но в разные
стороны). Тогда из (2.2), (2.3) мы получаем:
MAz + MBz = (JА + JB)<p.
А из уравнения (2.4) имеем:
фуАв + Ja + Jb + -^Yq- [(a + bf + tg2 в(а - bf] j -
тф(а + Ь)
4tg30
в
cos2 9
{а + Ь)
О,
(2.6)
т. е. получаем модель из [3].
Отметим, что для рассматриваемой модели в случае отсутствия
управляющих моментов Ма%, MBz (или их консервативности) будет
справедлив интеграл энергии. Вычислим кинетическую энергию
системы:
Т = ™ (4 + 4) + '-f Ф2 + у (* - ^i)2 + у (Ф + Ь)\ (2.7)
последние два слагаемых суть константы (при Maz = MBz = 0).
Поэтому интеграл энергии при Ма% = MBz = 0 принимает вид
m(v2ci + v2cr]) + JAb<P2 = hl = const.
154 Глава 7. Динамика неголономных моделей колесных экипажей
Из полученных выше кинематических формул следует:
a + b
vet
• <р, vcrj
atg92-btg9l
tg0!+tg02 r' Ь" tg0i+tg02
и тогда интеграл энергии приобретает вид
•*>>
2Т = ф2
Jab+гп
(a + b)2 + (atge2-btgel)2
= ho = const. (2.8)
(tg0i+tg02)2
Из уравнений (2.2), (2.3) при MAz = ^в^ — О МЫ получим:
0i =<p-hit+pu в2 = -(f + h2t+p2, (2.9)
где h\, р\, h2, p2 — константы, определяемые начальными
условиями. Подставляя (2.9) в (2.8), мы получаем для определения <р
нестационарное уравнение 1-го порядка.
Г. Рассмотрим частный случай: закрепленную колесную пару
А\А2, т. е. 9\ =0, тогда интеграл энергии (2.8) имеет вид
(a + b)2 + a2tg2e2~
Ф2
Ф2
Jab +rn-
tg202
h0
(JAB + ma2) + m(a + bf ctg2 62
(2.10)
h0.
Уравнение (2.3) при MBz дает:
ф = ш0 - #2,
и из (2.10) мы получаем, обозначая А2 = JAB+ma2, В2 = m(a+b)2,
А = ЛоМь ж = tg <92:
d02 o;0 x/S2 + ^l2 tg2 02 - ft0 tg 02
dt
л/В2 + A2 tg2 в2
d62 ^/B2 + A2 tg2 02
y/B2 + A2ig262-\ig62
Обозначая ж = tg62, мы получаем:
d#
/
uot + С.
/da; Г х d.
l + x2 J (l + x
dx^B2 + A2 tg2 02
2)[Б2 + (42-А2)ж2]
+
2. Динамика плоской колесной модели (скейтборд) 155
+ *
J (1 + х2
х1 dx
?2)[В2 + (А2 - Х2)х2]'
Нетрудно показать что все эти интегралы берутся в
элементарных функциях.
Таким образом, в указанном случае уравнения движения
системы интегрируются в функциях времени при любых значениях
параметров и начальных условиях.
2°. в\ = 02 = в (скейтборд управляемый) =4>
Фу
т
Ф\ Jab+Ja+Jb + —
(a+b)2
tg20
+ (a-b)2
}
тф(а+Ь)2 О
4tg3<9 cos2<9
= 0;
£~-^; фв = (ф)2 — ; A = -{a-bf + JAB + JA + JB;
2 dip dip 4
d{y2)
A +
^р2!
Ф2
m(a + bf ctg2 в
d6
m(a + b)2 . ч9
v ; (ф)2 d9 = 0
2 tg3 в cos2 в
m(a + b)2
2 tg3 в cos2 в
A +
m(a + bf ctg2 в
• 2
Обозначаем ф = u\ tg в = v\ тогда:
du m(a + b)2 dv
m(a + bf
In и - Co =
m(a + b)2
I
. ~ m(a + b)2
Av3 H —v
4
dv
= B;
v ( Av2 +
m(a + b)2
Г dv
= 2B / ,a 9
(^2 + B)'
In и - Co = In
Av2 + B
dv
u(Av2 + B)
vz
Co = const;
Г dv /VCo Dqv + Fq\
J v(Av2 + B) " J \v + Av2 + B )
Co(Av2 + B) + Dov2 + Eov = 1 ^>
156 Глава 7. Динамика неголономных моделей колесных экипажей
1 А
C0B = l; E0 = 0; C0A + D0 = 0; C0 = -; D0 = —-;
JD JD
J v(Av2 + B) J v 2BJ
vdv
av2 + B
1 1 , 2 ч 1 t;
В IB v ; В x/i^+S
.2,4tg20 + B . Cotg0
V —7T7> = C0 ^ (f-
tg2e Y у/А\%2е + в'
Полученное соотношение является определяющим уравнением
движения скейтборда.
Литература к Главе 7
1. Мартыненко Ю. Г. К теории обобщенного эффекта Магнуса для
неголономных механических систем // Прикладная математика и механика.
2004. Т. 68. № 6. С. 948-957.
2. Kuleshov A. S. Further Development of the Mathematical Model of a Snake-
board // Regul. & Chaotic Dyn. 2007. Vol. 12. № 3. P. 321-334.
3. Ispolov Yu. G., Smolnikov B.A. Skateboard dynamics // Computer Methods
in Appl. Mech. and Eng. 1996. № 131. P. 327-333.
4. Лобас Л. Г. Неголономные модели колесных экипажей. Киев: Наукова
думка, 1986. 232 с.
5. Журавлев В.Ф., Фуфаев И. А. Механика систем с неудерживающими
связями / Отв. ред. академик РАН Д. М. Климов. М.: Наука, Институт
проблем механики РАН, 1993. 240 с.
6. Раус Э.Дж. Динамика системы твердых тел. М.: Наука, 1983. Т. 2. 544 с.
7. Буданов В. М., Девянын Е. А. О движении колесных роботов //
Прикладная математика и механика. 2003. Т. 67. № 2. С. 244-255.
8. Суслов Г. К. Теоретическая механика. 3-е изд., посмертное / Под ред.
проф. П. П. Бухгольца и В. К. Гольцмана. М.; Л.: ОГИЗ ГИТТЛ, 1944.
655 с.
9. Маркеев А. П. Теоретическая механика. Изд. 4-е, испр. М.; Ижевск:
Научно-исследовательский центр «Регулярная и хаотическая
динамика», 2007. 591 с.
10. Розенблат Г. М. К динамике неголономных моделей колесных
экипажей // Вестн. Удм. ун-та. Серия «Математика. Механика.
Компьютерные науки». 2008. Вып. 3. С. 90-108.
Глава 8
Некоторые учебные задачи
с сухим трением и односторонними связями
Рассматриваются и обсуждаются постановки и решения
некоторых часто встречающихся в учебно-преподавательской практике
задач по теоретической механике с сухим (кулоновым) трением.
В заключительной части рассмотрены постановки и решения двух
известных задач из теории удара с исследованием послеударного
движения.
Введение
Примеры учат не меньше, чем
правила, а ошибки — больше, чем
правильные, но непонятные доказательства.
|В. И. Арнольд] ^
Задачи о равновесии и перемещении тел при наличии сил
сухого трения занимают особое место среди задач классической
механики, учитывающих диссипацию (силы сопротивления). Дело в том,
что элементарная сила сухого трения такова, что модуль ее, вообще
говоря, не зависит от скорости относительного перемещения
контактирующих точек, но направление всегда антипараллельно
вектору этой скорости. Аналитически этот факт выражается формулой
d¥Tp = -kpdS^- (0.1)
' Арнольд В. И. Математическое понимание природы: Очерки удивительных
физических явлений и их понимания математиками (с рисунками автора). М.:
МЦНМО, 2009. 144 с.
158 Глава 8. Сухое трение в задачах и решениях
где к — коэффициент (трения), р — нормальное давление в
рассматриваемом элементе площади dS,\ — скорость (относительная)
элемента dS. Особенность и неопределенность возникают тогда,
когда в (0.1) скорость v обращается в нуль. Кроме того, из (0.1)
мы видим, что dFTp при переходе вектора v через значение v = 0
может скачком изменить свое направление, сохраняя свой модуль
неизменным. Этот факт является причиной многих интересных
механических (динамических) эффектов, встречающихся на практике,
например легкость перевода движущегося ремня с одного шкива
на другой, легкость поворачивания автомобиля на ходу, занос
блокированных колес автомобиля на скользкой дороге и т. д.
Неопределенность в (0.1) при v = 0 приводит к рассмотрению
такого понятия как сила трения покоя. Направление и модуль этой
силы, вообще говоря, неопределенны. Для модуля можно указать
лишь верхнюю границу, близкую к соответствующей силе трения
скольжения. Для направления принимается гипотеза Пэнлеве [1],
которая предписывает антипараллельность вектора силы трения
покоя главному вектору сил, стремящихся заставить рассматриваемый
элемент скользить. Эти факты обусловливают наличие интересных
эффектов в статических задачах, например эффекты
заклинивания и самоторможения, которые используются при
проектировании тормозных устройств для транспортных средств.
Здесь обсуждаются решения нескольких «элементарных»
задач часто встречающихся в учебно-научно-методической
литературе при рассмотрении вопросов, связанных с силами сухого трения.
Кроме того (с точки зрения автора), эти задачи представляют
самостоятельный интерес и доступны для понимания школьникам
старших классов и студентам вузов. Некоторым задачам присвоено
имя автора, из публикации которого они были почерпнуты.
Рассмотрено десять задач, восемь из которых касаются
непосредственно сухого трения, а две последние — неупругого удара
с последующим исследованием послеударного движения.
Полученные решения и результаты докладывались автором в марте 2009
года на заседании Научно-методического совета по теоретической
механике при Минобрнауки РФ (председатель — академик МАН
ВШ, профессор Ю. Г. Мартыненко). Пользуясь случаем, автор
выражает свою благодарность за обсуждение и полезные замечания
1. Задача Р. Фейнмана
159
всем участникам этого заседания, и в особенности, профессорам
В. А. Самсонову, А. М. Формальскому и А. П. Иванову Последние
две задачи об ударе обсуждались с академиком РАН В.
Ф.Журавлевым, которому автор также выражает свою искреннюю
благодарность за высказанные замечания и полезные дополнения.
Проблема, связанная с постановкой и решением задачи 8 настоящей
главы, обсуждалась с академиком РАН В. В. Козловым, которому
автор выражает свою признательность за внимание, высказанные
замечания и поддержку.
1. Задача Р. Фейнмана
Задача 12.3 из [2], стр. 39, решение — стр. 184. Цитируем по книге [2].
«Тело весом W покоится на шероховатой плоскости,
наклоненной к горизонту под углом а (см. рис. 1).
а) Коэффициент статического трения ц = 2tga; найти
минимальную горизонтальную (выделено Р. Фейнманом) силу
Нт{П, которая способна будет привести тело в движение
(см. рис. 1).
б) В каком направлении начнет двигаться тело?»
Решение. Приведем кратко решение этой задачи. На рис. 1
показана система координат Axyz, связанная с наклонной плоскостью,
/3 — угол, образуемый силой Н с горизонталью Ах, причем Н
параллельна горизонтальной плоскости ху . Имеем:
Нх = Н cos /3, Ну = Н sin /3 cos a, Hz = —H sin /3 sin a,
где Н > 0, если Н направлена к наклонной плоскости, Н < О,
если наоборот, причем /3 G [0,7г/2]. Учитывая силу тяжести W, мы
получаем для равнодействующей (р сил, которые действуют на тело
(кроме силы трения FTp)
<рх = Н cos /3, <ру = Н sin /3 cos a - W sin a,
<pz = N - H sin a sin /3 - W cos a = 0,
где N — нормальная реакция плоскости.
160 Глава 8. Сухое трение в задачах и решениях
Рис. 1. Задача Р. Фейнмана. Тело на наклонной плоскости с трением [2]:
Axyz — система координат, связанная с наклонной плоскостью; ху —
горизонтальная плоскость; Н — сдвигающая сила, параллельная
плоскости ху'; /3 — угол, образуемый вектором Н с горизонталью Ах;
a — угол наклона шероховатой плоскости
Сила трения FTp в момент начала движения тела действует в
наклонной плоскости, направлена против вектора {(рх, <ру,0} ив
точности равна ему по модулю. В момент начала скольжения FTp = jiN.
Поэтому величина Н удовлетворяет уравнению
ц (W cos a + H sin a sin /3) =
= H2 cos2 /3 + (Я sin /3 cos a - W sin a)2,
(1.1)
которое имеет (как квадратное относительно Н) в точности два
корня. Отметим, что уравнение (1.1) может быть получено из
уравнений статики с использованием понятия силы трения покоя\
Примем W = 1 и обозначим у = sin/З, /З Е (0,тг/2). Тогда,
учитывая, что tga = /л/2, получим решения уравнения (1.1):
1) если Н > О (сила Н к наклонной плоскости),
#1,2 = /*
2у(1 + ii2) ^ vV(l + /*2)2-3*
(1.2)
где z = ?/У (1 + II2) - 4 - II2.
1. Задача Р. Фейнмана
161
2) если Н < О (сила Н от наклонной плоскости),
-2у(1+/х2)^ v/4?/2(l+/*2)2-3z
I-" I = ^1,2 = /^
2/У(1+/*2)
(1.3)
где z = ?Г/Г(1 +ц")-А- ц .
Рассмотрим случай 1. Если у = sin/З таково, что z > О, то
оба корня в (1.2) отрицательны, т. е. сила Н при таких /3 не может
сдвинуть тело (заклинивание!). Если у = sin/З таково, что z < О,
то положительный корень в (1.2) получается при выборе знака «+»
и равен
Я1=/1
2»(i + ii2) + VW+7F+3N
Нетрудно видеть, что минимум этой функции достигается при
g/ = sin/3 = 0=^/3 = OH равен
н* = Узд
1 чАТ^'
Рассмотрим случай 2. Нетрудно установить, что наименьший
положительный корень из (1.3) будет такой:
'2y(l+fi2) v/V(l+//2)2
я,
/^
Зг
3/1
2»(1 + М2) + ч/^2(1+М2)2-3/
Несложное вычисление показывает, что максимум знаменателя
в последнем выражении, т.е. минимум Щ, достигается при у =
= sin/З = 1, т. е. при /3 = 7г/2. Получим:
2 +/г2
Ясно, что Hi < Н{, т. е. минимальное усилие реализуется
при /3 = 7г/2 и сила Н направлена от плоскости. Такой же ответ
приведен в книге [2], однако составители решения заранее
предположили, что минимальное усилие Н реализуется при /3 = 7г/2,
а затем выбрали из двух сил (Я > 0 и Я < 0) меньшую. Ясно,
что этот факт не очевиден, тем более, как показано в настоящем
решении, при требовании Н > 0 (сила направлена к плоскости)
162 Глава 8. Сухое трение в задачах и решениях
минимум реализуется при /3 = 0 (сила направлена вдоль плоскости,
т.е. параллельна оси Ах).
Отметим, что этот же ответ (Н < 0, /3 = тг/2) справедлив при
tga = £//, где е 6 (0, 1). >
2. Задача С.П.Тимошенко
В книге С. Тимошенко, Д. Юнга [3, с. 56] приведена следующая
задача. Цитируем по книге [3].
«Человек с помощью веревки АВ (см. рис. 2) тащит по гори- I
зонтальному бетонному полу каменную глыбу весом G = vfijg. I
Определить, при каком угле а между веревкой и горизонтом I
тянущая сила, необходимая для создания скольжения камня, I
будет минимальной? Какова будет величина этой минималь- I
ной силы, если угол трения равен <р = arctg //?» I
Рис.2. Задача С. П.Тимошенко [3]: га2 — масса груза; mi — масса
человека: a — угол наклона веревки к горизонтали
Решение. Авторы книги [3] приводят элегантное и короткое
решение, составляя треугольник сил для глыбы в момент начала
скольжения (т. е. в момент предельного равновесия). Это решение
представлено на рис. 3, откуда получаются ответы
ц
a = <p = arctg //, Pmin = G sin <p = G
Однако более внимательный анализ этой задачи должен
учитывать возможность скольжения самого человека при попытке
сдвинуть глыбу! Такая возможность реально существует, так как масса
человека меньше массы глыбы, а коэффициент трения для человека
2. Задача С. П. Тимошенко
163
Рис.3. Треугольник сил, действующих на тело т2
в момент начала скольжения [3]
небесконечен. Примем (для простоты), что коэффициент трения
для человека также равен ц. Решение такой задачи (т. е. с учетом
требования неподвижности человека) подробно приведено в книге
[4], поэтому сформулируем лишь результат, предполагая ц < 1:
1) ЕСЛИ ГП\ > ™>2
1
F
l + fi2
то
G-
V
2) Если т\ < ГП2
1
А
1 + ц2
1 + ц2
2
, ТО
a = arctg //, G = rrijg.
P ■
ГШ1П-
y//2(mi+m2)2 + (m2-mi)2, a = arctg
m2-mi
ji(m2 + mi)
Этот результат нетрудно обобщить и на тот случай, когда
коэффициенты трения для глыбы и человека разные.
Приведем числовой пример. Пусть ji = 1/2, т\ = 100 кг, m2 =
= 1000 кг. Тогда реализуется случай 2, и мы имеем:
Pmin = 25gV445 « 525g, a = arctg (18/11) « 60.
Ответы из книги [3] приводят к таким числам: Рт[п « 484g,
а = arctg (1/2). Таким образом, чтобы оставаться на месте и
сдвинуть глыбу, человек должен тянуть с чуть большей силой, но под
углом, близким к 60°! >
164 Глава 8. Сухое трение в задачах и решениях
3. Задача Л. Б. Левенсона
Цитируем по книге [5, с. 145].
«Определите, как выгоднее, в смысле скорейшей остановки,
тормозить поезд: чтобы колеса еще катились или же
затормозить их полностью, чтобы началось скольжение поезда по
рельсам? Трением качения колес по его незначительности можно
пренебречь».
Решение. Ответ в этой задаче прост. Тормозить выгоднее
катящимися без проскальзывания в точке контакта колесами, так как в
этом случае в точке контакта реализуется сила трения покоя,
верхняя граница которой превосходит силу трения скольжения. Причем
не следует также пренебрегать и моментом сопротивления качению,
что особенно важно для автомобильных (упругих) колес. Именно
эти внешние силы замедляют движение центра масс поезда. Автор
цитированной книги [5] приходит к тому же выводу о
преимуществе торможения катящимися колесами, однако приписывает этот
факт наличию трения в цапфах осей в буксах. Ясно, что эти
силы являются внутренними и никак не могут повлиять на движение
центра масс поезда! Отметим, что сам процесс торможения является
управляемым и приводит к постепенному увеличению силы трения
покоя, вплоть до ее предельно допустимого значения. На рис. 4
представлена схема торможения катящегося колеса, для которого
уравнения динамики суть следующие:
гаг2
mv = —F + S, —— ш = Fr - 2/iiNr, v = wr, (3.1)
где ji\ — коэффициент трения между колодками и колесом, причем
предполагается, что отсутствует момент трения в центре колеса.
Рассмотрим плоскую задачу о движении вагона массы М с
двумя симметрично расположенными одинаковыми тормозящими
колесами массы га каждое. Эта система приведена на рис. 5.
Записывая аналогично (3.1) уравнения динамики для каждого
из колес и присоединяя к ним уравнение для горизонтального дви-
3. Задача Л. Б. Левенсона
165
/////////////////,
Рис.4. Задача Л. В. Левенсона. Схема торможения колеса: 1 — диск колеса,
масса которого т, а радиус г; 2 — тормозные колодки, N — нормальная
сила, прижимающая колодки к поверхности колеса; v — скорость центра
масс О колеса; ш — угловая скорость колеса; F — касательная сила реакции
плоскости (сила трения покоя); S — горизонтальная сила реакции со стороны
поезда; Р — мгновенный центр скоростей колеса
N0i ЧУ ЧУ ^02
Fi F2
Рис.5. Задача о торможении вагона: 1, 2 — тормозящие колеса; 3 — кузов
вагона; N0i, N02 — нормальные тормозящие усилия на колодки колес; v —
скорость центра масс системы; С — центр масс кузова; а, Ь — расстояния
от центра колеса до центра масс кузова
166 Глава 8. Сухое трение в задачах и решениях
жения центра масс кузова, получим:
га
mv = -Fi + Si, —v = Fx- 2niNou
m
mv
-F2 + S2, - = F2 - 2inN029
Mv = -Si - S2,
где S\, S2 — горизонтальные силы взаимодействия центров колес
с кузовом.
Предполагая ЛГоь Щ2 заданными, из этой системы нетрудно
получить соотношения
Hi
Fi
F2
v =
Зга + М
Hi
Зга + М
2 Hi
Зга + М
[(5га + 2M)N0i - mN02],
[(5га + 2M)N02 - raiVoi],
(iV0i +iV02).
Далее, применяя принцип Даламбера для кузова, мы получим
для вертикальных реакций 2\, Т2 в центрах колес выражения
М
м
т2 = —
2
a 2/jLi
+ т
Ъ Зга + М
a 2jii
6 Зга + М
(JVoi + N02)
(Nqi + N02)
где a, b — расстояния от центров масс колес до центра масс кузова
соответственно по вертикали и горизонтали. И наконец, для
нормальных реакций Ni я N2, действующих на колеса, мы получим:
Ni = mg + Гь N2 = mg + T2.
Полученные соотношения служат для проверки условий
Fi^/iNu F2^nN2,
где ji — коэффициент статического трения. Эти условия означают
отсутствие проскальзывания в точках контакта колес.
4. Задача о движении точки по двум шероховатым поверхностям 167
Полученные формулы служат также для выбора тормозящих
усилий JVqi, iV02 на колодки с целью достижения определенного
режима торможения.
Отметим, что рассмотренная плоская задача допускает
обобщения и для пространственного случая. Движение железнодорожных
составов по криволинейным траекториям при наличии трения
рассматривалось П. Е.Жуковским в его работе [6]. >
4. Задача о вынужденном движении точки
по двум шероховатым поверхностям
Приводим формулировку задачи, следуя [7, с. 13, пример 6].
-|_
«Материальная точка массой га движется по расположенной
в вертикальной плоскости круговой направляющей радиуса г
под действием кривошипа, ось вращения которого
находится на левом конце горизонтального диаметра направляющей
(см. рис. 6). Вращение кривошипа начинается из положения,
совпадающего с горизонтальным диаметром, и происходит по
закону <р = ut, ш = const. Коэффициенты трения при
движении точки по кривошипу и направляющей одинаковы и
равны /. При каком значении угла (р движение точки станет
невозможным при любой силе давления кривошипа на точку?»
Решение. Эта задача посвящена эффекту «заклинивания»,
который часто имеет место в реальных механизмах. Приведем ответ из
[7, стр. 14]: заклинивание происходит при (р = (р* таком, что
тг 2/ 1 - /2
<р* = - - arctg l_f2> т-е- <£* = arctS 2f *
Ниже будет показано, что этот ответ неполон и заклинивание
имеет место не всегда. Правильный ответ таков:
а) если / G [0, 1/л/31 и 0 < w < —— -т- = №, то заклинива-
/ J 4r/(l + /2)
ним не будет при всех <р G [0,7г/2];
168 Глава 8. Сухое трение в задачах и решениях
б) если / Е [0, l/v3] и ш > ujq, то заклинивание будет при <р =
t l~f2
= (р* = arctg ;
в) ес/ш / G [1/л/З, I], то заклинивание будет при любом и) и
случится оно при <р = <£>*;
г) ес/ш / G [1, оо), то заклинившие будет при любом ш и случится
оно при <р = 0.
Приведем полное решение задачи, опуская несущественные
детали. На рис. 6 v — абсолютная скорость точки, причем v _L 0\M
и v = 2(л)г. Силы R и F — это силы трения, направленные против
соответствующих скоростей: R — против скорости v, a F — против
скорости vr — относительной скорости точки М по кривошипу
ОВ (см. рис.6). Ясно, что направления v и vr, а вместе с ними
и силы трения R и F фиксированы и таковы, как они указаны
на рис. 6. Однако направления сил нормальных давлений N и Q
могут в процессе движения, вообще говоря, меняться. Те
направления N и Q, которые указаны на рис. 6, примем за положительные.
Рис.6. Движение точки по двум шероховатым направляющим.
ОВ — кривошип, М — материальная точка (втулка), v —
абсолютная скорость точки (по кругу), vr — относительная скорость
точки (по кривошипу), N, Q — силы нормального давления, R,
F — силы трения для круга и кривошипа соответственно
4. Задача о движении точки по двум шероховатым поверхностям 169
Полагая га = 1, запишем уравнения движения точки М в
проекциях наг ип (см. рис. 6):
О = -R - g cos 2<p - F sin <p + Q cos <p,
v2 (4-1)
— = N + g sin 2<р - F cos <p - Q sin (p.
r
Так как в процессе движения знаки сил трения R и F не меняются,
то справедливы соотношения
R = f\N\, F = f\Q\,
которые учитывают возможное изменение знаков сил нормального
давления N и Q. Обозначая Q = x, N = y,m (4A) получим систему
Г х cosy- \x\f sirup- f\y\ =gcos2(p,
1 - xsiny - \x\f cos(p + у = h -gsin2(p,
где обозначено h = v2/r.
Отметим, что в [7] при записи системы (4.2) отсутствовали
знаки модулей, что и привело к неполному результату.
Дальнейшее решение состоит в исследовании
кусочно-линейной алгебраической системы (4.2). Возможны 4 варианта:
1) хх > 0, ух > 0;
2) х2>0, у2<0;
3) х3 < 0, уз > 0;
4) х4 < 0, у4< 0.
Тогда соответствующие решения:
-ft(e-;)fl(*)cosy> h[(i + ef)-(e + f)z]
1)Ж1= 1-/2-2/* ' * = 1-/*-2/* ' (4J)
-fe(g + /)52(z)cosy h[(l + ef)-(e + f)z]
)Х2~ \ + р ' ^2" \ + р ' ^'
-hje-ftS^z) cosy h[{l-ef)-{e-f)z]
3)жз = Г-—Г5 . 03 = г-—Г5 , (4.5)
4)Ж4= 1-Я+2/, ' ^4= 1-/2 + 2/Z ' ^
170 Глава 8. Сухое трение в задачах и решениях
где обозначено:
g gr
е = т = -г, z = tg(p,
h v1
q < \ 2 , 2/g e + z 2 2fe e-z
Si(z) = z + -z , S2(z) = z —z —.
e - f e-z e+/ e+z
Если 0 < e < —-^=^=, то квадратные трехчлены S\(z) и S2(z)
в нуль не обращаются, т. е. S\ > О, S2 > 0. Тогда решение (4.4)
не реализуется, так как х2 < 0, а решение (4.5) не реализуется, так
как хз > 0 (е < /). Далее, при 0 < / < 1 имеем ef < / < 1, т. е.
?/4 > 0, и не реализуется (4.6). Остается решение (4.3), в котором
заклинивание (т. е. х\ —> оо, у\ —> оо) будет при z = — =tg<p*.
Если же /> 1, то не реализуется (4.3), так как х\ < 0, а (4.6)
не подходит, так как при z = 0 будет ^4 > 0.
Таким образом, незаклинивание может иметь место лишь при
В этом случае функции S\(x) и S2(x) имеют вещественные
корни:
e + f
51(z) = 0 -> zi =
ef + Vf^ + ^-f2'
-ef + Vf2£2 + e2 - /2
S2(z) = 0 ->■ 2i = -,
«i
z2 = —.
£2
Тогда мы имеем:
Sl{z) = (z-zl){z-z2), S2(z) = (z - y) (z - y) . (4.8)
/
Рассмотрим интервал —. < e < f.
Пусть 0 < / < 1. Тогда непосредственной проверкой убеж-
I-/2
даемся, что на интервале 0 ^ z < z* = —-—— реализуется лишь
^1
4. Задача о движении точки по двум шероховатым поверхностям 171
решение (4.3) (используется неравенство z^ > Z\ > z*), т.е.
заклинивание будет при z = z*.
Если 1 < / < оо, то опять же проверкой убеждаемся в том,
что при z = 0 ни одно из решений (4.3)-(4.6) не реализуется, т. е.
заклинивание будет сразу при z = О
Рассмотрим интервал / < е < оо.
Если 1 < / < оо, то при z = 0 имеем у\ < О, у^ > 0, уз < О,
?/4 > 0, т. е. ни одно из решений (4.3)-(4.6) не реализуется, и
заклинивание происходит сразу при z = 0, т. е. <р = 0.
Пусть 0 < / < 1. Так как / < е, то из (4.7) имеем zi > О,
Z2 < 0. Выпишем решения из (4.3)-(4.6), отбросив сомножители,
не влияющие на знак:
1+g/
т - z
Z - Z\ €+ f /
Ж1 = L>0, У1 = ^^ >0, 4.9
z* - z z* - z
( 1\ 1 + g/ /
ж2 = - U - - ) > 0, кг = —^ " z < О, (4.10)
яз = -(* - *i) < 0, у3= ]—^- -z>09 (4.11)
s4 = - (z - j J < 0, jfo = ^y - * < О, (4.12)
где zi дается формулой (4.7).
Сначала выбираем то решение, которое реализуется при z = О
(<р = 0). Ясно, что это — решение (4.9). Нетрудно показать
(доказательства здесь опускаются), что при / Е (1/л/З, 1) и е > /
справедливы неравенства
21 > 2*, — > 2*. (4.14)
Z\
Неравенства (4.13) проверяются непосредственно, а
неравенства (4.14) следуют из того факта, что z\ является монотонно
возрастающей функцией от е, a l/z\ — монотонно убывающей функцией
172 Глава 8. Сухое трение в задачах и решениях
от е. Поэтому:
Z\ ^ Zi
= / > z*, — ^ —
e=f Z± Z±
f + ViTf
> z*.
Из неравенств (4.13), (4.14) следует, что при 0 < z < z*
реализуется лишь решение (4.9), которое дает заклинивание при z = z*.
Пусть теперь 0 < / < 1/л/З и е > /.
Рассмотрим следующие случаи:
1 - f2
1) / < е < 1 и / G (0, л/2 - 1). Тогда z* = —-^- > 1 и
справедливы неравенства
1 1-е/ 1+е/
*i e - / е + /
1 + е/
Функции Zi и — монотонно убывающие по е функции,
причем при
£-£*~ 1-3/2 <1
они одновременно (!) принимают значение z*. Следовательно, при
О < е < е* реализуется только решение (4.9) (при 0 < z < z*),
в котором случится заклинивание при z = z*. Если же е* < е < 1,
то при 0 < z < z\ реализуется решение (4.9), при z\ < z < —
£-f
1 - е/
реализуется решение (4.11), а при — < z < оо реализуется
£ ~ J
решение (4.12), т.е. заклинивание не происходит.
2) 1 < е < оо и / Е (0, л/2- 1). Тогда справедливы неравенства
1+е/ 1-е/
£* ^ 1 > zi > —— > -.
z+f e-f
l+ef
В этом случае при 0 < z < — реализуется решение (4.9),
1 + е/ 1 / 1
при ^ z < — реализуется решение (4.10), а при — ^ z < оо
е + / zi zx
реализуется решение (4.12), т.е. заклинивание не происходит.
5. Задача Пэнлеве—Рауса
173
3) / Е (л/2 - 1, 1/л/З). Тогда z* < 1, и мы имеем, по аналогии
с предыдущими пунктами, при 0 < е < £* заклинивание в
реализующемся решении (4.9) при z = z* < 1. Если же е ^ е* > 1, то мы
имеем неравенства
1 , 1 + е/
- > 1 > z, > zx > ——г-
z\ e + f
1 + ef
Тогда при О ^ z < — реализуется решение (4.9), при
£ ~г I
1 + е/ 1 / !
< 2: < — реализуется решение (4.10), а при — < z < оо
1-е/ 1+е/ 1
реализуется решение (4.12) (так как < — < — при
е- f e + f zx
е > е* > 1), т. е. заклинивание не происходит.
Таким образом, все возможные ситуации исчерпаны, и ответ
к задаче обоснован. Отметим в заключении, что все переходы
решений друг в друга осуществляются при обнулении х или у, при этом
ненулевая переменная сохраняет свою непрерывность (это
проверяется непосредственно). >
5. Задача Пэнлеве—Рауса
В книге Э. Д. Рауса [8, стр. 147] приведена следующая задача
(цитируем по книге [8]).
«Однородный шар брошен без начальной угловой скорости
прямолинейно вверх по шероховатой плоскости, наклоненной
к горизонту под углом а. Коэффициент трения равен //.
Показать, что полное время, в течение которого шар поднимался
по плоскости, будет таким же, как и в случае гладкой
плоскости, и что время, в течение которого он скользил, относится
2tga
к времени, в течение которого он катится, как ».
7ц
Решение. Отметим, что приведенное утверждение справедливо
2 tg о. 2 tg о.
лишь при /л ^ . Если же ц < , то утверждение неверно
174 Глава 8. Сухое трение в задачах и решениях
потому, что у шара во время его подъема (т. е. пока скорость его
центра не обратится в нуль) не будет существовать режима
качения. Кроме того, время его подъема в этом случае зависит от ц.
Очень подробно решение подобной задачи (для обруча и
однородного шара) приведено в книге Пэнлеве [1, стр. 119, 135], причем
для произвольных начальных условий. Поэтому здесь для
начальных условий, рассматриваемых Раусом, приведем лишь основные
пункты решения.
Пусть v — скорость центра шара, ш — его угловая скорость
(ясно, что задача плоская, т. е. о; — угловая скорость качения шара).
Имеем v(0) = Vq, ш(0) = 0. Направление положительных
отсчетов — вдоль наклонной плоскости вверх. Обозначим через
V\ = v — шг скорость точки касания шара (г — радиус шара). В этой
точке возникает сила трения F, удовлетворяющая условиям
Vi ,..
F=--—-fimg cos a, v\ ф 0, |F| < /img cos a, v\=0.
Ivil
Уравнение движения при v\ Ф 0:
mv = —mg sin a - /img cos a • sgn v\,
2 2.
-mr u) = jimg cos a • sgn v\ • r,
где m — масса, г — радиус шара.
Из полученных уравнений имеем:
Ь\ = (v — uir) = —g sin a jig cos a • sgn v\.
2
а) Пусть ц ^ -tga. Тогда v\(t) монотонно убывает от vq
до нуля по закону
7
Ь\ = —g sin a - -jig cos a.
Этот процесс происходит в течение времени
U
gsina + -fig cos a
Далее будет v\(t) = 0, t > t\ (т.е. качение). Другие варианты ведут
к противоречию. При качении реализуется сила трения F такая,
5. Задача Пэнлеве—Рауса
175
что
2 2
F = -rag cos a ^ //rag cos a (так как // > - tg a),
причем направлена F строго вверх. Тогда скорость центра меняется
по закону
2 5
v = —g sin a + -g sin а = —g sin a (t ^ t\).
Ясно, что v(t) обратится в нуль через время t^.
5
1 1 vo-ngcosa
t2 = -г v(ti)
5 . v u 5 .7
Г
Тогда получим:
gsina -gsina gsina +-//gcosa
t* = ^i + ^2 = —: ?
gsma
т. е. утверждение Рауса.
2
б) Пусть ц < - tga. Тогда опять V\(t) будет монотонно
убывать от ^i(O) = Vo до нуля в течение времени t\ из пункта а).
Однако в точке t\, где V\(t\) = 0, мы должны принять V\(t\) < О
(другие варианты ведут к противоречию). Тогда процесс
уменьшения V\(t) пойдет дальше, причем сила трения F меняет знак и будет
направлена вверх, так как точка касания скользит против скорости
центра шара. Уравнения движения такие:
v = -gsina + jig cos a, (wr) = —jig cos a, t^t\.
Таким образом, v(t) уменьшается от v(t\) до нуля в течение времени
t
21
5
l v0-ngcosa
g sin a — ug cos a . 7
^° gsma +-//gcosa
Тогда имеем полное время подъема
3
г;0 sina + -//cosa ^
t\ =t\ + £21 = 7 ^ \~ < ^* = —г-
Я / . ч / • 7 \ g sin a
(sin a - // cos a) I sin a + -ц cos a !
176 Глава 8. Сухое трение в задачах и решениях
2
при ц < - tga. Итак, здесь утверждение Рауса становится
неверным (t\ < t* и t\ явно зависит от коэффициента ц). Отметим в
2
заключение, что здесь £*(//) ^ t* при О ^ ц ^ - tga, причем
t\(n = Q) = U и t\\u = -\%a\=U.
Минимальное же значение времени t\(ji) достигается при
^ = // = з VvT /tga*
При этом min t\(ц) = 0,944 • t*, т. е. ошибка невелика! >
6. Задача Зоммерфельда
В книге [9] на стр. 114 рассматривается следующая задача.
Цитируем:
"L
«...К вертикальной оси прикреплен под углом 7г/2 + а боковой
стержень, на который надета подвижная втулка (см. рис. 7).
Если ось не вращается, то втулка покоится, смотря по тому,
имеет ли место a < <р или a > <р (<р = arctg /, / —
коэффициент трения)...»
В этой задаче А. Зоммерфельд предлагает определить область
равновесия (относительного) втулки при ш ф 0. Приводим полное
решение этой задачи (решение, приведенное в цитированной книге
[9], с точки зрения автора настоящего пособия, представляется
запутанным и неполным).
Решение. Пусть г — расстояние втулки до оси вращения z, N —
сила нормальной реакции, действующей на втулку со стороны
бокового стержня, F — сила трения (покоя при относительном
равновесии втулки), Ф — сила инерции. Обозначим через £ ось,
направленную вдоль положительного направления бокового стержня.
6. Задача Зоммерфельда
111
Рис.7. К задаче Зоммерфельда: вращающийся стержень с ползуном
Если и) = const, то можно утверждать, что силы N и Ф лежат
в плоскости z£ (см. рис. 7). Применяя принцип Даламбера к
втулке в состоянии ее относительного равновесия, получим следующие
уравнения:
{F + Ф cos a — mg sin a = 0,
N — Ф sin a — mg cos a = 0.
Кроме того, имеет место неравенство Кулона:
F
(6.1)
N
</.
(6.2)
Учитывая, что Ф = row r, мы получим из (6.1) и (6.2)
неравенства
tga-f
г > к-
l + ftga
r(l-/tga)<*(tga + /),
(6.3)
(6.4)
где к = g/w .
178 Глава 8. Сухое трение в задачах и решениях
Рассмотрим два случая:
а) 0 < / tga < 1. Тогда из (6.3) и (6.4) следует, что зона
равновесия определяется неравенствами
г\ < г < г2, (6.5)
где г2 = к- ——, г{ = max <^ 0, к — >;
l-ftga { l + ftga)
б) 1 < /tga < оо. Тогда (6.4) выполнено заведомо при любом
г > 0, а зона равновесия задается неравенствами (6.5), где
следует полагать г2 = оо. Именно этот случай бесконечной зоны
относительного равновесия был упущен А. Зоммерфельдом! >
7. Задача о равновесии стержня
на шероховатой плоскости
Однородный стержень веса Р опирается своим нижним
концом А (см. рис. 8) на шероховатую горизонтальную плоскость
и удерживается в равновесии под углом а к горизонту
веревкой, привязанной к его верхнему концу В. Веревка перекинута
через неподвижный шероховатый цилиндр и на другом конце
несет груз весом Q. Коэффициент трения стержня о плоскость
и коэффициент трения веревки о цилиндр равны /. Найти
максимальное значение Q.
Рис.8
7. Задача о равновесии стержня на шероховатой плоскости 179
Решение. По условию задачи угол а фиксирован. Зафиксируем
также угол (3 — угол, составляемый нитью с горизонтом. Будем
искать допустимые значения Q для равновесия, а затем будем их
максимизировать по /3 Е (0,7г/2). Причем ясно, что /3 > а, так
как в противном случае стержень АВ будет вращаться по часовой
стрелке вокруг точки А.
ПустьПриведите подписи к рисункам 8, 10, 11, 12, 13
натяжение нити в точке В есть S. Тогда уравнения равновесия для
стержня суть следующие:
F + S cos (3 = 0, N - Р + S sin /3 = 0,
Р (7Л)
/ cos a + SI sin /3 cos a — SI cos /3 sin a = 0,
где F, N — силы, соответственно, трения покоя и нормальной
реакции в точке опоры ^4, причем, так как связь односторонняя,
то N ^ 0; S — натяжение нити, для которого полагаем S > 0, / —
длина стержня.
Из (7.1) получаем соотношения
F = -Scos/3, N = Р- Ssin(3 > 0,
s = р (7-2)
2cos/3(tg/3-tga)'
Кроме того, должно соблюдаться неравенство Кулона:
F
N
< /. (7.3)
Из соотношений (7.2) и (7.3) следует, что для равновесия
стержня необходимо выполнение следующих неравенств:
1
tg /3 > tg a, tg /3 ^ 2 tg a, tg /3 ^ 2 tg a + -.
Все эти неравенства эквивалентны одному неравенству
tg/3^2tga + - =щ. (7.4)
В дальнейшем будем предполагать неравенство (7.4)
выполненным.
180 Глава 8. Сухое трение в задачах и решениях
Натяжение веревки слева от блока дается формулой из (7.2),
которую запишем так:
Pv/l + tg2/3
(7.5)
2 tg/3-tga
Далее, для натяжения S, даваемого формулой (7.5), ищем
интервал изменения значений силы Q, при которых не
реализуется скольжения веревки по окружности блока (как против часовой
стрелки, так и по ней). В соответствии с формулой Эйлера (вывод
которой приведен, например, в [10, стр. 243-245]) имеем
следующий интервал:
Q2 <Q<Qu
Q2 = S exp
Qi = S exp
-/(§+,>
/i!+>
(7.6)
где S дается формулой (7.5), а угол /3 удовлетворяет неравенству
(7.4). Так как в задаче требуется найти максимальное Q, при
котором реализуется равновесие, то будем искать максимум Q\ по
углу /3, удовлетворяющему неравенству (7.4).
Обозначим u = tg/3. Тогда задача сводится к поиску максимума
функции
Qi(u)
pVTTv?
exp
7Г
/( -+arctg^
2 u - tg a
при u G [щ, 00], где щ = 2 tg a + 1//.
Берем производную этой функции по и:
(7.7)
dQi P
-г- = — ехр
du 2
7Г
/ ( - + arctg и
tt(/-tgq)-(l + /tga)
л/1 + и2(ы — tg a)2
(7.8)
Возможны два случая:
а) 0< / <tga;
б) tga < / < сю.
а) 0 < / < tg a. Тогда, в соответствии с формулой (7.8), имеем
dQi/du < 0 при всех и > щ,т.е. максимум функции Q\ реализуется
7. Задача о равновесии стержня на шероховатой плоскости 181
в точке и = щ:
7Г
л Л/ ч fV//2 + (2/tgg+l)2
maxQ = Qi(tti) = — exp
2 1 + / tg a
, 1 + 2/tga
где /?i = arctg
j+A
/
6) tg a < / < oo. Тогда функция Qi из (7.7) достигает строгого,
изолированного и единственного минимума в точке
l + /tga ,_Q.
^ = ^* = -^—: • (7.9)
/-tga
Иными словами, график этой функции выпуклый книзу. Здесь
следует различать два случая:
61) щ <щ -^tga< -f /- -
62) ti* > tii -^ tg a > - I / - -
Рассмотрим эти случаи в отдельности.
1 / 1\
61)tga<-(/-— I. Ясно, что этот случай реализуется лишь
при / > 1. Тогда функция Q\(u) из (7.7) монотонно возрастает при
всех и > щ, т. е. ее максимум реализуется при и = оо (/3 = тг/2)
и равен, в соответствии с формулой (7.7),
Р f
max Q = Qi(oo) = — е .
1 / 1\
62) tg а > - I / — — I. Кроме того, здесь (по исходному
предположению) tg a < /, т. е. множество таких а непусто! Ясно, что
в этом случае, в силу выпуклости графика функции Q\(u),
максимум реализуется на одном из концов интервала [tii, сю), т. е.
maxQ = max {Q\(ui), Q\(oo)}.
Таким образом, здесь максимум может достигаться как в точке
и = tii, так и в точке и = оо. Отметим, что реализация
максимума Q в точке и = оо соответствует углу /3 = тг/2 (оба конца веревки
182 Глава 8. Сухое трение в задачах и решениях
вертикальны), причем нарушение равновесия при Q > Q\(oo)
происходит с проскальзыванием веревки по блоку по часовой стрелке
с одновременным поворотом стержня против часовой стрелки
вокруг точки опоры А, в которой при этом реализуется почти нулевая
сила трения покоя, т. е. точка А остается неподвижной!
Реализация же максимума Q в точке и = щ соответствует углу
fl+2ftga\ тг
причем нарушение равновесия при Q > Q\(u\) происходит с
проскальзыванием веревки по блоку по часовой стрелке с
одновременным движением стержня АВ, происходящим со скольжением в
точке А (вправо!). Однако доказательство этого факта достаточно
громоздко и здесь не приводится.
Подведем итоги и сформулируем результат и ответы к задаче.
I. / Е (0, tg а). Тогда max Q реализуется при
l+2/tgaN
/3=/3i= arctg
и он равен
/
-+arctg^i ) | =Ql(ul),
Py//2 + (2/tga + l)2
maxQ = — — exp
2 l + /tga
где щ = 2 tg a + l/f.
II- / £ (tga, oo). Тогда
ILL Если tg a >-(/- — ) (так как tg a < /, то это множе-
2V f,
ство заведомо непусто!), то max (J реализуется либо при
/3 = /3\, либо при /3 = 7г/2 и он равен
maxQ = max< Qi(u\), —e^ >.
IL2. Если 0<tga<-(/—— 1 (это множество непусто лишь
при / > 1), то max Q реализуется при /3 = тг/2 и он равен
max Q = —eJ .
2
7. Задача о равновесии стержня на шероховатой плоскости 183
А=0,5/
\
А=0,5(/- 1/j)
Рис.9. Диаграмма реализации maxQ при различных параметрах {tga,/}
Изобразим этот результат на диаграмме в области параметров
{А = tga,/} (см. рис.9).
Область I —
f>^-<\{f-j)).
Р f
max Q реализуется при /3 = 7г/2 и равен max Q = — е .
Область II —
(tga = A>/),
max Q реализуется при
/3 = pi= arctg
1+2/Л
/
и равен max Q = <2i(^i)-
Область III —
(К'-7)<"'}-
max Q реализуется либо при /3 = /3\, либо при /3 = 7г/2 и равен
Q = max<Ql(ul),-efn\. >
max
184 Глава 8. Сухое трение в задачах и решениях
8. Задача с трением из сборника И. В. Мещерского*
Цилиндр веса Q лежит на двух опорах А и В,
расположенных симметрично относительно вертикали, проходящей через
центр цилиндра (см. рис. 10). Коэффициент трения между
цилиндром и опорами равен /.
1) При какой величине тангенциальной силы Т цилиндр
начнет вращаться?
2) При каком угле в это устройство будет самотормозящимся?
Рис.10. Цилиндр в опорах из сборника И. В. Мещерского
Решение. Поясним формулировку задачи. В пункте 1) следовало
бы говорить о величине минимальной силы Т, при которой цилиндр
начнет вращаться вокруг своего центра О. А еще точнее, следует
искать значение минимальной силы Т, при которой нарушается
равновесие цилиндра, так как связи в точках А ж В
предполагаются односторонними и до начала этого вращения цилиндра может
начаться его опрокидывание вокруг опоры В с отрывом от
опоры А. Можно, конечно, исключить возможность опрокидывания,
сделав контакты в точках А и В неточечными, однако это усложнит
* См. [11, стр. 55, задача 5.14].
8. Задача с трением из сборника И. В. Мещерского 185
постановку задачи. В пункте 2) следует говорить об углах в, так как
таких углов бесконечно много. Кроме того, термин
«самоторможение» следует понимать, как возможность равновесия цилиндра при
любой (как угодно большой) величине силы Т, т. е. «заклинивание»
(«зона застоя»).
Цитируем ответы из указанного выше источника.
Для пункта 1):
т = т' = %жщЛр}-Г <8Л>
Для пункта 2):
cos^r^- (8-2)
Отметим, что в цитированном сборнике [11] в числителе правой
части неравенства (8.2) стоит 1 (а не /), однако это, скорее всего,
опечатка!
Нетрудно восстановить принцип решения, с помощью
которого были получены ответы (8.1) и (8.2). Этот принцип был
реализован (в частности) в пособиях [12,13]. Заключается он в следующем:
рассматривается самое начало движения цилиндра, которое
(априори) полагается вращением вокруг точки О по часовой стрелке и
без отрыва от точек контакта А и В. В этом случае в точках
контакта возникают силы трения скольжения, направленные строго
против вращения цилиндра, причем модули этих сил совершенно
однозначно выражаются через коэффициент трения / и
соответствующие нормальные реакции. Составляя уравнения равновесия
цилиндра в таком предельном состоянии, приходят к формуле (8.1)
для силы Т, а затем делается вывод (если знаменатель в формуле
(8.1) положителен!), что это и есть минимальная сила Т,
нарушающая равновесие тела. Если исключить возможный поворот тела
вокруг точки В с отрывом от точки А, то этот результат
является вполне корректным. Однако, в противном случае, минимальная
сила Т может даваться формулой
sin в /
T = T2 = Q- —. 8.3
1 - sin в
186 Глава 8. Сухое трение в задачах и решениях
Нетрудно проверить, что при / tg в < 1 имеем неравенства:
ТХ<Т2 при tg0>/,
ТХ>Т2 при tg<9</.
Если же / tg в > 1, то все наоборот.
Кроме того, отметим, что формула (8.1) является корректной
только при выполнении следующего двойного неравенства:
/<tg0< J1 + /2 + 1.
При нарушении правой части этого неравенства будет
cos0(l + /2)-/ <0, т.е. Ti <0,
а это противоречит постановке задачи, в которой тангенциальная
сила Т является прижимающей. А при нарушении левой части
приведенного неравенства будет отрицательна нормальная реакция
в точке А, которая в условиях начала вращения цилиндра вокруг
точки О дается (как это нетрудно проверить) формулой
COS0(tg0- /)
2sin0[(l + /2) cos в- /]'
что является недопустимым, если связь в точке А предполагается
односторонней!
Условие же (8.2), скорее всего, получено из такого
«правдоподобного» рассуждения: если (8.2) выполнено, то Т\ < О, что
противоречиво, значит, минимальной силы Т, вращающей цилиндр,
не существует, а следовательно, будет покой при любой силе Т > О
Похожее рассуждение (оставшееся непонятным для автора
настоящей работы) приведено в [12,13].
Однако, условие (8.2) означает только, что равновесие
цилиндра реализуется при любой силе Т > 0 и силах трения
покоя в точках А и В, которые обе направлены строго против
часовой стрелки. Если же направление сил трения покоя в точках А
и В иное (например, сила трения покоя в точке В
ориентирована по часовой стрелке, что физически может быть осуществлено,
например, «вбиванием» цилиндра между опорами i и В!), то
равновесие может быть обеспечено и с нарушением неравенства (8.2)
8. Задача с трением из сборника И. В. Мещерского 187
при Т > Т\ (или Т > Т2). Здесь следует только применить принцип
Аппеля и Пэнлеве (см. [1]), восходящий к Дж. Джеллетту, о
стремлении системы избежать скольжения при равновесии в условиях
трения покоя. Для реализации этого принципа необходимо
составлять уравнения равновесия для тела в предположении, что в
точках А и В действуют силы трения покоя, имеющие неопределенные
(априори!) направления и модули которых стеснены неравенствами
Кулона. Разрешимость (или неразрешимость) этих условий
свидетельствует о возможности (или невозможности) равновесия тела.
Необходимость применения этих принципов нам кажется логичной
(приемлемой) еще и потому, что в реальности коэффициент
трения покоя превосходит коэффициент трения скольжения. Кроме
того, особенность сил сухого трения заключается еще и в том, что
они могут менять свое направление (и, возможно, модуль) скачком.
Именно такая ситуация возникает при переходе тела из состояния
покоя в состояние движения в условиях сухого трения.
Аналогичный эффект имеет место, например, в момент перехода
управляемого движения автомобиля в неуправляемое движение — его «заноса».
Для рассматриваемой задачи применение описанного принципа
приводит к следующим результатам.
1- /tg# G (1, оо) — равновесие при любом Т ^ О
(«самоторможение», «зона застоя»).
2- /tg0 G (0,1) — равновесие при T G [0, Ti), движение при
Т G [Тьоо), если tg0 > / > 0; равновесие при T G [0,Т2),
движение при Те [Т2, оо), если 0 < tg0 < /.
Отметим, что область, даваемая неравенством (8.2), целиком
лежит в области, определяемой неравенством /tg#>l(/>0,
tg0 > 0). Изобразим полученный результат на диаграмме (рис. 11)
в пространстве параметров {/, А}, где А = tg0.
Область I: О < А/ < 1, А > / > 0 (1\ < Г2):
равновесие при Т G (0, 2\), движение при Те (Ть оо).
Область II: 0 < А/ < 1, / > А > 0 (1\ > Г2):
равновесие при Т G (О, Т2), движение при Т G (Т2, оо).
Область III: К А/ < оо, А/ < \/l + /2 + /4
(т. е. cos 0(1 + /2) - / > 0): равновесие при любом Т > О
(самоторможение).
188 Глава 8. Сухое трение в задачах и решениях
Рис.11. Диаграмма областей движения, равновесия и самоторможения
Область IV: К А/ < оо, А/ > л/\ + /2 + /4
(т.е. cos(9(1 + /2) - / < 0): равновесие при любом Т > 0
(самоторможение).
Опишем, как обосновать приведенный результат. На рис. 10
вводим систему координат Оху, ось Оу — по вертикали вверх, О —
центр тяжести цилиндра, Q — вес цилиндра, Т — тангенциальная
сила, Ni, N2 — нормальные реакции в точках А, В; F1? F2 —
силы трения покоя в точках А, В; в — угол, образуемый силами
Ni, N2 с вертикалью. Предполагая связи односторонними, всюду
далее считаем, что Ni и N2 направлены так, как указано на рис. 10
(к центру О цилиндра), т. е. N\ > 0, N2 > 0. На направления сил
Fi и F2 никаких ограничений не налагаем. Известно только, что
модули этих сил удовлетворяют неравенствам Кулона:
|Fi|^/iVi, |F2|^/iV2, JVi > 0, iV2>0. (8.4)
При покое цилиндра соблюдаются следующие три уравнения:
Y,FX = 0:-N2 sin (9 + Nx sin (9 + Fx cos (9 + F2 cos (9 = 0,
Y<Fy = 0:-N2 cos (9 + Nx cos в - Fx sin (9 + F2 sin (9 - T - Q = 0,
EMo = 0: - Tr + F\r + F2r = 0 (r — радиус цилиндра).
(8.5)
Всюду в дальнейшем будет использоваться обозначение А = tg в.
Будем искать условия разрешимости уравнений (8.5) совместно
8. Задача с трением из сборника И. В. Мещерского 189
с неравенствами (8.4). Из (8.5) имеем соотношения:
N2 = N1 + -T, F2 = T-FX. (8.6)
Л
Подставляя полученные равенства во второе уравнения
системы (8.5), получаем:
1 Т , о / Ч\ 1 + Л2 , ч
Fl = XNl + 2X^l + X Av^1 + A) " Q^T' (8J)
Тогда из (8.6) имеем:
-F2 = IjVt + ^ (l - А2 - Л\Л + А2) - Q1-^-- (8-8)
Обозначая в дальнейшем
1 + А2
Nx = х > О, <2* = Q
Т
2А2
2А '
yi = JL(l + \2-\y/TTtf), (8.9)
?/2 = ^(1-А2-Ач/1 + А2),
мы получаем, подставляя (8.7), (8.8) и (8.6) в неравенства (8.4):
-f + -)x + y1<Q*<x(f + -)+y1,
(8.10)
1\ fT ( 1\ /Г
-/ + - J ж + у2 - Y < Q, < х [ / + - J + ?/2 + '—.
Если неравенства (8.10) совместны (разрешимы), то и
уравнения (8.5) вместе с неравенствами (8.4) имеют решения, т. е.
равновесие возможно в описанном выше смысле (реализуется допустимыми
силами трения покоя). Если же неравенства (8.10) при каком-либо
наборе параметров {/, Q, А, Т} несовместны, то это означает
невозможность статического равновесия, т. е. начало движения.
Несложный анализ неравенств (8.10) показывает, что при
/ Е (1/А, оо) и выборе достаточно большого N\ = х > 0
неравенства (8.10) всегда совместны при любом наборе параметров
190 Глава 8. Сухое трение в задачах и решениях
{/, Q, А, Т} (левые части этих неравенств при х —> оо становятся
отрицательными, а правые как угодно большими и
положительными). Физически реализация таких достаточно больших нормальных
реакций N\ и, соответственно, N2 достигается, например, уже
упомянутым выше «вбиванием» цилиндра между опорами А и В. При
этом, в соответствии с формулами (8.7) и (8.8), силы трения
покоя F\ и i<2 будут направлены в разные стороны, что и обеспечивает
равновесие для больших Т и при нарушении неравенства (8.2)!
Рассмотрим случай / G (0,1/А). В этом случае неравенства (8.10)
можно переписать так:
0<1<«1^, x>^f, (8.11)
fT fT
Q*-y2 + -r- Q* - У2 - -г-
0<х< р*-, х> j-^-. (8.12)
Для совместности неравенств (8.11) необходимо и достаточно,
чтобы Q* > у\. Вспоминая про обозначения (8.9), мы получим
неравенство
A sin# .
0 < Т < Q , = Q- — = Т2. 8.13
Будем предполагать неравенство (8.13) выполненным. Из (8.11)
и (8.12) мы получим такие двойные неравенства:
0<^<Ж<^-^, (8.14)
Q* - У2 - -г- Q* - Уг + -г-
г^-<ж< р*-. (8.15)
Неравенства (8.14) и (8.15) представляют собой отрезки на
вещественной оси {х : -оо < х < оо}. Для того чтобы эти отрезки
8. Задача с трением из сборника И. В. Мещерского 191
о<^
/ +
Q*-yi-
~^1
-У\
1
А
fT
А
<
<
Ч*-У2-
-/ +
Q* -у\
1
А
имели непустое пересечение, необходимо и достаточно, чтобы
нижняя оценка одного из них не превосходила верхней границы
другого. Отсюда получим следующие два неравенства:
fT
(8.16)
(8.17)
Использование обозначений (8.9) и несложная проверка
показывают, что неравенство (8.16) выполнено заведомо, а неравенство
(8.17) эквивалентно неравенству
Итак, одновременное выполнение неравенств (8.13) и (8.18)
эквивалентно разрешимости (совместности) неравенств (8.10), т.е.
возможности статического равновесия тела при / Е (0, 1/А).
Нарушение одного из неравенств (8.13), (8.18) влечет несовместность
неравенств (8.10), т.е. невозможность статического равновесия
тела. Отметим, что в силу условия 0 < /А < 1 мы всегда будем иметь
неравенство cos0(1 + / )-/ > 0, т.е. неравенство (8.18) корректно.
На этом все утверждения приведенного результата можно
считать доказанными.
Отметим, что приведенное аналитическое решение задачи
может быть также получено геометрическим способом с
использованием конусов трения в точках А я В я теоремы о трех силах,
которые должны пересекаться в одной точке при равновесии системы.
В данном случае эти три силы суть силы реакции R^, R5 в
точках А, В и равнодействующая двух параллельных сил Q и Т. >
Замечание. Постановку задачи 8 можно интерпретировать как
процесс постепенного («квазистатического») нагружения лежащего на
опорах А, В цилиндра касательной силой T(t) от 0 при t = 0 до
(вообще говоря) оо. Задача тогда заключается в том, чтобы определить
192 Глава 8. Сухое трение в задачах и решениях
условия, при которых цилиндр всегда будет находиться в равновесии.
Оказывается, ответ на этот вопрос (помимо прочих условий) зависит
от начальных сил реакций, действующих на цилиндр (при t = 0).
Сформулируем полученные результаты для случая Q = 0.
Теорема 1. Пусть Q = 0, А/ > 1 (А = tg#), и сила T(t)
монотонно и непрерывно возрастает от Т(0) = 0 до оо. Тогда:
1) Если при t = 0 начальное состояние цилиндра является
напряженным и он находится в равновесии (т. е. при t = 0
связи в опорах А, В напряжены и имеем iVi(O) = iV2(0) > 0
(строго!), Fi(0) = -F2(0) = Ni(0)/X), то при t > 0
сохранится равновесие при любом непрерывном изменении силы
T(t) в интервале (0, оо) и любых непрерывных законах
изменения реакций N{(t), F{(t), г = 1, 2, предписываемых
какой-либо конструктивной реализацией односторонних
связей в опорах А, В. При этом должно соблюдаться условие
А2^1 + /2 + 1//2.
2) Если при t = 0 начальное состояние цилиндра является
ненапряженным и он находится в равновесии (т. е. при t = 0
связи в опорах А, В ослаблены и имеем ЛГг-(0) = 0, i^-(O) = 0,
г = 1, 2), то при t > 0 может быть либо равновесие, либо
движение, причем:
2.1) при А2 > 1 + /2 + 1//2,т.е. при cos0< //(1+ /2),
обязательно сохранится равновесие при указанных в п. 1)
условиях;
2.2) при А2 < 1 + /2 + I//2, т. е. при cos0 > //(1 + /2),
обязательно (сразу!) будет движение (либо вращение
цилиндра вокруг точки О, либо поворот его вокруг
точки В с отрывом от точки А и, возможно, с
проскальзыванием в точке В).
I I
Теорема 2. Пусть Q = 0, 0 < А/ < 1. Тогда при t = 0 в
равновесии цилиндра напряженного его состояния быть не может,
и (сразу!) возникнет одно из описанных в п. 2.2) теоремы 1
движений, т. е. равновесия цилиндра в этом случае быть не может.
8. Задача с трением из сборника И. В. Мещерского 193
Доказательства сформулированных теорем осуществляются
непосредственным перебором всех возможных ситуаций при
непрерывном изменении касательной силы и сил реакций и здесь не
приводятся ввиду их громоздкости.
Аналогичные результаты (которые мы здесь подробно не
приводим) могут быть получены и в случае Q > О (строго). Разница
только в том, что при Q > О начальное состояние цилиндра (при
t = 0 и Т(0) = 0) всегда будет напряженным, причем выполнено
неравенство
Тогда вопрос о равновесии или движении цилиндра при
дальнейшем монотонном и непрерывном увеличении тангенциальной силы
T(t) зависит также и от того, насколько сильно напряженным
было начальное состояние (т. е. от величины N\(0)). Можно показать,
что при А/ > 1 существует такое N\*, зависящее только от
параметров (J, А, /, при котором для любого iVi(O) > max{iVio, N^}
будет сохраняться равновесие при t > 0 и произвольном
монотонном и непрерывном изменении тангенциальной нагрузки T(t)
в интервале (0, оо). Если же 0 < А/ < 1, то начальное напряженное
состояние равновесия характеризуется двойным неравенством
л/ГТа1 , ч л/ГТа1
°<QW7\ ^7Т <^i(0)<<2;
2(1 +A/) iV ' "2(1-А/)*
Тогда нетрудно показать, используя неравенства (8.10), что при
Т > тах{ТьТ2}, где Т\, Т^ даются формулами (8.1), (8.3),
обязательно нарушится равновесие цилиндра.
В заключение отметим, что рассмотренная задача
представляет собой упрощенную модель так называемой контактной задачи
с трением, которая является одной из труднейших в аналитической
теории упругости. Приведем здесь слова Р. В. Гольдштейна из
предисловия к книге [15, стр. 6]: «В контактных задачах с трением важна
история нагружения (курсив наш. — Г. Р.), а не только текущие
значения нормальных и сдвиговых нагрузок».
194 Глава 8. Сухое трение в задачах и решениях
9. О некоторых задачах теории удара
с односторонними связями*
Задача 1 (задача № 16.21 из [14]). В цирковом аттракционе
используется подкидная доска, на правый конец которой с
высоты Н падает шар А массы М\ и остается на доске в точке
контакта А\ (рис. 12). На другом конце доски находится шар В
массы М^, который, приобретя скорость, отделяется от доски при
повороте ее вокруг горизонтальной оси. Момент инерции доски
относительно горизонтальной оси вращения, проходящей
через точку О, равен J, угол наклона доски к горизонту равен а.
1) Определить наибольшую высоту подъема шара В, если
ОАх =/ь ОВ = 12.
2) Решить задачу, если шару В сообщена в конце удара
относительная по отношению к доске скорость v,
направленная перпендикулярно к доске.
Замечание 1. Фраза, выделенная в условии задачи, нуждается в
уточнении. Дело в том, что на шар В наложена существенно односторонняя
геометрическая связь, а поэтому процесс и момент схода с этой связи
///////////
Рис.12. Удар шара о цирковую доску
* Результаты настоящего пункта опубликованы в статье автора [16].
9. О некоторых задачах теории удара с односторонними связями 195
(о котором идет речь в формулировке задачи) должен быть определен
строго, как с формальной, так и с физической точек зрения. В
приводимом ниже решении предпринята попытка изложить этот вопрос
научно-методически так, чтобы сделать его понятным для студентов
вузов.
Замечание 2. Пункт 2) в формулировке задачи также нуждается в
уточнении. Непонятно, как сообщить шару В дополнительную
скорость в конце удара. Наверное, речь идет о той дополнительной
скорости, которую сообщает своему телу цирковой акробат (шар В)
в момент удара, отталкиваясь от доски.
Решение. 1) Доударное состояние системы известно: доска и шар В
в покое, т. е. uj~ = О, где uj~ — угловая скорость доски до удара,
шар А непосредственно перед ударом имеет вертикальную
скорость V\ = \/2gH (эта скорость определяется из закона полной
механической энергии для процесса свободного падания шара А
/ —\ 2 \
с высоты Н: M\gH = -M\(vx ) ). Послеударное состояние
системы также определено: доска вместе с шарами А я В начинает
поворачиваться вокруг О. Неизвестна только послеударная угловая
скорость этого поворота, которую обозначим ш+.
Подчеркнем еще раз, что непосредственно после удара оба
шара сохраняют свой контакт с доской (шар А по условию «прилипает
к доске», а шар В может оторваться от доски только при
дальнейшем ее вращении!). Для определения w+ применяем теорему
об изменении кинетического момента при ударе относительно
точки О. Выбор точки О связан с тем, что внешние ударные импульсы
возникают только в шарнире О, т. е. их момент относительно этой
точки равен 0, а поэтому кинетический момент всей системы
относительно точки О сохраняется.
До удара имеем:
Kq = M\Vil\ cos a,
после удара имеем:
К+ = Ju+ + Mxu)+l\ + M2u+l22.
Так как Kq = Kq , то получим:
+ Miy^gfi cos a
u) = ^ г- (9.1)
J + Mllj+M2f2 V ;
196 Глава 8. Сухое трение в задачах и решениях
2) Исследуем теперь вопрос отрыва шара В от доски. Будем
предполагать, что доска абсолютно шероховатая или шар помещен
в небольшом желобе доски, чтобы исключить возможность
перемещения его вдоль доски. Введем систему координат Вху с началом
в точке В и осью у, перпендикулярной доске (рис. 12). Основным
критерием безотрывного движения груза В на доске является
положительность нормальной (т. е. вдоль оси By) силы, действующей
на шар со стороны доски. Запишем уравнение динамики для
груза В вдоль оси у при безотрывном движении (т. е. вместе с доской):
M2ul2 = N - M2g cos <p, (9.2)
где N — нормальная реакция, ш — угловое ускорение доски, <р —
угол наклона доски к горизонту: <р Е (-а, а). Здесь мы для
простоты предполагаем, что граничные положения доски симметричны
при опоре на А или В, т. е. угол наклона <р доски к горизонтали
меняется в пределах от -а до +а. Этого всегда можно добиться,
подняв или опустив уровень пола под точкой А (или В).
Пусть М$ — масса доски, х3 — координата центра ее масс
в системе Вху, тогда уравнение моментов для системы
относительно точки О в послеударном движении имеет вид
<b(J + Mxl\ + M2l\) =
= M\gl\ cos <p - M2gl2 cos <p + Мз#(#з - l2) cos (p. (9.3)
Из (9.2) и (9.3) получим следующую формулу для N:
M2l2g cos (p r /
N = M2gcos<p+ 22f2 ;.12[М111-М212 + Мъ(хъ-12)]. (9.4)
J -\- 1V1\1\ -\- 1V1212
Изучим следующие две возможные ситуации:
Г) отрыв происходит сразу, т. е. при <р = —а;
2°) отрыва при (р G [—а, а) нет, и он происходит «естественным»
образом при <р = а, когда конец А доски ударится об опорную
горизонтальную плоскость и доска начнет обратное вращение
(если, конечно, у системы хватит приобретенной в результате
удара кинетической энергии!).
Из формулы (9.4) видно, что случай 1° имеет место при
выполнении неравенства
J + Mxl\ + Mi/i/2 + M3l2(x3 - l2) < 0. (9.5)
9. О некоторых задачах теории удара с односторонними связями 197
При выполнении противоположного неравенства
J + Mxl\ + Mi/1/2 + M3l2(x3 - /2) > 0 (9.6)
будет иметь место случай 2°.
Пусть, например, доска является однородной, тогда
хъ = —^—, J = M3V 12 + M3V 4 .
Неравенства (9.5) и (9.6) принимают вид
-М3(2/? - /22 + /i/2) + Mi/? + Mi/1/2 < 0, (9.7)
о
-M3(2Z? -l\ + /i/2) + Mi/? + Mi/1/2 > 0. (9.8)
6
Из этих формул видно, что если М3 достаточно велико и
2l\ - l\ + /1/2 < 0 (/2 > 2/i), то груз В отскочит сразу, а если
/2 < 2/i, то груз В отскочит лишь в момент удара конца А доски
о землю!
Пусть выполнено неравенство (9.5). Тогда груз В, получив
скорость V2 = u+h перпендикулярно к доске, сразу после удара не
будет контактировать с доской и полетит по параболе влево от
доски (так как предположение контакта приводит к отрицательности
нормальной реакции, действующей на шар В вдоль оси By).
Наибольшую высоту его подъема мы определим опять же из закона
сохранения полной механической энергии, записанного в
неподвижных осях Ох\у\ (см. рис. 12):
■ [(<) + К/] = Mjgjfaax + ^(<)2
=> Ушах = ^-(fj,)2 = ^-(w+)2/2 cos2 a =
= Я cos4 a -ф^ T . (9.9)
\J + Mll\ + M2l2J V ;
Пусть выполнено неравенство (9.6). Тогда груз В оторвется лишь
при ip = а, т. е. в момент удара конца А доски о землю. В этот
момент он будет иметь скорость щ = 0^2, где ш2 ф ш+, а>2 > ш+.
198 Глава 8. Сухое трение в задачах и решениях
Причем эта скорость будет перпендикулярна доске и направлена
вправо. Скорость оо2 мы найдем из закона сохранения полной
механической энергии для системы «доска + шары А я В»:
l-(j + mxi\ + M2i22)[u22 - (w+)2] =
= M\gl{l sin a - M2gl22 sin a + M3g(x3 - l2)2 sin a.
Отсюда получаем:
2 / +ч2^. • Mlll-M2l2+M3l2(x3-l2) ,Qin.
u)2 = w ) +4gsina 5 5 . (9.10)
Теперь нетрудно найти максимальную высоту подъема. Ясно,
что при малых а эта высота количественно будет мало отличаться
от уже полученного ответа (9.9). Однако качественно результаты
отличаются сильно: в одном случае шар В полетит влево, а в
другом — вправо.
Отметим еще одну возможную ситуацию, которая может
реализоваться в рассматриваемом случае выполнения неравенства (9.6).
Если вместе с неравенством (9.6) выполнено неравенство
Mi/i - М212 + М3(х3 - 12) < 0, (9.11)
то ситуация 2° имеет место при выполнении неравенства
+ 2 . Mi/i - М212 + М3(х3 - 12)
J + Mxl\ + M2l22
(w+)2 + 4gsina^^- -j—2 -yy2 >0.
Используя формулу (9.1), отсюда получим:
MlRl\ cos2 a+2sina(J+M1/?+M2/2)[M1/1-M2/2+M3(^3-/2)] > 0.
Если будет выполнено противоположное неравенство
(например, Н очень мало или а близко к 7г/2), то после удара доска
с шарами будет совершать замедленное вращение и, кроме того,
будет существовать также <р Е (-а, а), при котором w(<p*) = 0. После
этого доска начнет вращаться против часовой стрелки и ударится
о землю уже концом В.
9. О некоторых задачах теории удара с односторонними связями 199
Покажем, что множество, задаваемое неравенствами (9.6) и
(9.11), не пусто. Пусть доска однородная. Тогда имеем неравенства
-М3(2/? -l\ + hl2) + Mxl\ + Mxhl2 > О,
о
Mxlx - M2l2 + M3- <0.
Ясно, что при выборе достаточно большой массы М2 эти
неравенства заведомо имеют решения.
Подведем итоги. Возможны три варианта послеударного
движения шара В.
I. После удара шар В отрывается от доски и летит по параболе
влево от нее.
П. После удара шар В вращается вместе с доской, и этот процесс
длится вплоть до удара конца А об землю, после чего шар В
отрывается от доски и летит по параболе вправо от нее.
III. После удара шар В вращается по часовой стрелке вместе с доской
замедленно вплоть до того момента, когда доска остановится
в своем вращении {не ударившись концом А). Затем
продолжается ускоренное вращение против часовой стрелки вплоть до
момента удара доски об землю концом В. \>
Задача 2 (задача № 16.38 из [14]). Колесо массы т и
радиуса г, катясь без скольжения по горизонтальной
направляющей LL, наталкивается на уступ О и, огибая его, поднимается
на горизонтальную направляющую ОМ. Высота уступа h. >5дар
колеса об уступ неупругий, скольжение при ударе и огибании
уступа отсутствует.
1) Определить, какова должна быть скорость центра С
колеса перед ударом, чтобы колесо вкатилось на верхнюю
направляющую.
2) При заданной скорости центра колеса vc до удара
определить импульс ударной реакции уступа S. Колесо считать
однородным диском.
200 Глава 8. Сухое трение в задачах и решениях
Замечание. Фраза, выделенная в формулировке задачи, нуждается
в разъяснении и уточнении. Прежде всего, подразумевается, что
точка колеса, контактирующая в момент столкновения (и удара) с
уступом О, остается неподвижной и после удара. Поэтому
рассматриваемый в задаче удар следует называть абсолютно неупругим
(коэффициент восстановления равен 0). Далее, предположение об отсутствии
скольжения при ударе и последующем огибании уступа подразумевает
наличие положительной нормальной реакции, действующей на колесо
со стороны уступа, так как связь в точке контакта является
односторонней. Конечно, можно для упрощения предполагать эту связь
двухсторонней, однако такая модель является нереалистичной.
Решение. Пусть Sx и Sy — ударные импульсы, приложенные в
точке контакта О (см. рис. 13). Обозначим через а угол, образуемый
радиусом СО с вертикалью (а = ZOCP). Ясно, что
cos a
1-е, sin а = у2е - е2,
h
г
(9.12)
Доударное состояние колеса является качением без
проскальзывания, а послеударное — это вращение без проскальзывания
вокруг точки О. В системе координат Оху (рис. 13) имеем для ско-
9. О некоторых задачах теории удара с односторонними связями 201
ростей центра масс С и угловой скорости о; колеса
Vc
vCx = vc, vCy = 0, ш = ш =—,
г (9.13)
vjp = o;+r cos a, v£y = а;+г sin а, а; = а;+,
где знак «-» относится к доударному состоянию, а знак «+»
относится к состоянию, наступившему сразу после момента удара. Так
как ударные импульсы Sx и Sy не создают момента относительно
точки О, то сохраняется кинетический момент колеса
относительно точки О. Имеем, используя (9.2):
з
Kq = m(w+r)r + Jcw+ = -mr2w+.
Приравнивая полученные выражения, найдем о;+:
"+ = т(-5«)- <'14>
Для определения ударных импульсов запишем, используя
формулы (9.13), уравнения изменения количества движения в
проекциях на выбранные оси координат:
Sx = m(uj+r cos a - vc), Sy = muj+r sin a.
Подставляя сюда формулу (9.14) и используя формулу (9.12),
получим:
е, /2
Sx = mvc-(2e-5), Sy = mvcll- -е\у]е(2-ё).
Это и есть ответы к пункту 2 задачи.
Переходим к решению пункта 1 задачи. После удара колесо
начинает вращаться вокруг точки О по часовой стрелке, т. е.
поднимается вверх. Если не рассматривать процесс этого движения
в деталях, то ясно, что колесо поднимается до уровня
вкатывания на ОМ, если у него будет достаточный запас послеударной
кинетической энергии. Так как полная механическая энергия при
таком движении без проскальзывания в точке О сохраняется, то
202 Глава 8. Сухое трение в задачах и решениях
минимальное щ, необходимое для такого вкатывания, находится
из соотношения Т+ = П, где
. m, ч 9 J с 1
Т+ = - (щг)2 + -j-ul П = mgh.
2 4§h
Отсюда Ui = —т.
3 г2
Таким образом, для вкатывания необходимо, чтобы
(о,+)2>*? = ^. (9.15)
3 vL
Используя (9.14), получим соответствующее неравенство для Vq:
Формула (9.16) приведена в [14], где указано также и
неравенство, при котором этот ответ справедлив: 0 ^ h/r ^ 1. Это
неравенство, вообще говоря, очевидно, так как при h > г колесо
может отскочить только назад или «прилипнуть» к уступу в момент
удара, а далее, скорее всего, останется в покое.
Рассмотрим процесс послеударного движения колеса более
детально, предполагая, что в точке О отсутствует проскальзывание.
Пусть <р — угол между радиусом СО и отрицательной
горизонтальной осью Ох (рис. 13). Запишем уравнение движения центра
масс С колеса в проекции на радиус СО:
шф2г = mg sin <p - N, (9.17)
где N — нормальная реакция, действующая на колесо со стороны
уступа О.
Для осуществимости такого безотрывного движения колеса
необходимо, чтобы N > 0, т. е. из (9.17) имеем неравенство
N = mg sin <p - шф2г > 0. (9-18)
Ясно, что <р £ [ж/2 - а, 7г/2].
Запишем теорему об изменении кинетического момента колеса
относительно точки О:
3 2..
-mr (р = -mgr cos <p,
9. О некоторых задачах теории удара с односторонними связями 203
откуда следует, что ф < О, т. е. ф(<р) — монотонно убывающая
функция, a sin <р — монотонно возрастающая функция при <р Е
Е [тг/2 - а, 7г/2]. Тогда, если неравенство (9.18) выполнено в
начальный момент при <р = <ро = 7г/2 — а, то оно будет выполнено
вплоть до вкатывания колеса на ОМ. Таким образом, нарушение
неравенства (9.18) (т.е. неосуществимость описанного движения)
может произойти лишь при <р Е [тг/2 - а, тг/2], т. е. сразу после
удара выполняется соотношение
gsin I- - a ) - (u+fr < 0 ^ (u+f > 6
2 ^(^)^!(l-r)? (9Л9)
Л ) r
Итак, получен следующий результат:
а) если
3 г2 г \ г
то безотрывное вкатывание колеса возможно и реализуется при
отсутствии проскальзывания в точке О;
б) если (ш+) ^ —j, то вкатывание невозможно, а если (ш+) >
> -II , то безотрывное движение вообще невозможно
г \ г )
реализовать при отсутствии проскальзывания в точке О.
Непустота множества движений, удовлетворяющих пункту а),
может быть обеспечена только при соблюдении неравенства,
вытекающего из (9.19):
4gh g ( h\ 3
3 г2 г \ г / 7
Если h > -г, то вкатывание колеса при отсутствии
проскальзывания в точке О не реализуется. Таким образом, ответ в данной
задаче к пункту 1 должен быть таким: послеударное вкатывание
колеса на верхнюю направляющую ОМ при отсутствии проскальзывания
в точке контакта возможно только при соблюдении неравенств
4 gh 7 g(r -К) 3
о <vc< — Ч> 0 ^ h <: -г.
3 / 2/Л2 / _2h\2 1
1_3r/ V~3r
204 Глава 8. Сухое трение в задачах и решениях
Нарушение одного из этих неравенств свидетельствует о
невозможности вкатывания колеса в рамках рассматриваемой модели
движения с отсутствием проскальзывания колеса в точке О.
Отметим, что дальнейшее исследование данной задачи (которое
здесь не приводится) ведет к возникновению парадоксальных ситуаций
типа «парадоксов Пэнлеве». >
Литература к Главе 8
1. Пэнлеве 77. Лекции о трении. М.: Гостехтеориздат, 1954. 316 с.
2. Фейнман Р., Лейтон Р., Сендс М. Задачи и упражнения с ответами
и решениями. М.: Мир, 1969. 624 с.
3. Тимошенко С, Юнг Д. Инженерная механика. М.: Машгиз, 1960. 507 с.
4. Розенблат Г. М. Механика в задачах и решениях. М.: URSS, 2004. 160 с.
5. Левенсон Л. Б. Статика и динамика машин. ОНТИ НКТП СССР. Гос-
машметиздат, 1934. 476 с.
6. Жуковский 77. Е. Трение бандажей железнодорожных колес о рельсы.
Собр. соч. М.; Л.: Гостехтеориздат, 1950. Т. VII. С. 426-478.
7. Динамика материальной точки. Методические указания к решению
задач и выполнению курсовой работы по теоретической механике /
В. Н. Баранов, О. П. Феоктистова, Ю. С. Саратов, Н. Н. Щеглова. М.:
Изд-во МГТУ им. Н. Э. Баумана, 2002. 36 с.
8. Раус Э.Дж. Динамика системы твердых тел. М.: Наука, 1983. Т. I. 463 с.
9. Зоммерфелъд А. Механика. М.: Государственное издательство
иностранной литературы, 1947. 391 с.
10. Теоретическая механика. Учебник для вузов / Под ред. К. С.
Колесникова. М.: Издательство МГТУ им. Н. Э. Баумана, 2003. 787 с.
11. Мещерский 77. В. Сборник задач по теоретической механике. М.: Наука,
1986. 448 с.
12. Теоретическая механика. Руководство к решению задач / Под ред.
проф. С. К. Слезкинского. СПб.: Изд-во ПОЛИТЕХНИКА, 2007. 487 с.
13. Игнатов И. А. Теоретическая механика. Статика и кинематика.
Решения задач из сборника И. В. Мещерского. (36-е изд. 1986 г.). Вологда,
2000. 444 с.
14. Сборник задач по теоретической механике: Учебное пособие. 3-е изд.,
стер. / Под ред. К. С. Колесникова. СПб.: Издательство «Лань», 2007.
448 с.
Литература к Главе 8
205
15. Джонсон К. Механика контактного взаимодействия. М.: Мир, 1989.
509 с.
16. Розенблатп Г. М. О некоторых задачах теории удара с односторонними
связями // Сборник научно-методических статей. Теоретическая
механика. Вып. 27 / Под ред. проф. Ю. Г. Мартыненко. М.: Изд-во МГУ,
2009. С. 159-167.