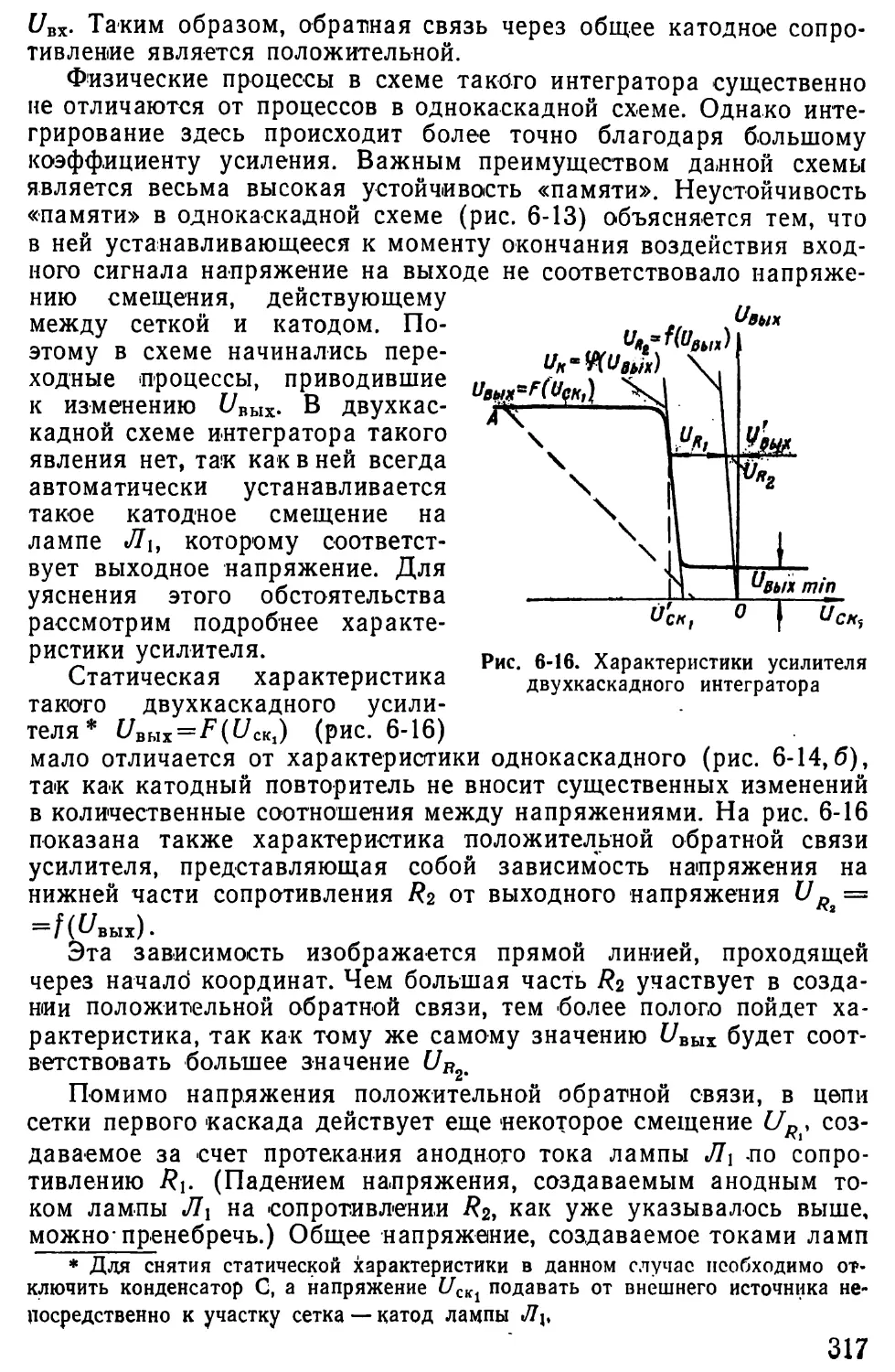
/





































































































































































































































































































































































































Текст
6П215
Л36
Левиг Н. Б., П о д г а й н ы й В. К.
АВТОМАТИКА
Учебное пособие рассчитано на курсантов радиотехнических
училищ, в которых радиотехника и радиолокация являются
профилирующими дисциплинами, а также на офицеров, связанных с
эксплуатацией радиотехнических средств. Книга может быть полезна
и учащимся гражданских учебных заведений соответствующего
профиля.
В книге излагаются вопросы автоматики применительно к
радиотехническим устройствам.
В частности, рассмотрены реле и релейные схемы, усилители
постоянного тока, различные радиотехнические системы
автоматического регулирования и основы теории автоматического
регулирования, синхронные передачи и приводы, а также счетно-решающие
приборы. Основное внимание уделено рассмотрению физических
процессов в схемах. Математический аппарат по возможности
упрощен. Книга написана с расчетом, что общие курсы электротехники,
радиотехники, и основ высшей математики в объеме среднего
специального учебного заведения читателем изучены.
Введение и главы 2, 3, 4. 5 и 6 написаны Левитом Н. Б.,
главы 1 и 7 — Подгайным В. К.
Левит Н. Б., Подгайний В. К.
АВТОМАТИКА. М. Воениздат, 1964. 400 С.
Редакторы: инженер-полковник Кривицкий Б. X., инженер-подполковник Шарогородский С. Г.
Технический редактор Медникова А. Н. Корректор Киселева 3. П.
Сдано в набор 28.2.63 г. ч Подписано к печати 10.12.63 г.
Формат бумаги 60Х90*/ц — 25 печ. л. 25 усл. печ: л. 26,030 уч.-изд. л. Тираж 29000. Т.П.1963-200
Изд. № 6/2998 ' Г-94709 ' Зак. № 616
2-я типография Военного издательства Министерства обороны СССР
Ленинград, Д-65, Дворцовая пл., 10
Цена 1 руб. 06 коп.
ВВЕДЕН ИЕ
Н настоящее время, когда советский народ под руководством
коммунистической партии успешно строит коммунизм, решающим
средством, обеспечивающим научный и технический прогресс,
является комплексная механизация и автоматизация процессов
производства.
Механизация — это один из методов повышения
производительности труда, заключающийся в полной или частичной замене
мишииами или механизмами ручного труда рабочих. Однако ме-
хмшшшия не только повышает производительность труда и
обеспечивает снижение себестоимости выпускаемой продукции, но и
иошолнет улучшить качество и увеличить количество
выпускаемой продукции. Человек освобождается от тяжелого или
утомительного однообразного физического труда. Он только управляет
процессом производства и контролирует его.
Л ито м атиз ац'ия — это направление технического прогрес-
си, обеспечивающее построение' самодействующих систем,
выполняющих те или иные операции или вырабатывающих ту или иную
продукцию без непосредственного участия человека.
Автоматизация является более высокой ступенью развития
производства, при которой человек освобождается от тяжелого
физического труда. Ему остаются лишь функции контроля. Здесь его
у чистке сводится лишь к предварительной регулировке,
включению и периодической наладке самого автоматического устройства,
работающего по определенной программе. Широкое внедрение ав-
гомлти.пщии, помимо повышения производительности. труда,
снижении себестоимости и улучшения качества продукции, позволяет
решить и некоторые другие, более узкие задачи.
НпжпеГипие из них:
•*•■ управление большими мощностями посредством
использовании маломощных управляющих сигналов;
централизация управления сложными объектами;
- • исключение влияния субъективных факторов на процесс
уиривленин;
повышение точности управления и, контроля;
повышение быстродействия при управлении быстро
протекающими процессами;
• сокращение обслуживающего персонала;
- решение мадач техники- безопасности и т. д.
А в т о м л т и к я — это область науки и техники, посвященная
теории и практике устройств и систем, работающих без участия
человека. Область применения автоматики очень быстро расши-
!•
3
ряется, автоматическое управление внедряется в самые
разнообразные сферы человеческой деятельности, в которых, кажется,
невозможно обойтись без непосредственного участия человека. Это
и сложнейшие вычисления, и управление работой энергетических и
иных систем, и руководство войсками на поле боя, осуществление
.записи, хранения и выдачи различной информации, перевод текста
с одного языка на другой, и даже решение некоторых проблем
медицины, физиологии и т. д.
Многочисленные и весьма разнообразные автоматические
устройства по основному назначению могут быть разделены на
пять групп.
1. Устройства автоматического контроля и
сигнализации. Эти устройства служат для контроля за ходом
того или иного процесса или состоянием того или иного объекта.
В отличие от обычного контроля, осуществляемого при помощи
измерительных приборов (вольтметров, амперметров,
термометров и т. ц.у, автоматический контроль не требует постоянного
или периодического наблюдения за показаниями приборов.
Устройство автоматического контроля и сигнализации подает
определенный сигнал при изменении зада.нного режима или нарушении
нормальных условий работы.
2. Устройства автоматической защиты и
блокировки. Эти устройства предназначены для предотвращения
аварий и несчастных случаев при нарушении нормального режима
работы или правил эксплуатации различных установок. Они,
в сущности, являются дальнейшим развитием устройств первой
группы. При «аличии устройств автоматического контроля и
сигнализации переключения в схеме осуществляет оператор после
получения сигнала о нарушении заданного режима работы.
Применение автоматической защиты и блокировки позволяет
осуществлять эти действия без оператора: сигнал сам воздействует на
соответствующие элементы схемы, осуществляющие переключение
или полное выключение аппаратуры. Таким сигналом может быть
отклонение величины тока или напряжения от нормального
значения, изменение температуры, давления и т. п. Автоматическая
защита особенно важна там, где необходимо быстродействие,
недоступное человеку, или там, где присутствие человека невозможно
по причинам безопасности.
Как правило, устройства автоматической защиты и блокировки
соединяются с устройством, сигнализирующим о возникшем
нарушении в работе аппаратуры.
3. Устройства автоматического
регулировали я. Устройства данной группы предназначены для поддержания
постоянства положения или состояния какого-либо объекта или же
для их изменения по некоторому закону, который в общем случае
заранее может быть и неизвестен.
Эти устройства выполняют более сложные функции по
сравнению с устройствами, рассмотренными выше. Действительно, устрой-
4
ста защиты и блокировки выполняют лишь простейшие
операции: включение, выключение или переключение аппаратуры, в то
прем и как системы автоматического регулирования могут
осуществлять управление по весьма сложным законам. Это
обстоятельство определяет и сложность самих систем.
Устройства автоматического регулирования весьма
разнообразны. К ним относятся стабилизаторы иапряжения,
температуры, частоты, поддерживающие постоянное значение
«регулируемых параметров, системы самонаведения боевых ракет, системы
иитоматического радиолокационного сопровождения цели, системы
иитоматической подстройки частоты и другие устройства, в
которых закон изменения регулируемого параметра заранее неиз-
иестеп.
В состав систем, автоматического регулирования как
вспомогательные элементы могут входить устройства автоматической
защиты и блокировки, контроля и сигнализации.
4. Счетно-решающие приборы. Данную группу со-
е1 пил я ют устройства, в которых средства автоматизации
используются для облегчения и ускорения вычислительной работы.
Современные универсальные счетно-решающие приборы могут
решать самые разнообразные задачи, выполняя не только чисто
кинематические, но и логические операции. Более того, они в
зависимости от промежуточных результатов вычислений сами
изменяют направление вычислительного процесса. Это не просто ме-
м»пи:»пция, а автоматизация умственного труда. Счетно-решающие
приборы применяются не только для вычислительных работ. Они
длин ншможпость определенным образом моделировать работу
сложных объектов или процессы в них. Это позволяет еще до
построении того или иного объекта достаточно точно испытать его
ни модели и в зависимости от результатов испытания внести
необходимые изменения в проект.
II состав счетно-решающих устройств, как правило, входят ав-
томитпческие системы всех трех рассмотренных групп.
П. Устройства автоматического управления.
.'Но ернииительно «новая группа автоматических устройств,
появившимся и результате развития устройств автоматического
регулировании и их обьединения со счетно-решающими приборами.
УсфпПсгпл иитоматического управления служат для сбора й
"Прилики информации, характеризующей протекание какого-либо
пропет», и иырнботки команд, необходимых для более
эффективного упрлилепия этим процессом.
ч 11/шример, и системе ПВО устройства автоматического
управлении могут собирать и обрабатывать информацию о действующих
И|>едс|ии\ иондушного "нападения противника, их расположении и
перемещениях и ходе воздушного налета, о боевых возможностях
и рмгиоложеппи своих средств ПВО и с учетом важности
обороняемых объектов, условий погоды и времени суток вырабатывать
нииболее целесообразное решение по использованию этих средств
5
и корректировать полученное решение по мере изменения
обстановки.
Развитие устройств автоматического управления привело к
созданию «самообучающихся» систем, которые не только
самостоятельно настраиваются на наивыгоднейший режим работы, но
могут улучшать свои характеристики по мере «накопления опыта».
В последние десятилетия автоматика сделала большие успехи,
осуществив переход от рассмотрения отдельных устройств к
разработке общих методов, пригодных для анализа и синтеза целых
классов систем.
Особенно большое внимание уделено вопросам развития
автоматизации в решениях XXII съезда КПСС, наметившего
конкретные пути построения коммунистического общества в нашей стране.
В принятой съездом программе КПСС говорится:
«В течение двадцатилетия осуществится в массовом масштабе
комплексная автоматизация производства... Получат широкое
применение кибернетика, электронные счетно-решающие и
управляющие устройства в производственных процессах
промышленности, строительной индустрии и транспорта, в научных
исследованиях, в плановых и проектно-конструкторских расчетах, в сфере
учета и управления».
Основным результатом комплексной автоматизации будет
значительное повышение производительности труда, культуры
производства, а вместе с тем и научно-технического уровня трудящихся,
ликвидация существенных различий между физическим и
умственным трудом, сокращение продолжительности рабочего дня и
рост благосостояния народа.
Бурно развиваясь, автоматика использует самые последние
достижения ведущих отраслей науки и техники:
радиоэлектроники, теории информации, кибернетики и т. д. В свою очередь
развитие автоматики оказывает и обратное влияние на эти отрасли,
выдвигая перед ними новые теоретические и практические задачи
и тем самым стимулируя юаучный и технический прогресс.
Исключительно велико значение автоматики в военном деле,
и в частности в управлении средствами ПВО. Скоротечность
боевых операций, высокая маневренность войск, громадные скорости
передвижения боевых машин делают невозможным эффективное
управление войсками без быстродействующих счетно-решающих
приборов и других средств автоматизации. "Вычисление данных
для стрельбы боевыми ракетами и их наведение на объекты
противника, решение задач навигации, обработка данных
радиолокационной и звукометрической артиллерийской разведки, повышение
живучести боевой техники, составление расчетов обеспечения
боевых действий — вот далеко не полный перечень тех задач, которые
могут решать автоматические устройства во время боевых
действий. В настоящее время без использования средств
автоматизации решение задач ПВО оказывается практически невозможным.
ГЛАВА I
УСИЛИТЕЛИ АВТОМАТИЧЕСКИХ УСТРОЙСТВ
§ 1-1. ОБЩИЕ СВЕДЕНИЯ
Работа большинства автоматических устройств основана на
использовании для управления и контроля разнообразных
физических явлений, возникающих или искусственно создаваемых в
процессе работы управляемого объекта. Физичеекое_воздействие,
ииляющееся причиной или следствием изм^ёния^^акой-либ^^и^
:* и ческой величины, принято называть сигналом. В качестве
сигналов используются изменения температуры, давления, тока,
напряжения, механические перемещения и т. д. В одних случаях эти
сигналы возникают как непосредственное следствие протекающих
при управлении процессов, в других для получения нужных
сигналов применяются специальные устройства — датчики.
На практике сравнительно редки случаи, когда мощность
сигналов оказывается достаточной для осуществления управления,
поэтому сигналы необходимо предварительно усиливать.
Усилением принято называть пропорциональное увеличение сигнала при
сохранении его формы и физической природы. Сущность работы
усилителя состоит в преобразовании энергии источника под
воздействием усиливаемого сигнала в более мощный выходной
сигнал.
Отношение величины выходного сигнала к величине входного
называется коэффициентом усиления. Иногда" коэффициент
усиления может быть меньше единицы, что указывает на ослабление
сигнала в схеме. Чаще всего в практике используются усилители
электрических сигналов. Они иаиболее просты, удобны, обладают
высокой чувствительностью, допускают простую регулировку
коэффициента усиления, хорошо сочетаются с электрическими
исполнительными устройствами (двигателями, электромагнитами и т. п.).
Поэтому в автоматических устройствах сигналы различной
физической природы предварительно преобразуются в
пропорциональные электрические сигналы, которые затем усиливаются и
используются для управления объектом или процессом.
7
Устройства, в которых при сохранении формы сигнала
изменяется его физическая природа, называются' преобразователями;
если же, кроме того, происходит еще и увеличение мощности
сигнала, то такие устройства называют
усилителями-преобразователями. Отнощение^выходного сигдала преобразователя к- его
входному-.сигналу называется коэффициентом передачи или
коэффициентом преобразования.
Коэффициент передачи — размерная величина. Его
размерность определяется видом выходного и входного сипталов. Само
понятие «коэффициент передачи» является общим и включает
в себя как частный случай понятие «коэффициент усиления».
В автоматических устройствах часто приходится усиливать
электрические сигналы, которые изменяются очень медленно. Для
их усиления применяются специальные усилители, называемые
усилителями постоянного тока (УПТ).
§ 1-2. ПРОСТЕЙШИЕ ЭЛЕКТРОННЫЕ УСИЛИТЕЛИ
ПОСТОЯННОГО ТОКА
Особенности электронных УПТ
Работа электронных усилителей постоянного тока основана на
использовании усилительных свойств электронных ламп. В основу
схемы усилительного каскада положен обычный реостатный
усилитель (рис. 1-1),'принцип работы которого подробно излагается
в курсах общей радиотехники. При воздействии положительного
входного сигнала напряжение на сетке возрастает. Это приводит
к увеличению анодного тока и
уменьшению анодного напряжения,
которое является выходным.
Отношение изменения
выходного напряжения Д^/Вых к
вызвавшему его приращению входного ДС/ВХ
называется коэффициентом
усиления каскада. Для данной схемы он
может быть определен по формуле
ВЫХ
д-_ АЕ/вых
И#а
Шъ:
Я/ + #а
(1-4)
Рис. 1-1. Реостатный усилитель
где ц—коэффициент усиления
лампы;
/?/ — внутреннее сопротивление
лампы.
В зависимости от параметров схемы и типа применяемых ламп
коэффициент усиления одного V каскада составляет от нескольких
десятков в триодных усилителях до нескольких сот в усилителях
«а пентодах. При необходимости большого усиления применяют
многокаскадные схемы УПТ,
8
+ -
вт
При использовании в качестве УПТ электронных усилителей
возникают трудности, которых нет при усилении сигналов
переменного тока. Появление большинства из них связано с тем, что
в схемах УПТ не применяются реактивные элементы
(конденсаторы, дроссели и трансформаторы): для ^игнала постоянного тока
наличие емкости соответствует, обрыву ~цепи, а наличие^Щдуктйв-
ности"'—"короткому замыканию. Это обстоятельство делает
невозможным использование обычных методов разделения цепей
питания и цепей сигнала.
В частности, в УПТ
используется только
гальваническая связь
между каскадами. Из-
за применения
гальванической
межкаскадной связи усложняется
создание нормального
режима работы ламп,
а значение выходного
напряжения может
отличаться от нуля и
при отсутствии
входного сигнала.
Постоянная составляющая
выходного напряжения,
которая в других
типах усилителей легко
отделяется переходной.цепочкой, в данном случае условно
принимается за нулевой уровень полезного сигнала. Иногда это создает
некоторые неудобства.
В УПТ также затруднено подавление паразитных
межкаскадных связей через общие цепи питания.
Межкаскадные связи должны быть построены так, чтобы
обеспечивался требуемый (нормальный) режим работы ламп, при
котором лампа работает на линейных участках статических
характеристик. Кроме того, часто бывает необходимо при отсутствии
входного сигнала иметь нулевой уровень выходного
напряжения.
Наиболее просто требуемый режим работы всех ламп
многокаскадного УПТ можно создать посредством применения
специального компенсирующего источника питания Ек,
положительный полюс которого обычно заземляется (рис. 1-2). Связь между
каскадами в этом случае осуществляется при помощи делителей
напряжения, включаемых между анодами ламп и отрицательным
полюсом источника Ек. Такая связь называется потенциометриче-
ской. Делители ослабляют усиленный сигнал, так как на вход
последующего каскада подается только часть напряжения*
снимаемого с анода лампы предыдущего каскада. Изменение напряже-
Рис. 1-2.
Потенциометрическая
каскадами УПТ
связь между
9
ния ШСг на сетке Л2 (рис. 1-2) и на выходе Д^вых можно
записать в виде:
#4
Шш- = Шаш-яЗъ-Ш.шкщ,
где
Д1 /?! + Д2
и &
= #3
Д2 Д3 + #4
являются коэффициентами передачи делителей; каждый из них
меньше единицы (к 9 ^д2<1)-
Чтобыч делитель возможно -меньше шунтировал анодную цепь
лампы, его сопротивление должно быть достаточно большим. При
этом ток делителя будет
Значительно меньше анодного тока
лампы, благодаря чему снижается
общий расход энергии источников.
В исходном состоянии
выходное напряжение усилителя будет
равно нулю, если ток делителя
#з — #4 создаст на
сопротивлении #з падение напряжения,
равное напряжению I/- на аноде Л2,
а на сопротивлении /?4 — падение
напряжения, равное ЕК.
Отсюда
вых
Рис. 1-3. Непосредственная связь
между каскадами УПТ
Ц
тъ~~€ или я*—Явтг"-
Полученное соотношение ограничивает увеличение
сопротивления /?4, а следовательно, и значение &Д2. Коэффициент
усиления второго каскада, являющегося типовым, будет равен
К*
рка
ъ
Я| + #а2 ^з + Я#
(1-2)
Исходное смещение на сетке Л2 имеет небольшую
отрицательную величину. Поэтому соотношение сопротивлений /?1 и К2 будет
примерно таким же, как и соотношение сопротивлений /?3 и /?4.
Однако катодное сопротивление в схеме первого каскада
несколько снижает усиление (см. § 1-3).
Практически применяемые значения Ек лежат в пределах
от 150 до 500 в, что при анодных напряжениях 1-25—150 в
позволяет получить коэффициент усиления делителей равным
примерно 0,6—0,8.
10
Потенциометрическйе межкаскадные связи встречаются
наиболее часто. Их применение делает схему наиболее простой и
удобной, так как в ней один из зажимов является общим для
входа и выхода и может быть заземлен.
Отдельные каскады УПТ могут иметь и непосредственную
связь. При этом потенциал катода лампы каждого последующего
каскада должен быть * несколько выше потенциала анода
предыдущего, что достигается включением в цепь катода второй лампы
компенсирующего источника Ек (рис. 1-3).
Нестабильность УПТ и меры борьбы с ней
Существенным недостатком УПТ является сравнительно
низкая стабильность работы.
Усилители постоянного тока усиливают не только полезный
сигнал, но и случайные изменения напряжений в схеме,
причинами которых могут быть:
—-* непостоянство напряжений источников питания;
— изменения параметров элементов схемы вследствие старей
иия деталей, влияния температурных и других внешних
воздействий;
— электрические флуктуации в сопротивлениях и дробовой
эффект ламп;
— наводки от внешних электрических и магнитных полей;
— механическая тряска, вибрация и т. д.
Все это может привести к изменению анодных токов ламп,
а следовательно, и напряжения на выходе усилителя, что
равноценно появлению некоторого ложного сигнала на его входе.
Ложные сигналы бывают внешние, появляющиеся в результате
внешних воздействий, и внутренние, возникающие в схеме усилителя.
При работе УПТ наблюдаются сравнительно медленные
изменения выходного напряжения (ложные сигналы) даже в том
случае, когда на вход «икакого сигнала не поступает. Это явление
называют «сползанием нуля» или дрейфом нуля. Чаще всего
дрейф нуля обусловлен непостоянством эмиссионных свойств
ламп. Наиболее опасна нестабильность работы первого каскада,
так как она будет усиливаться всеми последующими и приведет
к значительному изменению выходного напряжения. Поэтому
к первым каскадам предъявляются более высокие требования
в отношении стабильности их работы. Если быстро изменяющиеся
ложные сигналы (помехи) м6ж«о значительно уменьшить
экранировкой, амортизацией блока усилителя и другими мерами, то
уменьшить дрейф нуля практически очень сложно.
Дрейф нуля удобно пересчитывать ко входу усилителя
независимо от того, в какой точке схемы появляется нестабильность
работы. Если пересчитанный ко входу результирующий ложяый
сигнал за данный отрезок времени значительно меньше
минимального полезного сигнала, то работа усилителя считается до-
11
статочно стабильной. Для повышения стабильности работы УПТ
принимают следующие меры:
— стабилизируют напряжение всех источников питания
усилителя;
— применяют лампы со стабильными параметрами;
наибольшие изменения параметров наблюдаются у новых ламп в течение
первых 10—50 ч (непрерывной работы; поэтому в УПТ лучше
применять тренированные лампы, проработавшие 50—60 ч\
— используют высокостабильные сопротивления; для
улучшения теплового режима лучше применять сопротивления с
двукратным и более запасом мощности;
— поддерживают постоянство температуры в блоке УПТ
посредством принудительного охлаждения или подогрева;
окончательная установка нуля в УПТ должна производиться после
установления нормального теплового режима.
Применение всех указанных мер значительно усложняет блок
усилителя и не всегда обеспечивает достаточную стабильность
работы. Дальнейшее повышение стабильности достигается
применением некоторых специальных схем построения усилительных
каскадов и- использованием стабилизирующего действия
отрицательной обратной связи.
§ 1-3. ОТРИЦАТЕЛЬНАЯ ОБРАТНАЯ СВЯЗЬ
В УСИЛИТЕЛЯХ ПОСТОЯННОГО ТОКА
Основные определения и соотношения
Для улучшения характеристик усилителей сигнал с выхода
какого-либо, каскада подается на вход любого предшествующего
каскада. Такое соединение называют обратной связью. Обратной
связью могут охватываться отдельные каскады усилителя
(внутренняя или местная связь), а также весь усилитель (внешняя
или общая связь).
Различают положительные и отрицательные обратные связи.
Положительной называется такая обратная связь, при которой
сигнал,обратной связи совпадает по фазе или по знаку с входным
сигналом и усиливает его. Если сигнал обратной связи противо-
пШШже!Ггго знаку или по фазе входному, т. е. действует ему
навстречу, то обратную связь называют отрицательной. Величина
обратной связи оценивается коэффициентом обратной связи (3,
который равен отношению сигнала обратной, связи к выходному
сигналу. В УПТ сигнал обратной связи получают в виде напряжения.
В этом случае Р= /70с ?
^вых
Упрощенная функциональная схема усилителя с обратной
связью показана на рис. 1-4. По способу получения напряжения
обратной связи различают:
12
"вх*-
т,
ж
Усилитель К
Цепь обрат-
ной связи
Л
-и*
вы*
Рис. 1-4. Структурная схема УПТ с
обратной связью
%6/Х
-*- обратную связь по напряжению, когда напряжение
обратной связи пропорционально напряжению на выходе усилителя;
— обратную связь по току, когда напряжение обратной связи
пропорционально выходному току усилителя;
— комбинированную обратную связь, при которой напряжение
обратной связи
определяется и напряжением, и током
па выходе усилителя.
По способу подачи
напряжения обратной связи на
вход усилителя различают
последовательную' и
параллельную обратные связи.
Функциональные схемы
усилителей с наиболее часто
встречающимися видами
обратной связи показаны на
рис. 1-5.
Цепи обратной связи,
как правило, представляют
собой делители
напряжения, включаемые на
выходе усилителя. Часть
напряжения или все напряжение,
снимаемое с делителя,
используется в качестве
напряжения обратной связи.
Иногда этот делитель не
выражен в схеме явно. Так,
при включении в цепь
катода усилительной лампы
активного сопротивления /?к
для получения катодного
смещения (рис. 1-2)
неминуемо возникает
отрицательная обратная связь по
току. Напряжение смещения
пропорционально, анодному
току лампы; оно вводится
последовательно в цепь
сигнала с отрицательным знаком. Чем меньше
сопротивление Як по сравнению с /? , тем меньше будет коэффициент
обратной связи.
Для получения параллельной обратной связи (рис. 1-5,6)
необходимо включить сопротивление Н\ на вход усилителя и /?2
в цепь обратной связи. При отсутствии К\ внутреннее
сопротивление источника Г/вх будет шунтировать вход усилителя для сигнала
обратной связи. Сопротивление /?2 исключает 'непосредственное
Увых
ивых
Рис. 1-5. Способы осуществления
обратной связи в УПТ:
а — последовательная обратная связь по
напряжению; б — параллельная обратная связь
по напряжению; в — последовательная
обратная связь по току
13
соединение входа и выхода. Сопротивления К\ и /?? образуют
делитель, с которого напряжение обратной связи подается на вход
УПТ. При большом внутреннем сопротивлении источника входного
сигнала сопротивление Й\ в схеме может отсутствовать. Наличие
обратной связи существенно сказывается на величине основных
параметров' усилителя, причем отрицательная обратная связь
улучшает большинство его качественных показателей.
Положительная обратная связь ухудшает некоторые свойства усилителя
и поэтому применяется редко.
В усилителях возможно появление паразитных обратных
связей за счет общих цепей питания, монтажных емкостей и т. д.
Такие связи, как правило, крайне нежелательны. Поэтому при
конструировании усилителей принимают меры для их устранения.
Рассмотрим, как изменяются основные параметры усилителя
под воздействием отрицательной обратной связи.
Коэффициент усиления. Определим коэффициент
усиления для наиболее часто применяемых. схем рис. 1-5, а и б.
В схеме а имеет место следующее соотношение между сигналами:
где [/'В7. — напряжение, действующее непосредственно на входе
УПТ;
К—коэффициент усиления усилителя без обратной связи.
Учитывая, что С/0с = (Швых, получим
или после простых преобразований
откуда коэффициент усиления усилителя с обратной связью
Полученное выражение показывает, что при отрицательной
обратной связи коэффициент усиления усилителя уменьшается
в (1+р/С) раз.
Произведение р/С характеризует глубину обратной связи.
Если р/С^1, то обратную связь называют глубокой. В этом
случае можно пренебречь, единицей по сравнению с р/С и тогда
*о«-р-. * (1-5)
Соотношение между сигналами в схеме рис. 1-5,6 можно
привести к такому же виду. Для этого будем считать сигналом
14
обратной связи то напряжение, которое создается на
сопротивление /?1 за счет выходного сигнала. При этом схему можно
рассматривать как схему с последовательной обратной связью. При
большом усилении УПТ |6^Х|^^/Вых- Поэтому приближенно
можно полагать, что ток в сопротивлении #2 определяется только
величиной выходного напряжения, т. е.
Так как входной сеточный ток УПТ обычно очень мал, можно
считать, что по сопротивлениям /?1 и #2 протекает один и тот же
ток /. Он создает на сопротивлении /?1 падение напряжения,
играющее роль напряжения обратной связи:
где р = -^- —коэф|фициент обратной связи.
Аналогично предыдущему случаю С/т = (7В% — С/ос = [/вх —
7^вых ?•
Производя такие же выкладки, какие были приведены выше,
получим такой же конечный результат:
1 *
А при глубокой обратной связи К0~-о- •
Таким образом, для обеих схем с отрицательной обратной
связью по напряжению получены одинаковые значения
коэффициента усиления. Отсюда следует, что влияние отрицательной
обратной связи на коэффициент усиления усилителя не зависит
от способа ее осуществления, а определяется только
коэффициентом обратной связи р.
Зависимость коэффициента усиления Ко усилителя с обратной
связью от коэффициента К для разных значений коэффициента
обратной связи показана на рис. 1-6. Из графика видно, что, чем
больше коэффициент усиления К и чем больше значение р, тем
точнее оказывается зависимость /Со~-о-.
Стабильность коэффициента усиления. Влияние
отрицательной обратной связи на стабильность коэффициента
усиления рассмотрим путем сравнения усилителя без обратной связи
с тем же усилителем, охваченным обратной связью.
♦ Более точные соотношения будут приведены в главе VI.
15
Для усилителя без обратной связи относительная
нестабильность коэффициента усиления
Д/С
4 =
К '
(1-6)
где А/С — изменение коэффициента усиления под воздействием
различных факторов.
1
о \
1
о 1
1
7 }
1
с \
О 1
г]
1
л.
Ч "
3 ■
с
1 *
0'
I
X
Г
Г
Р-О,'
!,:>
(7,2
0=0,5
•
т
100 200 300 400 500 600 700 800 900 1000
Рис. 1-6. График зависимости Ко—ЦК) для
различных значений р
К
Для усилителя с обратной связью относительная
нестабильность
_ А/Со
<о '
*—%
где Д/Со — изменение коэффициента усиления усилителя с
обратной связью, вызванное изменением К.
Найдем отношение —:
А/Со . А/С _ А/Со /С
*)0
/Со ' /С
А/С Ко *
но
А/Со_*/Со_ Л / К \ 1 А_1 , б/Г
ьк ~ <*К ~ ак\1+ р/СУ (1 + Р/С)2 и /Со.""х + рд"
Следовательно,
3
1
1 + р/С'
откуда
16
Чо — *) 1 + р/с
0-7).
Формула (1-7) показывает, что относительная нестабильность
каскада с обратной связью т)о при достаточно глубокой
отрицательной связи (когда р/С велико) значительно меньше
относительной нестабильности г\ каскада без обратной связи.
При глубокой обратной связи коэффициент усиления /С0~-д-
определяется степенью обратной связи и не зависит от К. Эти
положения показаны на рис. 1-6.
Входное сопротивление усилителя. При
гальванической связи сетки первой лампы с источником входного
сигнала нет надобности ставить специальное сопротивление утечки
сетки. В этом случае входное сопротивление усилителя/?^ будет
определяться сеточным током первой лампы, который будет
протекать даже при отрицательном смещении. Он создается
вследствие ионизации остатков газа в баллоне, фото- и
термоэлектронной эмиссии сетки, а также вследствие попадания на сетку
электронов пространственного заряда.
В усилителе с последовательной обратной связью (рис. 1-5, а)
входное сопротивление равно
п ^вх
^Овх— "1 >
но
« 7 7" ^ВЫХ КоРвХ К С7цХ ^ВХ
'вх 77" у а ^вх
#вх К К 1 + Р* * 1+№*
Следовательно,
Яои = Я;,(1 + Р*)- (1-8)
Таким образом, входное сопротивление усилителя с
последовательной отрицательной обратной связью в (1+р/С) раз больше
входного сопротивления первого каскада. В усилителе с
параллельной обратной связью (рис. 1-5,6) величина напряжения Ц'вх
очень мала, и приближенно можно считать, что входной ток
определяется величиной сопротивления /?1*
/ ~ ^вх
*«~ я, •
Величина /?1 и является входным сопротивлением усилителя.
Оно не может быть сделана особенно большим, что является
некоторым недостатком. Однако параллельная обратная связь
допускает заземление как входа, так и выхода усилителя, что
позволяет широко применять данную схему.
Высокое входное сопротивление усилителей с отрицательной
обратной связью является весьма ценным качеством, так как
устраняет нагрузку на предыдущие, часто маломощные устройства,
стоящие на входе усилителя.
Выходное сопротивление усилителя. Выходное
сопротивление усилителя характеризует влияние изменений на-
17
грузки /?н на величину выходного сигнала. Роль выходного
сопротивления играет внутреннее сопротивление /?* последнего каскада,
который следует рассматривать как источник выходного
напряжения.
В обычных схемах при изменении /?н меняется выходной ток и
на внутреннем сопротивлении последнего каскада создается
дополнительное падение напряжения. В результате этого меняется
и напряжение на выходе:
В схемах с отрицательной обратной связью (рис. 1-5, а и б)
соотношения будут сложнее. /
Пусть при изменении нагрузки изменился выходной ток
усилителя и как следствие этого на величину А(/Вых изменилось
выходное напряжение. Такой процесс следует рассматривать как
результат падения (напряжения на внутреннем сопротивлении
последнего каскада, равного Д*Выха<, и появления сигнала
—А^выхрК за счет отрицательной обратной связи.
Поэтому Д{/Вых = Д^выЛ — Д^вы*Р# ИЛИ Д*Вых#/ = Д{/Вых (1 + $К).
Отсюда
г> А^вых &1 /1 п\
^Овы*— Д/внж — 1+0*' ^"^
Следовательно, выходное сопротивление усилителя при
отрицательной обратной связи в (1+р/С) раз меньше внутреннего
сопротивления последнего каскада. Уменьшение выходного
сопротивления обеспечивает лучшее согласование с низкоомной нагрузкой,
что увеличивает отдаваемую мощность выходного каскада до
номинальной, поэтому изменение нагрузки и воздействие других
факторов будут мало влиять на изменение величины выходного
напряжения. Физически это объясняется тем, что при
увеличении (/Вых появляется сигнал обратной связи, который, действуя на
вход усилителя, будет стремиться вновь уменьшить выходное
напряжение и, наоборот, при уменьшении (/Вых будет его
увеличивать.
Аналогичным образом можно показать, что при обратной
связи по току (рис. 1-5, в) происходит стабилизация выходного
тока, а выходное сопротивление возрастает. Так, при
уменьшении /Вых уменьшается и 1/ос. Сигнал 1/'т, действующий
непосредственно на входе усилителя, возрастает, что приводит к некоторой
компенсации уменьшения выходного тока. При увеличении /Вых
процессы будут протекать в обратном порядке.
Отридательная обратная связь улучшает и некоторые другие
параметры усилителей, расширяет полосу пропускания, повышает
линейность амплитудной характеристики и т. д.
Снижение общего- усиления — единственный недостаток
применения отрицательной обратной связи. Для компенсации его
приходится увеличивать "число усилительных каскадов.
18
Местные обратные связи
Дополнительное улучшение параметров УПТ и повышение его
стабильности может быть достигнуто применением местных
обратных связей в отдельных каскадах общей схемы. Местные
обратные связи также могут быть положительными и отрицательными.
Положительные местные обратные связи иногда применяются
I каскадах, охваченных, общей отрицательной обратной связью.
Их применение повышает коэффициент усиления усилителя /С,
й следовательно, и глубину обратной связи р/С, что способствует
улучшению параметров усилителя. Чаще применяются местные
отрицательные обратные связи; их широко используют при
построении большинства схем самостабилизирующихся каскадов.
вых
Маломощный
источник
Катодный
повторитель
Низкоом -
пая
нагрузка
Рис. 1-7. Катодный повторитель:
а — принципиальная схема; б — катодный повторитель в* роли согласующего эле-
Рассмотрим схемы наиболее часто встречающихся каскадов
с отрицательной обратной связью.
Катодный повторитель. В УПТ широко применяется
каскад, в котором сопротивление нагрузки включено в катодную
цепь лампы (рис. 1-7,а). При подаче положительного входного
сигнала напряжение на сетке увеличивается, что приводит к росту
анодного тока и напряжения на катодной нагрузке,, являющегося
выходным:
Каскад с катодной нагрузкой охвачен последовательной
отрицательной обратной связью по напряжению, причем р=1, так как
псе выходное напряжение используется в качестве сигнала
обратной связи:
Д^ск = Шп - Шос = Шп - ДС/ВЫХ.
к
Коэффициент усиления каскада равен К0= 1 - % > где К=
ШЛ /}"^ь/г усиление каскада без обратной связи с нагрузкой,
19
равной /?к. Коэффициент усиления Ко является положительной
величиной, так как знак выходного сигнала совпадает со знаком
входного.
Раскроем значение коэффициента усиления Ко:
К _ [х/?к
К0 =
1 + К Л, + #к
('+^к,+а+,)-- о-1»»
Так как ц^>1,то, пренебрегая единицей в сравнении
лучим
АГо^
н.як _ $я«
<1.
С [I, ПО-
(1-11)
Л/ + И#к 1 + 67?к
Значение /Со тем ближе к единице, чем больше
произведение 5/?к. При этом выходной сигнал с большой точностью
повторяет изменения входного.
Катодный повторитель,
являясь усилителем с
последовательной отрицательной
обратной связью по напряжению,
имеет очень высокое входное
и низкое выходное
сопротивления. Это позволяет исполь-
АЦ* зовать катодный повторитель в
качестве каскада,
согласующего маломощный источнике низ-
коомной нагрузкой (рис. 1-7 6),
и рассматривать его как
усилитель мощности. На малом
сопротивлении нагрузки /?н и
высоком входном сопротивлении /?вх напряжения примерно равны,
так как /Со«1. Поэтому коэффициент усиления по мощности
будет обратно пропорционален отношению сопротивлений:
«"вы у ЛУЦХ
1
а - 6
Рис. 1-8. Стабилизатор тока
АГР=
(1-12)
Применение катодногр повторителя на выходе УПТ при
наличии общей отрицательной обратной связи по напряжению
позволяет полунить еще более низкое выходное сопротивление,
измеряемое единицами ом.
Каскад с катодной нагрузкой в роли
стабилизатора тока. Каскад с катодной нагрузкой может быть
использован в качестве стабилизатора тока. В этом случае вход каскада
замыкается накоротко (рис. 1-8,а), выходное напряжение с #к
«е снимается, а катодное сопротивление служит для создания
отрицательной обратной связи по току внутри каскада. Анодная
цепь каскада включается последовательно в ту цепь, где ток
должен быть стабилизирован.
Случайное изменение (например, увеличение) анодного тока 1Л
приводит к пропорциональному изменению напряжения на катод-
20
ной нагрузке, которое действует между сеткой и катодом лампы.
В результате этого сопротивление лампы постоянному току
возрастает и анодный ток уменьшается почти- до прежней величины.
Данная схема широко применяется для стабилизации анодного
тока при значительных изменениях напряжения анодного
источника и носит название стабилизатора тока.
Рассмотрим процессы в схеме.
Изменение питающего напряжения можно представить как
воздействие некоторого ложного сигнала АЕ в анодной цепи
лампы. Напряжение АЕ будет распределяться между лампой и
катодным сопротивлением:
АЕ = Шй + Шк. (1-13)
Составляющая Д{/к=Д/аЯк приложена между сеткой и катодом
лампы, а составляющая А0й— между анодом и катодом. Поэтому
при воздействии ложного сигнала одновременно изменяется
напряжение и на сетке, и на аноде триода. Общее изменение
анодного тока составит
Ма = АЦск5 + ^-. (1-14)
В этой формуле первое слагаемое выражает приращение
анодного тока под воздействием изменения только сеточного
напряжения, а второе — только анодного.
Учитывая, что "в данном случае ДС/ск——Д^к=—А1&КК,
получим
д*.—идкз+^,
откуда
Подставим полученное значение в выражение (1-13):
АЕ = МД, + М^к^1 + МЯк,
откуда
*'* ~ Я/ + Як + ЯК^Я/ —-Я, + Як (1+ |») > (['10>
где /?г + #к(1 + р.) =/?гэ —эквивалентное сопротивление цепи
изменениям анодного тока.
Сопротивление Ягэ на величину р,/?к больше полного
сопротивления анодной цепи лампы при отсутствии обратной связи.
При /?к=100 ком и р,=50 это увеличение составляет 5 Мом, а при
необходимости может быть сделано еще большим.
Приближенно можно считать, что
/?/э = ^к; (1-16)
21
При изменении напряжения анодного источника анодный ток
лампы и напряжение на #к изменятся незначительно. АЕ будет
почти полностью падать на лампе. Однако, несмотря на высокое
значение эквивалентного сопротивления, величина анодного тока
может быть получена сравнительно большой, так как она
определяется сопротивлением анодной цепи постоянному току (Яо+,
+#к). Аналогичное явление наблюдается в пентодах, где
благодаря большому внутреннему сопротивлению лампы величина
анодного тока практически не зависит от изменений анодного
напряжения на всем рабочем участке характеристики лампы.
Величину стабилизированного тока можно регулировать
изменением напряжения на сетке стабилизатора, для чего в цепь
сетки включается источник управляющего напряжения Е
(рис. 1-8,6). Схему относительно этого напряжения можно
рассматривать как катодный повторитель. Поэтому
откуда
Ч»-^-. 0-18)
Сравнивая полученное выражение с (1-17), можно заметить,
что изменения напряжения в сеточной цепи в р. раз сильнее
влияют на величину анодного тока по сравнению с таким же
изменением (напряжения в анодной цепи лампы. Это позволяет
представить всю схему рис-. 1-8,6 в виде некоторой
эквивалентной лампы с коэффициентом усиления р.э=р., внутренним
сопротивлением К&яхрКх и крутизной характеристики *^э= "^"^ТТ"' В
такой «лампе» анодный ток оказывается весьма стабильным, а его
величину можно изменять, действуя на сеточную цепь.
Применение стабилизаторов тока в первых каскадах УПТ
позволяет значительно снизить дрейф нуля всего усилителя.
§ 1-4. БАЛАНСНЫЕ УСИЛИТЕЛИ
Схема последовательного баланса
Высокую стабильность работы УПТ обеспечивают схемы,
построенные по принципу сбалансированного моста. Основной
особенностью такого моста является отсутствие напряжения на его
диагонали при одинаковых изменениях сопротивлений в плечах
моста и при изменении напряжения питающего источника.
В схеме последовательного баланса (рис. 1-9) плечи моста
составлены из стабилизаторов тока, собранных на лампах Л\ и Л2,
и участков делителя напряжения /?1#/?2. Последовательное
включение ламп Л\ и Лъ и определило название схемы.
22
Сопротивления #К1 и /?К2 создают отрицательную обратную
связь по току, стабилизирующую анодный ток ламп. Кроме того,
они являются сопротивлениями автоматического смещения.
Элементы верхней и нижней частей схемы попарно одинаковы.
Поэтому при отсутствии входного сигнала мост сбалансирован, и вы-^
ходное напряжение равно нулю.
Однако из-за разброса параметров ламп и сопротивлений
получить идеальный баланс моста невозможно. Поэтому более
точная установка нуля на выходе производится потенциометром П.
Состояние равновесия
схемы сохраняется при измене
НИН
- +
напряжения источников А*а*
Установка
нуля
питания, так как при этом оди- ^ Лг
иаково изменяются параметры
обеих ламп. Сопротивления /?1
и /?2 также находятся в
одинаковых условиях и
изменяются под воздействием
внешних факторов одинаково. Чем
больше сопротивления /?к, тем
выше стабилизирующее
действие схемы, так как при этом
значительно снижается
влияние наиболее нестабильного
параметра лампы /?| на
эквивалентное сопротивление /?гэ =
—/?<+/?к(1+р.), которое в
основном определяется
слагаемым /?к(1+ц). Статический
коэффициент усиления р. почти
не изменяется при изменении х
напряжения всех источников питания и является наиболее
стабильным параметром лампы. Сопротивления /?К1 и /?Ка также
могут быть выполнены высокостабильными.
При подаче на вход полезного сигнала происходит изменение
сопротивления постоянному току лампы Ли что приводит к раз-
балансировке моста. Изменение потенциала анода лампы Л\
является выходным сигналом, который снимается с диагонали
моста. Схему можно рассматривать как реостатный усилитель,
в котором роль усилительной лампы с эквивалентными
параметрами Йгэ=\з-Кк и рэ=ц выполняет стабилизатор тока, собранный
на Л\. Второй стабилизатор играет роль анодной нагрузки,
имеющий сопротивление р. /?к. Определим коэффициент усиления схемы:
у_ К»#аэ _ ЕР^к
Рис. 1-9. Схема последовательного
баланса
Я/в + #аэ Р-#к + И#к
(1-19)
Несмотря на низкий для двухлампового каскада коэффициент.
усиления, схема получила широкое применение в УПТ из-за срав-
23
нительно высокой стабильности работы. Данная схема имеет
несимметричные вход и выход, так как потенциалы одного из
зажимов на входе и выходе фиксированы.
Схема параллельного баланса
Существует несколько разновидностей схем параллельного
баланса, отличительной особенностью которых является параллель-
- + ное включение одинаковых плеч
Ч Еа *-Л 1 М0Ста-
-А— ^ ^ Наиболее простой вариант
схемы показан на рис. 1-10. Схема
имеет симметричный вход, и при
подаче входного напряжения
потенциалы сеток обеих ламп и их
анодные токи изменяются на
одинаковую величину, но в разные стороны.
Поэтому общий катодный ток 1К =
= 1й + *а2, протекающий по /?к,
в процессе работы изменяться не
будет. Напряжение С1К также
остается постоянным, и обратная связь
за счет наличия катодного
сопротивления не возникает.
Каждая лампа работает
подобно обычному реостатному
усилителю. Схема имеет симметричные вход и выход, а общий
коэффициент усиления каскада определяется соотношением (1-1):
Рис. 1-10. Схема параллельного
баланса
к=
рЪ
/?/ + /?.'
(1-20)
где ^ = н-1 = Р-2; ^ = #1, = ^; #а = #а1=#ал
Схема допускает непосредственное соединение входных
зажимов с анодами усилительных ламп предыдущего каскада. Режим
сеточных цепей ламп остается нормальным из-за большого
падения напряжения на катодной «агрузке /?к. Если исходные
потенциалы входных зажимов каскада равны нулю или отрицательны,
то при большом катодном сопротивлении для получения
нормального режима работы лампы нижний вывод сопротивления /?к
подключают к минусу компенсирующего источника, что позволяет
снизить и потенциал катода.
При изменении питающих напряжений или параметров ламп
анодные токи ламп Л\ и Л2 изменяются в одну и ту же сторону.
Это приводит к изменению общего тока /к, а следовательно, и
к изменению напряжения на сопротивлении /?к, которое с обрат-
24
Иым знаком прикладывается к сеткам ламп и стремится вернуть
прежние значения токов. Это обеспечивает высокую стабильность
токов 1^ и 1^. Чем больше сопротивление, тем выше
стабилизирующие свойства схемы. Поэтому в качестве сопротивления #к
иногда используют стабилизаторы тока. Таким образом,.обратная
связь действует только для ложных сигналов, а для полезных
отсутствует. Кроме того, при одинаковом характере изменения
токов обеих ламп потенциалы анодов изменяются также одинаково,
и их разность будет оставаться равной нулю. Рассмотренная
схема балансного усилителя может быть использована в
качестве амплитудного различителя. В этом случае на сетки ламп
подаются сравниваемые напряжения Цх и /72.
Рис. 1-И. Способы симметрирования усилителя
Выходное напряжение будет пропорционально разности
подаваемых напряжений: А
^вых = К((/!-(/*),
где К для симметричной схемы выражается равенством (1-20).
В схемах усилителей предусматривается включение
потенциометров для установки нуля (рис. 1-11). В схеме а балансировка
производится за счет перераспределения анодных нагрузок ламп,
а в схеме б —за счет изменения катодных смещений.
Следует иметь в виду, что при включении потенциометра в цепь
катодов в каждой лампе появляется дополнительная
отрицательная обратная связь, снижающая усиление каскада.
- В симметричных схемах установку нуля часто называют
симметрированием усилителя.
Схема параллельного баланса может быть выполнена и с
несимметричным входом при симметричном выходе (рис. 1-12,а).
Для этого входной сигнал подается на сетку лампы Л{. При
помощи потенциометра П устанавливается постоянный потенциал сетки
25
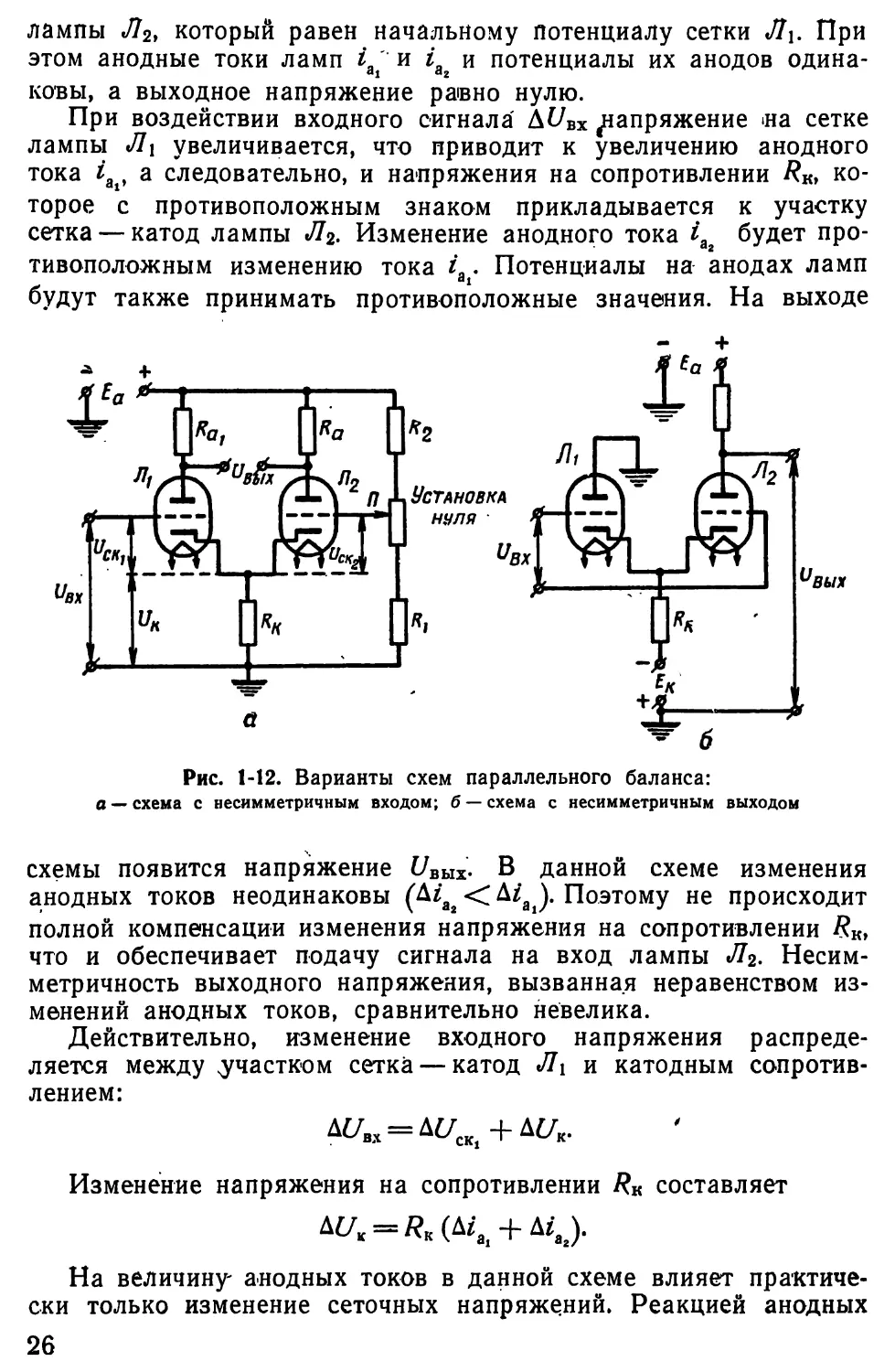
лампы Л2, который равен начальному потенциалу сетки Л\. При
этом анодные токи ламп I' и I и потенциалы их анодов одина-
«1 а2
ковы, а выходное напряжение равно нулю.
При воздействии входного сигнала Д1/вх напряжение «а сетке
лампы Л\ увеличивается, что приводит к увеличению анодного
тока /в1, а следовательно, и напряжения на сопротивлении /?к,
которое с противоположным знаком прикладывается к участку
сетка — катод лампы Л2. Изменение анодного тока 1а будет
противоположным изменению тока гй. Потенциалы на анодах ламп
будут также принимать противоположные значения. На выходе
Рис. 1-12. Варианты схем параллельного баланса:
а —схема с несимметричным входом; б —схема с несимметричным выходом
схемы появится напряжение Г/Вых. В данной схеме изменения
анодных токов неодинаковы (Д/а§ < Д^в|). Поэтому не происходит
полной компенсации изменения напряжения на сопротивлении /?к>
что и обеспечивает подачу сигнала на вход лампы Л2.
Несимметричность выходного напряжения, вызванная неравенством
изменений анодных токов, сравнительно невелика.
Действительно, изменение входного напряжения
распределяется между участком сетка — катод Л{ и катодным
сопротивлением:
Д^вх==^/СК1+Дг/к.
Изменение напряжения на сопротивлении /?к составляет
д^ = л>к(Д'-а1 + Ч,>
На величину анодных токов в данной схеме влияет
практически только изменение сеточных напряжений. Реакцией анодных
26
Як5АОск =
шк^шСК1
ШККК5.
— 2 '
нагрузок можно пренебречь, так как из-за отрицательной
обратной связи по току эквивалентные внутренние сопротивления ламп
очень велики.
Учитывая это, можно записать Д^ж^Ц^З^ Д*'а2~— Л{/к«?2.
Тогда
шк=як^с/СК1-ккз2шк
или
При 52#к^1 единицей можно пренебречь. Тогда при равенстве
параметров ламп 51=52=5 получим
Следовательно,
Таким образом, при подаче входного сигнала изменения
напряжения на сетках ламп Лх и Л2 относительно катодов почти
одинаковы и противофазны, что обеспечивает нормальную работу
схемы и достаточную симметрию выходного напряжения.
Чем больше сопротивление /?к, тем- выше симметрия
выходного напряжения.
Относительно напряжений Д1/<ж каждая половина схемы
представляет собой обычный реостатный усилитель, усиливающий
половину входного напряжения, поэтому общий коэффициент
усиления будет равен
Использование данной схемы позволяет осуществлять переход
от «несимметричного напряжения сигнала к симметричному.
При помощи потенциометра П можно в некоторых пределах
изменять потенциал сетки Л2 и таким образом подачей
небольшого дополнительного напряжения компенсировать разброс па^
раметров обеих половин схемы и устанавливать нулевое
напряжение «а выходе при отсутствии входного сигнала.
Если нужен несимметричный выход при симметричном входе,
можно использовать схему параллельного баланса с заземленным
анодом лампы Л\ (рис. 1-12,6). Для получения нулевого
напряжения «а выходе применен компенсирующий источник Ек. Точная
установка нуля на выходе и балансировка каскада производятся
регулировкой начальных выходных уровней в одном из
предыдущих каскадов.
Лампа Л\ и сопротивление /?к образуют катодный повторитель,
нагрузкой которого* является катодный вход лампы Л2. На входе
катодного повторителя действует половина входного напряжения.
27
Так как коэффициент усиления близок к единице, то это же на-
пряжение, примерно равное —^-, приложено к катодному входу
лампы Л2. Вторая половина входного напряжения приложена
к сеточному входу лампы Л2. Изменение анодного тока лампы Л2
практически не изменяет напряжения на сопротивлении /?к, так
как выходное сопротивление катодного повторителя Л\ очень
мало. Это напряжение зависит только от напряжения на сетке
лампы Ли
Общее напряжение, приложенное к участку сетка — катод Л2,
будет почти равно входному:
Лампа Л2 усиливает его в /Сг раз. Поэтому общее усиление
схемы будет почти таким же, как и в схеме с симметричным
выходом;
§ 1-5. МНОГОКАСКАДНЫЕ СХЕМЫ УПТ
Схемы с непосредственным усилением сигнала
Схемы с непосредственным усилением сигналов состоят из
соединенных в единую цепь нескольких каскадов УПТ. В
зависимости от места каскада в общей схеме усилителя несколько
изменяются требования к нему.
Первые каскады должны обеспечивать высокую стабильность
работы, удобство соединения "с источниками входного сигнала и
последующими каскадами, возможность ввода отрицательной
обратной связи, охватывающей весь усилитель, плавную
регулировку нуля, высокое входное сопротивление.
В первых каскадах наиболее часто используются балансные
схемы усилителей.
Особое внимание уделяется режиму питания первого каскада,
так как от него в основном зависит дрейф нуля усилителя.
Для увеличения входного сопротивления усилителя необходимо
взаимно скомпенсировать ионный и электронный токи сетки. Для
этого отрицательное напряжение смещения на сетке первой лампы
выбирается равным примерно 1—2 в. Увеличение отрицательного
смещения вызывает увеличение ионного и уменьшение
электронного тока, сетки, т. е. нарушение их взаимной компенсации.
Уменьшение напряжения на аноде также увеличивает электронный ток
и уменьшает ионный. Наиболее полная компенсация доков
происходит при пониженных анодных' напряжениях (100—120 в).
Уменьшение анодного напряжения снижает катодный дрейф и
улучшает тепловой режим сопротивлений и ламп, но увеличивает
28
разброс одноименных параметров ламп, что затрудняет
применение двухтактных балансных схем и делает более выгодным
применение в первом каскаде схемы последовательного баланса.
Промежуточные каскады УПТ должны обладать большим
усилением. Для уменьшения дрейфа нуля в этих каскадах часто
применяются балансные усилители с потенциометрическими
межкаскадными связями.
Выходные каскады должны иметь достаточную выходную
мощность (низкое выходное сопротивление). В них часто применяются
катодные повторители. Выходная лампа выбирается исходя из
требуемой выходной мощности. Для получения нулевого начального
напряжения на выходе можно использовать компенсирующий
источник.
Рис. 1-13. Многокаскадный УПТ
Если не требуется большая выходная мощность, то в выходном
каскаде удобно применять балансные схемы (особенно схему
параллельного баланса,, которая обеспечивает нулевое выходное
напряжение при отсутствии сигнала на входе).
Рассмотрим некоторые типовые схемы УПТ, применяемые
н автоматических системах. На рис. 1-13 показана схема УПТ,
и котором применены различные варианты схем балансных
каскадов.
В первом каскаде использована схема последовательного ба-
лннса, обладающая высокой стабильностью параметров и большим
иходным сопротивлением. Она работает при пониженном анодном
нлпряжении. Для понижения анодного напряжения служит
гасящее сопротивление Я\. Напряжение на аноде лампы Ли составляет
несколько десятков^ вольт. Это позволяет непосредственно
соединить первый каскад со вторым, у которого отрицательное
смещение» создается за счет большого падения напряжения на
сопротивлении /?ч. Второй каскад является симметрирующим и имеет по-
пчщиометрическую связь с третьим.
29
Требуемые напряжения смещения на сетках лампы Лъ
обеспечиваются делителями напряжения /?ю/?п и /?1г/?1з,
подключенными к компенсирующему источнику. Выходной каскад имеет
симметричный вход и несимметричный выход. Весь усилитель является
фазоинверсным, так как полярность выходного напряжения
противоположна полярности входного.
Схема усилителя постоянного тока с глубокой отрицательной
обратной связью показана на рис. 1-14. Первый каскад собран по
схеме параллельного баланса, которая в обычном режиме питания
обладает хорошей стабильностью. Напряжение обратной связи
подается на сетку лампы Л^. Благодаря большому катодному
сопротивлению каскад обладает симметричным выходом как для
Рис. 1-14. Многокаскадный УПТ с отрицательной обратной связью
входного сигнала, так и для напряжения обратной связи. В цепи
связи #4, #б, Ке со вторым каскадом есть потенциометр #5
установки нуля. Выход второго каскада несимметричный. Наличие
компенсирующего источника и больших сопротивлений /?т и Яв
обеспечивает отрицательный исходный потенциал анода лампы Л^ь
относительно корпуса, что позволяет осуществить непосредственную
связь с третьим каскадом — катодным повторителем.
Вход и выход усилителя несимметричные. Выходное
напряжение находится в. фазе со входным. Подача выходного напряжения
на сетку лампы Л\§ обеспечивает отрицательную обратную связь.
Усилитель имеет очень низкое выходное сопротивление.
Усилители с преобразованием сигнала.
Применение всех стабилизирующих мер в УПТ позволяет снизить
напряжение дрейфа, пересчитанное на вход, до единиц милливольт. Это
позволяет усиливать напряжение полезных сигналов величиной в
десятки милливольт. Усиление более слабых сигналов
затруднительно. Это основной недостаток обычных УПТ.
Усилители переменного тока свободны от этого недостатка; они
позволяют без особых трудностей усиливать напряжение сигналов
30
порядка единиц микровольт. (Усиливать сигналы еще меньшей
мощности нельзя из-за собственных шумов первого каскада.)
Это используется в УПТ с преобразованием входного сигнала в
переменное напряжение. Первый каскад в таком усилителе
выполняет функции амплитудного модулятора (рис. 1-15).
Основное усиление сигнала производится на переменнсгм токе.
Затем осуществляется детектирование сигнала — обратное
преобразование переменного напряжения в напряжение постоянного
тока. Процесс преобразования сигналов на входе и выходе должен
происходить так, чтобы сохранялись пропорциональность между
величинами входного и выходного сигналов и соответствие между
полярностью сигналов постоянного тока и фазой переменного.
Последнее условие выполняется благодаря воздействию специального
I преобразо-
ватель
шодулятор)
гч^
Усилитель
перемен-
ногатока
*х^
Фазовый
детектор
=ивых
Наерузлп
Шточник I
шорного ноА
| пряжения \
Рис. 1-15. Структурная схема УПТ с промежуточным
преобразованием сигнала
переменного опорного напряжения, синхронизирующего работу
модулятора и детектора. В отлитие от обычных детекторов данный
детектор является синхронным или фазовым.
Рассмотренный способ усиления сигнала особенно удобен, если
нагрузкой является устройство,, работающее на переменном токе,
например асинхронный двигатель (в этом случае детектора в
схеме нет).
Качество всего усилителя в значительной степени зависит от
его первого каскада — модулятора. По типу устройств,
используемых для преобразования сигналов, различают усилители с
магнитными, электромеханическими и электронными преобразователями.
Ниже будет рассмотрен принцип работы электромеханических
и электронных преобразователей; принцип работы магнитных
преобразователей изложен в разделе «Магнитные усилители».
1. Электромеханические преобразователи.
Широкое применение получили контактные электрические
вибрационные преобразователи, выполненные в виде электромагнита с
пружинящим якорем и контактной системой (рис. 1-16,а).
Переменный ток, протекающий по обмотке электромагнита,
создает переменное магнитное поле якоря. Взаимодействуя с
полем постоянного магнита, оно приводит в колебательное движение
контактную систему, при помощи которой осуществляется периоди-
31
ческое шунтирование или размыкание цепи входного сигнала
постоянного тока.
На рис. 1-16,6 показана схема, в которой подвижной контакт
преобразователя поочередно шунтирует вход и выход, осуществляя
в одном случае модуляцию входного, а в другом — детектирование
| I р и'„ 1 „ I 9.4*
О
О
Рис. 1-16. Электромеханический преобразователь:
а — схема преобразователя; б — схема включения преобразователя
1_
8ЫХ
—/г, замкнут (к2 разомкнут
^К^азомкщтМг^аммуп])
♦/
Х»ЛЛЦГ »*
^вых
1
1Д|||1Ш1ПЛЛПг>>пАГ
Увых^вых
I
^рда
Ш"
А$&
и8ЫХ
Увых
Рис. 1-17. Напряжения, действующие в схеме, показанной
на рис. 1-16
усиленного выходного сигнала. Графики, поясняющие работу
схемы, показаны на рис. 1-17. Благодаря периодическому
шунтированию входа усилителя контактом К\ образуется пульсирующее
переменное напряжение, амплитуда которого пропорциональна
величине входного сигнала, а фаза определяется его полярностью.
32
Чем больше частота колебаний контактной системы, тем точцеб
огибающая импульсов воспроизводит входное напряжение.
Постоянная составляющая импульсов через усилитель не проходит,
поэтому непосредственно на выходе усилителя (в данном случае
с четным числом каскадов) напряжение переменного тока Уъъл
будет иметь форму импульсов, симметрично расположенных
относительно нулевого уровня.
Синхронное детектирование достигается путем использования
контакта к2 преобразователя. Когда вход подключен к усилителю
(#1 разомкнут), выход усилителя заземлен (к2 замкнут), и
наоборот. При замыкании контакта к2 конденсатор С быстро заряжается
до амплитуды выходного импульса. При размыкании контакта к2
напряжение конденсатора С суммируется с напряжением импульса
другой полярности, действующим в следующий полупериод, и
прикладывается к сопротивлению Н[ через выходное сопротивление
усилителя. В результате этого на выходе образуется удвоенный по
амплитуде импульс отрицательной полярности.
Огибающая выходных импульсов повторяет по форме
огибающую входных, но имеет противоположную полярность. После
сглаживания выходных импульсов цепочкой СфНф получается
напряжение, форма которого соответствует входному сигналу.
Сопротивление К[ введено в схему для создания утечки сетки следующего
каскада.
Для сохранения полярности выходного сигнала достаточно
взять усилитель переменного тока с нечетным числом каскадов.
Качество работы преобразователя зависит от конструкции
механической "части, материала контактов и контактных пружин*
Искрение трущегося контакта при работе сокращает срок службы
вибропреобразователя и является источником помех. Высокое
качество выполнения контактной системы позволяет снизить
напряжение помех до нескольких микровольт и повысить срок службы
вибропреобразователя до нескольких тысяч часов. В качестве
электромеханического преобразователя может применяться
поляризованное реле*.
2. Электронные преобразователи. Для
преобразования постоянного тока в переменный можно использовать
вакуумные или полупроводниковые диоды и триоды. Наиболее часта
применяются мостиковые (балансные) преобразователи. Их пре*
имущество, как и других балансных схем, заключается в том, что
они позволяют получить выходное напряжение, равное нулю, при
отсутствии сигнала на входе.
Схема преобразователя на двух диодах и графики, поясняю*
щие ее работу, показаны на рис. 1-18, а и б. Опорное напряжение
подается в схему при помощи трансформатора. Под его
воздействием в одну половину периода, условно принимаемую за
положительную, оба диода открыты, а в следующую — закрыты.
* Устройство поляризованного реле описано в гл. II.
2 Автоматика
33
При отсутствии входного сигнала в схеме действует только
, опорное напряжение. В положительные полупериоды оно создает
ток через открытые диоды. Цепь этого тока замыкается по
внутреннему контуру схемы преобразователя. Из-за различия
параметров диодов падение напряжения на них не будет одинаковым,
что приводит к появлению переменного напряжения на выходе
даже при отсутствии входного сигнала. Это начальное выходное
напряжение называется напряжением небаланса, которое может
изменяться в процессе работы, вызывая дрейф усилителя. Для
балансировки усилителя служит потенциометр /7, при помощи
которого производится установка нуля..
Рис. 1-18. Диодные модуляторы:
а и в — принципиальные схемы; б —графики напряжений
При открытых диодах сопротивление между точками А и Б
очень мало; оно значительно меньше сопротивления /?0. В схеме
происходит параллельное двустороннее ограничение входного
сигнала на нулевом уровне, и при любой его полярности
напряжение на выходе равно нулю. Падение входного напряжения
происходит на сопротивлении #0 за счет протекания тока через
диод Д2, секцию обмотки хл)2 и правую половину потенциометра П
при Цвх>0 или же через левую ветвь схемы при Х/Вх<0.
При закрытых диодах сопротивление между точками А и Б
очень велико. Поэтому все входное напряжение будет передано
на выход схемы.
Таким образом, выходной сигнал оказывается промодулиро-
ванным.
На рис. 1-18, в показана схема преобразователя с четырьмя
диодами. Под воздействием опорного напряжения, снимаемого со
34
вторичной обмотки трансформатора Тр, происходит отпирание
всех диодов во время одного (положительного) полупериода и
запирание во время другого.
При открытых диодах входное напряжение вследствие падения
напряжения на сопротивлении /?0 ограничивается на нулевом
уровне.
Когда диоды закрыты, все входное напряжение передается на
выход. Графики, поясняющие работу данной схемы, имеют та,кой
же вид, как и в предыдущем случае. Чем больше амплитуда
опорного напряжения по сравнению с входным, тем более четко
работает преобразователь.
вИ
вх
■'вых
■ЛЛЛЛ/У-—■
ллллл
Рис. 1-19. Электронный преобразователь на триоде
При малой амплитуде {Уоп диоды, закрытые опорным
напряжением, могут открыться под воздействием напряжения сигнала,
что нарушит нормальную работу схемы. Поэтбму амплитуда
опорного напряжения в 10—20 раз должна превышать максимальное
аиачеиие входного напряжения.
Широкое распространение получили преобразователи с
усилительными лампами. Они не только преобразуют, но и усиливают
сигнал. На рис. 1-19 показана типовая схема подобного устрой-
пил. И этой схеме питание анодных цепей осуществляется
переменным опорным напряжением, снимаемым с
трансформатора Т})\ Триоды открываются лишь на половину периода. В схеме
применено аитоматическое катодное смещение, причем
напряжение смешении близко к напряжению отсечки. В&од схемы симмет-
рнчныП Мри отсутствии входного сигнала амплитуды импульсов
анидных шкоп обеих ламп равны по величине, но по секциям пер-
иичпи/1 пЛмитки выходного трансформатора Тр2 они протекают в
протниппо.чожиые стороны. Поэтому результирующий магнитный
поток и сердечник? равен нулю и напряжение во вторичной об-
Мотке отеутогиует.
При подаче входного сигнала потенциалы сеток триодов
принимают протииоиоложпые значения и равенство анодных токов
нарушается. В сердечнике появляется результирующий перемен-
Ч* 35
ный магнитный поток, индуктирующий во вторичной обмотке
напряжение, величина которого примерно пропорциональна
входному сигналу. Изменение полярности входного напряжения
вызывает изменение соотношения анодных токов ламп, и фаза
выходного сигнала изменяется на противоположную. Конденсатор С,
включенный параллельно выходу, вместе с индуктивностью
вторичной обмотки образует колебательный контур, который, если
его настроить на частоту опорного напряжения, подавляет все
высшие гармоники, появляющиеся за счет работы ламп с
отсечкой. Потенциометр П служит для симметрирования схемы.
Выпрямление усиленных сигналов переменного тока
осуществляется электронными фазовыми детекторами. Для нормальной
работы фазовых детекторов необходимо, чтобы амплитуда
опорного напряжения в несколько раз превышала максимально
возможную амплитуду входных сигналов.
На рис. 1-20, а показана схема балансного фазового детектора.
Усиленное напряжение сигнала переменного тока подается через
трансформатор Тр{ со средней точкой, а опорное — через
трансформатор Тр2.
Если входного сигнала нет, к диодам Д\ и Д2 приложено
опорное напряжение. Диоды открываются на время положительного
полупериода, и через них протекают одинаковые импульсы тока,
создающие на сопротивлениях Я\ и /?2 равные, но противоположно
направленные напряжения. Напряжение на выходе равно нулю.
При подаче входного сигнала во вторичных обмотках хю] и ш2
трансформатора Тр\ индуктируются равные и противофазные
напряжения [/, прикладываемые к диодам последовательно с
опорным напряжением. Пусть при данной фазе входного сигнала
напряжение на обмотке шх совпадает по фазе с опорным, а на
обмотке ш2 на/пряжение противофазно ему. При этом напряжение,
приложенное к диоду Ди окажется больше, чем напряжение,
приложенное к диоду Д2\-
Импульсы тока диода Д\ увеличатся, а импульсы тока
диода Д2 уменьшатся. Это приведет к увеличению падения
напряжения на сопротивлении Я\ и к уменьшению его на
сопротивлении /?2. На выходе образуются положительные импульсы
напряжения, которые сглаживаются конденсатором С. При изменении
фазы входного сигнала на противоположную импульсы тока
диода Д2 будут больше, а импульсы тока диода Д\ — меньше.
Напряжение на выходе становится отрицательным. В описанной
схеме происходит однополупериодное выпрямление.
Широкое применение получила схема двухполупериодного
кольцевого фазового детектора (рис. 1-20,6). Входной сигнал и
опорное напряжение подаются через трансформаторы Тр{ и Тр2
со средними точками. Четыре диода соединены между собой в
кольцо. Сопротивления /?^ #2, #з и /?4 ограничивают токи диодоз
33
и предохраняют их от перегрузки. Выходное напряжение
образуется на сопротивлении /?н, включенном между средними
точками трансформаторов, одна из которых заземлена.
Под воздействием опорного напряжения в один полупериод,
когда полярность напряжений на вторичной обмотке Тр2 такова,
что ллюс будет в точке Л, а минус в точке Б, диоды Дз и Д4
откроются, а диоды Д\ и Д2 закроются. Обмотка хюх оказывается
отключенной от схемы. Через нагрузку пойдет ток, направление
которого будет определяться только полярностью напряжения 1]2
в данный полупериод, т. е. фазой входного напряжения 1/вх. Для
полярности, обозначенной на схеме, ток через /?н будет проходить
сверху вниз и далее его цепь замкнется через и>3, #4 и Д4.
Рис. 1-20. Фазовые детекторы:
а —балансная схеца; б —кольцевой детектор
В следующий полупериод полярности всех напряжений
изменяются на противоположные (обозначения в скобках). Теперь
откроются диоды Д\ и Дг, а закроются диоды Д3 и Д4. Отключенной
от схемы окажется обмотка тю2, а ток в нагрузке будет создаваться
напряжением Ц1я Как видно из рис. 1-20,6, направление тока
в /?п не изменится, но теперь цепь будет замыкаться через о>4,
#2 и Д2.
Таким образом, в оба полупериода импульсы тока через /?н
проходят в одном и том же направлении, создавая
положительное напряжение на выходе.
При изменении фазы входного сигнала на противоположную
ток в нагрузке будет все время проходить снизу вверх, замыкаясь
п первый полупериод через /?з, Дз, ^4, #н и щ, а во второй —
через 7?ь Дь до3, #н и шх. Напряжение на выходе будет
отрицательным. Следовательно, изменение фазы входного напряжения
па 180° вызывает изменение полярности выходного напряжения.
Для сглаживания пульсаций выходного напряжения служит кон*
деисатор фильтра С.
При отсутствии входного сигнала напряжение на выходе
равно пулю, так как точки, к которым подключены вторичная
обмотка трансформатора Тр\ и нагрузка, имеют равные потенциалы.
37
Усилители постоянного тока с автоматической
стабилизацией нуля
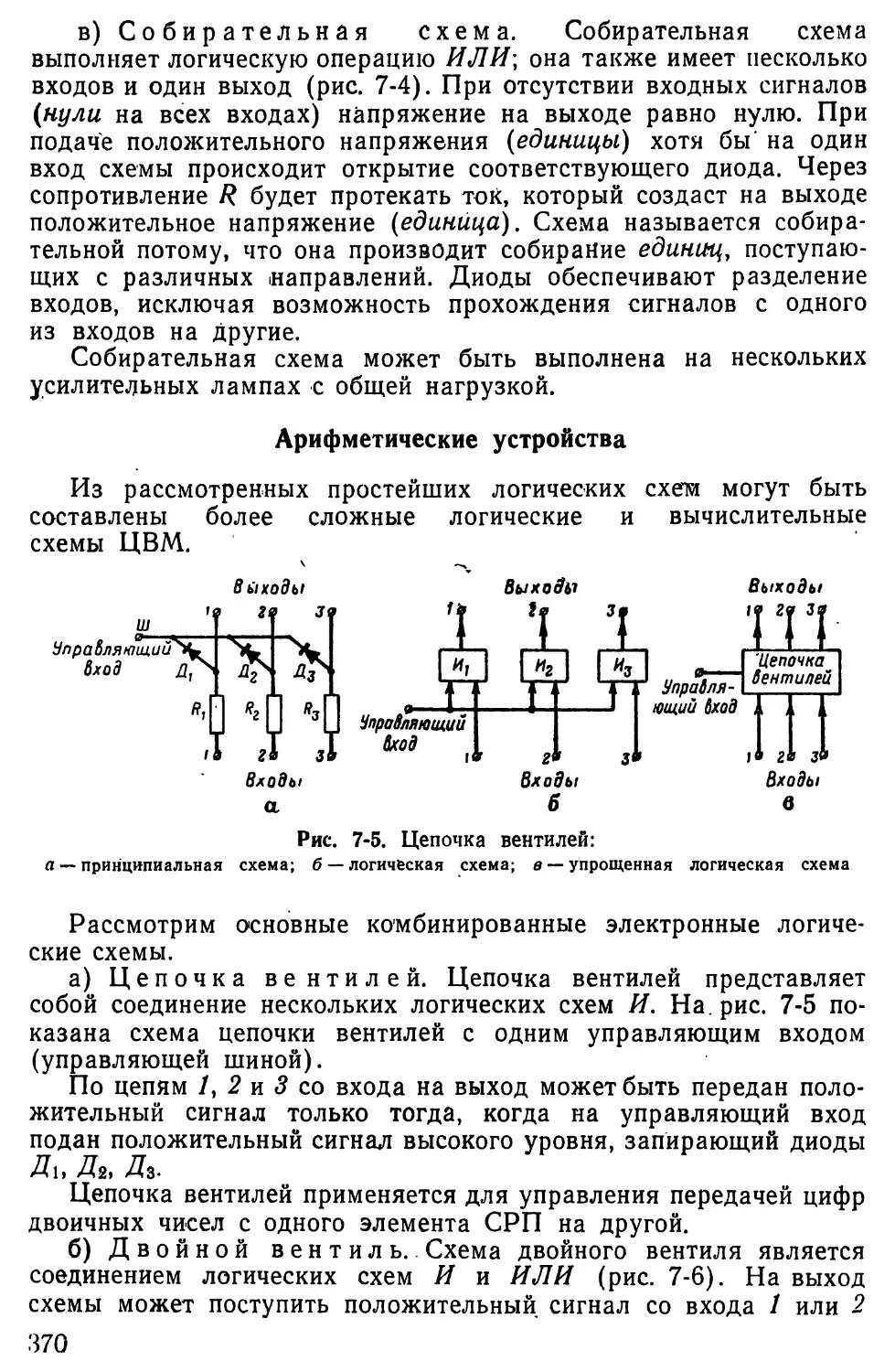
Усилители с промежуточным преобразованием сигнала хотя
и не имеют дрейфа, но обладают другим недостатком, в целом
ряде случаев ограничивающим их применение. Этот недостаток
заключается в сравнительно узкой полосе пропускания.
Расширению полосы пропускания препятствует наличие сглаживающего
фильтра на выходе фазового детектора и недостаточно точное
воспроизведение быстро изменяющихся сигналов переменным
напряжением в процессе преобразования сигнала. Повысить точность
воспроизведения можно лишь посредством увеличения частоты
опорного напряжения,
что в свою очередь
неминуемо вызывает
фазовые искажения, которые
проявляются при
детектировании. На практике
используют опорные
напряжения частотой до
400 гц, что позволяет
получить полосу
пропускания не выше нескольких
десятков герц. Для
получения более широкой
полосы пропускания
необходимо применять не-
Рис. 1-21. УПТ с автоматической стаби- посредственное усиление
лизацией нуля по постоянному току.
Устранение дрейфа в
этом случае может быть
достигнуто применением вспомогательного
усилителя-преобразователя, служащего для непрерывной стабилизации нуля.
Подобная схема показана на рис. 1-21.
Основной усилитель К охвачен отрицательной обратной
связью. Его первый каскад, собранный по схеме параллельного
баланса с общим катодным сопротивлением, имеет
дифференциальный вход. На сетку одного триода (Л\л) подается входной
сигнал, а на сетку второго (Л^) — корректирующее
напряжение с выхода вспомогательного стабилизирующего
усилителя /Сс.
Если в ранее сбалансированном УПТ по какой-либо причине
появится на выходе ложный сигнал, то по цепи обратной связи он
будет воздействовать на вход Л\а, что приведет к некоторой
компенсации изменений С/Вых- Если теперь на сетку Л^ подать
некоторое вспомогательное напряжение, противоположное по знаку
напряжению обратной связи, действующему на сетке «/7^, то тем
самым можно еще больше скомпенсировать изменение 0Вых-
38
Вспомогательное напряжение получается посредством
усиления напряжения сигнала отрицательной обратной связи
бездрейфовым усилителем-преобразователем, вход которого подключен
параллельно входу основного усилителя. Усиливая в Кс раз
напряжение отрицательной обратной связи, появившееся в
результате действия ложного сигнала, усилитель-преобразователь тем
самым дополнительно в Кс раз повышает его компенсирующее
действие, снижая во столько же раз дрейф нуля. При этом нет
опасности^ получения перекомпенсации, так как по мере
уменьшения изменений выходного напряжения будет уменьшаться
вызванный им сигнал обратной связи, а вместе с ним и вспомогательное
компенсирующее напряжение. Для идеальной стабилизации
необходимо иметь Дс = оо. Но уже при /Сс=Ю00 дрейф снижается до
уровня шумов первого каскада.
При подаче полезного сигнала вспомогательный усилитель
почти не влияет на работу устройства. Его наличие эквивалентно
повышению усиления основного УПТ в Кс раз:
^вЫх = {с/ю + ВДХ) к=и'вхк а + кс).
Но при наличии обратной связи общее усиление определяется
главным образом лишь параметрами цепи обратной связи
(выражение 1-5):
„ _ #С(1 + *с) _ 1
Ао"~"1 + рК(1 + Кс)~ Р *
На более высоких частотах, где происходит резкое уменьшение
коэффициента усиления вспомогательного усилителя, схема
работает так, как будто этот усилитель вообще выключен и /Сс=0.
Тогда
к ._ ^С 1
А° — 1 + р/С ~ р *
Таким образом, стабилизирующий усилитель не изменяет
усилительных свойств рсновного, а лишь способствует уменьшению
дрейфа. Ложные сигналы в такой схеме будут определяться не
первым каскадом УПТ, а первым каскадом стабилизирующего
усилителя,, т. е. преобразователем, и будут значительно меньше.
§ 1-6. МАГНИТНЫЕ УСИЛИТЕЛИ
Принцип действия магнитных усилителей
Действие магнитного усилителя основывается на использовании
зависимости индуктивности катушки с ферромагнитным
сердечником от величины подмагничивающего тока, создаваемого входным
сигналом.
39
Ферромагнитные материалы обладают нелинейной
зависимостью магнитной индукции В от напряженности магнитного поля Н
(рис. 1-22). В магнитных усилителях применяются магнитомягкие
материалы, имеющие очень узкую петлю гистерезиса, что
позволяет при анализе зависимость В=/(#) считать безгистерезиснои и
заменять ее средней кривой
намагничивания (рис. 1-23, а).
Если на сердечник из
ферромагнитного материала
поместить обмотку с малым
активным сопротивлением и
подключить ее к источнику
синусоидального переменного
напряжения, то почти все
напряжение будет падать на
индуктивном сопротивлении
обмотки. Оно будет
уравновешиваться возникающей в
обмотке ЭДС самоиндукции:
еь = Цт З1п «>Д
Эта ЭДС пропорциональна скорости изменения магнитного
потока Ф в сердечнике и числу витков обмотки до:
йФ
Но
Ф = ВЗ,
где 5 —сечение сердечника.
Следовательно,
А—**н
Рис. 1-22. Характеристики
ферромагнитных материалов:
/ — петля гистерезиса; 2 —средняя кривая
намагничивания
или
■^4г==^81па)^
4^---^йпа*
Отсюда
В= ~^ \ ^^^ + В0=^СО$^(+ В0 = ВтСО$^+ В0,
где В0 — достоянная интегрирования или постоянная
составляющая магнитной индукции, определяемая
начальным состоянием сердечника;
Вт = т™^ — амплитуда переменной составляющей магнитной
индукции.
Из полученного выражения следует, что переменная
составляющая магнитной индукции имеет косинусоидальный характер.
Амплитуда магнитной индукции Вт = * не зависит от магнитных
40
свойств сердечника, а следовательно, и величины постоянного
подмагничивания. Она определяется амплитудой приложенного к
обмотке переменного напряжения. В то же время величина
напряженности магнитного поля, а следовательно, и тока в обмотке
будет существенно зависеть от первоначального подмагничивания
сердечника. Это следует из рассмотрения кривой намагничивания.
Если первоначальное подмагничивание отсутствует (рис. 1-23, а),
В
Рис. 1-23. Зависимость р.^ от подмагничивания:
а — зависимость магнитной индукции от напряженности поля; б —
зависимость р.^ от Яо
то при данном общем изменении магнитной индукции АВ
изменение напряженности магнитного поля будет равным АН\. При
наличии первоначального подмагничивания Я0 те же изменения
индукции будут сопровождаться значительно большими изменениями
напряженности Д#2. Магнитные свойства сердечника в этом случае
удобно характеризовать динамической магнитной проницаемостью
ц_, величина которой определяется соотношением
и зависит от величины первоначального подмагничивания
(рис. 1-23,6). С увеличением подмагничивания р_ убывает.
Пропорционально убывает и индуктивность обмотки Ь и ее индуктив*.
ное сопротивление Хь\
**= 108/ ш\
Хь = о>/,,
где 5—сечение сердечника, см2;
I — средняя длина магнитопровода, см.
Возможность изменения индуктивного сопротивления обмотки
посредством подмагничивания сердечника лежит в основе работы
магнитных усилителей.
41
Для уяснения принципа действия магнитного усилителя
рассмотрим ферромагнитный сердечник, на котором расположены две
обмотки: управляющая ту и нагрузочная ти. Подмагничивание
сердечника осуществляется медленно изменяющимся током
входного сигнала /у, протекающим через управляющую обмотку щ.
Нагрузочная обмотка дросселя питается переменным
напряжением 1/^ постоянной амплитуды. Величина тока нагрузочной
обмотки зависит от ее индуктивного сопротивления. Если пренебречь
активным сопротивлением обмотке ы)я в сравнении с ее индуктивным
сопротивлением, можно записать:
/.-■%.
н <*!>*
При увеличении управляющего тока *у подмагничивание растет,
а динамическая магнитная проницаемость сердечника и
индуктивность обмотки дон падают, что приводит к увеличению амплитуды
(У
<У
С~в В* Сп^
\Ыу
Щ1*
'вьп
ел
Рис. 1-24. Простейший магнитный усилитель:
о —схема; б — графики напряжений; в — эквивалентная схема магнитного усилителя
переменного тока /и (рис. 1-24,6). При уменьшении /у процессы
протекают в обратном порядке. Если в цепь обмотки дросселя хюк
включить нагрузочное сопротивление Кн> то при изменении тока /н
будет изменяться и падение напряжения на нем. Это изменение
напряжения можно использовать как выходной сигнал.
Соответствующая эквивалентная схема магнитного усилителя показана на
рис. 1-24, е.
Мощность, выделяемая в нагрузочном сопротивлении, может во
много раз превышать мощность, расходуемую в управляющей
обмотке. Следовательно, схема обладает усилительными свойствами
и ее можно рассматривать как простейший магнитный усилитель.
Передача мощности в нагрузку происходит от источника
переменного тока под воздействием управляющего сигнала /у постоянного
тока.
Коэффициент усиления магнитного усилителя по току
определяется отношением изменения тока в нагрузке к изменению тока
управляющей обмотки:
(1-21)
42
Аналогично может быть записан и коэффициент усиления по
напряжению:
.Чем больше изменение индуктивного сопротивления
нагрузочной обмотки при том же управляющем сигнале, тем больше
изменение тока нагрузочной обмотки, а следовательно, тем выше
коэффициент усиления магнитного усилителя. Для увеличения
коэффициента усиления управляющую обмотку выполняют с большим
числом витков. Коэффициент усиления по мощности /Ср определяется
произведением коэффициентов Кг и Кц:
К9 = КйК* (1-23)
Магнитный усилитель является усилителем-преобразователем,
или модулятором, так как выходным является сигнал переменного
тока. Для получения выходного сигнала постоянного тока нагрузка
включается через выпрямитель (детектор).
Рассмотрим наиболее распространенные варианты схем
магнитных усилителей.
Однотактные магнитные усилители
Показанная на рис. 1-24, а простейшая схема магнитного
усилителя не может быть практически использована ввиду значительной
реакции нагрузочной обмотки на управляющую цепь.
Действительно, ЭДС, индуктируемая в управляющей обмотке за счет
переменной составляющей магнитного потока, создает переменный ток
в управляющей цепи, нагружающий каскад управления и
изменяющий форму входного сигнала. Для устранения указанного
недостатка в магнитных усилителях применяются схемы с двумя
одинаковыми сердечниками (рис. 1-25, а). Обмотки щ и тв имеют по
две секции — по одной на каждом сердечнике. Секции
управляющей обмотки соединяются последовательно и встречно. При этом
происходит взаимное вычитание ЭДС, индуктируемых в каждой
из них. Результирующая ЭДС в управляющей цепи оказывается
равной нулю. Из рис. 1-25, а видно, что в соседних стержнях
сердечников магнитные поля управляющей обмотки направлены в одну
сторону, а магнитные поля нагрузочных обмоток — в
противоположные стороны. Это позволяет сблизить сердечники, а управляю-»
щую обмотку наматывать так, чтобы охватывались оба соседних
стержня (рис. 1-25,6). Тогда переменные ЭДС, индуктируемые
в этой обмотке магнитными потоками нагрузочных обмоток, будут
взаимно компенсироваться.
Нагрузочные обмотки могут включаться не только последовав
тельно, но и параллельно. В последнем случае (рис. 1-25, г.) на*
правление магнитных силовых линий в стержнях должно быть
таким же, как и в схемах с последовательным соединением обмоток.
43
Дальнейшее развитие конструкции магнитных усилителей
привело к применению сердечников броневого типа (рис. 1-25,б), в
которых секции нагрузочной обмотки наматываются на крайних
стержнях, а управляющая обмотка — на среднем.
'вь/х
'И
"„I ГК ЦВ1»Х
и%1
ж
и^1
'И
Ьх
ПуК
=УЯ
Рис. 1-25. Однотактные магнитные усилители:
а, б, в, г — схемы усилителей; д — условное обозначение
. В этом случае в среднем стержне происходит компенсация
переменного магнитного потока, так как в нем переменные
магнитные потоки нагрузочных обмоток т'н и т"п одинаковы по величине
и направлены навстречу друг другу. Переменная э. д. с. в
управляющей обмотке индуктироваться
не будет.
Упрощенное схемное
обозначение магнитных усилителей
показано на рис. 1-25,5.
Зависимость тока нагрузки 1$
^>1 (н) от УпРавляющего тока 1У называет-
у у ся нагрузочной характеристикой
(рис. 1-26).
Эта же характеристика в другом
масштабе представляет собой
зависимость тока нагрузки от
напряженности магнитного поля: /н=/(#у).
Если управляющего сигнала нет, магнитная проницаемость
сердечников максимальна, индуктивность обмоток и их индуктивные
сопротивления также максимальны, а ток нагрузки минимален.
При подаче управляющего сигнала любой полярности происходит
Рис. 1-26. Характеристика
магнитного усилителя
44
подмагничивание сердечников постоянным магнитным полем.
Индуктивность нагрузочных обмоток уменьшается, а ток нагрузки
возрастает, поэтому нагрузочная характеристика однотактного
магнитного усилителя симметрична относительно оси ординат. Чтобы
ток нагрузки по-разному изменялся при положительных и
отрицательных сигналах, т. е. чтобы усилитель реагировал на полярность
входного сигнала, необходимо сместить нагрузочную
характеристику вправо или влево. Это достигается начальным подмагничи-
ванием сердечников полем специальной обмотки шсм,
расположенной рядом с управляющей (рис. 1-27,а).
Рис. 1-27. Смещение в магнитных усилителях:
■ схема включения обмотки смещения; б — характеристика уси«
лителя при наличии смещения
Величина смещения выбирается так, чтобы при отсутствии
входного сигнала через нагрузку протекал ток, соответствующий
середине прямолинейного участка характеристики (рис. 1-27,6).
При подаче положительного входного сигнала магнитный поток
управляющей обмотки увеличивает намагничивание сердечников,
и амплитуда тока нагрузки возрастает. При подаче отрицательного
входного сигнала намагничивание сердечников уменьшается,
вызывая уменьшение тока нагрузки.
При некотором значении отрицательного входного сигнала может
произойти полная компенсация потока смещения, и амплитуда тока
нагрузки окажется минимальной. Дальнейшее увеличение
отрицательного сигнала вновь вызывает рост тока нагрузки.
В пределах прямолинейного рабочего участка характеристики
усилитель реагирует на полярность входного сигнала увеличением
или уменьшением тока нагрузки.
Имеются усилители с несколькими управляющими обмотками;
при этом усилитель реагирует на алгебраическую сумму потоков
всех обмоток, что позволяет .использовать его для сложения или
вычитания управляющих сигналов.
45
Магнитные усилители могут применяться для усиления
сравнительно медленно изменяющихся сигналов. Для нормальной работы
магнитного усилителя необходимо, чтобы частота переменного
напряжения не менее чем в 10 раз превышала максимальную частоту
входного сигнала.
Обратная связь в магнитных усилителях
^0Х
Рис. 1-28.. Магнитный
усилитель с обратной связью
Обратная связь в магнитных усилителях осуществляется при
помощи специальной обмотки шос, которая располагается на тех же
стержнях, что и управляющая обмотка, и питается выпрямленным
током нагрузки. Если действие тока нагрузки в обмотке обратной
связи усиливает . действие входного
сигнала, то обратная связь является
положительной, а если ослабляет, то
отрицательной. Если необходимо
питать нагрузку выпрямленным током,
можно использовать один общий
выпрямитель и для питания нагрузки, и
для создания обратной связи
(рис. 1-28).
Магнитные усилители обладают
высокой стабильностью параметров,
поэтому для стабилизации
отрицательная обратная связь в них не
применяется. Более того, для повышения
коэффициента усиления целесообразно
применять положительную обратную связь, что практически не
ухудшает стабильности работы магнитного усилителя.
Нагрузочная характеристика усилителя с положительной
обратной связью может быть построена графически, для чего по оси
абсцисс удобно откладывать не токи обмоток щ и хю0Су а
пропорциональные им напряженности магнитных полей.
Построим нагрузочную характеристику /н=/(#у) усилителя без
обратной связи (рис. 1-29) и нанесем на нее характеристику
обратной связи, т. е. зависимость напряженности Нос поля обмотки
обратной связи от тока нагрузки /н. Эта зависимость представляет
собой прямую линию, проходящую через начало координат, так как
между #сс и током нагрузки существует прямо пропорциональная
зависимость. Чем глубже обратная связь, тем более полого пойдет
эта характеристика, так как тому же самому приращению тока
нагрузки /н будет соответствовать большее изменение Нос.
При отсутствии управляющего сигнала (#у*=0) поле в
сердечнике будет создаваться обмоткой обратной связи шос, по которой
протекает некоторый начальный ток. Режим усилителя будет
определяться точкой А пересечения характеристики обратной связи и
нагрузочной характеристики /н=/(#у). В этом режиме ток
46
нагрузки Гн создает такое подмагничивающее поле обратной
связи Н"ос, которому соответствует именно данное значение тока
нагрузки /ц.
Предположим, что на управляющую обмотку подан сигнал,
создающий поле //у управляющей обмотки. В нагрузочной обмотке
при этом потечет ток, определяемый равновесной точкой Б
пересечения характеристик, а напряженность поля в сердечнике будет
равна Н'&
Рис. 1-29. Характеристики усилителя с обратной связью
Напряженность поля Н0 складывается из напряженности
поля //у, создаваемой управляющей обмоткой доу, и
напряженности Нос, создаваемой обмоткой обратной связи: Нц = Н'у-\-Н'0С.
Бели нагрузочная прямая идет полого (обратная связь велика),
то даже при малой величине Ну суммарная напряженность поля,
а следовательно, и ток нагрузки получаются большими.
Проводя серию характеристик обратной связи, можно для
каждого значения Яу найти соответствующую точку пересечения и
построить зависимость /н от Ну (рис. 1-29,6).
^Из приведенного построения видно, что благодаря
положительной обратной связи небольшие изменения управляющего потока
приводят к значительным изменениям тока нагрузки, что
указывает на увеличение коэффициента усиления.
Начиная с некоторого значения отрицательного управляющего
сигнала напряженность поля обратной связи будет действовать
навстречу напряженности поля, создаваемой управляющей
обмоткой, замедляя рост тока нагрузки. Обратная связь становится
отрицательной, и крутизна левого участка нагрузочной
характеристики уменьшается.
Обратная связь регулируется при помощи реостата,
шунтирующего обмотку обратной связи'или часть ее витков. Очень часто
47
выбор рабочего участка характеристики (смещение) также
производится по магнитному потоку обратной связи. Для этого
коэффициент обратной связи изменяют так, чтобы начальный ток
нагрузки соответствовал середине линейного участка.
Двухтактные магнитные усилители
Особенность всех рассмотренных однотактных магнитных
усилителей состоит в том, что в нагрузке есть ток и при отсутствии
управляющего сигнала.
В автоматических устройствах часто бывает необходимо, чтобы
выходной сигнал был равен нулю при нулевом сигнале на входе.
Это достигается в двухтактных магнитных усилителях.
Важное достоинство двухтактных магнитных усилителей
состоит также в том, что фаза выходного напряжения изменяется
Рис. 1-30. Дифференциальный магнитный усилитель:
а — схема усилителя; б — характеристика усилителя
при изменении полярности входного сигнала. Благодаря этому
имеется возможность реверсирования исполнительного двигателя
переменного тока, питаемого магнитным усилителем.
Существует несколько разновидностей двухтактных усилителей.
Чаще применяются усилители, собранные по дифференциальной
и мостовой схемам.
Дифференциальная схема. Дифференциальный
магнитный усилитель (рис. 1-30, а) состоит из двух однотактных
усилителей, работающих на общую нагрузку, причем ток нагрузки
образуется как разностный ток обоих усилителей. Нагрузочные
обмотки усилителей питаются от общего трансформатора, вторичная
обмотка которого имеет среднюю точку. Характеристики усилите-
48
лей смещены в противоположные сторойы (рис. 1-30,6), что
достигается соответствующим включением обмоток смещения.
Регулировка смещения производится потенциометром /?См так, чтобы при
отсутствии входного сигнала общий ток нагрузки /н, равный
разности токов, проходящих через нагрузочные обмотки усилителей,
был равен нулю:
/.=/,-/, = 0.
При подаче положительного входного сигнала подмагничивание
первого сердечника увеличивается, а подмагничивание второго
сердечника уменьшается, что приводит к росту тока 1{ и такому же
уменьшению /г. Ток нагрузки, равный разности обоих токов,
возрастает. Приращение тока нагрузки будет равно
А/н = А/1-(-А/2) = 2Д/. •
При отрицательном входном сигнале уменьшится
подмагничивание в первом сердечнике и возрастет во втором, поэтому в
нагрузке будет преобладать ток второго усилителя, и фа'за
результирующего тока изменится на 180°.
Общая нагрузочная характеристика дифференциального
усилителя (рис. 1-30,6) может быть построена в результате
алгебраического суммирования ординат характеристик обоих усилителей. Она
проходит через начало координат и имеет большую крутизну, чем
у каждого из однотактных.
Ток нагрузки достигает максимального значения, когда
напряженность поля входного сигнала становится равной
напряженности поля смещения. При этом происходит компенсация подмагничи-
вающего потока во втором сердечнике при положительном сигнале
или в первом при отрицательном. Дальнейшее повышение
управляющего сигнала приводит к уменьшению тока нагрузки.
Следует отметить, что в дифференциальном усилителе имеет
место взаимное влияние обоих плеч. Оно объясняется тем, что
напряжение на нагрузке в зависимости от его фазы добавляется к
напряжению на одной секции вторичной обмотки трансформатора Тр
и вычитается из напряжения на другой. Это уменьшает
приращение токов 1\ и /2 и приводит к некоторому уменьшению крутизны
характеристики и коэффициента усиления дифференциального
усилителя.
Обратная связь в дифференциальных усилителях
осуществляется так же, как и в однотактных.
Мостовая схема. Существенным недостатком
дифференциальных магнитных усилителей является необходимость в
питающем трансформаторе, который усложняет схему. Двухтактный
магнитный усилитель может быть выполнен без трансформатора
Посредством включения двух однотактных усилителей по мостовой
схеме.
На рис. 1-31 показана широко распространенная практическая
схема магнитного усилителя, в которой он работает совместно
49
с электронным усилителем {Ли Л2). Нагрузкой усилителя является
одна из обмоток двухфазного асинхронного двигателя. Другая его
обмотка питается непосредственно от сети переменного тока через
фазосдвигающий конденсатор.
Анодное напряжение подается на лампы через управляющие
обмотки усилителя. Смещение обеспечивается начальными анодными
токами и регулируется сопротивлением /?к. К двум
противоположным вершинам моста А и Б подводится напряжение питающей
сети 6^, а к двум другим
Двигатель
вершинам В и Г
подключается нагрузка. Включение
обмоток переменного тока
производится так, чтобы
обмотки каждого однотакт-
ного усилителя оказались
в противоположных плечах
моста.
Симметричный входной
сигнал подается на сетки
ламп и приводит к
изменению анодных токов: в одной
лампе ток растет, а в
другой падает. Это изменение
анодных токов является
управляющим сигналом
магнитного усилителя. При
отсутствии управляющего
сигнала индуктивности всех
обмоток одинаковы, мост
сбалансирован и ток через
нагрузку не протекает.
Точная балансировка
производится потенциометром П
«Установка нуля». При
подаче управляющего сигнала подмагничивание одной пары
сердечников (например, / и 2) увеличивается, а другой пары (3 и 4)
уменьшается. В соответствии с этим изменяются в разные стороны
и индуктивные сопротивления обмоток, включенных в
противоположные плечи моста. Сопротивление обмоток гюп\ и шн2
уменьшается, а сопротивление обмоток донз и шш± увеличивается. Равновесие
моста нарушается, через нагрузку проходит ток, и двигатель
начинает вращаться. Изменение полярности входного сигнала вызывает
изменение фазы тока в нагрузке и реверсирование двигателя.
Нагрузочная характеристика мостового усилителя такая же, как
и дифференциального.
При использовании МУ в автоматических устройствах важное
значение имеет снижение его инерционности.
Рис. 1-31.
Мостовая схема
ного усилителя
магнит-
50
Если на вход МУ подать скачок управляющего напряжения, то
амплитуда, напряжения на нагрузочной обмотке нарастает
постепенно, изменяясь по экспоненциальному закону. Это объясняется
большой индуктивностью Ьу управляющей обмотки. Инерционность
значительно уменьшается при включении управляющих обмоток
через электронные лампы (как это показано, например, на
рис. 1-31). Из-за большого внутреннего сопротивления Яг ламп
постоянная времени управляющей цепи уменьшается от величины
до величины
Т — 1У ^^1
э Яу + Я^Д;'
где /?у <С /?/ — активное сопротивление управляющей обмотки,
§ 1-7. ЭЛЕКТРОМАШИННЫЕ УСИЛИТЕЛИ
Устройство и принцип работы электромашинного усилителя
Для усиления мощности электрических сигналов в
электромеханических системах часто применяются электромашинные
усилители. Электромашинный усилитель (ЭМУ), или амплидин,
представляет собой сочетание в одном корпусе электродвигателя и
генератора постоянного тока.
Электродвигатель предназначен для вращения якоря
генератора с постоянной скоростью. Принцип усиления основай на том,
что при помощи сравнительно небольшой мощности в цепи
возбуждения можно управлять значительно большей мощностью в цепи
якоря генератора. При этом происходит преобразование энергии
вращения электродвигателя в электрическую энергию на выходе
электромашинного усилителя.
Коэффициентом усиления ЭМУ по мощности называется
отношение мощности на выходе ЭМУ к мощности, затрачиваемой в
обмотке возбуждения. Обмотку возбуждения ЭМУ принято называть
управляющей.
В ЭМУ так же, как и в магнитных усилителях, может быть
несколько управляющих обмоток. В этом случае усилитель реагирует
на алгебраическую сумму потоков всех обмоток.
В отличие от обычных генераторов постоянного тока в ЭМУ
коллектор имеет две пары щеток, расположенных во
взаимно-перпендикулярных плоскостях (рис. 1-32). Щетки АА, установленные на
поперечной оси, перпендикулярной потоку Фу управляющей
обмотки щ, замыкаются накоротко. Вторая пара щеток,
установленная на продольной оси ББ, является выходом усилителя и подклю-
51
чается к нагрузке. Обмотка якоря является общей. Ее витки,
проходящие в данный момент у полюсов, коммутируются щетками АА,
а витки, пересекающие нейтраль, — щетками ББ. '
Магнитапровод выполняется с минимально возможным
воздушным зазором между ротором и статором. Это позволяет при малом
токе в управляющей обмотке создать сравнительно интенсивный
магнитный поток возбуждения, в результате чего повышается
чувствительность усилителя. Полюсы имеют широкие наконечники с
большой дугой охвата якоря и пазами, параллельными оси якоря.
Такая конструкция увеличивает поперечный магнитный поток
реакции якоря и улучшает его распределение.
а — потоки, действующие в ЭМУ; б — схема включения; в — внешние характеристики
Электрическая схема ЭМУ показана на рис. 1-32,6. При подаче
входного сигнала ток управляющей обмотки 1У создает продольный
управляющий магнитный поток Фу, пропорциональный
ампер-виткам обмОТЮ* ДОу/у!
ФУ = /^А, (1-24)
где Кг — коэффициент пропорциональности;
-о/у — число витков управляющей обмотки.
Этот поток индуктирует в обмотке вращающегося якоря э. д. с,
величина которой пропорциональна потоку Фу и. скорости вращения
якоря. Эта э. д. с. действует в короткозамкнутой поперечной цепи
щеток АА, создавая в ней сравнительно большой ток /п:
*и — А2 -/V »
где К2—коэффициент пропорциональности;
/?я—сопротивление короткозамкнутой цепи якоря;
п—число оборотов якоря в секунду. «
Рассмотренная часть ЭМУ является первым каскадом усиле*
ния, в котором происходит усиление по току. Ток *ш протекая по
52
обмотке якоря, создает свой магнитный поток реакции якоря Фш
повернутый на 90° по ходу вращения якоря относительно потока Фу
И потому называемый поперечным:
Фп = АУш
причем
Поперечный магнитный поток неподвижно ориентирован в
пространстве и является потоком возбуждения для второго каскада
усиления. Этот поток также пересекается витками якоря, а
индуктируемая в них рабочая э. д. с. 2?р коммутируется щетками ББ и
используется для питания нагрузки. Величина рабочей э. д. с.
пропорциональна поперечному потоку и скорости вращения якоря:
Учитывая предыдущие соотношения, получим
Е, = К1К2К^^- = К1^. (1-25)
Второй каскад ЭМУ является усилителем мощности, так как
при таком же внутреннем сопротивлении, как и в поперечной цепи,
в нем создается значительно большая э. д. с.
Ток нагрузки ЭМУ определяется суммарным сопротивлением
якоря и нагрузки:
г = ер
н Л. + *н '
Протекая по обмотке якоря, он создает свой поток реакции
якоря Фрн, который в свою очередь повернут на 90° относительно
потока Фп по ходу вращения якоря и потому направлен навстречу
управляющему потоку и уменьшает его. Возникает отрицательная
обратная связь, резко снижающая усиление. Для ее устранения на
полюсах устанавливается компенсационная обмотка док, которая
включается последовательно с нагрузкой.
Число витков компенсационной обмотки подбирается таким,
чтобы создаваемый ею магнитный поток Фк был примерно равен
магнитному потоку реакции тока нагрузки Фрн. Для регулировки
компенсационного потока параллельно док подключается
регулировочный реостат 7?ш (рис. 1-32,6).
Электромашинные усилители выполняются на различные
выходные мощности от сотен ватт до десятков* киловатт при
коэффициенте усиления по мощности от нескольких сотен до десятков
тысяч. Для повышения качества работы ЭМУ на статоре часто
размещают дополнительные обмотки: короткозамкнутую,
размагничивающую, обмотки дополнительных полюсов и обмотки обратной
связи.
53
Короткозамкнутая обмотка Т0КЗ служит для стабилизации
поперечного потока реакции якоря. При случайных изменениях
поперечного потока в ней индуктируется э. д. с. и появляется ток,
который своим магнитнУм полем препятствует этим изменениям.
Размагничивающая обмотка шро служит для устранения
остаточного намагничивания магуитопровода статора. При наличии
остаточного намагничивания на выходе ЭМУ будет некоторое
напряжение, даже если входного сигнала нет. Размагничивающая
обмотка укладывается в пазы управляющей обмотки и питается от
источника переменного тока небольшого напряжения, что дает
возможность получить среднее значение остаточной индукции,
равное нулю.
Переменное напряжение создается обычно небольшим
встроенным генератором, состоящим из вращающегося постоянного
магнита и небольшой обмотки на статоре ЭМУ.
Обмотка дополнительных полюсов шдсп включается
последовательно со щетками ББ (как и компенсирующая). Дополнительные
полюсы образуются пазами в основных полюсах и улучшают
коммутацию секций обмоток якоря щетками ББ.
Обмотки обратной связи укладываются в пазы
компенсационной обмотки и обеспечивают устойчивую работу ЭМУ.
Внешняя характеристика ЭМУ
Внешней характеристикой ЭМУ называется зависимость
напряжения на выходе от величины тока потребителя при постоянной
скорости вращения якоря и постоянном входном напряжении:
6гВых=/(/н) При П = СОП$1 И {Увх = СОП8{.
При полной компенсации реакции якоря э. д. с. прямо
пропорциональна управляющему току и не зависит от тока нагрузки.
Выходное напряжение при этом почти постоянно, так как падение
напряжения на обмотке якоря и щетках очень мало (график 1 на
рис. 1-32, в).
При небольшой перекомпенсации увеличение тока нагрузки
вызывает увеличение выходного напряжения, так как магнитный
поток, компенсирующий обмотки Фк, не только компенсирует
продольный магнитный поток реакции якоря Фрн, но и создает
дополнительный поток, усиливающий поток возбуждения. Это приводит
к увеличению э. д. с. в поперечной цепи и тока /п, в результате чего
возрастает поперечный магнитный поток реакции якоря и
увеличиваются э. д. с. и выходное напряжение до уровня напряжения
холостого хода.
Таким образом, небольшая перекомпенсация может устранить
снижение выходного напряжения, происходящее за счет
увеличения падения напряжения на обмотке якоря (график 2). При боль-
54
'вы*
шой перекомпенсации (график 3) работа ЭМУ становится
неустойчивой, так как рост тока нагрузки будет сопровождаться
увеличением рабочей э. ,д. с. Е^, что в свою очередь вызовет дальнейшее
увеличение тока нагрузки и т. д.
При недокомпенсации увеличение тока нагрузки вызывает
постепенное уменьшение продольного потока возбуждения, а
следовательно, и снижение выходного напряжения (график 4).
Сопротивление /?ш, шунтирующее компенсационную обмотку, подбирают
так, чтобы была небольшая недокомпенсация. Небольшое снижение
напряжения на выходе при росте тока
нагрузки не влияет на работу
системы, но устойчивость ее значительно
повышается.
Электромашинные усилители имеют
низкое входное сопротивление,
поэтому в большинстве автоматических
систем входной сигнал к ним
подводится предварительно усиленным по
мощности электронным усилителем
(рис. 1-33). Управляющая обмотка ЭМУ
в этом случае выполняется в виде
двух секций с одинаковым числом
витков; она включается в анодные цепи
усилительных ламп. Схема
симметрируется потенциометром Я «Установка
нуля» так, чтобы напряжение на
выходе ЭМУ было равно нулю. При по-
'даче входного сигнала анодный ток
одной лампы увеличивается, а
другой уменьшается. Возникает управляющий магнитный поток, а
следовательно, и напряжение на выходе. Изменение полярности
входного сигнала приводит к изменению направления
управляющего магнитного потока Фу и полярности выходного напряжения.
С включением обмоток ЭМУ в анодные цепи электронных ламп
значительно уменьшается инерционность управляющей обмотки,
что объясняется большим внутренним сопротивлением ламп.
Уменьшение инерционности имеет важное значение при
использовании ЭМУ в автоматических устройствах. Нагрузкой ЭМУ
обычно являются исполнительные электродвигатели.
Рис. 1-33. Схема соединения
электронного усилителя
с ЭМУ
ГЛАВА II
РЕЛЕ И РЕЛЕЙНЫЕ СХЕМЫ
§ 2-1. ОБЩИЕ СВЕДЕНИЯ
Одним из наиболее распространенных элементов различных
автоматических систем являются реле.
Реле — это устройство, которое под воздействием
управляющего сигнала производит определенные переключения в
электрических цепях.
В общем случае под термином «переключение» следует
понимать также включения и выключения. Свойство реле реагировать
на внешние сигналы используется в устройствах автоматического
контроля и сигнализации для автоматической защиты,
регулирования режимов работы, дистанционного управления аппаратурой, для
осуществления управления по заданной программе и т. д. Весьма
широко применяются реле в счетно-решающих приборах.
Основное достоинство реле заключается в возможности
управлять распределением значительных электрических мощностей при
помощи небольших по величине сигналов. Важным свойством реле
является наличие некоторого гистерезиса, состоящего в том, что
обычно для перевода реле в рабочее состояние — срабатывание —
требуется несколько другой уровень внешнего сигнала, чем для
возвращения в исходное состояние — отпускание реле. Более того,
в некоторых типах реле рабочее состояние сохраняется даже при
полном прекращении внешнего воздействия. В таких случаях
говорят, что реле «запоминает» это состояние, и только сигнал
обратного знака может произвести «сброс».
В зависимости от физического фактора, на который должно
реагировать реле, различают электрические, тепловые, оптические
(световые), акустические (звуковые), химические,
манометрические, механические и некоторые другие типы реле.
В схемах радиотехнической аппаратуры чаще применяются
различные типы электрических реле. Реле, в которых
электрическая величина преобразуется в механическое перемещение,
обеспечивающее переключение контактов, называются электромеханиче-
56
сними. Реле, в которых переключение осуществляется посредством
резкого изменения проводимостей цепей, называются
бесконтактными. К электромеханическим реле относятся электромагнитные,
магнитоэлектрические, резонансные, электродинамические и т. д.
Бесконтактными являются электронные, магнитные, тиратронные,
фотореле.
Всякое реле содержит воспринимающий или чувствительный
элемент, реагирующий на внешнее воздействие, и. исполнительную
часть, осуществляющую переключение. В некоторых реле есть еще
промежуточный элемент, сравнивающий внешнее воздействие с
заданным значением. Как только это значение оказывается
достигнутым, промежуточный элемент передает его исполнительной части.
Принцип действия и конструктивное оформление реле могут
быть самыми различными. Однако реле имеют ряд общих
параметров, Важнейшие из них следующие.
Мощность срабатывания (ЯСр)—минимальная
мощность, которую необходимо подвести к воспринимающей части,
чтобы перевести реле из состояния покоя в рабочее состояние. В
маломощных реле она не должна превышать 1 вт, в реле средней
мощности она лежит в пределах от 1 до 10 вт и в мощных реле
эта мощность более 10 вт.
Мощность срабатывания характеризует чувствительность реле;
в некоторых типах реле она составляет доли ватта.
Рабочая мощность (Рр) — мощность, которую необходимо
подвести к воспринимающей части, чтобы обеспечить надежное
срабатывание и удержание реле в рабочем состоянии; она должна
быть несколько больше мощности срабатывания; иногда для
повышения надежности срабатывания устанавливают* реле,
непосредственно реагирующее на внешний фактор, с повышенной
чувствительностью; это реле производит включение другого, более
мощного реле, которое производит основное переключение в схеме;
такое дополнительное реле называют промежуточным.
Мощность управления (Ру) — мощность, которой
управляет реле в процессе переключений; чрезмерное ее увеличение
может вывести реле из строя или сделать переключения
ненадежными.
Коэффициент управления (/Су) — отношение мощности
в управляемой цепи к рабочей мощности; коэффициент управления
характеризует усиление сигнала по мощности, производимое реле;
усиление в данном случае следует понимать условно, так как
пропорциональность между рабочей и управляемой мощностями не
соблюдается.
Время срабатывания (А>р) — промежуток времени от
момента воздействия внешнего фактора до момента переключения
управляемой цепи (перехода контактов в рабочее состояние).
По времени срабатывания реле делятся:
—- на быстродействующие, /Ср=1—50 мсек;
— на нормальные, ^ср = 50—150 мсек\
57
*— на замедленные, /Ср=0,15—1 сек;
— на реле выдержки времени (реле времени), /Ср ^ 1 сек.
Реле с временем срабатывания менее 1 мсек принято называть
безынерционными. К ним относятся, например, различные типы
электронных реле.
Время отпускания (*0тп) — промежуток времени от
момента выключения реле до момента выхода управляемой цепи из
рабочего состояния.
Коэффициент возврата (/Св) — отношение мощности
сигнала, при которой происходит отпускание реле, к мощности
срабатывания; в большинстве типов реле коэффициент возврата
меньше единицы; благодаря этому обеспечивается надежное
переключение, так как сработавшее реле остается в рабочем состоянии
до тех пор, пока не произойдет значительное уменьшение сигнала.
§ 2-2. КОНТАКТЫ РЕЛЕ
Устройство и работа контактов
Контакты реле выполняют функции исполнительного органа и
являются одним из наиболее ответственных элементов реле, в
значительной степени определяющим надежность его работы. Для
нормальной работы реле контакты должны
удовлетворять следующим
требованиям:
1 о — 7 о л| — обеспечивать надежность электри-
%% » зо ■• ческого .соединения;
б г — иметь весьма малое и стабильное
Рис. 2-1. Типы контакт- переходное сопротивление;
ных групп: — быть достаточно долговечными, т. е.
а —нормально разомкнутые; выдерживать без заметного износа боль-
б-нор^а^льно^амкнуты^; щое число срабатываний;
щие на переключение — не иметь ВИбраЦИЙ при ВКЛЮЧеНИИ И
в рабочем состоянии;
—- быть стойкими против внешних влияний (изменения
температуры, влажности и т. д.);
— обеспечивать требуемую мощность переключения.
По выполняемым функциям контакты можно разделить на
следующие четыре группы (рис. 2-1).
а) Контакты, работающие на замыкание или нормально
разомкнутые; нормально разомкнутые (нр) контакты широко
используются в различных пусковых реле.
б) Контакты, работающие на размыкание, или нормально
замкнутые (нз) *; эти контакты применяются в реле защиты.
* На схемах нормально замкнутые контакты принято затушевывать;
58
в) Контакты простого переключения; у этих контактов второй
контакт сначала отключается от третьего, а затем подключается
к первому.
г) Контакты переходного переключения; здесь сначала второй
контакт подключается к первому, а уже затем происходит
отключение третьего.
Контактные группы типа виг используются в цепях
управления. Из данных четырех типов контактных групп набираются
контактные системы различных реле.
По форме рабочих поверхностей различают точечные, линейные
и плоские контакты (рис. 2-2). Для цепей малой и средней
мощности применяют точечные контакты. Их достоинство состоит в том,
■ ' " о* |'" ' Ц* ' |_р
а б в
г а
Рис. 2-2. Формы контактных поверхностей:
а, б и в —точечные; г —линейные; д — плоские
что уже при малых контактных давлениях они надежно замыкают
цепь, так как благодаря большому удельному давлению (давлению
на единицу площади поверхности) хорошо стирается поверхностная
пленка окислов. Точечные контакты выполняются в виде двух
полусфер, полусферы и плоскости или конуса и плоокости. Для
повышения надежности иногда применяют двойные точечные
контакты, работающие параллельно. В цепях повышенной и большой
мощности применяют линейные или плоские контакты,
обеспечивающие малое переходное сопротивление и хороший отвод тепла.
Для коммутации малых токов применяют контакты из серебра
или платины. В реле, рассчитанных на большие токи и частые
переключения, контакты изготовляют из вольфрама и его сплава с
молибденом. В мощных реле, размыкающих токи в десятки и сотни
ампер, применяют контакты из графита или металлокерамики.
В качестве материала для контактных пластин применяют бронзу,
латунь, нейзильбер и пр.
Релейные контакты работают в трех режимах: разомкнутом,
замкнутом и переходном. В последнем в свою очередь различают
режимы замыкания и размыкания.
В замкнутом состоянии контакты нагреваются проходящим
через них током и испытывают взаимное давление. Даже при
прохождении сравнительно небольшого тока на малой поверхности
соприкосновения может произойти заметный разогрев контактов,
в результате которого материал контактов размягчается и проис-
59
ходит их деформация (смятие). В плоских контактах, где
протекают большие токи, чтобы избежать сильного местного перегрева,
необходимо добиваться тщательного прилегания контактных
поверхностей.
При замыкании контактов, когда расстояние между ними
становится очень малым, напряженность поля резко возрастает и
может возникнуть явление автоэлектронной эмиссии: электроны
будут вырываться с поверхности контакта, имеющего более низкий
потенциал. В результате этого возникнет искра, которая быстро
гасится замкнувшимися контактами. Реле должно быть
отрегулировано так, чтобы при замыкании не происходило вибрации
контактов.
Наиболее трудным этапом в работе контактов является
процесс их размыкания. Поверхность соприкосновения контактов при
размыкании быстро уменьшается, что приводит к росту
переходного сопротивления. В то же время ток в цепи почти не успевает
уменьшиться, поэтому резко увеличивается выделяемая в
контактах мощность Р = 12$. Контакты сильно разогреваются, металл в
точке соприкосновения оплавляется, что приводит к постепенному
разрушению контактов. Нагретые контакты являются источником
термоэлектронной эмиссии, которая облегчается благодаря
большой напряженности поля близко расположенных контактных
поверхностей. Вылетающие с катода электроны ионизируют газ, что
в определенных условиях может вызвать 'образование
электрической дуги, быстро выводящей контакты из строя. Дуга,
возникающая при вибрации, иногда приводит к свариванию контактов.
Если напряжение в размыкаемых контактах ниже 12—20 в или
ток меньше 0,4—0,9 а (эти пределы зависят от материала
контактов), то дуга не возникает. Разрушение контактов в этом случае
вызывается лишь оплавлением контактных точек. Однако если
в момент разрыва напряжение на контактах будет примерно 270—
330 в (в зависимости от давления и температуры), то образуется
искра, которая вызывает обгорание и окисление контактов.
В цепях переменного тока условия работы контактов более
благоприятны, так как электрическая дуга гаснет каждый раз при
переходе тока через нулевое значение. Это позволяет через те же
контакты пропускать в три — четыре раза больший ток.
Особенно быстро изнашиваются контакты, работающие в цепи,
содержащей индуктивность. В этом случае даже при низких
напряжениях источника тока размыкаемой цепи возможно сильное
искрение контактов, вызываемое э. д. с. самоиндукции. Величина
этой э. д. с. может быть очень большой. При протекании тока через
катушку индуктивности в ее поле запасается электромагнитная
РЬ
энергия ЧРЬ=-^. При размыкании цепи эта энергия будет
израсходована на создание тока (искры) в сопротивлении размыкаемых
контактов. Э. д. с. самоиндукции будет стремиться поддержать
прежнее значение така в возрастающем сопротивлении цепи. Чем
60
быстрее размыкаются контакты, тем быстрее будет расти общее
сопротивление цепи, большей будет скорость изменения (убывания)
тока и соответственно возрастет э. д. с. самоиндукции — между
контактами возникнет искра. Медленное размыкание контактов
приводит к оплавлению соприкасающихся точек. На практике
стремятся скорость размыкания цепи сделать возможно большей, но
принимают специальные меры для гашения искры.
Основные методы гашейия дуги и искры
Искрение и появление дуги при работе контактов не только
приводит к их разрушению, но и создает сильные помехи в работе
радиоаппаратуры.
Рассмотрим основные методы гашения дуги и искры. В
мощных выключателях — контакторах — для гашения дуги используют
так называемое магнитное дутье. Контакты помещаются в
сильное магнитное поле, образуемое током размыкаемой цепи. Это поле
создает выталкивающую силу, воздействующую
на дугу в направлении, перпендикулярном дуге
В результате этого дуга вытягивается, напря
женность электрического поля в ней падает и
дуговой разряд прекращается.' Схема
подобного устройства показана на рис. .2-3. Иногда
для гашения дуги применяют воздушное дутье.
Пространство вокруг контактов часто закры- у-
вают специальным колпаком из теплостойких Рис. 2-3. Схема
материалов — дугогасительной камерой. Для получения магнит-
лучшей очистки поверхности контактов от окис- ного дутья
лов, образующихся под воздействием дуги,
форма контактов выбирается такой, чтобы при замыкании и
размыкании происходило перекатывание контактов с небольшим
проскальзыванием.
Для гашения искры применяют целый ряд методов. Все они
сводятся к включению дополнительной цепи, по которой может
замкнуться ток, создаваемый э. д. с. самоиндукции. Благодаря этой
цепи энергия, накопленная в индуктивности, расходуется не в
зазоре между контактами, а в каком-либо другом элементе.
Дополнительная цепь включается или параллельно индуктивности
управляемой цепи (рис. 2-4, а, б, в), или параллельно контактам
(рис. 2-4, г, д, е).
Пусть через контакты реле замыкается цепь постоянного тока/,
протекающего через нагрузку ЯЬ. При размыкании контактов
э. д. с. самоиндукции будет стремиться поддержать неизменными
величину и направление этого тока.
На рис. 2-4, а цепь тока будет замыкаться через искрогасящее
сопротивление У?и- Однако это же сопротивление будет
шунтировать нагрузку и во время работы, вызывая тем самым излишний
расход энергии. Если же сопротивление взять весьма большим, то
61
часть тока будет замыкаться через разомкнувшиеся контакты,
образуя искру.
На рис. 2-4,6 последовательно с 7?и включена емкость Си,
благодаря которой устраняются потери энергии. Но ограничиваться
применением одной только емкости нельзя, так как, во-первых, при
замыкании контактов происходит значительное .искрение за счет
большого тока заряда .конденсатора, а во-вторых, качество
колебательного контура КЬСИ может оказаться сравнительно высоким и
в нем возникнут медленно затухающие колебания. Практически
используют емкости примерно 0,1—1 мкф и сопротивления в 50—
100 ом.
Рис. 2-4. Методы гашения искры в контактах:
а, б и в — шунтирование выключаемой цепи; г, д и е — шунтирование
контактов
Возможно шунтирование выключаемой цепи диодом (рис. 2-4, в),
который включается так, что для рабочего тока его сопротивление
велико, а ток, создаваемый э.д.с. самоиндукции, проходит через
него в проводящем направлении.
На рис. 2-4, г цепь для тока создается через сопротивление 7?п,
включенное параллельно размыкаемым контактам. Недостаток
такого метода заключается в том, что он не обеспечивает полного
вьгключения цепи после размыкания контактов, что может быть
устранено включением последовательно с #и емкости Си
(рис. 2-4,5). При разомкнутых контактах емкость оказывается
заряженной. В момент включения цепи сопротивление
ограничивает ток ее разряда, который мог бы вызвать подгорание
контактов. Здесь также должны быть приняты меры, исключающие
возникновение колебательного процесса в контуре.
На схеме е показано искрогашение при помощи неоновой
лампочки НЛ. Напряжение зажигания лампочки сравнительно мало,
и она загорается раньше, чем образуется искра. При этом ее
сопротивление резко падает и шунтирует контакты. Напряжение
потухания лампочки должно быть ниже напряжения основного
источника. Тогда по окончании процесса искрагашения лампочка
погаснет и цепь окажется полностью отключенной.
62
§ 2-3. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ
Устройство и принцип работы
Работа электромагнитных реле (рис. 2-5) основана на
притяжении стального якоря 1 к сердечнику 2 электромагнита, по
обмотке 3 которого протекает ток. Перемещение якоря привадит
к переключению контактов 4. При отсутствии тока якорь и
контакты возвращаются в исходное положение противодействующей
пружиной 5. Чтобы под влиянием остаточного магнетизма якорь
не оставался притянутым к сердечнику, на нем укреплен
небольшой штифт 6 высотой около 0,1 мм, выполненный из немагнитного
материала — латуни или меди. Его обычно называют «штифтом
отлипания». ъ
•* Рис. 2-Б. Конструкции электромагнитных реле:
а и б — реле с угловым перемещением якоря; в — реле с втяжным якорем;
г — условное обозначение
Внешним сигналом, под воздействием которого происходит
срабатывание электромагнитного реле, является изменение тока,
протекающего по обмотке, или напряжения, приложенного к ней.
В зависимости от назначения, мощности и некоторых других
факторов конструкции реле могут заметно различаться. Так, например,
есть некоторые различия между реле постоянного и переменного
тока. Реле постоянного тока бывают нормальные (или
нейтральные) и поляризованные. Поляризованные реле реагируют не только
на величину, но и на полярность приложенного напряжения.
Различаются также реле тока, включаемые последовательно в какую-
либо цепь, и реле напряжения, подключаемые к управляемой цепи
параллельно. Первые реле, как правило, имеют небольшое число
витков обмотки и малое сопротивление, вторые высокоомные и
содержат от нескольких сотен до нескольких десятков тысяч витков.
Как известно, электромагнитная сила, притягивающая якорь,
прямо пропорциональна .квадрату магнитного потока:
Гм = кФ*. (2-1)
Величина магнитного потока в реле будет тем большей, чем
больше ток обмотки и количество витков в ней, Поэтому сила
63
притяжения в первую очередь зависит от числа витков обмотки и
от управляющего напряжения.
Конструкции реле различают по количеству, типу и
расположению контактных групп, количеству обмоток, виду подвижной
системы и т. д. В частности, по виду подвижной системы различают
реле с угловым перемещением якоря (рис. 2-5, а и б) и реле
с втяжным якорем (рис. 2-5,в).
В реле с втяжным якорем происходит поступательное
перемещение подвижной части магнитной системы внутрь катушки.
Возвращение якоря в исходное положение происходит под
воздействием его веса или пружины.
Рассмотрим особенности некоторых специальных типов
электромагнитных реле.
*Н>
ПЗЦЕ2
Рис. 2-6. Поляризованное реле:
а «— конструкция реле; б —схема магнитных потоков; в — регулировка
«с преобладанием»; г — условное обозначение
контактов
Поляризованное реле. Поляризованными называются
реле, у которых направление перемещения якоря и переключение
контактов зависят от полярности приложенного напряжения. Одна
из конструкций реле такого типа показана на рис. 2-6, а, б. На
рис. 2-6, г показано условное обозначение поляризованного реле
на электрических схемах.
Поток, создаваемый постоянным магнитом /, разветвляется и
через магнитопроводящие винты 2 проходит в сердечник
электромагнита 3. Далее через воздушные зазоры обе части потока
проходят с противоположных сторон в якорь 4. Из якоря по
лепестку 5, служащему для уменьшения магнитного сопротивления
второго воздушного зазора, поток возвращается к другому полюсу
магнита.
При включении реле в зависимости от направления тока в
обмотке 6 ее магнитный поток Ф с одной стороны якоря
складывается с потоком постоянного магнита Ф0, а с другой — вычитается
из него. Это приводит к повороту якоря вокруг оси 7 в ту сторону,
где поток больше. К якорю подсоединен контакт 5, который
переключает цепь.
64
На рис. 2-6,6 показан случай, когда потоки складываются
справа:
Флев = Фо-Ф-
Электромагнитные силы пропорциональны квадрату магнитного
потока, поэтому справа и слева на якорь действуют силы:
/^ = К (Фо + Ф)2 = К (Ф* + 2Ф0Ф + Ф");
^лев = К (Ф0 - Ф)2 = К (Ф20 - 2Ф0Ф + Ф»),
где К — коэффициент пропорциональности.
Отсюда действующая на якорь разность сил равна
Д/7 = /7пР-/7лев = 4А:ФоФ. (2-2)
Из полученного выражения следует, что, чем больший поток
создает постоянный магнит, тем большей будет разность сил и
выше чувствительность реле. Практически чувствительность
поляризованных реле в 10—20 раз превышает чувствительность
нейтральных. Мощность срабатывания некоторых из них составляет
тысячные доли ватта.
При изменении направления тока в обмотке якорь
перебрасывается в другую сторону.
В некоторых типах поляризованных реле есть специальная
пружина, возвращающая якорь в нейтральное (среднее) положение
при отсутствии.тока в обмотке. Иногда при регулировке оба
неподвижных контакта располагают по одну сторону от нейтрали
(рис. 2-6,в). В этом случае после выключения управляющего
сигнала якорь всегда будет перебрасываться к контакту, наиболее
удаленному от нейтрали, т. е. к тому полюсу сердечника, к
которому он расположен ближе.
Реле переменного тока. Особенности реле переменного
тока заключаются в том, что в них применяются специальные
меры для устранения дребезжания (вибрации) контактов,
вызываемого периодическим уменьшением тока в обмотке, а для
снижения потерь на вихревые токи сердечник электромагнита делают
из листовой трансформаторной стали.
Наиболее распространена конструкция реле переменного тока
с раздвоенным сердечником (рис. 2-7).
Часть сердечника охвачена короткозамкнутым витком. Якорь
такого реле удерживается в рабочем состоянии благодаря
одновременному воздействию двух потоков Фа и ФБ. Переменный
магнитный поток Фа, сцепленный с короткозамкнутым витком,
индуктирует в нем э. д. с. Е0, отстающую по фазе от потока на угол 90°.
Ток витка /о отстает от э. д. с. на угол, меньший 90°. Величина угла
определяется соотношением активного и индуктивного
сопротивлений витка. Та часть потока Фа, которая создается этим током, сов-
3 Автоматика
65
падает с ним по фазе. Это позволяет найти остальную часть
потока, создаваемую обмоткой реле внутри витка:
ф1 = ФА_ф0|
где Ф0—поток, создаваемый током витка;
Фг—'часть потока основной обмотки, замыкающаяся через
сечение А.
Обозначим через Ф2 вторую часть основного потока, которая
проходит через сечение Б.
Очевидно, что поток Фг будет совпадать по фазе с потоком Ф|,
так как оба потока создаются одним и тем же током основной
обмотки *. Величина
ф>- потока Ф^ будет
несколько меньшей в
соответствии с площадью
сечения участка.
Таким
образом,действующие в зазоре
потоки ФА и Фб =Фг
сдвинуты один
относительно другого по
фазе на угол ср. Если
в какой-либо момент
времени один из
потоков становится
равным нулю, то второй поток будет заведомо отличаться от нуля.
Поэтому при включенном реле якорь будет прочно удерживаться
в рабочем состоянии и дребезжание контактов будет исключено.
Устранению вибрации также
способствует применение массивной
подвижной системы.
Резонансное реле. В системах
телеуправления широко применяются
резонансные электромагнитные реле
(рис. 2-8). Якорь этих реле изготовлен из
упругой пластинки, имеющей
определенную частоту собственных механических
колебаний. Сердечником обмотки
резонансного реле Р\ служит постоянный магнит, напряженность
поля которого недостаточна для срабатывания якоря. При
.прохождении по обмотке реле переменного тока суммарный
магнитный поток обмотки и постоянного магнита начинает
пульсировать с частотой этого тока. Если частота тока совпадает
с собственной частотой пластинки, то наступает электромеханиче-
Рис. 2-7. Реле переменного тока:
а — конструкция реле; б — векторная диаграмма
ШЧ;
Рис.
2-8. Резонансное
реле
* Часть потока Ф0 замыкается не по общему магнитопроводу, а через
второй участок сердечника. Однако это не меняет общей качественной картины,
а лишь приводит к увеличению фазового сдвига между потоками в зазоре.
66
ский резонанс, амплитуда механических колебаний пластинки
резко возрастает и контакты реле начинают замыкаться с той же
частотой. Через эти контакты включается медленно отпускающее
реле Р2, являющееся, в данном' случае промежуточным. Его время
отпускания должно быть больше периода колебаний якоря
резонансного реле. Реле Рч замыкает основную рабочую цепь.
При изменении частоты питающего тока резонансное реле не
срабатывает.
Обычно в цепь последовательно включают несколько
резонансных реле, настроенных на разные частоты. Срабатывание каждого
из них соответствует выполнению определенной команды. В других
случаях на одном якоре крепят несколько резонансных контактных
пластинок с разными частотами колебания. Каждая из них
срабатывает при соответствующей частоте питающего тока.
Изменение быстродействия электромагнитных реле
В схемах релейной защиты и программного управления
необходимо иметь реле, обладающие различным быстродействием,
величину которого иногда требуется регулировать. Существует ряд
методов, позволяющих изменять время срабатывания или
отпускания электромагнитных реле без изменения их конструкции. Это
достигается или регулировками, или применением специальных
схем включения реле.
Чтобы уяснить влияние различных факторов на быстродействие
электромагнитного реле, рассмотрим переходные процессы в нем.
Обмотку реле можно представить в виде последовательно
включенных индуктивности Ь и активного сопротивления #. При
включении напряжения ток в такой обмотке будет возрастать по
экспоненциальному закону (рис. 2-9) с постоянной времени* Т=-~.
В момент (\ ток в обмотке достигает значения тока
срабатывания /,.,,, при котором электромагнит оказывается способным
преодолеть противодействие пружины и притянуть якорь. С этого
момент якорь приходит в движение и воздушный зазор начинает
уменьшаться. По мере преодоления инерции якоря и нарастания
токл и обмотке воздушный зазор уменьшается со все большей
скорое гью.
В момент /у контакты реле переходят в рабочее состояние,
после* чего якорь еще некоторое время продолжает движение,
обеспечивая чтим более надежное переключение. Вследствие нажатия
им контактные пружины движение якоря замедляется и, дойдя до
упора, якорь останавливается (момент /з). Ток в обмотке
постепенно возрастает до своего рабочего значения /р.
* Предполагается, что индуктивность обмотки в" процессе, движения якоря
не меняется.
3* 67
После выключения реле (момент I*) ток начинает убывать.
В момент 1Ь он достигает величины тока отпускания /0Тп и якорь
трогается в обратном направлении. Отпускание реле происходит
при меньшем токе, чем срабатывание, так как у сработавшего реле
сопротивление магнитопровода меньше, и даже меньший ток
создает достаточный для удержания якоря магнитный поток.
Через некоторое время после трогания (в момент /6)
происходит переход контактов в состояние покоя, а затем якорь, дойдя до
упора, останавливается. Ток в обмотке реле постепенно падает до
нуля. На рисунке отдельно обозначены время срабатывания и
время отпускания реле.
,78
Рис. 2-9. Графики переходных процессов в
электромагнитном реле
Регулировки реле. Для изменения быстродействия реле
применяются следующие регулировки: изменение натяжения
пружины, свободного хода якоря или зазора в контактах.
Увеличение натяжения пружины приводит к возрастанию*
противодействующей механической силы Рм. Для преодоления ее
потребуется большая электромагнитная сила Р9. Поэтому движение
якоря начнется при большем значении тока в обмотке реле и тро-
гание якоря произойдет позже. Кроме того, из-за меньшего
преобладания электромагнитной силы над увеличившейся
механической якорь будет двигаться медленнее. Все это приведет к
увеличению времени срабатывания.
Легко понять, что время отпускания уменьшится, так как
движение якоря после выключения реле начнется раньше и будет
происходить быстрее.
Чрезмерно увеличивать натяжение пружины нельзя, так как
реле может не сработать «при нормальном токе или же, сработав,
не обеспечит надежного переключения.
68
Увеличение воздушного зазора между якорем и сердечником
катушки приводит к увеличению магнитного сопротивления магни-
топровода и соответствующему уменьшению магнитного потока.
Необходимый для 'срабатывания реле магнитный поток теперь
установится при большем значении тока, т. е. несколько позже.
Кроме того, якорю потребуется пройти больший, путь, пока не
произойдет переход контактов в рабочее состояние. Все это
увеличивает время срабатывания.
Следует, однако, учитывать, что увеличение зазора уменьшает
индуктивность обмотки реле, в результате чего ток в обмотке
будет нарастать несколько быстрее. Это частично скомпенсирует
увеличение времени срабатывания. Время отпускания практически не
изменится, так как магнитные характеристики реле при
притянутом якоре не зависят от величины зазора отпущенного якоря.
В реле с плоскими контактными пластинами изменение времени
срабатывания и отпускания может быть получено за счет
регулировки зазора в контактах, что достигается простым подгибанием
контактных пластин. Данный метод особенно широко применяется,
когда реле управляет большим количеством контактных групп и
в каждой из них нужно отдельно регулировать время
срабатывания или отпускания.
Схемные методы изменения быстродействия.
Можно в несколько десятков раз увеличить время срабатывания и
отпускания реле, если на сердечник электромагнита надеть корот-
козамкнутый виток или медную втулку.
В короткозамкнутом витке при изменениях магнитного потока
индуктируется ток, который своим магнитным полем препятствует
этим изменениям. В результате этого при включении реле
магнитный поток будет нарастать, а при выключении убывать
значительно медленнее, что приведет к увеличению и времени срабатывания,
и времени отпускания реле. При этом время срабатывания
увеличится несколько меньше, чем время отпускания, так как при
отпущенном якоре поток рассеивания возрастает и меньшая часть
общего потока сцепляется с короткозамкнутым витком. В нем
будет, следовательно, индуктироваться меньший ток, и
противодействие нарастанию потока при включении реле будет менее
интенсивным.
В некоторых конструкциях реле предусматривается
специальная дополнительная обмотка (рис. 2-10, а), которая при
необходимости может замыкаться накоротко. Иногда вместо обмотки на
сердечник надевается медная втулка или Несколько медных колец.
Эти меры должны быть предусмотрены при изготовлении реле,
так как они связаны с изменением его конструкции.
Весьма эффективным методом замедления отпускания реле
является шунтирование его обмотки активным сопротивлением
(рис. 2-10,6). Объясняется это тем, что э. д. с. самоиндукции,
возникающая в обмотке реле после его выключения, поддерживает
протекание тока в прежнем направлении. Этот ток, замыкаясь
69
через шунтирующее сопротивление, медленно убывает, и якорь
длительное время остается в рабочем состоянии. Недостаток
такого метода состоит в том, что при замкнутом ключе имеется
дополнительный расход мощности в шунтирующем сопротивлении.
Этим недостатком не обладает схема с шунтирующим диодом,
включенным навстречу питающему напряжению (рис. 2-10,в).
В остальном эта схема аналогична предыдущей. Обе схемы
применяются для замедления отпускания реле постоянного тока.
Рис. 2-10. Способы изменения быстродействия
реле:
а — использование короткозамкнутого витка; б —
шунтирование обмотки активным сопротивлением; в —
шунтирование обмотки диодом-; г — подача повышенного
напряжения для увеличения быстродействия
Для ускорения срабатывания реле включают от источника
с повышенным напряжением через параллельно включенные
емкость и ограничивающее сопротивление (рис. 2-10, г). При
замыкании ключа в первый момент, пока конденсатор не заряжен, через
обмотку реле будет протекать повышенный ток, что приведет к
более быстрому срабатыванию. В дальнейшем ток уменьшится до
номинального значения, определяемого суммарным активным
сопротивлением цепи.
Особую группу составляют схемные методы снижения
быстродействия реле, в основу которых положено использование
инерционных цепочек. Если параллельно реле установить конденсатор
большой емкости, а реле включать через сопротивление к
(рис. 2-11,а), то вначале будет протекать большой ток заряда
конденсатора и приложенное напряжение почти полностью по.гасится
на сопротивлении. Лишь по мере заряда конденсатора ток в
обмотке реле возрастет, и реле сработает. Продолжительность
времени задержки будет зависеть от постоянной времени цепи.
Этот метод применим только в реле, обладающих большим
сопротивлением обмотки и потребляющих малый рабочий ток.
70
В противном случае сопротивление К придется уменьшать и
получить большую задержку срабатывания будет невозможно.
Указанный недостаток может быть устранен, если применить
комбинацию инерционной цепочки с электронной схемой, в
которой реле включается в анодную цепь лампы (рис. 2-11,6). В
исходном состоянии лампа закрыта большим отрицательным
смещением Е8. Включение реле производится размыканием ключа К.
Лампа откроется, и реле сработает после того, как конденсатор
Рис. 2-11. Применение инерционных цепочек для уменьшения
быстродействия:
а, б и в — способы замедления срабатывания; г — схема замедления
отпускания
разрядится до величины напряжения отсечки. Время отпускания
при этом не меняется, так как после замыкания ключа конденсатор
зарядится практически мгновенно и лампа закроется.
Весьма большую выдержку при срабатывании позволяет
получить схема, покапанная па рис. 2-11, в. В этой схеме после
замыкания ключа К начинается заряд емкости С через стабилизатор
тока, ^киивалентное сопротивление которого очень велико. По мере
заряда конденсатора ток заряда, создающий падение напряжения
на сопротивлении /?, уменьшается и растет напряжение на сетке
лампы. Ее анодный ток постепенно возрастает, и происходит
срабатывание реле. Схема позволяет получить задержку в несколько
минут.
Для увеличения времени отпускания можно последовательно
в цепь источника отрицательного смещения включить большое
активное сопротивление (рис. 2-11,г), что приведет к замедлению
71
заряда конденсатора. Для включения реле ключ К переводится
в положение 2, и конденсатор разрядится через сопротивление /?'.
Постоянная времени цепи С/?' определяет в этой схеме время
срабатывания.
§ 2-4. СПЕЦИАЛЬНЫЕ ТИПЫ РЕЛЕ
Электромагнитные реле являются с^дними из наиболее простых,
надежных и удобных в эксплуатации. Поэтому они получили
самое .широкое и разнообразное применение. Однако
электромагнитные реле производят переключение под воздействием только
электрических сигналов сравнительно большой мощности и
поэтому не могут быть универсальными. В радиотехнической
аппаратуре используются и другие более специализированные типы
реле.
Тепловые реле
Тепловыми, или термореле, называются устройства,
осуществляющие переключения в электрических цепях при изменениях
температуры. Их работа основана на использовании
механического перемещения, возникающего при тепловом расширении
материалов. В основном они применяются в схемах защиты,
а также как реле времени.
Ф Латунь ^
»—■'
а
б
Рис. 2-12. Тепловое реле:
а, б, в и г — практические конструкции; д — условное обозначение
Воспринимающей частью большинства тепловых реле является
биметаллическая пластинка (рис. 2-12, а). Она состоит из двух
разнородных металлов, имеющих разные температурные
коэффициенты линейного расширения, например латуни и инвара, у кото-
72
рых один коэффициент больше другого почти в 20 раз. Различное
расширение слоев пластинки при нагреве приводит к ее изгибу,
причем прогиб на конце может достигать нескольких
миллиметров.
Пластинку нагревают током, проходящим или по самой
пластинке, или по подогревателю, электрически от нее
изолированному. В первом случае в пластинке делается разрез, чтобы
увеличить путь тока в ней (рис. 2-12,а), во втором — обеспечивается
тепловой контакт подогревателя с пластинкой (рис. 2-12,6).
Подвижной контакт или крепится на самой пластинке изолированно
от нее или механически с ней связан. Последняя конструкция
применяется чаще, так как позволяет сравнительно просто
осуществить ускорение разрыва и замыкания контактов, а также
обеспечивает более надежное переключение. Биметаллическая пластинка
(рис. 2-12, в) шарнирно связана с концом плоской согнутой в дугу
пружины. Эта пружина находится в сжатом состоянии и вторым
своим концом шарнирно соединена с контактной пластиной,
которая может вращаться вокруг шарнира О.
В исходном состоянии пружина занимает положение / и своим
правым концом давит на контактную пластину, удерживая
контакты в замкнутом состоянии. При нагреве биметаллическая
пластина прогибается и левый конец пружины перемещается из
точки А в точку В. Пружина переходит в положение 2, при
котором все три шарнира располагаются по одной линии. Дальнейший
прогиб приводит к тому, что пружина на контактную пластину
начинает давить вверх, последняя .скачком переходит в верхнее
положение (до упора), и контакты размыкаются. При
охлаждении пластина начнет возвращаться в исходное положение. В
положении 3 шарниры вновь окажутся на одной линии, после чего
под воздействием пружины произойдет быстрый возврат
контактов в замкнутое состояние.
Несколько иная конструкция теплового реле показана на
рис. 2-12, г. Контакты удерживаются в замкнутом состоянии при
помощи рычага 1, который одним концом упирается в
биметаллическую пластину 2. Вблизи пластины расположен
подогреватель 3. При нагреве пластина изгибается вверх и освобождает
рычаг. Под действием пружины 4 рычаг отходит и освобождает
контакты, размыкающие цепь.
Такого типа реле используется в схемах автоматической
защиты от электрических перегрузок, приводящих к увеличению
количества выделяемого тепла. После выключения цепи реле не
может само вернуться в исходное состояние. Чтобы произвести
повторное включение, необходимо взвести реле, для чего нажатием
на кнопку возврата 5 поворачивают рычаг в исходное положение.
При этом пластина вновь опускается и упирается в верхний конец
рычага. Такая конструкция-исключает самопроизвольное
замыкание контактов до устранения неисправности, вызвавшей
перегрузку.
73
Подобного типа термореле применяются в цепях защиты
электродвигателей. Электродвигатели обычно допускают
кратковременную перегрузку, не приводящую к чрезмерному нагреву
обмоток. Термореле с биметаллической пластинкой имеет
значительную инерцию при срабатывании. Поэтому при кратковременных
перегрузках электродвигатель не выключается и лишь при
опасном для двигателя длительном увеличении питающего тока реле
срабатывает и отключает питание.
Если через некоторое время после срабатывания защиты
необходимо, чтобы цепь самовосстановилась, то применяют
термореле, показанное на рис. 2-12,0.
Существуют и другие конструктивные разновидности
тепловых реле. На рис. 2-12,(3 показано условное схемное обозначение
тепловых реле,
Механические реле
Механические реле служат для осуществления переключений
под воздействием изменения механических^ Параметров,
характеризующих состояние объекта. К таким параметрам относятся
взаимное перемещение' элементов, изменение скорости, ускорения
и т. д.
Рис. 2-13. Механические реле:
а — концевой выключатель; б — поворотное механическое реле
с кулачком
Для наиболее простого переключения цепей можно
использовать взаимное перемещение элементов: крнтакты скрепляются
с этими элементами на определенном расстоянии друг от друга.
Перемещение используется для воздействия на контактные
пластины. Последний метод часто используется в концевых
выключателях (рис. 2-13, а) в устройствах, где механические
перемещения по условиям работы ограничены. Конструкция концевого
выключателя во многом аналогична конструкции теплового реле
(рис. 2-12, в). Вместо биметаллической пластины устанавливается
обычная пружина, изгиб которой происходит под воздействием
перемещения штыря. Работа такого устройства была описана
74
выше. В нем обеспечивается скачкообразный переход контактов
в рабочее положение и обратно.
На рис. 2-13,6 показано механическое реле, производящее
переключение при повороте вала на определенный угол. На валу
укреплен кулачок /, который при повороте своим выступом 2
нажимает на правый конец защелки 3. Ее левый конец опускается и
освобождает выступ 4 рычага 5, который под воздействием
пружины 6 поворачивается вокруг шарнира 7 и нажимает на
контактные пластины. Такая система ускоряет процесс переключения.
Для возвращения контактов в исходное состояние необходимо
нажать на кнопку 8. Эта операция в некоторых конструкциях реле
производится специальным механизмом, приводимым в действие
от основного вала при его повороте.
При коммутации, небольших токов система промежуточных
рычагов не применяется. Выступ кулачка сам нажимает на
контактные пластины и производит переключение.
Существуют и другие типы механических реле (центробежные,
инерционные и т. д.) весьма разнообразных конструкций.
Моторные реле времени
Включение большинства радиотехнических схем должно
осуществляться в строго определенной последовательности,
нарушение которой может привести к аварии. Часто оказывается
необходимым выдерживать не только порядок, но и определенные
интервалы времени между следующими одна за другой операциями.
Чтобы упростить включение аппаратуры и в то же время
исключить возможность нарушения порядка включения,
применяют специальные схемы программного управления. Наиболее
просто такое управление может быть осуществлено при помощи
релейных схем и; в частности, при помощи реле выдержки
времени. При выполнении очередной операции по включению
одновременно включается реле времени, срабатывание которого
произойдет после определенной выдержки и сделает возможным
выполнение следующей операции. Можно построить схему так, что
включение сложного комплекса будет производиться нажатием
одной кнопки.
Релейные схемы программного управления могут быть весьма
сложны и разнообразны. Ограничимся только рассмотрением
устройств программного включения аппаратуры. Сравнительно
небольшие выдержки времени могут быть получены при помощи
схем замедления срабатывания, рассмотренных выше. В
остальных случаях применяют реле времени. Наиболее простым
является реле времени с биметаллической пластинкой. Через
некоторое время после включения пластинка, нагреваемая током,
прогибается и производит переключение контактов. Однако такие
реле не позволяют получить достаточно стабильную выдержку,
75
а для осуществления серии переключений необходимо иметь
большое количество реле.
Более совершенными являются моторные реле времени. На
рис. 2-14, а, б показаны кинематическая и электрическая схемы
одной из наиболее распространенных конструкций подобного реле.
Синхронный мотор / с постоянной скоростью вращения через
систему понижающих передач (редуктор 2) и электромагнитную
муфту 3 связан с кулачковым валиком 4. При включении реле
Рис. 2-14. Моторное реле времени:
а — кинематическая схема; б — электрическая схема
электромагнит 5 производит сцепление муфты. Одновременно
начинается вращение мотора, передаваемое с большим замедлением
валику. На валике установлено несколько кулачков 6, каждый из
которых фиксируется в определенном положении и при повороте
воздействует на одну из контактных групп 7, производя
переключение. Время задержки и порядок переключений зависят от
установки кулачков. Последняя контактная группа с нормально
замкнутыми контактами используется для выключения мотора после
завершения всех операций. В некоторых конструкциях выключен
ние мотора не производится: он останавливается, когда
кулачковый валик повернется до упора. Благодаря большому
сопротивлению обмотки застопоренное состояние не является для мотора
опасным.
Кулачок может воздействовать на контактную группу
непосредственно или же через систему промежуточных рычагов,
подобную показанной на рис. 2-13,6. Такое устройство ускоряет
76
процесс переключения, улучшая тем самым условия работы
контактов.
При вращении валика одновременно заводится пружина 8.
После выключения реле электромагнит расцепляет муфту и
дружина быстро возбращает валик в исходное положение. Вместе
с тем в исходное положение возвращаются все контакты.
В некоторых типах реле времени возвращение валика в
исходное состояние происходит по завершении одного полного оборота,
после чего специальная
схема выключает мотор. В та- Кц
ких реле нет
электромагнитной муфты и пружины.
Для графического
изображения работы моторных
реле времени и релейных
схем, работающих по
определенной программе,
иногда применяют специальные
диаграммы (рис. 2-15). На
таких диаграммах в
определенном масштабе времени
изображают состояние каждой пары контактов, начиная с
момента включения реле и до полной его остановки. Зачерненным
промежуткам соответствует замкнутое состояние данных
контактов. Диаграммы позволяют наглядно представить
последовательность переключений и взаимное расположение контактов в любой
момент времени.
к4
|||||||[|
111111111
111111111
111|||1М
1111111Г1
^
*1(сек)
Рис. 2-15. Временная диаграмма работы
контактов
§ 2-5. БЕСКОНТАКТНЫЕ РЕЛЕ
Магнитное реле
Основу магнитного реле составляет магнитный усилитель с
положительной обратной связью. Работа такого усилителя была
подробно рассмотрена в гл. I. Благодаря положительной обратной
связи коэффициент усиления усилителя возрастает и небольшие
изменения входного напряжения приводят к резким изменениям
тока нагрузки.
Чтобы магнитный усилитель работал в релейном режиме,
нужно обратную связь сделать достаточно сильнбй. Тогда
характеристика обратной связи пойдет более полого, чем нагрузочная
характеристика рабочего участка того же усилителя без обратной
связи (рис. 2-16, а). При отсутствии входного сигнала подмагничи-
ваиие за счет потока обратной связи будет настолько велико, что
приведет к насыщению сердечника. Режим усилителя будет
определяться точкой / пересечения характеристик, а ток нагрузки
примет максимальное значение. Такое состояние соответствует зам*
киутым контактам реле.
77
Включение и выключение реле производится при помощи
управляющей обмотки щ (рис. 2-16,в). Сигнал подается в такой
полярности, чтобы поток управляющей обмотки был направлен
навстречу потоку обратной связи. Тогда характеристика обратной
связи начнет смещаться влево. Если напряженность поля
управляющей обмотки лежит в пределах между Н'у и Н', то
характеристика обратной связи пересечет нагрузочную характеристику
Рис. 2-16. Магнитное реле:
а и б — характеристики реле; в — схема реле
в трех точках (3, 5 и 7), что указывает на возможность работы
схемы в трех режимах. Состояние усилителя, определяемое
крайними точками 3 и 7, является устойчивым, так как случайные
изменения тока нагрузки здесь приводят к таким изменениям
суммарной напряженности Н0, которые восстанавливают прежнее
значение /н.
Режим усилителя, соответствующий точке 5, оказывается
неустойчивым. В этой точке случайное уменьшение /н приводит
к снижению подмагничивания за счет резкого уменьшения потока
обратной связи, а следовательно, и к дальнейшему уменьшению
/ы. Процесс начинает нарастать лавинообразно, пока не
установится режим, определяемый точкой 7. Первоначальное увеличе-
78
ние /н вызовет обратную картину: ток нагрузки будет нарастать,
пока усилитель не перейдет в устойчивое состояние 5.
Истинное состояние усилителя будет зависеть от
предшествующей его работы.
Дальнейшее увеличение тока управляющей обмотки еще
больше сместит характеристику обратной связи. При Яу= //'у'
пересечение характеристик будет происходить лишь в двух точках (4 и
8). Режим усилителя в точке 4 является неустойчивым, так как
■случайные уменьшения /н приведут к дальнейшему
лавинообразному нарастанию этого процесса, и состояние усилителя скачком
Рис. 2-17. Характеристики магнитных реле при
различных смещениях
изменится. Ток нагрузки станет минимальным (точка 5), что
соответствует разомкнутым контактам реле. При уменьшении Ну
состояние реле будет оставаться неизменным, пока не наступит
равенство Ну=Н'у и образуется точка касания 6. После этого
произойдет новое срабатывание, и ток нагрузки резко возрастет до
значения, определяемого-точкой 2.
Участок нагрузочной характеристики между точками 4 и 6
соответствует режимам, которые в усилителе установиться не могут.
Характеристика реле (рис. 2-16,6) имеет вид петли гистерезиса.
Критическое значение управляющего тока, при котором ток
нагрузки скачком увеличивается от минимального значения до
максимального, называется током срабатывания бесконтактного
реле /ср, а значение, при котором происходит обратный переход,-^-
током отпускания /отп- Чем шире петля, тем четче и устойчивее
работает реле.
. Результирующую характеристику реле можно смещать,
используя для этого обмотку смещения. Магнитное реле с
характеристикой (рис. 2-17, а) подобно электромагнитному реле с
нормально замкнутыми контактами, так как при отсутствии
управляющего сигнала ток нагрузки /н максимален. При подаче
отрицательного сигнала /у</0Тп ток нагрузки скачком уменьшится и
произойдет «отпускание» реле. После снятия сигнала-реле
возвращается в исходное состояние (точка 1). *
79
Характеристика на рис. 2-17,6 соответствует нормально
разомкнутым контактам. Здесь срабатывание происходит при
положительном сигнале /у^/ср, а после снятия сигнала реле
возвращается в исходное состояние, определяемое точкой 2.
Реле, характеристика которого показана на рис. 2-17, в,
представляет собой устройство с двумя устойчивыми состояниями
равновесия 3 и 4 (триггер). При подаче положительного сигнала
Лг^Лф Реле перейдет в положение «включено» и ток нагрузки
станет максимальным. В таком состоянии реле останется и.после
снятия сигнала. Лишь при воздействии отрицательного сигнала
Лг<Л>тп произойдет выключение.
Магнитные реле не обеспечивают полного выключения цепи и
позволяют осуществлять лишь простейшую коммутацию. Эти
недостатки могут быть устранены совместным применением-
магнитных и электромагнитных реле.
Магнитные усилители, работающие в релейном режиме,
широко применяются в устройствах автоматической защиты,
сигнализации и контроля, в схемах телеуправления и т. д. На основе
бесконтактных магнитных реле могут быть построены
мультивибраторы, усилители и восстановители формы импульсов, схемы
совпадения, счетнь!е схемы, реле выдержки времени, реле плав*
ного включения напряжения и многие другие устройства.
Магнитное реле времени
Время срабатывания магнитного реле зависит от инерционности
соответствующего магнитного усилителя и составляет сотые или тысячные доли секунды.
Для значительного замедления срабатывания и отпускания в магнитном реле,
помимо положительной, применяют дополнительную отрицательную обратную
связь, осуществляемую при помощи обмотки шд> включенной через конденсатор
большой емкости С (рис. 2-18,а). Статическая характеристика такого реле
(рис. 2-18,6) соответствует нормально замкнутой контактной системе.
В исходном состоянии через нагрузку #н протекает максимальный ток,
конденсатор С заряжен до напряжения, имеющегося на нагрузке, а ток в цепи
дополнительной обмотки отсутствует. Подмагничивание сердечника производится
только потоком обратной связи Фос> в то время как поток управляющей обмотки
равен нулю (Фу=0).
С подачей достаточного для отпускания реле управляющего сигнала,
создающего поток, направленный навстречу Фос, суммарный поток должен резко
уменьшиться и вызвать отпускание реле. Однако начинающееся при этом
уменьшение тока нагрузки сопровождается уменьшением напряжения на ней. В
результате этого конденсатор С начнет разряжаться через У?н, /? и дод. Ток
разряда, протекая по дополнительной обмотке адд, создает большой магнитный
поток, направленный навстречу потоку управляющей обмотки и препятствующий
уменьшению общего подмагничивания. Тем самым вводится отрицательная
обратная связь, компенсирующая действие положительной и замедляющая
убывание тока нагрузки. По мере разряда конденсатора ток разряда падает, поэтому
компенсирующее действие обмотки м>д ослабляется. Через некоторое время,
равное /задц напряженность размагничивающего поля достигнет критического
значения Яотп и произойдет отпускание реле: ток нагрузки резко уменьшится.
При снятии управляющего сигнала происходит • сначала плавное
увеличение /н, так как одновременно растет напряжение на нагрузке, и конденсатор С
заряжается током, создающим в обмотке дод поток отрицательной обратной
80
Рис. 2-18. Магнитное реле времени:
а — схема реле; б — характеристика реле; в — графики
токов в обмотках реле
связи. Лишь после уменьшения тока заряда
через интервал времени, равный *3ад2' ПР°"
исходит срабатывание реле.
Время задержки можно регулировать
изменением постоянной времени цепи
разряда или заряда конденсатора при помощи
сопротивления /?.
Обратная связь в магнитных реле
времени может осуществляться при помощи
трансформатора, первичная обмотка которого
включается в цепь выпрямленного тока
нагрузки, а вторичная — питает дополнительную
обмотку.
Для осуществления замедленного
плавного включения напряжения применяют
магнитное реле, схема которого показана на
рис. 2-19. На сердечник, помимо
дополнительной, помещена еще короткозамкнутая
демпфирующая обмотка Юкз. В остальном схема
аналогична предыдущей.
Рис. 2-19. Реле плавного
включения напряжения
81
Несмотря на глубокую обратную связь, лавинообразное "нарастание
процессов в схеме произойти не может, так как демпфирующая обмотка препятствует
резким изменениям потока в сердечнике. Плавный рост подмагничивания
приводит к постепенному увеличению тока нагрузки и напряжения на ней.
При выключении реле конденсатор разряжается, и схема быстро
возвращается в исходное состояние.
Переменное сопротивление /? позволяет регулировать ток нагрузки.
Рис. 2-20. Электронные реле
Электронные реле
В качестве электронных бесконтактных реле используются
спусковые схемы (триггеры), т. е. устройства, имеющие два
состояния равновесия и способные при подаче внешних пусковых
сигналов резко переходить из
одного состояния в другое.
Детально работа триггеров
изучается в курсе импульсной
техники. Здесь же кратко опишем
работу одной из наиболее
распространенных* схем (рис. 2-20).
Устойчивое состояние
соответствует такому положению, при
котором одна из ламп закрыта,
а другая открыта. Состояние, при
котором обе лампы открыты,
является неустойчивым, и малейшее
изменение токов ламп или
напряжений на электродах приводит к
его изменению. Так, например,
увеличение анодного тока первой лампы /а вызывает снижение
анодного напряжения 1/а. Это уменьшение напряжения через
делитель/?!^ передается на сетку Л2 и приводит к уменьшению ее
анодного тока и повышению анодного напряжения (Уа. Через делитель
/?3/?4 повышение напряжения передается на сетку Ли что
способствует дальнейшему росту /а # Процессы в схеме нарастают
лавинообразно и приводят к полному запиранию Л2 и отпиранию Л\.
Такое состояние схемы устойчиво, так как благодаря высокому
напряжению на аноде закрытой лампы Л2у который связан с
сеткой Л\, последняя поддерживается в открытом состоянии. Это
в свою очередь обеспечивает низкое напряжение на аноде Л\ и
сетке Л2. Лампа Л2 остается надежно запертой. Случайные
изменения анодного тока Ли вызываемые флуктуациями напряжений
или дробовым эффектом, не могут изменить состояния схемы, так
как для отпирания Л2 требуется значительно более высокий
уровень сигнала.
Во втором устойчивом состоянии лампа Л\ закрыта, а Л2 —
открыта. Переход схемы из одного устойчивого состояния в
другое соответствует срабатыванию реле и производится при воздей-
82
ствии напряжений, изменяющих режим работы ламп. Процесс
сводится либо к отпиранию ранее закрытой лампы, либо к
запиранию открытой путем подачи напряжений соответствующей
полярности на электроды ламп. Чтобы реле сработало, достаточно
кратковременного (импульсного) воздействия.' Для ускорения
срабатывания делители, включенные между анодами и сетками
ламп (/?! и /?з)> зашунтированы емкостями, благодаря чему
улучшаются условия передачи изменений напряжений с анода одной
лампы на сетку другой.
Фотореле
Для осуществления переключений под воздействием изменений
светового потока применяются фотореле, используемые в
устройствах автоматического контроля, схемах защиты, счетчиках,
дозиметрах и т. д.
Воспринимающей частью фотореле является фотоэлемент
с внутренним или внешним фотоэффектом. При освещении
фотоэлемента резко увеличивается количество свободных электронов и
уменьшается сопротивление; кроме того, возникает
фотоэлектродвижущая сила и фтооэлемент становится источником тока. Но
поскольку мощность получаемого сигнала очень мала, в качестве
^исполнительного элемента используются высокочувствительные
контактные реле других типов или полученный сигнал
предварительно усиливается. Совместно с фотоэлементом могут быть
применены магнитоэлектрические реле. Такие реле имеют мощность
срабатывания (10"5-5-10"8) вт. По принципу действия они не
отличаются от магнитоэлектрических измерительных приборов, но
у них вместо стрелки к рамке прикреплен рычаг, несущий на себе
легкий подвижный контакт, который включает более мощное
промежуточное реле, производящее основное переключение в схеме
(рис. 2-21, а).
При использовании фотосопротивления необходим внешний
источник питания. На рис. 2-21,6 показана схема, в которой
полезный сигнал получается за счет возрастания тока,
протекающее главой
поток
**к-*
Рис. 2-21. Фотореле:
а — схема, использующая фото э.д.с;
б — схема с фотосопротпвленнем
83
щего через сопротивление /? при освещении фотоэлемента. Сигнал
усиливается лампой, в анодную цепь которой включено
промежуточное электромагнитное реле Рп с током срабатывания в
несколько миллиампер. В исходном состоянии лампа заперта
отрицательным смещением. При освещении фотоэлемента напряжение
на сетке лампы йозрастает, что приводит к росту анодного тока и
включению Рп.
§ 2-6. РЕЛЕЙНЫЕ СХЕМЫ
Релейные схемы весьма разнообразны. Есть некоторые общие
принципы их построения, знание которых значительно облегчает
рассмотрение подобных схем. К таким общим принципам
относятся методы построения блокировки, сигнализации, кнопочного
управления и т. д.
.Блокировкой называется устройство, исключающее
возможность: нарушеиия-нормального порядка включения или
эксплуатации аппаратуры.
В большинстве случаев переключения в схемах узлов и
блоков радиолокационных станций осуществляются при помощи реле.
Поэтому в релейных схемах предусматривают различные методы
блокировки.
Релейная блокировка
Взаимна» блокировка. Взаимная блокировка
представляет собой такое построение релейной схемы, которое исключает
возможность одновременного срабатывания двух или нескольких
реле. Например, нельзя, допустить одновременного срабатывания
двух реле, включающих двигатель для вращения в разные стороны.
Для осуществления взаимной блокировки цепь обмотки данного
реле включается йоследовательно через нормально замкнутые
контакты всех тех реле, одновременно с которыми данное реле Р\
не должно сработать (рис. 2-22,а). Срабатывание любого из этих
реле (например, Р2) делает невозможным^ включение данного
реле Р\.
Последовательная блокировка. Последовательная
блокировка это такая релейная схема, при которой обеспечивается
только один определенный порядок ее включения. (В ряде случаев
нарушение порядка включения аппаратуры может явиться
причиной аварии.) Так, например, в радиотехнических схемах,, особенно
при наличии мощных ламп, должен быть обеспечен следующий
порядок включения:
— включение накала ламп и системы вентиляции;
— включение напряжения сеточного смещения;
— включение анодного напряжения.
Для осуществления последовательной блокировки цепь обмотки
данного реле должна проходить через нормально разомкнутые
контакты тех реле, раньше которых данное реле не должно сработать
84
(рис. 2-22,6). В этом случае подача напряжения на обмотки
данного реле исключается; если предварительно не включены другие.
Из схемы видно, что реле Р2 сработает лишь после того, как
будет включено реле Р\, а реле Р3 — только после включения реле Рг.
Можно осуществить также последовательную блокировку
выключения, если необходимо обеспечить строго определенный
порядок выключения аппаратуры. Для этого параллельно выключателю
данного реле устанавливаются нормально разомкнутые контакты
того реле, которое должно быть выключено раньше.
Кнопочное управление. Управление работой релейных
схем часто осуществляется при помощи кнопок, расположенных
на общем пульте управления. При нажатии кнопка замыкает или
размыкает цепь обмотки соответствующего реле, а при
отпускании— возвращается в исходное положение.
г-р
щзг^
б ^1^
Рис. 2-22. Релейная блокировка:
а — взаимная блокировка; б — последовательная блокировка
Кнопка включения (ВКЛ), как правило, имеет нормально
разомкнутые контакты; она устанавливается последовательно в цепь
питания обмотки реле. Чтобы после ее отпускания реле оставалось
в рабочем состоянии, применяется самоблокировка.
Самоблокировка заключается в использовании контактов
данного реле для дублирования функции контактов кнопки ВКЛ.
Для осуществления самоблокировки используется такая же
контактная группа, какую имеет кнопка ВКЛ. При этом нормально
разомкнутые контакты при дублировании включаются
параллельно, а нормально замкнутые — последовательно с основными
(рис. 2-23,а и б). В схеме, приведенной на рис. 2-23,6, включение
реле производится разрывом цепи, шунтирующей его обмотку.
В обеих схемах после срабатывания реле независимо от
положения кнопки ВКЛ сохраняется цепь питания его обмотки. Для
выключения реле служит кнопка ВЫКЛ, которая большей частью
имеет нормально замкнутые контакты. В схеме (рис. 2-23,6)
выключение производится не разрывом, а шунтированием обмотки
реле,
Для сигнализации о срабатывании реле и произведенном
переключении используется специальная лампочка, включаемая через
нормально разомкнутые контакты этого же реле.
85
При необходимости управлять включением и выключением реле
из разных мест в каждом из них устанавливают кнопки ВКЛ и
ВЫКЛ. Все кнопки с нормально разомкнутыми контактами
включаются между собой параллельно, а кнопки с нормально
замкнутыми— последовательно (рис. 2-23,в). Нажатие любой из этих
кнопок обеспечивает соответственно включение или выключение
реле. Самоблокировка здесь строится по общему принципу.
Лампочки, сигнализирующие о срабатывании реле, могут быть
установлены на каждом пульте управления или где-либо в одном месте.
Вкл
выкп
Рис. 2-23. Схема кнопочного управления:
а и б — схемы самоблокировки; в — схема кнопоч-»
ного управления из нескольких пунктов
Изображение релейных схем
Существуют два основных метода изображения релейных схем:
релейный и развернутый, или цепной. В первом случае на схемах
изображаются не только электрические цепи, но и механические
связи в каждом реле. Для этого все контакты данного реле
изображаются возле его воспринимающей части и условно
обозначается механическая связь между ними. Такое изображение
позволяет легко уяснить функции каждого реле в общей схеме.
Однако на схеме неизбежно возникает большое количество
пересечений цепей, что затрудняет рассмотрение путей прохождения
токов.
При цепном методе контакты и обмотки реле- изображаются
независимо друг от друга и механические связи между ними не
указываются. Такой метод позволяет резко сократить количество
пересечений цепей при вычерчивании схемы и выделить нужные
цепи. Для удобства рассмотрения прохождения токов все обмотки
86
и контакты реле снабжаются соответствующими индексами,
указывающими на принадлежность. При цепном методе усложняется
уяснение функций каждого реле, так как контакты одного и того
же реле изображены в различных местах схемы.
На рис. 2-24 изображена одна и та же схема двумя методами:
релейным (а) и цепным (б), а также цепи включения трех реле и
цепи сигнализации. В схеме предусмотрены последовательная
блокировка первого реле со вторым и третьим и взаимная
блокировка второго и третьего реле. Кроме того, имеется сигнализация
Рис. 2-24. Способы изображения релейных схем:
а — релейный; б — цепной
о срабатывании первого реле (Л\) и о срабатывании второго или
третьего реле (Лг).
Хотя на схеме изображены только цепи управления и
сигнализации и не показаны рабочие цепи, переключаемые этими реле,
однако и без них на рис. 2-24, а сравнительно трудно проследить
прохождение токов и уяснить конфигурацию всех цепей. В то же
время функции каждого реле из схемы ясны. На рис. 2-24, б
картина оказывается обратной: хорошо видны цепи, но недостаточно
ясна роль отдельных реле.
На практике применяют оба метода изображения, так как они
дополняют друг друга.
87
§ 2-7. РЕЛЕЙНАЯ ЗАЩИТА
При работе электрической аппаратуры небольшое повреждение
одного элемента может привести к выходу из строя целого узла
или блока, т. е. повлечь за собой ряд более серьезных
повреждений. Поэтому при возникновении повреждения необходимо быстро
отключить данную систему или блок от питающей сети,
предотвратив этим развитие аварии. Автоматическое отключение
производится при помощи специальных схем защиты.
Любая схема защиты содержит чувствительный элемент,
реагирующий на определенные изменения, происходящие в
электрической цепи или в условиях работы аппаратуры при
возникновении повреждения.
Простейшим устройством автоматической защиты являются
плавкие предохранители. Они применяются очень широко, хотя и
обладают рядом недостатков: замедляют восстановление рабочего
состояния схемы, так как являются устройствами однократного
действия, не везде могут быть использованы. Поэтому вместо них
часто применяют другие устройства автоматической защиты.
Чувствительными элементами этих устройств а* большинстве
случаев служат реле, в частности различные максимальные и
минимальные электромагнитные реле, термореле, реле обратного
тока, а также различного рода газоразрядные приборы,
нелинейные сопротивления и т. д.
Рассмотрим работу некоторых реле в схемах автоматической
защиты.
Реле максимальной и минимальной защиты
Различные нарушения в нормальной работе электрических
устройств обычно сопровождаются изменениями действующих в
них напряжений и токов. Максимальная и минимальная
электрические защиты предназначены для выключения аппаратуры, если
действующие в различных ее цепях токи или напряжения выходят
за допустимые пределы. Изменение токов и напряжений для
выключения цепей наиболее просто ^может быть использовано по?
средством применения электромагнитных реле. При этом
максимальные реле производят выключения при чрезмерном
увеличении, а минимальные — при уменьшении значений токов и
напряжений. Среди электромагнитных реле защиты различают реле
тока и реле напряжения. Первые имеют малое сопротивление,
включаются последовательно в цепь и срабатывают при
изменении действующего там тока; вторые имеют, как правило, высокое
сопротивление, включаются параллельно защищаемому участку
цепи и реагируют на изменение напряжения. Контакты реле
защиты в большинстве случаев устанавливаются в цепи
выключения питания.
Если контакты установлены в самой защищаемой цепи, то
88
якорь должен быть снабжен защелкой, принцип работы которой
ясен из рис. 2-25. При срабатывании реле защелка задерживает
якорь, который в противном случае
после выключения цепи возвращаете^ в ~^~^~*^\\ Защелка
исходное положение и вызывает ноЪое 0 »-+-^11 ш
срабатывание реле. Получается эффект,
аналогичный работе электрического
звонка или зуМмера.
В простейшем случае защелка
представляет собой пружину, которая не
препятствует срабатыванию якоря, но Рис' 2"25* Л „®*Т]?°"!!Г
г * ^ нитное реле максималь-
после срабатывания не дает ему вер- кой защиты с механиче-
нуться в исходное положение. Специаль- ской защелкой
ной кнопкой возврата защелку можно
отжать и освободить притянутый якорь,
после чего цепь вновь замкнется. Подобного рода механические
защелки бывают различного конструктивного оформления. Иногда
роль защелки выполняет схема самоблокировки. Максимальные
и минимальные реле должны быть тщательно отрегулированы,
чтобы не выключить аппаратуру при случайных кратковременных
изменениях тока или вследствие сотрясений и в то же время
своевременно сработать, если увеличение тока станет опасным.
Поэтому электромагнитные реле максимальной и минимальной
защиты делают замедленными. В остальном их конструкции ничем
не отличаются от обычных электромагнитных реле.
Для регулировки чувствительности параллельно обмотке реле
включают переменное сопротивление /? (рис. 2-25), меняя
величину сопротивления которого, можно изменять степень
шунтирования обмотки реле, а следовательно, и его чувствительность.
Емкость С, имеющая сравнительно большую величину, служит для
замедления срабатывания.
Опасные для работы аппаратуры длительные перегрузки или
короткие замыкания в цепях приводят к значительным
увеличениям тока. Это, как уже указывалось выще, позволяет
использовать для автоматической защиты тепловые реле.
Биметаллическая пластинка нагревается током защищаемой
цепи, а контакты реле устанавливаются или в ту же цепь, или
в цепь блокировки системы включения питания»
Реле обратного тока
В устройствах, где осуществляется параллельная работа
генератора постоянного тока и аккумуляторов, предусмотрены
специальные меры для отключения црпи в случаях, если напряжение на
зажимах генератора уменьшится и станет" возможным разряд
аккумуляторов через обмотку генератора. Такая защита
осуществляется при помощи реле обратного тока (рис. 2-26). Реле имеет
две обмотки: обмотку напряжения ха>\ и токовую обмотку т2.
Срабатывание реле происходит лишь тогда, когда напряжение на пер-
89
вой обмотке станет достаточным
по величине. Токовая обмотка
имеет несколько витков,
намотанных так, что ее поток при
заряде аккумуляторов
складывается с потоком обмотки
напряжения, что способствует более
прочному удержанию якоря.
* Рис. 2-26. Реле обратного -тока Если же по каким-либо
причинам напряжение генератора
упадет и начнется разряд
аккумуляторов, то направление потока в токовой обмотке изменится
на обратное и результирующий магнитный поток уменьшится.
Пружина оттянет якорь и разомкнет контакты — аккумулятор
окажется отключенным. Пока напряжение на зажимах генератора
будет оставаться малым, нового срабатывания реле не произойдет.
Уменьшение напряжения генератора из-за роста тока нагрузки
не вызовет отпускания реле, так как в этом случае одновременно
с уменьшением потока в первой обмотке будет расти поток во
второй, а суммарный поток практически не изменится.
Построение схем защиты
В большинстве случаев схемы защиты строятся так, чтобы при
аварии выключалось питание. Поэтому элементы защиты часто
конструктивно объединены с выключателями в одно общее
устройство. Примером подобных устройств являются магнитные
пускатели, автоматы дистанционного включения и т. д.
Дистанционные автоматы предназначены для включения питания в цепях
переменного тока. Они представляют собой мощные реле с тремя основными
контактными группами, работающими на замыкание, и несколькими
вспомогательными контактами, используемыми в цепях блокировки. Якорь воздействует на
контакты через систему промежуточных рычагов. В этой системе имеется
специальное устройство — расцепитель, которое позволяет механически отсоединять
контакты от якоря.
Основные контакты закрыты дугогасительной камерой и снабжены системой
магнитного дутья для гашения дуги. В каждой фазе, имеются термореле,
предназначенное для выключения автомата при длительных перегрузках, и
электромагнитное максимальное реле, выключающее автомат при коротком замыкании
цепи. В качестве обмотки этого реле используется катушка системы магнитного
дутья.
Термореле и электромагнитное реле при перегрузках воздействуют на
расцепитель, который отсоединяет контакты от якоря автомата, и происходит
выключение питания. Одновременно срабатывает механическая защелка,
исключающая повторное включение до тех пор, пока не устранена неисправность.
Аналогичное устройство имеют магнитные пускатели, применяемые главным
образом для включения моторов. Они имеют защиту только в двух фазах,
причем нормально замкнутые контакты реле защиты расположены в цепи питания
обмотки основного реле.
Рассмотрим в качестве примера построение схемы защиты высоковольтного
выпрямителя (рис. 2-27).
Выпрямитель включается контактором Р\ при нажатии кнопки ВКЛ. Схема
имеет самоблокировку включения. Контактор Р\ включится в том случае, если
рйИИН^
1 (
90
предварительно сработало реле Р7, обеспечивающее подачу напряжения
отрицательного смещения на сетки ламп, питаемых Данным выпрямителем.
При больших нагрузках или в случае аварии произойдет резкое увеличение
потребляемого выпрямителем тока или выпрямленного тока на его выходе. Это
приведет к срабатыванию одного из максимальных электромагнитных реле Рг,
Рл или Ре- Обмотка Р\ будет обесточена, и питание отключится. Питание
выпрямителя также выключится при размыкании блокировочных контактов Бл\
Рис. 2-27. Типовая схема защиты высоковольтного выпрямителя
и Бл2, установленных на дверках шкафа выпрямителя. Это исключает доступ
к высоковольтным шинам при включенном питании. Переменное сопротивление
служит для регулировки чувствительности реле ^ путем изменения степени его
шунтирования. Емкость С, имеющая сравнительно большую величину, служит
для сглаживания случайных пульсаций выпрямленного тока, которые при
отсутствии конденсатора могли бы привести к срабатыванию реле Рб или
повреждению прибора.
Последовательно с обмотками максимальных реле, установленных на входе
выпрямителя, включены подогреватели термореле Р3 и Р5. При небольших
длительных перегрузках, когда постепенно происходит чрезмерный нагрев всей
аппаратуры, они выключают выпрямитель посредством разрыва цепи питания
обмотки контактора Р\.
Схема повторного включения
В сложной радиотехнической аппаратуре возможны
кратковременное значительные увеличения тока в защищаемых цепях.
Причиной их могут быть пробои разрядников, самоустраняющиеся
короткие замыкания, а также различные переключения в схеме.
Эти явления могут привести к срабатыванию системы
максимальной защиты и выключению всей аппаратуры. Повторное
включение занимает сравнительно много времени, в результате
чего может произойти потеря цели радиолокатором и т. д. Чтобы
избежать подобных явлений и в то же время защитить
аппаратуру от кратковременных перегрузок, применяют различные
схемы автоматического повторного включения, одна из которых
рассмотрена ниже (рис. 2-28).
Данная схема при возникновении перегрузки в цепи
выпрямленного тока отключает выпрямитель на небольшой интервал
времени, после чего производит пробное повторное включение. Если
к этому времени перегрузка устранилась, то схема остается
включенной. Если же перегрузка осталась, то схема выключается
вторично и на этот раз окончательно.
В состав схемы входят (рис. 2-28, а): контактор Р\ включения
высоковольтного выпрямителя, реле максимальной защиты Рг, включенное в цепь отрица-
91
тельного полюса выпрямителя, реле автомата повторного включения Р3 и
моторное реле времени Р4, управляющее.работой контактов Ки /Сг и /С3.
При нажатии кнопки ВКЛ срабатывает контактор Р\ и включает
выпрямитель (этот контактор снабжен самоблокировкой включения /Се). В это время
мотор реле времени выключен, а реле Р% зашунтйровано контактами Кв и Ку.
При возникновении перегрузки сработает максимальное реле Р2 и, во-первых,
разомкнет цепь питания контактора Ри что приведет к выключению выпрями-,
теля, во-вторых, контактами К$ расщунтирует реле Р3. Реле Р3 также имеет
самоблокировку включения — контакт К7. Сработав, оно удерживается в рабочем
состоянии, причем своими контактами Кв замыкает цепь питания мотора реле
Т+Цсёк)
2-28. Схема автоматического повторного включения
времени. Вследствие выключения выпрямителя реле Р2 будет обесточено и вновь
вернется в исходное состояние, однако контактор Р\ при этом не включится, так
как цепь его питания, ранее замыкавшаяся через контакты самоблокировки /Се,
теперь разомкнута.
Дальнейшую работу схемы проследим, пользуясь временной диаграммой
(рис. 2-28,6). По прошествии двух секунд кратковременно замыкаются
контакты Ки включенные параллельно кнопке ВКЛ. Контактор Р\ получает питание,
и происходит пробное включение выпрямителя. Если возникшая ранее
перегрузка устранилась, то повторного срабатывания максимального реле Р2 не
произойдет, а самоблокировка контактора удержит его в рабочем состоянии и после
размыкания контактов Ки
Если перегрузка осталась, то после замыкания К\ и включения выпрямителя
вновь сработает максимальная защита и выключит выпрямитель. К этому
времени контакты К\ также разомкнутся, питание в обмотку Р\ поступать не будет
и выпрямитель будет выключен.
Независимо от того, остался ли выключенным выпрямитель или произошло
повторное включение, моторное реле времени продолжает работать, так как
включившее его реле Рз удерживается в рабочем состоянии самоблокировкой.
В середине четвертой секунды размыкается контакт /С2, который выключает
питание реле Рз. Отпуская контакты, реле Р3 восстанавливает шунтирующую его
цепь и размыкает цепь питания мотора. Однако мотор не останавливается, так
как еще несколько раньше замкнулись контакты /Сз, обеспечивающие
независимую цепь его питания. К исходу четвертой секунды вновь замыкаются
контакты /С2, после чего размыкаются контакты Кг- Схема повторного включения
вернется в исходное состояние, причем кулачковый валик к этому времени сделает
один полный оборот. За цикл работы или произойдет повторное включение
выпрямителя, если перегрузка была кратковременной (менее 2 сек), или его
выключение, если перегрузка была длительной.
Сопротивление #0 служит для ограничения тока в цепи, шунтирующей
реле Рз.
ГЛАВА III
ОСНОВЫ ТЕОРИИ АВТОМАТИЧЕСКОГО
РЕГУЛИРОВАНИЯ
§ 3-1. ОБЩИЕ СВЕДЕНИЯ
Типы автоматических систем. В современной
военной технике широкое применение нашли автоматические системы.
Их использование позволило повысить точность процесса
управления различными устройствами и ускорить его, разгрузить
оператора от второстепенных функций, привести в действие мощные
источники-энергии малыми мускульными усилиями и т. д. Кроме^
того, при автоматическом управлении на управляемом процессе
не сказываются субъективные индивидуальные особенности
оператора: его внимательность, реакция на различные раздражители,
утомляемость, выучка и т. д. Функции оператора в таких системах
сводятся к включению, выключению, заданию программы работы
приборов или вводу в них сигналов управления.
В процессе управления всегда есть физические величины,
значения которых требуется поддерживать постоянными^ или
изменять строго,., определенным образом. Эти _ величины ''"называются"
рещи^^емыми; к ним относятся напряжение генератора, число
оборотов "двигателя, частота настройки, например магнетрона,
положение антенны радиолокационной станции и т. д.
По принципу построения автоматические системы бывают двух
.типов: разомкнутые и замкнутые.
Разомкнутые автоматические системы
Разомкнутые' системы характеризуются отсутствием обратной
связи с выхода системы на ее.» вход. Вследствие этого протекание
процесса управления в разомкнутых системах не зависит от
результатов, т. е. от того, как система выполняет свои функции.
В разомкнутой автоматической системе им^ет .место только
прямое воздействие: от оператора к управляемому объекту, от входа
к выходу.
93
Простейший пример разомкнутой системы — система
регулирования напряжения генератора постоянного тока (рис. 3-1).
Перемещая движок реостата /?, оператор изменяет ток в обмотке
возбуждения дов, в результате чего соответствующим образом
изменяется магнитный поток возбуждения, а следовательно, и
напряжение на зажимах генератора. Если вблизи движка поместить
шкалу, проградуированную непосредственно в вольтах выходного
напряжения, то, устанавливая движок у нужного деления,
оператор сможет управлять напряжением генератора.
Разомкнутые автоматические
системы работают без непосредственного
участия человека. Программа
регулирования в них определяется или свойствами
отдельных элементов Системы, или
характером сигнала, подаваемого на вход.
По разомкнутой схеме работают многие
системы, имеющие заранее введенную
программу: дистанционные взрыватели
артиллерийских снарядов, автономные
^истемы .наведения управляемых сна-
""ршдой-4*--т. д. Особую группу
разомкнутых систем составляют схемы
параметрической стабилизации, в которых процесс регулирования
обусловлен наличием нелинейного элемента, обладающего некоторыми
особыми свойствами. К ним относятся, например, схемы
стабилизации тока и напряжения, содержащие нелинейные
сопротивления: бареттеры, термисторы, стабилитроны, насыщенные
дроссели и т. д.
||||||ц||| Шк аЛк
1 1 »
А
' 1
*в%
, /*
\Д6ига -
тель
г
ё
в
"г
—0
Рис. 3-1. Схема
регулирования напряжения генератора
Оператор
Задающее
\устройст6о\
Имел
Усилителе
\преобразо
батель
Исполнительное
{устройство]
Регулируемый
объект
</(*)
Рис. 3-2. Структурная схема разомкнутой системы
Функциональная схема разомкнутой автоматической системы
показана на рис. 3-2. Устройство, при помощи которого задается
необходимое значение выходной величины, называется задающим.
В нем вырабатывается управляющий сигнал г(1), который
подается на вход системы. Он является тем физическим
воздействием, которое приводит к изменению другой физической
величины— выходного сигнала 'У(1). Управляющий сигнал при
необходимости усиливается в усилителе-преобразователе и затем
воздействует «а исполнительное устройство, которое обладает
достаточной мощностью для приведения в действие регулируемого
объекта.
Все разомкнутые системы обладают весьма существенным
94
недостатком., который обусловлен отсутствием обратной связи.
В..лих нет контроля за тем, как' в действительности происходит
процесс , управления, действительно ли регулируемая., величина
приняла заданное значение, соответствуют ли ее изменения
загсяннпи_дрогрямм.р.. Полное соответствие может иметь место лишь
в том случае, когда характеристики всех элементов системы будут
весьма жесткими и будет исключено воздействие помех. На
практике такие требования выполнить невозможно. Это приводит к
появлению более или менее значительных ошибок. Так, например,
в схеме (рис. 3-1) при неизменном положении реостата
возбуждения 7? напряжение генератора может измениться вследствие
изменения напряжения источника возбуждения, скорости вращения
приводного двигателя, изменения сопротивления нагрузки и
некоторых других причин. Аналогичные явления возможны и в других
разомкнутых системах.
Замкнутые автоматические системы
В таких системах имеется обратная связь между выходом и
входом системы. По линди обратной связи поступает сигнал о том
значении, которое принимает выходная величина. Протекание
процесса управления зависит от его результатов. Автоматические
системы с обратной связью -называются системами
автоматического регулирования. Для пояснения принципа обратной связи
рассмотрим предварительно неавтоматическую систему
регулирования с обратной связью, в которой существенную роль играет
оператор (рис. 3-3,а). Система предназначена для изменения
регулируемой (выходной) величины в соответствии с тем значением,
которое задается оператором на входе системы. Регулируемая
величина измеряется при помощи какого-либо контрольного
устройства, и ее значение у(() по цепи обратной связи поступает
на вход системы к оператору.
Сравнивая показания контрольного прибора, измеряющего
действительное значение регулируемой величины, с заданным ее
значением, оператор производит дополнительное воздействие на
систему, чтобы устранить имеющуюся разницу показаний. При
этом управляющее воздействие становится зависимым не только
от входного сигнала х{1), но и от регулируемой величины.
Действия оператора в данном случае элементарно просты и
легко могут быть выполнены специальным измерительным или
сравнивающим устройством, тогда система становится
автоматической.
На измерительное устройство автоматической системы
(рис. 3-3,6), помимо входного сигнала х((), при помощи цепи
обратной связи подается значение регулируемой величины у(()
или зависящий от нее сигнал г(1). В результате сравнения этих
95
двух сигналов вырабатывается управляющий сигнал г(1),
производящий дополнительное воздействие на систему. Разность между
входной и выходной величинами называют сигналом
рассогласования или ошибкой системы Ъ{1).
Управляющий сигнал является функцией не только входного
сигнала, но и регулируемой величины. Он вырабатывается обычно
в виде электрического или механического воздействия. То
обстоятельство, что в измерительном устройстве сигнал обратной связи
вычитается из входного, говорит о «наличии в замкнутых системах
автоматического регулирования отрицательной обратной связи.
Оператор
Задающее
устройстбо
—*
Усилитель-
преобразователь
Исполни -
тельное
{устройстбо
Контроль
Регулируемый
объект
№
Задающее
х(1)
Измерительное
[устройстбо
и (г) или г(*А
Ш
усилитель]
преобразо
ва тель
Исполнительное
устройству •'
Регул и- \
руемый !
объект |
Обратная
связь
Рис. 3-3. Замкнутые системы регулирования:
а — система с ручным управлением; б — автоматическая система
Усилитель-преобразователь усиливает поступающий в него
сигнал, а при необходимости и преобразует его в сигнал другого
вида, и осуществляет некоторые функциональные преобразования
этого сигнала (например, сглаживание флуктуации,
интегрирование сигнала и т. д.). После усиления сигнал поступает на
исполнительное устройство, вырабатывающее регулирующее
воздействие, приложенное к объекту регулирования так, чтобы
происходило уменьшение рассогласования. Такое движение системы
называется отработкой рассогласования.
Система автоматического регулирования образует замкнутую
цепь, которая называется контуром регулирования.
Действия оператора при использовании системы
автоматического регулирования (САР) сводятся к первоначальной установке
.заданного режима (настройке системы) и общему наблюдению
за исправностью.
Помимо входного сигнала, на систему могут оказывать
воздействие помехи, возникающие в самой системе или поступающие
извне на один из элементов замкнутого контура регулирования.
Под воздействием помехи может измениться значение
регулируемой величины, но это сразу же вызовет появление рассогласова-
96
ния и управляющий сигнал начнет оказывать противоположное
воздействие, ослабляя влияние помехи.
Отдельные элементы в некоторых системах автоматического
регулирования или отсутствуют, или выражены неявно. В системе
может отсутствовать специальное задающее устройство. Исполни^-
тельное устройство в некоторых случаях представляет собой
единое целое с усилителем-преобразователем, а в других — с
объектом регулирования. Когда мощность управляющего сигнала
достаточна для осуществления необходимого воздействия на
регулируемый объект, то в системе отсутствует
усилитель-преобразователь, т. е. осуществляется прямое регулирование. Очень часто
усилительные и преобразовательные
функции распределяются между
несколькими элементами системы.
Иногда регулируемый объект не
входит в замкнутый контур
регулирования, а исполнительное
устройство непосредственно связано с
измерительным.
В качестве простейшего примера р"с^3"4' Привод механической
р г * обработки электрического напря-
системы автоматического регулиро- жения
вания рассмотрим работу
электрического привода (рис. 3-4),
служащего для преобразования электрического напряжения в
пропорциональное ему механическое перемещение (например, угол
поворота выходного вала). Такого рода приводы широко
используются в электромеханических счетно-решающих приборах, в по-
теищиометрических синхронных передачах, для усиления
мощности входного сигнала, дистанционного управления и т. д.
Входным сигналом системы является электрическое
напряжение ивх; регулируемой величиной — угол поворота (а) выходного
вала, на котором установлен движок потенциометра. Сигналом
обратной связи является напряжение ип, снимаемое с
потенциометра и пропорциональное перемещению движка. Сравнение
сигнала обратной связи с входным производится на входе усилителя,
куда оба напряжении подаются в противоположной полярности.
Если эти напряжения не равны, то их разностное напряжение
будет усилено и подано на двигатель. Двигатель начнет вращаться
и перемещать движок потенциометра. Направление вращения
двигателя зависит от полярности питающего его напряжения и
устанавливается так, чтобы перемещение движка происходило
в сторону устранения рассогласования. Как только
напряжение ип станет равным входному, разностное напряжение
уменьшится до нуля и вращение двигателя прекратится. Таким
образом, движок потенциометра автоматически устанавливается так,
что ип=ивх. Напряжение ип на потенциометре пропорционально
перемещению движка. Следовательно, привод осуществляет про-
4 Автоматика
97
ТСТт-и
«Э
порциональное преобразование входного напряжения в
механическое вращательное перемещение.
Необходимо указать на одну существенную сторону работы
данного привода и других систем автоматического регулирования.
Напряжение, питающее двигатель, становится равным нулю, как
только устранится рассогласование напряжений. Однако
вследствие инерции движения его якорь еще некоторое время будет
вращаться, перемещая движок потенциометра. В системе появится
рассогласование другого знака, которое начнет отрабатываться
п теперь уже в обратную сторону и т. д.
В результате этого возникнет
колебательный процесс, который может
продолжаться длительное время. Для его
устранения приходится принимать
специальные меры, или, как принято
говорить, осуществлять коррекцию
работы системы, являющуюся весьма
важной и подчас сложной задачей.
Методы коррекции рассматриваются
в теории автоматического
регулирования.
Примером замкнутой системы
автоматического регулирования, в которой
функции отдельных элементов
выражены менее явно, может служитьэлек-
тронный стабилизатор напряжения.
Большинство схем электронных стабилизаторов построено по
одному общему принципу. Упрощенный вариант одной из наиболее
распространенных подобных схем показан на рис. 3-5. Роль
нагрузки стабилизатора обычно выполняет какой-либо электронный
блок. Напряжение на нагрузке ии, являющееся в данном случае
регулируемой величиной, может изменяться или вследствие
изменения напряжения источника и3, или вследствие изменения
сопротивления нагрузки.
В схеме стабилизатора лампа Лх включена последовательно
с нагрузкой. Изменяя сопротивления этой лампы постоянному
току, можно скомпенсировать изменения напряжения на нагрузке.
Это обстоятельство положено в основу работы стабилизатора.
Схема реагирует на изменения ин независимо от того, чем эти
изменения вызваны.
Пусть по какой-либо причине произошло увеличение ин. Часть
этого изменения, снимаемая с нижнего участка потенциометра Я,
подается на сетку лампы усилителя постоянного тока Л2. Процесс
усиления сводится к следующему. Потенциал катода Л2
фиксирован стабилитроном «/73, включенным в цепь катода, и не зависит
от анодного тока лампы. Поэтому увеличение потенциала сетки
приводит к росту анодного тока лампы и уменьшению потенциала
ее анода. Анод Л2 соединен с сеткой лампы Л\, которая в общей
Рис. 3-5. Электронный
стабилизатор напряжения
98
схеме стабилизатора выполняет функции исполнительного
устройства и регулируемого объекта. Одновременно с уменьшением
потенциала анода Л2 происходит и снижение потенциала сетки Л{.
Сопротивление лампы постоянному току возрастает, что приводит
к уменьшению напряжения на выходе стабилизатора. Тем самым
почти полностью компенсируется воздействие фактора, который
стремится увеличить ин. В сущности, лампа Л\ является
автоматически регулируемым сопротивлением.
При уменьшении ин все процессы протекают в обратном
порядке. Схема работает практически безынерционно.
Очевидно, что, чем большим будет усиление каскада,
собранного на Л2, тем больше будет изменяться сопротивление Л\ и
более совершенной, более полной будет компенсация изменений
выходного напряжения. Чтобы повысить усиление, нужно на
вход Л2 подавать большую часть изменений ин. Для этого
сопротивление нижней части потенциометра П должно быть достаточно
большим и соизмеримым с его полным сопротивлением. Это
означает, что на сетке Л2 будет сравнительно высокий положительный
потенциал. Чтобы обеспечить нормальный режим работы,
потенциал катода должен быть еще на несколько вольт выше
потенциала сетки, что достигается включением в цепь катода
стабилитрона Л3. Если вместо стабиловольта включить соответствующим
образом подобранное активное сопротивление, то в усилителе
возникнет глубокая отрицательная обратная связь: усиление резко
уменьшится, и нормальная работа схемы будет нарушена.
Потенциометр П позволяет устанавливать нужное значение
выходного напряжения, т. е. производить настройку
стабилизатора. При перемещении движка потенциометра вверх потенциал
сетки усилительной лампы повышается и в результате
срабатывания схемы напряжение на выходе понижается. Перемещение
движка вниз приводит к повышению выходного напряжения.
В дальнейшем схема сама поддерживает установленное при
настройке напряжение. Таким образом, потенциометр выполняет
функции задающего устройства, а измерительным устройством
является вход усилительной лампы.
Классификация систем автоматического регулирования
В основу классификации САР могут быть положены
различные приписки. Основным из них является характер изменения
регулируемом величины/
По этому примиаку системы автоматического регулирования
можно разделить на три группы.
Системы автоматической стабилизации.
Системы автоматической стабилизации предназначены для
поддержания постоянного :Шс'1чсш1и регулируемой величины,
первоначально установленной при настройке системы. В процессе работы
4* 99
настройка, как правило, не изменяется, но на систему могут
воздействовать помехи, влияние которых благодаря стабилизации
резко снижается или полностью устраняется. Примерами таких
систем являются стабилизаторы напряжения, частоты, скорости,
температуры и т. д. Стабилизирующее воздействие системы
принято оценивать коэффициентом стабилизации.
Коэффициент стабилизации /Сет показывает, во сколько раз
снижается нестабильность регулируемой величины в результате
воздействия системы:
где Ау и Ауо — 'Нестабильность регулируемой величины в
разомкнутой и замкнутой системах.
Системы программного регулирования. В
системах программного регулирования входной сигнал изменяется
по определенной программе. По соответствующей программе
изменяется и регулируемая величина. К числу таких систем можно
отнести, например, систему управления самолетом-мишенью,
которому задаются определенные маршрут и высота полета.
Следящие системы. В следящих системах закон
изменения входного сигнала, как правило, заранее не известен. В
результате работы системы регулируемая величина должна
изменяться в полном соответствии с входным сигналом, т. е. как бы
следить за ним. К следящим относятся системы самонаведения
зенитных ракет, автосопровождения цели радиолокатором,
автоматической подстройки частоты и т. д.
Каких-либо принципиальных различий между, системами,
относящимися к разным группам, нет. Иногда одна и та же
система в зависимости от условий работы может быть отнесена то
к одной, то к другой группе систем. Проследим это на примере
только что рассмотренного привода (рис. 3-4).
Если в качестве ивх взять постоянное по величине
напряжение маломощного источника, а нагрузку подключить к выходу
потенциометра /7, то при любых изменениях сопротивления
нагрузки или напряжения источника и, питающего потенциометр,
привод автоматически будет так перемещать движок, чтобы вновь
установилось равенство ип=ивх, т. е. будет поддерживать
постоянным заданное значение регулируемой величины.
Величину ивх можно менять по заранее заданному закону.
Тогда при постоянном напряжении и вращение двигателя будет
происходить в строгом соответствии с этим законом, т. е. будет
осуществлено программное регулирование. Программу можно
задать, и другими способами. Можно, например, потенциометр П
сделать нелинейным. Тогда при равномерном изменении ивх
вращение движка будет происходить по определенному, более
сложному закону.
100
Если же входное напряжение подается извне и закон его
изменения заранее не известен, то система будет работать как
следящая, т. е. будет следить за изменениями ивх, устанавливая такое
же значение ип.
Другим классификационным признаком может служить способ
конструктивного исполнения системы автоматического
регулирования, который определяется главным образом источниками
энергии, используемыми для осуществления непосредственного
воздействия «а регулируемый объект.
Электронные системы. В системах этой группы
используются только электронные элементы как для усиления сигналов
и их преобразования, так и в качестве исполнительных устройств.
К таким системам можно отнести систему стабилизации частоты
клистрона, электронный стабилизатор напряжения и др. Особенно
широко они применяются в электронных счетно-решающих
приборах и других маломощных системах. Основным источником
энергии в них является источник анодного питания ламп. Это
ограничивает мощность подобных Систем величиной примерно 150—
200 вт.
Электромеханические системы. Эти системы
наряду с электронными или какими-либо другими усилителями
электрических сигналов содержат механический исполнительный
элемент. К электромеханическим системам относятся приводы антенн
радиолокационных станций, приводы орудий и других установок,
а также различные приводы для дистанционных настроек и
регулировок. Мощность электромеханических систем, применяемых
в радиолокационной технике, лежит в пределах от нескольких
ватт до нескольких киловатт.
Существуют и чисто механические системы регулирования.
Гидравлические системы. Отличительной чертой
гидравлических систем является возможность получения при малых
габаритах используемых приборов значительных мощностей
исполнительного устройства. Наряду с гидравлическими элементами в
них, как правило, применяются также и электрические. К
гидравлическим системам относятся приводы некоторых зенитных
орудии, приводы рулевого управления на тяжелых автомобилях и др.
И укапанных примерах их мощность имеет величину до
нескольких киловатт, хотя в других случаях она может быть значительно
большой. Недостатком гидравлических систем является
необходимость носьмл высокой' точности обработки всех деталей и как
следствио угого высокая стоимость систем.
Пневматические системы. Источником энергии в п-нев-
матических системах является сжатый воздух. Небольшой вес
баллонов со сжатым воздухом делает пневматические системы
особенно удобными на самолетах и ракетах. Но мощность этих
систем обычно невелика. Пневматические системы в своем составе
также могут иметь электрические элементы.
101
Классификация также может определяться ^сарактзром .упдав-
ляю^^^сш^ала. Ло этому признаку системы автоматического
регулирования "делят на сдсхемь; непрерывного регулирования,
системы прерывистого (импульсного) регулирования и системы ре-
лейного регулирования. —
В первых из них контур регулирования замкнут все время и
непрерывно вырабатывается управляющий сигнал. В системах
прерывистого регулирования контур замкнут лишь в определенные,
обычно равные промежутки времени. В системах релейного
регулирования управляющий сигнал подается на чувствительное реле,
которое включает исполнительное устройство.
В настоящей книге рассмотрены только системы непрерывного
регулирования.
В основу классификации могут быть положены и другие
признаки, например мощность исполнительного устройства, точность
работы и характер ошибок, методы коррекции и т. д. Ниже будет
приведено деление САР в соответствии с некоторыми из
указанных признаков.
§ 3-2. ИЗМЕРИТЕЛЬНЫЕ УСТРОЙСТВА
И ДАТЧИКИ
Принцип действия большинства систем автоматического
регулирования основан на сравнении действительного значения
регулируемой величины у(1) с ее заданным значением х{1) и сведении
разности этих значений к нулю в процессе работы системы.
Сравнение осуществляется в измерительных устройствах, измеряющих
поступающие сигналы и вырабатывающих соответствующий
электрический или механический сигнал, который зависит от
соотношений х(1) и у(/).
Измерительные устройства весьма разнообразны. Обычно их
различают или по типу сигналов,- для измерения которых они
предназначены, или по типу вырабатываемых ими сигналов
рассогласования. В подавляющем большинстве систем регулирования,
применяемых в радиолокационной- технике, сигналы
рассогласования получают в виде электрических величин и, в частности, в
виде электрического напряжения. Поэтому в дальнейшем
классификация измерительных устройств будет производиться в
зависимости от типа измеряемых величин.
Для преобразования неэлектрических измеряемых величин
в пропорциональные им электрические сигналы служат
специальные устройства, называемые датчиками. Датчики применяются не
только в измерительных устройствах, но и в устройствах
автоматического контроля и сигнализации, в счетно-решающих приборах
и т. д.
Датчики изменяют физическую природу измеряемы^ сигна-
102
лов, поэтому они относятся к числу преобразователей. Основным
параметром датчика является его коэффициент передачи, т. е.
отношение выходного сигнала к входному.
Характеристикой измерительного устройства называется
зависимость вырабатываемого им сигнала рассогласования от
величины рассогласования. Измерительные устройства имеют
характеристики, подобные показанной на рис. 3-6, а. Рассогласование
8(0—*(0—0(0 откладывается по оси абсцисс от точки х(().
Сигнал рассогласования, получаемый обычно в виде напряжения
постоянного или переменного тока, откладывается по оси ординат.
Рис. 3-6. Характеристики измерительных устройств:
я —обычная дискриминаторная характеристика; б — характеристика
избирательного элемента; в — взаимное смещение характеристик избирательных элементов
Характеристики такого вида иногда называют дискриминатор-
ными, а сами измерительные устройства — дискриминаторами.
В общем случае дискриминаторы и датчики являются элементами
измерительных устройств.
Большинство измерительных устройств нормально работает
при сравнительно малых рассогласованиях, ограниченных
некоторой рабочей областью. В пределах рабочей области, называемой
также областью регулирования, увеличение рассогласования
сопровождается ростом выходного напряжения.
Область рассогласований, в пределах которой на выходе
дискриминатора еще имеется достаточное напряжение для
приведения в действие управляющего устройства и воздействия на регу-
103
лируемый объект в направлении отработки рассогласования,
называется областью захватывания. Обычно она несколько уже
участка АБ, так как при малых выходных напряжениях
чувствительность системы может оказаться недостаточной. Направление
отработки на рис. 3-6, а показано стрелками.
Качество дискриминаторов оценивается крутизной
характеристики в точке, соответствующей согласованному положению, или
коэффициентом передачи дискриминатора
*--($и «-*■-(■*)«• <з-2>
Чем больше крутизна характеристики, тем лучше
дискриминатор реагирует на появление ошибки.
Значение регулируемой величины задается в САР не только
при помощи сигналов, поступающих с задающего устройства или
извне на вход системы, но и в виде величин, которые нельзя
рассматривать как физическое воздействие. Так, например,
регулируемой величиной может быть положение оси антенны
радиолокационной станции, которое при автоматическом
сопровождении задается угловыми координатами цели. При стабилизации
частоты колебаний генераторов роль задающего устройства иногда
выполняют различные колебательные системы (объемные
резонаторы, контуры высокой добротности), а значение частоты в этом
случае является параметром этих систем, а не физическим
воздействием. Однако и в тех случаях, когда значение регулируемой
величины задается при помощи параметра или она сама является
параметром, для общности рассуждений условимся применять
термины «входной сигнал» и «выходной сигнал».
Для получения сигнала, пропорционального измеряемой
величине, обычно используются избирательные устройства отдельных
элементов, входящих в состав измерительных устройств, т. е. их
способность по-разному реагировать на какие-либо внешние
воздействия, связанные с изменениями регулируемой величины
(рис. 3-6,6). При наличии таких избирательных элементов обычно
применяют дифференциальный метод измерения. Для этого в
состав измерительного устройства вводят два избирательных
элемента со смещенными относительно согласованного положения
'максимумам^. Разность реакций обоих элементов используется
как сигнал рассогласования (рис. 3-6,в).
Смещение характеристик или величина интервала, на
границах которого определяются реакции, выбираются такими, чтобы
измерение происходило на наиболее крутом участке, что
соответствует наибольшему коэффициенту передачи измерительного
устройства.
Может оказаться, что в момент включения системы
фактическое значение регулируемой величины у лежит вне области
захватывания измерительного устройства. В таких случаях или вручную
осуществляют первоначальное согласование, или в системе преду-
104
сматривается его автоматический поиск. Во время поиска
производится изменение у в широком диапазоне, заведомо включающем
заданное значение. По окончании поиска после захватывания
система автоматически переходит в нормальный режим
регулирования.
Рассмотрим наиболее употребительные измерительные
устройства.
Частотные дискриминаторы
В системах автоматической подстройки частоты
измерительным устройством, служащим для выявления частотного
рассогласования, являются частотные дискриминаторы. Обычно частотные
дискриминаторы реагируют на отличие частоты входного сигнала
от некоторой частоты /о, принятой за эталон и называемой
переходной. Выходной сигнал получается в виде напряжения,
зависящего от величины и знака частотного рассогласования.
Работа большинства схем частотных дискриминаторов
основана на использовании резонансных свойств колебательных
контуров, включенных на входе детекторов. Изменение частоты
сигнала приводит к соответствующему изменению амплитуды
переменного .напряжения, подаваемого с контура на вход детектора,
а следовательно, и к изменению напряжения на его выходе.
Характеристика частотных дискриминаторов показана на рис. 3-6,0.
Схемы частотных дискриминаторов принципиально не
отличаются от схем частотных детекторов, применямых в
радиоприемниках для детектирования частотно-модулированных сигналов и
подробно изучаемых в курсе радиотехники.
Временные дискриминаторы
Временные дискриминаторы служат для измерения временного
рассогласования в положении двух импульсов и преобразования
его в напряжение соответствующей величины и полярности.
Временные дискриминаторы применяются в
радионавигационных системах, в системах автоматического сопровождения цели по
дальности, а также в некоторых системах измерения угловых
координат цели, где сканирование луча антенны производится
с постоянной скоростью в одной плоскости.
Во временных дискриминаторах используются схемы
совпадения и амплитудные детекторы. Схема совпадения представляет
собой устройство, срабатывающее при совместном воздействии на
него двух импульсов, перекрывающихся во времени. Один из
импульсов является входным и поступает в систему извне, другой
вырабатывается в самой системе автоматического регулирования
и называется селекторным или следящим. Выходное напряжение
схемы совпадения представляет собой импульсы с длительностью,
105
равной времени перекрытия А* (рис. 3-7). В дальнейшем эти
импульсы используются для заряда конденсатора, что позволяет
получить напряжение, пропорциональное
времени перекрытия.
Временной дискриминатор включает в
себя две схемы совладения, для работы
которых необходимы два следящих импульса,
смещенных один относительно другого во
времени (рис. 3-8,а). Длительность
каждого из них не должна превышать
длительности входного. В качестве выходного
сигнала используется разность напряжений
обеих схем совпадений, преобразованная
в напряжение постоянного тока.
Если временного рассогласования нет,
то следящие импульсы располагаются
симметрично относительно середины входного.
Зремя перекрытия в обеих схемах
совпадения одинаково, а выходное напряжение
равно нулю. При наличии рассогласования
следящие импульсы смещаются и
нарушается равенство временных перекрытий, что приводит к
появлению результирующего выходного напряжения. При значительном
*»г
Рис. 3-7. Временное
рассогласование импульсов
чел а
Ф
""1 Ш
\А
-***
п Р).,
]А .,
*~1
8
Рис. 3-8. Графики напряжений в схемах
совпадения:
а'— нормальное расположение следящих импульсов;
б — расположение следящих импульсов с интервалом
рассогласовании в одной из схем возможно полное перекрытие
импульсов, тогда выходное напряжение становится максимальным.
Дальнейшее рассогласование вызывает уменьшение #„ы*. Изме-
106
лнение направления рассогласования приводит к изменению
полярности выходного напряжения. Общий вид характеристики
временного дискриминатора показан на нижнем графике рис. 3-8, а.
Следует иметь в виду, что в действительности ни входной, <ни
следящие импульсы не являются идеально прямоугольными. Поэтому
реальная характеристика дискриминатора получается более
плавной, без резких изломов.
В устройствах, где входной импульс имеет сравнительно
большую длительность и куполообразную форму, для улучшения
характеристики дискриминатора применяют следящие импульсы,
следующие один за другим с некоторым временным интервалом
(рис. 3-8,6). Интервал выбирается исходя *из такого расчета,
чтобы следящие импульсы в согласованном положении
располагались в точках, где фронты входного импульса имеют наибольшую
крутизну.
Одна из возможных принципиальных схем временного
дискриминатора показана на рис. 3-9. На лампе Л\ собраны схемы
совпадения, на лампе Л2 — схема разности и на Лъ — амплитудный
детектор, преобразующий разностное импульсное напряжение
в сигнал постоянного тока *.
В схеме совпадений отсутствует специальный источник
анодного питания. Оба триода закрыты большим отрицательным
сеточным смещением Ес. Входной импульс положительной
полярности через цепочки С^ и С2/?2 подается одновременно на оба
анода. Следящие импульсы (также положительные) подаются
поочередно на сетки. Если воздействие входного импульса
происходит одновременно с первым следящим, то левый триод
открывается на промежуток времени, равный времени перекрытия
импульсов. При этом конденсатор С\ заряжается через
сопротивление /?1 и анодную цепь триода. По окончании воздействия
входного или следящего импульса триод закрывается. Постоянная
времени цепи заряда берется в несколько раз большей, чем
длительность следящего импульса. Поэтому напряжение, до которого
конденсатор С{ успеет зарядиться, будет примерно
пропорционально времени перекрытия:
4 {/ ж—*{/
где Д/, — время перекрытия в первом плече;
Т—постоянная времени цепи заряда.
После прекращения воздействия входного импульса начнется
медленный разряд конденсатора через сопротивление* /?ь
выходное сопротивление предыдущего каскада и весьма большое
сопротивление /?б, на котором падает почти все напряжение
конденсатора, убывающее по экспоненциальному закону. Время разряда
конденсатора несколько меньше периода повторения, и к приходу
* В §• 4-4 рассмотрена еще одна схема временного дискриминатора, в
которой, помимо основных функций, осуществляется интегрирование сигнала.
107
следующих импульсов восстанавливается исходный режим. Совер- •
шенно аналогичные процессы протекают и в другом плече, где
конденсатор С2 заряжается до напряжения
с7 ^ — с7
с2 т вх'
где М2 — время перекрытия во втором плече.
На рис. 3-10, а, б показаны графики напряжений на
конденсаторах Сх и С2 и на выходе-плеч селекторов при наличии неболь-
V Н>
+*
\Ъ&г,
1№
-*~*
Рис. 3-10. Графики напряжений в схеме временного дискриминатора:
а^-на лампе Л\\ б — на лампе Л%
шого временного рассогласования А*. Выходные импульсы
селекторов (V\ и с72) имеют разные амплитуды и экспоненциальную
форму фронтов. На графиках Ц\ и с72 пунктиром показаны
кратковременные положительные всплески напряжения при воздействии
входного сигнала.
Их амплитуды равны соответственно:
6/,:
6А;
■■и =^и •
■мСг=^ив
(3-3)
Разность выходных напряжений схем совпадения выделяется
схемой разности, собранной на лампе Л2 (рис. 3-9). Схема
разности представляет собой два одинаковых усилителя с равными
анодными и катодными нагрузками. Коэффициент усиления
каждого из каскадов близок к единице, причем на катодной нагрузке
повторяется форма входного напряжения, а на анодной при
той же амплитуде и форме сигналы имеют противоположные
полярности. Поэтому
ш=их*ш=-и\.
(3-4)
109
Между анодом правого й катодом левого триодов включено
большое сопротивление потенциометра /?ц, что практически не
сказывается на режимах работы ламгг. Иногда для полной
симметрии схемы такое же, но постоянное сопротивление включают
между анодом левого и катодом правого триодов. Выходное
напряжение схемы разности снимается с движка потенциометра /?ц,
установленного посередине. Как видно из схемы, переменная
составляющая этого напряжения равна сумме
]
Поэтому
но Шр = Д<7 — Шк.
Ки а2 кх
'«I.1 2 ~~ 2 '
или, учитывая равенства (3-3) и (3-4), получим:
АЦ = и*-и> = -^(Д/, _ д/8) =^м и (3-5)
Таким образом, амплитуда импульса на выходе схемы
разности будет равна полуразности выходных напряжений схем
совпадения и в пределах рабочей области пропорциональна временному
рассогласованию Д/. Потенциометром /?и производят
симметрирование схемы, устраняющее разброс параметров ламп и деталей.
Выходное напряжение схемы разности А 0 является входным
для амплитудного детектора с/73. Постоянная составляющая этого
напряжения отделяется конденсаторами С5 и С6. В зависимости
от полярности импульсов Д И работает или правая, или левая
половина лампы детектора.
При положительной полярности импульсов происходит быстрый
заряд конденсатора С5 через левую половину Л3 до напряжения,
равного амплитуде Д(/. С началом уменьшения
напряжения А (/, которое убывает по экспоненте, конденсатор С5 начинает
разряжаться через выходное сопротивление схемы разности,
конденсатор С7 и сопротивление /?12. Постоянная времени этой цепи
весьма велика и значительно больше периода следования
импульсов, в то время как величина емкости конденсатора С7 значительно;
меньше, чем Сб. Поэтому за несколько периодов конденсатор С7
зарядится до амплитуды импульса ДС/, а напряжение на нем будет
оставаться практически постоянным, медленно изменяющимся
лишь по мере изменения амплитуды разностного импульса АЦ,
т. е. при изменении временного рассогласования.
При изменении направления рассогласования полярность им*
пульсов на выходе схемы разности изменяется и начинает
работать детектор, собранный на правой половине лампы Л3, Общее
выходное напряжение 1/Вых изменяет свой знак.
ПО
Амплитудный детектор имеет коэффициент передачи, близкий
к единице. Поэтому коэффициент передачи всего временного
дискриминатора можно определить из соотношения (3-5)
К ^ВЫХ ЪЦ Цвх ,гл д\
Тахогенераторы
Тахогенераторами называются электрические генераторы,
вырабатывающие э. д. с, пропорциональную скорости вращения
ротора. В САР они используются в качестве датчиков угловых
скоростей.
Рис. 3-11. Схемы тахогенераторов:
а — тахогенератор постоянного тока; б — тахогенератор переменного
тока
По принципу действия и конструктивному оформлению
тахогенераторы бывают постоянного и переменного тока. И те и
другие представляют собой электрические машины, работающие в
генераторном режиме.
Тахогенераторы постоянного тока. В качестве
тахогенераторов постоянного тока используются генераторы с
постоянным или независимым возбуждением. Из теории
электрических машин известно, что индуктируемая при вращении ротора
э. д. с. пропорциональна потоку возбуждения Ф и скорости
вращения:
Я=СшФ,
где С—постоянная для данной машины величина;
о)—угловая скорость вращения ротора.
Чтобы исключить зависимость э. д. с. от случайных изменений
потока возбуждения, в тахогенераторах с независимым
возбуждением (рис. 3-11, а) добиваются насыщения магнитопровода. При
этом изменения тока возбуждения не вызывают заметных
изменений потока Ф. При Ф=сопз1: •
Е = К<*> (3-7)
где К—коэффициент пропорциональности.
М1
Некоторые изменения в работу тахогенераторов вносит
нагрузка. Ток нагрузки вызывает появление реакции ротора,
которая искажает поток возбуждения и нарушает линейную
зависимость между скоростью вращения и выходным напряжением.
Индуктивность обмотки якоря должна быть минимальной,
чтобы постоянная времени выходной цепи была достаточно мала.
В противном случае изменения напряжения на выходе будут
отставать от изменений скоро.сти вращения. Механическая инерция
ротора не должна создавать дополнительных динамических
нагрузок на вал.
Тахогенераторы с постоянным возбуждением более просты по
устройству и не требуют отдельного источника для питания
возбуждения. Однако применяются они редко, так как
температурные воздействия и механические сотрясения изменяют их
характеристики,-снижая надежность работы аппаратуры. Общим
недостатком тахогенераторов постоянного тока является наличие
коллектора и переходного контакта в щетках, что снижает
надежность работы тахогенераторов, а при малых скоростях вращения
создает небольшую зону нечувствительности. Искрение в щетках
может явиться источником радиопомех.
Тахогенераторы переменного тока.
Тахогенераторы переменного тока (рис. 3-11,6) по устройству аналогичны
двухфазным асинхронным двигателям. Короткозамкнутый ротор
выполняется в ,виде алюминиевого стаканчика. Фазные обмотки
расположены в пазах статора так, что их оси
взаимно-перпендикулярны. Одна из обмоток (шв) питается от сети переменного
тока и выполняет функции обмотки возбуждения. Выходное
напряжение снимается с нагрузочной обмотки (о>н).
Переменный поток возбуждения Фв перпендикулярен оси
нагрузочной обмотки, поэтому не индуктирует в ней э. д. с. В
стенках же ротора он наводит э. д. с. трансформации, под воздействием
которой по стенкам ротора течет ток, создающий магнитный
поток, направленный навстречу потоку возбуждения, т. е. опять-таки
перпендикулярно оси нагрузочной обмотки. Ни величина, ни
направление э. д. с. трансформации не зависят от скорости
вращения ротора. Но при вращении ротора его стенки пересекают поток
возбуждения, и в них индуктируется э. д. с. вращения Е,
пропорциональная скорости вращения ротора. На рис. 3-11,6 показано
направление э. д. с. вращения в верхней и нижней стенках
ротора в момент времени, когда поток Фв иаправлен сверху вниз,
а ротор вращается по часовой стрелке. Так как поток
возбуждения является переменным, то и э. д. с. вращения также будет
переменной, она будет иметь ту же частоту, что и напряжение
возбуждения. В короткозамкнутом роторе эта э. д. с. будет создавать
свой ток. Этот ток образует магнитный поток реакции ротора Фр,
направленный перпендикулярно потоку возбуждения, т. е. вдоль
оси второй фазной обмотки. Поскольку этот поток переменный, он
индуктирует э. д. с. в нагрузочной обмотке. С увеличением ско-
112
рости вращения ротора растет индуктируемая в нем э. д. с, что
приводит к увеличению тока и потока реакции. В результате
этого пропорционально возрастает переменное напряжение на
выходе. При изменении направления вращения изменяется и фаза
выходного сигнала.
Сопротивление нагрузки должно быть достаточно велико,
чтобы ток выходной обмотки не создавал заметного магнитного
потока, который может исказить основную зависимость Е = Кш.
Реактивный характер нагрузки может привести к появлению
фазовых погрешностей — дополнительного сдвига фазы выходного
напряжения.
Датчики механических перемещений
Датчики этого типа служат для преобразования вращательного
или поступательного перемещения в пропорциональный ему
электрический сигнал. Такие устройства применяются как
самостоятельно, так и в качестве составных элементов других
измерительных устройств и датчиков. Среди устройств данной группы
наиболее широкое применение получили потенциометрические и
индукционные датчики.
Поте-нциометрические датчики. Потенциометр
(рис. 3-12, а) является элементом, преобразующим механическое
перемещение движка в пропорциональное ему электрическое
напряжение постоянного или переменного тока.
Если потенциометр не нагружен, то справедливо следующее
соотношение:
-тГ-=^-или^- = ^о-^. (3-8)
Здесь 1/0 и /?о — постоянные величины. Чтобы выходное мапря-
жение было пропорционально перемещению движка, величина
перемещения х должна быть пропорциональна сопротивлению гх
т. е. потенциометр должен быть линейным:
г ^с_
Тогда
«о
где /0 — полное перемещение движка;
/Сп — коэффициент преобразования или масштабный
множитель.
Размерность коэффициента преобразования определяется
характером перемещения движка и измеряется в в/см или в/град.
Если преобразование должно осуществляться с учетом
направления перемещения, то применяют потенциометры, имеющие
113
вывод от средней точки (рис. 3-12,6). Нулевому значению
входного сигнала соответствуют положение движка около средней точки
и, следовательно, нулевое выходное напряжение. Направление
перемещения движка относительно этой точки определяет
полярность выходного напряжения или его фазу (при питании
потенциометра переменным током).
0-
4
*0
1о
I
-в}
'вых
-0
О"
Ъ-
\*
I
1
'вых
^гДейстдитель-
мое значение
Рис. 3-12. Потенциометрические датчики:
а и б — принципиальные схемы; в — устройство каркасного потенциометра;
г — характеристика потенциометрического датчика
' Создать строго линейные потенциометры со стабильной
величиной сопротивления, достаточно прочные и долговечные,
довольно сложно. Как правило, практически применяют
проволочные потенциометры, так как они могут быть сделаны весьма
стабильными и надежными. Однако способ изменения
сопротивления перемещением подвижного контакта обусловливает его
дискретный (скачкообразный) характер.
Поэтому и выходное напряжение также будет изменяться
скачками при плавном, перемещении движка (рис. 3-12,г). Чтобы
уменьшить величину скачков, используют очень тонкий провод
с диаметром до сотых долей миллиметра. Такой провод из сплава
с большим удельным сопротивлением наматывается на плоский
или цилиндрический изолирующий каркас (рис. 3-12,в).
Контактирующая часть движка выполняется из серебра, сплавов
платины с бериллием и других сплавов, что уменьшает окисление
контакта.
114
К выходу потенциометрического датчика, как правило,
подключается нагрузка, имеющая конечное сопротивление и
шунтирующая часть потенциометра (рис. 3-13, а). Это приводит к
перераспределению напряжений в схеме и уменьшению С/Вых-
Появляется некоторая погрешность.
5*
$о 1о
Р=^1 ;*
Со
Чин
\и 1
0 1 ду.
6
Рис. 3-13. Влияние нагрузки на точность потенциометрического датчика:
а — обычный способ включения нагрузки; б — график погрешностей, вызываемых
включением нагрузки; в — включение, обеспечивающее уменьшение погрешностей
При наличии нагрузки
1Гт = Щ
Кн + Г
Кг
+ 1В0 —г)
= 17о-
/г„г
КоГ "Т" ^о"н
^Н^О
~^° Я0' ЯнЯо + /ЧЙо —/0 #
Изменение напряжения при подключении нагрузки будет
равно
= ^о^-
г(/?0-г)
#о КыКо + Г(Я0-г)
Чем больше сопротивление нагрузки /?н, тем ошибка Д(/ будет
меньше.
гЧКо-г)
Если.^н»/?о.тоАг/жг/0-
^О^н
или относительная ошибка
Ш г» (До —г) ~
ТГ = —Б^—• ОТСК)Да можно найти максимальное значение
ошибки и то значение сопротивления г, а следовательно, и
соответствующее ему перемещение движка х, при котором она
возможна. Расчеты показывают, что если Ян^^о» то цт =0»15 -^.
Эта ошибка возникает при перемещении движка! составляю*
щем 2/з максимального (рис. 3-13,6).
115
Рис. 3-14.
вых
Дифференциальный
датчик
индукционный
Таким образом, чтобы погрешность, вызванная подключением
нагрузки, не превышала 1%, сопротивление нагрузки должно
быть по крайней мере в 15 раз больше сопротивления
потенциометра. На рис. 3-13, в изображена схема с дополнительным
сопротивлением /?, обеспечивающим уменьшение погрешностей.
Практически полное устранение влияния нагрузки на точность
потенциометрической схемы может быть достигнуто применением
привода, подобного показанному на рис. 3-4. В таком приводе
на потенциометре П всегда устанавливается напряжение ^/п,
равное входному. Это
напряжение можно
использовать для питания
нагрузки. При
изменении нагрузки привод
будет автоматически
отрабатывать
возникающие погрешности.
Другим способом
устранения влияния
нагрузки является
включение на выходе
потенциометра усилителя с
коэффициентом
усиления, равным единице.
Для этого используют усилитель с глубокой отрицательной
обратной связью. При (3=1 его коэффициент усиления также будет
равен единице, а входное сопротивление будет весьма высоким.
Индукционные датчики. Одним из существенных
недостатков потенциометрических датчиков являются наличие
скользящего контакта и дискретный характер изменения выходного
напряжения. Этим недостатком не обладают индукционные датчики
механических перемещений, работающие на переменном токе.
На рис. 3-14 показан дифференциальный индукционный датчик
линейных перемещений. Обмотка шв расположена на среднем
стержне Ш-образного сердечника. Она питается от сети
переменного тока и создает переменный магнитный поток возбуждения.
При отсутствии смещения якоря, относительно среднего
положения поток возбуждения будет разветвляться на две равные части.
В нагрузочных обмотках ^ и т"н будут наводиться равные и
противоположно направленные э. д. с. и напряжение на выходе
будет равно нулю.
При смещении якоря от среднего (нулевого) положения вправо
большая часть потока возбуждения будет сцепляться с
обмоткой т"н и индуктируемая в ней э. д. с. возрастет, в то время как
э. д. с. в обмотке шн уменьшится. На выходных зажимах
появится некоторое разностное напряжение. При смещении якоря
116
Р^И
в другую сторону будет преобладать э. д. с. в обмотке те/н и фаза
напряжения {/Вых изменится на обратную.
Для небольших смещений якоря имеет место практически
линейная зависимость между смещением якоря и выходным
напряжением.
Работа индукционного датчика угловых перемещений
(рис. 3-15 а, б) основана на принципе поворотного
трансформатора. В нейтральном положении ось обмотки возбуждения дов,
расположенной на роторе и питаемой переменным током,
перпендикулярна оси
нагрузочной обмотки дон,
помещенной на статоре, и не
индуктирует в ней э. д. с.
Поток возбуждения при
этом разветвляется на
две равные части,
замыкающиеся по
симметричным магнитным
цепям.
Форма ротора и
полюсных наконечников
статора выполнена с таким
расчетом, чтобы при
повороте ротора возникала
резкая несимметрия
магнитных цепей справа и
слева. При этом
магнитный поток возбуждения
начинает сцепляться с нагрузочной обмоткой, индуктируя в ней
э. д. с, используемую в качестве выходного сигнала. Изменение
направления поворота ротора приводит к изменению фазы
выходного напряжения.
Гироскопы
Свободный гироскоп. Измерительным устройством,
служащим для выявления угловых отклонений в пространстве,
является гироскоп. Основным свойством гироскопа является его
способность «запоминать» в пространстве определенное
направление, совпадающее с осью вращения ротора. Эту ось (ох) называют
главной осью гироскопа (рис. 3-16, а). Ротор вращается в
подшипниках А и Б, установленных на внутренней рамке /, которая
в свою очередь может поворачиваться в подшипниках Б и Г
вокруг оси оу. Эти подшипники установлены на внешней рамке 2,
которая тоже может поворачиваться вокруг третьей оси ог
в подшипниках Д и Е, закрепленных в основании гироскопа. Все
три оси взаимно-перпендикулярны. Такая конструкция создаст
возможность вращения гироскопа вокруг любой из его осей: он
обладает тремя степенями свободы.
^вых
б
Рис. 3-15. Индукционный датчик угловых
перемещений:
а — магнитный поток при согласованном положении
ротора; б — магнитный поток при наличии
рассогласования
117
Общая теория гироскопа достаточно сложна. Его свойства
объясняются инерцией вращательного движения. Инерция
поступательного движения проявляется как свойство тела сохранять
неизменными направление и скорость движения тела, т. е.
состояние равномерного прямолинейного движения. Инерция
вращательного движения проявляется в свойстве гела сохранять
(«запоминать») скорость и положение оси вращения. Наличие трех сте:
пеней свободы обеспечивает такую возможность для гироскопа
независимо от поворота основания. Так, например, при повороте
основания вокруг оси оу внутренняя рамка провернется в
подшипниках В и Г относительно внешней, в результате чего
положение главной оси останется неизменным. Аналогичным образом
Рис. 3-16. Гироскопы:
а—-свободный гироскоп; б — двухстепенной гироскоп
при повороте основания вокруг оси ог внешняя рамка
провернется в подшипниках Д и Е, и опять положение главной оси
останется прежцим. Если на основании гироскопа установить каркас
потенциометра 3, движок которого укреплен на одной из рамок,
то при повороте основания движок будет перемещаться, что
позволит снимать напряжение, зависящее от величины
рассогласования. Схема должна быть отрегулирована так, чтобы среднему
положению движка соответствовало нулевое напряжение на
выходе. Тогда полярность или фаза выходного напряжения будет
определяться направлением углового отклонения.
Двухстепенной гироскоп. В качестве датчика
небольших угловых скоростей применяются гироскопы с двумя степенями
свободы, у которых внешняя рамка наглухо соединена с
основанием (рис. 3-16, б).
Если основание гироскопа поворачивать вокруг оси огу то
ротор вместе с внутренней рамкой начнет поворачиваться вокруг
оси оу. Это объясняется следующим образом.
118
Точка а вследствие инерции будет сохранять направление и
скорость своего движения, изображаемые вектором V. При
повороте основания вокруг оси ог точке а навязывается новое
направление скорости у'. В результате этого возникает сила
инерции Ра, стремящаяся восстановить прежнее направление скорости,
т. е. появляется приращение скорости А у, которое в сумме с ь'
дает V. Аналогично в точке в, находящейся внизу, появляется
сила Рв- Обе эти силы образуют вращающий момент,
поворачивающий всю систему вокруг оси ог. Этому вращению
противодействуют пружины 4, и угол поворота будет тем большим, чем
больше вращающий момент, который в свою очередь зависит от
скорости поворота основания вокруг оси ог. Таким образом,
удается получить перемещение, пропорциональное угловой
скорости. При помощи потенциометрического датчика это перемещение
преобразуется в электрический сигнал.
Датчики ускорений
Датчики ускорений служат для преобразования ускорения
в электрический сигнал. Они применяются в системах
автоматического регулирования скорости, в автопилотах, в
счетно-решающих приборах систем управления
ракетами для выработки сигналов, кор- | . м * \
ректирующих управляющий сигнал и I \Ч п ^^"Т\Т\ 1
позволяющих осуществлять регулиро- : >А ььЦ-^-^--^-|Х иь ц, *
вание с некоторым предвидением
течения процессов.
Наиболее простым по устройству и
принципу действия является датчик^
^вух
Гм *
ускорений с инерционной массой ♦ * 1 *
(рис. 3-17). ▼
Масса М подвешена на двух пру- Рис# 3-17. Инерционный
жинках и может перемещаться гори- датчик ускорений
зонтально в плоскости чертежа,
деформируя при этом пружинки.
Датчик устанавливается на регулируемом объекте. При
возникновении ускорения силы инерции, ему пропорциональные,
воздействуют на массу, ггеремещая ее. Величина упругой
деформации пропорциональна приложенной силе, а следовательно, и
ускорению поступательного движения. Для гашения колебаний
датчик снабжается демпфером.
Перемещение массы М под действием сил инерции может быть
использовано для изменения емкости, нарушения балансировки
схемы, перекрытия светового потока и т. д. Во всех этих случаях
тем или иным способом получается электрический сигнал,
пропорциональный ускорению,
П9
§ 3-3. УРАВНЕНИЯ ЗВЕНЬЕВ И СИСТЕМ
Элементарные звенья систем автоматического регулирования
Элементы, входящие в состав систем автоматического
регулирования, различаются по конструктивному оформлению,
характеру совершающихся в них физических явлений, а также по тем
функциям, которые они. выполняют в системе, т. е. по тем
преобразованиям, которые они производят с сигналами. Элементы
могут быть механическими, электронными, гидравлическими,
пневматическими, комбинированными и т. д. Однако с точки
зрения процесса регулирования существенным является не то, как
конструктивно выполнен тот или иной элемент или какие
физические явления лежат в основе его работы, а то, как данный
элемент реагирует на входное воздействие, какие преобразования
совершаются в нем при действии входного сигнала.
Так, например, совершенно безразлично, какой усилитель
производит усиление сигнала, т. е. является ли этот усилитель
электронным, магнитным, гидравлическим или пневматическим.
Важно, чтобы усиление сигнала происходило без искажения.
В линейных системах представляется возможным
происходящие с сигналами преобразования представить в виде
сравнительно небольшого числа простейших преобразований. Это
позволяет разнообразные элементы систем автоматического
регулирования заменять эквивалентной комбинацией так называемых
элементарных звеньев.
Элементарными звеньями систем автоматического
регулирования принято называть такие элементы систем, в которых
происходят простейшие преобразования сигналов.
Некоторые из элементарных звеньев нельзя создать в чистом
виде, они являются составными частями других, более сложных
элементов. Представление любой системы в виде комбинации
элементарных звеньев является весьма удобным приемом как при
анализе процессов регулирования и работы систем, так и при
проектировании систем с заданными свойствами.
Преобразования, которые осуществляются звеном, удобно
характеризовать отношением изображения * выходного сигнала
к изображению входного, т. е. х, . .
Это отношение будем называть передаточной функцией звена:
*м-т8Ь <3-10>
Для линейного звена выражение-передаточной функции гае
зависит от конкретного вида входного сигнала. Передаточная
функция определяется лишь теми преобразованиями, которые
осуществляются в звене.
, * См. приложение (стр. 388).
120
Необходимо отметить, что в реальных условиях при очень
большой скорости изменения входного сигнала становится
заметным отставание в изменениях выходного. Поэтому на практике
звенья считают пропорциональными (безынерционными) в том
случае, когда такими отставаниями можно пренебречь.
Пропорциональность между выходным и входным сигналами
соблюдается, как правило, если входное воздействие не очень
велико и лежит в определенных границах. При больших входных
сигналах коэффициент передачи Ки не остается постоянным, а
изменяется: звено становится нелинейным. Примером может
служить электронный усилитель. При больших величинах входного
сигнала в усилителе неизбежно возникает ограничение.
Дифференцирующее звено. Дифференцирующим
называется звено, у которого выходной сигнал у{1) представляет
собой производную входного сигнала х{1):
у(()=^р. (3-12)
В этом звене выходной сигнал определяется скоростью изменения
входного.
Найдем передаточную функцию дифференцирующего звена,
для чего представим данное выражение в операторной форме.
Так как дифференцированию функции соответствует умножение
ее изображения на р, то в операторной форме будем иметь
У(р)=рХ(р).
Отсюда передаточная функция равна
К^ = 1Г$)=Р- (3_13)
Из самого определения дифференцирующего звена следует,
что, чем большей будет скорость изменения входного сигнала, тем
большей будет величина выходного. Однако невозможно создать
такое устройство, у которого любое увеличение скорости входного
воздействия будет сопровождаться пропорциональным
возрастанием величины выходного и, в частности, при воздействии
перепада входного сигнала позволит получить бесконечно большой
сигнал на выходе: Это говорит о том, что идеальное
дифференцирование практически осуществить невозможно. К числу устройств,
осуществляющих приближенное дифференцирование сигнала,
относятся тахогенераторы, специальные схемы усилителей и др.
Все эти устройства производят пропорциональное
дифференцирование. В них выходной сигнал не равен скорости изменения
входного, а пропорционален ей. Коэффициент пропорциональности
(коэффициент передачи) в этом случае имеет размерность вре*
мени (сек) и часто обозначается буквой Т:
122
Наличие такой пропорциональности можно представить как
осуществление наряду с дифференцированием безынерционного
усиления сигнала.
Интегрирующее звено. Интегрирующим называется
звено, у которого выходной сигнал у(1) представляет собой
интеграл входного х(1):
у{$ = ]х (/) (И или -^ = х (/). (3-15)
Отсюда следует, что в интегрирующем звене скорость
изменения выходного сигнала пропорциональна величине входного.
Так как интегрированию исходной функции соответствует
деление ее операторного изображения на /?, то в операторной форме
исходное соотношение примет вид
Отсюда передаточная функция интегрирующего звена будет
равна
*<*)~7ЙН7- (3"16)
Во всех практически используемых устройствах
осуществляется пропорциональное интегрирование, т. е. выходной сигнал
не равен, а пропорционален интегралу входного. В этом случае
коэффициент пропорциональности имеет размерность, обратную
времени (т^г)» и часто обозначается через у:
уф=у\х{{)М. (3-17)
Само же интегрирующее устройство может быть
представлено как соединение интегрирующего звена с безынерционным
усилителем, имеющим коэффициент передачи, равный -у.
При воздействии единичного перепада входного сигнала
выходной сигнал будет нарастать пропорционально времени.
Действительно, при х\1) = 1
Это и есть переходная характеристика интегрирующего звена.
/ Инерционное звено. Наиболее распространенными среди
всех элементарных звеньев являются инерционные. Это связано
с тем, что определенная инерция свойственна практически всем
протекающим в природе процессам. Она проявляется в том, что
при приложении какого-либо физического воздействия
соответствующая реакция не сразу достигнет конечного значения. В
большинстве случаев реакция возрастает по экспоненциальному закону.
123
Из всех сигналов, которые могут воздействовать на звенья или
систему, выбирают некоторые типовые сигналы, удобные для
анализа. Такими сигналами чаще всего являются синусоидальный
(гармонический) сигнал определенной частоты и единичный перепад.
Реакция на эти сигналы зависит от свойств данного звена и
может служить его характеристикой. Так же как и в
радиотехнике, зависимость отношения амплитуды выходного сигнала
к амплитуде входного от частоты воздействующих
гармонических колебаний называется амплитудно-частотной
характеристикой звена;-зависимость разности фаз от частоты — фазо-частотной
характеристикой. Амплитудно- и фазо-частотная характеристики
полностью определяют свойства звена или системы.
Значительный интерес для исследования свойств систем и
звеньев представляет изучение -реакции системы на воздействие
единичного перепада, изображение которого равно 1/р.
Зависимость выходного сигнала от времени при воздействии
на вход единичного перепада называется переходной
характеристикой звена или системы.
Переходная характеристика достаточно полно отражает
свойства звена или системы. При помощи этой характеристики можно
сравнительно простыми вычислениями определить, как реагирует
система на сигналы других типов.
Для нахождения частотных и переходных характеристик
необходимо предварительно записать выражение для передаточной
функции звена.
Найдем выражение для передаточной функции различных
звеньев, которые выполняют определенные операции .над
входными сигналами.
Пропорциональное звено. В пропорциональном звене
выходной сигнал пропорционален входному. Это можно записать
в виде следующего равенства: *
где /Сп — коэффициент передачи звена; обычно это размерная
величина.
Очевидно, что передаточная функция пропорционального звена
равна коэффициенту передачи
*&0 = 7$- = *»- (3-И)
При воздействии перепада входного сигнала выходной сигнал
в пропорциональном звене также будет иметь форму перепада, но
величина его может быть иной. Если же входным является
синусоидальный сигнал, то в силу пропорциональности выходной
сигнал будет тоже синусоидальным и т. д. Иногда пропорциональные
звенья называют также безынерционными.
Примерами пропорциональных звеньев являются реостатные
усилители, делители напряжения на активных сопротивлениях,
зубчатые передачи и т, д,
121
Элементарные звенья, имеющие переходную характеристику
в виде нарастающей экспоненты, называются инерционными.
По переходной характеристике можно легко найти
передаточную функцию инерционного звена. Изображение входного
сигнала— единичного перепада — равно
Изображение .нарастающей экспонентыуЦ) = 1 — е гнайдем,
пользуясь соотношениями 4, 6, 10 приложения:
У(п\— 1 Т _ \
' \Р)— р \+рт —р(\+рТ)>
откуда передаточная функция
*'/0=7$-=пЬг- (3'18>
Величина Т называется постоянной времени звена. Чем
больше Г, тем большей будет инерционность звена.
Из соотношения между значениями оригиналов входного и
выходного сигналов инерционного звена на основании (3-18)
можно записать
У(р)(1 + рТ)=Х(р) или Г(р) + рТУ(р) = X(/>),
откуда легко перейти к оригиналам:
Преобразуем это уравнение:
4зР- = -т1х(*)-у№ (3-19)
В таком виде уравнение инерционного звена может быть
истолковано следующим образом. В левой части уравнения стоит
производная выходного сигнала, физический смысл которой —
скорость его изменения; в правой части — величина,
пропорциональная разности между входным и выходным сигналами.
Следовательно, в инерционном звене скорость изменения выходного
сигнала пропорциональна разности мгновенных значений входного и
выходного сигналов. По мере того как величина выходного
сигнала приближается к значению входного, скорость его изменения
убывает.
Существует много примеров электрических и механических
инерционных звеньев. Простейшим из «их является цепь /?С
(рис. 3-18).
124
По отношению к входному напряжению цепь является
последовательной. Передаточная функция, равная отношению
изображений выходного и входного напряжений, может быть
определена как отношение операторных сопротивлений тех участков
цепи, на которых эти напряжения действуют:
рС + к
где Т=*ЦС — постоянная времени цепи.
0 1 $
Рис. 3-18. Инерционное звено:
а **• цепь /?С; б — переходная характеристика цепи
Форсирующее звено. Форсирующим называется звено,
в котором выходной сигнал состоит из двух слагаемых. Одно из
них является входным сигналом, а другое — пропорционально
производной этого сигнала:
, их (О
у(()=х№ + Т-
(И
где Т — постоянное число, имеющее размерность времени; в
дальнейшем по аналогии с предыдущими примерами это число будем
называть постоянной времени звена. Запишем соотношение в
операторной форме:
У(р)=Х(р)+рТХ(р),
откуда передаточная функция \
К(Р)-Т1$-*+РТ- (3-21)
Это значение является обратным по сравнению с передаточной
функцией инерционного звена. Поэтому, если форсирующее звено
применять совместно с инерционным, то при равенстве их
постоянных времени влияние инерционного звена будет полностью
скомпенсировано и система станет безынерционной. Это
обстоятельство широко используется для улучшения работы систем
регулирования.
Следует иметь в виду, что в чистом виде форсирующее звено
получить невозможно по той же причине, по которой нельзя
получить идеального дифференцирования. Однако форсирующими
свойствами могут облапать некоторые более сложные звенья.
125
Колебательное звено. Колебательными называются
звенья, в которых в процессе работы может происходить обмен
энергией между отдельными элементами звена.
Так, например, кинетическая энергия может превращаться
в потенциальную или в энергию упругой деформации сжатой
пружины; энергия электрического поля — в энергию магнитного поля
и т. д. Эти превращения носят колебательный характер и обычно
сопровождаются потерями энергии —з ату х ан и е м. В
зависимости от величины потерь затухание колебаний происходит быстрее
или медленнее, а при очень больших потерях процесс может стать
апериодическим.
I П
Рис. 3-19. Колебательное звено:
а —схема электрического колебательного звена; б — переходные характеристики звена
В качестве примера колебательного звена рассмотрим
последовательный контур, причем выходное напряжение будем снимать
с емкости (рис. 3-19,а).
Определим передаточную функцию такого звена:
,_Е/вых(/0_ РС 1_
У*ЛР)
*(/>)■
1
рС
+ М + #
1 + рСН + р21С'
1
(3-22)
Собственная частота колебаний контура равна
о>0=—^.Обратную величину Т=]/Г1С назовем постоянной времени звена. Эта
величина в известной степени характеризует скорость протекания
процессов в звене (не следует ее путать с периодом колебаний).
Отношение активного сопротивления /? к волновому
сопротивлению контура р = у-{? принято называть затуханием звена и
обозначать через 2Е = -—. Чем больше эта величина, тем
большими будут потери в контуре и тем быстрее будет происходить
затухание колебаний.
Если ввести принятые обозначения, передаточная функция
звена примет вид
126
К(Р)— х + 2ЬрТ + р*Т2 ' (3-23)
Аналогичные обозначения можно ввести и в колебательных
звеньях другого вида. Из общей теории колебательных контуров
известно, что характер переходных процессов в них зависит от
величины затухания. При Б<1 колебания в контуре носят
затухающий характер, при ?>1—апериодический. Случай, когда 6=1,
является критическим.
На рис. 3-19,6 показаны графики переходных процессов
(переходные характеристики) в колебательном звене при различных
значениях затухания.
Входной сигнал ^вх=*(0 имеет вид единичного перепада.
График 1 соответствует значению ?>1, график 2 — значению 6<1
и график 3 — критическому затуханию. .
Если в контуре активное сопротивление отсутствует (/? = 0) и
нет потерь энергии, то равно нулю и затухание звена. Такое
колебательное звено называют идеальным. Его передаточная
функция равна
К{р) = ~-^. (3-24)
Хотя колебательный контур типа НЬС нельзя сделать
идеальным, однако в колебательных звеньях других типов возможен
случай полного отсутствия затухания. Это связано с восполнением
потерь энергии, происходящих в процессе колебаний, за счет
какого-либо постороннего источника. Колебания становятся
незатухающими (график 4, рис. 3-19,6). Если пополнение, энергии
происходит быстрее, чем ее потери, то амплитуда колебаний будет
нарастать, что соответствует отрицательному значению затухания.
Интересно отметить, что передаточная функция
колебательного звена имеет (с точностью до постоянной величины) такой же
вид, как и изображение функции, затухающих колебаний
(формула 13, приложение).
Соединения звеньев. Передаточные функции
систем регулирования
При исследовании систем автоматического регулирования
необходимо находить передаточные функции различных соединений
звеньев.
Рассмотрим правила, по которым можно определить
передаточную функцию соединения звеньев. Будем считать звенья
направленными и независимыми. Это означает:
— сигналы в звеньях могут проходить только в одном
(направлении — от входа к выходу;
— подключение последующих звеньев не влияет на характер
протекания процессов в предыдущих; свойства направленности и
независимости проще всего иллюстрировать на примере лампового
усилителя.
127
При подаче переменного напряжения на сетку появляется
усиленное переменное напряжение на ее аноде. То же переменное
напряжение, поданное на анод лампы, не вызовет исходных
колебаний на сетке: сигнал проходит только от входа (сетка ламлы)
к выходу (нагрузочное сопротивление лампы).
Подключение следующего каскада усиления может повлиять
на процессы в данном каскаде, например изменить коэффициент
усиления. Этого не будет происходить, если входное
сопротивление последующего" каскада будет намного больше выходного
сопротивления предыдущего.
В автоматических системах используются следующие типы
соединений: последовательное, параллельное и соединение обратной
связи.
К(р)
К,(Р)
У1(Р)=Х2(Р)
К2(Р)
У2(Р> хп<Р)
«п(Р>
УпГР)
Рис. 3-20. Последовательное соединение звеньев
Последовательное соединение звеньев. При
последовательном соединении звеньев (рис. 3-20) выходной сигнал
предыдущего звена является входным сигналом последующего.
Найдем передаточную функцию последовательной цепочки
звеньев, если известны передаточные функции отдельных звеньев:
УЛр) . к /„ч_ У'2(Р) к (~\— уп(Р)
КЛР) =
хлр)
Рассмотрим произведение всех передаточных функций:
*1 (Р)#« (/0 ••.*«(/») = $$"
у*(р)
Мр)
Так как выходной сигнал предыдущего элемента является
входным для последующего, то
У г (р) = *г (/>); У г {р) = *з (/>)•• • Уп-г (/>) = *п (/>),
что позволяет произвести сокращение в правой части равенства.
В результате получим
клрЖ2(р).-.Кп(р)=Ш
Это отношение изображения общего выходного сигнала к
изображению Входного и есть передаточная функция всей системы.
Таким образом, передаточная функция системы, состоящей из
нескольких направленных элементов, равна произведению их
передаточных функций:
К(р) = КЛр-)КЛР)--Кп(Р).
(3-25)
128
Обозначим через 1{р) сигнал, поступающий на звено К(р).
Тогда при соединении обратной связи
2(р) = Х(р) + У(р) (3-27;
или
2(р)=Х(р)-Г(р). ГЗ-28)
В первом случае связь называется положительной, во втором —
отрицательной.
В автоматике почти всегда применяется отрицательная обрат
«ая связь. Соединение отрицательной обратной связи можно
заменить одним динамическим звеном Ко(р) с сигналом на
входе Х(р) и выходным сигна-
Пр) лом У(р) (рис. 3-22,6):
Найдем соотношение
между Ко(р) и К(р). Из рис.
3-22, а следует, что
сигнал У(р) можно найти,
умножив сигнал 2(р) на
передаточную функцию звена К(р):
Подставляя в это
выражение значение %{р) из
формулы (3-28), получим
У{р) = К{р)[Х{р)-У{р)Ъ
Ш®
2(Р)
У(Р)
^(Ю
\Ц-
НН к2(р)
У(Р)
Х(РЬ
7\ ■_
\У(Р)
^(Р)
Р
Пр)
Рис. 3-23. Обобщенная схема
соединения обратной связи:
а — определение сигнала в промежуточной
точке контура регулирования; б — соединение
с преобразованием сигнала в цепи обратной
связи
откуда находим
У(Р)[1 + КШ-
Следовательно,
-К(Р)Х{Р)-
*.(»=Ш=™ <3-29>
Полученная формула выражает важнейшее соотношение, часто
используемое в автоматике.
В заключение рассмотрим некоторое обобщение
формулы (3-29). Пусть имеется система, составленная из двух
звеньев К\(р) и/С2(р), охваченных отрицательной обратной связью
(рис. 3-23, а). Требуется майти зависимость между
величиной/7^) на выходе звена К\(р) и входным воздействием Х(р),
поданным на систему.
На основании формулы (3-29)
130
Поскольку сигнал Р(р) является входным для звена /СгСр),
Подставляя значение У(р) из предыдущего уравнения и
учитывая, что согласно формуле (3-25) К(р) =К\(р)К2(р), получим
^)^^Лтав^ттз(Ь- (3-30)
Последняя формула позволяет найти сигнал в промежуточной
точке системы. Следует обратить внимание на то, как построена
полученная формула. Ее числитель включает произведение
входного сигнала на передаточную функцию звена, расположенную
между входом системы и точкой искомого возмущения.
Знаменатель является суммой единицы и произведения К(р) =К\(р)К2{р)
всех звеньев системы.
Произведение К(р) называется передаточной функцией
разомкнутой системы. Она равна отношению изображений выходного
сигнала к управляющему:
кс/о-ттё--*! (/о *,(/»)•
Если звено /Сг(р) представляет собой безынерционный
усилитель с коэффициентом передачи р (рис. 3-23,6), то формула (3-30)
приобретает вид
В таком виде она хорошо известна из теории усилителей
с обратной связью.
Типовые элементы систем автоматического регулирования
Каждая реальная автоматическая система составлена из
типовых элементов: усилителей, преобразователей, стабилизирующих
цепей, исполнительных устройств и тг д. Свойства этих элементов
можно описать при помощи передаточных функций
рассмотренных выше элементарных звеньев. Последние являются
идеализацией типовых элементов реальных автоматических систем. Не вда-
наясь детально в рассмотрение принципов работы и
конструктивных особенностей типовых элементов, проанализируем их
свойства как элементов систем автоматического регулирования.
Реальное дифференцирующее звено типа /?С.
Мри сравнительно медленно меняющихся сигналах для осущест-
и.'нчши дифференцирования применяют переходную цепочку типа
НС (рис. 3-24, а).
•V 131
Параллельное соединение. При параллельном
соединении на вход всех звеньев с передаточными функциями К\(р),
Кг(р), ..., Кп(р) подается общий сигнал Х(р), а выходной
сигнал У(р) является суммой выходных сигналов отдельных звеньев
(рис. 3-21).
Х(Р)
.Вход
к,ю
К2(р)
кп(р)
У,(Р)
Ъ(».Л
1
уп(р)
Ыу
/Выход
Рис. 3-21. Параллельное соединение
звеньев
Точка суммиробс
1 или Вычитат
*2к
ВхЩ
Ь-ЗЩ
г
'У(Р)
Х(Р)
■ >'
К(Р)
а
К0(Р)
1ния
/я
У(Р1
У(р)
Рис. 3-22. Соединение обратной
связи:
а — схема соединения; б — эквива*
лентная схема
Так как
У(р) = У, (р) + У2 (р),+ ... + Уп (р),
то
Уг (/>) = К, (р) X (р); У2 (р) = К, (Р) Х(р)...,
Уп{Р)=Кп{р)Х{р),
- У(р) = Х(р)[К1(Р) + КЛР) + -.. + Ка{р)\.
Но отношение
У(Р) -угп\
есть передаточная функция соединения звеньев. Поэтому
К(р)=К1(р) + К2(р) + ... + Кп(р).
(3-26)
Передаточная функция параллельного соединения звеньев
равна суммо передаточных функций отдельных звеньев.
Соединение обратной связи. При этом соединении
сигнал, поступающий на данное звено К(р), образуется в
результате сложения или вычитания входного и выходного сигналов
звееа (рис 3-22,а).
5 Автоматика
129
Напряжение на конденсаторе и проходящий через него ток
связаны соотношением
откуда
т-с^Р-
т. е. ток конденсатора пропорционален скорости изменения
напряжения на его обкладках. Чтобы получить напряжение,
пропорциональное этому току, последовательно с конденсатором включают
ивх>ивых
С
-0
&—
I I \к "вых®
-0
Овх(Р)
Чр)=т
—»■
Кг(р)=р
нз(Р)вф\
^вых(Р)
Рис. 3-24. Реальное дифференцирующее звено:
а — схема; б — переходная характеристика; в — эквивалентная схема
небольшое сопротивление /?. В этом случае уже не все входное
напряжение будет приложено к конденсатору и, следовательно, ток
в нем не будет в точности пропорционален скорости
изменения (7ВХ(/).
В связи с тем что дифференцирование приближенное, данное
звено называют реальным дифференцирующим звеном. Его
передаточную функцию можно определить как отношение
сопротивления /? к полному сопротивлению цепи:
АР) _ Я _ рСК _ РТ
^в
(Р)
7с + я
1 +/?С#~~1 +рТ'
(3-32)
где Т — постоянная времени цепи.
Анализируя полученное соотношение, легко установить, что
реальное дифференцирующее звено может быть представлено
в виде последовательного соединения трех звеньев (рис. 3-24, в);
пропорционального с коэффициентом передачи К\ = Т,
дифференцирующего К2{р) =р и инерционного Кг (р) = 1 + у.
132
При воздействии единичного перепада в первый момент на
выходе также произойдет единичный скачок напряжения, но затем
по мере заряда конденсатора выходное напряжение будет падать
по закону убывающей экспоненты.
Действительно,
— -I. рт т
и*ыЛр)=и*Лр)К(р)=-
р г+рт
что соответствует изображению экспоненты.
1+рТ '
""СП
ивых
-0
иВх(Р)
т
г
.^
/+рт'
1+рТ
"выхМ
Рис. 3-25. Звено быстрого реагирования:
а — схема; б — переходная характеристика; в — эквивалентная
Звено быстрого реагирования. Для улучшения
работы систем регулирования в их состав часто вводят специальную
цепочку, получившую название звена быстрого реагирования
(рис. 3-26, а) *.
Отличительной особенностью такого звена является то, что
быстрые* изменения входного напряжения оно полностью передает
на выход схемы, а медленные — лишь частично. Объясняется это
следующим образом.
Сопротивления /?1 и /?2 образуют делитель, с которого часть
пхолного напряжения снимается на выход. Конденсатор С при
быстрых изменениях {/Вх шунтирует сопротивление /?ь повышая
выходное напряжение.
Коэффициент передачи звена найдем из соотношения
сопротивлений
К(Р)~ ■- !1' ЪЦ+рСЪ) _ Я2 1+рСКг
К* •!■
Яу+Ъ + К&рС #1 + #2 1+ С
#1#2
#1 + #2
* I) литературе истрсчаются и другие наименования этого звена, например
реилыюс форсирующее зисио.
133
Обозначим
Тогда после подстановки
Л \р) ~ #! + #2 1 + рТ ' но /?! + #2 — Г ' •
следовательно,
^(Л—Р-ТТ^' где г>г- (3'33)
Отсюда следует, что звено быстрого реагирования может быть
представлено как последовательное соединение трех звеньев
(рис. 3-25, в): пропорционального, форсирующего и инерционного,
имеющего постоянную времени, меньшую чем у форсирующего. При
воздействии перепада входного напряжения (рис. 3-25,6) на
выходе также произойдет скачок напряжения такой же величины.
Это объясняется тем, что в первый момент конденсатор С еще не
заряжен и напряжение на нем равно нулю. Поэтому все
действующее на входе напряжение оказывается приложенным к участку
цепи, включенному последовательно с тем, который содержит
емкость, т. е. к сопротивлению /?2- По мере заряда конденсатора
•напряжение на нем растет и соответственно падает напряжение
на /?2, включенном на выходе. По окончании заряда конденсатора
выходное напряжение будет определяться соотношением
сопротивлений /?1 и /?2. Более строго этот вывод может быть получен при
помощи операторного метода *.
"-1Л-УЯО0-Т--7ТГ+5Т- 0-34)
Разложим рациональную дробь на простейшие и приведем их к общему
знаменателю:
1+рГ А0 Ах __ Ар + АррТ + А^
рЦ+рТ) р * \+рТ "" р(\+рТ)
Приравнивая в числителях левой и правой частей члены, содержащие
одинаковые степени р, получим:
Ар = 1;
А0Т + АХ = Г,
откуда
АХ = Г — Т.
Следовательно,
ив*лр) = Тг-{— + тт-^г)
и
г/вых(') = уг[1-+ г^т * т)-
134
Звено медленного реагирования. Другим типовым
звеном, применяемым для улучшения работы систем
автоматического регулирования, является звено медленного реагирования
(рис. 3-26,а).
Такое звено передает практически полностью на выход схемы
медленные изменения входного сигнала и его постоянную
составляющую, а быстрые изменения — лишь частично.
*1
"ВХ
Г/+/7Г'
>
_1_ 1
1+рТ I
'ВЫХ I
Рис. 3-26. Звено медленного реагирования:
а —схема; б — переходная характеристика; в — эквивалентная
Действительно, на низких частотах сопротивление
конденсатора С весьма велико, ток / мал и падения напряжения на
сопротивлении /?1 почти не происходит. Практически все входное
напряжение передается на выход звена. На более высоких частотах
сопротивление емкости мало и образуется делитель, с которого лишь
часть входного напряжения снимается на выход схемы.
Обычно /?1^>/?2, и при переменном входном сигнале выходное
напряжение будет мало.
Передаточную функцию звена, ка"К и в прежних примерах,
найдем из соотношения сопротивлений:
К{Р) =
я2 +
рс _
Обозначим
тогда
причем
*• + *' +7?
1 + рСК2
1 +рС(К1 + Кг)
*(/»)- 1+рТ ,
(3-35)
Т>Г.
Само звено медленного реагирования можно представить как
последовательное соединение форсирующего и инерционного звеньев
135
(рис. 3-26,б), причем постоянная времени инерционного звена
больше, чем форсирующего.
В таком звене при скачке входного сигнала (рис. 3-26,6) на
выходе тоже произойдет скачок, но меньший по величине. Это
"вхМ
&-
ГГ ТЕП
■'вых*' "вх1
Сг
I
ЧвшжЮ
-0
0-
Увх, ^вых
Рис. 3-27. Интегро-дифференцирующий контур:
а и б —схемы; в —переходная характеристика
объясняется тем, что напряжение на конденсаторе не может
мгновенно измениться, и все приложенное напряжение скачка
распределится между сопротивлениями /?1 и /?2. В дальнейшем
конденсатор постепенно зарядится до величины входного напряжения и
соответственно напряжение на выходе станет равно входному *.
Интегро-дифференцирующий контур. Интегро-
дифференцирующий контур (рис. 3-27, а) представляет собой
комбинацию звеньев быстрого и медленного реагирования. Параметры
контура выбирают так, чтобы получить следующие соотношения:
/?!^>к2 и С2^>Сг. На низких частотах сопротивление небольшой
емкости С\ очень велико, в этом случае контур превращается
в звено медленного реагирования. На высоких частотах
сопротивление большой емкости С2 мало, что равносильно короткому ее
замыканию. Контур при этом превращается в звено быстрого
реагирования.
1 1 Л- пТ1'
* Изображение #ВЫх(0 будет равно 1/вш (р) = —/?(/>) = " ,Р Т)
Т
От выражения (3-34) оно отличается отсутствием постоянного множителя -~г •
Это же отличие сохранится и в полученном результате
- —
^вых(0 = 1+^-=^-*~ Т ,
но здесь Т'<Т% поэтому второе слагаемое будет отрицательным.
136
Можно показать, что передаточная функция контура
приводится к следующему виду:
У(п\— (* +/*П(1 +РТ") /оодч
К М - {1+рТ)М+рГ") ' (66Ь)
Постоянные времени форсирующих звеньев являются
величинами примерно одного порядка и равны Т=Я\СХ и Г//=/?2С2.
Постоянные времени инерционных звеньев Т и Т" представляют
собой сравнительно сложные функции параметров цепи. Если
выполнены указанные выше соотношения между этими параметрами,
т. е. /?1^#2 и С2^>С1у то имеют место следующие приближенные
равенства: Т^Я\С2 и Т^^^^Си
Одна из этих постоянных времени значительно больше, а
другая значительно меньше, чем постоянные времени форсирующих
звеньев.
Интегро-дифференцирующий контур позволяет значительно
улучшить работу систем автоматического регулирования во
многих специальных случаях практики. Переходная характеристика
контура показана на рис. 3-27, е. Иногда для ослабления быстро
изменяющихся сигналов последовательно с конденсатором Сь
беспрепятственно пропускающим токи высоких частот, включают
дополнительное активное сопротивление (рис. 3-27,6).
Тахогенератор. В системах автоматического
регулирования тахогенераторы (рис. 3-11) применяются не только в качестве
датчиков угловых скоростей, но и для улучшения динамических
свойств систем. Найдем передаточную функцию тахогенератора.
Входным сигналом является угол поворота ротора 0(/), а
выходным— напряжение, снимаемое с тахогенератора С/Вых(0- Это
напряжение пропорционально скорости вращения ротора, т. е. пер*
вой производной входного сигнала:
Перейдем к операторной форме записи:
*/.«Л/0-*о/Л(/0,
откуда передаточная функция
к(р)-и71~г=кар- (3-37)
11:1 полученного выражения видно, что тахогенератор может
быть иргдгглнлен в виде соединения двух элементарных звеньев:
пропорционального и дифференцирующего. Таким образом,
тахогенераторы осуществляют пропорциональное дифференцирование.
Следует отметить, что у тахогенераторов входной сигнал является
механической величиной, а выходной — электрической. Это делает
тахогенераторы весьма удобными для применения в
электромеханических системах.
Магнитный усилитель. Магнитные усилители
являются наиболее простыми и надежными из всех усилителей, при-
137
меняемых в САР. Они обладают многими преимуществами по
сравнению с другими типами усилителей, включая электронные, и
единственным их существенным недостатком является
сравнительно большая инерционность, особенно заметная при больших
скоростях изменения входного сигнала.
Инерционность магнитных усилителей проявляется в том, что
изменения амплитуды тока нагрузки или выходного напряжения
отстают во времени от изменений напряжения иа входе усилителя.
В основном инерционность определяется индуктивностью
управляющей обмотки и в меньшей степени — индуктивностью
других обмоток.
Управляющая обмотка ведет себя подобно инерционному
звену с постоянной времени Т = -^-> где Ьу и /?у — индуктивность и
активное сопротивление всей управляющей цепи.
Следовательно, магнитный усилитель может быть представлен
в виде последовательного соединения безынерционного усилителя
с инерционным звеном. Постоянная времени магнитного
усилителя может достигать величины примерно десятых долей секунды.
Для ее уменьшения в качестве источника входного сигнала
применяют ламповый усилитель, обладающий сравнительно высоким
выходным сопротивлением. Управляющую обмотку при этом
включают в анодную цепь лампы (рис. 1-31).
Снизить инерционность можно применением положительной
обратной связи. Хотя обмотка обратной связи повышает
инерционность, однако одновременно резко возрастает коэффициент
усиления, что позволяет сократить число витков, а следовательно,
и индуктивность управляющей обмотки.
Электро машинный усилитель. Электромашинный
усилитель (рис. 1-32) замедленно реагирует на изменения
входного сигнала, что объясняется индуктивностью его обмоток.
Управляющая обмотка может быть представлена в виде
инерционного звена с постоянной времени 7\=--д-,где Ьу —
индуктивность, а /?у — активное сопротивление этой обмотки. Точно так же
инерционным звеном является и короткозамкнутая цепь якоря,
так как при изменениях индуктируемой в ней э. д. с. ток будет
изменяться с некоторым запаздыванием. Постоянная времени этого
звена будет равна Т2 = -^~, где Ья — индуктивность, а Яя —
активное сопротивление якоря.
Таким образом, ЭМУ можно рассматривать как элемент,
состоящий из безынерционного усилителя и двух инерционных
звеньев:
«Ы-{1+рТЛ1+рТ4. 0-38)
Так как управляющая обмотка обычно включается через
138
источник с большим внутренним сопротивлением (например,
ламповый усилитель), наибольшей постоянной времени обладает ко-
роткозамкнутая поперечная цепь якоря, активное сопротивление
которой очень мало.
Электрический двигатель. Электрические двигатели
используются в электромеханических системах регулирования, где
они являются исполнительными устройствами. Наибольшее
применение получили двигатели постоянного тока с независимым
возбуждением и двухфазные асинхронные двигатели.
о«Ю
ивозб=сол$1
^ивх(*)
Ову(Р)
±
р
б В
Рис. 3-28. Схемы электрических двигателей:
а — с управлением по цепи якоря; б — с управлением по цепи возбуждения;
в*-»эквивалентная схема двигателей
Двигатели с независимым возбуждением управляются со
стороны якоря* (рис. 3-28,а). Управление со стороны обмотки
возбуждения двигателя затруднительно вследствие большой
инерционности этой обмотки. Для управления двигателем требуется
значительное усиление сигнала, поступающего на его вход, что
вынуждает применять в системе мощные электромашинные
усилители. В маломощных системах чаще всего применяются
двухфазные асинхронные двигатели (рис. 3-28,6), имеющие малую зону
нечувствительности и обеспечивающие удобство согласования
с питающими их усилителями переменного тока (обычно
магнитными усилителями).
Входным сигналом для двигателя является напряжение #вх(0|
а выходным — угол поворота его якоря. Скорость вращения якоря
двигателя в установившемся режиме пропорциональна входному
* При этом двигатель имеет небольшую зону нечувствительности, которая
определяется напряжением грогания, т. е. минимальным напряжением, которое
нужно подвести к двигателю, чтобы якорь тронулся.
139
напряжению. Если питающее напряжение изменяется очень
медленно, то инерцией якоря можно пренебречь. Тогда, учитывая, что
угловая скорость вращения является первой производной от угла
поворота, можно записать
или в операторной форме
рЧр)=Кп1/вАр)-
Отсюда легко найти передаточную функцию двигателя:
*<>>-т#ёгвт- (3"39)
Следовательно, в данном случае двигатель ведет себя как
система, состоящая из пропорционального и интегрирующего звеньев.
Однако в большинстве случаев при использовании двигателей
в системах регулирования входной сигнал изменяется достаточно
быстро, поэтому приходится считаться с инерцией двигателя. При
резком изменении питающего напряжения двигатель сравнительно
плавно изменяет число оборотов, т. е. реагирует подобно
инерционному звену. С учетом этой инерции двигатель можно
представить как соединение инерционного, пропорционального и
интегрирующего звеньев (рис. 3-28, в); передаточная функция двигателя
в соответствии с этим будет равна
Постоянная времени двигателя 7ДВ определяется его
конструктивными данными.
Все другие элементы систем автоматического регулирования
также можно представить в виде комбинации. элементарных
звеньев. При наличии в системе нескольких элементов, в состав
которых входят пропорциональные звенья, общий коэффициент
передачи системы будет равен произведению всех коэффициентов
усиления и коэффициентов передачи отдельных элементов. Это
произведение характеризует усиление САР без учета
инерционности.
§ 3-4. ТОЧНОСТЬ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Ко всем системам автоматического регулирования
предъявляются определенные требования в отношении точности процесса
регулирования. Отклонение регулируемой величины от заданного
значения называется ошибкой.
Идеальной была бы-такая система, в которой в любой момент
времени независимо от вида входного сигнала и возмущающих
воздействий ошибка была бы равна нулю. Однако идеально точ-
140
Если система является статической, то эта ошибка будет в
общем случае отличаться от нуля и выполнять функции
управляющего сигнала г=Ъ. Между управляющим сигналом г и
регулируемой величиной в установившемся режиме существует зависимость
у=гКп=ЪКи, где /Сп—коэффициент передачи системы.
Используя записанные выше соотношения между сигналами,
можно найти значение этой ошибки:
Ь = х — у = х — 8/Сш
откуда
8 + &Кп = х или 8(1+ Кп) = *>
и окончательно;
1 + *„
(3-41)
Следовательно, в статической системе установившаяся ошибка
пропорциональна внешнему воздействию; с увеличением
коэффициента передачи системы она уменьшается.
Только при отсутствии внешних воздействий установившаяся
ошибка в статической системе равна нулю. Типичным примером
статической системы является электронный стабилизатор
напряжения. В нем выходное напряжение тем больше будет отличаться
от заданного значения, чем больше изменится напряжение на
входе стабилизатора или его нагрузка, т. е. чем больше
возмущающее воздействие.
Астатическими (нестатическими) называются такие системы,
в которых при любом постоянном внешнем воздействии
установившаяся ошибка равна нулю.
Система является астатической, если в ее составе имеются
интегрирующие элементы. Действительно, если в системе есть
интегрирующее звено, то регулируемая величина будет
пропорциональна не самому сигналу ошибки, как это было в статических
системах, а его интегралу:
У(*) = Кп{Ч*)М>
или (после дифференцирования)
<^-*„«(<). (3-42)
Отсюда следует, что сигналу ошибки в такой системе
пропорциональна не сама регулируемая величина, а скорость ее
изменения. В этом случае до тех пор, пока есть ошибка, регулируемая
величина будет изменяться со скоростью, отличной от нуля
(установившийся режим наступить не может).
Только после согласования системы, когда ошибка исчезнет,
установится постоянное значение регулируемой величины.
142
Таким образом, наличие интегрирующего звена является
признаком того, что система является астатической *.
Типичным примером астатической системы является система
(рис. 3-4) для механической отработки электрического
напряжения. При любом входном сигнале Цвх двигатель будет вращаться
до тех пор, пока на потенциометре не установится напряжение
(/ш равное входному, т. е. статическая ошибка не станет равной
нулю.
Переходные процессы в системах автоматического регулирования.
Динамические ошибки
Характер переходных процессов в системе зависит от состава
системы и от формы входного сигнала. Хотя входные сигналы
могут иметь самую различную форму, удобнее рассматривать
реакцию системы на сигналы вполне определенной формы. Такими
типовыми сигналами являются:
— скачок входного сигнала (воздействие перепада);
— скачок скорости входного сигнала;
— синусоидальный входной сигнал.
Пусть на систему подан какой-либо входной сигнал. В
процессе перехода системы к новому состоянию регулируемая
величина будет отличаться от значения, заданного этим входным сиг-
палом. В зависимости от характера переходных процессов такое
отличие может быть большим или малым, длительным или
кратковременным.
Динамической ошибкой называется отличие регулируемой
величины от заданного значения во время переходных процессов.
По окончании переходных процессов устанавливается новое
аппчсппо регулируемой величины, а динамическая ошибка
уменьшается до нуля. Лишь в том случае, когда входной сигнал непре-
рмиио меняется, процесс перехода системы к новому состоянию
также будет непрерывным и динамические ошибки могут оста-
ип'И.ен и ( истеме длительное время./
I (могли отделит рассматривают установившуюся динамиче-
I кую шпиОку, имеющую место по окончании переходных
процессом, когдл мходпоП еигплл непрерывно изменяется по
определенному .икону (ипиример, с постоянной скоростью).
Тик к.1к (оетли системы и характер воздействующих сигналов
могут Оып» иееьмл сложными, то наиболее целесообразно для
анализа переходных процессов и динамических ошибок
воспользоваться операторным методом.
* Вообще говори, можно получить астатическое регулирование и при отсут-
стили в системе интегрирующего зиеиа. Подобный пример будет рассмотрен
ниже.
143
ное регулирование осуществить невозможно из-за воздействия
помех и по ряду других причин.
Большинство САР обладают некоторой инерционностью, из-за
чего процесс регулирования завершается лишь спустя некоторое
время после воздействия входного сигнала. В течение этого
времени, а в некоторых случаях даже и по его истечении
регулируемая величина может отличаться от заданного значения, т. е. имеет
место ошибка, зависящая от того, как данная система реагирует
на тот или иной входной сигнал.
В процессе регулирования следует различать два режима:
переходный и установившийся. При каждом изменении входного
сигнала соответственно начинает изменяться и регулируемая
величина. Процесс перехода системы из одного установившегося
состояния в другое называется переходным процессом или
переходным режимом. По окончании переходных процессов наступает
установившийся режим.
В правильно сконструированной и. отрегулированной системе
переходные процессы должны постепенно прекращаться и должен
наступить установившийся режим. Желательно, чтобы это
происходило достаточно быстро. Если длительность переходных
процессов в системе ничтожно мала по сравнению со временем
воздействия сигнала, то такую систему считают безынерционной.
Примером безынерционной системы может служить электронный
стабилизатор напряжения.
По ошибки возможны не только во время переходных
процессов, но и в установившемся режиме. Однако факторы, влияющие
на величину ошибок в обоих случаях, различны. Поэтому
примято ошибки, обусловленные характером реагирования системы,
рассматривать отдельно для установившегося и переходного
режимов работы.
Статические ошибки. Статические и астатические системы
регулирования
СтлтчегкпЛ ошибкой называется отклонение регулируемой
величины «и шдлмнои) нос шинного значения, появляющееся в уста-
НоМНПНН'МШ |И'Ж11М(\
Ношожмпги» появлении статической ошибки зависит от со-
1' 1111111 СИеП'МЫ.
II шииспмопи от наличия установившейся ошибки системы
регулировании делится на статические и астатические.
Статическими называются такие системы, в которых при
постоянном внешнем воздействии имеется постоянная ошибка,
зависящая от величины воздействия. Пусть при постоянном внешнем
воздействии х установилось постоянное значение регулируемой
величины у. Разность этих величин, т. е. ошибка системы, в этом
случае также будет постоянной величиной.
141
Изображение сигнала ошибки равно
Ь(р) = Х(р)-У(р).
Как правило, сигнал ошибки используется в качестве
управляющего. В этом случае
Учитывая, что У(р)=К(р)2{р), и произведя подстановку,
получим
Ь(р) = Х(р)-К(р)Ь(р)
или после простых преобразований
д^=ттга- <3-43>
Данное выражение отображает зависимость ошибки как от
вида входного сигнала Х(р), так и от вида системы, т. е. ее
передаточной функции К(р).
Рассмотрим переходные процессы и динамические ошибки в
некоторых типовых системах при воздействии единичного перепада
входного сигнала.
Переходные процессы и динамические ошибки
в статических системах. Наиболее простыми из всех
статических систем являются безынерционные. Они практически
мгновенно реагируют на входные сигналы, причем выходной сигнал
повторяет форму входного. Переходный процесс в такой системе
практически отсутствует, в нем сразу же наступает
установившийся режим. Соответственно отсутствуют и динамические
ошибки.
Новое значение регулируемой величины устанавливается со
статической ошибкой, равной, как это уже было показано,
А
6 =
1 +Х„ '
где А—величина перепада.
В случае воздействия единичного перепада
8 = ТТкГ (3"44)
На рис. 3-29 приводится график (2), показывающий характер
изменения регулируемой величины, и входной сигнал (/),
имеющий форму единичного перепада.
Пусть в состав системы входит лишь одно звено, с инерциого
ностью которого необходимо считаться, в то время как
инерционностью других звеньев можно пренебречь.
Тогда
где Т — постоянная времени инерционного звена,
144
Определим, как в этом случае будет изменяться регулируемая
величина под воздействием перепада входного сигнала. Функция
передачи системы в замкнутом состоянии будет равна
1+К1Р)
или после подстановки значения К(р) и упрощения
Преобразуем это выражение:
К ( п\ ^п , \ ^п0
Ао^— {+Кп п_7_ ~ 1+рТ9 >
где Т9 == 1 „ некоторая эквивалентная постоянная времени,
а КПо = 1 , пк коэффициент передачи замкнутой системы.
Следовательно, система, содержащая инерционное звено, в
замкнутом состоянии также будет вести себя как инерционное
звено с постоянной времени Тэ и коэффициентом передачи /СПа,
в (1+Кп) раз меньшими, чем у исходной системы.
Изображение регулируемой величины будет равно
У(р) = Х(р)К0(Р),
где X (р) = изображение единичного перепада.
Отсюда
у<» = 707кр
Выражение (1 , т ^ для решения задачи необходимо
представить в виде суммы простейших дробей, что уже было
проделано в одном из ранее рассматриваршихся примеров (см. стр. 136).
Поэтому сразу запишем результат:
откуда
Это.значит, что регулируемая величина в рассматриваемой
системе под воздействием перепада входного сигнала будет
изменяться по закону нарастающей экспоненты с постоянной времени
Т = Т
9 1 + Ка'
145
Коэффициент передачи /Сп характеризует безынерционное
усиление системы. Чем оно больше, тем эквивалентная постоянная
времени будет меньше и переходный процесс в системе будет
заканчиваться быстрее. Система быстрее придет в новое
установившееся состояние. По окончании переходного процесса значение
регулируемой величины установится равным
у=К
Кп
1 + Кп
Это значение меньше входного сигнала на величину
статической ошибки, равной, как и в предыдущем случае, 1 ^ .
Переходный процесс в системе иллюстрируется графиком 3 «а рис. 3-29.
Рис. 3-29. Переходные характеристики статических
систем
Отрезки ординат, заключенные между графиками 1 и 3,
представляют собой значение ошибок в различные моменты времени. Как
видно из графика, эти ошибки постепенно убывают,
В системах, содержащих два инерционных звена, передаточная
функция равна
К„
Ка
К(Р) — (1 +рт1) (1 +рТ2) — 1 + р(Т1 + Т2) +р*ТгТ2 *
Отсюда легко перейти к стандартной форме передаточной
функции колебательного звена (3-23). Можно показать, что
у этого звена Б>1, т. е. оно является апериодическим. В
замкнутом состоянии колебательные свойства системы усиливаются,
причем чем больше коэффициент передачи системы, тем меньше
становятся ее эквивалентное затухание и постоянная времени.
При воздействии перепада входного сигнала на выходе
системы могут происходить затухающие колебания. График
переходного процесса для такого случая изображен кривой 4 на рис. 3-29,
Из графика видно, что из-за наличия колебаний в системе
длительное время будут динамические ошибки.
146
Можно показать, что при наличии в статической системе
более двух инерционных звеньев и достаточно большом усилении
в системе будут происходить незатухающие колебания.
В таких случаях говорят, что система потеряла устойчивость.
Потеря устойчивости системы совершенно недопустима, поэтому
приходится вводить дополнительные стабилизирующие цепи или
ограничивать усиление, хотя скорость реагирования при этом
снижается, а статические ошибки увеличиваются.
Переходные процессы и динамические ошибки
в астатических системах. В простейшем случае
астатическая система, помимо усилителя, содержит только одно
интегрирующее звено:
*(/»=-5-.
При воздействии перепада входного сигнала регулируемая
величина начнет изменяться со скоростью, пропорциональной
управляющему сигналу, роль которого в данном случае выполняет
сигнал ошибки. По мере установления нового значения
регулируемой величины ошибка будет уменьшаться. Следовательно, будет
уменьшаться и скорость изменения регулируемой величины, что
говорит об экспоненциальном характере изменения последней.
Докажем это положение более строго.
Передаточная функция системы в замкнутом состоянии будет
равна
К (п\— К{р) — Р — 1
Р Ап
обозначим -г7-=7\
Ап
тогда
*о(/0=-пЬг-
Полученный результат означает^ что система, содержащая
интегрирующий элемент, в замкнутом состоянии будет вести себя
подобно инерционному звену. При воздействии единичного
перепада X (/?)=—изображение регулируемой величины будет равно
, В таком виде изображения сигналов ранее получались
неоднократно. Им соответствуют изменения самого сигнала по закону
нарастающей экспоненты (рис. 3-30, график 2):
у(0 = 1-Г"?\
147
Чем больше коэффициент передачи системы /Сп, тем меньше
постоянная времени Г = -^-итем быстрее будут протекать про-
цессы в системе. Поэтому в астатических системах величину Ки
иногда называют коэффициентом усиления по скорости.
Ошибка системы будет изменяться по закону убывающей
экспоненты:
«(*)=*{<)— уф = 1 — (1 — е~~т) = е~~т .
Это динамическая ошибка системы. При /->оо она исчезает,
т. е. установившаяся ошибка в системе отсутствует. Тем самым
Рис. 3-30. Переходные характеристики
астатических систем
еще раз подтверждается, что в системе, содержащей
интегрирующий элемент, статической ошибки нет. Регулируемая величина по
мере уменьшения ошибки становится равной заданному значению:
у (1) -> 1 при I -> оо.
Несколько сложнее протекают переходные процессы, если,
помимо интегрирующего элемента, в системе имеется еще и
инерционное звено. Примером такой системы является привод для
механической отработки электрического напряжения (рис. 3-4).
Ранее было показано, что в системе, содержащей
интегрирующее или инерционное звено, с увеличением усиления скорость
переходных процессов возрастает, система быстрее приходит к
новому установившемуся состоянию. Если в системе имеются оба
звена одновременно, процесс установления может сопровождаться
затухающими колебаниями. По достижении регулируемой
величиной заданного значения из-за наличия инерционности в системе
ее изменения будут продолжаться дальше (рис. 3-30, график 3).
Наступит явление перерегулирования. При этом знак сигнала
ошибки изменится на обратный и начнется сначала торможение,
148
а затем отработка в обратном направлении. Но и в этом случае
система пройдет согласованное положение и лишь после
нескольких колебаний установится, наконец, новое значение регулируемой
величины.
Покажем это более строго.
Для рассматриваемой системы
К(р) =
р(1 + рТ)ш
В замкнутом состоянии
Если обозначить -«— = Т\ и -тг- = 2?ЭГЭ, то получится выражение коэф-
фициента передачи колебательного звена (3-23):
Ко(Р)= 1 + Ц^т. + р*Т* '
Отсюда следует, что система, содержащая интегрирующий и инерционный
элементы^ в замкнутом состоянии ведет себя как колебательное звено.
Чем больше коэффициент преобразования системы /Сп, тем меньшими будут
затухание системы и ее постоянная времени. Это означает, что после
воздействия перепада колебания выходного сигнала будут происходить с большей
частотой и медленнее затухать (рис. 3-30, график 4).
Для оценки переходного процесса при наличии
перерегулирования пользуются специальной величиной — коэффициентом
перерегулирования. Коэффициентом перерегулирования называется
отношение максимального значения регулируемой величины к
установившемуся значению:
4 = ^. (3-45)
На практике допускается перерегулирование примерно 1,2-5-1,5.
При этом колебания затухают достаточно быстро, и в то же время
в начальный момент регулируемая величина быстро
приближается к заданному значению, т. е. динамические ошибки быстро
убывают. Коэффициент усиления подбирают так, чтобы при
воздействии перепада после одного — двух отклонений колебания
прекращались.
Можно показать, что при наличии в астатической системе двух
и более инерционных звеньев и достаточно большом усилении
система может потерять устойчивость, колебания в ней не будут
затухать. Такое состояние системы является недопустимым.
Особый интерес представляет случай воздействия на систему,
содержащую интегрирующее звено, сигнала, изменяющегося с
постоянной скоростью,
149
Пусть x(^)=V^, сигнал изменяется со скоростью V. Тогда на
основании формулы (11) приложения X (р) = -~ Предположим,
что система содержит только одно интегрирующее и одно
пропорциональное звенья. Передаточная функция системы
ед=-т--
Ошибка системы
Д^) = ГТ7Г
О»)
'К1+^) «"(1+>-кУ
Обозначим -[(- — Ту тогда окончательно получим
Подобная рациональная дробь представляется в виде
следующей суммы простейших дробей, формула (27) приложения:
откуда
4<'> = Т5г(-7-ГТ7г).
,т=^.(1-е-т).
бка будет ]
гепенно ус
ошибки 8 я= ~. Это и есть установившаяся динамическая ошибка.
8|
Это значит, что ошибка будет изменяться по закону
нарастающей экспоненты. Постепенно установится постоянное значение
Рис. 3-31. Реакция астатической системы на сигнал,
изменяющийся с постоянной скоростью
Регулируемая величина по окончании переходного процесса бу»
дет изменяться по такому же закону, что и входной сигнал, но
с отставанием, равным значению ошибки. Графики значений х(1),
у{1) и Ъ(1) показаны на рис. 3-31.
150
Если в системе, помимо интегрирующего, есть также
инерционные звенья, то это скажется лишь на характере переходного
процесса. В установившемся режиме, когда скорость изменения
входного сигнала длительное время остается постоянной, наличие
инерционных звеньев ни в чем не проявляется и ошибка системы
будет иметь такое же значение, как и в прежнем случае:
8 = ^. (3-46)
Таким образом, в астатической системе при постоянной
скорости изменения входного сигнала возникает установившаяся
динамическая ошибка, прямо пропорциональная этой скорости и
обратно пропорциональная коэффициенту передачи системы.
Можно показать, что при наличии в системе двух интегрирующих звеньев
будет отсутствовать ошибка не только при постоянном входном сигнале, но и
при постоянной скорости его изменения. Ошибка появляется лишь в том
случае, когда входной сигнал изменяется с ускорением. Такие системы называют
астатическими второго порядка.
Влияние нелинейных элементов на точность регулирования
К числу келинейностей, наиболее часто встречающихся в
системах автоматического регулирования, следует отнести сухое
трение в механических элементах и люфт. Влияние этих нелинейно-
стей сказывается вблизи положения согласования, и поэтому они
особенно нежелательны. Сухое трение проявляется как
некоторый тормозящий момент, не зависящий от скорости вращения
вала. Это трение даже несколько возрастает при остановке вала.
Если усиленный сигнал рассогласования окажется
недостаточным для трогания системы (преодоления трения* покоя), то
рассогласование отработано не будет — появится постоянная ошибка
даже в том случае, когда система" является астатической. Эта
ошибка уменьшается с ростом усиления. Однако последнее
чрезмерно увеличивать нельзя, так как в противном случае
произойдет трогание системы под воздействием собственных шумов
системы. Целесообразно усиление выбирать таким, чтобы усиленные
собственные шумы оказались меньше напряжения трогания
двигателя. Выше указывались и другие причины, не позволяющие
чрезмерно увеличивать усиление в системах автоматического
регулирования.
Наличие люфтов (мертвых ходов) проявляется лишь в
системах, отрабатывающих положение регулируемой величины. В тех
случаях, когда регулируемая величина все время изменяется и
имеется значительная нагрузка на двигатель, влияние мертвых
ходов несущественно. Но она резко возрастает при
реверсировании движения и может даже привести к возникновению в системе
незатухающих колебаний. Другие нелинейности в системах регу-
151
лирования, как правило, возникают при очень больших
рассогласованиях и проявляются главным образом в ограничении
сигналов. Часто подобного рода ограничители специально применяют
в системах для уменьшения динамических перегрузок.
В правильно сконструированных системах влияние нелинейных
, элементов на работу систем в нормальном режиме и на величину
ошибок сравнительно мало, поэтому оно в дальнейшем
учитываться не будет,
Воздействие помех на работу систем автоматического
регулирования
По своей природе помехи весьма различны. Они могут
возникать внутри системы или проникать в нее извне. В одних случаях
помехи появляются случайно, в других—специально создаются
противником для нарушения нормальной работы автоматических
устройств. Такие помехи появляются в том случае, когда входной
У(РЦ
■у2(рЫ(р)
К,(Р)
<ь*
Кг(р)
У(Р)
Рис. 3-32. Воздействие помехи на САР
сигнал поступает по линии радиосвязи или же такая линия входит
в состав контура регулирования, что очень часто (Зывает в
радиолокационных системах. В качестве источников случайных помех
можно указать на изменение питающих напряжений, нагрузки,
параметров отдельных элементов, входящих в систему
регулирования, собственные шумы системы и т. д.
Все эти воздействия могут иметь такой же характер, как и'
полезный сигнал. Если помеха поступает в систему по тому же
пути, что и входной сигнал, тЪ при одинаковом их характере
избавиться от ее воздействия в самой системе практически невоз-#
можно. Система будет одинаково отрабатывать и входной сигнал,'
и помеху.
Если же помеха возникает внутри контура регулирования или
же поступает в этот контур извне, то ее воздействие может быть,
как правило, значительно уменьшено.
• Возможность устранения помехи зависит от характера
сигнала помехи и места его появления в системе.
Пусть помеха О(р) возникла в каком-то элементе контура
регулирования или поступила в него извне (рис. 3-32).
Передаточную функцию той части контура регулирования, которая располо-
152
жена между измерительным устройством и точкой воздействия
помехи, обозначим К\(р), а остальной его части — /<2(р). Общая
передаточная функция разомкнутого контура будет равна
К(р) = КЛрЖЛр).
Для упрощения будем считать, что входной сигнал отсутствует
Х(р)=0 и на систему действует только помеха О(р). В этом
случае между действующими в системе сигналами установится
следующее соотношение:
Д (р) = X (р) -У(р) = -У (р). (3-47)
Из функциональной схемы следует, что на входе элемента
К2{р) происходит сложение сигнала помехи О(р) с сигналом,
поступающим от элемента К\(р), равным &(р)К\(р), тогда выходной
сигнал будет равен
У (Р) = [Д (Р) Кх (р) + 0(р)] К, (р).
Учитывая (3-47), можно записать
* (Р) = -У (Р) = -Д (Р) Ку (р) К2 (р) - О (р) К2 (р) =
= -А(р)К(р)-0(р)К2(р).
Решив это уравнение относительно А(р), получим
изображение сигнала ошибки
Проанализируем полученный результат.
Если помеха является постоянной (равной д)> то наличие в
системе инерционных элементов не будет сказываться на величине
установившейся под воздействием помехи ошибки. Поэтому в
статической системе величина ошибки равна
д-"Т+"7Гп'
где /Сг — усиление той части контура регулирования, которая
заключена между точкой воздействия помехи и выходом, а /Сп —
общий коэффициент преобразования. Отсюда видно, что, чем
дальше от входа системы воздействует помеха, тем меньшей будет
вызванная этой помехой ошибка, так как меньшим будет /Сг.
При воздействии помехи .на астатическую систему наличие
установившейся ошибки определяется тем, в каком месте контура
регулирования расположено интегрирующее звено. Если оно
входит в состав элемента К\(р), т. е. расположено до точки
воздействия помехи, то установившейся ошибки не будет. Действительно,
если появится ошибка, то под ее воздействием сигнал на выходе
К\(Р) будет непрерывно изменяться, вызывая уем самым
изменение регулируемой величины, и установившийся режим наступит
лишь после полного согласования,
153
Если же интегрирующее звено входит в состав элемента КгСр),
то установится такая статическая ошибка, при которой
суммарный сигнал на входе /СгСр) будет равен нулю:
8/^+^ = 0 или 8 = —-|г-.
Лишь в этом случае прекратятся изменения регулируемой
величины и наступит установившийся режим. Следовательно, эта
система является астатической по отношению к управляющему
воздействию, но статической по отношению к возмущающему.
В большинстве случаев помеха изменяется во времени.
Поэтому она будет вызывать дополнительные ошибки, которые будут
складываться с динамическими ошибками, вызванными
изменениями полезного входного сигнала.
§ 3-5. ЧАСТОТНЫЕ ХАРАКТЕРИСТИКИ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Общие сведения ,
Очень часто при исследовании систем в качестве типового
входного сигнала используют синусоидальный сигнал,
изменяющийся с определенной частотой. При этом наблюдают, как будет
вести себя система, т. е. как будет изменяться выходной сигнал,
каковы будут его амплитуда и начальная фаза. Такой метод
анализа называется частотным.
Если *система является линейной, то при непрерывном
воздействии синусоидального входного сигнала выходной сигнал и
сигнал ошибки также будут изменяться по синусоидальному закону
с той же частотой, но, как правило, с другими амплитудами и
фазами.
Если частоту входного сигнала изменить, то изменится не
только частота, но и амплитуда и фаза выходного сигнала и
сигнала ошибки.
Чтобы одновременно учитывать изменение и амплитуд, и фаз
сигналов, целесообразно перейти к символическому или комплекс-'
ному методу и рассматривать соотношение комплексных
значений или, как иногда говорят, комплексных амплитуд сигналов.
Будем условно считать начальную фазу входного сигнала
равной нулю и по отношению к ней отсчитывать все сдвиги фаз.
Тогда комплексные значения входного и выходного сигналов
можно записать следующим образом:
У=Уе\
154
Отношение комплексных значений выходного и входного
сигналов само является комплексной величиной и называется
комплексным коэффициентом усиления системы.
Комплексный коэффициент усиления системы зависит от
частоты действующего в системе синусоидального сигнала, что
условно подчеркивается следующей формой записи:
Модуль комплексного коэффициента усиления К показывает
отношение амплитуд сигналов, т. е. является коэффициентом
усиления, а аргумент ср учитывает происходящий . в системе сдвиг
фаз.
Во всех системах, кроме безынерционной, коэффициент
усиления и сдвиг фаз зависят от частоты сигнала.
Графики зависимости коэффициента усиления и сдвига фаз в
системе от частоты входного сигнала называются соответственно
амплитудно-частотной и фазо-частотной характеристиками
системы: /С(со) — амплитудно-частотная характеристика системы *;
ср(со) —фазо^частотная характеристика системы.
Частотный метод благодаря ряду преимуществ получил
широкое распространение не только в автоматике, ио и в импульсной
технике, общей радиотехнике и т. д. Применение частотного
метода в автоматике весьма удобно, по следующим соображениям:
— входной сигнал любой формы может быть представлен в
виде суммы синусоидальных сигналов разных частот; зная, как
реагирует система на воздействие каждого из этих сигналов,
можно определить, как будет- вести себя система при воздействии
общего сигнала;
— для синусоидальных сигналов в электрических системах
легко могут быть найдены сопротивления элементов НЬС и
другие параметры цепей;
— реальные сигналы по своей форме иногда близки к
синусоидальным; .
— по частотным характеристикам можно судить о свойствах и
качестве системы регулирования; в частности, можно определить,
как быстро и с какими ошибками будет происходить процесс
регулирования, возможно ли в системе самовозбуждение, какими
путями можно улучшить систему и т. д.;
— при исследовании цепей легко можно перейти от
соотношений в операторной форме к комплексным соотношениям простой
заменой р на /со.
* В тех случаях, когда не интересуются сдвигом фаз, зависимость /С(со)
называют просто частотной характеристикой. В дальнейшем под частотной
характеристикой будем понимать совокупность характеристик /С(ш) и ср(<°) или же
зависимость комплексного коэффициента усиления от частоты.
155
Воспользуемся последним положением для вывода в
комплексной форме основных соотношений между сигналами,
действующими в системе автоматического регулирования. По аналогии
с ранее рассмотренными примерами введем следующие
обозначения:
у
К(/<о) = -у — комплексный коэффициент усиления разомкнутой
системы;
у
Ко О®) = —? комплексный коэффициент усиления замкнутой
системы.
Из выражения передаточной функции замкнутой системы
(3-31) заменой р на /© легко получить следующую зависимость:
«»(*)- ! + *(/&(>)• (3"50)
Выражение комплексного коэффициента усиления системы,
состоящей из нескольких звеньев, аналогичным образом можно
получить из выражения передаточной функции этой системы (3-25):
АГ(уш)=/с1(усо)л:2(уа))...А:п(уо)).
При перемножении комплексных чисел их модули
перемножаются, а аргументы складываются. Следовательно, общий
коэффициент усиления будет равен
АГ(ш) = А:1(а))А:2(о))...А:п(а)); (3-51)
при общем сдвиге фаз
Т («О = ?! (ш) + <р2 («О + • • • + ?п (<*>)• (3-52)
«
Таким образом, коэффициент усиления системы равен
произведению коэффициентов усиления всех звеньев, а общий сдвиг
фаз складывается из сдвигов фаз в каждом из них.
Практическое применение частотного метода основано на
использовании частотных характеристик систем.
Пусть известен комплексный коэффициент усиления системы:
Кии>)=К(«>)етш).
Можно задаться различными значениями частоты о и по ним
вычислить величины К (о) и ср(со) для этих частот, данные
вычислений свести в таблицу, пользуясь которой построить
характеристики.
Однако даже для простой системы, содержащей лишь одно
инерционное звено, эти вычисления будут весьма сложными.
Комплексный коэффициент усиления инерционного звена
ки®)= 1+у«г — * + »«л»
156
модуль числителя * равен У"\ + а)2Р, а аргумент агс*д —^— =
= —агс1до)7\ Таким образом,
У0' ~ у\ + <»2Т2 '
ср (ш) = —агс!§ о)Г.
Следовательно,
К (» = (VI + о>2р)-! е-'™**.
В более сложных системах соотношения получаются
неудобными для расчета. Поэтому на ^практике для построения
частотных характеристик используются^ логарифмические
координаты.—
Логарифмические координаты
Логарифмической называют такую систему координат, в
которой по осям откладываются не сами числовые значения величин,
а логарифмы этих значений.
Если логарифмы значений откладываются только по одной из
осей, то такая система называется полулогарифмической. Часто
на осях обозначают не только логарифмы числовых значений, но
и сами числа (при этом для логарифмов шкала получается
равномерной, а для чисел—неравномерной).
В логарифмическом масштабе для измерения коэффициента
усиления применяют специальную относительную единицу, назы-
ваемую__децибелом. Эта единица применяется для измерения
отношений различных величин.
Коэффициент усиления, выраженный в децибелах,, вычисляется
ДР формуле!___.
#* = 2018-^ = 2013/Г, (3-55)
где У и X — выходная и входная величины.
Из формулы (3-55) следует, что для выражения
коэффициента К в децибелах достаточно вычислить 20 десятичных
логарифмов этой величины. Так, если /(=100, то ЛГд^ =201^ 100 =
= 40 дб, при К=200 Кдб = 20\% (2-100) =20 [1^ 2 + 1^ 100] = 20[0,3 +
+2]=46 дб и т. д.
* Комплексное число а+/6 имеет модуль и аргумент, определяемые
соотношениями:
г = Уа? + &\ (3-53)
*= агс*в —. (3-54)
157
Единицей измерение част<зты в логарифмическом масштабе
является декада. Декадой"" называется диапазон частот, в пределах
которого частота изменяется в 10 раз.
На рис, 3-33 показана сетка логарифмических координат,
подготовленная для построения частотных характеристик.
По осям абсцисс отложены логарифмы частоты в декадах. Над
осью обозначены соответствующие значения частот в рад/сек. По
оси ординат верхнего графика отложены значения коэффициента
усиления в децибелах. Отрицательные значения соответствуют не
усилению, а ослаблению сигналов (/С<1). В этих осях удобно
строить логарифмическую амплитудно-частотную
характеристику— сокращенно ЛАХ.
На втором графике по оси ординат отложено значение сдвига
фаз, выраженное непосредственно в градусах. Такая система
является полулогарифмической. Ее удобно применять для
построения логарифмической фазо-частотной характеристики — ЛФХ.
Отрицательным значениям фазы соответствует отставание фазы
выходного сигнала по отношению к входному.,
Применение логарифмического масштаба при построении
частотных характеристик имеет целый ряд существенных
преимуществ.. Важнейшими из них являются:
— в логарифмическом масштабе можно наглядно изобразить
ход характеристик в очень большом диапазоне частот, так как
десятикратному изменению частоты соответствует изменение
логарифма лишь на одну единицу;
* — характеристики элементарных звеньев имеют простую
стандартную форму и могут быть с большой точностью представлены
в виде отрезков ломаной линии;
| — характеристики сложных систем могут быть получены
простым суммированием характеристик входящих в них
элементарных звеньев; это объясняется тем, что в сложных системах общий
коэффициент усилия равен произведению коэффициентов
усиления отдельных звеньев (3-51):
/с(со)=Аг1(а>)А:2(ш)...А:„Н;
в логарифмическом масштабе такому перемножению
соответствует сложение логарифмов:
**=^ь **+••• + *•*• <3-56)
общий сдвиг фаз в сложных системах равен сумме сдвигов фаз
в отдельных звеньях (3-52):^
? («О = ?1 («О + ?2 («О + • • • + Т/1 И;
— при использовании логарифмических характеристик можно
сравнительно легко оценить качество системы регулирования,
а также определить, как будет реагировать система на те или
иные изменения в ее структуре,
158
Логарифмические частотные характеристики элементарных
звеньев
Пропорциональное звено. Комплексный коэффициент
усиления пропорционального звена равен:
КЦш) = Ке*о = К. (3-57)
Это значит, что на всех частотах усиление постоянно, а сдвиг
фаз отсутствует:
<Р = 0°.
Соответствующие характеристики показаны на рис. 3-34.
ЛАХ представляет собой прямую, параллельную оси абсцисс.
Если /С<1, то /(Дб<0 — отрицательное число. В этом случае ЛАХ
располагается под осью абсцисс.
Пропорциональное звено является единственным из всех
элементарных звеньев, не создающих сдвига фаз. Ее ЛФХ совпадает
с осью абсцисс.
Дифференцирующее звено. Комплексный
коэффициент усиления дифференцирующего звена получается- из (3-13)
заменой р на /а>:
К{» = /со = ®е Т. (3-58)
В нем сдвиг фаз на всех частотах постоянный (он равен +90°),
а усиление растет пропорционально частоте:
Кдб = 2018«>;
ср = -^ = 90°.
В данном случае коэффициент усиления (в децибелах)
пропорционален логарифму частоты, а, следовательно, ЛАХ
представляет собой график прямой пропорциональности, т. е. прямую
линию, проходящую через начало координат.
Определим наклон этой прямой. При десятикратном
изменении частоты, т. е. изменении частоты на одну декаду, коэффициент
усиления возрастёт на 20 дб независимо от того, в каком
диапазоне частот произведено это изменение:
АКдб = 201ё 10(о — 201^со = 201^ 10 = 20 дб.
Это значит, что ЛАХ имеет наклон в 20 дб на декаду. Данное
обстоятельство будет многократно использовано в дальнейшем
при построении характеристик.
ЛФХ будет представлять собой прямую линию, параллельную
оси абсцисс и проходящую на уровне +90°.
Логарифмические характеристики дифференцирующего звена
показаны на рис. 3-35, а.
160
Интегрирующее звено. Как и в предыдущем случае,
значение комплексного коэффициента усиления звена может быть
получено из выражения коэффициента передачи заменой р на /ш:
КО) =^г = -д=ш_1 е~^- (3"59)
Из приведенного соотношения видно, что усиление звена
обратно пропорционально частоте, а сдвиг фаз на всех частотах
составляет— -|-, т, е. —90°:
(р(а))= —90°,
откуда
^ = 201г/Г(а>)=2018гш-1 = —201^©.
Рассмотрение приведенных соотношений показывает, что ЛАХ
и ЛФХ интегрирующего звена отличаются от характеристик
дифференцирующего только знакам, т. е. ЛАХ имеет наклон
—20 дб/дек, а ЛФХ проходит параллельно оси абсцисс*на уровне
—90°. Эти характеристики показаны на рис. 3-35, б.
Форсирующее звено. Комплексный коэффициент
усиления форсирующего звена равен
/С(>)==1+>7\ (3-60)
Очевидно, что К («>) = У\ + <*>2Т2 или К& = 201% У\ + о>2Г2;
<Р (со) = агс1& ®Т.
На очень низких частотах, где а><С-у-или (оГ<1,
приближенно можно считать, что шГ«0,
Тогда АГ(о))ж1 или ^ = 201^1=0,
(р((о)жагс^0 = 0°.
„Отсюда, следует, дто.на низких частотах.. ЛАХ и ЛФХ совпа-
даюх-^^ью^,абсцасс- / '
На очень высоких частотах, где а^^> -у или шТ ^> 1,
приближенные соотношения будут иными:
или
Кдб = 201^ о>Г = 201^ Т + 201§ со.
Здесь первое слагаемое является постоянной величиной, а
второе изменяется по такому же закону, как и в дифференцирующем
164
звене. Это значит, что в области высоких частот ЛАХ будет пред.
ставлять собой прямую линию, идущую с наклоном +20 дб/дек.
Точкой пересечения этой линии с осью абсцисс будет являться
частота ш = -=-. На этой частоте Дг(а)) = а)Г=1 или /(^ = 0.
С другой стороны, при а)^>-~- можно считать, что о)Г«оо,
тогда
ср (о) = агс{& о)Г ж агс{§ оо = -^-.
На очень высоких частотах фазовый сдвиг в форсирующем
звене составляет 90°. Следовательно, в этой области ЛФХ будет
представлять собой прямую линию, проходящую параллельно оси
абсцисс на уровне +90°.
Уточним ход характеристик вблизи частоты о = ^.Эту частоту
принято называть частотой сопряжения; в ней сопрягаются два
участка ЛАХ. На частоте сопряжения
/С(о))=КГТТ = КТ
или
Д^ = 2018КТ= 1018:2 = 3 дб.
Если представить ЛАХ в виде ломаной линии, одним отрезком
которой является ось абсцисс (до точки со = -=Да вторым — линия,
идущая с наклоном +20 дб/дек через точку со= у, то
максимальная погрешность такой приближенной характеристики будет всего
3 дб. Она будет возникать лишь на частоте сопряжения. При
отходе от этой частоты погрешность будет уменьшаться (рис. 3-36, а).
Приближенная ЛАХ может быть построена весьма просто, а
ошибки, возникающие при ее использовании, несущественны при реше*
пии очень многих задач.
Па частоте сопряжения сдвиг фаз равен
<р ;1гс1к (о'Г = агс!^ 1 = -^- = 45°.
Вблизи же от пес происходит изменение фазового сдвига от 0°
на -IIизнойх частотах до 90° на высоких. Закон этого изменения
сравнительно сложен. Однако и здесь можно точную ЛФХ
заменить приближенной, представляющей собой ломаную линию,
состоящую из трех отрезков. Крайние ее отрезки —это ось абсцисс и
линия +90°, а средний отрезок — прямая, идущая с наклоном
+ 45 град/дек через точку с координатами о>=в-=- иср = 45°.Такое
приближение дает максимальную ошибку примерно в шесть
градусов, но- существенно упрощает все построения.
Щ
-- На практике можно применять следующий порядок
построения приближенной ЛФХ.
От частоты сопряжения отступают влево на одну декаду и
помечают найденную на оси абсцисс точку стрелкой, направленной
вверх. Аналогичным образом отмечают стрелкой, направленной
^низ, точку, отстоящую вправо на декаду от частоты сопряжения.
Эти точки в дальнейшем условимся называть частотами излома
приближенной ЛФХ.
До первой стрелки (рис. 3-36, а) в области низких частот
приближенная ЛФХ будет совпадать с осью абсцисс. Стрелка,
направленная вверх, указывает на то, что дальше характеристика
увеличит свой наклон, который достигнет +45 град/дек, и с таким
наклоном пойдет до частоты, отмеченной второй стрелкой. На
этой частоте наклон уменьшится на 45 град/дек и станет равным
нулю, т. е. характеристика далее пойдет горизонтально.
Расстояние между стрелками составляет две декады, что при наклоне
характеристики в 45 град/дек дает общий сдвиг фаз 90°. Такой
сдвиг фаз будет происходить в области высоких частот.
Форсирующее звено в области высоких частот создает
положительный сдвиг фаз' и повышает усиление.
При другом значении постоянной времени Т форма
логарифмических характеристик звена останется прежней, они лишь
сместятся вправо или влево вдоль оси абсцисс в Соответствии с
новым значением частоты сопряжения а) = -=-.
Инерционное звено. В инерционном звене значение
комплексного коэффициента усиления является обратной величиной
его значения в форсирующем:
к (» - ттт^т = о + >7')"1- (3-61)
Отсюда следует, что
К (о) = (КГ+^Р)"1, или Кдб = 2018 {VI + шТ2)-1 =
= —20%К1 + «>2Р;
<р (со) = — агс{§ о>7\
Из этих выражений видно, что ЛАХ и ЛФХ инерционного звена
отличаются от характеристик форсирующего только знаком.
Данное обстоятельство позволяет сразу осуществить их построение
(рис. 3-36,6).
Первоначально определяется и обозначается на оси абсцисс
частота сопряжения со = -^-.До этой частоты приближенная ЛАХ
совпадает с осью абсцисс, а далее идет с наклоном —20 дб/дек.
166
Затем определяются границы среднегб участка ЛФХ, для чего
на расстоянии в одну декаду по обе стороны от сопрягающей
частоты стрелками отмечаются частоты излома. Направление
стрелок здесь будет обратным тому, которое было в форсирующем
звене.
На начальном участке ЛФХ совпадает с осью абсцисс.
Начиная с частоты, отмеченной первой стрелкой, приближенная
характеристика имеет наклон —45 град/дек и идет с таким наклоном
в пределах двух декад. Далее сдвиг фаз составляет —90°. Таким
образом, инерционное звено в области высоких частот создает
отрицательный фазовый сдвиг при одновременном уменьшении
усиления. Для более точного построения ЛФХ следует
пользоваться данными справочников.
Колебательное звено. Комплексный коэффициент
усиления колебательного звена зависит от его затухания 2(1, величина
которого существенно влияет на ход характеристик вблизи
сопрягающей частоты со = -у-:
* (» = 1+У2&.Г—>л = с1 + &*т - тгТ2^к <3-62)
Для выражения, стоящего в скобках, модуль равен
У(\— о>*Т2)* + (2ЫТ)2.
Отсюда следует, что
К (ш) = [К(1— ^ГУ + Ф^Т2]-1. (3-63)
На очень «изких частотах при со<Сув выражении (3-63) можно
пренебречь членами, содержащими множитель &Т. Тогда /С((о)«1
или Кдб=0, т. е. на низких частотах ЛАХ будет совпадать с осью
абсцисс. Соответственно на высоких частотах при ш^>-у-можно
считаться лишь с членом, содержащим множитель шГ в самой
высокой степени (четвертой). Тогда
/ГЫжКИ"1 или Км = — 201ги)»Р = — 401еа>7\
Это значит, что в области высоких частот ЛАХ имеет наклон
40 Об/дск, т. е. вдвое больший, чем в инерционном звене. Это
позволяет легко построить ЛАХ колебательного звена в области
высоких частот. Определим ход характеристики вблизи частоты
сопряжения.
На частоте сопряжения соГ=1. Следовательно, /С(о)) = (2$)-1
„ли /Г* = —201В26.
Зная значение Затухания 2?, можно легко определить ход ЛАХ
колебательного звена вблизи частоты сопряжения
Если 2^=1, то /С^ = 0, т. е. ЛАХ пересечет ось абсцисс на
частоте сопряжения.
167
При большом затухании, когда 26 > 1, /Саб<0. Это значит, что
в точке «> = -у- ЛАХ пройдет под осью абсцисс. При малом
затухании % < 1 и Кдб> 0- Следовательно, на частоте сопряжения
появится выброс, подъем усиления.
Ход ЛФХ можно определить, исследуя выражение
На низких частотах о)7«0 и, следовательно, <р=0. Приш = -^
(на сопрягающей частоте) шГ=1 и <р =—агс!§оо = —90°. На
высоких частотах о)Г ^> 1 и, следовательно, ср=—агс1^ 0 = —180°. Это
максимальный сдвиг фаз, создаваемый колебательным звеном.
ЛФХ для разных затуханий показаны на рис. 3-37. Заменять
такие точные характеристики приближенными, состоящими из
отрезков ломаной линии, нужно очень осторожно, так как могут
возникнуть большие ошибки.
В тех случаях, когда требуется большая точность,
характеристики колебательных звеньев рассчитываются отдельно или же
данные для их построения берутся из справочников.
Аппроксимация * логарифмических характеристик
элементарных звеньев отрезками ломаной линии, имеющей стандартную
форму, позволяет очень быстро производить их построение.
Построение бсобенно упрощается в тех случаях, когда имеются
специальные бланки логарифмических координат. Если необходимо
построить точные характеристики, можно изготовить специальный
шаблон или для самих характеристик, или для поправок к ним,
представляющих собой разность между точной и приближенной
характеристиками. Такой шаблон прикладывается в
соответствующих точках графика и обводится.
Логарифмические характеристики сложных систем
Преимущества использования логарифмических координат
становятся особенно очевидными при построении частотных
характеристик сложных систем, состоящих из нескольких различных
звеньев.
Рассмотрим на примерах порядок построения таких харакэге-'
ристик.
1. Построим логарифмические частотные характеристики
системы регулирования, содержащей безынерционный усилитель и
два инерционных звена, постоянные времени которых известны:
К^ = Ч+№%)*1+№%) >
* Аппроксимацией называется замена сложных точных зависимостей более
простыми приближенными.
171
где 7*1 = 0,5 сек, и 7*2=0,01 сек, коэффициент передачи Кп может
быть различным.
Определим частоты сопряжений и построим характеристики
каждого из инерционных звеньев в отдельности:
®1 = у- = ^ = 2 Рад1сек'>
а>2=^- = щ = 100 рад/сек.
Обе эти характеристики имеют одинаковый стандартный вид
(рис. 3-38), но сдвинуты одна относительно другой вдоль оси
абсцисс. Общая характеристика системы — результат
суммирования характеристик отдельных звеньев. Произведем это
суммирование, не учитывая пока влияния безынерционного усилителя.
До частоты о)1 усиление каждого из инерционных звеньев
составляет 0 дб. Следовательно, и суммарное усиление также будет
равно нулю. ЛАХ пойдет вдоль оси абсцисс.
В диапазоне частот щ — о)2 усиление второго звена
по-прежнему равно 0 дб, поэтому общее усиление будет определяться
лишь первым звеном и общая характеристика будет совпадать
с ЛАХ первого звена, т. е. пойдет с наклоном'—20 дб/дек.
Начиная с частоты щ на ход общей характеристики начнет
оказывать влияние второе инерционное звено и общий наклон
характеристики станет равным —40 дб/дек.
Аналогичным образом производится суммирование для
построения общей ЛФХ.
На очень низких частотах не создается сдвига фаз ни в одном,
ни в другом звене. Соответственно и общий сдвиг фаз будет равен
нулю. Затем начинает сказываться лишь влияние первого звена,
поэтому суммарная характеристика будет совпадать с ЛФХ
первого звена. Вскоре начинает добавляться сдвиг фаз, вносимый
вторым звеном, и суммарный сдвиг фаз будет увеличиваться. На
очень высоких частотах он достигнет предельного значения —180°*
Заметим сразу, что общая приближенная фазо-частотная
характеристика имеет точки излома на тех же частотах, что и ЛФХ
элементарных звеньев. Эти частоты удалены от соответствующих
сопрягающих частот на декаду вправо и влево и помечены
стрелками, стоящими у оси абсцисс и имеющими направление вниз,
если в этой точке наклон ЛФХ возрастает, или вверх, если наклон
уменьшается.
Безынерционный усилитель не вносит сдвига фаз, и поэтому
не изменяет хода ЛФХ, но изменяет усиление одинаково на всех
частотах. Его ЛАХ представляет собой прямую, параллельную
оси абсцисс и проведенную от нее на расстоянии 20\%Кп- Поэтому
добавление в систему безынерционного усилителя лишь сместит
общую ЛАХ вдоль оси ординат на величину, равную 201^/Сп.
172
Поскольку величина /Сп обычно регулируется, то для каждого
его значения пришлось бы строить новую Л АХ. Вместо этого
пользуются лишь одной характеристикой, но соответствующим
образом смещают ось абсцисс, от которой производится отсчет
усиления.
Процесс построения общих характеристик системы можно
упростить еще больше и не производить даже построения
характеристик отдельных звеньев. Проследим это на втором примере.
2. Построим логарифмические частотные характеристики
системы, содержащей безынерционный усилитель, двигатель и звено
быстрого реагирования, если параметры всех звеньев известны.
.Комплексные коэффициенты усиления отдельных звеньев
соответственно равны.
Для двигателя
^(/">)=>(1+П)мГдв)-
Для звена быстрого реагирования
АГ2(уо)) = уг-ТТ7^-
Общий комплексный коэффициент усиления системы в этом
случае будет равен
А Vю; — > о + 7»^) (1 + у«л'
где /Сп — коэффициент передачи всей системы.
Систему можно считать состоящей из пяти элементарных
звеньев: пропорционального, интегрирующего, форсирующего и
двух инерционных.
Пусть постоянные времени звеньев системы соответственно
равны: Гдв=0,25 се/с, Г'=0,1 сек, Г=0,01 сек, а значение /Сп может
регулироваться.
На различных участках наклон приближенных характеристик
может принимать лишь* вполне определенные значения, кратные
±20 дб/дек для Л АХ и ±45 град/дек для ЛФХ. Поэтому
целесообразно вначале провести на бланке логарифмических координат
веер линий с соответствующими, наклонами, а затем проводить
отрезки характеристик параллельно этим линиям.
Построение характеристик следует начинать с определения
частот сопряжения:
<©/= у- = о^г = 4 рад/сек — первая частота сопряжения;
ш2 = уг = "оу = 10 рад/сек — вторая частота сопряжения;
ш3 = -у = о-щ = 100 рад/сек — третья частота сопряжения.
174
Как и в предыдущем примере, наличие безынерционного
усиления будет учтено в последующем путем соответствующего
смещения оси абсцисс.
На участке до ал (рис. 3-39) наклон ЛАХ будет определяться
только наличием интегрирующего звена. Данный участок будет
представлять собой прямую линию, проходящую через нулевую
точку с наклоном —20 дб/дек. Начиная с частоты со1 под
влиянием инерционного звена наклон характеристики возрастет до
—40 дб/дек. С таким наклоном ЛАХ пойдет до частоты сог,
определяемой постоянной времени форсирующего звена Т. Под
влиянием форсирующего звена уменьшение усиления замедлится и
соответственно наклон ЛАХ уменьшится до —20 дб/дек. Далее,
начиная с шз наклон- ЛАХ вновь возрастет до =—40 дб/дек, так как
под влиянием второго инерционного звена усиление начнет
уменьшаться быстрее.
Все участки ЛАХ строятся параллельно соответствующим
линиям вспомогательного веера.
Аналогичным образом строится и приближённая ЛФХ. Здесь
необходимо предварительно найти точки излома приближенной
характеристики. Эти точки удалены на декаду вправо и влево от
частот сопряжения. Они обозначаются стрелками,
перпендикулярными оси абсцисс и имеющими направление вниз, если в данной
точке с ростом частоты наклон характеристики возрастает, и
вверх, если он убывает.
Такими точками для инерционных звеньев будут
соответственно Л и Г для одного и В и Е — для другого, а для
форсирующего— Б и Д. Дальнейшее построение не вызывает каких-либо
трудностей.
На начальном участке (до точки А) сдвиг фаз будет
определяться только наличием интегрирующего звена и будет равен—90°.
Характеристика пойдет без наклона. В точке А за декаду до оп
наклон ЛФХ изменится, увеличившись на 45 град/дек за счет
воздействия первого инерционного звена. С наклоном —45 град/дек
характеристика -пойдет досточки Б. В этой точке, отстоящей на
декаду от шг, под воздействием форсирующего звена наклон ЛФХ
уменьшится на 45 град/дек и характеристика опять пойдет без
наклона.- Дальнейшее построение характеристики произведем чисто
формально, принимая во внимание лишь стрелки, проставленные
ранее у оси абсцисс. В точке В наклон возрастет на 45 град/дек,
в точке Г — уменьшится, в точке Д — опять возрастет и, наконец,
в точке Е — опять уменьшится. Далее ЛФХ пойдет параллельно
оси абсцисс и сдвиг фаз будет оставаться постоянным и равным
—180°. Этого следовало ожидать, так как интегрирующее и два
инерционных звена создадут максимальный суммарный сдвиг фаз
в —270°, а форсирующее +90°.
Как уже отмечалось, если необходимы более точные
характеристики, можно воспользоваться данными справочников или
шаблоном поправок. •
175
В зависимости от установленного в системе усиления следует
сместить ось абсцисс графика ЛАХ на величину 20 \§КЛ и уже от
этой оси производить отсчет усиления.
Аналогичным образом строятся логарифмические
характеристики систем и при большем количестве содержащихся в них
звеньев.
Использование логарифмических характеристик для анализа
качества системы и уяснения происходящих в ней физических
процессов будет изложено в следующих разделах.
§ 3-6. УСТОЙЧИВОСТЬ СИСТЕМ
АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Во всякой системе автоматического регулирования есть
обратная связь, благодаря которой выходной сигнал или сигнал, от него
зависящий, подается на измерительное устройство (рис. 3-40).
В результате сравнения его с входным сигналом вырабатывается
управляющий сигнал, равный разности входного и выходного
сигналов или зависящий от нее. Для синусоидальных входных
сигналов 2 = Х — У.
Вычитание выходного сигнала из
входного показывает, что обратная
связь, имеющаяся в замкнутой
системе, является отрицательной. При
отсутствии входного сигнала 2 = —У. Рис. 3-40. Упрощенная
Иначе говоря, измерительное устрой- структурная схема САР
ство изменяет фазу сигнала обратной
связи на 180°. В других элементах системы также происходят
фазовые сдвиги, в результате чего общий сдвиг фазы может
составить 360°.' Это будет означать, что возникший в любой точке
замкнутой системы случайный сигнал (например, флуктуация), пройдя
весь контур регулирования, вновь вернется в эту точку в той же
самой фазе. Если при этом амплитуда сигнала не уменьшится, т. е.
коэффициент усиления контура на частоте сигнала окажется
равным единице или больше ее, то в дальнейшем этот сигнал уже не
исчезнет, а будет непрерывно увеличиваться. В таких случаях
говорят, что система самовозбудилась или потеряла устойчивость.
На возможность такого крайне нежелательного явления уже
указывалось при рассмотрении переходных процессов в системах.
Линейная система автоматического регулирования называется
устойчивой, если после устранения возмущающего воздействия она
возвращается в состояние равновесия.
В устойчивой системе при постоянном входном сигнале
устанавливается постоянное значение регулируемой величины.
Возникновение возбуждения возможно, если выполнены два
условия. Во-первых, фаза сигнала, прошедшего весь контур
регулирования, должна остаться неизменной (или должна измениться
• •
--н8)—■"■
т,..
к(№
/
177
на 360°). Поскольку измерительное устройство создает фазовый
сдвиг на 180°, самовозбуждение станет возможным, если в
остальной части контура есть сдвиг фаз еще на 180°. Это условие
называется фазовым условием самовозбуждения. Математически его
можно записать в виде
<Р К) = 180°. (3-64)
Через о)о обозначена частота, на которой это условие
выполнено. В дальнейшем ее будем называть собственной частотой
системы.
Во-вторых, коэффициент усиления контура регулирования на
собственной частоте должен быть не меньше единицы. В
противном случае, если в системе случайно возникнет сигнал, то после
прохождения контура он будет ослаблен и постепенно затухнет.
Это условие называется амплитудным условием самовозбуждения.
Его можно записать в виде
КЫ>1. (3-65)
Итак, если имеется некоторая частота шо, на которой в системе
одновременно выполнены оба условия самовозбуждения, то
система будет неустойчивой, в ней возникнут самопроизвольные
изменения регулируемой величины.
Оба условия самовозбуждения можно обобщить, выразив их
в комплексной форме. При выполнении на частоте соо условий
самовозбуждения комплексный коэффициент усиления на этой
частоте будет равен
/С(>0) = КЫ еМ"о) = 1** = - 1. (3-66)
В замкнутой системе
При к*(™-1 + ки*оГ
к (/о=-1. Ко сю = «>. (3-67)
Это означает, что отсутствию в системе входного сигнала
(Х=д) может соответствовать любое значение выходного (Уф 0).
Для определения устойчивости системы необходимо исследовать
поведение системы на всех частотах.
Наиболее удобно это можно сделать при помощи частотных
характеристик. Так как приходится одновременно рассматривать
и амплитудную, и фазовую характеристику, то обычно для
определения устойчивости используют обобщенную частотную
характеристику, называемую амплитудно-фазовой характеристикой
системы.
Амплитудно-фазовые характеристики систем
Амплитудно-фазовой характеристикой системы (АФХ)
называется зависимость ее комплексного коэффициента усиления от
частоты.
178
+]\
а
Ш«оо
1
\сч
1 ^
V
Рис. 3-41.
^Л'Г***
У 1 *п +
^<ш=^Х^
Принцип по-
строения АФХ
Эта характеристика одновременно показывает зависимость от
частоты коэффициента усиления и сдвига фаз. Она строится на
комплексной плоскости в виде графика (рис. 3-41).
Значению каждого комплексного числа А соответствует
определенное положение точки на комплексной плоскости. Модуль
комплексного чцсла определяет расстояние г точки от начала
координат, а аргумент — угол ср между положительным направлением
вещественной оси и направлением на ^Ьнную точку, отсчитываемый
в направлении против часовой стрелки.
С изменением частоты изменяются
модуль и аргумент комплексного
коэффициента усиления К (/со) =/С((о)е;?(а)).
Следовательно, каждому значению ш
будет соответствовать новое положение
точки на комплексной плоскости. Ее
удаление от начала координат
характеризует усиление, а направление на эту
точку — сдвиг фаз на данной частоте.
Для построения АФХ нужно так же, как и для построения
обычных частотных характеристик, задаваться различными
значениями частоты со и для этих значений находить величины /С(а>) и
<р(а>).
В качестве примера построим АФХ инерционного звена:
*(»=гда- ■
Отметив на комплексной плоскости точки, укажем около них,
каким значениям частоты они соответствуют. Значению а>=0
соответствует точка /С(/о>) = 1, а частоте <о=оо — начало координат.
Все остальные точки графика расположатся по дуге окружности *.
На графиках АФХ стрелкой часто указывают направление, в
котором происходит увеличение частоты. Точно такую же форму
будет иметь график и при любой другой постоянной времени, но не«
сколько иначе будут распределены вдоль графика точки,
соответствующие определенным значениям частоты.
Если в систему ввести пропорциональное звено с
коэффициентом передачи /Сп, то сдвиги фаз ни на одной из частот не
изменятся, но модуль комплексного коэффициента усиления возрастет
и в /Сп раз увеличатся расстояния всех точек графика от начала
координат. АФХ такой системы (штриховая линия на рис. 3-41)
будет подобна исходной характеристике.
Если /Сп<1, то весь график сожмется. Построение АФХ для
систем, состоящих из нескольких звеньев, путем расчета значений
К (со) и <р(со) для разных частот весьма сложно. Более удобно
предварительно построить логарифмические характеристики, из
которых можно затем взять данные для построения АФХ.
* Доказательство данного положения здесь не приводится.
179
Преимущество АФХ перед другими видами частотных
характеристик состоит в том, что по ним очень удобно судить об
устойчивости системы, так как они дают очень простой и наглядный
критерий устойчивости.
Амплитудно-ф азовые характеристики
статических систем. Отличительным признаком всех статических
систем является отсутствие в их составе интегрирующих звеньев.
Количество инерционных и форсирующих звеньев может быть
различным, причем для всех реально осуществимых систем
количество форсирующих звеньев не может быть больше, чем
инерционных и интегрирующих вместе взятых.
Рис. 3-42. АФХ систем автоматического регулирования:
а — статических систем; б — астатических систем
Наиболее простой из всех статических систем является
безынерционная. Для безынерционной системы /С(]о))=/Сп, т. е. для
всех частот значение комплексного коэффициента усиления
одинаково и равно /Сп — вся характеристика изображается точкой /Сп
на вещественной оси (рис. 3-42,а).
При наличии одного инерционного звена:
*(/»)=пг^
и характеристика изображается дугой окружности с диаметром,
равным /Сп.
В статической системе с двумя инерционными звеньями-:
ЯЧ» = (1 + уа>7\) (1 + №ш) •
Для построения АФХ удобно воспользоваться ранее
построенными логарифмическими характеристиками подобной системы. Из
рис. 3-38 следует, что с увеличением частоты сдвиг фаз в системе
растет от 0° до —180° при одновременном уменьшении усиления от
/Сп на самых низких частотах до нуля на весьма высоких.
Следовательно, вся АФХ расположится в третьем и четвертом квадран-
180
тах, причем с ростом частоты о> ее точки будут постепенно
приближаться к началу координат (график 2). При изменении усиления Ки
все точки АФХ сместятся в направлении радиусов, проведенных
из начала координат.
Добавление каждого инерционного звена увеличивает на 90°
сдвиг фаз на высоких частотах. Следовательно, АФХ при
добавлении третьего инерционного звена займет три квадранта (график 3),
а при дальнейшем увеличении количества инерционных звеньев
характеристика будет все больше и больше «закручиваться»
вокруг начала координат.
Существенно изменяется форма АФХ статических систем при
включении в их состав форсирующих звеньев. Из частотных
характеристик этих звеньев видно, что на высоких частотах
форсирующее звено создает положительный сдвиг фаз до 90°. Однако,
как уже указывалось, всякое реальное форсирующее звено
обладает инерционностью, которая проявляется на еще более высоких
частотах. Поэтому реальные форсирующие звенья создают
положительный фазовый сдвиг лишь в сравнительно узком диапазоне
частот. Ход АФХ меняется, и на ней образуется своеобразный
изгиб (трафик 5).
Амплитудно-фазовые характеристики
астатических систем. В состав каждой астатической системы
входит хотя бы один интегрирующий элемент. Кроме того,
астатическая система может содержать инерционные и форсирующие
звенья. В зависимости от количества звеньев и их постоянных
времени изменяются вид АФХ и свойства системы.
Если астатическая система состоит только из одного
интегрирующего и одного пропорционального звеньев, то
*(» = §-;
В такой системе на всех частотах^ сдвиг фаз будет равен —90°.
Это значит, что все точки ее АФХ будут лежать на отрицательной
части мнимой оси.
Низким частотам соответствует большее значение
коэффициента усиления К(<*>) = -^-. На высоких частотах величина /С(о>)
уменьшается, что указывает на приближение АФХ к началу
координат по мере увеличения частоты (рис. 3-42,6 график 1). С
изменением усиления форма АФХ не изменится; происходит только
перераспределение точек, соответствующих различным частотам.
Если в рассмотренную систему включить еще инерционное звено, то
В такой системе возможны сдвиги фаз от —90° до —180°,
причем увеличению частоты соответствует уменьшение усиления и
увеличение сдвига фаз. Следовательно* АФХ системы будет полно-
181
стью располагаться в третьем квадранте, и ее точки с ростом
частоты приближаются к началу координат (рис. 3-42,6, график 2).
Увеличение количества инерционных звеньев в астатических
системах или введение форсирующих приводит к таким же
результатам, как и в -статических. Каждое новое инерционное звено
увеличивает максимально возможный сдвиг фаз на 90° (рис. 3-42, б,
график 3).
Введение в состав астатической системы форсирующих звеньев
приводит к появлению на АФХ характерного изгиба подобно
тому, как это имело место для статических систем (рис. 3-42,6,
кривая 4). '
Частотный критерий устойчивости. Для определения,
устойчива ли система автоматического регулирования при заданных ее параметрах,
разработаны некоторые правила, которые принято называть критериями
устойчивости. Наиболее часто в практике применяется частотный (или амплитудно-
фазовый) критерий. Для проверки устойчивости системы этим методом нужно
построить амплитудно-фазовую характеристику разомкнутой системы и
установить, как относительно этой характеристики располагается точка с
координатами (—1, /0). Эта точка соответствует фазовому сдвигу 180° и коэффициенту
усиления, равному единице, т. е. выполнению условий самовозбуждения,
выражения (3-64; 3-65).
Система будет устойчивой, если точка (—1, /0) не охватывается АФХ при
изменении частоты от ш=0 до и>=оо, или неустойчивой, если точка (—1, /0)
лежит внутри петли, образованной АФХ.
Для получения замкнутой петли. в статических системах нужно соединить
начало координат с точкой, откуда АФХ берет свое начало (/Сп, /0), а в
астатических системах нужно провести из начала координат, как из центра, дугу
окружности весьма большого радиуса (теоретически — бесконечно большого) от
положительной действительной оси до АФХ по часовой стрелке (рис. 3-42,6).
Замкнутая петля будет образована этой дугой, самой характеристикой и
положительной вещественной осью. Так, АФХ /, 2, 3, 4 на рис. 3-42, б и 1, 2, 39 5 на
рис. 3-42, а-соответствуют устойчивым системам; точка —1, /0 лежит вне петли,
образованной этими характеристиками.
Остальные характеристики ни том же рисунке соответствуют неустойчивым
системам, так как точка (—1, /0) лежит внутри петель.
Если система автоматического регулирования содержит два инерционных
звена или одно инерционное и одно интегрирующее звенья, то она будет
устойчива при любом коэффициенте передачи /\ш так как АФХ этих систем не
пересекают отрицательную часть вещественной оси и поэтому не могут охватить
точку (—1, /0).
То же относится к системам с одним инерционным и одним интегрирующим
звеньями.
Напротив, если в системе содержатся три инерционных звена или два
инерционных' и одно интегрирующее (кривые 3 рис. 3-42), то по" мере роста
коэффициента усиления они все больше вытягиваются и, наконец, начинают
охватывать точку (—1, /0) — система теряет устойчивость.
При введении форсирующих звеньев система из неустойчивой может
превратиться в устойчивую, когда точка (—1, /0) выходит из петли АФХ (рис. 3-42, а,
кривая 5 и рис. 3-42,6, кривая 4).
Два последовательно включенных интегрирующих звена делают систему
неустойчивой, АФХ в этом случае лежит выше отрицательной действительной
полуоси и охватывает точку (—1, /0) (рис. 3-42,6, кривая 6).
Заметим, что если АФХ проходит через точку (—1, /0), то система будет
находиться на границе устойчивости и малейшее изменение параметров системы
может сделать систему неустойчивой. Следовательно, такая система
неработоспособна.
182
Для рассматриваемой системы запас устойчивости по
амплитуде равен 1/ОВ и представляет собой величину, обратную
коэффициенту усиления на собственной частоте шо. При введении
такого дополнительного усиления общее усиление на этой частоте
будет равно единице, и система станет неустойчивой.
Чем больше отрезок ОВ и чем меньше угол 6У, тем ближе к
точке" (—1, /0) проходит АФХ системы. Такая система будет близка
к возбуждению, так как ее запас устойчивости мал. При изменении
входного сигнала в системе будет возникать значительное
перерегулирование с медленно затухающими колебаниями. Поэтому
на практике добиваются, чтобы АФХ системы проходила
достаточно далеко от точки (—1, /0), т. е. чтобы запас устойчивости был
большим.
Особенно удобно определять запас устойчивости системы по ее
логарифмическим характеристикам (рис. 3-43,6). ЛАХ пересекает
ось абсцисс на частоте среза, так как на этой частоте коэффициент
усиления системы равен единице (составляет нуль децибел).
Отличие сдвига фаз от —180° на этой частоте и будет запасом
устойчивости системы по фазе —6У. Достаточным является запас
устойчивости по фазе примерно 30—40°.
На частоте шо, где фазовый сдвиг составляет —180°, ордината
ЛАХ будет являться запасом устойчивости системы по амплитуде.
Считается достаточным запас устойчивости по амплитуде в
6-^8 (36, что соответствует усилению в 2—2,5 раза. Излишний запас
устойчивости говорит о том, что возможности увеличения
быстродействия системы используются не полностью.
Определение свойств систем по их характеристикам
Комплексные коэффициенты усиления замкнутой и
разомкнутой систем связаны между собой зависимостью
К {/«Л- Ки<а)
*о(/®)-1+/суюГ
Из этого выражения следует, что все свойства системы в
замкнутом состоянии могут быть полностью определены, если известен
комплексный коэффициент усиления или частотные
характеристики разомкнутой системы.
На частотных характеристиках систем регулирования (рис. 3-44)
можно выделить три области. Область, охватывающая частоту
среза и собственную частоту, называется областью средних частот.
Слева от нее располо'жена область нижних, а справа — область
верхних частот. По виду характеристик разомкнутой системы в
области нижних частот можно судить о том, как будет вести себя
185
Частотный критерий позволяет сделать заключение об устойчивости системы
без построения АФХ по логарифмическим характеристикам.
Это следует из полного соответствия между АФХ, с одной стороны, ЛАХ
и ЛФХ — с другой. Точке с координатами (—1, /0) на плоскости АФХ
соответствует точка с частотой среза со=соСр, на которой коэффициент усиления равен
единице (составляет нуль децибел и ЛАХ пересекает ось абсцисс). Если для
этой частоты ЛФХ лежит над уровнем — 180°, значит система устойчива, если
под ним,— неустойчива * (рис. 3-43).
Следует иметь в виду, что в системах автоматического регулирования
возможны паразитные сдвиги фаз за счет факторов, действие которых трудно
' учесть. Такие сдвиги фаз особенно велики на высоких частотах. Иначе говоря,
в любой системе имеется частота, на которой сдвиг фаз составляет 180°, т. е.
выполняется фазовое условие самовозбуждения. Поэтому при увеличении
усиления практически любая система может стать неустойчивой.
Запас устойчивости систем
Система автоматического регулирования должна быть не
просто устойчивой, но и должна находиться достаточно далеко от
неустойчивого состояния. В противном случае при случайном
изменении усиления или сдвиге фаз система может стать неустойчивой.
Для оценки возможности самовозбуждения системы
пользуются специальным понятием «запас устойчивости системы».
Различают запас устойчивости по фазе и по амплитуде.
Запасом устойчивости по фазе называется тот дополнительный
сдвиг фаз, который нужно ввести в систему на частоте, где
коэффициент передачи равен единице, чтобы сделать систему
неустойчивой, ч
На АФХ, показанной на рис. 3-43, а, точка А соответствует
частоте, на которой коэффициент усиления равен единице: /С(соСр) = 1
(частота среза). Если в систему ввести дополнительный сдвиг фаз,
равный 8У, то она станет неустойчибой: амплитудно-фазовая
характеристика пройдет через точку (—1, /0). Следовательно, бу и
есть залас устойчивости по фазе.
Точка В соответствует частоте <о0, на которой выполнено
фазовое условие самовозбуждения, т. е. собственной частоте системы
ф((оо) = 180°. Однако амплитудное условие на этс$ частоте не
выполнено, так как коэффициент усиления, измеряемый расстоянием
точки В от начала координат, меньше единицы:
КЫ = ОВ<1.
Запасом устойчивости по амплитуде называется то
дополнительное усиление, которое нужно ввести в систему на частоте шо,
чтобы сделать систему неустойчивой.
* Особый случай соответствует АФХ типа 4 на рис. 3-42,6, поскольку здесь
имеются три точки, где АФХ пересекает отрицательную полуось. В этом случае
удобнее пользоваться АФХ.
183
замкнутая система в установившемся режиме. Ход характеристик
в области средних частот определяет динамический режим
замкнутой системы и переходные процессы в ней. Положение
характеристик в области верхних частот не оказывает существенного
влияния на свойства системы.
Остановимся на указанных положениях более подробно. В
установившемся режиме по-разному ведут себя статические и
астатические системы. Если система является астатической, то в области
нижних частот ее ЛАХ будет иметь наклон —20 дб/дек^
обусловленный наличием интегрирующего звена, а сдвиг фаз будет
составлять —90°. В такой системе при постоянном входном сигнале
ошибка отсутствует. Если же начальный участок ЛАХ идет
горизонтально, а сдвиг фаз отсутствует, система является статической и
будет иметь статическую ошибку.
Величина установившейся ошибки зависит от коэффициента
передачи системы /Сп, который может быть определен по отрезку
оси ординат, заключенному между ЛАХ и осью абсцисс. Именно
на этот отрезок, равный 20 1^/Сп, смещается ось абсцисс при
построении ЛАХ*. Зная величину /Сш легко определить значение
установившихся ошибок. В статической системе при постоянном
входном сигнале х эта ошибка равна (см. выражение 3-41)
В астатической системе при постоянной скорости изменения
входного сигнала V установившаяся динамическая ошибка (см.
выражение 3-46) равна
Идеальной была бы такая система регулирования, которая
в замкнутом состоянии на всех частотах имела бы комплексный
коэффициент усиления, равный единице:
Это равенство означает, что в любой момент времени
регулируемая величина ^ соответствует заданному значению X:
У = ХУ
а ошибка, равная разности этих величин, отсутствует. Данное
условие довольно хорошо выполняется в области нижних частот.
* Указанное положение справедливо лишь для систем со сравнительно
малыми постоянными времени, меньшими 1 сек. При этом сопрягающие частоты
будут лежать правее начала координат,
187
На нижних частотах /С(со)^>1 и имеет место следующее
приближенное равенство:
К*(уа)) ТТЖЙ" - Т7>Г ~ (3 8)
В области средних частот при нормальном запасе устойчивости
коэффициент усиления близок к единице, а сдвиг фаз близок
к 180°. Следовательно, на средних частотах комплексный
коэффициент усиления К (/со) близок к -*-1. Это говорит о том, что
знаменатель в выражении, определяющем значение Ко (/со), равный
сумме 1+/С(/со), мал, а модуль Ко (/со), т. е. коэффициент усиления
замкнутой системы, в области средних частот сравнительно велик.
Он имеет тем большую величину, чем меньше запас устойчивости.
В области верхних частот /С(со)<С1. Следовательно,
к* О) - гтжш - ^=к (»• <3-69>
Это означает, что на высоких частотах усиление в замкнутой
системе так же мало, как и в разомкнутой. Поэтому
высокочастотные составляющие входного сигнала системой пропущены не
будут.
Общая амплитудно-частотная характеристика замкнутой
системы, построенная в полулогарифмическом масштабе,
изображена на нижнем графике рис. 3-44. Из этой характеристики видно,
что в области средних частот, вблизи частоты среза, имеет место
некоторый подъем усиления.
Если входной сигнал имеет составляющие, лежащие в области
средних частот, то эти составляющие сигнала будут усилены
больше других, поэтому при перерегулировании будут происходить
колебания регулируемой величины с частотой, близкой к частоте
среза.
При медленных изменениях входного сигнала он не будет
содержать составляющих из области средних частот и
перерегулирование с сопровождающими его колебаниями не возникнет.
Полоса пропускания замкнутой системы ограничена сверху
областью средних частот, так как далее усиление резко падает. При
увеличении усиления, как было установлено раньше, скорость
протекания процесса регулирования возрастает. Такой же вывод
получается и при анализе частотных характеристик системы. Дело
в том, что с ростом усиления возрастает частота среза, а
следовательно, расширяется полоса пропускания системы, т. е. система
пропускает более высокочастотные составляющие входного
•сигнала. Однако в этом случае равномерность частотной характеристики
уменьшается, а ее максимум смещается в область более высоких
частот. Все это приводит к возрастанию перерегулирования, при*
чем частота колебаний, возникающих при перерегулировании,
также возрастает. Запас устойчивости системы снижается.
138
Анализ частотных характеристик разомкнутой системы
позволяет установить основные свойства, которыми эта система будет
обладать в замкнутом состоянии, и оценить качество
регулирования. В частности, по частотным характеристикам можно очень
просто определить следующие параметры системы:
— значение коэффициента передачи, а следовательно, и
величину возможных ошибок; /
— запас устойчивости системы, от которого зависят характер
протекания переходных процессов и величина перерегулирования;
— ширину полосы пропускания системы в замкнутом
состоянии и связанную с ней скорость реагирования системы на внешние
воздействия.
Кроме того, из характеристик видно, статической или
астатической является данная система.
ГЛАВА IV
СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
§ 4-1. КАЧЕСТВО ПРОЦЕССА РЕГУЛИРОВАНИЯ
В зависимости от назначения к системам автоматического
регулирования могут быть предъявлены различные требования.
Основное требование, которое должно безусловно выполняться во всех
случаях, — устойчивость системы. Если система неустойчива, то
она вообще не может осуществлять процесс регулирования.
Однако регулирование, осуществляемое даже и устойчивой системой,
может быть неудовлетворительным.
Качество регулирования определяется точностью, т. е.
величиной статических и динамических ошибок системы, величиной
перерегулирования, скоростью реагирования системы и длительностью
переходного режима. В.се эти показатели связаны между собой и
зависят в значительной степени от коэффициента передачи
системы /(п; они могут быть определены по частотным характеристикам
системы. Чем больше /Сп, тем меньшими будут установившиеся
ошибки и большей скорость реагирования. Но вместе с тем
возрастает перерегулирование и более длительным становится
затухающий колебательный процесс после изменения входного сигнала.
Значение /Сп изменяется обычно регулировкой усилителя,
входящего в состав системы.
Определим допустимое значение /Сп, при котором система
сохраняет еще достаточный запас устойчивости.
Пусть имеется астатическая система с двумя инерционными
звеньями, причем постоянная времени одного из них значительно
больше, чем другого:
* У*) = ]* (1 + 7(оГ1)П(1 + ]*т%) '
где ТХ>Т2.
Логарифмические характеристики такой системы показаны на
рис. 4-1, а. На первой частоте сопряжения щ есть достаточный за-
190
пас устойчивости по фазе, равный 45°. Поэтому значение
коэффициента передачи может быть установлено таким, при котором на
частоте Ш1 коэффициент усиления будет равен единице (/С(со1) = 1).
Но на этой частоте инерционные звенья еще не оказывают
влияния на ход ЛАХ, следовательно, коэффициент усиления будет
определяться только наличием пропорционального и интегрирующего
звеньев:
откуда
к -1-
*\п— у •
Полученный результат означает, что, чем больше наибольшая
постоянная времени Ти тем меньшим будет значение /Сш при
котором система сохраняет достаточный запас устойчивости. Если
значение постоянной времени второго инерционного звена Г2 будет
близко к величине Гь то уже на первой частоте сопряжения сдвиг
фаз будет несколько большим, а запас устойчивости меньшим.
Поэтому допустимое значение /Сп окажется еще более ограниченным.
Таким образом, при всех условиях
*п<^. (4-1)
Аналогичным образом можно определить предельно допустимое
или устойчивое значение /Сп и в статических системах. Пусть
статическая система содержит несколько инерционных звеньев
(например, три звена), среди которых два имеют значительно большие
постоянные времени, чем все остальные:
К (» = (1 + ^тг) (1 + >Г2) (1 + УсоГз)'
где Т1>Т2>Т3.
Логарифмические характеристики этой системы показаны на
рис. 4-1,6. Из характеристик видно, что на второй частоте
сопряжения запас устойчивости составляет 45°. Это. позволяет ввести
такое значение /Сш при котором на частоте а>2 общий коэффициент
усиления будет равен единице:
АГК> = 1.
На этой частоте лишь первое инерционное звено влияет на ход
ЛАХ. Поэтому возможно следующее приближенное равенство:
*^~т+%?т или к^ = тгтщ>
НО и>2 = -^-.
1г
191
Следовательно,
V
12
т\
Так как Т\>Т2, то—т^> 1,тогда можно записать
откуда
к -Ь-
Если значение Г3 будет близким к Т2, то на частоте <ог общий
сдвиг фаз возрастет, запас устойчивости системы уменьшится, что
заставит понизить усиление. Следовательно, для статических
систем
Ки<%, где Тг>Т2. (4-2)
Указанные ограничения коэффициента передачи в значительной
степени определяют качество регулирования.
Пусть, например, цель сопровождается по дальности
астатической системой, содержащей инерционное звено со сравнительно
малой постоянной времени Г = 0,05 сек. Допустимое значение /Сп
в такой системе будет равно
^т-ж-20^]-
При скорости цели V = 400 м/сек только за счет работы системы
автосопровождения возникнет ошибка
Общая же ошибка по дальности будет еще большей. Все это
заставляет принимать дополнительные меры, которые без ущерба
для устойчивости позволили бы значительно повысить усиление
системы и улучшить качество регулирования.
Помимо высокого качества регулирования, к САР могут
предъявляться различные специфические требования. В ряде случаев
системы должны выдерживать большие скорости и ускорения,
значительно превышающие скорости и ускорения нормального
режима работы. Например, при переходе от сопровождения одной цели
к сопровождению другой необходимо возможно быстрее
развернуть антенну в новом направлении или осуществить переброску
194
антенны. Чтобы следящий привод антенны мог обеспечить
большую скорость переброски, его исполнительное устройство —
двигатель— должно иметь соответствующий запас мощности. Кроме
того, механические элементы привода должны иметь
определенный запас прочности, чтобы выдержать те значительные
перегрузки, которые возникают при больших ускорениях.
Система регулирования должна быть защищена от воздействия
помех, особенно тех, которые поступают вместе с входным
сигналом. Для этого полоса пропускания системы должна быть
возможно более узкой и точно соответствовать характеру входного
сигнала. Система должна иметь возможно более узкую зону
нечувствительности. В противном случае при медленном изменении
входного сигнала регулируемая величина будет изменяться
рывками.
§ 4-2, КОРРЕКЦИЯ СИСТЕМ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ
Коррекцией САР называется осуществление специальных мер,
делающих систему устойчивой и улучшающих качество ее работы.
Если эти меры имеют своей целью только повышение
устойчивости системы, то их обычно называют стабилизацией.
Характер реагирования системы и ее ошибки зависят от состава
системы и характера воздействующего на нее сигнала. Поэтому
коррекция системы может осуществляться или путем учета
характера управляющего сигнала, или путем изменения свойств
отдельных элементов системы.
Учет характера управляющего сигнала достигается
добавлением к сигналу рассогласования других сигналов, определенным
образом зависящих от входного (коррекция по возмущению) или
от самого сигнала рассогласования (коррекция по отклонению).
Свойства отдельных элементов системы обычно изменяются
посредством применения местных обратных связей, охватывающих
отдельные участки контура регулирования.
Нельзя строго разграничивать различные методы коррекции,
так как управляющий сигнал изменяют включением в систему
дополнительных элементов, что изменяет в свою очередь ее состав
и свойства, а применение местных обратных связей приводит к
изменению действующих в системе сигналов. Выбор тех -или иных
методов зависит как от состава и параметров корректируемой
системы, так и от преследуемых целей. Возможно одновременное
применение нескольких методов коррекции, взаимно
дополняющих один другой.
Для осуществления коррекции в систему приходится водить ряд
дополнительных элементов,. которые могут быть включены или
последовательно в цепь прохождения сигнала, или параллельно
чтой цепи. В первом случае коррекцию иногда называют последо-
и/пч'лыюй, во втором — параллельной. Рассмотрим основные
мет/ил коррекции САР.
;*
195
Коррекция по возмущению
Можно значительно повысить качество регулирования и
снизить ошибки, если к сигналу рассогласования добавить сигнал,
определенным образом зависящий от входного сигнала. Этот
способ показан на рис. 4-2, а.
Управляющий сигнал образуется как сумма сигнала
рассогласования и сигнала, поступающего через корректирующий элемент
и равного ХКк(]ы)'-
Выходной сигнал будет равен
У = 2К(/т) = [Д + ХКК (»] АГ(»,
а ошибка системы определится как разность:
А=х- у = х- [д + хкк (»] а: (».
Найдем отсюда значение Д:
А[1+Х(уа))]=^[1-/Ск(уЬ)А:(уа))]
или
(4-3).
*к(№ Н
<$<&
кию) и* у
т. е. при любом внешнем воздействии А" ошибка А будет
тождественно равна нулю, если
1 ~ К. (» К (>) = 0, или Кк (>) = -щ^. (4-4)
. Однако на практике полностью исключить ошибки
регулирования невозможно. Объясняется это тем, что обычно сама система
содержит интегрирующие и
\ХКк(}и) инерционные звенья. Поэтому
корректирующий элемент
должен состоять из
дифференцирующих и форсирующих
звеньев. Ранее уже
указывалось, что для быстро
изменяющихся сигналов невозможно
создать звенья,
осуществляющие достаточно точное
дифференцирование, а следова--
тельно, и идеальные
форсирующие звенья. Поэтому
корректирование по
возмущению применимо лишь в тех
системах, где скорость изменения сигналов мала. Другим
ограничением является то обстоятельство, что не всякий сигнал можно
продифференцировать. Наиболее просто это может быть
осуществлено с сигналами, выраженными углом поворота вала или
196
Я \Кк(Цо)
кЦы)
Рис. 4-2. Коррекция по возмущению:
а —общая схема; б — схема при
разомкнутой обратной ' связи
медленно меняющимся напряжением. В радиолокационных
системах произвести дифференцирование входного сигнала обычно
невозможно, поэтому коррекция по возмущению в них неосуществима.
Применение метода рассмотрим на примере астатической
системы. Пусть/((/<о) =-г^-. При постоянной скорости изменения
входного сигнала установится постоянная ошибка, равная -рг-,
а скорость изменения регулируемой величины будет такой же,
как и у входного сигнала, т. е. будет происходить лишь некоторое
постоянное запаздывание (отставание) в изменениях
регулируемой величины (рис. 3-31).
..В данном случае корректирующее звено должно иметь
комплексный коэффициент усиления, равный
Это значит, что оно должно состоять из дифференцирующего
звена и безынерционного усилителя. Такой состав обеспечивает
получение сигнала, пропорционального скорости изменения
входного сигнала и равного -тг (этот сигнал в точности равен сигналу
ошибки нескорректированной системы).
Допустим, что в этой системе цепь коррекции, ранее
разомкнутая, в некоторый момент времени был.а включена. Тогда
первоначально оба эти сигнала будут действовать одновременно, что
приведет к повышению скорости реагирования системы, и
регулируемая величина начнет изменяться быстрее. Так будет продолжаться
до тех пор, пока не наступит согласование системы. Когда система
будет согласована и ошибка исчезнет, в качестве управляющего
сигнала останется лишь сигнал, поступающий через цепь
коррекции. Он обеспечит такую же скорость изменения регулируемой
величины, какую имеет входной сигнал.
Отсутствие сигнала расоогласования'делает, на первый взгляд,
возможным исключение измерительного устройства из общей
схемы системы. Действительно, измерительное устройство служит
для получения сигнала рассогласования. Необходимость в нем
отпадает, если регулирование все время происходит идеально и
рассогласования в системе не происходит.
Однако при устранении из системы измерительного устройства,
а вместе с тем и обратной связи система регулирования становится,
разомкнутой (рис. 4-2,6). В такой разомкнутой системе общий
комплексный коэффициент усиления будет равен единице:
аг(>)=лгк(>)л:(>) = 1.
Но при воздействии помех или изменении параметров системы
сразу же появятся ошибки, которые самой системой обнаружены
не будут, т. е. появится недостаток, присущий всем разомкнутым
системам.
197
При наличии измерительного устройства процесс
регулирования осуществляется в основном за счет сигнала, поступающего
через корректирующий элемент /Ск (/<»>) непосредственно со входа
системы. За счет сигнала рассогласования происходит лишь
устранение случайных ошибок, что делает процесс регулирования более
точным.
Коррекция по сигналу рассогласования (по отклонению)
Улучшение реагирования системы и повышение ее
устойчивости в некоторых случаях может быть достигнуто путем различных
преобразований сигнала рассогласования. Эти преобразования
сводятся к получению управляющего сигнала в виде суммы самого
сигнала рассогласования с сигналами, представляющими его
производную, интеграл или какую-либо другую функцию.
Получение дополнительного сигнала производится при помощи
вводимых в систему вспомогательных корректирующих элементов:
дифференцирующих и интегрирующих звеньев и других пассивных
четырехполюсников *. Корректирующие элементы могут быть
включены или непосредственно на выходе измерительного
устройства, или в другом участке контура регулирования, если это
удобнее в конструктивном отношении.
Добавление производной сигнала
рассогласования. Пусть имеется астатическая система с несколькими
инерционными звеньями и необходимо для уменьшения ошибок и
повышения скорости реагирования увеличить усиление системы.
Это может привести к уменьшению запаса устойчивости или даже
к .полной его потере. Если же к сигналу рассогласования добавить
его производную, то даже при большом дополнительном усилении
система останется устойчивой.
Для осуществления коррекции в этом случае в систему следует
включить форсирующее звено. При идеальном форсирующем звене
управляющий сигнал будет равен
2' = Д(1+/а>7').
Будем считать, что комплексный коэффициент усиления
нескорректированной системы равен
КО'®) = уш(1 + ]*тЦ{\ + >Г2) '
причем Т\>Тъ.
Тогда при наличии коррекции
* Четырехполюсниками называются устройства, включаемые в общую схему
четырьмя точками (два входных и два выходных зажима). Четырехполюсники
являются пассивными, если они не содержат источников энергии.
198
С физической точки зрения улучшение качества регулирования
может быть объяснено следующим образом. Если система
обладает инерционностью, то при резких изменениях входного сигнала
рассогласование начинает быстро расти. К сигналу
рассогласования будет добавляться значительный по величине сигнал,
пропорциональный скорости его изменения, т. е. его производной. Это
приводит к увеличению управляющего сигнала, а следовательно,
и к соответствующему возрастанию скорости реагирования.
Если же в процессе регулирования рассогласование начинает
уменьшаться, то его производная будет отрицательной. Это
приведет к уменьшению управляющего сигнала и скорости
реагирования системы. При меньшей скорости слабее проявляется
инерционность системы, и система более плавно подходит к согласованному
положению. Перерегулирование уменьшается или полностью
устраняется.
Примером применения данного метода коррекции может
служить система стабилизации крена в автопилотах. В этих системах
сигнал рассогласования, пропорциональный крену, получается при
помощи свободного гироскопа, а его производная — при помощи
двухстепенного. Одновременное воздействие обоих сигналов
повышает стабильность работы системы, что вызывает так называемое
демпфирование системы. Поэтому двухстепенной гироскоп часто
называют демпфирующим.
В статических системах введение производной сигнала
рассогласования лишь уменьшает ее инерционность, что приводит к
увеличению скорости реагирования системы и улучшает переходный
процесс.
Добавление интеграла сигнала
рассогласования. Если в статическую систему регулирования включить
интегрирующее звено, то статическая система превратится в
астатическую.
Если же интегрирующее звено включить в обычную
астатическую систему (астатическую систему первого порядка), то эта
система превратится в астатическую систему второго порядка
(с двумя интегрирующими звеньями). Такая система не имеет
ошибок не только при постоянном по величине входном сигнале,
но и в том случае, когда входной сигнал изменяется с постоянной
скоростью, т. е. в ней отсутствуют ошибки по скорости. В. ряде
случаев такие системы крайне необходимы. Так, например, при
сопровождении цели возможны периодические пропадания
отраженного сигнала. Однако система будет продолжать вести
сопровождение цели с прежней скоростью, «запомнив» ее значение. Поэтому
ошибки сопровождения- длительное время будут невелики.
«Запоминание» скорости достигается благодаря наличию двух
интегрирующих звеньев. После исчезновения входного сигнала перестает
изменяться величина сигнала на выходе первого интегрирующего
звена, а следовательно, и-скорость на выходе второго.
201
Постоянную времени корректирующего звена берут примерно
равной постоянной времени наиболее инерционного звена: Т^Т\.
При та«ком выборе получим
Сравнивая значения К (/со) и /С (/со), легко установить, что
добавление производной полностью скомпенсировало влияние
наиболее инерционного элемента системы. Общий фазовый сдвиг в
системе уменьшился, что увеличило запас устойчивости. Это
позволяет при сохранении прежнего запаса устойчивости повысить
коэффициент усиления, а следовательно, снизить ошибки и повысить
скорость реагирования системы.
Более наглядно это видно из рассмотрения частотных
характеристик (рис. 4-3).
Начальный участок ЛАХ нескорректированной системы
(рис. 4-3, а) имеет наклон —20 дб/дек, что объясняется наличием
интегрирующего звена. Начиная с частоты о> = -~- благодаря
влиянию первого инерционного звена наклон возрастает и становится
равным —40 дб/дек. С частоты со = -=- наклон увеличивается еще
* 2
на 20 дб/дек вследствие влияния второго инерционного звена.
Соответственно изображена и ЛФХ системы.
При усилении, равном 20 \^КП дб, система имеет достаточный
запас устойчивости. В скорректированной системе характеристики
пойдут иначе. Наклон —20 дб/дек сохранится вплоть до частоты
о) = -=-, на которой запас устойчивости по фазе составляет 45°.
* 2
Следовательно, на этой частоте коэффициент усиления может быть
сделан равным единице (0 дб), что позволяет ввести в систему
дополнительное усиление, равное 20 1&/СДОп дб. Иначе говоря, при
добавлении производной сигнала рассогласования уменьшается
фазовый сдвиг на тех частотах, где система наиболее близка к
самовозбуждению, а также на всех более выеоких частотах. Частота
среза в системе увеличивается, что говорит об увеличении полосы
пропускания и, следовательно, об уменьшении динамических
ошибок. Кроме того, за счет увеличения коэффициента усиления
уменьшаются и статические ошибки. Следует, однако, .помнить, что при
расширении полосы пропускания увеличивается воздействие
помех на систему регулирования.
Все изменения, происходящие в системе при применении
коррекции, можно проследить и на амплитудно-фазовых
характеристиках (рис. 4-3,6). Простое увеличение усиления (график 2)
приводит к охвату характеристикой точки (—1, /0), в то время как
увеличение усиления с одновременным корректированием
позволяет сохранить достаточный запас устойчивости (график 3).
199
Астатические системы второго порядка при отсутствии
специальных мер стабилизации оказываются неустойчивыми. Это
объясняется тем, что только за счет интегрирующих звеньев в таких
системах создается фазовый сдвиг в 180° и тем самым сводится
к нулю запас устойчивости по фазе. С физической точки зрения
это обстоятельство может быть объяснено следующим образом.
При наличии двух интегрирующих звеньев ускорение
регулируемой величины пропорционально сигналу ошибки. Это значит,
что как только сигнал ошибки станет равным нулю (в момент
согласования), станет равным нулю и, ускорение, т. е. регулируемая
величина будет продолжать изменяться с постоянной скоростью.
Это вновь приведет к рассогласованию системы и т. д. Более
подробно это явление рассмотрено ниже на примере конкретной
системы регулирования.
Чтобы избежать рассогласования системы и в то же время
получить систему с нулевой ошибкой по скорости, в обычную
астатическую систему не вводят второе интегрирующее звено, а к
сигналу рассогласования лишь добавляют сигнал, пропорциональный
его интегралу*. Управляющий сигнал в этом случае будет равен
Это значит, что добавление интеграла эквивалентно включению
в систему одновременно интегрирующего и форсирующего звеньев.
Пусть астатическая система содержит, помимо
интегрирующего, несколько инерционных звеньев. Ее комплексный коэффициент
усиления будет равен
Тогда после корректирования
К №> - К V*) М - ы м (1 + ^Тх) (1 + >Га).
или
„ ( . . К (1 +>Г)
Д V*' ~ у«>.(1 + >7\) (1 + ]*Тг) • I4"*'
Как видно из выражения (4-5), это астатическая система
второго порядка. Постоянную времени Т берут больше наибольшей
из постоянных времени инерционных звеньев: Т>Т\>Т2.
В этом случае влияние форсирующего звена на ход
характеристик системы скажется на более низких частотах по сравнению
с инерционными звеньями. В области нижних частот наклон
характеристики благодаря интегрирующим звеньям равен —40 дб/дек
при сдвиге фаз —180° (рис. 4-4,а).
* Данная операция осуществляется при помощи схемы решающего
усилителя, рис. 6-20,6.
202
Начиная с частоты а>= у под воздействием форсирующего
звена наклон ЛАХ и фазовый сдвиг уменьшаются. Система
приобретает достаточный запас устойчивости по фазе. На более
высоких частотах за счет инерционных звеньев фазовый сдвиг вновь
возрастает, но там, где он доходит до 180°, имеется достаточный
запас устойчивости по амплитуде. Соответствующая амплитудно-
фазовая характеристика показана на рис. 4-4,6. Как видно из
рисунка, она не охватывает точку (—Л/0).
К астатическим системам второго порядка прибегают
сравнительно редко, так как эти системы трудно сделать устойчивыми и
при отсутствии статических ошибок в них могут быть большие
динамические ошибки.
Таким образом, если добавление производных сигнала
рассогласования снижает динамические ошибки, то добавление
интегралов снижает статические.
Для осуществления корректирования добавлением к сигналу
рассогласования его производных или интегралов в систему
приходится вводить относительно сложные дифференцирующие или
интегрирующие устройства. Тот же самый результат может быть
получен и более простым путем. Достигается это включением
корректирующих четырехполюсников.
Включение звена быстрого реагирования. Пусть
комплексный коэффициент усиления системы равен:
К(>) = уш (1 + усоГОО + ]<*Т2) '
т. е. система, как и в ранее рассмотренных случаях, содержит одно
интегрирующее и два инерционных звена.
Последовательно в цепь сигнала включим звено быстрого
реагирования, комплексный коэффициент усиления которого согласно
выражению (3-33) имеет вид
причем Т<Т'.
Тогда общий комплексный коэффициент усиления системы
станет равным*
* Уменьшение усиления в -~т" раз, вызванное включением звена быстрого
реагирования, будем считать скомпенсированным соответствующим увеличением
общего усиления системы.
204
Параметры корректирующего звена выбирают так, чтобы
постоянная времени Т' была примерно равна постоянной времени
наиболее инерционного звена системы:
Т^ТХ>Т2.
Тогда после сокращения получим
К ^ = > (1 + >)7\0 (1 + у»Г) '
Сравнивая значение К (/со) и /Г (/со), легко установить, что при
включении звена быстрого реагирования структурный состав
системы не изменяется, однако значительно уменьшается постоянная
времени наиболее инерционного звена, что положительно
оказывается на качестве регулирования.
Рассмотрим, как изменятся характеристики системы (рис. 4-5, а)
при включении в нее звена быстрого реагирования. Будем считать,
что Т<Т2. (В общем случае это соотношение может быть и
обратным.)
Если коэффициент передачи системы после корректирования
установить таким же, каким он был в исходной системе, то на
нижних частотах положение ЛАХ не изменится. Характеристика
теперь сохранит наклон —20 дб/дек до частоты сопряжения о> = ^-.
Вблизи этой частоты запас устойчивости по фазе будет близким
к. 45°. Следовательно, в систему можно ввести дополнительное
усиление, величина которого может быть легко определена при
помощи логарифмических характеристик.
АФХ систем показаны на рис. 4-5,6. Улучшение переходных
процессов при включении звена быстрого реагирования
объясняется следующим образом. При резком изменении входного сигнала и
возникновении рассогласования звено полностью пропустит
управляющий сигнал, что приведет к увеличению скорости
реагирования системы и более быстрому протеканию переходного процесса.
В дальнейшем сигнал на выходе звена будет уменьшаться
(рис. 3-25,6), что предотвратит значительное перерегулирование.
Звенья быстрого реагирования могут применяться для.
коррекции астатических систем второго порядка. Создавая в некоторой
области частот положительный фазовый сдвиг, они позволяют
получить характеристику такого же вида, как изображенная на
рис. 4-4,6, что обеспечивает устойчивую работу системы.
Включение звена медленного реагирования.
Звено медленного реагирования (рис. 3-26) имеет комплексный
коэффициент усиления
Ак — 1 + ]^Т *
где Т>Т'.
205
Приближенные логарифмические характеристики такого звена
показаны на рис. 4-6. Из этих характеристик видно, что звено
медленного реагирования при его включении в систему регулирования
уменьшает общее усиление на высоких частотах. Это уменьшение
усиления будет тем большим, чем больше интервал между
частотами сопряжения со = -^- и ю = -=г. Кроме того, в интервале между
частотами сопряжения звено создает отрицательный сдвиг фаз,
который при большой величине интервала становится близким
к 90°.
.Включение такого звена в САР может привести к снижению
запаса устойчивости. Поэтому звенья медленного реагирования
используют лишь в тех случаях, когда для уменьшения
высокочастотных помех необходимо сузить полосу пропускания системы
при сохранении большого усиления.
В качестве примера рассмотрим, как изменятся
характеристики ^астатической системы:
%№) == XI + ^Ш + X*,)
при включении звена медленного реагирования.
Приближенные логарифмические характеристики системы
показаны на рис. 4-7, а. На ЛАХ отмечено предельно допустимое
усиление, при котором сохраняется достаточный запас
устойчивости.
Комплексный коэффициент -усиления скорректированной
системы будет равен
к с»=к(» к. с» - ^ (1+>^++/:^(1+т .
Параметры звена медленного реагирования выбирают с таким
расчетом, чтобы обе частоты сопряжения отличались одна от
другой не более чем на две декады. В этом случае максимальный
сдвиг фаз, создаваемый звеном в диапазоне между частотами
сопряжения, будет по крайней мере на 12° меньше 90°.
Наибольшую из частот сопряжения выбирают более низкой, чем частота
среза системы
Тогда уменьшение запаса устойчивости по фазе при
включении звена медленного реагирования будет сравнительно
небольшим.
Из характеристик скорректированной системы видно, что при
прежнем усилении полоса пропускания системы значительно
уменьшается. Если входной сигнал изменяется медленно, то это
обстоятельство не ухудшит реагирования системы.
207
Можно, сохранив прежнее значение полосы пропускания,
повысить усиление на величину 201^/Сдоп дб.
На рис. 4-7,6 показаны АФХ системы в исходном состоянии,
при введении дополнительного усиления и при корректировании.
—— д) Включение интегро-дифференцирующего
контура. При включении интегро-дифференцирующего контура
(рис. 3-27) можно получить еще большее устойчивое усиление
системы без заметного расширения ее полосы пропускания.
Пусть по-прежнему имеется астатическая система с двумя
инерционными звеньями:
К(М = уо,(1 +т(\ +>г2) *
Логарифмические характеристики такой системы показаны на
рис. 4-8, а, амплитудно-фазовые —на рис. 4-8,6. При
значительном увеличении усиления система может стать неустойчивой и
ее АФХ охватит точку (—1, /0).
Для устойчивой работы системы необходимо, чтобы ни на
одной из частот не выполнялись одновременно оба условия
самовозбуждения и, в частности, чтобы на частоте среза, где/С((оСр) = 1,
сдвиг фаз был меньше 180°.
Достигается это включением интегро-дифференцирующего
контура. Такой контур уменьшает сдвиг фаз на тех частотах, где
система была наиболее близка к самовозбуждению.
Комплексный коэффициент усиления контура согласно
выражению (3-36) равен
/г (/,,л — (1+>П(1+>П
ак иш; —(1 + >л (1 + >г") •
При наличии коррекции будем иметь
К (» = АГ(» Кк (» = М1 + ](лТ)\\ ^Д) (1 ^Д) (1 + >Г'") •
Параметры корректирующего контура выбирают так, чтобы
было выдержано следующее соотношение между постоянными
времени:
Г>Г1>Г^Г,>Г2>Г,/. \ (4-6)
Если известны постоянные времени звеньев, легко построить
логарифмические характеристики всей системы.
В области нижних частот наклон ЛАХ составляет —20 дб/дек,
что обусловлено наличием интегрирующего звена* При
увеличении частоты наклон возрастает сначала до —40, а затем до
—60 дб/дек. Это объясняется влиянием инерционных звеньев,
имеющих наибольшие постоянные времени Т и Т\. На более
высоких частотах под влиянием форсирующих звеньев с постоянными
времени V и V наклон характеристики вновь уменьшается:
сначала до —40, а затем до —20 дб/дек. И наконец, при дальнейшем
210
увеличении частоты на ход характеристики начинают влиять
инерционные звенья с малыми постоянными времени Т2 и Т"\ в
результате чего ее наклон вновь возрастает. На самых высоких частотах
характеристики стабилизированной и нестабилизированной систем
совпадают.
""Аналогичным образом можно объяснить и построение ЛФХ
системы. На нижних частотах сдвиг фаз создается только
интегрирующим звеном и составляет —90°. Увеличение нахлона ЛАХ
под влиянием инерционных звеньев или его уменьшение под
влиянием компенсирующих звеньев сопровождается
соответствующим увеличением или уменьшением фазового сдвига.
На частоте <о^р имеется достаточный запас устойчивости по
фазе, что позволяет ввести значительное дополнительное усиление,
чтобы на этой частоте коэффициент усиления был равен единице.
Система становится условно устойчивой. На более низких и более
высоких частотах сдвиг фаз достигает 180°. Однако на этих
частотах коэффициент усиления отличается от единицы, т. е. не
выполнено амплитудное условие самовозбуждения. Поэтому, несмотря
на значительное дополнительное усиление, система остается
устойчивой.
Весьма существенным здесь является то, что значительное
увеличение усиления не сопровождается большим расширением
полосы пропускания. Это объясняется увеличением наклона ЛАХ
по сравнению с нескорректированной системой, т. е. быстрым
уменьшением усиления по мере увеличения частоты.
Местные обратные связи
В системе автоматического регулирования, помимо цепи
обратной связи, охватывающей ее в целом, могут быть местные
обратные связи, охватывающие только отдельные звенья или
группы звеньев системы (рис. 4-9,а). Такие местные обратные
связи широко применяются как для улучшения параметров
отдельных звеньев, так и для коррекции всей системы. Их наличие
делает систему регулирования многоконтурной.
Если комплексный коэффициент усиления элемента равен
КаО©), то при наличии охватывающей его местной обратной связи
его значение изменится и станет равным
лао^ш'— 1 + РСМК.1У») '
Следовательно, характер местной обратной связи оказывает
существенное влияние на свойства элемента.
Среди местных обратных связей различают жесткие и гибкие.
Если в цепи обратной связи имеются только безынерционные
элементы, обратная связь называется жесткой. В этом случае сигнал
212
обратной связи будет пропорционален выходному сигналу
элемента, охваченного связью:
/? = РК
Обратная связь называется гибкой, когда в цепи обратной
связи имеются дифференцирующие элементы. При этом сигнал
обратной связи будет зависеть от скорости изменения выходного
сигнала.
4 ^9)^4 к,(М
обратная связь
Общая обратная связь
Щестная | . | < |
обратная связь Р" / Г^ ..
К4()Ы) Цр-
|Х На
_^ ^
каци)
*1г
&в?!1—_Х^
I I—
I
Рис. 4-9. САР с местной обратной связью:
а — общая схема системы; б — элемент, охваченный местной обратной
Жесткие обратные связи. Пусть жесткая обратная
связь охватывает инерционный элемент системы. В этом случае
ЛОЬ) = тт>гиРС/ь)=*Р.
Тогда
Кп
*аа(» =
Обозначим
_ 1+>Г _ К„ _К2_
1 + р
Кп
\ + 1»Т
1 + РКп+У«ЗГ~" 1+Р^п
_Кп
1+РКп
В результате получим
К„
1 + РК-
к* (/<■>) =
кп
1+У«-
1 + РКн
••Г ' 1+>7У
Отсюда следует, что жесткая обратная связь уменьшает
постоянную времени инерционного звена, снижая тем самым инер-
213
ционность всей системы в целом. Это обстоятельство
используется для коррекции систем. Уменьшение усиления в (1'+$Кп)
раз, происходящее при этом, может быть скомпенсировано
соответствующим его увеличением в других звеньях, не охваченных
местной обратной связью. Чем больше произведение р/Сп, тем
глубже обратная связь и тем сильнее она воздействует, снижая
инерционность системы.
В качестве второго дримера использования жесткой обратной
связи рассмотрим охват ею интегрирующего элемента/ В этом
случае
Ка(»=-^ИР(/")=Р.
Следовательно^
где
Отсюда следует, что при наличии жесткой обратной связи
интегрирующий элемент приобретает свойства инерционного с
постоянной времени Гэ, обратно пропорциональной глубине обратной
-связи р/Сп. Данное обстоятельство используется для коррекции
астатических систем второго порядка. Как уже указывалось, эти
системы содержат два .интегрирующих элемента, каждый из
которых создает фазовый сдвиг на 90°, в результате чего система
становится неустойчивой.
Применение жесткой обратной связи превращает одно из
интегрирующих звеньев в инерционное, в результате чего фазовый
сдвиг в системе на низких частотах уменьшается и система
становится устойчивой. Это можно проследить на процессах,
происходящих при работе автопилота, задачей которого является
стабилизация курса самолета, т. е. обеспечение заданного направления
полета.
Функциональная схема автопилота показана на рис. 4-10, а.
Курс самолета задается при помощи свободного гироскопа.
В системе регулирования гироскоп является измерительным
устройством. При отклонении курса самолета от заданного в
гироскопе вырабатывается сигнал рассогласования х(1). Этот
сигнал усиливается и поступает на исполнительный двигатель,
который поворачивает руль. Положение самолета в пространстве
изменяется, самолет выходит на заданный курс, в результате
чего исчезает сигнал рассогласования.
Данная система относится к числу астатических второго по*
рядка: она содержит два интегрирующих элемента. Первым из
214
с которого снимается напряжение жесткой обратной связи,
пропорциональное углу поворота руля. Этот сигнал вычитается из
сигнала рассогласования, поступающего с гироскопа, и на
усилитель подается разностный сигнал г'(1)у который и является
управляющим.
В первый момент после отклонения самолета от курса
двигатель еще «не успеет» повернуть руль, и напряжение обратной
связи, поскольку оно невелико, не будет значительно уменьшать
сигнал рассогласования. Поэтому скорость реагирования системы
будет большой. По мере выхода самолета на курс сигнал
рассогласования уменьшается, и при большом повороте руля он
становится меньше сигнала обратной связи. Знак результирующего
сигнала изменится на противоположный, и начнется возвращение
руля в нейтральное положение. При правильном подборе величины
обратной связи к моменту, выхода самолета на курс руль будет
установлен прямо, что устранит колебания самолета.
Таким образом, жесткая обратная связь—хорошее средство
подавления колебаний в системе, но основной ее недостаток
заключается в том, что она вводит в систему статическую ошибку,
так как превращает интегрирующие звенья в инерционные.
Гибкие обратные связи. Гибкие обратные связи
особенно широко применяются для корректирования
электромеханических систем, хотя принципиально их можно применять и в
других случаях.
Пусть гибкая обратная связь охватывает инерционный
элемент
^(>)=тт^гиРС/Ь)=у^.
Тогда у
К„
80 1+>Рг^г~1+>(Г+Р/Сп)*
Отсюда следует, что гибкая обратная связь увеличивает
постоянную времени инерционного звена.
В астатических системах это может привести лишь к
снижению запаса устойчивости и качества регулирования вообще, так
как предельное усиление, при котором система сохраняет еще
достаточную устойчивость, обратно пропорционально постоянной
времени наиболее инерционного звена (выражение (4-1)):
л шах
Однако в статических системах предельное значение усиления
определяется соотношением двух наибольших постоянных времени
(выражение (4-2)):
где ТХ>П
216
Отсюда следует, чтог-увеличив постоянную времени наиболее
инерционного звена, можно повысить запас устойчивости
статической системы регулирования.
На рис. 4-11 показаны логарифмические и амплитудно-фазовые
характеристики статической системы, содержащей несколько
инерционных звеньев. При наличии гибкой обратной связи постоянная
времени Т\ увеличивается до значения Т\ и соответственно
уменьшается частота сопряжения. Из характеристик видно, что
введение коррекции позволяет, не уменьшая запаса устойчивости, уве-
л^ить усиление на 20 \&Кдоп дб.
Так же гибкая обратная связь действует при охвате не одного,
а нескольких инерционных или колебательных звеньев. В
колебательном звене, охваченном гибкой обратной связью, возрастает
эквивалентное затухание, что, естественно, приводит к подавлению
колебаний.
Конкретный примар использования гибкой обратной связи для
корректирования статической системы путем повышения ее
инерционности разобран в § 4-3. Несколько по-иному используют
гибкую обратную связь в астатических системах, где при помощи
гибкой обратной связи можно получить уменьшение
инерционности отдельных элементов, в частности электрического двигателя.
При рассмотрении работы электрического привода
указывалось, что значительная инерция двигателя может сделать работу
всей системы неустойчивой. Работа привода значительно
улучшается, если двигатель, т. е. устройство, содержащее
интегрирующее и инерционное звенья, охватить гибкой обратной связью.
В данном случае
*' (>) - >(1+%Гда) И Р (>) =М'
При замкнутой местной обратной связи
К (!<А — 1* (1 + ^Т^] *п____
"0 1 + /»9 '*" ~ У- (1 + РКп + У-Гд.)
+ У Р У- (1 + У"ГДВ)
Обозначим
тогда
^п /у- „ Т}
= К„_ и
'ДВ
1 + Р/Сп Ч " 1 + р/Сп —'•»
#а0(» = >(1+%Гв)
217
них является двигатель, а вторым — система руль — самолет; при
постоянном угле поворота руля устанавливается постоянная
скорость поворота самолета, пропорциональная этому углу. Такая
система является неустойчивой, причем неустойчивость ее
проявляется следующим образом.
Пусть в точке А по каким-либо причинам самолет отклонился
вправо от курса (рис. 4-10,6). На выходе гироскопа тотчас же
появляется сигнал рассогласования г(1), который после усиления
поступает на двигатель, поворачивающий руль. В результате
этсуо через некоторое время в точке Б самолет выходит на
нужный курс.
Гироскоп
{Усилитель
\-*4йвигатель\
ъесткая
обратная
связь
Я РУ">
Самолет
4 Заданный курс
Рис. 4-ГО. Контур регулирования автопилота:
а — структурная схема, б —полет при отсутствии стабилизации автопилота
Однако до этого момента все время имелось рассогласование,
вследствие чего на двигатель непрерывно поступало напряжение
и двигатель в«се больше и больше поворачивал руль. В результате
этого в точке Б руль самолета окажется максимально
повернутым. Это обстоятельство определяет дальнейшее движение
самолета, который начинает отклоняться влево. Появится сигнал
рассогласования обратного знака, и двигатель начнет возвращать
руль в нейтральное положение. В точке В руль будет выравнен,
но к этому времени уже изменится курс самолета. Аналогично
будут происходить и дальнейшие процессы. Полет самолета будет
протекать с непрерывными колебаниями около заданного курса.
Для устранения этого явления необходимо, чтобы уже в
точке Б руль самолета был возвращен в нейтральное положение, т. е.
чтобы обратное движение руля начиналось заблаговременно еще
до полного вывода самолета на заданный курс.
Достигается это применением жесткой обратной связи,
охватывающей усилитель и исполнительный двигатель. Двигатель,
поворачивая руль, одновременно смещает движок потенциометра,
215
Отсюда следует, что при охвате гибкой обратной связью
участка, содержащего интегрирующее и инерционное звенья,
структурный состав этого участка не изменяется, но значительно
снижается его инерционность, аналогично тому, как это имеет место
при включении звена быстрого реагирования. В
электромеханических системах гибкая обратная связь осуществляется при помощи
тахогенератора (рис. 4-12); она охватывает не только двигатель,
но и усилитель (или часть его). Улучшение процесса
регулирования цри этом можно объяснить следующим образом.
—^00—-^Усилитель
цут
т.
Тахогене-
{ратпор
Риге. 4-12. Гибкая обратная связь в электрическом приводе
В данном случае управляющий сигнал представляет собой
разность сигнала рассогласования Ь(1) и сигнала гибкой обратной
связи г(1)\
*(0 = *'(')-'Ю-
При быстром изменении входного сигнала из-за инерции
скорость вращения двигателя первоначально будет небольшой и
соответственно небольшим будет напряжение тахогенератора.
Следовательно, в этот период гибкая обратная связь не будет
существенно уменьшать управляющий сигнал и влиять на скорость
реагирования системы.
В дальнейшем двигатель разовьет обороты, но к этому
времени система будет ближе к -согласованному положению, сигнал
рассогласования уменьшится и станет меньше сигнала гибкой
обратной связи. Знак результирующего управляющего сигнала
изменится на обратный. Это приведет к электрическому
торможению двигателя, и система плавно, без значительного
перерегулирования подойдет к согласованному положению. В этом, в
сущности, и проявляется уменьшение инерции двигателя.
Если в подобной системе -входной сигнал изменяется с
постоянной скоростью, то установившаяся ошибка будет сравнительно
велика, так как гибкая обратная связь существенно уменьшает
коэффициент передачи
А*э " I + Р/С„" *
Физически это объясняется тем, что в данном случае
постоянное напряжение тахогенератора непрерывно вычитается из сиг-
219
нала рассогласования, уменьшая тем самым управляющий сигнал,
и лишь при большом рассогласовании управляющий сигнал
обеспечит достаточную скорость регулирования.
Данный недостаток можно устранить, если напряжение гибкой
обратной связи подавать через реальное дифференцирующее звено
типа ЯС (рис. 3-24,а). При постоянной скорости регулирования,
когда напряжение тахогенератора также постоянно, цепочка ЯС
его не пропускает, местная обратная связь оказывается
разомкнутой и не понижает усиления системы. Лишь при изменениях
скорости вращения двигателя во время переходных процессов
напряжение тахогенератора меняется. В этом случае изменения
напряжения будут переданы цепочкой в качестве сигнала гибкой
обратной связи.
Таким образом, гибкая обратная связь здесь действует не
постоянно, а лишь во время переходных процессов, когда особенно
нужна коррекция.
От измерительного АП
устройства ~У
Усилитель
Цдс[\ "
Рис. 4-13. Осуществление гибкой обратной связи в схеме привода с ЭМУ
Гибкие обратные связи обладают тем преимуществом по
сравнению с жесткими, что они не вводят в систему статической
ошибки. Кроме того, они уменьшают зону нечувствительности системы,
которая определяется напряжением трогания двигателя. Введя
дополнительное усиление, можно добиться трогания при
достаточно малом сигнале рассогласования. Сразу же после трогания
тахогенератор начинает вырабатывать сигнал обратной связи, что
уменьшает усиление. Благодаря этому система остается
устойчивой.
Сигнал гибкой обратной связи может быть получен не только
при помощи тахогенератора. Иногда для этого используют более
•простые методы. В частности, если последовательно с двигателем
включить небольшое сопротивление, то падение напряжения на
нем будет примерно пропорционально скорости вращения
двигателя, так как ее изменение сопровождается пропорциональным
изменением потребляемого тока. Однако включение специального
сопротивления приводит к дополнительным потерям. Поэтому
стремятся использовать сопротивления, уже имеющиеся в цепи
питания двигателя. Например, если усилителем мощности привода
является ЭМУ, то его компенсирующая обмотка док включена
последовательно с двигателем и может быть использована в качестве
220
источника сигнала *. Схема цепей коррекции для такого случая
показана на рис. 4-13. В цепи обратной связи установлено
реальное дифференцирующее звено.
§ 4-3. СТАБИЛИЗАТОРЫ НАПРЯЖЕНИЯ
Надежная работа многих радиотехнических схем может быть
достигнута только при использовании высОкостабильных
питающих напряжений и токов. Поэтому в цепях питания применяется
автоматическая стабилизация напряжения источников.
* Угольный регулятор напряжения
Угольный регулятор напряжения (УРН) предназначен для
автоматической стабилизации напряжения генераторов
переменного тока маломощных (до нескольких десятков ква) подвижных
электростанций.
Как известно, э. д. с. генераторов зависит от числа оборотов
якоря и потока возбуждения:
Е = СпФ,
где п — число оборотов якоря в минуту;
Ф — поток возбуждения;
С— постоянный коэффициент, определяемый
конструктивными данными генератора.
Регулирование напряжения путем изменения числа оборотов
в генераторах переменного тока исключено, так как оно приводит
к изменению частоты, что допустимо лишь в очень узких пределах.
Поэтому на практике напряжение регулируют только посредством
изменения магнитного потока, создаваемого током специального
возбудителя — «вспомогательного генератора постоянного тока, со-
осного с основным генератором. Возбуждение вспомогательного
генератора автоматически приводится в соответствие с величиной
переменного напряжения на зажимах генератора.
Основным элементом схемы стабилизации является угольный
регулятор, схематический разрез которого показан на рис. 4-14,а.
Угольный столбик /, состоящий из набора угольных шайб,
помещен внутри изоляционного цилиндра 2 и поджимается с одной
стороны регулировочным винтом 5, а с другой — упором 4, на
который воздействуют плоские пружины 5. Для лучшего охлаждения
изоляционный цилиндр имеет снаружи ребристую поверхность.
* Компенсирующая обмотка обладает некоторой индуктивностью. Поэтому
при изменении скорости на ней также появляется составляющая напряжения,
пропорциональная ускорению.
221
При протекании тока по обмотке 6 электромагнита его
сердечник 7 намагничивается и притягивает якорь 5, скрепленный
с упором. Притяжение якоря будет тем большим, чем больший ток
протекает в обмотке. Оно ослабляет сжатие угольного столбика,
что в свою очередь приводит к увеличению переходного
сопротивления между дисками и общего сопротивления всего столбика.
Общая схема системы стабилизации показана на рис. 4-14,6.
МЬЧвР •
Рис. 4-14. Угольный регулятор напряжения:
а — угольный столбик, б -— схема регулятора
Напряжение генератора / через понижающий согласующий
трансформатор 2 подается на мостиковый выпрямитель 3,
питающий обмотку электромагнита 4. Величина тока электромагнита
определяет степень поджатия дисков угольного столбика 5,
включенного последовательно с обмоткой возбуждения 6
возбудителя 7. В результате этого устанавливается соответствующее
значение напряжения возбудителя.
В динамике работа схемы выглядит следующим образом.
Пусть по каким-либо причинам произошло увеличение напряжения
генератора переменного тока. При этом возрастет выпрямленный
ток, питающий электромагнит. Якорь электромагнита притянется
сильнее, и сжатие угольного столбика уменьшится. Соответственно
возрастет сопротивление цепи возбуждения, а ток возбуждения
222
уменьшится. Это в свою очередь приведет к уменьшению э. д. с,
питающей обмотку возбуждения 8 основного генератора. По-
* ток возбуждения уменьшится, чем будет почти полностью
скомпенсировано возникшее ранее увеличение генерируемого
напряжения. Если, же напряжение на зажимах генератора почему-
либо уменьшится, то все процессы в схеме регулирования будут
протекать в обратном направлении и приведут к росту потока
возбуждения.
В общей схеме автоматического регулирования электромагнит
вместе с противодействующей пружиной выполняет функции
измерительного устройства. В нем происходит сравнение
электромагнитной силы, определяемой напряжением генератора, с
механической силой пружины. Угольный столбик является исполнительным
устройством.
Реостат 9 служит для установки начального значения тока
Электромагнита, а при помощи реостата 10 устанавливается
значение выходного напряжения генератора. Поскольку оба реостата
входят в состав контура регулирования, обет регулировки
оказываются взаимозависимыми. Конденсатор // — фильтр на выходе
выпрямителя.
Основной контур регулирования содержит несколько
инерционных звеньев, к числу которых относятся обмотка и якорь
электромагнита *, обмотка возбуждения возбудителя, фильтр
выпрямителя и пр.
Стабильность регулируемого напряжения будет тем выше, чем
больше коэффициент передачи системы. Однако значительное его
увеличение при столь большом количестве инерционных звеньев
может сделать систему неустойчивой. Поэтому коррекция
достигается применением гибкой обратной связи **. Гибкая обратная
связь осуществляется при помощи демпфирующего
трансформатора 12 и охватывает электромагнит и возбудитель. Первичная
обмотка трансформатора включена на выходе возбудителя, а
вторичная— последовательно в цепь питания электромагнита.
В нормальных условиях по первичной обмотке протекает
постоянный ток, который никакого влияния на вторичную цепь не
оказывает. Если же по каким-либо причинам произошло резкое
изменение (например, увеличение) напряжения генератора /, то
сразу же возрастет выпрямленный ток, питающий электромагнит.
Сжатие угольного столбика уменьшится, а его сопротивление
увеличится. В результате этого начнет уменьшаться ток, проходящий
по обмотке 6 возбудителя, и напряжение на его зажимах,
приложенное к первичной обмотке демпфирующего трансформатора. Во
вторичной обмотке при этом будет индуктироваться некоторая
э. д. с. Включение вторичной обмотки произведено так, что эта
* Строго говоря, электромагнит вместе с угольным столбиком следует
считать колебательным звеном.
** Теоретическое обоснование данного метода применительно к статической
системе регулирования дано в § 4-2 (рис. 4-11).
223
э. д. с. будет препятствовать резкому возрастанию тока
электромагнита. Все это демпфирует колебания в регуляторе, так как
подвижная система электромагнита удерживается от резких
перемещений, которые могли бы вызвать значительные колебания
регулируемого напряжения.
Коррекция электронного стабилизатора напряжения
Электронный стабилизатор напряжения (рис. 3-5)
представляет собой типичный пример статической системы регулирования.
Это обстоятельство в значительной степени определяет те методы,
которые используются для
его коррекции.
На рис. 4-15 показана
схема стабилизатора, в
которой одновременно
применено несколько методов
коррекции, взаимно
дополняющих друг друга. В отличие
от схемы рис. 3-5 здесь
усилитель собран на пентоде,
что повышает коэффициент
усиления каскада и снижает
статические ошибки.
Делитель /?2Яз в цепи экранной
сетки одновременно создает
дополнительную цепь для
питания стабилитрона, так
как анодного тока лампы
Л2 недостаточно для
поддержания в нем режима
нормального горения.
Конденсатор С2 с сопротивлениями /?7 — /?ю* образует звено
быстрого реагирования, включенное в цепь контура регулирования
между выходом стабилизатора и сеткой усилительной лампы.
Звено быстрого реагирования снижает собственную инерционность
стабилизатора до величины, характеризуемой некоторой
постоянной времени Т2. В то же время конденсатор С3, включенный на
выходе, вместе с другими элементами схемы стабилизатора образует
инерционное звено с относительно большой постоянной времени Т\.
В статических системах допустимое усиление и устойчивость тем
выше, чем больше отношение двух наибольших постоянных
времени (выражение (4-2):
—&
Рис. 4-15. Скорректированный электронный
стабилизатор напряжения
* Сопротивление #5 относительно мало (несколько килоом) и не влияет на
работу звена быстрого реагирования.
224
Если не принять специальных мер, то из-за воздействия
различных дестабилизирующих факторов может произойти
изменение частот генерируемых колебаний, что приведет к нарушению
радиосвязи или потере цели радиолокатором. Такими факторами
являются изменения внешних условий (температуры, давления,
влажности), параметров отдельных элементов вследствие старения
и других причин, а также режима работы аппаратуры (питающих
напряжений, нагрузки и пр.).
В настоящее время в зависимости от назначения и характера
работы аппаратуры применяются различные методы настройки.
В Одних случаях перестраивается гетеродин приемника в
соответствии со случайными изменениями частоты передатчика, в других,
наоборот, передатчик настраивается по частоте гетеродина
приемника. Во -всех современных радиолокационных станциях частоты
подстраиваются автоматически.
В автономных системах, где имеется лишь один передатчик и
один приемник, осуществляется относительная подстройка,
обеспечивающая лишь постоянство разности частот передатчика и
гетеродина приемника. В системах, где в одной радиосети несколько
передатчиков и приемников работают на общей волне,
производится абсолютная настройка, при которой каждый передатчик и
все гетеродины приемников настраиваются по специальным
эталонам, которые имеются на каждой станции.
Условия боевой работы могут вынудить при воздействии
активных помех изменить рабочую частоту радиолокационной станции,
т. е. одновременно перестроить и приемник, и передатчик. Сразу
же после этого точность взаимной настройки обычно невелика, и
частотное рассогласование может оказаться вне полосы
регулирования. Поэтому наряду с системой автоподстройки частоты
предусматривается совмещенная с ней система поиска настройки.
Система поиска осуществляет изменение частоты гетеродина
в широких пределах до тех пор, пока не установится номинальное
значение промежуточной частоты. Система поиска ускоряет также
процесс установления нормального режима работы после
включения аппаратуры. Ниже рассмотрены структурные схемы и
принцип работы наиболее распространенных систем автоматической
подстройки частоты (АПЧ).
Система стабилизации частоты клистрона
Система стабилизации частоты клистрона (СЧК) является
статической системой автоматического регулирования. Она
предназначена для настройки клистронного гетеродина приемника по
эталону частоты. Фиксация частоты осуществляется объемным
резонатором. Поэтому СЧК относится к числу абсолютных систем
АПЧ. Функциональная схема системы СЧК показана на рис. 4-16.
226
В общей схеме системы клистрон является регулируемым
объектом, а частота его колебаний — регулируемой величиной.
Исполнительным устройством является схема поиска настройки,
представляющая собой фантастронный генератор пилообразного
напряжения. По окончании поиска он автоматически переходит
на работу в усилительном режиме, при .котором частота колебаний
клистрона удерживается вблизи эталонной.
От генератора опорного напряжения на катод клистрона *
подается переменное напряжение частотой, равной частоте
повторения Р импульсов станции. Это приводит к небольшой частотной
модуляции колебаний клистрона, которая осуществляется в такт
с излучением импульсов передатчика и поэтому не создает помех
\Г
Эталонный резо-\
на/пор
Детектор
Генератор
опорных
напряте-\
най
УНЧ
Фазовый
детектор
щ
1_.
Измерительное устройство
Схема
поиска
Клистрон
*кл
.^
Рис. 4-16. Структурная схема системы СЧК
в работе. Модулированные по частоте колебания клистрона
подаются на объемный резонатор, выполняющий в общей схеме
системы функции задающего устройства. В объемном резонаторе
частотно-модулированные колебания преобразуются в амплитуд-
но-модулированные. Амплитуда колебаний в резонаторе
изменяется в зависимости от частоты колебаний, поступающих с
клистрона в соответствии с частотной характеристикой резонатора
(рис. 4-17). Если средняя частота клистрона /к больше
собственной частоты резонатора /0, то работа будет происходить на правом
склоне характеристики; если меньше — то на левом, а если они
равны, то рабочим участком будет вершина характеристики.
В зависимости от того, на каком склоне характеристики
производится работа, изменяется фаза огибающей модулированного
колебания. При равенстве /к=/о модуляция будет происходить
с удвоенной частотой, так как любому отклонению /к от /0
соответствует уменьшение амплитуды колебаний.
Колебания с выхода резонатора поступают на амплитудный
детектор, и сигнал частоты модуляции усиливается резонансным
усилителем, после чего поступает на фазовый детектор.
* Для модуляции частоты клистрона модулирующее напряжение можно
подавать и на его отражатель.
8*
227
Отсюда следует, что одновременное применение инерционного
звена и звена быстрого реагирования повышает устойчивость
схемы и позволяет применить усилитель с большим
коэффициентом усиления.
Физически это можно пояснить следующим образом.
Конденсатор С3 большой емкости сглаживает резкие колебания
напряжения на выходе стабилизатора. Если же такие колебания и
возникают, то через конденсатор С2 они непосредственно
воздействуют на сетку усилительной лампы Л2, что в конечном счете
приводит к изменению сопротивления регулирующей лампы Л\ и
к компенсации изменения С/вых»
В данной схеме применена также коррекция по возмущению,
действующему со стороны входных зажимов.' Изменение
напряжения, поступающего с выпрямителя, является основным
источником статических ошибок. Применение коррекции по возмущению
позволяет исключить в данной системе статическую ошибку.
Из соотношения (4-4) следует, что корректирующий элемент,
- включенный между входом стабилизатора и входом усилителя,
должен содержать пропорциональное и форсирующее звенья, так
как в. контуре регулирования стабилизатора имеются
пропорциональное и инерционное звенья. Постоянную составляющую
сигнала возмущения передает на вход усилителя делитель /?в/?7. Он
имеет коэффициент передачи, обратный по величине коэффициенту
усиления усилителя. Сигнал, примерно пропорциональный
производной возмущающего воздействия, передается через
сопротивление /?4 и конденсатор С2. При увеличении напряжения иъ
возрастает напряжение на Яч и на сетке Л2, что приводит к росту
сопротивления лампы Л\ постоянному току, и напряжение на
нагрузке остается прежним. Резкие изменения иг передаются на
вход Л2 через цепочку /?4С2 и также приводят к соответствующему
изменению параметров Л\*
Конденсатор Сх сглаживает собственные шумы стабиловольта,
вызванные дробовым эффектом, что уменьшает уровень шумов
на выходе стабилизатора.
§ 4-4. СИСТЕМЫ АВТОМАТИЧЕСКОЙ ПОДСТРОЙКИ ЧАСТОТЫ
Для обеспечения устойчивой радиосвязи и надежной работы
радиолокационной аппаратуры передатчики и приемники,
работающие в одной сети, должны быть настроены точно на одну
и ту же волну.
Настройка приемно-передающих систем в большинстве случаев
сводится к установлению определенной разности между частотой
передатчика и частотой гетеродина — маломощного генератора,
имеющегося в схеме приемника. Разность этих частот должна
быть равна промежуточной частоте приемника, которая является
одним из его параметров, -
8 Автоматика
225
Схема фазового детектора построена так, что при совпадении
фаз колебаний сигнала и опорного напряжения на выходе
фазового детектора появляется отрицательное напряжение, которое
подается на управляющую сетку фантастрона, удерживая его в
усилительном режиме. В случае отсутствия такого совпадения фаз
напряжение на фантастрон не поступает, и он начинает работать
в автоколебательном режиме, производя поиск. В режиме поиска
фантастрон генерирует линейно-падающее напряжение,
подаваемое на отражатель клистрона. Это приводит к изменениям частоты
клистрона от меньших значений к большим в широком диапазоне,
Рис. 4-17. Работа эталонного резонатора
охватывающем всю частотную характеристику резонатора. Как
только частота клистрона /„ несколько превысит значение Го,
наступит соответствие фаз сигнала и- опорного напряжения и
дальнейший поиск настройки прекратится. Таким .образом, настройка
клистрона производится на частоту, лежащую вблизи
собственной частоты резонатора я несколько ее превышающую.
Фантастронная схема поиска показана на рис. 4-18, а. наоота
схемы в колебательном режиме обеспечивается благодаря наличию
транзитронной связи, передающей резкие изменения напряжения
экранной сетки через переходную цепочку С^5 на защитную сетку.
Рассмотрим работу схемы в режиме поиска, когда напряжение
на входе С/Вх равно нулю.
Сопротивление анодной нагрузки Л, велико. Из-за сильной
емкостной связи через конденсатор С{ между анодом и сеткой
лампы напряжение на аноде медленно падает. Так продолжается
до момента 1и когда напряжение на аноде достигает минимальной
величины. Затем происходит перераспределение токов между
экранной сеткой и анодом: анодный ток уменьшается, а экранный
ток быстро растет. Это приводит к уменьшению напряжения на
экранной сетке, которое через цепочку С2/?5 передается на
защитную Снижение напряжения на защитной сетке вызывает
дальнейшее'уменьшение анодного тока лампы и повышение анодного на-
228
пряжения, которое через конденсатор Сг передается на
управляющую сетку лампы. В результате этого катодный ток лампы
возрастает, но его рост происходит не за счет анодного тока, а за счет
экранного, так как низкое напряжение на защитной сетке
препятствует росту /а. Рост экранного тока вызывает дальнейшее
снижение напряжения на экранной, а следовательно, и на защитной сетке
и т. д. Все эти процессы протекают лавинообразно, скачком и
приводят к полному запиранию анодной цепи по 3-й сетке. При этом
происходит заряд конденсатора С{ через сопротивление /?1 и
участок сетка — катод лампы. Лампа будет закрыта до тех пор, пока
шт_яш^ иа теп
/?, \\Н2 идк
^ К отражателю \
*~ клистрона '
-г—— ч Напряжения
*з 1: ) после окониа-
" ~ ни я поиска
гггр
!/*♦ ^ ^ Г
Рис. 4-18. Схема поиска настройки:
а — принципиальная схема; б — графики напряжений в схеме
конденсатор С2, разряжаясь через участок экранная сетка —
катод лампы и сопротивление /?5, создает на этом сопротивлении
падение напряжения, достаточное для запирания анодной цепи.
В момент *2 лампа откроется по 3-й сетке и появится анодный ток.
Это приведет к уменьшению экранного тока и увеличению
экранного напряжения, которое передается на защитную сетку, в
результате чего происходит более полное отпирание анодной цепи.
Эти процессы также протекают лавинообразно. Однако, несмотря
на полное отпирание анодной цепи по. 3-й сетке, резкого
уменьшения анодного напряжения не происходит. Это объясняется тем,
что снижение (/а через конденсатор С\ передается на управляющую
сетку, напряжение на которой также уменьшается, задерживая
рост анодного тока. В дальнейшем по мере разряда Сь
происходящего через открытую лампу и сопротивления /?3 и /?4, ток
разряда уменьшается и уменьшается падение напряжения,
создаваемое этим током на цепочке /?3#4. Вследствие этого напряжение
пн сетке растет, а анодное напряжение падает (интервал ^з). Так
происходит до тех пор, пока вновь напряжение на аноде не достиг-
1и»г минимального уровня и наступит новый скачок (момент /3,
пнннстствующий моменту /1).
229
Линейно-падающее напряжение с анода фантастрона
передается на отражатель клистрона, в результате чего частота его
колебаний изменяется в широких пределах. В момент окончания
поиска (/о), когда.частота клистрона несколько превысит частоту
резонатора, с выхода фазового детектора на вход фантастрона
поступит отрицательное напряжение. Рост сеточного напряжения
лампы прекратится, и соответственно прекратятся дальнейшие
изменения напряжения на аноде. Схема переходит в
усилительный режим.
Остаточное частотное рассогласование является
установившейся ошибкой системы. С увеличением коэффициента усиления
УНЧ эта ошибка будет уменьшаться, так как уже при меньшем
отклонении частоты клистрона от эталонной сигнал на выходе
фазового детектора окажется достаточным, чтобы перевести схему
поиска в усилительный режим.
С переходом фантастрона в усилительный режим вся схема
начинает работать как стабилизатор частоты. Если по какой-либо
причине частота клистрона возрастет, то рабочая точка сместится
дальше по правому склону характеристики резонатора (рис. 4-17),
где крутизна характеристики больше. Это приведет к увеличению
амплитуды переменного напряжения на входе УНЧ, а
следовательно, и к росту отрицательного напряжения на выходе фазового
детектора (входе фантастрона). В результате этого напряжение
на аноде фантастрона и отражателе клистрона возрастет, что
приведет к уменьшению частоты колебаний клистрона, т. е.
компенсации внешнего воздействия.
Если внешнее воздействие будет уменьшать частоту клистрона,
то все процессы будут протекать в обратном порядке и схема вновь
будет стремиться восстановить прежнее значение частоты.
Система СЧК обеспечивает хорошее качество регулирования
без применения каких-либо специальных методов коррекции.
Система автоматической подстройки частоты магнетрона
Примером системы относительной АПЧ является схема
автоматической подстройки частоты магнетрона (АПЧМ). Данная
система предназначена для подстройки магнетронного генератора
передатчика радиолокационной станции в соответствии со
случайными изменениями частоты клистронного гетеродина приемника.
Подстройка производится таким образом, что разность обеих
частот поддерживается постоянной и равной промежуточной частоте
приемника /Пр.
Блок-схема системы АПЧМ показана на рис. 4-19.
Входным сигналом х(1) является частота клистрона /к, а
регулируемой величиной у(1) —частота магнетрона /м- Сам магнетрон
является объектом регулирования. Напряжения обоих генераторов
подаются на смеситель, который вырабатывает новое напряжение,
230
имеющее частоту, равную разности частот клистрона и
магнетрона:
Д/=Л-/м-
Это напряжение поступает в усилитель промежуточной частоту
(УПЧ) и после усиления подается на частотный дискриминатор.
Частотный дискриминатор сравнивает разностную частоту с
промежуточной частотой приемника и вырабатывает напряжение,
величина которого зависит от рассогласования, т. е. от того,
насколько разностная частота отличается от промежуточной.
Полярность напряжения дискриминатора определяется знаком этого
частотного рассогласования.
г к I
Смеситель
&\т М
Частотный
дискриминатор
^дискр
к и/сили-
^^тель
Измерительное устройство
Ш
I
I
щвигаАА
тель
\Редукторг*\
Магнетрон
V
Рис. 4-19. Структурная схема системы АПЧМ
Дискриминатор вместе со смесителем и УПЧ выполняет
функции измерительного устройства. Напряжение дискриминатора
полностью характеризует рассогласование и используется в качестве
управляющего сигнала. Так как магнетрон работает в импульсном
режиме, то и напряжение дискриминатора имеет импульсный
характер. В усилителе .оно сглаживается и после усиления поступает
на двигатель,- являющийся исполнительным устройством системы
и через понижающий редуктор связанный с органом перестройки
магнетрона.
Если рассогласование в системе отсутствует и разностная
частота равна промежуточной, то напряжение на выходе
дискриминатора равно нулю. Двигатель в этом случае не будет
перестраивать магнетрон. Если есть рассогласование, двигатель будет
вращаться до тех пор, пока будет получать питание с выхода
усилителя, т. е. пока система не будет согласована. Направление
вращения двигателя устанавливается так, чтобы перестройка
магнетрона приводила к устранению рассогласования. Данная система
является астатической.
Для перестройки магнетрона требуется сравнительно
медленное воздействие на органы перестройки, но в то же время
двигатели хорошо работают только на больших оборотах. При малых
питающих напряжениях вращение двигателей происходит
рывки ми. Наличие редуктора позволяет при большой скорости
вращения двигателя производить плавную перестройку магнетрона.
При необходимости в состав системы АПЧМ может быть вклю-
2,31
чена схема поиска, плавно перестраивающая магнетрон в широком
диапазоне частот.
Аналогичным образом работает система, перестраивающая
клистрон в соответствии с изменениями частоты магнетрона.
В ней напряжение с усилителя поступает на фантастронную
схему поиска, управляющую частотой колебаний клистрона
(рис. 4-20). (Работа схемы поиска была описана выше.)
В данном случае вследствие импульсного режима работы
магнетрона сигнал, поступающий с выхода частотного
дискриминатора, также будет иметь импульсный характер. Это обстоятельство
существенного значения не имеет, так как напряжение с выхода
хЮ\
Смеситель
Н
УПЧ
Схема
поиска
\Клистрон\
\ Измерительиое^стройстВо^
1
0)
Рис. 4-20. Структурная схема системы АПЧК
усилителя подается предварительно на пиковый детектор,
предшествующий фантастрону схемы поиска. В случае изменения
частоты клистрона меняется амплитуда импульсов на выходе
дискриминатора, что вызывает изменение напряжения на пиковом
детекторе и аноде фантастрона. Это вызывает восстановление
частоты клистрона. При фиксированной частоте магнетрона эту
схему следует рассматривать как.систему автоматической
стабилизации частоты клистрона, значительно уменьшающую
расстройку гетеродина, происходящую под воздействием различных
факторов. При изменении частоты магнетрона схема работает как
следящая система, перестраивающая соответствующим образом
клистрон. В режиме поиска схема работает .как система программного
регулирования. Таким образом, одна и та же система может быть
отнесена к различным классам САР. Это обстоятельство еще раз
подтверждает, что принципиальных различий между различными
классами САР нет.
Системы, показанные на рис. 4-19 и 4-20, работают устойчиво
без применения корректирующих элементов.
§ 4-5. СИСТЕМЫ СОПРОВОЖДЕНИЯ ЦЕЛИ
Сопровождением цели в радиолокации принято называть
непрерывное определение ее координат. Положение точки в
пространстве характеризуется тремя координатами, которые могут
задаваться различными способами. Наиболее распространенной
является сферическая система координат. При ее применении пред-
232
Рис. 4-21. Пространственная система
координат
полагается, что начало координат совмещено с тачкой
расположения радиолокационной станции. Координатами цели (рис. 4-21)
являются наклонная дальность й (расстояние до цели), угол
места е (угол между горизонтальной плоскостью и направлением
па цель) и азимут р (угол между направлением на север или
другим условным
направлением и вертикальной
плоскостью, проходящей
через цель.
Несколько реже
применяются другие системы
координат. Например при
Наведении истребителей
в армиях США, Англии,
Франции применяется
цилиндрическая система, в
которой положение цели
задается горизонтальной
дальностью г, азимутом р
и высотой Л.
При установке станций на подвижные объекты более удобными
оказываются относительные системы координат, в которых
угловые координаты отсчитываются от направления, не
зафиксированного строго в пространстве, например относительно оси самолета,
корабля, ракеты и т. д.
Во время сопровождения должны непрерывно вырабатываться
сигналы, пропорциональные измеряемым координатам. Эти
сигналы используют в счетно-решающих приборах, служащих для
управления средствами ПВО или системами навигации.
В современных радиолокационных станциях, как правило,
предусматривается и ручное, и автоматическое сопровождение цели.
Обе системы сопровождения совмещаются, что позволяет наиболее
просто осуществлять переход с одного способа сопровождения на
другой.
Сопровождение цели по дальности
В импульсных радиолокационных станциях дальность
определяют посредством измерения промежутка времени /Зап от момента
излучения зондирующего радиоимпульса до момента приема
импульса, отраженного от цели. Этот промежуток называется
временем запаздывания.
Время запаздывания связано с дальностью й следующим
известным соотношением:
гдо с —скорость распространения радиоволн (скорость света).
Чтобы непрерывно получать сигнал дальности, устройство, вы-
рлблтывающее такой сигнал, должно быть связано с системой ин-
233
дикации сопровождения. Наиболее просто это осуществить, если
применить электрический визир. Электрический визир
представляет собой импульс, подаваемый на развертку индикатора
дальности в виде яркостной или какой-либо иной отметки. Отметка
формируется специальным генератором задержки, который
запускается в момент излучения зондирующего импульса. Время
задержки 4аД линейно связано с величиной (или фазой)
напряжения, поступающего в генератор. Во время сопровождения цели
оператор при помощи штурвала дальности (рис. 4-22) изменяет
это напряжение, добиваясь совмещения визирной отметки и ртра-
женного импульса. При этом время задержки оказывается в
точности равным времени запаздывания (/Зад=4ап), а угол поворота
[Генератор задержки
Приемник
(Индика\
тор
Схема
формироВа- N
ния Визир- м
\нойотметт\
Запуск
Схема регуА
лируемой
задержки \
Оператор
\
==----^
Устройство
передачи
данных
Сигнал
дальности
(в
Тн*П)
Рис. 4-22. Структурная схема системы сопровождения цели по дальности
штурвала пропорциональным дальности. Со штурвалом связано
устройство передачи данных, которое и вырабатывает сигнал
дальности.
Работа всей системы может быть автоматизирована. Для этого
необходимо в ее состав ввести измерительное устройство, которое
производило бы сравнение временного положения отраженного
импульса цели и визирной отметки и при наличии рассогласования
вырабатывало соответствующий управляющий сигнал. Таким
измерительным устройством является временной дискриминатор.
Процесс измерения сводится к преобразованию расстояния до цели
во временной интервал 4ап и последующему сравнению времени
запаздывания и времени задержки. При сравнении функции
визирной отметки выполняют следящие импульсы, которые
формируются специальной схемой, входящей в состав генератора задержки.
На рис. 4-23 показана упрощенная структурная схема
электромеханической системы автоматического сопровождения по
дальности (АСД)..
На вход системы с приемника поступают импульсы,
отраженные от цели, выбранной для сопровождения. Эти импульсы
выделяются из всех принятых сигналов в приемнике при помощи
специального селектора.
234
Регулируемой величиной является время задержки следящих
импульсов. При наличии временного рассогласования на выходе
дискриминатора появляется напряжение С/Дискр- Это напряжение
используется в качестве управляющего сигнала, который после
усиления подается на исполнительное устройство системы —
двигатель. Двигатель при помощи потенциометра (или
фазовращателя) изменяет напряжение, определяющее время задержки.
Направление вращения двигателя устанавливается так, чтобы
происходило уменьшение рассогласования. Как только оно будет
устранено, (УДИскр станет равным нулю и вращение двигателя
прекратится. С двигателем механически связано устройство передачи
данных.
Приемник]
^дискр
1зап\°Ремепнии
» дискри-
\х(?) \минатор
\*эад\
г га.
гт
\Усилителм*\Д6игатель\
Генератор
следящих
импульсщ
Схема
регулируемой^
заверши
Устройстбо]
передачи
данных
Сигнал
дальности
ЧТСРП)
I
-Запуск
! Генератор задержки
Рис. 4-23. Структурная схема электромеханической системы АСД
Можно построить чисто электронную систе*му АСД, в которой
двигатель заменен электронным интегратором.
Двигатель, вращаясь со скоростью, пропорциональной сигналу
рассогласования, изменяет напряжение, управляющее временем
задержки. Точно также на выходе интегратора* напряжение
непрерывно изменяется со скоростью, пропорциональной величине
входного напряжения. Выходное напряжение интегратора может
быть непосредственно использовано для управления работой
генератора задержки (рис. 4-24) ;и в то же время может служить
сигналом дальности, так как оно линейно связано с временем
задержки. Значение дальности может передаваться в
счетно-решающий прибор и в виде временного интервала. В этом случае
интервал фиксируется между запускающим импульсом и одним из
следящих, и уже в счетно-решающем приборе он преобразуется в
соответствующее напряжение.
Первоначальное согласование системы может производиться
вручную и автоматически. В первом случае оператор, вращая
штурвал дальности, перемещает следящие импульсы и по
индикатору устанавливает момент их совмещения с отраженным. После
алого производится включение АСД.
* Подробно о работе электронного интегратора см. гл. VI.
235
Для автоматического поиска цели в АСД может быть
предусмотрена схема, непрерывно изменяющая положение следящих
импульсов. После захвата схема поиска отключается и система
переходит в режим слежения.
Обе рассмотренные системы АСД (рис. 4:23 и 4-24) при
постоянной скорости цели вносят ошибку в. измерение дальности,
пропорциональную этой скорости (выражение 3-46):
-*•
Учитывая, что перемещения цели в пространстве происходят
плавно, вследствие чего полоса пропускания системы АСД мо,жет
быть сравнительно узкой, для стабилизации используют звенья
Приемник
1зап
хШ
Временной
дискриминатор
Удиск
♦ *зад \
гш
Усилитель]
Интегра\
тор
Г.""
Генератор
следящих
импульсов
Схема
регулир.
задержки
НИ
- Сигнал
дальности
(вСРУ)
^Запуск
Генератор задержки
Рис. 4-^4. Структурная схема электронной системы АСД
медленного реагирования. Данный метод стабилизации
применительно к системе/имеющей структуру, аналогичную системе АСД
(статическая система с несколькими инерционными звеньями), был
рассмотрен в § 4-2 (рис. 4-7).
Одним из специальных условий, предъявляемых к системе АСД,
является возможность сопровождения цели при кратковременных
замираниях отраженных сигналов. Иначе говоря, система должна
«запоминать» скорость цели и во время замираний продолжать
сопровождение с прежней скоростью.
В системе, содержащей инерционное и интегрирующее звенья,
с исчезновением входного сигнала напряжение на выходе
инерционного звена начинает убывать, что приводит к плавному
спаданию скорости изменения сигнала на выходе интегратора.
Поэтому при длительных замираниях входного сигнала система
сопровождения потеряет цель. Более совершенны в этом
отношении системы АСД с двумя интегрирующими звеньями
(астатические системы второго порядка). Такие системы, как уже
указывалось выше (стр. 151), обладают способностью «запоминать»
скорость изменения входного сигнала.
Функции второго интегрирующего звена иногда выполняет
специальная схема временного дискриминатора»
236
Так как Еа велико, то сравнительно небольшие изменения напряжения на
конденсаторе на режим работы лампы Л2 влияют слабо.
Включение в систему АСД второго интегратора делает ее неустойчивой.
Поэтому для получения астатической системы второго порядка к сигналу
рассогласования добавляют сигнал, пропорциональный его интегралу * или вводят
последовательные форсирующие цепи коррекции.
Сопровождение цели по направлению
В радиолокационных станциях измерение угловых координат
цели основано на использовании направленных свойств антенны.
Благодаря направленности излучения амплитуда отраженных от
цели импульсов изменяется при перемещении (развертывании)
луча антенны. Чем ближе к направлению на цель находится
направление максимума излучения, тем большей будет амплитуда
отраженных импульсов.
Для получения непрерывной информации о положении цели и
измерения ее угловых координат необходимо достаточно часто
развертывать луч и наблюдать за перемещением максимума
амплитуды отраженных сигналов. Такое развертывание луча
называется сканированием. Чтобы исключить возможность выхода цели
из зоны обзора и потерю ее радиолокатором, вся антенная система
должна сравнительно медленно вращаться вслед за угловыми
перемещениями цели.
Процесс измерения угловых координат можно
автоматизировать.
Если производится определение только одной угловой
координаты, то луч при сканировании надо развертывать в какой-либо
одной плоскости — азимутальной или угломестной (рис. 4-26, а).
Такое развертывание называется линейным. Луч равномерно
перемещается в пределах сектора обзора, и, когда зона облучения
накрывает цель, появляется серия или «пачка» отраженных
импульсов. Форма огибающей «пачки» соответствует характеру
диаграммы направленности антенны (рис. 4-26,6).
Количество импульсов в пачке^ зависит от частоты повторения
станции, скорости развертывания и ширины диаграммы
направленности антенны. Максимум огибающей соответствует направлению
на цель. Если сектор сканирования неподвижен, то при
перемещении цели будет изменяться положение максимума относительно
начала сектора сканирования или его середины. Любое из этих
направлений может быть принято за исходное при определении
относительных координат.
Для выделения огибающей отраженных импульсов может быть
использован импульсный детектор. Это позволяет получить на
выходе напряжение, значительно превышающее среднее значение
* Данный метод коррекции подробно рассмотрен в § 4-2 (рис. 4-4).
238
входного сигнала (рис. 4_-26,в). Для увеличения коэффициента
передачи иногда применяют синхронные пиковые детекторы,
в которых «запоминается» амплитуда напряжения импульса почти
на весь период повторения и лишь перед приходом следующего
импульса производится сброс (рис. 4-26,г). Полученное
напряжение в последующем сглаживается (рис. 4-26, д). Недостаток такого
детектора заключается в большой чувствительности к воздействию
случайных изменений амплитуды входного сигнала.
■ |ИП|. *<* Г
Ютноситель-
ная у глодая
координата
ппППППпп
Л
1зад
1за/7
Д±
9
Рис. 4-26. Принцип работы системы АСН с линейным
развертыванием луча антенны:
а — схема обзора пространства; б — «пачка» отраженных импульсов;
в —«пачка», продетектированная импульсным детектором; г —«пачка»,
продетектированная синхронным пиковым детектором; д — сглаженный
сигнал; е — следящие импульсы
При ручном сопровождении цели оператор поворачивает всю
антенную систему так, чтобы максимум отраженных импульсов
все время находился в середине сектора сканирования, т. е. на
его биссектрисе. Тогда направление биссектрисы будет определять
угловую координату цели. Такое сопровождение по максимуму
не является точным, так как даже в сантиметровом диапазоне
волн максимум диаграмм направленности антенн выражен
недостаточно четко. Оно приемлемо лишь для станций разведки и
целеуказания, а также для удержания цели в секторе обзора. Точное
определение угловой координаты при этом может осуществляться
при помощи системы, полностью аналогичной системе АСД
(рис. 4-27). .
На временной дискриминатор поступает сигнал,
представляющий собой огибающую пачки. Так как максимум такого
сигнала выражен недостаточно четко, то для повышения точности
следящие импульсы подаются с некоторым временным
интервалом Д/. В отличие от системы АСД запуск схемы регулируемой
239
Подобная схема в упрощенном виде показана на рис. 4-25. Лампы Л\ и Ль
в исходном состоянии заперты по управляющим сеткам отрицательными
смещениями Ес и Ес . Анодное питание на. лампы подается от разных источников
напряжения 2;а и Еа^причем \Еа\ = \Еа\.Входными сигналами ламп являются
импульсы, поступающие со схем совпадения на управляющие сетки ламп.
Длительность этих импульсов равна времени перекрытия отраженного и следящих
импульсов. С подачей входных импульсов лампы открываются, причем током Л\
производится заряд конденсатора С, а током Л2 — ее разряд. Если время
перекрытия импульсов в обеих схемах совпадения одинаково, то лампы Л\ и Лъ
будут открываться на равные интервалы времени и заряд конденсатора С
изменяться не будет.
1-й следящий
импульс
Отраженный
импульс
Схема
1—| совпадения
Г
й.
нь
Схема
совпадения
II ■
кх
\У
Выход
2-й следящий
импульс
Рис. 4-25. Интегрирующий временной дискриминатор
^ При наличии временного рассогласования длительность импульсов,
открывающих лампы, будет различна и за каждый период повторения конденсатор С
будет получать .(или терять) дополнительный заряд
Д# = Ш,
где /—анодный ток ламп;
А^ — временное рассогласование (разница времени заряда и разряда
конденсаторов).
В результате этого при наличии постоянного временного рассогласования
на выходе дискриминатора напряжение будет изменяться с постоянной
скоростью, пропорциональной рассогласованию, т. е. в схеме будет происходить
интегрирование сигнала.
Напряжение смещения на сетку лампы Л\ нельзя подавать от источника
постоянного тока. Действительно, при изменении напряжения на конденсаторе С
будет меняться потенциал катода Л\ и вместе с ним разность потенциалов
между катодом и сеткой Л\. Поэтому смещение на сетку Л\ подается с отвода А
нагрузочного сопротивления /?к катодного повторителя Лз-
При изменении напряжения на конденсаторе С меняется потенциал сетки
лампы Лз. Коэффициент передачи катодного повторителя близок к единице.
Следовательно, эти изменения напряжения на емкости, будут повторяться на
катоде лампы Л3 (выходе схемы), а также в точке А.
Поэтому первоначально выбранная разность потенциалов Ес будет
оставаться практически постоянной независимо от величины напряжения на
конденсаторе.
237
задержки производится в момент начала сканирования. В системе
происходит совмещение середины временного интервала А^ с
максимумом сигнала. Положение следящих импульсов известно. Это
позволяет определить относительную угловую координату цели.
Ее значение передается в счетно- решающий прибор в виде
сигнала, пропорционального промежутку времени от начала
сканирования до середины интервала.
Импу
огиоа
тс
гющей „пачки"
Временной
дискриминатор
щиеимл
пульсы
Збено
{медленного}^]
реагирования
Усилитель
Интегратор
Генератор
слеоящик
импульсов\
Следя-
щиеим\
пульсы
Схема
регулируемой
задержки
временной]
дискриминатор
У+АУсилитель
Тахо-
генератор
Относительная
угловая
координата
-*-(вСРП)
Запуск
Абсолютная
, угловая
координата
Двигатель
Антенна
Импульс биссектрисы
сектора сканирования
Устройство]
сканирования
(в^СРП)
Рис. 4-27. Структурная схема системы АСН
В нижней части рис. 4-27 штриховой линией обведена схема
следящей системы, совмещенной с системой АСН и служащей для
автоматического поворота антенны вслед за угловыми
перемещениями цели.
Устройство сканирования в момент прохождения лучом
антенны середины сектора сканирования вырабатывает специальный
импульс. Если этот импульс не совпадает со следящими импуль:
сами системы АСН, то возникает сигнал рассогласования, который
через усилитель воздействует на двигатель привода антенны. В
результате этого антенна будет непрерывно поворачиваться в такое
положение, при котором импульс середины сектора сканирования
240
будет совпадать со следящими импульсами. Последние же
благодаря работе системы АСН всегда совпадают с серединой
огибающей пачки.
Таким образом, данная система не только непрерывно
определяет координаты цели, но и направляет на нее середину сектора
обзора. Абсолютное значение угловой координаты цели можно
получать с датчика, соединенного с осью антенны.
В схеме рис. 4-27 объединены две системы автоматического
регулирования, одна из которых является чисто электронной,
а вторая — электромеханической. Корректирование первой
системы, полоса пропускания которой может быть весьма узкой
(доли герца), осуществлено
звеном медленного
реагирования; корректирование
второй — гибкой обратной
связью.
Для определения
угловых • координат
используют также сопровождение
по методу равносигнальной
зоны. Он состоит * в том,
что после грубого
определения направления на цель
производится периодическое
смещение диаграммы
направленности вправо и
влево от этого направления
(рис. 4-28).
Если цель находится на
амплитуды отраженных сигналов будут одинаковы. Поэтому
направление 00' называется равносигнальным. При смещении цели
с равносигнального направления сигналы в одном положении
будут больше, чем в другом.
За отраженными сигналами наблюдают при помощи
индикатора, например, с амплитудной отметкой. При одном из
положений диаграммы направленности начало развертки искусственно
смещается, что позволяет раздельно наблюдать отраженные
импульсы в обоих положениях (рис. 4-28,6). Возможны и другие
методы индикации. Задача оператора состоит в том, чтобы
вращением антенной системы добиваться выравнивания амплитуд
отраженных сигналов. При этом равносигнальная линия будет
следовать за всеми угловыми перемещениями цели, и положение этой
линии может служить текущей угловой координатой цели в данной
плоскости.
Точность этого метода высока потому, что при небольшом
смещении цели от равносигнального направления резко изменяются
амплитуды отраженных сигналов, в то время как при
сопровождении по максимуму эти изменения почти незаметны.
Равносигнальное О
направление
1/Напрабление
на цель
е
Рис. 4-28. Метод равносигнальной зоны:
а —схема обзора пространства; б — картина
на индикаторе направления
линии 00\ то в обоих положениях
241
Процесс сопровождения по угловым координатам можно
автоматизировать. Для этого необходимо иметь измерительное
устройство, которое будет производить сравнение амплитуд отраженных
импульсов в обоих положениях диаграммы направленности и в
зависимости от их соотношения вырабатывать сигнал
рассогласования. Роль такого измерительного устройства может выполнить
фазовый детектор. На него подается напряжение огибающей
отраженных импульсов, которое получается при помощи импульсного
детектора. Опорным служит напряжение, изменяющееся синфазно
со смещениями диаграммы направленности. Полярность
напряжения на выходе детектора
будет зависеть от того, в
какую сторону смещена
цель от равносигнального
направления. Усиленный
сигнал рассогласования
используется для
поворота всей антенной системы
в согласованное
положение, при котором равно-
сигнальное направление
совмещено с
направлением на цель.
Для определения двух
угловых координат
необходимо иметь две
отдельные системы или систему
с пространственным
развертыванием луча
антенны. Наиболее широко
применяется коническое
развертывание, при
котором ось диаграммы
направленности описывает
коническую поверхность
(рис. 4-29, а),
перемещаясь и по азимуту, и по
углу места. Ось конуса
является равносигнальным направлением, и если цель
расположена в направлении оси, то, несмотря на непрерывное
перемещение диаграммы направленности, амплитуда импульсов,
отраженных от цели, не будет изменяться.
На рис. 4-29,6 показано изображение следа максимума на
плоскости, проходящей через цель перпендикулярно
равносигнальному направлению (оси конуса). Это окружность с центром
в точке О, соответствующей равносигнальному направлению. При
нахождении цели в этой точке, как уже указывалось, модуляция
отраженных сигналов производиться не будет (рис. 4-29, в).
Рис. 4-29. Коническое развертывание луча
антенны:
а — схема обзора пространства; б ■— картинная
плоскость; в, г, д, е — отраженные импульсы при
различных угловых ошибках; ж —опорные напряжения
242
Азимутальная и угломестная составляющие сигнала ошибки,
выделенные при помощи фазовых детекторов, поступают далее в
различные усилители, управляющие приводами азимута и угла
места. Здесь, как и в других рассмотренных ранее системах,
исполнительными устройствами являются двигатели. Регулируемым
объектом является антенна, а регулируемой величиной —
положение ее оси (равносигнального направления). При совмещении
Устройстбо
передачи
данных
Редуктор
Сигнал игла места
—*~ (в СРП)
Канале угла места
Двигатель
\Усилитель
Антенна
I
Передатчик
I
Антенный
коммута-
тор
устройство]
сканиро
вания
Фазовый
детектор
Ы ГОН
Приемник
Канал азимута
Фазовый
детектор
Редуктор
ДбЛап: иАУсилитель
тель
Устройство
передачи
аанных
Сигнал азимута
-*- (в СРП)
Рис. 4-30. Структурная схема системы АСН
равносигнального направления с целью сигнал ошибки становится
равным нулю. Так система следит за угловыми перемещениями
цели в пространстве.
Корректирование такой системы осуществляется при помощи
последовательных корректирующих цепей или гибкой местной
обратной связи, охватывающей двигатель и электромашинный
усилитель. Это позволяет придать системе (необходимые динами»
ческие качества.
Устройства передачи данных соединены с механизмами
вращения антенн, что позволяет непосредственно передавать в счетно-
решающий прибор угловые координаты цели.
244
Полуавтоматическое сопровождение
Для перехода к автоматическому сопровождению необходимо
предварительно произвести поиск цели. Иногда поиск цели и ввод
системы в режим слежения осуществляются с участием оператора
(вручную). Ручное регулирование оправдывает себя, кроме того,
при сопровождении групповой цели и при работе в условиях
сильных помех, затрудняющих надежную работу автоматических
устройств.
При ручном регулировании в системе должен быть индикатор,
позволяющий производить сравнение регулируемой величины
с заданным ее значением. В зависимости от рассогласования
оператор при помощи задающего устройства подает соответствующий
управляющий сигнал для приведения системы в согласованное
положение.
Сравнение структурных схем систем ручного и автоматического
регулирования (рис. 3.3) показывает, что обе системы имеют ряд
одинаковых элементов начиная от
усилительно-преобразовательного устройства и кончая регулируемым объектом. Это делает
предпочтительным такое совмещение обеих систем, при котором
большая часть этих элементов будет использована в обоих случаях.
Кроме того, необходимо, чтобы при переходе с одного способа
регулирования на другой исключалось нарушение непрерывности
процесса регулирования и появление больших динамических
перегрузок системы.
Рассмотрим некоторые примеры совмещения систем ручного и
автоматического солровождения цели. Использование общих
элементов будет минимальным, если оператор при вращении
штурвала сопровождения воздействует непосредственно на
регулируемый объект системы: антенну станции или генератор задержки
следящих импульсов и т. д. В режиме автоматического
регулирования работой этого же регулируемого объекта управляет
исполнительное устройство системы — двигатель. При таком совмещении
ручное сопровождение принято называть сопровождением по
положению, так как оператор непосредственно воздействует на
положение регулируемого объекта или текущее значение
регулируемой величины. Основным недостатком сопровождения по
положению (рис. 4-31, а) является отсутствие плавности, что снижает
точность вырабатываемых данных о координатах цели. Для
повышения плавности применяется сопровождение по скорости. Оно
заключается в том, что для воздействия «а регулируемый объект
в режиме ручного сопровождения используется исполнительное
устройство САР, например двигатель, а оператор лишь управляет
скоростью его вращения. Для этого на вход усилителя,
питающего двигатель, подается сигнал соответствующей величины и
полярности.
Сопровождение по скорости иногда называют
полуавтоматическим, так как регулируемая величина изменяется без участия
245
Если равносигнальное направление не проходит через цель, то
возникает амплитудная модуляция отраженных импульсов по
закону, близкому к синусоидальному. Частота модуляции будет
равна частоте сканирования Й, а глубина модуляции будет
определяться угловой ошибкой, т. е. отклонением равносигнального
направления от цели.
За начальную фазу сканирования условимся принимать момент
прохождения вершиной диаграммы направленности точки А.
Если равносигнальное направление смещено только по углу
места (цель в точке /), то отраженные импульсы будут
максимальны, когда ось диаграммы направленности находится
в точке В, и минимальны спустя половину оборота луча
(рис. 4-29,г). Огибающая импульсов будет изменяться по
синусоидальному закону. При азимутальном смещении (цель в точке 2)
максимум огибающей сместится в точку А и фаза огибающей
изменится на угол 90° (рис. 4-29,5). В общем случае при смещении
равносигнального направления и по азимуту, и по углу места
(цель в точке 3) огибающая отраженных импульсов будет
изменяться с некоторой начальной фазой (рис. 4-29, в), зависящей от
направления смещения. Эта огибающая представляет собой
сигнал ошибки.
На рис. 4-30 показана упрощенная функциональная схема
системы автоматического сопровождения цели по направлению
(АСН). На схеме.изображены лишь основные элементы системы.
Следует иметь в виду, что в ее состав входят также передатчик,
и приемник, которые вместе с антенной системой и фазовым
детектором образуют измерительное устройство, сравнивающее
угловое положение цели с направлением оси антенны. В
приемнике происходит усиление отраженных импульсов и выделение
(селекция) сигналов цели, выбранной для сопровождения. Эти
сигналы промодулированы по амплитуде в соответствии с
имеющимся рассогласованием между направлением на цель и равно-
сигнальным направлением. Импульсный детектор выделяет
напряжение, изменяющееся по закону огибающей входных сигналов,
т. е. сигнал ошибки.
В системах АСН рассогласование устраняется отдельно по
азимуту и углу места. Поэтому из сигнала рассогласования
необходимо выделить две его составляющие, характеризующие смещение
равносигнального направления в обеих плоскостях. Выделение
осуществляется при помощи фазовых детекторов. В
качестве опорных используются два переменных напряжения
частотой й и сдвинутые по фазе на 90° (рис. 4-29,ж).
Луч антенны обычно развертывается путем вращения
эксцентрично расположенного облучателя параболического рефлектора
антенны. Вместе с облучателем вращается ротор специального
генератора опорных напряжений (ГОН).
243
человека. Оператор лишь корректирует этот процесс, изменяя
скорость вращения двигателя в соответствии с изменениями скорости
перемещения цели в пространстве.
Сопровождение по скорости особенно оправдывает себя в
условиях воздействия помех или при^кратковременных пропаданиях
отраженного сигнала. В этих случаях обычные автоматические
системы прекращают сопровождение, что приводит к потере цели.
При- полуавтоматическом сопровождении по скорости отсутствие
отраженного сигнала делает невозможной лишь коррекцию
скорости сопровождения. Система продолжает сопровождение с
прежней скоростью: она как бы «запоминает» ее значение.
Кратковременные появления отраженного сигнала могут быть использованы
для внесения поправок. Это позволяет непрерывно вырабатывать
сравнительно точную информацию о цели.
*~0
Вис. 4-31. Ручное и полуавтоматическое сопровождение:
— сопровождение по положению; б — сопровождение по скорости;
г — сопровождение по положению и скорости
Рассмотрим в общем виде процесс сопровождения по скорости.
На графике рис. 4-31,6 сплошной линией изображено изменение
во времени входного сигнала х{1), а штриховой линией —
регулируемой величины у(1). В ходе полуавтоматического
сопровождения значение регулируемой величины должно возможно более
точно соответствовать изменениям входного сигнала.
До момента 1\ (рис. 4-31,6) сопровождение цели достаточно
точно. В момент 1\ скорость изменения сигнала возрастает.
Регулируемая величина в течение некоторого времени будет
изменяться с прежней скоростью, пока в момент ^ рассогласование не
станет настолько большим, что будет легко различимо на
индикаторе. Для устранения рассогласования оператору недостаточно
просто установить еовое значение скорости изменения
регулируемой величины таким же, каким после момента 12 оно стало у
входного сигнала. Необходимо еще устранить возникшее
рассогласование. Поэтому оператор, естественно, установит скорость с
некоторым превышением. В результате этого в момент 1$ произойдет
согласование. Однако вследствие разности скоростей через
некоторое время система вновь рассогласуется и т. д. Этот процесс
еще больше усложняется в том случае, если скорость измене-
246
ния х{1) не остается постоянной. В этом случае сопровождение
будет происходить с ошибками.
Значительно лучший результат дает
полуавтоматическое'сопровождение по положению и по скорости (рис. 4-31, в). Оно
заключается в том, что оператор, заметив в момент /г
рассогласование, устанавливает новое значение скорости изменения
регулируемой величины таким же, как и у входного сигнала.
Одновременно производится* коррекция возникшего рассогласования 5=
=х(1)—*/(/), для чего изменяется само мгновенное
значение */(/), или, как иногда говррят, его положение. Практически это
Тахоге-
нератор
\\
Управление по
положению
П1
ЛПТ
х
2и\\ Усили-
1/1 тель
1Д
I ^1 Дбига- I ^1
|™^1 тель г"^
Регулируемый
объект
у(И
УпраВление
по скорости
~+-\ Оператор
Индикатор
им
Потенциометр
Звено
быстрого
Оператор
Усилитель
Индикатор
Двигатель
Регулируемый
объект
У
х(1>
Рис. 4-32. Структурная схема систем полуавтоматического
сопровождения по положению и по скорости:
а — схема с тахогенератором; в — схема со звеном быстрого
реагирования
может осуществляться путем кратковременного дополнительного
увеличения или уменьшения скорости уЦ), называемого «дого-
ном». После завершения догона и устранения рассогласования
регулируемая величина продолжает изменяться с такой же
скоростью, как и входной сигнал. Одна из схем, позволяющих
осуществлять полуавтоматическое сопровождение по положению и по
скорости, показана на рис. 4-32, а.
247
Изменение регулируемой величины производится
исполнительным устройством — двигателем, скорость вращения которого,
а следовательно, и скорость сопровождения определяются
напряжением, поступающим с усилителя.
На входе усилителя складываются два напряжения,
образующие управляющий сигнал 2(/). Одно из них поступает с
линейного поворотного трансформатора (ЛПТ) * (или потенциометра)
и имеет величину, зависящую от угла поворота его ротора,
механически связанного со штурвалом. Это напряжение будет
определять постоянную составляющую скорости вращения двигателя.
При вращении штурвала изменяется напряжение, поступающее
с ЛПТ, а следовательно, и скорость сопровождения, а также
вырабатывается дополнительное напряжение в тахогенераторе (ТГ),
обеспечивающее догон. После завершения догона оператор
прекращает вращение штурвала, напряжение с тахогенератора
больше не поступает, и скорость сопровождения будет
определяться лишь напряжением ЛПТ. Линейный поворотный
трансформатор и тахогенератор являются задающим устройством системы.
Соответствие полярностей или фаз напряжений ЛПТ и ТГ
устанавливается так, чтобы при увеличении напряжения ЛПТ,
т. е. повышении скорости сопровождения, напряжение ТГ к нему
добавлялось, устраняя возникшее ранее отставание в изменениях
регулируемой величины. Тогда при снижении напряжения ЛПТ
напряжение ТГ будет из него вычитаться, приводя к компенсации
опережения, возникшего вследствие имевшегося ранее
превышения скорости изменения регулируемой величины над скоростью
изменения входного сигнала.
Аналогичная схема показана на рис. 4-32,6. В ней
сопровождение по положению и по скорости достигается включением звена
быстрого реагирования (рис. 3-25, а) в цепь прохождения сигнала.
Постоянная составляющая напряжения, определяющая скорость
вращения двигателя (скорость сопровождения), поступает через
делитель /?1/?2 с потенциометра, управляемого штурвалом. При
повороте штурвала это напряжение изменяется и за счет
изменения заряда конденсатора С через сопротивление /? протекает
некоторый ток, что изменяет напряжение на входе усилителя. Тем
самым достигается кратковременное изменение скорости вращения
двигателя — догон.
Для осуществления перехода с ручного (или
полуавтоматического) сопровождения на автоматическое и обратно необходимо
подключать усилитель или к выходу измерительного устройства,
или к выходу задающего.
Сравнительно просто происходит переход на автоматическое
сопровождение. Здесь должно быть выполнено лишь одно требо*
* Линейный поворотный трансформатор (ЛПТ) — электрическая машина
переменного тока, позволяющая получить напряжение, пропорциональное углу
поворота ее ротора. Подробно см. гл. VI.
248
На правой части схемы изображена обычная система АСД,
подобная показанной на рис. 4-23. Левая часть, обведенная
штриховой линией, представляет собой привод ручного сопровождения.
В середине расположен переключатель Авт. — Ручн. перевода
с автоматического сопровождения на ручное.
В режиме автоматического сопровождения усилитель
привода АСД подключается к выходу дискриминатора. Одновременно
к дискриминатору подключается вспомогательный привод,
состоящий из усилителя, двигателя и потенциометра П. На выходе этого
привода непрерывно устанавливается напряжение, равное
поступающему с временного дискриминатора.
В режиме ручного сопровождения оператор ведет наблюдение
по индикатору, куда, помимо отраженных импульсов, с
генератора задержки поступает импульс визирной отметки. Вращение
штурвала через механический дифференциал передается движку
потенциометра. В результате этого изменяется напряжение,
поступающее через усилитель привода АСД к двигателю, а
следовательно, и скорость вращения последнего. Тем самым
осуществляется управление по скорости. Вход усилителя вспомогательного
привода при этом замкнут накоротко.
Управление по положению достигается благодаря подаче с та-
хогенератора дополнительного напряжения на усилитель
привода АСД во время вращения штурвала. Возможен и другой
метод, при котором механическое вращение штурвала при помощи
дифференциала добавляется к вращению, передаваемому на
генератор задержки с двигателя. Тем самым осуществляется
дополнительное изменение времени задержки, т. е. изменяется
положение визирной отметки.
§ 4-6. СИСТЕМЫ УПРАВЛЕНИЯ СНАРЯДАМИ
В настоящее время одним из наиболее универсальных видов
оружия стали управляемые реактивные снаряды. Они могут
применяться против различных целей, включая и находящиеся в
полете реактивные снаряды противника.
Управляемые реактивные снаряды имеют весьма широкий
диапазон дальности действия, способны нести мощный боевой
заряд и могут запускаться как со стационарных, так и с подвижных
объектов (самолетов, кораблей, подводных лодок). Основное
преимущество управляемых снарядов — способность эффективно
поражать движущие цели. Высокая эффективность объясняется
возможностью корректировать траекторию полета снаряда при
помощи системы управления, представляющей собой сложную
замкнутую следящую систему, которая автоматически наводит на цель
реактивные снаряды.
Рассмотрим системы наведения и управления по данным,
имеющимся в иностранной печати. Система наведения (рис. 4-34) со-
250
стоит из устройства
определения координат или
взаимного положения цели и
снаряда и счетно-решающего при-'
бора, который рассчитывает
траекторию полета снаряда,
обеспечивающую его встречу
с целью, и вырабатывает
соответствующие команды управ-4
ления. Кроме того, при
размещении системы наведения
вне снаряда, в ней должен
быть передатчик (для
передачи команд на снаряд).
Система управления,
устанавливаемая на борту
снаряда, обеспечивает
стабилизацию снаряда в полете и
выполнение всех получаемых с
системы наведения команд об
изменении траектории полета.
Важным элементом бортовой
системы управления является
автопилот.
Данные о движении цели
и снаряда, определяемые
радиолокационным или каким-
либо другим методом,
поступают в быстродействующий
счетно-решающий прибор, в
котором эта информация
обрабатывается и рассчитывается
траектория полета,
обеспечивающая встречу снаряда с
целью. Расчет траектории
корректируется в соответствии с
маневрированием цели и
принятым способом наведения,
причем учитываются
динамические свойства снаряда и
условия боевой работы.
Отклонение снаряда от требуемой
траектории является ошибкой
системы. В зависимости от
величины ошибки
вырабатываются команды управления,
передаваемые на снаряд.
Под воздействием команд
йайиё: в момент переключения рассогласование должно быть
возможно меньшим и лежать в пределах полосы захватывания.
При обратном переходе может оказаться, что на выходе
задающего устройства установлено напряжение, существенно
отличающееся от текущего значения напряжения на выходе
измерительного устройства. Тогда после переключения резко изменится
скорость сопровождения, что, во-первых, может привести к потере
цели, а, во-вторых, вызывает значительные динамические
перегрузки системы.
Антенна
Приемник
Оператор
т
■—]1
временной
дискриминатор
\Индикатор
1И
Тахоге-
нератор
\ Дифференциал^ \
Двигатель
Вспомогательного
приВода
Усилитель
Вспомогательного
приВода
Ручн
ТЗтЗТ
Айт.\—
3_Х
Генератор]
задержки
\\
Двигатель]
приВода
АСД
\Усилитель
привода
АСД
Сигнал
дальности
(в СРП)/
передачи
данных
7
Рис. 4-33. Совмещение систем автоматического и
полуавтоматического сопровождения по дальности
Устранить подобные явления наиболее просто можно
применением вспомогательного следящего привода, подобного
изображенному «а рис. 3-4. На вход такого привода подается
напряжение с выхода измерительного устройства. Привод автоматически
устанавливает такое же напряжение на потенциометре (или ЛПТ),
используемом в качестве задающего устройства, поэтому в
момент переключения не возникает каких-либо нежелательных
переходных процессов. После перехода на ручное сопровождение
вспомогательный привод отключается и дальнейшее изменение
напряжения на потенциометре осуществляет оператор.
В качестве примера рассмотрим схему совмещения систем
автоматического и ручного сопровождения по дальности
(рис. 4-33), составленную авторами безотносительно к конкретному
образцу.
249
бортовая система управления поворачивает руль снаряда, выводя
его на расчетную траекторию.
При отсутствии рассогласования значение команд управления
становится равным нулю. В этом случае бортовая система
управления выполняет более узкие функции стабилизации снаряда, т. е.
обеспечения его устойчивого прямолинейного движения.
Существуют различные технические средства и методы, при
помощи которых реализуется решение задачи управления
снарядом. Их выбор зависит от тактического назначения снаряда,
характера и удаления цели. Все системы управления обычно делятся
на три основные группы:
— автономные системы управления;
— системы телеуправления;
— системы самонаведения.
1. Автономные системы управления. Автономные
системы управления полностью размещены на снаряде и во
время работы не имеют связи ни с пунктом запуска, ни с целью.
Они применяются главным образом для наведения снарядов
дальнего действия.
Основными типами автономных систем наведения являются:
инерциальная, магнитометрическая и астронавигационная. Работа
инерциальнои системы основана на использовании инерционных
свойств гироскопов и датчиков ускорений. Способность гироскопов
«запоминать» положение главной оси используется для создания
на борту снаряда так называемой гиростабилизированной
платформы -*- площадки, сохраняющей неизменной свою ориентацию
относительно мирового пространства. На платформе
устанавливаются датчики ускорений, измеряющие ускорения в трех взаимно-
перпендикулярных осях координат. После двойного
интегрирования ускорений в системе определяются значения перемещений
снаряда по высоте и направлению, а также пройденный путь. Эти
величины сравниваются с данными траектории, введенной в
программу. Если есть отклонение от заданного значения, на бортовую
систему управления выдаются сигналы управления, в результате
воздействия которых происходит коррекция возникших ошибок.
После прохождения заданного пути программное устройство
направляет снаряд на цель.
Действие магнитометрической системы наведения основано на
использовании относительного постоянства магнитного поля
земли. Измерительное устройство системы в ходе полета снаряда
производит магнитные измерения. Специальная следящая система
удерживает снаряд под определенным углом к магнитным
меридианам. Угол выбирается с таким расчетом, чтобы траектория
вывела снаряд на цель.
Астронавигационные системы используют принципы навигации
по небесным светилам. Специальные телескопические устройства,
установленные на гиростабилизированной платформе,
автоматически следят за положением одной или двух звезд. Измеренные
252
значения высоты звезд (угол между направлением на звезду и
плоскостью горизонта) сравниваются со значениями, заранее
вычисленными для каждого момента времени и. введенными в
программное устройство. Сигнал рассогласования используется для
коррекции траектории. Перевод снаряда в пикирование на цель
производит программное устройство.
Помимо рассмотренных, применяются также комбинированные
системы наведения, в которых на начальном и конечном участках
траектории используются разные методы. Например, на
начальном участке может быть использована командная система
телеуправления, а на конечном — система самонаведения.
Радиолокатор
сопровождения
цели и наве-
дения снаряда
Радиолокатор]
наведения
снаряда
Н СРП М
Радиолокатор
сопровождения
дели \
цель I—Н
Радиолокатор
Сопровождения
цели
СРП
Радиолокатор]
наведения
снаряда
—ш4 Снаряд
6
Рис. 4-35. Системы наведения по лучу:
а — однолучевая система; б — двухлучевая система; в — функциональная схема
двухлучевой системы
2. Системы телеуправления. В системах
телеуправления аппаратура наведения располагается вне снаряда на пункте
управления и команды управления передаются на борт снаряда по
линии связи.
Существуют три основных типа систем телеуправления:
система наведения по лучу радиолокатора, командная система и
радионавигационная система.
В системе управления по лучу радиолокатор расположен на
пункте управления: он сопровождает цель методом конического
развертывания луча антенны. Излучение передатчика
принимается и на снаряде. Бортовое оборудование снаряда
самостоятельно вырабатывает сигналы управления, заставляющие снаряд
лететь по равносигнальному направлению. Принцип действия
такого оборудования был изложен выше.
253
В рассматриваемом случае (рис. 4-35, а) для сопровождения
цели и управления снарядом используют один и тот же
радиолокационный луч. Это не позволяет наводить снаряд в упрежденную
точку, что ухудшает динамические свойства системы. Более
совершенной является двухлучевая система наведения снаряда по
лучу радиолокатора. В ней цель сопровождается одним
радиолокатором. По данным сопровождения специальный
счетно-решающий прибор, непрерывно определяет положение упрежденной
точки, куда и направляется луч второго радиолокатора, ведущего
снаряд (рис. 4-35,6).
В таком исполнении системы ее основной контур
регулирования оказывается разомкнутым (рис. 4-35, б). Если из-за неточной
юстировки антенны второго радиолокатора или по какой-либо
другой причине возникнет ошибка в направлении его луча, то
она ни обнаружена, «ни устранена системой не будет.
1 Радиолека-
\тор
сопровождения
цели и
\ снаряда
СРП
Пере
\датчик\
\команд\
Радиолокатор
наведения
СРП
РадиолокаЛ
тор сопроА
вождения
цели
Рис. 4-36. Командные системы наведения:
о — одно луч ев а я радиолокационная система наведения; б — двухлучевая радио*
локационная система наведения
Отличительной особенностью командных систем является
наведение снаряда на цель при помощи специальных команд,
вырабатываемых системой наведения и передаваемых на борт снаряда
по линии связи. Сопровождение цели и снаряда осуществляется
одним или двумя различными радиолокаторами (рис. 4-36,а, б).
Измеренные координаты цели вводятся в счетно-решающий
прибор, где в соответствии с принятым методом наведения
рассчитывается траектория полета снаряда. При стрельбе по неподвижной
цели сопровождается только снаряд, а координаты цели заранее
вводятся в счетно-решающий прибор.
В радионавигационных системах наведения для управления
снарядом используют обычные средства радионавигации. Эти
системы являются, как правило, разомкнутыми.
254
3. Системы самонаведения. В системах
самонаведения вся аппаратура, управляющая полетом снаряда, находится
на его борту. Сопровождение цели и определение ее положения
относительно снаряда производятся устройством самонаведения.
На основании этих данных счетно-решающий прибор
вырабатывает управляющий сигнал, непосредственно поступающий на
бортовую систему управления. Последняя поворачивает надлежащим
образом органы управления.
Для осуществления самонаведения .необходимо, чтобы цель
излучала или отражала энергию какого-либо вида. Например,
отражение радиоволн (радиолокационный метод) или тепловое
излучение цели (теплопеленгационный метод).
По принципу использования излучаемой или отраженной
целью энергии системы самонаведения подразделяются на три
типа: активные, полуактивные и пассивные.
щ^ттттттттг щщщщтттщрт? Ш№ти&шт®®ш
а 6 в
Рис. 4-37. Системы самонаведения:
а — активная система; б — полуактивная система; в — пассивная система
При активном самонаведении (рис. 4-37, а) источник
излучаемой энергии находится на борту снаряда. Обычно это
радиолокационная станция с коническим развертыванием луча антенны
(рис. 4-30), в которой каналам азимута и угла места
соответствуют каналы курса и тангажа. После обнаружения цели антенна
такой станции непрерывно следит за целью, поворачиваясь в двух
плоскостях. Данные об угловом положении антенны относительно
оси снаряда наряду с данными о дальности цели поступают
в, счетно-решающий прибор. На основании этой информации там
вырабатываются команды управления, которые через бортовую
систему управления воздействуют на рули. Принципиально
возможно осуществление самонаведения без данных о дальности.
Поэтому последние в ряде систем являются вспомогательными и
используются для селекции сигналов сопровождаемой цели.
Повышение мощности радиолокационного передатчика неизбежно
связано со значительным увеличением его веса, что неприемлемо
для бортовой аппаратуры. Поэтому дальность действия активных
систем самонаведения невелика.
Бортовое оборудование снаряда в полуактивной системе
отличается тем, что в нем нет передатчика, но имеется дополнительный
хвостовой приемник и хвостовая антенна. Передатчик,
облучающий цель, устанавливают вне снаряда: на земле, корабле, само-
255
лете (рис. 4-37,6). Передатчик осуществляет автоматическое
сопровождение цели по направлению, непрерывно ее облучая.
Иначе говоря, внешний передатчик относительно большой
мощности производит радиолокационное «подсвечивание» цели.
Основной приемный канал бортовой аппаратуры служит для
определения угловых координат цели относительно оси снаряда.
Сигналы, принятые хвостовым приемником, используются для
синхронизации аппаратуры и приближенного определения
дальности цели. В остальном динамика наведения в полуактивной
системе такая же, как и в активной системе.
Поворот оптической системы
б горизонтальной плоскости
Цель Ъ*\
Оптиче-\
екая
\система\
лятор
54:кй&1*™Г
элемент
тель
Поборот оптической системы
У+\Двига-
тель
\-**\
Двигатель
6 вертикальной плоскости
а
безрастровые
кольца '
Рис. 4-38. Пассивная система самонаведения:
а _ функциональная схема; б — принцип работы модулятора
При пассивном самонаведении можно использовать теплопелен-
гаторные системы, использующие тепловое (инфракрасное)
излучение цели. Тепловая головка самонаведения имеет оптическую
систему, установленную в носовой части снаряда (рис. 4-38, а). В
фокусе этой системы расположен модулятор теплового луча.
Простейший модулятор (рис. 4-38,6) состоит из двух вращающихся
дисков, по окружности которых расположены чередующиеся
прозрачные и непрозрачные секторы — растры. На каждом диске
имеется по два растра, причем все растры содержат разное
количество секторов. Между растрами расположены безрастровыв
кольца.
Если цель находится на оси оптической системы, то
сфокусированный луч попадет на точку О пересечения безрастровых колец
и не будет модулироваться. При смещении цели в горизонтальной
256
плоскости луч будет проходить через внешний или внутренний
растр первого диска, .при вертикальном смещении — через растры
второго. В результате этого луч окажется промоделированным
той или иной частотой или комбинацией частот, характеризующей
смещение цели. Такой луч попадает на чувствительный элемент,
функции которого могут выполнять фотоэлементы,
фотосопротивления или термоэлементы. В чувствительном элементе возникают
импульсы тока или напряжения, которые затем усиливаются и
подаются на исполнительное устройство, поворачивающее
оптическую систему в направлений на цель.
При использовании простейших растровых модуляторов
величина сигнала рассогласования не зависит от величины
рассогласования системы. Это делает наиболее предпочтительным
применение релейного метода регулирования. На выходе последнего
каскада усилителя установлено резонансное реле с четырьмя
контактными группами, имеющими частоты резонанса, соответственно
равные частотам растров. Каждая из контактных групп включает
один из исполнительных двигателей для вращения в ту или иную
сторону. Исполнительные двигатели поворачивают оптическую
систему в направлении совмещения ее оси с направлением на цель.
После совмещения луч попадает на безрастровое кольцо и
модуляция луча прекращается.
ГЛАВА V
СИНХРОННЫЕ ПЕРЕДАЧИ И ПРИВОДЫ
§ 5-1. ОБЩИЕ СВЕДЕНИЯ
Синхронной передачей называется устройство, обеспечивающее
непрерывное согласование положения двух или нескольких
механически не связанных между собой валов в процессе их
вращения.
Под согласованным понимается такое положение валов, при
котором равны их углы поворота относительно некоторого
начального положения. Необходимость автоматического согласования
положения валов возникает во многих производственных
процессах, а также при использовании военной техники. Особенно
широко синхронные передачи применяются в различных системах
дистанционного управления и
п а . /^~^Г\ телеизмерений. При их помо-
Линия соязи ( Г \ г г
щи, например, управляют
положением орудий, передают
данные о положении антенны
радиолокатора и т. д.
Датчик Приемник
Рис. 5-1. Структурная схема синхрон- В состав синхронной пере-
• ной передачи дачи входят следующие
основные устройства и приборы
(рис. 5-1):
— датчик или устройство, преобразующее угол поворота вала
в соответствующие ему электрические сигналы;
— приемник или устройство, воспринимающее электрические
сигналы датчика для их последующего преобразования в угол
поворота управляемого вала;
— линия связи, служащая для передачи электрических
сигналов датчика к приемнику.
Существуют "несколько различных типов синхронных передач.
В настоящее время наибольшее распространение получили так
называемые индукционные синхронные передачи, работающие на
переменном токе постоянной частоты. Эти передачи относятся
к числу самосинхронизирующихся, так как при включении пита-
258
Однофазная обмотка / в сельсин-датчиках является обмоткой
возбуждения и питается от сети переменного тока, создавая
переменный магнитный поток возбуждения. Эта обмотка может
иметь явно выраженные полюсы (рис. 5-2, а) или же выполняться
распределенной (рис. 5-2,6), с неявными полюсами. При повороте
ротора изменяется взаимное положение фазных обмоток 2 и
потока возбуждения.
Рис. 6-2. Схематический разрез контактных
сельсинов:
а — с явно выраженными полюсами на статоре; б — с рас*
пределенными обмотками; в — ротор сельсина
Корпус сельсина выполняется из немагнитных материалов.
Магнитопровод статора и ротор для уменьшения потерь на
вихревые токи набираются из листов трансформаторной стали. Ротор
может поворачиваться в подшипниках, установленных в торцовых
стенках корпуса.
Основным недостатком контактных сельсинов, снижающим
точность работы синхронной передачи, является трение,
испытываемое ротором в контактных кольцах. Это трение сравнительно
велико, так как для повышения, надежности синхронной передачи
на каждом кольце обычно устанавливают по две щетки.
Бесконтактные сельсины лишены этого недостатка.
В бесконтактных сельсинах обмотка возбуждения так же, как
и трехфазная обмотка, находится на статоре. Но особое ее
расположение наряду со специальной конструкцией ротора
обеспечивает строго определенное соответствие положения магнитного по-
260
тока возбуждения положению ротора. Поэтому при повороте
ротора на определенный угол на такой же угол поворачивается и
магнитный поток.
Конструкция современного бесконтактного сельсина показана
на рис. 5-3. Корпус / сельсина представляет собой стакан,
выполненный из немагнитного материала. Стакан закрывается
крышкой 2. В дне стакана и в крышке установлены подшипники 3,
в которых своими полуосями 4 крепится ротор 5. Ротор наискось
пересекается слоем
немагнитного материала 6 —
магнитной «изоляцией».
Вплотную к стенкам
стакана прилегает статорное
железо, имеющее
сложную конфигурацию. Вдоль
образующих и торцовых
стенок расположена
внешняя часть магнитопрово-
да 7, а в середине — его
внутренняя часть 8. В
пазах этой части
размещена трехфазная
обмотка 9. У торцовых стенок
находится обмотка
возбуждения, состоящая из
двух секций 10. Ее витки
лежат в плоскости,
перпендикулярной оси
ротора, охватывая его. Чтобы
действующие в сельсине
переменные магнитные потоки не создавали больших потерь на
вихревые токи, магнитопровод выполнен из листов
трансформаторной стали, расположенных вдоль потоков.
Воздушные зазоры между ротором и статором сделаны
минимальными с магнитным сопротивлением, значительно меньшим,
чем у магнитной «изоляции». Создаваемый током обмотки
возбуждения переменный магнитный поток стремится замкнуться по
цепи с наименьшим магнитным сопротивлением. Поток левой
секции будет проходить по телу ротора, далее вверх через зазор
в статорное железо и по наружному магнитопроводу по часовой
стрелке *. Аналогично замыкается и поток правой секции (но
против часовой стрелки). Следует иметь в виду, что часть потока
является общей для обеих секций, так как поток одной из секций,
выйдя из ротора и обойдя вокруг него по статорному железу,
переходит во вторую половину ротора.
Как- видно из рис. 5-3, внутри статора поток возбуждения при
* Направление принято условно, так как поток является переменным.
Рис. 5-3. Бесконтактный сельсин:
/ — корпус; 2 — крышка; 3 — подшипник; 4 —
полуось; 5 — ротор; 6 — магнитная «изоляция»; 7 —
внешняя часть магнитопровода; 8 — внутренняя часть
магнитопровода; 0 —трехфазная обмотка; /0
—однофазная обмотка
261
иия они сами приходят в согласованное положение независимо от
предыдущего расположения валов. По мощности, развиваемой на
выходном валу, различают индикаторные и силовые синхронные
передачи. В первых по линии связи передается незначительная
мощность, достаточная для вращения уравновешенной стрелки
или шкалы. Эти передачи отличаются сравнительно высокой
точностью; их применяют для передачи показания приборов, данных
об угловом положении валов или команд на установку угловых
положений, а также для передачи других данных. В силовых
передачах передаваемая мощность значительна; эти передачи
применяют для осуществления синхронного вращения
нагруженных валов.
Наличие значительных нагрузок снижает точность передач.
Точность синхронной передачи — ее важнейший качественный
показатель. В тех случаях, когда необходимы одновременно и
высокая точность, и значительная мощность передачи, применяют
синхронно-следящий привод, представляющий собой соединение
синхронной передачи со следящей системой.
Устройство и принцип работы сельсина
Основным элементом индукционной синхронной передачи
является специальная электрическая машина, получившая
название сельсина. Слово сельсин означает самосинхронизирующийся.
Иногда вместо термина сельсин применяют равнозначные ему
термины самосин или автосин. В общей схеме синхронной
передачи сельсин может быть датчиком (сельсин-датчик — СД) или
Приемником (сельсин-приемник—СП).
Принцип работы сельсина основан на получении трех
переменных синусоидальных ЭДС, амплитуды и фазы которых жестко
связаны с углом поворота его ротора. Сельсин имеет две обмотки:
трехфазную и однофазную. В зависимости от типа сельсина
обмотки могут быть размещены или порознь (одна на роторе, а
другая на статоре), или обе вместе (на статоре). Обмотка,
расположенная на роторе, подключается при помощи контактных колец.
Ксли на роторе размещена однофазная обмотка, то он имеет два
контактных кольца, если трехфазная, — то три (рис. 5-2).
Сельсины, в которых обе обмотки размещены на статоре, вообще не
имеют контактных колец; они называются бесконтактными.
Трехфазная обмотка обычно соединяется звездой, причем все
три обмотки выполняются совершенно одинаковыми, но
располагаются в пазах ротора или статора так, что их оси смещены одна
относительно другой на угол 120° в плоскости вращения ротора.
Чтобы магнитное сопротивление было одинаковым во всех
осени х сечениях, пазы делаются скошенными под углом к
образующей цилиндрической поверхности, причем величина скоса равна
ширине выступа между пазами.
и*
259
данном положении ротора направлен сверху вниз, т. е. лежит
в плоскости, перпендикулярной слою магнитной изоляции и
проходящей через ось. При повороте ротора соответственно изменит
•направление и магнитный поток. Таким образом, в бесконтактных
сельсинах так же, как и в контактных, при повороте ротора
изменяется взаимное положение потока возбуждения и фазных
обмоток.
В некоторых типах бесконтактных сельсинов ротор выполняют
в виде лепестков, смещенных относительно оси. Это обеспечивает
неравенство магнитного сопротивления ротора в различных
осевых сечениях.
Независимо от того, какие сельсины применяются в передаче,
принцип работы всех синхронных передач одинаков. Поэтому все
дальнейшие объяснения относятся к любым типам сельсинов.
■зОезОезОе
б в г
Рис. 5-4. Условные изображения сельсинов:
а — развернутое; б, в и г — упрощенные
Протекающий по однофазной обмотке ток внутри статора
создает переменный магнитный поток, являющийся потоком
возбуждения. В фазных обмотках поток возбуждения индуктирует
электродвижущие силы, амплитуды которых зависят от угла между
осью соответствующей обмотки и направлением магнитного
потока возбуждения. При повороте ротора изменяется взаимное
расположение потока возбуждения и осей фазных обмоток. При
этом будут изменяться амплитуды э. д. с, индуктируемых в
фазных обмотках, а .после перехода обмотки через магнитную
нейтраль изменится и начальная фаза э. д. с. Конструкция ротора
выполнена так, чтобы при его повороте значения амплитуд э. д. с.
в фазных обмотках изменялись по синусоидальному закону, что
достигается определенным (а точнее, синусоидальным)
распределением магнитной индукции в зазоре между ротором и статором.
На рис. 5-4, а показано условное обозначение сельсина.
Трехфазная обмотка и обмотка возбуждения изображены рядом.
Иногда применяют упрощенные изображения, показанные на
рис. 5-4, б, в и г. На них внутренний кружок изображает ротор,
а внешний — статор. В зависимости от того, где расположена та
или иная обмотка, соответственно к ротору или к статору
подведены схемные выводы этой обмотки.
262
Условимся отсчитывать угол поворота ротора сельсина от
положения, при котором магнитный поток возбуждения совпадает
с осью первой фазной обмотки, и обозначим этот угол 0. Тогда
при данном положении ротора в фазных обмотках будут
индуктироваться э. д. с, амплитуды которых пропорциональны той
части потока возбуждения, которая «сцепляется» с той или иной
фазной обмоткой. Эта часть потока определяется косинусом угла
между направлением потока
возбуждения и осью об- п И /1 /
мотки. е* - А '* '1'^г
Следовательно, , л „ м (1^,,, „ . ^^, п „
ЕХ = Е созб;
Е2 = ^соз(0+ 120°);
Ег = Есо* (0 + 240°),
(5-1)
Рис. 5-5. График ЭДС в фазной обмотке
при различных углах в
где Е—максимальная э. д. с,
которая индуктируется* в
фазной обмотке при
совпадении потока с ее осью.
Амплитуды ^ь Е2, Ег зависят только от угла поворота ротора.
При неподвижном роторе они остаются постоянными, а при
повороте ротора изменяются. Каждому положению ротора
соответствует определенное и единственное соотношение этих э. д. с.
На рис. 5-5 показано, какие амплитуды и начальные фазы
будет иметь э. д. с, индуктируемая в первой обмотке при
различных углах между потоком возбуждения и осью этой обмотки.
В двух других обмотках такие, же значения э. д. с. индуктируются
при меньших углах поворота ротора, соответственно на 120 и 240°.
Дистанционная передача углового положения магнитного
потока
Осуществление синхронной связи на сельсинах основано на
передаче от датчика к приемнику при помощи системы из трех
переменных токов углового положения магнитного потока: при
повороте ротора датчика на такой же угол поворачивается и
магнитный поток в приемнике.
В схемах синхронной передачи трехфазная обмотка сельсин*
датчика соединяется с трехфазной обмоткой. сельсин-приемника
(рис. 5-6). Для удобства рассмотрения соединим условно точки О
и О' проводником. При подаче напряжения возбуждения на
сельсин-датчик (СД) в его фазных обмотках будут индуктироваться
*. д. с. Благодаря наличию проводника 00' каждая фаза датчика
оказывается «агруженной только на одну из фазных обмоток
263
сельсин-приемника (СП). Амплитуда тока в каждой из фаз при
данном угле поворота ротора 6 равна:
/г = ^==Есо51е + 120°) = /со8(9+120О); , (52)
/3 = 4— С05 (' + ^^ = / С05 (9 + 240°),
где 2 — суммарное сопротивление фазной обмотки сельсин-дат-
. чика и всей ее «агрузки;
/ — максимально возможное амплитудное значение фазного
тока в том случае, когда поток возбуждения направлен
вдоль оси обмотки данной фазы.
д)е=эо*
Рис. 5-6. Токи и магнитные потоки в сельсинах:
а — схема соединения обмоток; б, в, г, д — векторные диаграммы маг-*
нитных потоков
Общий ток в нулевом проводе 00' равен сумме всех трех
токов:
/0 — /, + /, + /8 = / [соз 6 + соз (0 + 120°) + соз (6 + 240°) ]. (5-3)
Легко подсчитать, что выражение, стоящее в квадратных
скобках, равно нулю. Следовательно, /о^О, т. е. ток в нулевом
проводе отсутствует, и отключение его не повлияет на величины
токов, протекающих в каждой из фаз. Эти токи зависят только от
э. д. с, индуктируемых потоком возбуждения в каждой данной
фазе, и не зависят от з. д. с. других фаз.
Такой вывод существенно облегчает дальнейшее рассмотрение
процессов. Протекающие по фазным обмоткам токи Л, /г и /3
создают свои магнитные потоки как в обмотках сельсин-датчика, так
и в обмотках сельсин-приемника. Поток каждой из обмоток
направлен вдоль ее оси. Все эти потоки складываются в один
общий суммарный магнитный поток, который в дальнейшем будем
называть результирующим.
264
Это утверждение можно доказать более строго. Если результирующий
магнитный поток при любых углах б имеет постоянную величину и всегда направлен
вдоль потока возбуждения, то его поперечная составляющая, перпендикулярная
этому потоку, будет равна нулю,, а продольная составляющая не будет зависеть
от угла б. Поток каждой из обмоток пропорционален току этой обмотки, а его
проекция на то или иное направление будет равна произведению величины
потока на косинус угла между потоком и данным направлением. Так, например,
поток первой фазной обмотки будет равен
ф! = ^ = К1 С05 б,
где К — коэффициент пропорциональности.
Поскольку угол между потоком возбуждения и осью этой обмотки равен б,
продольная составляющая потока первой фазы будет равна
Фи = фг со8 в = Щ соз2 в = -Ц- (1 + соз28),
а поперечная составляющая
ф1д = ф4 5ш 8 = К1 сов 0 8И1 8 = -^-з!п 28.
Для других фазных обмоток значения продольной и поперечной
составляющих будут соответственно равны:
Фц = Щ С082 (в + 12о°) = Ж- [1 + сов (28 + 240°) ];
К1
Ф2д = /(/сов (в + 120°) 81п (в + 120°) = -у- &1п (28 + 240°);
Фз/ = К1соз* (в + 240°) = -у- [1 + сов (28 + 480°) ] =
= -^-[1 + соз (28 + 120°)];
Фц = Х/С082 (в + 240°) 8Ш (8+240°) = -у- б1п (28+480°) =
= -^-8ш(2в+ 120°).
Продольная составляющая результирующего потока
Фрез. / = Фи + Ф2/ + Фз/ = -^-[1 + С08 28 + 1 + соз (28 + 240°) + 1 +
+ соз (28 + 120°) ] = -|- К1 + -у- [соз 28 + соз (28 + 240°) + со8(28 + 120е).].
Выражение, стоящее в квадратных скобках, равно нулю. Следовательно,
Фрез.; = -у #А т. е. эта составляющая не зависит от угла поворота ротора б.
Поперечная составляющая результирующего потока
Фрез. « = <>* + ф2д + Ф«д = "^ И*1 26 + 8*п (29 + 2^°) + ^П (28+120°) ].
Сумма, стоящая в квадратных скобках, здесь также равна нулю.
Следовательно, Фрез. 3=0, т. е. результирующий поток не имеет поперечной составляющей.
266
В схеме, показанной на рис. 5-6, в сельсин-датчике в
результате взаимодействия магнитного потока фазных обмоток и потока
возбуждения Фв не может возникнуть вращение ротора, так как
при его вращении величины магнитных потоков и их взаимное
положение не меняются.
В сельсин-приемникё по фазным обмоткам протекают те же
самые токи, что и в датчике, но их направление соответственно
противоположно. Точно так же противоположным будет и
направление результирующего магнитного потока, создаваемого этими
токами.
Таким образом, при повороте ротора токи в фазных обмотках
датчика меняются так, что создаваемый ими в приемнике
результирующий магнитный поток Фрезш оставаясь постоянным по
величине, изменяет направление на такой же угол, как и ротор датчика.
Этот дистанционный поворот магнитного потока лежит в основе
работы всех синхронных передач.
§ 5-2. ИНДИКАТОРНАЯ СИНХРОННАЯ ПЕРЕДАЧА
Принцип действия
В индикаторной синхронной передаче обмотка возбуждения
сельсин-приемника подключается к той же сети, которая питает
обмотку возбуждения датчика. Схема приобретает вид,
показанный на рис. 5-7. Между потоком фазных обмоток приемника,
направление которого определяется положением ротора датчика, и
потоком возбуждения, направление которого зависит от
положения ротора приемника, воз- ^_
пикает взаимодействие. Если ^^
ротор приемника может
свободно вращаться, то в
результате этого
взаимодействия он повернется так,
чтобы направление обоих
потоков совпадало.
Передача окажется
согласованной, так как у приемника
ротор займет такое же
угловое положение, какое
занимает ротор датчика.
При вращении ротора датчика будет поворачиваться
результирующий магнитный поток фазных обмоток приемника, а
следовательно, и его ротор, т. е. будет осуществлено согласованное
вращение механически между собой не связанных валов.
В данной схеме индикаторной синхронной передачи оба
сельсина занимают совершенно одинаковое положение. Это значит,
что, если освободить ротор левого сельсина и поворачивать ротор
Рис. 5-7.
Схема индикаторной
синхронной передачи
267
Определим направление результирующего потока для разных
углов 8.
а) Пусть 8=0° (поток возбуждения направлен вдоль
оси'первой обмотки сельсин-датчика).
Тогда
/1==/со8 0° = /;
/а = /со8(0°+120°)=—4-/;
/3 = / со8 (0° + 240°) = —~ I.
Потоки в обмотках будут пропорциональны этим токам. Для
«ахождения общего потока статора нужно произвести векторное
сложение потоков всех обмоток. Такое сложение произведено на
рис. 5-6,6. Наиболее просто определяется направление потока
первой фазной обмотки. Так как поток возбуждения Фв
направлен вдоль ее оси снизу вверх, то поток самой обмотки Ф1 будет
направлен ему навстречу, т. е. от точки О вниз.
Токи в двух других фазных обмотках вдвое меньше, чем в
первой, и отрицательны. Поэтому потоки Фг и Ф3 также будут вдвое
меньше и направлены вдоль осей обмоток от точки О.
Результирующий поток ФРез.д получается направленным навстречу потоку
возбуждения Фв.
б) Пусть 8=30° (ротор датчика повернут «а 30° по ходу
часовой стрелки).
Тогда
^ = /008 30° = -^/;
/2 = / соз (30° + 120°) = - Х^ I;
/3 = /соз(30о + 240°)==0.
Для данного случая векторное сложение потоков произведена
на рис. 5-6, е. Величина результирующего потока Фрез.д не
изменилась, изменилось только его направление, причем, как и в
предыдущем случае, он вновь направлен навстречу потоку
возбуждения Фв. Следовательно^ результирующий поток фазных обмоток
повернулся на тот же угол, что и поток возбуждения, т. е. на тот
же угол, на который повернулся ротор сельсин-датчика.
На рис. 5-6, г и д произведено сложение Магнитных потоков
для углов 8, равных соответственно 60р и 90°. Аналогичное
построение можно произвести и для любых других углов. Во всех
случаях результирующий поток будет получаться постоянным по
величине и направленным навстречу потоку возбуждения.
265
правого, то функции сельсинов меняются: правый сельсин станет
датчиком, а левый — приемником. Иначе говоря, индикаторная
синхронная передача является обратимой. При возникновении
рассогласования в каждом из сельсинов появляется вращающий
момент, но поворачиваться будет только тот ротор, который не
•заторможен. По линии связи в рассматриваемом случае будут
протекать токи обоих сельсинов, причем, хотя они образуют один
суммарный ток, но действуют они независимо один от другого.
Если оба сельсина однотипны, то такая передача работает
в режиме максимальной мощности:, в ней сопротивление нагрузки
(обмоток приемника) в точности равно внутреннему
сопротивлению источника (обмоток датчика). Этот режим является наиболее
выгодным, так как чем выше передаваемая мощность, тем при
прочих равных условиях будут меньше ошибки.
Однако в ряде случаев от одного датчика работают несколько
приемников, что создает дополнительную нагрузку и приводит
к уменьшению напряжения, поступающего в линию связи.
Соответственно уменьшаются токи, питающие каждый из приемников,
что приводит к увеличению ошибок. Во избежание этого в
указанных случаях устанавливают сельсин-датчик повышенной
мощности с меньшим сопротивлением обмоток. При этом увеличение
нагрузки не приводит к значительному снижению напряжения на
выходе датчика: точность работы передачи остается высокой. Так,
если от одного датчика питается п приемников, то сопротивление
его обмоток должно быть в п раз меньше, чем у каждого из
приемников. Такое соотношение сохранит режим максимальной
мощности для всей передачи, причем мощность датчика будет
равномерно распределяться между приемниками. Подобные случаи
имеют место при передаче данных от одного ПУАЗО к
нескольким орудиям.
Синхронизирующий момент
Вращающий момент, возникающий в результате
взаимодействия результирующего потока фазных обмоток и потока
возбуждения сельсин-приемника и поворачивающий его ротор в
согласованное положение, называется синхронизирующим.
Синхронизирующий момент не равен нулю, если эти потоки
расположены под углом один к другому. Величина момента
зависит как от самих потоков, так и от величины этого угла (рис. 5-8):
М = /СФРе3Фв31пДе, (5-4)
или рез в \. '
М = Мт8ЖЬЪ, (5-5)
где АГ—коэффициент пропорциональности;
Мт = /СФрезФв— максимальный синхронизирующий момент;
46— угол между потоками (угол рассогласования
передачи); он равен разности углов поворота
роторов приемника и датчика: Дб=02—6ь
268
Между взаимодействующими потоками возможен еще и временной сдвиг
фаз, величина которого зависит от соотношения активного и индуктивного
сопротивлений фазных обмоток и линий связи. Наличие такого фазового сдвига
несколько снижает значение синхронизирующего момента.
Синхронизирующий момент будет максимальным при
рассогласовании на 90° (рис. 5-8,6):
М = Мт.
При любых других углах А б он будет иметь меньшее значение.
Знак синхронизирующего момента зависит от . направления
рассогласования и указывает, в какую сторону будет происходить
вращение ротора в процессе его отработки.
м
^Ч
Рис. 5-8. Зависимость синхронизирующего момента от
угла рассогласования
При* рассогласовании на 180° синхронизирующий момент
равен нулю, поэтому не будет производить согласование передачи.
Однако такое состояние является неустойчивым: при малейшем
изменении угла А 6, которое неизбежно возникает в процессе
работы, сразу же появится
синхронизирующий момент,
который приведет валы в
согласованное положение.
Устойчивое и неустойчивое
состояние системы можно
сравнить с устойчивым или
неустойчивым равновесием
шарика, находящегося на
изогнутой поверхности (рис. 5-9).
В точке а положение шарика устойчиво. Если шарик вывести из
этой точки, он сам вернется в нее. Это соответствует
согласованному состоянию в синхронной передаче (Д8=0°). Система,
выведенная из такого состояния, сама вернется в него под воздействием
синхронизирующего момента.
В точке б равновесие шарика неустойчиво: если шарик
сдвинуть, то он будет продолжать движение в том же направлении.
Аналогичным является состояние в системе при рассогласовании
на 180°: стоит систему вывести из такого состояния, как она
Рис. 5-9. Устойчивое и неустойчивое
механическое равновесие
269
•начнет движение в заданном ей направлении, пока не придет
в устойчивое состояние (Д9 = 0° или Д6 = 360°).
Следует иметь в виду, что в большинстве случаев зависимость
синхронизирующего момента от угла рассогласования несколько
отличается от синусоидальной, так как к моменту» возникающему
вследствие взаимодействия потоков, добавляется момент,
обусловленный наличием явно выраженных полюсов ротора или
статора.
Потоки взаимодействуют не только в сельсин-приемнике, но и
в сельсин-датчике, так как в схеме индикаторной передачи оба
сельсина занимают одинаковое положение. При этом в датчике
вращающий момент соответственно будет иметь противоположный
знак; он будет стремиться повернуть ротор в такое же положение,
которое занимает ротор у приемника. Вращения не произойдет
лишь потому, что ротор датчика заторможен. Вращающий момент
в датчике препятствует повороту ротора. Поэтому его называют
тормозным моментом.
Точность работы индикаторной передачи
Помимо синхронизирующего момента, на ротор
сельсин-приемника всегда действует некоторый\тормозящий момент,
обусловленный наличием трения. Вблизи согласованного положения
синхронизирующий момент мал и может даже оказаться меньшим, чем
момент трения. При этом ротор сельсина больше проворачиваться
не будет и в системе останется некоторое рассогласование или
ошибка.
Величина ошибки зависит от так называемого удельного
синхронизирующего момента Му, величина которого характеризует
скорость нарастания синхронизирующего момента при появлении
рассогласования, т. е. наклон графика зависимости М=/(Д6):
пл ДМ
\
(5-6)
9=0
Чем больше удельный синхронизирующий момент, тем быстрее
будет расти синхронизирующий момент при появлении
рассогласования, а следовательно, меньшей будет ошибка.
Величина ошибки трения Д6Т может быть рассчитана по
формуле
Ч-$. (5-7)
где Мт — момент трения.
Помимо трения, имеются и другие источники ошибок
синхронной передачи: неточная балансировка ротора, неоднородность маг-
270
будет вращаться синфазно с валом 0\Ох и давать грубые
показания, которые можно уточнить по первой шкале, имеющей
в п раз большую цену деления, что существенно повышает
точность отсчетов.
Передаточное отношение п нельзя чрезмерно увеличивать, так
как это приводит к росту ошибок в самой механической передаче
и увеличению нагрузок на валы. Кроме того, необходимо
учитывать, что одному и тому же положению ротора сельсин-приемника
относительно его фазных обмоток соответствует п различных
положений вала 0202. Это может привести к рассогласованию
передачи и появлению систематической ошибки, которую при
большом п будет трудно заметить*. Практически значение п берут до
нескольких десятков.
Для повышения точности и расширения диапазона
значений передаваемой величины применяются двухканальныё
передачи. Такая передача состоит из двух пар сельсинов,
образующих два канала: грубого и точного отсчёта. Канал грубого
отсчета является основным, а канал точного отсчета—
вспомогательным (рис. 5-10,6).
Между датчиками ГО и ТО имеется повышающая
механическая передача 1: /г. В такой схеме при повороте роторов
сельсинов канала ГО на 1° роторы сельсинов накала ТО повернутся
на п градусов. Это позволяет для отсчета использовать шкалы,
имеющие значительно более крупный масштаб, а следовательно,
повысить точность отсчета. • Наличие канала ГО избавляет от
многозначности отсчета, который может возникнуть потому,, что
при одном обороте валов в канале ГО роторы сельсинов ТО
повернутся п раз и п раз займут одно и то же положение.
Деления на шкалах наносят с таким расчетом, чтобы в
канале ТО цена деления соответствовала удвоенному значению
ошибки, допускаемому сельсином по классу точности, а
в-канале ГО цена деления должна равняться цене одного оборота
точной шкалы. При этом полное число делений на шкале сельсина ГО
будет равно передаточному отношению. Оно должно охватывать
весь диапазон изменения передаваемой величины.
Дифференциальный сельсин
В некоторых схемах синхронной связи, а также в
счетно-решающих приборах. возникает необходимость так согласовать
одновременное вращение трех или большего числа механически 'между
собой не связанных валов, чтобы угол поворота одного из них
* Существуют методы, позволяющие автоматически устранить такое рассо*
гласование в том случае, если допустима синхронизация передачи не с первого
оборота.
272
равнялся алгебраической сумме углов поворота всех других. В
таких случаях для осуществления суммирования применяют
специальные типы сельсинов, называемые дифференциальными.
В отличие от обычных дифференциальные сельсины имеют две
трехфазные обмотки, одна из которых размещена на статоре,
а другая —на роторе (рис. 5-11). И статор, и ротор выполняются
с неявными полюсами. В схеме передачи имеются два датчика:
СД1 и СД2. Каждый из них соединен с одной из трехфазных
обмоток дифференциального сельсина ДС. В результате взаимо-
Рис, 5-11. Дифференциальный сельсин:
а — схема соединения обмоток; б — условное изображение; в — схема включения
действия магнитных потоков обеих обмоток ротор
дифференциального сельсина поворачивается так, чтобы направления обоих
магнитных потоков совпали.
Если в ранее согласованной передаче роторы обоих датчиков
будут повернуты на один и тот же угол, то результирующие
магнитные потоки обеих трехфазных обмоток дифференциального
сельсина также повернутся на одинаковые углы и по-прежнему
их направления будут совпадать, не вызывая вращения ротора.
Если же углы поворота роторов датчиков будут различны, то
соответственно на разные углы повернутся и результирующие
потоки, а их взаимодействие приведет к повороту ротора
дифференциального сельсина на разностный угол, после чего вновь будет
достигнуто совпадение потокор.
Таким образом достигается вычитание углов поворота двух
валов. Если изменить направление вращения одного из датчиков,
можно получить суммирование углов.
Данная схема обратима* т. е. можно в качестве одного из
датчиков использовать дифференциальный сельсин, а один из
обычных сельсинов сделать принимающим — все зависит от того,
какие из роторов заторможень^ а какой может свободно
поворачиваться.
273
питного материала, приводящая к искажению направления
магнитных потоков, неравенство воздушных зазоров в различных
сечениях и т. д.
Величину ошибки определяют как полусумму максимальных
ошибок при вращении в двух противоположных направлениях
в пределах одного оборота. В зависимости от величины ошибок
сельсины делятся по точности на четыре класса.
Таблица 5-1
Класс точности
I
II
III
IV
Максимальная ошибка
0,75°
От 0,75° до 1,5°
От 1,5° до 2,5°
От 2,5° до 5°
Значительное увеличение точности синхронной передачи может
быть достигнуто, если между синхронизируемыми валами и
сельсинами установить повышающую механическую передачу с
передаточным отношением \:п (рис. 5-10,а). В такой передаче
рассогласованию сельсин-приемника на угол А 6 соответствует
рассогласование синхронизируемого вала на угол, в п раз мень-
шии Дв'= —.
Шкала ГО
0,< ЬП \ \п:1
-4
60-
^=0
СДГО СП ГО
СДТО СП ТО
Рис. 5-10. Методы увеличения точности индикаторной
передачи:
а — применение повышающей механической передачи, б — двух*
канальная передача
Если производится передача данных, то на оси сельсин-прием-
шика можно установить стрелку или шкалу точных отсчетов (ТО),
а на самом валу 0202 — шкалу грубых отсчетов (ГО). Эта шкала
271
§ 5-3. СИНХРОННО-СЛЕДЯЩИЙ ПРИВОД
Сельсин-трансформатор
Помимо индикаторных синхронных передач, при помощи
обычных сельсинов может быть осуществлена еще одна схема
синхронной связи, позволяющая при высокой точности получить
значительную мощность на синхронизируемом валу. Это так
называемый синхронно-следящий привод.
В схеме синхронно-следящего привода работа
сельсин-приемника отличается от его работы в индикаторном режиме. Здесь он
выполняет функции измерительного устройства следящей системы.
№ Д9
Рис. 5-12. Сельсин-трансформатор:
а — схема включения; б — зависимость напряжения сельсин-трансформатора от угла
рассогласования
Схема соединения трехфазных обмоток остается прежней, но
однофазная обмотка приемника не подключается к сети
переменного тока (рис. 5-12,а), поэтому в «нем будет действовать только
результирующий магнитный поток фазных обмоток, направление
которого определяется положением ротора датчика.
В контактных сельсинах одна из обмоток расположена на
роторе, а другая — на статоре. Поэтому в зависимости от взаимного
расположения магнитного потока и однофазной обмотки в
последней будет индуктироваться большая или меньшая по
величине э. д. с, используемая в качестве сигнала рассогласования.
Сельсин-'приемник, работающий в таком режиме, называют
сельсин-трансформатором. В нем трехфазная обмотка выполняет роль
первичной, а однофазная — роль вторичной обмотки. Если ось
однофазной обмотки расположена перпендикулярно направлению
результирующего потока, э. д. с. в обмотке индуктироваться не
будет. Такое взаимное положение обмотки и результирующего
потока будем считать согласованным.
При повороте ротора датчика соответственно повернется
результирующий магнитный поток в приемнике и в его однофазной
обмотке появится напряжение рассогласования. Начальная фаза
274
пого напряжения будет зависеть от направления рассогласования.
Величина той части потока, которая «сцепляется» с однофазной
обмоткой, зависит от синуса угла рассогласования. При
рассогласовании на 90° происходит полное «сцепление» и индуктируемая
и однофазной обмотке э. д. с. становится максимальной.
В общем случае амплитуда напряжения на выходе сельсин-
трансформатора будет равна
(5-8)
^ст=^31ПД6,
А-А
6-Б
где Цт—амплитуда при рассогласовании на 90°;
Д6— угол рассогласования.
На рис. 5-12,6 показан график зависимости амплитуды
переменного напряжения на выходе сельсин-трансформатора <7Ст и его
начальной фазы от
угла рассогласования.
Из графика видно, что
амплитуда (УСт зависит
от величины угла
рассогласования, а
начальная фаза — от
направления рассогласол
вания. Это позволяет
использовать сельсин-
трансформатор в
качестве дискриминатора
угла рассогласования,
т. е. устройства,
выявляющего наличие и
направление углового
рассогласования. При
этом понятие о
положительной или
отрицательной начальной
фазе является чисто
условным.
Существенно здесь то, что при
изменении
направления
рассогласования фаза напряжения
сельсин -
трансформатора изменяется на
противоположную.
В качестве сельсин-трансформатора может быть использован
и бесконтактный сельсин. Если его ротор повернуть так, чтобы
результирующий магнитный поток фазных обмоток ме пересекал
слой магнитной изоляции, а проходил параллельно ' ему
(рис. 5-13,а), то внутри статора поток будет замыкаться
кратчайшим путем, непосредственно через тело ротора. С однофазной
Рис. 5-13. Использование бесконтактного
сельсина в. качестве сельсин-трансформатора:
а — положение согласования; б — положение
рассогласования на 90°
275
обмоткой, расположенной у торцовых стенок, Поток в этом
случае «сцепляться» не будет, и в ней не будет индуктироваться
э. д. е. Такое положение ротора будет согласованным. Если же на
пути потока лежит слой магнитной «изоляции» (рис. 5-13,6), то
поток будет замыкаться через торцовые стенки и внешний маг-
нитопровод, т. е. пройдет внутри обеих секций однофазной
обмотки, индуктируя в ней максимальную э. д. с. При других
положениях ротора относительно потока величина э. д. с. будет им^ть
какое-то промежуточное значение.
Фазочувствитпель -
ный прибор
Рис. 5-14. Синхронная передача с нулевым индикатором
Таким образом, нет принципиальных различий при
использовании в качестве сельсин-трансформатора контактных и
бесконтактных сельсинов. Если напряжение сельсин-трансформатора
подать на фазочувствительный измерительный прибор, то
оператор, «аблюдая за показаниями прибора, может вручную
согласовывать передачу, а вместе с тем устанавливать заданное угловое
положение регулируемого вала. Схема подобной передачи
показана на рис. 5-14. В ней оператор выполняет функции
управляющего и исполнительного устройства.
Наличие в данной системе сигнала рассогласования позволяет
автоматизировать ее работу, для чего в схему должны быть
введены усилитель и двигатель.
Структурная схема и работа привода
Структурная схема синхронно-следящего привода показана
на рис. 5-15. Задающим устройством системы является сельсин-
датчик, измерительным — сельсин-трансформатор. Входным
сигналом х(() следует считать изменение положения результирующего
магнитного потока фазных обмоток сельсин-трансформатора,
которое соответствует угловому перемещению ротора датчика,
Регулируемой величиной у(() является угловое перемещение
управляемого вала, механически связанного с ротором
сельсин-трансформатора.
276^
Начальная фаза и амплитуда
напряжения на выходе
сельсин-трансформатора полностью, характеризуют как
направление, так и величину имеющегося
в систему углового рассогласования. Это
напряжение является управляющим
сигналом г(/). После усиления оно
подается на исполнительное устройство
системы—двигатель, производящий
отработку рассогласования путем вращения
управляемого вала.
Если использован двигатель
постоянного тока, то наряду с усилением должно
производиться преобразование сигнала.
Это достигается применением фазового
детектора, на который подается опорное
напряжение из той же сети переменного
тока, которая питает обмотку
возбуждения датчика. Если же применен
двигатель переменного тока (например,
двухфазный асинхронный двигатель), то он
является фазочувствительным, поэтому
усиление ведется на переменном
токе.
Синхронно-следящие приводы
используют, как правило, для вращения
нагруженных валов. Поэтому должна
быть обеспечена достаточная мощность
сигнала, питающего двигатель. Обычно
после предварительного усиления
управляющего сигнала в электронном
усилителе его дополнительно усиливают по
мощности.
Редуктор служит для согласования
скоростей и моментов вращения
двигателя и управляемого вала без изменения
передаваемой мощности.
Наличие редуктора уменьшает
влияние на двигатель инерции вращения
нагрузки при переходных процессах в
системе.
При повороте ротора датчика на
выходе сельсин-трансформатора
появляется напряжение рассогласования. Это
напряжение после усиления воздействует
на двигатель. Направление вращения
двигателя установлено так, чтобы ротор
сельсин-трансформатора, а вместе с ним
и вал регулируемого объекта поворачивались в согласованное
положение. При повороте ротора датчика в обратную сторону фаза
напряжения сельсин-трансформатора изменяется на
противоположную и соответственно обратным становится направление
вращения двигателя. Направление отработки указано стрелками на
характеристике сельсин-трансформатора (рис. 5-12,6).
При отсутствии рассогласования напряжение
сельсин-трансформатора равно нулю. Питание «а двигатель не поступает, и
двигатель остается неподвижным. При рассогласовании на 180
оно также равно нулю. Однако такое состояние системы является
неустойчивым. В процессе работы вал датчика обязательно
повернется, и значение Д6 изменится. Это приведет к появлению
напряжения на сельсин-трансформаторе, и начнется отработка
рассогласования. Сделав половину оборота, регулируемый вал
придет в согласованное состояние. Отсюда следует, что сельсин-
трансформатор имеет неограниченную область захватывания, но
возможно такое согласование системы, при котором регулируемый
объект сделает один лишний оборот в ту или иную сторону.
В подавляющем большинстве случаев это обстоятельство не имеет
значения.
Синхронно-следящие приводы используются для управления
положением антенны РЛС в процессе поиска или сопровождения
цели, для централизованного «аведения стволов артиллерийских
орудий и пусковых установок боевых ракет по данным счетно-
решающих приборов и т. д. Маломощные приводы применяются
для дистанционного ввода данных в счетно-решающие приборы,
синхронизации положения отклоняющей системы трубок
индикаторов кругового обзора в
соответствии с положением
антенны и т. д.
1
Редуктор
Усилитель
Двигатель
Рис»
Потенциометрическая
синхронная передача
Согласованное вращение
механически не связанных между
собой валов может быть
осуществлено при помощи
потенциометр ической передачи (рис. 5-16)
следующим образом. Два
одинаковых потенциометра питаются от
общего источника Е. Потенциометр Пх является датчиком, преобразующим угол
поворота вала 0Ь соединенного с его движком, в электрическое напряжение.
Движок принимающего потенциометра П2 соединен с управляемым валом. При
наличии рассогласования в положении валов между движками будет
некоторая разность потенциалов, которая может быть использована в качестве
управляющего сигнала системы автоматического регулирования. Измерительным
устройством системы является вход усилителя. В остальном работа данной
передачи такая же, как и передачи на сельсинах.
5-16. Потенциометрическая
синхронная передача
278
тельных проводов могут быть несколько различными. Все это
приводит к изменению соотношения токов в фазных обмотках и
к изменению направления результирующего магнитного потока
в сельсин-трансформаторе. Это значит, что напряжение (/Ст будет
равно нулю при положении ротора, отличающемся от
согласованного на некоторый угол А б. В системе возникнет ошибка.
Наличие канала точного отсчета позволяет уменьшить
величину этой ошибки. Роторы сельсинов ГО соединены с роторами
сельсинов канала ТО повышающими механическими
передачами 1:л (рис. 5-17). Поэтому, если в канале ГО останется
рассогласование на угол А б, определяемый классом точности
сельсина, то в канале ТО рассогласование будет в п раз большим,
т. е. будет значительно превышать возможное отклонение
результирующего потока от истинного согласованного направления. На
выходе сельсин-трансформатора ТО появится напряжение,
которое можно подать на усилитель и получить отработку ошибки.
Когда отработка закончится, в канале ТО останется ошибка Аб,
но это будет соответствовать в п раз меньшему рассогласованию
основного канала. Ограничиться применением одного канала ТО
здесь также нельзя из-за возможности неоднозначного
согласования передачи. При одном обороте ротора датчика в канале ГО
магнитный поток в сельсин-трансформаторе ТО сделает п
оборотов, т. е. п раз займет такое положение, при котором
напряжение на его выходе будет отсутствовать. Это может привести
к а ложному согласованию в любом из этих положений. Во избежа-
ние~этого система при больших рассогласованиях работает по
каналу ГО, обеспечивающему только одно положение устойчивого
истинного согласования, и лишь при малых рассогласованиях,
когда напряжение в канале ГО становится небольшим,
подключается канал ТО. Такое переключение каналов производится
автоматически специальным устройством — синхронизатором.
Следует отметить, что при малых рассогласованиях
напряжение в канале ТО больше, чем в канале ГО. Это также
способствует более точной отработке ошибки без дополнительного
большого усиления. В канале ТО применяют сельсины более высокого
класса точности.
Существует весьма много различных схем синхронизаторов:
электромеханические, электронные, электронно-ионные,
электронно-релейные и др. Все они выполняют одну и ту же функцию:
производят автоматическое переключение каналов при подходе
системы к согласованному положению. В качестве признака
подхода к согласованному положению в очень многих схемах
используется уменьшение амплитуды напряжения ГО. Однако такое же
явление возникает и при рассогласовании на 180°. Как будет
показано ниже, при четном передаточном отношении каналов это
может привести к устойчивому ложному равновесию системы
с ошибкой 180°. При нечетном передаточном отношении никаких
затруднений не возникает.
280
Как более простой рассмотрим сначала случай синхронизации
при нечетном передаточном отношении (рис. 5-18,а).
Подключение канала точного отсчета происходит в точках, где
амплитуда напряжения в канале ГО становится малой, т. е.
вблизи Д6==0° и Д6=180°. Первая из этих точек является
положением истинного согласования. Положение системы в ней
устойчиво, так как при отклонении вправо (в сторону
положительных Дб) отработка будет происходить влево, и наоборот. Вторая
точка является положением неустойчивого равновесия. Если
система случайно окажется рассогласованной на угол, близкий
к 180°, что возможно лишь при первоначальном ее включении, то
будет подключен канал ТО. При этом, если Д6<180°, начальная
Рис. 5-18. Синхронизация при нечетном передаточном
отношении:
а — напряжение на сельсин-трансформаторах; б — схема синхронизатора
фаза напряжения будет положительной и отработка будет
происходить влево, в сторону уменьшения Д6. Это приведет к
увеличению напряжения в канале ГО, и синхронизатор подключит этот
канал. Начальная фаза напряжения здесь также положительна,
благодаря чему будет происходить дальнейшее движение системы
к согласованному положению. При малых рассогласованиях вновь
произойдет подключение канала ТО и ошибка будет отработана.
Система придет к согласованному положению.
Если же Д6>180°, то отработка произойдет вправо и система
согласуется в точке, где Д 6=360°.
Одна из возможных схем синхронизаторов, работающих при
нечетном передаточном отношении я, показана на рис. 5-18,6.
Постоянное напряжение задержки Е3 подается на делитель,
состоящий из двух равных сопротивлений Н\ и /?2. На каждом из них
происходит падение половины этого напряжения. Средняя точка
делителя >по постоянному току заземлена через обмотку сельсин-
трансформатора ГО и. имеет поэтому нулевой потенциал.
Потенциал анода диода Д\ равен — Уг Ё3, а потенциал катода
диода Д2 равен +72 Е3, в то время как катод диода Д{ и анод
диода Дг, заземленные через первичную обмотку выходного транс-
281
§ 5-4! МЕТОДЫ ПОВЫШЕНИЯ ТОЧНОСТИ РАБОТЫ ПРИВОДА
Синхронно-следящие приводы являются астатическими
системами регулирования, так как в их состав входит интегрирующий
элемент — двигатель. Однако в силу конструктивных особенностей
сельсинов и наличия у двигателя зоны нечувствительности в
приводе возможно появление дополнительных ошибок. Улучшить
динамический режим работы привода можно применением
коррекции; для уменьшения ошибок, обусловленных застоем (сухим
трением), синхронную передачу в приводе делают двухканальной.
Двухканальный привод
Основным источником ошибок в индикаторной передаче
является наличие трения. В сельсин-трансформаторе трение не
играет существенной роли, так как вращение ротора производит
достаточно мощный двигатель, основной нагрузкой которого
является не ротор сельсина, а регулируемый объект. Усиление
Рис. 5-17. Структурная схема двухканального привода
в системе устанавливается с таким расчетом, чтобы трогание
двигателя происходило при достаточно малом рассогласовании. Это
при наличии гибкой обратной связи позволяет уменьшить зону
нечувствительности.
Основным источником ошибок в синхронной передаче с сель-
син-тдансформатором является невозможность создать сельсины
с идеально одинаковыми фазными обмотками и идеально
однородным магнитопроводом. Кроме того, сопротивления соедини-
279
форматора, имеют нулевой потенциал. Поэтому каждый из диодов
в исходном состоянии заперт напряжением, равным 72^з. Если
амплитуда напряжения в канале ГО меньше этого напряжения,
то оба диода оказываются запертыми, а канал ГО — отключенным
от схемы. Этим обеспечивается задержка включения канала ГО,
в то время как канал ТО подключен к выходному
трансформатору. При увеличении амплитуды напряжения в канале ГО диоды
будут поочередно открываться (Д1 — в положительный, а Дг —
в отрицательный полупериод), обеспечивая подачу этого
напряжения к выходному трансформатору. Преобладание напряжения
канала ГО обеспечивается благодаря тому, что с делителя /?3#4 на
выходной трансформатор подается лишь часть напряжения
канала ТО.
Конденсатор С вместе с первичной обмоткой трансформатора
образует резонансный контур, подавляющий гармоники,
возникающие вследствие частичного ограничения напряжения в
канале ГО, а также создающий (необходимый фазовый сдвиг
напряжения, снимаемого со вторичной обмотки трансформатора на
усилитель.
Более сложным является цроцесс синхронизации при четном
передаточном отношении п. В этом случае при Д6=180° возможно
устойчивое ложное равновесие. Действительно, вблизи этой точки
напряжение в канале ГО мало, и синхронизатор подключит
точный канал, для которого при Д8=180° наступит устойчивое
состояние (рис. 5-19,а).
Чтобы исключить такую возможность, принимают следующие
меры. Статор одного из сельсинов канала ГО разворачивают на
угол, соответствующий четверти оборота ротора сельсинов
канала ТО. Легко подсчитать, что этот угол, который в дальнейшем
360*
будем называть углом сдвига, равен ?сдв:=:"4^'
График напряжения в канале ТО(1/'то) сместится на такой же
угол. Кроме того, последовательно в канал ГО включают
напряжение сдвига {/Сдв, имеющее такую же амплитуду, как и
напряжение 6^0 при Д9=0, но противоположную фазу. Амплитуда и
фаза напряжения сдвига остаются постоянными независимо от
угла рассогласования. Суммарное напряжение (/сдв+^/ро* помимо
точки истинного согласования (А 6=0°), имеет малую амплитуду
также вблизи угла 6а. Однако подключение канала ТО вблизи
этой точки неопасно, так как состояние системы в ней является
неустойчивым. Таким образом устраняется возможность
устойчивого ложного согласования системы.
На рис. 5-19,6 показана одна из возможных схем
синхронизаторов, работающих при четном п. Это так называемый
электронно-ионный синхронизатор.
На триоде собран обычный реостатный усилитель с анодной
нагрузкой /?2 и цепочкой катодного смещения Н\С\. Навходусили-
282
теля через ограничительное сопротивление /?3 подается
напряжение сельсин-трансформатора ГО, сложенное с напряжением
сдвига, снимаемым с трансформатора Тр. Питание этого
трансформатора производится от той же сети переменного тока,
которая питает обмотки возбуждения сельсин-датчиков. Усиленное
Рис. 5-19. Синхронизация при четном передаточном
отношении:
а — напряжения, действующие в схеме; б —схема синхронизатора
суммарное напряжение через переходную цепочку С2/?4 подается
на неоновую лампочку НЛ. Если амплитуда этого напряжения
меньше потенциала зажигания неоновой лампочки, последняя
гореть «е будет. Ее сопротивление будет практически бесконечным,
и канал ГО окажется отключенным. В этом случае на выход
синхронизатора через сопротивление /?5 будет подаваться только
напряжение канала ТО, снимаемое с потенциометра Я, который
установлен на выходе сельсин-трансформатора и служит для
регулировки усиления сигнала.
283
При увеличении напряжения в канале ГО неоновая лампочка
будет зажигаться каждый полупериод напряжения. Ее
сопротивление при этом резко уменьшается, и канал ГО оказывается
подключенным к выходу. В этом случае напряжение канала ТО
будет частично ограничиваться на сопротивлении /?5 за счет тока,
протекающего через #5, неоновую лампочку и выходное
сопротивление усилителя.
Коррекция синхронно-следящего привода
Основным методом коррекции привода является применение
гибкой обратной связи, охватывающей усилитель и двигатель.
Этот метод был рассмотрен в гл. IV. Он позволяет значительно
снизить инерционность привода и его зону нечувствительности.
Включение в цепи местной обратной связи реального
дифференцирующего звена позволяет, кроме того, уменьшить установившуюся
динамическую ошибку при постоянной скорости изменения
входного сигнала. Возможно также осуществление последовательной
коррекции при помощи четырехполюсников. Эти методы широко
применяются на практике как совместно, так и порознь.
Существенно работа системы может быть улучшена
применением коррекции по возмущению. При использовании этого метода
для получения идеального регулирования комплексный
коэффициент усиления корректирующего элемента должен иметь
величину, обратную комплексному коэффициенту усиления самой
системы:
Сама система содержит интегрирующее и инерционные звенья.
Однако при применении местной гибкой обратной связи
инерционность системы может быть . значительно уменьшена и ее
свойства будут определяться главным образом наличием в
контуре регулировагния интегрирующего звена. Это обстоятельство
требует применения в качестве корректирующего элемента
дифференцирующего звена — тахогенератора, механически связанного
с ротором сельсин-датчика.
На рис. 5-20 авторы приводят один из возможных вариантов
упрощенной структурной схемы скорректированного синхронно-
следящего привода антенны радиолокационной станции. Гибкая
обратная связь осуществляется при помощи тахогенератора ТГ-2,
напряжение которого на входе усилителя вычитается из
напряжения сигнала рассогласования, снимаемого с
сельсин-трансформатора. Дифференцирование входного сигнала производится тахоге-
нератором ТГ-1. Его напряжение добавляется к сигналу
рассогласования. Благодаря одновременному использованию двух методов
коррекции данный привод работает весьма точно, с очень малыми
284
ошибками. С физической точки зрения это может быть объяснено
следующим образом. С сельсин-трансформатора поступает сигнал,
пропорциональный угловому рассогласованию валов. Кроме того,
на входе усилителя происходит сравнение напряжений тахо-
генераторов, которые про-
\х Антенна
(К*
порциональны скоростям их
вращения. Если вал датчика
вращается быстрее, чем вал,
соединенный с антенной, то
преобладать будет
напряжение первого тахогенера-
тора, и к сигналу
рассогласования добавится
некоторый дополнительный
сигнал, который вызовет
увеличение скорости вращения
двигателя. Если же
преобладать будет скорость
вращения антенны, то
дополнительный сигнал будет
вычитаться из сигнала
рассогласования, уменьшая тем
самым скорость вращения
двигателя и антенны. В системе происходит сравнение как
положений валов, так и скоростей их вращения и в соответствии с этим
вырабатывается управляющий сигнал. Такое управление
значительно более точно, чем управление толкко по положению,
применяемое в обычных приводах. Сравнение скоростей позволяет как
бы осуществить предвидение дальнейшего хода процесса и в
соответствии с этим производить регулирование.
К рассмотрению физических процессов в данном случае можно подойти и
несколько иначе. На вход усилителя, помимо сигнала рассогласования,
поступает сигнал, пропорциональный разности скоростей входного и выходного
сигналов, т. е. разности их производных.
Управляющий сигнал в системе будет равен
Рис. 5-20. Схема корректирования
синхронно-следящего привода
,(0 = /СстА8(0 + /(тг^#-)-/Стг^2(0
М
м
(5-9)
где /(ст и /Стг — коэффициенты передачи сельсин-трансформатора и тахогене-
раторов.
Так как разность производных равна производной разности, то
г (0 = /Сет АО Ю + /Стг 4г № № - °2 ^] = *«Ав М + *™ 'Щг''
Запишем это соотношение в операторной форме:
2{Р) = #ст А6 (Р) + КтгРДб (Р) = КстАв (р) (1 + р -^ ) .
Отсюда следует, что коррекцию привода при помощи двух тахогенераторов
можно рассматривать как добавление к сигналу рассогласования его
производной, что эквивалентно включению в контур регулирования форсирующего звена.
285
Постоянную времени этого звена 7\ равную отношению -тг*-, следует взять
Лет
примерно равной постоянной времени наиболее инерционного звена из числа
входящих в контур регулирования. В большинстве случаев наибольшая
инерционность свойственна двигателю. Поэтому должно быть выполнено условие 7,=ГДВ,
из которого легко найти необходимый коэффициент передачи в цепях тахогене-
раторов.
При постоянной скорости отработки й в системе даже при
наличии коррекции будет установившаяся динамическая ошибка,
равная тг-.Ее наличие объясняется тем, что для обеспечения за-
данной скорости вращения управляемого вала на двигатель
должно быть подано напряжение соответствующей величины,
которое представляет собой усиленный сигнал рассогласования.
Если напряжение, снимаемое с ТГ-1, взять с некоторым
превышением по сравнению с напряжением ТГ-2, то при отсутствии
рассогласования и равных скоростях вращения валов на входе
усилителя будет действовать сигнал, который обеспечит
требуемую скорость вращения двигателя. В этом случае в
установившемся режиме отработка будет происходить без рассогласования.
Определим, при каком соотношении коэффициентов передачи
тахогенераторов будет отсутствовать установившаяся
динамическая ошибка. Разностное напряжение тахогенераторов при
отсутствии рассогласования должно обеспечить такую же скорость
вращения двигателя, какую в обычном случае создает сигнал
рассогласования, численно равный 0//Сп.
Следовательно,
откуда
/СТГ1 = ^+/СТГ,., (5-10)
Чем больше коэффициент передачи системы /Сп, тем меньшим
должно быть превышение напряжения первого тахогенератора.
В состав контура регулирования синхронно-следящего
привода, помимо двигателя, могут входить и другие элементы,
обладающие большой инерционностью, например ЭМУ. Поэтому для
коррекции привода. наряду с включением в систему
тахогенераторов используют дополнительные местные обратные связи.
Такого типа гибкая обратная связь, осуществляемая через реальное
дифференцирующее звено, была рассмотрена в гл. IV.
ГЛАВА VI
СЧЕТНО-РЕШАЮЩИЕ ПРИБОРЫ НЕПРЕРЫВНОГО
ДЕЙСТВИЯ
§ 6-1. ОБЩИЕ СВЕДЕНИЯ
В состав современных автоматических систем часто входят
устройства, предназначенные для выполнения определенных
математических операций.
Сигналы этих устройств чаще всего используются для
выработки команд управления. Область применения
счетно-решающих приборов в военной технике непрерывно расширяется, а.
задачи, возлагаемые на эти приборы, становятся все более
ответственными.
Счетно-решающими называются приборы, выполняющие
определенные математические операции бад введенными в них
данными для получения результатов вычислений или выработки
сигналов управления.
Существует два класса СРП:
а) дискретного счета (или цифровые вычислительные машины,
работа которых рассмотрена в следующей главе);
б) непрерывного действия (или моделирующие устройства).
Работа моделирующих устройств основана на математическом
подобии различных по своей природе физических процессов,
описываемых одинаковыми алгебраическими или
дифференциальными уравнениями. Задача решается постановкой опыта, в
котором трудно осуществляемый процесс заменяется другим,
равноценным ему в математическом отношении,, но легче
воспроизводимым. При этом одно физическое явление служит математической
моделью другого. Отсюда и происходит название «моделирующие
устройства». В таких устройствах исходные, промежуточные и
выходные данные изображаются в виде непрерывных'значений
каких-либо физических величин. Простейшими примерами
моделирующих устройств могут служить логарифмическая линейка,
механический дифференциал, электрический счетчик и т. д.
В моделирующих вычислителыных устройствах выполняются
287
действия над исходными и промежуточными величинами, которые
следуют из вида решаемого уравнения. Помимо четырех
арифметических действий, может выполняться интегрирование,
дифференцирование, образование сложных функциональных зависимостей
и т. д. Точность решения задачи зависит от качества изготовления
отдельных элементов, и в лучших случаях она ограничивается
тремя — четырьмя значащими цифрами. Входные данные в
моделирующие устройства поступают непрерывно; так же непрерывно
вырабатываются результаты вычислений.
Для решения каждой новой задачи необходимо в соответствии
с ней изменять всю схему взаимодействия элементов устройства.
Часто в практике необходимо решать определенные заранее
заданные задачи, для чего . используются специализированные
устройства, приспособленные для решения именно этих задач.
Примером такого устройства могут служить приборы
управления артиллерийским зенитным огнем (ПУАЗО), авиационные
стрелковые прицелы или прицелы бомбометания и т. д.
Машины непрерывного действия оказались весьма
эффективными при работе в различных системах управления и навигации,
а также тогда, когда при решении сложных задач не требуется
особенно высокая точность (эскизное проектирование сложных
систем управления, прикидочные расчеты и т. д.). Универсальные
вычислительные машины непрерывного действия, получившие
название электронных интеграторов, позволяют моделировать весьма
сложные устройства и процессы. При этом представляется
возможным изменять масштаб времени, т. е. быстро протекающие
процессы для удобства исследования могут быть замедлены,
а медленные — ускорены во много раз без изменения их*
качественных показателей.
По характеру физических процессов, при помощи которых
выполняются математические операции, счетно-решающие приборы
подразделяются на механические, гидравлические,
электромеханические, электронные и т. д. В последние годы
электромеханические и собенно электронные вычислительные машины почти
полностью вытеснили устройства других типов. Это объясняется
рядом их существенных .преимуществ. Важнейшими из них
являются: .
— высокая скорость вычислений;
— высокая точность;
— универсальность применения;
— простота преобразования различных физических и
математических величин в электрические сигналы;
— возможность стандартизации узлов;
— простота контроля и управления работой машины;
— удобство ввода данных.
Отдельные элементы СРП различаются по характеру
осуществляемых в них математических операций (суммирование, умноже-
288
§ 6-2. РЕОСТАТНО-ПОТЕНЦИОМЕТРИЧЕСКИЕ РЕШАЮЩИЕ СХЕМЫ
Реостатно-потенциометрические счетно-решающие приборы
наиболее просты; во многих случаях они обеспечивают вполне
удовлетворительную точность вычислений.
В этих устройствах величины, над которыми производятся
математические операции, задаются в виде напряжений постоянного
или переменного тока или в виде механических перемещений
движков потенциометров. Ответ в большинстве случаев получается
в виде напряжения, которое используется для дальнейших
операций.
Рассмотрим операции, которые могут быть выполнены при
помощи реостатно-потенциометрических схем.
Получение заданной функциональной зависимости
Обычную потенциометрическую схему можно использовать для
получения определенных функций переменных величин. Для
этого применяют функциональные потенциометры, имеющие
неравномерную намотку. Аргумент функции задается в виде
перемещения движка этого потенциометра.
В ненагруженном потенциометре выходное напряжение
пропорционально сопротивлению того участка, с -которого оно снимается.
Поэтому для получения напряжения, являющегося заданной
функцией перемещения движка, сопротивление потенциометра должно
являться точно такой же его функцией. Достигается это или
использованием для намотки потенциометра каркаса, ширина
которого определенным образом изменяется вдоль его длины, или
шунтированием отдельных участков потенциометра дополнительными
сопротивлениями.
В -первом случае сторона каркаса, по которой скользит щетка,
делае.тся прямой, а противоположная сторона профилируется.
Определим, каким должен быть профиль каркаса для получения
заданной функциональной зависимости г={(х).
Сопротивление участка их (рис. 6-1, а) равно с1г=аЬс!ху где
Ь — ширина каркаса, а а — коэффициент, учитывающий удельное
сопротивление провода, его диаметр и шаг намотки (толщиной
каркаса пренебрегаем).
Полное сопротивление участка, соответствующего
перемещению х, равно
г=\ адс1х = а,\ ЬЛх.
о о
Это сопротивление является заданной функцией х:
х
а | ШХ=/(Х)%
О
290
Продифференцируем полученное равенство
о* =/(*),
откуда
*=4/ч*).
(6-1)
Таким образом, ширина каркаса полностью определяется
заданной функцией (~(х). Например, для получения квадратичной
зависимости }(х)=х2 профиль каркаса должен быть линейным, так
= 2х. Следует иметь в виду, что по мере перемещения
как
4 (**)
ах
движка (увеличения х) сопротивление потенциометра растет.
Поэтому обычные функциональные потенциометры пригодны для
получения монотонной функциональной зависимости (непрерывно
растущей или убывающей, как показано на рис. 6-1, а). В тех
случаях, когда функция /(*) йе является монотонной (т. е. по мере
в
1 ^ 1 к
1 " х
ТПТПТП
1о*
Рис. 6-1. Функциональные потенциометры:
а —г расчет профиля каркаса; б — получение немонотонной функции;
в — условное изображение
изменения х она может то увеличиваться, то убывать), применяют
потенциометры с промежуточными отводами и несколькими
питающими источниками. Потенциометр такого типа изображен на
рис. 6-1,6. В нем при перемещении движка снизу вверх выходное
напряжение на участке 1—2 будет расти, затем на участке 2—3
падать и, наконец, на последующем участке 3—4 вновь расти.
На рис. 6-1, в показано условное обозначение функционального
потенциометра. На практике функциональные потенциометры
с профилированными каркасами применяются сравнительно редко
по следующей причине. В тех случаях, когда на некотором участке
/(лг)=сопз{, ширина каркаса должна равняться нулю, что
практически неосуществимо. Такой участок приходится делать просто
достаточно узким, с минимальной шириной каркаса, обеспечивающей
необходимую прочность. На участках с резко меняющимся
профилем наблюдается сползание витков, что понижает точность
потенциометра. Кроме того, такие потенциометры сложны в
изготовлении.
10*
291
пие, интегрирование и т. д.). Однако при изучении оказывается
более удобным разделение их по принципу действия. В частности,
среди электромеханических и электронных элементов по принципу
действия различают реостатно-патенциомётрические схемы,
решающие усилители, электронно-ключевые схемы и т. д. В одном
и том же СРП могут быть одновременно использованы элементы
с различными принципами, действия.
В электромеханических и электронных СРП математические
операции выполняются с электрическими сигналами и величинами
В то же время решаемая задача может касаться совершенно
других по своей природе величин, таких, как температура, давление,
скорость, время, расстояние, тригонометрические функции и т. д.
Большинство из них не может быть непосредственно введено
в счетно-решающий прибор. Поэтому возникает необходимость
в выражении всех этих величин в виде таких электрических
сигналов, которые могут быть наиболее просто введены в прибор
и использованы для решения той или иной задачи.
Преобразование величин применяется не только для ввода
данных. При соединении нескольких отдельных элементов СРП
в одну общую схему выходные величины одних элементов
являются входными для других. Способ изображения этих
величин целиком определяется типом используемого решающего
прибора. Как правило, целесообразно применять устройства с
соответствующими один другому способами воспроизведения входных
и выходных величин. Однако не всегда возможно создать
необходимую для этого аппаратуру или получить достаточную точность.
Эти обстоятельства заставляют вводить в схему СРП
дополнительные устройства, служащие исключительно для изменения
способа воспроизведения величин.
В СРП применяются также масштабные преобразователи в тех
случаях, когда необходимо пропорционально изменить лишь
значение величины, а не ее характер. Эти преобразователи по
принципу действия наиболее просты. К ним относятся, например,
механические редукторы и делители напряжения.
Преобразование величин часто производится на выходе СРП.
При этом, если выходную величину необходимо передавать для
дальнейшего использования в других элементах, ее стремятся
получить в виде электрического сигнала. Если же производится
периодическое считывание результата, то эту величину удобнее иметь
в виде показания прибора или обозначения на шкале. В последнем
случае требуется обратное преобразование электрической
величины в механическое перемещение.
Сам процесс преобразования в счетно-решающих приборах
применяется настолько часто, что его следует рассматривать как
одну из обычных математических операций. Это тем более
справедливо, что для его выполнения применяются такие же по
принципу действия устройства, как и для выполнения других операций.
1и Автоматик*
289
Поэтому целесообразнее применять каркасы со ступенчатым
профилем, представляющим определенное приближение к
плавному. Сопротивление каждого участка такого потенциометра при
перемещении движка изменяется линейно. Это значит, что
функция г=1(х) заменяется другой функцией г=^(х), состоящей из
линейных участков (рис. 6-2,а). При такой замене возникают
ошибки. Чтобы они были достаточно малы, отклонение новой
функции от заданной во всех случаях должно быть меньше
некоторого предельного значения 5
(рис. 6-2, а).
Границы допустимых
отклонений обозначены на
рис. 6-2, а «пунктирными
линиями. Они представляют собой
тот же график, но смещенный
на величину 8 вверх и вниз.
Следует стремиться к
получению возможно меньшего
количества участков. Для этого
нужно отрезки ломаной линии
при графическом расчете
проводить так, чтобы они,
располагаясь между граничными
линиями, имели возможно
большую длину, т. е. были
касательными к граничным линиям.
Каждому участку ломаной
будет соответствовать своя
ширина каркаса (рис. 6-2,6),
пропорциональная ' навдону
этого участка, т. е.
производной функции М#). Для
Удобства намотки ступенчатый
каркас выполняется с некоторым
запасом длины каждого
участка (рис. 6-2,0).
Ту же самую приближенную функциональную зависимость
можно получить шунтированием отдельных участков линейного
потенциометра постоянными сопротивлениями (рис. 6-2,г). Для
этого на линейном потенциометре в точках 1, 2 и 3 делаются
отводы. Сопротивление зашунтированного участка при перемещении
движка изменяется менее резко. Поэтому потенциометр
выполняется с таким расчетом, чтобы обеспечить максимально
необходимую скорость изменения г,что соответствует участку/ (рис.6-2).
Все остальные участки представляют собой параллельное
соединение частей основного потенциометра с шунтирующими
сопротивлениями. Величины этих сопротивлений должны быть подобраны
так, чтобы общее сопротивление участка соответствовало значе*
292
Рис. 6-2. Построение приближенной
функциональной зависимости:
а — линейно-кусочное приближение; бив —
профили каркасов; г — шунтирование
участков линейного потенциометра
нию, определенному из графика !\(х). Так, например, общее
сопротивление второго участка должно быть равно гп=г" — г'. Вместе
с тем
М2
**2 + >*Ш2
где гш2— сопротивление, шунтирующее второй участок;
^—сопротивление потенциометра на этом же участке.
Отсюда
Аналогично можно рассчитать шунтирующие сопротивления и
для других участков.
Описанный метод получения функциональных потенциометров
применяется чаще, чем профилирование каркасов.
Схемы суммирования и вычитания
Суммирование и вычитание величин, заданных в виде
электрических напряжений, наиболее просто осуществляются
последовательным согласным или встречным включением этих напряжений
(рис. 6-3,а).
_-*. 'г
Т*! 1.
'2.
'ВЫХ
Рис. 6-3. Схемы суммирования:
а — последовательное; б — параллельное
При отсутствии нагрузки или компенсации ее влияния
^вых = ^1 + ^2 + ... + ^/Л.
• При наличии нагрузки и учете внутренних сопротивлений гь
?ь •••, г-п источников
и*
где ДГп== г , г ,—, г , п
фициент передачи).
■ масштабный множитель (коэф-
293
Наличие масштабного множителя может быть учтено в ходе
решения, если он является постоянной величиной. Однако это «е
всегда имеет место, так как значение нагрузочного сопротивления,
от которого зависит коэффициент /Сш может изменяться в
процессе работы схемы. Здесь, как и в других подобных случаях,
ответ получается тем точнее, чем меньше нагрузка (больше /?н).
Основной недостаток схемы — невозможность заземления
источников суммируемых напряжений. Этого недостатка нет в
схемах параллельного суммирования (рис. 6-3,6). Здесь
последовательно в цепи каждого источника включено сопротивление,
исключающее шунтирование нагрузки внутренними сопротивлениями
источников. Чтобы все источники находились в одинаковых
условиях, сопротивления гь г2,..., гп должны быть одинаковыми
(предположим, что в состав этих сопротивлений входят и внутренние
сопротивления самих источников):
г1 = гг = ... = гя = г.
Тогда токи источников будут соответственно равны:
/ ^1 — ^вых . / ^2 — ^вых . -• Уд — ^вых
Н — ~г I Н — г » • • • 1п — ~} •
Общий ток, протекающий по нагрузке, равен сумме этих токов:
/ — /-1-/4- I Г — .Ц + Ц + --- + Ц| Цшх „
Выходное напряжение:
^вы* = /Ян = -7М^ + ^ + ... + ^)--Ь-.яС/вш.-
Отсюда
^вы,(1 + -^п)^Ж([/1 + [/2 + ... + С/п)
или
= ^(^ + ^2 + ... + ^), (6-3)
где /Сп—масштабный множитель (коэффициент передачи).
Выходное напряжение пропорционально сумме входных.
Точность работы данной схемы может оказаться невысокой, если
"внутренние сопротивления источников и сопротивление нагрузки
изменяются в процессе работы. С увеличением числа слагаемых
значение масштабного множителя уменьшается.
В электромеханических СРП суммирование или вычитание двух
величин, заданных в виде механических перемещений, можно
осуществить при помощи потенциометров. Потенциометры служат для
294
преобразования механических перемещений в электрические
напряжения, которые суммируются методом последовательного
включения (рис. 6-4,а).
[-■\ Учък. | т? Ц}~.
а б
Рис. 6-4. Потенциометрические схемы суммирования:
а— схема суммирования; б— схема вычитания
Питаются потенциометры от стабилизированного источника
(напряжение 1/о). Потенциометры имеют выводы от средних точек,
которые соединены между собой. Положению движков около этих
точек соответствуют нулевые значения величин хх и х2.
Положительным их значениям соответствует перемещение движков к
взаимно-противоположным зажимам источника 1/<ь как это
обозначено на схеме. При одинаковых коэффициентах передачи
потенциометров
1/г = АГп*1 и(/2 = Кпх2
и
^вых = ^1 + ^2 = #п (*1 + Х2)9
т. е. выходное напряжение пропорционально алгебраической сумме
входных величин Х\ и л:2.
Для получения разности может быть применен упрощенный
вариант данной схемы (рис. 6-4,6). Здесь (/1 = /Сп*1 и с/2=#п*2.
Выходное напряжение равно разности потенциалов движков
потенциометров. Следовательно,
^вых = Кп (Х1 — Хъ)-
Обе схемы рис. 6-4 могут «применяться для нахождения
алгебраической суммы функций. В этом случае следует использовать
функциональные потенциометры.
Схемы умножения и деления
Обычный линейный потенциометр может быть использован для
перемножения двух переменных величин, одна из которых задана
напряжением -С/, питающим потенциометр, а другая —
механическим перемещением его движка х (рис. 6-5,а). Выходное
напряжение пропорционально их произведению:
С/вых
и
г = Ц-х*=К*1Гх.
295
Две величины Х\ и х2, заданные механическим перемещением,
перемножаются при помощи двухкаскаднои схемы умножения
(рис. 6-5,6). Первый потенциометр преобразует механическое
перемещение движка в пропорциональное ему напряжение И\=Кп\^\,
а второй перемножает величины, заданные электрическим
напряжением и механическим перемещением:
где Кп=Кп\Кп2 — коэффициент передачи.
Т Ы Т иЛ Т ивых\ 11 II "Ч
I
0-
0—4
г 1
•0 0-
Увт;г1к
О X
х &
тт
тах
"9
1
V*
вых
Рис. 6-5. Схемы умножения и деления:^
о, б и в —схемы умножения; г *- график зависимости г/вш = _П ; <Э — схема деления
При перемножении алгебраических величин, когда необходимо
учитывать знаки сомножителей, применяют потенциометры,
имеющие дополнительные выводы средней точки (рис. 6-5,в).
Изменение направления перемещения любого из движков относительно
средней точки привбдит к изменению знака или фазы напряжения
на выходе. Для перемножения нескольких величин применяют
л^огокаскадные схемы. При двух и более каскадах должны быть
обязательно 'предусмотрены меры, устраняющие влияние
последующих каскадов на предыдущие *,
Используя функциональные потенциометры, можно
осуществлять перемножение одной переменной величины на заданную
функцию другой:
Мши* = №/{*)•
* См. § 3-2.
296
При помощи функциональных потенциометров можно также
осуществлять деление на переменную величину, ограниченную
некоторым интервалом ее значений. Для этого величина
сопротивлении должна находиться в обратной зависимости от перемещения
движка: г = -^-.
Чтобы получить такую зависимость, нужно, включив
потенциометр по обычной схеме (рис. 6-5,(9), отсчитывать перемещение
движка от верхнего его положения, а величину сопротивления от
нижнего.
Тогда С/Вык = -—-. График этой зависимости представляет собой
гиперболу (рис. 6-5,г). Здесь малым значениям х соответствуют
очень большие значения сопротивления, а большим — очень
малые. Деление можно осуществить для значений х, лежащих в не*
котором ограниченном интервале хтщхт&х. Верхнему положению
движ<ка будет соответствовать значение хтцц а нижнему л:тах.
Чтобы при нижнем положении ивых отличалось от нуля,
последовательно в цепь потенциометра включают добавочное
сопротивление, равное г0. В остальном расчет функционального
потенциометра производится, как описано выше.
Мостиковые решающие схемы
Мостиковые решающие схемы могут применяться для
выполнения большого количества различных операций. Работа всех мрсти-
ковых схем основана на использовании свойства электрического
моста: при балансе произведения сопротивлений противоположных
плеч одинаковы, т. е. Г\Гъ=г2Г\ (рис. 6-6,а).
Входные величины задаются в виде перемещений движков
переменных сопротивлений, образующих плечи моста. Если
сопротивление гх постоянно, то при наличии баланса величина г3 будет
пропорциональна произведению г2г^ т. е. произведению
перемещений их движков х2Х4. Отсчет можно производить непосредственно
по шкале движка г3. Если же сопротивление и постоянно, то
величина г3 будет пропорциональна частному от деления г2 на гь т. е.
частному от деления перемещения х2 на хх. Схема рис. 6-6, б
позволяет осуществить сложение величин. Здесь
г* = (г1 + г2)-у = г1 + г2.
Во всех мостиковых схемах приходится считывать ответ,
который получается в виде перемещения движка после установки
баланса. Чтобы этот ответ можно было использовать для
дальнейших операций в СРП, его необходимо преобразовать в
электрический сигнал.
297
Другим недостатком мостиковых схем является невозможность
оперирования с величинами, изменяющимися в широких пределах.
Балансировка мостиковых схем может быть автоматизирована
при помощи следящего привода (рис. 6-6,б), работа которого была
рассмотрена в гл. III.
§ 6-3. ПОВОРОТНЫЕ ТРАНСФОРМАТОРЫ
Поворотные (или вращающиеся) трансформаторы (ПТ)
используются для выполнения различных математических операций,
главным образом над тригонометрическими величинами. Кроме
того, отдельные разновидности ПТ применяются как датчики в
некоторых системах автоматического регулирования.
Рис. 6-7. Поворотные трансформаторы:
а — однообмоточный ПТ; бив — синусно-косинусные ПТ
Поворотный трансформатор является прибором переменного
тока. В отличие от обычных трансформаторов вторичная
обмотка ПТ может поворачиваться относительно магнитного потока,
создаваемого первичной обмоткой. Внешне и конструктивно ПТ
напоминает сельсин и имеет статор и ротор, на которых
размещаются обмотки. Он выполняется с неявными полюсами. Если на
статоре и роторе имеется по две обмотки, то они укладываются
так, чтобы их оси были взаим,но-перпендикулярны. Схематичное
изображение однообмоточного ПТ показано на рис. 6-7, а. Статор
и ротор изображаются рядом, хотя в действительности ротор со
своими обмотками расположен внутри статора. Первичная
обмотка (обмотка возбуждения) шв может находиться или на роторе,
или на статоре. Она питается напряжением 0В от сети переменного
тока. Создаваемый током, этой обмотки переменный магнитный
поток индуктирует во вторичной обмотке э. д. с. Еу величина которой
зависит от взаимного положения обмоток, т. е. от угла поворота
ротора.
299
* Синус-косинусный поворотный трансформатор
Условимся отсчитывать угол 6 поворота ротора от положения,
при котором ось вторичной обмотки совпадает с направлением
магнитной нейтрали пп (рис. 6-7, &) против часовой стрелки. Тогда
величина э. д. с. во вторичной обмотке будет пропорциональна
синусу этого угла
# = /а/в8т6, (6-4)
где К—коэффициент пропорциональности.
В этом случае ПТ будет являться синусным. Его же можно
использовать в качестве .косинусного, если отсчет угла поворота
вести от направления, перпендикулярного нейтрали.
Наличие нагрузки гя может • внести заметные погрешности.
Объясняется это следующим образом. При наличии нагрузки
вторичная цепь оказывается замкнутой и по ней протекает ток,
создающий свой магнитный поток Ф, направленный вдоль оси
обмотки. Этот поток можно разложить на две составляющие —
продольную Ф/, направленную навстречу потоку возбуждения Фв, и
поперечную Фд, перпендикулярную этому потоку.
Продольная составляющая Ф* оказывает размагничивающее
действие на первичную обмотку, в результате чего ток в ней
возрастает, чем компенсируется влияние этой составляющей.
Поперечная составляющая Фд будет индуктировать во вторичной обмотке
э.д.с. самоиндукции, которая будет искажать синусоидальную
зависимость вторичной э. д. с. от угла поворота.
Для устранения этой погрешности применяют
компенсирующие обмотки. Они располагаются на роторе или на статоре
перпендикулярно основным и имеют одинаковые с ними параметры.
Пусть компенсирующая обмотка расположена на роторе
(рис. 6-7,6). Обе роторные обмотки нагружены на сопротивления
и по ним будут протекать токи, создавая магнитные потоки.
Продольные составляющие этих потоков будут направлены вдоль оси
обмотки возбуждения навстречу потоку Фв. Их действие будет
скомпенсировано увеличением тока в первичной обмотке.
Поперечные составляющие потоков обеих обмоток оказываются
направленными навстречу одна- другой. Они будут в некоторой
степени взаимно компенсироваться. При равенстве параметров
цепей обеих обмоток произойдет полная компенсация поперечных
потоков для любых углов поворота ротора. При этом с одной
из обмоток можно будет снимать напряжение, в точности
пропорциональное синусу, а с другой — косинусу угла поворота ротора.
Однако, если сопротивление нагрузки хотя бы одной из
обмоток в процессе работы изменяется, то компенсация становится
неполной. В таких случаях применяют компенсацию со стороны
питающего напряжения (рис. 6-7,в). Перпендикулярно обмотке
возбуждения шъ располагают такую же обмотку а>к, играющую
роль компенсирующей. Компенсирующую обмотку нагружают на
300
сопротивление го. Нескомпенсированная часть поперечной
составляющей магнитного потока будет индуктировать
в/компенсирующей обмотке э. д. с, и по обмотке потечет ток, образующий
магнитный поток, направленный навстречу поперечному потоку и
компенсирующий его. Величина тока в компенсирующей обмотке зависит
от значения сопротивления г0. Если его взять равным внутреннему
сопротивлению источника 1/В1 то при таком соотношении
параметров произойдет практически полная компенсация поперечного
потока. При этом с обмоток хю\ и ш2 можно снимать напряжения,
пропорциональные соответственно синусу или косинусу угла
поворота ротора. Эти напряжения используются в качестве сигналов,
с которыми выполняются дальнейшие математические операции.
Линейный поворотный трансформатор
При помощи ЯГ, изображенного на рис. 6-7, в, применяя
специальную схему соединения его обмоток, можно получить
напряжение, которое при сравнительно небольших углах поворота
ротора будет изменяться примерно пропорционально углу. В этом
случае ПТ называют линейным.
Схема соединения обмоток для
получения линейного ПТ показана на рис. 6-8.
Обмотка 102, нагруженная на
сопротивление 2, служит для компенсации.поперечной
составляющей магнитного потока.
Обмотки 1Ю\ и Ш2 соединены последовательно. В
общем случае обмотка Шх расположена под
некоторым углом к обмоткам хюъ и тюк.
Поэтому токи каждой из этих обмоток будут
индуктировать в «ей свои э. д. с. Общая
э. д. с. в первой обмотке будет равна их
алгебраической сумме.
Э. д. с, индуктируемая током обмотки
возбуждения, будет равна
где 8 — угол поворота оси обмотки шх относительно магнитной
нейтрали.
Э. д. с. Е", индуктируемая током обмотки док, будет
пропорциональна этому току / и косинусу угла 8. Но ток / протекает и
по самой обмотке хю\. Он создается суммарной э. д,сА обмотки Е
и пропорционален ей.
Следовательно,
Я" = /С2Ясо8 0.
Концы обмоток хюк и ы>1 соединены так, чтобы знак Е" был
обратным знаку Е\ Тогда суммарная э. д. с. будет равна
Е = Е' — Е" = Кхив 81П 0 — К2Е соз 0.
Рис. ^8. Линейный
поворотный трансформатор
301
Отсюда
Е (1 + Кг сов 6) = /СА зт 8 (6-5)
или окончательно
^ ~ 1 + К2 сов 0 '
Эта зависимость э. д. с. 5 от угла 6 является почти линейной
для углов 6, лежащих в пределах от —60° до +60°. Действительно,
с увеличением 6 числитель дроби несколько замедляет свой рост
по сравнению с линейным, но это компенсируется уменьшением
знаменателя. В результате этого зависимость получается
практически линейной. При /С2=0,5 погрешности не- превышают 0,5%.
§ 6-4. РЕШАЮЩИЕ УСИЛИТЕЛИ
Основное уравнение решающих усилителей
Рассмотренные выше простейшие схемы дают сравнительно
низкую точность вычислений, а количество математических
операций, которые можно выполнять при их помощи, весьма ограничено.
Поэтому в моделирующих СРП большое распространение получил
особый класс решающих схем, не обладающих этими
недостатками. Это так называемые решающие или операционные
усилители.
Работа решающих усилителей основана на использовании
отрицательной обратной связи. В гл. I было показано, что при
глубокой отрицательной обратной связи существенно изменяются
свойства усилителей постоянного тока. В частности, резко
повышается стабильность их работы, а коэффициент передачи зависит
только от коэффициента обратйой связи.
Ранее были рассмотрены только безынерционные усилители
с омическими цепями обратной связи. Однако если в состав этих
цепей ввести реактивные элементы, то сам усилитель уже не будет
безынерционным и его можно использовать для выполнения
различных математических операций. Отсюда и происходит второе
название усилителей этого класса — операционные. Ниже будет
показано, что при определенных условиях свойства решающих
усилителей и их передаточные функции определяются только
параметрами входных цепей и цепей обратной связи и практически
не зависят от свойств самого усилителя, его схемы, числа
каскадов и т. д. Это обстоятельство позволяет, приняв за основу
один и тот же УПТ, получать за счет изменения характера
обратной связи различные решающие схемы. В этом отношении
решающие усилители являются весьма универсальными. Можно
построить сложный СРП, состоящий из большого числа усилителей,
отличающихся один от другого только цепями обратной связи.
302
г,(Р)
"В*
>—
г2(Р)
1 1 .
— 1 1 '.
—-'г
упт
1_
—^
Увых\
т 9
Основой всякого решающего усилителя является УПТ с
параллельной отрицательной обратной связью по напряжению (рис. 6-9),
Взятый за основу УПТ должен отвечать следующим требованиям.
1. Усилитель должен быть безынерционным, инвертирующим и
иметь достаточно большой коэффициент усиления (от тысячи до
сотен тысяч).
2. Входное сопротивление
УПТ должно быть очень
большим, т. е. его первый
каскад должен работать без
сеточных токов.
3. В усилителе должны
отсутствовать нелинейные
искажения сигналов в рабочем
диапазоне изменений их
величины.
4. Выходное сопротивление
усилителя должно быть
малым.
5. Дрейф руля в усилителе
должен быть весьма
малым *.
6. При нулевом
напряжении на входе уровень
выходного напряжения должен быть
равным нулю.
Основное значение для повышения точности работы решающего
усилителя имеет величина коэффициента усиления УПТ. Найдем
передаточную функцию решающего усилителя рис. (6:9, а):
^вы*
б '
Рис. 6-9. Решающий усилитель:
а — структурная схема; б — схема
регулировки коэффициента передачи
Ко(Р)=-77
ЛР)
Токи в сопротивлениях 2\(р) и 22(р) равны частному от
деления разности потенциалов их концов на величину сопротивлений:
2.ЛР)
глр)
(6-6),
где Ц'т (р) — напряжение непосредственно на входе УПТ.
Так как входной ток УПТ равен нулю, то 12(р)=11(р). Отсюда
^вх(Р)-^вых(Р)
^вх(/>)-С/Вх(Р)
г»(.р)
глр)
(6-7)
* Уменьшение дрейфа в решающих усилителях часто достигается
применением в качестве УПТ усилителей с автоматической стабилизацией нуля
(см. стр. 38, 39).
303
Для определения коэффициента передачи необходимо из
полученного соотношения исключить 6^х (/?). Учитывая, что УПТ
является инвертирующим и безынерционным, можно записать
^О»)---*^.
где К — коэффициент усиления УПТ.
Подставив это значение в уравнение (6-7), получим
Увых(Р) ^вых(Р) _ ^вх(р) ■ ^вых(Р)
К22(р) 22(Р) 2х(Р) "*" К2х{р) #
Перегруппируем слагаемые и вынесем за скобки отношение
ивых (р)
в™ ^ , после чего получим
_ Цшх(Р) П . Л . Ыр) 1 __ ^вх (Р)
2*(Р) I ^ К -1" К2Х(Р) А 2ЛР) #
Отсюда коэффициент передачи будет равен
^ ( *\ _ ^ВЫХ (Р) _ ^М 1 /Д оч
^°(^~1^1>Г--^(ЙГ' . 1 , ?ЛР) ' (6"'8)
+ /С + Я*1 (Р)
Полученное выражение молено несколько упростить, если
учесть, что усиление УПТ очень велико и считать /(^оо. Тогда
в знаменателе второго сомножителя дву^мя последними членами
можно пренебречь*, а сам сомножитель "становится равным
единице. В этом случае
*«(/>)=-|^. (6-9)
Данное соотношение будем называть основным уравнением
решающего усилителя. Функция Ко(р) усилителя определяется
только соотношением сопротивлений делителя, образующего цепь
обратной связи. Изменяя характер и величину сопротивлений
2\(р) и 22(р)у можно получить самые различные значения
коэффициента передачи, т. е. осуществлять при помощи усилителя
различные математические операции.
При помощи решающих усилителей можно производить
алгебраическое суммирование величин, умножение и деление на
постоянный множитель, дифференцирование, интегрирование и т. д.
Отрицательный знак коэффициента передачи указывает на то, что
при осуществлении любых математических операций одновременно
происходит инвертирование выходного напряжения. В тех случаях,
когда имеет значение только характер математической операции,
7 I п\
* Предполагается, что отношение -?) { не может быть особенно боль*
^1 \Р)
шим. Иначе в усилителе существенно ослабляется обратная связь и полученные
выводы станут ошибочными.
304
пряжение обратной связи, что наряду с повышением коэффициента
передачи приводит к изменению основных свойств усилителя и
увеличению ошибок. Во избежание этЪго последовательно с
потенциометром включают постоянное сопротивление г0, что в то же
время повышает плавность регулировки коэффициента передачи.
Происходящее при этом сужение пределов регулировки не имеет
существенного значения, так как широкие пределы обычно не
требуются.
Масштабные усилители
Масштабные решающие усилители предназначены для
умножения величин, выраженных напряжением постоянного тока, на
постоянный коэффициент.
Для осуществления перемножения в качестве сопротивлений
1\ и 22 удобно использовать активные сопротивления. Тогда
согласно основному уравнению (6-9)
#о (Р) = — -щ- = #о-
Отсюда
^вы*=ад,*. (6-п)
Полученный результат указывает на то, что выходное
напряжение представляет собой увеличенное в Ко раз входное напряжение.
Как было показано в гл. I, величина Ко имеет очень высокую
стабильность.
Умножение на постоянный коэффициент используется для
согласования масштабов величин в различных узлах общей схемы
счетно-решающего прибора.
Несогласованность масштабов в отдельных элементах СРП
возникает из-за стремления получить в каждом из них наивыгоднейт
шие условия работы и наиболее широкие пределы возможных
значений действующих в них напряжений. Значение масштабного
множителя /Со определяется соотношением сопротивлений #1 и К2-
При /?2>#1 |Ко|>1, при /?2<#1 |Ко| <!• Случай, когда #2 = &1'
т. е. /Со =—1, используется в инвертирующих усилителях,
служащих для изменения знака сигнала.
Усилители с | Ко| = 1 используются также в качестве
развязывающих для согласования высокоомного источника с низкоомнои
нагрузкой. Это обеспечивается высоким входным и низким
выходным сопротивлениями масштабного усилителя.
Суммирующие усилители
Суммирующие решающие усилители применяются для
алгебраического суммирования величин, выраженных напряжением
постоянного тока. Схема суммирующего усилителя показана на
306
*п~Т!п
рис. 6-10. Один из зажимов у всех источников напряжений может
быть заземлен. Заземлен также зажим на рыходе усилителя. Все
это весьма удобно при построении
сложных схем.
Если считать усиление УПТ
бесконечно большим, то любому
конечному значению 1/Вых будет
соответствовать исчезающе малое на- Ъ*
пряжение V'вх, действующее
непосредственно на его входе.. Тогда
токи в сопротивлениях /?ь /?2, ..., Кп |
' будут соответственно равны: "^
у _ ^ . ; _ Ох.
Лс=&
К,—'»
4»
0 1
1 ^ .» ■
1 1 .
УПТ
—ч
[1
Ь 9
-ж
Рис. 6-10. Суммирующий
усилитель
Так как входное сопротивление УПТ бесконечно велико, то все
эти токи будут протекать по /?0, образуя один общий ток
Вместе с тем
Следовательно,
^вых
Ко
— г> "г р "Т-««1~ р •
Отсюда
</еЫ* = -(^-§-+^ + ... + ^). (6-12)
Таким образом, усилитель производит пропорциональное
суммирование, т. е. каждое из входных напряжений входит в состав
суммы с некоторым масштабным множителем, величина которого
определяется соотношением сопротивлений /?0 и /?ь #2, ., Яп.
Если все сопротивления, включенные на входе, взять равными:
/? 1 =/?2 = •••== А 71 = А,
ТО
^нЫх = -^(^1 + ^2 + .-. + ^).
(6-13)
В этом случае наряду с простым суммированием входных
напряжений будет осуществляться усиление суммы. Коэффициент
усиления, определяемый соотношением активных сопротивлений
-^-, будет стабильной величиной. Для получения простого
суммирования напряжений сопротивления /?о и /? должны быть
одинаковы. Тогда
{/вых = -(^1 + ^2 + ... + ^п). (6-Н)
307
в знак с/вых значения не имеет, его обычно опускают и основное
уравнение усилителя записывают без учета знака.
Чем больше величина /(, тем более точным будет основное
уравнение. Для оценки погрешностей, возникающих в усилителе,
следует пользоваться не основным уравнением, а более точным
соотношением (6-8).
В общей схеме СРП должны быть согласованы масштабы, в
которых сигналы изображают различные величины, являющиеся
объектом математических операций. При этом возникает
необходимость в регулировке коэффициентов передачи отдельных
элементов и, в частности, решающих усилителей. Основным
требованием при осуществлении такой регулировки является сохранение
характера передаточной функции, т. е. характера преобразований
выполняемых усилителем.
Для регулировки коэффициента передачи на выходе усилителя
устанавливается потенциометр (рис. 6-9,б), к движку которого
подключают цепь обратной связи. При бесконечно большом
усилении УПТ
//' ^ВЫХ ^^ Г)
ивх— /( ~и
Тогда
, ~ Ц» (Р)
Л(/>)-
ЛС/0-
^вых(Р)
где 6^ых (р) — напряжение на нижнем участке потенциометра /?,
Если сопротивление этого участка обозначить через г, то
Следовательно,
Т ( г>\— ""^вых (Р) Г
*2КР)— гЛр) "д-
Приравнивая токи 1\(р) и Ыр), получим
^вых (Р) Г Увх(Р)
' Ыр) ' Я 2у(р) »
откуда
V / «Л _ ^ВЫХ (Р) _ —^2 (Р) ш К ,п 1Пч
Перемещая движок потенциометра и изменяя тем самым
сопротивление г, можно регулировать коэффициент передачи
усилителя. Однако при очень малых значениях г резко уменьшается на-
305
Все входные напряжения входят в состав суммы со своими
знаками (производится их алгебраическое суммирование).
Следует учитывать, что одновременно с суммированием происходи!
инвертирование напряжения.-Суммирующий усилитель имеет
значительные преимущества по сравнению с обычной схемой
параллельного суммирования (рис. 6-3,6). Он не подвержен влиянию
изменений нагрузки. Его коэффициент усиления не зависит от
количества слагаемых и может быть по необходимости сделан
большим или меньшим единицы.
§ 6-5. ИНТЕГРИРУЮЩИЕ УСИЛИТЕЛИ
Интегрирование напряжений
Выходное напряжение интегрирующего усилителя представляет
собой интеграл входного:
^вых (0 = К* \ <Лх (О Л + 6/0, (6-15)
где Кп—коэффициент преобразования;
С/0—постоянная интегрирования.
Наличие в выражении (6-15) постоянной интегрирования
указывает на то, что выходная величина (/вых определяется с точностью
до произвольной постоянной интегрирования С/о- Постоянная 1/{)
определяется исходя из начальных условий, которые задаются
состоянием схемы в момент подачи входного напряжения. Они
определяют то исходное значение С/Вых, с которого начинаются его
изменения. Этот исходный уровень может иметь как
положительные, так и отрицательные значения.
Продифференцируем уравнение (6-15):
Из полученного выражения непосредственно следует
физический смысл интегрирования напряжения, заключающийся в
получении нового напряжения, скорость изменения которого в любой
момент времени пропорциональна мгновенному значению данного
напряжения.
Рассмотрим интегрирование напряжений в некоторых наиболее
типичных случаях.
Пусть входной сигнал представляет собой воздействие
перепада Е (рис. 6-11,а). До момента *=0 (/вх=0. Поэтому
выходное напряжение будет оставаться постоянным и равным исходному
уровню С/о- В данном примере этот уровень условно принят
положительным. В момент *=0 на вход подано постоянное
напряжение (график 1). Поэтому выходное напряжение начинает
изменяться с постоянной скоростью.
308
Если величина Цвх будет меньше (график 2), то и скорость
изменения /7ВЬ1Х также будет меньше. Отрицательному значению
и их соответствует не рост, а убывание УВых (график 3). При
линейно-растущем входном напряжении (рис. 6-11,6) скорость
изменения [/Вых не будет оставаться постоянной. На графике
исходный уровень принят отрицательным. Начиная с момента * = 0
постоянный рост {/Вх приводит к изменению [/Вых со все
возрастающей скоростью. График выходного напряжения будет
представлять собой квадратичную параболу.
Рис. 6-11. Интегрирование напряжений различной формы:
а — перепад напряжения; б — линейно-растущее напряжение; в — косинусоидальное
напряжение; г — импульсное напряжение
На рис. 6-11, в показаны графики, соответствующие
интегрированию косинусоидально'го напряжения при нулевом начальном
уровне.
На рис. 6-11,2 показано интегрирование импульсов с
одинаковыми площадями 5] и 52*. Начальный уровень здесь принят
равным нулю. Выходное напряжение достигает одинакового уровня
независимо от формы импульсов.
В интегрирующих решающих усилителях одновременно с
интегрированием происходит инвертирование сигнала. Поэтому там
положительным значениям 11вх соответствует не рост, а
убывание (Увых-
В основу работы электрических интеграторов положено
использование процессов заряда конденсатора через активное
сопротивление. В простейшем случае для приближенного 'интегрирования
применяется обычное инерционное звено типа /?С (рис. 3-18,а).
Выходным сигналом является напряжение на конденсаторе,
которое равно
* Под площадью - импульса 5 понимают площадь, ограниченную осью
абсцисс и графиком мгновенных значений напряжения.
309
Следовательно, конденсатор является интегратором проходя
щего через него тока.
Если продолжительность процесса интегрирования очень малл
по сравнению с постоянной времени цепи, то конденсатор не успеем
заметно зарядиться. Напряжение на нем будет значительно
меньше (/вх, и приближенно можно считать, что все входное
напряжение полностью приложено к сопротивлению Я. Тогда ток в цепи
будет равен
Этот ток, протекая через конденсатор, заряжает его:
Обозначив постоянную времени цепи /?С = 7\ получим
окончательно
Отсюда следует, что выходное напряжение, равное С/с, будет
представлять собой интеграл от входного.
. В интеграторах, применяемых в СРП радиолокационных
систем, процесс интегрирования должен продолжаться все время,
пока идет сопровождение цели. Постоянная времени цепи при этом
может быть по крайней мере в 50—100 раз большей, т. е. будет
измеряться часами. Реально можно использовать сопротивление и
емкость, позволяющие получить постоянную времени примерно
1—2 мин. Применение большого сопротивления невозможно, так
как оно становится соизмеримым с сопротивлением изоляции цепи
и входным сопротивлением последующего усилителя.
Использование же большей емкости ведет к снижению сопротивления утечки.
Оба эти обстоятельства отрицательно сказываются на точности
интегрирования. Кроме того, при очень большой постоянной
времени цепи напряжение на выходе длительное время остается столь
малым, что практическое использование его оказывается
невозможным, так как уровень сигнала остается меньшим дрейфа нуля
усилителя, включаемого на выходе цепи. Все это ограничивает
применение инерционного звена в качестве интегрирующего
элемента. Лишь при интегрировании кратковременных сигналов
может быть получена достаточно высокая точность.
Скелетная схема решающего интегрирующего усилителя
Интегрирование электрических сигналов является одной из
наиболее распространенных математических операций из числа
применяемых в моделирующих СРП. Существуют вычислитель-
310
ные машины, которые содержат десятки и даже сотни
интеграторов.
В интегрирующем решающем усилителе (интеграторе) на
входе включается активное сопротивление /?, а в качестве
сопротивления 22 в цепи обратной связи используется конденсатор
(рис. 6-12,а).
Учитывая, что г{(р)=Я, а 22(р) = -7гдля передаточной
функции, получим р^
А0 КР) - 2х {р) - ^Д — —у?"
где Т=ЦС.
Рис. 6-12. Интегрирующий усилитель:
а — структурная схема; б — сравнение процессов в интеграторе и
инерционном звене
/ —точное интегрирование; 2=-{/вых в инерционном звене; 3—иВЬ1х в
интеграторе
Усилитель осуществляет операцию интегрирования с
коэффициентом передачи /С0= -^ и инвертирование. Физически процесс
интегрирования может быть пояснен следующим образом.
При К^оо Ц'вх «0. Тогда ток в сопротивлении /? будет
определяться только величиной входного напряжения
, _ */вх
**—тг-
Этот ток, протекая далее через конденсатор С, заряжает его до
напряжения
Учитывая, что 1/вх «0, можно считать напряжение на
конденсаторе равным выходному. Следовательно*,
______ ^вых~^с = -^- |^вх^*
* Без учета знака.
311
т. е. выходное напряжение представляет собой величину,
пропорциональную интегралу входного.
Для оценки погрешности схемы воспользуемся точным
выражением коэффициента передачи решающего усилителя. Согласно
уравнению (6-8).
К>(Р) = -Ш
1
?Лр) 1,1, 2ш(р) '
+ К + К2Ар)
Подставим в это уравнение значения 2,\{р) и 22(р), получим
1 1
КЛР)
+ К + КрСЯ
или после простых преобразований
КЛР)=— рта+рТ + КрТ)^- \+рТ(1+К)=~1+рТ" (6"16)
Полученное выражение свидетельствует о том, что в
действительности интегратор следует рассматривать как инерционный
усилитель с некоторой весьма большой эквивалентной постоянной
времени Т'=Т(1+К) и коэффициентом усиления /(. Выше было
установлено, что при использовании для приближенного
интегрирования инерционного звена точность работы схемы определяется
его постоянной времени. В данном случае при тех же значениях
Я. и С эквивалентная постоянная времени получается в (1+/С) раз
большей, что позволяет или во столько же раз повысить точность,
или при той же точности осуществлять интегрирование сигнала в
течение значительно большего интервала времени.
Увеличение эквивалентной постоянной времени (1+/С) раз не
приводит к уменьшению напряжения на выходе схемы, что было
при использовании инерционного звена. Это объясняется тем, что
одновременно в К раз возрастает усиление. При большом
значении/С можно считать, что (1+/С)я«/(.
Влияние изменения эквивалентных параметров схемы на
точность ее работы проследим на примере интегрирования перепада
напряжения Е (рис. 6-12,6). Напряжение [/вых в этом случае
должно изменяться по линейному закону (график 1). При
использовании инерционного звена выходное напряжение можно считать
линейным лишь в течение сравнительно малого промежутка
времени Д/ (график 2). Если же в К раз увеличить коэффициент
усиления, что равносильно интегрированию перепада КЕ, и
одновременно во столько же раз увеличить постоянную времени, то
выходное напряжение можно считать линейным в течение
значительно большего промежутка времени А*' (график 3). Чем большим
коэффициентом усиления К обладает УПТ, тем точнее будет
работать схема.
312
Однокаскадный интегрирующий усилитель
Некоторый интересе точки зрения протекания физических
процессов представляю* одно- и двухкаскадные интеграторы.
Применяя в качестве УПТ реостатный усилитель с пентодом,
имеющим большое значение ц, можно получить в одном каскаде
коэффициент усиления порядка нескольких сотен. Это позволяет
построить достаточно точный однокаскадный электронный
интегратор. Схема такого интегратора показана на рис. 6-13, а и в
несколько более удобном виде—на рис. 6-13,6.
Для получения возможно большего усиления сопротивление
/?а выбирается достаточно большим, примерно 1 Мом. Режим
вых
а б
Рис. 6-13. Принципиальная схема интегратора
экранной сетки обеспечивается сравнительно низкоомным
делителем #1#2, благодаря чему напряжение на этой сетке в процессе
работы практически постоянно.
На рис. 6-14, а показана нагрузочная характеристика
усилителя *. Благодаря большому значению сопротивления /?а она идет
весьма полого, захватывая лишь ту часть семейства анодных
характеристик, которая соответствует сеточным напряжениям,
близким к напряжению запирания 5С0.
Можно подобрать такое сеточное смещение, при котором в
исходном состоянии на а#оде лампы установится среднее между
(/апип и Е& напряжение {/о- Это напряжение в дальнейшем будет
являться начальным уровнем интегрирования, определяющим
начальные условия.
Небольшое увеличение напряжения на сетке С/Ск снизит
анодное напряжение до значения Г/апип- При уменьшении Г/ск
лампа закроется и анодное напряжение возрастет до величины Е&.
График зависимости анодного напряжения лампы, являющегося
выходным в схеме, от напряжения между сеткой и катодом {/Ск
условимся называть статической характеристикой усилителя *.
* Характеристики рис. 6-14, а и 6-14,6 могут быть сняты при отключенной
емкости С (рис. 6-13). При включенной емкости установление режимов в схеме,
как показано ниже, будет очень длительным.
313
Эта характеристика показана на рис. 6-14,6. На рабочем участке
характеристика идет весьма круто, что говорит о резких
изменениях ^/а=^вых при небольших изменениях (7Ск. Крутизна этого
участка характеристики равна коэффициенту усиления' усилителя
Физические процессы в схеме рассмотрим на примере
интегрирования постоянного входного напряжения С/вх, действующего
в течение интервала времени 1\1ч (рис. 6-14,в).
Рис. 6-14. Физические процессы в интеграторе:
а — нагрузочная характеристика усилителя; б — статическая характеристика
усилителя; в — интегрирование прямоугольного импульса
В момент подачи С/вх напряжение на сетке должно возрасти
до величины ^ск=^вх+^с а анодное напряжение понизится до
значения 1/атт. Как только начнет понижаться потенциал анода,
конденсатор С начнет разряжаться по следующей цепи: с правой
обкладки через выходное сопротивление усилителя, источник
смещения Ес, внутреннее сопротивление источника входного
напряжения и сопротивление /?. Ток разряда на сопротивлении /?
создает падение напряжения Г/л, которое приложено навстречу
входному. В первый момент напряжение оказывается практически
равным входному и компенсирует его воздействие *.
Поэтому в первый момеит времени потенциал сетки
изменяется незначительно.
* Это легко установить из следующих соображений. Если бы оно отличалось
от 1/вх, то. скачком изменились бы значения 0СК и [/а, а следовательно, и
напряжение на конденсаторе С, что физически невозможно.
314
нение выходного напряжения интегратора после прекращения
воздействия входного называется убыванием «памяти» интегратора *.
Чем больше коэффициент усиления /С, тем большим будет
постоянная времени цепей заряда и разряда конденсатора,
интегрирование будет более точным, а скорость убывания «памяти» меньшей.
При подаче на вход отрицательного напряжения процессы в схеме
будут протекать в обратном порядке. Выходное напряжение будет
не падать, а расти со скоростью, пропорциональной 11вх.
Двухкаскадный интегрирующий усилитель
Рис.
Рассмотренная схема интегратора (рис. 6-13) обладает
некоторыми недостатками как в отношении точности ее работы, так и
в отношении удобства соединения ее с предыдущим и последующим
каскадами. Более совершенной в
этом отношении является схема
двухкаскадного интегратора,
показанная на рис. 6-15. В этой схеме
на выходе включен катодный
повторитель Л2, который обеспечивает
согласование интегратора с
последующим каскадом, исключая
влияние входного сопротивления
последующего кабкада на работу
интегратора. В первом каскаде
применено катодное смещение, что
позволяет заземлить один из входных
зажимов интегратора и тем самым
упростить подключение
предыдущего каскада. Кроме того, в схеме
применена положительная обратная связь, увеличивающая
коэффициент усиления усилителя, а следовательно, и точность работы
интегратора.
Положительная обратная связь осуществляется включением
в схему общей катодной нагрузки /?2, через которую протекают
анодные токи обеих ламп. Основное падение напряжения
создается током катодного повторителя «/72, так как анодный ток
пентода и его изменения очень малы. Увеличение 11вх приводит
к росту анодного тока первой лампы и уменьшению напряжения
на.ее аноде, соединенном с сеткой Л^ В результате этого анодный
ток второй лампы уменьшается и снижается падение напряжения
на нижней части сопротивления /?2 с плюсом на катоде Л\. Это
понижение потенциала катода приводит к дальнейшему
увеличению анодного тока ла<мпы, т. е. действует так же, как и увеличение
вых
6-15.
Усовершенствованная схема интегратора
* Скорость убывания «памяти» интегратора иногда называют собственной
скоростью интегрирования. '
316
Укя9(У-вт)
1/вх. Таким образом, обратная связь через общее катодное
сопротивление является положительной.
Физические процессы в схеме такого интегратора существенно
не отличаются от процессов в однокаскадной схеме. Однако
интегрирование здесь происходит более точно благодаря большому
коэффициенту усиления. Важным преимуществом данной схемы
является весьма высокая устойчивость «памяти». Неустойчивость
«памяти» в однокаскадной схеме (рис. 6-13) объясняется тем, что
в ней устанавливающееся к моменту окончания воздействия
входного сигнала напряжение на выходе не соответствовало
напряжению смещения, действующему
между сеткой и катодом.
Поэтому в схеме начинались
переходные процессы, приводившие
к изменению (Лых. В двухкас-
кадной схеме интегратора такого
явления нет, так как в ней всегда
автоматически устанавливается
такое катодное смещение на
лампе Ли которому
соответствует выходное напряжение. Для
уяснения этого обстоятельства
рассмотрим подробнее
характеристики усилителя.
Статическая характеристика
такого двухкаскадного
усилителя* гУВых=^(^сК1) (рис. 6-16)
мало отличается от характеристики однокаскадного (рис. 6-14,6),
так как катодный повторитель не вносит существенных изменений
в количественные соотношения между напряжениями. На рис. 6-16
показана также характеристика положительной обратной связи
усилителя, представляющая собой зависимость напряжения на
нижней части сопротивления #2 от выходного напряжения Vя =
= №ых).
Эта зависимость изображается прямой линией, проходящей
через начало координат. Чем большая часть /?2 участвует в
создании положительной обратной связи, тем более полого пойдет
характеристика, так как тому же самому значению (/ВЫх будет
соответствовать большее значение (/д2#
Помимо напряжения положительной обратной связи, в цепи
сетки первого каскада действует еще 'некоторое смещение С/р,
создаваемое за счет протекания анодного тока лампы Л{ -по
сопротивлению /?1. (Падением напряжения, создаваемым анодным
током лампы Л\ на -сопротивлении /?2, как уже указывалось выше,
можно- пренебречь.) Общее напряжение, создаваемое токами ламп
* Для снятия статической характеристики в данном случае необходимо
отключить конденсатор С, а напряжение исК1 подавать от внешнего источника
непосредственно к участку сетка — катод лампы Л\,
317
Рис. 6-16. Характеристики усилителя
двухкаскадного интегратора
По мере разряда конденсатора ток разряда падает, что
вызывает уменьшение напряжения Ин, действующего навстречу
входному. В результате этого /7СК возрастает, а анодное напряжение
снижается, чем поддерживается разряд конденсатора почти
неизменяющимся токам. Поэтому напряжение на выходе уменьшается
с практически постоянной скоростью. Это соответствует
интегрированию постоянного входного напряжения. При большем входном
напряжении ток в цепи ЯС соответственно возрастет, разряд
конденсатора будет происходить быстрее. Таким образом, скорость
изменения выходного напряжения будет пропорциональна
величине входного напряжения.
Процесс разряда конденсатора происходит очень медленно, так как
Эквивалентное сопротивление цепи разряда конденсатора оказывается очень большим.
Оно может быть определено как отношение изменения напряжения на
конденсаторе аОс к изменению тока его разряда Л/с:
Поскольку конденсатор включен между анодом и сеткой лампы, а
потенциалы этих электродов во время работы изменяются в противоположные
стороны, то изменение напряжения на конденсаторе равно сумме абсолютных
значений изменений напряжений на сетке и на аноде:
Шс = Шск + Шй = Шск + КШСК = Шск (1 + К),
где К — коэффициент усиления усилителя.
Изменение сеточного напряжения при (/вх = сопз1: происходит вследствие
изменения тока разряда, протекающего по /?. Поэтому Д(/ск=А*'с#. Подставляя
это значение в предыдущее равенство, получим
Д^С = Д/СД(1 + /С),
откуда
Увеличение в (1+/С) раз эквивалентного сопротивления цепи свидетельствует
О таком же росте постоянной времени. Однако это не приводит к замедлению
процессов, так как напряжение, приложенное к цепи #С, также пропорционально
возрастает.
По окончании воздействия входного сигнала (момент <2)
устанавливается нулевое значение (/вх. Следовательно, в интеграторе
должно прекратиться изменение выходного напряжения, т. е.
интегратор должен «запомнить» то значение {/Вых> которое
установилось к моменту окончания воздействия (/вх. Однако при {/вх=0
между сеткой и катодом лампы действует только напряжение
смещения Ес, которому соответствует С/а=^о. Отсюда следует, что
после момента 12 значение (/а должно в рассматриваемом случае
возрасти. Этот процесс будет происходить очень медленно, так как
рост 1/а приводит к заряду конденсатора по цепи от +Е.Л через /?а,
С, /? и источник ^/вх. Ток заряда на сопротивлении /? создает
падение напряжения, приложенное плюсом к сетке лампы. Тем
самым задерживается снижение С/ск и рост С/&. Постепенное изме-
315
на сопротивлениях /?! и /?2, обозначим Г/к и условимся называть
катодным смещением Л\\ оно будет равно
С/к = 1/Я1+(7к2. (6-18)
Напряжение, фактически действующее между сеткой и катодом
первой лампы 1/Ск1 в процессе работы интегратора,
складывается из напряжения входного сигнала 1/вх и напряжения
катодного смещения
^сК1=^в*-^к.
По окончании действия. ^вх напряжение Г/ск будет
определяться только напряжением катодного смещения
Можно построить график зависимости ^/к от выходного
напряжения 1/к=ф(^вых)- Этот график будет смещен вле,во от
характеристики положительной обратной связи 6^ =/(6гВых) на величину,
равную 1/р\ Это смещение будет возрастать по мере увеличения
сопротивления К\.
Подбирая величины сопротивлений /?1 и /?2> т. е. наклон и
смещение характеристики ^/к = ф(^вых), можно добиться того, что
эта характеристика совпадет с рабочим участком статической
характеристики интегратора. Такое совпадение будет означать, что
«память» интегратора сделана устойчивой.
Действительно, если к моменту окончания действия (/вх на
выходе интегратора установится некоторое напряжение /7'ВыХ, то при
этом за счет катодного смещения к сетке лампы Лх окажется
приложенным именно такое напряжение Ц'ск^ =—11к, определяемое
характеристикой {/к=ср(^вых), которому соответствует значение
^вых = ^'вых. Данное положение будет справедливо для любых
значений 0ВЫХ из рабочей области. Наличие соответствия между
напряжениями, действующими, в схеме к моменту прекращения
подачи С/Вх, т, е. между смещением на сетке Лх и напряжением на
выходе, говорит о том, что переходные процессы в интеграторе
возникать не будут и его «память» будет устойчивой.
Если же характеристика Ик=^([}ъых) не будет совпадать со
статической (штриховая линия на рис. 6-16), то по окончании
интегрирования начнутся переходные процессы, которые приведут
к установлению режима, определяемого точкой А пересечения
характеристик. При наличии трех точек пересечения режим в
средней точке будет неустойчивым.
Совпадение характеристик в рабочей области указывает на то, что
благодаря положительной обратной связи коэффициент усиления усилителя стал ра-
318
вен бесконечности. Как указывалось выше, крутизна статической характеристики
равна коэффициенту усиления усилителя без обратной свя^и
Крутизна характеристики #к=<р(^/вых) определяет коэффициент обратной
связи, так как катодное смещение 1!к можно рассматривать как напряжение
обратной связи:
При отсутствии входного напряжения А#ск =А^/к. Поэтому произведение
Учитывая, что обратная связь в данном случае является положительной,
В действительности .идеально устойчивую «память» получить
невозможно, так как при различных режимах параметры лампы
несколько изменяются. На практике добиваются лишь достаточно
хорошей ее устойчивости (малой собственной скорости
интегрирования) путем регулировки сопротивлений #1 и /?2. Настройка
производится методом последовательных приближений. Критерием
точности настройки служит устойчивость «памяти» интегратора.
Если на вход схемы интегратора подать некоторое напряжение,
то (7Вых будет изменяться до тех пор, пока не достигнет
максимально или минимально возможной величины, после чего
дальнейшие его изменения прекратятся. Допустимо производить
интегрирование в течение такого промежутка времени, во время которого
эти значения еще не достигнуты.
Для возвращения схемы в некоторое исходное состояние
осуществляют сброс: вход интегратора замыкают накоротко и при
помощи постороннего источника аноду пентода навязывают
определенное напряжение, которое передается на выход схемы.
§ 6-6. ДРУГИЕ ТИПЫ РЕШАЮЩИХ УСИЛИТЕЛЕЙ
Если в общей схеме решающего усилителя в качестве 2\ и 22
использовать различные комбинации активных и ёмкостных
сопротивлений, можно получить большую группу специальных
усилителей, осуществляющих разнообразные математические операции.
Так, например, можно построить схемы, имеющие передаточные
функции любых элементарных или типовых звеньев систем
автоматического регулирования. Такие усилители широко применяются
в качестве корректирующих четырехполюсников. Основное же
применение специальные усилители нашли в моделирующих
счетно-решающих приборах.
Рассмотрим некоторые из наиболее распространенных схем
таких усилителей.
319
Дифференцирующие усилители
Продифференцировать сигнал, выраженный электрическим
напряжением <7Вх(0» —это значит получить новое напряжение
^вых(0» величина которого пропорциональна скорости изменения
входного. В соответствии с определением
где /Сп — коэффициент передачи, имеющий размерность времени.
При дифференцировании постоянного напряжения <7вх(0 =
= /: = соп51 (рис. 6-17, а) выходной сигнал равен нулю независимо
от величины и полярности (7ВХ, так как нулю равна скорость
изменения входного напряжения.
Уех
ивх=сопз*
о
к
"вых^О
"ВХ
^1
Рис. 6-17. Дифференцирование напряжений различной формы:
а—постоянное напряжение; б— линейно-изменяющееся напряжение;
в — перепад
При дифференцировании линейно-изменяющегося напряжения
С/Вх = а/ (рис. 6-17,6) величина выходного сигнала все время
остается постоянной:
Цшх(0=#п
^вх(')
ЛЬ
= КтР = СОПЗ*.
При большей скорости изменения С/вх большим будет значение
{/Вых- Линейно-убывающему входному напряжению соответствует
отрицательное значение выходного.
Следует подчеркнуть, что не абсолютное значение, а только
скорость изменения С/Вх определяет величину (7Вых. Так, при
дифференцировании разных по величине, но изменяющихся с
одинаковыми скоростями напряжений, изображаемых графиками 1 и 1\
выходное напряжение получается одинаковым.
Перепад напряжения (рис. 6-17, в) представляет собой
изменение напряжения с бесконечно большой скоростью. Поэтому при
дифференцировании перепада выходное напряжение должно быть
бесконечно большим. Однако уже в следующий момент
устанавливается постоянное значение /Увх, которому при
дифференцировании соответствует нулевое значение С/ВЫх«.
320
дифференцировании. На рис. 6-18,6, в, г показана форма
выходных напряжений при дифференцировании различных сигналов. На
верхних графиках изображено входное напряжение, на средних —
^вых при идеальном дифференцировании и на нижних — выходное
напряжение в реальном
дифференцирующем звене, т. е. с учетом
сглаживания.
Чем медленнее изменяется входное
Л*ь'* напряжение, тем меньшее влияние
будет оказывать наличие инерционного
множителя и точность
дифференцирования будет выше. Поэтому переход-
Рис. 6-19. Дифференцирующий Ную цепочку типа КС можно приме-
усилитель нять только для дифференцирования
медленно изменяющихся напряжений.
Скелетная схема дифференцирующего операционного
усилителя показана на рис. 6-19. В,данном случае
^Ы = ^и22(р)=/?.
Передаточная функция усилителя равна
^о(Р)=—^ = -дС/? = -рГ. (6-19)
Вид передаточной функции указывает на то, что усилитель
производит дифференцирование сигнала.
Физически процесс дифференцирования объясняется
следующим образом. Приняв, как и в предыдущих примерах, напряжение
на входе УПТ равным нулю, можно считать, что ток, протекающий
через конденсатор С, определяется лишь изменениями входного
напряжения:
Этот ток, протекая по сопротивлению /?, создает на нем падение
напряжения, которое приближенно можно считать равным {УВЫх>
так как б/^жО:
Таким образом, выходное напряжение оказывается
пропорциональным производйой входного.
Оценим точность работы дифференцирующего усилителя в
сравнении с реальным дифференцирующим звеном. Для этого под
ставим в выражение передаточной функции (6-8) значения 2х(р)
и22(р):
к0(р)=-рск—т^-тсп-
1+ К + К
322
После простых преобразований получим
Т
Обозначим 1 у=^'- Тогда, учитывая, что /С^>1 и 1+/С«/С,
окончательно получим
АГо(Р) = —гттг"- (6"2°)
Отсюда следует, что дифференцирующий усилитель, как и
реальное дифференцирующее звено, включает в себя инерционное
звено. Однако при тех же самых значениях # и С эквивалентная
постоянная времени этого звена доказывается в (1+/С) раз
меньшей. Это обеспечивает соответствующее увеличение точности
работы схемы или при той же точности позволяет производить
дифференцирование напряжения, изменяющегося в (1+/С) раз
быстрее.
Усилители со сложными коэффициентами передачи
Форсирующий усилитель. При корректировании в
системах автоматического регулирования, а также в моделирующих
счетно-решающих приборах возникает необходимость реализовать
с возможно большей точностью свойства форсирующего звена. Это
может быть достигнуто применением решающего усилителя,
выполненного по схеме рис. 6-20, а и получившего название
форсирующего.
В данной схеме
2ЛР)
Следовательно,
1 , р 1+/>СЛ, 1+рТ
-р~С+К1
%2 (р) = /?2-
Ко (Р) = - §$ = - ■§■ С1 +■/*■>. С6"21)
что соответствует передаточной функции форсирующего звена.
Полагая, как и раньше С/п = 0, можно считать, что ток в
сопротивлении /?1 пропорционален только Величине входного
напряжения, а ток, протекающий через конденсатор С,— скорости
изменения ^/вх. Напряжение на сопротивлении /?2 пропорционально
сумме обоих токов и с большой степенью точности равно (/вых.
Следовательно, выходное нацряжение усилителя будет пропорцио-
11*
323
В гл. III уже указывалось, что в простейшем случае
приближенное дифференцирование напряжения может быть осуществлено
при помощи переходной цепочки типа /?С, представляющей собой
реальное дифференцирующее звено.
Ток конденсатора пропорционален скорости изменения
напряжения на его обкладках:
йЦ
ль '
1 = С-
Однако на практике обычно желательно иметь не ток, а
напряжение, пропорциональное этой скорости. Для этого ток пропускают
через сопротивление, с которого и снимают выходное напряжение
(рис. 6-18,а). Включение дополнительного сопротивления
приводит к тому, что уже не все входное напряжение прикладывается
к емкости, поэтому ток лишь с известным приближением будет
с
ивых
ивы* Увих, | I
/
:>
"« у\и™ Ж
к
вы* ,^~\
Хт*
Рис. 6-18. Реальное дифференцирующее звено:
а —схема; б, в, г — дифференцирование при помощи звена /?С
пропорционален скорости изменения 11вх. Чем меньше величины #
и С, т. е. чем меньше постоянная времени цепи, тем быстрее будут
протекать процессы в схеме. Напряжение на сопротивлении будет
малым, а напряжение на конденсаторе по величине будет ближе
к входному. Следовательно, точность дифференцирования будет
выше. Но вместе с тем уменьшается величина выходного
напряжения, что нежелательно.
Возможность уменьшения постоянной времени цепи ограничена
рядом причин. Во-первых, с ее уменьшением уменьшается
величина выходного сигнала, так как коэффициент передачи цепи
равен Т. Во-вторых, при чрезмерном уменьшении емкости
конденсатора С она становится соизмеримой с паразитными емкостями
схемы, вследствие чего напряжение наводок будет иметь примерно
такую же величину, как и напряжение полезного сигнала, особенно
при большой частоте наводок.
Наличие в составе функции передачи реального
дифференцирующего звена инерционного множителя 1 т приводит к
сглаживанию выходного сигнала. В этом, и проявляются искажения при
11 Автоматика
321
нально сумме входного и его производной. Точный анализ
показывает, что в действительности такой усилитель обладает еще
некоторой инерционностью, которая сравнительно мала.
0 в г I I "Г
выя
упт
т* '—[
упт
'ВЫХ
§
■аг
г*
Рис. 6-20. Специальные решающие усилители:
а — форсирующий усилитель; 0 — сглаживающий усилитель; е —
усилитель для дифферен*цИрбвания со сглаживанием; з — интегратор
суммы; а и е =^ усилители со сложными коэффициентами передачи
Сглаживающий усилитель. Для подавления
высокочастотных помех, содержащихся в сигнале, необходимо сузить
полосу пропускания усилителя. Наиболее просто это достигается
путем придания усилителю свойств инерционного звена. Такой
усилитель часто называют сглаживающим (рис. 6-20,6),
В. этом случае
#2
2х(р)=Яг и22(р) = т^т
Следовательно,
#о(/>) =
22{р)
глр)
Нг 1
~Щ"ТТрТ'
(в-22)
Передаточная функция показывает, что одновременно с
усилением сигнала происходит его сглаживание. Сглаживающие
свойства усилителя объясняются тем, что напряжение на
сопротивлении $2 быстро изменяться не может, так как параллельно ему
324
подключен конденсатор С. Поэтому при резких изменениях
входного напряжения выходное напряжение будет изменяться более
плавно. Одновременно подавляются высокочастотные помехи и
шумы. Коэффициент усиления усилителя определяется отношением
сопротивлении -ф.
Усилитель для дифференцирования со
сглаживанием. Дифференцирующие усилители обладают свойством
«подчеркивать» помехи. Объясняется это тем, что даже при малом
уровне помехи скорость ее изменения может быть значительной по
сравнению со скоростью изменения сигнала. Поэтому при
дифференцировании, когда величина выходного сигнала определяется
лишь скоростью изменения входного, уровень помехи на выходе
больше, чем на входе.
Для устранения, этого явления применяют дифференцирование
со сглаживанием. Схема соответствующего усилителя показана
на рис. 6-20, е.
В этой схеме
Передаточная функция усилителя равна
V ( гЛ — — ^(1> — _ *Р С* — _ РТ*
Ао1Л— 2х{р)— ГГрТ*~ ТТрТ*'
Наличие инерционного множителя указывает на то, что в
усилителе наряду с дифференцированием происходит подавление
высокочастотных составляющих входного напряжения, т. е. помех.
Поэтому выходное напряжение представляет собой производную
полезного сигнала.
На рис. 6-20 приведено еще несколько схем усилителей. На
схеме 6-20, г показано интегрирование суммы нескольких сигналов:
*о^Ъ + *г +-•- + **= ^ + ^ + --- + -^>
но
Ъ-±№<-±1(% + % + ... + %)*.
Вместе с тем С/вьпг^—^с, так как величиной 6^х можно
пренебречь.
Следовательно,
325
Если
А1 = А 2 = • • • == Кп == *?»
ТО
^вых=^|(^1 + ^2 + ... + ^1^ =
= 4" •" (^1 + ^ + ... + С/я)М. (6-24)
Схема рис. 6-20,(9 имеет передаточную функцию
К0(р) = -^,
где Г1 = /?1С и Г2 = /?2С.
Включение такого усилителя в контур системы автоматического
регулирования равносильно добавлению к сигналу
рассогласования его интеграла.
Передаточная функция усилителя (рис. 6-20, е) имеет вид
АоКР)— -Щ Т+7Г2>
где 7\ =ВХСХ и,Т2 = Я2С2.
В зависимости от выбора параметров этот усилитель может
быть уподоблен звену быстрого или медленного реагирования*.
Такого типа усилители также используются для
корректирования систем автоматического регулирования.
§ 6-7. ЭЛЕКТРОННО-ИМПУЛЬСНЫЕ РЕШАЮЩИЕ СХЕМЫ
В последние годы широкое применение в СРП получили
электронно-импульсные решающие схемы, позволяющие осуществлять
некоторые математические операции методами импульсной
техники. В этих схемах для электрического изображения различных
величин используются импульсы напряжения или тока различной
длительности с постоянной частотой повторения. Такой способ
изображения различных величин особенно удобен в
радиолокационной технике, где дальность до цели, а иногда и некоторые
другие величины выражаются в виде временных интервалов.
Электронно-импульсные схемы позволяют перемножать две
величины, непрерывно изменяющиеся во времени, в то время как
решающие усилители могут умножать переменную величину только
на постоянный множитель. При помощи электронно-импульсных
схем можно также находить сравнительно сложные функции одной
или нескольких переменных величин.
Для изображения величин, над которыми осуществляются
математические операции в виде временных интервалов, а также для
обратных преобразований временных интервалов в другие типы
электрических сигналов применяются специальные
преобразователи.
326
Схемы сравнения
Схемы сравнения, или компараторы, являются
преобразователями сигналов, выраженных напряжением постоянного тока, в
сигналы, величина которых в определенном масштабе изображается
длительностью импульсов, имеющих постоянную частоту
повторения.
Работа схемы сравнения заключается в следующем. На вход
схемы (рис. 6-21, а) подается напряжение постоянного тока 0ВХ.
Кромке того, на схему воздействует вспомогательное пилообразное
линейно-растущее или линейно-падающее опорное напряжение
с заданным периодом повторения Т0 и постоянной амплитудой.
В самой схеме, которая построена аналогично триггеру, возможны
два различных устойчивых состояния; переход из одного в другое
'Инг
Схема
сравнения
*иоп
ивых
ш
[л.
[м .Нппг
— *
Рис. 6-21. Схема сравнения:
а — структурная схема; б —напряжения на входе и выходе
происходит скачком. Состояние схемы зависит от соотношения
мгновенных значений обоих воздействующих на нее напряжений
в данный момент времени. Это соотношение дважды изменяется за
один период следования опорного сигнала, приводя каждый раз
к скачкам, в ходе которых формируются импульсы выходного
напряжения. Иначе говоря, воздействие опорного напряжения
в схеме вызывает принудительное опрокидывание. Длительность
формируемых импульсов зависит от продолжительности
пребывания схемы в том или ином состоянии.
Постоянная составляющая пилообразного напряжения
подбирается с таким расчетом, чтобы нулевой уровень входного
сигнала делил пилу пополам. При этом будут формироваться
импульсы, длительность которых равна паузе между ними
(рис. 6-21,6). При изменении величины входного напряжения в ту
или иную сторону пропорционально будет изменяться
длительность формируемых импульсов.
Типовая схема сравнения показана на рис. 6-22, а. Состояние,
при котором обе лампы открыты, неустойчиво. Так, например,
при случайном увеличении напряжения на сетке Л2 ее анодный
ток растет, а анодное напряжение снижается. Это уменьшение
напряжения через переходную цепочку С^ передается на
сетку Ли вызывая значительное уменьшение ее анодного тока, что
327
в свою очередь приводит к уменьшению потенциала общего
катода. Уменьшение потенциала общего катода оказывает такое же
действие, как и рост напряжения на сетке Л2, т. е. еще больше
увеличивает анодный ток Л2 и т. д. Возникает лавинообразный
процесс, в ходе которого Л2 открывается, а Лх запирается. Если
же в дальнейшем по какой-либо причине Л\ откроется, то все
процессы будут протекать в обратном порядке; после нового
скачка Л2 полностью закроется.
а
Рис. 6-22. Типовые схемы сравнения
После запирания любой из ламп цепь обратной связи
оказывается разомкнутой и вторая половина схемы, содержащая
открытую лампу, превращается в усилитель с анодно-катодной
нагрузкой. Сопротивление /?к очень'велико (примерно 1 Мом и
более) и в десятки раз превышает величины анодных нагрузок
ламп Л\ и Л2. Поэтому усиление такой схемы по катодному
выходу близко к единице, а по анодному оно значительно меньше.
Другой особенностью такого каскада является режим малых
токов, при котором лампа близка к запиранию, т. е. напряжение
между сеткой и катодом почти равно напряжению отсечки
лампы Ес. Это обстоятельство важно для уяснения дальнейшей
работы схемы.
Из изложенного можно сделать следующие выводы.
Устойчивым в схеме является состояние, при котором одна из ламп
закрыта, а другая открыта. В момент отпирания одной лампы в
схеме возникает лавинообразный процесс, при котором запирается
другая. Отпирание и запирание ламп приводит к резким
изменениям анодных напряжений, имеющих форму перепадов. В
устойчивом состоянии в открытой лампе'напряжение между сеткой и
катодом близко к напряжению запирания /:Со.
328
устраняет положительную обратную связь. Однако срабатывание
схемы происходит достаточно четко благодаря крутому фронту
опорного напряжения. Во время рабочего хода, когда опорное
напряжение медленно убывает, изменения С/Я2 очень малы, так
как коэффициент усиления каскада по анодному выходу
значительно меньше единицы. Поэтому ток заряда С1 также мал, а
напряжение на сетке Лх можно по-прежнему считать равным {/Вх-
Выходное напряжение можно снимать с анода любого из
триодов. Если с анода Л\ напряжение не снимается, то анодную
нагрузку /?а1 можно не включать, так как для работы самой схемы
она не нужна.
На рис. 6-22, б показан несколько измененный вариант схемы
сравнения. Основным ее отличием является включение в цепь
катода основной лампы стабилизатора тока «773. Анодный ток
стабилизатора очень мало зависит от анодного напряжения и задается
потенциалом сетки, который в свою очередь определяется
соотношением сопротивлений делителя /?2#з- Эквивалентное
сопротивление стабилизатора тока очень велико. Это обеспечивает высокую
стабильность уровня сравнения и четкость срабатывания схемы.
Линейно-растущее опорное напряжение может вырабатываться
блокинг-генератором. Оно имеет очень резкий спад, что надежно
фиксирует положение одного из фронтов формируемых импульсов.
Это важно потому, что после запирания Л2 и возрастания Ц^
процесс заряда конденсатора С\ происходит через малое
сопротивление диода Д, чем практически устраняется влияние
положительной обратной связи на скорость скачка. Диод, способствуя
быстрому завершению переходных процессов, позволяет
использовать почти весь период повторения опорного напряжения в
качестве рабочего диапазона изменений длительности импульсов. При
нарастании напряжения (/оп после отпирания Л2 начинается
резкое падение <7а2. На этом этапе работы действует положительная
обратная связь, так как при разряде конденсатора С\
сопротивление /?1 не шунтируется диодом.
Таким образом, оба фронта формируемого импульса хорошо
фиксируются и имеют значительную крутизну.
В качестве схем сравнения могут быть использованы
генераторы регулируемой задержки, в которых время задержки линейно
зависит от некоторого управляющего напряжения.
Электронно-ключевые преобразователи
Для "преобразования величин, выраженных длительностью А/
импульсов, имеющих постоянную частоту повторения, в
пропорциональное этой длительности напряжение постоянного тока
используются схемы электронно-ключевых преобразователей.
В простейшем случае это преобразование может быть осущест-
330
влено при помощи обычного инерционного звена типа /?С
(рис. 3-18,а).
Если постоянная времени такого звена значительно больше
периода повторения импульсов Т0, то за время одного периода
напряжение на емкости, являющееся выходным в схеме, будет
изменяться незначительно. Оно будет равно постоянной
составляющей входного напряжения и может быть определено как
произведение* его амплитуды Цш на коэффициент заполнения •=?-:
* о
^вых <-у ш т '
1 О
При постоянных значениях \)т и Г0 величина выходного
напряжения будет зависеть только от длительности импульса и будет
ей пропорциональна:
(6-25)
где Кп =
ип
коэффициент передачи.
1п ±
Нлтг
Рис. 6-23. Электронно-ключевой преобразователь:
а — принципиальная схема; б — график и
Рассмотренная схема применяется лишь в тех случаях, когда
величина, выраженная длительностью импульсов, не может
изменять свой знак. Недостатком схемы является сравнительно низкое
значение коэффициента передачи и его зависимость от амплитуды
входных импульсов.
Более совершенными являются схемы электронно-ключевых
преобразователей, одна из которых показана на рис. 6-23, а.
Триод Л\ выполняет роль электронного ключа. Эта лампа
запирается отрицательными входными импульсами и открывается
331
Схема имеет два входа: основной, на который подается
напряжение постоянного тока #вх, и вспомогательный, к которому
через переходную цепочку С2Н2 подводится опорное напряжение {Уоп.
Определим, при .каких значениях опорного напряжения схема
срабатывает и переходит из одного устойчивого состояния
в другое.
Пусть 1/0п<^вх, Л2 заперта и происходит процесс нарастания
опорного напряжения. В это время, если процессы в переходной
цепи СхЯх закончились, напряжение на сетке будет равно 1/в*,
а потенциал катода будет отличаться от него на величину,
близкую к Ес . Как только-мгновенное значение опорного
напряжения достигнет величины (/вх, напряжение между сеткой и
катодом Л2 станет равным напряжению отсечки и лампа откроется.
В схеме произойдет скачок.
При уменьшении опорного напряжения одновременно будут
уменьшаться анодный ток Л2 и потенциал катода. Напряжение
между сеткой и катодом лампы будет оставаться примерно
равным /ГС(). Когда же вследствие снижения потенциала катода
напряжение между сеткой и катодом Л\ также станет равным ЕСо*
Л\ откроется и произойдет новый скачок.
Таким образом, скачки в схеме происходят в моменты
сравнения мгновенных значений Цвх и С/0п.
Так как параметры обоих триодов могут'.несколько
различаться, то для точной установки уровня срабатывания при
помощи потенциометра П изменяют значение постоянной
составляющей пилообразного напряжения.
После каждого скачка резко изменяется, напряжение на
аноде «/72, что приводит к возникновению процессов заряда или
разряда конденсатора С\. Ток, протекающий при этом через
конденсатор, создает на сопротивлении /?1 некоторое падение
напряжения, что может изменить уровень напряжения на сетке Ли а
следовательно, и момент срабатывания схемы. Это влияние особенно
заметно, когда уровень сравнения лежит близко к максимальному
или минимальному значению опорного напряжения. В этом
случае промежуток времени между скачками очень мал и переходные
процессы в цепи /?]<?! оказываются незавершенными к моменту
начала следующего скачка.
Для быстрого восстановления исходного уровня напряжения
параллельно Я\ включают фиксирующий диод. На рис. 6-22, а
показано включение диода при линейно-падающем опорном
напряжении. При резком возрастании опорного напряжения анодное
напряжение Л2 остается постоянным до момента отпирания
лампы. Поэтому переходные процессы в цепи Ц\С\ не возникают.
После срабатывания схемы анодное напряжение Л2 резко падает
и конденсатор Сх начинает разряжаться. Ток его разряда
проходит через диод, шунтирующий сопротивление /?ь не создавая на
самом сопротивлении падения напряжения. Это обстоятельство
329
на время паузы. Исходный режим лампы определяется
напряжением смещения, снимаемым с делителя К\#2- На триоде Л3 собран
стабилизатор тока. Анодный ток стабилизатора /Ст практически не
зависит от режима анодной цепи и определяется только величиной
катодной нагрузки /?? и потенциалом сетки, подключенной к
средней точке делителя /?з#4. Лампа Л2 при запирании лампы Л\
образует дополнительную цепь для тока стабилизатора. Режим лампы
подобран так, чтобы увеличение потенциала ее катода,
происходящее при отпирании Ль приводило к полному запиранию Л2.
В этом случае весь ток стабилизатора будет протекать только
через Ль
При запирании Л\ происходит заряд накопительного
конденсатора С через сопротивление Я, а при отпирании — ее разряд
через Ль стабилизатор тока и источник компенсирующего
напряжения Як. Постоянные времени цепей заряда и разряда во много раз
превышают период повторения импульсов. Поэтому за время
действия одного импульса или в течение одной паузы напряжение на
накопительной емкости, являющееся выходным в схеме, изменяется
весьма незначительно. Соответственно ток в сопротивлении /?
остается практически постоянным и равлым
**— я •
При запертой лампе Л\ в течение времени Ы происходит заряд
конденсатора С этим током и конденсатор получает
дополнительный заряд
После отпирания Л\ начинается разряд конденсатора током
При этом конденсатор теряет заряд
Д?р - н <То - и) = ('с - ад (То - ДО-
В установившемся режиме справедливо равенство Д<7з=Д<7р»
т. е. количество электричества, потерянное конденсатором в
процессе разряда, равно количеству электричества, получаемому при
заряде. Следовательно,
^^(''ст-Ш^о-Д'),
или после простых преобразований
1Ц *ст ^
♦Кроме того,
* — ^а ~~ ^вых
'я— к
или
Е.-Цвт _,. 7-о-Ы
Я ст Т0 '
332
Это соотношение позволяет определить значение ЦВых-
(Увы, = Еа-ШсТ^^-. (6-26)
1 О
Можно подо-брать значение тока стабилизатора так, чтобы при
Д<=0 выходное напряжение также равнялось нулю:
V вых == *^& *\^ст ~~т~~ === "
1 О
ИЛИ
Подставив это значение в (6-26), получим в общем случае
*/.« = Я.# = #,М (6-27)
где /Сп = "т^- — коэффициент, передачи.
* о
Значение коэффициента передачи здесь не зависит от
амплитуды входных импульсов и является сравнительно большим. Если
нулевому значению входного сигнала соответствуют импульсы с
половинным заполнением, то схема регулируется так, чтобы выход-
т
ное напряжение равнялось нулю при М=-^-:
т ^о
Ел—тс7:—т~±-=°
1 о
ИЛИ
ст Я ' '
Тогда в общем случае
*/.« = ЕЛ-2ЕЛ &=± = Ел ^^. (6-28)
Т
. При Д/< -—выходное напряжение будет отрицательным, а при
т
Д^>~—положительным. Характеристика преобразователя
приобретает вид дискриминаторной, а коэффициент передач-и
увеличивается вдвое по сравнению с предыдущим случаем.
Электронно-ключевые множительные устройства
Электронно-ключевые схемы применяются для осуществления
перемножения двух величин, непрерывно изменяющихся во
времени. Одна из величин выражается напряжением постоянного
тока, а вторая—длительностью импульсов, имеющих постоянный
период повторения То.
333
Упрощенная схема та.кого умножителя показана на рис. 6-24, а.
Роль ключа К выполняет электронная лампа. На сетку лампы
подается напряжение 6/2, запирающее лампу на время действия
отрицательного импульса. Длительность этого импульса Д/ в
определенном масштабе выражает величину одного из сомножителей.
Величина второго сомножителя выражается напряжением
постоянного тока /7Ь действующего на входе схемы. Закрытое состояние
лампы соответствует-разомкнутому положению ключа К. При
размыкании ключа происходит заряд конденсатора С от источника
(/2 через сопротивления К\ и /?2. По окончании действия импульса
Рис. 6-24. Электронно-ключевой умножитель:
а — упрощенная схема; б — напряжение, управляющее ключом; в -*
биполярный ключ
ключ К замыкается (лампа открывается) и начинается разряд
конденсатора через сопротивление /?2 и ключ. Если при заряде
конденсатор получает большее количество электричества, чем теряет
при разряде, то напряжение на нем будет постепенно повышаться.
Это приведет к увеличению тока разряда и снижению тока заряда.
В результате этого через несколько зарядно-разрядных циклов
наступит установившийся режим, при котором в процессе разряда
конденсатор будет терять точно такое же количество
электричества, какое он получает за время заряда. Постоянные времени
цепей заряда и разряда значительно превышают период
повторения импульсов. Поэтому за время одного периода напряжение на
конденсаторе, являющееся выходным в схеме, можно считать
практически постоянным.
Ток, заряжающий конденсатор, равен
Сопротивление Я\ является внутренним сопротивлением
источника 0\. Оно обычно во много раз меньше сопротивления /?2.
Поэтому приближенно можно записать '
*3~ ^ •
Заряжаясь этим током в течение времени Д*, конденсатор
получит заряд
334
Несколько более высокую точность позволяют получить
электронно-ключевые схемы, в которых заряд накопительной емкости
производится стабилизированным током, пропорциональным одно*
му из сомножителей. Функции управляемого стабилизатора тока
выполняет триод с большой катодной нагрузкой (рис. Ь-2Ь,а).
Анодный ток этой лампы /0т определяется только напряжением^ на
ее сетке и практически не зависит от величины напряжения,
действующего в анодной цепи, т. е. он стабилизирован относительно
Рис. 6-25. Стабилизатор тока в роли преобразователя:
а —схема; б — характеристика
изменений анодного напряжения. При изменении напряжения У,
в широких пределах, не захватывающих область, близкую к
напряжению запирания, пропорционально будет изменяться
величина стабилизированного анодного тока лампы (рис. ь-го,о).
Так как схема стабилизатора является, в сущности, катодным
повторителем, то изменения потенциала катода, равные Д*стКк,
будут такими же, как и изменения потенциала сетки, т. е.
или
Отсюда следует, что
Д<'ст^4гд^
Кг =
Если правильно подобрать исходное сеточное смещение Ес, от
уровня которого (точка 0') отсчитывать величину С/,,; то, за
исключением небольшого начального участка, величина тока,
стабилизатора будет пропорциональна входному напряжению:
336
Таким образом, стабилизатор тока можно рассматривать как
преобразователь напряжения постоянного тока в
пропорциональный ему ток. Величина этого тока не должна принимать
отрицательных значений или значений, близких к нулю, в противном
случае могут возникнуть существенные ошибки вследствие
нелинейности характеристики ^=/((7^. Это ограничение оказывается
несущественным, если такой величиной является, например,
дальность цели, а также и в ряде других случаев.
Величина второго сомножителя выражается длительностью
временного интервала Д/ между двумя импульсами А и Б
(рис. 6-26,а), имеющими, как и в ранее рассмотренных случаях,
,А
Ы-
6
.'*.
*»
А
Д<
6
.«*.
Го
и
А
В
С~± С~ь
С~* С*
Ук4 ЬТивык /«* У*е сЛимх
I ГГ^^Чг^ * ^4Ь^
\\1ет Ф Ц/сг ^ф
,, /I СтпабилизаА п ^\Стабилиза\
и1 Р"*1 /770/7 /Ш/Ш и/ ^4070/7 /770КЯ
'сг
^СТ"
Рис. 6-2^. Электронно-ключевые схемы:
а — импульсы, управляющие работой ключей; б — однополярная
схема; в т— биполярная схема
постоянный период повторения. Знак сомножителя определяется
порядком следования импульсов. Условимся считать сигнал
положительным, если первым следует импульс Л, и отрицательным при
обратном порядке следования. Эти импульсы поступают на
специальную схему, управляющую работой ключей. Весь период
повторения импульсов состоит из трех частей — {\, М и ^,
соответствующих трем этапам работы электронно-ключевого умножителя.
Если по условиям работы порядок следования импульсов не
может изменяться, т. е. второй сомножитель является существенно
положительной величиной, то для перемножения применяется
однополярная электронно-ключевая схема (рис. 6-26,6). В состав
схемы, помимо электронных ключей и стабилизатора тока, входят
два конденсатора: накопительный, или интегрирующий конденса-
337
Если пренебречь сопротивлением ключа, то ток разряда
конденсатора будет равен
При разряде конденсатор отдает заряд
И ==Л (^о-Д') =-^-(Го - ДО-
Так как в установившемся режиме Д^з=А?р> то
^~^вы> Д* = -^2 (Т0 — Д/).
После простых преобразований получим
откуда
^ш* = -г игм = №№ (6-29)
1 0
где /Сп—коэффициент передачи.
Выходное напряжение оказывается пропорциональным
произведению исходных величин 11\ и Л/. Если одна из этих величин
уменьшится, соответственно уменьшится Д<7з и возрастет Д<7р. В
результате этого значение 1/Вых будет снижаться до тех пор, пока
вновь не наступит равновесие. При увеличении 1}\ или ЬЛ картина
будет обратной. Очевидно, что данная схема обладает некоторой
инерционностью, так как при изменении входных сигналов новое
значение [/Вых устанавливается не сразу, а лишь спустя некоторое
время.
Величина, изображаемая напряжением Ци может быть-как
положительной, так и отрицательной. В зависимости от знака этой
величины будет изменяться полярность выходного напряжения.
Вторая величина, изображаемая временным интервалом Д^, может
иметь только один знак. Это ограничение очень часто оказывается
несущественным.
В тех случаях, когда возможно изменение полярности (/ь
электронный ключ К должен иметь двустороннюю проводимость.
Такой ключ называется биполярным. Он представляет собой
двойной триод (рис. 6-24,в), у которого обе половины включены
в общую цепь так, что они могут пропускать ток во
взаимно-противоположных направлениях. При воздействии отрицательного
импульса обе лампы, сетки которых соединены, запираются. По
окончании импульса лампы открываются и ключ приобретает
двустороннюю проводимость. Очевидно, что сопротивление такого
ключа в замкнутом состоянии отличается от нуля. Точно так же
не равно нулю и внутреннее сопротивление источника 1/1в Наличие
этих сопротивлений снижает точность работы схемы.
335
тор Си и запоминающий конденсатор С2, величина емкости
которого во много раз меньше емкости конденсатора С\ (С2<С С\).
Работа схемы протекает следующим образом.
1-й этап (^) —сброс. Замкнуты ключи Ки #2 и /Сб. Ток
стабилизатора замыкается через ключ /С5, накопительная емкость
полностью разряжается через ключи К\ и /(2.
2-й этап (М) — перемножение. Замкнуты ключи К2 и Ка- Ток
стабилизатора замыкается через ключ /С2, конденсатор С\ и ключ
/С4. Конденсатор получает заряд, равный произведению тока
стабилизатора /Ст на время заряда А/, и к концу этапа напряжение
на конденсаторе оказывается пропорциональным произведению
двух входных величин:
3-й этап (?2) —передача заряда. Замкнуты ключи Ки Кг и Кб-
Ток стабилизатора замыкается через ключ К6. Оба конденсатора
соединены параллельно, и часть заряда с накопительного
конденсатора переходит на запоминающий.
Далее весь цикл повторяется. Сначала происходит сброс
оставшегося на накопительном конденсаторе заряда, затем он вновь
заряжается стабилизированным током, после чего заряд
передается на запоминающий конденсатор. За время нескольких
циклов работы на нем устанавливается такое же напряжение, как и
на накопительном. Это напряжение является выходным.
Следовательно,
</.ыж~#.АтА'. (6-31)
т. е. выходное напряжение также пропорционально произведению
входных величин.
При изменении входных величин соответственно будет
изменяться напряжение, до которого заряжается накопительный
конденсатор. Если это напряжение растет, то запоминающий
конденсатор будет при передаче заряда постепенно дозаряжаться, если
напряжение падает, то он будет разряжаться, отдавая часть
заряда накопительному конденсатору. Выравнивание зарядов
происходит сравнительно быстро, так как С2<ССь и на выходе
устанавливается такое же напряжение, до которого заряжается
накопительный конденсатор. Поэтому инерционность схемы
относительно мала.
Биполярная электронно-ключейая схема умножения
(рис. 6-26,0) применяется в тех случаях, когда величина,
изображаемая временным интервалом, может изменять свой знак, что
выражается в изменении порядка следования импульсов А и Б.
При нормальном порядке следования импульсов эта схема
работает точно так же, как и однополярная, причем ключ Кв остается
все время разомкнутым. Если же первым поступает импульс 5,
338
то порядок управления ключами изменяется. После сброса,
осуществляемого обычным порядком, происходит замыкание ключей
К\ и /Сб. Ток стабилизатора будет заряжать накопительный
конденсатор, протекая через «его в обратном направлении по
сравнению с прежним случаем. Полярность напряжения на С\ изменится
на противоположную, и после передачи заряда изменится знак
выходного напряжения. После окончания передачи заряда в
течение двух следующих этапов работы схемы конденсатор С2
оказывается отключенным и напряжениена нем измениться не может.
Он как бы «запоминает» уровень напряжения, поэтому и
называется запоминающим.
Ключи Ки Яг и Къ должны быть биполярными, так как ток
через них должен протекать в обоих .направлениях. Остальные
ключи могут быть однополярными.
§ 6-8. ПРИНЦИПЫ ПОСТРОЕНИЯ СЧЕТНО-РЕШАЮЩИХ
ПРИБОРОВ
При выборе способа построения счетно-решающих приборов
учитываются следующие основные требования:
— необходимая точность вычислений;
— возможность осуществления тех или иных математических
операций при помощи рещающих схем;
— удобство соединения решающих элементов в одну общую
схему;
— удобство ввода данных и способ выражения результата;
— диапазон изменения входных, выходных и промежуточных
величин;
— необходимая скорость процесса вычислений.
Кроме того, приходится учитывать ряд эксплуатационных
требований, таких, как надежность, экономичность, габариты и вес
аппаратуры, ее транспортабельность и т^ д.
Решение некоторых задач может быть осуществлено при
помощи искусственных приемов, позаоляющих в отдельных частных
случаях весьма быстро и просто получать ответ. Однако
существуют и общие методы, используемые при решении задач
различных классов. Они позволяют значительно упростить конструкцию
счетно-решающего прибора или же получить обходные пути
решения там, где непосредственное вычисление невозможно. К числу
таких методов относятся:
— замена способа воспроизведения величин;
— преобразование уравнений;
— аппроксимация сложных функций;
— применение отрицательной обратной связи.
Сущность первого метода была изложена при рассмотрении
преобразователей. Ниже остановимся более подробно на
остальных методах.
339
Преобразование уравнений
Процесс решения задачи во многих случаях сводится к
последовательному преобразованию заданных уравнений в новые,
эквивалентные исходным, но такие, из которых .непосредственно может
быть получен результат. К числу подобных преобразований
относятся перенос слагаемых
из одной части равенства
в другую, приведение
к общему знаменателю,
введение
вспомогательных промежуточных
величин и т. д. Все эти
действия в равной степени
Рис. 6-27. Мостиковая схема умножения ВОЗМОЖНЫ И при решении
задачи в
счетно-решающем приборе. Из всех возможных эквивалентных форм исходного
уравнения выбирается такая, в которой наиболее просто могут
быть реализованы определяемые ею математические операции.
Например, уравнение г=ху, определяющее одну из величин
как произведение двух других, может быть преобразовано в
эквивалентные ему:
* = у или \%г = \%х + \%у.
Используя логарифмическое преобразование, можно весьма
просто при помощи мостиковой схемы умножать и делить
несколько величин. Плечи моста /?1 и #2 (рис. 6-27) выполняются
одинаковыми. Два других плеча образованы последовательно
включенными переменными сопротивлениями с логарифмическим
характером намотки. Сопротивление каждого из .них пропорционально
логарифму перемещения движка:
Из условия баланса моста следует:
#1 (На + #> + Я,) = #2 (Я, + Я, + Я/ + Яу) •
. Учитывая предыдущее равенство и то обстоятельство, что
/?1=^2) можно записать
Я01вл + Я018[* + Яо18^ = Яо418^ + Яо18^ + Яо18/+Яо1вЛ
откуда
Из полученного выражения следует, что если входные величины
вводить в виде перемещения движков; а для балансировки исполь-
340
зовать сопротивление /?у, то перемещение движка этого
сопротивления будет определяться соотношением
Решение может быть автоматизировано при помощи следящего
привода. При использовании такого решающего устройства все
величины, являющиеся объектом операций, должны иметь
ограничение по величине и не должны изменять свой знак.
На практике весьма часто прибегают к преобразованиям
уравнений в неявной форме.
Неявными уравнениями называются такие, которые не решены
относительно входящей в них неизвестной величины. В неявную
форму могут быть легко преобразованы любые уравнения. Ниже
дано несколько примеров одних и тех же уравнений, записанных
в явном и неявном виде:
1) у = а + х, у — а — х = 0;
2)у = \х(И, у—\ хсИ = 0.
В общем случае неявное уравнение записывается в следующем
виде:
/(У, а, *,..., л, л;)=0. (6-32)
Как будет показано ниже, применяя' в СРП отрицательную
обратную связь, можно решить многие такие неявные уравнения,
которые в явном виде не решаются.
После преобразования уравнения в удобную для решения
форму составляют структурную схему счетно-решающего прибора.
В такой схеме указывают, ка.кие операции осуществляются в том
или ином ее элементе, как эти элементы связаны между собой,
куда вводятся входные данные и откуда снимается результат.
На рис. 6-28, а показана структурная схема СРП, часто
применяющегося в различных навигационных системах и
предназначенного для пересчета координат точки при повороте осей координат.
Сущность задачи, решаемой этим прибором, состоит в следующем.
Задано положение точки А ее координатами в осях V и V
(рис. 6-28, б): 1/=05; 1/=В А.
Необходимо определить координаты этой же точки в осях х
и у, повернутых на угол 6 относительно осей Ц и V.
Проведем вспомогательные прямые ЛМ||Ох и ВР\\Оу. Из
чертежа непосредственно следует:
* == ОЕ = ОО + ОЕ = О О + РА \
у=ЕА = ОР = ВР—ВО.
341
Учитывая, что
ОЛ = 05созе = 6гсозб;
/7Л = 5Лз1пв = 1/8тв;
ВР = ВАсозЪ = У со$Ъ;
получаем окончательно:
х = 1/со$Ъ+ Кзшб;
у = ]/гсо$Ь — Ц$тЬ.
Такая система уравнений может быть легко решена
непосредственно при помощи схемы рис. 6-28, а. Пусть значения координат
V и V, а также значения угла 6 поступают в прибор
выраженными через соответствующие электрические напряжения. Для
нахождения тригонометрических функций наиболее удобно
воспользоваться поворотными трансформаторами иди функциональными
^С&Ус'или- I
^Ч/уп тела I
Убили- 1|
Двигатель П тель
_ ТТе
\Линейныо
потенциометр
и
Сов в
V
НЕ
Стабилизированное
*""* напряжение
У
\исозв1 1
х
г—^ ем в
х\Г$тв
{Суммирую
\щий
усилитель
С 05 в
\1Гсозв
\-АИнВерторСЦ Згп в
\\ -.ГЫпВ
\ Суммирую! и
щий уси- ' -
литель
Рис. 6-28. Решение задачи поворота осей координат:
а — схема СРП; б — содержание задачи
потенциометрами. И в том и в другом случаях необходимо
преобразовать значение угла б, выраженное напряжением, в угол
поворота вала. Эту операцию осуществляет следящий привод,
состоящий из усилителя, двигателя и линейного потенциометра,
питаемого стабилизированным напряжением. На общем валу с
линейным 'потенциометром закреплены движки четырех
функциональных: двух синусных и двух косинусных. Суммирование выходных
напряжений позволяет получить выраженные в определенном
масштабе координаты х и у. В схеме предусмотрено инвертирование
одного из слагаемых для получения разности^
342
Аппроксимация сложных функций
Все вычисления в счетно-решающих приборах производятся
с определенными погрешностями, допустимыми при решении тех
или иных задач. В некоторых случаях, когда не требуется очень
высокая точность, можно значительно упростить схему СРП,
выразив некоторые функциональные зависимости приближенно.
Замена одной функции другой, мало отличающейся от
исходной, «называется аппроксимацией.
Различные способы аппроксимации широко используются в
инженерных расчетах. Так, например, при расчете радиопередающих
устройств характеристики генераторных ламп приближенно
изображают в виде отрезков ломаной линии.
Ранее уже приводились примеры использования
аппроксимации в счетно-решающих приборах. К ним относится получение
линейной зависимости напряжения от угла поворота вала при
помощи линейного поворотного трансформатора, а также кусочно-
линейная аппроксимация, применяемая при изготовлении
функциональных потенциометров.
Кусочно-линейная аппроксимация заключается в
представлении отдельных участков сложной функциональной зависимости
в^вдде^охрезкоБ прямой линии. Она может быть сравнительно легко
реализована при помощи простых схем, вследствие чего получила
широкое .применение в моделирующих устройствах, и, в частности,
в радиолокационных имитаторах и тренажерах.
Для осуществления кусочно-линейной аппроксимации
используются диодные функциональные преобразователи напряжения,
представляющие собой сочетание различных схем диодных
ограничителей со схемами параллельного суммирования.
На отдельных участках сложная< функция может быть или
монотонно возрастающей, или монотонно убывающей. На рис. 6-29
показаны графики для некоторых типовых функций
(штриховые лирии), их приближенное выражение на отдельном участке
в виде отрезков прямой (сплошные линии) и схемы диодных
преобразователей, осуществляющих заданный характер изменения
напряжения.
В схеме а до тех пор, пока потенциал точки А остается
отрицательным, напряжение на выходе равно нулю. Увеличение 0ВХ
до значения (У'вх приводит к отпиранию диода, и напряжение на
выходе начинает изменяться пропорционально входному, так как
схема превращается в делитель на активных сопротивлениях.
В схеме б на входе включен инвертирующий усилитель. Поэтому
в<!:е те же самые изменения 1/Вых будут происходить при обратной
полярности 1/вх и график получается симметричным графику а
относительно оси ординат. Схемы виг отличаются обратным
включением диодов, что обеспечивает ограничение выходного
напряжения уже не снизу, а сверху. Напряжение 1/'вх, при котором
343
происходит переход диодов от открытого состояния к закрытому
и обратно, определяется соотношением сопротивлений Я\ и /?2,
величиной напряжения источника смещения Е и его полярностью.
Рассмотренными четырьмя схемами не исчерпываются все
возможные способы включения диодов в схемах функциональных
преобразователей. В частности, диоды могут быть включены
непосредственно на входе схем, а делители, при помощи которых
устанавливается напряжение их отпирания,— на выходе.
ВЫХ
и'в*
и'л
вх
и>
дых
У,
вх
'вых
+1
в б б г
Рис. 6-29. Схемы кусочно-линейной аппроксимации
При необходимости аппроксимировать функцию в широком
интервале изменения аргумента производится суммирование
выходных сигналов от нескольких диодных схем.
ЦгуУвых
Рис. 6-30. Аппроксимация радиальной составляющей
скорости цели:
а — график функции; б — схема
Для работы радиолокационных имитаторов требуется получать
напряжения, изменяющиеся по такому ж«е закону, как текущие
координаты приближающейся цели или скорости изменения
текущих координат. На рис. 6-30 показаны график изменения
радиальной составляющей скорости цели Ут и схема диодного
преобразователя, при помощи которого может быть сформировано
соответствующее Напряжение. Отсчет производится от момента начала со-
344
Применение отрицательной обратной связи
В счетно-решающих приборах отрицательная обратная связь
применяется в следующих случаях:
— для решения уравнений, заданных неявно;
— для выполнения математических операций при помощи схем
и устройств, предназначенных для производства соответственно
обратных действий;
— для решения систем уравнений;
— для согласования отдельных элементов общей схемы СРП
и преобразования величин.
В подавляющем большинстве случаев заданные и искомые
величины связаны между собой довольно сложными неявными
соотношениями. Обычные методы решения задач сводятся к тому,
что путем ряда^ последовательных преобразований та или иная
искомая величина выражается явно через известные, после чего
производятся вычисления искомой величины из полученного
соотношения.
Примером неявно заданной функции является обычное
квадратное уравнение ау2+ву+с=0. После его решения значение у
становится явно выраженным через коэффициенты уравнения а, Ь и с:
. _ — Ь ± У Ь* — 4ас
Другим примером может служить соотношение между
наклонной дальностью цели й, высотой ее полета к и горизонтальной
дальностью г:
которое легко может быть преобразовано в явную форму
относительно любой из входящих в него величин. Например,
г = Уа2 — А2.
Но имеется весьма много уравнений, которые принципиально
не могут быть решены путем преобразования в явную форму. Для
решения таких уравнений разработаны специальные приемы; из
них наиболее распространен метод последовательных
приближений, являющийся по существу методом упорядоченного подбора
корней уравнения. Первое значение корня выбираемся несколько
произвольно, после чего вычислитель проверяет, насколько данный
корень удовлетворяет уравнению. В зависимости•от полученного
результата значение корня изменяется в ту или иную сторону,
пока ошибка не станет достаточно малой.
При такой схеме решения человек выполняет функции цепи
обратной связи, передавая полученный «на выходе» результат
вновь на «вход» схемы. Отработка производится до тех пор, пока
не наступит «равновесие», т. е. пока результат не будет
удовлетворять уравнению. Весь этот процесс может быть автоматизирован
346
включением в следящую систему с отрицательной обратной связью
счетно-решающего прибора (рис. 6-32).
Если величина у является неявной функцией нескольких
параметров а, й, ..., и, то {(у, а, 6,..., п) = 0.
Значения параметров вводятся в устройство, осуществляющее
математические операции, определяемые функцией /. В это же
устройство вводится значение у с выхода схемы.. Если данное
значение не удовлетворяет уравнению, появляется сигнал ошибки,
который будет отрабатываться системой.
а в п
11-1
Вычисли
тельное усп\
ройсглво
Усилитель
К
ив л
1Ь11
Вычисли
тельное ист\
роистёо
Рис. 6-32. Схема СРП с отрицательной обратной
связью:
а <— с применением усилителя; б — без усилителя
По окончании отработки установится статическая ошибка
Это з>начит, что в системе определяется значение у,
удовлетворяющее не исходному уравнению [(у, а, 6, ..., п)=0, а уравнению
/О, в, *,..., л) = 8 = -^-.
При достаточно большом коэффициенте усиления К
величиной 8 можно пренебречь. Тогда
/СУ, а, *,...,л) = 8ж0,
т. е. ошибка в определении у будет незначительной.
Если последовательно с усилителем включить интегрирующее
звено, то система станет астатической и при постоянных значениях
вводимых в схему параметров а, 6, ..., п величина у будет
определяться без установившихся ошибок. В практических схемах
значения параметров все время меняются. Поэтому в системе
возникают переходные процессы и могут появиться динамические
ошибки. При 'выполнении условий самовозбуждения система может
стать неустойчивой.
При решении уравнений вида у=$(у, а,6, ..., п) усилитель
в цепи обратной связи может вообще отсутствовать. Вся схема
при. этом становится проще (рис. 6-32,6). Однако для раз-вязкй
элементов схемы в большинстве случаев в цепи обратной связи
устанавливают усилитель мощности. Очень часто его функции
выполняет следящая система.
347
провождения. Момент прохождения целью точки кратчайшего
расстояния до радиолокационной станции обозначен 1Т.
На вход схемы подается линейно-падающее напряжение.
Режим ламп подобран так, что в исходном состоянии все диоды
заперты, причем установлены различные потенциалы их анодов.
Пока диоды закрыты, напряжение на выходе изменяется очень
незначительно, так как /?9"Э>#8. Величина этого напряжения
подбирается изменением /?7 с таким расчетом, чтобы оно
аппроксимировало начальный участок функции в интервале 01х%
Рис. 6-31. Аппроксимация изменений угла места цели:
а — график функции; б — схема
В момент 1\ открывается диод Дь его сопротивление становится
малым и точка А через диод подключается к источнику С/вх, а
сопротивление /?2 подключается параллельно /?9. Через эти
сопротивления большая часть входного «напряжения передается на
выход схемы, и -выходное напряжение начинает убывать быстрее.
В момент 1ч открывается Д2, параллельно Яд и /?2 подключается /?4
и <7Вых начинает убывать еще быстрее. Затем открывается Д3, что
еще больше увеличивает скорость убывания выходного
напряжения.
Включением в состав преобразователя различных вариантов
диодных схем можно аппроксимировать и более сложные функции.
Примером может служить схема формирования напряжения,
изменяющегося по такому же закону, .как угол места приближающейся
цели (рис. 6-31).
На вход схемы подается линейно-растущее напряжение.
Смещения диодов установлены так, что ,в исходном состояний открыт
только диод Ди имеющий обратное .включение по сравнению с Д2
и Д3. Сопротивление диода в открытом состоянии очень мало, и
через /?! часть входного напряжения передается на выход схемы.
С увеличением Цвх в момент 1Х открывается Д2 .и параллельно #1
подсоединяется /?3- Это увеличивает скорость возрастания С/Вых.
В момент 12 открывается Д3 и .выходное напряжение начинает
расти еще быстрее. Дальнейший рост 11вх приводит к запиранию
Дь что вызывает в интервале Ур замедление в изменениях 1/Пых-
345
В качестве примера использования отрицательной обратной
связи для решения уравнений, заданных неявно, рассмотрим
работу схемы, осуществляющей деление на переменную величину
в соответствии с уравнением у =— .Отсутствие простых и надежно
работающих электронных схем, непосредственно производящих
такую операцию, вынуждает искать другие пути решения.
Преобразуем уравнение в неявную форму:
а — ху = О
/(х, у,а) = а — ху = 0.
что вычислительное устройство для воспроиз-
должно состоять из умножителя и схемы вы-
Продесс решения состоит в том, что выходной
сигнал у умножается на
величину х, после чего
производится сравнение полученного
произведения с параметром а,
вводимым в вычитающее
устройство. Разность 8 является
ошибкой системы: 8=а — ху.
или
Отсюда следует,
водства функции /
читания (р.ис. 6-33),
[вычислительное]
| устройство
| *<х,у,а)
\Вь1читаюш,ее\
*\устройстВо
ХУ.
\ Умножитель
Усилитель
К
К
а
ТОТ
Рис. 6-33. Схема решения уравнения
а
у=т...
Если известны пределы
возможных изменений а и л; и
допустимое значение ошибки 8,
можно определить, каким
должно быть усиление К..
Частйым случаем решения уравнений, заданных неявно,
является осуществление математических операций при помощи схем
и устройств, предназначенных для обратных действий. Данный
метод позволяет производить вычитание при помощи
суммирующего устройства, дифференцирование путем применения
интегратора и. т. д.
Пусть необходимо определить некоторую величину у,
являющуюся заданной функцией известной величины х: у=<р(х).
Для решения этой задачи применим устройство,
осуществляющее обратную математическую операцию х=Р(у). Данное
выражение в неявной форме имеет вид
х— Г(у)=0
или
/(х,У)=х-Г(У)=0.
Отсюда следует, что для получения функции / в состав
решающей схемы должно быть включено вычитающее устройство и
348
устройство, воспроизводящее функцию Р{у). Вся схема в целом
(рис. 6-34, а) представляет собой следящую систему, в которой
измерительным элементом является вычитающее устройство, а в
цепь обратной связи включено звено, осуществляющее операцию
Р(у). Вырабатываемый в системе сигнал у с большой степенью
точности удовлетворяет исходному уравнению, связывающему
х и у.
^Вычислительное*
устройстбо I
Цх,у)--0 |
I*
Вычитающее
устройстбо
Усилитель
К
{Вычислительное \
| устройство \
, У _ и8х | {Вычитающее
1 * л\устройст6о
Ну) |
Пф
\у
ГГ
\йи
Усилитель
И
и8ь»
иос=/и6ь,**1
I
Интегратор
Рис. 6-34. Рещение уравнений при помощи устройств
для обратных действий:
а я- общая схема; б *- дифференцирование при помощи
интегратора
Действительно, в установившемся режиме между сигналами,
действующими в системе, имеют место следующие соотношения:
где Ь = х — Р(у).
Отсюда
ИЛИ
■Если коэффициент усиления усилителя достаточно высок, то
при любых реальных значениях у разность х— Г (у) будет весьма
мала:
*-/>О0»х«о.
Следовательно, в схеме установится значение выходной
величины у, удовлетворяющее соотношению Р (у) = х, которое
эквивалентно исходному уравнению у=Цх).
На ,рис. 6-34,6 показана, схема, в которой для осуществления
дифференцирования применена следящая система; в цепь
обратной связи этой системы включен интегратор. Такое построение
схем позволяет обойтись без «дифференцирующих усилителей,
которые менее удобны в работе по сравнению с интегрирующими.
Здесь напряжение обратной связи представляет собой интеграл
349
выходного. В результате работы системы оно устанавливается
равным входному с погрешностью Д[/, которая может быть
сделана достаточно малой:
^вх-1^вых^=Д^~0
ИЛИ
1/ш
К
М.
Л/в:
Полученное равенство означает, что (/Вых=^р> т. е. что
в схеме осуществлено дифференцирование. Этот же вывод можно
получить и другим путем. Схема рис. 6-34,6 представляет собой
астатическую следящую систему. В такой системе устанавливается
ошибка, пропорциональная скорости изменения входного сигнала,
а В а
[вичиаштемнсе
цстройстбо
Т=Е
*,
I I
У
Усилитель [У^
к.
Г:=|
вычислительное
устройство К
А\
Усилитель
М.
П : \Щ.у.М>л)
~Ж
«,
X
Усилитель
01
^Усилитель
Кг
Уг
Т
{Вычислительное]
устройство
Щ>У2Мч*)
а В а а б
Рис. 6-35. Схема решения системы из двух уравнений
т. е. его производной. В качестве выходного оигаала используется
усиленный сигнал ошибки, который, следовательно, также будет
пропорционален производной входного сигнала.
В вычислительное устройство общей решающей схемы
(рис. 6-32,а), служащей для решения уравнения в неявном виде,
помимо сигнала обратной связи у> в процессе решения вводятся
еще некоторые постоянные или изменяющиеся параметры а, 6, ...,/г.
По мере их изменения вырабатывается новое значение выходной
величины у.
Некоторые из этих параметров могут сами являться выходными
сигналами других решающих схем. В свою очередь сигнал у
может вводиться в другие схемы. При этом получается устройство,
решающее систему из нескольких уравнений с несколькими
неизвестными величинами.
На рис. 6-35, а показана схема для решения системы из двух
уравнений с двумя неизвестными у\ и у*.
/|(Л»Л. а> *,-.., я) =0;
/в (У г
у19 у2) а, *,..., п) =0; 1
1>1> Л, а> Ь,...,п)=0. I
(6-33)
350
ГЛАВА VII
ЭЛЕКТРОННЫЕ ЦИФРОВЫЕ ВЫЧИСЛИТЕЛЬНЫЕ
МАШИНЫ
§ 7-1. ОБЩИЕ СВЕДЕНИЯ
Основным недостатком счетно-решающих приборов
непрерывного действия является сравнительно низкая точность.
Кроме того, счетно-решающие приборы непрерывного действия
являются специализированными, так как могут решать лишь класс
задач, определяемый конструкцией отдельных блоков и схемой их
включения.
Цифровые СРП или цифровые вычислительные машины (ЦВМ)
являются более универсальными; они не обладают указанными
недостатками. В них различные физические величины выражаются
последовательным рядом цифр. Для изображения каждой цифры
заданного числа применяется элемент, который может находиться
в одном из нескольких устойчивых состояний, резко отличающихся
одно от другого. Например, лампа открыта или закрыта, якорь
реле притянут или отпущен, сердечник намагничен или
размагничен и т. д.
Переход из одного состояния в другое происходит очень быстро
под действием сигналов, соответствующих исходным числам,
вводимым в машину. Каждому устойчивому состоянию элемента
соответствует определенная цифра. Все вводимое число изображается
набором таких элементов. ' •
Самые разнообразные математические задачи в цифровых
машинах сводятся к последовательному выполнению четырех
простейших арифметических действий над введенными исходными
числами. Снижение погрешности достигается включением
дополнительного количества элементов, изображающих разряды чисел.
При этом можно обеспечить любую заранее заданную точность
без повышения требования к точности изготовления приборов и
стабильности параметров отдельных элементов.
Современные электронные цифровые машины полностью
автоматизированы и действуют по заранее составленной программе.
352
Программа представляет собой последовательность сигналов или
команд, под воздействием которых машина совершает
определенные операции. Каждая команда задается определенной
последовательностью цифр, т. е. в виде некоторого числа. Это число
называется кодом команды.
В состав цифровых машин входят следующие устройства:-
— устройство ввода данных;
— запоминающее устройство;
— арифметическое устройство;
— устройство вывода результатов;
— устройство управления.
Общая структурная схема ЭЦВМ показана на рис. 7-Г.
Рез у л ьтат
г
\Устройст6о\
—Н 66
ввода
Числа
Програм^
Запомин.
Управление
вводом
т
Числа
Результаты
\Арифметич\
\УЩ ' '
Адреса
5
Га
Операции *
Ус трои с т в о
упрабления
1
{Устройство]
1 быШа '■•'
Управление
выводом
Рис. 7-1. Структурная схема ЭЦВМ
Перед вводом чисел и программы они сначала наносятся на
перфокарты * или перфоленты в виде системы отверстий.
Отверстия пробиваются при помощи перфораторов, представляющих
собой набор пуансонов, управляемых клавиатурой. При
нажатии клавиша пробивается группа отверстий, соответствующих
цифре нажатого клавиша.
В приемнике устройства ввода происходит считывание при
помощи системы контактов, которые замыкаются в тех местах, где
перфокарта имеет отверстия. В результате этого образуются
электрические сигналы, под действием которых происходит запись
чисел и программы в запоминающем устройстве. В некоторых
машинах используется зачерненная перфолента (кинопленка),
которая движется между источником света й рядом фотоэлементов.
Попадая в отверстия перфоленты, луч света освещает
соответствующий фотоэлемент, в цепи которого возникает импульс тока.
Существуют и другие методы ввода чисел и программы.
В запоминающем устройстве имеется большое количество ячеек,
в которых может храниться информация, как вводимая в машину,
так и появляющаяся в процессе работы. Каждому сигналу в
запоминающем устройстве программой отводится определенная ячейка.
* Перфокартой называется бланк из плотной бумаги, на котором в
определенном порядке пробиты отверстия, обозначающие цифры числа. Такая
кодированная запись чисел может производиться и на ленте.
12 Автоматика
353
Так как решение производится с некоторыми ошибками,
соответственно равными ^ = -^-и82 = -^» то, в сущности, можно
утверждать, что схема решает несколько иные уравнения, весьма
близкие к исходным:
Л(Л>Л. *.*>•• м *) = т?7?
— 21-
1г{УьУ»а,Ь,;..уп) = ^
(6-34)
В качестве выходных используются усиленные сигналы ошибки. Следует
отметить, что принципиально безразлично, какой из сигналов ошибки подавать и
на какой усилитель. Можно применить перекрещивающиеся связи, при которых
сигнал ошибки §1 подается на вход /(2, а 82 —на вход К\. При
перекрещивающихся связях решается система уравнений:
Л (У и Уъа,Ь,...,п) = ^;
(6-35)
которая при больших значениях К] и К2 весьма близка к исходной.
Выбор прямой или перекрещивающейся связи определяется исходя из
соображений повышения чувствительности всей системы в целом.
Если при данных значениях у\ и у2 изменения у\ оказывают большее
влияние на величину 81, а изменения у2 на величину Ь2, то чувствительность будет
большей при прямых обратных связях. Если же, наоборот, изменение у\ сильнее
влияет на величину Ъ2у а изменение у2— на &ь то для повышения чувствитель-
ностичобратные связи следует сделать перекрещивающимися. В процессе решения
уравнений при изменении вводимых в систему параметров может возникать
необходимость в переключении выходов. Для этого устанавливают специальные
переключатели *, срабатывающие в момент, когда значения у\ и у2 становятся
равными. Если необходимость в переключении не возникает, то переключатели
выходов в схемах отсутствуют.
В большинстве случаев имеется одно общее вычислительное
устройство (рис. 6-35,6), которое воспроизводит обе функции /1
и /2. Это связано с тем, что для решейия обоих уравнений бывают
необходимы одни и те же параметры или какие-либо
промежуточные величины. Наличие общего вычислительного устройства
значительно упрощает связи между отдельными элементами схемы.
* В счетно-решающих системах, служащих для преобразования координат,
такие переключатели называются квадрантными.
Номер ячейки, в которой хранится данное число, называется его
адресом. Все сигналы, хранящиеся в запоминающем устройстве,
могут быть быстро переданы в соответствующие устройства
машины, что и определяет большую скорость вычислений.
Во время работы машины сигналы программы из
запоминающего устройства передаются в управляющее устройство, где
вырабатываются команды, определяющие действия машины в
определенные промежутки времени, а также адреса чисел, над
которыми производятся операции.
Управляющее устройство может самостоятельно выбирать
нужные сигналы программы, хранящейся в запоминающем
устройстве, и .при необходимости изменять порядок ее выполнения.
Введенные числа по мере поступления команд с их адреса*чи
передаются в арифметическое устройство, где над ними выполняются
действия в соответствии с кодом операции.
Промежуточные результаты поступают в определенные адреса
запоминающего устройства, где хранятся до последующего их
использования. В то же в,ремя из арифметического устройства
в управляющее поступает сигнал о выполнении данной операции.
После этого подается команда на выполнение следующей
операции. Окончательный результат решения задачи через устройство
вывода выдается из машины в виде чисел, отпечатанных на бланке
или на ленте.
Запуск и остановка машины, а также проверка ее работы
производится оператором или автоматически. -Кроме указанных
устройств, имеются внешние устройства, электрически не
связанные с машиной. В них .подготовляются данные для ввода в
машину и анализируются полученные результаты.
В цифровых вычислительных машинах систем автоматического
управления роль устройства ввода выполняют датчики,
преобразующие различные физические величины в серию импульсов,
представляющих собой цифровой код данной физической величины.
§ 7-2. ДВОИЧНАЯ СИСТЕМА СЧИСЛЕНИЯ
Запись чисел в двоичной системе
Для обозначения чисел могут применяться различные системы
счисления. Система счисления — это способ представления чисел
посредством цифровых знаков (цифр). Количество цифр,
необходимых для изображения числа, может быть различным. Наиболее
распространенной является десятичная система, в которой для
записи чисел используются десять знаков — цифр. Каждое число
изображается определенной последовательностью цифр,
разделенных запятой на целую и дробную части. Значение каждой цифры
зависит от ее положения в этой последовательности (позиции).
354
Например, в числе 325,7461 цифра, стоящая на первом^ месте
слева, означает количество сотен, на втором — количество*
десятков, на третьем — количество единиц, а цифры, стоящие после
запятой,— количество десятых, сотых, тысячных и десятитысячных
долей единицы, содержащихся в данном числе.
Любое число х может быть записано в десятичной системе в
следующем виде:
х = ап_г- Ю"-1 + ал_2.10я""2 + ... + аг 101 + а0-10° +
+ а_г 10-1 + а_2. Ю-2 + ... + а_т- КГ™ =
= ап-1ап—2 • • • а1 а0> а~\ Я_2 • • • а-т у
где п — количество разрядов в целой части числа ('количество
цифр до запятой);
т — количество разрядов в дробной части числа (количество
цифр после запятой).
Так, для числа 325,7461 я = 3 и т=4, что соответствует
следующей развернутой записи:
325,7461 = 3 • Ю2 + 2 • 10 + 5 • 10° + 7 • 10"1 + 4 • 10"2 +
+ 6-10~3 + 1 • 10~4 = 300 + 20 + 5 + 0,7 + 0,04 +
+ 0,006 + 0,0001.
Имеются и другие позиционные системы счисления
(восьмеричная, двоичная и др.)- Количество цифр, применяемое в
позиционной системе счисления, называется основанием системы.
В десятичной системе основанием является число десять (10).
В восьмеричной системе счисления для обозначения чисел
используется восемь различных цифр (0, 1, 2, 3, 4, 5, 6, 7). Число
восемь — это первое двухразрядное число. Оно является
основанием системы и записывается уже двумя цифрами 10 (один ноль,
а не-десять).
Наименьшее количество различных цифр для записи чисел
имеет двоичная позиционная система счисления. В ней
используются всего две цифры 0 и 1, обозначающие нуль и единицу.
Число два, являющееся основанием этой системы, записывается
двумя цифрами 10 (один ноль, а *не десять).
Для перевода числа из одной позиционной системы счисления
в другую необходимо представить данное число в виде полинома
относительно основания й «овой системы:
х = ап ап + ап_г <1п~~1 + .- + ахЛ + аоа°.
Наиболее просто это может быть осуществлено путем
последовательного деления данного числа х на основание новой
системы й. Полученные остатки,. начиная с последнего, являются
коэффициентами этого полинома и в то же время цифрами числа
12* 355
в новой системе счисления. Деление нужно производить в
исходной системе счисления. Проследим это на.примере перевода
числа 369 в двоичную систему*:
369
368
1
2
184
184
2
92
0 92
2
46
0 46
2
23
0 22
2
П
1 10
2
5
1 4
1
2
2
2
Отсюда
369=Ь28 + 0-27 + Ь26 + Ь25+Ь24 + 0.23 +
+ 0-22 + 0.21+1-2°
и запись числа в двоичной системе принимает вид 369=
= 10П100012**.
Числа, меньшие единицы, записываются двоичной дробью,
указывающей количество половин, четвертых, восьмых и т. д. долей
единицы в данном числе:
(т-)10=(ш)2=°'012=102-10;
(-г)10 = (ш)2=°.°012=102-пит-д-
Для перевода десятичной дроби в двоичную необходимо
производить последовательное умножение дробных частей на
основание новой системы счисления, до тех пор пока дробная часть не
превратится в нуль или в очень малую величину (в случае
непрерывной двоичной дроби). Полученные целые части произведений
и представляют собой дробную часть числа, записанного в этой
системе.
* Первый остаток деления указывает количество в данном числе единиц (2°),
второй —двоек (21), третий — четверок (22) и т. д.
** Индекс «2» означает, что число записано в двоичной системе.
356
Например, требуется найти двоичную запись десятичной
дроби 0,375:
0,375
" 2
0,750
2_ Ответ: 0,01 Ц.
1,50
2
1,0
Если число имеет целую и дробную части, то целая и дробная
части переводятся в новую систему отдельно, а затем все число
записывается в новой системе счисления.
Для записи двоичных чисел элементы запоминающего
устройства должны иметь всего лишь два устойчивых состояния:
«включено» (открыто) и «выключено» (закрыто), что весьма удобно
в электронных системах.
Для записи любого числа необходимо иметь столько
элементов в запоминающем устройстве (ячейке «памяти»), сколько
двоичных цифр имеется в данном числе. Для записи числа в
машине одно (первое) состояние условно обозначается юулем,
а второе — единицей.
Например, для записи числа 101110001= (369) необходимо
иметь девять элементов с двумя устойчивыми состояниями:
1
закр.
0
откр.
1
закр.
1 1
закр. закр.
0
откр.
0
откр.
0
откр.
1
закр.
Хотя двоичные числа имеют значительно больше разрядов, чем
десятичные, но количество возможных цифр в каждом разряде
минимально (всего две). Поэтому количество цифро-разрядов,
необходимых для записи числа в двоичной системе, меньше, чем в
десятичной. Кроме того, в двоичной системе проще выполняются
математические операции.
Недостаток двоичной системы — необходимость перевода
десятичных, чисел, вводимых в машину, в двоичную систему и
обратного преобразования полученного результата.
Арифметические действия в двоичной системе счисления
В двоичной системе счисления арифметические действия:
сложение, вычитание, умножение и деление — выполняются по тем же
правилам, как и в десятичной системе счисления.
* Результат первого умножения указывает на наличие половины, второго
четвертой, третьего — восьмой и т. д. частей единицы в данном числе.
357
Таблица сложения очень проста и имеет следующий вид:
0+0=0; 0+1=1; 1+0=1; 1 + 1=10 (два)
Сложение многозначных чисел производится поразрядно. Если
при сложении получается число, большее единицы, то
производится перенос единицы в старший разряд.
Примеры*
1)
10 |
1
П
и
3
2) +1011
ПО
и
1 6
3) , 10000111
+ 1010110
10011001
1+ 67
+ 86
Г 153
3
1
2
2) 1001
~~ 1\
И
1 4
~~1
з
3)
101011|
~~ 10110
10101
1 ^З
"22
21
Также поразрядно производится и вычитание чисел, причем
если в разряде уменьшаемого числа цифра меньше, чем у
вычитаемого, то следует «занять» единицу в старшем разряде и
вычитание производить из 10 (10—1 = 1). Вычитание старших
разрядов производится в обычном порядке с учетом уменьшения на
единицу.
Примеры:
1) _И.
1
10
В ЦВМ действие вычитания для удобства заменяется
сложением с некоторым другим числом, обратным данному**, и-перено-
сом единицы из старшего разряда в младший. Обоснование
такого приема очевидно из следующего примера. Разность (43—22)
в двоичной записи имеет вид 101011—10110. Дописав спереди
нули, уравняем количество разрядов вычитаемого и уменьшаемого
и преобразуем разность
101011 —010110= 101011 — (1000000— 101001—000001).
Легко убедиться, что. выражение, стоящее в скобках, равно
вычитаемому. Первое число в скобках содержит единицу только
в разряде, старшем высшего разряда уменьшаемого: последнее —
только в самом младшем, а среднее число является обратным
вычитаемому. Раскрыв скобки, получим
101011 + 101001 — 1000000 + 000001.
Здесь первые два слагаемых представляют собой сумму
уменьшаемого с числом, обратным вычитаемому. Третье слагаемое
указывает на то, что от старшего разряда суммы должна быть
отнята единица, а четвертое — что к младшему разряду суммы
единицу нужно прибавить. Перенос единицы из старшего разряда
* Рядом показано действие над теми же числами в десятичной системе.
** Условимся называть число обратным данному, если оно получено
поразрядной заменой единиц нулями, а нулей единицами.
358
чисел, т. е. к алгебраическому суммированию. Для осуществления
сложения построены простые устройства — сумматоры, которые
являются основными элементами цифровых вычислительных
машин.
Способы записи чисел в ячейках памяти машин
Нормальная форма записи. При решении задачи
необходимо знать знаки чисел и положение запятой, отделяющей
целую часть от дробной. Для этого применяют кодированную
запись чисел в элементах памяти машины.
Для записи знака числа в ячейке памяти отводится нулевой,
или знаковый, разряд, расположенный перед цифровыми
разрядами. Положительные числа обозначаются юулем в знаковом
разряде, а отрицательные — единицей. Само число записывается
в цифровых разрядах ячейки памяти. Ячейка памяти,
разделенная на разряды, называется разрядной сеткой.
В некоторых типах машин положение запятой в разрядной
сетке заранее определено, т. е. зафиксировано, и для записи
каждой части числа (целой и дробной) отводится ограниченное
количество разрядов. Такие машины называются машинами с
фиксированной запятой. Ниже приведена запись одного и того же
числа 101,011101, взятого с положительным и отрицательным
знаком, в ячейке памяти, содержащей четыре разряда для целой
части и восемь для дробной.
Знак
Целая часть
Дробная часть
0 | 1 | 0 | 1 |, | 0 [ 1 | 1 | 1
I 1
0 10 1
1 1 1 I 1
1 0
В машинах с фиксированной запятой возникают неудобства
при записи малых и больших чисел. В первом случае окажутся
пустыми (незанятыми) разряды целых чисел и переполненными
разряды дробной части числа. Во втором, наоборот, будут
переполнены разряды целых чисел. Переполнение означает, что
в числе имеется больше разрядов, чем в разрядной сетке ячейки
памяти.
Если переполнение разрядов дробной части числа приводит
лишь к незначительному снижению точности вычислений
(теряются младшие разряды), то переполнение разрядов целых
чисел приводит к искажению результата вычисления (теряются
старшие разряды). Чтобы избежать переполнения разрядной сетки,
можно все числа, используемые при решении задачи, заранее
умножить на масштабные коэффициенты, т. е. превратить их
в правильные дроби. Это позволит применить разрядную сетку
360
с запятой, фиксированной после знакового разряда. Однако и
в этом случае возникают трудности в правильном подборе
масштабных коэффициентов.
Этот недостаток отсутствует в машинах с плавающей запятой,
в которых, кроме знакового и цифровых разрядов, есть
специальные разряды в разрядной сетке, где указывается положение
запятой.
Любое число х можно представить в следующем виде:
х = тс1р = т(10)р,
где т — мантисса числа х\
<1 — основание системы счисления, которым для всех систем
является число 10 (один ноль);
р —порядок числа.
Такая форма записи чисел называется нормальной формой.
Если мантисса числа х удовлетворяет условию
-уд-</ю<1,
где 10 (один ноль)—основание системы, то запись х называется
нормализованной. При этом число оказывается записанным в виде
правильной дроби, в которой после запятой стоит значащая
цифра. Если это условие ие выполнено, то число считается
ненормализованным. Например, число *!= 1101,0112 двоичной
системы в нормализованной форме имеет следующую запись:
л:1 = 1101,011 =0,1101011 • 10100.
^Число ЛГ2=0,001112 после нормализации будет записано так:
х2 = 0,00111 =0,11 МО"10.
Аналогично нормализуются и отрицательные числа, но
мантисса будет иметь отрицательный знак:
хг я _ 0,0000011 = — 0,11 • Юг**.
Показатель степени р указывает, на сколько разрядов вправо
(при р>0) или влево (при р<0) нужгао перенести запятую, чтобы
из нормализованной формы записи получить обычную.
В цифровых машинах с плавающей запятой действия
производятся с нормализованными числами. При этом значительно
сокращается количество заполненных разрядов разрядной сетки
при записи очень больших и очень малых чисел, что практически
исключает ее переполнение и повышает точность вычислений.
Знак числа по-прежнему записывается в знаковом разряде
нулем ( + ) или единицей (—), а мантисса числа — в числовых
разрядах. Целая часть от дробной не отделяется, так как целая
361
в младший называется циклическим; в ЦВМ он осуществляется
автоматически:
, 101011
+ 101001
1010100
Циклический перенос
10101
Получен такой же ответ, как и при вычитании обычным
методом (пример 3 на вычитание).
Очень'проста в двоичной системе таблица умножения:
0-0 = 0; 0-1=0; Ь0 = 0; Ы = 1.
Характерным для умножения в двоичной системе счисления
является то, что частными произведениями получаются или
множимое число, если умножение производится на 1, или нули, если
умножение производится на нуль. Частное произведение, равное
нулю, не записывается, а следующее частное произведение
сдвигается влево на два разряда.
При наличии в множителе рядом двух нулей сдвиг
производится «а три разряда и т. д. Все сдвинутые частные произведения
суммируются по правилам сложения.
Умножению числа на основание системы счисления
соответствует сдвиг числа на один разряд влево: 101001x10=1010010.
Примеры:.
1) уПО
Х 11
, ПО
+ 110
10010
У6
*3
18
2) ^10110
х 1011
10110
+ ЮНО
10110
11110010
V22
х11
22
22
242
При делении пользуются правилами умножения и вычитания.
Действия сводятся к вычитанию из делимого делителя,
дополнению справа полученного остатка, новому вычитанию делителя, и
так до получения нулей в остатке.
Пример:
100011110
1101
10011
1101
1101
1Щ
00
1101 1
10110
1 286 1 13
26 1 22
26
2§
0
Делению числа на основание системы соответствует сдвиг
числа вправо на один разряд: 101001:10=10100,1.
Из рассмотренных примеров видно, что все арифметические
действия сводятся в конечном счете к сложению и вычитанию
359
часть мантиссы всегда равна нулю. Указатель положения запятой
(показатель степени р) записывается после цифровых разрядов:
Знак порядка
/.—
1 II 1 1 1 1 1 1 1 II II
порядок
1 1 1
1
/ О
Знак < ^
числа Цифровые разряды
3 4 5 6 7 8 9 10 11 12 13
Указатель положения запятой
Ниже показана запись нормализованных чисел #ь х2 и *з
в разрядной сетке машины с плавающей запятой:
1 о 1
1 0
1 1 1
| 1
| 1
1 1
1
1
1
0 1
1
0 1
1 | 0
0 | 0
0 | 0
1
0
0
1
0
0
о|
о
о|
о
| 1
| 1
1 о
Ю
[о
1
ю
1
0
1
0
0,|
°1
1 |
При выполнении арифметических действий производится
автоматическая нормализация полученного результата.
Одновременно от порядка р отнимается или к нему прибавляется
количество единиц, на которое произведен 'сдвиг мантиссы.
Например, для нормализации числа лг4=0,0001101 • Ю-101
необходимо произвести сдвиг мантийсы влево на три разряда/ а от
показателя порядка (р=—101) отнять три единицы (Иг):
—101 —11=—1000.
После нормализации получим
хА = 0,0001101 • Ю-101 = 0,1101. Ю-1000.
Для (нормализации числа лг5 =1,11001 • Ю-110 мантиссу сдвигают
вправо на один разряд, а к показателю порядка прибавляют
единицу:
хь = 1,11001 • Ю-110 = 0,111001.10-'01.
Рассмотренный выше способ записи чисел в виде правильной
двоичной дроби условимся называть прямым кодом. При решении
задач применяются и другие коды, отличающиеся от прямого.
В этих кодах записываются нормализованные двоичные числа.
Наиболее употребительным оказался модифицированный
обратный код, который рассмотрен ниже.
Модифицированный обратный код.
Модифицированный обратный код положительного числа совпадает с самим
числом, а код отрицательного числа представляет собой число,
обратное данному. Знак числа записывается двумя разрядами:
362
нулевым и первым (считая слева направо). Положительные
числа обозначаются «00», а отрицательные «11»*.
Например, число х=—0,11001 в модифицированном обратном
коде будет записано так:
[*]5р = "11,00110".
Замена нулей единицами, а единиц нулями, производимая для
получения обратного кода, называется поразрядным логическим
отрицанием и обозначается следующим образом;
Г=0; 0=1.
Запись чисел в модифицированном обратном коде позволяет
непосредственно производить вычитание путем сложения с
обратным числом, причем при необходимости осуществляется
последующий циклический перенос единицы из старшего разряда в
младший. Знак результата получается суммированием знаковых
разрядов слагаемых. Если абсолютная величина суммы чисел равна
или больше единицы: \х + .у|>1,—-то при сложении единица из
старшего числового разряда переходит в знаковый. Это явление,
называемое переполнением разрядной сетки, возможно только при
сложении чисел с одинаковыми знаками. Например,
х = 0,11000 [*]|*р = 00,11000
.У = 0,10001 №Р = 00Д 0001
х + у = 1,01001 [х]% + №бр = 01,01001
Полученное число не имеет смысла, так как «е определен его
знак.
Признаком переполнения разрядной сетки сумматора является
несовпадение цифр в знаковых разрядах (10 или 01). Старший
разряд дробной части перещел в первый знаковый разряд. Для
восстановления результата необходимо все цифры передвинуть на
один разряд вправо, т. е. умножить на 10, а в освободившемся
#евом разряде оставить- ту же цифру, что в нем была ранее.
Произведенный сдвиг должен быть учтен изменением порядка р
числа.
Для рассмотренного примера после сдвига
[* + .Ййр = 00,101001.
После перехода к обычной записи и учета сдвига вправо
умножением на 101 получим
х + у = 0,101001.101 = 1,01001.
* В обратном коде в отличие от модифицированного обратного кода знак
числа записывается не двумя, а одним знаковым разрядом. В некоторых случаях
это приводит к искажению результатов вычислений. Поэтому обратный код
применяется очень редко.
** Нули в младших разрядах модифицированного обратного кода
отбрасывать нельзя,
363
В цифровых машинах эти преобразования производятся
автоматически. Специальное устройство сравнивает две цифры
знакового разряда и при их отличии посылает определенный сигнал
в управляющее устройство, которое выдает необходимые команды.
Таким образом, наличие двух знаковых разрядов исключает
искажение результата при переполнении разрядной сетки.
Если при сложении в модифицированном обратном коде в
знаковых разрядах получается число, равное или большее 100, то
путем циклического переноса единица из старшего разряда
переносится в младший.
Арифметические операции с нормализованными числами
Алгебраическое сложение. В ЦВМ с запятой,
фиксированной после нулевого разряда, сложение производится в
одном из рассмотренных кодов. Порядок сложения был изложен
выше. В машинах с плавающей запятой эта операция выполняется
преимущественно в модифицированном обратном коде.
Действие выполняется в следующем порядке.
1. Уравниваются порядки слагаемых путем денормализации
числа с меньшим порядком. Число с меньшим порядком
сдвигается вправо на количество разрядов, равное разности порядков
чисел.
2. Мантиссы слагаемых переводятся в модифицированный
обратный код и складываются в сумматоре с циклическим
переносом. При переполнении разрядной сетки сумматора
производится нормализация сдвигом вправо.
3. Результат переводится в прямой код. Порядком результата
является общий порядок слагаемых.
4. Производится нормализация результата (при
необходимости) и запись его в ответную ячейку памяти.
Рассмотрим примеры сложения нормализованных чисел в
модифицированном обратном коде.
Пример 1.
Слагаемые х и у записаны в прямом коде:
0 10110100 0 0101 (х = 0,101 ЮЫО1*1)
1 10001100 0 0111 (у = —0,10001 МО1")
1. Уравнивание порядков слагаемых:
1112—1012=102 (два).
Мантисса первого слагаемого сдвигается вправо на два
разряда:
0,00101101 0 0111.
2. Перевод мантисс в модифицированный обратный код и
сложение: 00,00101101
+ 11,01110011
11,10100000
364
2. Производится алгебраическое сложение порядков для
нахождения порядка результата. Порядки складываются в
модифицированном коде при помощи обычного сумматора.
3. Производится перемножение мантисс, которое сводится
к последовательному сдвигу мантиссы множимого числа на
количество разрядов мантиссы множителя. Результаты сдвигов
(частные произведения) подаются на сумматоры, где происходит
их последовательное суммирование. После, нормализации
результат умножения записывается в ответной ячейке.
Деление. Деление чисел производится в прямом коде в
следующем порядке.
1. Определяется знак частного путем сложения нулевых
разрядов.
2. Определяется порядок частного путем вычитания из
порядка делимого порядка делителя.
3. Производится деление мантисс, которое сводится к
вычитанию делителя из - делимого, дополнению справа полученного-
остатка, нового вычитания делителя из делимого и т. д. После
нормализации результат записывается в ответной ячейке.
Основные логические операции. Для решения задач
в ЦВМ используется аппарат математической логики, при помощи
которого преобразуется поступающая информация. Этот аппарат
позволяет самые сложные логические операции представить в виде
комбинации ряда элементарно простых. В математической логике
любое суждение, относительно которого имеет^смысл утверждение
б'^его!Гистйнностй йли^ложности, называется высказыванием. Не-
возможно_ высказывание^, которое одновременно является и
истинным, й~ ложным^!
"" "Для~вБГПцлтгё'н'ия операций математической логики может быть
применена двоичная система счисления, которую можно весьма
просто использовать для решения разнообразных задач.
^Основными логическими операциями, применяемыми в
цифровых машинах, являются отрицание высказывания (логическое
отрицание), сложение высказываний (логическое сложение) и
^мн^женйе высказываний—(логическое умножение).
-^^ТГогическое отрицание условно обозначается^'"НЕ"' или НЕТ. 7
Для высказывания А отрицание записывается А и читается «не
Л». Отрицание ложного высказывания есть истинное
высказывание, а отрицание истинного высказывания есть ложное.
Если в двоичной системе счисления ложное высказывание
обозначить 0, а истинное 1, то можно записать
0=1; Т = 0.
С операцией логического отрицания приходится часто
встречаться при записи чисел в обратном коде.
]"| Логическое сложение условно обозначается ИЛИ. Для
нескольких высказываний А, Б, В и т. д. сложение записывается и
читается «А или Б или В» и т. д. Логическое сложение высказы-
366
ваний является сложным высказыванием, которое будет истинным
при истинности хотя бы одного из входящих в него
высказываний и ложным, если ложны все высказывания.
Логическое сложение в двоичной системе счисления
записывается:
0 + 0 = 0; 0+1 = 1+0=1; 1 + 1 = 1.
Здесь « + » обозначает логическое сложение ИЛИ.
]Т> Логическое умножение условно обозначается И и для
нескольких высказываний Л, Б, В и т. д. записывается и читается «Л и
Б и В» и т. д. Логическое умножение высказываний является
сложным высказыванием, которое будет истинным лишь в случае
истинности всех входящих в него высказываний. Во всех других
случаях оно ложно.
Логическое умножение в двоичной системе записывается:
0x0 = 0; 1X0 = 0X1=0; 1X1 = 1.
Здесь «X» означает логическое умножение И%
§ 7-3. ЭЛЕМЕНТЫ ЭЛЕКТРОННЫХ ЦИФРОВЫХ МАШИН
Цифровые вычислительные машины содержат большое
количество типовых элементов, выполняющих простейшие
математические операции. Из последовательного выполнения таких
простейших операций в соответствии с заданной программой
складывается решение сложных задач.
Существует несколько типов цифровых вычислительных машин,
которые различаются по следующим основным признакам.
а) Способ выполнения арифметических
операций. По способу выполнения арифметических операций
различают машины параллельного и последовательного действия.
В машинах параллельного действия передача чисел,
выполнение арифметических операций, выбор и запись чисел производятся
одновременно всеми разрядами по параллельным каналам. В
машинах последовательного действия все указанные операции
производятся последовательно разряд за разрядом. Машины
параллельного действия обладают высокой скоростью вычислений, но
они сложнее, чем машины последовательного действия.
б) Способ отделения дробной части. По способу
отделения дробной части ЦВМ делятся на машины с
фиксированной запятой и машины с плавающей запятой. Общая
характеристика машин обоих типов была дана выше.
в) Количество адресов в команде. По количеству
адресов различают машины с одно-, двух- и трехадресной
системой команд.
В арифметическом действии участвуют два числа: два
слагаемых, уменьшаемое и вычитаемое, множимое и множитель или де-
367
3. Перевод результата в прямой код:
1 01011111 0 0111.
4. Нормализация результата (сдвиг влево на один разряд) и
запись его в ответную ячейку. Порядок становится
равным 111—1 = 110:
1 10111110 0 ОНО.
В ответе получилось число
х + у = — 0,101111Ы0110 ==—101111,1.
Пример 2.
Слагаемые записаны в ячейке в прямом коде:
л: II 1 11001100 1 ОНО (х = —0,11001 Ы0-»°)
у II 1 11111000 1 0100 (у = —0,1111Ы0-"»)
1. Уравнивание порядков слагаемых.
Мантисса х сдвигается вправо на два разряда:
■*||1 00110011 1 0100 (х = — 0,00110011 • Ю-*00).
2. Перевод мантисс в модифицированный обратный код и
сложение:
, 1111001100
1100000111
11011010011
Циклический перенос дает 1011010100.
Произошло переполнение разрядной сетки, поэтому
производится нормализация сдвигом на один разряд вправо:
11 011010100 1 ООН.
3. Перевод результата в прямой код:
1 100101011 1 ООП.
Результат нормализован, поэтому в таком же виде он
записывается в ответной ячейке.
В ответе получилось число
х + у = —0,100101011.10-и.
Умножение. Умножение чисел в цифровых машинах
производится в прямом коде в следующем порядке.
1. Определяется знак произведения путем сложения нулевых
(знаковых) разрядов. Если при сложении получается число 10, то
старший разряд (1) теряется, так как для хранения знака числа
в прямом коде отводится только один разряд.
Правило знаков при умножении показано в таблице
0 + 0 = 0 (+).(+)«(+)
0+1 = 1 (+).(-) = (-)
1+0=1 (_).(+) = (-)
1 + 1 = [1]0 (-)•(-) = (+)
365
/штель и делимое; з результате получается третье число: сумма,
разность, произведение #или частное. Поэтому из управляющего
устройства в запоминающее устройство должны поступать
команды, указывающие адрес ячейки, из которой нужно взять
первое число, адрес ячейки, из которой нужно взять второе число,
и адрес ячейки, в которую нужно направить результат
вычисления.
В машинах с одноадресной системой команд в запоминающее
устройство подаются три команды, в каждой из которых
содержится по одному адресу. В машинах с двухадресной системой
команд используются две команды, а результат вычисления
всегда передается в ячейку, освободившуюся после взятия числа
второй команды. В машинах с трехадресной системой команд длЪ
выполнения одного арифметического действия в запоминающее
устройство подается одна команда, в которой содержатся * три
адреса. Применение трехадресной системы команд упрощает
программирование, так как значительно уменьшается общее
количество команд для решения одной задачи. Быстродействие машины
не зависит от выбранной системы команд, так как количество и
продолжительность обращений к запоминающему'устройству
получаются одними и теми же. Одноадресная система команд
применяется в небольших машинах, предназначенных для
сравнительно несложных расчетов.
Основные логические элементы
Для построения логических схем используются
переключающие устройства, которые могут находиться в одном из двух
состояний, резко отличающихся одно от другого. Переключающие
устройства под воздействием подводимых к ним сигналов
изменяют напряжения, действующие в электрической цепи. В ЦВМ
единица изображается положительным потенциалом, или
положительным импульсом напряжения, а нуль — отсутствием
напряжения (нулевым потенциалом) или отсутствием импульса. Нулем
также считается небольшое остаточное напряжение, а иногда
отрицательный импульс напряжения.
Рассмотрим простейшие электронные схемы НЕ, Я, ИЛИ,
производящие основные логические операции. 7
а) Инвертор. Инвертор служит для выполнения логической
операции НЕ (НЕТ). Схема инвертора и его условное
обозначение показана на рис. 7-2, а, б. Сопротивления Я[К2 образуют
делитель, к которому подключен источник отрицательного
смещения Ес. При отсутствии сигнала на входе (нуль на входе) лампа
закрыта напряжением смещения и на выходе будет положительное
напряжение +Еа (единица). При подаче на вход положительного
напряжения (единица на входе) лампа откроется и напряжение
на выходе резко уменьшится (нуль на выходе). *
368
б) Схема совпадения. Схема совпадения выполняет
логическую операцию И (рис. 7-3). При отсутствии входных
сигналов (нули на всех входах) все диоды открыты. Через них от
источника Е& протекает ток, который создает на сопротивлении /?
большое падение напряжения. Напряжение на выходе становится
очень малым (нуль на выходе).
Подача положительного сигнала (единицы) на один из входов
схемы приводит к запиранию только одного диода, а 'остальные
диоды обеспечивают протекание тока через сопротивление /? и
поддерживают низким напряжение на выходе (нуль).
Положительный сигнал «а выходе (единица) появится лишь
при одновременном воздействии
положительных сигналов (единиц)
на все входы схемы. Отсюда
происходит название «схема
совпадения».
Г°
Выход
Выход А
9
Входы
Выход
с
I
III.
а -
пи
А В ВГ
Входы
б
НЕЛ
Выход I
Вход А
Выход А
Вход А
б
■ * ±Д
Вход и ,Т Выход
Управляющий е->-
дход Управляющий
±
а
Рис. 7-2. Инвертор:
а — принципиальная схема; б — ло*
гическая схема
Вход
е г
Рис. 7-3. Схема совпадения:
а — принципиальная схема; б —
логическая схема; в — управляемый
вентиль; г —логическая схема
вентиля
Схема совпадения может быть собрана и «а многосеточной
лампе, управляемой по двум или трем сеткам.
Упрощенная схема И может быть использована в качестве
управляемого вентиля или клапана (рис. 7-3,в). Положительное
входное напряжение будет по- Выхода
дано на выход лишь в том ,—г—■ т, , 9 , I
случае, если на управляющем ^Х.Х ЛЛХ I .—1
входе будет положительное на- 7
пряжение высокого уровня,
запирающее диод. При его
отсутствии диод будет открыт и
произойдет ограничение
входного напряжения. Напряжение
на выходе будет близким к
нулю (вентиль закрыт) А
Входы
А Б В Г У
ММ
Выход
ИЛИ
тт
А В В Г
. Входы
Рис. 7-4. Собирательная схема:
а — принципиальная схема; б = логическая
13 Автоматика
369
в) Собирательная схема. Собирательная схема
выполняет логическую операцию ИЛИ; она также имеет несколько
входов и один выход (рис. 7-4). При отсутствии входных сигналов
(нули на всех входах) напряжение на выходе равно нулю. При
подаче положительного напряжения (единицы) хотя бы' на один
вход схемы происходит открытие соответствующего диода. Через
сопротивление /? будет протекать ток, который создаст на выходе
положительное напряжение (единица). Схема называется
собирательной потому, что она производит собирание единиц,
поступающих с различных направлений. Диоды обеспечивают разделение
входов, исключая возможность прохождения сигналов с одного
из входов на другие.
Собирательная схема может быть выполнена на нескольких
усилительных лампах с общей нагрузкой.
Арифметические устройства
Из рассмотренных простейших логических схем могут быть
составлены более сложные логические и вычислительные
схемы ЦВМ.
Выходы
Выхо ды
Управляющий
Вход
дг\ Щ дЦ
"■А *п *п
1 1 Л
Управляющий
вход
19
"г
Выходы
Ш
ГГ ТТ 1
г*
Входы
б
ПГП I Цепочка _
-I Т ющий бход \1 I Г
3& |1 г« 39
Входы
6
Входы
а
Рис. 7-5. Цепочка вентилей:
а — принципиальная схема; б —логическая схема; в — упрощенная логическая схема
Рассмотрим основные комбинированные электронные
логические схемы.
а) Цепочка вентилей. Цепочка вентилей представляет
собой соединение нескольких логических схем И. На. рис. 7-5
показана схема цепочки вентилей с одним управляющим входом
(управляющей шиной).
По цепям /, 2 и 3 со входа на выход может быть передан
положительный сигнал только тогда, когда на управляющий вход
подан положительный сигнал высокого уровня, запирающий диоды
Ди Дв, Дз.
Цепочка вентилей применяется для управления передачей цифр
двоичных чисел с одного элемента СРП на другой.
б) Двойной вентиль. Схема двойного вентиля является
соединением логических схем И и ИЛИ (рис. 7-6). На выход
схемы может поступить положительный сигнал со входа / или 2
370
в зависимости от того, на какую управляющую шину подан
положительный управляющий сигнал. Если управляющий сигнал
высокого уровня (единица) подан на шину Ш\, а на управляющей
шине Ш2 действует сигнал низкого уровня (нуль), то «а выход
пройдет сигнал со входа /, так как закрытым окажется только
диод Д\ и он не будет шунтировать свою выходную цепь. При
подаче положительного управляющего сигнала на другой
управляющий вход на выход пройдет сигнал со входа 2, а вход 1
окажется отключенным. - *
Диоды Д3 и Д4, выпбл- ,—Х
няющие логическую
1
/0-
Д3± ±4, ш„
Входы
ИПИ
Шо
№~
Входы
Управляющие
Входы ~
Входы
а б
Рис. 7-6. Двойной вентиль:
а — принципиальная схема; б •-= логическая схема
9 Выход
Выход
Операцию ИЛИ, ИСКЛЮ- Управляющие МГд
чают шунтирование **пЙК' * 1
выхода схемы
оставшимся открытым
диодом (Д\ или Д2).
Поэтому они называются
развязывающими, или
блокирующими,
диодами.
Двойной вентиль
является простейшей
избирательной схемой. Если добавить еще один вход и
управляющую шину Щ, то получим схему тройного вентиля и т. д.
в) Одноразрядный преобразователь. Для
получения обратного кода числа можмо из логических схем НЕТ и
двойного вентиля составить схему
специального преобразователя
(рис. 7-7).
Преобразователь имеет два вхо«
да: один для цифры, а другой для
знака. Схема НЕТг производит
логическое отрицание разряда:
заменяет нуль единицей, а единицу
нулем. Когда подано отрицательное
число (единица на входе 2),
схема И\ подготовлена к открытию.
Обратное число с выхода НЕТХ
пройдет на общий выход, так как,
если оно является единицей, то в
схеме Их произойдет совпадение и
на выходе появится положительный
сигнал, а если нулем, то схема И\
останется закрытой и на ее выходе
будет нуль. Схема И2 в это время
закрыта, так как с выхода НЕТ2 поступает нуль.
Если же подано положительное число (нуль на входе 2), то
схема Их заведомо закрыта, а схема Я2 подготовлена к.откры-
Рис. 7-7. Одноразрядный
преобразователь:
а — логическая схема; б —
упрощенная логическая схема; е —
упрощенная схема преобразователя
знака
13*
371
тию, так как на один из ее входов со схемы НЕТ2 подан
положительный сигнал (единица). Поэтому со входа / прямое
значение цифры через схему И2 и ИЛИ пройдет на выход.
Таким образом, цифры положительных двоичных чисел
проходят на выход «неинвертированными, а отрицательных —
инвертированными, что и требуется для получения обратных кодов.
Результаты работы преобразователя могут быть записаны в виде
таблицы 7-1, в которой для всех возможных комбинаций сигналов на
входах указан сигнал на выходе.
Таблица 7-1
Входы
1
0
1
0
1
2
0(+)-
0(+)
Н-)
Н-)
Выход
3
0
1
1
0
Для преобразования многоразрядного числа необходимо
применить несколько таких преобразователей.
Преобразование знаков, необходимое при вычитании чисел,
также может быть выполнено при помощи такого же
преобразователя (рис. 7-7,в). На него подается знак числа, и сигнал с
управляющего устройства, определяющий операцию (0 —
сложение, 1—вычитание). На выходе преобразователя знак числа
меняется на обратный, если с управляющего устройства подан
сигнал 1 (вычитание). Результаты работы преобразователя даны
в табл. 7-2.
Таблица 7-2
1
0(+)
Н-)
0(+)
К-)
Входы
2
0( + )
0( + )
К-)
К-)
Выход
3
0(+)
Ч-)
Ч-)
0(+)
г) Схема сдвигателя. Сдвиг двоичных чисел,
необходимый при иормализации чисел и при умножении, производится при
помощи схемы, составленной из управляемых вентилей (схемы И)
и развязывающих диодов (схемы ИЛИ). Схема сдвигателя вправо
для сдвига трехразрядных двоичных чисел показана на рис. 7-8.
Из схемы видно, что при подаче положительного напряжения
высокого уровня (единица) только на шину Ш0 будут
подготовлены к открыванию схемы Яь Иь И7 (диоды Ди Да, м закрыты),
372
Сигналы двоичных чисел, поданные на входы /, 2, 3, будут
переданы на выходы /, 2, 3, т. е. пройдут без сдвига.
При подаче положительного напряжения только на шину Ш\
будут подготовлены к открыванию схемы Я2, И5 и Я8 (диоды Дг,
йъ и Д8 закрыты). Сигналы со входов /, 2, 3 будут переданы со
ответственно на выходы со сдвигом на один разряд вправо.
Аналогично при подаче положительного напряжения на
шину Ш2 произойдет сдвиг числа на два разряда вправо. Для
сдвига чисел с большим количеством разрядов и на большее
число разрядов можно увеличить количество входов и
управляющих шин. Если изменить коммутацию выходов, можно производить
сдвиг влево.
Перенос
Перенос
входы слагаемых
/23
Входы слагаемых
Рис. 7-9. Одноразрядный двоичный сумматор:
а —логическая схема; б — упрощенная логическая схема
д) Одноразрядный двоичный сумматор.
Основным элементом арифметического устройства является
одноразрядный двоичный сумматор. Логическая схема сумматора на три
слагаемых показана на рис. 7-9. Работу схемы рассмотрим на
примере сложения трех одноразрядных чисел, записанных
в табл. 7-3.
Таблица 7-3
№ рядов
1
2
3
4
5
6
7
8
1
0
1
0
0
1
0
1
. 1
Входы
2
0
0
1
0
1
1
0
1
,
3
0
0
0
1
0
1
1
1
Выходы
4
0
0
0
0
1
1
1
1
5
0
1
1
1
0
0
0 •
1 '
374
Логические схемы Ии И2 и И3 контролируют по две цифры
слагаемых, и при. совпадении единиц хотя бы в одной из этих
схем единица будет передана через схему ИЛИ\ в старший
разряд, так как сумма получается большей единицы (5, 6, 7, 8 ряды
таблицы).
Остальные элементы обеспечивают получение на выходе цифры
младшего разряда суммы. Наличие единиц у двух слагаемых
должно обеспечить на выходе суммы нуль и перенос единицы,
а наличие единицы только у одного слагаемого — единицу на
выходе суммы и отсутствие переноса. Эта противоположность
результата может быть выполнена сочетанием логических схем И5 и НЕТ.
Выход суммы
5 5 5 5. 6
"С
и
5 \\
2®
» и
К*
с-аЛ3т 4Г
А Г 1
* и
з ГП
г*
\ и
С-И2ЛТ
г П
м
1 19
а
Входь! слагаемых
Выход суммы
5 5 5
С53
с-з
4
С-З
3
?**\
Р Р ,Р I*
Циклический
перенос
б
Рис. 7-10. Многоразрядные двоичные сумматоры:
а — без циклического переноса, б •*- с циклическим переносом
Отсутствие переноса обеспечивает на выходе схемы НЕТ и на
первом входе схемы Я5 единицу. Поэтому достаточно иметь
единицу в одном из слагаемых, и она через схему ИЛИ2у И5 и ИЛИ3
поступит на выход суммы. Если же есть перенос единицы, то из
схемы НЕТ «а вход Яб поступит нуль. Поэтому наличие единицы
у двух слагаемых дает на выходе суммы нуль. Если все три
слагаемых равны единице, то и на выходе суммы должна быть
единица, что обеспечивается схемой Я4, контролирующей цифры всех
слагаемых, и схемой ИЛИг.
Для получения многоразрядного двоичного сумматора
необходимо соединить последовательно несколько одноразрядных. Каж-
375
2 5
Ч О)
г I
Ю I
О) ш
X X
и °
. к
со л
.' *
1>- Л
373
дый из них производит сложение только двух чисел, а третий
вход используется для переноса единиц в старший разряд. Схема
такого сумматора показана на рис. 7-10, а. Для суммирования
в обратных кодах используют сумматоры с циклическим
переносом (рис. 7-10,6).
Одноразрядные сумматоры в схеме многоразрядного
называются разрядами сумматора. В сумматоре без циклического
переноса при переполнении разрядной сетки происходит потеря
старшего разряда, а в сумматоре с циклическим переносом
происходит перенос единицы в младший разряд по цепи обратной
связи.
В многоразрядных сумматорах два высших разряда отводятся
для определения знака суммы, а остальные для вычисления суммы
мантисс. Запятая фиксируется после знаковых разрядов.
Используя многоразрядный сумматор и преобразователи,
можно построить схему алгебраического суммирования. В ней до
суммирования производится преобразование слагаемых в
соответствии с их знаком и выполняемой операцией, а затем уже при
помощи обычного сумматора осуществляется сложение.
В машинах с плавающей запятой в сумматорах
предусматривается специальная схема для нахождения разности порядков
слагаемых. Кроме того, имеется сдвигатель, производящий сдвиг
вправо мантиссы меньшего числа на величину разности порядков,
и сдвигатель нормализации результата.
Используя свойства простейших логических элементов, можно
построить схему для умножения двоичных чисел. Умножение про1
изводится в прямом коде.
Логическая схема для умножения двух четырехразрядных
чисел показана на рис. 7-11. Частные произведения получаются при
помощи цепочек вентилей, которые управляются сигналами цифр
множителя, подаваемыми на управляющие входы.
Множимое проходит только через те цепочки вентилей, на
управляющие входы которых поданы единицы сомножителя.
В каждой такой цепочке происходит умножение множимого числа
на единицу. Если на управляющий вход цепочки подан нуль
множителя, то множимое на выход не проходит. В такой цепочке
происходит умножение на нуль.
Таким образом, на выходах цепочек вентилей образуются
частные произведения.
Частные произведения суммируются по частям. В
сумматорах С-1 складываются первое и второе, а в сумматорах С-Н—
третье и четвертое частные произведения. Полученные частные
суммы складываются в сумматорах С-///. Необходимый сдвиг
частных произведений достигается соответствующим соединением
в схеме. Выходы цепочек вентилей 2 и 4 соединены со входами
сумматоров С-1 и С-Н со сдвигом вправо на один разряд, а
выходы сумматоров С-Н со входами сумматоров С-1Н со сдвигом
вправо на два разряда.
876
Сдвиг частных произведений может также производиться при
помощи сдвигателей.
На схеме рис. 7-11 показаны сигналы, действующие в
отдельных цепях при перемножении чисел лг=1011 и у=1101,
выход произведения
Множитель 1101
Рис. 7-П. Схема умножения
Для определения знака произведения применяется
дополнительный одноразрядный сумматор »на два входа. В нем
складываются сигналы, соответствующие знакам сомножителей.
Запоминающие устройства
Во всех рассмотренных логических схемах отсутствуют
элементы, способные сохранять некоторое устойчивое состояние посГле
прекращения воздействия внешних сигналов. Поэтому в них
одновременно с исчезновением сигнала на входе исчезает и сигнал на
выходе. Иначе говоря, такие схемы не обладают «памятью».
Применение логических элементов с «памятью» позволяет
использовать импульсный метод представления чисел.
Рассмотрим работу некоторых запоминающих устройств,
наиболее широко применяемых в цифровых вычислительных машинах.
Электронный триггер. Работа электронного триггера
была рассмотрена в гл. II. Основной особенностью его схемы
является способность долго находиться в одном из двух
возможных устойчивых состояний. Например, лампа Л\ (рис. 7-12, а)
закрыта, а лампа Л2 открыта. При этом на первом выходе схемы
377
Выход 1
устанавливается высокое напряжение (единица), а на втором —
низкое (нуль). Такое состояние сохраняется до тех пор, пока на
вход 1 схемы не поступит положительный импульс, переводящий
схему во второе устойчивое состояние. При этом лампа Лх
открывается а лампа Л2 закрывается, на первом выходе
устанавливается низкое напряжение
Еа- (нуль), а на втором — высокое
(единица). Возврат схемы в
исходное состояние — сброс —
производится специальным
положительным импульсом
сброса, подаваемым на вход 2.
Очень часто работа ЦВМ
состоит из отдельных,
повторяющихся циклов вычислений,
называемых тактами. По
окончании вычислений сброс
производится так называемым
тактовым импульсом.
Существуют* разновидности
триггеров с запуском на
сетки, аноды и катоды ламп.
Схемы с запуском на катоды
(рис. 7-12, б) используются для
запоминания двоичных чисел.
Каждый второй входной
импульс возвращает схему в
исходное состояние. Один
триггер запоминает только
одноразрядное число. Поэтому для
запоминания я-разрядного
числа нужно соединить п
триггеров. Полученное устройство,
служащее для запоминания
двоичного числа, называется
регистром. Соединив несколько триггерных схем так, чтобы сигнал
с выхода одной схемы являлся входным для другой, можно
получить счетчик импульсов, который в то же время будет регистром
(рис. 7-13).
При подаче одного импульса на вход счетчика первый
триггер Тр\ изменяет свое состояние и на его выходе 2 появляется
единица. Появление нуля на выходе / не воздействует на второй
триггер, так как отрицательный перепад его не запускает. Подача
второго импульса переводит триггер Трх в исходное состояние,
причем положительный перепад на выходе / приводит к
изменению состояния второго триггера Тр2. На его выходе 2 появляется
единица, чем и осуществляется перенос в старший разряд. Таким
образом, счетчик отсчитал две единицы. При подаче третьего им-
п Вход г
\*6 (тактовый)
Рис. 7-12. Электронный триггер:
а — принципиальная схема триггера; б -•
принципиальная схема триггера с
запуском на катоды
378
пульса опять изменяется состояние только Трх и на выходе 2
появляется единица и т. д.
Цифры на выходах 2 триггеров определяют количество
пришедших на счетчик импульсов (единиц) в двоичной системе
счисления.
Такой способ записи или. ввода числа называется
последовательным. Для счета импульсов до N необходимо иметь
п = \&Ы (7-1)
триггеров или разрядов в счетчике (число округляется в большую
сторону до целого значения).
Выходы / можно использовать для образования обратного
кода числа, так как цифры на этих выходах являются логическим
отрицанием цифр на выходах 2Я
г
и
л
П"Г
ЛЬ
Тактобый
импульс
Рис. 7-13. Регистр на триггерах
Для возврата схемы в исходное состояние на триггеры
подается тактовый импульс. Под его воздействием производится
сброс и независимо от предыдущего состояния схемы «а всех
выходах 2 устанавливаются нули. При этом на всех выходах 1
триггеров, в которых были записаны единицы, формируются
положительные перепады. Это может быть использовано для
параллельного ввода чисел в арифметическое устройство наряду со сбросом.
Схема также может быть использована для суммирования
чисел, заданных серией коротких импульсов. В этом случае
слагаемые подаются на схему последовательно друг за другом. На
выходах 2 образуется число, представляющее собой сумму
слагаемых. Такой'сумматор называется накапливающим; он широко
применяется в арифметических устройствах последовательного
действия.
Схема триггера может быть выполнена и на
полупроводниковых триодахг что значительно уменьшает габариты и вес
устройства, а также расходуемую для его питания мощность.
Магнитостатический триггер. Магнитные сердеч*
ники, выполненные из феррита и некоторых специальных
магнитных сплавов (перминвар, пермаллой), имеют прямоугольную
форму петли гистерезиса, поэтому могут находиться *в двух
различных устойчивых состояниях (рис. 7-14), характеризуемых
остаточной индукцией +ВТ или —Вг. Эти состояния могут быть
приняты за цифры двоичной системы: единица +ВГу нуль —Вг. Для
уменьшения магнитного поля рассеивания применяют сердечники
379
-ч
-Но
«1
г
ЗГ
0
+4>
г
■в.
Ъ ►
*"о
Выход
тороидальной формы. Внешний диаметр сердечников может быть
от 1,4 до 10 мм.
Простейшее магнитостатическое реле выполняется на одном
сердечнике с двумя обмотками: управляющей доу и
нагрузочной дон (рис. 7-14,6). Для перевода сердечника из одного
устойчивого состояния в другое нужно создать напряженность
магнитного поля Я, превышающую величину коэрцитивной силы Яс.
Если на управляющую обмотку подавать положительные
импульсы, создающие напряженность поля Я=.+ Я0, то первый
импульс переведет реле в устойчивое состояние, характеризуемое
точкой [+ВГ, а последующие уже не будут изменять магнитного
состояния сердечника,
В следствие постоя нства
магнитной индукции все
последующие импульсы
не будут индуктировать
э. д. с. в нагрузочной
обмотке. При подаче
отрицательного импульса,
создающего напряженность
ТантоВый поля Н=—Н0, магнитная
импульс индукция изменится -йа
| величину 25г, и станет
равной —ВТ. При этом
в нагрузочной обмотке
появится кратковремен-
ный импульс.
При повторной подаче отрицательных импульсов напряжение
на выходе будет отсутствовать, так как магнитная индукция почти
не будет изменяться.
Таким образом, выходные импульсы появляются лишь при
чередовании положительных и отрицательных входных импульсов.
Возвращение сердечника в исходное состояние (—Вг или нуль)
производится отрицательными тактовыми импульсами,
подаваемыми на отдельную обмотку.
Если в схеме предусмотреть п управляющих обмоток, то
получится простейшая логическая схема ИЛИ. Положительный
импульс, поданный на одну из управляющих обмоток и создающий
напряженность магнитного поля #>#с, приводит, к изменению
состояния сердечника от — Вт до +ВГ, и на выходе образуется
положительный импульс напряжения (единица).
Сердечник с п управляющими обмотками может применяться
й в качестве логической схемы И. Это достигается подбором на-
пряженностей полей обмоток с таким расчетом, чтобы
(п—\)Н<Нс<пН.
Отсутствие положительного импульса хотя бы в одной из
обмоток не приводит к изменению состояния сердечника, и напряжение
(На выходе будет отсутствовать (нуль). Лишь совпадение импуль-
Рис. 7-14. Магнитостатический триггер:
^ петля гистерезиса; б — схема триггера;
е» элемент ячейки памяти
380
сов во всех обмотках создает общую напряженность магнитного
поля пН>Нс и сердечник переходит в состояние +ВГ. На выходе
появляется положительный импульс совпадения (единица).
Смещая характеристику вправо или влево, можно построить
реле, реагирующее лишь на импульсы положительной или
отрицательной полярности, — магнитный вентиль.
Иногда на сердечнике располагается так называемая обмотка
запрета, которая наматывается в нротивоположном -направлении
относительно управляющей. Эта обмотка нейтрализует действие
управляющего сигнала, если одновременно с ним подан импульс
на обмотку запрета.
Рис. 7-15. Прямоугольная матрица
Обмотки могут быть выполнены в виде проводников (шин),
проходящих внутри сердечника (рис. 7-14,в).
Магнитостатические триггеры широко применяются для
построения регистров, запоминающих двоичные числа. Сердечники
в них располагаются правильными горизонтальными и
вертикальными рядами, образуя плоскую или пространственную
прямоугольную систему, называемую матрицей (рис. 7-15). Каждый
горизонтальный ряд представляет собой регистр для запоминания
одного двоичного числа с количеством разрядов, равным числу
сердечников в ряду.
Вертикальные ряды соединяют одинаковые разряды всех
регистров и служат для подачи разрядов записываемых чисел хи х2%
Хг и т. д. Вторичные обмотки также соединяются последовательно
для всех вертикальных рядов, образуя общие выходы,
соответствующие разрядам записанных чисел при считывании.
381
Исходным является; состояние отрицательной намагниченности
сердечника в матрице.
Пусть /о — величина тока, необходимая для создания
напряженности #0 (рис. 7-14). Тогда если по цепям Х2 и у3 матрицы
пропустить токи величиной -у-, то напряженность поля достигнет
величины Н0 только в сердечнике 2, в обмотках которого протекают
оба тока. В остальных сердечниках напряженность поля будет
недостаточной для перемагничивания, так как -^-<//с.
Для записи числа в данном регистре необходимо подать на
регистра положительный импульс
тока -^- и одновременно подать
положительные импульсы,
соответствующие цифрам двоичного
числа на вертикальные входы.
Например, при записи на втором
регистре числа 1101 произойдет
перемагничивание сердечников 5,
6 и 5, а все остальные
сердечники останутся в исходном
состоянии.
Записанные числа могут
храниться в ячейке «памяти»
длительное время. Для считывания
числа, хранящегося в данной
ячейке, необходимо на ее
горизонтальный вход и на все
вертикальные входы подать
отрицательные импульсы —^-.
Во вторичных обмотках
сердечников только данного регистра,
ранее намагниченных положительно, при обратном перемагничи-
вании возникнут импульсы, которые поступят в арифметическое
устройство. Остальные сердечники останутся в исходном состоянии.
Матричные запоминающие устройства на магнитных
сердечниках позволяют производить выборку чисел в любом порядке. Эти
устройства отличаются простотой конструкции, высокой скоростью
записи и считывания, а также малыми габаритами.
Магнитные ленты и барабаны. Широкое применение
получили запоминающие устройства с записью на магнитные
ленты и барабаны (рис. 7-16).
Магнитная лента представляет собой эластичную основу, на
которую нанесен слой лака, смешанный с ферромагнитным порош»
ком. Запись информации производится на нескольких
параллельных дорожках по длине ленты, для чего лента перемещается с
постоянной скоростью около записывающих головок. Ширина каж-
горизонтальный вход этого
Рис. 7-16. Запоминающие
устройства:
а «на магнитной ленте; б» на маг*
нитном барабане
382
определяется требуемой точностью измерения 8; она выбирается
такой, чтобы изменению измеряемой величины, равному 8,
соответствовала единица двоичного числа (один импульс).
Учитывая, что весь тактовый интервал Тт соответствует
максимальному значению измеряемой величины Хт можно составить
соотношение
Т—&■■ (7-2)
где Гп-
откуда
период повторения импульсов генератора,
Т = -—Т
(7-3)
а частота повторения импульсов генератора
* п —~ т —•
ьтт
т. е., чем выше требуемая точность измерения, тем больше
должна быть частота повторения импульсов генератора.
Максимальному значению измеряемой величины соответствует
количество импульсов, равное
(7-4)
л* & •
Для их записи потребуется согласно выражению (7-1) иметь
п—1&2^ разрядов в ячейке памяти.
^Диск с
прорезями
Источниках
сбета Ч9
Фотоэлемент
сброса
.У/ОН
тттттт
Счетчик
импульсоВ
Фотоэлемент
счета
Прорезь
сброса
Прорези
счета
Рис. 7-18. Схема преобразования угла поворота в число:
а — схема преобразования; б — непрозрачный диск с прорезями
На рис. 7-18 показана возможная схема для преобразования
в цифровую форму угла поворота вала. Между источником света
и фотоэлементом расположен закрепленный на валу
непрозрачный диск с прорезям», равномерно распределенными по
окружности. Количество световых импульсов, осветивших фотоэлемент,
пропорционально углу поворота вала. Сквозь отдельную прорезь
освещается фотоэлемент сброса. С этого момента начинается счет
импульсов в счетчике. Выдача результата может производиться
по специальной команде, поступающей в счетчик.
интервал между двумя импульсами, например между импульсом
запуска передатчика и импульсом, отраженным от цели. Оба
импульса подаются на триггер. Первый импульс переводит триггер
в состояние /. Повышение потенциала на выходе триггера
приводит к отпиранию управляющего вентиля, благодаря чему
импульсы генератора поступают на счетчик. По окончании
временного интервала второй импульс возвращает триггер в исходное
состояние 0, и вентиль закрывается. Количество импульсов,
прошедших на счетчик, в данном случае будет пропорционально
дальности до цели.
Двоичное
число
ттттт
Тантовьш
импульс
(импульс
* запуска
передатчина-ИЗП)
Тактовый
импульс
Входное
напряжение
Рис. 7-17. Схемы преобразователей сигналов в число:
а —схема преобразования временного интервала; б —схема пре«
образования напряжения постоянного тока
Таким образом, схема преобразует радиолокационную
информацию в цифровую форму. Импульс запуска передатчика в этой
схеме является тактовым, а период повторения станции — тактом.
Вторая схема преобразует в цифровой код сигнал,
выраженный напряжением постоянного тока. Тактовый импульс
производит сброс на счетчике и запускает генератор пилообразного
опорного напряжения, которое вместе с входным сигналом воздейст-,
вует на схему сравнения. Схема сравнения преобразует
напряжение постоянного тока в импульс, пропорциональный ему по
длительности, который воздействует на управляемый вентиль, как и
в схеме, рассмотренной выше.
При изменении входного сигнала на выходе счетчика
изменяется двоичное число, что приводит к изменению управляющего
сигнала на выходе цифровой машины и к изменению положения
управляемого объекта. Частота повторения импульсов генератора
384
дой дорожки 1—3 мм, а плотность записи до 10 двоичных знаков
на 1 мм. Для считывания имеется дополнительная головка,
в обмотке которой индуктируется э. д. с. при движении мимо
головки намагниченных участков .ленты. Около каждой ячейки
записывается ее номер (адрес). Поэтому в машине всегда известно,
какая ячейка в данный момент находится у головки. Скорость
считывания ограничена допустимой скоростью перемотки ленты,
что требует значительного времени «а отыскание нужной ячейки.
Стирается информация отдельной головкой.
Магнитный барабан представляет собой цилиндр диаметром
от 10 до 80 см с ферромагнитным покрытием. Барабан вращается
со скоростью 6000—12000 об/мин, что сокращает время на
отыскание «ужной ячейки до сотых долей секунды. Головки
располагаются в ряд по образующей барабана. На 1 см длины барабана
размещается 5—8 дорожек, а по всей длине может разместиться
100—200 дорожек и столько же головок, что позволяет
производить параллельную запись чисел.
Числа записываются поразрядно на нескольких дорожках.
Одна дорожка отводится для записи номера ячейки (адреса).
Емкость современных магнитных барабанов достигает 1,5—2 млн.
двоичных знаков.
Считывание информации производится так же, как и с
магнитных лент.
Наличие механических вращающихся частей снижает
надежность запоминающего устройства на магнитных лентах и
барабанах.
Помимо рассмотренных, в ЦВМ применяются также
запоминающие устройства на линиях задержки, потенциалоскопах и др,
§ 7-4. ПРЕОБРАЗОВАНИЕ РАДИОЛОКАЦИОННОЙ
ИНФОРМАЦИИ В ЦИФРОВУЮ ФОРМУ
ЦВМ4 находят применение в таких САР, где требуется высокая
точность управления процессами. Сигналы, определяющие
положение управляемого объекта, и другие исходные данные
специальными преобразователями преобразуются из непрерывной формы
в цифровую и вводятся в ЦВМ. Цифровая машина
перерабатывает поступающую информацию и выдает управляющий сигнал
в виде цифрового кода. Полученный сигнал вновь преобразуется
в непрерывную форму и отрабатывается системой
автоматического регулирования. В зарубежных радиолокационных системах
исходные сигналы обычно выражены электрическим напряжением
или временным интервалом. Такие сигналы преобразуются в
цифровой код при помощи схем, показанных на рис. 7-17. Основной
элемент этих схем, определяющий точность их работы,— генератор
импульсов с постоянным, стабилизированным периодом
повторения Гц. Входным сигналом для первой схемы является временной
383
ПРИЛОЖЕНИЕ
ОПЕРАТОРНЫЙ МЕТОД
В системах автоматического регулирования используются взаимосвязанные
элементы или устройства, в основе действия которых лежат самые различные
по своей природе физические процессы. При рассмотрении системы в целом
возникает необходимость установить связь между этими процессами, т. е.
количественную математическую связь между различными величинами (электрическими,
механическими, гидравлическими и др.).
Математическая связь между различными величинами устанавливается при
помощи дифференциальных уравнений. При исследовании САР часто
приходится иметь дело лишь с весьма ограниченным классом дифференциальных
уравнений, а именно: линейными дифференциальными уравнениями с постоянными
коэффициентами. Такими уравнениями описываются процессы в линейных
системах автоматического регулирования.
Линейными называются такие системы, в которых соблюдается принцип
суперпозиции. В линейных системах не может иметь места ограничение сигналов.
Именно такие системы и рассмотрены в книге.
Для решения линейных дифференциальных уравнений удобно использовать
так называемый операторный метод. Основное достоинство операторного
метода состоит в том, что он позволяет сложные интегро-дифференциальные
соотношения между сигналами представить в удобной для анализа алгебраической
форме.
Сущность метода состоит в следующем. Сигналы или другие изменяющиеся
во времени величины заменяются по определенным правилам соответствующими
операторными изображениями этих величин. Задача решается для полученных
изображений, после чего осуществляют обратный переход от изображений к
самим величинам.
Можно провести некоторую аналогию между применением данного метода
и использованием логарифмов для выполнения сложных вычислений.
Когда нужно с большой точностью и быстро выполнить сложные
вычисления, в которых преобладающими действиями являются умножение, деление,
возведение в степень и извлечение корня, то выполняют действия не над самими
числами, а над их логарифмами.
Переход к логарифмам позволяет заменить сравнительно сложные и
.трудоемкие вычислительные операции умножения и деления более простыми —
сложением и вычитанием, а возведение в степень и извлечение корня — соответственно
умножением и делением. По окончании вычислений в качестве заключительного
этапа осуществляется обратный переход от логарифмов к самим величинам.
В дальнейшем без строгого математического обоснования будут приведены
наиболее часто встречающиеся основные соотношения операторного исчисления.
Сами соотношения будут даны в таком виде, в котором их наиболее удобно
можно использовать для анализа систем автоматического регулирования.
386
Операторные изображения функций
Пусть имеется какая-либо изменяющаяся во времени величина (функция
времени) /(*). Этой величиной могут быть ток, напряжение, скорость, угол
поворота вала и т. д. В дальнейшем ее будем называть оригиналом.
Операторным изображением данной функции или данного оригинала
называется новая функция, связанная с первой следующим соотношением:
^(/0 = 1 е-Р'/(()сН. (1)«
Обратно от изображения функции можно перейти к ее оригиналу. Операция
взаимного перехода записывается следующим образом:
/(0.5*'Ч/О- (2)
Эту запись нужно понимать так: от данной функции /(/) можно перейти
к ее изображению Р(р) и, наоборот, от изображения данной функции Р(р)
можно перейти к самой функции /(/).
Величина р является комплексной. Буква р, стоящая в скобках, после
преобразованной функции будет в дальнейшем применяться как символ
операторной формы записи.
При решении большинства задач приходится иметь дело с весьма небольшим
количеством операторных изображений функций, значение которых полезно
запомнить, чтобы каждый раз не вычислять их.
Найдем основные соотношения, которым подчиняются изображения
функций, а также изображения некоторых простейших функций.
Изображение суммы функций. Пусть данная функция /(/)
представляет собой сумму нескольких других функций:
/(0=Л«)+Л(') + ...+/я(0. (3)
Функцией ((() может быть, например, напряжение на зажимах
последовательной цепи, а л(0. ЫО и т« А- — напряжения на отдельных участках цепи.
По основному соотношению
оо ео
Г(Р) = / Г^(0Л = ]* е-#[М*) +/,(0 + ... +/яф]Л.
о о
Так как интеграл суммы равен сумме интегралов, то
ОО 00 ОО
Г(р) = Г *-*/Г(0 Я + Г в"*/. (О Л + ... + | е-#/я (О Л.
0 0 О
В правой части равенства стоит сумма изображений.
Следовательно, изображение суммы функций равно сумме изображений этих
функций:
Г(Р) = Г1{Р) + Ыр) + -» + Гп1Р)- (4)
Изображение произведения функции на постоянную
величину. Пусть ^(*)=ЛЫ0-
Такое соотношение отвечает, например, закону Ома: напряжение на
активном сопротивлении равно произведению этого сопротивления на ток в нем:
ОО 00 ОО
* Соотношение (1) чаще называют преобразованием Лапласа функции (((),
387
Следовательно, изображение произведения постоянного множителя на какую-
либо функцию равно произведению этого множителя на изображение функции:
Р№ = АРЛР\ (5)
т. е. умножению функции на постоянный множитель соответствует
умножение ее изображения на этот же множитель.
Изображение перепада (функции включения). Перепадом,
или функцией включения, называют скачкообразное изменение какой-либо
величины, которая до скачка равнялась нулю, а после скачка остается постоянной
(рис. 1,а),
ГЦ)
*
-*-*
о.
Рис. 1. Типовые сигналы:
а — перепад; б — скачок скорости
Примером перепада является включение напряжения в цепь, ранее
отключенную от источника.
Пусть значение функции после включения равно Л. Условно это
записывается следующим образом:
/М
-{
О при *<0;
А при * > 0.
Учитывая, что в пределах от /=0 до /=оо значение /(/)=Л, можно
записать:
оо «я» со
А^
Р
Следовательно, изображение перепада равно величине перепада, деленной
на р:
р{р)=^-. (в)
\ Р
В частном случае, когда величина перепада равна 1 (единичный перепад),
изображение перепада будет равно —.
Изображение производной. Пусть данная функция является
производной от какой-то другой функции:
Записанное выше соотношение связывает, например, скорость движения тела
и пройденный путь, э. д. с. самоиндукции и ток в катушке и т. д.
В этом случае
388
Будем интегрировать по частям
и = ё~рг \<1и = ~ре-р<сИ
оо во
Первое слагаемое при подстановке пределов обращается в —/1 (0), а второе
есть произведение р на изображение МО» тогда
г(р)=рЪкр)-м<>). (7)
В этом выражении ^(0) означает величину исходной функции в начальный
момент времени (или, как говорят, начальные условия). Везде, где это
специально не оговаривается, предполагается что /г (0) =0, т. е. начальные условия
считаются нулевыми. Для большинства практических приложений это условие
выполняется. Для нулевых начальных условий
Пр)^рЪ(р). (8)
Следовательно, изображение производной равно произведению изображения
дифференцируемой функции на р. Иначе говоря, дифференцированию исходной
функции соответствует умножение на р ее операторного изображения.
Изображение интеграла. Пусть данная функция является
интегралом какой-то другой:
/(0 = |Л(0^.
Подобное соотношение связывает, например, напряжение на конденсаторе
с протекающим через него током.
Для нахождения изображения продифференцируем данное равенство:
а/ (О
а
= Л(0-
Учитывая, что дифференцированию функции соответствует умножение ее
изображения на р, можно записать
рГ (р) = Рх (р\ откуда Г(р) = А^-. (9)
Следовательно, изображение интеграла равно частному от деления
изображения подынтегральной функции на р, т. е. интегрированию исходной функции
соответствует деление на р ее изображения.
Изображение показательной функции. Протекание очень
многих процессов происходит по экспоненциальному закону, который
выражается показательной функцией вида
_*_
/чо» Г т.
где Т — постоянная времени экспоненты.
Найдем изображение этой функции: .
Ркр) =
0
.-(,♦
р + -
е-Р*е
ее
■М'1
1
т 1
тЛвг\-^+т)'Лш.
■-;
4)
-0-1 1-| = Т+7Г- НО)
389
Изображение экспоненты равно ее постоянной времени, деленной на двучлен
вида 1+рГ. Двучлены такого вида встречаются весьма часто в операторных
изображениях различных функций.
Изображение линейно-нарастающей функции. Пусть
начиная с момента /=0 функция /(/) изменяется от нулевого значения с
постоянной скоростью V (рис. 1,6):
Примером такого соотношения является начавшееся в момент *=0
равномерное движение или же пилообразное нарастание напряжения.
Чсобы найти изображение функции, продифференцируем данное уравнение
а/{*)
В левой части полученного выражения стоит производная, а в правой
—скорость, причем для *<0. о=0, для *>0 V — постоянная величина.
Тогда
Р?(Р) = у
или
*>(/>) = -^-. (П)
Это и есть изображение линейно нарастающей функции.
В заключение приведем без вывода изображение еще двух функций, часто
встречающихся при рассмотрении САР.
Изображение синусоидальной функции (синусоидальных колебаний) /(0 =
*=А 51п <о* имеет вид
Г(р) =
2 4- л>2
Р* +
Обозначив — = 7\ можно представить выражение в несколько иной форме:
АТ
р(Р) = ТТрч*- (12)
Изображение затухающих колебаний/^) — Ае~~& з'т о>* равно
Лео
Г\р) =
Можно ввести следующие обозначения:
Аа>
(Р + Р)2 + «>2
2р
02 + 0)2
= Т — постоянная времени;
= 2? — затухание.
У$? + *>2
Тогда после упрощения получим
Р№= 1 + 2/*Г+/>«Л • (13)
390 *
Это — выраженный в операторной форме закон Ома для цепи с
индуктивностью. Величина рЬ представляет собой операторное сопротивление
индуктивности.
Цепь с емкостью (рис. 2, в). Между напряжением на конденсаторе
и током в нем существует следующая зависимость:
*Ц) = Щ- = ^-\ш)а*- (18)
В правой части этого уравнения имеется произведение постоянного
множителя -7г на функцию, представляющую собой интеграл.
Следовательно,
,т ч 1 1(Р)
"и) = -с-'-Т->
откуда
/И--^. 09)
РС
Данное соотношение является выраженным в операторной форме законом
Ома для цепи с емкостью, причем величина —р — операторное сопротивление
конденсатора.
Сложная последовательная цепь (рис. 2,г). В заключение
рассмотрим более сложный случай — последовательную цепь, содержащую все
три типа сопротивлений.
Для такой цепи
где ы„ (2), иь (0 и «с (*) — напряжения на активном сопротивлении,
индуктивности и емкости, определяемые соотношениями (14, 16, 18).
Отсюда следует:
«(0 = /« я +1.1$- + -^ ] Ш)(И.
Это соотношение справедливо при любой форме действующего в цепи
напряжения. Но оно сравнительно сложно для исследования.
Правая часть уравнения представляет собой сумму различных функций. На
основании приведенных ранее правил перехода от функций к изображениям
можно записать:
Щр) = /(р) Я + рЩр) + -^с1(Р) = *(Р) (Я + Р1 + -^ё) >
откуда
/(Р) = г--
л+^ + тгг
Данное соотношение — выраженный в операторной форме закон Ома для
последовательной цепи.
Обозначим
Это выражение — полное операторное сопротивление рассматриваемой цепи...
392
Во всех рассмотренных примерах в операторной форме получалось одно и
то же простое алгебраическое соотношение между напряжением, током и
сопротивлением. Операторные сопротивления весьма напоминают по форме записи
комплексные сопротивления тех же цепей переменному току. Это очевидно из
табл. 1.
Таблица 1
Наименование цепи
Активное сопротивление
Индуктивное
сопротивление
Емкостное сопротивление
Последовательный контур
Операторное сопротивление
Рь
1
Я+Р1 + 1с
Комплексное сопротивление
1
/«С
* + '•*+тг
Отсюда следует, что для электрических цепей операторное сопротивление
элементов может быть получено из комплексного и, наоборот, простой заменой:
При определении операторных сопротивлений цепей нет необходимости
записывать соответствующие интегро-дифференциальные уравнения. Это можно
сделать, пользуясь приведенной таблицей или путем замены /о> на р.
Следует иметь в виду, что если комплексные сопротивления и весь
символический метод могут быть использованы только в том случае, когда в цепи
действуют синусоидальные напряжения и токи, то операторный метод применим
дри любой форме напряжений и токов, причем во всех случаях значения опера-*
торных сопротивлений остаются одними и теми же.
Символический метод позволяет определять только действующие и
амплитудные значения напряжений и токов в цепях и фазовые соотношения между
ними, а операторный — изображения напряжений и токов, по которым
впоследствии можно найти их мгновенные значения.
Выше было показано, что при переходе к изображениям сохраняется
обычная форма записи закона Ома. Можно показать, что сохраняется при этом фор*
ма записи и других основных законов электротехники: первого и второго
законов Кирхгофа и т. д.
Переход от изображений к оригиналам
В операторной форме соотношения между различными величинами имеют,
как правило, простую алгебраическую форму. Поэтому решение даже
сравнительно сложных задач не вызывает каких-либо затруднений.
Более сложным является обратный переход, т. е. нахождение оригиналов
по известным изображениям.
• В тех случаях, когда изображение функции может быть найдено в таблице
изображений, значение оригинала также берется из таблицы.
Для наиболее часто встречающихся функций, рассмотренных выше,
значение изображений полезно запомнить. Тогда и переход к оригиналам не будет
представлять труда,
393
В дальнейшем, если изображение какой-либо функции будет получено в
таком виде или будет можно привести его к такому виду, это означает, что при
Б<1 сама функция изменяется по закону затухающих колебаний.
Во всех рассмотренных случаях соотношения между изображениями
величин в операторной форме оказались проще соотношений между оригиналами,
что весьма важно при решении задач. Имеются специальные таблицы, в которых
даны изображения самых различных функций. Поэтому на практике не
приходится заниматься их вычислением. При изучении процессов в системах
автоматического регулирования оказывается вполне достаточным знания изображений
тех функций, которые были рассмотрены выше.
Операторные сопротивления
Большой интерес представляют собой выраженные в операторной форме
соотношения между током и напряжением в различных электрических цепях, т, е.
закон Ома в операторной форме.
0-
V-
&-
^
V
V
^
а б. в г
Рис. 2. Простейшие электрические цепи
(15)
Цепь с активным сопротивлением (рис. 2,а). В активном
сопротивлении в любой момент времени ток пропорционален напряжению:
<Ю-т|?. (И)
Правая часть этого уравнения — произведение постоянного множителя -р
яа функцию и((). Следовательно, в операторной форме данное соотношение
примет вид
Это — выраженный в операторной форме закон Ома для цепи с активным
сопротивлением.
Цепь с индуктивностью (рис. 2,б). Для цепи с индуктивностью
справедливо следующее известное соотношение между током и напряжением:
И«) = ^4Г" (16)
Правая часть уравнения -— произведение постоянного множителя на
функцию, представляющую собой производную.
В операторной форме такое уравнение примет вид
Ц(р) = 1р1 (р),-
откуда
,,, и(р)
'р1
(17)
391
Так, например, если изображение имеет вид
то сама функция представляет собой перепад величины Л.
Очень часто изображение функции получается в виде простейшей дроби
/^—ттаг- (20)
Чтобы найти оригинал этого изображения, умножим числитель и
знаменатель данной дроби на Т:
В таком виде изображение функции представляет собой произведение
постоянного множителя на изображение экспоненты.
1ис.ия
1
Е
Е
1
■ ■ а»
Рис. 3. Заряд емкости через активное
сопротивление:
а — схема цепи; б — графики напряжений и тока
Следовательно,
./(0 = у-* т.
(21)
В качестве примера рассмотрим процессы, происходящие при подключении
цепи ЯС к источнику постоянного тока.
В момент *=0 ключ К (рис. 3) замыкается и к цепи #С оказывается
приложенным перепад напряжения величиной Е. Требуется определить, как будут
изменяться ток в цепи и напряжение на ее элементах.
Задачу будем решать сразу в операторной форме.
По закону Ома
1{р)=~т-
Но действующее в цепи напряжение представляет собой перепад с величи-
Е
ной Е. Его изображение —.
Р
Операторное сопротивление такой цепи равно
2и>~ Рс +н р!Г^ рТ^
где Т = ВС.
394
Следовательно,
/г ч - ЕРС _ ЕС
Пр) рЦ+рТ) 1+рТ *
Изображение тока имеет вид дроби (20), что позволяет сразу же
записать оригинал:
. ... сС» ^ /20 "~~т *1 т*
,(,) = _, Т = Ж< Т = ~^е т.
Это и есть уравнение убывающей экспоненты с постоянной времени Т=КС
Напряжение на активном сопротивлении пропорционально току:
Е -- --
«Л(0 = /(0Л = -|-Яв т =Ее т,
а напряжение на емкости равно разности между приложенным напряжением Е
и напряжением на сопротивлении /?:
1 (.-.-*).
ас(0 =Е-ик{*)=Е-Ее т=е
Оно представляет собой нарастающую экспоненту. Графики тока и
напряжений показаны на рис. 3, б.
В более сложных случаях очень часто изображение искомой функции
является рациональной дробью следующего вида:
_ Л + М + *Ц»' + •.- + &/Я/»'* (22)
{Р)~ ра+рТ1){1±рТ2)...{1+рТп)>
или может быть к такому виду приведено.
В алгебре доказывается, что всякая рациональная дробь может быть
преобразована в сумму*:
Г(р) = С* + -^_ + Л*-^ + .. . + ' Сп ,, , (23)
" Р Р-Р1 Р-Р* Р-Рп
где Со, Си С2, ..., Сп — некоторые постоянные коэффициенты, а рь рг,..., рп —
корни знаменателя (22). Эти корни можно найти, приравняв поочередно к нулю
все сомножители знаменателя:
I + рТ1 = 0 или р1 = — -=-.
11
Подставим полученные значения в выражение (23):
/Ч/0 = -§ +—^т- + —^г-+ •-. + —%- =
Р > + 4- 1 + 4- 1+4-
' 1 * 2 -«Л
_ _^о , С\Т1 С2Т2 , , СпТп
р + 1+рГ, + 1 +/7Г2 ■*-■••■»■ 1+рГяв
Обозначим числители слагаемых соответственно через Ло, Ль Л2,..., Лп.
Тогда получим
^) = Т+Тн^ + -П^ + --- + ТТ777- <24>
* Такое разложение возможно, если в знаменателе нет кратных корней,
а п >пг. Последнее условие выполняется во всех реальных задачах.
Доказательство этого положения выходит за рамки настоящего пособия.
395
Правая часть представляет собой сумму, в которой первое слагаемое
является изображением перепада, а все остальные — простейшими дробями.
Отсюда следует, что оригинал будет равен
1\ 12
1 П
т. е. ответ может быть записан сразу. Для этого нужно знать только значения
коэффициентов Л о, А\ и т. д. Эти коэффициенты таковы, что сумма (24)
равняется исходной дроби (22).
Эти коэффициенты можно найти несколькими способами.
Одним из наиболее простых является метод сравнения коэффициентов,
заключающийся в следующем. Искомое разложение записывается в виде суммы
простейших дробей (24), в которых коэффициенты Ло, Аи ... , Ап подлежат
определению. Эта сумма приводится к общему знаменателю, который,
естественно, получается равным знаменателю исходной дроби (22). Чтобы и сами
дроби были равны, должны быть также равны их числители. Приравнивая в
числителях слагаемые, содержащие множитель р в одной и той же степени,
можно найти искомые коэффициенты Л0, А\. и т. д.
лад*
Рис. 4. Воздействие перепада напряжения на
цепь:
а —схема цепи; б —графики напряжений и тока
/
Поясним этот метод на следующем примере. В момент *=0 к цепи Щ
(рис. 4, а) подключается источник напряжения Е. Требуется найти характер
изменения тока в цепи и напряжение на отдельных участках.
По закону Ома
1(р) =
2(Р)%
где [/(р) = -г изображение перепада;
г[р) = К + рЬ = я(1 +р-р) = * (1 +РТ)%
где Г =
Отсюда
Р Р
/(')= /^^>(Г+^,7•) = ^Г
1
Представим полученную дробь в виде суммы простейших*
Аг
~р1УТрТГ-~Г * \+рт'
396
Приведем правую часть к общему знаменателю:
1 _ А0 + рА0Т + рА1
р(1+рТ) рИ+рТ)
Чтобы данное равенство действительно имело место, числители правой и
левой частей должны быть тождественно равны
1=А0 + р {Л0Т + А,).
Приравняем члены, содержащие множитель р в одной и той же степени:
Ло=1; I (25)
Л0Г + Л, = 0. I
Решая совместно эти два уравнения, находим
Д,= 1; Л,= -7\ (26)
Итак, найдены такие значения коэффициентов Ло и Аи при которых сумма
простейших дробей действительно равна исходной дроби.
Дальнейшее решение задачи не представляет труда:
'ю-Ыт-ттцтУ (27)
Отсюда оригинал тока равен
Это уравнение нарастающей экспоненты.
Напряжение на активном сопротивлении будет пропорционально- току*
«Л(0=*'(*)Я = я(1-* т)%
а напряжение на катушке индуктивности
Графики тока и напряжений показаны на рис. 4,6.
ОГЛАВЛЕНИЕ
Введение .,...«*...
Глава I. Усилители автоматических устройств
§ 1-1. Общие сведения . . .
§ 1-2. Простейшие электронные усилители постоянного тока . . . .
Особенности электронных УПТ
Нестабильность УПТ и меры борьбы с ней
§ 1-3. Отрицательная обратная связь в усилителях постоянного тока
Основные определения и соотношения
Местные обратные связи
§ 1-4. Балансные усилители * «
Схема последовательного баланса .
Схема параллельного баланса * •
§ 1-5. Многокаскадные схемы УПТ
Схемы с непосредственным усилением-сигнала , . . .
Усилители постоянного тока с автоматической стабилизацией нуля
^7§ 1-6. Магнитные усилители
Принцип действия магнитных усилителей
Однотактные магнитные усилители
Обратная связь в магнитных усилителях
Двухтактные магнитные усилители . .
§ 1-7. Электромашинные усилители .
Устройство и принцип работы электромашинного усилителя . . . .
Внешняя характеристика ЭМУ »
Глава II. Реле и релейные схемы ,.*..,.. . . •
§ 2-1. Общие сведения .
§ 2-2. Контакты реле ,
Устройство и работа контактов .' * •
Основные методы гашения дуги и искры . . . . #
§ 2-3. Электромагнитные реле
Устройство и принцип работы
Изменение быстродействия электромагнитных реле ........
§ 2-4. Специальные типы реле
Тепловые реле .....
Механические реле ...**,. »
Моторные реле времени
§ 2-5. Бесконтактные реле *
• Магнитное реле
Магнитное реле времени . . .
Электронные реле .
Фотореле
§ 2-6. Релейные схемы
Релейная блокировка
Изображение релейных схем .
§ 2-7. Релейная защита ...... , . ,
Реле максимальной и минимальной защиты « .
Реле обратного тока . . . « .
Построение схем защиты
Схема повторного включения
Глава III. Основы теории автоматического регулирования ......
§ 3-1. Общие сведения
Разомкнутые автоматические системы . ...........
398
Стр.
Замкнутые автоматические системы «Ь
Классификация систем автоматического регулирования ^
§ 3-2. Измерительные устройства и датчики 102
Частотные дискриминаторы . . . Ю5
Временные дискриминаторы "~~
Тахогенераторы Щ
Датчики механических перемещений 11^
Гироскопы ||7
Датчики ускорений }19
§ 3-3. Уравнения звеньев и систем 12°
Элементарные звенья систем автоматического регулирования ... —
Соединения звеньев. Передаточные функции систем регулирования 127
Типовые элементы систем автоматического регулирования .... 131
§ 3-4. Точность систем автоматического регулирования 140
Статические ошибки. Статические и астатические системы
регулирования 141
Переходные процессы в системах автоматического регулирования.
Динамические ошибки 143
Влияние нелинейных элементов на точность регулирования .... 151
Воздействие помех на работу систем автоматического регулирования 152
§ 3-5. Частотные характеристики систем автоматического
регулирования 154
Общие сведения —
Логарифмические координаты 157
Логарифмические частотные характеристики элементарных звеньев 160
Логарифмические характеристики сложных систем ....... 171
§ 3-6. Устойчивость систем автоматического регулирования 177
Амплитудно-фазовые характеристики систем 178
Запас устойчивости систем 183
Определение свойств систем по их характеристикам . 185
лава IV. Системы автоматического регулирования 190
§ 4-1. Качество процесса регулирования —
§ 4-2. Коррекция систем автоматического регулирования 195
Коррекция по возмущению 196
Коррекция по сигналу рассогласования (по отклонению) 198
Местные обратные связи ...» 212
§ 4-3. Стабилизаторы напряжения ........*..... 221
Угольный регулятор напряжения —
Коррекция электронного стабилизатора напряжения ..... 224
§ 4-4. Системы автоматической подстройки частоты 225
Система стабилизации частоты клистрона 226
Система автоматической подстройки частоты магнетрона .... 230
§ 4-5. Системы сопровождения цели 232
Сопровождение цели по дальности . , 233
Сопровождение цели по направлению 238
Полуавтоматическое сопровождение 245
§ 4-6. Системы управления снарядами 250
лава V. Синхронные передачи и приводы 258
§ 5-1. Общие сведения , —
Устройство и принцип работы сельсина 259
Дистанционная передача углового положения магнитного потока 263
§ 5-2. Индикаторная синхронная передача щ . 267
Принцип действия —
Синхронизирующий момент 268
Точность работы индикаторной передачи . . . . • 270
Дифференциальный сельсин Й72
§ 5-3. Синхронно-следящий привод 274
399
Стр.
Сельсин-трансформатор 274
Структурная схема и работа привода 276
Потенциометрическая синхронная передача 278
§ 5-4. Методы повышения точности работы привода 279
Двухканальный привод —
Коррекция синхронно-следящего привода « . 284
Глава VI. Счетно-решающие приборы непрерывного действия .... 287
§ 6-1. Общие сведения "—
§ 6-2. Реостатно-потенциометрические решающие схемы 290
Получение заданной функциональной зависимости —
Схемы суммирования и вычитания 293
Схемы умножения и деления 295
Мостиковые решающие схемы 297
§ 6-3. Поворотные трансформаторы 299
Синус-косинусный поворотный трансформатор . 300
Линейный поворотный трансформатор 301
§ 6-4. Решающие усилители 302
Основное уравнение решающих усилителей . —
Масштабные усилители 306
Суммирующие усилители . . , • —
§ 6-5. Интегрирующие усилители 308
Интегрирование напряжений —
Скелетная схема решающего интегрирующего усилителя 310
Однокаскадный интегрирующий усилитель 313
Даухкаскадный интегрирующий усилитель 316
§ 6-6. Другие типы решающих усилителей 319
Дифференцирующие усилители 320
Усилители со сложными коэффициентами передачи 323
^У § 6-7. Электронно-импульсные решающие схемы 326
Схемы сравнения 327
Электронно-ключевые преобразователи 330
Электронно-ключевые множительные устройства 333
§ 6-8. Принципы построения счетно-решающих приборов 339
Преобразование уравнений 340
Аппроксимация сложных функций 343
Применение отрицательной обратной связи 346
Глава VII. Электронные цифровые вычислительные машины 352
§ 7-1. Общие сведения —
§ 7-2. Двоичная система счисления 354
Запись чисел в двоичной системе . . » —
Арифметические 'действия в двоичной системе счисления 357
Способы записи чисел в ячейках памяти машин 360
Арифметические операции с нормализованными числами .... 364
§ 7-3. Элементы электронных цифровых машин 367
Основные логические элементы 368
Арифметические устройства . . . . « 370
Запоминающие устройства 377
§ 7-4. Преобразование радиолокационной информации в цифровую
форму 383
Приложение. Операторный метод . . . , 386
Операторные изображения функций . 387
Операторные сопротивления 391
Переход от изображений к оригиналам 393