/





























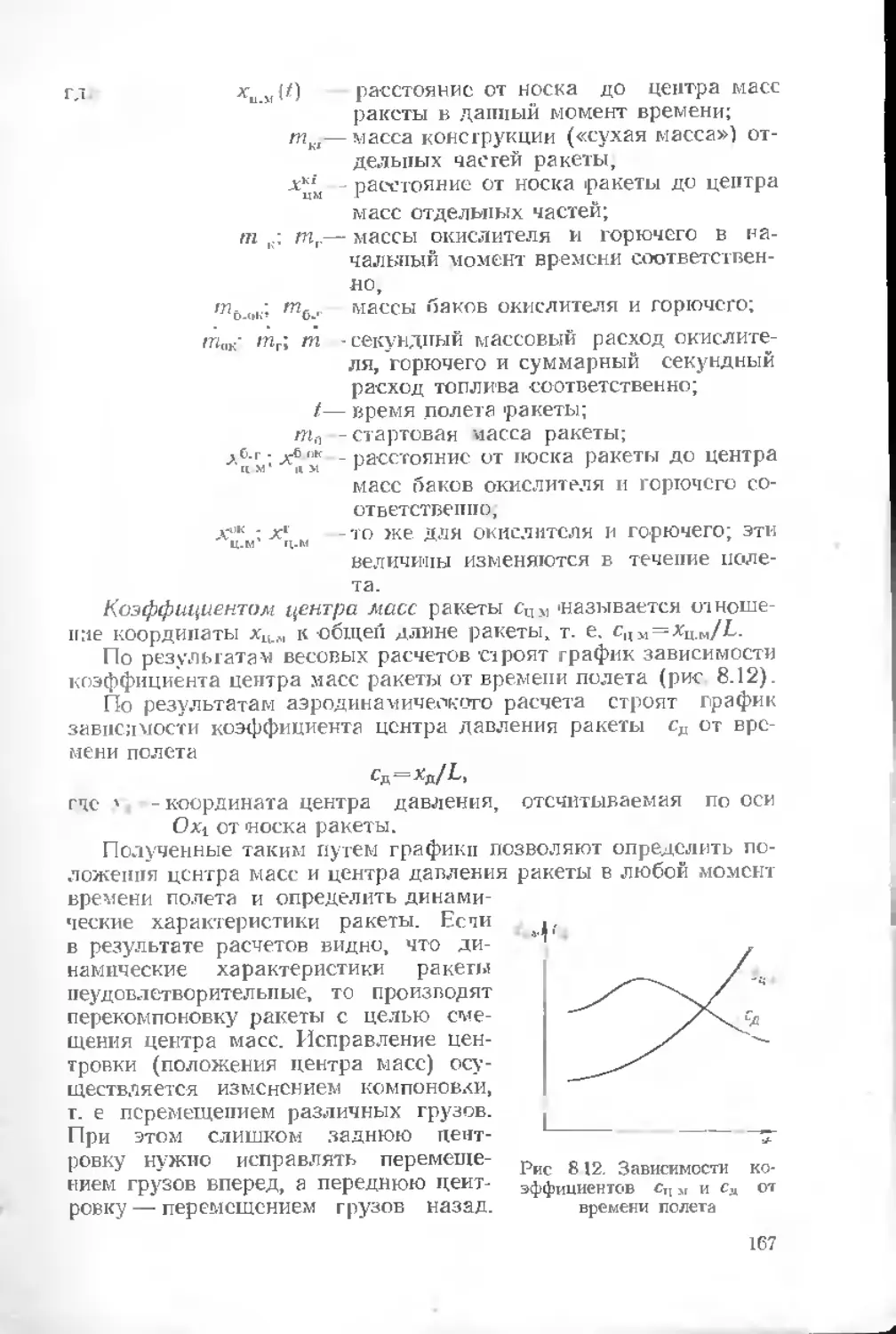

































Автор: Пенцак И.Н.
Теги: техника средств транспорта машиностроение ракетная техника теория полёта
Год: 1974




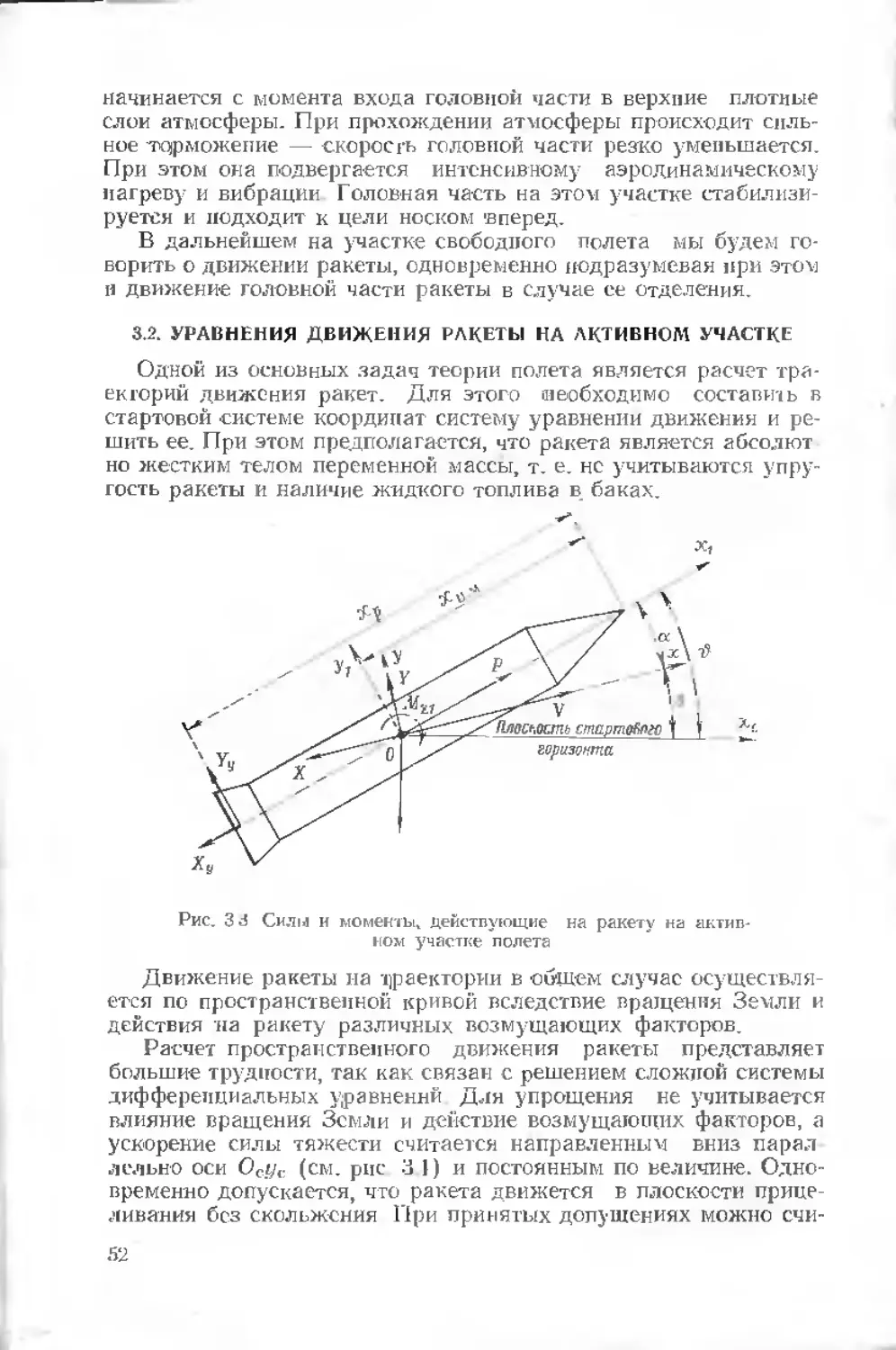
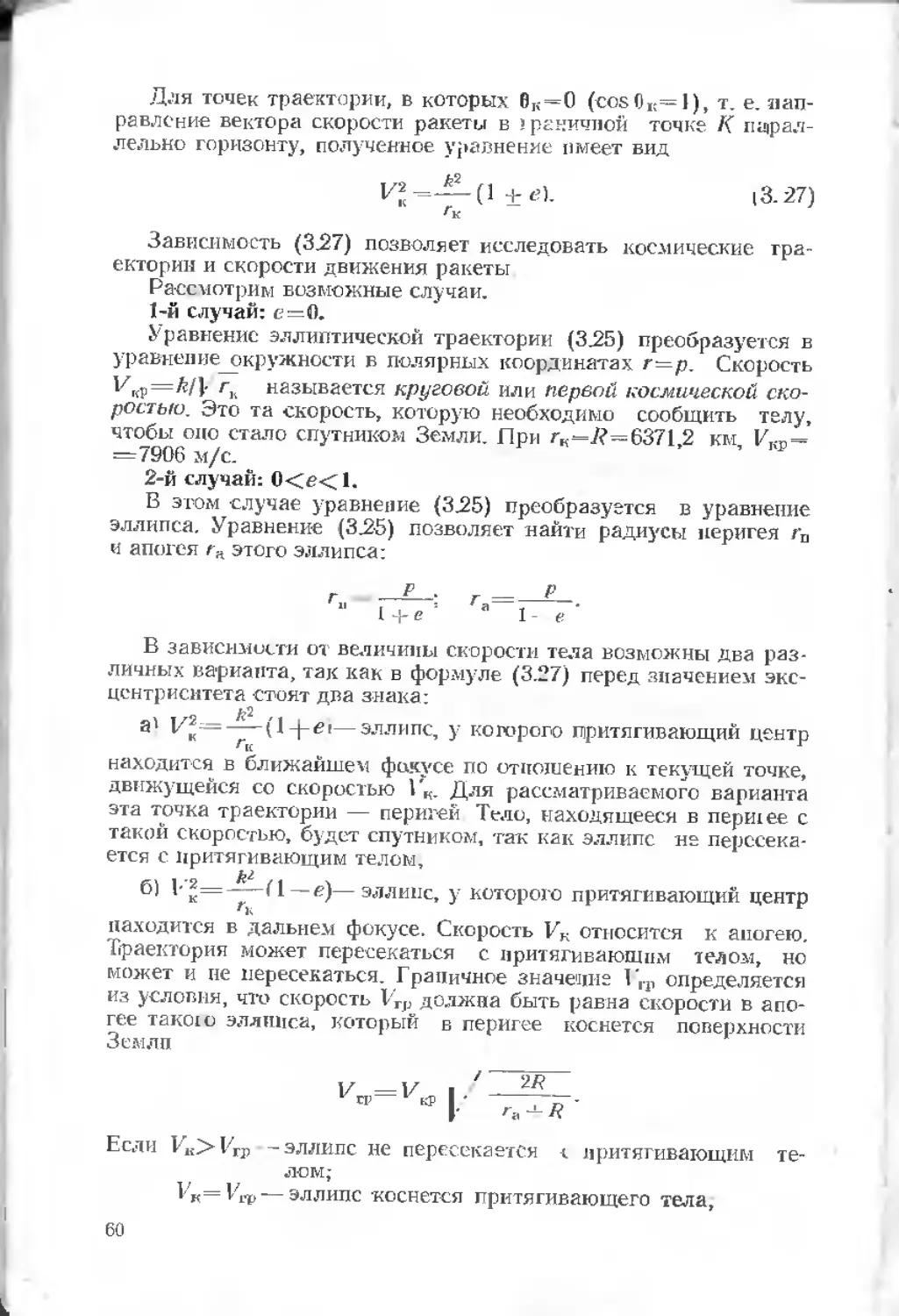
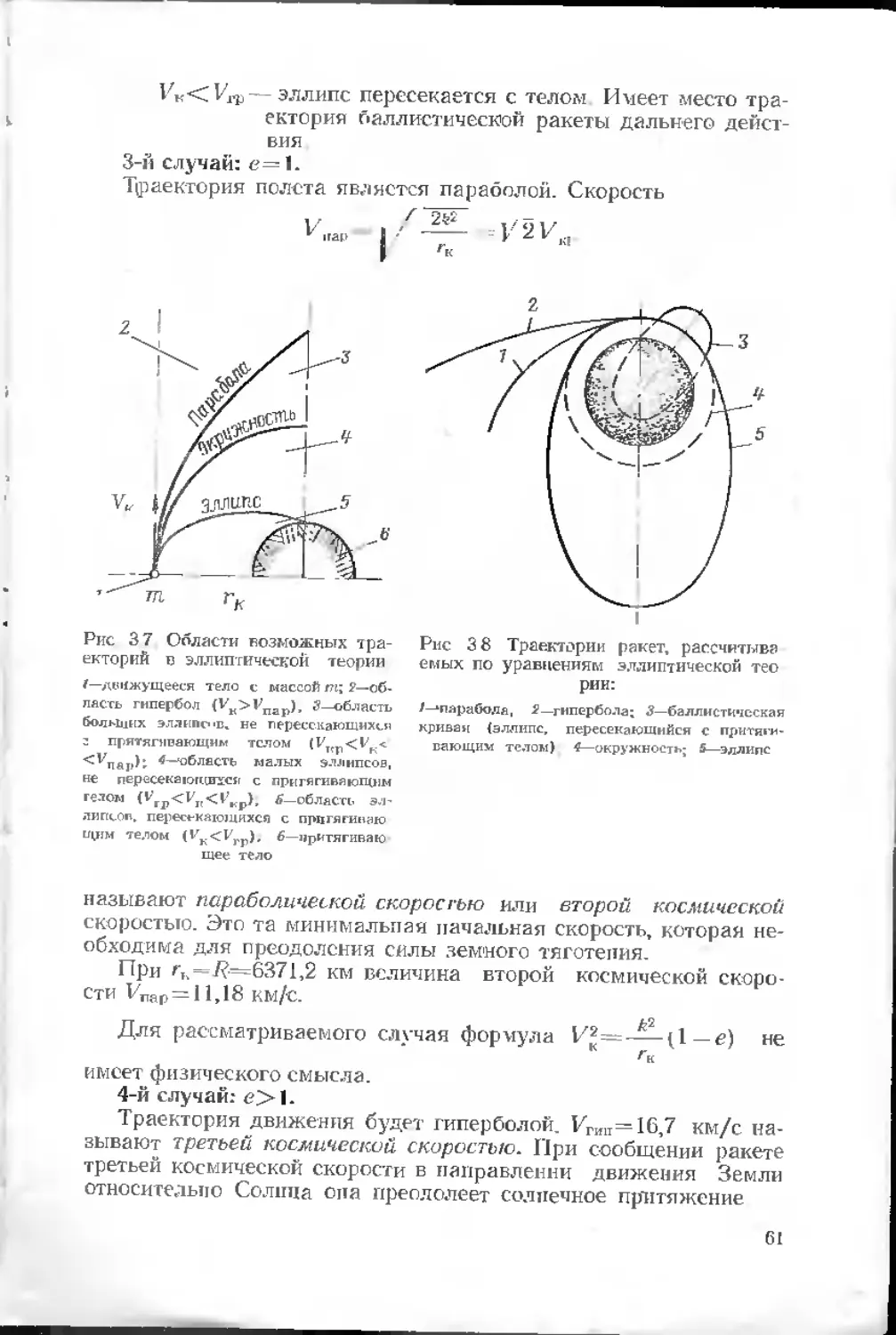
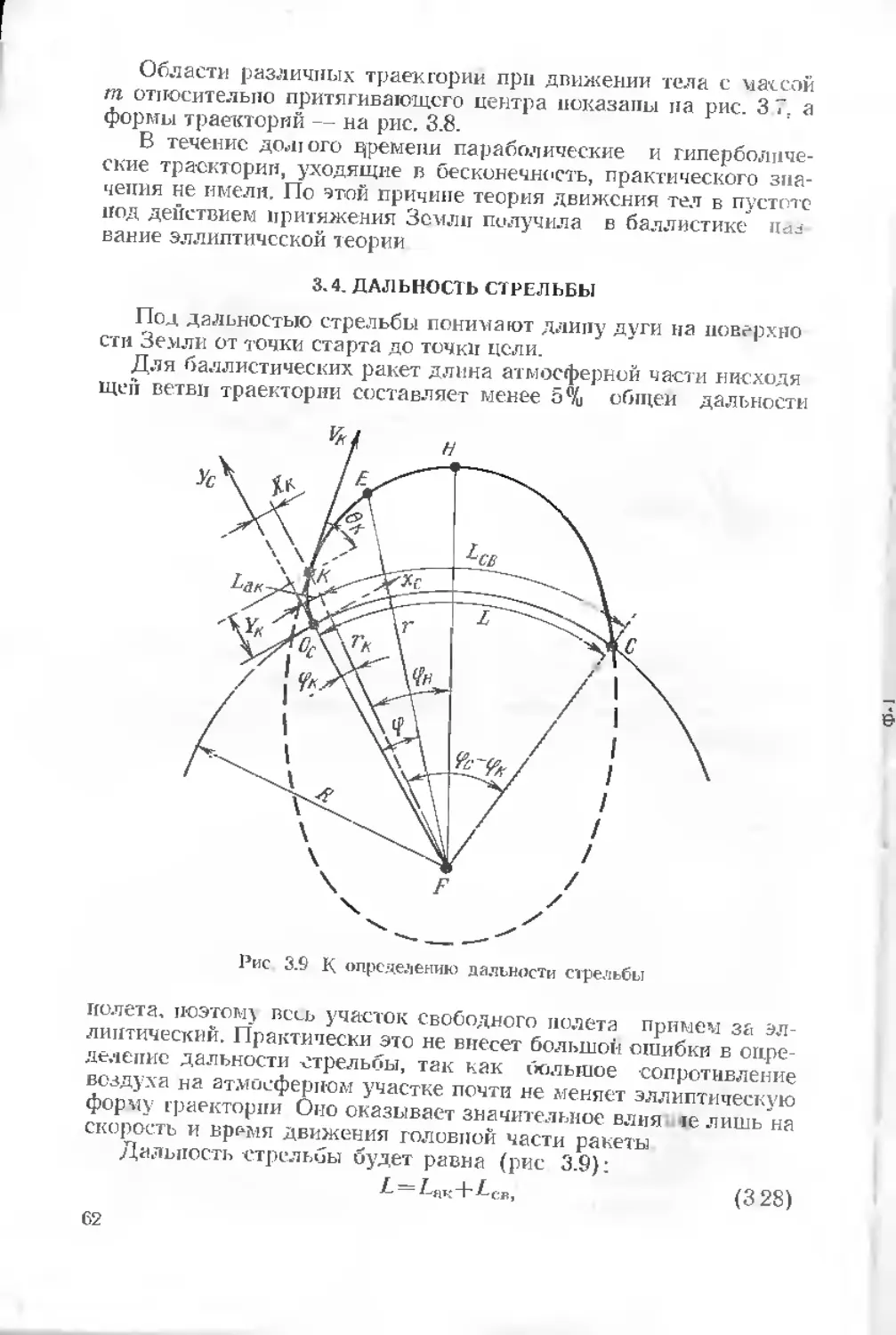
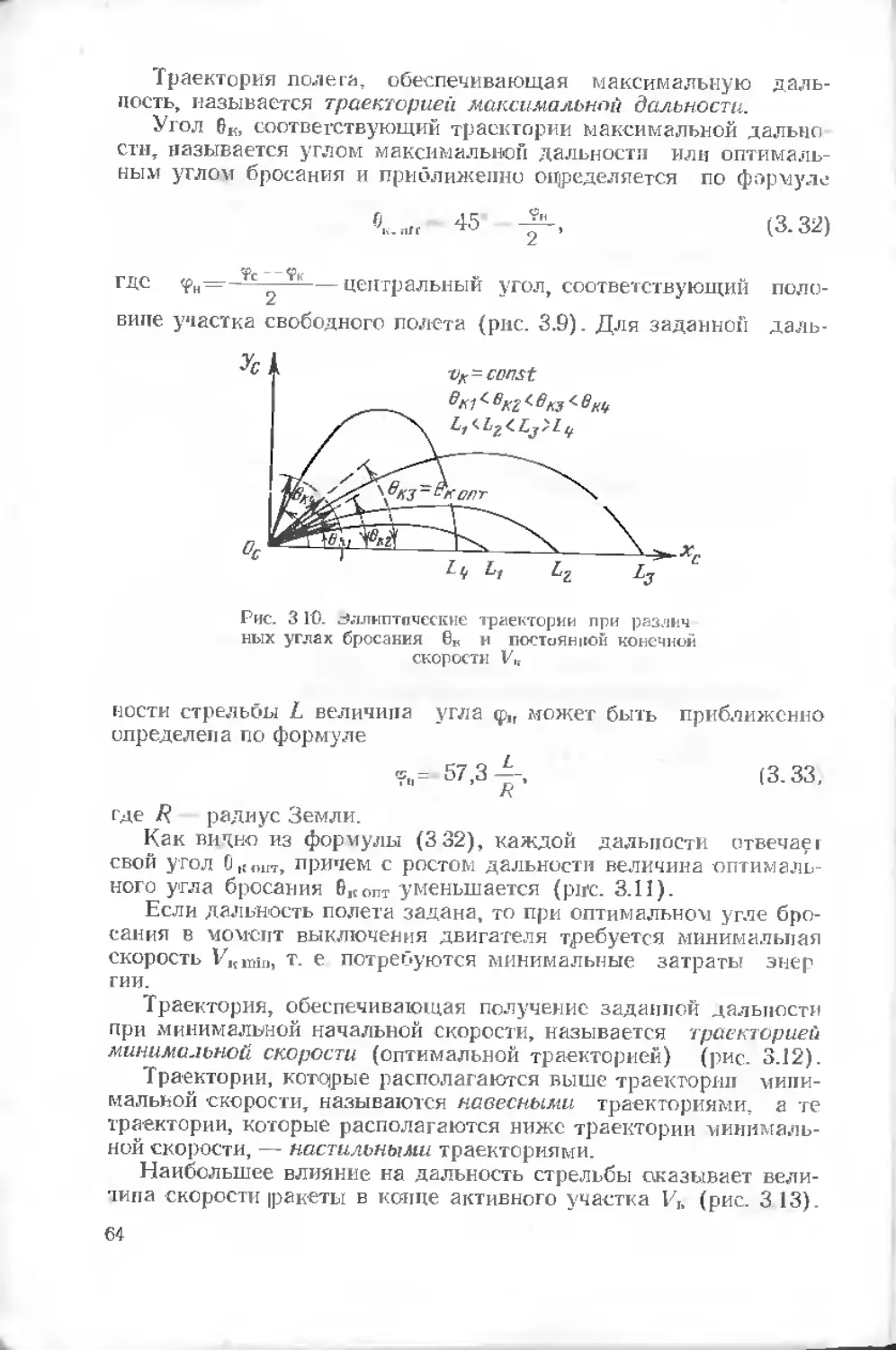
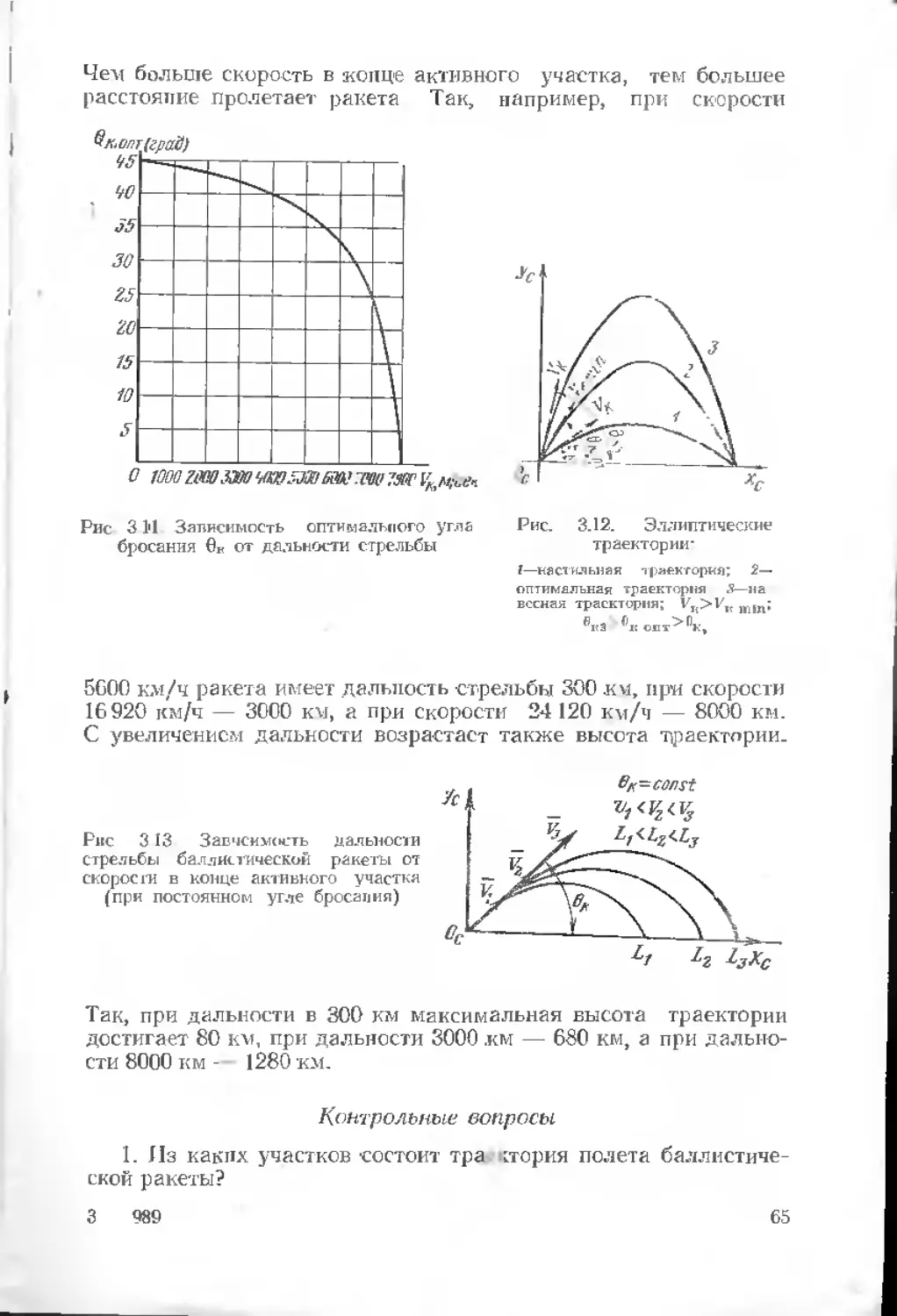
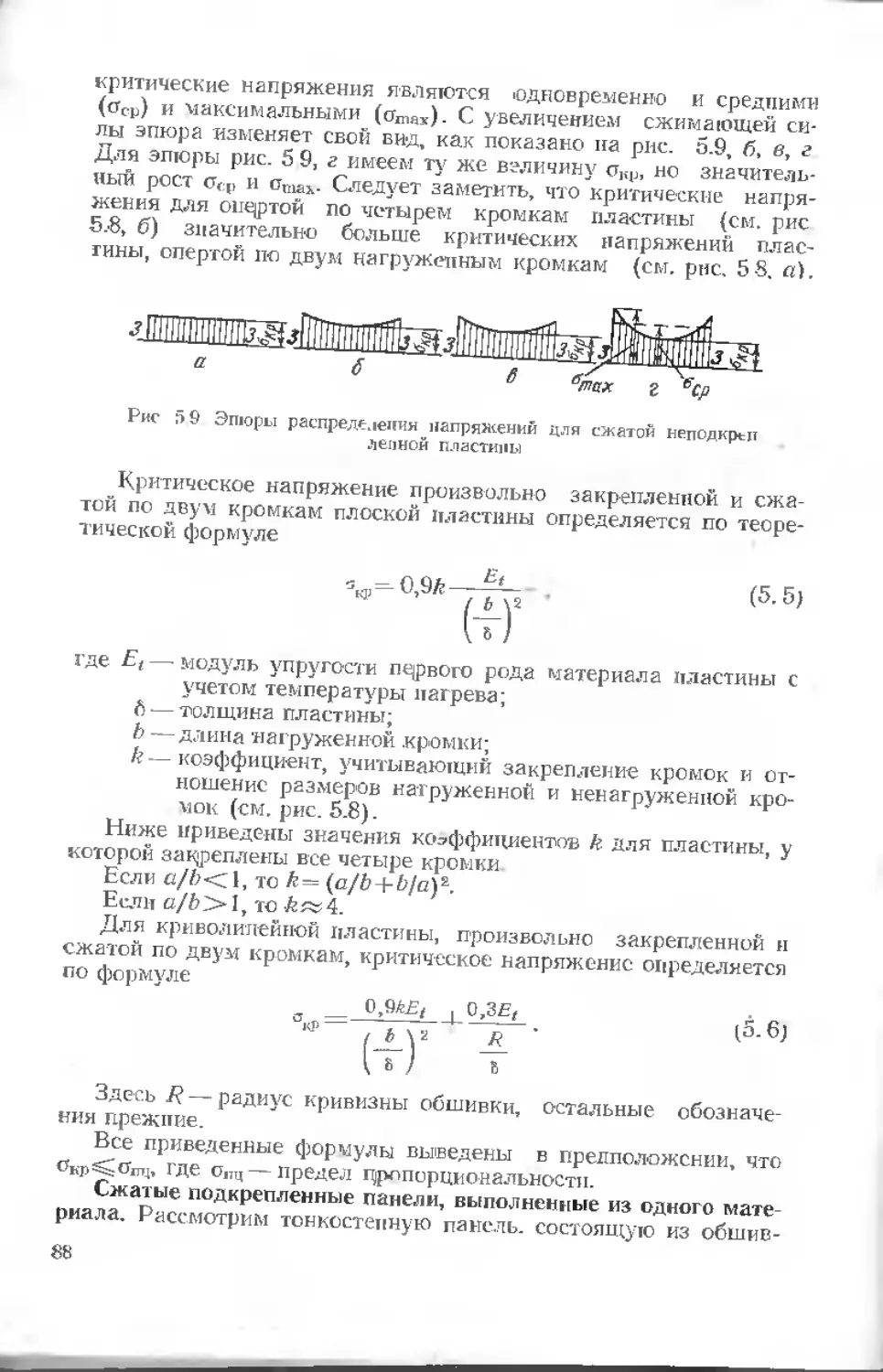
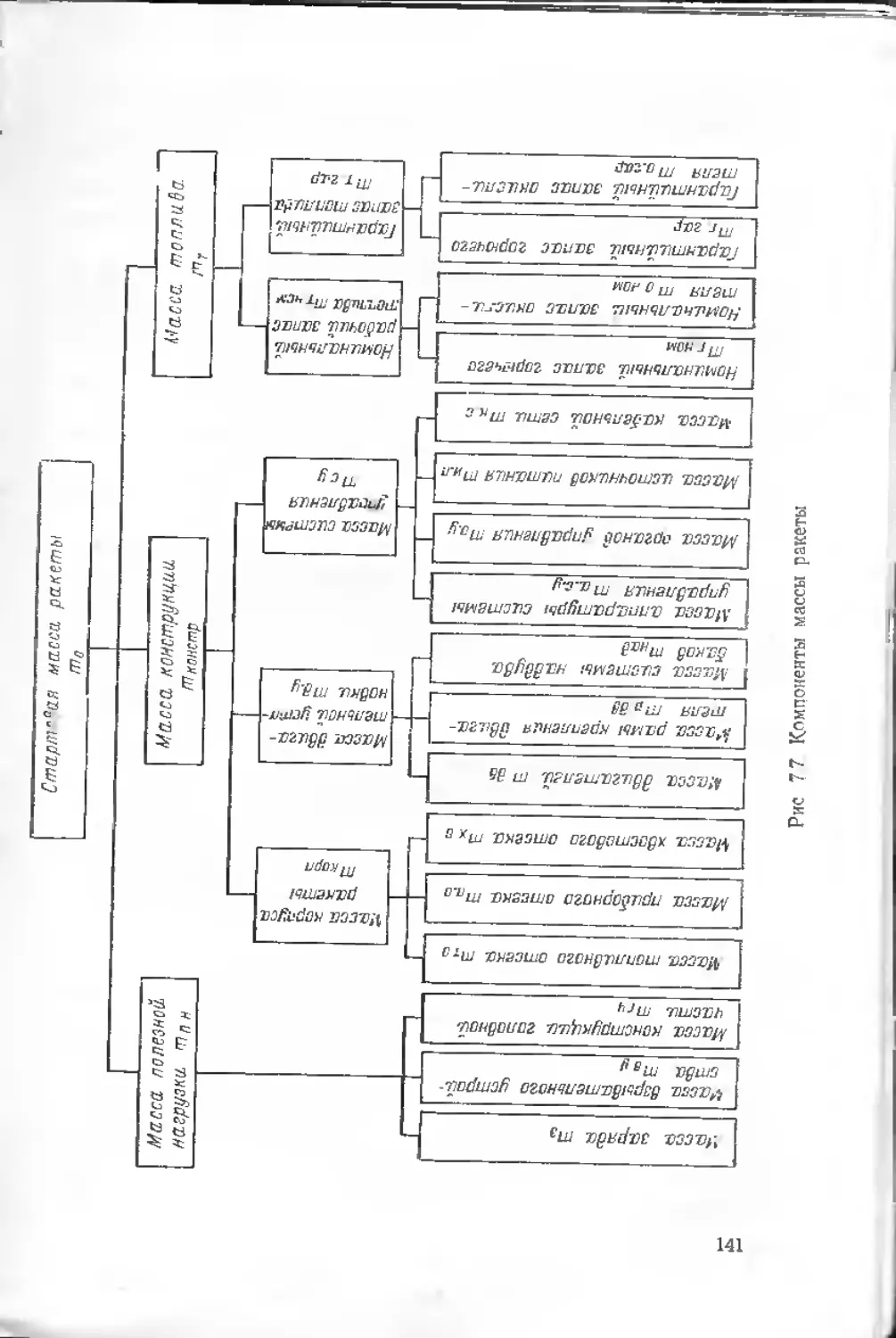
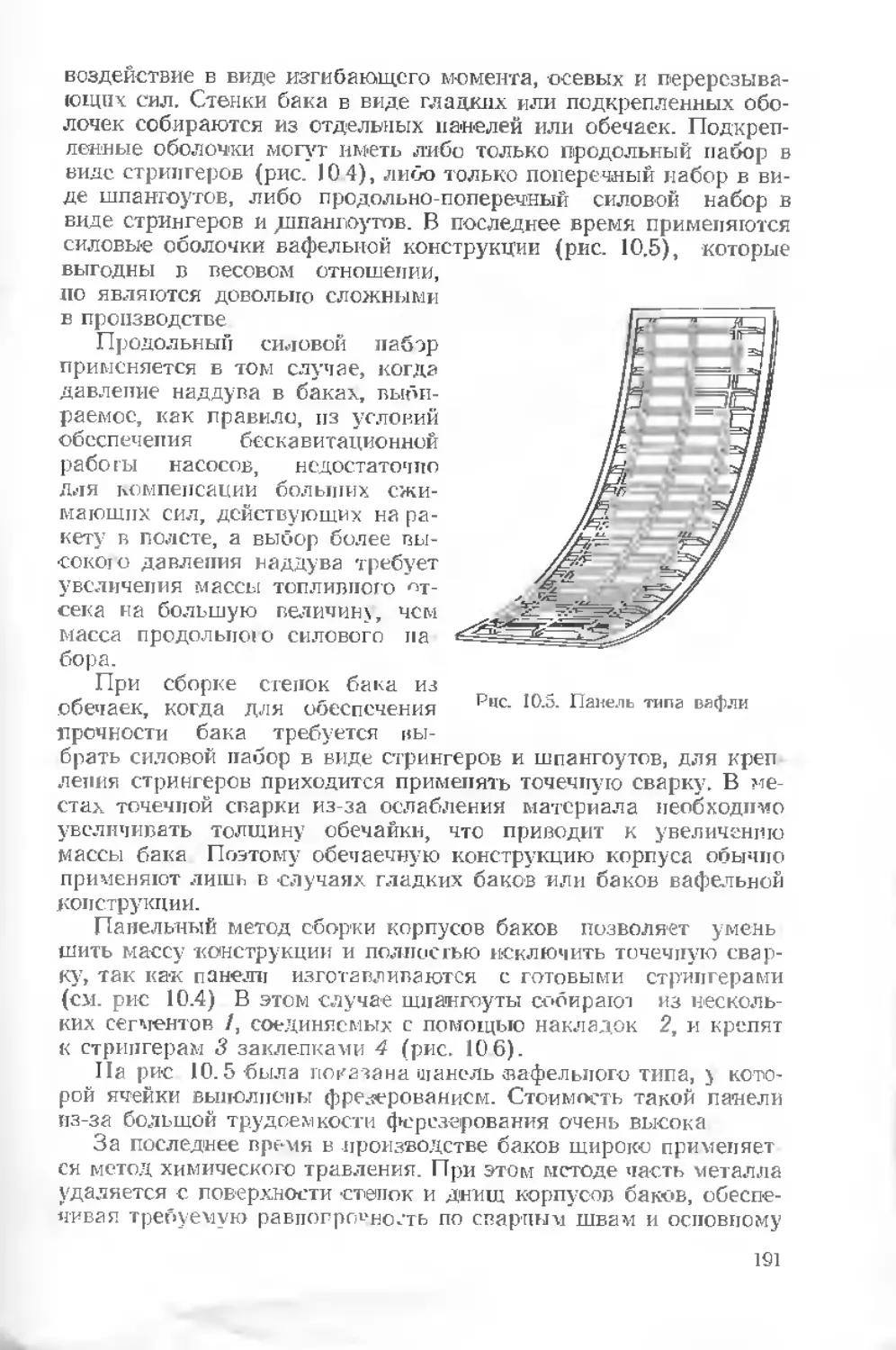
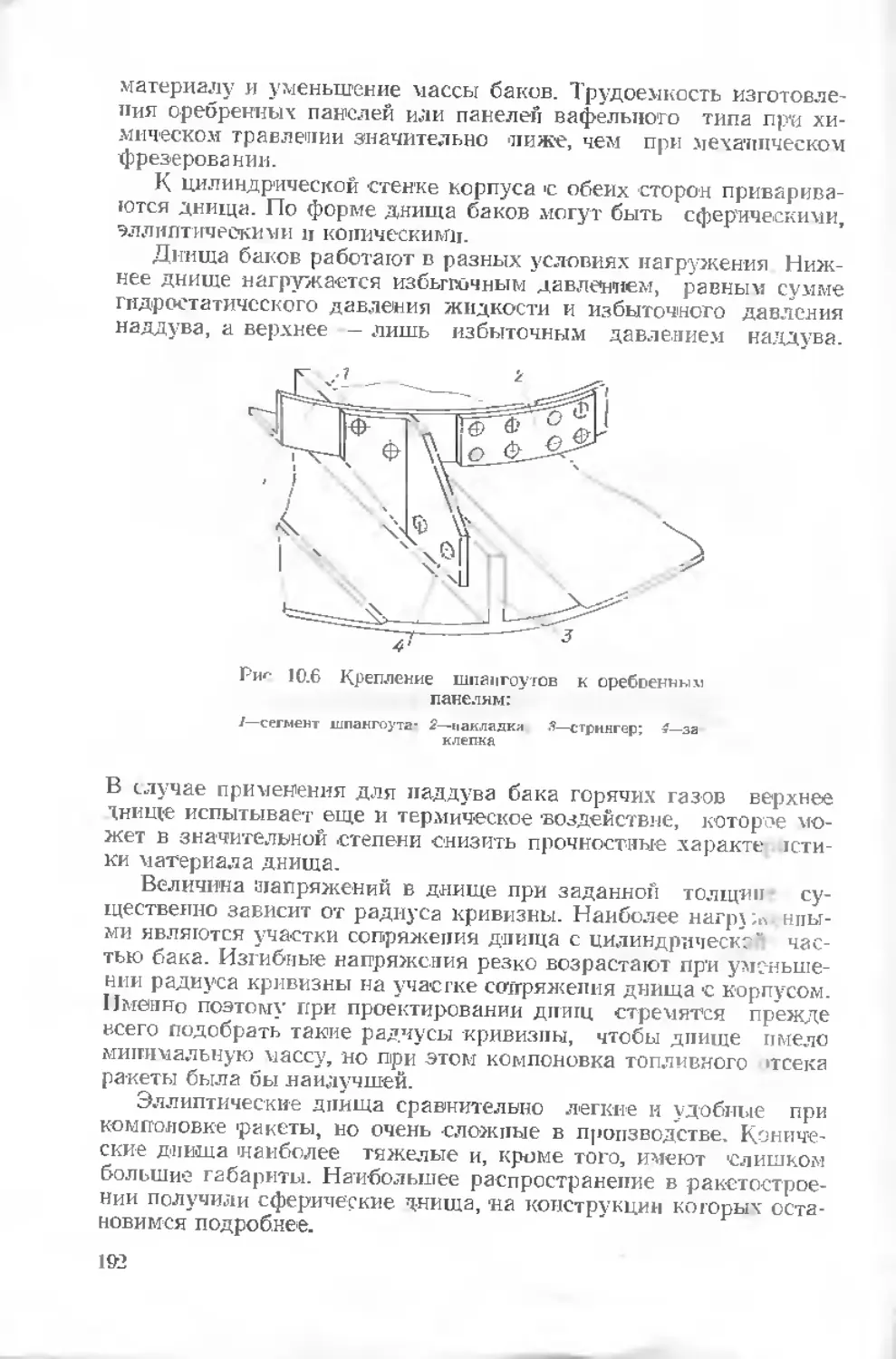
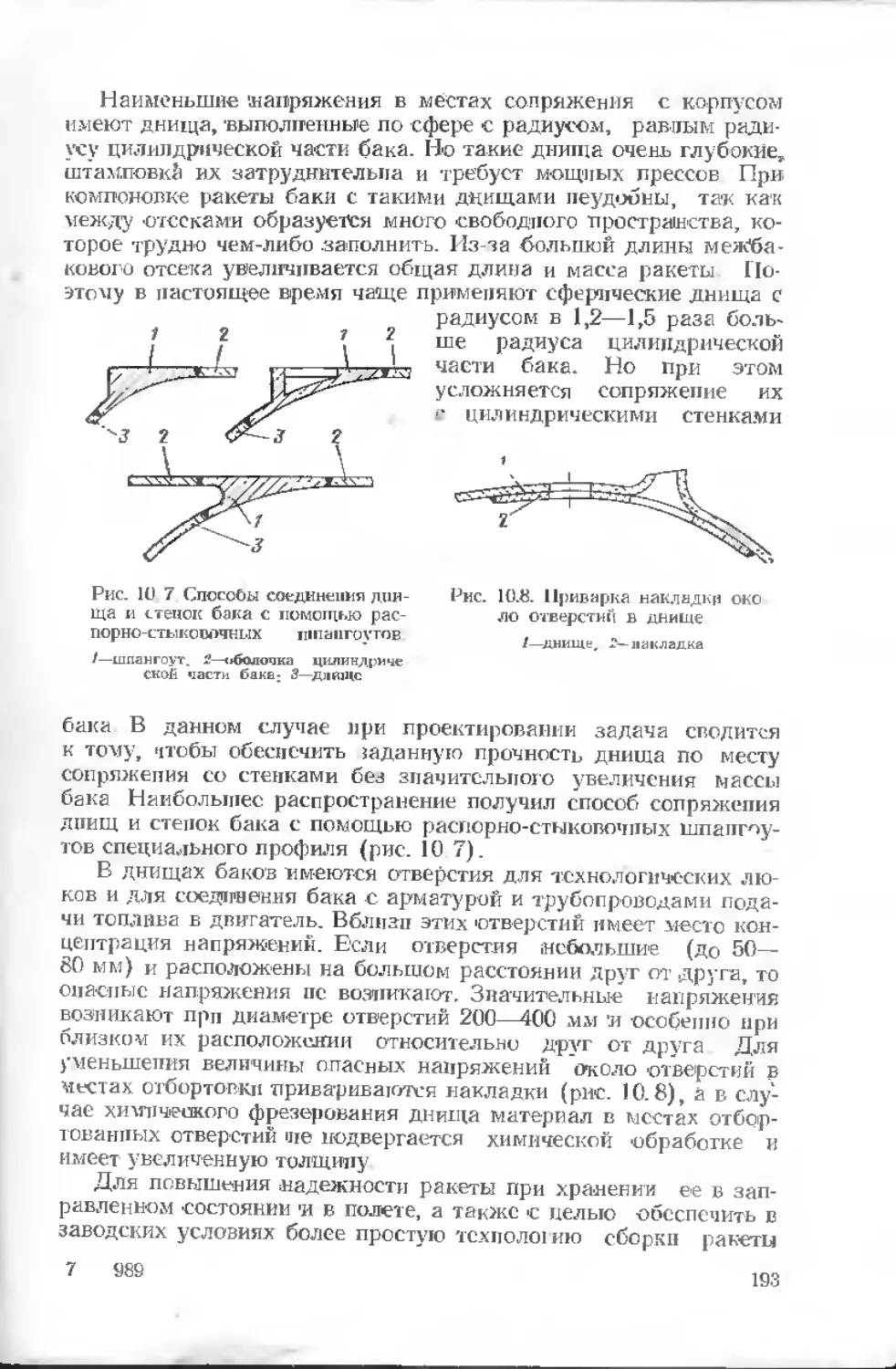
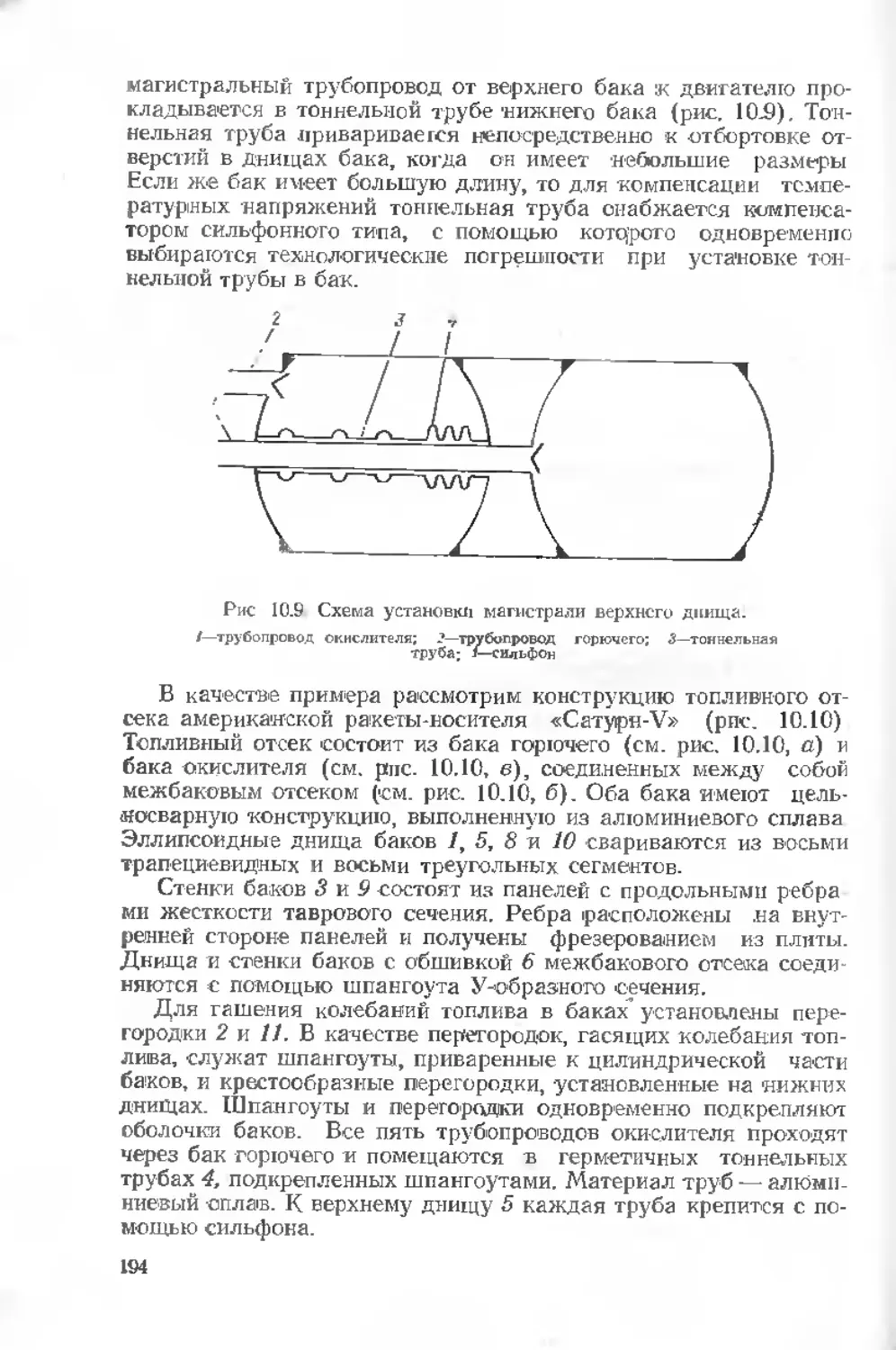
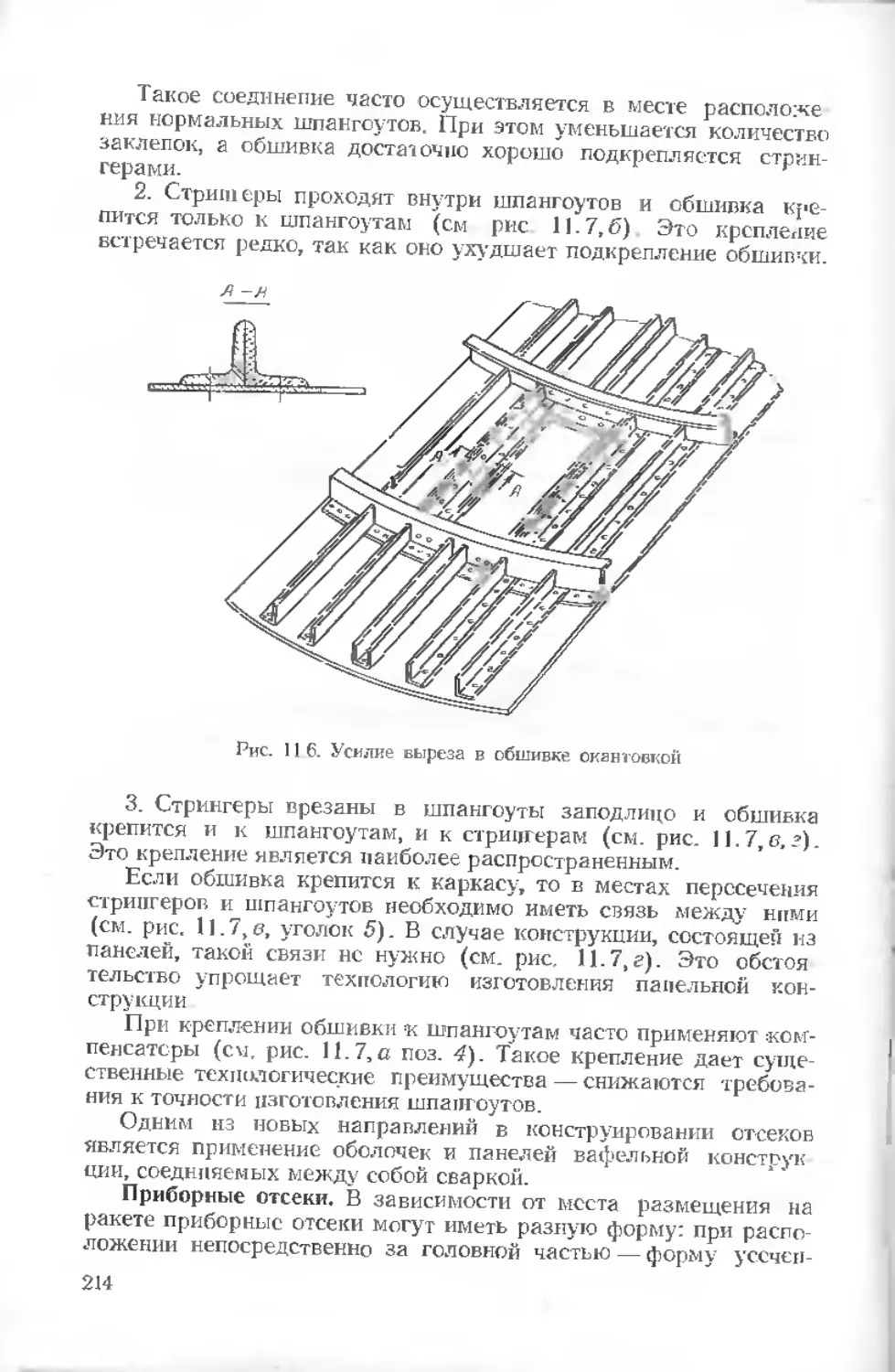
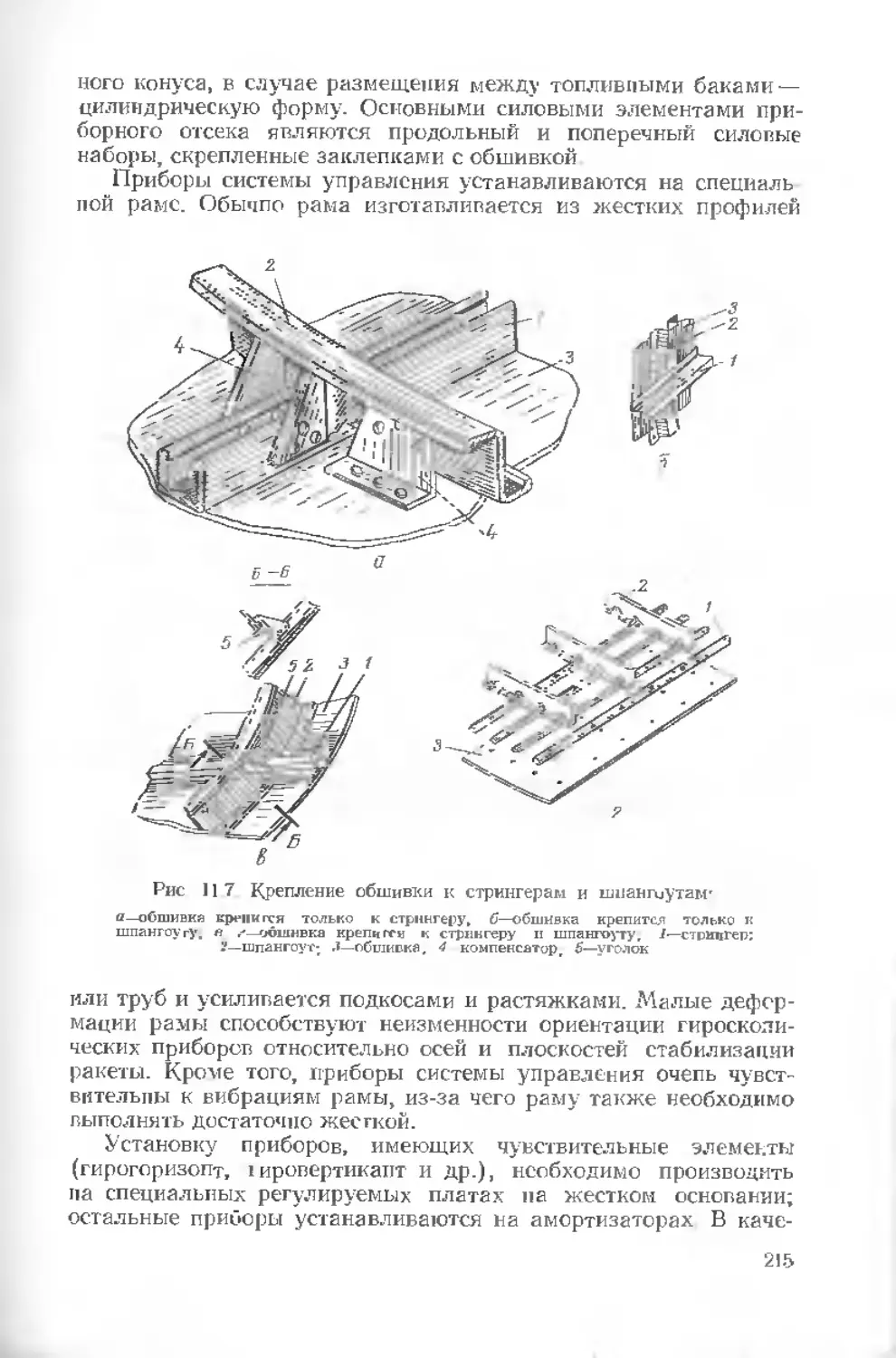
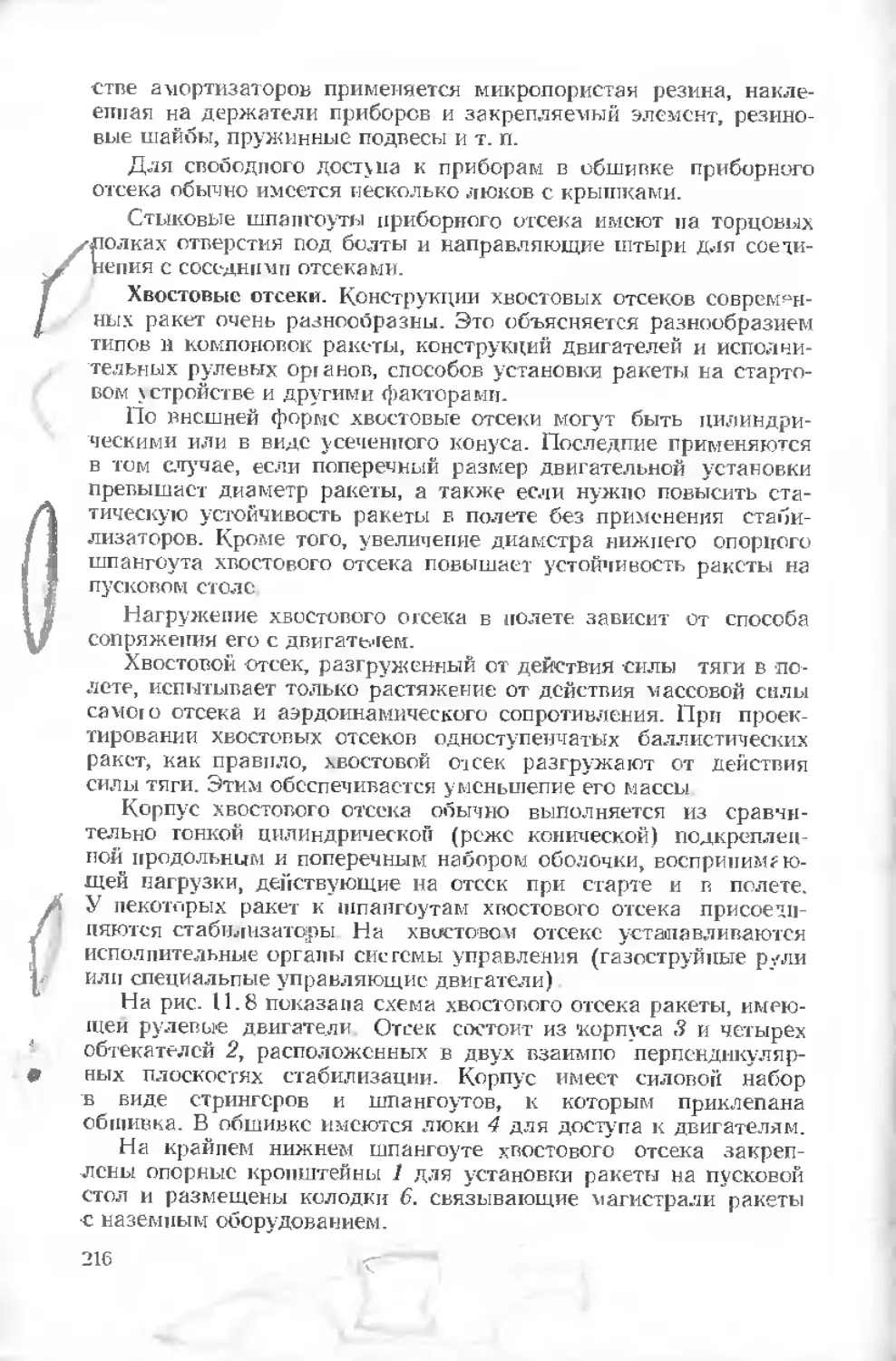
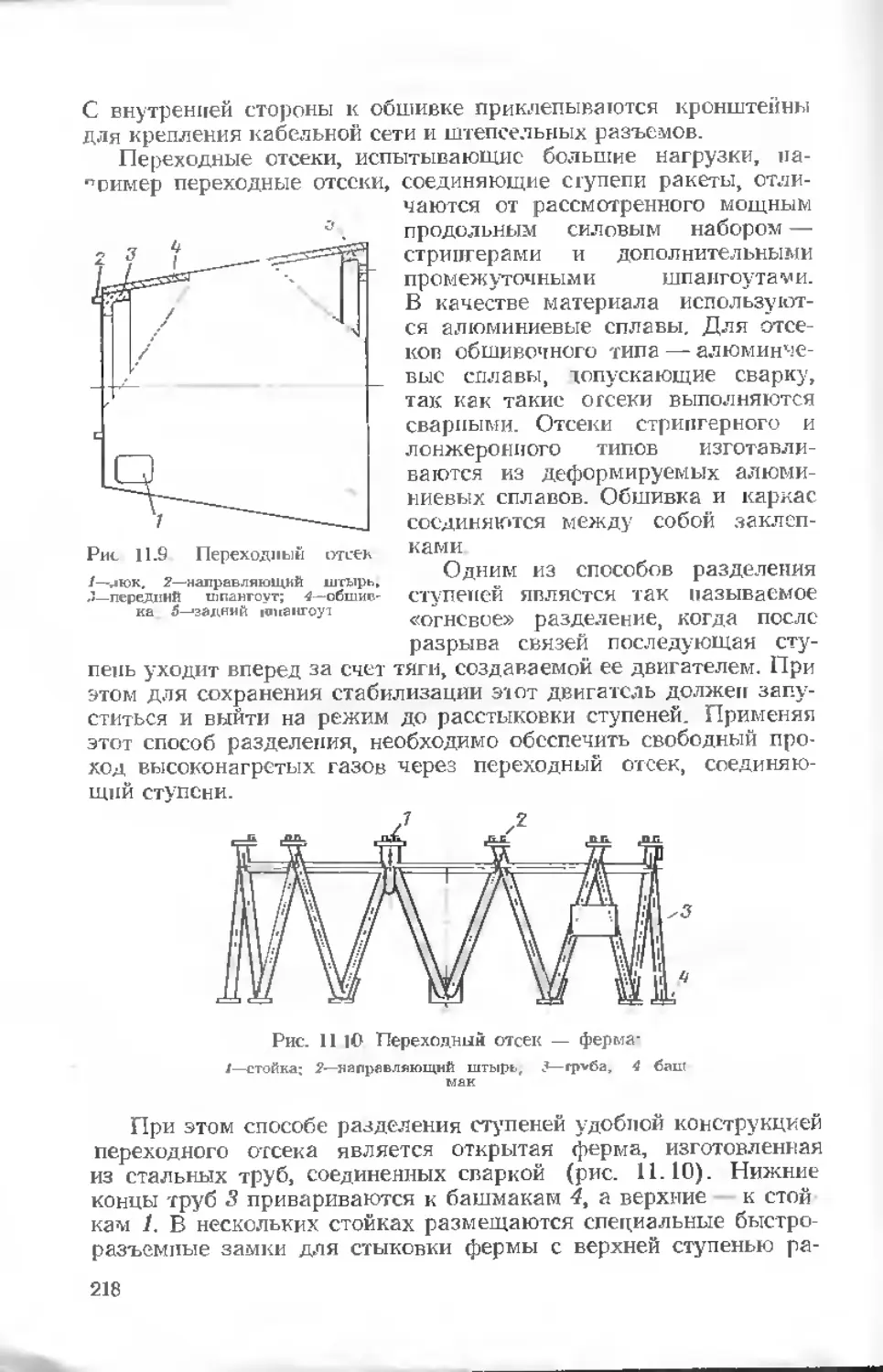
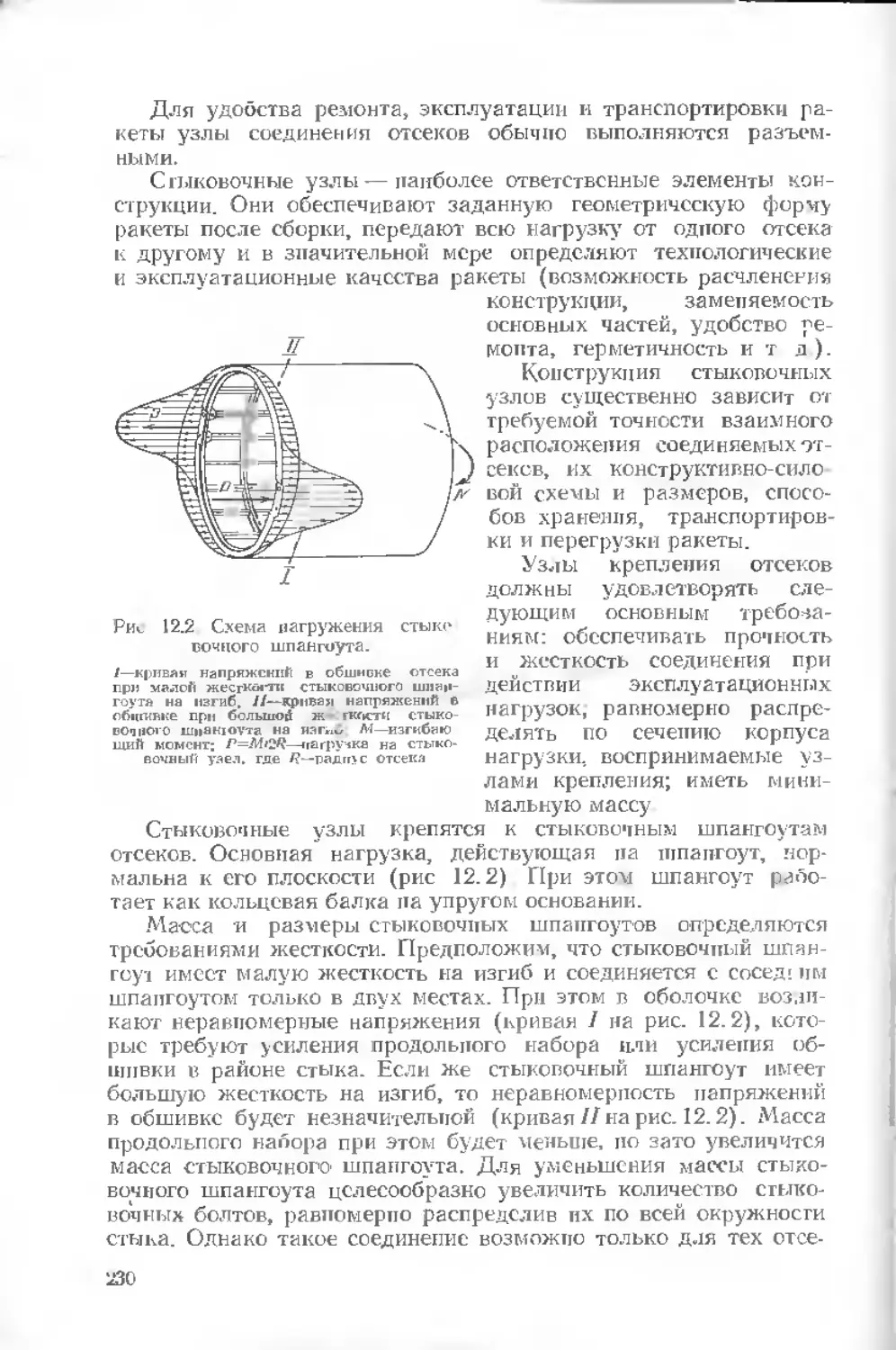
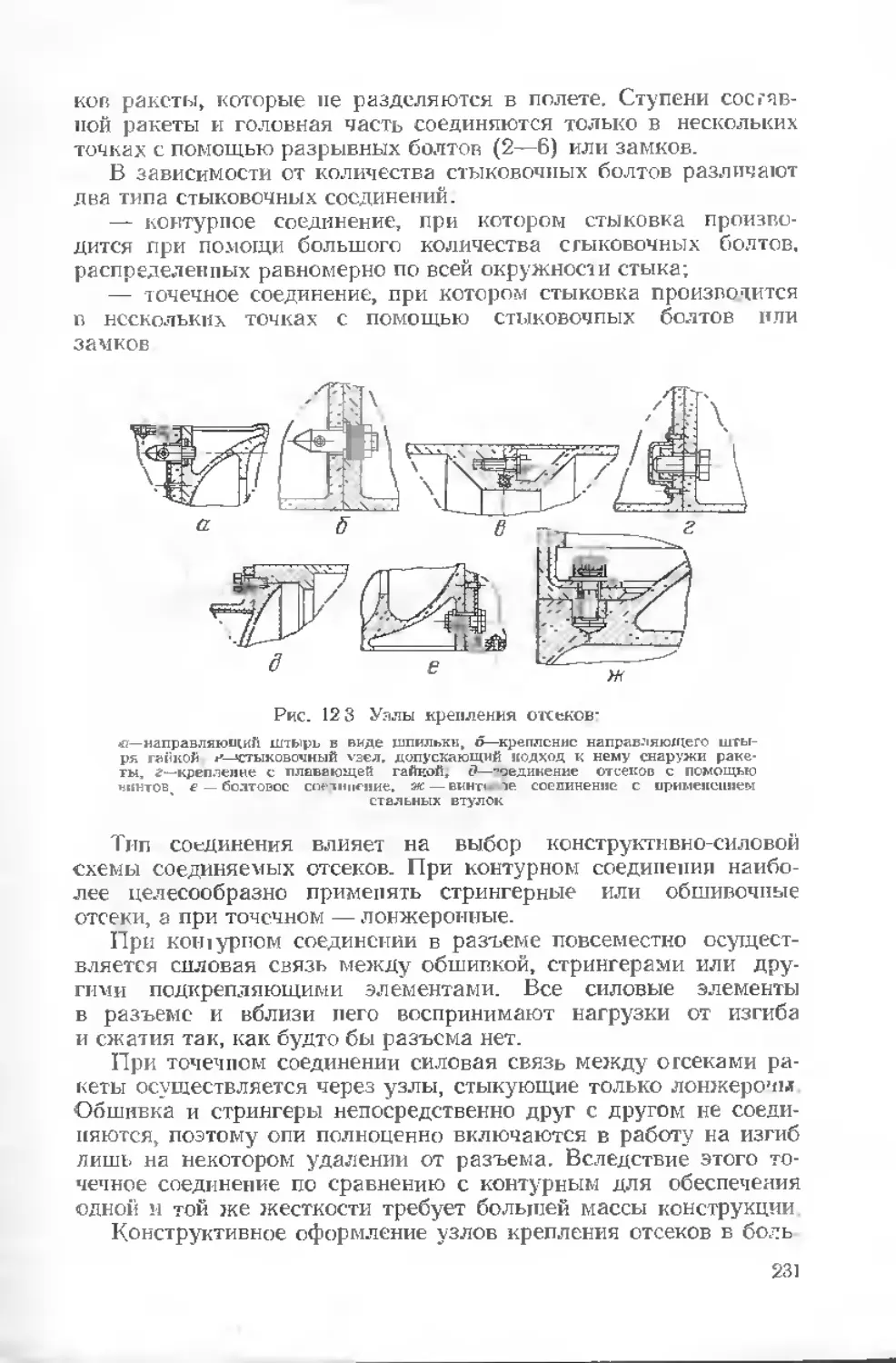
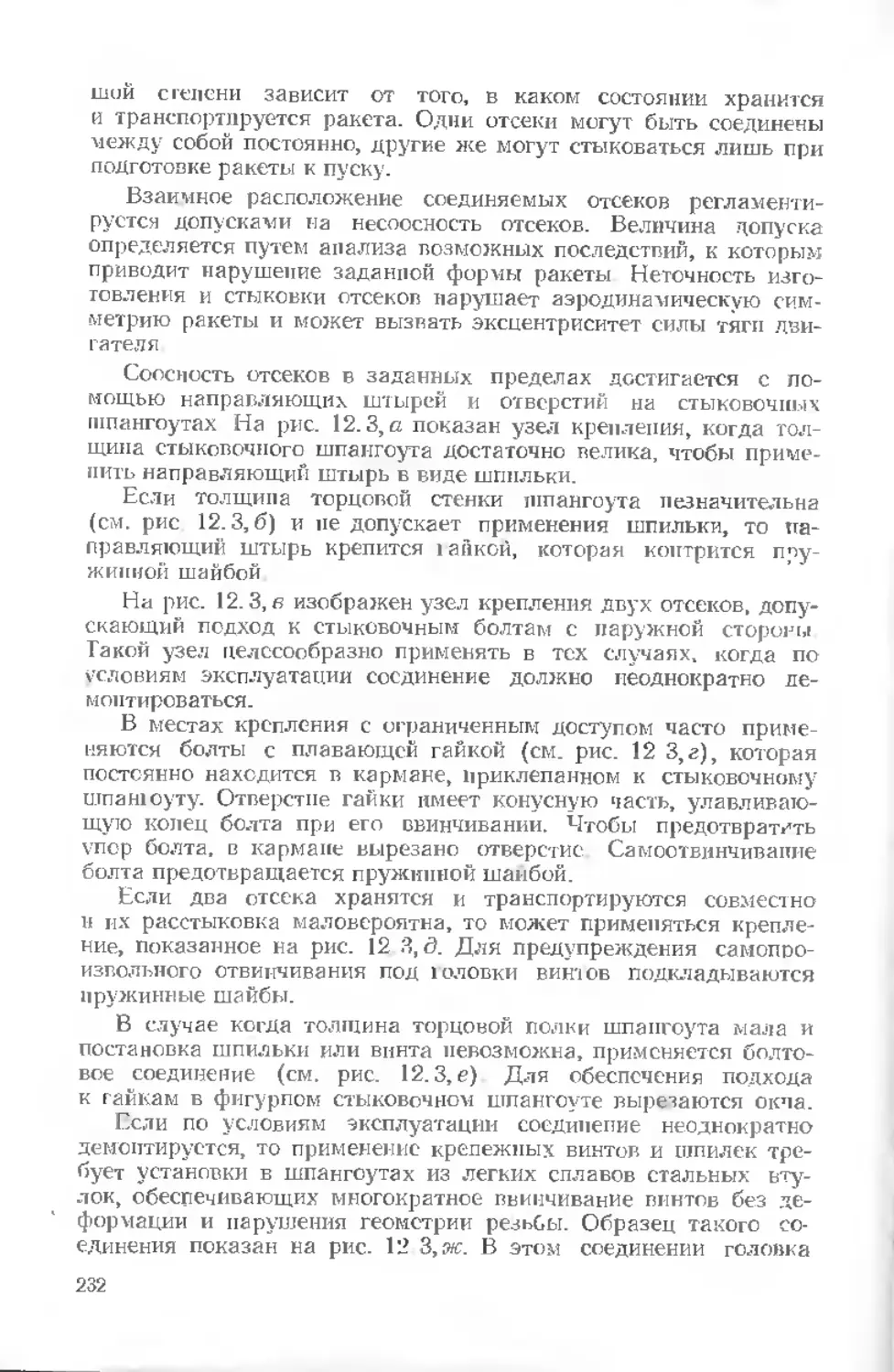
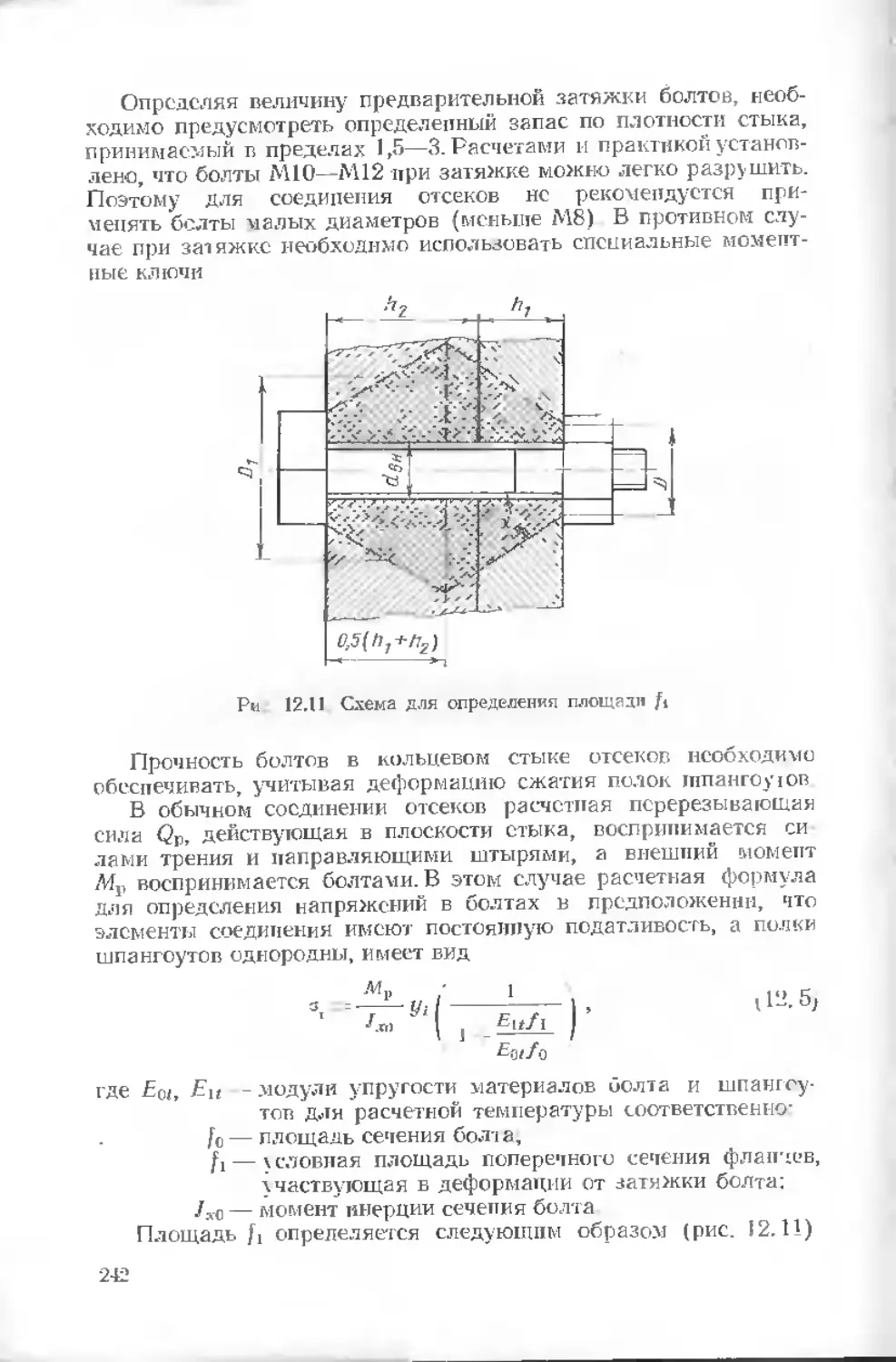
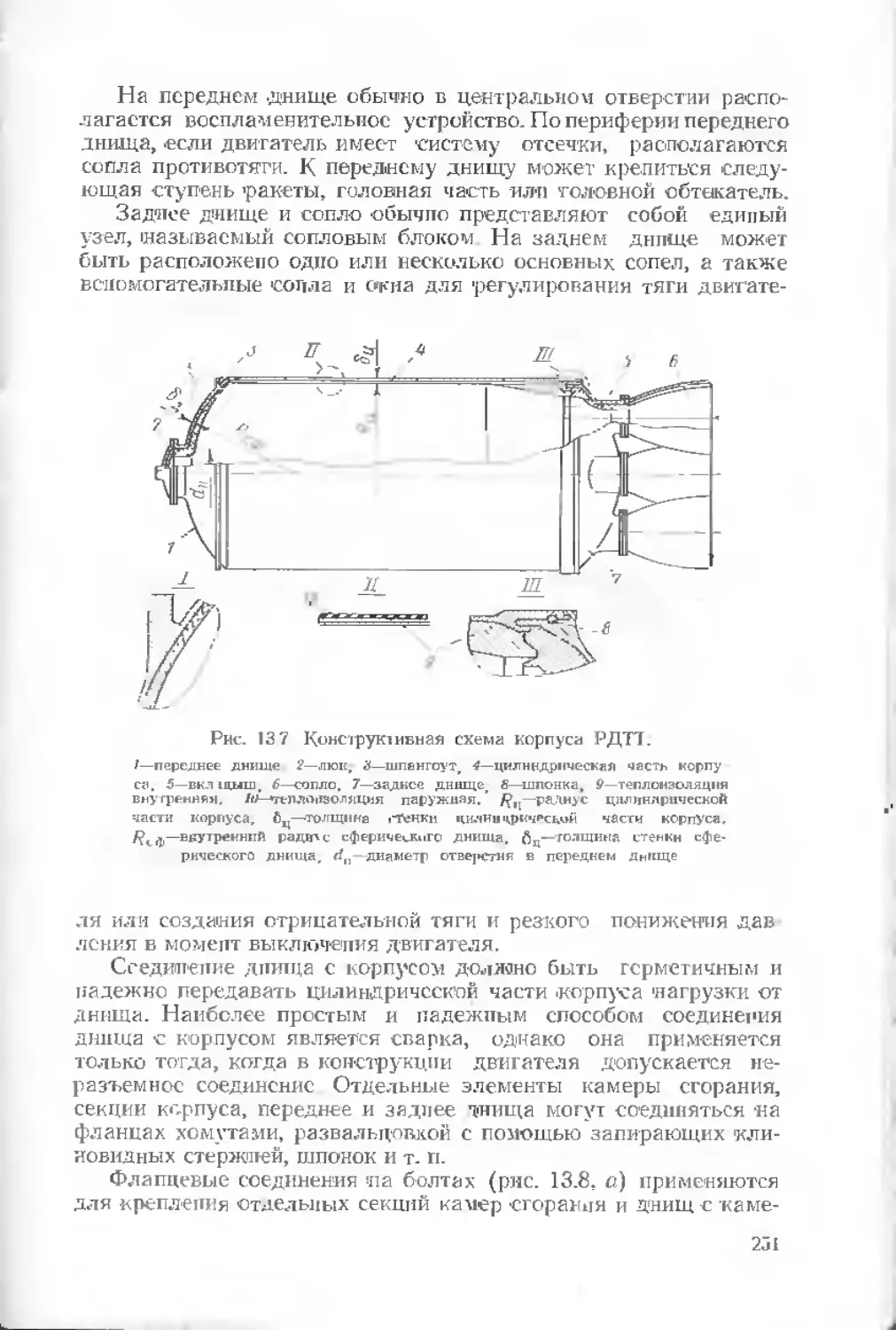
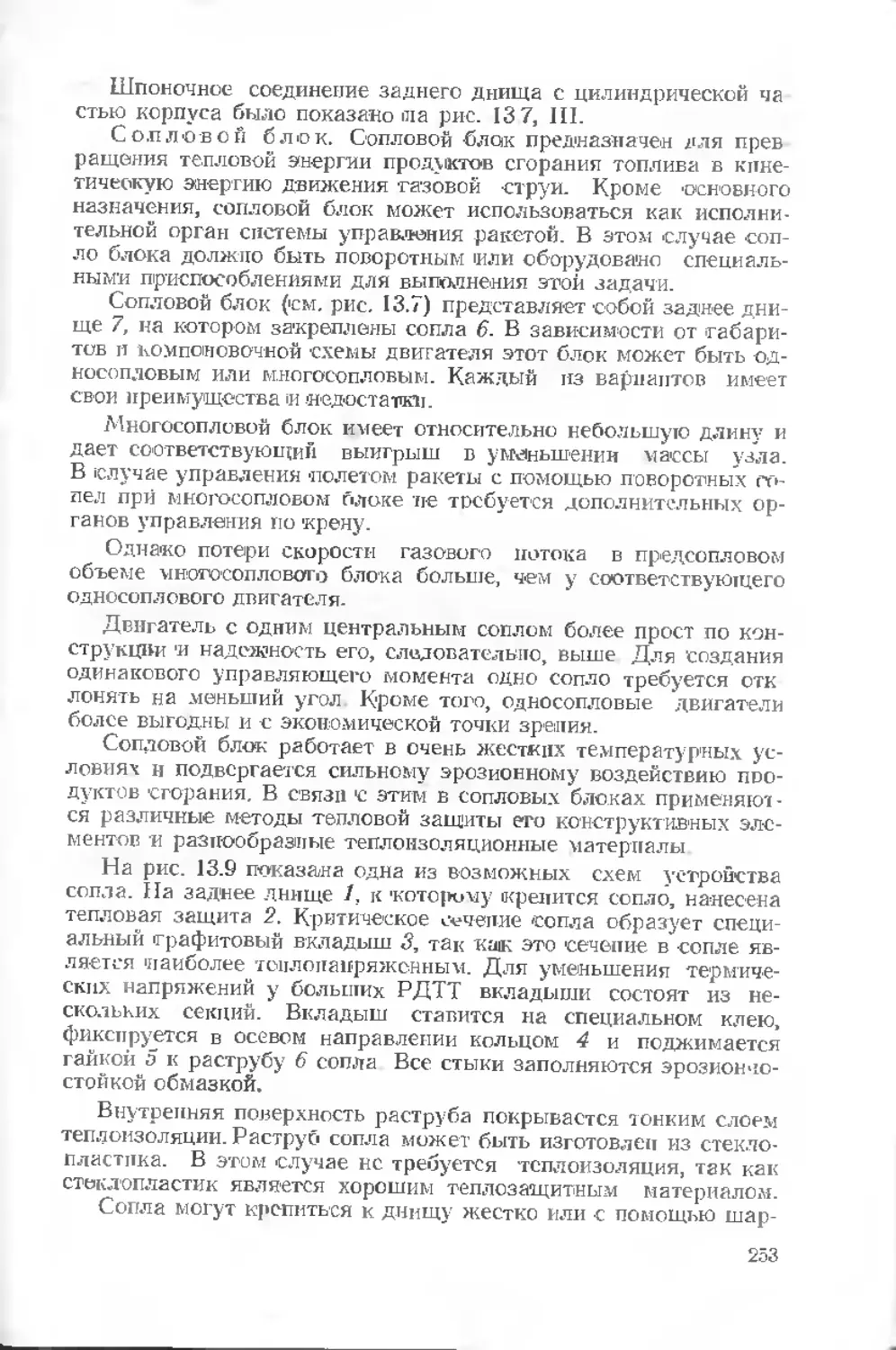
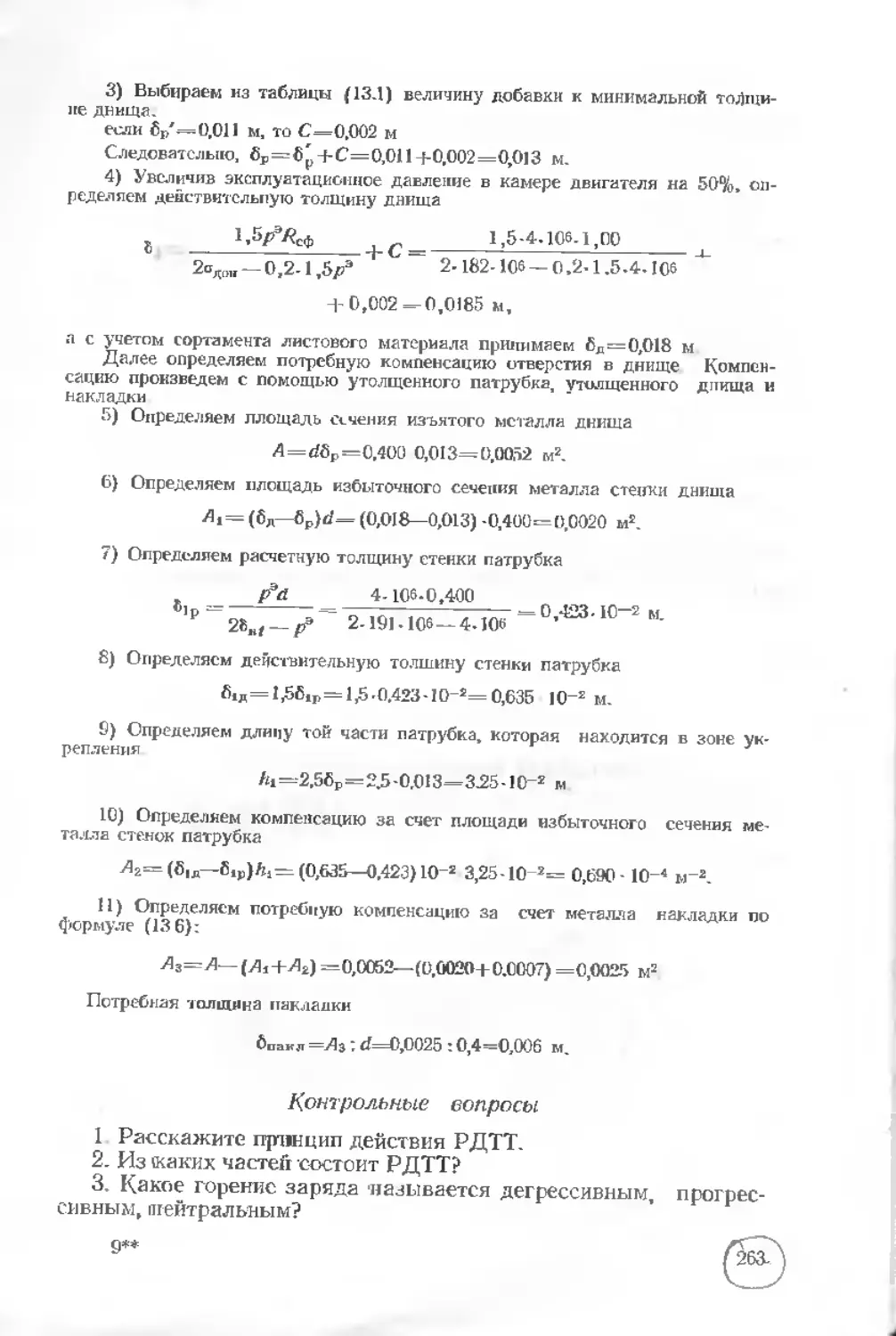
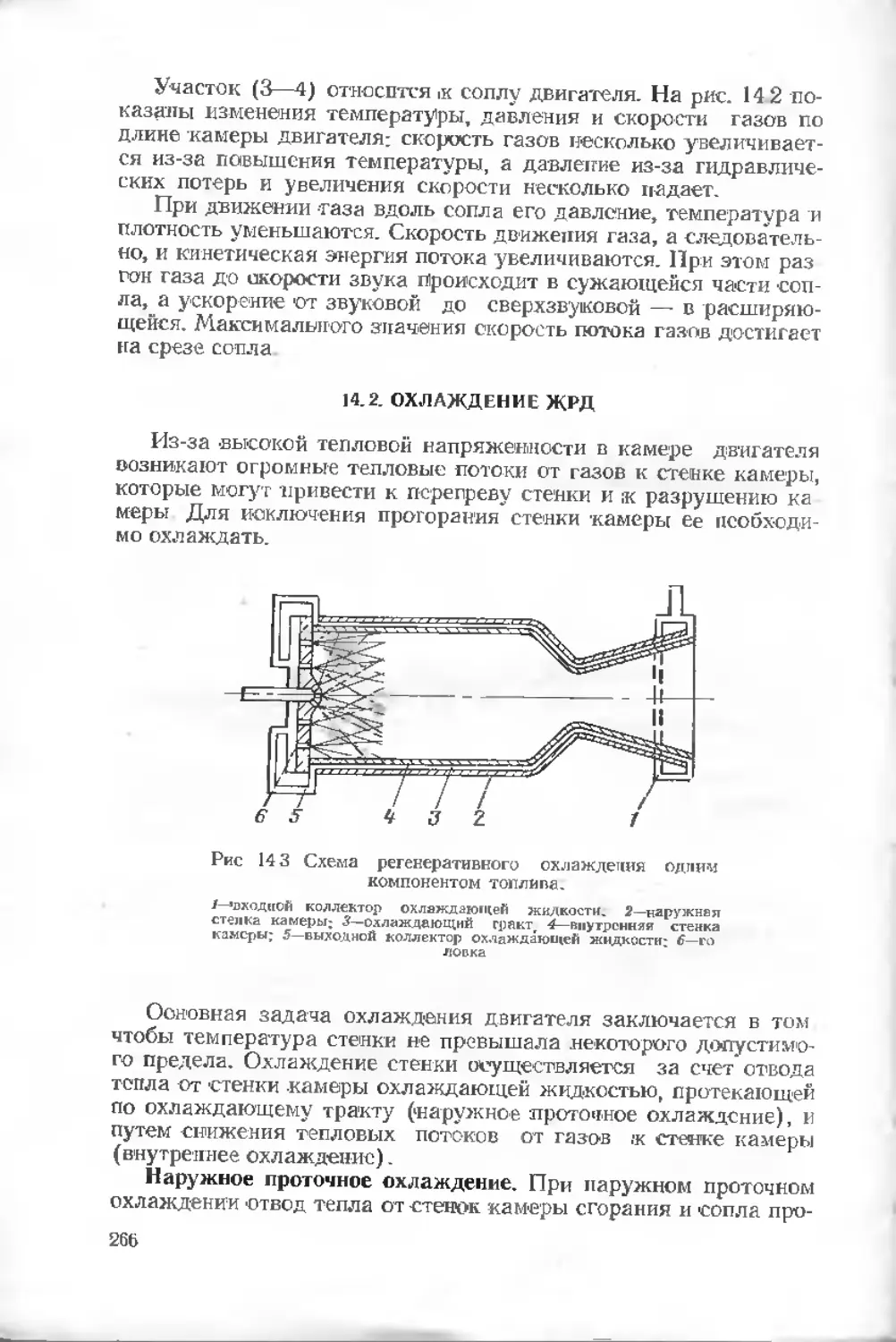
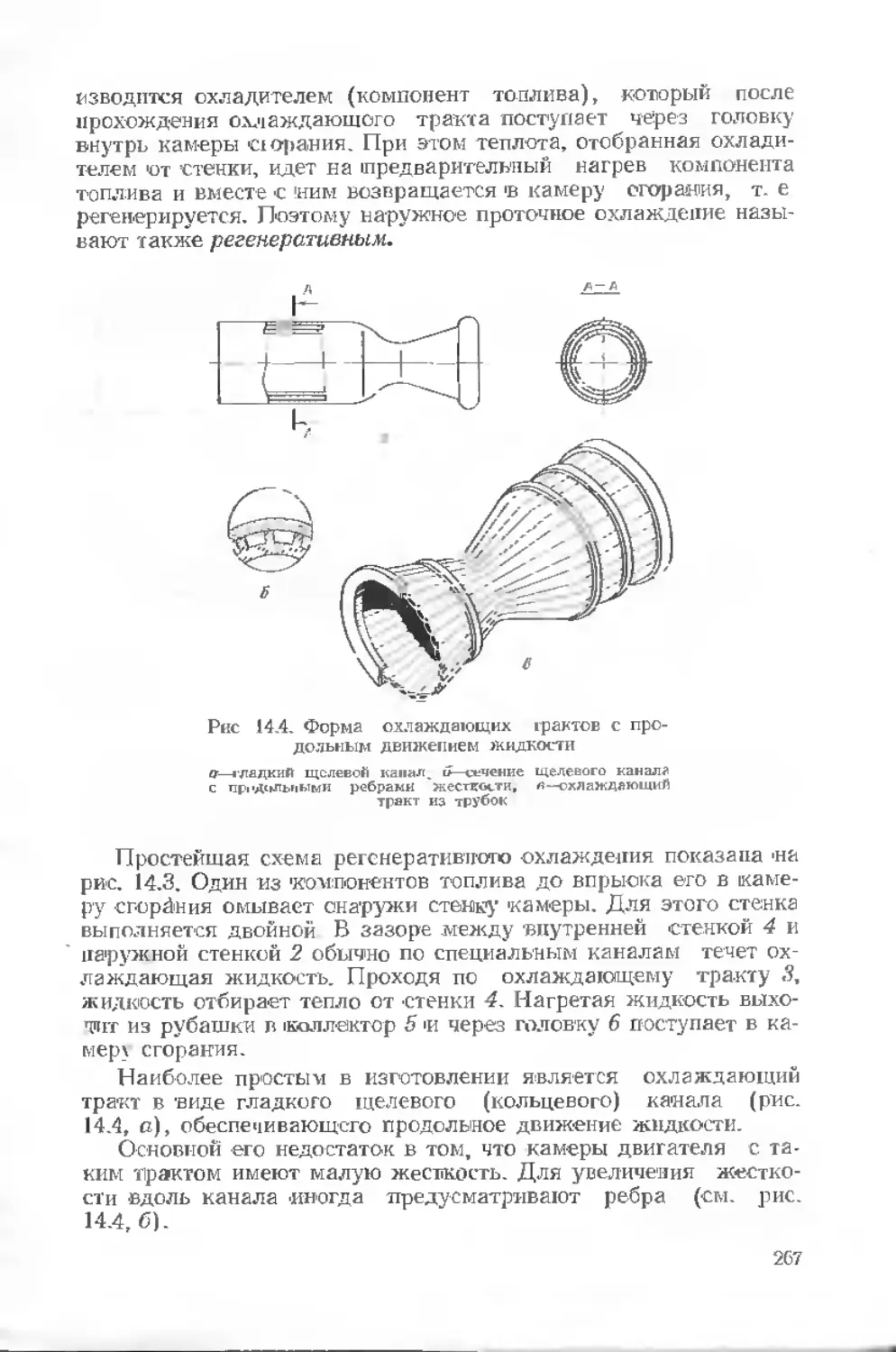
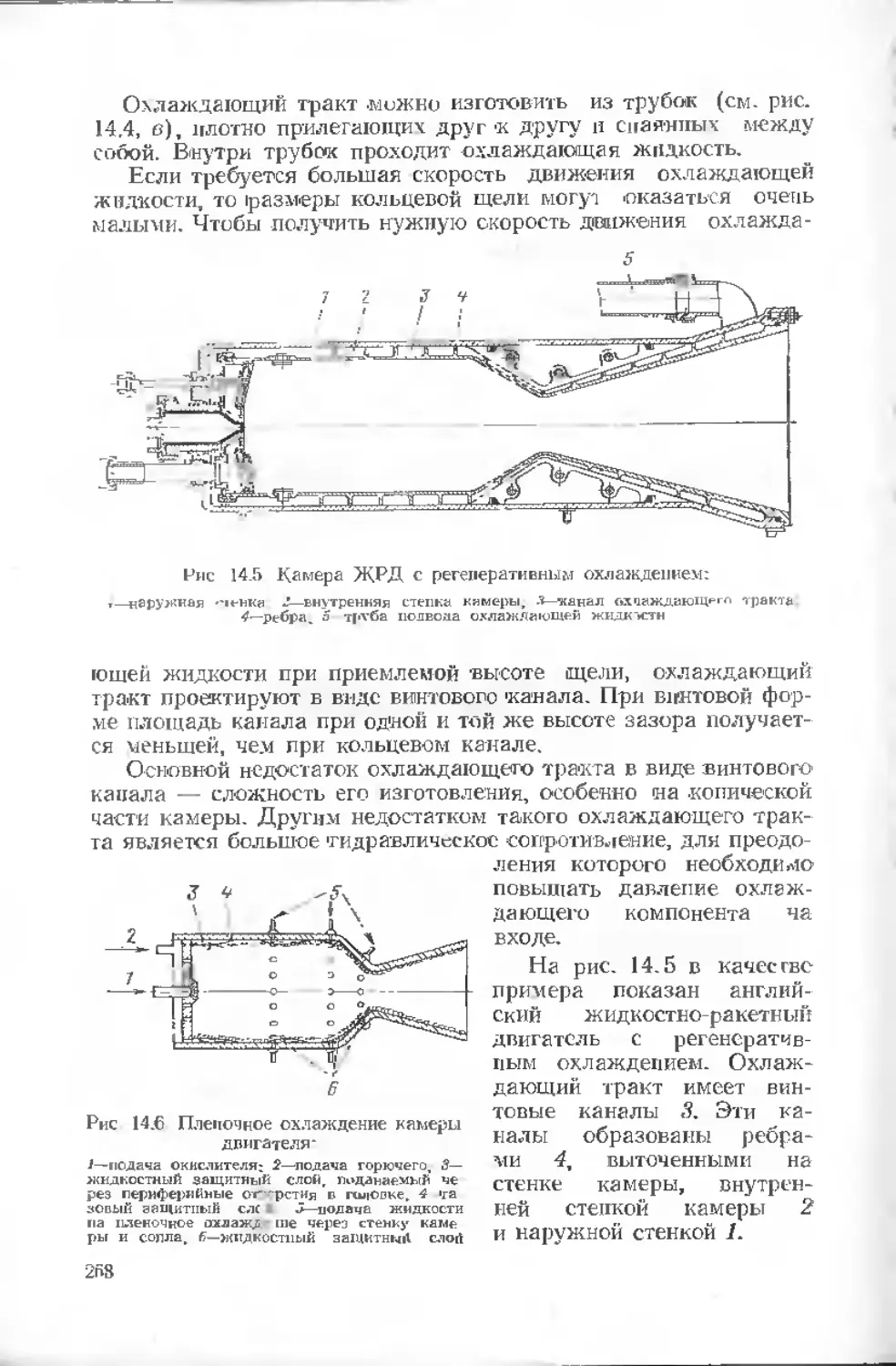
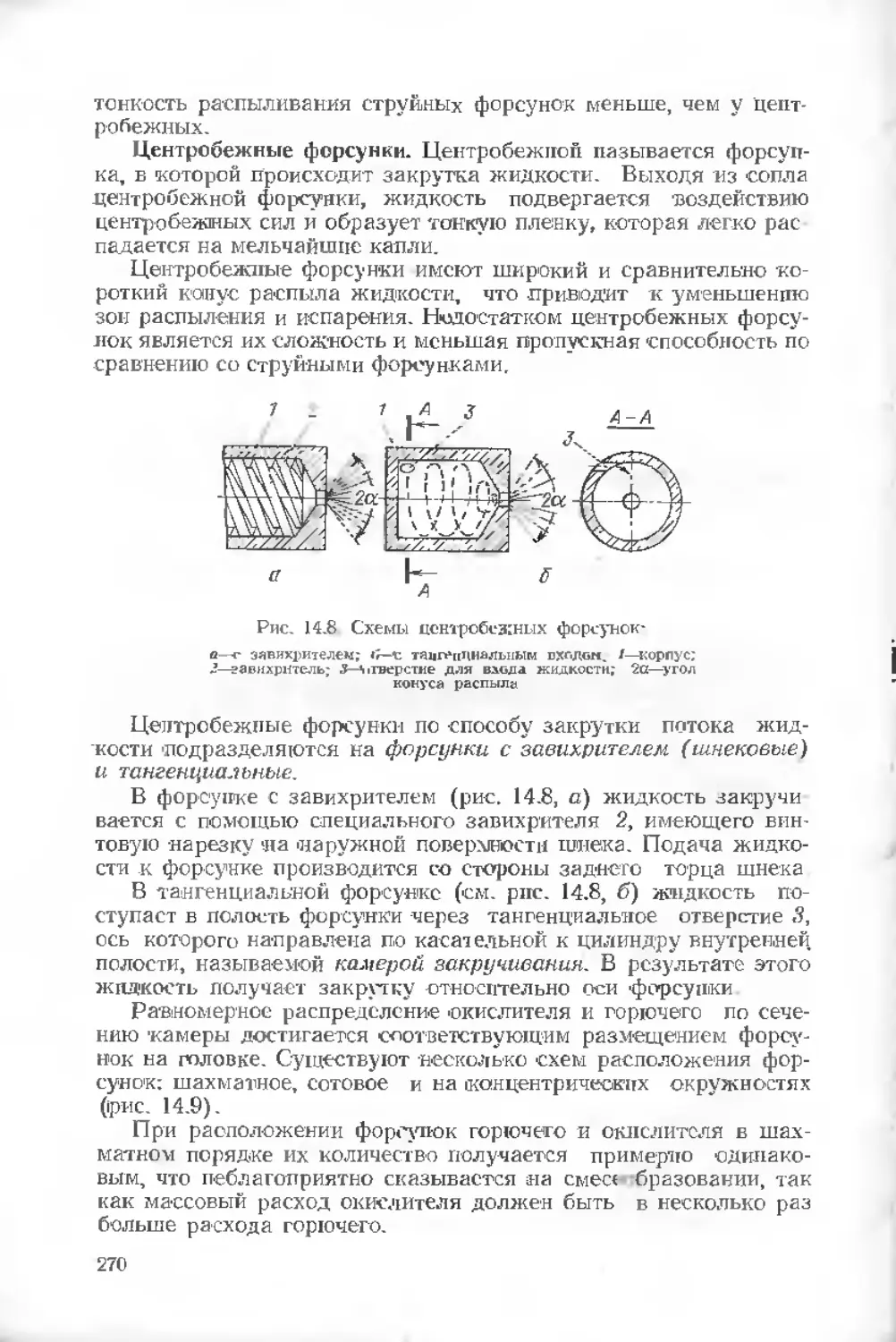
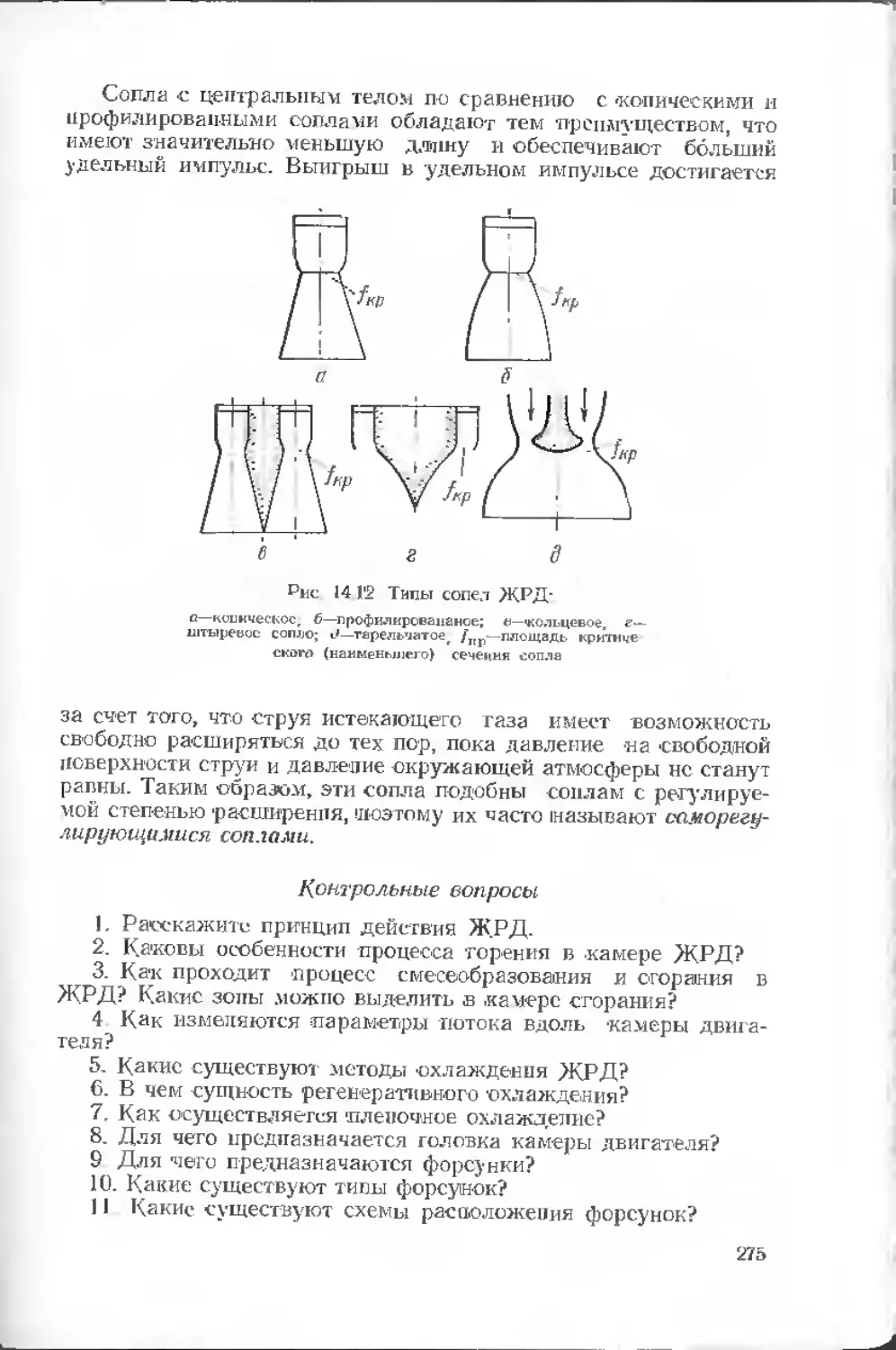
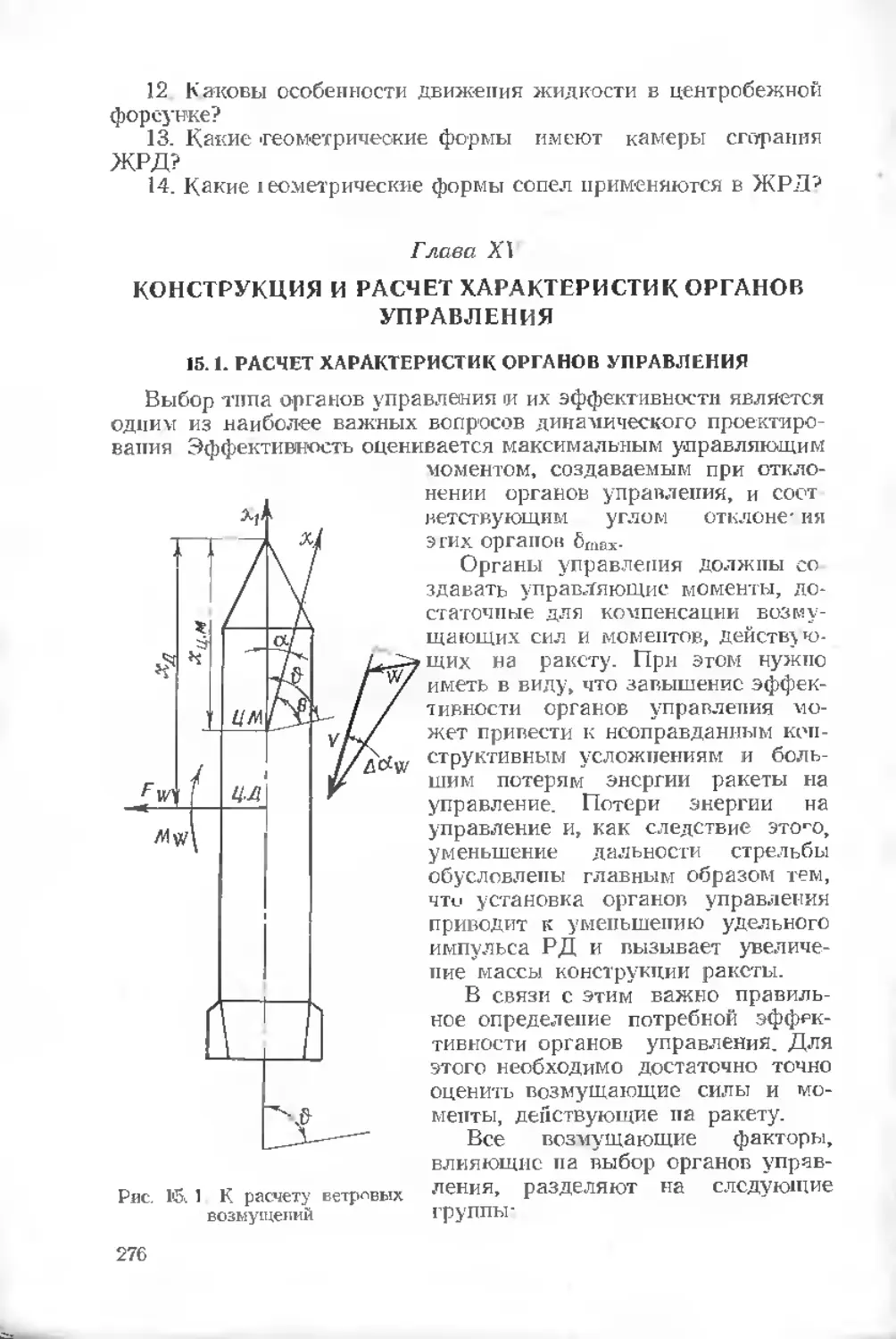
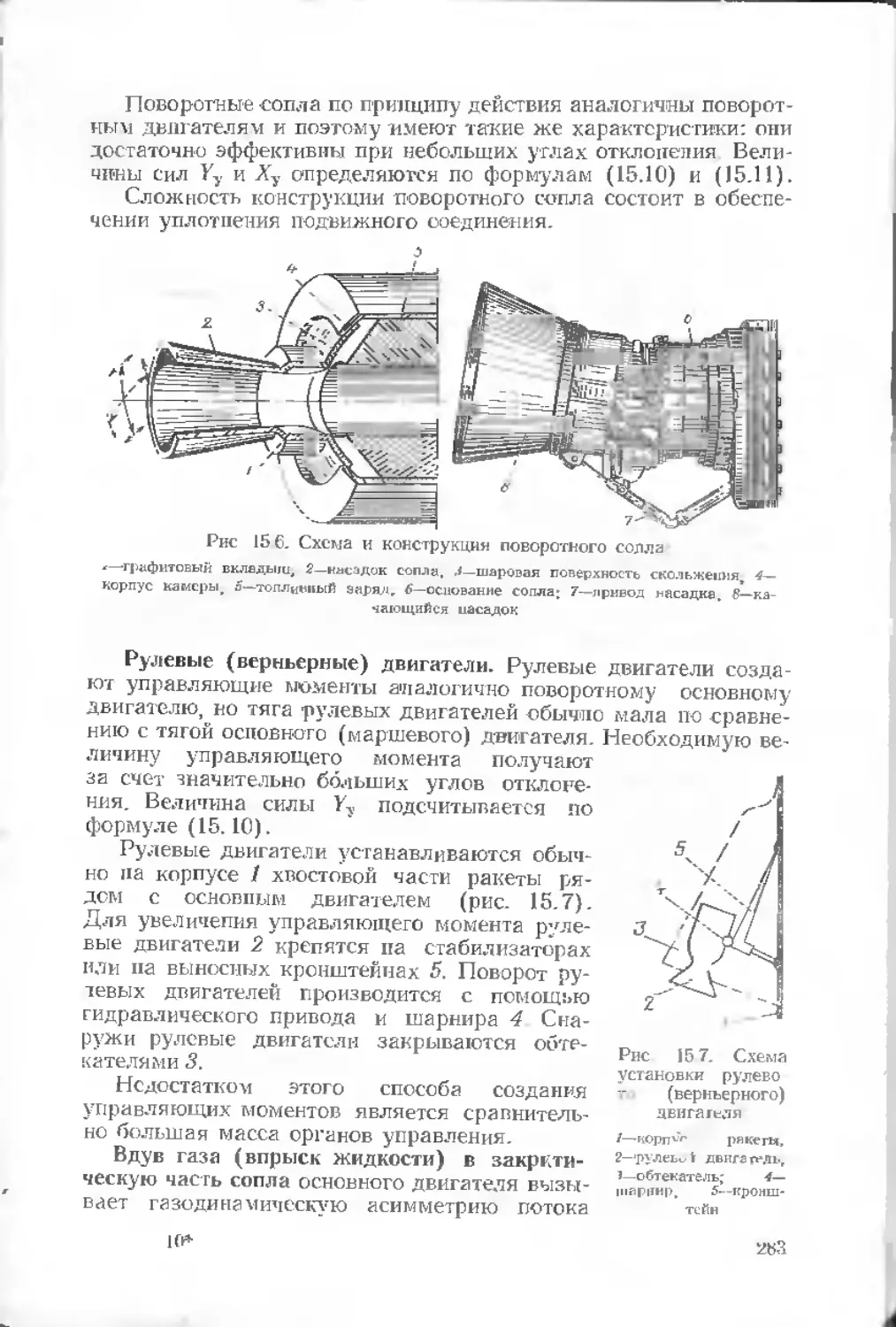
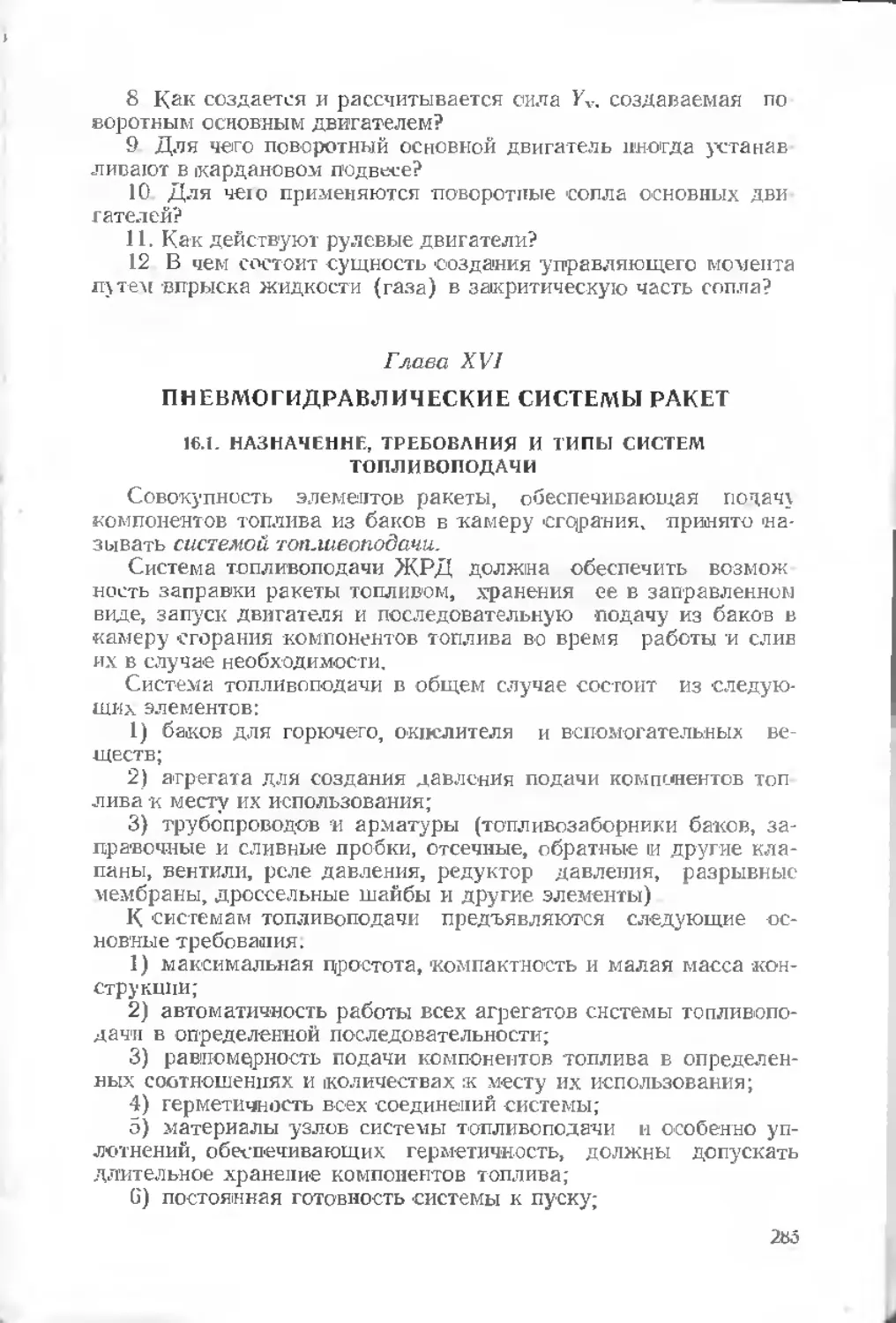
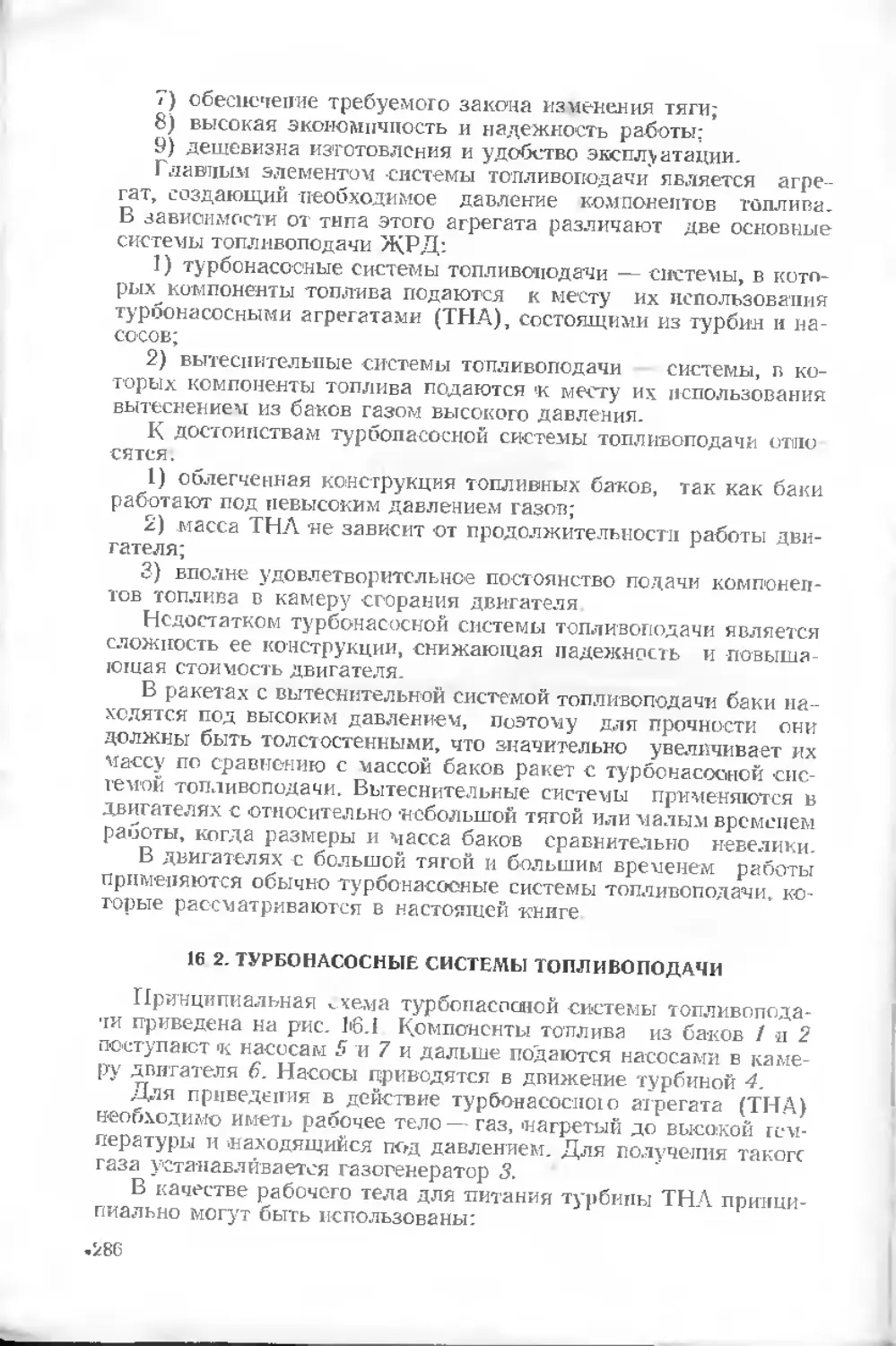
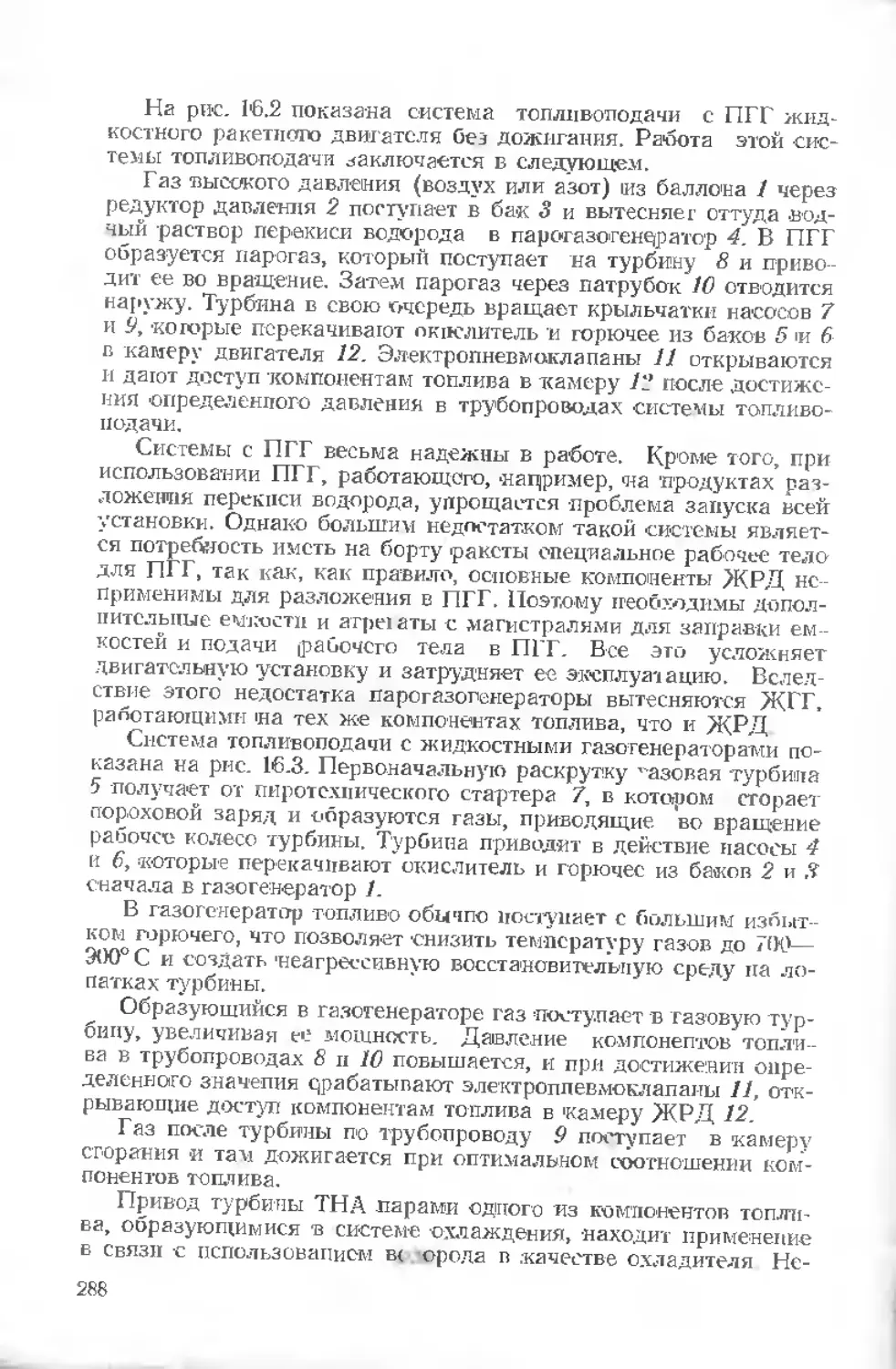
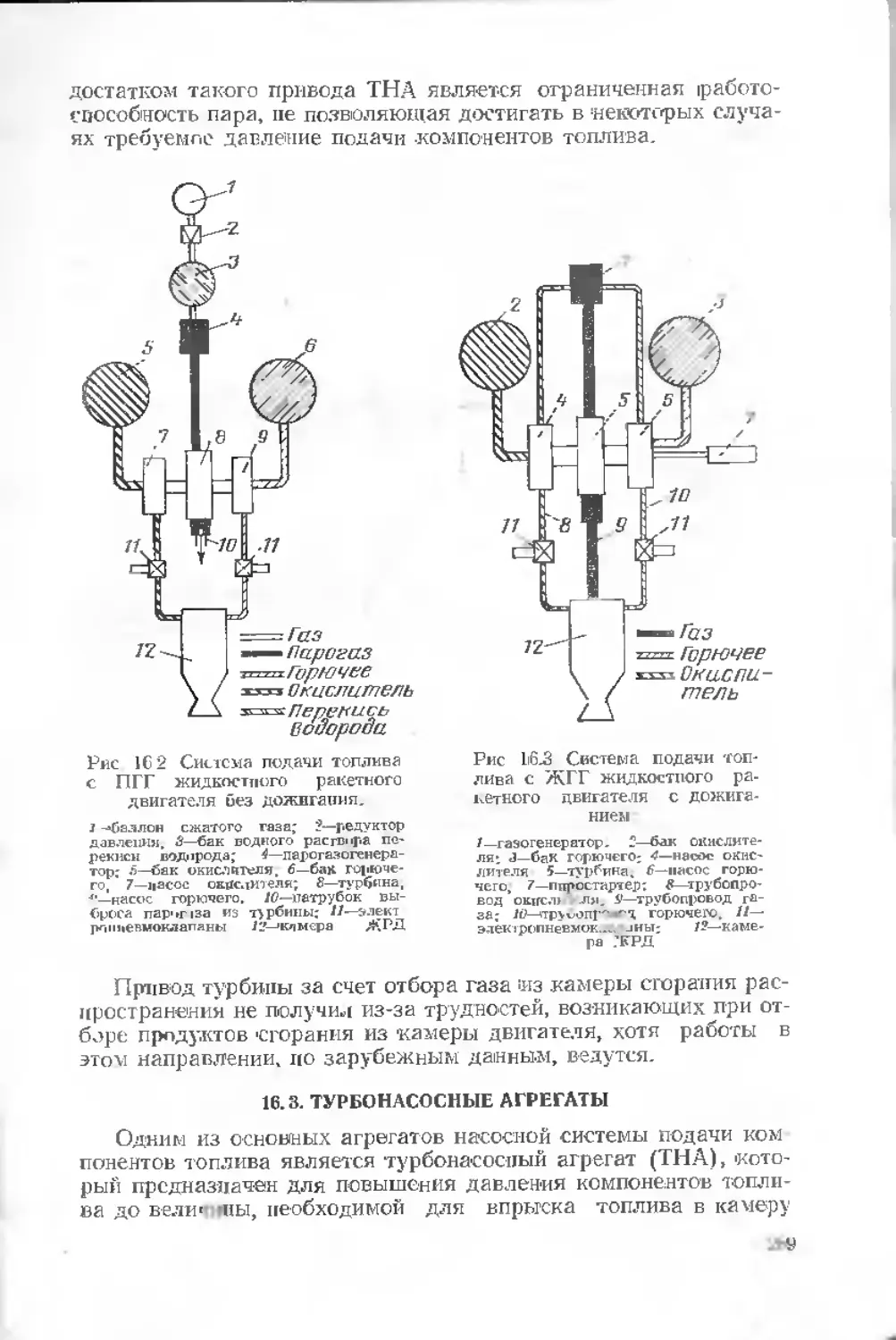
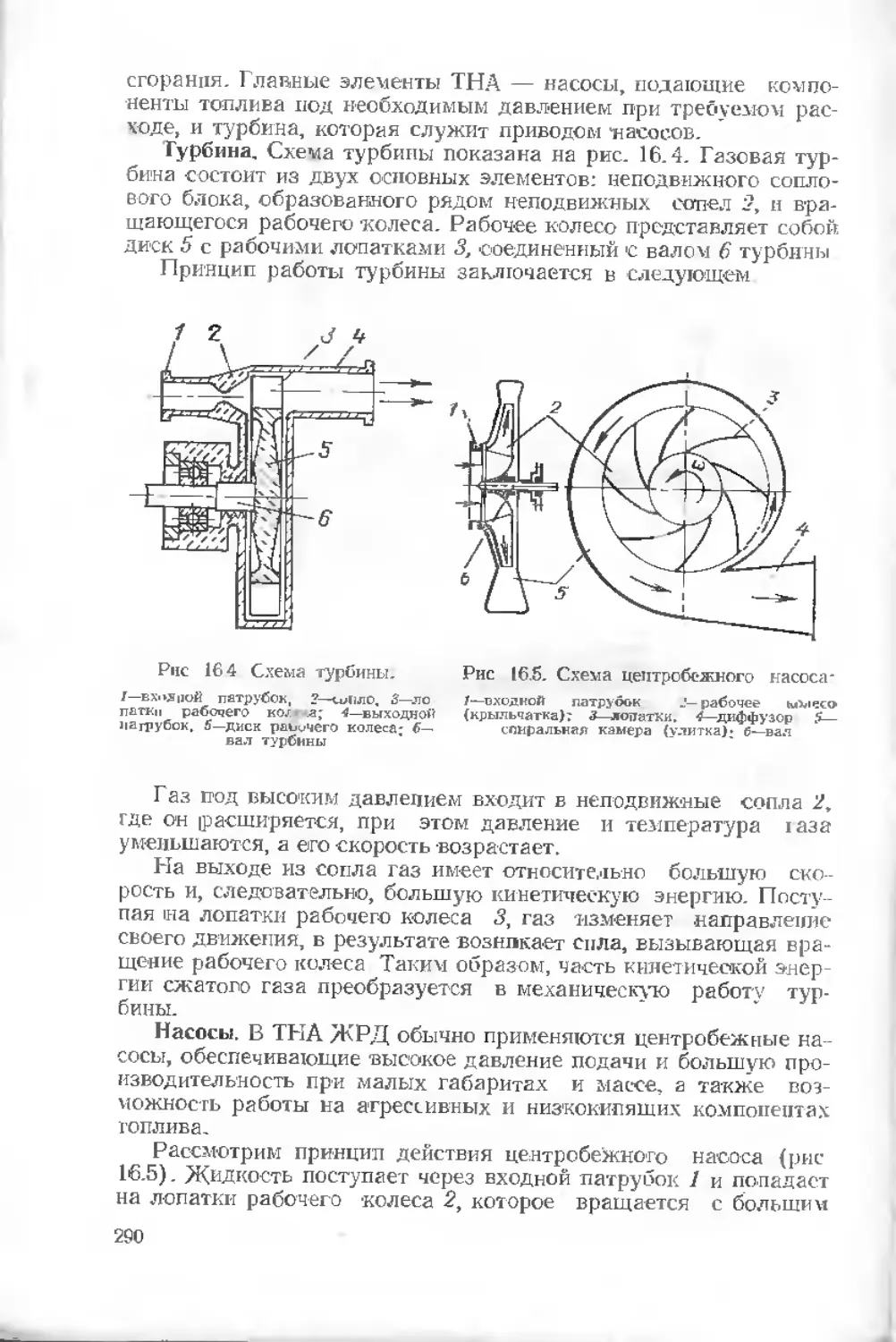
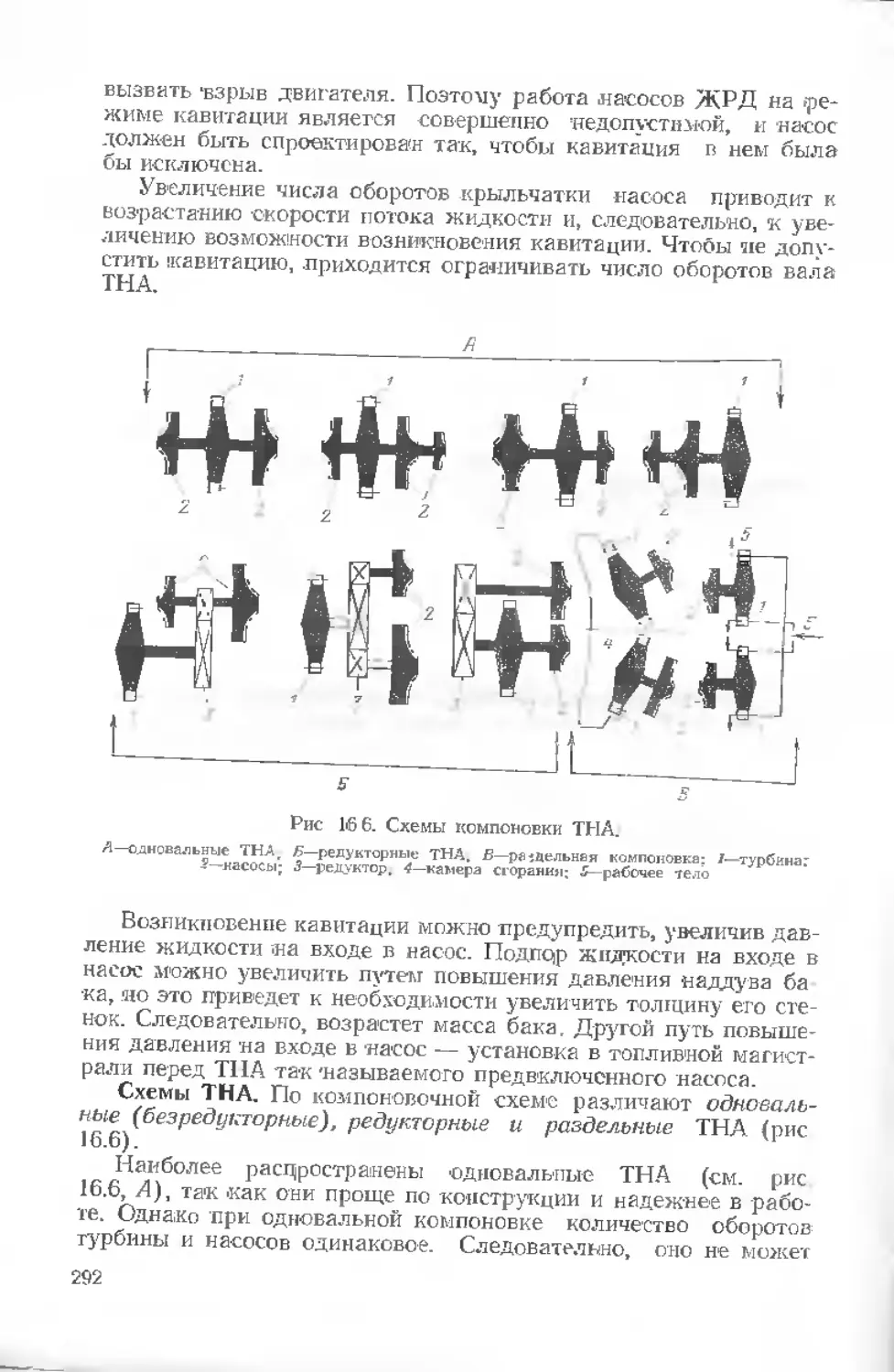
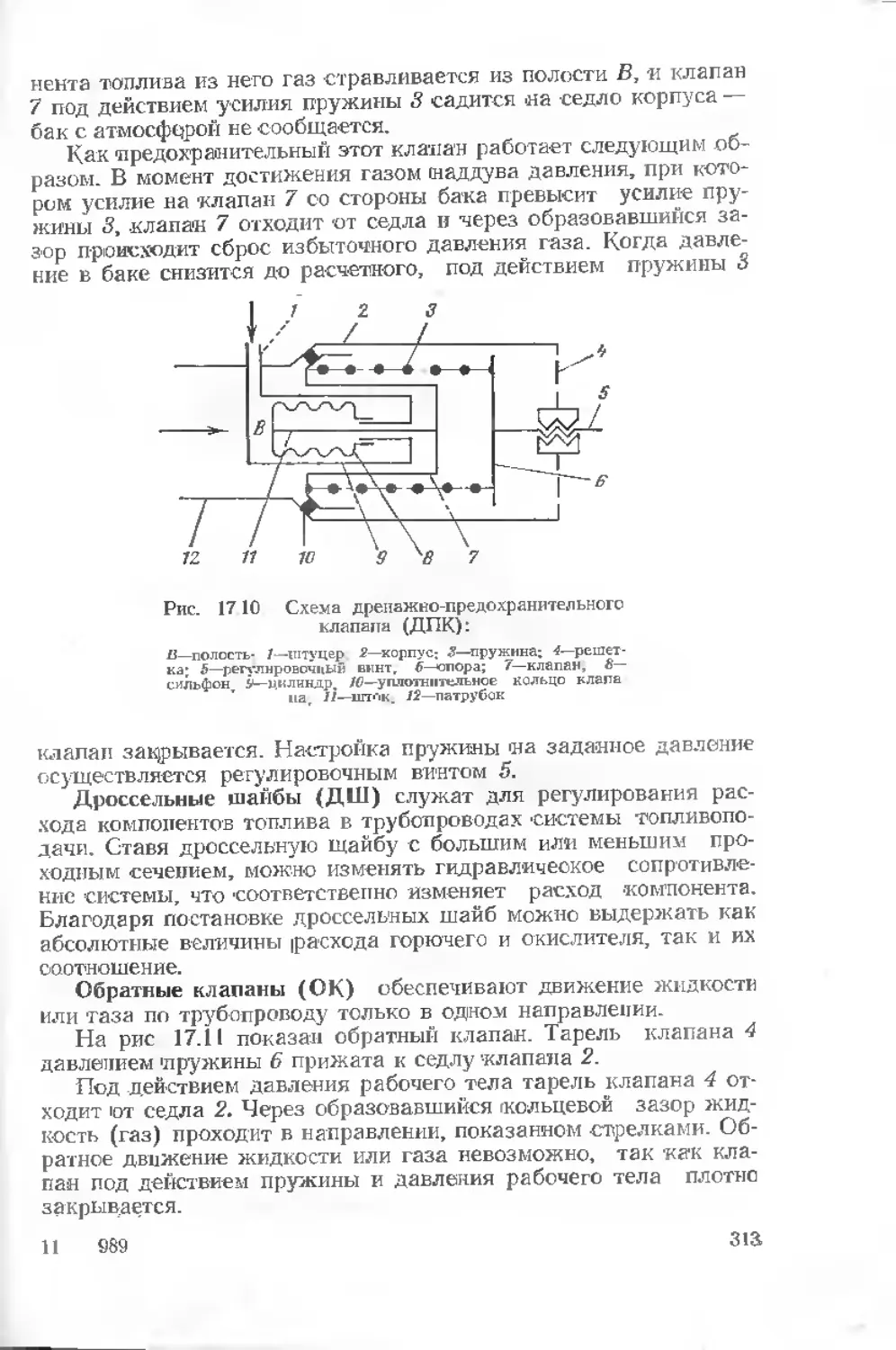
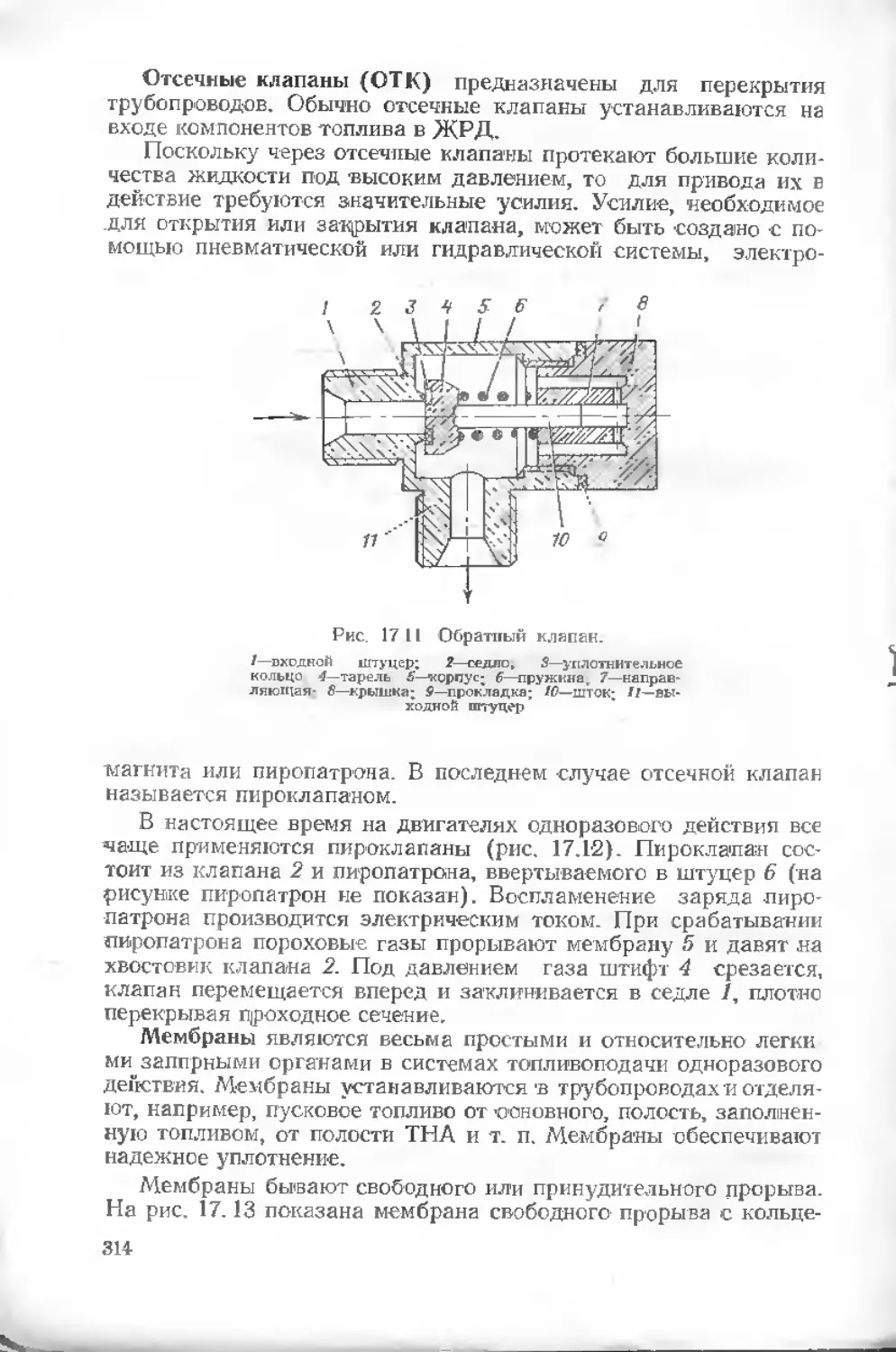
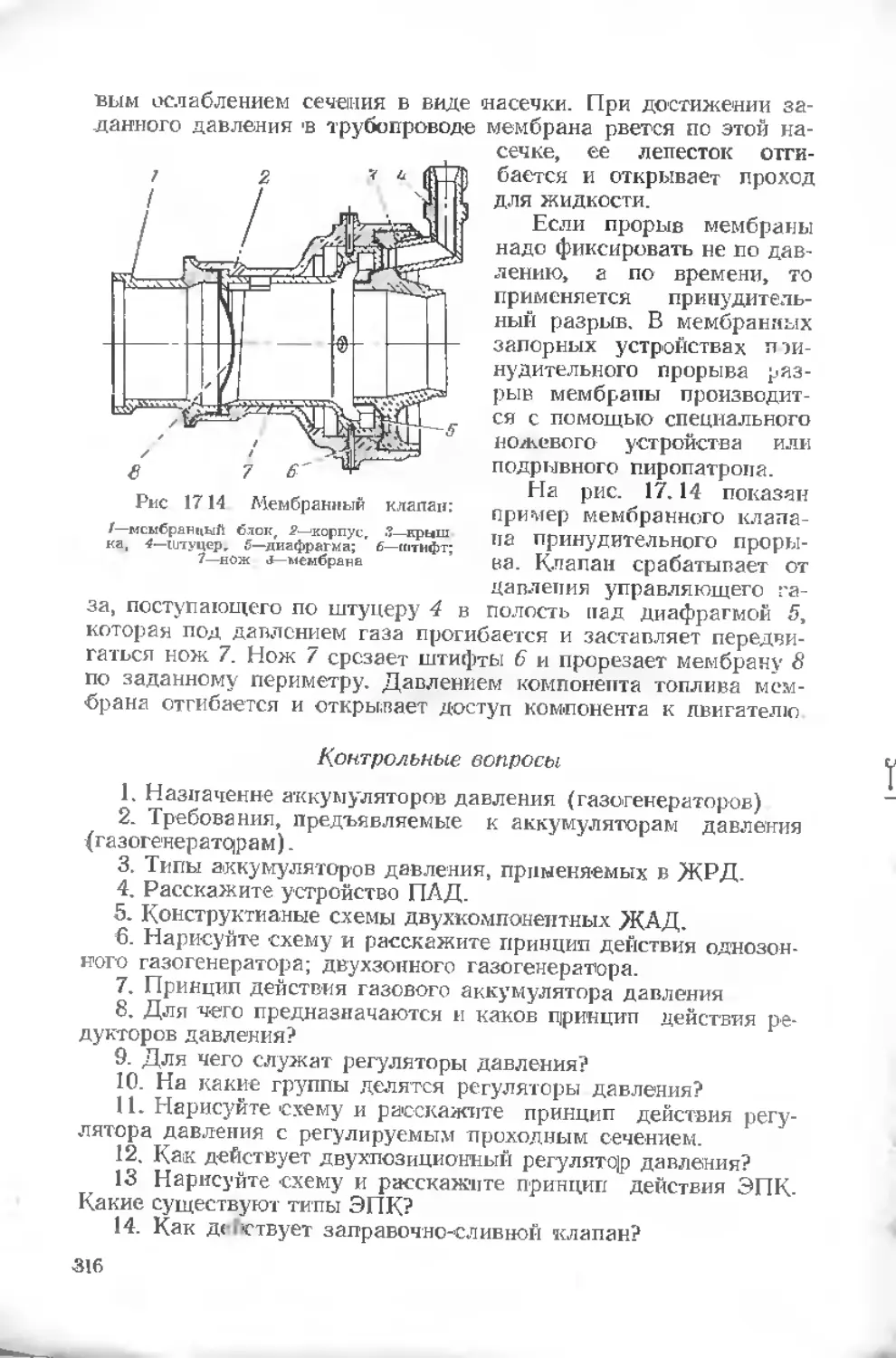
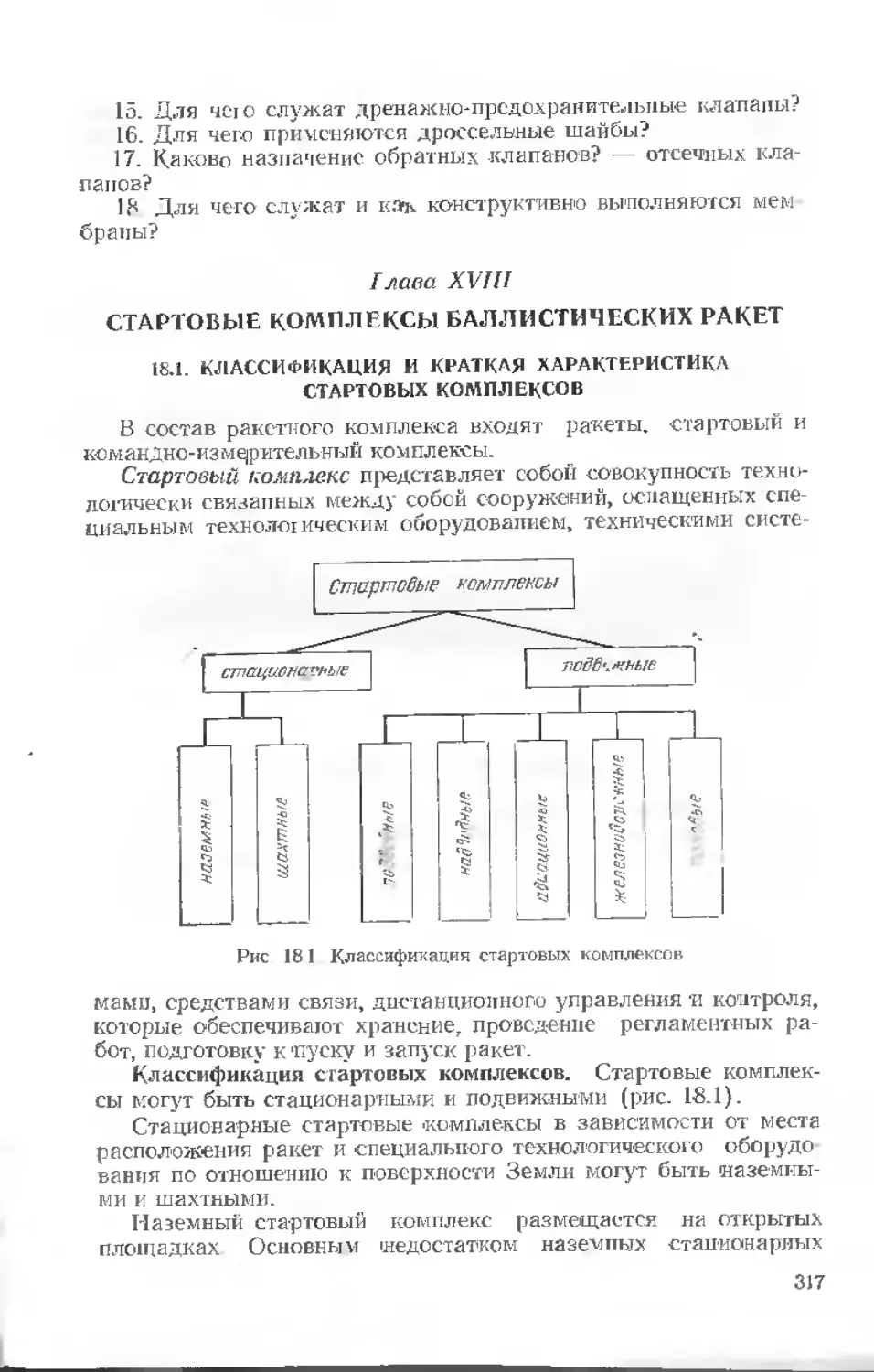
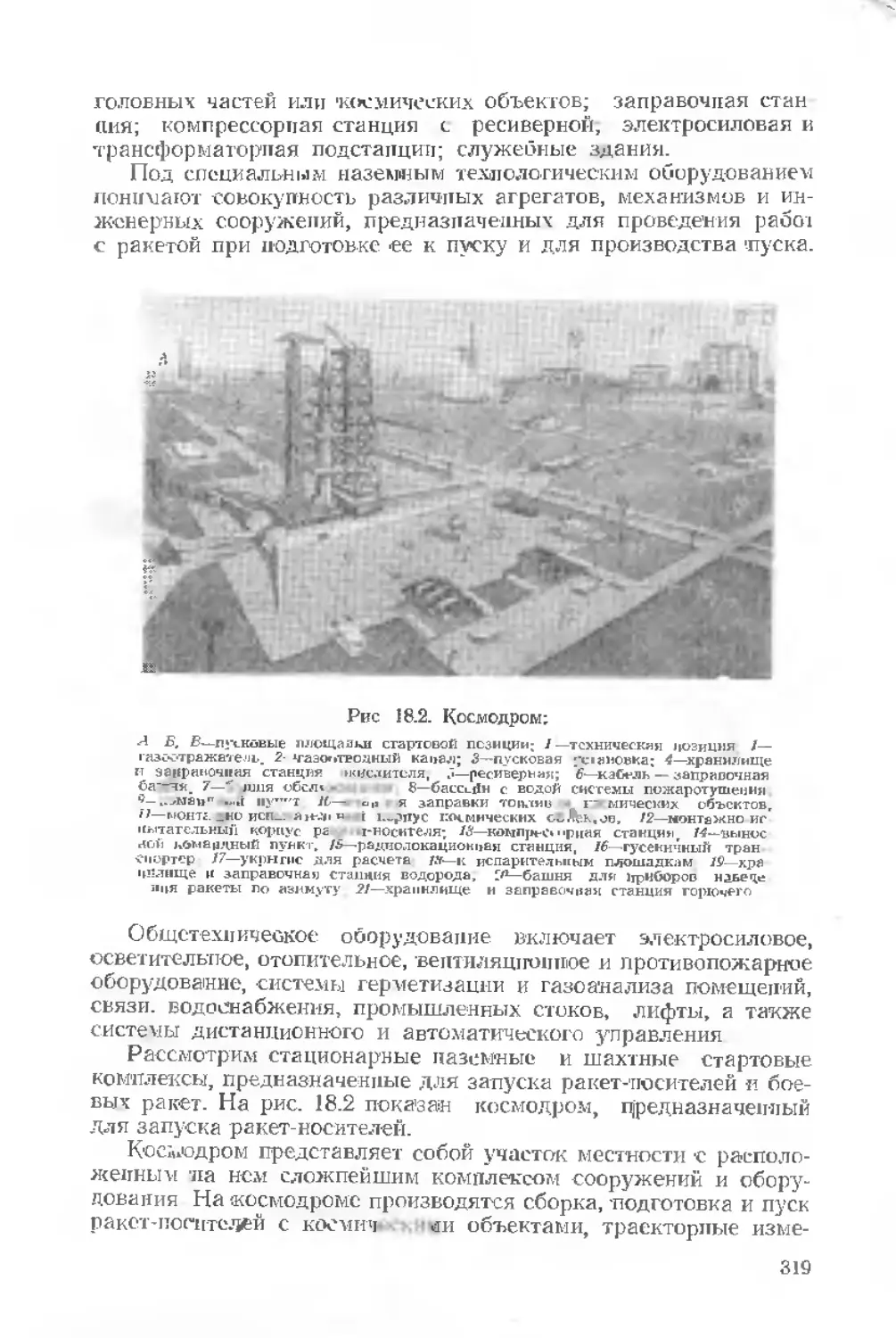
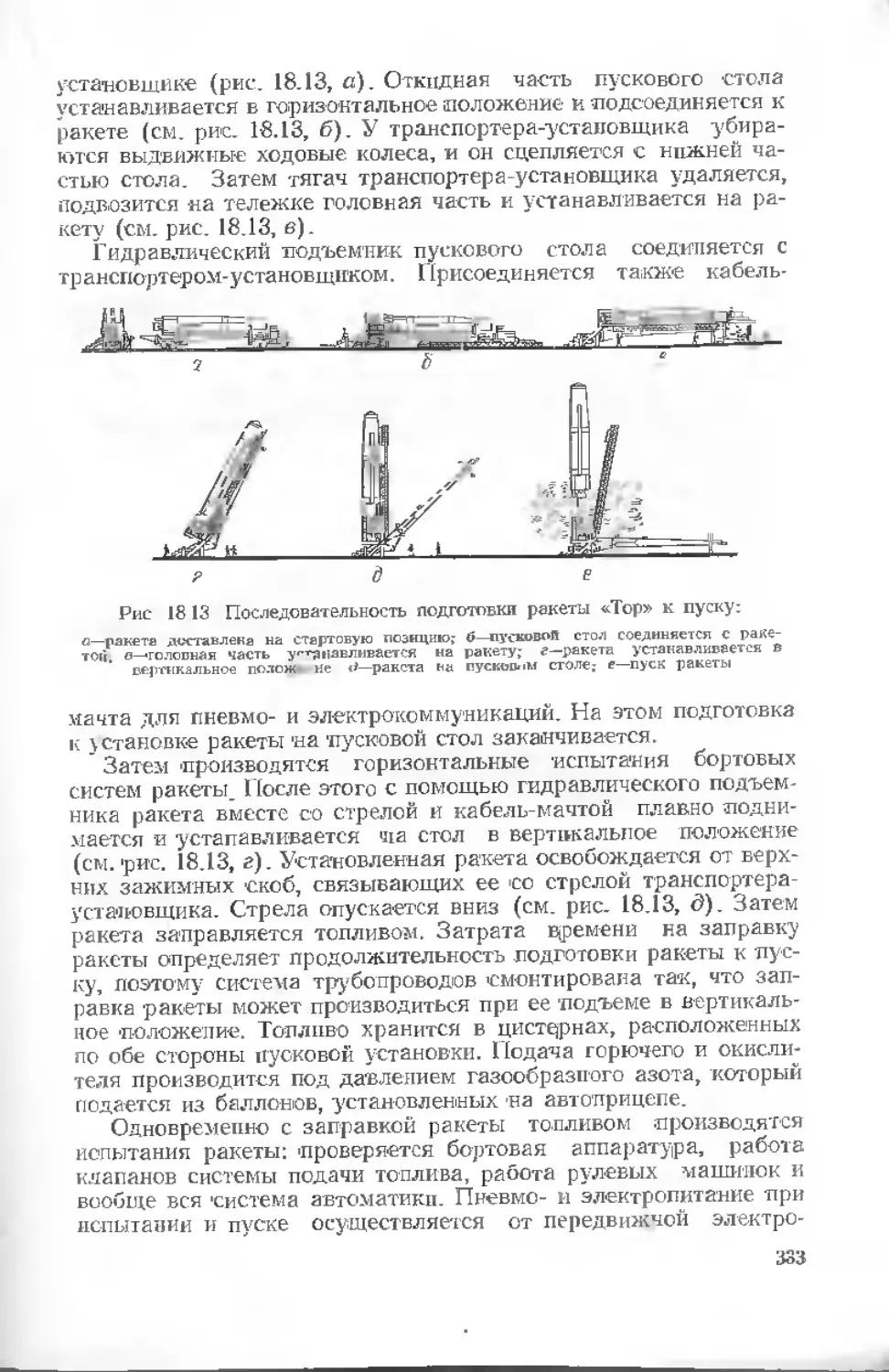
Текст
И Н. ПЕНЦЛК
ТЕОРИЯ ПОЛЕТА
И КОНСТРУКЦИЯ
БАЛЛИСТИЧЕСКИХ РАКЕТ
Допущено
Мити гс/'к чем высше о и среднего специального образования СССР
в качестве учебного пособия
сия учащихся машиностроительных техникумов
311027
й
Москва
МАШИНОСТРОЕНИЕ
1974
П25
УДК 629 76 (075.3)
Пенцак И. Н. Теория
ракет. Учебное пособие
ние». 1974, 344 с.
полета и конструкция
ДЛЯ техникумов. М.,
баллистических
«Машинострое-
_ ®учс5яом пособии изложены основы теории почета
актирования и конструкции баллистических ракет ’
₽ RnHne я™же™ем ракеты и его стабилизация. * ’ J
кет ’ ЖК ₽-
экс'
Ч книге имеются две вклейка (номограммы-приложение 3)
Рецензенты — Предметные комиссии техникумов
п 31808-161
П 038(01)-74 161-74
Й Издательство «•Машиностроение», 1974 г.
ПРЕДИСЛОВИЕ
В настоящее время имеется достаточно обширная литература
по теории, проектированию и конструкции баллистических ра-
кет. О тиа ко до последнего времени отсутствовало учебное посо-
бие по баллистическим ракетам для учащихся техникумов. Цель
настоящей книги — восполнить этот пробел.
Учебное пособие состоит из двух частей.
В первой части рассмотрены основные положения теории по-
лета: физические основы реактивного движения, уравнения
И В Мещерскою и К. Э. Циолковского, силы и моменты, дейст-
вующие на ракету в полете, траектории полета баллистических
pt ьст. принципы стабилизации и управления.
Во второй части описаны основы проектирования" баллисти-
ческих ракет: “нагрузки, действующие на ракету в полете и при
наземном обслуживании; Жидкие и твердые ракетные топлива;
материалы, применяемые в ракетостроении; этапы проектирова-
ния, тактико-технические требования к (ракетным комплексам;
конструктивные схемы ракет; основные проектные параметры и
компоновка ракет.
Кроме того, в книге рассмотрены головная часть, топливные
баки и отсеки (приборные, переходные и хвостовые отсеки). Они
рассматриваются в га коп последовательности: назначение, тре-
бования, конструктивные схемы и конструкции, нагрузки, дейст-
вующие па arpei ат. расчет на прочность
В книге описаны ракетные двигатели твердого топлива, жид-
костные ракетные двигатели, системы подачи топлива и наддува,
работа пневмогидравлических систем ракет на старте и в полете,
агрегаты и арматура пневмогидравлических систем ракет, стар-
товый комплекс баллистических ракет.
Иллюстративный материал и конкретные цифровые данные.
приведенные в книге, заимствованы из отечественной и зарубеж-
ной открытой литературы
Автор выражает благодарность пнж. В. И. Жихареву за кри-
тические замечания по содержанию книги, которые учтены при
доработке.
3
При написании некоторых глав учебного пособия были полез-
ными замечания инж. Г. С Францева, А. А. Харченко н
В. В. Трошневой. Большую помощь автору оказали при выполне-
нии расчетов инж. В. Г. Томкович, а в оформлении рисунков —
конструктор К- Ф- Ложников и техник Л. В. Троценко. Всем им
автор выражает свою признательность.
Критические замечания и пожелания по улучшению книги
следует направлять по адресу: Москва, Б-78, 1-й Басманный
пер.. 3. Издательство «Машиностроение»
ВВЕДЕНИЕ
Последние десятилетия являются периодом быстрого (разви-
тия ракетной техники. С одной стороны, ракеты являются един-
ственным средством для запуска искусственных спутников Зем-
ли и космических кораблей. С другой стороны, ракетное оружие
стало одним из основных видов вооружения современных ар-
мий.
История развития ракет восходит к глубокой древности
Появление ракет неразрывно связано с изобретением пороха,
который был использован для создания реактивной силы,
способной двигать ракету. В литературе имеется упоминание о
том, что в Китае, являющемся родиной пороха, ракеты («огнен-
ные стрелы») применялись еще в X—XII веках.
Широкое развитие «огненные стрелы» получили в Индии
Из европейцев впервые столкнулись с «огненными стрелами»
англичане в период колонизации Индии. Изучением их занялся
английский военный инженер полковник Вильям Конгрев, кото-
рый вывез «огненные стрелы» в Англию и усовепшенствовал их.
Появление ракет на вооружении Англии заставило заняться
ими и другие страны.
В нашей стране описание первых ракет приводится в «Уста-
ве» Онисима Михайлова, написанном им в 1607—1621 годах. Бо-
лее широко ракеты стали применяться при Петре I. В начале
80-х годов XVII века в Москве было учреждено «Ракетное заве-
дение», которое затем было переведено в Санкт-Петербург. В на-
чале XVIII века в пем была изготовлена сигнальная ракета, ко-
торая состояла на вооружении русской армии почти 150 лет.
Среди первых создателей боевых русских ракет был генерал
Александр Дмитриевич Засядко (1779—1-837 пг.). Хорошо заре-
комендовавшие себя рикошетные и зажигательные ракеты За
сядко были приняты на вооружение русской армии
В 40-х годах прошлого столетия начал свою деятельность
выдающийся русский ученый генерал Константин Иванович
Константинов (1818—1871 гг.), который заложил научные осно-
вы расчета и проектирования ракет. Благодаря его трудам даль-
ность стрельбы ракетами была доведена до 4—5 км. Ракеты ста-
ли эффективным оружием русской армии. Только развитие во
второй половине XIX века нарезной артиллерии, имевшей значи-
тельно большую дальность стрельбы и более высокую точность
попадания, вытеснило ракеты. Ракеты как оружие появились
вновь лишь накануне второй мировой войны.
На возможность использования ракеты как летательного ап-
парата для полета человека впервые указал в 1881 году русский
народоволец-революционер Николай Иванович Кибальчич
(1853—1881 гг_), приговоренный к смертной казни за участие в
покушении на царя Александра И. Находясь в торьме, за не-
сколько дней до казни он предложил первый в мире научный
проект ракетного летательного аппарата, который остался"в ар-
хивах царской охранки и
стал известен лишь после
Великой Октябрьской со-
циалистической революции.
Идея полета при помо-
щи ракеты получила свое
глубокое научное обоснова-
ние в трудах выдающегося
советского ученого Констан-
тина Эдуардовича Циолков-
ского (1857—1935 гг).
Реактивный принцип
движения Циолковский на-
чал изучать с восьмидеся-
тых годов прошлого столе-
тия. В 1903 году оп опубли-
ковал свой классический
труд «Исследование миро-
вых пространств реактивны-
ми приборами», где впервые
вывел законы движения ра-
кеты как тела переменной
массы, обосновал возмож-
Николай Иванович Кибальчич ность применения ракеты
для межпланетных полетов,
наметил пути овладения кос-
мическим пространством. В этой же книге К. Э. Циолковский
разработал в общих чертах схему ракеты на жидком топливе.
Он предложил использовать для ЖРД различные топлива,
в том числе жидкий кислород и водород, использовать компо-
ненты топлива для охлаждения двигателя ракеты, принудитель-
ную подачу топлива в двигатель насосами, управлять ракетой
с помощью рулей, помещенных в струе вытекающих из двигате-
ля газов, и, наконец, предусмотрел автоматическое управление
ракетой при помощи приборов.
Циолковский рассмотрел условия полета ракеты в космиче-
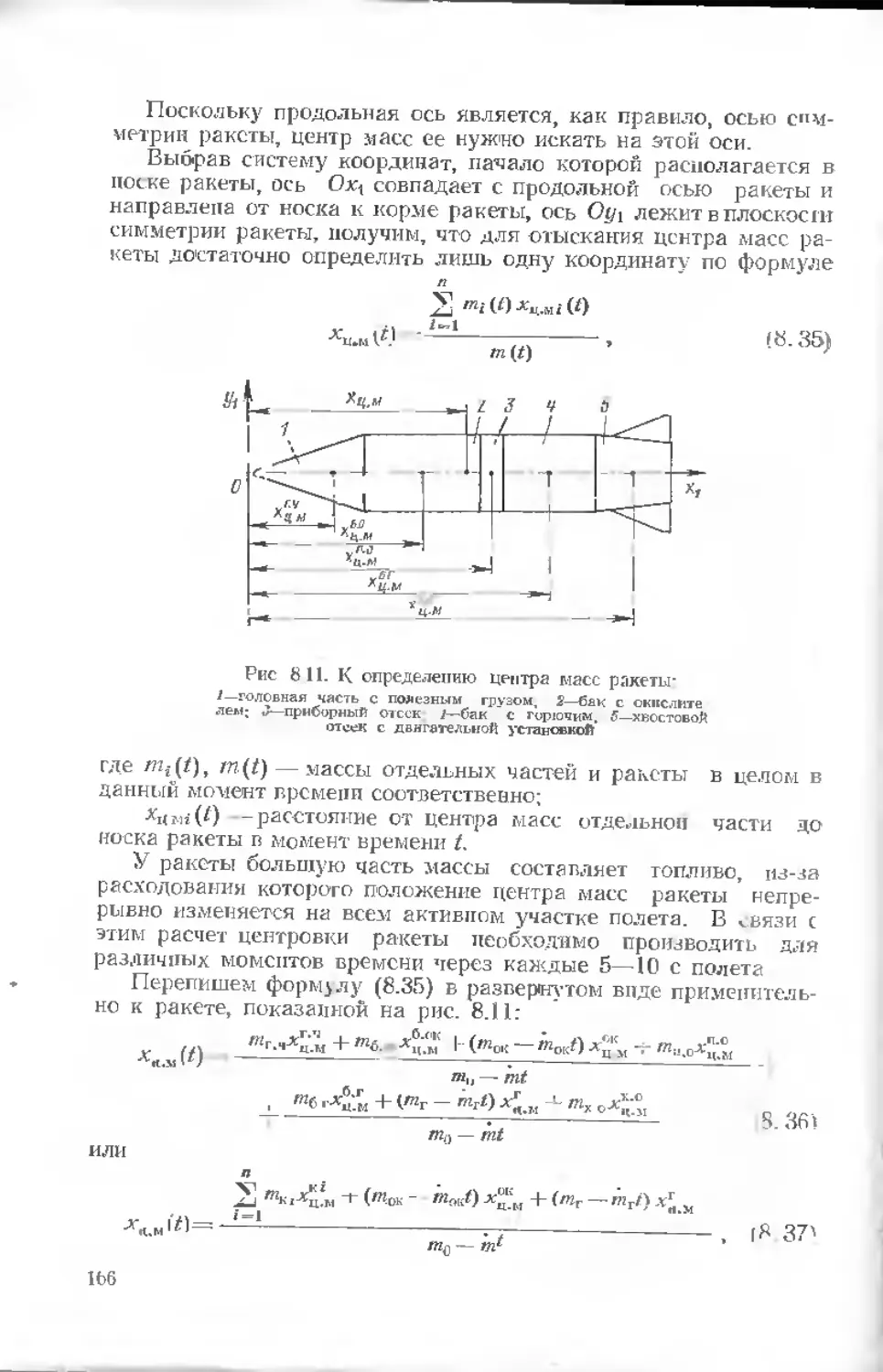
ском пространстве, указал на целесообразность вооружения про-
межуточных станций при полетах на другие планеты.
В 1929 году' в работе «Космические ракетные поезда» Циол-
ковский развил теорию движения составных ракет (ракетных
поездов), с помощью которых стало возможным достижение
космических скоростей полета.
В условиях царской России выдающиеся работы Циолковско-
го не получили должного признания и поддержки. Только при
советской власти работы Циолковского были оценены по досто-
Копстантин Эдуардович Циолковский
инству, ему были созданы условия для плодотворной научной
работы. р
Большой вклад в теорию реактивного движения и механику
тел переменной массы внесли русские ученые Николай Егорович
Жуковский (1847—1921 гг.), Иван Всеволодович Мещерский
(1859—1935 гг.) и др.
Фрпдрих Артурович Пандер
В области -теоретической разработки вопросов межпланетных
путешествий работал и талантливый исследователь Юрий Ва-
сильевич Кондратюк (1897 1942 гг.). Ю. В. Кондратюк незави-
симо от Циолковского б работах «Тем, кто будет читать, чтобы
строить» (1919 г ) и «Завоевание межпланетных пространств»
(1929 I') вывел оригинальным методом основные уравнения дви-
жения ракеты. В ряде вопросов его работы не только повторили,
но и дополнили труды Циолковского. Еще в то время он пред-
ложил при полетах на Лупу выходить на орбиту искусственного
спутника Луны с последующим
отделением взлетно-посадочно-
[О аппарата и обосновал энер-
гетическую выгодность этого
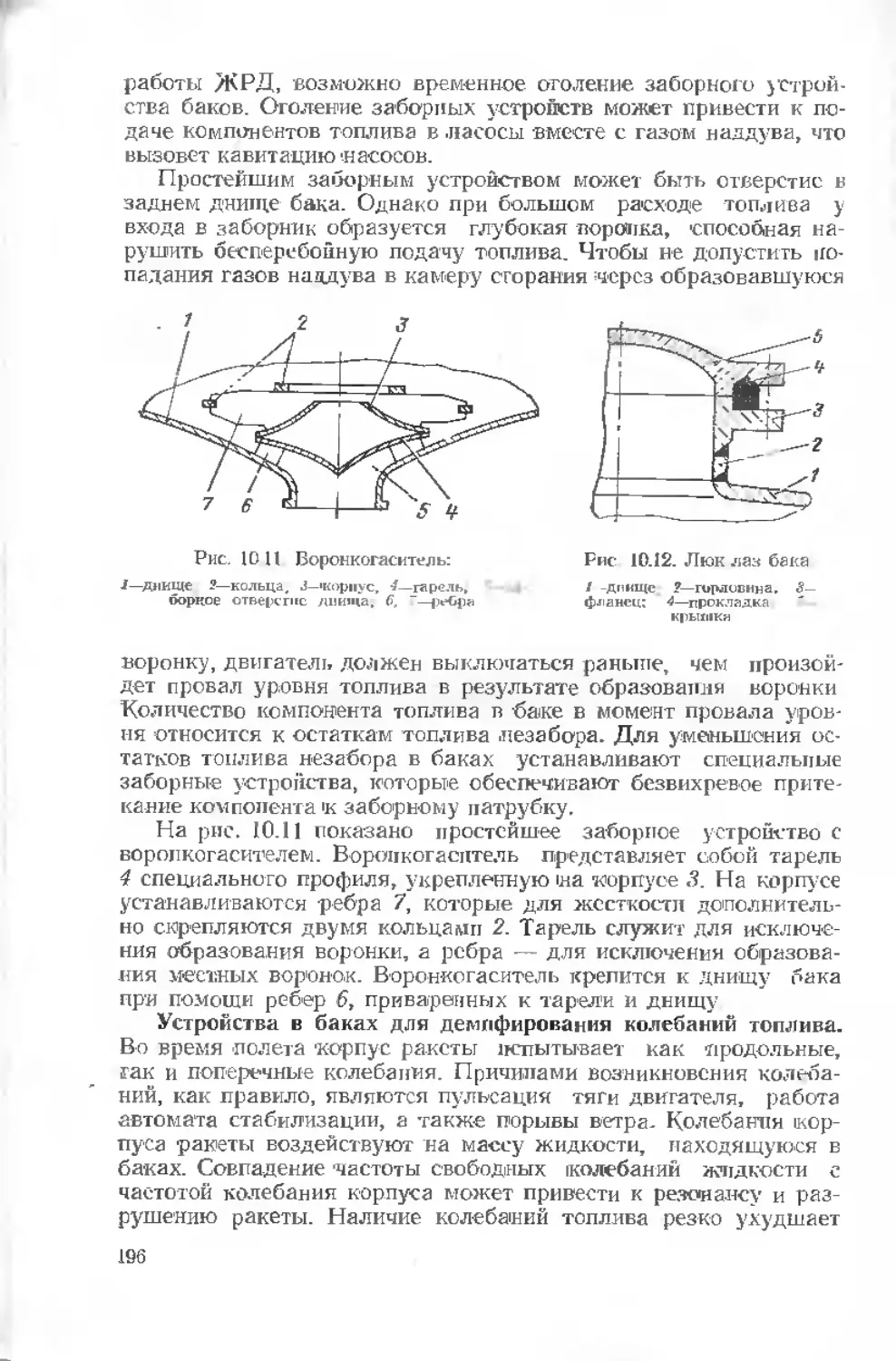
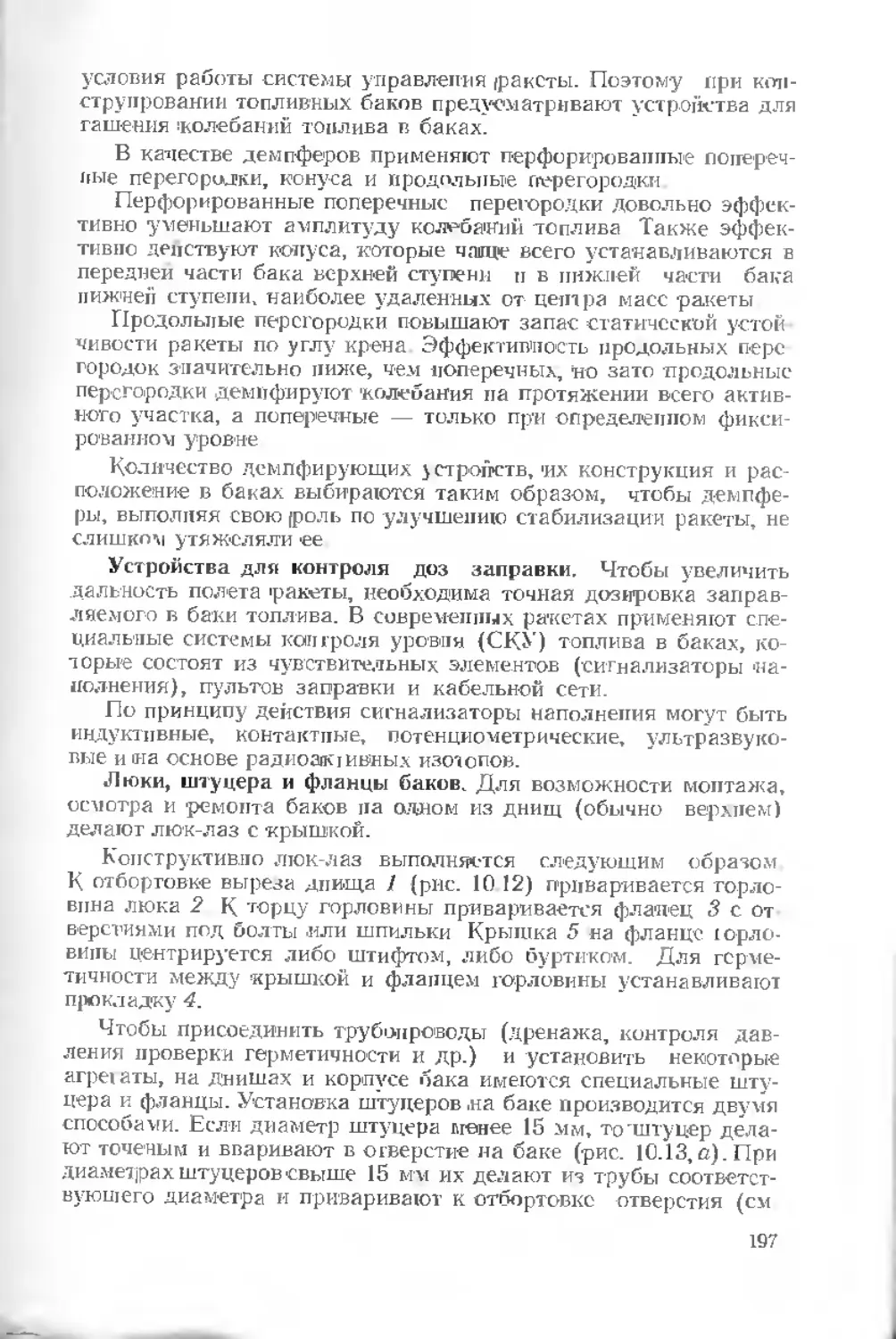
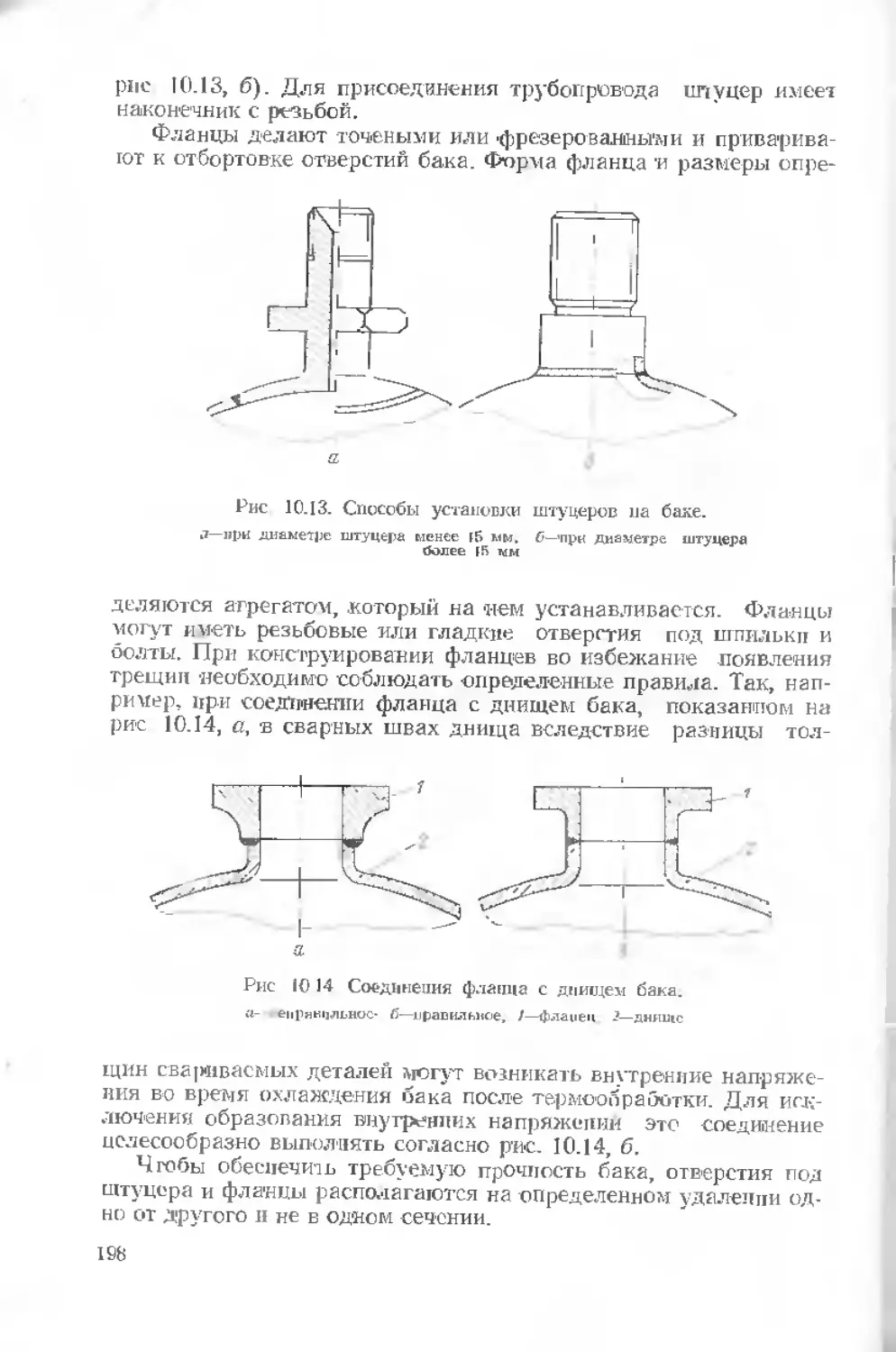
приема.
Другим крупным предста-
вителем советской школы раке-
тостроения был Фридрих Арту-
рович Цандер (1887—1933 гг.).
В 1932 году вышла книга Цан-
дера «Проблема полета при по-
мощи реактивных аппаратов»,
в которой были собраны его
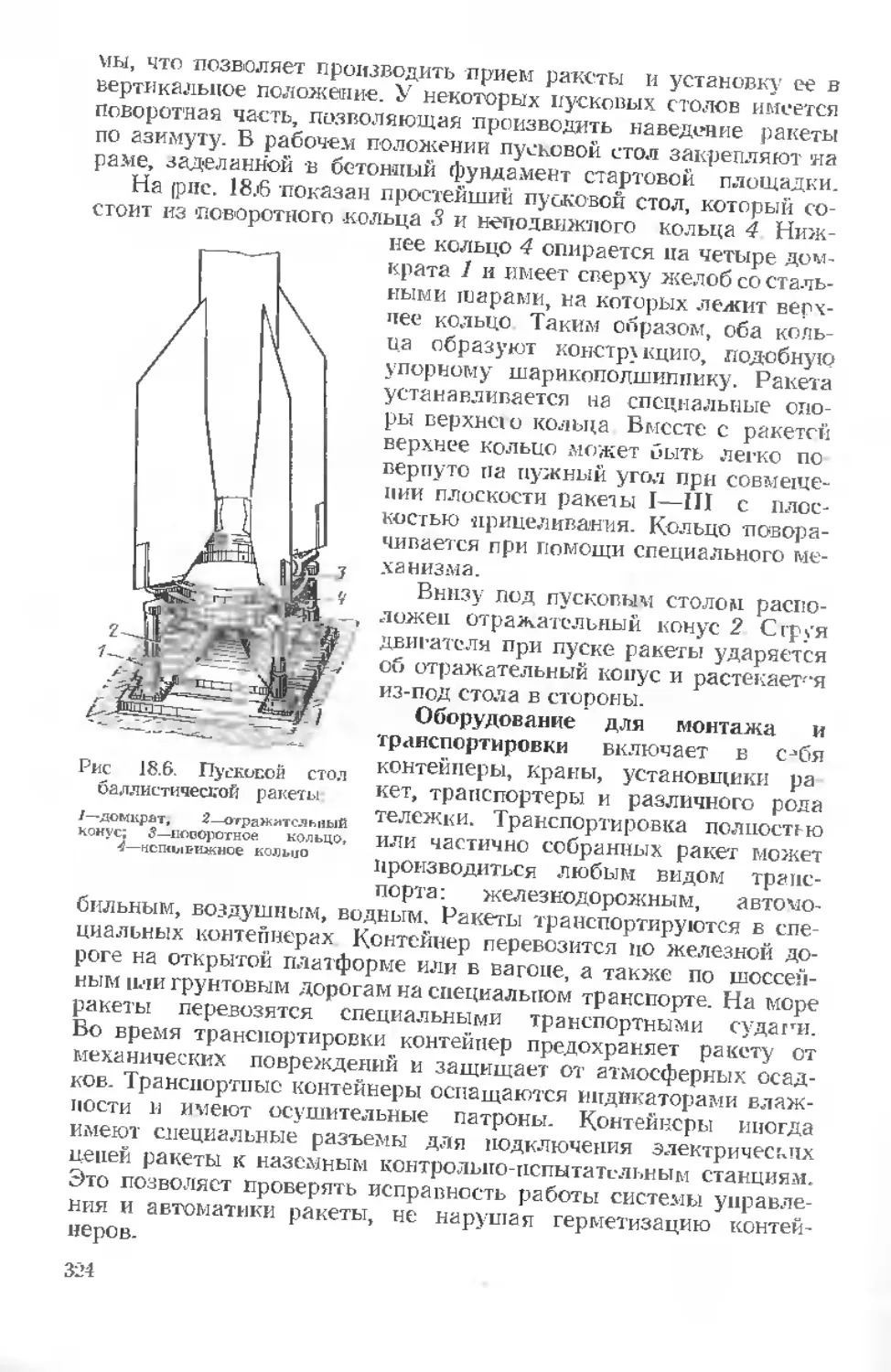
последования конструкций кос-
мических ракет и их полета,
внесены предложения по при-
менению в качестве топлив для
ракетных двигателей некото-
рых металлов и их сплавов.
В 1921 году по инициативе
и под руководством -инженера
Николая Ивановича Тихомиро-
ва (I860—1930 гг.) в системе
Военно - научно-исследователь-
ского комитета при Реввоен-
совете СССР была создана Га-
зодинамическая лаборатория
(ГДЛ), которая занималась
разработкой ракетных снаря-
дов на бездымном порохе. Были проведены успешные испытания
снарядов, которые в дальнейшем после некоторой доработки бы-
ли приняты на вооружение нашей армии— гвардейские ми-
нометы «Катюши» — сыграли немалую роль в Великой Отечест-
венной войне.
В мае 1929 года в ГДЛ по инициативе Валентина Петровича
Глушко (ныне академик, дважды Герой Социалистического тру-
да, лауреат Ленинской и Государственных премий) был создан
отдел, в котором под его руководством в 1930—1931 годах разра-
ботаны реактивные двигатели — ОРМ (опытный реактивный мо-
тор), ОРМ-1 и ОРМ-2. Эти двигатели работали на жидком топ-
ливе — четыре.хокиси азота и полуоле или смеси бензина с толуо-
лом -и развивали тягу- до 20 килограммов. В 1931—1932 годах
была создана и испытана целая серия опытных реактивных дви
гателей вплоть до ОРМ-52 с тягой 250- 300 килограммов
В 1931 году п Москве и Ленинграде были созданы при Осо-
виахиме группы изучения ракетных двигателей—МосГИРД и
ЛенГИРД, которые на общественных началах объединяли энту-
зиастов ракетного дела.
Среди организаторов МосГИРДа были Ф. А. Цандер, Сергей
Павлович Королев (1906—1966 гг.), (впоследствии академик, вы-
дающийся конструктор первых ражетно-жосмических систем. Кро-
ме них, .здесь работали Ю. А. Победоносцев, М. К. Тихонравов и
другие
Первая ракета «ГИРД-09», созданная в ГИРДе по проекту
Тихонравова, была построена под руководством С П. Королева.
Ее двигатель работал на гибридном топливе — желеобразном
бензине и жидком кислороде—и при испытаниях (в августе
1933 года) развивал тягу 25—33 килограмма В ноябре того" же
года гирдовцы запустили ракету «ГМРД-Х», созданную под ру-
ководством С. П. Королева <с двигателем «10» (по проекту
Ф. А. Цандера) на жидком топливе—спирте и жидком кислоро-
де. Тяга двигателя достигала 65 килограммов.
Новый толчок развитию ракетостроения в нашей стране дала
организация Реактивного научно-исследовательского института
(РНИИ РККА), который был создан в 1933 г. на базе ГДЛ и
МосГИРДа, но вскоре—:в октябре того же года—передан в
промышленность. Специалисты, пришедшие в PH! III из ГДЛ,
разработали в 1934—1938 годах под руководством В П. Глушко
целую серию двигателей от ОРМ-53 до ОРМ-102. Двигатель
ОРМ-65, созданный ® 1936 году, развивал тягу до 175 килограм-
мов и бы.л наиболее совершенным двигателем своего времени
В 1939 году В. П. Глушко была создана самостоятельная ор-
1аиизация, выросшая с. 1941 года в опытно-жопструкторское бю-
ро по жидкостным ракетным двигателям (ГДЛ-ОКБ). Здесь в
сороковых годах было разработано семейство авиационных
ЖРД, а впоследствии опыт, накопленный ирч! разработке этого
семейства, послужил фундаментом для создапия мощных ракет-
ных двигателей.
В первые три десятилетия нашего века пад теорией реактив-
ною движения и проблемой космических -полетов работали и за-
рубежные ученые, которые опубликовали ряд теоретических и
экспериментальных последований. Таковы, например, работы по
теории реактивного движения, изданные -в 1913, 1928 и 1930 го-
дах французским летчиком, изобретателем и ученым Робером
Эно-Пельтри; исследования и патенты, опубликованные амери-
канским профессором Робертом Годдардом в 1914—-1940 годах;
книги о-межпланетных ракетах немецкого ученого Германа Обер-
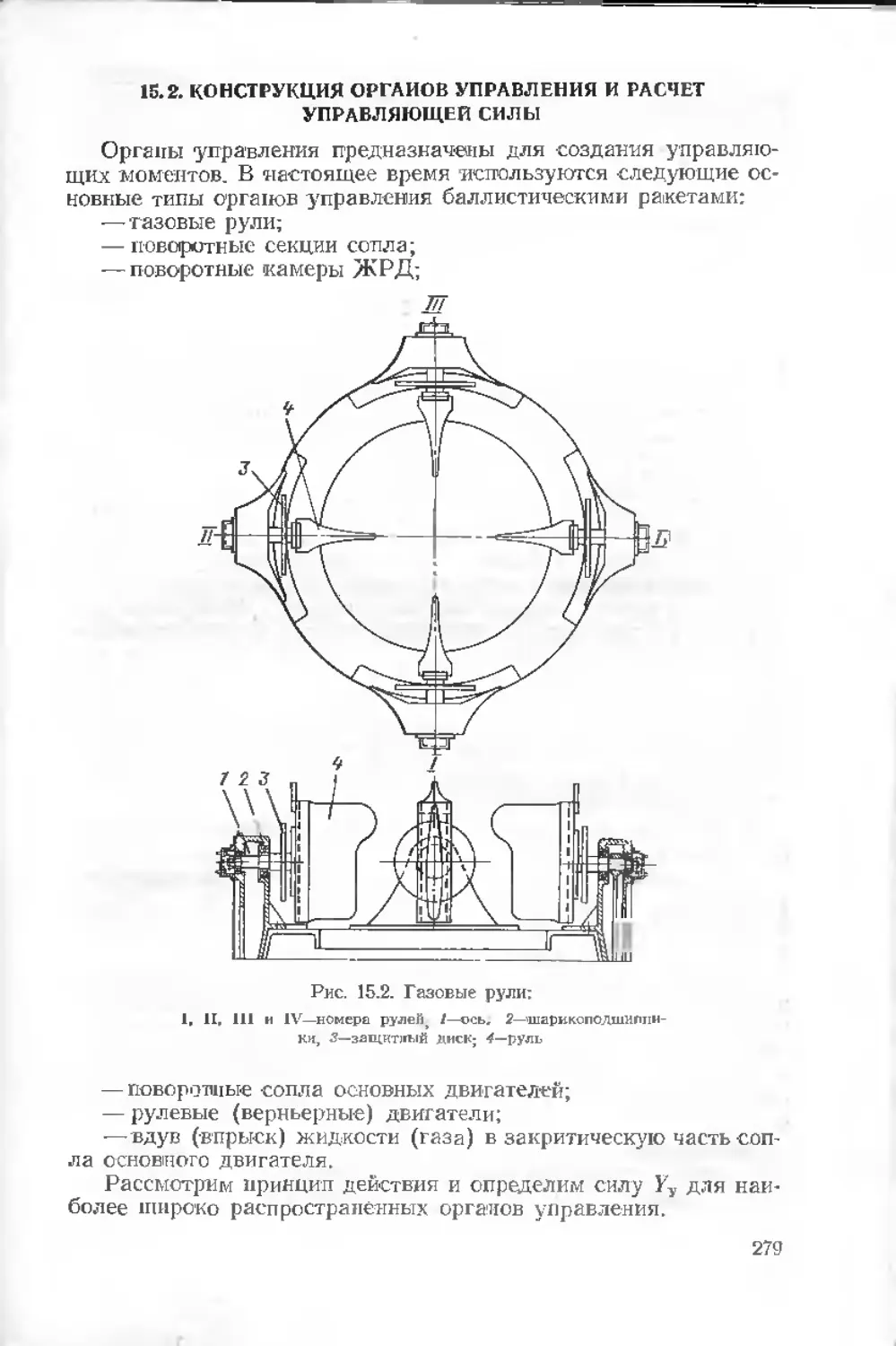
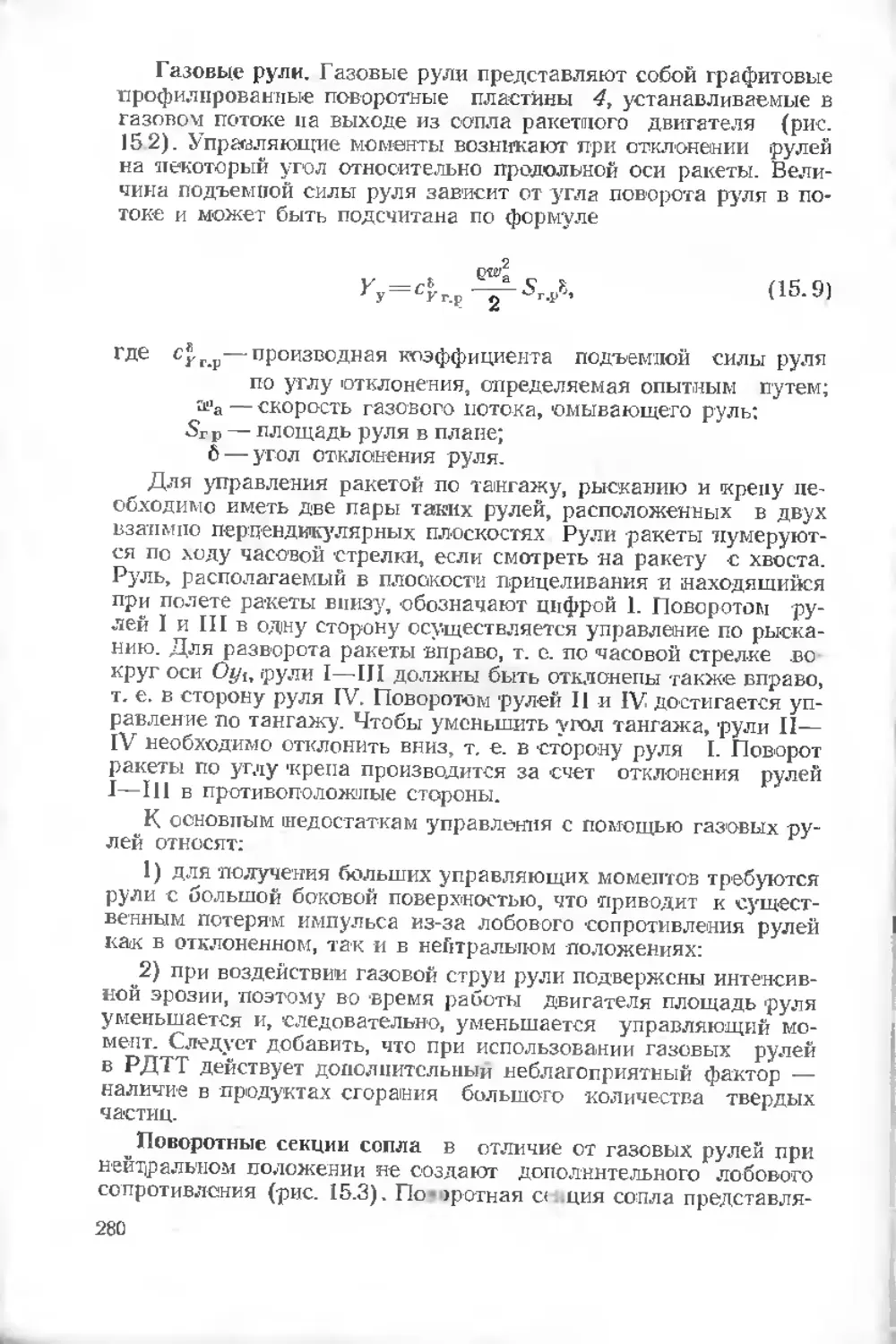
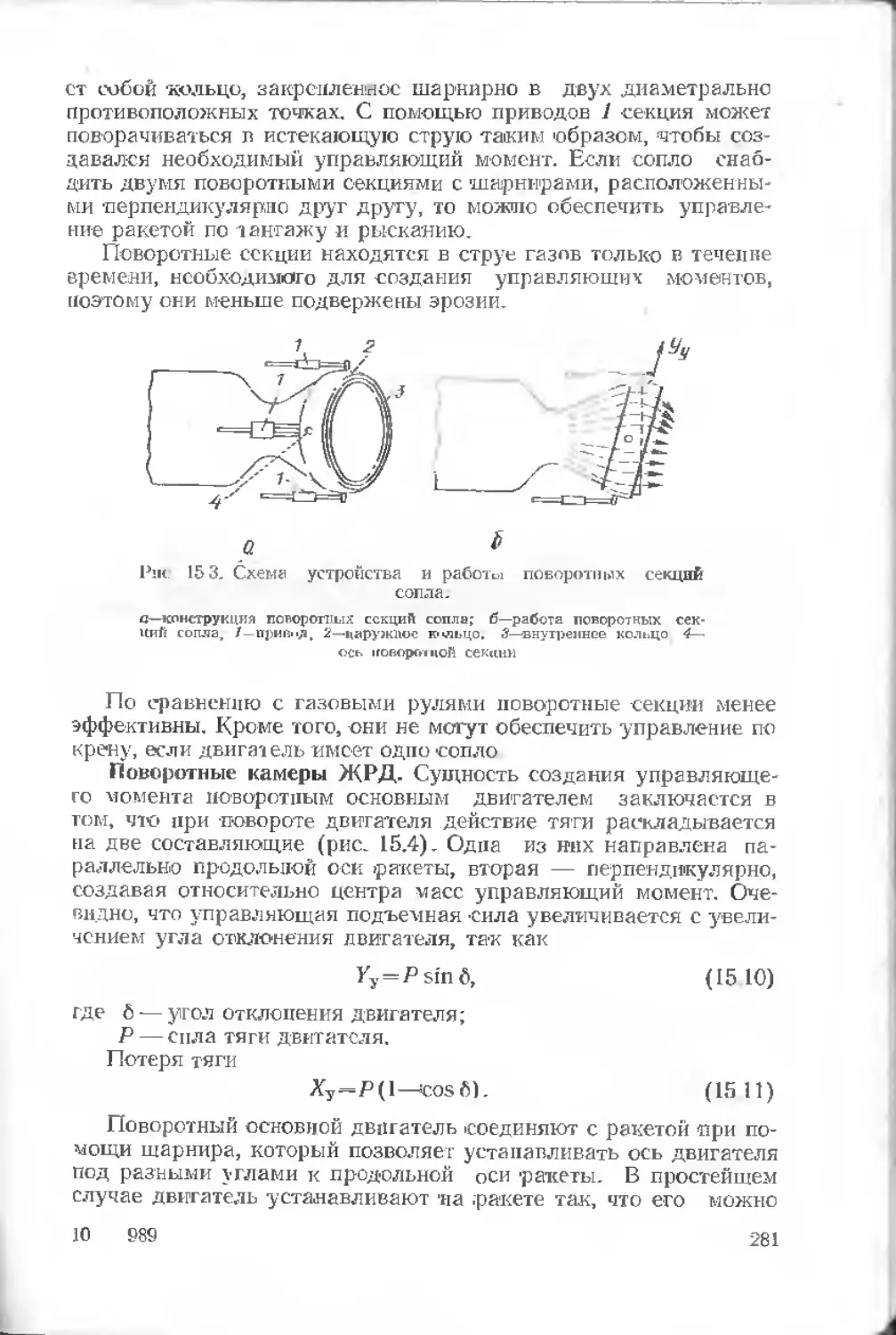
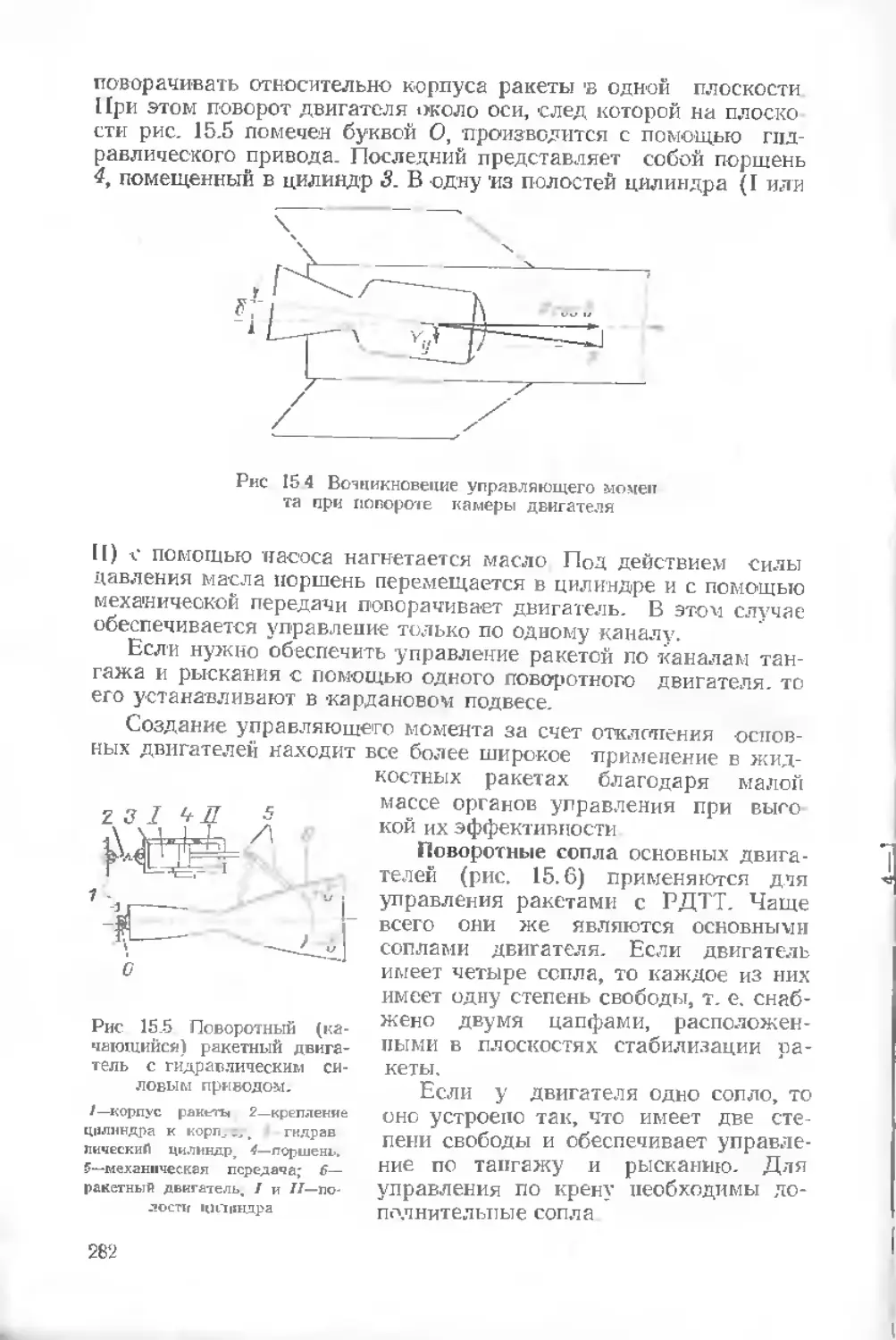
та, изданные в 1923 1929 годах; работы по ракетной технике,
опубликованные немецким ученым Эйгсном Зенгером (в тридца-
тых и сороковых годах ан работал в Австрии), изданные в 1933
году.
о
Сергей Павлович Королев
Качественно новый этап развития ракетной техники начался
после второй мировой войны в СССР и в США, которые в тече-
ние довольно короткого периода времени достигли больших
успехов в ракетостроении и в освоении космоса.
Выдающееся значение в создании ракетно-космической тех-
ники имеет научная, техническая и организаторская деятель-
ность академика С П. Королева Велика заслуга в развитии ра-
кетостроения и космонавтики академика Михаила Ку.ц.мича Ян-
геля (1611—1971 гг.).
Начиная с 1949 года у нас проводятся регулярные запуски ра-
кет, снабженных научной аппаратурой для исследования верх-
них слоев атмосферы.
Самым значительным достижением советских ракетостроите-
лей в послевоенный период было создание в 1957 году межконти-
Валеитан Петрович Глушко
нентальиой многоступенчатой баллистической ракеты и запуск
4 октября 1957 года первого в мире искусственного спутника
Земли.
Наша страна завоевала приоритет в освоении межпланетных
трасс, осуществив в январе 1959 года пуск космической ракеты в
направлении Луны, а в феврале 1961тго- в направлении Ве-
неры.
Триумфом советской науки и техники явился полет в Космос
12 апреля 1961 года первого в мире летчика-космонавта
Ю. А Гагарина (1934- 1968 гг.). Этот подвиг открыл новую
страницу в истории покорения космоса. Вслед за полетом
Ю. А. Гагарина последовали полеты советских и американских
космонавтов вокруг Земли, полеты американских космонавтов и
советских автоматических станций на Луну и запуск орбиталь-
ных станций «Салют-1» и «Скайлаб».
11
Проникновение ib космос происходит в необычно быстром
темпе. Хотя прошло не так уже много времени с того дня, когда
первый советский искусственный спутник Земли возвестил всему
миру о начале космической эры в развитии человечества, изуче-
ние космоса и использование его для земных нужд прочно вош-
ло в нашу повседневную жизнь.
Коммунистическая партия Советского Союза и Советское
правительство постоянно проявляют большую заботу о дальней-
шем развитии ракетной техпики, без которой невозможны наши
последующие шаги в освоении космоса. Большое внимание уде-
ляется также подготовке высококвалнфицироваипых специали-
стов по ракетной технике, обладающих глубокими и разносто-
ронними знаниями по теории, проектированию и эксплуатации
ракетных комплексов.
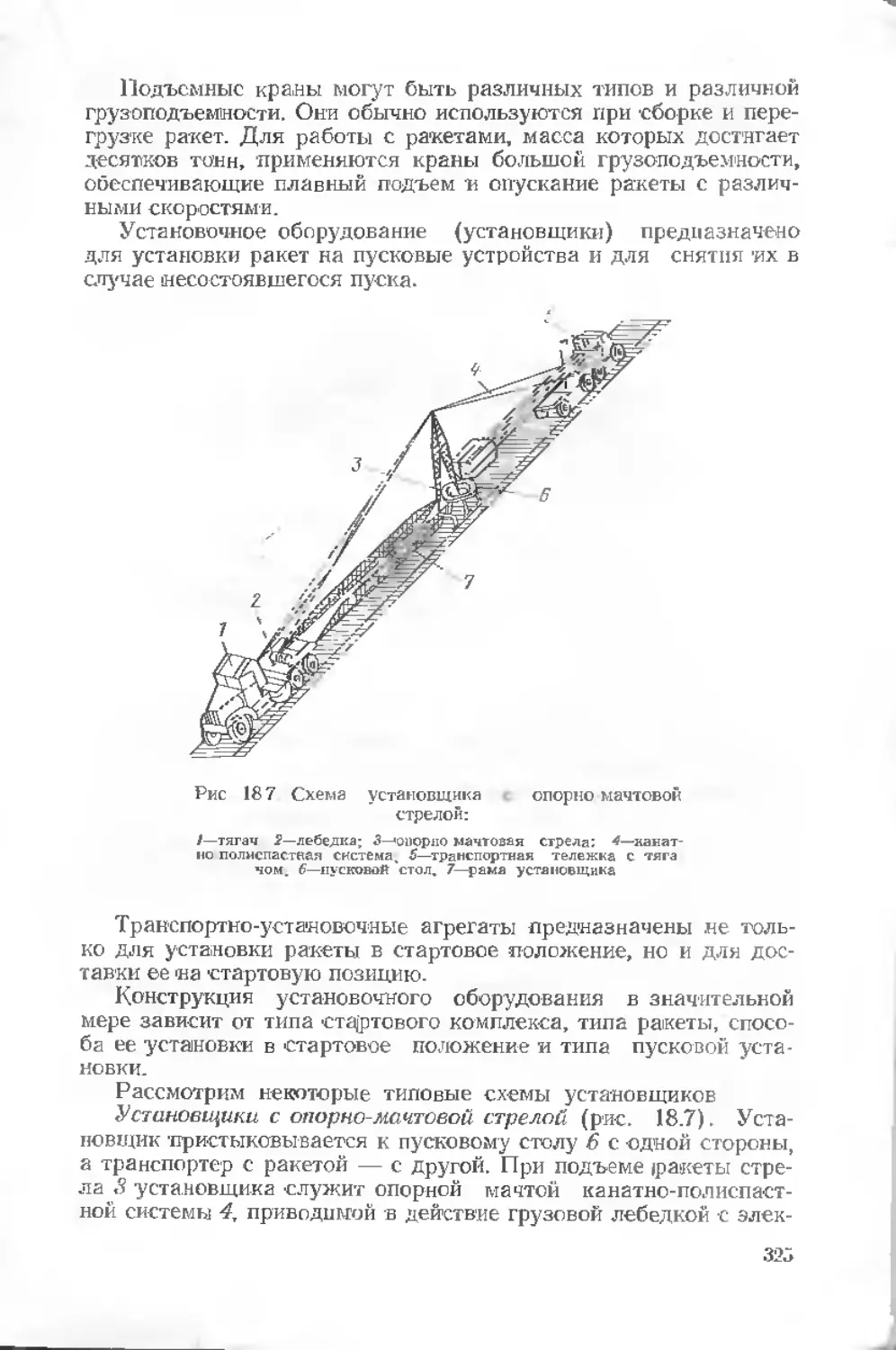
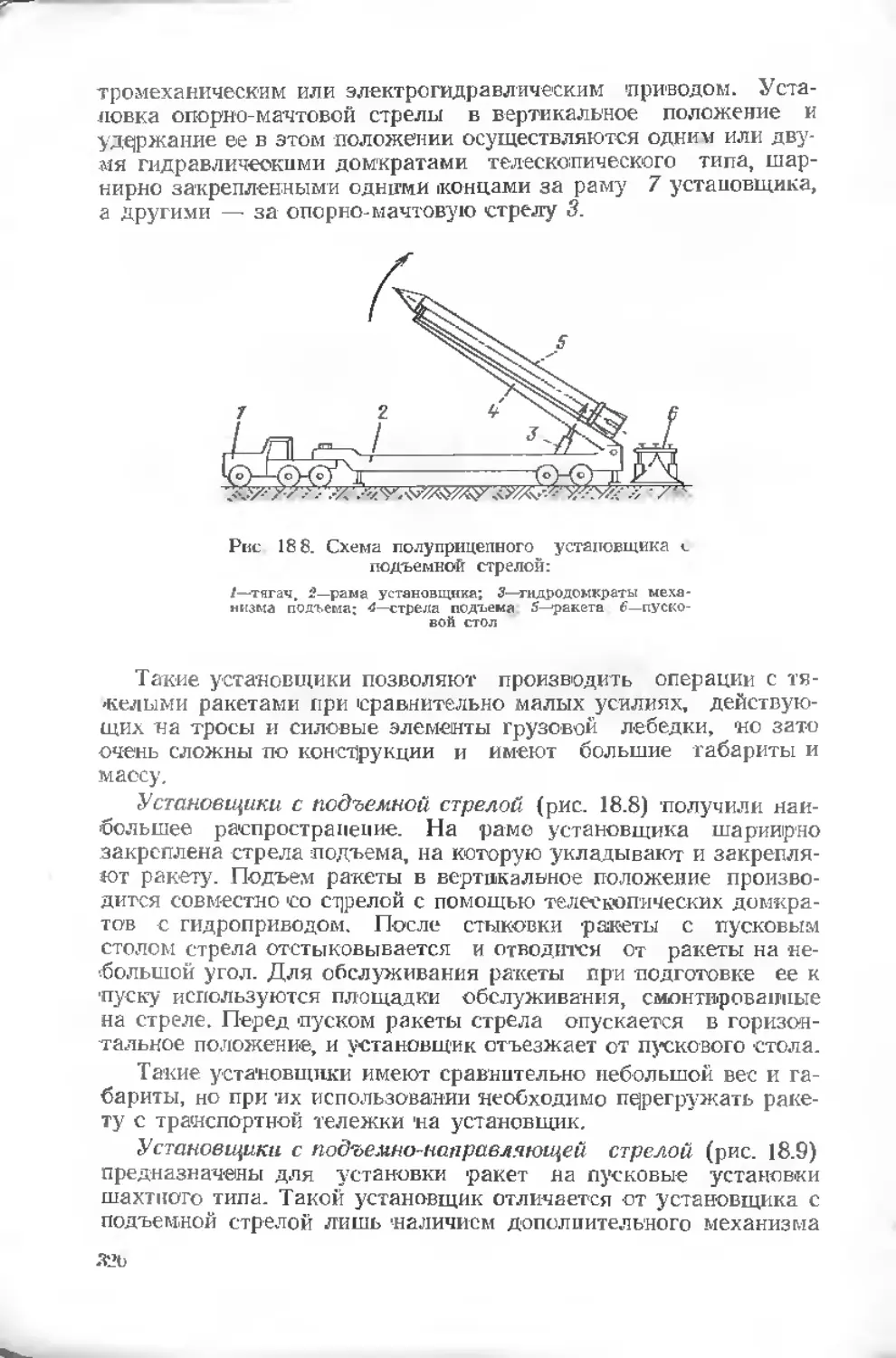
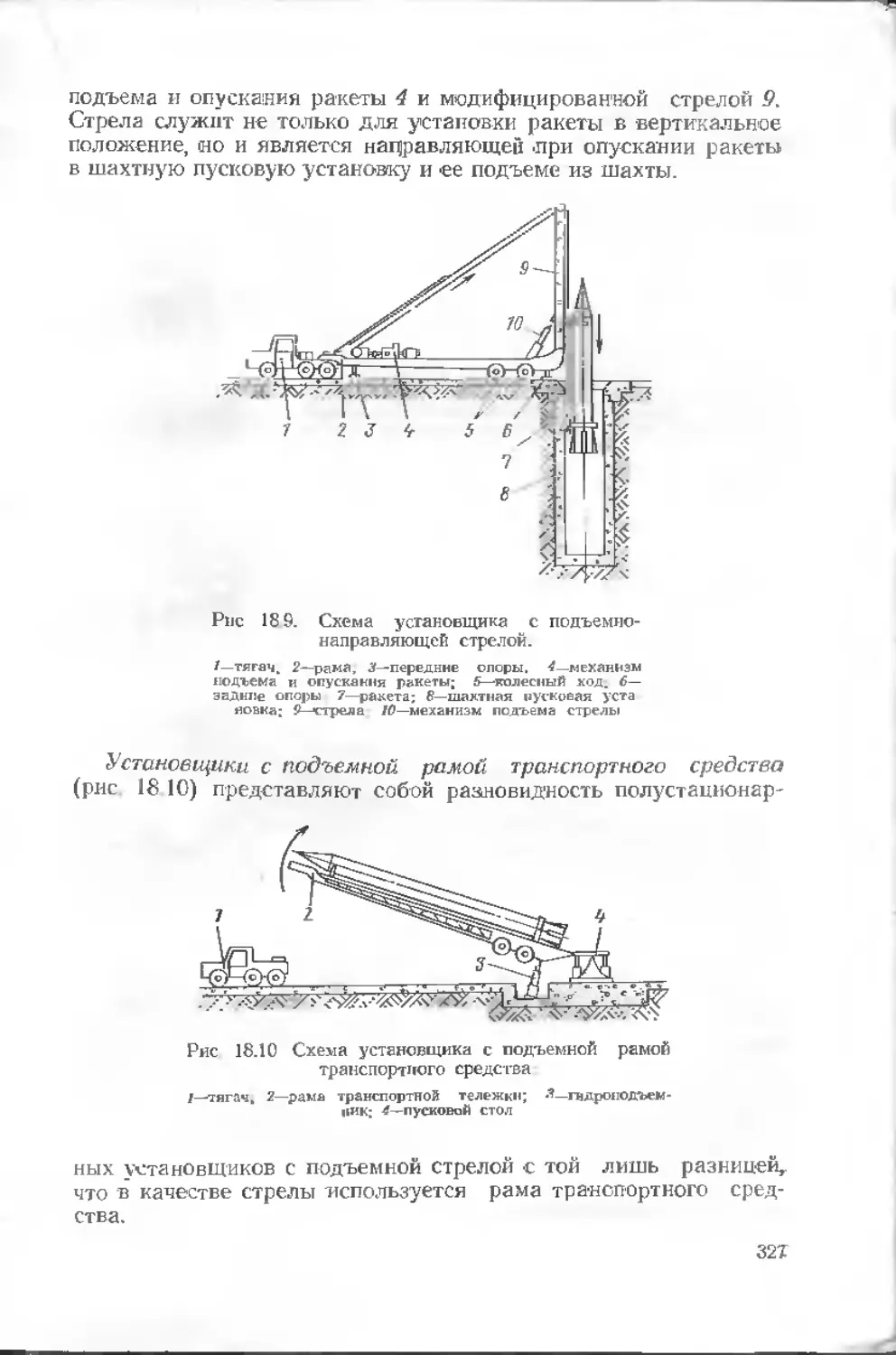
Часть первая
ОСНОВЫ ТЕОРИИ ПОЛЕТА БАЛЛИСТИЧЕСКИХ РАКЕТ
Глава I
ОСНОВНЫЕ ПОЛОЖЕНИЯ ТЕОРИИ РЕАКТИВНОГО
ДВИЖЕНИЯ
Ракетой -называется летательный аппарат, движущийся за
счет реактивной силы, возникающей при отбрасывании части
собственной массы. Отбрасываемая масса истекает с большой
скоростью из сопла двигателя летателыюго аппарата, создавая
реактивную силу. Кривая, по которой происходит полет ракеты,
называется траекторией.
Баллистическая ракета в отличие от крылатой ракеты не
имеет несущих поверхностей (крыла), предназначенных для
создания аэродинамической подъемной силы при полете в атмо-
сфере. Полет баллистической ракеты происходит по баллистиче-
ской траектории. Баллистической траекторией называется траек-
тория движения тела при отсутствии аэродинамической
подъемной силы. Траектория баллистической ракеты состоит из
Двух участков: активного и пассивного. На активном участке
работает двигатель ракеты, создающий реактивную силу. На
этом участке ракета набирает кинетическую энергию. На пассив-
ном участке за счет накопленной энергии ракета совершает по-
лет по 'инерции.
1.1. ОСНОВНЫЕ ЧАСТИ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ
Особенности конструкций ракет определяются их назначением,
средствами пуска, способами управления в полете, дальностью
полета, а также видом применяемого топлива. В зависимости от
дальности полета баллистические ракеты могут быть одноступен-
чатыми или .многоступенчатыми, а в зависимости от применя-
емого топлива- жидкостными или твердотопливными
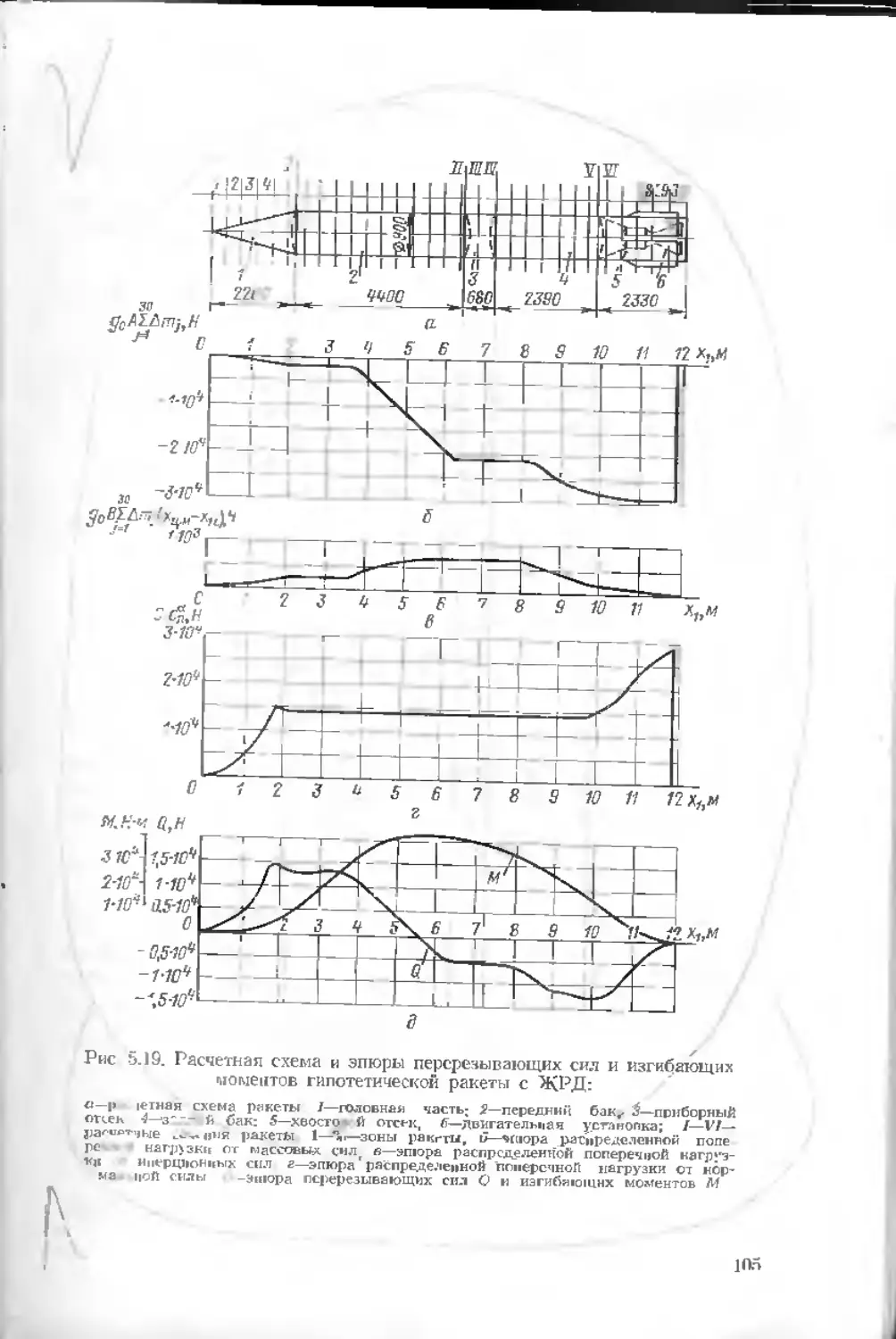
Рассмотрим основные части баллистической ракеты и их наз-
начение.
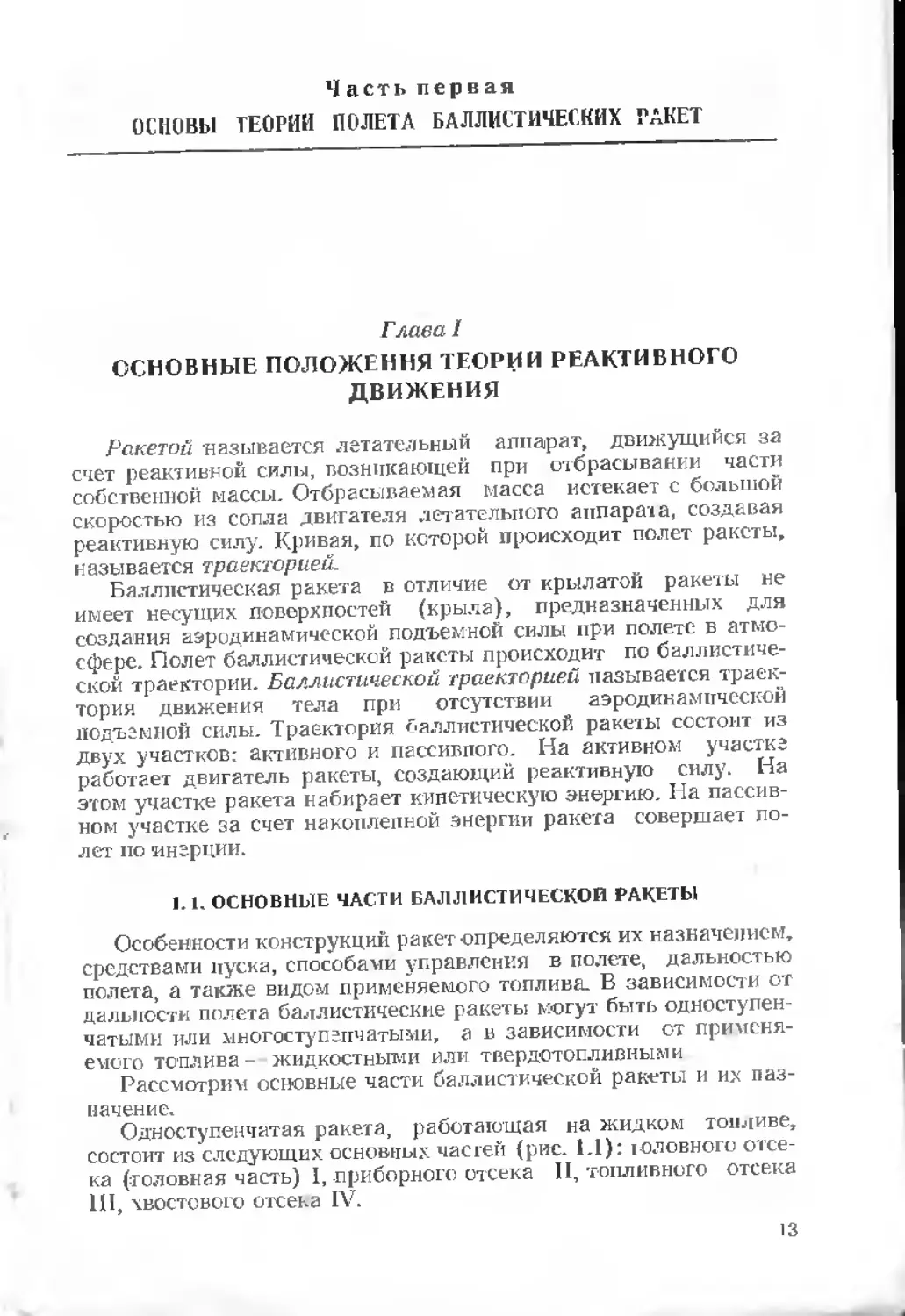
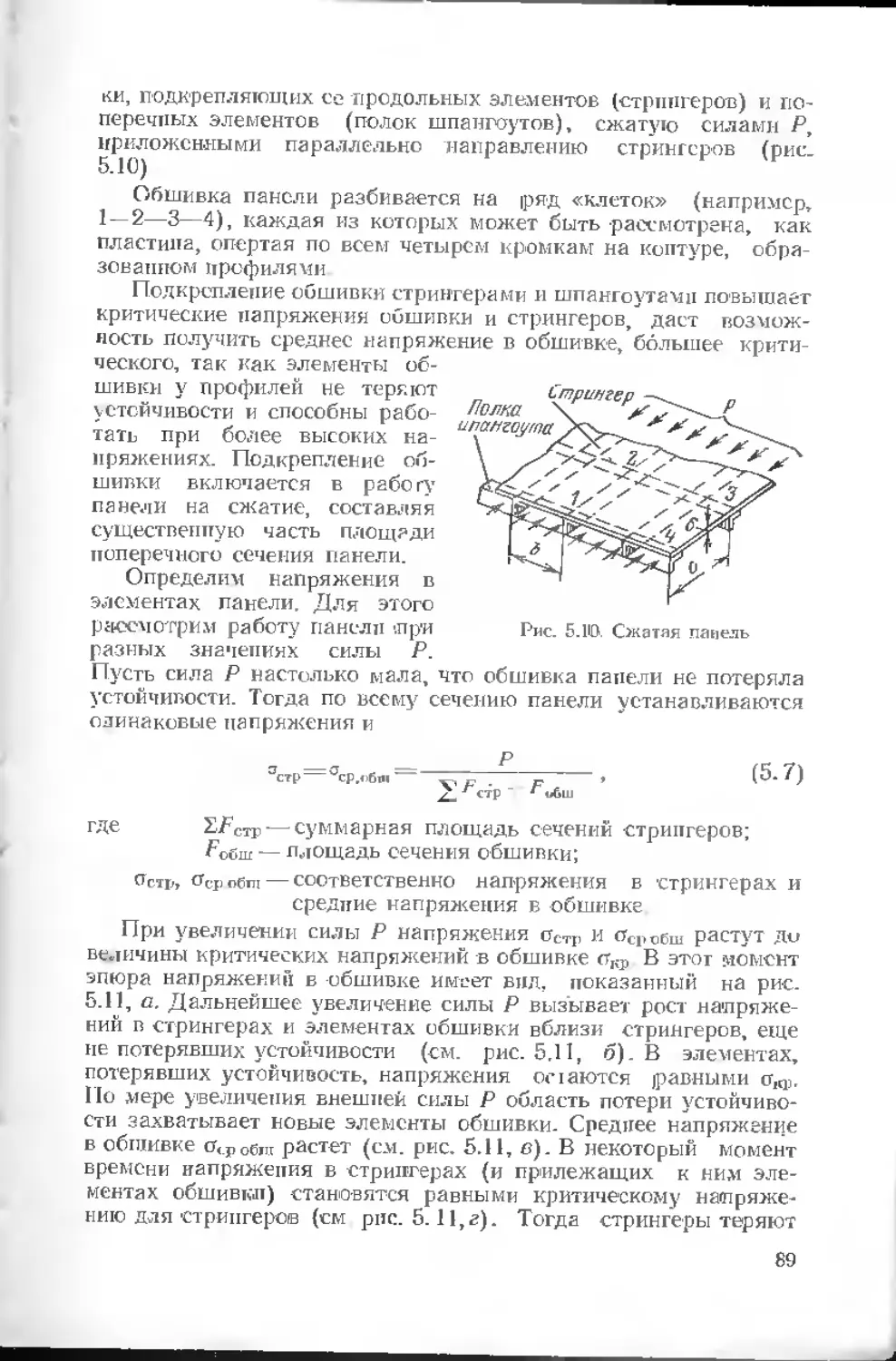
Одноступенчатая ракета, работающая на жидком топливе,
состоит из следующих основных частей (рис. 1.1): юловного отсе-
ка (головная часть) I, приборного отсека II, топливного отсека
111, хвостового отсека IV.
13
В головной части размещается полезный груз 1. У бое-
вых ракет полезным грузом является боевая часть с боевым за-
рядом, у исследовательских ракет — научная аппаратура.
7
Рис 1.1 Схема односту-
пенчатой ракеты-
I—полезный груз; 2—бак
тат двигателя S—камера
сгорания двигателя 6—ста
бнливаторы 7—управляю-
щие двигатели 8—сопло
двигателя. /—головная
часть; Я—'приборный отсек;
///•—топливный отсек; IV—
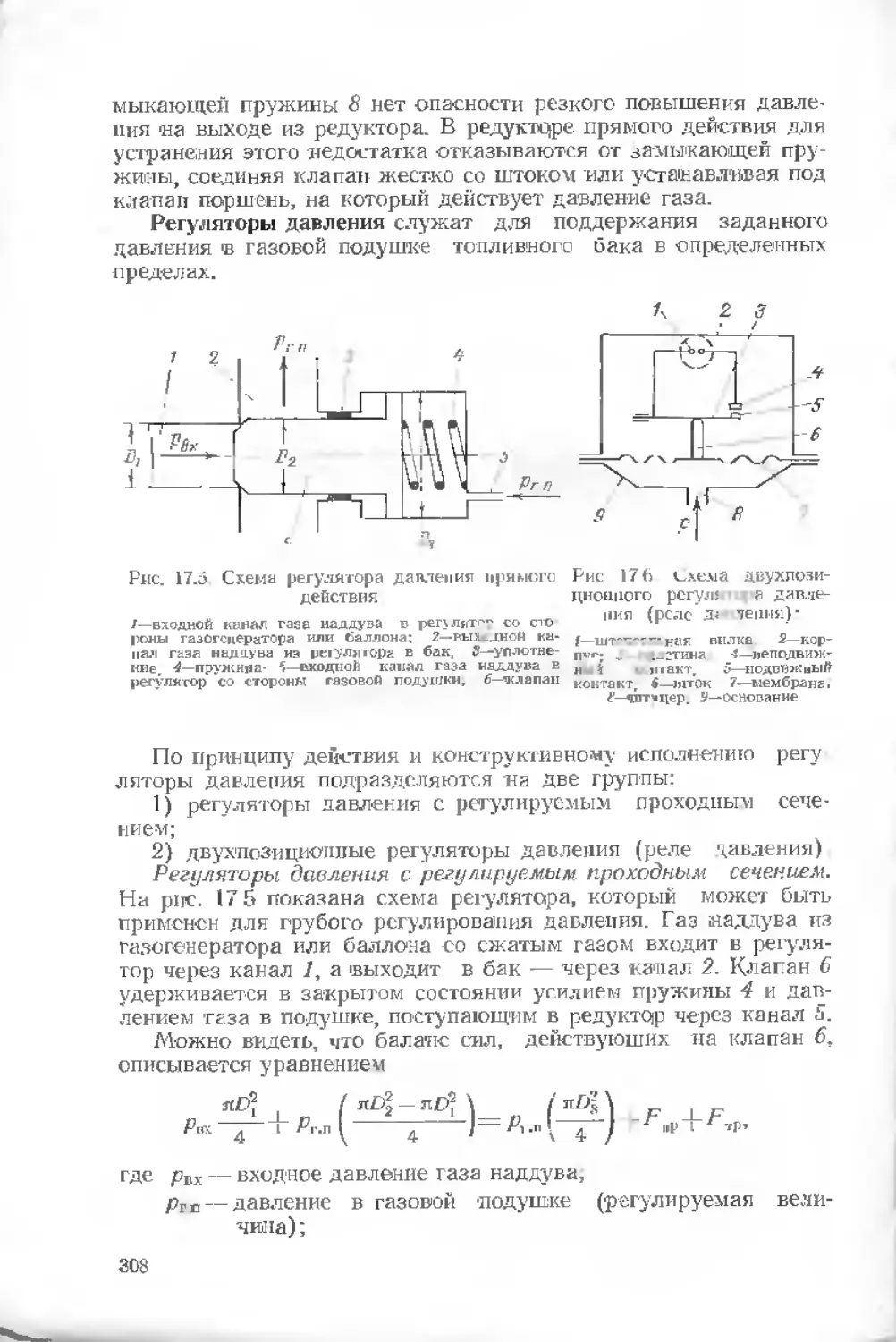
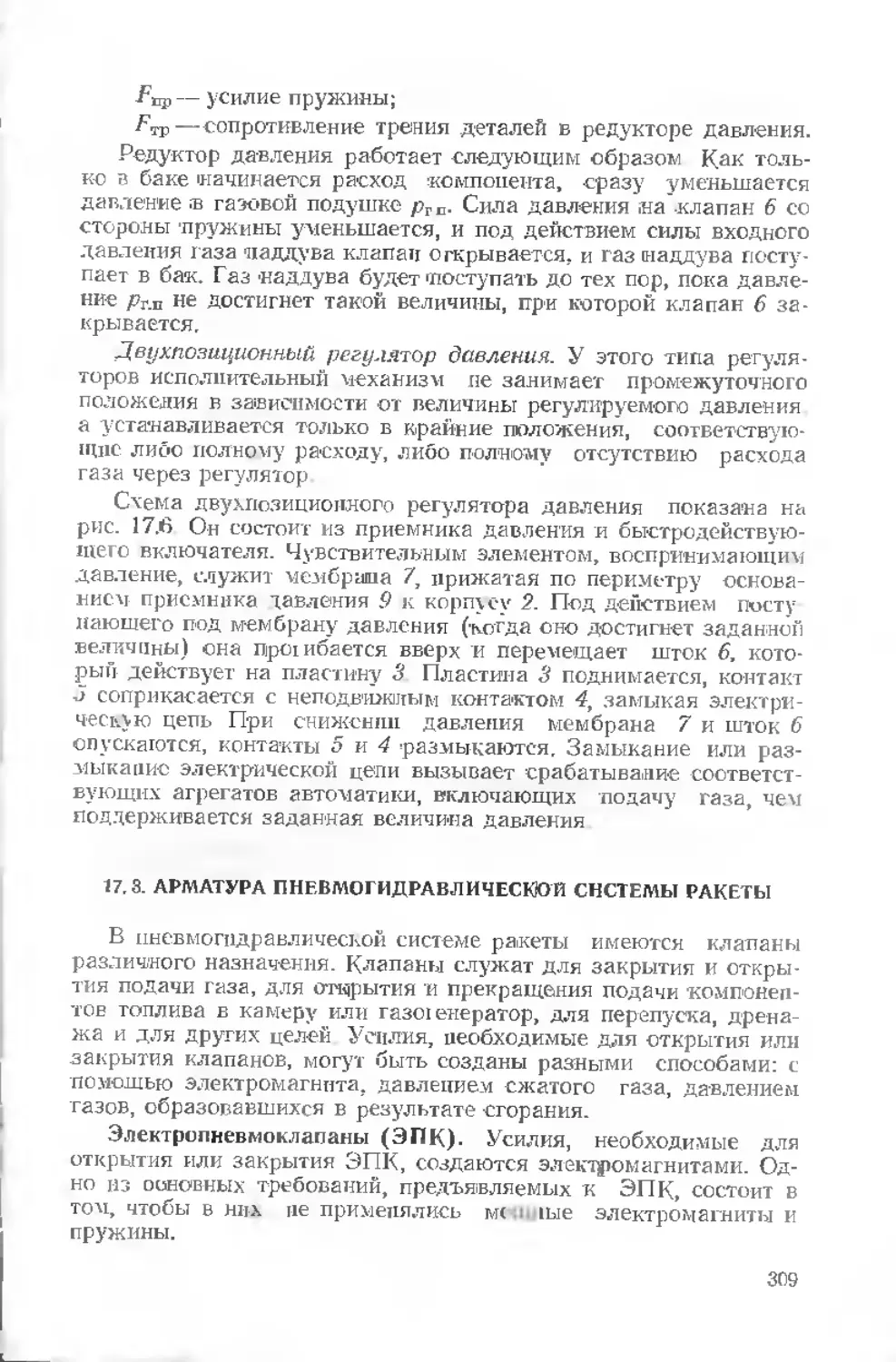
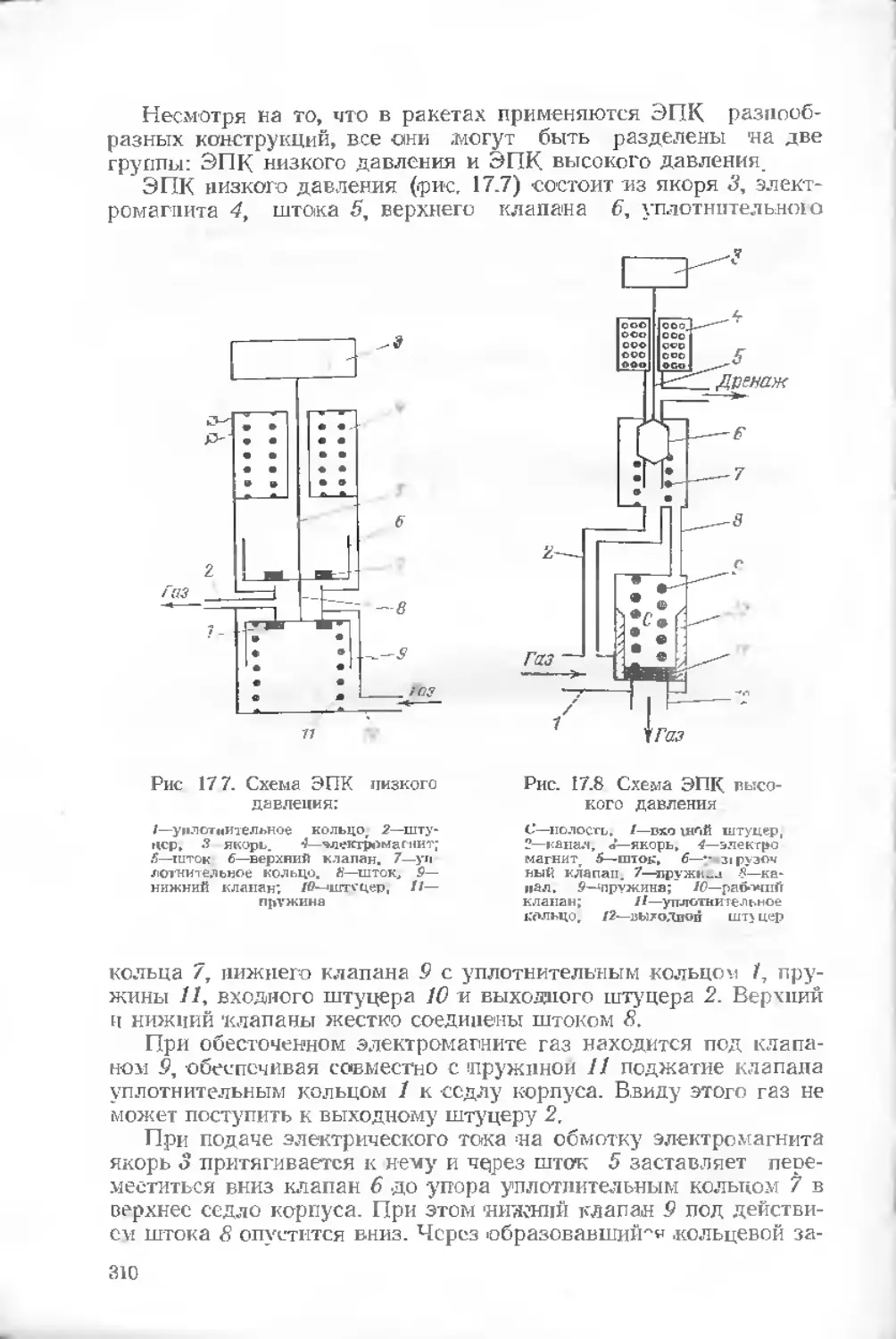
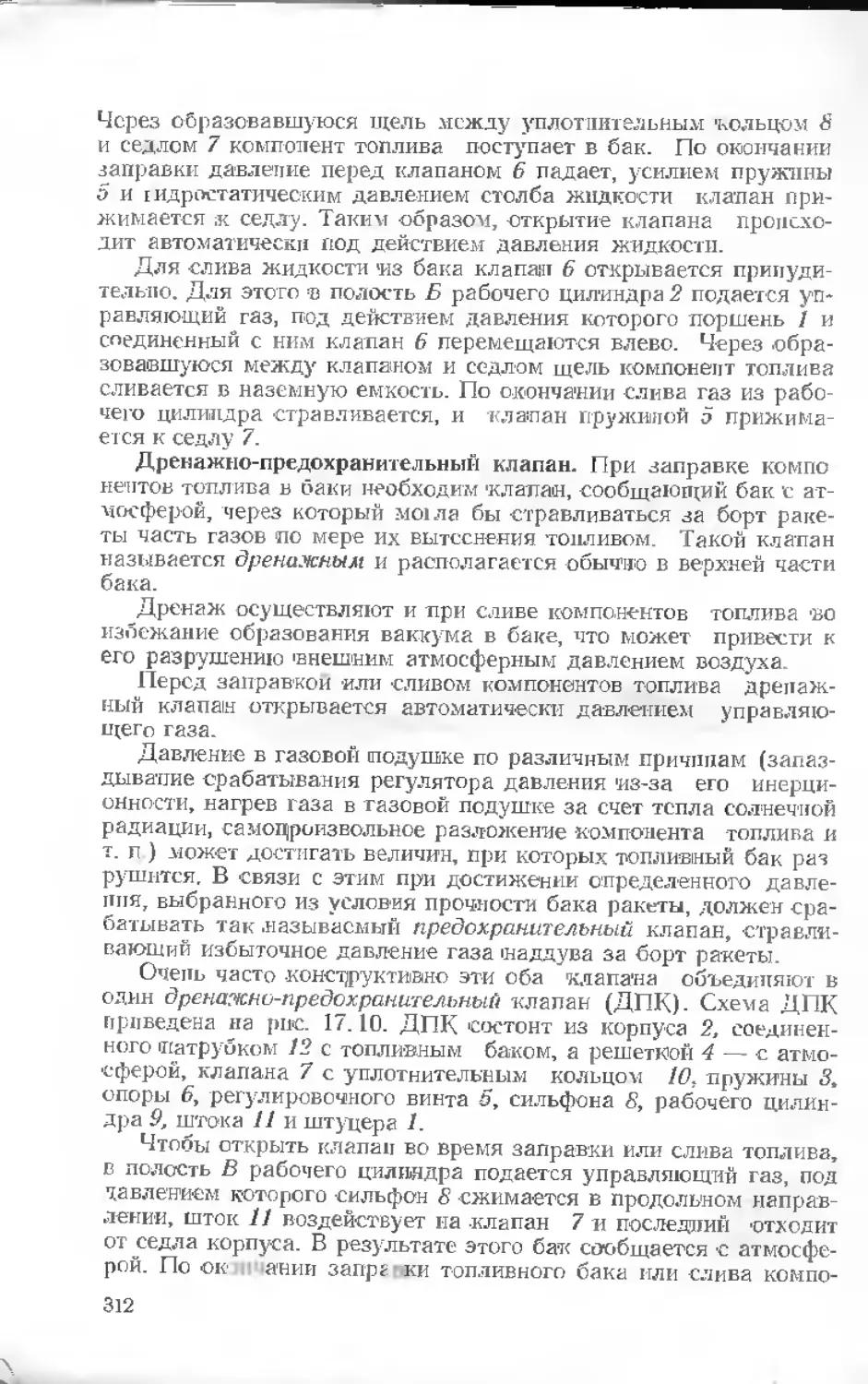
У баллистических ракет дальнего
депс/вия головная часть обычно выпол-
няется отделяющейся от корпуса. Это
позволяет уменьшить массу конструкции
ракеты. Дело в том, что при входе
в плотные слои атмосферы ракета сильно
разогревается и одновременно па нее
действуют большие нагрузки. Чтобы
предохранить ракету от разрушения на
этом участке, ее пришлось бы выполнять
более прочной' и, кроме того, покрыв ггь
слоем теплозащитного материала. При-
меняя отделяющуюся головную часть,
теплозащитное покрытие и упрочнение
конструкции производят только для го-
ловной части.
Приборный отсек II предна-
значается для размещения большей ча-
сти приборов системы управления раке-
той, источников электропитания и др.
Топливный отсек III служит для
размещения топлива и включает в себя
бак горючего 3 и бак окислителя 2.
В хвостовом отсеке IV разме-
щается двигательная установка, за
исключением топливных баков, и часть
приборов системы управления. Кроме
того, хвостовой отсек является силовым
элементом при установке ракеты на пу-
сковое устройство.
Двигательная установка служит для
создания силы тяги. Она включает
в себя один или несколько двшателей,
топливные баки, систему подачи компо-
нентов топлива, магистрали, соединяю-
щие двигатели с баками, и вспомогатель-
ные устройства.
Двигатель состоит из камеры сгора-
ния 5, сопла 8, газогенератора и турбо-
насосного агрегата (ТИЛ) 4, предназначенного для принуди-
тельной подачи компонентов топлпва из баков в камеру сгора-
ния и газогенератор; агрегатов автоматики, обеспечивающих
управление, регулирование и обслуживание двигателя; устройств
для создания управляющих усилий и моментов; рамы для креп-
ления двигателя к корпусу ракеты.
Система управления ракеты представляет собой авто-
матический комплекс устройств, обеспечивающий пуск ракеты и
поддерживающий ее движение близким к требуемому, т е_ за-
данному заранее или выбираемому в каждый момент самой сис-
темой управления так, чтобы обеспечить с определенной точно-
стью выполнение конечной задачи — попадание головной части
в заданную цель, вывод искусственного спутника Земли на за-
даппую орбиту и т. д.
Большинство систем управления состоит из чувствительных
элементов (измерительного и программного устройств), преобра-
зующих устройств и исполнительных органов.
Чувствительные элементы регистрируют отклонения движе-
ния ракеты от требуемого и вырабатывают сигналы об этих отк-
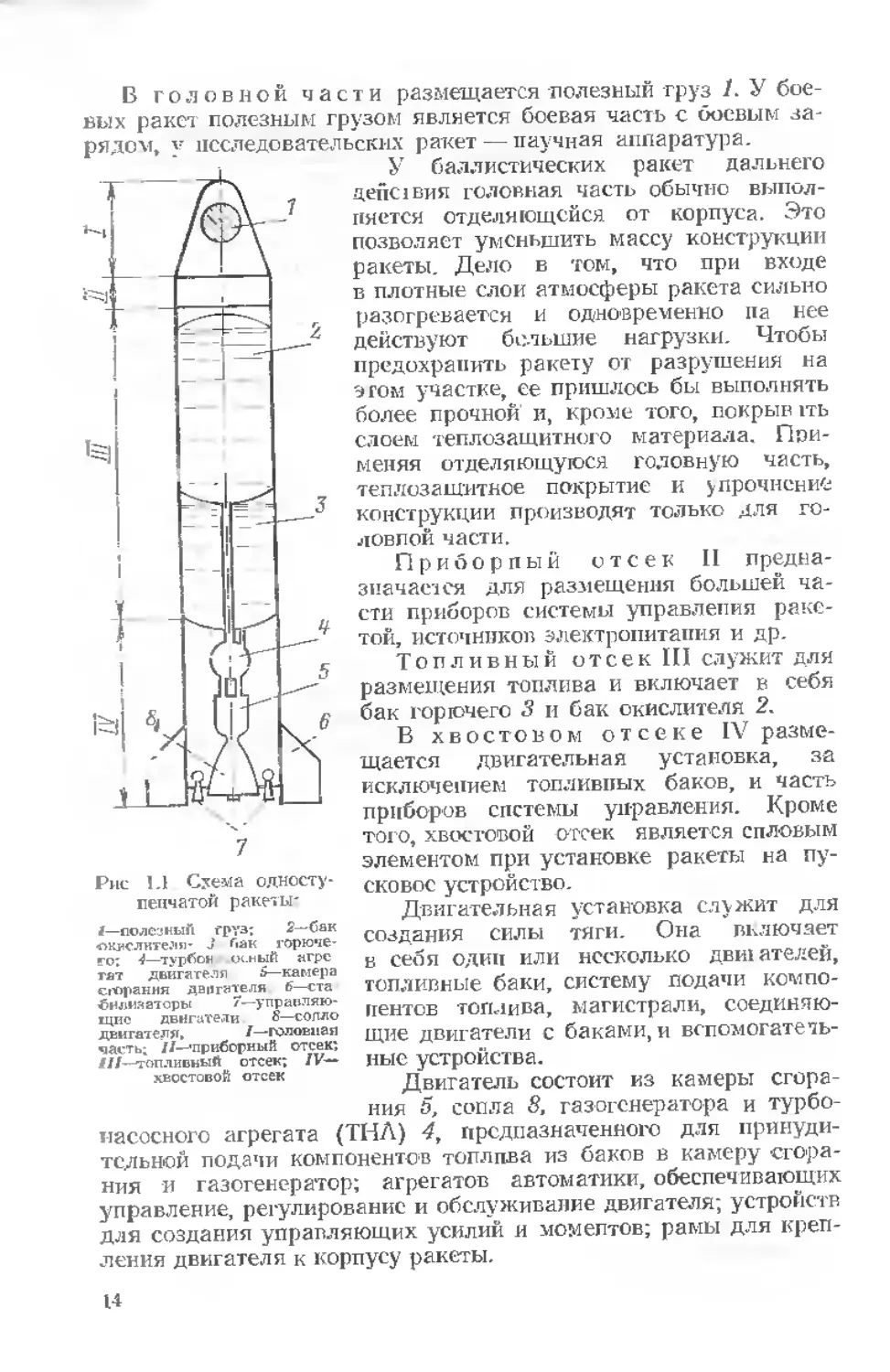
Рис. 1 2. Схема неуправляемой ракеты с двигателем на
твердом топливе:
лонеииях. Эти сигналы поступают в усилительно-л реобразующие
устройства, которые в свою очередь вырабатывают сигналы-
команды на отклонение исполнительных органов.
Исполнительные органы системы управления создают управ-
ляющие моменты, обеспечивающие такое положение ракеты в
пространстве, при котором она совершает полет по заданной тра-
ектории. Ракета в движении относительно центра масс обладает
тремя степенями свободы, поэтому исполнительные органы сис-
темы управления должны обеспечивать поворот ракеты относи-
тельно трех взаимно перпендикулярных осей.
Исполнительными органами системы управления могут быть
газовые рули, рулевые (верньерные) двигатели, поворотные ос-
новные двигатели и другие устройства, изменяющие направление
газового потока, а следовательно, и вектора тяти двигателя.
На рис. 1.2 показана типовая схема неуправляемой ракеты
на твердом топливе. Основной отличительной особенностью этих
ракет является то, что двигатель их работает па топливе, нахо-
дящемся в твердом агрегатном состоянии. Кроме того, весь за-
пас топлива ракеты размещается непосредственно в камере
ci орания двигате ля. Неуправляемая твердотопливная ракета со-
стоит из боевой части /, камеры егцрапия двигателя 2, заряда
последующие
являются для
грузом.
двига-
происходит отделе-
ускорителя ступени,
оставшейся части
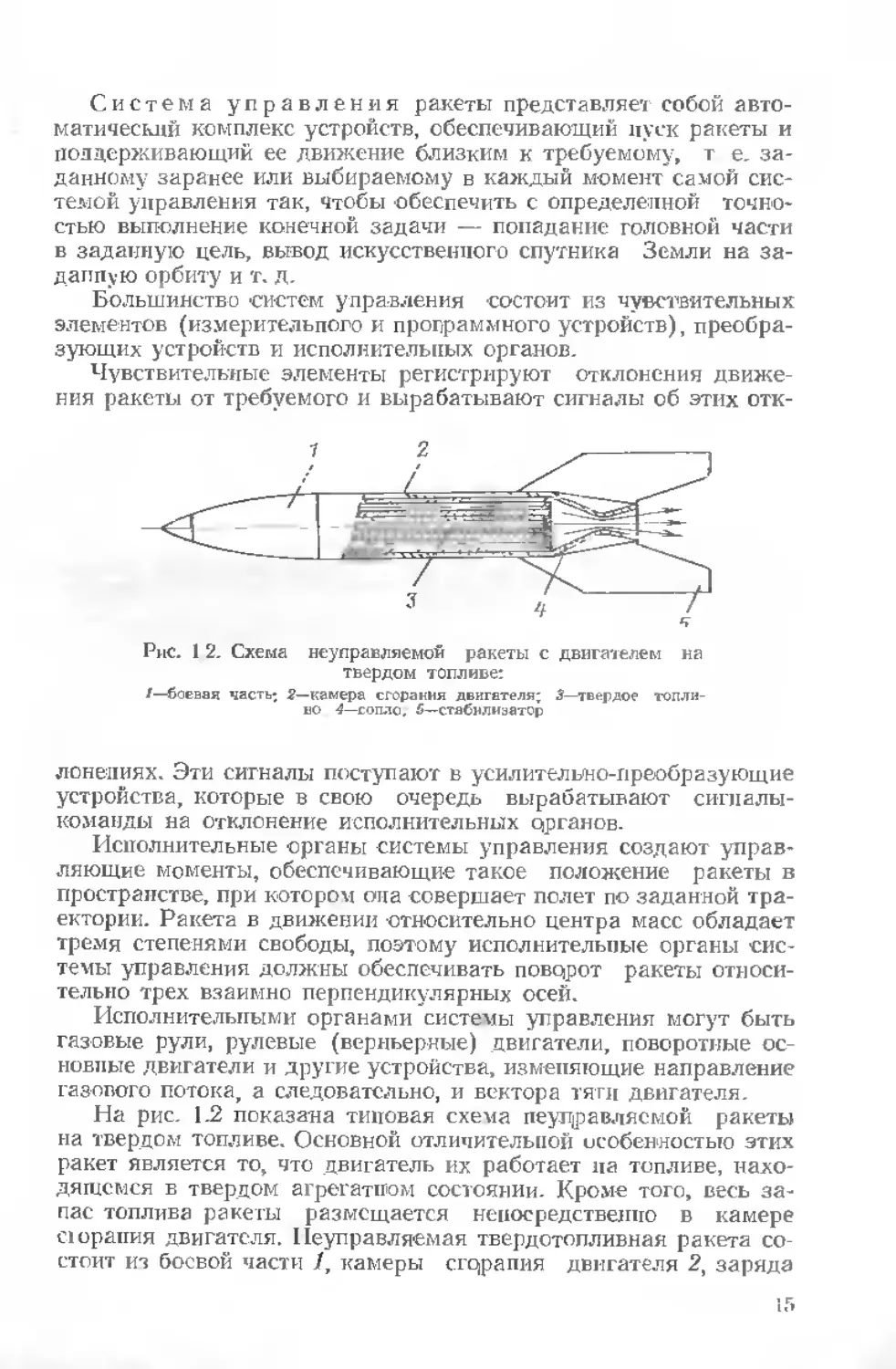
Рис. 1 3. Схема мншоступепчатой ракеты:
твердою топлива 3, сопла 4 и стабилизаторов 5. Стабилизаторы
обеспечивают устойчивый полет неуправляемой ракеты.
Многоступенчатая (или составная) ракета (рис 1.3) состоит
из нескольких соединеипых между собой отдельных ракетных
ступеней®, каждая из ко-
торых имеет свою двига-
тельную установку (уско-
ритель ступени). При ра-
боте двигателя очередной
ступени
ступени
нее полезным
После выгорания топлива
работающей ступени и
выключения ~
теля
пие
масса
ракеты уменьшает ся.
После отделения ускори-
теля последней ступени
движение к пели совер
тает головная часть ра-
кеты. Вследствие умень-
шения общей массы па-
кеты при отделении уско-
рителей ступеней много-
ступенчатая ракета мо-
жет сообщить головной
части значительно боль-
шую скорость, чем одно-
ступенчатая при той же
начальной массе, одина-
ковых запасе топлива и
массе полезной нагрузки.
1.2. ПРИНЦИП
РЕАКТИВНОГО
ДВИЖЕНИЯ
Принцип реактивного
движения рассмотрим 1га
следующем примере.
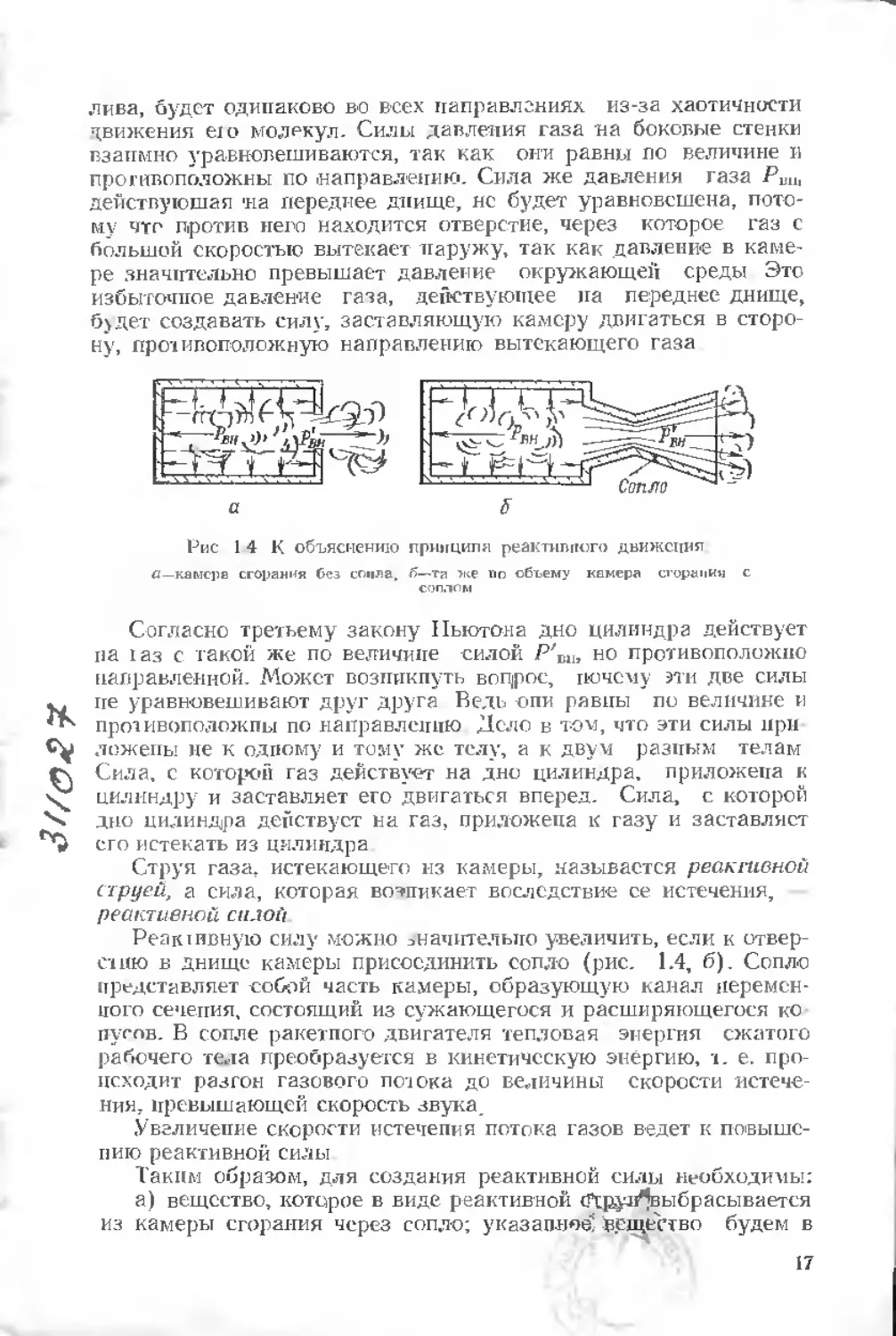
Пусть в цилиндрической камере сгорания с отверстием
в днище (рис. 1.4, с) сгорает какое-либо топливо (например, по-
рох). Давление газа, образовавшегося вследствие сгорания топ-
♦ Ступень ракеты представляет собой условную одноступенчатую ракету,
состоящую из ускорителя и условного полезного груза в виде остальной
(верхней) части ракеты.
16
лива, будет одинаково во всех направлениях из-за хаотичности
движения его молекул. Силы давления газа на боковые стенки
взаимно уравновешиваются, так как они равны по величине и
противоположны по .направлению. Сила же давления газа РЫ1,
действующая на переднее днище, нс будет уравновешена, пото-
му что против него находится отверстие, через которое газ с
большой скоростью вытекает наружу, так как давление в каме-
ре значительно превышает давление окружающей среды Это
избыточное давление газа, действующее на переднее днище,
будет создавать силу, заставляющую камеру двигаться в сторо-
ну, противоположную направлению вытекающего газа
а
Рис 1 4 К объяснению принципа реактивного движения
Согласно третьему закону Ньютона дно цилиндра действует
па 1аз с. такой же по величине силой Р'п1, но противоположно
направленной. Может возникнуть вопрос, почему эти две силы
не уравновешивают друг друга Ведь опи равны по величине и
противоположны по направлению Дело в том, что эти силы при
ложеггы не к одному и тому же телу, а к двум разным телам
Сила, с которой газ действует на дно цилиндра, приложена к
цилиндру и заставляет его двигаться вперед. Сила, с которой
дно цилиндра действует на газ, приложена к газу и заставляет
его истекать из цилиндра
Струя газа, истекающего из камеры, называется реактвной
струей, а сила, которая возникает вослсдствие се истечения,
реактивной силой
Реам явную силу можно значительно увеличить, если к отвер-
стию в днище камеры присоединить сопло (рис. 1.4, б). Сопло
представляет собой часть камеры, образующую канал перемен-
ного сечения, состоящий из сужающегося и расширяющегося ко
цугов. В сопле ракетного двигателя тепловая энергия сжатого
рабочего тада преобразуется в кинетическую энергию, т. е. про-
исходит разгон газового потока до величины скорости истече-
ния, превышающей скорость звука.
Увеличение скорости истечения потока газов ведет к повыше-
нию реактивной силы
Таким образом, для создания реактивной силы необходимы:
а) вещество, которое в виде реактивной СДрун^выбрасывается
из камеры сгорания через сопло; указ апное* Вещество будем в
17
дальнейшем называть рабочим телом. В разобран пом нами при-
мере рабочим телом являются продукты сгорания пороха;
б) источник первичной энергии, которая преобразуется в
кинетическую энергию реактивной струи. В данном случае ис-
точником первичной энергии является химическая энергия по-
роха;
в) двигатель, т. е. устройство, обеспечивающее преобразова-
ние химической энергии топлива в тепловую энергию тазов и за-
тем тепловой энергии — в кинетическую энергию реактивной
струи.
На ракетах применяются реактивные двигатели, у которых
рабочее тело и источник первичной энергии размещены на бор-
ту. Такие двигатели выделены в так называемый класс ракетных
двигателей* Ракетный двигатель является единственным типом
двигателя, который может работать в любой газообразной сре-
де, в воде, а также в пустоте.
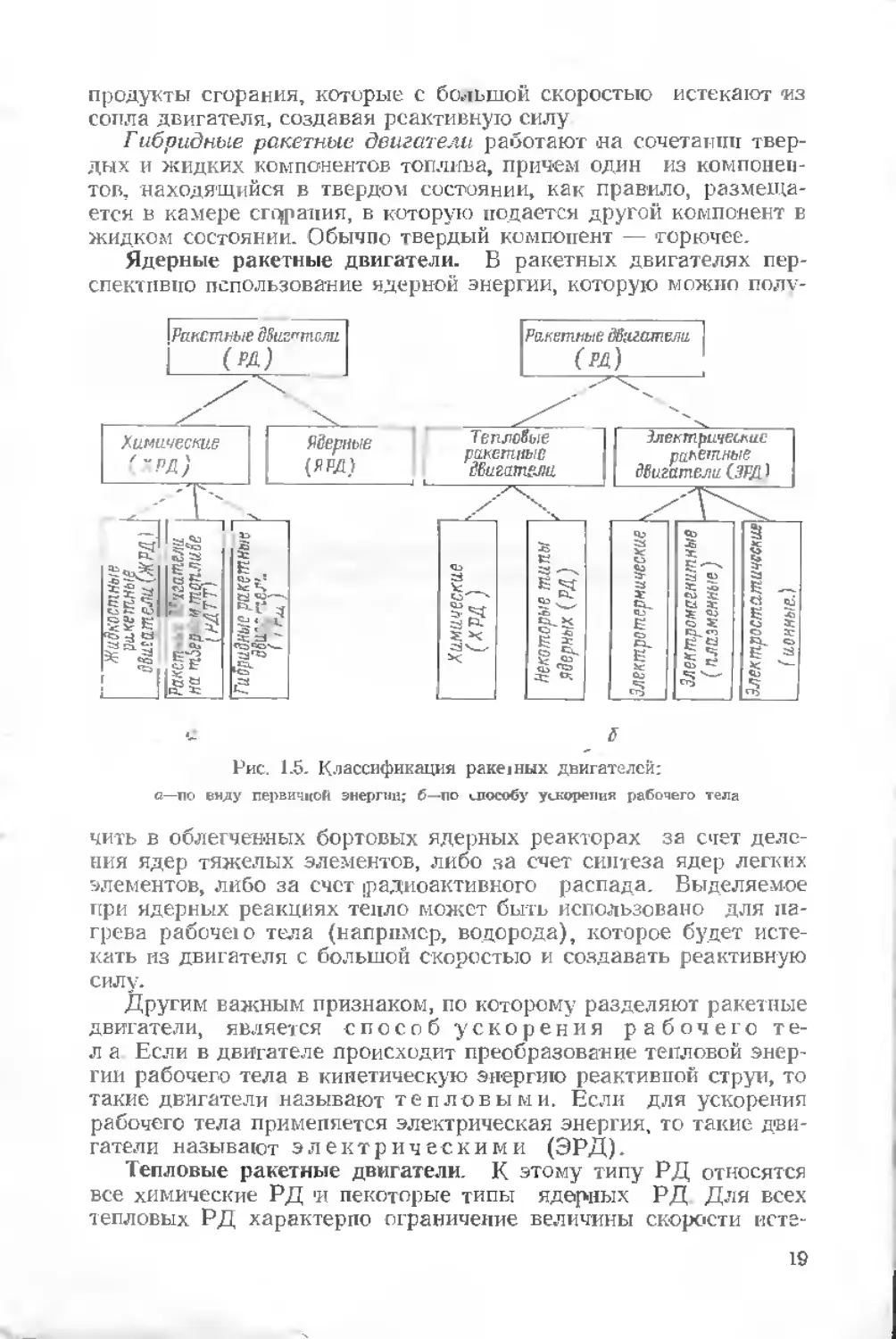
1.3. КЛАССИФИКАЦИЯ РАКЕТНЫХ ДВИГАТЕЛЕЙ
Наиболее существенным признаком, по которому разделяют
ракетные двигатели, является вид первичной энергии,
которая используется в ракетном двигателе — это химическая и
ядерная энергия. По этому признаку различают химические
и ядерные ракетные двигатели (рис. 1.5).
Химические ракетные двигатели по фазовому состоянию топ-
лива подразделяют па жидкостные ракетные двигатели (ЖРД),
ракетные двигатели твердого топлива (РДТТ) и гибридные ра-
кетные двигатели (ГРД).
Жидкостные ракетные двигатели. В качестве источника энер-
гии и рабочего тела в ЖРД чаще всего используют жидкие спе-
циально подобранные химические вещества: г о р ю ч е е и окис-
литель, которые называются компонентами химического
ракетного топлива. При их взаимодействии происходит экзотер-
мическая реакция, т. е. реакция с выделением тепла, и образуют-
ся газообразные продукты сгорания, имеющие высокую темпе-
ратуру и давление. Истечение продуктов сгорания из сопла дви-
гателя, вследствие преобразования их теплоты в кинетическую
энергию, приводит к созданию реактивной силы.
Ракетные двигатели на твердом топливе. Твердое химическое
топливо представляет собой твердый раствор органических ве-
ществ, молекулы которых содержат юрючис и окислительные
элементы, либо механическую смесь окислителя и горючего, ко-
торая в виде заряда размещается непосредственно в камере сго-
рания- При горении твердого топлива образуются 1 азообразные
* Реактивные двигатели (двигатели прямой реакции) разделяют на два
класса' ракетные двигатели и воздушно-реактивные д- г гатели. которые для
работы используют воздух окружающей среды.
18
продукты сгорания, которые с большой скоростью истекают из
сопла двигателя, создавай реактивную силу
Гибридные ракетные двигатели работают да сочетании твер-
дых и жидких компонентов топлива, причем один из компонен-
тов, находящийся в твердом состоянии, как правило, размеща-
ется в камере сгорания, в которую подается другой компонент в
жидком состоянии. Обычно твердый компонент — торючее.
Ядерные ракетные двигатели. В ракетных двигателях пер-
спективно использование ядерной энергии, которую можно полу-
Рис. 1.5. Классификация ракешых двигателей:
а—по виду первичкой энергии; б—по аюсобу ускорения рабочего тела
чить в облегченных бортовых ядерных реакторах за счет деле-
ния ядер тяжелых элементов, либо за счет синтеза ядер легких
элементов, либо за счет (радиоактивного распада. Выделяемое
при ядерных реакциях тепло может быть использовано для на-
грева рабочею тела (например, водорода), которое будет исте-
кать из двигателя с большой скоростью и создавать реактивную
силу.
Другим важным признаком, по которому разделяют ракетные
двигатели, является способ ускорения рабочего те-
л а Если в двигателе происходит преобразование тепловой энер-
гии рабочего тела в кинетическую энергию реактивной струи, то
такие двигатели называют тепловыми. Если для ускорения
рабочего тела применяется электрическая энергия, то такие дви-
гатели называют электрическими (ЭРД).
Тепловые ракетные двигатели. К этому типу РД относятся
все химические РД >и некоторые типы ядерных РД. Для всех
тепловых РД характерно ограничение величины скорости исте-
19
тения реактивной струи, которая в конечном итоге зависит от
температуры рабочего тела. В свою очередь температура нагрева
рабочего тела определяется максимально допустимой для ма-
териалов конструкции двигателя.
Электрические ракетные двигатели. В этих двигателях раба
чее тело с помощью электрической энергии разгоняется Д" .нм
ма высоких скоростей истечения (недостижимых в ракетных
двигателях с использованием химической энергии топлива).
Электрическая энергия получается с помощью силовой установ-
ки, генерирующей электрический ток При этом первичной мо-
жет быть ядерная, солнечная или химическая энергия. Созданы
экспериментальные образцы электрических ракетных двигателей:
электротермический, электромагнитный (плазменный или магни-
тогидродипамический) и электростатический (ионный).
В электротермическом ракетном двигателе с помощью элект-
родугового нагревателя рабочее тело — обычно газы с малым
молекулярным весом (гелий, водород и др.) — нагревается до
очень высокой температуры. В результате скорость истечения
реактивной струи достигает 25-103 м/с.
В электромагнитном ракетном двигателе рабочее тело на-
гревается до состояния плазмы. В отличие от обычных газов,
являющихся изоляторами, плазма является хорошим проводни-
ком электрического тока. С помощью электродинамического ус-
корителя можно разогнать плазму до очень высоких скоростей —
500- 10э м/с.
В электростатическом, (ионном) ракетном двигателе реактив-
ная тяга создается потоком ионов, ускоряемых с помощью элек-
тростатического поля. Рабочее тело, обычно щелочные метал-
лы — цезий, рубидий, а также другие элементы — ртуть, аргон
и т. п, сначала в ионизационной камере подвергается ионизации.
Образовавшиеся ионы ускоряются в электростатическом ускори-
теле до скоростей порядка 10е м/с.
Общим недостатком электроракетных двигателей является
малая величина абсолютной тяги. В связи с этим они могут эф-
фективно применяться главным образом в системах ориентации
искусственных спутников и космических летательных аппаратов,
для коррекции их скоростей и -траектории полета, а также для
длительного разгона и торможения.
1.4. УРАВНЕНИЕ ДВИЖЕНИЯ ТОЧКИ ПЕРЕМЕННОЙ МАССЫ
(УРАВНЕНИЕ Н. В. МЕЩЕРСКОГО)
При движении ракета представляет собой тело переменной
массы. Тело переменной массы есть совокупность точек перемен-
ной массы. Теорию движения точки переменной массы разрабо-
тал И. В. Мещерский, именем которого названо выведенное им
уравнение.
20
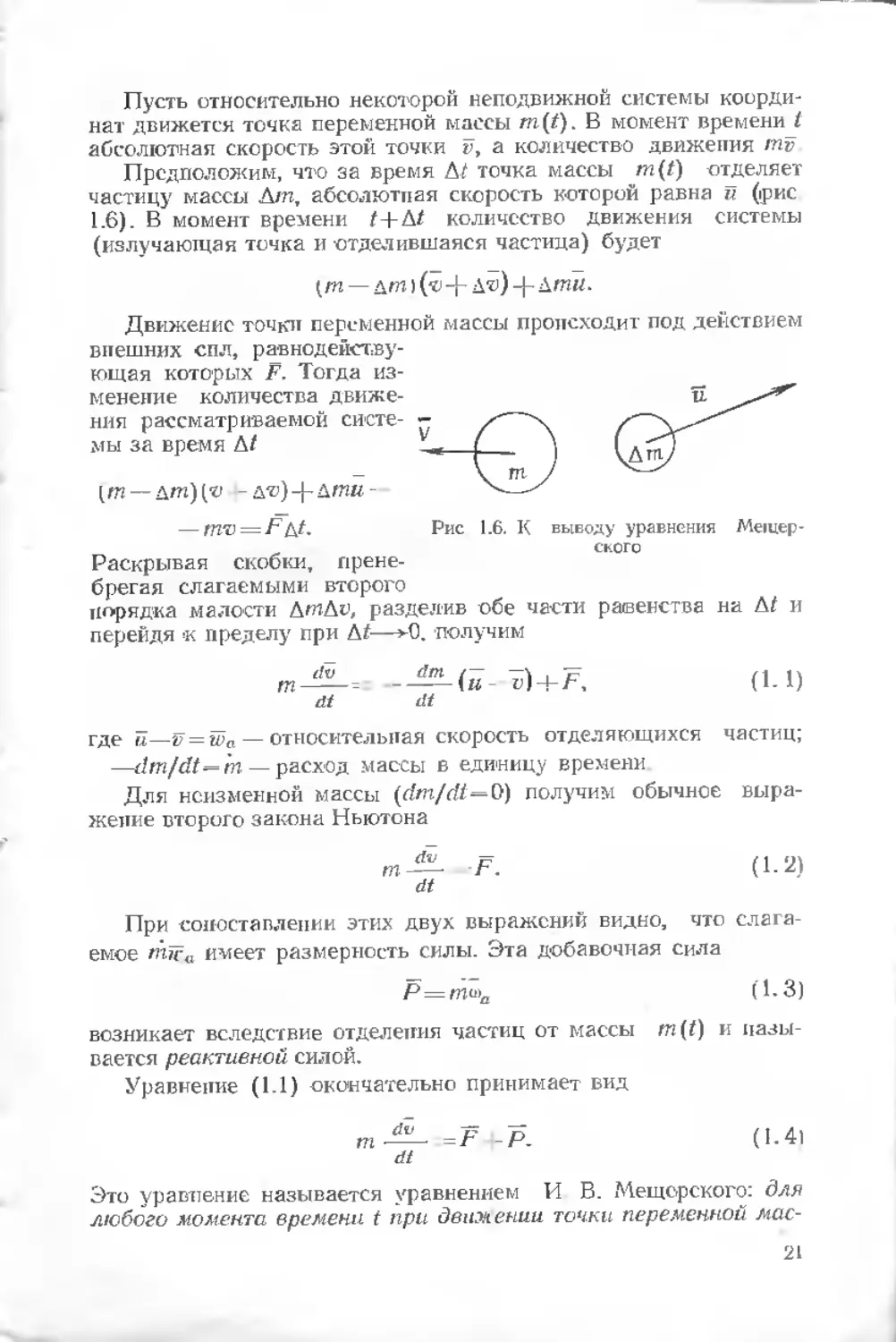
Пусть относительно некоторой неподвижной системы коорди-
нат движется точка переменной массы m(t). В момент времени t
абсолютная скорость этой точки v, а количество движения rnv
Предположим, что за время А/ точка массы m{t) отделяет
частицу массы Дт, абсолютная скорость которой равна и (рис
1.6). В момент времени t+At количество движения системы
(излучающая точка и -отделившаяся частица) будет
{т — д m) (ф+Д т>) А ти.
Движение точки переменной массы происходит под действием
внешних сил, равнодейству-
ющая которых F. Тогда из-
менение количества движе-
ння рассматриваемой систе- —
мы за время Д/
[т — im)(® 1-дт>)-|-дтй-
—tnT)=F&t. Рис 1.6. К выводу уравнения Метер-
_ СК0ГО
Раскрывая скобки, прене-
брегая слагаемыми второго
порядка малости Дп?До, разделив обе части равенства на At и
перейдя к пределу при Д£—>0. -получим
dv dm i—
:---------------(к-
di di
(1-1)
где й—v = wa — относительная скорость отделяющихся частиц;
—dmfdt=-m — расход массы в единицу времени.
Для неизменной массы {dm/dt=ty получим обычное выра-
жение второго закона Ньютона
т— - F. (1.2)
dt
При сопоставлении этих двух выражений видно, что слага-
емое гпгёа имеет размерность силы. Эта добавочная сила
Р=тч>а (1.3)
возникает вследствие отделения частиц от массы m(t) и назы-
вается реактивной силой.
Уравнение (1.1) окончательно принимает вид
m — =Р -р. (1.41
di
Это уравнение называется уравнением И В. Мещерского: для
любого момента времени t при движ ении точки переменной мас-
21
сы произведение массы точки на ее ускорение равно геометриче-
ской сумме равнодействующей всех внешних сил F и дополни-
тельной реактивной силы Р.
1. Б, ТЯГА И УДЕЛЬНЫЙ ИМПУЛЬС ТЯГИ РАКЕТНОГО ДВИГАТЕЛЯ
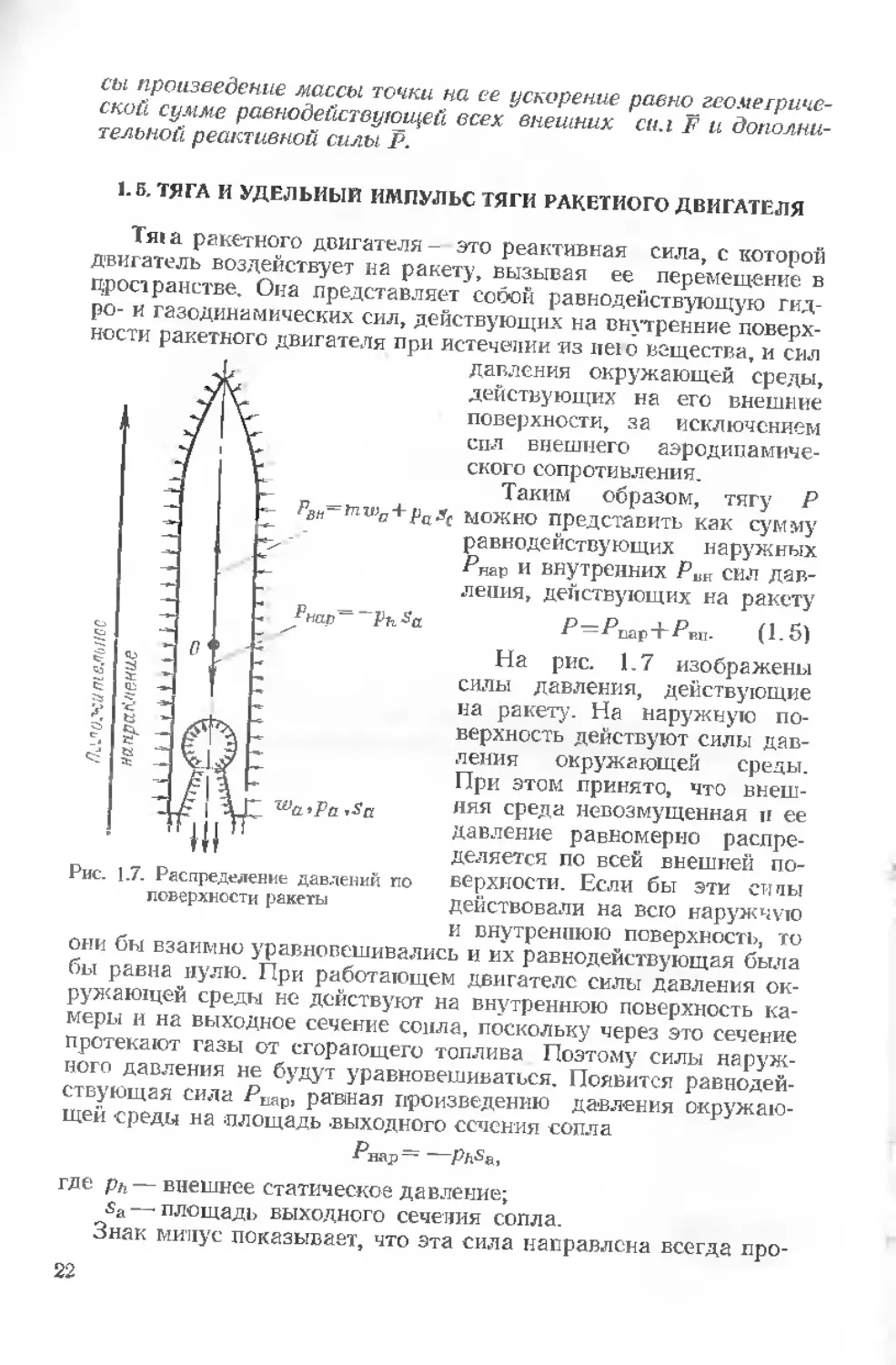
Рис. 1.7. Распределение давлений по
поверхности ракеты
Тя| а ракетного двигателя - это реактивная сила, с которой
двигатель воздействует на ракету, вызывая ее перемещение в
пространстве. Она представляет собой равнодействующую гид-
ро- и газодинамических сил, действующих на внутренние поверх-
ности ракетного двигателя при истечении из нею вещества, и сил
давления окружающей среды,
действующих на его внешние
поверхности, за исключением
сил внешнего аэродинамиче-
ского сопротивления.
Таким образом, тягу Р
— можно представить как сумму
равнодействующих наружных
РНар и внутренних Рви сил дав-
ления, действующих на ракету
Р^пар+Аш- (1-5)
На рис. 1.7 изображены
силы давления, действующие
на ракету. На наружную по-
верхность действуют силы дав-
ления окружающей среды.
При этом принято, что внеш-
няя среда невозмущенная и ее
давление равномерно распре-
деляется по всей внешней по-
верхности. Если бы эти силы
действовали на всю наружную
и внутреннюю поверхность, то
они бы взаимно уравновешивались и их равнодействующая была
бы равна нулю. При работающем двигателе силы давления ок-
ружающей среды не действуют на внутреннюю поверхность ка-
меры и на выходное сечение сопла, поскольку через это сечение
протекают газы от сгорающего топлива Поэтому силы наруж-
ного давления не будут уравновешиваться. Появится равнодей-
ствующая сила Рцар, равная произведению давления окружаю-
щей среды на площадь .выходного сечения сопла
Рцар--------Phsa.,
где ph— внешнее статическое давление;
$а—'площадь выходного сечения сопла.
Знак минус показывает, что эта сила направлена всегда про-
22
тив силы тяги и является тормозящей (силы, направленные по
направлению тяги, будем считать положительными).
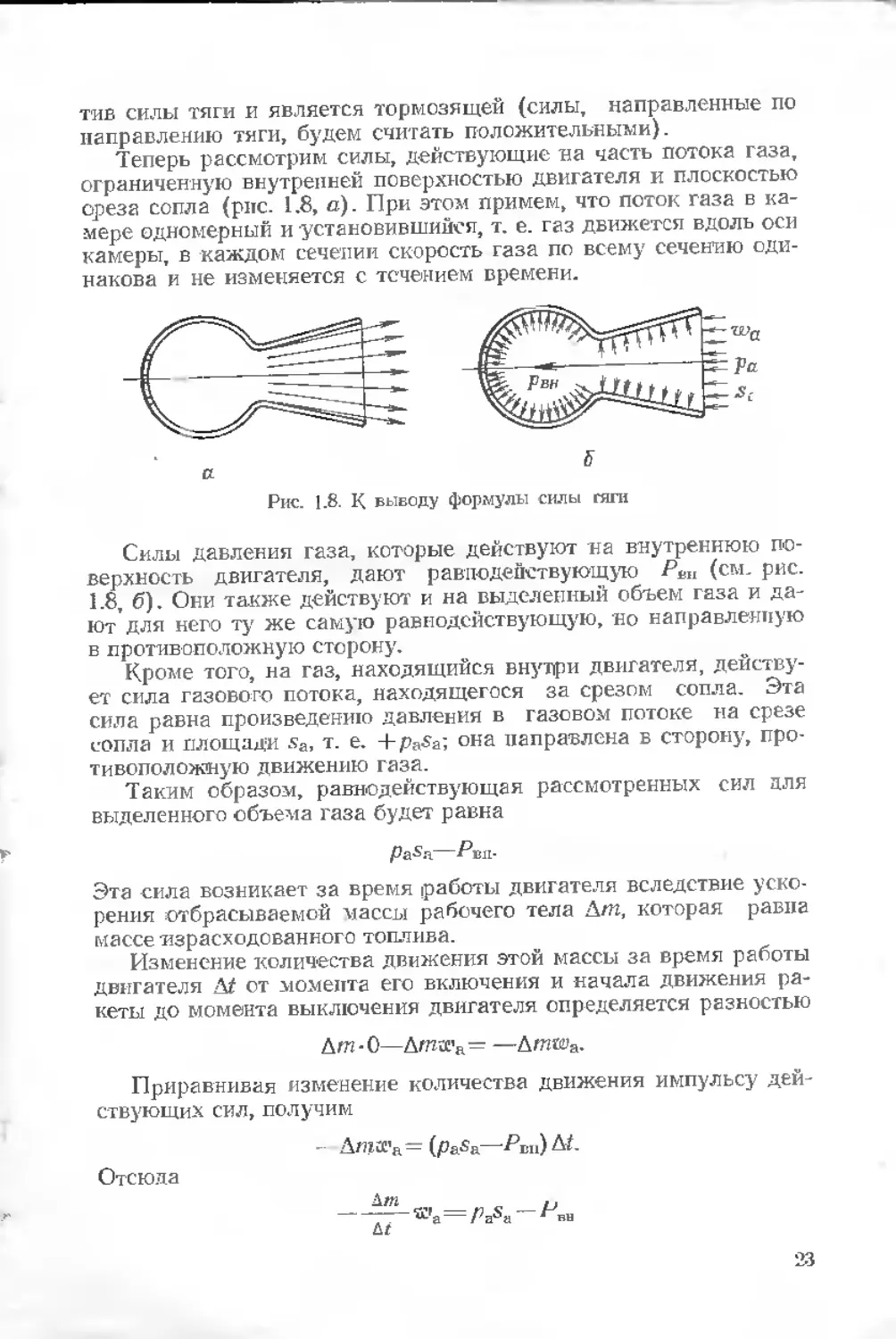
Теперь рассмотрим силы, действующие на часть потока газа,
ограниченную внутренней поверхностью двигателя и плоскостью
среза сопла (рис. 1.8, а). При этом примем, что поток газа в ка-
мере одномерный и установившийся, т. е. газ движется вдоль оси
камеры, в каждом сечении скорость газа по всему сечению оди-
накова и не изменяется с течением времени.
Рис. 1.8. К выводу формулы силы гяги
Силы давления газа, которые действуют на внутреннюю по-
верхность двигателя, дают равно действующую РЫ1 (см. рис.
1.8, б). Они также действуют и на выделенный объем газа и да-
ют для него ту же самую равнодействующую, но направленную
в противоположную сторону.
Кроме того, на газ, находящийся внутри двигателя, действу-
ет сила газового потока, находящегося за срезом сопла. Эта
сила равна произведению давления в газовом потоке на срезе
сопла и площади sa, т. е. +pasa; она направлена в сторону, про-
тивоположную движению газа.
Таким образом, равнодействующая рассмотренных сил для
выделенного объема газа будет равна
PaSa.—Рвя-
Эта сила возникает за время работы двигателя вследствие уско-
рения отбрасываемой массы рабочего тела Ат, которая равна
массе израсходованного топлива.
Изменение количества движения этой массы за время работы
двигателя от момента его включения и начала движения ра-
кеты до момента выключения двигателя определяется разностью
Am-О—Amtea= —Amwa.
Приравнивая изменение количества движения импульсу дей-
ствующих сил, получим
- Аи1йРа = —Рвп) А/.
Отсюда
—77-’».=/>А
PJ>.-
А так как при неизменном режиме работы двигателя
д,и ' , *
—= т=const,
д/
т е. секундный массовый расход топлива постоянен, то
PBH==m®a+ pasa
Подставляя значения Рвар‘и/’вн в формулу (1.5), получим
формулу силы тяги
/' л»> О-6)
Выражение (1.6) показывает, что тяга при уменьшении атмо-
сферного давления рп увеличивается. Определим зависимость
тя1и от высоты полета
Тяга ракетного двигателя на уровне моря
-/>„), (1.7)
где ро — атмосферное давление у Земли (на уровне моря).
Тяга на высоте Н определяется формулой (1.6).
Вычитая из выражения (16) выражение (1.7), найдем
P=Po+se(po— Ph)- (18)
Наибольшего значения тяга достигает при ph=0, т. е. в пус-
тоте
^n = "’®’a + saPa=^0-|-SaPa- (1-9)
Тяга в пустоте может быть больше тяги двигателя на Земле
примерно на 15%.
Иногда выражение тяги в пустоте записывают в виде
Рп-ти’ап, (1 10)
где гоя.п — эффективная скорость истечения в пустоте.
Из сопоставления выражений (19) и (1.10) следует, что эф-
фективная скорость истечения
®..,.=«„+^р (1-11)
Расчеты показывают, что второе слагаемое в выражении
(1.11) по сравнению с первым мало и составляет обычно нс бо-
лее 10—15%, поэтому величина эффективной скорости истечения
определяется в основном величиной скорости газа в выходном
сечении сопла w&.
24
Удельный импульс. Одним из основных параметров ракетно-
го двигателя является удельный импульс. Различают массовый
и объемный удельный импульс.
Массовым удельным импульсом называют импульс, прихо-
дящийся на единицу массы (1 кг) рабочего тела (топлива),
/у=1/т. (1.12)
Если тяга двигателя постоянна в течение всего времени ра
боты двигателя, то импульс, развиваемый двигателем,
/=Р(.
Следовательно, массовый удельный импульс
где т - массовый секундный расход топлива.
Удельный импульс является качественным показателем ра-
кетного двигателя, характеризуя как экономичность его работы,
так и энергетические возможности применяемого топлива.
Чем выше удельный^мпульс, тем меньше расходуется топли-
ва в единицу времени для создания требуемой тяги
Удельный импульс определяется главным образом величиной
скорости истечения газов. Скорость истечения газов из сопла
двигателя зависит от вида топлива и конструктивных особенно-
стей двигателя.
На скорость истечения газов из сопла в значительной степе-
ни влияjot температура в камере сгорания и отношение давления
в камере и на срезе сопла. Давление на срезе сопла стремятся
обеспечить постоянным. Тогда с увеличением давления в камере
сгорания скорость истечения, следовательно, и удельный им-
пульс будут расти Однако повышение давления выгодно лишь
до некоторых пределов, так как с ростом давления увеличивает-
ется масса конструкции двигателя
Из выражения (1.13) следует, что удельный импульс, так же
как и тяга двигателя, зависит от атмосферного давления ры
которое уменьшается с подъемом на высоту. В связи с этим
удельный импульс двигателя достигает наибольшего значения в
пустоте. Удельный 'импульс в пустоте
Размерность удельного импульса можно определить из урав-
нения (1.13):
г/ ГН] (Н-с1.
у ря] [кг/с| [кг]
25
Объемным удельным импульсом тяги двигателя называют
отношение тяги двигателя к объемному расходу топлива
где v — объемный секундный расход топлива в м3/с.
1.6. ФОРМУЛА ЦИОЛКОВСКОГО ДЛЯ ИДЕАЛЬНОЙ СКОРОСТИ
РАКЕТЫ
Идеальная скорость одноступенчатой ракеты. Скорость, раз-
виваемая баллистической ракетой, перемещающейся в безвоз-
душном пространстве при отсутствии сил гравитационных полей,
называется идеальной скоростью VM.
Для определения идеальной скор Lt ти воспользуемся урав-
нениями (1.2) и (1.10), из которых получаем
mV'B=m®s.n
dm
или m——= — ,
di s’n df
откуда tZ V„ = — ws.n
Учитывая, что эффективную скорость ге>ап можно считать ве-
личиной постоянной, после интегрирования цолучим
IZ„= — ws.n (In m—In C),
где C — произвольная постоянная.
При Уи=0 масса ракеты равна начальной массе то (суммарной
массе конструкции и запаса топлива). Поэтому
К,= -®„1п-=-. (1.15)
Это соотношение впервые получено К. Э. Циолковским и поз-
же названо уравнением Циолковского для идеальной скорости
ракеты. Здесь под т понимается текущее значение массы ра-
кеты.
Отношение т/тй обозначают буквой р. Безразмерный коэф-
фициент р характеризует относительную массу ракеты, т. е. по-
казывает, какую долю первоначальной массы сохраняет ракета
в рассматриваемый момент.
В момент старта этот коэффициент равен единице, а в момент
выключения двигателя рк=ш1{/то— относительная конечная
масса ракеты. Величина рк в известной мере характеризует со-
вершенство конструкции При этом наибольшая (идеальная)
скорость ракеты
V„=-ws.nlnpK. (1.16)
26
Формула (1.16) имеет исключительно важное значение не
только для теории полета ракет, но и для анализа их эффектив-
ности. Она показывает основные пути повышения скорости и,
следовательно, дальности полета ракет
Из анализа выражения (1.16) следует, что существуют два пу-
ти повышения скорости ракет:
1) повышение эффективной скорости истечения газов, т. е.
повышение удельного импульса тяги за счет применения топлива
высокой калорийности и улучшения качества двигательной уста-
новки;
2) уменьшение относительной конечной массы ракеты за счет
максимального облегчения конструкции ракеты и увеличения до-
ли массы топлива в общей стартовой массе ракеты Величина
рЕ определяет совершенство конструкции ракеты. Чем меньше
р.к, тем более совершенна конструкция ракеты. Для современных
ракет 0,12^цк^0,3.
Формула Циолковского показывает, что одноступенчатые ра-
кеты имеют ограниченные скорости, а следовательно, и дально-
сти полета.
4 Идеальная скорость многоступенчатой ракеты. В одноступен-
чатых ракетах скорость сообщается не только полезному грузу,
но и целиком всей конструкции ракеты, что вызывает большие
затраты энергии. От указанного недостатка частично свободны
многоступенчатые (составные) ракеты.
Под многоступенчатой понимается такая ракета, у которой в
полете, когда еще не израсходован весь запас топлива, происхо-
дит сброс использованных и ненужных для дальнейшего полета
элементов конструкции. В отличие от одноступенчатой ракеты
здесь одновременно с полезным грузом заданную конечную ско-
рость получает масса не всей конструкции ракеты, а только по-
следней ступени. Массы же отделяющихся частей составной ра-
кеты получают меньшие скорости.
Определим идеальную скорость многоступенчатой ракеты,
состоящей из п ступеней.
Обозначим через рК1 относительную конечную массу первой
ступени (отношение массы первой ступени без топлива в баках
ускорителя первой ступени к стартовой массе первой ступени),
через Цк2 — относительную конечную массу второй ступени. Ана-
логично для последующих ступеней 'Относительную конечную
массу обозначим через рк4,..., р,кп.
После того как сгорит топливо ускорителя первой ступени,
ее идеальная конечная скорость
141=— «’э.ыЬНл.
После сгорания топлива ускорителя второй ступени к этой
скорости добавится скорость
Цй= — ^ЭД121пр.н2.
27
Каждый последующий ускоритель даст аналогичное добавле-
ние скорости Для n-й -ступени добавка скорости равна
v..“-
В итоге получим скорость многоступенчатой ракеты, равную
сумме скоростей
VH1 + + . .-j- 1/ня= — ®э.п1 In HKi -
~111Р-К2 — ws,.ffi 111 Н1(8 — • • - — In !\„
В частном случае, если гэап и одинаковы для всех ступе-
ней, то конечная скорость многоступенчатой ракеты
V,=-nw,.„ta|v, (LIT)
где я — количество ступеней.
Откуда видно, что при одинаковых величинах эффективной
скорости истечения газов и коэффициента цк получим скорость
последней ступени в п раз большую, чем у одноступенчатой ра-
кеты.
При помощи многоступенчатых ракет оказалось возможным
достижение космических скоростей полета.
Контрольные вопросы
1. Назначение основных частой жидкостной ракеты.
2. Конструктивные отличия твердотопливной ракеты от жид-
костной.
3. Принцип действия .многоступенчатой ракеты.
4. Принцип реактивного движения. Какие основные законы
физики положены в основу этого принципа?
5. Как классифицируются ракетные двигатели?
6 Выведите уравнение Мещерского.
7. Проделайте вывод уравнения силы тяги.
8. Что такое удельный импульс тяги? Что он характеризует?
9. Как зависит удельный импульс тяги от высоты полета?
10 При каких допущениях выведена формула Циолковского
для идеальной скорости ракеты?
11. Чему равна идеальная скорость ракеты?
12. Каковы основные пути повышения скорости ракеты?
13 Подсчитайте идеальную скорость ракеты, у которой сред-
няя эффективная скорость истечения газов равна 2500 м/с и от-
носительная конечная масса равна 0,15.
14. Подсчитайте идеальную скорость двухступенчатой ракеты,
имеющей следующие значения а»ЭЛ1 и ц1(:
для I ступени — ais.n=250b м/с, цк=0,18;
для II ступени — i0p.n=26OO м/с, p.i;=0,13.
28
Глава И
СИЛЫ И МОМЕНТЫ, ДЕЙСТВУЮЩИЕ НА РАКЕТУ
В ПОЛЕТЕ
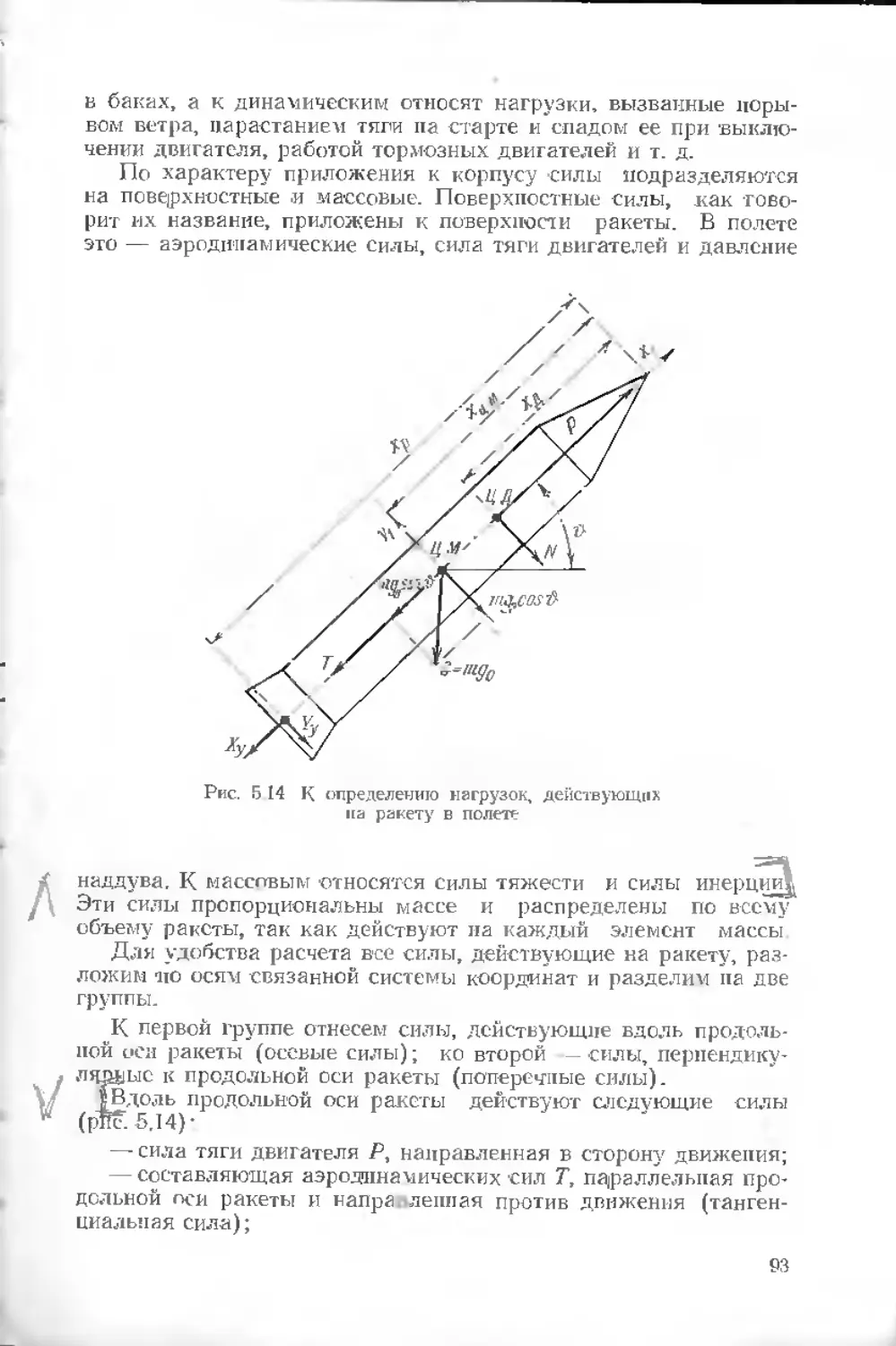
В общем случае на ракету в полете действуют сила тяги, си-
ла тяжести, аэродинамические силы и силы от органов управле-
ния.
Действие каждой силы обусловлено рядом факторов и изме-
няется по мере перёйещепия ракеты по траектории. Коротко
рассмотрим характер этих изменений и физическую сущность
каждой силы, а также системы координат и углов, определяю-
щих положение ракеты в пространстве.
2.1. СИСТЕМЫ КООРДИНАТ И УГЛОВ, ОПРЕДЕЛЯЮЩИЕ
ПОЛОЖЕНИЕ РАКЕТЫ В ПРОСТРАНСТВЕ
При расчете траектории движения ракеты необходимо рас-
смотреть движение сс центра масс (как материальной точки с
массой, равней массе ракеты) и движение ракеты (как твердого
тела) относительно центра масс. В теории полета для исследова-
ракет
следую-
пия движения
используются
щие системы координат:
стартовая, полярная, свя-
занная, скоростная.
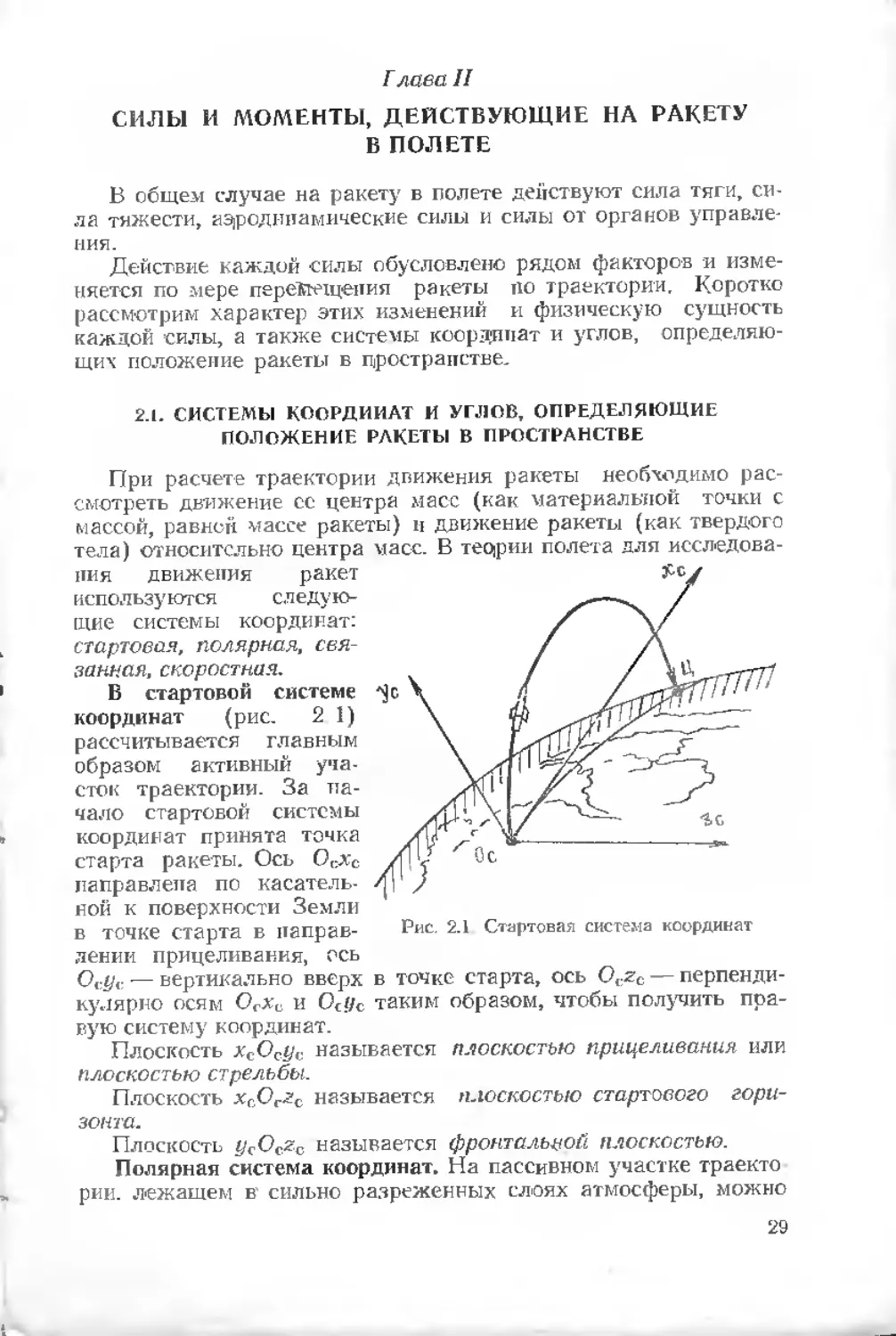
В стартовой системе
координат (рис. 21)
рассчитывается главным
образом активный уча-
сток траектории. За на-
чало стартовой системы
координат принята точка
старта ракеты. Ось 0,-Хс.
направлена по касатель-
ной к поверхности Земли
в точке старта в направ-
лении прицеливания, ось
— вертикально вверх в х , _ ...
кулярно осям Огхс и ОсУс таким образом, чтобы получить пра-
вую систему координат.
Плоскость хсОсус называется плоскостью прицеливания или
плоскостью стрельбы.
Плоскость хс,Оггс называется
зонта.
Плоскость УсОсЯс называется фронтальной плоскостью.
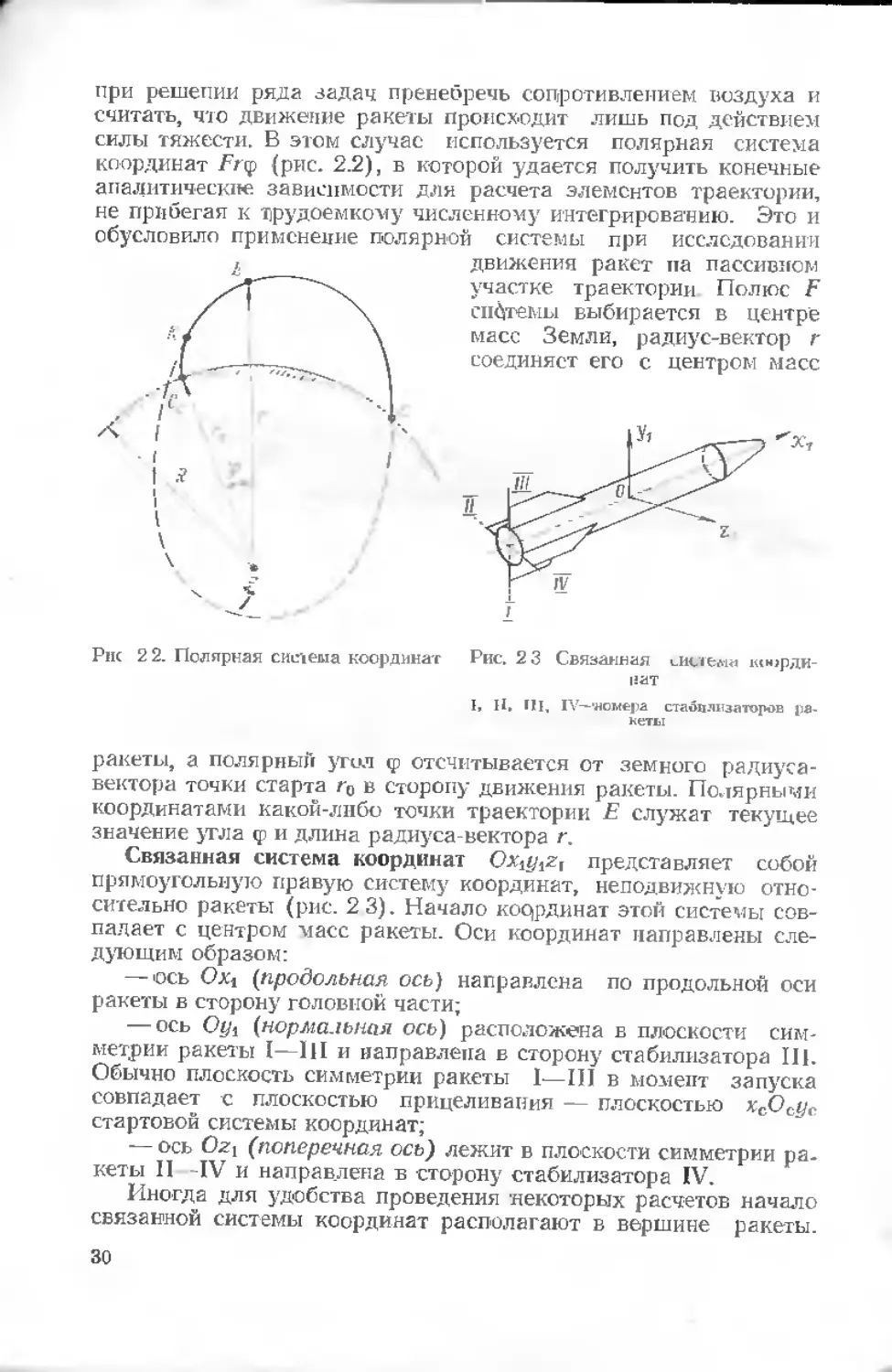
Полярная система координат. На пассивном участке траекто
рии. лежащем в’ сильно разреженных слоях атмосферы, можно
ние. 2.1 Стартовая система координат
точке старта, ось O,-zc — перпенди-
плоскостыо стартового гори-
29
при решении ряда задач пренебречь сопротивлением воздуха и
считать, что движение ракеты происходит лишь под действием
силы тяжести. В этом случае используется полярная система
координат Frq> (рис. 2.2), в которой удается получить конечные
аналитические зависимости для расчета элементов траектории,
не прибегая к трудоемкому численному интегрированию. Это и
обусловило применение полярной системы при исследовании
движения ракет па пассивном
участке траектории. Полюс F
системы выбирается в центре
масс Земли, радиус-вектор г
соединяет его с центром масс
центром масс
Рис 2 2. Полярная система координат Рис. 2 3 Связанная иютема ксн>рди-
ракеты, а полярный угол <р отсчитывается от земного радиуса-
вектора точки старта г0 в сторону движения ракеты. Полярными
координатами какой-либо точки траектории Е служат текущее
значение утла <р и длина радиуса-вектора г.
Связанная система координат Ох^г, представляет собой
прямоугольную правую систему координат, неподвижную отно-
сительно ракеты (рис. 2 3). Начало координат этой системы сов-
падает с центром масс ракеты. Оси координат направлены сле-
дующим образом:
— ось Oxt (продольная ось) направлена по продольной оси
ракеты в сторону головной части;
— ось Оу! (нормальная ось) расположена в плоскости сим-
метрии ракеты I—Ш и направлена в сторону стабилизатора III.
Обычно плоскость симметрии ракеты I—III в момент запуска
совпадает с плоскостью прицеливания — плоскостью хсОсус
стартовой системы координат;
— ось Ozi (поперечная ось) лежит в плоскости симметрии ра-
кеты II -IV и направлена в сторону стабилизатора IV.
Иногда для удобства проведения некоторых расчетов начало
связанной системы координат располагают в вершине ракеты.
30
В этом случае ось Ох, направляется от вершины к хвостовой
части ракеты.
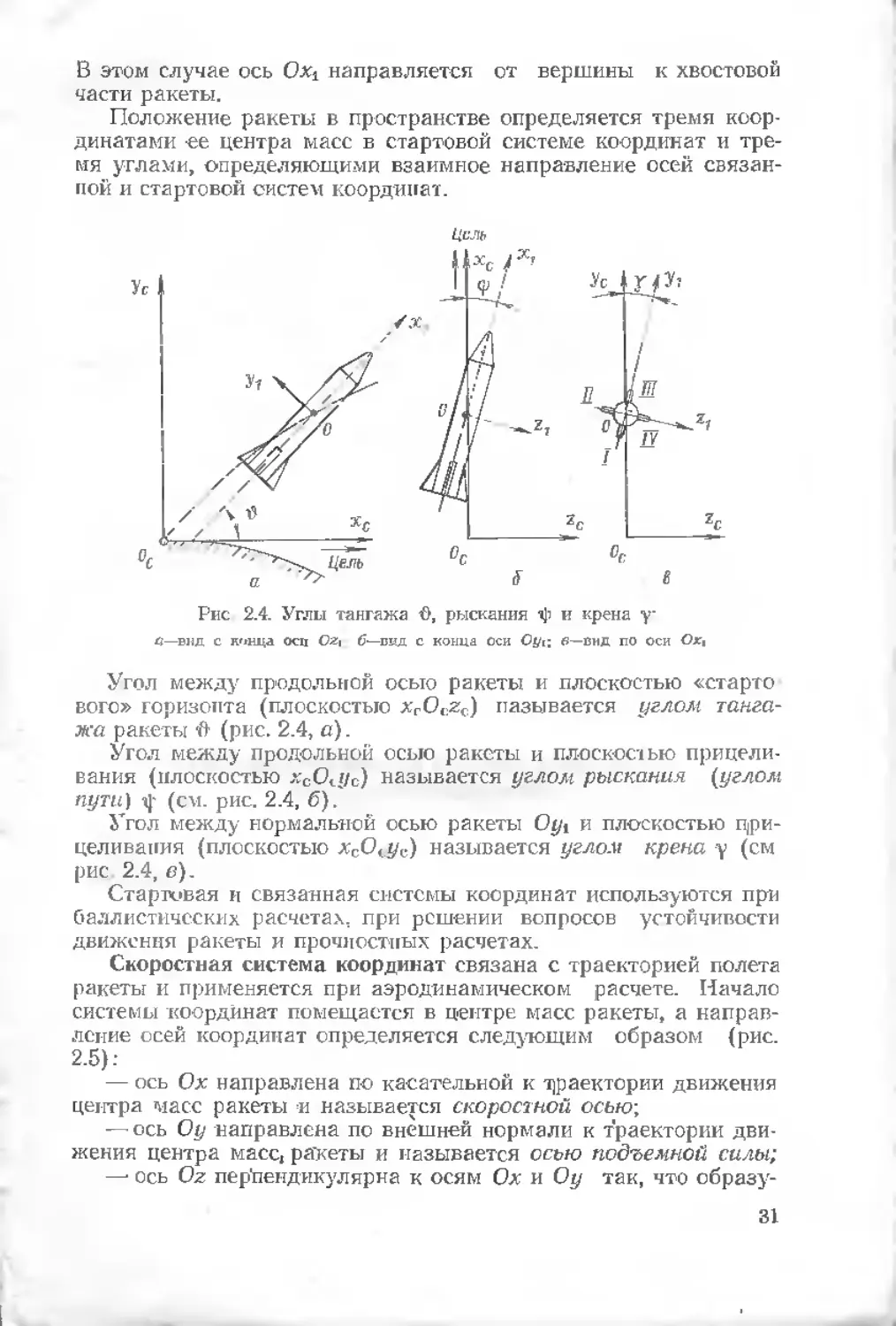
Положение ракеты в пространстве определяется тремя коор-
динатами ее центра масс в стартовой системе координат и тре-
мя углами, определяющими взаимное направление осей связан-
ной и стартовой систем координат.
Угол между продольной осью ракеты и плоскостью «старто
вого» горизонта (плоскостью xrOczc) называется углом танга-
жа ракеты О (рис. 2.4, а).
Угол между продольной осью ракеты и плоскостью прицели-
вания (плоскостью хсО<.//с) называется углом рыскания (углом
пути) 4- (см. рис. 2.4, 6).
Угол между нормальной осью ракеты Оу± и плоскостью цри-
целивапия (плоскостью хсОьук) называется углом крена у (см
рис. 2.4, в).
Стартовая и связанная системы координат используются при
баллистических расчетах, при решении вопросов устойчивости
движения ракеты и прочностных расчетах.
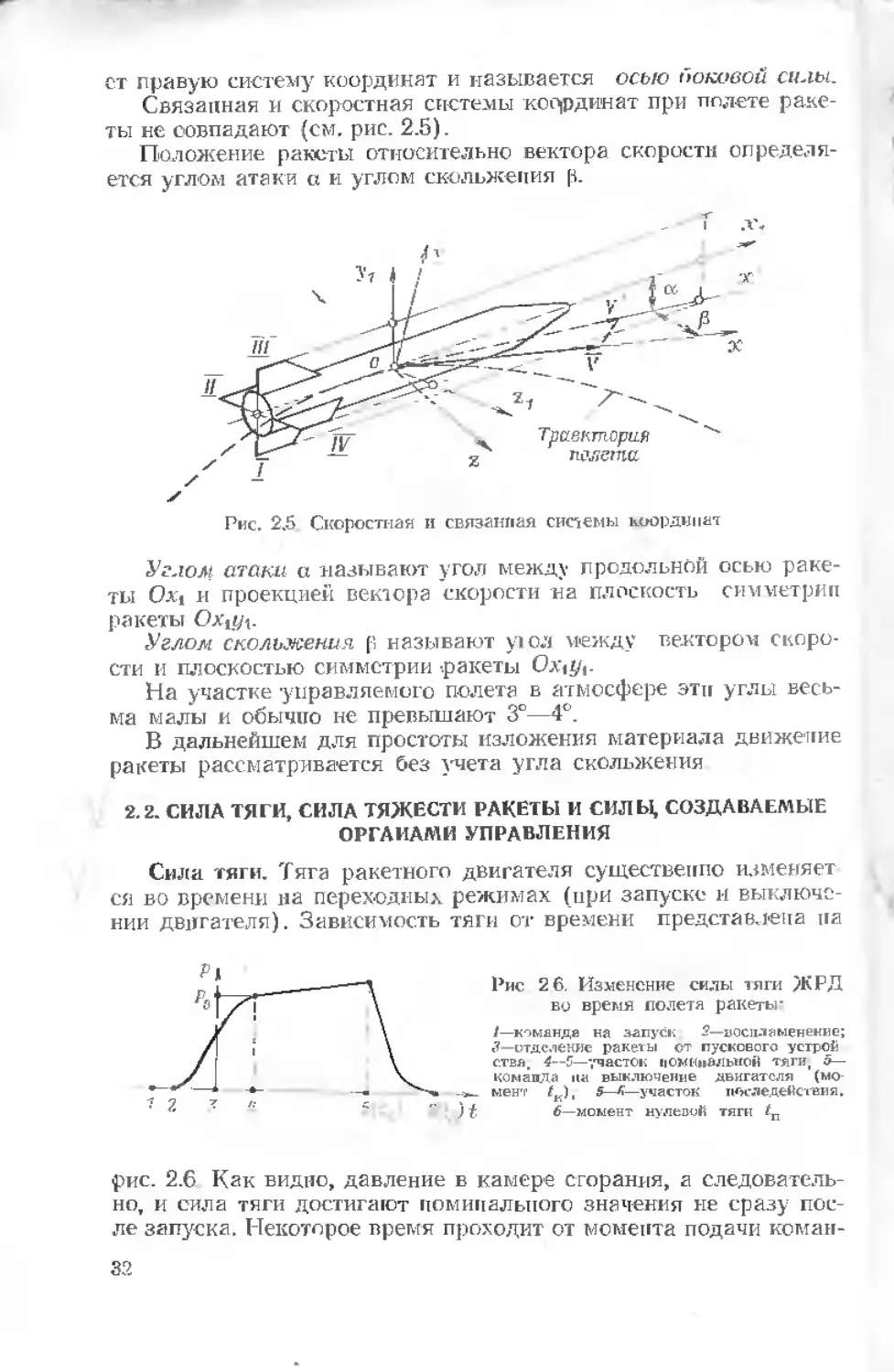
Скоростная система координат связана с траекторией полета
ракеты и применяется при аэродинамическом расчете. Начало
системы координат помещается в центре масс ракеты, а направ-
ление осей координат определяется следующим образом (рис.
2.5):
— ось Ох направлена по касательной к траектории движения
центра масс ракеты -и называется скоростной осью-,
— ось Оу направлена по внешней нормали к траектории дви-
жения центра масс, ракеты и называется осью подъемной силы;
— ось Oz перпендикулярна к осям Ох и Оу так, что образу-
31
от правую систему координат и называется осью боковой силы.
Связанная и скоростная системы координат при полете раке-
ты не совпадают (см. рис. 2.5).
Положение ракеты относительно вектора скорости определя-
ется углом атаки а и утлом скольжения р.
Рис. 2.5 Скоростная и связанная системы координат
Углом атаки а называют угол между продольной осью раке-
ты Ox, и проекцией вектора скорости на плоскость симметрии
ракеты Ох,у,.
Углом скольжения р называют уюл между вектором скоро-
сти и плоскостью симметрии ракеты Ох,у,.
На участке управляемого полета в атмосфере эти утлы весь-
ма малы и обычно не превышают 3°—4°.
В дальнейшем для простоты изложения материала движение
ракеты рассматривается без учета угла скольжения
2.2. СИЛА ТЯГИ, СИЛА ТЯЖЕСТИ РАКЕТЫ И СИЛЫ, СОЗДАВАЕМЫЕ
ОРГАНАМИ УПРАВЛЕНИЯ
Сила тяги. Тяга ракетного двигателя существенно изменяет
ся во времени на переходных режимах (при запуске и выключе-
нии двигателя). Зависимость тяги от времени представлена на
Рис 2 6. Изменение силы тяги ЖРД
во время полета ракеты-
I—команда на запуск 2—восилаыенекие;
3—отделение ракеты от пускового устрой
ствя. 4—5—участок поминальной тяги, 5—
команда на выключение двигателя (мо-
мент iK). 5—К— участок последействия.
рис. 2.6. Как видно, давление в камере сгорания, а следователь-
но, и сила тяги достигают поминального значения не сразу пос-
ле запуска. Некоторое время проходит от момента подачи коман-
ды иа запуск двигателя (точка /) до начала воспламенения
(точка 2). Тяга появляется практически в момент воспламене-
ния. Точка 3 соответствует отрыву ракеты от стартового стола и
моменту начала отсчета времени движения ракеты по траекто-
рии, точка 4- выходу двигателя на расчетный режим работы
(Т>=Т>о), точка 5 — моменту выключения двигателя tK. От мо-
мента выхода двигателя па расчетный режим до мо-
мента выключения двигателя гяга увеличивается за счет умень-
шения атмосферного давления при подъеме ракеты на высоту
При выключении жидкостною двигателя тяга исчезает не
Мгновенно, а наблюдается явление последействия. По команде
па выключение двигателя /„• происходит прекращение подачи
топлива, по процесс горения сразу не прекращается. В камере
двигателя до момента /п (точка 6) догорает топливо, оставше-
еся в ней и примыкающих участках топливопроводов.
Продолжительность времени Д/и—fu- называется време-
нем последействия Импульс, создаваемый двигателем за время
последействия, называется импульсом последействия.
Импульсом постоянной силы называется произведение силы
на время ее действия Тяга является переменной силой, поэтому
импульс последействия /Пд выражается интегралом
Л,-- f (2.1)
£|с
где /ь— время подачи команды ’на выключение двигателя;
tn — момент времени, соответствующий нулевой тяге.
Импульс последействия является случайной величиной, раз-
брос которой может составлять значительную долю от среднего
значения импульса, определяемого выражением (2.1). Такая ооо-
ренпость переходной характеристики двигателя влияет па усло-
вия разделения ступеней и отделения головных частей ракет.
г Сила тяжести. Равнодействующая сил тяжести элементов
ракеты G=mg приложена в центре масс ракеты и всегда нап-
равлена к центру Земли При полете ракеты по траектории ее
масса изменяется из-за выт орания топлива. Зависимость массы
ракеты от продолжительности работы двигателя определяется
выражением
m=т0 —mt. (2.2)
где то — стартовая масса ракеты;
т — массовый секундный расход топлива;
t — текущее время полета ракеты.
Изменение силы тяжести происходит также вследствие изме
нения ускорения силы тяжести g но мере подъема ракеты на
высоту. В этом случае сила, с которой летательный аппарат при-
33
тягивается к Земле, определяется по закону Ньютона (закону
всемирного тяготения)х
где f — гравитационная постоянная;
М масса Земли;
т — масса ракеты;
г — расстояние между центром масс ракеты и пет ром
Земли.
Ускорение силы тяжести g на расстоянии г от центра Земли
получим из выражения (2.3), учтя, что сила притяжения ракеты
Землей равна силе тяжести ракеты на этой высоте, т е. г—mg
Числитель этого выражения является константой поля тяготе
яия. Для поля тяготения Земли
k =[М=3,9862-1014 м3/с2.
Ускорение силы тяжести на поверхности Земли g0 будет равне
gD=fM/I?.
(2.5)
Здесь через /? обозначен средний радиус Земли.
Отношение величин ускорения на расстоянии г от центра
Земл и и на ее поверхности составит
Таким образом, величина ускорения силы тяжести в гравита-
ционном поле Земли уменьшается по мере подъема ракеты. Она
обратно пропорциональна квадрату расстояния между центром
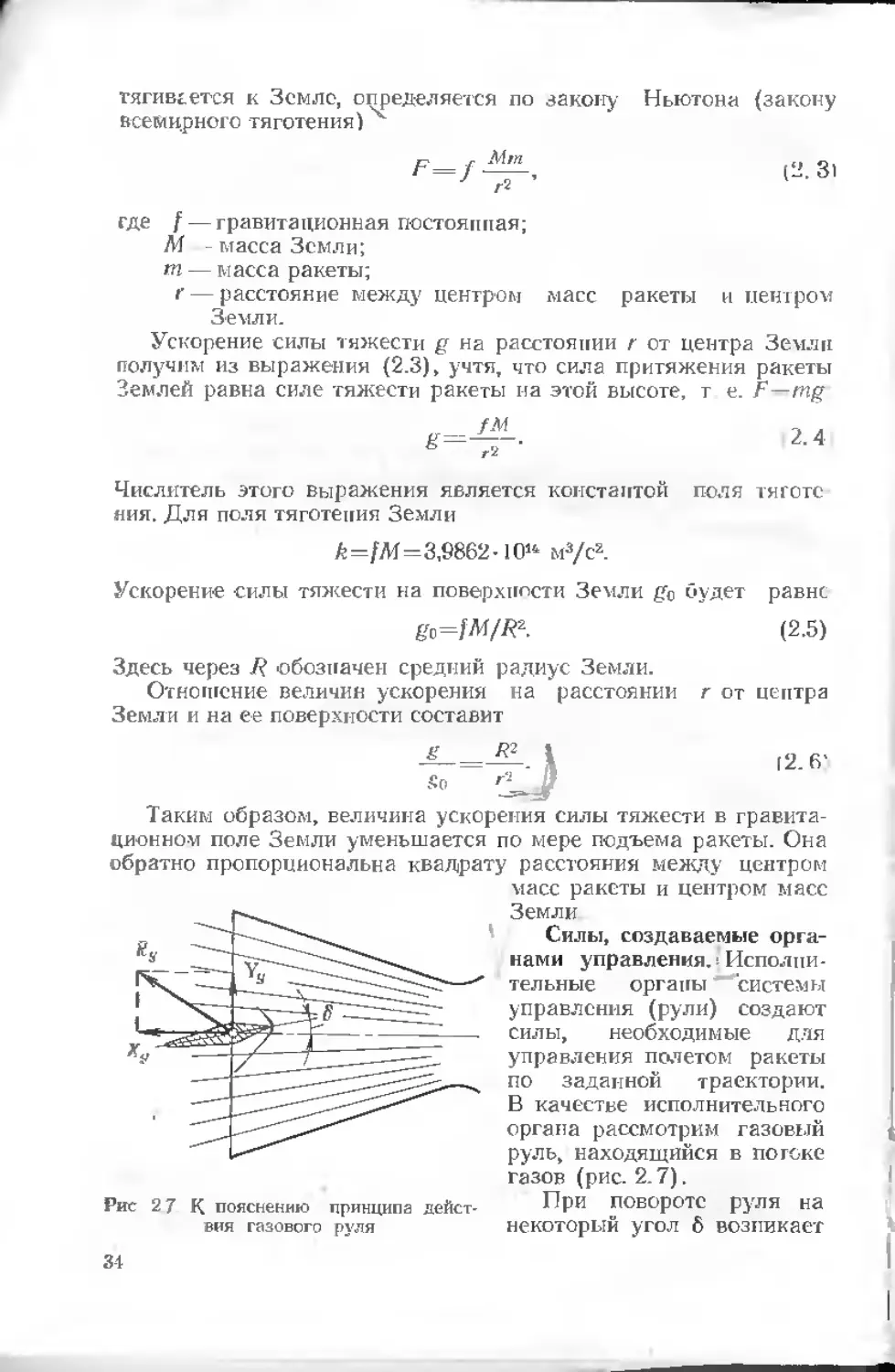
Силы, создаваемые орга-
нами управления. ! Исполни-
тельные органы системы
управления (рули) создают
Рис 2 7 К пояснению принципа дейст- При повороте руля на
некоторый угол 6 возникает
34
газодинамическая сила 1Эту i азцдипамическую силу разло-
жим на две составляющие”^- и Уу {Первую из этих составляю-
щих Х}, направленную по осн ракеты и тормозящую ее полет,
называют потерей тяги на органах управления. Эта составляю-
щая не создает момента относительно центра масс ракеты
Вторая составляющая Уу, называемая подъемной силой ру-
ля, направлена перпендикулярно оси ракеты, поэтому она отно-
сительно центра масс ракеты создает управляющий момент.
Величина Уу зависит от площади руля, скорости газового по-
тока и угла отклонения руля Изменяя угол отклонения руля,
получают различные величины У». Приближенно можно считать,
что сила Уу пропорциональна углу отклонения руля
У,- У**, I2-7)
где Уу- градиент подъемной силы руля. I
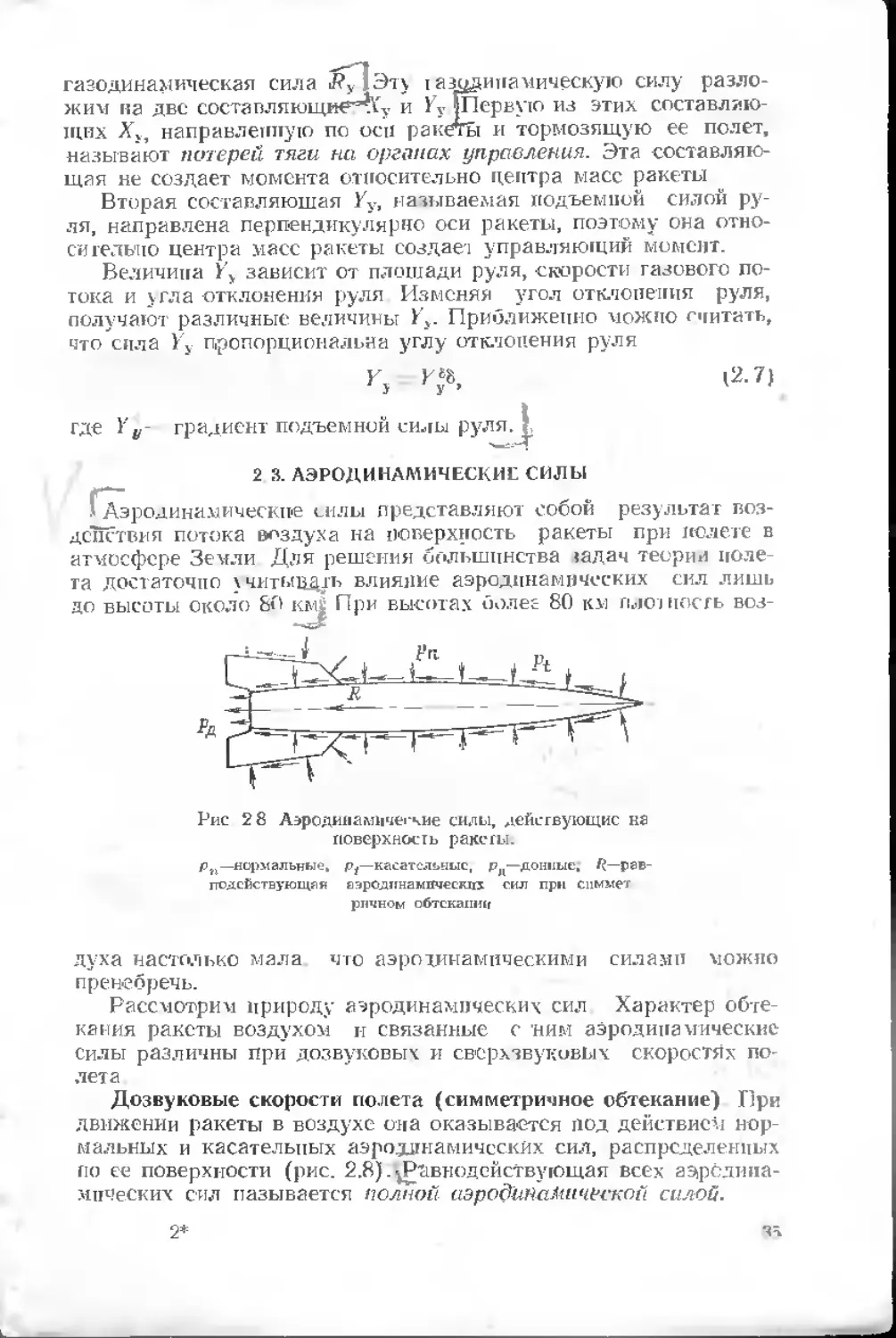
2 3. АЭРОДИНАМИЧЕСКИЕ СИЛЫ
^Аэродинамические силы представляют собой результат воз-
действия потока воздуха на поверхность ракеты при полете в
атмосфере Земли Для решения большинства задач теории поле-
та достаточно учитывать влияние аэродинамических сил лишь
до высоты около 80 км£ При высотах более 80 км плотность воз-
Рис 28 Аэродинамические силы, действующие на
поверхность ракеты.
духа настолько мала, что аэродинамическими силами можно
пренебречь.
Рассмотрим природу аэродинамических сил Характер обте-
кания ракеты воздухом и связанные с ним аэродинамические
силы различны при дозвуковых и сверхзвуковых скоростях по-
лета
Дозвуковые скорости полета (симметричное обтекание) При
движении ракеты в воздухе она оказывается под действием нор-
мальных и касательных аэродинамических сил, распределенных
по ее поверхности (рис. 2.8) .^Равнодействующая всех аэродина-
мических сил называется полной аэродинамической силой.
2*
Если продольная ось ракеты совпадает с направлением век-
тора скорости, т. е. углы атаки и скольжения равны нулю, то
обтекание ракеты будет симметричным, так как корпус ракеты
представляет собой тело вращения. Симметричным будет при
этом и распределение нормальных и касательных аэродинамиче-
ских сил, следовательно, нормальная аэродинамическая сила
будет равна нулю. В этом случае полная аэродинамическая си-
ла направлена против движения ракеты и называется силой ло-
' босого сопротивления.
^Полное лобовое сопротивление ракеты на дозвуковых скоро-
стях для удобства исследования расчленяют па три части: соп-
ротивление трения, сопротивление давления и донное сопротив-
ление
Под силой сопротивления трения понимается результирую-
щая сил сопротивления pt, касательных к поверхности ракеты;
под силой сопротивления давления — результирующая сил р„,
нормальных к боковой поверхности ракеты, а под силой донного
сопротивления результирующая сил рд, нормальных к донной
части тела вращения.
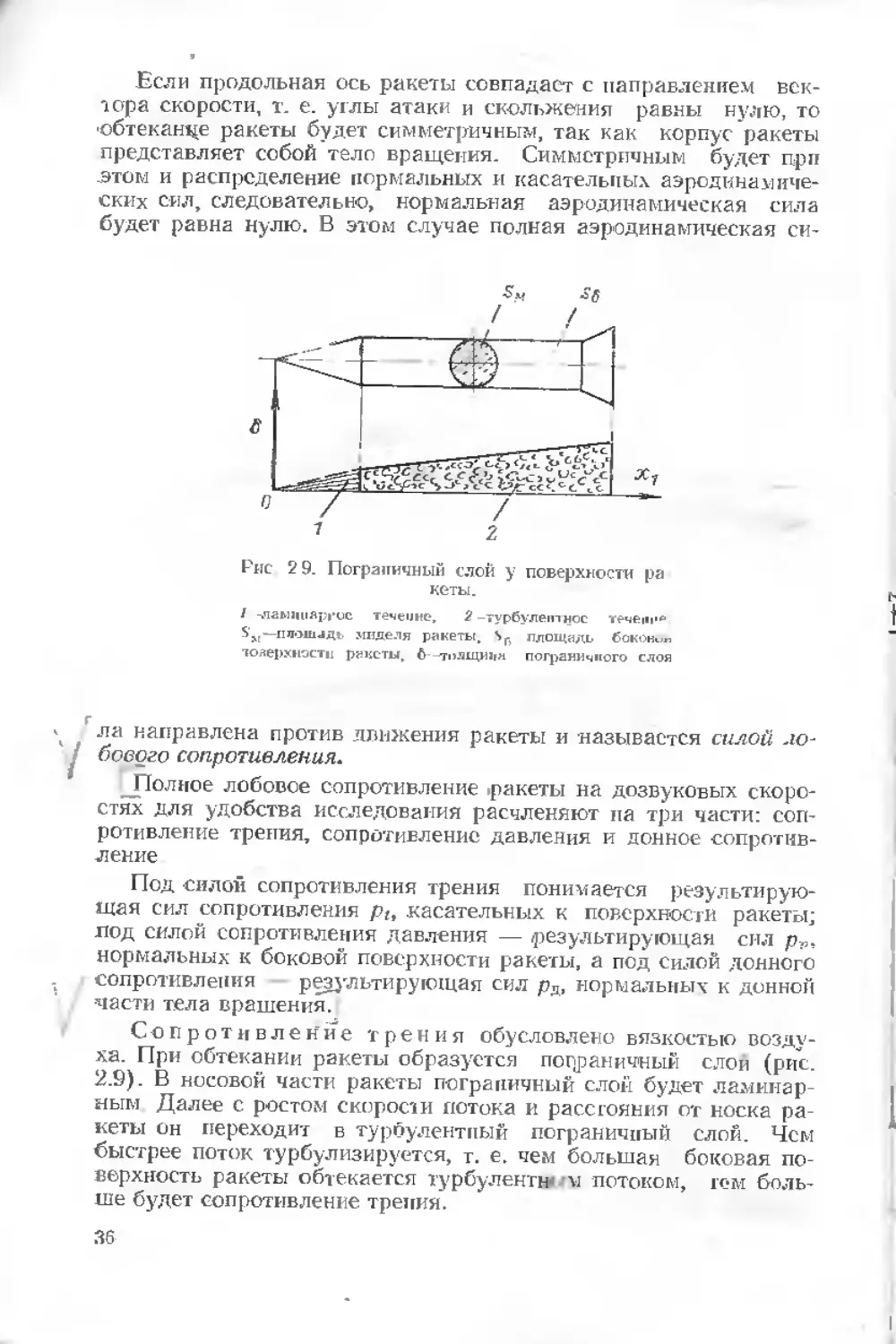
Сопротивление трения обусловлено вязкостью возду-
ха. При обтекании ракеты образуется пограничный слои (рис.
2.9). В носовой части ракеты пограничный слой будет ламинар-
ным Далее с ростом скорости потока и расстояния от носка ра-
кеты он переходит в турбулентный пограничный слой. Чем
быстрее поток турбулизируется, т. е. чем большая боковая по-
верхность ракеты обтекается турбулентщ/м потоком, гем боль-
ше будет сопротивление трения.
36
Определить режим течения в пограничном слое можно с по-
мощью безразмерного числа Рейнольдса
I, |2.8)
['• v
где v — скорость потока;
L длина ракеты;
о -массовая плотность воздуха;
[1 — динамическая вязкость воздуха;
т—— -кинематическая вязкость воздуха,
е
Физический смысл числа Рейнольдса заключается в том, что
оно является мерилом отношения сил инерции к силам вязкости
воздуха. Чем больше число Рейнольдса, тем большая доля при-
ходится па -силы инерции (pv— количество движения единицы
объема воздуха) и меньшая — на силы вязкости (р и v опреде-
ляют силы вязкости) При этом, конечно, легче возникнуть иск-
ривлениям траекторий частиц воздуха, завихрениям и перемеши-
ванию, так как силы вязкости не могут преодолеть действие раз-
личных случайных импульсов, возникающих в воздухе. Переход
от ламинарного к турбулентному режиму течения определяется
критическим числом ReI<p При Re<ReKP течение ламинарное;
при Re>RKp течение турбулентное. Как показали опыты, для до-
звуковых потоков ReBP=4-105, а для сверхзвуковых RK1)=6,5-10’
Сопротивление давления представляет собой равно-
действующую сил давления воздуха на различные части поверх-
ности ракеты. При полете -ракеты воздух впереди нее уплотня-
ется. Здесь создается повышенное избыточное давление,
величина которого определяет сопротивление давления Это соп-
ротивление с ростом скорости возрастает и при сверхзвуковых
скоростях, как будет показано ниже, переходит в так называемое
волновое сопротивление.
При изучении распределения давления по поверхности тела
в аэродинамике принято рассматривать безразмерный коэффи-
циент давления р, определяемый соотношением
— Рыке г Р«о Др
р=----------------------=—^>
°.,.,
где рмест — абсолютное давление -в данной точке;
рс» — статическое давление в невозмущенном потоке;
Ои2
—- скоростной напор.
— скорость невозмущенного потока.
Очевидно, что в тех местах, где имеется повышенное давле-
ние. коэффициент давления Представляет собой положительную
величину, так как в этих местах давление рмес? больше атмос-
ферного.
37
В rex местах, где имеется пониженное давление, коэффици-
ент давления отрицательный.
Донное сопротивление. За летящей ракетой в дон-
ной ее части образуется область пониженного давления по срав-
нению с давлением окружающего воздуха Это происходит из-за
срыва потока за донной частью ракеты. Явление образования
разрежения за дном имеет много общего с процессами, характер-
ными для струйного насоса. Роль сцруи в данном случае играет'
наружный поток, который эжектирует воздух, заполняющий за-
стойную зону за дном. В результате за дном возникает разреже-
ние Существование в хвостовой части ракеты зоны пониженного
давления (донного подсоса) приводит к возникновению донного
сопротивления.
Донное разрежение, а следовательно, донное сопротивление
в большой степени зависит о г состояния поверхности ракеты, ее
длины и сужения, т е. от, тех же величин, что и сопротивление
трения, причем с увеличением сопротивления трения донное со
противление уменьшается Физически это -объясняется следую-
щим. Когда сопротивление трения увеличивается, пограничный
слой оказывается толще. Этот утолщенный слой у донного сре-
за, играя роль изолирующей рубашки, ослабляет эжектиругощее
действие napj-жпого потока
Донное сопротивление зависит также от скорости полета.
С ростом скорости оно возрастает, однако не беспредельно Оно
не может быть больше величины, -соответствующей абсолютному
донному вакууму.
Сверхзвуковые скорости полета. При сверхзвуковых скоро-
стях полета на характер обтекания и величину аэродинамиче-
ских сил оказывает влияние сжимаемость воздуха.
Впереди летящего со сверхзвуковой скоростью тела возника-
ет скачок уплотнения. Скачок уплотнения представляет собой
очень тонкий слой сильно сжатою воздуха. В потоке за скачком
уплотнения резко, скачкообразно уменьшается скорость и в то
же время резко повышаются давление, плотность и температура.
Торможение потока за скачком уплотнения сопровождается
уменьшением его кинетической энергии, которая безвозвратно
переходит в тепловую энергию. Скачки уплотнения вызывают до-
полнительное сопротивление, которое называется волновым соп-
ротивлением. Величина волнового сопротивления зависит от
формы скачка уплотнения.
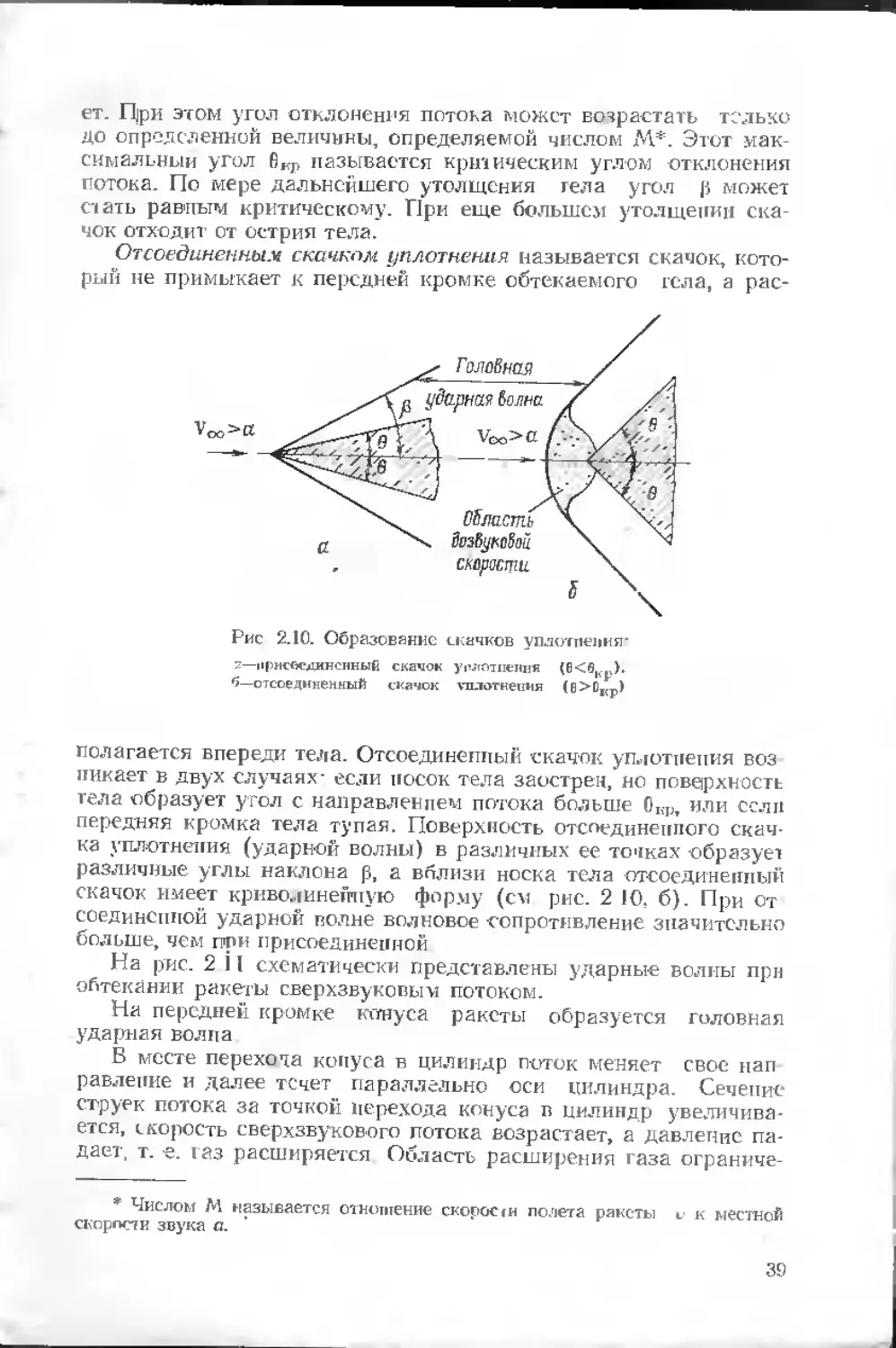
В зависимости от формы носовой части тела скачок уплотне-
ния может быть присоединенным или отсоединенным.
Присоединенным скачком уплотнения называется скачок,
примыкающий к передней кромке обтекаемого тела и имеющий
прямолинейную форму. Такой скачок уплотнения возникает, ес-
ли топкое тело имеет заостренную переднюю кромку (рис
2.10, а). По мере роста толщины тела и, следовательно, увеличе-
ния Угла отклонения потока 6 угол 'наклона скачка ₽ возраста-
38
ет. При этом угол отклонения потока может возрастать только
до определенной величины, определяемой числом М*. Этот мак-
симальный угол Вкр называется критическим углом отклонения
потока. По мере дальнейшего утолщения тела угол р может
стать равным критическому. При еще большем утолщении ска-
чок отходит от острия тела.
Отсоединенным скачком уплотнения называется скачок, кото-
рый не примыкает к передней кромке обтекаемого гола, а рас-
Рис 2.10. Образование скачков уплотнения-
г—п|>испединс1шыВ скачок уциотнеиия (в<вкр).
б—отсоединенный скачок уплотнения (В>0|(р)
полагается впереди тела. Отсоединенный -скачок уплотнения воз
пикает в двух случаях- если носок тела заострен, но поверхность
тела образует угол с направлением потока больше 0кр, или если
передняя кромка тела тупая. Поверхность отсоединенного скач-
ка уплотнения (ударной волны) в различных ее точках образует
различные углы наклона р, а вблизи носка тела отсоединенный
скачок имеет криволинейную форму (см рис. 2 10, б). При ст
соединенной ударной волне волновое сопротивление значительно
больше, чем при присоединенной
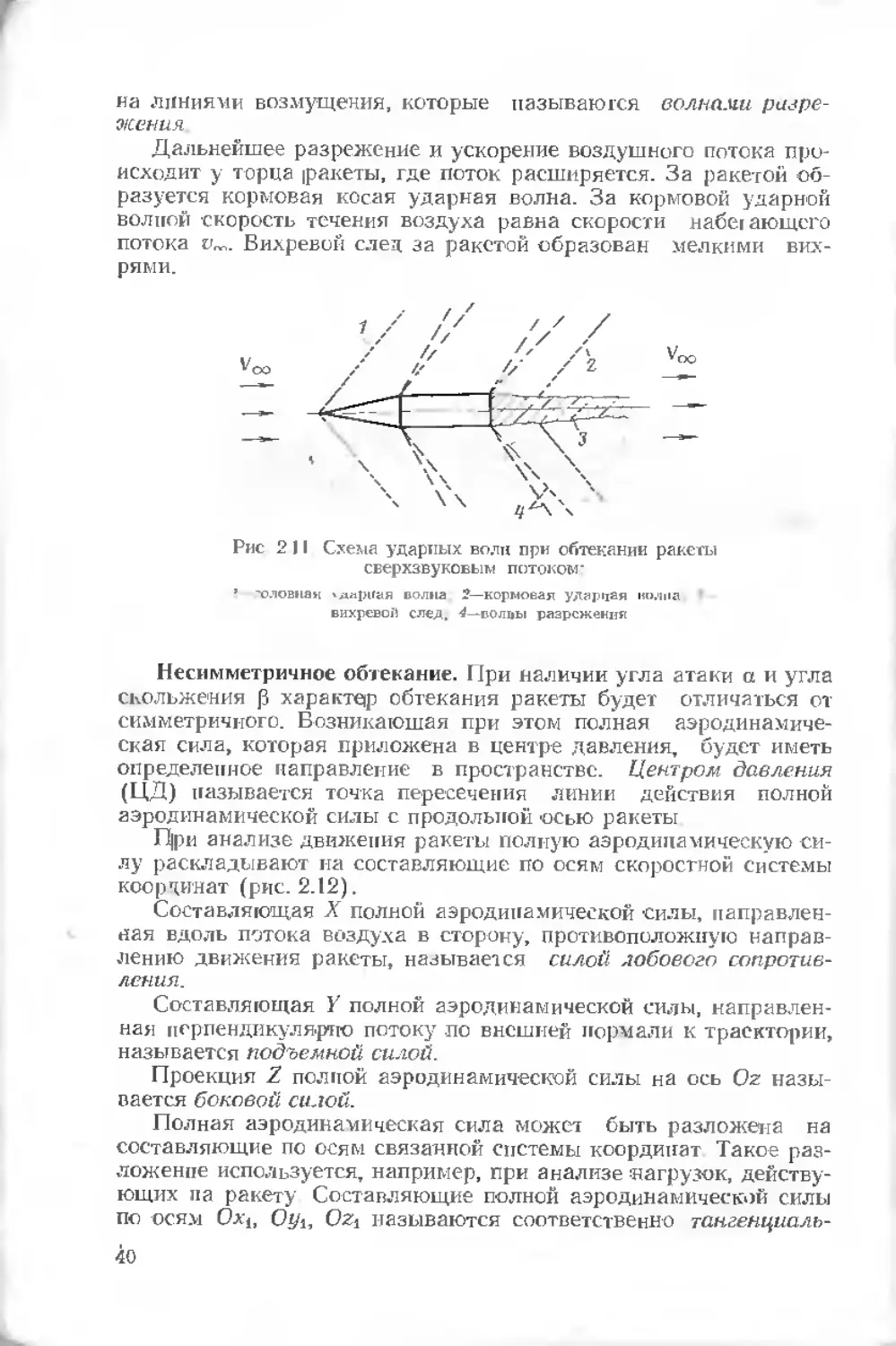
На рис. 2 11 схематически представлены ударные волны при
обтекании ракеты сверхзвуковым потоком.
На передней кромке конуса ракеты образуется головная
ударная волна
В месте перехода конуса в цилиндр поток меняет свое нап-
равление и далее течет параллельно оси цилиндра. Сечение
струек потока за точкой перехода конуса в цилиндр увеличива-
ется, скорость сверхзвукового потока возрастает, а давление па-
дает, т. -е. газ расширяется Область расширения газа ограниче-
* Числом М называется отношение скорое<и полета ракеты v к местной
скорости звука а.
39
на линиями возмущения, которые называются волнами разре-
жения
Дальнейшее разрежение и ускорение воздушного потока про-
исходит у торца ракеты, где поток расширяется. За ракетой об-
разуется кормовая косая ударная волна. За кормовой ударной
волной скорость течения воздуха равна скорости набе|ающего
потока V™. Вихревой елец за ракетой образован мелкими вих-
рями.
Рис 211 Схема ударных волн при обтекании ракеты
сверхзвуковым потоком:
! головная «дариая волна 2—кормовая ударная волна
Несимметричное обтекание. При наличии угла атаки а и утла
скольжения р характер обтекания ракеты будет отличаться от
симметричного. Возникающая при этом полная аэродинамиче-
ская сила, которая приложена в центре давления, будет иметь
определенное направление в пространстве. Центром давления
(ЦД) называется точка пересечения линии действия полной
аэродинамической силы с продольной осью ракеты
Цри анализе движения ракеты полную аэродинамическую си-
лу раскладывают на составляющие по осям скоростной системы
координат (рис. 2.12).
Составляющая X полной аэродинамической силы, направлен-
ная вдоль потока воздуха в сторону, противоположную направ-
лению движения ракеты, называется силой лобового сопротив-
ления.
Составляющая У полной аэродинамической силы, направлен-
ная перпендикулярно потоку по внешней нормали к траектории,
называется подъемной силой.
Проекция 2 полной аэродинамической силы на ось Ог назы-
вается боковой силой.
Полная аэродинамическая сила может быть разложена на
составляющие по осям связанной системы координат Такое раз-
ложение используется, например, при анализе нагрузок, действу-
ющих па ракету Составляющие полной аэродинамической силы
по осям 0xit Oyi, Ozt называются соответственно тангенциаль-
но
ной T, нормальной N и поперечной В аэродинамическими сила-
ми. Из рис. 2.13, на котором составляющие полной аэродинами-
ческой силы приведены к центру масс ракеты *, можно устано-
вить, что при отсутствии угла скольжения, т. е. при движении
ракеты в одной плоскости
Т . X cos a — Y sin а; (2.10)
.V Л'sin a-j-Kcosa. (2.11)
Рис 212 Составляющие полной аэродинамической си-
лы в скоростной системе координат-
сила Z—боко-
Подъемная сила возникает при полете ракеты под углом ата-
ки к набегающему потоку. При этом нарушается симметрия
потока относительно продольной оси |ракеты; распределение дав-
Рис 213 Составляющие полной аэродинамической си
лы в скоростной и связанной сис!емах координат (дви
жение ракеты в одной ижккости)
ления по верхней и по нижней поверхности корпуса ракеты ста-
новится неодинаковым: на нижнюю поверхность давление уве-
личивается, а на верхнюю — уменьшается и возникает разре-
* Приведение аэ]кдин- , - их сил к центру масс рг»гты дано в следу-
ющем параграфе.
41
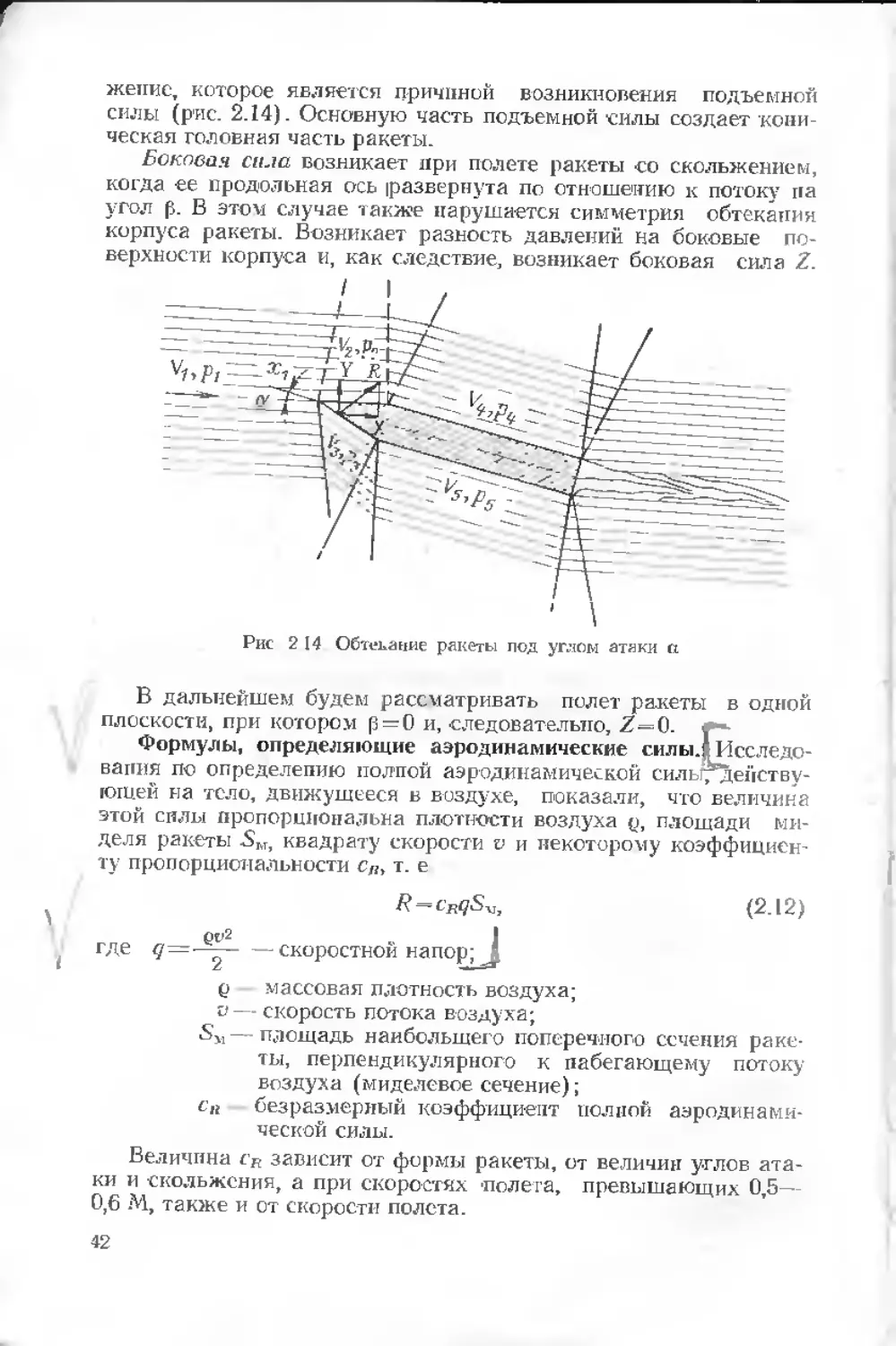
жеиис, которое является причиной возникновения подъемной
силы (рис. 2.14). Основную часть подъемной силы создает кони-
ческая головная часть ракеты.
Боковая аиа возникает при полете ракеты со скольжением,
когда ее продольная ось развернута по отношению к потоку па
угол р. В этом случае также нарушается симметрия обтекания
корпуса ракеты. Возникает разность давлений на боковые по-
верхности корпуса и, как следствие, возникает боковая сила Z.
Рис 2 14 Обтекание ракеты под углом атаки а
В дальнейшем будем рассматривать полет ракеты в одной
плоскости, при котором р—0 и, следовательно, 2=0.
Формулы, определяющие аэродинамические силы.«Исследо-
вания по определению полной аэродинамической силытдейству-
ютей на тело, движущееся в воздухе, показали, что величина
этой силы пропорциональна плотности воздуха р, площади ми-
деля ракеты 5М, квадрату скорости v и некоторому коэффициен-
ту пропорциональности сл, т. е
/?-ся?5ч, (2.12)
ev2 <• "
где ?=— -------скоростной напор;
q массовая плотность воздуха;
о — скорость потока воздуха;
Sj, — площадь наибольшего поперечного сечения раке-
ты, перпендикулярного к набегающему потоку
воздуха (миделевое сечение);
Сц безразмерный коэффициент полной аэродинами-
ческой силы.
Величина cR зависит от формы ракеты, от величин углов ата-
ки и скольжения, а при скоростях 'Полета, превышающих 0,5—
0,6 М, также и от скорости полета.
42
^Составляющие полной аэродинамической силы по осям ско-
ростной системы координат определяются формулами
Г=с^5м; <2.131
(2.14)
Z_C,9S„, (2. 15)
где сх и с2—безразмерные коэффициенты подъемной силы,
силы лобового сопротивления и боковой силы
соответственно
Составляющие полной аэродинамической силы по осям свя-
занной системы координат запишутся в виде
7V= c„?Sv; i2. 16)
T=CrqSM; (2.17)
B = cbqSa, (2.18)
/ где c„, c-с и cb — безразмерные коэффициенты нормальной, тан-
генциальной и боковой сил соответственно?!
I Между коэффициентами сп, с-, clh сх на основании выражений
(2.10) и (2.11) существуют следующие зависимости:
с-=Сц.соза -c^sin ц; (2. 19)
с„ - с, sin a+cycosct. (2.20)
При полете ракеты в атмосфере угол а бывает небольшим,
поэтому можно считать, что cosa«<l, a sin а «а. Тогда получим
выражения (2.19) и (2.20) в приближенном виде
ст«сЛ—Cj,a; (2.21)
сп^сха-, су. (2.22)
Отметим основные особенности аэродинамических характе-
ристик ракеты.
' Аэродинамические исследования показывают, что при неболь-
! / ших углах атаки (а^10°) коэффициент тангенциальной силы
ст мало зависит от угла атаки, аТкоэффициенты подъемной су и
нормальной сп сил пропорциональны углу атаки:
сг,=с“а; (2.23)
с„ - =с“а, (2.24)
где с“ и с“ — частные производные от соответствующих коэф-
фициентов по углу атаки.
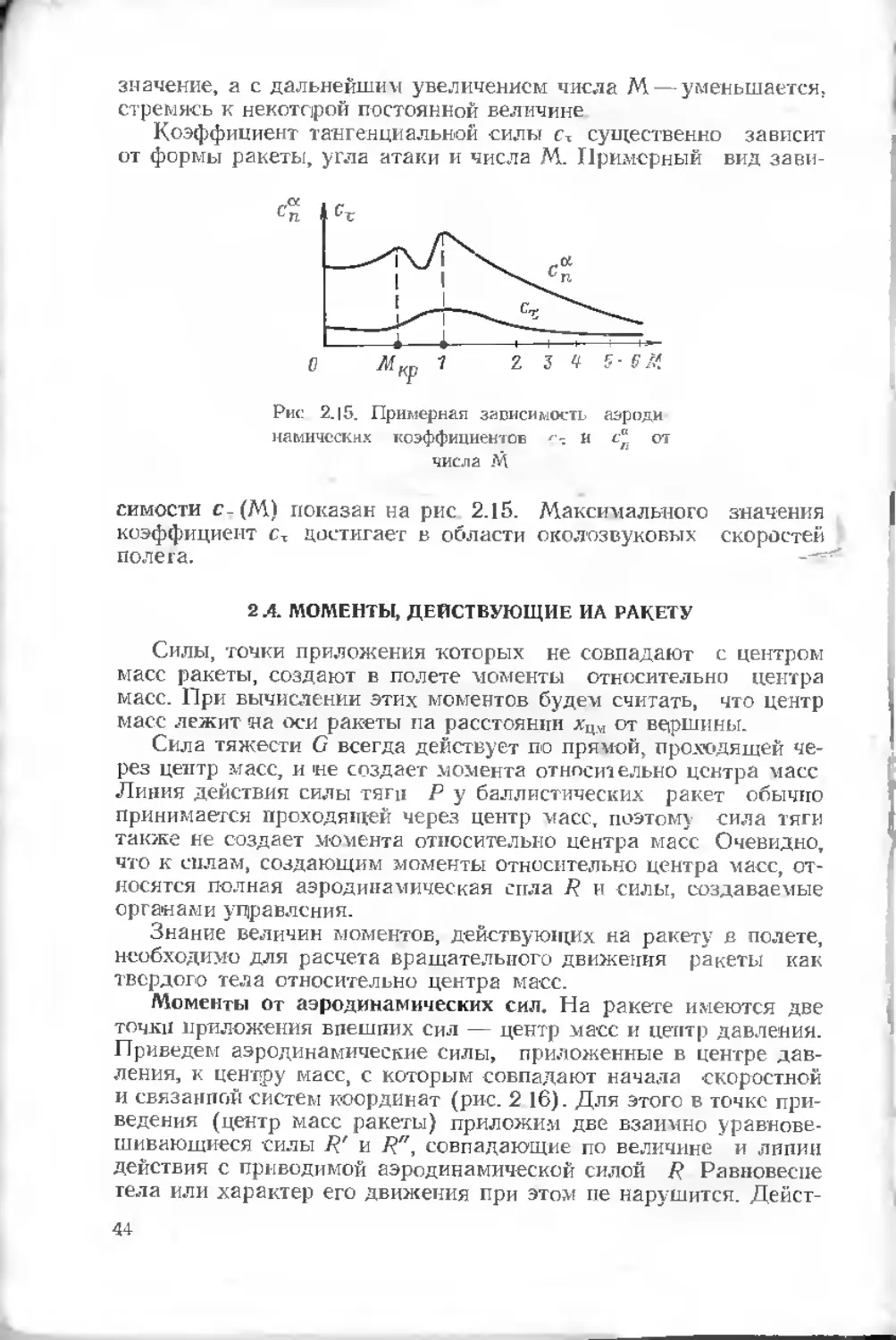
Производная коэффициента нормальной силы сап зависит
главным образом от числа М (рве. 2.15). В области околозвуко-
вых скоростей ракеты этот коэффициент имеет максимальное
43
значение, а с дальнейшим увеличением числа М — уменьшается,
стремясь к некоторой постоянной величине
Коэффициент тангенциальной силы с\ существенно зависит
от формы ракеты, угла атаки и числа М. Примерный вид зави-
Рис 2.|5. Примерная зависимость аэроди
намичсских коэффициентов и с“ от
числа М
симости с-(М) показан на рис 2.15. Максимального значения
коэффициент ст достигает в области околозвуковых скоростей
полега.
2 Л. МОМЕНТЫ, ДЕЙСТВУЮЩИЕ ИА РАКЕТУ
Силы, точки приложения которых не совпадают с центром
масс ракеты, создают в полете моменты относительно центра
масс. При вычислении этих моментов будем считать, что центр
масс лежит «а оси ракеты па расстоянии хцм от вершины.
Сила тяжести G всегда действует по прямой, проходящей че-
рез центр масс, и «не создает момента относительно центра масс
Линия действия силы тяги Р у баллистических ракет обычно
принимается проходящей через центр масс, поэтому сила тяги
также не создает момента относительно центра масс Очевидно,
что к силам, создающим моменты относительно центра масс, от-
носятся полная аэродинамическая сила Р и силы, создаваемые
органами управления.
Знание величин моментов, действующих на ракету в полете,
необходимо для расчета вращательного движения ракеты как
твердого тела относительно центра масс.
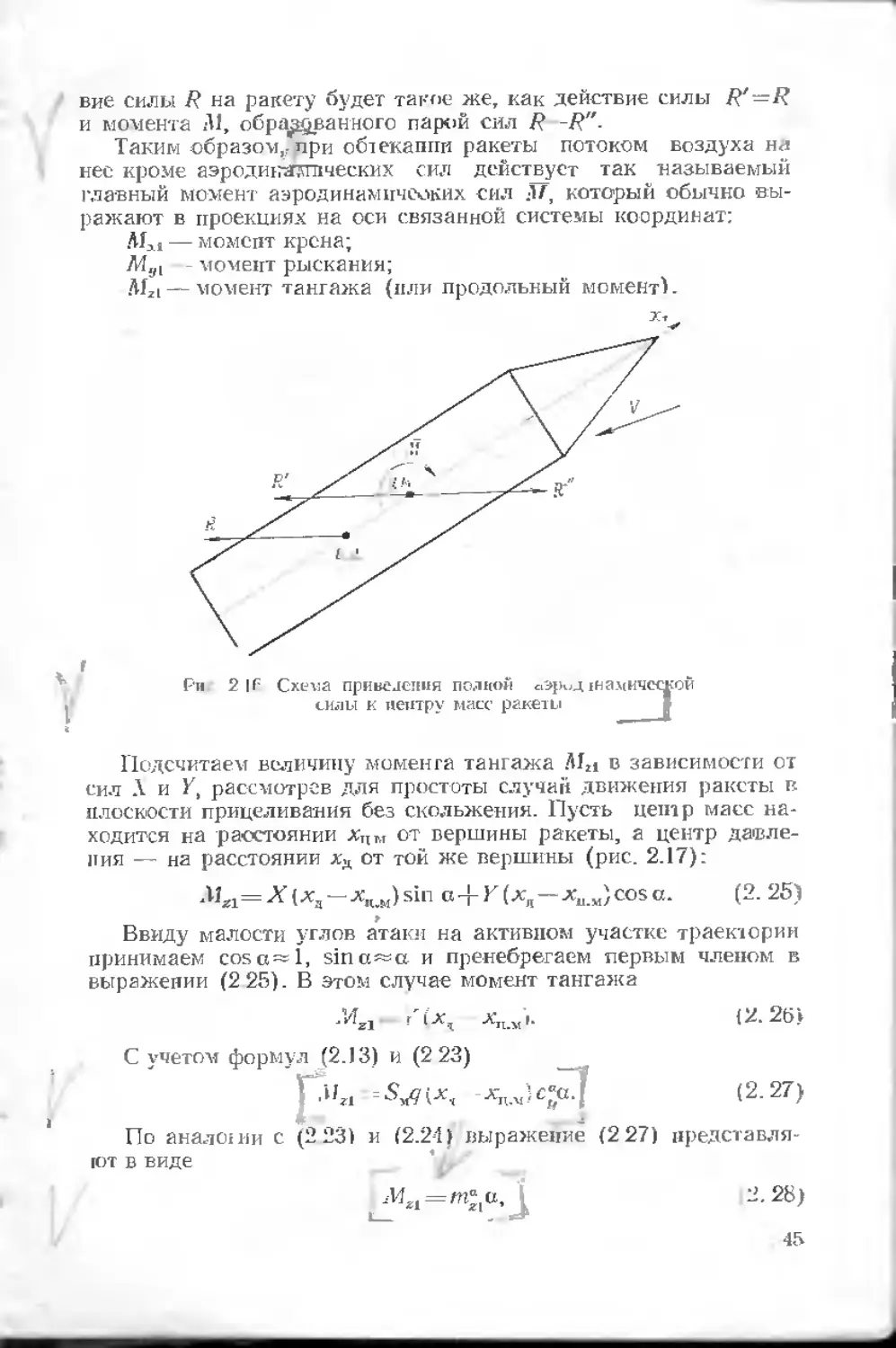
Моменты от аэродинамических сил. На ракеге имеются две
точки приложения внешних сил — центр масс и центр давления.
Приведем аэродинамические силы, приложенные в центре дав-
ления, к центру масс, с которым совпадают начала скоростной
и связанной систем координат (рис. 2 16). Для этого в точке при-
ведения (центр масс ракеты) приложим две взаимно уравнове-
шивающиеся силы Р' и Р", совпадающие по величине и линии
действия с приводимой аэродинамической силой Р Равновесие
тела или характер его движения при этом не нарушится. Дейст-
44
вие силы на ракету будет такое же, как действие силы R'—R
и момента ill, образованного парой сил R—R".
Таким образом,, рри обтекании ракеты потоком воздуха нд
нес кроме аэродинамических сил действует так называемый
главный момент аэродинамических сил -И, который обычно вы-
ражают в проекциях на оси связанной системы координат:
Ми — момент крена;
Л'!а| - момент рыскания;
Л121— момент тангажа (или продольный момент) -
Подсчитаем величину момента тангажа Л1ц в зависимости от
сил Л и У, рассмотрев для простоты случай движения ракеты в
плоскости прицеливания без скольжения. Пусть центр масс на-
ходится на расстоянии x,IM от вершины ракеты, а центр давле-
ния — на расстоянии хл от той же вершины (рис. 2.17):
Мг1= X (л5—x1UM) sin a+Y (xn—xUM) cos a. (2. 25)
Ввиду малости углов атаки на активном участке траектории
принимаем cosa=sl, sin а»а и пренебрегаем первым членом в
выражении (2 25). В этом случае момент тангажа
и„ .-Я
С учетом формул (2.13) и (2 23)
Г.И„ А;,.(2.27)
По аналшии с (2 23) и (2.24) выражение (2 27) представля-
ют в виде
^1=^°’J, 1“' 2&)
45
ргде x„.M)c“ — коэффициент статического .момента
тангажа (продольного момента)
Аналогично
(2.291
(2.30)
где !nj:l~ коэффициент статического момента крена,
। — коэффициент статического момента рыскания.
Управляющие моменты относительно каждой из осей связан-
ной системы координат у баллистических ракет создаются пспол-
i иительпымп органами системы управления?^
| В качестве исполнительных органов рассмотрим газовые ру-
* ли (рис.2.18). Управляющий момент относительно поперечной
оси Ozt, поворачивающий ракету в плоскости прицеливания.
ЛЦ-=М*р- xllwj, (2.31)
где —расстояние от ведшины ракеты до точки приложения
подъемной силы руля.
С учетом формулы (2.7)
|2-3'2)
Аналогично подсчитывается управляющий момент, поворачиваю-
щий ракету относительно нормальной оси
(2-331
В отличие от моментов -И21у и .UtJy управляющий мо-
мент крена баллистической ракеты создается газовыми рулями
па сравнительно небольшом плече 1Р (рис. 2.19):
ЛЦ-1Г»Мр. (2.34)
По аналогии с формулами (2 28) — (2.30) выражения
(2.32)—(2.34) представляют в виде
.Иг1. /и*, 8; (2.35)
Ма =т^ 8; (2.36)
•Ил, т^Ъ, (2.371
где , т\ -коэффициенты управляющих моментов;
б —угол отклонения руля. Y
46
Put 2 17 К расчету момента тангажа Д1.-, оч аэродииамиче
ских сил
Рис 2 18 Управляющий молект газовых ручей
47
Контрольные вопросы
1. Какие системы координат применяются в теории полета
ракет?
2. Почему начало координат связанной и скоростной систем
координат целесообразно размещать в центре масс ракеты3
3. Что называется углом тангажа, углом рыскания и углом
крена?
4. Перечислите названия осей в скоростной и связанной сис-
темах координат'.
5 Что называется углом атаки и углом скольжения?
С Какие силы действуют па ракету при полете в атмосфере и
работающим двигателем?
7 Как изменяется сила тяги управляемой баллистической
ракеты?
8 Что такое импульс последействия тяги? Почему стремятся
свести его к минимуму?
D. Как изменяется сила тяжести ракеты при ее полете?
10. Чем вызвано сопротивление трения н сопротивление дав-
ления?
11. Объясните физический смысл донного сопротивления ра-
кеты.
12. Каковы особенности сверхзвукового обтекания тел?
13. Чем отличается несимметричное обтекание тела от сим-
метричного?
14. Как возникает подъемная сила при несимметричном обте-
кании ракеты?
15 Как называются составляющие полной аэродинамической
силы в скоростной и в связанной системах координат3
16. Напишите формулы аэродинамических сил У, X и Z
17. Какие моменты действуют на ракету при ее полете в ат-
мосфере с работающим двигателем?
18 Что называется центром давления?
Глава III
ТРАЕКТОРИЯ ПОЛЕТА БАЛЛИСТИЧЕСКОЙ РАКЕТЫ
3.1. УЧАСТКИ ТРАЕКТОРИИ
Траектория ракеты это линия, которую в пространстве
списывает центр масс. Па рис. 3.1 показана траектория баяли
стической ракеты, запускаемой из точки Ос в точку С Траекто-
рия имеет лва участка- активный участок ОСК и пассивный уча-
сток КС.
Активным называется начальный участок траектории, на ко
тором ракета движется с работающим двигателем. В конце ак-
тивного участка, когда ракета приобретет скорость, имеющую
48 -
заданную величину- и направление, двигательная установка вы-
ключается. Величина и направление скорости в конце активного
участка Ук определяются заданной дальностью стрельбы.
На пассивном участке траектории двигатель не работает, по-
лет ракеты продолжается по инерции за счет запаса кинетиче-
ской (скорость полета) и потенциальной (высота полета) энер-
гии, приобретенною на активном участке траектории полета.
Активный участок траектории ракеты подразделяют на три
более мелких участка: стартовый, программного разворота и на-
ведения
Баллистические ракеты, как правило, запускаются с пусково-
го стола вертикально вверх. Этот участок полета Ог.4 называет-
ся стартовым участком. Зада-
ча управления на стартовом
участке сводится к сохранению
вертикального положения ра-
кеты и прямолинейности ее
траектории.
Баллистические ракеты
имеют вертикальный старт по
ряду причин. Во-первых, вер-
тикальный старч позволяет
ракете пройти наиболее плот-
ные слои атмосферы по крат-
чайшему расстоянию с отно-
сительно малой скоростью, что
сводит к минимуму аэродина-
мическое сопротивление и на-
грев ракеты.
Во-вторых, вертикальный старт ракеты сопровождается в ос-
новном осевыми нагрузками на конструкцию, поэтому конструк-
ция ракеты может не иметь большой поперечной жесткости, а
это способствует уменьшению ее массы.
В-третьих, упрощается проектирование и изготовление пуско-
вого устройства, которое удерживает ракету перед стартом с по-
мошью одних только опор в хвостовой части.
В-четвертых, при наклонном старте потребовалась бы более
мощная двигательная установка, так как вертикальная состав-
ляющая силы тяги, являясь поддерживающей силой, должна
превышать силу тяжести, действующую на ракету
После достижения ракетой безопасной (по условиям эксплуа-
тации) высоты (точка А) система управления начинает откло-
нять ее от вертикали в сторону цели. Это отклонение происходит
по заранее заданной программе по криволинейной траектории и
прекращается в точке В незадолго до конца работы двигателя.
Участок Л В -служит для выведения ракеты к точке К под задан-
ным углом к горизонту Ок и называется участком программного
разворота.
49
Разворот ракеты необходимо выполнять, не вызывая на кон-
струкцию ракеты чрезмерные поперечные перегрузки. В то же
время поворот ракеты до заданного угла гангажа -0к должен
осуществляться после старта как можно быстрее, чтобы расход
топлива был небольшим. Удовлетворить этим двум противоре-
чивым требованиям можно, если выполнить маневр, который
называется поворотом ракеты при нулевой подъемной силе. Пу-
тем резкого отклонения органов управления и возвращения их
обратно ракета получает импульс для движения по направлению
к цели. Как только ракета отклонится от своего вертикального
положения, возникает составляющая силы тяжести, которая не
уравновешивается силой тяги Поэтому ракета будет продолжать
все более и более отклоняться от вертикали Во время этого ма-
невра направление тяги и продольной оси ракеты остается па-
раллельным направлению скорости и угол атаки равен нулю.
Поворот при пулевой подъемной силе -обычно завершается к
моменту, когда ракета поднялась выше верхних слоев атмосфе-
ры и достигла заданного угла fiK. Достижение заданной скорости
осуществляется путем дальнейшего разгона ракеты на прямоли-
нейном наклонном участке ВК, называемом участком наведения.
В разных точках этого участка в зависимости от требуемой даль-
ности стрельбы происходит выключение двигателя.
Если бы в период этого разгона направление тяги оставалось
параллельным направлению скорости, то сила притяжения иск
ривила бы траекторию, продолжая поворачивать ракету при нх
левой подъемной силе. Воздействие, создаваемое нормальной
составляющей силы тяжести, необходимо нейтрализовать. Это
можпо осуществить несколькими методами, из которых наибо-
лее экономичным является метод стабилизации положения раке-
ты, изменяя по определенной программе угол тапгажа. Угол тан-
гажа, задаваемый в любой момент времени программным меха-
низмом системы управления, называется программным углом
тангажа Ощ,, а закон его изменения во времени программой
тангажа ракеты.
Примерный вид программы утла тангажа баллистической ра-
кеты показал на рис. 32. Вначале программный угол тангажа
равен .90", а_затем постепенно уменьшается до Оцрк Программ-
j иый угол Опр к на участке наведения обычно выдерживают пос-
тоянным. В этом случае выключение двигателя происходит при
минимальных величинах угловых возмущений и уменьшается
рассеивание ракет у цели полета. Величина угла 1>пр.к изменяет-
ся в зависимости -от дальности стрельбы. При сравнительно ма-
лых дальностях (100—300 км) этот угол близок к 45°. При
больших дальностях угол Оцрл уменьшается и может быть рав-
ным 17—25°.
Выбор закона Олр(0 представляет собой одну из важпых за-
дач баллистического проектирования, так как от программы тан-
гажа зависит не только дальность полета ракеты, но и .рарсеи-
50
Банке ракет, величина поперечных нагрузок, действующих на
корпус ракеты па активном участке полета и др. Практически
'Выбор закона 'З^ЛТГ'бсуществляётся одновременно с выбором
остальных параметров проектируемой ракеты.
.Момент выключения двигателя разделяет траекторию ракеты
на активный и пассивный участки. В точке выключения двигате-
ля j правление ракетой заканчивается, и весь дальнейший путь
до цели она совершает по инерции в свободном движении по
баллистической кривой После выключения двигателя произво-
дится отделение головной части ракеты.
Баллистическая траектория и точка се пересечения с Землей
зависят от координат ракеты в мо-
мент выключения двигателя, а 1ак-
же от величины и направления ско-
рости ракеты в этот момент. Следо-
вательно, задача управления бал-
листическими ракетами состоит
в том, чтобы к моменту выключения
двигателя ракета была выведена
в расчетную точку пространства и
чтобы в этой точке были дости-
гнуты расчетные величина и на-
правление скорости ракеты. Если
<1
Рис. 3.-2 Программа угла тан-
гажа баллистической ракеты
эти условия в точке выключения
двигателя не будут соблюдены, то ошибка уже не может быть
исправлена, так как на пассивном участке траектории ракета
не управляется.
Траекторию баллистической ракеты подразделяют также па
участки атмосферного и заатмосферного полета. За атмосфер-
ным считается полет в столь разреженных слоях атмосферы, что
аэродинамические силы оказываются ничтожно малыми по срав-
нению с силой тяжести ракеты.
В зависимости от дальности стрельбы выключение двигате-
ля может происходить как в пределах атмосферного, так и заат-
мосферного полета. Обычно выключение двигателя баллистиче-
ских. ракет происходит в пределах заатмосферного полета
В этом случае пассивный участок можно разделить на внеатмо-
сферный KD и атмосферный DC (см. рис. 3.1).
На внеатмосферном пассивном участке головная часть раке
ты движется по инерции как свободно брошенное тело. Основное
действие на нее оказывает сила притяжения к Земле — сила тя-
жести. Она определяет форму траектории. Аэродинамические
силы отсутствуют. Скорость головной части па восходящей вет-
ви траектории постепенно уменьшается, достигая минимального
значения в вершине траектории. На нисходящей ветви траекто-
рии под действием силы тяжести скорость головной части уве-
личивается
Атмосферный пассивный участок или участок стабилизации
51
начинается с момента входа головной части в верхние плотные
слои атмосферы. При прохождении атмосферы происходит силь-
ное торможение — скорое гь головной части резко уменьшается.
При этом она подвергается интенсивному аэродинамическому
нагреву- и вибрации Головная часть на этом участке стабилизи-
руется и подходит к цели носком вперед.
В дальнейшем на участке свободного полета мы будем го-
ворить о движении ракеты, одновременно подразумевая при этом
н движение головной части ракеты в случае се отделения.
3.2. УРАВНЕНИЯ ДВИЖЕНИЯ РАКЕТЫ НА АКТИВНОМ УЧАСТКЕ
Одной из основных задач теории полета является расчет тра-
екторий движения ракет. Для этого необходимо составить в
стартовой системе координат систему уравнении движения и ре-
шить ее. При этом предполагается, что ракета является абсолют
но жестким телом переменной массы, т. е. нс учитываются упру-
гость ракеты и наличие жидкого топлива в баках.
Движение ракеты на траектории в общем случае осуществля-
ется по пространственной кривой вследствие вращения Земли и
действия на ракету различных возмущающих факторов.
Расчет пространственного движения ракеты представляет
большие трудности, так как связан с решением сложной системы
дифференциальных уравнений Для упрощения не учитывается
влияние вращения Земли и действие возмущающих факторов, а
ускорение силы тяжести считается направленным вниз пара л
лельно оси Осус (см. рис 3 1) и постоянным по величине. Одно-
временно допускается, что ракета движется в плоскости прице-
ливания без скольжения При принятых допущениях можно счи-
52
тать, что силы, действующие на ракету, лежат в одной плоско-
сти, а траектория полета — плоская кривая.
При полете на активном участке траектории <на ракету дей-
ствуют силы и моменты, показанные на рис. 3.3.
Сила тяги Р. Направление тяги при соосном расположении
двигателя совпадает с продольной осью ракеты.
Сила тяжести G~mg, изменяющаяся с течением времени
вследствие выгорания топлива.
Сила лобового сопротивления X (направлена по касательной
к траектории).
Подъемная сила У (направлена по нормали к траектории).
Силы Ху и Уу, создаваемые органами управления.
Момент тангажа М21
Управляющий момент 7Иг1у.
Составим уравнения движения, описывающие управляемый
полет баллистической ракеты.
В соответствии г основными принципами механики движение
ракеты относительно стартовой системы координат можно рас-
сматривать как поступательное движение центра масс ракеты и
вращательное движение вокруг центра масс.
Уравнение движения центра масс ракеты, записанное для
рассмотренной системы сил в форме уравнения Мещерского,
имеет вид
та \У7<=Р^-С-^-Х-РУ- А'у-*-Гу. (3.1)
где т масса ракеты;
Р -силатя!и;
_а — ускорение в криволинейном движении;
~2.Fi—сумма действующих на ракету' сил, исключая силу
тяги.
Для получения расчетных уравнений движения ракеты век-
торное уравнение (3.1) спроектируем почленно на оси скорост-
ной системы координат (см рис. 3.3).
Проекция на ось Ох (касательная к траектории полета):
mV =(Р -A'y}cos« — X —Gsin О — IP sin а. (3.2)
Проекция на ось Оу (нормаль к траектории полета):
mV6 (Р —Aj)sina У -G'cos6-| Xv coso. (3.3)
Ввиду малости углов атаки баллистических ракет значения
sin а «а, cos а «1. Пренебрегая величиной Vysinu, уравнения
(3.2) и (3.3), описывающие движение центра масс ракеты, с
учетом соотношения G—mg, примут вид
V = (Р - Ху - Л’)—g sin 0, i3.4)
«=v {•д1<р _ d •1 +1 '»1 - «0| <3-5)
53
В рассматриваемом случае вращательное движение ракеты
как твердого тела относительно своего центра масс эквивалент-
но движению относительно осн Ozi- Уравнение этого движения
записывается как равенство произведения момента инерции ра-
кеты J2i на угловое ускорение вращения <ozi сумме моментов от-
носительно оси Ozi, всех сил, действующих на ракету,
/„«,!=»« -ИЯу. (3.6)
Положение продольной оси ракеты определяет угод тангажа
О. Первая производная от угла тангажа по времени определя-
е> угловую скорость, а вторая производная ft определяет угло-
вое ускорение вращательного движения ракеты вокруг центра
масс, т. е.
««!=» 13.7)
С учетом формул (2.26), (2.31) и (3.7) выражение (3 6) при-
мет вид
/,Л= V (х, - Г, (Z, -Х„). (3.8)
К этим уравнениям движения необходимо добавить кинема-
тические уравнения, определяющие скорость перемещения цент-
ра масс ракеты в стартовой системе координат:
Vz=tfx/rf/=Vcos6. (3.91
Vy—dyidt=V sin 6, (3. 10)
уравнение связи между углами &, 6 и а
е=е+и (З.и)
и уравнение, учитывающее изменение массы ракеты во время
полета. Согласно выражению (2.2)
tn=tn0—mt.
Для управляемой баллистической ракеты к дифференциаль-
ным уравнениям движения должно быть присоединено еще урав-
нение программы угла тангажа
0щ»=/(О. (3.12)
При баллистических расчетах принимается, что ось ракеты
строго выполняет задаваемые ей программным механизмом уг-
ловые повороты, т. е.
<*(*)= Опр W-
Таким образом, система уравнений, описывающая невозму
щепное движение управляемой баллистической ракеты на ак-
тивном участке траектории, имеет вид
54
I7=-J-(P- Лу —Л)—gsin S;
^cos6 I;
41^Y {Xi — ^Ц.м)+ ГУ 1л!> - *Я.ЫК
л—I/ cos 6;
y=V sin 0;
&=6-|-а;
»(Л ».<.('):
m=m0 — mf.
(3. 13;
Для того чтобы решить систему уравнений (3.13), 'необходи-
мо знать, от чего зависят величины, входящие в эти уравнения,
и как они изменяются во времени. Ранее было установлено, что
аэродинамические силы для данной ракеты зависят от скорости,
высоты полета и угла атаки. Сила тяги изменяется в связи с из-
мснением внешнего атмосферного давления по траектории по-
лета. Масса ракеты уменьшается с расходованием топлива
В связи с этим полученную систему дифференциальных уравне-
ний решить аналитически нельзя. Эта система дифференциаль-
ных уравнений решается методом численного интегрирования
Система дифференциальных уравнений (3.13) описывает
движение ракеты только в одной плоскости и не учитывает воз-
можности движения по пространственной траектории В тех слу-
чаях, когда траектория полета представляет собой пространст-
венную кривую, система уравнений значительно усложняется.
При составлении этой системы необходимо рассматривать силы
и моменты по трем координатным осям, учитывать угловые пере
мещения ракеты по рысканию и крепу, а также изменение вели-
чины и направления ускорения силы тяжести g.
3.3. СВОБОДНЫЙ ПОЛЕТ БАЛЛИСТИЧЕСКОЙ РАКЕТЫ
В ЦЕНТРАЛЬНОМ ПОЛЕ ТЯГОТЕНИЯ (ЭЛЛИПТИЧЕСКАЯ ТЕОРИЯ)
Движение баллистической ракеты на участке свободного по-
лета происходит под действием только силы притяжения Земли,
поскольку на высотах, превышающих 80—-100 км, сопротивление
воздуха практически равно нулю.
Если считать, что Земля по форме представляет собой шар с
равномерно распределенной массой, то сила тяжести ракеты во
всех точках траектории будет направлена к центру Земли (та-
кое гравитационное поле называют ньютоновским или нейтраль-
ным). Следовательно, сила тяжести или ускорение силы тяжести
изменяет свое направление в пространстве по мере движения
ракеты к цели (рис. 3.4).
35
При полете баллистической ракеты в центральном поле тяго-
тения ее траектория (пассивный участок) будет находиться в
плоскости, проходящей через центр Земли и граничную точку Л
(рис. 3.5). Вектор скорости -ракеты в этой точке Ук также будет
располагаться <в этой плоскости.
Движение ракеты удобно рассматривать в полярной системе
координат. Траектория ракеты на пассивном участке опредсля-
Рис. 34 К вопросу о централь-
ном гравитационном поле
Рис 3J5 К выводу уравнения дви-
жения ракеты в полярной системе
координат
ется координатами граничной точки над поверхностью Земли
Ук и хк, скоростью Vlt и углом бросания ракеты 0К. Углом броса-
ния ракеты 6 к называется угол между вектором скорости 1-'к и
местным горизонтом
Уравнение траектории должно связать текущие значения по-
лярных координат ракеты г -и tp, т. е. должно выразить функцио-
нальную зависимость г(<р).
Пусть ракета, изображенная на рис. 3.5 точкой Е, движется
по инерции по некоторой траектории и находится в данный мо-
мент на расстоянии г от центра Земли. При переходе из точки Е
в точку И кинетическая энергия ракеты т\г“/2 изменится на ве-
личину <Z(mk'2/2). Потенциальная энергия изменится на величи-
ну сЦтцг).
Изменение кинетической энер1ии равно изменению потенци-
альной энергии, поскольку двигатель ракеты не работает и аэро-
динамическое сопротивление отсутствует:
, / mV? \
d\2-----тёг}=^-
56
Так как масса ракеты после выключения двигателя остается
постоянной, го
— er =const.
2 ь
С учетом формулы (2.4) получим
YL—£±=Clmst 13.14)
2 г
Выражение (3.14), называемое интегралом энергии, показы-
вает, что скорость полета ракеты будет зависеть только от рас-
стояния г данной точки траектории от центра Земли. Значение
постоянной в правой части этого выражения характеризует
энергетический уровень траектории и определяется начальными
условиями движения в граничной точке траектории К при r—r,t
и V—Ук. Отсюда, обозначив fM через k2,
'4 » . ,3. |5)
2 г 2 гк
Учитывая, что скорость
v .7. 1'747?
(it. lit
где r—drldt,
подставив в выражение (3.15) значение скорости V, получим
J ,()г । ..24 4у-- (3.16)
Второе уравнение получим из условия, что момент количест-
ва движения ракеты относительно центра Земли является вели-
чиной постоянной
tnrV cos 0= - const, (3.17)
где VcosO —составляющая скорости, перпендикулярная ради-
усу г
Из выражения (3.17) следует, что
rV cos 0=r1(l/K cos 9K.
Но из рис. 3.5 видно, что
056=2^.
ds
поэтому
riz cos I г— -J-’- r‘i.
di ds
rai=rKVKcosflK. (3-181
57
Рис. 3 6 К понятию об интег-
рале площадей
Зависимость (3.18) носит название интеграла площадей. Физи-
ческий смысл этого понятия заключается в том, что площади,
описываемые радиусом-вектором за одинаковые промежутки
времени Ai, равны (рис. 3.6).
Если уравнения (3 16) и (3.18) решить совместно и исклю-
чить из них /, то получим зависимость г(ф), т. -е. уравнение тра-
ектории ракеты
Согласно уравнению (3.18)
Vl(rK cos 6|(
Ф=------------*
Но
d'f __ tty dr __ tty
at ~~ dr at ~~ dr
Отсюда получим
___ dr dr VKrK cos ty dr c
tty ' rf<p r2 tty r2 *
==VKrKcosOK. (319)
Подставив выражения для г и о в уравнение (3.16'1 и умно-
жив обе части равенства на 2, получим
Отсюда
В подкоренном выражении прибавим и вычтем постоянную
величину А4/с2, введем также величину — Л2/с под знак диффе-
ренциала в числителе и после этого подучим
58
После интегрирования выражения (3.20) получим
с Л2
"j—<fK-=arccos
2й2 k*
(3.21
откуда искомое уравнение траектории
(3.22)
Постоянная интегрирования <plt зависит от начала отсчета угла
Ф (см. рис. 3.5).
Введем следующие обозначения
/?--с2/Л2, (3.23)
(3.24)
В итоге уравнение траектории полета (3.22) примет вит
_________Р______
\ -«C..S (у— $>к)
(3.25)
Проанализируем полученное выражение. Из курса аналити-
ческой геометрии известно, что уравнение (3.25) - уравнение
кривой второго порядка в полярной системе координат с полю-
сом в одном из фокусов кривой, где р — фокальный параметр
кривой, а е — эксцентриситет кривой.
Поскольку вид траектории характеризуется эксцентрисите-
том, найдем выражение для е. Преобразуем формулу (3.24), вве-
дя величину с//?2 в подкоренное выражение,
I
2с2
Подставив в последнюю формулу вместо величины г ее вы-
ражение из (3.19), получим
е= ,3.26,
V № М
Решив уравнение (3.26) относительно VK2, получим
1/2=----—-----Icos 6к -l )' cos3eK—( I .
к гк cos 6„-
59
Для точек траектории, в которых 8K=0 (cosOK=l), т. е. нап-
равление вектора скорости ракеты в (раяичпой точке парал-
лельно горизонту, полученное уравнение имеет вид
IZ«—!L(1 ,.<). 18.27)
Зависимость (3.27) позволяет исследовать космические тра-
ектории и скорости движения ракеты
Рассмотрим возможные случаи.
1-й случай: е=0.
Уравнение эллиптической траектории (3.25) преобразуется в
уравнен ие_окружности в полярных координатах г—р. Скорость
VKp=A/)- гк называется круговой или первой космической ско-
ростью. Это та скорость, которую необходимо сообщить телу,
чтобы опо стало спутником Земли. При гк=7?=6371,2 км, У1!р=
=7906 м/с.
2-й случай: 0<е< 1.
В этом случае уравнение (325) преобразуется в уравнение
эллипса. Уравнение (3.25) позволяет найти радиусы перигея гп
и апогея г-л этого эллипса:
В зависимости от величины скорости тела возможны два раз-
личных варианта, так как в формуле (3.27) перед значением экс-
центриситета стоят два знака:
а' 1^—---—эллипс, у которого притягивающий центр
находится в ближайшем фокусе по отношению к текущей точке,
движущейся со скоростью Гк. Для рассматриваемого варианта
эта точка траектории — перигей Тело, находящееся в першее с
такой скоросгъю, будет спутником, так как эллипс не пересека-
ется с притягивающим телом,
б) (1 —е)—эллине, у которого притягивающий центр
находится в дальнем фокусе. Скорость VK относится к апогею.
Траектория может пересекаться с притягивающим телом, но
может и не пересекаться. Граничное значение Г,р определяется
из условия, что скорость Угр должна быть равна скорости в апо-
гее такою эллипса, который в перигее коснется поверхности
Земли
Если Vu>Vrp -эллипс не пересекается < притягивающим те-
лом;
Ук=К-р-—эллипс коснется притягивающего тела,
60
VK<Vr[) — эллипс пересекается с телом Имеет место тра-
ектория баллистической ракеты дальнего дейст-
вия
3-й случай: е=1.
Траектория полета является параболой. Скорость
Рис 38 Траектории ракет, рассчитыва
емых по уравнениям эллиптической тео
Рис 37 Области возможных тра-
екторий в эллиптической теории
ищи телом (vK<Frp), 6—притягиваю
щее тело
I—‘парабола, 2—гипербола; 3—баллистическая
кривая (эллипс, пересекающийся с притяги-
вающим телом) 4—окружность; S—эллипс
называют параболической скоростью или второй космической
скоростью. Это та минимальная начальная скорость, которая не-
обходима для преодоления силы земного тяготения.
При гь=/?=6371,2 км величина второй космической скоро-
сти VnBp=11,18 км/с.
Для рассматриваемого случая формула е) не
имеет физического смысла.
4-й случай: е> 1.
Траектория движения будет гиперболой. Vr„1T=16,7 км/с на-
зывают третьей космической скоростью. При сообщении ракете
третьей космической скорости в направлении движения Земли
относительно Солнца опа преодолеет солнечное притяжение
61
Области различных траектории при движении тела с массой
т относительно притягивающего центра показаны на рис. 3 7, а
формы траекторий — на рис. 3.8.
В течение долюго времени параболические и гиперболиче-
ские траектории, уходящие в бесконечность, практического зна-
чения не имели. По этой причине теория движения тел в пустоте
код действием притяжения Земли получила в баллистике иаз-
вание эллиптической теории
3.4. ДАЛЬНОСТЬ СТРЕЛЬБЫ
Под дальностью стрельбы понимают длину дуги на иоверхло
сти Земли от точки старта до точки цели.
Для баллистических ракет длина атмосферной части нисходя
щей ветви траектории составляет менее 5% общей дальности
иолета, поэтому весь участок свободного полета примем за эл-
липтический. Практически это не внесет большой ошибки в опре-
деление дальности стрельбы, так как большое сопротивление
воздуха на атмосферном участке почти не меняет эллиптическую
форму траектории Ойо оказывает значительное влия. «е лишь на
скорость и время движения головной части ракеты
Дальность стрельбы будет равна (рис 3.9):
£=Д,К+£СВ, (3 28)
62
где 7-ак — дальность активного участка;
L(:r, — дальность участка свободного полета.
Дальность активною участка £ак определяется программой
изменения угла тангажа на активном участке траектории и вы-
чнслятся путем численного интегрирования уравнений движения
ракеты. Зная координаты хк и уа, полученные в результате бал
листическиго расчета активного участка, легко определить даль
ность активного участка
Аак=/?фн, (3 29)
где фк — центральный угол, соответствующий активному участ
ку траектории. Угол <рк, как следует из рис. 3.9, определяется по
формуле
(3'30)
Дальность участка свободного полета определяется длиной
дуги на поверхности Земли, соответствующей углу (qi<:—<р,.):
£св=^(фс—Фк), (3 31)
а величина центрального угла (<рс—фн) определяется из уравне-
ния (3.21).
Дальность стрельбы является одним из элементов траектории
полета и определяется параметрами движения ракеты. Достиже-
ние необходимой дальности может быть получено при различных
соотношениях параметров полета Иначе говоря, ракету к задан-
ной цели можно привести разными путями.
Начиная с момента выключения двигателя, ракета перестает
быть управляемой, и траектория полета почти целиком определя-
ется теми начальными условиями свободного полета, которые
были получены ракетой в конце активного участка Начальными
параметрами, определяющими движение баллистического тела,
являются, очевидно, скорость Йв, угол бросания 0!Г и координа-
ты конца активного участка х,< и у„.
Степень влияния на дальность стрельбы каждого из этих па-
раметров неодинакова.
Координаты конца активного участка на дальность влияют
Незна чительпо.
Значительно в большей степени влияет на дальность стрель-
бы угол бросания 0К. На рис. 3 10 показаны эллиптические трг
ектории, получающиеся при постоянной скорости Vti, но при
различных углах бросания Ч к. Из рассмотрения полученных тра-
екторий видно, что если, пе меняя высоты ук и скорости Ук раке-
ты в момент выключения двигателя, изменять угол бросания 0„-,
то при некотором значении угла 0в=0КОПт можно получить при
данных параметрах конца активного участка максимальную
дальность Длих
63
Траектория полета, обеспечивающая максимальную даль-
ность, называется траекторией максимальной дальности.
Угол ек, соответствующий траектории максимальной дальне
стн, называется углом максимальной дальности или оптималь-
ным углом бросания и приближенно определяется по формуле
45 уЧ 13.32)
где <рн=—Ус —центральный угол, соответствующий поло-
вине участка свободного полета (рис. 3.9). Для заданной даль-
vK=const
Рис. 3 ГО. эллиптические траектории при различ
ных углах бросания 6F и постоянной конечной
скорости V.,
пости стрельбы L величина угла может быть приближенно
определена по формуле
«„=-57,3—-, (3.33,
' ' R
где /? радиус Земли.
Как видно из формулы (3 32), каждой дальности отвечает
свой угол 0 к «и?, причем с ростом дальности величина оптималь-
ного угла бросания 0,СОПт уменьшается (рис. 3.11).
Если дальность полета задана, то при оптимальном угле бро-
сания в момент выключения двигателя требуется минимальная
скорость Vlfinin, т. е потребуются минимальные затраты энер
гии.
Траектория, обеспечивающая получение заданной дальности
при минимальной начальной скорости, называется траекторией
минимальной скорости (оптимальной траекторией) (рис. 3.12).
Траектории, которые располагаются выше траектории мини-
мальной скорости, называются навесными траекториями, а те
траектории, которые располагаются ниже траектории минималь-
ной скорости, — настильными траекториями.
Наибольшее влияние на дальность стрельбы оказывает вели-
чина скорости (ракеты в копие активного участка У,, (рис. 3 13).
64
Чем больше скорость в конце активного участка, тем большее
расстояние пролетает ракета Так, например, при скорости
Рис 31'1 Зависимость оптимального угла
бросания 6К от дальности стрельбы
Рис. 3.12. Эллиптические
траектории-
5600 км/ч ракета имеет дальность стрельбы 300 км, при скорости
16920 км/ч — 3000 км, а при скорости 24 120 км/ч — 8000 км.
С увеличением дальности возрастает также высота траектории.
Рис 313 Зависимость дальности
стрельбы баллистической ракет от
скоросга в конце активного участка
(при постоянном угле бросания)
Так, при дальности в 300 км максимальная высота траектории
достигает 80 км, при дальности 3000 .км — 680 км, а при дально-
сти 8000 км — 1280 км.
Контрольные вопросы
1. Из каких участков состоит траектория полета баллистиче-
ской ракеты?
989
65
2. Какие силы действуют на ракету на различных участках
траектории?
3. Почему баллистические ракеты стартуют вертикально
вверх?
4. Как осуществляется разворот ракеты от вертикального по
ложения в сторону цели?
5 Что даст разворот ракеты при нулевой подъемной силе?
Когда он производится?
6 Охарактеризуйте программу ташажа баллистической ра-
кеты
7 Выведите уравнения движения баллистической ракеты на
активном участке. Какие допущения приняты при их выводе?
8 Как решается система дифференциальных уравнений дви-
жения ракеты?
9. Какие приняты допущения в эллиптической теории движе-
ния ракет?
10. При каких расчетах применяется эллиптическая теория
движения ракет?
11. Что называется дальностью стрельбы?
12 Как определяется дальность стрельбы?
13 Какие параметры траектории полета влияют на даль-
ность?
14. Как влияет на дальность -стрельбы угол бросания
15. Какой угол бросания называется оптимальным? Как из-
меняется величина оптимального угла бросания с изменением
дальности стрельбы?
16 Какие траектории называются навесными?
17. Чем отличаются настильные траектории от навесных?
18. Как влияет на дальность стрельбы величина скорости в
конце активного участка?
Глава IV
ОСНОВНЫЕ ПРИНЦИПЫ УПРАВЛЕНИЯ РАКЕТАМИ
4.1. УПРАВЛЕНИЕ ДВИЖЕНИЕМ РАКЕТЫ
Общее движение ракеты можно представить в виде суммы
двух движений: движение ее центра масс и вращение относи-
тельно центра масс. В соответствии с этим управление полетом
ракеты разделяется на две части:
— управление движением центра масс, i е. изменение вели-
чины и направления скорости полета;
— управление вращательным движением относительно цент-
ра масс.
Управление баллистическими ракетами осуществляется толь-
ко па активном участке траектории.
В общем случае па ракету в полете действуют сила тяги Р,
полная аэродинамическая сила /? и сила тяжести G. Для изме-
нения траектории полета ракеты нужно изменять величину и
направление этих сил Поскольку на силу тяжести влиять не-
возможно, то управление полетом практически осуществляется
двигателей и аэродина-
мических сил. Силу Q
можно разложить на две
составляющие- тангенци-
альную Qt и нормальную
Q,,, направленные соот-
ветственно вдоль векто-
ра скорости V и перпен-
дикулярно к нему Qp \
(рис. 4.1).
Тангенциальная со- t
ставляющая может /
служить для регулирова-
ния скорости полета. Она
равна /
(4.2)
ПОЙ составляющей От ц;ая снлы V,,—нормальная составляющая сп-
у баллистических ракет
достигается изменением
тяги основных двигателей (например, регулированием секунд-
ного расхода топлива, если двигатель жидкостной) или периоди-
ческим включением и выключением двигателей. Ту часть состав-
ляющей силы тяги ДР-, которую можно использовать для регу-
лирования скорости ракеты, называют тангенциальной управ-
ляющей силой.
Нормальная составляющая
Qn=Pn + Y,
где У — подъемная сила;
— составляющая силы тяги, перпендикулярная вектору
скорости V.
3*
67
Составляющую Qv силы Qn, действующую на ракету в плос-
кости прицеливания, называют нормальной управляющей силой.
По аналогии с нормальной управляющей силой вводят поня-
тие боковой управляющей силы, Qz> представляющей собой про-
екцию силы Qn па перпендикуляр к плоскости полета.
Изменяя величину и направление тангенциальной нормаль-
ной н боковой управляющих сил, можно обеспечить заданную
полета ракеты. Получить
величину и направление
и боковой управляющих
различными способами.
Рис. 4.3. Схема создания управ-
ляющих моментов относитель-
но оси Ozi при отклонении ру-
левых двигателей II—IV (на
рисунке показана схема созда
ния управляющего момента,
обеспечивающего уменьшение
угла тангажа)
Рис 4 2 Схема возникнове-
ния нормальной управляю-
щей силы у ракеты
У баллистических ракет для этой
цели изменяется угол атаки: в плос-
кости полета ау для изменения нор-
мальной управляющей силы, и
в плоскости, перпендикулярной к плоскости полета, az — цчя
изменения боковой управляющей силы. Нормальная управляю-
щая сила при наличии угла атаки равна (рис. 4 2):
Qv= р s’n av ' 5' ~ (Р a„. (4.3)
Таким образом, для получения требуемых по величине и •нап-
равлению нормальной и боковой управляющих сил необходимо
регулировать угловое положение ракеты в пространстве. Эта за-
дача решается путем создания управляющих моментов, которые
поворачивают ракету вокруг трех ее осей Oxit Oyt и Ozif прохо-
дящих через центр масс. Для образования управляющих момен-
тов на ракете имеются исполнительные органы системы управле-
ния, которые создают чравпительио небольшие газодинамиче-
ские или реактивные силы. Обычно эти силы ле оказывают
большого 'влияния на нормальную и боковую управляющие си-
68
лы, но моменты этих сил относительно центра масс являются
достаточными для управления угловыми движениями ракеты.
Рассмотрим создание управляющих моментов на примере уп-
равления движением ракеты с помощью четырех рулевых двига-
телей
Рулевые двигатели II -IV (рис. 4.3) обеспечивают (разворот
ракеты по углу тангажа: при отклонениях их в сторону рулевого
двигателя I угол тангажа уменьшается, а при отклонениях в сто-
Pitc 4 4 Схема создания
управляющих моментов от-
носительно оси Oi/i при отк-
лонении рулевых двигате-
лей I—III (на рисунке по
казана схема создания уп-
равляющего момента, обес-
печивающего разворот ра-
кеты в сторону путевого
двигателя II)
создания
управляющих моментов от-
носительно оси Oxt при отк
лонении всех рулевых дви-
гателей (на рисунке показа
на схема создания управля-
ющего момента, обеспечи-
вающего креп ракеты ло
часовой с грелке)
рону рулевого двигателя Ill -увеличивается. Аналогично необ-
ходимо отклонять рулевые двигатели I—III для обеспечения
разворота ракеты по углу рыскания (рис. 4 4). Для управления
ракетой по углу крена может применяться любая пара рулевых
двигателей, при этом двигатели должны отклоняться в противо-
положные стороны Если управляющий момент по углу крена
будет недостаточным, то -одновременно могут отклоняться обе
пары рулевых двигателей (рис. 4.5).
Итак, управление баллистической ракетой осуществляется
путем изменения направления и величины силы тяги двигателей
и аэродинамических сил таким образом, чтобы полет происхо-
дил по заданной (расчетной) траектории, называемой программ-
ной траекторией. Движение ракеты по программной траектории
происходит только лишь под действием заданных (расчетных)
сил и называется невозмущенным движением.
Фактически па ракету в полете действуют силы, отличные
от заданнвтх при расчете программной траектории. Кроме того.
69
на ракету в полете могут воздействовать случайные факторы,
например ветер. Под действием возмущающих сил ракета будет
совершать движение, которое называется возмущенным движе-
нием. Фактическая траектория ракеты будет отличаться от про-
граммной траектории. Чтобы возвратить ракету на программную
траекторию, необходимо прикладывать к центру ее масс, опреде-
ленную •силу, создаваемую за счет изменения аэродинамических
и реактивных сил. Изменение действующих на ракету сил осу-
ществляет система управления, которая вырабатывает сигналы,
отклоняющие соответствующим образом органы управления.
Движение ракеты, при котором регулируемые параметры
(углы тангажа, рыскания и крена, нормальный и бощ^ой снос
ракеты и т п ) не выходят за определенные пределы, ио оцени-
вающие выполнение поставленной задачи, называется устойчи-
вым движением.
Устойчивость движения зависит как от свойств системы уп-
равления, так и от свойств ракеты как объекта регулирования
и в первую очередь от достаточной эффективности органов уп-
равления. Расчет эффективности и основные типы органов уп-
равления приводятся в гл. XV.
4.2 ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ РАКЕТЫ
Ракета вместе с системой управления образует замкнутую
динамическую систему автоматического регулирования. Поэтому
закон, в соответствии с которым система управления вырабаты-
вает управляющий сигнал, зависит от динамических характери-
стик ракеты.
При анализе уравнений движения ракеты обычно пользуют-
ся ее различными динамическими моделями, например, в первом
приближении ракета рассматривается как абсолютно твердое
тело. При таком допущении после чуется устойчивость и vnpas-
ляемоеть ракеты.
Рассмотрим понятия устойчивости и управляемости ракеты
применительно к движению ее. относительно центра масс В об
щем случае уравнение вращательного движения ракеты после
приложения возмущения согласно (3.6) и (3.7) запишется следу-
ющим образом:
/и» -.1Ц, (4.4)
где — статический аэродинамический момент;
- управляющий момент, создаваемый органами управ-
ления.
С учетом (2 28) и (2.35) уравнение (4.4) запишется в виде
/г1&=т“га 4- trtgiv 8, l4.5)
где — коэффициент статического момента;
70
a—угол атаки;
—коэффициент управляющего момента;
Й—угол отклонения органов управления.
Разделив все члены уравнения (4 5) на момент инерции ра-
кеты Ль можно записать это уравнение в виде
0=й2сс+г>88, (4-6)
где коэффициенты a &s=m*, ijzl.
Коэффициент &2 характеризует статическую устойчивость ра
кеты при неподвижных рулях управления. коэффициент Ьз
Рис 4.6 Влияние взаимного положения центра масс и центра
давления па устойчивость ракеты:
эффективность органов управления, а оба коэффициента вмес-
те - управляемость ракеты.
На динамические характеристики ракеты влияет взаимное
расположение центра масс и центра давления ракеты (рис. 4 6).
Согласно (2 26) момент тангажа от аэродинамических сил ра-
вен
t Л' (хя 'хл - хпм).
Если центр давления находится позади центра масс (см. рис.
4.6, а), то момент подъемной аэродинамической силы действует
на уменьшение угла атаки и называется в этом случае стабили-
зирующим аэродинамическим моментом, а ракета с таким рас-
71
положением центра давления и центра масс - статически устой-
чивой. Если же центр давления лежит впереди центра масс (см.
рис 4.6, б), то ракета называется статически неустойчивой; мо-
мент подъемной аэродинамической силы действует у такой раке-
ты на увеличение у1ла атаки и носит "название опрокидывающе-
го аэродинамического момента.
Статическая устойчивость ракеты оценивается запасом ста-
тической устойчивости.
Запасом статической устойчивости называется отношение
расстояния между центром давления и центром масс к общей
длине ракегы L
м, =,J-- 100%
где Лд — расстояние от вершины ракеты до центра давления;
^им — расстояние от вершины ракеты до центра масс.
Понятие статической устойчивости 'Нельзя отождествлять с
понятием устойчивости движения. Наличие статической устой-
чивости лишь свидетельствует о том, что в данный момент вре-
мени на ракету действуют силы, сгремящиеся вернуть ее в поло-
жение равновесия.
Статическая устойчивость является характеристикой ракеты
с неподвижными органами управления. Упразднение движением
путем отклонения органов управления существенно изменяет
динамические свойства летательного аппарата.
Управляемая ракета является динамически устойчивой (ста-
билизированной), так как ее угловое движение происходит под
действием двух моментов: аэродинамического и управляющего,
которые всегда приводят ее в заданное положение
Из уравнения (4 6) следует, что .коэффициент &2 представля-
ет собой приращение углового ускорения, обусловленное изме-
нением угла атаки на единицу, а коэффициент &з — приращение
углового ускорения ракеты, создаваемое единичным угловым
отклонением органов управления.
Управляемостью ракеты называется способность ее изменять
параметры движения (углы атаки, тангажа и др.) при отклоне-
нии органов управления.
Очевидно, чем больше запас статической устойчивости (чем
больше &г). тем ракета хуже отзывается на отклонения органов
управления, т. е. она менее управляема. Чем больше коэффици-
ент &з, т. е. чем выше эффективность органов управления, тем
лучше при прочих равных условиях управляемость ракегы.
Во время полета ракеты ее динамические характеристики
резко изменяются. В результате большого расхода топлива из-
меняются масса, моменты инерции ракеты и положение центра
масс. С -изменением скорости изменяются и аэродинамические
характеристики ракеты, в частности, смещается центр давления.
72
Считать ракету абсолютно твердым телом можно лишь в пер-
вом приближении. С увеличением диаметра и длины корпуса та-
кая модель ракеты становится весьма грубым, а при рассмотре-
нии некоторых вопросов даже недопустимым упрощением. При
исследовании движения ракет с сильно удлиненным корпусом
большое значение могут иметь упругие колебания корпуса, а для
ракет с большим диаметром баков — колебания масс жидкого
топлива.
При проектировании системы управления учитываются все
эти динамические характеристики ракеты. Правильно спроекти-
рованная система управления будет обеспечивать движение ра-
кеты по траектории, мало отличающейся от расчетной.
4.3. СИСТЕМЫ УПРАВЛЕНИЯ РАКЕТ
Классификация систем управления. По принципу действия
•все системы управления баллистическими ракетами разделяются
на два класса — системы автономного управления и системы те-
леуправления.
В автономных системах управления, сигналы управления вы-
рабатываются аппаратурой, размещенной па ракете. При авто-
номном управлении наведение ракеты на цель может осуществ-
ляться по программной траектории, заранее рассчитанной и
введенной в систему управления перед пуском ракеты, или по
траектории, определяемой ‘в процессе полета С учетом текущих
значений координат и параметров движения [ракеты относитель-
но цели, координаты которой вводятся перед стартом.
В системах телеуправления курс ракеты вырабатывается па
станции наведения, расположенной на командном пункте. В про-
цессе полета ракеты команды управления передаются на борто-
вую аппаратуру по каналу связи.
На баллистических ракетах обычно применяются автоном-
ные системы управления, обладающие более высокой помехоза-
щищенностью благодаря отсутствию каналов связи с командным
пунктом управления.
Автономные системы управления, в свою очередь, подразде-
ляют на астронавигационные, магнитометрические и инерциаль-
ные.
В астронавигационных системах текущие коор-
динаты ракеты определяются методом астрономической обсерва-
ции. В основу метода положено измерение высоты небесных
светил, т. е. углов наклона линий визирования к местному гори-
зонту. На точность и надежность астронавигационных систем в
значительной степени влияют условия видимости.
В магнитометрических системах для наведения
ракеты на цель используется явление земного магнетизма. Каж-
дой точке околоземного пространства соответствует вполне оп-
р. и-ленное направление магнитной силовой линии. Следователь-
73
но, измерение координат ракеты относительно Земли может быть
заменено измерением характеристик магнитного поля Земли. На
точность работы магнитометрической системы влияет неравно-
мерность распределения магнитного поля по поверхности Земли
вследствие магнитных аномалий, учесть которые очень трудно.
В инерциальных системах управления текущее поло-
жение ракеты в пространстве определяется путем интегрирова-
ния ускорения, измеренного приборами системы управления
инерциального типа
Если программная траектория ракеты задается в прямо-
угольной системе координат Oexcycz,., то для определения теку-
щих координат центра масс (ракеты необходимо измерять и
дважды интегрировать проекции ускорения на оси Осхе, Осцс и
Oczr.
Точйгость работы инерциальной системы управления в основ-
ном зависит от точности измерения, ускорения и его интегриро-
вания. Для баллистических ракет -наибольшее распространение
получили инерциальные системы управления. В дальнейшем бу-
дем рассматривать только инерциальные автономные системы
управления.
Инерциальные системы управления. Общая задача системы
управления может быть разделена на задачи стабилизации и па
ведения ракеты.
Задача стабилизации ракеты, а точнее, управления движени-
ем вокруг центра масс сводится к управлению ориентацией всей
ракеты в (пространстве и выдерживанию требуемой -ориентации.
Эта задача решается группой устройств, расположенных на бор-
ту ракеты, — автоматом угловой стабилизации. Обычно ракета
стабилизируется относительно всех трех связанных осей коорди-
нат. Соответственно система стабилизации состоит из трех кана-
лов- тангажа, рыскания и крена.
Задача наведения ракеты (управления движением центра
масс) сводится к управлению тремя составляющими скорости
центра масс (продольной, нормальной и боковой), отделением
ступеней и головной части в такие моменты времени, чтобы па-
раметры движения .центра масс ракеты в момент отделения го-
ловной части обеспечивали свободный полет последней но требу-
емой траектории. Автоматическую систему управления, решаю-
щую эту задачу, называют системой наведения.
Автомат угловой стабилизации. Угловое положе-
ние ракеты определяется углами тангажа б, рыскания -ф и кре-
на у в стартовой системе координат. Очевидно, требуемое угло-
вое положение ракеты па программной траектории можно зада-
вать тремя углами; впр(/), ф11р(/) иупр(£). Для баллистических
ракет углы i];i,p(O и упр(0 принимаются равными пулю, а угол
&пр(/) определяется программой тангажа. Это означает, что оси
Ох, и Oyi связанной системы координат должны находиться в
плоскости прицеливания
74
В реальном полете в результате воздействия ла ракету (раз-
личных возмущении происходит отклонение действительных зна-
чений углов у(/) от их программных значений <Ьпр(/),
«j’np(/)=O я упр(г) =0 Эти отклонения обозначим соответственно
Д4*(Л > ' -ф
ДУИ У (О Тп1>10-
Ри : Функциональная блок системы угловой
тзгхи- 7 >ei , : . тшгажа
Задачей автомата условий стабилизации является сведение к
нулю отклонений AO(Z), Дф(£) и Ау(0- Принцип действия авто-
мата угловой стабилизации рассмотрим на примере его работы
по каналу тангажа, функциональная блок-схема котового изоб-
ражена па рис. 4.7.
Пропраммпое устройство вырабатывает требуемое значение
параметра движения ракеты — программное значение угла тан-
гажа. Это значение угла тангажа {)-|Ц1(/) сравнивается "с факти-
ческим значением угла тангажа которое пс.гупает в
сравнивающее устройство от измерительного устройства. Срав-
нивающее устройство вырабатывает сигнал рассогласования,
соответствующий величине 1€(О- Сигнал рапогла- 1ванпя в
усплителыю-прсобра чующем устройстве усиливается и прсобра-
зуется в ток is, необходимый для работы пополнительного уст-
ройства.
В состав исполнительного устройства системы управления
входят рули (исполнительные органы управления) и рулевые ма-
шины, которые осуществляют поворот рулей Входной сигнал
поступает в рулевую машину, которая поворачивает руль на
угол б, необходимый для устранения отклонения АО (0- Таким
образом, система управления ракеты реагирует на рассогласова-
ние между действительным и программным значением регулиру-
емого параметра полета ракеты.
В качестве измерительных устройств, определяющих углы по-
ворота осей ракеты, обычно используются гироскопические при-
боры, основным элементом которых является гироскоп.
Г и р о с к о п представляет собой быстро вращающееся сим-
метричное твердое тело, установленное в кардановом подвесе,
позволяющем ему изменять свое положение относительно осно-
вания.
Гироскоп обладает свойством сохранять направление, задан-
ное его оси вращения, и оказывать сопротивление изменению
этого направления при действии на него возмущающих сил
Для измерения угловых отклонений в качестве чувствитель-
ных элементов используются трехстепенные гироскопы, т. е ги-
роскопы, имеющие три степени свободы. Задание ухла 0Пр(£)
и измерение углового отклонения Л&(<) осуществляется при по-
мощи трехстепенного гироскопа, называемого гирогоризонтом.
Угловые отклонения (Z) и Ду(/) измеряются при помощи вто-
рого трехстепенного гироскопа, называемого гировертикантом.
Система наведения В состав системы наведения вхо-
дят система нормальной стабилизации (НС), система боковой
стабилизации (БС), система регулирования кажущейся скоро-
сти (РКС) и автомат управления дальностью стрельбы (АУД).
Система нормальной стабилизации стабилизирует центр масс
ракеты в плоскости прицеливания по нормали к траектории.
Действие системы нормальной стабилизации приводит к умень-
шению возможных отклонений центра масс ракеты от npoi рамм-
ной траектории на активном участке, и что особенно важно, к
уменьшению отклонения вектора скорости в плоскости прицели-
вания от касательной к программной траектории в момент вы-
ключения двигателя. Благодаря этому уменьшается рассеивание
по дальности
Система боковой стабилизации стабилизирует центр масс ра-
кеты в направлении, перпендикулярном к плоскости прицелива-
ния. Действие системы боковой стабилизации приводит к су-
щественному уменьшению отклонении центра масс от плоскости
прицеливания, к уменьшению боковых скоростей в момент вы-
ключения двшателя и, следовательно, к существенному умень-
шению оший.тк стрельбы по направлению.
76
Принцип стабилизации центра масс ракеты сводится к изме-
рению величины и скорости изменения отклонений центра масс
и воздействию на исполнительные устройства системы управле-
ния таким образом, чтобы ликвидировать эти отклонения.
Силы, необходимые для возвращения центра масс на расчет-
ную траекторию, создаются за счет разворота корпуса ракеты
При этом возникают боковые или нормальные составляющие
силы тяги и аэродинамической силы. Разворот корпуса ракеты
осуществляется исполнительными устройствами так же, как и
при угловой стабилизации. Для этой цели обычно используются
одни и те же органы управления. Такая схема стабилизации
центра масс ракеты позволяет вместо отдельного автомата ста-
билизации центра масс иметь систему, связанную с автоматом
угловой стабилизации Сигналы, вырабатываемые системой ста-
билизации центра масс, подаются на вход автомата угловой ста-
билизации, где они суммируются с сигналами гироприбсцров. Эти
сигналы затем усиливаются и подаются на исполнительные уст-
ройства системы управления.
Для измерений соответствующих отклонений центра масс
ракеты от расчетной траектории оси чувствительности измерите-
лей систем НС и БС должны -быть ориентированы относитель-
но этой траектории. Ось чувствительности измерителя системы
НС ориентирована в плоскости прицеливания перпендикулярно
к расчетной траектории (но главной нормали), а ось чувстви-
тельности измерителя системы БС — перпендикулярно к плос-
кости прицеливания
Измерять непосредственно отклонения центра масс ракеты от
расчетной траектории автономная система не может. Ее работа
заключается в измерении и последующем интегрировании уско-
рений, вызывающих отклонение ракеты от расчетной траектории
Если ракета движется строго по программе, то системы НС и
БС выдавать сигналы не будут
Система регулирования кажущейся скорости обеспечивает
стабилизацию центра масс ракеты в продольном направлении
путем pei улирования продольной составляющей скорости раке-
ты.
Регулирование скорости полета ракеты производится на ак-
тивном участке траектории за счет изменения тяги двигательной
установки.
Для измерения скорости полета ракеты применяется гироско-
пический интегратор, ось чувствительности которого устанавли
ваегся параллельно продольной оси ракеты. На гпроинтегратдр
действуют силы земною притяжения, поэтому он измеряет не
истинную, а кажущуюся скорость полета. Измеренное значение
кажущейся скорости в виде соответствующего сигнала поступа-
ет в сравнивающее устройство, куда поступает также сигнал
программного значения кажущейся скорости. Сигнал, пропорци-
ональный рассогласованию, через усилитель-преобразователь
77
подастся в исполнительный орган системы РКС, который изме-
няет режим работы двигателя, увеличивая или уменьшая ею
тягу Тяга возрастает, если фактическое значение кажущейся
скорости меньше программного, и наоборот.
Автомат управления дальностью стрельбы. Дальность стрель-
бы баллистической ракеты зависит от параметров конца активно-
го участка траектории: V1& 0К, хк и ук. Задача автомата управ-
ления дальностью стрельбы состоит в том, чтобы выключить
двигатель в тот момент времени, когда сочетание параметров
активного участка обеспечит расчетную дальность стрельбы.
Формирование на борту ракеты параметров движения тре-
бует сложного приборного обеспечения. Наличие в инерциаль-
ной системе наведения систем нормальной и боковой стабилиза-
ции, а также системы РКС обеспечивает достаточно малое рас-
сеивание всех координат и составляющих скорости центра масс
ракеты. Выдерживание угла бросания 0,, в определенных преде-
лах осуществляет автомат угловой стабилизации. В этом случае
на автомат управления дальноегью стрельбы возлагается зада-
ча контроля продольной составляющей скорости ракеты и выда-
чи в соответствующий момент команды на выключение двига-
теля
Такой автомат управления дальностью стрельбы содержит из-
меритель продольной составляющей кажущейся скорост раке-
ты. Обычно автомат устанавливается па борту ракеты таким об-
разом, что его ось чувствительности параллельна продольной оси
ракеты.
Информация измерителя о проекциях кажущейся скорости
поступает в вычислительное устройство для выработки сигнала
на выключение двигательной установки и отделение головной
части в тот момент, когда значение кажущейся скорости достиг-
нет расчетного значения.
Существует много других вариантов построения автоматов
управления дальностью стрельбы, которые позволяют получить
большую точность по дальности стрельбы, но они значительно
сложнее по конструкции.
4.4. РАССЕИВАНИЕ РАКЕТ
В результате влияния различных возмущений фактическая
траектория ракеты и головной части (ГЧ) никогда не совпадает
с расчетной, а точка падения головной части неизбежно откло-
няется от расчетной точки прицеливания на некоторую случай-
ную величину.
Отклонение головных частей от точки прицеливания, вызы-
ваемое случайными причинами, называется рассеиванием. Так
как отклонения головных частей от цели обусловлены множест-
вом случайных факторов, то рассеивание их подчиняется нор-
мальному закону [распределения. При этом область рассеивания
7Ь
практически ограничена эллипсом, который называется эллип-
сом рассеивания.
Наибольшее количество головных частей падает вблизи цен-
тра эллипса, чем дальше от центра, тем меньше количество упав-
ших ГЧ,
Точка, совпадающая с центром эллипса, вокруг которой па
дает наибольшее количество головных частей, называется цент-
ром рассеивания или центром группирования.
Величина главных полуосей эллипса рассеивания определяет
кучность стрельбы. Чем меньше главные полуоси эллипса рассе-
ивания, тем лучше кучность стрельбы.
Величина отклонения центра рассеивания от точки прицели-
вания определяет точность стрельбы. Отклонение центра рассеи-
вания от точки прицеливания происходит за счет систематиче-
ских ошибок.
Рассмотрим причины, вызывающие отклонения траектории
ракет от расчетной и. как следствие, приводящие .к рассеиванию.
Па активном участке траектории, где движение ракеты уп-
равляемое, отклонения фактических значений параметров дви-
жения от расчетных обусловливаются в основном ошибками сис-
темы управления. Величина погрешностей системы управления
определяется:
- методическими ошибками системы управления;
- инструментальными погрешностями цр ибо ров системы уп-
равления ракеты.
Методические ошибки возникают за счет несовер-
шенства реализации па борту ракеты закона управления даль-
ностью стрельбы, в частности, вследствие того, что приборами
системы наведения контролируется не истинная скорость раке-
ты, а кажущаяся Если некоторое возмущение вызвало измене
пие траектории, то появляется отклонение точки падения ГЧ, не-
смотря на то, что контролируемая системой наведения кажуща-
яся скорость в момент отделения ГЧ точно равна расчетному
значению.
Примером другой методической ошибки может служить по-
грешность, вызванная пренебрежением влияния боковых откло-
нений па дальность стрельбы.
Для уменьшения методических ошибок необходимо услож-
нять закон управления и, следовательно, саму систему управле-
ния.
И н с т р у м е п та л ьн ые о ш и б к и складываются:
а) из ошибок измерителей скоростей Точность работы изме-
рителей должна быть очень высотой, гак как незначительная
ошибка в измерении скорости приводит к существенному откло-
нению ракеты от цели;
о) из погрешностей предстартовой ориентации чувствитель-
ных элементов iироприбиров. Погрешности предстартовой ори-
ентации возникают вследствие ошибок работы системы прице-
70
ливапия ракеты и ошибок выставки гироприборов в горизонталь
пой и вертикальной плоскостях;
в) из ошибок ориентации ракеты в полете, связанных с ухо-
дами осей гироириборов -из плоскостей предстартовой ориента-
ции. Уходы осей гироприборов в полете возникают вследствие
различного рода производственных и конструктивных погрешно-
стей (наличие трения в осях подвеса, несбалансированность ро-
тора гироскопа, упругие деформации осей ротора ягод действием
перегрузок и др );
г) из погрешностей (ввода программных значений угла тан-
гаж полета ракеты и кажущейся скорости.
При движении головных частей па пассивном участке траек
тории основными возмущениями, вызывающими отклонения то-
чек падения от расчетных, являются.
1) разброс тяги двигателя в период последействия. Условно
принято считать началом пассивного участка момент подачи ко
манды на выключение двигателя. Поэтому последействие отно-
сят в группу причин, вызывающих рассеивание, действующих на
пассивном участке;
2) отклонения метеорологических условий от стандартных в
районе цели (температура и давление воздуха);
3) наличие ветра, сносящего головную часть в направлении
действия его;
4) аэродинамический эксцентриситет, под которым понимают
аэродинамическую асимметрию головной части, вследствие кото-
рой сила сопротивления воздуха при нулевом угле атаки направ-
лена не по оси головной части, а под некоторым углом к ней.
При этом возникает боковая сила, уводящая головную часть с
расчетной траектории;
5) отклонения площади наибольшего сечения и формы голов-
ной части от расчетных, приводящие к изменению коэффициента
лобового сопротивления;
6) отклонение положения центра масс головной части от рас-
четного;
7) различия в колебательном движении головных частей от-
носительно центра масс при входе в атмосферу.
Для уменьшения рассеивания точек падения головных частей
применяются следующие меры.
1. Совершенствуются измерители составляющих кажущейся
скорости.
2. Совершенствуется система ориентации ракеты.
3 Производят выключение двигателей в несколько ступеней,
за счет чего уменьшается разброс импульса последействия.
Иногда для исключения влияния тяги последействия применяют
тормозные ПРД, которые устанавливают на корпусе ракеты.
4. В системах управления применяют бортовые цифровые вы-
числительные машины, которые позволяют (реализовать более
80
сложный и более точный закон управления дальностью стрель-
бы.
Контрольные вопросы
1 За счет каких сил 'Изменяются направление и скорость по-
лета ракеты?
2. Для чего служат исполнительные органы системы управ-
ления ракеты?
3. Относительно каких осей должны поворачивать ракету ис-
полнительные органы системы управления?
4. Как создаются управляющие моменты с помощью рулевых
двигателей?
5. Охарактеризуйте понятия возмущенного и 'невозмушенного
движений.
6. Какое движение ракеты называется устойчивым?
7. Какие бывают системы управления ракетами?
8. Какие задачи решает автономная система управления?
9. Расскажите принцип действия автомата угловой стабили-
зации ракеты.
10. Что называется гироскопом? Каковы свойства гироскопа?
11. Для чего служит система нормальной стабилизации цент-
ра масс ракеты?
12. Для чего служит система боковой стабилизации центра
масс ip а кеты?
13. Расскажите принцип действия систем нормальной и боко-
вой стабилизации центра масс.
14. Назначение и принцип действия системы РКС.
15. Как работает автомат управления дальностью стрельбы?
16 Расскажите про основные особенности ракеты как дина-
мической системы
17. Что называется рассеиванием ракет?
18. Что называется центром рассеивания?
19. Что определяет точность стрельбы? — кучность стрельбы?
20. Какие причины 'вызывают рассеивание головных частей
ракет?
21. Перечислите методические ошибки систем управления.
22. Перечислите инструментальные погрешности приборов
систем управления.
23. Перечислите основные возмущения, действующие на ГЧ
на пассивном участке.
Часть вторая
КОНСТРУКЦИЯ И ОСНОВЫ ПРОЕКТИРОВАНИЯ
БАЛЛИСТИЧЕСКИХ РАКЕТ
Глава V
НАГРУЗКИ, ДЕЙСТВУЮЩИЕ НА РАКЕТУ
5.1. ОСНОВНЫЕ ПОНЯТИЯ, ПРИМЕНЯЕМЫЕ ПРИ РАСЧЕТЕ
КОРПУСА РАКЕТЫ НА ПРОЧНОСТЬ
Понятия о силовых элементах корпуса ракеты. Корпус раке-
ты состоит из таких элементов конструкции, как стержни, балки,
рамы, фермы и тонкостенные панели.
Стержнем называется элемент конструкции, работающий
на растяжение или сжатие, длина которого значительно превос-
ходит тва других его измерения (ширину и толщину). Стержни
используются в основном в качестве элементов, подкрепляющих
обшивку. Эти силовые элементы называются стрингерами (рис
3’)
Балкой (рис. 5.2) называют элемент конструкции, состав-
ленный из профилей и пластин и имеющий коробчатое, корытное
или двутавровое сечение Пояса балок связываются относитель-
но тонкими стенками При такой конструкции изгибающий мо-
82
мёнт воспринимается поясами, а перерезывающая сила — стен
кой.
Рамой называют геометрически неизменяемую систему,
состоящую из стержней или балок, соединенных жесткими узла-
ми, вследствие чего углы между стержнями (балками) после де-
формации нс изменяются
Фермой называют геометрически неизменяемое сооруже-
ние, состоящее 'ИЗ стержней, соединенных в узлах шарнирами.
Рис &2 Балки
Фермы в современных конструкциях ракет находят 'Применение
в качестве рам крепления двигателей и иногда в качестве меж-
ступенного переходника.
Тонкостенной панелью (рис. 53) называют конст
рукцию, основным элементом ко горой является тонкая стенка
(обшивка), подкрепленная профилями (стрингерами).
Характерной особенностью ракетостроения является приме-
нение тонкостенных конструкций с обшивкой, работающей при
изгибе и кручении Это позволяет создать прочные и жесткие
конструкции, обладающие малой массой.
Понятие о расчетной схеме. При решении задач, связанных
с расчетом конструкций ракеты на прочность, для упрощения
расчетов часто прибегают к схематизации конструкций, т. е. к
•различным допущениям, позволяющим создать так называемые
расчетные схемы.
Так, папример, в ферменной конструкции нагрузка считается
приложенной только *в узлах фермы и соединения стержней по-
лагаются шарнирными. Такое допущение значительно облегчает
определение усилий в стержнях и не вносит большой погрешно-
сти, так как в практике деформации фермы весьма малы. Бла-
83
годаря такому допущению считается, что усилия в стержнях фер-
мы действуют лишь по оси стержня
Понятие об основном методе расчета на прочность. Основ-
ным методом, применяемом при расчете па прочность корпуса
ракеты, является метод сечении, известный учащимся из курса
Рис. 5 3. Тонкостенная панель’
сопротивления материалов Сущность его сводится к сечению
конструкции плоскостью (или несколькими плоскостями), к
отбрасыванию одной части конструкции и замене действия от-
брошенной части на оставшуюся часть неизвестными тюка уси-
лиями. Затем рассматривается равновесие оставшейся части
конструкции, из которого определяются неизвестные усилия.
Применение этого метола
Рис 54 К понятию о методе сече
б—схема уравновеши-
вания нагрузок на отсеченной части
ясно из следующего при-
мера
Рассмотрим стабили-
затор ракеты, на который
действует аэродинамиче-
ская подъемная сила Y
(рис. 5.4) Найдем изги-
бающий момент .И и по-
перечную силу Q в селе-
нии а—а. Для этого че-
рез а—а проводим мыс-
ленно плоскость, рассе-
кающую стабилизатор на
84
две част, отбрасываем одну часть стабилизатора и заменяем
действие ее на оставшуюся часгь неизвестными <И и Q. Из рав-
новесия отсеченном части имеем
M=Yl-. (5. II
Q=Y. (5.2)
5.2. ОСНОВЫ РАСЧЕТА ТОНКОСТЕННЫХ КОНСТРУКЦИИ
Сжатые стержни. Особенность работы тонкостенного сжато-
го стержня заключается в том, что в силу малой жесткости он
разрушав! ся от потери устойчивости.
Возможны две формы потери устойчивости стержней- общая
и местная.
Рис 5 5 Виды потери устойчиво-
сти сжатого стержня-
с—'Общая, б—местная
Рис 5.6 К понятию устойчивости
ежа । ого стержня
Общая потеря устойчивости характеризуется изгибом оси
стержня, а местная потеря — деформацией стенок стержня. Вы-
пучивание, вмятины, искривление стенок могут появиться до то
го, когда наступит общая потеря устойчивости. Первый вид по
герц устойчивости типичен для длинных относительно гибких
стержней, а втором для коротких стержней с малой гибко-
стью На рис 5.5 показаны: а—общая и б—местная потери ус-
тойчивости сжатого стержня.
Рассмотрим общую потерю устойчивости еж этого стержня
Сначала условимся, что следует понимать под устойчивостью
стержня. Если сжатый стержень, искривленный малой попереч-
ной силой АР, восстанавливает свое первоначальное положение
после снятия поперечной силы, то равновесие его устойчиво; го
верят, что такой стержень устойчив (рис. 5.6, а). При увеличе-
нии сжимающей силы Р наступит момент, когда снятие попереч-
ной силы АР не 'Приведет к восстановлению первоначального
положения стержня и прогиб останется (см. рис. 5.6, б). Такое
равновесие называют безразличным, а соответствующую ему
сжимающую силу называют критической силой Р№. При даль-
85
нейшс.м увеличении сжимающей силы (/?>РК1,) искривление
стержня от поперечной силы возрастает и становится значитель-
ным. Таким образом, практически критическая сила для сжато-
го стержня является предельной
Формула для определения критической силы получена
Л. Эйлером в предположении, что напряжения в сжатом элемен-
те не превосходят предела пропорциональности (-в пределах дей-
ствия закона Гука):
..3)
«—концы шарцирно опер-
S
Рис. 57 Способы за-
делки концов стерж
11Я
где г коэффициент, учитывающий способ закрепления кон-
цов стержня (коэффициент заделки);
Et — модуль упругости первого рода
материала стержня с учетом тем-
пературы нагрева;
Anil — момецт инерции сечения стержня
относительно оси меньшей жест-
кости, т. е. меньший из двух эква-
ториальных моментов инерции от-
носительно центральных осей;
I — длина стержня.
На рис. 5 7 показаны некоторые спо-
собы закрепления концов стержня, поло-
жение изогнутой оси стержня, а также
даны соответствующие этим способам
значения коэффициента задегтки. На
практике наиболее часто встречается
закрепление концов стержня среднее
между шарнирным и жесткой заделкой.
Для такого закрепления, называемого
приторцовкой, коэффициент с прини-
мается равным 2
Разделим обе части уравнения (5.3) па площадь сечения
стержня
Т’кр ZfiEt
F t2 F '
где окр — критическое напряжение общей потери устойчивости
сжатого стержня.
Используем известное из сопротивления материалов выраже-
ние
J , !F = P.
J т п- min’
где йпщ—минимальный радиус инерции сечения.
Sb
Получим другой вид формулы Эйлера
Сжатые тонкостенные панели. Рассмотрим сжатую панель
без подкреплений (рис. 5,8, а), нагруженную но двум кромкам;
две ©стальные кромки свободны. Для краткости леподкреплен-
пую панель назовем пластиной. Работа такой пластины анало-
гична работе стержня на продольный изгиб. При напряжениях,
называемых критическими, пластина 'потеряет устойчивость и об-
Рис. 58 Сжатая пеподкрепленная пластина, нагруженная по двум
кромкам.
разует волну. Дальнейшее увеличение сжимающей силы факти-
чески невозможно, так как даже очень малые приращения се
вызывают резкое увеличение деформаций. Следует отметить, что
напряжения во всех сечениях пластины, перпендикулярных ежи
мающим силам, одинаковы.
Рассмотрим теперь ту же пластину при условии, что она
оперта по всем четырем кромкам (см. рис. 5.8, б). В этом слу-
чае после потери пластиной устойчивости нагрузку на нее мож-
но еще увеличить за счет элементов пластины по сечению 2—2
расположенных вблизи опертых кромок и остающихся почти пря-
молинейными. Возрастание нагрузки в сечении 2—2 будет вызы-
вать увеличение напряжения в этом течении, в то время как нап-
ряжения вдали от кромок остаются равными Пир-
Рассмотрим, как изменяются эпюры распределения напря
жспий по сечению 3—3 (см. |рис. 5.8, б) по мере увеличения
сжимающей силы. Эпюра, приведенная на рис. 59, а, соответст-
вует моменту' потери устойчивости пластины. Для этой эпюры
8?
критические напряжения являются одновременно и средними
(Оср) и максимальными (оГОЯх)- С увеличением сжимающей си-
лы эпюра изменяет свой вид, как показано на рис. 5.9, б, в, г
Для эпюры рис. 5 9, а имеем ту же величину окр, но значитель-
ный рост <тср и Отах- Следует заметить, что критические напря-
жения для опертой по четырем кромкам пластины (см. рис
5.8, б) значительно больше критических напряжений плас-
тины, опертой по двум нагруженным кромкам (см. рис. 5 8. а}.
Рис 59 Эпюры распределения напряжений для сжатой неподкрыт
лепной пластины
Критическое напряжение произвольно закрепленной и сжа-
той по двум кромкам плоской пластины определяется по теоре-
тической формуле
(S-5>
Гм
где Et — модуль упругости первого рода материала пластины с
учетом температуры нагрева;
6 — толщина пластины;
b —длина нагруженной .кромки;
k — коэффициент, учитывающий закрепление кромок и от-
ношение размеров натруженной и ненагруженпой кро-
мок (см. рис. 5.8).
Ниже приведены значения коэффициентов k для пластины, у
которой закреплены все четыре кромки.
Если а/Ь<\, то Л= (a/b+b/a)2.
Если «/&>!, то k «4.
Для криволинейной пластины, произвольно закрепленной и
сжатой по двум кромкам, критическое напряжение определяется
по формуле
0,9Л£, . 0,3Ez д д,
( 6 ) Б
Здесь 7? — радиус кривизны обшивки, остальные обозначе-
ния прежние.
Все приведенные формулы выведены в предположении, что
Скр^бпц, где Опц — предел пропорциональности.
Сжатые подкрепленные панели, выполненные из одного мате-
риала. Рассмотрим тонкостепную панель, состоящую из обшив-
88
ки, подкрепляющих се продольных элементов (стрингеров) и по-
перечных элементов (полок шпангоутов), сжатую силами Р,
приложенными параллельно направлению стрингеров (рис.
5.10)
Обшивка панели разбивается на ряд «клеток» (например,
1—2—3—4), каждая из которых может быть рассмотрена, как
пластина, опертая по всем четырем кромкам на контуре, обра-
зованном профилями
Подкрепление обшивки стрингерами и шпангоутами повышает
критические напряжения обшивки и стрингеров, даст возмож-
ность получить среднее напряжение в обшивке, большее крити-
ческого, так как элементы об-
шивки у профилей не теряют
устойчивости и способны рабо-
тать при более высоких на-
пряжениях. Подкрепление об-
шивки включается в рабогу
панели на сжатие, составляя
существенную часть площади
поперечного сечения панели.
Определим напряжения в
элементах панели. Для этого
рассмотрим работу панели '.при
разных значениях силы Р.
Пусть сила Р настолько мала, 1
устойчивости. Тогда по всему' о
Рис. 5.Ю. Сжатая панель
обшивка панели не потеряла
1ию панели устанавливаются
одинаковые напряжения и
Z-- ‘
(5-7)
где Sfcip—’Суммарная площадь сечений стрингеров;
Тобш — площадь сечения обшивки;
Остр, «Тсробт — соответственно напряжения в стрингерах и
средние напряжения в обшивке
При увеличении силы Р напряжения Остр и Осробш растут ди
величины критических напряжений в обшивке сГцр В этот момент
эпюра напряжений в обшивке имеет вид, показанный на рис.
5.11, а. Дальнейшее увеличение силы Р вызывает рост напряже-
ний в стрингерах и элементах обшивки вблизи стрингеров, еще
не потерявших устойчивости (см. рис. 5,11, б). В элементах,
потерявших устойчивость, напряжения опаются (равными ojQ),
По мере увеличения внешней силы Р область потери устойчиво-
сти захватывает новые элементы обшивки. Среднее напряжение
в обшивке (Усроблг растет (см. рис. 5.11, в). В некоторый момент
времени напряжения в стрингерах (и прилежащих к ним эле-
ментах обшивкл) становятся равными критическому напряже-
нию для стрингеров (см рис. 5.11,а). Тогда стрингеры теряют
89
устойчивость, и панель разрушается. Соответствующая этому
моменту нагрузка является разрушающей для панели Драэр
Начиная с момента потери обшивкой устойчивости напря-
жение в панели (стрингерах и обшивке) нельзя определять де-
лением силы на площадь панели. Для определения напряжений
в стрингере оСтр в момент, близкий к разрушению панели, ра-
зобьем внешнюю сил}' Р на сил} Рс^, воспринимаемую стринге-
рами, и силу /-'общ, воспринимаемую обшивкой
Рис. 5 11 Эпюры распределения напряжений длт.
сжатой панели
Очевидно, что
(5.8)
выра-
(5.9)
(5. 10)
Величина среднего напряжения в обшивке может быть
жена в долях от максимального напряжения в обшивке
ссР.обш ®3тах сети== ?5cip»
асробш ,
О =----------- „ 1.
°стр
Коэффициент <р, равный отношению средних напряжений в
обшпчпее к максимальному значению шапряжепия в районе стрин-
геров, называется редукционным коэффициентом Он меньше
единицы .и различен для разных панелей.
Для более толстой обшивки потеря устойчивости наступает
позже при более высоких <ткр Следовательно, «провалы» в эпюре
Сосш будут меньше, а средние 'напряжения в обшивке будут бли-
же к максимальным, т. е. редукционный коэффициент будет
больше.
При более частом (расположении стрингеров уменьшаются
размеры клеток панели, повышается устойчивость обшивки и
90
crKI, возрастает. с*то вызывает увеличение acpO6iu и. следователь-
но, увеличивает редукционный коэффициент. При этом уменьша-
ется часть площади обшивки, потерявшей устойчивость. Это
также повышает средние напряжения Псрояш и увеличивает ре-
дукционный коэффициент. На величину коэффициента <р также
влияет жесткость подкрепляющих стрингеров, определяющая
величину критических напряжений стрингера и максимальных
напряжений обшивки
Таким образом, редукционный коэффициент зависит от тол-
щины обшивки б (прямая зависимость), шага стрингеров (об-
ратная зависимость),
а также от типа стрнн
I еров.
На основании опыт-
ных данных получены
следующие формулы зля
редукционных коэффи
цнентов q (нагруз-
ка близка к разрушаю-
щей).
Для обшивки, скрепленной со стрингерами однорядным швом
(рис. 5.12,о),
Ф« 406/6. (5 11)
Для обшивки, скрепленной со стрингерами двухрядным швом
(см. рис 5 12,6),
Ф» (406+rf)/6, (5.12)
1дс t.l- расстояние между рядами заклепок.
Теперь из выражений (5-8) и (5,9) определим Остр:
Р
Следовательно,
..7 — <513)
Л СТО + обш
Произведение <pfO6in называется приведенной (редуцирован-
ной) площадью сечения обшивки Fup.o6in, тогда
------------ (S.141
У с, । /'„р обш
Таким образом, для определения напряжений в сжатой па-
нели необходимо определить:
1) действительные площади сечений стрингеров и обшивки;
2) значение редукционного коэффициента по формуле (5.11)
или (5.12);
Рис > 12 К определению редукционным ко-
эффициентов
91
3) приведенную площадь сечения обшивки;
4) напряжение о, тр=отах обив
5) ХСЛОВИе ПРОЧНОСТИ Остр ^Окр стр-
При этом стКр стрингера и панели, как было указало выше,
увеличивается по сравнению с пкр для изо-
лированного стрингера, так как стрингер
в панели не может потерять устойчивости
в плоскости, параллельной плоскости об-
шивки Учитывая это обстоятельство, ха-
Рис. 5 13 Сечепие стрингера вместе
с присоединенном обшивкой
рактернстпки сечения стрингера следует рассматривать вместе с
присоединенной обшивкой (рис, 5.13), длила которой принимает-
ся равной 406.
5.3. ХАРАКТЕРИСТИКА СИЛ, ДЕЙСТВУЮЩИХ НА КОРПУС РАКЕТЫ
В ПОЛЕТЕ
Создание конструкции ракеты, обладающей При минимальной
массе достаточной прочностью и жесткостью, существенно зави-
сит от правильности учета действующих на нее нагрузок. Опре-
деление этих нагрузок представляют собой сложную задачу,
решение которой основывается на глубоких теоретических и экс-
периментальных исследованиях.
Г Все нагрузки, действующие на ракету и ее отдельные части,
можно разделить на две категории нагрузки, возникающие в
полете, и нагрузки, возникающие при наземной эксплуатации ра-
кеты.
Рассмотрим, какие нагрузки действуют на баллистическую
ракету в полете.
На активном участке траектории па ракету действуют сила
тяги, аэродинамические силы, сила тяжести и силы, создавае-
мые органами управления. Под действием этой системы сил ра-
кета совершает движение с ускорением, из-за чего возникают
инерционные сиды-А направленные в сторону, противоположную
вектору ускорения. |
При опенке прочности конструкции ракеты необходимо знать
не только равнодействующие внешних сил, но и законы распре-
деления нагрузок по длине конструкции, чтобы можно было оп-
ределить внутренние силы и напряжения в основных -несущих
элементах ракеты.
\ По характеру' действия на конструкцию ракеты различают
нагрузки статические и динамические. К статическим нагрузкам
относят силу тяги, аэродинамические силы, давление наддува
Й2
в баках, а к динамическим относят нагрузки, вызванные поры-
вом ветра, нарастанием тяга па старте и спадом ее при выклю-
чении двигателя, работой тормозных двигателей и т. д.
По характеру приложения к корпусу силы подразделяются
на поверхностные и массовые. Поверхностные силы, как -гово-
рит их название, приложены к поверхности ракеты. В полете
это — аэродинамические силы, сила тяги двигателей и давление
Рис. 5 14 К определению нагрузок, действующих
па ракету в полете
/ наддува. К массовым относятся силы тяжести и силы инерции'^
Эти силы пропорциональны массе и распределены по всему
объему ракеты, так как действуют на каждый элемент массы
Для удобства расчета все силы, действующие на ракету, раз-
ложим но осям связанной системы координат и разделим па две
группы.
К первой группе отнесем силы, действующие вдоль продоль-
ной осн ракеты (осевые силы); ко второй — силы, перпендику-
а лярцыс к продольной оси ракеты (поперечные силы).
\/ {Вдоль продольной оси ракеты действуют следующие силы
W (рйс.5.14)-
— сила тяги двигателя Р, направленная в сторону движения;
— составляющая аэродинамических сил Т, параллельная про-
дольной оси ракеты и направленная против движения (танген-
циальная сила);
93
— составляющая силы, создаваемой органами управления
(потеря тяги на органах управления) Ху;
- составляющая силы тяжести mgoSinO;
— инерционные осевые силы Jo.
В направлении, перпендикулярном к продольной оси ракеты,
действуют:
— составляющая аэродинамических сил N (нормальная си-
ла) ;
- составляющая силы тяжести mgo-'COsO;
— составляющая силы, создаваемой органами управле-
ния Л,
инерционные поперечные силы Лы.;’
1 Остановимся несколько подробнеёна порядке определения
величины перечисленных выше сил, а также на характере их
. распределения вдоль оси ракеты.
У КСила тяги обычно передается на корпус ракеты в виде не-
скольких (чаше четырех или шести) равных сосредоточенных
сил, симметрично расположенных относительно оси ракеты (в
местах крепления рамы двигательной установки). Такое распо-
ложение дает право приводить силу тяги к одной сосредоточен-
ной силе, приложенной nojjgn корпуса в плоскости крепления
д рамы двигательной установщик
I Как отмечалось в гл. П.Тпла тяги растет по мере набора ра-
кетой высоты в связи с уменьшением давления окружающей
с^еды.
V 11Аэродинамические силы. На атмосферном участке траектории
v полета ракета испытывает воздействие аэродинамических сил,
распределенных 'по поверхности корпуса. Для 'оценки прочности
используют •составляющие аэродинамических сил в связанной
системе координат: тангенциальную силу Т и нормальную си-
лу N.
Согласно- (2,10)
T=Xcos a—/sin а.
94
Ввиду малости углов атаки sin а к, 0, a cos а» 1. Поэтому при
прочностных расчетах тангенциальную силу принимают равной
силе лобового сопротивления
(515)
Лобовое сопротивление предполагается приложенным в ос-
новном к головной части ракеты в виде равно-мерно (распреде-
ленной осевой нагрузки. Характер распределения коэффициента
Рис 5 16. Распределение производной коэффициента нор-
мальной силы по углу атаки с“ по длине гипотетической
ракеты
по длине гипотетической ракеты показан на рис. 5.15. Гипоте-
тическая ракета, представленная на рис. 5.18, а. является импро-
визацией автора и используется в качестве примера для расчета
внешних нагрузок, действующих на ракету, и при расчетах от-
дельных отсеков ракеты на -прочность.
Сетласно формулам (2.16) и (2.24) нормальна# рила
[л' -
где с* — производная коэффициента нормальной силы по углу
атаки а. Характер изменения с’ по длине гипотети-
ческой ракеты показан па рис. 5 ifi
Коэффициенты сх и сап определяются по результатам аэро-
динамического расчета ракеты или подрезу льтатам продувок мо-
делей ракеты в аэродинамической трубед,
При полете па ракету может действовать ветер. Примерный
характер изменения максимальной скорости ветра с высотой до-
сказан на (рис. 5.17.
£сила тяжести и инерционные силы. Сила тяжести ракеты
пропорциональна ее массе G-=wigo и является переменной вели-
чиной из-за выгорания топлива, разделения ступеней ракеты, из-
менения ускорения силы земного притяжения с высотой полета.
В пределах высоты активного участка траектории полета раке-
ты изменение ускорения силы тяжести незначительно, поэтому
95
можно принять-ию при прочностных расчетах постоянным и рав-
। ним go=9,81 м/с2}.
Как уже отмечалось, неравномерность движения ракеты при-
водит к появлению сил инерции, дополнительно загружающих
элементы конструкции. Инерционные силы, как известно, опре-
ъ/ ^деляются произведением массы па соответствующее ускорение.
Vf ^Практически удобно инерционные силы рассматривать совмест-
но с силой тяжести. Сила, равная сумме силы тяжести и инерци-
онной силы, называется массовой силой. При расчетах на проч-
ность летательных аппаратов
влияние массовых сил характе-
ризуется безразмерным коэффи-
циентом перегрузки п.
Коэффициентом перегрузки
или просто перегрузкой назы-
вают отношение вектора равно-
__действующей всех поверхност-
н,км ных сил, действующих на ракету.
к ее весу.
При расчетах на прочность
Рис 517 Примерный вид 1рафика пользуются составляющими ПО.Ч-
ичменении максимальной скорости Hog перегрузки по направлениям
ветра с ВВ1ОНЖ ccgn связанной системы коорди-
Д нат/ Перегрузка в направлении
оси Ох, носит название прудоДьЯб^ или осевой пх1, в направуе-
нии оси Oyt — нормальной пв1, в направлении оси Ozj — попе-
речной ttzi.
{^Осевая перегрузка центра масс ракеты пз1 согласно опреде-
лению определяется по формуле (см. рис. 5.14):
(Р—Уу)-Г
(5. 16)
а нормальная перегрузка центра масс ракеты
(5. 17)
А Минус показывает, что перегрузка направлена в сховону, про-
тивоположную положительному направлению оси Озд
Разделив числитель и знаменатель правой части выражений
(5.16) и (5.17) на массу-ракеты, получим
а-^0,
где a°xl=fP Xy—T)im и а°,= -(W-f-PyJ/m
составляющие ускорения центра масс ракеты от действия по-
верхностных сил по осям связанной системы координат.
96
Таким образом, с физической точки зрения перегрузка пред-
ставляет собой отношение ускорения от действия поверхностных
сид, которые получила бы ракета при движении вне поля земно-
го тяготения, к ускорению силы тяжести на поверхности Земли.
В общем случае в условиях полета ускорение любой точки;
ракеты 'определяется ускорением поступательного движения цен-
тра масс ракеты и ускорением вращательного движения вокру
центра масс. Поэтому при прочностных расчетах учитывают, что
отдельные тючки ракеты могут иметь различные перегрузки
Пусть, например, ракета совершает маневр в вертикальной пло-
скости и имеет угловое ускорение •&. Если пренебречь осестреми-
тельпой составляющей вращательного ускорения (ввиду ее отно-
сительной малости), то перегрузки в любой точке ракеты могут
быть выражены через перегрузки центра масс следующим обра-
зом:
С-518>
дпи, (5.19)
где Лпд, — вращательная составляющая коэффициента нор-
мальной перегрузки в произвольном сечении xj, которая опреде-
ляется формулой
-Д«м= (5.20)
£о
Осевая перегрузка в любой тючке ракеты согласно (518).
(5IR), (5 15)
Влияние силы лобового сопротивления па величину осевой
перегрузки на активном участке траектории значительно сказы-
вается лишь в области больших скоростных напоров. Большие
скоростные напоры буд\т при полете ракеты ла сравнительно
небольших высотах со скоростями, соответствующими числам
M = l-r-2,5. С увеличением силы тяги и начальной стартовой
/ массы ракеты влияние сил®-лобового сопротивления -на величи-
У ну резко уменьшает ся.Юссвая перегрузка достигает своего
г максимального значения в конце активного участка траектории,
когда масса ракеты будет минимальной и будет отсутствовать
Лобову сопротивление. Минимальной она будет в момент старта
Д ракетьЦ
J | ПбЯьзуясь понятием перегрузки, можно определить массовые
силы отдельных грузов, агрегатов или частей ракеты. Для этого
достаточно умножить соответствующий вес на перегрузку. На-
пример, на узел крепления груза в ракете в криволинейном по-
лете действуют массовые силы:
889
97
в направлении оси Ох±
Рм=^ф@ЬПх1; (5.22)
в 'направлении оси Оу±
. Pyi = mtvganvl, (5.23)
, / гдАиЛгр — масса груза.
у t Массовые силы по длине корпуса распределяются в соответ-
стщГп с распределением грузов и массы конструкции самого кор-
пуса. В зависимости от положения ракеты на траектории она
рассматривается с баками, полностью или частично заполненны-
ми топливо_м1
Для определения отдельных составляющих массовых осевых
сил при расчете корпуса в первом приближении достаточно раз-
бить корпус на отдельные отсеки: головной, приборный, перед-
ний бак, задний бак. хвостовой отсек. Вычислив по формуле
(5.24)
силы, приходящиеся на каждый из этих отсеков, следует прило
жить их к корпусу в виде сосредоточенных сил на границах со-
ответствующих отсеков («—соответствует номеру отсека).
Аналогично определяются составляющие массовых попереч-
ных сил, по при этом для повышения точности расчетов ракету
по длине разбивают на значительно большее числю участков.
5.4. ОСЕВЫЕ НАГРУЗКИ НА АКТИВНОМ УЧАСТКЕ ТРАЕКТОРИИ
Определим осевые нагрузки, действующие на корпус ракеты
на активном участке.
Положим, что баллистическая ракета имеет конструктивную
схему с так называемыми несущими баками, т е. баками, вос-
принимающими нагрузки (рис. 5.18)
Разобьем корпус ракеты на» отдельные отсеки, головной /,
передний бак 2, приборный отсек 3. задний бак 4, хвостовой от-
\ с$к=5 с двигательной установкой 6.
L I Осевые силы в рассматриваемых сечениях /—17 определя-
* клТЯ по формуле
! '^=T-i+migvnxb (5.25)
где Ti=qSKcXf — осевая составляющая аэродинамических сил.
действующих на ракету в рассматриваемом сечении!
/: q — скоростной напор;
/Sis—площадь миделевого сечения ракеты;
cxt — коэффициент силы лобового сопротивления в рас с мат
риваемом сечении;
trii—масса ракеты до рассматриваемого сечения в расчет
ный момент времени;
пх1— осевая перегрузка в расчетный момент времени поле-
та ракеты.
98
В сечении / осевая сила
^х/=-(Л + «гг.ч^о«ж1). (5-26)
где Т, - осевая составляющая аэродинамических сил, действу-
ющих на ракету до сечения I;
тГч — масса головной части ракеты.
Рис 5.18 Расчетная схема и эпюры осевых сил гипотетичес
ракеты с ЖРД:
«—р-'чегная схема ракеты: /—головная часть; 2—передний бак 3—
irpiiv.nPbfji отсек, 4—задний бак 5—хвостовой отсек- б—двигательная
'станс- ;а, 1—VI—расчетное сеч.епия ракеты; б—эпюра распределен
пой осевой -нагрузки от г^ссовых сил. в—эпюра осевой аэридинамиче-
ской нагрузки, а—эпюра осевых еял
Знак минус показывает, что нагрузка является сжимающей.
При определении осевой силы в произвольном сеченпп перед-
него бака необходимо принимать в расчет разгружающую силу
внутреннего давления, равную произведению давления наддува
4* 99
в баке на площадь рассматриваемого поперечного сечения л£^н/4,
где Лвн — внутренний диаметр бака
Давление наддува в баках подбирается с таким расчетом,
чтобы давление компонентов топлива на входе в турбонасосный
агрегат было достаточным для обеспечения бескавитацношюй
работы центробежных иасосов. Давление наддува в баках ока-
зывается выгодным и для обеспечения их несущей способности.
При больших сжимающих усилиях возможна потеря устойчиво-
сти стенок сжатых баков. Давление наддува в баке является
разгружающим фактором и некоторое его увеличение повышает
запас устойчивости. При дальнейшем увеличении давления над-
дува возникает опасность разрыва баков внутренним давле-
нием.
Разгружающую силу от действия внутреннего давления удоб-
нее учитывать не цри расчете внешних нагрузок, а при расчете
(баков на прочность, поэтому ее здесь рассматривать не будем
В этом случае
+ |5.271
где тп$ц- масса части .конструкции несущего переднего бака
(пустого) до рассматриваемого сечения.
Аналогично
= ~[Л' (5- 28!
уде тпв — масса переднего бака, включая массу компонента
топлива, содержащегося в баке в расчетный момент
времени;
Им — масса приборного отсека;
тз.бк — масса части конструкции несущего заднего бака до
рассматриваемого сечения (без массы компонента
топлива).
V Осевая сила является сложной функцией времени и опреде-,
.ляЕтся законами изменения величин, входящих в выражение
(5.28). Так, из предыдущего изложения уже известно, что сила'
лобового сопротивления на активном участке вначале возраста-
ет, а затем уменьшается практически до нуля. Примерно также
изменяется и осевая аэродинамическая сила 7,-, которую при
расчетах ввиду малости углов атаки принимают равной силе ло-
бового сопротивления Хг. Массы тгч и m1IO остаются неизменны-
ми, а /72л с и s уменьшаются в связи с расходом компонентов
топлива. Перегрузка tixt на активном участке возрастает. В по-
лете значения продольных нагрузок будут определяться главным
образом величиной массовых сил migotin. Влияние силы лобово-
го сопротивления во многих случаях оказывается небольшим
Зная закон изменения слагаемых в выражении (5.28), устанав
ливают закон изменения осевой силы па -траектории в разные
моменты времени.
100
На рис. 5.18, б показана эпюра распределения осевой нагруз
ки от массовых сил для гипотетической ракеты с ЖРД, а на
рис 5.18. в -эпюра осевой аэродинамической нагрузки Сум
марная эпюра осевых сил показана па рис. 5 18 г. Все эпюры
/йщхвйдены для одного расчетного момента времени
' Т11з втмхршор видно, что на активном участке траектории для
сечений ракеты, расположенных выше плоскости приложения
силы тяги (сеч VI), продольная нагрузка (у одноступенчатых
ракет) является всегда сжимающей, а для сечений, расположен-
ных ниже места приложения силы тят, она, как правило, явля-
ется растягивающей?
Осевая сила длГяхвостового отсека определяется из выраже-
ния
™s.6)go«Ai— (5.29)
".W-— Ди г(<П,
где Р — тяга двигателя;
tn.s_r, — масса заднего бака, включая массу компонента топ-
лива, содержащегося в баке в расчетный момент времени
Т Скачки на эпюре осевых сил соответствуют силам давления
компонентов топлива на днище баков (при переходе от сеч.,//к,
сеч. III п от сеч. V к сеч VI) и силе тяги двигателя Р (сеч I’Tf/
/ ' 5 5. ПОПЕРЕЧНЫЕ НАГРУЗКИ НА АКТИВНОМ УЧАСТКЕ ТРАЕКТОРИИ
На активном участке управляемого полета ракета испытыва-
ет не только действие сил, направленных вдоль продольной оси,
, но воспринимает также и боковые нагрузки, приводящие к И31 и-
U'ejuaipnyca.
V L§.° время полета в поперечном направлении на ракету дей-
ствуют (см. рис. 5 14) нормальная аэродинамическая сила N,
поперечная массовая сила mg0cos -Q-riyt и сила на органах управ-
дЛенияУ1
Лртгттолетс в спокойной атмосфере (невозмущенное движе-
ние) угловая скорость поворота ракеты по тангажу невелика и
изменяется весьма медленно, а угловое ускорение практически
равно нулю. В этом случае сила Ку, заставляющая ракету сох-
ранять заданный угол атаки, определяется из условия равнове-
сия относительно центра масс ракеты
(5.30)
\i Рассмотрим ракету как балку, нагруженную поперечными
аэродинамическими и массовыми силами.^Обозначим через q?,
поперечную аэродинамическую силу, приводящуюся на единицу
длины балки. Закон ее изменения вдоль продольной оси ракеты
определяется по результатам аэродинамического расчета или
продувок в аэродинамической трубе. Величина qK, как и вели-
чина нормальной аэродинамической силы, зависит от угла атаки
101
и скоростного напорал Равнодействующая сил qv равна нор-
мальной силе N и приложена в центре давления.
и VЧерез qt обозначим силу тяжести единицы длины ракеты.
Тотаа интенсивность поперечных массовых сил
(5.31)
Перегрузка п,^ согласно (5.17) с учетом выражения (5.30) оп-
ределяется по формуле
„о _ __^-fi-is^.-ьв'ГТ :5.3L-i
Закон изменения величин N, G. хА хцм, х}У на траектории из-
вестен и поддается расчету. Поэтому поперечная перегрузка мо-
жет быть определена как функция времени для данной -ракеты
в условиях ее выведения по заданной программе тангажа! В ито-
ге на участке выведения ракета нагружена системой поперечных
сил в виде двух распределенных нагрузок, интенсивность кото-
рых ^льДИ Кроме того, к ракете приложена сосредоточенная
сила YJ Понятно, что с течением времени величина нагрузок
изменяется, поскольку' изменяется угол атаки, скорость полета
и величина поперечной перегрузки.
Из уравнения (5.32) видно, что при невозмущенном движении
величина коэффициента нормальной перегрузки определяется в
основном величиной угла атаки а, так как сила N—c’^iqS^
При полете в неспокойной атмосфере коэффициент перегруз-
ки рассчитывают, предполагая, что внезапно подействовал мтио-
вепяый порыв ветра перпендикулярно к направлению полета.
Динамичность действия ветра определяется коэффициентом ди-
намичности йд=1,3, который вводится в выражение для силы
К. (5.30):
Гу = — 1-37V (5. 33:
При этом нормальная сила
/V -= с“ (a -J- Д а) qSx, 15.34i
где Aa=H'7lz — приращение угла атаки от воздействия ветра;
д — скоростной напор.
Коэффициент нормальной перегрузки центра масс ракеты г
учетом действия мгновенною порыва ветра
. / j _ । з xt-xuaf
т£о \ Хр—>'ц.м>
'5.35
В момент порыва ветра управляющая сила не уравновешивает
ракету, поэтому возникает угловое ускорение Р
Из теоретической механики известно, что Мг1 = Jxlb.
Следовательно,
102
€ учетом выражения (5 34)
» 1.3(Л-„.И -^,)| -0,зЛЩл„.„-л-п), (5.36
Jzl Jgi
где /л— момент инерции ракеты относительно оси Ozt.
С появлением углового ускорения возникает вращательная
составляющая коэффициента нормальной перегрузки кото-
рая определяется формулой (5.20)
Учитывая (5 36) и (5.34). получим
с“(а - aa)?SM( — 0,3) (Лщ, * I
Д%1=--------------------------(5.37
’гЛ&О
Для сокращения письма обозначим
С in 4 да)^5м:
Тоыа согласно (5.19)
nvl = -A J • В (хцЛ1+. (5 39)
Определив значения составляющих поперечных сил от аэро-
динамических и массовых сил,.действующих на ракету, можно
керейтп к определению суммарных поперечных сил Q и изгиба-
ющих моментов М.
Чтобы определить поперечные нагрузки в общем случае, не
обходимо совместно решить уравнения возмущенного движения
ракеты и уравнения управления с \ четом работы автомата
стабилизации. Вследствие сложности решения этой системы
уравнений и отсутствия достоверных значений некоторых пара
метров задачу несколько упрощают, определяя независимо ста
тические«и динамические нагрузки. Расчет статических нагрузок
ведут в предположении действия нормального порыва ветра
В этом случае в поперечном направлении ракета нагружает
ся силами инерции и аэродинамическими силами с суммарной
интенсивностью
дс“
qri- ——(a — La)qSK-\-(о. 40)
103
где m.„i — погонная масса в рассматриваемом сечении Попе-
речная сила в произвольном сечении xt:
Qlxi) f i5.41j
б
Учитывая уравнения (5.38) и (5.39), получим
QUJ— f |с -~+.4й-отЛ 1'^. Я-42,
J L С1*)
О
На практике этот интеграл обычно не берется. Задачу решают
следующим образом Мысленно разбивают ракету по длине, на-
пример, на 30 участков (рис. 5 19, а) и вместо интегрирования
выражения (542) производят его суммирование. Если участки
выбраны одинаковой длины (Ax4), то
Q,- ДМ (9x1)/ I6-43
Таким образом,
Qi ^XjC X4. ( —l + A-Vteo X1 (тЛ1
i i /=1
Ч-ДЛа^Й, V [тЛ1 (xJUM—
Учитывая, что постоянные величины Axi и go можно внести
под знак суммы, получим
S? дл, =Л;
\d-Kt
J~‘ i=i
2 *10^*1= У, — хн »
<5.44j
где с“.—производная коэффициента нормальной аэродинами-
ческой силы по укчу атаки части ракеты до рассмат-
риваемого i-го сечения;
У ДО7- — вес корпуса ракеты до рассматриваемою сечения.
104
Рис 5.19. Расчетная схема и эпюры перерезывающих сил и изгибающих
моментов гипотетической ракеты с ЖРД:
г—эпюра' распределенной 'поперечной нагрузки от нор-
Подставив (5.44) в (5.43), получим
Qi=c^+A 22д0, в 22 4O/ijc"-’ !®-45>
У-1 ) г
Из курса сопротивления материалов известно, что изгибаю-
щий момент М—[ Qdx Следовательно,
Им,) j'opc.Mx, |<Ь
или -И, A'Vj X* Q. 1-5.47)
Окончательно
,Wf=дх, |с J с“, -A * 2 В У 2S 10А,г Л'] ’
(5.48)
Величина 1t\go, входящая в выражение (5.38),
Aifio Д-*5 2 2L дО/х«-« xi'J '5.491
Ml Ml
Определив величину Qt последовательно на всех участках,
находим V Qi и, умножая па Дхь в каждой зоне находим
величину изгибающего момента 31,. Строим эпюры Q и AI, при
этом величину Qi откладываем в конце участка, а величину
Alj — в середине участка. На рис. 5 19 приведена расчетная схе-
ма гипотетической ракеты и эпкодзы перерезывающих сил и из-
гибающих моментов для какого-то одного расчетного момента
времени.
5.6. РАСЧЕТНЫЕ НАГРУЗКИ. НОРМИРОВАНИЕ НАГРУЗОК
Ракета должна обладать достаточной прочностью и надежно
выдерживать все нагрузки, действующие на нее в процессе экс-
iciya гации.
Расчет на прочность конструкции ракеты может быть прове-
ден двумя способами: либо в соответствии с эксплуатационными
нагрузками, либо в соответствии с расчетными нагрузками, ко-
, [ торые больше эксплуатационных нагрузок.
^Эксплуатационными нагрузками Ря называются возможные
। в‘полете или в процессе наземной эксплуатации ракеты нагруз-
_ки Они равны произведению веса ракеты на коэффициент экс-
плуатационной перегрузки
P°=G«® (5 50)
106
Подбор сечений элементов конструкции ракеты производят
таким образом, чтобы напряжения в них были равны допускае-
мым 'напряжениям, которые принимаются ниже разрушающих.
Такой способ расчета принят в машиностроении. В этом случае
коэффициент fi, характеризующий запас прочности, определяет-
ся как отношение разрушающих напряжений к допускаемым
fi = Оразр/Одоп. j (5.511
М Расчетные нагрузки. При расчете конструкции на прочность,
руководствуясь увеличенными по сравнению с эксплуатационны-
ми расчетными нагрузками, подбор сечений элементов конструк-
1 пии производят таким образом, чтобы напряжения в них были
равны разрушающим или несколько меньше. ^Гак как эксплуата-
’ иконные нагрузки меньше расчетных, то конструкция будет
иметь некоторый запас прочности.
Число, показывающее, во сколько раз [расчетная нагрузка
больше эксплуатационной нагрузки Рэ, называется коэффи-
циентом безопасности
f=P»/P. (5-52)
Отсюда
PP=fP”- (5.53)
С учетом формулы (5.50)
P9=fGif. (5.54)
Коэффициент безопасности вводится для обеспечения работы
конструкции при нормальной эксплуатации ракеты и учитывает
неточности определения нагрузок и несущей способности копст-
А рукции?
I Коэффициент безопасности выбирается с учетом характера
' нагрузок, их повторяемости, требуемой степени надежности рас-
s (считываемого агрегата и условий эксплуатации ракеты.(Обычно
у стремятся получить конструкцию как можно меньшей массы
Это достигается при наименьших величинах коэффициен-
I. та безопасности! Однако наименьшая величина коэффициента
' безопасности определяется из условия отсутствия обтаточных де-
формаццй при действии эксплуатационных перегрузок и темпе-
I ратурлДля ракет, являющихся беспилотными летательными ап-
паратаЯй одноразового действия, значения-коэффициента безо-
п пасности выбираются в пределах 1,2^/^ 1,51
I 1 Этот способ расчета принят в самолето-“и ракетостроении.
При любом расчете на прочность применяются некоторые
допущения в отношении выбора расчетной схемы для определе-
ния нагрузок Поэтому надежность расчета па прочность долж-
на подтверждаться опытными испытаниями. При расчете по пер
вому способу опытная проверка заключается в сравнении рас
107
четных напряжений с действительными. Замер последних под
нагрузкой достаточно сложен.
Для проверки результатов расчета, выполненною по второму
способу, достаточно провести испытания конструкции при посте-
пенно увеличивающейся нагрузке до ее разрушения Правильно
рассчитанная конструкция разрушается при силе, равной Рр.
Преждевременное разрушение свидетельствует о недостаточной
прочности конструкции, разрушение при P>PV свидетельствует
о том, что конструкция псретяжелена.
Такие испытания называются статическими. Они проводятся
не только над опытными, но и время от времени над серийными
конструкциями.
Отношение разрушающей нагрузки к расчетной ‘называется
коэффициентом запаса прочности
Ч=Дразр/Рр. (5.55)
При проектировании конструкции необходимо стремиться
обеспечить коэффициент запаса прочности, равный единице.
Нормирование натрузок. На ракету и ее отдельные части при
транспортировке, установке в стартовое положение, при стоянке
ча старте и в полете действуют различные пл направлению в
величине силы.
Чтобы при расчете на прочность конструкции ракеты тли ее
отдельных частей не производить в каждом случае специальных
исследований для определения расчетных нагрузок, выбраны ха-
рактерные положения ракеты, обусловливающие наиболее тяже-
лые условия работы ее частей. Эти положения называются рас-
четными случаями.
Расчетные случаи рассматриваются в нормах прочности, раз-
работанных на основе опыта отечественного и зарубежного ра-
кетостроения и новейших данных науки
Нормы прочности представляют собой свод обязатель-
ных положений, регламентирующих величину и характер распре-
деления внешних нагрузок для основных частей ракеты примени-
тельно к расчету па прочность, а также для статических в
динамических испытаний Нормы прочности в связи с быстрым
развитием науки и техники непрерывно совершенствуются и
уточняются.
Таким образом, к расчетным относятся те случаи нагруже-
ния, при которых в отдельных частях ракеты возникают макси-
мальные напряжения. Па эти случаи рассчитывают специальные
силовые элементы корпуса, обеспечивающие восприятие повы-
шенных нагрузок, предотвращающих разрушение всей конструк-
ции. ‘
Основными расчетными случаями являются: транспортировка
ракеты, установка ракеты в стартовое положение, стартовое по-
ложение ракеты, пуск ракеты (сочетание больших осевых нагру-
зок и внутреннего давления), разворот ракеты по -программе на
108
участке выведения (сочетание значительных осевых и попереч-
ных нагрузок), конец активного участка траектории (максималь-
ные осевые перегрузки), вход головной части в плотные слои
атмосферы на пассивном участке траектории (большие осевые и
поперечные нагрузки и аэродинамический нагрев конструкции
» д головной части ракеты).
У I Тр а псп орт иро в к а ,р а к с ты.] В зависимости от разме-
роврэкета может транспортйров'аться по железным, шоссейным
V-и грунтовым дорогам либо отдельными ступенями, либо целиком-
. Корпус «ракеты находится при этом на транспортировочной те-
.тежке'йСнагружен распределенными по длине силами тяжести и,
инерции с интенсивностью /гь1бг и nxlGi, уравновешенными ре-
Д акциями опбрЬ узлах крепления корпуса к транспортировочной
/ ' тележке (риГэ.20). При определении нагрузок ракета рассыдт-
t /ривается как двухопорная балка со свободными консолями! Ве-
V Дичина изгибающих моментов и перерезывающих сил получает-
ся умножением ординат эпюр M(xt) и <?(xi) от действия сил
веса (с учетом реакции опор) па коэффициент поперечной пере-
грузки nyi.
Осевые усилия в корпусе возникают лишь при торможении и
разгоне транспортировочных средств и величину их определяют
А как произведение 6,/СЛ
Величина перегрузи nvi в большой степени зависит от каче-
ства дорог, скорости движения, упругости ложементов и аморти-
заторов тележки. При скорости, не превышающей 15—20 км/ч,
величина поперечной перегрузки составляет примерно пм=
— —(1,2-4-1,5). а величина осевой перегрузки па1—2,0.
Стремятся, чтобы нагрузки при транспортировке не были рас-
четными для общей прочности ракеты Частично эго достигается
выбором соответствующих транспортных средств и условий
транспортировки (снижение скорости при движении по неровно-
му грунту и т. п.). Благоприятным обстоятельством является то,
что мощные жидкостные ракеты транспортируются, как прави
,чо, не снаряженными, т е. без полезной нагрузки, топлива и спе-
х 1 цидльного оборудования.
) Л • Ус т а н о в к а в ста р т о в о е полом е и п_е_ Нагрузки на
1 1 корпус зависят от степени снаряженное™ ракеты, расположе-
ния на ее корпусе узлов для подъема, способа и скорости уста-
Уновки в стартовое положение.ГРасчет нагрузок в рассматрива-
емом случае сводится ^.-построению эпюр перерезывающих сил
А, и изгибающих моментов^ при этом корпус ракеты представляют
' ' обычно в виде балки с шарнирными опорами, нагруженной рас-
пределенными по^длине массовыми силами с интенсивностью
VnyIGi (рис. 5.21).лКоэффициецт поперечной перегрузки опреде-
ляется величинойТТредельпого углового ускорения стрелы подъ-
емного устройства
«„т 1“Ь"~ ^bp~xi\ (5.56V
10ft
на ракету при ее
Рис. 520. Эпюры сил и моментов, действующих
транспортировке:
а—схема опор при транспортировке ракеты; б—эпюра распределенной попе-
речной нагрузки от массовых сил (oyj=l,2); о—эпюра поперечных нагрузок
от опорных реакции, а—эпюры перерезывающих сил Q и изгибающих момен
ИО
где е — угловое ускорение стрелы при подъеме, обычно
хвр — координата оси вращения стрелы лафета (см. рис.
5.21);
Цо — ускорение -силы тяжести; ^Vi
Xi — координата рассматриваемого сечения ракеты.у
59 ’ б
<23 4 5 6 7 8 9 10 11 W
М.Н-Ы 11,11
0,5-Ю'1 0,5-Ю^-
Рис 5.21. Эпюры сил и моментов, действующих на ракету при установ-
Стоянка па ц_усйовом устройстве. При стоянке на
открытом 'пусковом устройстве на ракету действуют сила тяже-
сти от масс конструкции и грузов, размещенных в корпусе, и
силы реакции опорного устройства (рис. 5.22). Для баллистиче-
ских ракет, стартующих вертикально, этот случай характерен
111
Большими сжимающими усилиями для хвостового отсека корпу-
са. При определении реакции опор и при расчете корпуса па
прочность необходимо учесть влияние бокового ветра, создающе-
го распределенную аэродинамическую нагрузку, которая стре-
Рис. 5 22 Схема сил, дей
ствующих ка ракету при
стоянке на пусковом уст-
ройстве
мится опрокинуть ракету.
При отсутствии оперепия ракеты
поперечная ветровая нагрузка
Z Г>71
где сг - - коэффициент сопротивления
корпуса, который опреде-
ляется при обтекании ци-
линдра поперечным дозвуко-
вым потоком воздуха; вели-
чина коэффициента cz, отне-
сенная к площади меридио-
нального сечения корпуса,
находится в пределах 0.75—
0,90;
О — плотность воздуха при ми-
нимальной температуре экс-
плуатации;
W' — скорость ветра у поверхно-
сти Земли;
Flt — площадь меридионального
сечения корпуса.
При наличии четырех опорных
кронштейнов наиболее опасным в от-
ношении устойчивости ракеты па сто-
ле является направление ветра под
углом 45° к плоскости установки крон-
штейнов. В этом случае критическая
ветровая нагрузка ZFp, при которой
возможно опрокидывание ракеты, опре-
деляется из условия
(те0 —
(5.58)
где Ь—наименьшее расстояние от поперечной оси ракеты до
плоскости кронштейнов:
1тй масса ракетьГбез топлива;
L —длина ракеты;
—координата центра давления потока (совпадает с цент-
ром масс меридионального сечения ракеты).
Зная величину .критической ветровой на1рузки, с помощью
выражения (5 58) нетрудно найти максимальную допустимую
скорость ветра на старте. Если допустимая скорость получается
112
меньше указанной в задании па проектирование ракетного комп-
лекса, то расположение опор должно быть изменено
Ветровая нагрузка вызывает появление изгибающего момен-
та, который может быть приближенно вычислен как произведе-
ние
(Б. 59)
где Z'— ветровая нагрузка части корпуса, находящейся выше
расчетного сечения;
х'д —координата центра давления этой же части корпуса;
Xi — координата рассматриваемого сечения.
Старт из шахты При свободном старте ракеты из шах-
ты нагрузки на корпус определяются в основном собственным
весом ракеты, силой тяги и ветром, действующим на ракету в
момент выхода из шахты.
Контрольные вопросы
1 . Из каких силовых элементов состоит корпус ракеты?
2 Что такое расчетная схема конструкции?
3 . В чем заключается смысл метода сечений, применяемого
при расчете конструкции на прочность?
4 В чем особенности работы тонкостенных стержней и плас-
тин?
5 . Что называется критической сплои?
6 Что называется редукционным коэффициентом?
7 Что называется приведенной (редуцированной) площадью
обшивки?
8 . На какие категории и группы разделяются нагрузки, дей
ствующие на ракету?
9 . Какие силы действуют вдоль продольной оси ракеты?
10 . Какие силы действуют поперек продольной оси ракеты?
11 Как изменяется в полете сила тяги?
12 . Какие аэродинамические силы действуют на ракету? Как
они изменяются во время полета?
13 Как изменяется в полете сила тяжести’
14 . Отчего возникают инерционные силы’
|5 . Что называется перегрузкой?
16 Что называется массовой силой?
17 Как определяются массовые силы, действующие па ра-
кет) ’
18 Как подсчитываются осевые пагрузки на активном участ-
ке полета?
19 Для чего производится наддув баков?
20 В каких ссчепиях ракеты возникают сжимающие, а в ка-
ких растягивающие осевые усилия?
21 . Как строится эпюра осевых сил’
ИЗ
22 . Как определяются поперечные нагрузки на активном уча-
стке?
23 Как строятся эпюры поперечных сил и изгибающих мо-
ментов?
24 . Что такое расчетная нагрузка и чем она отличается от
эксплуатационной нагрузки?
25 Дайте определение коэффициента безопасности.
26 . Как устанавливается величина коэффициента безопасно
ети?
27 Что называется коэффициентом запаса прочности?
28 . Что такое расчетный случай?
29 Для чего необходимы нормы прочности?
30 . Какие расчетные случаи существуют для ракеты в поле-
те? — в наземных условиях?
31 Какие нагрузки действуют на ракету при транспортиров-
ке, при установке в стартовое положение, при стоянке на пуско-
вом устройстве?
Глава VI
ТОПЛИВА И МАТЕРИАЛЫ, ПРИМЕНЯЕМЫЕ В РАКЕТАХ
6.1 КРАТКИЕ СВЕДЕНИЯ О ЖИДКИХ РАКЕТНЫХ ТОПЛИВАХ
Основные требования к жидким ракетным топливам. К жид-
ким ракетным топливам предъявляют следующие требования
1. Топливо должно обеспечить возможно больший удельный
импульс тяги, что при прочих равных условиях, как видно из
формулы Циолковского (1.16), Позволит получить более высо-
кую конечную скорость ракеты, а следовательно, и большую
дальность стрельбы
2. Окислитель и горючее должны обладать высокой цлочпо-
стью. При более высокой плотности топливо будет занимать
меньший объем, что приводит к уменьшению массы конструкции.
3. Компоненты топлива, или хотя бы один из них, должны
обладать хорошей охлаждающей способностью, позволяющей
надежно охлаждать стенки камеры сгорания при работе двига-
теля.
4 Топливные компоненты должны по возможности обладать
малой вязкостью, а также слабой зависимостью вязкости от тем-
пературы. /Малая вязкость улучшает условия подачи -топлива в
камеру сгорания за счет мепьшего гидравлического сопротивле-
ния системы подачи и улучшения процесса распыления компо-
нентов в камере сгорания
5. Топлива должны обеспечивать нормальные процессы вос-
пламенения и иметь большие скорости горения
6. Компоненты топлива должны обладать низкой температу-
рой замерзания и высокой температурой кипения, обеспечиваю-
114
щими нормальную работу двигательной установки, возможность
хранения топлив, а также заправленных ракет в широком темпе-
ратурном диапазоне
7. Компоненты топлива должны быть стабильными, т. е. из
менять своих физических и химических свойств в процессе экс-
плуатации, что позволяет хранить компоненты топлива продол-
жительное время
8. Компоненты топлива должны обладать малой токсично-
стью.
9 Топлива по возможности нс должны быть агрессивными
(разр>шатощими) по отношению к конструкционным материа-
лам.
10 Топлива не должны быть взрывоопасными.
11 Топливо должно быть дешевым, получение его должно
быть обеспечено широкой отечественной сырьевой и промышлен-
ной базой.
Очевидно, что удовлетворить всему многообразию требова-
ний, предъявляемых к ракетным топливам, очень трудно, а под-
час и невозможно. В каждом конкретном случае, учитывая паз
качение ракеты, выбирают топливо, отдавая предпочтение тем
или иным его характеристикам. В ряде случаев, несмотря на не-
достатки эксплуатационного характера, оказывается целесооб-
разным применять топлива с высокими энергетическими харак-
теристиками. В других случаях выбирают топлива с меньшими
энергетическими характеристиками, но зато более удобные в
эксплуатации.
Горючие. В качестве горючих компонентов жидких топлив
применяются в основном вещества, в которых содержится угле-
род п водород. Среди этих веществ наибольшее распространение
получили керосин, гидразин и его производные (несимметрич-
ный диметплгидразин, аэрозин и др ) и жидкий водород.
К е р о с и и является фракцией прямой перегонки нефти. Ши-
рокое применение получил керосин со следующими свойствами-
— плотность 0,82—0,85-1 С3 кг/м3;
— температура замерзания —60° С;
— температура кипения 150—280° С.
Керосин в ЖРД обычно применяется с жидким кислородом
или с азотнокислотными окислителями. Топлива на основе керо-
сина несамовоспламеняющиеся, поэтому при запуске двигателя
необходимо специальное самовоспламеняющееся пусковое топли-
во или другой источник зажигания.
Широкая сырьевая база, дешевизна, нстоксичность и неагрес-
сивность по отношению к металлам, возможность использования
для охлаждения камеры сгорания — положительные свойства
керосинов
Гидразин представляет собой при нормальных условиях
бесцветную дымящуюся на воздухе ядовитую жидкость, погло-
щающую из атмосферы вла! у, углекислоту и кислород. Он иесяа-
11В
билен, в безводном состоянии подвергается каталитическому и
термическому разложению, коррозионно активен
Положительными свойствами гидразина как ракетного горю-
чего является большая плотность (1,04-103 кг/м3) и высокая
температура кипения (113,7“С).
Гидразин имеет и существенные недостатки Температура за-
мерзания гидразина + 2'С Столь высокая температура замерза-
ния делает гидразин неудобным в эксплуатации, особенно в зим-
нее время. При хранении и заправке его в ракету в холодное
время года ею нужно подогревать Еще больший недостаток
шдразина склонность eio паров при назревании и при уда-
рах к взрывчатому разложению, что не позволяет использовать
его в качестве охлаждающей жидкости камеры сгорания.
Несимметричный д и м ет и л г и д р а з и н (НДМГ)
представляет собой бесцветную, весьма летучую и подвижную
жидкость с интенсивным аммиачным запахом. Температура за-
мерзания НДМГ равна —57.2° С, температура кипения 4-63е С и
плотность 0,79-10s кг/м3
НДМГ имеет лучшие эксплуатационные характеристики, но
несколько уступает по энергетическим показателям гидразину.
НДМГ сильно пи роскопичен и взаимодействует с углекислотой
и кислородом из воздуха Пары НДМГ в смеси с воздухом лег-
ко самовоспламеняются при повышенной температуре, поэтому
он обычно хранится в герметичных емкостях под давлением
инертного газа.
НДМГ коррозионно инертен к сталям и алюминиевым спла
вам. Он является высокотоксичным веществом, обращение с. ко-
торым требует крайней осторожности
С окислителями на основе азотной кислоты и окислов азота
он образует самовоспламеняющиеся топлива.
Большая химическая активность диметилгидразина делает
его цепным компонентом топлива, позволяющим получить отно-
сительно большой удельный импульс тяги.
Широко применяется в качестве горючего аэрозин, представ-
ляющий собой смесь 50% гидразина и 50% НДМГ.
Жидкий водород обладает наиболее высокими энерге-
тическими характеристиками, благодаря чему топлива на его ос-
нове дают наибольший удельный импульс тяти.
Недостатками жидкого водорода являются низкая темпера-
тура кипения (—253° С) и .малая плотность (0,071-Ю3 ш/м3).
Хроме того, водородно-воздушные смеси в широких пределах
концентраций являются взрывоопасными, что усложняет усло-
вия хранения и обращения с ним.
Окислители. В настоящее время в качестве окислителей на-
шли широкое применение азотная кислота, смесь азотной кисло-
ты с четырехокисыо азота и жидкий кислород. Перспективным
окислителем является жидкий фтор
116
Окислители на основе азотной кислоты -относятся к высоко-
кипящим, а жидкий кислород и жидкий фтор — к низкокипя-
щим.
Высококипящие окислители имеют большие эксплуатацион-
ные преимущества и позволяют создавать ракеты, предназна-
ченные для длительного хранения в заправленном состоянии.
Низкокипящие окислители имеют солее высокие энергетиче-
ские характеристики, благодаря чему они нашли применение в
ракетах-носителях, предназначенных для запуска космических
объектов, хотя они менее удобны в эксплуатации из-за вепре
рывного интенсивного испарения.
Азотная кислота IIN03 в чистом виде представляет со
бой бесцветную ядовитую гигроскопическую жидкость, дымя-
щуюся на воздухе, с сильно раздражающим запахом. Техниче-
ская азотная кислота всегда содержит некоторое количество
воды, а также окяслов азота, придающих ей красно-бурую ок-
раску
Азотная кислота кипит при температуре -f-bJT'C и замерзает
при—41,8° С. Довольно низкая температура затвердевания и
высокая температура кипения облегчает условия ее хранения,
транспортировки и перекачки.
Азотная кислота содержит 76% кислорода, что делает ес
сильным окислителем. Из всех широко применяемых окислите-
лей азотная кислота имеет наибольшую плотность 1,52-103 кг/м3
Азотная кислота обладает и недостатками. Пары ее ядови-
ты, а при попадании на кожу она вызывает тяжелые ожоги.
Азотная кислота весьма агрессивна по отношению почти ко всем
материалам. Концентрированная азотная кислота имеет малую
химическую стойкость, вследствие чего при хранении она разла-
Iается.
Из-за ее недостатков азотная кислота применяется в качест-
ве окислителя весьма редко, а в основном используется в сме-
си с четырехокисью азота.
Смесь азотной кислоты с четырехокисью
азота. Четырехокись азота N2O4 может применяться в качестве
окислителя в чистом виде. Однако применение четырехокиси азо-
та в качестве окислителя ракетных топлив затруднено из-за ее
эксплуатационных свойств.
Главным недостатком четырехокиси азота является высокая
температура замерзания (—11,2'С) и низкая температура ки-
пения (+21,2° С). Но четырехокись азота оказалась ценной в
смесях с азотпой кислотой Смеси четырехокиси азота и азотной
кислоты :по- сравнению с азотной кислотой имеют более высокую
плотность (до 1,6-10* кг/м3), более низкую температуру замер-
зания (до —70° С), могут выделять несколько больше кислоро-
да для окисления горючего, менее агрессивны и более стабиль-
ны при хранении.
Жидкий кислород. Жидкий кислород является одним из
наиболее мощных окислителей бгтагодаря тому, что содержит
100% окисляющею элемента. Жидкий кислород представляет
собой прозрачную голубоватую легко подвижную жидкость с
плотностью 1,144 -103 кг/м3.
Температура кипения кислорода —183° С, температура за-
мерзания —219° С. Многие материалы (сталь, чугун, резина и
др.) при таких низких температурах становятся хрупкими.
Основными достоинствами жидкого кислорода являются
большой удельный импульс тяги двигателя, нетоксичность, про-
стота производства и низкая стоимость при неограниченной
сырьевой базе. К недостаткам жидкого кислорода необходимо
отнести малую плотность и низкую температуру кипения, что вы-
нуждает производить заправку ракеты непосредственно перед
пуском из-за больших потерь окислителя на испарение.
Жидкий фтор. Жидкий фтор представляет собой желтую
жидкость.Температура кипения равна 188° С, плотность при
этой температуре 1,51-IO3 кг/м3. Фтор беспрерывно кипит, выде-
ляя чрезвычайно ядовитые пары. Он является самым сильным
окислителем и практически соединяется со всеми известными
горючими, образуя самовоспламеняющиеся топлива. Топлива на
основе фтора имеют наиболее высокие энергетические показа-
тели.
Высокая химическая активность фтора создает большие труд-
ности при его эксплуатации, так как большинство материалов
не выдерживают контакта с ним Однако такие металлы, как
никель, нержавеющая сталь, медь, алюминий и др., пригодны
для изготовления емкостей и арматуры, так как на их поверхно-
сти образуется пленка фторидов, защищающая металл от разру
шения
Оборудование, предназначенное для работы с фтором, дол ж
но тщательно обезжириваться во избежание загорапия.
Заправку ракет фтором из-за потерь на испарение можно
производить только перед пуском.
Основные характеристики жидких топлив. Свойства жидких
ракетных топлив в значительной степени определяются характе-
ром окислителей Для каждого горючего можно подобрать окис
литель, обеспечивающий наибольшую эффективность образу-
емого топлива.
На основе азотнокнелотных окислителей могут быть два вида
топлива: самовоспламеняющиеся и несамовоспламеняющиеся
Особенно легко самовоспламеняются с этими окислителями
такие горючие, как гидразин и его производные, в частности,
несимметричный диметилгидразин. Применение самовоспламеня
ющихся топлив облегчает проблему запуска двигателя, несколь-
ко упрощает его конструкцию, но одновременно усложняет экс
плуатацию ракет из-за возможности пожара при случайном сме
шёнии комы тентов.
118
Керосин с азотнокислотными окислителями образует несамо-
воспл вменяющееся топлив о.
Применение топлив с азотнокислотными окислителями поз-
воляет хранить ракету в заправленном состоянии длительное
время
В качестве горючих для жидкого кислорода могут применять-
ся любые углеводороды Все они дают с жидким кислородом не-
самовоспл вменяющиеся топлива. К горючим с повышенным со-
держанием водорода относятся жидкий водород, аммиак, гидра-
зин, несимметричный диметилгпдразин и др. Топлива на основе
жидкого кислорода с этими горючими обладают более высокими
показателями по сравнению с топливами на основе азотнокис-
лотных окислителей. Однако низкая температура кипения жид-
кого кислорода ограничивает его применение для ракет, требу-
ющих заблаговременной заправки
Фтор как окислитель в сочетании с большинством элементов
образует топлива с лучшими энергетическими показателями, чем
кислород, по из-за его эксплуатационных недостатков топлива
на основе фтора не получили еще широкого применения.
Характеристики некоторых жидких ракетных топлив приве-
дены в табл 6 1
Таблица 6.1
Теоретические характеристики некоторых ракетных топлив
(при давлении в камере сгорания 70-10 Па)
Топтиво Соотноше- ние ком- понентов топлива Плотность КГ/м-3-10-3 Удельный импульс в пустоте Н-с/кг
Окислите.!» Горючее
Фтор Аммиак НДМГ Водород 2,37 2,45 «,<19 1,31 1,19 0,47 4210 4050 4680
Трехфтористый хлор Аммиак ндмг Водород 2,70 3,00 1 1 ,50 1,51 1,38 0,62 3350 3240 3620
Кислород Аммиак НДМГ Водород 0,92 1,70 4,00 1,06 0,98 0,28 3625 ЗИЮ 4470
Азотная кислота Аммиак НДМГ Водород ],50 3,00 0,14 1,22 0.39 3210 3150 3640
Соотношение между компонентами топлива. Для полного
окисления (сгорания) определенного количества горючею тес-
но
ретически требуется вполне определенное количество окисли-
теля.
Соотношение между компонентами топлива, при котором ко-
личество окислителя, приходящееся на 1 кг горючею, в точности
равно количеству, необходимому для его полного окисления, на-
зывается стехиометрическим Стехиометрическое соотношение
характеризуется стехиометрическим коэффициентом кото-
рый показывает, сколько килограммов окислителя требуется для
полного окисления 1 кг горючего.
Количество окислителя, фактически подаваемое в камеру
сгорания на 1 кг горючего, называется действительным соотно-
шением компонентов топлива и характеризуется коэффициентом
х, который равен отношению секундных массовых расходов
окислителя и горючего:
х-тм®- 1.6. 1)
Отношение действительного соотношения компонентов к сте-
хнометрическому называется коэффициентом избытка окисли-
теля:
Ooii=Ji/»0cTCx (6.2)
Если OokCI, то в топливе недостаток окислителя или избы-
ток горючего, если опК>1, то в топливе избыток окислителя или
недостаток горючего.
Обычно в камере ЖРД обеспечивают некоторый избыток ю-
рючего аок=0,7-ь0,9.
6.2. КРАТКИЕ СВЕДЕНИЯ О ТВЕРДЫХ РАКЕТНЫХ ТОПЛИВАХ
Основные требования к твердым ракетным: топливам. Как
жидкие, так и твердые ракетные топлива должны обладать боль-
шим запасом энергии и при горении образовывать большое ко-
личество газообразных продуктов. Однако к твердым топливам
предъявляется ряд -специальных требований, обусловленных не-
обходимостью создания ракеты, обладающей высокой надежно-
стью и наименьшей стартовой массой.
1 Устойчивость горения при минимально возможном давле-
нии У ракет с РДТТ камера сгорания одновременно является и
корпусом ракеты. Высокое давление в камере сгорания требует
увеличения толщины стенок корпуса ракеты, что приводит к
чрезмерному увеличению массы ракеты.
2. Высокая механическая прчность заряда, исключающая его
разрушение под воздействием давления в камере сгорания инер-
ционных нагрузок. Разрушение заряда ’недопустимо, так как это
ведет к увеличению поверхности горения, повышению давления
в камере и разрыву камеры.
3. Однородность по составу всех частей заряда В противном
случае не могут быть обеспечены равномерное горение заряда
и. следовательно, стабильные баллистические характеристики
ракеты.
120
4. Постоянство скорости горения твердого топлива в широком
температурном диапазоне. Это обеспечит постоянство значений
основных параметров двигательной установки при различных
температурах пуска.
5. Топливо должно быть химически стойким и физически ста-
бильным, т. е. не должно изменять своих свойств при хранении
под воздействием внешних условий, в частности температуры в
влажности воздуха.
6 Топливо должно обладать достаточной эластичностью, иск-
лючающей появление в нем трещип иод действием термических
напряжений или при деформации под действием давления в про-
цессе воспламенения и работы.
7. При длительном храпении снаряженных ракет твердое
топливо не должно взаимодействовать с металлом и элементами
тепловой изоляции камеры сгорания.
8. Возможность изготовления из твердого топлива крупнога-
баритных зарядов Технологический процесс изготовления заря-
да должен быть предельно простым
Твердые топлива по физической структуре разделяют на два
основных класса: двухосновные, или гомогенные, и
с месевы е, или гетерогенные топлива.
Двухосновные топлива представляют собой твердые рас-
творы органических веществ, молекулы которых содержат горю-
чие и окислительное элементы Эти топлива называют также
порохами и коллоидными топливами. Основой их является нит-
роцеллюлоза и твердые растворители типа нитроглицерина, ди-
гликольдинитрата и др. Нитраты целлюлозы или нитроклетчат-
ка получаются обработкой целлюлозы смесью азотной и серной
кислот. Нитроклетчатка легко воспламеняется даже от неболь-
шой искры. Горение происходит за счет активного кислорода,
содержащегося в ;нсй
По запасу энергии нитраты целлюлозы непосредственно мог-
ли бы быть использованы в качестве топлива, так как содержат
в себе горючие элементы и активный кислород. Однако из них
нельзя изготовить сплошные заряды, горящие по определенному
закону. Даже сильно спрессованные шашки имеют поры, и горе-
ние их происходит со взрывом.
Для получения сплошных, прочных зарядов нитраты целлю
лозы обрабатывают растворителями и вводят пластификаторы
или цементаторы, придающие топливу необходимые механиче-
ские свойства.
В качестве растворителей применяют нитроглицерин, нитро-
дигликоль и др. Нитроглицерин по внешнему виду представляет
собой маслянистую бесцветную или слегка желтоватую жид-
кость. Это одно из наиболее мощных взрывчатых веществ. Нит-
родшликоль является также взрывчатым веществом, но он ме-
нее чувствителен к механическим воздействиям, чем нитрогли-
церин.
121
Пластификаторами служат динитротолуол, диэтилфталат, ди-
бутилфталат и др.
Для повышения химической стойкости топлива в него добав-
ляют стабилизаторы (чаше всего цннтралит).
В состав твердого топлива включают также технологические
добавки: мел, который уменьшает внутреннее трение топливной
массы; вазелин и трансформаторное масло, которые снижают
давление при прессовании и улучшают процесс формования
Двухосновные топлива имеют плотность в пределах (1 54-е-
1,62)-10я кг/м3, удельный импульс 2000—2300 И-с/кг при давле
нии в камере более 35-105 Па.
В настоящее время, судя по иностранным источникам, двух-
основные топлива находят ограниченное применение в ракетной
технике, так как являются более дорогостоящими и имеют более
низкие энергетические характеристики, чем смесевые топлива.
Смесевые топлива представляют собой механическую смесь
тонко измельченного твердого окислителя, тщательно переме-
шанного с жидким горючим, отвердевающим при полимеризации
В качестве окислителей используются богатые кислородом
неорганические соли. Обычно это соли хлорной и азотной кис
лот. перхлорат аммония NH4CIO4, перхлорат калия КСЮ* и др
Наиболее распространенным окислителем в настоящее время яв
ляется перхлорат аммония.
В качестве горючих, которые также являются связующими
веществами, применяются высокомолекулярные синтетические
соединения типа каучука и пластмасс (например, тиоколы, по-
лиуретаны, полибутадиены и др.), а также тяжелые углеводоро-
ды (например, битумы).
Если окислитель в основном определяет энергетические воз-
можности смесевых топлив, то от горюче-связующего вещества
зависят химические р физико-механические пх свойства. Соотно-
шение горючего и окислителя в смесевом топливе может изме-
няться в довольпо широких пределах, что позволяет вырьиро-
вать его характеристики.
Смесевые топлива без добавок обеспечиваю г удельные тяги
того же порядка, что и двухосновные. В последнее время в твер-
дые топлива с целью повышения удельной тяги стали вводить в
виде мелкодисперсных порошков легкие металлы: алюминий,
магний, цирконий, бор и др. Созданные смесевые топлива обес-
печивают удельный*импульс около 2600 Н-с/кг при давлении в
камере более 1 105 Па.
Несмотря на многообразие существующих и разрабатыва-
емых за рубежом составов, смесевые топлива, как прг шло, со-
держат следующие вещества (ио весу):
окислители (перхлорат калия, перхлорат* аммония
и Др.)................................ , 50 —80%
горюче-связующие вещества (каучуки, полиуретаны) 25—15%
122
алюминий (б виде порошка) , ... . 10—,5>%
катализаторы и другие специальные вещества до 5%
Смссевые топлива обладают хорошими упругими свойствами,
хорошо сопротивляются образованию трещим под действием
термических напряжений и устойчиво горят при сравнительно
невысоких давлениях.
Производство сйесевых твердых топлив по сравнению с про
изводством двухосновных топлив отличается значительной про-
стотой и дешевизной. Смесевые топлива обладают хорошими
литьевыми качествами, что позволяет получать заряды литьем
непосредственно в корпус ракеты,
Благодаря своим достоинствам смесевые твердые топлива
получили широкое распространение в ракетной технике.
6.3. МАТЕРИАЛЫ, ПРИМЕНЯЕМЫЕ В РАКЕТАХ
Требования к материалам. Условия работы отдельных частей
и всей ракеты в целом характеризуются высокими механически-
ми нагрузками, крайне высокими и низкими температурами и
коррозионным воздействием агрессивных топлив и газообразных
продуктов сгорания.
Для увеличения массы транспортируемой полезной нагрузки
• при наименьшей затрате топлива масса конструкции ракет дол-
1 жна быть минимальной. Это предъявляет особые требования к
материалам в отношении возможно большей прочности и одно
временно наименьшей плотности. Для оценки материала с точки
зрения характеристики «прочность масса» введено понятие
удельной прочности материала.
Отношение предела прочности материала на растяжение Л
Gio плотности называется удельной прочностью материала нц
растяжение оврИст/б ---—
Для дружх деформаций поломаются другие выражения
дельной прочности, например, при срезе оЕ/р, при изгибе
s----- _
Г'а|!.изг/У> при продольном изгибе v EjQ и т. д.
Кроме требования высокой удельной прочности к материа
там, применяемым в ракетостроении, предъявляется еще ряд
основных требований- коррозионная стойкость материала, пред-
назначенного для изготовления емкостей и трубопроводов двига-
тельной установки, к воздействию агрессивных компонентов топ-
лива; высокая жаропрочность и жаростойкость, достаточная
вязкость и отсутствие хладноломкости; хорошая штампуемость
и свариваемость; пёдифицитность и дешевизна.
/ Материалы для головных частей. Корпус головной части, как
правило, представляет собой коническую тонкостенную оГюлоч-
I ку, работающую в основном па сжатие или растяжение. Крите-
риями для выбора материала могут служить показатели удель-
ной прочности Оврает.'С и™ Основными материалами для
123
Kopnyccns головных частей могут быть алюминиево-магниевые и
титановые сплавы, а также пластмассы.
Для теплозащитных покрытий корпуса головной части при-
меняются армированные-пластмассы на основе эпоксидных смол
Лвиолытых материалов! ___
Материалы для тоОНвных баков,}) стенки которых одновре-
менно образуют внешнюю несущую оболочку ракеты, должны
обладать возможно большей удельной прочностью на
растяжение. Кроме того, при выборе материала учитывается кор-
розионная стойкость и химическая совместимость с топливом
По химической совместимости между металлами и топливами не
обходимо отметить что топлива на основе гидразина будут рас-
творять такие присадки в сплавах, как медь или .молибден. Ти
гаи воспламеняется в красной дымящей азотной кислоте, а
также несовместим с жидким кислородом. Материалы для топ-
•< /лирных баков должны хорошо свариваться и штамповаться.
V (Для изготовления баков широко применяются алюминиево-
магниевые сплавы и тонколистовая нержавеющая сталь. В по
следнее время используют и титан п в ы е. спл а вы, .которые дают
значительную экономию в массе по сравнению с использованием
Гсгали и алюминиевых сплавов Титан и его сплавы находят все
I более широкое применение в ракетных конструкциях благодаря
I сочетанию высокой ущельной прочности, ударной вязкости, плас
I точности и ’прочности при температурах жидкого водорода. Кро-
кге-того, титан и его сплавы обладают высокой коррозионной
I стойкостью при воздействии большей части горючих и окислите
к лей, абсолютной стойкостью к коррозионному воздействию ат-
Д) мосферной влаги и морской водьц)
[Материалы для приборных и хвостовых отсековр Приборные
v и хвостовые отсеки являются силовыми элементами корпуса ра-
кеты и представляют собой оболочки, подкрепленные продоль-
ным и поперечным силовым набором. Под воздействием про
дольных нагрузок отсеки испытывают сжатие или растяжение,
т от спл, действующих перпендикулярно оси ракеты, — деформа-
ции изгиба и сдвига Исходя из этого к материалам для изготов-
Гления приборных и хвострв.ых. отсеков" предъявляются высокие
I требования по их удельной прочности на растяжение и продоль-
\Уньщ_Цзгиб..
у" ГДля изготовления этих отсеков широко применяются дефор
мрууемые алюминиевые сплавы. В тех случаях, когда аэродина-
мический нагрев стенок приборного и хвостового отсеков будет
превосходить 200—250° С, применение деформируемых алюмини-
евых сплавов становится неэффективным. В этом случае целесо-
образно применять тцтановые сплавы, коррозионностойкие ста
Д ли и другие материалы^
/ \ Материалы, применяемые в ракетах с РД'ГТ. Материалы для
ракет с РДТТ выбирают в первую очередь по удельной -прочно
сти. С этой точки зрения наиболее приемлемыми материалами
124
для корпусов РДТТ являются стеклопластики, однако из-за тех-
нологических трудностей они не всегда применяются Для изго-
товления корпусов РДТТ применяются также титановые сплавы
и нержавеющие стали. Так, например, корпус РДТТ первых ра-
кет «Минитмен» изготавливался из нержавеющей стали. Вес кор-
пуса первой ступени достигал 290 кг. При изготовлении этого же
корпуса из титанового сплава его удалось уменьшить до 160 кг
Еще большая экономия в весе достигается при изготовлении
корпуса твердотопливной ра-кеты намоткой стеклянного -волокна,
пропитанного фенольными или другими смолами. Поэтому в ка-
честве конструкционного материала для третьей ступени ракеты
«Мипптмен» был выбран стеклопластик «Спираллой».
Критические сечения сопел образуются 1рафитовыми вкла-
дышами, которые для защиты от эрозии покрываются вольфра
мом.
Контрольные вопросы
1 . Какие требования предъявляются к жидким ракетным топ-
ливам и чем они обусловлены?
2 . Назовите горючие жидких ракетных топлив и охарактери-
зуйте их основные свойства.
3 Чем характерен водород как топливо ракетных двигате-
лей?
4 Какие окислители применяются в ракетных топливах?
5 . Преимущества и недостатки азотнокислотпых окислителей
6 Чем характерен жидким кислород как окислитель ракетных
топлив?
7 . Чем вызвано применение фтора в качестве окислителя ра-
кетного топлива? Каковы при этом трудности эксплуатации ра-
кет?
S Какие требования предъявляются к твердым ракетным топ-
ливам и чем они обусловлены?
9 . Каков состав и характеристики двухосновных твердых топ-
лив?
10 Расскажите про состав и характеристики смесевых топ
лив.
11 Что называется удельной прочностью материала?
12 Перечислите основные требования, предъявляемые к ма-
териалам
13 Из каких материалов изготавливаются основные части ра-
кеты. корпуса головных частей, топливные баки, клепаные от-
секи, корпуса РДТТ?
125
Глава VII
ЭТАПЫ СОЗДАНИЯ РАКЕТНОГО КОМПЛЕКСА.
ВЫБОР КОНСТРУКТИВНОЙ СХЕМЫ РАКЕТЫ
7.1. КЛАССИФИКАЦИЯ PAKIET
Классификация ракет по назначению. Назначение ракеты в
значительной мере определяет ее тактико-технические и весовые
характеристики, размеры, особенности компоновки и оборудова-
ния. По назначению ракеты разделяют на боевые, исследова-
тельские и ракеты-носители (рис. 7.1).
Рис 7 1 Классификация ракет по назначению
Боевые ракеты 'Предназначены для доставки к цели боевого
заряда Они имеют большие преимущества перед бомбардиро-
вочной авиацией, так как могут использоваться в любое время
суток и в любых метеорологических условиях; имеют дальности
стрельбы, достаточные для достижения любой точки земного
шара; их трудно j ничтожцть во время полета, благодаря чему
они могут быть использованы для нанесения внезапных ударов
по важным объектам; постоянно готовы к пуску и отличаются
большой эффективностью поражения целей с меньшей затратой
средств и без потерь личного состава.
В зависимости от места расположения установок для запус-
ка и места нахождения целей все боевые ракеты подразделяют-
126
ся на следующие классы: «воздух -воздух»; «земля—воздух»;
«воздух—земля»; «земля—земля».
Понятие «земля» и «воздух» означает, с одной стороны, место
расположения пусковых установок для запуска ракет (с поверх-
ности земли, из шахты, с борта корабля, с подводной лодки, на-
ходящейся под водой, или с 'самолета, летящего в воздухе), а с
другой стороны, место расположения цели (объекта), по которой
осуществляется запуск ракеты.
В зависимости от дальности стрельбы все ракеты класса
«земля—-земля» подразделяются па тактические, оперативпо-так-
тические и стратегические.
К тактическим ракетам относятся ракеты с дальностью
стрельбы от десятков до сотен километров. Они используются на
поле боя в интересах общевойсковых частей и -соединений.
Ракеты оперативно-тактического назначения имеют дальность
стрельбы до многих сотен километров. Эти ракеты применяются
в интересах крупных войсковых соединений.
К стратегическим ракетам относятся ракеты с дальностью
стрельбы до нескольких тысяч километров. Стратегические ipa
кеты находятся в распоряжении высшего командования и при-
меняются для выполнения стратегических задач.
Стратегические ракеты в зависимости от дальности стрельбы
в свою счередь подразделяются на впутриконтинептальные (ра-
кеты средней дальности), межконтинентальные и ьчобальные.
Ракеты-носители предназначаются для вывода на орби-
ту вокруг Земли искусственных спутников и орбитальных стан-
ций, а также для запуска в космическое пространство автомати-
ческих космических аппаратов и космических кораблей с космо-
навтами.
Установившейся классификации ракет-носителей в настоящее
время не имеется По данным зарубежной печати целесообраз-
нее всего их классифицировать ,по весу полезного груза, выво-
димого на круговую орбиту вокруг Земли высотой, папример
200 км. Ракеты-носители в этом случае разделяют на следующие
группы:
i) ракеты-посители для запуска легких искусственных спут-
ников земли весом до 500 кг,
2) ракеты-носители для запуска средних ИСЗ весом от 500
до 3500 кг;
3) ракеты-посители для запуска тяжелых ИСЗ и космических
кораблей весом от 35<Х) чо 10000 кг на орбиты вокруг Земли;
4) ракеты-посители для запуска сверхтяжелых ИСЗ и орби-
тальных -станций весом свыше 10000 кг и космических кораб-
лей в межпланетное пространство.
Исследовательские ракеты служат для исследова-
ния верхних слоев атмосферы или космического пространства с
127
помощью приборов, установленных в специальных контейнерах
ракеты Они подразделяются на метеорологические и геофизиче-
ские ракеты
Метеорологические ракеты предназначены для исследования
верхних слоев атмосферы с целью сбора данных, необходимых
для прогнозирования погоды. Метеорологические ракеты запу-
скаются на высоту до 200 км.
Геофизические ракеты предназначены для выполнения геофи-
зических исследований (исследований для уточнения физических
данных Земли, таких, как магнитное по.те Земли и т. п.) и ис-
следований высоких слоев атмосферы.
Геофизические ракеты запускаются на высоту до 2000 гм
Классификация баллистических ракет. При всем многообра-
зии существующие баллистические ракеты можно свести к сле-
дующим группам, различающимся по количеству и расположе-
нию ступеней, а также по типу двигательной установки, органов
управления, систем управления и типу старта (рис. 7.2).
По количеству ступеней ракеты подразделяются на односту-
пенчатые и многоступенчатые.
В свою очередь многоступенчатые ракеты могут быть с по-
следовательным расположением ступеней (тандемная схема), с
параллельным расположением ступеней (пакетная схема), г ком-
бинированным расположением ступеней.
По типу двигательной установки различают ракеты с жид-
костными ракетными двигателями (ЖРД); с гибридными двига-
телями (ГРД); с двигателями на твердом топливе (РДТТ), с
ядериыми двигателями (ЯРД); с электроракетпыми двигателя-
ми (ЭРД) и ракеты со смешанной двигательной установкой, ког-
да на одной ступени используется, например, жидкостный ракет-
ный двигатель, а на другой — ракетный двигатель твердого топ-
лива.
По типу органов управления различают ракеты, управляемые
газодинамическими рулями; рулевыми (верньерными) двигате-
лями; поворотными камерами основных двигателей, с устройст-
вами, отклоняющими струю вытекающих из двигателя газ^в (по-
воротные секции сопла, поворотные реактивные сопла) и со сме-
шанными органами управления (например, для поворота ракеты
в одной плоскости применяются поворотные камеры основных
двигателей, а для поворота ракеты в перпендикулярной плоско-
сти — рулевые двигатели, или на первой ступени - поворотные
камеры основных двигателей, а на второй — рулевые двига-
тели) .
По типу систем управления баллистические ракеты разделя-
ют на ракеты с автономным управлением (управление ракетой
производится по программе, заложенной в систему управления)
и ракеты с телеуправлением (управление по радио).
По типу старта различают ракеты со стационарным стартом
и ракеты с подвижным стартам
128
с автономной.
СУ
с телеуправ-
лением
с подвижным
стартом
со стационарны*
стартом
,_____ I ,
с надводных кораблей с подводных лодок с самолетов с железнодорож- ных подвижных стартов с полевых подвижных стартов с наземных ПЦ из шахт
Рис. 7.2. Классификация баллистических ракет по конструктивным признакам
Ракеты со стационарным стартом запускаются с наземных
стационарных пусковых установок (ПУ), а ракеты с подвижным
стартом — с передвижных пусковых установок.
7.2. ТАКТИКО-ТЕХНИЧЕСКИЕ ТРЕБОВАНИЯ НА ПРОЕКТИРОВАНИЕ
РАКЕТНОГО КОМПЛЕКСА
Для проведения проверок и пуска ракеты, а также для ее
защиты от воздействия противника до пуска оборудуются спе-
циальные сооружения, создается комплекс нроверочно-нусковой
аппаратуры и наземного оборудования. Эти элементы вместе с
ракетой составляют ракетный 'комплекс (РК) •
Ракета является изделием одноразового действия, в то время
как пусковые установки и все наземное оборудование нспользу
ются для проведения большого числа пусков. Свойства ракеты
зависят от состава и характеристик всего ракетного комплекса,
который предназначен для выполнения возложенной на него
задачи.
Проектирование ракетного комплекса производится на осно-
вании тактико-технических требований (ТТТ), которые опреде-
ляют его основные характеристики: диапазон дальностей стрель-
бы, массу полезной нагрузки, время подготовки ракеты к пуску,
рассеивание ракет, надежность преодоления ракетой противора
кетной обороны (ПРО), надежность комплекса и его защиту от
воздействия противника
Диапазон дальностей стрельбы определяется максимальным
и минимальным расстояниями, измеряемыми по поверхности
Земли, на которые может доставить ракета полезную нагрузю,
заданной .массы. При стрельбе на дальности, выходящие за гра
ницы заданного диапазона, ракета может не удовлетворять тем
или иным техническим требованиям.
При заданной массе полезной нагрузки максимальная даль
ность стрельбы во многом предопределяет габариты и массу ра-
кеты. Ясно, что чем больше требуемая дальность стрельбы, тем
тяжелее, сложнее и дороже ракета.
Масса полезной нагрузки - второй важнейший показатель
ракеты. За величину массы полезной нагрузки принимается та-
кая масса, которую может доставить ракета на дальность, обус-
ловленную тактико-техническими требованиями.
Время подготовки ракеты к пуску является одним из основных
тактико-технических требований и должно быть возможно мень-
шим. Для этого следует свести к минимуму количество операций
по проверке и испытаниям систем ракеты после доставки ее на
стартовую позицию, по установке ракеты на пусковое устройст-
во, автоматизировать предстартовую проверку и подготовку ра-
кеты к пуску.
Рассеивание ракет характеризуется отклонениями по дально-
сти и в боковом направлении точек падения головных частей ра-
130
кет от точки прицеливания. Величина рассеивания зависит от
точности работы приборов системы управления ракеты, точно-
сти прицеливания и отклонений траектории на пассивном участ-
ке полета в атмосфере. При проектировании ракеты необходимо
обеспечить рассеивание головных частей не более заданного
Надежность преодоления ПРО противника Для обеспечения
успешного достижения ракетой цели применяются специальные
конструкции головных частей, затрудняющие обнаружение их в
полете (радиопрозрачные головные части из пластмасс, голов-
ные части, выбрасывающие ложные цели, станции активных по-
мех и т. л.), или маневрирующие при подходе к цели головные
части, затрудняющие перехват их антиракетами противника
Надежность ракетного комплекса определяется вероятностью
безотказной работы всех его элементов при подготовке ракеты
к пуску, при пуске, в полете и у цели
Обеспечение заданной надежности достигается путем тща-
тельной отработки элементов РК при наземных и летных испы-
таниях
Ракетные комплексы должны быть надежно защищены от
воздействия противника. Для выполнения этого требования ра-
кеты, как правило, помещаются в шахтные -сооружения, имею-
щие мощную защиту от воздействия ядерпого взрыва. Остальные
элементы РК, обеспечивающие .управление пуском ракеты, также
размещаются в подземных сооружениях. Обычно защищенность
от ядерного взрыва оценивают способностью сооружения выдер-
живать определенное избыточное давление во фронте ударной
волны.
Рассмотренные выше требования могут быть достигнуты при
затратах большего или меныцего количества сил, средств и вре-
мени. Для уменьшения этих затрат при разработке ракетного
комплекса необходимо обеспечивать высокую технологичность
конструкции, которая обеспечивается простотой и уменьшением
количества деталей ракеты; применением стандартизованных и
унифицированных -комплектующих агрегатов, узлов, деталей, ма-
териалов и сырья, обеспечивающих повышение уровня взаимо-
заменяемости, сокращение -номенклатуры и типоразмеров; при-
менением современных, наиболее производительных технологи-
ческих процессов обработки деталей и сборки их (проката,
штамповки, химического фрезерования, чистого литья, машинной
клепки и новейших методов сварки и склейки); минимальным
расходом материалов; высоким качеством продукции и возмож-
ностью применения рациональных методов и средств контроля
за качеством; расчленением конструкции па отсеки и панели, что
значительно уменьшает трудоемкость, повышает производитель-
ность труда за счет механизации сборочных работ и сокращает
цикл сборки и монтажа.
Следует заметить, что в суммарной стоимости производства
РК затраты на производство ракеты обычно не превышают 15—
5*
131
25%, а расходы на эксплуатацию РК в течение ряда лет могут
в несколько раз превосходить стоимость его производства
При разработке проекта ракетного комплекса предусматри-
ваются различные меры, позволяющие сократить расходы на его
создание и эксплуатацию Так, например, при проектировании
следует добиваться высокой степени автоматизации работ по
контролю за состоянием ракеты, подготовки и проведению ее
пуска. Простота обслуживания и автоматизация комплекса поз-
воляют резко сократить количество обслуживающего персона-
ла, а значит, и существенно уменьшить эксплуатационные рас-
ходы.
7.3. «ЭТАПЫ РАЗРАБОТКИ И СОЗДАНИЯ РАКЕТНОГО КОМПЛЕКСА
Проектирование ракеты неразрывно связано со всем процес-
сом создания ракетного комплекса и является его важнейшей
составной частью. Процесс создания РК обычно разбивается на
следующие основные этапы:
1) разработка технического предложения;
2) разработка эскизною проекта;
3) разработка технического проекта,
4) разработка рабочей документации на опытные образцы и
проведение наземных испытаний;
5) полигонные испытания;
б) серийное производство ракег.
Разработка техническою предложения. Этот этап включает
изучение тактико-технических требований и динамики развития
ракет, обработку статистических данных, теоретические и экспе-
риментальные данные. После изучения ТТТ разрабатывается се-
рия предварительных проектов ракет, отвечающих поставленным
требованиям. При разработке этих проектов должны учитывать
ся все новейшие достижения в области двигательных установок,
конструкций и систем управления.
Для каждого предварительного проекта ракеты производят
выбор топлива, принципиальной конструктивной схемы ракеты
и основных материалов, ориентировочное определение основных
весовых, геометрических и тяговых параметров ракеты (балли-
стическое проектирование ракеты), выбор двигателя, выбор сис-
темы управления, конструкции приборов и органов управления,
вычерчивание общего вида и компоновки ракеты.
После того как будут определены наиболее перспективные
проекты, производят их анализ с целью выбора наилучшего ва-
рианта, который более детально разрабатывается на последую-
щих этапах проектирования. Результаты проектных проработок
оформляются в виде технического предложения, включающею в
себя описание назначения и конструкции ракеты, расчеты и чер-
тежи общего вида выбранного варианта ракеты. Этот этан за-
132
.капчивается рассмотрением и утверждением технического пред-
ложения.
Разработка эскизною проекта. На этом этапе проектирова-
ния головная проектная организация но ракетному комплексу
подготавливает к выдает технические задания и исходные дан-
ные организациям-соисполнителям на разработку системы уп-
равления, двигательной установки, наземного стартового комп
лекса и других систем При этом составляются планы совмест
пых работ.
Исходными данными для эскизного проектирования являют-
ся параметры ракеты, полученные при разработке технического
предложения.
На этапе эскизного проектирования уточняется компоновка
ракеты, на основе прочностных расчетов выбираются конструк-
тивно-силовые схемы основных агрегатов >и узлов ракеты, разра-
батываются чертежи агрегатов и узлов, в полном объеме
производятся аэродинамический, весовой, центровочный, балли-
стический и динамический расчеты, расчеты надежности, эконо-
мические расчеты. Составляются сметные калькуляции на раз-
работку ракетного комплекса
11осле выполнения этих работ головной исполнитель составля-
ет эскизный проект, который является итоговым отчетным доку-
ментом по всей проделанной работе и содержит: описание раке
ты с приложением компоновочного чертежа и чертежей на все
основные агрегаты и узлы ракеты; обоснование выбранной конст-
рукции ракеты и се параметров; все .расчеты по ракете. Одно-
временно организациями-соисполнителями выпускаются эскиз-
ные проекты по системе управления, двигательной установке,
стартовому комплексу, наземному оборудованию и другим сис
темам.
Этот этап заканчивается защитой эскизного проекта ракет-
ного комплекса, внесением в него по результатам защиты необ-
ходимых исправлений, наконец, утверждением
Разработка технического проекта. Разработать проект ракет-
ного комплекса, являющегося весьма сложным объектом проек-
тирования, в создании которого участвуют десятки конструктор-
ских коллективов организаций-соисполнителей, в два этапа очень
трудно В связи с этим предусматривается третий этап проекти-
рования — разработка технического проекта. На этом этапе на
основе данных эскизного проекта уточняется компоновка, разра-
батывается конструкция агрегатов и узлов ракеты, уточняются
все расчеты. Головная организация выдает технические задания
и исходные данные организациям-соисполнителям па разработку
технического проекта. Разрабатывается конструкторская доку
мептация для изготовления испытательного оборудования и ма-
кетов экспериментальных образцов Изготавливается материаль-
ная часть и проводятся экспериментальные работы для проверки
принятых технических решений Разрабатывается «Единый свод-
133
ный план создания ракетного комплекса», включая программу
обеспечения надежности, проекты программ наземной отработки
и летных испытаний, калькуляции сметной стоимости и сетевой
график.
Этот этап заканчивается составлением, экспертизой, зашитой
и утверждением технического проекта
Разработка рабочей документации на опытные образцы и
проведение наземных испытаний, Па основании технического
проекта разрабатывается конструкторская документация для из-
готовления 'и испытания опытных образцов, частные программы
наземной отработки, эксплуатационная документация, включая
документацию на испытательное оборудование
Конструкторская документация передается в опытное про-
изводство, производится подготовка опытного производства, из-
готовление опытных образцов и испытательного оборудования
для наземных испытаний.
Вначале проводятся автономные испытания отдельных узлов
я систем ракеты. После получения удовлетворительных резуль-
татов этих испытаний приступают к стендовым испытаниям всей
ракеты или ее отдельных ступеней. Одновременно произво-
дится опытная отработка остальных агрегатов и систем ракетно-
го комплекса.
Полигонные испытания. На полигоне опытные образцы раке-
ты и элементов РК впервые испытываются совместно. В ходе на-
земной отработки обеспечивается работоспособность всех агре-
гатов и систем п.ри транспортировке, установке ракеты в старто-
вое положение и подготовке ее к пуску. При этом выявляются и
устраняются недостатки в конструкции отдельных узлов ракеты,
наземного оборудования и стартовых сооружений. В процессе по-
лигонных испытаний проверяется соответствие характеристик
ракетною комплекса требованиям ТТТ. окончательно устанавли-
ваются режимы его эксплуатации.
После завершения этих работ приступают к летным испыта-
ниям ракет. На «первом этапе, который называют летно-конст-
рукторскими испытаниями (ЯКИ), выявляются и устраняются
дефекты -комплекса, не обнаруженные прн стендовых испытани-
ях и наземной отработке. В ходе ЯКИ завершается отработка
конструкции ракеты и элементов РК В этот же период могут
проводиться специальные транспорп1|ювочные испытания раке-
ты на штатных транспортных средствах, а также испытания РК
в тяжелых климатических условиях (при низких и высоких тем-
пературах, повышенной влажности воздуха, сильном ветре и
т п.)_ Такие испытания, как правило, завершаются пуском ра-
кеты.
При положительных результатах ЯКИ производится заклю-
чительная серия пусков (зачетные летные испытания), при ус-
пешном проведении которых принимается решение о серийном
иронзводстве ракет.
134
Серийное производство ракет. По результатам всех испыта-
ний производится уточнение чертежно-технической и эксплуата-
ционной документации и отработка ее для серийного производ-
ства По этой документации организуется серийное производство
ракет
7.4. ВЫБОР КОНСТРУКТИВНОЙ СХЕМЫ РАКЕТЫ
Приступая к проектированию, необходимо выбрать принци-
пиальную конструктивно-компоновочную схему ракеты. Конст-
руктивную схему ракеты определяют:
— тип полезного груза;
— тип и назначение ракеты,
- гип дведателя и применяемое топливо (твердое, жидкое);
— тип системы управления:
— вид старта;
— количество и расположение ступеней.
Конструктивно-компоновочная схема ракеты должна отра-
жать новейшие достижения науки в области ракетной техники
и технологии производства ракет; обеспечивать минимальные за-
траты на разработку и производство ракеты, позволять с наи-
большей полнотой использовать стандартизованные и унифици-
рованные узлы, агрегаты и материалы: учитывать технические
возможности существующей экспериментальной и производст-
венной базы, либо затраты да создание новых стендов для экс-
пери метальной отработки и новых специализированных произ-
водств.
Принципиальная конструктивно-компоновочная схема сущест-
венно влияет на геометрические и массовые характеристики ра-
кеты При выборе ее необходимо принять решение о количестве
ступеней, способе их соединения, типе органов управления, сис-
темах разделения сгупеней и отделения головной части. Здесь
же устанавливается взаимное расположение отсеков и принци-
пиальные схемы топливных отсеков.
В настоящее время некоторые характерные признаки, опре-
деляющие схему ракеты, являются относительно стабильными.
Основные соображения по выбору количества ступеней мно-
f иступенчатых ракет и распределению масс между ступенями
будут изложены в главе VIII.
Ступени составных ракет имеют обычно одинаковые по наз-
начению отсеки. Исключение составляет приборный отсек. Буду-
чи обязательным на последней ступени, он может отсутствовать
как отдельный отсек на других ступенях. Поскольку головные
части баллистических ракет в конце активного участка траекто-
рии отделяются -от последней ступени, их располагают в перед-
ней части ракеты.
Наличие струи вытекающих газов вынуждает располагать
двигатель в хвостовом отсеке. Таким образом, при выборе ком-
поновочной схемы ступени приходится решать лишь вопрос о вза-
13»
имном расположении топливного и прииориого отсеков, а также
выбирать конструкцию переходников, соединяющих степени и
головную часть с корпусом ракеты
Рассмотрим конструктивные схемы одноступенчатых и мно-
гоступенчатых ракет.
Конструктивные схемы одноступенчатых ракет с ЖРД. Одно-
ступенчатые баллистические ракеты обычно состоят из следую-
щих агрегатов или отсеков (рис 7.3). головной части 1, прибор-
ного отсека 2, топливного отсека, включающего в себя бак
горючего 4 и бак окислителя 7, и хвостового отсека 8 Отсеки
Рис. 7 3. Конструктивная схема одноступенчатой ракеты «Тор»
зарядом. 1—приборный отсек, 3—приборы борто-
•ючесо, 5—двигатели торможения корпус
-иеткбаковый отсек 7—бак окислителя.
ракеты собираются, как правило, отдельно и крепятся друг к
другу болтами.
Головная часть Корпус головной часта ракеты пред-
ставляет собой коническую оболочку с притупленной вершиной»
обычно покрытую специальным теплозащитным материалом
Внутри корпуса размещается полезный груз.
Приборный отсе-к выполняется как отдельная часть (с
полной или местной герметизацией приборов) или как удлинен-
ная юбка бака Характерным для силовой схемы корпуса при-
борного отсека является наличие мощного силового продольного
набора и съемных силовых люков, обеспечивающих доступ к
приборам системы управления.
Иногда от приборных оттеков, как таковых, отказываются,
размещая герметизированные приборы системы управления iro
остальным отсекам и между ними.
Топливный отсек. Имеется два основных типа топлив-
ных отсеков: с несущими и ненесущими (подвесными) баками.
Подвесные баки размещаются внутри специального каркаса,
который воспринимает все внешние нагрузки, действующие на
топливный отсек в полете и на старте. К этому каркасу болтами
или специальными замками присоединяются головная часть и
корпус хвостового отсека с двигательной установкой.
У" конструкции с несущими баками оболочка баков одновре
мепио является силовой частью корпуса топливного отсека ра-
кеты.
13(5
В хвостовом отсеке размещается двигательная уста-
новка Корпус хвостового отсека является силовым элементом
конструкции, воспринимающим осевые нагрузки на стартовом
столе Одновременно хвостовой отсек защищает двигательную
установку от действия окружающей среды на старте Он чаще
всего состоит из сравнительно тонкой цилиндрической (реже
конической) оболочки, подкрепленной продольным и поперечным
набором. У некоторых ракет к шпангоутам хвостового отсека
присоединяются стабилизи-
рующие поверхности, увели-
чивающие устойчивость ра-
кеты в полете. К шпангоу-
там хвостового отсека мо-
жет присоединяться и рама
основной двигательной уста-
новки, передающая усилие
тяги на корпус ракеты.
Конструктивные схемы
многоступенчатых ракет.
Конструктивно - компоновоч-
ные схемы составных ракет
могут иметь последователь-
ное, параллельное и комби-
нированное соединение сту-
пеней (рис. 7 4).
Схема с последователь-
ным соединением ступеней
(см рис. 7.4, л) предпола-
гает соосное расположение
ступеней одна за другой. Ее
иногда называют схемой
«с поперечным делением»
или схемой «тандем».
Конструктивную схему с
параллельным -соединением
ступеней (см. рис. 7.4,6)
иногда называют «пакетной», поскольку ступени ракеты соеди-
няются (связываются) одна с другой в пакет так, что их про-
дельные оси параллельны или наклонены одна к другой на не-
большой угол. Ракеты такой схемы можно создавать, соединяя
в связку необходимое количество корпусов одноступенчатых ра-
кет. При этом в качестве ступеней ракеты могут использоваться
как твердотопливные, так и ракеты с ЖРД.
Ракеты пакетной схемы могут выполняться с автономными
блоками иля же с гидравлической связью (по топливу) между
двигателями соседних блоков. На старте запускаются двигатели
либо только боковых блоков, либо сразу всех блоков. После
J37
Рис 7 Конструр soiiaw
rycvia _ раксть9-нос.итеяя
«Титап-ЗС
ДЛЯ ЬспИИ ступеней,
7 уск первой ступе-
ни с ЖРД '—головной об-
усворичяь третьей
- с 'ЖРД, " -отсек
блок горавлепня. 7—кпов
ной обтскат«.1Ь, S—уекчрп
толь второй ступени с "ЖРД,
Рис 7о Конструктивная схема трехступеи
ракет «Европа i
I- пскорнтсзь первой ступени, я—илсн-кость ра -глекня
первой и второй ступеней ускоритель второй ступени;
4—плогчость разделения второй и третьей ступеней 5 -
ускоритель третьей ступени, 6—плоскость раздел--пня
третьей ступени и спутника; 7—плентккгь разделении
третьей ступени ™~... о ----------------------------------
спутника " ------------------------------------------------
-бак горючего в топливном от
—бак окислителя в топливном
отсеке третьей сту пени 12—рулевые двигатели (2 шт).
М—мар-певый (основной) Я-РД третьей ступени 14—бак
окисли re-тя ЖРД второй ступени 15— бак горючего ЖРД
вте—iii стутюви 15— Я<РД второй ступени 14 шт), 17—
огс-д обг ованпя первой ступени IB—бак окислители
ЖРД нет - - ‘'ту пени, /О—чУак горючего 4\РД первой
стшепн УЗ—хвосптой отсек; 2/—ЖРД первой ступени
выгорания топлива боковых блоков последние отделяются, а
центральный блок продолжает полет.
При прочих равных условиях ракеты с последовательным сое-
динением ступеней имеют следующие преимущества: за счет
меньшего диаметра более просто решается вопрос размещения
ракет в шахтных пусковых установках и меньше лобовое сопро-
тивление при разгоне ракеты в плотных слоях атмосферы; прос-
тота узлов сочленения; сравнителыно небольшие возмущения
при разделении ступеней; более простое пусковое устройство.
Недостатками ракет с последовательным соединением ступе-
ней являются, большая чли-на ракет (в особенности тяжелых
ракет-носителей), что усложняет подготовку их к пуску и обслу-
живание на стартовой (позиции; при запуске используются дви-
гатели только первой ступени, из-за чего они должны быть дос-
таточно мощными и, следовательно, тяжелыми; необходимость
проектирования и отработки каждой ступени в отдельности,
вследствие чего увеличивается стоимость ракеты, в то время как
при пакетной схеме возможно использование готовых (штатных)
блоков; необходимость запуска двигателей второй и последую
щих ступеней в ‘Полете при низких атмосферных давлениях, что
повышает вероятность отказа в запуске и, следовательно, пони-
жает надежность ракеты; чувствительность конструкции такой
схемы к поперечным перегрузкам из-за невысокой жесткости
Ракеты комбинированной схемы сочетают пакетное и последо-
вательное соединение ступеней. Например, первая и вторая сту-
пени соединены в пакет, а третья соединяется со второй после-
довательно (см. рис. 7.4, в). Они имеют достоинства и недостат-
ки ракет обеих рассмотренных выше схем.
На рис 7.5 в качестве примера показана конструктивная схе-
ма трехступенчатой ракеты-носителя «Европа-I», выполненная г
последоватсльпым расположением ступеней.
На грис 7.6 показана схема трехступенчатой ракеты-носителя
«Тптан-ЗС», выполненная с комбинированным расположением
ступеней. Центральный блок представляет собой трехступенча-
тую ракету. На эту ракету навешиваются стартовые РДТТ 5,
которые включаются одновременно, сразу после включения
ЖРД первой ступени
7.5. СТАТИСТИКА И ЕЕ ЗНАЧЕНИЕ
Выбирая основные размеры ракеты, конструктор должен
удовлетворить многим противоречивым требованиям. Так, тре-
бования прочности ракеты противоречат требованию минималь-
ной массы ее. Для увеличения эффективности органов управле-
ния их необходимо ‘расположить как можно дальше от центра
масс ракеты, т. е. при заданной стартовой массе ракеты увеличи
вать ее длину при одновременном уменьшении диаметра ракеты
По тонкая н длинная ракета будет иметь недостаточную проч-
139
пость при действии ветра во время стоянки на отусковом устрой-
стве. Кроме того, большая длина ракеты может быть неприемле-
ма из-за невозможности ее транспортировки по железной дороге..
Если еще учесть, что стартовая масса ракеты оказывает влияние
на ее размеры, а размеры, в свою очередь, влияют на массу, то
станет понятной трудность выбора основных размеров ракеты с
помощью только теоретических расчетов.
Поэтому для предварительного определения основных разме-
ров проектируемой ракеты пользуются данными современных,,
однотипных с проектируемой ракет. При этом пользуются не аб-
солютными величинами (размер, масса, мощность двигательной
установки), а относительными величинами, называемыми (логи-
стическими коэффициентами. Эти коэффициенты получают в ре-
зультате обработки статистических данных ракет-прототипов.
Статистической обработке подвергаются следующие основные
х а р актеристики ракет-прототипов:
а) общие характеристики ракет;
б) технические характеристики двигателей;
в) геометрические размеры,
г) массовые характеристики.
Рассмотрим некоторые основные статистические коэффици-
енты
Стартовую массу ракеты (рис. 7.7) обычно представляют в
виде суммы
m, а и„ (7. 1)
где т„„ — масса полезной нагрузки;
тьонстр — масса конструкции ракеты;
т-с — масса топлива
Л1асса полезной нагрузки складывается из массы конструк-
ции головной части пгг ч, массы заряда т3 и массы взрыватель-
ного устройства те_у.
Масса конструкции ракеты
^Л'еоистр = ?Пкорй Гтя.у
где ткорп — масса корпуса ракеты;
mgv— масса двигательной установки;
т(.у масса системы управления.
Масса корпуса ракеты складывается из массы конструкций
топливною отсека приборного отсека т„о п хвостового от-
сека т^„
Масса двигательной установки складывается пз массы дви-
гателей тДБ, рамы крепления двигателя пгрлв и системы надду-
ва баков тлад.
Масса системы управления складывается из массы аппарату-
ры системы управления та.ь.у, органов управления тОу, источ-
ников питания электроэнергией mnn и кабельной сети твс- Мас-
140
Рис 77 Компоненты массы ракеты
Масса, полезной. Масса конструкции. Масса топлива
нагрузки. тпн [ | тмнстр л?
са топлива складывается из номинального 'рабочего запаса ком-
понентов топлива т1Л10ь, и гарантийного запаса И1тгар
I73)
Номинальный рабочий запас топлива рассчитывается из усло-
вия достижения ракетой заданной дальности при номинальных
(расчетных) параметрах ракеты и условиях полета.
Гарантийным запасом топлива -называется дополнительное к
номинальному рабочему запасу количество топлива, необходи-
мое для обеспечения заданной максимальной дальности полета
в случае отклонения действительных параметров ракеты и усло-
вий полета от номинальных значений.
Гарантийный запас топлива следует по возможности умень-
шать, так как он является пассивным грузом.
При предварительных расчетах стартовую массу ракеты
представляют в виде следующей суммы:
I ®,. (7.4)
Коэффициенты относительных масс составных частей ракеты.
Соотношения между величинами стартовой массы, массы .конст-
рукции ракеты и массы топлива могуч- быть 'различными в зави-
симости от типа и назначения ракеты. Но для ракет одного типа
и назначения эти соотношения более или менее одинаковые и ле-
жат в определенных пределах.
Для сравнения различных ракет и облегчения проектировоч-
ных расчетов введены коэффициенты относительных масс сос-
тавных частей ракеты.
Относительная масса полезной нагрузки
(7.5)
Этот коэффициент показывает долю полезной нагрузки в стар-
товой массе ракеты и желательно, чтобы он был возможно боль-
шим.
Относительная масса конструкции ракеты
Нковс1р==яй<оистр/ГИо. (7.6)
Желательно, чтобы это значение было наименьшим для уве-
личения доли топлива в стартовой массе ракеты.
Относительная копечная масса ракеты
\.iK=mK/m0. (7.7)
В конечную массу ракеты входит масса конструкции ракеты,
масса полезной нагрузки и масса топлива, оставшегося в ракете
после выключения двигателя.
Величина, обратная ив называется числом Циолковского
2=1/рк,
142
По зарубежным чанным число Циолковского мри использо-
вании современных материалов может достигать 6—7. а в пер-
спективе — 10.
Относительная масса системы управления
рсу = тс.у1ти- (7.8)
Геометрические коэффициенты. При статистической обработке
геометрических размеров ракет-прототипов получают безразмер-
ный коэффициент, который равен отношению длины той или иной
составной части ракеты к диаметру наибольшего поперечного
сечения ракеты.
Удлинение ракеты
l=L/dK, (7.9)
где L длина ракеты;
— диаметр миделевого (наибольшего) сечения ракеты.
Удлинение головной 430111 ракеты
t , (7. 10)
где Lr4- длина головной части.
Контрольные вопросы
1. Как классифицируются ракеты по назначению?
2 Расскажите о классификации баллистических ракет.
3. Проанализируйте конструкция американских ракет «Ми-
нитмен» и «Титан-П» с учетом схемы классификации ракет.
4 Перечислите основные тактико-технические требования к
ракете.
5. Перечислите эксплуатационные требования к ракетам.
6. Перечислите и охарактеризуйте производственно-экономи-
ческие требования к ракетам.
". На какие основные этапы разбивается процесс проектиро-
вания ракет? Охарактеризуйте их.
8 Что определяет конструктивную схему ракеты?
9 . Каким общим требованиям должна удовлетворять конст-
руктивная схема ракеты?
10 . Какие существуют конструктивные схемы многоступенча-
тых ракет?
11 . Какие преимущества и недостатки имеют схемы с после-
довательным и параллельным расположением ступеней?
12 . Каково значение статистики при просктирова1нии ракет?
13 Какими слагаемыми определяется стартовая масса ра-
кеты?
14 Что называется гарантийным запасом топлива?
15 Что называется относительной массой полезной нагрузки?
143
Глава VIII
БАЛЛИСТИЧЕСКОЕ ПРОЕКТИРОВАНИЕ И КОМПОНОВКА
ракеты
8.1. ПРОЕКТНЫЕ ПАРАМЕТРЫ РАКЕТЫ
Проектными параметрами ракеты называются такие пара
метры, определяемые при проектировании ракеты, которые поз-
воляют найти ее дальность и приближенно массу при заданной
полезной нагрузке и принятых конструктивно-компоновочной
схеме и топливе.
К основным проектным параметрам ракеты относятся:
рк — относительная конечная масса ракеты;
7у.п — удельный импульс в пустоте;
По — начальная тяговооруженность;
Рм — начальная нагрузка яга мидель.
Рассмотрим влияние проектных параметров на скорость ра-
кеты. Отдельные параметры оказывают влияние па скорость ра-
кеты различным образом.
Относительная конечная масса ракеты характеризует совер-
шенство конструкции ракеты. Этот коэффициент показывает ве-
личину массы ракеты к моменту выключения двигателя, когда
израсходовано почти все топливо. Чем меньше относительная
масса конструкции ракеты, тем совершеннее ракета при данной
стартовой массе и гем большую скорость она разовьет в конце
активного участка.
Величина р.к зависит от стартовой массы ракеты, конструк-
тивной схемы ракеты, рода топлива, массы полезной нагрузки
и др.
С увеличением стартовой массы коэффициент уменьшает-
ся за счет более медленного увеличения масс отдельных отсе-
ков ракеты, чем повышение ти.
Так как с эксплуатационной и производственно-экономиче-
ской точек зрения повышение ш0 нежелательно, то уменьшение
j.iK следует осуществлять за счет выбора наиболее совершенной
принципиальной конструктивной схемы ракеты, улучшения
формы и обеспечения равнопрочное! и конструкций, применения
легких и прочных материалов, топлива с высокой калорийностью
и большей плотностью, выбором оптимальных параметров п0,
Рм, а также за счет совершенствования двигателя и уменьшения
гарантийного запаса топлива.
Величина рк определяется в результате массового анализа
ракеты.
Удельный импульс в пустоте 1уп=Рп/т характеризует эф-
фективность использования каждой единицы расходуемой мас-
сы топлива для создания тяги. Величина /у.п зависит от совокуп-
ности энергетических возможностей топлива, термодинамических
144
свойств образующегося рабочею тела, а также от степени со-
вершенства конструкции двигателя.
В тл. I было показано, что удельный импульс в пустоте опре-
деляется величиной эффективной скорости истечения (1.1-4), ко
тора я входит сомножителем в уравнение Циолковского (1.15)
для идеальной скорости ракеты. Следовательно, для получения
заданной конечной скорости ракеты при более -высоком удель-
ном импульсе необходимый запас топлива будет меньше, что
снижает стартовую массу ракеты.
Существует два пути увеличения удельного импульса:
1) совершенствование конструкции ракетных двигателей;
2) применение топлив с большими энергетическими возмож-
ностями
Начальная тяговооруженность ракеты определяется из выра-
жения
. №. 1)
.С'.ЛГ.,
Чем больше тяговооруженность ракеты, тем больше будет ус
корёпйе ракеты, тем быстрее ракета достигнет заданной колеч
ион"скорости." Следовательно, потери скорости за счет 'влияния
силы земного тяготения будут меньшими. Но удед.ичн.1ле-хц1двд=-
оружснности приводит к утяжелению .двш ягельной.—установки
Кр~о.ме юго, при больших ускорениях возрастают нагрев оболоч-
ки корпуса, аэродинамические и инерционные нагрузки, дейст-
вующие на ракету на активном участке, что в конечном итоге
Ттрйвбдит к утяжелению -корпуса ракеты и увеличению ее относи-
тельной конечной массы.
Расчеты показывают, что имеется оптимальная величина, при
ко!орой_до_стигается максихмальная'далькость полета Оптималь-
ная величина начальной тяговооруженнюсти зависит от дально-
сти и конструктивной схемы ракеты. Чем больше дальность, тем
меньше оптимальная величина п0, так как с увеличением даль-
ности уменьшаются относительные затраты тяги на преодоление
силы земного тяготения.
Обычно для одноступенчатых баллистических ракет с ЖРД
nj'n = 1,5~1Д а для двухступенчатых ракет с РДТТ п*"т =2-:-
2,5 для лервой ступени и 3,3—5,0 для второй ступени.
Величина, обратная начальной тяговооружеиности, называ-
ется коэффициентом начальной нагрузки на тягу двигателя;
ч=.'.=^& . (8.2)
«о ро
Начальная нагрузка на мидель ракеты определяется отноше-
нием стартовой массы ракеты к площади се мпделевого сечения-
(8 3)
145
Чем больше начальная нагрузка на мидель, тем меньше по-
тери скорости при прохождении ракетой атмосферы
Параметры, отвечающие максимальной дальности при задан-
ной стартовой массе, называются оптимальными параметрами.
При анализе и выборе проектных параметров, кроме летно-
технических данных, учитывается наличие готовых двигателей,
тяга которых незначительно отличается от потребной, эксплуа-
тационные, производственно-экономические факторы и возмож-
ность сокращения затраты времени на проектирование ракеты
Учитывая эти факторы, как правило, приходится отходить от оп-
тимального значения проектных параметров и выбирать их ра-
циональные значения.
8.2. ВЫБОР КОЛИЧЕСТВА СТУПЕНЕЙ И РАСПРЕДЕЛЕНИЕ МАСС
ПО СТУПЕНЯМ
Выбор количества ступеней При проектировании ракеты со-
став топлива, масса (полезной нагрузки и предельная дальность
полета являются заданными. Чтобы в этих условиях обоснован
по выбрать количество ступеней ракеты, необходимо знать вли-
яние количества ступеней на массу и -размеры ракеты, на на-
дежность ракеты при ее использовании, на эксплуатационные
свойства ракеты, ла трудоемкость отработки и изготовления ра-
^Асты, на стоимость ракеты и в целом ракет^гщк^куп^ек^а
г, Втлт1-нри-расезтотрении формулы-Циолковскего для ниие-
- 'ступенчатых ракет-было-доказа+ю,' -что [увеличение количества
ступеней приводит к увеличению скорости полета и дальности.
Для одной и той же заданной скорости многоступенчатая ра-
кета будет иметь меньше стартовую массу, чем одноступенчатая.
Но будет ошибкой считать, что чем больше ступеней, тем ракета
будет легче В зависимости от соотношения заданной скорости
и скорости истечения газов, а также относительной массы кон-
струкции существует оптимальное (наивыгоднейшее) количест-
во ступеней. Увеличение количества ступеней сверх сятпь а ли-
пой величины приводит не только к усложнению конструкции,
удорожанию и уменьшению надежности ракеты, но и к увеличе-
нию ее стартовой массы.
Чтобы определить оцтима.лыюс количество ступеней, необхо-
димо устанЬвить_связь между числом ступеней и потребной стар-
тбВпй^ННССлТГ^акётыТ^Для этого при заданном топливе и приня-
тых проектных параметрах ракеты обычно рассчитывают и стро-
ят графики, зависимости дальности стрельбы L от tn0/maM
"Подобные графики изображены па рис. 8.1 и 8.2, Они позво-
ляют выявить варианты ракет с разным количеством ступеней,
которые могут обладать заданной дальностью полета, и сравнить
стартовые массы этих вариантов.
Анализ трафиков па рис 8.1 и 8.2 позволяет сделать следую-
щие выводы:
146
баллистические возможности одноступенчатых ракет с ЖРД
и двухступенчатых ракет с РДТТ практически одинаковы в свя-
зи с тем, что удельный импульс РДТТ меньше удельного им-
пульса ЖРД п ракеты с РДТТ обладают большими значени-
ями
в диапазоне дальностей 10004-1500 км одноступенчатые и
двухступенчатые ракеты с ЖРД обладают практически одипа-
L. тыс км
п
10 20 30 00 30 тв/тм
Рис 81 Зависимость дальности полета от
т01тп к и количества ступеней ракет с
ЖРД (при /у.П1=2700 Н-с/кг; 7уП2=
=3200 Н с/кг; Ду пг=3200 Н-с/кг)
ксвой стартовой массой; в этом же диапазоне дальностей поле-
та одинаковой -стартовой массой обладают двух- и трсхступенча-
тые ракеты о РДТТ;
двухступенчатые ракеты с ЖРД могут обеспечить полет прак-
тически на любые дальности, а также способны вывести искусст-
венный спутник Земли на круговую или эллиптическую орбиту;
трехступенчатые ракеты с ЖРД, начиная с дальностей L»
я»20004-3000 км, обладают несколько меньшей стартовой мас-
сой, чем двухступенчатые, однако выигрыш в стартовой массе
не превышает 10%;
увеличение количества ступеней ракет с РДТТ свыше i не
приводит к существенному приросту дальности полета.
Остальные характеристики ракет изменяются с увеличением
количества ступеней следующим образом: надежность ракеты
заметно снижается, так как возрастает количество элементов,
отказ или неправильное функционирование которых влияет па
надежность ракеты в целом; трудоемкость и стоимость отработ-
147
кл и изготовления ракеты, объем регламентных работ с ракетой
и объем контрольных проверок перед пуском резко возрастают.
При учете всех факторов наивыгоднейшее количество ступе-
ней в ракете обычно оказывается па единицу меньшим того коли-
чества. ступеней, при котором ракета имеет наименьшую старто-
вую массу. При дальностях полета до 4000—5000 км ракеты на
жидком топливе имеют одну ступень, а твердотопливные — две.
.При дальностях стрельбы свыше 6000 км ракеты с ЖРД
Рис 82 Зависимость дальности полета от
mo/mu ч и количества ступеней ракет с РДТТ
(при /) п=2400 Н с/кг)
выполняются двухступенчатыми, а ракеты с РДТТ — трехсту-
пепчатыми. У ракет-носителей количество ступеней может быть
от 2 до 6 в зависимости от массы космического аппарата и ха-
рактеристик рабочих орбит, на которые они выводятся.
Распределение масс по ступеням ракеты. Чтобы решить воп-
рос о рациональном распределении масс по ступеням ракеты,
необходимо оценить влияние этого распределения на потребную
стартовую массу и на габариты ракеты Оценку этого влияния
для простоты рассмотрим -па примере двухступенчатой ракеты.
Введем понятия о коэффициенте заполнения ракеты топливом
и коэффициенте соотношения относительных масс топлива, с по-
мощью которых легко проанализировать влияние 'распределения
масс между ступенями на потребную стартовую массу.
Коэффициентом заполнения ракеты топливом рт называется
отношение массы топлива тт к начальной массе ступени т0:
Р'т, = m^//nOi. f8-4)
Для первой ступени ц11='гац/и’о1-
Для второй ступени
Величина рт также носит название относительной массы топ-
лива ракеты.
Коэффициент соотношения относительных масс топлива
смежных ступеней
Z, =!\(от/Н,, (8-5)
Для двухступенчатой ракеты
Анализ влияния распределения масс между ступенями на
стартовую массу ракеты сводится к расчету зависимостей т0 =
(рис. 83). Имея графики таких зависимостей, можно
найти соотношения между Цт<> соответствующие минимуму стар-
товой массы, и оценить увеличе! ио
стартовой массы при отклонении com-
ношений .между в ту или ин,то . х.
сторону. Наивыгоднейшие по старто- "%/ - —----
вой массе ракеты соотношения между I
ит,- ступеней ракеты в основном зави-
сят от массы полезной нагрузки, от
дальности полета ракеты, состава топ-
лива и типа двигателей, значений i______________i___
удельных импульсов двигателей па х.„ , >
различных ступенях, совершенства Рие 8.з Зависимосгь стар.
конструкции ступеней. Общие законе- Товой массы двухыупенча-
мерности этих зависимостей таковы- той ракеты от коэффициен-
а) с ростом дальности полета ра- та х’
кеты (с ростом стартовой массы)
оптимальные относительные массы верхних ступеней умень-
шаются;
б) с увеличением массы полезной нагрузки оптимальные от-
носительные массы верхних ступеней увеличиваются;
в) с ‘увеличением удельных импульсов тяги двигателей на
верхних ступенях ракеты оптимальные относительные массы
этих ступеней увеличиваются, так как в mix более эффективно
используется топливо, а повышение удельного импульса двига
теля на нижней ступени ракеты уменьшает относительные массы
верх!гих ступеней;
г) улучшение конструкции любой ступени привозит к росту
ее наивыгоднейшей относительной массы;
д) зависимость 'начальной массы ступени от распределения
масс по ступеням имеет около точки минимума пологий харак-
тер, поэтому небольшой отход от оптимальных соотношений масс
ступеней не приводит к заметному переутяжелению ракет.
Анализ конкретных расчетов, проведенных при весовых ко-
эффициентах, тяговооруженностях и удельных 'импульсах, кото-
рыми обладают современные американские ракеты, показывает,
что х ракет с ЖРД наивыгоднейшие соотношения между ц,
близки к следующим-.
14»
а) у двухступенчатых ракет щв= 1,14-1,3 |iTi,
б) у трехступенчатых ракет цтз = 1,1^-1,5 pTsf=1,24-1,25 цТ|.
У ракет с РДТТ, когда все ступени ракеты имеют одинаковое
топливо, ртз = 1,0-т-1,5 [ЛТ2= 1,0— 1,1 (АТ1
8.3. ОПРЕДЕЛЕНИЕ ПРОЕКТНЫХ ПАРАМЕТРОВ АНАЛИТИЧЕСКИМ
МЕТОДОМ
При проектировании необходимо выбрать оптимальное соче-
тание числовых значений проектных параметров, при котором
достигается, например, наименьшая стартовая масса ракеты
при условии достижения заданной дальности стрельбы при за-
данной .массе полезной нагрузки.
Методика расчета оптимальных проектных параметров осно
вывается на совместном решении системы дифференциальных
уравнений движения ракеты и уравнений, связывающих массо-
вые характеристики проектируемой ракеты с проектными пара-
метрами (массовые уравнения)
Система уравнений движения на активном участке траекто-
рии позволяет выразить баллистические характеристики ракеты
(дальность стрельбы, скорость в конце активного участка и др.)
через проектные параметры.
Комплексное определение оптимальных значений всех пара-
метров по минимальному значению стартовой массы, которая
будет функцией большого числа переменных, представляет со-
бой весьма громоздкую и трудоемкую задачу.
На практике возможно применить менее точные, но более
простые методы решения данной задачи. Для этого целесооб-
разно выбирать только те проектные параметры, которые наибо-
лее тесно связаны между собой и существенно влияют на
величину стартовой массы и дальность стрельбы. Такими пара-
метрами являются ц1{ и 7у.п. Остальные проектные параметры
предварительно принимаются заданными на основании имею-
щихся статистических материалов, а затем в процессе проекти-
рования уточняются.
Выбор проектных параметров рассмотрим на примере одно-
ступенчатой ракеты Исходными данными, 'необходимыми для
проведения баллистических и массовых расчетов, являются за-
данные максимальная дальность полета, масса полезной нагруз-
ки и выбранная конструктивная схема ракеты.
По заданной дальности полета по эллиптической теории оп-
ределяем потребную скорость ракеты в конце активного участка
траектории.
Для этою воспользуемся графиком изменения дальности
стрельбы от скорости 14 (рис. 8.4). Каждой дальности полета
соответствует определенная величина скорости
VK=V„--AVrf-Ara-AVp, (8. б)
150
где Уи — идеальная скорость ракеты, определяемая по форму-
ле Циолковского;
ЛУК - потери скорости, вызванные действием силы тяжести;
потери скорости на преодоление сопротивления воз-
духа;
ДУр—поправка, учитывающая изменение тяги с высотой.
По формуле (8.6) определим потребную идеальную скорость
ракеты
Рис 84 Зависимость ыаксииалыюй дальности
полета баллистической ракеты от скорости в
конце активного участка
Можно принять, что
(8.71
Для межконтинентальных баллистических ракет с дально-
стью полета 10—14 тыс. км коэффициент Kv~ 1,154-1,25, при
этом большим дальностям полета соответствует меньшее значе-
ние коэффициента.
Пользуясь формулой Циолковского (1 1'6), определим по-
гребные величины относительной конечной массы ракеты
эффективной скорости истечения а'а.п и, следовательно, удель-
ного-импульса /у м,
На рис. 8.5 показано изменение идеальной скорости ракеты
ь зависимости от р.к при различных значениях удельного им-
пульса тяти Из графика ’видно, -что может быть несколько со-
четаний р-и и и, обеспечивающих требуемую идеальную ско-
рость ракеты.
Если топливо выбрано, то уже известна примерная величина
К п- Имея эту величину удельного импульса, по графику (см
151
рис. 8.5) находим такое значение р.к, при котором обеспечивает-
ся достижение ракетой требуемой идеальной скорости в конце
активного участка траектории полета.
Затем Определяем стартовую массу ракеты. При этом на эта-
пе разработки технического предложения на основе обра-
ботки статистических материалов по существующим однотипным
ракетам составляют уравнения для массы отсеков ракеты Ис
ходными данными для -составления этих уравнений являются
Рис 85 Зависимость идеальной скорости
ракеты V',! от величины р.к и удельного им
пульса тяги двигателя
конструктивная схема ракеты, масса полезной нагрузки, харак-
теристики применяемых компонентов топлива и конструкцион-
ных материалов, типе! различных систем ракеты и т. д. При
этом масса полезной нагрузки, задаваемая тактико-техническими
требованиями на проектирование .ракет, не зависит от основных
проектных параметров ракеты, а масса топливного, приборного,
хвостового отсеков ракеты, двигательной установки, системы уп-
равления и запас топлива выражают через проектные пара-
метры.
Составляющие слагаемые стартовой массы рассчитываются
по следующим формулам.
Масса топлива /пт=то—тк, где т,;—масса ракеты в
конце активного участка траектории:
тк=ркщ0.
Следовательно, tri г = mc 11 — t*K)- (8-8)
Масса топливного отсека пропорциональна массе топлива
'• V-4.Pm011 — рк), (8.9)
где рт.о—статистический коэффициент для массы топливного
отсека.
По зарубежным данным pTOf5s0,02-b0,U4
Масса приборного отсека зависит ст осевых пере
грузок, действующих на ракету, и может быть рассчитана по эм-
пирической формуле
иг,,., Ри..Лл,по» (8.10)
где Ццо- статистический коэффициент для массы приборного
отсека.
По зарубежным данным рп о-^0,00054-0,0007;
я. 1 — максимальная осевая перегрузка.
В первом приближении
п _р,< = Р" тг> - р” т° — р" 1
” gc.mK ^тк т0 g^nn тк g^m-,
Тяга двигателя в пустоте примерно на 15% больше тяги
двигателя на уровне моря (у Земли), т. е. Рп=1,15Ро
Тяга двигателя на уровне моря связана с тачальной тягово
оружеппостью ракеты соотношением
й0 = ^о-'ёо^о-
Начальная тяговоеруженность баллистических ракет с ЖРД
как отмечалось выше, лежит в пределах от 1.5 до 1.8.
Теперь выражение (8.10) примет вид
m„.v “ 1. ls«ofJ7o!l...7l1K. (8.11)
Масса хвостового отсека в основном зависит толь-
ко от стартовой массы ракеты, так как он воспринимает массу
всей ракеты при стоянке ее «а пусковой установке:
-1ЧА- (8. 12)
где Цх о — статистический коэффициент для хвостового отсека.
По зарубежным данным p.xt>»0,004-=-0,006.
Конструктивно-технологическое совершенство двигателя ра-
кеты характеризуется удельным параметром, который называет-
ся удельной массой РД и определяется отношением массы дви-
гательной установки (без массы топливных баков) к тяге, раз-
виваемой при работе РД в пустоте, т. е.
й’ъу="гл.у/ря- (8-13)
По зарубежным данным £д.у« 0,001 кг/Н.
]53
Учитывая, что Pn=1.15F(l—l,15g(ynl(nc, получим
гал.у= ^1бп0^Н10^л.у- (8- 14
М а с с а системы управления не зависит от проектных
параметров. Она 'может быть определена по статистическому
коэффициенту относительной массы системы управления (7.9):
тс.у ' Fc.y,no- (s-151
Коэффициент относительной массы системы управления балли-
стических ракет по зарубежным данным рс у ~ 0,002-=-0,006,
С учетом (8 8), (8.9), (8.11), (8.12) (8.14) и (8.15) стартовую
массу ракеты, определяемую уравнением (7 4), удается выра-
зить через начальную тяговооруженность и статистические ко
эффициенгьг и получить расчет ное уравнение стартовой массы
ракеты
то '"пл 1\.о ( 1 — Рк I то + 1.15/гСтоР1..../Рк Т
— Рхд^По-*- b lS«<ig,.ySoWo |-pc.ymo I •1 - Рк)тч- (8-
Рис. 8.6 Вид графика для определ
иия огни • 1 ты» • величины |1К
т0
Обычно при проектировании берется несколько значений от-
носительной конечной массы, близких по величине к которая
в первом приближении была
определена по графику рис
8.5. Затем производится рас-
чет стартовых масс с учетом
этих значений. По результатам
расчетов строится график за-
висимости mn=f(pK) при
«пл—const (рис. 8 6) и по
наименьшему значению
определяется оптимальная ве-
личина ркош
Определив величины про-
ектных параметров (тс ущ,,
И»» от- и др ), далее можно рас-
считать все основные массо-
вые, габаритные и баллисти-
ческие характеристики ракеты.
Массовые характеристики ракеты (масса топлива, масса от-
дельных частей ракеты) определяются по вышеприведенным
формулам для выбранного значения стартовой массы. Масса
компонентов топлва рассчитывается по следующим уравнениям:
ГП.. '= ,П^ - ; ток ~~~~ •
(8- 17)
где н — коэффициент соотношение компонентов топлива, опре-
деляемый уравнением (61).
154
На основании массовых зависимое гей первого приближения
составляется предварительная сводка масс всех отсеков ракеты.
Объемные характеристики. Определив с помощью основных
проектных .параметров массы компонентов топлива и зная их
характеристики, можно рассчитать габаритные размеры топлив-
ных баков.
Объем заправляемого окислителя
где QOli — плотность окислителя.
Объем заправляемого горючего
Vr -«VPr,
где у,. — плотность горючего.
Потребный объем бака окислителя определяется расчетным объ-
емом окислителя Гок, объемом гарантийного запаса окислите-
ля Рокгарп объемом воздушной подушки Рок-иод- Масса тараи-
тийпо-го запаса окислителя берется в пределах 1-—2% от его по-
минального запаса. При этом величина объема гарантийного за-
паса окислителя будет составлять примерно 1—2% Уок.
Воздушная подушка необходима для компенсации объемного
расширения компонента топлива при повышении его температу-
ры во время хранения заправленной ракеты. Обычно величин}'
I <жлк>д берут равной 2 3 % Pqk.
Следовательно, потребный объем бака окислителя
К, 1-К -гяр —доклад- (8.18)
Аналогично определяем объем бака горючего
i^r-K-; (в.»,
Гяювые характеристики и время работы двигателя. По вели-
шне начальной тяговооруженности, выбранной по статистиче-
ским данным ракет-прототипов, определяем потребную тягу дви-
гателя у Земли
Р0=л«^^в.
Массовый секундный расход топлива может быть определен из
выражения (1.14)
т=.Ря!1ум. (8.20)
Номинальный запас топлива согласно(7.3) равен
лгг.нпы тт— тпц1~ т-< —0,02mT^0,98mr.
Время работы двигателя
/—^1х.№ы1т ~ 0,98/п^/ш. (8.21)
155
Геометрические характеристики ракеты. Определим основные
геометрические характеристики ракеты, компоновочная схема ко-
торой представлена чта рис 8 7.
По заданной стартовой массе и выбранной нагрузке па ми-
дель из формулы (8.3) определяется диаметр ракеты (калибр)
4-т,,
пРы
(8.22)
Для баллистических ракет средней дальности по формуле
(8.22) получаются величины диаметров в пределах 1.5—2 м, а
для межконтинентальных ракет 3- 6 м.
При окончательном выборе диаметра ракеты необходимо учи-
тывать изменение массы топливного отсека и сопротивления
воздуха с изменением диаметра ракеты. Кроме того, необходимо
учитывать, что с изменением диаметра при постоянной старто-
вой массе изменяется длина ракеты, поэтому выбор диаметра
следует производить с учетом требований удобства эксплуата-
ции (при транспортировке, перегрузке и установке ракеты па
кусковой стол). Длина конусной боевой части определяется по
формуле
4.ч =(/M/2tgOA., (8.23)
где 08 — угол наклона образующей конуса (выбирается в пре
делах 11—20°).
Длина бака окислителя
i«... «'«.ок/»/;,. (8.24)
Длина бака горючего
•4V«.r/«/’. (8.Ц
Длина приборного отсека в первом приближении может быть оп-
ределена по эмпирической формуле
(8- 261
где К— 1 4-1,5 — условная площадь в м2;
dBI - диаметр миделевого сечеиия.
156
Длина корпуса хвостового отсека подбирается в зависимости от
длины двигателя
£х - L№ -у- 50 мм. (8.27)
Длина ракеты
*=4Л Ь6. • L^. <8.28)
Полученные в результате баллистического проектирования
весовые и геометрические характеристики являются приближен-
ными, так как расчеты весовых характеристик и дальности про-
извочятся при этом по приближенным зависимостям, имеющим
невысокую точность (до 5%) В процессе дальнейшего проектиро-
вания уточняются данные, полученные при баллистическом про-
ектировании, и производится окончательный выбор всех пара-
метров и характеристик ракеты.
Определив проектные параметры, можно приступить к ком-
поновке ракеты
8.4. ОПРЕДЕЛЕНИЕ ПАРАМЕТРОВ РАКЕТЫ С ПОМОЩЬЮ
НОМОГРАММ
В предыдущем параграфе был рассмотрен аналитический ме-
тод приближенного определения параметров ракеты. Трудоем-
кость расчетов с помощью аналитических методов довольно ве-
лика. Поэтому для быстрого определения параметров ракет
наряду с аналитическими применяют методы, использующие за-
ранее построенные номограммы.
Номография — область математики, в которой рассматрива-
ется теория построения особых чертежей, называемых номот рам-
ками, служащих для решения различных уравнений. Точность
номографических методов определяется масштабом чертежа и
характером зависимостей, используемых для его построения.
В приложении 3 привечены номограммы I и П для расчета
параметров одноступенчатых ракет с ЖРД-
13 томограмме 1 приведено семейство кривых £(рв. А-о» vo).
отражающих взаимосвязь между максимальной дальностью по-
лета £U|>IX, относительной конечной массой р,к и коэффициентом
начальной нагрузки на тягу двигателя v0 одноступенчатой раке-
(ы. Данные для построения этих кривых были получены путем
совместных решений массовых уравнений и уравнений движения
ракегы Номограмма I служит для определения максимальной
дальности полета одноступенчатой ракеты по известным /ус, у1%,
т0, а также для отыскания коэффициента рв при заданных £,
/у0 II То-
График 1 номограммы i охватывает следующие значения
входных величин. /у <>=2200—4000 Н-с/кг; vc=0,6-:-0,8.
Семейство прямых на графике 2 номограммы I рассчитано
по массовому уравнению, приведенному к 'виду
1 U — — Р-ь _!л-« (8.29)
где Цпл=тлн/^и — относительная масса полезной нагрузки;
и—и,, <1^|,|Ч(ьл+л.Л). (8. зо)
Обозначим
н;„=1 -u+isjci-io.
тогда
Рл.. (8.31)
При заданных рк, рЕ и р.т.о можно определить ци.н в следую-
щем порядке:
1) по графику 2 номограммы 1 по цк и рт о находим [ч.н?
2) по формуле (8.31) вычисляем относительную .масс" по-
лезной нагрузки ри I,
Дальнейшие расчеты параметров одноступенчатых ракет ве-
дут с помощью графиков 1—4, приведенных в номограмме II.
На графике 1 представлено семейство прямых для опреде-
ления стартовой массы одноступенчатой ракеты.
График 2 номограммы II отражает зависимость диаметра
миделя ракеты от стартовой массы ракеты и коэффициента Cq<
определяемого по формуле
с _2* (К 32)
< 4
На графике 3 изображена прямая, характеризующая связь
между удлинением ракеты K=L,'dM -и коэффициентом Cq.
с, |8.33)
где (jCp — средняя плотность отсеков ракеты (принято по стати-
стическим данным q<p=800 кг/м3).
Абсолютная длина ракеты определяется с помощью графика 4,
при рассмотрении которого использовано соотношение £=WM.
Расчет 'параметров с помощью номограммы II ведется в сле-
дующей последовательности:
1) с помощью графика 1 по рпн и заданной полезной нагруз-
ке определяют на оси ординат стартовую массу ракеты пг0\
2) относительное удлинение одноступенчатой ракеты л выби-
рают по статистическим данным;
3) по трафику 3 находят величину Сч;
4) используя график 2, по Cq и /и0*=що—/пп.н выбирают диа-
метр ракеты;
5) с помошью графика 4 определяют длину одноступенчатой
ракеты.
Пример. Найти параметры одноступенчатой ракеты с ЖРД при следую-
щих исходных данных- £=4000 км; Мн и=1500 кг; /у <,=2000 Н-<7Кг:гв= 0,6-
Ит.о=0ч04; р2 =0,03. ?.=9.
158
Решение 1) С помощью графика 1 номограммы I находим требуемое
значение коэффициента относительной конечной массы
1Ы=0,105.
2) С помощью графика 2 номограммы I находим
р-:., 0.07,
тогда =р*.н — р.в = и,07 — U,03 = 0,04.
3) С помощью графика 1 номограммы II определяем стартовую массу
ракеты
Мл=37.5-103 кг
4) По графику 3 при Х=9 находим
Св=6,5-10- кг/м*.
&J Вычисляем массу ракеты без полезной нагрузки
mo*=«iD—тп и =37,5-КН—1,5 103 = 36 103 кг
6) По то* и Сц с помощью графика 2 находим диаметр ракеты
<4ы = 1,8 м
7) По графику 4 находим длину ракеты без головной част
£=16 м
8.5. КОМПОНОВКА РАКЕТЫ
/ Компоновкой ракеты называется взаимное расположение ча-
стей п отсеков ракеты, а также размещение в ракете полезного
груза, оборудования и приборов.
Различают аэродинамическую и конструктивную компоновки.
Под аэродинамической компоновкой понимают рациональ-
ный выбор внешних форм и взаимного расположения головной
часта, топливного и хвостового отсеков и оперения ракеты.
^Аэродинамическая компоновка определяет аэродинамические
характеристики ракеты, в частности коэффициенты силы сопро-
тивления и подъемной силы и положение центра давления.
Взаимное расположение 1рузов, оборудования, приборов сис-
темы управления, двигательной установки и т. п внутри отсеков
ракеты, а также взаимное расположение отсеков определяет
конструктивную компоновку.
Компоновка ракеты проводится с учетом следующих основ i
пых требований.
I) обеспечить малое перемещение центра масс ракеты в по
лете;
2) конструкция ракеты должна быть простой и технологич-
ной;
3) обеспечить наиболее благоприятные условия для работы
отдельных агрегатов и узлов ракеты, особенно для приборов
управления, на точность работы которых существенно влияют
изменения температуры и вибрации;
159
4) обеспечить свободный доступ к отдельным элементам и
агрегатам ракеты, в частности к приборам системы управления
и к элементам автоматики двигательной установки;
5) обеспечить компактность ракеты, г. е внутри ракеты не
должно быть больших свободных 'объемов;
6) обеспечить снижение нагрузок па элементы конструкции
ракеты.
~ Для. улучшения динамических характеристик ракеты необхо-
димо, 'чтобы центр масс ее был расположен впереди центра дав-
ления и в. полете имел малое перемещение. Основной мерой,
позволяющей переместить центр масс вперед, является разме-
щение более тяжелого (по <плотнос'/н) компонента топлива впе-
рЕдп-тго отношению к более легкому. По этой причине, как пра-
вило, баки окислителя располагаются впереди баков горючего
Во время полета на активном участке траектории из-за вьгго-
рашия топлива центр масс ракеты перемещается назад вдоль оси
ракеты. Величину перемещения центра масс ракеты удается
уменьшить за счет ступенчатого опорожнения топливных баков,
особенно переднего, с более тяжелым компонентом: сначала
расходуется компонент из задней части бака, а затем из перед-
ней
Чтобы переместить центр давления назад, применяются ста-
билизаторы и конические хвостовые отсеки. В связи с изменени-
ем скорости полета ракеты центр давления аэродинамических
сил изменяет свое положение в полете. Поэтому при весовой
компоновке ракеты необходимо учитывать смещение центра масс
и смещение центра давления.
Надо иметь также в виду, что любая из рассмотренных мер
изменения межцентрового расстояния изменяет другие характе-
Гистики ракеты, например, увеличивает ее пассивную массу,
[среднее расположение более тяжелого компонента топлива из-
меняет распределение про дольных и поперечных нагрузок на
ракету и иногда вызывает необходимость упрочнения корпуса
ракеты. Ступенчатое 'Опорожнение топливного бака требует при-
менения ряда дополнительных устройств (промежуточных днищ,
клапанов и т п.), и поэтому оно также увеличивает пассивную
массу ракеты. Применение 'Стабилизаторов и коническою хвосто-
вого отсека увеличивает лобовое сопротивление и пассивную
массу. Поэтому окончательная целесообразность применения той
или ивой меры изменения межцентрового расстояния должна
оцениваться с учетом всех факторов.
В предыдущей главе при рассмотрении конструктивных схем
ракет были изложены .некоторые соображения по взаимному
расположению отсеков ракеты. Теперь рассмотрим п.х (несколько
подробнее.
Приборный отсек можно расположить или сразу за головной
частью, или в хвостовой части ракеты, или посередине ее.
160
Расположение приборного отсека после головной части вы-
годно в том отношении, что приборы управления в этом случае
находятся далеко от двигательной установки. Поэтому на их ра-
боту будут меньше влиять вибрации, возникающие при работаю-
щем двигателе. Но при таком расположении приборного отсека
электрокабсли, соединяющие приборы с органами управления и
наземным проверочным оборудованием, получаются очень длин
ними и тяжелыми. Для прокладки кабелей требуются специаль-
ные желоба внутри или снаружи топливных отсеков. Пассивная
масса ракеты увеличивается.
При расположении приборного отсека в хвостовой части ра-
кеты на работу приборов системы управления сильно влияют по-
мехи, обусловленные близким расположением двигательной ус-
тановки. Поэтому такая схема расположения приборного отсека
распространения не получила.
Если 'в схеме ракеты есть межбаковое пространство, то при-
боры системы управления размешаются непосредственно между
баками или же между баками предусматривается приборный от-
сек Такое расположение поиборного отсека -вблизи центра масс
ракеты считается наилучшим, так как уменьшаются инерцион-
ные нагрузки на гироскопы датчиков углового положения раке-
ты и уменьшается длина кабельной сети. Но в этом случае воз-
растает длина ракеты за счет ухудшения заполнения внутренних
объемов.
В последнее время топливные отсеки чаще выполняются в ви-
де одной емкости с промежуточным днищем. В этом случае при-
борный отсек размещают впереди топливного отсека. Длина ра-
кеты при этом уменьшается.
При разработке компоновочной схемы ракеты необходимо
разместить по отсекам (топливному и хвостовому) емкости под
сжатый воздух и жидкий азот или гелий (если наддув баков
производится азотом или гелием).
Емкости под сжатый воздух и сжатый азот (или гелий) мо-
гут быть шаровыми, торовымп и цилиндрическими. При задан-
ном объеме и давлении наименьшую массу имеют шаровые ем-
кости, а наибольшую - торовые емкости. Поэтому с целью сни-
жения массы желательно для емкости выбирать форму шара.
Цилиндрические емкости во многих случаях при компоновке и
центровке ракеты неудобны Наиболее удобны торовые емкости,
которые обеспечивают хорошее заполнение кольцевых объемов
я являются при этом симметричными относительно оси ракеты.
Торовые и шаровые емкости получили наибольшее распростра-
нение.
В хвостовых отсеках, кроме двшателей, размещается часть
приборов системы управления, бортовые источники энергии,
часть элементов пневмосистемы и органы управления. Хвосто-
вой отсек первой ступени снабжается опорами для установки .ра-
кеты на пусковой стол,
6 98° 161
Иногда двигатель закрепляется не на хвостовом отсеке, а па
днище заднего топливного бака или его силовом шпангоуте.
В этом случае для увеличения дальности полета ракеты преду-
сматривается система сброса хвостового отсека на активном уча-
стке траектории Если же старт ракеты предусмотрен из специ-
ального контейнера, то в этом случае для облегчения конструк-
ции хвостовой отсек вообще отсутствует.
Компоновка отдельных ступеней многоступенчатой ракеты
принципиально ничем не отличается от компоновки одноступен-
Рис. 8.8. Компоновочная схема одноступенчатой ракеты «Тор»:
ной пороховой двигатель 5—ыежбаковый отсек 6—бак окислителя. 7—промежуточный
отсек, л—хвостовой отсек, 9—веуяьерныс (управляющие) двигатели, 10—основной двига
тель- //—выхлопной патрубок турбины ТНА, /2—трубопровод подачи горючего. 13—
люк приборного отсека
чатой ракеты. Необходимо лишь иметь в виду, что головная
часть с полезной нагрузкой и приборный отсек размещаются
только на последней ступени.
Таким образом, при разработке компоновочной схемы иеоб
ходимо стремиться к тому, чтобы обеспечивалась минимальная
масса конструкции, оптимальная центровка ракеты, компоновка
была достаточно плотной, пневмо-, гидро- и электрокоммулика
ции были короткими, а эксплуатация — удобной.
Примеры компоновок некоторых ракет. Американская одноступенчатая
баллистическая ракета средней дальности «Тор» (рис. 88) состоит ич голов
ной части с боевым зарядом /, приборного отсека 2 с приборами системы уп-
равления, бака горючего S, бака окислителя 6. межбакового отсека 5 с дви-
гателями 4 для торможения корпуса при отделении головной части, хвоегчво-
го отсека 8.
Длина ракеты «Тор» 19,8 м, диаметр корпуса 2,5 м. Стартовый вес 47—
50 т Максимальная дальность полета 2800 км. Тротиловый эквивалент ядер-
ного заряда — 1,5 Мт.
На ракете «Тор» применены несущие баки, которые собраны из панелей,
изготовленных из алюминиевого сплава
Двигательная установка ракеты «Тор» состоит из трех ЖРД основного
10 с тягой 68 т в двух управляющих (верньерных) 9
162
Управляющие двигатели, предназначенные для стабилизации ракеты, ра-
ботают на всем активном участке траектории После выключении основного
(маршевого) двигателя управляющие двигатели продолжают работать еще в
течение 7 с, корректируя траекторию и стабилизируя ракету перед отделени-
ем головной части. Управление ракетой осуществляется с помощью шарнир-
но подвешенного маршевого и управляющих двигателей.
Рис. 8.9. Компоновка ракеты-носителя «Диамант»
•«—веруипе ступени с полезной нагрузкой, б—ускоритель первой ступени 1—>К₽Д пер-
вой ступени 2—рули управления по крену; <f—трубопровод горючего; 4—гидравлический
привод, отклоняющий ДСРД первой ступени для управления ракетой по тангажу и
рыгкапню. S—штуцер для зэпрапйп компонентом топлива, 6—трубоправ»,ч окислителя.
»—сЯекатель бортовой ка£ .. 1 сети t—бак горючего, 9—дпи>цс бака окислителя:
fu—i„K окислителя: Л—rasin » ,.атор системы вытеснительной подачи топлива; 12—заряд
твердого топлива газогенср_1 -, а 1J—«отверг11ч- для входа газов из газогенератора н бак
окислителя, W—трубопровод для подвода газов из газогенератора и бак горючего , 15—
соцло (4 шт) РДТТ второй ступени, /й—плоскость ра-шелегшя
В качестве топлива используются кероепп и жидкий кислород
На рис. 89 показана компоновка французской трсхступенчаюй ракеты-
носителя .Диамант:', выполненной с последовательным расположением ступе-
На первой ступени ракеты применяется жидкостный ракетный двигатель
I, установленный в кардаповом подвесе. Управление ракетой по тангажу и
рысканию производится за счет отклонения двигателя в двух взаимно перпен-
дикулярных плоскостях, а управление по крену — за счет отклонения воздуш-
ных рулей 2
На второй ступени устанавливается четырехсопловый ракетный двигатель
твердого топлива Управление ракетой производится за счет отклонения пово-
ротных сопел, имеющих гидроприводы
На третьей ступени применяется одкосопловый РДТТ Полезный груз 22
размещается на третьей ступени и прикрывается сбрасываемым обтекателем
8.6. РАСЧЕТ МАССЫ РАКЕТЫ И ОПРЕДЕЛЕНИЕ ПОЛОЖЕНИЯ
ЦЕНТРА МАСС
Расчет массы. Знать массу отдельных отсеков, узлов, грузов,
оборудования и т. п., составляющих стартовую массу ракеты, не •
обходимо на всех этапах проектирования ракет, так как расчет
массы ракеты и компоновка являются исходными данными для
других расчетов (аэродинамического, баллистического, прочно-
стного и др.).
Предварительно масса конструкции отсеков и узлов ракеты
определяется при проектировании с .помощью массовых уравне-
ний, рассмотренных ранее. Массовые уравнения, составленные
эмпирически на основании обработки статистических данных,
являются приближенными Они не отражают точно тех законо-
мерностей, которые связывают параметры отсеков с их массой.
Поэтому эти уравнения можно применять для расчета массы
ракеты только на стадии разработки технического предложения.
Уточнение же массы конструкции частей ракеты производят в
конце проектирования путем расчета масс по рабочим чертежам
Массу однородного твердого тела обычно считают пропорци-
ональной его объему
m=pV,
где (> — плотность тела;
V — объем тела.
Ракету в целом нельзя считать сплошным .однородным твер-
дым телом Однако к отдельным деталям ракеты такое предпо-
ложение вполне применимо. Следовательно, чтобы рассчитать
массу ракеты, необходимо суммировать массы всех деталей, вхо-
дящих в окончательную сборку, причем массы отдельных дета-
лей можно определить через их объемы и плотность материала
В ракете встречаются детали, вычисление объема которых не
представляет большого труда (например, цилиндрический кор-
пус топливного отсека), и детали, сложная конфи» урация кото-
рых затрудняет необходимые вычисления В последнем случае
принято -сложную деталь разбивать условными сечениями па
ряд более простых (цилиндр, конус и т. п.) и вычислять объем
детали как сумму объемов ее элементарных частей.
На стадии опытной отработки ракет производят дальнейшее
уточнение массы конструкции путем взвешивания деталей, уз-
лов и отсеков.
Определение положения центра масс ракеты. Координаты
центра масс рассчитывают обычны.м методом определения цент-
164
ра параллельных сил, применяя теорему о статических момен-
тах. которая гласит:
«если массу всех составных частей сосредоточить в ее центре
масс, то статический момент этой массы относительно какой-ни-
будь плоскости равен сумме статических моментов 'Относительно
гой же плоскости масс всех ее составных частей».
Массу отдельной детали обычно рассчитывают через массы
элементарных фигур, со-
ставляющих эту деталь, по-
этому координату центра
масс детали вычисляют с ис-
пользованием теоремы о
статических моментах, при-
мененной к элементарным
фигурам. При этом коорди-
нату центра масс каждой
элементарной фигуры рас-
считывают по чертежу де-
тали с учетом того, что по-
ложение центра масс каж-
дого отдельного элемента
известно (рис 8 10)
Центр масс цилиндра
где I — длина образующей цилиндра.
Центр масс усеченного конуса рассчитывается по формуле
(см рис 8.10)
хуек- Л W + l8 34
«»' 4 /Р + fir |Г2
Определив для каждого отдельною отсека, входящего в
сборку ракеты, массы отдельных деталей и узлов и положение
их центров масс, рассчитывают положение центра масс отсека.
Зная координаты центров масс отдельных отсеков, нетрудно
рассчитать координату центра масс ракеты. Для этого на боко-
вой проекции ракеты, выполненной в масштабе, наносятся точки,
соответствующие центрам масс отдельных отсеков (рис. 8.11)
Координаты центров масс отсеков относительно начала выбран-
ной системы координат определяются по этому чертежу.
При расчете координат центра масс полезно пользоваться
следующими свойствами центра масс:
1) если система имеет центр симметрии, то центр масс сов-
падает с центром симметрии;
2) если система имеет плоскость симметрии, то центр масс
лежит в этой плоскости;
3) для системы, 'имеющей ось симметрии, центр) масс нахо
дится на оси симметрии.
165
Поскольку продольная ось является, как правило, осью сим-
метрии ракеты, центр масс ее нужно искать на этой оси.
Выбрав систему координат, начало которой располагается в
поске ракеты, ось Олд совпадает с продольной осью ракеты и
направлена от носка к корме ракеты, ось Оу\ лежит в плоское nr
симметрии ракеты, получим, что для отыскания центра масс ра-
кеты достаточно определить лишь одну координату по формуле
2 'МЛ*ц.м«(О
~ » (8.35)
Рис 811. К определению центра масс ракеты-
1—головная часть с полезным грузом, 2—бак с оккелг
леи; J—приборный отсек /—бак с горючим. 5—хвосто
отсек с двигательной установкой
где m(t) -массы отдельных частей и ракеты в целом в
данный момент времени соответственно;
^«ni(O —расстояние от центра масс отдельной части до
носка ракеты в момент времени t.
У ракеты большую часть массы составляет топливо, из-за
расходования которого положение центра масс ракеты непре-
рывно изменяется на всем активном участке полета. В связи с
этим расчет центровки ракеты необходимо производить для
различных моментов времени через каждые 5—10 с полета
Перепишем формулу (8.35) в развернутом виде применитель-
но к ракете, показанной на рис. 8.11:
, , + т6,. I- (m0K—mOKf) x™ ( ~ mu.ox-£°
----------------------г------------------------
— mt.
--------------------;--------------- э. 3b 1
nz,) — mt
или
2 -r (m0K - »W) -Cm + (mT — mTf)
*км '«= —---------------------, (8 37'
m0 —
166
расстояние от носка до центра масс
ракеты в данный момент времени;
тК1— масса конструкции («сухая масса») от-
дельных частей ракеты,
^им " расстояние от носка ракеты до центра
масс отдельных частей;
т к: т,.— массы окислителя и горючего в на-
чальный момент времени соответствен-
но,
ш6ЛК; то." массы баков окислителя и горючего;
m(1K’ тг; т - секундный массовый расход окислите-
ля, горючего и суммарный секундный
расход топлива соответственно;
/— время полета ракеты;
тп - стартовая масса ракеты;
и- 'м " расстояние от носка ракеты до центра
масс баков окислителя и горючего со-
ответственно,
-’го же окислителя и горючего; эти
величины изменяются в течение поле-
та.
Коэффициентом центра масс ракеты сцм 'называется отноше-
ние координаты Хц-л к общей длине ракеты, т. е. СцМ = хц.м/£.
По результатам весовых расчетов строят график зависимости
коэффициента центра масс ракеты от времени полета (рис 8.12).
По результатам аэродинамического расчета строят график
зависимости коэффициента центра давления ракеты сд от вре-
мени полета
гце ' । -координата центра давления, отсчитываемая по оси
О Xi отиоска ракеты.
Полученные таким путем графики позволяют определить по-
ложения центра масс и центра давления ракеты в любой момент
времени полета и определить динами-
ческие характеристики ракеты. Если
в результате расчетов видно, что ди-
намические характеристики ракеты
неудовлетворительные, то производят
перекомпоновку ракеты с целью сме-
щения центра масс. Исправление цен-
тровки (положения центра масс) осу-
ществляется изменением компоновки,
т. е перемещением различных грузов.
При этом слишком заднюю цент-
ровку нужно исправлять перемеще-
нием грузов вперед, а переднюю цент-
ровку — перемещением грузов назад.
Рис 812. Зависимости ко-
эффициентов Си м и сд от
времени полета
167
Операция эта громоздка, так как приходится производить новую
компоновку ракеты.
Контрольные вопросы
1. Перечислите основные проектные параметры ракеты.
2. Какие проектные параметры называются оптимальными?
3. Как влияет на летные характеристики ракеты параметр
«к (параметр /у11; параметр tin, параметр Рм)?
4 Как выбираются параметры и 7ук для одноступенчатых
ракет?
5. Как влияет количество ступеней па -стартовую массу ра-
кеты (на надежность ракеты; на трудоемкость изготовления и
отработки ракеты)?
6. Как выбирается количество ступеней ракеты?
7 Что называется коэффициентом заполнения ракеты топ-
ливом?
8. Что называется коэффициентом соотношения относитель-
ных масс топлива?
9 Как распределяются массы между ступенями ракет с ЖРД
и ракет с РДТТ?
10. Какие зависимости устанавливают массовые уравнения?
11. Из каких частей состоит стартовая масса ракеты?
12. Как рассчитываются составляющие стартовой массы?
13. Как выбирается оптимальное значение рк?
14 Как определяются объемные характеристики ракеты?
15 Как определяются геометрические характеристики раке-
ты?
16. Какие преимущества и недостатки имеет метод «пределе
пня параметров ракеты с помощью ломот рамм?
17 Определите по номограммам проектные параметры ракеты
с ЖРД при следующих исходных данных: Д11ах=3500 км;
/^,.„=2000 кг; Д о=3000 Н-с/кг; -vo=0,8: p.fO=0.03. иЕ =0,03:
л—8,
18. Что называется компоновкой ракеты?
19. Какие требования предъявляются к компоновке ракет?
20 Как осуществляется компоновка одноступенчатых ракет?
21. Для чего необходимо производить расчет массы ракеты?
22. Как определяется центр масс ракеты?
23 Каким образом можно переместить центр масс ракеты?
ItiB
Глава IX
КОНСТРУКЦИЯ ГОЛОВНЫХ ЧАСТЕЙ И РАСЧЕТ ИХ
НА ПРОЧНОСТЬ
9.1. ФОРМЫ ГОЛОВНЫХ ЧАСТЕЙ
Требования к конструкции головных частей. Конструкции го-
ловных частей должны удовлетворять следующим требованиям
1 . Обеспечение минимального рассеивания ГЧ
2 . Достаточная прочность, т. е. способность выдерживать
большие знакопеременные нагрузки на активном и пассивном
участках траектории (Коэффициент продольной перегрузки на
активном участке траектории может достигать 20, а ма пассив-
ном — 80)
3 Большая теплостойкость. (На нисходящей ветви траекто-
рии при входе-в плотные слои атмосферы наружная поверхность
ГЧ интенсивно нагревается; температура воздуха в пограничном
слое может достигать 7500—12000 К).
4 . Простота формы и возможность размещения полезного
груза заданных габаритов
5 Устойчивость движения на атмосферной части пассивного
участка траектории при минимальном запасе статической устой-
чивости (При этом должно быть такое затухание колебатель-
ною движения, чтобы при любых начальных возмущениях угол
атаки у цели был практически равен нулю).
6 Наименьший коэффициент силы лобового сопротивления
при условии обеспечения теплозащиты
7 . Наименьшая внешняя поверхность при максимальном объ-
еме и заданной форме полезного груза.
8 Высокая 'надежность достижения цели
9 Наименьшая масса конструкции ГЧ.
10 Удобство установки полезного груза.
11 . Обеспечение необходимой температуры и давления в от-
секе с полезным грузом.
12 . Удобство стыковки ГЧ с корпусом ракеты
13 Простота устройства и технологичность изготовления ГЧ.
Внешние формы и стабилизация головных частей. Конструк-
ция и внешняя форма головных частей обусловлены не столь-
ко условиями размещения полезного груза, сколько условиями
полета в плотных слоях атмосферы на пассивном участке.
По форме головные части (рис. 9.1) подразделяются на кони-
ческие, конические со сферическим притуплением, конические со
сферическим притуплением и расширяющимся коническим ста-
билизатором, цилиндро-конические со сферическим притуплени-
ем и коническим стабилизатором.
От формы головной части сильно зависит ее аэродинамиче-
ское сопротивление и нагрев Однако наивыгоднейшие с точки
зрения аэродинамического сопротивления очертания головной
части ракеты оказываются нецелесообразными по условиям
аэродинамического нагрева Поэтому форма -головной части оп-
ределяется тем, какое из двух этих требований является реша-
ющим
Для ракет с дальностью полета менее 2000 км аэродинамиче-
ский нагрев играет второстепенную роль по сравнению с лобо-
вым сопротивлением Это объясняется сравнительно невысокими
Формы
(по сравнению с ракетами большой дальности) скоростями по-
лета. Меньшие скорости полета приводят к меньшим «нагреву и
нагрузкам головной части при входе в плотные слои атмосферы
В этом случае для ГЧ обычно выбирается коническая форма
При этом ГЧ имеет острый носок, сравнительно большое удли-
нение и минимальное лобовое сопротивление
Удлинением головной части Аг.ч -называется отношение длины
головной части к ее максимальному диаметру
Кроме удлинения, коническая юловиая часть характер! 1ует-
ся углом наклона образующей конуса 65.
Для получения небольшого аэродинамического сопротивле-
ния необходимо брать уюл 0„ малым. Однако при 9,= 1-^-5° за-
труднено размещение полезного груза, юловные части получа-
170
ются очень длинными и тяжелыми. При слишком больших
углах .наклона образующей конуса резко возрастает аэродинами-
ческое сопротивление. Оптимальная величина угла 0s=lO-=-2O°
Эти -значения угла 0 к рекомендуется принимать при проектирова
нии конических головных частей.
Для ракет с дальностью полета более 2000 км аэродинамиче-
ский нагрев ГЧ при входе в плотные слои атмосферы приобрета-
ет первостепенное значение из-за большой скорости полета и
большого скоростного напора Ими нередко определяются внеш-
ние формы ГЧ таких ракет.
Количество тепла, передаваемое головной части, может быть
уменьшено, если впереди нее образовать мощную отсоединенную
ударную волну. На образование этой волны тратится основная
доля кинетической энергии головной части л передача тепла ее
корпусу уменьшается В связи с этим для таких ракет применя-
ются головные части с притупленным носком в виде сферы, пе-
ред которым образуется отсоединенная ударная волна. Уменьше-
ние аэродинамического нагрева ГЧ позволяет уменьшить толщи-
ну теплозащитного покрытия и тем самым существенно снизить
вес головной части.
I оловная часть после отделения от «ракеты движется по бал-
листической траектории в разреженных слоях атмосферы, почти
нс испытывая аэродинамического сопротивления. При этом она
совершает сложное вращательное движение относительно центра
масс, обусловленное возмущениями, возникающими при ес отде-
лении.
При входе ГЧ в атмосферу быстро возрастают аэродинамиче-
ские силы: лобовое сопротивление, подъемная и боковая силы
Под их воздействием вращательное движение головной части пе-
реходит в затухающее колебательное .движение относительно
направления скорости, сопровождающееся возникновением боль-
ших знакопеременных поперечных перегрузок. Колебание i олов-
ной части приводит к тому, что на внешнюю поверхность 1'4
действуют переменные тепловые потоки, приводящие к неравно-
мерному унос\ теплозащитного покрытия.
Затухание колебаний обеспечивается аэродинамической ста
бялизанией головной части. Для этого необходимо сделать ГЧ
статически устойчивой, т. с. ее центр масс разместить впереди
центра давления
Скорость затухания колебаний зависит от запаса статиче-
ской устойчивости.
Запасом статической устойчивости называется разность ко-
эффициентов центра давления и центра масс, выраженная в про-
центах.
Дсн= (сд—сц м) 100%, (9.2)
Где Сд=Хц.г.ч/^-г ч И Сд м — Хд. м г ц/Д ч*
17)
Здесь Хдгч и Хцмгч координаты центра давления и центра
масс головной части
На основании статистических данных запас статической ус-
тойчивости должен быть не менее 3%.
Формула (9.2) показывает, что при заданной форме головной
части .необходимый запас статической устойчивости можно ооес
печить перемещением центра масс к вершине головной части
или смещением центра давления к ее основанию.
Рис. 9.2. Формы головных частей ракет США
Перемещение центра масс головной части к вершине можно
получить при утяжелении «особой части конуса путем размеще-
ния специальных грузов. Однако это приводит к утяжелению о-
ловпой части и снижению дальности полета, поэтому 'применять
только этот способ стабилизации нецелесообразно.
Перемещение центра давления головной части к основанию
можно получить путем установки у основания конуса ГЧ кониче-
ских стабилизаторов (в виде усеченного «опуса).
Стабилизаторы могут быть с углом 0si>Oe (см. рис 9 1, в, г)
и с утлом 0si=()s (см. рис. 9.1, а, б).
Сравнение этих двух видов стабилизаторов показывает, что
головные части, у которых угол Оц стабилизатора больше угла
0г головной части, имеют более заднее положение центра давле-
ния. Однако излом образующей конуса при переходе от головной
части к стабилизатору приводит к образованию местных скачков
уплотнения и, как следствие этого, к увеличению аэро динамиче-
ского сопротивления.
Стабилизировать головную часть можно с помощью сопел,
установленных в сс нижней части и работающих на истечении
сжатого газа, или за счет работы специальных ра-кетных двига-
телей (РДТТ или ЖРД), обеспечивающих стабилизацию голов-
ной части путем вращения ее вокруг продольной оси.
Формы головных частей баллистических ракет США показа-
ны на рис. 9.2.
8.2. КОНСТРУКЦИЯ ГОЛОВНЫХ ЧАСТЕЙ
Конструкция головных частей состоит из силовой системы и
элементов вспомогательного ‘назначения. Силовую систему го-
ловной части составляет коническая оболочка, обычно покрытая
172
специальным теплозащитным материалом и подкрепленная по-
перечным пли поперечно-продольным набором. Силовая схема
головных частей представляет собой тонкостенную балку, поэто-
му такие головные части называются балочными.
В балочной головной части основными элементами являются,
поперечный набор (шпангоуты); продольный набор (стрингеры),
обшивка и теплоизолирующее покрытие.
К элементам вспомогательного (назначения относятся узлы и
детали, предназначенные для местною усиления основной конст-
рукции: узлы и детали для установки и крепления полезнЪго гру-
за; узлы, выполняющие специальное назначение и в то же время
являющиеся частью конструкции головной части (например, дни-
ше и т. и.).
Характер и степень нагружения элементов конструкции зави-
сят от разновидностей конструктивно-силовой схемы головной
части. Применяются две разновидности балочных головных час-
тей.
1. Конструкция, представляющая собой сравнительно толстую
или многослойную обшивку, подкрепленную только шпангоута-
ми и покрытую теплозащитным материалом. В этой конструкции
все «нагрузки воспринимает обшивка. Такая конструкция называ-
ется обшивочной (монокок).
2. Конструкция, состоящая из обшивки, покрытой теплоза-
щитным материалом, и часто расположенных стрингеров и
шпангоутов. Обшивка в этом случае может быть более тонкой,
гак как внешнюю нагрузку воспринимает и обшивка и каркас
Такая головная часть называется стрингерной (полумоно
кок).
Наибольшее распространение получила обшивочная схема
i оловной части, так как применение толстой обшивки более бла-
гоприятно сказывается на поглощении тепла.
В современных головных частях каркас и оболочка выполня-
ются, как правило, из алюминиевого сплава, хотя нс исключает-
ся™ применение стали.
В последнее время, по сообщениям иностранной печати, кор-
пус головной части иногда изготавливается из пластмассы
стеклоткани, пропитанной смолой
На рис. 9.3 показана возможная конструкция головной час-
ти обшивочного типа. Головная часть состоит из наконечника 3,
корпуса 10, стабилизатора 13 и днища 17.
Наконечник предназначен для уменьшения тепловых потоков
к корпусу головной части при входе ее в плотные слои атмосфе-
ры. Он -находится в наиболее тяжелых температурных условиях.
Наконечник, выполненный в виде сферической поверхности,
состоит из стального корпуса 1 и теплозащитного покрытия 2
Он соединяется с корпусом головной части с помощью болтов 5,
равномерно распределенных по периметру стыкового сечения.
173
Корпус головной части 10 представляет -собой сварную кон-
струкцию, изготовленную из алюминиевого сплава, и состоит из
опорного кольца 4, силовых шпангоутов 9 и 12, промежуточных
шпангоутов 7 и оболочки (обшивки) 6.
Опорное кольцо 4 имеет отверстия для болтов крепления на-
конечника к корпусу. Силовые шпангоуты 9 и 12 предназнача-
ются для крепления полезного груза.
Толщина металлической конической оболочки 6 определяет-
ся расчетом -на прочность в зависимости от величины осевой си-
лы, изгибающего момента и внешнего избыточного давления.
Для повышения несущей способности оболочки к ней приварива-
ются промежуточные шпангоуты 7.
Стабилизатор 13 приваривается к силовому шпангоуту 12
Стабилизатор проектируется в виде тонкостенной усеченной ко-
нической оболочки, подкрепленной поперечным набором - про-
межуточным 14 ы стыковочным 15 шпангоутами. Стыковочный
шпангоут 15 служит для стыковки -головной части с ракетой.
В шпангоуте просверливается обычно шесть отверстий с за-
прессованными стальными втулками. Три отверстия служат для
установки разрывных болтов, соединяющих головную часть с ра-
кетой, и три — для направляющих штырей переходника.
174
В .нижней части стабилизатора обычно устанавливают экран
или днище 17 для защиты внутренней полости головной части и
установленных в ней приборов от теплового воздействия частиц
нагретого воздуха и раскаленных газов расплавившегося покры-
тия, уносимого" с оболочки головной части. Если в конструкции
головной части не предусматривается специальный гермоотсек
для [размещения полезного груза, то днище в этом случае одно
временно служит -и тля герметизации внутреннего объема го-
Рис 9 4 Корпус головной чае>и стрингерного шла
/—отверстия стыковьн головной части к ракете 2—днище: 3—
оболочка, покрытая теплозащитным материалом; 4—шпангоут.
ловной части. Днище представляет собой штампованный диск с
отверстиями для крепления к стабилизатору.
Внутри головной части размещается полезный груз, который
крепится к корпусу различными способами в зависимости от кон-
структивных особенностей и условий эксплуатации. Обычно уз-
лы крепления полезного 1 руза ‘передают па корпус сосредоточен
пые усилия.
Корпус головной части, стабилизатор, днище, полезный груз
а аппаратура защищаются от воздействия высоких температур
при полете теплозащитным покрытием 8 и 16, нанесенным на
наружную поверхность корпуса головной части, стабилизатора
и днище.
Корпус головной части стрингерного типа показан на рис
9.4, Каркас корпуса состоит из стрингеров 5 и шпангоутов 4
Каркас обшивается оболочкой 3, покрытой теплозащитным ма-
териалом. Впереди головной части устанавливается наконечник
6. Отверстия 1 предназначены для болтов крепления головной
части к ракете.
При разработке конструкции корпуса головной части боль-
шое внимание уделяется выбору теплозащитного покрытия Наи-
175
большее распространение в ракетостроении нашел способ защи-
ты конструкции головной части от нагревания с помощью расхо-
дуемого теплоизолирующего покрытия. Сущность этого метода
заключается в том, что поверхность головной части покрывается
таким веществом, которое при интенсивном нагревании сразу
переходит из твердого состояния в газообразное, пылощая теп-
ло, поступающее из пограничного слоя к обшивке. Это тепло
отводится от головной части и рассеивается в пространстве вме-
сте с уносимой массой покрытия. На нагрев близлежащих слоев
покрытия идет только небольшая часть тепла. При входе голов-
ной части в плотные слои атмосферы слой покрытия обгорает, а
корпус ГЧ остается невредимым.
Наиболее распространенными материалами для теплозащит-
ного покрытия являются армированные пластмассы на основе
эпоксидных смол и фенольные соединения.
Применением соответствующих материалов и толщин покры-
тия можно обеспечить достаточную защиту металлической обо-
лочки корпуса головной части от напрсва до температуры, ые
превышающей допустимую величину, определяемую -из условий
обеспечения прочности ГЧ и допустимой температуры в отсеке с
полезным грузом
9.3. НАГРУЗКИ, ДЕЙСТВУЮЩИЕ ИЛ ГОЛОВНУЮ ЧАСТЬ
t Нагрузки, действующие на головную часть, являются исход
'ними данными для анализа ее напряженного состояния и расче-
та на прочность. Они состоят йз распределенных по поверхности
аэродинамических сил (распределенная тангенциальная сила
(Jr, направленная вдоль оси головной части, и распределенная
нормальная сила qN, перпендикулярная оси), распределенных
массовых сил корпуса головной части q^ (их равнодействующая
бгч приложена в центре масс головной части) и сосредоточен-
ных сил от масс грузов, находящихся в -головной части (полез-
ный груз, балансировочные грузы, приборы и т. д.).
Величина и распределение аэродинамических и инерционных
нагрузок, действующих «а корпус головной части в полете, изме-
няются вдоль траектории, изменяется и температура нагрева
корпуса Поэтому при расчетах на прочность возникает вопрос
о выборе расчетных случаев нагружения корпуса, т. е. таких
комбинация? внешних и внутренних нагрузок с учетом нагрева
корпуса, которые 'наиболее опасны с точки зрения прочности и
устойчивости
Расчетными для головной части будут случаи maiряжения в
те моменты полета, когда продольные (осевые) или нор-
мальные (поперечные) nvi перегрузки достигают наибольшей
величины. В эти моменты узлы и агрегаты, расположенные внут-
ри корпуса, будут находиться под воздействием максимальных
нагрузок. Как правило, и корпус ГЧ в эти моменты полета на-
17Ь
гружается наиболее интенсивно, так как, вообще говоря, макси-
мальные инерционные нагрузки должны уравновешиваться мак-
симальными аэродинамическими нагрузками.
Потребная несущая способность корпуса отделяющейся го-
ловной части определяется .нагрузками, действующими на нее на
участке свободного полета.
При этом рассматривают два
расчетных случая.
I. На участке неустаповив-
шегося свободного полета при
угле атаки о#=0 корпус голов-
ной части подвер! аегся воздей-
ствию неравномерно распреде-
ленного по поверхности аэро-
динамического давления, по-
верхностных инерционных сил
от массы оболочки корпуса и
инерционных нагрузок от масс,
расположенных внутри корпу-
са Неравномерное распределе-
ние поверхностной нагрузки вы-
зывает изгиб корпуса. При из-
гибе возникают осевые и сдви-
гающие усилия, которые в со-
вокупности с кольцевыми уси
лиями представляют опасность
для прочности и устойчивости
корпуса. Этот расчетный слу-
чай нагружения соответствует
тому моменту времени полета,
когда поперечная перегрузка
достигает максимальной вели-
чины
2 На участке установив-
шегося свободного полета кор-
пус головной части нагружает-
ся осесимметрично распреде-
ленными осевыми силами и
равномерным внешним давле-
нием Этот расчетный случай
соответствует тому моменту
Рис. 9.5 Нагручки, действующие на
головную часть в полёте:
времени, когда осевая пере-
грузка достигает максимальной величины
Максимальные значения коэффициентов осевой и поперечной
перегрузок определяются в результате баллистического расчета
ракеты па максимальную дальность полета.
Сравнительно большие напряжения возникают при действии
на корпус ГЧ сосредоточенных сил. которые передаются от узлов
177
крепления грузов, расположенных внутри 'корпуса. Действие сос-
редоточенных сил на корпус должно учитываться во всех расчет-
ных случаях.
Для расчета головной части на прочность необходимо знать
действующие в отдельных ее сечениях величины осевых сил U,
перерезывающих сил Q и изгибающих моментов Л1 Эпюры этих
сил и моментов для головной части строятся как для балки, на-
груженной распределенными и сосредоточенными силами (рис.
9 5)
Распределение аэродинамических сил (тангенциальных и
нормальных) производится по результатам аэродинамического
расчета головной части или по результатам продувок моделей
головных частей в аэродинамических трубах.
По известным значениям перегрузок /гд, и nvl можно опреде-
лить массовые силы Рх1 и PVi отдельных грузов, расположенных
в головной части:
Рх, -=пит£0; (9.3
!9-4'
где т, - масса г-го груза;
f/o — ускорение силы тяжести
Массовые силы конструкции самой головной части относи-
тельно малы 1J.\ определяют перемножением эпюр погонной си-
лы тяжести конструкции Qg и перегрузок nxi и nyi по длине го-
ловной части (нх1^с и -
Осевая сила в любом поперечном сечении юловной части оп-
ределяется алгебраической суммой проекций иа продольною ось
сил, действующих на отсеченную часть конструкции
С - V (9- о)
6
г де q._..! — погонная осевая нагрузка
^1=»х1?о—(9-6)
q-r — погонная нагрузка от осевых аэродинамических сил
(см рис 9.5, а);
Qg — погонная нагрузка от силы тяжести конструкции го-
ловной части (см. рис. 9 5, б);
т[ — масса груза, находящегося в головной части;
п и —осевая перегрузка
Здесь — площадь миделевого сечения головной части;
ст —коэффициент тангенциальной силы головной ча-
сти.
178
Перерезывающие силы определяются по формуле
<2 = j
{9.8,
где ду\ —погонная поперечная нагрузка
fa-WWvi (9-9)
дх — погонная нагрузка от нормальных аэродинамических
спл (см. рис. 9 5, в);
hyi — поперечная перегрузка. В центре масс головной части
Здесь с„ —производная коэффициента нормальной силы голов-
ной части по углу атаки а. В сечениях, не проходящих через
центр масс, при уточненных расчетах учитывают перегрузку, воз-
никающую за счет вращения головной части -вокруг центра
масс.
Изгибающий момент -вычисляется по формуле
.11 = j Qdx^.
о
(9.1П
В выражениях (9.5) и (9 В) иод знак суммы выключаются мас-
совые силы всех -грузов, находящихся слева от рассматриваемо-
го сечения.
Интегрирование проводят методом трапеций, сводя вычисле-
ния в табл. 9.1. По этому методу' разбивают головную часть на
ряд зон сечениями, отстоящими друг от друга на равном рассто-
янии ДХ|, и по формулам (916) и (9 9) определяют соответству-
ющие каждому отсеку величины дхц и дУп.
Далее вычисляют приращения осевой силы
,, г Чхи + Ч
LL=------г
(9.12)
где д. |, и дх, . — погонные осевые силы в двух соседних сече-
ниях головной части.
Приращения перерезывающей силы
д<2 =
!\Xlt
(9. 13)
где qtlll и дщц+i} — погонные попепечные силы в двух соседних
сечениях головной части.
179
Таблица c.i
Расчет эпюр осевых сил, перерезывающих сил и изтбающих моментов
в сечениях головной части ракеты
Последовательным суммированием приращения осевой силы
и сосредоточенных массовых сил получают осевую силу в любом
сечении головной части
U ^пг1О,. (9-14)
Аналогично определяют перерезывающую силу в любом тече-
нии головной части
Q TaQ V«)nOl. 19.15)
Затем вычисляют приращение И31ибающего момента
4,u^2!_L&±lLiAi. 9.16)
Последовательное суммирование величин АЛ! позволяет оп-
ределить изгибающий момент в любом сечении головной части
.•М-ЙДД1. (9 17)
Величины А(7, AQ и АЛ! суммируются от носка к корме го-
ловной части.
На рис. 9.5 приведены эпюры U, Q и Л! для головной части,
у которой полезный груз закреплен на одном силовом шпанго-
уте.
Эпюры U, Q и А! строятся для обоих расчетных случаев и из
них выбирается наиболее опасный.
Кроме изгибающих моментов, осевых и перерезывающих сил
на корпус головной части действует внешнее избыточное давле-
ние.
При движении головной части на участке свободного подета
с нулевым углом атаки внешнее избыточное давление равномер-
но
но распределено по контуру поперечного сечения и по длине. Ве-
личина избыточного давления рассчитывается по следующим
формулам:
для герметичного отсека
/’г..,=Рп—Pft—г™;
для пегерметичпого отсека
/’н.г.о А»+ Рзав-
для днища 1 оловной части
Pw Ph Р.ччп Г пи»
(9.18)
(9. 191
i9.20)
Рис 9& Эпюры распределения
избыточного давления по кон-
где — внутреннее избыточное
давление в гермоотсеке;
Pi, — наружное атмосферное
давление на высоте h;
ркои — донное избыточное дав-
ление;
Ръ волновое избыточное да в-
ление.
.Максимальная величина Ри при возмущенном движении бу-
дет распределена по образующей корпуса со стороны набегаю-
щего потока
Эпюры распределения избыточного давления по контуру по-
перечного сечения головной части для герметичного и негерме-
тичного отсеков приведены на рис 9.6.
9.4. РАСЧЕТ КОРПУСА ГОЛОВНОЙ ЧАСТИ НА ПРОЧНОСТЬ
Исходными данными при расчете корпуса головной части на
прочность являются конструктивно-силовая схема корпуса и экс-
плуатационные нагрузки, которые обычно представляются в ви-
де эпюр изгибающих моментов М, перерезывающих сил Q, осе-
вых сил U п внешнего осесимметричного давления р по корпусу
головной части. Кроме того, в результате теплового расчета из-
вестны тепловой режим корпуса и кривая оплавления теплоизо-
ляционного покрытия по времени.
В момент достижения наибольшей продольной перегрузки
корпус головной части подвергается действию осесимметричной
нагрузки: внешнего аэродинамического давления и инерционных
массовых сосредоточенных сил.
В корпусе головной части наряду с большим внешним давле-
нием возникают значительные осевые сжимающие усилия, ко-
7 орые в совокупности с 'кольцевыми усилиями могут представ-
лять опасность для прочности корпуса Из-за действия этих у си
лии в конструкции возникают сжимающие напряжения оп, в по-
перечных сечениях и <гт и продольных (рис 9 7).
181
Напряжения cm определяются из равновесия той части кону-
са, которая отсекается поперечным сечением:
(9.211
т 2лЯ8СО8 0л
где t/=f(pb *|) —-осевая сила в рассматриваемом сечении ко-
нуса;
/? — радиус поперечного сечения;
б —толщина обшивки;
—угол наклона об-
разующей конуса
Напряжения в продоль-
сечениях
PR
Рис 9.7. К расчету головной части на проч-
ность;
(9. 221
где р — избыточное внеш-
нее давление на корпус го-
ловной части.
Головная часть может
разрушиться вследствие
местной потери устойчиво-
сти обшиньи на длине а
межд\ шпангоутами или
общей потерн устойчиво-
сти всей конструкции. При
проверке устойчивости
корпуса в случае дости-
жения наибольшей про-
дольной перегрузки с до-
статочной степенью точно-
сти можно пользоваться
формулами, полученными
для определения критиче-
ского внешнего давления на коническую оболочку:
_ 0,92g;6s^(cos BS)3-'J
.ее давление на корпусе го-
жкмающие напряжения в по
(9.23)
где Et—модуль продольной упругости материала обшивки с
учетом температуры нагрева;
а — расстояние между шпангоутами;
/?ср — средний радиус отсека между шпангоутами.
Отсеки между шпангоутами проверяются ма устойчивость при
совместном действии внешнего избыточного давления р и осевой
сжимающей силы U. В этом случае условие устойчивости запи-
сывается в следующем виде-
РР
|9, 24)
382
где Up - расчетная величина осевой силы
(925)
рр расчетная величина внешнего избыточно! и давления
Рр=^ЭЬсил, (926)
/'=1,3 коэффициент безопасности,
UKI, - -критическая величина осевой силы;
Ркр -критическая величина внешнего избыточного дав-
ления, рассчитанная по формуле (923).
Величина критической осевой силы
6W (9.27)
je k=0,18 поправочный коэффициент.
Так как радиус поперечного сечения оболочки по направле-
нию к вершине уменьшается, то расстояние между шпангоутами
ио направлению к вершине можно увеличивать
В случае длинной оболочки целесообразно делать несколько-
мощных промежуточных шпангоутов (например, в стыковых се-
чениях отсека полезного груза с передними отсеком и стабилиза-
тором) , которые бы разбивали всю оболочку головной части на
несколько самостоятельных отсеков.
Если шпангоуты расположены равномерно, достаточно про-
верить устойчивость первого отсека, находящегося у наибольше-
го поперечного сечения корпуса
При максимальной нормальной перегрузке корпус головной
части нагружается распределенным по окружности внешним дав-
лением, которое уравновешивается поперечными н осевыми
инерционными нагрузками. В результате этого возникает интен-
сивный поперечный изгиб корпуса при наличии кольцевых сжи-
мающих усилий. В этом случае корпус головной части проверя-
ется на устойчивость при действии изгибающего момента и осе-
вой силы
Действующие напряжения в оболочке корпуса
’>"= __gL_ + _Г»ДЧ. ) is.28)
cos V IK 2n/?cpR ~~ 2 В '
где f=l,3 — коэффициент безопасности;
Pm — внутреннее давление в корпусе головной части;
IV — момент сопротивления поперечного сечения обо-
лочки
«=л/<у. (9.29)
Внутреннее давление в корпусе головной части (или в гермо-
зтееке корпуса) вызывает растяжение оболочки Поэтому там,
где изгиб вызывает растяжения, напряжения от внутреннего
183
Рис. У 8. Эскиз головной части
I—VIII—расчетные зоны.
Пример. Проверим на устойчивость корпус головной части, эскиз которой
дан на рис 9.8, а эпюры нагружения приведены на рис 99. при следующих
условиях-
материал оболочки
свариваемый алюминие-
вый сплав
<=40° С
толщина обшивки . ....
половина угла при вершине конуса .
давление в корпусе головной чао и . ...
внешнее избыточное давление на герметичный
отсек . . ........................
внешнее избыточное давление из несер логичный
подкрепляющее влияние теплозащитного покры
тия не учитывать
Ei =43,65-10|П Па;
/=4о°С
б—0,2-16_-g м.
7^0.192 рад (11°)
Рин=0,5 10= Па
рс „ =1,5-10’’ Па
Риг о =2,0 10s Па
184
Расчет произведем для двух случаев. 1) когда досиггается наибольшая
продольная перегрузка (полет при пулевом угле атаки); 2) когда достигает-
ся наибольшая поперечная перегрузка (полет при угле атаки не равном ну-
тю) Все расчсчы будем производить по золам I- VIII между шпангоутами и
результаты вычислений записывать в табл 9.2.
Случай 1. Полет при нулевом угле атаки, продольная перегрузка макси-
мальная
Рис 99 Эпюры осевой силы V и изгибающего момента
ловкой части ракеты
В этом случае оболочка корпуса головной части нагружается осевой
сжимающей силой и равномерно распределенным внешним избыточным дав-
тением
1 Запишем в таблицу толщину обшивки 6, расстояние между шпангоута-
ми каждой расчетной зоны а, средний радиус поперечного сечения каждой
2 Определим величину расчетного внешнего избыточного давления ре
я всех зон по формуле (9.26)
3 Определим величину критического давления по формуле (9.23).
4 Определим величину расчетной осевом сжимающей силы по формуле
(927)
Определим величину критической осевой сжимающей силы по формуле
6 Определим запас устойчивости оболочки корпуса при сжатии (расчет
ные золы I—IV) по формуле
185
g Расче) оболочки корпуса головной части на устойчивость Тдадаца
Расчетные зоны
по пор. Наименование величин 11 Размерность I II ill IV V VI VII VIII
1 Толщина обшивки й IO--! м 2 2 2 2 2 2 2
2 Рассюяние между шпангоутами а 10—а м 38 29 23 23 17 10 8 12
3 Средний радичс сечения зоны R-., 10—2 м 14 21 26 31 35 38 40 43
4 Расчетное внешнее избыючное давление Pv 105 Па 1,95 1,95 1,95 1,95 1,95 ,95 1,95 2,60
5 Критическое давление Ркр 105 па 5,37 3,81 3,50 2,68 3.02 4,53 5,22 3.15
6 Расчетная осевая сжимающая сила 10'1 н 1,95 3,26 4,56 6 ,ии Раст л ж е п и е
7 Критическая осевая сжимающая сила 105 II 2,У1 2,91 2,91 2,9! Огшлочка растянута
я Запас устойчивости при максимальной продольной перегрузке Чу 2,32 1.60 1,40 1.07 1,55 2.32 2.68 1.61
9 Изгибающий момент .11 10" Н-м 7,0 12,0 16,0 14,0 8,0 1,5 3,5 2,0
10 Осевая сжимающая сила и 1(Р и 6,0 11,0 16,0 22,0 18,0 14,0 11,0 7.0
11 Момент сопротивления Г 10- М‘ 123 277 425 (>04 770 1-08 10115 1160
12 Напряжение в оболочке корпуса «ИЯ 105 Па 773 595 520 181 21,4 Рас г я ж НИС
13 Критическое напряжение °кр шг Па 1690 1120 90S 767 673 625 590 555
14 Запас устойчивое) и при м.жги мяльной нормальной перст рувш Чу 2,09 1,88 1.75 4,24 Боль- ше 10
а в тех зонах, которые испытывают растяжение (расчетные зоны V—VIII) —
но формуле
Чх=Рвр/Рр-
Случай 2. Полет при угле атаки не равном нулю, поперечная (нормаль-
ная) перегрузка максимальная.
В этом случае оболочка корпуса головной части нагружается неравномер-
но распределенным внешним давлением, которое уравновешивается поперек
ними и осевыми инерционными нагрузками
I Запишем в расчетную таблицу величины изгибающею момента и осе-
вой сжимающей силы в среднем сечении каждой расчетной зоны, используя
данные эпюры рис 99
2 . Определим момент сопротивления рассматриваемых сечений оболочки
корпуса по зонам, используя формулу (9.29)
3 . Определим величину действующих напряжений в оболочке корпуса по
формуле (928)
4 Определим величину критических напряжений по формуле (9,30).
5 Определим коэффициент запаса устойчивости по формуле (9.31)
По результатам расчета делаем вывод, чго корпус головной части усло-
виям устойчивости удовлетворяет, так как во всех расчетных зонах коэффи-
циент запаса устойчивое]и т]у>1
Контрольные вопросы
1 . Какие требования предъявляются к головным частям ра-
кет ?
2 Какие внешние формы придают головным частям?
3 . Что называется запасом статической устойчивости?
4 Как обеспечивается стабилизация головпых частей?
5 Какие существуют разновидности конструктивно-силовых
схем головных частей?
6 , Из каких частей состоит головная часть и каково назна-
чение этих частей?
7 Какие нагрузки действуют на головную часть?
8 Перечислите расчетные случаи для головной части.
9 Как рассчитывается головная часть па прочность?
Глава X
КОНСТРУКЦИЯ ТОПЛИВНЫХ БАКОВ И РАСЧЕТ ИХ
НА ПРОЧНОСТЬ
to. 1. КОНСТРУКТИВНЫЕ СХЕМЫ ТОПЛИВНЫХ БАКОВ
Требования к конструкции топливных баков. Составными эле-
ментами корпусов баллистических ракет с ЖРД являются топ-
ливные баки, предназначенные для размещения компонентов
топлива.
Топливные баки должны удовлетворять следующим требова-
ниям
I) иметь достаточную прочность и жесткость при малой мае-
пых и легких материалов, а также путем выбора наиболее рани
опальных форм 'и размеров баков, работающих при малых запа-
сах прочности);
2) обладать устойчивостью против коррозии. (Это требова
ние приобретает особую важность при работе ЖРД на агрессив-
ных компонентах и при длительном хранении в баках компонен-
тов топлива),
3) простота конструкции, технологичность при нзютовлении
и удобство при эксплуатации;
Рис 101. Схема ие-
иесущего Сака-
Ниццу?» е бяке
4) конструкция заборных устройств баков должна обеспечи-
вать минимальное количество незабо.ра компонентов топлива,
5) педефицнтность материалов, применяемых при изготовле-
нии баков.
Конструктивные схемы баков. Компоновка топливных отсе-
ков. Существуют две разновидности топливных паков: несущие
баки 'и иенесущие баки.
Непесущие баки (рис. 10.1) выполняются в виде изолирован-
ных емкостей 3, прикрепленных к корпусу ракеты 2.
Силами, действующими на ненесущие баки, являются силы
внутреннего давления и сравнительно небольшие осевые силы
(растягивающие или сжимающие в зависимости от характера
крепления баков).
188
В «.несущем баке (рис. 10,2) боковая оболочка одновременно
является наружной силовой оболочкой ракеты, воспринимающей
внешние и внутренние силы, действующие на .ракету в полете и
при наземной эксплуатации.
Чаще применяют несущие баки, так как при этом уменьшает-
ся масса ракеты. Ненесущпе баки имеют преимущества при ком-
поновке ракеты, к тому же их удобно теплоизолировать, поэто-
му -они нашли применение на вермвих ступенях мощных ракет-
носителей.
Рис. 103 Конструктивные схемы топливных отсеков
п|Х>межутачпым
к с щюмежуточ
Рассмотрим геометрические формы и взаимное расположение
топливных баков, определяющих компоновку топливных отсеков
Основные конструктивные схемы топливных отсеков показаны
па рис 103. Топливные баки жидкостных ракет обычно имеют
цилиндрическую форму и расположены на ракетах раздельно
(одни за другим) Такая форма баков удобна с точки зрения
комиояовкн ракеты, стыковки oiwkgb и технологии производства
баков
На рис 103, а показана схема раздельно о расположения
нссчшнх баков для горючего и окислителя. Такие баки 'наиболее
просты в изготовлении По условиям прочности баки имеют сфе-
рические днища, между' которыми остается свободное простран-
ство Обычно для уменьшения размеров ракеты в этом простран-
стве размещают приборы и агрегаты
В настоящее время для уменьшения длины и веса ракеты ча-
ще применяются несущие топливные отсеки с промежуточным,
днищем, разделяющем -емкость на две части: люд окислитель и
горючее (см. рис 10 3,6). Такие баки сложнее в производстве,
так как необходимо обеспечить ыдрметичпость сварных швов пре
189
межуточного днища во избежание смешивания компонентов топ-
лива.
Кроме цилиндрических, иногда применяются сферические ба-
ки. Па рис 10.3, в показан 'ненесущий топливный отсек, который
состоит из двух раздельных баков сферической формы. Сфери-
ческие баки целесообразно применять при использовании низко-
кипящих компонентов топлива, так как сферический бак при оди-
наковой емкости с цилиндрическим имеет меньшую поверхность
п, следовательно, масса его теплоизоляшш будет меньше. Кроме
того, при одинаковом давлении наддува масса сферического ба-
ка меньше, чем цилиндрического.
С целью уменьшения массы ракеты по сравнению с предыду-
щим случаем возможно применение «ненесущих сферических ба-
ков с общим промежуточным днищем (см. рис. 10,3, г).
Топливные отсеки со сферическими баками выгодно приме-
нять только для мощных ракет-носителей, у которых можно
сбросить в полете тяжелую теплоизоляцию, предохраняющую ба-
ки от нагрева при движении в плотных слоях атмосферы.
На последней ступени составной ракеты возможно примене-
ние топливного отсека в виде тора с промежуточным днпщем
(см. рис. 10.3, д). При такой схеме топливного отсека компонов
ка ракеты получается более компактной и уменьшаются габари-
ты ракеты, хотя масса ракеты будет несколько больше, чем при
применении цилиндрических или сферических баков.
10 2. КОНСТРУКЦИЯ КОРПУСОВ ТОПЛИВНЫХ БАКОВ
Топливные баки состоят из корпуса и арматуры, предназна-
ченной для заправки баков топливом и надежной подачи топли-
ва в двигатель.
Рис 10.4 Панель с ребрами жесткости (стрингерами)
Конструкцию корпусов топливных баков рассмотрим на при-
мере цилиндрических баков, имеющих наиболее широкое приме-
нение в ракетах. Основными элементами корпуса цилиндриче-
ского бака являются стенка бака, верхнее и нижнее днища и рас-
порно-стыковочные шпангоуты.
Стенка бака представляет собой силовую оболочку, воспри-
нимающую как внутреннее избыточное давление, так и внешнее
190
воздействие в виде изгибающего момента, осевых и перерезыва-
ющих сил. Стенки бака в виде гладких или подкрепленных обо-
лочек собираются из отдельных панелей или обечаек. Подкреп-
ленные оболочки могут иметь либо только продольный набор в
виде стрингеров (рис. 104), либо только поперечный набор в ви-
де шпангоутов, либо продольно-поперечный силовой набор в
виде стрингеров и днпангоутов. В последнее время применяются
силовые оболочки вафельной конструкции (рис. 10.5), которые
выгодны в весовом отношении,
по являются довольно сложными
в производстве
Продольный силовой набор
применяется в том случае, когда
давление наддува в баках, выпи-
раемое, как правило, из условий
обеспечения бескавитационной
рабо гы насосов, недостаточно
для компенсации больших сжи-
мающих сил, действующих на ра-
кету в полете, а выбор более вы-
сокого давления наддува требует
увеличения массы топливного от-
сека на большую величину, чем
масса продольною силового ла
бора.
При сборке стенок бака из _
обечаек, когда для обеспечения р,,с- 1(л&- Па1<ель ™па вафли
прочности бака требуется вы-
брать силовой набор в виде стрингеров и шпангоутов, для креп
ления стрингеров приходится применять точечную сварку. В ме-
стах точечной сварки из-за ослабления материала необходимо
увеличивать толщину обечайки, что приводит к увеличению
массы бака Поэтому обечаечную конструкцию корпуса обычно
применяют лишь в случаях гладких баков пли баков вафельной
конструкции.
Панельный метод сборки корпусов баков позволяет умень
шить массу -конструкции и полпоегью исключить точечную свар-
ку', так как панели изготавливаются с готовыми стрингерами
(см. рис 10.4) В этом случае шпангоуты собирают из несколь-
ких сегментов /, соединяемых с помощью накладок 2, и крепят
к стрингерам 3 заклепками 4 (рис. 10 6).
Па рис 10.5 была показана шанель «вафельного типа, у кото-
рой ячейки выполнены фрезерованием. Стоимость такой ламели
из-за большой трудоемкости ферезэрования очень высока
За последнее время в -производстве баков широко применяет
ся метод химического травления. При этом методе часть металла
удаляется с поверхности стенок и днищ корпусов баков, обеспе-
чивая требуемую равпогрочноггь по сварным швам и основному
191
материалу и уменьшение массы баков. Трудоемкость изготовле-
ния оребренных панелей или панелей вафельного типа при хи-
мическом травлении значительно -ниже, чем при .механическом
фрезеровании.
К цилиндрической стенке корпуса -с обеих сторон приварива-
ются днища. По форме днища баков могут быть сферическими,
эллиптическими п коническими.
Днища баков работают в разных условиях нагружения Ниж-
нее днище нагружается избыточным давлением, равным сумме
гидростатического давления жидкости и избыточного давления
наддува, а верхнее — лишь избыточным давлением наддува.
Риг- 10.6 Крепление шпангоутов к оребоенным
панелям:
I—сегмент шпангоута- 2—накладка 3—стрингер; 4—за-
клепка
В случае применения для наддува бака горячих газов верхнее
днище испытывает еще и термическое воздействие, которое мо-
жет в значительной степени снизить прочностные характеристи-
ки материала днища.
Величина напряжений в днище при заданной толщин су-
щественно зависит от радиуса кривизны. Наиболее нагр\ ж. ины-
ми являются участки сопряжения днища с цилиндрически" час-
тью бака. Изгибиые напряжения резко возрастают при уменьше-
нии радиуса кривизны на учаегке сопряжения днища с корпусом.
Именно поэтому при проектировании днищ стремятся прежде
всего подобрать такие радчусы кривизны, чтобы днище имело
минимальную массу, но при этом компоновка топливного »тсека
ракеты была бы наилучшей.
Эллиптические днища сравнительно легкие и удобные при
компоновке ракеты, но очень сложные в производстве. Кониче-
ские днища 'наиболее тяжелые и, кроме того, имеют -слишком
большие габариты. Наибольшее распространение в ракетострое-
нии получили сферические днища, -на конструкции которых оста-
новимся подробнее.
192
Наименьшие 'напряжения в местах сопряжения с корпусом
имеют днища, 'выполненные по сфере с радиусом, равным ради-
усу цилиндрической части бака. Но такие днища очень глубокие,
штахшовкй их затруднительна и требует мощных прессов При
компоновке ракеты баки с такими днищами неудобны, так как
между отесками образуется много свободного простра1нства, ко-
торое трудно чем-либо .заполнить. Из-за большой длины меж*ба-
кового отсека увеличивается общая длина и масса ракеты По-
этому в настоящее время чаще применяют сферические днища с
радиусом в 1,2—1,5 раза боль-
ше радиуса цилиндрической
части бака. Но при этом
усложняется сопряжение их
s цилиндрическими стенками
3 2
'3 2
Рис. 10 7 Способы соединения дни- Рис. 10.8. Приварка накладки око
ща и стенок бака с помощью рас- ло отверстии в днище
порно-стыковочных шпангоутов /-днище. г—акладка
t—шпангоут. 2—<Икмючка цилиндриче
свой части бака: 3—днище
бака В данном случае при проектировании задача сводится
к тому, чтобы обеспечить заданную прочность днища по месту
сопряжения со стенками без значительного увеличения массы
бака Наибольшее распространение получил способ сопряжения
днищ и стенок бака с помощью распорно-стыковочных шпангоу-
тов специального профиля (рис. 10 7).
В днищах баков имеются отверстия для технологических лю-
ков и для соединения бака с арматурой и трубопроводами пода-
чи топлива в двигатель. Вблизи этих 'отверстий имеет место кон-
центрация напряжений. Если отверстия небольшие (до 50—
80 мм) и расположены на большом расстоянии друг от друга, то
опасные напряжения пс возникают. Значительные напряжения
возникают при диаметре отверстий 200—400 мм 'и особенно при
близком их расположении относительно друг от друга Для
>’меньшепия величины опасных напряжений около отверстий в
местах отбортовки привариваются накладки (рис. 10.8), а в слу-
чае химического фрезерования днища материал в местах отбор-
тованных отверстий те подвергается химической обработке и
имеет увеличенную толщину
Для повышения надежности ракеты при хранении ее в зап-
равленном состоянии 'и в полете, а также с целью обеспечить в
заводских условиях более простую технологию сборки ракеты
7 989
193
магистральный трубопровод от верхнего бака к двигателю про-
кладывается в тоннельной трубе нижнего бака (рис. 10-9), Тон-
нельная труба приваривается непосредственно к отбортовке от-
верстий в днищах бака, когда он имеет небольшие размеры
Если же бак имеет большую длину, то для компенсации темпе-
ратурных напряжений тоннельная труба снабжается компенса-
тором сильфонного типа, с помощью которого одновременно
выбираются технологические погрешности при установке тон-
нельной трубы в бак.
Рис 10.9 Схема установки магистрали верхнего днища.
t—трубопровод окислителя; 2—трубопровод горючего; 3—тоннельная
труба; f—сильфон
В качестве примера рассмотрим конструкцию топливного от-
сека американской ракеты-носителя «Сатурн-V» (рис. 10.10)
Топливный отсек состоит из бака горючего (см. рис. 10.10, а) и
бака окислителя (см. рис. 10.10, в), соединенных между собой
межбаковым отсеком (см. рис. 10.10, б). Оба бака имеют цель-
мосварную конструкцию, выполненную из алюминиевого сплава
Эллипсоидные днища баков 1, 5, 8 и 10 свариваются из восьми
трапециевидных и восьми треугольных сегментов.
Стенки баков 3 и 9 состоят из панелей с продольными ребра
ми жесткости таврового сечения. Ребра расположены .на внут-
ренней стороне панелей и получены фрезерованием из плиты.
Днища и стенки баков с обшивкой 6 межбакового отсека соеди-
няются с помощью шпангоута У-обраэното сечения.
Для гашения колебаний топлива в баках" установлены пере-
городки 2 и 11. В качестве перегородок, гасящих колебания топ-
лива, служат шпангоуты, приваренные к цилиндрической части
баков, и крестообразные перегородки, установленные на нижних
днищах. Шпангоуты и перегородки одновременно подкрепляют
оболочки баков. Все пять трубопроводов окислителя проходят
через бак горючего и помещаются в герметичных тоннельных
трубах 4, подкрепленных шпангоутами. Материал труб — алюми-
ниевый сплав. К верхнему днищу 5 каждая труба крепится с по-
мощью сильфона.
194
Внутри указанных тоннельных труб проходят трубопроводы
окислителя. Трубопроводы прикрепляются к нижнему днищу
бака окислителя и к кронштейнам двигательного отсека Трубо-
проводы имеют универсальные герметичные шарниры и специ-
Рис 10 10 Конструкция топливного отсека первой ступени американской раке-
ты-носителя «Сатурн-V».
I»—бак горючего, и—межбаковый отсек, а—бак окислителя /—нижнее днище бака горю-
чего, 2—демпфирующие перегородки бака горючего. 3—цилиндрическая оболочка бака
горючего; 4—тоннельные трубы 4—верхнее днище бака горючего; 6—оболочка межба-
копого отсека, 7—шпангоуты межбакового Отсека, а—нижнее днище бака окислителя.
п—цилиндрическая оболочка бака окислителя- 10—верхнее днище бака окислителя; 11—
демпфирующие перегородки бака окислителя
альные узлы — температурные компенсаторы, которые допуска-
ют повороты работающих двигателей и температурные деформа-
ции конструкции.
Меж баковый отсек (негерметичная полумоникоковая конст-
рукция) выполнен в виде тонкостенной цилиндрической оболоч-
ки, состоящей 'из 18 гофрированных панелей, подкрепленных ше-
стью разъемными круговыми шпангоутами 7 двутаврового попе-
речного сечения
10.3. АРМАТУРА ТОПЛИВНЫХ БАКОВ
Топливные баки современных ракет с ЖРД представляют со-
бой сложные агрегаты, оснащенные различными устройствами:
устройствами для забора топлива, демпферами колебаний жид-
кости, системами -контроля уровня, датчиками систем •одновре-
менного опорожнения баков, заправочно-сливными и дренажно
предохранительными клапанами, реле давления, люками-лаза
ми, штуцерами, фланцами и другими элементами Рассмотрим
некоторые из -них.
Заборные устройства баков. Значительную трудность при
проектировании баков представляет обеспечение непрерывной
подачи компонентов топлива из баков в камеру сгорания двига-
теля. Это объясняется тем, что в полете -ракеты с ЖРД возника-
ют ускорения во всех направлениях, поэтому, особенно в (конце
7*
195
работы ЖРД, возможно временное оголение заборного >гтрой-
ства баков. Оголение заборных устройств может привести к по-
даче компонентов топлива в .насосы вместе с газом наддува, что
вызовет кавитацию'.насосов.
Простейшим заборным устройством может быть отверстие в
заднем днище бака. Однако при большом расходе топлива у
входа в заборник образуется глубокая воронка, способная на-
рушить бесперебойную подачу топлива. Чтобы не допустить по-
падания газов наддува в камеру сгорания через образовавшуюся
воронку, двигатель должен выключаться раньше, чем произой-
дет провал уровня топлива в результате образования воронки
Количество компонента топлива в баке в момент провала уров-
ня относится к остаткам топлива .пезабора. Для уменьшения ос-
татков топлива незабора в баках устанавливают специальные
заборные устройства, которые обеспечивают безвихревое прите-
кание компонента 'к заборному патрубку.
На рис. 10.11 показано простейшее заборное устройство с
воропкогасителем. Вороикогасптель представляет собой тарель
4 специального профиля, укрепленную >на корпусе 3. На корпусе
устанавливаются ребра 7, которые для жесткости дополнитель-
но скрепляются двумя кольцами 2. Тарель служит для исключе-
ния образования воронки, а ребра — для исключения образова-
ния местных воронок. Воронкогаситель крепится к днищу бака
при помощи ребер 6, приваренных к тарели и днищу
Устройства в баках для демпфирования колебаний топлива.
Во время -полета корпус ракеты испытывает как продольные,
гак и поперечные колебания. Причинами возникновения колеба-
ний, как правило, являются пульсация тяги двигателя, работа
автомата стабилизации, а также порывы ветра- Колебания кор-
пуса ракеты воздействуют на массу жидкости, находящуюся в
баках. Совпадение частоты свободных колебаний жидкости с
частотой колебания корпуса может привести к резонансу и раз
рушению ракеты. Наличие колебаний топлива резко ухудшает
196
условия работы системы управления (ракеты. Поэтому при кон-
струировании топливных баков предусматривают устройства для
гашения ’колебаний топлива в баках.
В качестве демпферов применяют перфорированные попереч-
ные перегородки, конуса и продольные перегородки
Перфорированные поперечные перегородки довольно эффек-
тивно уменьшают амплитуду колебаний топлива Также эффек-
тивно действуют конуса, которые чаще всего устанавливаются в
передней части бака верхней ступени п в нижней части бака
нижней ступени, наиболее удаленных от центра масс ракеты
Продольные перегородки повышают запас статической устой
чивости ракеты по углу крена, Эффективность продольных перс
городок значительно ниже, чем поперечных, но зато продольные
перегородки .демпфируют 'колебания па протяжении всего актив-
ного участка, а поперечные — только при определенном фикси-
рованном уровне
Количество демпфирующих у стройств, 'их конструкция и рас-
положение в баках выбираются таким образом, чтобы демпфе-
ры, выполняя свою (роль по улучшению стабилизации ракеты, не
слишком утяжеляли ее
Устройства для контроля доз заправки. Чтобы увеличить
дальность полета ракеты, необходима точная дозировка заправ-
ляемого в баки топлива. В современных ракетах применяют спе-
циальные системы контроля уровня (СКУ) топлива в баках, ко-
торые состоят из чувствительных элементов (сигнализаторы 'на-
полнения), пультов запра-вки и кабельной сети.
По принципу действия сигнализаторы наполнения могут быть
индуктивные, контактные, потенциометрические, ультразвуко-
вые и иа основе радиоактивных изотопов.
Люки, штуцера и фланцы баков. Для возможности монтажа,
осмотра и ремонта баков па одном из днищ (обычно верхнем)
делают люк-лаз с крышкой.
Конструктивно люк-лаз выполняется следующим образом
К отбортовке выреза днища 1 (рис. 10 12) приваривается горло-
вина люка 2 К торцу горловины приваривается фланец 3 с от
верстиями под болты .или шпильки Крышка 5 «а фланце юрло-
випы центрируется либо штифтом, либо буртиком. Для герме-
тичности между крышкой и фланцем горловины устанавливают
прокладку 4.
Чтобы присоединить трубопроводы (дренажа, контроля дав-
ления проверки герметичности и др.) и установить некоторые
arpeia-ты, на днишах и корпусе бака имеются специальные шту-
цера и фланцы. Установка штуцеров .на баке производится двумя
способами. Если диаметр штуцера шенее 15 мм, то'штуцер дела-
ют точеным и вваривают в отверстие на баке (рис. 10.13, а). При
диаметрах штуцеров свыше 15 мм их делают из трубы соответст-
вующего диаметра и приваривают к отбортовке отверстия (см
197
рис 10.13, б). Для присоединения трубопровода штуцер имеет
наконечник с резьбой.
Фланцы делают точеными или фрезерованными и приварива-
ют к отбортовке отверстий бака. Форма фланца 'и размеры опре-
а
Рис 10.13. Способы установки штуцеров иа баке.
-при диаметре штуцера менее |5 мм. б—'при диаметре штуцера
делаются агрегатом, который на -нем устанавливается. Фланцы
могут иметь резьбовые или гладкие отверстия под шпильки и
болты. При конструировании фланцев во избежание появления
трещин необходимо -соблюдать определенные правила. Так, нап-
ример, при соединении фланца с днищем бака, показанном на
рис 10.14, а, в сварных швах днища вследствие разницы тол-
Рис 10 14 Соединения фланца с днищем бака.
щин сва|М1васмых деталей могут возникать внутренние напряже-
ния во время охлаждения бака после термообработки. Для иск-
лючении образования внутренних напряжении это соединение
целесообразно выполнять согласно рис. 10.14, б.
Чгобы обеспечить требуемую прочность бака, отверстия под
штуцера и фланцы располагаются на определенном удалении од-
но от другого и не в одном сечении.
198
10.4. НАГРУЗКИ. ДЕЙСТВУЮЩИЕ НА БАКИ. РАСЧЕТ БАКОВ
НА ПРОЧНОСТЬ
Нагрузки, действующие на баки. Рассмотрим расчеты на
прочность только цилиндрических несущих баков, которце полу-
чили наибольшее распространение. В процессе эксплуатации та-
кие баки подвергаются воздействию внешних и внутренних сило
вых факторов
К числу первых относятся продольные нагрузки, возникаю-
щие за счет перегрузок на активном участке траектории полета,
и поперечные нагрузки, являющиеся результатом воздействия
ветра в полете .и на старте, а также возникающие при транспор-
тировке под действием собственного веса конструкции.
Кроме внешних факторов, на топливные баки действуют внут-
реннее избыточное давление за счет наддува и гидродинамиче-
ское давление столба жидкости.
Наддув баков воздухом или инертным газом способствует
беокавитационной работе топливных насосов и вместе с тем ска-
зывается на прочности конструкции баков. Вследствие наддува в
стенке бака создаются растягивающие усилия, которые частично
или полностью уравновешивают сжимающие усилия от внешней
нагрузки. Кроме того, наддув баков повышает критические нап-
ряжения обшивки.
1 идродинамичеокое нагружение наиболее существенно при
больших значениях продольной перегрузки пл1. В этом случае
давление на стенки бака рГ1ИР в сечении, отстоящем на (расстоя-
нии h ют свободной поверхности жидкости, определяется по
формуле
FrHlp=ffo«uC’ft. (Ю-11
где gu — ускорение земного притяжения ма уровне моря,
Р — плотность жидкости.
Суммарное давление жидкости и газов внутри баков
+ go« vil’* . (10-2
где р„ад^—давление наддува.
Основными нагрузками сна топливные баки являются осевое
сжатие, изгиб и внутреннее избыточное давление. Вместе с тем в
полете стенки бана могут нагреваться до температуры порядка
300° С Это также необходимо учитывать при расчете бака на
прочность, так как из-за действия высокой температуры снижа-
ются прочностные характеристики 'материала бака. На рис
10 15 приведены расчетная схема и примерные эпюры нагрузок
ч температур, действующих на несущий топливный бак ракеты.
Наиболее важными элементами несущего топливного бака,
прочность которых необходимо проверить при проектировании,
являются стенка и днища баков, силовые шпангоуты, фланцевые
199
соединения и трубопроводы баков. Рассмотрим расчет на 'проч-
ность степцп и днищ баков.
Расчет на прочность цилиндрической части бака. Под дейст-
вием внутреннего избыточного давления оболочка бака деформи-
руется. Вдали от днищ и шпангоутов деформированная поверх-
ность 1нс имеет резких изменений кривизны. Поэтому можно
Ррс 10 15. Расчетная схема, эпюры нагрузок и темперап'р, действующих
на несущий гоиливиый бак ракеты.
о-расчетная хема бака й—эпюра «севых сил U; в—эпюра избитечного давле-
ния в баке .-—эпюра изгибаюищх моментов М д—эпюра температур стенки топ
.niBHoio бака
предположить, что п.эгии сгепжи оболочки отсутствует, напряже-
ния но толщине стенки распределены равномерно и, следователь-
но, деформации и напряжения с достаточной степенью точности
можно рассчитывать по безмоментнон теории. При этом внут-
ренние силовые факторы сводятся лишь -к нормальным напряже-
ниям (рис. 10 16). Для цилиндрической обечайки эти напряже-
ния определяются по формулам
('0-3)
m 4В 48
о_лЕг£=йЛ ,-юл)
28 28 '
где On — меридиональное напряжение (напряжение в попе-
речных сечениях, от действия внутреннего избыточ-
ного давления);
— кольцевое напряжение (напряжение в продольных
сечениях от действия внутреннего избыточного дав-
ления) ;
D и б — диаметр и толщина обечайки бака соответственно;
/ — коэффициент безопасности;
р«н=/Ап —расчетное давление в баке.
Рис. 10.16 К расчету бака на прочность-
бг
-сига уравновешивания внешних нагрузок
6
-тиндрнческой оболочки бака
Так -как кроме внутреннего избыточного давления несущий
бак нагружен изгибающим моментом и осевыми -силами, то ме-
ридиональное напряжение в обечайке представляет собой алгеб-
раическую сумму напряжений (величину напряжения брать с
соответствующим знаком) -
алг8=эуи , (10.5)
где Ом — напряжение от .действия внешнего (изгибающего мо-
мента
(10.61
201
or- — напряжение от действия осевых сил
=f7=UfiitDb L ₽/лбГ>. 10.7)
В зависимости от соотношения Al, U и рт суммарное мери
диональное напряжение в разных сечениях бака может быть как
положительным (растягивающим), так и отрицательным (сжи-
мающим), а кольцевые напряжения всегда положительные
При положительном <rnis разрушение бака прглкхадит вслед
ствие потери прочности. При отрицательных (сжимающих) нап-
ряжениях возможна потеря устойчивости, так как топливные
баки представляют собой тонкостенные оболочки (подкреплен
аые или гладкие). При турбонасосной системе подачи топлива,
когда давление па стенки не превышает (4ч-5) -10s Па, разруше
ние обечайки -возможно как вследствие потери прочности, так и
вследствие потери устойчивости.
Условие прочности оболочки, испытывающей напряжения в
двух направлениях, согласно теории 'наибольших касательных
напряжений (3-й теории .прочности) записывается в виде нера-
венства
Озкв S? ОвГ> ( 10 8)
где Opt — предел прочности материала е учетам его темпера-
туры;
Оэкв — эквивалентное 'напряжение
3ЭКВ—3Т. (10. 91
При этом, если aras и п- .имеют разные знаки, то в качестве
нужно брать сумму абсолютных значений |^теЯ[-|-|ох|_ Если
s„iS и I- имеют одинаковые знаки, то за принимается
наибольшее напряжение.
Коэффициент запаса прочности |рассчитывается по формуле
П,,—(10. im
Запас прочности зависит от момента времени и от располо-
жения рассматриваемой точки по высоте бака. При этом 'нельзя
заранее указать наиболее опасное сечение. В нижней части бака
внутреннее избыточное давление наибольшее. Но здесь в ре-
зультате интенсивного отвода тепла в жидкость температура
стенки будет мепьше, поэтому величина пьг остается довольно
большой, соответствующей нормальным температурным усло-
виям. В верхней части бака давление существенно ниже, поэто
му Оэкв невелико. Однако здесь степка бака нагревается аэроди-
намическим потоком воздуха или горячими газами 'наддува топ-
лива и соответственно снижается предел .прочности материала
При конструктивных расчетах наиболее -опасные сечения ба
ка и наиболее опасные моменты времени его -нагружения выяв-
ляются то1да, когда рассматриваются несколько сечений по
длине бака в различные моменты времени полета В зависимо
202
стп от полученных результатов (расчета 'Определяется потребная
толщина стенки бака.
Оболочка, как уже отмечалось, может потерять устойчивость
<я действия осевых -сил. Условие устойчивости оболочки записы-
вается в виде неравенства
(Ю.П)
где Окр — критическое напряжение оболочки
Критические напряжения сжатия оболочки с учетом одновре-
менного действия внутреннего .давления
(10.121
где К* — коэффициент устойчивости оболочки
К* = К4-|ДК; (10.13)
К=0,22—0,35, причем меньшее значение справедливо для
более длинных оболочек (£>0,2.0);
АК=0,229 р/1^ при O^pCl^: (10 14)
АК=0,229 при jp> 1,2;
р„я— внутреннее избыточное давление;
Et — модуль упругости материала бака с учетом темпера-
туры -нагрева;
L—длина цилиндрической оболочки.
Коэффициент запаса устойчивости
— (10.16)
Для получения конструкции минимальной массы необходимо,
чтобы
^=^«1 (10.17)
Расчет днищ баков. Величина и характер изменения напря-
жений в днищах зависят от их формы. Рассмотрим расчет наи-
более распространенных днищ, имеющих вид сферического сег-
мента (рис. 10 17). В процессе эксплуатации ракеты днища
баков могут нагружаться как внутренним, так -и внешним избы-
точным давлением. Под действием внутреннего избыточного
давления pDU в днище возникают меридиональные от и кольце-
вые От растягивающие напряжения, определяемые по формуле
’»-«.=no-isi
iде б — толщина днища;
203
Ri —«радиус сферы сегмента;
A»t-
нее днище рВн=Риал.
+Р.™г):
f — коэффициент безопас-
ности.
После определения напря-
жений необходимо произвести
проверку прочности. Коэффи-
циент запаса прочности
— внутреннее избыточное давление
ща нижнее
на днище (на верх-
днище рви=Риал+
Рис 1018 Пример расчетной схе-
мы бака
Рис 1017. К расчету
на прочность днища в
виде сферического
сегмента (/?t fvD)
(10.19)
где ав1 —предел прочности материала с учетом температуры на-
грева.
При .нагружении внешним избыточным давлением рн в дни-
ще возникают «сжимающие напряжения.
Критическая величина допускаемого ота днище внешнего дав-
ления
ры>==0,2£'/8//?^,
ПО. 201
где £/ — модуль продольной упругости материала днища с уче-
том температуры нагрева
Запас устойчивости днища
V=/WrS>
(10.21)
204
где pf =fpH;
f — коэффициент безопасности.
Днища в виде сферического сегмента или не имеют вовсе
плавного перехода от сферической части к цилиндрической, или
этот переход выполняется с очень малым радиусом. В связи
с этим в месте сопряжения цилиндрической части бака со сфе-
рой возникают значительные радиальные сжимающие усилия,
которые требуют введения в конструкцию дополнительных сило-
вых шпангоутов по линии сопряжения цилиндрической части
бака со сферической. Эти шпангоуты называются распорными.
Потребная площадь распорною шпангоута при нагружении
бака внутренним избыточным давлением приближенно опреде-
ляется по формуле
F... = 0,45 Ртт' cos ?. ,10 22)
°|1/
где р — половина центрально! о угла сферического сегмента.
Для получения минимальной массы шпангоута и днища
радиус днища
1,152/?, (10. 23)
где R — радиус цилиндрической части бака
Пример. Рассчитать на прочность и устойчивость оболочку топливного
бака, эскиз_ которого дан па рис 1018, а эпюры нагружения приведены па
рис. 5.18 и о 19 при следующих условиях
материал оболочки .
диаметр цилиндрической оболочки .
толщина оболочки . ...
длина цилиндрической части бака
плотность компонента топлива
осевая перегрузка
давление наддува в баке минимальное
давление наддува в баке максимальное
коэффициент безопасности при расчете-
— на максимальное давление
— на минимальное давление
свариваемый алюминиевый
сплав
D = 0,9 м
6=i,2 IO-» м
Lf, =4,4 м
р=1,4 10s кг/м3
«*1=2,27
рЯаапнп=1,5 105 Па
»-а.чшах=4р-105 Па
7=1,5
Расчет производится для 50-й секунды полета Внешние нагрузки по дли-
не бака (величины осевых сил и изгибающих моментов) берутся по данным
расчетных эпюр в трех расчетных сечениях /, II и III (см рис 1018).
В этих расчетных сечениях:
Температура оболочки
Модуль упругости ма-
териала оболочки . . .
Предел прочности ма-
териала оболочки .
Изгибающий момент _
Осевая сила ....
Высота столба жидко-
Размерность Сечение I
°C 30
Па 6.75 10'°
Па 3,78- 10s
Н-м 42-110®
Н 30-10е
м '2
Сечение II Сечение III
40 €0
6,65-10'® 6.50-10го
3,74-10® 3,60 -108
37-103 11-108
36-Ю3 25-105
0 О
205
Таблица 10.1
Расчет цилиндрической оболочки бака на прочность и устойчивость
№ по пор, Наименование величин Обозначение Размерность Расчетные сечения
1 II III
Расчетное максимальное давление в баке •Рви (max) 10к Па 6,96 6,00 6,00
2 Расчетное минимальное давление в баке Рви (mln) 105 Па 2,14 1,50 1,50
3 Расчетный изгибающий момент М? Н'М 54700 48100 14300
1 Расчетная осевая сжимающая сила Up Н 46800 39000 32500
Диаметр цилиндрической оболочки D м 0,9 0,9 0,9
Толщина оболочки s 10 •> м 1,2 1305 1,2 1125 1,2 1125
7 Максимальное меридиональное напряжение от давления в баке «in (max) 10о Па
8 Минимальное меридиональное напряжение от давления в баке «m(mln) 10« Па 401 281 281
9 Максимальное кольцевое напряжение от давле пия в баке «т (max) 10о Па 2610 2250 2250
10 Напряжения от изгибающего момента «Л 105 Па 707 621 185
11 Напряжения от осевой сжимающей силы «У 105 Па 138 115 96
12 Максимальное суммарное меридиональное нап SmS (max) 105 Па 1874/46U 1631/389 1214/844
13 Минимальное суммарное меридиональное пап- «m S (min) 105 Па 970/444 787/455 370/0
14 Эквивалентное напряжение «эки 105 Па 2610 2250 2250
15 Предел прочности материала Коэффициент запаса прочности 105 Па 3780 3740 3600
16 *4np — 1,45 1,66 1,60
17 Модуль упругости материала оболочки Et 10W Па 6,75 0,446 6,65 0,318 6,50
18 Относительная величина p — 0,325
19 Поправка к коэффициенту устойчивости ДК — 0,085 0,061 0,062
2U Коэффициент устойчивости K* 0,305 550 0,281 0,282
21 Критическое напряжение «Kp 105 Па 500 490
22 Коэффициент запаса устойчивости Чу — 1,2-1 1,10 —
Все расчеты будем производить для этих трех сечений и результаты вы-
числений записывать в табл 10,1
I. Расчет оболочки бака на прочность
1 . Определим расчетные максимальное и минимальное давление в баке по
формуле (10.2) с учетом коэффициента безопасности
2 Определим расчетные величины изгибающего момента и осевой сжима-
ющей силы, воспользовавшись данными эпюр (см рис 5 19 и 5.18) с учетом
коэффициента безопасности /=1.3
3 Определим максимальное и минимальное меридиональные напряжения
по формуле (10.3) и максимальное кольцевое напряжение по формуле (10.4),
предварительно записав в таблицу результатов расчета величину диаметра и
толщину оболочки бака
4 Определим напряжение от действия внешнего изгибающего момента по
формуле (10.6) и напряжение от действия осевой сжимающей силы по форму
ле (107)
5 Определим максимальное и минимальное суммарные меридиональные
напряжения по формуле (105) При этом учтем, что напряжения от действия
изгибающего момента с одной стороны от нейтральной липни будут сжимаю-
щими, а с другой — растягивающими Напряжения от действия осевой сжи-
мающей силы по обе стороны от нейтральной линии будут сжимающими, а
напряжения от действия внутреннего давления всегда растягивающие. В таб-
лицу для каждого расчетного сечения оболочки запишем две величины сум-
марного напряжения соответственно двум сторонам От нейтральной линии.
6 Определим эквивалентное напряжение в оболочке бака по формуле
(109) В пашем случае суммарные меридиональные напряжения и кольцевые
напряжения во всех расчетных сечениях имеют одинаковые знаки, поэтому
большее по величине напряжение принимаем за эквивалентное (у насот>стВ
во всех сечениях).
7 . Запишем в таблицу величину предела прочности материала оболочки
бака с учетом его температуры в расчетных сечениях
8 Определим запас прочности оболочки по формуле (10 10)
II. Расчет оболочки бака на устойчивость
Критические напряжения сжатия оболочки бака с учетом одновременного
действия внутреннего давления в баке определим по формуле (1012). При
этом наиболее опасным будет случай, когда давление в баке минимальное
1 Запишем в таблицу величину модуля упругости материала оболочки ба-
ка с учетом температуры его нагрева в расчетных сечениях.
2 Определим величин}' коэффициента устойчивое! и оболочки по формуле
(1013), приняв /(=0,22, так как в нашем случае оболочка бака относится к
разряду длинных оболочек
Для расчета величины поправки Д/( по формуле (10.14) определим по
формуле (10.15) безразмерную величину р
3 Определим величину критических напряжений по формуле (1012)
4 . Определим коэффициент запаса устойчивости оболочки бака по форму-
ле (10.17)
По результатам расчета делаем вывод, чго оболочка бака условиям проч-
ности и устойчивости удовлетворяет, так как во всех расчетных сечениях
коэффициенты запаса прочности и запаса устойчивости больше единицы.
Контрольные вопросы
1. Какие требования предъявляются к топливным бакам?
2. Чем конструктивно отличаются несущие баки от нене-
сущих?
3. Какие существуют основные конструктивные схемы топ-
ливных отсеков?
4. Перечислите элементы силовой схемы баков.
5. Как конструктивно выполняется цилиндрическая часть
бака3
6. Какие преимущества панельной конструкции баков перед
обечаочной?
7 Какую форму имеют днища баков?
8. Какая арматура устанавливается на бак?
9 Какие существуют схемы заборных устройств?
10 Для чею необходимы демпфирующие перегородки?
11. Какие нагрузки действуют па несущий бак?
12. Как рассчитывается па прочность цилиндрическая часть
бака3
18 Как рассчитывается па прочность днище бака?
Глава XI
КОНСТРУКЦИЯ ПЕРЕХОДНЫХ, ПРИБОРНЫХ
И ХВОСТОВЫХ ОТСЕКОВ И РАСЧЕТ ИХ НА ПРОЧНОСТЬ
11.1. НАЗНАЧЕНИЕ И КОНСТРУКТИВНО-СИЛОВЫЕ СХЕМЫ ОТСЕКОВ
Назначение и требования, предъявляемые к отсекам ракет.
Баллистические ракеты с ЖРД и РДТТ независимо оз их кон-
структивной схемы всегда имеют переходные, приборные и хво-
стовые отсеки.
Переходные отсеки служат для соединения в одно целое
корпусов ступеней составной ракеты и корпуса последней сту-
пени с юловной частью. Применение переходных отсеков объ-
ясняется различием диаметров стыковочных шпангоутов корпу-
сов ступеней ракеты и головной части.
Приборные отсеки служат для размещения в них аппаратуры
системы управления.
Хвостовые (двигательные) отсеки предназначены для за-
щиты двигателей от непосредственного воздействия внешних
сил, а также для крепления исполнительных органов систем
управления и стабилизаторов ракет. Часто хвостовые отсеки
используются также для передачи силы тяги двигателя на кор-
пус ракеты, установки ракеты па пусковой стол и соединения
ступеней ракеты.
Все отсеки из-за специфики их назначения и особенностей
нагружения имеют определенные различия в конструктивном
исполнении, тем нс менее в конструктивно-силовых схемах отсе-
ков есть много общего: все они, как правило, выполняются
в виде тонкостенных подкрепленных оболочек. Обеспечивая
достаточную прочность, подкрепленные тонкостенные оболочки
позволяют создавать отсеки с минимальной массой конструкции.
208
Отсеки, выполненные в виде тонкостенных подкрепленных
оболочек, должны удовлетворять следующим требованиям:
а) иметь объем, достаточный для размещения необходимых
ai регатов и приборов;
б) иметь при наименьшей массе достаточную прочность и
жесткость конструкции в полете и при наземной эксплуатации;
в) обеспечивать максимальное использование объема;
г) быть простыми по конструкции и иметь удобную конструк-
тивную увязку с другими частями и агрегатами ракеты,
д) обеспечивать доступ
и приборам для осмотра,
контроля, ремонта или
замены их;
е) удовлетворять ус-
ловиям длительного хра-
пения и эксплуатации
(пыле- и влагопепропи-
цаемость, коррозионна я
стойкость и т. п.);
ж) удовлетворять всем
производственно • эконо-
мическим требованиям.
Конструктивно - сило-
вые схемы отсеков.^ Эле-
менты конструкции, 1кото-
рые служат для восприя-
тия действующих на от-
сек нагрузок,образуют ос-
новную силовую схему.
В общем случае эта схема
включает в себя продоль-
•ный лабор (лон’керйиы и с:
гоуты) и обшивку.{
Кроме того, Реконструкции отсеков имеются элементы всю-
могательного назначения, к которым относятся детали для
местного усиления основной конструкции, детали для установки
различного оборудования и т. д. •
Под действием рассмотренных выше сил отсек работает как
са неуравновешенная балка без опор. Эта балка изгибается,под-
вергается сдвигу, а также сжатию или растяжению. Все эле-
менты конструкции отсека — обшивка, стрингеры, лонжероны
и шпангоуты — участвуют в передаче нагрузок. Характер и сте
пень нагружения элементов конструкции зависят от разновидно-
стей конструктивно-силовой схемы отсека
। Применяются три разновидности конструктивно-силовых
cStn отсеков.
1. Конструкция, состоящая из мощных лонжеронов и слабого
209
набора стрингеров и шпангоутов В таких конструкциях, назы-
ваемых лонжеронными, осевая сила и изгибающий момент вос-
принимаются продольными элементами (лонжеронами), а об-
шивка воспринимает местные нагрузки и перерезывающую силу.
2. Конструкция, состоящая из сравнительно топкой обшивки,
подкрепленной часто расположенными стрингерами и шпангоу-
тами, называется стрингерной (полумонокок). В конструкциях
этой схемы изгибающии момент и осевая сила воспринимаются
обшивкой и стрингерами. Отсеки стрингерной конструкции
имеют наименьшую массу. "~
3. Конструкция, представляющая собой сравнительно тол-
стую или многослойную обшивку, подкрепленную только шпан-
гоутами. Такой отсек называется обшивочным (монокок). В этой
конструкции вес нагрузки воспринимает обшивка. В производ-
стве такая конструкция проще, чем стрингерная Отказ от стрин-
геров позволяет увеличить полезный объем отсека. Однако для
увеличения жесткости обшивку приходится утолщать, а это утя-
желяет конструкции^
Тот или иной ТЙп конструкции определяется объемной ком-
поновкой отсека, технологическими соображениями и характе-
ром внешних нагрузок. Наибольшее распространение получила
стрингерная схема отсеков (рис. 11.1).
11 .2. КОНСТРУКЦИЯ ПЕРЕХОДНЫХ, ПРИБОРНЫХ И ХВОСТОВЫХ
ОТСЕКОВ
Основными элементами конструкции отсеков являются стрин-
у/ ге&ы-, лонжероны, шпангоуты, обшивка и стыковые узлы.
/ .Стрингеры — продольные элементы конструкции — воспри-
нимают (вместе с обшивкой) изгибающий момент и осевые на-
грузки, действующие на отсек Помимо осевых усилий,
стрингеры через обшивку нагружаются распределенными
поперечпыми-^силиями. При этом шпангоуты служат опорами
АдлХ стрингеров^
•, РазрушейЙ^стрингсров в растянутой зоне происходит обычно
при напряжениях, близких к временному сопротивлению В сжа-
/t гой зоне отсека разрушение стрингеров может произойти вслед
I ствие общей или местной потери устойчивости при напряжениях,
। значительно меньших временного сопротивления материала
i В конструкциях современных отсеков применяются стрии-
\т еры в виде прессованных или гнутых из листа профилей. Формы
сеченнж стрингеров отличаются большим разнообразием (см.
риё{ 5.1). Рациональный выбор формы стрингера определяется
мноЪгйи факторами, в гом числе размерами отсека, величиной
нагрузки, действующей на отсек, величиной и характером рас-
\ ' пределения лжемпературы по сечению профиля, технологией
i сборки и др|Для тяжелопагруженных отсеков чаще других при-
меняются профили закрытого типа (см. рис. 5 1,а, б, в), которые
210
обладают высокими критическими напряжениями местной и об-
щей потери устойчивости.
Лонжероны устанавливаются в тех случаях, когда необхо-
димо воспринять большие сосредоточенные осевые нагрузки
(например,--от узлов крепления двигателя), или в местах выре-
зов в отсеке.!
Лонжероны, так же как и стрингеры, выполняются из прес-
сованных профилей, ио площадь сечения лонжеронов значи-
тельно больше (рис. 11.2).
Лонжероны работают подобно стрингерам, воспринимая
изгибающий момент и осевые силы, действующие на отсек. При
этом в сечениях лонжерона возникают
нормальные напряжения. г
{Шпангоуты подразделяются на z\ \
портальные, усиленные и стыковые. /—' лдХ \
Нормальные шпангоуты у / ..................tv—j
служат в основном для обеспечения )*/ JX
формы поперечного сечения отсека.
Являясь опорам.1 для стрингеров \„ e S
Типовые сечения локжеро
и общивки, они воспринимают местную аэродинамическую на-
грузкуЛ
Нормальные шпангоуты изготавливаются штамповкой
в виде кольца из листового материала швеллерного или Z-образ-
ного сечения (рис. 11.3). Иногда пояса шпангоутов образуются
профилями уголкового или таврового сечения. Нормальные
шпангоуты устанавливаются в промежутках между усиленными
илп-стыковыми шпангоутами.
ХУюпленные шпангоуты предназначены для восприя-
тпя^начительных местных сосредоточенных сил и передачи их
па обшивку в виде распределенной нагрузки. Усиленные шпан-
гоуты устанавливаются в местах крепления рам двигателей, ста-
211
билизаторов, рулевых двигателей и т. п Каждый усиленный
шпангоут представляет собой плоскую раму, нагруженную урав-
новешенными усилиями-^лзрсредоточениыми силами от грузов
и касательными от обшивкид(рис. 11.4).
Усиленные шпангоуты изготавливаются клепкой из отдель-
ных листов и профилей Пояса клепаных (сборных) шпангоутов
выполняются из -прессова-нных профилей уголкового или тав-
рового сечения. Стенки изготавливаются из листового материала
Рис. 11.4. Конструктивная схема усиленного шпашоута
и подкрепляются стойками, которые повышают критические на-
пряжения и улучшают условия работы шпангоутов при сосредо-
пщ&иных силах.
* - Стыковые шпангоуты устанавливаются иа торнах
Ъ(йяй>чек и предназначены для соединения отсековД
/ рбшивка придает отсеку обтекаемую форму.~Т)на восприни-
мает*- местные аэродинамические нагрузки, передавая их на
стрингеры и шпангоуты в виде нормальных сил Выполняя эту
функцию, обшивка работает на поперечный изгиб и растяжение.
Вторая функция обшивки заключается в восприятии части
изгибающего момента и осевой силы. При этом в обшивке воз-
никают нормальные напряжения! Доля изгибающего момента
и осевой силы, приходящаяся йа обшивку, зависит от соотноше-
ния толщины обшивки и площади сечения продольного набора.
Тонкие обшивки (б<0.8 мм) практически не работают на нор-
мальные напряжения. В этом случае общий изгиб восприни-
мается продольным набором. По мере увеличения толщины об-
шивки отношение ее критических напряжений к напряжениям
в стрингерах повышается. Следовательно, доля изгибающего
момента и осевой силы, воспринимаемая обшивкой, возрастает.
212
Обшивка изготавливается из отдельных дуралюминовых
листов. В некоторых случаях могут применяться стальные ли-
сты или листы из сплава на титановой основе. Листы соеди-
няются между собой встык или внахлестку' сварными или клее-
выми швами. При применении сварных и клеевых швов масса
конструкции уменьшается и обеспечивается герметичность сты-
ков обшивки Последнее важно для обеспечения влагонепрони-
цаемое! и отсеков корпуса. Сварные и клеевые швы нс всегда
обеспечивают достаточную прочность соединения, и поэтому
в ответственных, с точки зрения прочности, конструкциях ши-
роко применяются заклепочные so-
единения В этом случае для обес-
печения герметичности стыков про-
изводят внутришовную или поверх-
ностную герметизацию заклепочных
швов (рис 11 5). Отличительной
особенностью таких соединений яв-
ляется уменьшение шага заклепок,
увеличение количества их рядов
и применение специальных уплот-
нительных элементов. Уплотнитель-
ными элементами являются покры-
тые герметиком полотняные ленты,
герметизирующие замазки, пасты,
жгуты.
Для доступа к арматуре двигательной установки и приборам,
а также для проведения необходимых работ по монтажу, про-
веркам и подготовке к пуску в обшивке отсеков производят вы-
резы под люки.
Вырезы в обшивке нарушают целостность силовых элементов
оболочки, в результате происходит перераспределение нагрузок.
Продольные элементы, ограничивающие вырез, получают допол-
нительную ншрузку. Поэтому в местах вырезов делают местные
подкрепления.
В лонжеронных и стрингерных отсеках небольшие вырезы
мало ослабляю г сечения и для их усиления достаточно круговой
окантовки отверстия (рис. 11,6). Сечения значительно ослаб-
ляются при больших вырезах и для их усиления приходился
ставить усиленные стрингеры, короткие лонжероны и усиленные
шпангоуты.
Для обеспечения влагопепроиицаемости отсеков на крышки
люков устанавливают резиновые прокладки
Крепление обшггвки к продольному и поперечным .наборам
зависит от расположения стрингеров (лонжеронов) относительно
шпангоутов и бывает следующих видов
1. Стрингеры проходят снаружи шпага оутои и обшивка кре-
пится только к стрингерам (рис. 11.7, а).
213
Такое соединение часто осуществляется в месте расположе
ния нормальных шпангоутов. При этом уменьшается количество
заклепок, а обшивка достаточно хорошо подкрепляется стрин-
герами.
2. Стритеры проходят внутри шпангоутов и обшивка кре-
пится только к шпангоутам (см рис 11.7,6). Это крепление
встречается редко, так как оно ухудшает подкрепление обшивки.
Рис. 11 6. Усилие выреза в обшивке окантовкой
3. Стрингеры врезаны в шпангоуты заподлицо и обшивка
крепится и к шпангоутам, и к стрингерам (см. рис. 11.7, в, ’).
Это крепление является наиболее распространенным.
Если обшивка крепится к каркасу, то в местах пересечения
стрингеров и шпангоутов необходимо иметь связь между7 ними
(см. рис. 11.7,6, уголок 5). В случае конструкции, состоящей из
панелей, такой связи нс нужно (см. рис. 11.7,а). Это обстоя
тельство упрощает технологию изготовления панельной кон-
струкции
При креплении обшивки к шпангоутам часто применяют ком-
пенсаторы (см, рис. 11.7, а поз. 4). Такое крепление дает суще-
ственные технологические преимущества — снижаются требова-
ния к точности изготовления шпангоутов.
Одним из новых направлений в конструировании отсеков
является применение оболочек и панелей вафельной конструк
ции, соединяемых между собой сваркой.
Приборные отсеки. В зависимости от места размещения на
ракете приборные отсеки могут иметь разную форму: при распо-
ложении непосредственно за головной частью — форму уссчсп-
214
него конуса, в случае размещения между топливными баками —
цилиндрическую форму. Основными силовыми элементами при-
борного отсека являются продольный и поперечный силовые
наборы, скрепленные заклепками с обшивкой
Приборы системы управления устанавливаются на специаль
пой рамс. Обычно рама изготавливается из жестких профилей
Рис 11 7 Крепление обшивки к стрингерам и шпангиутамг
б—обшивка крепится
геру и шпангоуту, 1-
?—шпангоут; Л—общипка.
эбшивка крепи гея только
или труб и усиливается подкосами и растяжками. Малые дефор-
мации рамы способствуют неизменности ориентации гироскопи-
ческих приборов относительно осей и плоскостей стабилизации
ракеты. Кроме того, приборы системы управления очень чувст-
вительны к вибрациям рамы, из-за чего раму также необходимо
выполнять достаточно жесткой.
Установку приборов, имеющих чувствительные элементы
(гирогоризопт, Iировертикапт и др.), необходимо производить
па специальных регулируемых платах па жестком основании;
остальные приборы устанавливаются на амортизаторах В каче-
215
стве амортизаторов применяется микропористая резина, накле-
енная на держатели приборов и закрепляемый элемент, резино-
вые шайбы, пружинные подвесы и т. п.
Для свободного доступа к приборам в обшивке приборного
отсека обычно имеется несколько люков с крышками.
Стыковые шпангоуты приборного отсека имеют па торцовых
'Лолках отверстия под болты и направляющие штыри для соеди-
нения с соседними отсеками.
Хвостовые отсеки. Конструкции хвостовых отсеков современ-
ных ракет очень разнообразны. Это объясняется разнообразием
типов и компоновок ракеты, конструкций двигателей и исполни-
тельных рулевых органов, способов установки ракеты на старто-
вом устройстве и другими факторами.
По внешней форме хвостовые отсеки могут быть цилиндри-
ческими или в виде усеченного конуса. Последние применяются
в том случае, если поперечный размер двигательной установки
превышает диаметр ракеты, а также если нужно повысить ста-
тическую устойчивость ракеты в полете без применения стаби-
лизаторов. Кроме того, увеличение диаметра нижнего опорного
шпангоута хвостового отсека повышает устойчивость ракеты на
пусковом столе
Нагружение хвостового отсека в полете зависит от способа
сопряжения его с двигателем.
Хвостовой отсек, разгруженный от действия силы тяги в по-
лете, испытывает только растяжение от действия массовой силы
самою отсека и аэрдоинамического сопротивления. При проек-
тировании хвостовых отсеков одноступенчатых баллистических
ракет, как правило, хвостовой оз сек разгружают от действия
силы тяги. Этим обеспечивается уменьшение его массы
Корпус хвостового отсека обычно выполняется из сравни-
тельно гонкой цилиндрической (реже конической) подкреплен-
ной продольным и поперечным набором оболочки, воспринимаю-
щей нагрузки, действующие на отсек при старте и в полете.
У некоторых ракет к шпангоутам хвостового отсека присоеди-
няются стабилизаторы На хвостовом отсеке устанавливаются
исполнительные органы системы управления (газоструйные рули
или специальные управляющие двигатели)
На рис. 11.8 показана схема хвостового отсека ракеты, имею-
щей рулевые двигатели. Отсек состоит из корпуса 3 и четырех
обтекателей 2, расположенных в двух взаимно перпендикуляр-
ных плоскостях стабилизации. Корпус имеет силовой набор
в виде стрингеров и шпангоутов, к которым приклепана
обшивка. В обшивке имеются люки 4 для доступа к двигателям.
На крайнем нижнем шпангоуте хвостового отсека закреп-
лены опорные кронштейны 1 для установки ракеты на пусковой
стол и размещены колодки 6. связывающие магистрали ракеты
с наземным оборудованием.
216
Под обтекателями хвостового отсека размещены рулевые
двщатели 5. Обтекатели имеют люки, закрытые крышками, для
доступа к рулевым машинам и другим arpei атам.
Для последних ступеней баллистических ракет могут приме-
няться сбрасываемые хвостовые отсеки Такие отсеки конструк-
тивно могут быть выполнены из отдельных панелей, скреплен-
ных между собой специальными быстроразъемными замками,
а крепление отсека к корпусу ступени может осуществляться
Рис. 11.8 Схема хвостового отсека.
разрывными болтами При сбросе отсека болты крепления
рвутся, замки раскрываются и панели разбрасываются в сто-
роны от ракеты.
Переходные отсеки чаще всего имеют коническую форму
На рис. 11.9 изображена простейшая конструктивная схема пе-
реходного отсека обшивочного типа, предназначенного для со-
единения юловной части с корпусом ракеты. Он имеет форму
усеченного конуса и состоит из сравнительно толстой силовой
обшивки 4 и двух стыковых шпангоутов 3 и 5 уголкового про-
филя. Стрингеры в данном случае отсутствуют.
На переднем шпангоуте 3 устанавливаются направляющие
штыри 2 для центрирования головной части при стыковке и от-
верстия для установки умзрывных болтов, соединяющих голов-
ную часть с переходным отсеком. В местах установки разрывных
болтов приклепываются стыковые фитинги.
На герцовой полке заднего шпангоута 5 имеются отверстия
для направляющих штырей и болтов крепления переходного
отсека к корпусу ракеты В его обшивке предусматриваются
люки 1 для доступа к разрывным болтам и штепсельным разъе-
мам. Люки закрываются крышками с крепежными винтами.
217
"ример переходные отсеки,
Рис 11.9 Переходный отсек
/—июк, 2—-направляющий штырь,
.’—передний шпангоут; 4—обшив-
ка 5—‘задний юиаигоут
С внутренней стороны к обшивке приклепываются кронштейны
для крепления кабельной сети и штепсельных разъемов.
Переходные отсеки, испытывающие большие нагрузки, иа-
соединяющие ступени ракеты, отли-
чаются от рассмотренного мощным
продольным силовым набором —
стрингерами и дополнительными
промежуточными шпангоутами.
В качестве материала используют-
ся алюминиевые сплавы. Для отсе-
ков обшивочного типа — алюминче-
выс сплавы, топускающие сварку,
так как такие отсеки выполняются
сварными. Отсеки стрингерного и
лонжеронного типов изготавли-
ваются из деформируемых алюми-
ниевых сплавов. Обшивка и каркас
соединяются между собой заклеп-
ками.
Одним из способов разделения
ступеней является так называемое
«огневое» разделение, когда после
разрыва связей последующая сту-
пень уходит вперед за счет тяги, создаваемой ее двигателем. При
этом для сохранения стабилизации этот двигатель должен запу-
ститься и выйти на режим до расстыковки ступеней. Применяя
этот способ разделения, необходимо обеспечить свободный про-
ход высоконагретых газов через переходный отсек, соединяю-
щий ступени.
Рис. 11 10 Переходный отсек — ферма-
1—стойка; 2—направляющий штырь.
3—rpv6a, 4 баш
При этом способе разделения ступеней удобной конструкцией
переходного отсека является открытая ферма, изготовленная
из стальных труб, соединенных сваркой (рис. 11.10). Нижние
концы труб 3 привариваются к башмакам 4, а верхние - к стой
кам 1. В нескольких стойках размещаются специальные быстро-
разъемные замки для стыковки фермы с верхней ступенью ра-
218
кеты. Кроме того, на стойках имеются направляющие штыри 2
К корпусу нижней ступени ракеты ферма крепится через
башмаки 4 обычными болтами или шпильками,
11.3. РАСЧЕТ ОТСЕКОВ НА ПРОЧНОСТЬ
Нагрузки, действующие на отсеки. Расчетные случаи. В по
легс и при наземной эксплуатации отсеки нагружаются силами
от присоединенных к ним других отсеков, массовыми силами
грузов, расположенных в отсеках, массовыми силами самой кон-
струкции отсеков, аэродинамическими силами, действующими
па отсеки, и силой тяги двш ателей.
Для корпусов приборного и переходного отсеков расчетными
будут следующие случаи:
1) нагружение корпуса ракеты максимальными поперечными
нагрузками на активном участке полета;
2) нагружение корпуса ракеты максимальными осевыми си
лани на активном участке полета;
3) нагружение корпуса ракеты при максимальном значении
осевой перегрузки;
4} нагружение корпуса ракеты на старте. При этом корпус
нагружается осевыми силами и ветровой нагрузкой.
Наиболее опасным является случай действия максимальной
приведенной нагрузки (т. е. нагрузки, учитывающей совместное
действие осевой силы и изгибающего момента).
Прочность хвостового отсека проверяется па нагрузки, дейст-
вующие в следующих расчетных случаях:
I) нагружение корпуса ракеты при максимальной попереч-
ной перегрузке на активном участке полета;
2) нагружение корпуса ракеты максимальными осевыми
силами;
3) нагружение корпуса ракеты при максимальном значении
осевой перегрузки;
4) нагружение заправленной ракеты на старте при действии
ветра.
Наиболее опасным для хвостового отсека является послед-
ний случай на1 ружения. Ракета при этом находится в верти-
кальном положении и опирается на кронштейны. Па хвостовой
отсек действует вес полностью заправленной ракеты и ветровые
нагрузки, создающие опрокидывающий момент.
Таким образом, переходный, приборный и хвостовой отсеки
должны рассчитываться на прочность при совместном действии
осевых сил и изгибающих моментов.
Определение напряжений в элементах отсеков. Исходными
данными для расчета прочности отсека являются:
а) геометрические размеры его сечений (рис II 11);
б) физико-мехапческие свойства материалов элементов от-
сека при различных температурах;
219
в) эпюры осевых сил U, перерезывающих сил Q и изгибаю-
щих моментов Л1;
г) распределение температур по конструкции отсека.
Расчетные нагрузки на корпус определяются по формулам
U^=Uf; (11.1,
..UP- Mf, (11.21
Рис 11,11 Геометрические
параметры сечения цнлипл
ричсекого отсека
где f = 1,1 —1,5 — коэффициент безопасности.
Расчет корпуса отсека на прочность заключается в опреде-
лении напряжений в элементах конструкции от расчетных нагру-
зок и сравнении этих напряжений
с разрушающими. Величина разруша-
ющих напряжений берется с учетом
тех температур, которые имеют эле-
менты конструкции в расчетный мо-
мент времени
Отсек рассматривается как балка,
воспринимающая осевые силы и изги-
бающие моменты При совместном
действии осевых сил и из!ибающих
моментов в обшивке и стрингерах
возникают нормальные напряжения
Рассмотрим сначала действие
только изгибающего момента . В стрин-
герном отсеке изгибающий момент
.Цр воспринимается стрингерами и
обшивкой, вызывая в них растяжение и сжатие (рис. 11.12).
Стрингеры и обшивка, расположенные вблизи нейтральной
оси, работают при малых напряжениях. Пренебрегая ими, для
приближенного расчета можно принять, что пара сил t/из с плс
чом 2/3 D нагружает верхний и нижний своды, состоящие из
стрингеров и обшивок (на рис 11.12 своды обведены штрчх-
пунктирпой линией). Здесь 2/3D — расстояние между центрами
масс сводов. Высоту сводов для круглых сечений можно принят!
равной 1/4£>:
Z7ps 3.Wi’/2D. (П.З)
Тогда для растянутого свода напряжения от изгиба спреде
ляются так:
(11.4)
где F, и — площадь сечения свода;
FtTp — площадь сечения одного стрингера;
Лги — число стрингеров свода;
Foo™ ср — площадь сечения обшивки свода.
220
Для сжатого свода
Л1 F------------------r ------₽--------’ к 1 1 - '’!
* irphP.cn ^с.в« стр Т* обш с»
где fnpuD св — приведенная (редуцированная) площадь сечения
свода;
<р — редукционный коэффициент обшивки, который
учитывает потерю устойчивости обшивки и при
ближенно равен (40 64-d)/d;
б — толщина обшивки;
Рис. 11 12 Нагрузки, действующие на коне i рук шппые
элементы стрингерного отсека-
5свш—У<вяие в обшивке 5г,тр—училие о стрингере
Ь — расстояние между стрингерами;
d — расстояние между заклепочными швами
Нормальные напряжения от растягивающих осевых сил
ДСеч ИДстр Fобш
где Г7₽. расчетная осевая сила;
Fceq — площадь сечения отсека,
п — количество стрингеров в отсеке;
/ойш — площадь сечения обшивки отсека.
Нормальные напряжения от сжимающих осевых сил
Суммарное нормальное напряжение от совместного действия
изгиба и растяжения равно алгебраической сумме напряжении
5л1-: яи
221
При совместном действии осевых сил и изгибающих момен-
тов возможны два случая; случай, когда имеется достаточно
большая осевая растягивающая нагрузка и изгибающий момент,
п случай сочетания сжимающей нагрузки и изгибающего мо-
мента.
В первом случае можно ожидать, что потери устойчивости
обшивки в верхнем своде не произойдет, а более опасным мо
жег оказаться нижний свод, работающий на растяжение и от
изгиба и от осевой силы. Условие прочности отсека в этом слу-
чае запишется в виде
II. 9)
где оЕ I — временное сопротивление на разрыв материала стрин-
гера.
Коэффициент запаса прочности по растягивающим напря-
жениям
4ip-=°B/3Pac
Во втором случае, когда по оси отсека действуют сжимаю-
щие нагрузки, наиболее опасным из-за потери устойчивости vo-
жет оказаться верхний свод, работающий на сжатие и от изгиба
и от осевой силы. Условие прочности отсека в этом случае
! 11.11)
где Оцр стр — критическое напряжение стрингера
Коэффициент запаса устойчивости
Пу
(11. 12)
Пример. Проверим на прочность приборный отсек стрингерной конструк-
ции, схема которою приведена на рис. И 13, при следующих условиях
материал обшивки и стрингеров
температура нагрева обшивки
толщина обшивки . . .
расстояние между заклепочными швами
общее количество стрингеров . ...
алюминиевый сплав Д16Т
/ = 50° С
6 = 1.5 -10я м
d= 0,026 и
количество стрингеров, работающих на сжатие
(стрингеры, расположенные над люками, на
сжатие не работают)
«об=20
п=16
количество стрингеров в своде
профиль стрингеров . . . ...........
площадь сечения стрингера....................
модуль продольной упругости материала стрин-
гера . ..................................
ПРИЗ-16
£СТР=1Д 10-4 м®
£, = 6,75-10'» Па
222
радиус инерции сечения стрингера
длина стрингера . ...
коэффициент заделки стрингера
количество люков в обшивке
ширина люка
осевая сжимающая сила
изгибающий момент
диаметр отсека
коэффициент безопасности
1х=0,68-10-2 Л
/=0,68 м
с=2
Пт=2
=0,4 м
l/oc=25 101 Н
/4=2 Ю4 II м
D=0,9 м
/=1,3
Решение. При совместном действии осевых сил и изгибающих момен-
тов наиболее опасным является случай сжатия свода отсека и от изгиба и от
осевой сиды Поэтому рассчитаем приборный отсек на устойчивость
I Определим напряжения в стрингере при сжатии по формуле (11.11)
Для этого.
1) Определим расчетные величины изгибающего момента и осевой силы
но формулам (11.1) и (112)
Л1‘ = /Л1 = 1,3-2-104 = 2,6-104 Н-м;
//₽.= /£/<«.= 1,3-25-104 = 32,5-104 н.
2) Определим расчетную нагрузку на своды отсека от действия изгибаю-
щего момента по формуле (11.3)-
из 2Д
3) Опред- .*им расстояние между стрингерами по периметру обшивки
3-2,6-104
—-^ззло®
20
223
4) Определим величину редукционного коэффициента обшивки
_ 406 _ 40-1,5-10~3+26-1Q—3 _
b ~ 140-Ю-з - ’
э) Определим площадь обшивки свода
1’20° 120
F.itao, = /св” - 8 -= 3,М.0,8— 1,5- Ю-з = и. 10-4 м:.
6) Определим площадь обшивки отсека с учетом площади выречов под
люки
Го6ш =. л£В — 2Z,B г : (3,14-0,9
2-0,4) 1,5-10—* _ 30,3-10--« и--
Напряжения в стрингере по формуле (1111)'
Up U1
UIIS_______ ПС
^св^стр + 4F «би св nF стр + <fF „61П
4,-13-101_________________________32,5-104___________
6-1,5-10-4 + 0,61 -14-10-4 + 16-1,5-10-4 + 0.61-30-3-10-4
= 402-№ Па-
11. Определим критическое напряжение при сжатии стрингера по формуле
Эйлера (5.4):
=К|>ЛТР — е
1.2
2-3,14--б,75- ЮИ'-(О,68-10~2)-
СГ,682
=1330-105 Па.
III Определим коэффициент запаса устойчивости по формуле (11.12)
СКЮ стр 1330-105
Вывод: приборный отсек требованиям прочности (устойчивости) удов-
летворяет.
11.4. РАСЧЕТ ФЕРМ НА ПРОЧНОСТЬ
Фермы в конструкции ракет могут применяться не только для
переходных отсеков, но и для изготовления рам крепления дви-
гателей, искусственных спутников Земли, приборов системы
управления и т. д.
В зависимости от количества стержней в ферме они бывают
статически определимыми или статически неопределимы «и.
Стержневая система, в которой количество определяемых неиз-
вестных усилий равно количеству уравнений статики, является
статически определимой.
Расчет статически неопределимых ферм весьма сложен.
Однако некоторые допущения могут упростить решение. Так, на-
пример, вследствие симметрии фермы при некоторых видах на-
1рузки степень статической неопределимости может быть сни-
жена. Если все стержни имеют одинаковое сечение, то при дейст-
вии осевой силы усилия в стержнях тоже одинаковые. В этом
случае ферма оказывается статически определимой.
224
Рис. 11.14. Расчетная схема фермы
Если изгибающий момент и поперечная сила действуют
в плоскости симметрии фермы, то усилия в стержнях, симмет-
рично расположенных относительно плоскости симметрии, оди-
наковые и по величине и по знаку, а в стержнях, симметрично
расположенных относительно плоскости, перпендикулярной
плоскости симметрии, по величине — одинаковые, а по таку —
противоположные. В этом
случае одно из уравнений
статики, выражающее про-
екцию сил на продольную
ось ракеты Охь превра-
щается в тождество. Остав-
шиеся два уравнения ста-
тики позволяют найти уси-
лия в двух стержнях каж-
дого квадранта (всего в
восьми стержнях фермы).
Рассмотрим случай ста
тически определимой си-
стемы, когда количество
связей-фитингов фермы рав-
но количеству ее стержней
(рис. 11.14). Известно, что
усилия в стержнях статиче-
ски определимой фермы при
заданной на> рузке зависят
лишь от геометрических па-
раметров фермы.
Определим эквивалент-
ную осевую нагрузку
^Ь.=/Л+Л •
{11.13)
где fi и fa — коэффициенты
безопасности;
Uoo— осевая нагрузка;
М - изгибающий момент;
О,,—диаметр основания фермы.
Нагрузка на один стержень симметричной цилиндрической
фермы
где 2а —уюл между стержнями цилиндрической фермы;
п — количество стержней фермы.
689
225
Для конической фермы
где 20 — угол конусности фермы.
При выбранном из условий стыковки смежных отсеков коли-
честве стержней фермы угол а определяется соотношением
а-arctg^, JI. 16)
где £>и — диаметр нижнего основания фермы,
И — высота фермы
Длина стержней /с-. определяется следующими соотноше-
ниями:
----’для цилиндрической фермы: (11 171
-------—-------для конической фермы. (11.18)
т cos a cos 8--* '
Зная длину стержня 1СЧ, площадь его поперечного сечения
FCT> радиус инерции сечения стержня I, гибкость стержня
А=/стЛ> критическую гибкость стержня
Ч.='т|/—. <11.19)
где с — коэффициент заделки стержней фермы (при расчете
предполагают, что узлы являются шарнирами, следо-
вательно, с— 1);
Et - модуль упругости материала стержпя при расчетной
температуре нагрева;
*ffpt — предел пропорциональности материала стержня при
той же температуре,
•определяют критические напряжения сжатия в стержне, кото-
рые затем сравнивают с действующими напряжениями.
При Х>Х1!р критические напряжения сжатия определяют по
-формуле Эйлера
О1(Р=ся9£'А (11.20)
а при — по формуле Тетмайера
. (11.21)
где Ort—предел текучести материала стержня при расчетной
температуре.
226
Действующие напряжения в стержне
вл=иг/Г„, (11.22)
где Ui — нагрузка на один стержень;
fci — площадь поперечного сечения стержня.
Коэффициент запаса устойчивости стержня
1,о. (п.оЗ)
Пример. Рассчитав?-! на прочность ферму, эскиз которой
рис. 11.14, при следующих условиях-
высота переходного отсека...............
диаметр нижнего основания фермы .
диаметр верхнего основания
количество стержней в раме . ...
коэффициент заделки стержней фермы
стержни трубчатого сечения . ...
площадь поперечного сечении стержня
радиус инерции сечения стержня
материал оержней
//=0,9 м V
Лп=1,5м V
приведен на
0,05X0,04 м
/;1=7,07-10~4 м2 V
температура нагрева фермы . .
модуль упругости материала стержня ....
предел пропорциональности материала стержня
предел текучести материала стержня
осевая сила, действующая на оттек
изгибающий момент . ..............
коэффициенты белой acw юти (определяются и°
справочника по нормам прочности) ...
алюминиевый сплав
АМгб-М
f=50°C
£t=B0==6.6-10«° Па V
Opf^и= 1,29-I03 Па V*
oTi=so=2,38-10’ Па/
Л4=1.5 10s Н-м
Р ешеиие. 1) определим величину эквивалентной осевой нагрузки по
формуле (11 13):
rrt> 4М / 4-lj-105\
-- -1,3^2,0-IOS + —гС—1 = 7,8-№И.
2) Определим угол конусности фермы 2₽, угол между стержнями 2а и на-
грузку на один стержень по формуле (11.15):
2₽ — arctg D" f[ Г>" = arctg q1,2 = arerg 0,334 = 0,323 рад;
р = 0,162 рад: cos Р — 0,085;
2а = 2 arctg = 2 arctg = 2 а,С1£ °«436;
а = 0,410 рад; cos а — 0,016;
^',<в 7,8-105
я cos о. cos Р 12-0,916-0,985
= 7,22.104 н.
3) Определим длину стержня по формуле .(11.18):
//0,9
cos а cos £ 0,916-0,985
8*
4) Определим гибкость и критическую гибкость стержня
X = —= =62,5;
I 0,016
, / cEt „ , / I-6,6-10Ю
X е =ят/ ------ = 3,14 1 / ---------— 71.
к₽ у opt ' у 1,29-108
5) Определим критическое напряжение сжатия стержня по формуле
(11 21), так как Х<Л1ф:
°кР = °Tt — (°71 - °pt) = 2,38-100 — (2,38-108 —1,29-1С8)^р =
= 1,42.108 Па.
6) Определим действующие напряжения в стержне по формуле ('11.22):
Uy
7,22-104
-Ч—— — 1,02-108 Па.
7,07-10—>
7) Определим коэффициент запаса устойчивости по формуле (1123):
скр 1,42-108
-=-------=-----------= 1,39.
v сп 1,02-10»
Вывод; ферма требованиям прочности (устойчивости) удовлетворяет, так
как коэффициент запаса усидчивости больше единицы
Контрольные вопросы
1. Назначение и требования, предъявляемые к переходным,
приборным и хвостовым отсекам ракет.
2. Какие существуют конструктивно-силовые схемы отсеков?
3 Назовите виды шпангоутов.
4. Назовите виды герметизации заклепочных соединений.
5. Какими способами крепится обшивка к продольному и по-
перечному наборам?
6. Каковы особенности проектирования приборного и пере-
ходного отсеков ракеты?
7. Назовите особенности проектирования хвостового отсека
ракеты,
8 Перечислите расчетные случаи для корпусов приборного и
переходного отсеков.
9. Перечислите расчетные случаи для корпуса хвостовсго
отсека.
10. Назовите исходные данные для расчета прочности отсека.
11. На какие нагрузки рассчитываются отсеки на прочность?
12. Как рассчитываются отсеки на изгиб?
13. Как рассчитываются отсеки на сжатие (растяжение)3
14. Как рассчитываются отсеки при совместном действии
изгиба и сжатия (растяжения) ?
228
15. Чему равен коэффициент запаса прочности по крити е
ским напряжениям стрингера?
16. Как рассчитываются на прочность статически определи-
мые фермы?
Глава ХИ
СПОСОБЫ СОЕДИНЕНИЯ ОТСЕКОВ.
КОНСТРУКЦИЯ СИСТЕМ РАЗДЕЛЕНИЯ
12 I. СПОСОБЫ СОЕДИНЕНИЯ ОТСЕКОВ И КОНСТРУКЦИЯ
СТЫКОВОЧНЫХ УЗЛОВ
Различие конструкций отдельных час!ей ракет, условия экс-
плуатации и хранения вынуждают расчленять ракету на отдель-
ные части (рис. 12 1). головную часть /, приборный отсек 2, топ-
ливный отсек 3 с полостями окислителя и горючего, переходный
отсек 4, хвостовой отсек 6 и двигатель 8. Расчленение конструк-
С »
Рис 12.1 Технологические разъемы корпуса ракеты
1—головная часть. 2—приборный отсек. 3—топливный
нии вызвано тем, что отсеки имеют различные конструктивно-
силовые схемы, различные материалы, а производство их свя-
зано с разнотипными технологическими процессами. Большие
ракеты к тому же нельзя транспортировать иначе, как в разо-
бранном виде.
Многоступенчатые ракеты должны иметь конструктивные
разъемы, обеспечивающие отсоединение ступеней в полете.
Каждый отсек ракеты проектируется с таким расчетом, чтобы
можно было полностью собрать его, смонтировать в нем обору-
дование, испытать и в законченном виде подать на общую
сборку. Одновременное изготовление различных частей ракеты
сокращает производственный цикл, создает необходимые усло-
вия для специализации производства и уменьшает дорогостоя-
щие площади цехов окончательной сборки, так как в них выпол-
няется лишь стыковка отсеков и проверка систем
л'
229
Для удобства ремонта, эксплуатации и транспортировки ра-
кеты узлы соединения отсеков обычно выполняются разъем-
ными.
Стыковочные узлы — наиболее ответственные элементы кон-
струкции. Они обеспечивают заданную геометрическую форму
ракеты после сборки, передают всю нагрузку от одного отсека
к другому и в значительной мере определяют технологические
и эксплуатационные качества ракеты (возможность расчленения
конструкции, заменяемость
основных частей, удобство ре-
монта, герметичность и т л).
Конструкция стыковочных
узлов существенно зависит от
требуемой точности взаимного
расположения соединяемых от-
секов, их конструктивно-сило-
вой схемы и размеров, спосо-
бов хранения, транспортиров-
ки и перегрузки ракеты.
Узлы крепления отсеков
должны удовлетворять сле-
дующим основным требова-
ниям: обеспечивать прочность
и жесткость соединения при
действии эксплуатационных
нагрузок; равномерно распре-
делять по сечению корпуса
нагрузки, воспринимаемые уз-
лами крепления; иметь мини-
мальную массу
Стыковочные узлы крепятся к стыковочным шпангоутам
отсеков. Основная нагрузка, действующая па шпангоут, нор-
мальна к его плоскости (рис 12.2) При этом шпангоут рабо-
тает как кольцевая балка па упругом основании.
Масса и размеры стыковочных шпангоутов определяются
требованиями жесткости. Предположим, что стыковочный шпан-
гоут имеет малую жесткость на изгиб и соединяется с сосед; им
шпангоутом только в двух местах. При этом в оболочке возни-
кают неравномерные напряжения (кривая / на рис. 12.2), кото-
рые требуют усиления продольного набора или усиления об-
шивки в районе стыка. Если же стыковочный шпангоут имеет
большую жесткость на изгиб, то неравномерность напряжений
в обшивке будет незначительной (кривая//нарис. 12.2). Масса
продольного напора при этом будет меньше, по зато увеличится
масса стыковочного шпангоута. Для уменьшения массы стыко-
вочного шпангоута целесообразно увеличить количество стыко-
вочных болтов, равномерно распределив их по всей окружности
стыка. Однако такое соединение возможно только для тех отсе-
ков ракеты, которые не разделяются в полете. Ступени состав-
ной ракеты и головная часть соединяются только в нескольких
точках с помощью разрывных болтов (2—6) или замков.
В зависимости от количества стыковочных болтов различают
два типа стыковочных соединений.
— контурное соединение, при котором стыковка произво-
дится при помощи большого количества стыковочных болтов,
распределенных равномерно по всей окружности стыка;
— точечное соединение, при котором стыковка производится
п нескольких точках с помощью стыковочных болтов пли
замков
Рис. 12 3 Узлы крепления отсеков-
отсеков с нимошми
Тип соединения влияет на выбор конструктивно-силовой
схемы соединяемых отсеков. При контурном соединении наибо-
лее целесообразно применять стрингерные или обшивочные
отсеки, а при точечном — лонжеронные.
При кош ур пом соединении в разъеме повсеместно осущест-
вляется силовая связь между обшивкой, стрингерами или дру-
гими подкрепляющими элементами. Все силовые элементы
в разъеме и вблизи пего воспринимают нагрузки от изгиба
и сжатия так, как будто бы разъема нет.
При точечном соединении силовая связь между отсеками ра-
кеты осуществляется через узлы, стыкующие только лонжерочы.
Обшивка и стрингеры непосредственно друг с другом не соеди-
няются, поэтому опи полноценно включаются в работу на изгиб
лишь на некотором удалении от разъема. Вследствие этого то-
чечное соединение по сравнению с контурным для обеспечения
одной и той же жесткости требует большей массы конструкции.
Конструктивное оформление узлов крепления отсеков в боль
231
ший степени зависит от того, в каком состоянии хранится
и транспортируется ракета. Одни отсеки могут быть соединены
между собой постоянно, другие же могут стыковаться лишь при
подготовке ракеты к пуску.
Взаимное расположение соединяемых отсеков регламенти-
руется допусками на несоосность отсеков. Величина допуска
определяется путем анализа возможных последствий, к которым
приводит нарушение заданной формы ракеты Неточность изго-
товления и стыковки отсеков нарушает аэродинамическую сим-
метрию ракеты п может вызвать эксцентриситет силы тяги дви-
гателя
Соосность отсеков в заданных пределах достигается с по-
мощью направляющих штырей и отверстий на стыковочных
шпангоутах На рис. 12.3, а показан узел крепления, когда тол-
щина стыковочного шпангоута достаточно велика, чтобы приме-
нить направляющий штырь в виде шпильки.
Если толщина торцовой стенки шпангоута незначительна
(см. рис 12.3, б) и не допускает применения шпильки, то на-
правляющий штырь крепится 1айкой, которая контрится пру-
жинной шайбой
На рис. 12.3, в изображен узел крепления двух отсеков, допу-
скающий подход к стыковочным болтам с наружной стороны
Такой узел целесообразно применять в тех случаях, когда по
условиям эксплуатации соединение должно неоднократно де-
монтироваться.
В местах крепления с ограниченным доступом часто приме-
няются болты с плавающей гайкой (см. рис. 12 3,г), которая
постоянно находится в кармане, приклепанном к стыковочному
шпанюуту. Отверстие гайки имеет конусную часть, улавливаю-
щую колец болта при его ввинчивании. Чтобы предотвратить
упор болта, в кармане вырезано отверстие Самоотвинчивапие
болта предотвращается пружинной шайбой.
Если два отсека хранятся и транспортируются совместно
н их расстыковка маловероятна, то может применяться крепле-
ние, показанное на рис. 12 Я, д. Для предупреждения самопро-
извольного отвинчивания под юловки винтов подкладываются
пружинные шайбы.
В случае когда толщина торцовой полки шпангоута мала и
постановка шпильки или винта невозможна, применяется болто-
вое соединение (см. рис. 12.3, е) Для обеспечения подхода
к гайкам в фигурном стыковочном шпангоуте вырезаются окна.
Если по условиям эксплуатации соединение неоднократно
демонтируется, то применение крепежных винтов и шпилек тре-
бует установки в шпангоутах из легких сплавов стальных вту-
лок, обеспечивающих многократное ввинчивание винтов без де-
формации и нарушения геометрии резьбы. Образец такого со-
единения показан на рис. 12 3,ж. В этом соединении головка
232
Рис 124 Разрывной болт.
1* ’—заряд: 3—запал, 4—гай
электрошнур
пинта имеет внутреннее гнездо под торцовый ключ, так как при-
менение других ключей в данном случае затруднительно.
Разделяемые в полете отсеки ракеты крепятся с помощью
разрывных болтов пли быстродействующих замков различной
конструкции.
Разрывной болт (рис
12.4) имеет заряд взрывча-
того вещества, который вос-
пламеняется в определен-
ный момент времени по
команде от системы управ-
ления
Применение пиротехни-
ческих средств обеспечивает
практически одновременное
их срабатывание, что улуч-
шает процесс разделения
отсеков.
Разрывные болты устанавливаются в стыковочные шпан-
юуты с радиальным зазором и работают только на растяжен ie
Перерезывающие силы и крутящие моменты воспринимают на-
правляющие шпильки, которые работают на срез.
12.2. КОНСТРУКЦИЯ СИСТЕМ РАЗДЕЛЕНИЯ
К системам разделения относят системы отделения головных
частей, системы разделения ступеней, системы разделения и
сброса створок головных обтекателей ракет-носителей и т. п
Рассмотрим системы отделения головных частей и системы
разделения ступеней.
Системы отделения головных частей. Система отделения
предназначена для отделения головной части от ускорителя пос-
ледней ступени ракеты в конце активного участка траектории,
а также для крепления ее к корпусу ракеты при наземной экс-
плуатации п в полете. Всякая система отделения включает
в себя устройство крепления и устройство отделения.
Устройство крепления должно обеспечить надежную связь
головной части с корпусом ракеты в начале полета и полную
свободу головной части перед отделением. Соединение головной
части с корпусом ракеты может осуществляться с помощью
р азравных болтов.
Надежное разъединение головной части и корпуса ракеты
осуществляется специальным механизмом отделения, создаю-
щим необходимую разность скоростей головной части и кор-
пуса.
К механизмам отделения предъявляются следующие основ-
ные требования.
233
1) надежность работы, под которой понимается своевремен-
ное отделение головной части и исключение догона ее корпусом
ракеты;
2) минимум влияния процесса отделения головной части на
рассеивание ракеты;
3) наименьшие потерн в дальности;
4) малые габариты и масса;
5) простота устройства, технологичность изготовления, удоб-
ство монтажа.
Для., обеспечения безопасности отделения головной части
. очень «важно правильно1 выбрать момент отделения. Во-первых,
' после отсечки двигатель некоторое время еще продолжает созда-
’вать тягу (импульс последействия). Если отделение произвести
।сразу после главной команды па останов двигателя, то из-за
Iимпульса последействия корпус ракеты нагонит головную часть
и ударит по ней. | Во-вторых, после отсечки подачи топлива ра-
кета становится неуправляемой п под действием возмущающих
сил (импульс последействия, разница в величине тяги двигате-
лей ракеты и т. п ) исказится траектория полета. Это вызовет
увеличение рассеивания головных частей. Поэтому момент от де-
ления должен быть выбран так, чтобы была уже достаточно
.мала тяга последействия, но были бы еще невелики возмуще-
ния траектории.
При отделении головная часть может получить два вида
возмущений: за счет отклонения вектор а абсолютной линейной
скорости и за счет угловой скорости вращения относительно
центра масс.
Основной причиной, вызывающей отклонение вектора абсо-
лютной скорости, является разброс таких параметров, как
импульс последействия двигателя, время срабатывания системы
отделения, масса ракеты в момент отделения, энергетические
характеристики механизма отделения.
Причинами появления угловых скоростей вращения головной
части вокруг собственного центра масс могут быть, упругие по-
перечные колебания корпуса ракеты в период отделения, экс-
центриситет тяги последействия и эксцентриситет сил механиз-
мов отделения.
При выборе принципиальной схемы системы отделения и мо-
мента отделения в первую очередь стараются удовлетворить тре-
бованию минимальных возмущений.
В зависимости от характера, места приложения и направле-
ния действия сил, осуществляющих отделение, возможны три
группы устройств отделения: расталкивающие, тормозящие
и комбинированные.
Первые расталкивают головную часть и корпус ракеты си
ламп, действующими в направлении их продольных осей; вто-
рые — притормаживают корпус ракеты; третьи — сочетают рас-
ЗЗФ
талкивание или притормаживание с поворотом корпуса ракегы
вокруг центра масс-.
По источнику энергии, сообщающей головной части допол-
нительную скорость, механизмы отделения подразделяются па
следующие типы: пружинные, пневматические и пороховые.
Пружинный механизм (пружинный толкатель) производит
отделение головной части за счет потенциальной энергии пру-
жин, освободившихся при разъединении головной части и кор
п\са ракеты (рис. 12.5). В этом случае головная часть присо-
единяется к корпусу ракеты с помощью разрывных болтов Тол-
Рис 125 Пружинный
чс 2—пружина, 3—стакаь
' разрывной Сол-
пан (ЭПК). 2—
разрывной болт
катели удерживаются во взведенном состоянии чеками 1,
фиксирующими стаканы 3 в корпусах 4. По окончании стыковки
головной части чеки / уделяют, в результате стаканы 3 опи-
раются на днища корпуса головной части. При обрыве разрыв-
ных болтов 5 пружины 2 разжимаются и расталкивают голов-
ную часть и корпус ракеты.
Пружинные механизмы отделения наиболее просты по уст
ройству и надежны в работе, но являются самыми тяжелыми из
расталкивающих механизмов
Основной частью пневматических механизмов отделения
(пневмотолкателей) является цилиндр с поршнем, совершаю-
щим одностороннее прямолинейное перемещение под давлением
подаваемого в нужный момент сжатого воздуха.
На рис. 12.6 показана схема пневматического механизма
отделения с центральным пневмотолкателем При разрыве раз-
рывных болтов 3 головная часть освобождается от механической
связи с корпусом. Одновременно поступает команда на электро-
235
пневмоклапан 1, который открывается и дает доступ сжатому
газу в пневмотолкатель 5. Под действием сжатого i аза пневмо-
толкатель срабатывает, срезает удерживающую шпильку 4 и от-
талкивает головную пасть от корпуса.
Пневматические механизмы отделения конструктивно про-
сты, обеспечивают центральный удар, нс требуют каких-либо
Рис. 12.7. Пороховой толкатель;
сложных операций по подготовке к действию при стыковке го-
ловной части и корпуса, но являются также сравнительно
тяжелыми.
Пороховые расталкивающие механизмы (пиротолкателп) ио
принципу действия аналогичны пневмотолкатег|ям, отличаяс» от
них лишь тем, что давление на поршень 4 создается газами при
сгорании небольшого порохового заряда 5 (рис. 12 7). Пиротол-
катели являются наиболее легкими и компактными из растал-
кивающих механизмов. Одпако пиротолкатели дают большие
разбросы сил, так как скорость юрения пороха зависит от тем-
пературы заряда.
Рис 12 8
Схема
устройства отделения ГЧ с поио-
гормозных двигателей:
3—ториолной
двигатель
Расчеты показывают, что при приемлемых габаритах и массе
расталкивающие механизмы не позволяют получить силу, до-
статочную для падежного отделения головной части в период
последействия двигателя. Они должны вступать в работу после
его окончания, а это вследствие разброса импульса последейст-
вия приводит к рассеиванию головных частей.
Кроме того, поскольку расталкивающие механизмы сооб-
щают головным частям дополнительную скорость, величина
236
которой случайна, постольку это увеличивает рассеивание точек
падения головных частей.
Тормозящие устройства отделения действуют не на головную
часть, а на ускоритель последней ступени ракеты.
Торможение ускорителя производится тормозными двига
гелями или газами наддува топливных баков
В качестве тормозных двигателей используются небольшие
РДТТ, которые устанавливаются па корпусе хвостового отсека
или в межбаковом пространстве (рис. 12.8). Двигатели 3 закры-
ваются специальными обтекателями 2. Сопла двигателей отде-
2 J
Рис. 129 Тормозные сопла, работающие
на газах наддува:
/—головная часть: 2—сеяло, 3—переднее днище
бака; 4—заглушка
лепия направлены в сторону, противоположную скорости
ракеты
Для соединения головной части с корпусом ракеты обычно
используются разрывные болты 1. Команда на подрыв разрыв-
ных болтов подается одновременно с командами на останов
основных двигателей и запуск-тормозных.
Тормозные ПРД, создавая тягу, направленную в сторону,
противоположную движению ракеты, притормаживают ее кор-
пус, а головная часть, освобожденная от связи с ним, по инерции
продолжает полет
Отделение головных частей путем торможения корпуса ра-
кеты пороховыми ракетными двигателями выгодно в том отно-
шении, что при таком отделении скорость головной части не за-
меняется, и процесс отделения не вызывает дополнительного
рассеивания головных частей. Указанное достоинство являйся
весьма существенным, поэтому такие устройства широко приме-
няются в ракетостроении, хотя они являются более тяжелыми
и сложными по конструкции и в эксплуатации.
При торможении корпуса ракеты газами наддува (рис. 12.9)
на переднем днище топливного бака 3 делают несколько на-
правленных вперед, наклоненных к оси ракеты сопел 2 в исход-
ном состоянии закрытых заглушками 4. Чтобы отделить голов-
ную часть 1, заглушки на всех соплах одновременно отбрасы-
ваются. Вытекающие из сопел газы наддува создают реактивную
силу, во многих случаях достаточную для надежного торможе-
ния корпуса и отделения головной части в период последействия
двигателя.
Такая система имеет небольшую массу и обладает всеми
достоинствами системы с тормозными ПРД. Применяться эта
система может не во всех случаях, поскольку, во-первых, в топ-
ливном баке давление наддува может оказаться недостаточным,
чтобы создать необходимый тормозной импульс; во-вторых,
из-за разброса давлений наддува будет и разброс значений тор-
мозного импульса.
Выше указывалось, что комбинированные устройства отде-
ляют головную часть с одновременным или последующим
поворотом корпуса ракеты. При повороте корпуса не происходит
«го соударение с головной частью под действием импульса пос-
ледействия двигателя Для обеспечения разворота корпуса тор-
мозные ПРД должны устанавливаться асимметрично относи-
тельно центра масс.
Такая система в принципе позволяет отделить головную
часть от твердотопливной ступени ракеты в конце периода после-
действия.
Системы разделения ступеней предназначены для прочного
«соединения ступеней ракеты во время полета и надежного их
разделения в необходимый момент времени по команде от си-
стемы управления.
К системам разделения ступеней предъявляют такие же тре-
бования, как и к системам отделения головных частей. Кроме
того необходимо обеспечить стабилизацию верхней ступени
*в период разделения и быстроту процесса разделения. Это тре
бование обусловлено желанием уменьшить потери дальности
полета из-за уменьшения скорости ракеты под действием грави-
тационных сил. Сократить время разделения можно за счет уве-
личения действующих при разделении сил, но это приведет
к росту возмущений и к увеличению рассеивания.
Существуют две основные схемы систем разделения: холод-
ное разделение и огневое разделение ступеней ракет. Ппи
холодном разделении запуск двигателя верхней ступени произ-
водится после того, как произойдет освобождение узлов крепле-
ния ступеней и между ступенями образуется определенное рас-
стояние за счет торможения ускорителя с помощью включеппего
тормозного ПРД. При огневом разделении запуск двигателя
верхней ступени производится до освобождения узлов крепле-
ния ступеней. В этом случае необходима тепловая защита уско-
238
рителя отделяемой ступени. С этой целью еще до начала раз-
деления ступеней обеспечивается свободный выход газов рабо-
тающего двигателя через газодинамические окна переходного
отсека или же переходный отсек выполняется в виде фермы.
Для тепловой защиты ускорителя предыдущей ступени на его-
верхнем днище устанавливается экран. Форма экрана и его кон-
струкция зависят от количества двигателей последующей сту-
пени. Если двигательная установка верхней ступени включает
в себя только один двигатель, то защитный экран выполняется
в виде металлического конуса с тепловой изоляцией.
Основным достоинством системы холодного разделения
является то, что разделение ступеней происходит под действием
небольших сил, поэтому в процессе разделения возникают срав-
нительно небольшие возмущения К тому же масса узлов си-
стемы разделения (тормозные ПРД с деталями крепления)!
меньше, чем при огневом разделении.
Однако если на последующей ступени нет рулевых двигате-
лей, то обеспечить стабилизацию ее в период разделения очень
трудно. В этом случае система разделения торможением не мо-
жет быть применена
Преимуществами системы огневого разделения являются:
а) быстрое разделение ступеней, в результате — почти нет
потерь дальности полета ракеты за счет действия гравитацион-
ных сил;
б) большая надежность запуска двигателя второй ступени,
так как осевые перегрузки, создаваемые работающим двигате-
лем первой ступени, обеспечивают устойчивую работу заборных
устройств баков;
в) система стабилизации верхней ступени начинает функцио-
нировать еще но разделения (выдачу команд обеспечивает-
система управления ракеты, а исполнительными органами
являюгся основные двигатели этой ступени).
Основные недостатки огневого разделения:
а) большие возмущения, получаемые второй ступенью в про-
цессе разделения;
б) большая длина переходного отсека, так как необходимо
обеспечить минимально допустимое расстояние между камерой
сгорания двигателя верхней ступени и теплозащитным экраном
днища ускорителя нижней ступени во избежание «запирания»
двигателя в момент запуска;
в) достартовый расход топлива второй ступени, так как ее
двигатель запускается до потери связи между ступенями.
При последовательном соединении ступеней для их стыковки
применяются разрывные болты и направляющие штыри. Их ко-
личество и размеры определяются нагрузками, действующими
в плоскости стыка ступеней. При этом болты рассчитывают на
осевую, а штыри — на перерезывающую силу, как и в системе
239
отделения головной части. Длину штырей выбирают с учетом
того, что они одновременно являются направляющими при сты-
ковке п разделении ступеней. Длина штырей не должна быть
слишком большой, иначе при разделении ступеней возникают
большие возмущения.
При проектировании систем разделения ступеней ракет
с РДТТ учитывают следующие особенности.
1. Ракеты с РДТТ проходят плотные слои атмосферы с более
высокими скоростями, так как они имеют большую тяговоору-
женность, чем ракеты с ЖРД. Поэтому для отделения ускори-
телей ступеней можно использовать аэродинамические силы.
2 Перед разделением трудно обеспечить надежное выключе-
ние РДТТ Поэтому разделение ступеней обычно проектируют
с учетом полного выгорания топлива ускорителя.
3. Запуск и выключение РДТТ происходят быстрее, чем
ЖРД. Быстрый запуск двигателя облегчает задачу управления
в период разделения и уменьшает потери дальности полета ра-
кеты
4. Ракеты с РДТТ допускают большие продольные и попереч-
ные перегрузки, чем ракеты с ЖРД-
12.3. РАСЧЕТ НА ПРОЧНОСТЬ СТЫКОВЫХ СОЕДИНЕНИЙ
При проектировании узлов соединения отсеков необходимо
решить следующие задачи:
1) установить количество и размеры элементов крепления
(болтов, шпилек) и проверить их на прочность;
2) проверить и обеспечить нераскрытое стыка соединения;
3) проверить невозможность местного изгиба или вырыва
Рис 12 10. Сечение стыка отсе-
радиус сечения егыка; Г,—лло
щадь стыка; /«—площадь сечения
полки шпангоута вблизи установ-
ленных стыковых болтов.
При проверке прочности уз-
лов соединения отсеков расчет-
ные нагрузки берут по макси-
мальным расчетным силам и мо-
ментам, действующим в данном
сечении корпуса ракеты в полете
и при наземной эксплуатации.
Рассмотрим методы расчета
на прочность элементов крепле-
ния отсеков. Как уже отмеча-
лось, наиболее распространен-
ними являются соединения отсе-
ков несколькими разрывными
болтами или болтами (шпиль-
ками), равномерно распределен-
ными по окружности стыка. Ра-
счет на прочность сводится к оп-
240
ределению напряжений в наиболее нагруженном болте и про-
верке его на прочность.
Стыковые болты, соединяющие отсеки, предварительно загя-
гивают так, чтобы при эксплуатационных нагрузках стык не ра-
скрылся. При расчете на прочность необходимо выбрать вели-
чину предварительной затяжки болтов.
Пусть стык затягивается п болтами, имеющими площадь
сечения болта fa и напряжение предварительной затяжки по.
Отметим, что при равномерном расположении болтов по окруж-
ности стыка (рис 12.10) центр тяжести сечений всех болтов
(шпилек) совпадает с центром тяжести стыка (точка 0). В эсом
случае напряжения на стыке будут распределены равномерно
и их величина
4—*7). (12.1
где f! — площадь стыка.
Условие плотности стыка состоит в том, чтобы во всех сто
точках после приложения внешней нагрузки оставались напря-
жения сжатия Если в какой-либо точке стыка по расчету полу-
чается растягивающее напряжение, это значит, что в этой точке
коптакг нарушен Раскрытие стыка очень опасно для прочности
соединения, так как при этом возрастают усилия на болты, а при
переменной нагрузке появляются дополнительные усилия удар-
ного .характера.
Если на корпус ракеты в сечении стыка действует расчетная
осевая сила (7,, и изгибающий момент Л4Р, то напряжения па
стыке от внешней нагрузки
up , -wi>
г I '.«
где До — момент инерции сечения стыка;
у — расстояние от нейтральной линии до рассматриваемой
точки
11аиболыпее напряжение растяжения
<4„ Я- ,12'2>
где /? — радиус сечения стыка.
Условие плотного стыка выражает неравенство
з„^о(> 'з» 0. (12.3)
«1 ml гитах ' \
Отсюда, используя формулы (12.1) и (12.2), получим ча-
пряжепие предварительной затяжки болтов, обеспечивающее
нераскрытое стыка
F, / U,, Л1., .
• (12 4'
и/р \ Г\ 3^ }
241
Определяя величину предварительной затяжки болтов, необ-
ходимо предусмотреть определенный запас по плотности стыка,
принимаемый в пределах 1,5—3. Расчетами и практикой установ-
лено, что болты MIO—М12 при затяжке можно легко разрушить.
Поэтому для соединения отсеков нс рекомендуется при-
менять болты малых диаметров (меньше М8) В противном слу-
чае при затяжке необходимо использовать специальные момент-
ные ключи
Ри; 12.11. Схема для определения площади Л
Прочность болтов в кольцевом стыке отсеков необходимо
обеспечивать, учитывая деформацию сжатия полок шпангоутов
В обычном соединении отсеков расчетная перерезывающая
сила Qp, действующая в плоскости стыка, воспринимается си-
лами трения и направляющими штырями, а внешний момент
<ИР воспринимается болтами. В этом случае расчетная формула
для определения напряжений в болтах в предположении, что
элементы соединения имеют постоянную податливость, а полки
шпангоутов однородны, имеет вид
Л*р 1 к> к
гм | j £u/i /
'Wo
где Eoi, Ен -модули упругости материалов болта и шпангоу-
тов для расчетной температуры соответственно:
fa — площадь сечения болта,
fi — \ словлая площадь поперечного сечения фланцев,
участвующая в деформации от затяжки болта:
7д-о — момент инерции сечения болта
Площадь fi определяется следующим образом (рис. 12.11)
242
Допускают, что деформации от гайки и головки болта распро-
страняются в глубь шпангоутов по конусам с углом «=30°.
Приравнивая объем полученных усеченных конусов объему
условного цилиндра с диаметром Pi, находим
Г\~Г)+
1 4
где D — наружный диаметр опорной поверхности гайки.
Тогда
-"У-
Ри^ 12 12 К расчету изгябных напряжений в полке шпангоута
₽fl ЫЁХ—расчетная сила, приложенная через болт к полке шпангоута
—расстояние о >си болта до наиболее удаленного сечения полки uinan
о>та б—Условная ширина элемента полки сеч
напряжения при изгибе
восприми мающего
Момент инерции сечений болтов
612.7)
Коэффициент запаса прочности, учитывая затяжку, обычно
определяют по отношению
11=0>85Ов/0|т1ах. (12 8)
При расчете направляющих штырей на срез влиянием гре
ния в стыке пренебрегают. Тогда напряжение на срез
T=QP/nfm.r, (12.9)
где п — количество направляющих штырей;
/шт — площадь поперечного сечения штыря.
Коэффициент запаса прочности
т)=0,6ов/т. (12.10)
243
Напряжения при изгибе в полке шпангоута, не подкреплен-
ного фитингами (рис. 12.12). определяются по формуле
Циз""Р]рmax <г/й" > (12. J 1)
где Рртах—Отахfо — расчетная сила, приложенная через болт
к полке шпангоута;
W'=Wi2/6— момент сопротивления сечения элемента
полки шпангоута при изгибе.
Контрольные вопросы
1. Для чего необходимо расчленять конструкцию ракеты на
отдельные отсеки?
2. Какие требования предъявляются к узлам крепления
отсеков?
3. Какие существуют типы стыковых соединений?
4. Чем обеспечивается соосность отсеков?
5. Какие требования предъявляются к системам отделения
головных частей?
6. Какие существуют группы устройств для отделения голов-
ных частей?
7. Расскажите принцип действия пружинного толкателя,
пневмотолкателя и порохового толкателя. Их преимущества н
недостатки,
8. Какие существуют способы торможения корпуса ракеты?
9. Какие требования предъявляются к системам разделения
ступеней?
10. Какие существуют схемы систем разделения?
11. Преимущества и недостатки холодного и огневого разде-
ления ступеней.
12. Какие особенности ракет с РДТТ учитывают при проекти-
ровании систем разделения ступеней?
13 Какие задачи решают при расчете стыковых соединений
на прочность?
14. Для чего производят предварительную затяжку стыковых
болтов?
15. Как определяют напряжения на стыке?
16. Как определяют прочность болтов в кольцевом стыке
отсеков?
17. Как рассчитываются направляющие штыри?
244
Глава XIII
ТВЕРДОТОПЛИВНЫЕ РАКЕТЫ. РАСЧЕТ КОРПУСОВ РДТТ
НА ПРОЧНОСТЬ
13.1. ПРИНЦИП ДЕЙСТВИЯ РДТТ
Принцип действия 'ракетного двигателя на твердом топливе
(РДТТ) одинаков с принципом работы других ракетных двигате-
лей. Отличительной особенностью РДТТ является то, что топли-
во находится в твердом состоянии и весь запас его размещается
непосредственно в камере crop амия.
Принципиальная схема РДТТ приведена на рис. 13.1. В кор-
пусе двигателя 2, представляющем собой камеру сгорания, раз-
мещается заряд твердого
топлива 3. С одной стороны
камера сгорания имеет пе-
реднее днище I, с другой —
заднее днище 4 с соплом 5.
Для запуска двигателя на
переднем днище распола-
гается воспламенитель 8
В РДТТ применяются
медленно горящие топлива
Для воспламенения их необ-
ходимо повысить темпера-
туру поверхности заряда до
величины, превышающей
температуру самовоспла ще-
нения топлива, и создать
в течение некоторого времени давление в камере сгорания, обес-
печивающее устойчивую передачу тепла к поверхности заряда.
Эту задачу выполняет воспламенитель, в котором применяются
легковоспламеняющиеся и быстрогорящие топлива, что способ-
ствует быстрому выходу двигателя на поминальный реж 1м
работы.
Горение твердого топлива начинается с поверхности, затем
но мере сгорания вышележащих слоев пламя проникает в глуби-
ну заряда.
Скорость горения большинства твердых топлив растет при
повышении давления в камере сгорания, так как при этом \ ве-
личивается теплоотдача к поверхности горения. Кроме того, ско-
рость горения зависит от начальной температуры заряда: чем
она ниже, тем большее количество тепла необходимо подвести,
чтобы началась реакция разрушения твердой фазы топлива, сле-
довательно, тем меньше будет скорость горения.
Горящая поверхность топливного заряда непрерывно омыва-
ется потоком тазов, движущимся в направлении от переднего
днища к соплу Скорость горения топлива зависит от скорости
245
обдувающего потока: чем выше скорость, тем быст^юе идет про-
цесс горения. Эта скорость определяется формой заряда п ве-
личиной зазоров, через которые протекает газовый поток.
Заряд твердого топлива является носителем тепловой эиер-
1ии и первоисточником для образования рабочею тела. Кроме
того, при соответствующих конструкции и размещении заряда в
камере он может служить теплоизолирующим экраном для стен-
ки корпуса двигателя, так как большинство твердых топлив яв-
ляются плохими проводниками тепла
Количество продуктов сгорания, образующихся в камере ра-
кетного двигателя, определяется скоростью горения твердого
Рис 132 Геометрические формы зарядов, обеспечивающие
различный хар.»-.тер изменения поверхности горения и тяги но
времени
ВСРХИОСТК.
ио наружной по
СНП1ТИ, <’—заряц
топлива и величиной поверхности горения заряда, которая зави-
сит от его геометрической формы и размеров. При -горении топ-
лива определенного состава давление в «камере зависит в основ-
ном от величины площадей поверхности горения и критического
сечения сопла. Форму заряда выбирают такой, чтобы обеспечить
либо постоянство давления и тяги .двигателя, либо определенный
закон «их изменения во времени в соответствии с требуемыми ха-
рактеристиками ракеты.
Топливные заряды выполняются монолитными или составны-
ми Как правило, заряд представляет собой осесимметричный
топливный блок, продольная ось недорого совпадает с осью ка-
меры сгорания.
Монолитными (моноблочными) называются заряды, выпол-
ненные в виде одной шашки, а составными — из двух и более
шашек, размещенных в одной камере сгорания.
Очевидно, что при горении твердотопливной шашки величина
поверхности ее горения может изменяться. Если поверхность го-
рения увеличивается, то юрение называется прогрессивным,
если уменьшается — дегрессивным. Если величина поверхности
не изменяется, то такое горение называется нейтральным.
24fi
На степень изменения поверхности горения заряда можно
влиять несколькими способами. Одним из -них является приме-
нение бранирующего покрытия, исключающего горение шашки со
стороны покрытой поверхности. Изменяя величину бронирован-
ной поверхности шашки, можно получить разную прогрессив-
ность горения в шашках одной и той же геометрической формы.
Так, например, если забронировать боковую поверхность цилии
дрической шашки, то она будет гореть только с торцовой поверх-
ности, сохраняя площадь горения постоянной в течение всего
Рис 133. Различные формы поперечных сечений зарядов
времени своего горения (рис. 13 2, а). Заряды, торящие с торца,
обеспечивают постоянную по времени тягу и применяются в Дви-
гателях относительно низкой тяги и с длительным временем ра-
боты. Заряды, горящие с боковой поверхности, позволяют полу-
чить самые разнообразные законы 'изменения тяги; при горении
с -наружной цилиндрической поверхности (см рис. 13.2, б) полу-
чается дегрессивное горение; при горении с внутренней поверх-
ности (см. рис. 13.2, в) прогрессивное горение; при одновре-
менном горении с внутренней и -наружной поверхностей (см. рис.
13.2, г) —нейтральное горение.
Для бронирующего покрытия зарядов из двух основных топ-
лив применяют ацетат или этнлцеллголозу В зарядах из смесе-
вых топлив на полисульфядном горючем для бронирования ис-
пользуется синтетический каучук -в смеси с газовой сажей, плас-
тификаторами и вулканизирующими добавками.
Изменять количество газообразования в единицу времени
можно подбором смесевых топлив с -различными скоростями го-
рения и соответствующим размещением их в мололитном комби-
нированном заряде.
247
Различные формы поперечные сечений монолитных зарядов,
горящих с боковой поверхности, показаны на рие. 13.3
Заряды, -горящие 'С боковой поверхности, 'называются неог-
ражденныяи, если их сгорание происходит почти со всех боко-
вых поверхностей (см. рис. 13.3, а—в, м). Неогражденные заря-
ды применяются 'сравнительно редко, так как при их горении
сильно (Нагреваются стенки корпуса и в конце горения происхо-
дит разрушение заряда, которое приводит к непроизводительной
потере тяги.
В современных РДТТ применяются заряды, скрепленные с
корпусом двигателя и горящие с внутренней поверхности (см
рис. 13.3, г—л, п). При этом продукты сгорания ще соприкаса-
ются со стенками корпуса и не происходит их чрезмерного на-
грева.
13.2. КОНСТРУКТИВНЫЕ СХЕМЫ РДТТ
В зависимости от способа размещения заряда в 'камере его
рання двигателя различают следующие .копструктивиые схемы
ракетных двигателей на твердом топливе:
1) РДТТ со свободно вложенным зарядом;
2) РДТТ с зарядом, скрепленным с корпусом двигателя;
3) секционные РДТТ.
До появления смесевых теплив РДТТ выполнялись по схеме
со свободно вложенным зарядом (рис. 13.4) В этой схеме РДТТ
заряд состоит из одной или нескольких шашек, уложенных в -ка-
меру двигателя с зазором. При таком снаряжении горячие газы
соприкасаются 'с корпусом двигателя по всей его внутренней по-
верхности, напревают корпус и снижают его прочность. Между
зарядом и корпусом (необходима тепловая изоляция. Для удер-
жания заряда внутри -камеры сгорания устанавливают диафраг
мы или другие поддерживающие устройства.
С появлением смесевых топлив возникла -конструктивная схе-
ма РДТТ с зарядом, скрепленным с -корпусом двигателя (рис
13.5). В этом двигателе между зарядом и корпусом камеры нет
248
зазора, поэтому материал корпуса защищен от непосредственно-
го воздействия горячих продуктов сгорания самим топливом
Это позволяет при относительно продолжительной работе двига-
теля значительно уменьшить толщину теплоизолирующего по-
крытия, а в ряде случаев вовсе отказаться от него. Кроме того,
смесевые топлива способны к устойчивому горению при -относи-
тельно иизкпх давлениях (30—40-105 Па). Все это позволило
значительно улучшить весовые характеристики двигателя за счет
с корпусом
Рис. 135 РДТТ г зарядом, скрепленным
двигателя.
эхладыш в крптиче-
использования для изготовления корпуса более легких материа-
лов: титана, алюминиевых'Сплавов и пластмасс.
В большинстве 'Случаев конструкция со скрепленным зарядом
не требует специальных элементов фиксации заряда в камере.
Секционный РДТТ (рис. 13.6) состоит зга нескольких после-
довательно расположенных частей .корпуса РДТТ со скреплен-
ными топливными зарядами, имеющими внутренний канал
Секции окроплены между собой с 'помощью разъемного (на-
пример фланцевого) или неразъемного (сварного) соединений.
Сварное соединение обеспечивает лучшую герметичность и мень-
шую массу РДТТ, но вызывает 'неудобство в эксплуатации при
с борке РДТТ.
Преимущество секционных РДТТ заключается в том, что,
имея один стандартный тип секций, можно, применяя различное
и\ 'количество, получить те или иные потребные значения тяги и
времени работы двигателя.
Корпус РДТТ. Основным силовым элементом твердотоп-
ливной ракеты является корпус РДТТ, который одновременно
является корпусом ракеты и камерой сгорания двигателя.
249
Корпус представляет собой полую моноблочную или сборную
оболочку цилилдричеокий формы, закрытую с торцов передним
и задним днищами (рис 13.7).
Корпуса изготавливаются сварными или намотанными Мате-
риалами для их изготовления служат малоуглеродистые или ма
делегированные стали, легкие алюминиевые
или титановые сплавы и стеклопла
стики.
В последнее время в США большое рас-
пространение для изготовления корпусов
получают титановые сплавы. Титановые
сплавы обладают свойством сохранять свои
прочностные характеристики при высоких
температурах. Кроме того, они имеют высо-
кую удельную прочность. Корпус, изготов-
ленный из титанового сплава, более чем
в полтора раза легче корпуса из стали
Особый интерес в США уделяется изго-
товлению корпусов РДТТ из неметалличе-
ских материалов — стеклопластиков. Стек-
лопластики выполняются на основе эпок-
сидной или фенольной смолы и работают
только на растяжение Намотка корпуса
производится из отдельных нитей пли лент
стеклоткани с направлением волокон гол
углом к образующей После намотки па
каркас .материал пропитывается смолой и
проходит полимеризацию под давлением
при высокой температуре. Стеклопластико-
<вые корпуса в основном применяются при
скрепленных зарядах. В таких конструк-
циях для надежного соединения днищ с ци-
линдрической пластмассовой частью кор-
пуса применяются переходные металли ie-
ские кольца
Основным преимуществом стеклопла-
стика по сравнению с такими конструк-
ционными материалами, как сталь и титан,
считается более высокая удельная прочность, более низкая теп-
лопроводность и низкая стоимость.
Для защиты корпуса от действия высоких температур стенка
его покрывается изнутри и снаружи слоем теплоизоляционного
материала.
В большинстве конструкций передние днища изготавливают-
ся отдельно от камеры сгорания. В неразъемном соединении
днище приваривается к цилиндрической обечайке nenocjie,>. тши-
но или через 'распорный шпангоут.
На переднем .днище обычно в центральном отверстии распо-
лагается воспламенительное устройство. По периферии переднего
днища, если двигатель имеет систему отсечки, располагаются
сопла противотяти. К переднему днищу может крепиться следу-
ющая ступень 'ракеты, головная часть или головной обтекатель.
Заднее днище и сопло обычно представляют собой единый
узел, называемый сопловым блоком. На заднем днище может
быть расположено одно или несколько основных сопел, а также
вспомогательные сопла и окна для 'регулирования тяги двигате-
ля или создания отрицательной тяги и резкого понижения дав
лсния в момент выключения двигателя.
Соединение днища с корпусом должно быть герметичным и
надежно передавать цилиндрической части корпуса 'нагрузки от
днища. Наиболее простым и надежным способом соединения
днища с корпусом является сварка, однако она применяется
только тогда, когда в конструкции двигателя допускается не-
разъемное соединение Отдельные элементы камеры сгорания,
секции корпуса, переднее и заднее тнища могут соединяться на
фланцах хомутами, развальцовкой с помощью запирающих кли-
новидных стержней, шпонок и т. п.
Флапцевые соединения па болтах (рис. 13.8, о) применяются
для крепления отдельных секций камер сгорания и днищ с каме-
251
рами сгорания при их изготовлении как из металлических, так
и неметаллических материалов. В последнем случае фланцы из
готовляются из стали или жаропрочных сплавов. При этом неме-
таллические корпуса приклеиваются к фланцам или наматыва-
ются в канавки -па полках фланцев. Такие соединения называ-
ются комбинированными фланцевыми соединениями. На рис
Рис 138. Типы соединений у.члок камеры сгорания РДТТ-
с—болтовое, б—соединение с хомутом, н—на радиальных штифтах.
; 3—фланец 4—кольцо. 5—радиа.и
клиновидный стержень; 7— уши
гшл покрытие; 9—тпориое кольцо
меры сгорания 11—днище
13.8,6, в показаны комбинированные фланцевые соединения
с применением хомутов и радиальных штифтов. В некоторых
конструкциях применяется соединение с помощью фигурных за-
пирающих стержней, которые входят в канавки фигурного замка
(см рис. 13.8, а).
Пример соединения днища с корпусом камеры сгорания с
помощью завальцовки показан на рис. 13.8,6. Здесь фиксация
днища 'в осевом -направлении осуществляется, с одной стороны,
упором в кюльцо 9, приваренное к корпусу камеры сгорания, а с
друюй — в завальцованный бурт корпуса камеры сгорания
Для герметичности соединения поставлено уплотнительное
кольцо 7.
252
Шпоночное соединение заднего днища с цилиндрической ча
стью корпуса было показано ла рис. 13 7, III.
Солловой блок. Сопловой блок предназначен для прев
ращения тепловой энергии продуктов сгорания топлива в кине-
тическую энергию движения газовой -струи. Кроме 'основного
назначения, сопловой блок может использоваться как исполни-
тельной орган системы управления ракетой. В этом случае соп-
ло блока должно быть поворотным или оборудовано специаль-
ными приспособлениями для выполнения этой задачи.
Сопловой блок (см. рис. 13.7) представляет собой заднее дни-
ще 7, на котором закреплены сопла 6. В зависимости от габари-
тов н компоновочной схемы двигателя этот блок может быть од-
носопловым или многосопловым. Каждый из вариантов имеет
свои преимущества и недостатки.
Многосопловой блок имеет относительно небольшую длину и
дает соответствующий выигрыш в уменьшении массы узла.
В случае управления полетом ракеты с помощью поворотных ог>-
пел при многосопловом блоке не требуется дополнительных ор-
ганов управления по крену.
Однако потери скорости газового потока в предсопловом
объеме многосопловото блока больше, чем у соответствующего
односоплового двигателя.
Двигатель с одним центральным соплом более прост по кон-
струкции 'и надежность его, следовательно, выше Для создания
одинакового управляющего момента одно сопло требуется отк
лонять на меньший угол Кроме того, односопловые двигатели
более выгодны и с экономической точки зрения.
Сопдовой блок работает в очень жестких температурных ус-
ловиях и подвергается сильному эрозионному воздействию про-
дуктов сгорания. В связи с этим в сопловых блоках применяю! -
ся различные методы тепловой защиты его конструктивных эле-
ментов и разнообразные теплоизоляционные материалы
На рис. 13.9 показана одна из возможных схем устройства
сопла. На заднее днище /, к которому вменится сопло, нанесена
тепловая защита 2. Критическое сечение сопла образует специ-
альный графитовый вкладыш 3, так как это сечение в сопле яв-
ляется 'наиболее тоилопацряженным. Для уменьшения термиче-
ских напряжений у больших РДТТ вкладыши состоят из не-
скольких секций. Вкладыш ставится на специальном клею,
фиксируется в осевом направлении кольцом 4 и поджимается
гайкой 5 к раструбу 6 сопла Все стыки заполняются эрозиончо-
стойкой обмазкой.
Внутренняя поверхность раструба покрывается тонким слоем
теплоизоляции. Раструб сопла может быть изготовлен из стекло-
пластика. В этом случае не требуется теплоизоляция, так как
стеклопластик является хорошим теплозащитным материалом.
Сопла могут крепиться к днищу жестко или с помощью шар-
253
мирного соединения, позволяющего использовать их для управ-
ления полетом ракеты.
Крепление 'неподвижных сопел -к днищу может быть различ-
ным в зависимости от 'сочетания материалов камеры и сопла,
размеров и конструкции двигателя, а также технологических со-
Рис 139 Сопло РДТТ
ображений. Крепление может осуществляться шпильками, бол-
тами, на резьбе или с помощью сварки.
В мпогосопловых двщ ателях и двигателях е большим диамет-
ром камеры сгорания чаще применяются сопла с входной час-
тью, привариваемой или 'крепящейся nia резьбе к заднему днищу.
Крепление поворотных сопел к днищу рассматривается в
гл. XV.
!3-3. КОНСТРУКТИВНЫЕ СХЕМЫ РАКЕТ С РДТТ
Ракеты с РДТТ по сравнению с ракетами -на жидком топли-
ве обладают целым рядом достоинств. Основными из них явля-
ются:
1) простота и компактность устройства; не требуется баков
для топлива, трубопроводов и элементов подачи топлива в ка-
меру, которые являются неотъемлемой частью любой жидкост-
ной ракеты;
2) высокая-надежность действия, так как ракеты с РДТТ име-
ют значительно меньше движущихся деталей, узлов и регулиру-
ющих устройств (клапанов, реле и т. д);
3) постоянная готовность к пуску и простота запуска (эти ка-
чества особенно важны при эксплуатации ракет в боевых усло-
виях, так как уменьшается время их подготовки к пуску);
4) простота эксплуатации и связанные -с этим простота на-
земного оборудования и меньшая численность обслуживающего
персонала;
-5) возможность длительного хранения в окончательно снаря-
женном виде;
6) меньшая по сравнению -с другими ракетами 'стоимость из-
готовления.
254
К-недостаткам ракет-с РДТТ относятся:
I) меньший удельный импульс. Для достижения одинаковых
тактико-технических характеристик ракеты с РДТТ должны
иметь на одну ступень больше, чем 'ракеты с ЖРД;
2) общественная зависимость величины тяги и давления в ка-
мере РДТТ от начальной температуры заряда. Это вызывает
необходимость поддерживать температуру ракет перед пуском в
определенных пределах;
3) сложность программирования тяти и управления импуль-
сом;
4) высокая стоимость твердого топлива (ио сравнению со сто-
имостью обычных жидких топлив);
Несмотря на указанные недостатки, ракеты с РДТТ получили
широкое распространение
Чтобы обеспечить большую дальность полета, ракеты с РДТТ
должны быть, как правило, многоступенчатыми. В мнотоступеи-
чатых ракетах с РДТТ, как и в ракетах с ЖРД, возможны сле-
дующие схемы расположения ступеней: последовательная (моно-
блочная), последовательно-параллельная (комбинированная) и
параллельная (пакетная)
Наиболее совершенной является моноблочная схема ракеты.
При последовательном расположении ступеней стартовая масса
При прочих равных условиях меньше на 10—30% стартовой мас-
сы ракеты пакетной схемы. Объясняется это тем, что при пакет-
ной схеме необходимы дополнительные узлы крепления двигате-
лей. В свяли с применением в .пакете двигателей меньших диа-
метров увеличивается масса конструкции двигателя. Кроме того,
существенным недостатком пакетных схем является их меньшая
надежность, трудность управления и сложность узлов сочлене-
ния, включающих механические, электрические <и газовые связи
двигателей, входящих в пакет. Газовая связь между двигателя-
ми необходима потому, что в настоящее время нет отработан-
пыь систем регулирования тяги РДТТ. Двигатели в пакете име-
ют разную тягу, превышающую тот допустимый предел, который
можно ликвидировать органами управления
При пакетной схеме ракеты сложной является и система раз-
деления ступеней, т. е. отделения боковых блоков. Для этой сис-
темы необходимо иметь такие устройства, которые отводили бы
боковые блоки в сторону ют центрального и предотвращали бы
их столкновение в момент разделения
Однако в некоторых случаях охакетную схему применять це-
лесообразно. Если -имеется отработанный ракетный блок с
РДТТ, то, составляя пакет из двух, трех и бол-ее блоков, можно
создать ряд ракет различного класса. Такой путь создания -ракет
значительно сокращает время и затраты на их отработку, благо-
даря широкой унификации этих ракет между собой и с базовым
ракетным блоком.
255
В комбинированных схемах ускорители нижних ступеней ра-
кет состоят из -«пакетов», а верхние — из моноблоков. Эти схе-
мы имеют преимущества .и недостатки схем с последовательным
и параллельным расположением ступеней
Наибольшее распространение получили ракеты с 'последова-
тельным расположением ступеней.
Компонуются ракеты с РДТТ аналотично баллистическим ра-
кетам с ЖРД- На рис. 13 10 показана компоновочная схема
двухступенчатой ракеты с РДТТ,
Рис 13 10 Схема двухступенчатой твердотопливной раке-
ты с последовательным расположением ступеней:
Основу конструкции ракеты составляют РДТТ 3 и 5, к кото-
рым присоединяются головная часть /, •приборный отсек 2, пере-
ходный отсек 4 и хвостовой отсек 6.
Принципиальных отличий в 'конструкции -головных частей и
отсеков для ракет с РДТТ и ракет с ЖРД нет. При достаточ-
ной степени унификации возможна, по сообщениям иностранной
печати, хгтановка одних и тех же головных частей как -на твер-
дотопливные, так и -на жидкостные ракеты.
Нагтичие заряда топлива внутри ракеты значительно увели-
чивает ее массу во время транспортировки как три изготовле-
нии, так и лри перевозке к месту старта. В связи с этим отдель-
ные части твердотопливной ракеты должны иметь значительно
большую жесткость, чем аналогичные отсеки жидкостной ра-
кеты.
Приборные, переходные и хвостовые отсеки чаще -всего пред-
ставляют собой тонкостенные конструкции, хотя иногда переход-
ные отсеки изготавливаются в-виде ферм. В ракетах с РДТТ рас-
положение приборного отсека определено однозначно: между
головной частью и корпусом ускорителя последней ступени, так
как межбакового пространства па ракете нет. Все остальные
приборы, необходимые для управления работой двигателей от-
дельных ступеней, располагаются в переходных или хвостовых
отсеках этих ступеней.
Кроме рассмотренных выше элементов, конструктивно-компо-
новочные схемы ракет с РДТТ включают системы разделения
ступеней и отделения головной части.
256
При последовательном расположении ступени крепятся обыч-
но разрывными болтами или какими-либо другими быстроравъ-
емными соединениями. Для разделения ступеней ракет с РДТТ,
как травило, используется огневой способ, три котором разделе-
ние ступеней 'Производится после выгорания всего топлива в
двигателе ускорителя Такой способ существенно упрощает сис-
тему разделения. В этом случае не требуется устройство для
выключения двигателей.
При пакетной схеме ракеты разделение ступеней должно
производиться раньше полного выгорания топлива, так как од-
новременное выгорание топлива во всех двигателях осуществить
невозможно. В связи с этим в конструкции двигателей обяза-
тельно предусматривается система выключения двигателей.
Система 'отделения головной части должна обеспечивать на-
дежное крепление головной части к корпусу и ее отделение при
достижении ракетой заданной скорости полета. Поэтому на дви-
гателе последней ступени обязательно должна быть система его
выключения.
Для выключения РДТТ требуется либо 'гашение заряда, ли-
бо создание противотяги. Гашение производится быстрым сбро-
сом давления в камере сгорания путем увеличения площади кри-
тического сечения сопла или даже отделения заднего днища. При
резком падении давления в камере сгорания возникает ударная
волна разрежепия, которая гасит заряд.
Наиболее широко применяется способ выключения РДТТ за
счет иротивотяги, которая создается при истечении газов из со-
пел, расположенных па переднем или заднем днище так, чтобы
их тяга была направлена против тяги основных сопел. Наибо-
лее удобно располагать сопла противотяги па переднем днище
двигателя (см. рис. 13.6). При открывании этих сопел возникает
нротивотяга и одновременно падает давление в камере сгорания.
Падение давления приводит к гашению заряда.
На рис. 13.11 показана американская двухступенчатая твер-
дотопливная ракета «Пюларис А-3», предназначенная для воору-
жения атомных подводных лодок и надводных кораблей. Даль-
ность полета ракеты достигает 4600 км.
Двигатель каждой ступени ракеты снабжен четырьмя сопла-
ми. Корпуса двигателей изготовлены из стеклопластика методом
намотки с пропиткой эпоксидными смолами.
13.4. РАСЧЕТ НА ПРОЧНОСТЬ МЕТАЛЛИЧЕСКИХ КОРПУСОВ РДТТ
В процессе наземной эксплуатации и в полете корпус двига-
теля подвергается воздействию внутреннего давления, осевых и
поперечных сил и изгибающих моментов. Основным расчетным
случаем, определяющим конструктивную схему двигателя, явля-
ется действие максимального внутреннего давления.
У89
257
Рис. 13.11- Ракета «Поларис А-3:.:
у—по»-ротное сопли РДТТ первой ступени; 2—РДТТ перво» ступени; 3-блок
инетпиалыюй системы управления; 4—головная часть, 8—ядерпый заряд; в—
пр1.1орпьтй отсек 7-уяементы, образующие уплотнительные пояса, прилегающие
к стенке пусковой шахты. 8-РДТТ второй ступени; 5-сопло РДТТ второй сту-
пени; 10—привод поворотного сопла 1
При оценке -прочности корпуса двигателя производятся сле-
дующие основные расчеты:
1) расчет «несущей способности цилиндрической обечайки и
днищ «корпуса;
2) расчет моментного .напряженного состояния в днищах око-
ло отверстий;
3) расчет узлов соединения даища -с цилиндрической обечай-
кой корпуса;
4) расчет моментного напряженного состояния корпуса в зо-
нах стыковки с днищем.
Рассмотрим расчет несущей способности цилиндрической обе-
чайки и днищ металлического корпуса. Металлический корпус и
металлические днища РДТТ целесообразно рассчитывать по раз-
рушающим нагрузкам.
Расчет корпусов. В качестве основной расчетной схемы рас-
сматривается оболочка вращения, нагруженная внутренним дав-
лением горячих газов, образующихся в результате горения
заряда твердого топлива. Основное назначение корпуса — вы-
держать в течение заданного времени совместное воздействие
внутреннего давления и высоких температур и передать на ос-
тальную часть ракеты силу тяги. Предполагается, что толщина
изоляции выбрана и температура стенок корпуса известна.
Расчет цельнометаллического цилиндрического корпуса ве-
дут по так -называемой котельной формуле и запас прочности ц
определяют из условия прочности в окружном «направлении
г,. (is. и
где ра — максимальное эксплуатационное давление в дви-
гателе;
oBf — предел -прочности материала с учетом темпера-
туры;
йц и — толщина стенки -и радиус корпуса соответственно.
При этом предполагается, что либо сварные швы вообще от-
сутствуют (корпус изготовлен методом раскатки), либо техно-
логически обеспечена равнопрочность сварного шва и основного
материала (корпус свернут из листа с последующей сваркой).
Расчет днищ. Одна из основных -трудностей расчета днищ
состоит в необходимости учитывать ослабляющее влияние име-
ющихся в них отверстий. Для компенсации отверстий пользуют-
ся основанными на опыте нормами.
Компенсация может 'производиться двумя способами: утол-
щением днища по всей ci □ поверхности (величина утолщения за-
висит ют относительной величины и положения выреза) и мест-
ным усилением днища в зоне, которая расположена вблизи
отверстия. Увеличение толщины днища вдали ют отверстия прак-
тически не влияет на уменьшение -концентрации напряжений
9*
259
вблизи отверстия. Следовательно, утолщение всего днища ведет
к неоправданному увеличению его массы.
Вблизи отверстий происходит значительная концентрация на-
пряжений, которая у края отверстий '-примерно в 5 раз больше
расчетных напряжений в цельном днище, а на расстоянии от
края, равном примерно птоловине диаметра отверстия, напряже-
ния приближаются к расчетным.
Уменьшение и более равномерное распределение напряжений
вдоль края выреза зависит от укрепления края отверстия пат-
рубками и кольцами. При этом, чем больше добавлено металла,
тем сильнее падают напряжения.
Бесшовные штампованные сферические днища рассчитыва-
ются по формулам:
а) для днища без отверстий (или с отверстиями, компенсиро-
ванными согласно указанным ниже (нормам)
----/Ч» ,С = у + С
₽ 2Ow-0,2/>9
б) для днища с (некомпенсированными отверстиями
(13.2)
₽ 2го/оп—0,2//* ’
В этих формулах
бр—минимальная толщина днища:
бр — расчетная толщина днища;
рэ— внутреннее избыточное давление;
Яеф — внутренний радиус сферического днища;
Одоп — допускаемое напряжение в материале днища
°,1Сл=^в/;
(13.3)
cBt — предел прочности материала днища с учетом темпе-
ратуры;
— коэффициент, зависящий от конструктивных и эксплу-
атационных особенностей конструкции; обычно
= 1,0 — для глухих днищ, 1]=0,95 — для днищ с от-
верстиями;
z —безразмерный коэффициент
2=1—гогв//?сф; (13.4)
С — величина добавки к б' (выбирается из табл 13.1).
Действительная толщина днища бд определяется из условия
увеличения эксплуатационного давления в камере двигателя на
50%.
Компенсация 'влияния отверстий производится добавкой ме-
талла сверх 'расчетных толщин. Добавленный с этой целью ме-
талл называется укрепляющим.
260
Таблица 13 1
Величина добавки к минимальной толщине дншца
Минимальная толщина дншца, мм Добавка к минимальной толщине, см
0,1
10,5 <о'<20 0,2
20,5 <б’<30 0,3
Площадь сечения изъятого металла дниша (рис. 13.12), под-
лежащего компенсации,
A=dbp,
Рис 1312 К расчету днищ, ослабленных отверсти-
ями
где d внутренний диаметр подкрепляющего патрубка.
Укрепляющим считается лишь гот добавочный металл, кото-
рый находится внутри зоны укрепления, представляющей собой
прямоугольник GHJK, у которого две -стороны параллельны оси
патрубка. Сторона GH зоны подкрепления не должна быть
больше двух диаметров d.
Обозначим:
At — площадь избыточного сечения металла стенки днища;
Л2 — площадь избыточного сечения металла стенки пат-
рубка;
А3 — площадь сечения накладки.
Очевидно, должно быть
Ai+As+As^A
Находим величины площадей этих сечений
где 6д - действительная толщина днища;
9** 989 261
б„ —расчетная толщина днища, полученная по формуле (13.3);
—(&1 л—%') А»
где 61д—действительная толщина стенки патрубка;
6ip — расчетная толщина стенки патрубка, вычисленная по
формуле для цилиндров
hi—длина части патрубка ® зоне подкрепления; она дол-
жна удовлетворять условию A+6naKJi^2,5<5p. Далее находим
площадь сечения накладки
(13.6)
откуда толщина накладки дцакл=Aa/d.
Подкрепляются не все отверстия на днище, а лишь начиная
с определенного диаметра.
Максимальный диаметр отверстия, 'наличие которого не тре-
бует усиления оболочки: d=75 мм при толщине стенки меньше
16 мм; d=50 мм при толщине стенки больше 16 мм.
Пример. Определим толщины стенки корпуса двигателя (см рис 13.7)
при следующих исходных данных:
радиус цилиндрической части корпуса
радиус сферического днища . . .
диаметр отверстия в переднем днище . .
избыточное давление в корпусе двигателя
температура корпуса двигателя ....
материал корпуса
Яц=0,75 м
/?<ф = 1,00 м
dn=0,400 м
р»=4-10® Па
Г=200° С
свариваемый алюминиево-
магниевый сплав
предел прочности материала корпуса ов|=2оо=191 106 Па
Решение. / Расчет цилиндрической части корпуса.
Толщину стенки корпуса двигателя определяем по формуле (13 1), пола-
191-106—4.1<1б
1,6-10—2 м.
77 Расчет переднего днища.
1) Определяем величину допускаемого напряжения в днище, ослабленном
сваркой
°ют < 0,95св/ = 0,95-191.106 = 182-106 Па.
2) Определяем минимальную толщину днища по формуле (13.2):
. »э^сф 4-106.1,00
?>г —---------------------------г-------= 0,011 м.
₽ 2сД0П—0,2/>э 2-182-106—0,2-4-|Гб
3) Выбираем из таблицы (13.1) величину добавки к минимальной толщи-
не днища.
если Sp'—0,011 м, то С=0,002 м
Следовательно, бр=б'+С=0,011+0,002=0,013 м.
4) Увеличив эксплуатационное давление в камере двигателя на 50%, оп-
ределяем действительную толщину днища
1.5^/?сф ? 1,5-4.1(16-1 ,t]Q
2оЛ1,„ — 0,2-1 ,5ра 1Я2-106 - 0,2-1.5.4.106
+ 0,002 = 0,0185 м.
а с учетом сортамента листового материала принимаем бв=0,018 м
Далее определяем потребную компенсацию отверстия в днище Компен-
сацию произведем с помощью утолщенного патрубка, утолщенного днища и
накладки
5) Определяем площадь Сечения изъятого металла днища
A=d8p=0.400 0,013= 0,0052 м2.
6) Определяем площадь избыточного сечения металла стенки днища
Л1= (бл—6p)d= (0,018—0,013) -0,400=0,0020 м2.
7) Определяем расчетную толщину стенки патрубка
р’а 4-106-0,400
28в, —рэ== 2-191.106—4-106
= 0,423-10-2 м_
8) Определяем действительную толщину стенки патрубка
fiiB=l^C,p=l^-0.423-10-s=0,635 10-2 м.
9) Определяем длину той части патрубка, которая находится в зоне ук-
репления
й1=2,5бр=25-0.013—3-25-10-2 м
10) Определяем компенсацию за счет площади избыточного сечения ме-
талла стенок патрубка
А=(6|Д—6.»)^= (0,635—0,423) 10~2 3,25-10-*= 0,690-10~4 м"2.
11) Определяем потребную компенсацию за счет металла накладки по
формуле (13 6):
А3=А—(А1+Аг) =0,0052—(0,0020+0.0007) =0,0025 №
Потребная толщина пакладки
бпаил =т4з: d=0,0025 : 0,4—0,006 м.
Контрольные вопросы
1 Расскажите принцип действия РДТТ.
2. Из каких частей состоит РДТТ?
3. Какое горение заряда 'называется дегрессивным, прогрес-
сивным, нейтральным?
4. Какие формы зарядов обеспечивают дегрессивное, прогрес-
сивное и нейтральное горение?
5. Какой заряд называется монолитным? — составным?
6. Какие существуют конструктивные схемы РДТТ?
7. Какие функции выполняет .корпус РДТТ?
8. Из каких материалов и как конструктивно изготавливает-
ся корпус РДТТ?
9. Для чего предназначается теплоизоляция РДТТ?
10. Какие существуют способы соединения отдельных частей
корпуса РДТТ?
11. Для чего служит сопловой блок двигателя?
12. Какие существуют конструктивные схемы сопел?
13. Какие преимущества и недостатки твердотопливных ра-
кет по сравнению с жидкостньши ракетами?
14. Какие применяются схемы соединения ступеней твердо-
топливных ракет?
15. Из каких основных частей состоит твердотопливная ра-
кета?
16. По какой формуле рассчитывается толщина цилиндриче-
ской стенки металлического корпуса РДТТ?
17. В чем состоят 'особенности расчета на прочность дниш
РДТТ?
Глава XIV
ЖИДКОСТНЫЕ РАКЕТНЫЕ ДВИГАТЕЛИ
14.1. ПРОЦЕССЫ, ПРОИСХОДЯЩИЕ В КАМЕРЕ ЖРД
Жидкостный ракетный двигатель (ЖРД) создает силу тяги
за счет истечения с большой скоростью из его камеры продуктов
сгорания жидкого топлива.
264
Камера двигателя 'состоит из камеры сгорания 3 и сопла 2
(рис. 14.1). Камера сгорания включает в себя смесительную го-
ловку 6 и часть корпуса камеры двигателя до начала сопла.
В головке камеры расположены форсунки 4, обеспечивающие
впрыск компонентов топлива в камеру двигателя и их распыл,
сопровождающийся значительным увеличением поверхности ка-
пель
В камере сгорания
происходит образование
смеси компонентов топли-
ва, испарение и их сго-
рание.
Селлом называется та
часть камеры ЖРД, в ко-
торой тепловая энергия
газов превращается в ки-
нетическую энергию исте-
кающей струи.
Процесс горения в ка-
мере двигателя характе-
ризуется следующими осо-
бенностями:
а) высокой температу-
рой горения топлива, до-
стигающей 3000—4500 К,
что приводит к очень боль-
шой тепловой напряжен-
ности камеры сгорания;
0 12 3 4
Рис. 14.2 Изменение параметров газового
потока по длине камеры ЖРД
б) очень высоким давлением газа в камере сгорания, дости-
гающим у ЖРД с насосной системой «подачи (50-5-100) 10s Па;
в) малым временем пребывания топлива в камере, составля-
ющим 0.002—0.005 с.
Процессы перемешивания, испарения и сгорания происходят
практически по всей длине камеры сгорания. Тем не менее в ка-
мере сгорания можно выделить три зоны, в каждой из которых
преобладают определенные процессы (рис 14.2).
Первый участок (0—1) — зона распыла компонентов топли-
ва. Она расположена в иепосредствепной близости к -форсункам.
Длина этой зоны определяется типом форсунок.
Второй участок (1—2) — зона подогрева, испарения и сме-
шения компонентов топлива. В ней частично •начинается горение
топлива.
Третий участок (2—3) — зона горения. В 'ней происходит
главным образом «сгорание и выравнивание состава продуктов
сгорания по сечению камеры.
2Ь5
Участок (3—4) относится ж соплу двигателя. На рис. 14 2 по-
казаны изменения температуры, давления и скорости газов по
длине камеры двигателя: скорость газов несколько увеличивает-
ся из-за повышения температуры, а давление из-за гидравличе-
ских потерь и увеличения скорости несколько падает.
При движении таза вдоль сопла его давление, температура и
плотность уменьшаются. Скорость движения газа, а следователь-
но, и кинетическая энергия потока увеличиваются. При этом раз
гон газа до скорости звука происходит в сужающейся части соп-
ла, а ускорение ют звуковой до сверхзвуковой — в расширяю-
щейся. Максимального значения скорость потока газов достигает
на срезе сопла.
14.2. ОХЛАЖДЕНИЕ ЖРД
Из-за высокой тепловой напряженности в камере двигателя
возникают огромные тепловые потоки от газов к стенке камеры,
которые могут -привести к перегреву стенки и к разрушению ка
меры Для исключения прогорания стенки -камеры ее необходи-
мо охлаждать.
Рис 143 Схема регенеративного охлаждения одним
компонентом топлива.
/—"входной коллектор охлаждающей жидкости. 2—наружная
стенка камеры; З1—охлаждающий тракт, 4—внутренняя стенка
камеры; 5—выходной коллектор охлаждающей жидкости; С—го
Основная задача охлаждения двигателя заключается в том
чтобы температура стенки не превышала некоторого допустимо-
го предела. Охлаждение стенки осуществляется за счет отвода
тепла от стенки -камеры охлаждающей жидкостью, протекающей
по охлаждающему тракту ("наружное проточное охлаждение), и
путем снижения тепловых потоков от газов ж стенке камеры
(внутреннее охлаждение).
Наружное проточное охлаждение. При наружном проточном
охлаждении отвод тепла от стенок камеры сгорания и сопла про-
266
изводится охладителем (компонент топлива), который после
прохождения охлаждающего тракта поступает через головку
внутрь камеры о орания. При этом теплота, отобранная охлади-
телем ют стенки, идет на шредварительный нагрев компонента
топлива и вместе с мим возвращается 'в камеру сгорания, т. е
регенерируется. Поэтому наружное проточное охлаждение назы-
вают также регенеративным.
эхлаждяющмй
Рис 14.4. Форма охлаждающих фактов с про-
дольным движением жидкости
эрами жесткости,
тракт иа трубок
Простейшая схема регенеративного охлаждения показана на
рис. 14.3. Один из 'компонентов топлива до впрыока его в каме-
ру сгюрйния омывает снаружи стенку камеры. Для этого стенка
выполняется двойной В зазоре между внутренней стенкой 4 и
наружной стенкой 2 обычно по специальным каналам течет ох-
лаждающая жидкость. Проходя по охлаждающему тракту 3,
жидкость отбирает тепло от стенки 4. Нагретая жидкость выхо-
тит из рубашки в ®оллектор 5 >и через головку 6 поступает в ка-
меру сгорания.
Наиболее простым в изготовлении является охлаждающий
тракт в виде гладкого щелевого (кольцевого) канала (рис.
14.4, а), обеспечивающего продольное движение жидкости.
Основной его недостаток в том, что камеры двигателя с та-
ким трактом имеют малую жесткость. Для увеличения жестко-
сти вдоль канала иногда предусматривают ребра (см. рис.
14.4,6).
Охлаждающий тракт .можно изготовить из трубок (см. рис.
14.4, в), плотно прилегающих друг-к другу и спаянных между
собой. Внутри трубок проходит охлаждающая жидкость.
Если требуется большая скорость движения охлаждающей
жидкости, то размеры кольцевой щели могут оказаться очень
малыми. Чтобы -получить нужную скорость движения охлажда-
Рис 14.5 Камера ЖРД с регенеративным охлаждением:
юшей жидкости при приемлемой -высоте щели, охлаждающий
тракт проектируют в виде винтового 'канала. При винтовой фор-
ме площадь канала при одной и той же высоте зазора получает-
ся меньшей, чем при кольцевом канале.
Основной недостаток охлаждающего тракта в виде винтового
канала — сложность его изготовления, особенно на .конической
части камеры. Другим недостатком такого охлаждающего трак-
та является большое 'гидравлическое сопротивление, для преодо-
ления которого необходимо
Рис 14.6 Пленочное охлаждение камеры
двигателя*
1—-подача окислителя; 2—подача горючего, 3—
жидкостный защитный слой, подаваемый че
зовый защитный еле « 5—иодача жидкости
на пленочное охаажд. те через стенку каме
ры и сопла, В—жидкостный защитный слой
повышать давление охлаж-
дающего компонента ча
входе.
На рис. 14.5 в качестве
примера показан англий-
ский жидкостно-ракетный
двигатель с регенератив-
ным охлаждением. Охлаж-
дающий тракт имеет вин-
товые каналы 3. Эти ка-
налы образованы ребра-
ми 4, выточенными на
стенке камеры, внутрен-
ней стейком камеры 2
и наружной стенкой 1.
2RS
Внутреннее охлаждение. Охлаждение, при котором охлади-
тель вводится внутрь камера и создает вдоль стенки слой пони-
женной температуры, называют внутренним или пленочным. При
таком методе охлаждения задача состоит в том, чтобы снизить
тепловые потоки, идущие к стенке камеры двигателя.
Пленочное охлаждение •конструктивно обеспечивается двумя
способами: специальным расположением форсунок на головке
камеры или подачей горючего на внутреннюю поверхность стен-
ки через специальные отверстия (рис. 14.6)
Большой недостаток пленочного охлаждения заключается в
том, что компонент топлива, поступающий для охлаждения, не
участвует полностью в процессе сгорания и удельный импульс
ЖРД с пленочным охлаждением меньше, чем удельный импульс
ЖРД с регенеративным охлаждением.
Обеспечить охлаждение ЖРД только регенеративным спосо-
бом или только пленочным охлаждением обычно не удается, по-
этому применяют одновременно оба метода. Такое охлаждение
называют комбинированным (смешанным).
14.3. СМЕСИТЕЛЬНАЯ ГОЛОВКА КАМЕРЫ, КАМЕРА СГОРАНИЯ
И СОПЛО
Смесительная головка камеры. Подача топлива в камеру сго-
рания осуществляется с помощью форсунок, расположенных в
головке. Основное требование к форсункам — обеспечить по
возможности более тонкий и однородный распыл топлива при
достаточно малом перепаде дав-
лений на форсунке. ’
Конструктивно форсунки мо-
гут выполняться как в виде про-
стых тонких сверлений непосред-
ственно в головке камеры двига-
теля, так и в виде отдельных са-
мостоятельных узлов, закреплен-
ных в головке. В ЖРД при-
меняются форсунки двух ти-
пов: струйные и центробеж-
ные.
Струйные форсунки представляют собой точно выполненные
отверстия в головке камеры, сообщающие полости горючего и
окислителя с камерой сгорания, из которых жидкость выходит в.
виде струи (рис. 14.7).
Основными достоинствами струйных форсунок являются, во-
первых, простота выполнения и, во-вторых, большая пропускная
способность головки со струйными форсунками.
Однако недостатками струппых форсупок является их относи-
тельно большая дальнобойность и малый угол распиливания;.
269
тонкость распиливания струйных форсунок меньше, чем у цент-
робежных.
Центробежные форсунки. Центробежной называется форсун-
ка, в которой происходит закрутка жидкости. Выходя из сопла
центробежной форсунки, жидкость подвергается -воздействию
центробежных сил и образует тонкую пленку, которая легко рас
падается на мельчайшие капли.
Центробежные форсунки имеют широкий и сравнительно ко-
роткий конус распыла жидкости, что приводит к уменьшению
зон распыления и испарения. Недостатком центробежных форсу-
нок является их сложность и меньшая пропускная способность по
сравнению со струйными форсунками.
Рис. 14.8 Схемы центробежных форсунок-
Целтробежпые форсунки по способу закрутки потока жид-
кости -подразделяются на форсунки с завихрителем (шнековые)
и тангенциальные.
В форсунке с завихрителем (рис. 14.8, а) жидкость закручи
вается с помощью специального завихрителя 2, имеющего вин-
товую нарезку «а (наружной повермностн шнека. Подача жидко-
сти к форсунке производится со стороны заднего торца шнека
В тангенциальной форсунке (см. рис. 14.8, б) жидкость по-
ступает в полость форсунки через тангенциальное отверстие 3,
ось которого направлена по касательной к цилиндру внутренней
полости, называемой камерой закручивания. В результате этого
жидкость получает закрутку относительно оси форсунки.
Равномерное распределение окислителя и горючего по сече-
нию -камеры достигается соответствующим размещением форсу-
нок на головке. Существуют несколько схем расположения фор-
сунок: шахматное, сотовое и на (концентрических окружностях
(рис. 14.9).
При расположении форсунок горючего и окислителя в шах-
матном порядке их количество получается примерно одинако-
вым, что неблагоприятно сказывается на смеси-бразовании, так
как массовый расход окислителя должен быть в несколько раз
больше расхода горючего.
270
При -сотовом расположении форсунок достигается увеличение
количества форсунок окислителя по сравнению с количеством
форсунок горючею. Как видно из рис. 14.9, б, при сотовом рас-
положении каждая форсунка горючего окружена группой форсу-
нок окислителя, поэтому распыл и смесеобразование значитель-
но улучшаются.
При расположении форсунок на концентрических ©кружно
стах пояса с форсунками топлива чередуются с форсунками -окис-
лителя (см рис. 14.9, е). При этом способе упрощается подвод
топлива к форсункам.
Рис 149 Схемы расположения форсунок
в—концентрическое, X—форсунки горючего.
горючего для создания пристеночного
S
Форсунки на головке должны быть размещены так, чтобы сне
было попадания 'на стенки камеры сгорания струй топлива с из-
бытком окислителя. При избытке окислителя стенка легко мо-
жет прогореть. Поэтому всегда по краю головки располагаются
форсунки горючего для создания пристеночного слоя.
По форме -смесительные головки бывают плоские, шатровые
и сферические. Наибольшее распростращение получили плоские
головки благодаря простоте их изготовления и возможности по
лучить однородное поле -скоростей и равномерное распределение
топлива то поперечному сечению камеры.
На рис 14.10 показана 'конструкция смесите-лыпой головки
камеры двигателя ракеты «Ника» (США). Дно головки представ-
ляет собой плоскую плиту со сверлениями для подвода горючего
н окислителя. На входе в двигатель установлены патрубки 1 с
дроссельными шайбами, обеспечивающими поступление компо-
нентов топлива в необходимом соотношении.
Камера сгорания В камере ЖРД протекают процессы, обес-
печивающие выделение тепла и переход жидких компонентов в
газообразные продукты старания. Полнота этих процессов зави-
сит «не только от 'конструкции головки, 'но и от объема, и от фор-
мы камеры ыорания.
Объем камеры определяет время пребывания в ней топлива и
газообразных продуктов сгорания. Это время должно быть дсс-
271
таточным для полного завершения всех процессов, протекаю-
щих в камере сгорания. Чем совершеннее они организованы,
тем меньше необходимое время пребывания топлива и газооб-
разных продуктов в камере сгорания до входа в сопло.
Формы камер сгорания. По геометрической форме камеры
сгорания ЖРД подразделяют на цилиндрические, сферические,
конические и кольцевые.
Наиболее распространены цилиндрические камеры ci орания.
Они применяются для .камер двигателей всех тяг. Их основное
Рис. 14 10 Головка камеры двигателя ракеты «Ника» (США)
/—патрубки с Дроссельными шайбами. 2—форсунки горючего, 3—фор
сункн окислителя 4—смесительная головка, л—боковые отверстия для
вид сверху)
преимущество — простота изготовления. Применения цилиндри-
ческих камер в многокамерных двигательных установках облег-
чает компоновку связки двигателей. К недостаткам цилиндриче-
ских камер в сравнении со сферическими относят; пониженные
прочностные характеристики, большую поверхность стенок для
охлаждения и билыдее гидравлическое сопротивление.
На 'рис. 14.11 показана камера английского двигателя RZ-2,
которая близка .по форме к цилиндрической камере. Камера дви-
гателя состоит из никелевых трубок 16 прямоугольного сечения,
изогнутых по форме образующей камеры. Они собраны в обо
дочку 'И спаяны друг с другом. Для обеспечения достаточной
прочности камеры трубки скреплены также поперечными пояса-
ми 2 различного профиля. В наиболее нагруженном месте — в
критическом сечении сопла- поставлен усиленный пояс 17.
В качестве -охлаждающей жидкости используется горючее -
керосин, который течет внутри трубок 16. Из входной распреде-
ли 1ельной трубы S керосин через отверстия 15 поступает в каж-
272
Рис 14 11 Камера английского ракетного двигателя RZ-2-
/—сопло- 2—пояса для усиления камеры, 3—критическое сечение сопла,
4—»яел кр:— ния рычага для управления вектором тяги, S—камера его-
р»“чя, б—^.«лрический калояь 7—пнро^хинческий запал, 8—входной
кс • icKTop керосина 9-Чия-ше. 10—натру л« подвода жидкого кнелоро
дг 11—шарнир карданной подвески; 12—решетка ДЛЯ спрямления потока
жидкого кислорода; 12—крышка головки, 14—фланец подвода горючего,
!>—вход горючего, '16—трубки о'Лаллакяцего тракта; 17—пояс для усиле-
ния сопла в критически11 сечении 18—фланец для крепления теплозащит
•ого кожуха, /и—усилительное кольцо являющееся одновременно коллек-
юром для горючего э1—отлита головки 21 под под гоу очего, 22—подвод
пускового горючего 22—подасц v слорода
273
дую вторую трубку и течет к концу сопла до коллектора 19, за-
тем яо оставшимся трубкам возвращается обратно к головке 9
Жидкий кислород подводится к головке 9 через коленообразный
патрубок 10.
Плита головки 20 состоит из ряда концентрических колец с
отверстиями. Начиная с внешнего кольца, через которое подается
керосин, каждое последующее предназначается для подачи кис-
лорода и /керосина поочередно.
Горючее, выходящее из трубок охлаждающего тракта, посту-
пает по радиальным отверстиям в головку к 'кольцевым пазам и
через форсунки впрыскивается в камеру сгорания. Жидкий кис-
лород подводится с верхней стороны головки и оттуда поступа-
ет 'к кольцам.
Смесь в камере сгорания воспламеняется пиротехническим
запалом 7, который приводится в действие электрической иск-
рой
Сопло. Известны следующие основные типы сопел (рис
14.12): конические, профилированные и сопла с центральным те
лом
Конические сопла имеют закритичеокую часть в виде конуса
с прямой образующей (см, рис. 14.12, а). Оши наиболее просты
в изготовлении. По экономичности работы, т. е по величине по-
терь и весовым характеристикам, они уступают профилирован-
ным соплам и в настоящее время почти полностью вытеснены
ими, находя применение только в некоторых двигателях малых
тяг.
Профилированные сопла имеют образующую закритичеокой
части, выполненную -по кривой, совпадающей с линией тока (см.
рис 14.12, б). В настоящее время это самый распространенный
тип сопел ЖРД.
Сопла с центральным телом В последние годы интенсивно
исследуется возможность применения в ЖРД сопел с централь-
ным телом, принципиально аналогичных типу сопел, успешно
применяемых в воздушно-реактивных двигателях.
Различают следующие типы сопел с центральным телом.
Кольцевые сопла (см. рис. 14.12,6), расширение пото-
ка в которых ограничено кольцевым каналом с твердыми стен-
ками. Принципиально работа кольцевых сопел не отличается от
работы круглых сопел.
Ш т ы р е в ы е сопла (см. рис. 14.12, г), не имеющие за кри-
тическим сечением внешней стенки, формирующей поток Часто
этот тип сопел называют соплом с центральным телом.
Тарельчатые сопла (см. рис. 14.12, д), которые так
называются из-за тарельчатой формы центрального тела. По су-
ществу они являются соплами с центральным телом со свободной
внутренней поверхностью расширения, так как за критическим
сечением они те имеют внутренней стенки.
Сопла с центральным телом по сравнению с -коническими и
профилированными соплами обладают тем преимуществом, что
имеют значительно меньшую длину и обеспечивают больший
удельный импульс. Выигрыш в удельном импульсе достигается
6 г д
Рие 14 Г2 Типы сопел ЖРД-
а—комическое, б—профилировапаное; а—'кольцевое,
штыревое сопло; тарельчатое, /,1р—площадь Крит
сечения сопла
за счет того, что струя истекающего газа имеет возможность
свободно расширяться до тех пор, пока давление на свободной
поверхности струи и давление -окружающей атмосферы нс станут
равны. Таким образом, эти сопла подобны соплам с регулируе-
мой степенью расширения, «поэтому их часто называют саморегу-
лирующимися соплами.
Контрольные вопросы
1. Расскажите принцип действия ЖРД.
2. Каковы особенности процесса горения в .камере ЖРД?
3. Как проходит процесс смесеобразования и сгорания в
ЖРД? Какие золы .можно выделить в камере сгорания?
4 Как изменяются параметры потока вдоль камеры двига-
теля?
5. Какие существуют методы охлаждения ЖРД?
6. В чем сущность регенеративного охлаждения?
7, Как осуществляется 'пленочное охлаждение?
8. Для чего предназначается головка камеры двигателя?
9 Для чего предназначаются форсунки?
10. Какие существуют типы форсунок?
11 Какие существуют схемы расположения форсунок?
275
12 Каковы особенности движения жидкости в центробежной
форсунке?
13. Какие «геометрические формы имеют камеры сгорания
ЖРД?
14. Какие 1 еометрические формы сопел применяются в ЖРД?
Глава XI
КОНСТРУКЦИЯ И РАСЧЕТ ХАРАКТЕРИСТИК ОРГАНОВ
УПРАВЛЕНИЯ
15.1. РАСЧЕТ ХАРАКТЕРИСТИК ОРГАНОВ УПРАВЛЕНИЯ
(У
Выбор типа органов управления «и их эффективности является
одним из наиболее важных вопросов динамического проектиро-
вания Эффективность оценивается максимальным управляющим
моментом, создаваемым при откло-
нении органов управления, и соот
летствующим углом отклонен ня
этих органов бЮах-
Органы управления должны со-
здавать управляющие моменты, до-
статочные для компенсации возму-
щающих сил и моментов, действую-
щих на ракету. При этом нужно
иметь в виду, что завышение эффек-
тивности органов управления мо-
жет привести к неоправданным коп-
дУда структивным усложнениям и боль-
шим потерям энергии ракеты на
управление. Потери энергии на
управление и, как следствие это-о,
уменьшение дальности стрельбы
обусловлены главным образом тем,
чти установка органов управления
приводит к уменьшению удельного
импульса РД и вызывает увеличе-
ние массы конструкции ракеты.
В связи с этим важно правиль-
ное определение потребной эффек-
тивности органов управления. Для
этого необходимо достаточно точно
оценить возмущающие силы и мо-
менты, действующие па ракету.
Все возмущающие факторы,
влияющие па выбор органов управ-
Рис. 16,1 К расчету ветрах ^ения, разделяют на следующие
возмущений группы
276
1) ветер;
2) погрешности изготовления и монтажа ракеты;
3) носимметрпчнссть компоновки ракеты.
Наличие ветра приводит к появлению дополнительных сил и
моментов, действующих на ракету. Величина и направление вет-
ра носят случайный характер, что не позволяет заранее учесть
ветер при расчете траектории
Возмущающие силы и .моменты, обусловленные погрешностя-
ми изготовления и монтажа ракеты и несимметричностью компо-
новки, значительно меньше 'ветровых сил и моментов и поэтому
при оценке эффективности органов управления существенной
роли 'не играют Для предварительного определения потребных
углов отклонения органов управления одноступенчатых и первых
ступеней многоступенчатых ракет достаточно оценить действие
на ракету ветра с некоторым коэффициентом запаса, учитываю-
щим погрешности изготовления ракеты
(15.1)
где Мгоз—расчетный возмущающий момент;
М,г — возмущающий момент от действия ветра;
k — коэффициент запаса (Л=1Д).
Произведем расчет возмущающих сил и моментов, вызванных
действием -ветра на ракету. Ветер обычно задают в виде трафика
зависимости его скорости от высоты. Определим силы и момен-
ты от ветра для угла тангажа по зависимостям (рис. 15.1):
Диг=с^,5’мдав,; (15.2)
(15.3)
В приведенных выражениях
„ W sin 6
да™=arctg---------- ;
ц w 6 V-pWcos в
д' = IVJ.2BZVcost),
О угол наклона вектора скорости ракеты к горизонту;
сл — производная коэффициента нормальной силы по углу
атаки;
8Ы—площадь миделя ракеты;
хд—координата центра давления;
хчм—координата центра масс;
q — плотность воздуха;
W—скорость ветра;
V — скорость ракеты.
Ветровые возмущения зависят от скоростей ветра и ракеты и
высоты полета, а моменты еще и от расстояния между центрами
давления >и масс. Максимальные ветровые возмущения, как пра-
вило, действуют в период наибольшего скоростного напора.
277
Чтобы рассчитать ветровые возмущения по приведенным за-
висимостям, необходимо знать, помимо аэродинамических ха-
рактеристик, как изменяется угол , скорость и высота полета
ракеты. Эти данные определяются при баллистическом расчете
ракеты.
Определим потребные управляющие моменты. Величина пот-
ребного управляющего момента будет максимальной для канала
тангажа, так как одновременно с «компенсацией возмущений не-
обходимо обеспечить программный разворот ракеты в плоскости
прицеливания. В связи с этим потребный управляющий момент
условно можно разделить на две части, т. е.
.-И. = .'ИпРЧ-Жвсз. (15.4)
‘Здесь 2Ирр — программный управляющий момент, необходимый
для ведения ракеты по программной траектории. Величина АГщ,
по сравнению с 2ИПОЗ мала. Кроме того, в тот момент, «когда рас-
четный возмущающий момент достигает своего наибольшего зна-
чения (в момент максимального скоростного капора), програм-
мный управляющий момент равен нулю. В связи с этим расчет
потребных управляющих моментов для одноступенчатых «ракет
может производиться только с учетом компенсации расчетного
возмущающего момента.
В любое -время полета максимальный момент, который может
быть создан исполнительными «органами системы управления,
должен быть больше максимального возмущающего момента.
Например, для плоскости тангажа
С учетом формул (2 35) и (1«5.1)
л«Л«> t«s.6>
Это неравенство должно выполняться в любой момент времени
полета Исходя из этого значения потребного управляющего мо-
мента и учитывая конструктивные особенности ракеты, можно
выбрать тип органов управления.
Используя выражение (2.32), неравенство (15.6) запишем в
виде
Yу8|Пах (-*"р -'р.ы) 1 Л шах- (15-7)
Так «как правая часть этого неравенства может быть определена
из анализа возможных траекторий и величин -возмущения от за'
данного ветра, а максимальный угол отклонения органов управ-
ления определяется их конструкцией, то из последнего неравен-
ства можно определить -потребный градиент подъемной силы на
органах управления
И »-----l-IMirmp---- , 15 8)
®|пах (хр — хн.м)
278
15.2. КОНСТРУКЦИЯ ОРГАНОВ УПРАВЛЕНИЯ И РАСЧЕТ
УПРАВЛЯЮЩЕЙ СИЛЫ
Органы управления предназначены для создания управляю-
щих моментов. В настоящее время -используются следующие ос-
новные типы органов управления баллистическими ракетами:
— газовые рули;
— поворотные секции сопла;
- — поворотные камеры ЖРД;
Рис. 15.2. Газовые рули:
— поворотные сопла основных двигателей;
— рулевые (верньерные) двигатели;
—вдув (впрыск) жидкости (газа) в закритическую часть соп-
ла основного двигателя.
Рассмотрим принцип действия и определим силу У¥ для наи-
более широко распространенных органов управления.
279
Газовые рули. Газовые рули представляют собой графитовые
профилированные поворотные пластины 4, устанавливаемые в
газовом потоке на выходе из сопла ракетного двигателя {рис.
152). Управляющие моменты возникают при отклонении рулей
на некоторый угол относительно продольной оси ракеты. Вели-
чина подъемной силы руля зависит от утла поворота руля в по-
токе и может быть подсчитана по формуле
где cj.rp—производная коэффициента подъемной силы руля
по углу отклонения, определяемая опытным путем;
и'а — скорость газового потока, омывающего руль;
5Гр — площадь руля в плане;
б— угол отклонения руля.
Для управления ракетой по тангажу, рысканию и крепу не-
обходимо иметь две пары таких рулей, расположенных в двух
взаимно перпендикулярных плоскостях Рули ракеты нумеруют-
ся по ходу часовой стрелки, если смотреть на ракету с хвоста.
Руль, располагаемый в плоскости прицеливания и находящийся
при полете ракеты внизу, обозначают цифрой 1. Поворотом ру-
лей I и III в одну сторону осуществляется управление по рыска-
нию. Для разворота ракеты вправо, т. с. по часовой стрелке .во
круг оси Оуи ;рули I—III должны быть отклонены также вправо,
т. е. в сторону руля IV. Поворотом рулей 11 и IV достигается уп-
равление по тангажу. Чтобы уменьшить угол тангажа, рули II—
IV необходимо отклонить вниз, т. е. в сторону руля I. Поворот
ракеты по углу крепа производится за счет отклонения рулей
I—Ill в противоположные стороны.
К основным шед остаткам управления с помощью газовых ру-
лей относят:
1) для получения больших управляющих моментов требуются
рули с большой боковой поверхностью, что приводит к сущест-
венным потерям импульса из-за лобового сопротивления рулей
как в отклоненном, так и в нейтральном положениях:
2) при воздействии газовой струи рули подвержены интенсив-
ной эрозии, поэтому во -время работы двигателя площадь руля
уменьшается и, следовательно, уменьшается управляющий мо-
мент. Следует добавить, что при использовании газовых рулей
в РДТТ действует дополнительный неблагоприятный фактор —
наличие в продуктах сгорания большого количества твердых
частиц.
Поворотные секции сопла в отличие от газовых рулей при
нейтральном положении не создают дополнительного лобового
сопротивления (рис. 15.3). Поворотная сс..ция сопла представля-
280
ст собой -кольцо, закрепленное шарнирно в двух диаметрально
противоположных точках, С помощью приводов 1 секция может
поворачиваться в истекающую струю таким образом, чтобы соз-
давался необходимый управляющий момент. Если сопло снаб-
дить двумя поворотными секциями с шарнирами, расположенны-
ми перпендикулярно друг другу, то мололо обеспечить управле-
ние ракетой по тангажу и рысканию.
Поворотные секции находятся в струе газов только в течение
времени, необходимого для создания управляющих моментов,
поэтому они меньше подвержены эрозии.
О
Рис 153. Схема устройства и работы поворотных секций
сопла.
а—конструкция поворотных секций сопла; б—работа поворотных сек-
По сравнению с газовыми рулями поворотные секции менее
эффективны. Кроме того, они не могут обеспечить управление по
крену, если двигатель имеет одно сопло
Поворотные камеры ЖРД. Сущность создания управляюще-
го момента поворотным основным двигателем заключается в
том, что при повороте двигателя действие тяги раскладывается
на две составляющие (рис. 15.4). Одна из mix направлена па-
раллельно продольной оси ракеты, вторая — перпендикулярно,
создавая относительно центра масс управляющий момент. Оче-
видно, что управляющая подъемная сила увеличивается с увели-
чением угла отклонения двигателя, так как
Ky=Psmd,
(15 10)
где б — угол отклонения двигателя;
Р — сила тяги двигателя.
Потеря тяги
Xy=P(l—cos б).
(15 11)
Поворотный основной двигатель соединяют с ракетой при по-
мощи шарнира, который позволяет устанавливать ось двигателя
под разными углами к продольной оси -ракеты. В простейшем
случае двигатель устанавливают -на .ракете так, что его можно
10 989
281
поворачивать относительно корпуса ракеты ® одной плоскости
При этом поворот двигателя около оси, след которой на плоско,
сти рис. 15.5 помечен буквой О, производится с помощью гид-
равлического привода. Последний представляет собой поршень
4, помещенный в цилиндр 3. В одну 'из полостей цилиндра (I или
Рис 15 4 Возникновение управляющего иомен
та при повороте камеры двигателя
II) с помощью насоса нагнетается масло Под действием силы
давления масла поршень перемещается в цилиндре и с помощью
механической передачи поворачивает двигатель. В этом случае
обеспечивается управление только по одному каналу.
Если нужно "обеспечить управление ракетой по каналам тан-
гажа и рыскания с помощью одного поворотного двигателя, то
его устанавливают в кардановом подвесе.
Создание управляющего момента за счет отклсчтения основ-
ных двигателей находит все более широкое применение в жид-
костных ракетах благодаря малой
Рис 15.5 Поворотный (ка-
чающийся) ракетный двига-
тель с гидравлическим си-
ловым приводом.
массе органов управления при высо
кой их эффективности
Поворотные сопла основных двига-
телей (рис. 15.6) применяются для
управления ракетами с РДТТ. Чаще
всего они же являются основными
соплами двигателя. Если двигатель
имеет четыре сопла, то каждое из них
имеет одну степень свободы, т. е. снаб-
жено двумя цапфами, расположен-
ными в плоскостях стабилизации ра-
кеты.
Если у двигателя одно сопло, то
/—корпус ракеты 2—крепление
цилиндра к кори.. •-, гкдрав
лический цилиндр, 4—поршень.
5—механическая передача; 6—
ракетный двигатель, / и /Г—по-
лости цилиндра
оно устроено так, что имеет две сте-
пени свободы и обеспечивает управле-
ние по тангажу и рысканию. Для
управления по крену необходимы до-
полнительные сопла
282
Поворотные сопла по принципу действия аналогичны поворот-
ным двигателям и поэтому имеют такие же характеристики: они
достаточно эффективны при небольших углах отклонения Вели-
чины сил Уу и определяются по формулам (15.10) и (15.11).
Сложность конструкции поворотного сипла состоит в обеспе-
чении уплотнения подвижного соединения.
Рис 156. Схема и конструкция поворотного сопла
'—графитовый вкладыш, 2—насадок сопла, 3—шаровая поверхность скольжения, 4—
корпус камеры, а—топливный заряд, 6— основание сопла; 7—привод насадка. S—ка-
Рулевые (верньерные) двигатели. Рулевые двигатели созда-
ют управляющие моменты аналогично поворотному основному
двигателю, но тяга рулевых двигателей обычно мала по сравне-
нию с тягой основного (маршевого) двигателя. Необходимую ве-
личину управляющего момента получают
за счет- значительно больших углов отклоне-
ния. Величина силы Уу подсчитывается по
формуле (15.10).
Рулевые двигатели устанавливаются обыч-
но па корпусе 1 хвостовой части ракеты ря-
дом с основным двигателем (рис. 15.7).
Для увеличения управляющего момента руле-
вые двигатели 2 крепятся па стабилизаторах
иди па выносных кронштейнах 5. Поворот ру-
тевых двигателей производится с помощью
гидравлического привода и шарнира 4 Сна-
ружи рулевые двигатели закрываются обте-
кателями 3.
Недостатком этого способа создания
Рис 15 7. Схема
установки рулево
- (верньерного)
управляющих моментов является сравнитель-
но большая масса органов управления.
Вдув газа (впрыск жидкости) в закрити-
ческую часть сопла основного двигателя вызы-
вает газодинамическую асимметрию потока
10*
263
газов. При этом в потоке газа образуется косой скачок уплотне-
ния, за которым располагается область повышенного давления,
захватывающая только некоторую часть внутренней поверхности
сопла (рис. 15.8). Сила Уу, создающая управляющий момент,
появляется из-за разности давлений на диаметрально противо-
Рис. 158. Создание управляющей силы вдувом (впрыском) газа (жидко-
сти) в закритическую часть сопла.
вряд РДТТ
положпых участках поверхности. Если в закритичсской части
сопла расположить четыре диаметрально противоположных
ввода для жидкости, снабженных регулирующими клапанами,
то можно изменять направление тяги по тангажу и курсу. Вели-
чина силы Уу пропорциональна количеству впрыскиваемой
жидкости Следовательно, изменяя расход жидкости, можно ре-
гулировать угол отклонения тяги двигателя по направлению.
Для впрыскивания можно использовать фреон, азотную кис-
лоту, жидкий азот, воду и т. п.
Этот способ создания управляющего момента считается весь
ма перспективным для ракет с РДТТ Конструкция органов ул
равления в этом случае имеет наименьшую массу по сравнению
с другими типами органов управления.
Контрольные вопросы
1 Какие возмущаюшие факторы влияют на выбор органов
управления ракеты?
2 . Какие возмущения являются преобладающими?
3 . Как рассчитываются возмущающие силы и моменты от
действия ветра?
4 Как определяется необходимый управляющий момент?
5 . Как подсчитывается величина силы Уу для газовых рулей?
6 . Как управляется ракета с помощью газовых рулей?
7 . Расскажите принцип действия поворотных секций сопла.
284
8 Как создается и рассчитывается сила Fv. создаваемая по
воротным основным двигателем?
9 Для чего поворотный основной двигатель иногда устанав-
ливают в кардановом подвесе?
10 Для чею применяются поворотные сопла основных дви-
гателей?
11 . Как действуют рулевые двигатели?
12 В чем состоит сущность создания управляющего момента
путем впрыска жидкости (газа) в за1критическую часть сопла?
Глава XVI
ПНЕВМОГИДРАВЛИЧЕСКИЕ СИСТЕМЫ РАКЕТ
16.1. НАЗНАЧЕНИЕ, ТРЕБОВАНИЯ И ТИПЫ СИСТЕМ
ТОПЛ И ВОПОДАЧ И
Совокупность элементов ракеты, обеспечивающая подачу
компонентов топлива из баков в камеру сгорания, принято на-
зывать системой топливоподачи.
Система топливоподачи ЖРД должна обеспечить возмож
ность заправки ракеты топливом, хранения ее в заправленном
виде, запуск двигателя и последовательную подачу из баков в
камеру сгорания компонентов топлива во время работы и слив
их в случае необходимости.
Система топливоподачи в общем случае состоит из следую-
щих элементов:
1) баков для горючего, окислителя и вспомогательных ве-
ществ;
2) агрегата для создания давления подачи компонентов топ
лива к месту их использования;
3) трубопроводов и арматуры (топливозаборники баков, за-
правочные и сливные пробки, отсечные, обратные и другие кла-
паны, вентили, реле давления, редуктор давления, разрывные
мембраны, дроссельные шайбы и другие элементы)
К системам топливоподачи предъявляются следующие ос-
новные требоваашя;
1) максимальная простота, компактность и малая масса кон-
струкции;
2) автоматичность работы всех агрегатов системы топливопо-
дач'и в определенной последовательности;
3) равномерность подачи компонентов топлива в определен-
ных соотношениях и количествах к месту их использования;
4) герметичность всех соединений системы;
5) материалы узлов системы топливоподачи и особенно уп-
лотнений, обеспечивающих герметичность, должны допускать
длительное хранение компонентов топлива;
6) постоянная готовность системы к пуску;
2«5
7) обеспечение требуемого закона изменения тяги;
8) высокая экономичность и надежность работы:
9) дешевизна изготовления и удобство эксплуатации.
Главным элементом -системы топливоподачи является агре-
гат, создающий необходимое давление компонентов топлива.
В зависимости от типа этого агрегата различают две основные
системы топливоподачи ЖРД:
1) турбонасосные системы топливоподачи — системы, в кото-
рых компоненты топлива подаются к месту их использования
турбонасосными агрегатами (ТНА), состоящими из турбин и на-
сосов;
2) вытеснительные системы топливоподачи системы, в ко-
торых компоненты топлива подаются чк месту их использования
вытеснением из баков газом высокого давления.
К достоинствам турбонасосной системы топливоподачи отио
сятся.
1) облегченная конструкция топлив!ных баков, так как баки
работают под невысоким давлением газов,-
2) масса ТНА не зависит от продолжительности работы дви-
гателя;
3) вполне удовлетворительнее постоянство подачи компонен-
тов топлива в камеру сгорания двигателя.
Недостатком турбонасосной системы топливоподачи является
сложность ее конструкции, снижающая надежность и повыша-
ющая стоимость двигателя.
В ракетах с вытеснительной системой топливоподачи баки на-
ходятся под высоким давлением, поэтому для прочности они
должны быть толстостенными, что значительно увеличивает их
массу по сравнению с массой баков ракет с турбонасосной сис-
темой топливоподачи. Вытеснительные системы применяются в
двигателях с относительно 'небольшой тягой или малым временем
работы, когда размеры и масса баков сравнительно невелики.
В двигателях с большой тягой и большим временем работы
применяются обычно турбонасосные системы топливоподачи. ко-
торые рассматриваются в настоящей книге.
16 2. ТУРБОНАСОСНЫЕ СИСТЕМЫ ТОПЛИВОПОДАЧИ
Принципиальная ».хе.ма турбопасосной системы топливопода-
1И приведена на рис. 1'6.1 Компоненты топлива из баков / -и 2
поступают к насосам 5 и 7 и дальше подаются насосами в каме-
ру двигателя 6. Насосы приводятся в движение турбиной 4.
Для приведения в действие турбонасосною агрегата (ТНА)
необходимо иметь рабочее тело — газ, нагретый до высокой тем-
пературы и находящийся под давлением. Для получения такогс
газа устанавлйвается газогенератор 3.
В качестве рабочего тела для питания турбины ТНА принци-
пиально могут быть использованы:
.286
1) парогаз, получаемый в результате /разложения перекиси
водорода в парогазогеператоре (ПГГ);
2) газ, получаемый в результате сгорания -основных или вспо-
могательных .компонентов топлива в жидкостном газогенераторе
(ЖГГ),
3) газ, отбираемый из -камеры -сгорания двигателя,
4) теплый водород из охлаждающего тракта двигателя перед
поступлением -в камеру сгорания;
5) пороховой таз, получаемый в результате медленного горе-
ния пороховою «ряда в специальной камере.
Схема насосной системы топливоподач!
Питание турбины пороховыми газами практического интере-
са не представляет из-за присущих им .существенных недостат-
ков, однако пороховые газы могут быть -использованы для на-
чальной раскрутки турбины при питании ее энергией от другого
ксточ-ника.
Наибольшее распространение получили турбонасосные систе-
мы. у которых в качестве рабочего тела для питания турбины
ТНА применяется газ, получаемый в результате сгорания основ-
ных компонентов топлива в Ж ГГ.
Газ, выходящий из ТНА, обладает определенным запасом
энергии Использование этой энергии позволяет повысить удель-
ную тягу ЖРД. Если этот газ направляется в камеру сгорания
двигателя и там дожигается вместе с остальным топливом, то
такая двигательная установка называется ЖРД с дожиганием
Если газ, отработавший па турбине, -направляется на выхлоп
в атмосферу или в какое-либо расположенное вне камеры сго-
рания двигателя устройство, предназначенное для использования
запаса энергии, заключенной в газе (рулевые сопла, дополни-
тельные камеры дожигания и т. д.), то такая двигательная уста-
новка называется ЖРД без дожигания.
Удельный импульс ЖРД -с дожиганием при прочих равных
условиях выше, чем у ЖРД без дожигания.
Рассмотрим некоторые турбонасосные системы топлпвопо-
дачп.
287
На рис. Г6.2 показана система топливоподачи с ПГГ жид-
костного ракетного двигателя без дожигания. Рачтота этой сис-
темы топливоподачи заключается в следующем.
Газ высокого давления (воздух или азот) из баллона 1 через
редуктор давления 2 поступает в бак 3 и вытесняет оттуда -вод-
ный раствор перекиси водорода в парогазоген^ратор 4. В ПГГ
образуется парогаз, который поступает на турбину 8 и приво-
дит ее во вращение. Затем парогаз через патрубок /0 отводится
наружу. Турбина в свою очередь вращает крыльчатки насосов 7
и .9, -которые перекачивают окислитель и горючее из баков 5 и 6
в камеру двигателя 12. Электропневмоклапаны 11 открываются
и дают доступ -компонентам топлива в камеру 1'1 после достиже-
ния определенного давления в трубопроводах системы топливо-
подачи.
Системы с ПГГ весьма надежны в работе. Кроме того, при
использовании ПГГ, работающего, -например, «на продуктах раз-
ложения перекиси водорода, упрощается -проблема запуска всей
установки. Однако большим недостатком такой системы явгтяет-
ся потребность иметь на борту ракеты специальное рабочее тело
для ПГГ, так как, как правило, основные компоненты ЖРД не-
применимы для разложения в ПГГ. Поэтому необходимы допол-
нительные емк-остп и атрматы с магистралями для заправки ем-
костей и подачи (рабочего тела в ПГГ. Все это усложняет
двигательную установку и затрудняет ее эксплуатацию. Вслед-
ствие этого недостатка парогазогенераторы вытесняются ЖГГ,
работающими иа тех же компонентах топлива, что и ЖРД
Система топливоподачи с жидкостными газогенераторами по-
казана на рис. 16.3. Первоначальную раскрутку "азовая турбина
5 получает от пиротехнического стартера 7, в котором сгорает
пороховой заряд и образуются газы, приводящие во вращение
рабочее колесо турбины. Турбина приводит в действие насосы 4
и 6, (которые перекачивают окислитель и горючее из баков 2 и 3
сначала в газогенератор 1.
В газогенератор топливо обычно поступает с большим избыт-
ком горючего, что позволяет -снизить температуру газов до 700—
900° С и создать 'неагрессивную восстановительную среду па ло-
патках турбины.
Образующийся в газогенераторе газ поступает в тазовую тур-
бину, увеличивая ее мощность. Давление компонентов топли-
ва в трубопроводах 8 п 10 повышается, и при достижении опре-
деленного значения срабатывают электроппевмоклапаиы 11, отк-
рывающие доступ компонентам топлива в 'камеру ЖРД 12.
Газ после турбины по трубопроводу 9 поступает в камеру
сгорания -и там дожигается при оптимальном соотношении ком-
понентов топлива.
Привод турбины ТНА парами одного из компонентов топли-
ва, образующимися в системе охлаждения, -находит применение
в связи с использованием в< ,-орода в качестве охладителя Не-
288
достатком такого привода ТНА является ограниченная |работо-
способиость пара, не позволяющая достигать в некоторых случа-
ях требуемое давление подачи -компонентов топлива.
=Гаа
—Паре г аз
т^шТорючее
окислитель
Перекись
Воиорооа
Рис 162 Система подачи топлива
с ПГГ жидкостного ракетного
двигателя без дожигания.
сжатого
рекнеи водорода; 4—ларогазогенера-
горючего. 10—патрубок вы-
Рис li6.3 Система подачи топ-
лива с ЖГГ жидкостного ра-
кетного двигателя с дожига-
нием
Привод турбины за счет отбора газа !из камеры сгорания рас-
пространения не получил из-за трудностей, возникающих при от-
боре продуктов 'Сгорания из камеры двигателя, хотя работы в
этом направлении, по зарубежным данным, ведутся.
16.3. ТУРБОНАСОСНЫЕ АГРЕГАТЫ
Одним из основных агрегатов насосной системы подачи ком
понентов топлива является турбонасосный агрегат (ТНА), 'Кото-
рый предназначен для повышения давления компонентов топли-
ва до величины, необходимой для впрыска топлива в камеру
сгорания. Главные элементы ТНА — насосы, подающие компо-
ненты топлива под необходимым давлением при требуемом рас-
ходе, и турбина, которая служит приводом насосов.
Турбина, Схема турбины показана на рис. 16.4. Газовая тур-
бина состоит из двух основных элементов: неподвижного сопло-
вого блока, образованного рядом неподвижных сопел 5, и вра-
щающегося рабочего -колеса. Рабочее колесо представляет собой
диск 5 с рабочими лопатками 3, соединенный с валом 6 турбины
Принцип работы турбины заключается в следующем
Рис 164 Схема турбины.
I—входной патрубок, ’—сипло, 3—ло
патки рабочего кол г.л; 4—выходной
иащубок. S—диск рабочего колеса; б—
вал турбины
Рис 16.5. Схема центробежного насоса-
1—входной патрубок рабочее колесо
(крыльчатка); 3—лопатки. 4—диффузор 5—
спиральная камера (улитка); б—вал
Газ под высоким давлением входит в неподвижные сопла 2,
где он (расширяется, при этом давление и температура 1аза
уменьшаются, а его скорость -возрастает.
На выходе из сопла газ имеет относительно большую ско-
рость и, следовательно, большую кинетическую энергию. Посту-
пая та лопатки рабочего колеса 3, газ -изменяет направление
своего движения, в результате возникает сила, вызывающая вра-
щение рабочего колеса Таким образом, часть кинетической энер-
гии сжатого газа преобразуется в механическую работу тур-
бины.
Насосы. В ТНА ЖРД обычно применяются центробежные на-
сосы, обеспечивающие -высокое давление подачи и большую про-
изводительность при малых габаритах и массе, а также воз-
можность работы на агрессивных и низ'кокипяших компонентах
топлива.
Рассмотрим принцип действия центробежного насоса (рис
16.5). Жидкость поступает через входной патрубок 1 и попадает
на лопатки рабочего -колеса 2, которое вращается с большим
290
числом 'оборотов. Лопатки оказывают давление на жидкость, в
результате чего давление и скорость жидкости при движении в
каналах между лопатками непрерывно увеличиваются. Из
крыльчатки жидкость поступает в спиральную камеру 5 и по ней
движется к диффузору 4. Поперечное сечение камеры при дви-
жении в сторону диффузора непрерывно возрастает. В диффузо-
ре кинетическая энергия потока жидкости преобразуется в по-
тенциальную энергию давления, так что наибольшее давление
жидкость имеет -па выходе из диффузора
Потребное давление жидкости на выходе из насоса — давле-
ние подачи рассчитывают ио формуле
Рпод=Рк.с+Арф+
1де рас. —давление в камере сгорания-,
Арф — потери давления в форсунках;
Арм— потери давления в топливных магистралях.
Давление жидкости, создаваемое насосом, тем больше, чем
больше, число оборотов крыльчатки
Однако значительное увеличение числа оборотов ограничено
возникновением кавитации.
Кавитацией, или холодным кипением жидкости, называется
возникновение в потоке жидкости разрывов или пустот, запол-
няемых парами жидкости.
При поступлении жидкости на рабочее колесо насоса давле-
ние жидкости падает, так как скорость ее увеличивается. При
понижении давления из компонента топлива начинает выделять-
ся растворенный в нем воздух Когда статическое давление в
потоке станет меньше давления насыщенных паров компонента
топлива, начинается образование пузырьков данного •компонента
топлива. Образующиеся пузырьки увеличиваются в объеме и в
конечном итоге приводя!' к разрывам струи жидкости. В резуль-
тате через крыльчатку идет смесь жидкости и -пара.
Кавитапия нарушает нормальную работу macoca по двум при-
чинам.
Во-первых, цри попадании жидкости, имеющей в своей массе
паровые объемы, в область более высоких давлений пар кон-
денсируется, а образовавшаяся пустота с очень большой скоро-
стью заполняется жидкостью. При этом происходит значитель-
ное местное повышение давления ('Гидравлический удар). Мест-
ные гидравлические удары приводят к выкрашиванию (эрозии)
металла внутренней поверхности каналов крыльчатки. При дли-
тельной работе насоса эрозия снижает прочность крыльчатки и
даже может ее разрушить.
Во-вторых, объемный расход жидкости при возникновении ка-
витации резко уменьшается, так как часть объема оказывается
заполненной парами жидкости. Такое явление называется сры
вом подачи Срыв подачи обязательно -приводит к нарушению
правильного протекания процесса сгорания в 'камере и может
2S1
вызвать ‘взрыв двигателя. Поэтому работа .насосов ЖРД на 'ре-
жиме кавитации является совершенно недопустимой, и насос
должен быть спроектирован так, чтобы кавитация в нем была
бы исключена.
Увеличение числа оборотов крыльчатки насоса приводит к
возрастанию скорости потока жидкости и, следовательно, к уве-
личению возможности возникновения кавитации. Чтобы ие допу-
стить '.кавитацию, приходится ограничивать число оборотов вала
ТНА.
/I
Рис 16 6. Схемы компоновки ТНА.
А—одновальные ТНА, В—редукторные ТНА, В—ря; дельна я компоновка: I—турбина:
Возникновение кавитации можно предупредить, увеличив дав-
ление жидкости на входе в насос. Подпор жидкости на входе в
насос можно увеличить путем повышения давления наддува ба
•ка, до это приведет к необходимости увеличить толщину его сте-
нок. Следовательно, возрастет масса бака. Другой путь повыше-
ния давления на входе в насос — установка в топливной магист-
рали перед ТНА так 'называемого предвключенного насоса.
Схемы ТНА. По компоновочной схеме различают одноваль-
ные (без редукторные), редукторные и раздельные ТНА (рис
16.6).
Наиболее распространены ©дневальные ТНА (см. рис
16.6, А), так .как они проще по конструкции и надежнее в рабо-
те. Однако при одновальной компоновке количество оборотов;
турбины и насосов одинаковое. Следовательно, оно не может
292
быть оптимальным для всех агрегатов, из-за чего снижается ко-
эффициент полезного действия ТНА.
В «дневальном ТНА турбина может быть расположена меж-
ду 'насосами или консольно.
При расположении турбины между 'насосами полости компо-
нентов разобщаются надежней, что особенно важно для само-
воспламеняющихся компонентов. Кроме того, более рационально
распределяется крутящий момент по валам агрегата.
Консольное расположение турбины целесообразно в двш а-
телыных установках с закрытой ’схемой, так как при этом упро-
щается подача продуктов сгорания от турбины в камеру двига-
теля.
Редукторные ТНА (см. рис. 1’616, Б} имеют зубчатую переда-
чу, снижающую число оборотов насоса (одного или нескольких)
по сравнению с числом оборотов турбины. При этом каждый аг-
регат (турйша и насосы) работает при оптимальном числе обо-
ротов, что повышает его к. и. д. Однако такие ТНА значительно
сложнее и тяжелее.
Схемы раздельной компоновки ТНА представлены ма рис.
16.6, В. Здесь каждый насос имеет свою турбину. Такая схема
может быть целесообразной -в водородных двигателях, у которых
особенно велика разница в потребных числах оборотов .насосов
окислителя и горючего. Недостаток такой схемы — необходи-
мость устанавливать две турбины.
ТНА могут иметь два, три и более насоса. При этом дополни-
тельные насосы служат для подачи топлива в ЖГГ или в ПГГ,
для привода электрических генераторов, регуляторов и т. д.
16.4. НАЗНАЧЕНИЕ, ПРИНЦИП ДЕЙСТВИЯ И ТРЕБОВАНИЯ,
ПРЕДЪЯВЛЯЕМЫЕ К СИСТЕМАМ НАДДУВА
В ЖРД с турбонасосной системой топливоподачи компонен-
ты топлива должны подаваться из баков в насосы ТНА под не-
которым начальным давлением, обеспечивающим бескавитаци-
онную работу «насосов. Для этого используется система наддува,
поддерживающая определенное давление в газовом объеме (по-
душке) топливных баков.
Кроме того, наддув, как отмечалось в гл. V, увеличивает несу-
щую способность топливных баков.
В процессе работы ЖРД в каждом из топливных баков необ-
ходимо поддерживать давление газа между минимально и мак-
симально допустимыми величинами. Минимальное давление оп-
ределяется требованием бескавитационной работы насосов, или
из условия обеспечения минимальной устойчивости стенок бака.
Максимальное давление определяется из условия прочности кон-
струкции бака.
В систему наддува баков в общем случае входят следующие
элементы-
1) источник рабочего тела для наддува (баллон сжатого га-
за, пороховой аккумулятор давления, газогенератор и т. -п.);
2) регуляторы давления, обеспечивающие заданную величину
давления в газовой подушке топливных баков;
3) трубопроводы и арматура (клапаны, вентили, мембраны,
и прочие элементы).
Расход поступающего в топливный бак i аза регулируется од •
ним из двух общепринятых способов: либо с помощью регулято-
ров давления, обеспечивающих постоянное давление в подушке
бака, либо с помощью простого регулятора расхода, когда дав-
ление в подушке бака переменное. Для каждого конкретного га-
за и способа регулирования разрабатывается система, поддер
живающая давление в баке в допустимых пределах
К системам наддува топливных баков предъявляются следу-
ющие основные требования:
1) максимальная простота, компактность и малая масса кон-
струкции;
2) автоматичность работы всех агрегатов системы наддува в
определенной последовательности;
3) подача рабочего тела в топливный бак в количествах, обе-
спечивающих давление в газовой подушке в заданных пределах,
4) высокие скорость срабатывания и чувствительность агре-
гатов -управления системой наддува;
5) герметичность всех -соединений системы;
б) материалы узлов -системы наддува и особенно уплотнений,
обеспечивающих ее герметичность, должны сохранять свои свой-
ства в течение всего гарантийного срока хранения ракеты;
7) постоянная готовность ci-iciемы наддува к пуску,
8) высокая экономичность и надежность работы;
9) дешевизна изготовления и удобство эксплуатации.
Так как характеристики системы наддува зависят непосред-
ственно от типа газа, который применяется для -наддува баков,
то к газу (рабочему телу) наддува предъявляются особые тре
бования. Основные требования к рабочему телу наддува следу-
ющие.
1) высокая плотность при хранении, так как чем выше плот-
ность таза, тем меньше масса баллона для хранения рабочего
тела;
2) низкая температура кипения; температура кипения газа
наддува должна быть -ниже температуры поверхностного слоя
жидкости в баке, в -противном случае возможна каиденсапия га-
за наддува;
3) малая растворимость; растворимость таза наддува в ком
повейте топлива ухудшает характеристики двигательной уста-
новки,
4) низкая или регулируемая химическая активность; игнтен
сивно протекающие, -нерегулируемые реакции между газом пад-
291
дува и компонентом топлива могут вызвать взрыв и осложнить
проблему борьбы с коррозией.
В настоящее время для наддува баков используются:
а) предварительно сжатые газы (воздух, азот, гелий);
б) продукты сгорания (разложения) специального одноком-
поъенгного твердого или жидкого топлива;
в) продукты сгорания основных компонентов топлива;
г) сжиженные газы (с последующей их газификацией);
д) воздух атмосферы (при полете ракеты в плотных слоях
атмосферы).
16.6. ПРИНЦИПИАЛЬНЫЕ СХЕМЫ И ТИПЫ СИСТЕМ НАДДУВА
При проектировании имеется возможность широкого выбора
принципиально различных систем наддува. Любой метод получе-
ния и регулирования расхода газа, вообще говоря, может быть
использован для разработки системы наддува.
Наиболее часто применяются следующие типы систем над-
дува:
а) система наддува с газовым аккумулятором давления-,
6) система наддува встречным потоком воздуха;
в) система наддува с пороховым аккумулятором давления,
г) газогенераторная система наддува;
д) испарительная система наддува;
е) система наддува с впрыском реагента в топливный бак.
Выбор той пли иной системы наддува определяется в основ-
ном конструктивной схемой ракеты, физико-химическими свой-
ствами компонентов топлива и требованием обеспечения мини-
мальной массы конструкции.
Система наддува с газовым аккумулятором давления. Про-
стейшая схема системы >наддува с газовым аккумулятором дав-
ления показана на рис, 16.7. Газ под высоким давлением нахо-
дится в баллоне 8 При расходовании топлива из баков
давление газа в подушке уменьшается, датчики давления в ма-
гистралях 4 и 10 подают сигналы на включение регуляторов 5 п
9, в газ поступает в баки по трубопроводу 6 Дреиажно предо-
хранительные клапаны 3 и 11 -необходимы для дренажа топлив-
ных баков во время заправки топлива через заправочные кла-
паны 1 и 13, а также для сброса газа в атмосферу, если давле-
ние в подушке превысит расчетное.
В качестве рабочего тела могут быть использованы воздух,
азот, -гелий и другие газы.
Системы наддува с газовым аккумулятором давления наи-
более просты и надежны, но являются самыми тяжелыми. Для
улучшения весовых характеристик такой системы наддува иног-
да применяют подогрев рабочего тела в специальном теплооб-
меннике.
295
Система наддува встречным потоком воздуха. Наддув баков
встречным потоком воздуха (рис. 16.8) 'производится в началь-
ный период полета ракеты, когда его плотность достаточна для
обеспечения требуемого давления ‘наддува. Для этого имеется
Рис, 16.8. Схема системы
наддува баков встречным
потоком воздуха:
/—бак, 2—клапан; 3-^груба
наддува; 4—носовой конус:
б—итоднод управляющего га
Рис 16 7 Система над-
дува с газовым аккуму-
лятором давления-
/—«клапан заправки, слива и
отсечки горючего. 2—трубо-
провод горючего, 3—дре-
назкно - предохранительный
раль замера давления над
дуоа бака горючего, 5—ре-
гулятор давления наддува
бака горюче, о 6—трубопро-
вод наддува, 7—клапан за-
Я-баллон с газом; У—pcrv
лттор давления наддува ба
ка от целителя; 10—магист-
раль замера давления над
- ва бака окислителя- Н—
окислителя
специальная труба наддува 3, со-
единенная с передним днищем
бака.
Наддув баков встречным пото-
ком воздуха может производиться
до определенного момента времени
полета ракеты, после чего труба
наддува перекрывается клапаном 2
и далее в бакс происходит адиаба-
тическое расширение воздуха. При
этом минимальное давление 'наддува должно быть не меньше
требуемого.
Система наддува баков встречным потоком воздуха проста,
безотказна, надежна, удобна в эксплуатации и по сравнению с
другими системами '-наддува имеет (незначительную массу. Одна-
ко эта система наддува имеет ограниченное применение, так как
она не всегда может обеспечить требуемое давление наддува.
Система наддува с пороховым аккумулятором давления
(ПАД). В этой системе наддува рабочим телом являются про-
дукты сгорания заряда твердого топлива, размещенного в спе-
циальной камере сгорания, рассчитанной на высокие температу-
ры. Обычно используется твердотопливный заряд торцового го-
рения. Воспламеняется заряд при помощи электрозапала или
химическим способом. Если для поддержания реакции требуется
впрыск жидкости, то такой аккумулятор давления называется
гибридным; в этом случае система наддува становится регули-
руемой и обеспечивает возможность повторного запуска.
Системы наддува с пороховым аккумулятором давления не
нашли еще широкого применения из-за недостаточной их отра-
ботки.
Газогенераторная система наддува. В двигателе с турбона-
сосной системой топливоподачи для получения газа наддува
можно использовать газогенератор, работающий на основных
компонентах топлива Для обслуживания системы наддува мо-
жет устанавливаться автономный дополнительный газогенера-
тор или может быть использован основной газогенератор, пита-
ющий ТИА двигателя
Генераторный газ обычно имеет температуру около 850° С.
поэтому его необходимо предварительно охладить.
Для исключения взрыва при соприкосновении горячего газо-
генераторного газа с компонентами топлива (окислителем или
горючим) -в системе наддува устанавливают два газогенератора,
вырабатывающих газы разною состава. Один газогенератор вы-
рабатывает газ с избытком окислителя (для бака окислителя),
а второй — с избытком гпрючего (для бака горючего).
В практике используются различные, зачастую более слож-
ные, нежели описанный циклы газогенерации. На рис. 16.9 пока-
зана -газогенераторная система наддува бака с высококипящим
окислителем. Газ для наддува образуется в газогенераторе /,
работающем на основных компонентах топлива. Для бака горю-
чего таз для наддува может быть взят или из газогенератора
турбонасосного агрегата 2, или из специального газогенератора
(на рис. 16.9 схема наддува бака горючего не показана).
Генераторная система наддува имеет небольшую массу, про-
ста по устройству, надежна в работе и удобна в эксплуатации
Благодаря этому она получила в -настоящее время широкое рас-
пространение в двигательных установках с турбонасосной систе-
мой топливоподачи.
Испарительная система наддува. Некоторые компоненты
топлива можно нагревать и их пары использовать для наддува
топливного бака. Так как многие горючие при -нагревании раз-
лагаются, то для наддува используют главным образом окисли-
тели: кислород, фтор и четырехокись азота, хотя можно также
использовать и -водород. Схематически испарительная система
маддува показана на рис. 116.10. Для простоты дана схема над-
дува одного топливного бака. Окислитель под высоким давлени-
ем отбирается на выходе из насоса 9, а затем подогревается и
испаряется в теплообменнике /. В качестве теплоносителя ис-
пользуются выхлопные газы турбины 5. Полностью 'испаривший-
ся -компонент топлива через газораспределитель 6 поступает в
топливный бак 8. Необходимый расход жидкого компонента, от-
бираемого для наддува, обеспечивается при помощи расходомер-
ного сопла 3. Для
Рис. 16.9. Газоге-
нераторная схема
наддува бака «О»-
регулирования температуры газа использует-
ся жиклер 2.
К достоинствам испарительных сие; ем
наддува можно отнести дешевизну, относи-
тельную простоту и надежность, отсутствие
дополнительных компонентов на борту
ракеты
генератор ТНА;
насос горючего
Рис. 1610. Испаритель-
ная система наддува
Недостатками этой системы являются задержка в наддуве
бака из-за необходимости предварительного нагрева газа в теп-
лообменнике и низкая точность регулирования давления над-
дува.
Испарительная система получила преимущественное распро-
странение для наддува баков € лизкокппящими компонентами
топлива, как-то. кислород, водород, фтпр и т. д.
Система наддува с впрыском реагента в топливный бак.
В этой системе используется принцип регулируемых экзотерми-
ческих реакций, происходящих при впрыске химически активной
298
жидкости в топливный бак. При этом температура газа наддува
достигает 90—100° С. Существует много различных вариантов
этой системы наддува, так как инжектируемый реагент может
быть твердым, жидким и газообразным. Система наддува полу-
чается проще, если для впрыска используется второй основной
компонент топлива, имеющийся на ракете.
Реакция происходит 1непосредственно в топливных баках.
В баки горючего через пневматический редукционный клапан 'пе-
риодически, отдельными порциями впрыскивается окислитель
из небольшой емкости, находящейся под давлением, а в баки
окислителя — торючее. Наддув создается за счет образования
газообразных продуктов реакции. При достижении необходимого
давления наддува подача реагента автоматически прекращается.
В весовом отношении такая система «наддува является наи-
более выгодной.
16.6. ПОСЛЕДОВАТЕЛЬНОСТЬ СРАБАТЫВАНИЯ ЭЛЕМЕНТОВ
ПНЕВМОГИДРАВЛИЧЕСКОЙ СИСТЕМЫ
Агрегаты автоматики, входящие в состав пневмогидравличе-
ской системы (ПГС), должны взаимодействовать между собой
п с системой управления в определенной последовательности,
обеспечивающей нормальной запуск и выключение двигателей и
полет ракеты по заданной программе.
Для ракет с ЖРД можно выделить наиболее характерные
этапы работы ПГС, в частности, для двухступенчатых ракет с
последовательным расположением ступеней, Такими этапами яв-
ляются:
а) подготовительные операции;
б) предстартовый наддув топливных баков;
в) запуск двигателей первой ступени и выход их на режим с
последующим '.подъемом от пускового устройства (старт ракеты);
г) взаимодействие агрегатов автоматики во время работы
двигателей первой ступени (с момента старта до разделения
ступеней);
д) разделение ступеней;
е) взаимодействие агрегатов автоматики во время работы
двигателей второй ступени,
ж) отделение головной части.
К п о д г о т о в и т с л ын ы м операциям относятся заправ-
ка ракеты компонентами топлива, срабатывание разделительных
клапанов, отделяющих системы топливоподачи от двигателей,
задействование бортовых источников электропитания, заправка
сжатыми тазами бортовых баллонов и др.
Предстартовый наддув топливных баков не-
обходим для того, чтобы подготовить двигатели первой ступени
к надежному запуску. Одновременно с предстартовым наддувом
299
баков первой ступени может производиться наддув баков второй
ступени.
Для сокращения времени подготовки ракеты к пуску необхо-
димо всемерно стремиться к уменьшению продолжительности
операции предстартового наддува баков.
На этапе работы ПГС с момента запуска дви-
гателей до старта ракеты производятся операции, глав-
ным образом связанные с обеспечением нормальною запуска
двигателей.
Во время полета ракеты ПГС первой ступени долж-
на регулировать тягу двигателя и коэффициент соотношения
компонентов топлива, а также регулировать наддув баков путем
стравливания газов наддува из баков через дренажно-предохра-
нительные клапаны в случае 'превышения допустимого давления
наддува или путем увеличения интенсивности наддува при пони-
жении давления -ниже допустимого.
.Агрегаты автоматики ПГС ша этом этапе обычно взаимодей-
ствуют по программе, заложенной в систему управления. После
старта ракеты начинают работать системы регулирования дви-
гателей по тяге и коэффициенту соотношения компонентов топ-
лива, происходит наддув баков из бортовых источников наддува.
Этап разделения ступеней является наиболее от-
ветственным с точки зрения работы ПГС Под разделением сту-
пеней понимается совокупность следующих операций: выключе-
ние двигателя первой ступени, выключение рулевого двигателя
первой ступени (если оп имеется), разрыв связей между ступе-
нями, торможение ускорителя первой ступени и запуск основно-
го двигателя второй ступени.
При разработке (последовательности взаимодействия агрега-
тов ПГС в период разделения ступеней учитываются следующие
требования:
1) необходимо обеспечить неирерывное управление ракетой,
в противном случае вторая ступень ракеты может получить -на-
столько сильные возмущения, что система управления с ними не
справился;
2) необходимо обеспечить положительный коэффициент осе-
вой перегрузки второй ступени (для предотвращения перемеще-
ния жидкости в баках, в результате которого могут возникнуть
большие возмущения в движении второй ступени, и для создания
необходимого напора •компонентов топлива на входе в насосы);
3) не допустить возможность догона ускорителем первой сту-
пени второй ступени -после их разделения; необходимо обеспе-
чить с помощью ПГС уменьшение тяги последействия двигателя
первой ступени Эго требование может быть выполнено ступен-
чатым выключением двигателя, использованием быстродейству-
ющих отсечных клапанов в двигателях и применением продувки
камер сгорания при выключении двигателей Наиболее эффек-
300
пивным способом уменьшения влияния тяги последействия явля-
ется применение тормозных двигателей.
Во время полета второй ступени агрегаты взаимодействуют
по программе, заложенной ® системе управления.
При отделении головной части происходит выклю-
чение двигателей! второй ступени и отделение головной части от
ускорителя второй ступени.
Контрольные вопросы.
I. Для чего предназначаются системы топливоподачи?
2. Какие требования предъявляются к системам топливопо-
дачи?
3 Какие существуют типы системы топливоподачи?
4. Перечислите преимущества и недостатки вытеснительных
систем топливоподачи перед турбонасосными
5. Нарисуйте схему турбонасосной системы топливоподачи и
расскажите принцип ее действия.
6 Какими способами можно получать газ, используемый в
качестве рабочего тела турбины?
7. Какой тип ЖРД называется ЖРД с дожиганием? без
дожигания?
8. Какие преимущества имеет ЖРД о дожиганием перед
ЖРД без дожигания3
9. Какие существуют типы турбонасосных систем топливопо-
дачи?
10. Какие существуют конструктивные схемы ТНА?
11. Расскажите принцип действия центробежного насоса.
12. Что такое кавитация и чем она опасна для насосов ЖРД?
13. Как можно предупредить возникновение кавитации?
14. Какое назначение систем наддува топливных баков?
15. Из каких элементов состоит система наддува баков?
16- Какие требования предъявляются к системам наддува ба-
ков?
17. Какие существуют типы систем наддува баков?
18. Нарисуйте схему наддува бака с газовым аккумулятором
давления и расскажите принцип ес действия.
19. Как осуществляется наддув баков встречным потоком воз-
духа?
20. Каковы особенности систем наддува баков с ПАД?
21. Нарисуйсе и расскажите особенности газогенераторной
системы 1паддува баков.
22 Расскажите принцип действия испарительной системы над-
дува баков.
23. Как действует система -наддува с впрыском реагента в
топливный бак?
24. Расскажите последовательность срабатывания элементов
пге
301
Глава XVII
АГРЕГАТЫ И АРМАТУРА ПНЕВМОГИДРАВЛИЧЕСКОЙ
СИСТЕМЫ РАКЕТЫ
К агрегатам и арматуре пневмогидравлической системы
(ПГС) (ракеты относятся аккумуляторы давления (газогенерато
ры), редукторы давления и регуляторы давления, электропневмо-
клаианы, заправочно-сливные -клапаны, дренажно-предохрани-
тельные клапаны, дроссельные шайбы, обратные клапаны, отсеч-
ные клапаны, мембраны, вентили, трубопроводы и т. п.
Выбор агрегатов и арматуры пневмогидравлической -системы,
их количества и конструкции зависит от назначения п тяги дви-
гателей, компонентов топлива, типа систем -маддува и топливо-
подачи и других факторов. Во всех случаях стремятся к тому,
чтобы для увеличения безопасности и -надежности работы ПГС
количество се механических устройств таких, как клапаны, ре-
ле и трубопроводы, было сведено к минимуму.
Рассмотрим некоторые основные типы агрегатов и арматуры
ПГС ракеты.
17.1. АККУМУЛЯТОРЫ ДАВЛЕНИЯ (ГАЗОГЕНЕРАТОРЫ!
Аккумулятор давления (АД) является источником газа (ра-
бочего тела), используемого для привода турбин или для вытес-
нения топлива из топливных баков ракеты.
Аккумулятор давления и газогенератор являются однознач-
ными терминами, определяющими один и тот же агрегат. Термин
«аккумулятор давления» применяется в тех случаях, когда газ
используется для вытеснения топлива. Термин «газогенератор»
применяется к источнику газа, который является рабочим ге.том
для турбины.
К аккумуляторам давления (газогенераторам) предъявляют-
ся следующие сановные требования:
1) высокая экономичность;
2) малые габариты и масса;
3) удобство регулирования количества вырабатываемого га-
за в широком диапазоне;
4) отсутствие пли малое содержание в газе коидансировап
•ных частиц,
5) высокая надежность и безопасность эксплуатации
В зависимости от конкретных схем систем наддува и топли-
воподачи к аккумуляторам давления могут предъявляться и дру-
гие специфические требования.
В ЖРД в ‘настоящее время нашли применение следующие
типы АД:
1) пороховой (твердотопливный) аккумулятор давления
(ПАД);
302
2) двухкомлонентиый жидкостный аккумулятор давления
(двухкомпонентный ЖАД);
3) испарительный жидкостный аккумулятор давления (испа-
рительный ЖАД);
4) газовый аккумулятор давления (ГАД)
Первые три типа аккумуляторов давления вырабатывают газ
непрерывно во время работы двигательной установки. В газовом
аккумуляторе газ запасен заранее в специальной емкости, отку-
да он расходуется по мере надобности.
Рис. 17.1. Пороховой аккумулятор давления:
/—корпус; 2—воспламенитель; 3—пружина; 4—заряд- 5—'гай-
ка; 6—шайба; 7—прокладка: В—диафрагма; S—гайка; 10—
СОПЛО; if—’шайба; 12—крышка
Пороховые аккумуляторы давления обеспечивают только од-
нократный запуск двигательной установки. Остальные типы ак-
кумуляторов давления мо!ут обеспечить многократный запуск
двигательной установки.
Пороховой аккумулятор давления. Источником газа, выраба-
тываемого в пороховом аккумуляторе давления, является заряд
твердого топлива (пороха). Конструктивная схема ПАДа при-
ведена на рис. 17.1.
Для газогенерации могут использоваться только медленно
горящие пороха.
Эта система генерирования газов отличается конструктивной
простотой и легкостью запуска; весь запас топлива и 'Воспламе-
нитель находятся в этом случае в баллоне высокого давления,,
являющемся корпусом ПАДа. Однако ПАДы обладают значи-
тельной массой и часто бывают более громоздкими по сравне-
нию с другими типами аккумуляторов давления. Кроме того, в
ПАДах конструктивно сложнее обеспечить регулирование коли-
чества вырабатываемого газа.
Наиболее часто ПАД 'применяется для вытеснения топлива
из баков в вытеснительных системах подачи, стартового надду-
ва свободного объема топливных баков, стартовой раскрутки
ТНА систем топливоподачи и для создания пускового факела в
камерах егцрапия -и газогенераторах, работающих ма несамо-
воспламеняющихся компонентах топлива.
303
Двухкомпонентный ЖАД. В двухкомпонептных газогенера-
торах обычно используются окислитель и горючее, на которых
работает основная камера двигателя. По принципу действия
двухкомпонентный ЖАД аналогичен камере сгорания ЖРД.
Однако продукты сгораиия топлива ЖРД имеют очень высо-
кую температуру, 'которая совершенно неприемлема для системы
наддува и турбины. Для обеспечения заданной температуры га-
за на выходе из газогенератора прибегают к балластировке
продуктов сгорания одним из компонентов топлива. I Иными сло-
вами, процесс торения топлива в двухкомпонентном ЖАДе про-
текает при таких значениях коэффициента -избытка окислителя,
Рис. 172 Схемы двухкомпонентных газогенераторов-
и~однозонный газогенератор; б—деухзонный газогенератор; I—смесительная
ловка 2—тракт охлаждения; 3—коллектор, 4—испарительная гмОвка. Л—1
при которых обеспечивается заданная температура таза на вы-
ходе из газогенератора. Соответственно процесс в газогенерато-
ре может идти при избытке или недостатке горючего. При из-
бытке горючего на выходе из газогенератора получается таз с
восстановительными свойствами, переобогащениый горючим. При
недостатке горючего на выходе из газогенератора получается
газ с избыточным количеством кислорода и соответственно с
окислительными свойствами.
Выбор восстановительного или окислительного газа опреде-
ляется конкретными, задачами, решаемыми при проектировании
ракеты.
Существуют две конструктивные схемы двухкомпонентных га-
зогенераторов: однозонный и двухзониый газогенератор.
Наиболее простым типом является однозонпый газогенератор,
у которого весь расход компонентов газогенерации вводится в
одном поперечном сечении через смесительную головку (рис.
17.2, а). Недостатком такого газогенератора является сложность
обеспечения устойчивого горения, которое протекает в условиях
относительно низких температур, и высокая расходонапряжен-
ность головки газогенератора.
Более перспективным является двухэоиный газогенератор
{см. рис. 17,2, б). В этом газогенераторе ввод компонентов топ-
лива ‘производится через смесительную головку 1, обеспечиваю-
щую генерацию высокотемпературного газа, и испарительную
304
Рнс. 17 3. Двухтонный । азогенератор,
работающий на двухкомпонептпом топ-
ливе.
головку 4, обеспечивающую подачу в газогенератор избыточного
компонента газогенерации и смешение его с высокотемператур-
ным газом. По конструкции и условиям работы смесительная го-
ловка аналогична головке -камеры сгорания ЖРД. Назначение
испарительной головки — подача в газогенератор компонентов
топлива, нс 'Прошедших через смесительную толовку, равномер-
ное перемешивание этого топлива с продуктами сгорания, иду-
щими от смесительной
головки, и обеспечение
испарения и разложения
избыточного ком понеп га.
Соответственно внутрен-
ний объем таких 1азоге-
нсраторов делится на две
зоны: зону горения, где
происходит высокотемпе-
ратурное сгорание топли-
ва, и зону испарения, где
происходит испарепие и
термическое разложение
избыточного компонента
топлива при одновремен-
ном снижении темпера-
туры газа и выравнива-
нии поля температур га-
зового потока.
Двухзонный газогене-
ратор, несмотря на боль-
шую конструктивную
сложность предпочти-
тельнее, так как он по-
зволяет:
а) иметь в газогенера-
торе стабильный, высоко-
температурный очаг пламени (зона горения),
б) наиболее эффективно организовать ввод избыточного 'ком-
понента топлива, обеспечивая минимальный объем зоны испаре-
ния и равномерное поле температур по сечению газогенератора;
в) подобрать такой объем зоны испарения, гари котором па-
раметры газа на выходе из газогенератора будут оптимальными.
На рис. 17.3 показан двухзонный газогенератор двигателя
RZ-2, работающий на основных компонентах топлива.
Газогенератор состоит из корпуса 12, внутрнцней камеры 10,
инжектора горючего 1 и смесительной головки 9.
В газогенераторе происходит сгорание обогащенной горю-
чим смеси. Обогащение смеси позволило получить перед турби-
ной приемлемую величину температуры 'продмктов сгорания
(650° С).
имя контрольно мерительных приборов; 5—
-тыитьение, 6— _ верстки для запала; 7—от-
верстия для впрыска кислорода. 3—отверстия
для впрыска горючего. S—смесительная го-
ловка 10—внугрелняя камера. Л—центробеж
пая форсунка, ’корпус газогенератора; 13—
ПОЯРО1Г горючего к инжектору, 14—фланец
305
Смесительная головка 9 имеет отверстия, расположенные по
концентрическим окружностям. Через отверстия трех наружных
поясов 8 поступает примерно 90% сгорающего в газогенераторе
керосина. Остальная доля 'керосина (10%), впрыскиваемая через
инжектор 1 с центробежной форсункой 11, способствует пони-
жению температуры продуктов сгорания. Жидкий кислород вхо
дит через отверстия внутренних поясов 7, а также вместе с го-
рючим через отверстия смежного пояса.
Воспламенение в газогенераторе происходит от пиротехниче-
ских запалов, ввертываемых в отверстия 6.
Внутренняя камера 10 обеспечивает хорошее перемешивание
топлива в газогенераторе. Поэтому в продуктах сгорания не воз-
никает местных зон с более высокими температурами, которые
могли бы способствовать разрушению лопаток турбины.
Газовый аккумулятор давления является наиболее простым
типом АД — это баллон высокого давления со сжатым газом
(воздухом, азотом, гелием и т. п.).
Находящиеся под давлением емкости, применяемые в раке-
тах, должны работать в условиях высоких напряжений для
уменьшения их массы. Уменьшение массы достигается путем
придания баллонам соответствующей формы и применением ма-
териалов с высокой удельной прочностью Наименьшую массу
при заданном объеме имеют баллоны в виде шара, поэтому они
получили ‘наибольшее распространение. Иногда из-за условий
компановки ракеты применяют баллоны в виде тора, хотя их ве-
совые характеристики несколько хуже
Баллоны высокого Давления изготавливают из высоколегиро-
ванных сталей или из титановых сплавов. Наиболее легкими по-
лучаются баллоны из титановых сплавов, но они несколько
сложнее в производстве.
Вес газового аккумулятора давления сильно зависит от рабо-
чею тела. Наиболее тяжелыми являются воздушные аккумуля-
юры дав гс’.тия, а наиболее легкими—гелиевые.
17.2. РЕДУКТОРЫ ДАВЛЕНИЯ Н РЕГУЛЯТОРЫ ДАВЛЕНИЯ
Редукторы давления предназначены для понижения и поддер-
жания на заданном уровне давления сжатого газа, поступающе-
го из баллонов в •пневмосистему. Настройка редуктора большей
частью бывает постоянной и не изменяется во время работы дви-
гателя
Схемы редукторов с постоянной настройкой показаны на рис
17.4. Редуктор состоит из регулирующего органа—клапана 7 и
чувствительного элемента—мебраны 4. Мембрана 4 вместе с
пружинами 2 и 8 служит для создания силы, необходимой для
подъема (клапана 7, с которым она связана шгоком 6.
Принцип работы редуктора, показанного на рис 17.4, а, сво-
дится । следующему. Г аз под высоким давлением рих входит че-
306
рез канал 1, проходит под клапаном 7, где происходит его дрос-
селирование (уменьшение давления), и выходит с пониженным
давлением рВЬ|Х
Величина понижения давления в (редукторе определяется сте-
пенью открытия клапана 7. Чем больше клапан отошел от сед-
ла, тем меньше будет перепад давлений. Клапан в процессе ра-
боты редуктора 'перемещается под действием приложенных к не-
му сил. Пружина 2 и сила давления входящего газа на клапан
Рис. 174 Схемы редукюров.
7 стремятся открыть клапан, а на мембране из-за давления газа
Риых возникает сила, стремящаяся закрыть клапан. В результате
устанавливается (равновесие сил, при котором клапан будет под-
нят на некоторую высоту, соответствующую заданному давле-
нию в полости 5. Величину давления рвых устанавливают с по-
мощью регулировочного винта 5, изменяя натяжение пружи-
ны 2.
В рассмотренном редукторе высокое давление способствует
открытию клапана. Такие редукторы ‘называются редукторами
прямого действия; в редукторе обратного действия (см. рис,
17 4, 6) высокое давление стремится прижать клапан к седлу
В качестве чувствительного элемента вместо мембраны мо-
жет применяться сильфом или поршень.
В системах топливоподачи ?КРД в основном применяются ре-
дукторы обратного действия из-за того, что в случае поломки за-
307
мыкающей пружины 8 нет опасности резкого повышения давле-
ния на выходе из редуктора. В редукторе прямого действия для
устранения этого -недостатка отказываются от замыкающей пру-
жины, соединяя клапан жестко со штоком или устанавливая под
клапан поршень, на который действует давление газа.
Регуляторы давления служат для поддержания заданного
давления 'в газовой подушке топливного бака в определенных
пределах.
Рис. 17.5 Схема регулятора давления прямого
действия
!—входной канал rasa наддува в регу литер со сто
роны газогенератора или баллона; 2—выходной ка-
Рис 176 Схема двухлози-
регулятор со стороны газовой подуикн.
ЦНОН1ЮГО
регул». • а давле-
ния (реле Д| лепия)-
По принципу действия и конструктивному исполнению регу
ляторы давления подразделяются на две группы:
1) регуляторы давления с регулируемым проходным сече-
нием;
2) двухпозициоппые регуляторы давления (реле давления)
Регуляторы давления с регулируемым проходным сечением.
На рис. 17 5 показана схема pei-улятора, который может быть
применен для грубого регулирования давления. Газ наддува из
газогенератора или баллона со сжатым газом входит в регуля-
тор через канал 1, а выходит в бак — через капал 2. Клапан 6
удерживается в закрытом состоянии усилием пружины 4 и дав-
лением таза в подушке, поступающим в редуктсф через канал 5.
Можно видеть, что баланс сил, действующих на клапан 6.
описывается уравнением
itdl / л£% — nD? \ / nDl \
—+ A.n (--------1----)== A.n (—J kFl(ll+F,p,
где pBx — входное давление газа наддува,
Pre — давление в газовой подушке (регулируемая вели-
чина);
308
F-щ, — усилие пружины;
F?p—сопротивление трения деталей в редукторе давления.
Редуктор давления работает следующим образом Как толь-
ко в баке 'начинается расход компонента, сразу уменьшается
давление ® газовой подушке ргп. Сила давления иа -клапан 6 со
стороны 'пружины уменьшается, и под действием силы входного
давления газа наддува клапан огкрывается, и газ наддува посту-
пает в бак. Газ -наддува будет поступать до тех пор, пока давле-
ние рт.ц не достигнет такой величины, при которой клапан 6 за-
крывается.
Двухпозиционный регулятор давления. У этого типа регуля-
торов исполнительный механизм не занимает промежуточного
положения в за-висимости от величины регулируемого давления
а устанавливается только в крайние положения, соответствую-
щие либо полному расходу, либо полному отсутствию расхода
газа через регулятор.
Схема двухпозициоиного регулятора давления показана на
рис. 17.6 Он состоит из приемника давления и быстродействую-
щего включателя. Чувствительным элементом, воспринимающим
давление, служит мембрана 7, прижатая по периметру основа-
нием приемника давления 9 к корпусу 2. Под действием посту
лающего под мембрану давления (когда оно достигнет заданной
величины) она прогибается вверх и перемещает шток 6, кото-
рый действует на пластину 5 Пластина 3 поднимается, контакт
5 соприкасается с неподвижным контактом 4, замыкая электри-
ческую цепь При снижении давления мембрана 7 и шток б
опускаются, контакты 5 и 4 -размыкаются. Замыкание или раз-
мыкание электрической цепи вызывает срабатывание соответст-
вующих агрегатов автоматики, включающих подачу газа, чем
поддерживается заданная величина давления
17,3. АРМАТУРА ПНЕВМОГИДРАВЛИЧЕСКОЙ СИСТЕМЫ РАКЕТЫ
В пневмогидравлической системе ракеты имеются клапаны
различного назначения. Клапаны служат для закрытия и откры-
тия подачи газа, для открытия "И прекращения подачи компонен-
тов топлива в камеру или газш енератор, для перепуска, дрена-
жа и для других целей Усилия, иеобходимые для открытия или
закрытия клапанов, могут быть созданы разными способами: с
помощью электромагнита, давлением сжатого газа, давлением
тазов, образовавшихся в результате сгорания.
Электропневмоклапаны (ЭПК). Усилия, необходимые для
открытия или закрытия ЭПК, создаются электромагнитами. Од-
но из основных требований, предъя'вляемых к ЭПК, состоит в
том, чтобы в них не применялись мнимые электромагниты и
пружины.
309
Несмотря на то, что в ракетах применяются ЭПК разнооб-
разных конструкций, все они .могут быть разделены на две
группы: ЭПК низкого давления и ЭПК высокого давления.
ЭПК низкого давления («рис. 17.7) состоит из якоря 3, элект-
ромагнита 4, штока 5, верхнего клапана 6, уплотнительною
Рис 177. Схема ЭПК низкого
давления:
Рис. 17.8 Схема ЭПК высо-
кого давления
кольца 7, нижнего клапана 9 с уплотнительным кольцом /, пру-
жины 11, входного штуцера 10 и выходного штуцера 2. Верхний
и нижний клапаны жестко соединены штоком 8.
При обесточенном электромагните газ находится под клапа-
ном 9, обеспечивая совместно с пружиной 11 поджатие клапана
уплотнительным кольцом 1 к седлу корпуса. Ввиду этого газ не
может поступить к выходному штуцеру 2,
При подаче электрического тока =на обмотку электромагнита
якорь 3 притягивается к нему и чедеез шток 5 заставляет пере-
меститься вниз клапан 6 .до упора уплотнительным кольцом 7 в
верхнее седло корпуса. При этом •ни'ягний клапан 9 под действи-
ем штока 8 опустится вниз. Через образовавшийся .кольцевой за-
310
зор газ выходит через штуцер 2 к потребителю. Таким образом,
в ЭПК данной конструкции якорь преодолевает давление газа,
действующее на рабочий клапан.
В ЭПК высокого давления такая конструкция потребовала
бы лрнмсиеиия мощного электромагнита. В связи с этим в таких
ЭПК 'используется конструкция с разгрузочным клапаном (рис.
17.8) При обесточенном электромагните 4 разгрузочный кла-
пан 6 иод действием -пружины 7 прижимается к седлу корпуса.
Газ высокою давления по каналу 2 проходит в полость разгру-
зочного клапана и затем по каналу 8 - в полость С рабочего
клапана. Рабочий -клапан 10 уплотнительным кольцом 11 плотно
прижимается -к седлу, препятствуя прохождению газа в выход-
ной штуцер 12.
При срабатывании электромагнита шток 5 переместит раз-
1 рузочный клапан 6 вниз, который своим хвостявиком перекроет
канал 2. Газ, находившийся в полости С рабочего клапана, че-
рез канал 8 и зазор между разгрузочным клапаном и его сед-
лом стравливается в окружающую среду (стрелка «дренаж»)
Газ высокого давления, воздействуя :на выступающие бурты кла-
пана 10, преодолевает сопротивление пружины 9. Клапан 10
поднимается вверх и через образовавшийся зазор газ из штуце-
ра 1 поступает в Штуцер 12
Таким образом, в данном клапане усилие электромагнита ис-
пользуется только для юю, чтобы переместить разгрузочный
клалаи
Заправочно-сливные клапаны (ЗСК) служат для заправки
через них компонентов топлива в бак и слива их в случае пе-
состоявшегося пуска. На рис 17 9 приведена атригщиниаль'ная
схема ЗСК, который работает следующим образом.
При заправке топливного бака жидкость из заправочных уст-
ройств под давлением поступает к клапану 6 и открывает его
311
Через образовавшуюся щель между уплотнительным 'кольцом 8
и седлом 7 компонент топлива поступает в бак. По окончании
заправки давление перед клапаном 6 падает, усилием пружины
5 и гидростатическим давлением столба жидкости клапан при-
жимается к седлу. Таким образом, -открытие клапана происхо-
дит автоматически под действием давления жидкости.
Для слива жидкости из бака клапан 6 открывается принуди-
тельно. Для этого ъ полость Б рабочего цилиндра 2 подается уп-
равляющий газ, под действием давления которого поршень 1 и
соединенный с ним клапан 6 перемещаются влево. Через обра-
зовавшуюся между клапаном и седлом щель компонент топлива
сливается в наземную емкость. По окончании слива газ из рабо-
чего цилиндра стравливается, и клапан пружиной 5 прижима-
ется к седлу 7.
Дренажно-предохранительный клапан. При заправке компо
пептон топлива в баки необходим 'клапан, сообщающий бак с ат-
мосферой, через который М01ла бы стравливаться за борт раке-
ты часть газов по мере их вытеснения топливом. Такой клапан
называется дренажным и располагается обычно в верхней части
бака.
Дренаж осуществляют и при сливе компонентов топлива во
избежание образования ваккума в баке, что может привести к
его разрушению 'внешним атмосферным давлением воздуха.
Перед заправкой или сливом компонентов топлива дренаж-
ный клапан открывается автоматически давлением управляю-
щего газа.
Давление в газовой подушке по различным причинам (запаз-
дывание срабатывания регулятора давления из-за его инерци-
онности, нагрев газа в тазовой подушке за счет тепла солнечной
радиации, самопроизвольное разложение компонента топлива и
т. л ) может достигать величин, при которых топливный бак раз
рушится. В связи с этим при достижении определенного давле-
ния, выбранного из условия прочности бака ракеты, должен сра-
батывать так .называемый предохранительный клапан, стравли-
вающий избыточное давление газа 'наддува за борт ракеты.
Очень часто конструктивно эти оба клапана объединяют в
один дренажно-предохранительный клапан (ДПК). Схема ДПК
приведена на рис. 17.10. ДПК состоит из корпуса 2, соединен-
ного патрубком 12 с топливным баком, а решеткой 4 — с атмо-
сферой, клапана 7 с уплотнительным кольцом 10, пружины 3.
опоры 6, регулировочного винта §, сильфона 8, рабочего цилин-
дра 9, штока 11 и штуцера 1.
Чтобы открыть клапан во время заправки или слива топлива,
в полость В рабочего цилиндра подается управляющий газ, под
давлением которого сильфон 8 сжимается в продольном направ-
лении, шток 11 воздействует на -клапан 7 и последний отходит
от седла корпуса. В результате этого бак сообщается с атмосфе-
рой. По ок цианин запргпки топливного бака или слива компо-
312
нента топлива из него газ стравливается из полости В, -и клапан
7 под действием усилия пружины 3 садится «а седло корпуса —
бак с атмосферой не сообщается.
Как предохранительный этот клапан работает следующим об-
разом. В момент достижения газом (наддува давления, при кото-
ром усилие на -клапан 7 со стороны бака превысит усилие пру-
жины 3, клапан 7 отходит от седла и -через образовавшийся за-
зор происходит сброс избыточного давления газа. Когда давле-
ние в баке снизится до расчетного, под действием пружины 3
Рис. 1710 Схема дренажно-предохранительного
клапана (ДПК):
•В—полость- /—штуцер 2—корпус; 3—пружина; 4—решет-
ка; 5—регулировочный винт, 6—опора; 7—клапан, S—
сильфон, у—цклиндр. 10—уплотнительное кольцо клала
на, II—шток. 12—патрубок
клапан закрывается. Настройка пружины на заданное давление
осуществляется регулировочным винтом 5.
Дроссельные шайбы (ДШ) служат для регулирования рас-
хода компонентов топлива в трубопроводах -системы топливопо-
дачи. Ставя дроссельную щайбу с большим или меньшим про-
ходным сечением, можно изменять гидравлическое сопротивле-
ние системы, что -соответственно изменяет расход -компонента.
Благодаря постановке дроссельных шайб можно выдержать как
абсолютные величины ipa-схода горючего и окислителя, так и их
соотношение.
Обратные клапаны (ОК) обеспечивают движение жидкости
или таза по трубопроводу только в одном направлении.
На рис 17.11 показал обратный клапан. Тарель клапана 4
давлением 'пружины 6 прижата к седлу -клапана 2.
Под действием давления рабочего тела тарель клапана 4 от-
ходит ют седла 2. Через образовавшийся 'кольцевой зазор жид-
кость (газ) проходит в направлении, показанном стрелками. Об-
ратное движение жидкости или газа невозможно, так как кла-
пан под действием пружины и давления рабочего тела плотно
закрывается.
11 989 313
Отсечные клапаны (ОТК) предназначены для перекрытия
трубопроводов. Обычно отсечные клапаны устанавливаются на
входе компонентов топлива в ЖРД.
Поскольку через отсечные клапаны протекают большие коли-
чества жидкости под высоким давлением, то для привода их в
действие требуются значительные усилия. Усилие, необходимое
.для открытия или закрытия клапана, может быть создано с по-
мощью пневматической или гидравлической системы, электро-
Рис. 17 11 Обратный клапан.
/—входной штуцер; 2—седло, 3—уплотнительное
кольцо 4—тарель 5—-корпус; 6—пружина, 7—направ-
ляющая- S—крышка; S—прокладка; /0—ШТОК; И—вы-
магнита или пиропатрона. В последнем случае отсечной клапан
называется пироклапаном.
В настоящее время на двигателях одноразового действия все
чаще применяются пироклапаны (рис. 17.12). Пироклапан сос-
тоит из клапана 2 и пиропатрона, ввертываемого в штуцер 6 (на
рисунке пиропатрон не показан). Воспламенение заряда пиро-
патрона производится электрическим током. При срабатывании
пиропатрона пороховые газы прорывают мембрану 5 и давят на
хвостовик клапана 2. Под давлением газа штифт 4 срезается,
клапан перемещается вперед и заклинивается в седле 1, плотно
перекрывая гцроходное сечение.
Мембраны являются весьма простыми и относительно легки
ми заппрными органами в системах топливоподачи одноразового
действия. Мембраны устанавливаются ъ трубопроводах и отделя-
ют, например, пусковое топливо от основного, полость, заполнен-
ную топливом, от полости ТНА и т. п. Мембраны обеспечивают
надежное уплотнение.
Мембраны бывают свободного или принудительного прорыва.
На рис. 17.13 показана мембрана свободного прорыва с кольце-
314
Рис. 17 12. Отсечной пироклапан:
Рис. 17.13. Мембрана свободного про[ ва
315.
вым ослаблением сечения в ваде насечки. При достижении за-
данного давления -в трубопроводе мембрана рвется по этой на-
Рис 1714 Мембранный клапан;
4—штуцер, S—диафрагма;
.?—крыш
6—штифт;
за, поступающего по штуцеру 4 в
сечке, ее лепесток отги-
бается и открывает проход
для жидкости.
Если прорыв мембраны
надо фиксировать не по дав-
лению, а по времени, то
применяется принудитель-
ный разрыв, В мембранных
запорных устройствах при-
нудительного прорыва раз-
рыв мембраны производит-
ся с помощью специального
ножевого устройства или
подрывного пиропатрона.
На рис. 17.14 показан
пример мембранного клапа-
на принудительного проры-
ва. Клапан срабатывает от
давления управляющего га-
полостъ над диафрагмой 5,
которая под давлением газа прогибается и заставляет передви-
гаться нож 7. Нож 7 срезает штифты 6 и прорезает мембрану 8
по заданному периметру. Давлением компонента топлива мем-
брана отгибается и открывает доступ компонента к двигателю
Контрольные вопросы
1. Назначение аккумуляторов давления (газогенераторов)
2. Требования, предъявляемые к аккумуляторам давления
(газогенератдра м).
3. Типы аккумуляторов давления, применяемых в ЖРД.
4. Расскажите устройство ПАД.
5. Конструктианые схемы двужкомпонеитных ЖАД.
6. Нарисуйте схему и расскажите принцип действия однозон-
ного газогенератора; двухзонного газогенератора.
7. Принцип действия газового аккумулятора давления
8. Для чего предназначаются и каков принцип действия ре-
дукторов давления?
9. Для чего служат регуляторы давления?
10. На какие группы делятся регуляторы давления?
11. Нарисуйте схему и расскажите принцип действия регу-
лятора давления с регулируемым проходным сечением.
12. Как действует двухпозиционный регулято|р давления?
13 Нарисуйте схему и расскажите принцип действия ЭПК-
Какие существуют типы ЭПК?
14. Как действует заправочно-сливной клапан?
316
15. Для чет о служат дренажно-предохранительные клапаны?
16. Для чего применяются дроссельные шайбы?
17. Каково назначение обратных клапанов? — отсечных кла-
панов?
18 Для чего служат и как конструктивно выполняются мем •
брапы?
Глава XVIU
СТАРТОВЫЕ КОМПЛЕКСЫ БАЛЛИСТИЧЕСКИХ РАКЕТ
18.1. КЛАССИФИКАЦИЯ И КРАТКАЯ ХАРАКТЕРИСТИКА
СТАРТОВЫХ КОМПЛЕКСОВ
В состав ракетного комплекса входят ракеты, стартовый и
командно-измерительный комплексы.
Стартовый комплекс представляет собой совокупность техно-
логически связанных между собой сооружений, оснащенных спе-
циальным технологическим оборудованием, техническими систе-
мами, средствами связи, дистанционного управления и контроля,
которые обеспечивают хранение, проведение регламентных ра-
бот, подготовку к пуску и запуск ракет.
Классификация стартовых комплексов. Стартовые комплек-
сы могут быть стационарными и подвижными (рис. 18.1).
Стационарные стартовые комплексы в зависимости от места
расположения ракет и специального технологического оборудо
вания по отношению к поверхности Земли могут быть наземны-
ми и шахтными.
Наземный стартовый комплекс размещается на открытых
площадках Основным недостатком наземных стационарных
317
стартовых комплексов является уязвимость ракет, наземного обо-
рудования и обслуживающего персонала при ядерном нападении.
Менее уязвимы при ядерном нападении стартовые комплексы, на-
ходящиеся в шахтах, заглубленных в землю, а также подвижные
стартовые комплексы, размещенные «а транспортных средствах.
Подвижные стартовые комплексы в зависимости от применя-
емого транспорта подразделяются на подводные, надводные,
авиационные, железнодорожные и полевые.
Подводные, 'надводные -и авиационные подвижные стартовые
комплексы размещаются та специально оборудованных подвод-
ных лодках, морских судах и самолетах. Подводные ракетные
комплексы обеспечивают запуск баллистических ракет из-под
воды. Они удачно сочетают положительные тактические свойства
подводных лодок с техническими возможностями ракетно-ядер-
ного оружия и поэтому получили наибольшее распространение.
Подвижный железнодорожный стартовый комплекс включает
в себя стартовые вагоны, предназначенные для размещения пус-
ковых установок и ракет, вагоны специального назначения с ап-
паратурой пусковой, электросиловой и связи, вагоны веномога
тельного назначения и локомотив.
Стартовый комплекс, размещаемый на колесных или гусе-
ничных машинах, обеспечивающих возможность перемещения
ракетных подразделений, проведения подготовки и пуска ракет,
называют полевым.
В этой книге рассматриваются только стационарные старто
вне комплексы.
18.2. СТАЦИОНАРНЫЕ СТАРТОВЫЕ КОМПЛЕКСЫ
Стационарный стартовый комплекс включает в себя старто-
вую и техническую позиции, оснащенные специальным наземным
технологическим и общетехническим оборудованием.
Стартовая позиция представляет собой участок местности с
расположенными на нем пусковыми установками и другими тех-
нологически связанными инженерными сооружениями, коммуни-
кациями, агрегатами и системами, предназначенными для подго-
товки к пуску и запуска ракет.
На стартовой позиции, >кроме пусковых остановок, размеща-
ются командный пункт, сооружения с оборудованием для хра-
пения и заправки ракет компонентами топлива и сжатыми i аза-
ми, .нейтрализационное оборудование, трансформаторная под-
станция и дизель-электростанция, средства пожаротушения,
подъездные пути.
Техническая позиция включает в себя комплекс сооружений с
общетехпическим оборудованием, специальным наземным техно-
логическим оборудованием и земельный участок с подъездными
путями. На технической позиции располагаются: монтажно-ис-
пытательный корпус ракеты; монтажно-испытательный корпус
318
головных частей или космических объектов; заправочная стан
кия; компрессорная станция е ресиверной, электросиловая и
трансформаторная подстанции; служебные здания.
Под специальным наземным технологическим оборудованием
понимают совокупность различных агрегатов, механизмов и ин-
женерных сооружений, предназначенных для проведения paooi
с ракетой при подготовке ее к пуску и для производства '-пуска.
Общетехническое оборудование включает электросиловое,
осветительное, отопительное, •вептялящгошпое и противопожарное
оборудование, системы герметизации и газоаиализа помещений,
связи, водоснабжения, промышленных стоков, лифты, а также
системы дистанционного и автоматического управления
Рассмотрим стационарные наземные и шахтные стартовые
комплексы, предназначенные для запуска ракет-тюсителей и бое-
вых ракет. На рис. 18.2 показал космодром, предназначенный
для запуска ракет-носителей.
Космодром представляет собой участок местности о располо-
жеиным ага нем сложнейшим комплексом сооружений и обору-
дования На (космодроме производятся сборка, -подготовка и пуск
ракот-поситедей с космич»-. . гчги объектами, траекторные изме-
319
рения их полета, подача команд, п]рием и обработка поступаю-
щей телеметрической информации.
Главными объектами космодрома являются техническая по-
зиция (ем. рис. 18.2 Г), стартовая позиция с несколькими пуско-
Рис 18.3. Схема стартовой позиции баллистической ракеты «Тор»
тележка для перевозки головной
-прицеп с элекгрнче-
кии кислородом 9—автоприцеп с баллонами азота я подачи жидкого кислорода;
IV—трубопровод жидкого кисл<»н>да, II—пусковой стол; 12- кабель-мачта с плевмо-
и алектрокоммуникациями IS— ..пластическая ракета «Тор» ни песковом сп..,
/6'—трубопровод
17—барьер
пневматической сипам, 19—автоцистерна с жидким хютом- 20—авт । .прицеп с балло
памп азота для иодачи горючего, 21—пр» « ксоры и громкоговорители, 22-^гранспор-
тер-уст0пОвщнк
выми площадками (см. рис. 18.2 А, Б, В) и К'омандмо-из'иери-
телывый комплекс. Каждый объект представляет собой сложный
комплекс оборудования, а также инженерных сооружений для
размещения эюго оборудования и обеспечения пессходимых ус-
ловий его эксплуатации^
Кроме того, на к<кмодроме имеются вспомо! ательяые и обс-
луживающие -объекты и системы система энергоснабжения; жи-
лой городок со штабом, службами управления, учебным центром
и комплексом бытовых учреждении; ремонтная база и склад-
ское хозяйство, аэродром, подъездные пути и транспортные ком-
муникации, включая и железнодорожный узел.
В качестве примера наземной стартовой позиции на рис. 18 3
представлена стартовая позиция ракегы «Тор».
Рис. !®.4 Схема стартовой позиции баллистической ракеты
«Минитмен»:
рддемный бункер для вспомогителыгого оборудования
леиня /—ракета, 2—помещение для стартового обору
дования. 3—i-рышка uiaxiu. 4—люк.
ыещеппс 6—пост управления 7— под.
помещение для вборудо-
Пусковой стол И, с которого осуществляется пуск ракеты /3,
устанавливается в центре стартовой позиции па бетонированной
площадке. Пусковой стол состоит из двух частей-, нижнего осно-
вания, закрепленного на бетонированной площадке, и шарнирно
подвешенной откидной верхней части. На откидной части укреп-
лены опоры с установочными втулками для соединения ее с ра-
ке! ой. Смснтнроваиные на пусковом столе гидроприводы обеспе-
чивают выравнивание и поворачивание его верхней части в гори-
зонтальной плоскости. Это позволяет придавать ракете после ее
установки на стол строго вертикальное положение и точное нап-
равление по азимуту.
Шахтные стартовые комплексы представляют собой железо-
бетонные сооружения, соединенные между собой подземными
туннелями. Для защиты от ударной волны при ядерном взрыве
все выходы -на поверхность закрыты мощными -крышками; раке-
ты и вспомогательное оборудование в этих сооружениях подве-
шены па амортизирующих устройствах.
32.
На рис. 18.4 показан шахтный -стартовый комплекс ракеты
«Минитмен».
Твердотопливные баллистические ракеты «Минитмен» уста-
навливаются для длительного хранения и запуска в подземные
пусковые шахты (-см. рис. 18.4, а).
Аппаратура и оборудование стартовой позиция размещаются
в оголовке шахты 2 и в удаленном от нее на расстояние 15 м
подземном бункере (см. рис 18 4, б).
Оголовок шахты представляет собой двухэтажное кольцевое
Рис 185 Схема шахты ракеты
'Минитмен»-
Г—'noBCj? >гкое Кольцо, на котором
установлена ракета. 2-ствол шах
ты 3—дверца люка, обеспечиваю-
-—................... иснользуе
ракеты по
. связанная
устройством
управления.
мэляторпие батареи н о'борудова-
ние для кондиционирования возлу-
хан шах-ты.
помещение, опоясывающее шахтный
ствол В верхней части на аморти-
зированном основании установлена
контрольно-пусковая аппаратура и
оптические приборы для прицелива-
ния В нижней части размещены ре-
зервные батареи и оборудование
для кондиционирования воздуха.
Б подземном бункере находятся
резервный дизель-генератор, кото-
рый автоматически включается на
зарядку аккумуляторов при выхоте
из строя промышленной сети пита-
ния, запас топлива для этого агре-
гата, а также установка для конди-
ционирования воздуха.
Пункт управления представляет
собой укрепленную позицию (см
рис. 18.4,в), на которой имеются
помещения для жилья, укрытия и
средства жизнеобеспечения, а так-
же оборудование, необходимое дня
дистанционного контроля состояния
стартовых позиций и управления
пуском ракет
Железобетонная шахта (рис.
18.5) имеет глубину 27 м, внутрен-
ний диаметр ствола около 4 м Внх
тренней стенкой шахты является
стальной стакан 11. Ракета 10
в шахте установлена на поворот-
ном кольце /, подвешенном на трех
амортизационных опорах 12
Амортизация ракет и оборудо-
вания предназначена для защиты
их от сотрясений при ядер пом
взрыве
Между корпусом ракеты и обли-
цовкой шахты имеется зазор, обес-
32J
печивагощий проход газам работающего двигателя без вредного
воздействия на ракету.
Сверху шахта закрыта гкрышкой 7. Крышка примерно за 3 с
перед стартом сдвшается по рельсам в сторону, освобождая про-
ход для ракеты В крышке находится люк, через который можно
войти в шахту для ремонта или регламентных работ.
Твердотопливные двигатели очень чувствительны к колебани-
ям температуры, поэтому температура в шахте •поддерживается
около 21° С при максимальной относительной влажности 60%.
В связи с этим шахты и пункты управления запуском с-набжа
ются системой кондиционирования воздуха.
18.3. СПЕЦИАЛЬНОЕ НАЗЕМНОЕ ТЕХНОЛОГИЧЕСКОЕ
ОБОРУДОВАНИЕ
Важную часть стартового комплекса представляет специаль-
ное наземное технологическое оборудование. От его состава, со-
стояния и степени совершенства часто 'полностью зависят успех
п неудача ’пусков, продолжительность предстартовой подготовки
и практическое применение ракет.
В зависимости от назначения специальное наземное техноло-
гическое оборудование подразделяется на следующие основные
группы-.
1) пусковые установки;
2) оборудование для монтажа и транспортировки;
3) заправочное оборудование;
4) контрольно-испытательное оборудование.
Рассмотрим кратко каждую группу специального наземного
гехн ологического оборудования.
Пусковые установки являются основным агрегатом стартово-
ю комплекса. Они обеспечивают: установку и удержание ракеты
в вертикальном положении для пуска; подвод к ней электриче-
ских, заправочных, пневматических, дренажных и других комму-
никаций; пуск ракеты. Некоторые пусковые установки имеют
устройства для азимутального наведения ракеты.
Стационарные пусковые установки в зависимости от назна-
чения ракетных комплексов могут быть выполнены -в виде пус-
ковых систем, пусковых столов и шахтных пусковых установок.
Пусковые установки, предназначенные для пуска ракет-носи-
телей, принято называть тюковыми системами. Конструкции
стационарных пусковых систем очень разнообразны и определя-
ются конструкцией и особенностями ракет Наиболее сложны
конструкции таких систем для ракет пакетного типа.
Пусковые столы по конструкции 'намного проще стационар-
ных пусковых систем. Опорная силовая конструкция пускового
стола выполняется в виде рамы (или кольца), смонтированной
на нескольких опорах (от 3 до 12). Между опорами располага-
ется газоотражатель. В опоры стола часто встраивают подъем-
ные механизмы, которые предназначаются для перемещения ipa-
Рис 18.6. Пусковой стол
баллистической ракеты
конус; 3—поворотной кольцо,
’ 4—нсшывижиое кольцо
мы, что позволяет производить прием ракеты и установку ее в
вертикальное положение. У некоторых пусковых столов имеется
поворотная часть, позволяющая производить наведение ракеты
по азимуту. В рабочем положении пусковой стол закрепляют на
раме, заделанной -в бетонный фундамент стартовой площадки.
На (рис. 18.6 показан простейший пусковой стол, который со-
стоит из 'Поворотного -кольца S и неподвижного кольца 4 Ниж-
нее кольцо 4 опирается на четыре дом-
крата 1 и имеет сверху желоб со сталь-
ными шарами, на которых лежит верх-
нее кольцо Таким образом, оба коль-
ца образуют конструкцию, подобную
упорному шарикоподшипнику. Ракета
устанавливается на специальные опо-
ры верхнею кольца Вместе с ракетой
верхнее кольцо может быть легко по
верпуто па нужный угол при совмеще-
нии плоскости ракеты I—Ш с плос-
костью прицеливания. Кольцо повора-
чивается при помощи специального ме-
ханизма.
Внизу под пусковым столом распо-
ложен отражательный конус 2 Струя
двигателя при пуске ракеты ударяется
об отражательный конус и растекается
из-под стола в стороны.
Оборудование для монтажа и
транспортировки включает в с->бя
контейнеры, краны, установщики ра
кет, транспортеры и различного рода
тележки. Транспортировка полностью
или частично собранных ракет может
производиться любым видом транс-
порта: железнодорожным, автомо-
бильным, воздушным, водным. Ракеты транспортируются в спе-
циальных контейнерах Контейнер перевозится по железной до-
роге на открытой платформе или в вагоне, а также по шоссей-
ным или грунтовым дорогам на специальном транспорте. На море
ракеты перевозятся специальными транспортными судами.
Во время транспортировки контейнер предохраняет ракету от
механических повреждений и защищает от атмосферных осад-
ков. Транспортные контейнеры оснащаются индикаторами влаж-
ности и имеют осушительные патроны. Контейнеры иногда
имеют специальные разъемы для подключения электрических
цепей ракеты к наземным контролыю-пспытатсльным станциям.
Это позволяет проверять исправность работы системы управле-
ния и автоматики ракеты, не нарушая герметизацию контей-
неров.
324
Подъемные краны могут быть различных типов и различной
грузоподъемности. Они обычно используются при сборке и пере-
грузке ракет. Для работы с ракетами, масса которых достигает
десятков тонн, применяются краны большой грузоподъемности,
обеспечивающие плавный подъем и опускание ракеты с различ-
ными скоростями.
Установочное оборудование (установщики) предназначено
для установки ракет на пусковые устройства и для снятия их в
случае несостоявшегося пуска.
Рис 18 7 Схема установщика опорно мачтовой
стрелой:
3—-опорно мачтовая
Транспортно-установочные агрегаты предназначены не толь-
ко для установки ракеты в стартовое положение, но и для дос-
тавки ее «а стартовую позицию.
Конструкция установочного оборудования в значительной
мере зависит от типа стартового комплекса, типа ракеты, спосо-
ба ее установки в стартовое положение и типа пусковой уста-
новки.
Рассмотрим некоторые типовые схемы установщиков
Установщики с опорно-мачтовой стрелой (рис. 18.7). Уста-
новщик пристыковывается к пусковому столу 6 с одной стороны,
а транспортер с ракетой — с другой. При подъеме ракеты стре-
ла 3 установщика служит опорной мачтой канатно-полиспаст-
ной системы 4, приводимой в действие грузовой лебедкой с элек-
тромеханическим или электрогидравлическим 'приводом. Уста-
новка опорно-мачтовой стрелы в вертикальное положение и
удержание ее в этом положении осуществляются одним или дву-
мя гидравлическими домкратами телескопического типа, шар-
нирно закрепленными одними концами за раму 7 установщика,
а другими — за опорно-мачтовую стрелу 3.
Рис 188. Схема полуприцепного установщика с
подъемной стрелой:
идродомкраты ыеха-
Такие установщики позволяют производить операции с тя-
«елыми ракетами при сравнительно малых усилиях, действую-
щих на тросы и силовые элементы грузовой лебедки, ко зато
очень сложны по конструкции и имеют большие габариты и
массу.
Установщики с подъемной стрелой (рис. 18.8) получили наи-
большее распространение. На раме установщика шарнирно
закреплена стрела подъема, на которую укладывают и закрепля-
ют ракету. Подъем ракеты в вертикальное положение произво-
дится совместно со стрелой с помощью телескопических домкра-
тов с гидроприводом. После стыковки ракеты с пусковым
столом стрела отстыковывается и отводится от ракеты на не-
большой угол. Для обслуживания ракеты при подготовке ее к
•пуску используются площадки обслуживания, смонтированные
на стреле. Перед пуском ракеты стрела опускается в горизон-
тальное положение, и установщик отъезжает от щекового стола.
Такие установщики имеют сравнительно небольшой вес и га-
бариты, но при 'их использовании необходимо перегружать раке-
ту с транспортной тележки на установщик.
Установщики с подъемно-направляющей стрелой (рис. 18.9)
предназначены для установки ракет на пусковые установки
шахтного типа. Такой установщик отличается от установщика с
подъемной стрелой лишь «наличием дополнительного механизма
32b
подъема и опускания ракеты 4 и модифицированной стрелой 9.
Стрела служит не только для установки ракеты в вертикальное
положение, но и является направляющей -при опускании ракеты
в шахтную пусковую установку и ее подъеме из шахты.
Рис 189. Схема установщика с подъемно-
направляющей стрелой.
Установщики с подъемной рамой транспортного средства
(рис. 18 10) представляют собой разновидность полустационар-
Ряс 18.10 Схема установщика с подъемной рамой
транспортного средства
/-^тягач, 2—рама транспортной тележки; —гндроподъем-
ных установщиков с подъемной стрелой с той лишь разницей,
что в качестве стрелы используется рама транспортного сред-
ства.
327
Транспортеры-установщики применяются для транспортиров-
ки ракет больших габаритов от технической позиции до старто-
вой и для установки ракет на пусковую установку. На рис. 18.11
показан транспортер-установщик ракеты «Минитмен». Ом состо-
ит из тягача с прицепом 1, контейнера 6 для транспортировки
ракеты и оборудования для установки (ракеты в шахту. При
транспортировке в контейнере поддерживается температура в
пределах 18—36° С и относительная влажность не более 57%.
Оборудование для установки ракеты «Минитмен» в шахты
включает ® себя гидропривод, связанный с двигателем тягача,
два телескопических домкрата <?, подъемник 5 и пульт управле
ния 13.
Ракету из контейнера с помощью транспортера-уста1новщика
опускают в шахту 11 и устанавливают на пусковом столе.
Транспортные тележки предназначаются для перевозки и
временного храпения «а них ракет.
Заправочное оборудование включает в себя специальные аг-
регаты. системы и устройства, обеспечивающие транспортиров-
328
ку, хранение и заправку ракет компонентами топлива и сжаты-
ми газами. Кроме того, с 'помощью заправочного оборудования
производятся слив компонентов топлива из баков ракет, переме-
шивание компонента топлива при хранении, термостатироваиие
а другие операции.
Заправочное оборудование бывает- передвижным или стацио-
нарным.
Передвижное заправочное оборудование в зависимости от
выполняемых функций подразделяется на цистерны, заправочно-
дозирующие станции и заправщики
Цистерны бывают железнодорожные и грунтовые. В них пе-
ревозят и временно хранят компоненты топлива.
Заправочно-дозиру-ющие станции представляют собой пере-
движные средства, снабженные насосной установкой и дозирую-
щими устройствами. Оборудование станций монтируют на шасси
автомобиля.
Передвижные заправщики объединяют в себе грунтовую цис-
терну и оборудование заправочно-дозирующей станции.
Стационарное заправочное оборудование монтируется в спе-
циальных защищенных и полузащищенных долговременных со-
оружениях. Б состав стационарной системы заправки входят ра-
бочие емкости и емкости храпения с необходимой арматурой и
приборами, насосная станция с запорной и распределительной
арматурой, фильтрами и оборудованием для дренажа трубопро-
водов. магистральные трубопроводы -к заправочным -колодцам.
В зависимости от вида заправляемого компонента различа-
ют оборудование для заправки окислителем, горючим, сжатыми
газами и другими компонентами.
По способу подачи компонентов топлива ® баки ракет запра-
вочное оборудование подразделяется на оборудование с насос
пой подачей н оборудование с атодачей выдавливанием
Простейшая заправочная система с насосной подачей состоит
из одной или нескольких емкостей 1 (рис. 18.12, а), -насосной ус-
тановки 2, системы трубопроводов, арматуры, фильтров 5, гиб-
ких шлама ов 6 и наполнительных соединений 7, которыми систе-
ма заправки соединяется с заправочно-сливными -клапанами ра-
кеты
Сисгема заправки выдавливанием компонентов топлива {см
рис 18.12, б) имеет аналогичные элементы, за исключением па
сосных установок. Необходимый напор создается за счет избы-
точного давления газа над поверхностью (компонента топлива в
емкости. Для этого служит источник сжатого газа 8 с регулиру-
ющей аппаратурой 10.
Управление заправкой может быть автоматическим и полу-
автоматическим, дистанционным или с непосредственным ручным
управлением. Современные стационарные заправочные станции
имеют, как правило, автоматическое управление.
329
В ракетной технике широко применяются сжатые газы для
заправки баллонов ракет, проведения пневмоиспытапий, вылав-
ливания компонентов топлива при заправке мт п.
Для получения и хранения сжатых газов, а также проведе
ния с ними (необходимых операций служат компрессорные стан-
ции, азотодобвивающие станции, ресиверные, заправщики сжа-
тыми газами и газификаторы сжиженных газов. Оборудование
для заправки сжатыми газами также выполняется подвижным
или стационарным.
Рис 18.12 Схема систем заправки
Для твердотопливных ракет необходимость в заправочном
оборудовании отпадает.
Контрольно-испытательное оборудование. На современных
ракетах устанавливается большое количество различных по
принципу действия систем. Многие из этих систем функцио-
нально связаны между собой.
Для обеспечения надежности, точности и повышения боего-
товности баллистических ракет необходима их всесторонняя
предстартовая 'проверка. Для этой цели создается контрольно
испытательная аппаратура, которая состоит из специальных
пультов и испытательных станций, подсоединяемых к ракете на
технической и стартовой позициях 'при помощи 'наземной кабель-
ной сети.
Вес используемые в настоящее время за рубежом системы
контроля ракет подразделяются ла три основные категории: не-
ЗЗо
автоматизированные, полуавтоматизированные и автоматизиро-
ванные.
В неавтоматизированных системах для проведения необходи-
мых проверок требуется обязательное участие оператора, ко-
торый контролирует ракету в определенной последовательности
с помощью •контрольно-испытательной аппаратуры. В состав этой
аппаратуры обычно входят контрольно-измерительные приборы
для 'непосредственного измерения физических величин (элект-
ронные вольтметры, ампер-вольтомметры, осциллографы и т. д.),
а также специальные (Контрольно-проверочные приборы и уста-
новки для {регулировки и проверки основных характеристик и
параметров испытываемых систем.
При проведении неавтоматизированного контроля более 50%
всего времени оператор затрачивает на -выполнение различных
операций по управлению средствами -контроля Такой процесс
контроля требует мною времени на проверку, а результаты его
субъективны, так как зависят от опыта и (квалификации опера-
тора
Полуавтоматизированные системы имеют в своем составе,
кроме обычных измерительных и проверочных приборов, средст-
ва контроля, автоматически выполняющие часть операций. Опе-
ратор, производящий контроль, может включить их или выклю-
чить, но не может изменить процесс выполнения определенного
заранее цикла проверок. Применение полуавтоматизированных
систем позволяет значительно сократить время проверки и объ
ем ручных операций контроля, а также повысить объективность
получаемых результатов.
Автоматизированные системы контроля состоят из устройств,
обеспечивающих автоматическое определение (оценку) техниче-
ского состояния проверяемой ракеты.
Весь цикл проверки происходит по заранее подготовленной
программе Роль оператора по существу сводится к выбору ре-
жимов работы системы контроля и режимов работы проверяемой
ракеты.
Автоматизированные системы характеризуются высоким
быстродействием и объективностью проверки.
Ио зарубежным сообщениям, автоматическая система подго-
товки старта должна строиться на базе цифровой вычислитель-
ной машины, работающей по введенной в нее программе
Основными преимуществами применения цифровой -вычисли-
тельной машины являются надежность, высокая оперативная го-
товность, возможность регистрации результатов проверки и эко-
номичность По такой схеме выполнена автоматическая система
контроля для ракет «Минитмен». Бортовая цифровая вычисли-
тельная машина (БЦВМ) системы управления ракеты, помимо
ее основных функций — расчета уравнений -наведения ракеты,
выключения двигателей и (разделения ступеней, выполняет ряд
331
дополнительных функций, связанных с постановкой ракеты на
боевое дежурство и ее проверкой как во время хранения в шах-
те, так и дри подготовке к пуску
18.4. ТЕХНОЛОГИЯ РАБОТЫ С РАКЕТАМИ НА ТЕХНИЧЕСКОЙ
И СТАРТОВОЙ ПОЗИЦИЯХ
С заводов-изготовителей ступени и узлы ракет поступают в
монтажно-ислытательиый корпус (МИК) технической позиции.
Ракеты доставляются обычно по железным или шоссейным доро-
гам с твердым покрытием: используется для доставки ракет так-
же авиация
Все транспортные средства имеют ложементы с захватами и
опоры для крепления ракет
В МИКе производится сборка ракет. Наибольшее распрост-
ранение получил горизонтальный способ сборки. При этом спо-
собе ракета полностью собирается в горизонтальном положении,
к ней Пристыковывается головная часть или космический объект
и в таком положении она проходит автономные и комплексные
испытания всех систем. Затем ракета с помощью кранов и тра-
верс перекладывается па транспортер-установщик и перевозится
на стартовую позицию
Установка ракет на пусковой аол или в шахту осуществля-
ется установщиками. При этом производится вертпкализация и
ориентация гракеты.
После установки, наведения ракеты и подключения к шей
электрических, заправочных, пневматических и других коммуни-
каций производятся проверки с помощью проверочно-пускового
оборудования. При положительных результатах испытаний при-
ступают к заправке ракеты компонентами топлива и сжатыми
газами.
Вес операции предстартовой подготовки фиксируются на
пульте пуска набором транспор антов готовностей После 'набора
готовностей всех систем подается команда на пуск.
При возникновении неисправностей и аварийных ситуаций
происходит сброс схемы пуска и возврат ее элементов в исход-
ное положение. При нееостоявшемся пуске производится слив из
ракеты компонентов топлива, нейтрализация емкостей, снятие
ее с тюкового устройства и транспортировка на техническую
позицию.
В качестве примеров рассмотрим последовательность выпол-
нения работ при подготовке к пуску1 жидкостной баллистической
ракеты «Тор» (наземная стартовая позиция) и твердотопливной
баллистической ракеты «Минитмен» (шахтная стартовая пози-
ция).
Баллистическая ракета «Тор» находится в aniajpe на транс-
портере-установщике в горизонтальном положении. Транспорти-
ровка ракеты к пусковому столу производится на транспортере-
332
установщике (рис. 18.13, а). Откидная часть пускового стола
устанавливается в горизонтальное положение и подсоединяется к
ракете (см. рис. 18.13, б). У транспортера-установщика убира-
ются выдвижные ходовые колеса, и он сцепляется с нижней ча-
стью стола. Затем тягач транспортера-установщика удаляется,
подвозится на тележке головная часть и устанавливается на ра-
кету (см. рис. 18.13, в).
Гидравлический подъемник пускового стола соединяется с
транспортером-установщиком. Присоединяется также кабель-
Рис 1813 Последовательность подготовки ракеты «Тор» к пуску;
та доставлена на стартовую позицию; б—пусковой стол соединяется с раке-
-головная часть y'-’'йнавливается на ракету; г—ракета устанавливается в
мачта для пневмо- и электрокоммуникаций. На этом подготовка
к установке ракеты иа пусковой стол заканчивается.
Затем 'Производятся горизонтальные 'испытания бортовых
систем ракеты. После этого с помощью гидравлического подъем-
ника ракета вместе со стрелой и кабель-мачтой плавно подни-
мается и устанавливается на стол в вертикальное положение
(см. ‘рис. 18.13, г). Установленная ракета освобождается от верх-
них зажимных скоб, связывающих ее со стрелой транспортера-
устачювщика. Стрела опускается вниз (см. рис. 18.13, б). Затем
ракета заправляется топливом. Затрата времени на заправку
ракеты определяет продолжительность подготовки ракеты к пус-
ку, поэтому система трубопроводов ‘смонтировала так, что зап-
равка ракеты может производиться при ее подъеме в вертикаль-
ное 'положение. Топливо хранится в цистернах, расположенных
по обе стороны пусковой установки. Подача горючего и окисли-
теля производится под давлением газообразного азота, который
подается из баллонов, установленных на автоприцепе.
Одновременно с заправкой ракеты топливом производятся
испытания ракеты: 'Проверяется бортовая аппаратура, работа
клапанов системы подачи топлива, работа рулевых машинок и
вообще вся 'система автоматики. Пневмо- и электропитание при
испытании и пуске осуществляется от передвижной электро-
333
станции. По окончании подготовки запускаются двигатели, и
ракета отрывается от пускового стола. При старте ракеты -ка-
бель-мачта отклоняется в сторону, и электрические цепи ракеты
переходят па пптание от бортовых батарей (см. рис. 18.13, е).
Ступени ракеты «Минитмен», отсек управления и головную
часть, содержащую боевой заряд, доставляют на стартовую по-
зицию порознь, последовательно загружают -в шахту и 'произво-
дят сборку.
Ракета в шахте может длительное время «находиться в систо
янии боевой готовности; шахта 'Необитаема. Контроль состояния
стартовой позиции и (ракеты, а также управление пуском осуще-
ствляется дистанционно из пункта управления. Па десять стар-
товых позиций предусмотрен один пункт управления
Пункт управления выполняет следующие функции:
J) контролирует состояние готовности стартовых позиции,
2) реагирует на обнаруженную угрозу безопасности;
3) обнаруживает ненормальные режимы работы комплекса
и принимает соответствующие меры;
4) управляет пуском ракет.
Электронное оборудование ракеты и пусковой установки поз-
воляет производить автоматическую их проверку.
В случае обнаружения неисправности результаты проверки ис
пользуются для устранения отказа. Сначала грубо определяется
место 'неисправности, в бортовом или наземном оборудовании.
Затем определяется неисправный блок или узел, подлежащпп
замене.
Подготовка ракеты к пуску происходит в течение 30 с перед
стартом по командам, поступающим от БЦВМ. Эти операции не
могут быть прерваны вручную и останавливаются только авто-
матически при обнаружении неисправности. Во время подготов-
ки к пуску проверяется работа от бортовых источников тока в^сх
устройств, действующих в полете. При отсутствии неисправно-
стей БЦВМ выдает ‘команду на запуск двигателей первой ступе-
ни, после чего БЦВМ и другие устройства переходят на полет-
ный режим работы.
Контрольные вопросы
1 Назовите типы стартовых комплексов
2. Каково назначение технической и стартовой позиций?
3. Расскажите устройство наземной стартовой позиции
4 Как устроена шахтная Стартовая позиция?
5. На какие группы подразделяется специальное наземное
технологическое оборудование ракет?
6. Как конструктивно устроен пусковой стол?
7. Как производится транспортировка (ракет?
334
8. Как производится подъем и установка ракет на пусковой
стол?
9. Какие существуют типы установщиков?
10. Как осуществляется заправка жидкостных ракет?
11. Для чего предназначается контрольно-испытательное
оборудование?
12. Какие цели преследует автоматизация стартовых комп-
лексов баллистических ракет?
13. Какова последовательность операций при подготовке к
пуску (ракеты с наземной стартовой позиции?
14. Расскажите технологию работ три пуске ракеты из
шахты.
ПРИЛОЖЕНИЯ
Приложение 1
ПОНЯТИЕ О СТАНДАРТИЗАЦИИ РАКЕТНОЙ ТЕХНИКИ
Современное развитие пауки и техники характеризуется постоянным появ-
лением новых, бол«х совершенных образцов ракетно-космической техники
Растет количество изделий, усложняется их производство. Дальнейшее по-
вышение технического уровня ракетной техники не может быть осуществлено
без широкого применения стандартпзации и унификации
Стандартизация ракетной техники что установление соответствующих
современному уровню развития пауки и техники оптимальных норы, показа-
телей, требований, правил, понятий, методов и т п, предназначенных для ис-
пользования при проектировании, производстве, испытаниях, приемке, ремон-
те, эксплуатации и хранении ракетной техники.
Основными целями стандартизации ракетной техники являются-
а) обеспечение постоянной боевой гптовноеги ракет, повышение их надеж-
ности, увеличение сроков службы, сохраняемое! я и периодичности обслужива
ния, сокращение времени на обслуживание, упрощение условий эксплуатации
и ремонта;
б) развитие специализации промышленных предприятий,
в) сокращение сроков и затрат на разработку и производство ракетной
техники,
г) создание и совершенствование системы обеспечения единства мер в
достоверности измерений.
Унификация — одна из разновидностей стандартизации Она означает
применение ранее изготовленных и отработанных систем и узлов в конструк-
ции вновь создаваемых машин
Достижение указанных целей может быть осуществлено путем решения
следующих основных задач:
1) создание и применение в конструкциях ракет стандартизованных и уни-
фицированных коыплек1ующих агрегатов, узлов, деталей, материалов и сырья,
обеспечивающих повышение уровня взаимозаменяемости, сокращение номен-
клатуры и типоразмеров ракет;
2) установление технических требований, норм, методов и правил проек-
тирования, изготовления и испытаний ракетпой техники опытного и серийно! л
производства, а также требований к их упаковке, маркировке, транспортире
нашло и храпению,
3) разработка и внедрение стандартов технических условий на произвол
ство ракетной техники;
4) разработка общих норм и требований по обеспечению условий безопас-
ности и удобства работы при эксплуатации, обслуживании и ремонте ракет
ной техники,
5) создание и совершенствование единых систем конструкторской, техно
логической, Эксплуатационной, ремонтной и других видов документации,
6) установление единых терминов, обозначений и величин,
/) стандартизация и унификация испытательных средств и оборудования
Наибольший технико-экономический эффект дает комплексная стандарти-
зация, проводимая по единым плацам разработчиками всех систем, агрегатов
и узлов, входящих в состав ракеты
Работы по стандартизации и унификации ракет, агрегатов, узлов и дета
лей, блоков и других элементов должны осуществляться, начиная с этапов
проведения научно-исследовательских и опытно-копструкторспих работ впятит
до введения ракетных комплексов в эксплуатацию
336
ОСНОВНЫЕ ТАКТИКО-ТЕХНИЧЕСКИЕ ДАННЫЕ БАЛЛИСТИЧЕСКИХ
РАКЕТ КАПИТАЛИСТИЧЕСКИХ ГОСУДАРСТВ
Наименование Е, и Заряд 1 - я'"- i £ <5 £ то 1 § с; 1 Дат а»ля Примечание
Баллистические ракеты среднем действия
США кПоларие Л-2» 2 Ядсрный, 0.5 Мт 13.6 2HUU 9,45 1.37 1 РДТТ 1 РДТТ
«Поларж • Л- 2 Ядерпый, 3 бое- I главки по 0,2 М ) 15.9 400Q 9.8 1,37 I CIVII - 1 РД'1’1 II CTVU — 1 РДТТ
«Посейдон1- 2 Ядерпый, 10 — 14 боеголовок по 0.04—0,05 Мт 29.5 4000 10,37 1.88 1 РДГ’Г II стул - 1 РДТТ
Франция SSBS 2 Ядерпый. (),« Мт 32 3000 14.8 1,5 1 ступ — 1 РДТТ И ступ - 1 РДТТ
MSBS Ядерпый 0.5 Мт 18,1 2500 10.4 1 РДТТ 11 ступ, 1 РДТТ
Запускается с подвод-
ных лодок
Запускается с подвод-
ных лодок
Запускается с подвол-
ной лодки; модификация
ракет «Поларис»
Запускается ич под-
ъемной шахты
Запускается с подвод-
ной лодки
С « л
Заряд или вес е ь
полезного груза о. . is S S
И G и и 38 5 = Е(
США
«Титя тг-2»
Продолжение
Двигатели Примечание
«Титап-ЗС»
*.Минитмеп-2»
«Мнпитмсн-З.
2 ЖРД । жрд>п Запускается и; подзем- ной шахты Использует- ся как ракета-носитель для вывода па орбиты полезного грузя весом до
I ступ — ЖРД 11 ступ — ЖРД Ш ступ — ЖРД • Стартовые vc- корнтели—РДТТ Используется как бое- вая ракета и как ракет а- носитель для вывода и а орбиты полезного груза зесом до 12 т
I CTV11 — РДТ'1 И ступ — РДТТ Il C1YIT РДГТ Запускав п я из пол- зем! toft шахты
I ступ. РДТТ 11 CTVTT - РДТТ 111 ступ. — РДТТ Запускается из под земной шахты
1
Наименование лиличес | ступеней 1 Вес полезного труза Стартовый вес, т Дальность полета, км Длина, и
США Раке ты-нос тли
;Лтлае Лджвпа» 2 3,6 1 13Л 30
«Атлас-Кен тавр» а 4 т 137 34,4
«Сатурн-1» 1 10 т 520 38.1
«Сатурн-1 В» 2 15 т 570 43
«Сатурн-V» 3 127 т 2800 85,8
Двигают
Примечание
3,05
3,05
6.5Я
6,58
10.ОЬ
ЖРД
ЖРД
ЖРД
ЖРД
ЖРД
СПИСОК ЛИТЕРАТУРЫ
1 . Абгарян К. А., Рапопорт И. М. Динамика ракет М., «Машинострое-
ние», 1969, 379 с.
2 Алемасов В. Е. и др. Теория ракетных двигателей Изд 2-е. М_. «Ча
дшипстроецие.-, 1969, 548 с.
3 Алсшков М. Н-, Жуков И И. и др. Физические основы ракетного орт
жия Изд 2е М., Воениздат, 1572, 312 с
4 . Лппазов Р. Ф., Лавров С. С-, Мишин В. П. Баллистика управляемых
panel дальнего действия М. «Наука», 1966, 308 с
5 Афонии П. М„ Голубев Й С и др. Беспилотные летательные аппар:
ты Й, «Машиностроение», 1967, 440 с
6 Байдаков В. Б., Иванов-Эмин Л. Н. Аэромеханика летательных аппа-
ратов М, «Машиностроение», 19(75, 410 с.
7 Бала бух Л. И и др Основы строительной механики ракет М. «Выс-
шая школа», 1969, 496 с
8 Бельский В. Л. и др Конструкция летательных аппаратов М, Оборой
гпз, 1963, 710 с
9 Вермишев Ю. X. Основы управления ракетами. М, Воениздат, 1968.
320 с
10 Волков Е. Б. и др Жидкостные ракетные двигатели М, Виенязяат.
1970, 591 и
II Володин В. А. Конструкция и проектирование ракетных двигателей
М, «Машины.-!роение», 1971.336 с
12 Воронин Б. П, Столяров Н. А. Подготовка к пуску и пуск ракет М.
Воениздат. 1972, 108 с
13 Гладкий В. Ф. Динамика конструкции летательного аппарата М,
«Наука», 1*л>9. 496 с
14 Гудков А. И Лешаков П. С. Внешние нагрузки и прочность лета
тельных аппаратов Изд. 2е, М, «Машиностроение», 1968, 471 с
15 Двигательные установки ракет па жидком топливе Пол ред. Э Рпнг,
(Пер с англ ) М, «Мир», 1966, 404 с
1С Дмитриевский А. А. и др Движение ракет М, Воениздат, 1968, 463 <.
17 . Добровольский М. В. Жидкостные ракетные двигатели М, «Машино-
строение», 1968, 396 с.
18 Жаков А. М, Лигулевский Ф. А. Управление баллистическими ракета-
ми М, Воениздат, 1965, 280 с
19 Кан С. Н„ Свердлов И. А. Расчет самолета на прочность. Изд 5е.
М. «Машиностроение-. 1966, G20 с.
20 Кары-Ниязов 111. Полет баллистических ракет М, Воениздат, 1966,
100 с.
21 Киселев С. П., Чуев Ю. В. Рассеивание ракет М, Воениздат. 19Г4.
88 с
22 . Колесников К. С. Жидкостная ракета как объект регулирования М,
«Машиностроение», 1569, 29U с.
23 Конструкция управляемых баллистических ракет. Под ред. А М. Си-
нюкова, Н И Йорозова М, Воениздат, 1969, 444 с
24 Космонавтика. Маленькая энциклопедия Гл ред В П Глушко. Изд
2-е. доп М. «Советская энциклопедия», 1970, 592 с.
25 Кохтев А. А. Основы стандартизации Изд. 2-е, М. «Высшая школа»,
1971. 296 с.
26 . Лебедев А. А., Герасюта И. Ф. Баллистика ракет. М, «Машинострое-
ние». 1'970, 244 с
340
27 Маликов В. Г. и др Наземное оборудование ракет М., Воениздат,
1971, 304 с
28 . Орлов Б. В., Мазинг Г Ю. Термодинамические и баллистические ос-
новы проектирования ракетных двшателей па твердом топливе Изд 2-е, М.,
«Машиностроением, 1968, 536 с
29 Основы теории п расчета жидкостных ракетных двигателей Пол ред.
В М. Кудрявксва М «Высшая школа», 1967, 676 с
30 Проектирование и испытания баллистических ракет. Под ред
В И Варфоломеева и М И Копытова М, Воениздат, 1970, 392 с
31 . Пронин Л. Н. Баллистические ракеты. М., Воепиздат, 1968, 112 с
32 . Ракетные двигатели. Поя ред Т М. Мелькумова. М, «Мшиийострие-
ниеж, 1968, 512 с.
33 Рожков В. В. Двигатели ракет па твердом топливе М, Воениздат,
1971, 110 с.
34 Синюков Л. М., Волков Л. И. и др. Баллистическая ракета па твердом
топливе М, Воениздат, 1972. 5112 с
35 . Фсодосьев В. И. Синярев Г. Б. Введение в ракетную технику Изд
2-е, М, Оборонгиз, 1961. 507 с
36 Шульженко М. И., Мостовой Л. С. Курс конструкции самолетов Ии.
2-е. М. «Машиностроение», 1965, 564 с
ОГЛАВЛЕНИЕ
Предисловие
Введение
Стр
Основы теории полета баллистических ракет
Глава I Основные положения теории реактивного движении
I 1 Основные части баллистической ракеты
1.2. Принцип реактивного движения .
1.3. Классификация ракетных двигателей ... ............
14 Уравнение движения точки переменной массы (уравнение
И В Мещерского)............................................
1. 3 Тяга и удельный импульс тяги ракетного двигателя .
1 6 Формула Циолковского для идеальной сгооости ракеты
Глава II. Силы и моменты, действующие на ракету в полете
2 1 Системы координат и углов, определяющие положение ракеты в
пространстве . . ..........................
22 . Сила тяги, сила тяжести ракеты и силы, создаваемые органами
управления ........................
23 Аэродинамические силы
24 . Моменты, действующие на ракету . . . <
13
13
16
18
22
26
Глава Ш. Траектория полета баллистической ракегы 48
31 Участки траектории - ............. 18
32. Уравнения движения ракеты на активном участке.......... 52
3 3. Свободный полет баллистической ракеты в центральном поле . ,
тяготения (эллиптическая теория) .......... I 55
34 Дальность стрельбы .... 62
Глава IV. Основные принципы управления ракетами Ю
4.1 Управление движением ракеты . 66
4 2. Динамические характеристики ракеты 70
43 Системы управления ракет ... 73
4.4 Рассеивание ракет . 78
Часть вторая
Конструкция и основы проектирования баллистических ракет
Глава V. Нагрузки, действующие па ракету . ................. 82
5 1. Основные понятия, применяемые при расчете корпуса ракеты на
прочность . . .. .............................. . - 82
52 Основы расчета тонкое 1СШ1ых конструкций.................. 85
5.3 Характеристика сил, действующих на корпус ракеты в полете 92
5 4 Осевые нагрузки па активном участке траектории ... 98
55 Поперечные нагрузки на активном участке траектории 101
5.6. Расчетные нагрузки. Нормирование нагрузок . И)6
Глава VI Топлива и материалы, применяемые в ракетах 114
6.1 . Краткие сведения о жидких ракетных топливах 114
6.2 Краткие, сведения о твердых ракетных топливах . .12'1
6.3 Материалы, применяемые в ракетах ....................... 123
312
Crp.
16 3 Турбонасосные агрегаты ........................ 289
164 Назначение, принцип действия и требования, предъявляемые к
системам наддува . .........................1. . 293
165 Принципиальные схема и типы систем наддува . 295
166 . Последовательность срабатывания элементов пневмогидравли
ческой системы . . . .1................... 299
Глава XVII. Агрегаты и арматура пневмогидравлической системы ра-
кеты ................ .... 302
171 Аккумуляторы давления (газогенераторы) . 302
172 Редукторы давления и регуляторы давления 306
173 Арматура пневмогидравлической системы ракеты 309
Глава XVI11. Стартовые комплексы баллистических ракет 317
181 Классификация и краткая характеристика стартовых колпаск
сов . . ................................... 317
- 18 2. Стационарные стартовые комплексы . ... 318
18 3 Специальное наземное технологическое оборудование . 323
184 Технология работы с ракетами на технической и стартовой по
знциях ................... 332
Приложения.
1 Понятие о стандартизации ракетной техники . ... 336
2 Основные тактико-технические данные баллистических ракет ка-
питалистических государств................................... 337
3 Номограммы I и II для определения параметров баллистических
ракет . .................................. - вкл.
Список титеватуры . 340
Иосиф Нико щевич Пенцак
ТЕОРИЯ ПОЛЕТА И КОНСТРУКЦИЯ БАЛЛИСТИЧЕСКИХ РАКЕТ
Технический редактор В И Орешкина Корректор Е. П Карнаух
Художник Д. Ю Литвиненко
Сдано и набор 31/V 1974 г Подписано к печати 17/Х 1974 г Т— <7916
Формат 60Х« '|« Бумага № I Печ л. 22.0. в т. ч 1 вкл Уч -изд л. В2.1
Тираж 4000 экз _______Изд заказ 187Г.__________________Цена 97 коп.
Издательство «Ма»1ииостроенпе», 107385, Москва, Б-78, 1 й Басманный пер , 3
Московская типография № 8 «Союзполиграфпрома»
при Государственном комитете Совета Министров СССР
по делам издательств, полиграфии и книжной торговли.
Замеченные опечатки
Стр. Строка Напечатано Следу ег читать
9 2 я сверху иидуоле TOjlJlvie
67 20-я снизу Р
187 при малой мае- при малой массе. (Малая масса конструкции достигается r. пользованием проч-
263 11-я снизу м8.
274 12-я снизу рис 14 12. b рис 14 12, в
989/1876