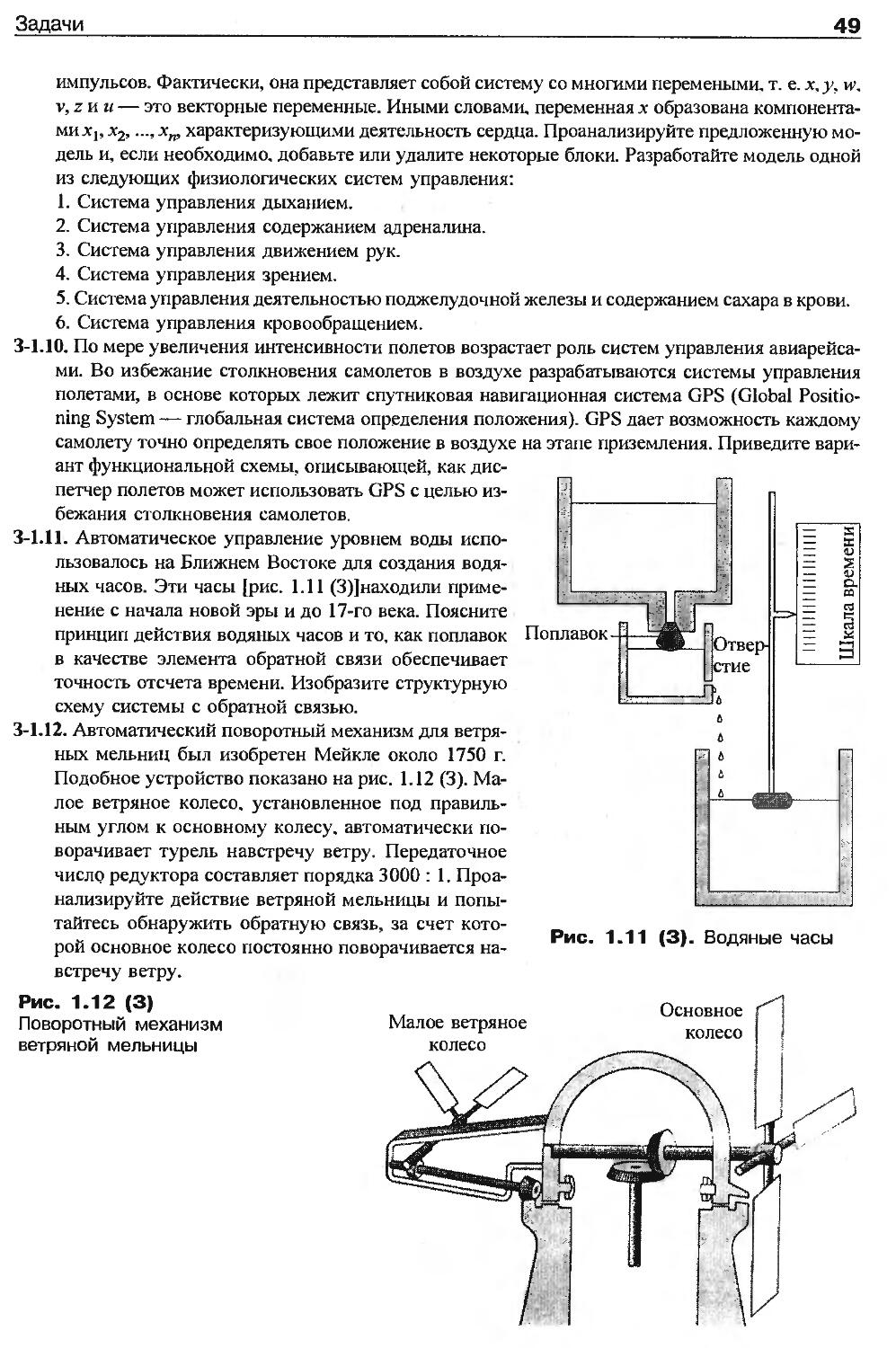
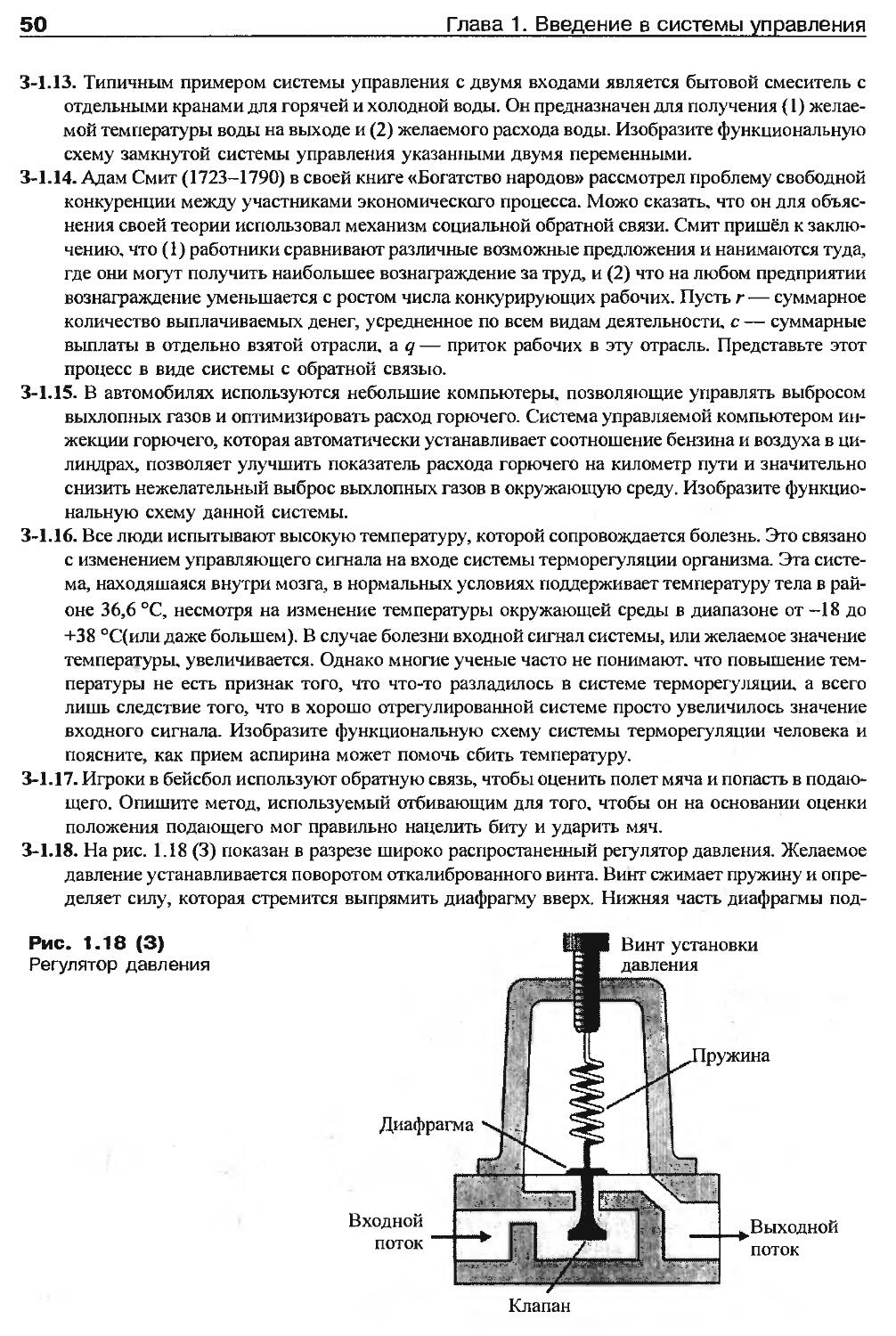
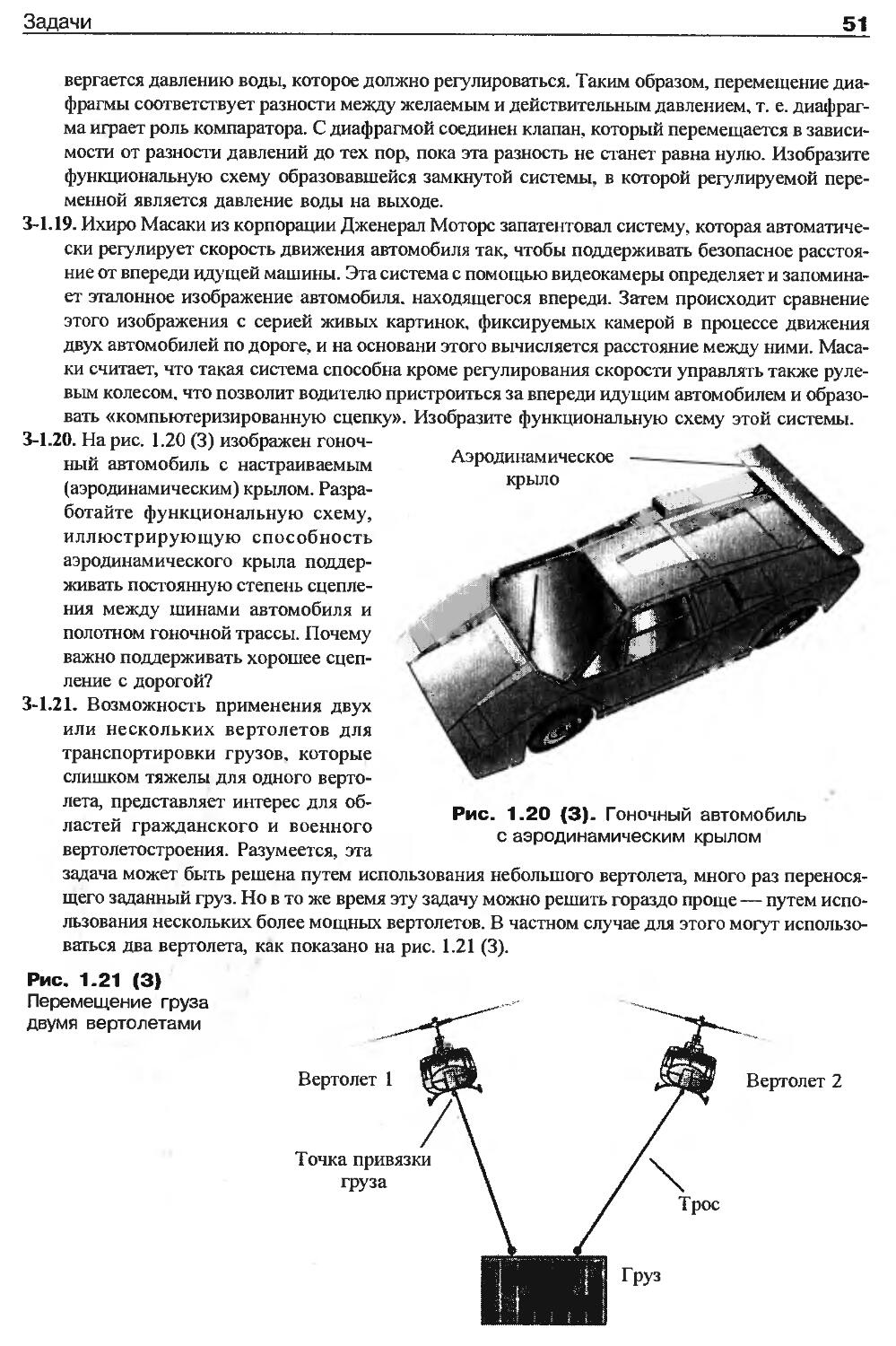
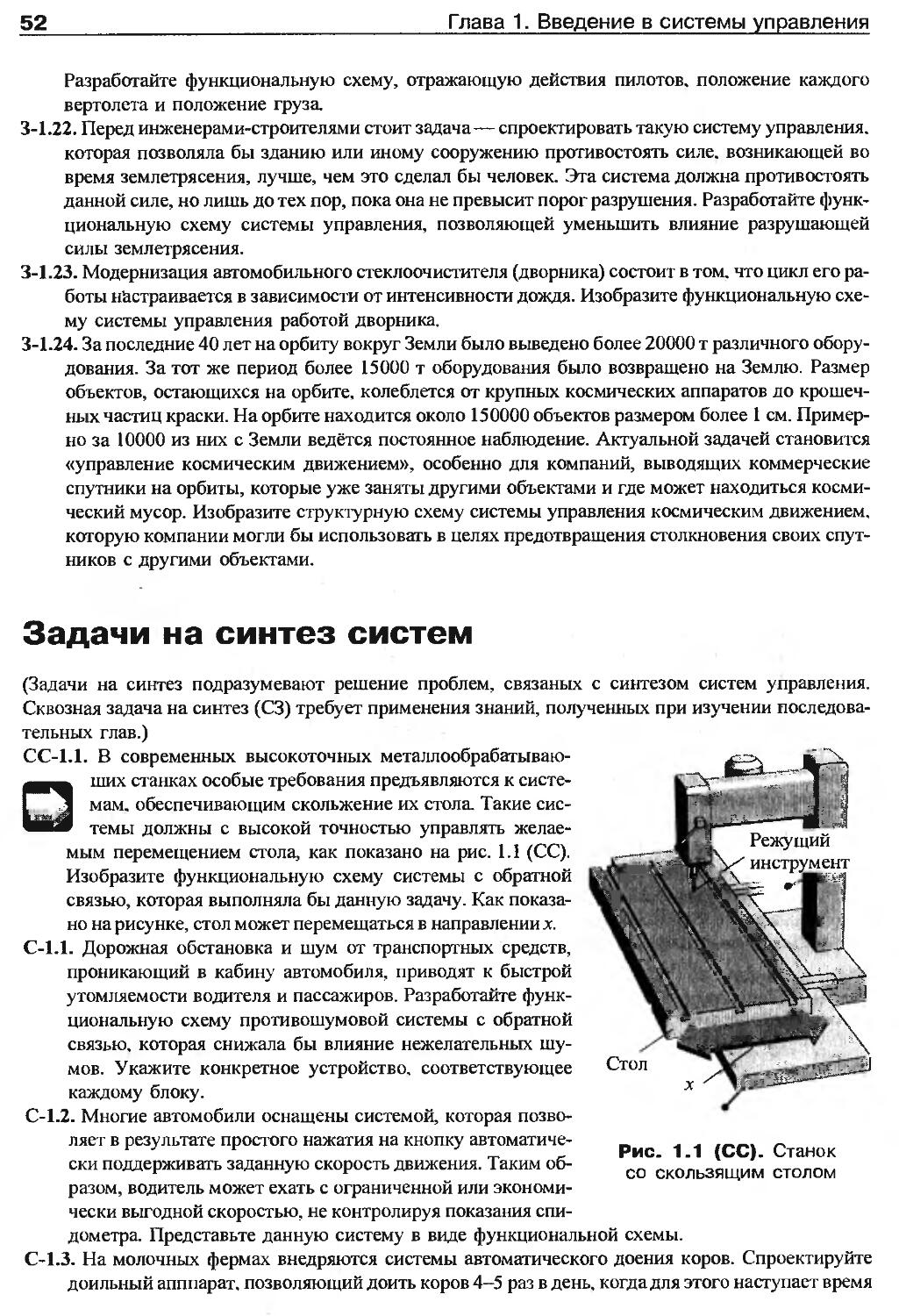
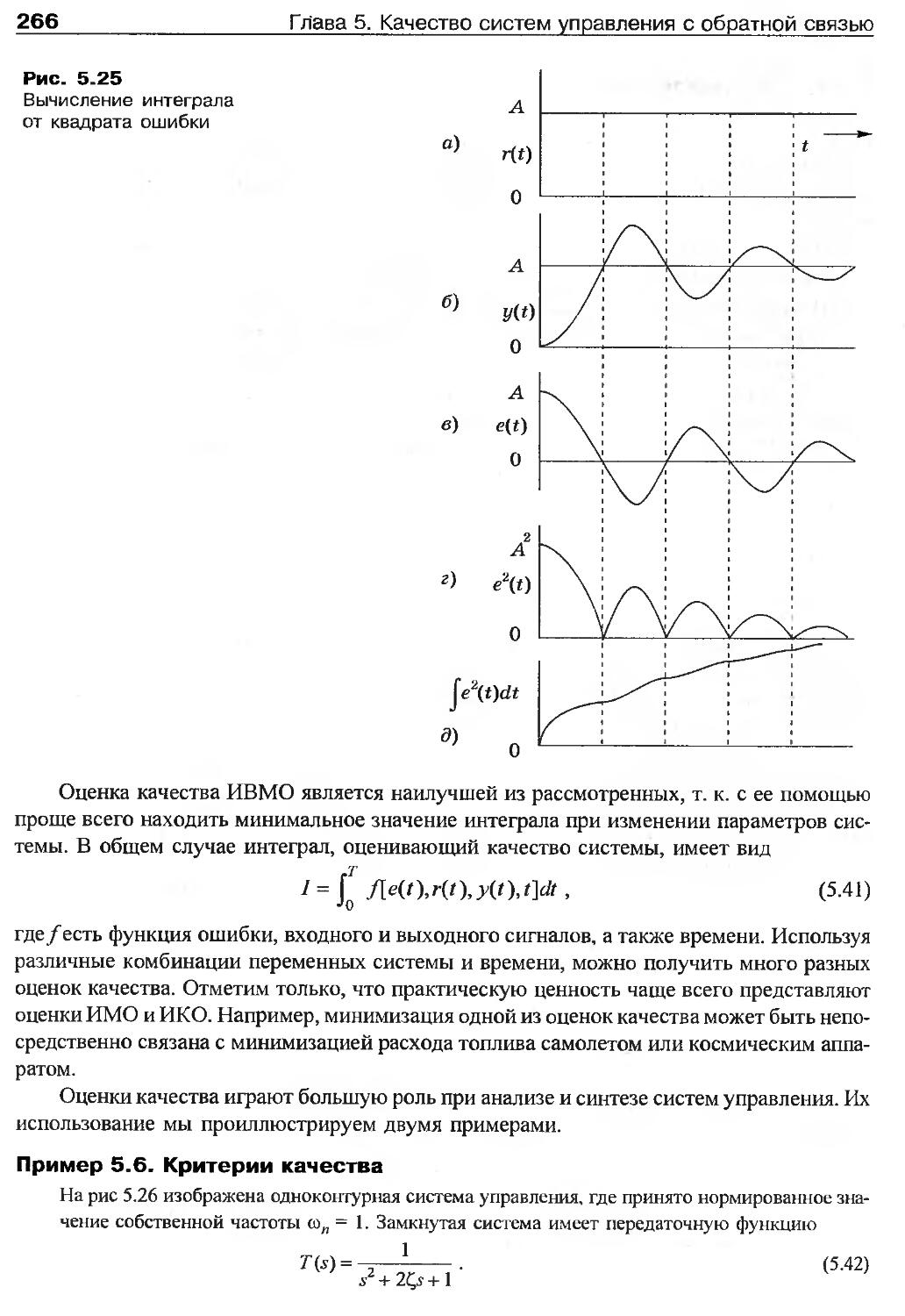
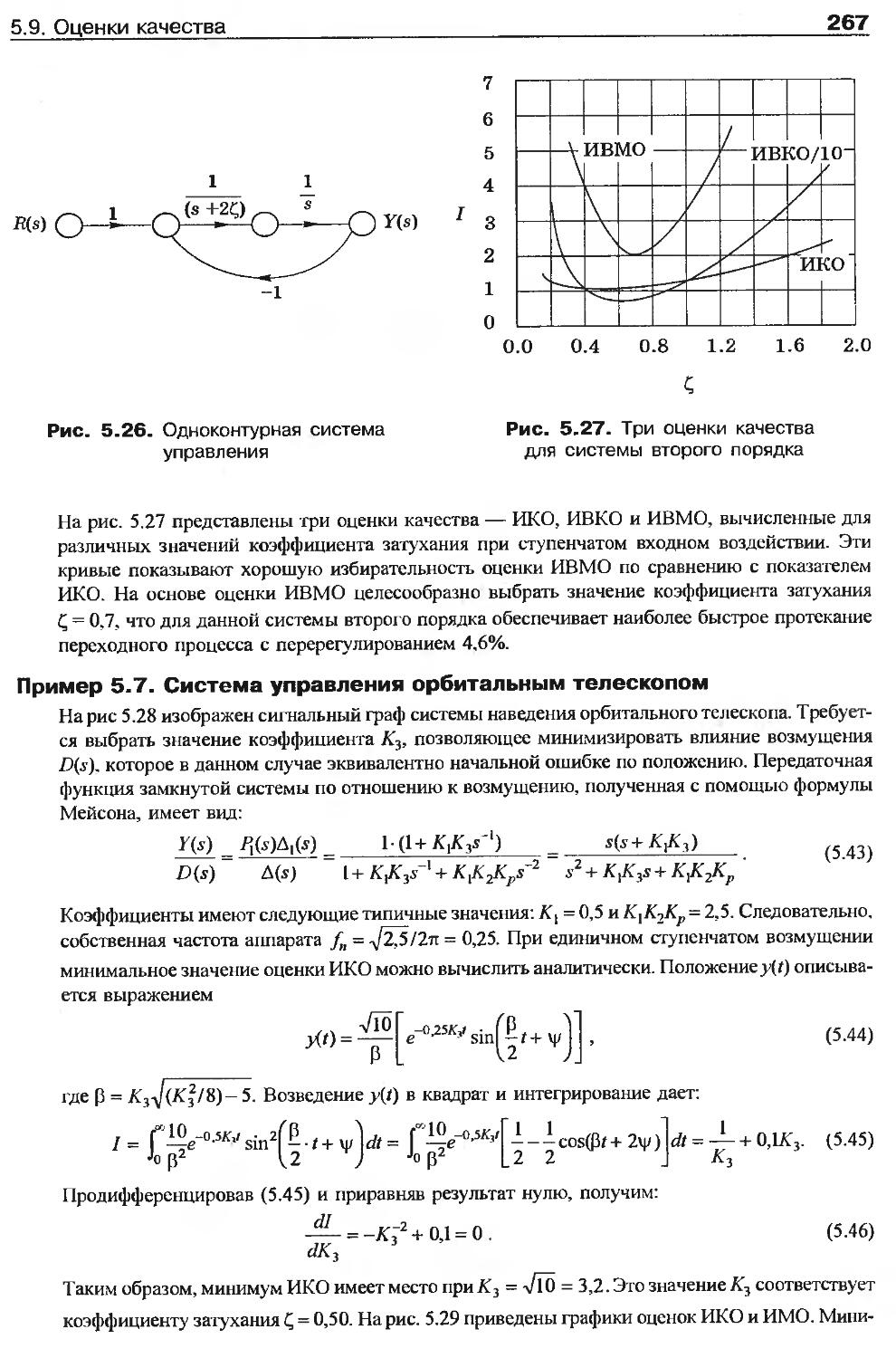
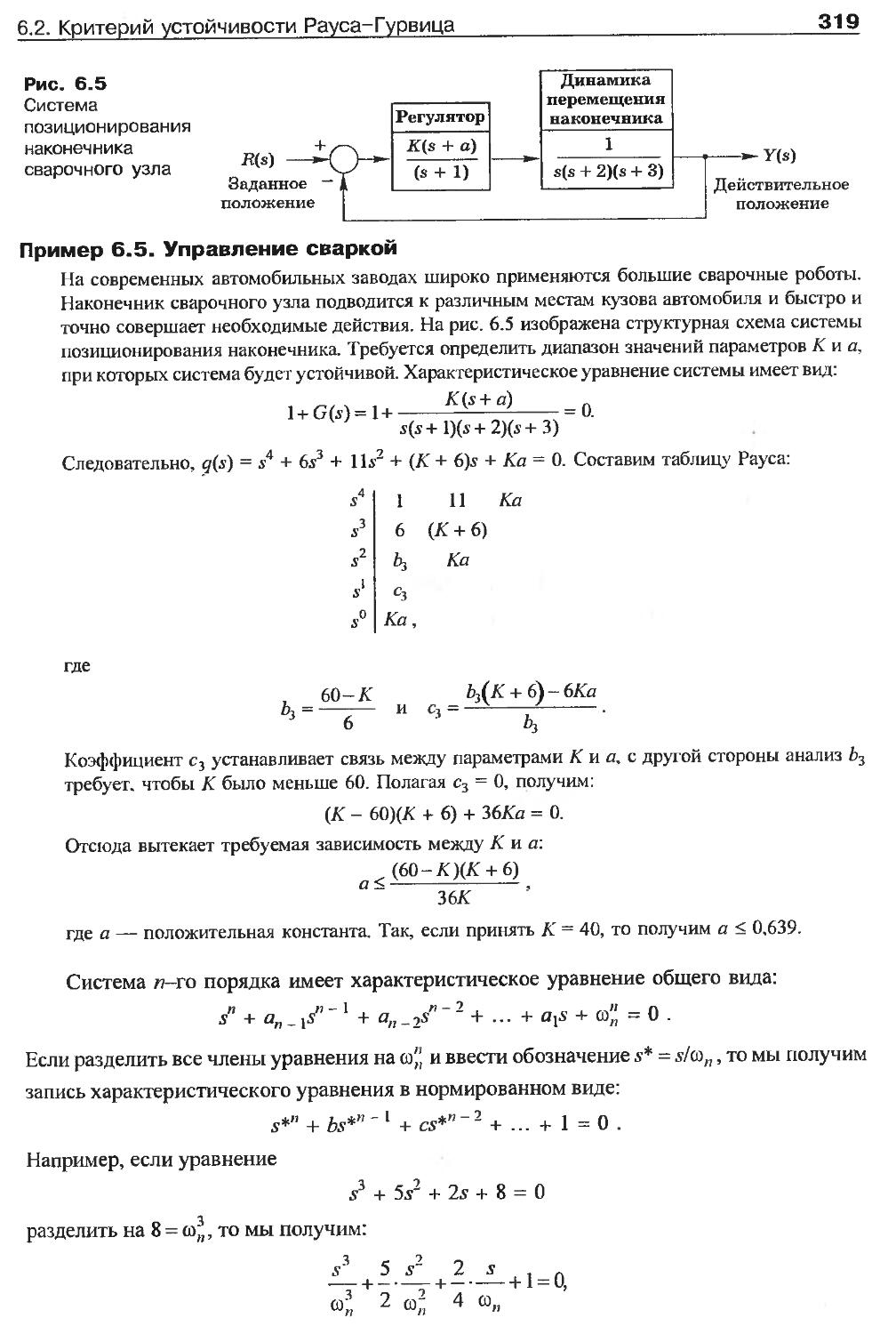
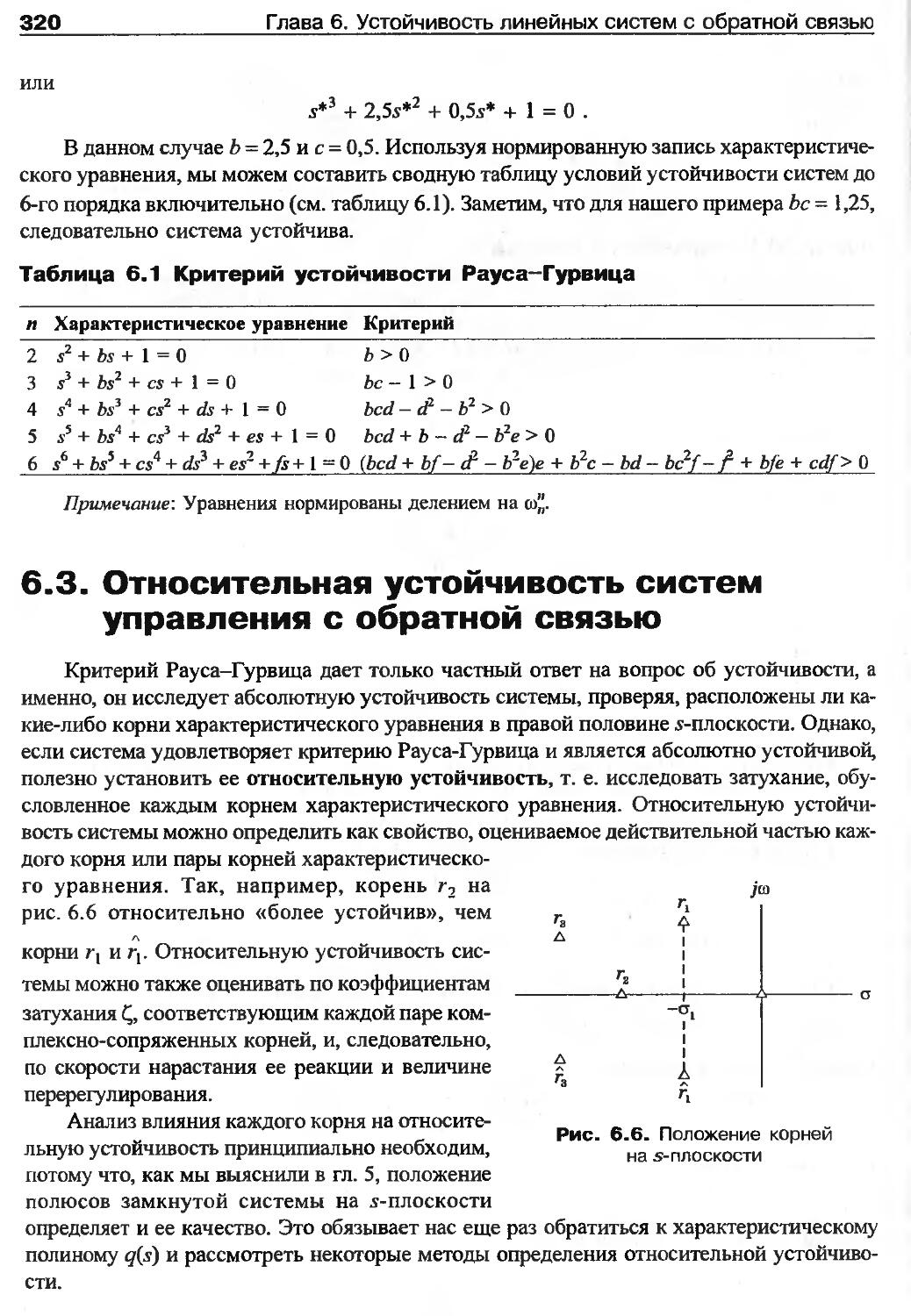
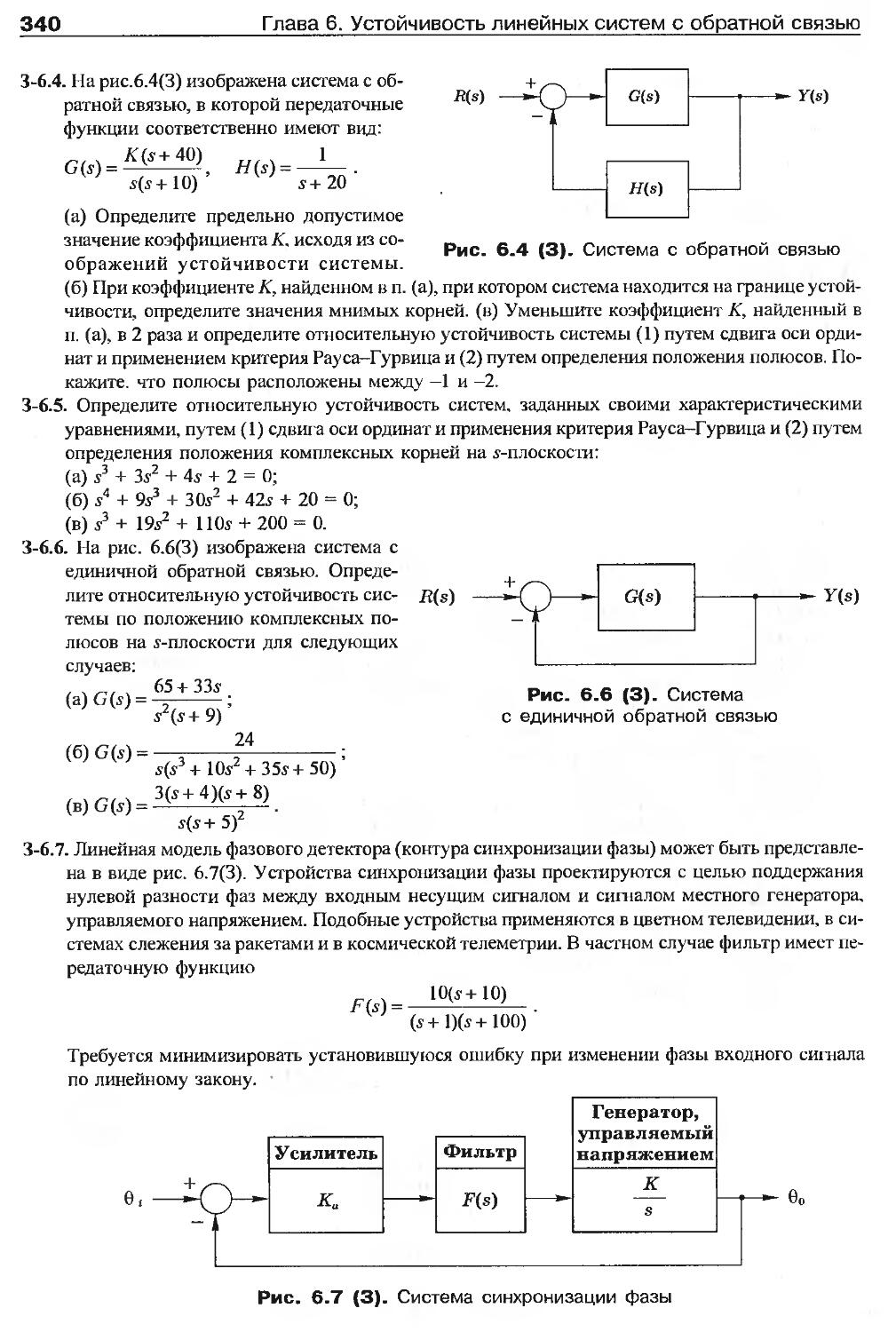
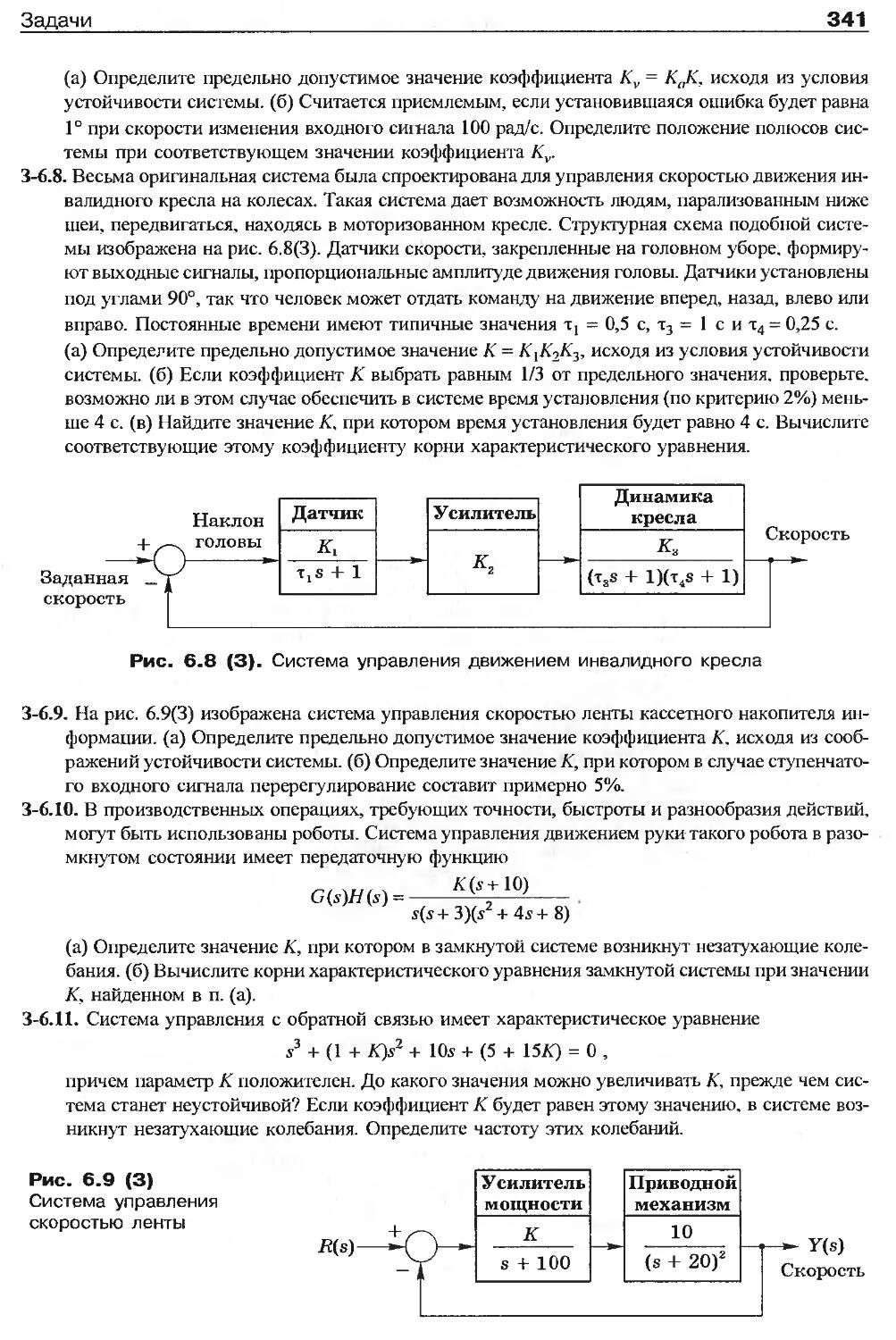
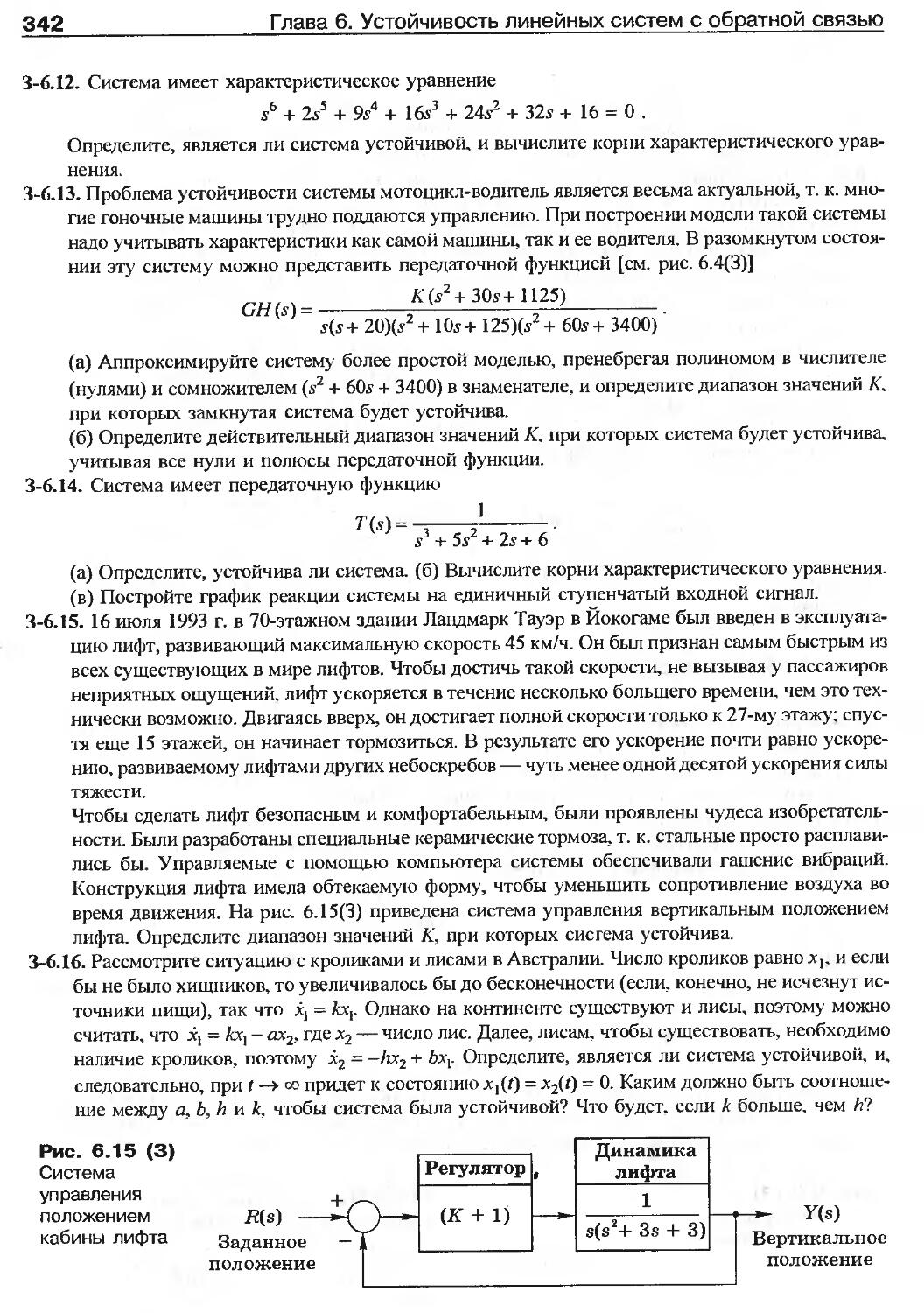
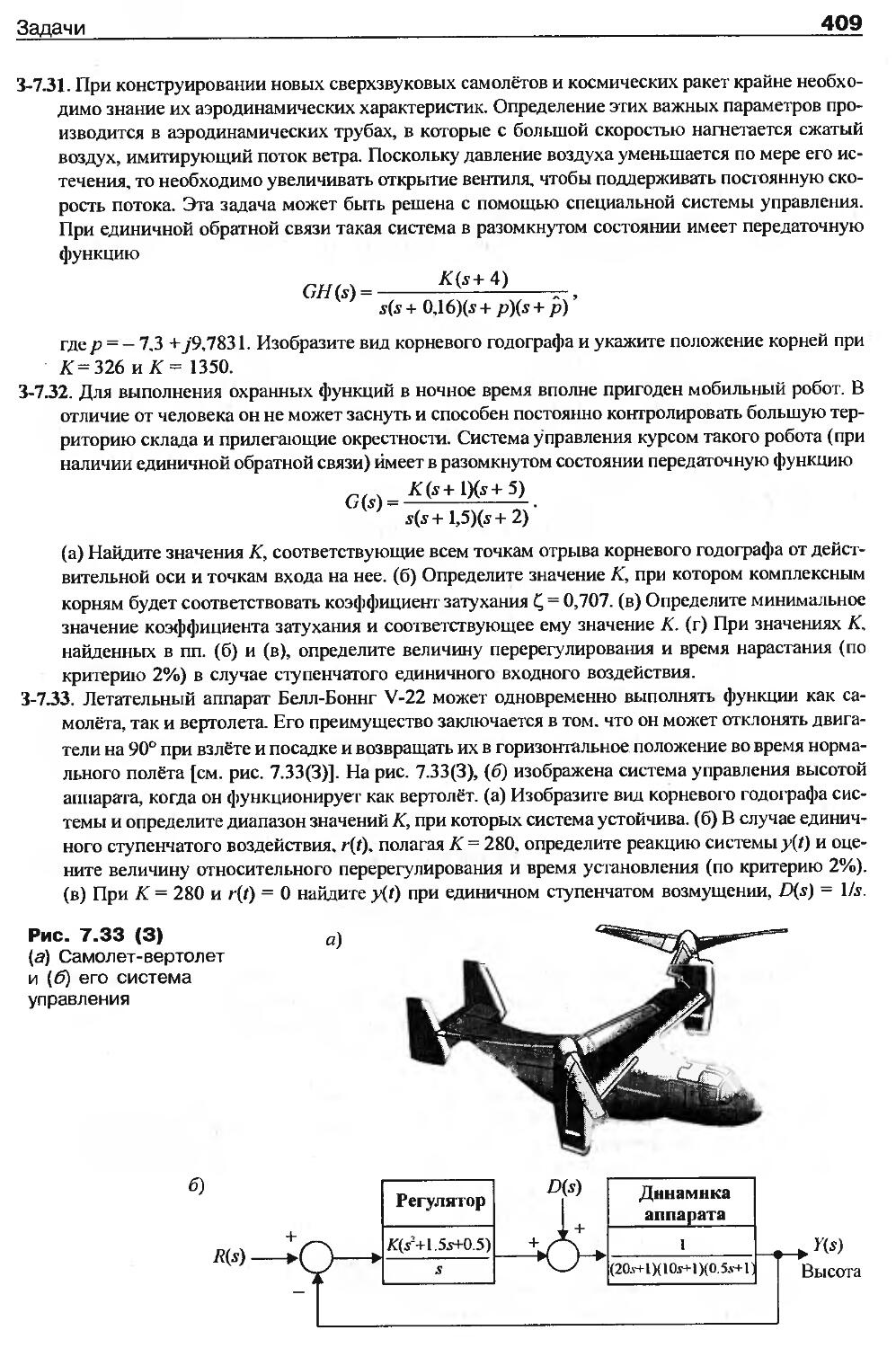
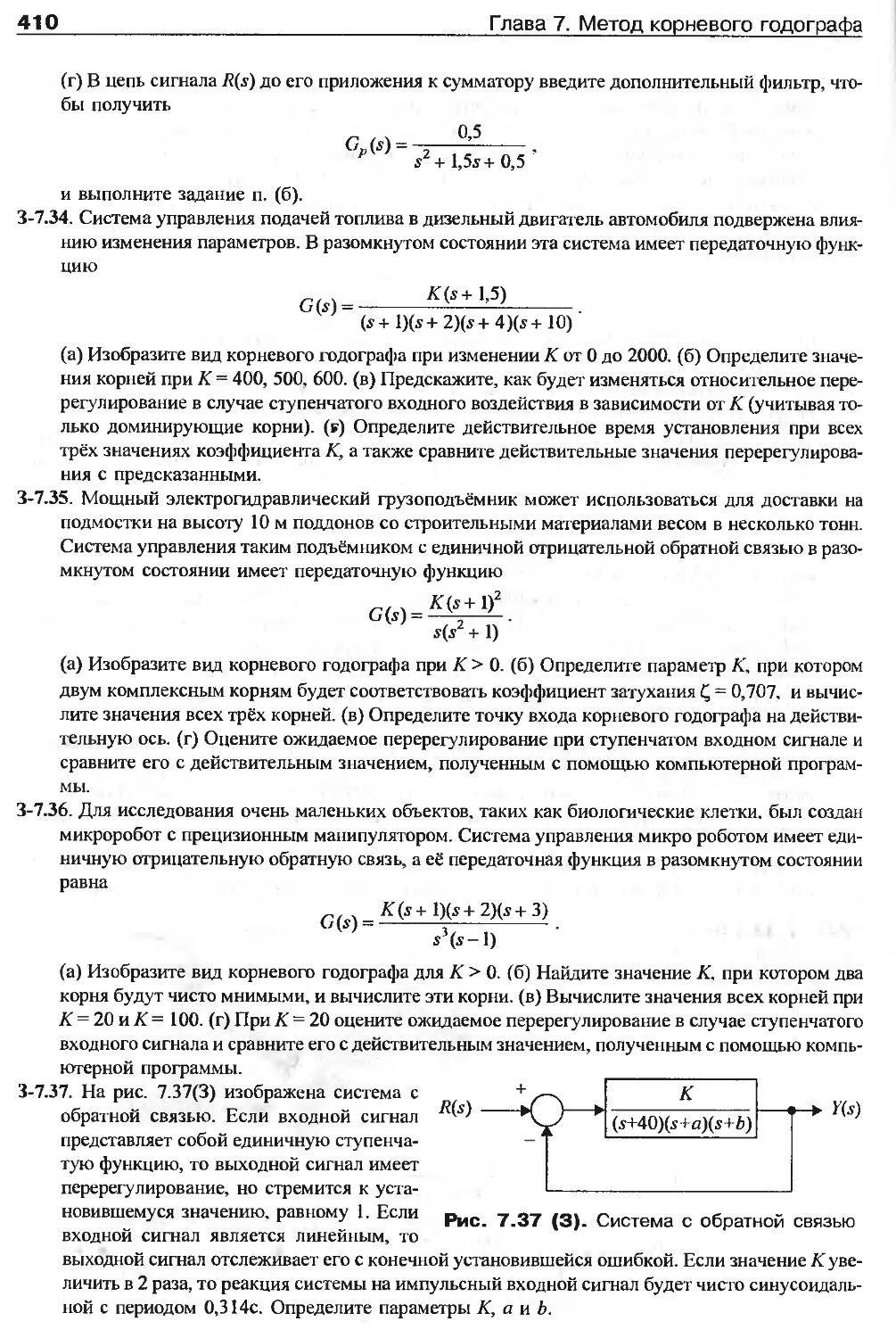
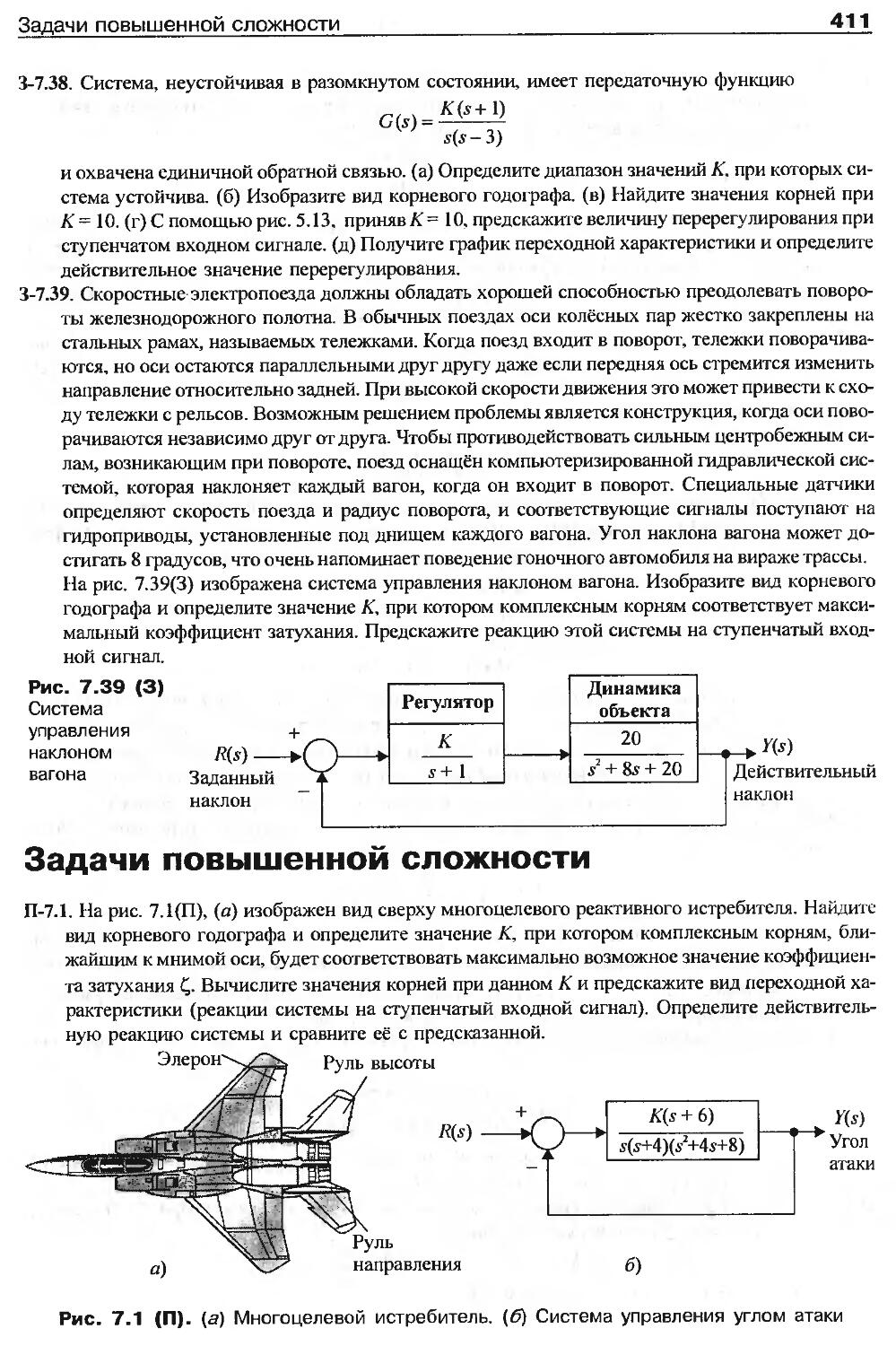
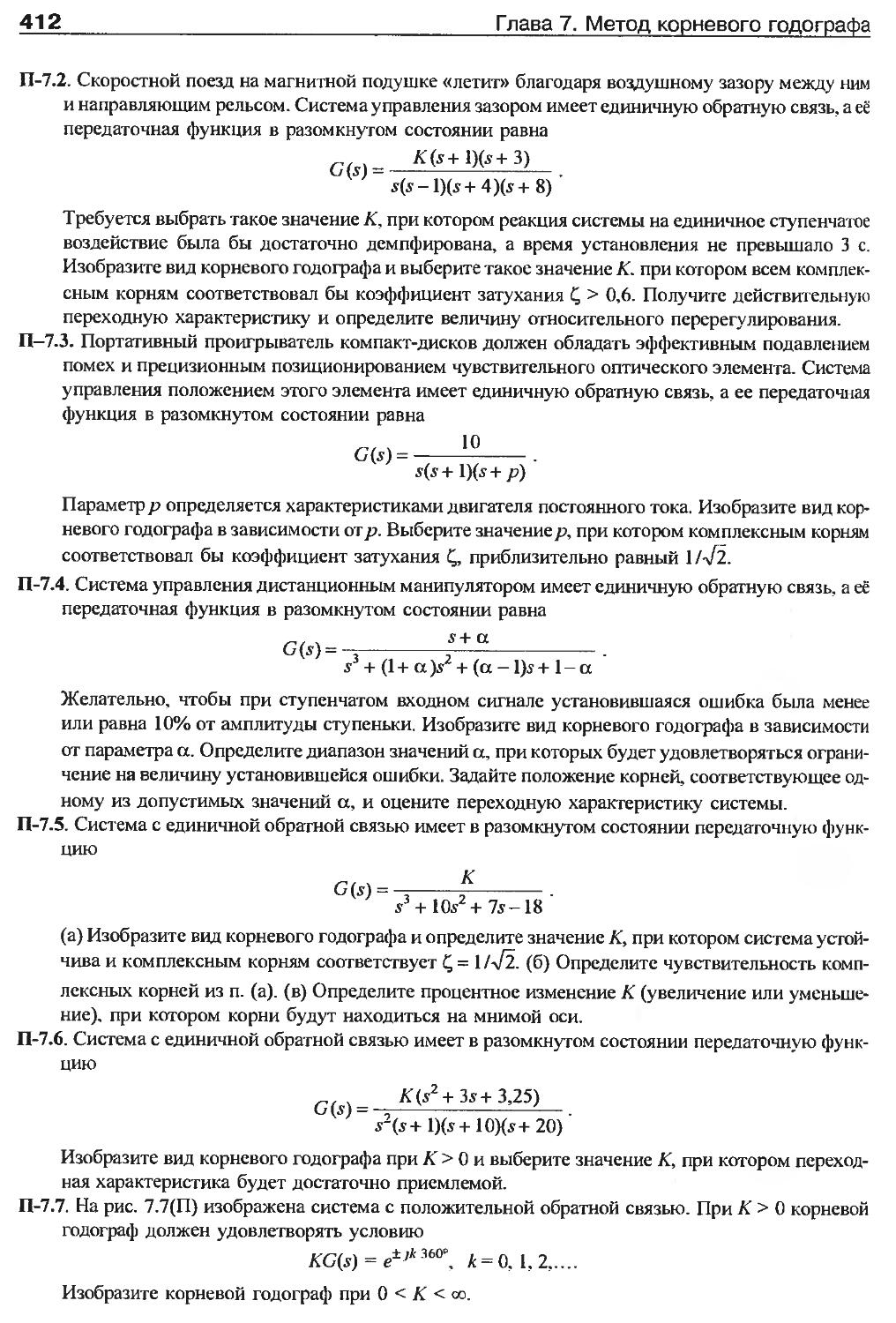
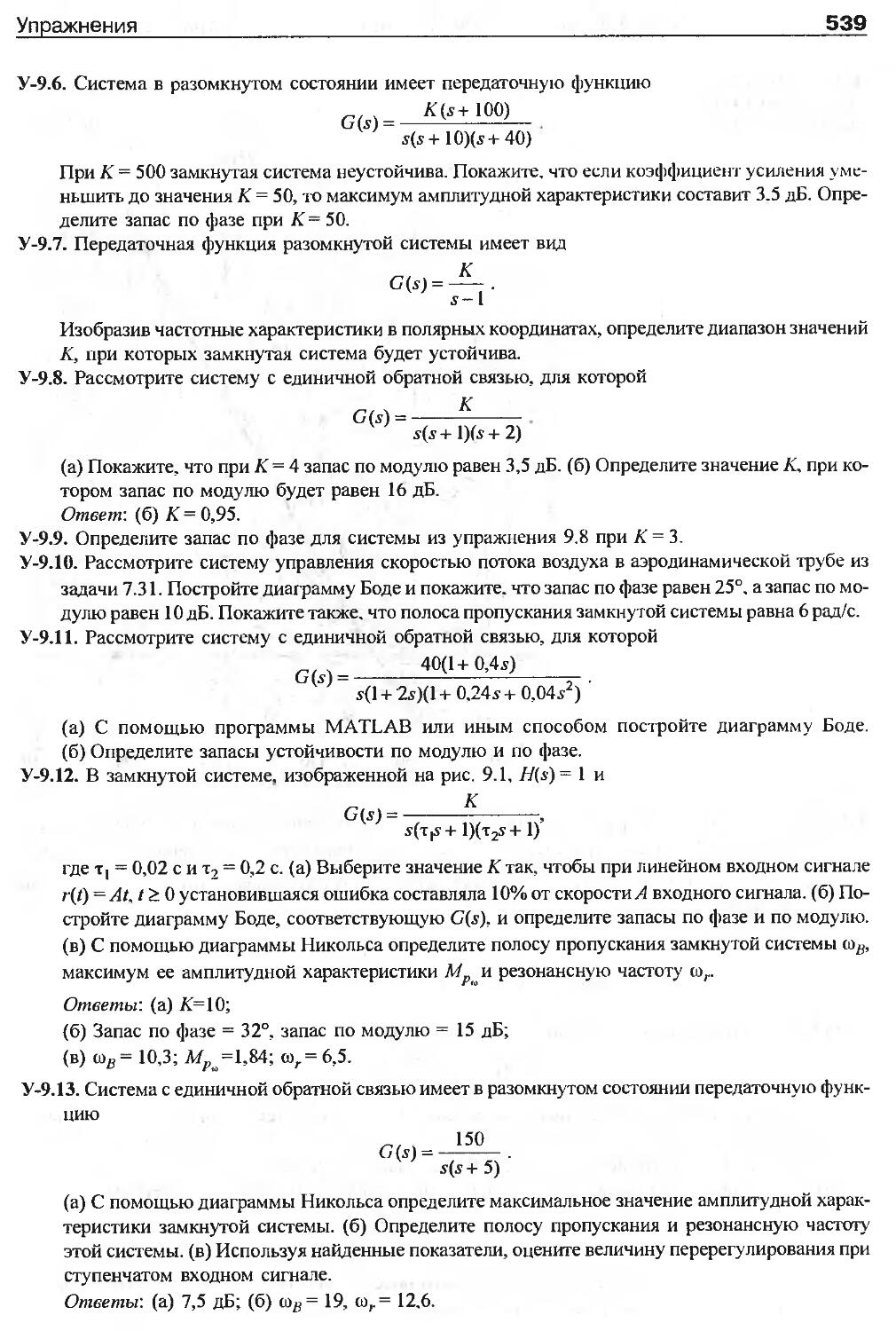
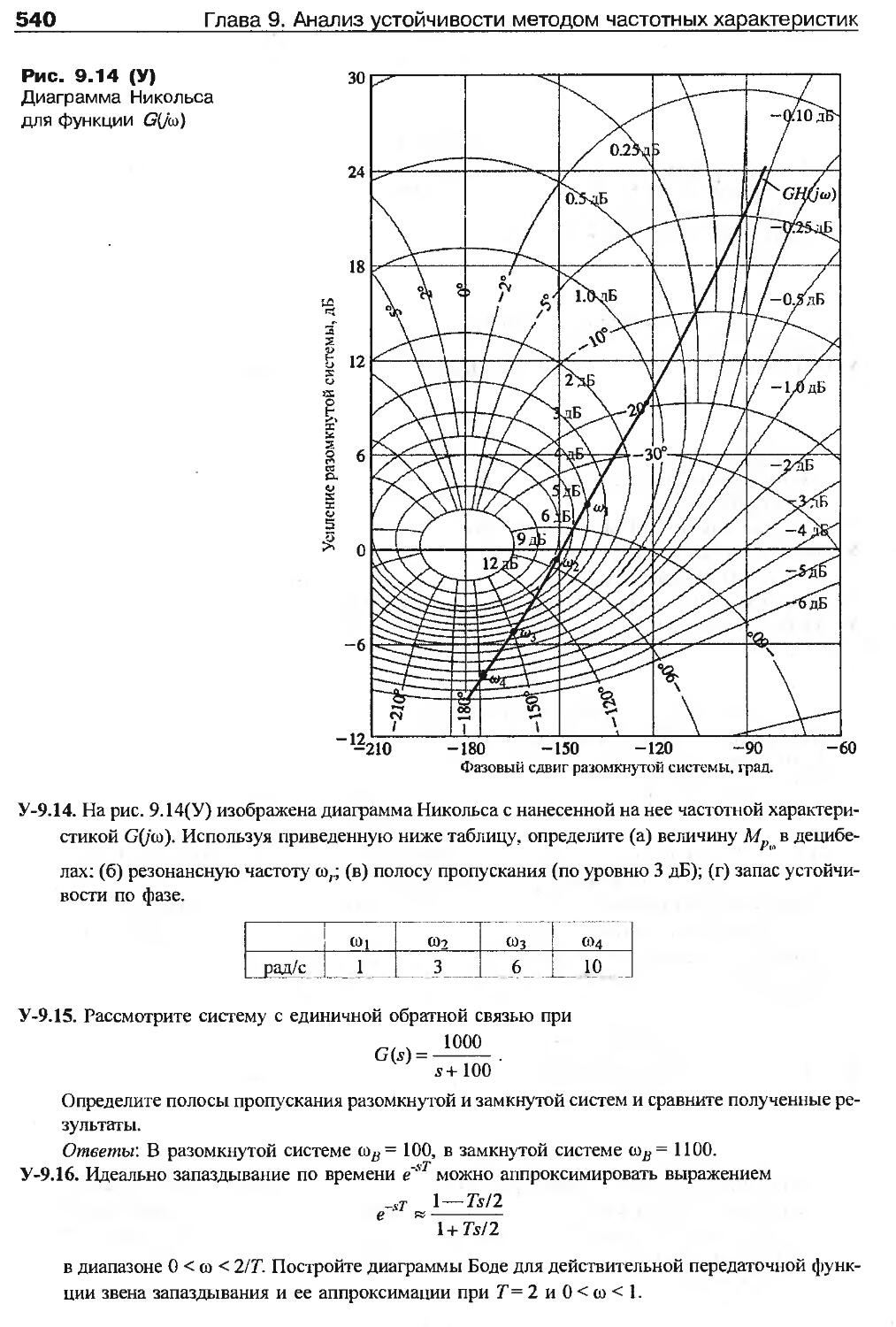
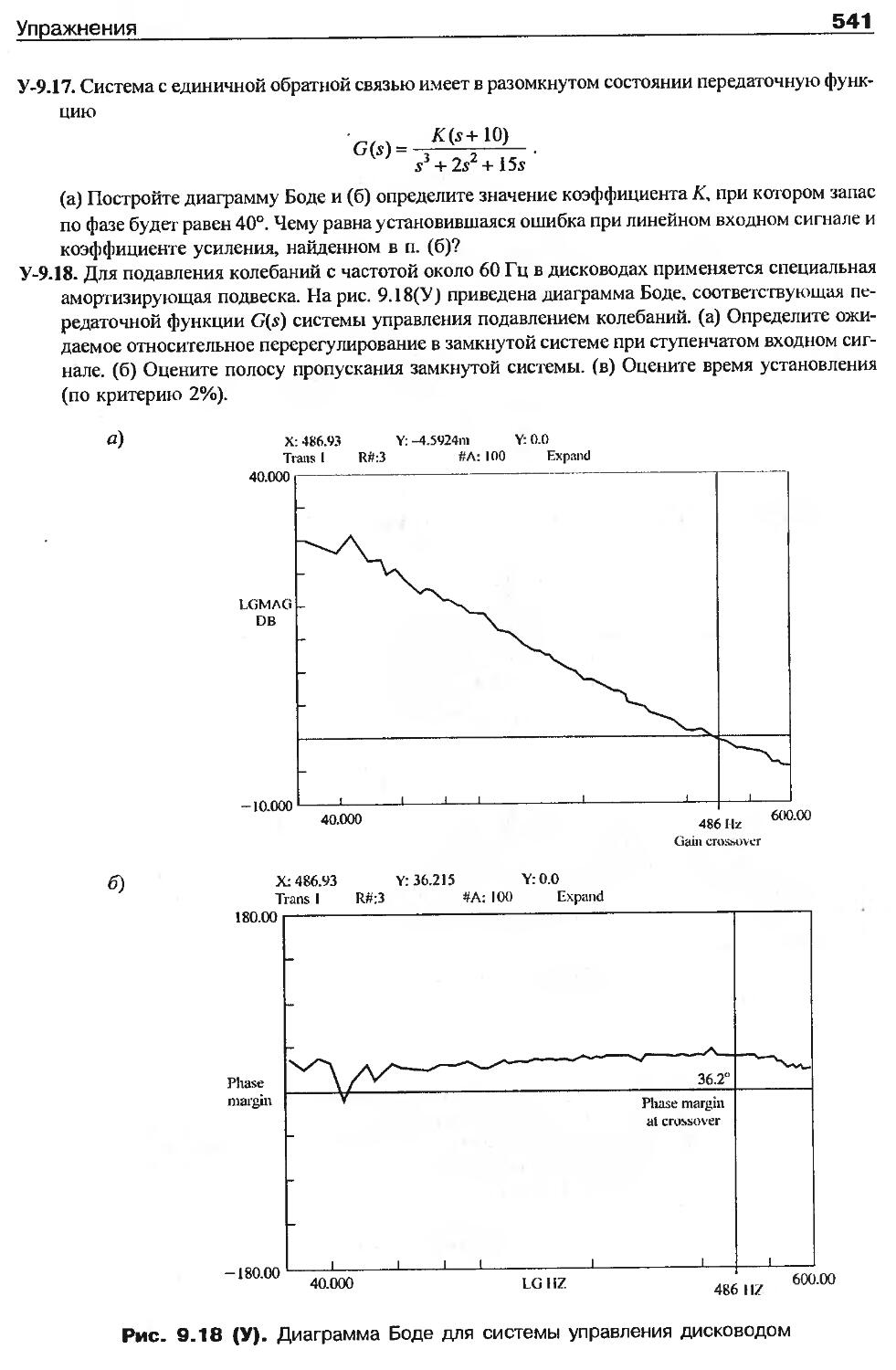
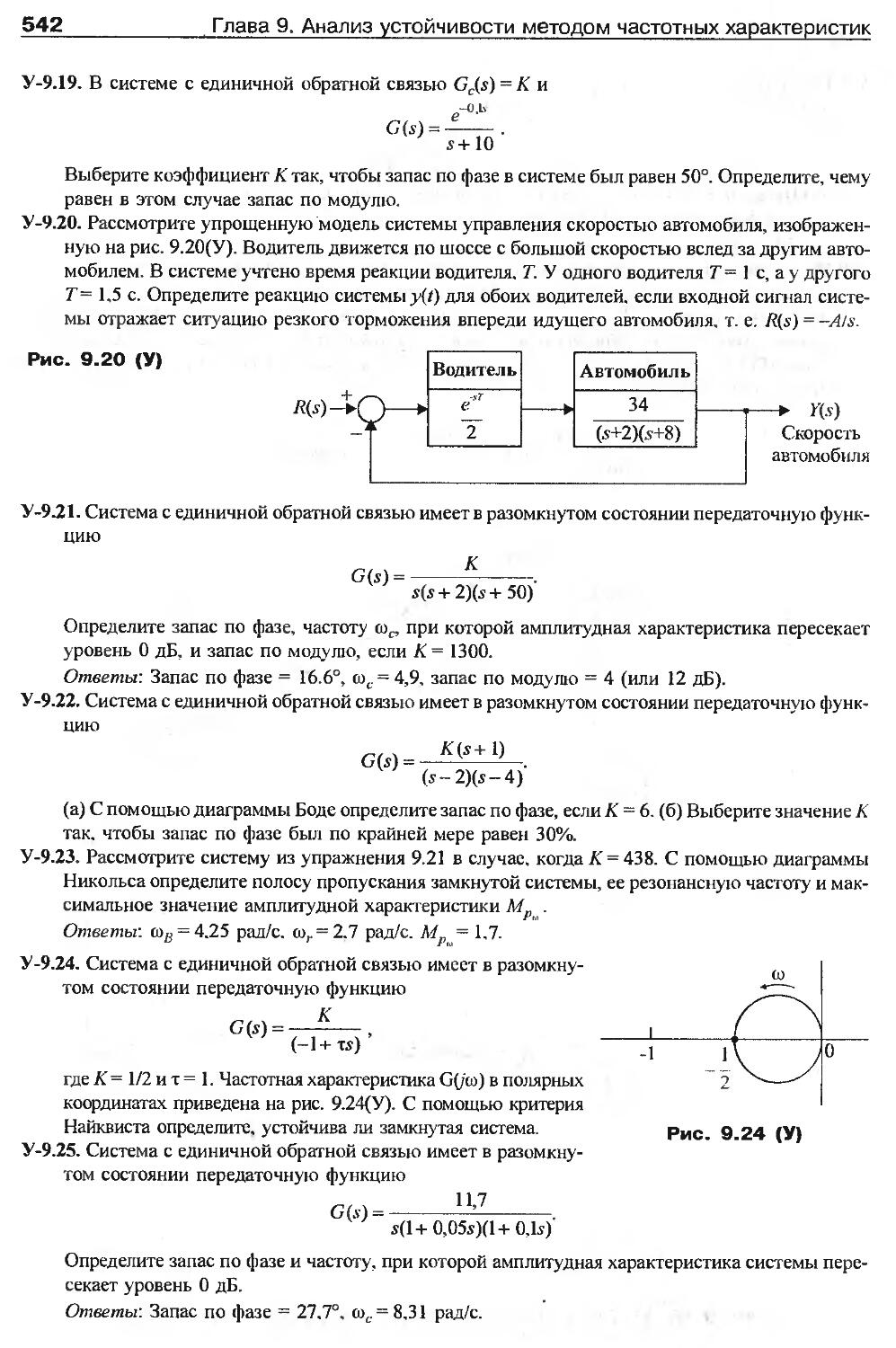
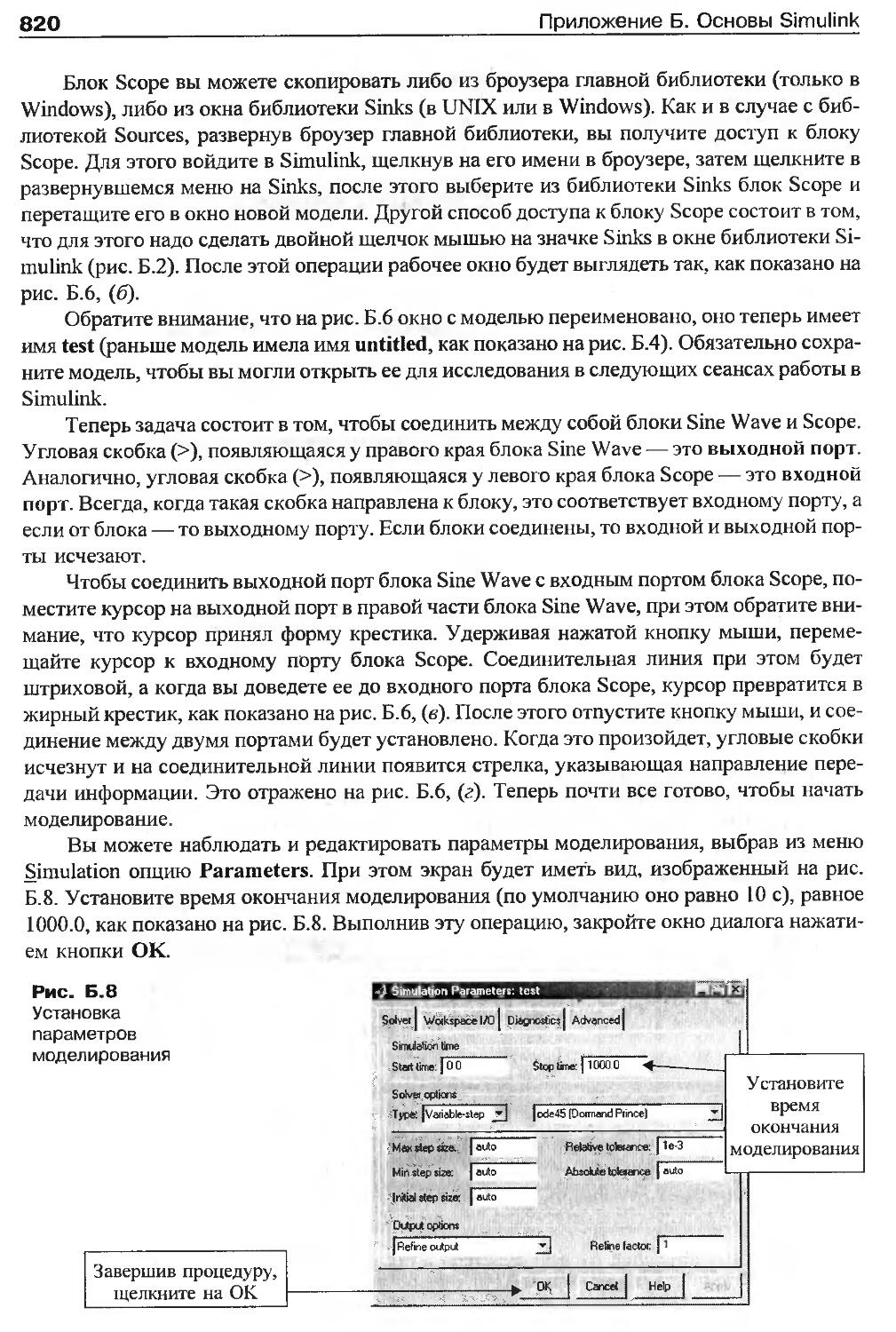
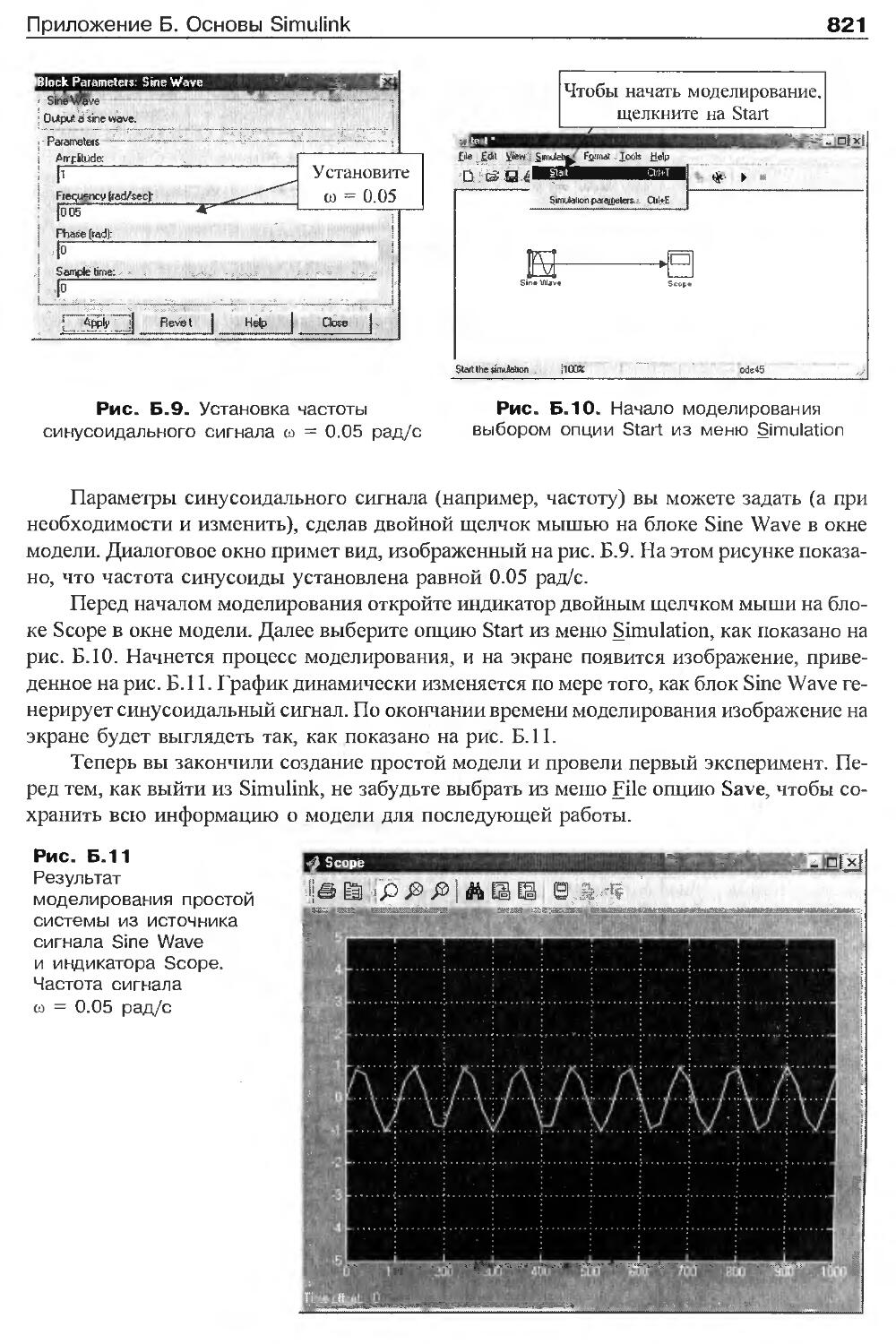
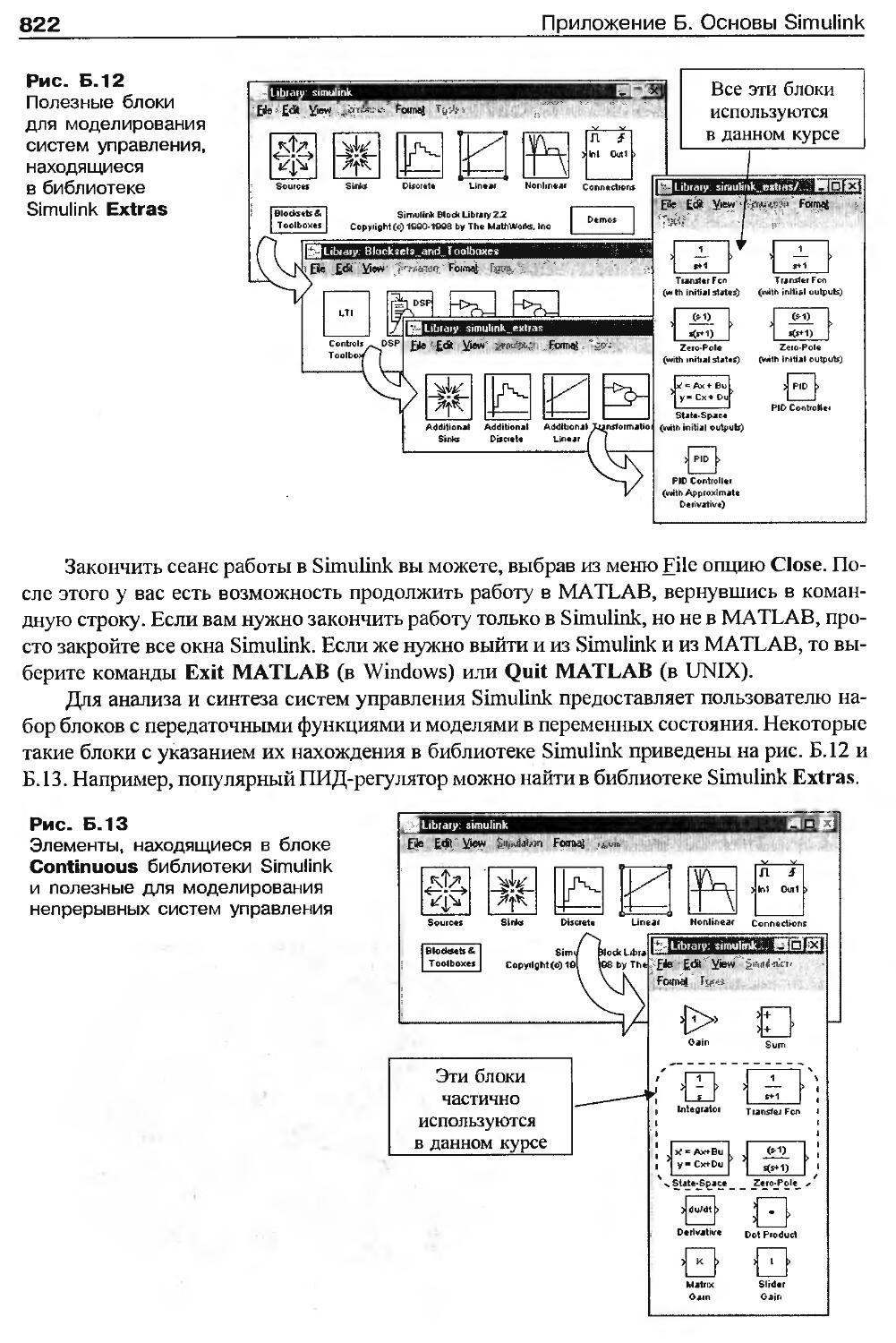
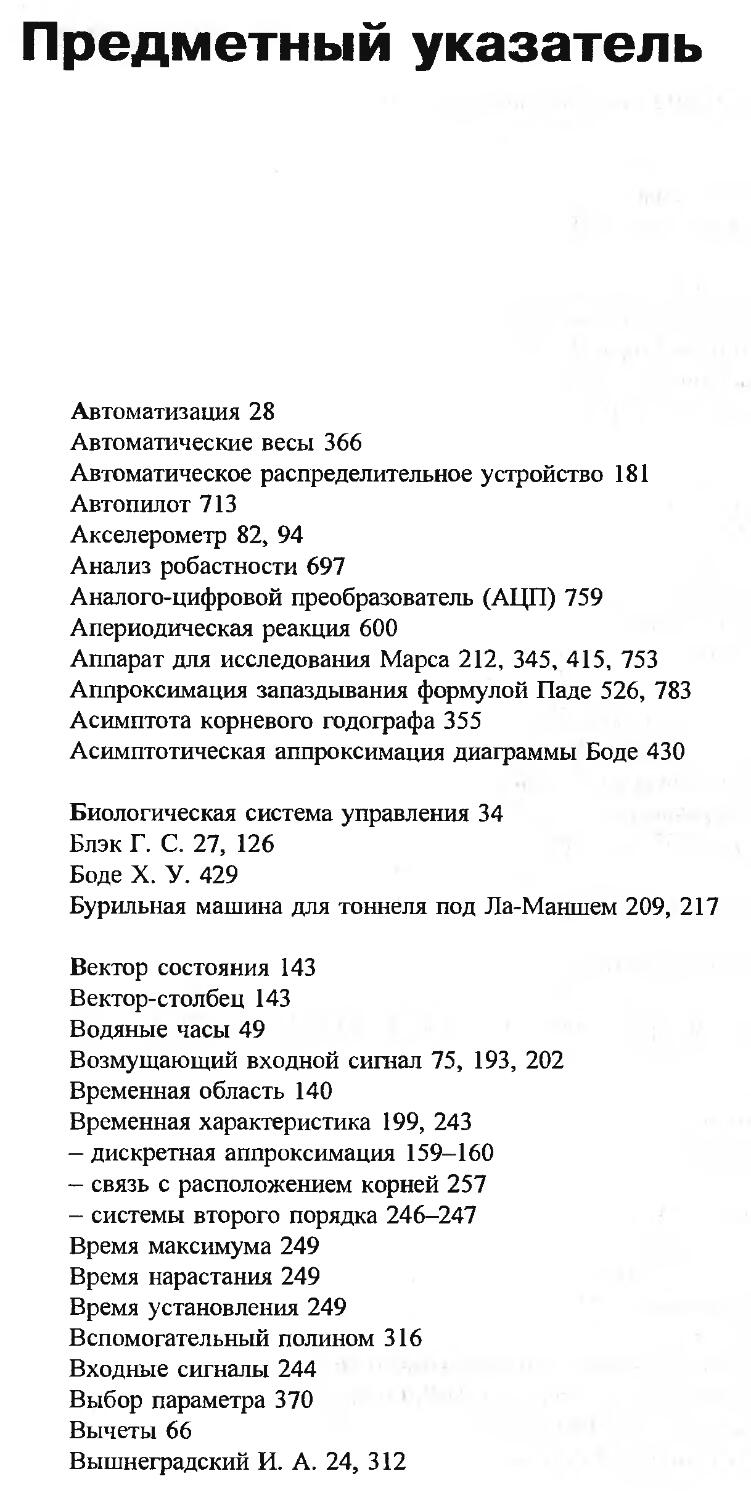
/



















Теги: регулирование и управление машинами, процессами автоматика системы управления
ISBN: 5-93208-119-8
Год: 2002



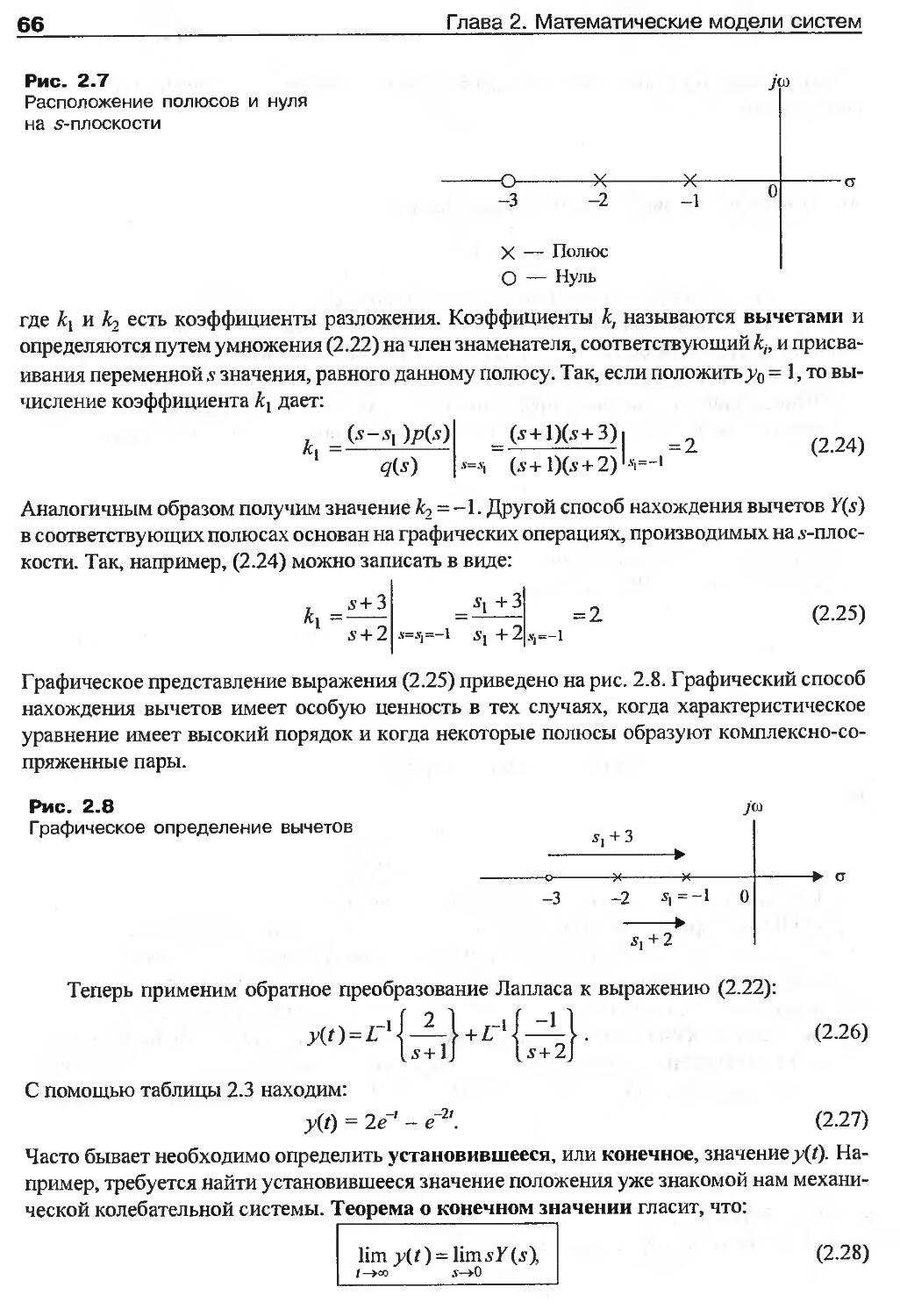
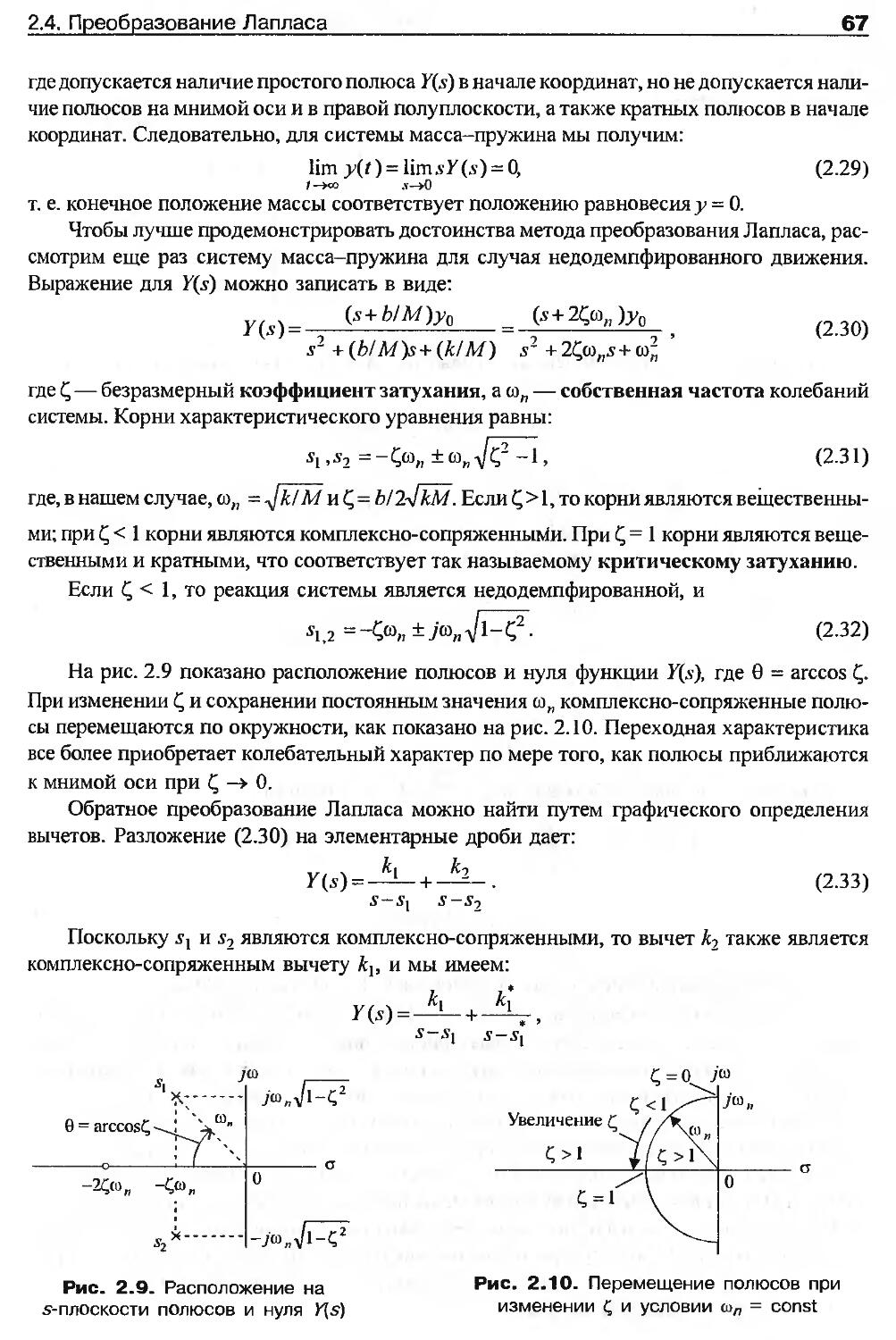
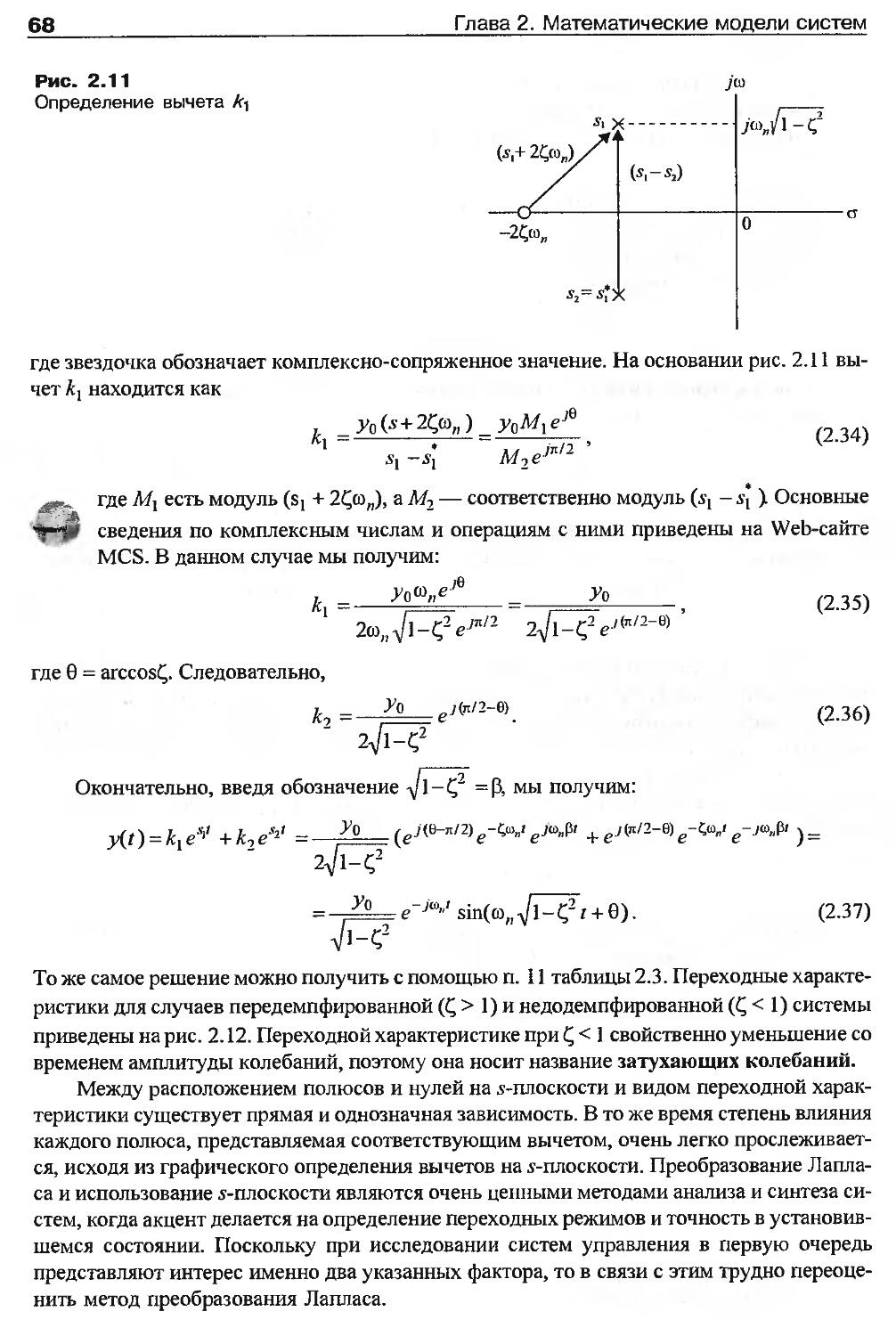
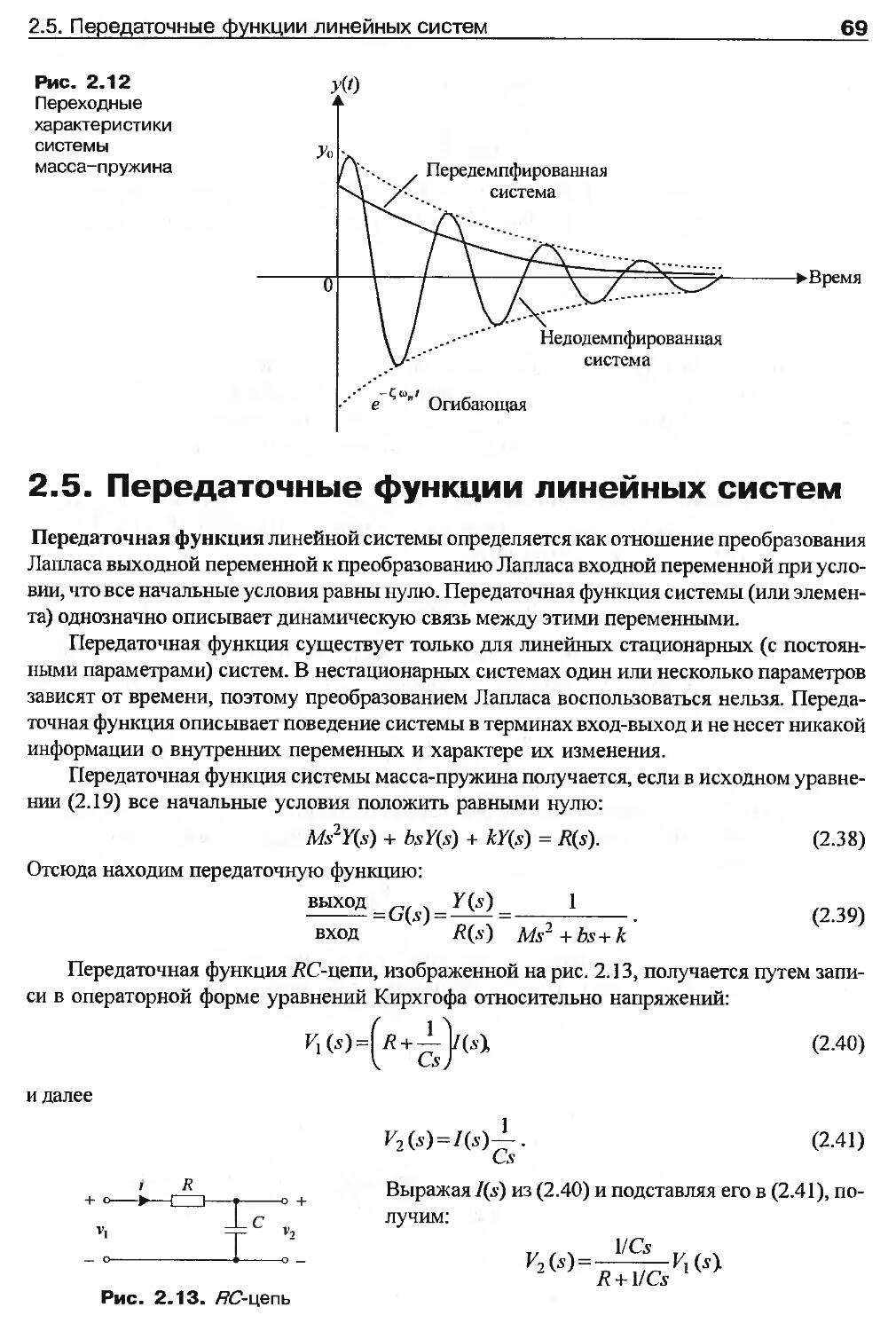
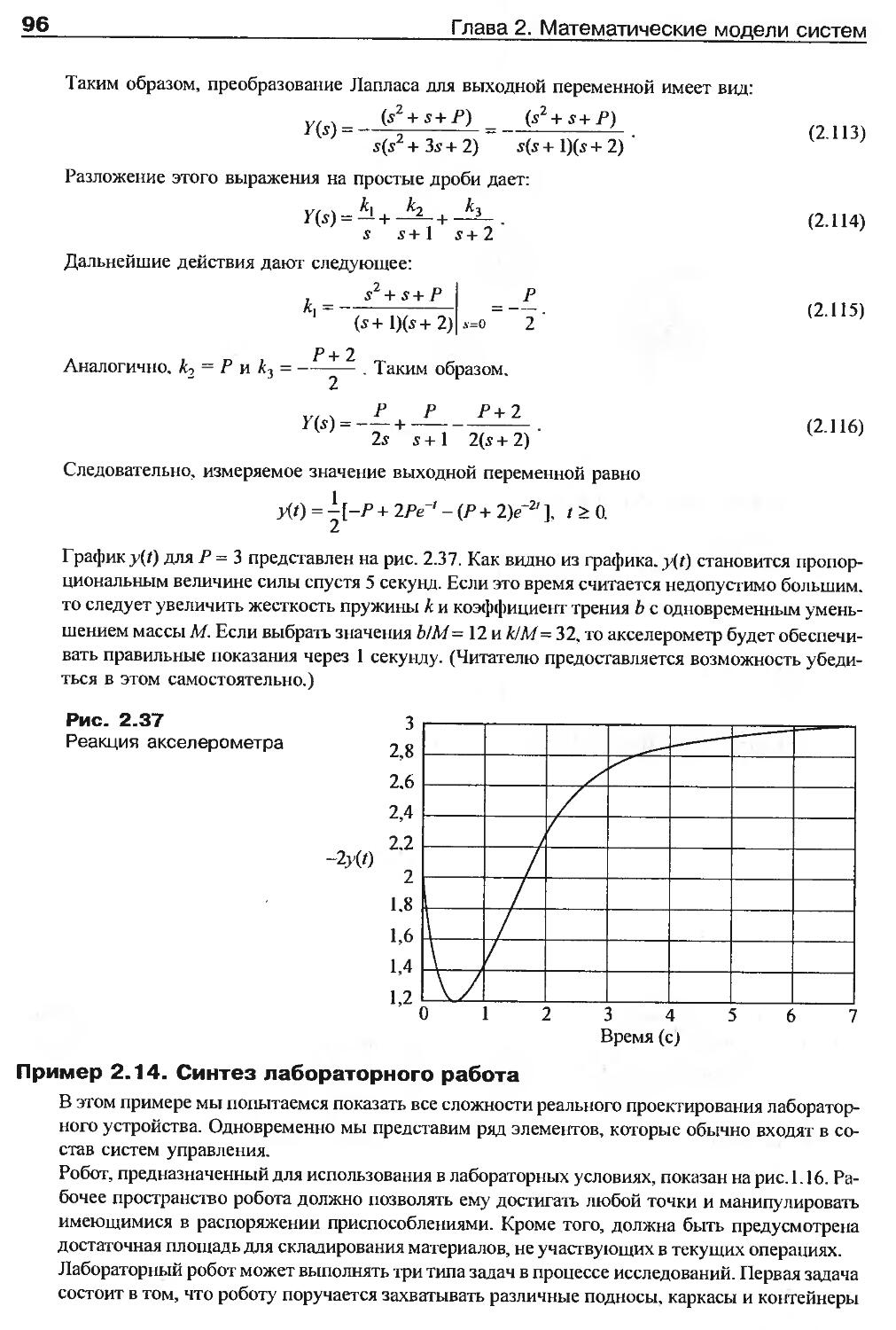
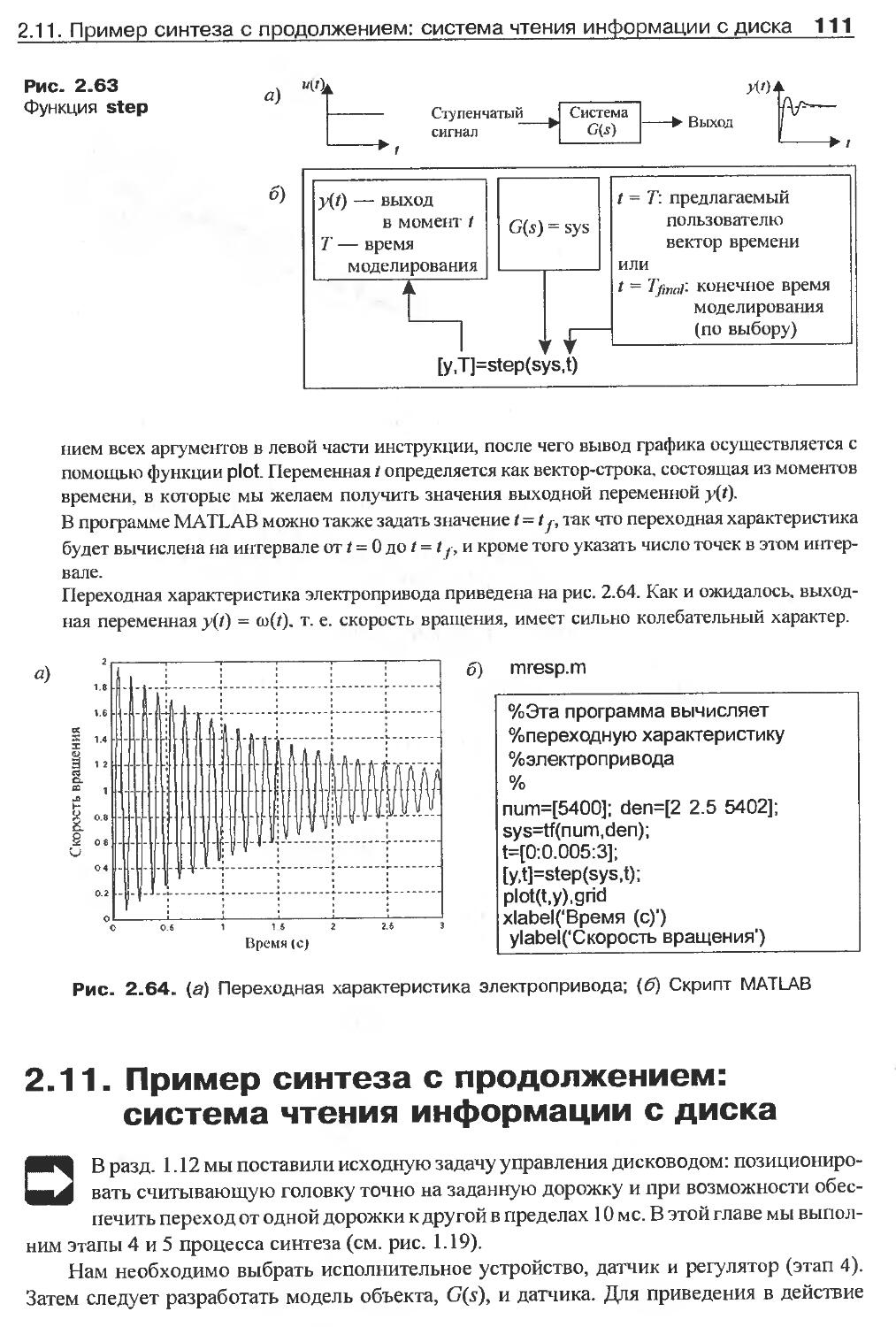
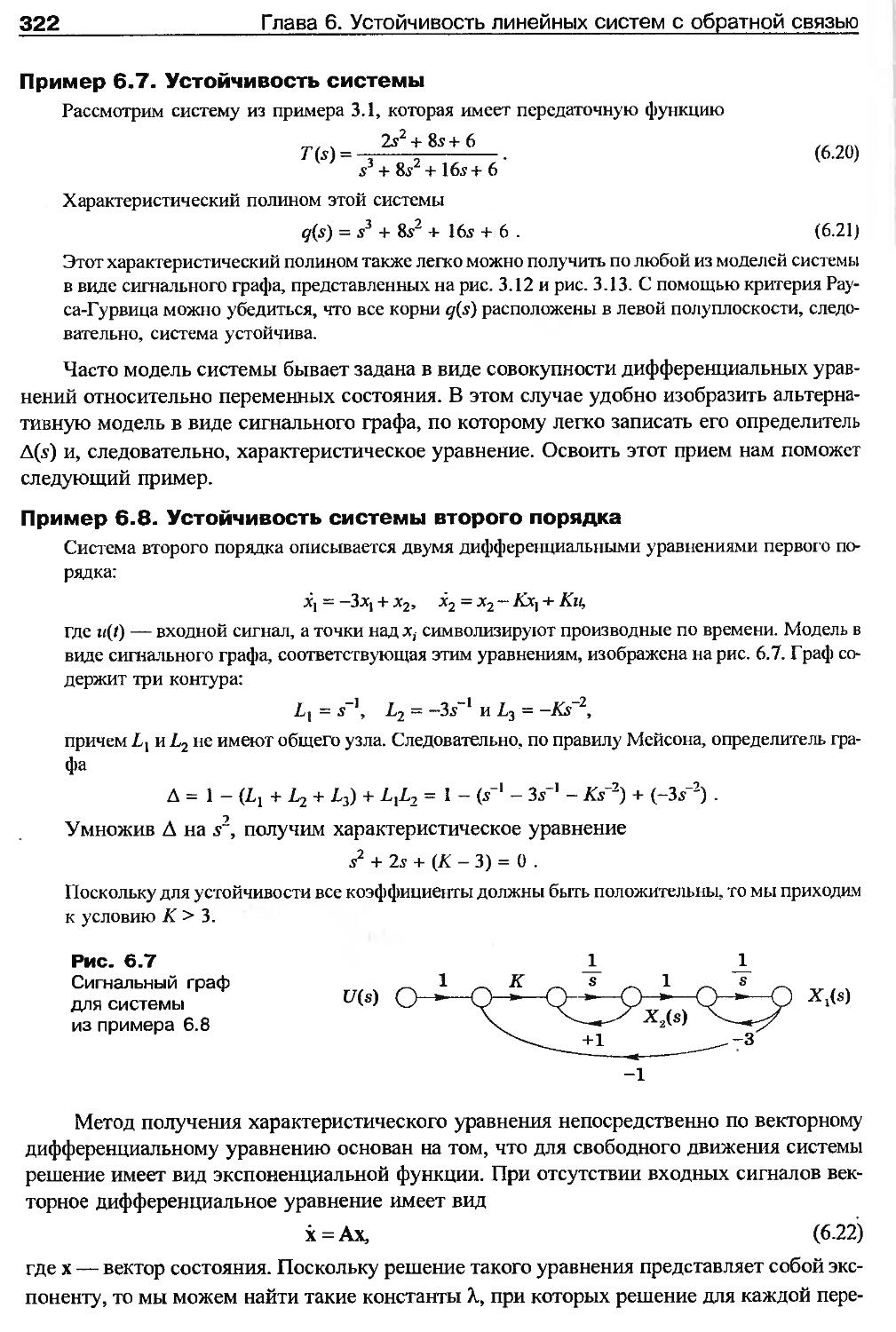
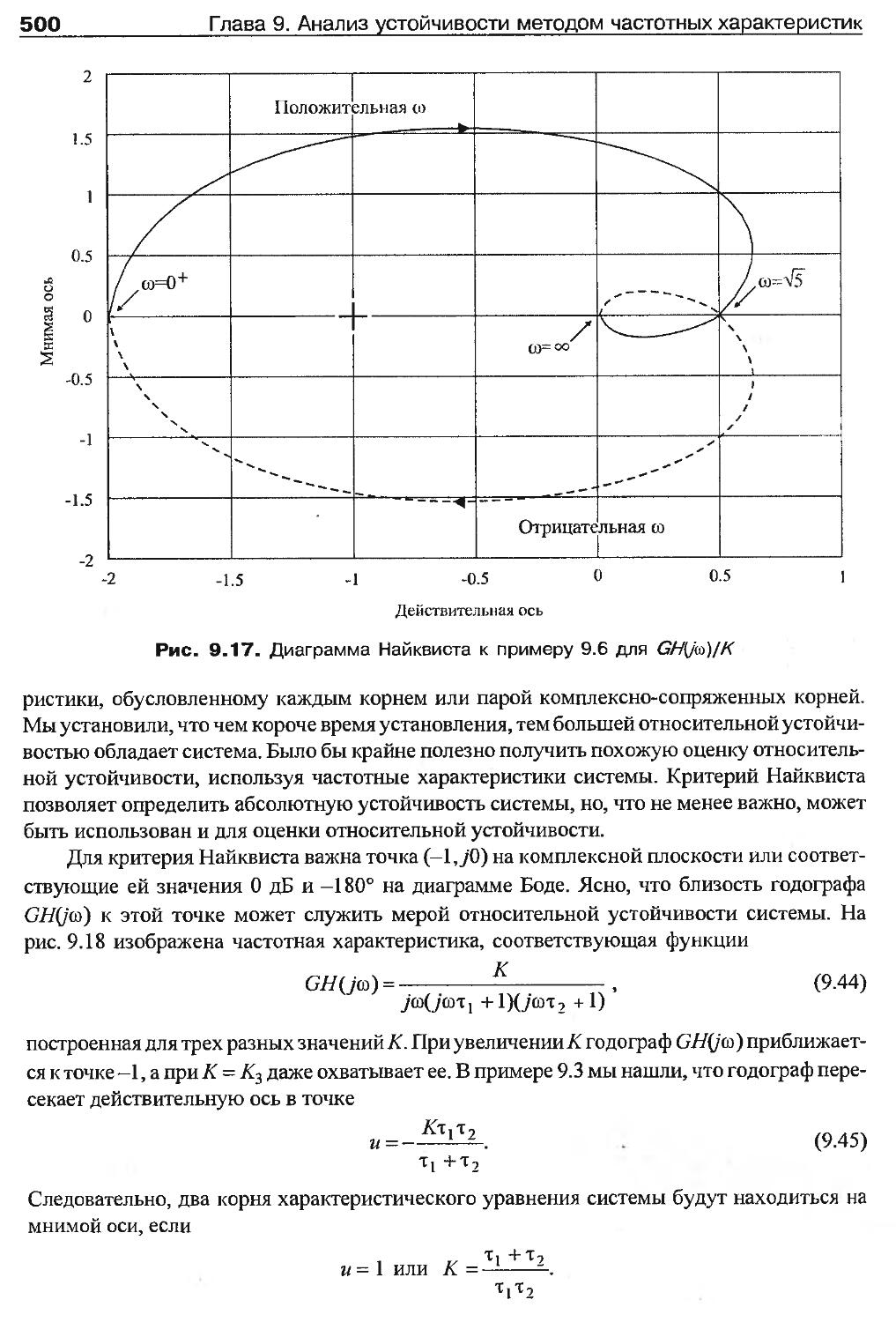
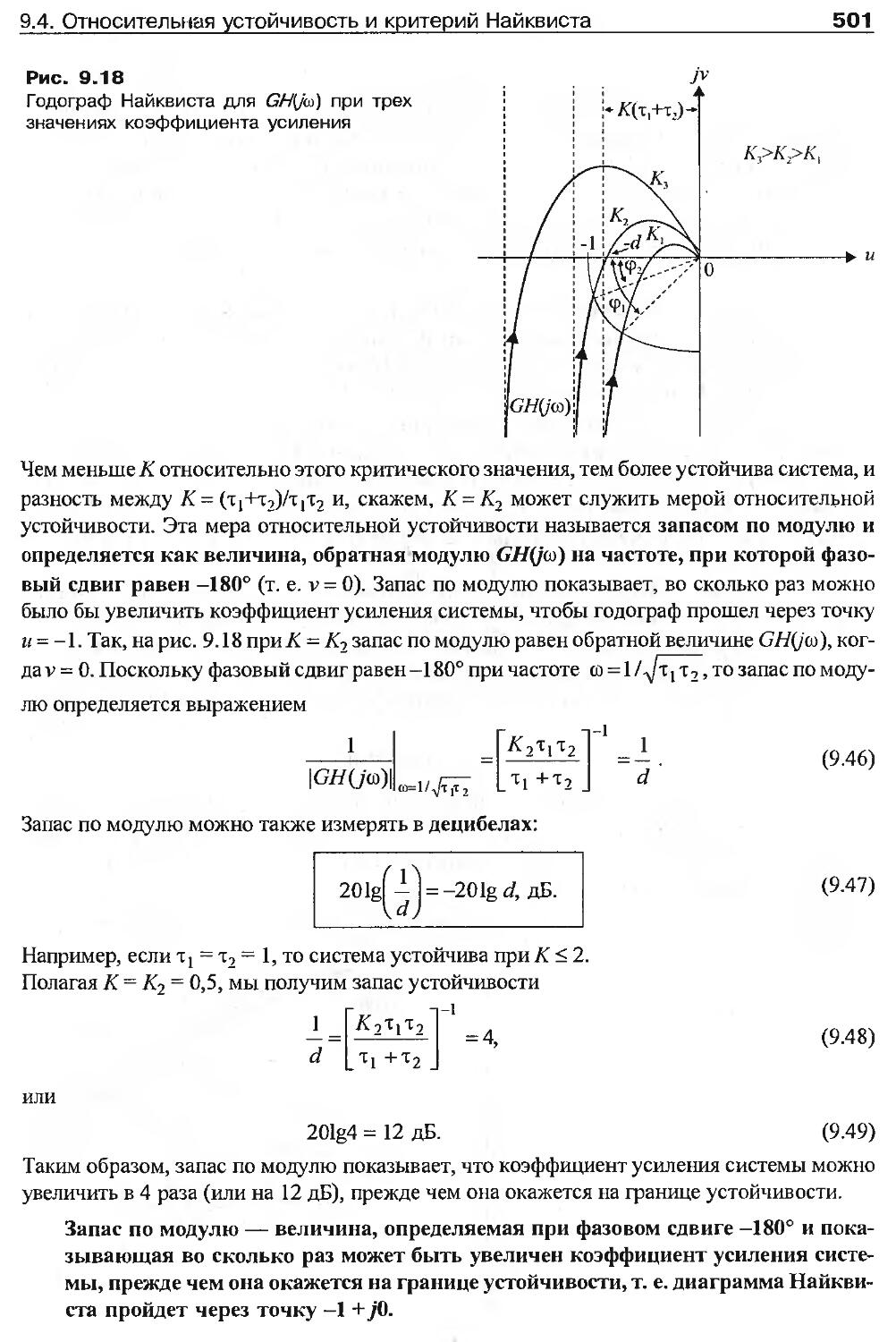
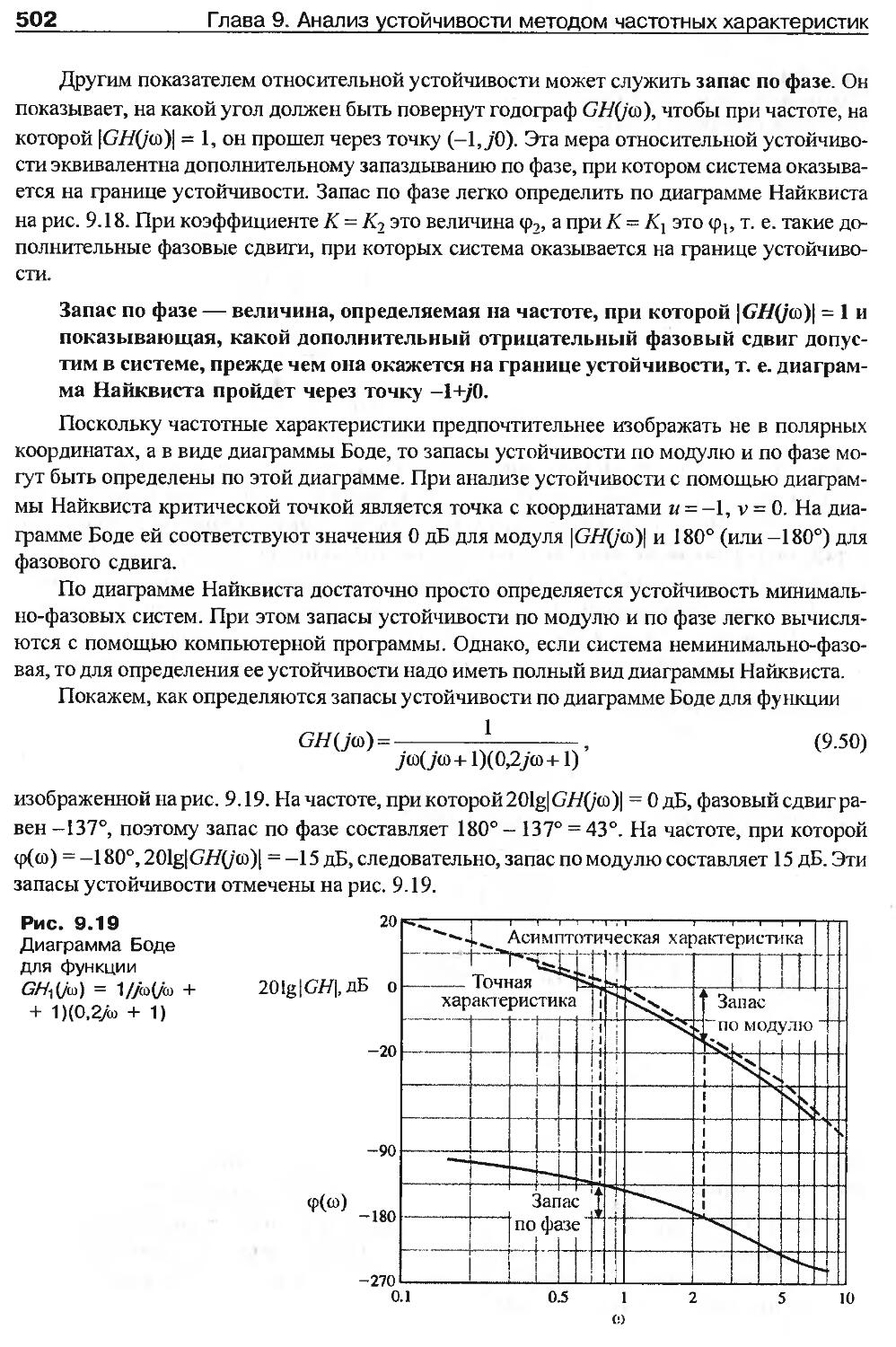
Текст
Р. ДОРФ, Р. БИШОП
СОВРЕМЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
MODERN CONTROL SYSTEMS
Eighth Edition
Richard C.Dorf
University of California, Davis
Robert H.Bishop
The University of Texas at Austin
ADDISON-WESLEY
ТЕХНИЧЕСКИЙ
Л УНИВЕРСИТЕТ
б Я 5 £699
Р. ДОРФ, Р. БИШОП
СОВРЕМЕННЫЕ СИСТЕМЫ УПРАВЛЕНИЯ
Перевод с английского Б.И.КОПЫЛОВА
Москва Лаборатория Базовых Знаний ЮНИМЕДИАСТАЙЛ 2 0 0 2
M5i
УДК 62-52-ББК 32.965
Д59
Дорф Р.
Д 59 Современные системы управления/ Р. Дорф, Р. Бишоп. Пер. с англ. Б. И. Копылова. — М.: Лаборатория Базовых Знаний, 2002. — 832 с.: ил.
ISBN 5-93208-119-8
В книге излагаются методы анализа и синтеза современных систем автоматического управления. Показано, как с использованием принципа обратной связи могут быть созданы высокоэффективные системы управления различного назначения (аэрокосмическая техника, промышленные роботы, автомобилестроение, медицинская аппаратура и др.).
Значительное место в книге уделено применению для анализа и синтеза систем управления интегрированной среды MATLAB и программы Simulink.
Книга содержит большое количество примеров и около 800 задач для самостоятельного решения и предназначена для студентов, преподавателей и аспирантов вузов, а также инженеров-практиков, занимающихся проектированием систем управления.
УДК 62-52
ББК 32.965
По вопросам приобретения обращаться: В Москве «Лаборатория Базовых Знаний» (095) 955-03-98, e-mail: lbz@aha.ru
В Санкт-Петербурге «Диалект» (812) 247-93-01, e-mail: dialect@sndlct.ioffe.rssi.ru
ISBN 0-201-30864-9
ISBN 5-93208-119-8
Original English language title:
Modern Control Systems, Fourth Edition by Richard C. Dorf, Robert H. Bishop, © 1998
© Издание на русском языке
Лаборатория Базовых Знаний, 2002
Когда уходят выдающиеся учителя, их студенты могут сказать: «Это сделали мы сами»
С признательностью посвящается:
Линде Феррера Бишоп и
Джой Макдональд Дорф
Содержание
Предисловие...........................................................14
Глава 1. Введение в системы управления..............................21
Обзор..............................................................21
1.1. Введение......................................................21
1.2. История автоматического управления............................23
1.3. Два примера использования обратной связи......................26
1.4. Управление на практике........................................28
1.5. Примеры современных систем управления.........................29
1.6. Автоматическая сборка и роботы................................35
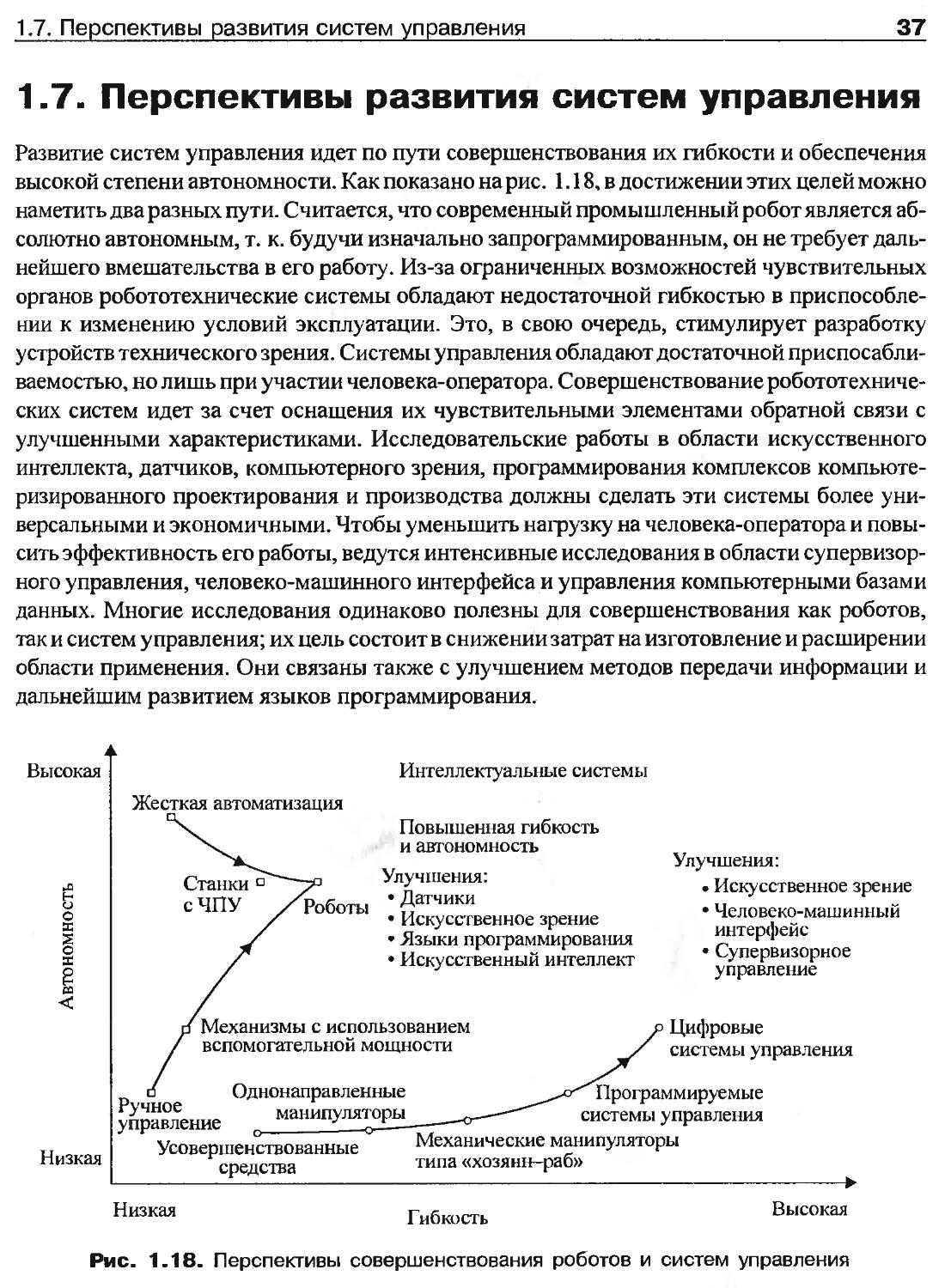
1.7. Перспективы развития систем управления........................37
1.8. Техническое проектирование....................................38
1.9. Синтез системы управления.....................................39
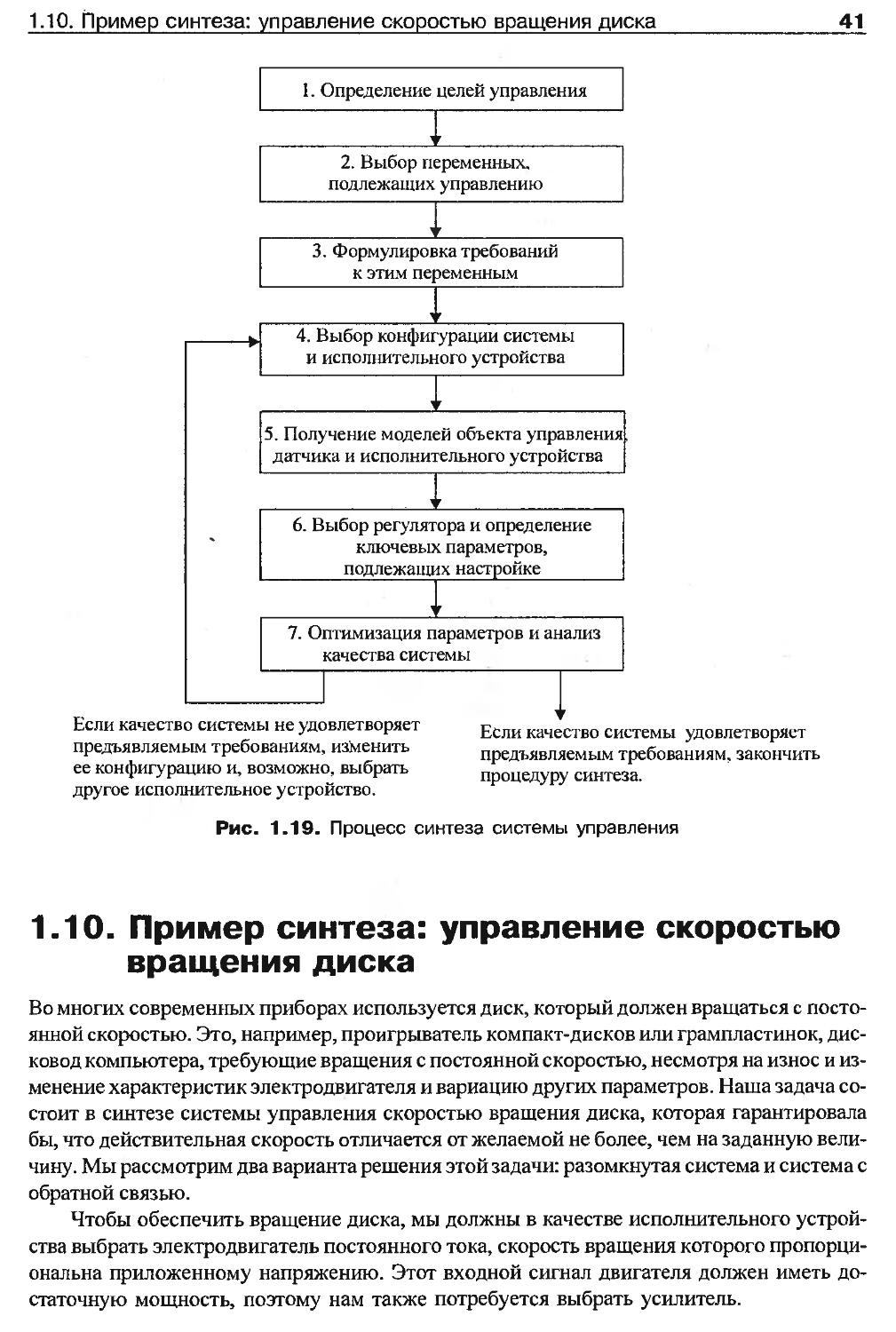
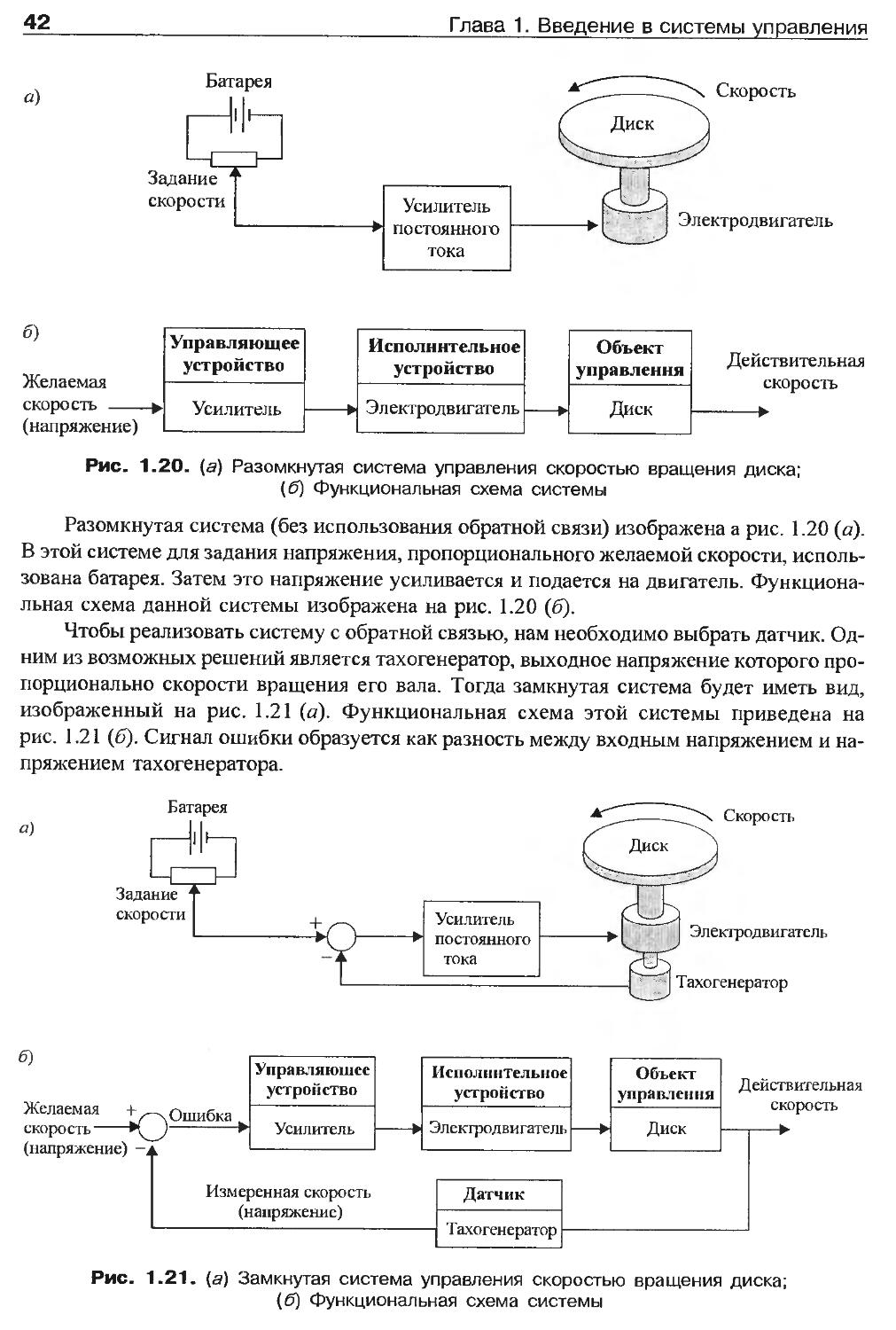
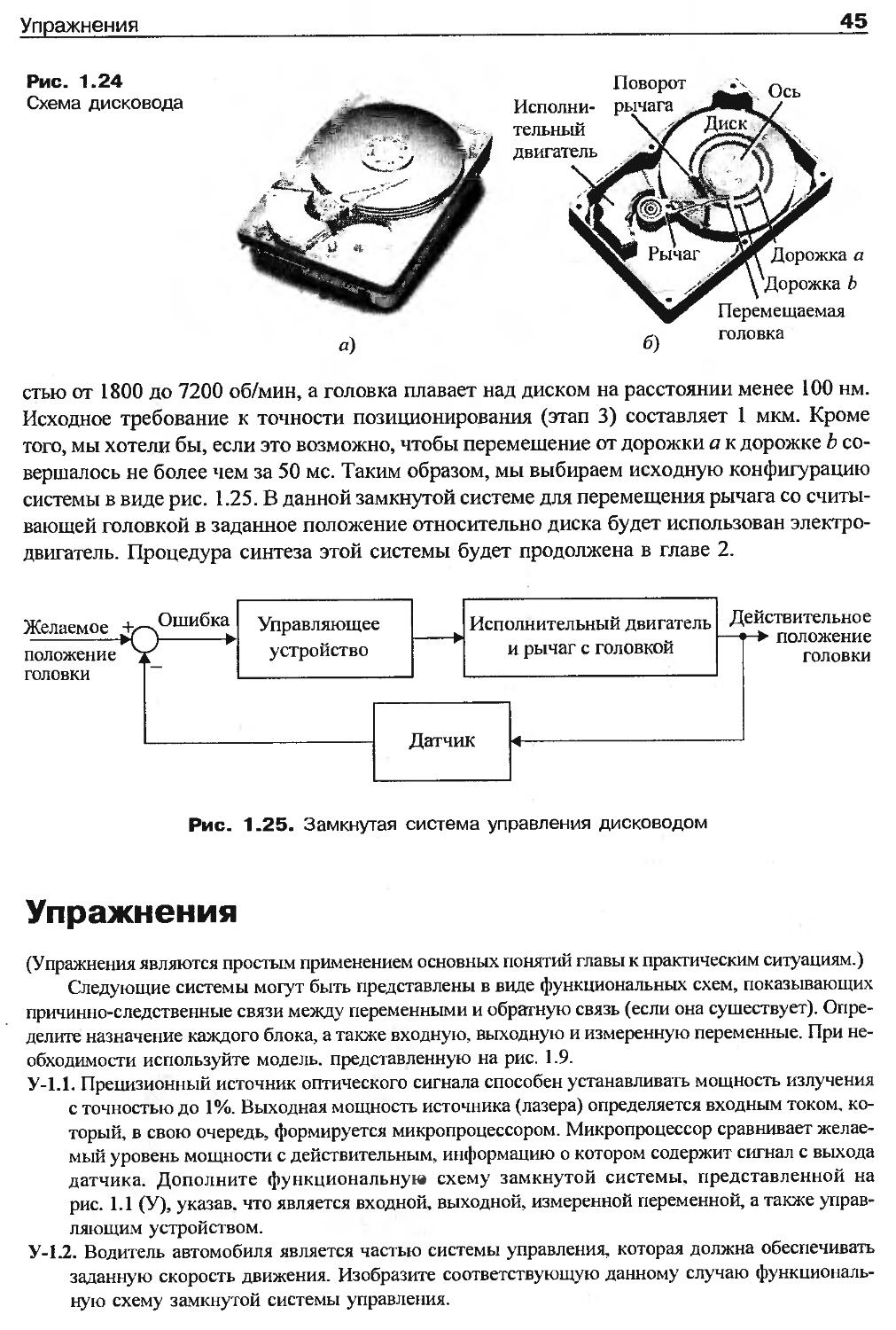
1.10. Пример синтеза: управление скоростью вращения диска..........41
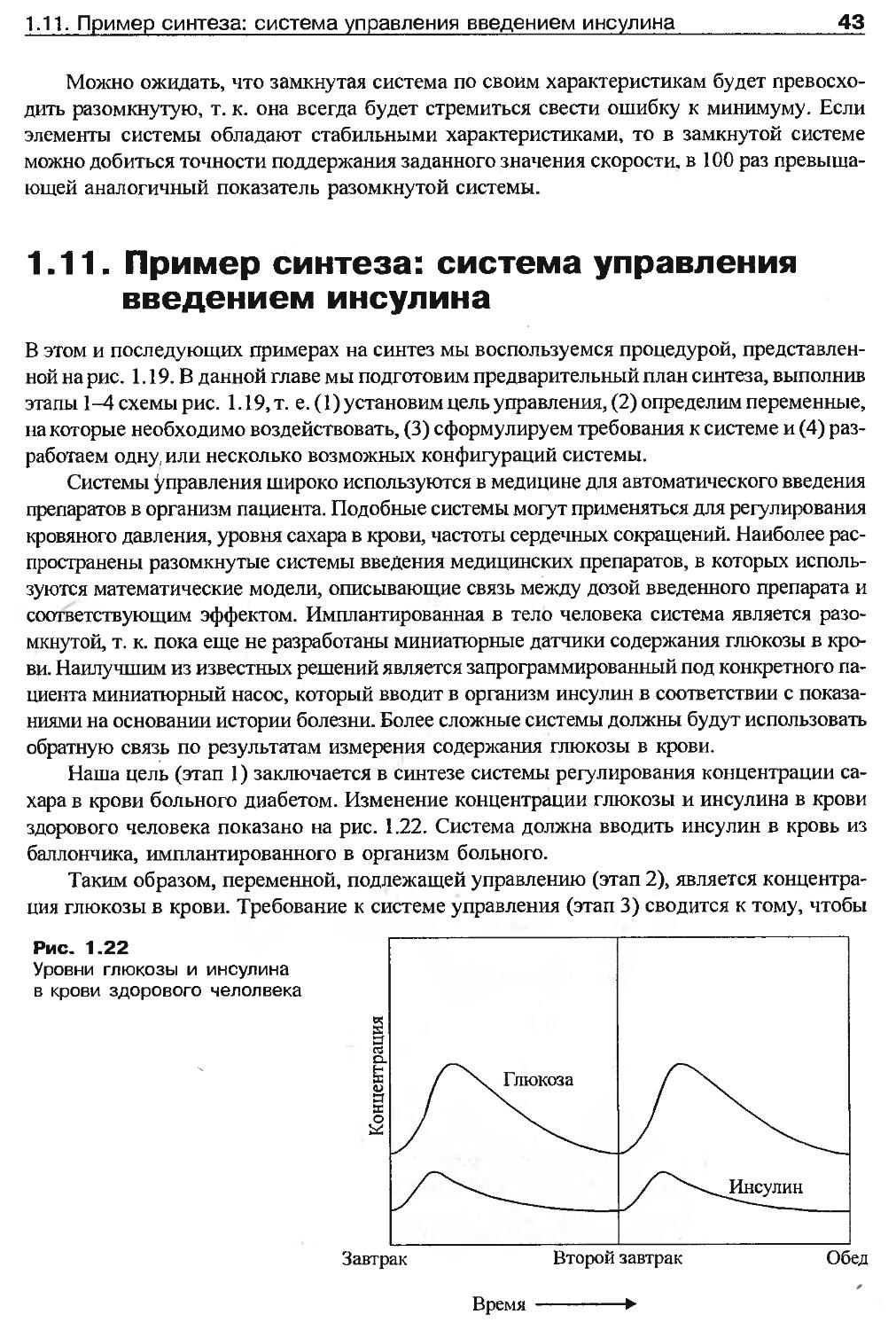
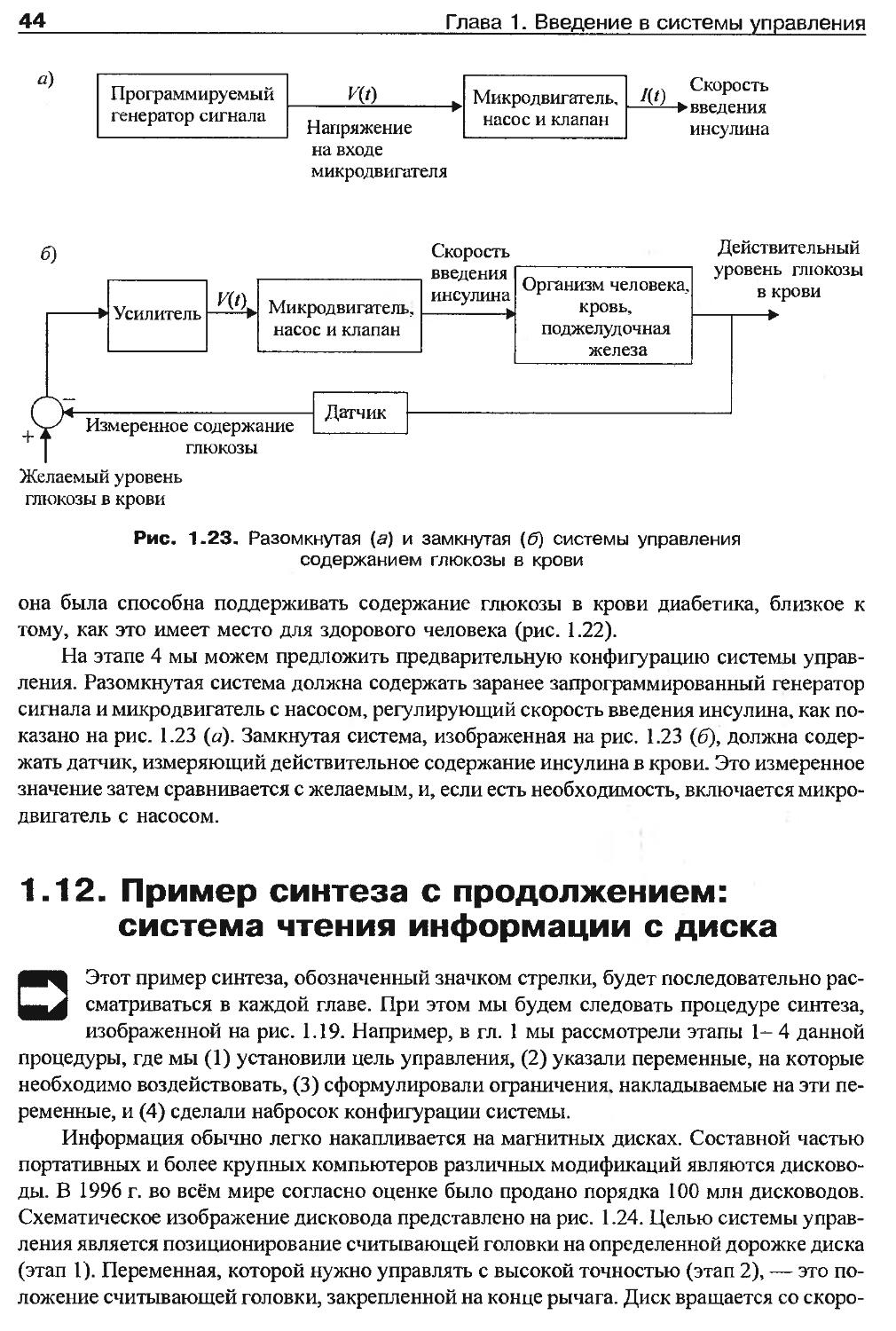
1.11. Пример синтеза: система управления введением инсулина........43
1.12. Пример синтеза с продолжением: система чтения информации с диска. ... 44
Упражнения.........................................................45
Задачи.............................................................46
Задачи на синтез систем............................................52
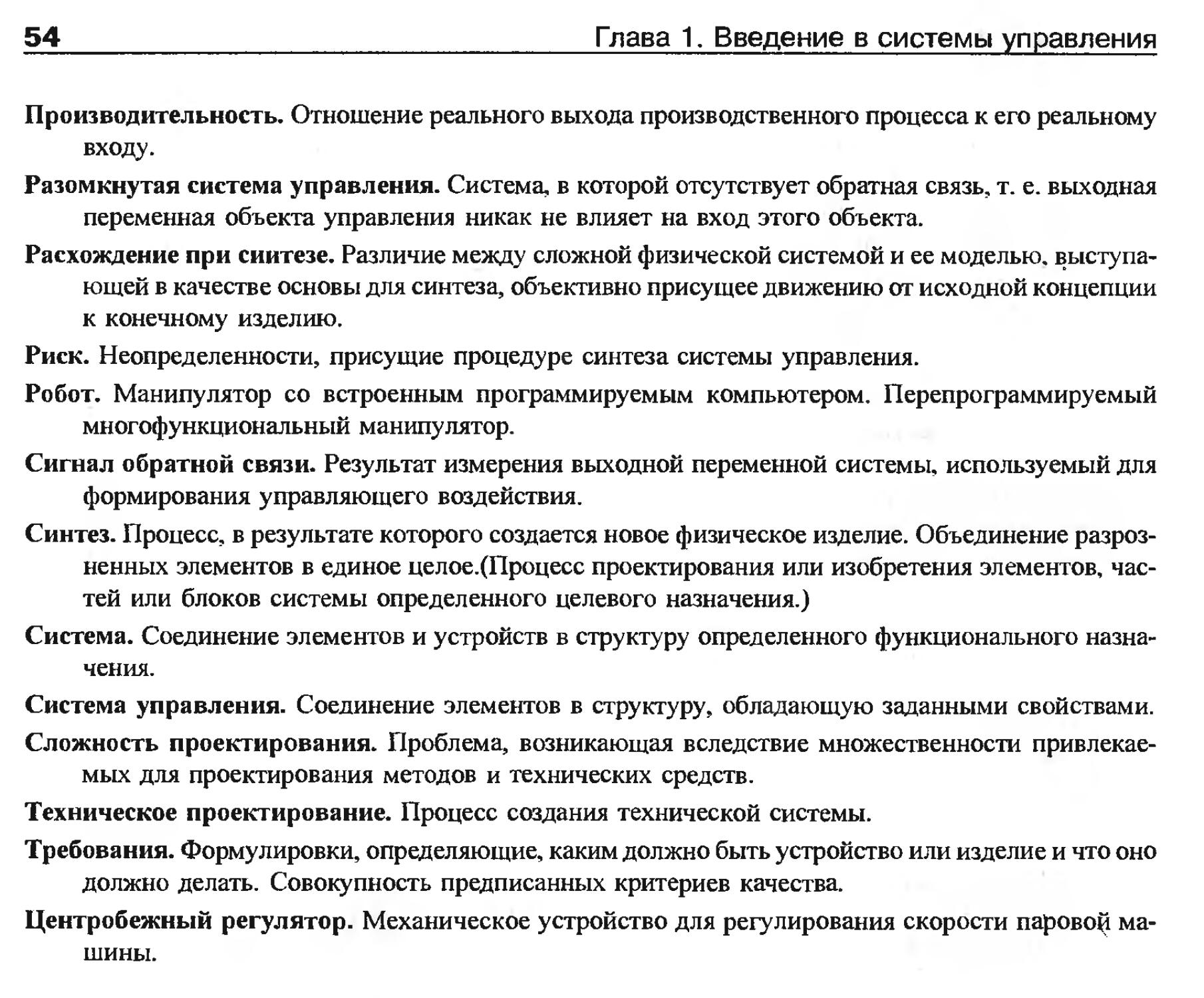
Ключевые термины и понятия ........................................53
Глава 2. Математические модели систем.................................55
Обзор..............................................................55
2.1. Введение......................................................55
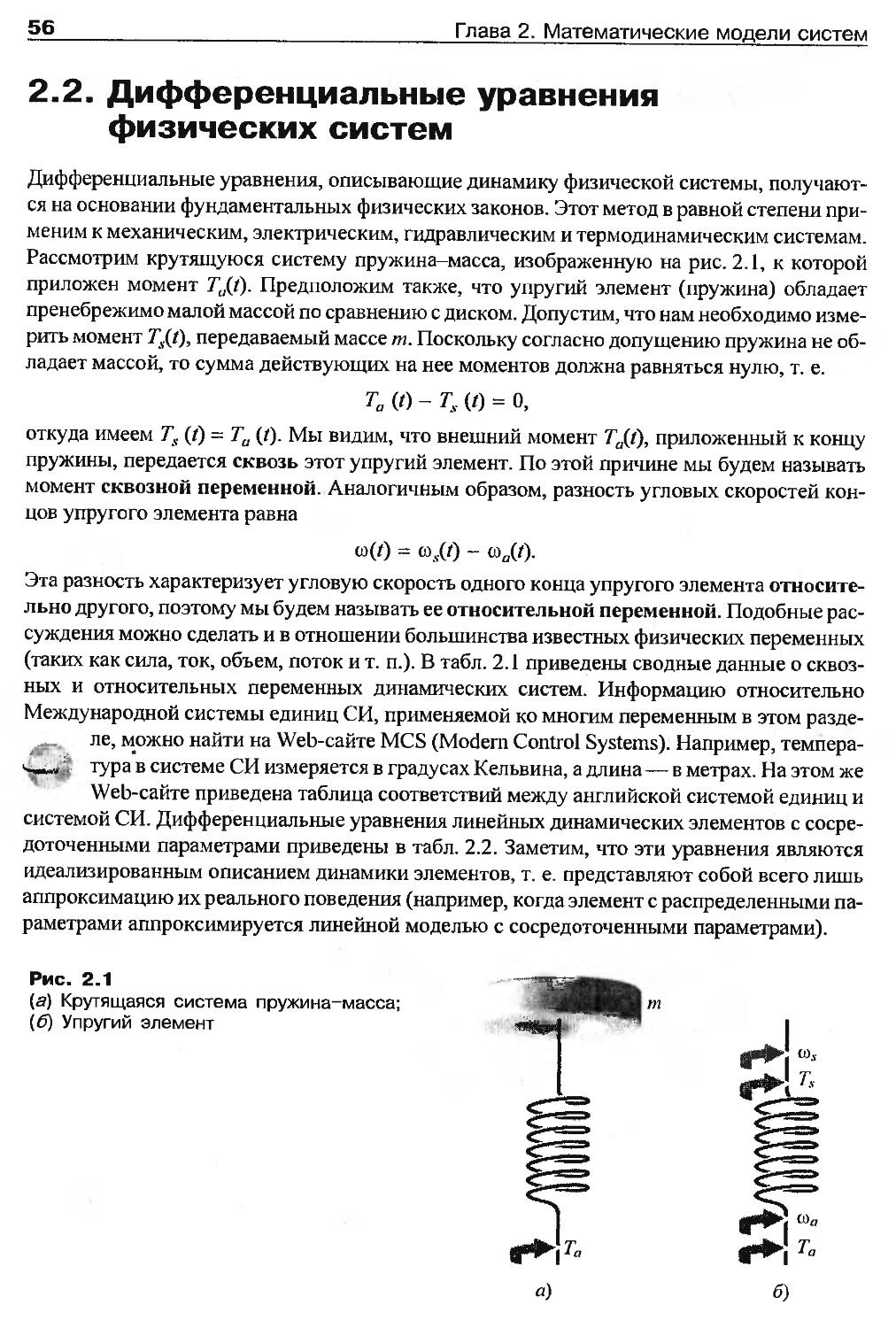
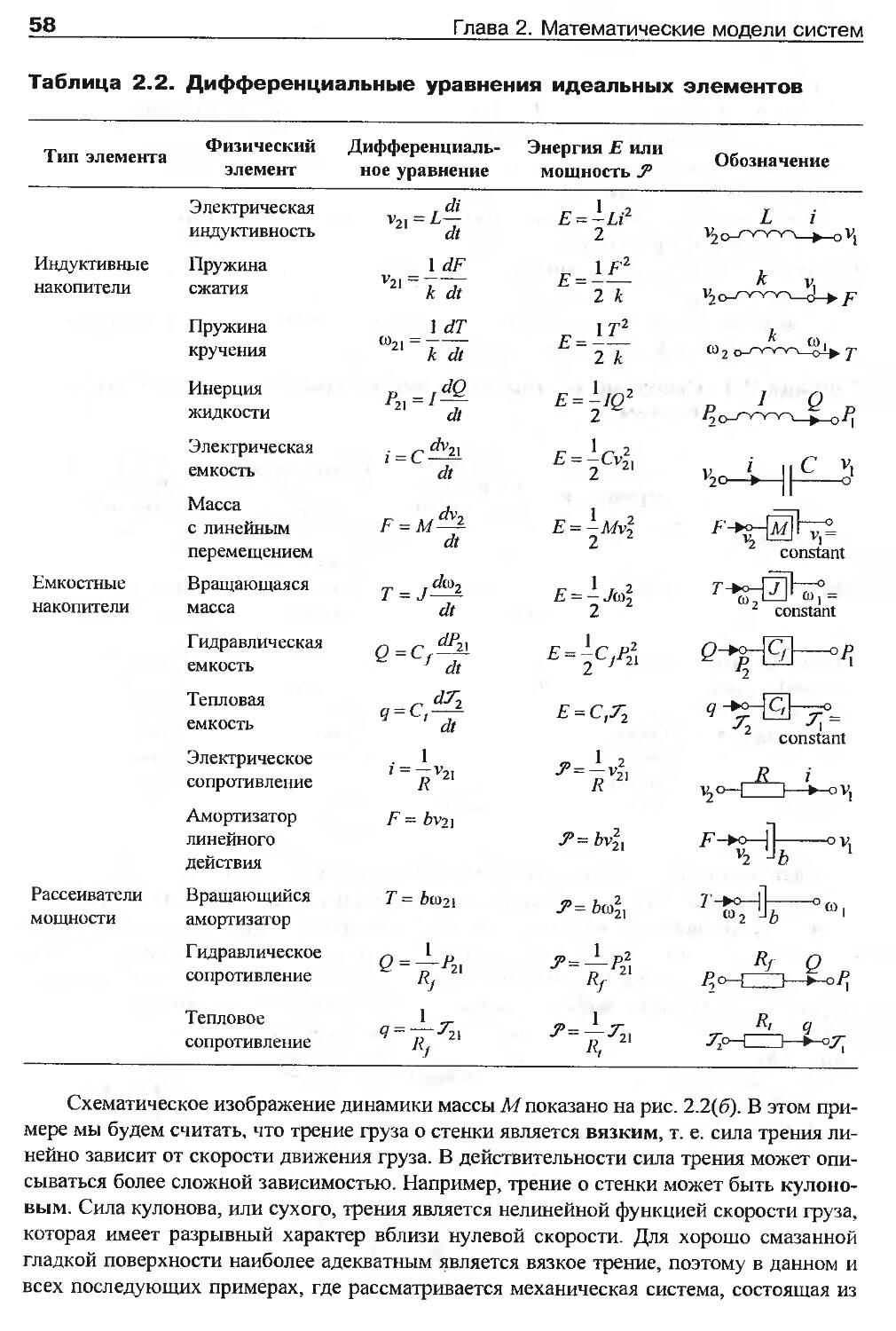
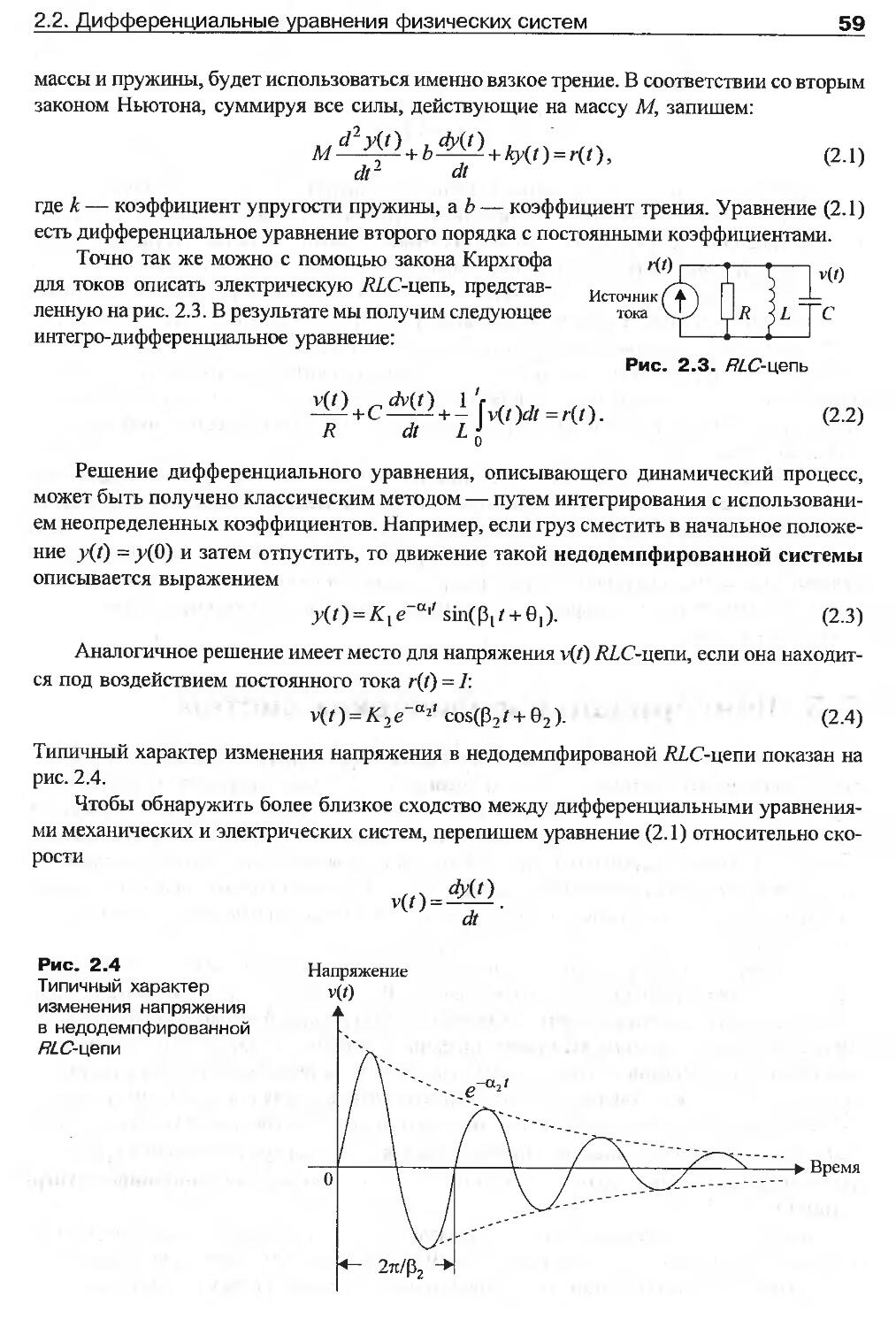
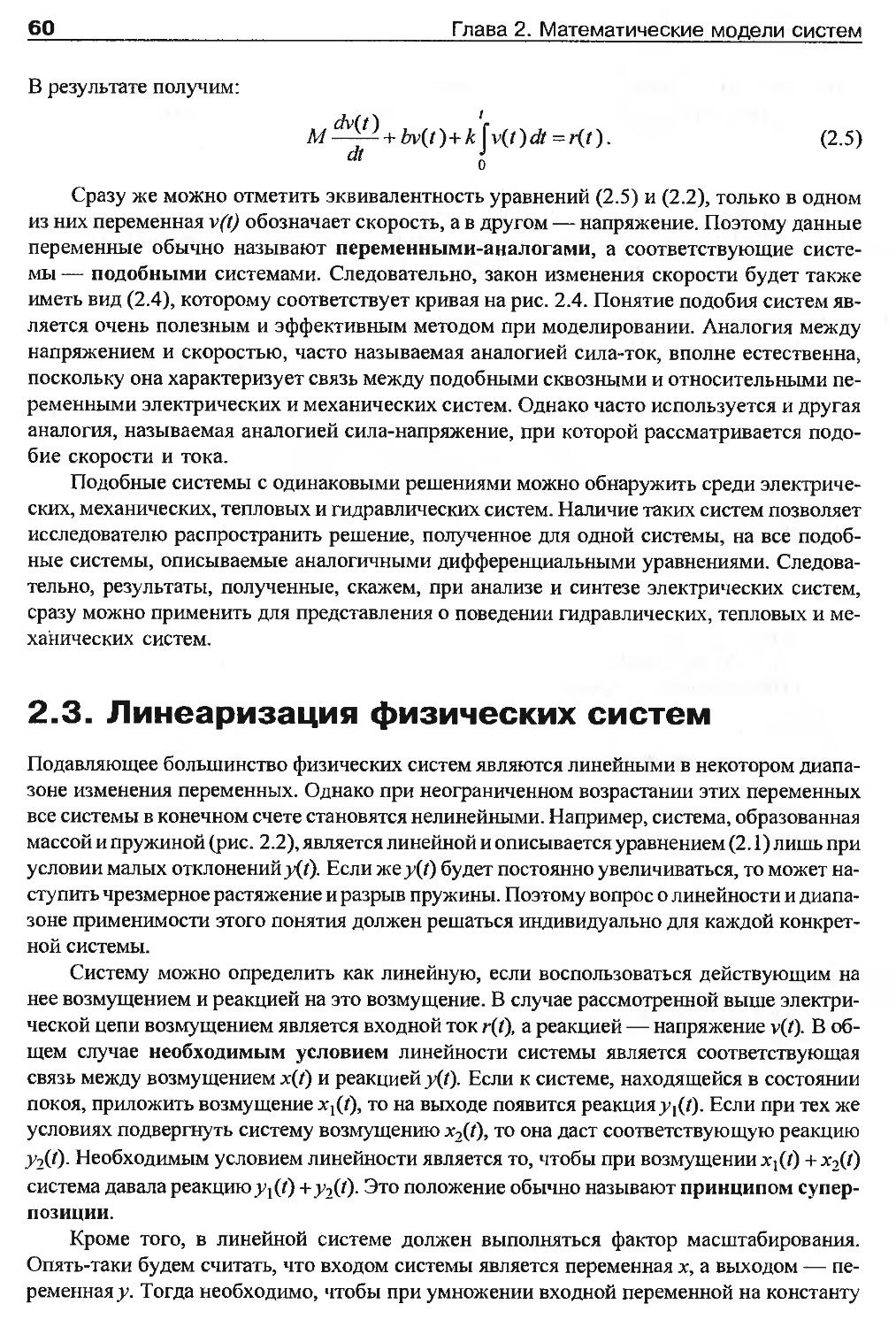
2.2. Дифференциальные уравнения физических систем..................56
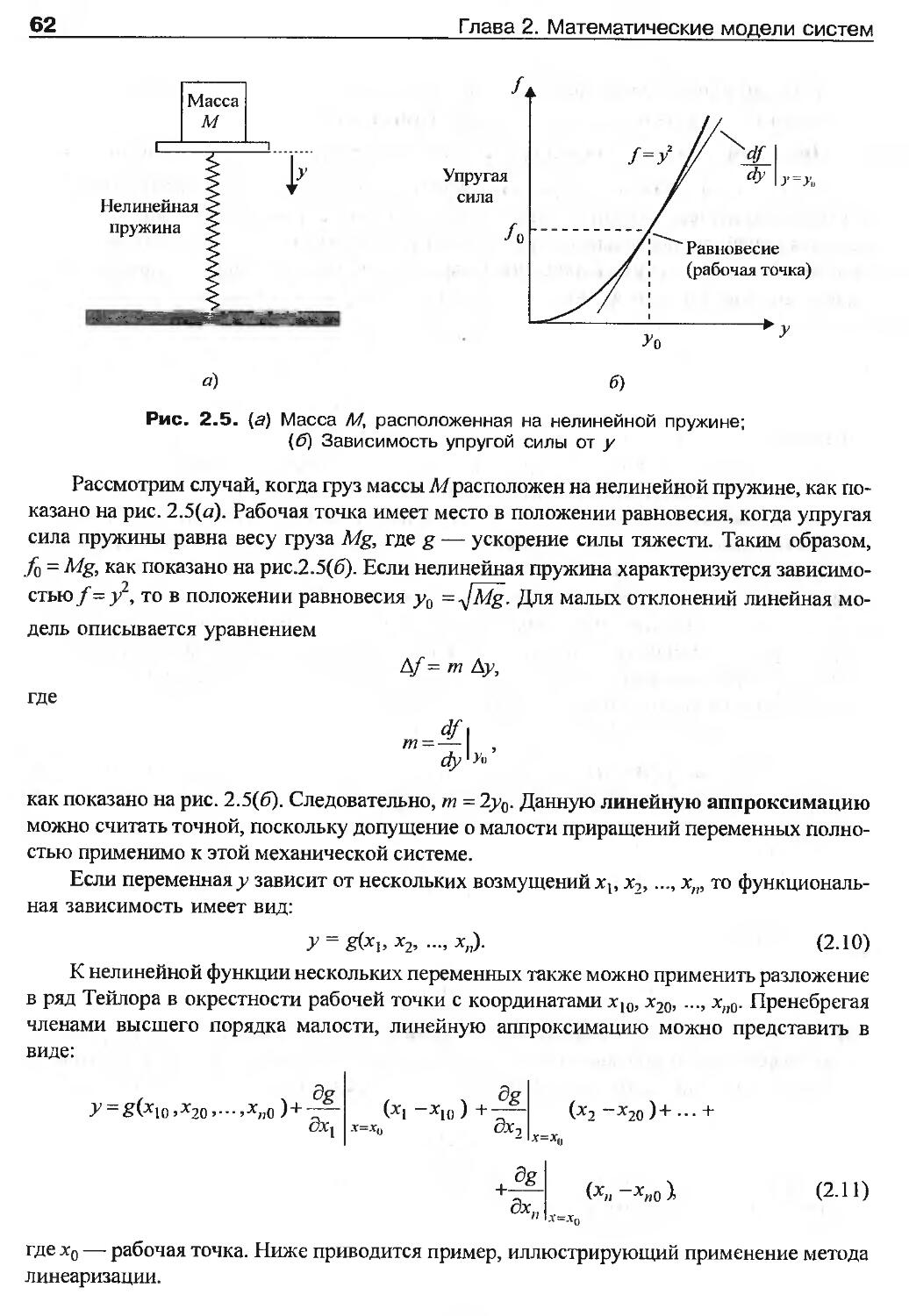
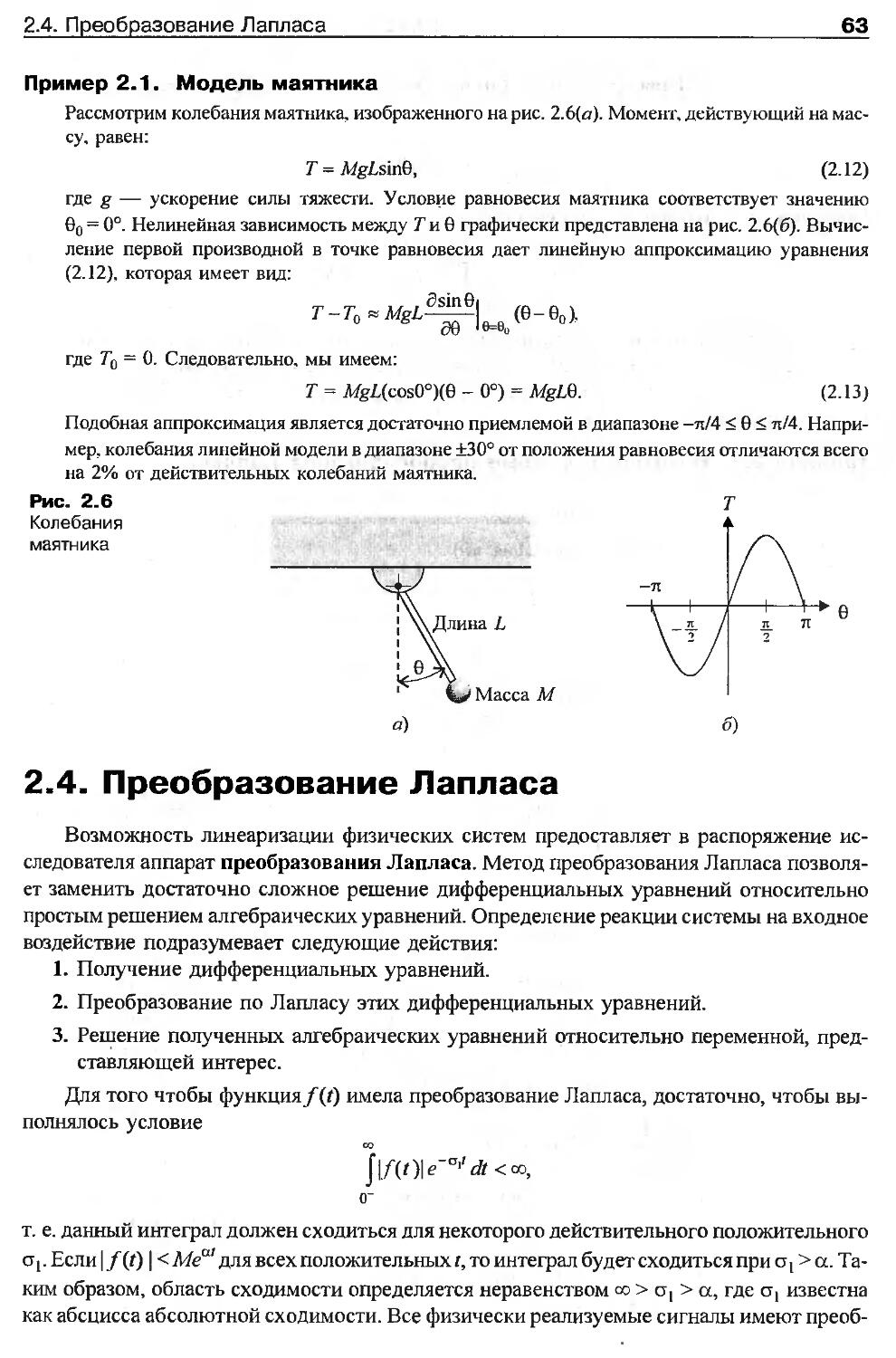
2.3. Линеаризация физических систем................................60
2.4. Преобразование Лапласа........................................63
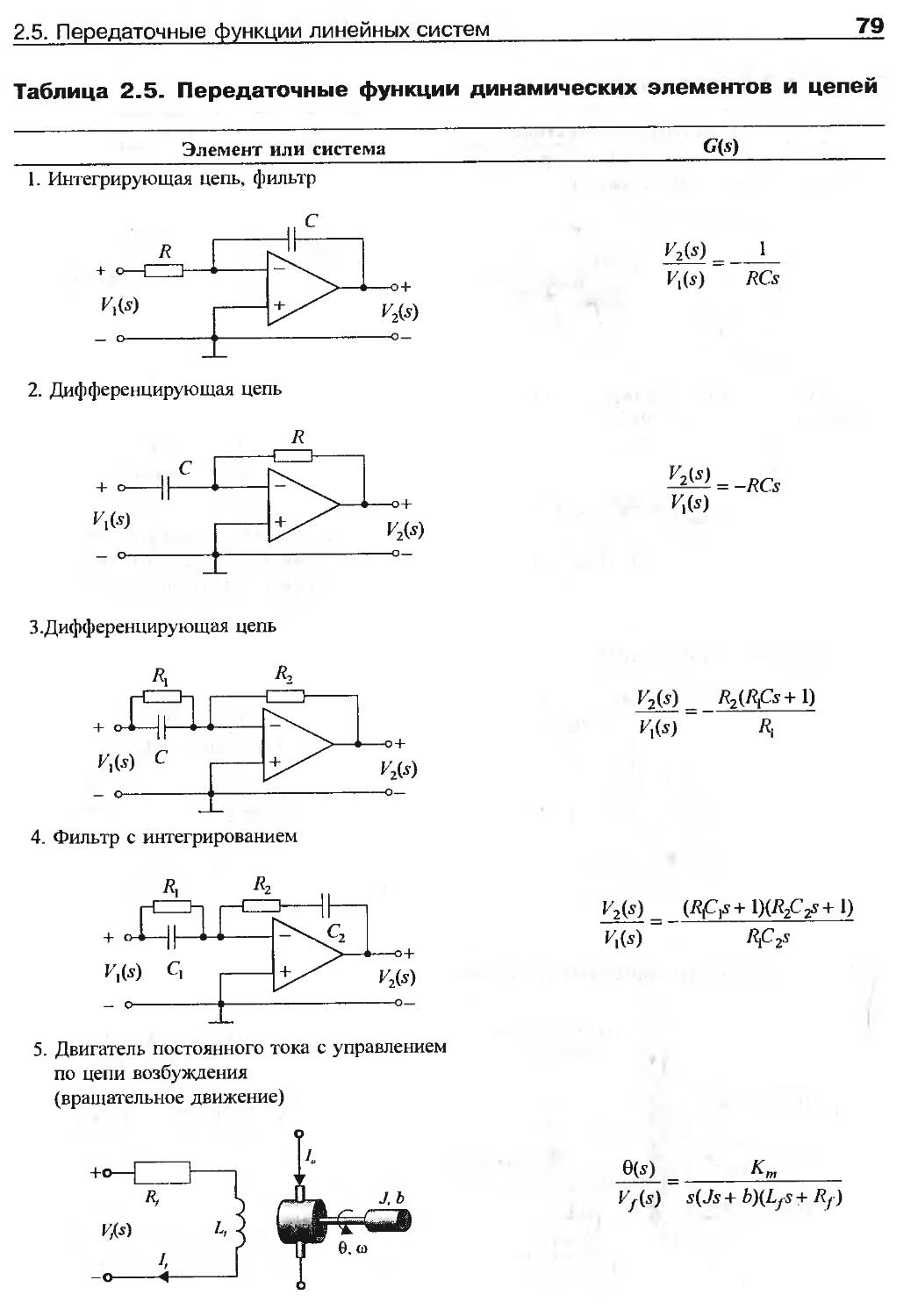
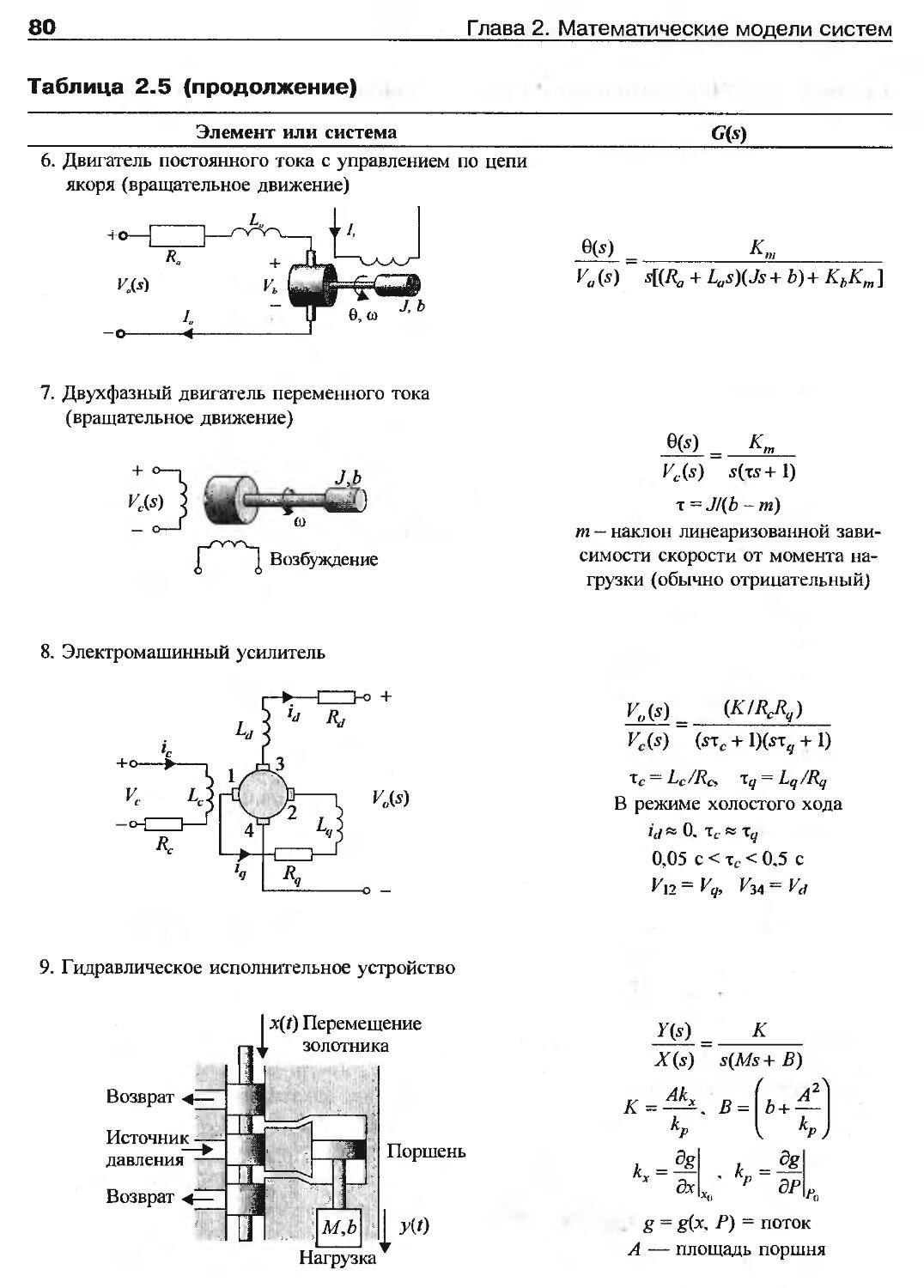
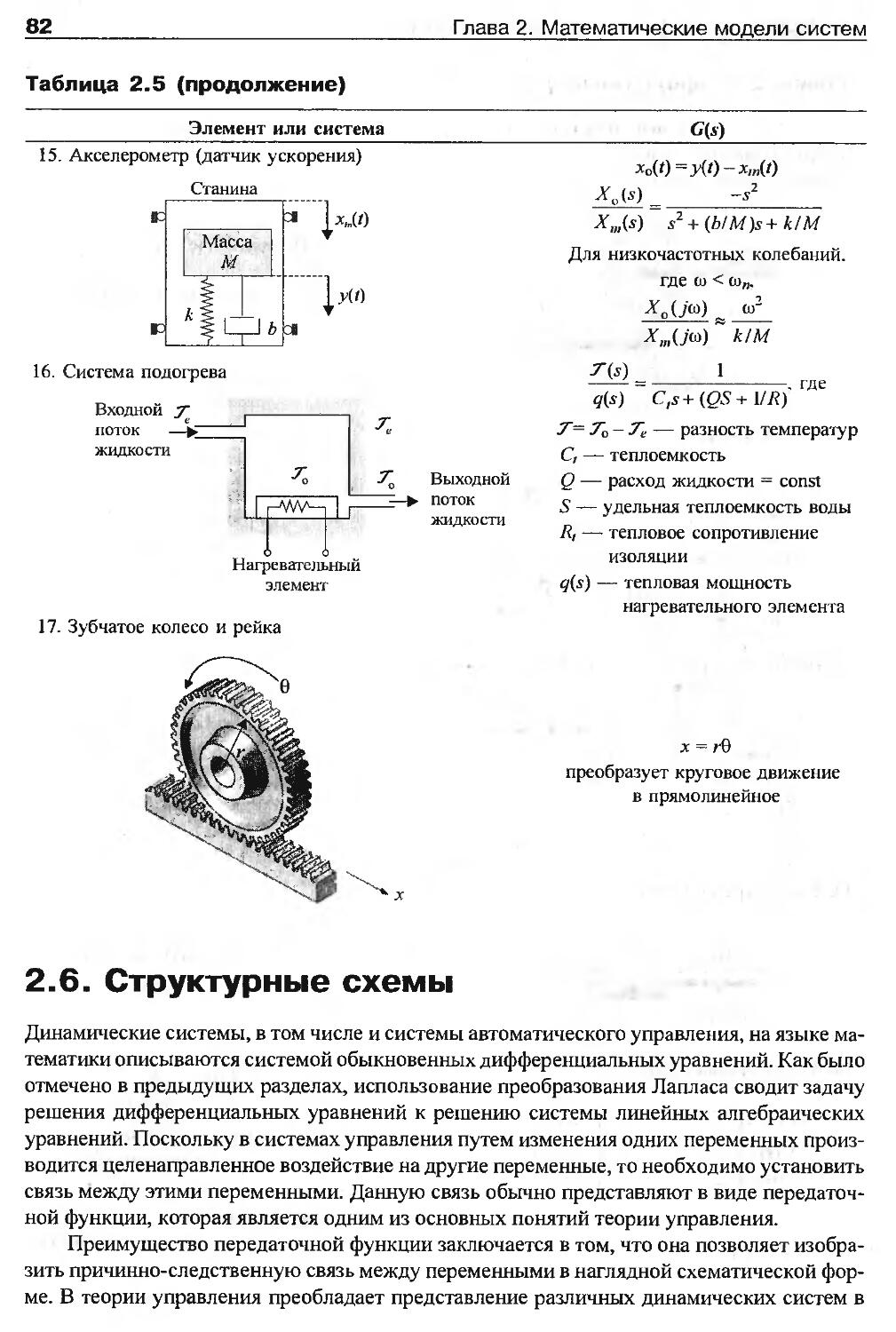
2.5. Передаточные функции линейных систем..........................69
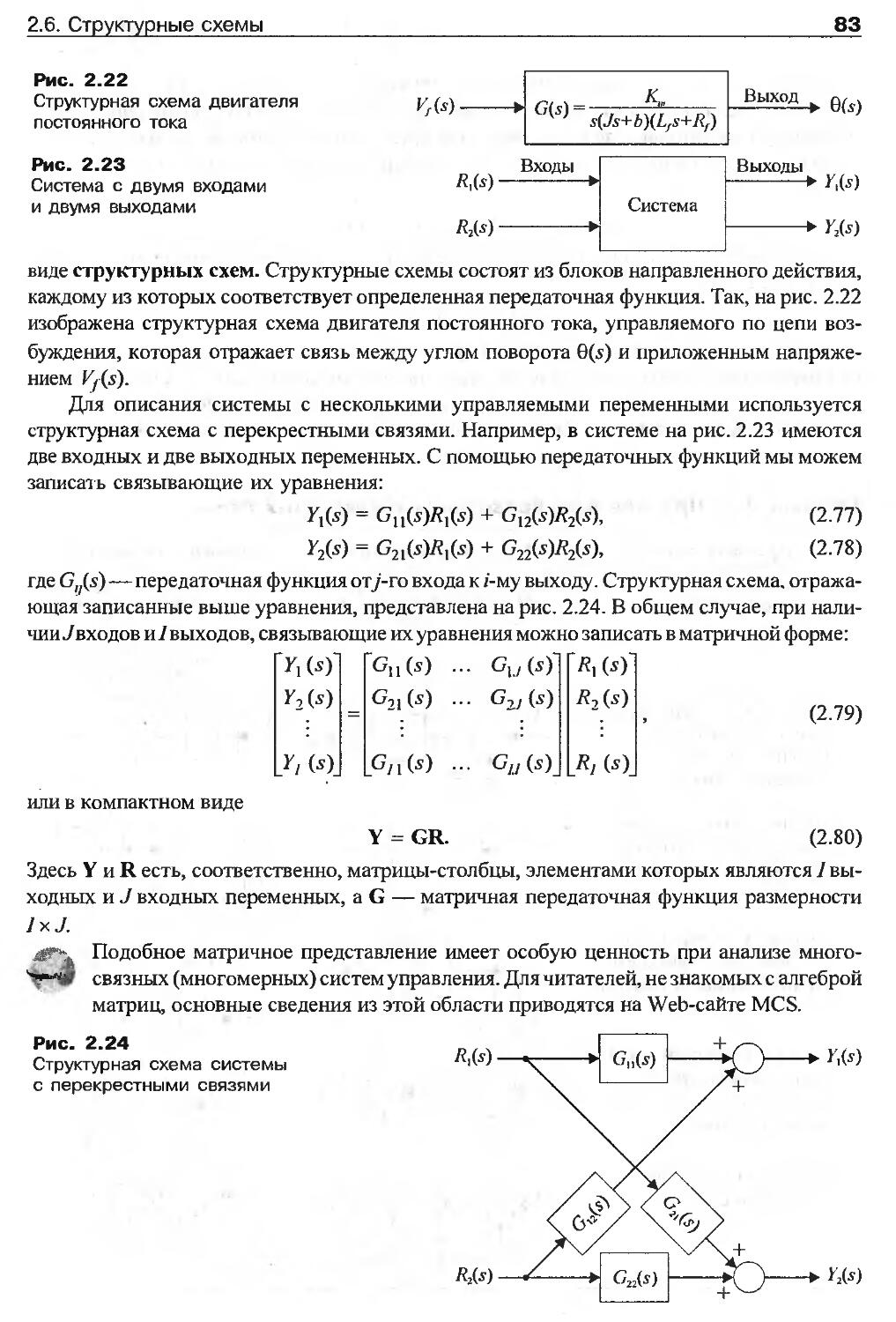
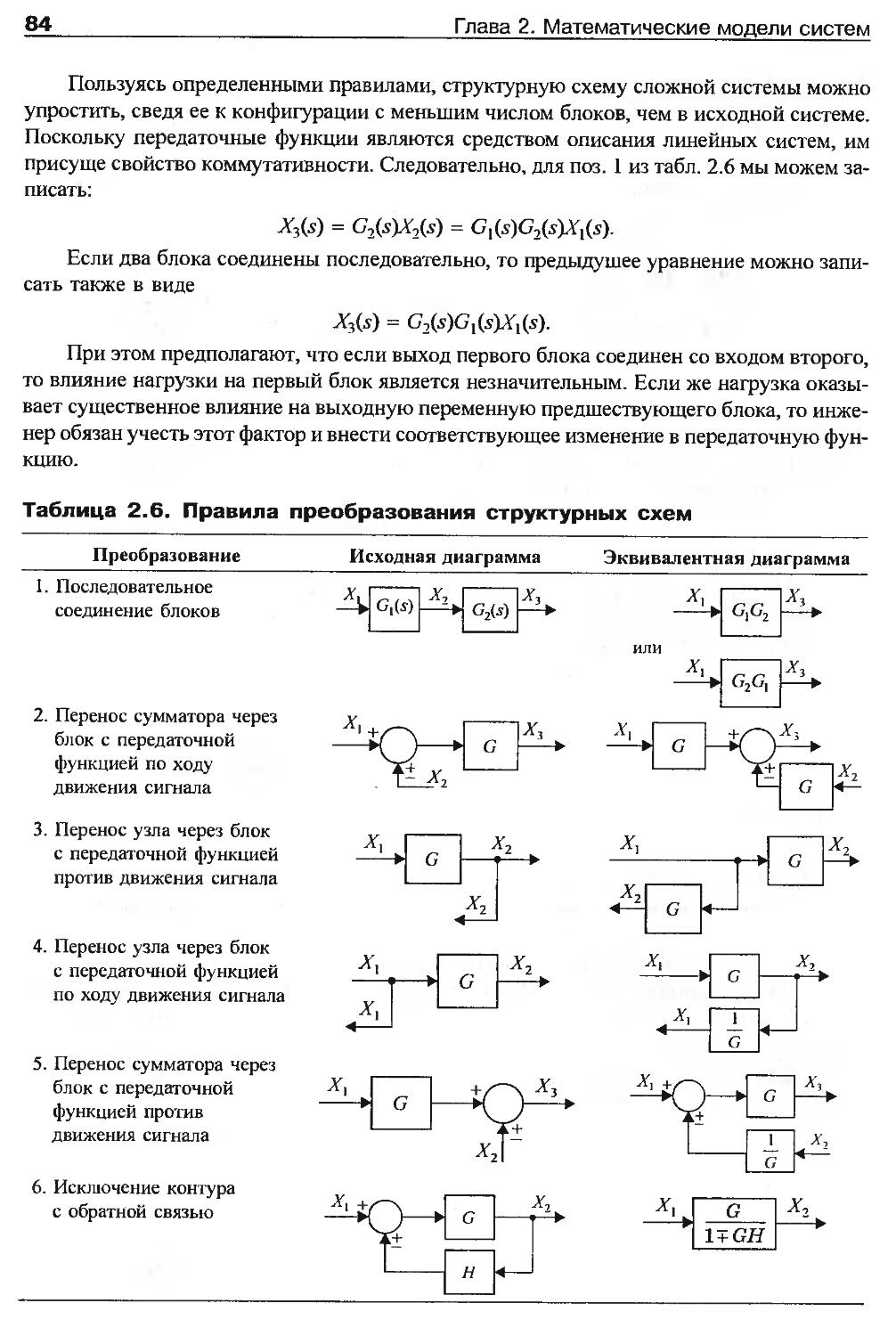
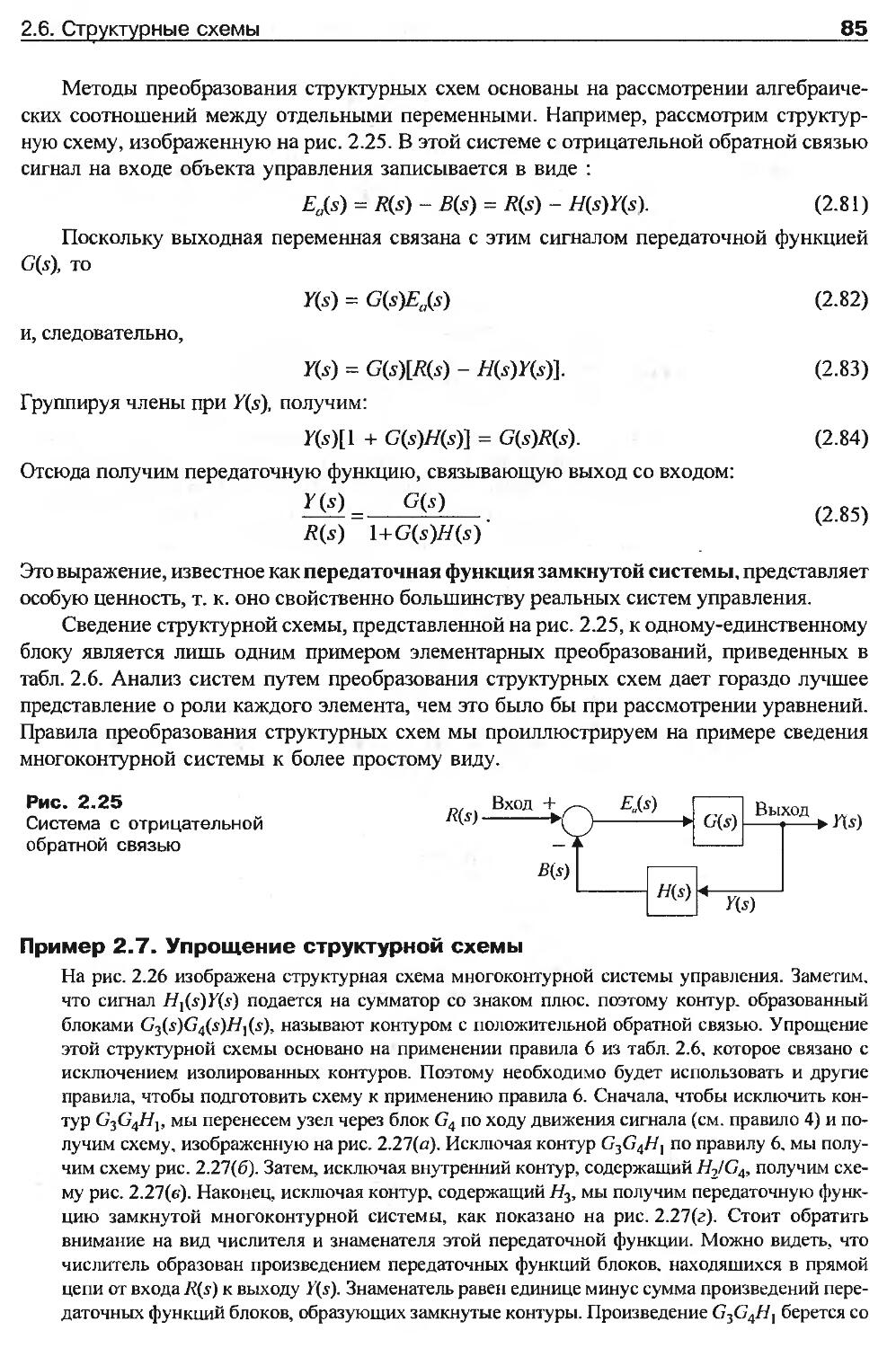
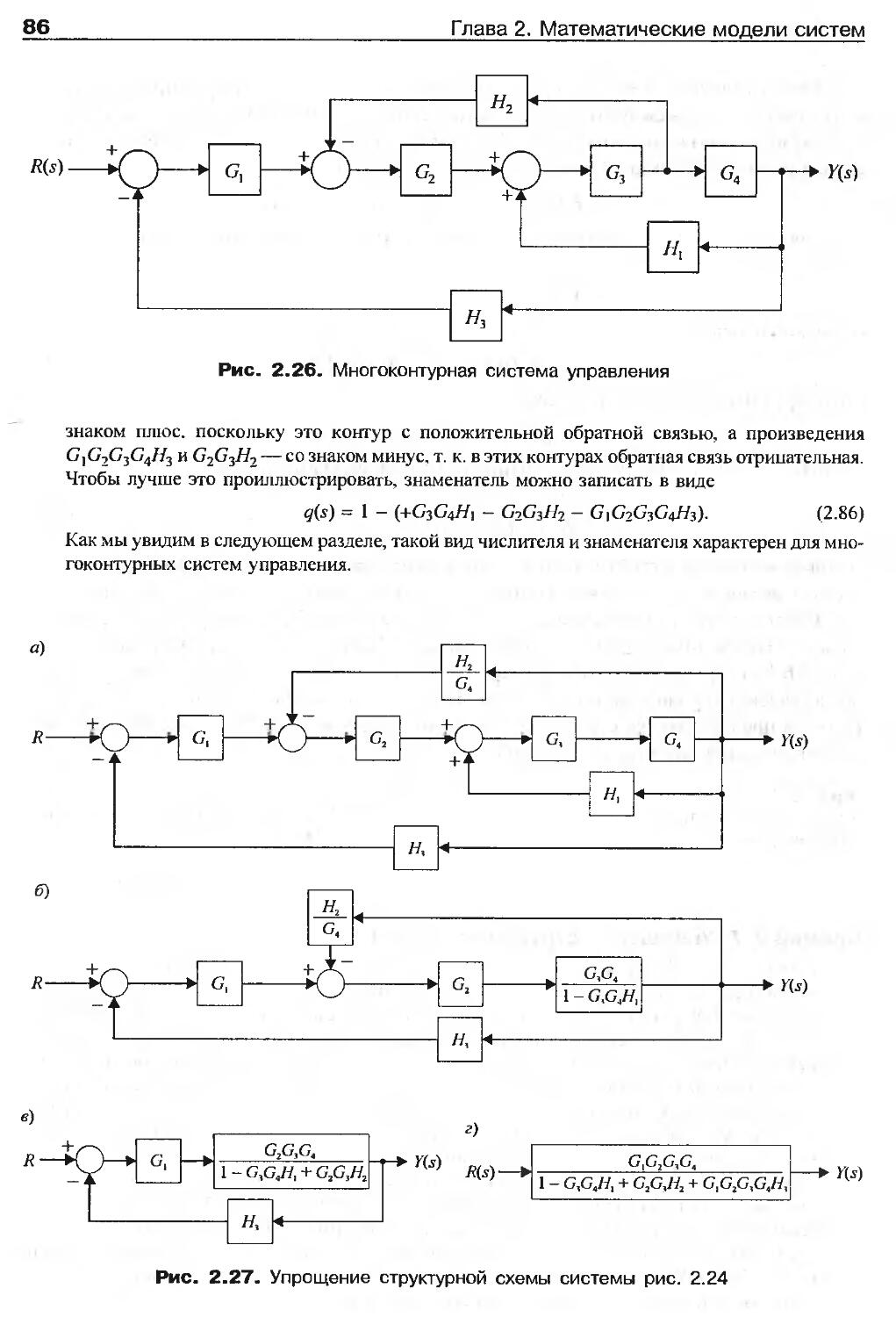
2.6. Структурные схемы............................................ 82
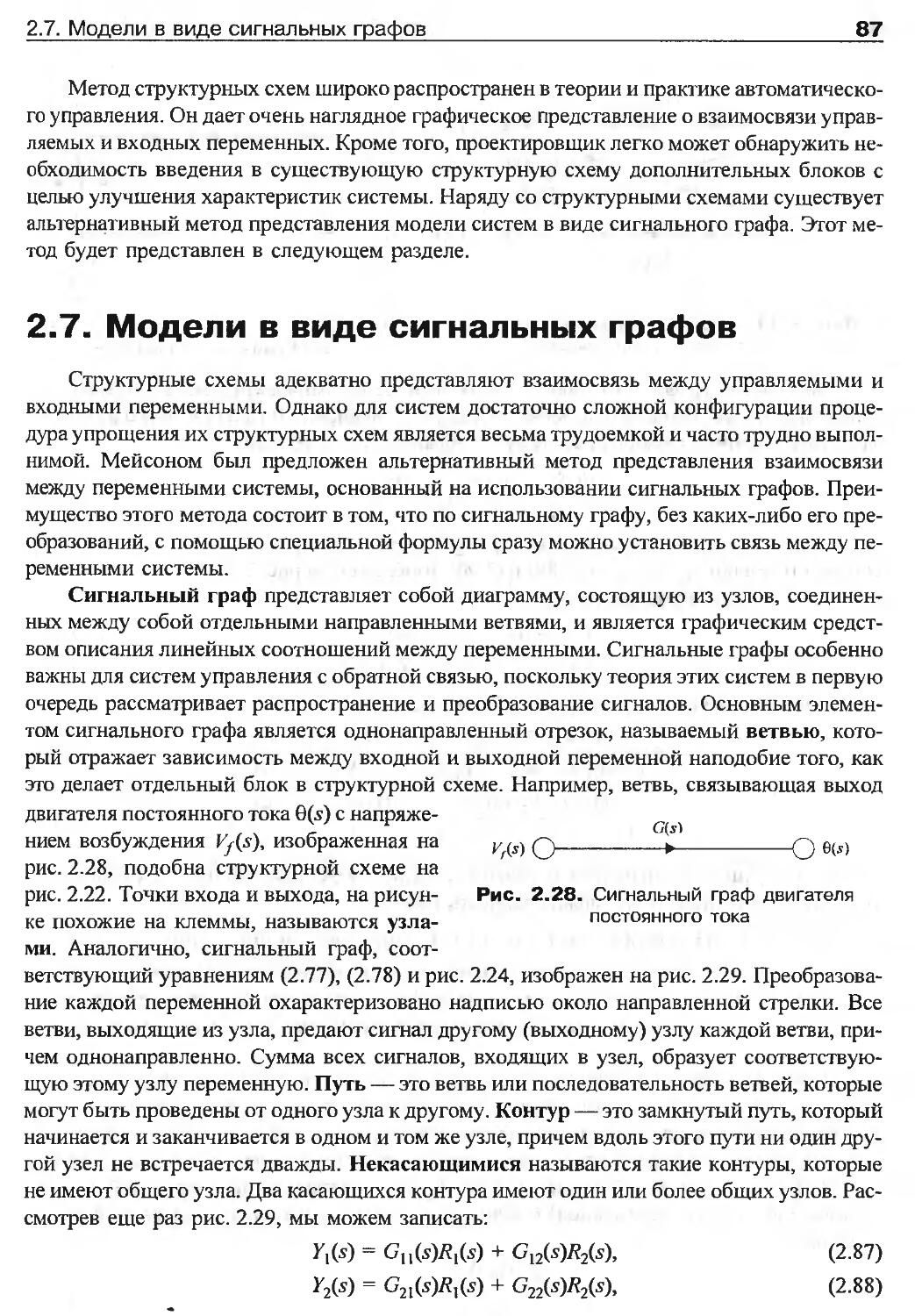
2.7. Модели в виде сигнальных графов...............................87
2.8. Компьютерный анализ систем управления.........................91
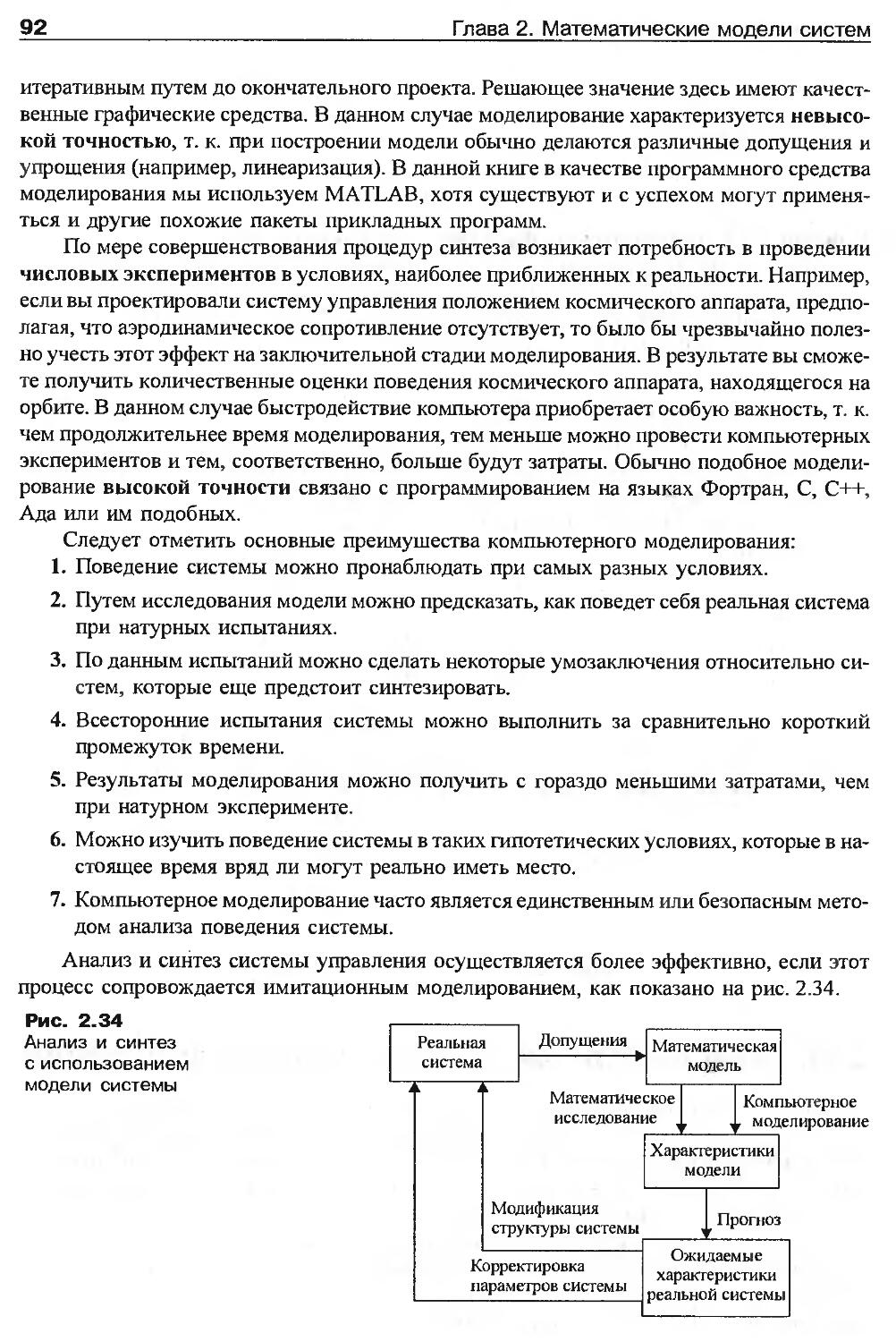
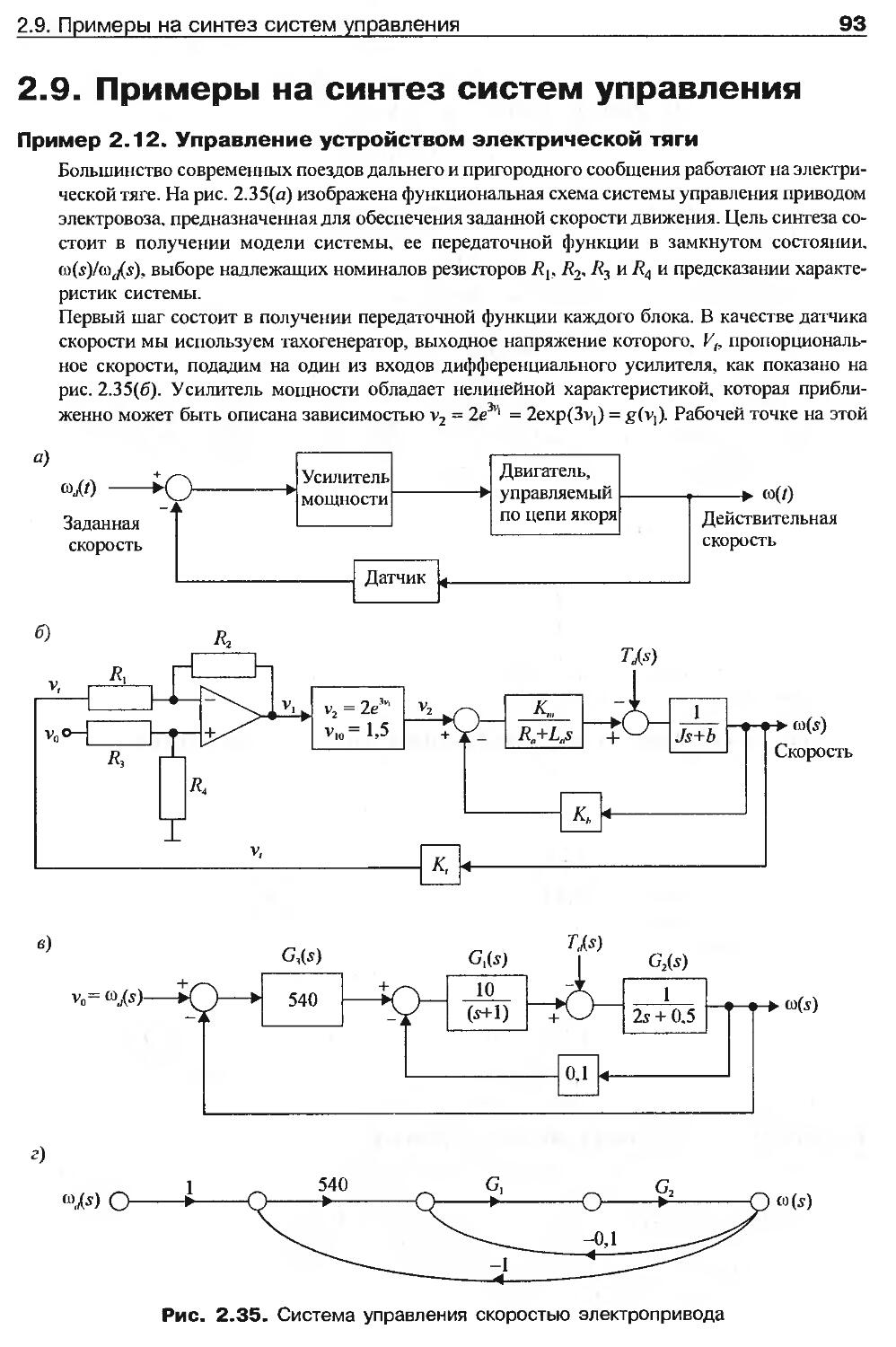
2.9. Примеры на синтез систем управления...........................93
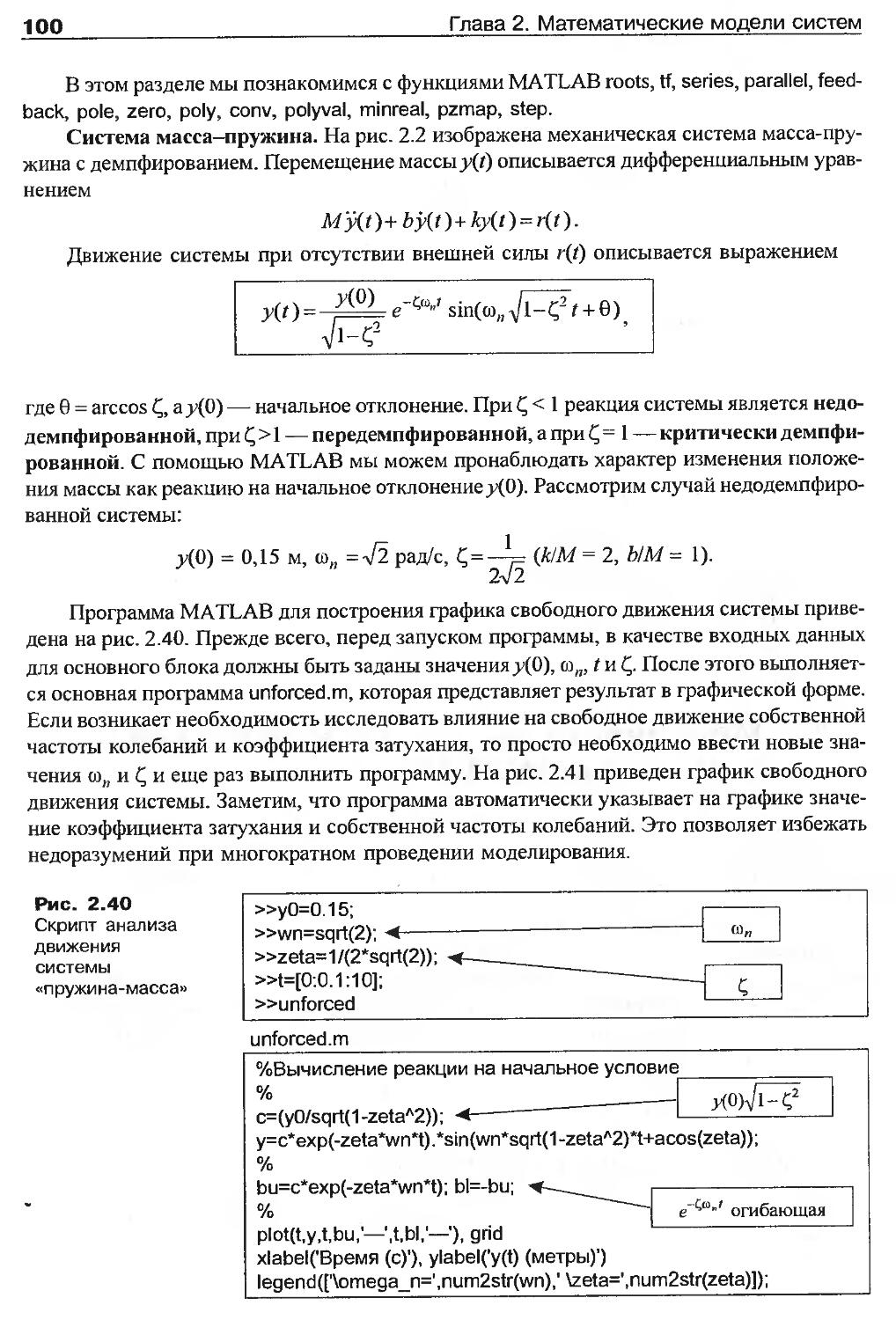
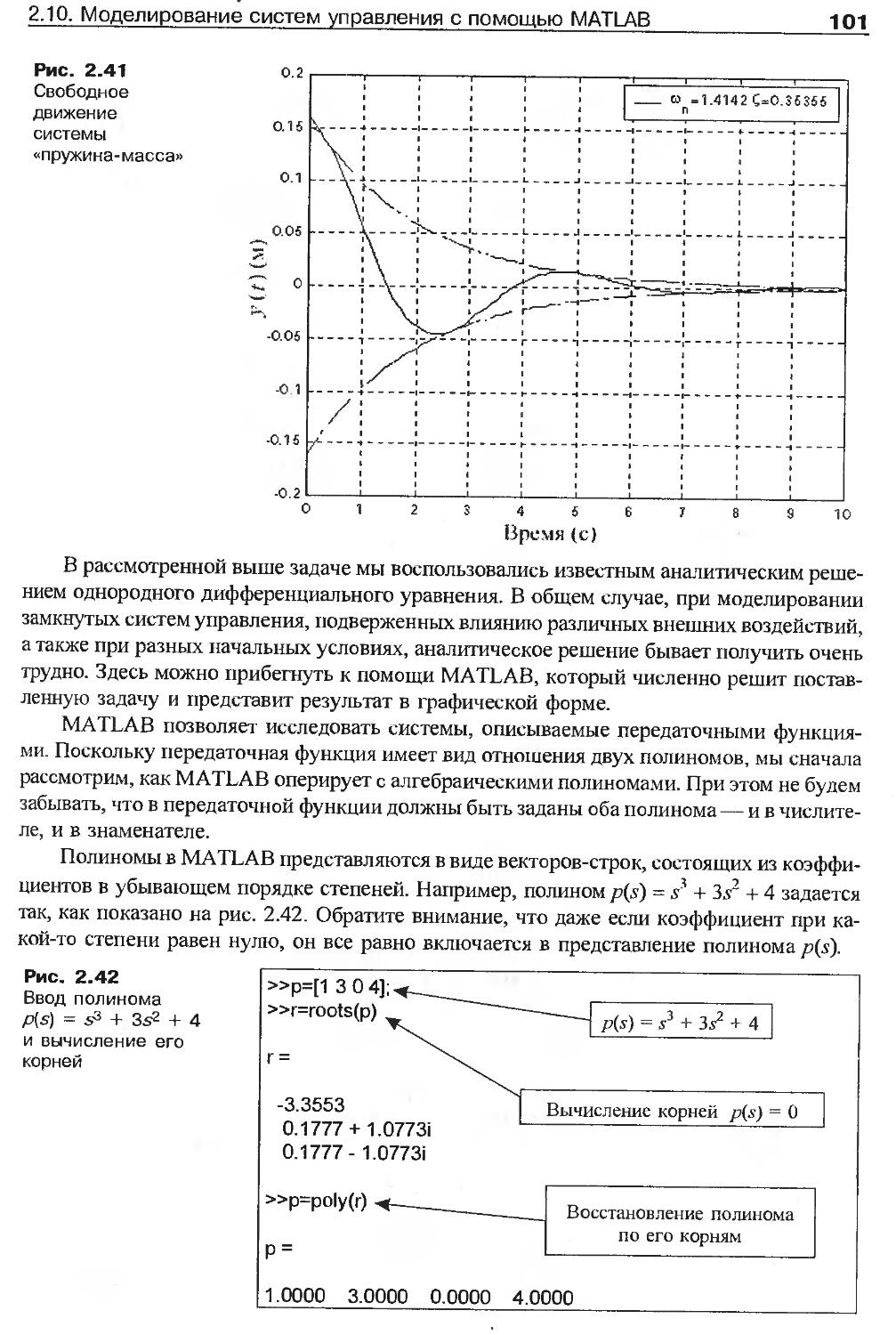
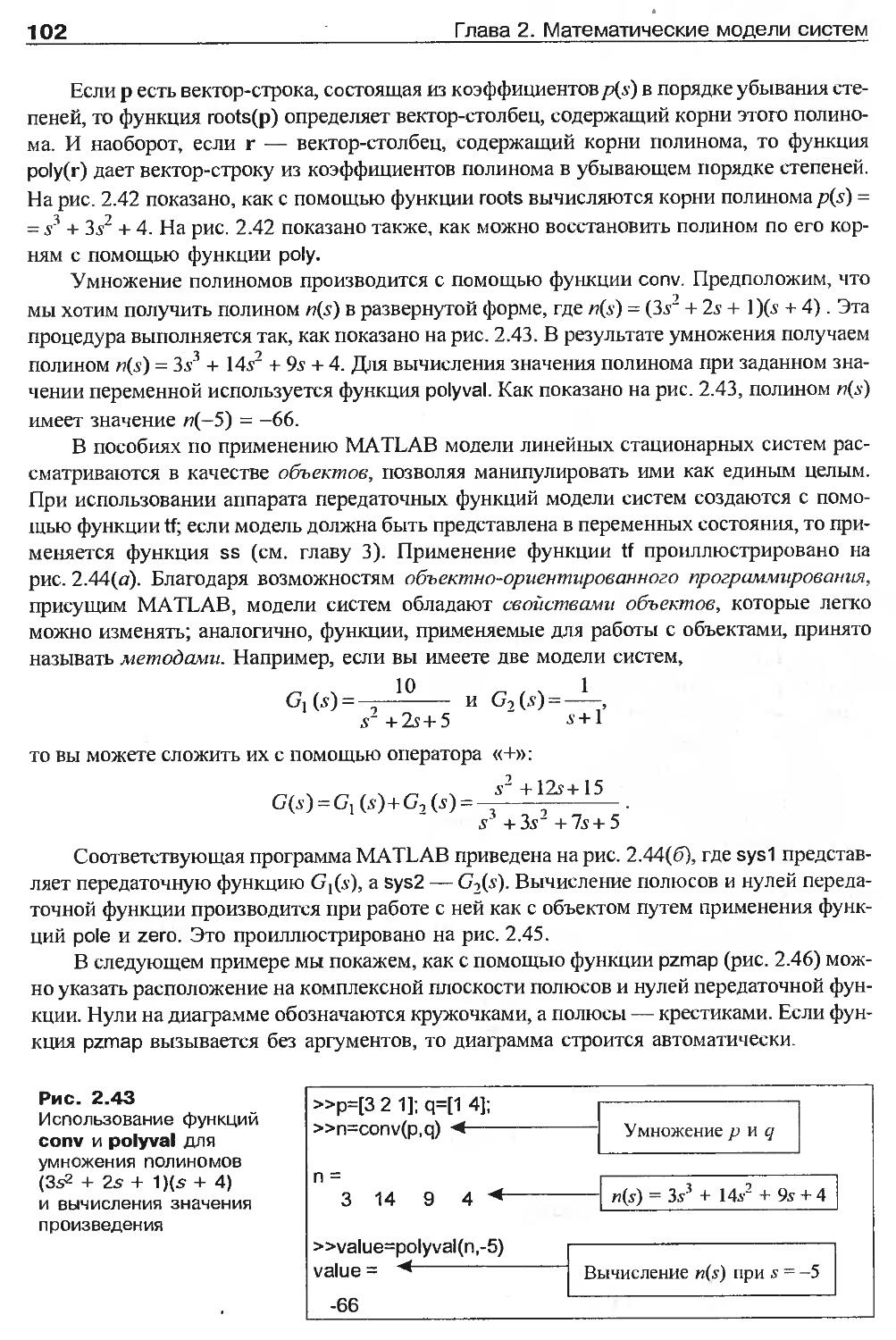
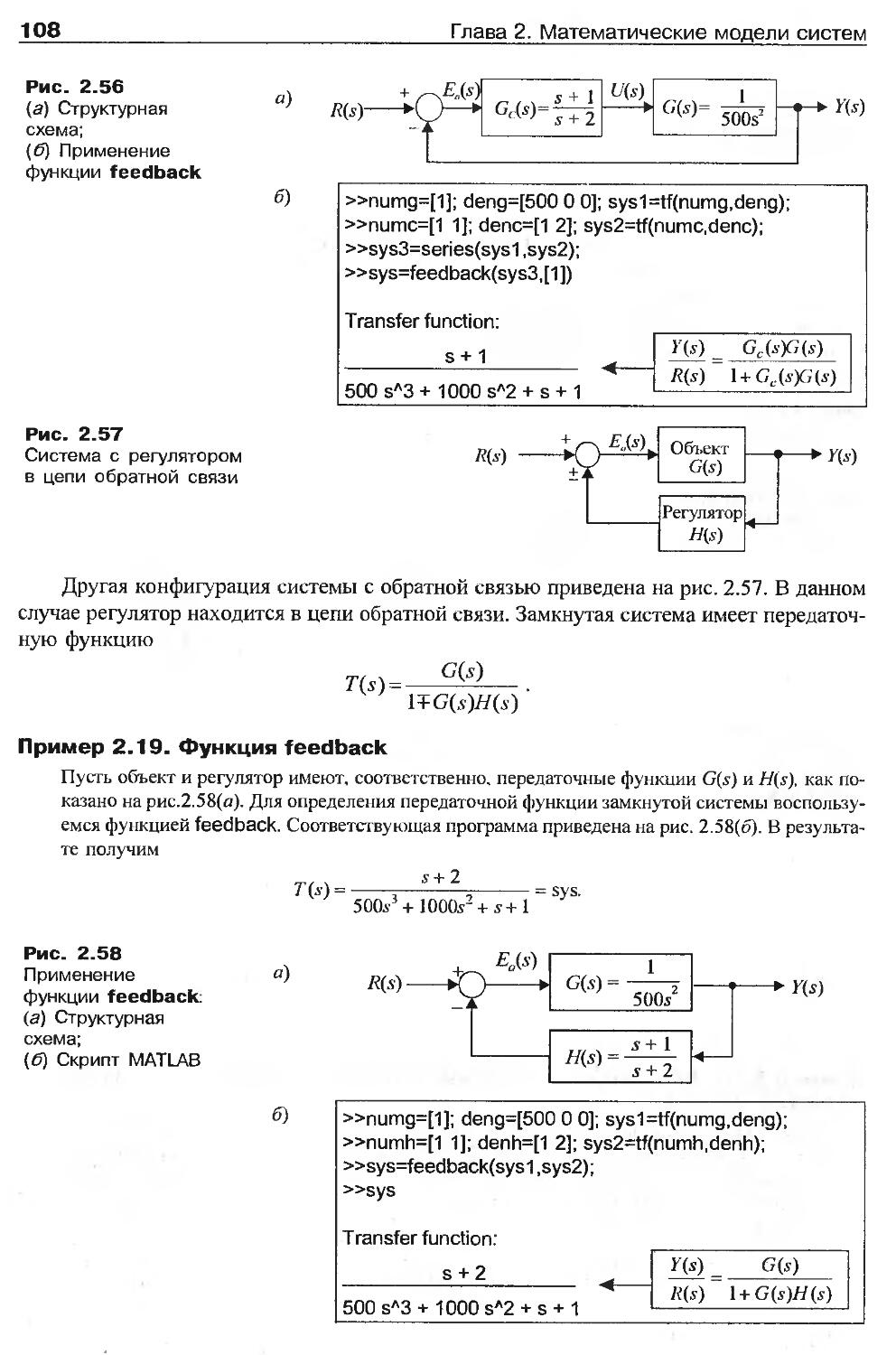
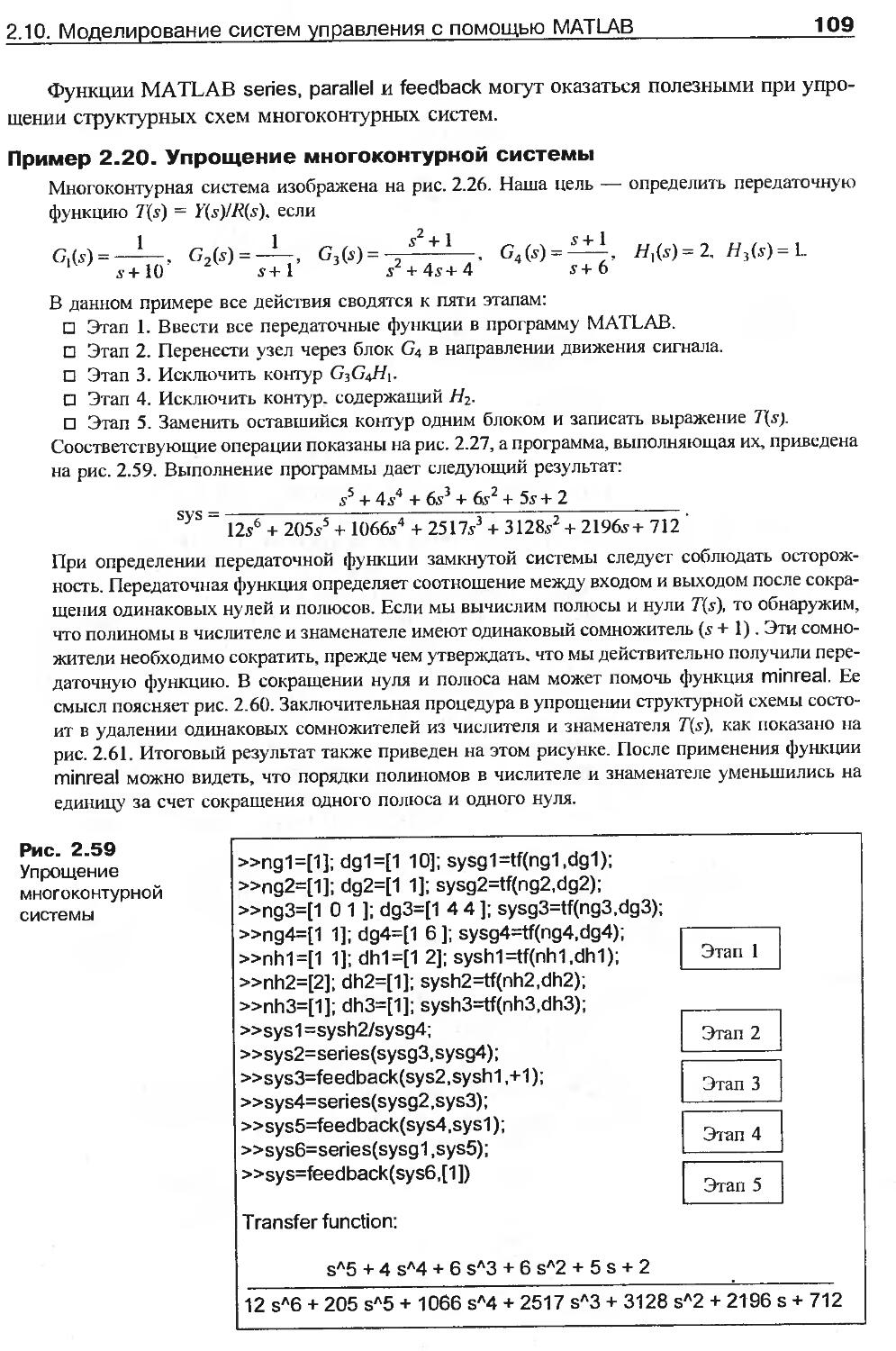
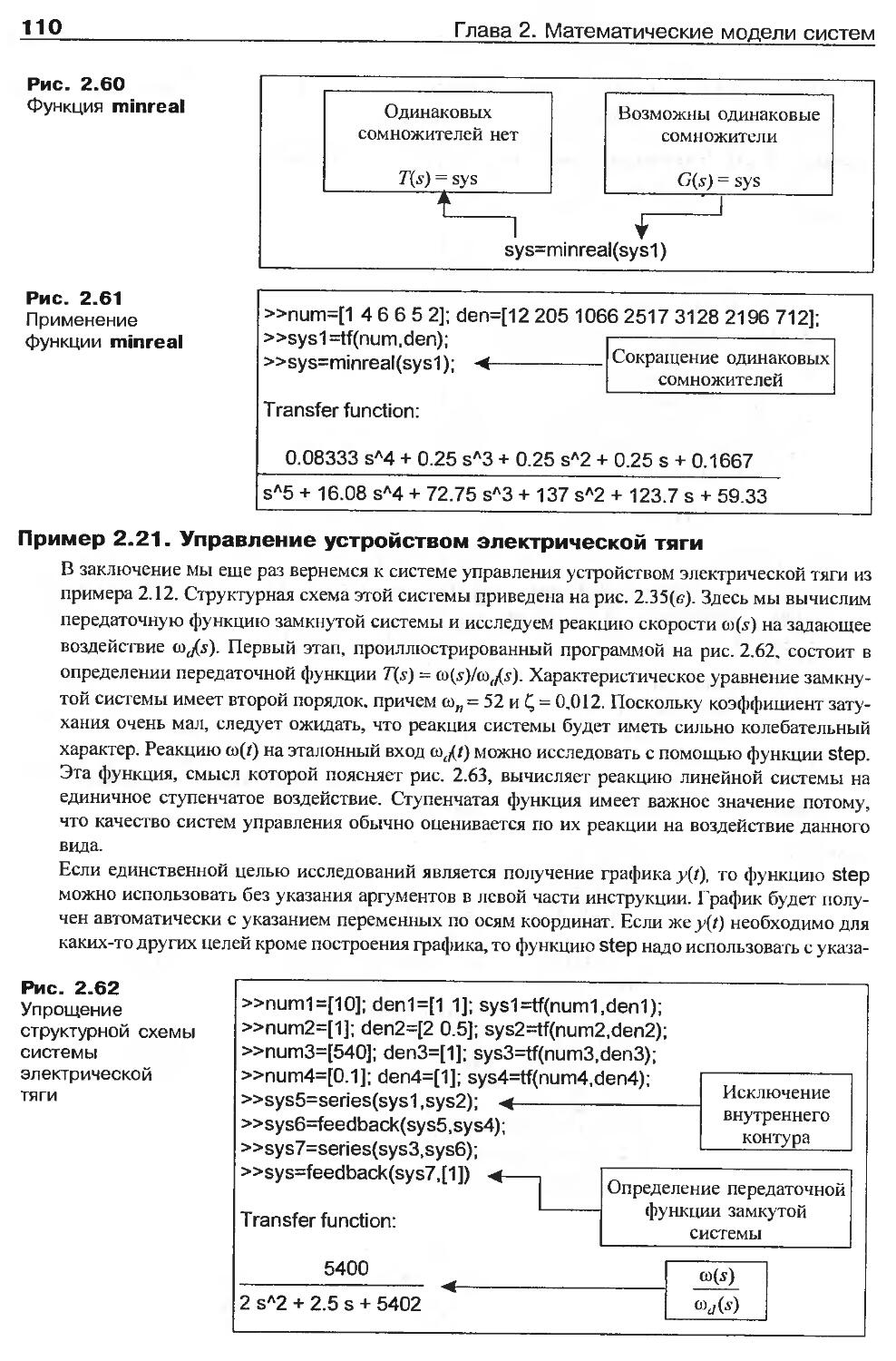
2.10. Моделирование систем управления с помощью MATLAB.............99
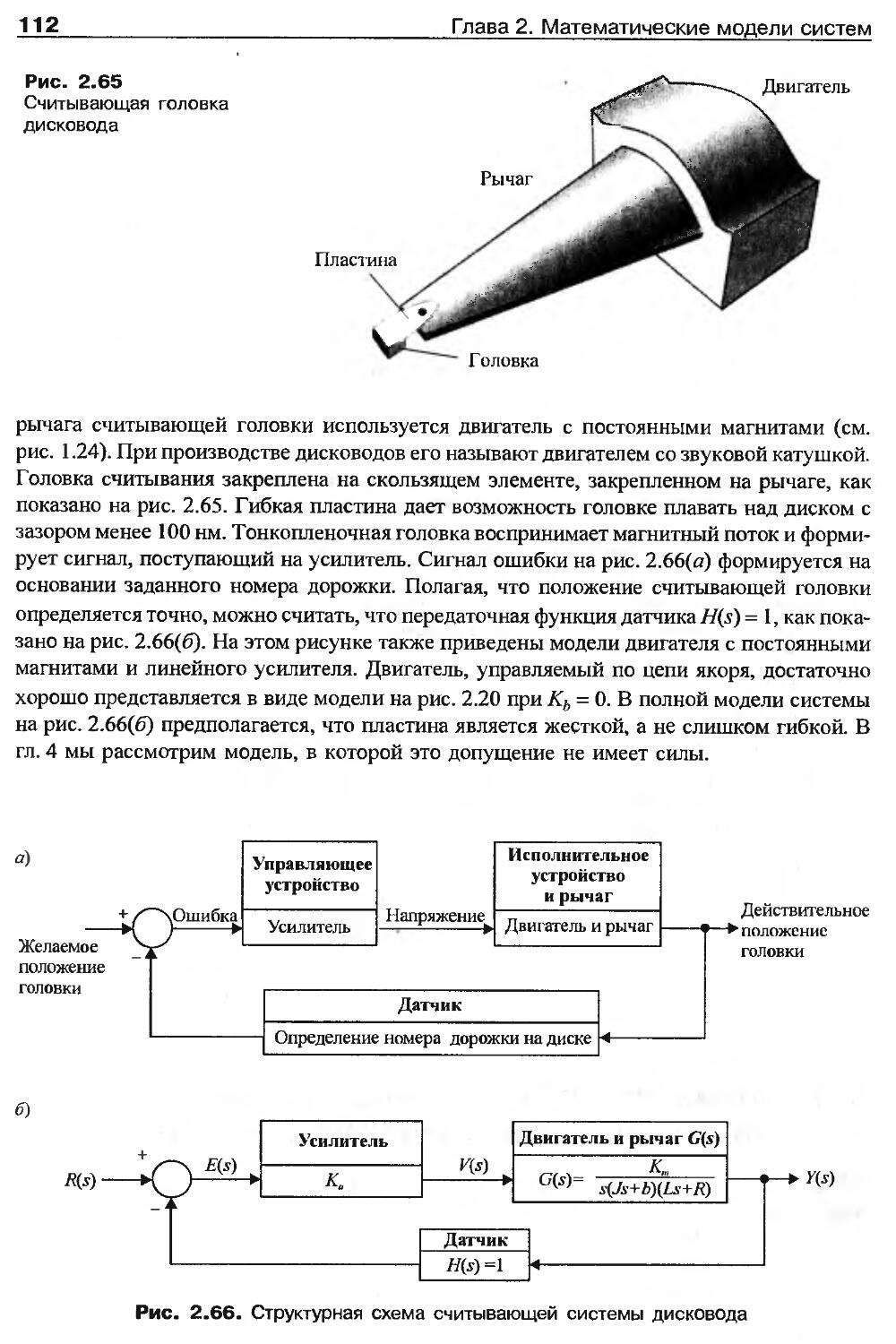
2.11. Пример синтеза с продолжением: система чтения информации с диска. . . 111
2.12. Резюме.......................................................114
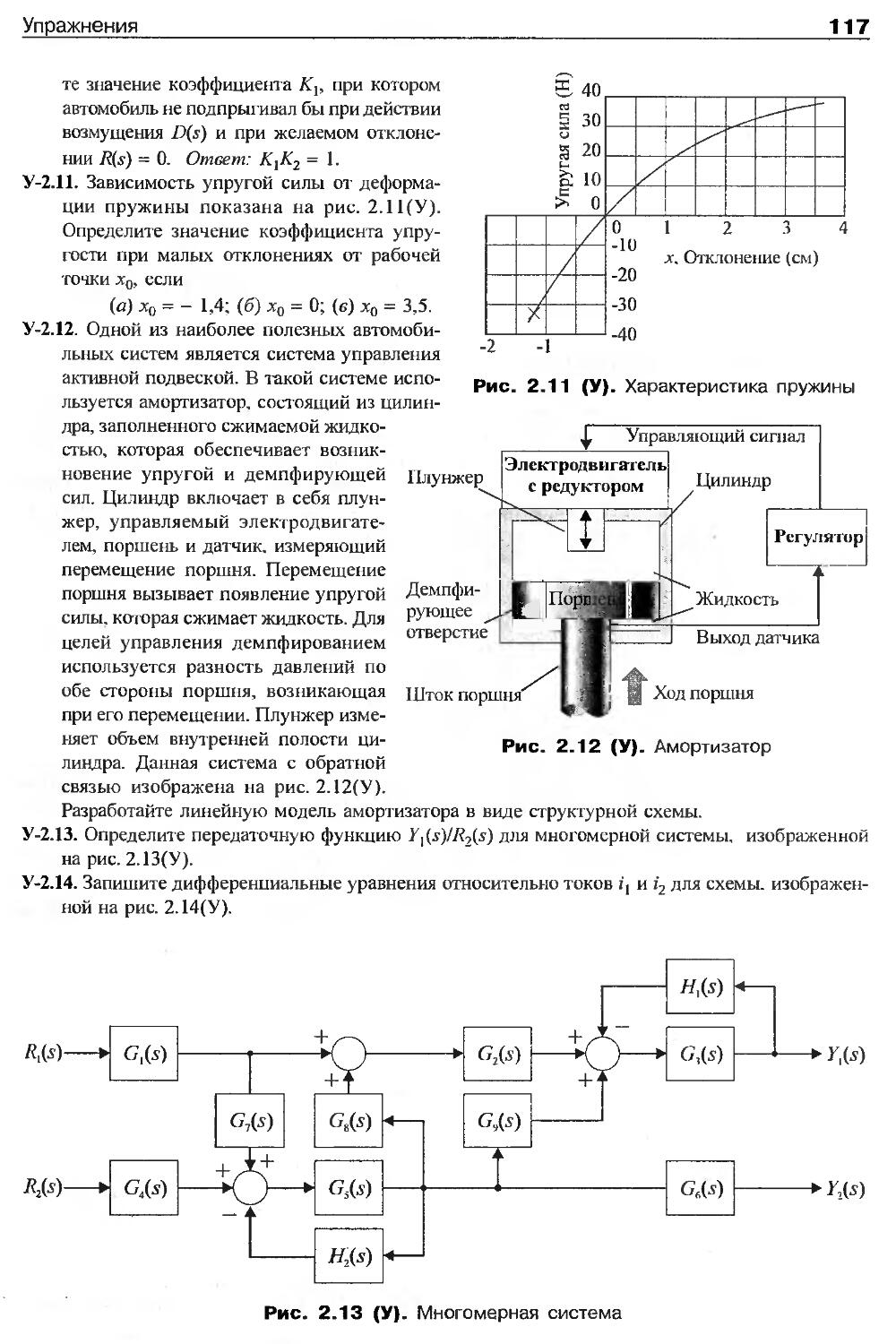
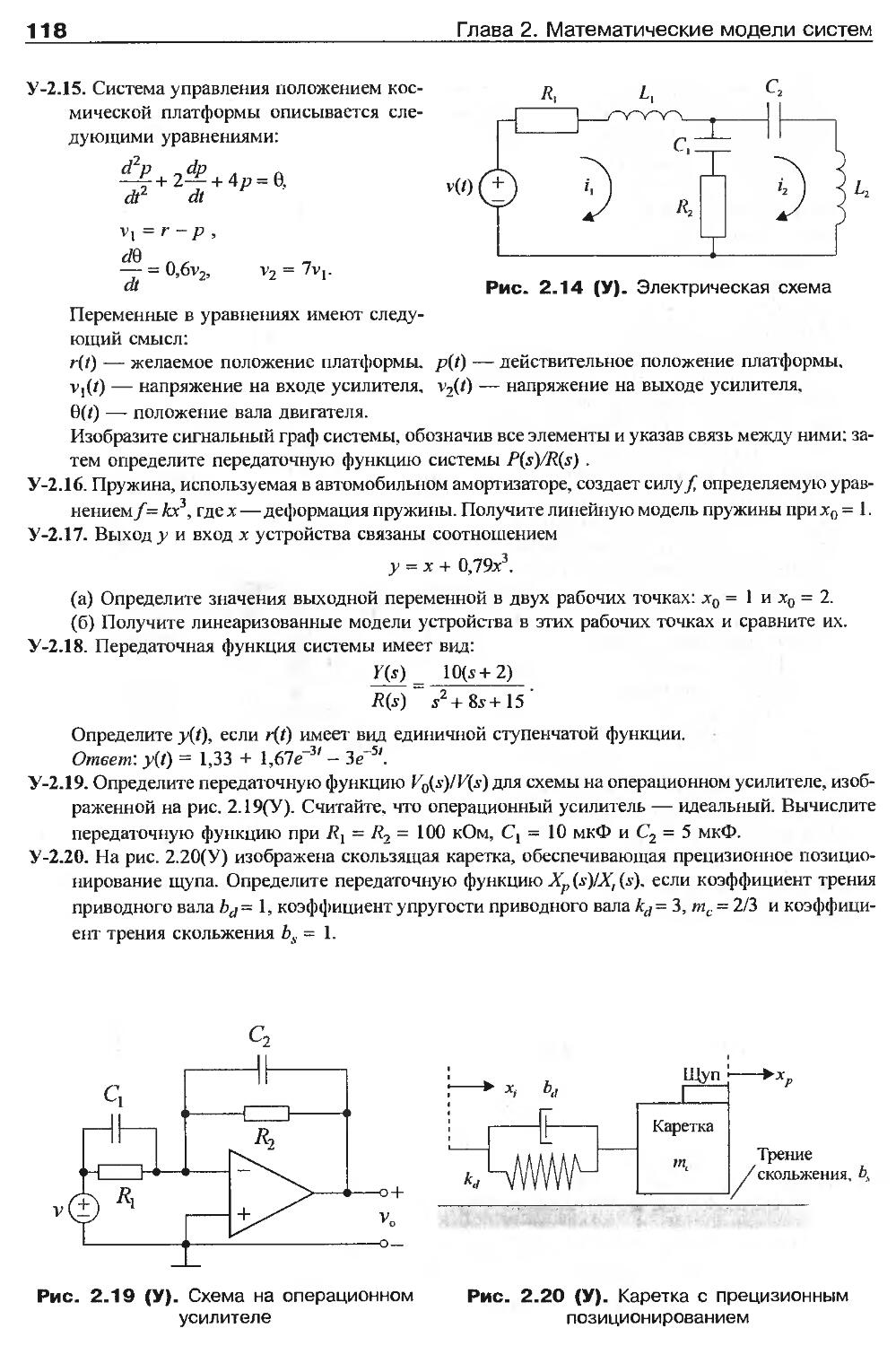
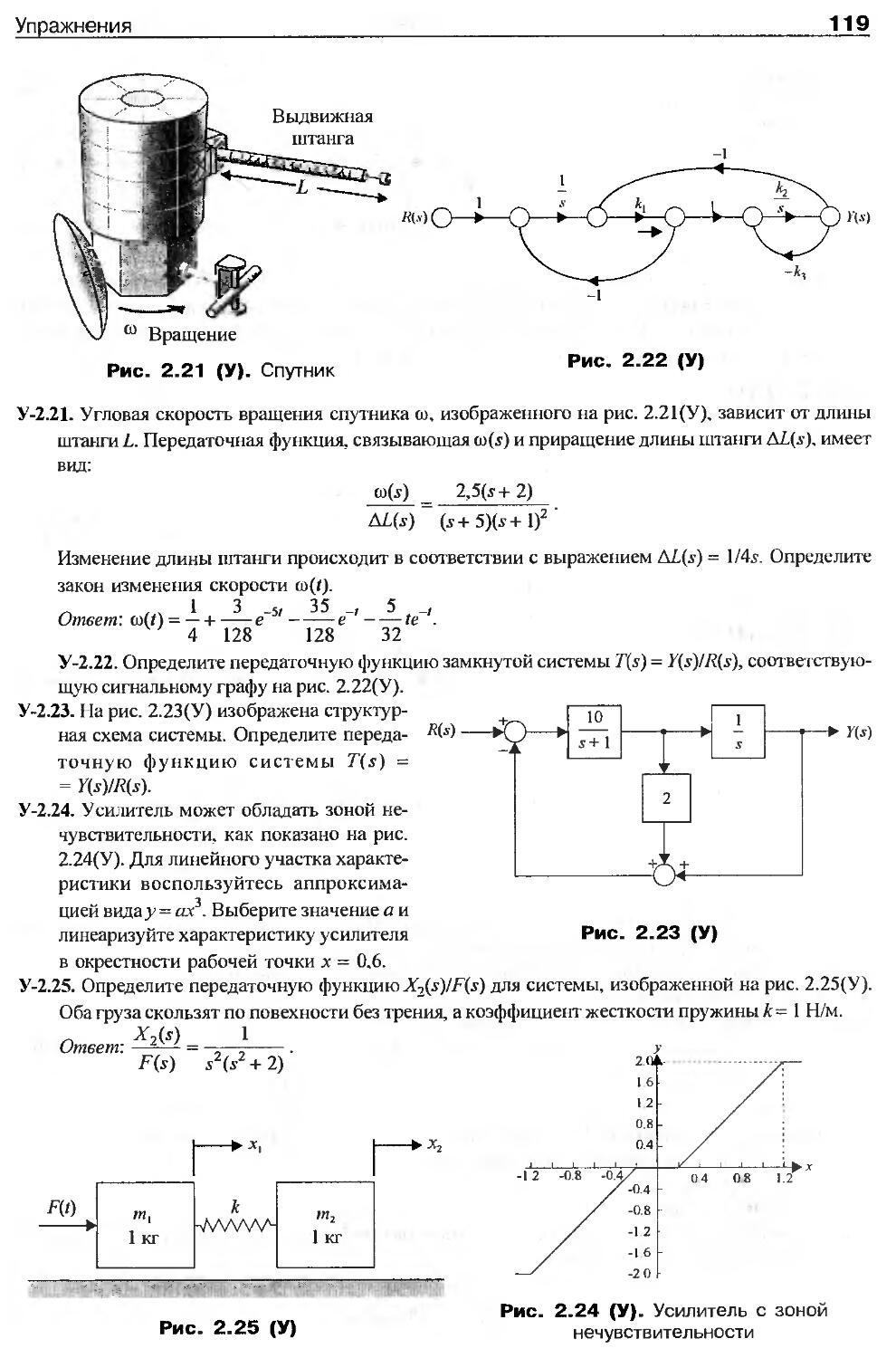
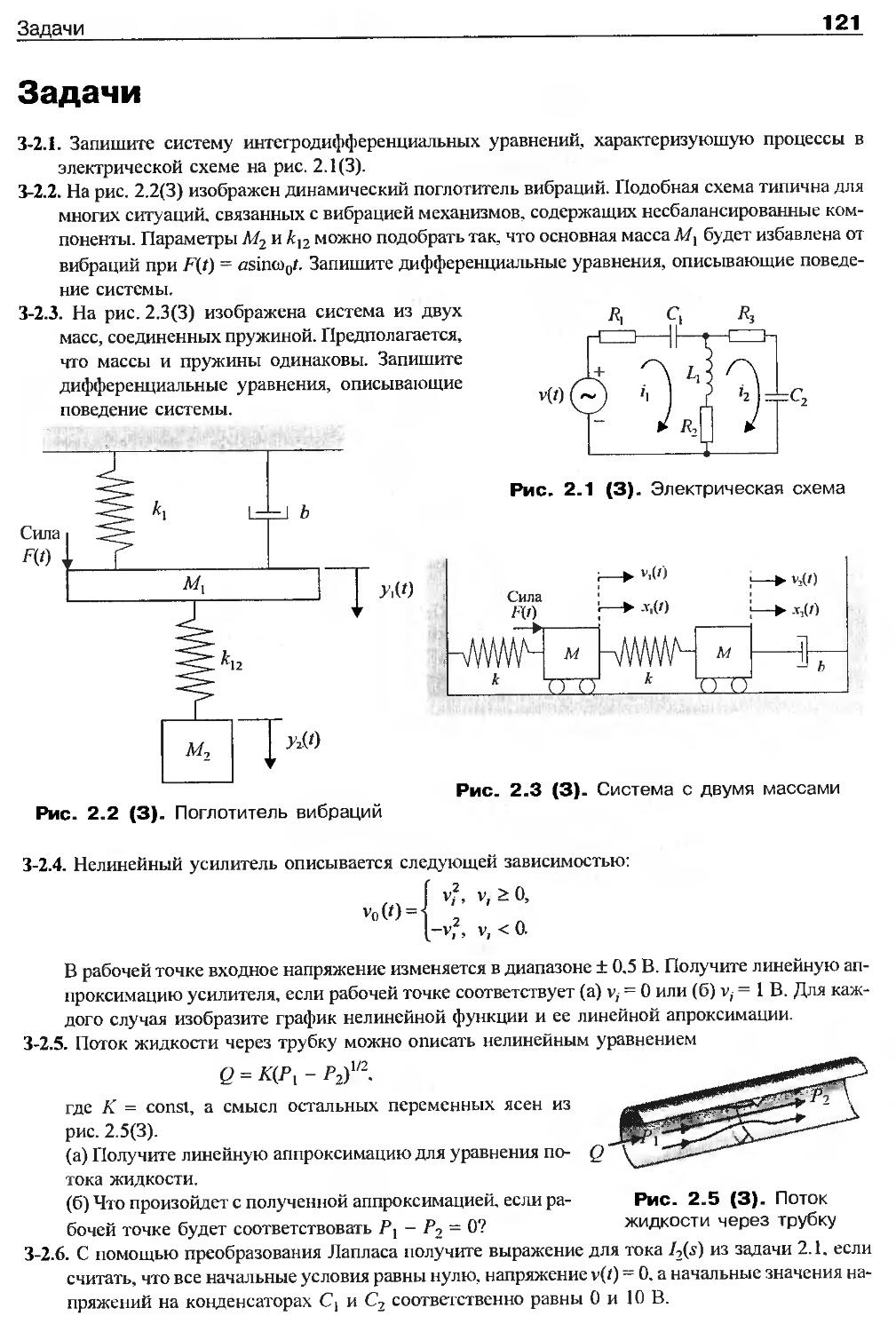
Упражнения.........................................................114
8
Содержание
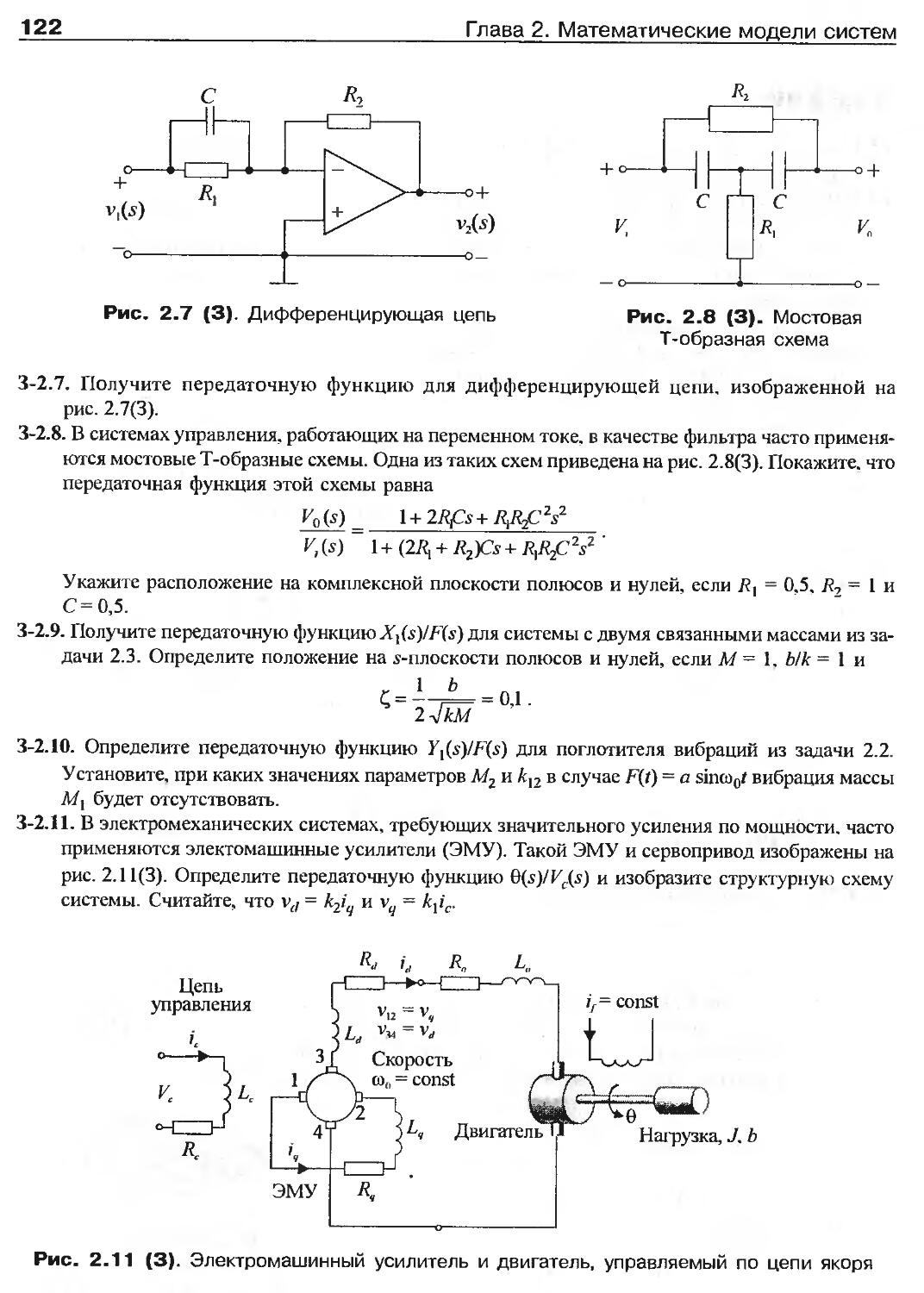
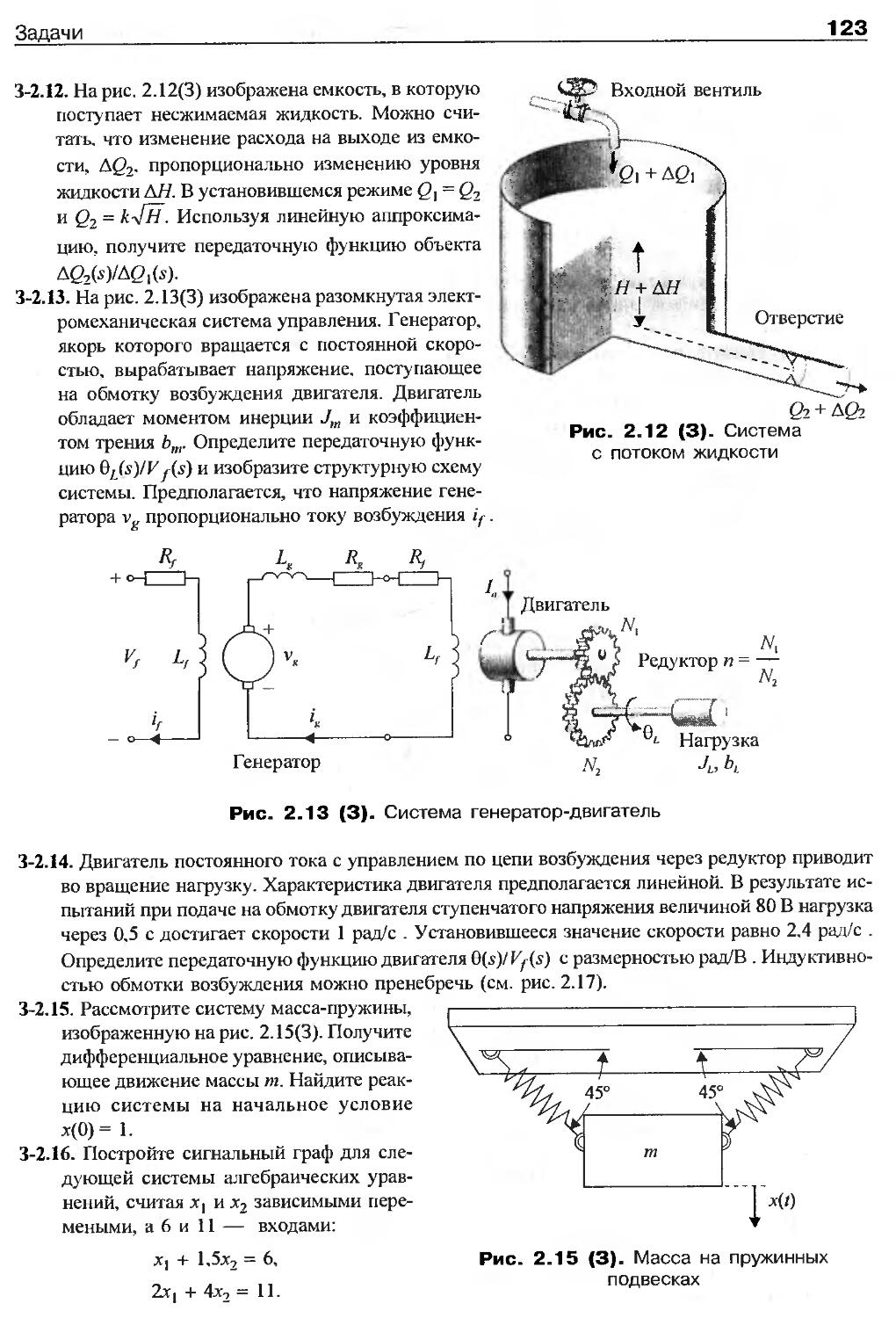
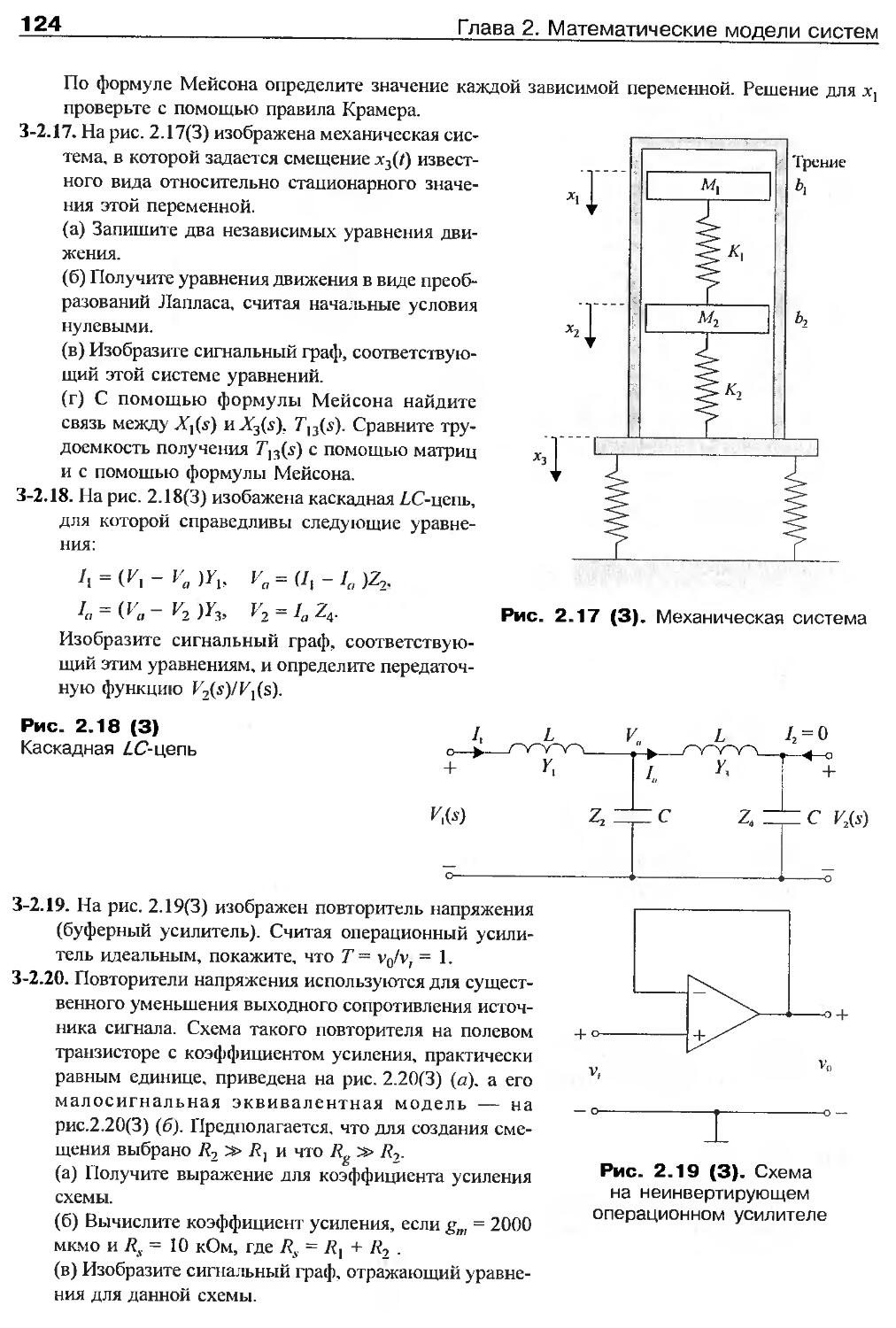
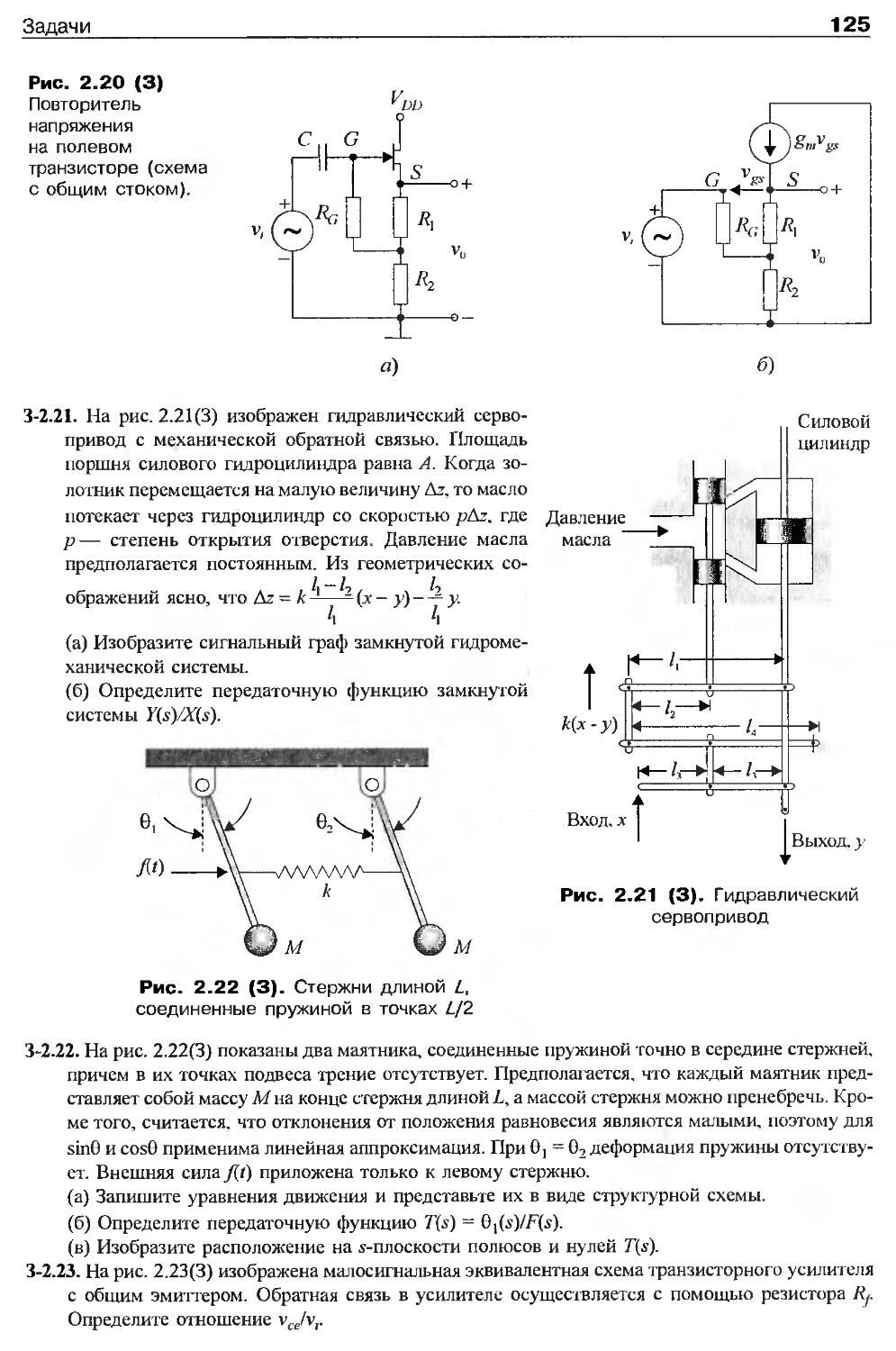
Задачи.............................................................121
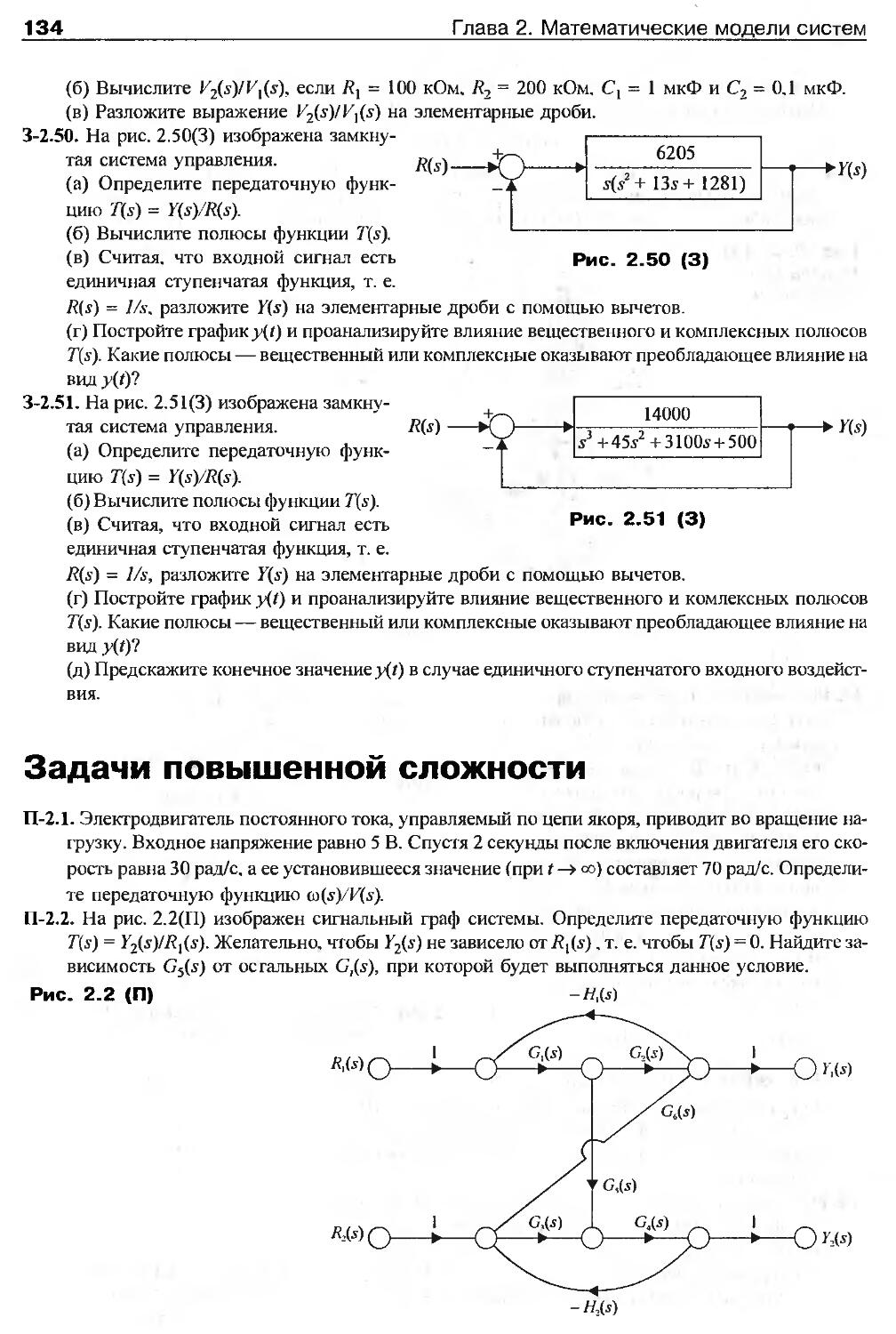
Задачи повышенной сложности........................................134
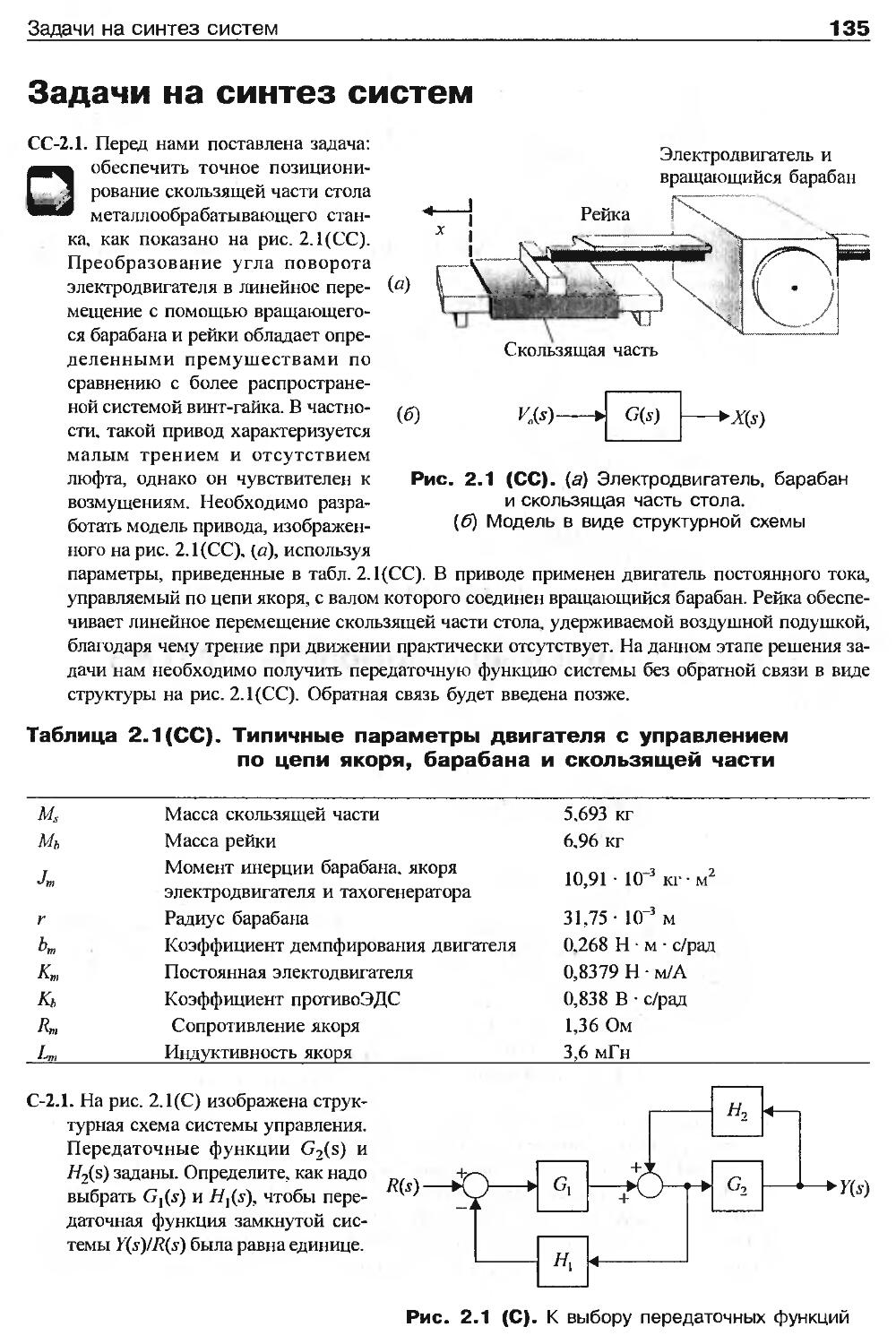
Задачи на синтез систем............................................135
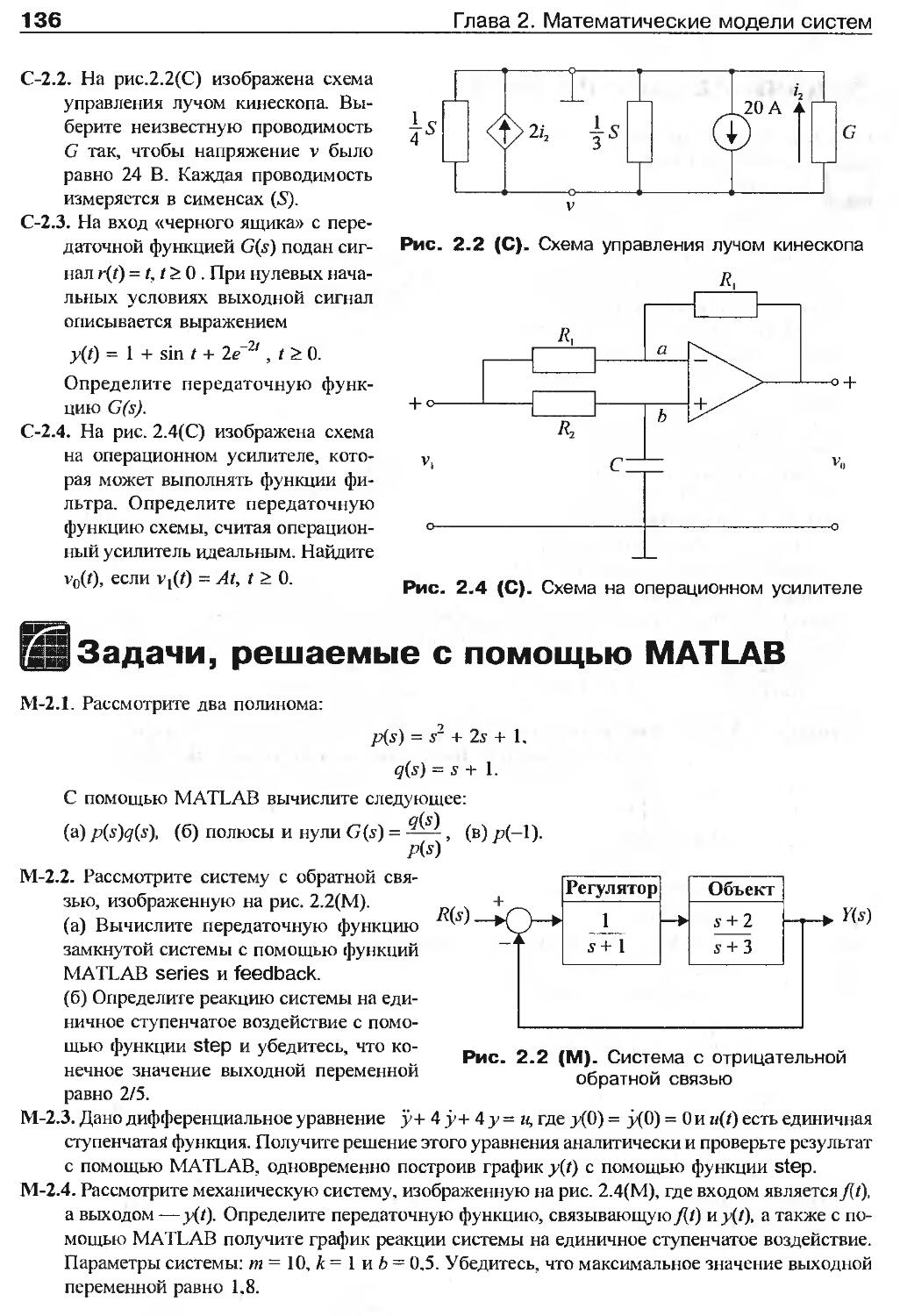
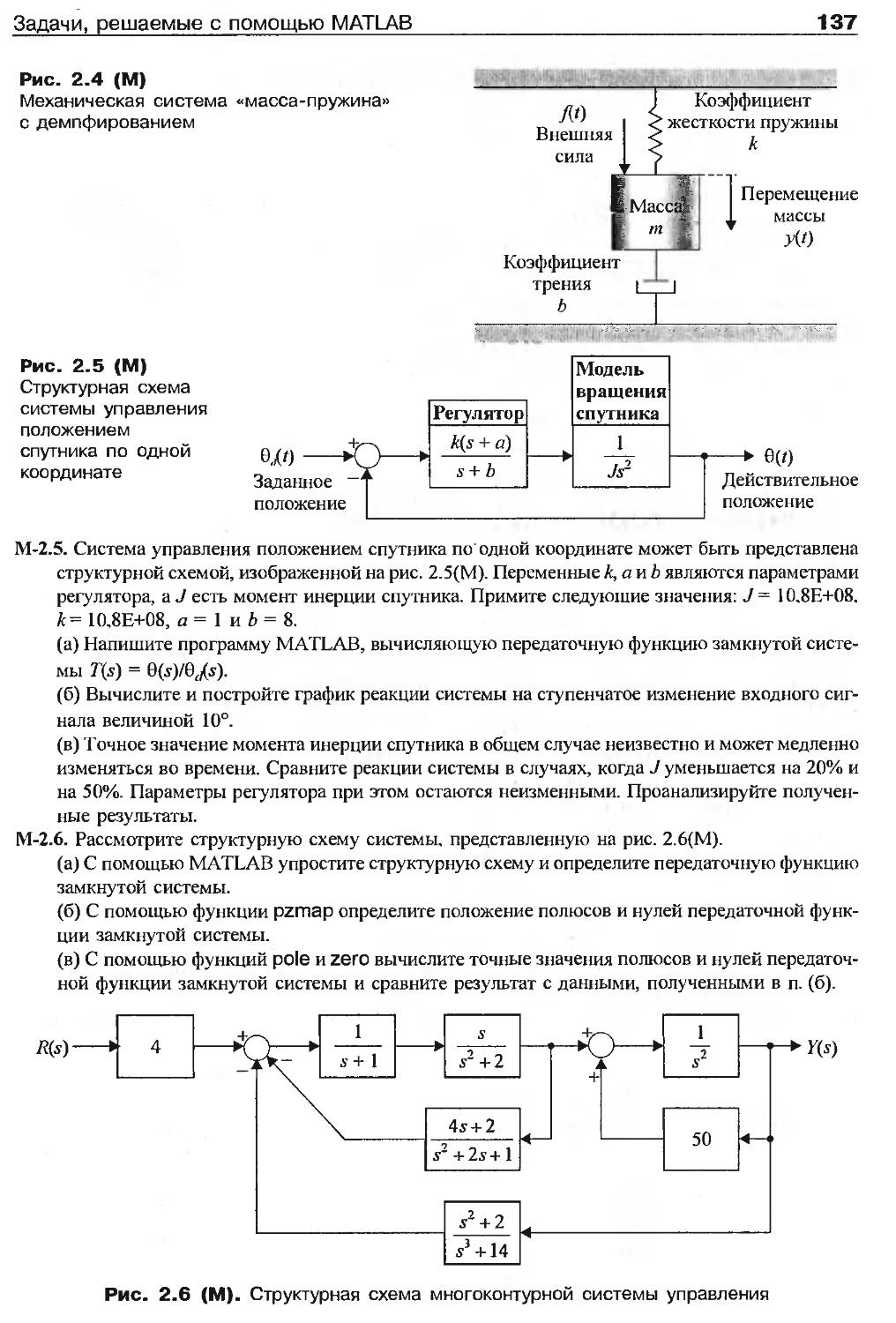
Задачи, решаемые с помощью MATLAB..................................136
Ключевые термины и понятия.........................................138
Глава 3. Модели в переменных состояния................................139
Обзор..............................................................139
3.1. Введение.................................................... 139
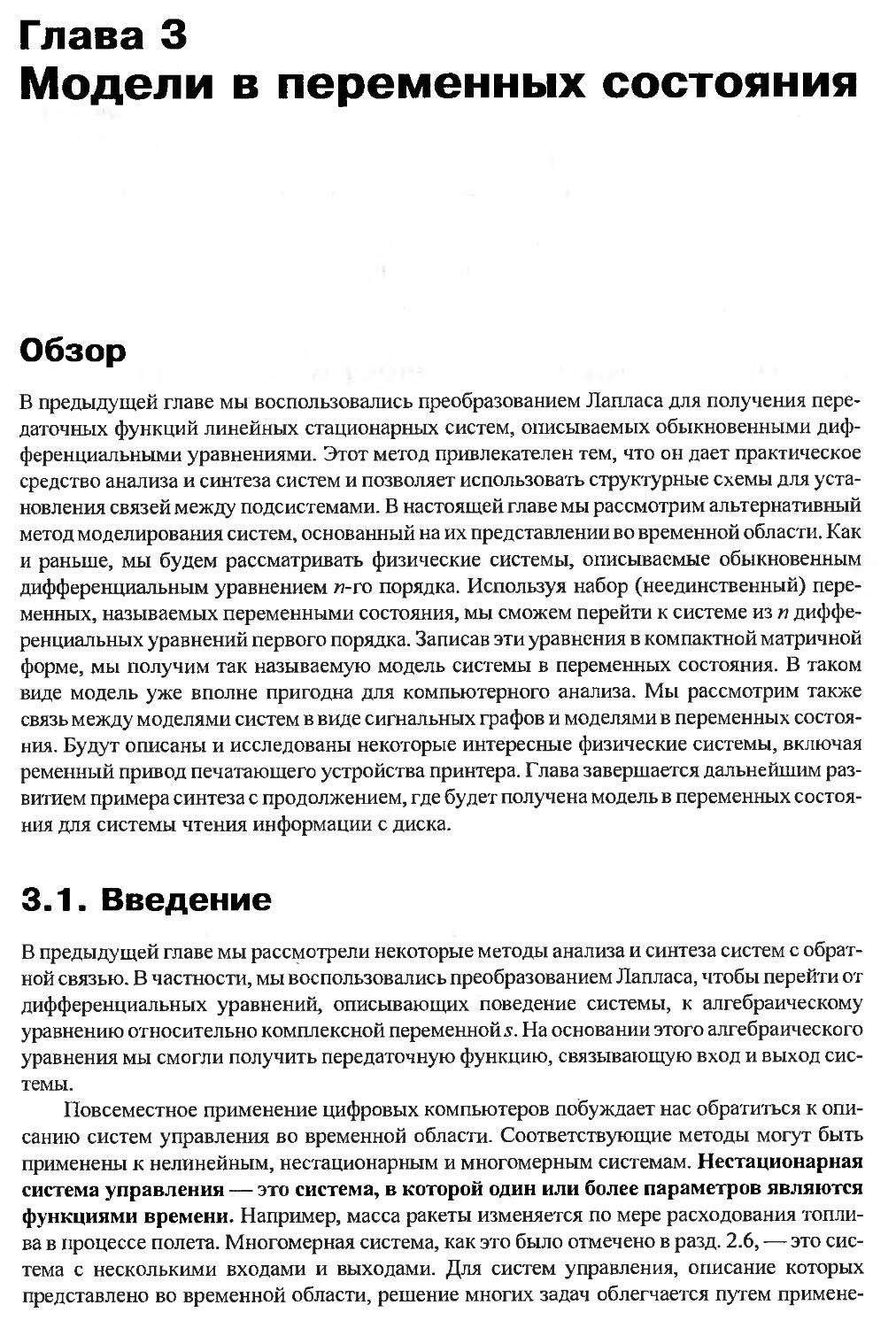
3.2. Переменные состояния динамической системы.....................140
3.3. Дифференциальные уравнения состояния..........................143
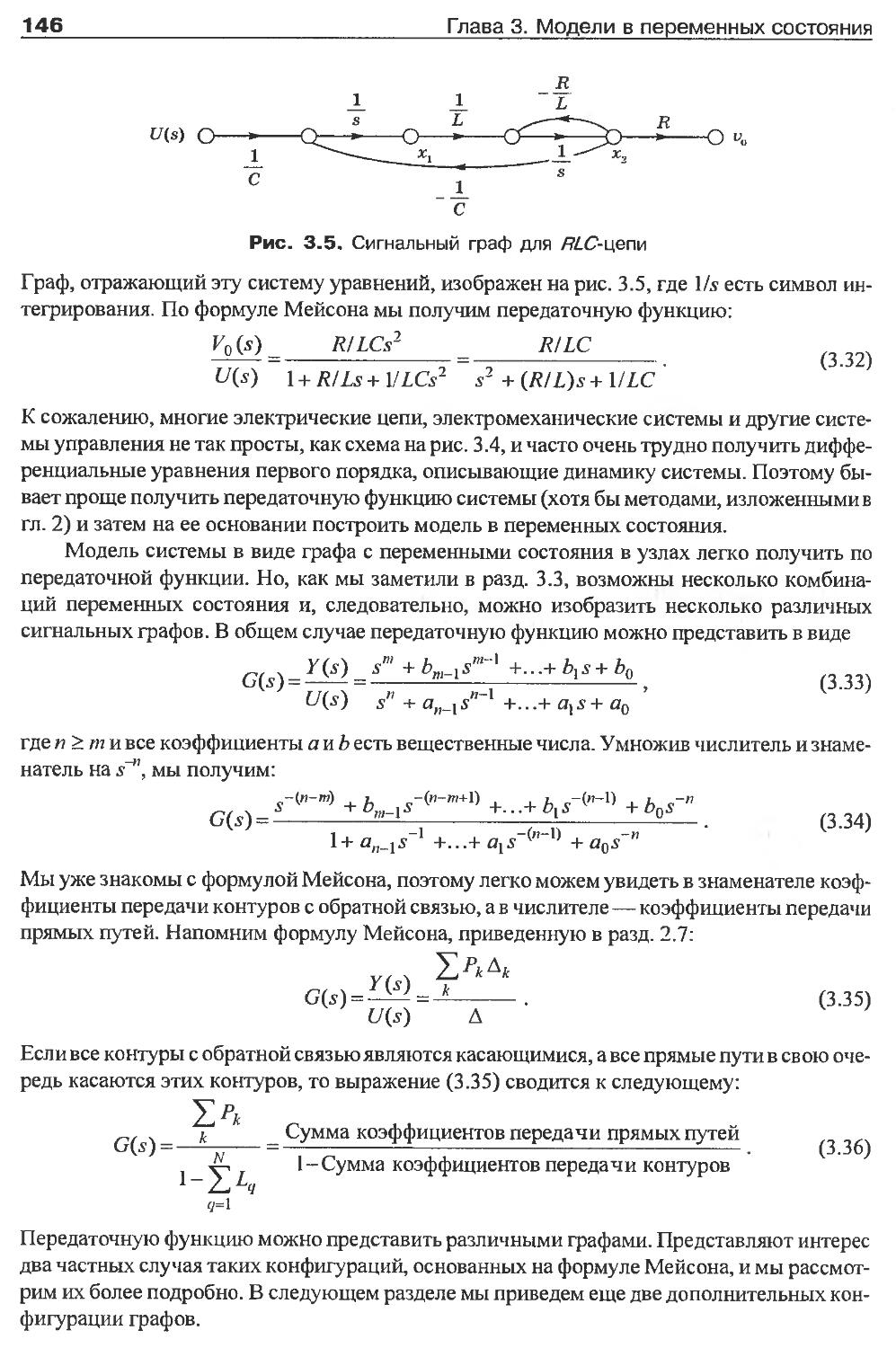
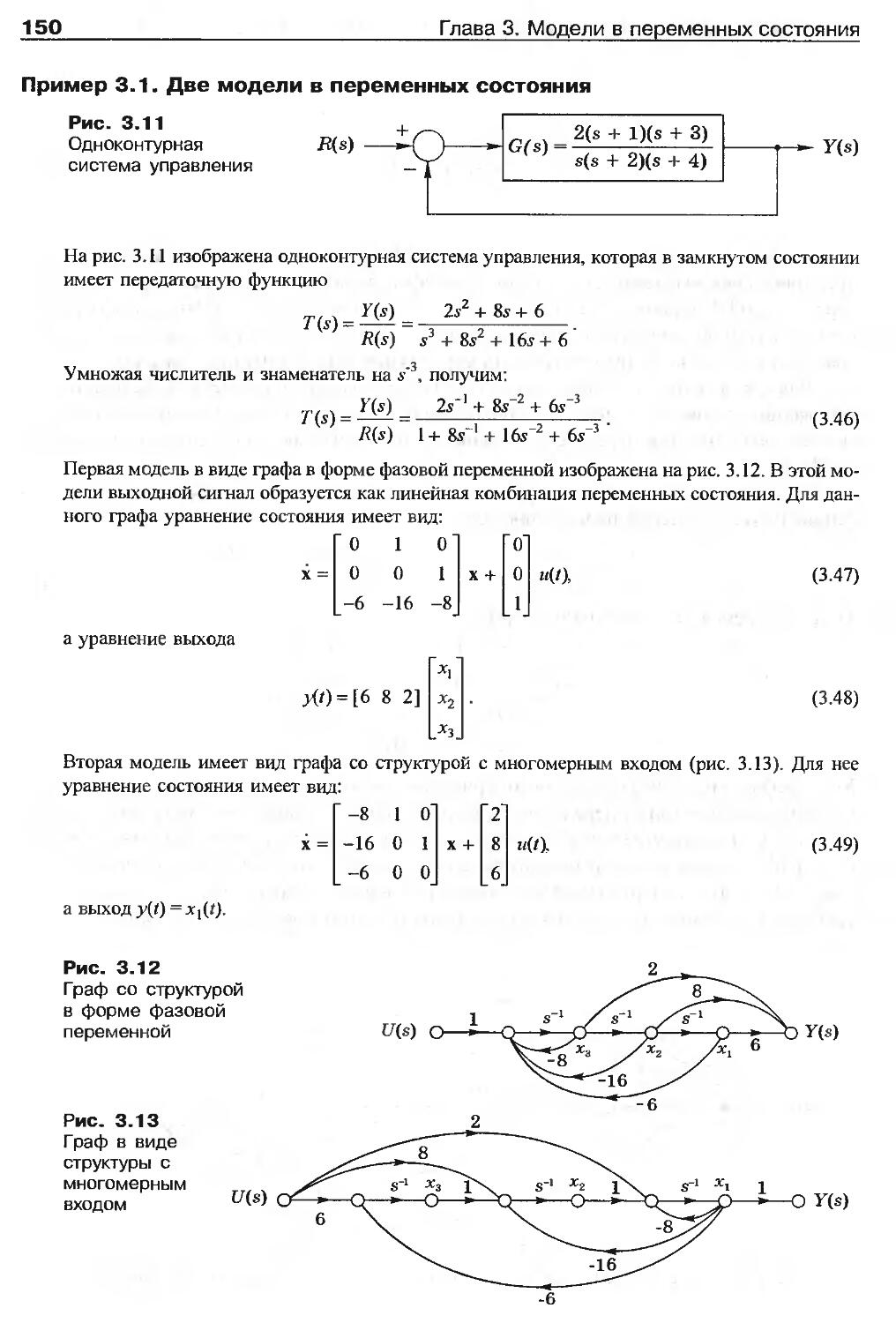
3.4. Модели систем в переменных состояния в виде сигнального графа.145
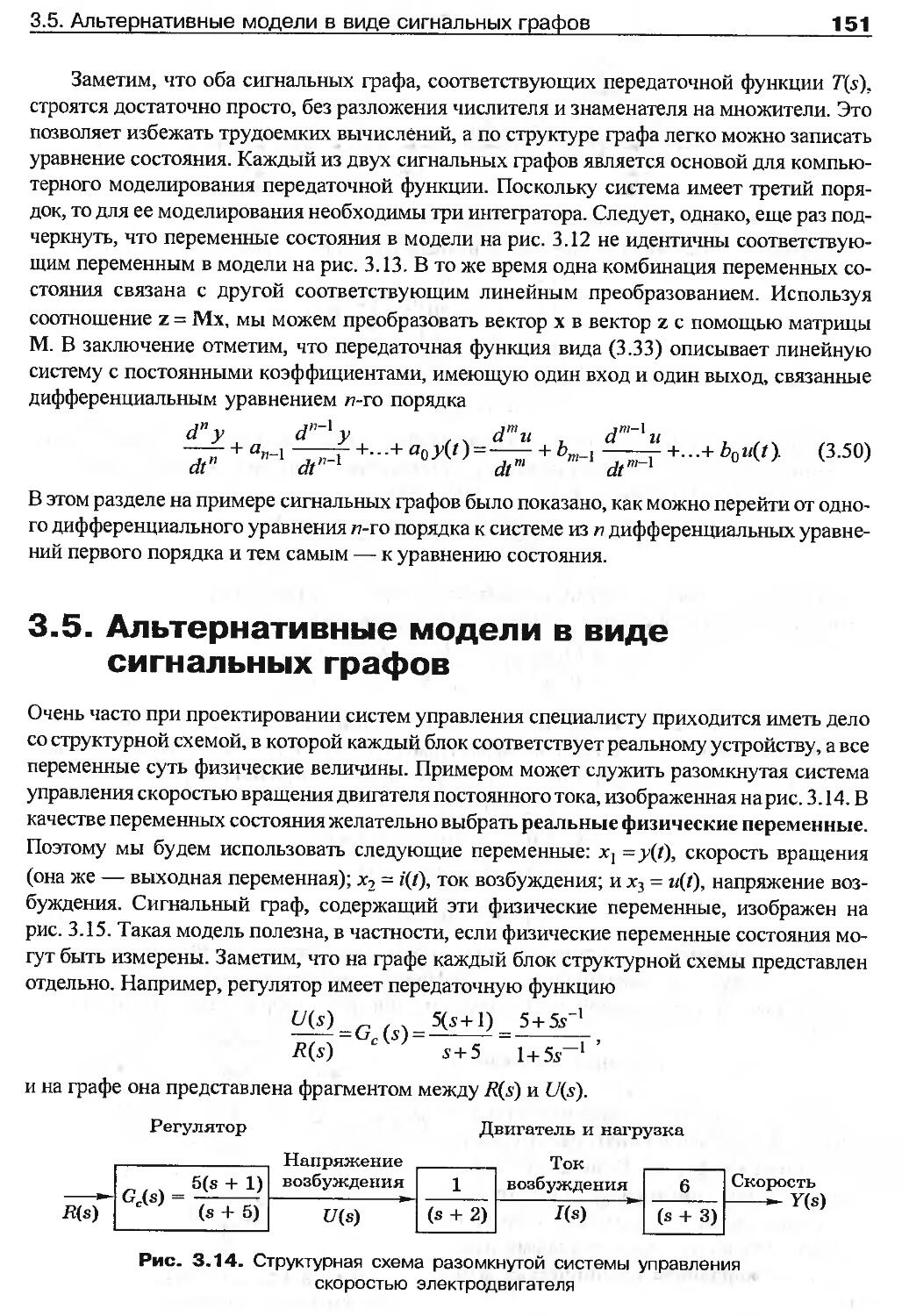
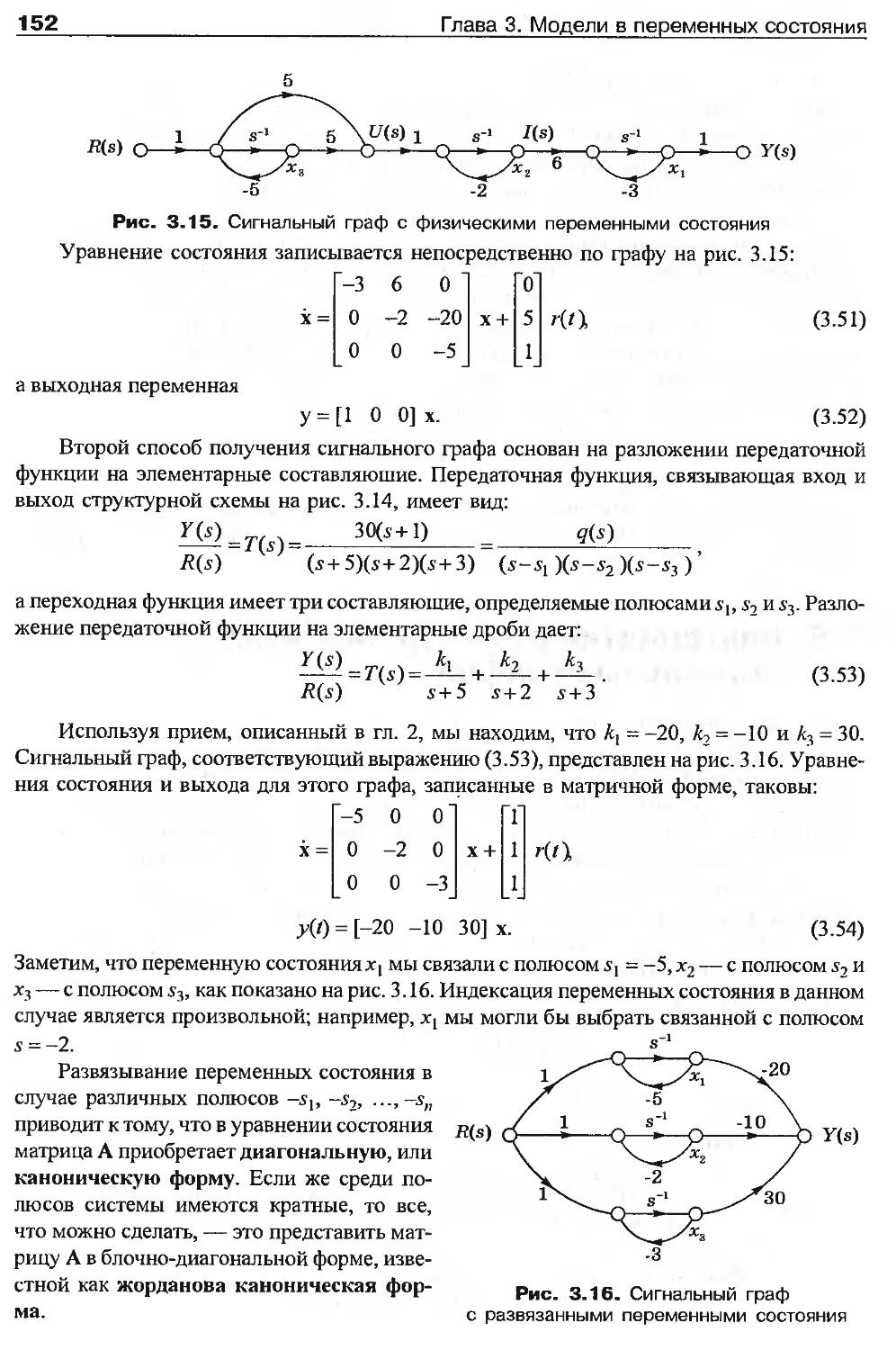
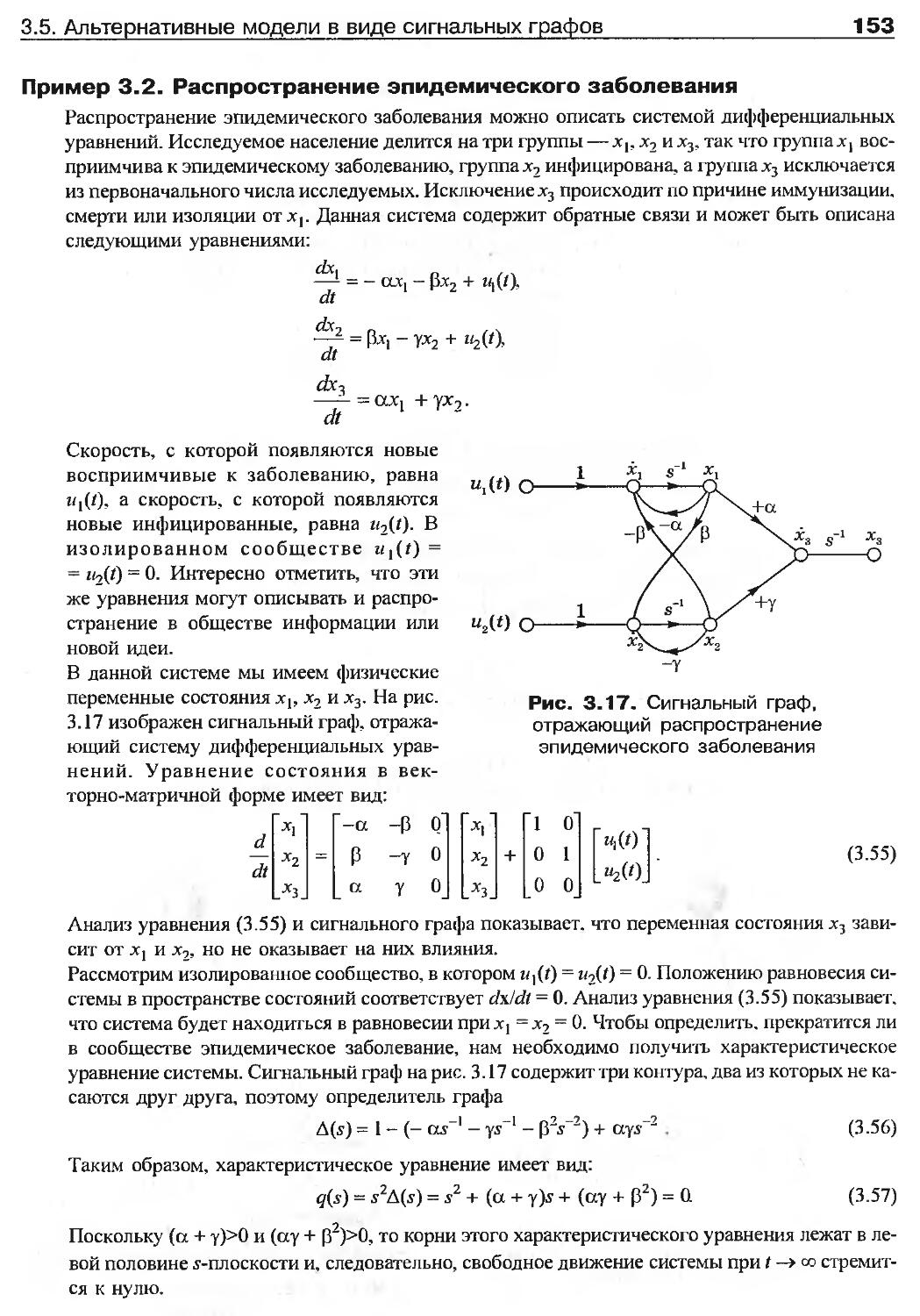
3.5. Альтернативные модели в виде сигнальных графов................151
3.6. Связь между передаточной функцией и уравнениями состояния.....155
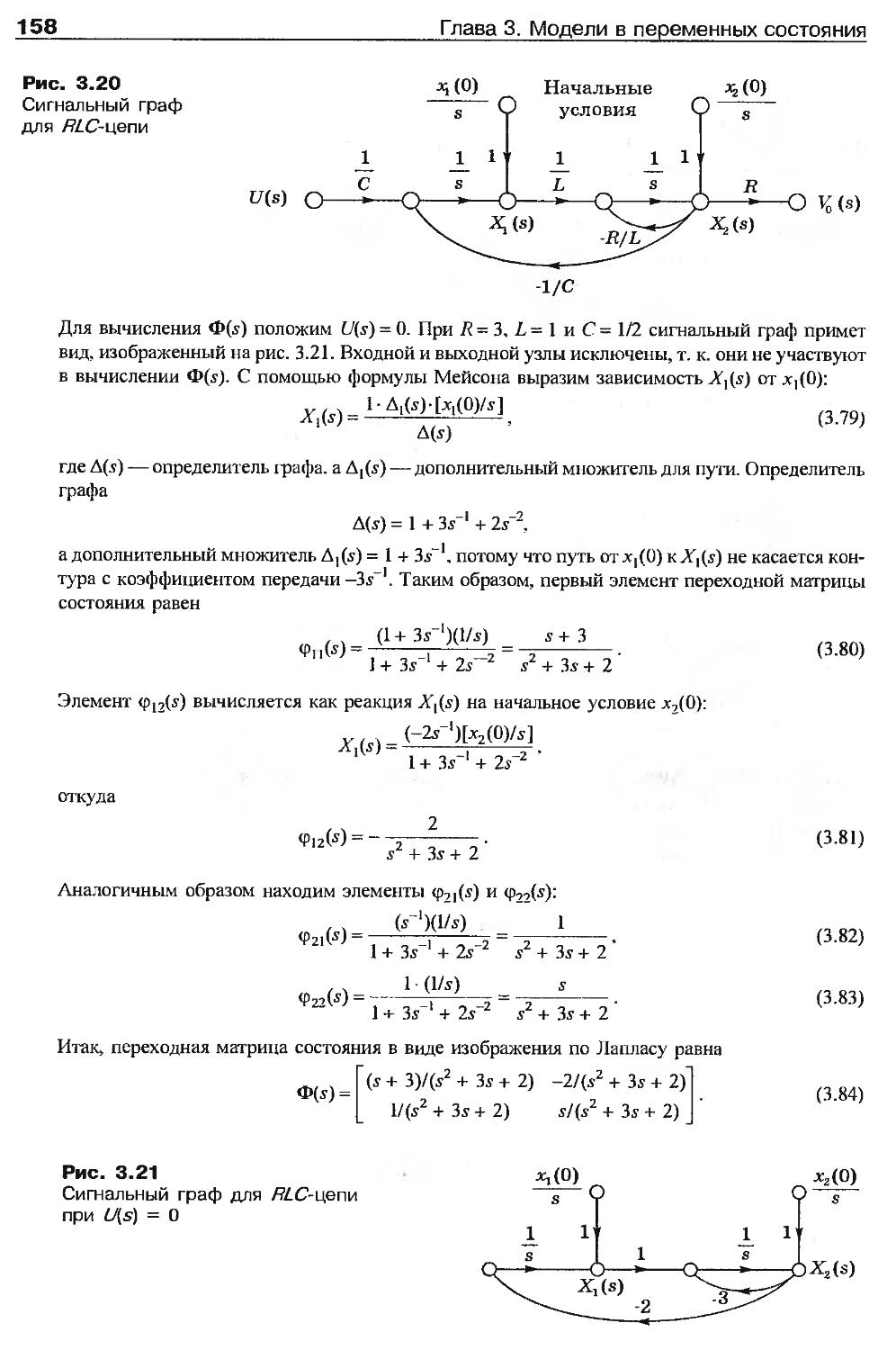
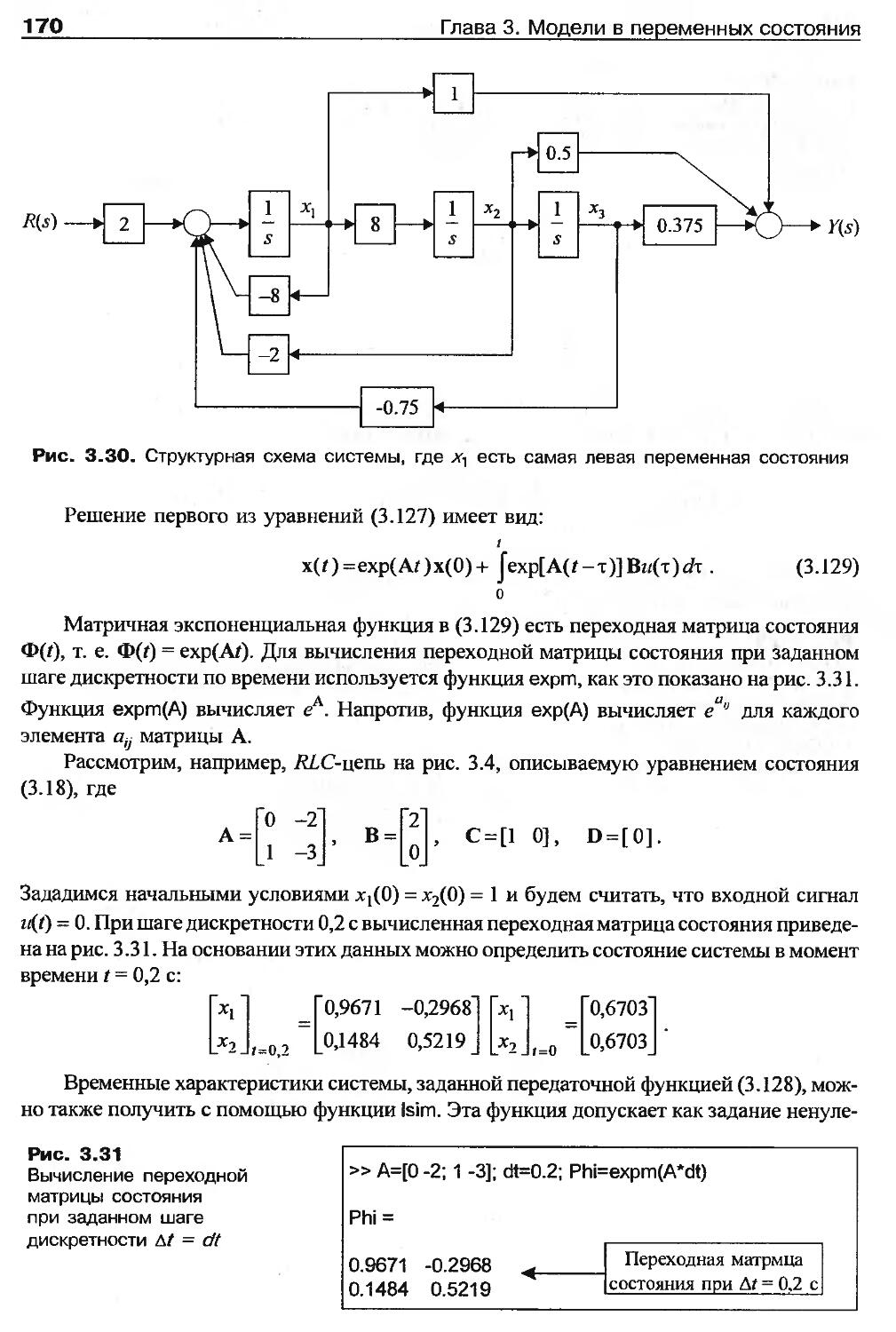
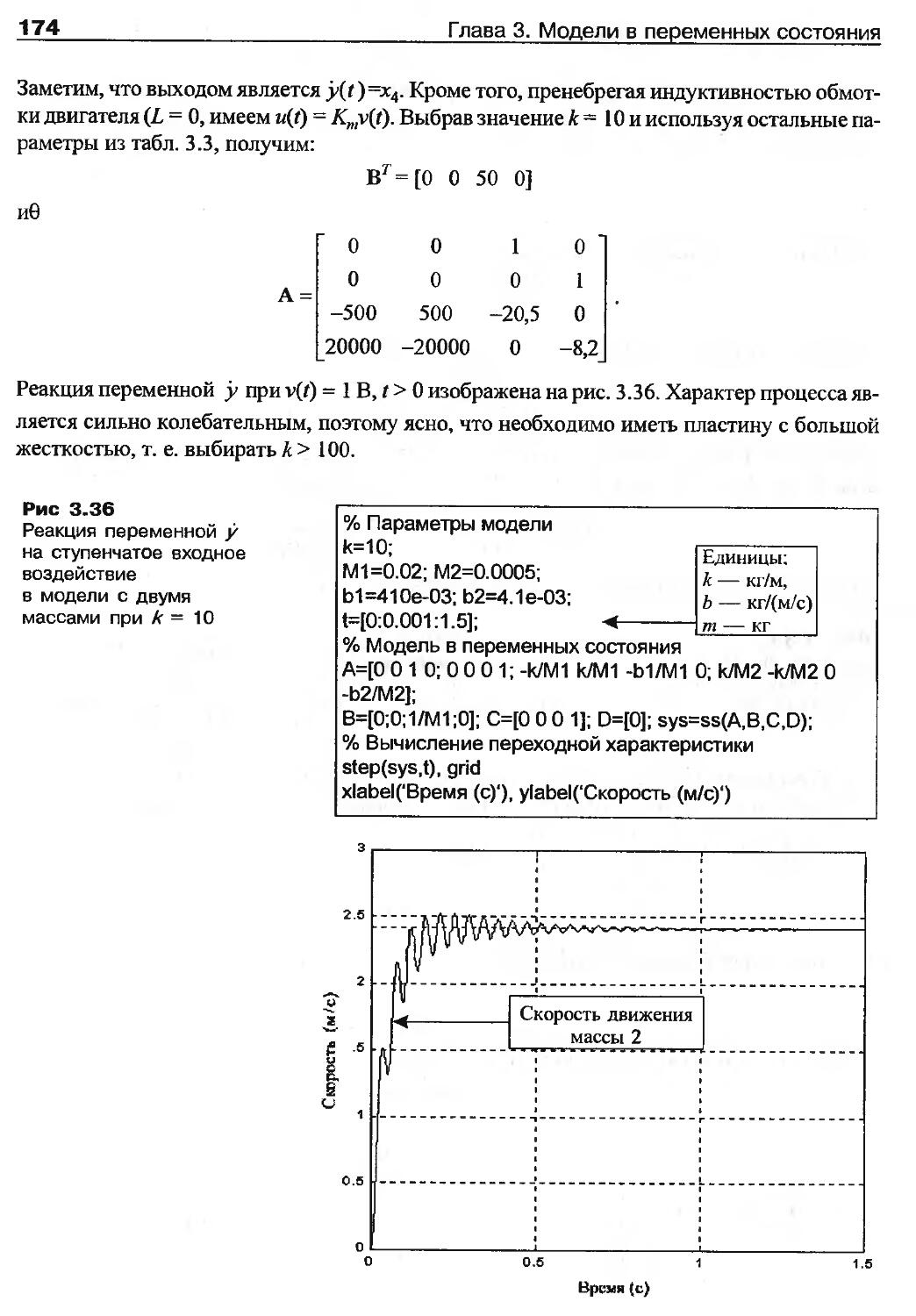
3.7. Временные характеристики и переходная матрица состояния.......156
3.8. Дискретный способ вычисления временных характеристик..........159
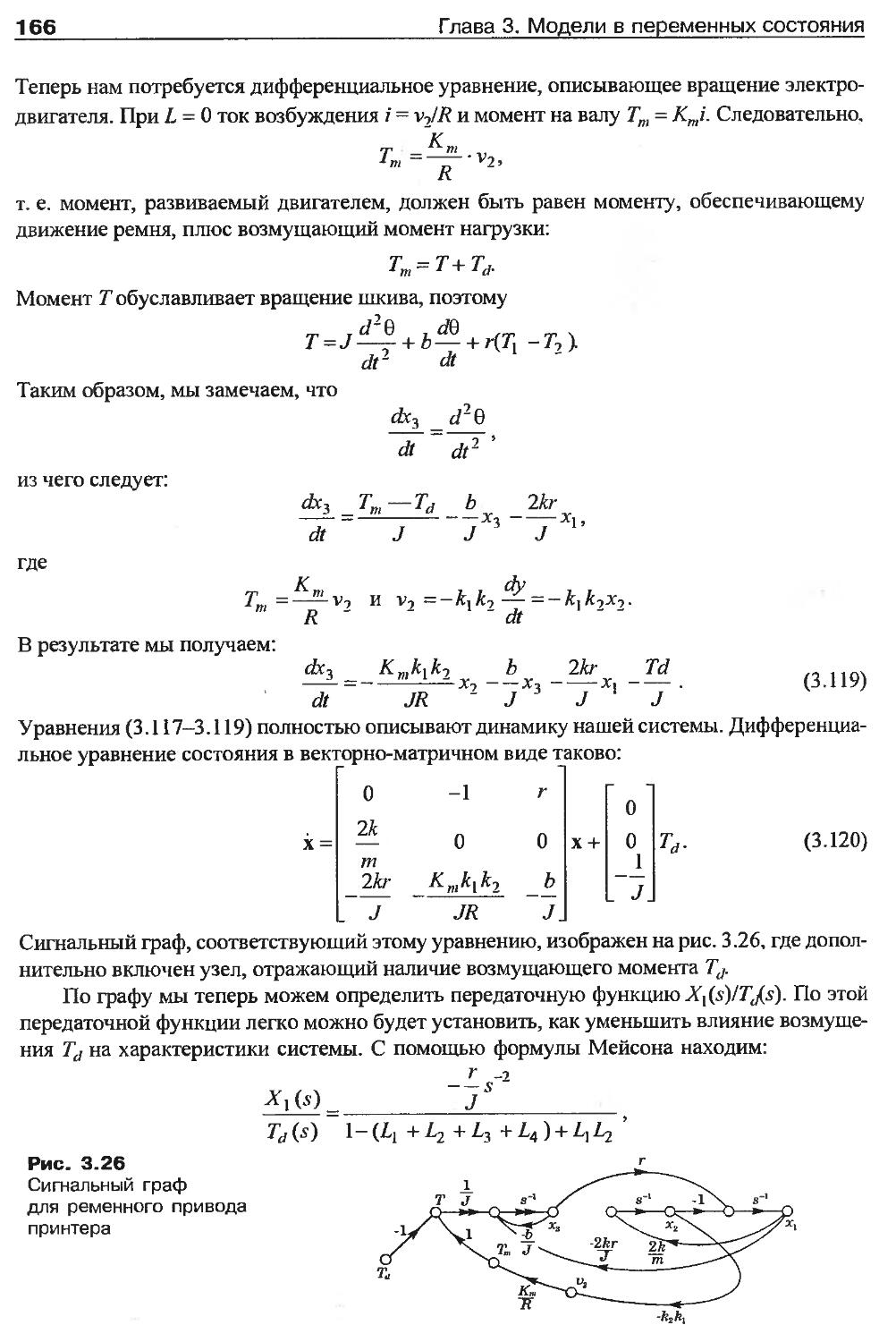
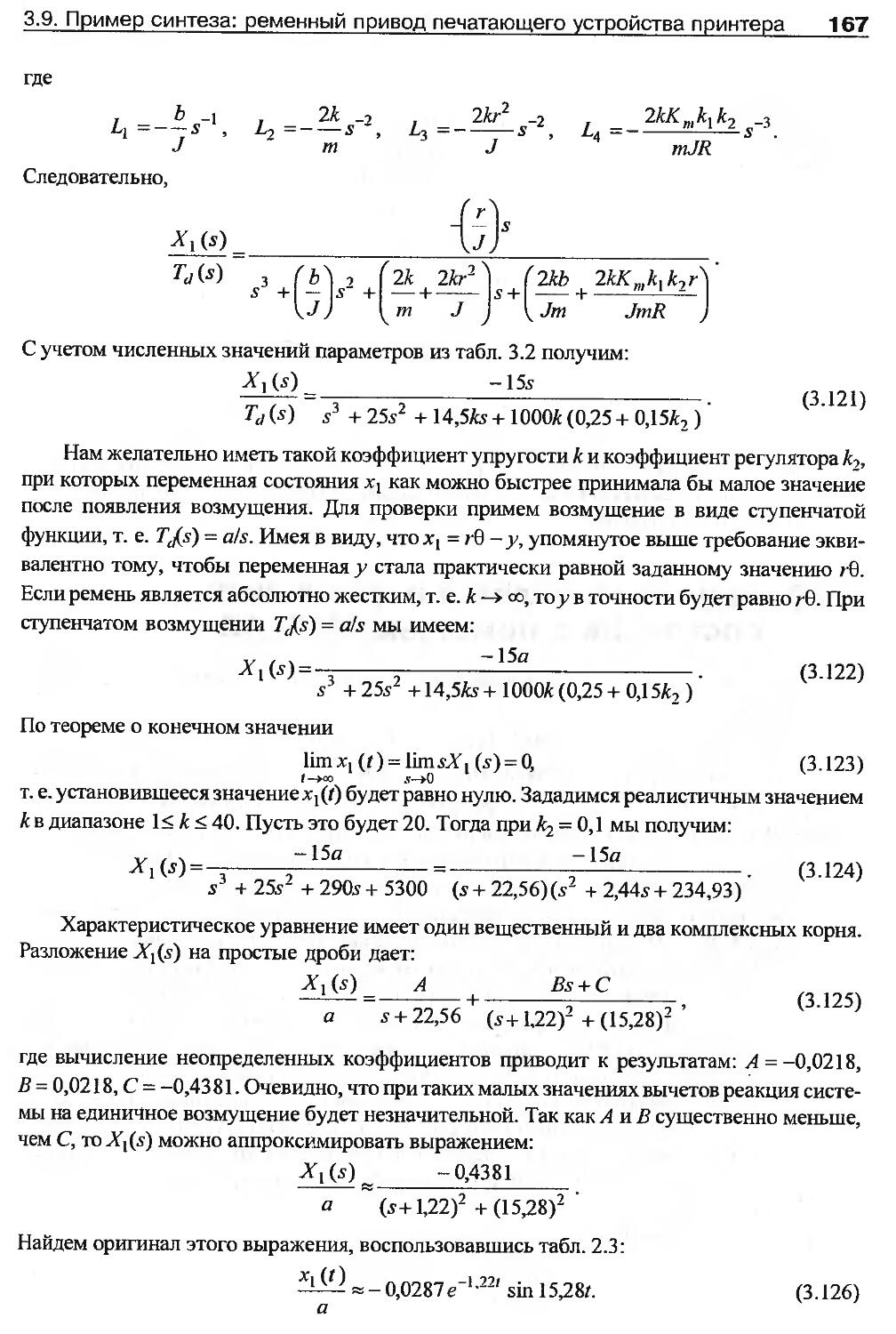
3.9. Пример синтеза: ременный привод печатающего устройства принтера .... 164
3.10. Анализ моделей в переменных состояния с помощью MATLAB.......168
3.11. Пример синтеза с продолжением: система чтения информации с диска. . . 172
3.12. Резюме.......................................................175
Упражнения.........................................................175
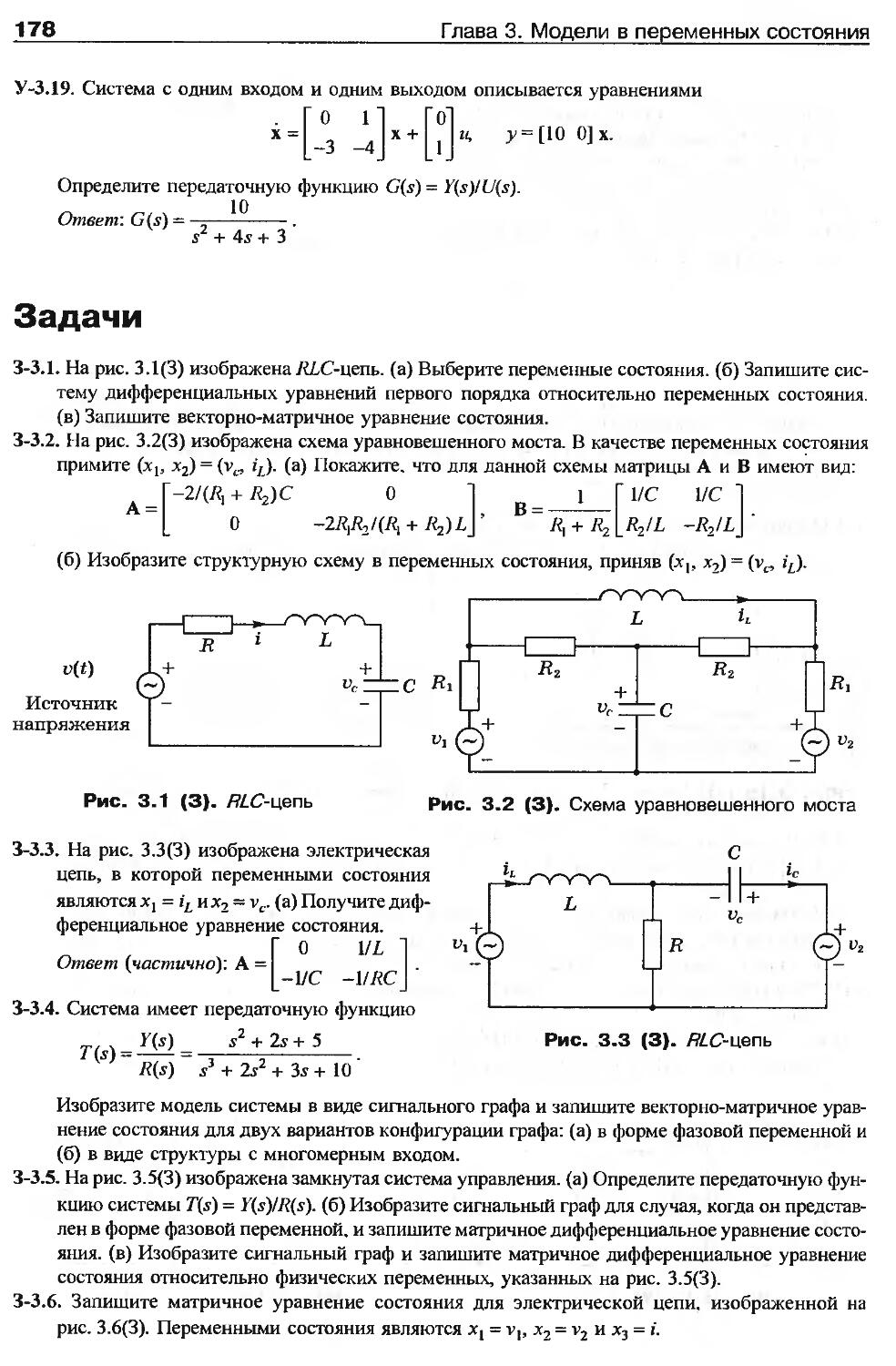
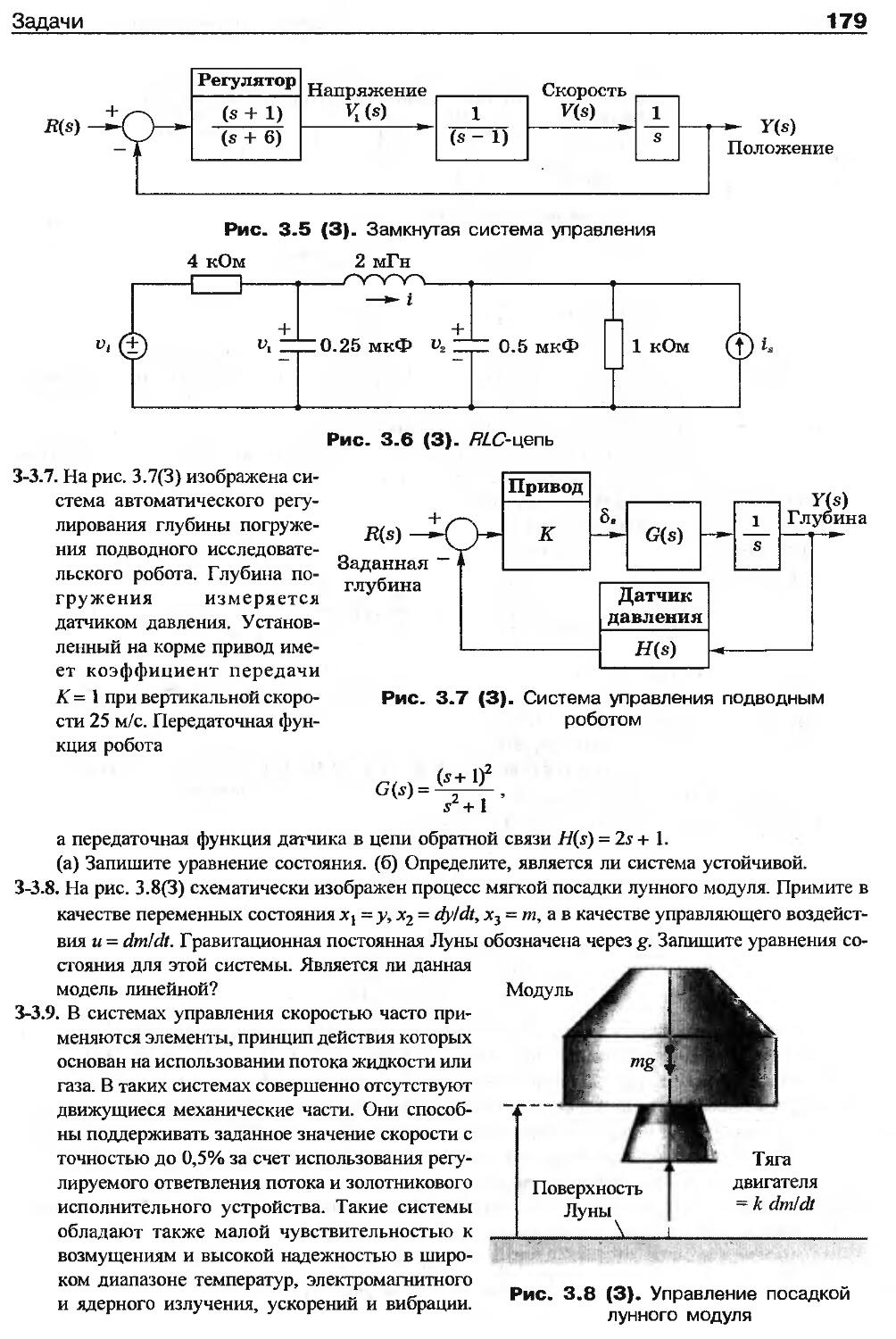
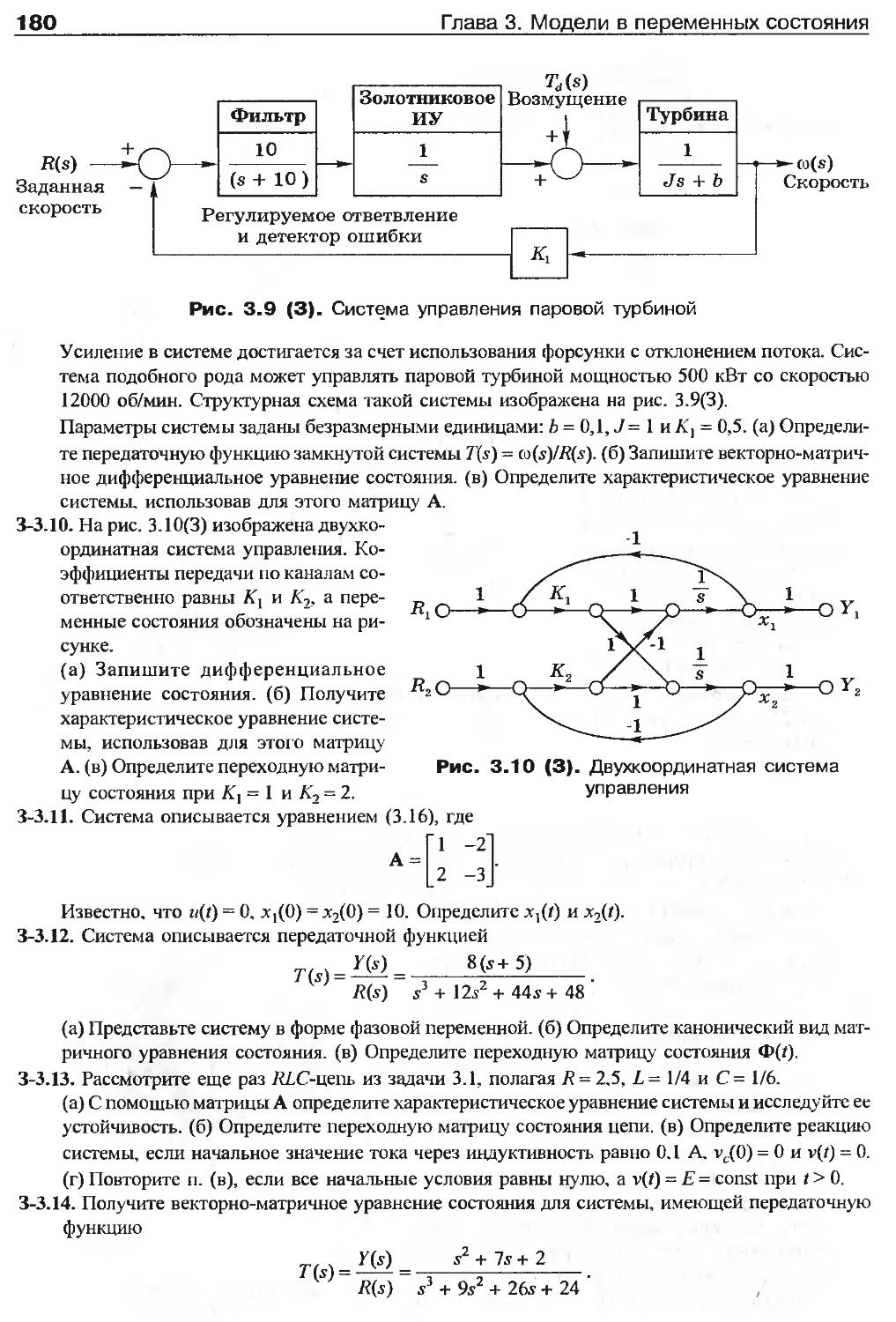
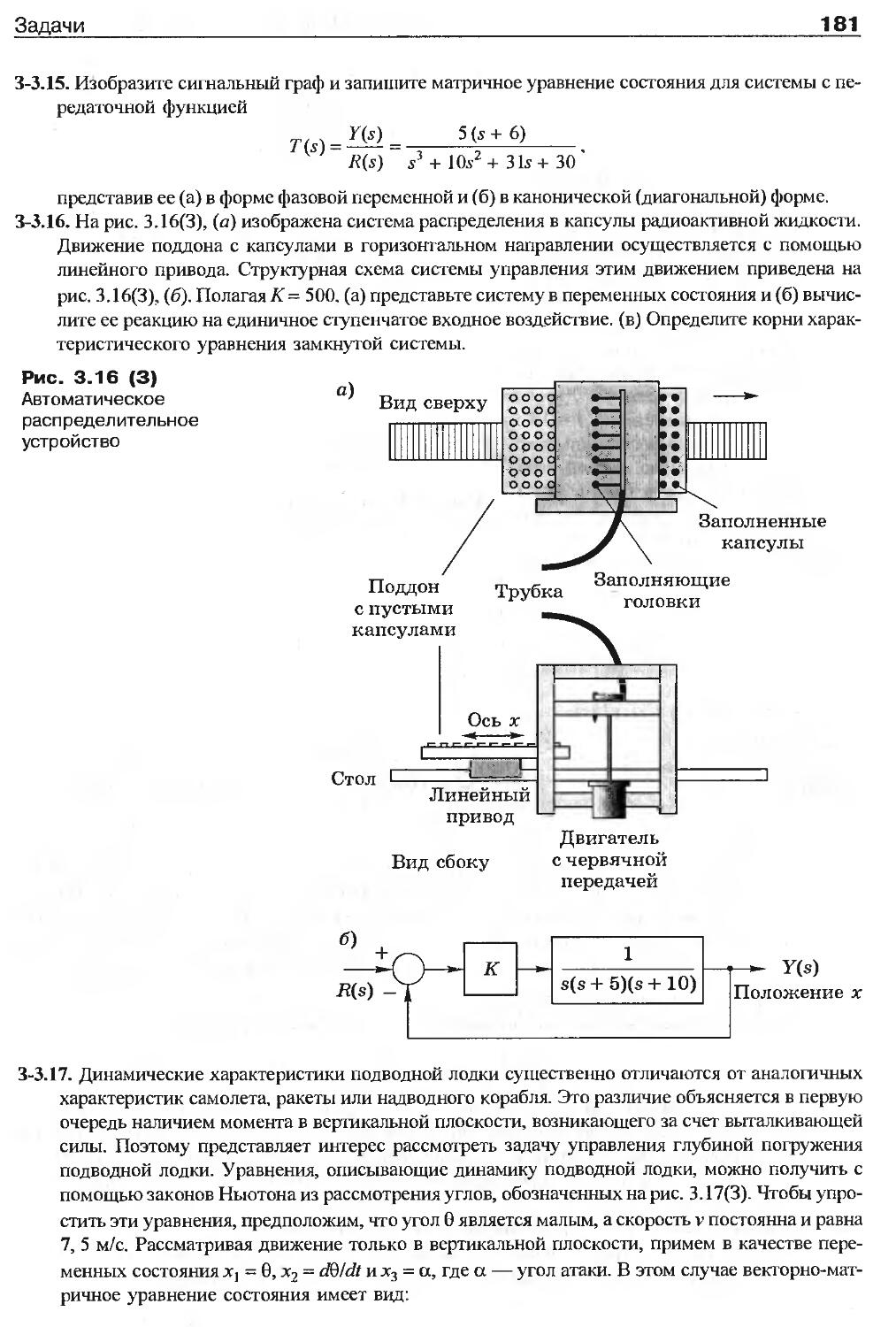
Задачи.............................................................178
Задачи повышенной сложности........................................187
Задачи на синтез систем............................................189
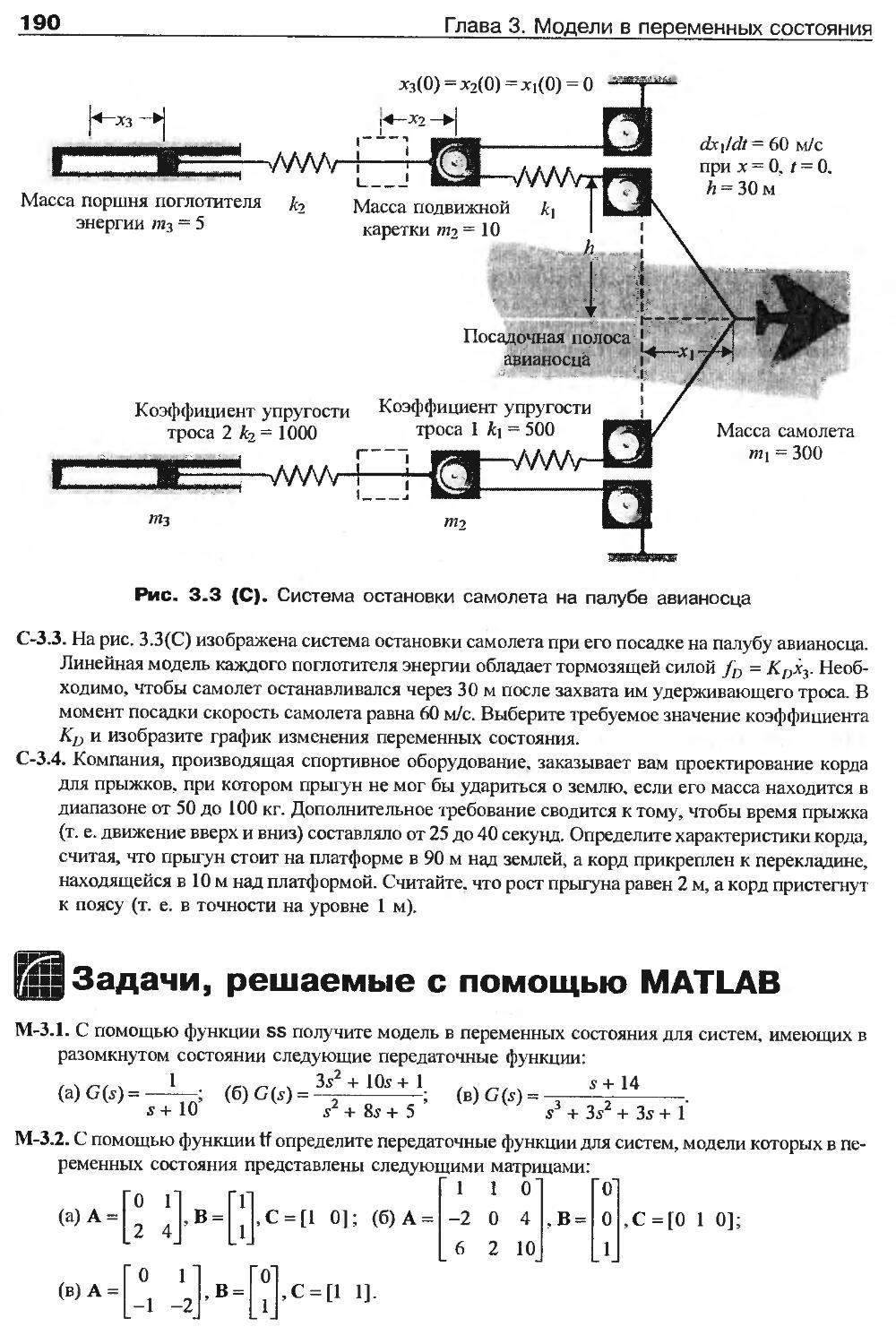
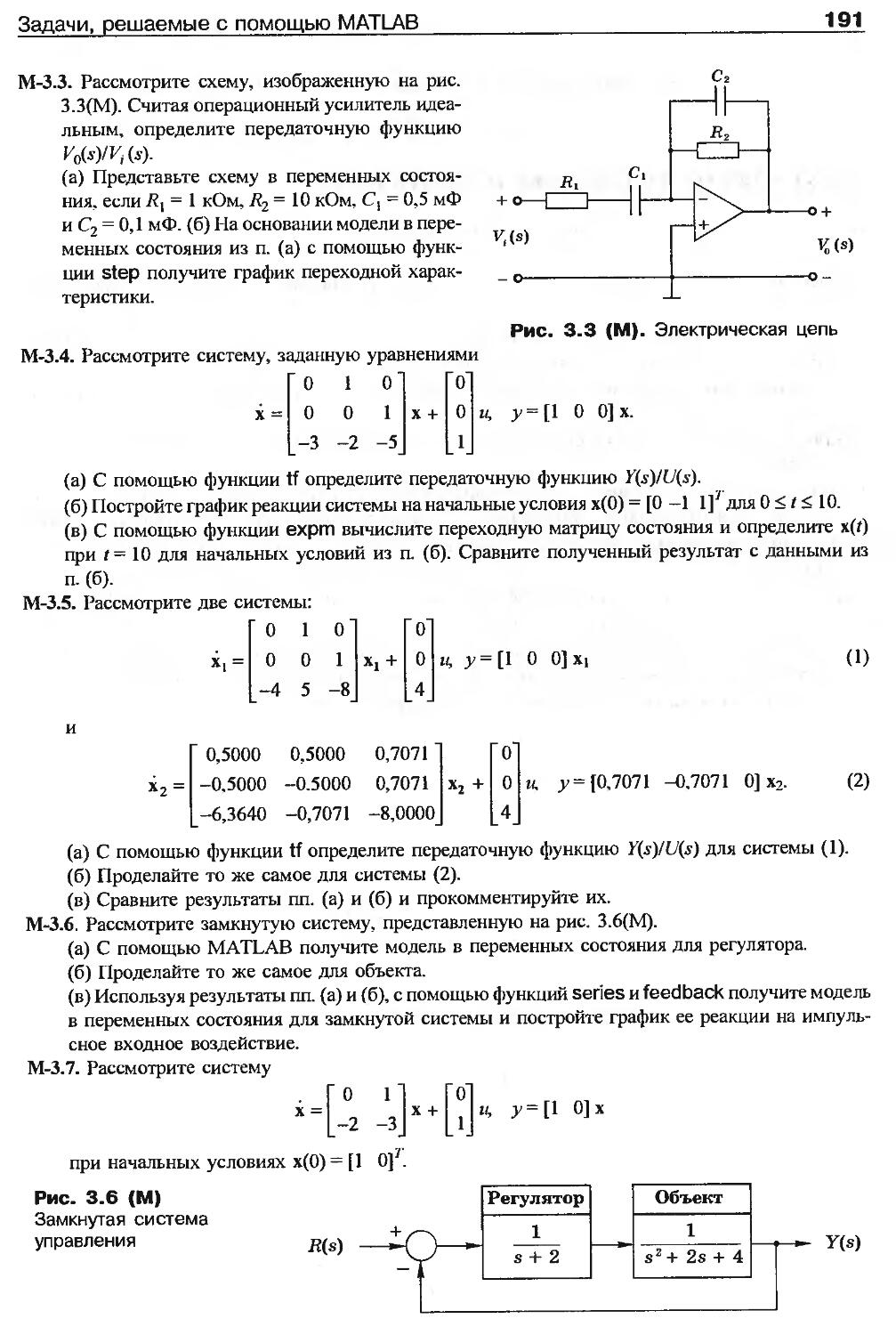
Задачи, решаемые с помощью MATLAB..................................190
Ключевые термины и понятия.........................................192
Глава 4. Характеристики систем управления с обратной связью...........193
Обзор..............................................................193
4.1. Разомкнутые и замкнутые системы управления....................193
4.2. Чувствительность систем управления к изменению параметров.....195
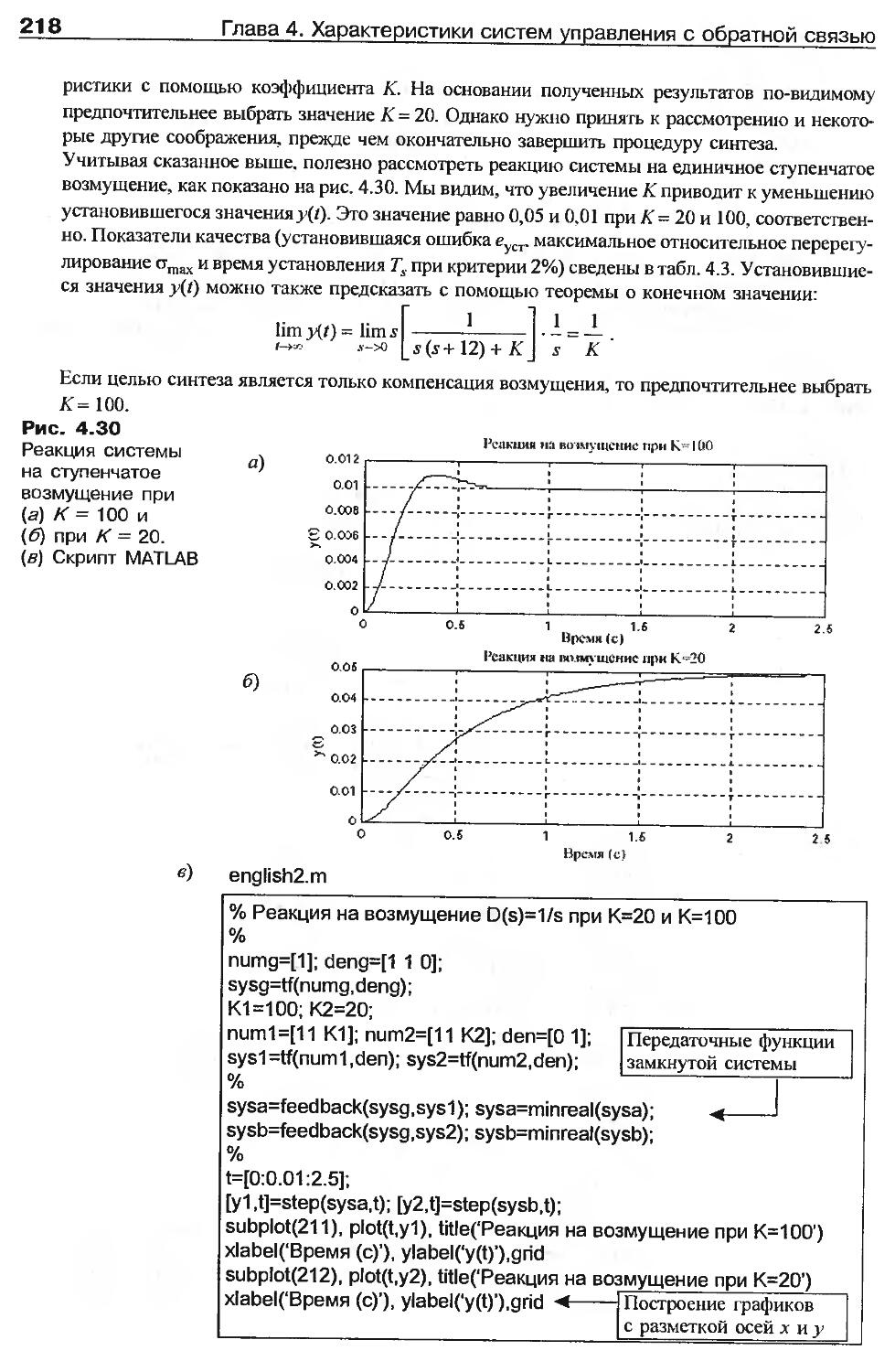
4.3. Воздействие на переходную характеристику систем управления....199
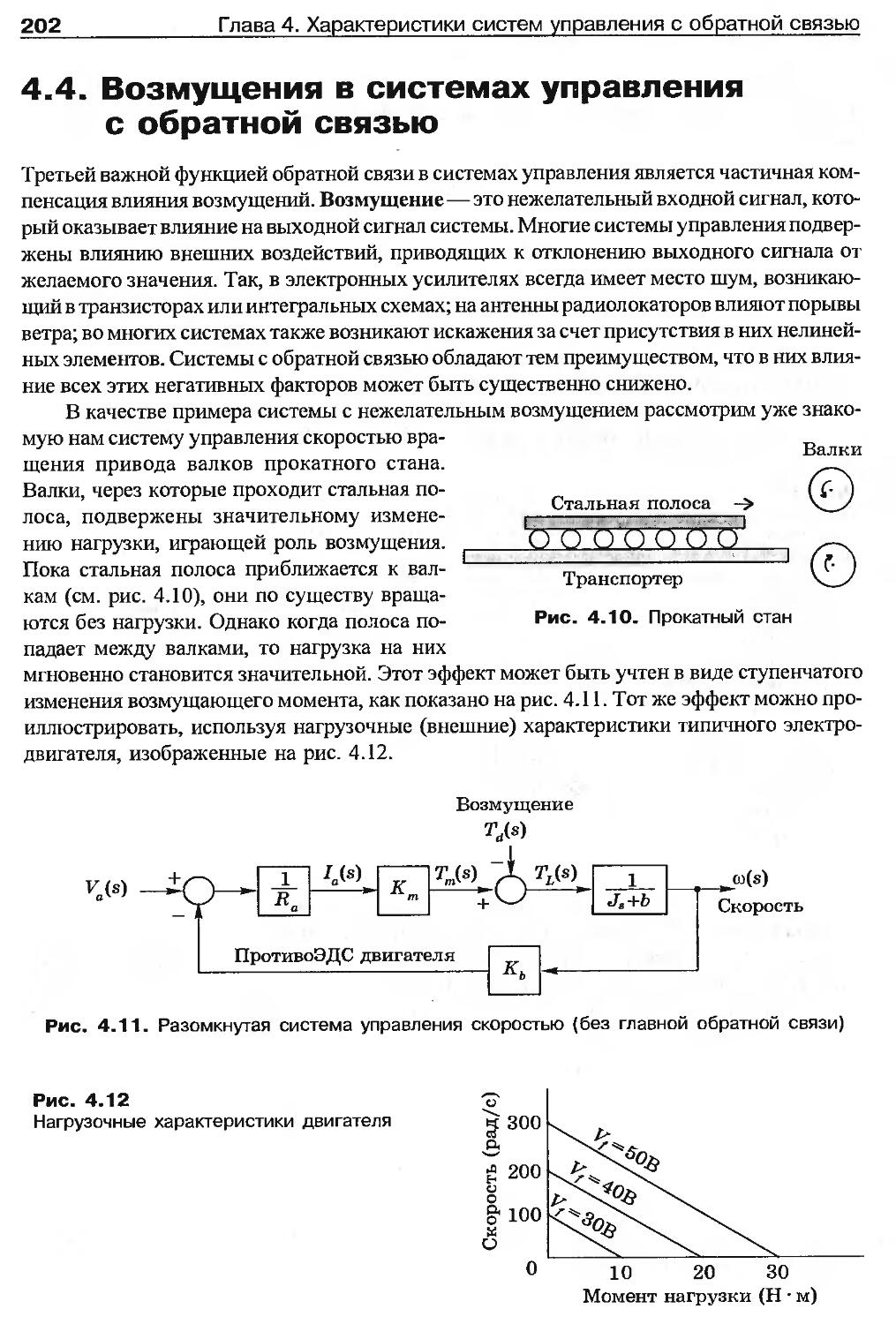
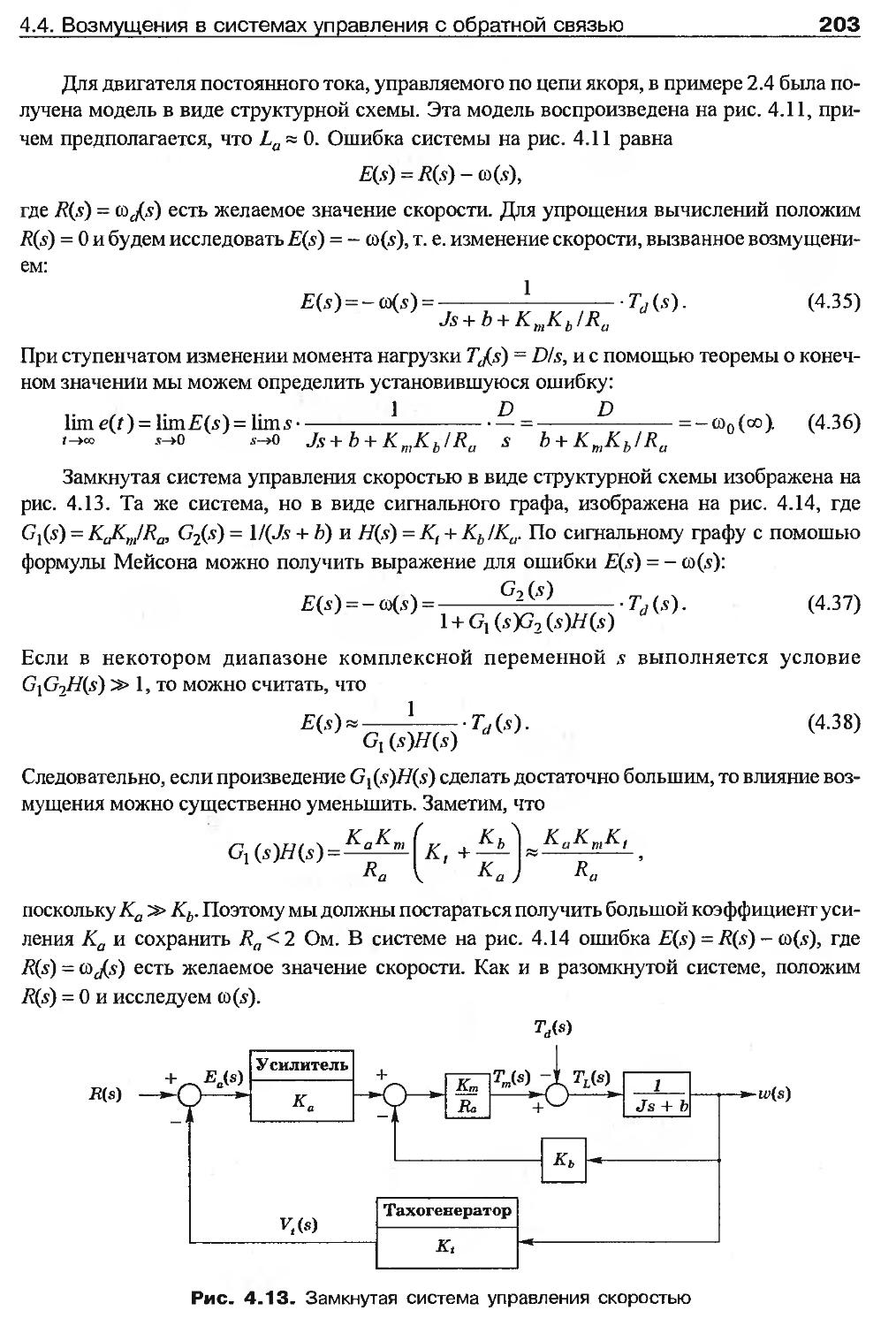
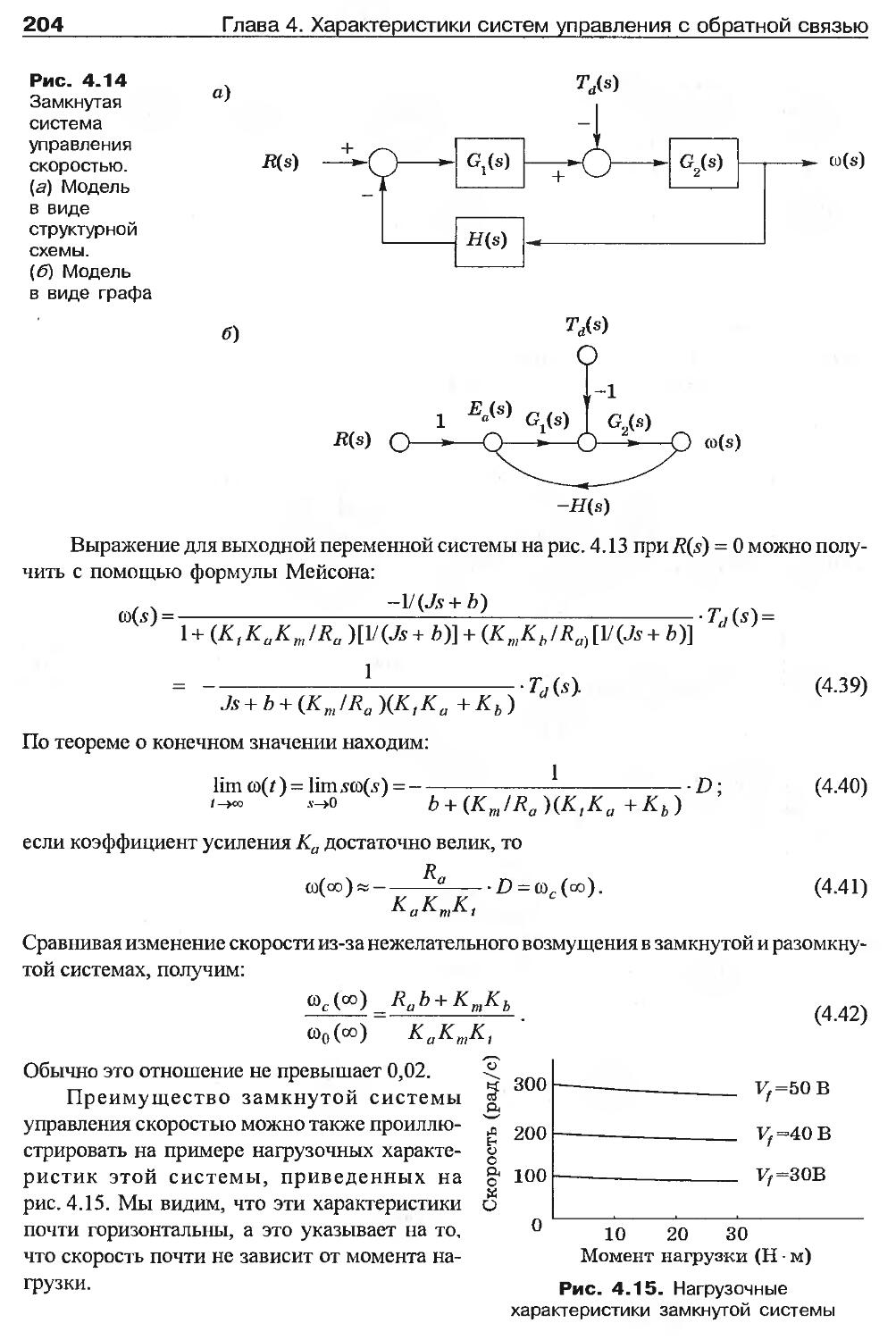
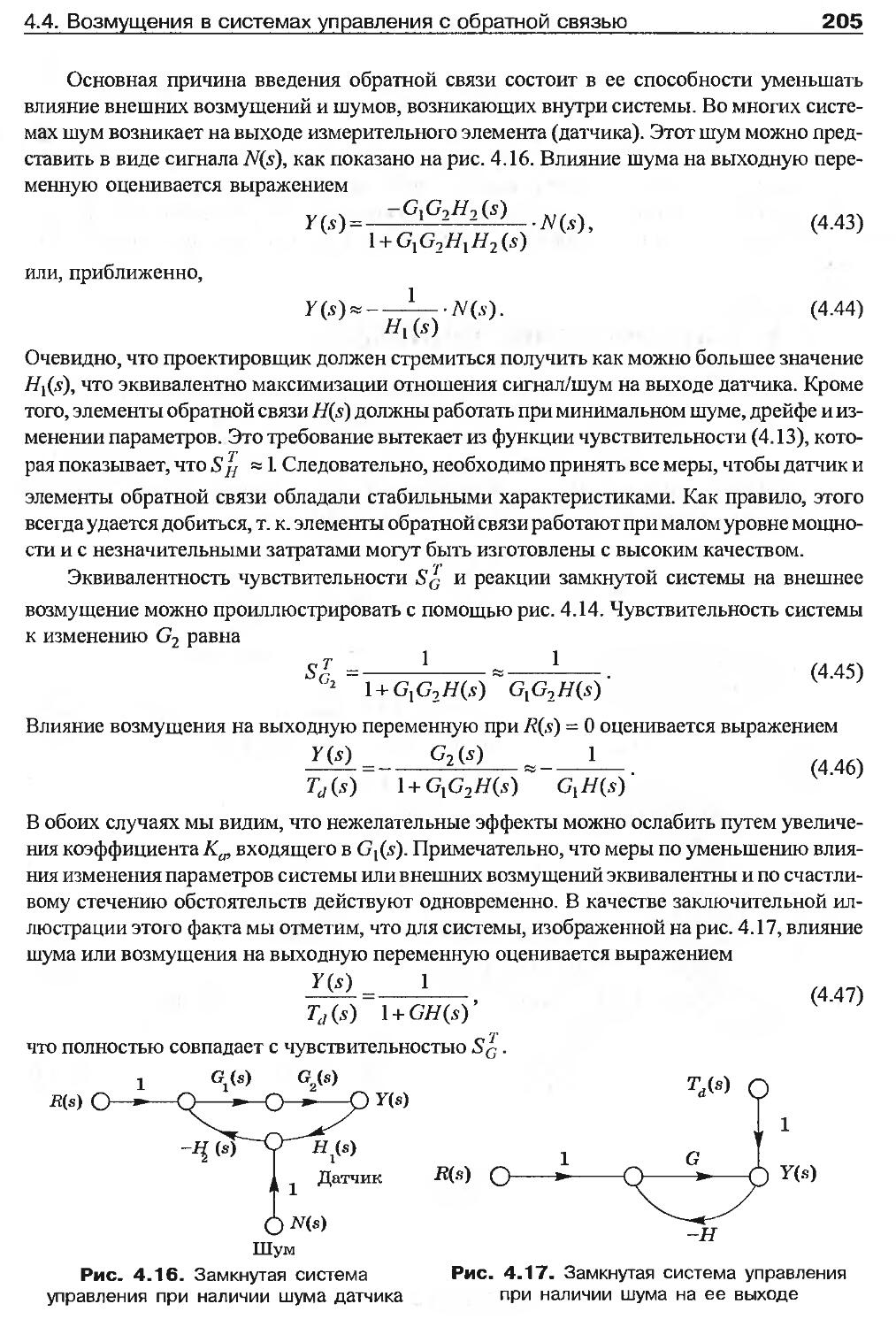
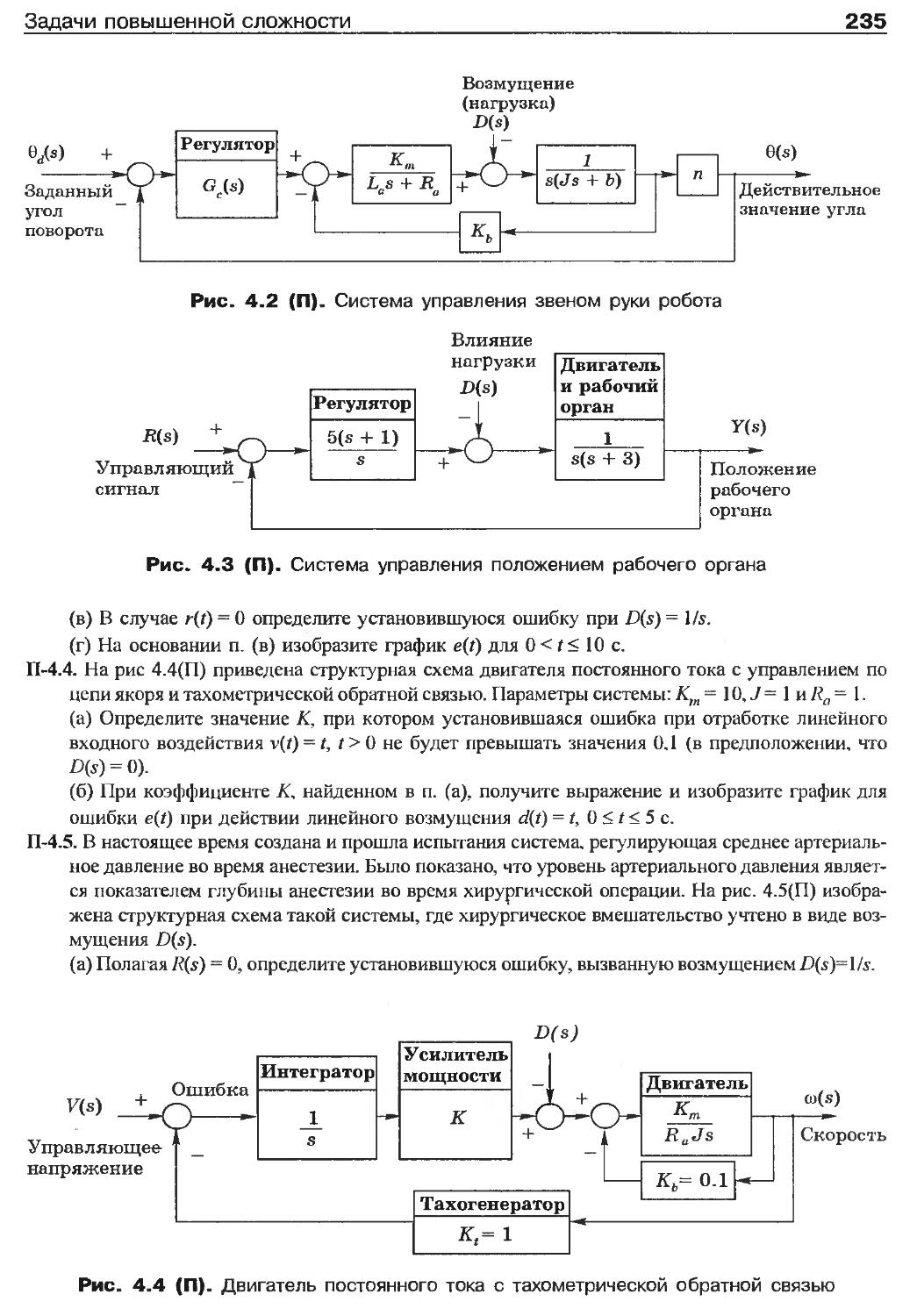
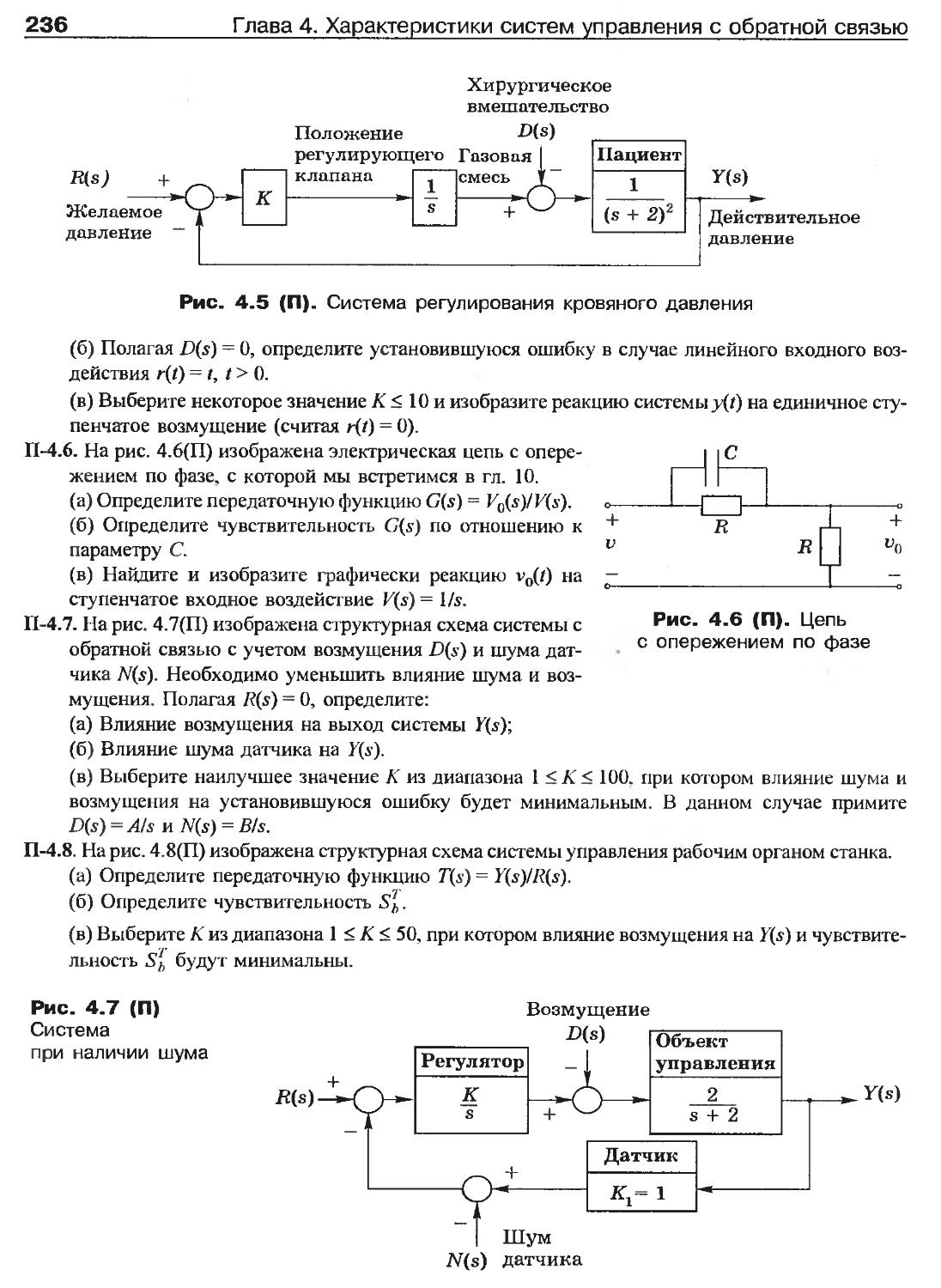
4.4. Возмущения в системах управления с обратной связью............202
4.5. Установившаяся ошибка.........................................206
4.6. Издержки обратной связи.......................................208
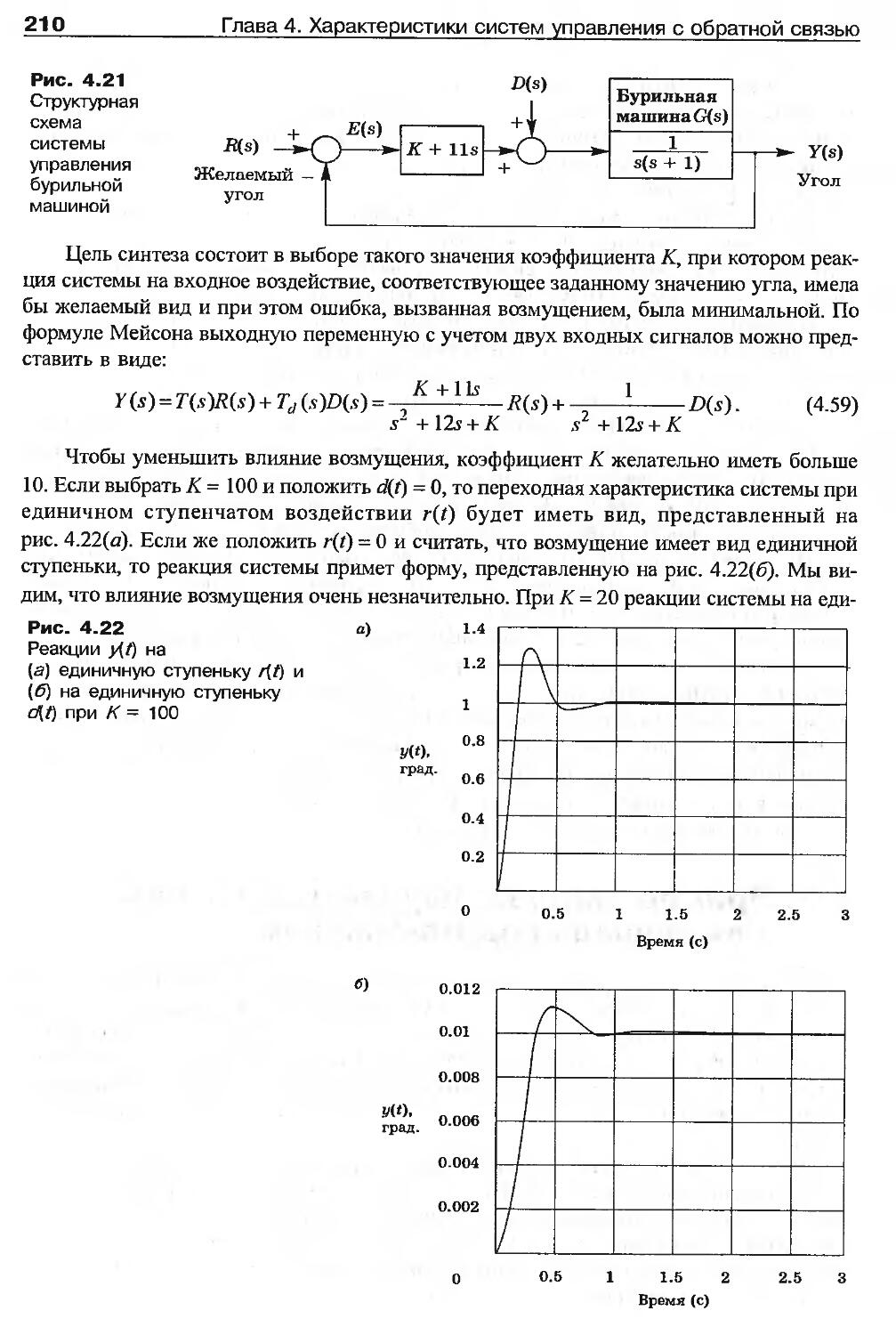
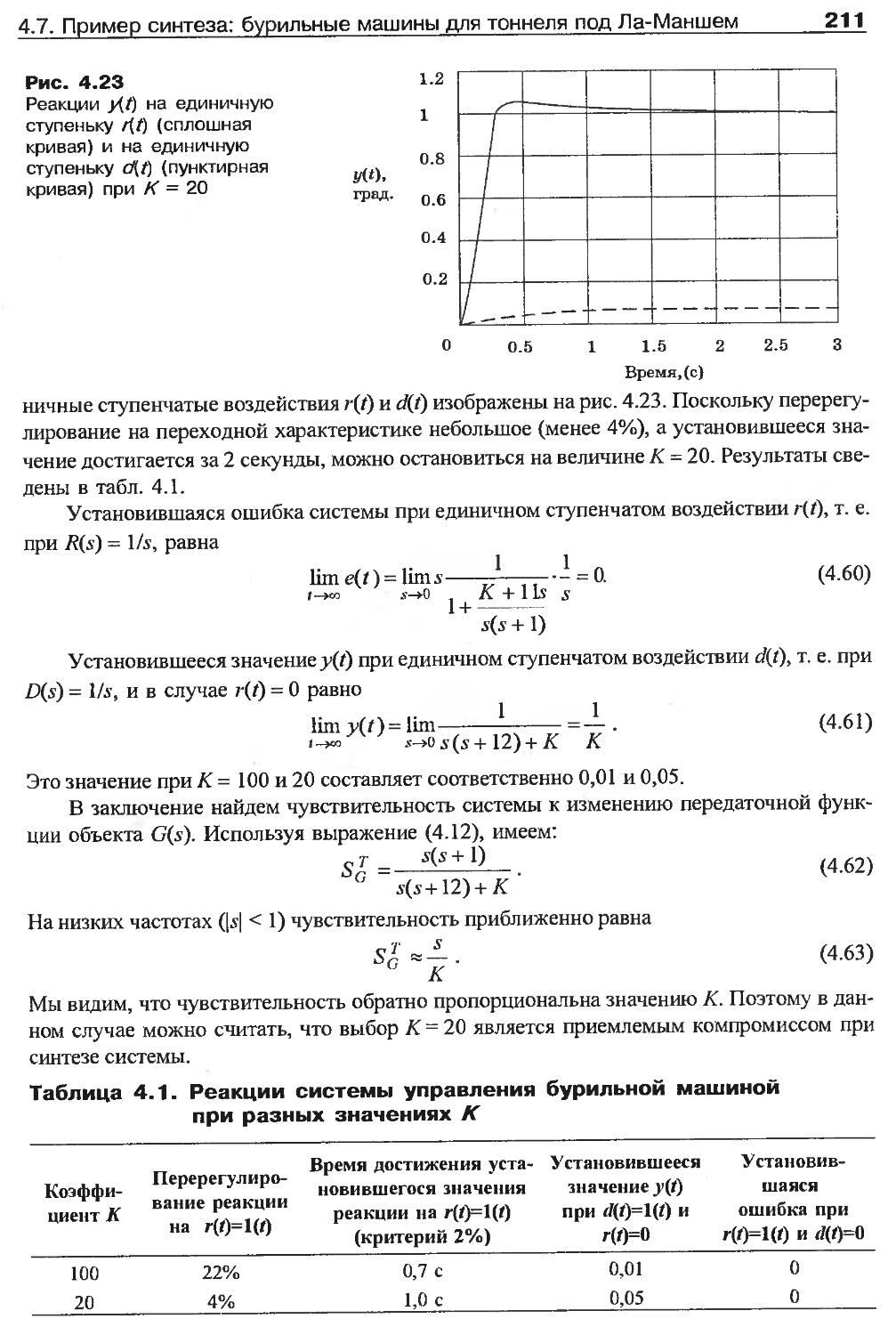
4.7. Пример синтеза: бурильные машины для тоннеля под Ла-Маншем....209
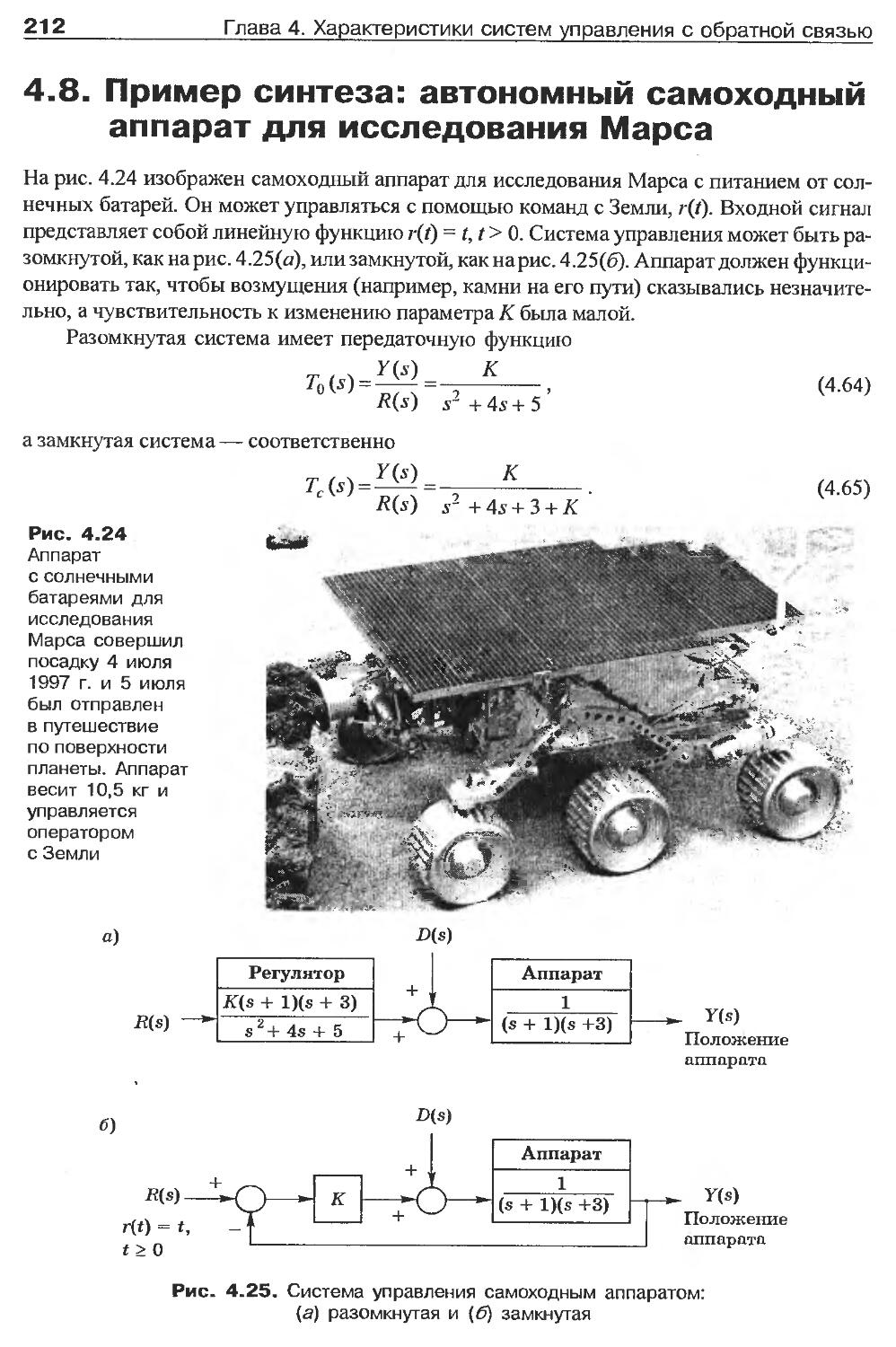
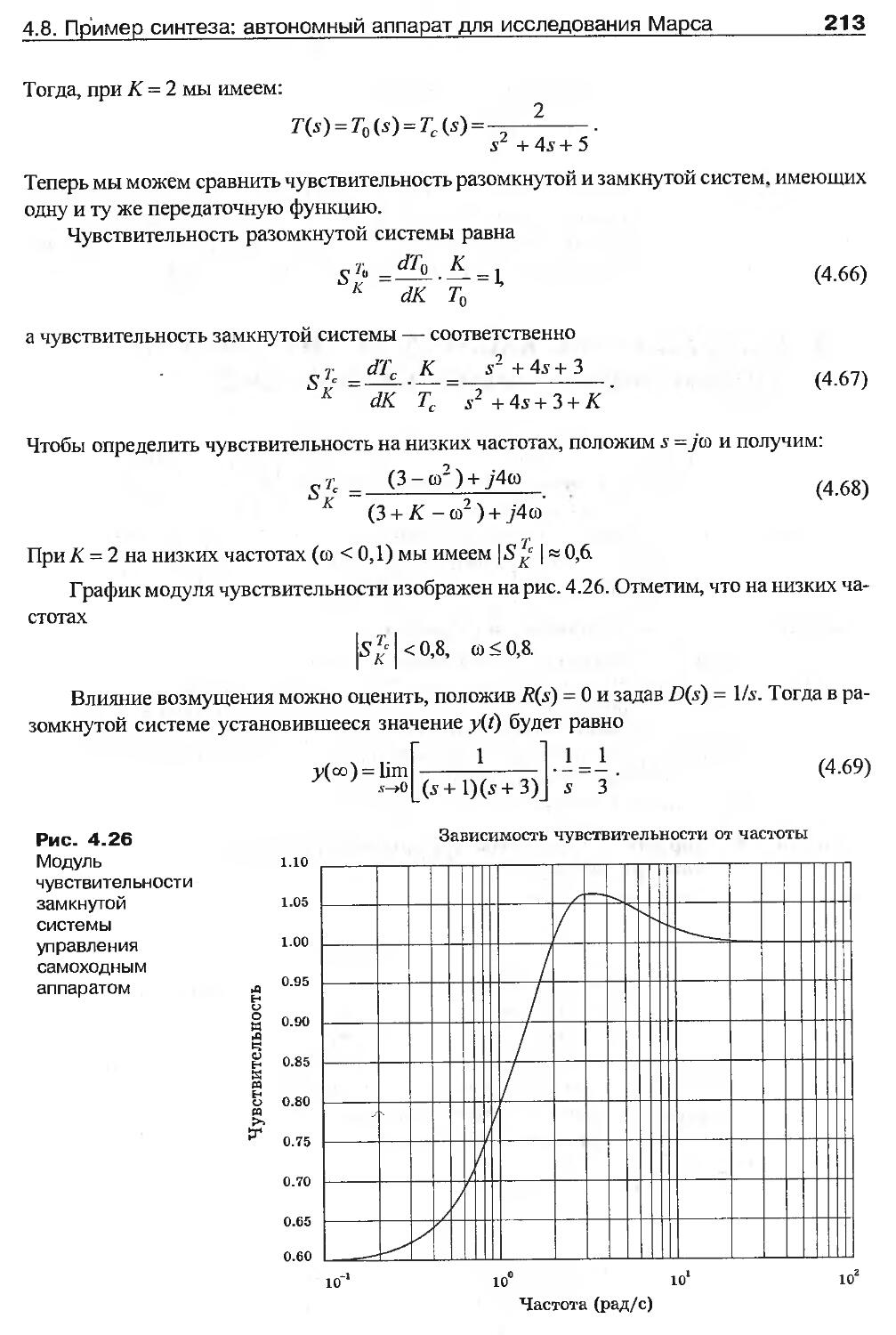
4.8. Пример синтеза: автономный самоходный аппарат для исследования Марса.............................................212
4.9. Определение характеристик систем управления с помощью MATLAB .... 214
4.10. Пример синтеза с продолжением: система чтения информации с диска. . . 220
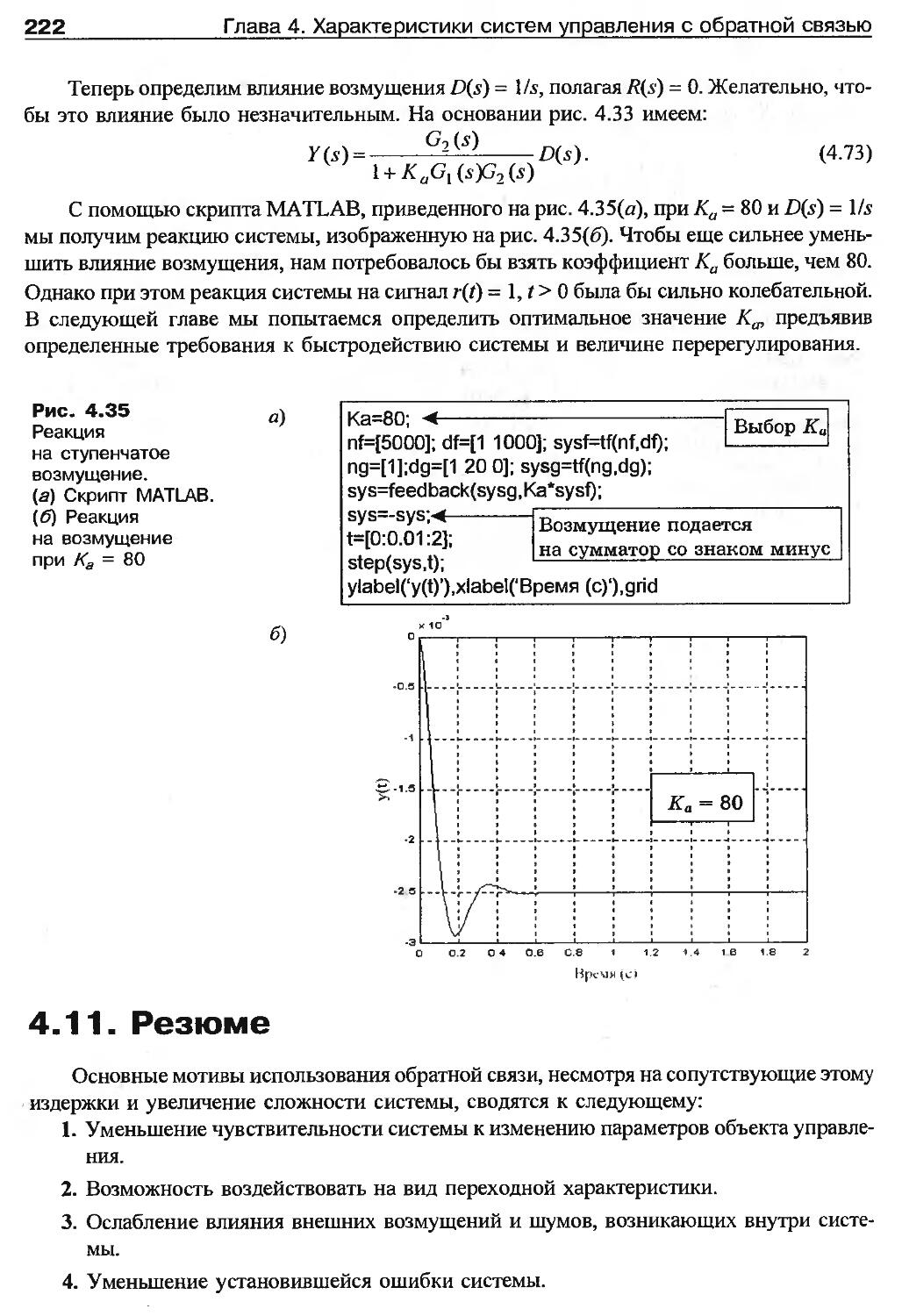
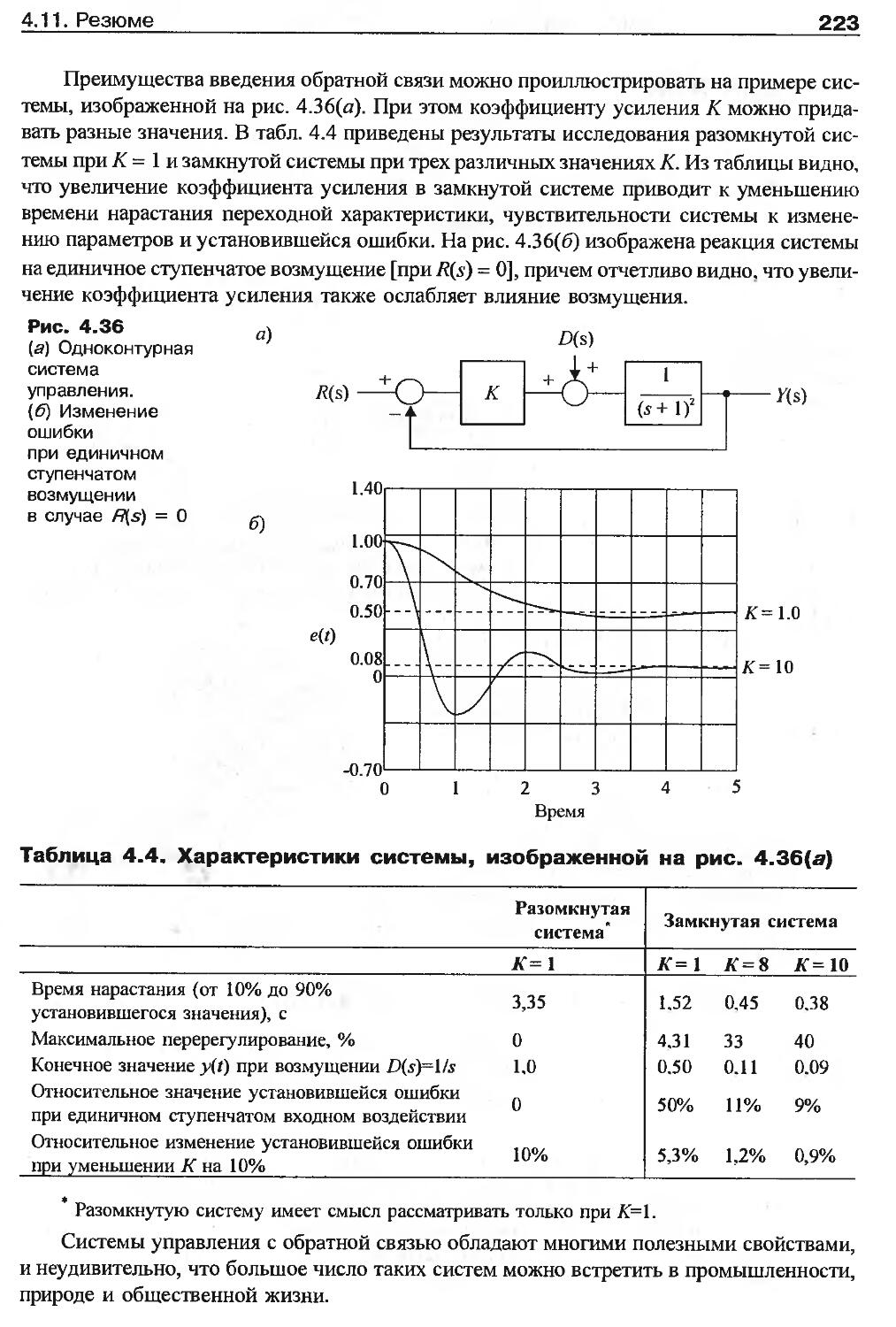
4.11. Резюме.......................................................222
Упражнения.........................................................224
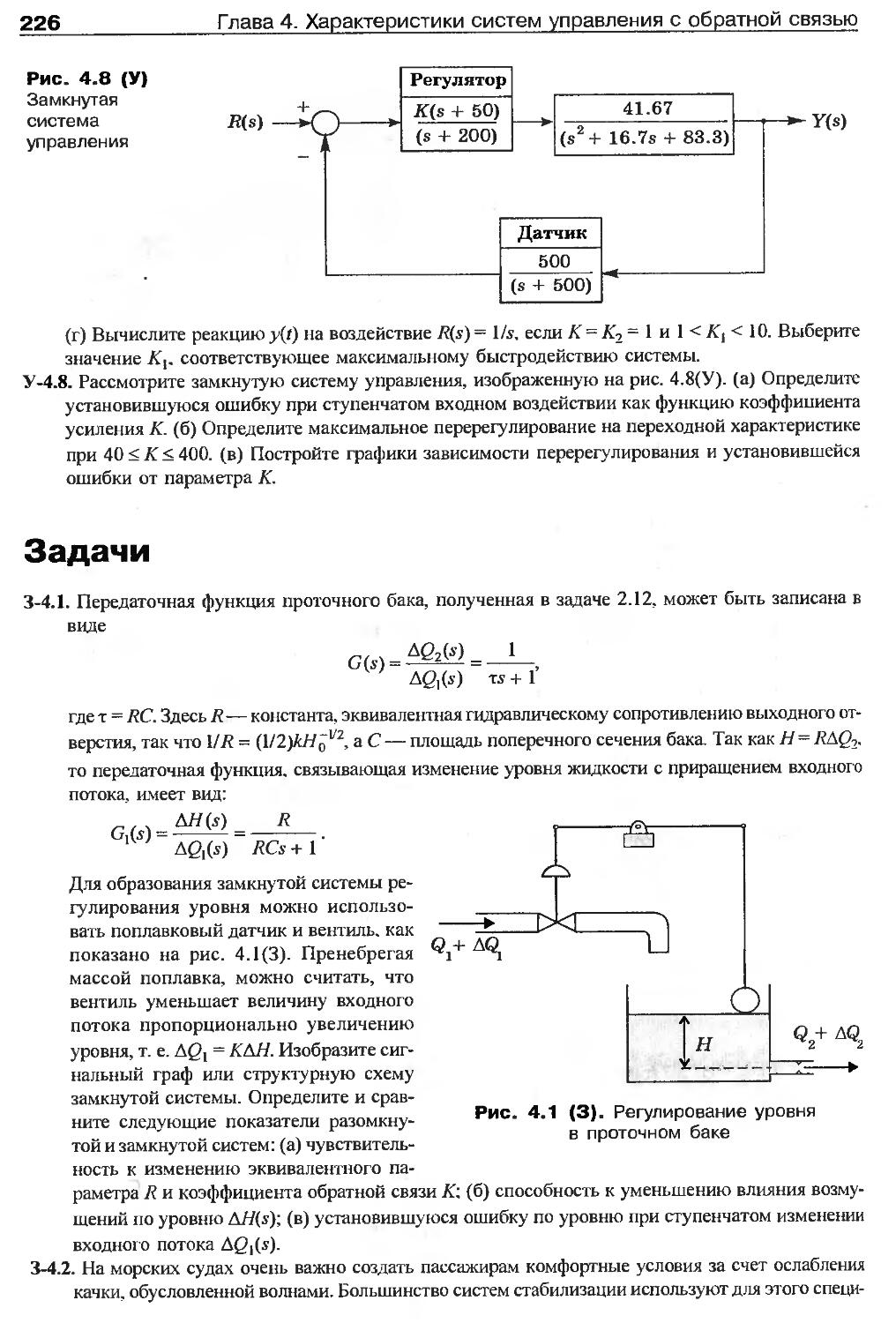
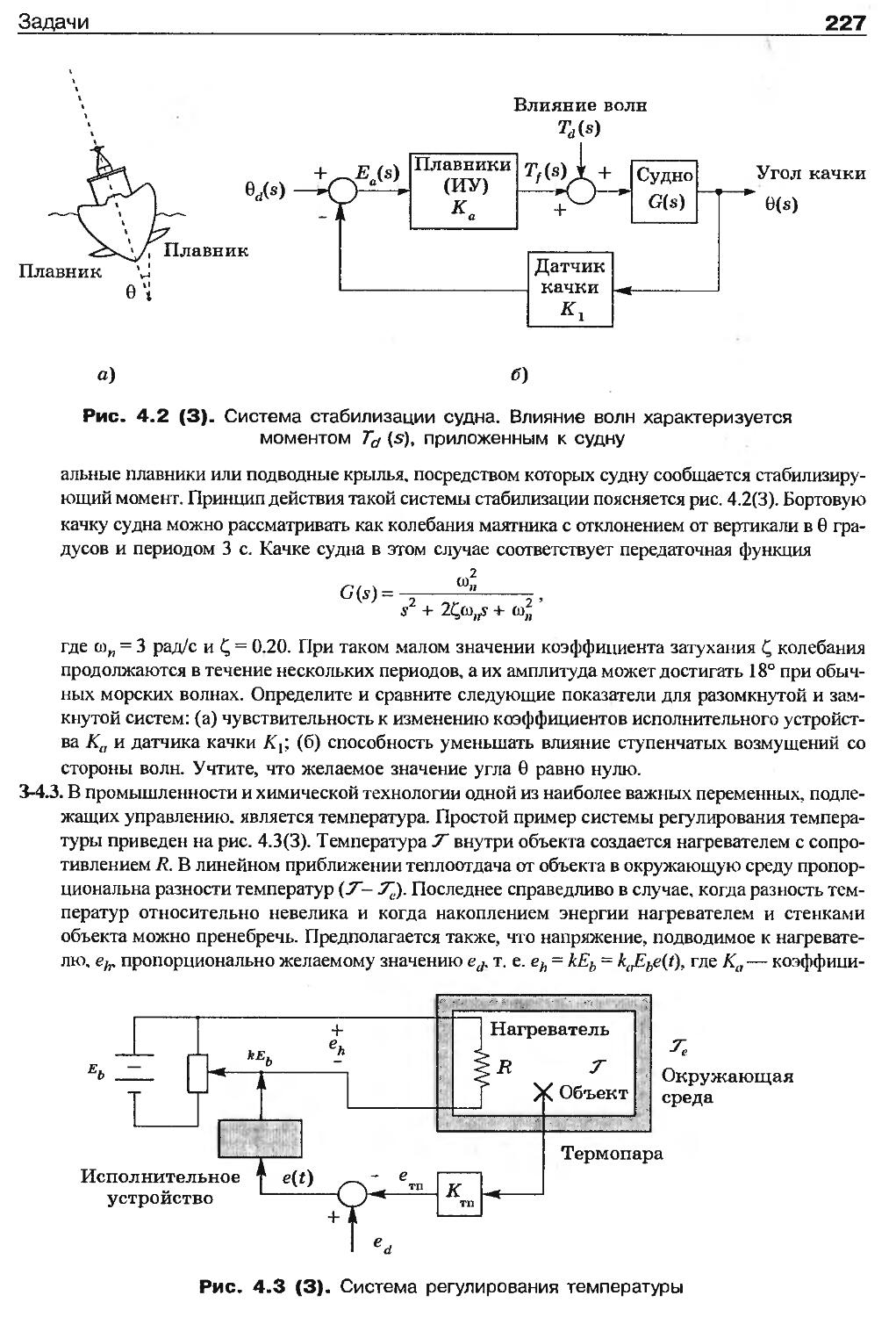
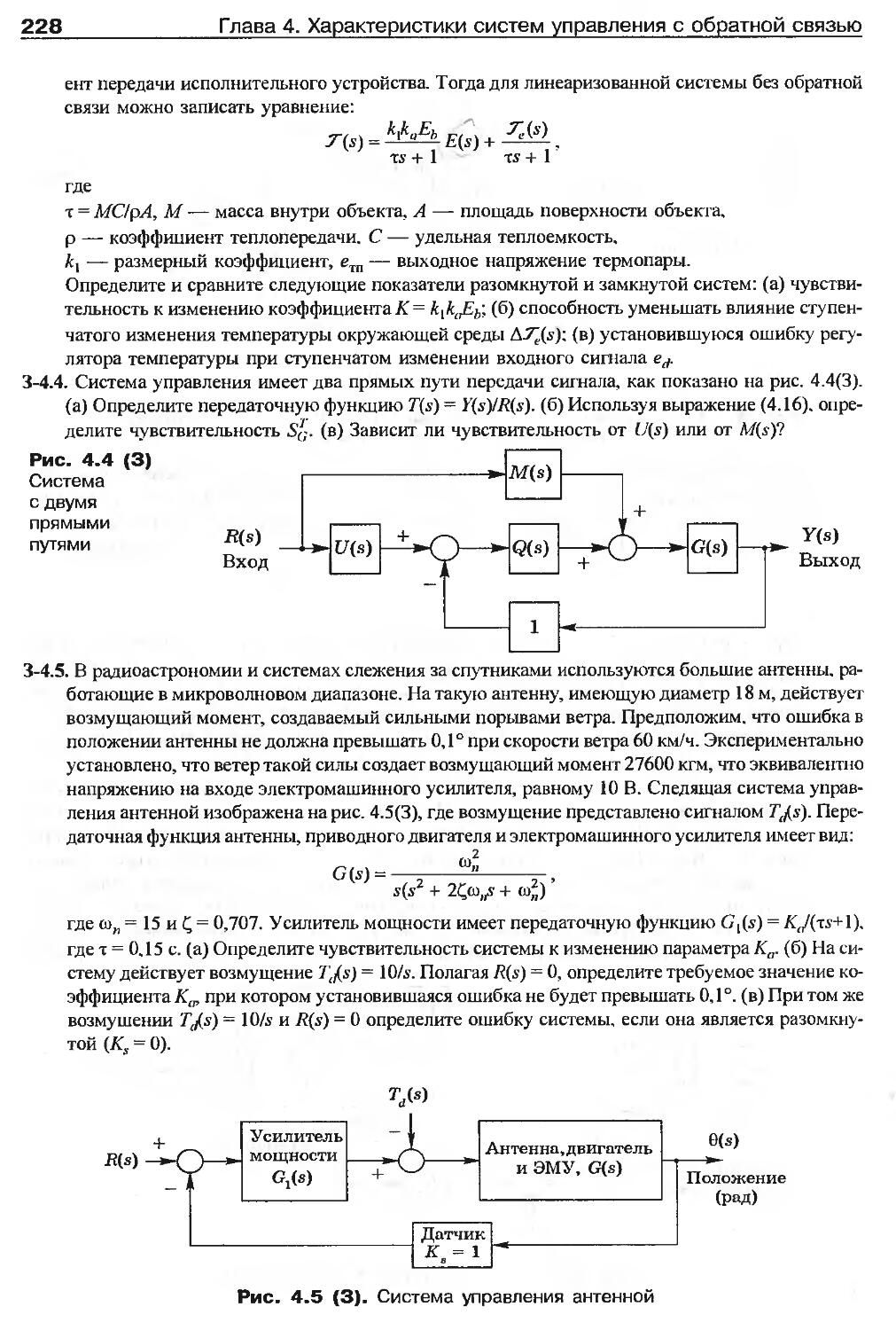
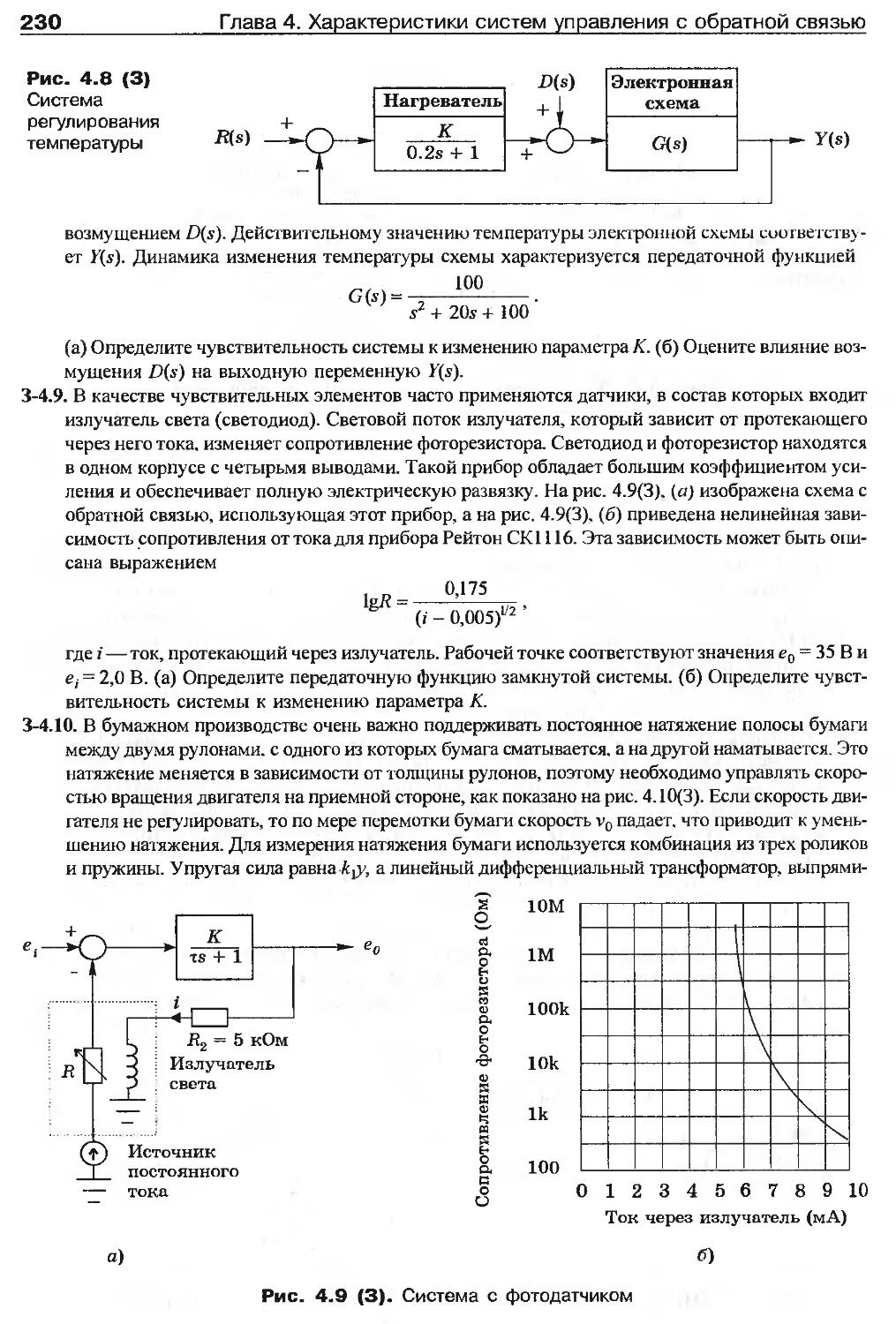
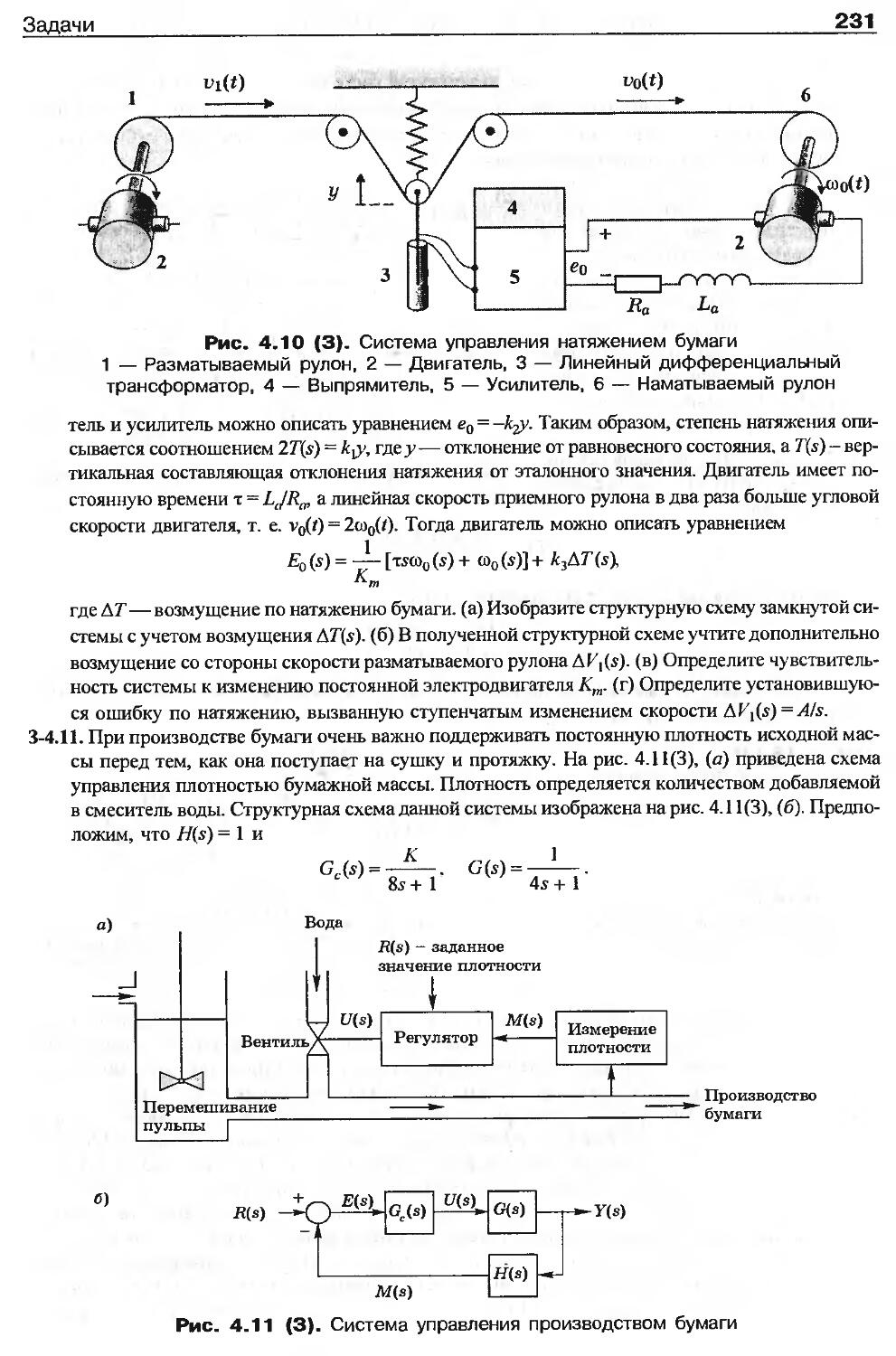
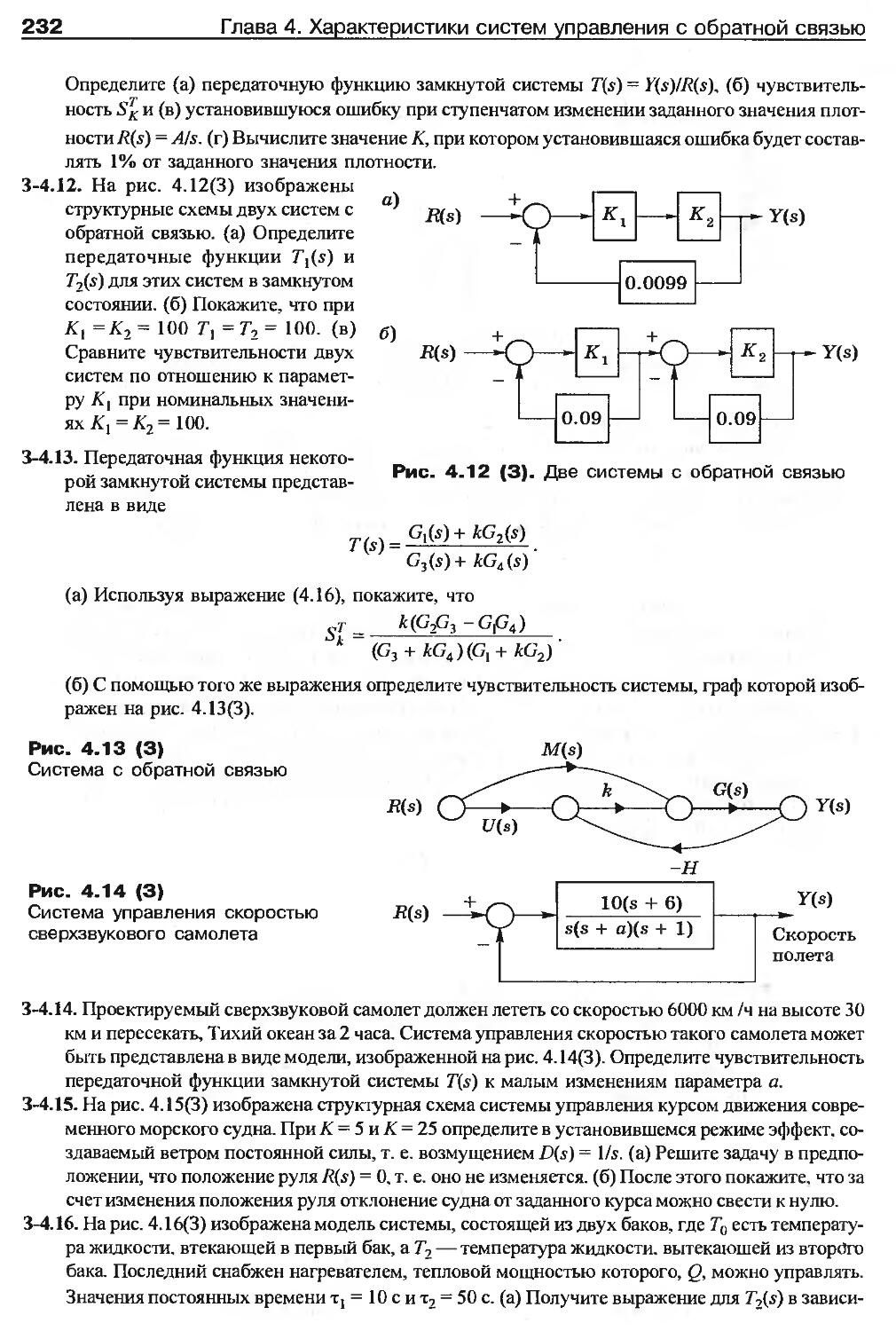
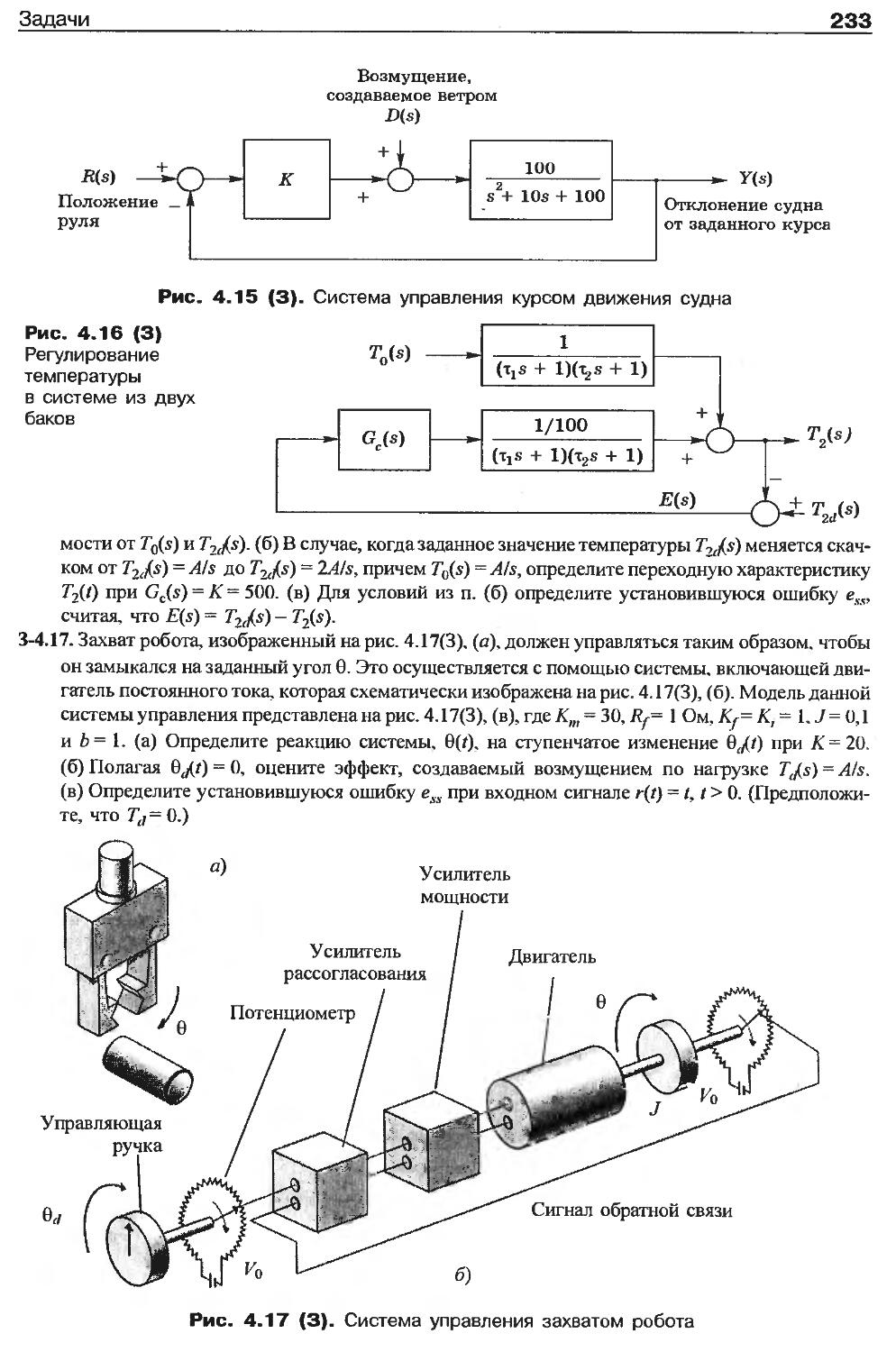
Задачи ........................................................... 226
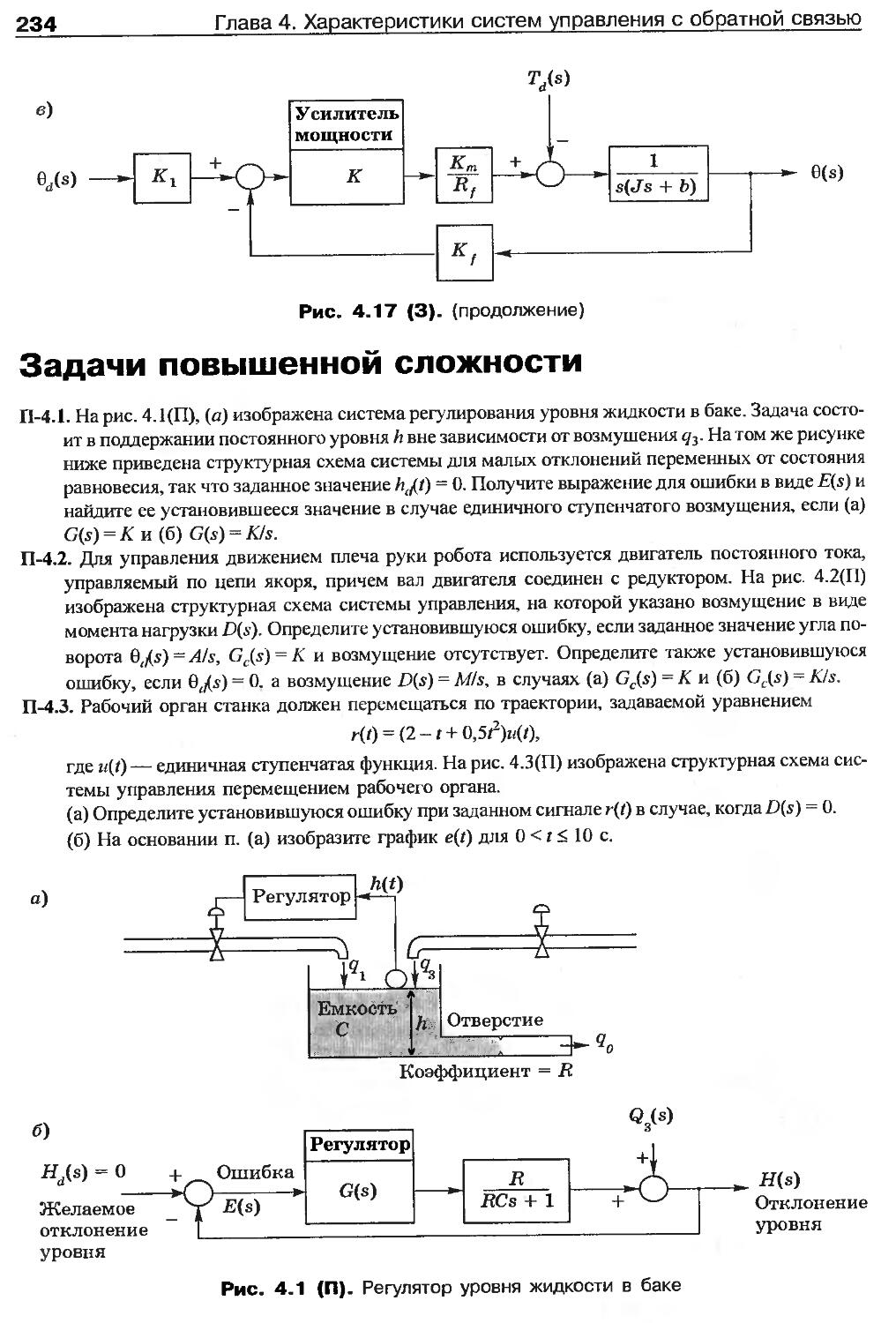
Задачи повышенной сложности........................................234
Содержание
9
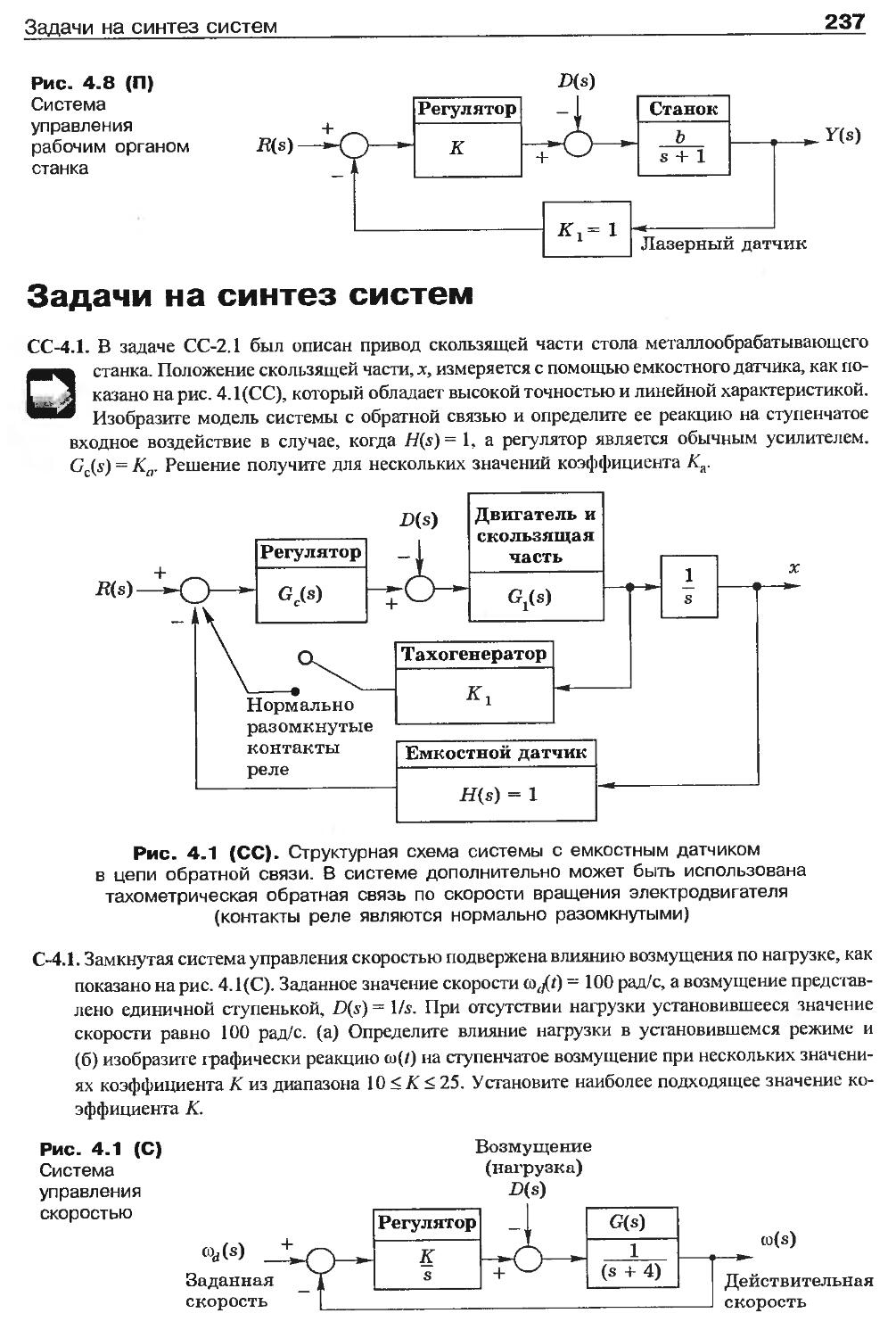
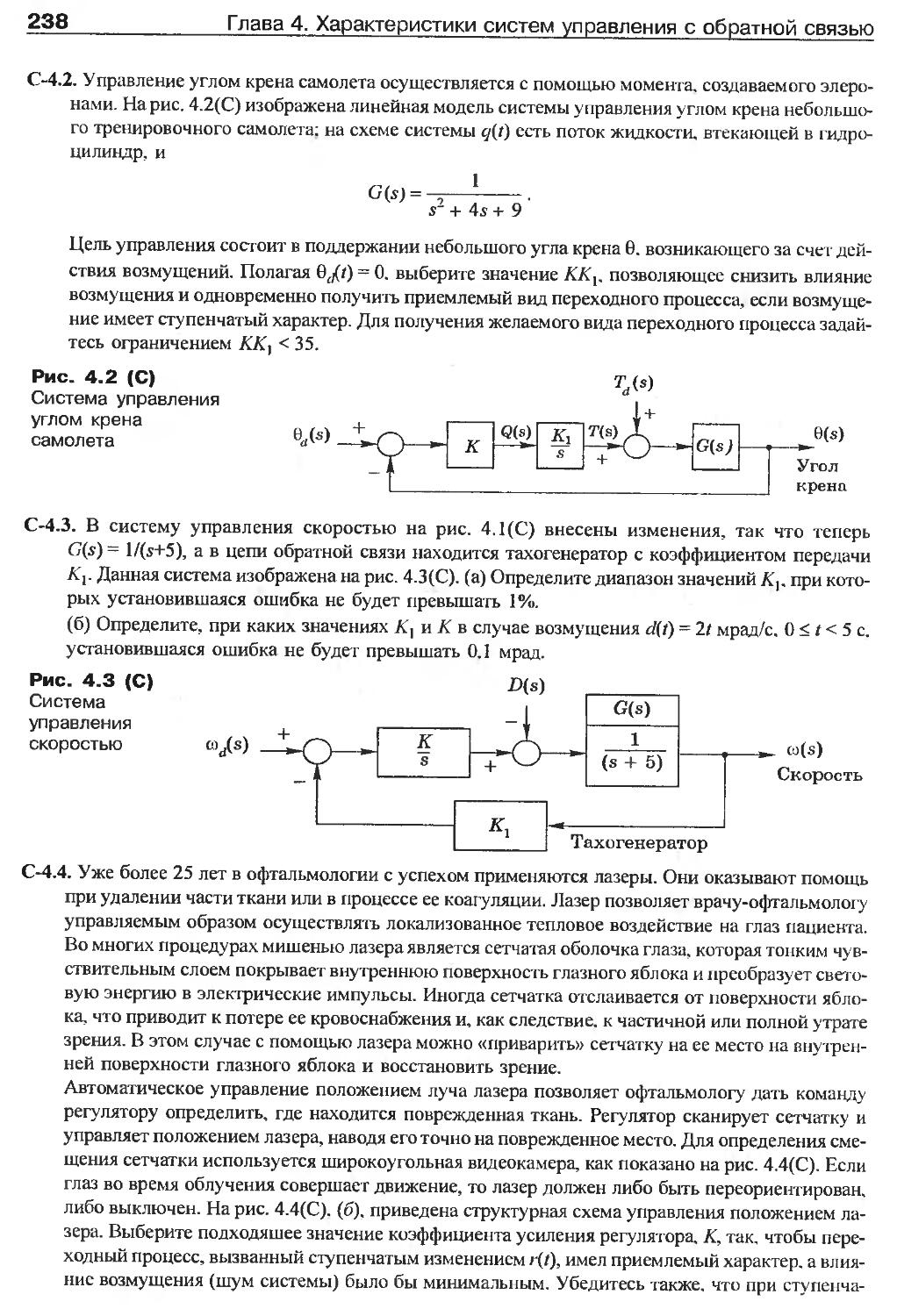
Задачи на синтез систем............................................237
Задачи, решаемые с помощью MATLAB..................................239
Ключевые термины и понятия.........................................242
Глава 5. Качество систем управления с обратной связью.................243
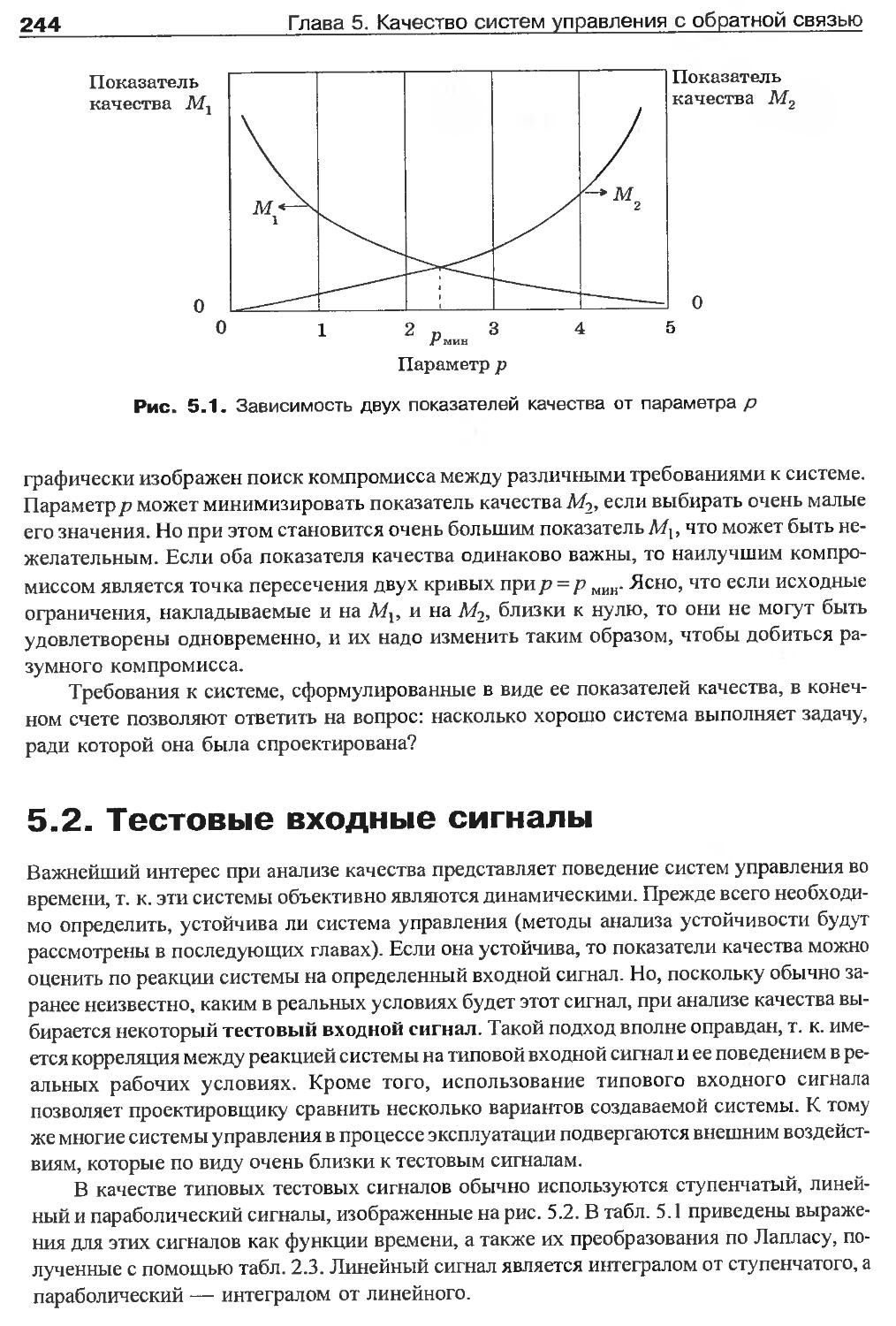
Обзор............................................................. 243
5.1. Введение......................................................243
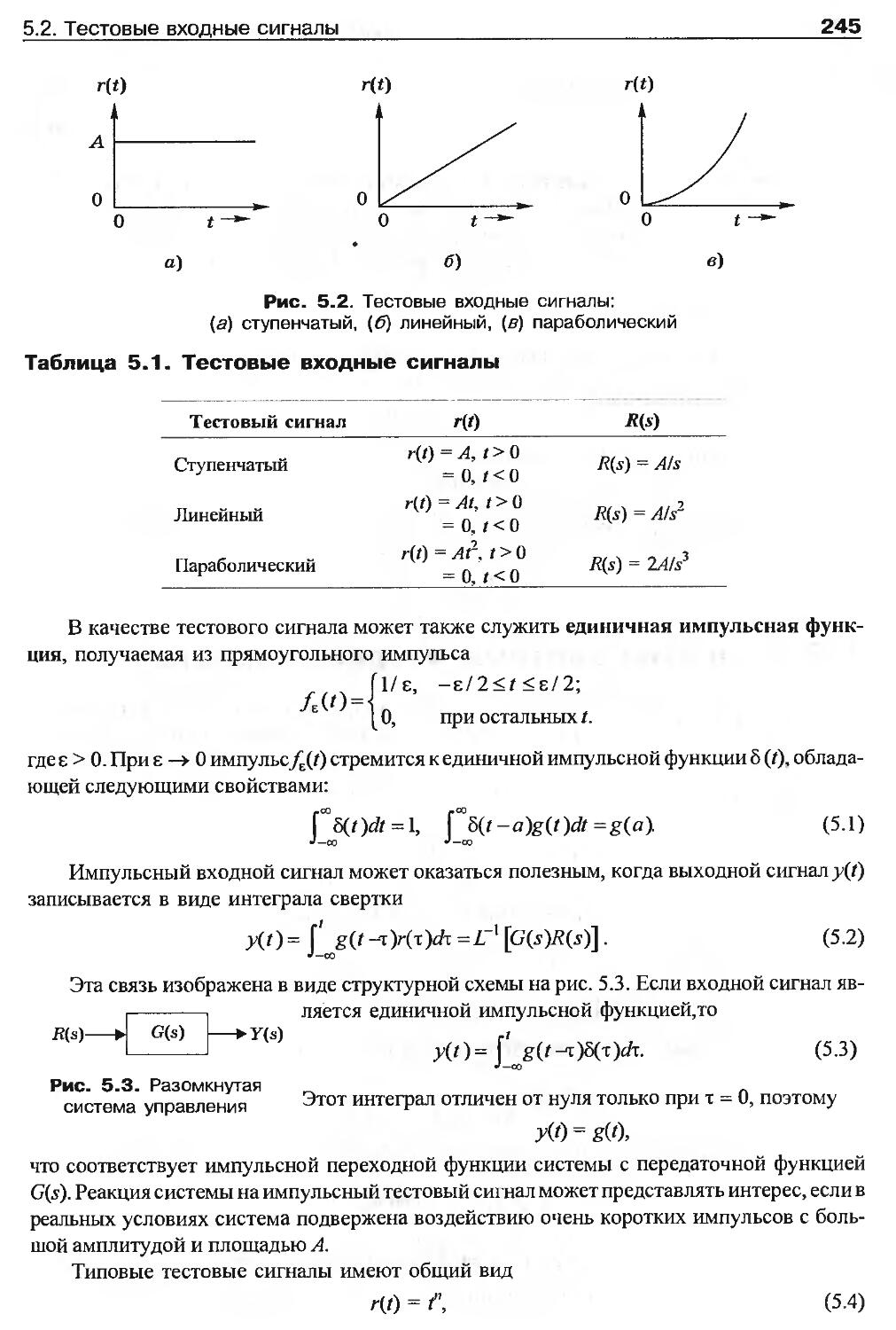
5.2. Тестовые входные сигналы . .'.................................244
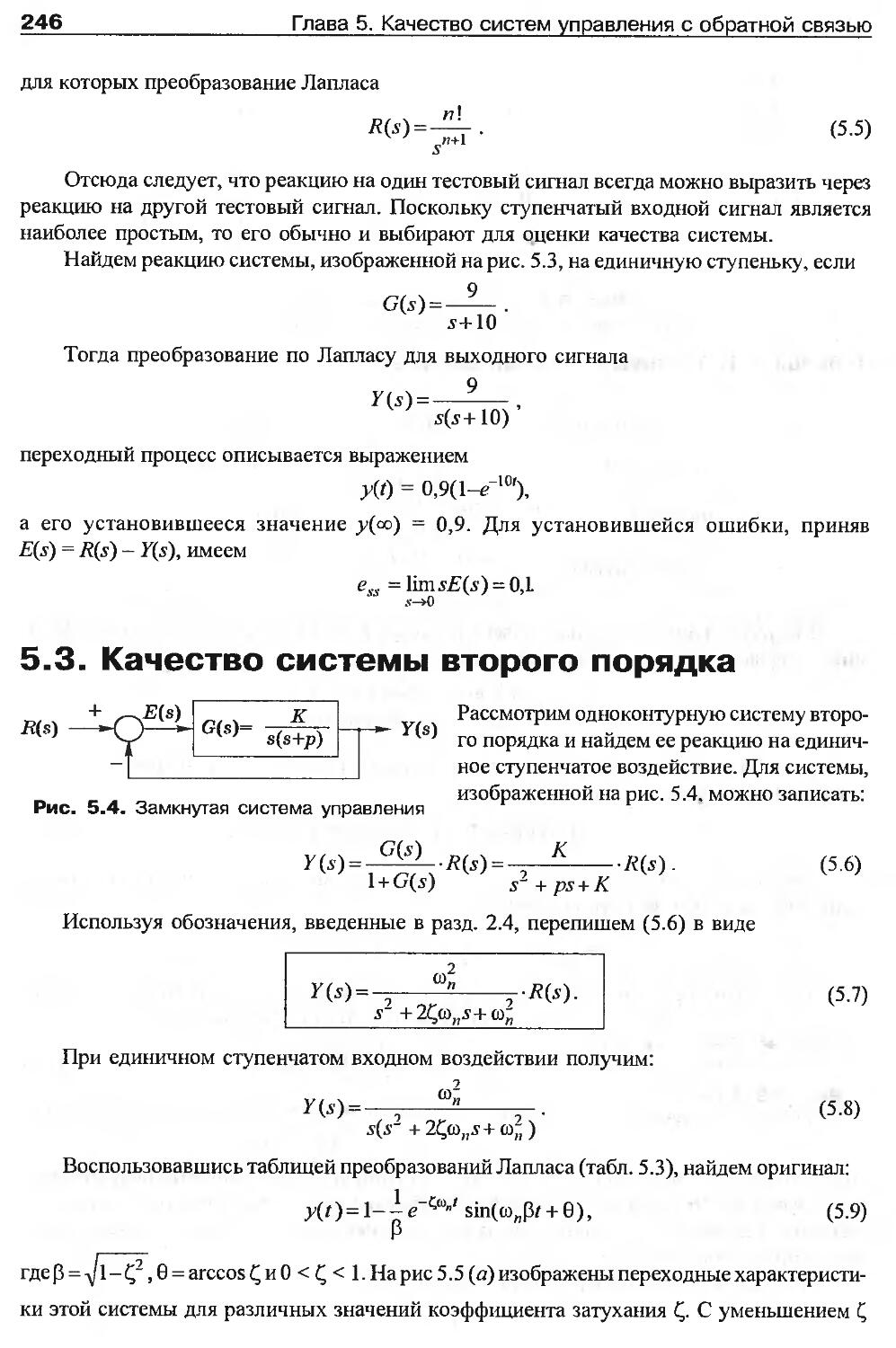
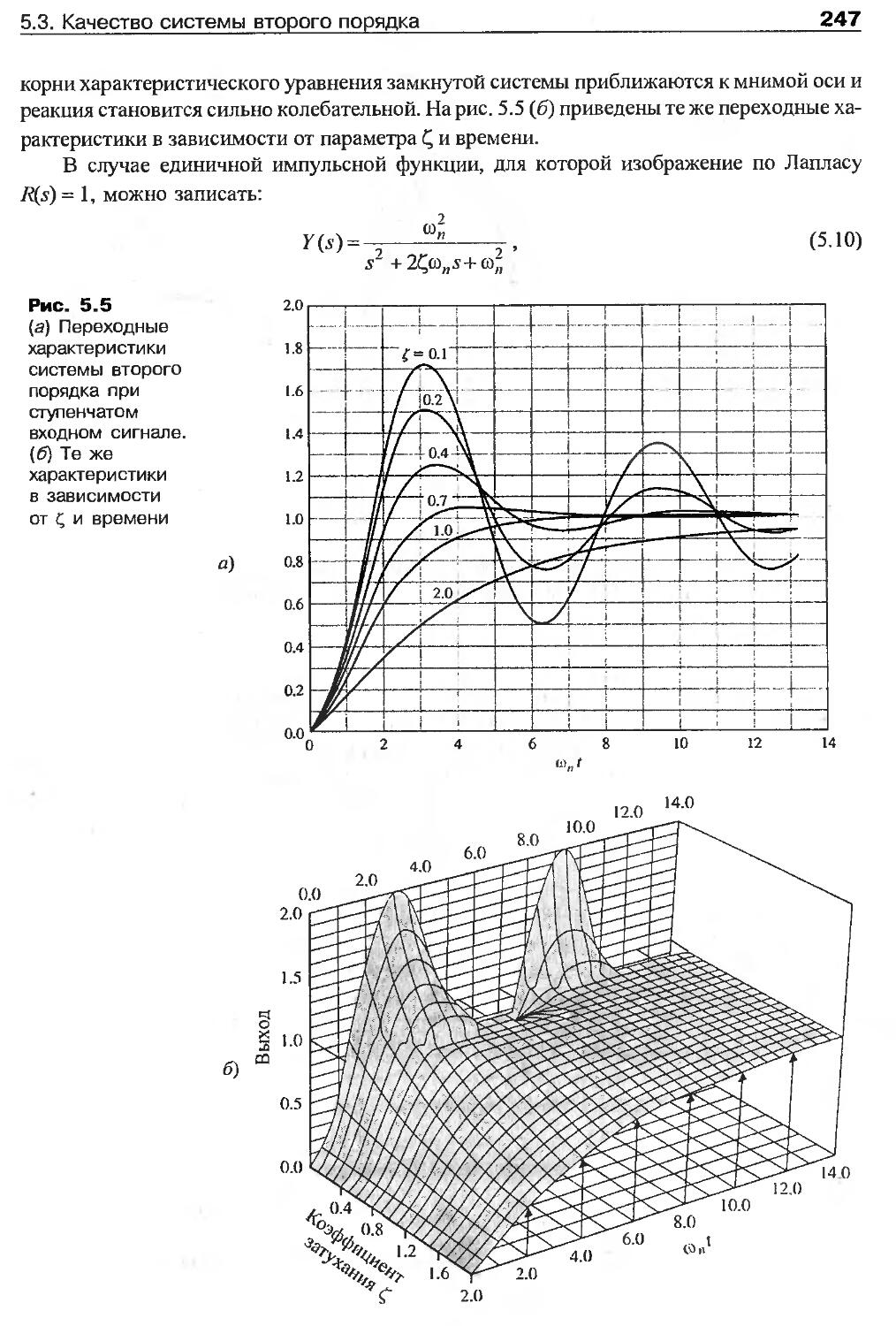
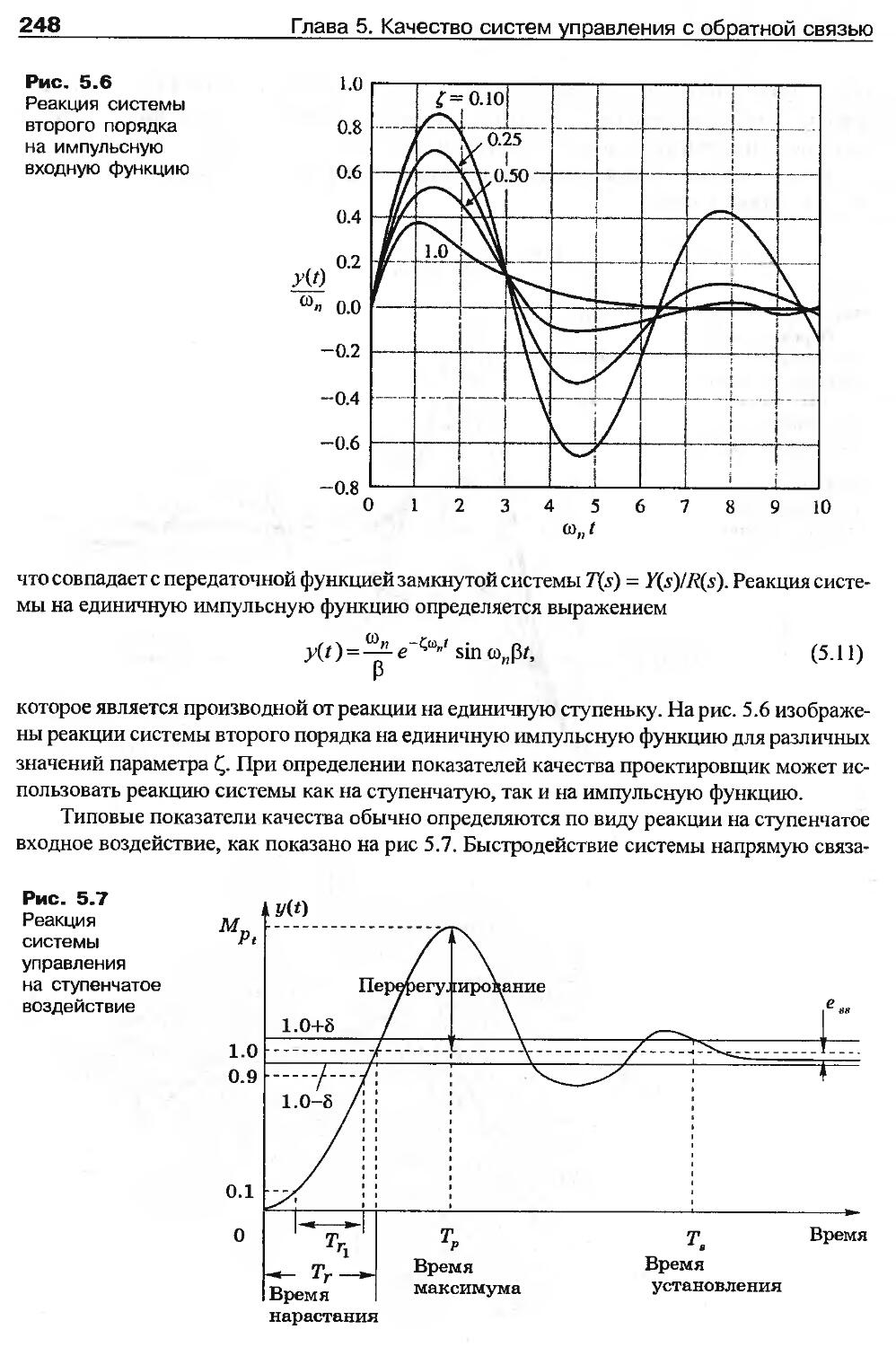
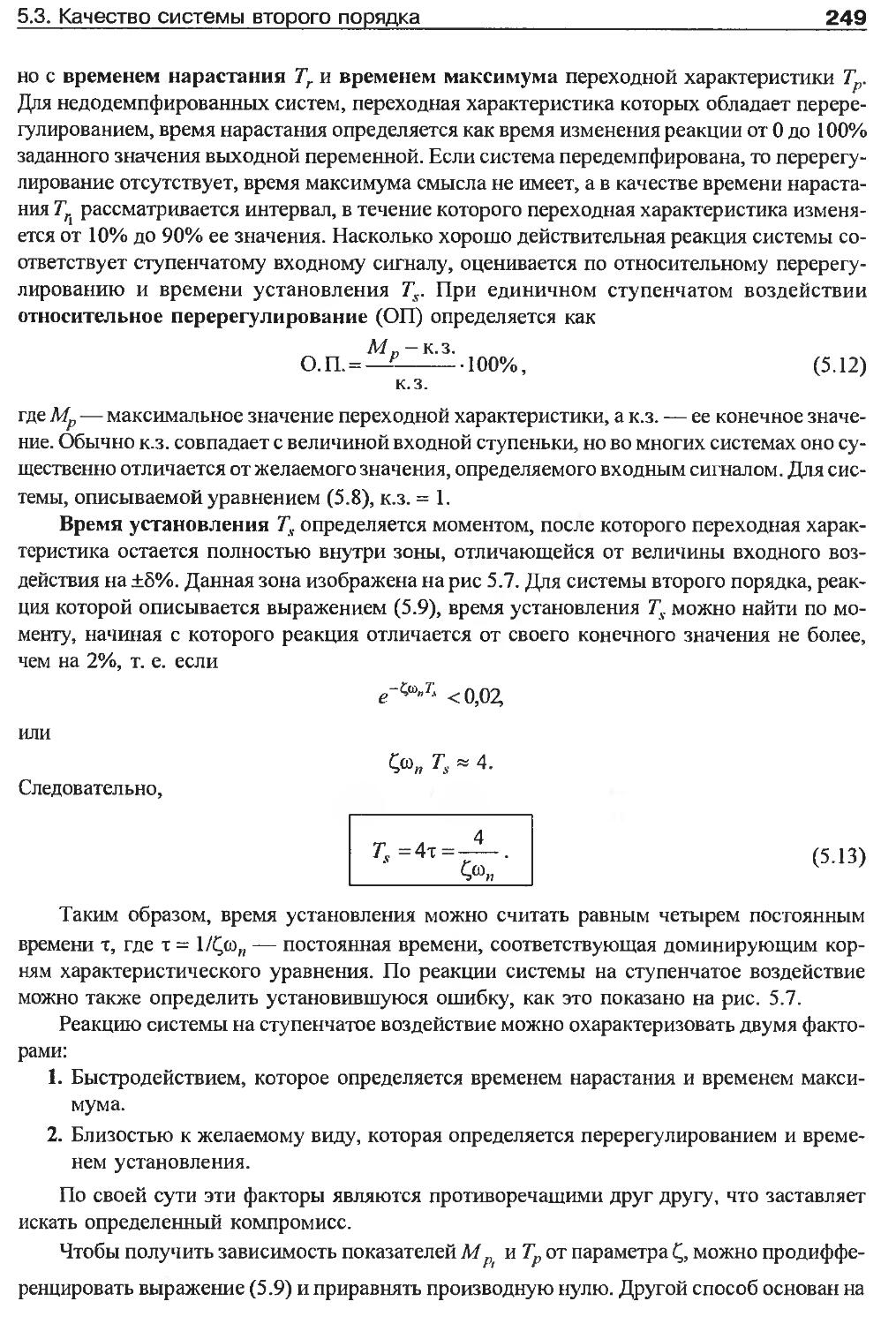
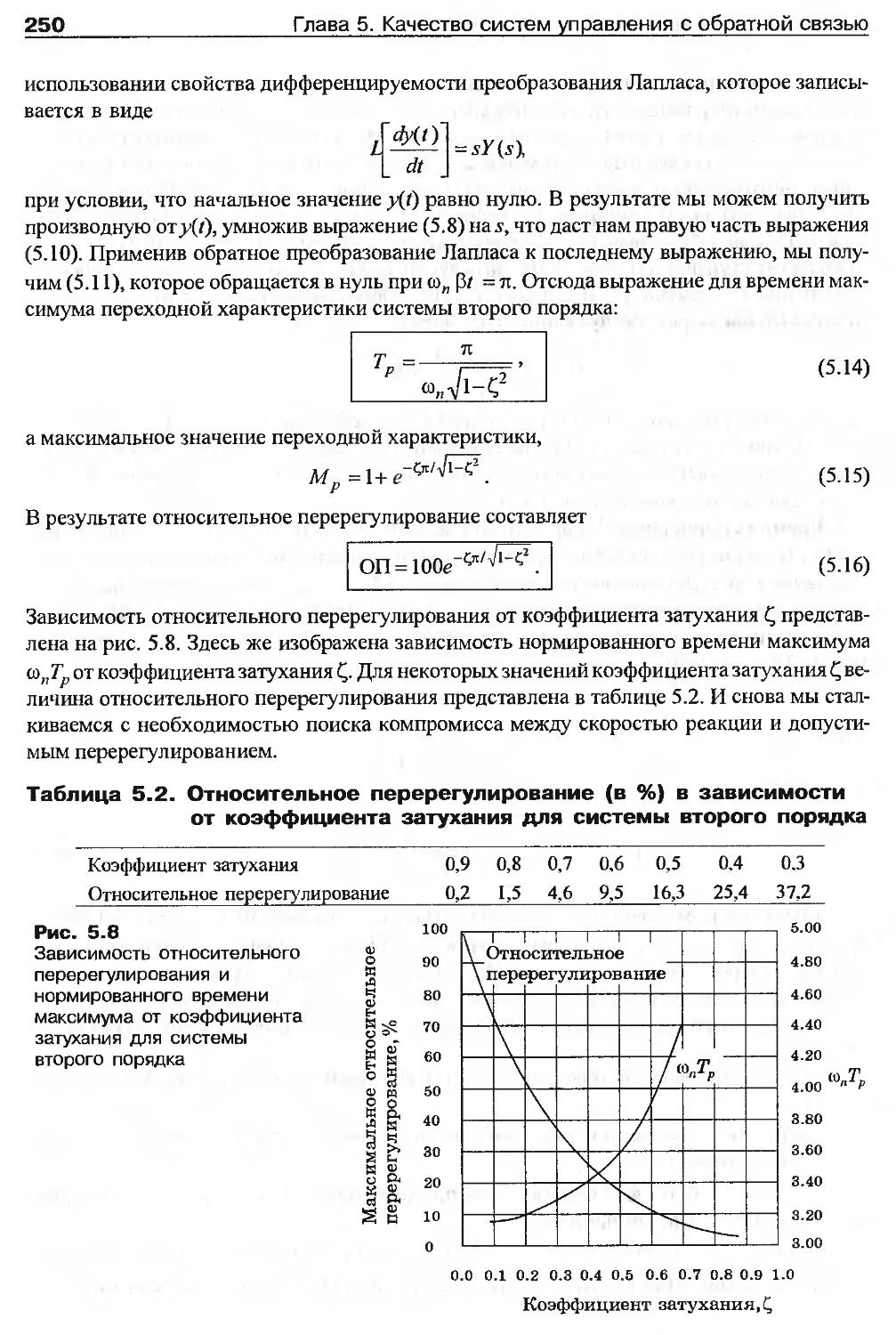
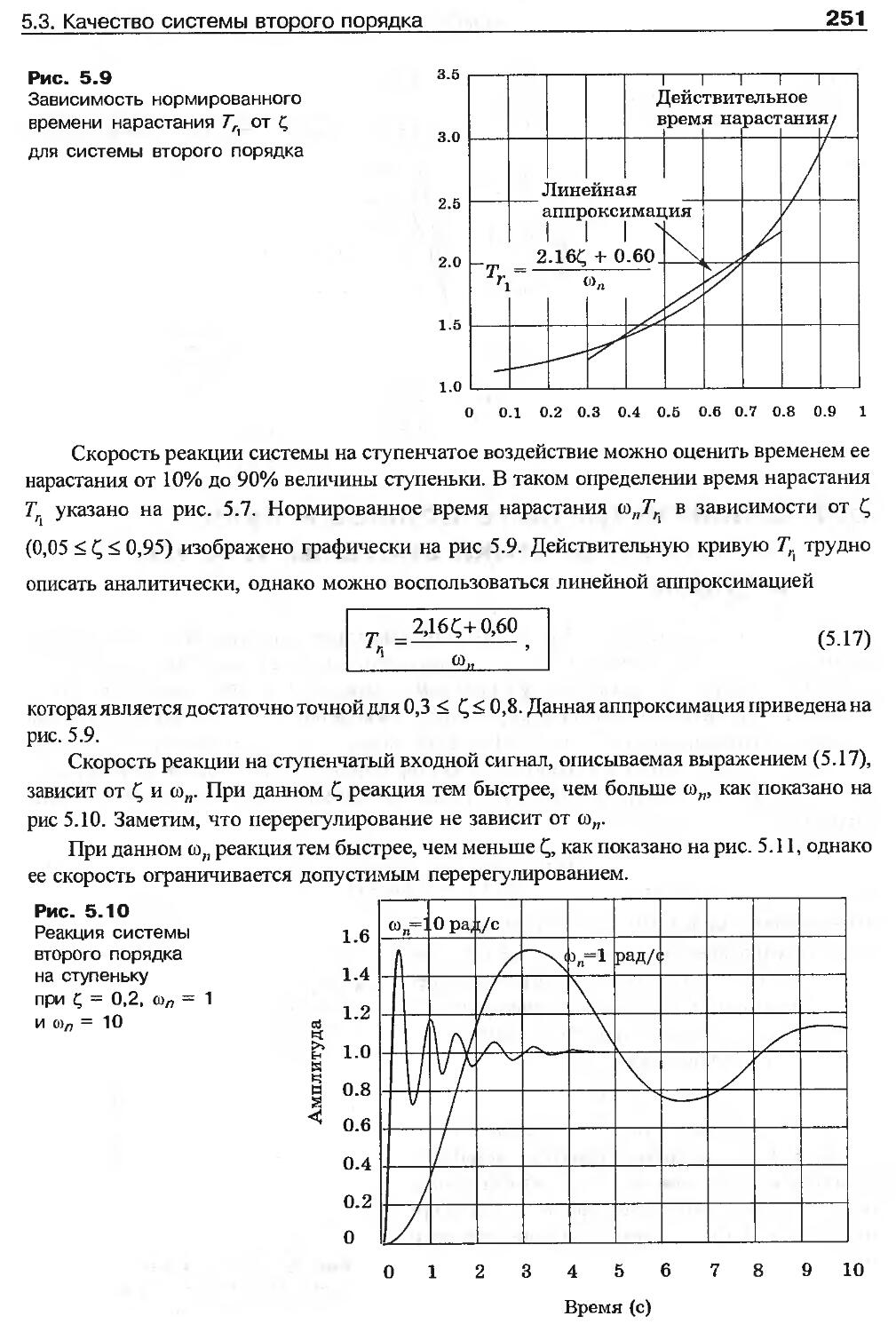
5.3. Качество системы второго порядка..............................246
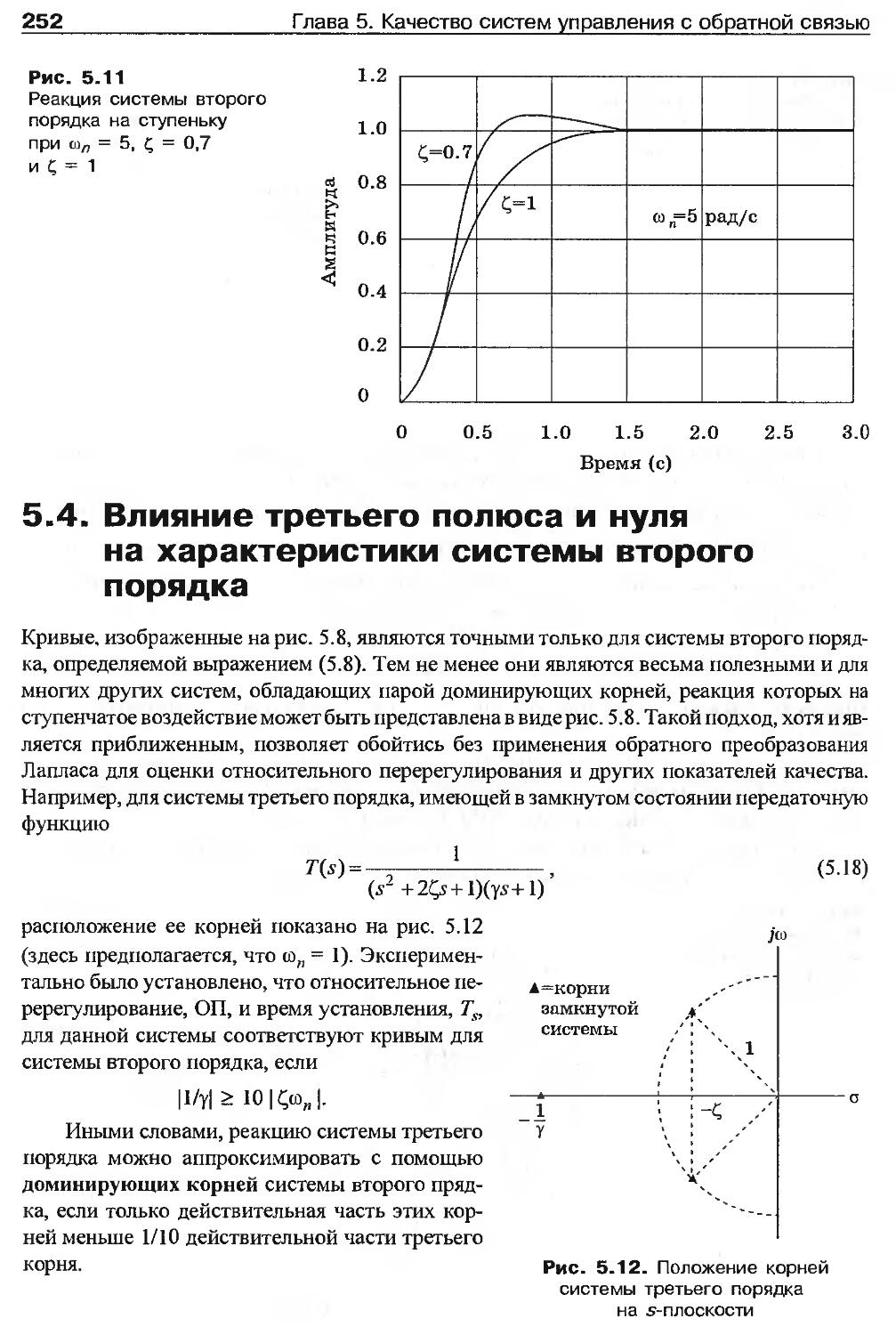
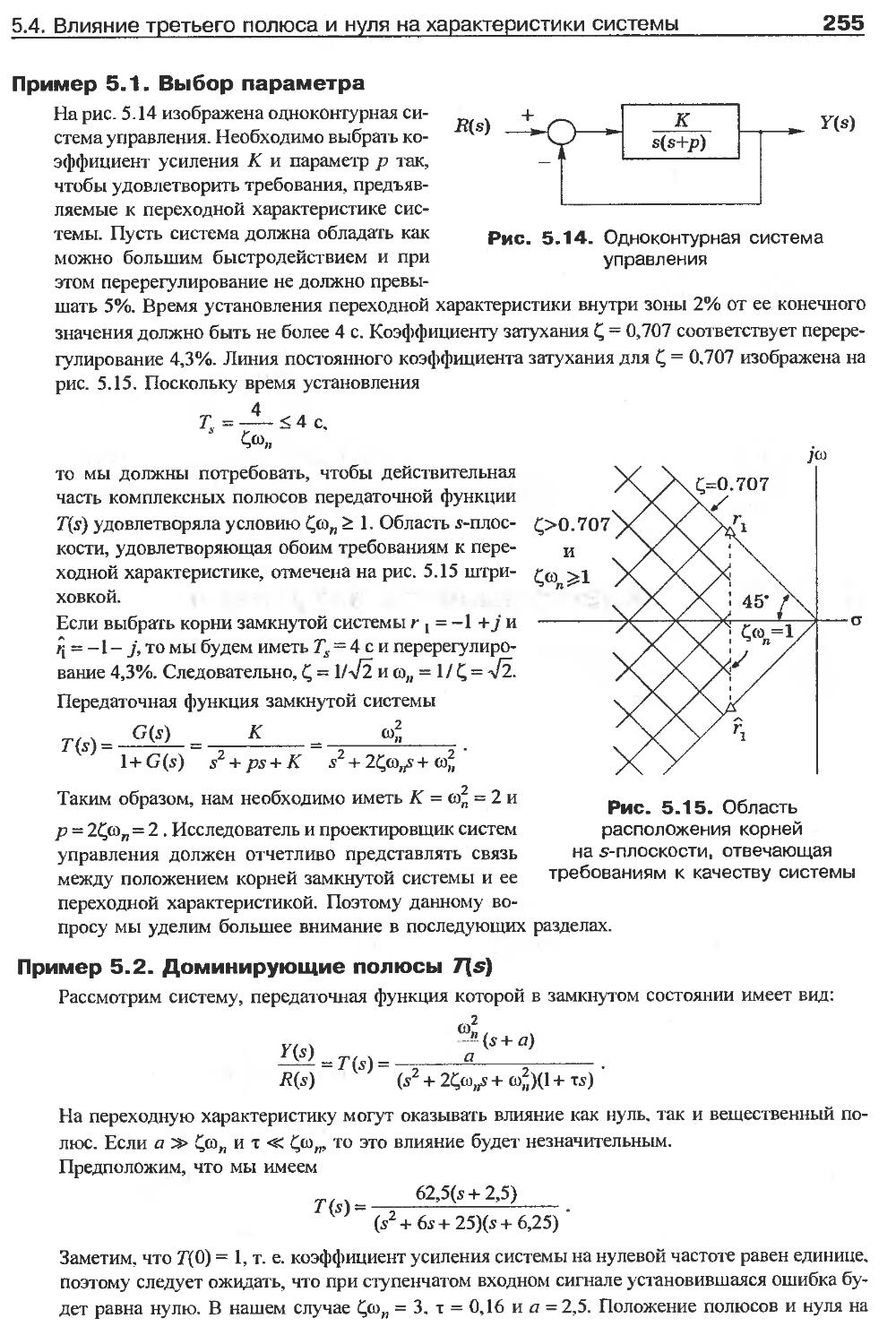
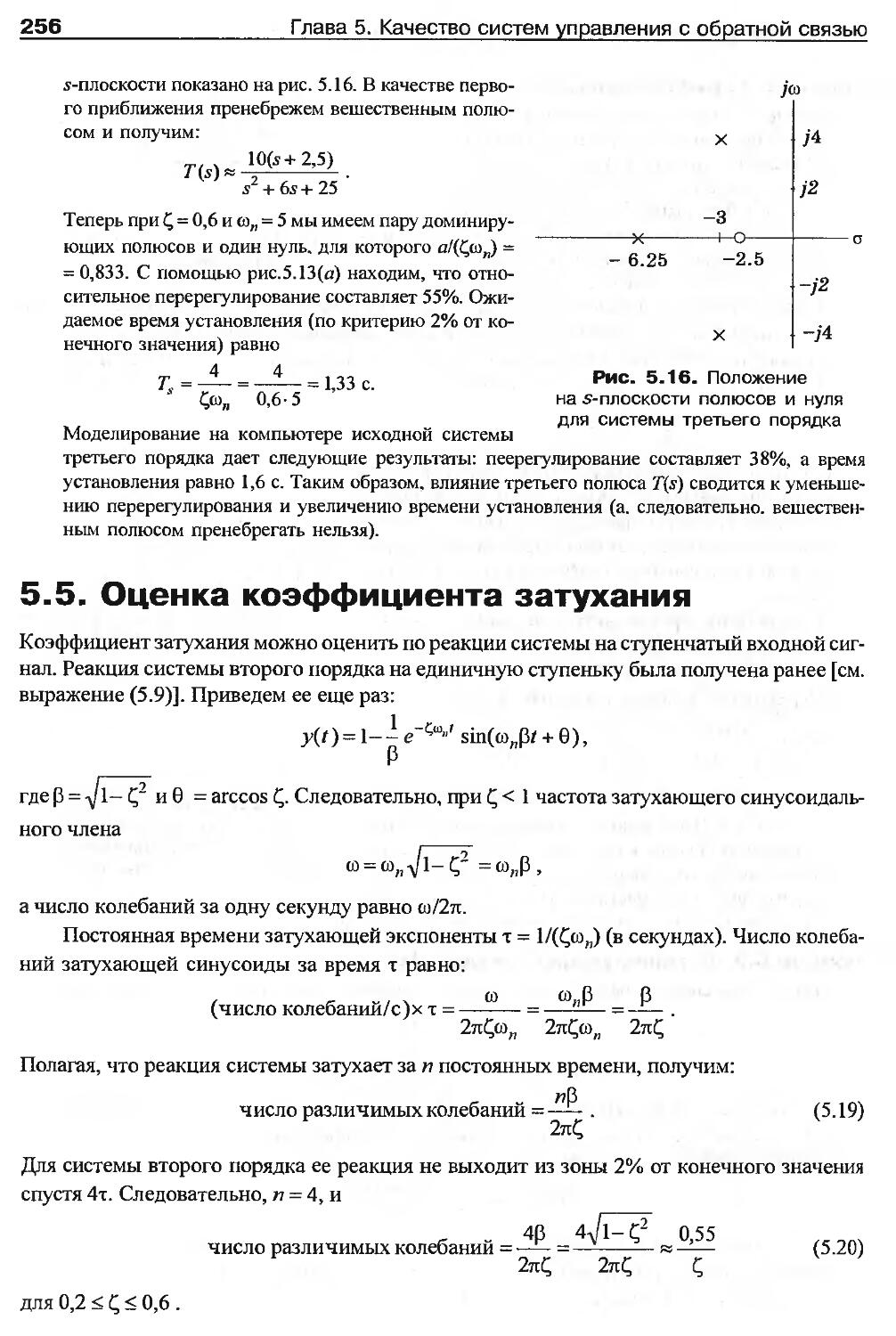
5.4. Влияние третьего полюса и нуля на характеристики системы второго порядка .......................................................... 252
5.5. Оценка коэффициента затухания.................................256
5.6. Связь между переходной характеристикой и положением корней на s-плоскости.....................................................257
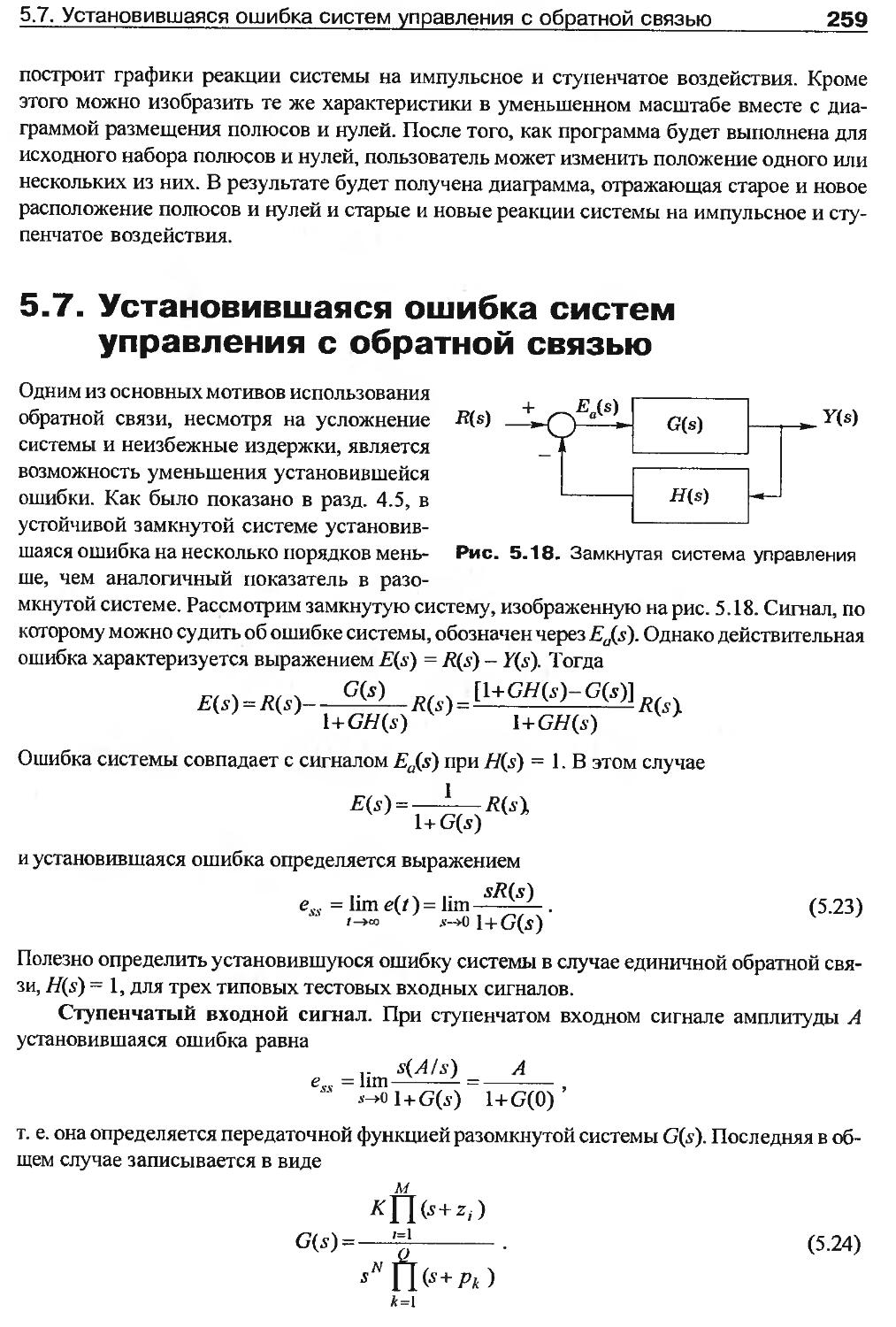
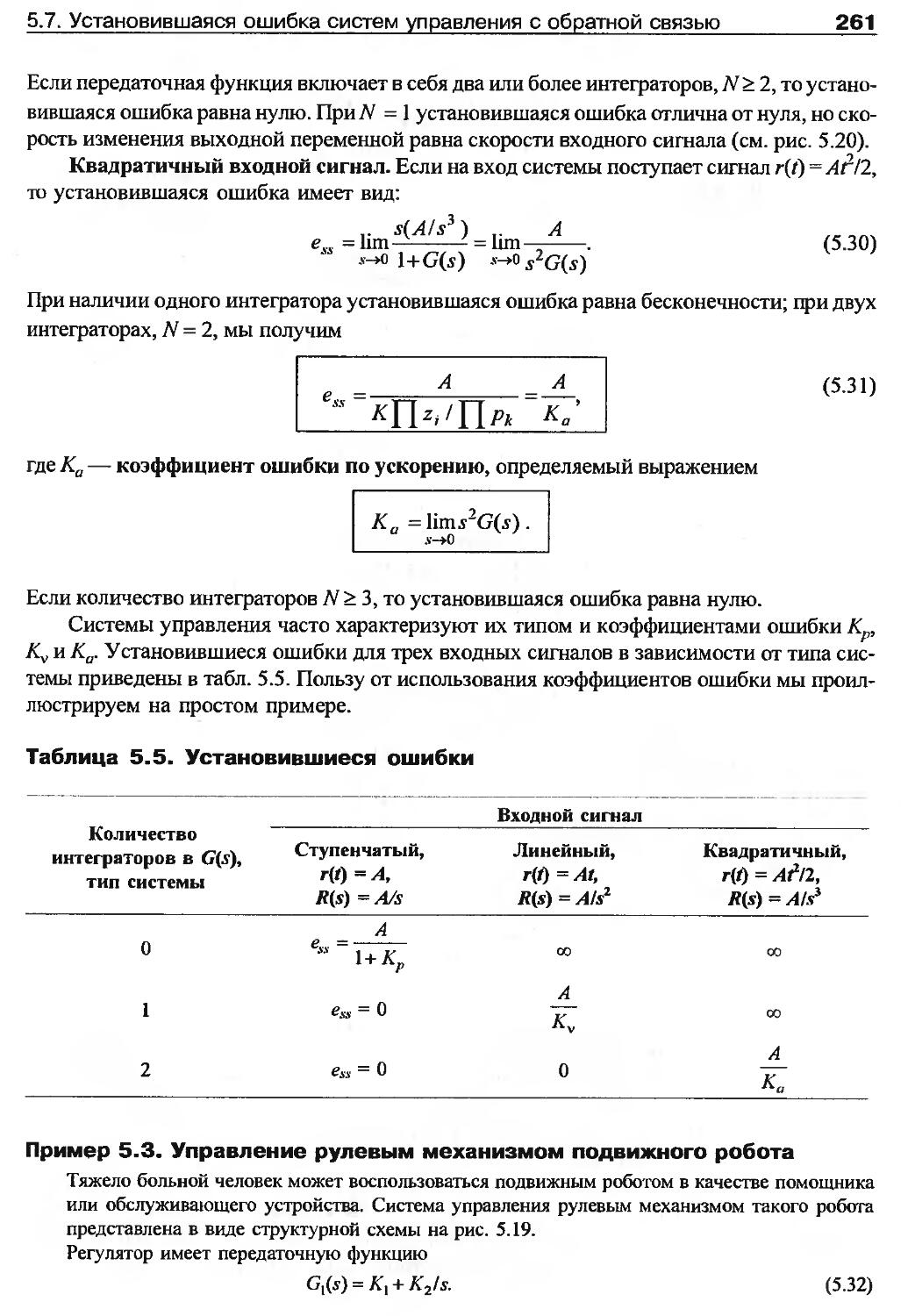
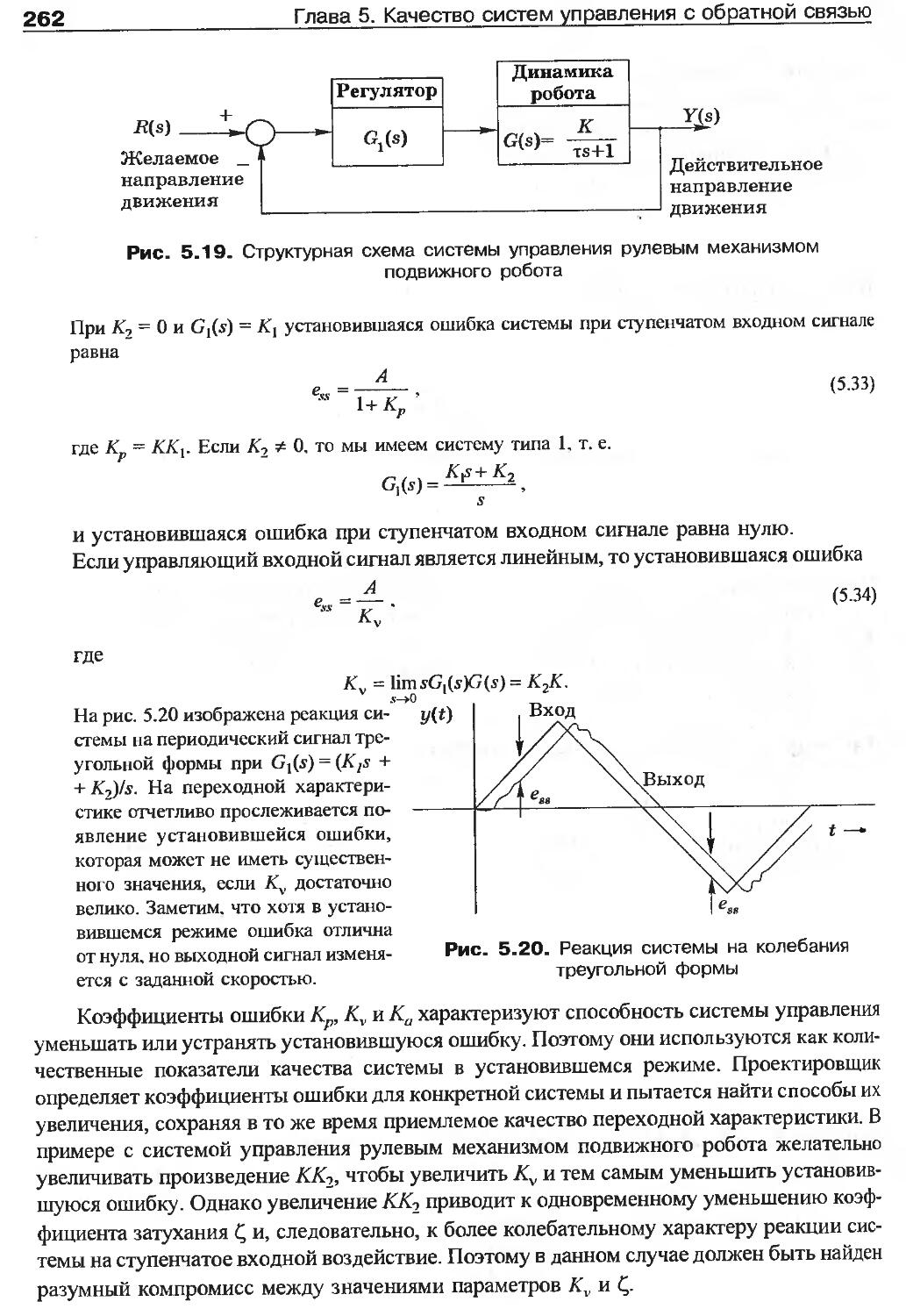
5.7. Установившаяся ошибка систем управления с обратной связью.....259
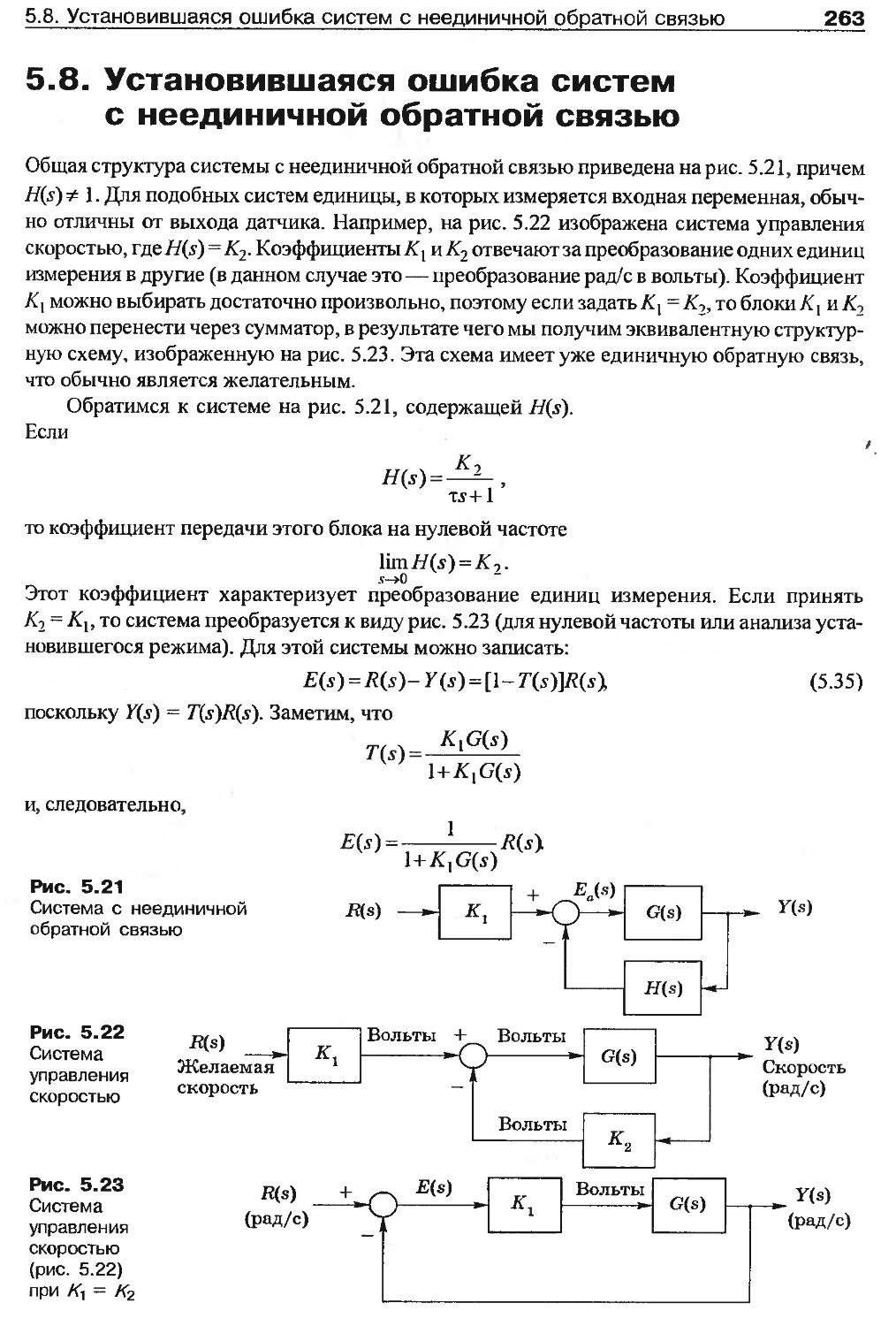
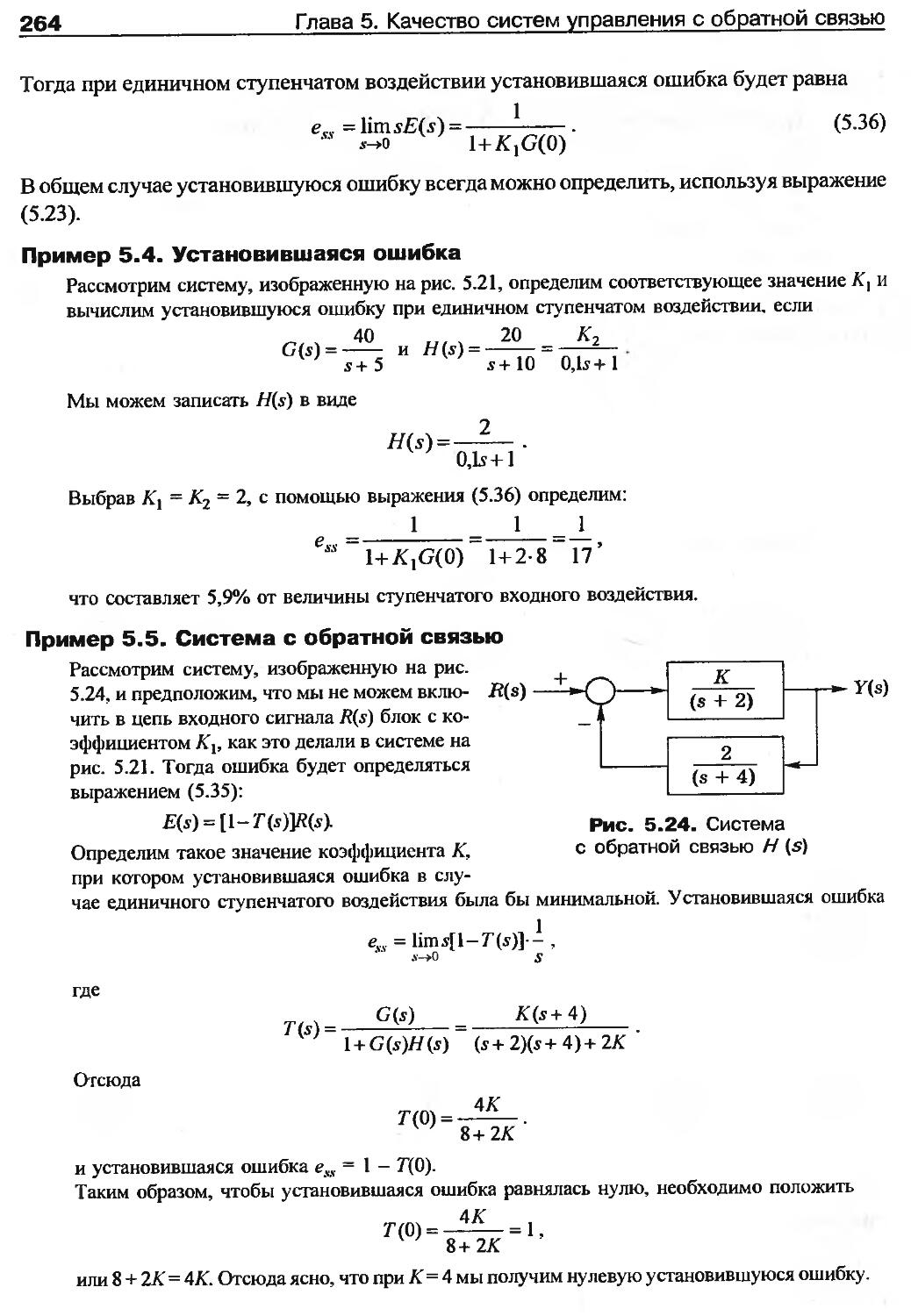
5.8. Установившаяся ошибка систем с неединичной обратной связью....263
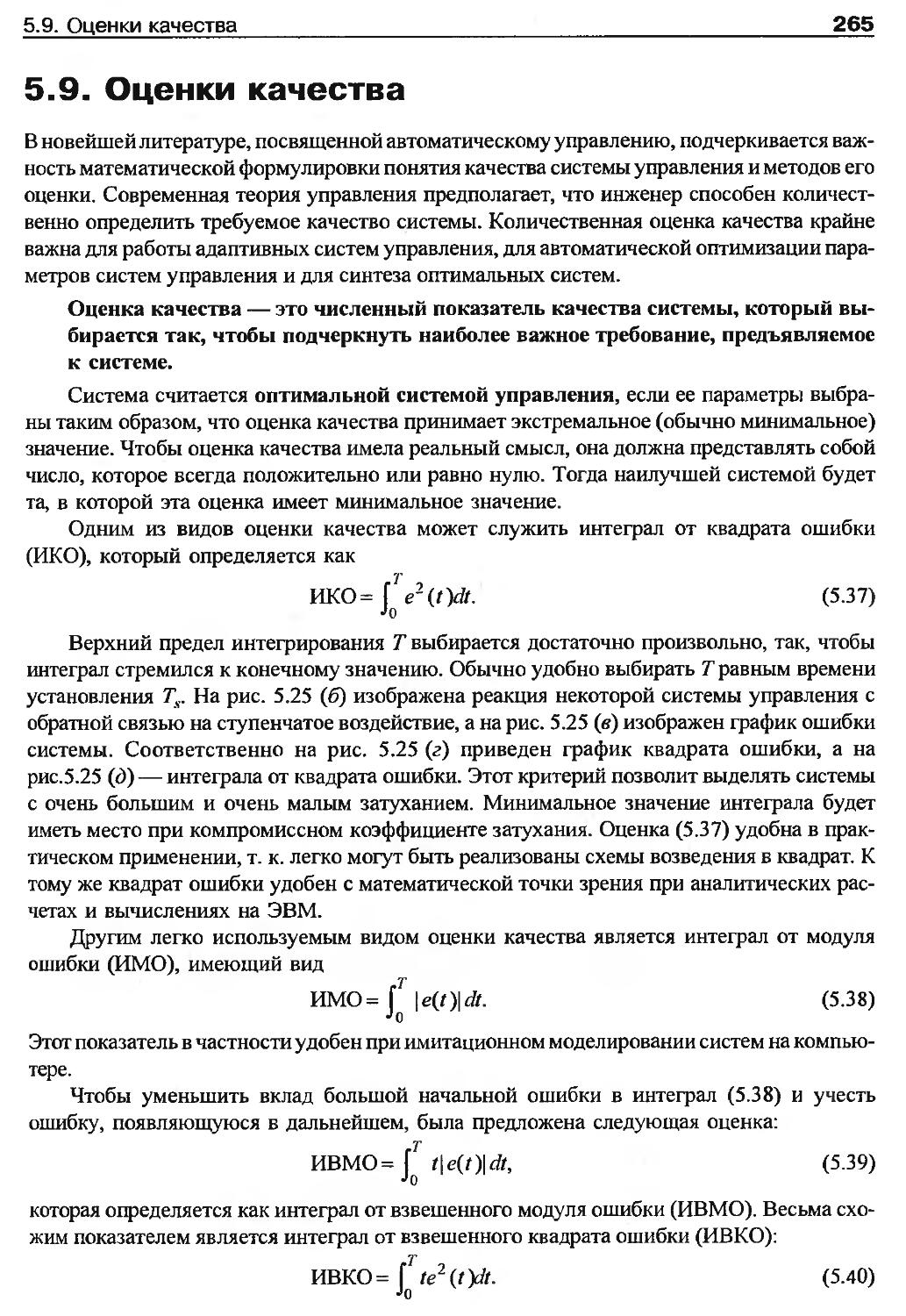
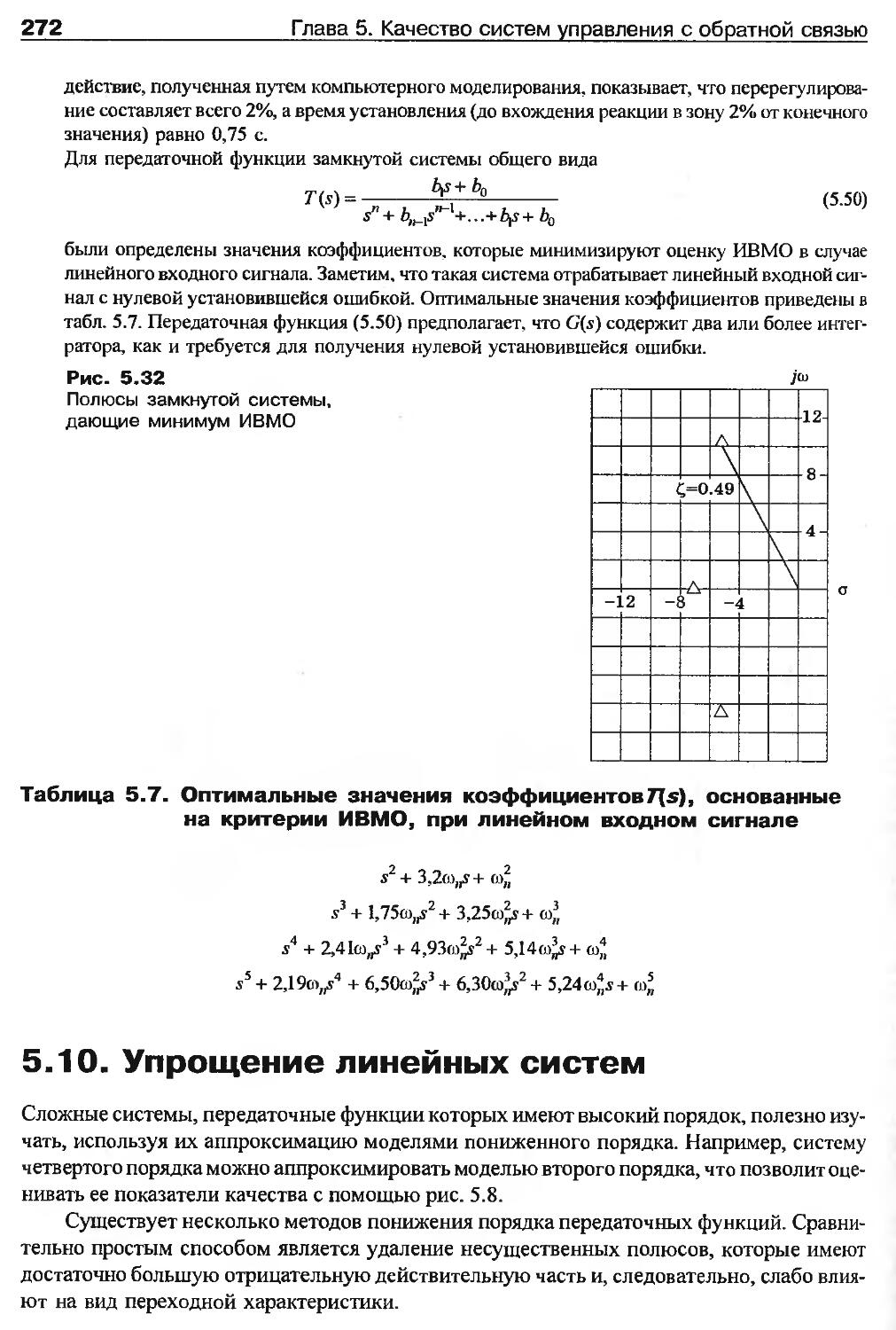
5.9. Оценки качества...............................................265
5.10. Упрощение линейных систем....................................272
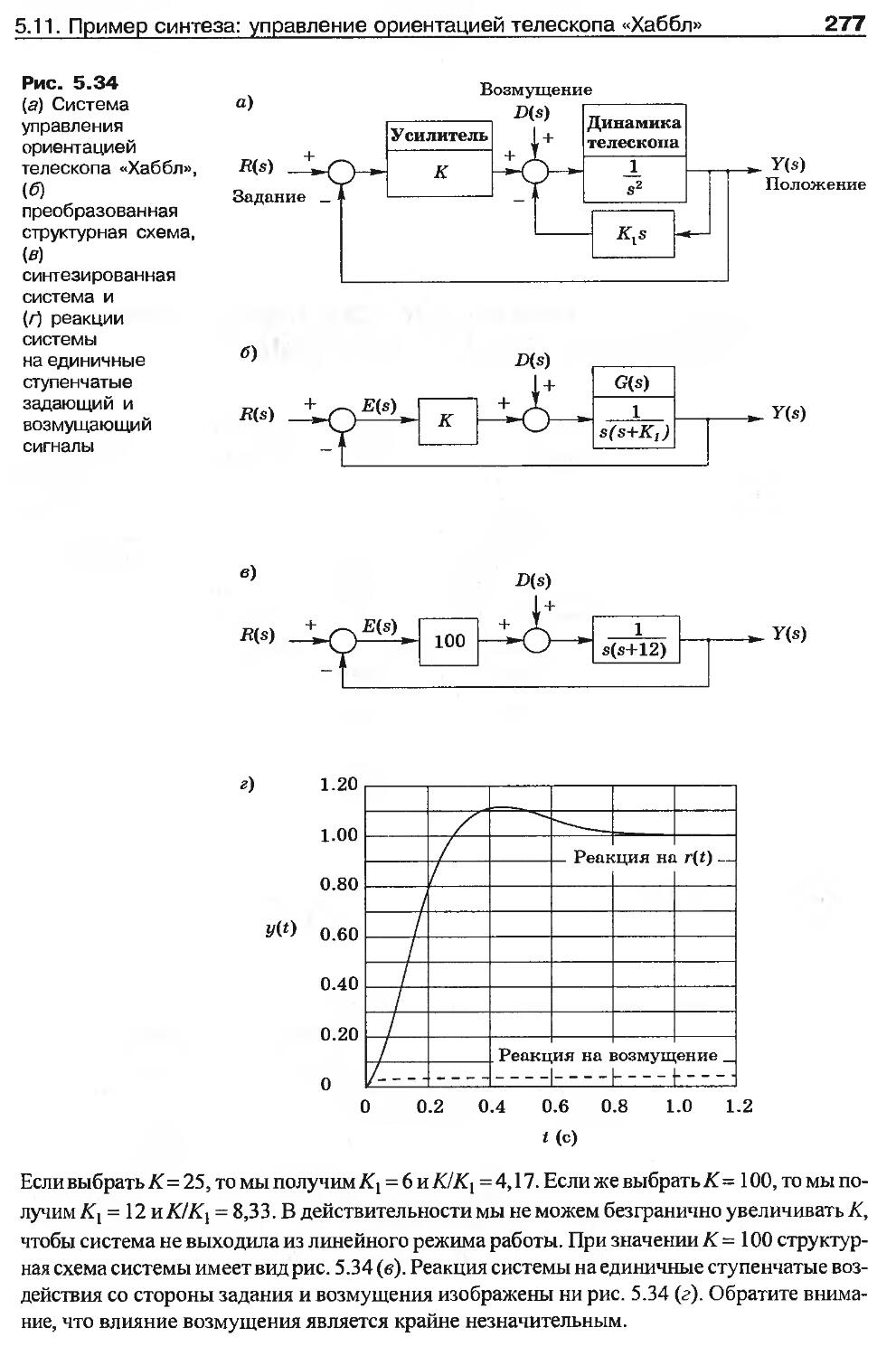
5.11. Пример синтеза: управление ориентацией телескопа «Хаббл».....275
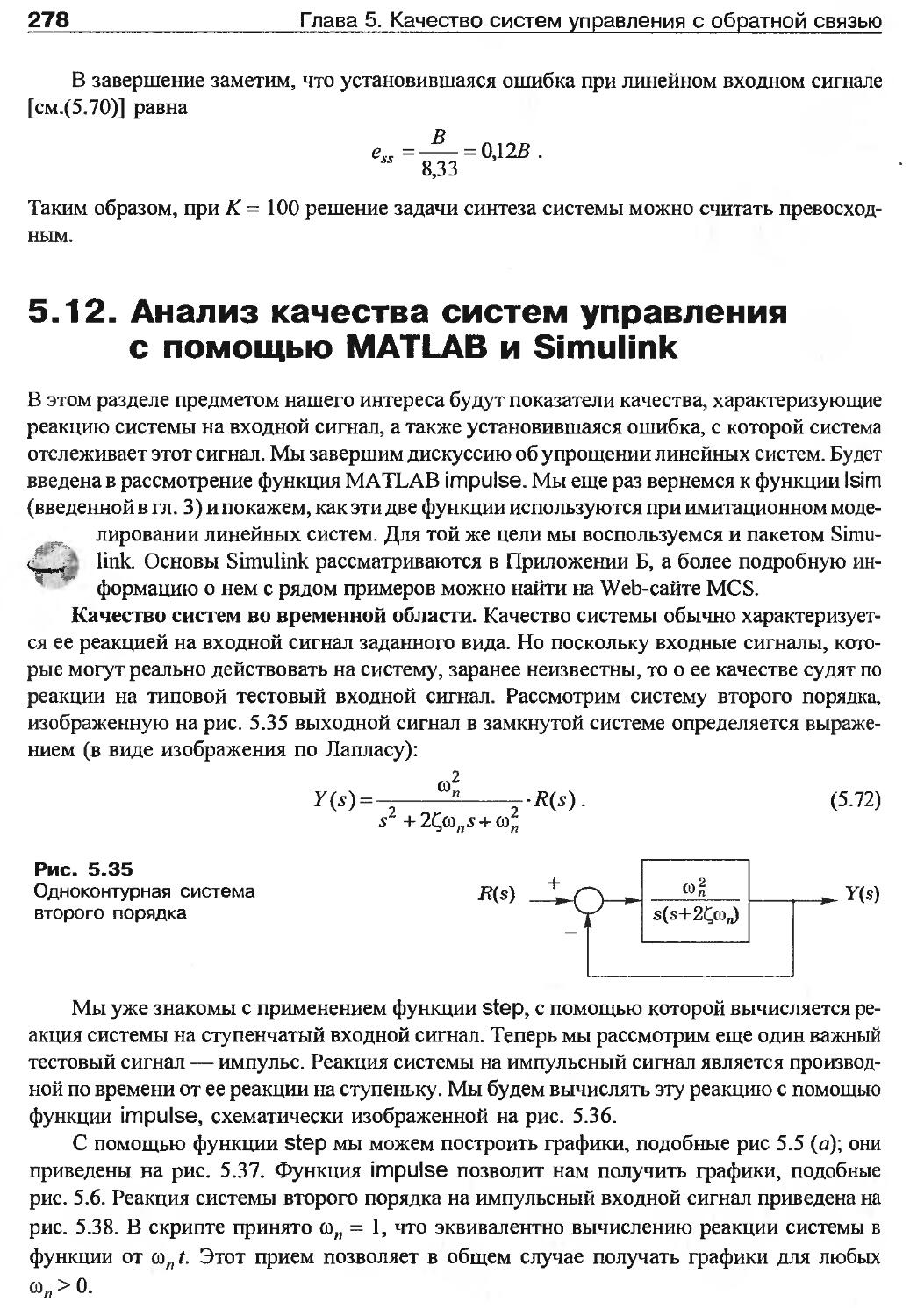
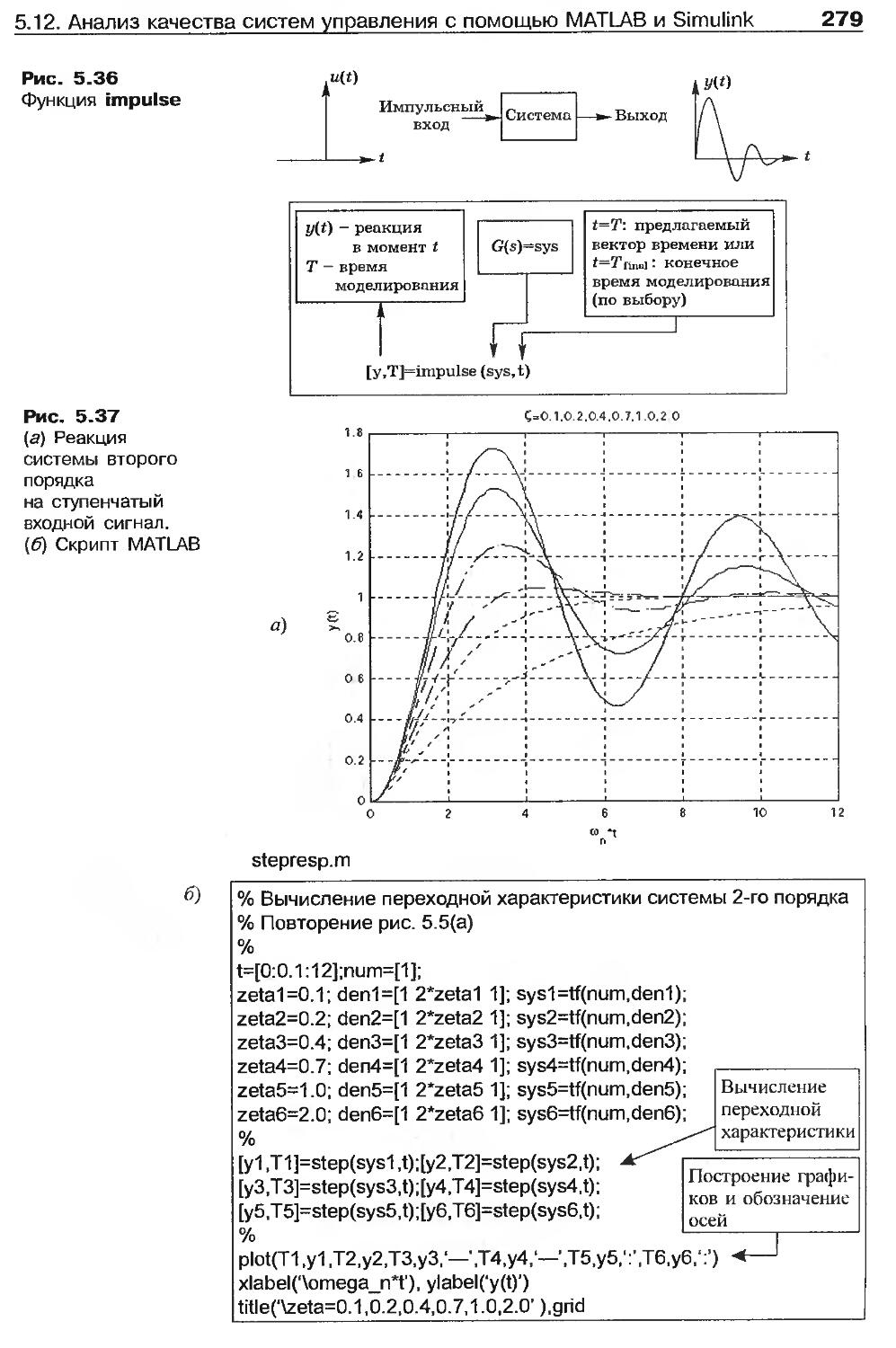
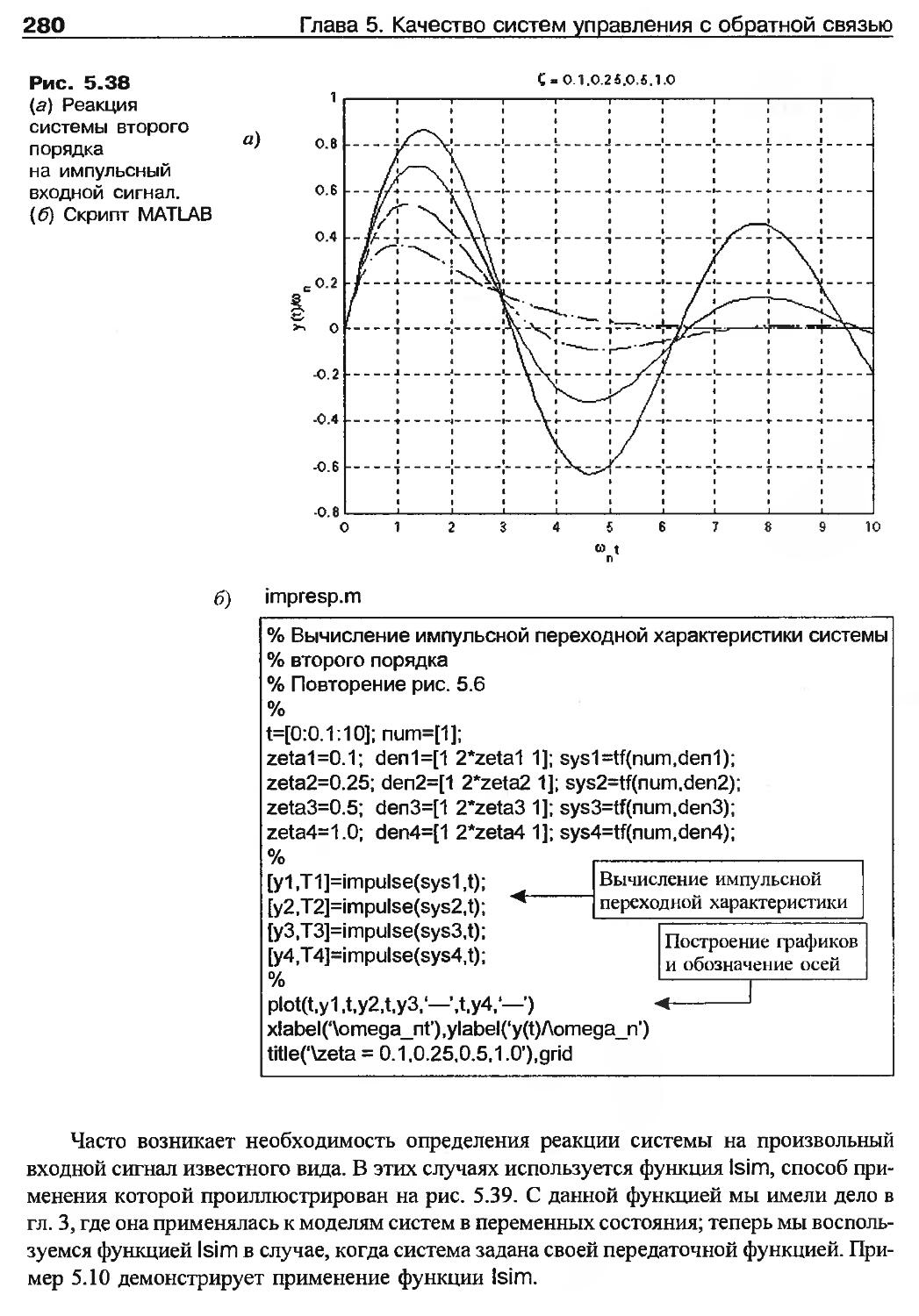
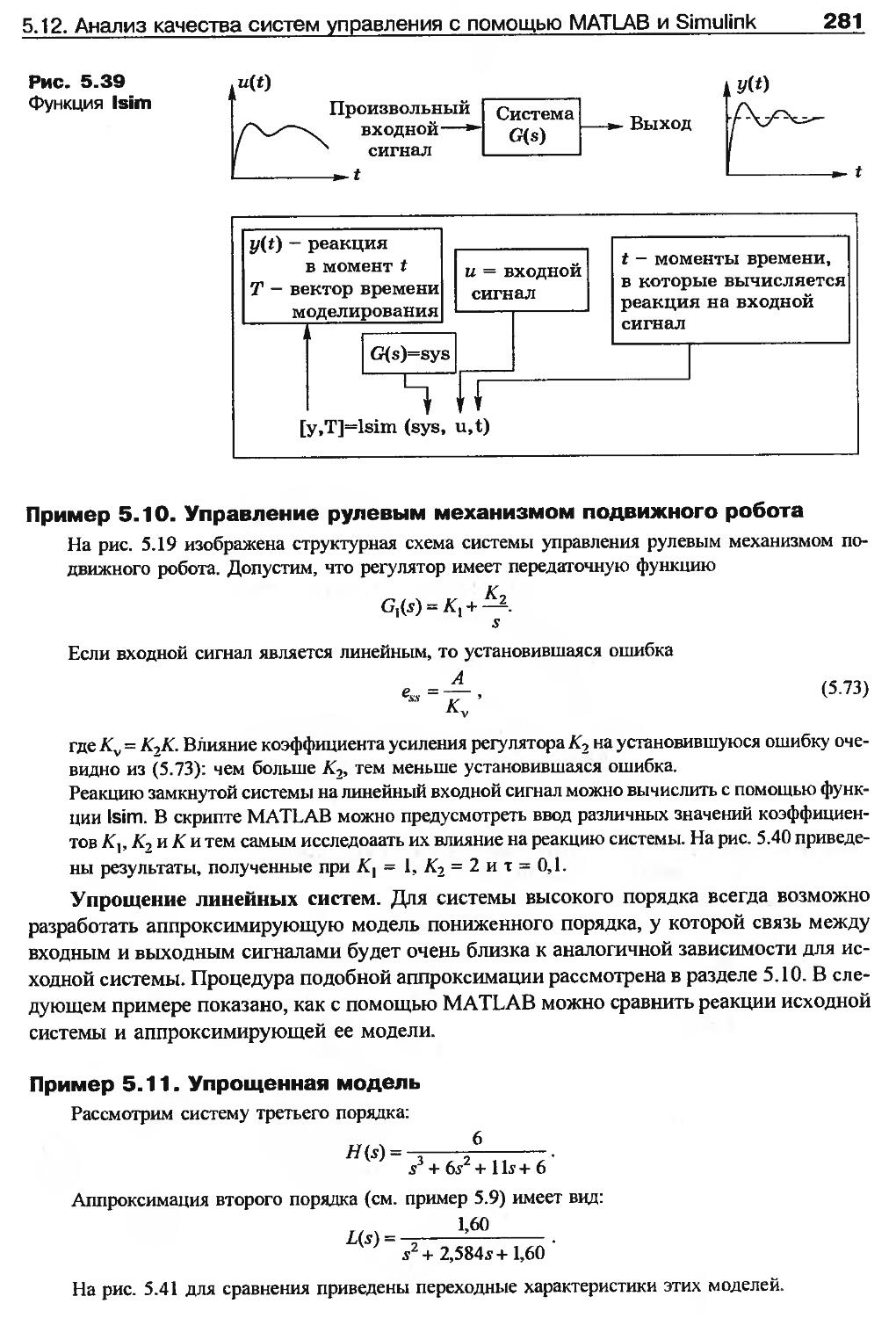
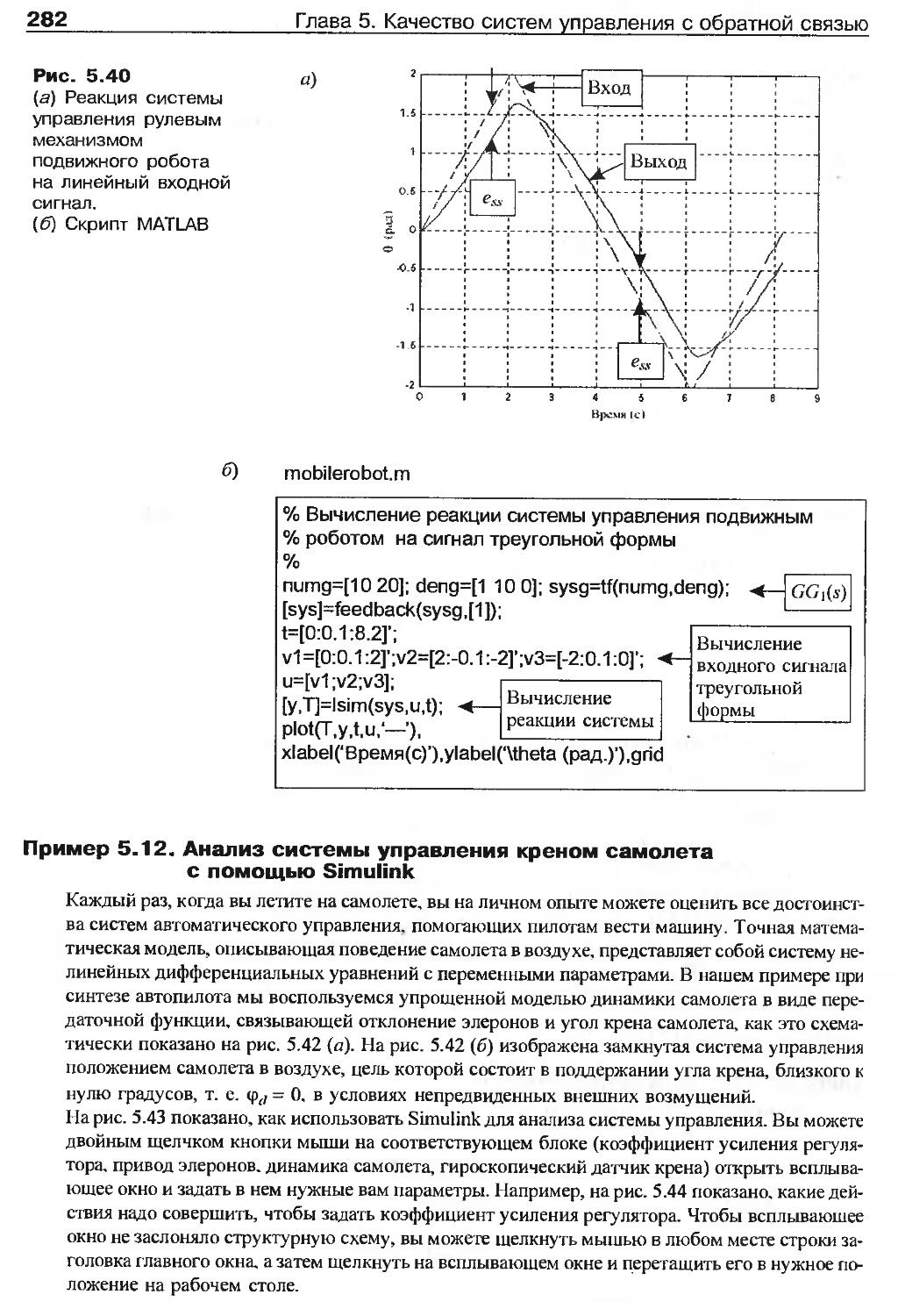
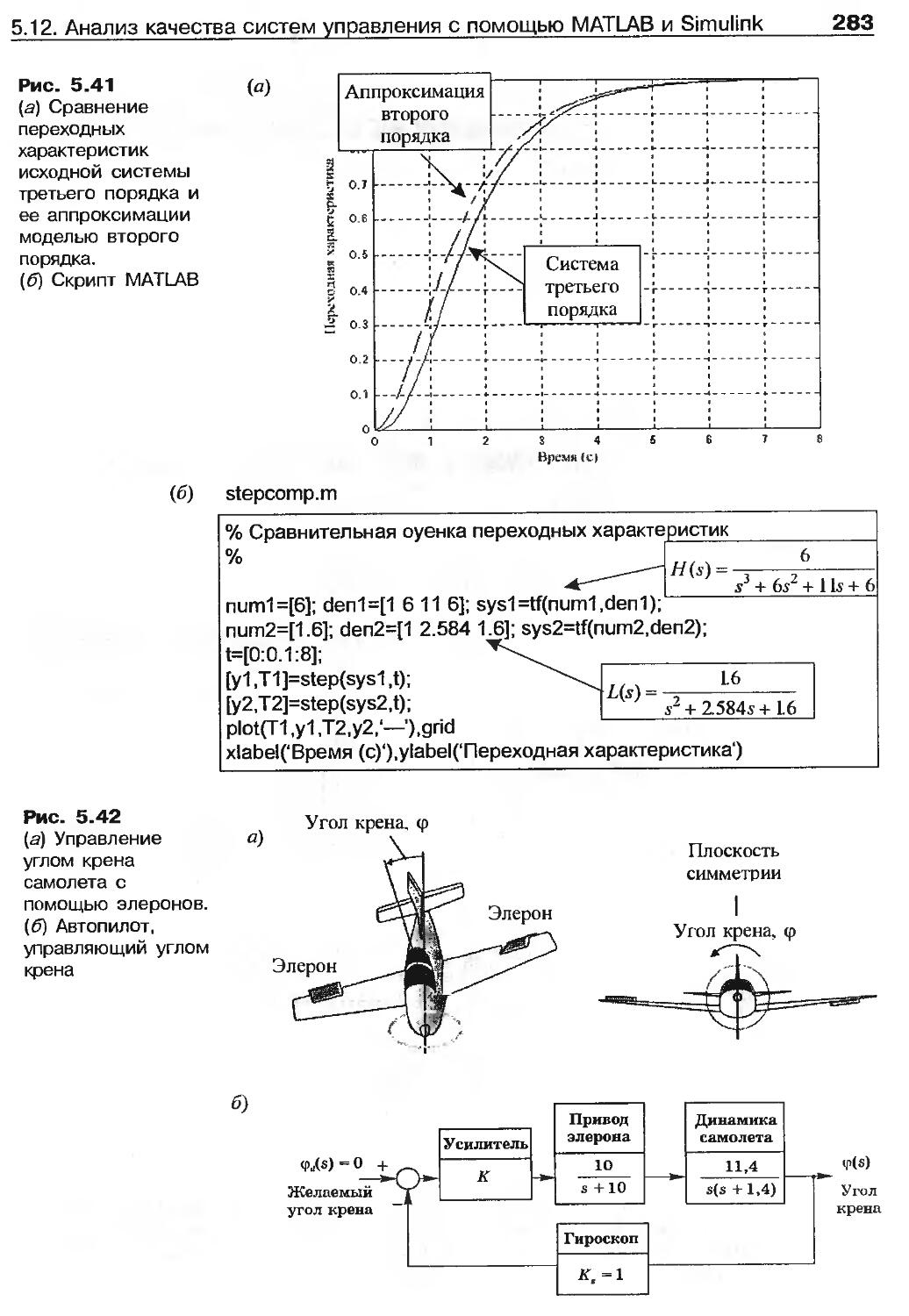
5.12. Анализ качества систем управления с помощью MATLAB и Simulink.........................................................278
5.13. Пример синтеза с продолжением: система чтения информации с диска. . . 286
5.14. Резюме.......................................................289
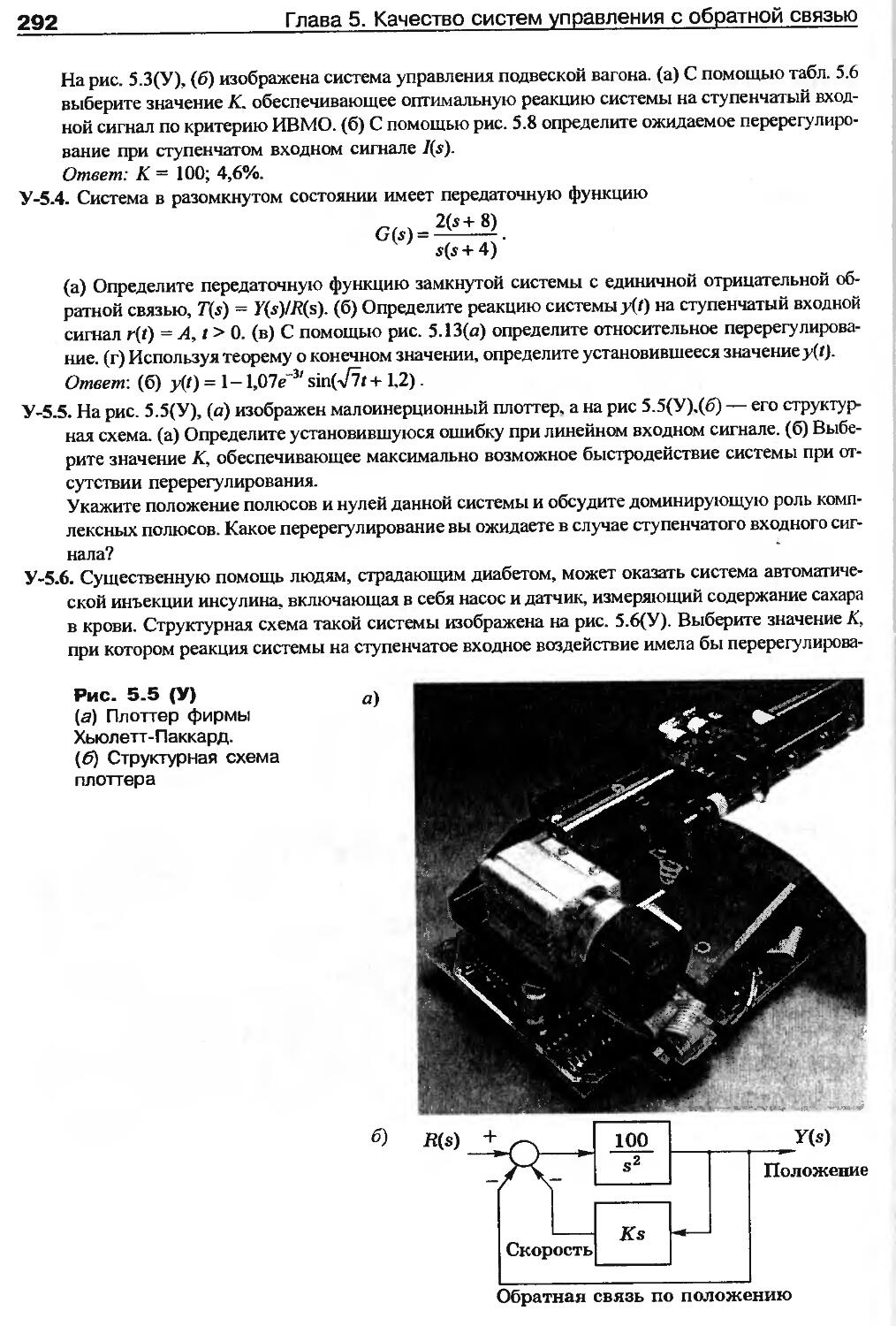
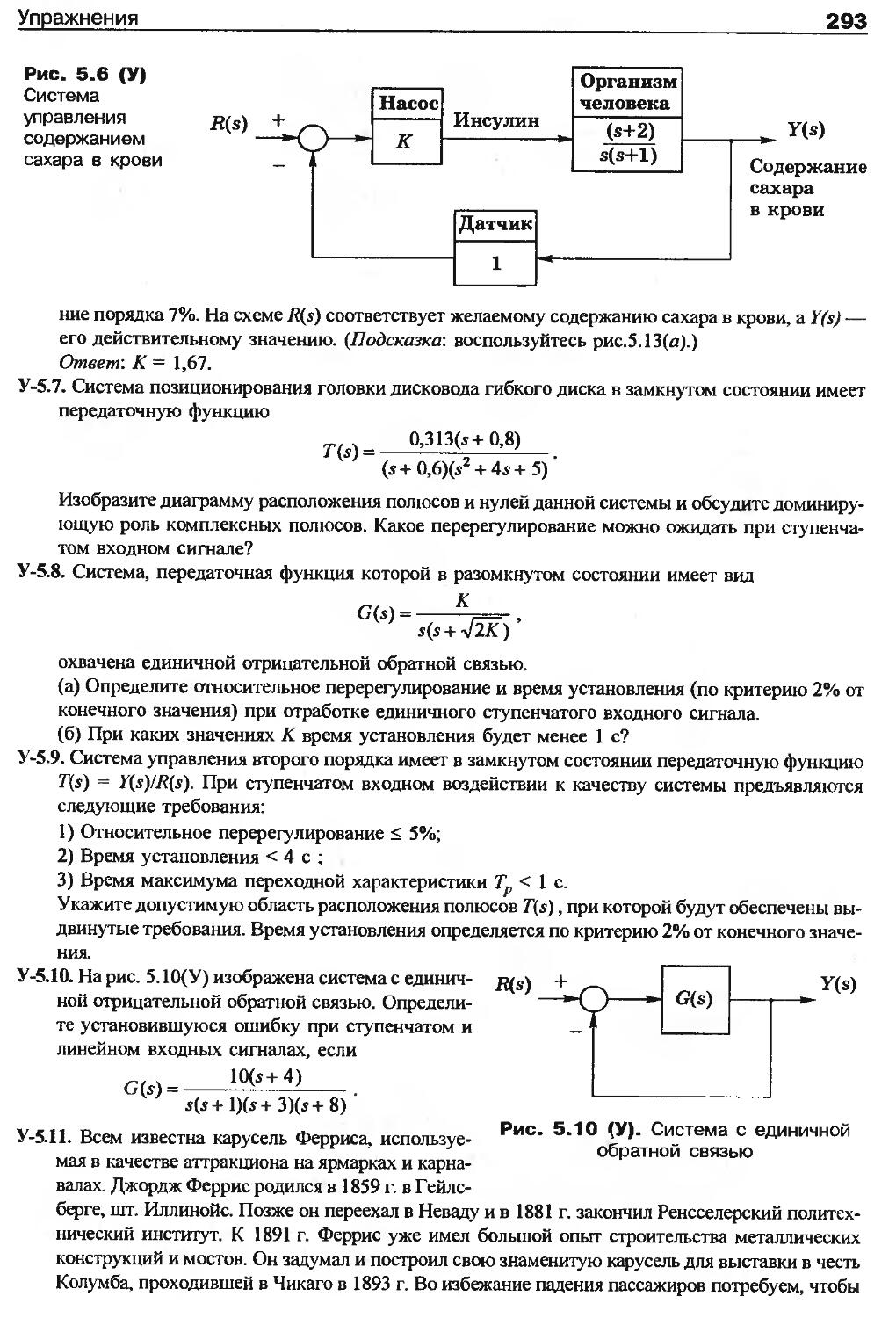
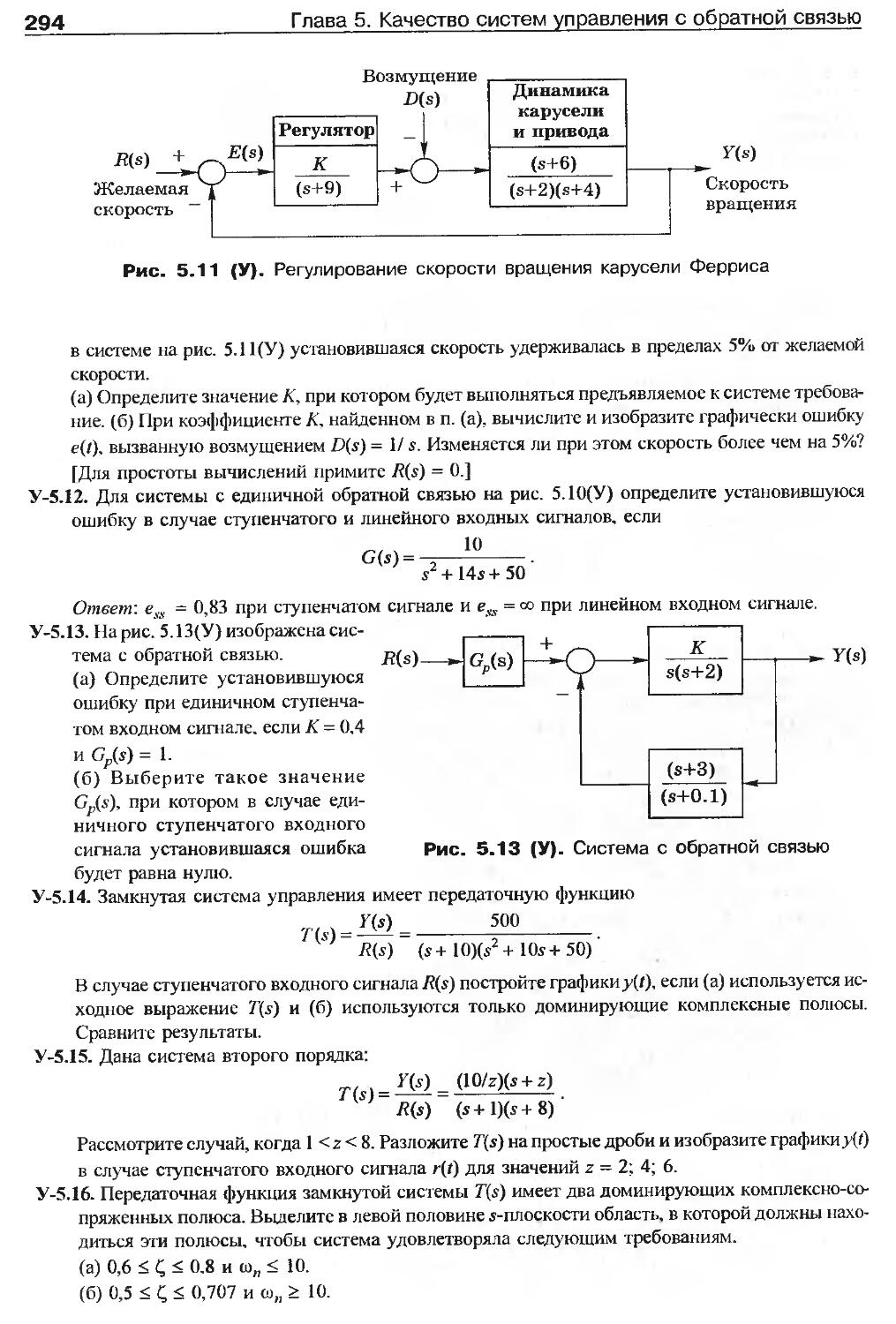
Упражнения.........................................................291
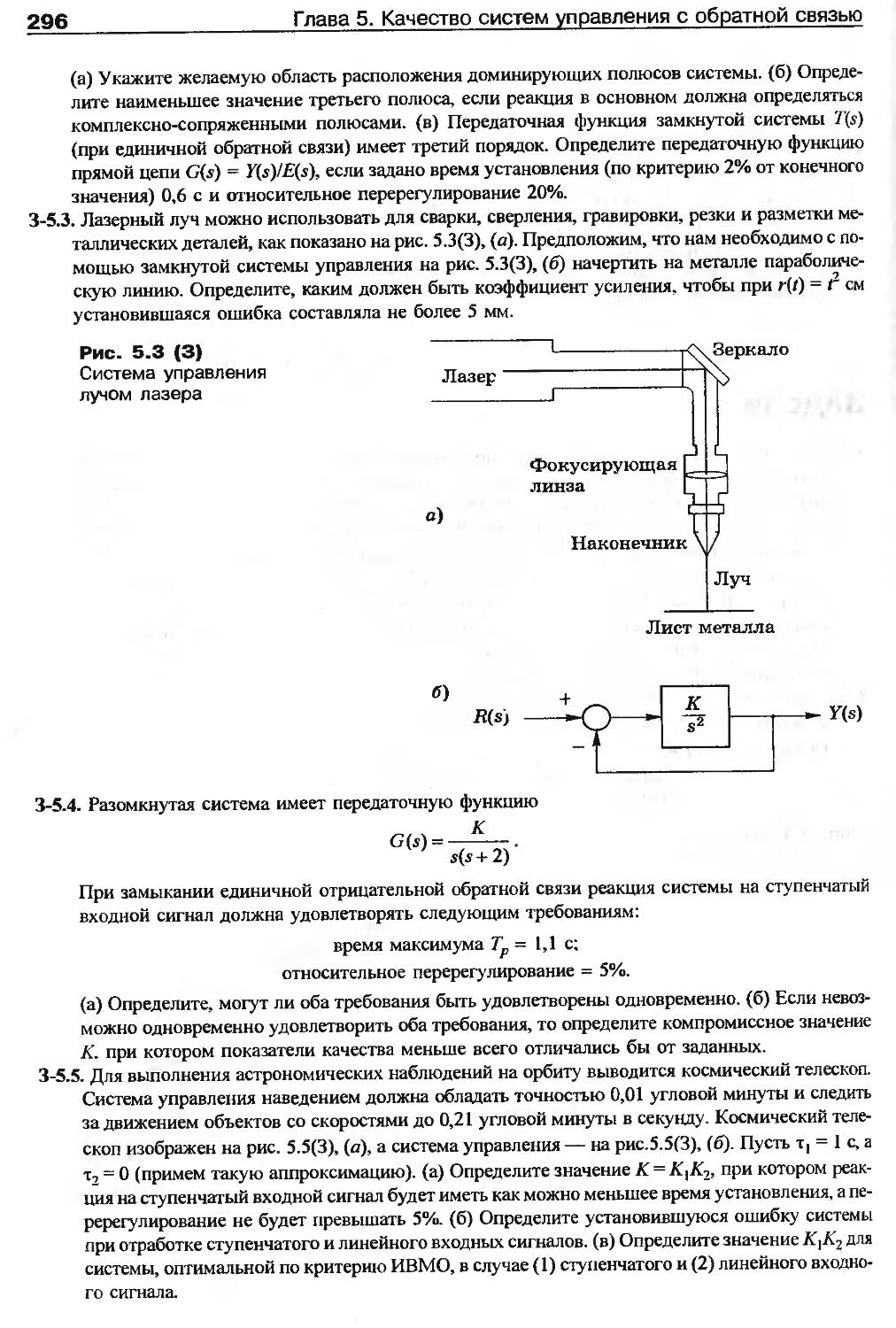
Задачи ........................................................... 295
Задачи повышенной сложности........................................301
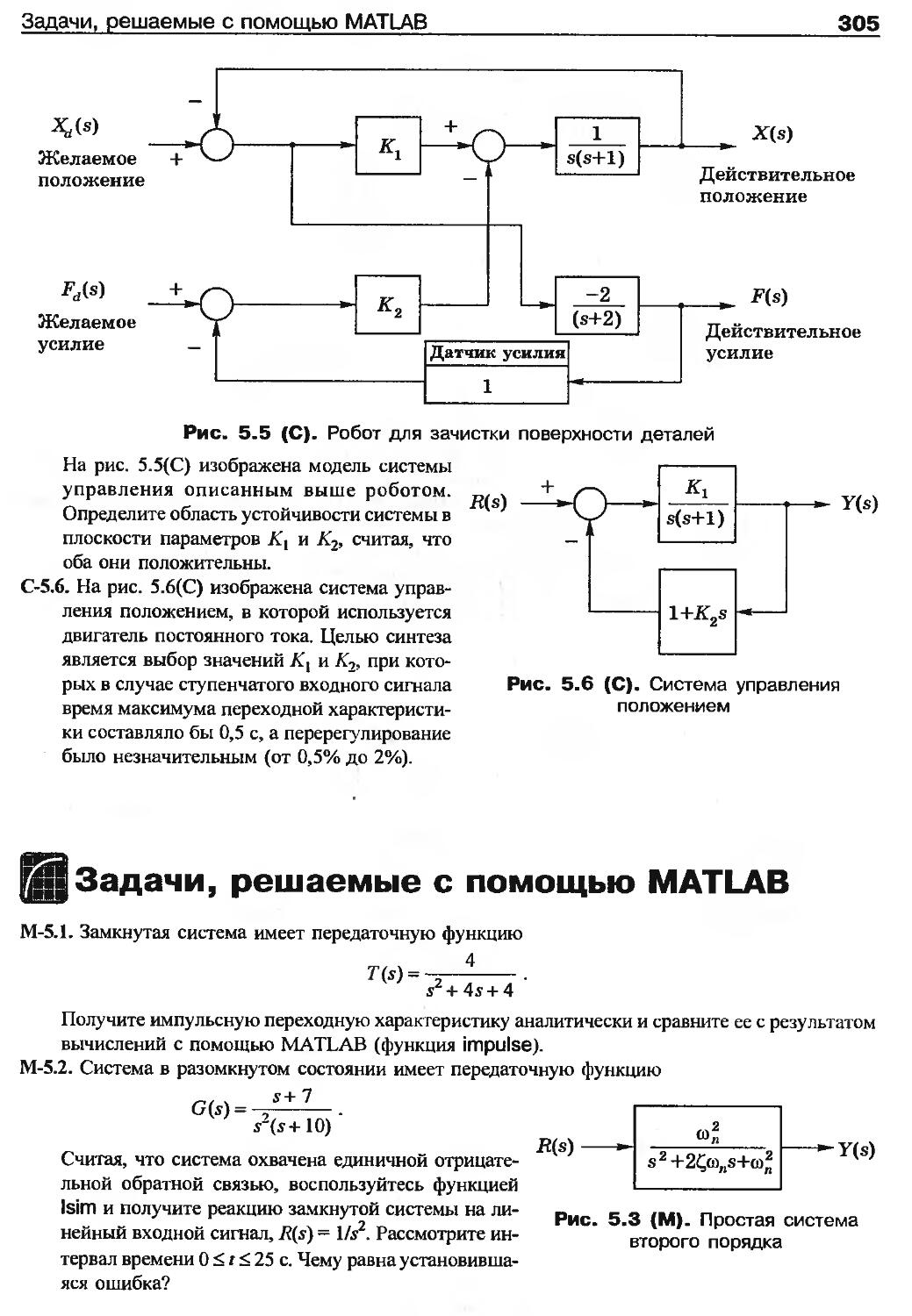
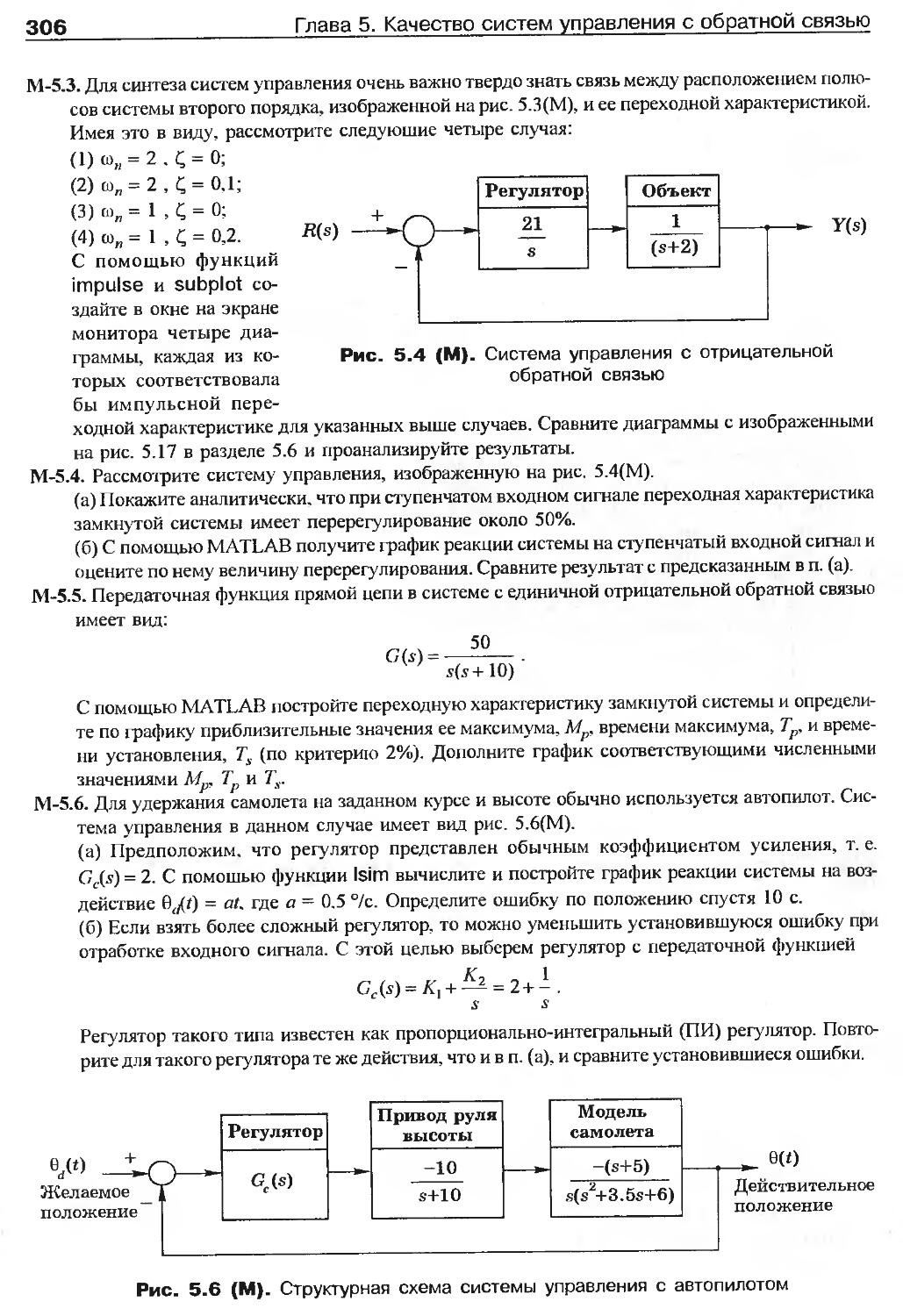
Задачи на синтез систем............................................303
Задачи, решаемые с помощью MATLAB..................................305
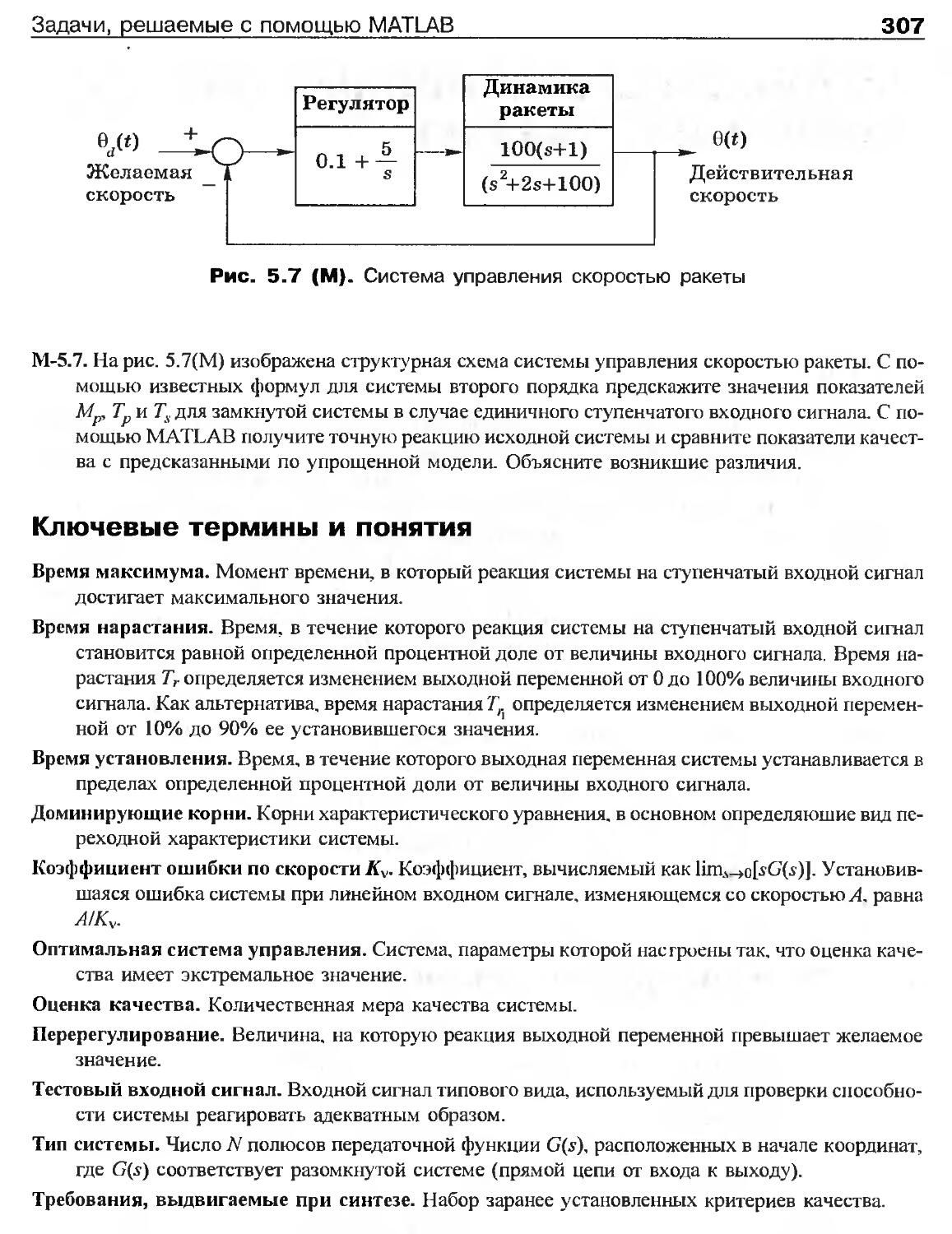
Ключевые термины и понятия.........................................307
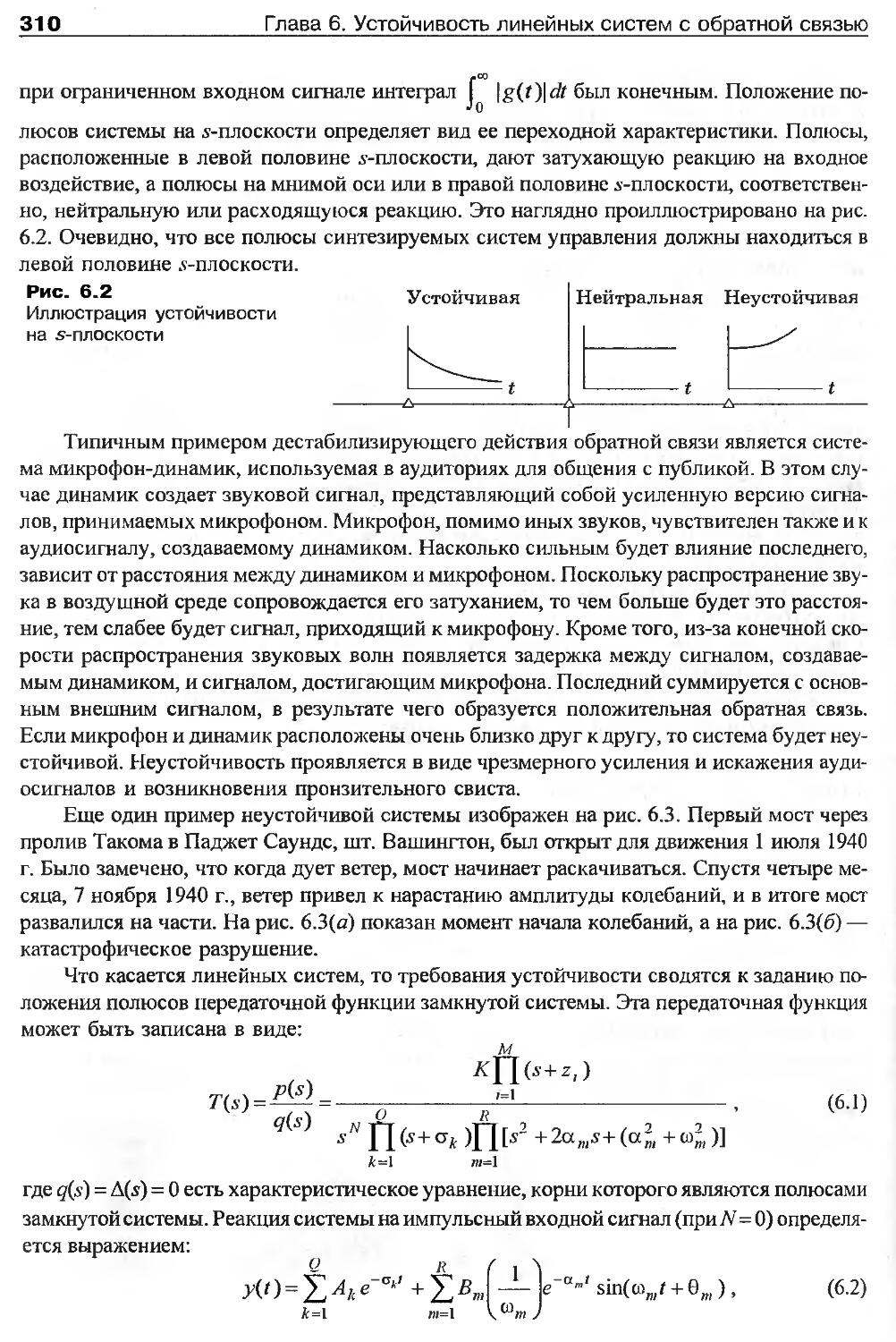
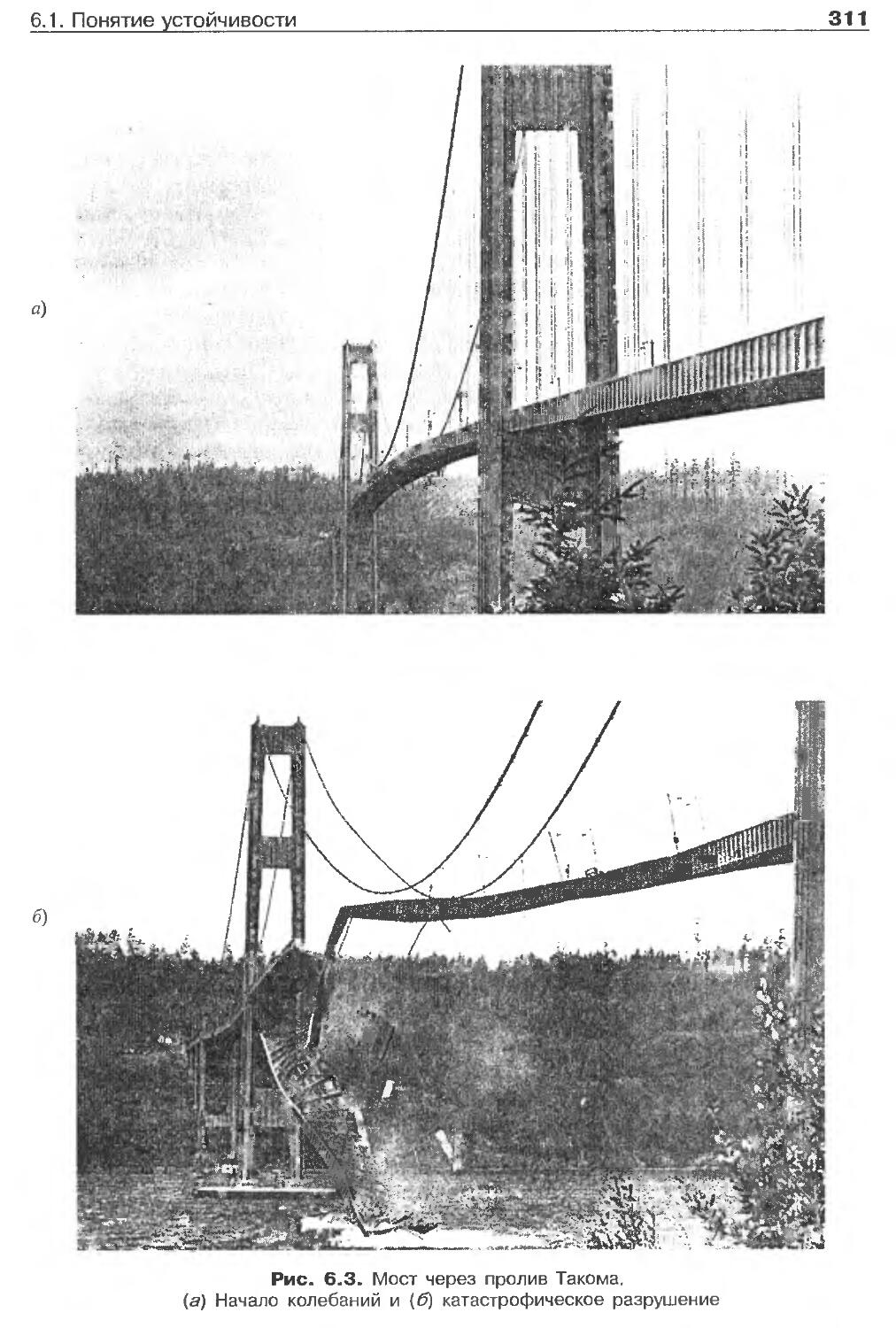
Глава 6. Устойчивость линейных систем с обратной связью...............308
Обзор..............................................................308
6.1. Понятие устойчивости..........................................308
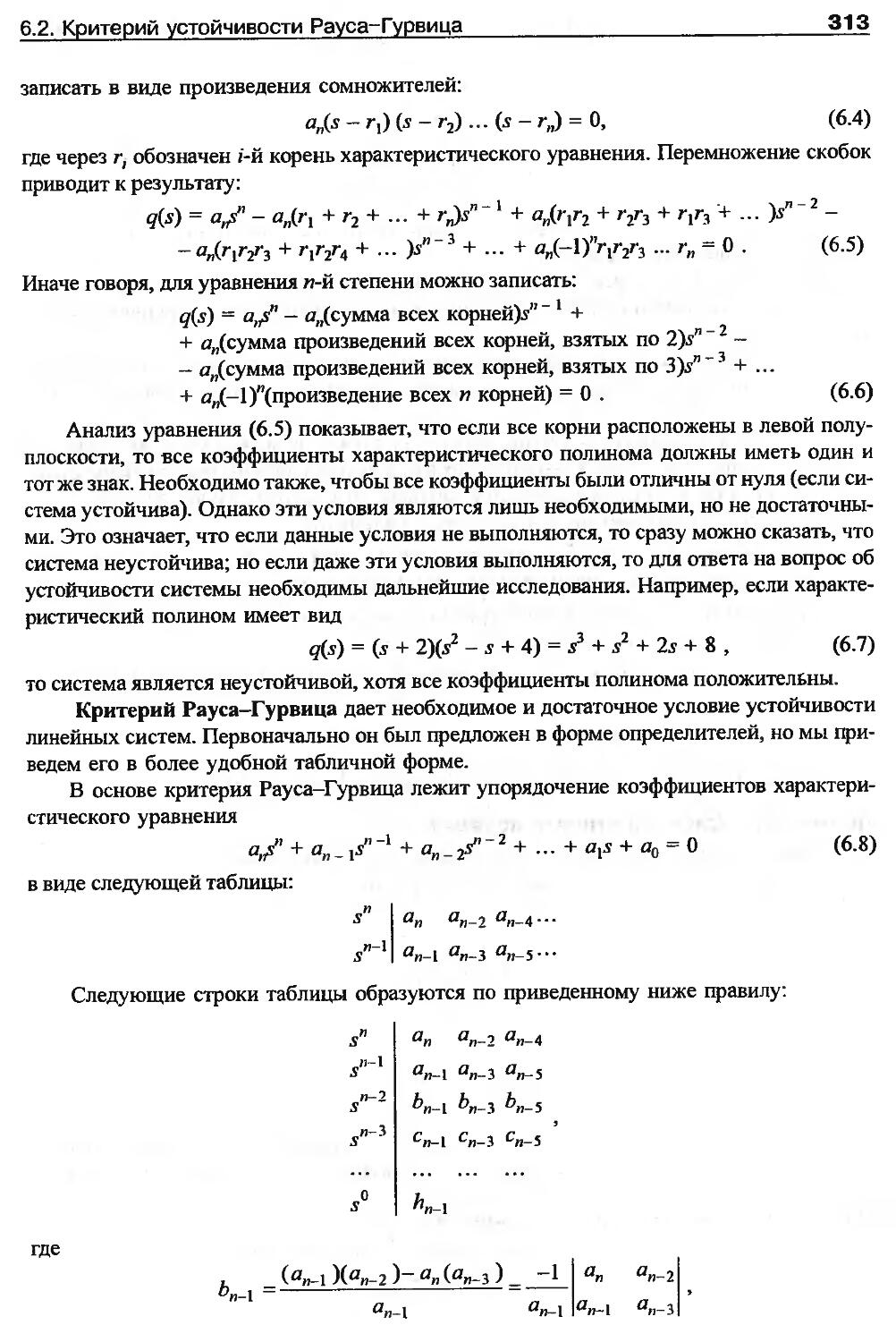
6.2. Критерий устойчивости Рауса-Гурвица...........................312
6.3. Относительная устойчивость систем управления с обратной связью.320
6.4. Устойчивость систем, описываемых переменными состояния........321
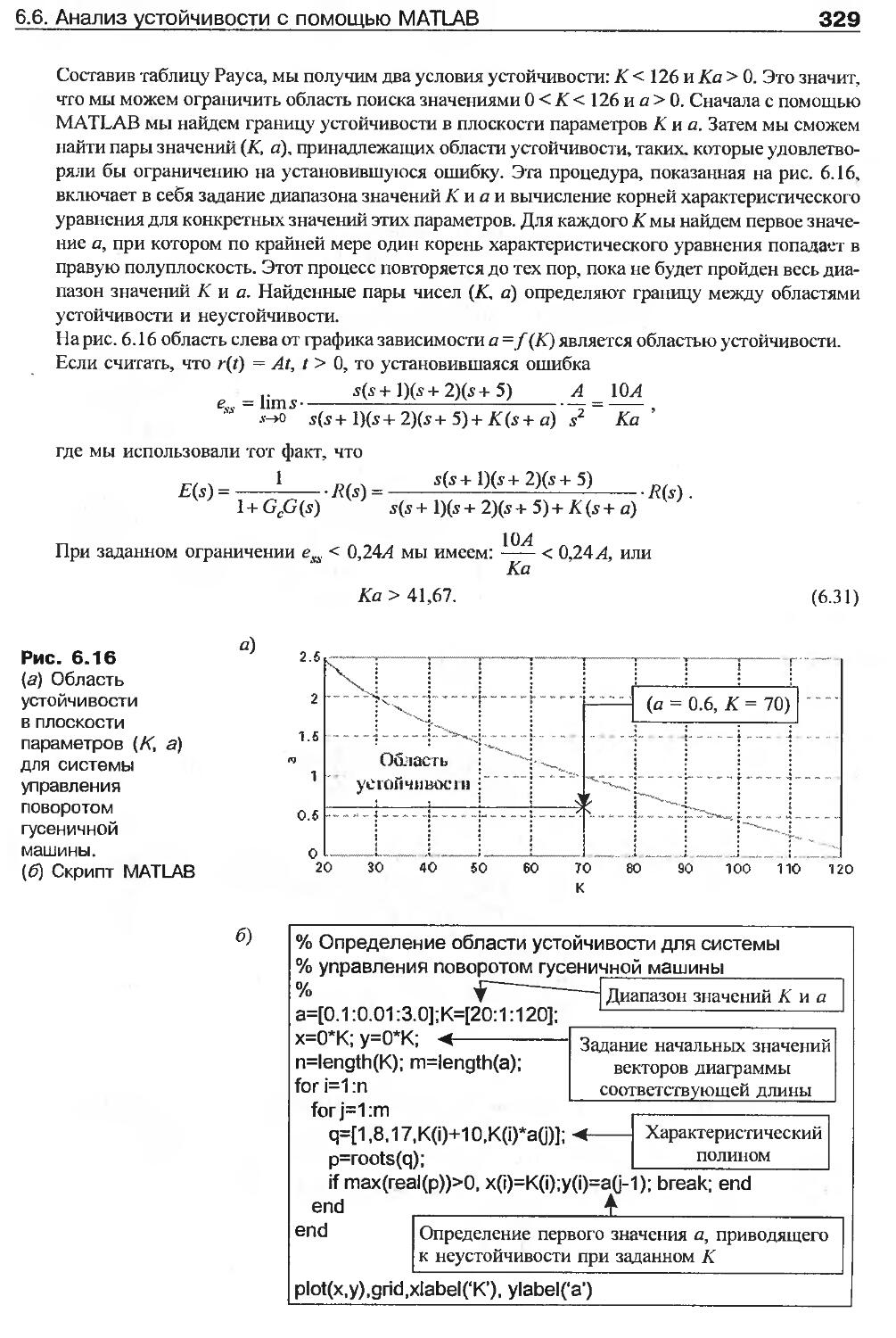
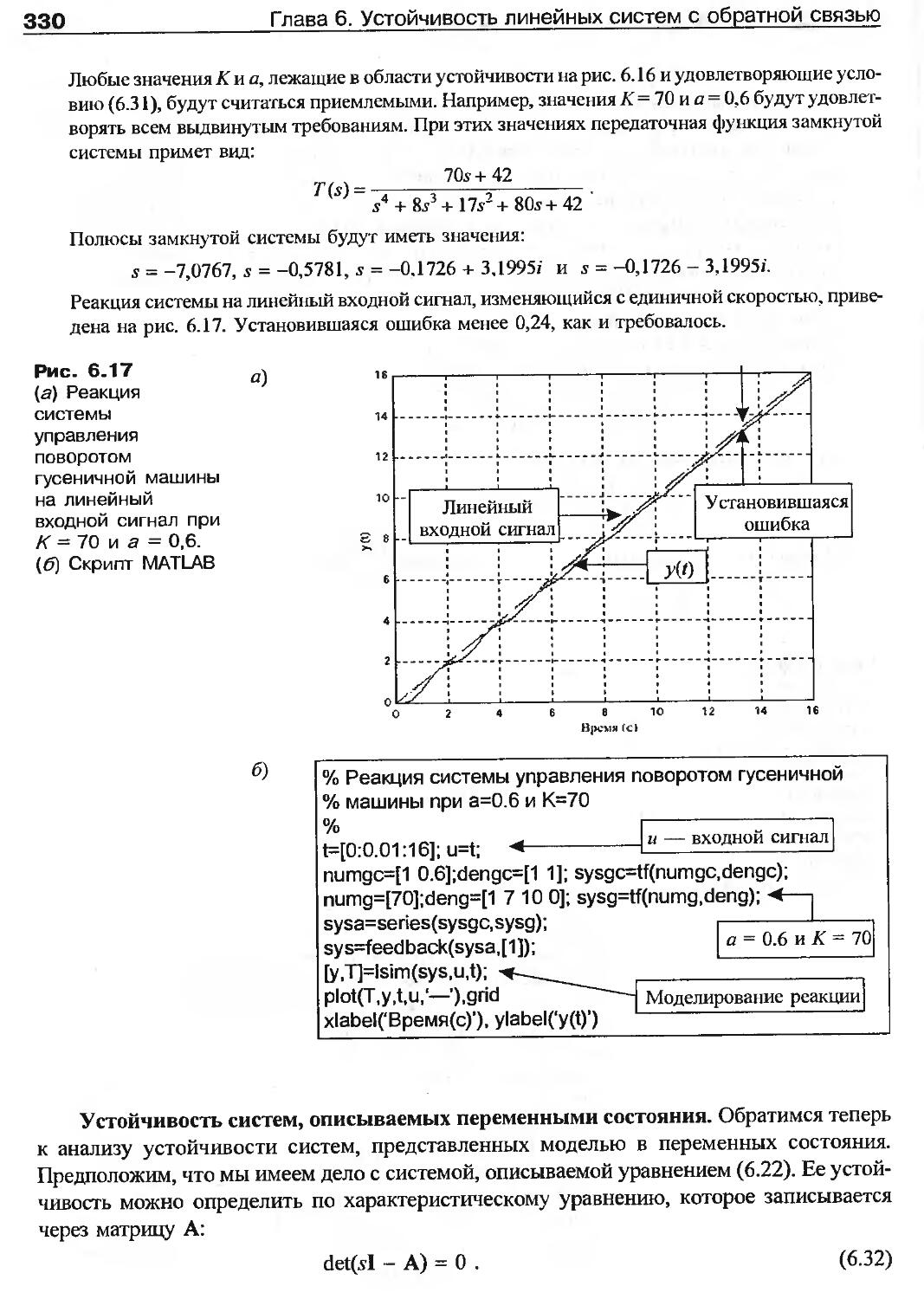
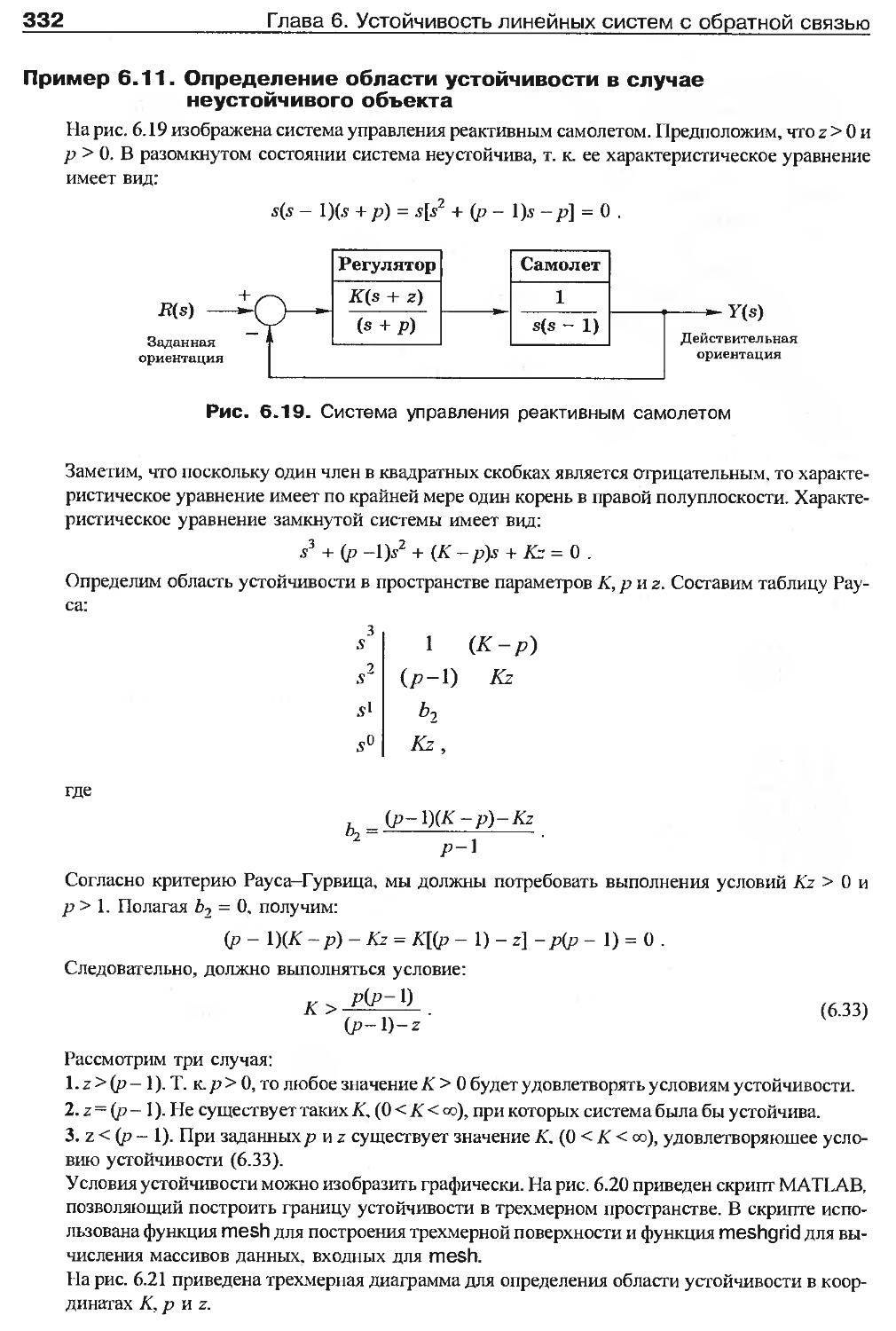
6.5. Пример синтеза: управление поворотом гусеничной машины........324
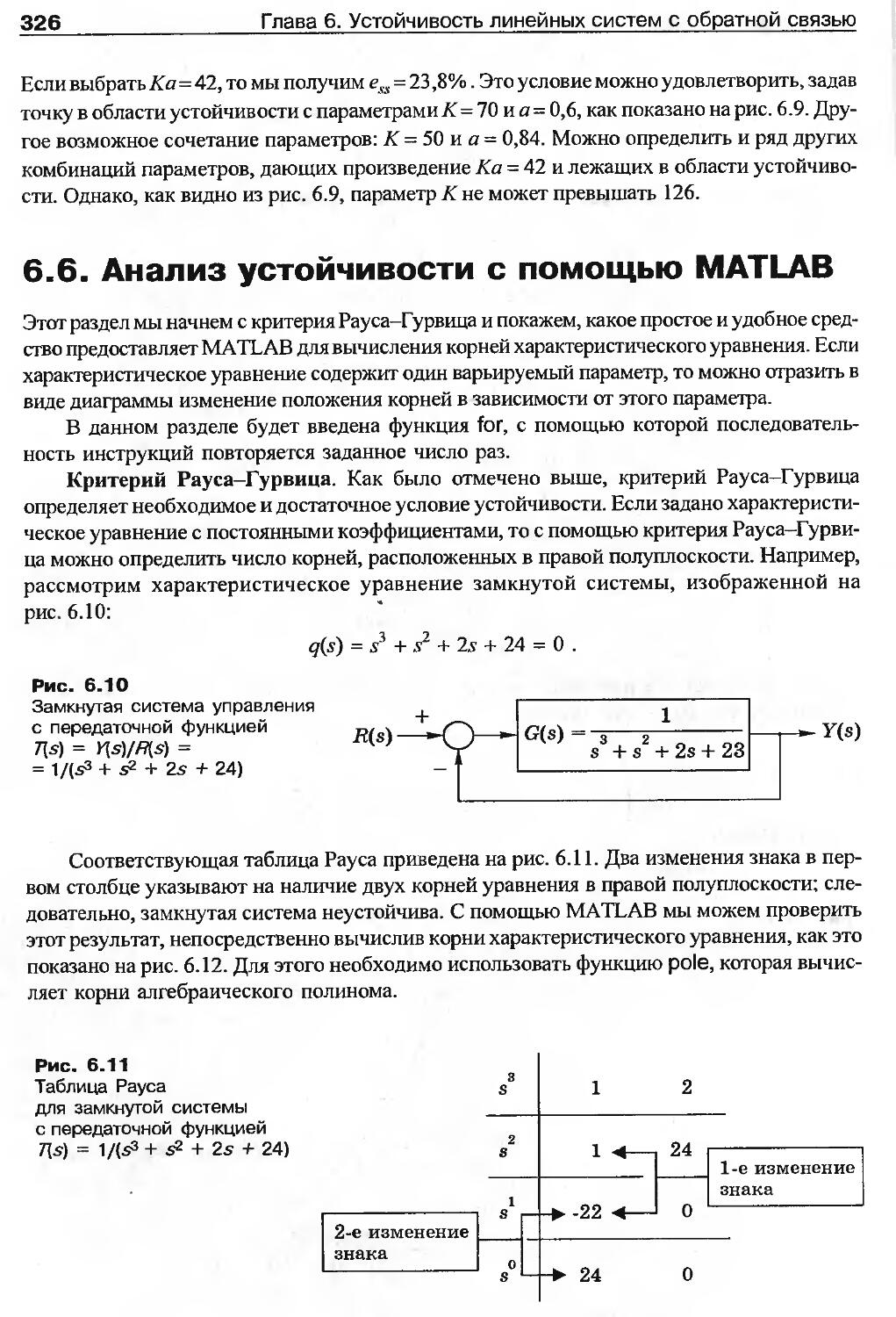
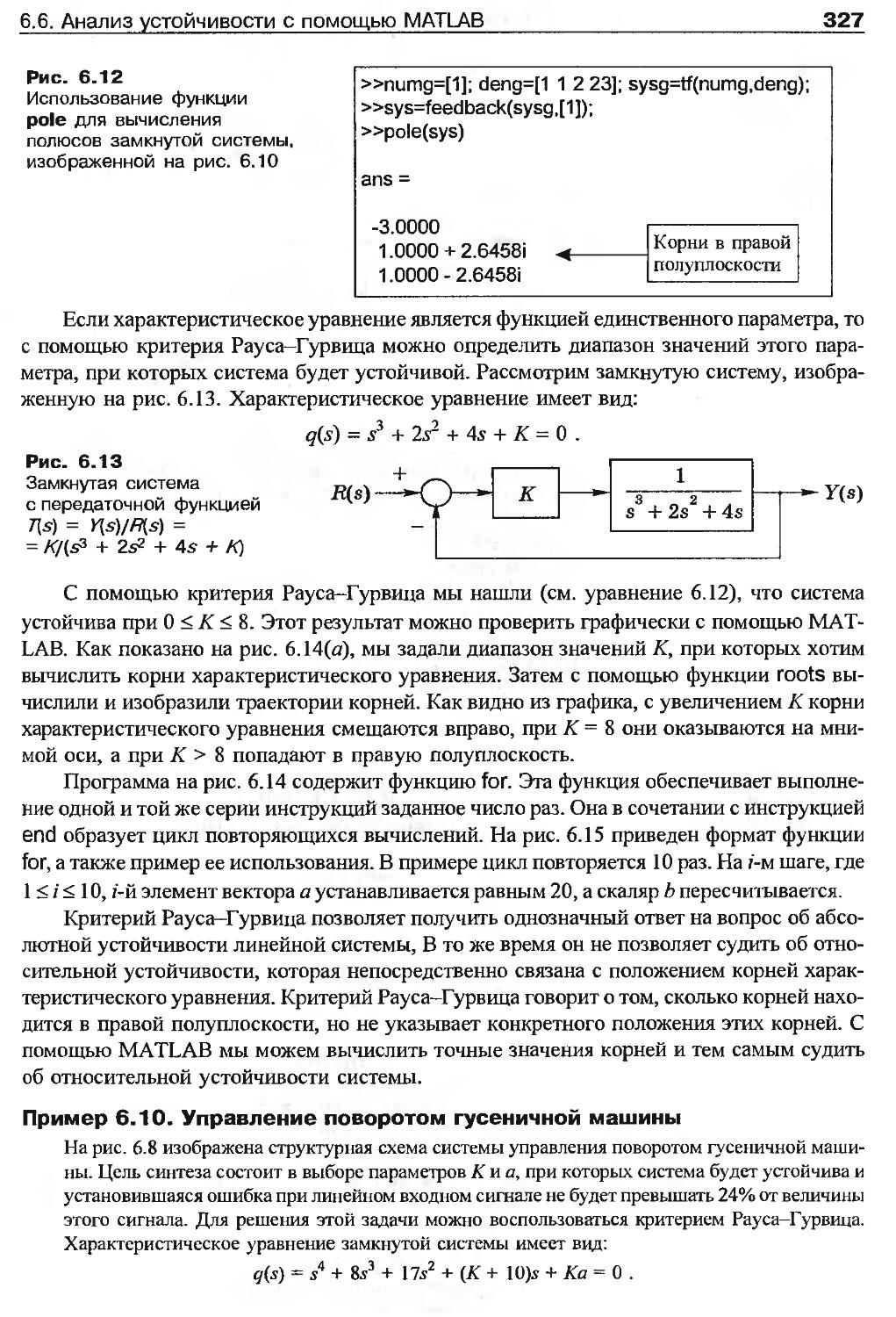
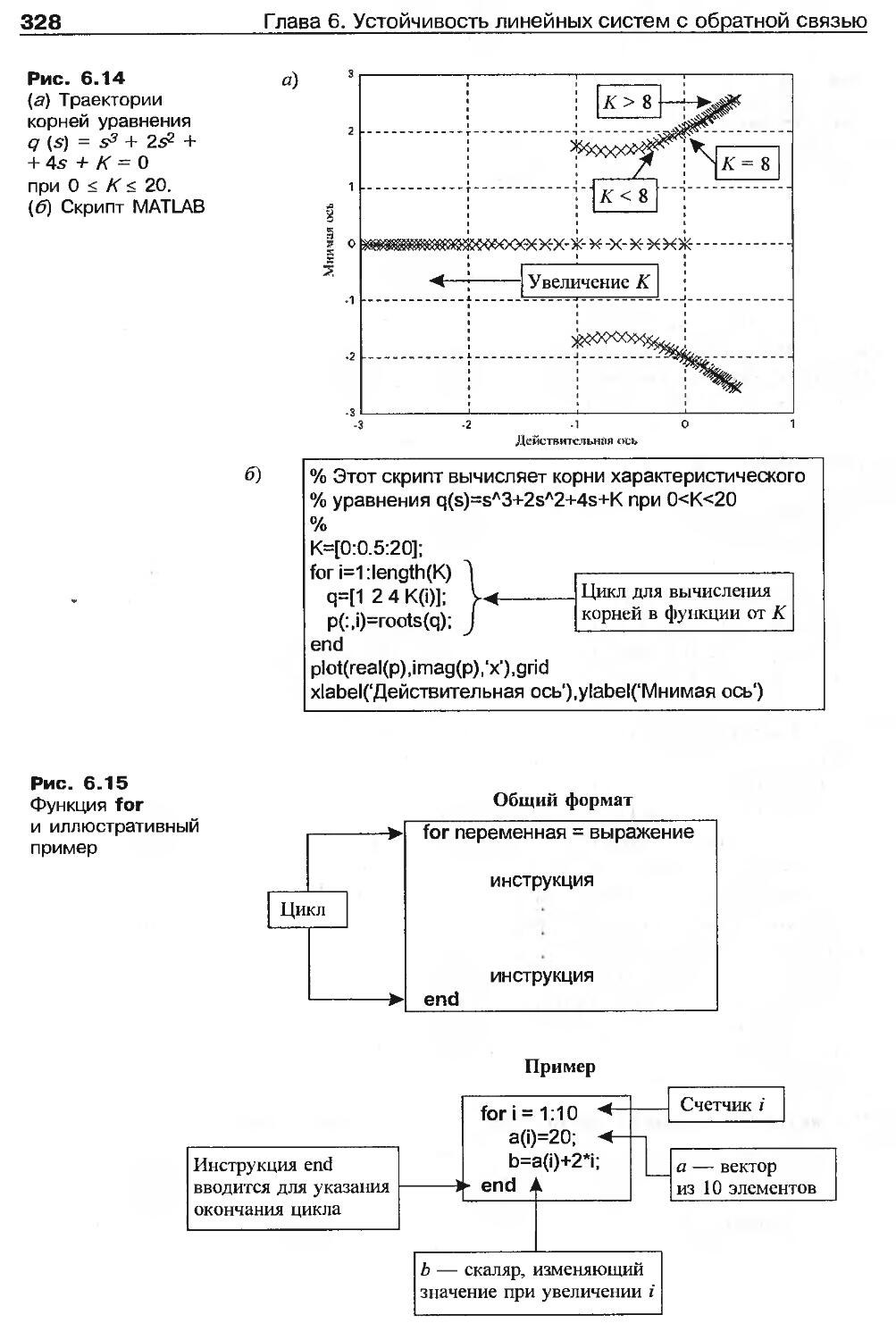
6.6. Анализ устойчивости с помощью MATLAB..........................326
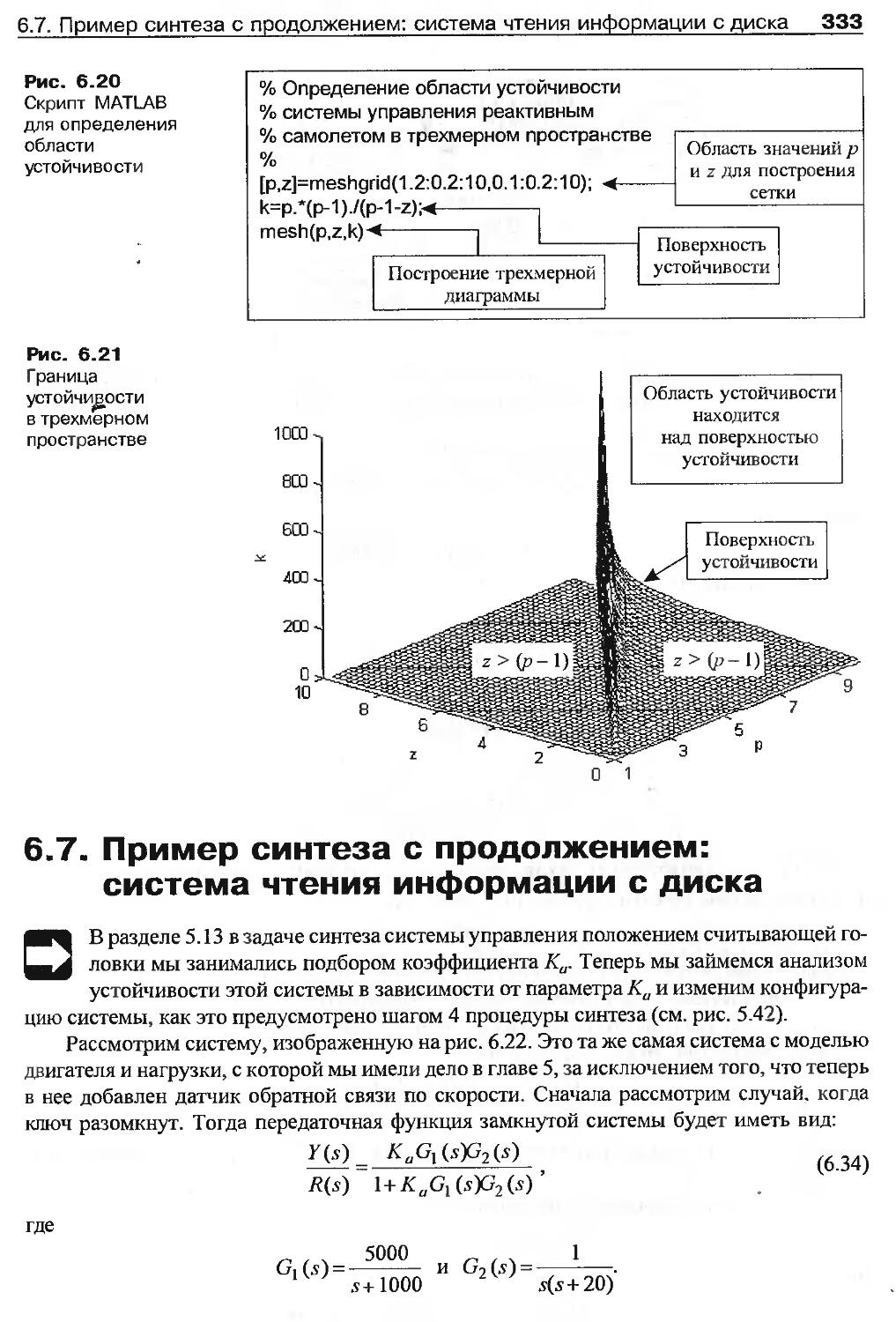
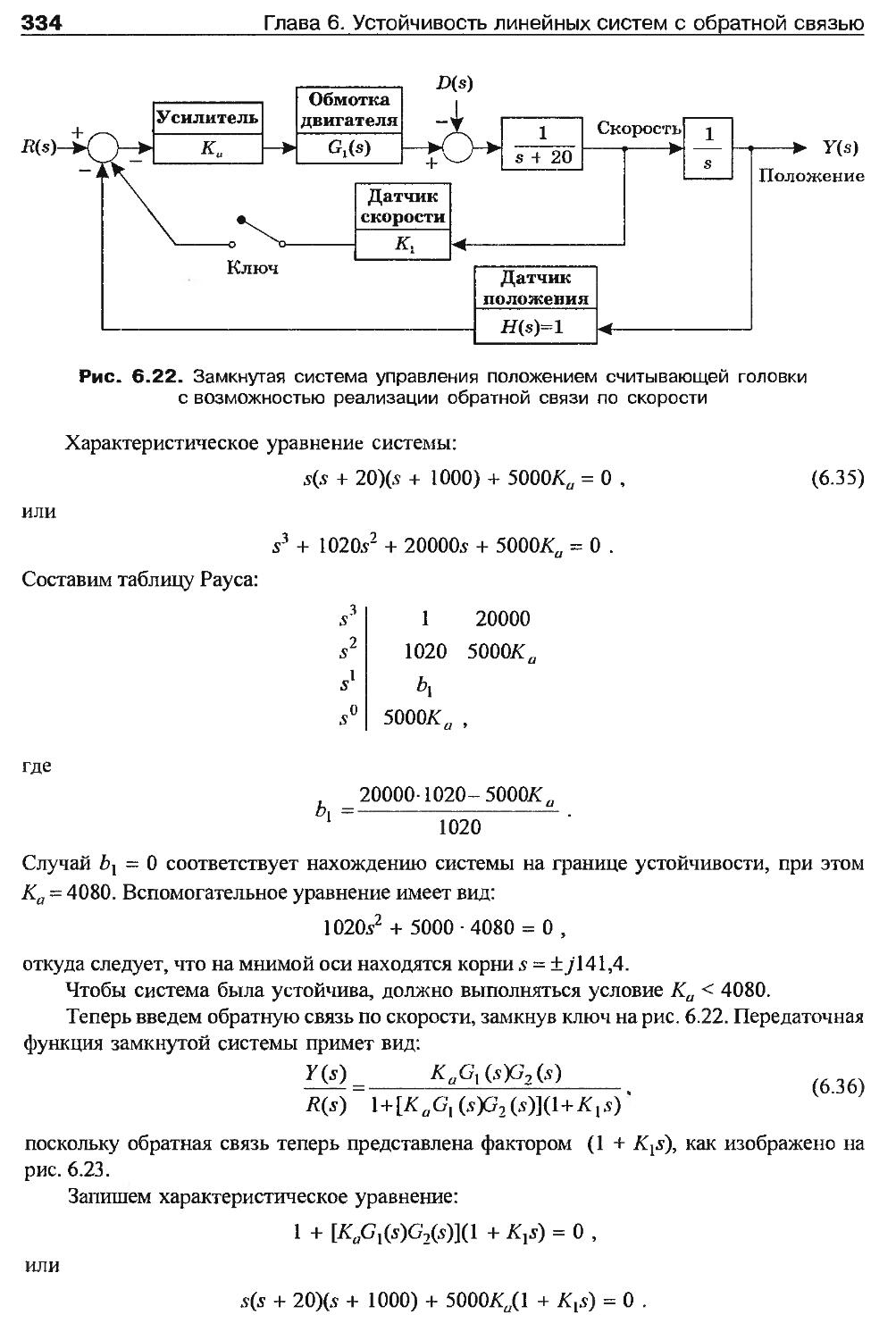
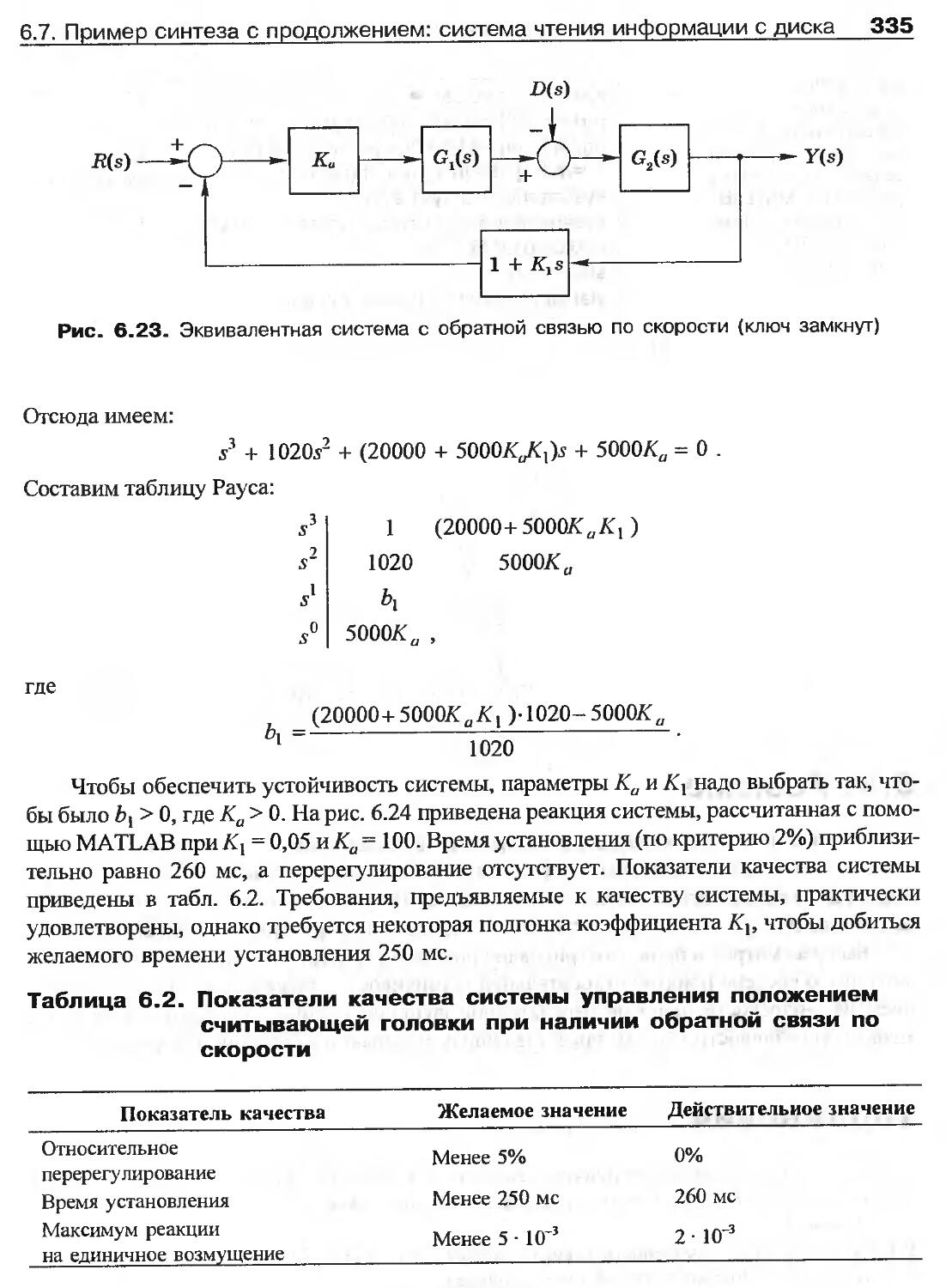
6.7. Пример синтеза с продолжением: система чтения информации с диска. . . . 333
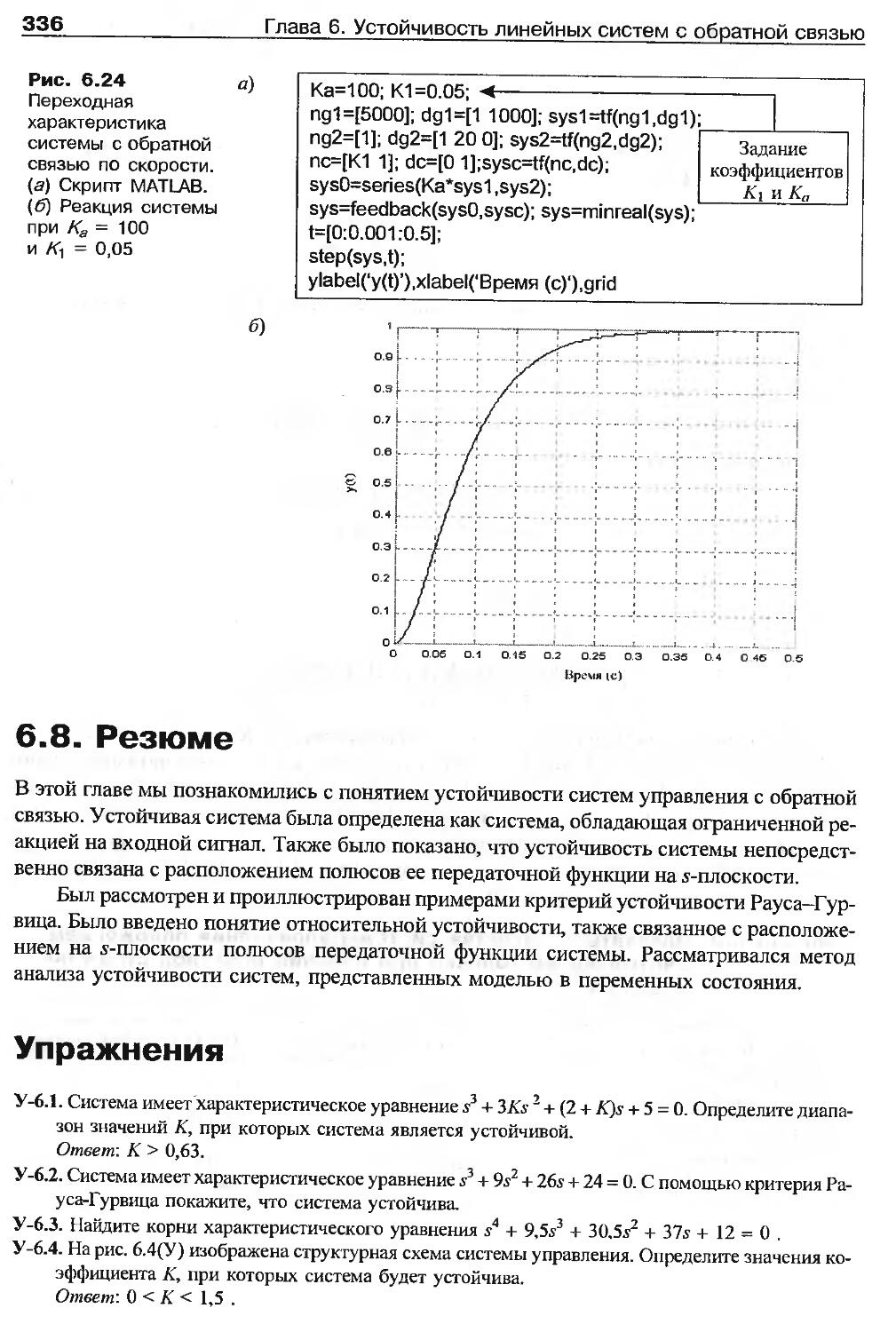
6.8. Резюме........................................................336
Упражнения.........................................................336
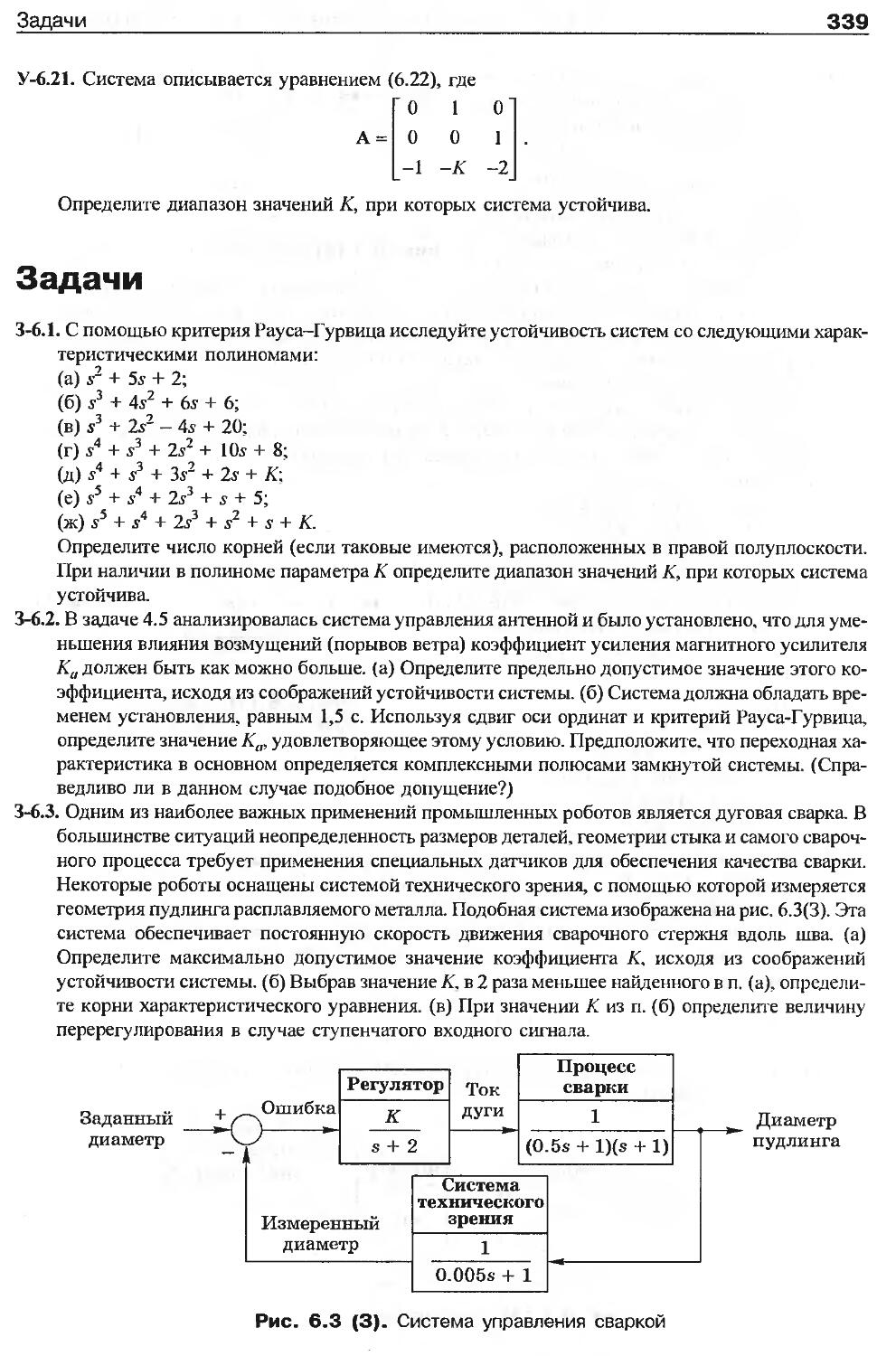
Задачи.............................................................339
Задачи повышенной сложности........................................343
Задачи на синтез систем............................................344
10
Содержание
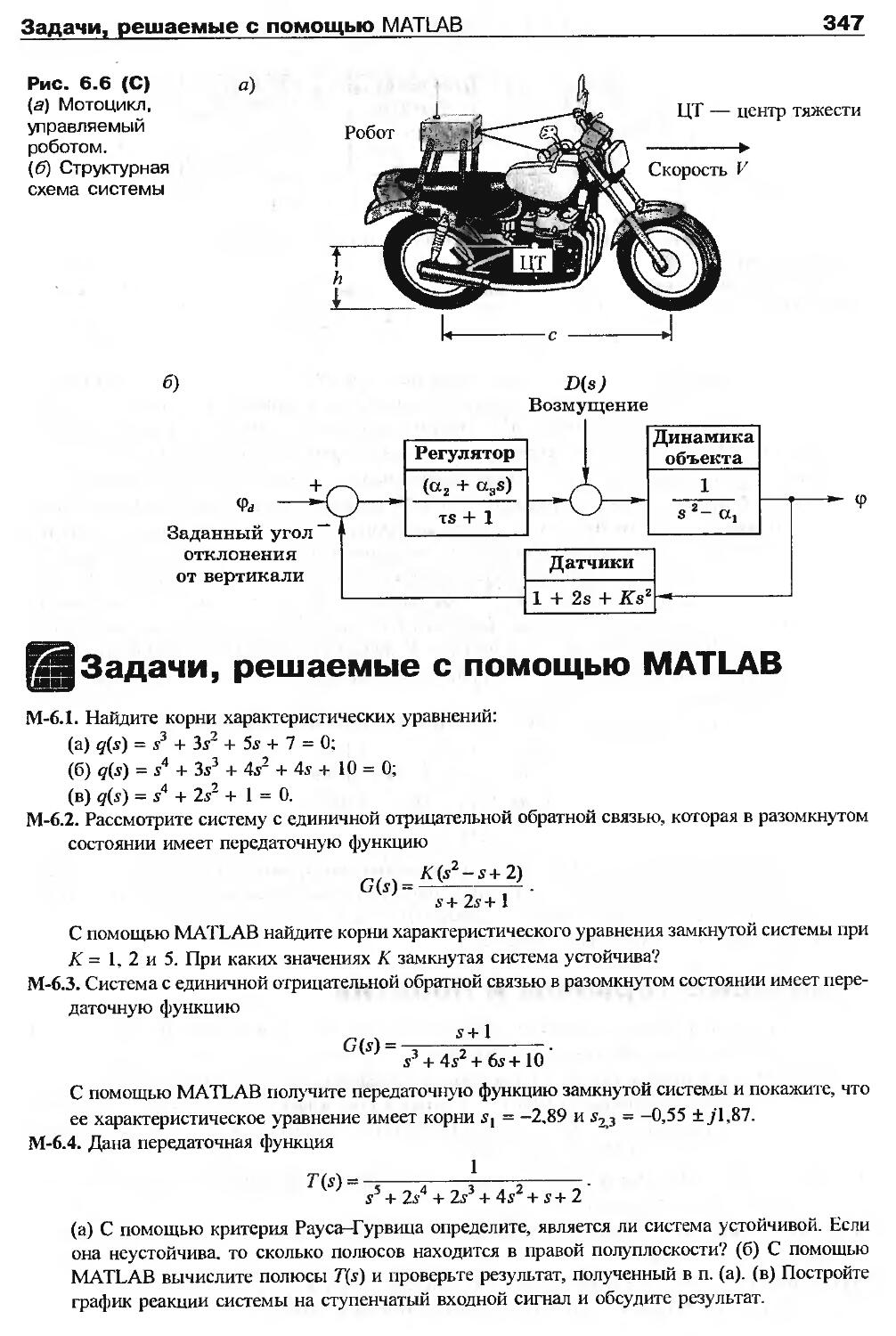
Задачи, решаемые с помощью MATLAB..................................347
Ключевые термины и понятия.........................................348
Глава 7. Метод корневого годографа....................................349
Обзор..............................................................349
7.1. Введение......................................................349
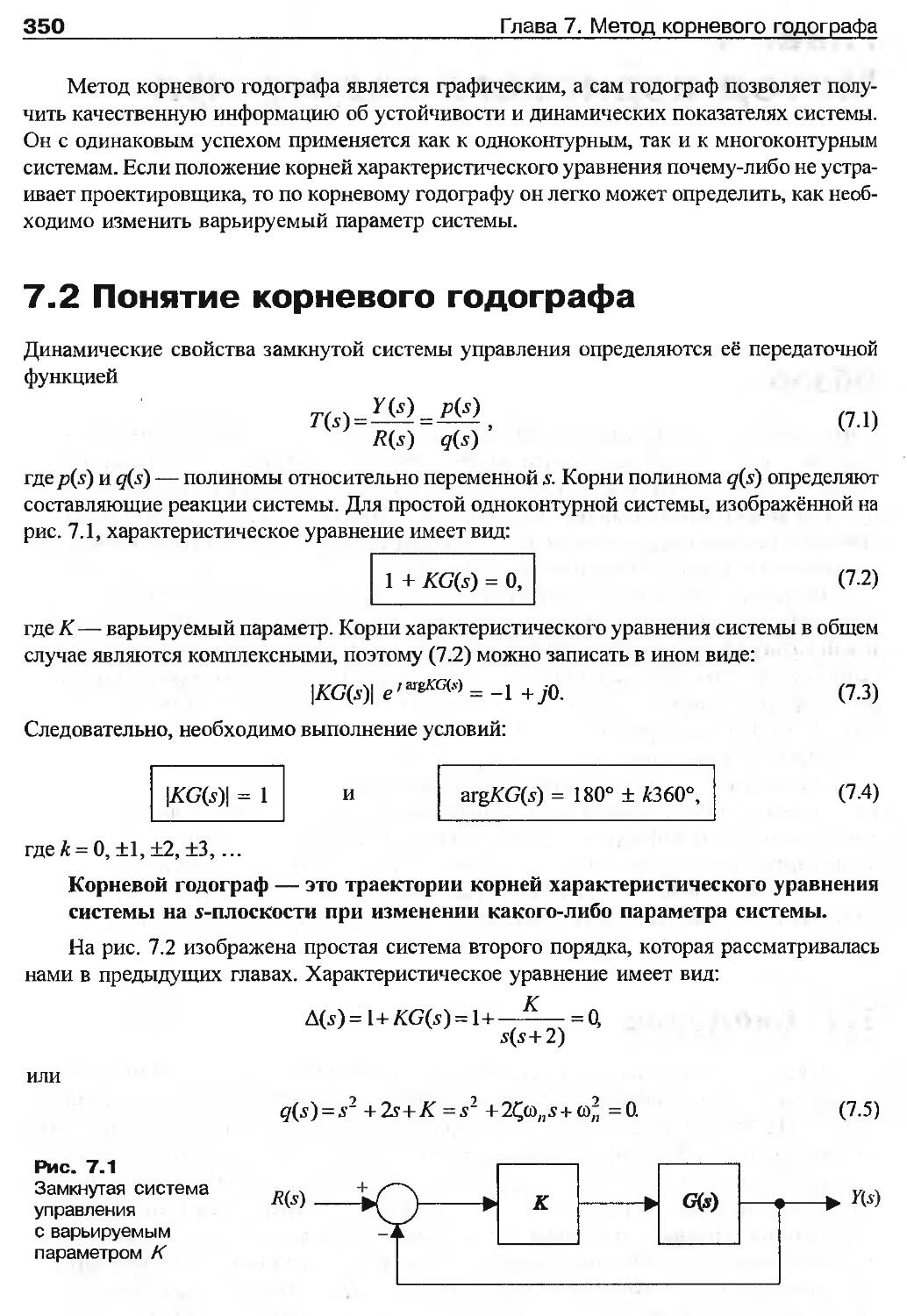
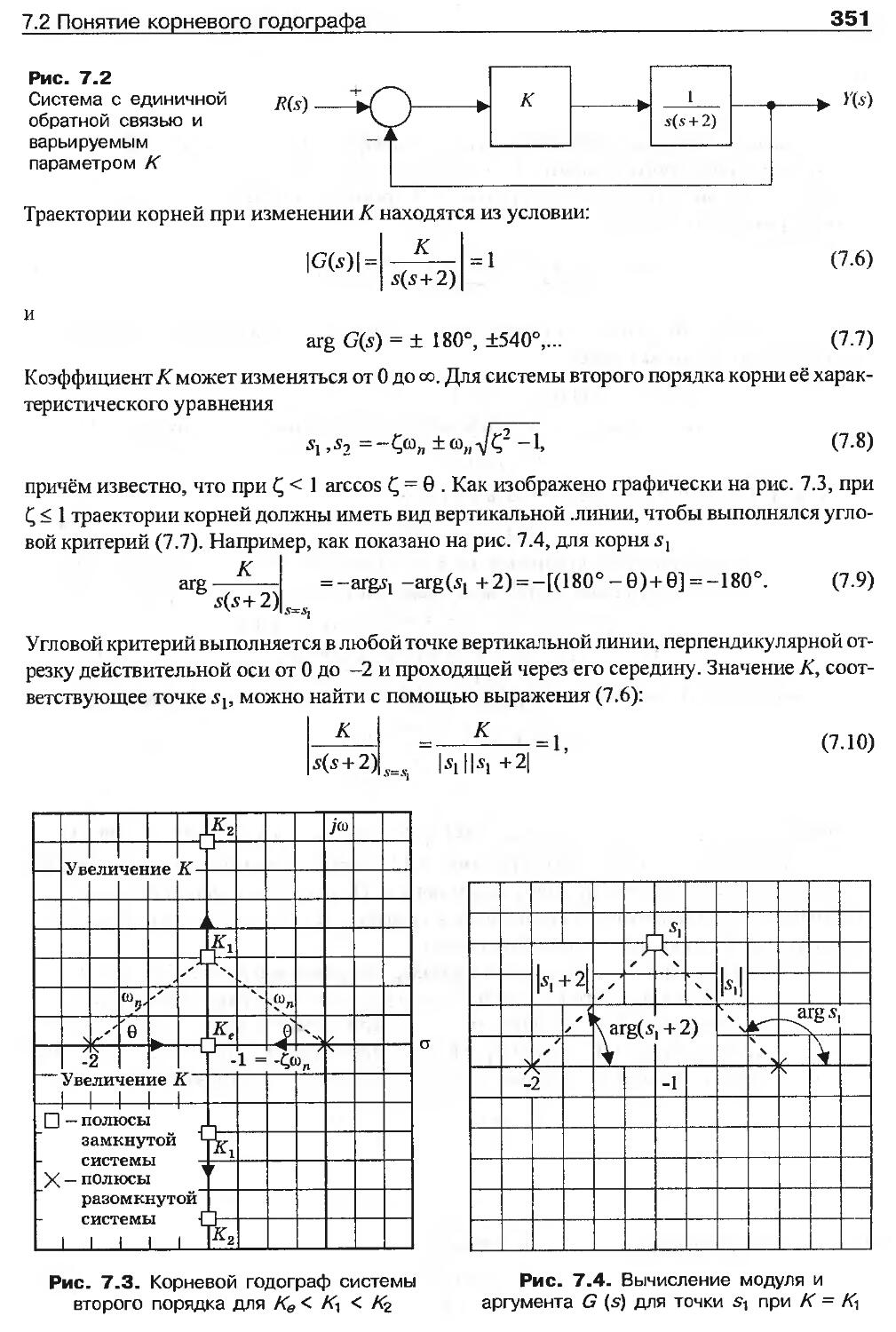
7.2. Понятие корневого годографа...................................350
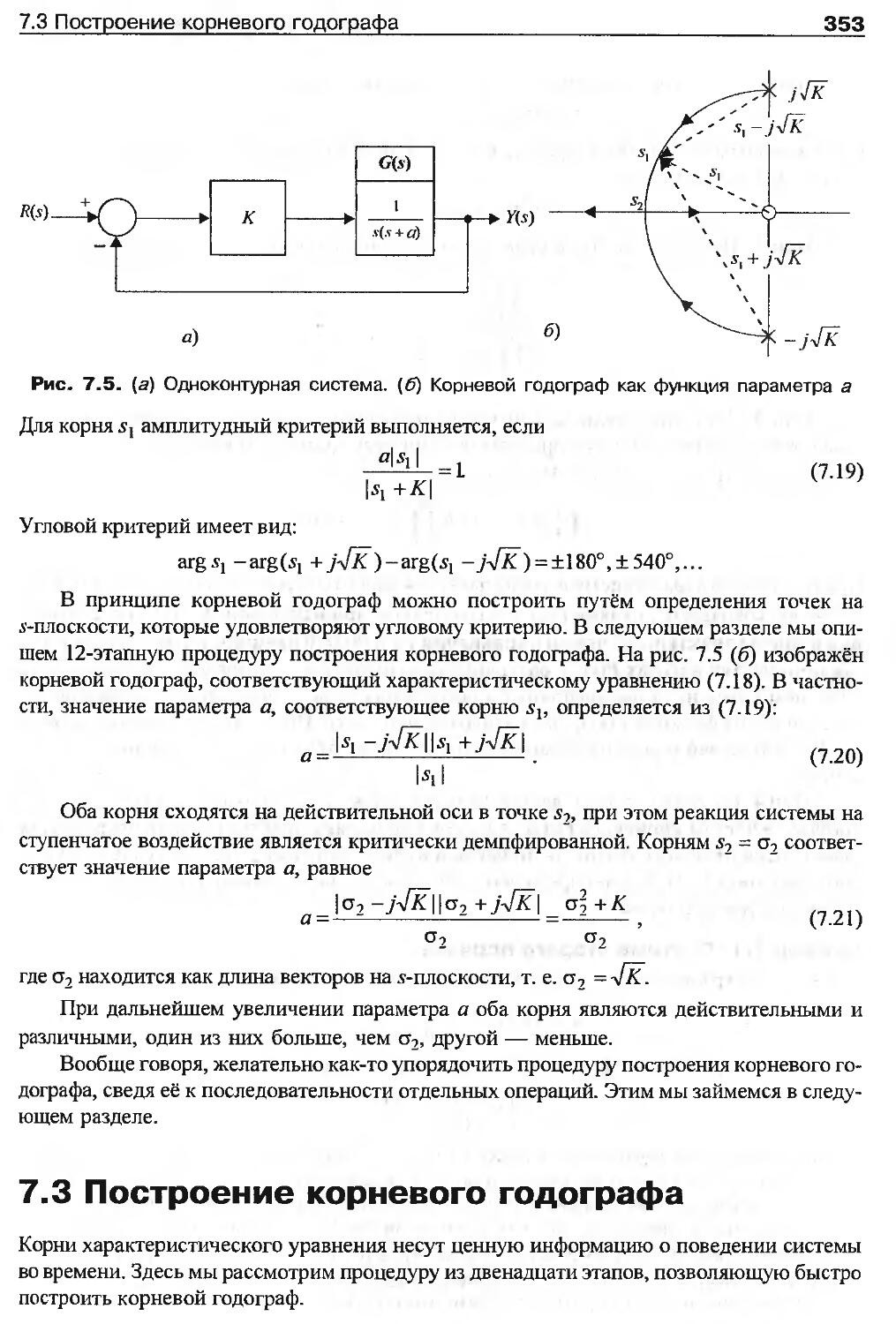
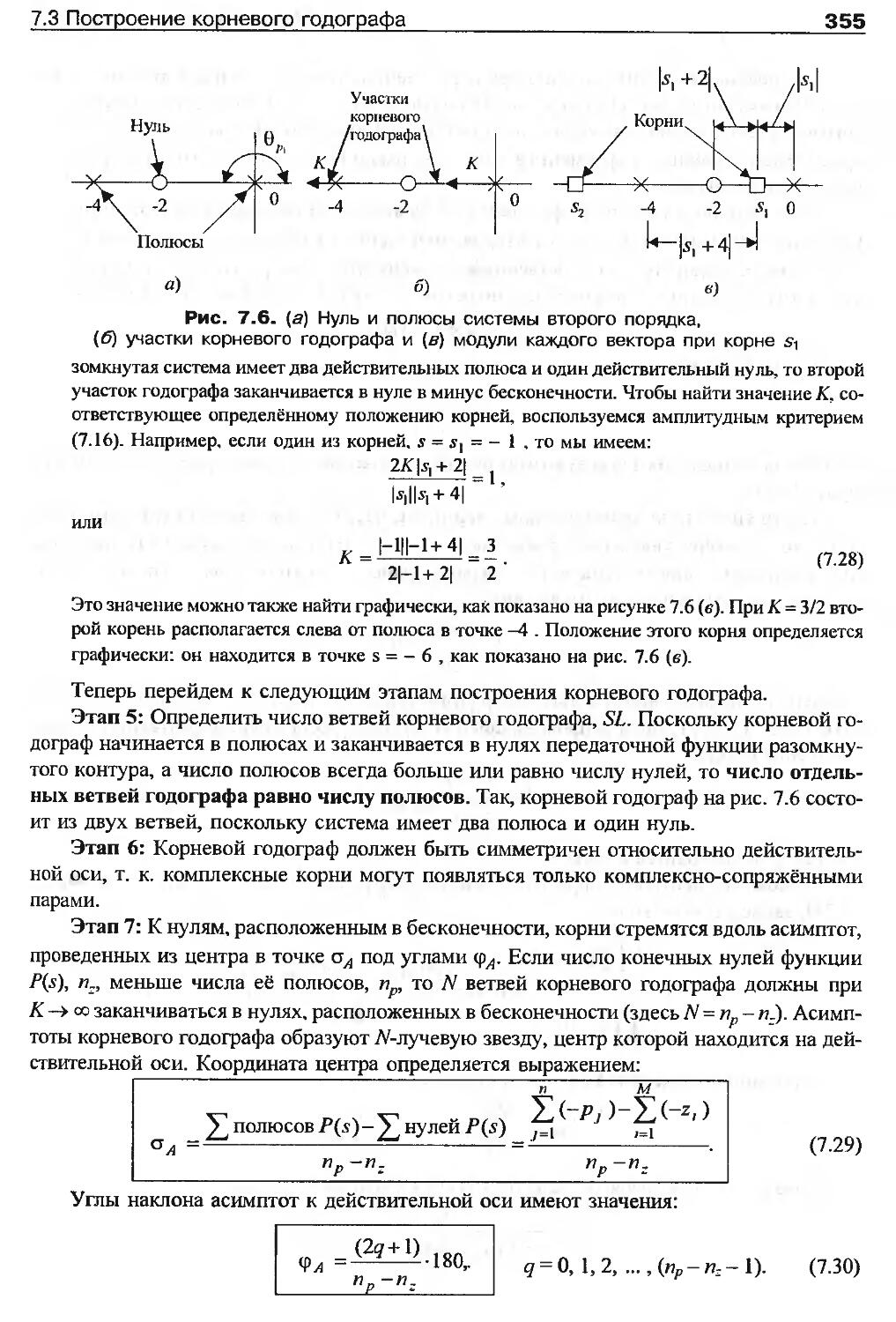
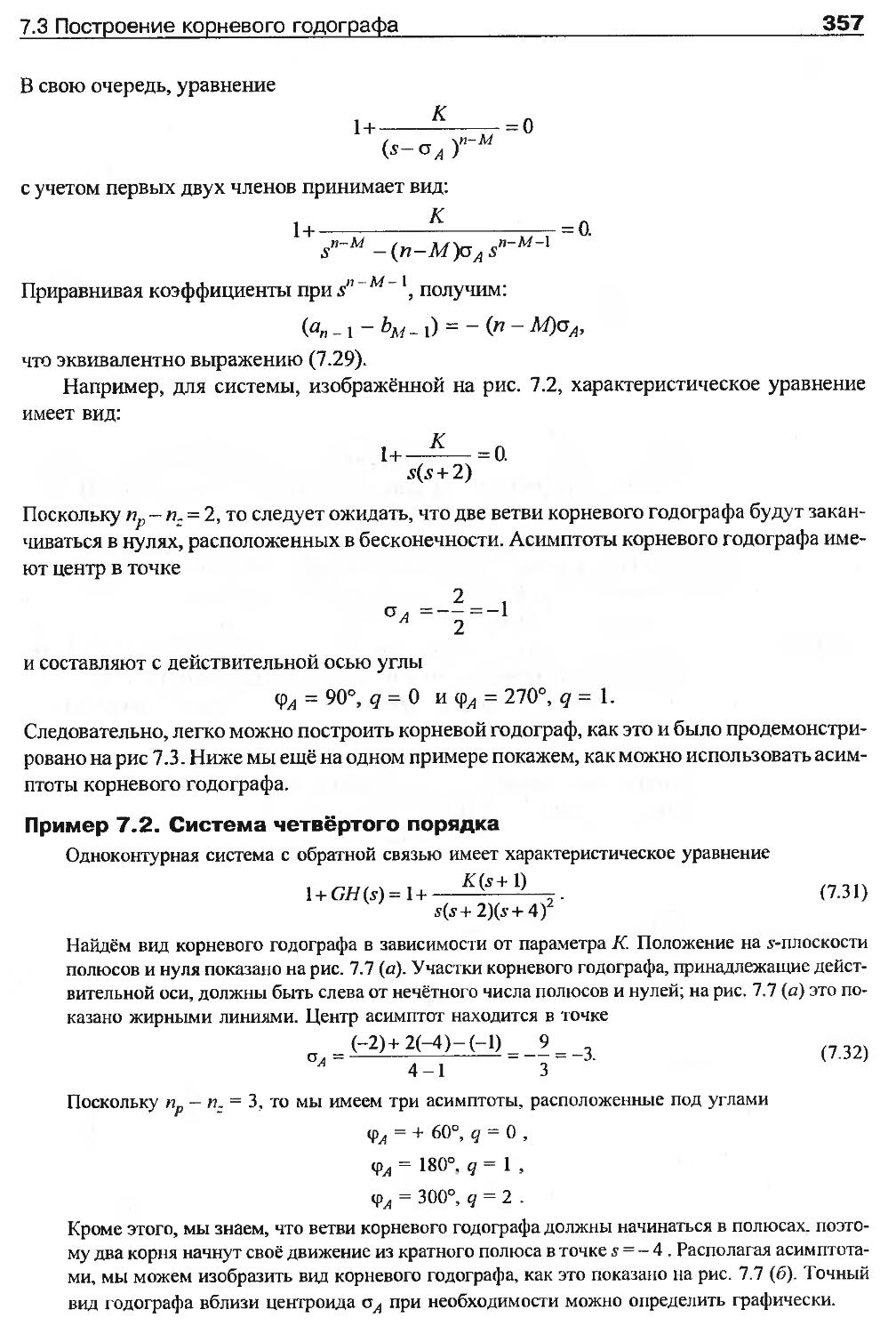
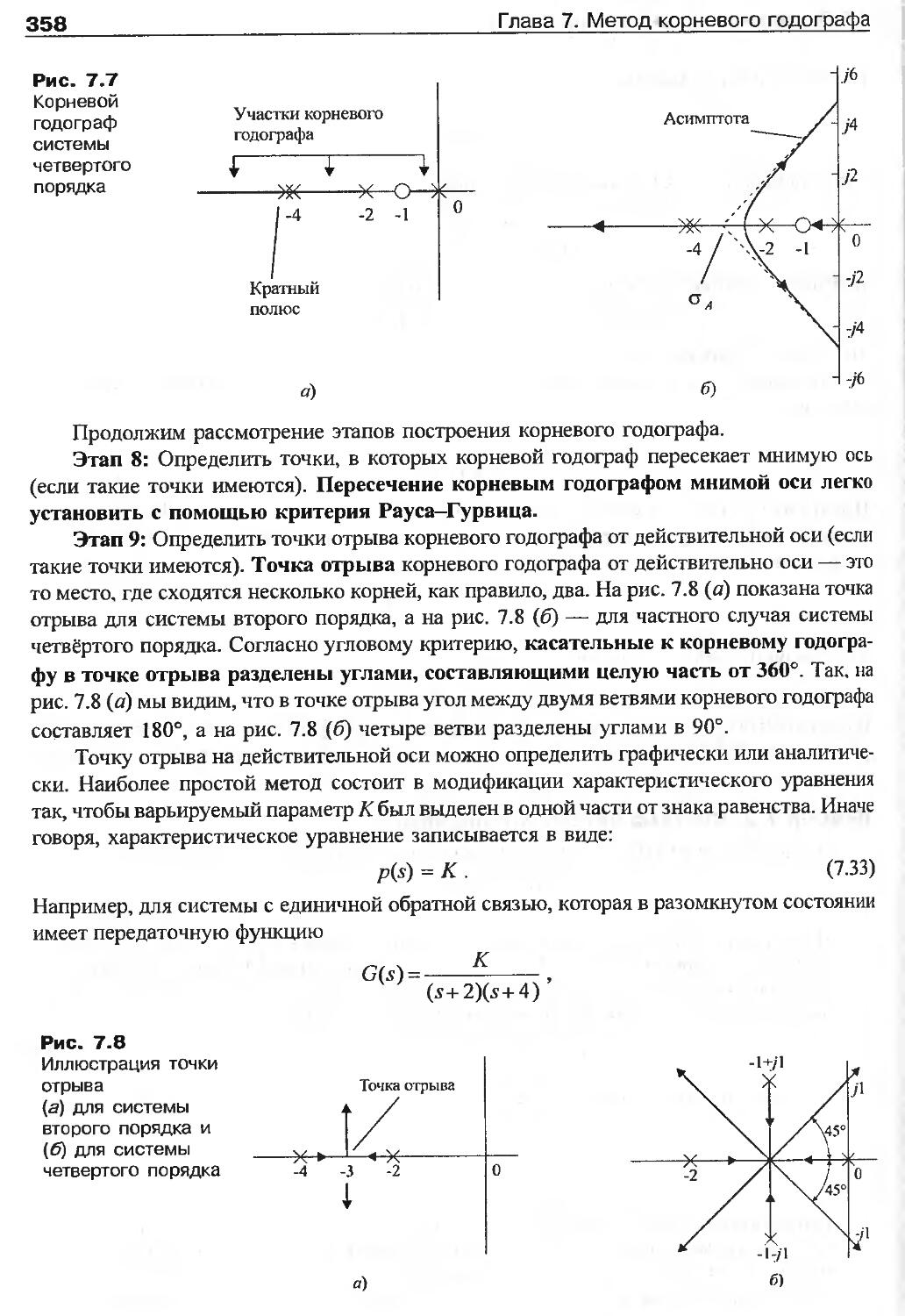
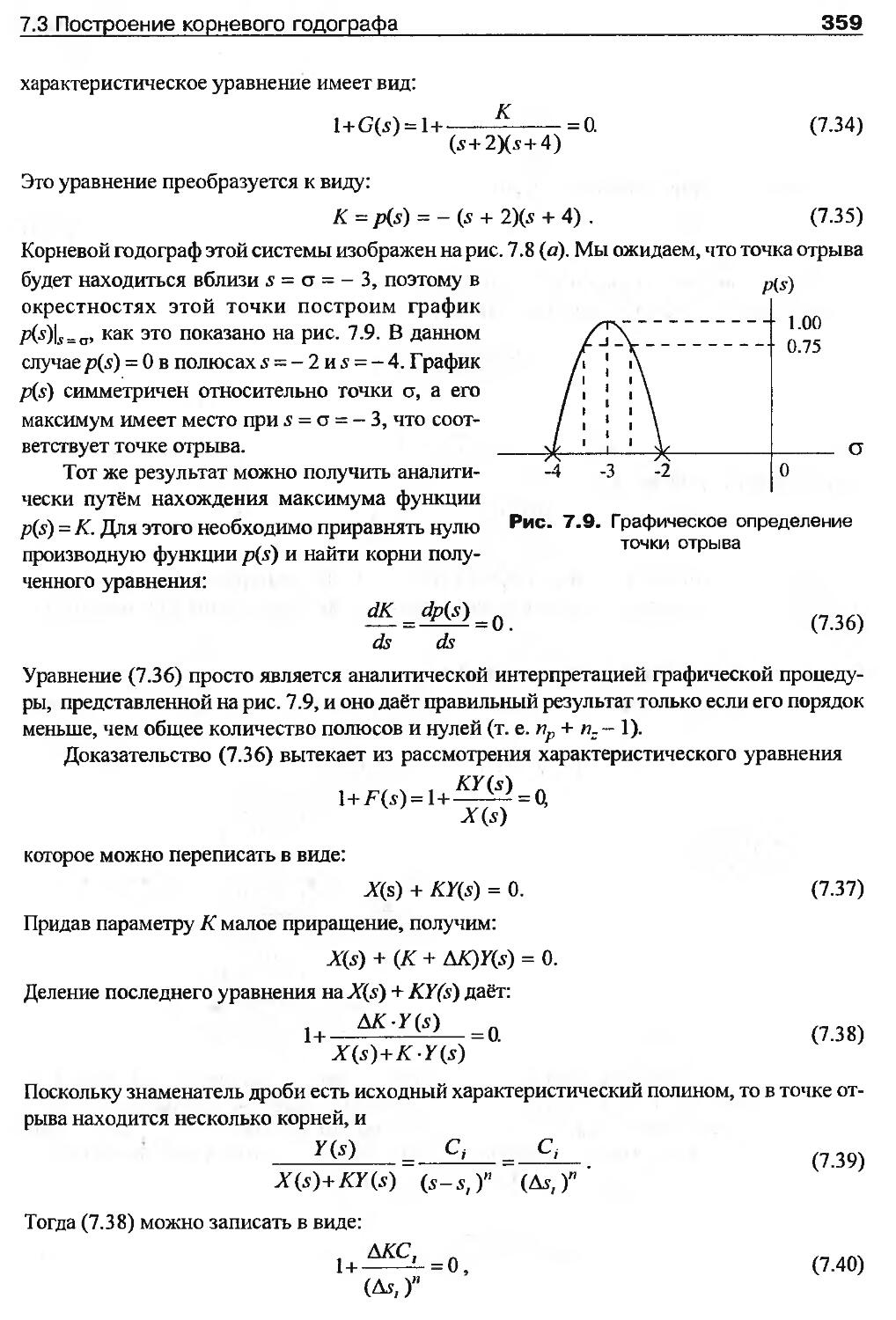
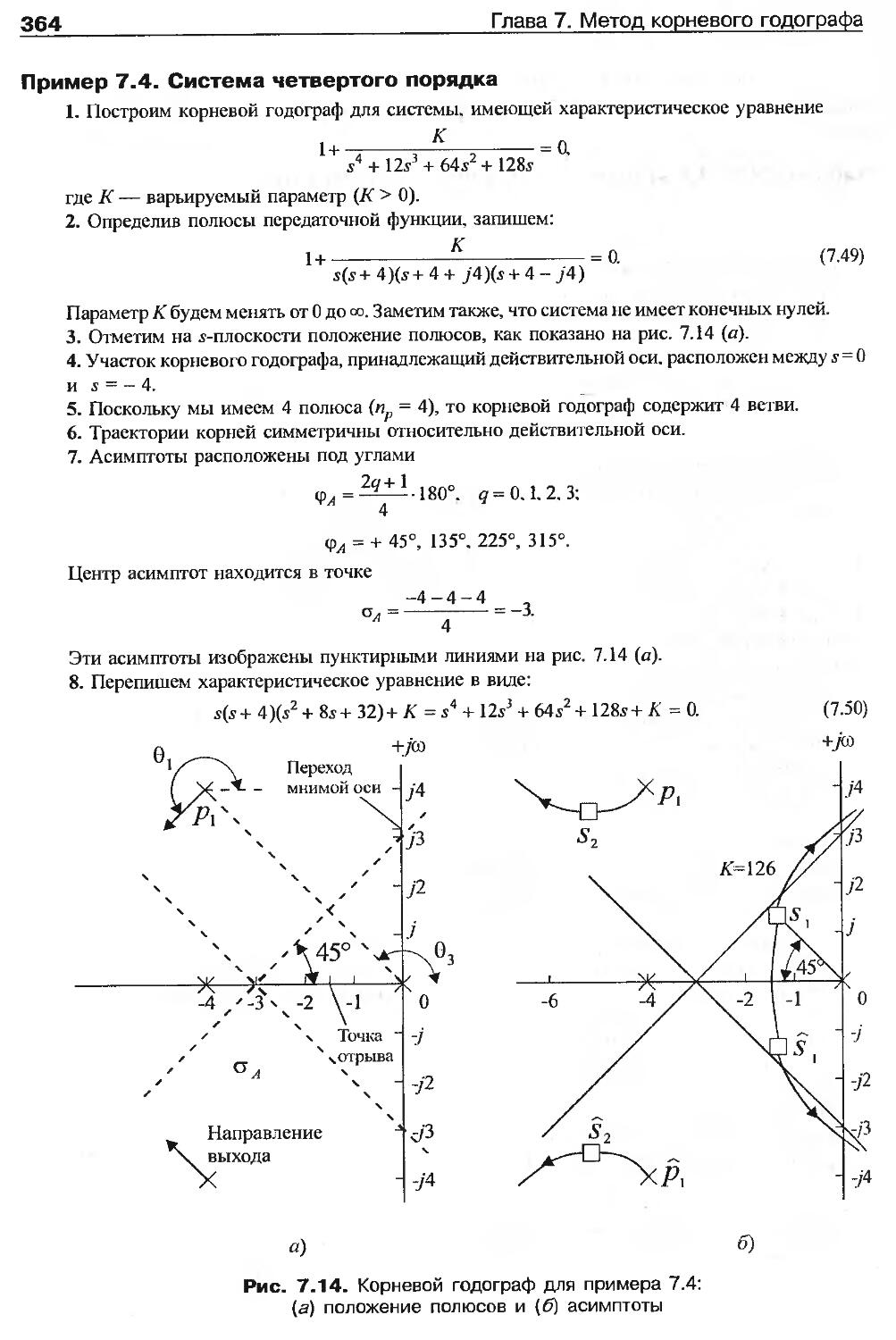
7.3. Построение корневого годографа................................353
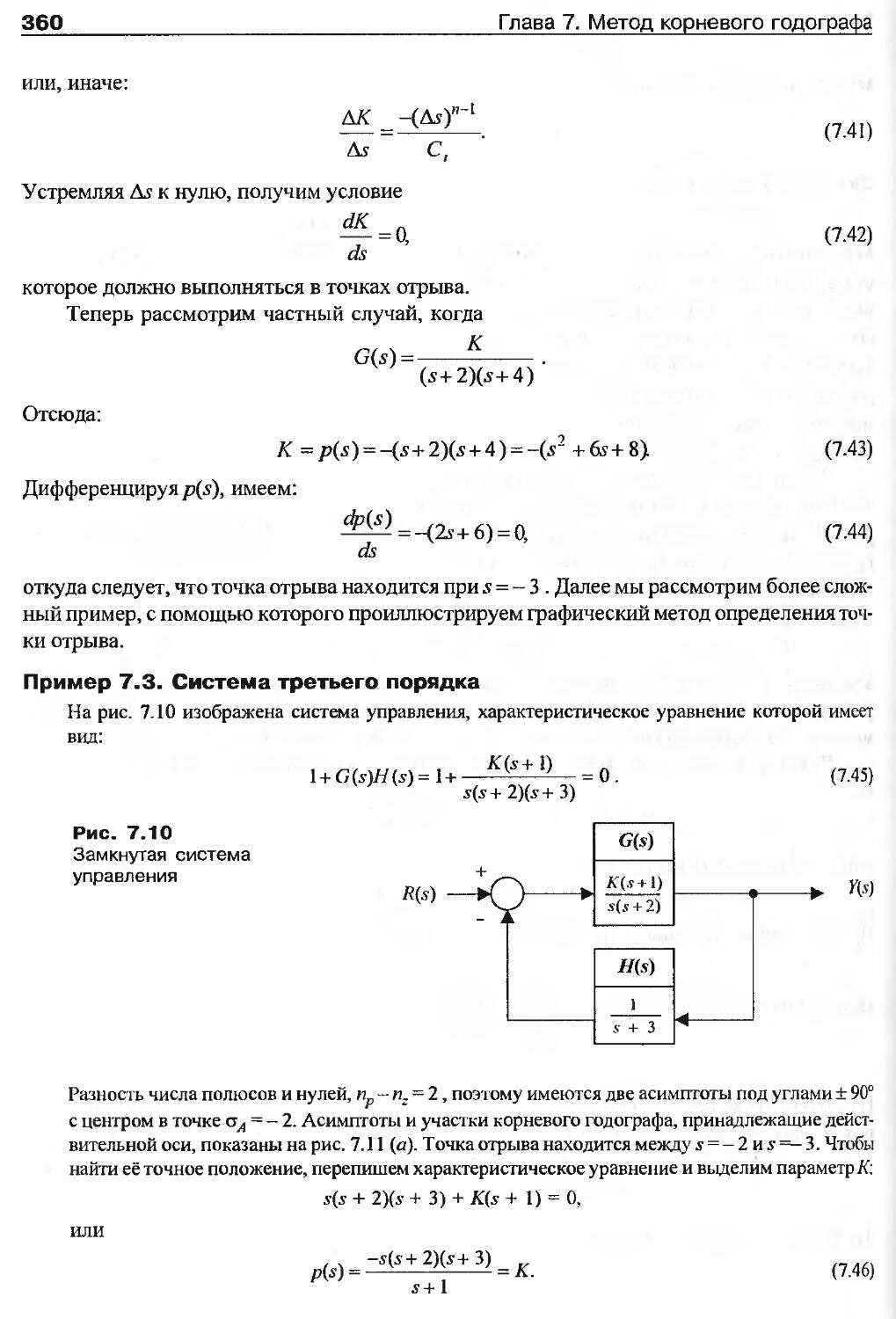
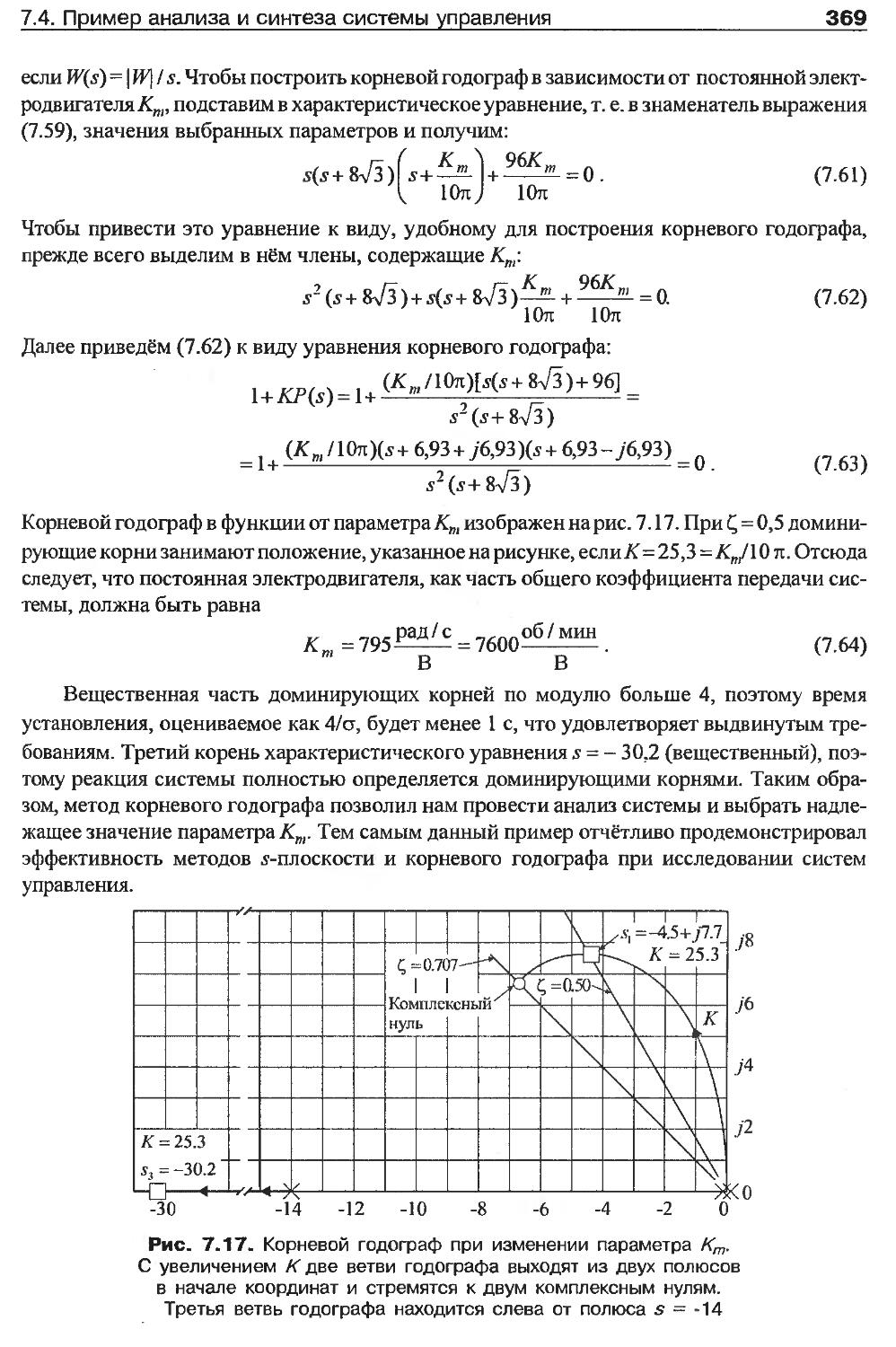
7.4. Пример анализа и синтеза системы управления с помощью метода корневого годографа................................................366
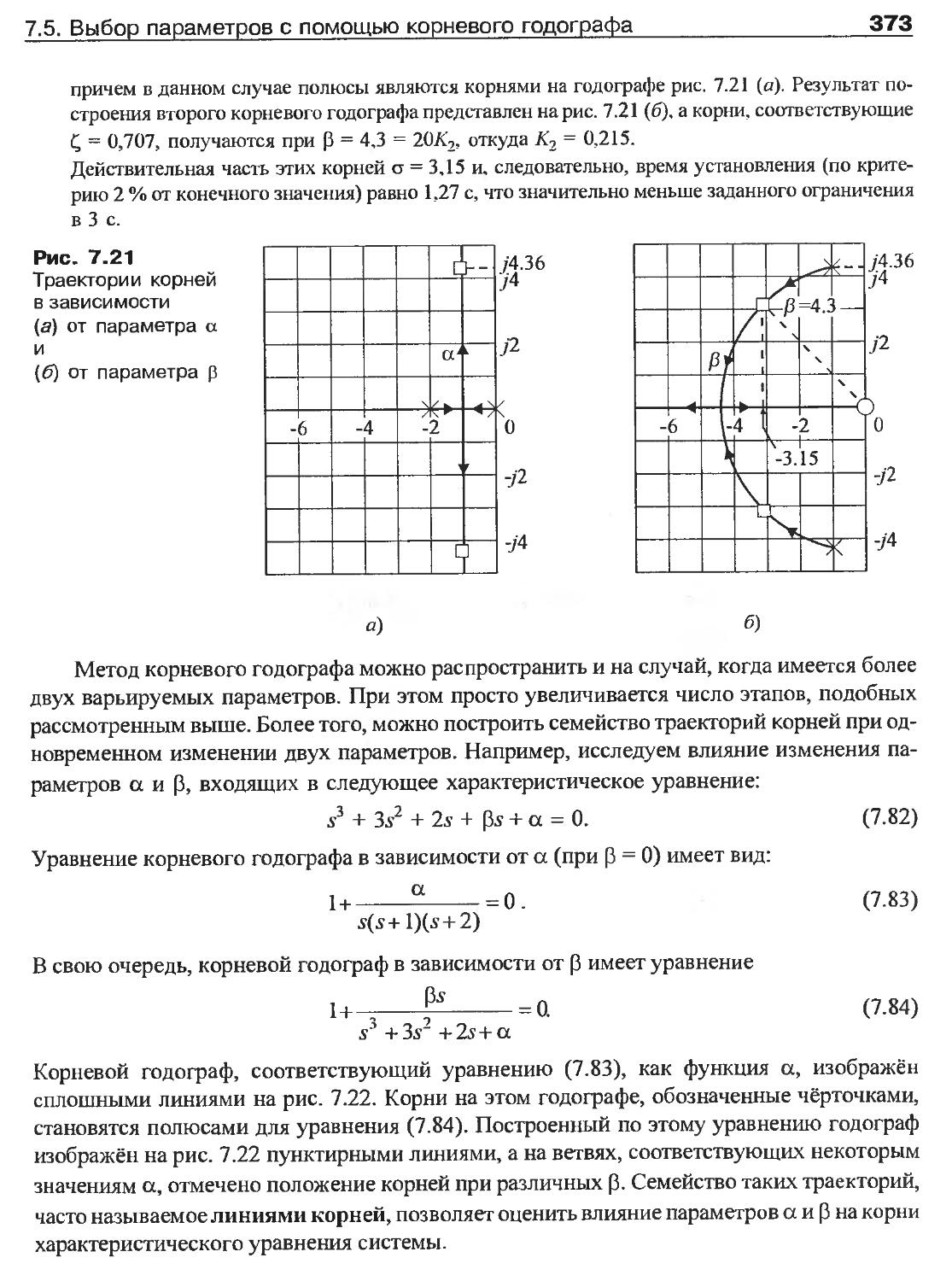
7.5. Выбор параметров с помощью корневого годографа................370
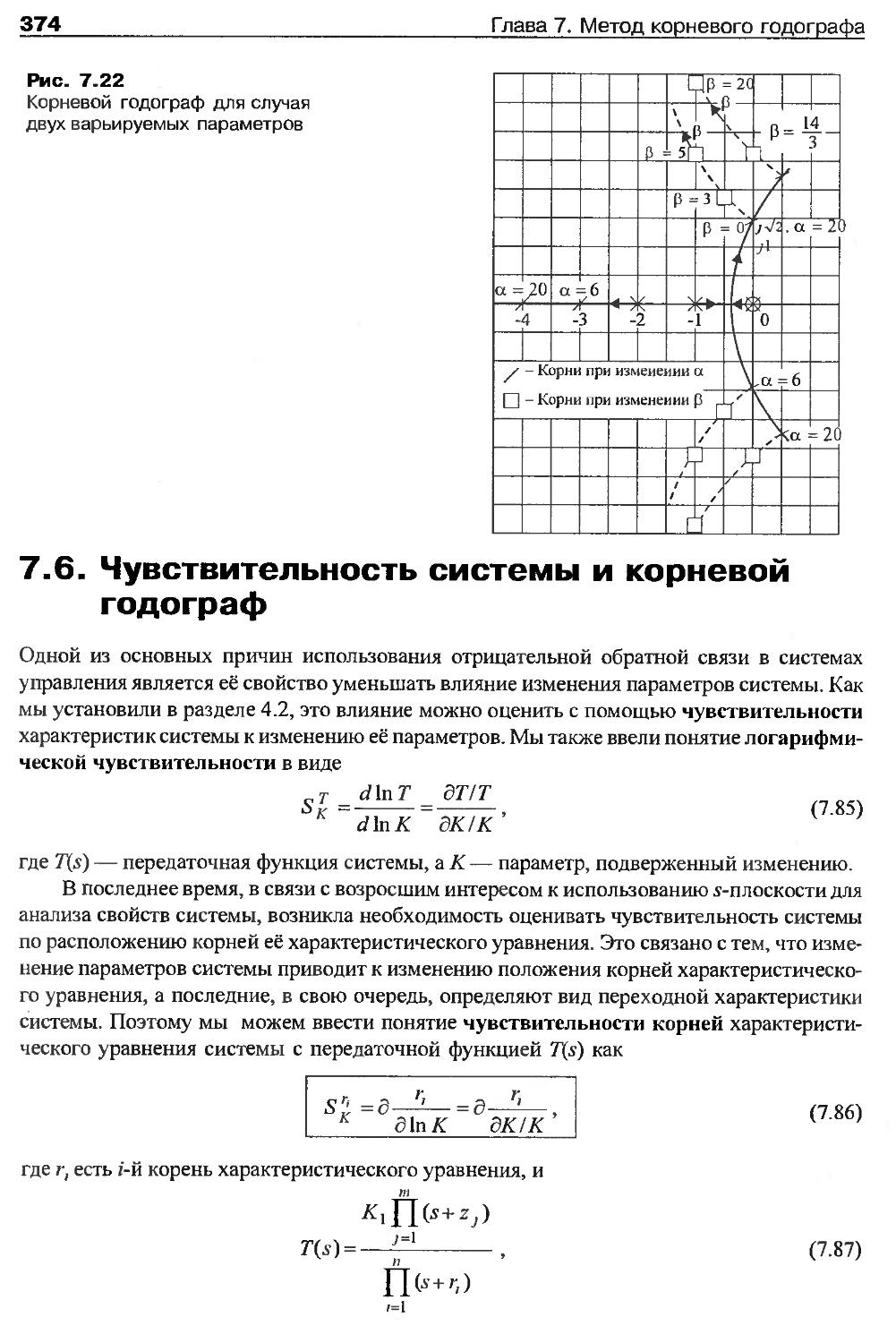
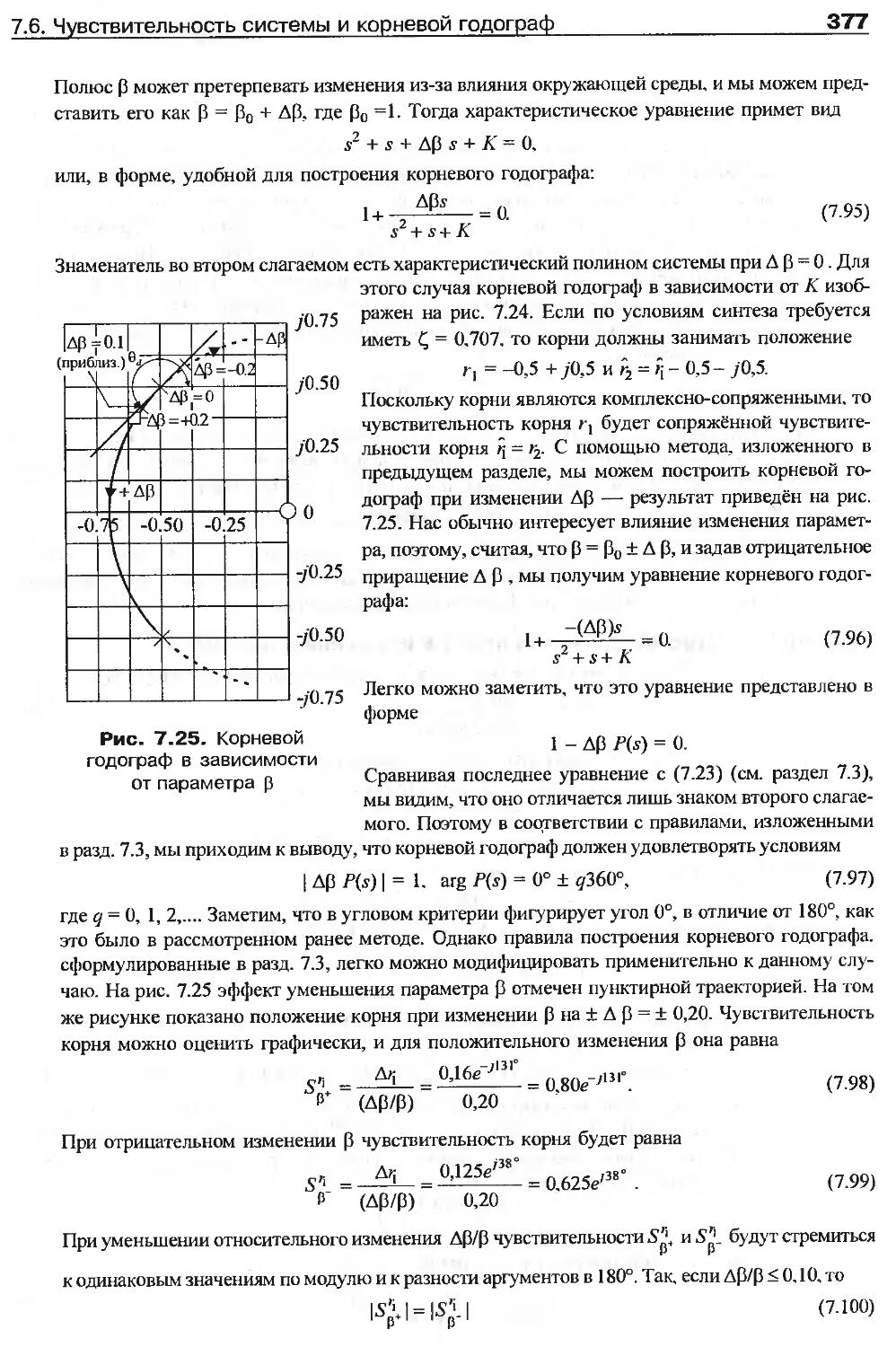
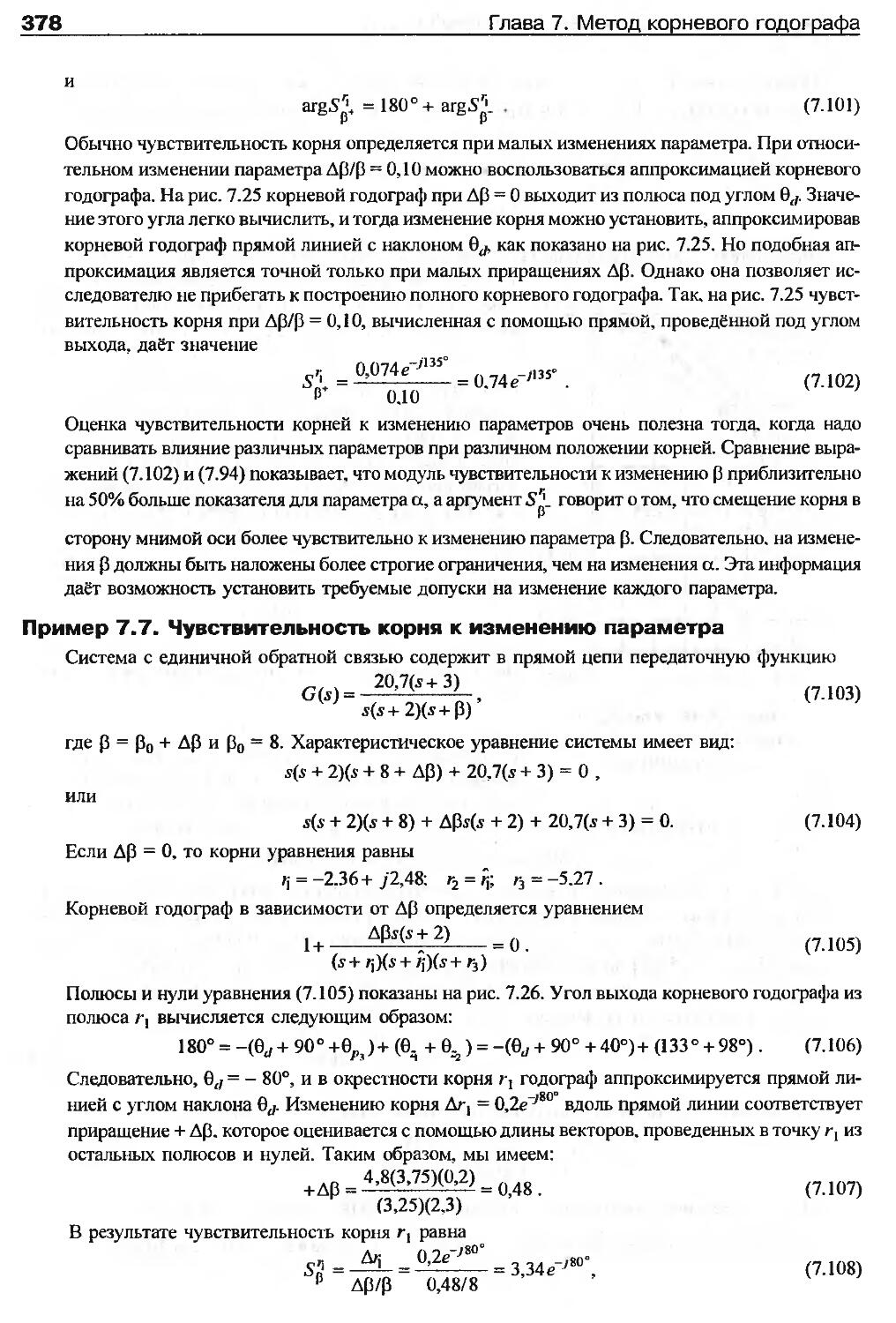
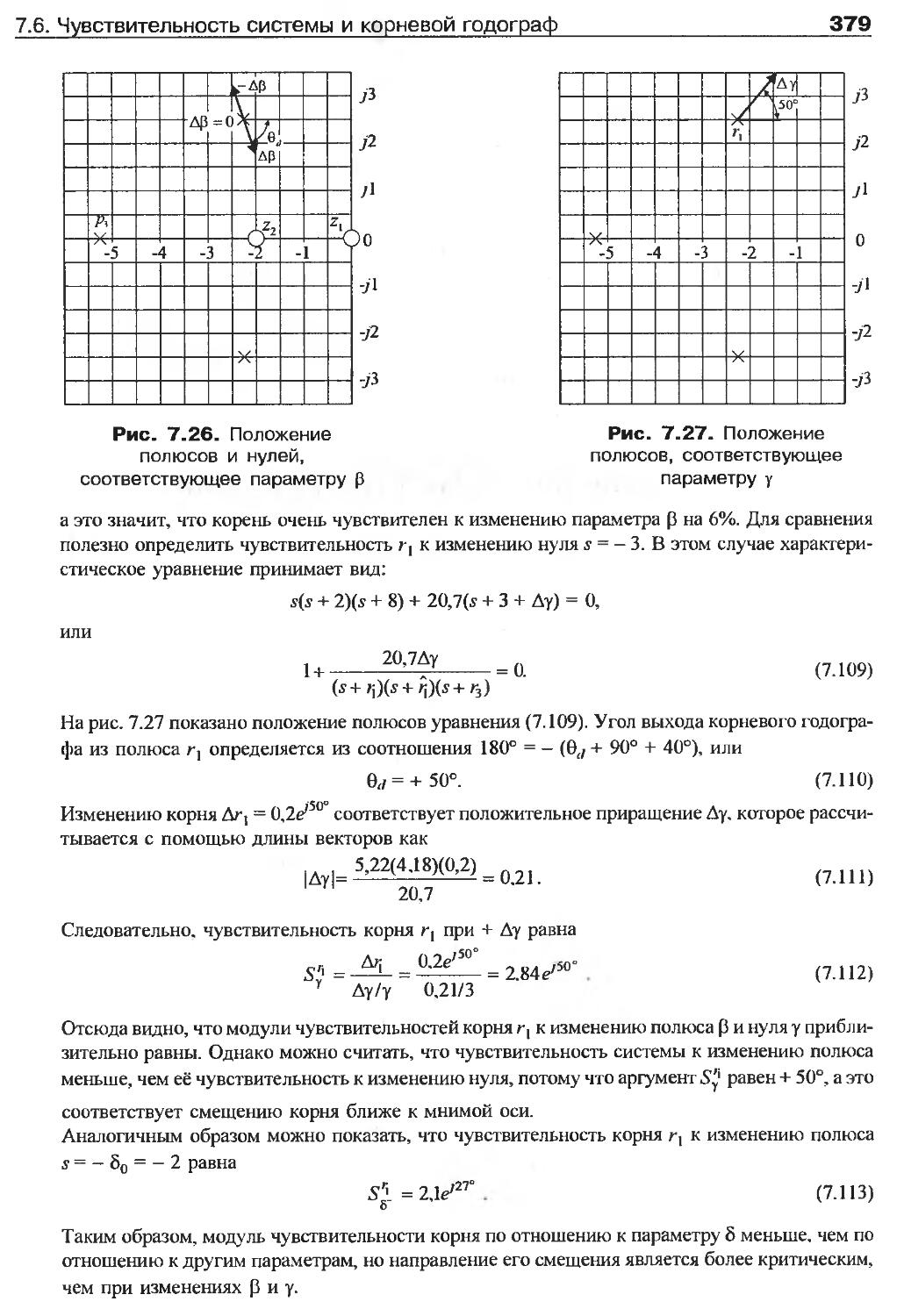
7.6. Чувствительность системы и корневой годограф..................374
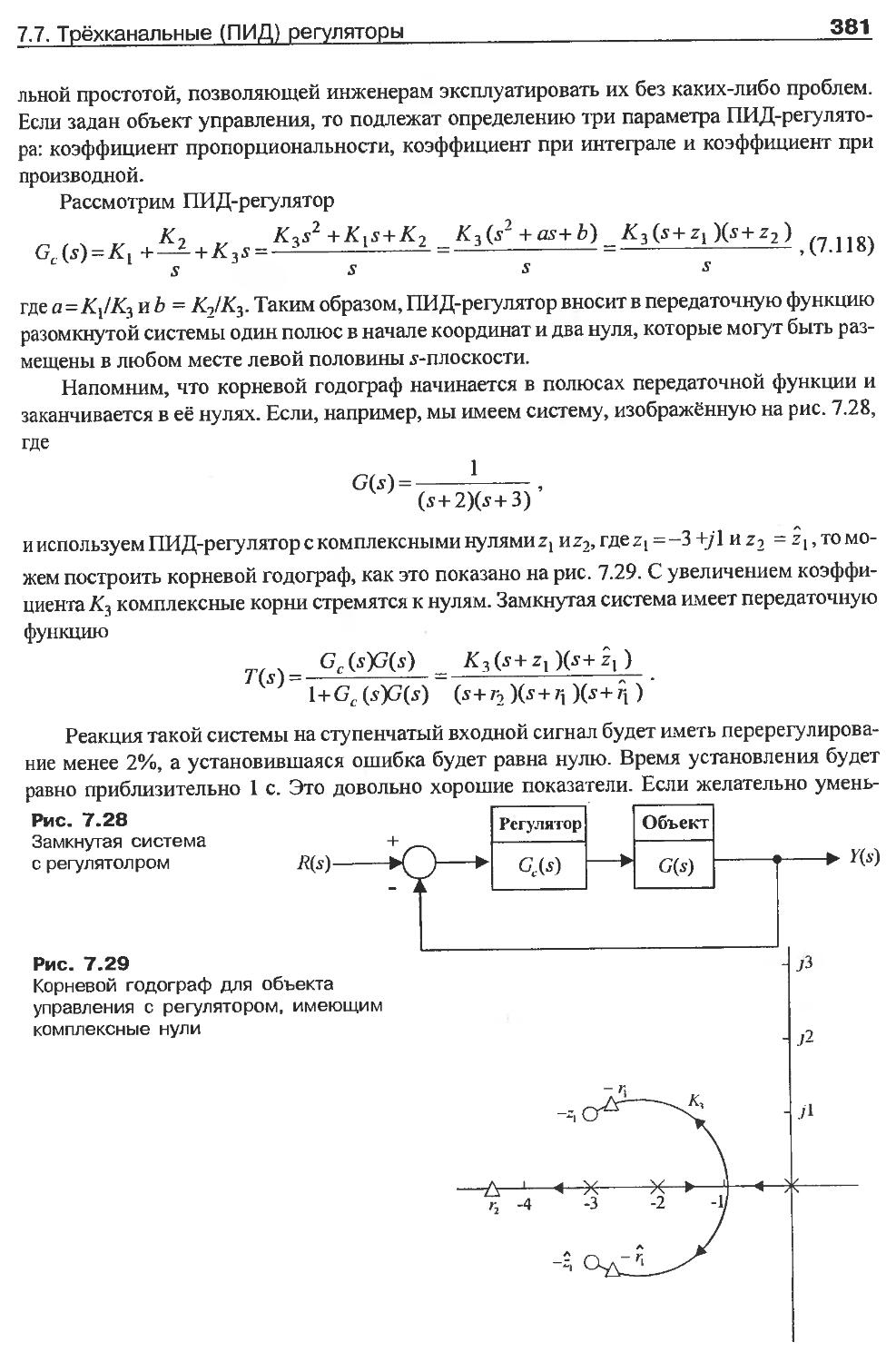
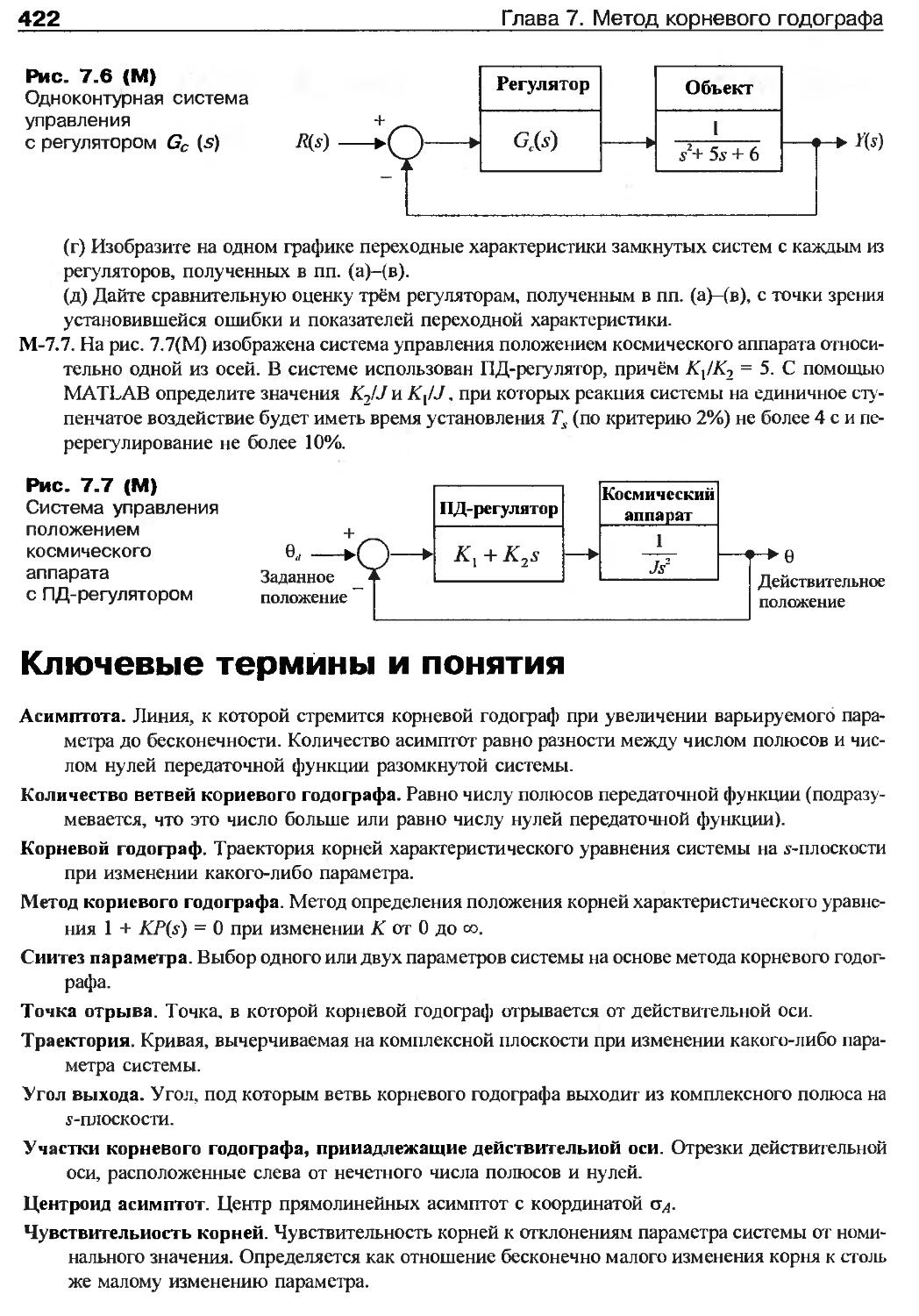
7.7. Трёхканальные (ПИД) регуляторы................................380
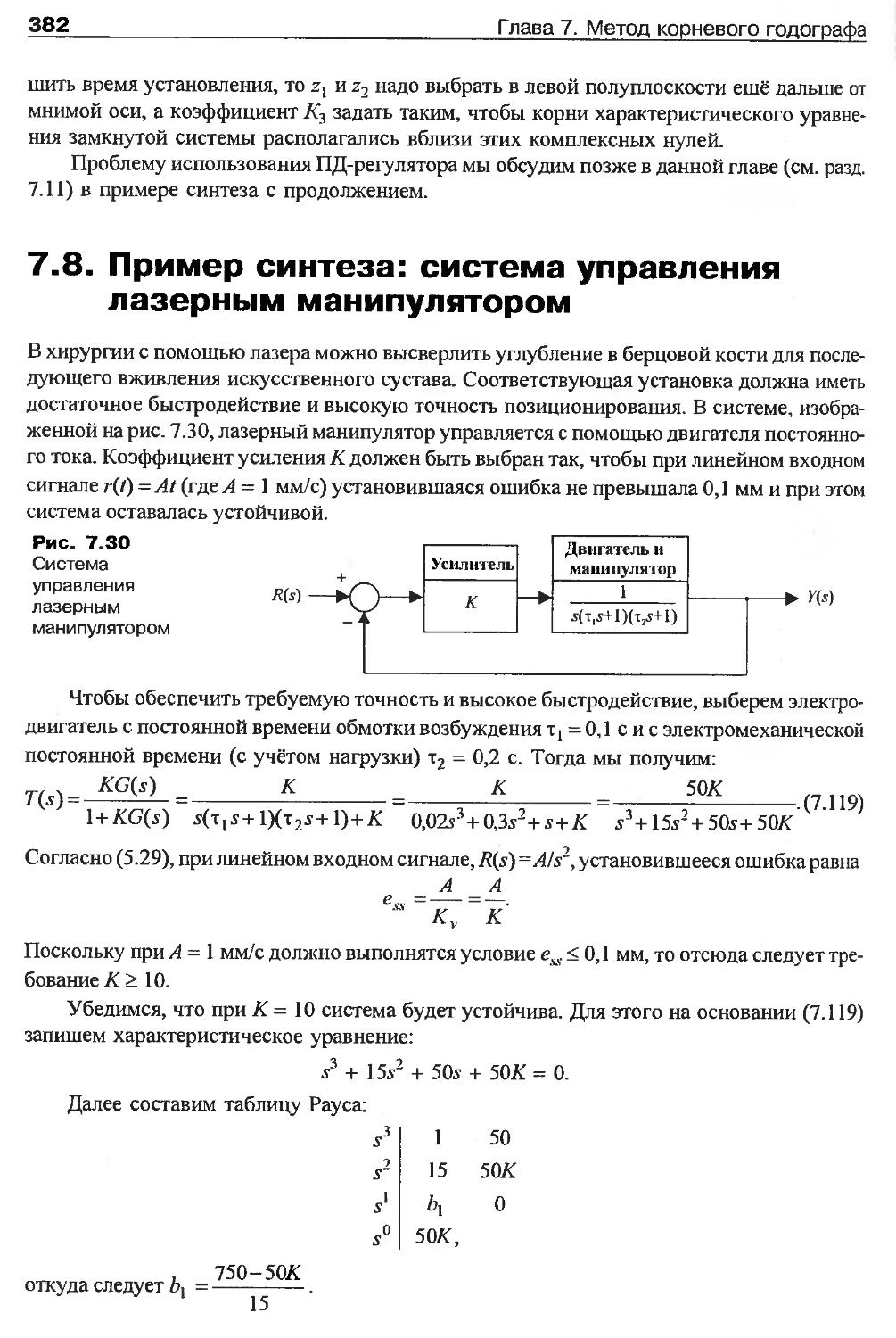
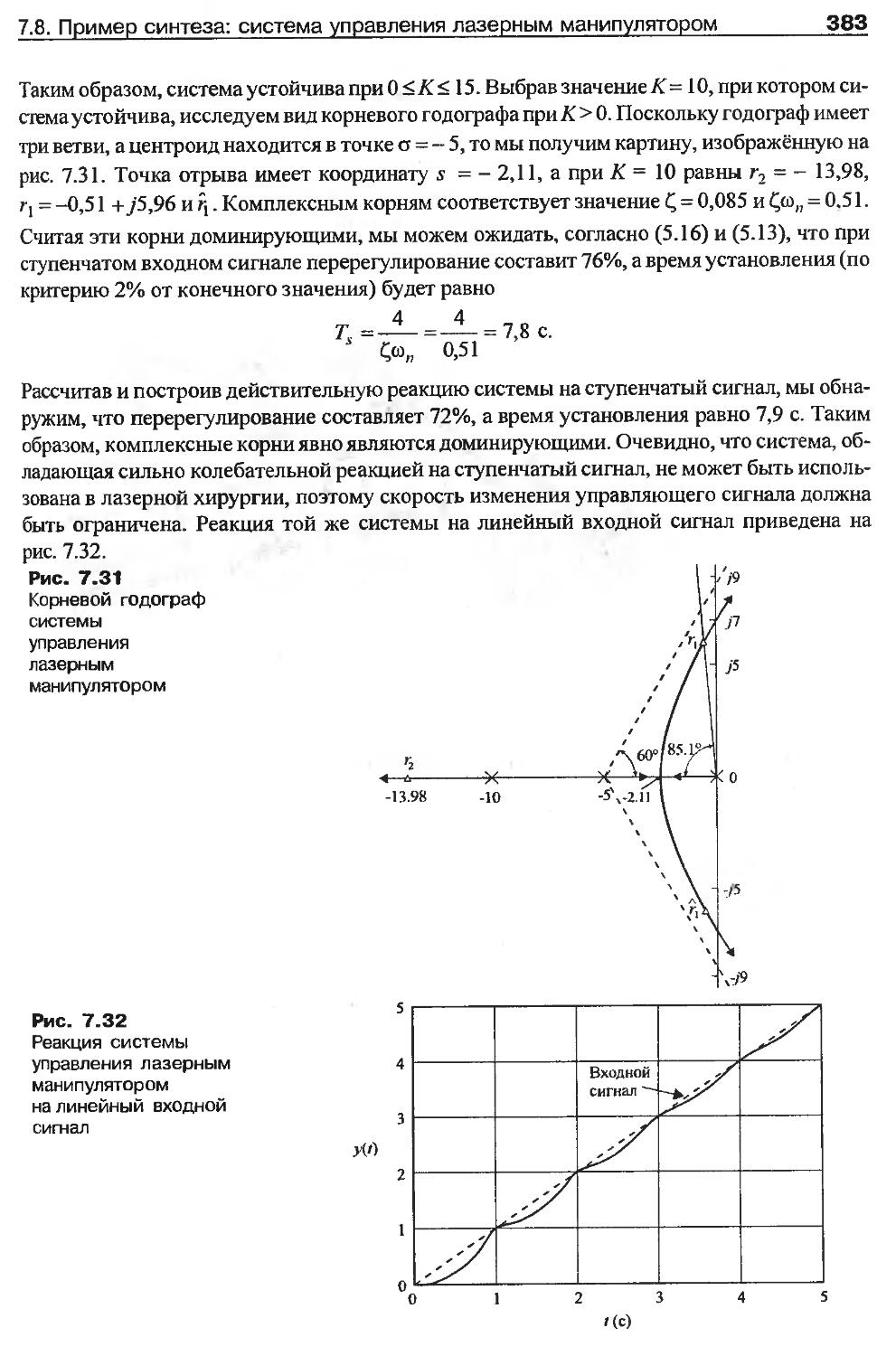
7.8. Пример синтеза: система управления лазерным манипулятором.....382
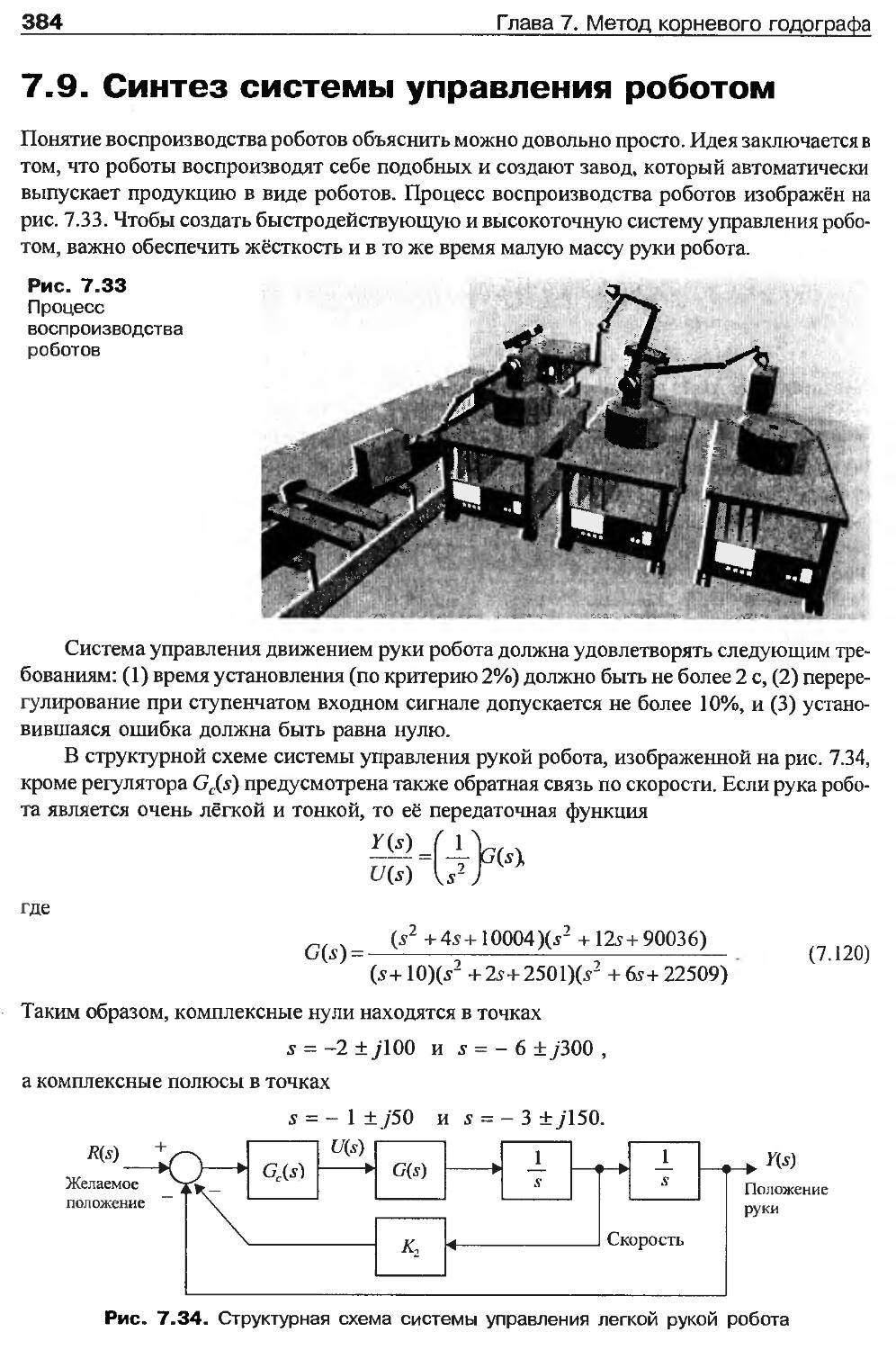
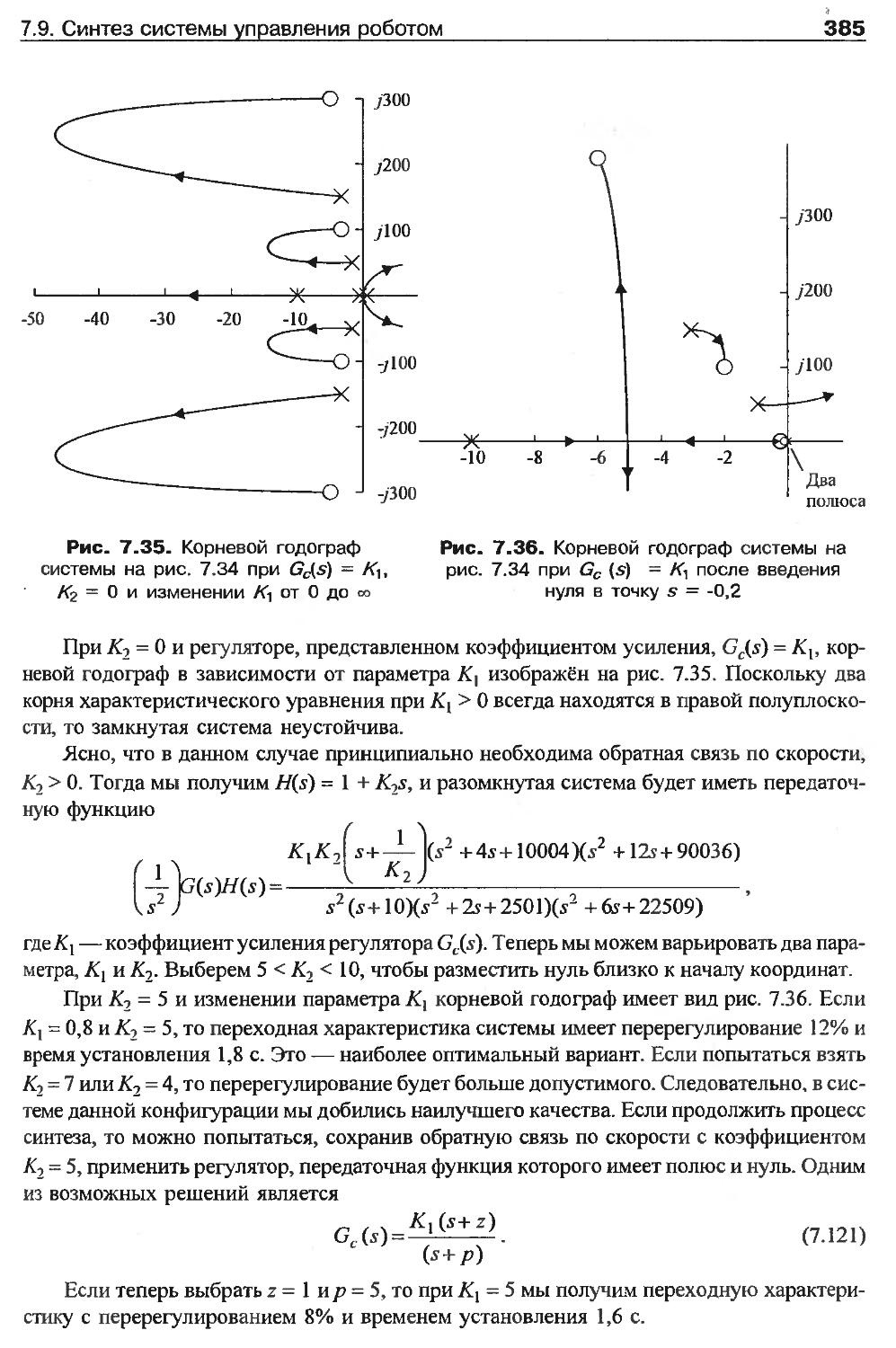
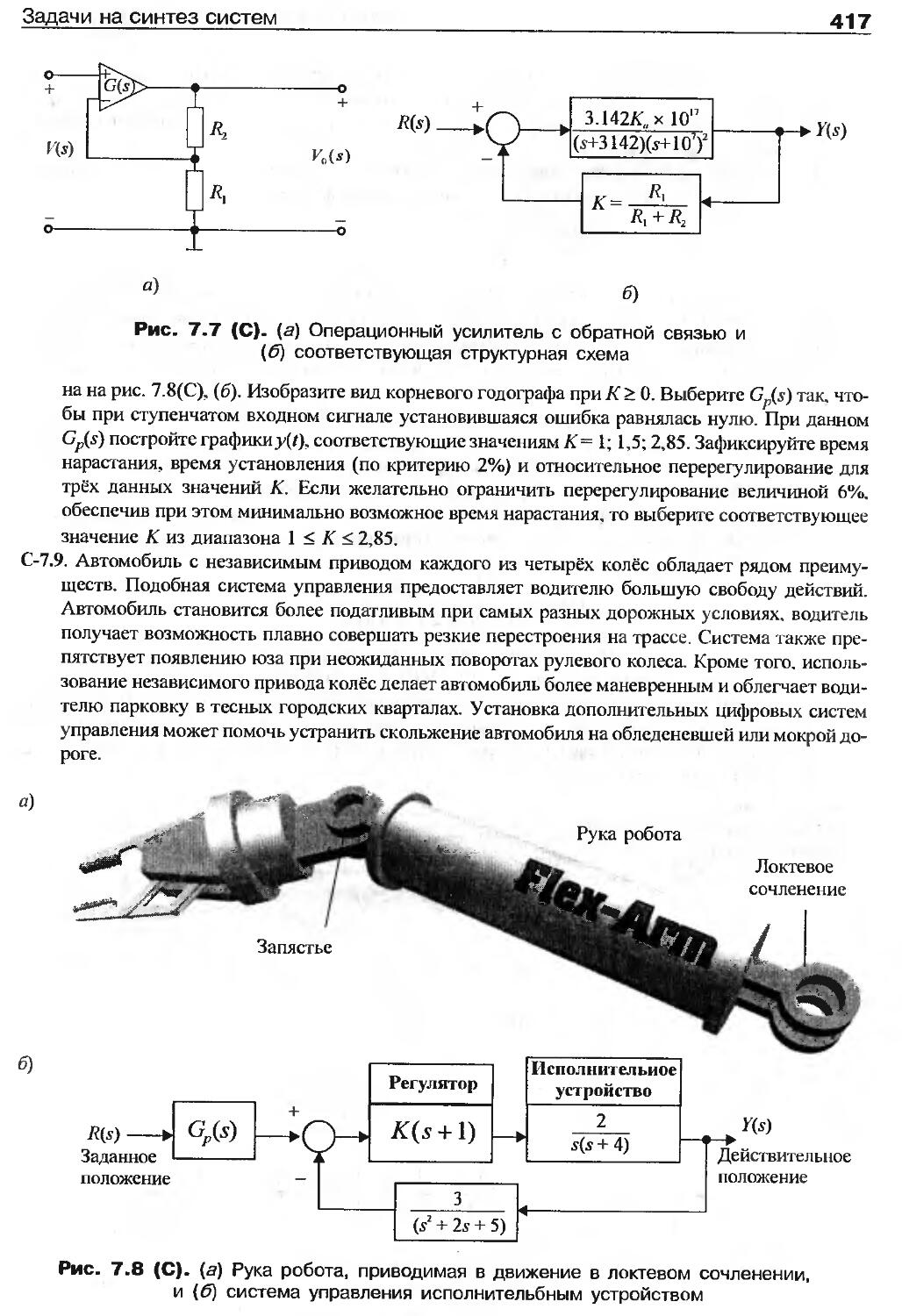
7.9. Синтез системы управления роботом.............................384
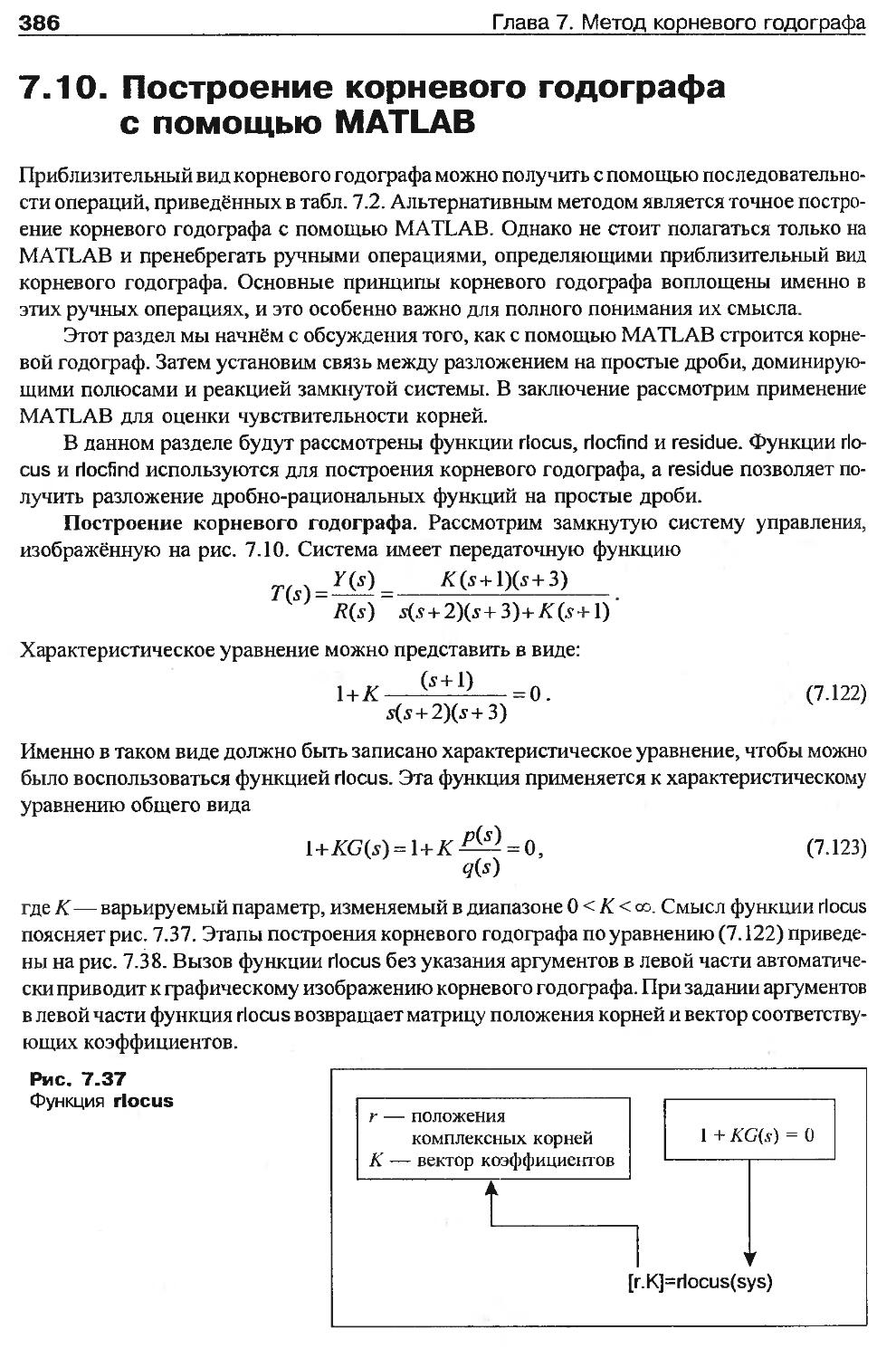
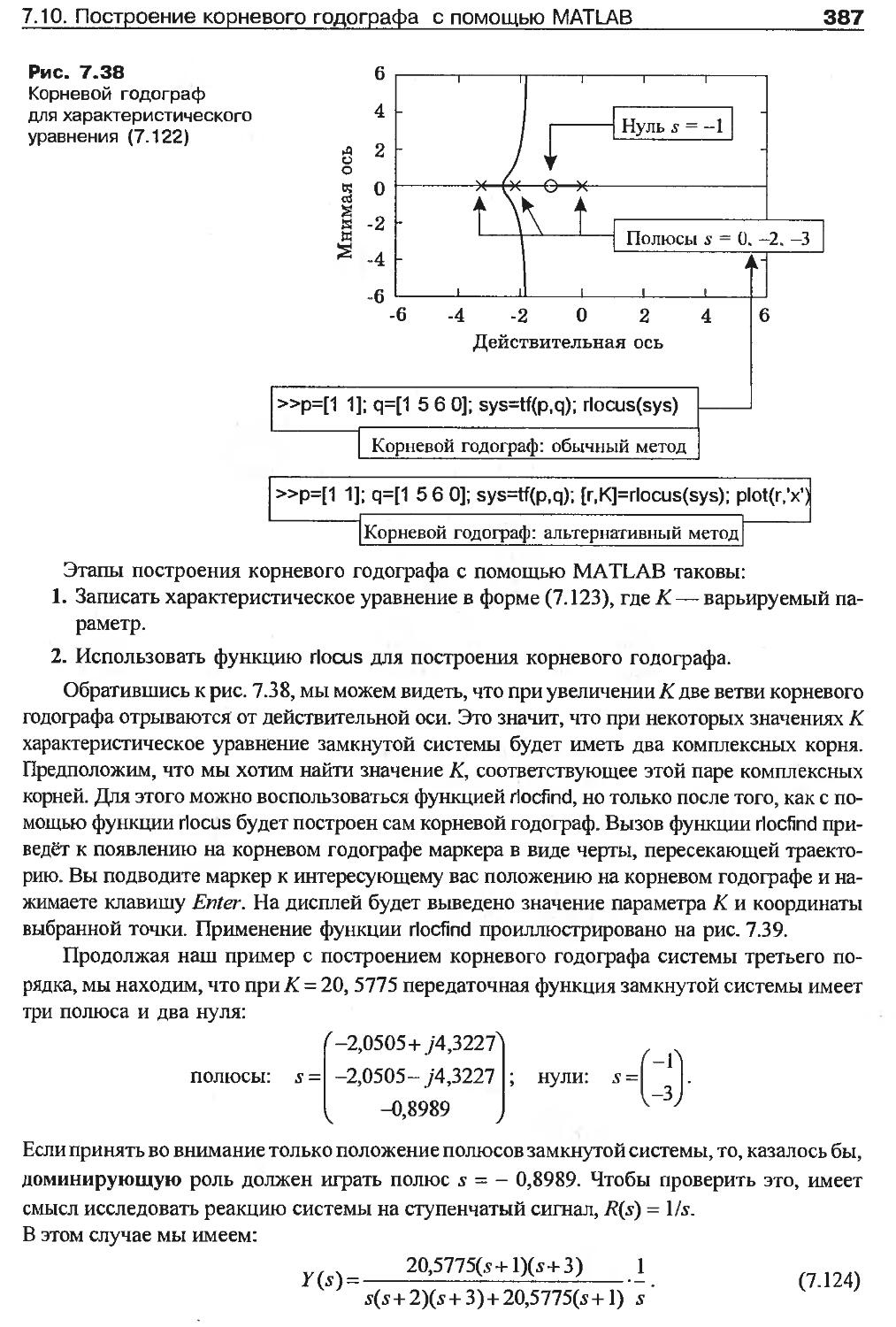
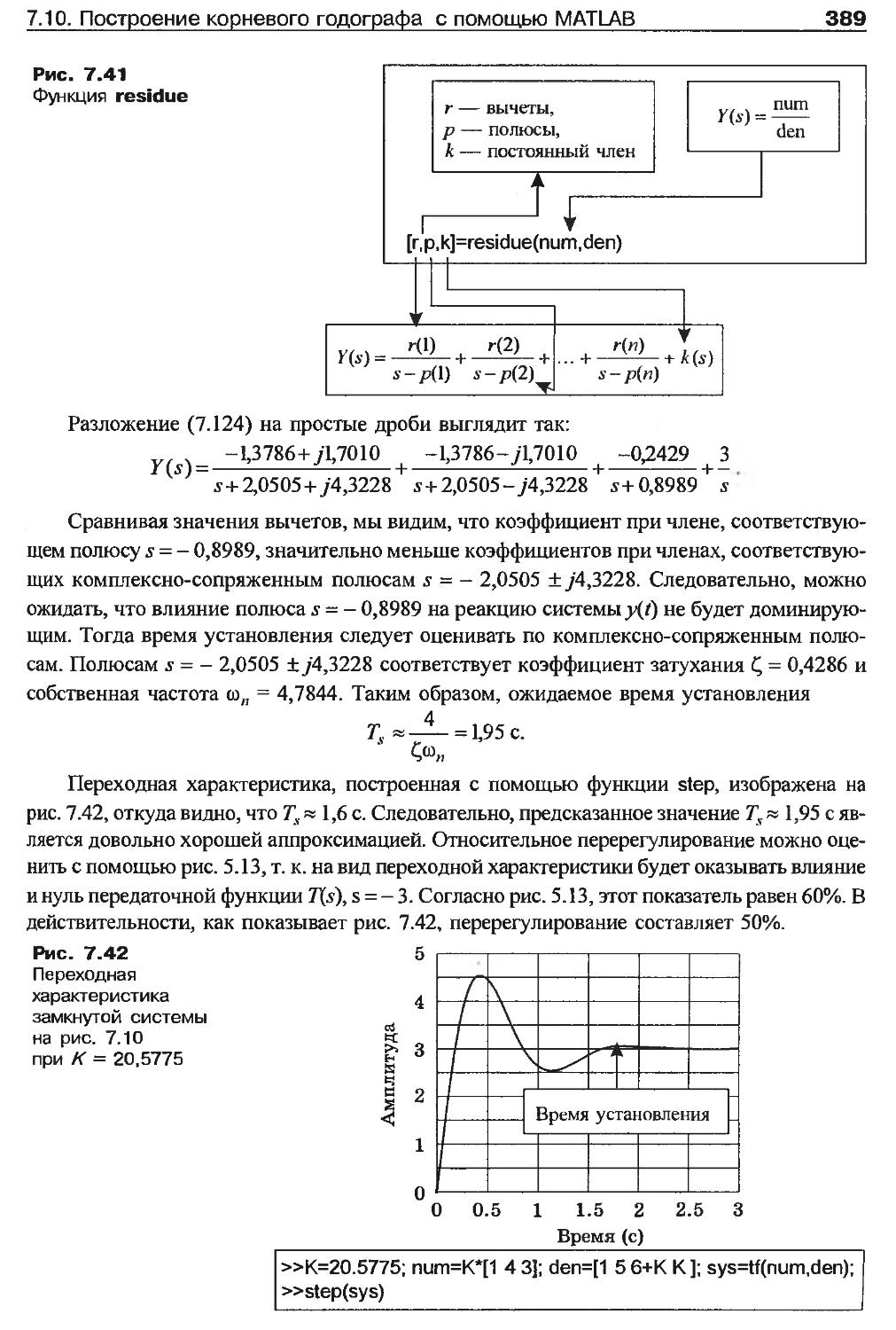
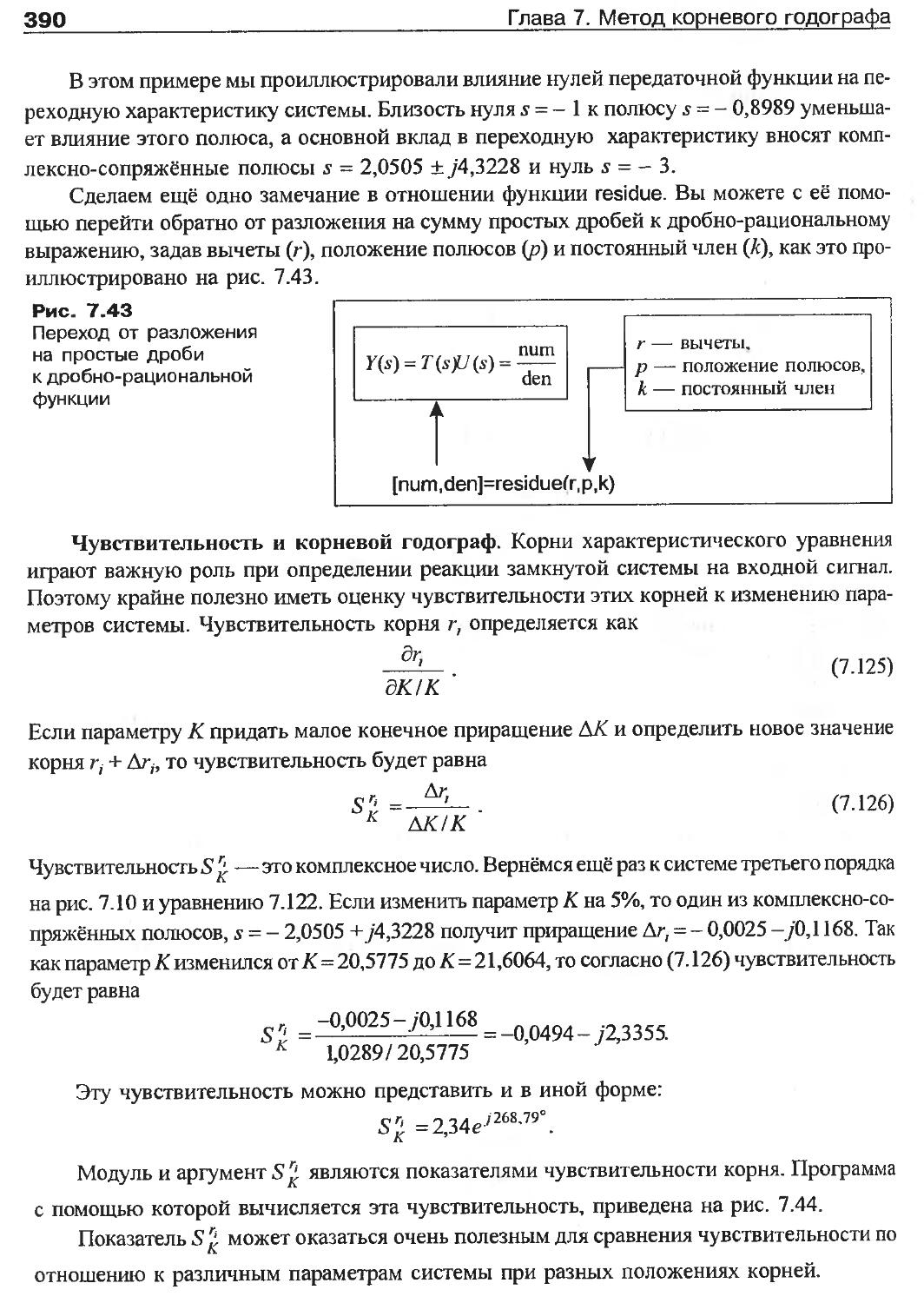
7.10. Построение корневого годографа с помощью MATLAB..............386
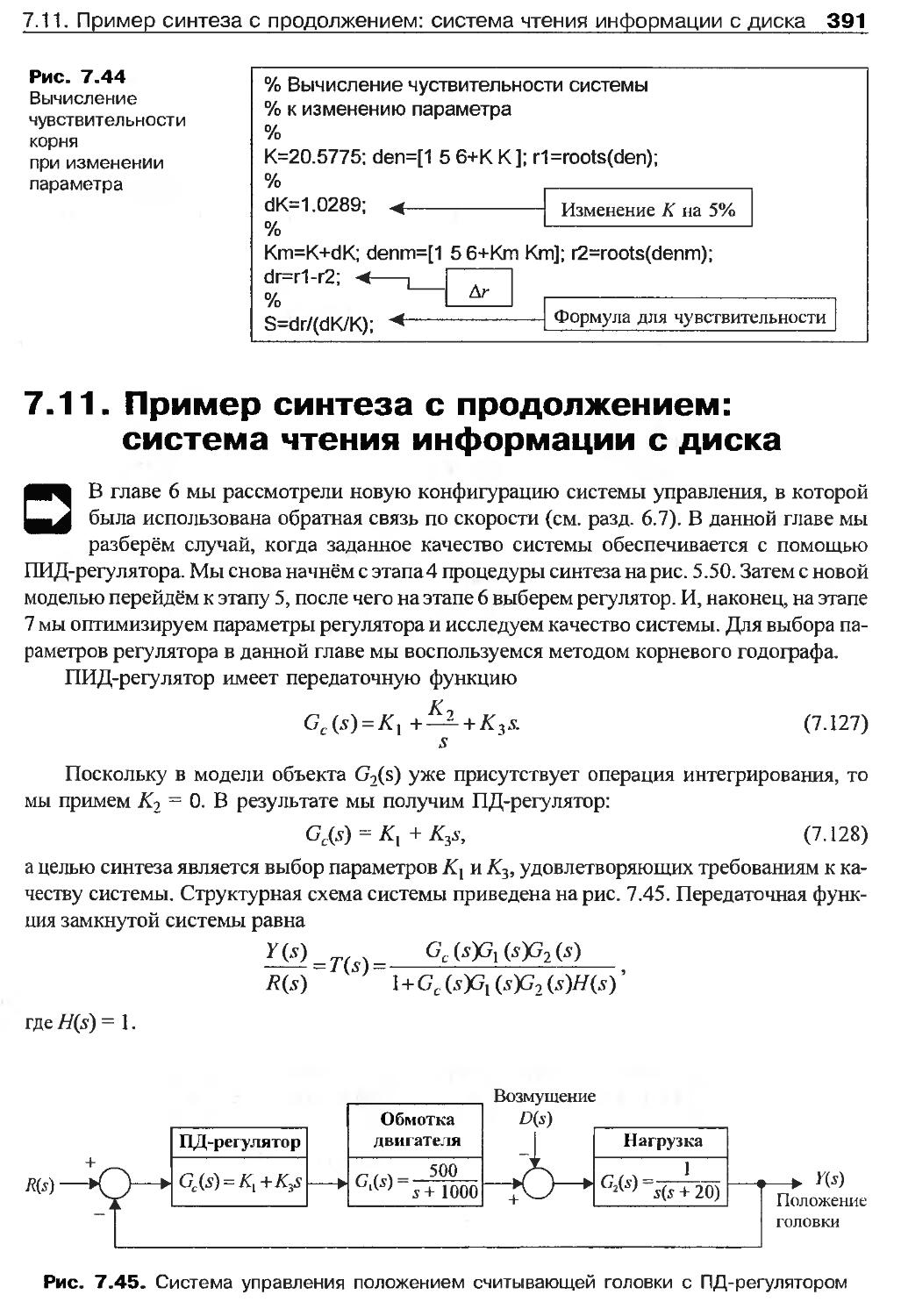
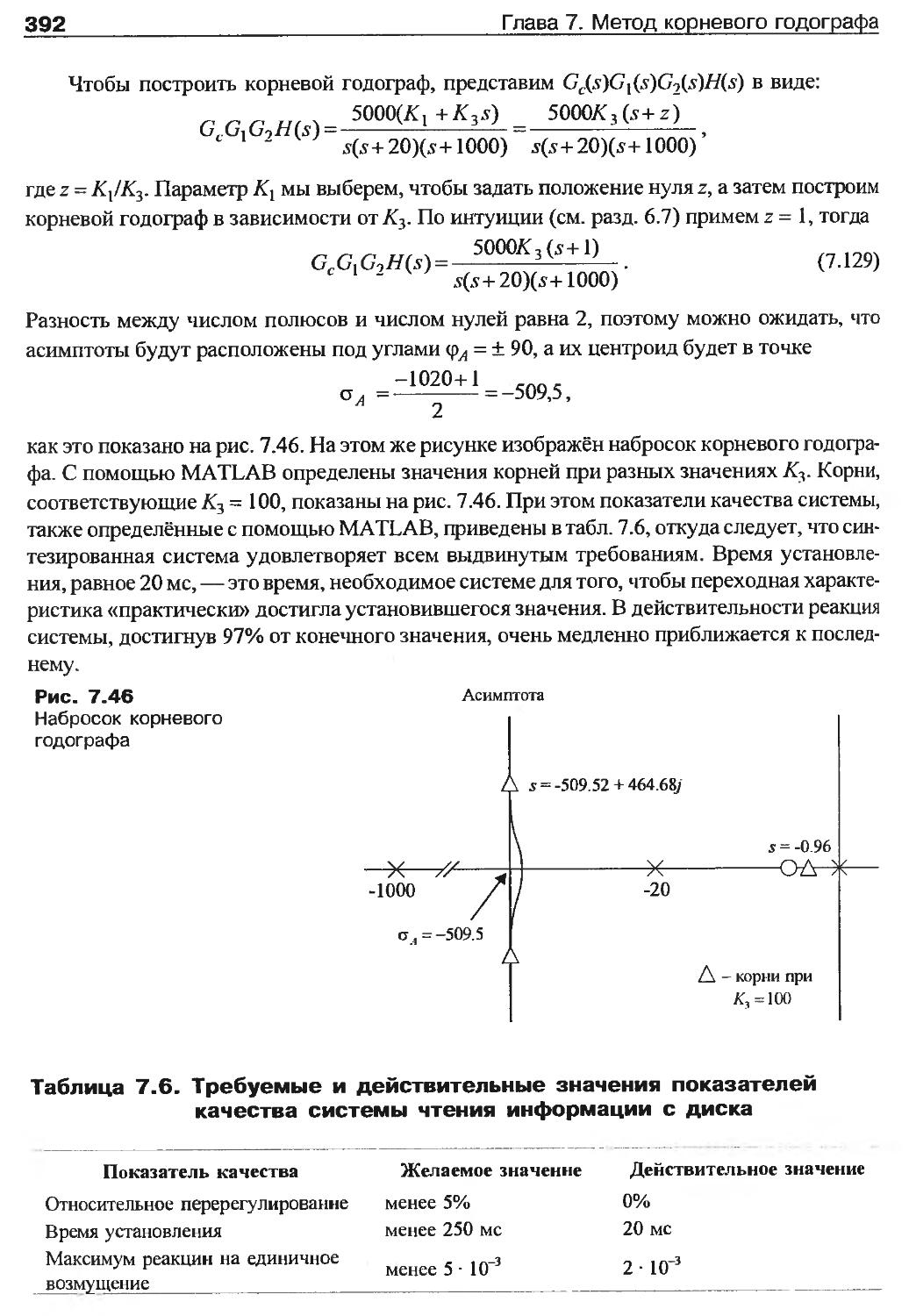
7.11. Пример синтеза с продолжением: система чтения информации с диска. . . 391
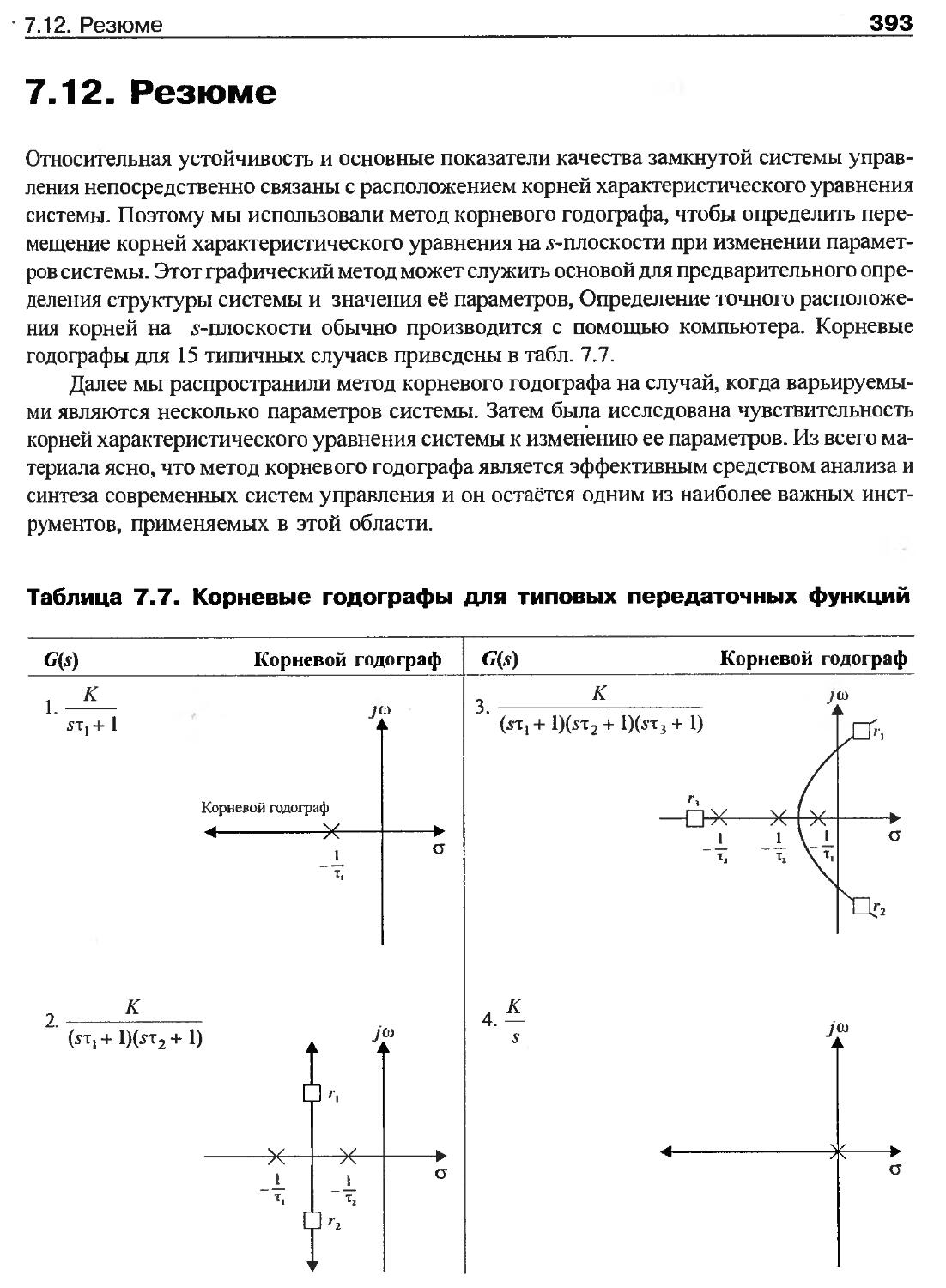
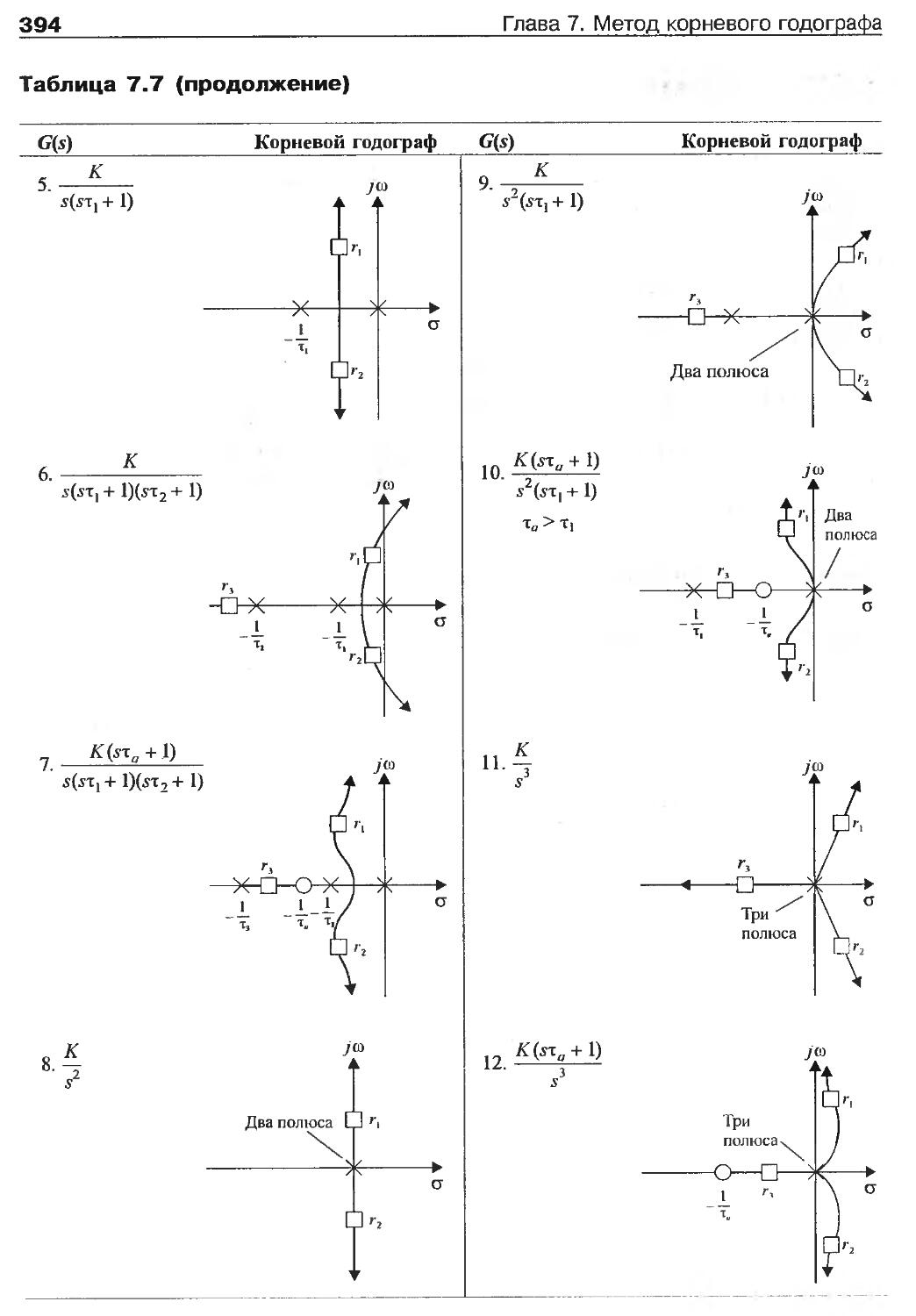
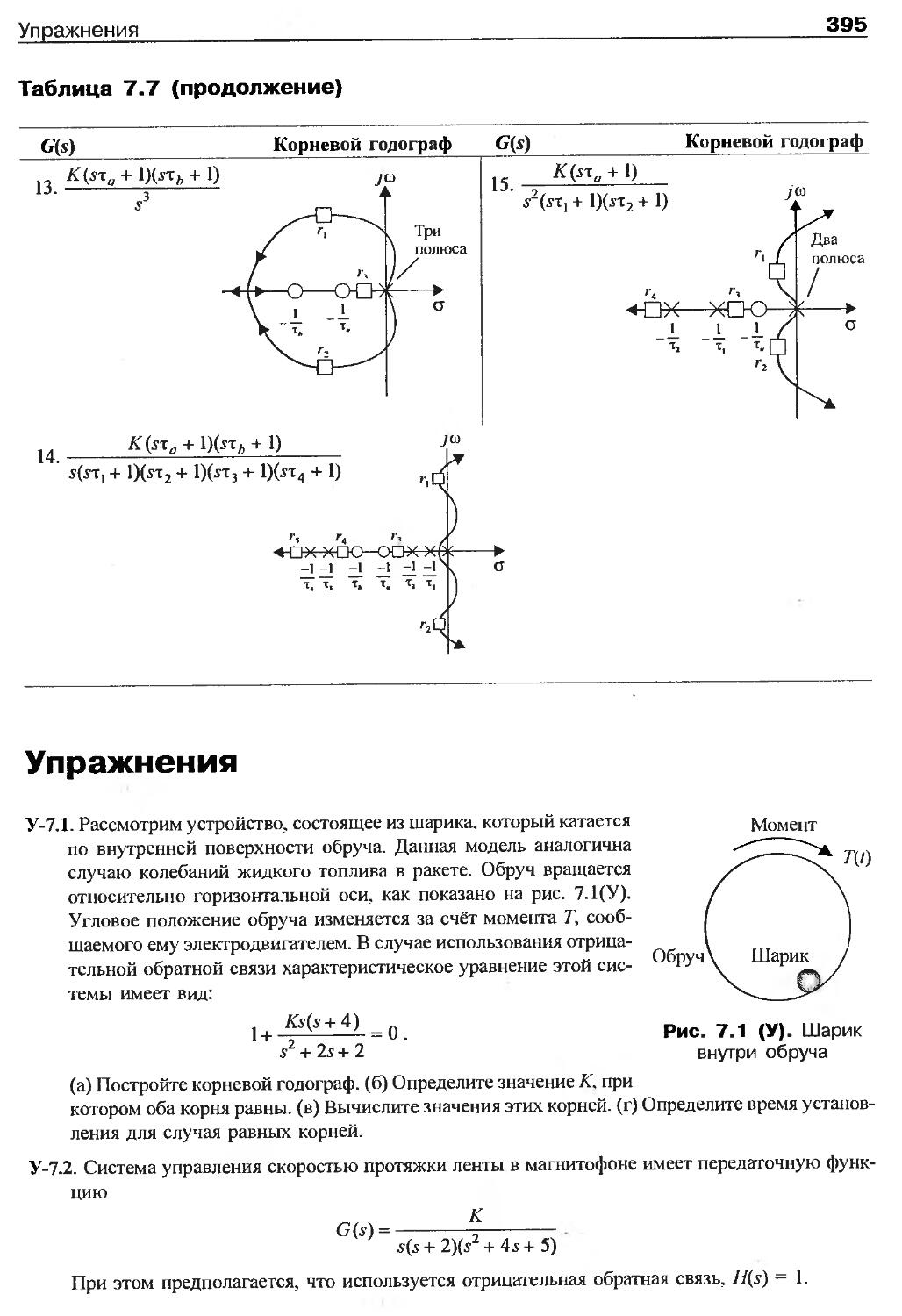
7.12. Резюме.......................................................393
Упражнения.........................................................395
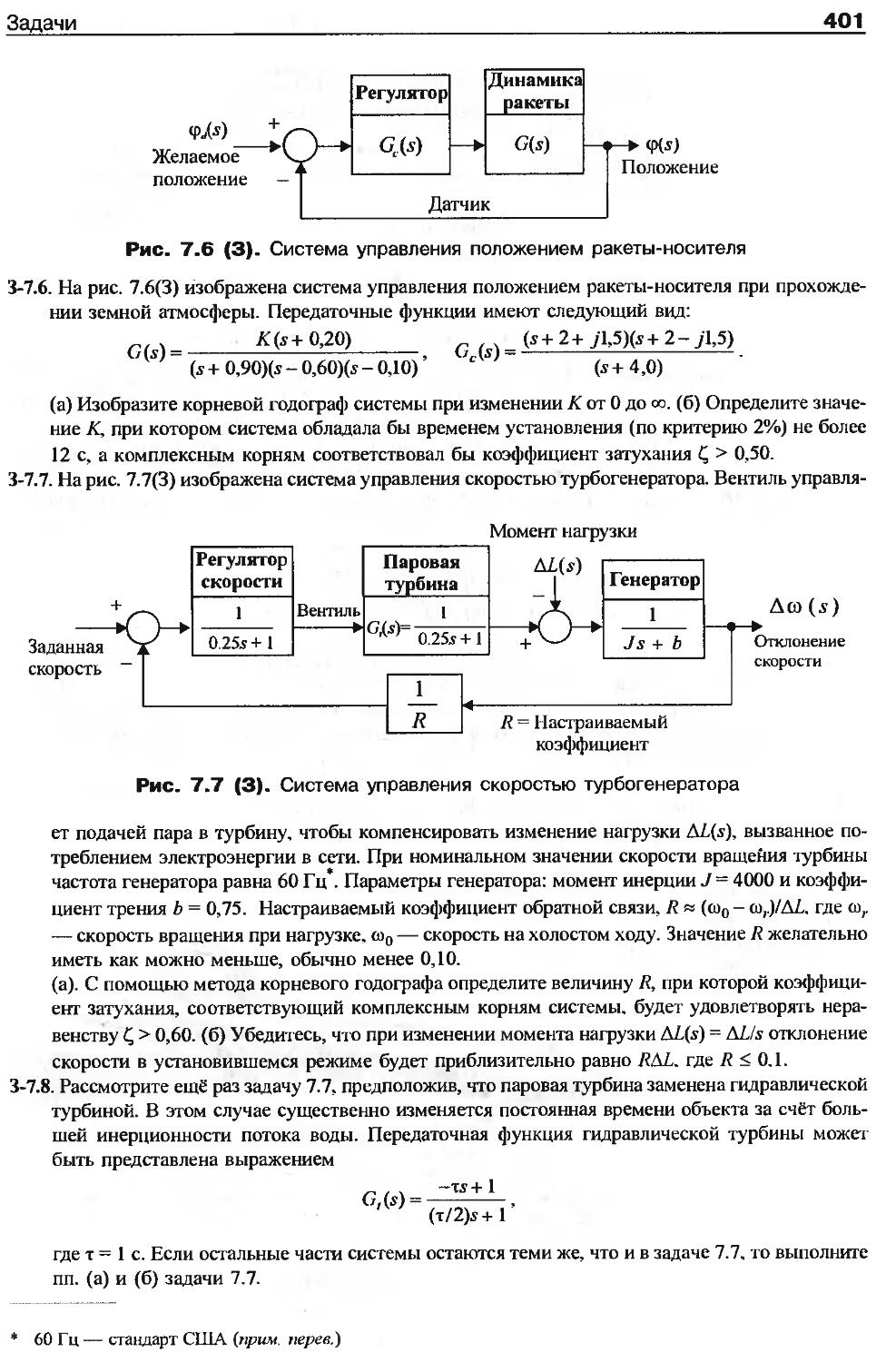
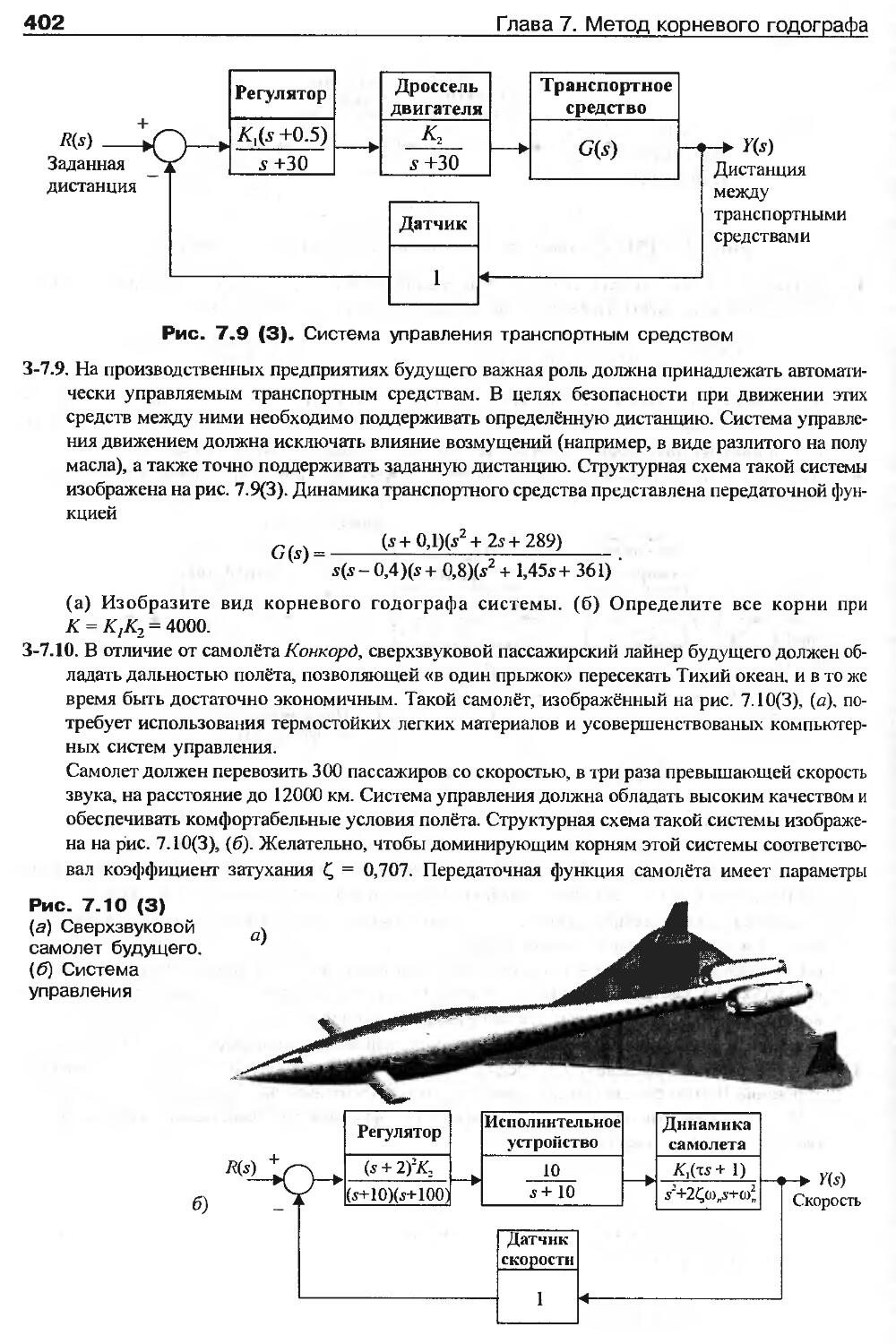
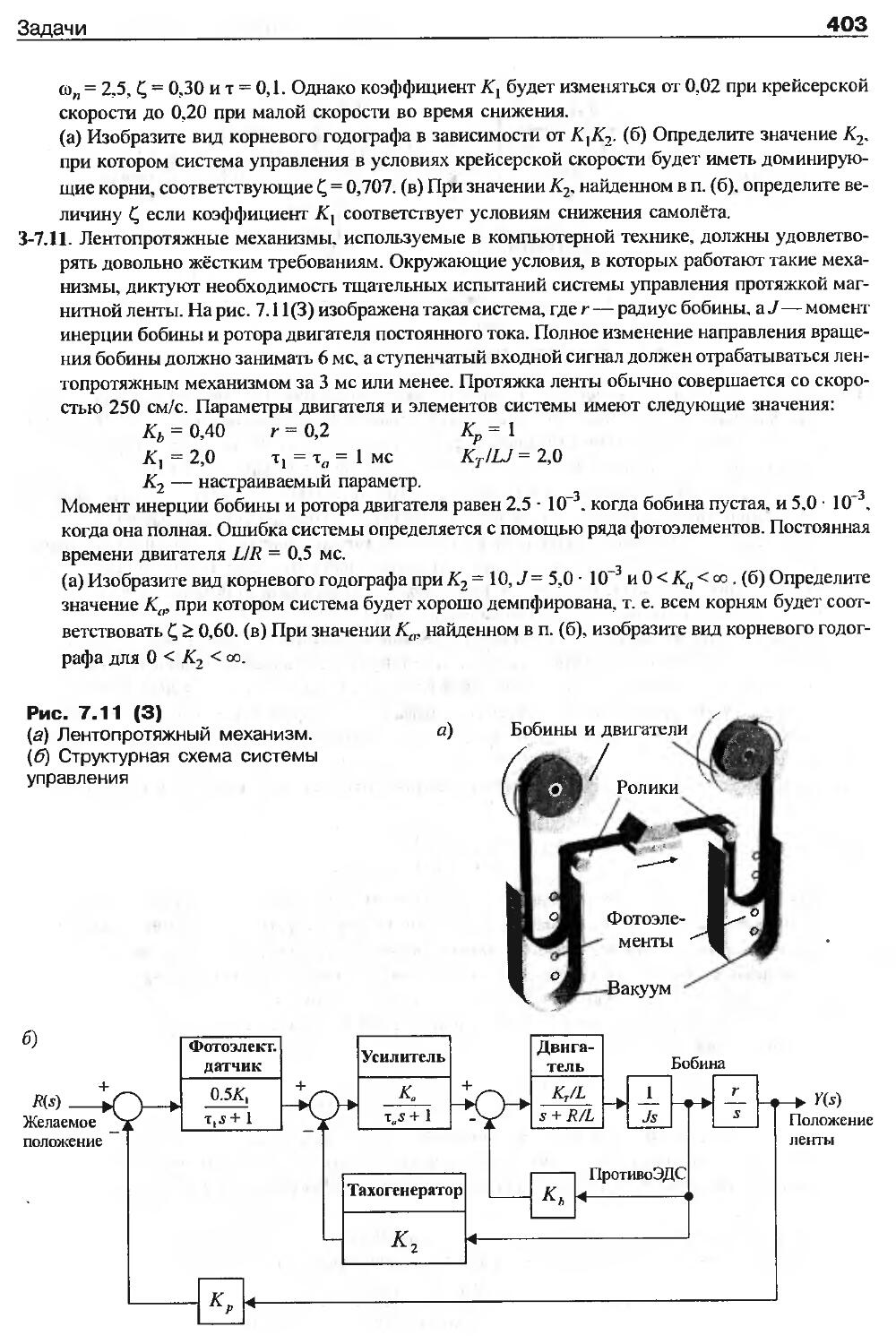
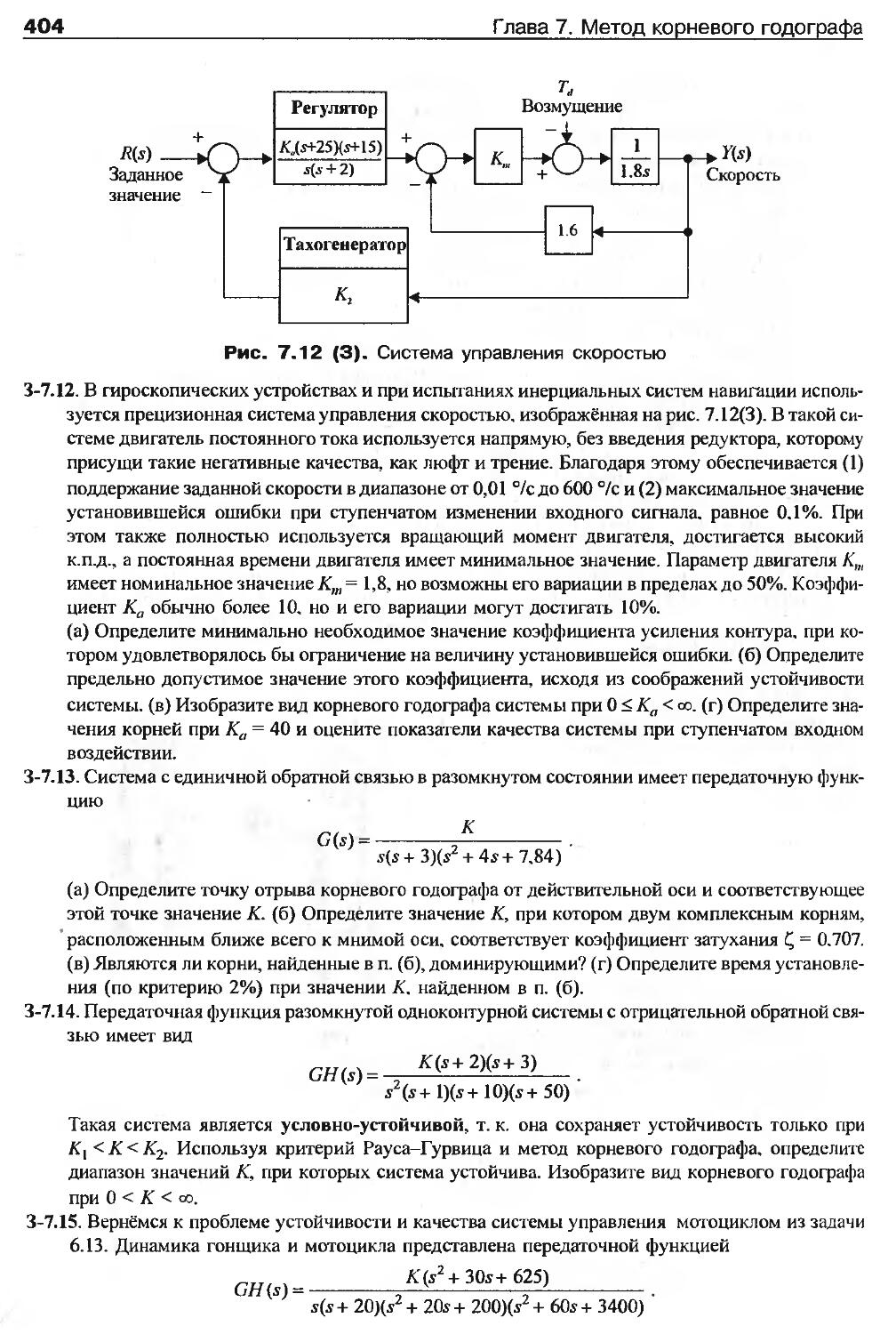
Задачи ........................................................... 399
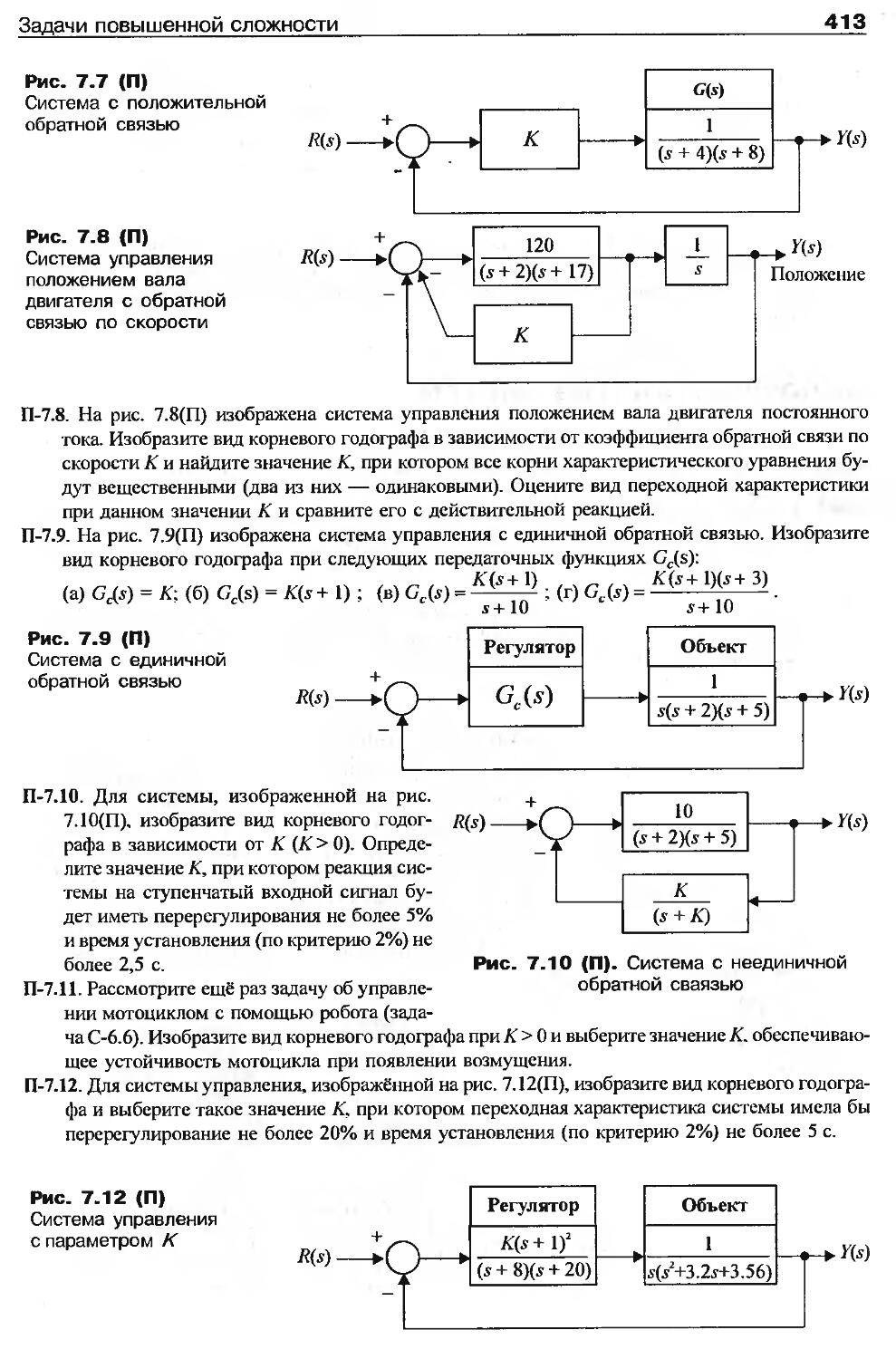
Задачи повышенной сложности........................................411
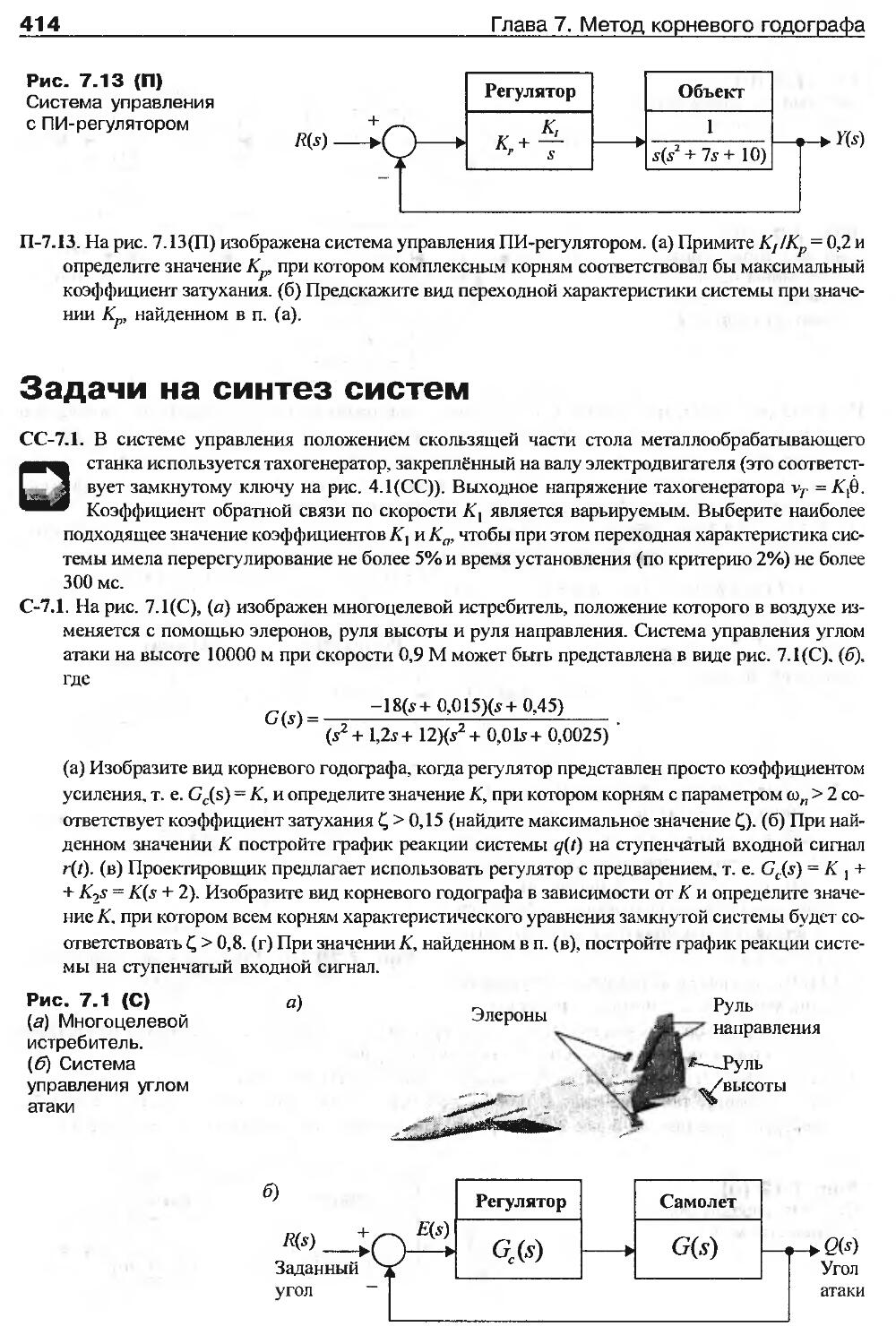
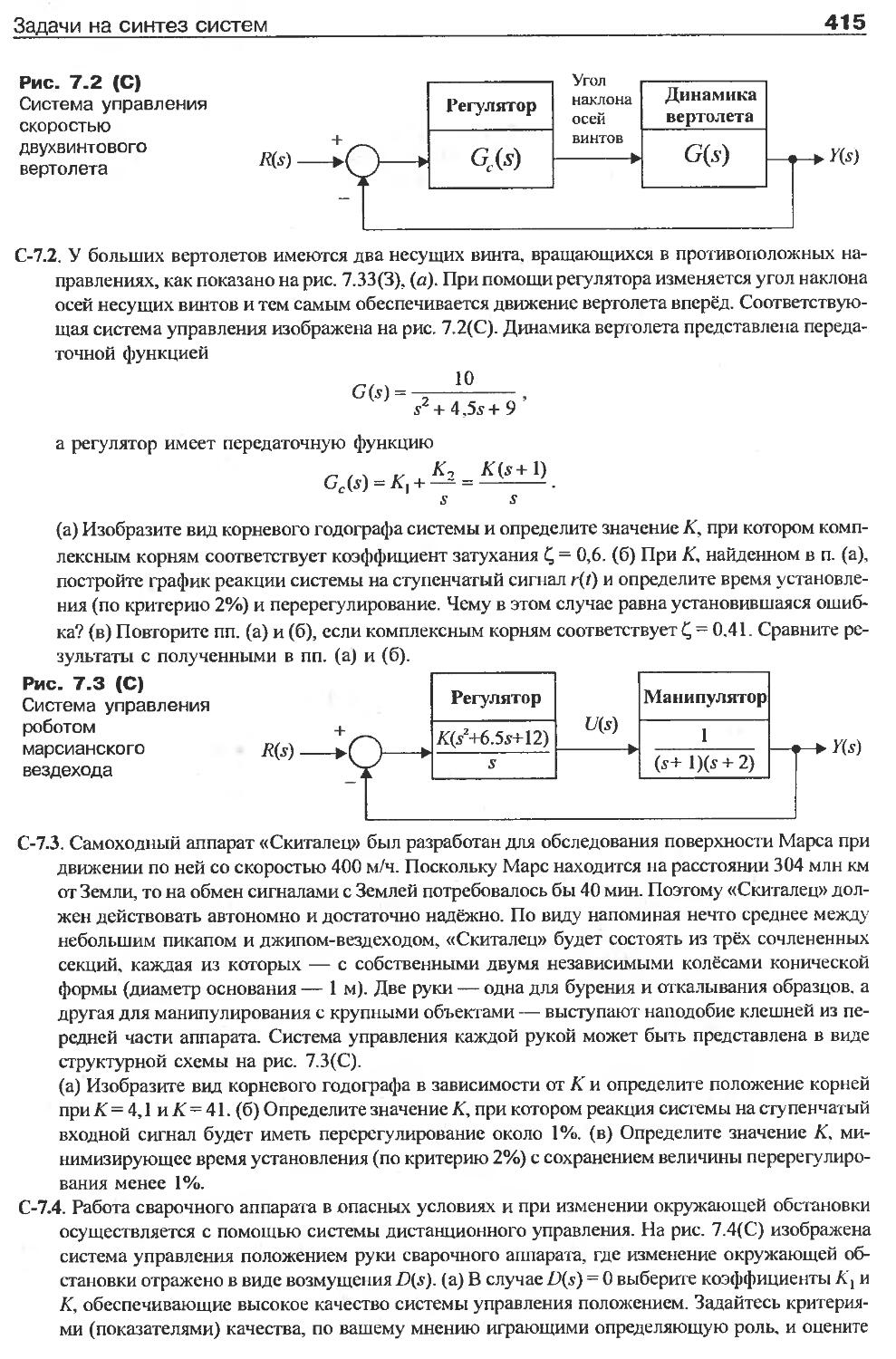
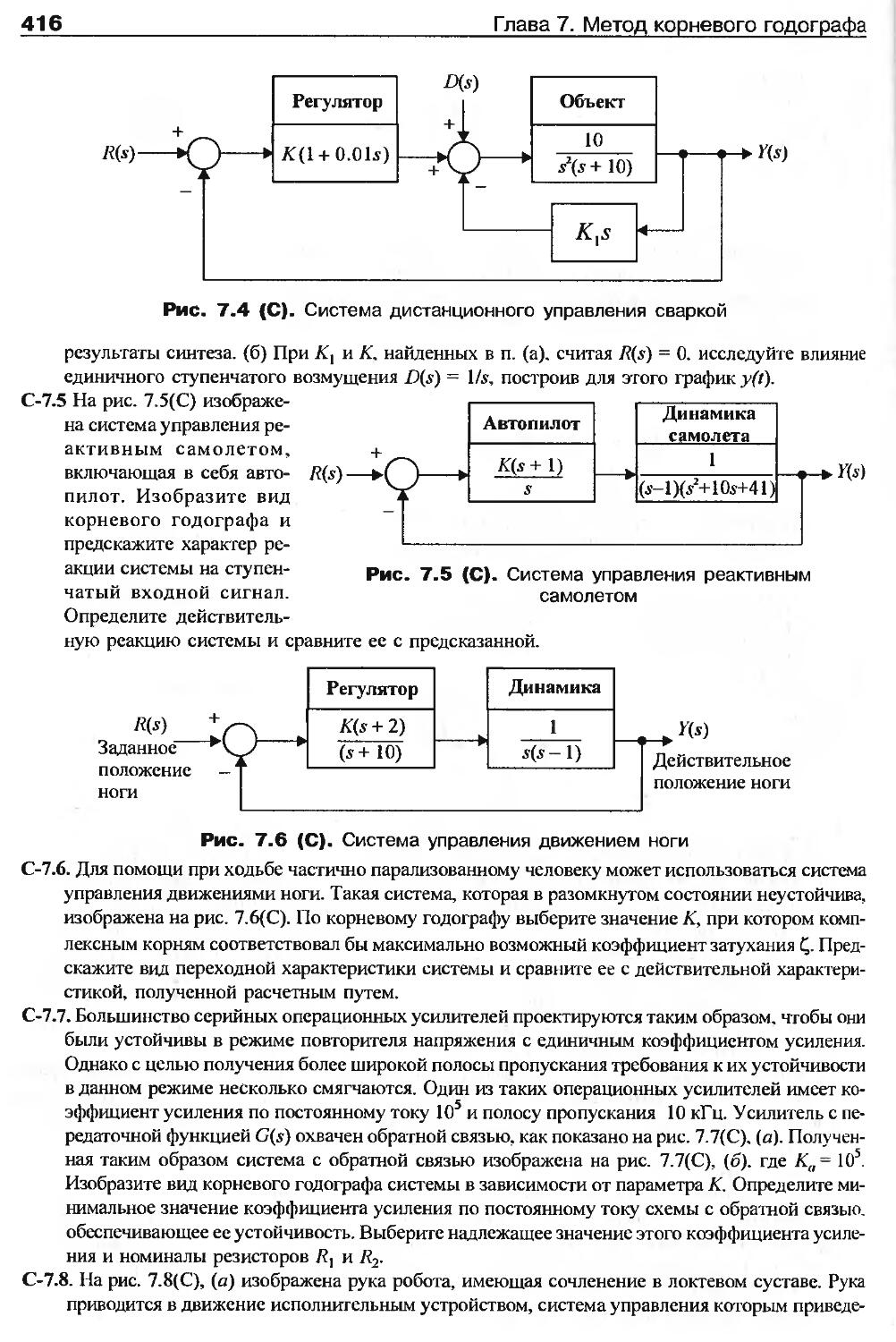
Задачи на синтез систем............................................414
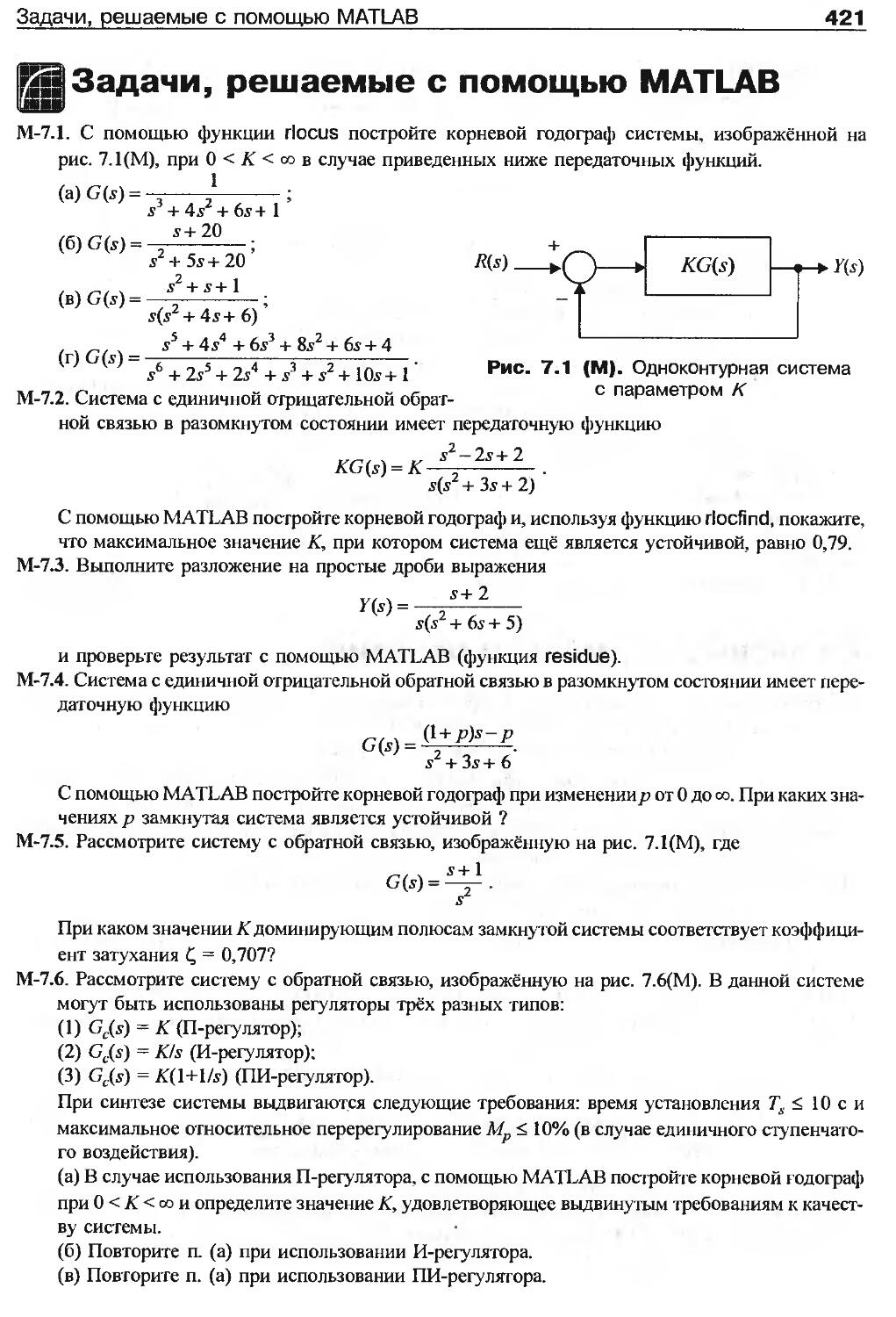
Задачи, решаемые с помощью MATLAB..................................421
Ключевые термины и понятия.........................................422
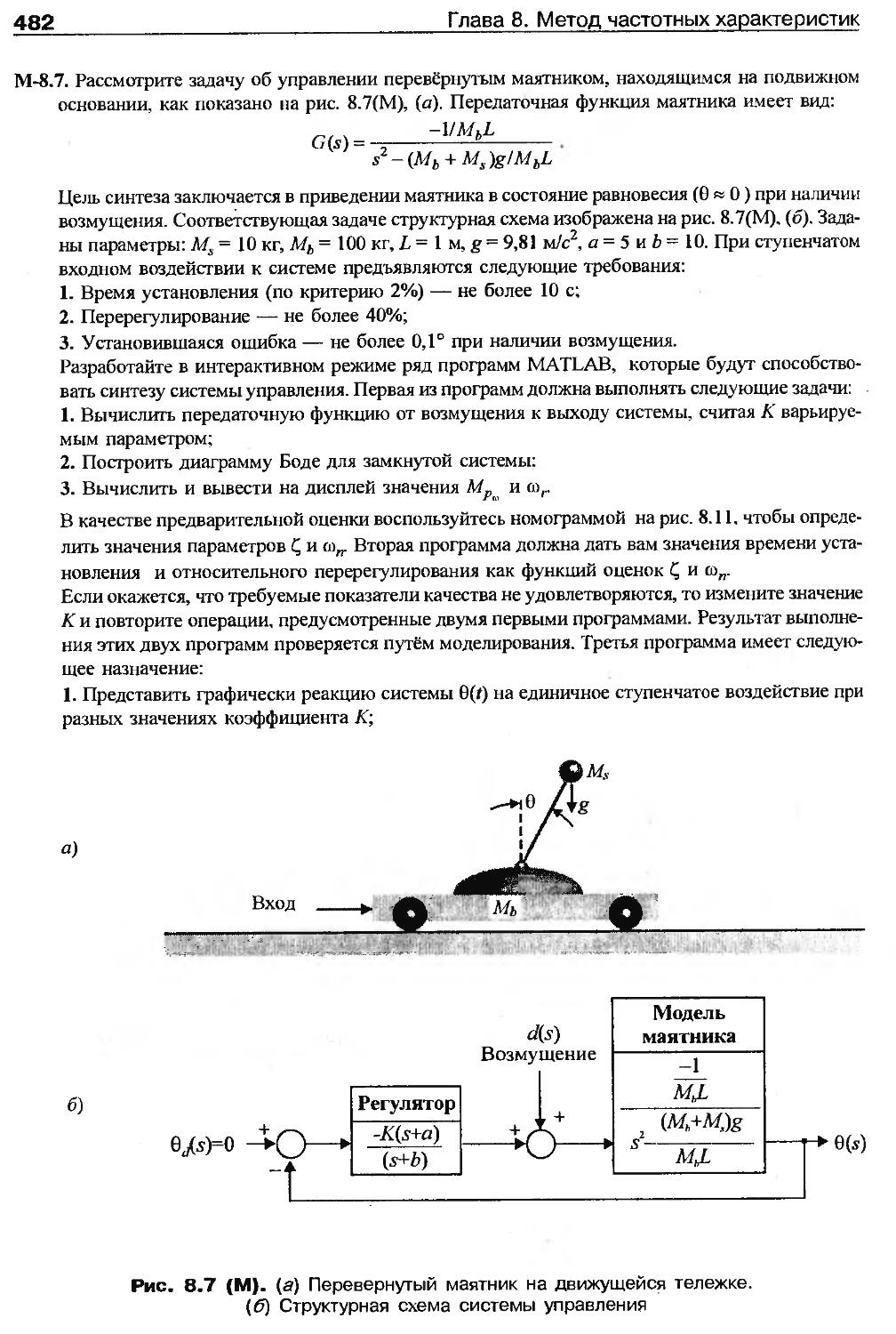
Глава 8. Метод частотных характеристик................................423
Обзор..............................................................423
8.1. Введение......................................................423
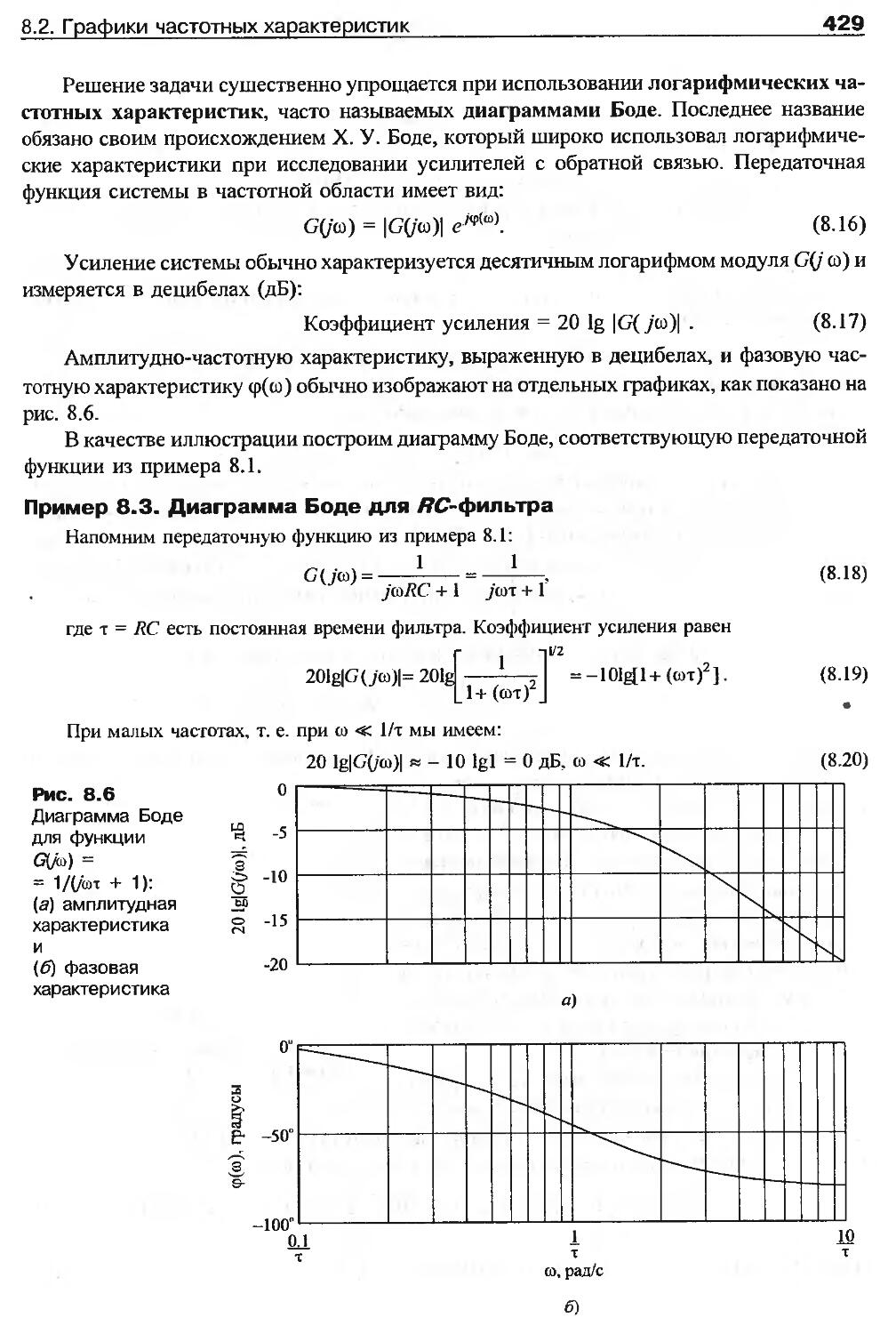
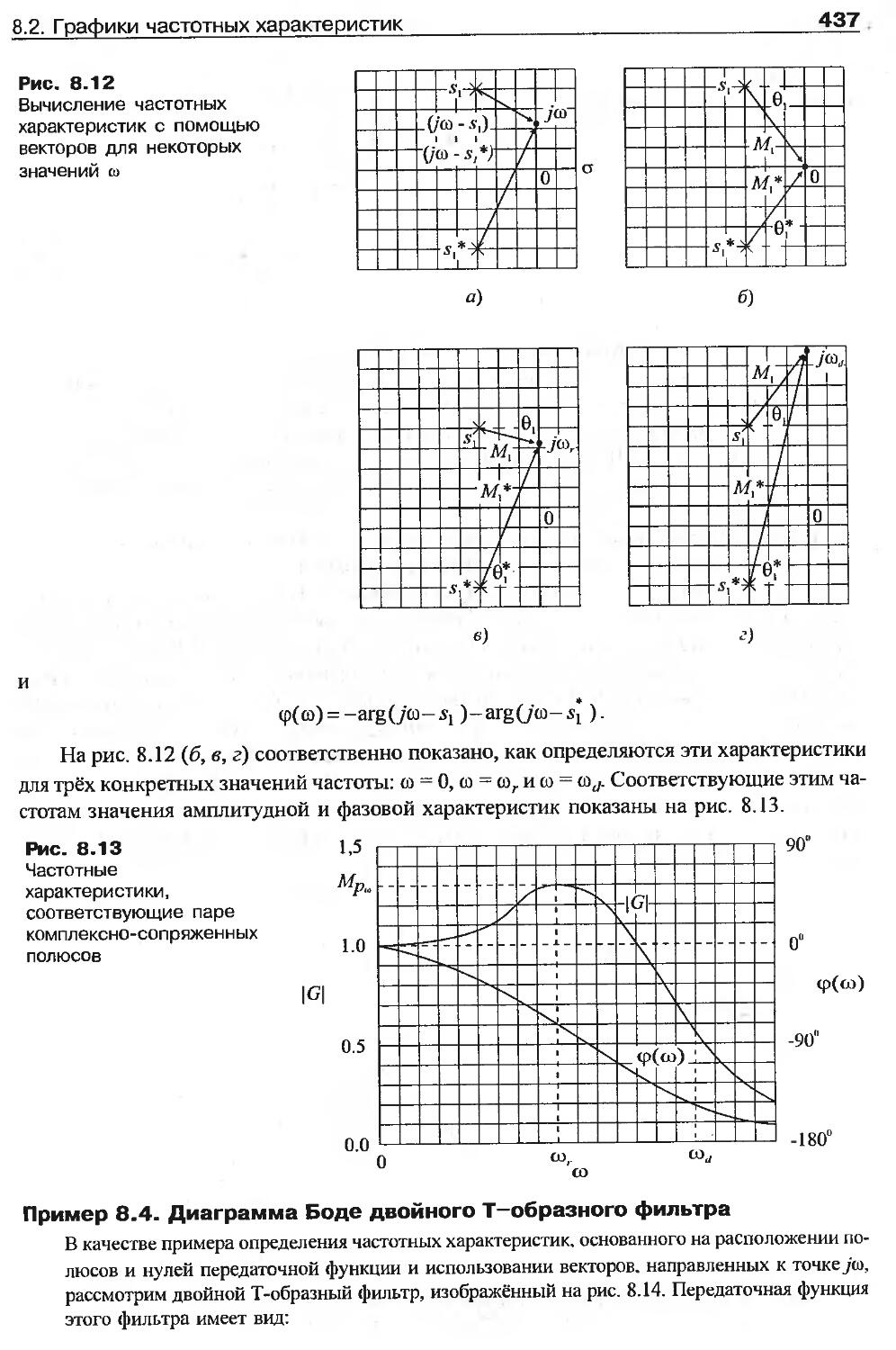
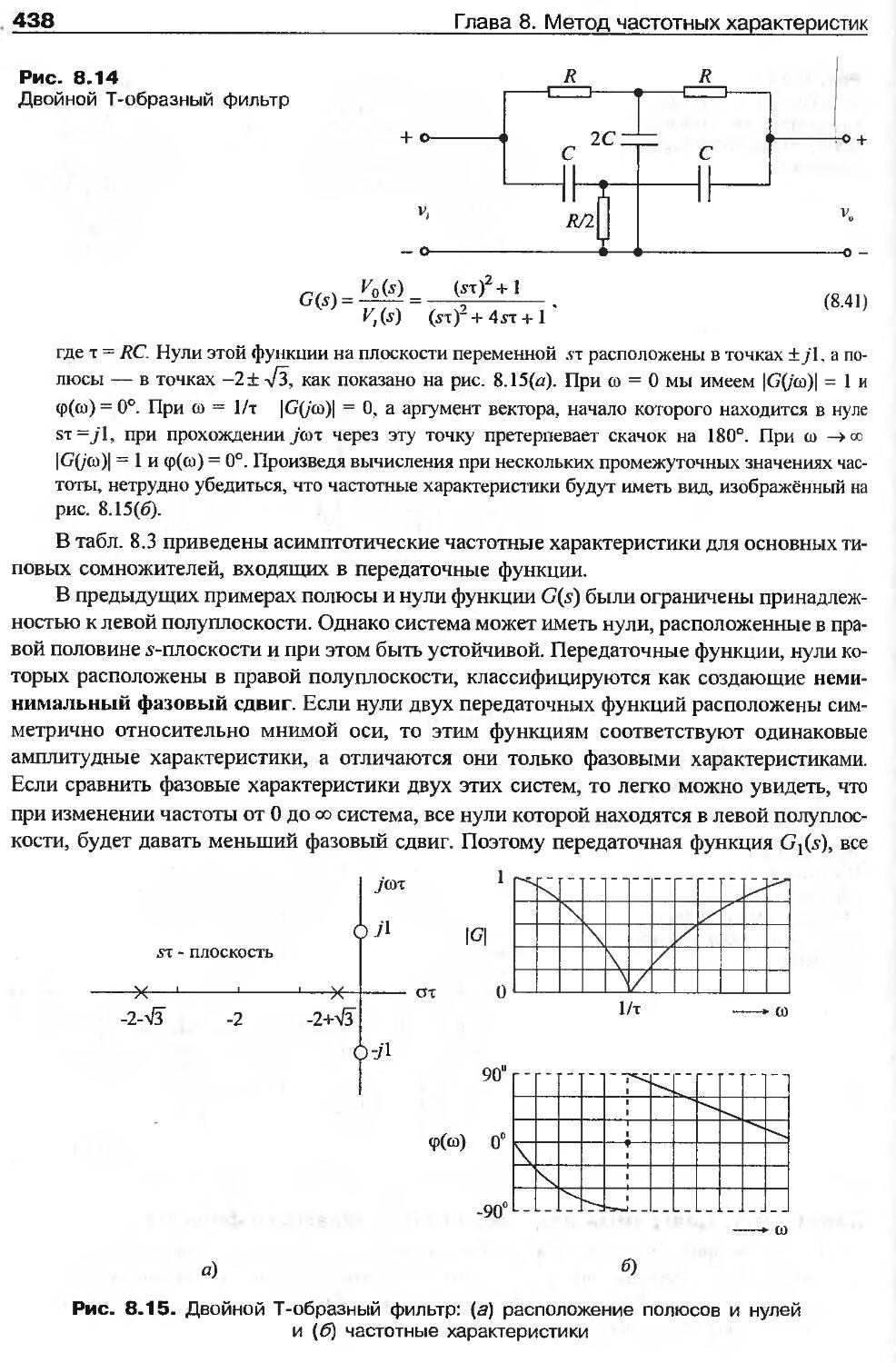
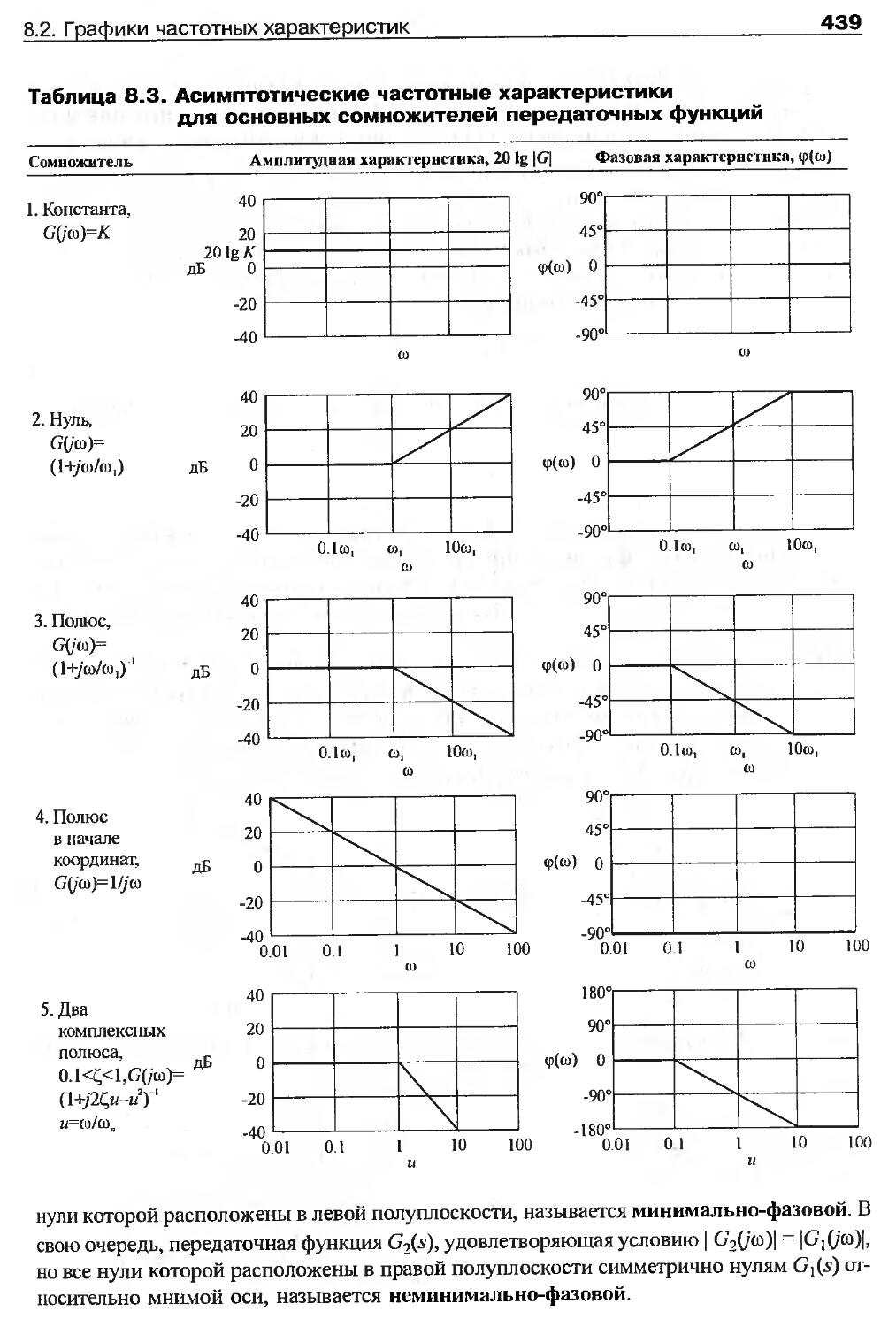
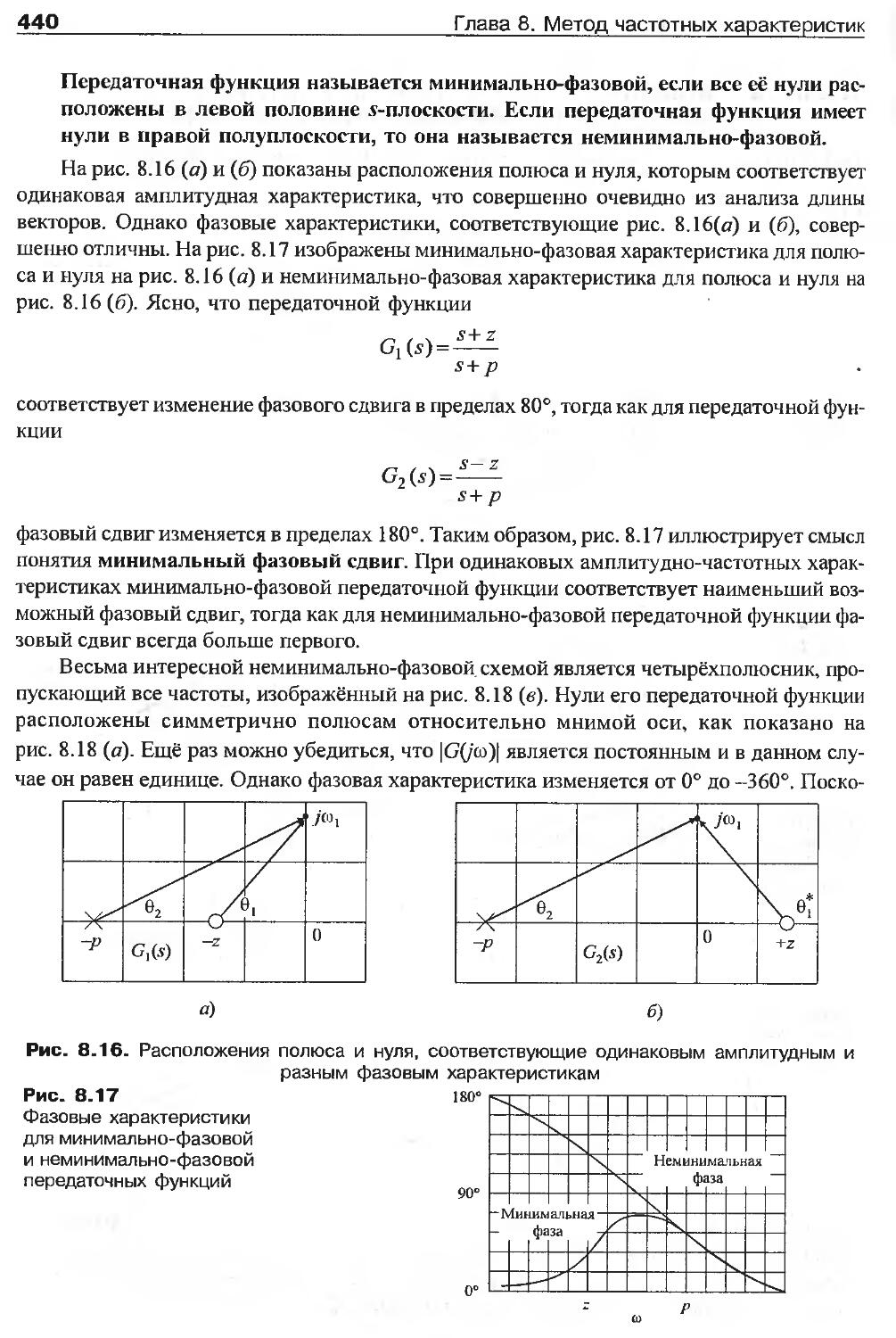
8.2. Графики частотных характеристик...............................426
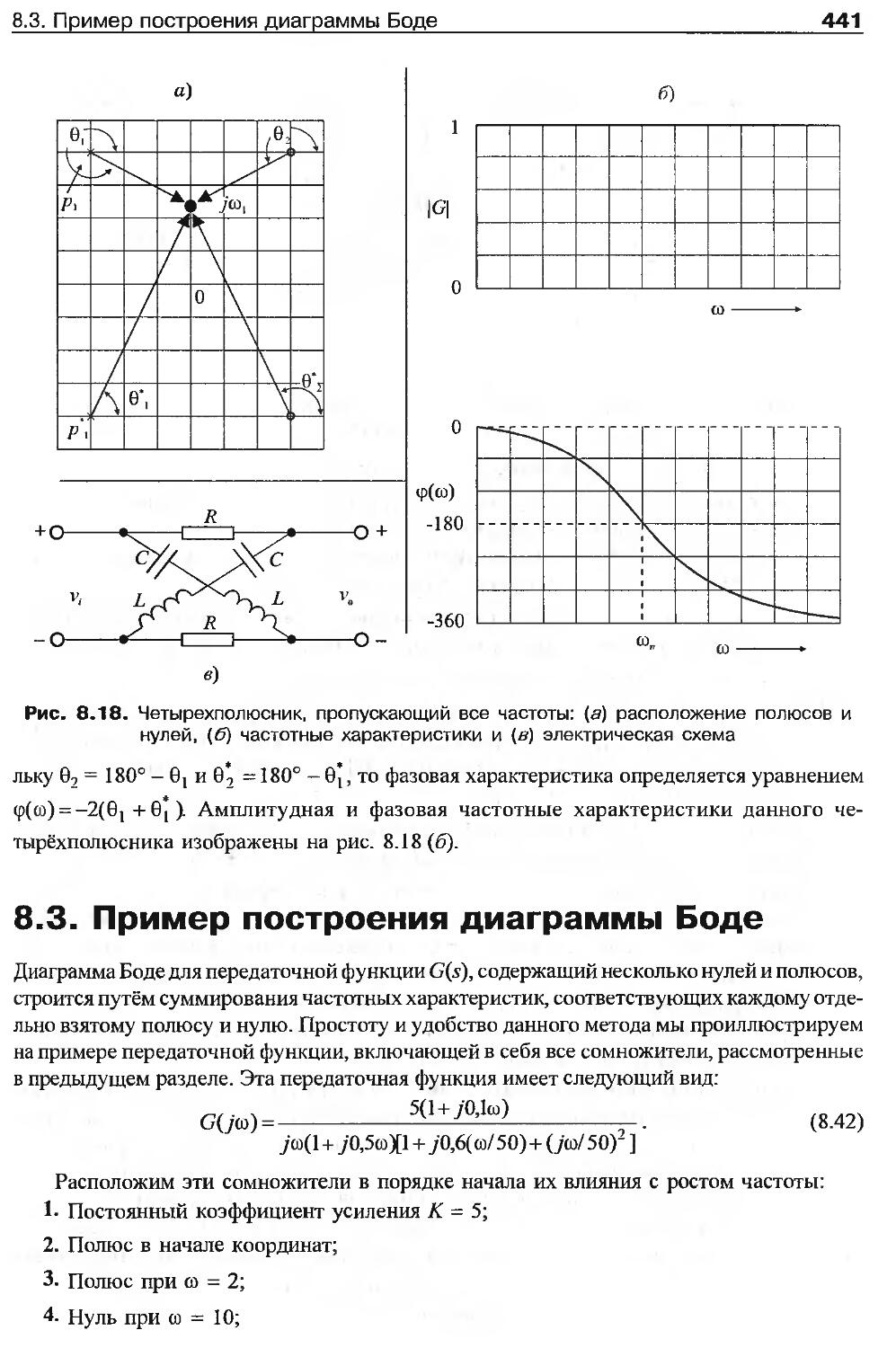
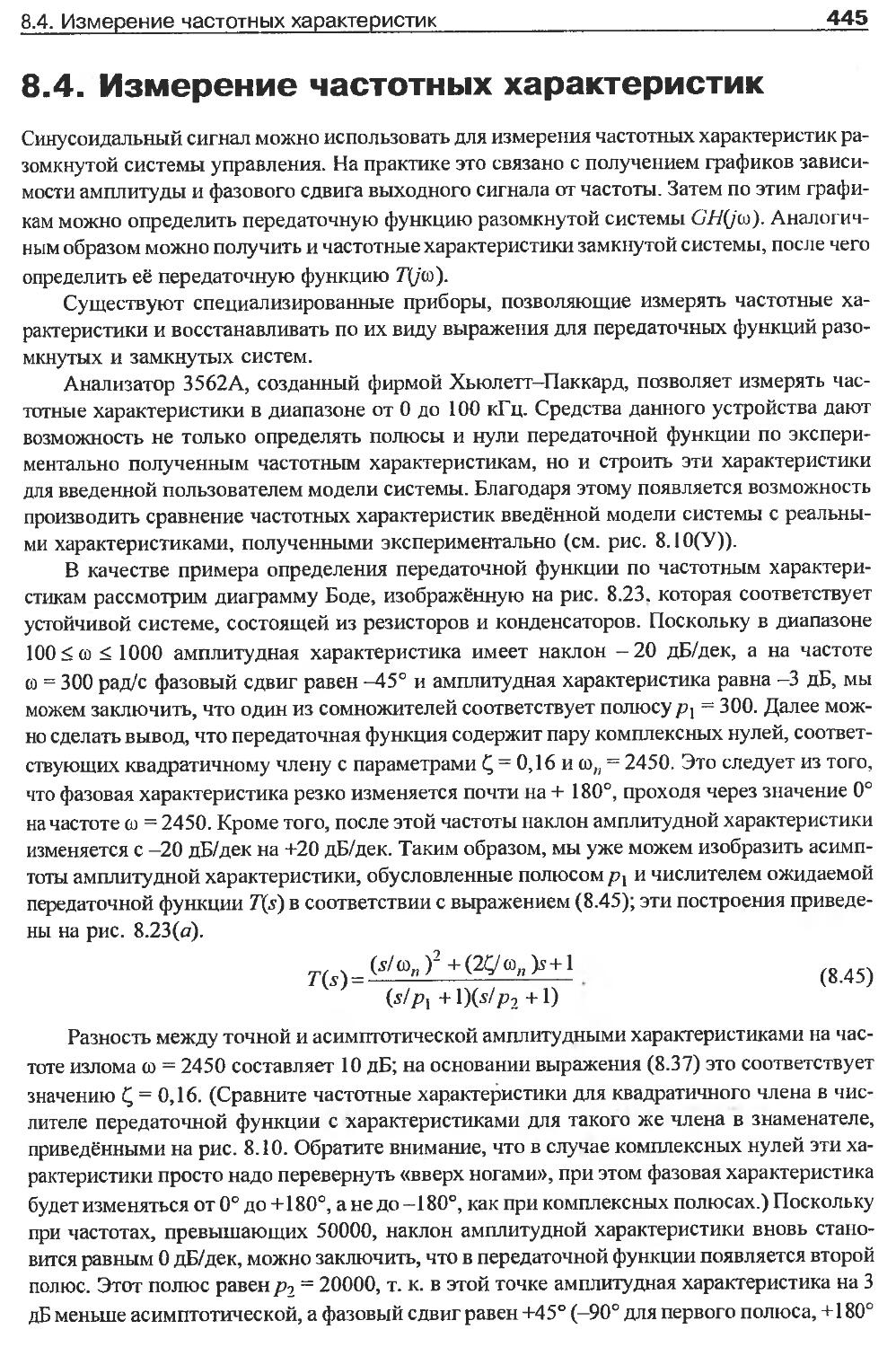
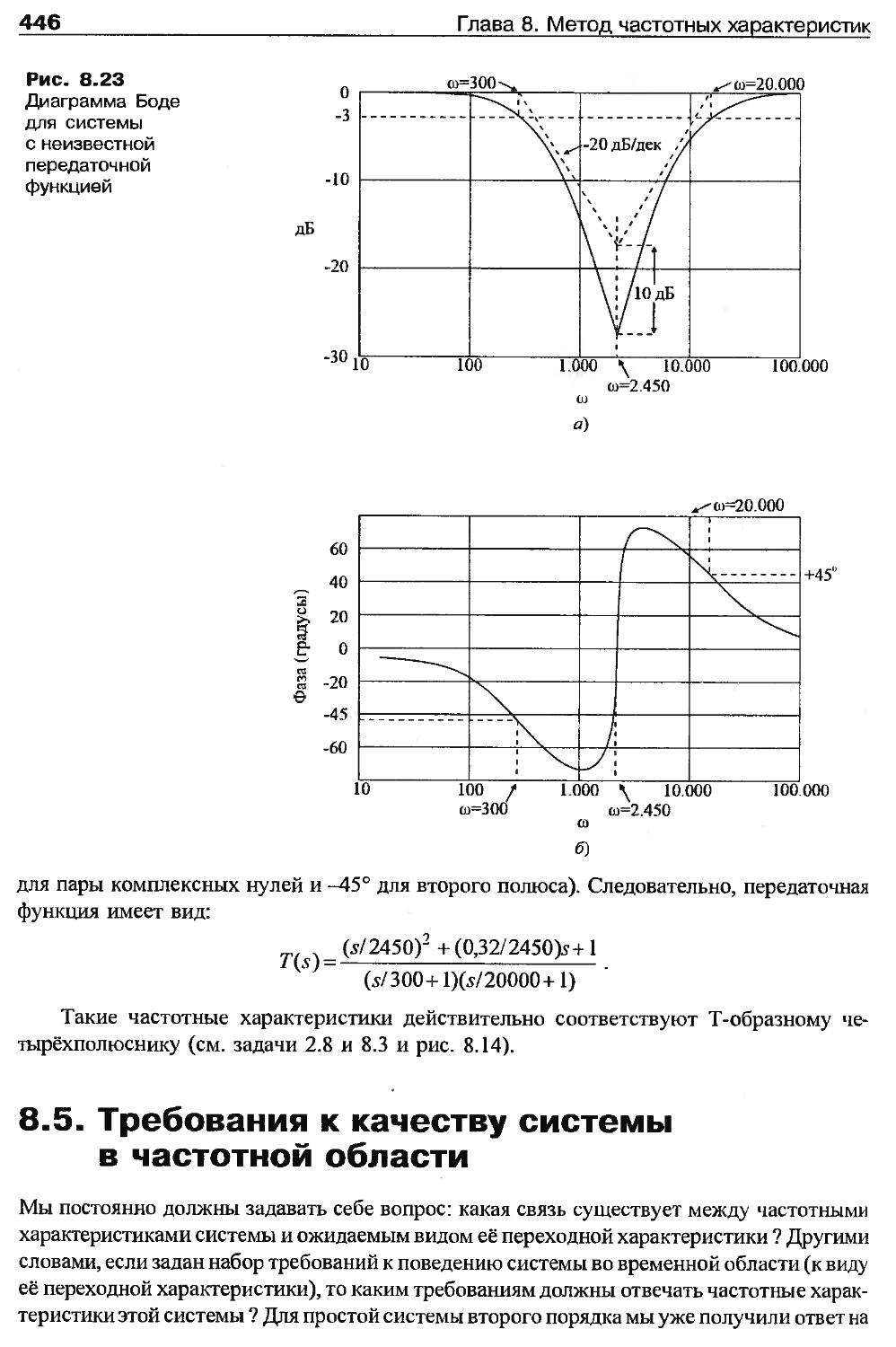
8.3. Пример построения диаграммы Боде..............................441
8.4. Измерение частотных характеристик.............................445
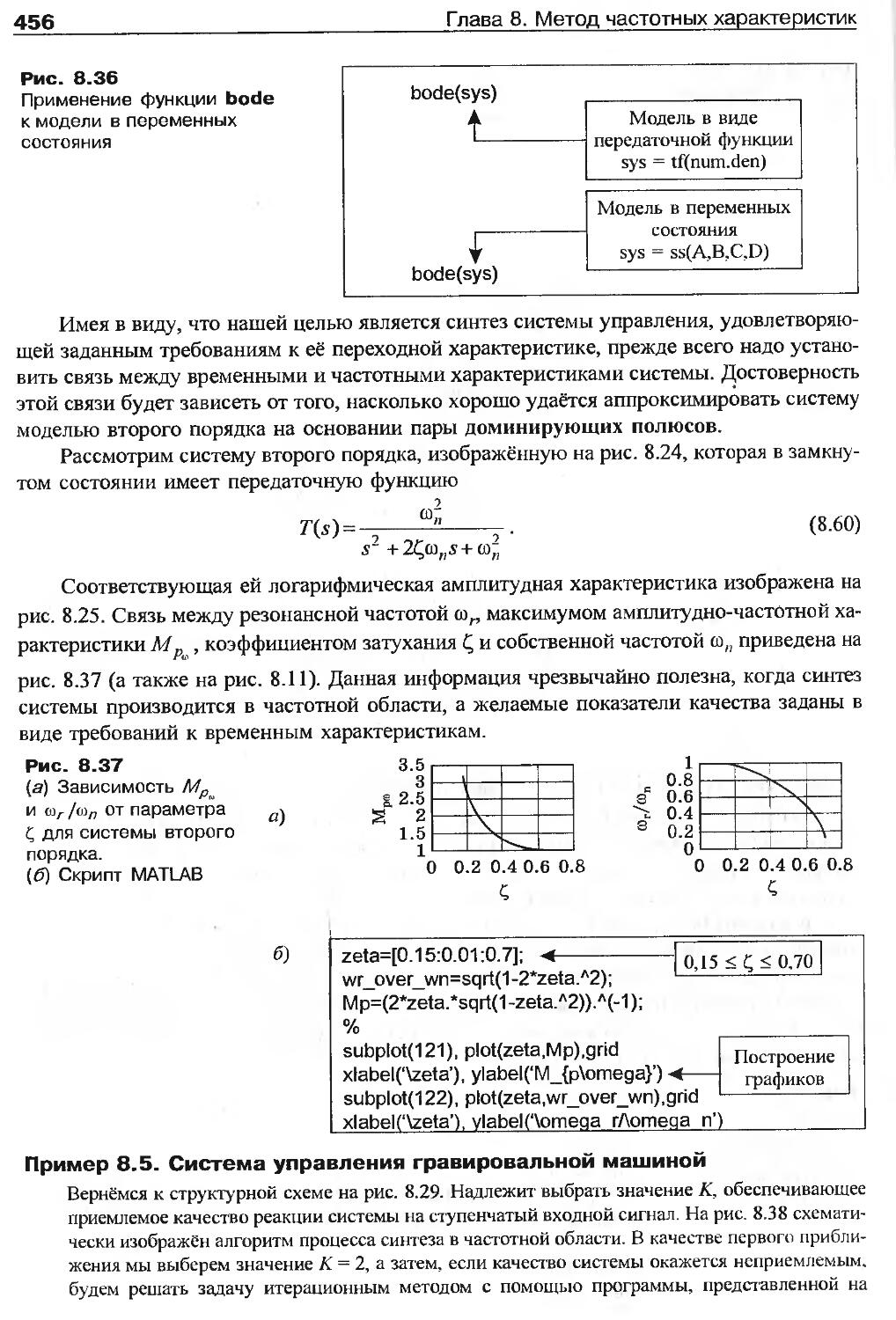
8.5. Требования к качеству системы в частотной области.............446
8.6. Логарифмические амплитудно-фазовые диаграммы..................449
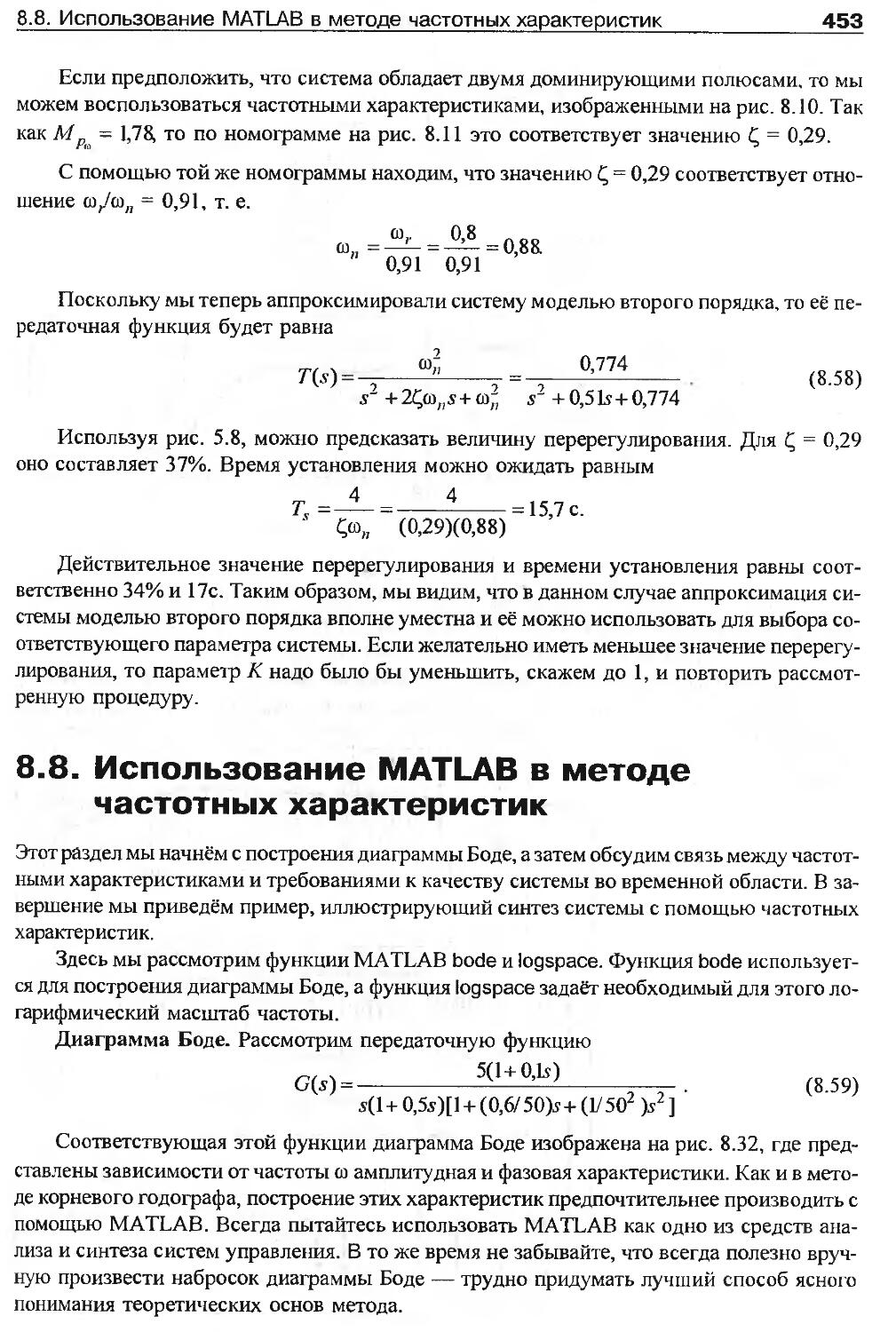
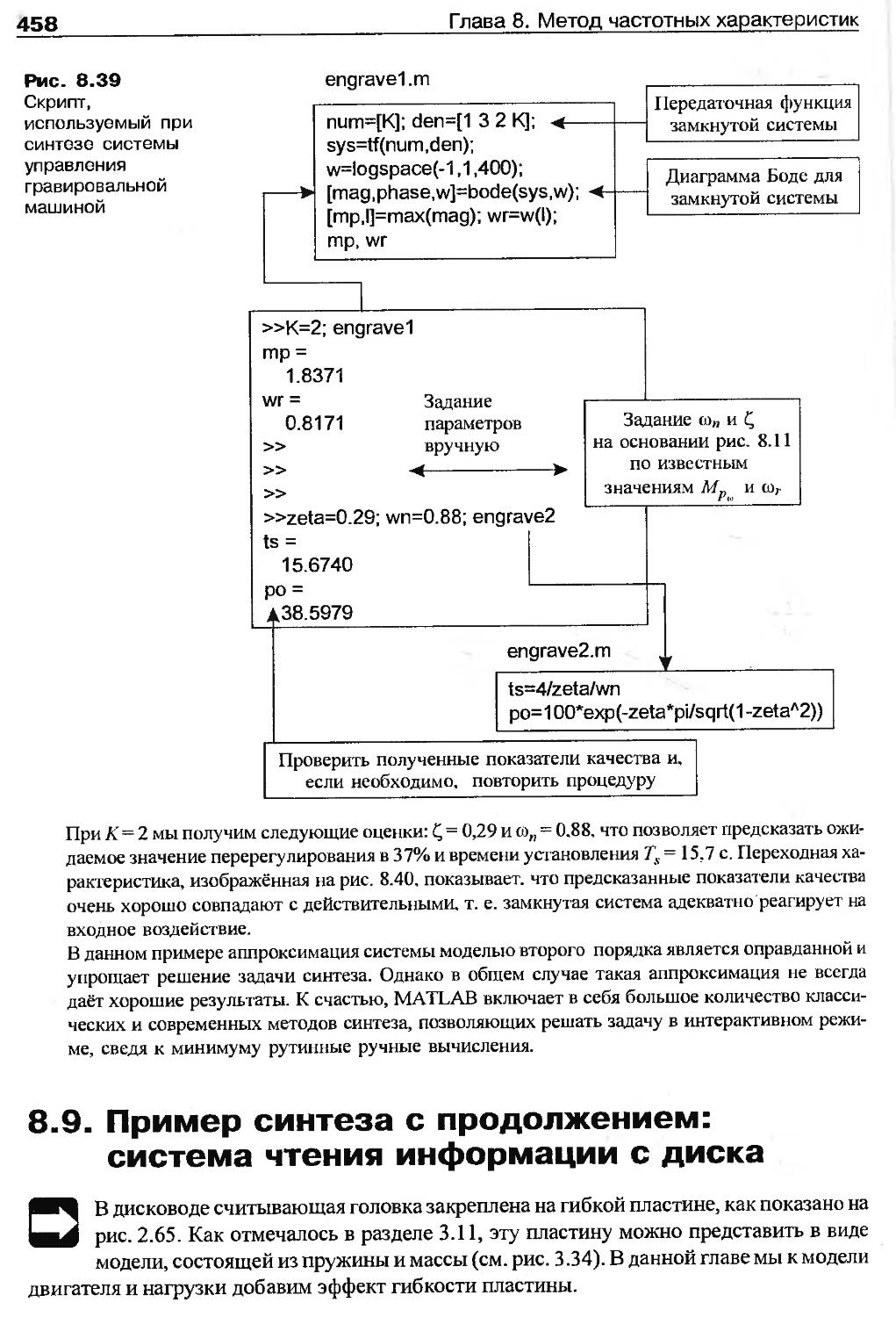
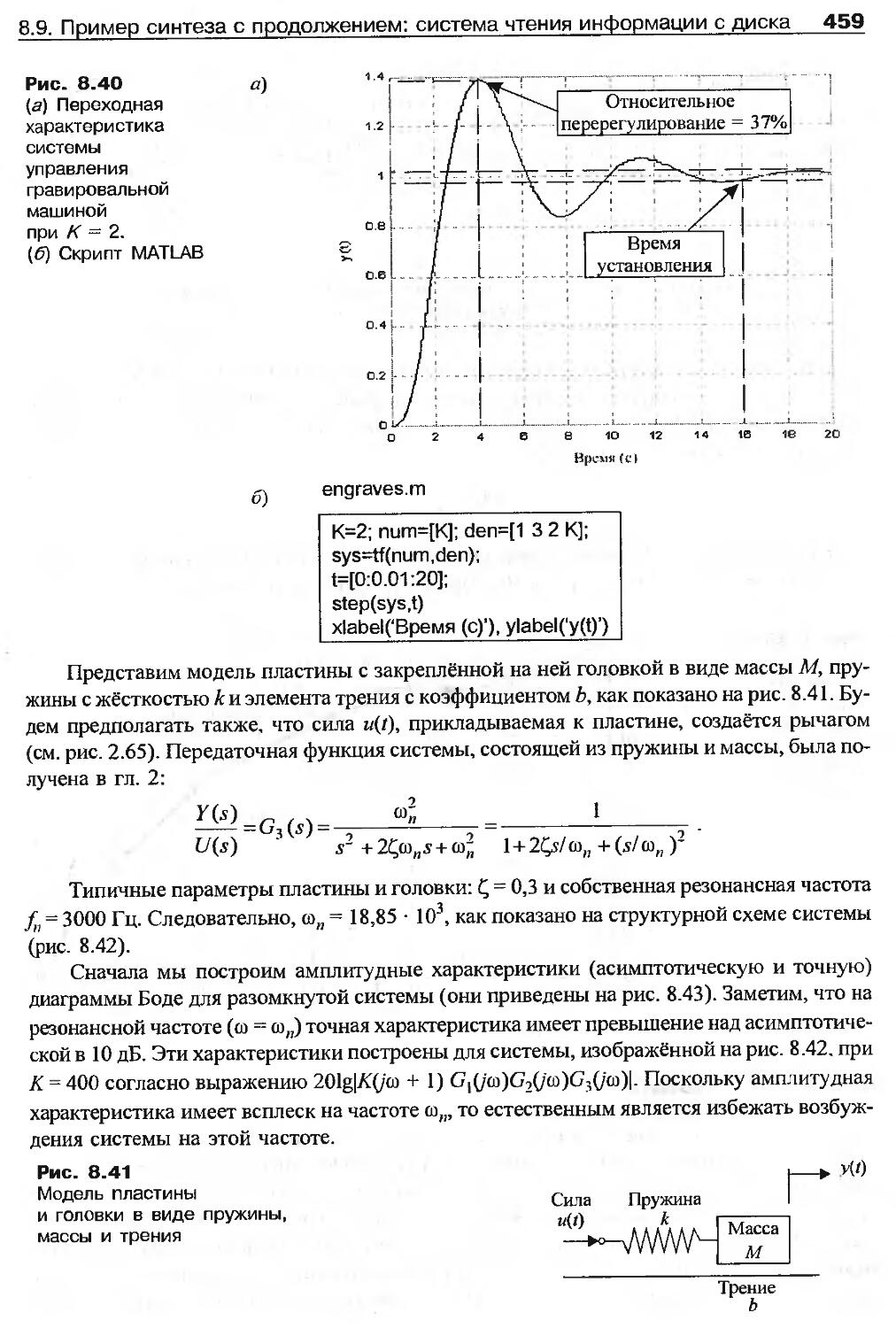
8.7. Пример синтеза: система управления гравировальной машиной.....451
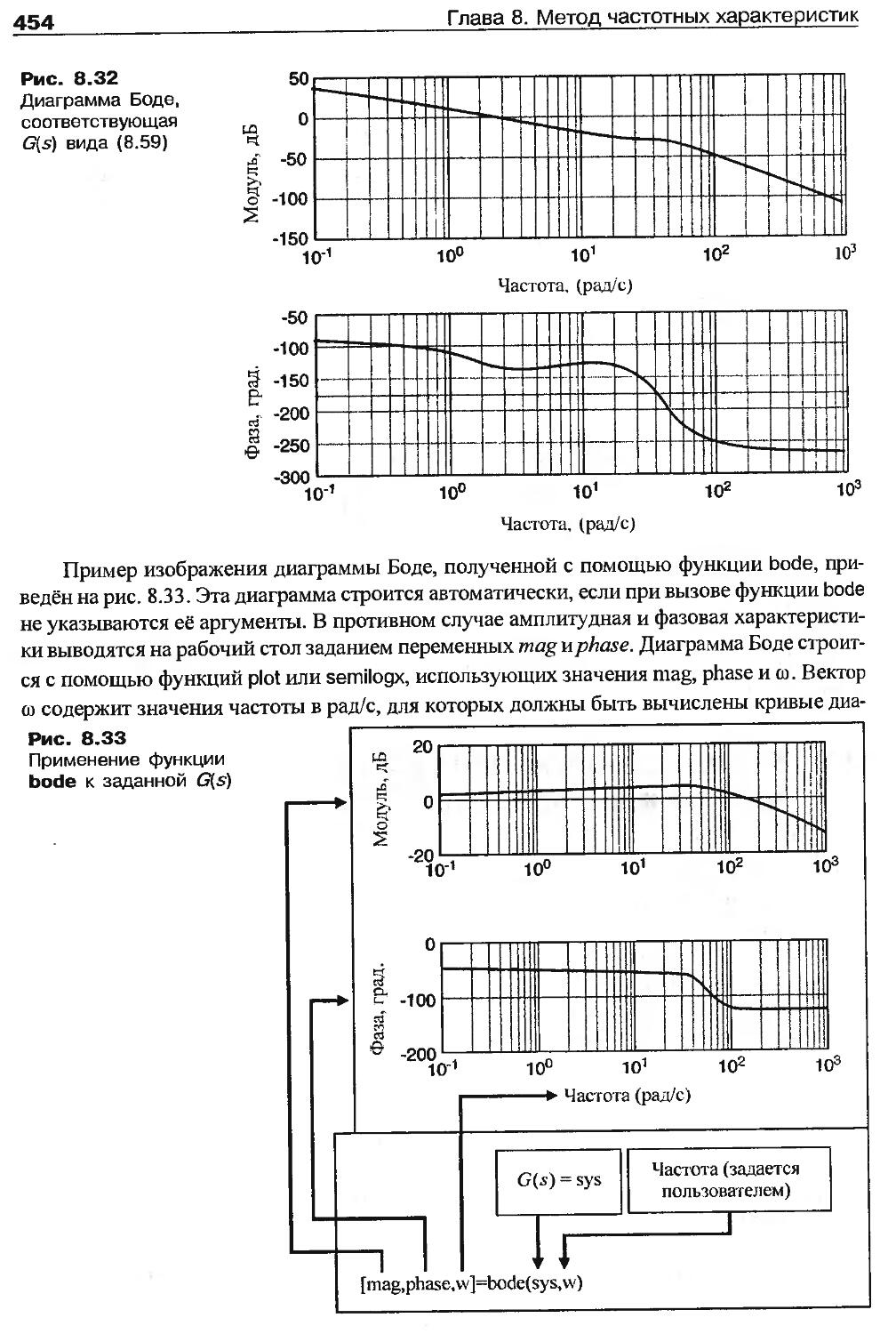
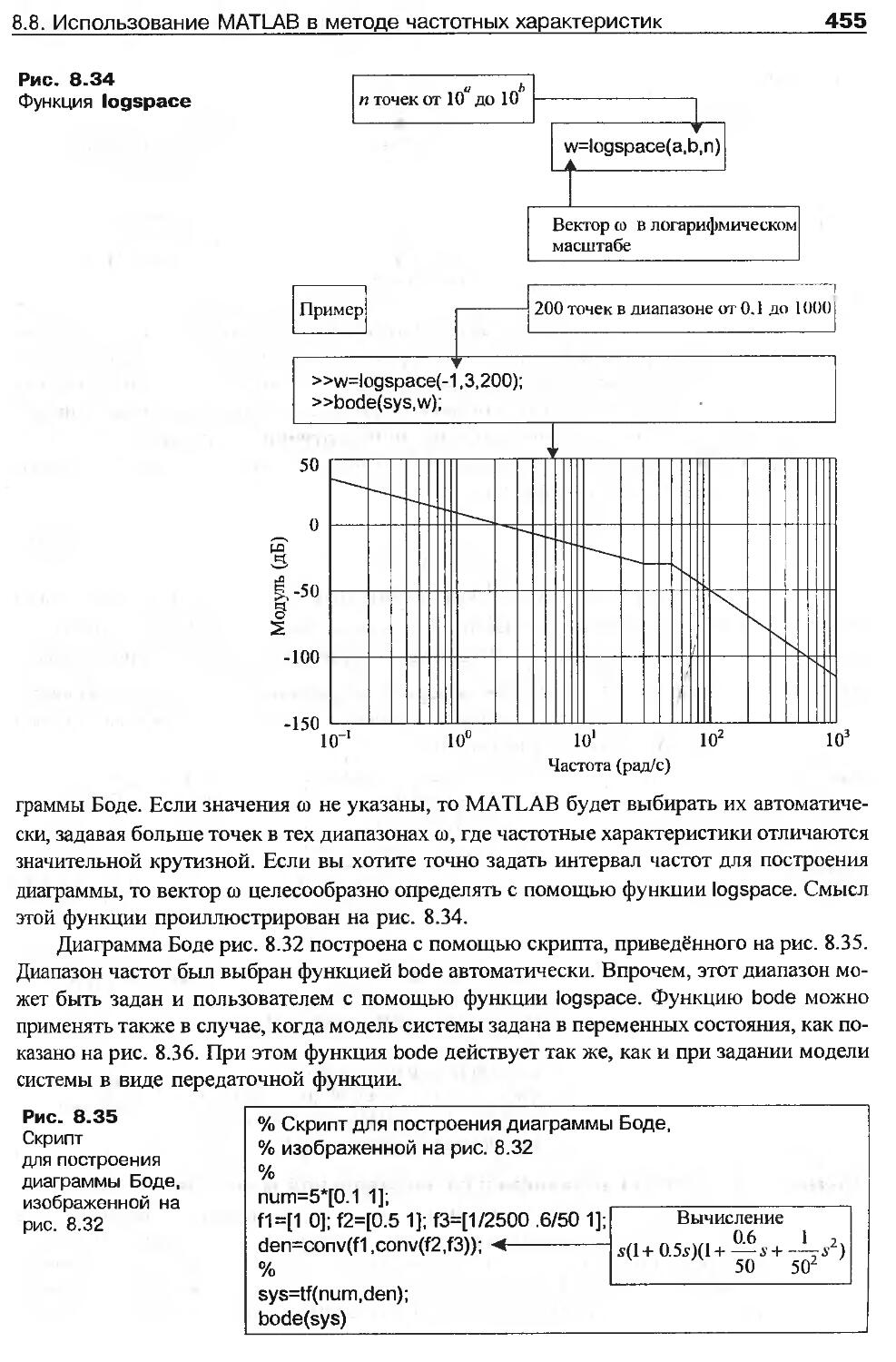
8.8. Использование MATLAB в методе частотных характеристик.........453
8.9. Пример синтеза с продолжением: система чтения информации с диска. . . . 458
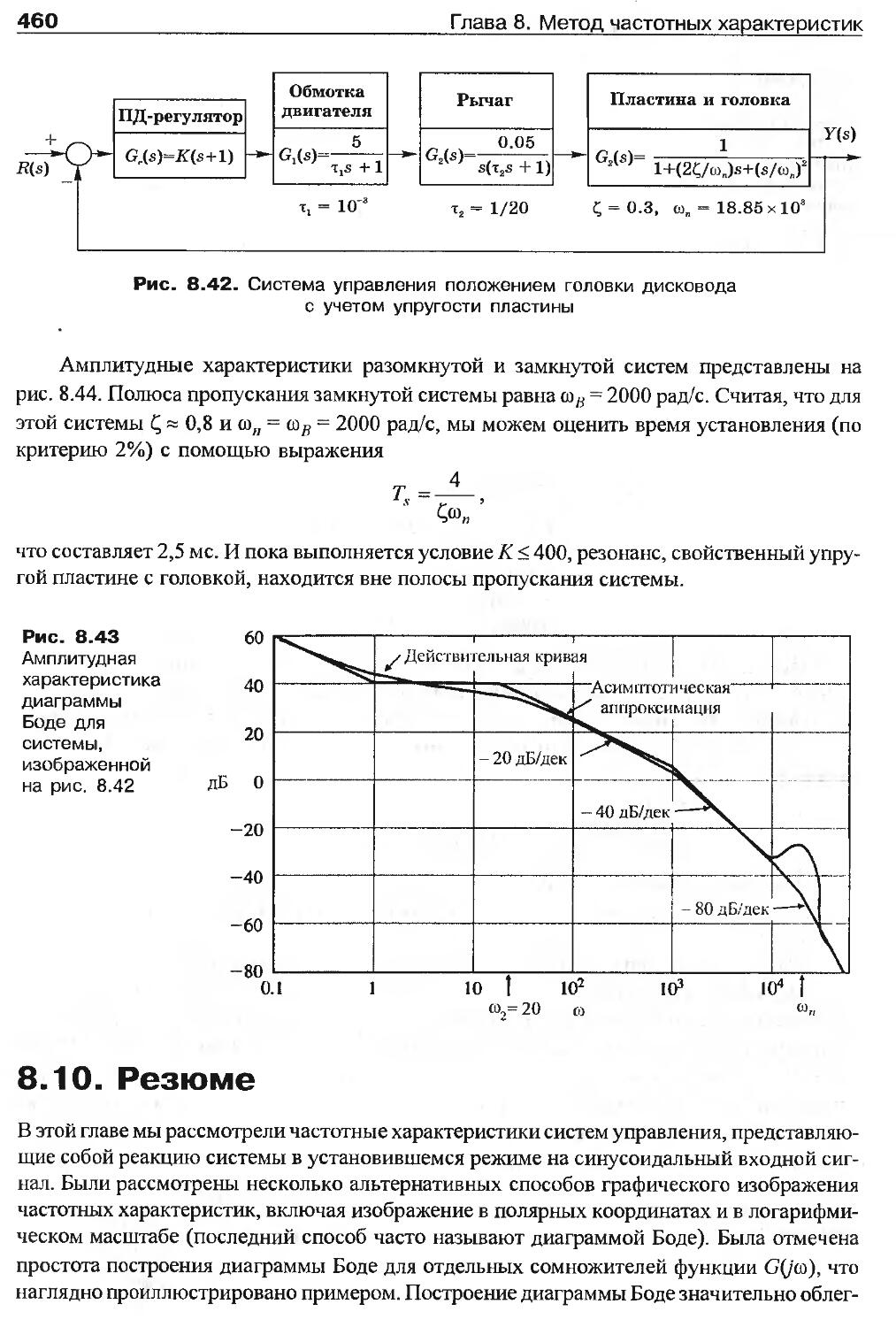
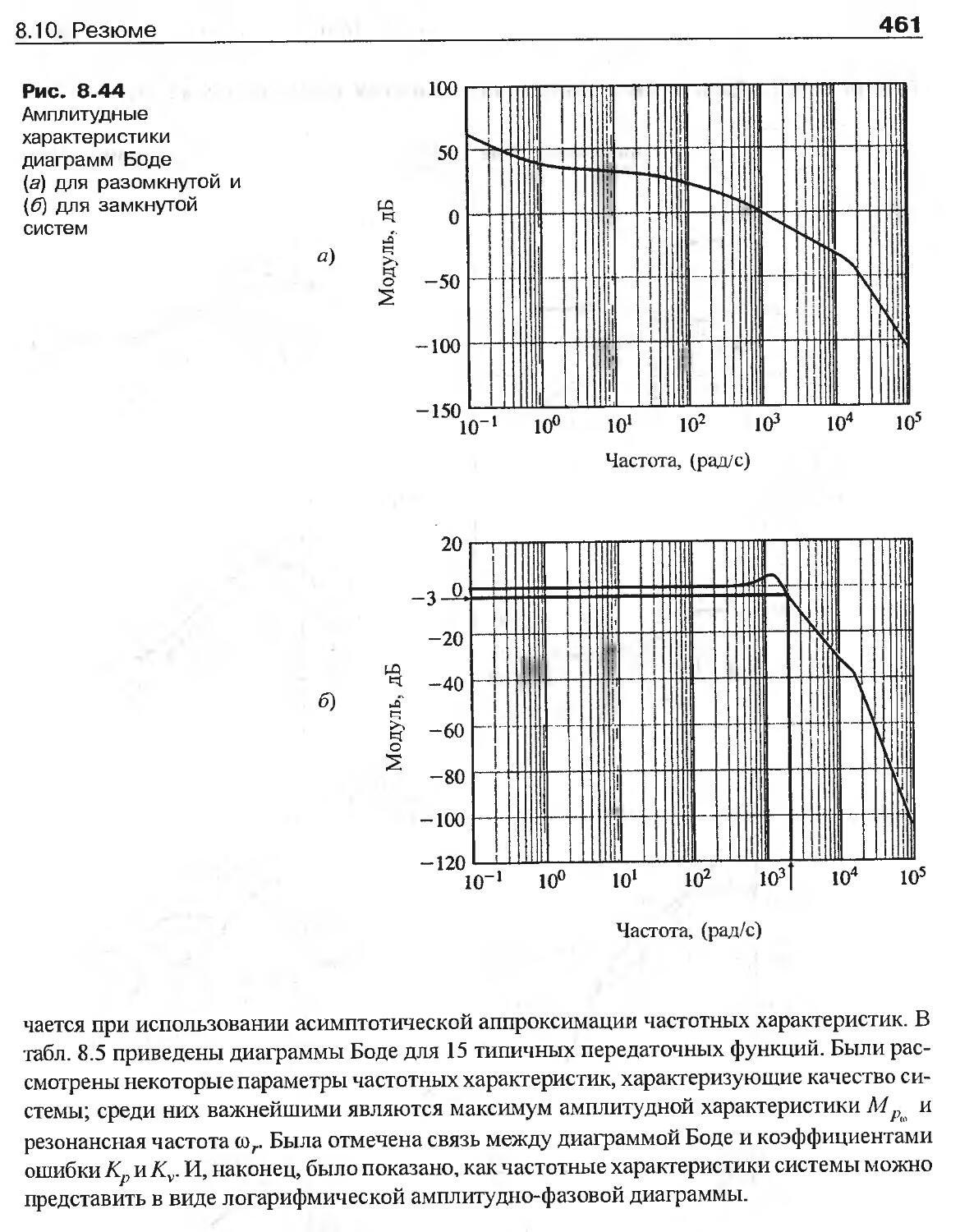
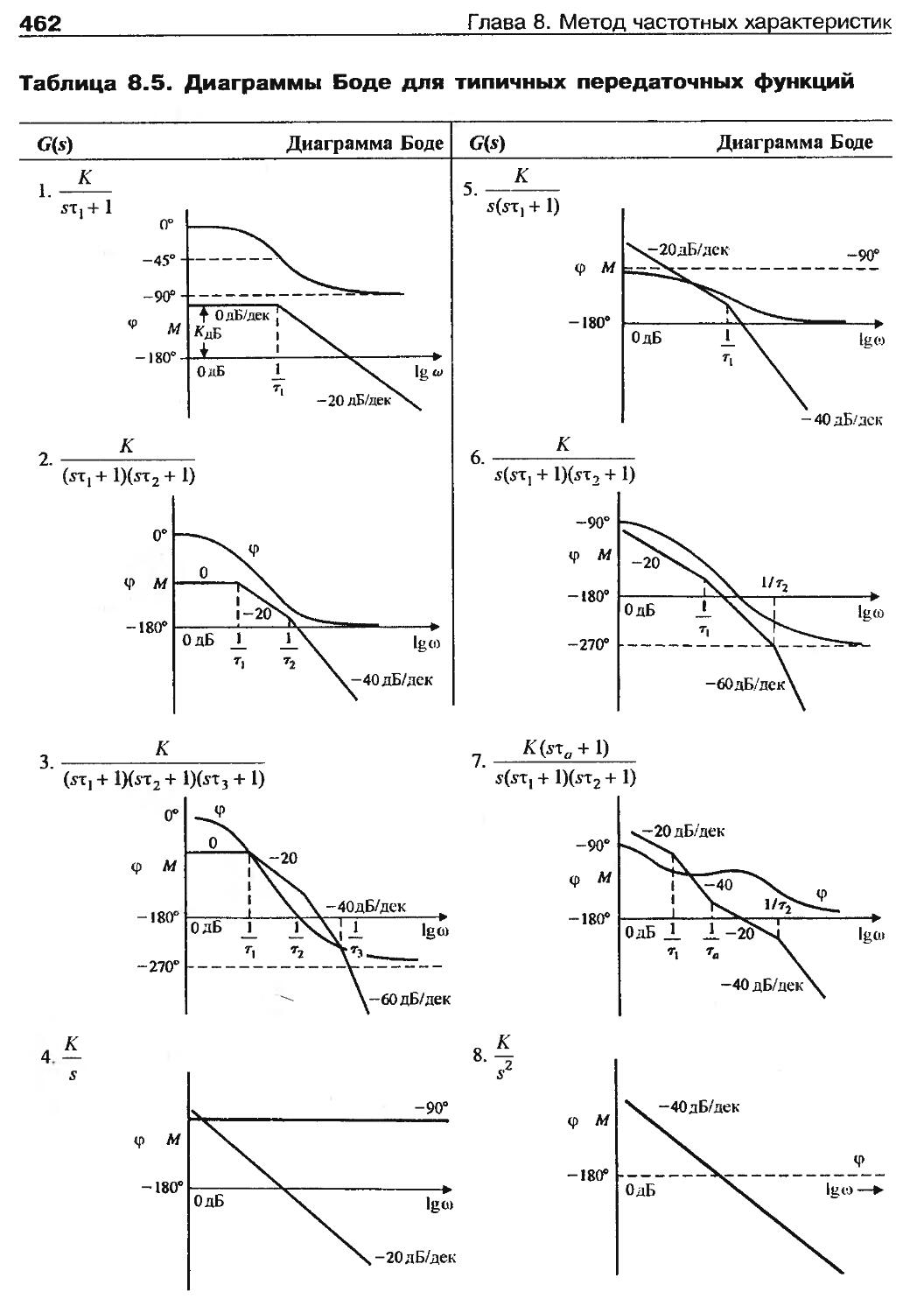
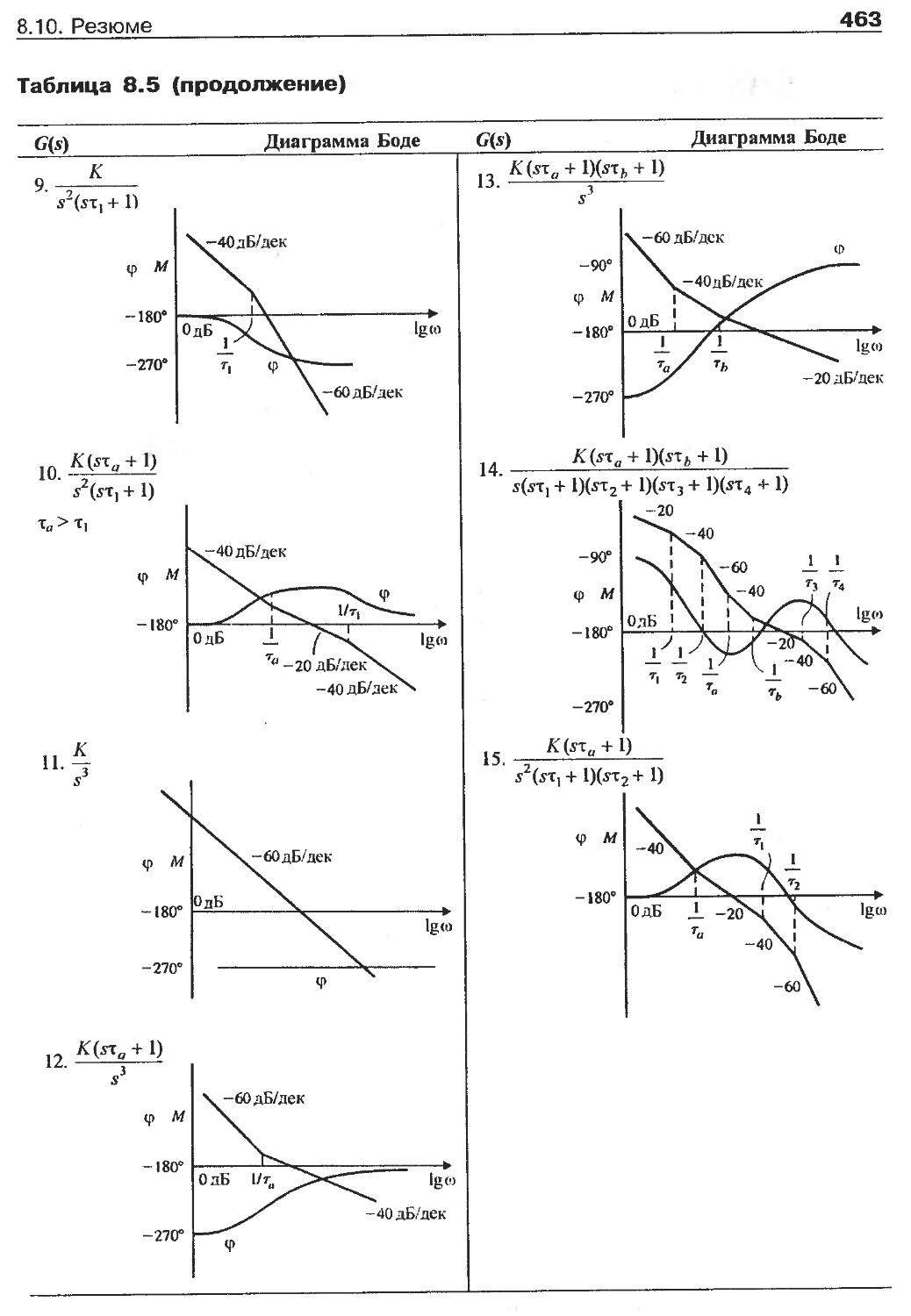
8.10. Резюме.......................................................460
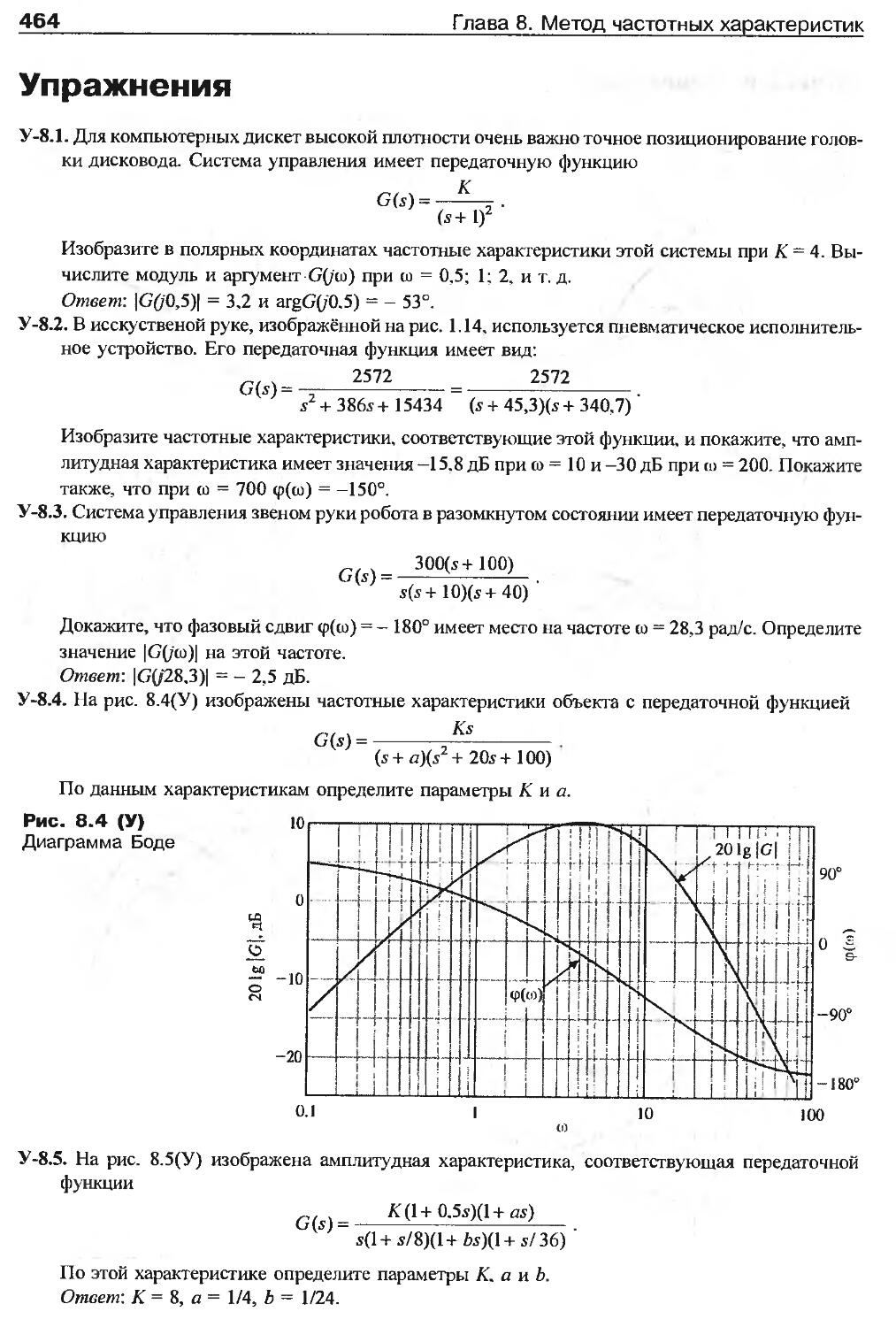
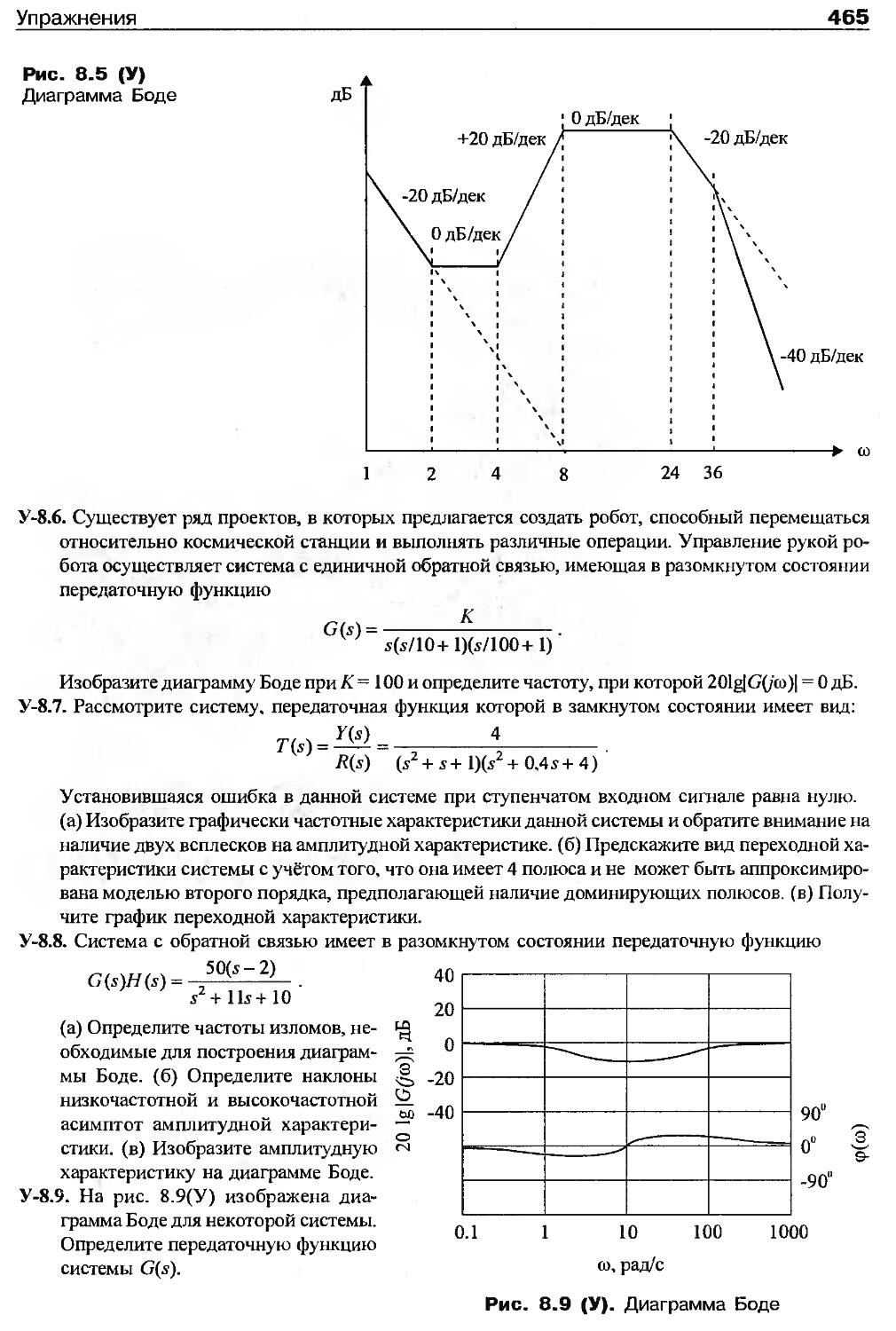
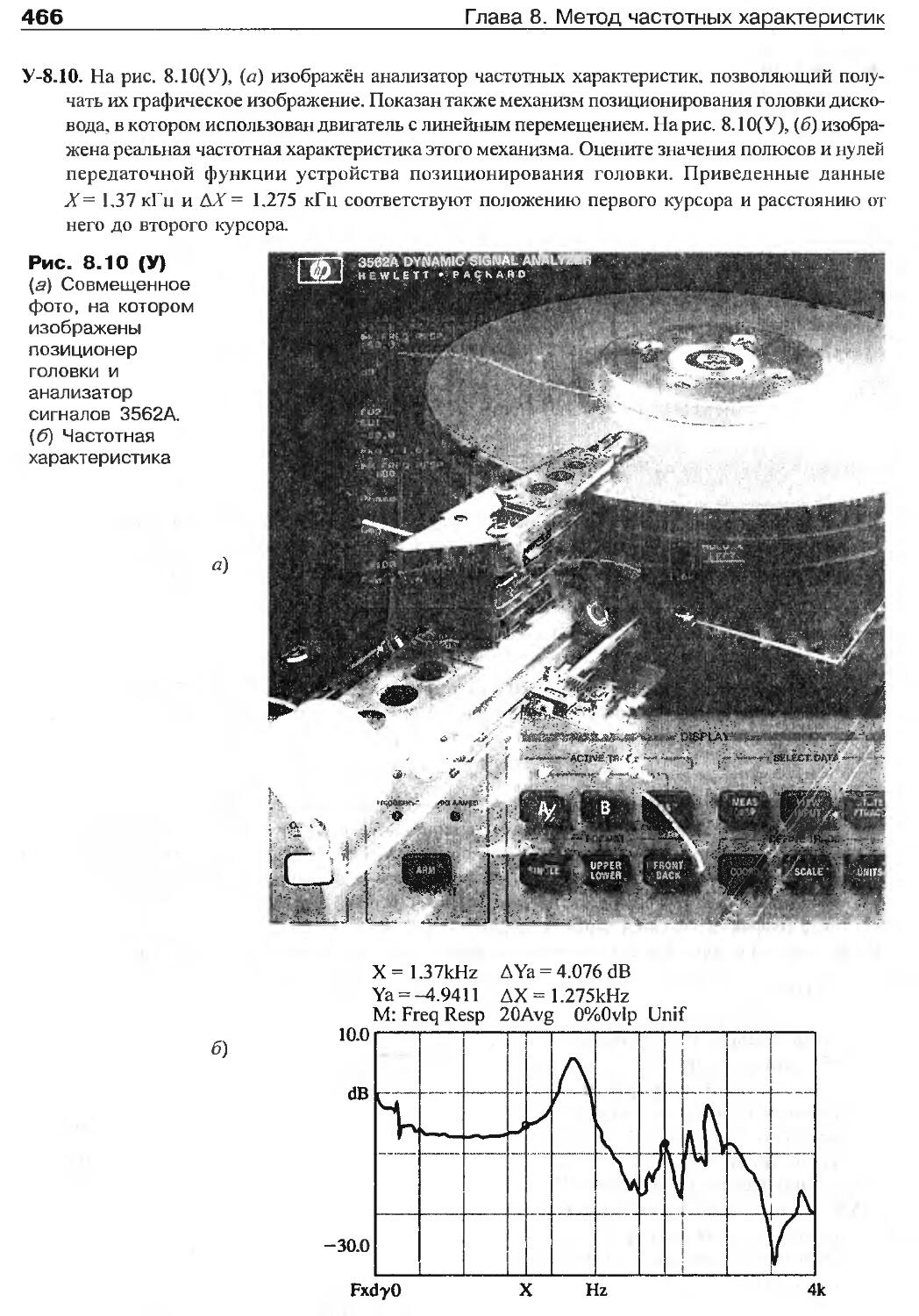
Упражнения.......’.................................................464
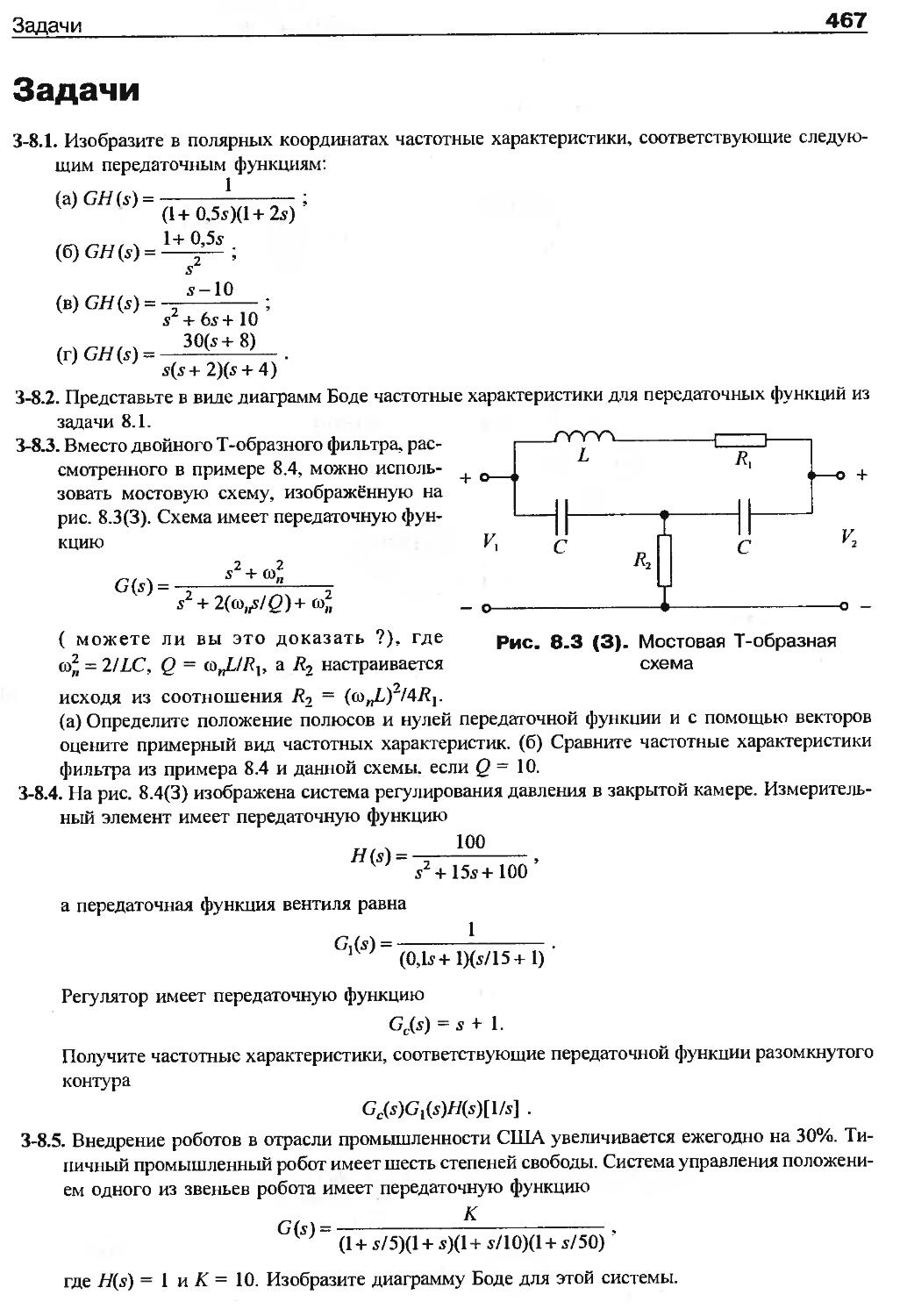
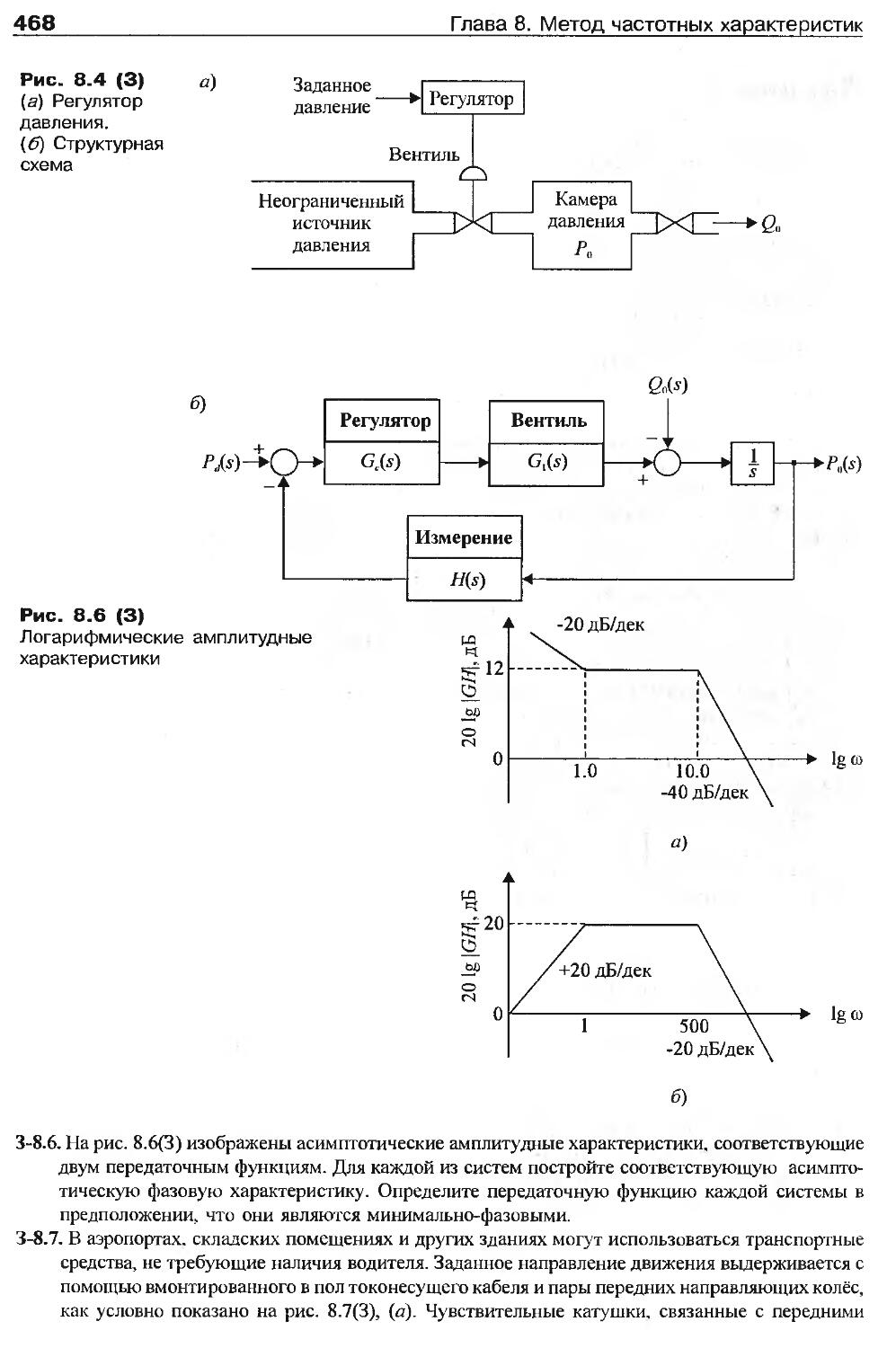
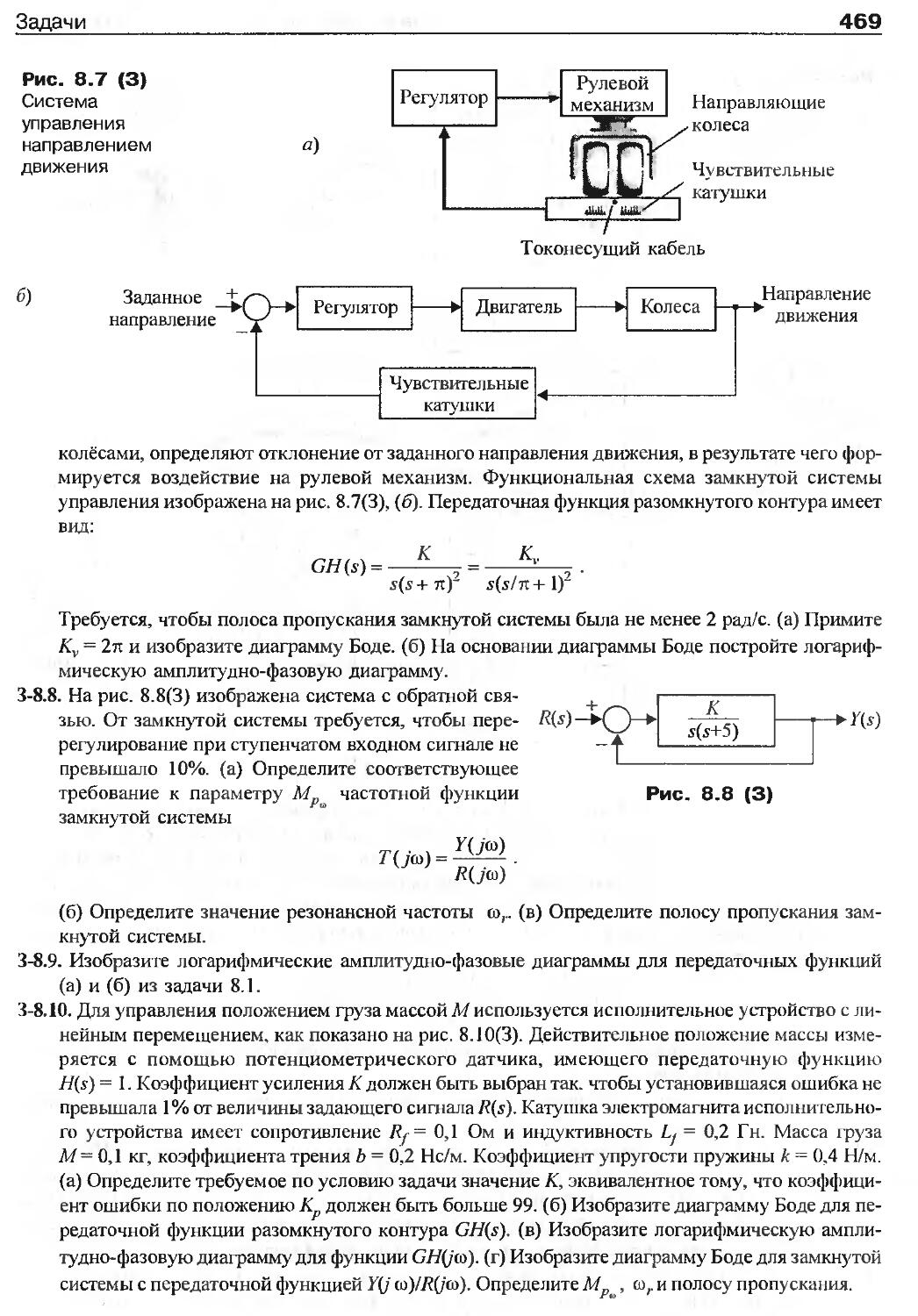
Задачи ........................................................... 467
Задачи повышенной сложности........................................477
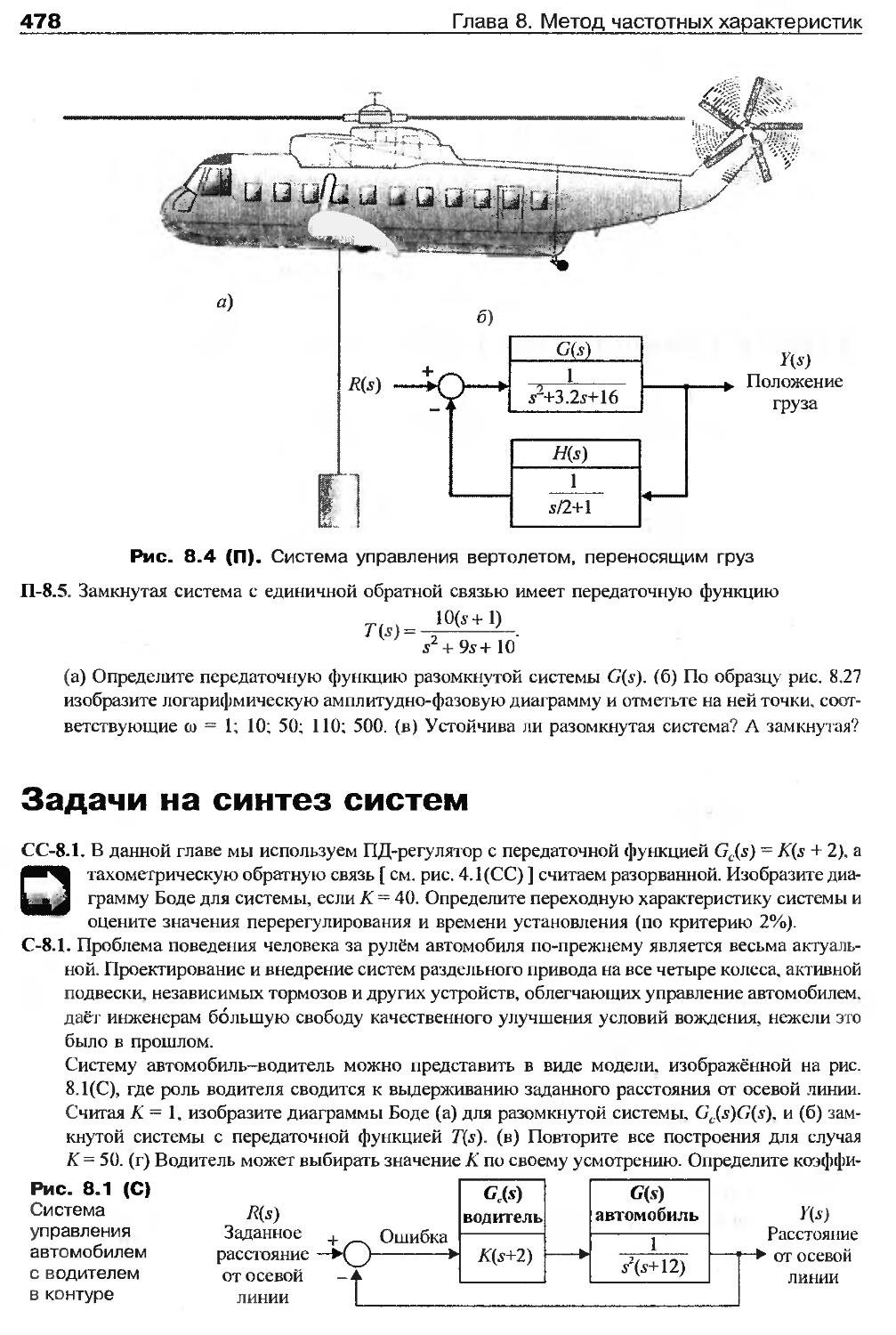
Задачи на синтез систем............................................478
Задачи, решаемые с помощью MATLAB..................................481
Ключевые термины и понятия.........................................483
Содержание
11
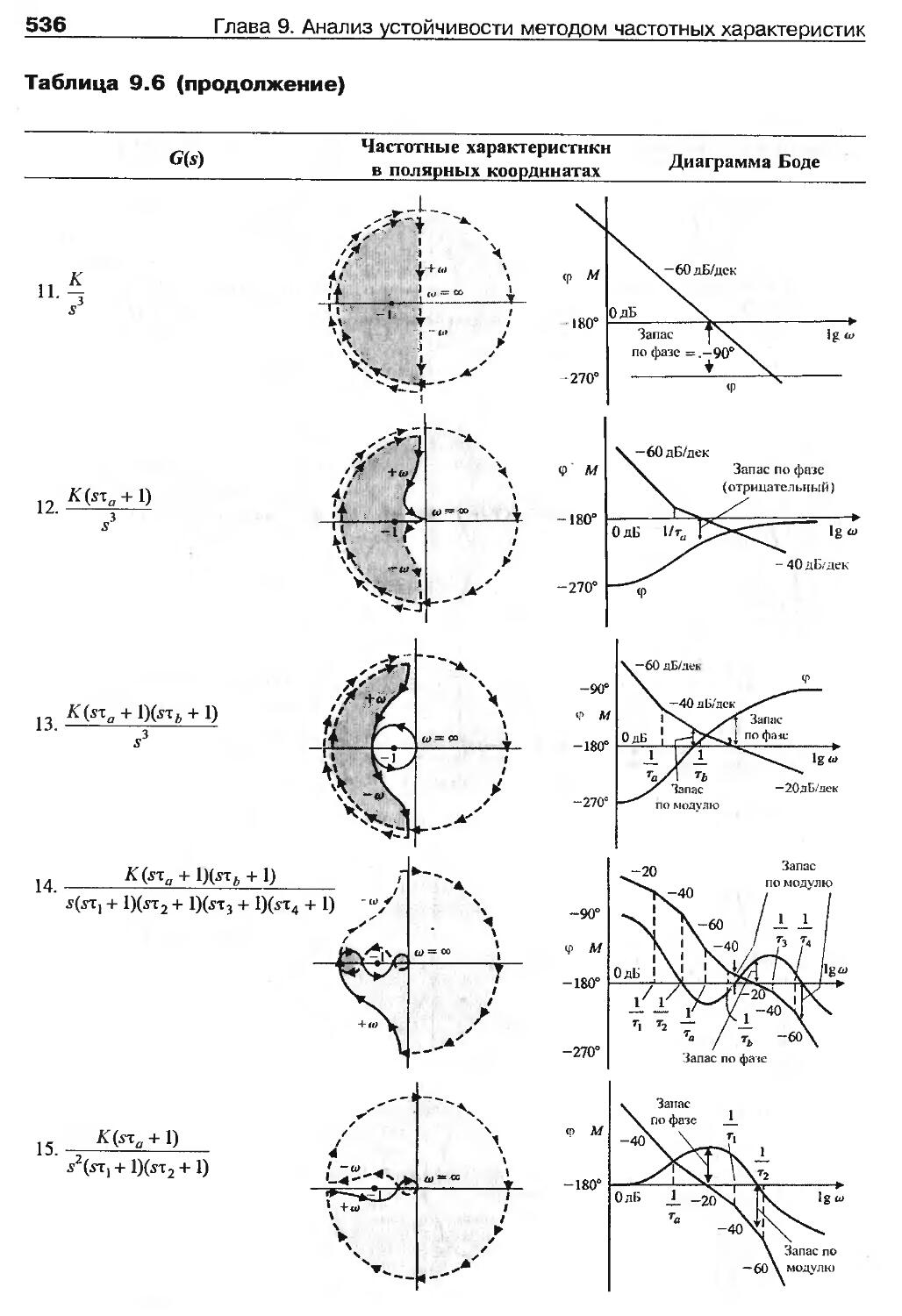
Глава 9. Анализ устойчивости методом частотных характеристик.... 484
Обзор..............................................................484
9.1. Введение......................................................484
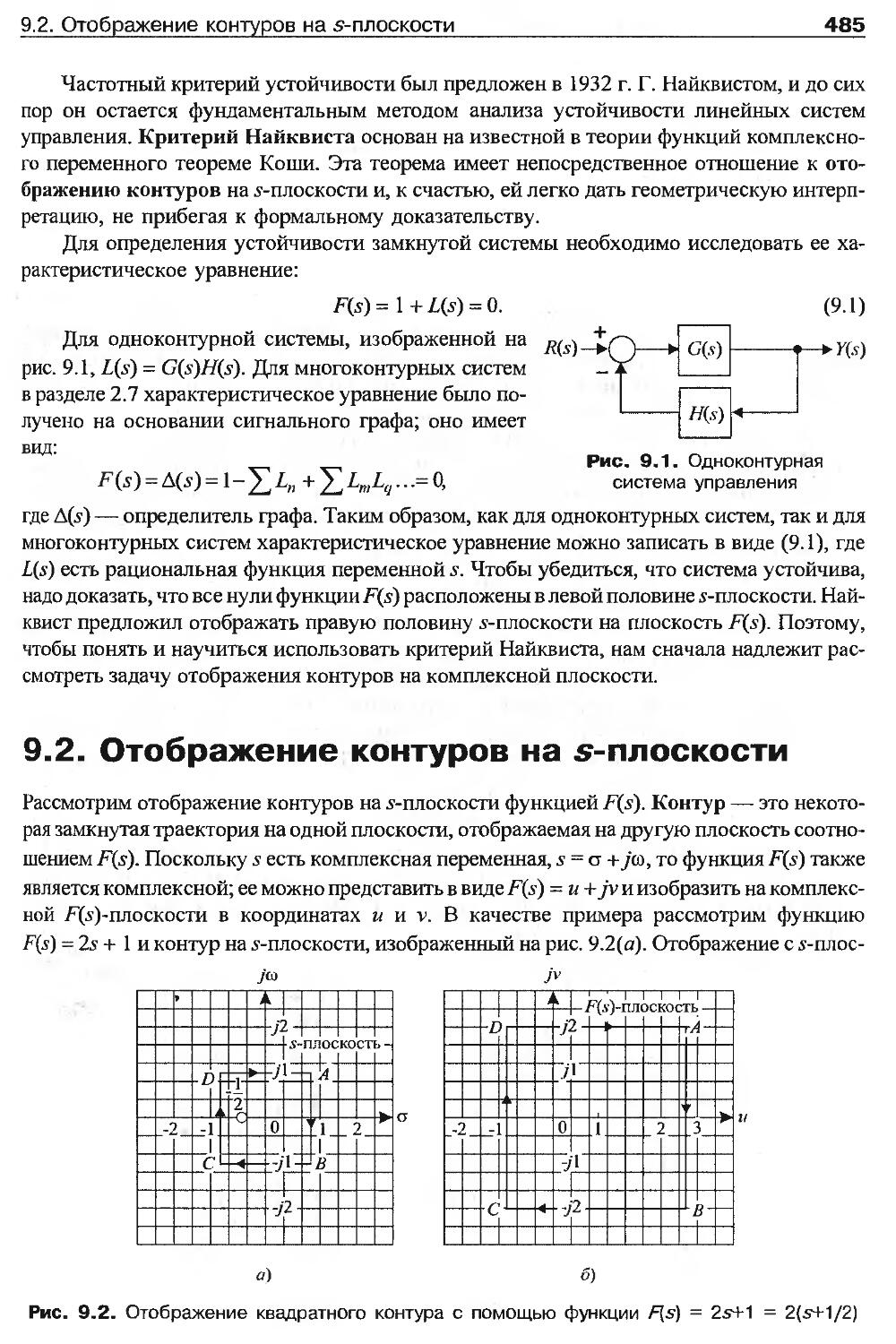
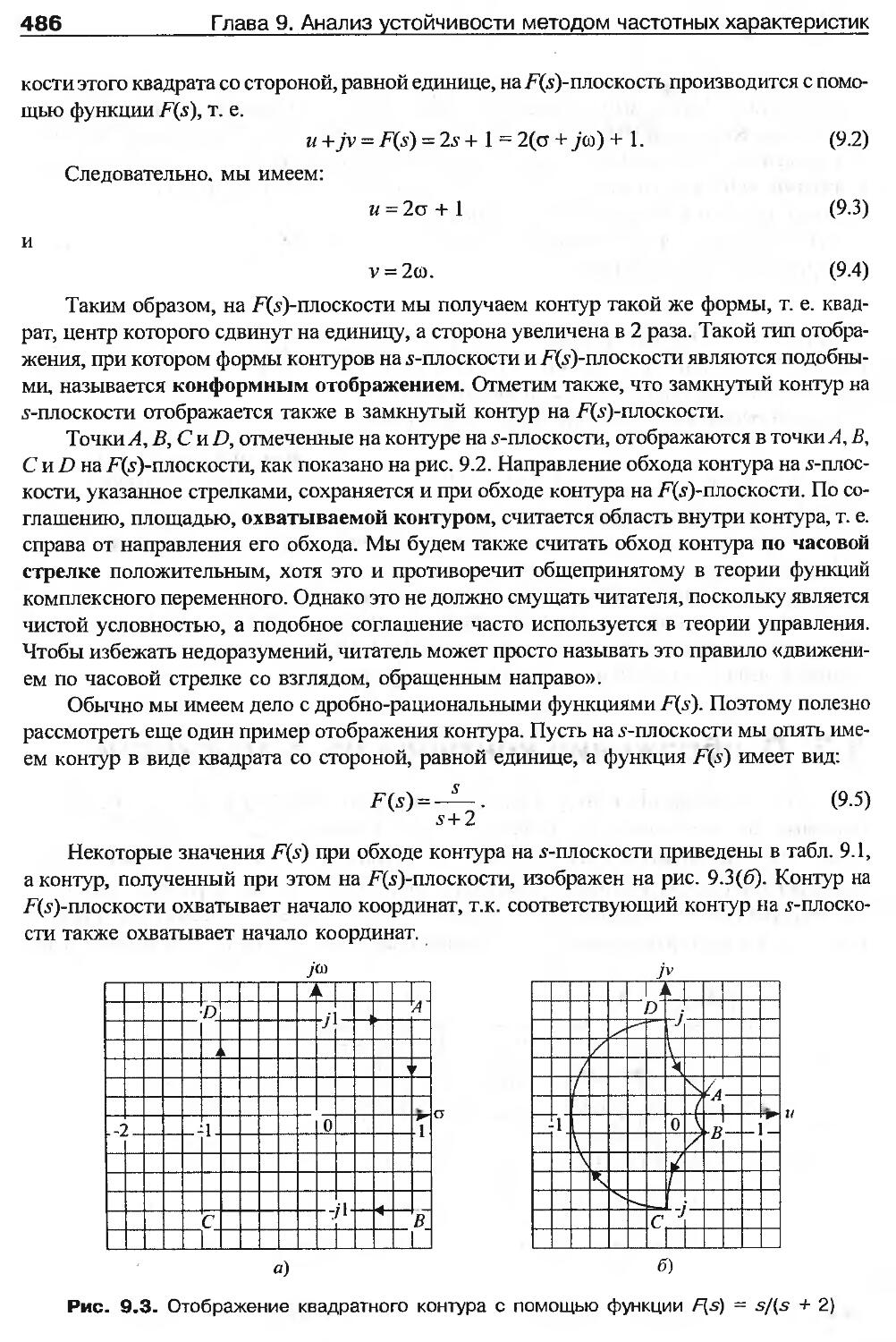
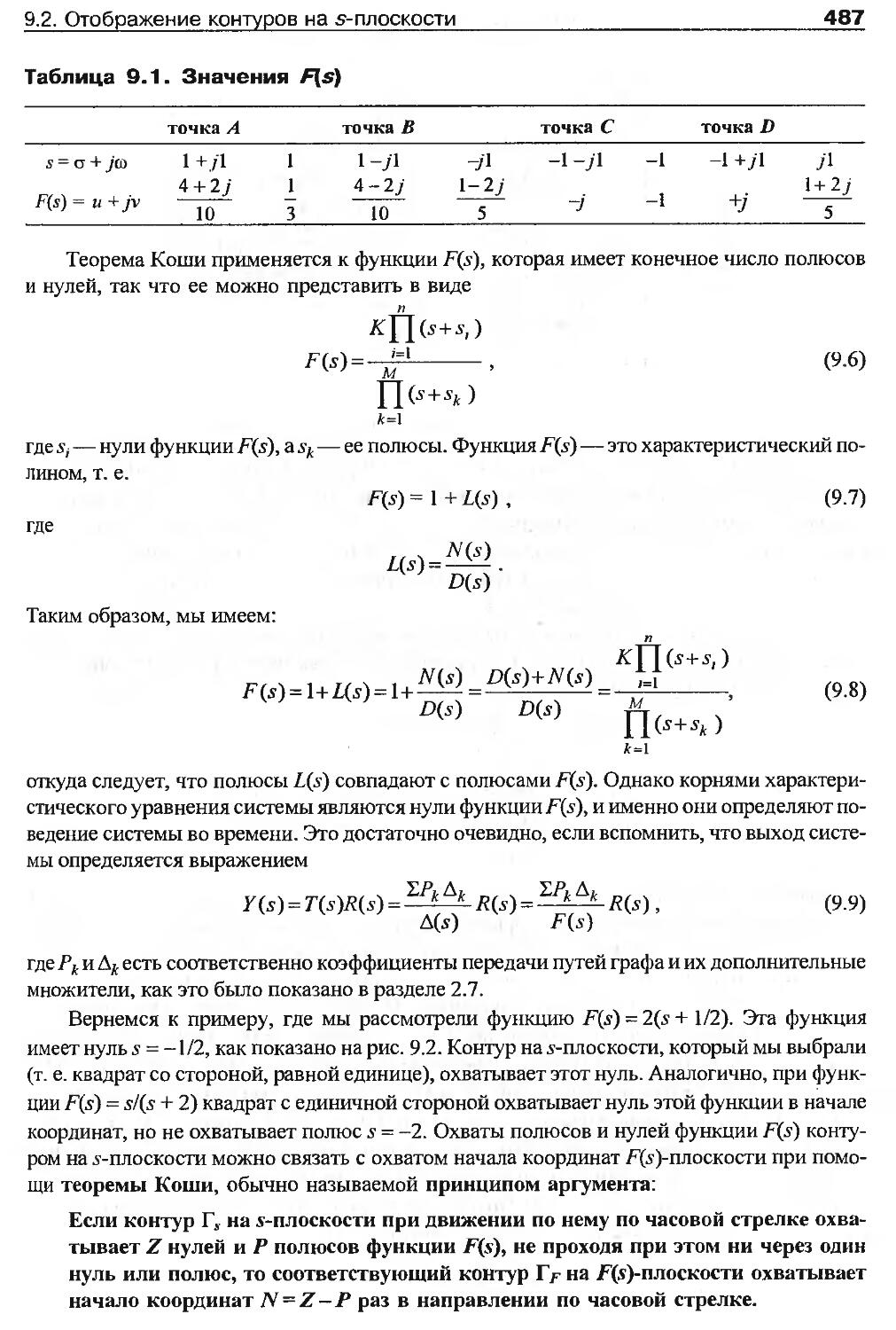
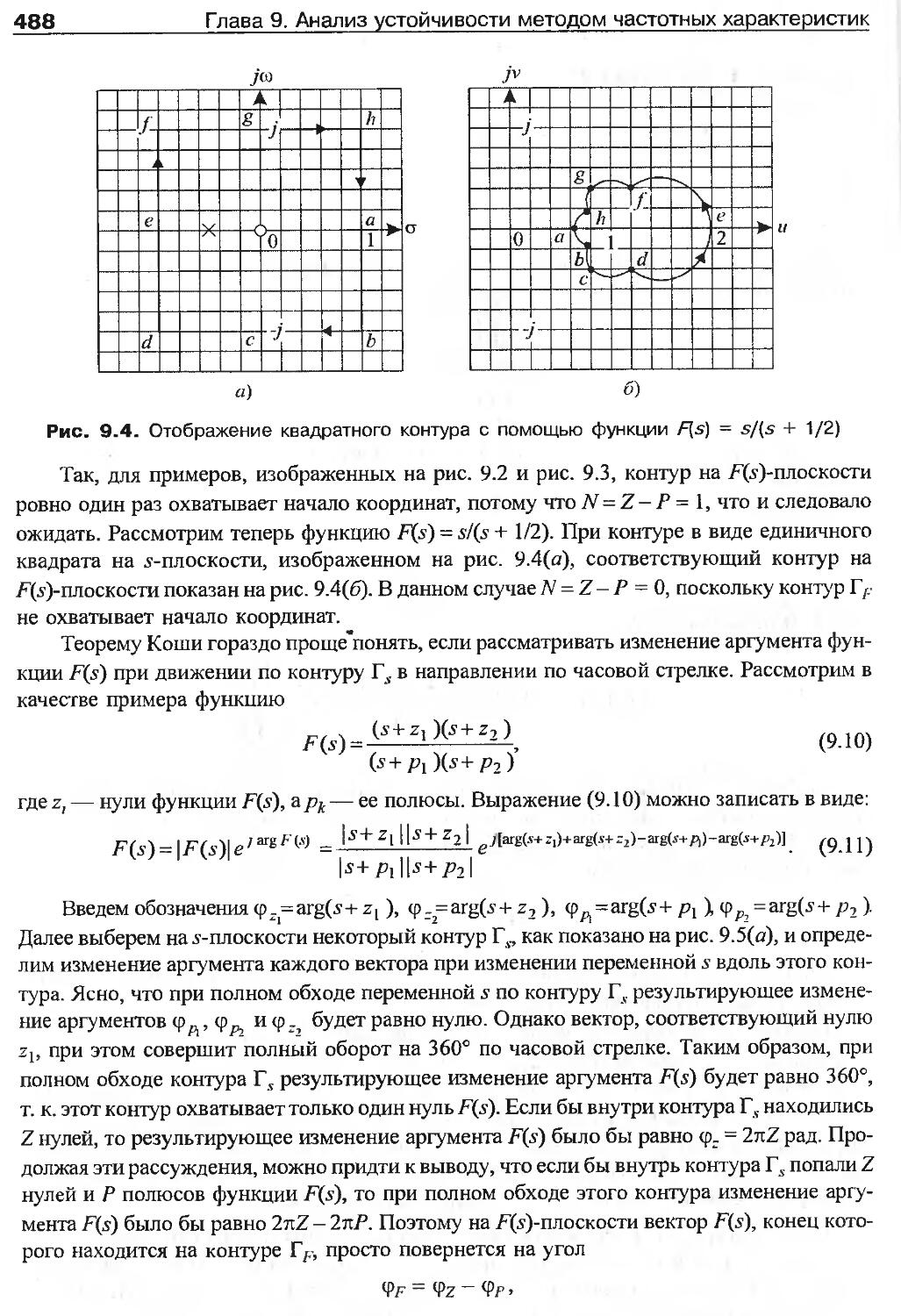
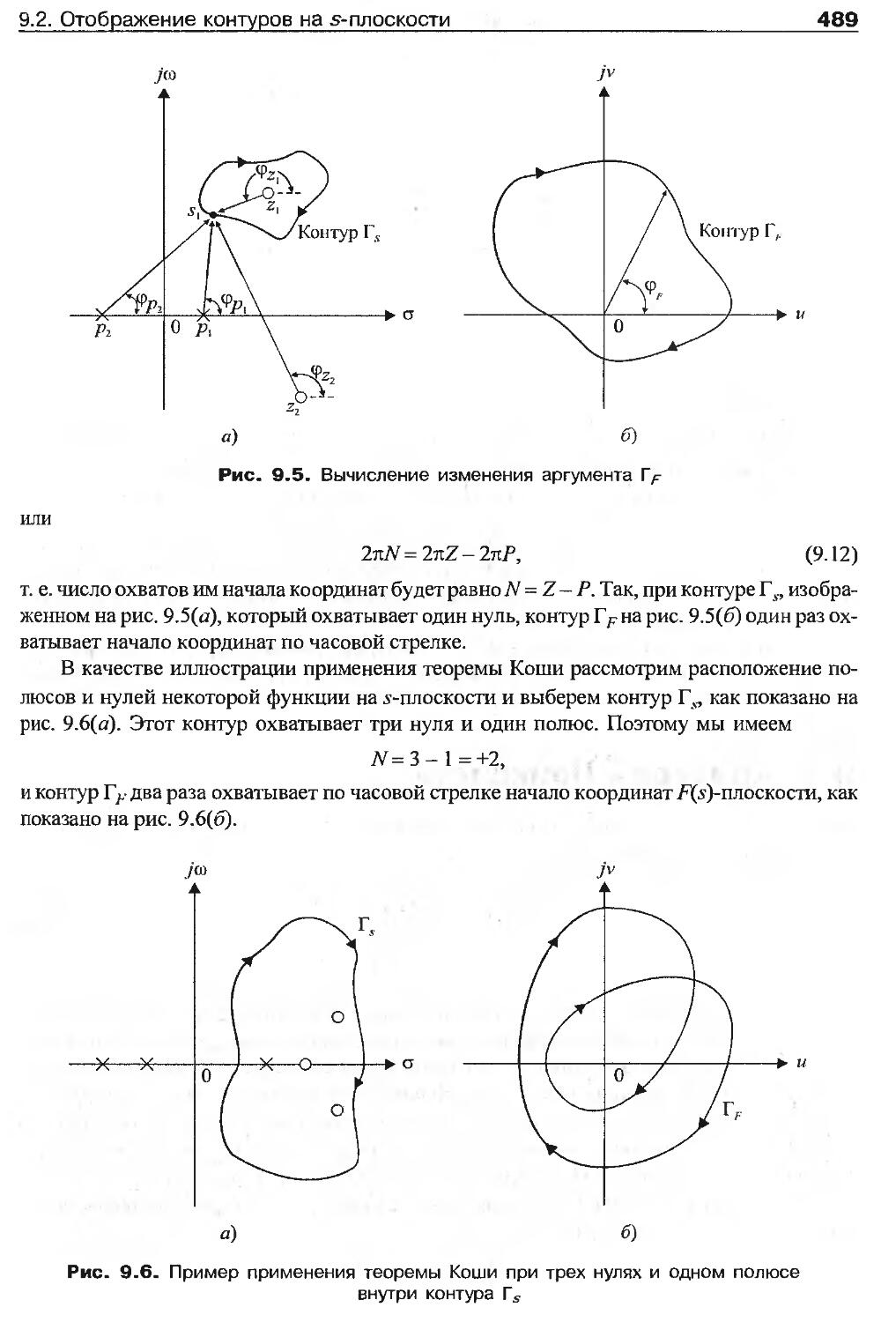
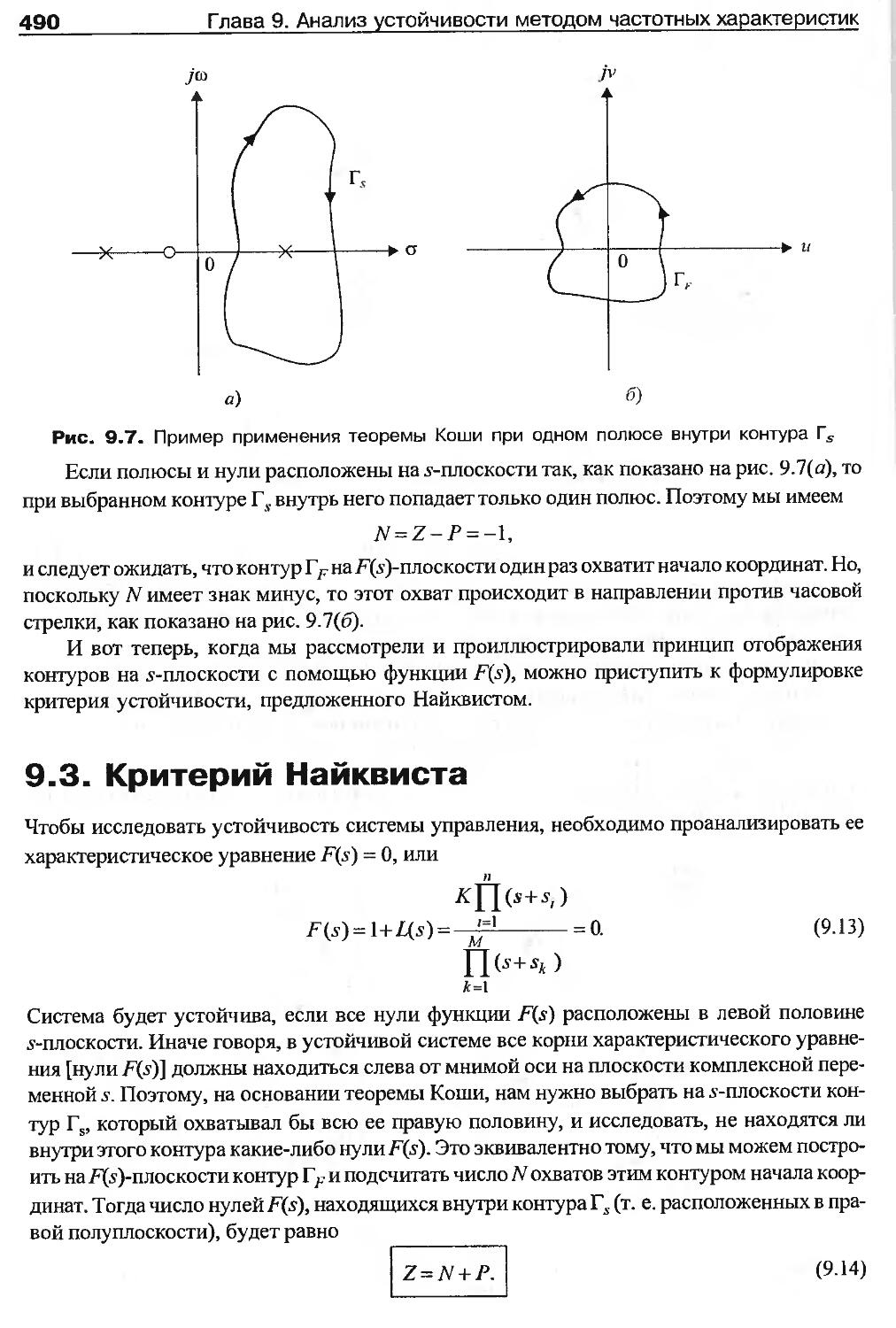
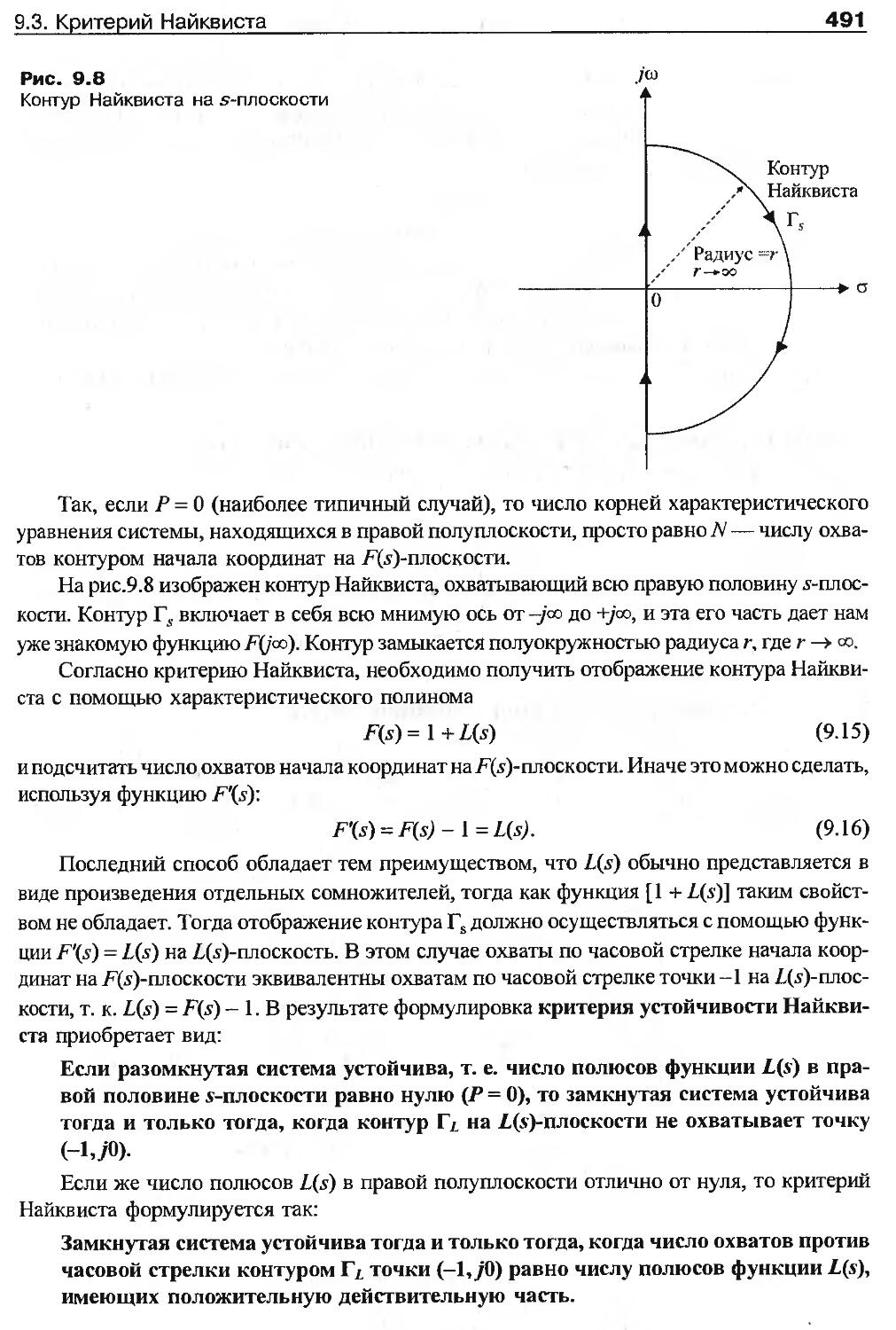
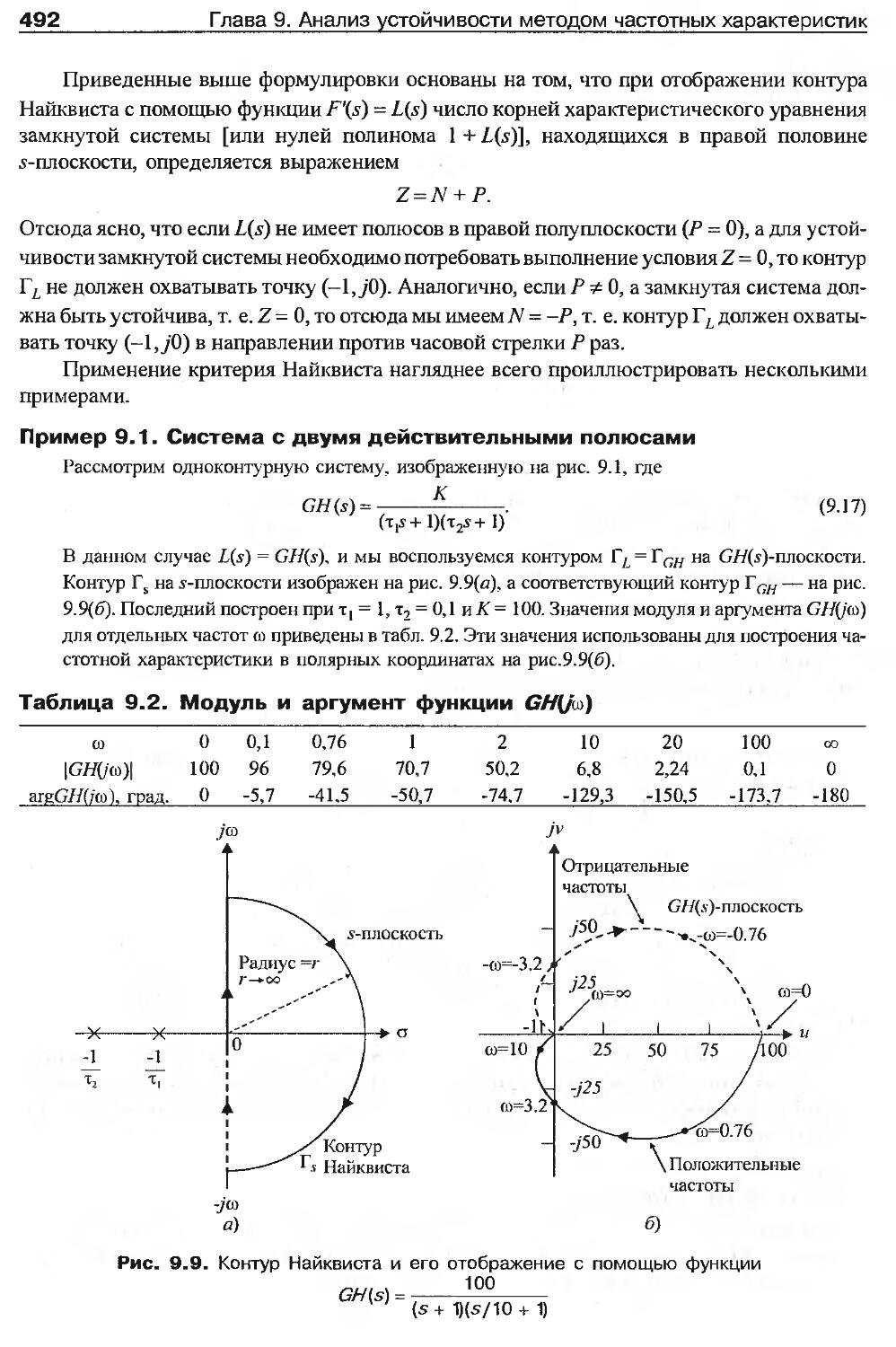
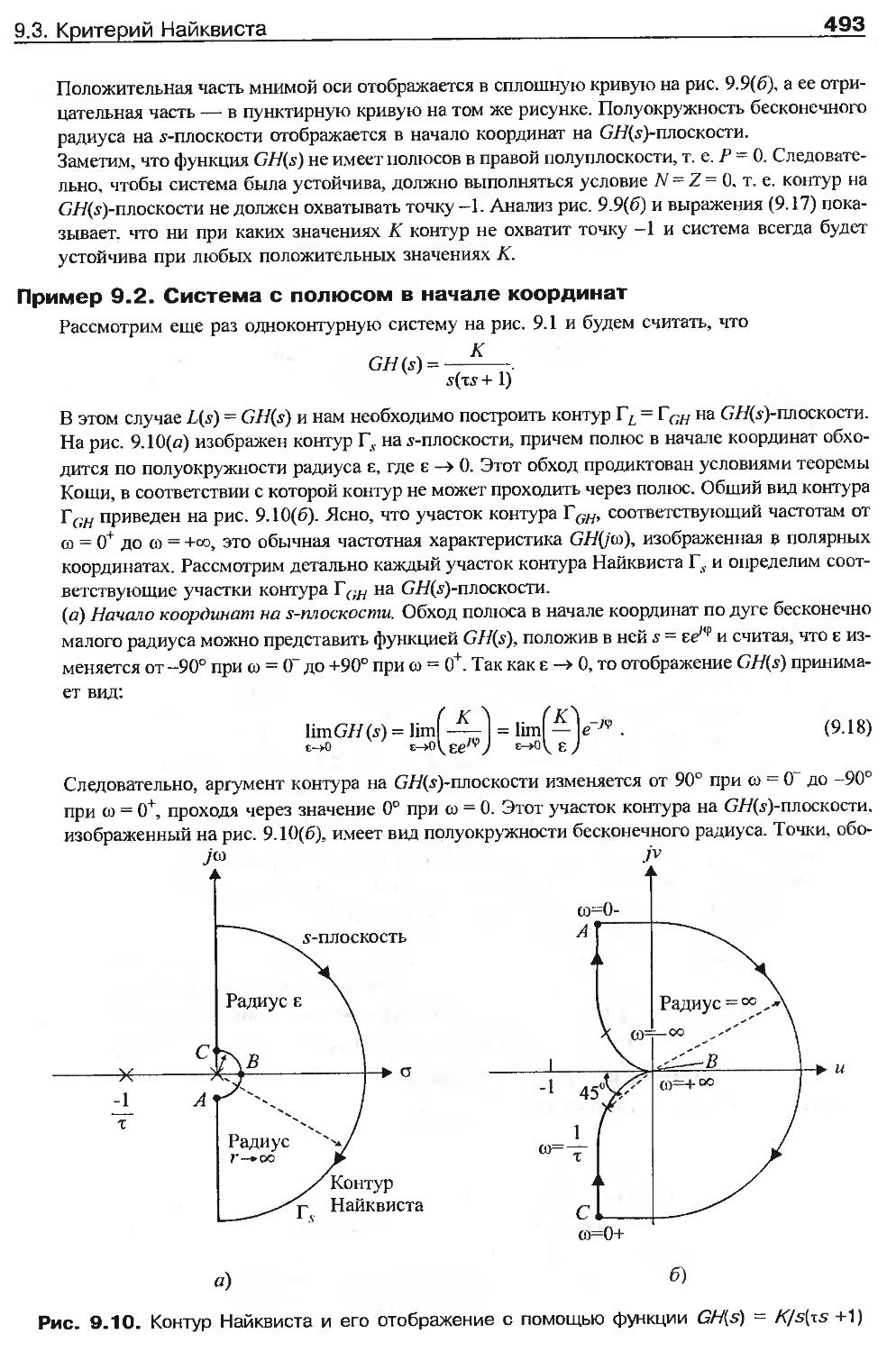
9.2. Отображение контуров на 5-плоскости...........................485
9.3. Критерий Найквиста............................................490
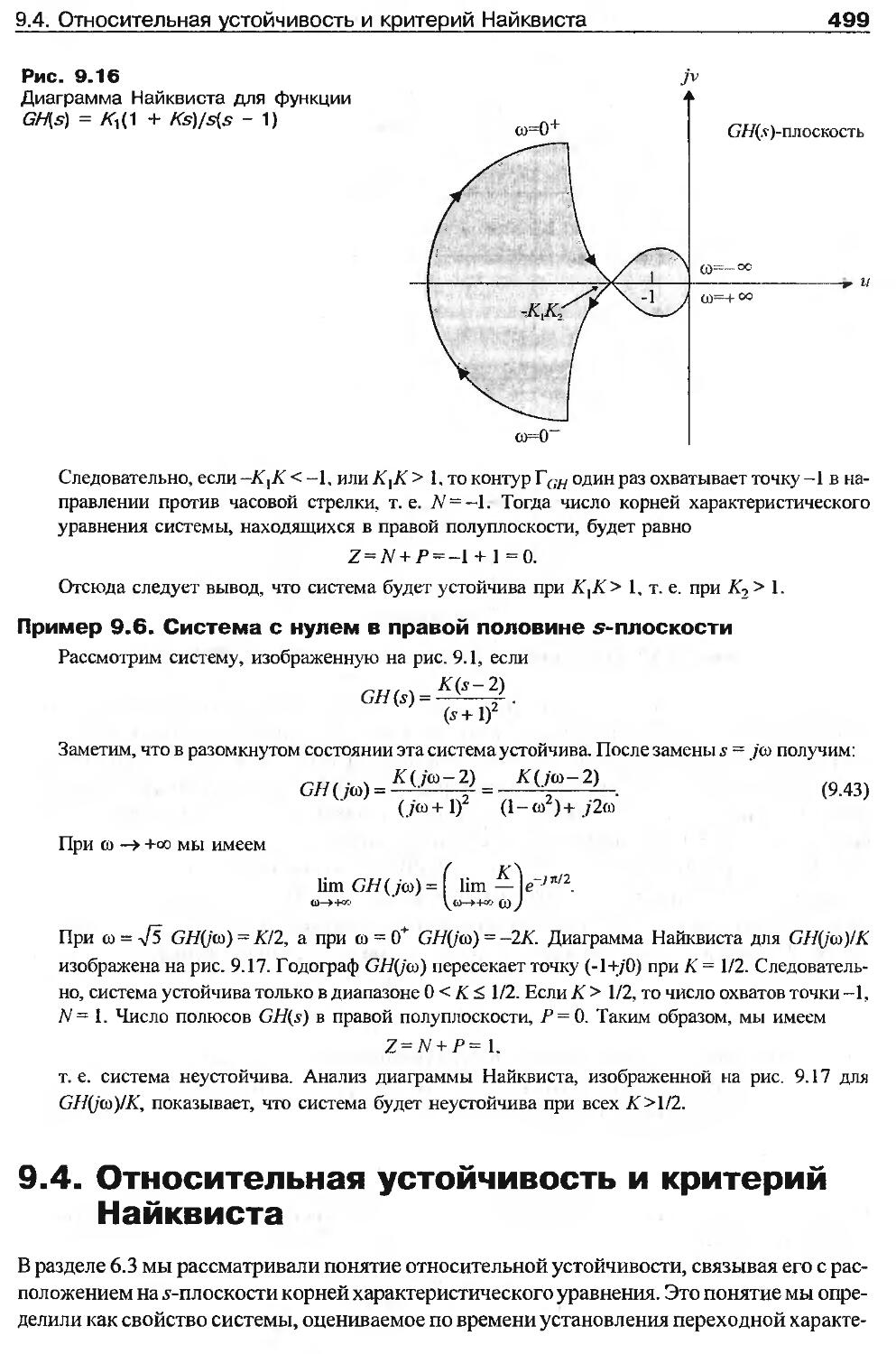
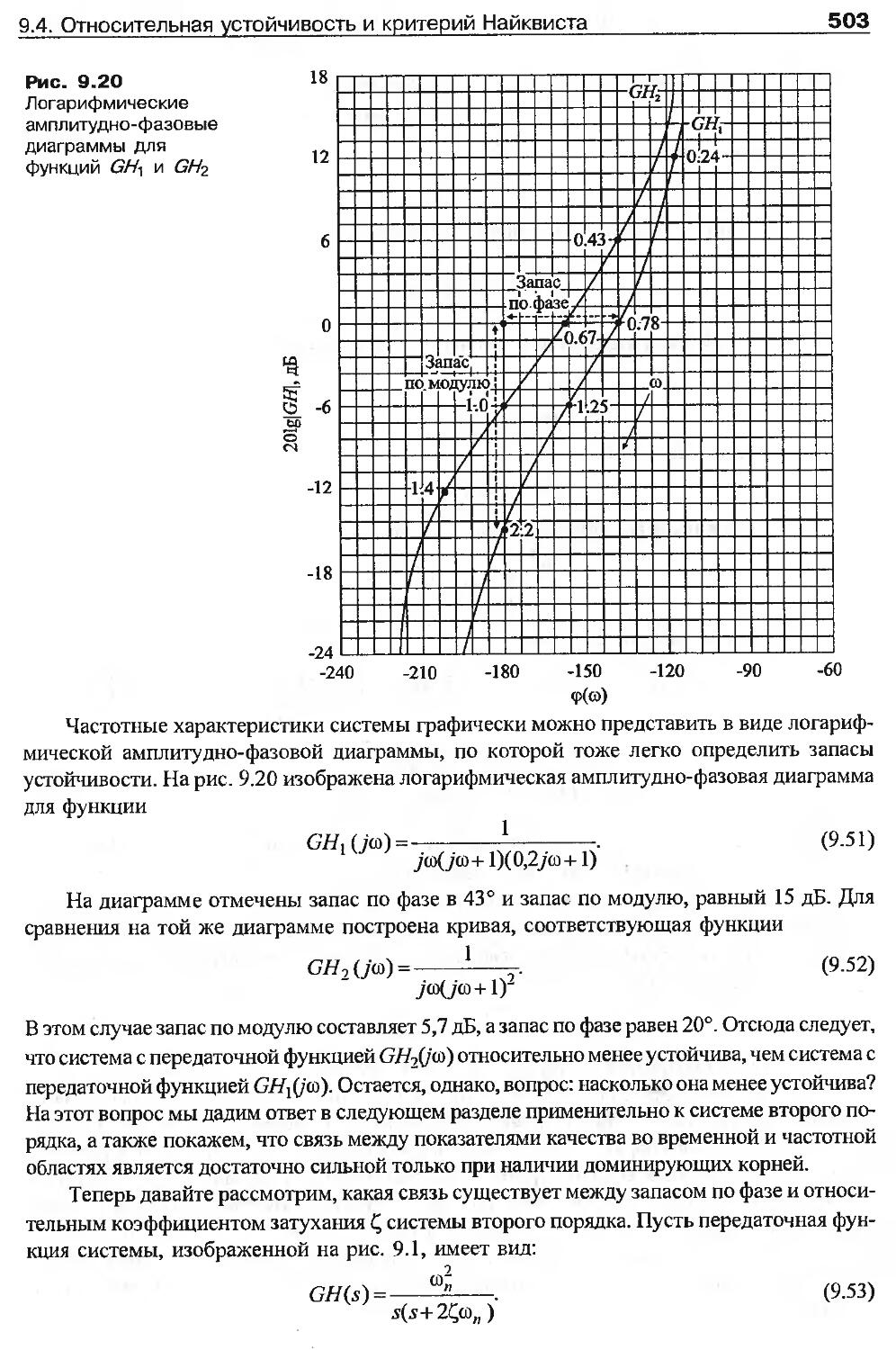
9.4. Относительная устойчивость и критерий Найквиста...............499
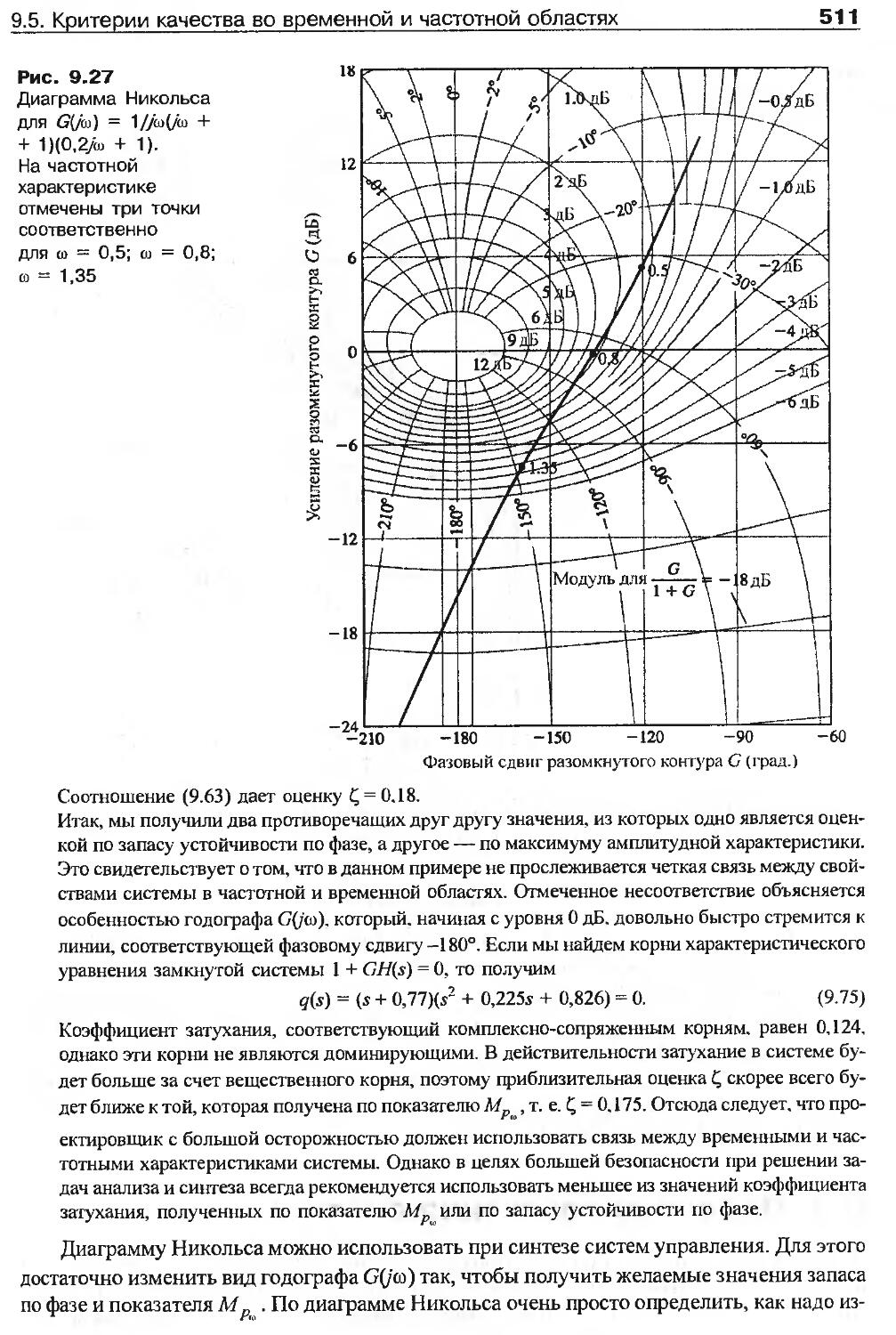
9.5. Критерии качества во временной и частотной областях...........506
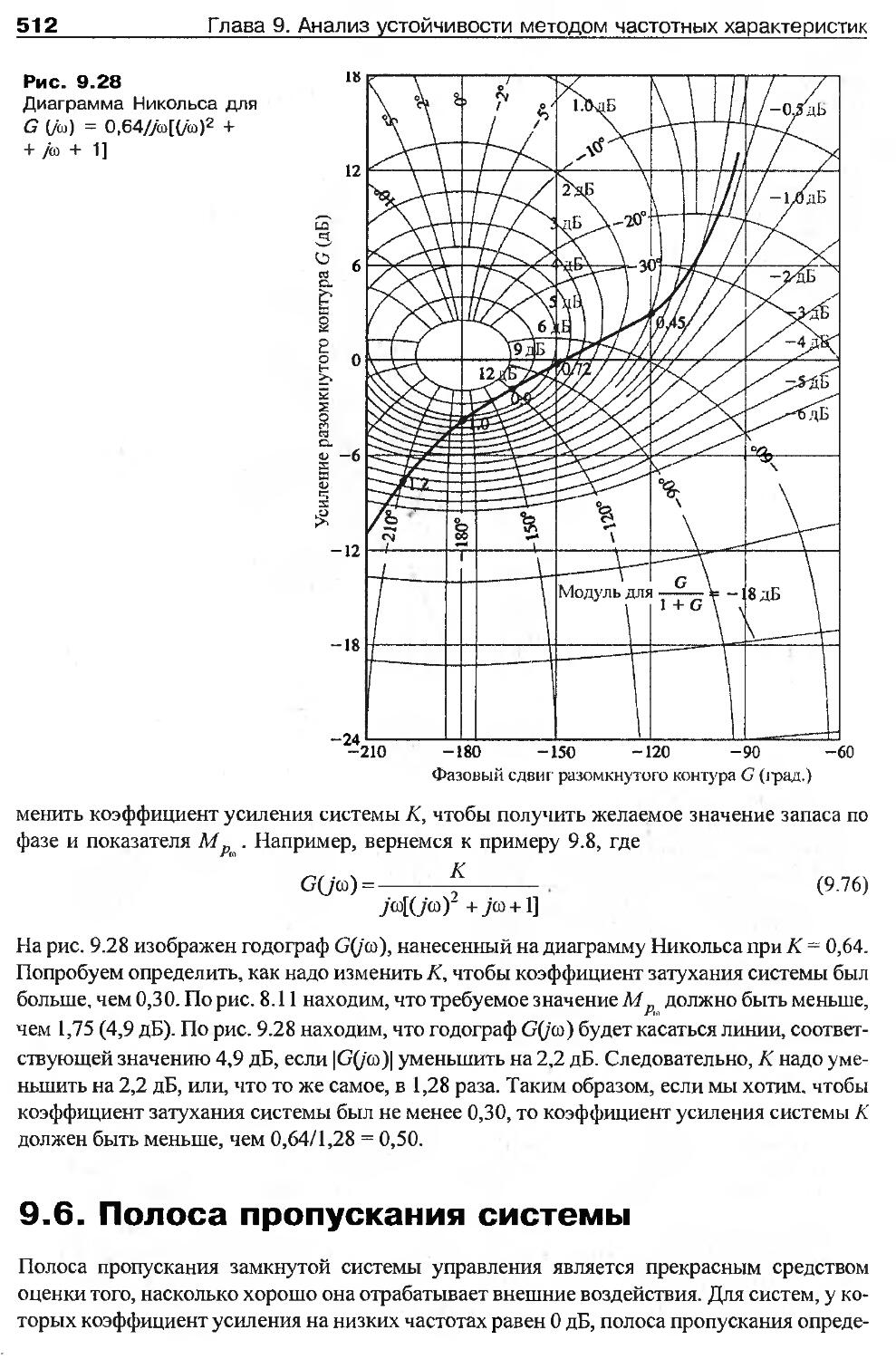
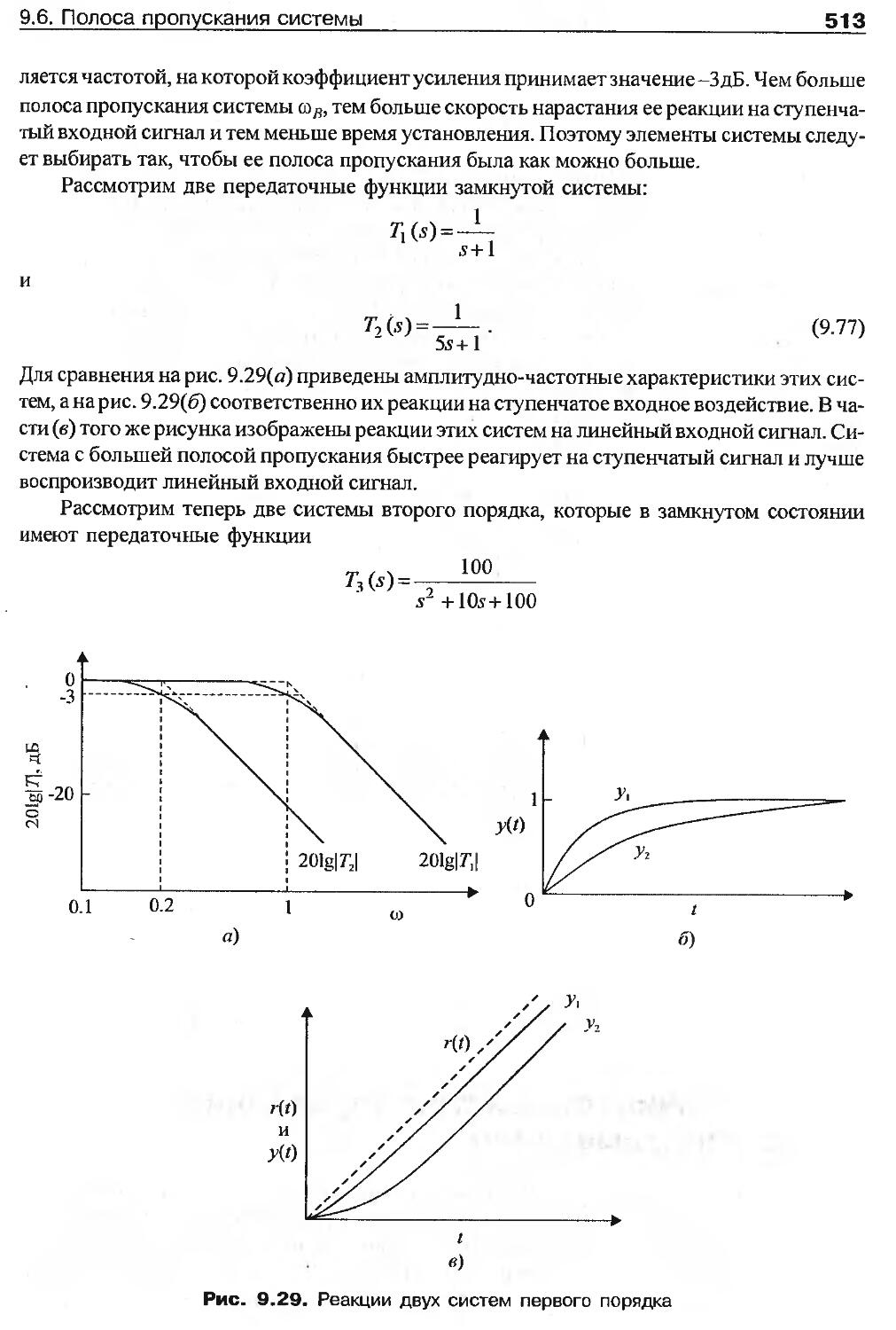
9.6. Полоса пропускания системы....................................512
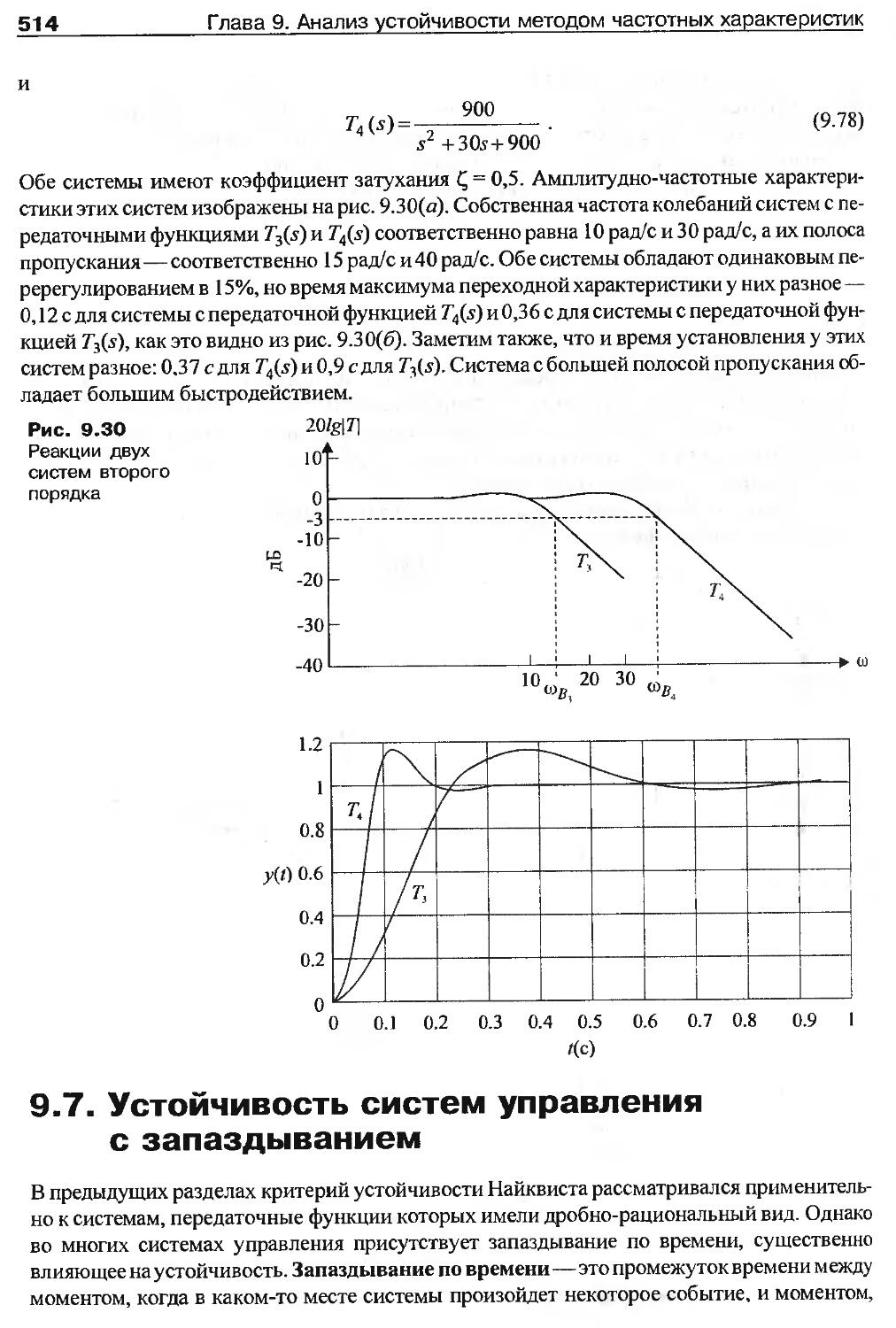
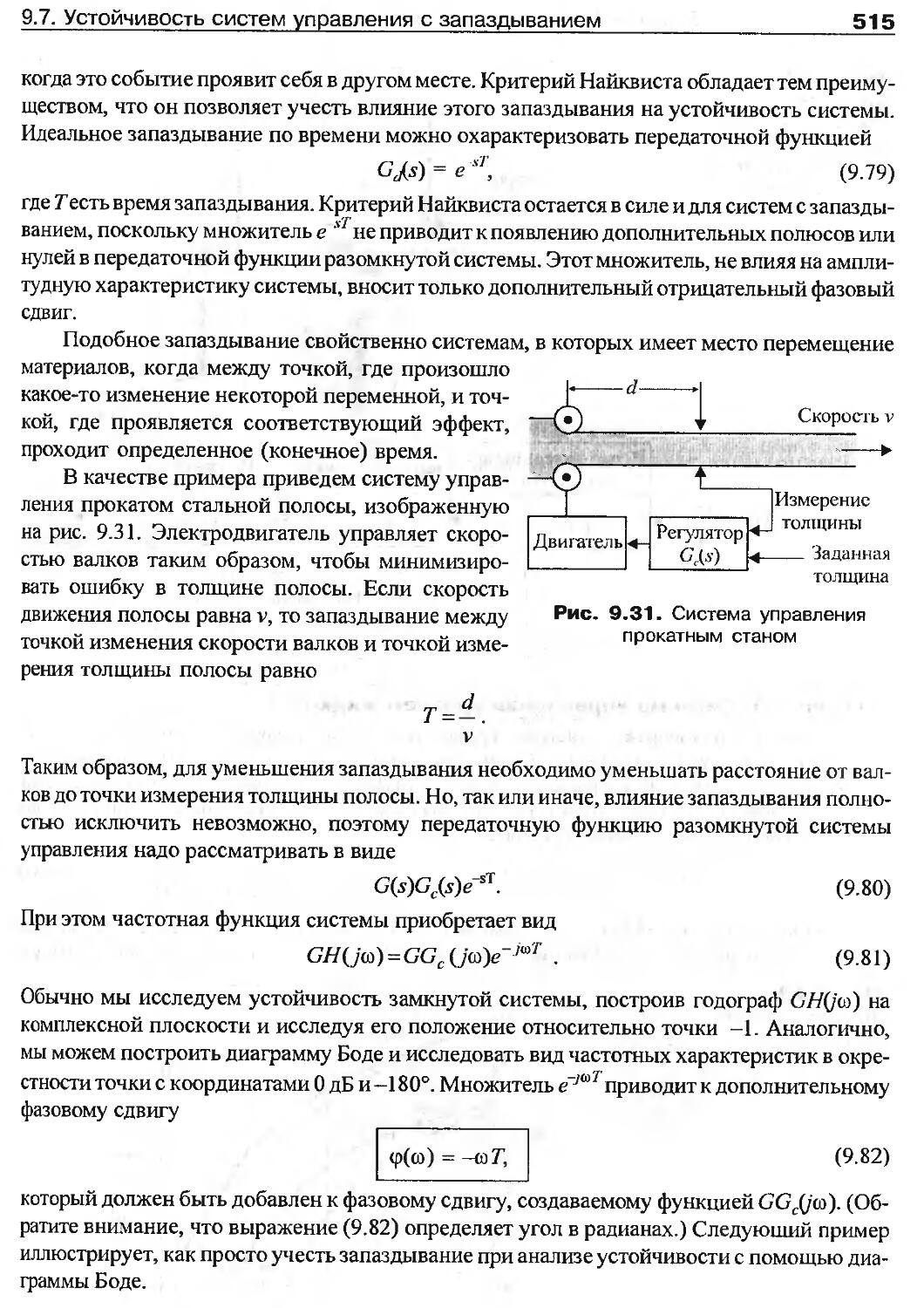
9.7. Устойчивость систем управления с запаздыванием................514
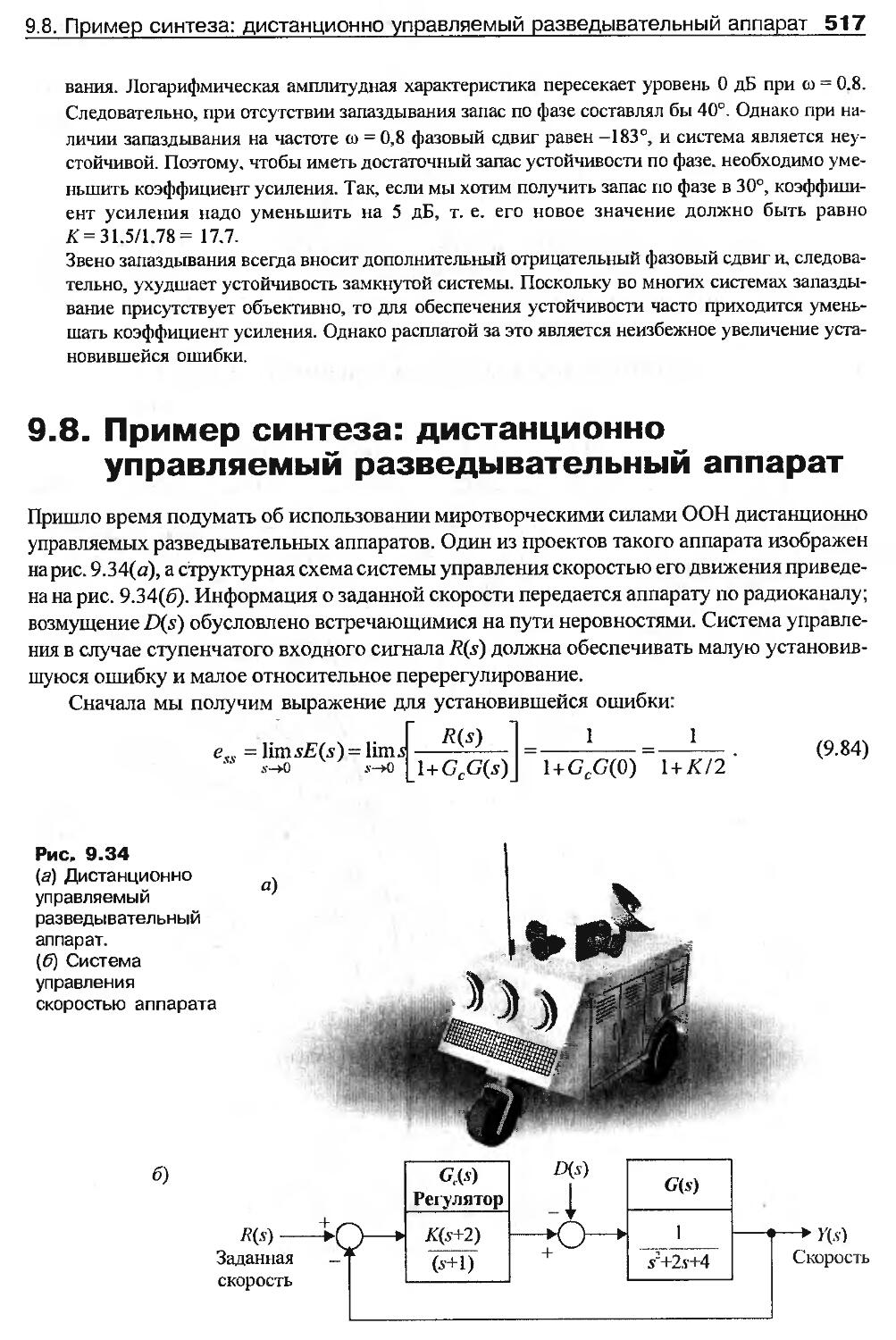
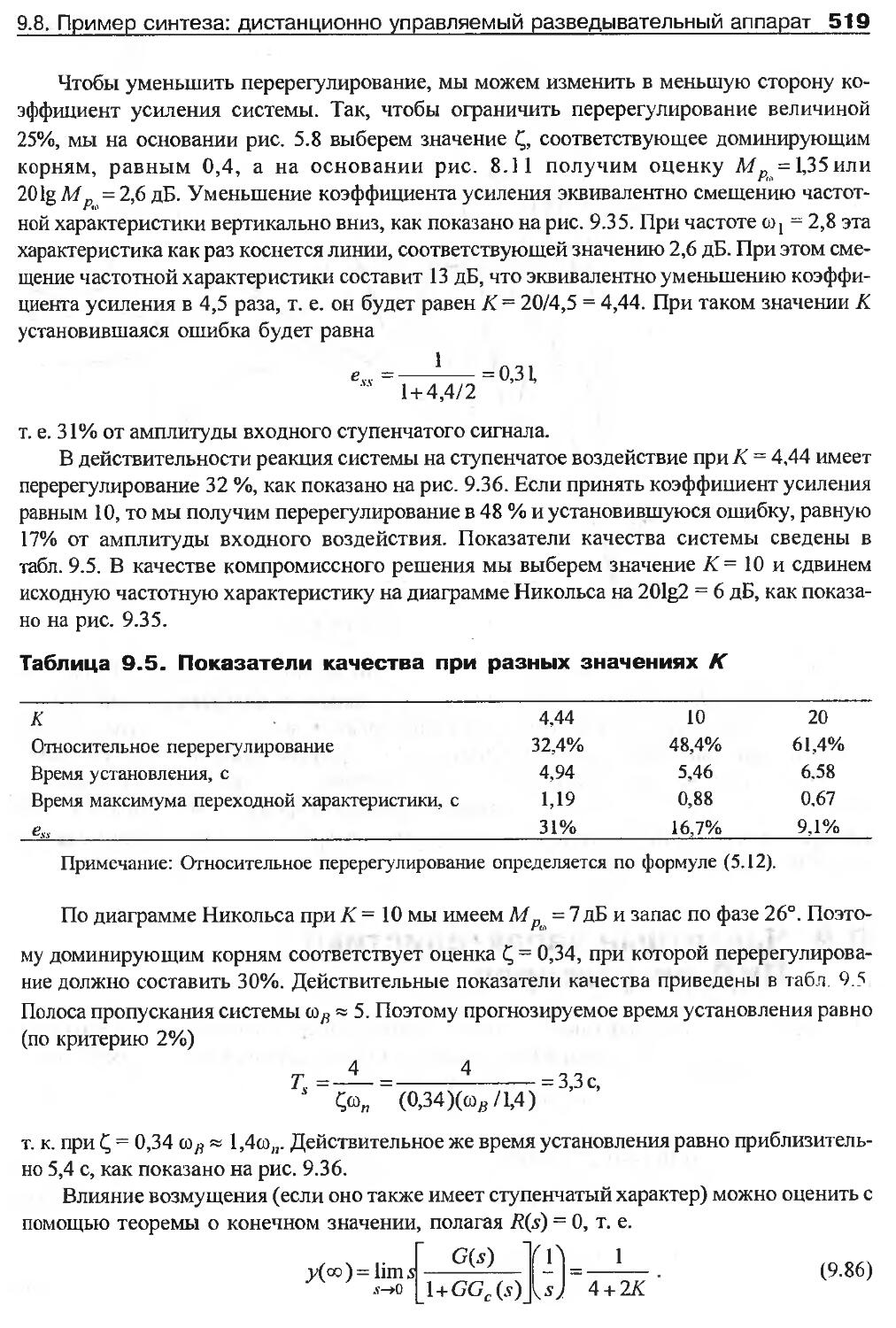
9.8. Пример синтеза: дистанционно управляемый разведывательный аппарат. . . 517
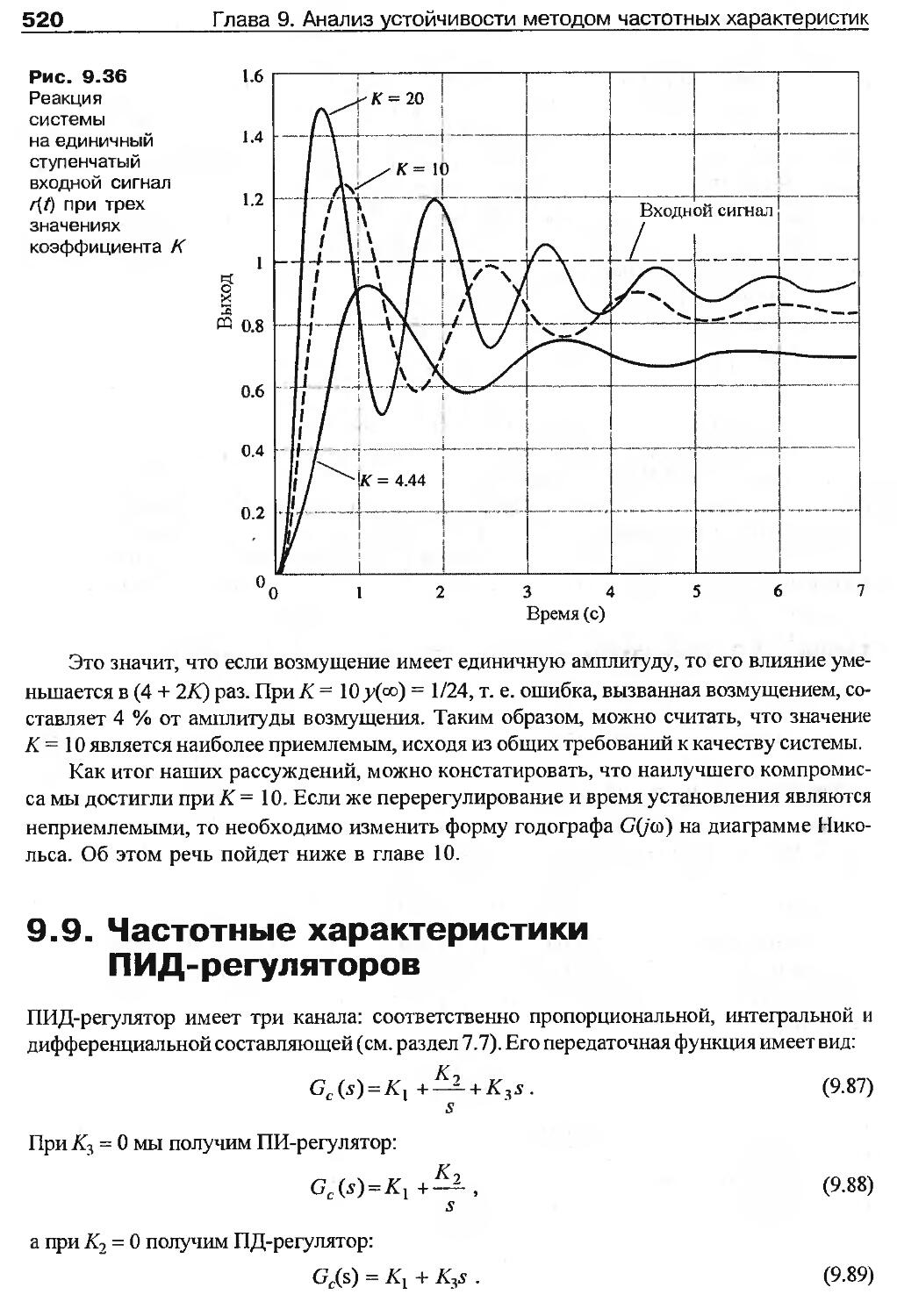
9.9. Частотные характеристики ПИД-регуляторов......................520
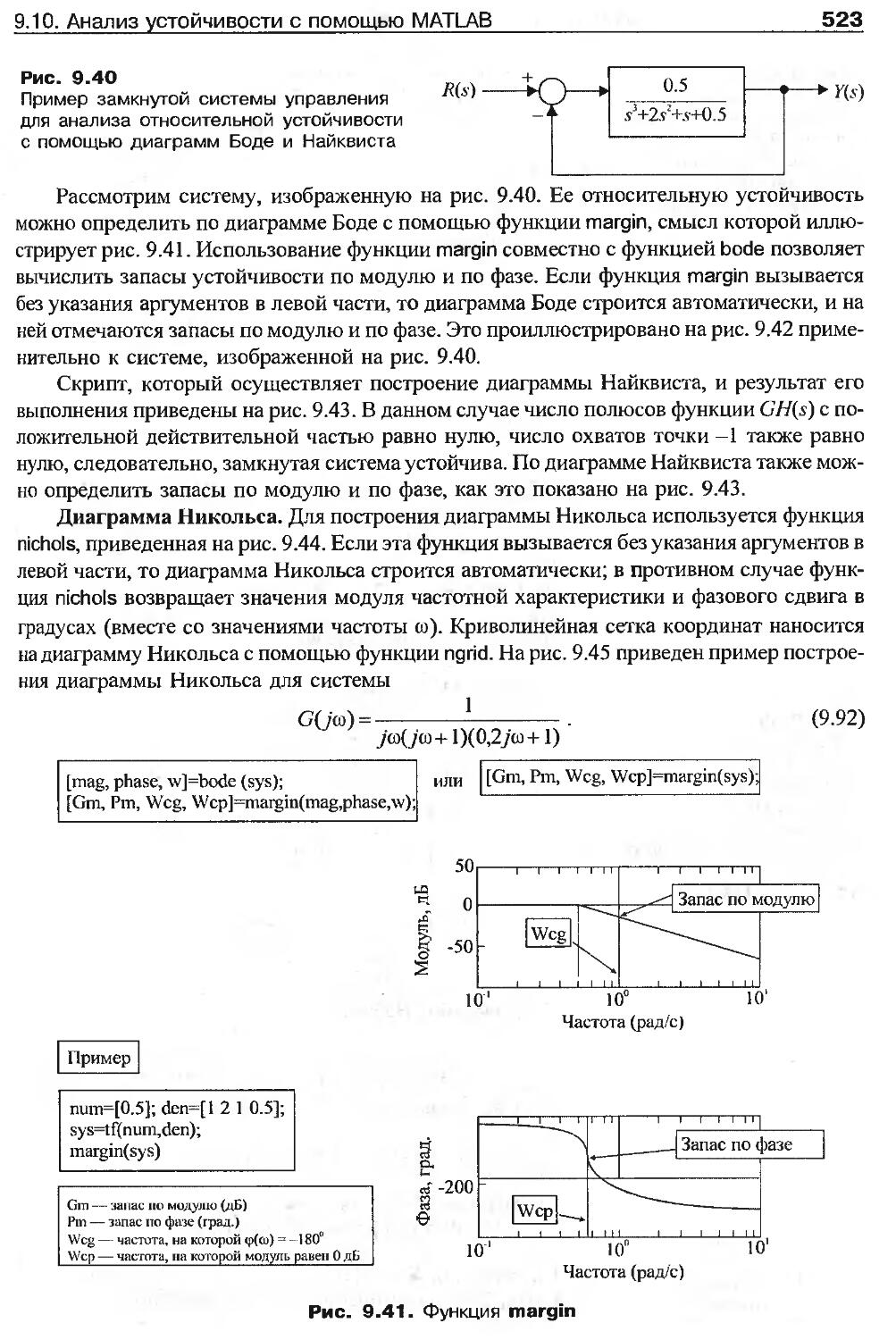
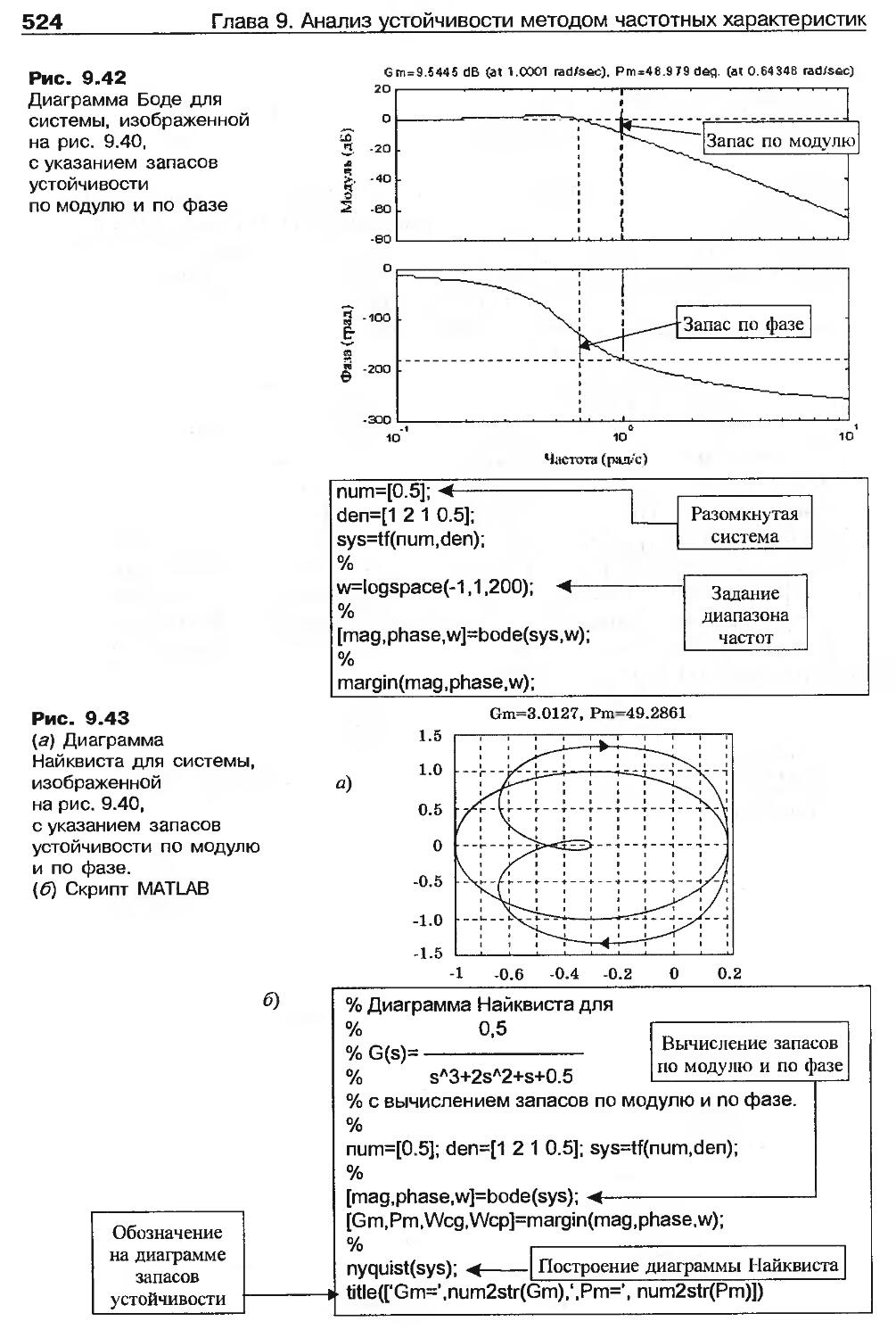
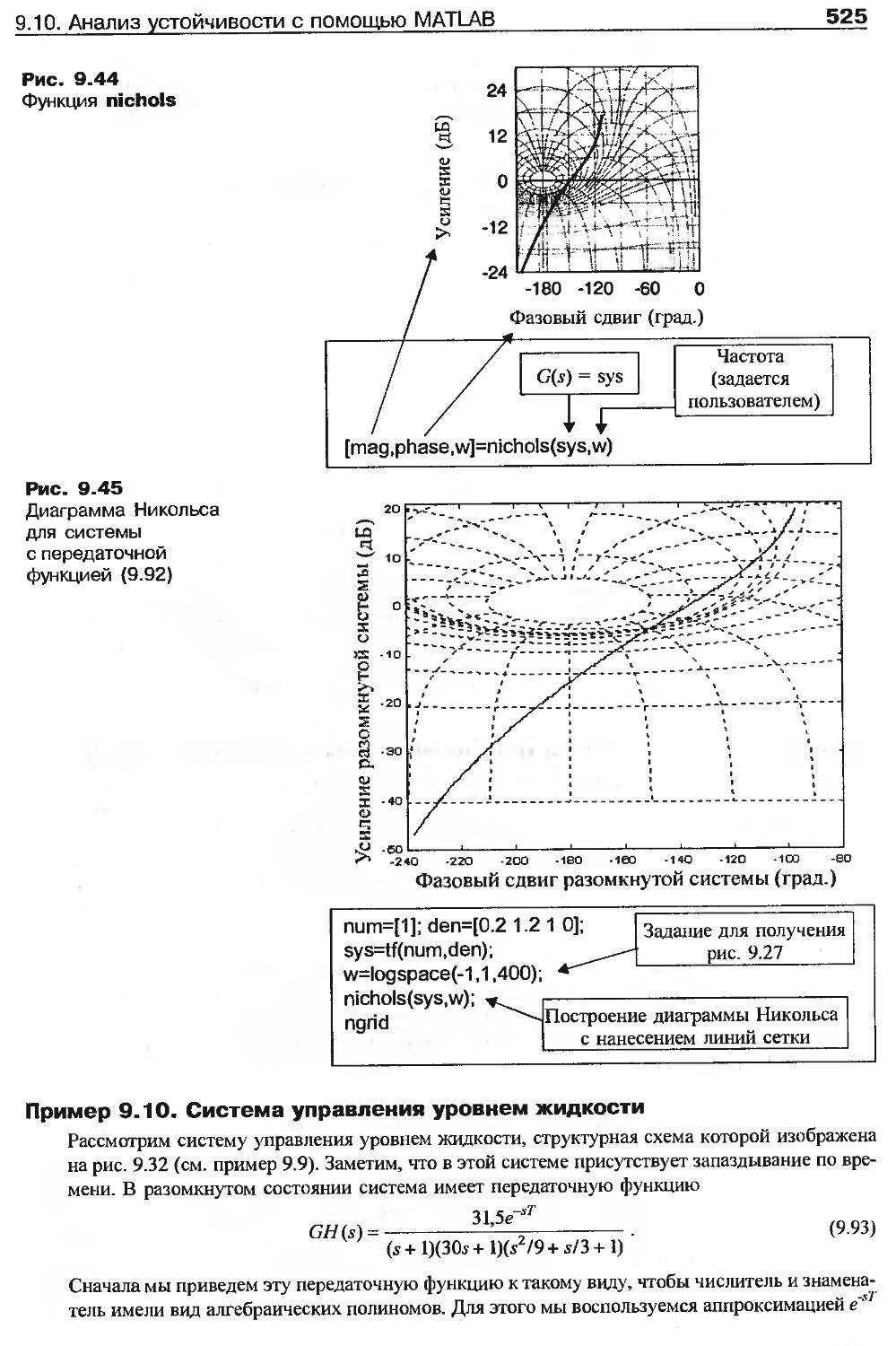
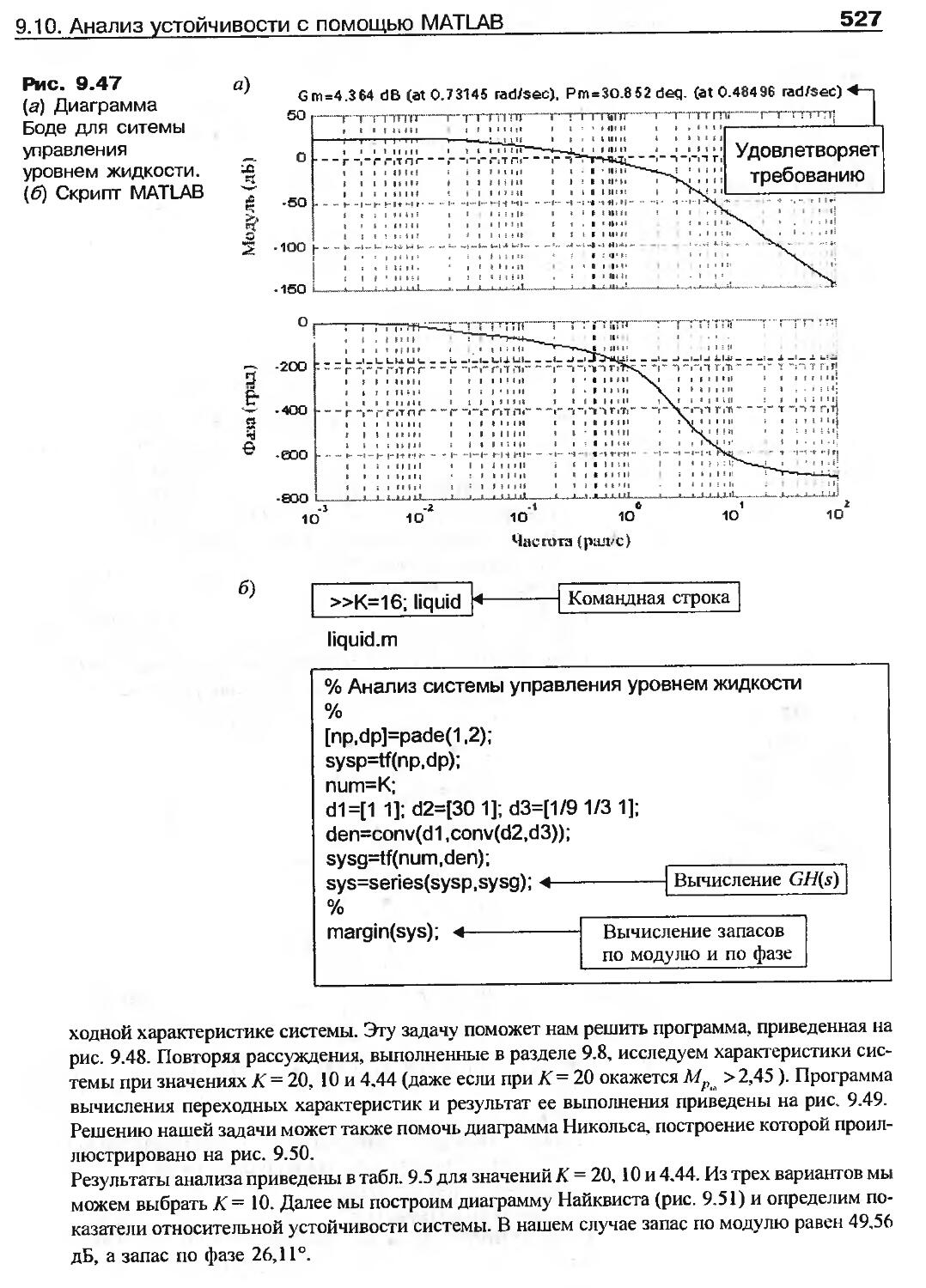
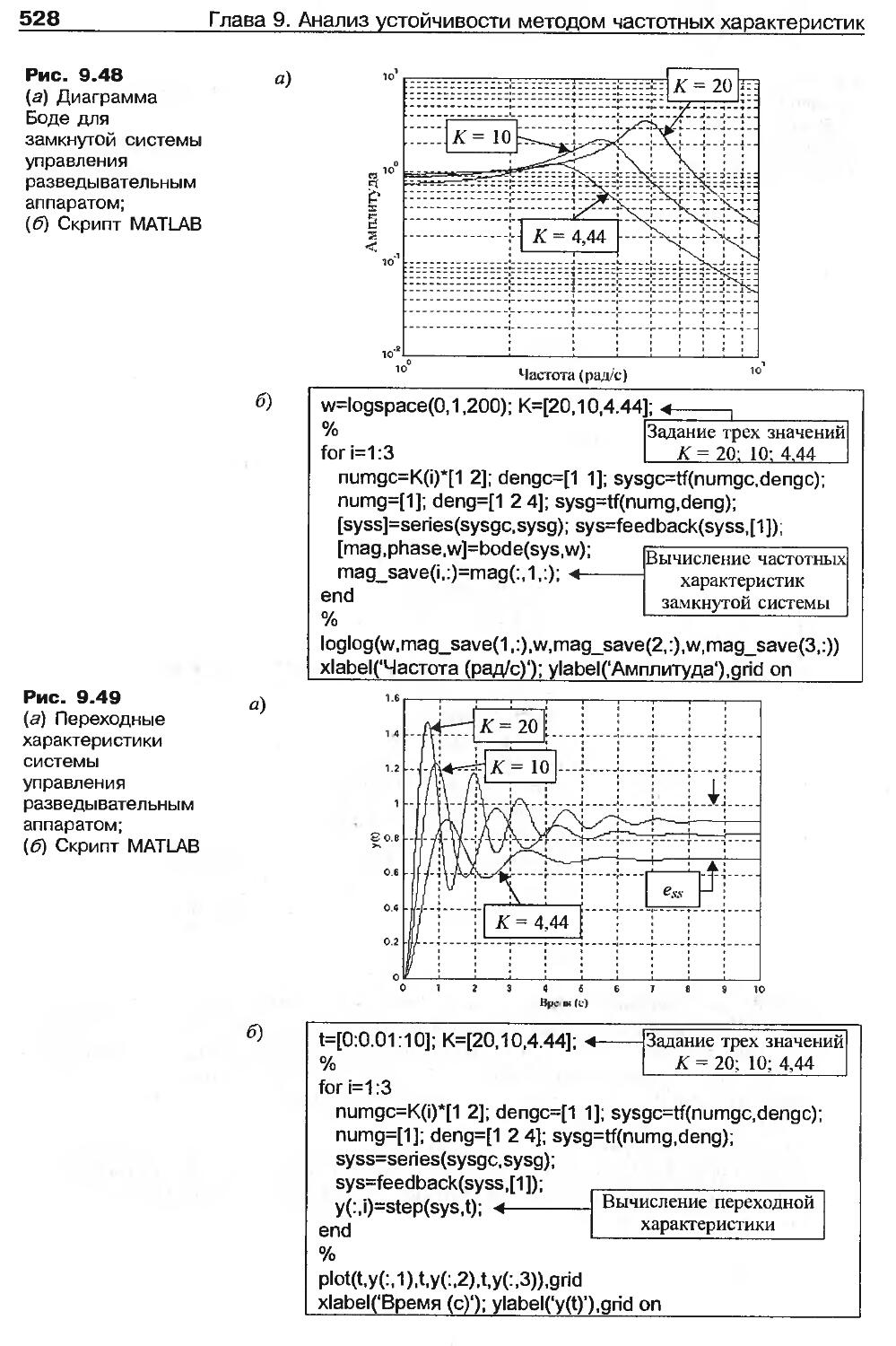
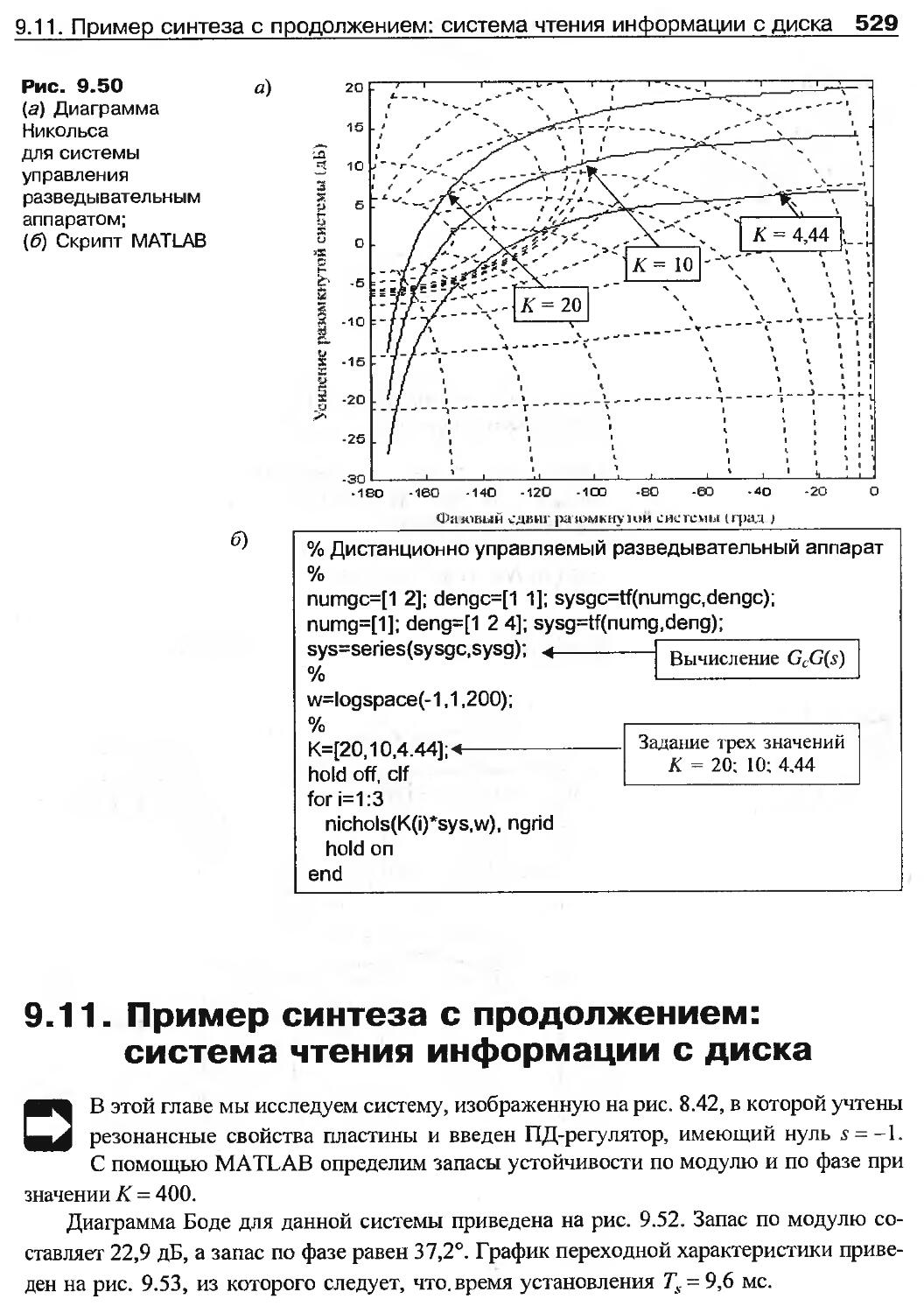
9.10. Анализ устойчивости с помощью MATLAB.........................521
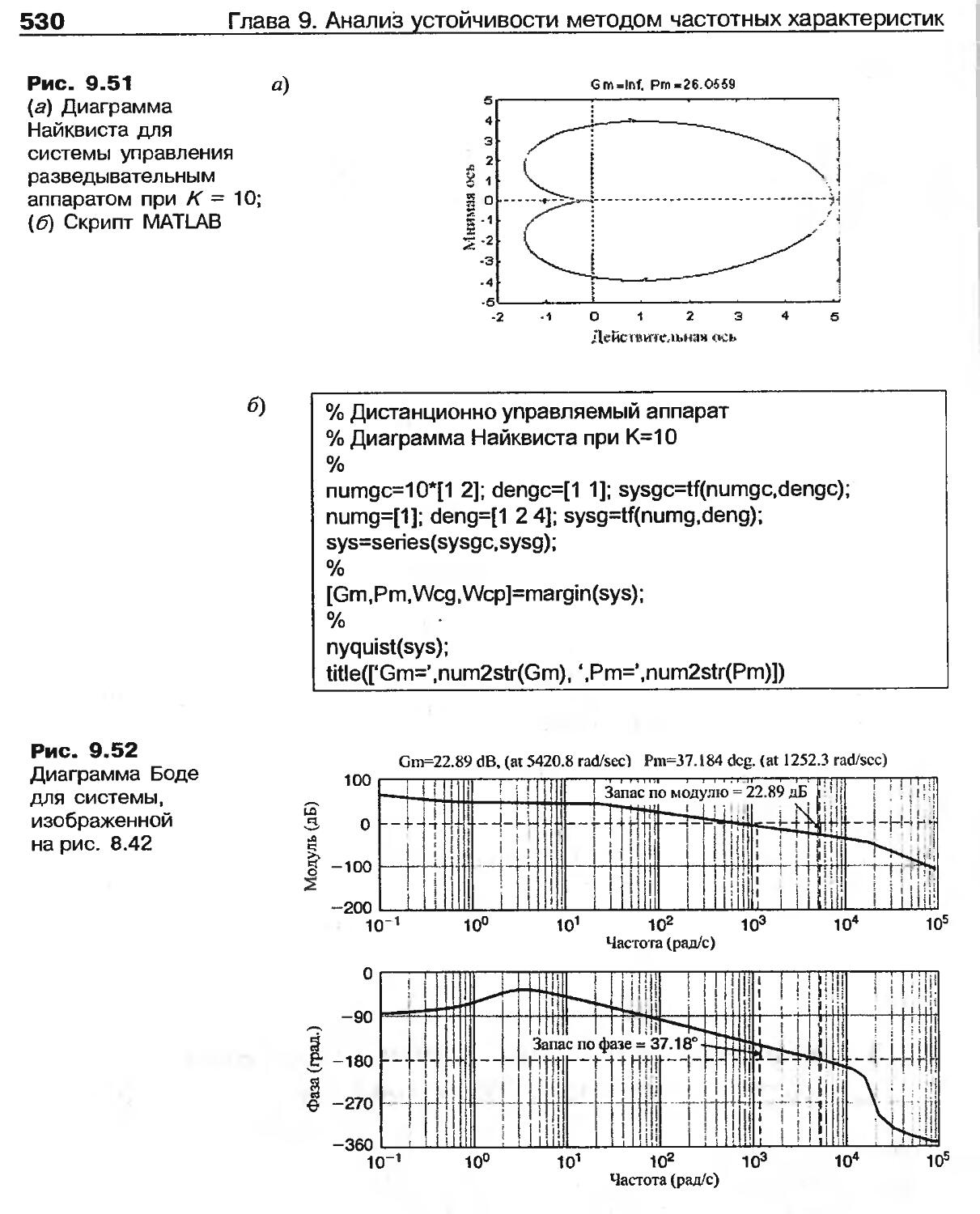
9.11. Пример синтеза с продолжением: систра чтения информации с диска. . . 529
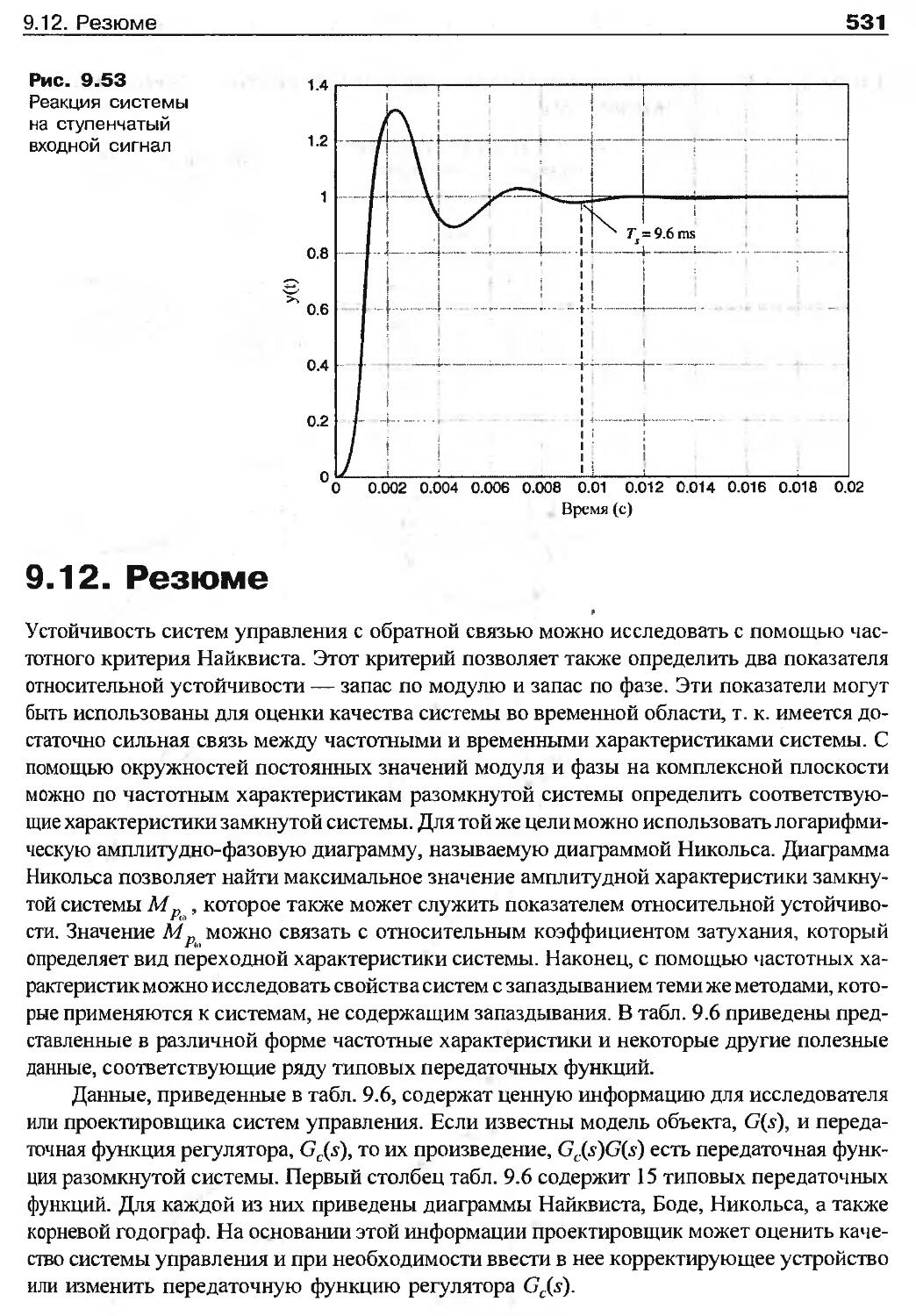
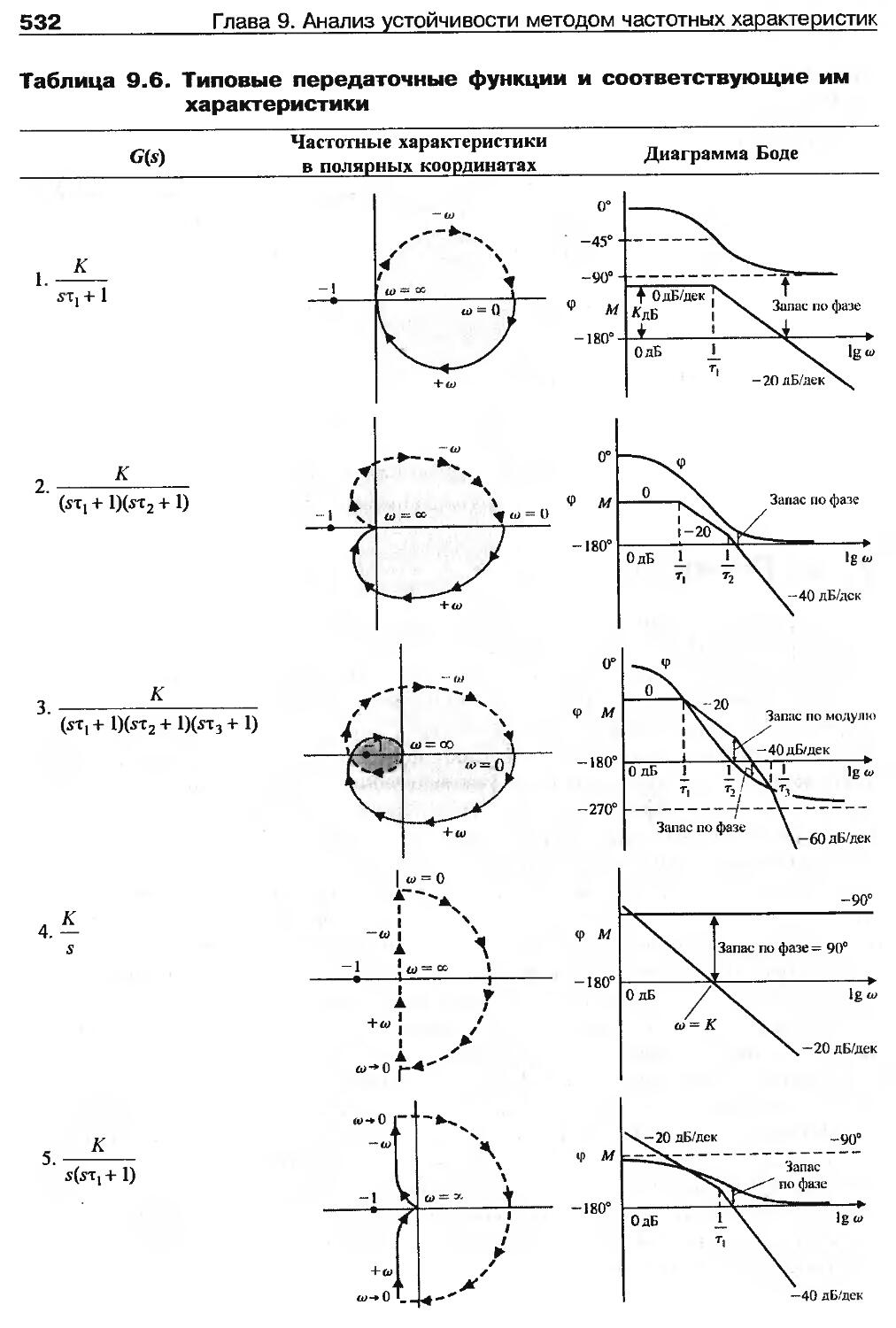
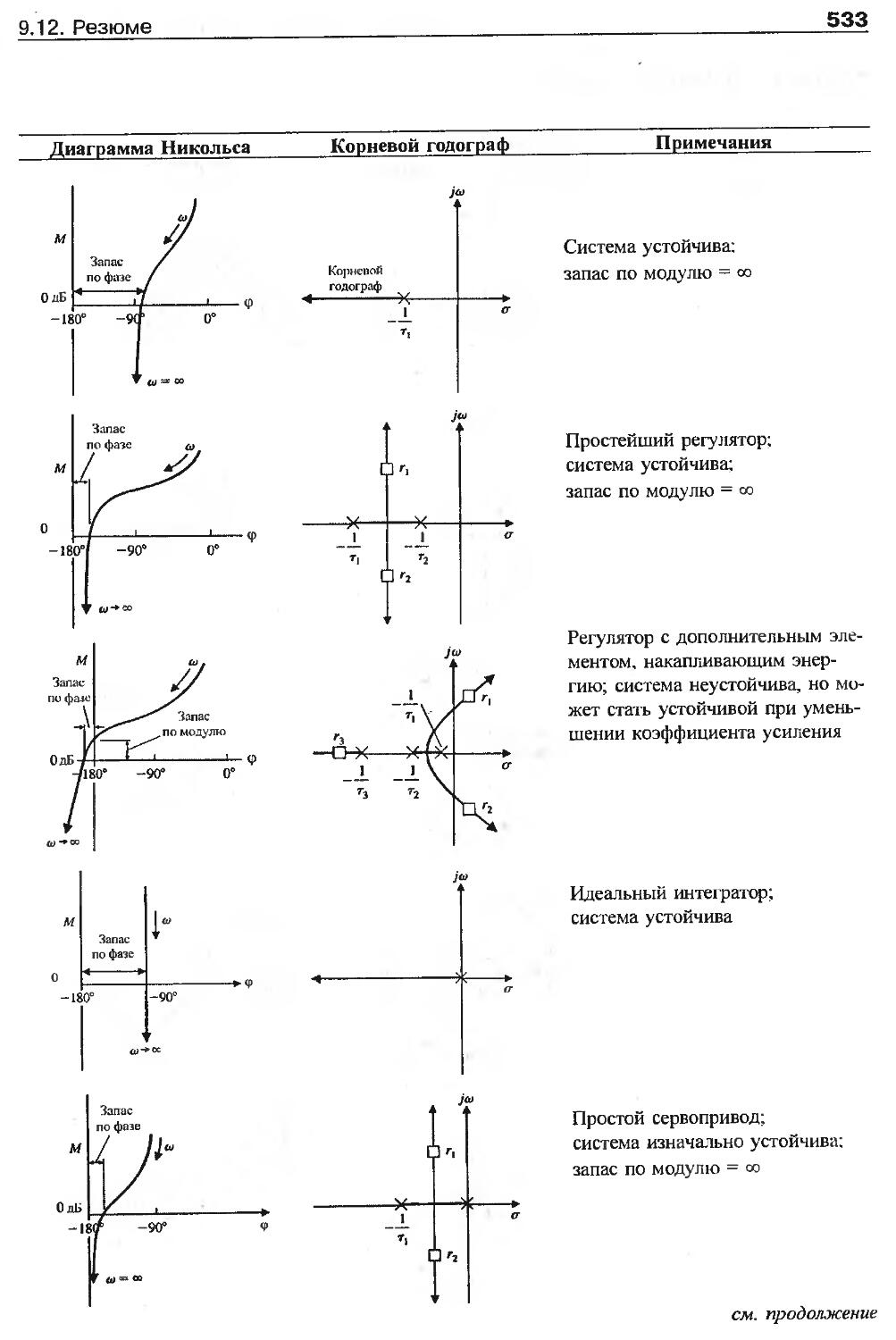
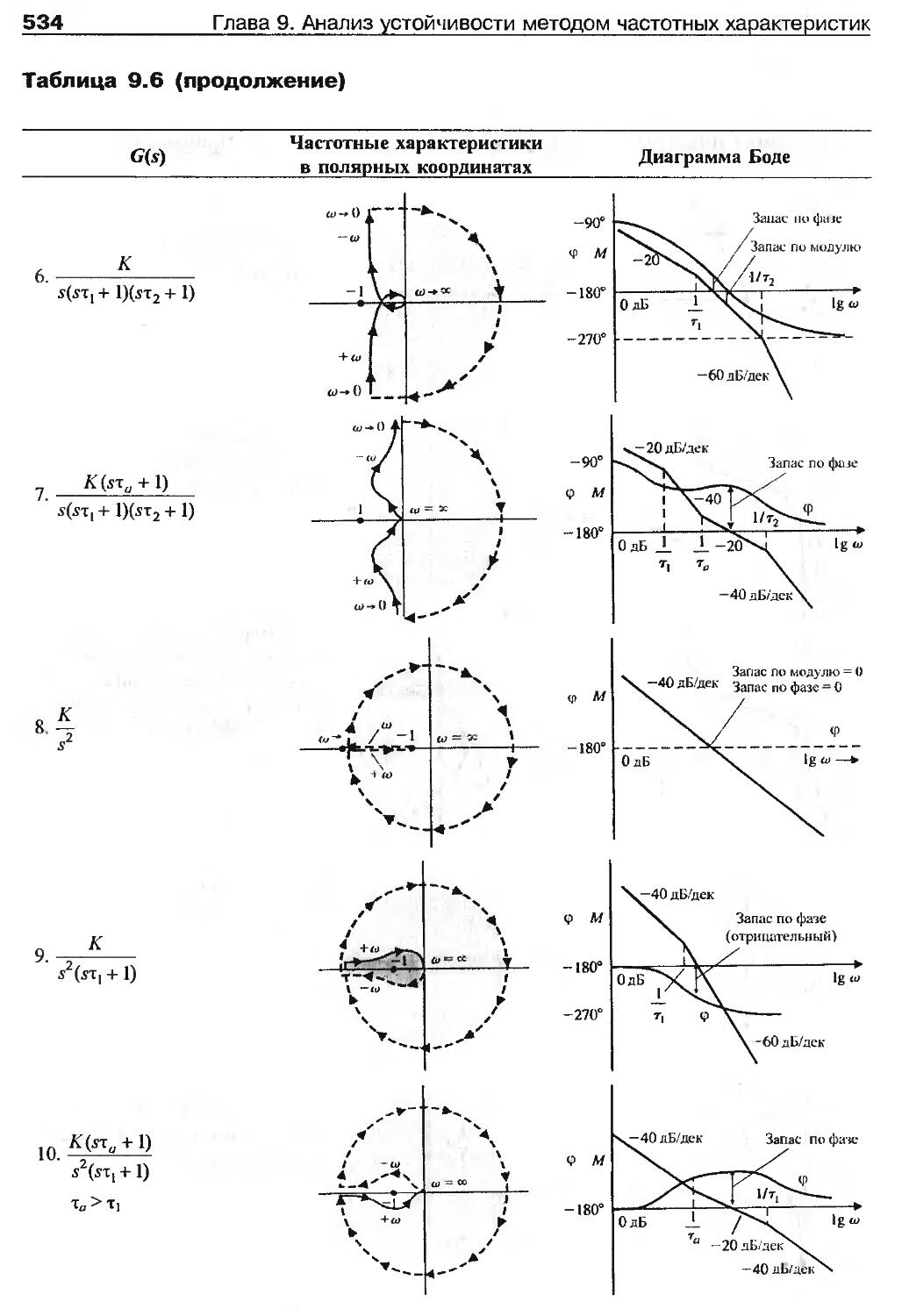
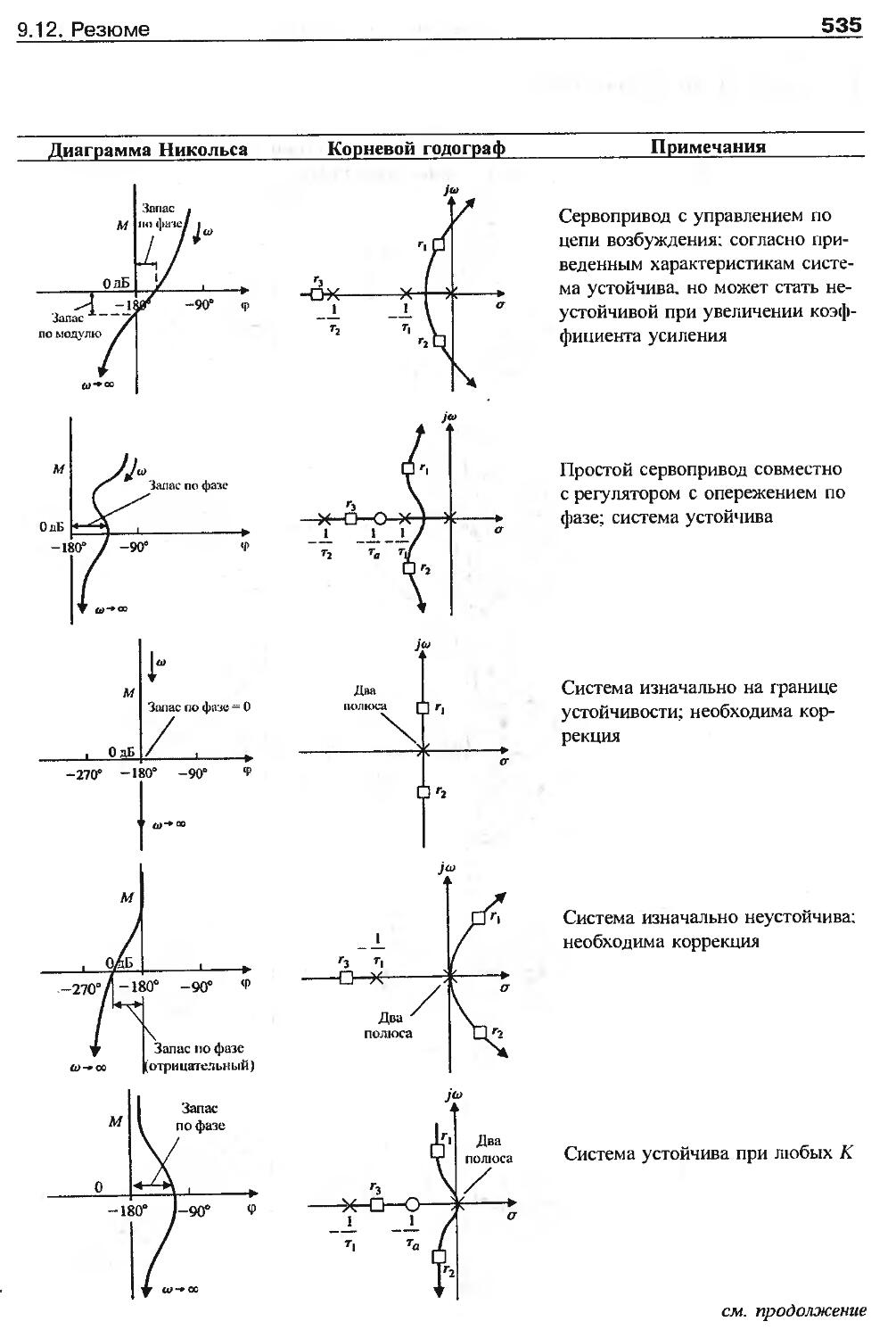
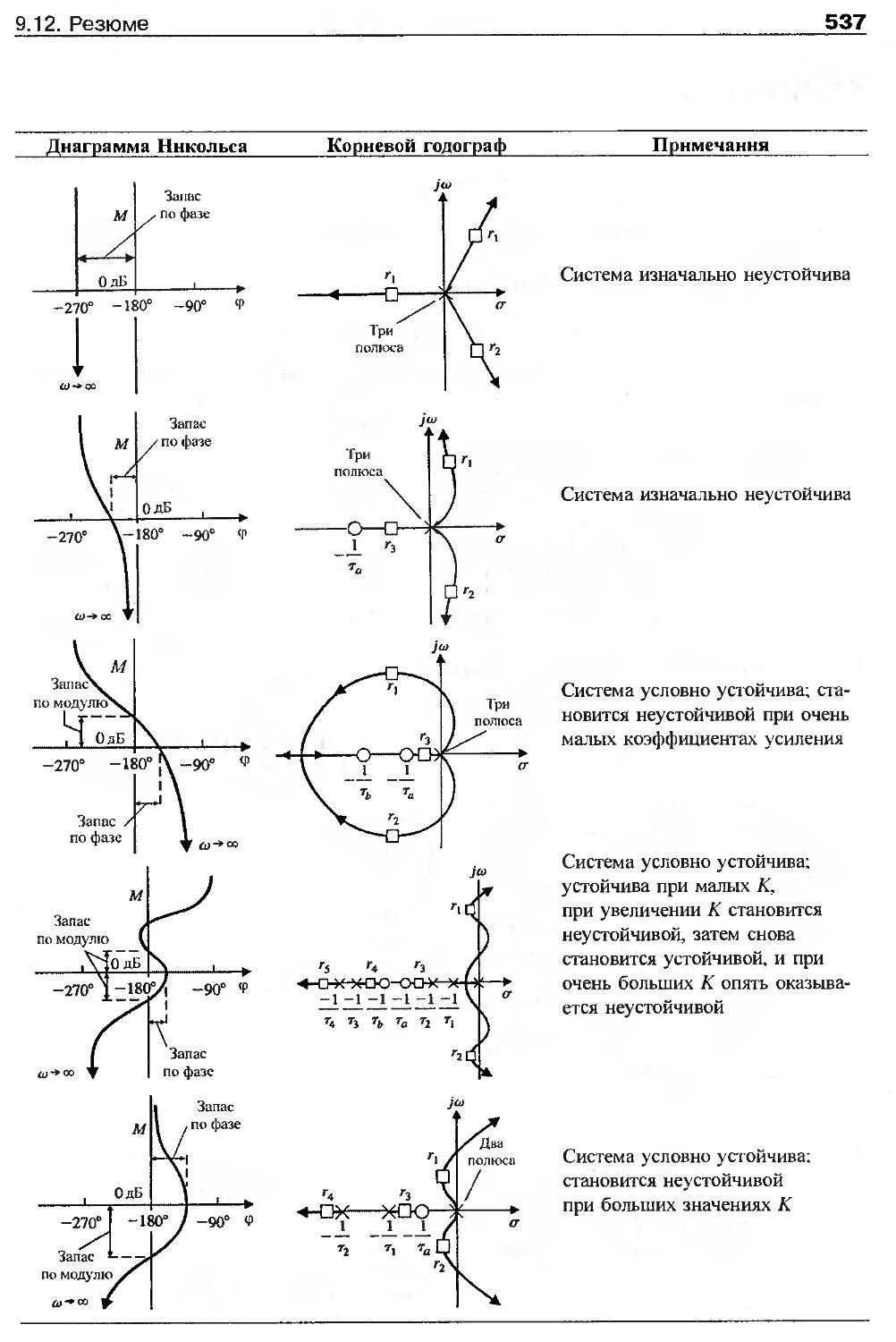
9.12. Резюме.......................................................531
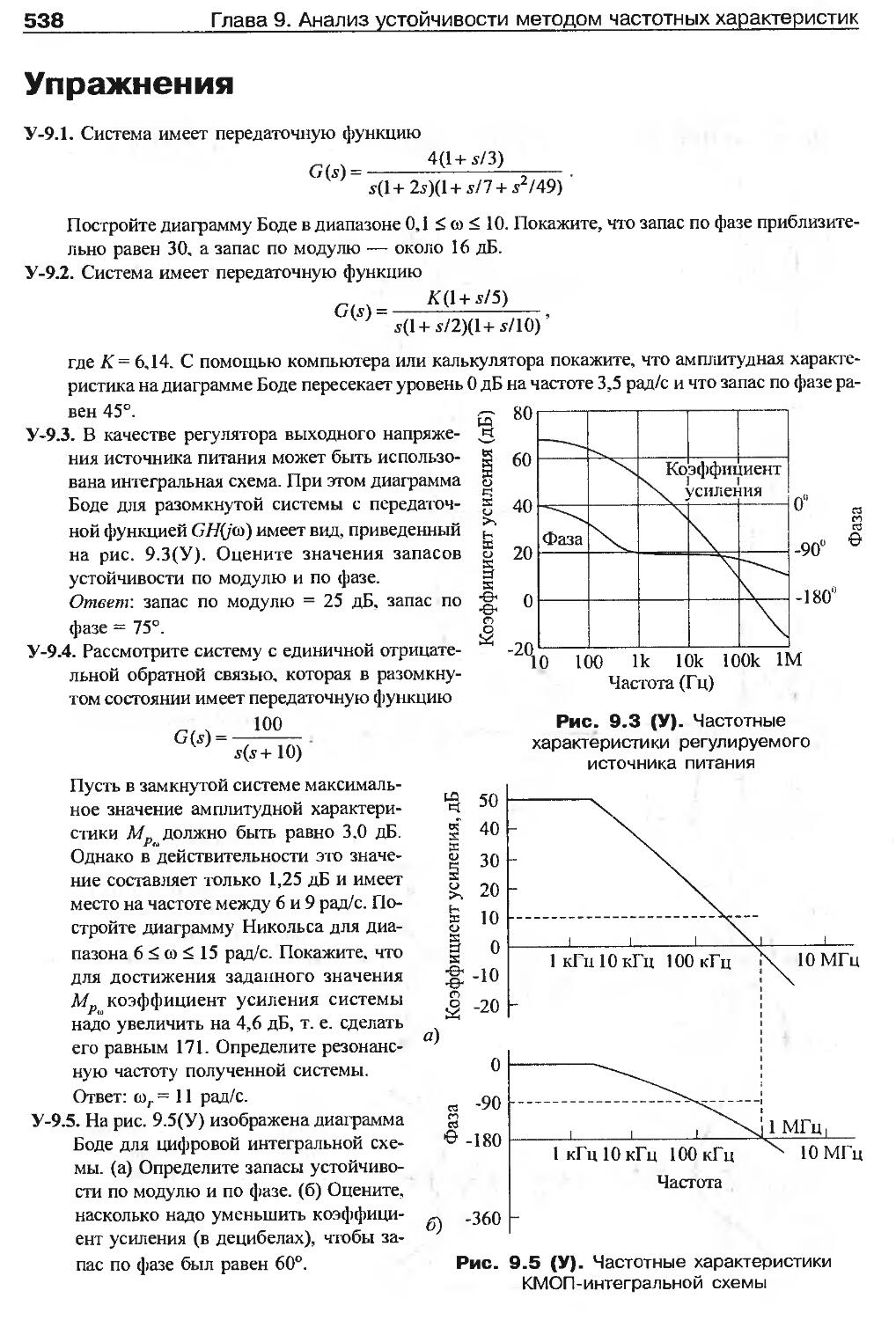
Упражнения.........................................................538
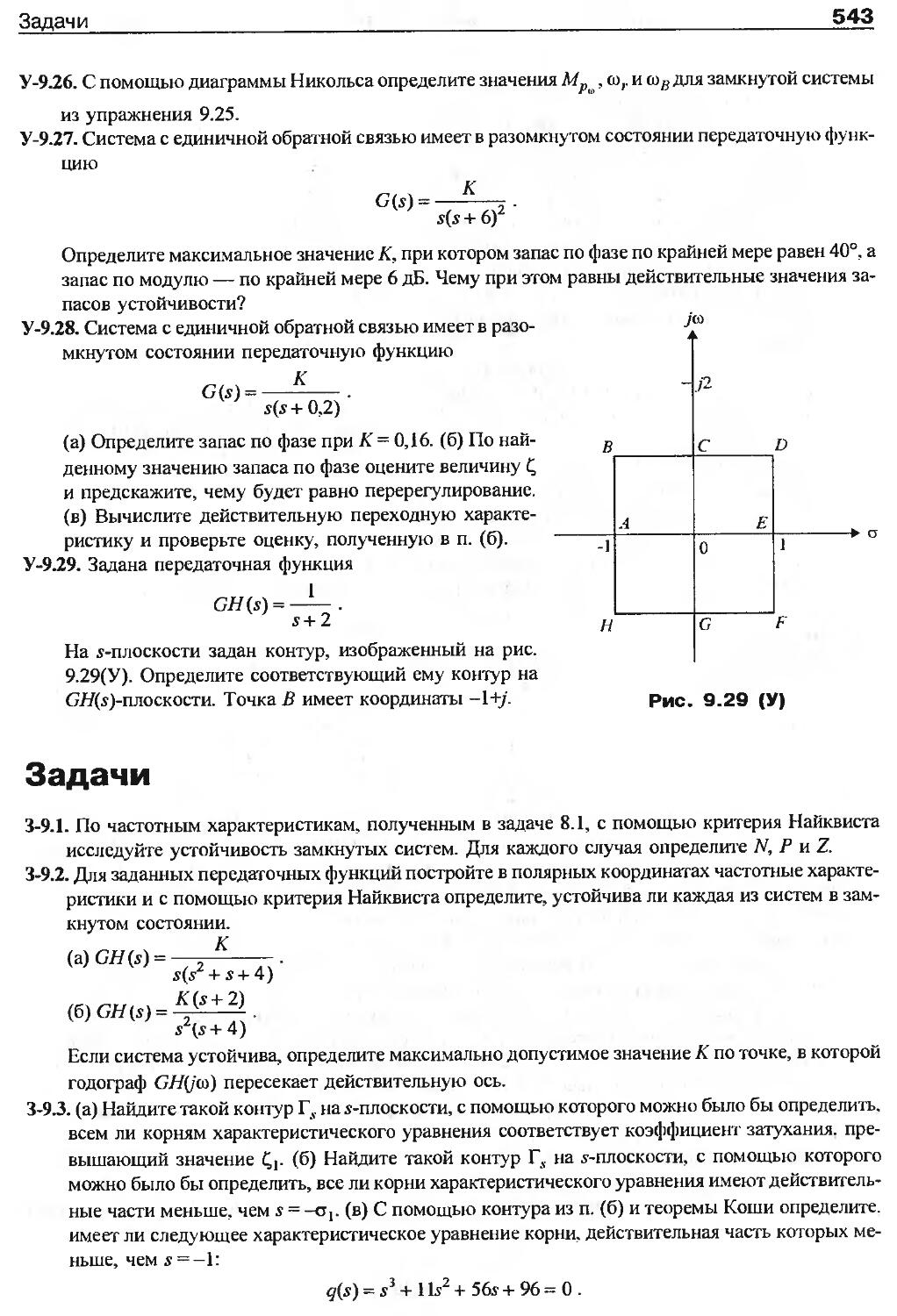
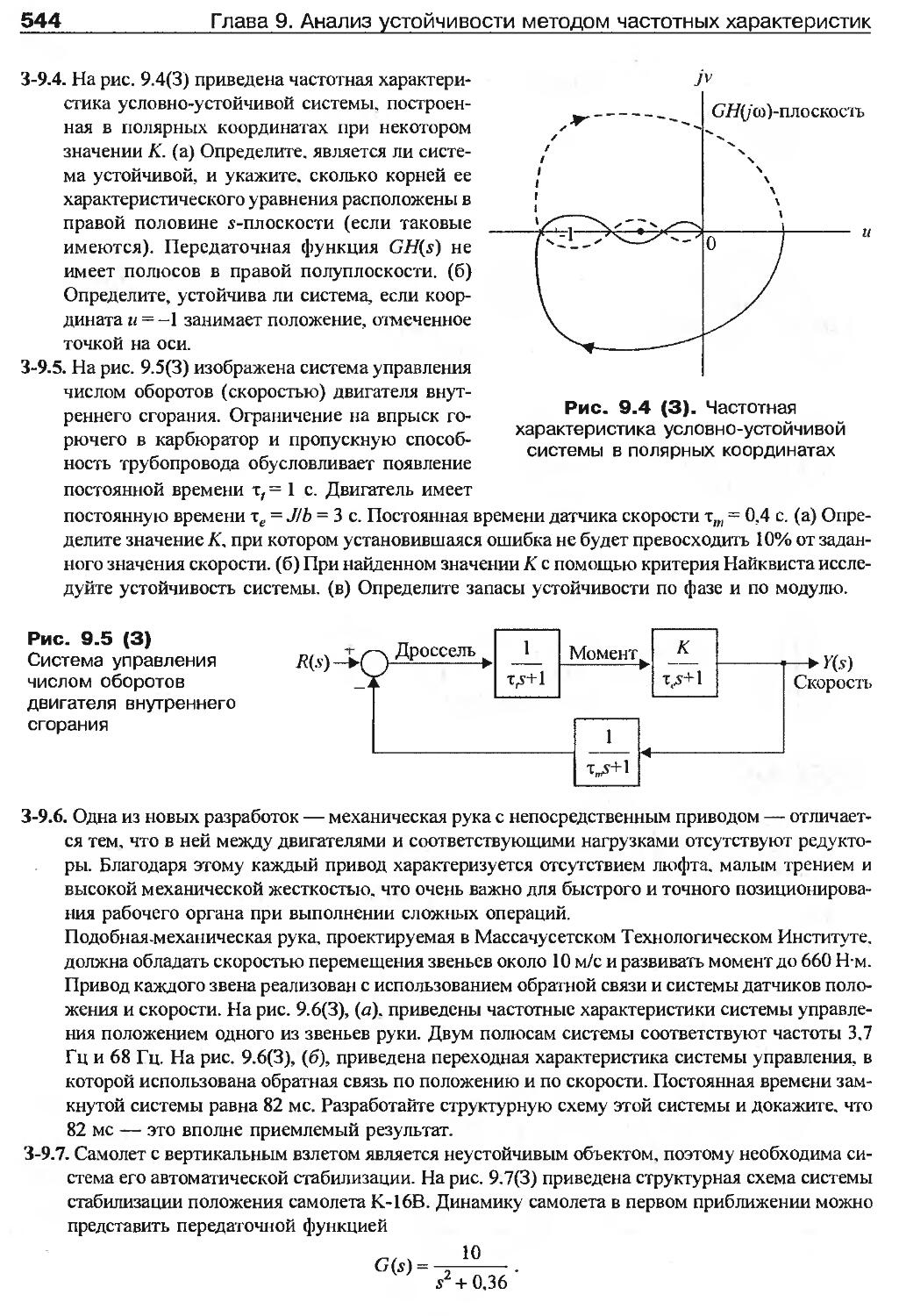
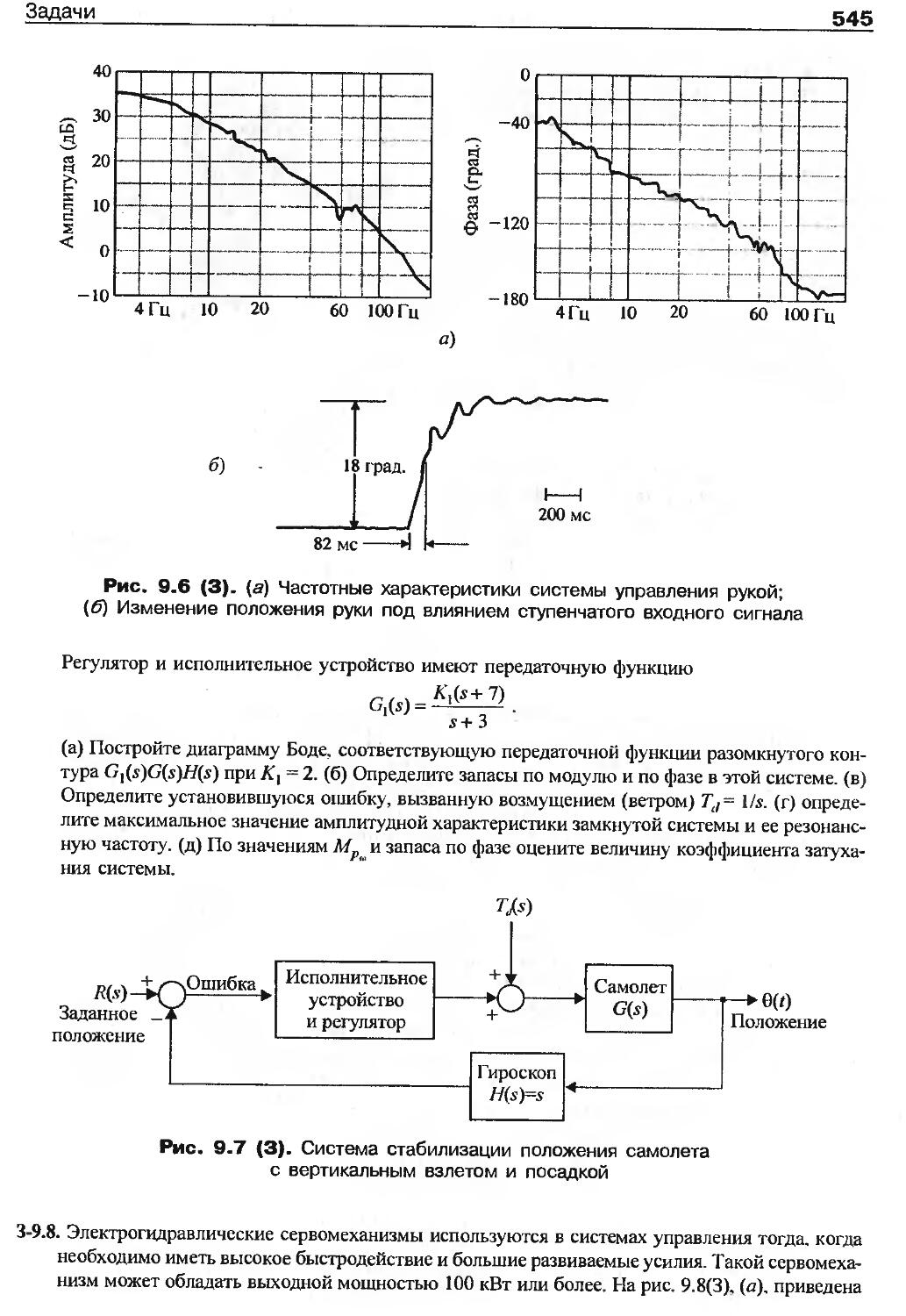
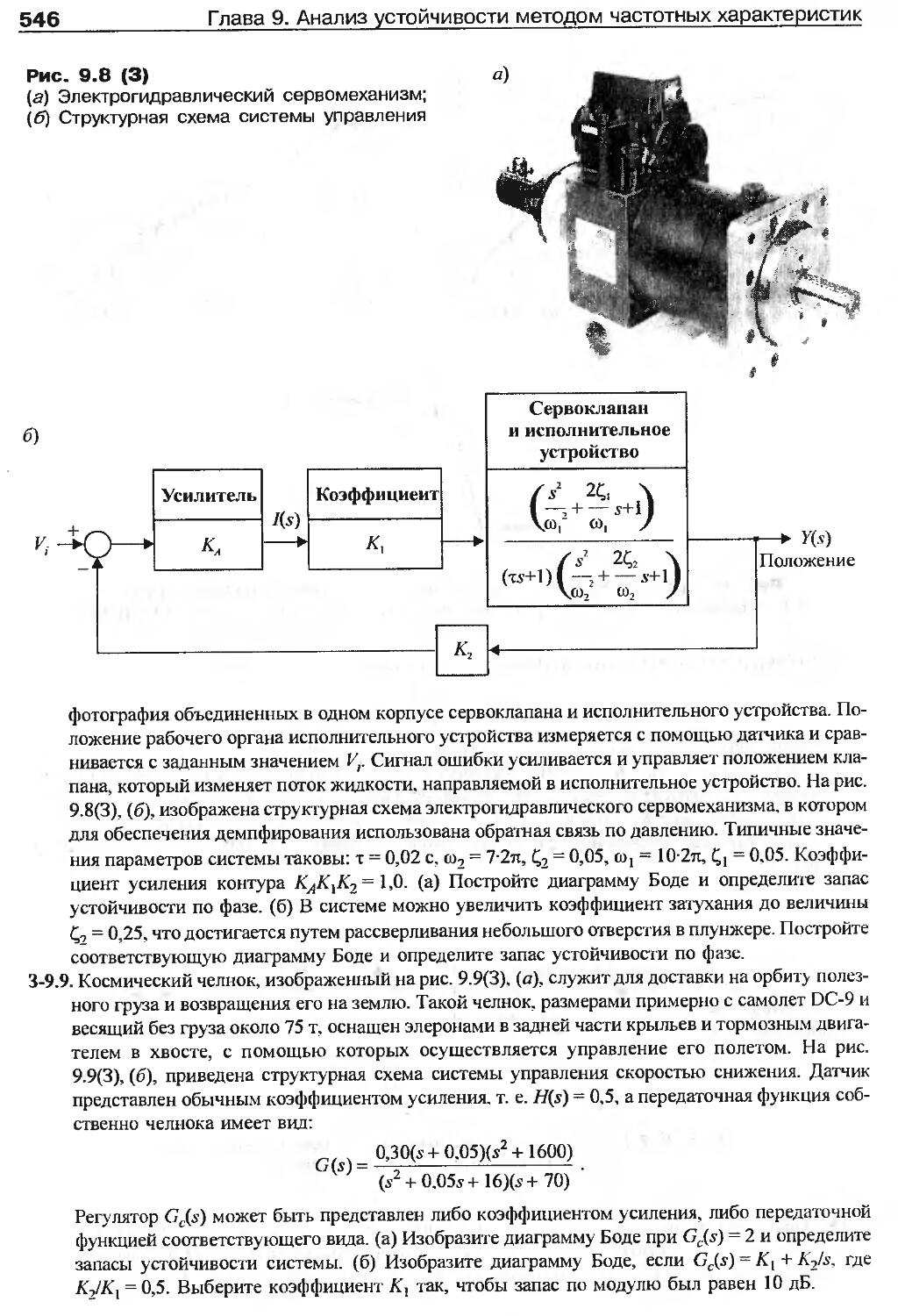
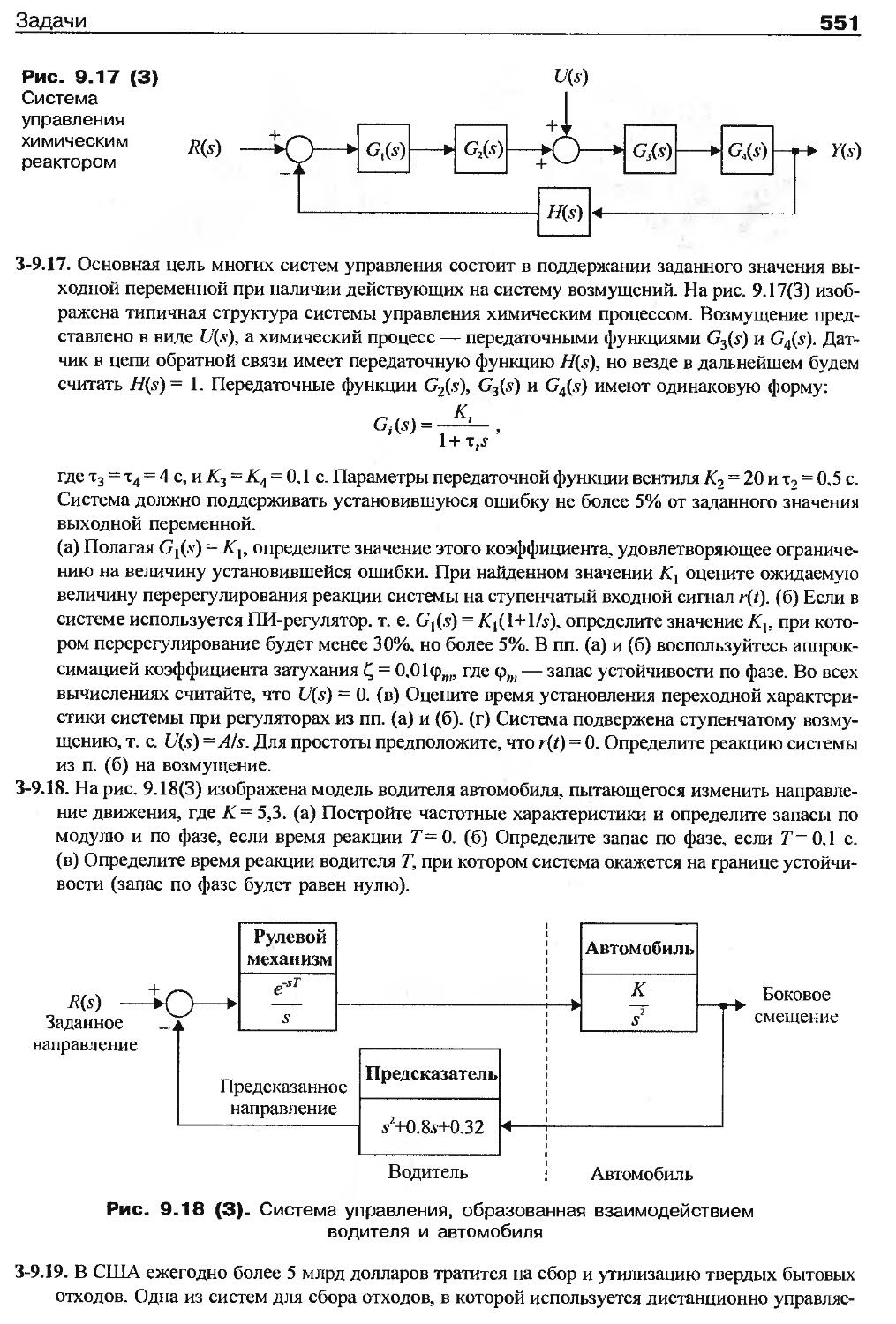
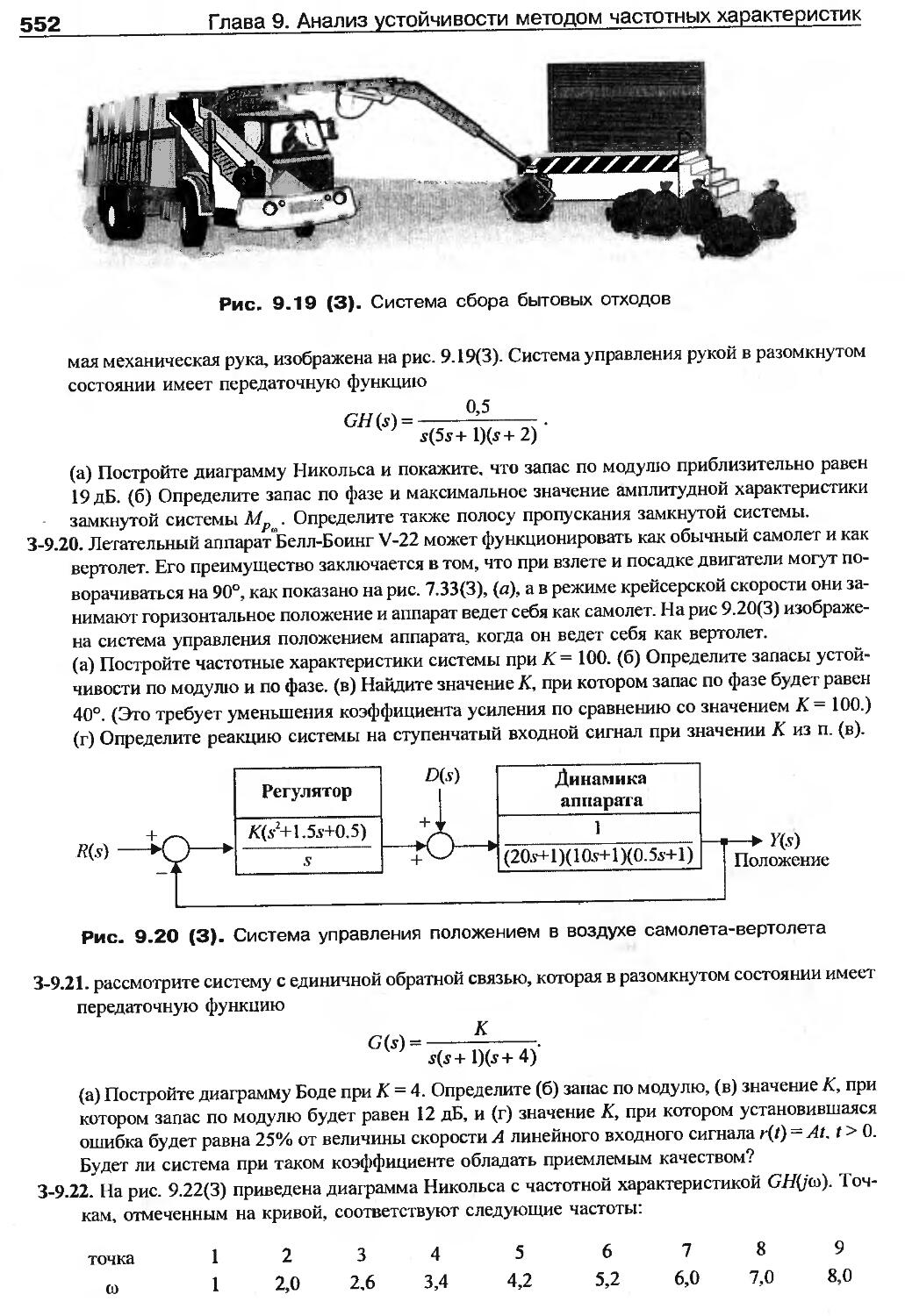
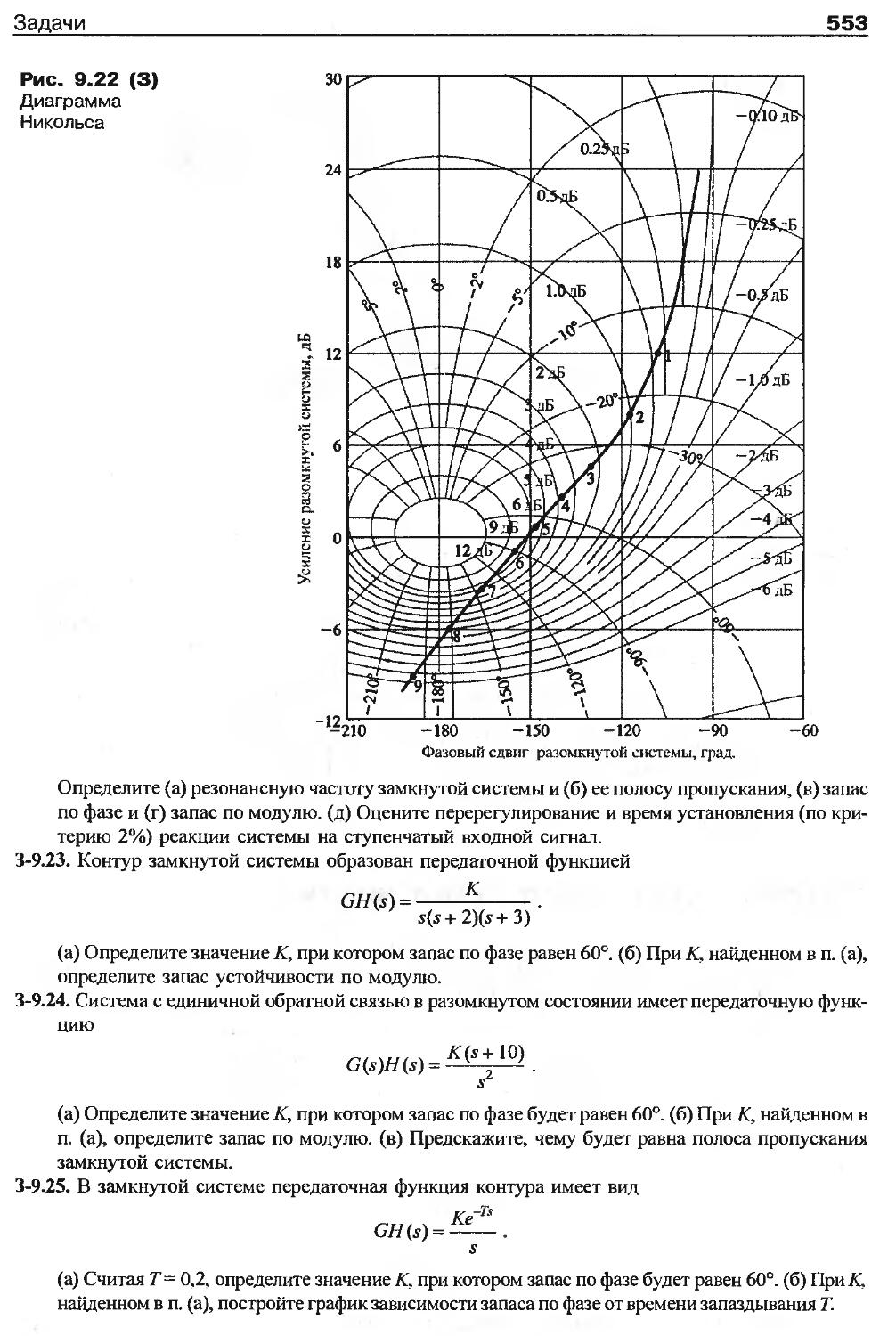
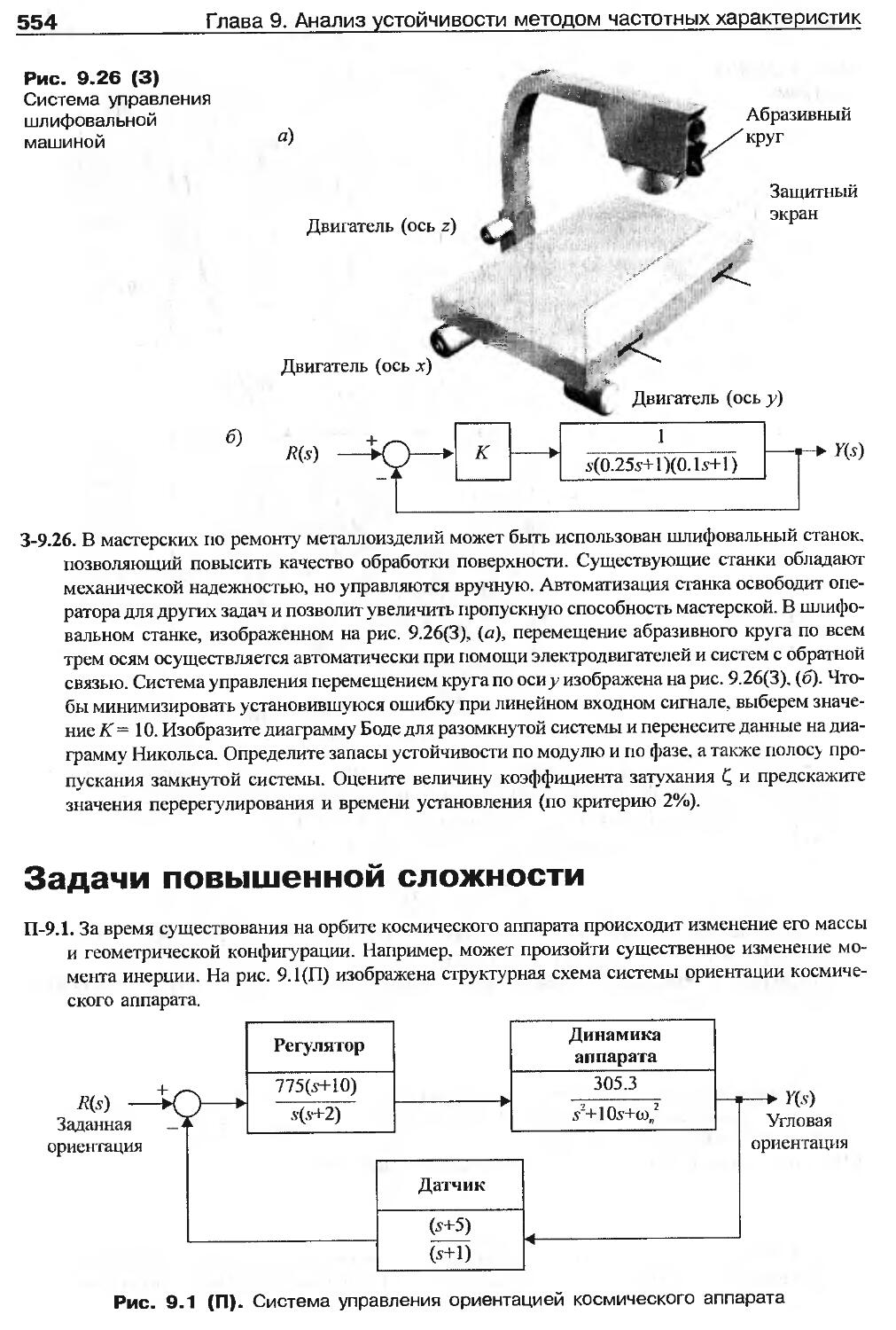
Задачи ........................................................... 543
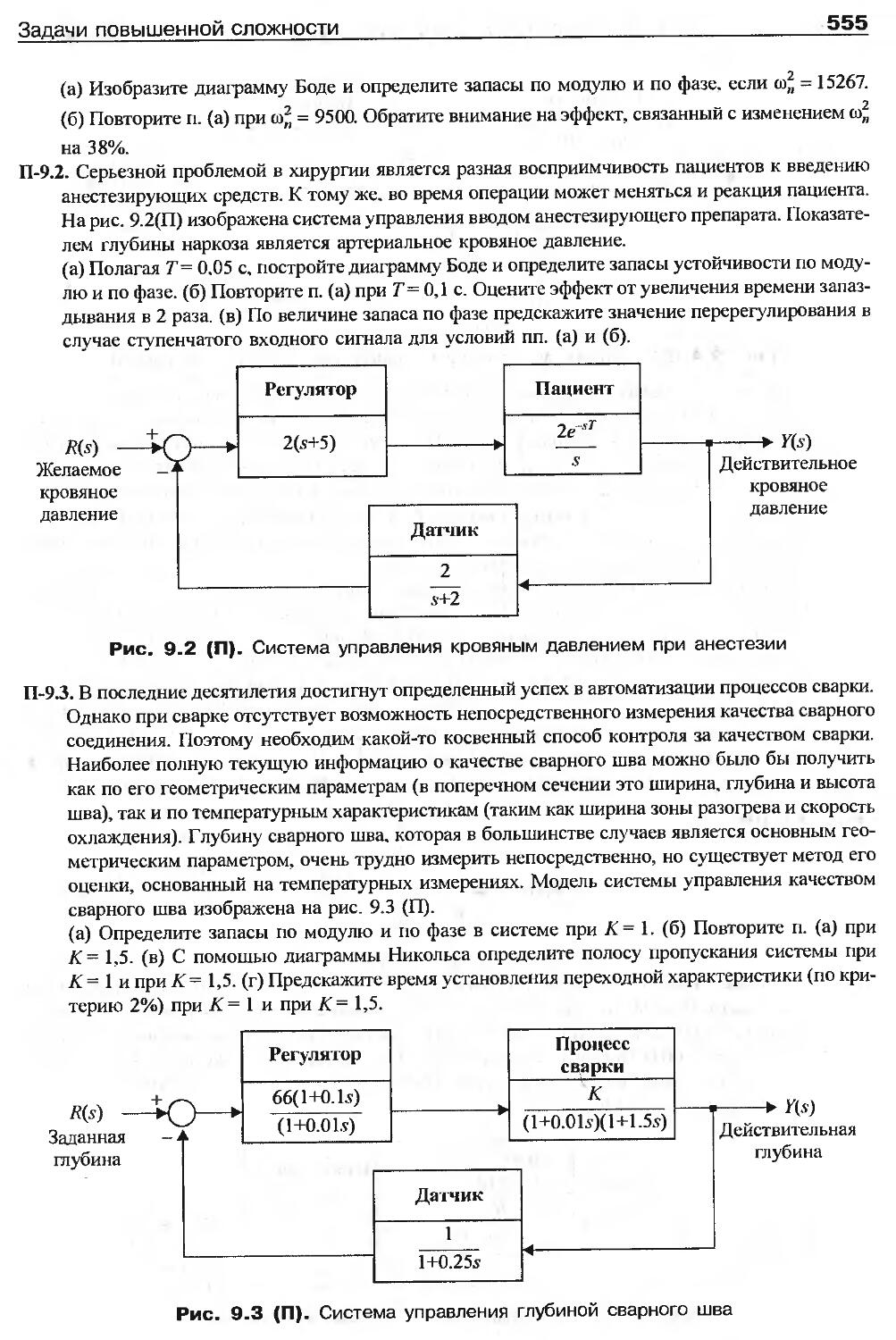
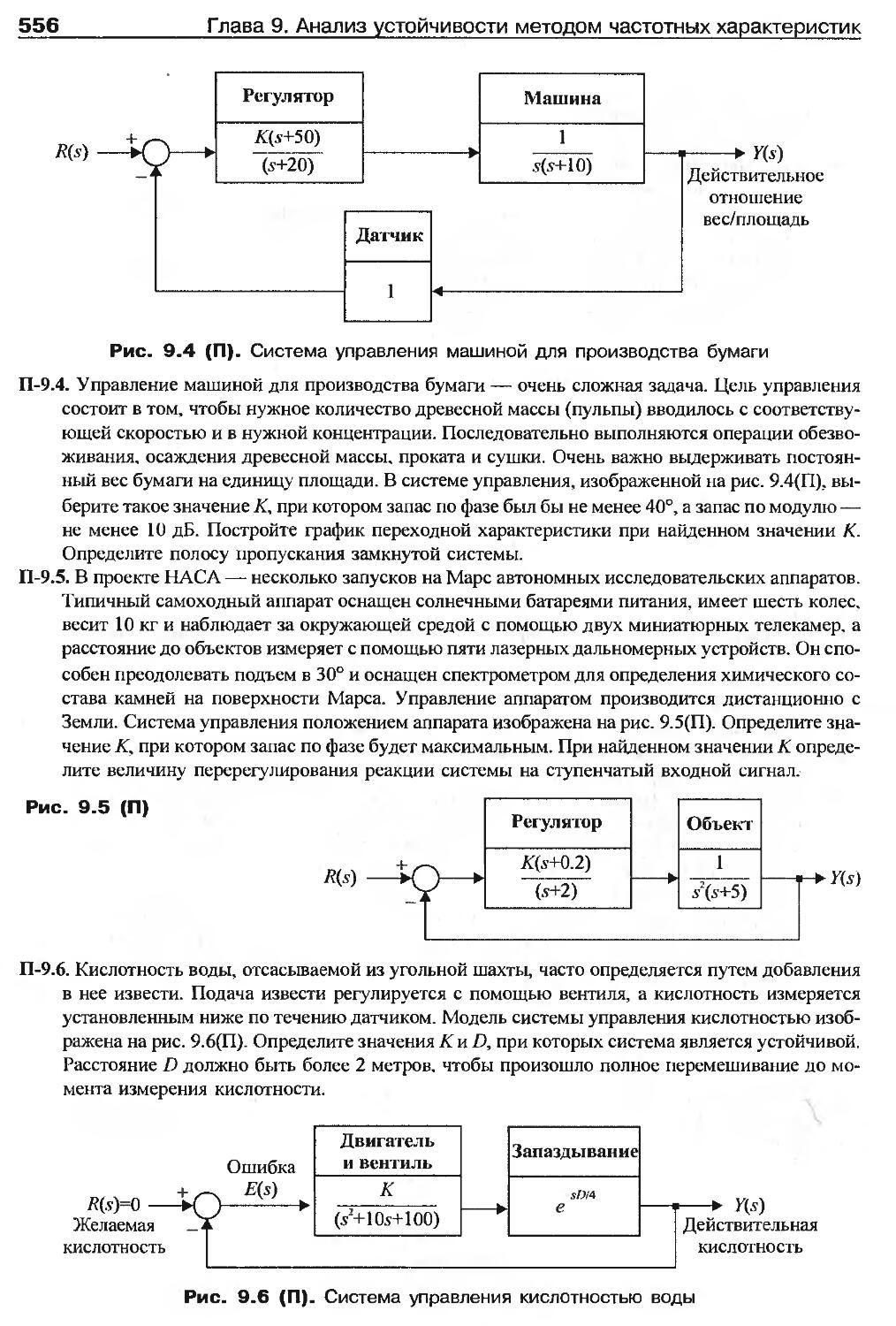
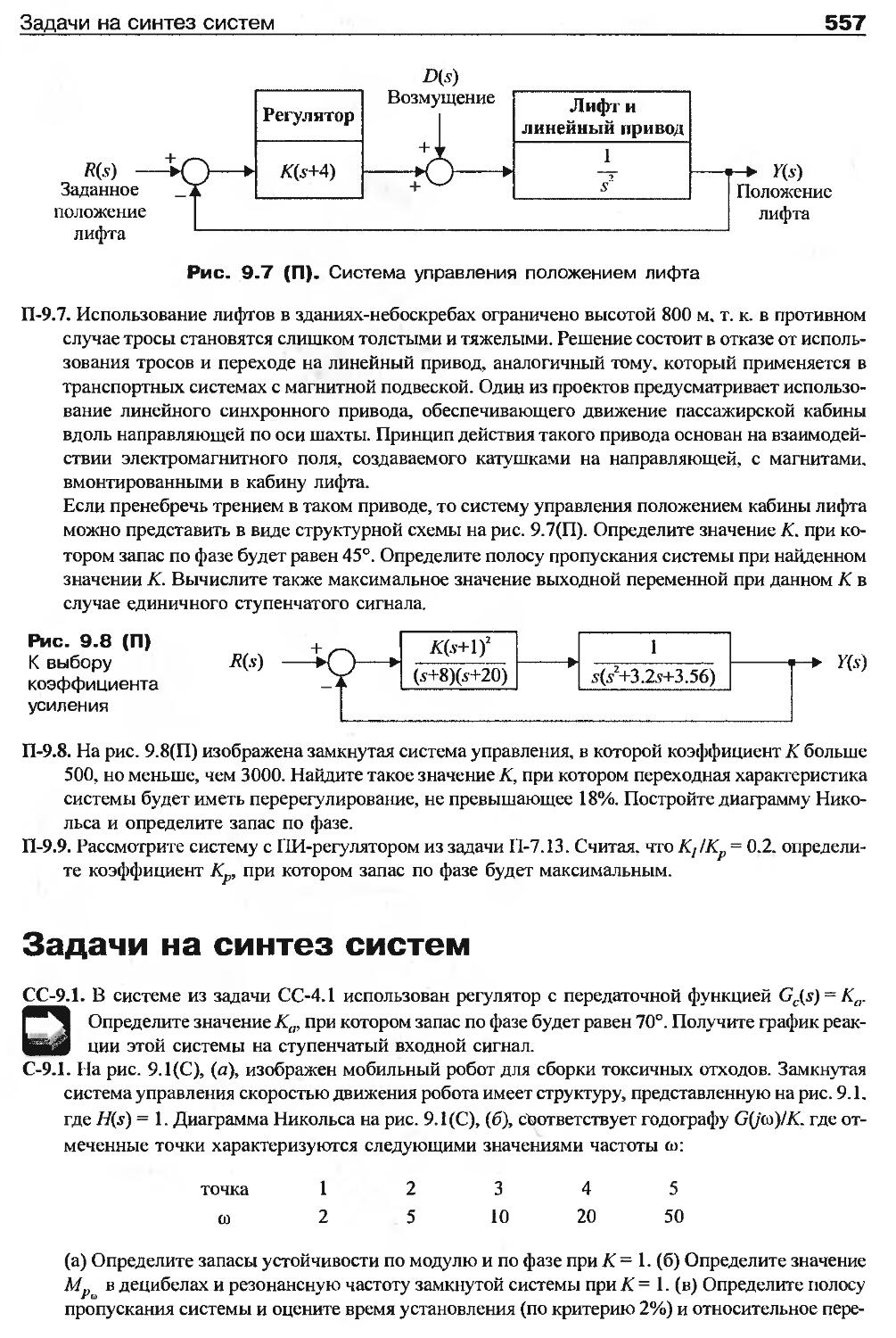
Задачи повышенной сложности........................................554
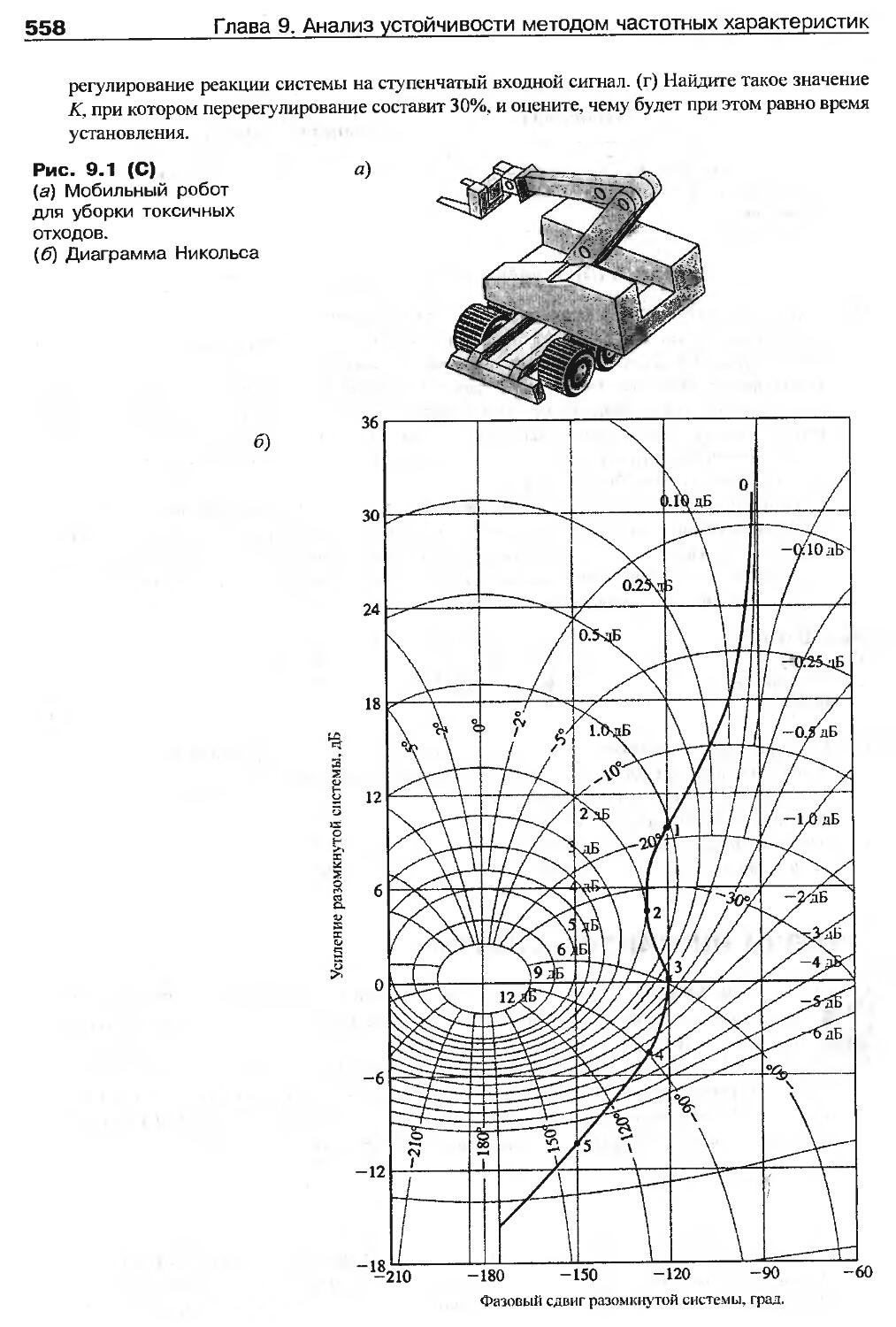
Задачи на синтез систем............................................557
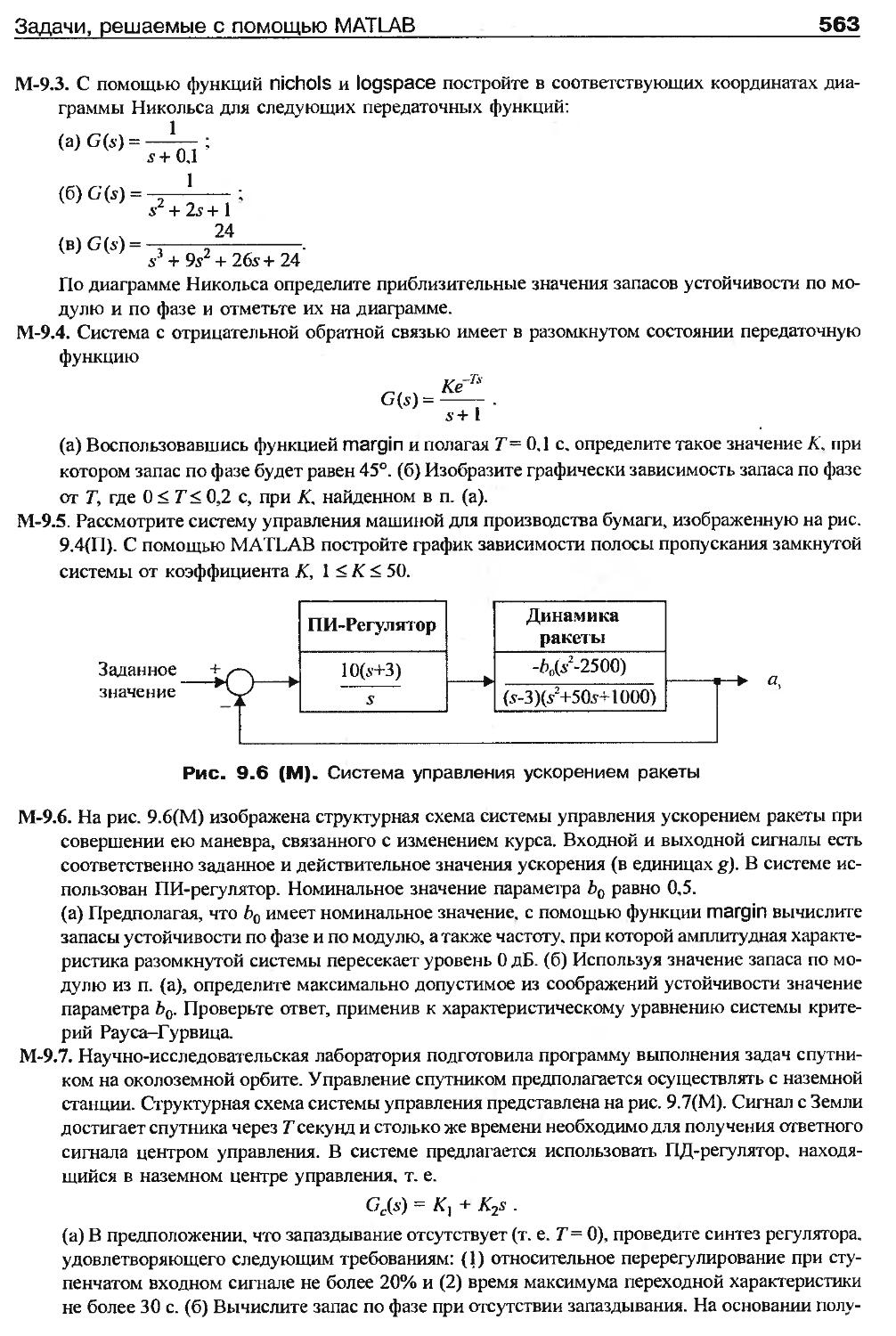
Задачи, решаемые с помощью MATLAB..................................562
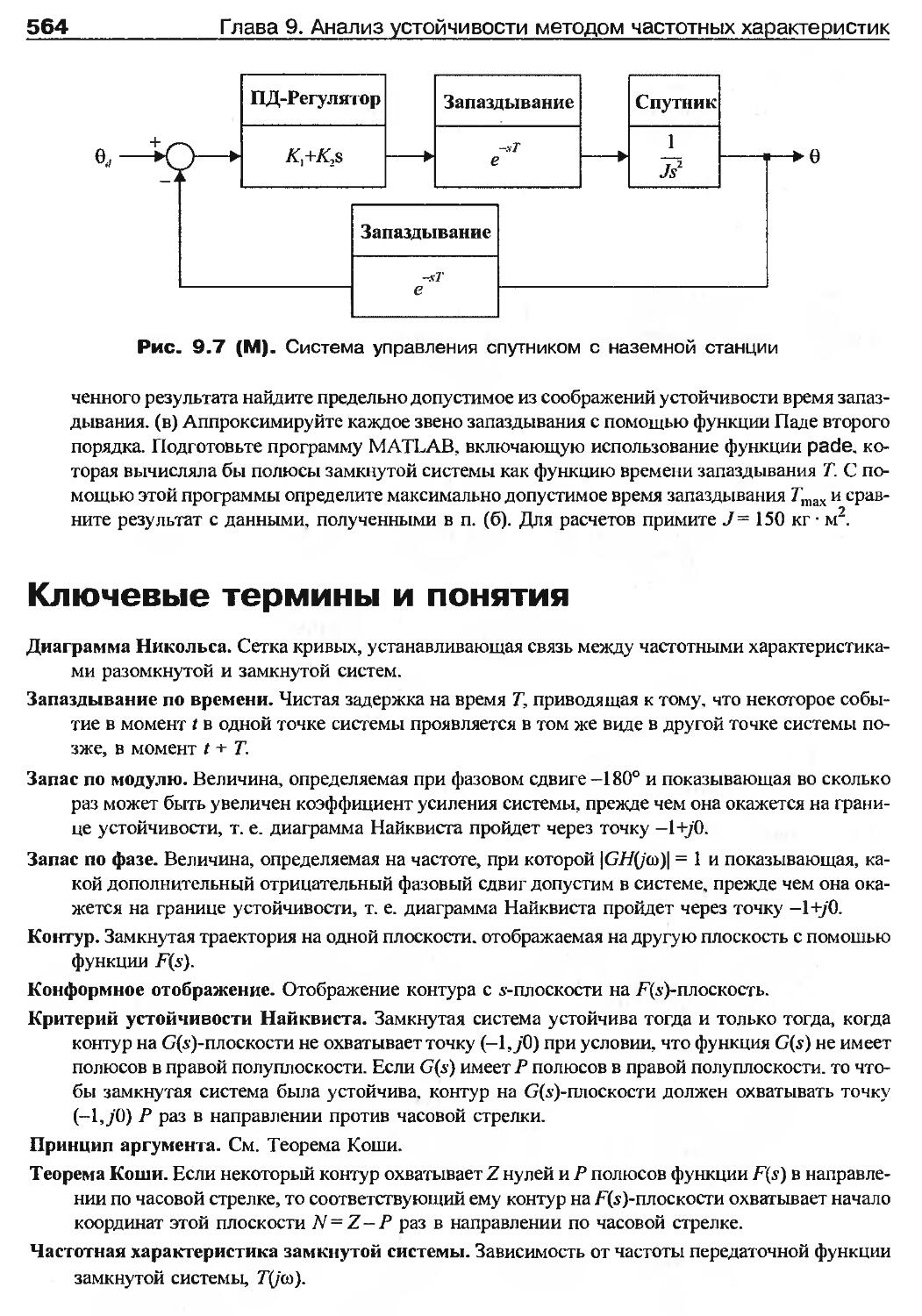
Ключевые термины и понятия.........................................564
Глава 10. Синтез систем управления с обратной связью..................565
Обзор..............................................................565
10.1. Введение.....................................................565
10.2. Подходы к синтезу системы....................................567
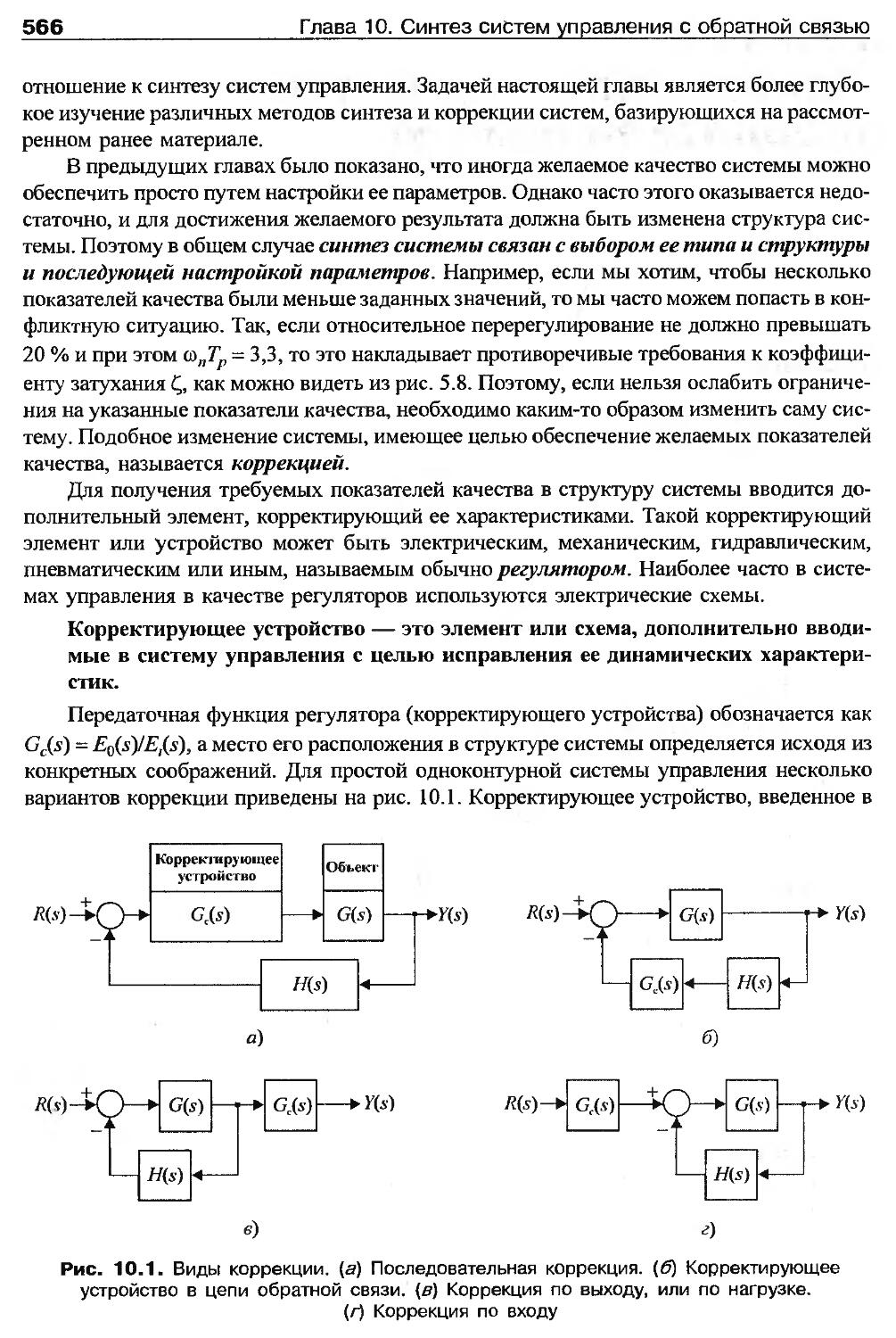
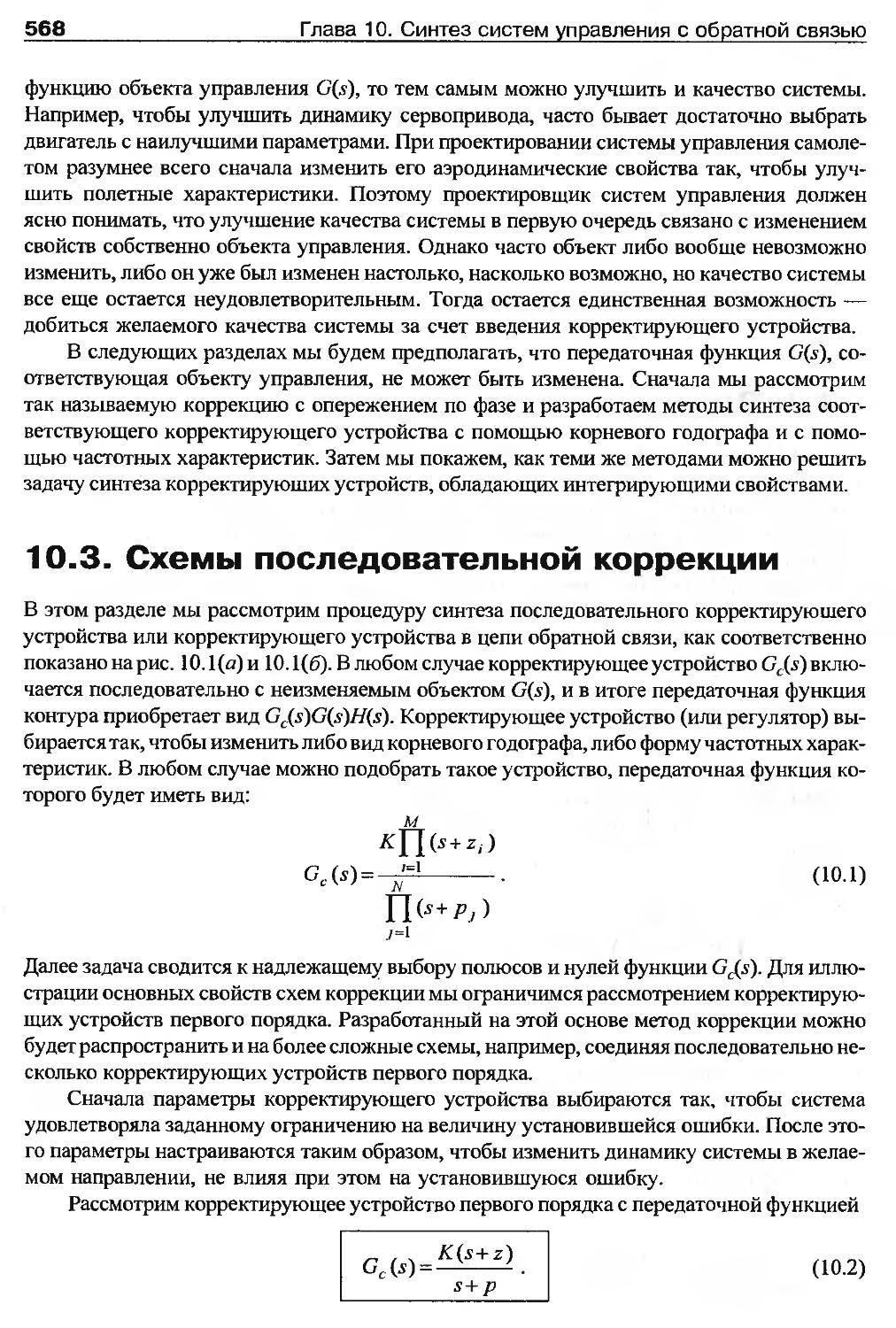
10.3. Схемы последовательной коррекции.............................568
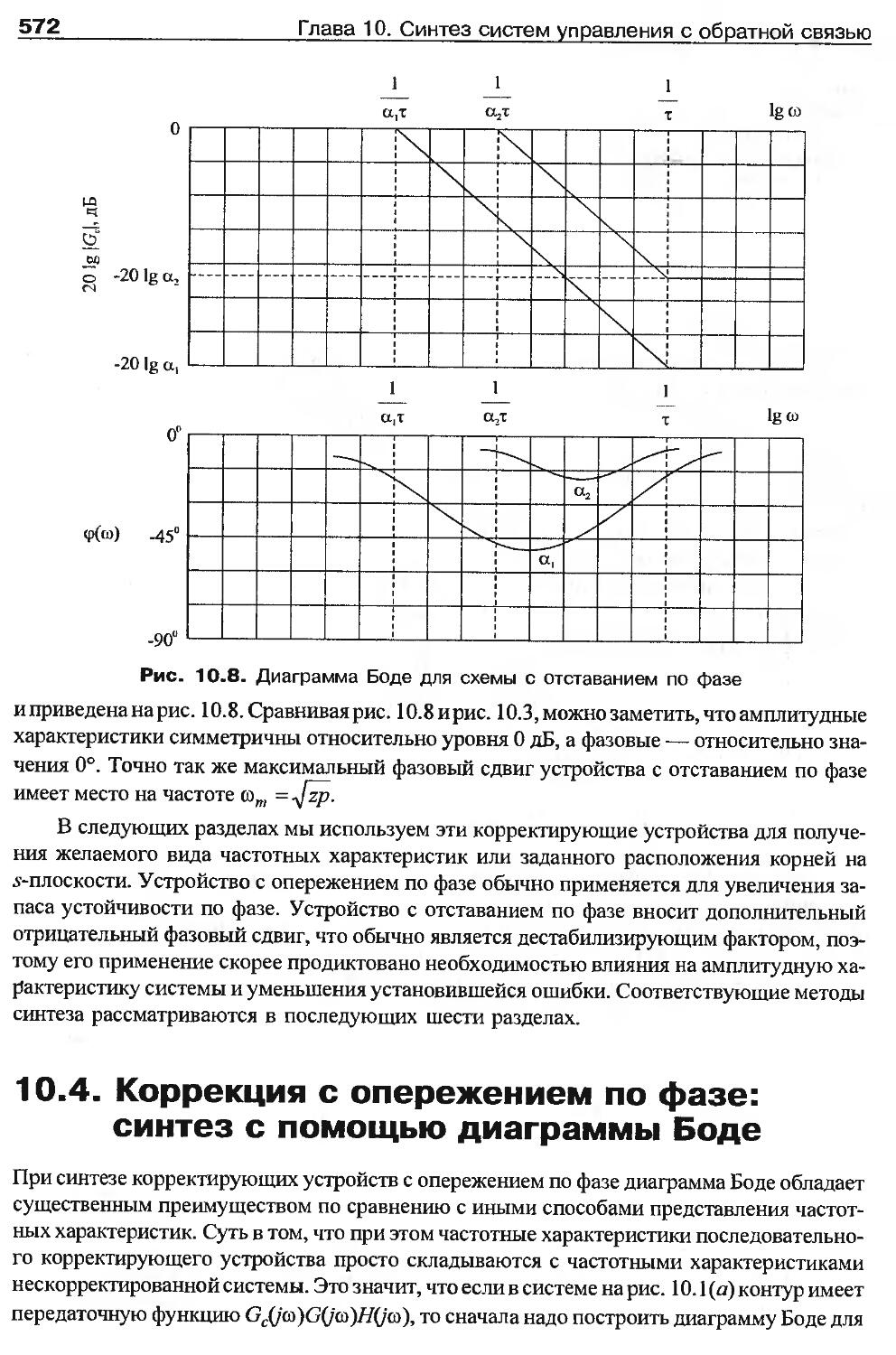
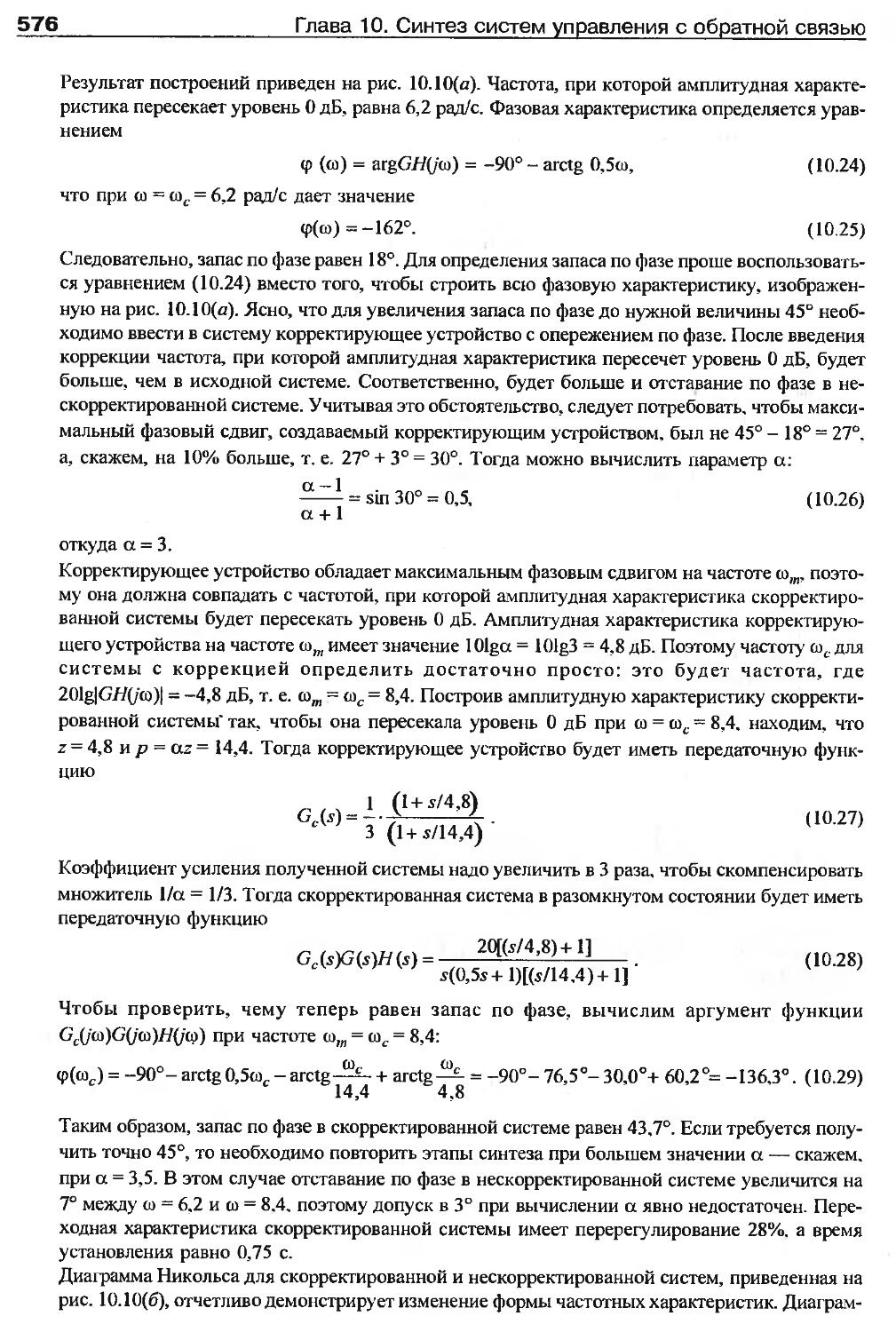
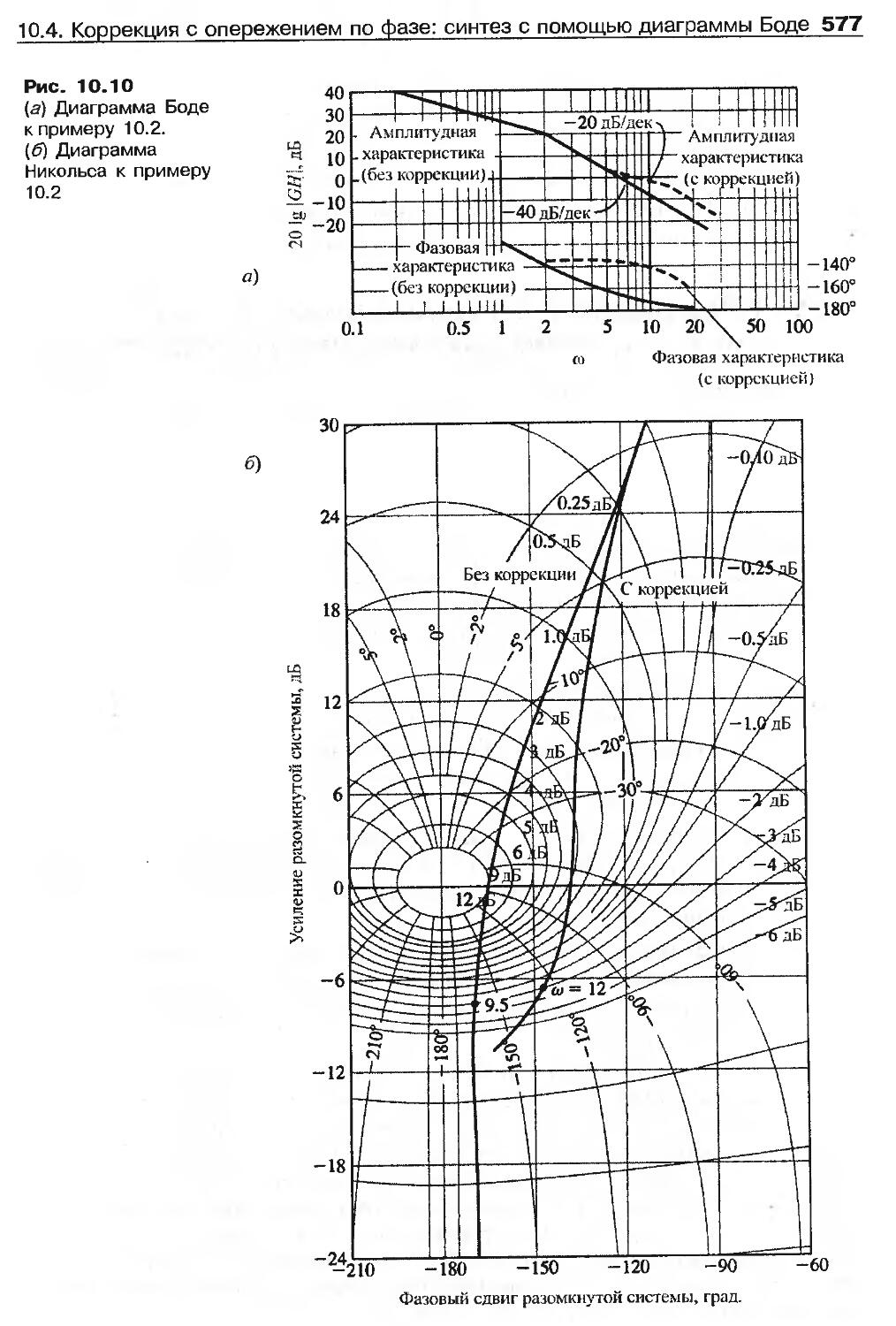
10.4. Коррекция с опережением по фазе: синтез с помощью диаграммы Боде . . 572
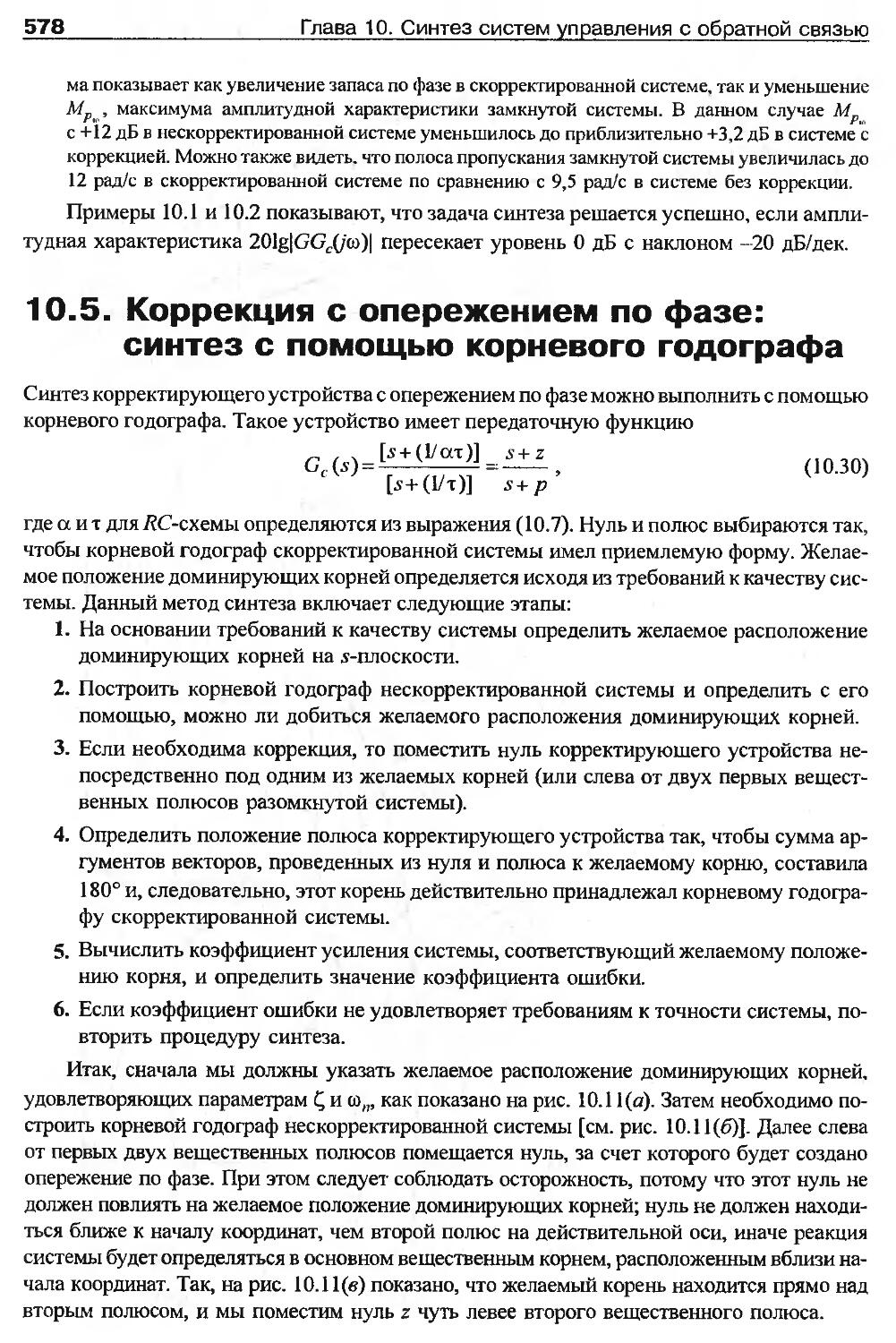
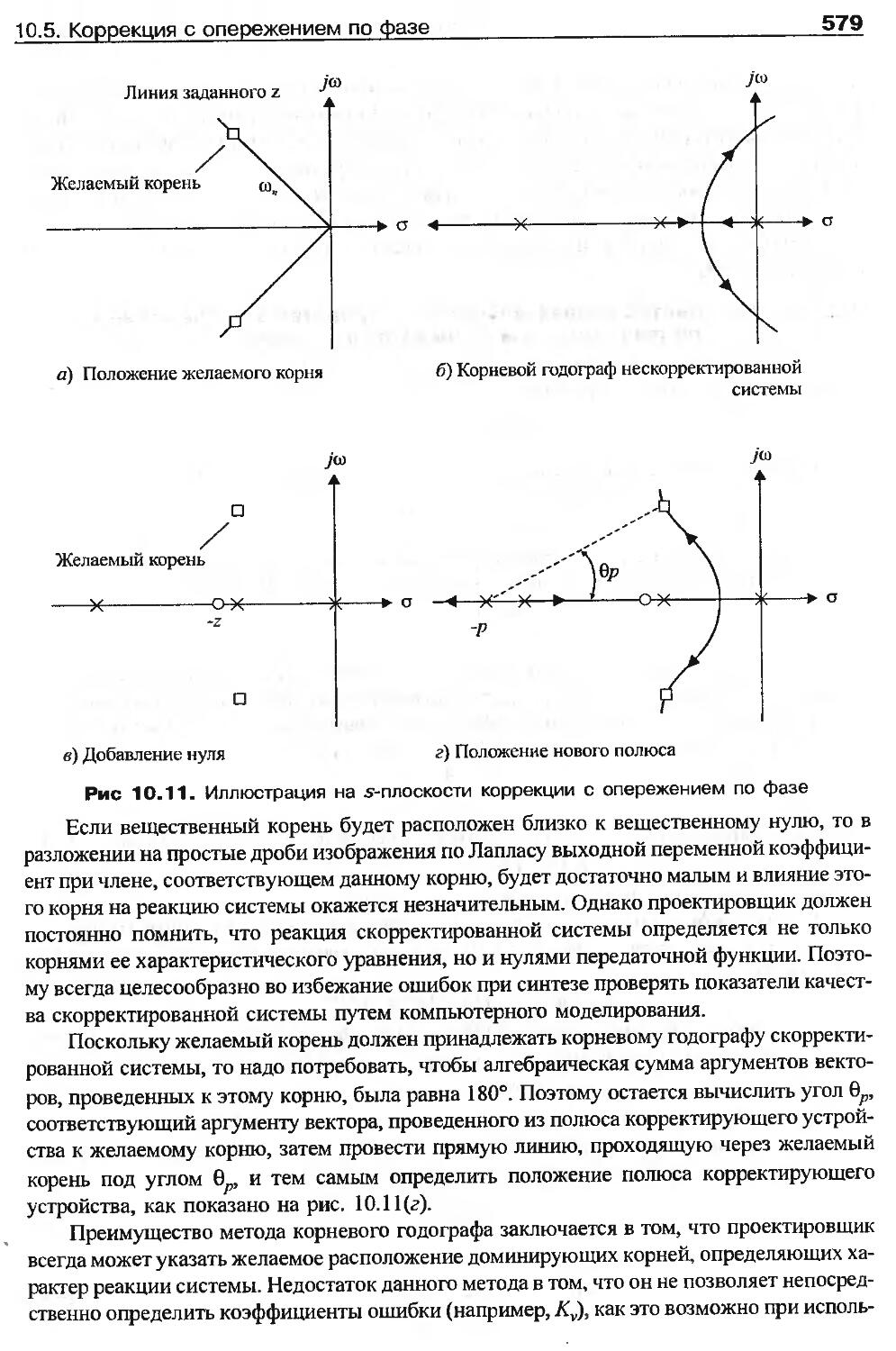
10.5. Коррекция с опережением по фазе: синтез с помощью корневого годографа..........................................................578
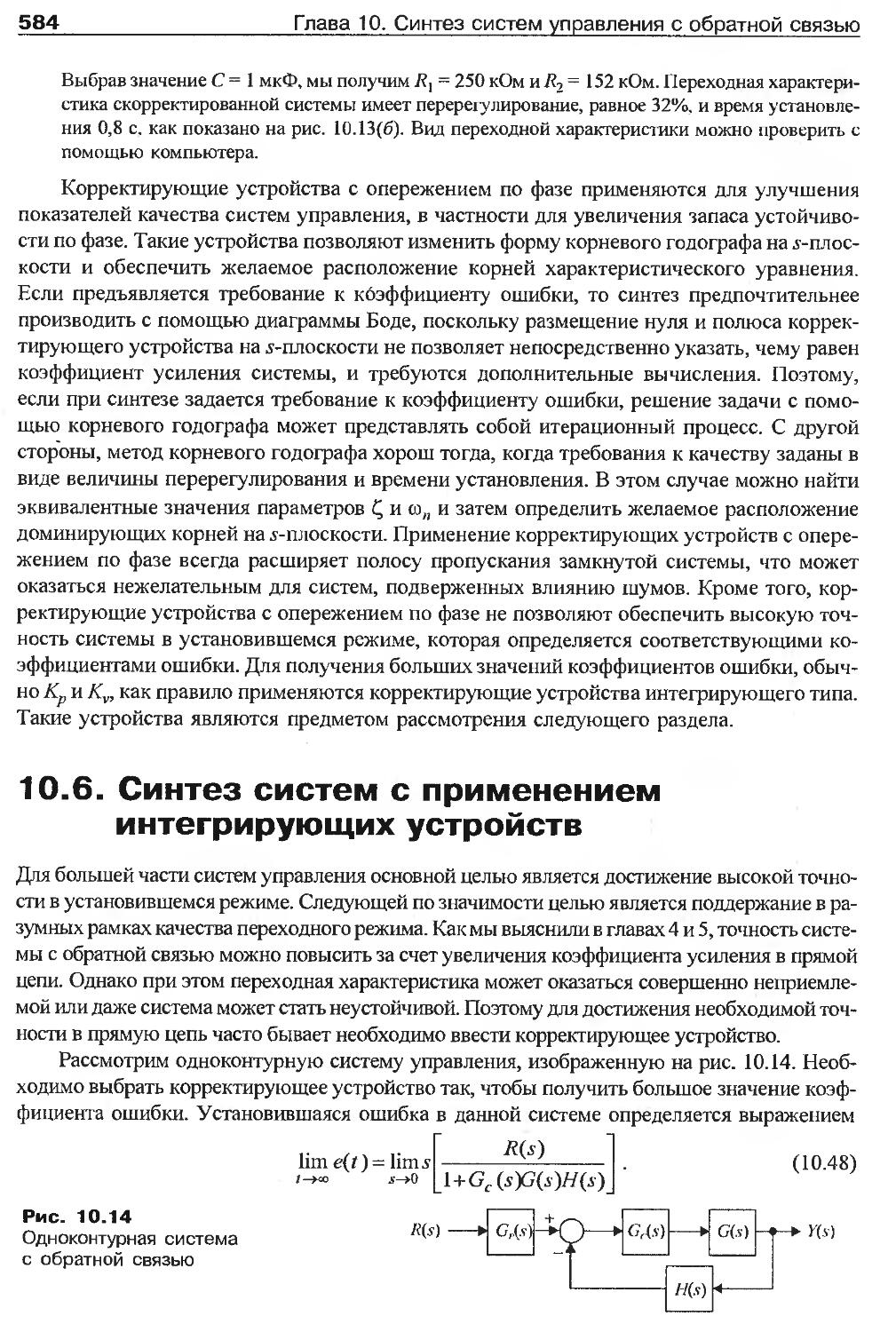
10.6. Синтез систем с применением интегрирующих устройств..........584
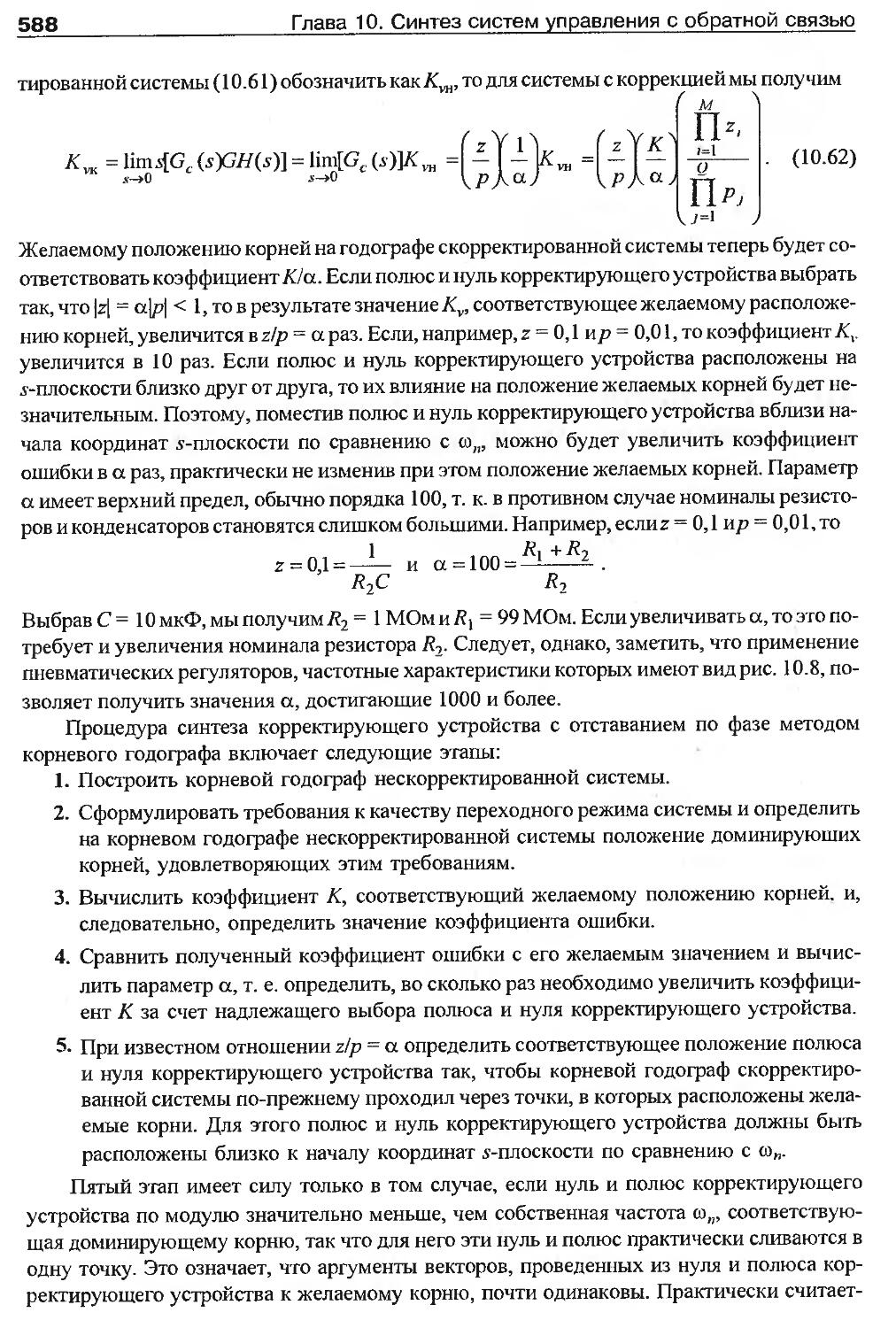
10.7. Коррекция с отставанием по фазе: синтез с помощью корневого годографа..........................................................587
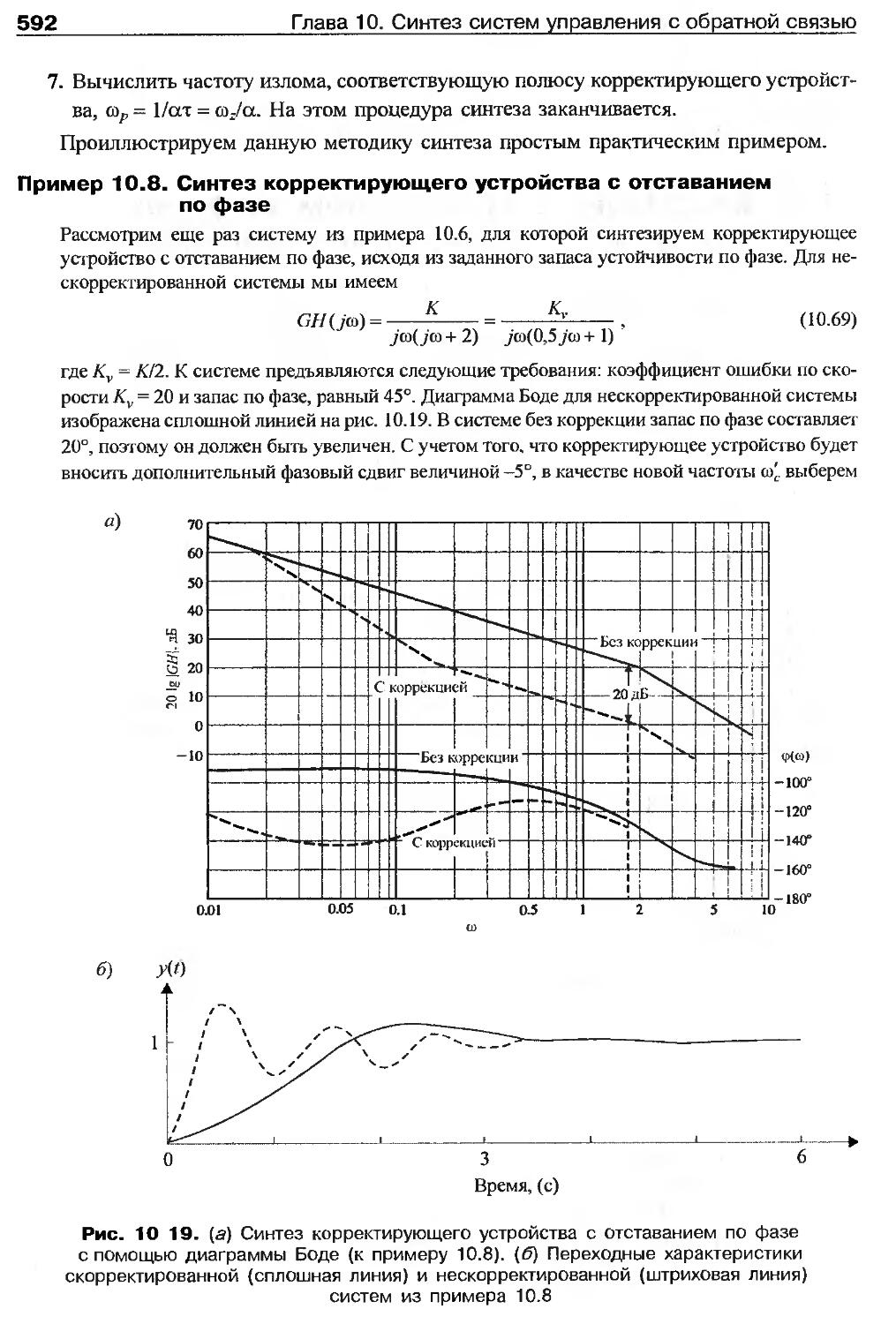
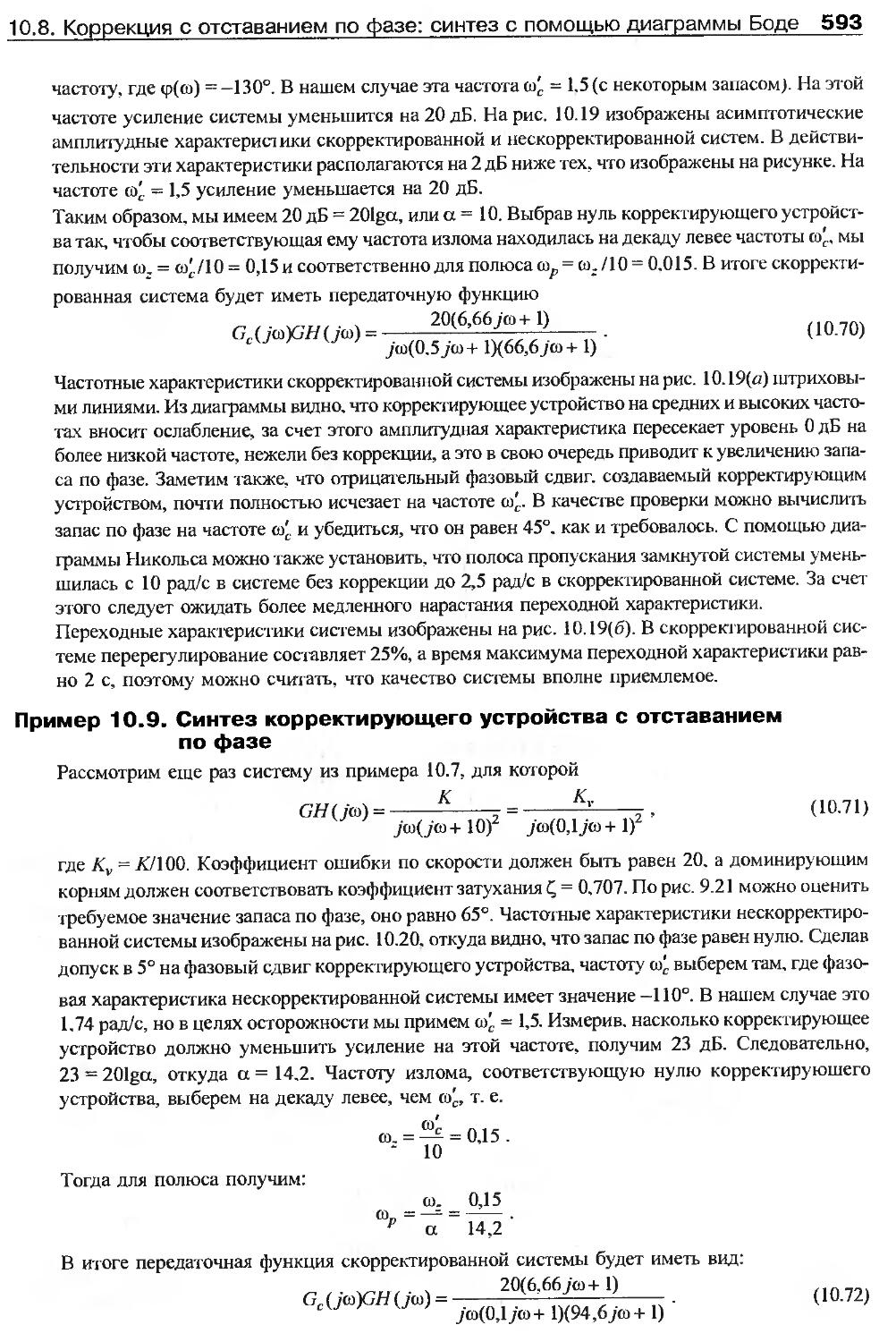
10.8. Коррекция с отставанием по фазе: синтез с помощью диаграммы Боде. . . 591
10.9. Синтез с помощью диаграммы Боде и использования аналитических методов и компьютеров..............................................595
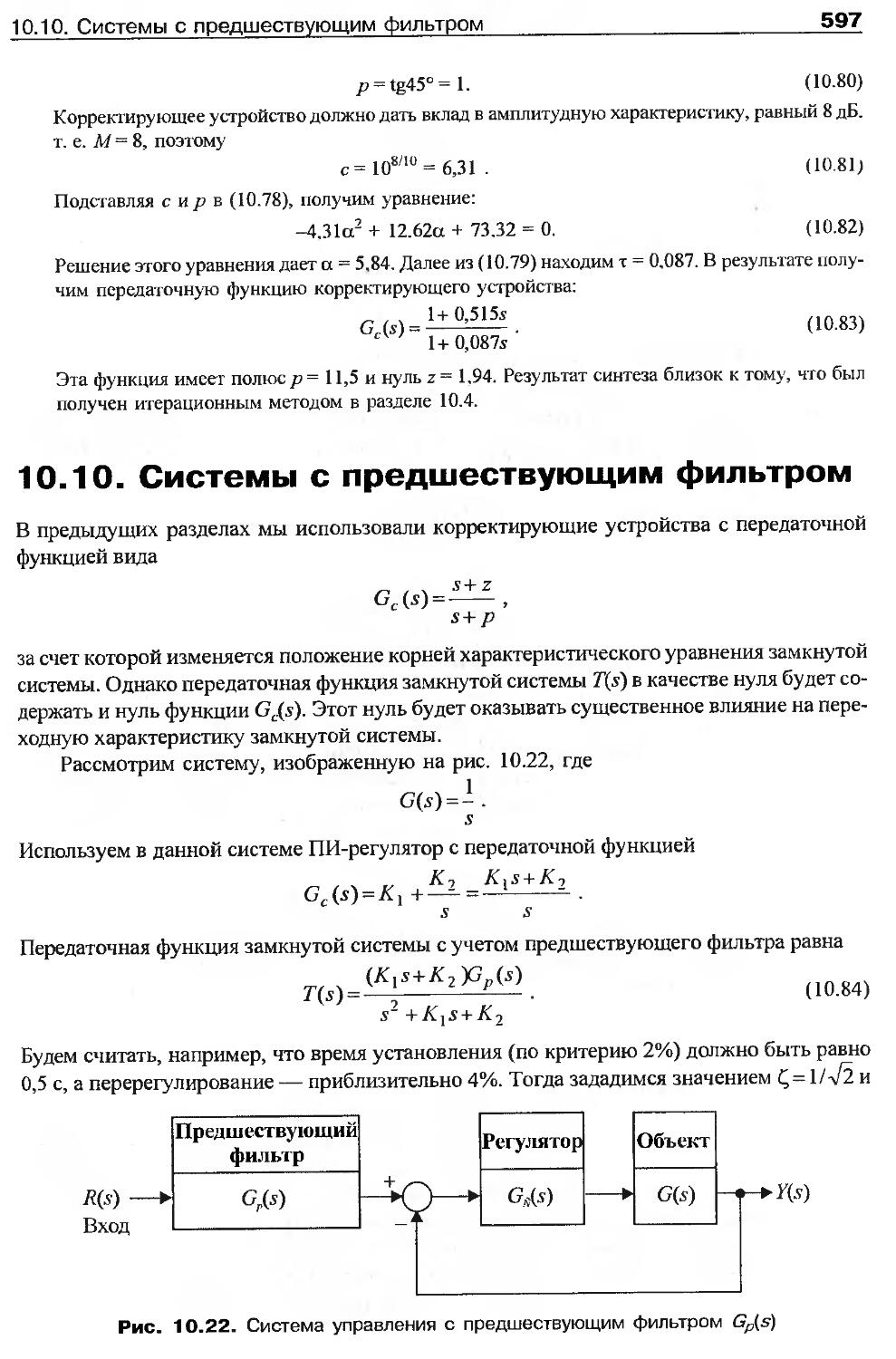
10.10. Системы с предшествующим фильтром...........................597
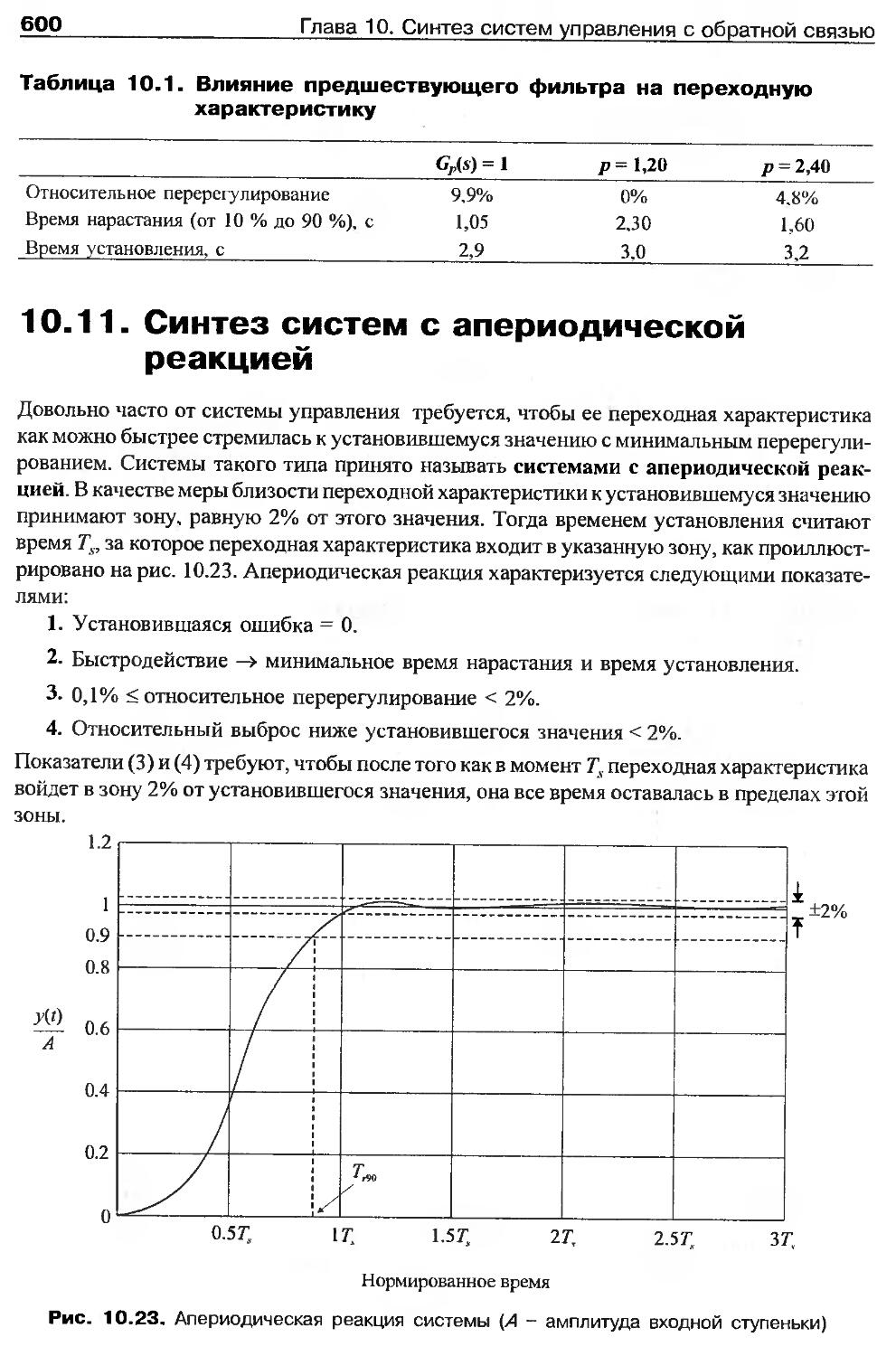
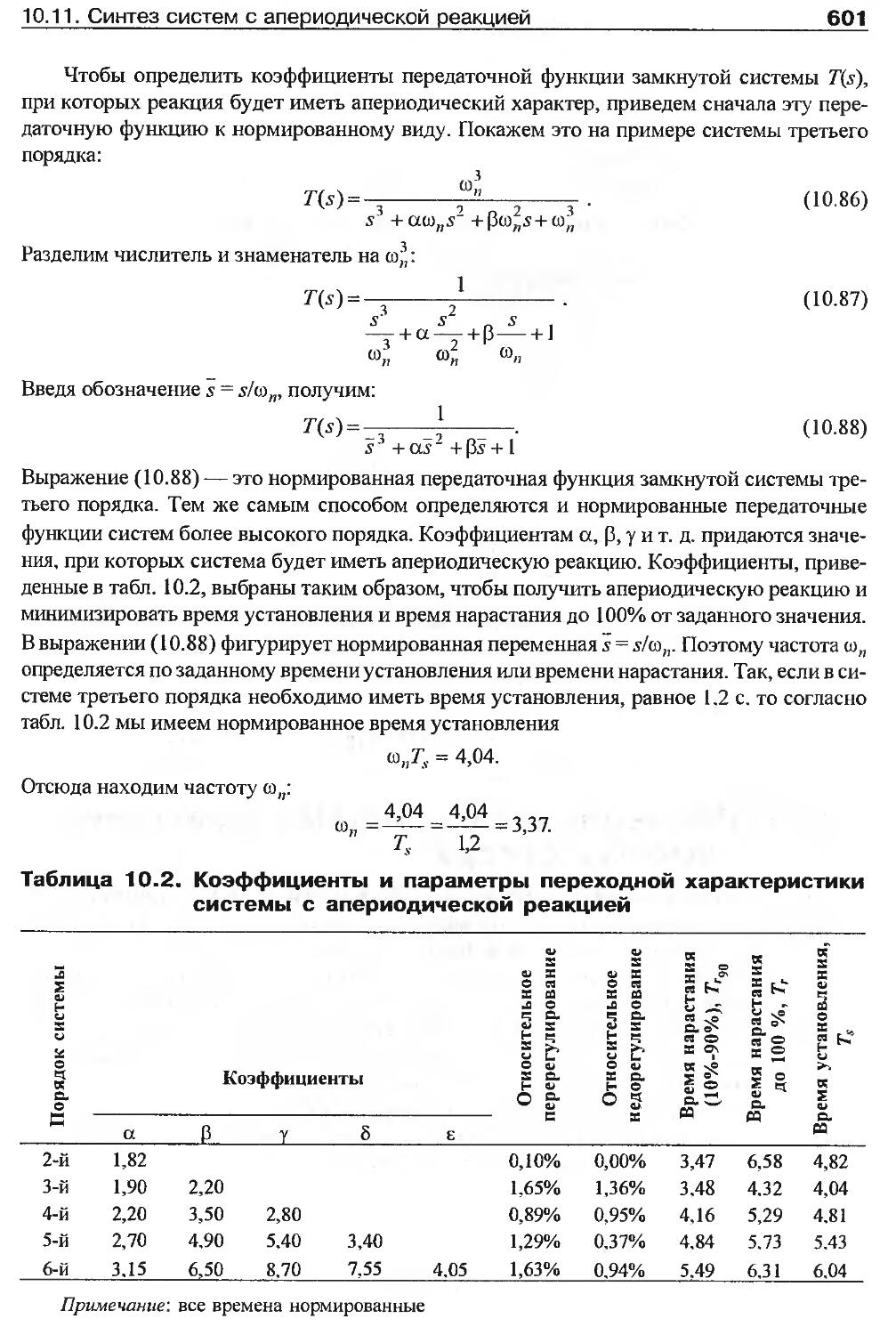
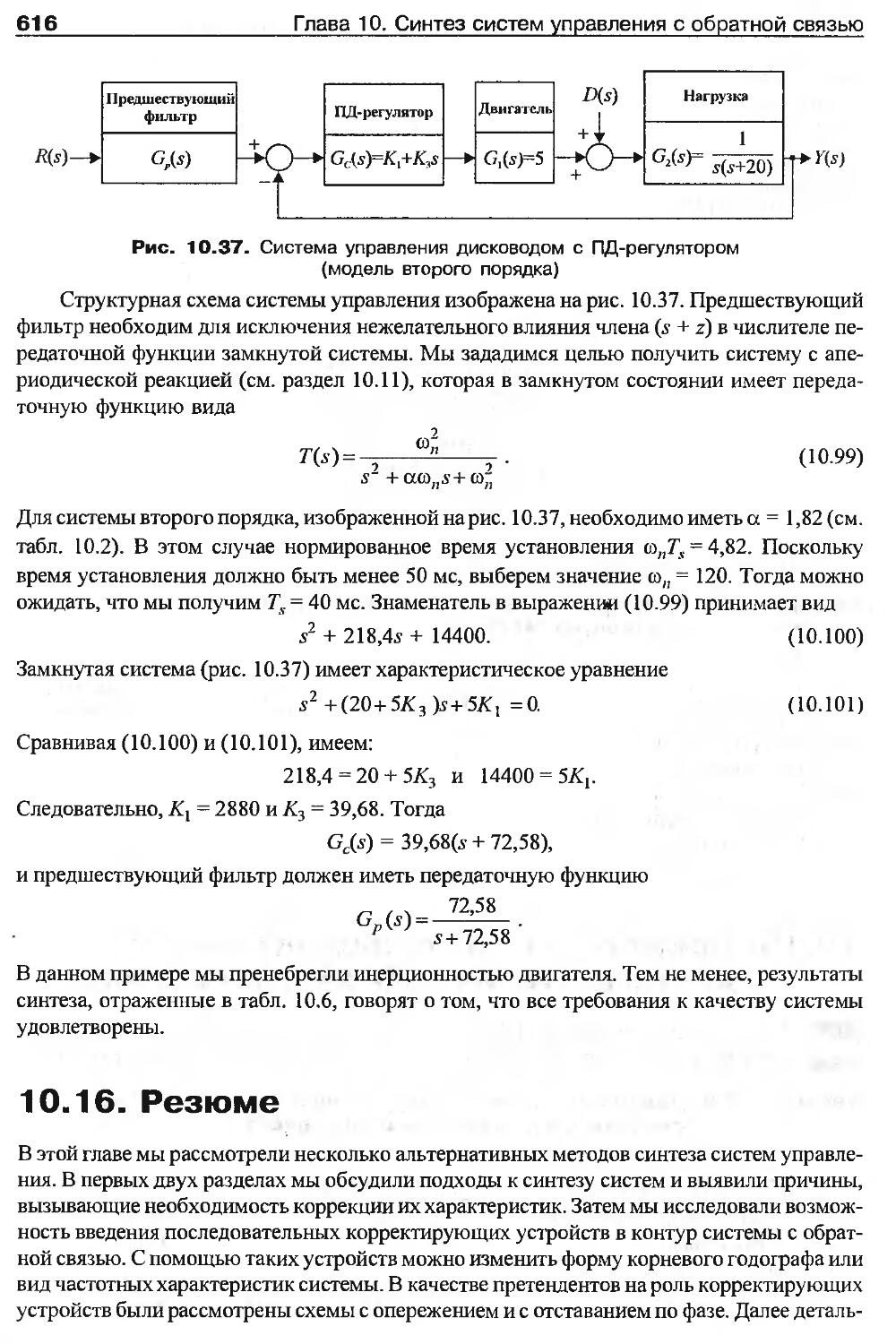
10.11. Синтез систем с апериодической реакцией.....................600
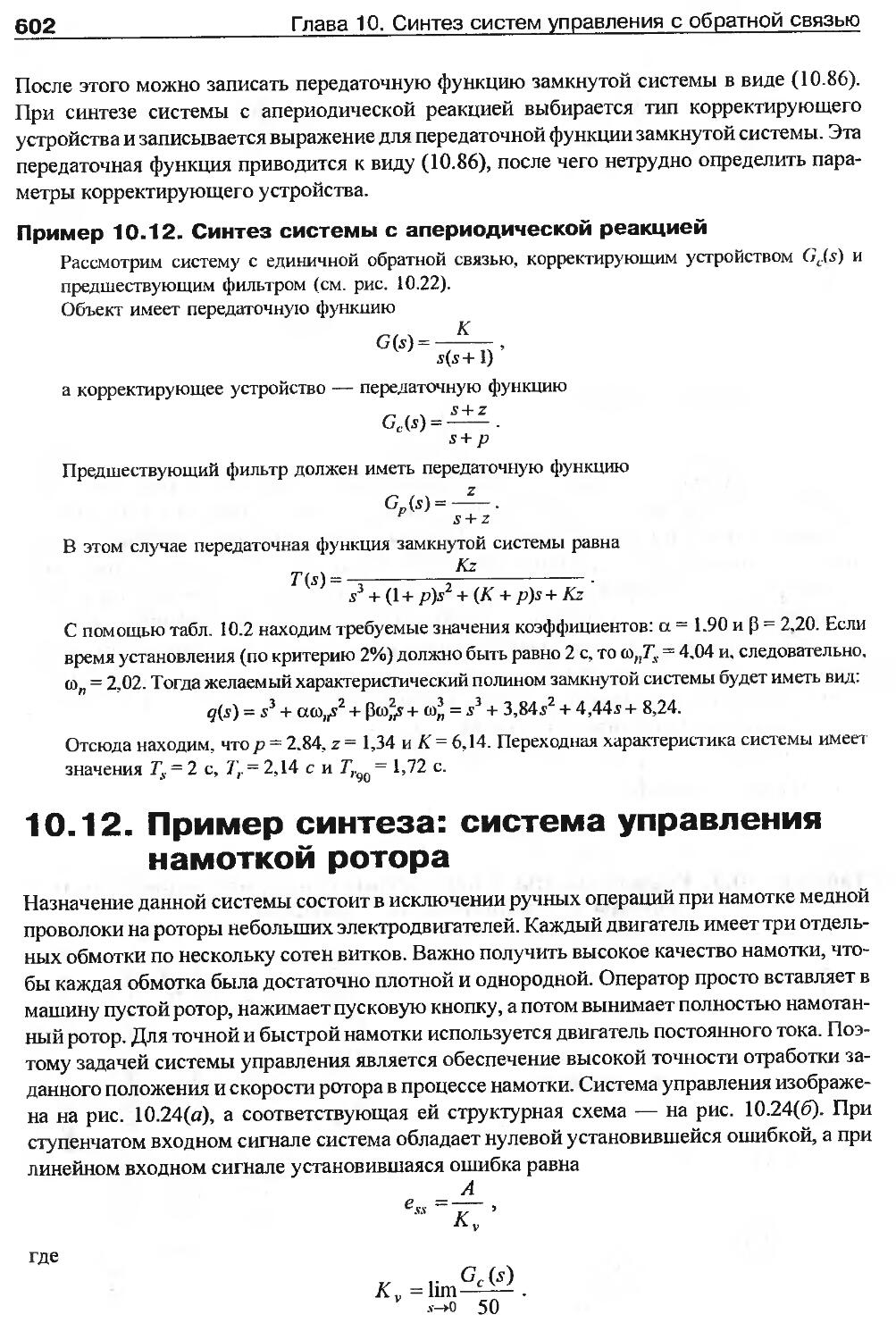
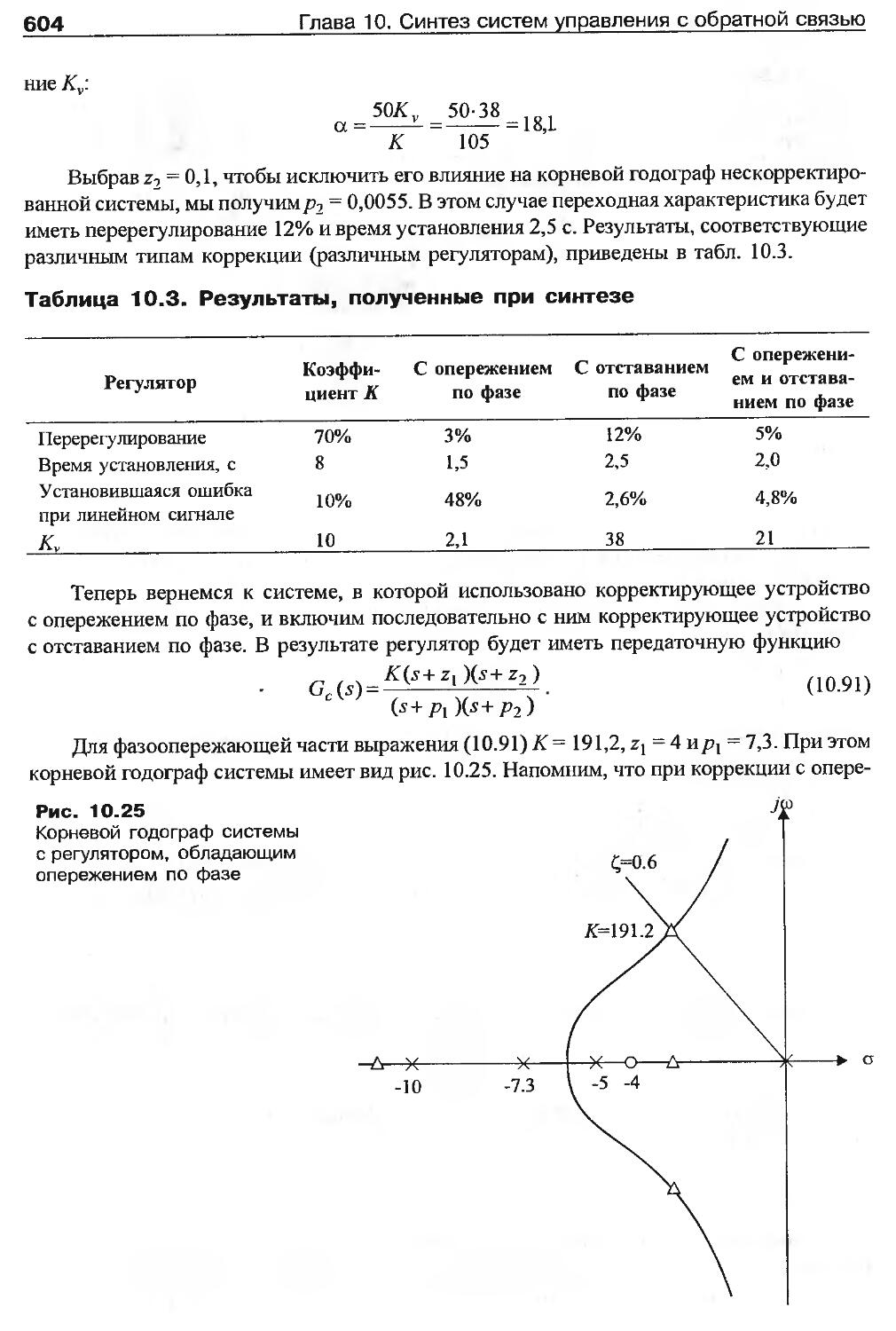
10.12. Пример синтеза: система управления намоткой ротора..........602
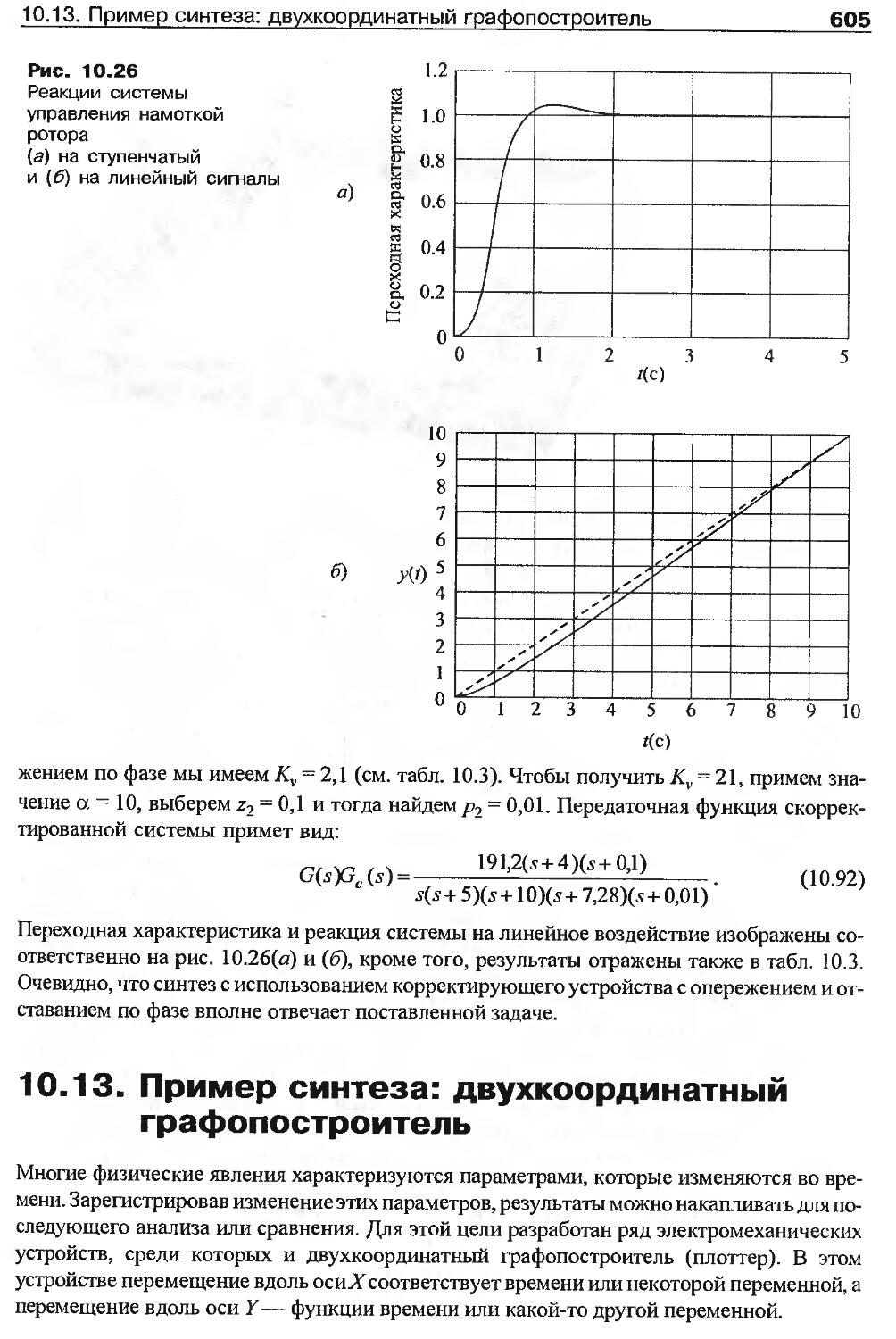
10.13. Пример синтеза: двухкоординатный графопостроитель...........606
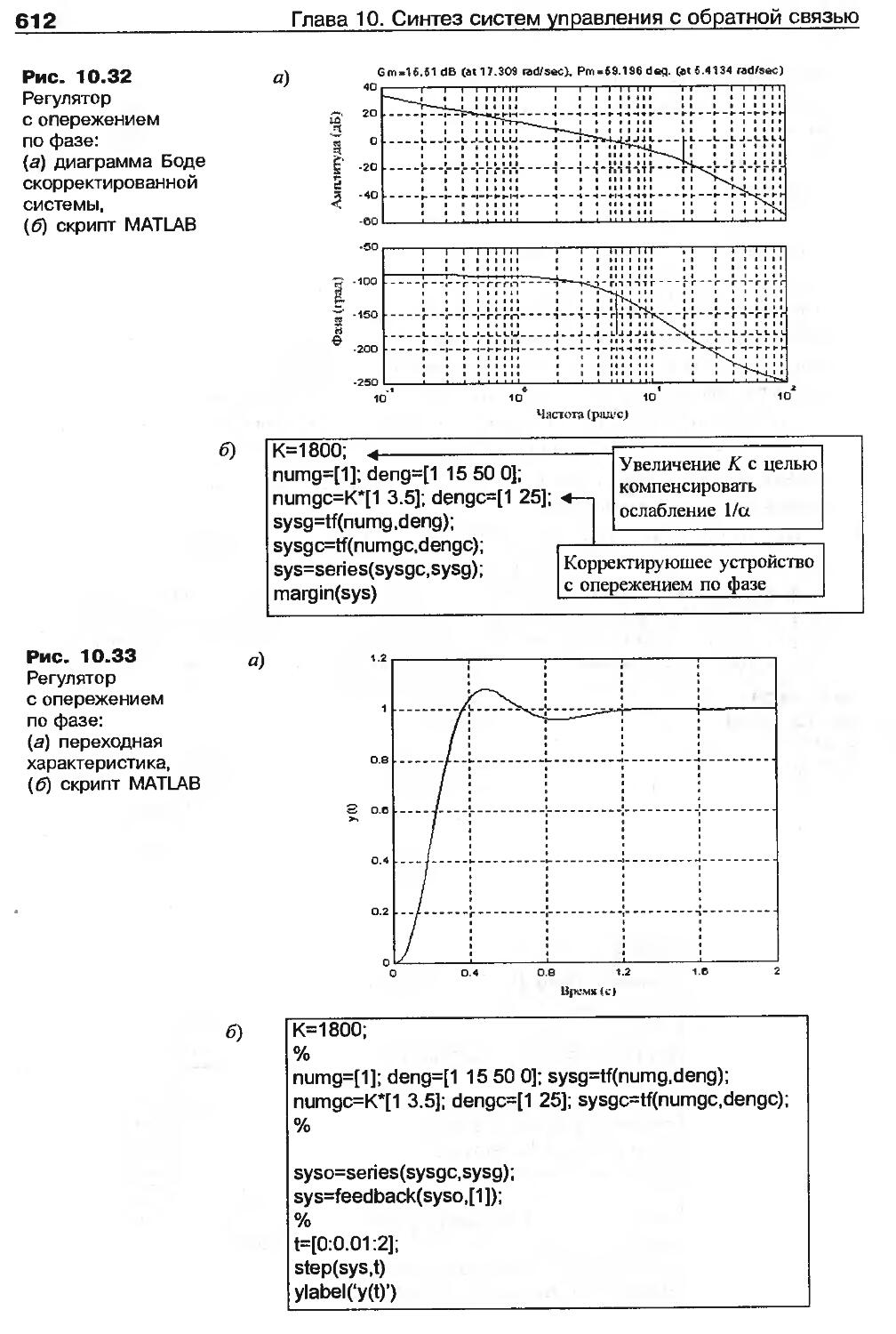
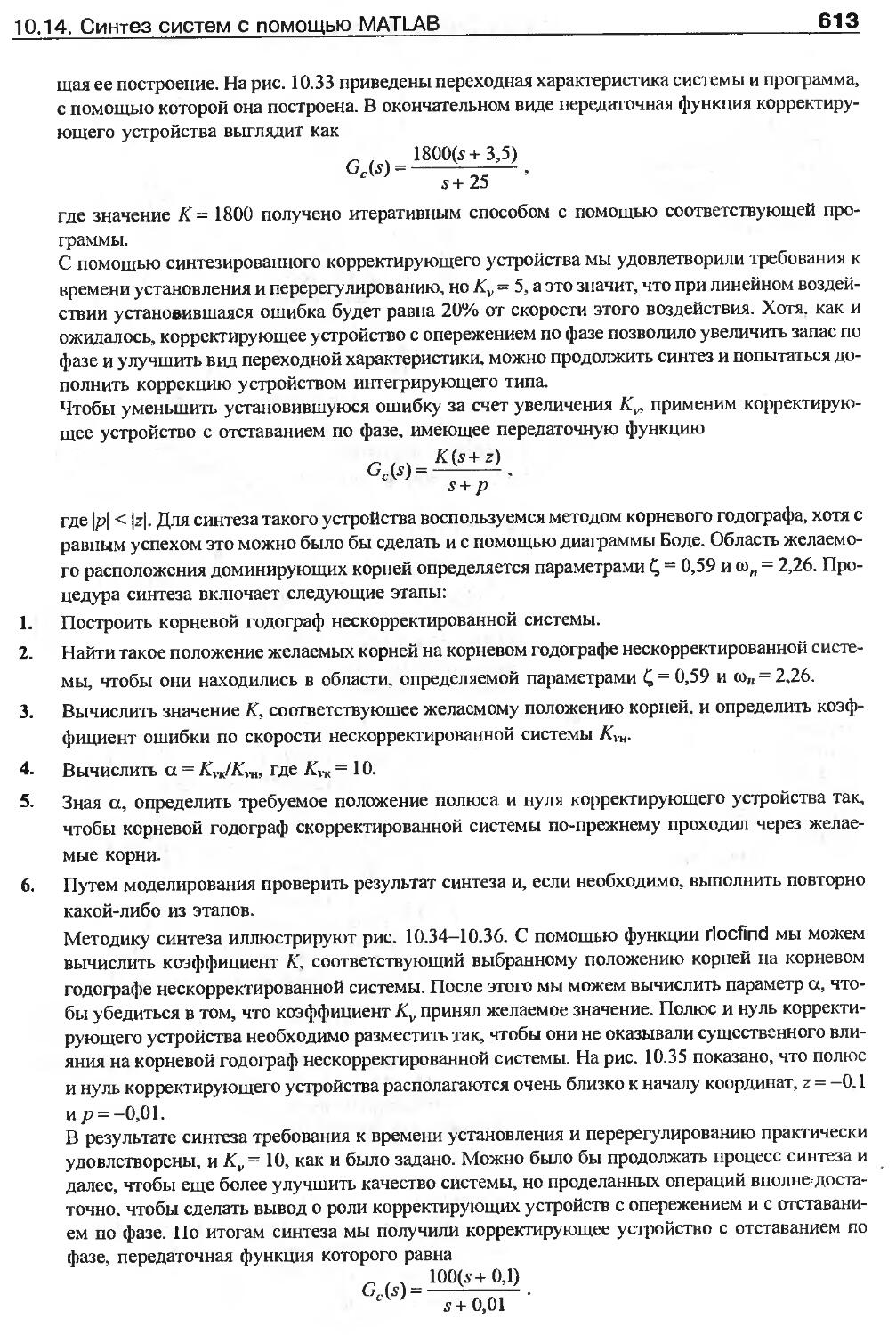
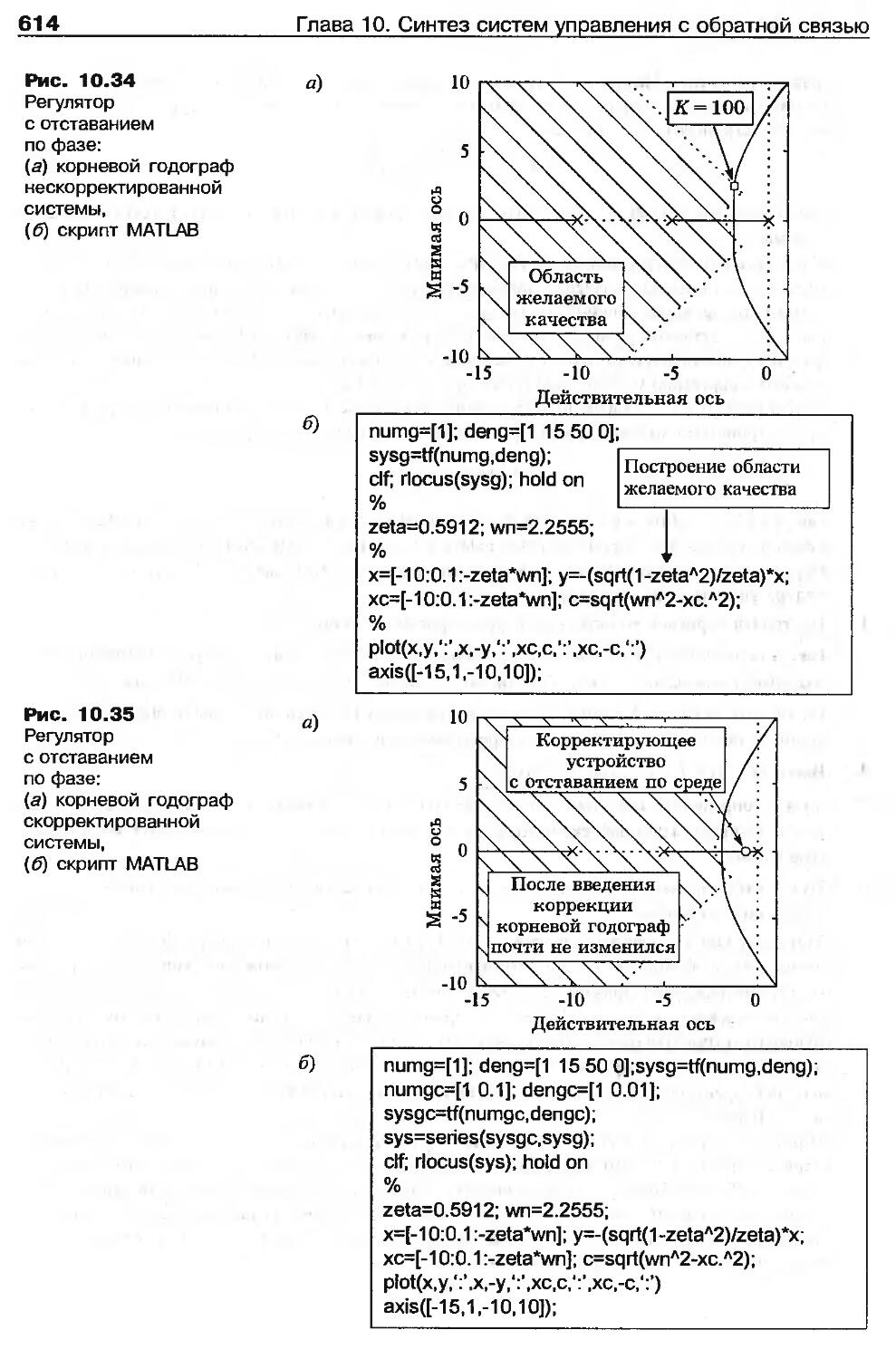
10.14. Синтез систем с помощью MATLAB..............................609
10.15. Пример синтеза с продолжением: система чтения информации с диска............................................................616
10.16. Резюме......................................................617
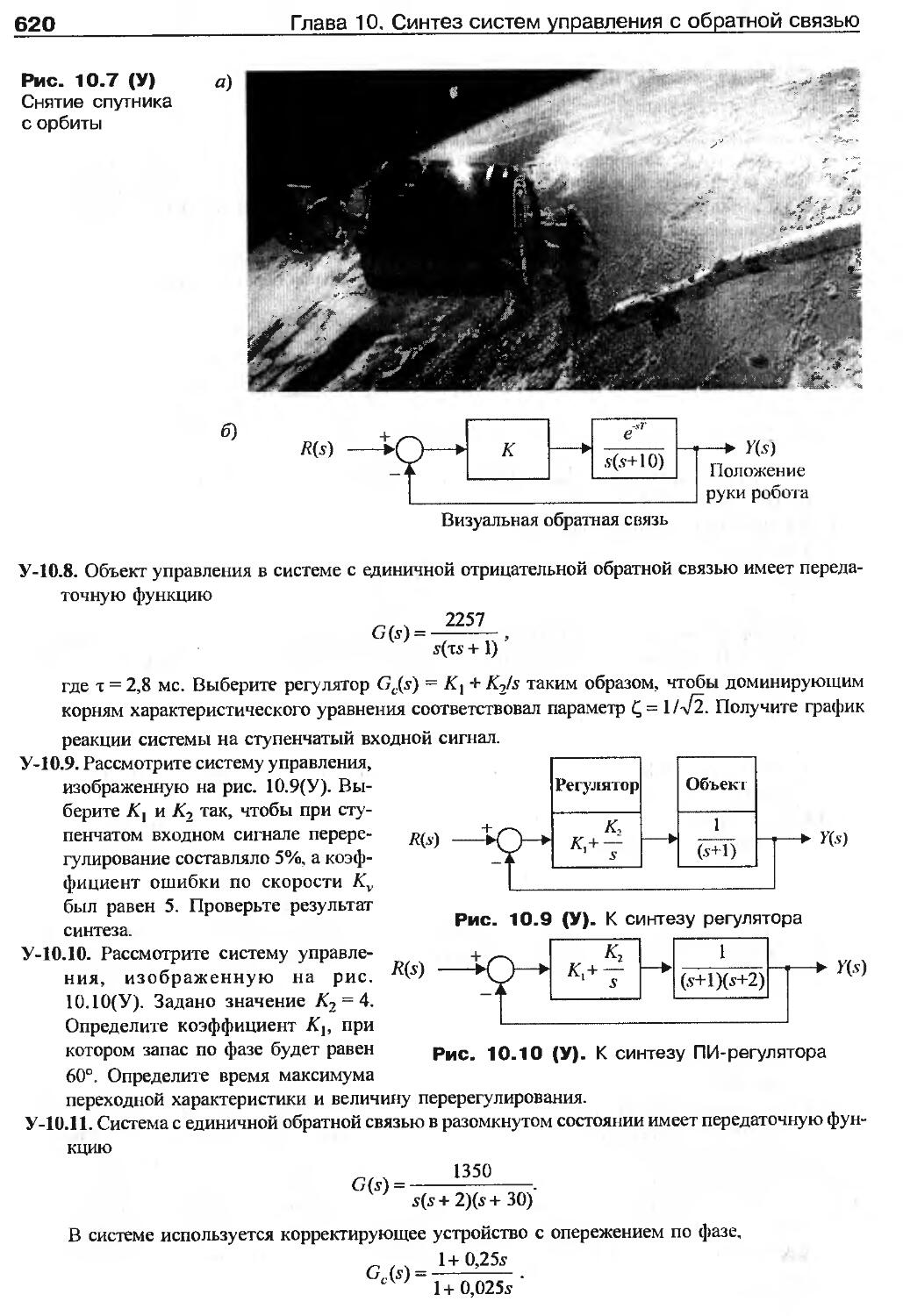
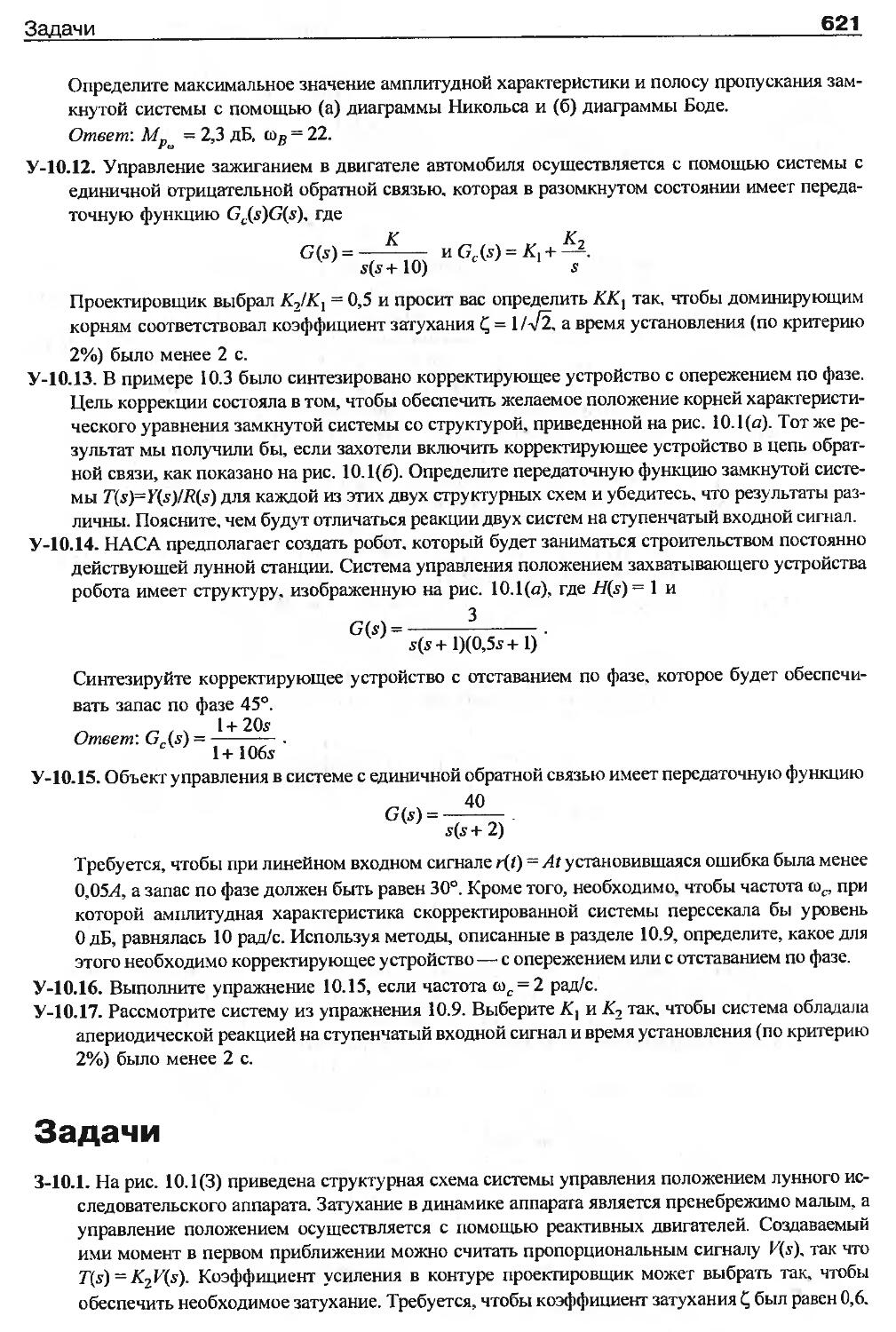
Упражнения.........................................................619
12
Содержание
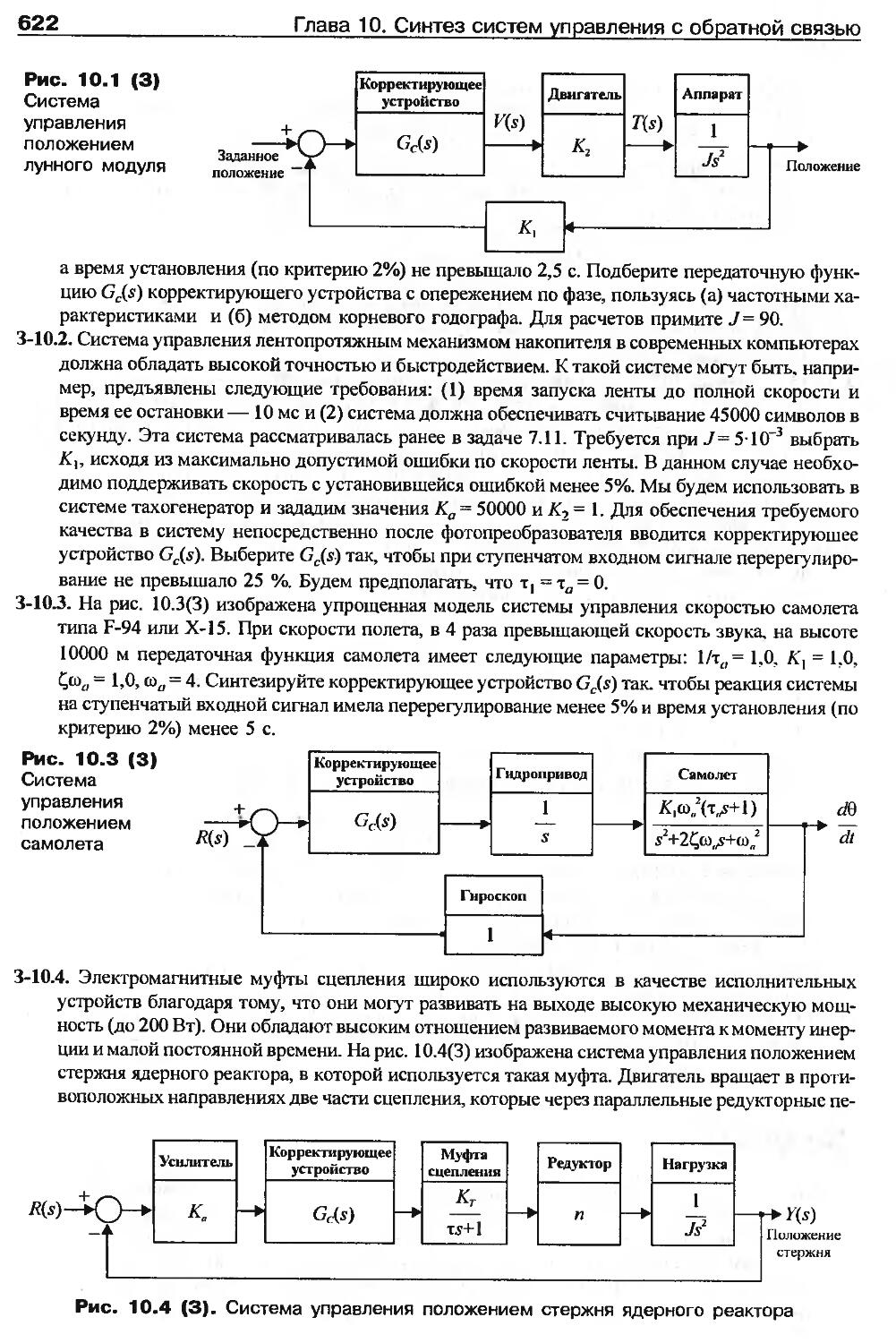
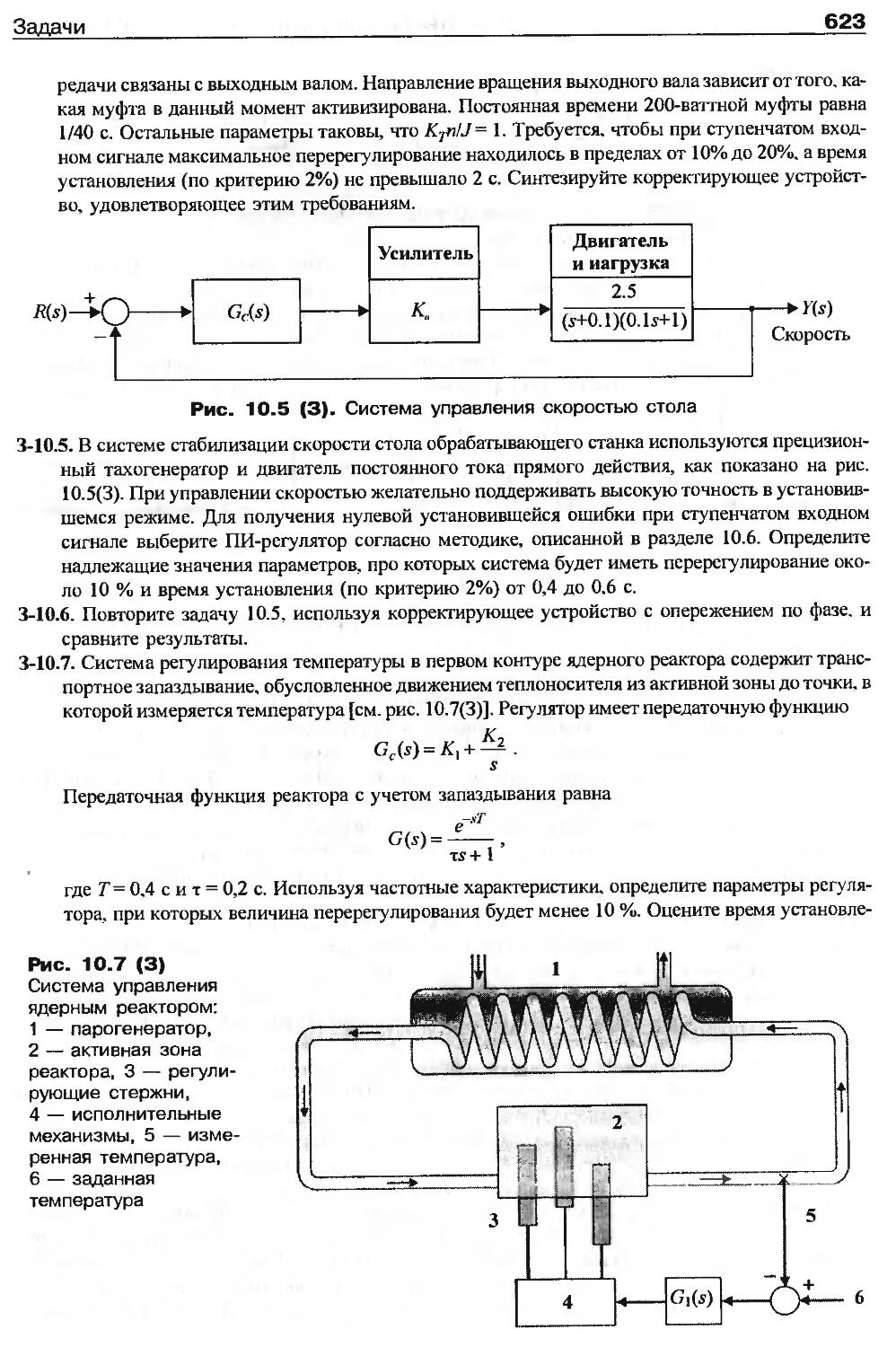
Задачи.............................................................622
Задачи повышенной сложности........................................636
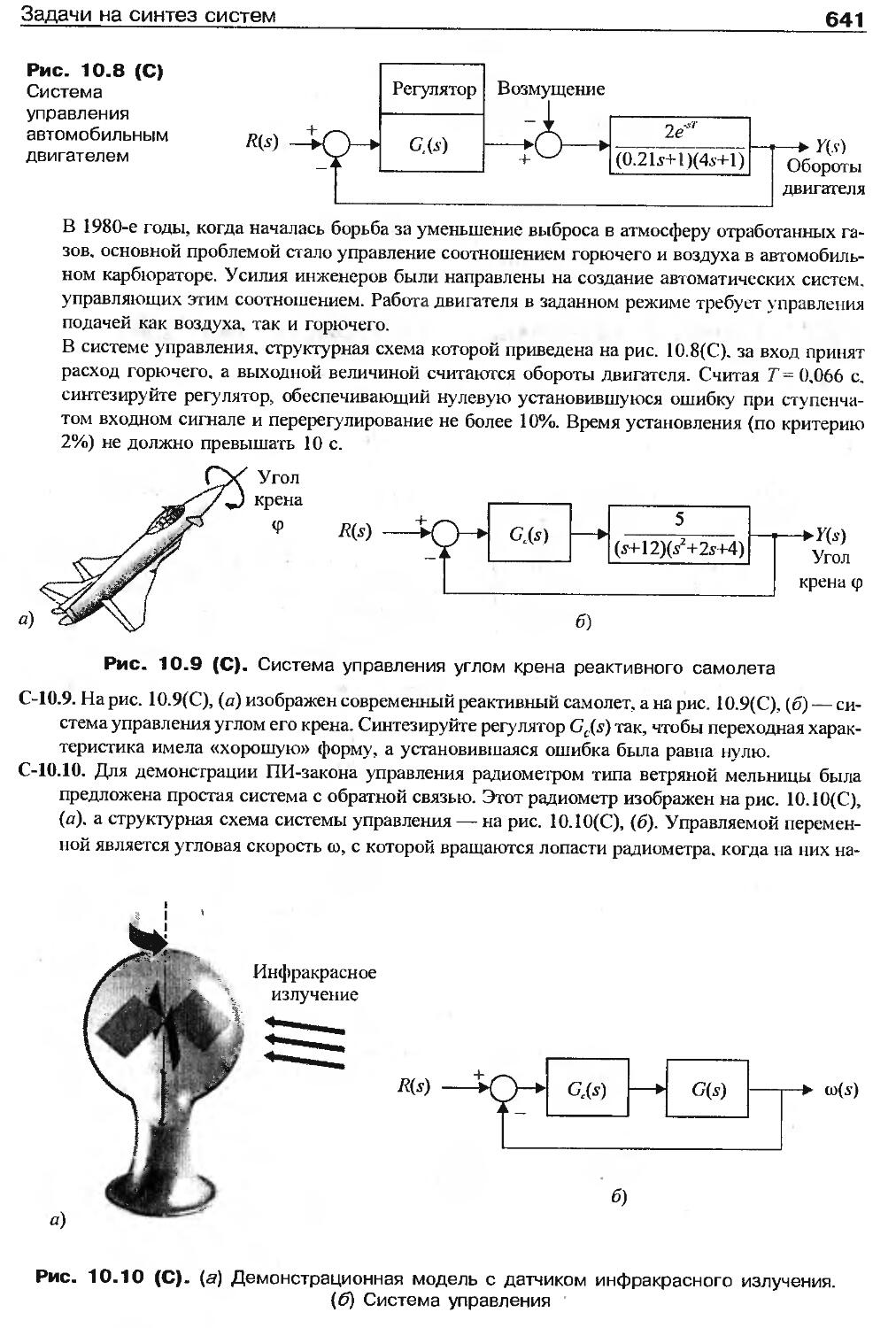
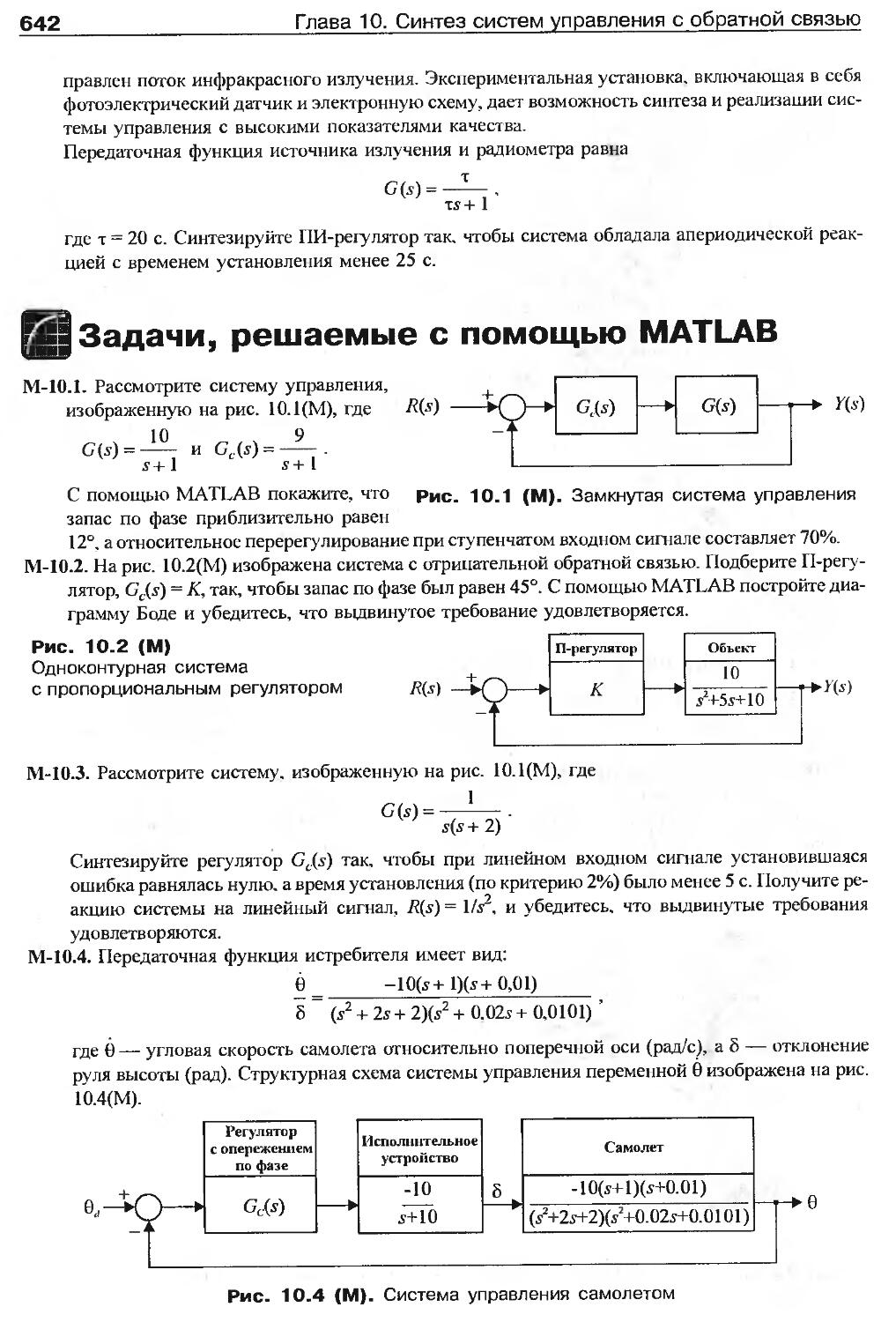
Задачи на синтез систем............................................638
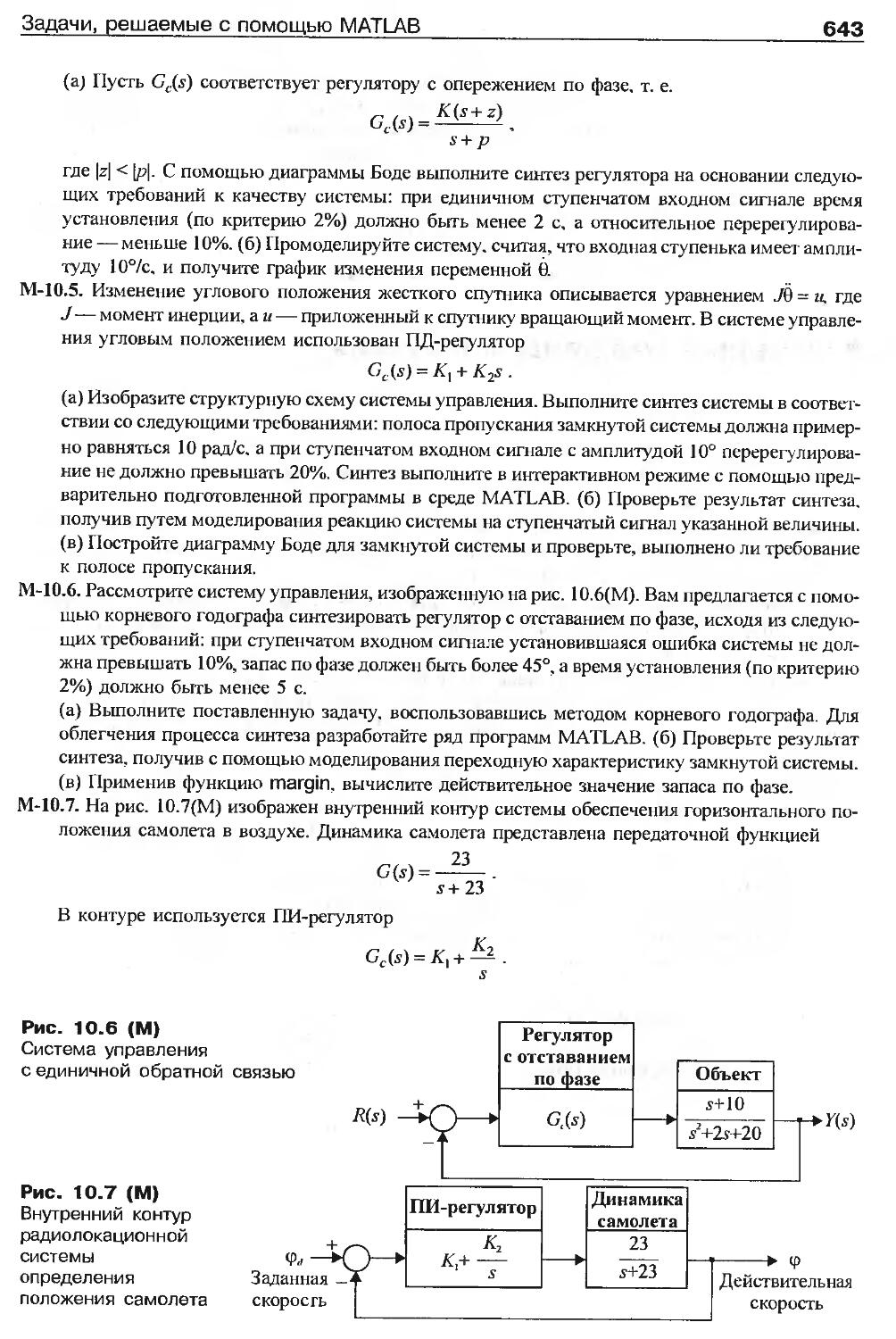
Задачи, решаемые с помощью MATLAB..................................643
Ключевые термины и понятия.........................................644
Глава 11. Синтез систем с обратной связью по состоянию................646
Обзор..............................................................646
11.1. Введение.....................................................646
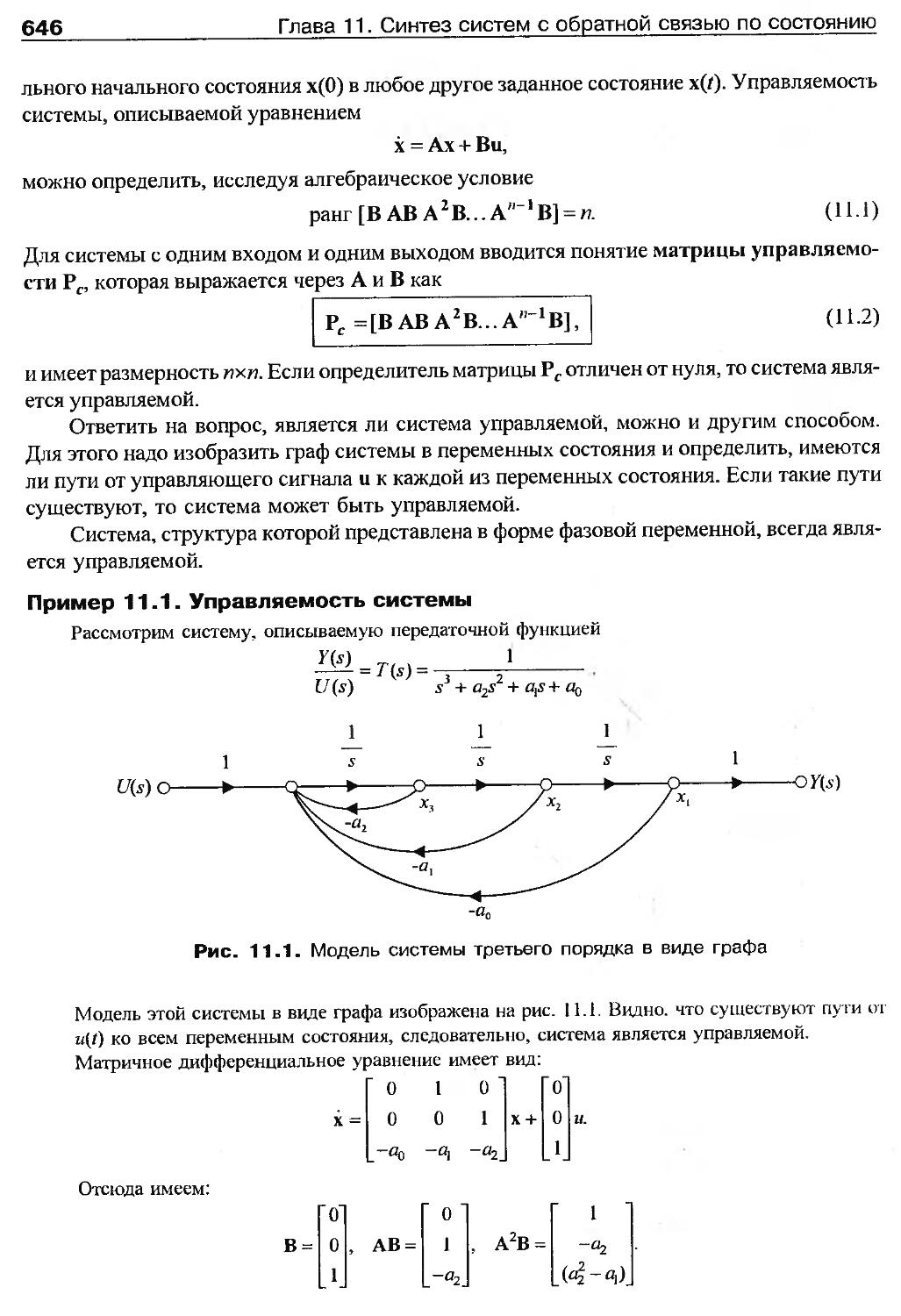
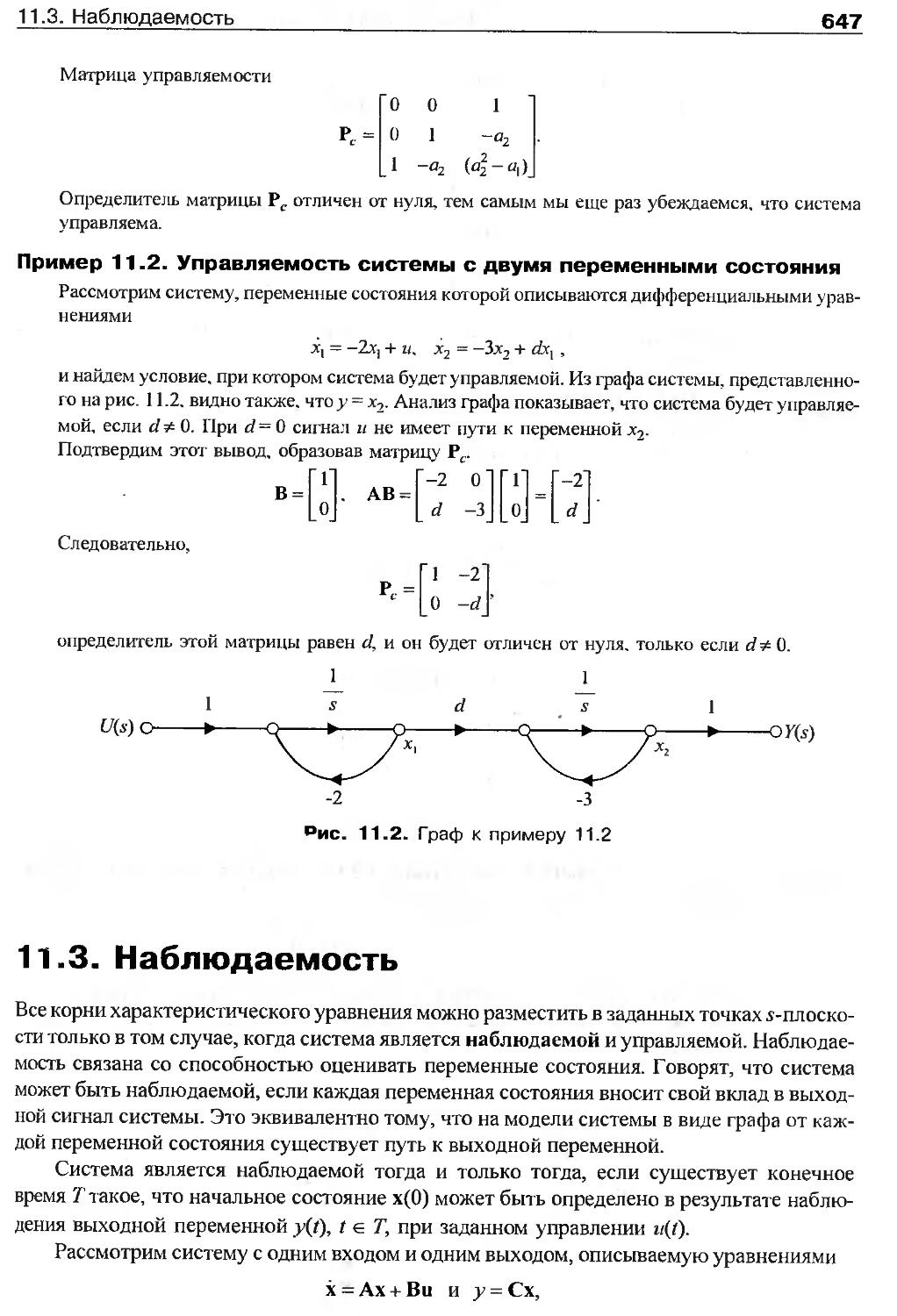
11.2. Управляемость................................................646
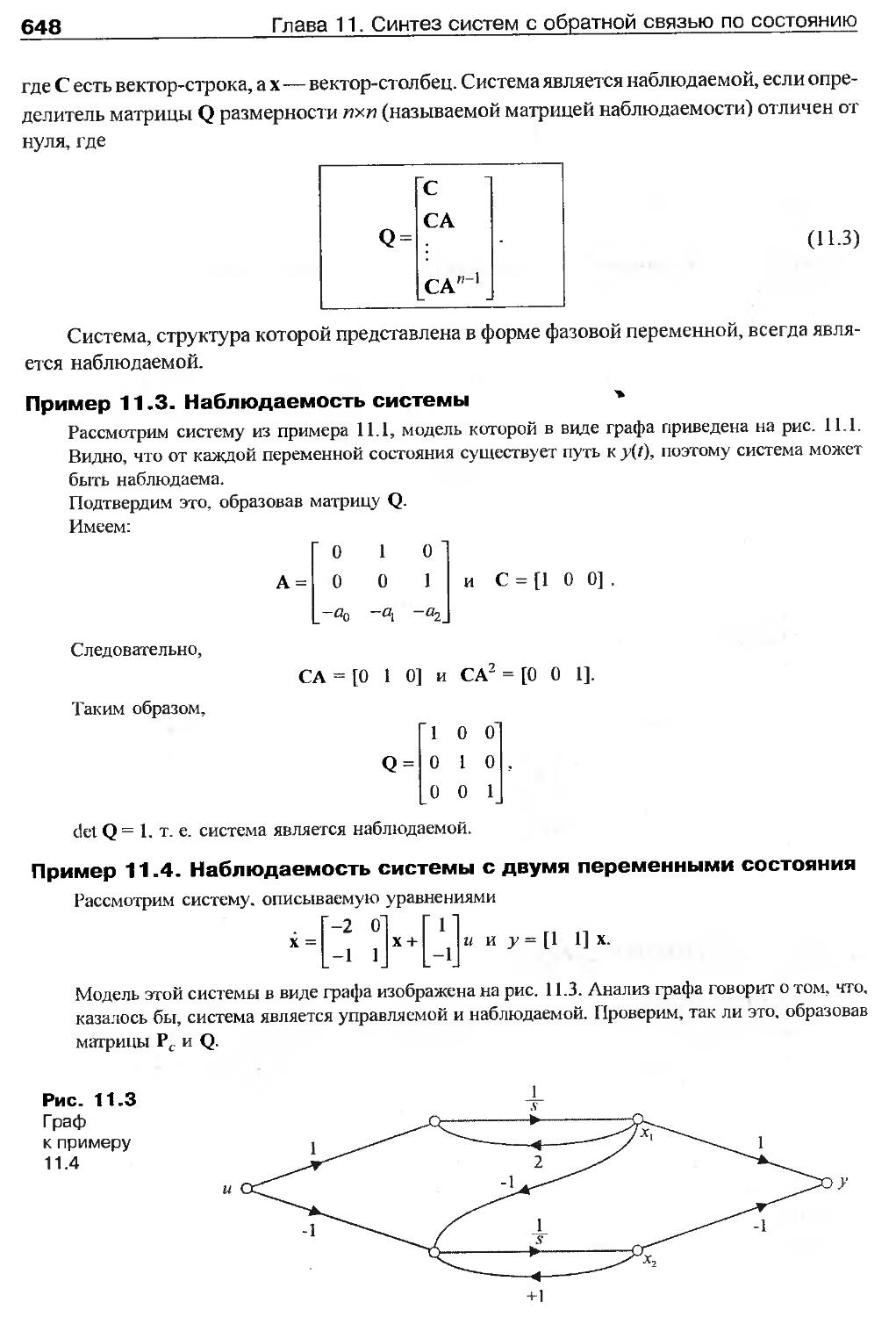
11.3. Наблюдаемость................................................648
11.4. Оптимальные системы управления...............................650
11.5. Размещение полюсов с помощью обратной связи по состоянию.....658
11.6. Формула Аккермана............................................663
11.7. Ограничения обратной связи по состоянию......................664
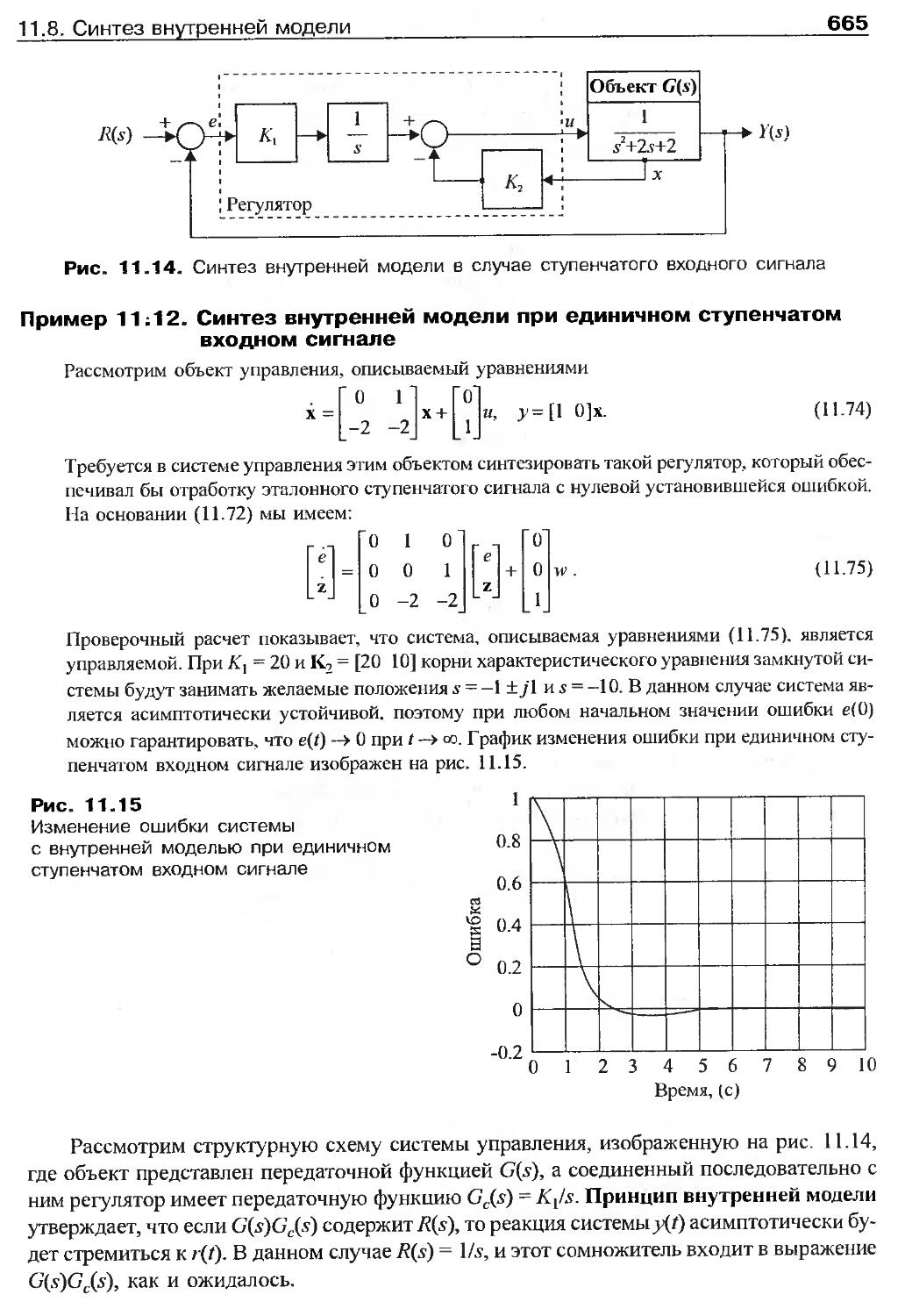
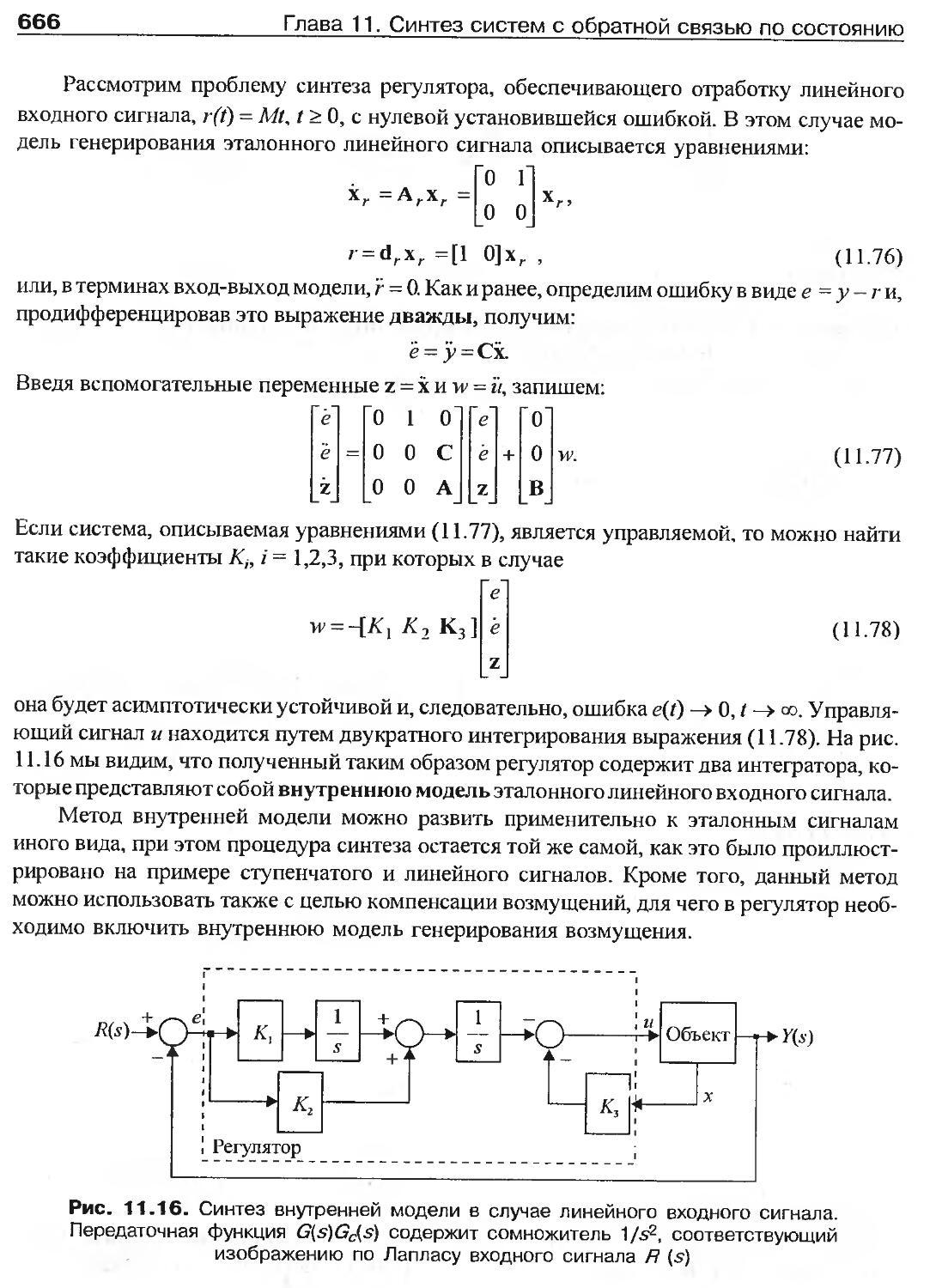
11.8. Синтез внутренней модели.....................................664
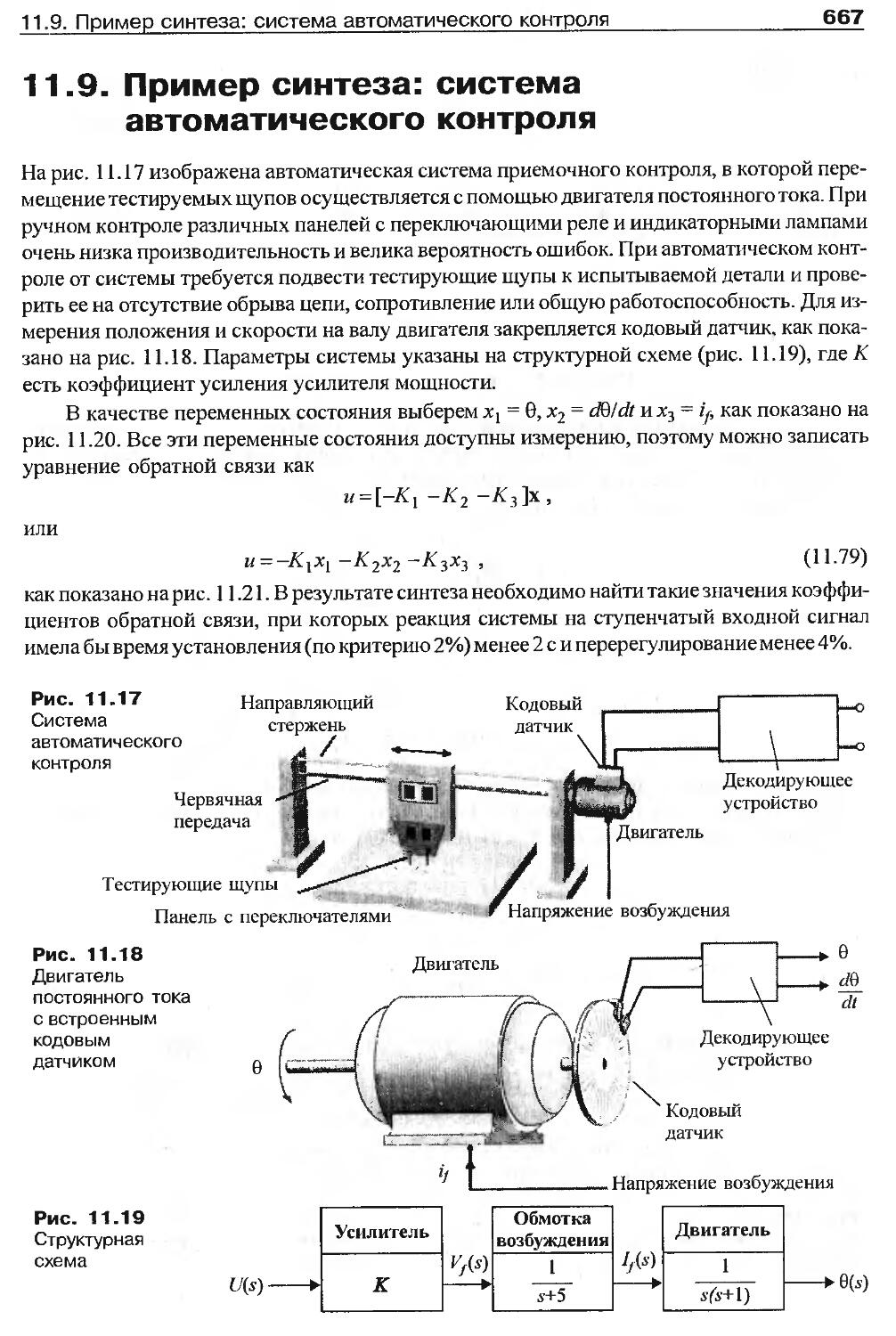
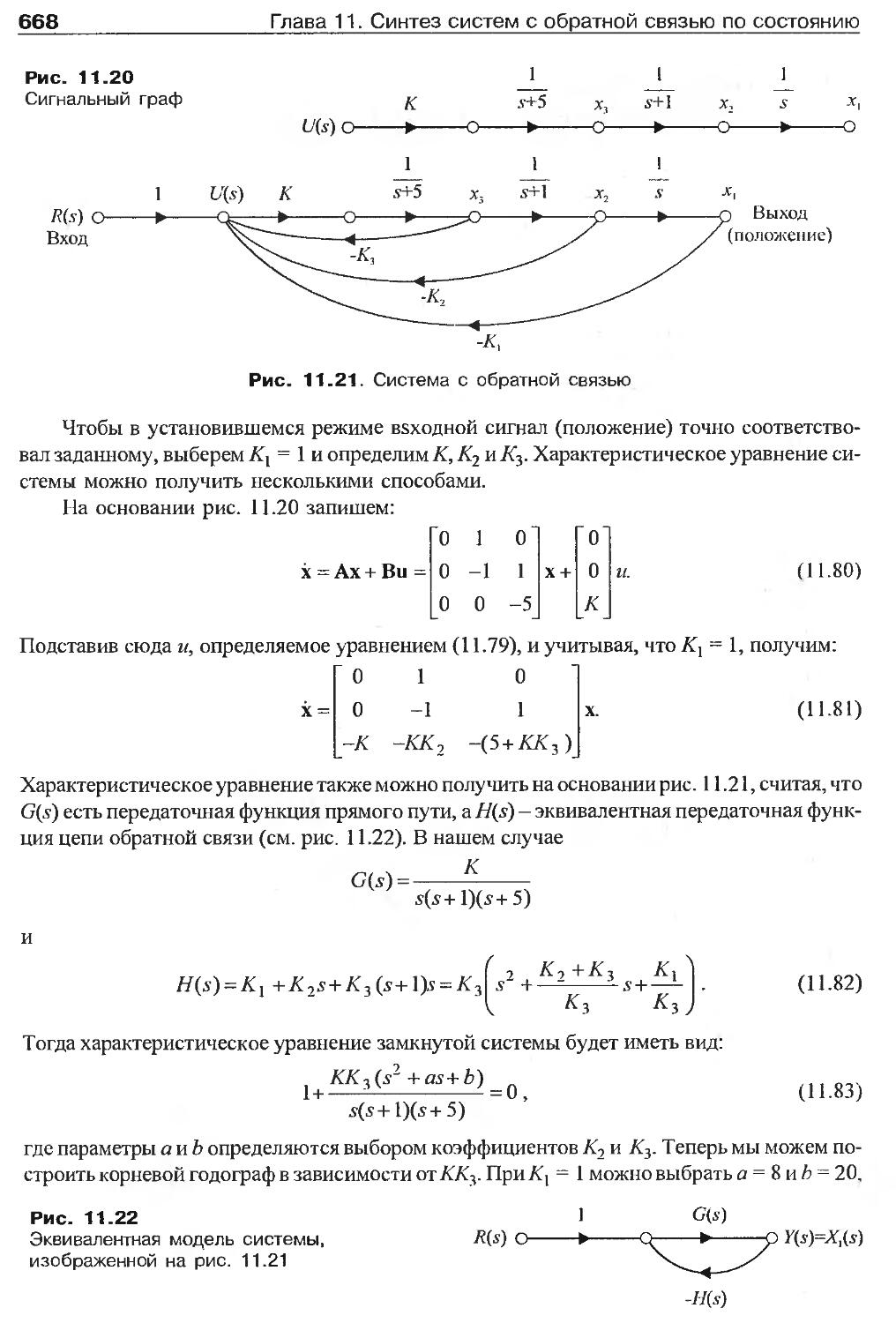
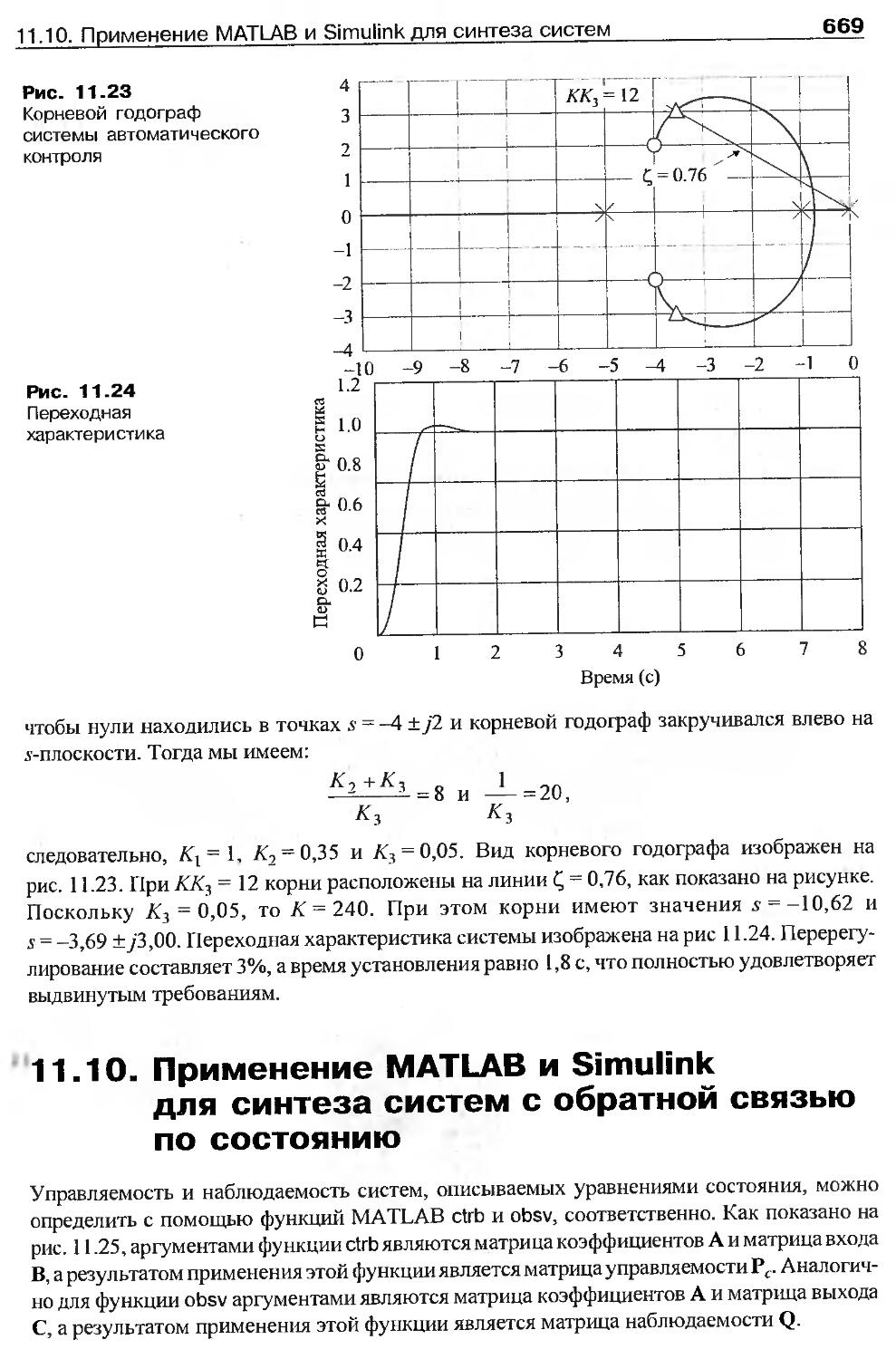
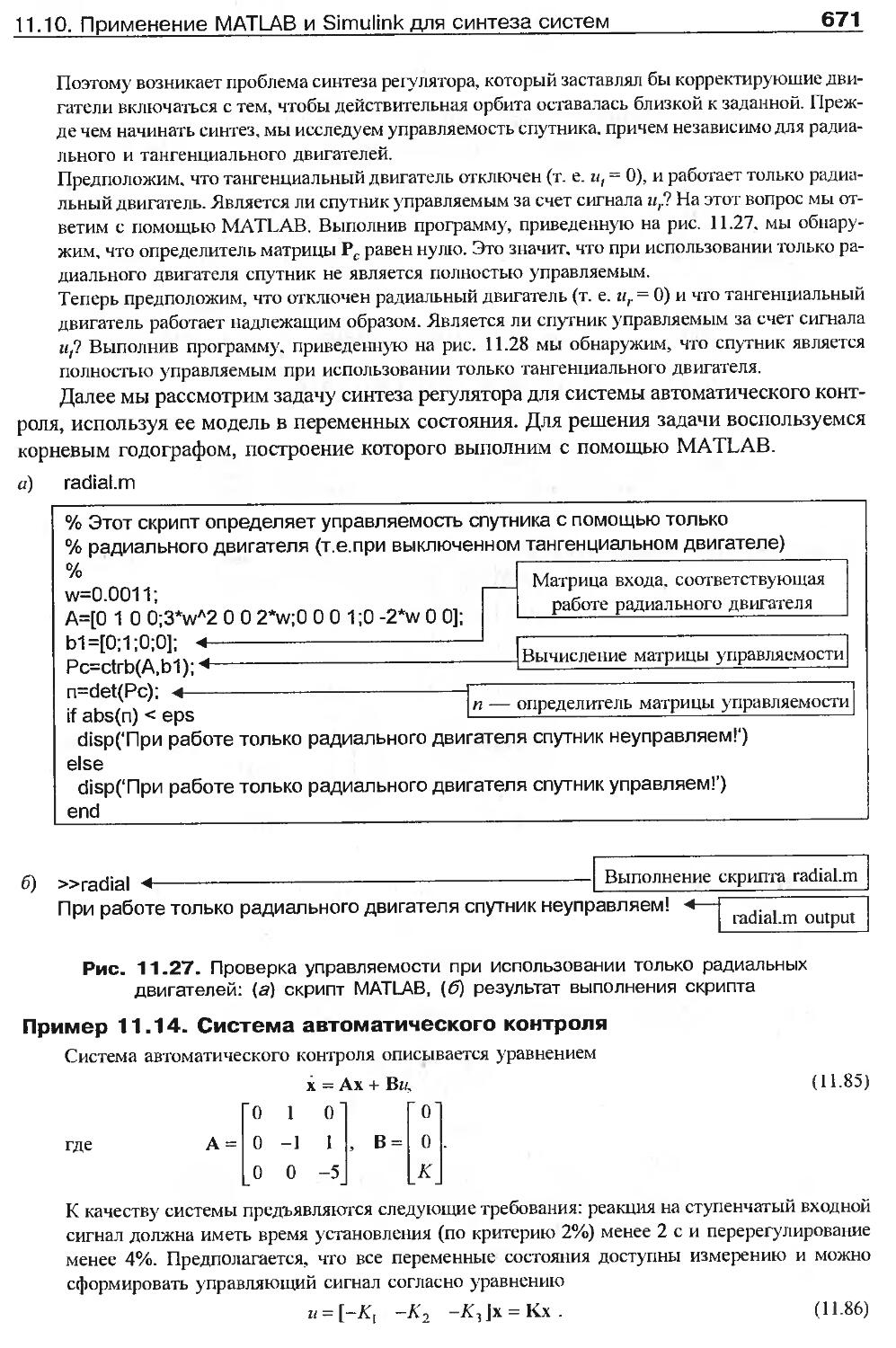
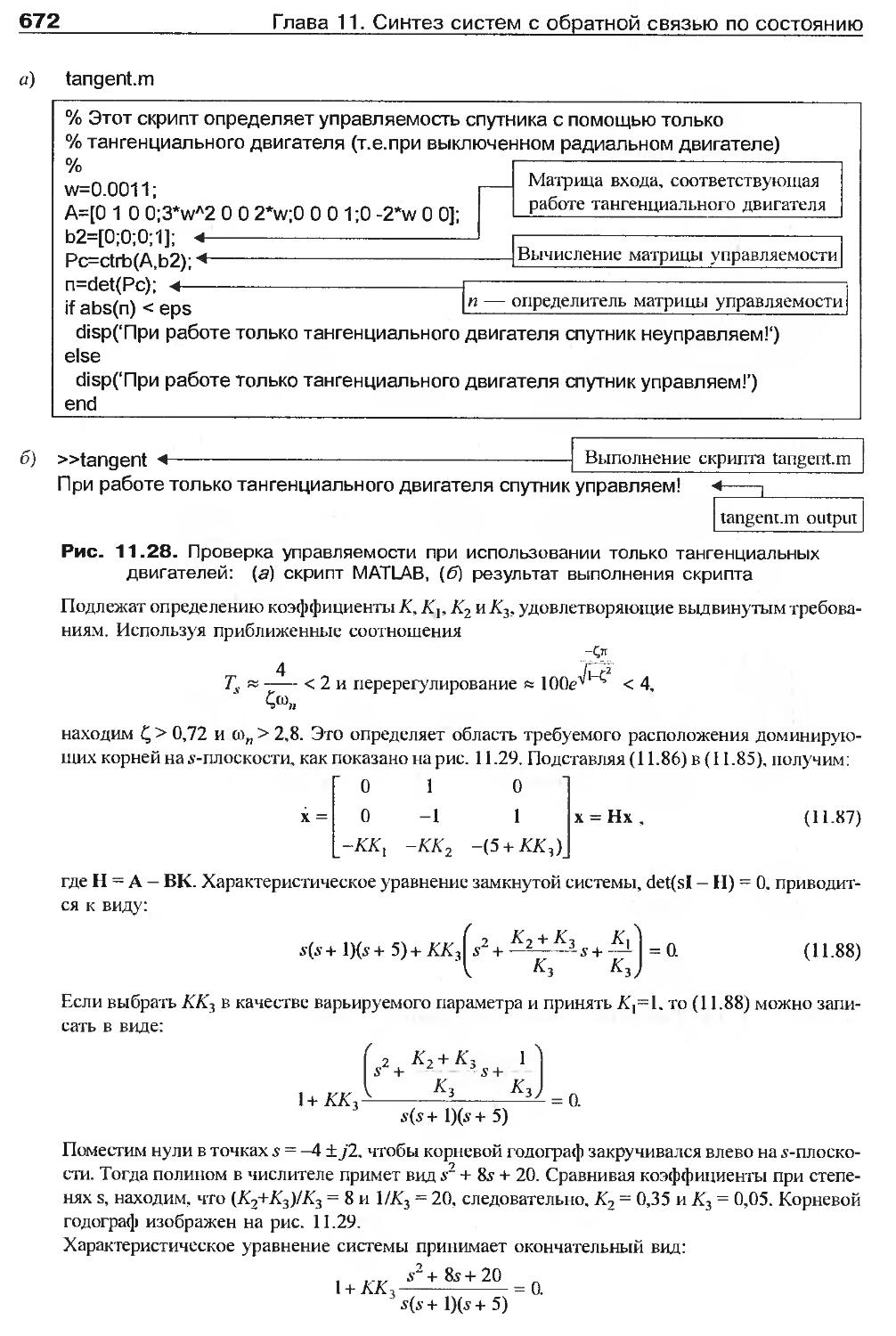
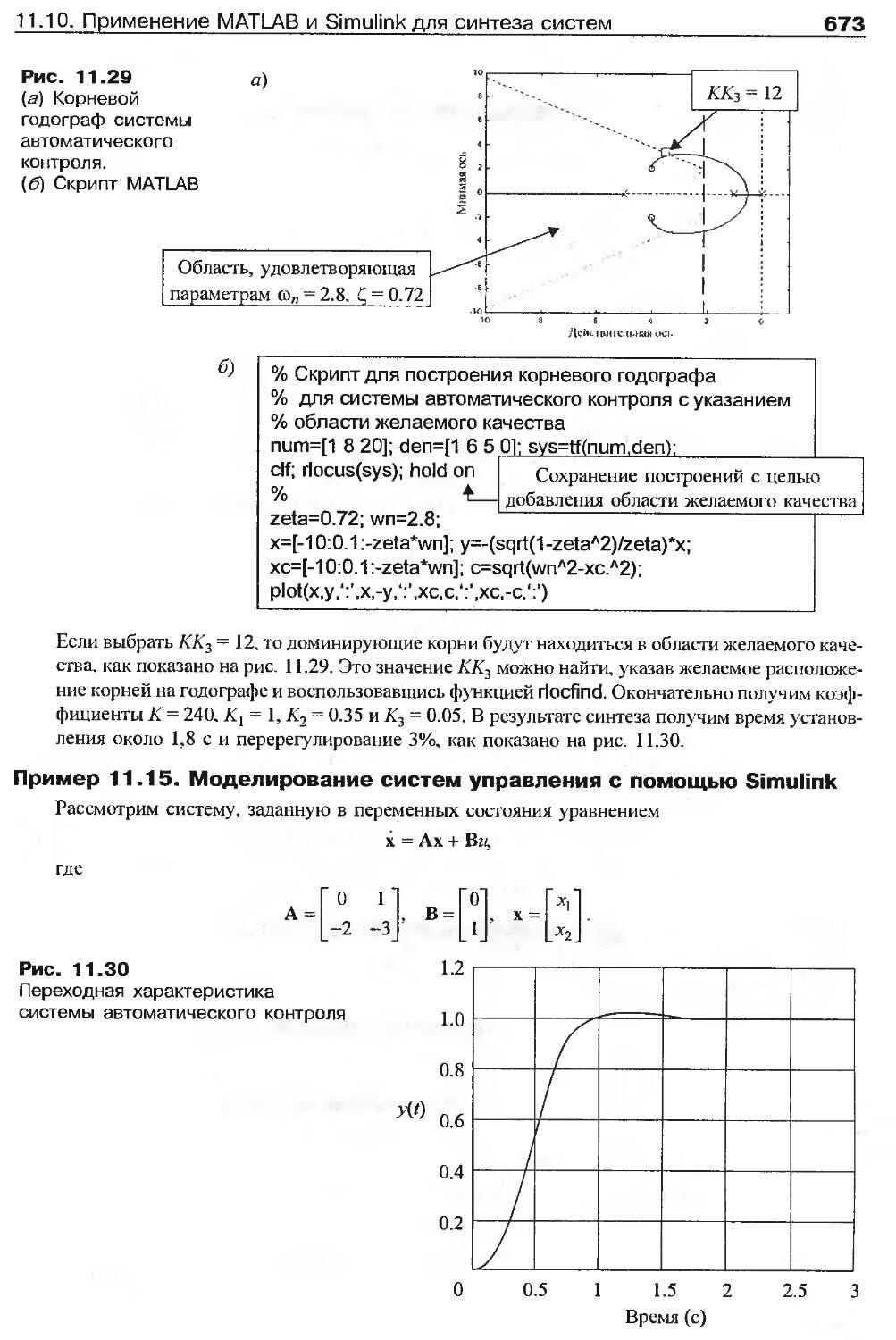
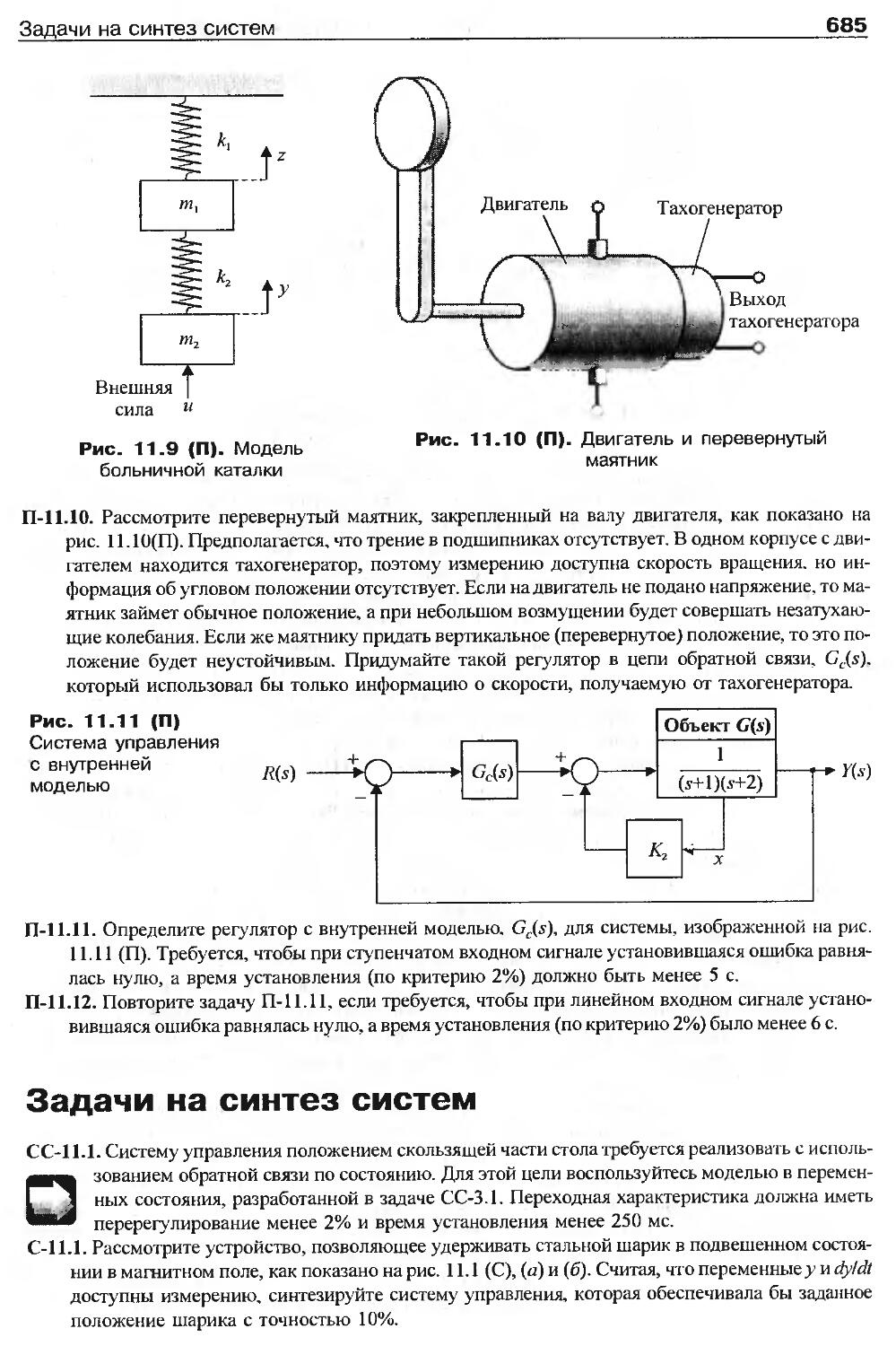
11.9. Пример синтеза: система автоматического контроля.............668
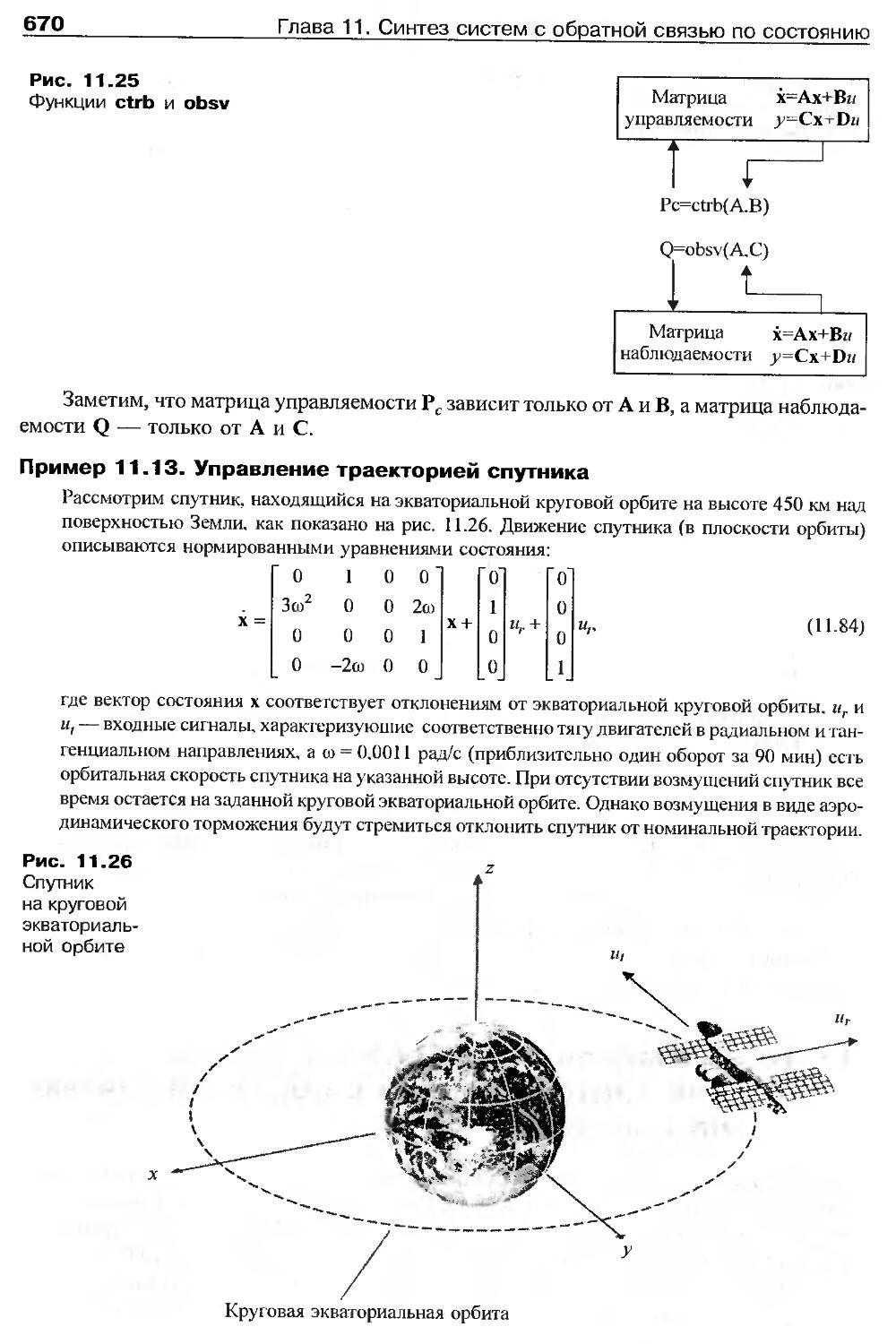
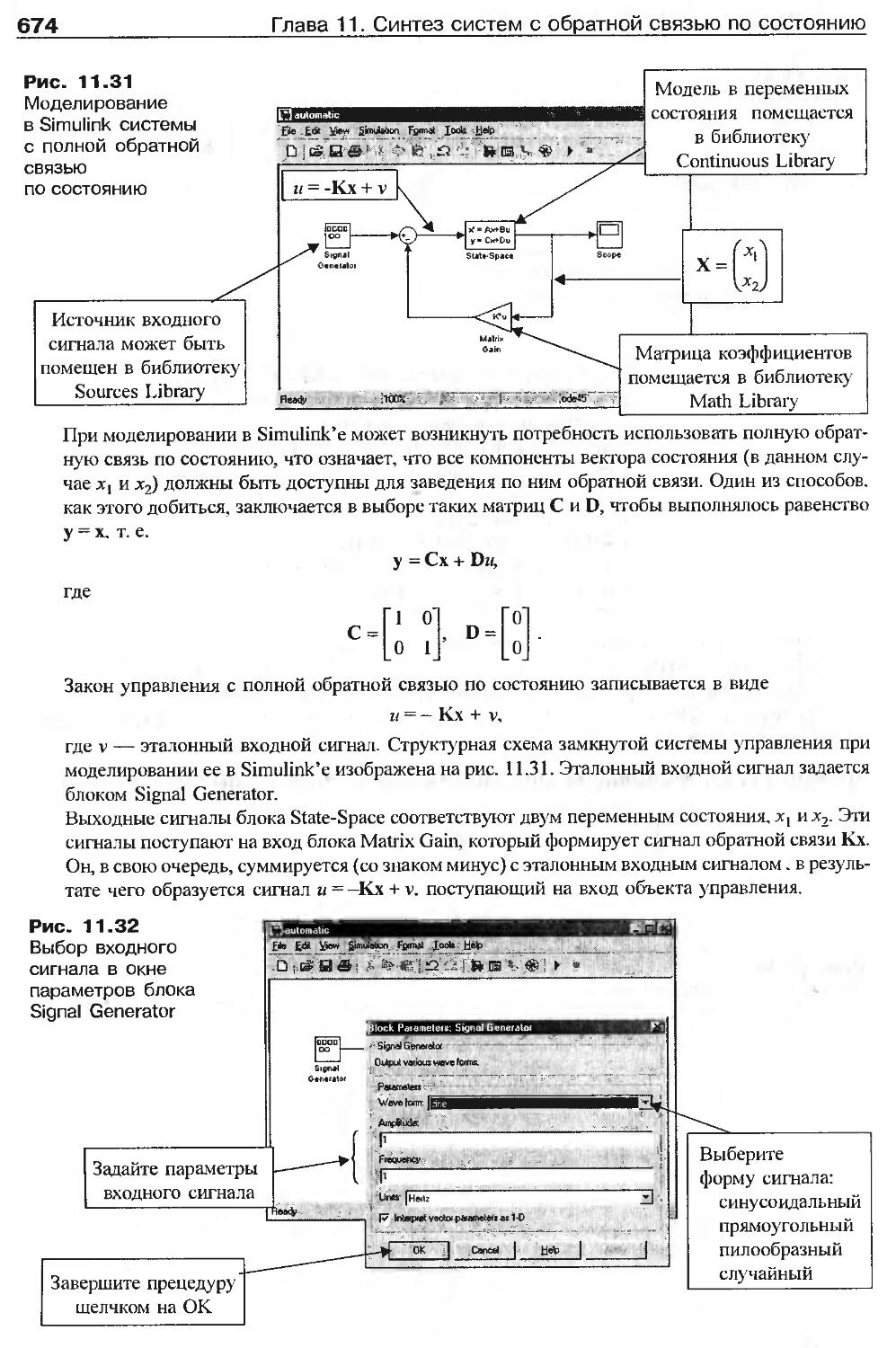
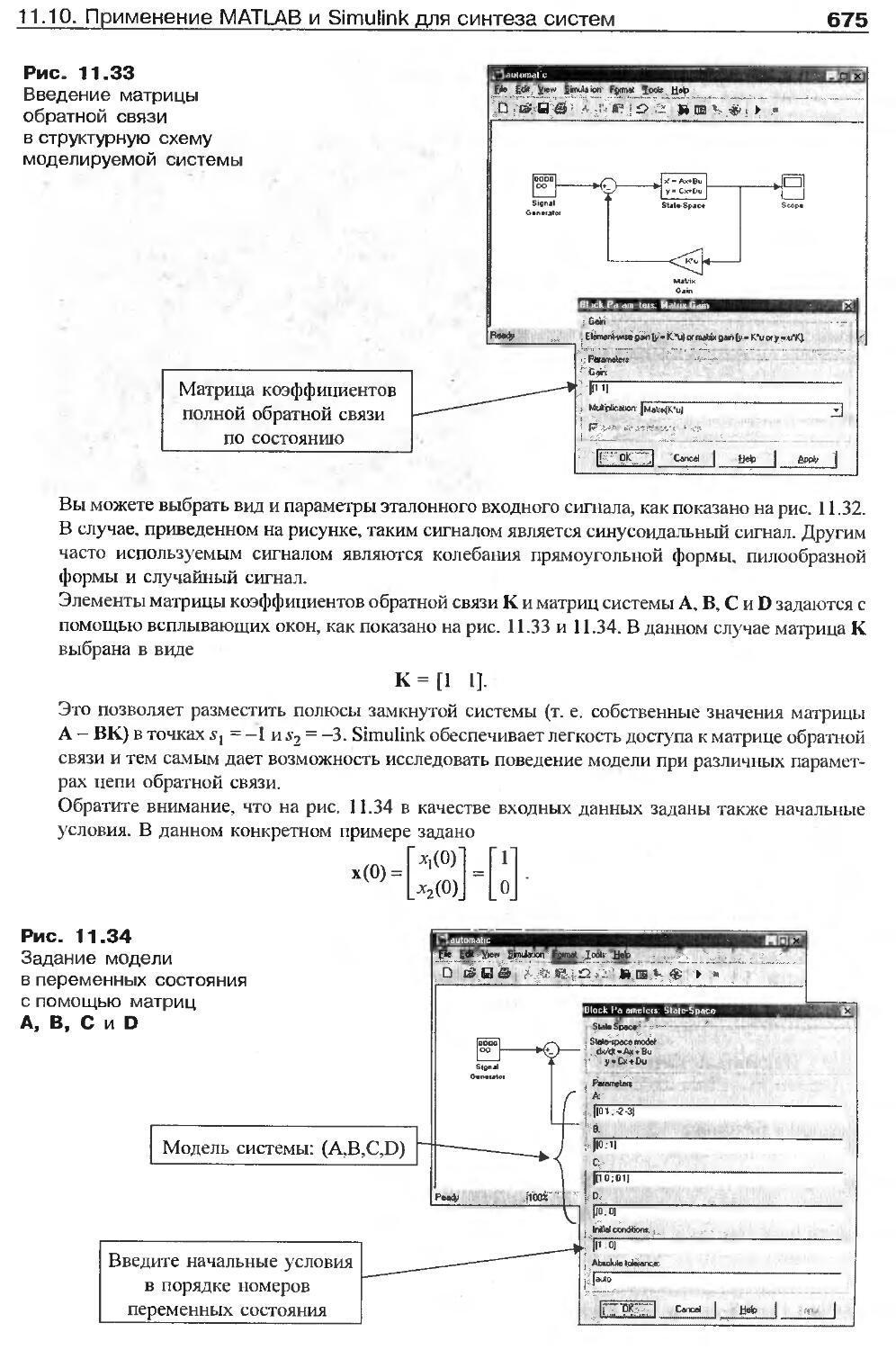
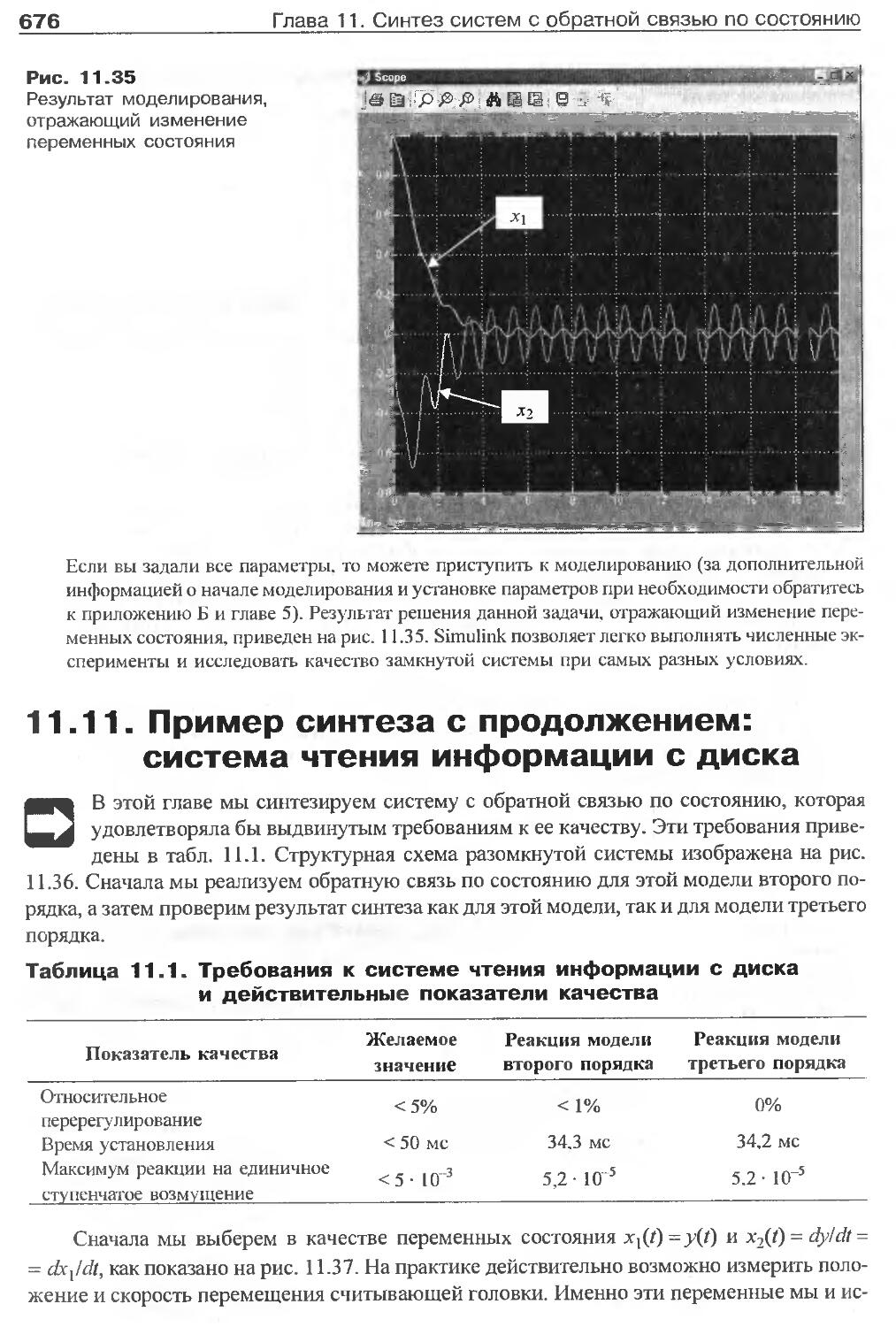
11.10. Применение MATLAB и Simulink для синтеза систем с обратной связью по состоянию................................................670
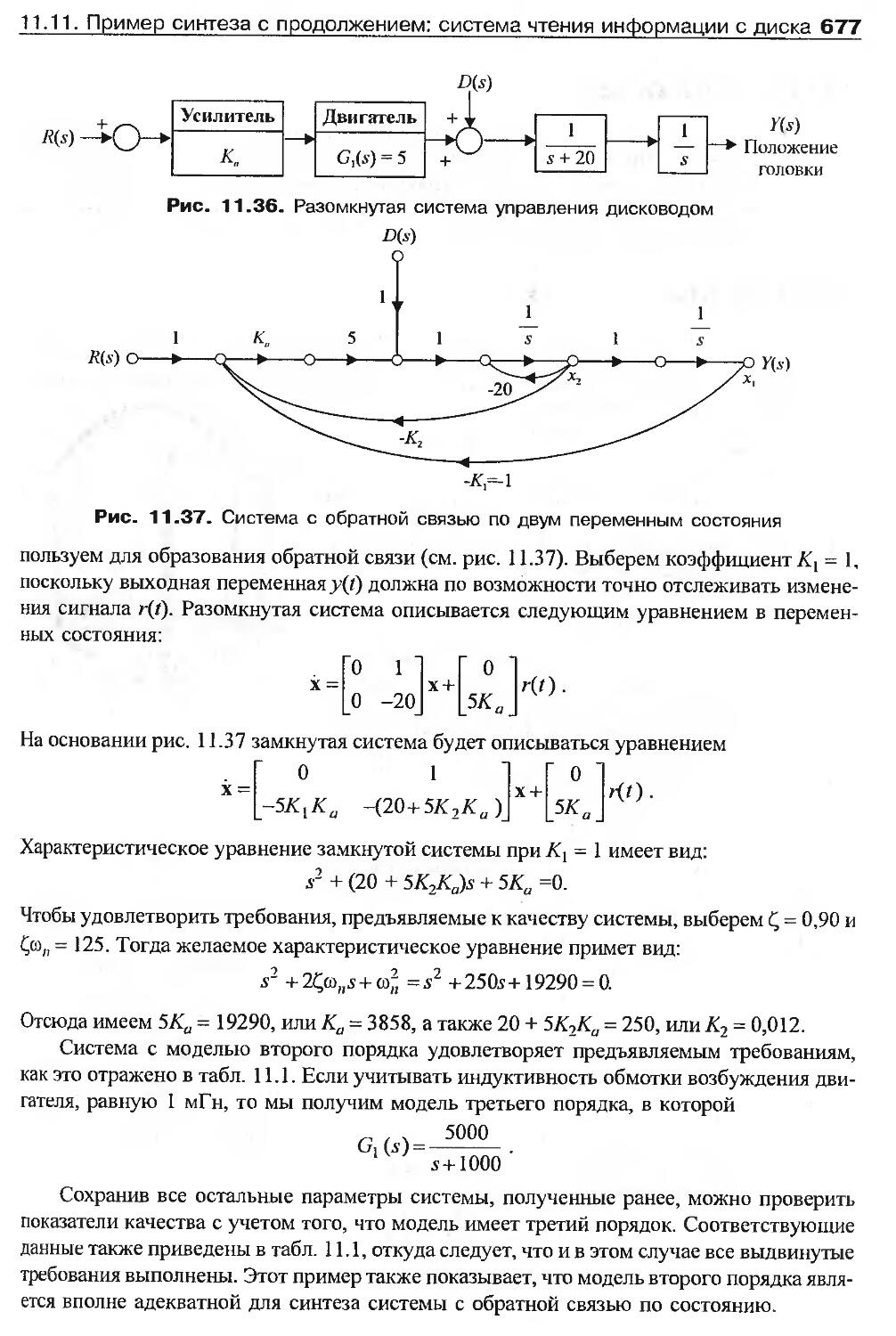
11.11. Пример синтеза с продолжением: система чтения информации с диска............................................................677
11.12. Резюме......................................................679
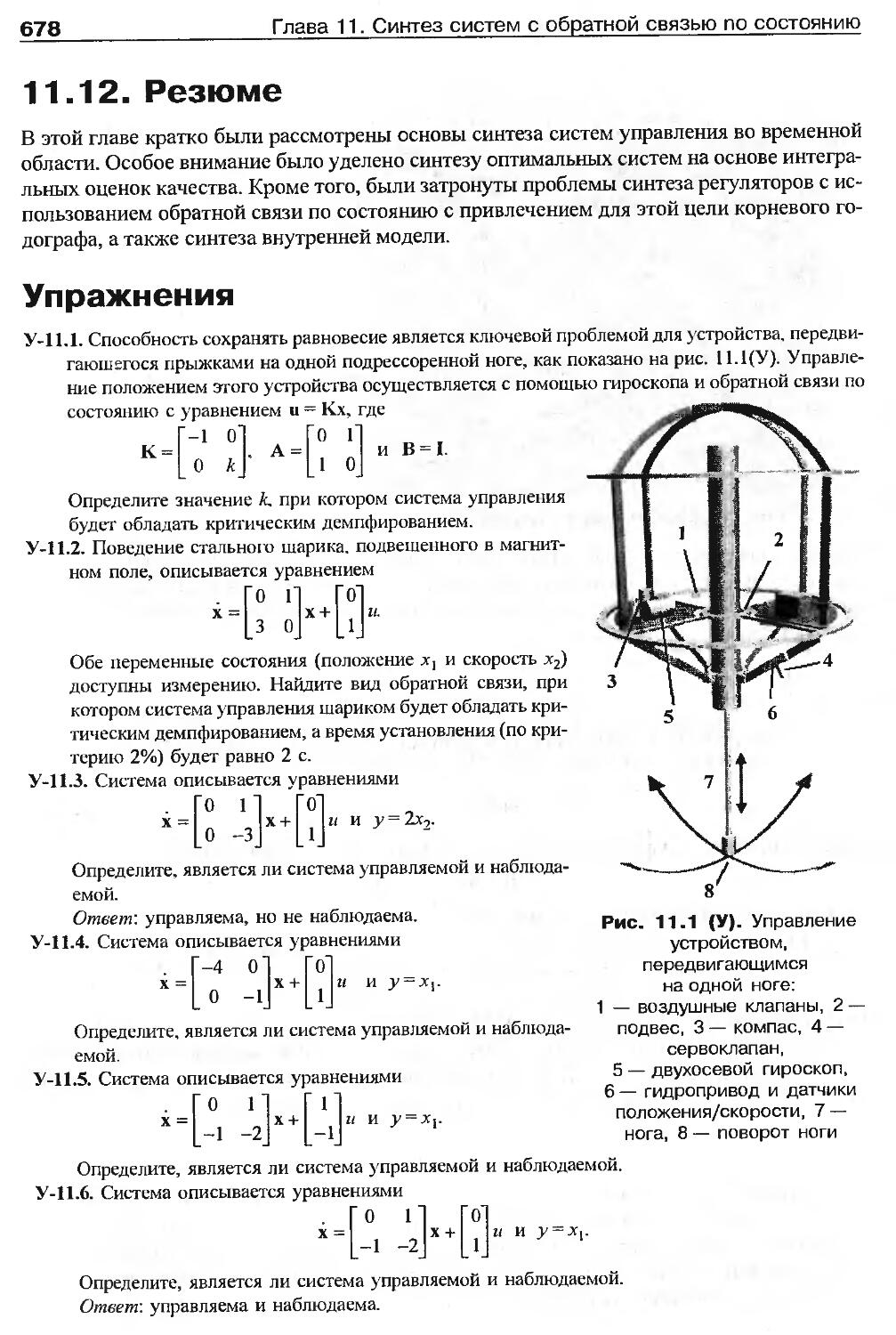
Упражнения.........................................................679
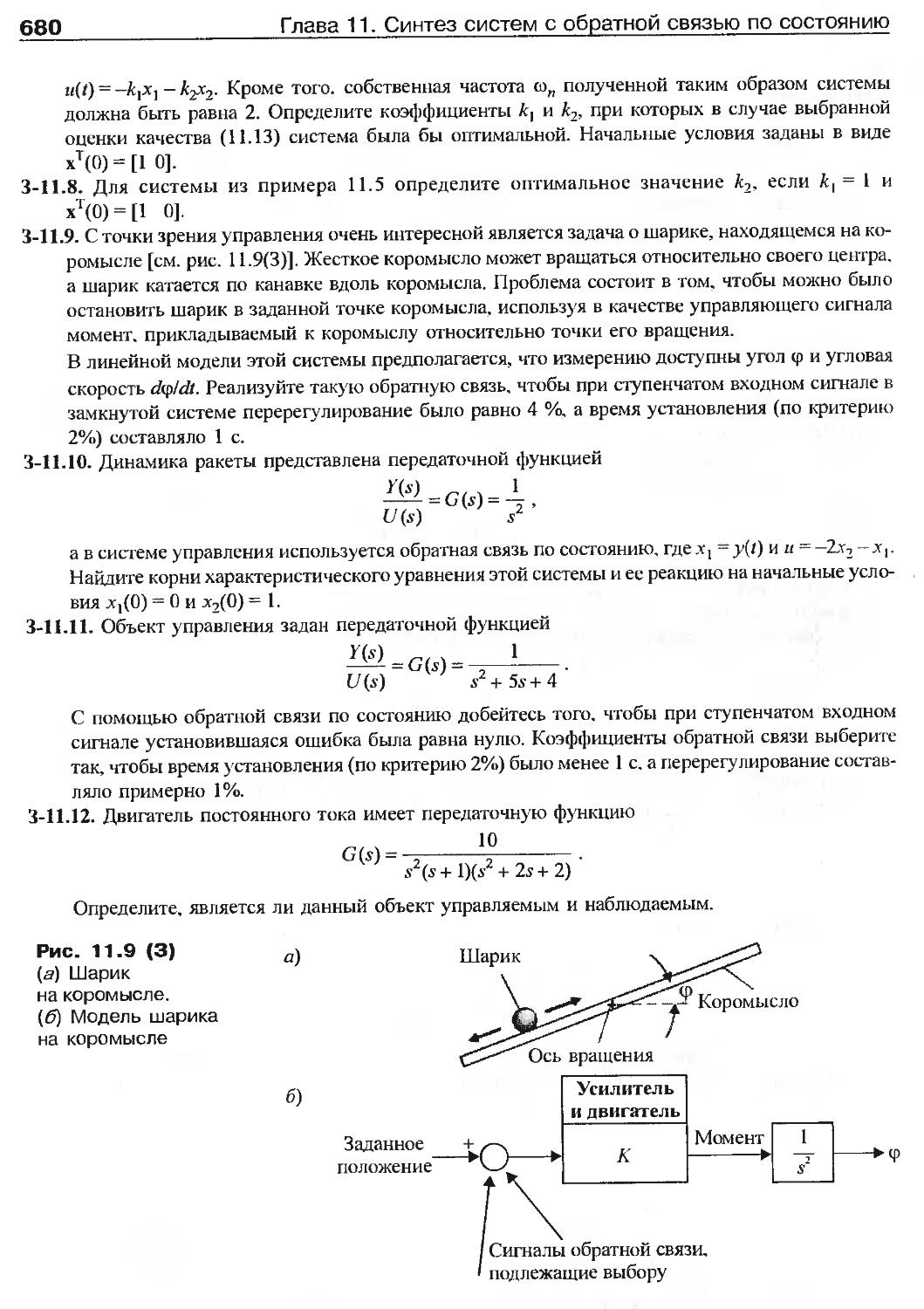
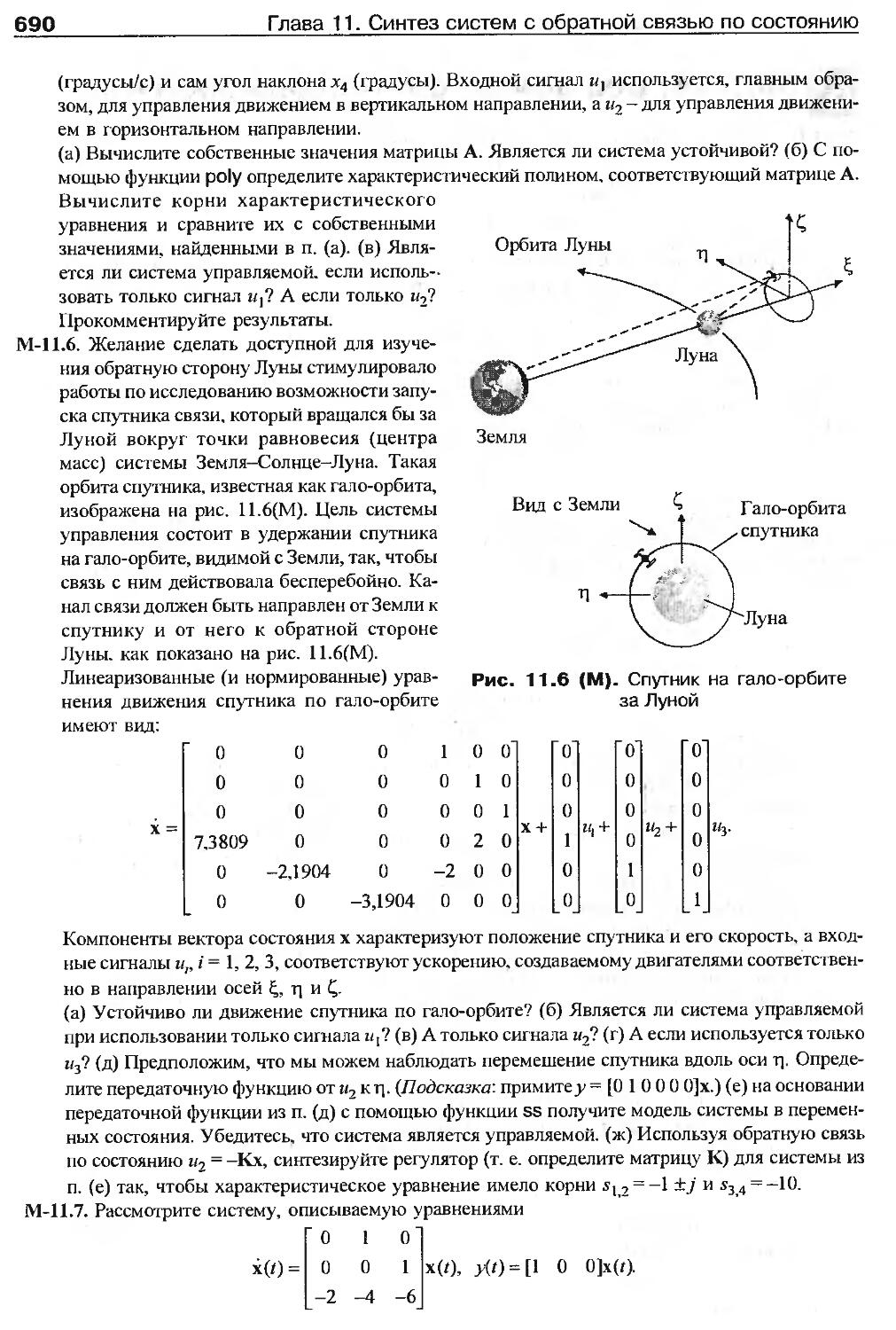
Задачи ........................................................... 680
Задачи повышенной сложности........................................684
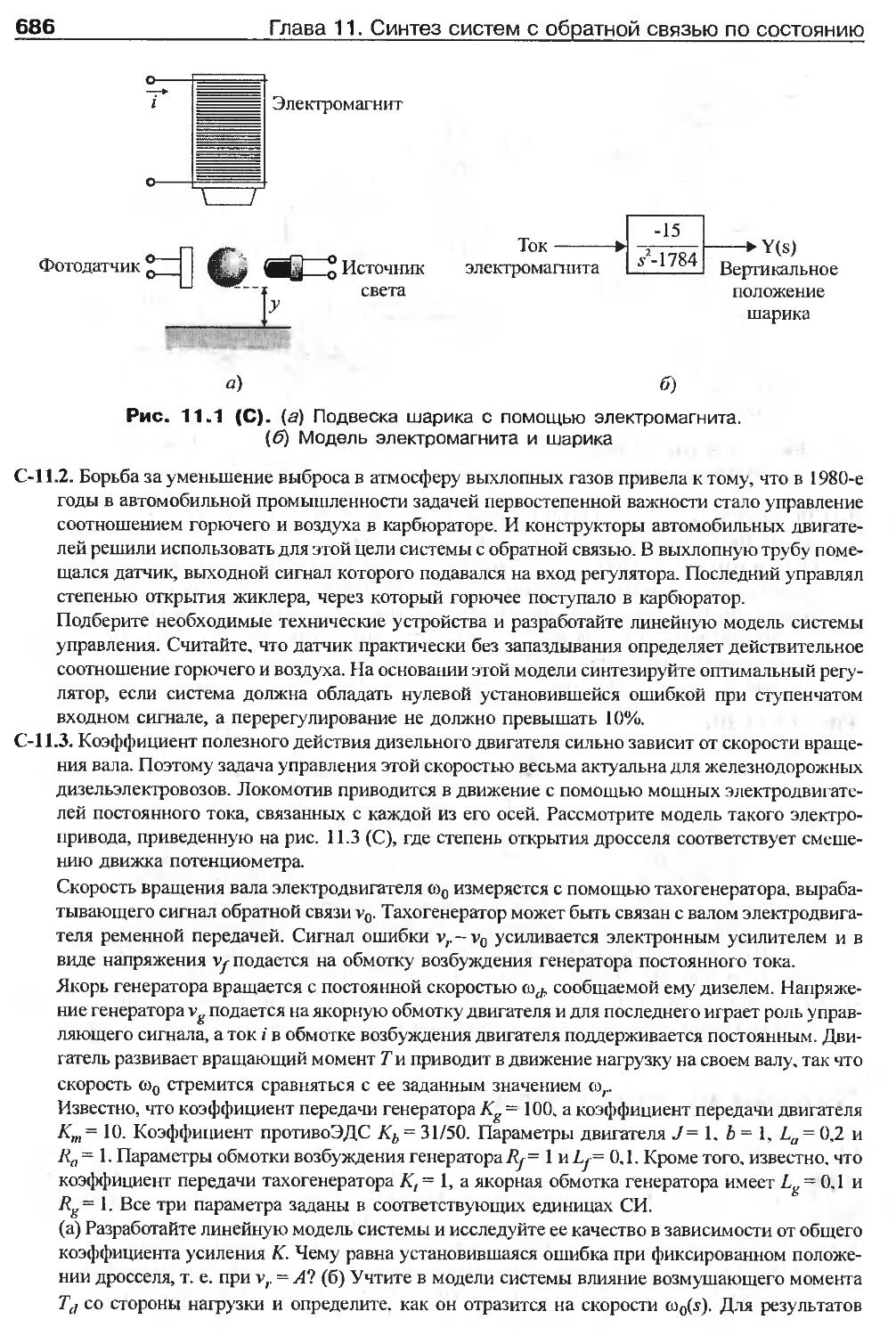
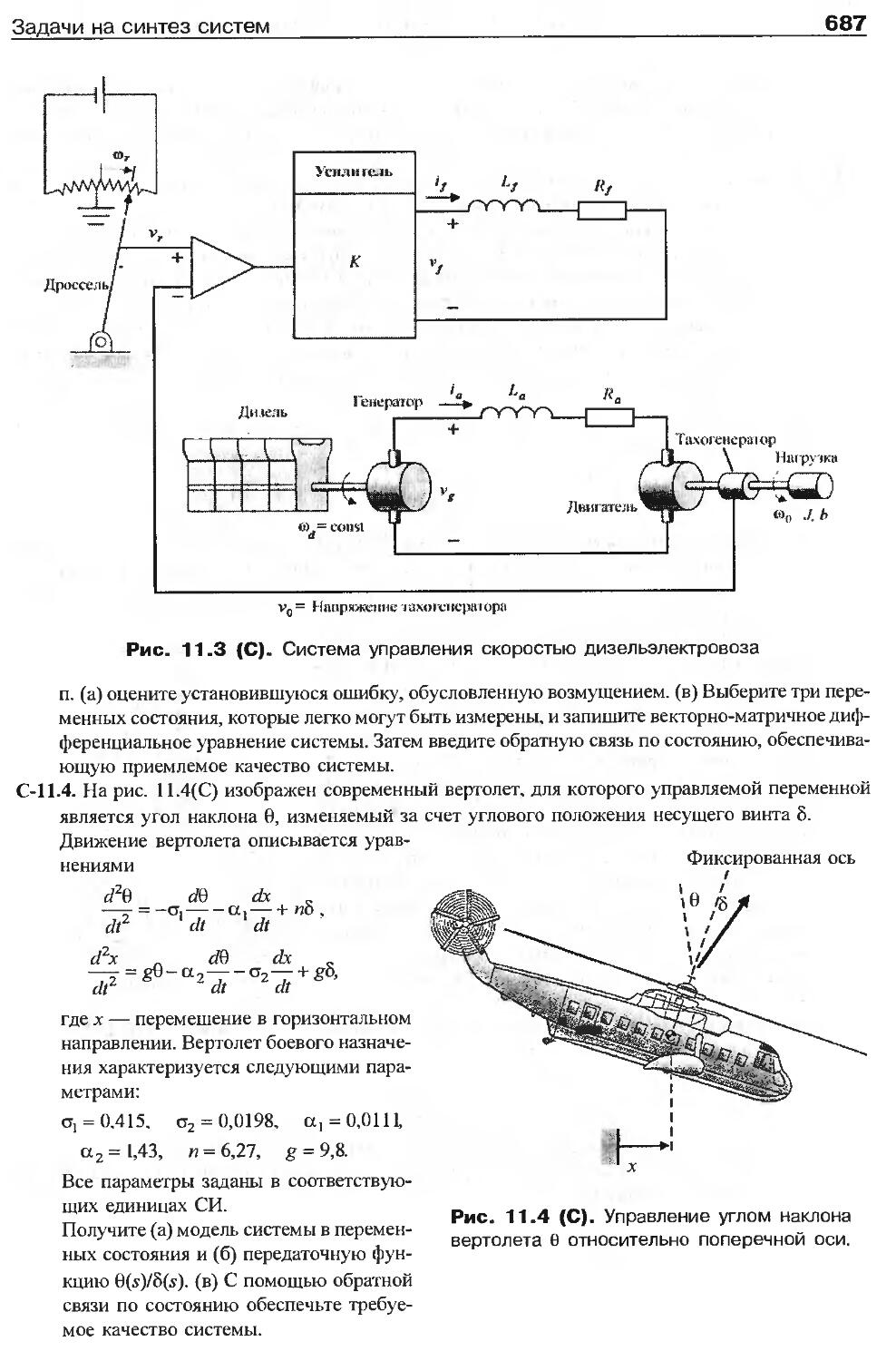
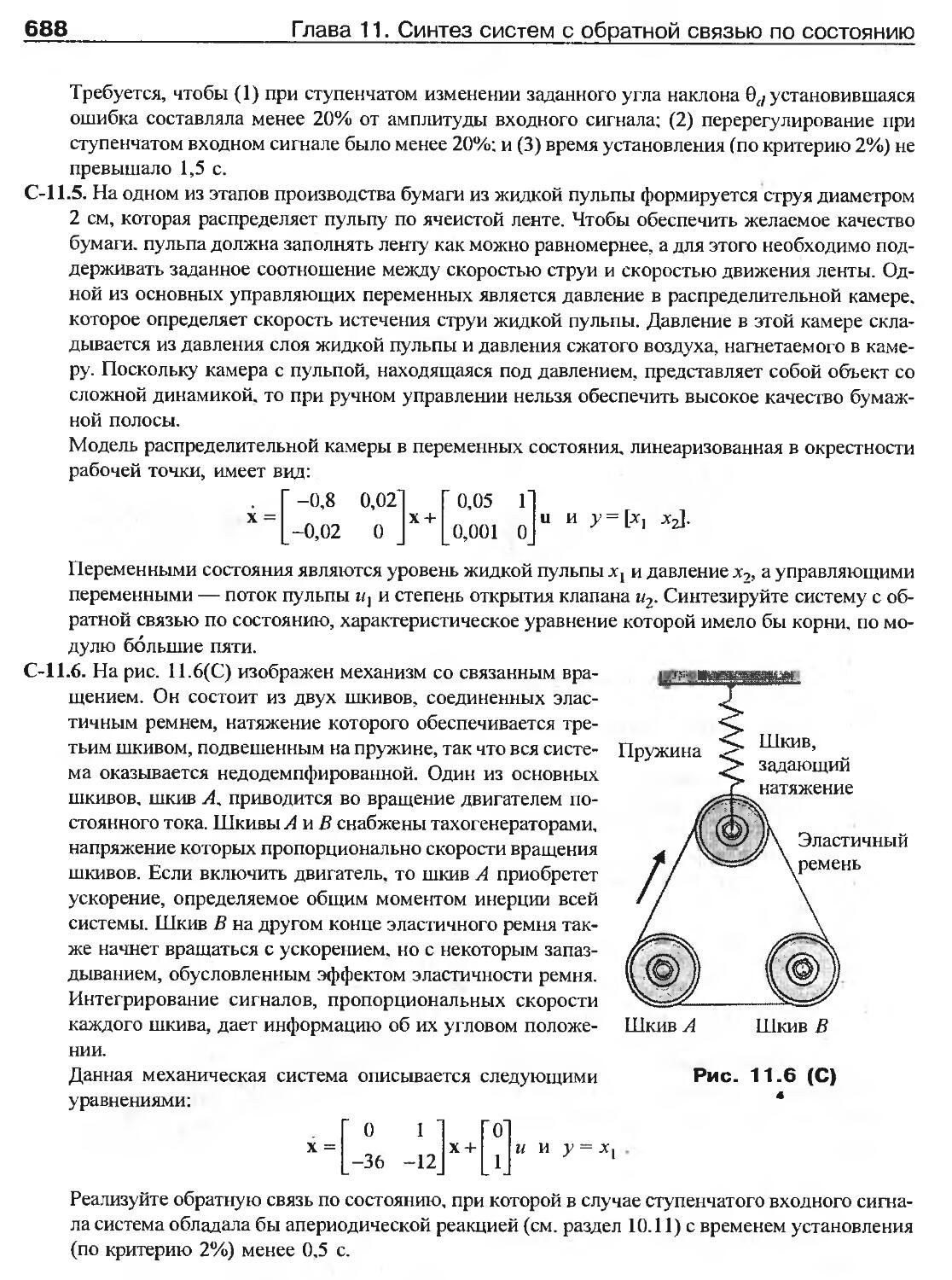
Задачи на синтез систем............................................686
Задачи, решаемые с помощью MATLAB..................................690
Ключевые термины и понятия.........................................692
Глава 12. Робастные системы управления................................693
Обзор..............................................................693
12.1. Введение.....................................................693
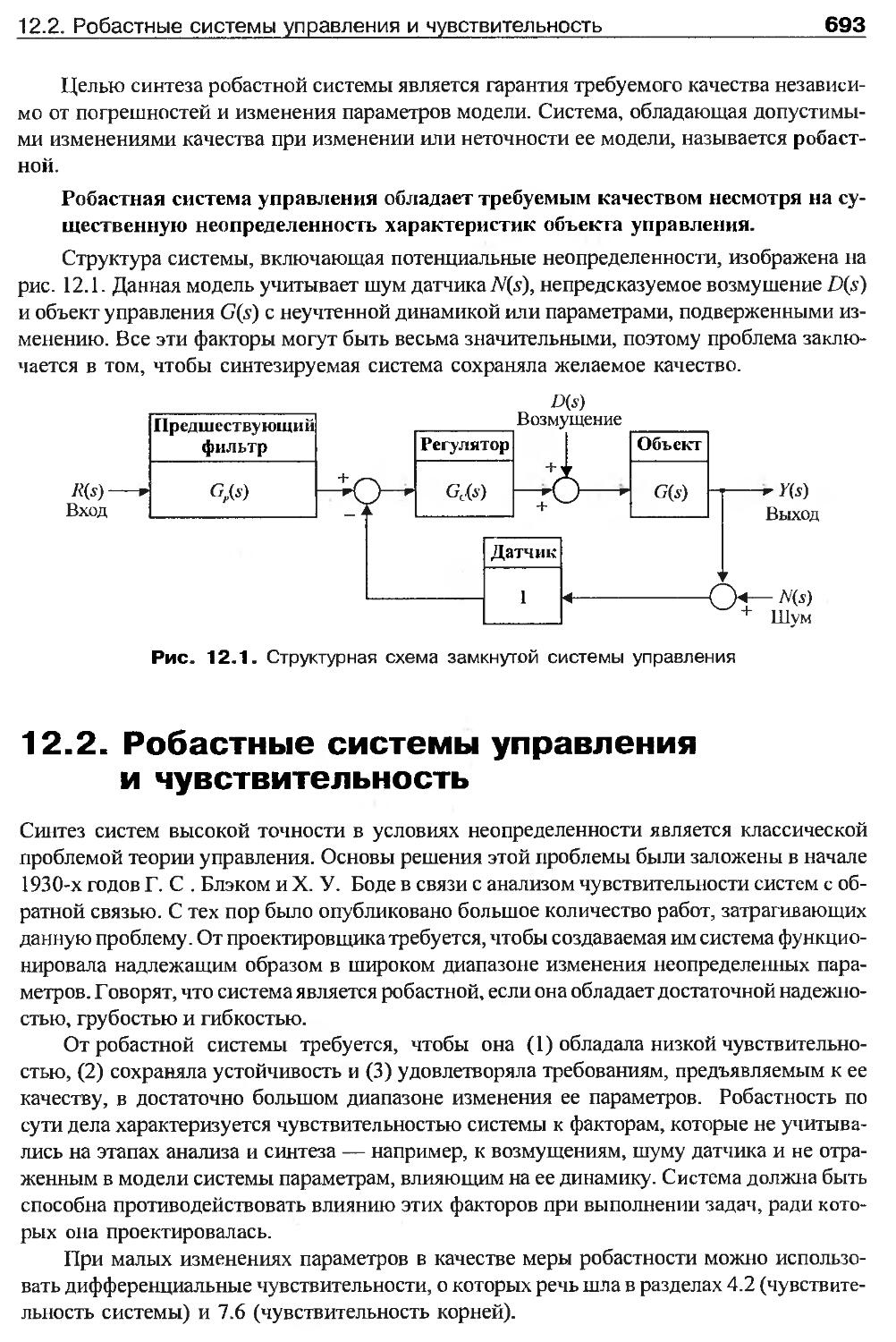
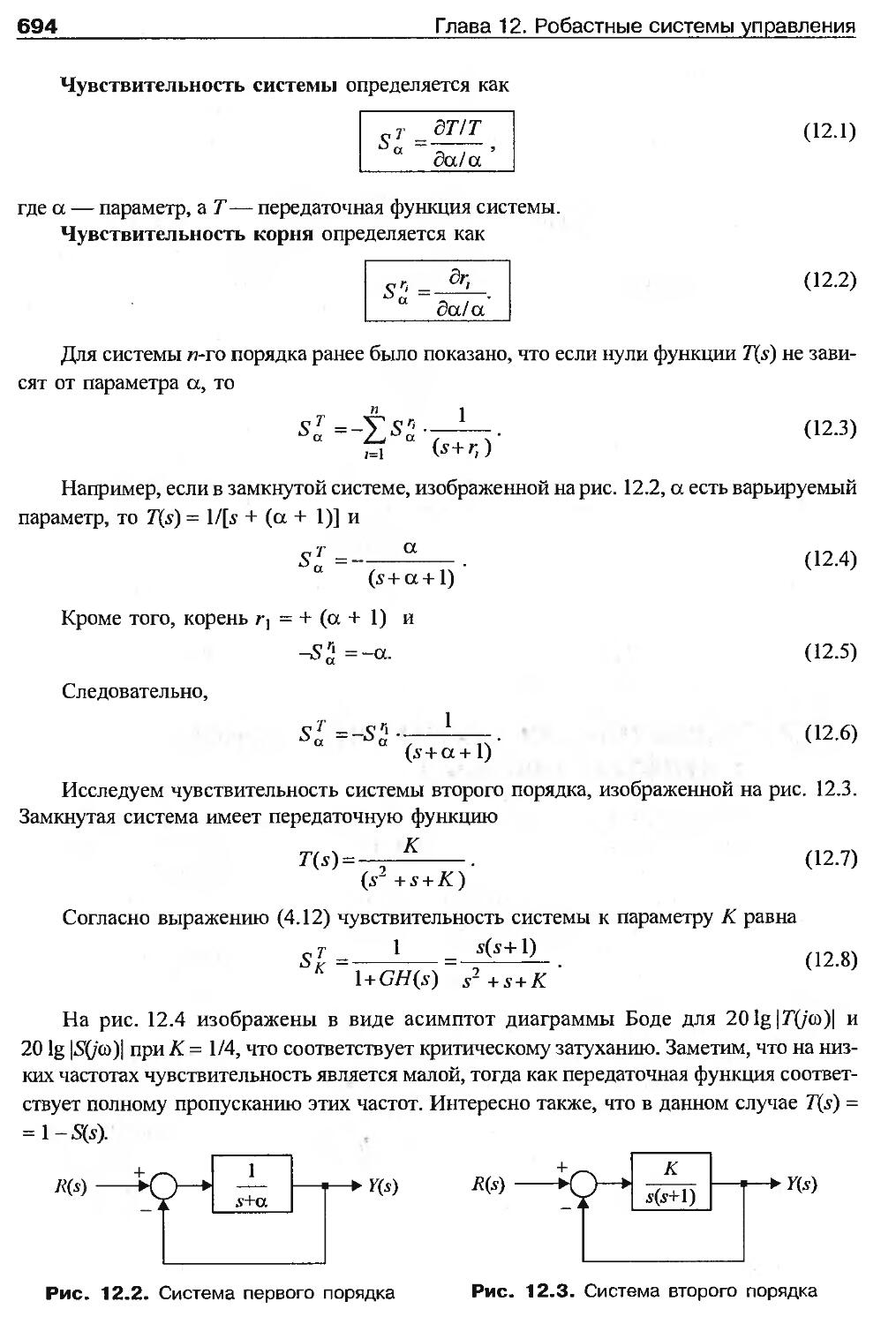
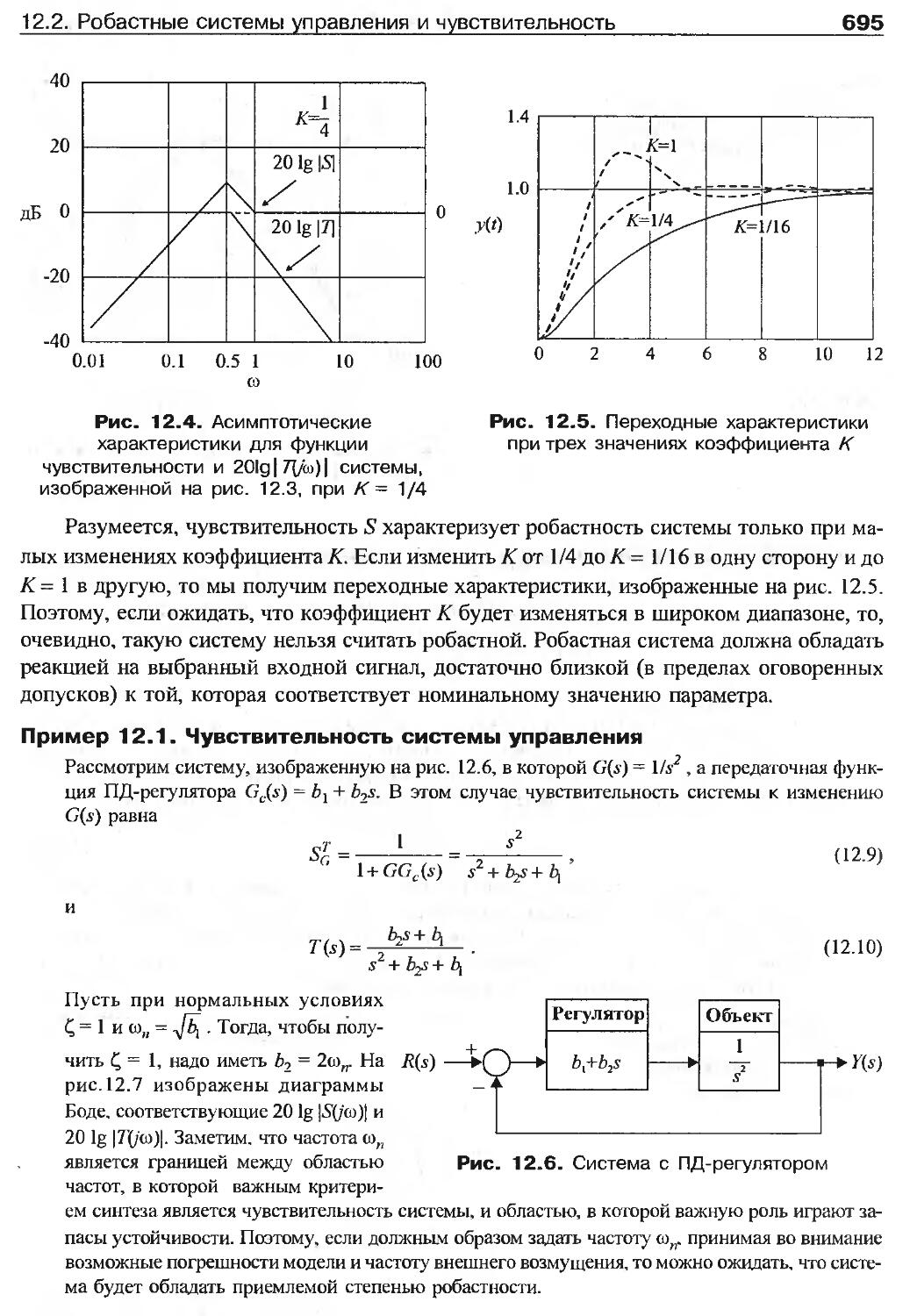
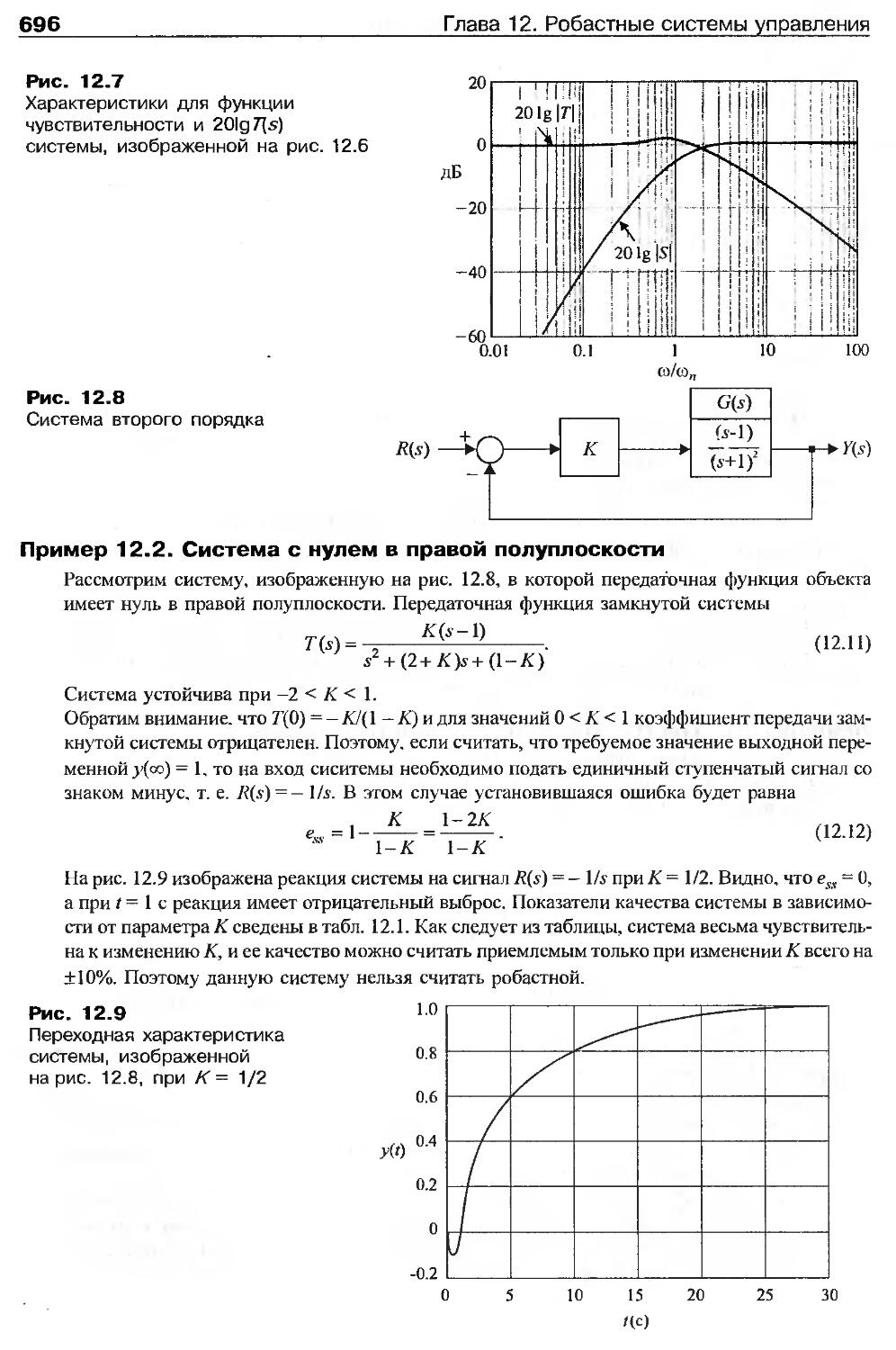
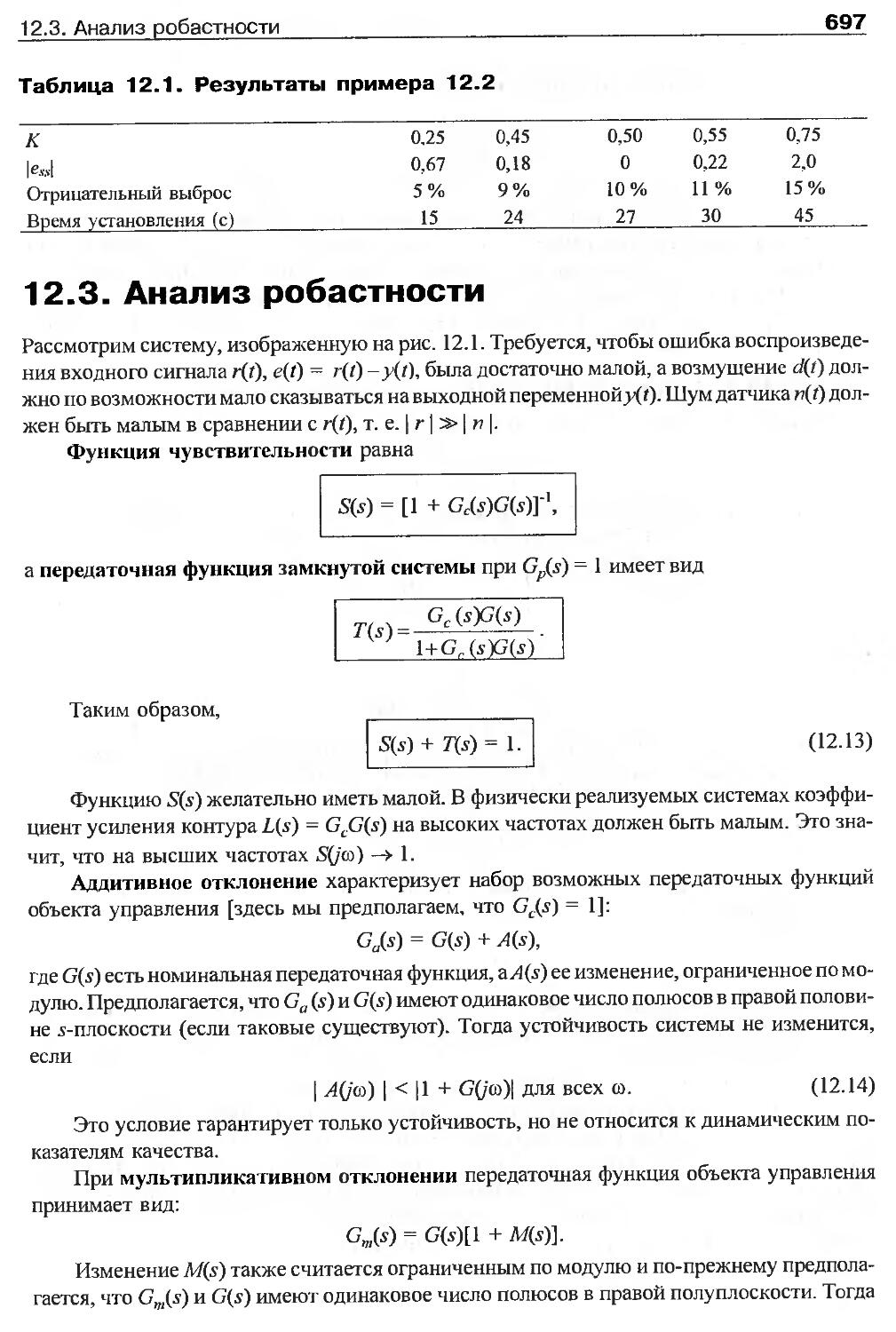
12.2. Робастные системы управления и чувствительность..............694
12.3. Анализ робастности...........................................698
12.4. Системы с неопределенными параметрами........................700
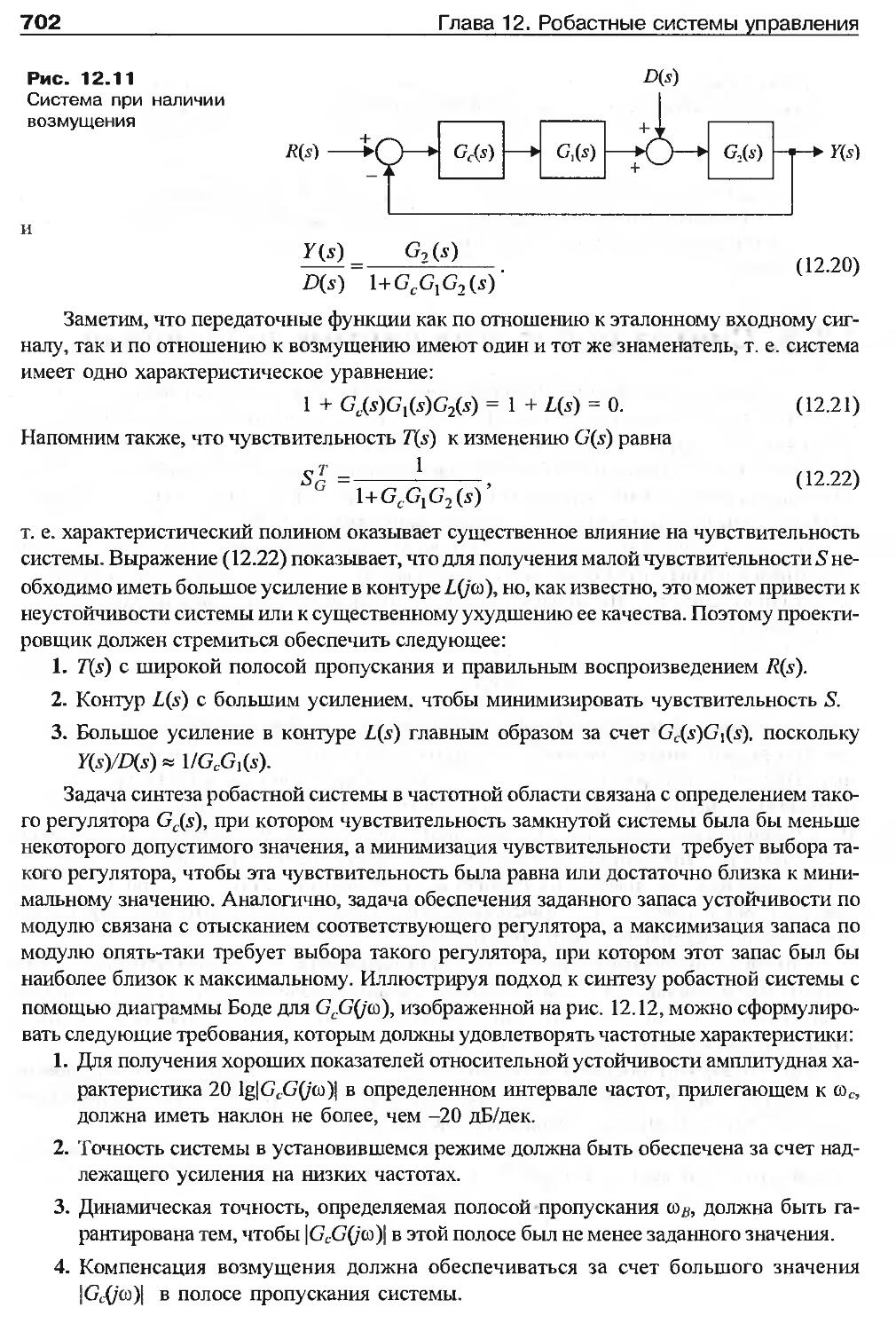
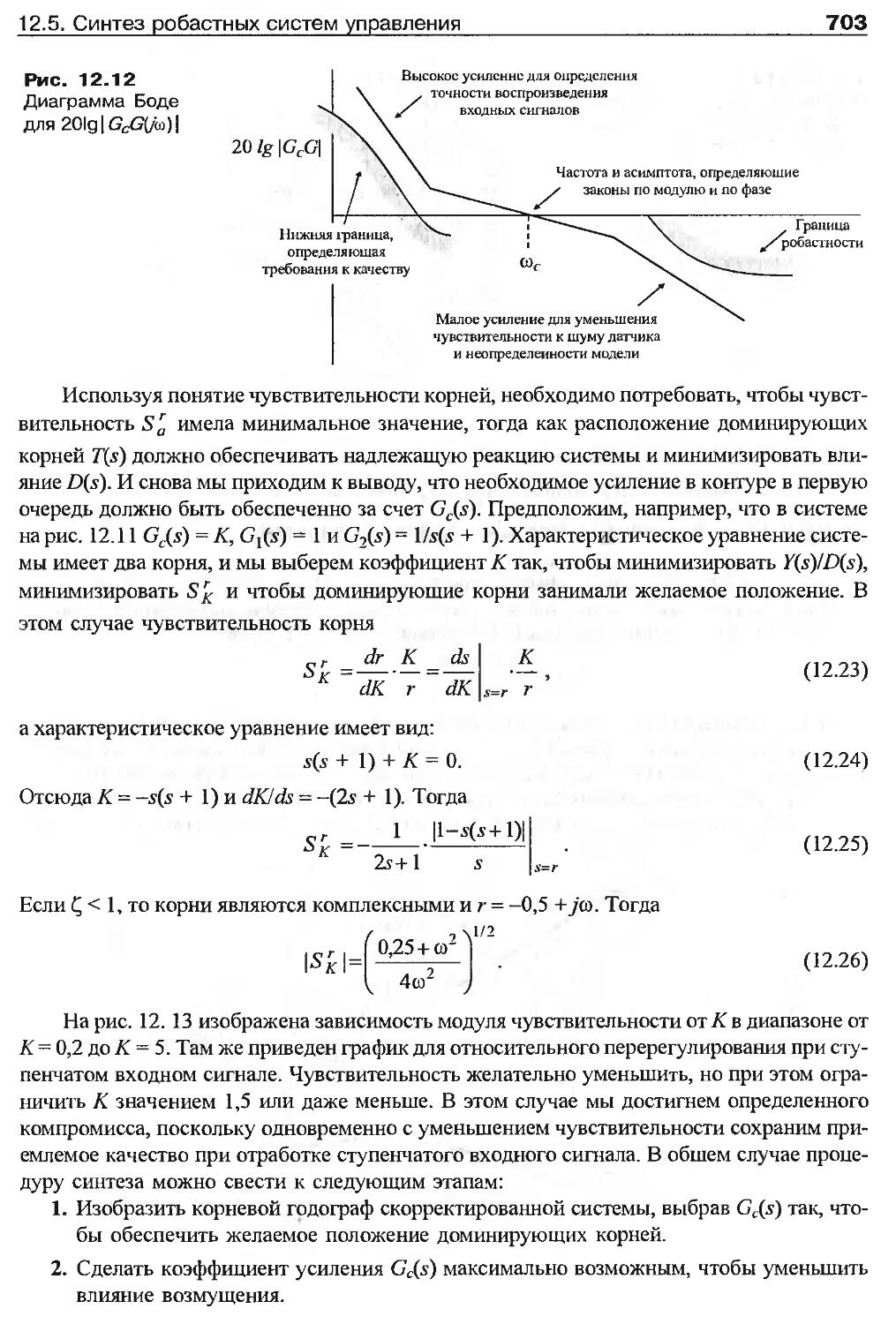
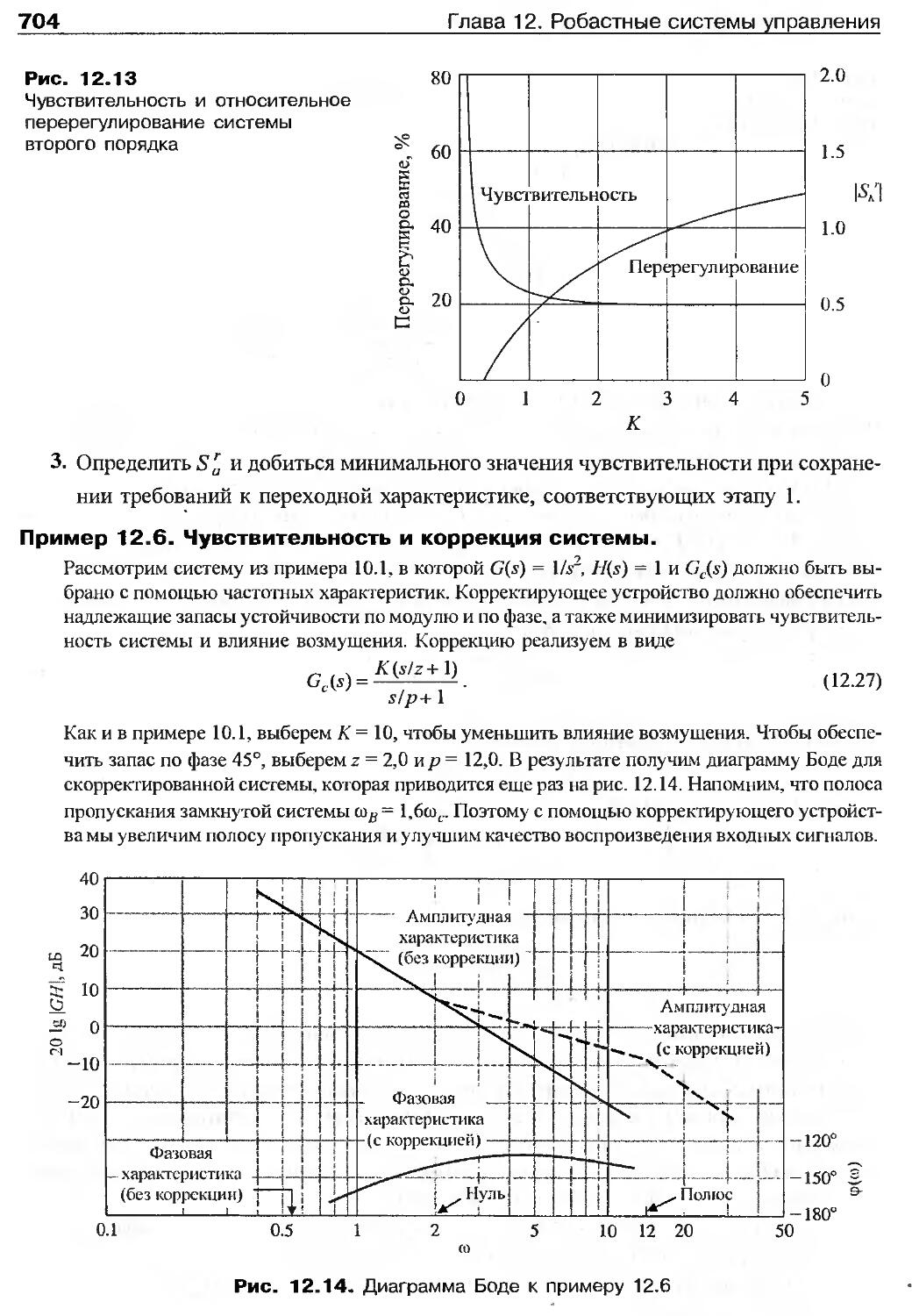
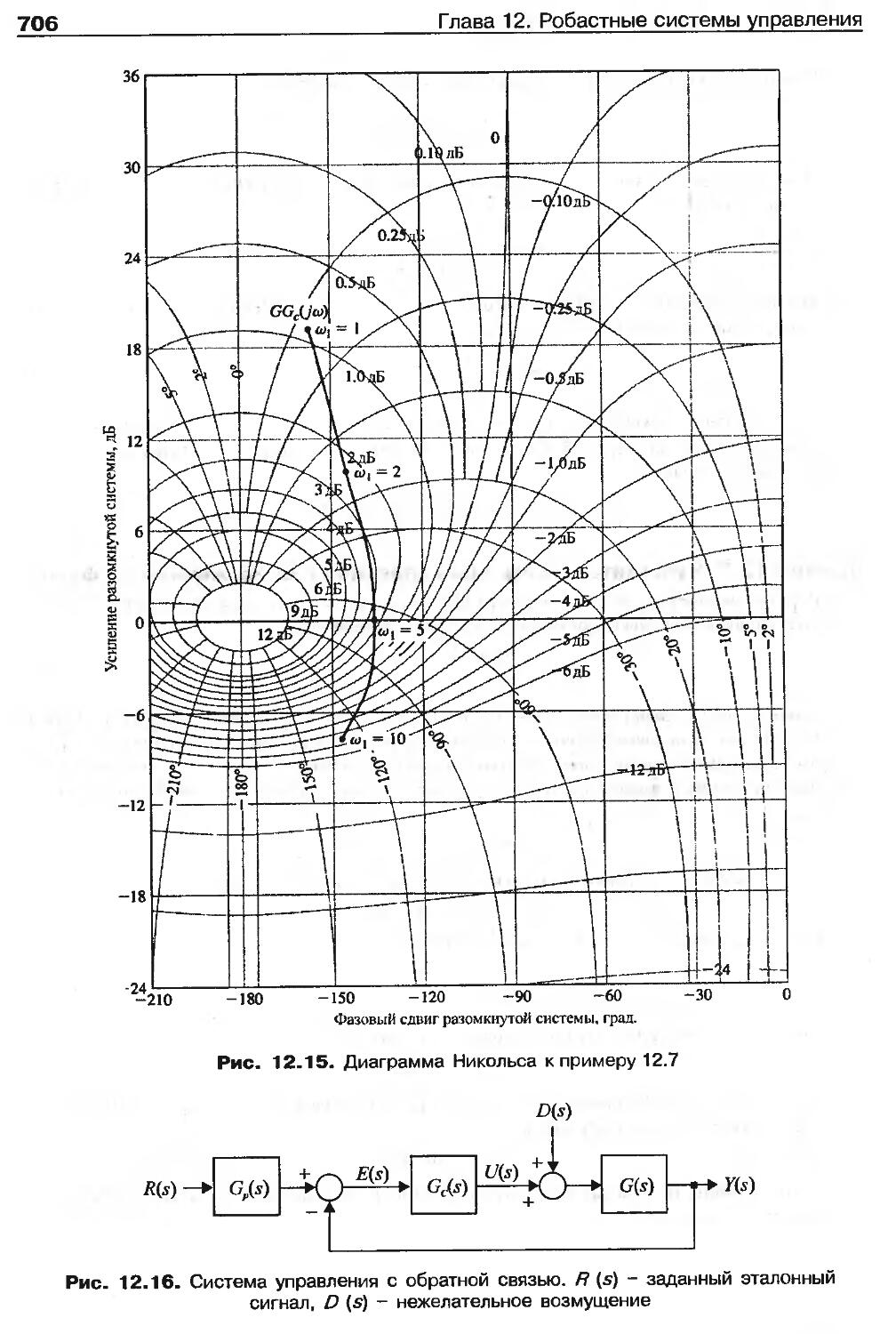
12.5. Синтез робастных систем управления...........................702
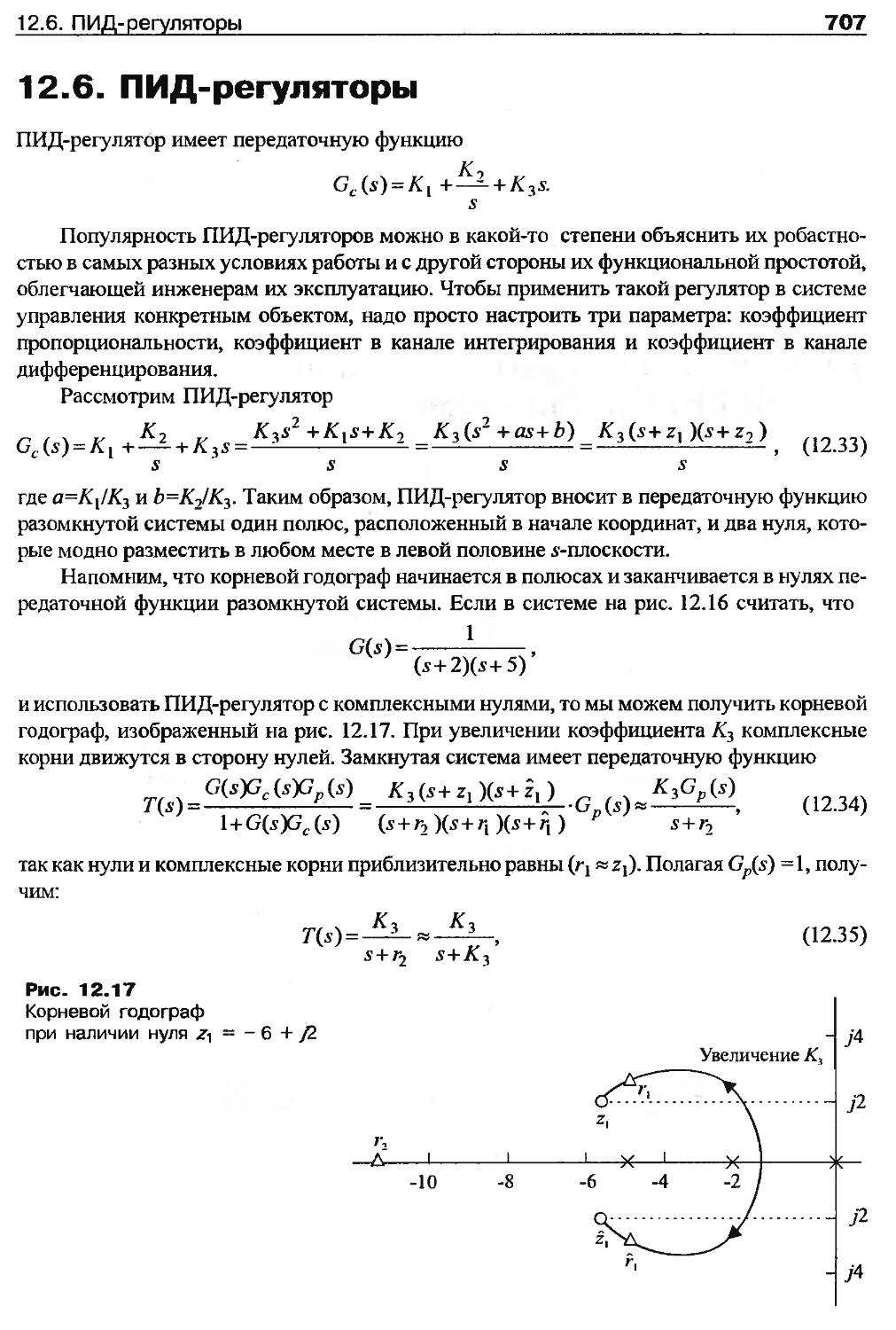
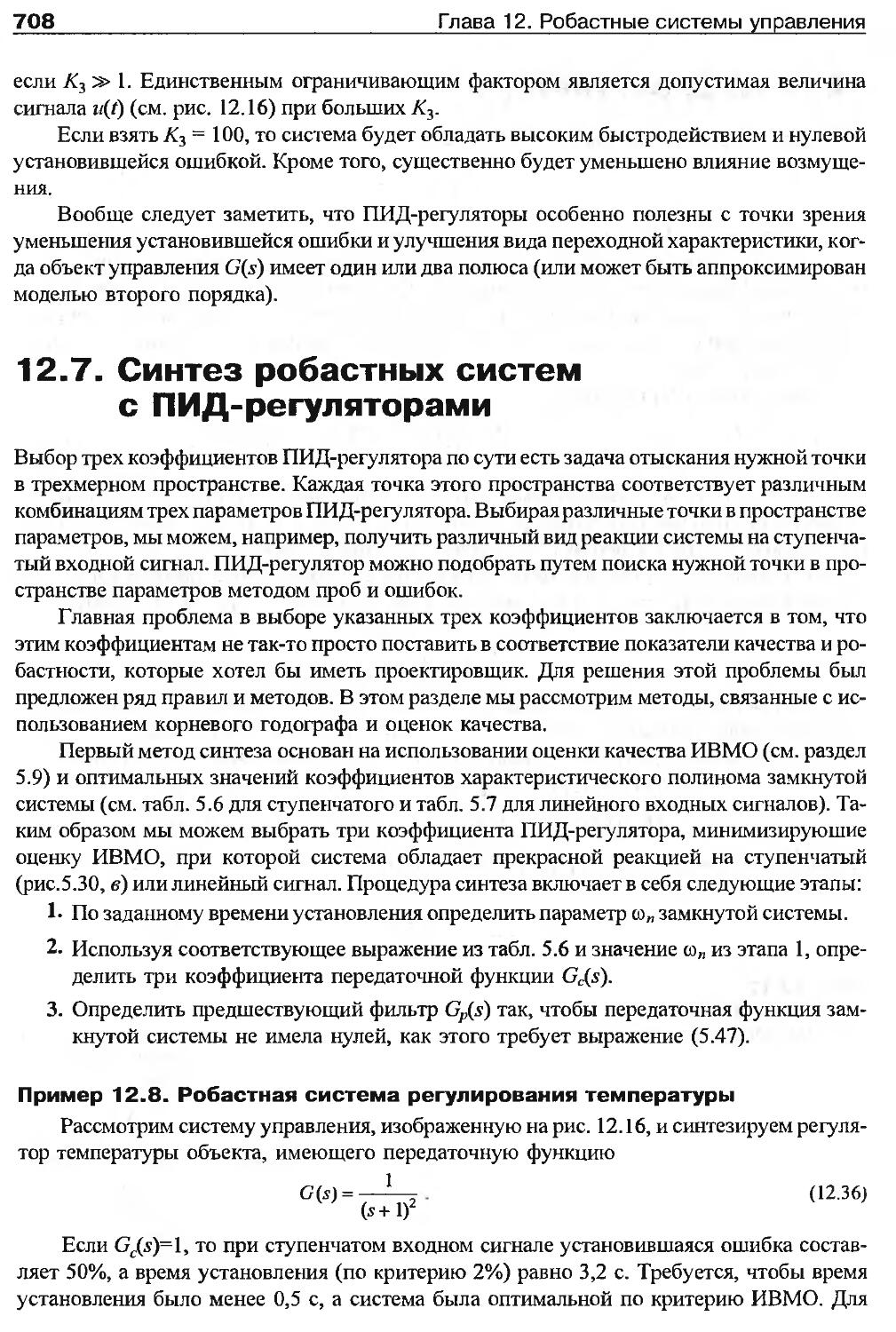
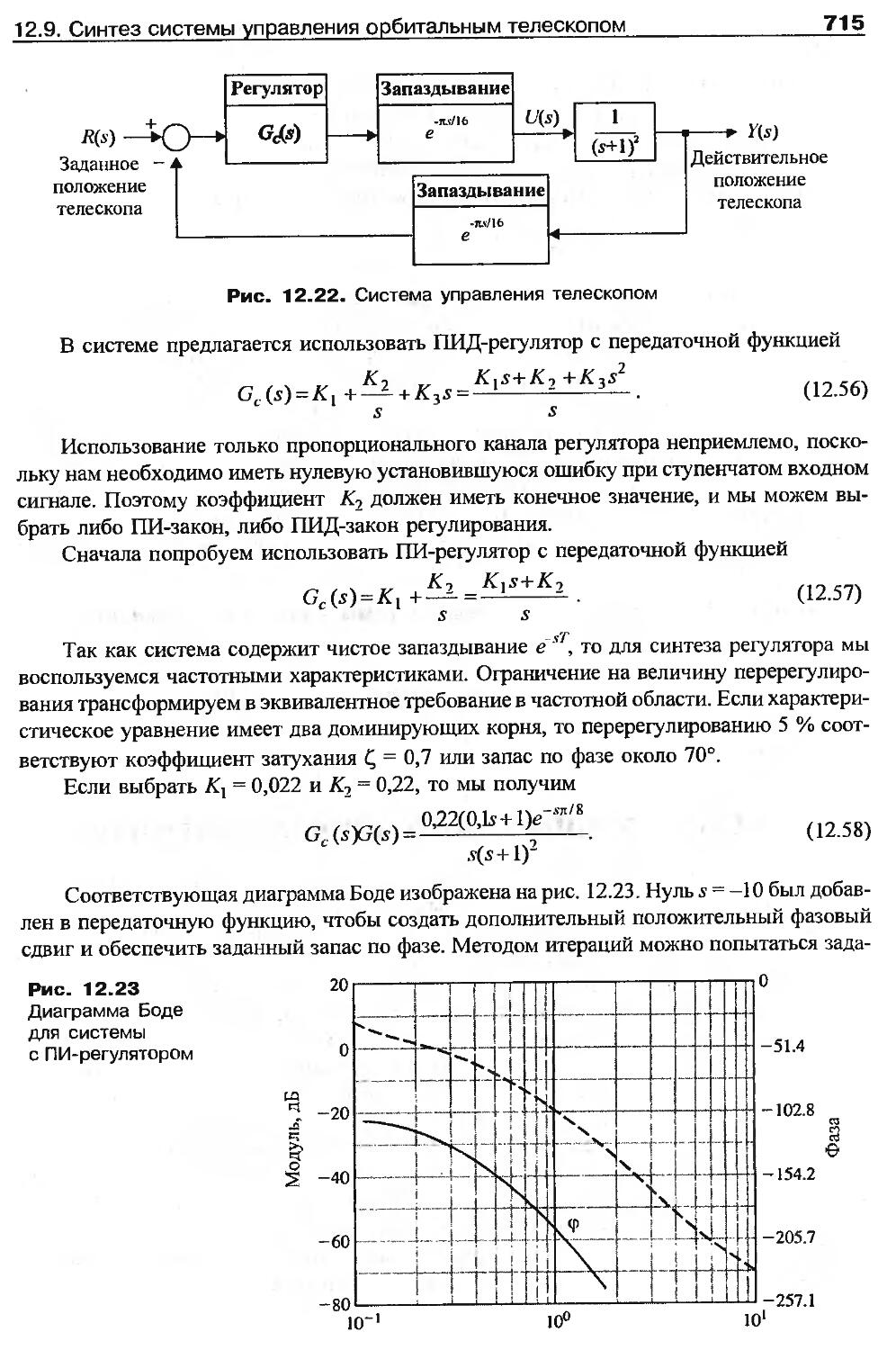
12.6. ПИД-регуляторы...............................................708
12.7. Синтез робастных систем с ПИД-регуляторами...................709
12.8. Пример синтеза: автопилот....................................714
12.9. Синтез системы управления орбитальным телескопом.............715
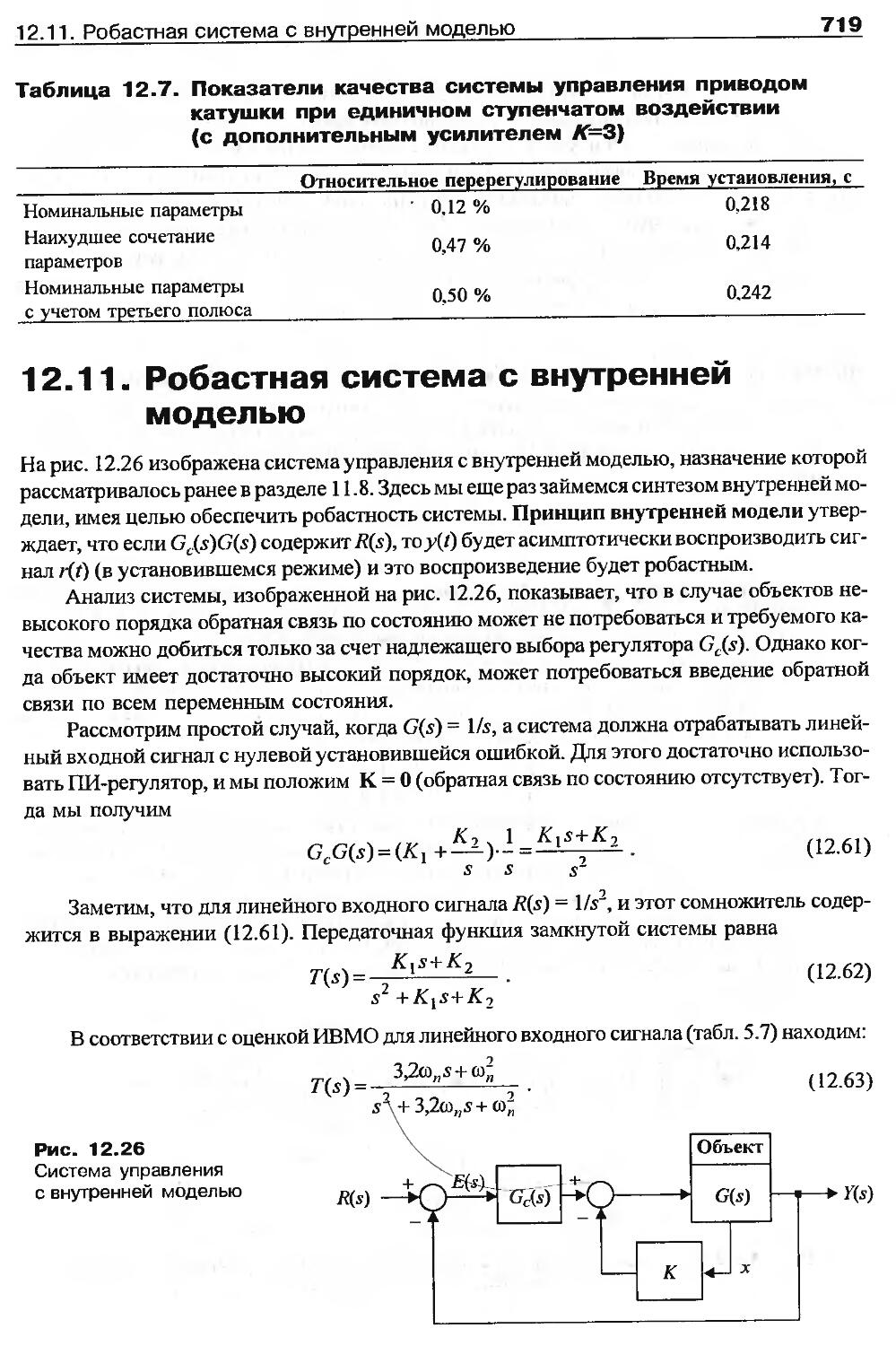
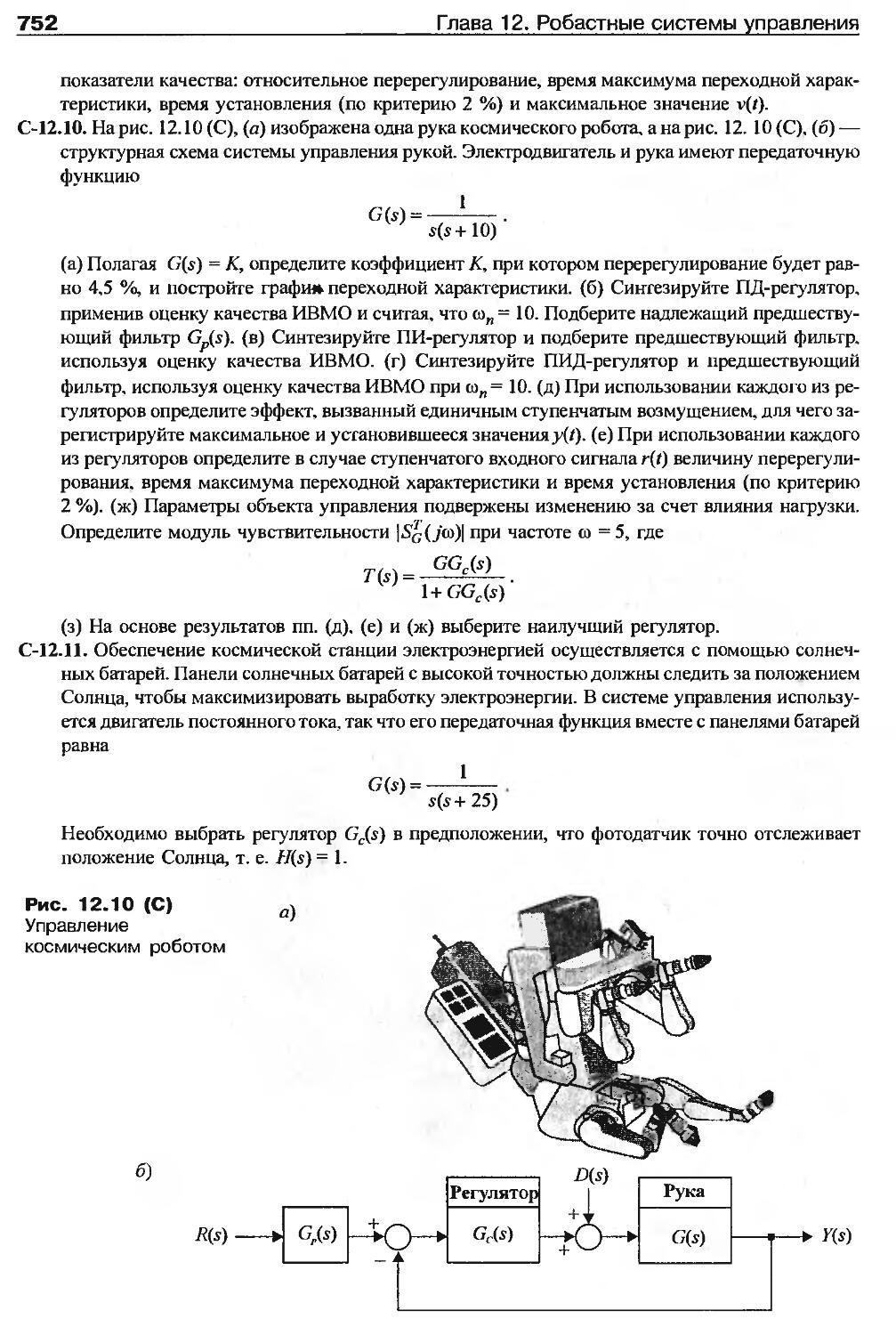
12.10. Синтез робастного привода катушки...........................717
12.11. Робастная система с внутренней моделью......................720
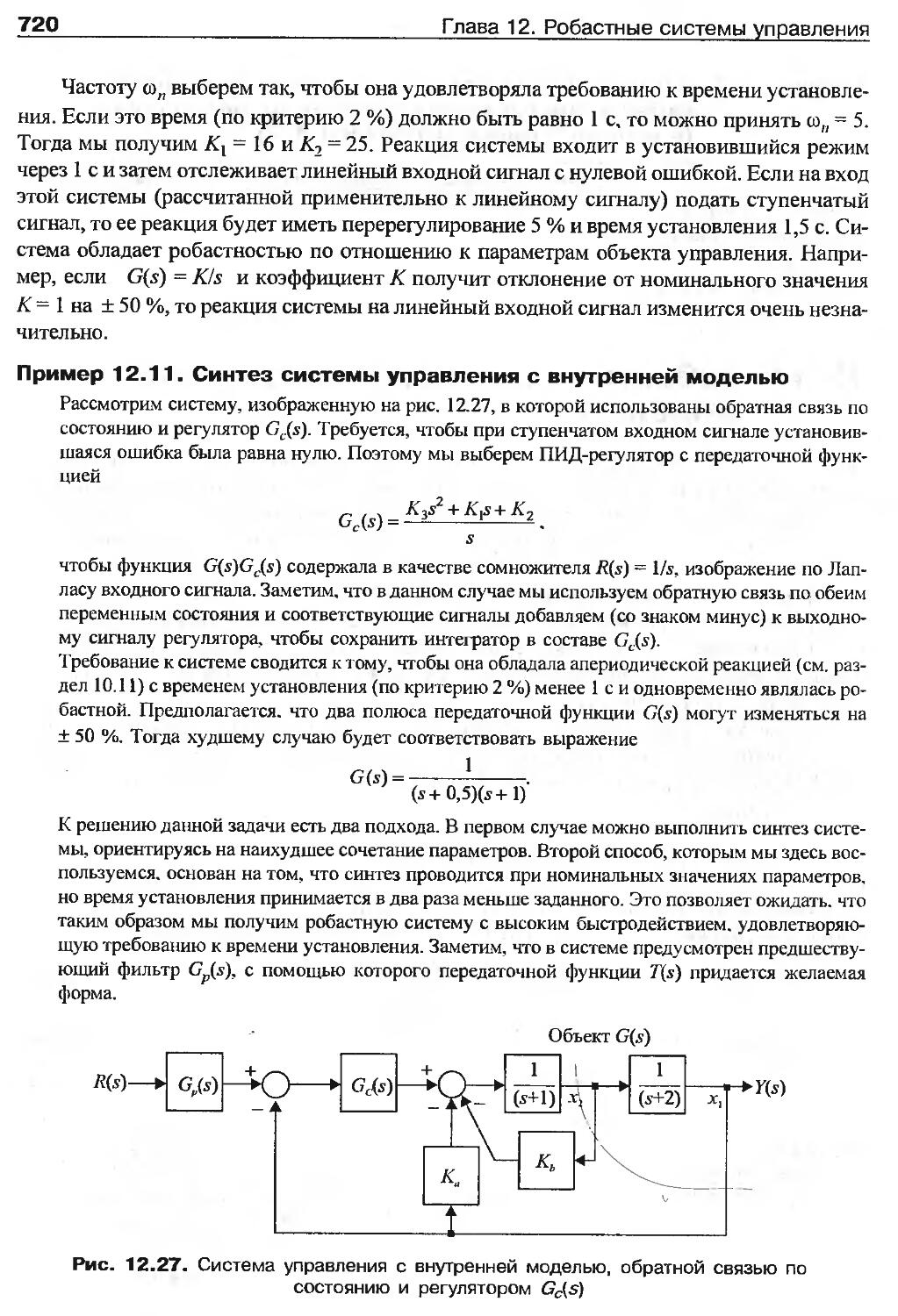
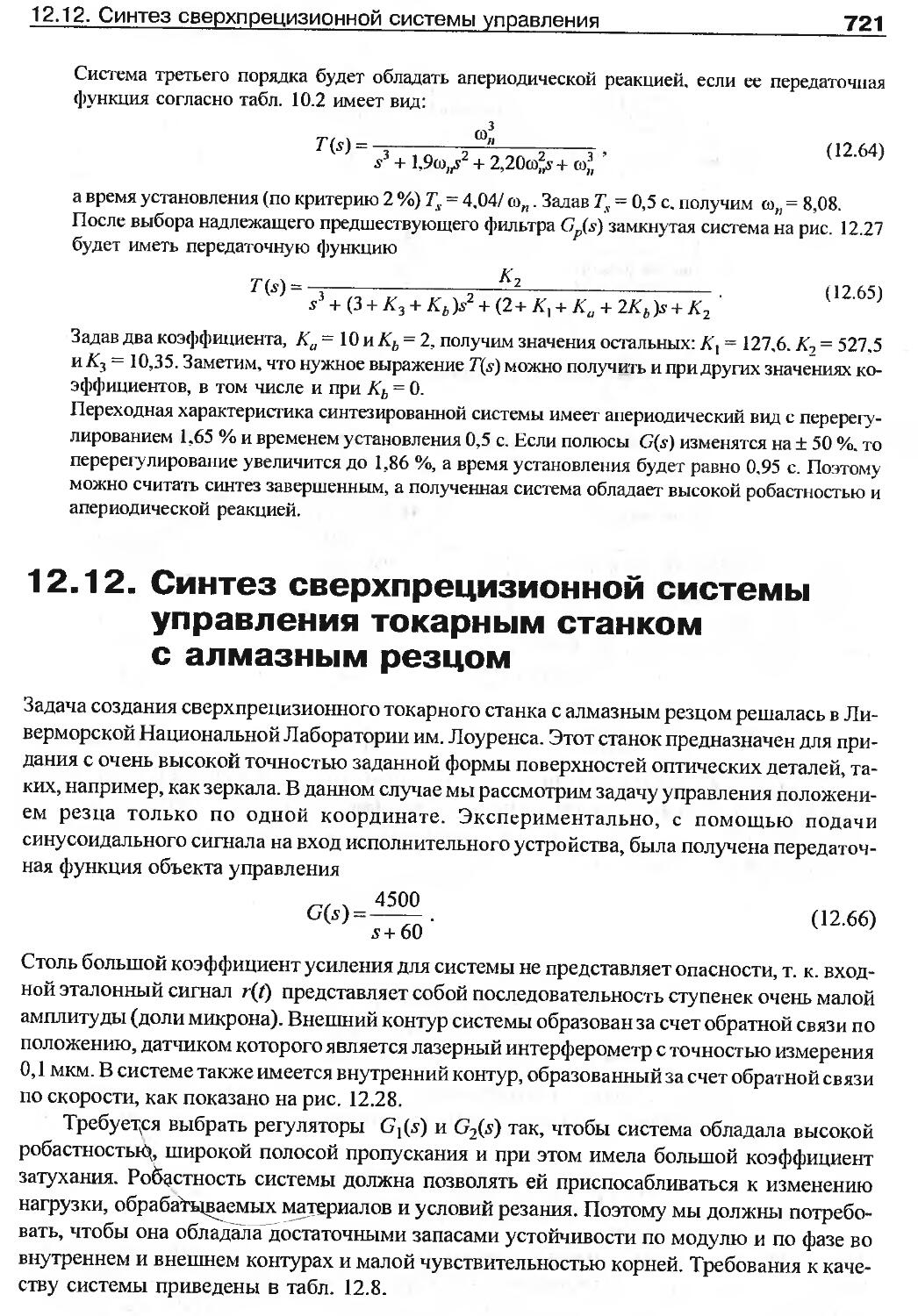
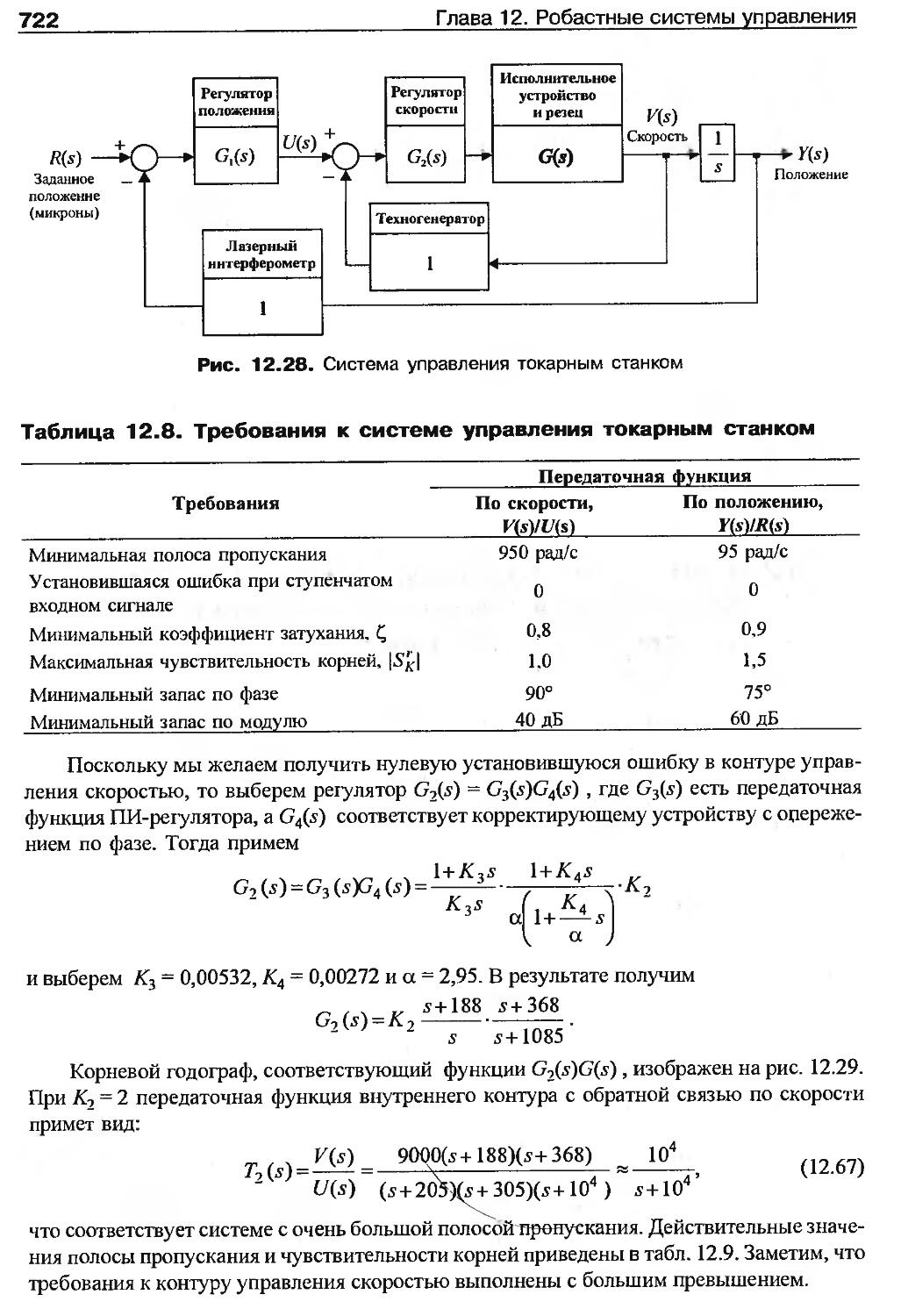
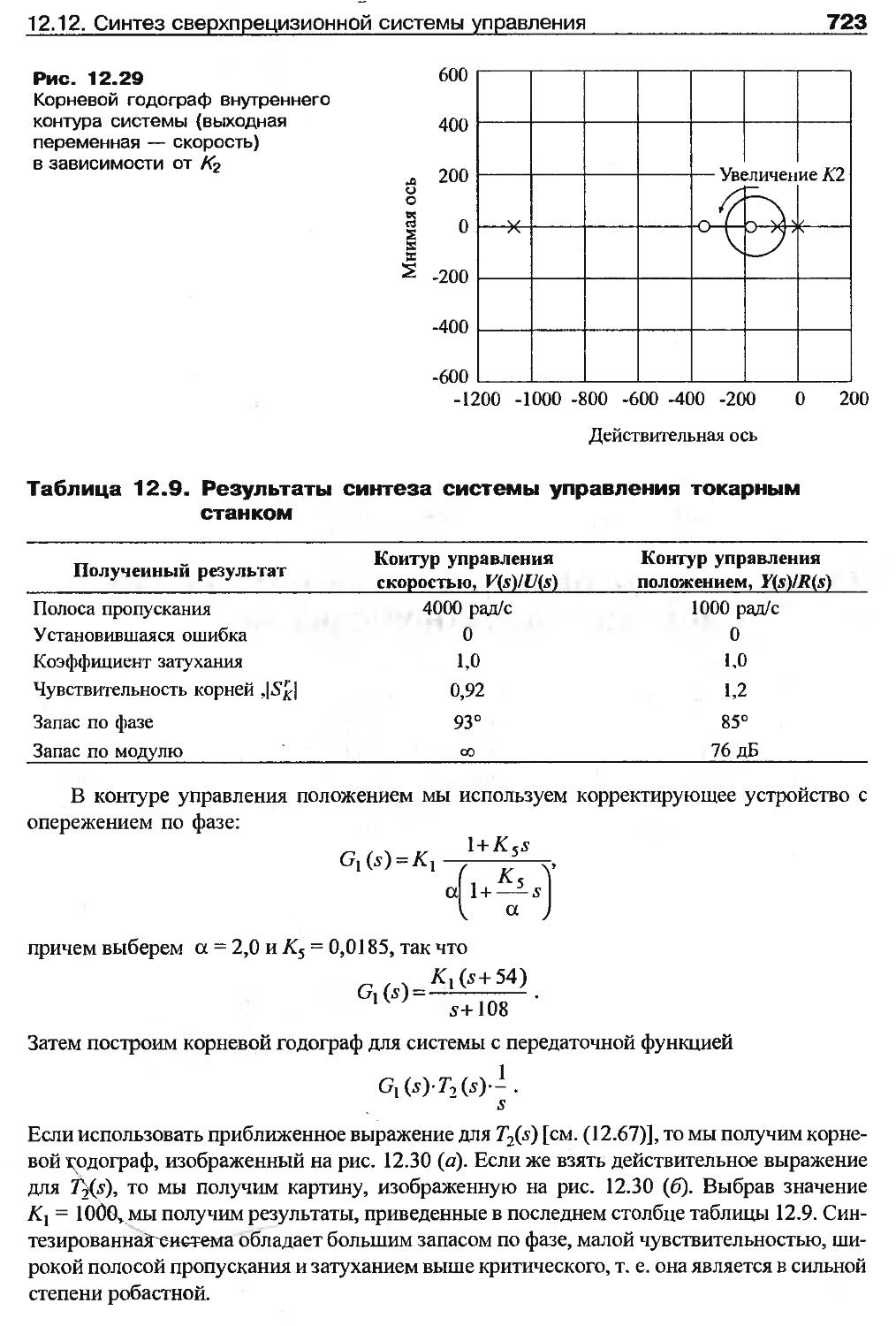
12.12. Синтез сверхпрецизионной системы управления токарным станком с алмазным резцом..................................................722
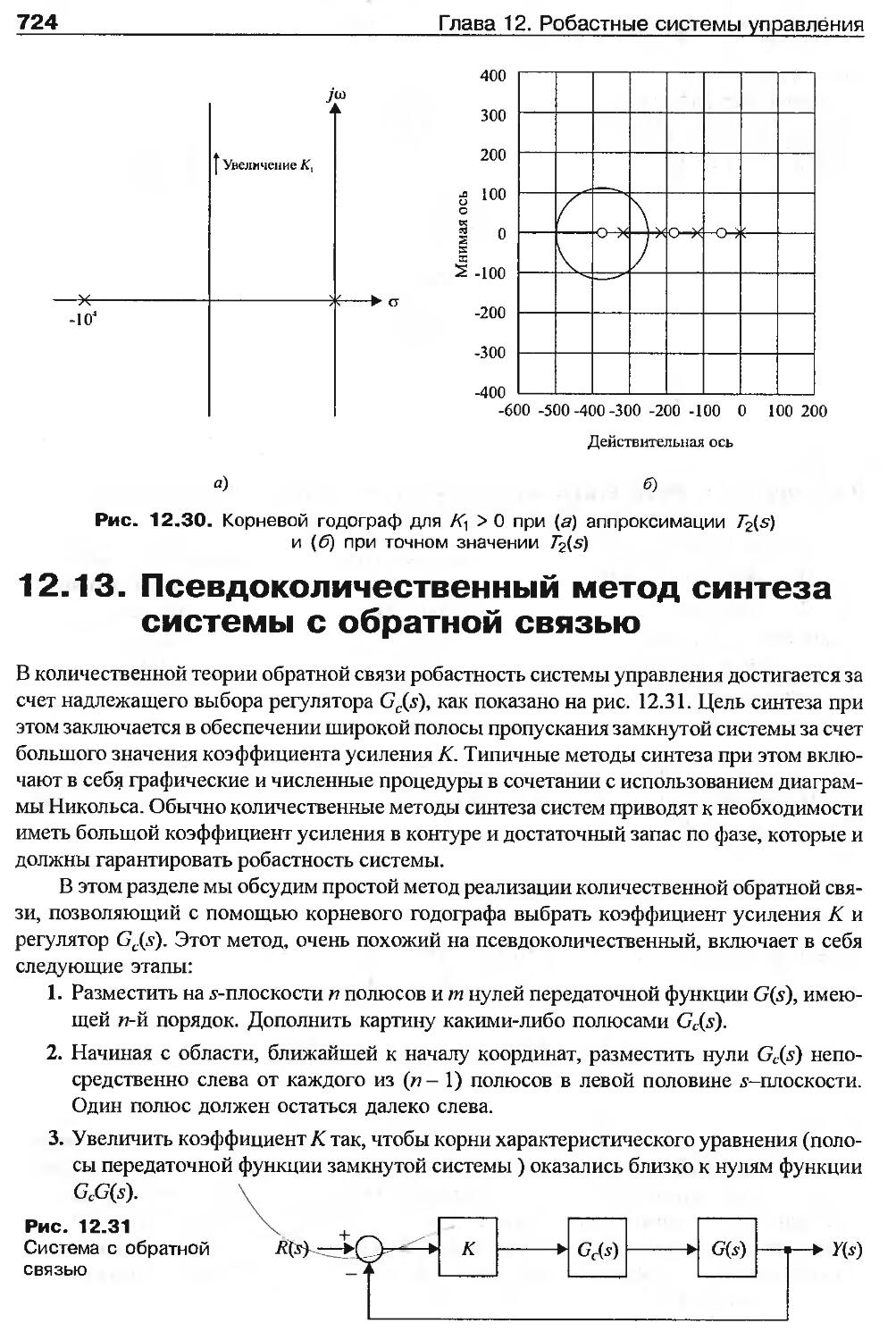
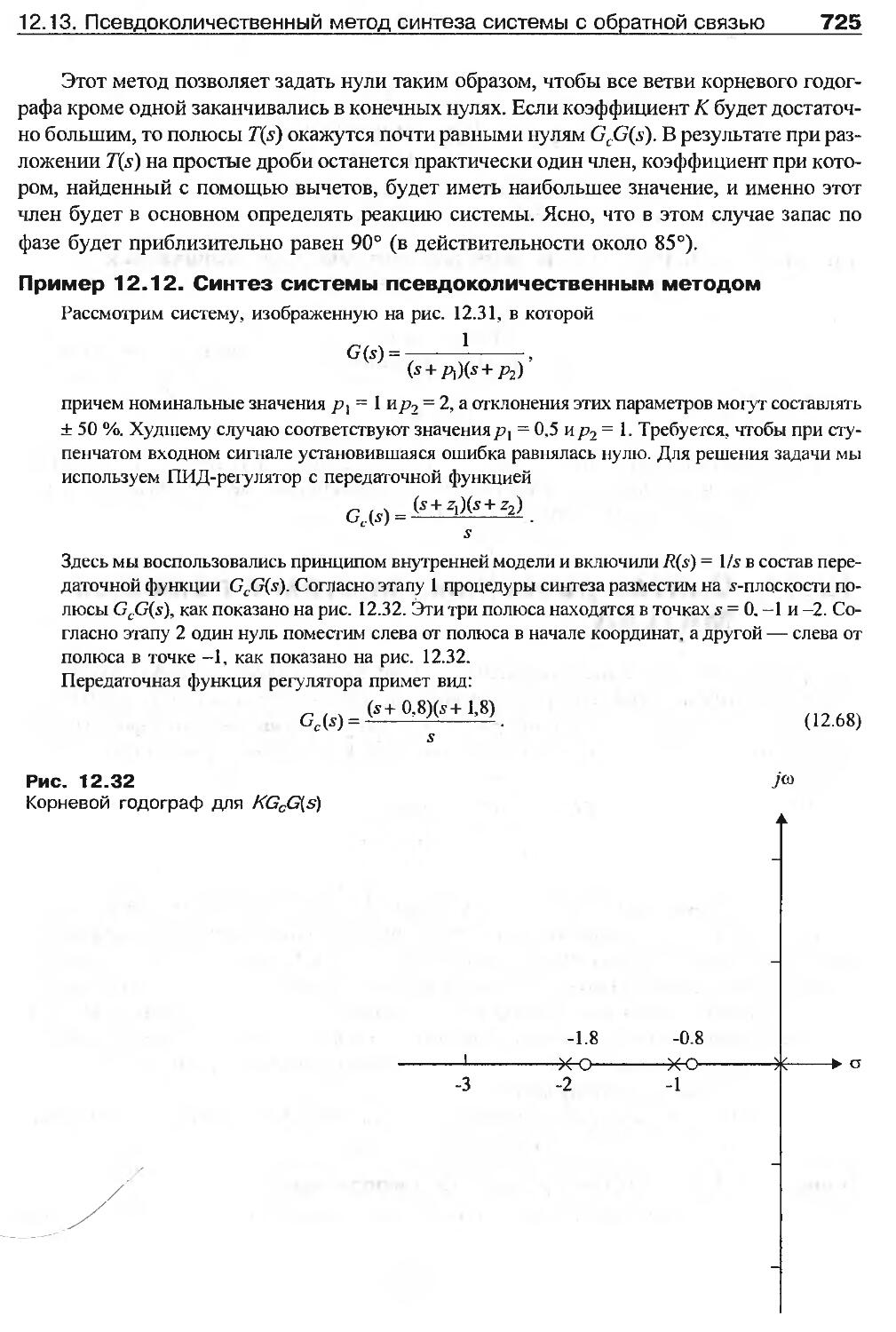
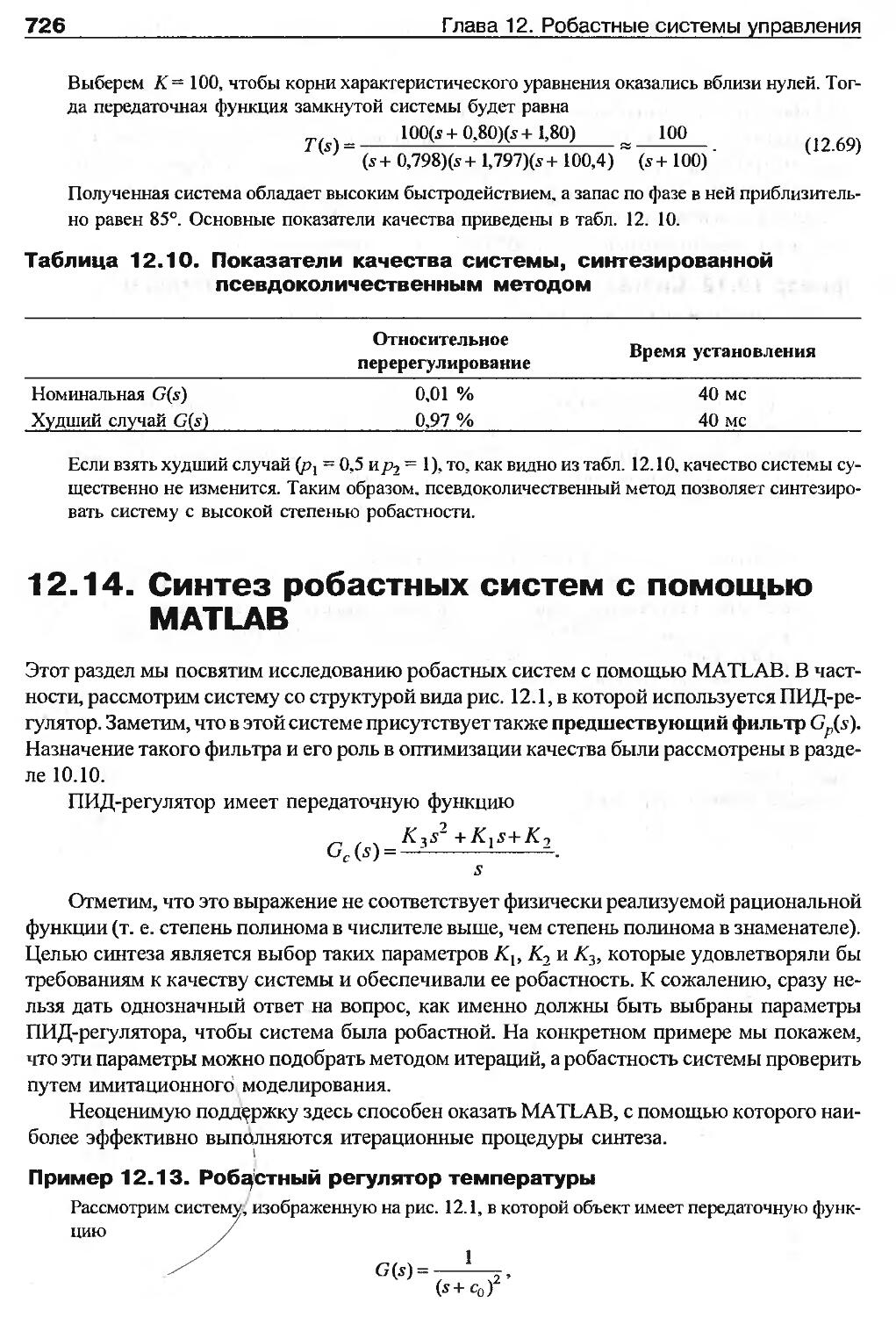
12.13. Псевдоколичественный метод синтеза системы с обратной связью.725
Содержание
13
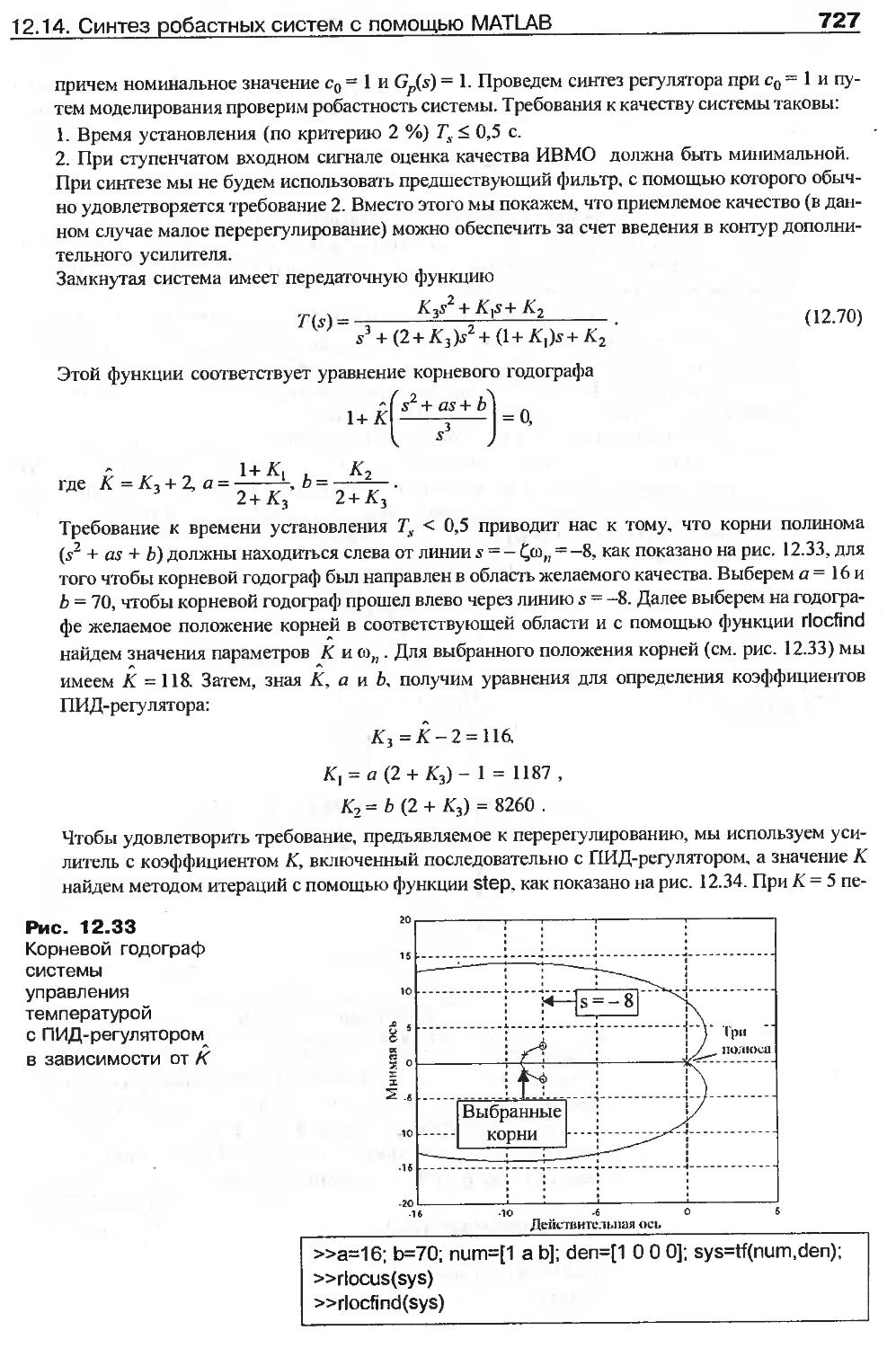
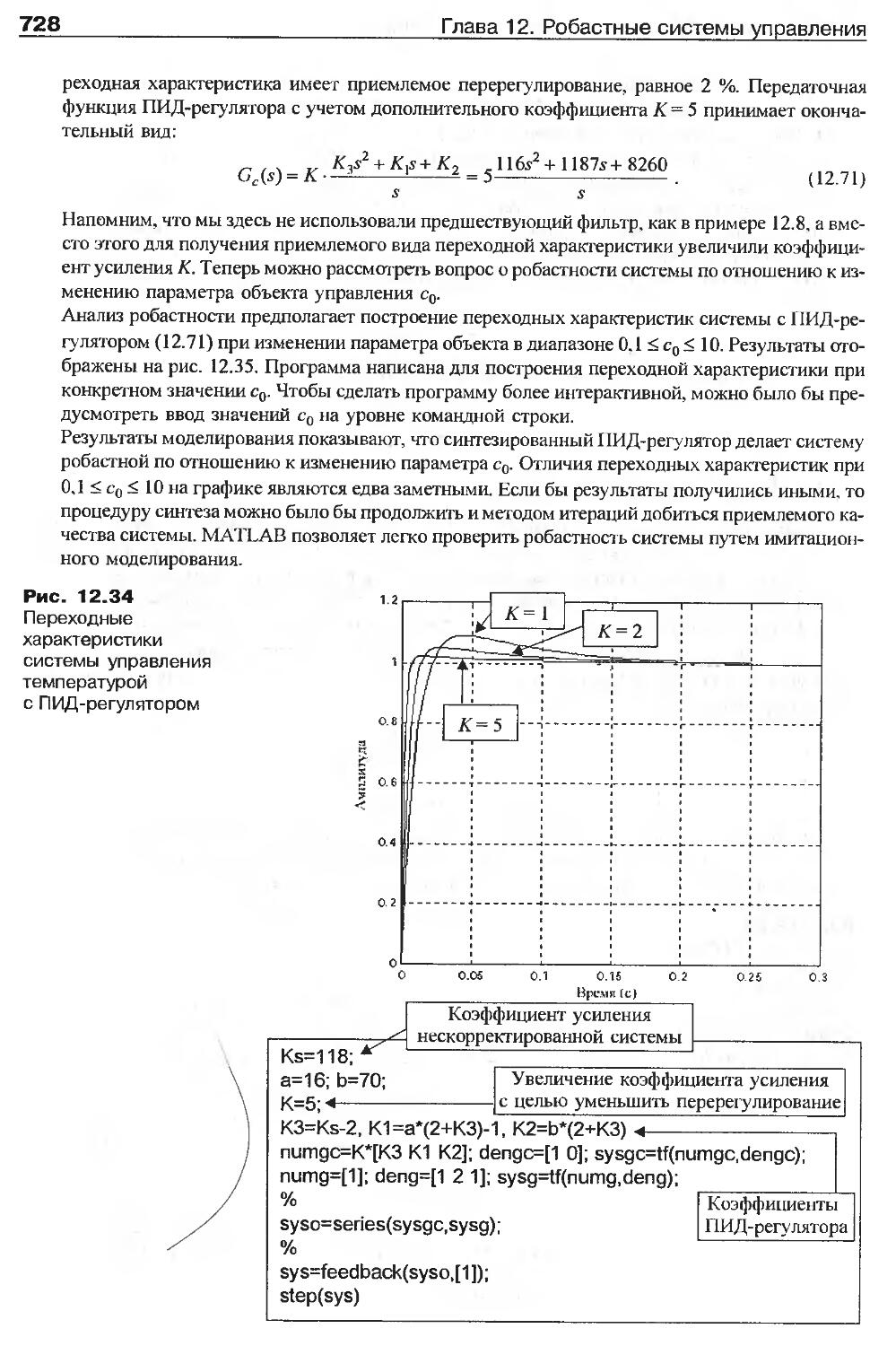
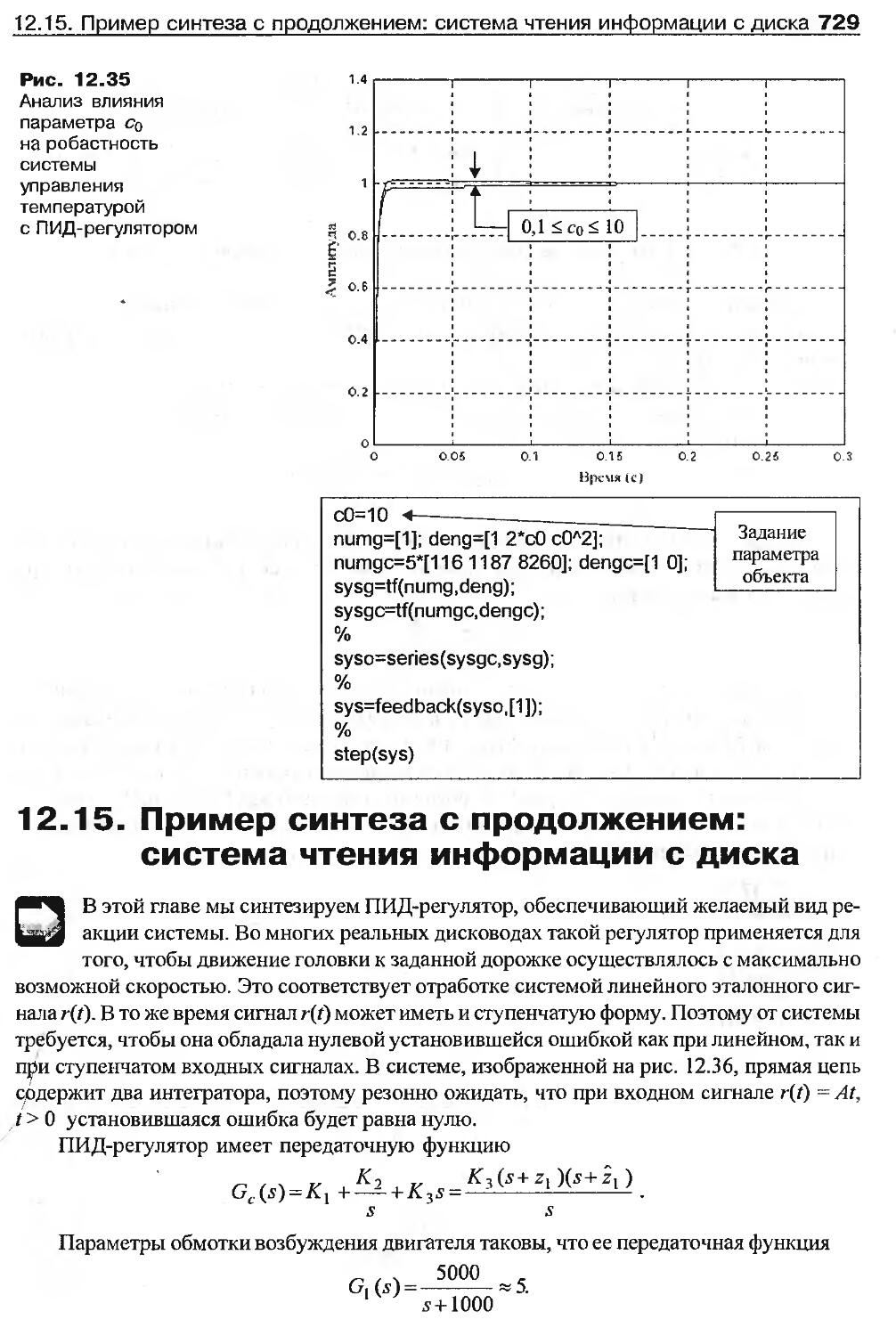
12.14. Синтез робастных систем с помощью MATLAB...................727
12.15. Пример синтеза с продолжением: система чтения информации с диска ......................................................... 730
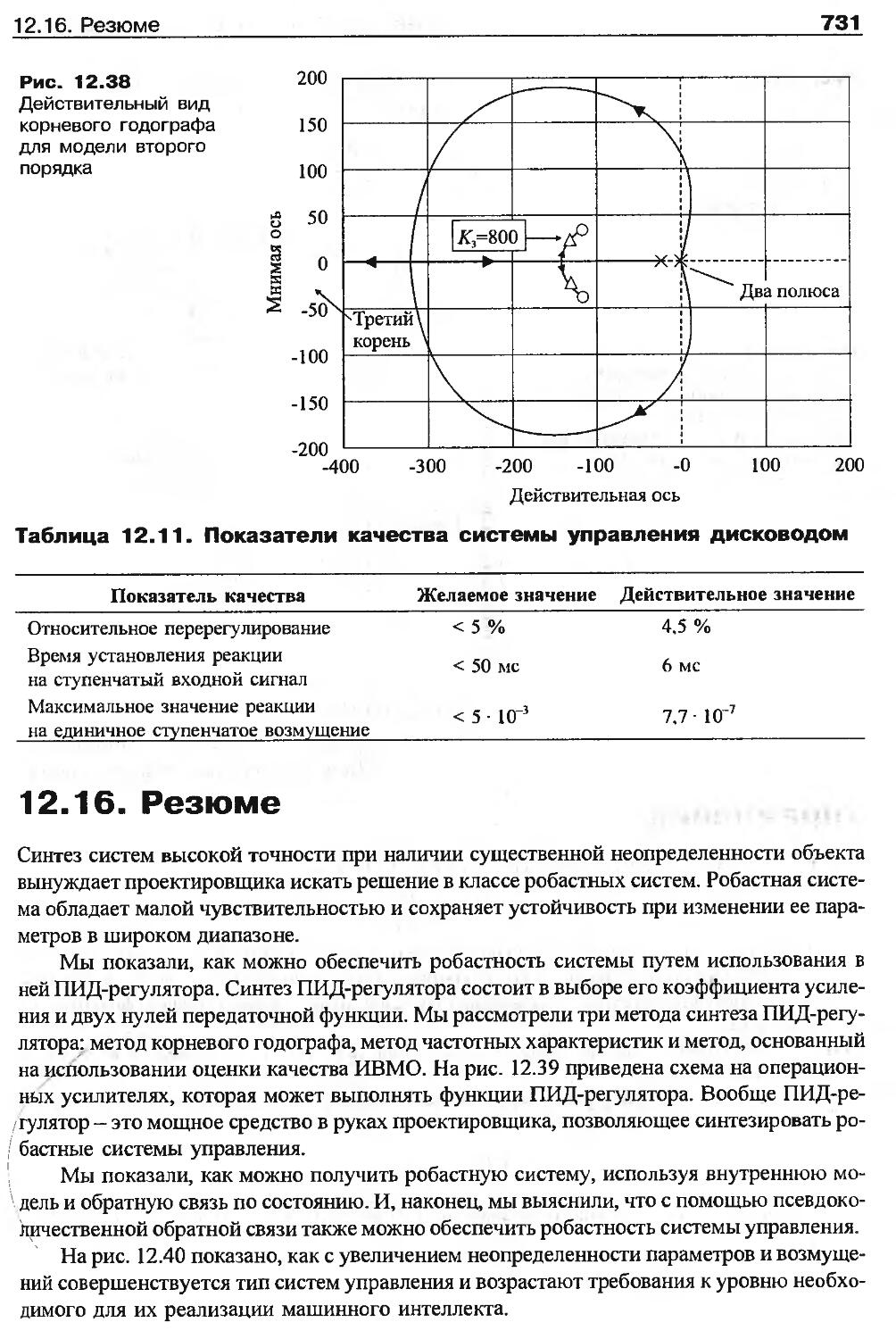
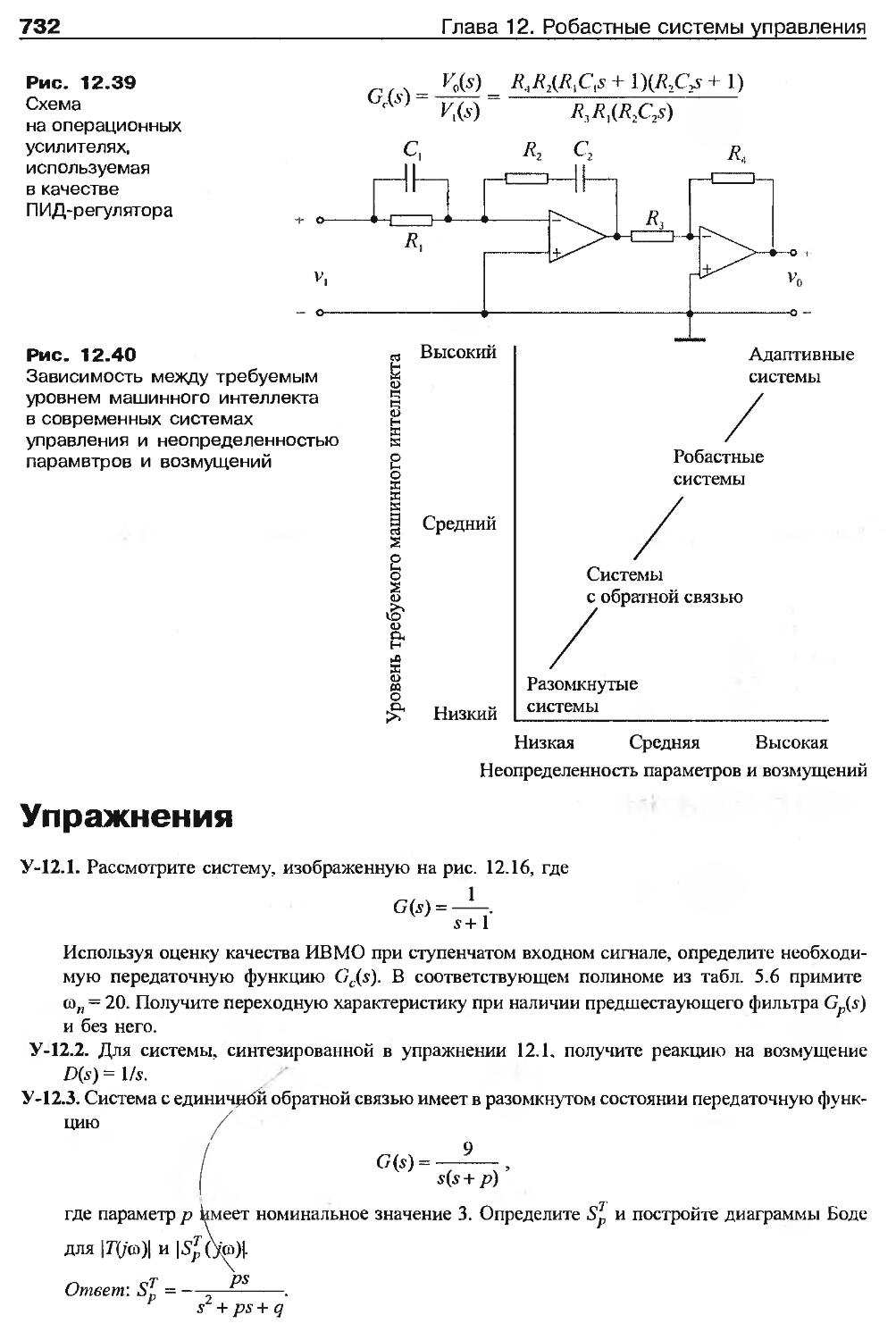
12.16. Резюме.....................................................732
Упражнения........................................................733
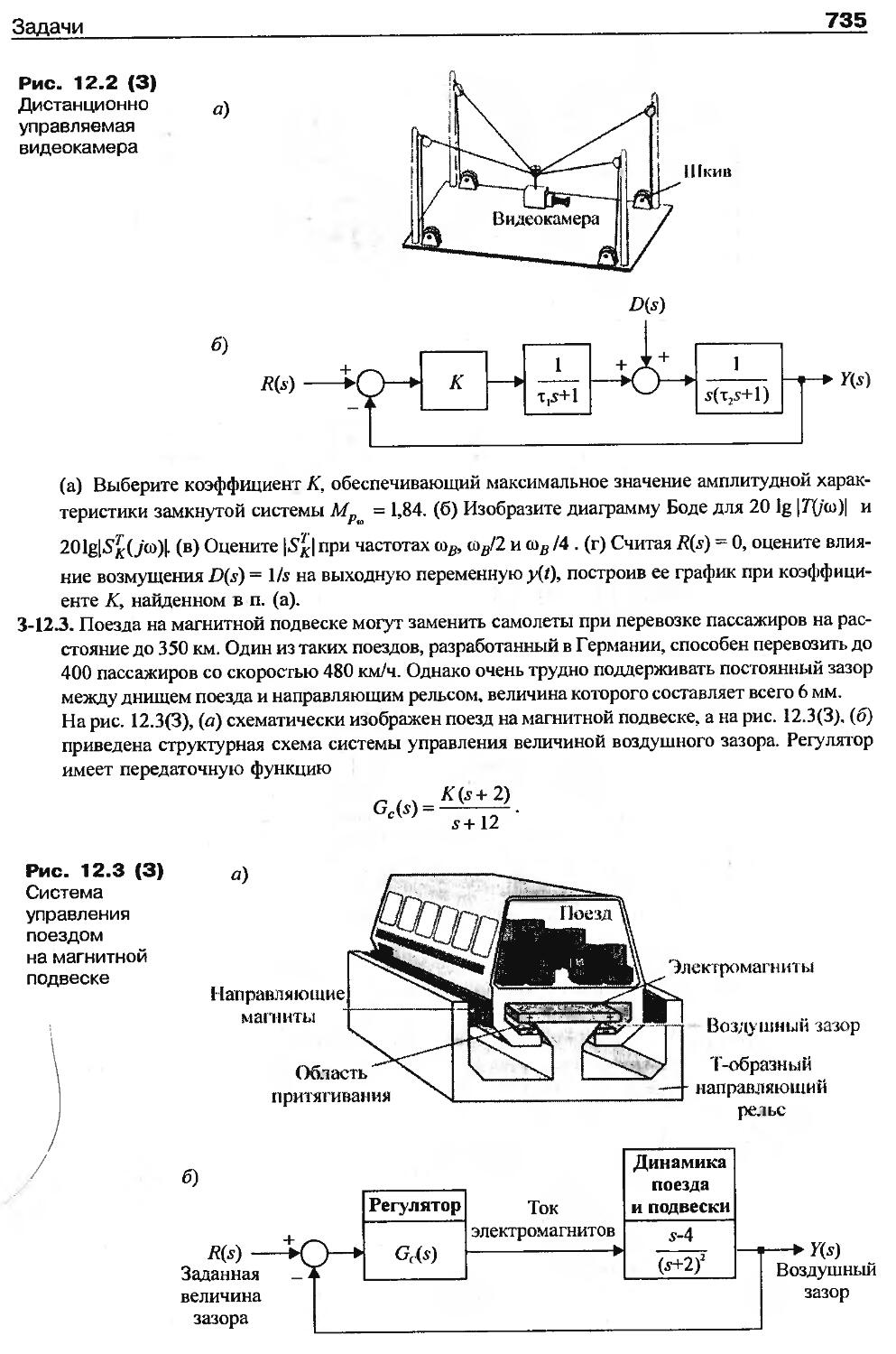
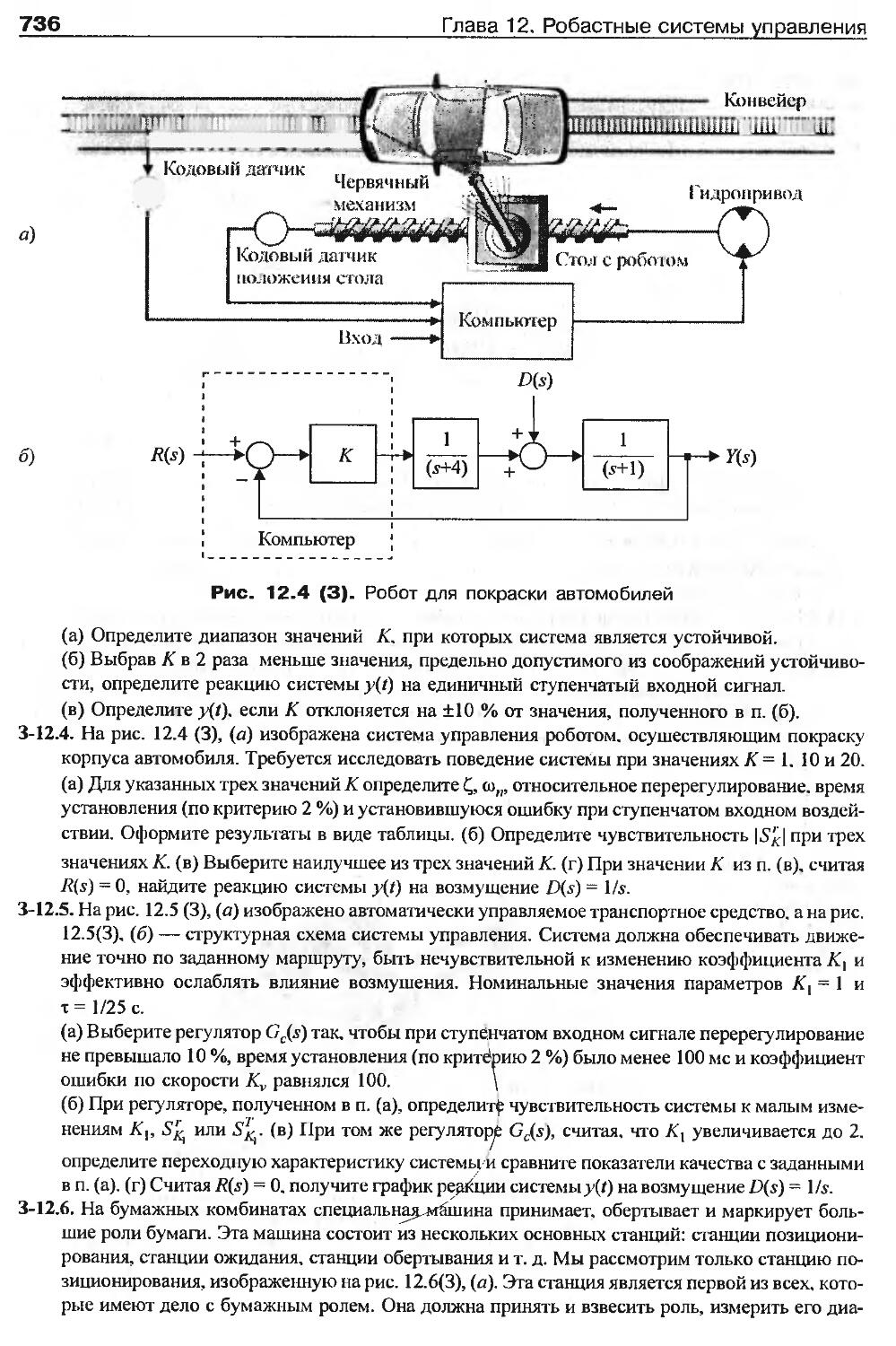
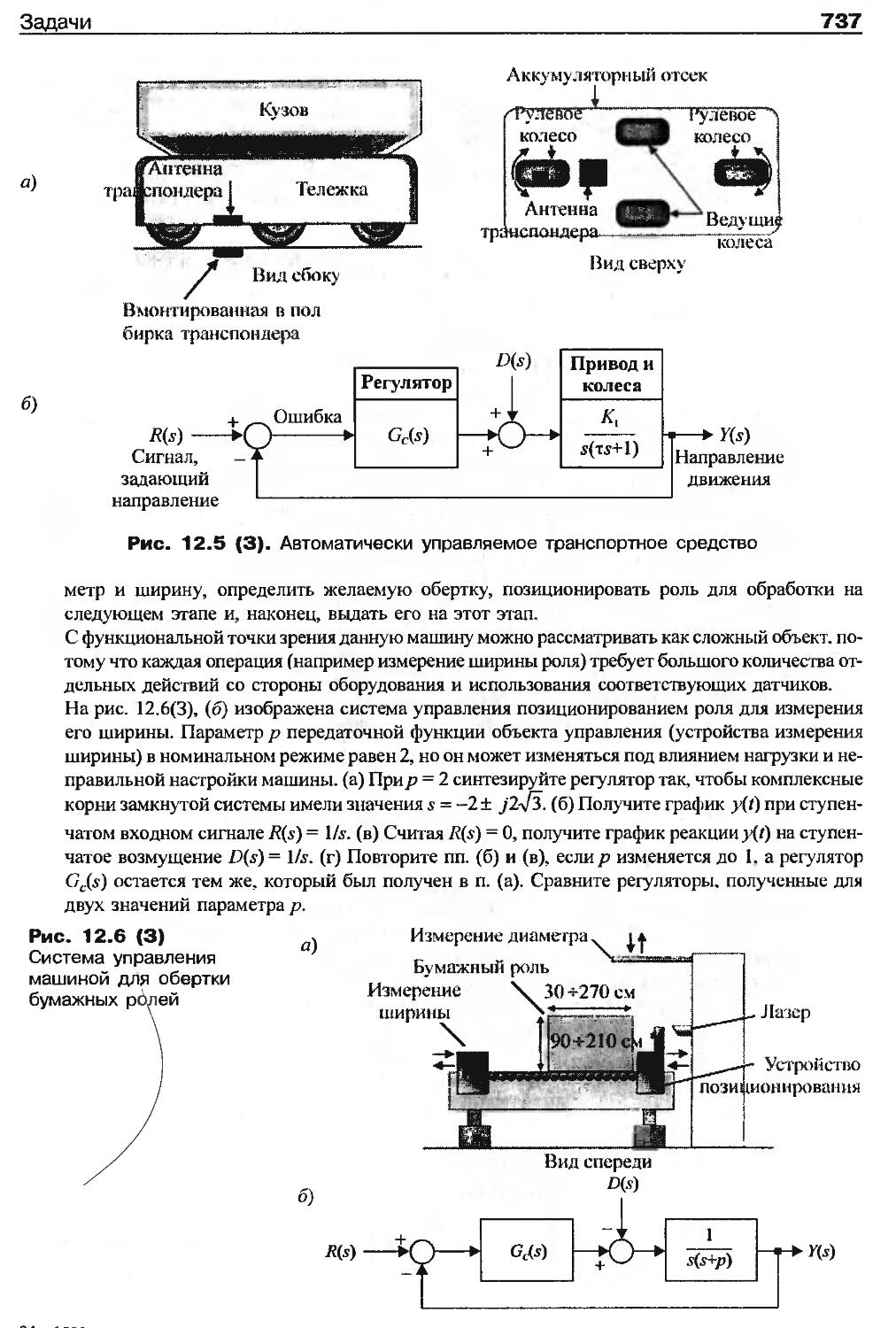
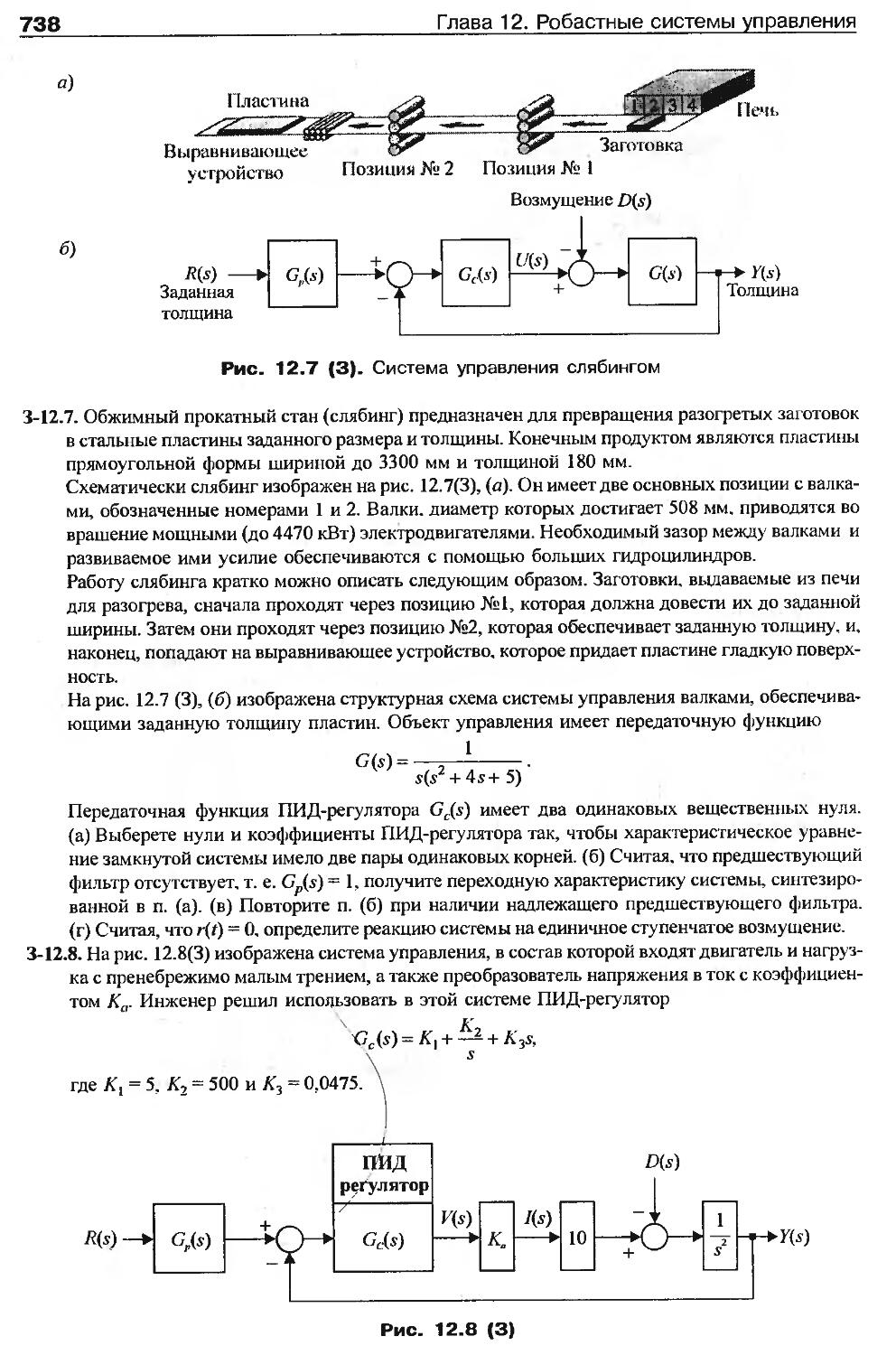
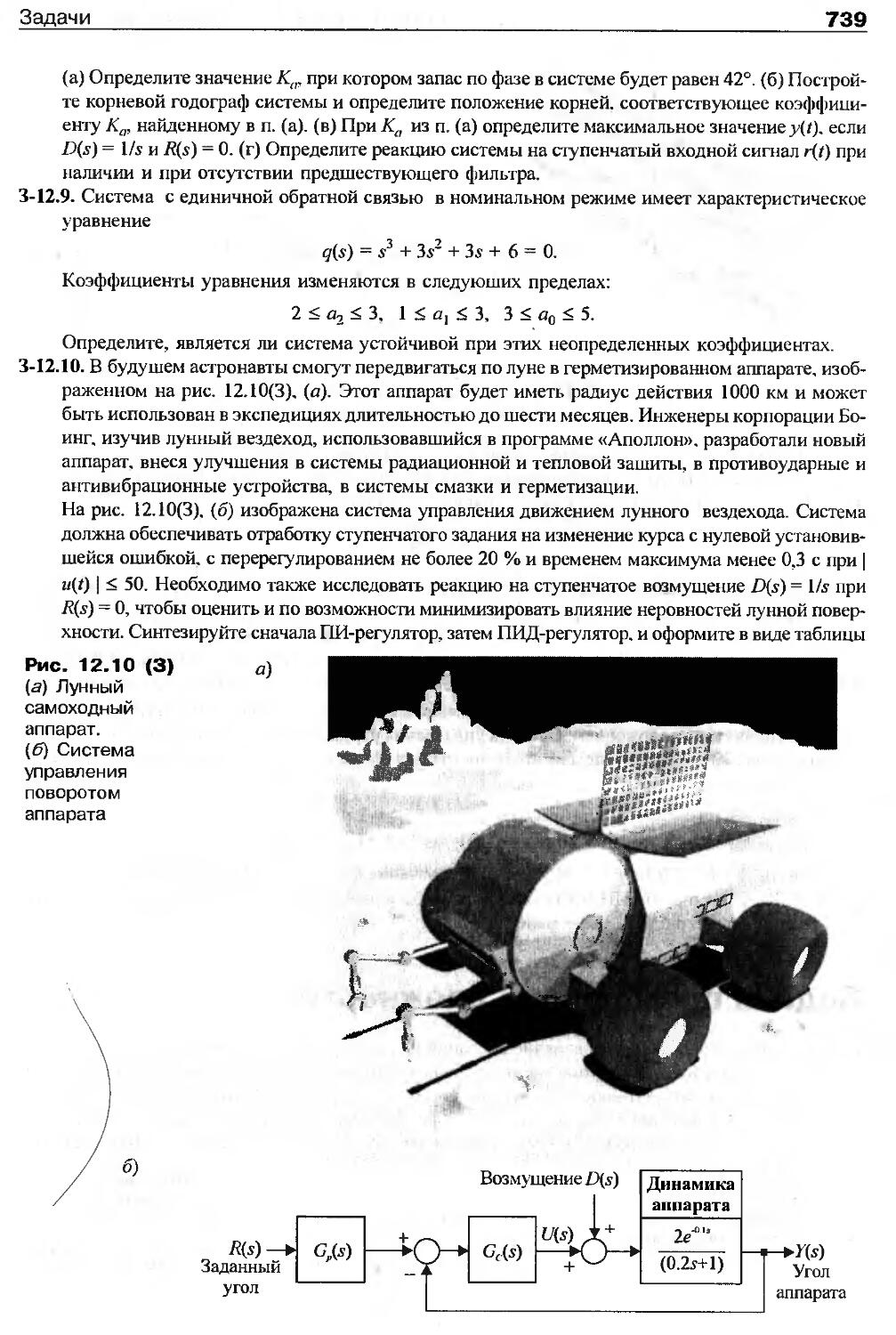
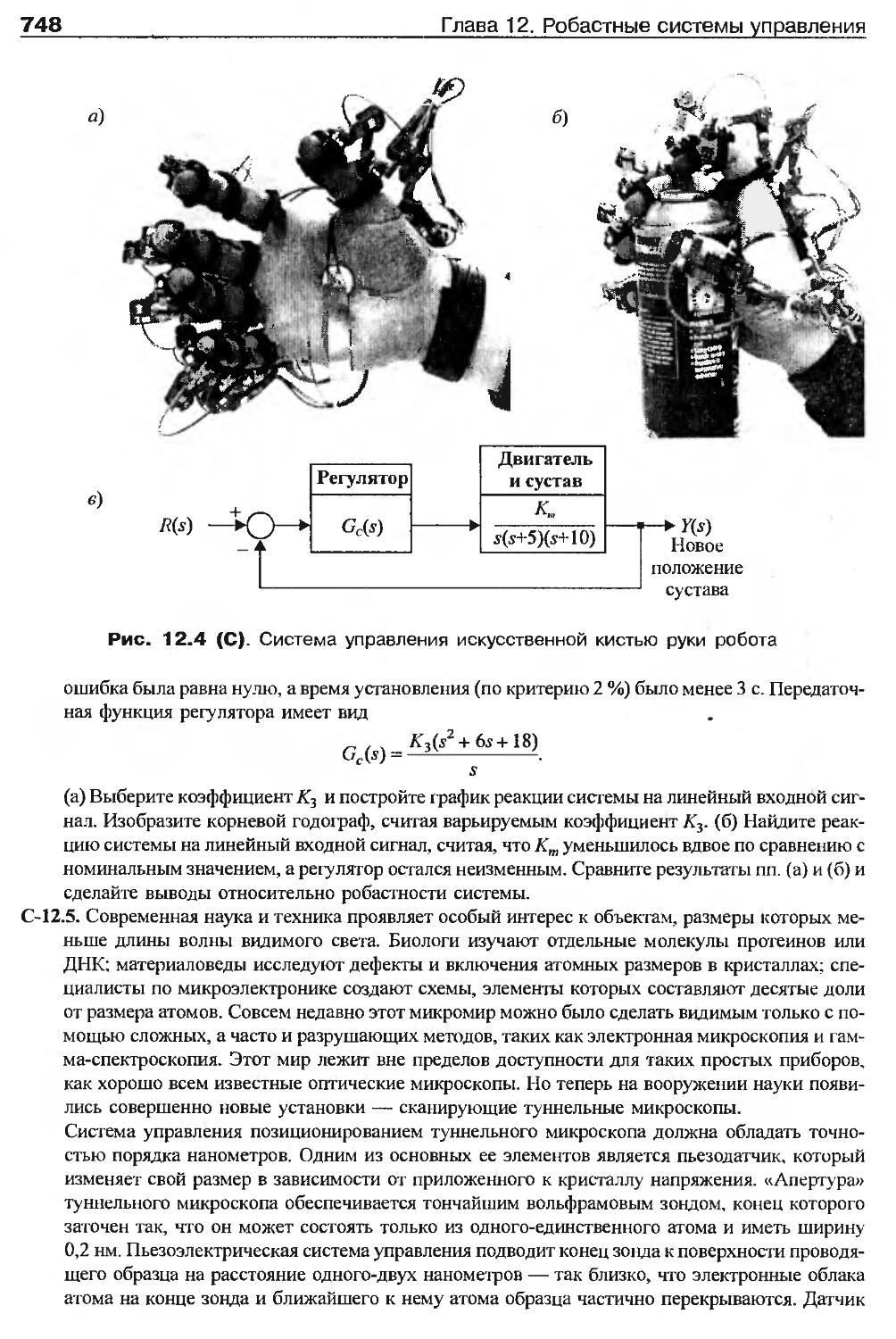
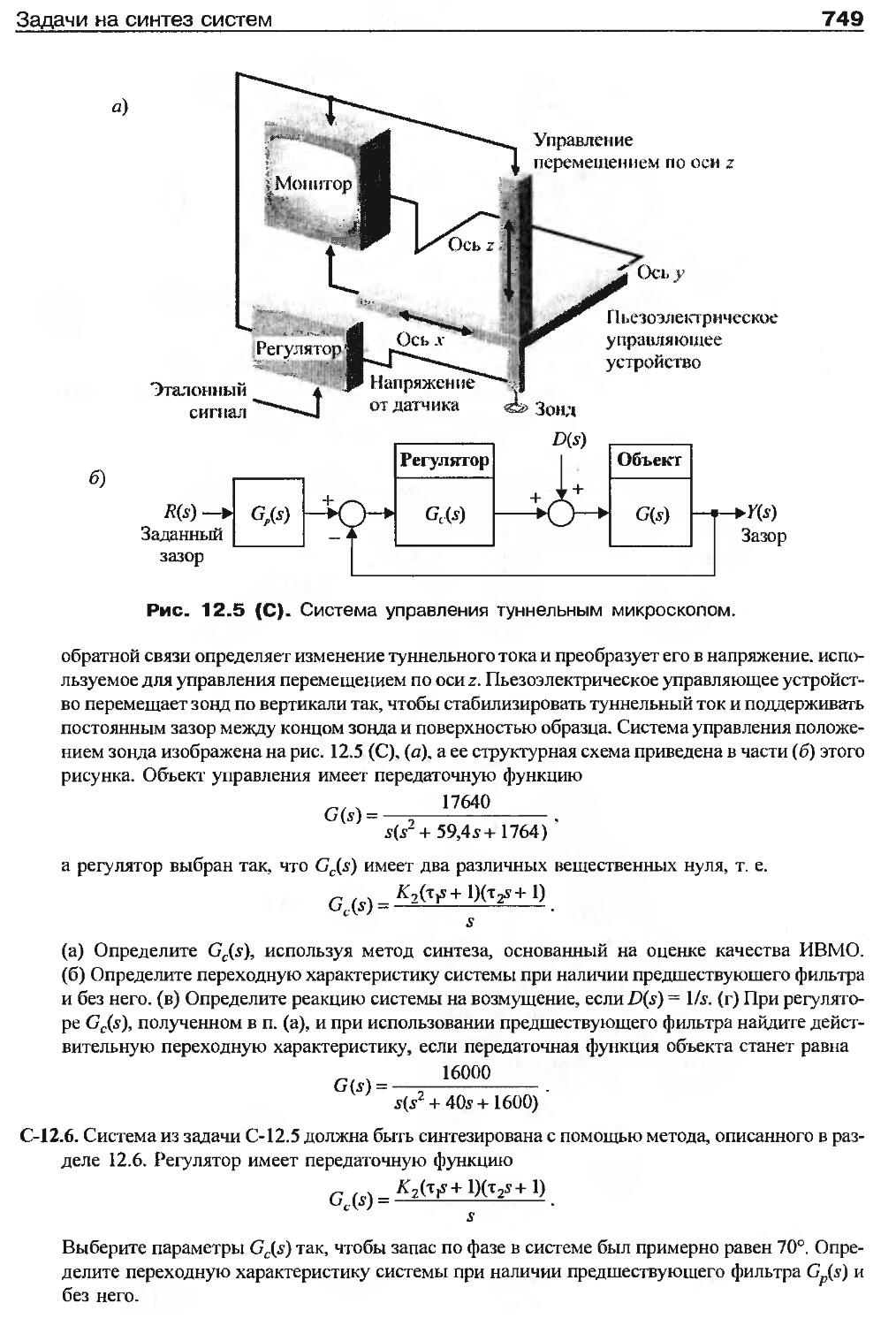
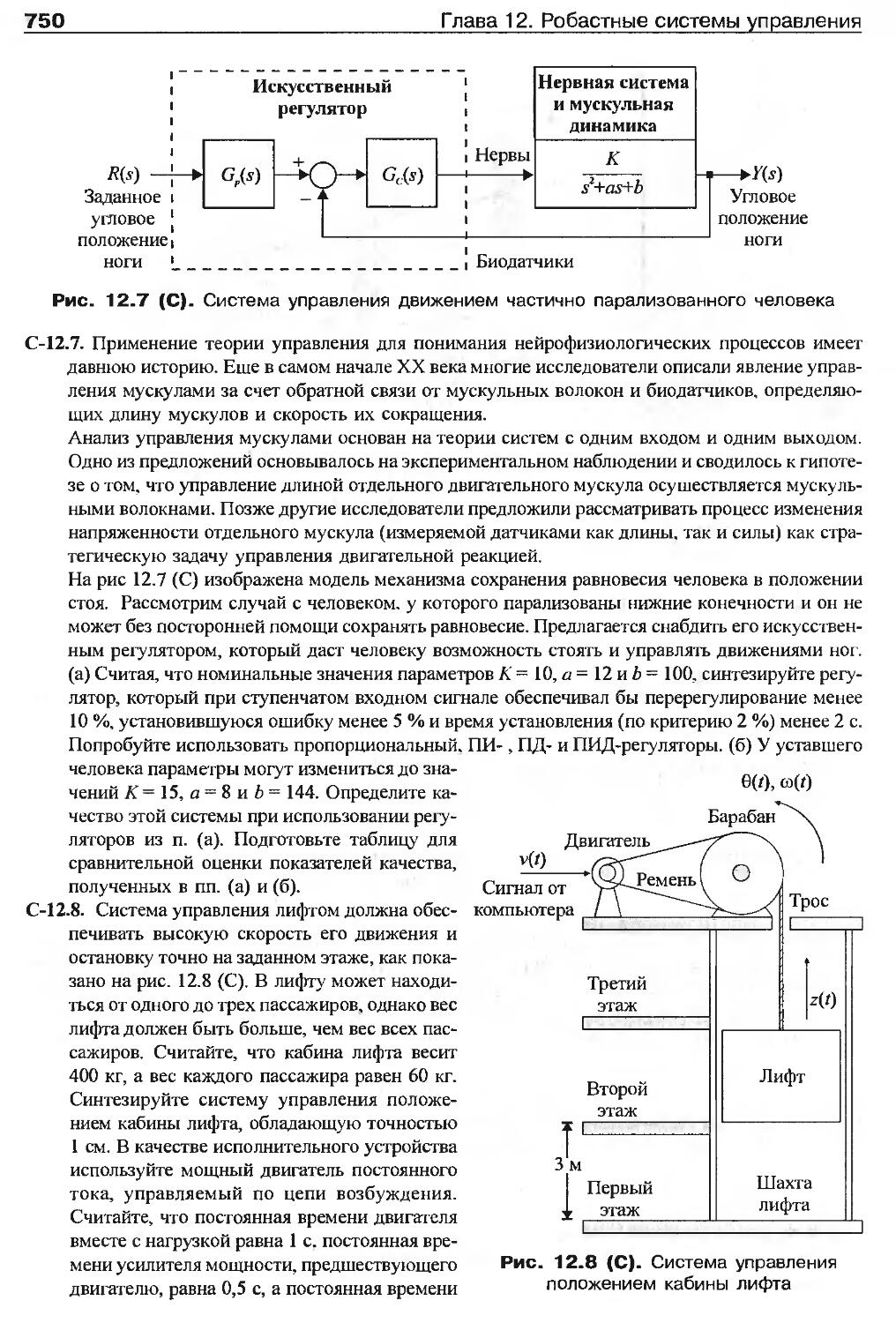
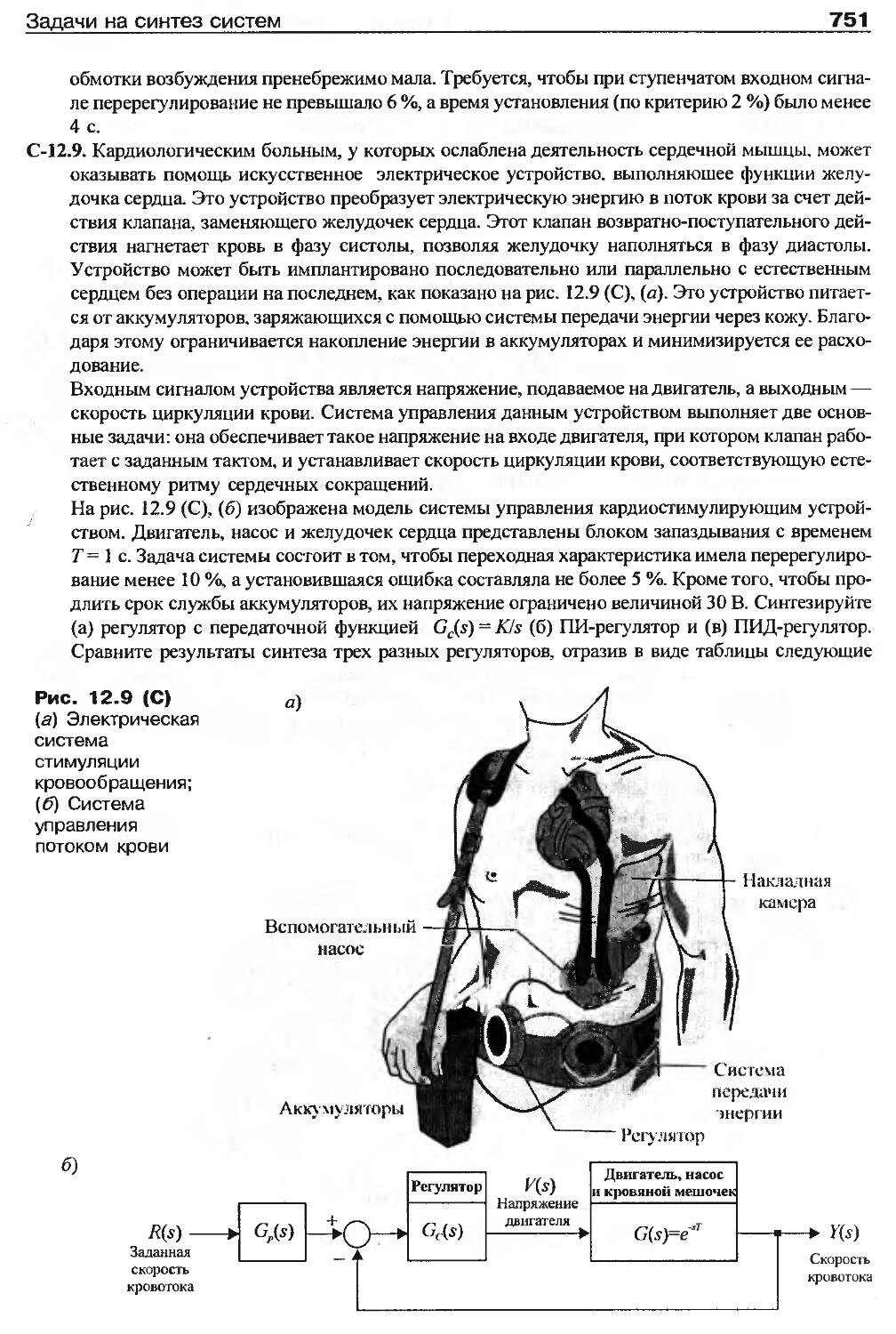
Задачи............................................................735
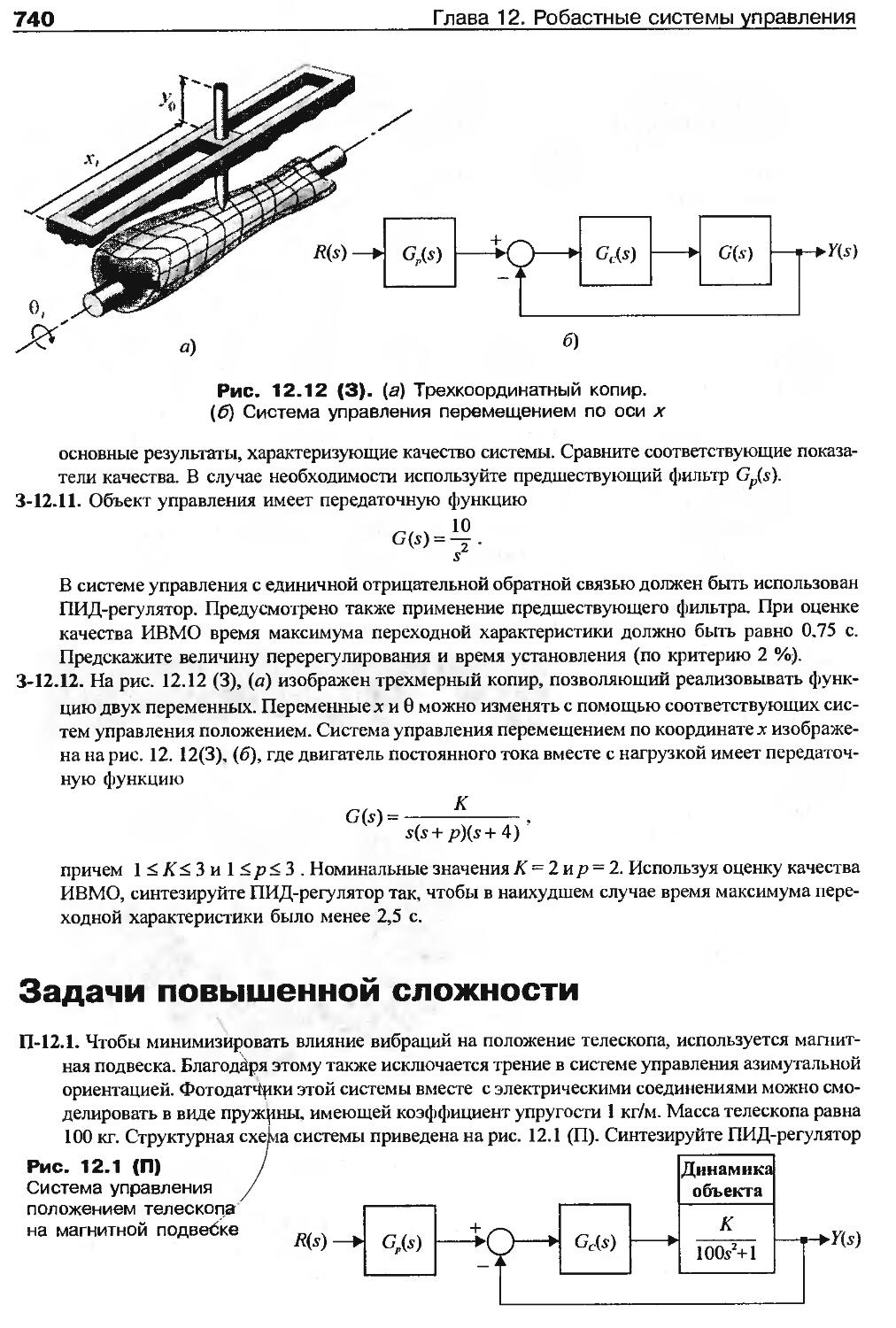
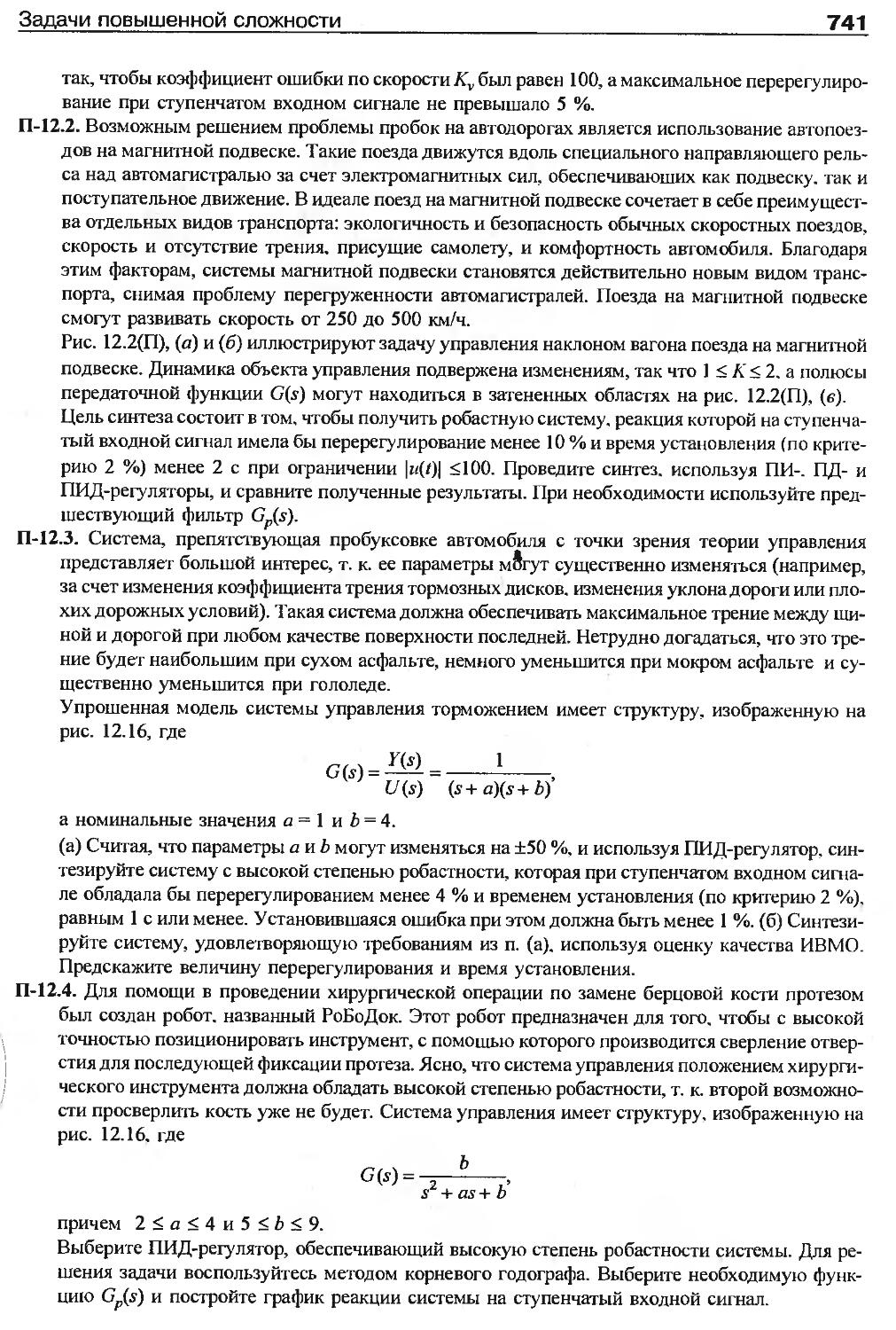
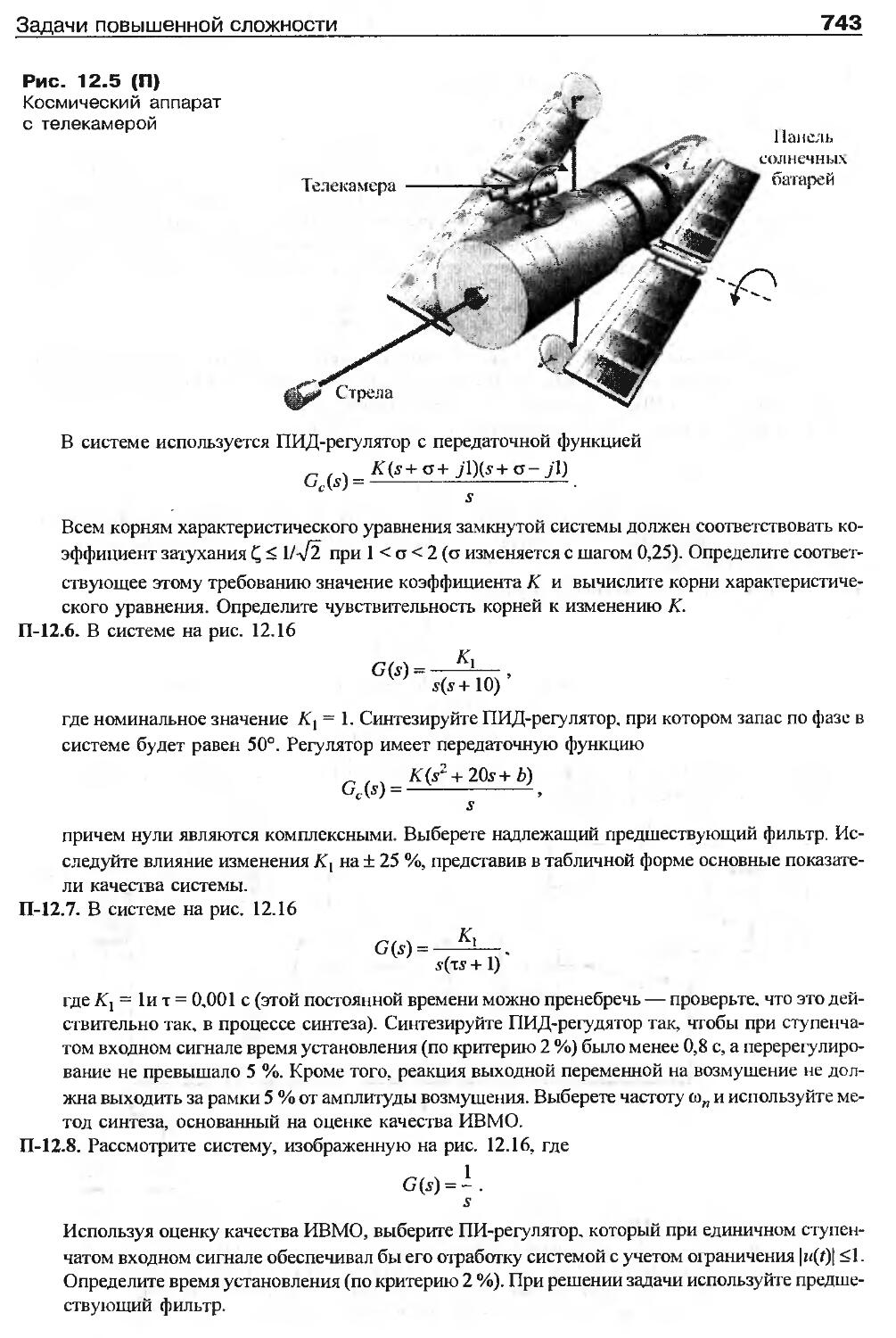
Задачи повышенной сложности.......................................741
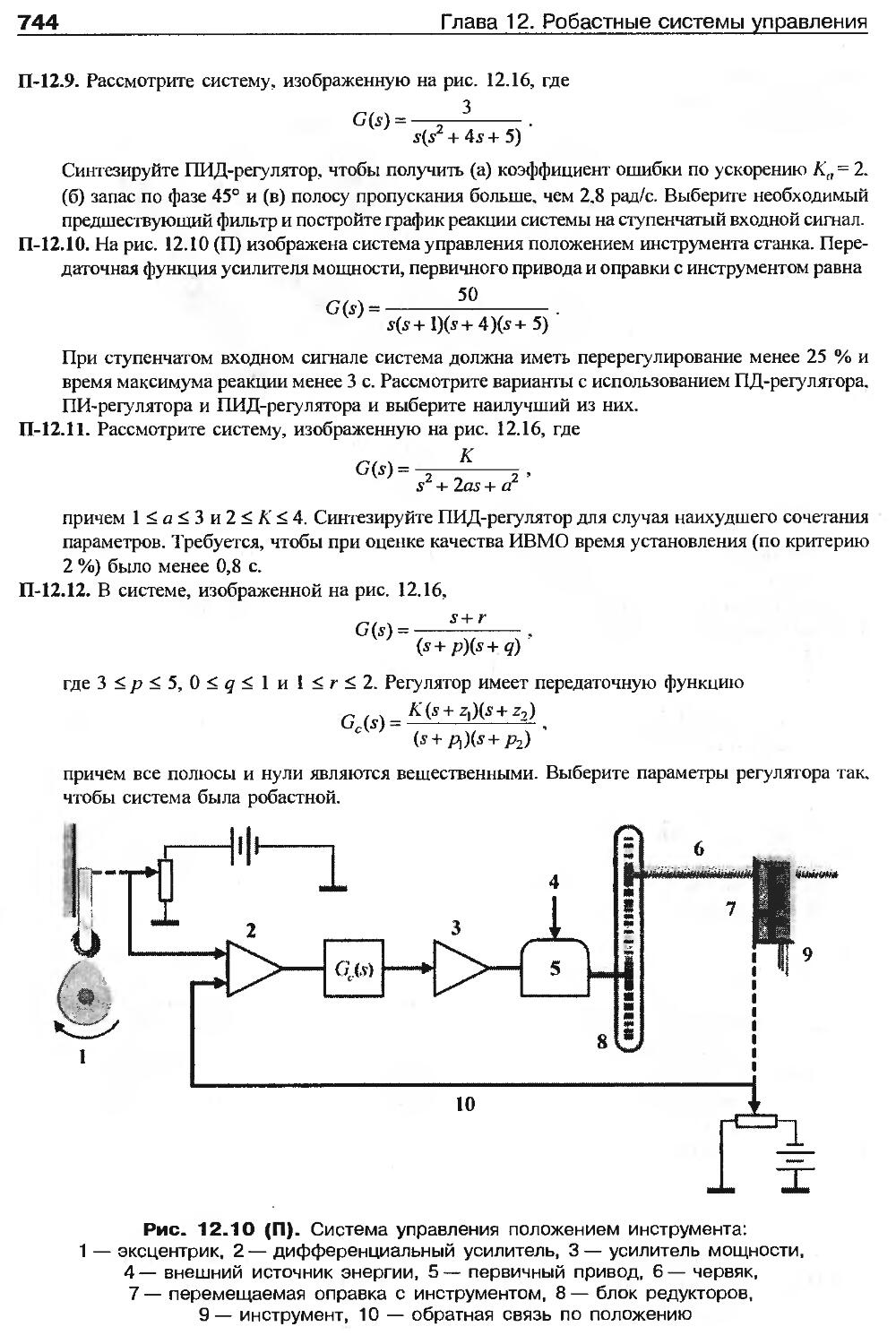
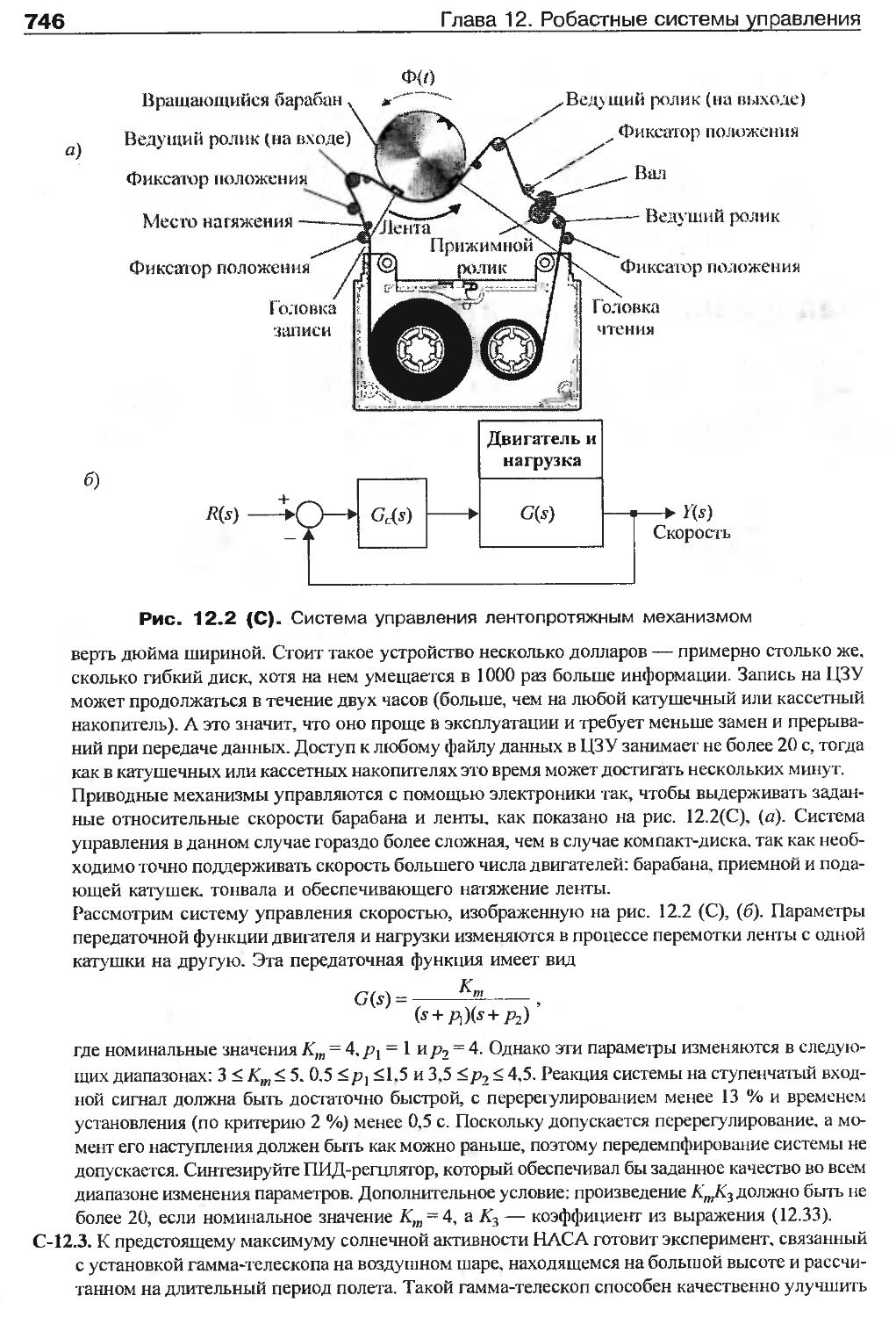
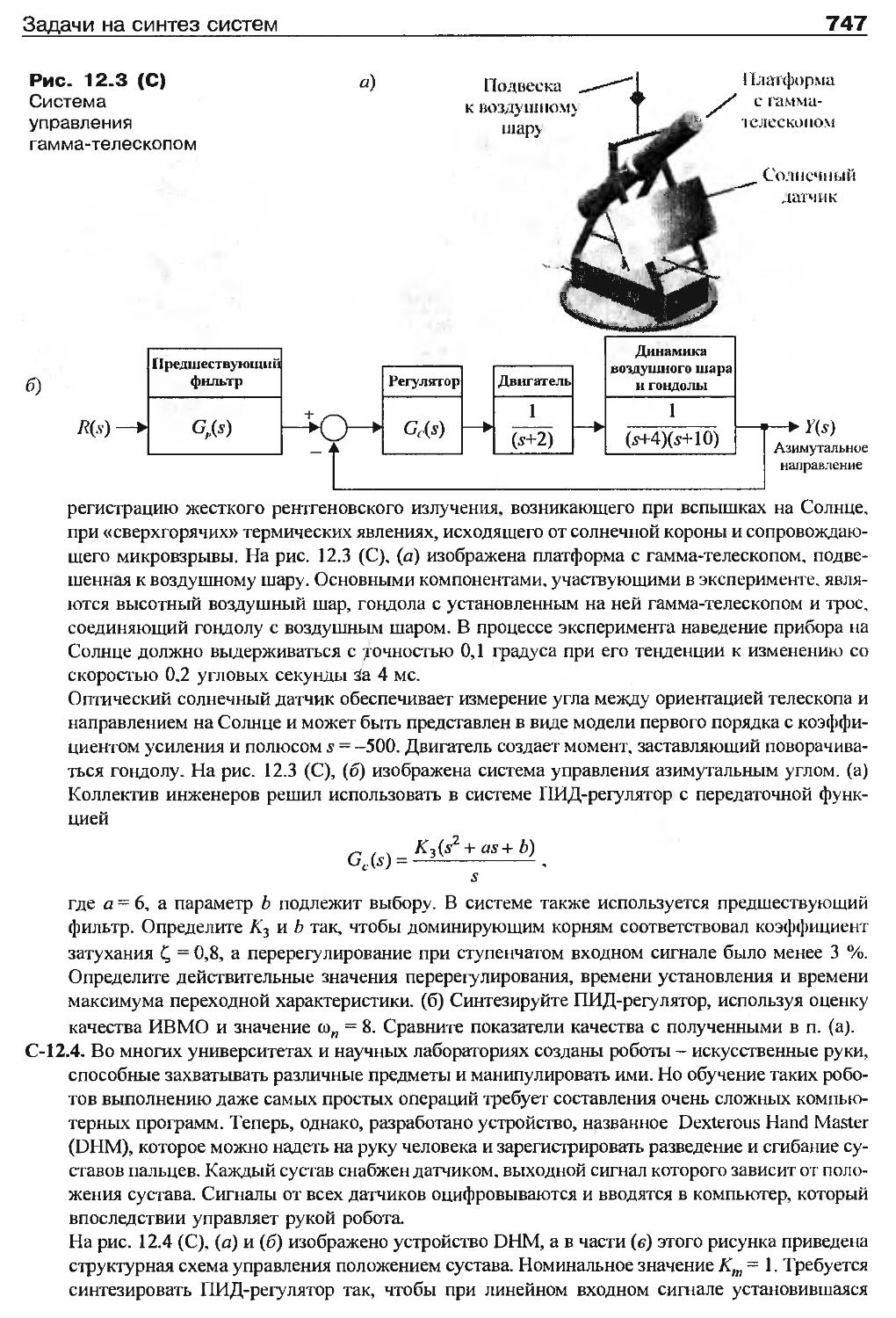
Задачи на синтез систем...........................................746
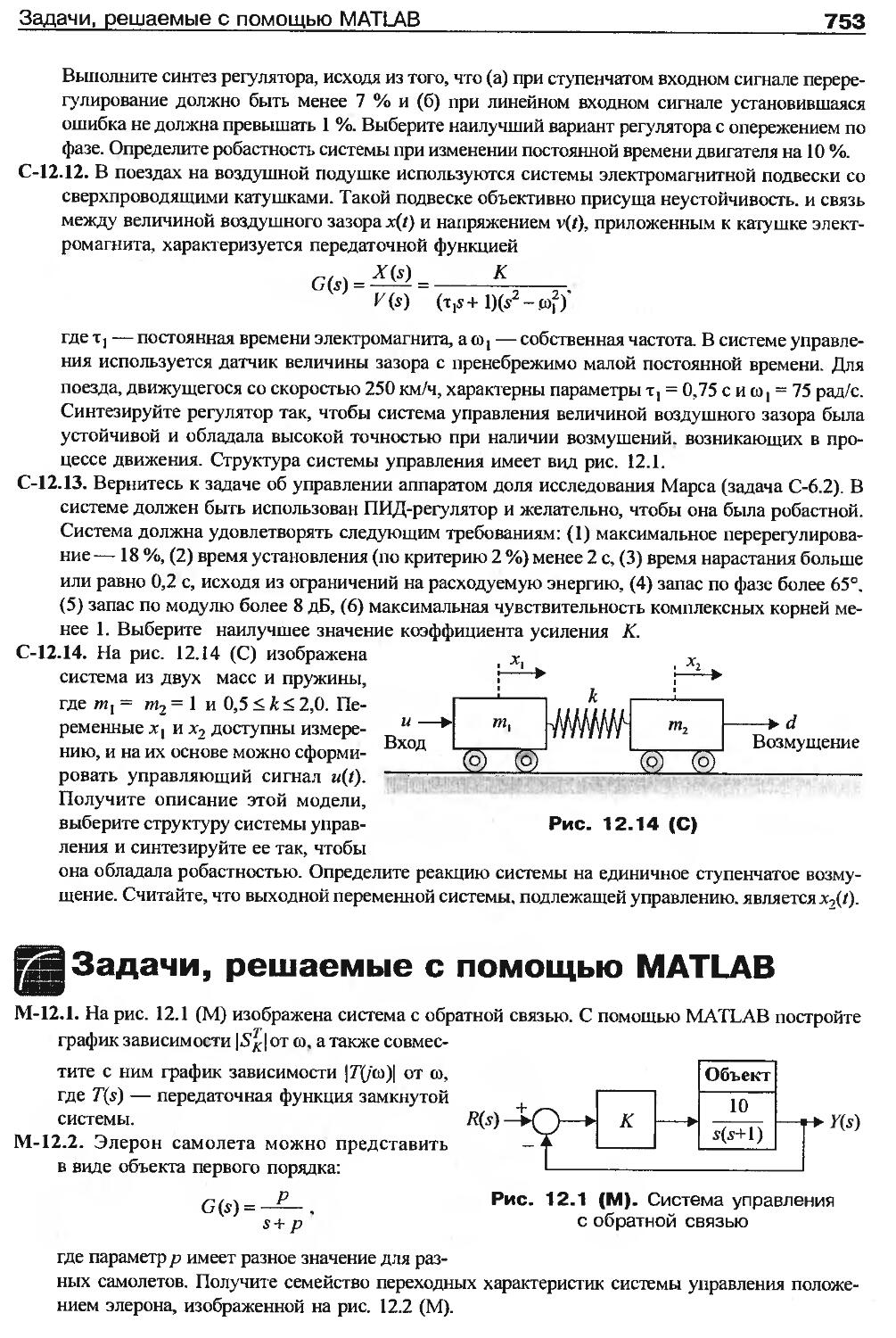
Задачи, решаемые с помощью MATLAB.................................754
Ключевые термины и понятия........................................756
Глава 13. Цифровые системы управления................................756
Обзор.............................................................756
13.1. Введение....................................................756
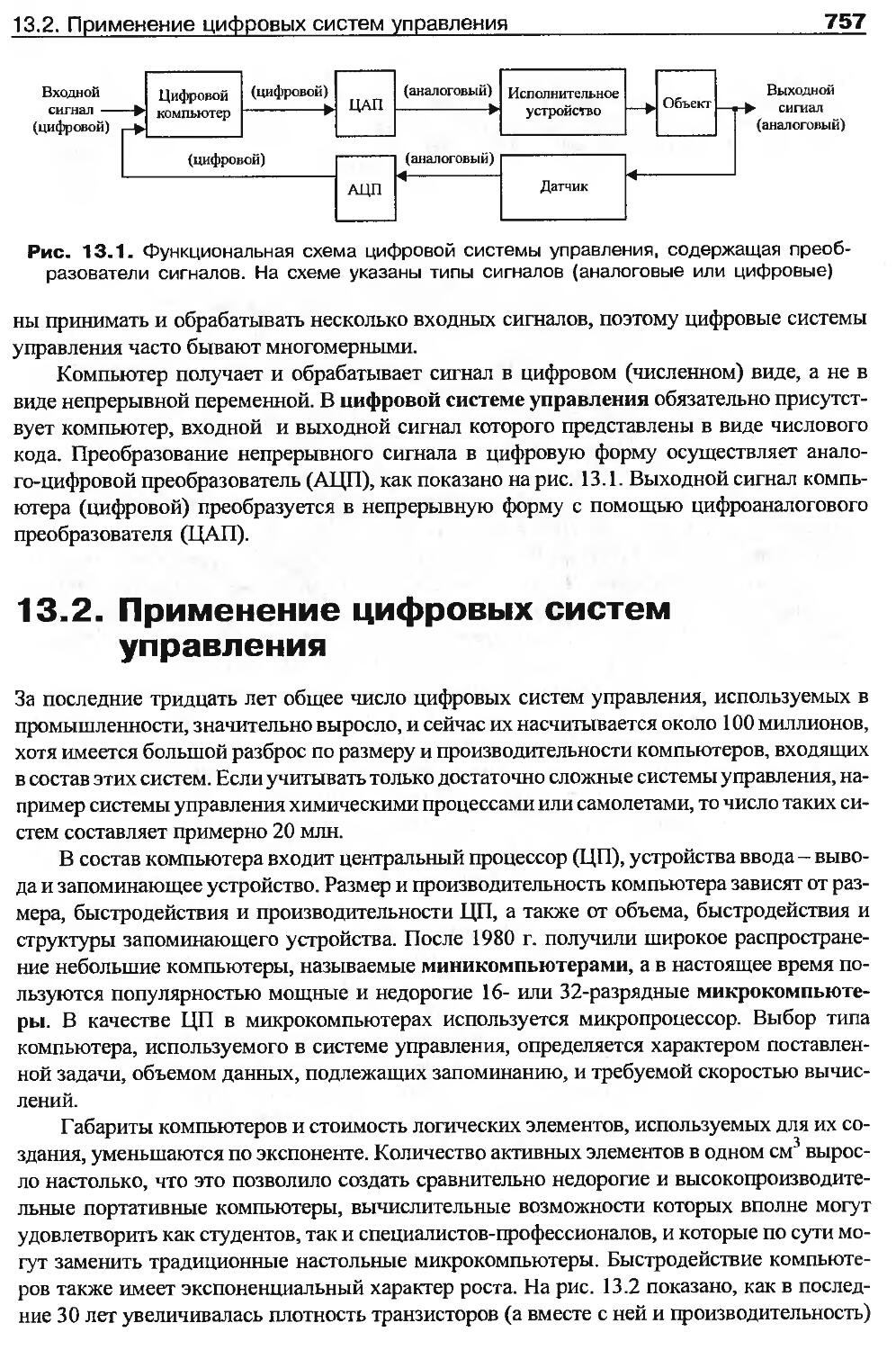
13.2. Применение цифровых систем управления.......................757
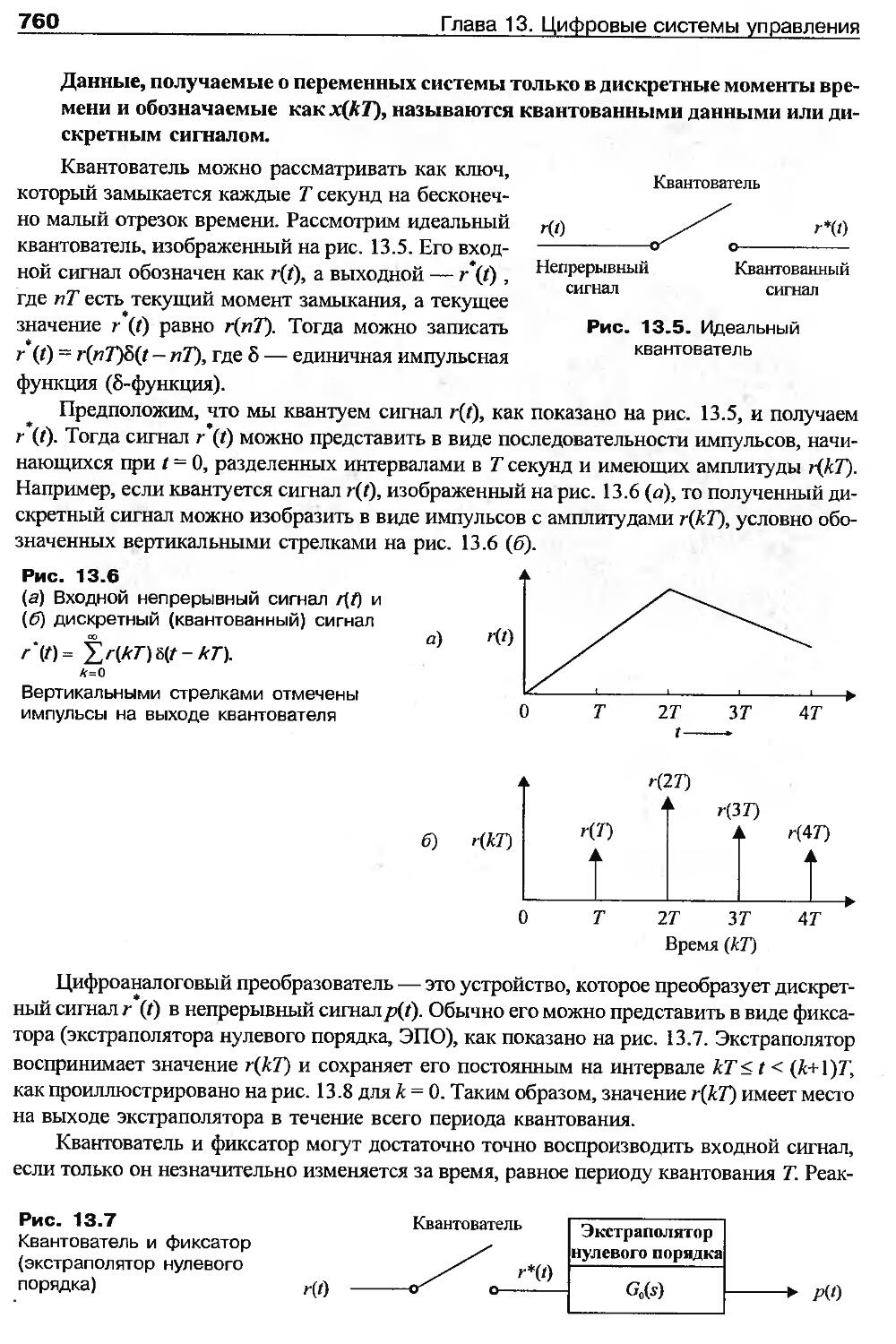
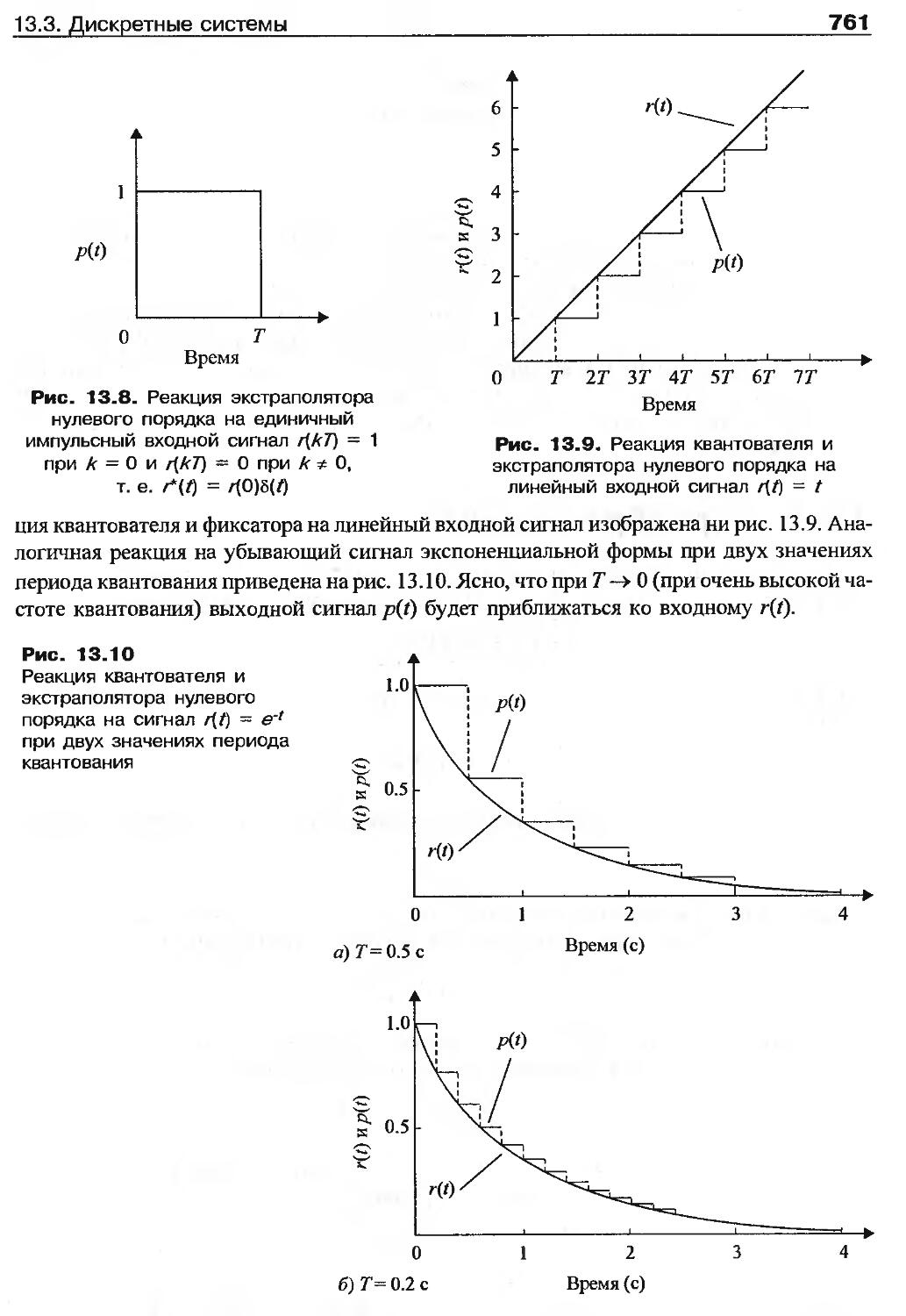
13.3. Дискретные системы..........................................759
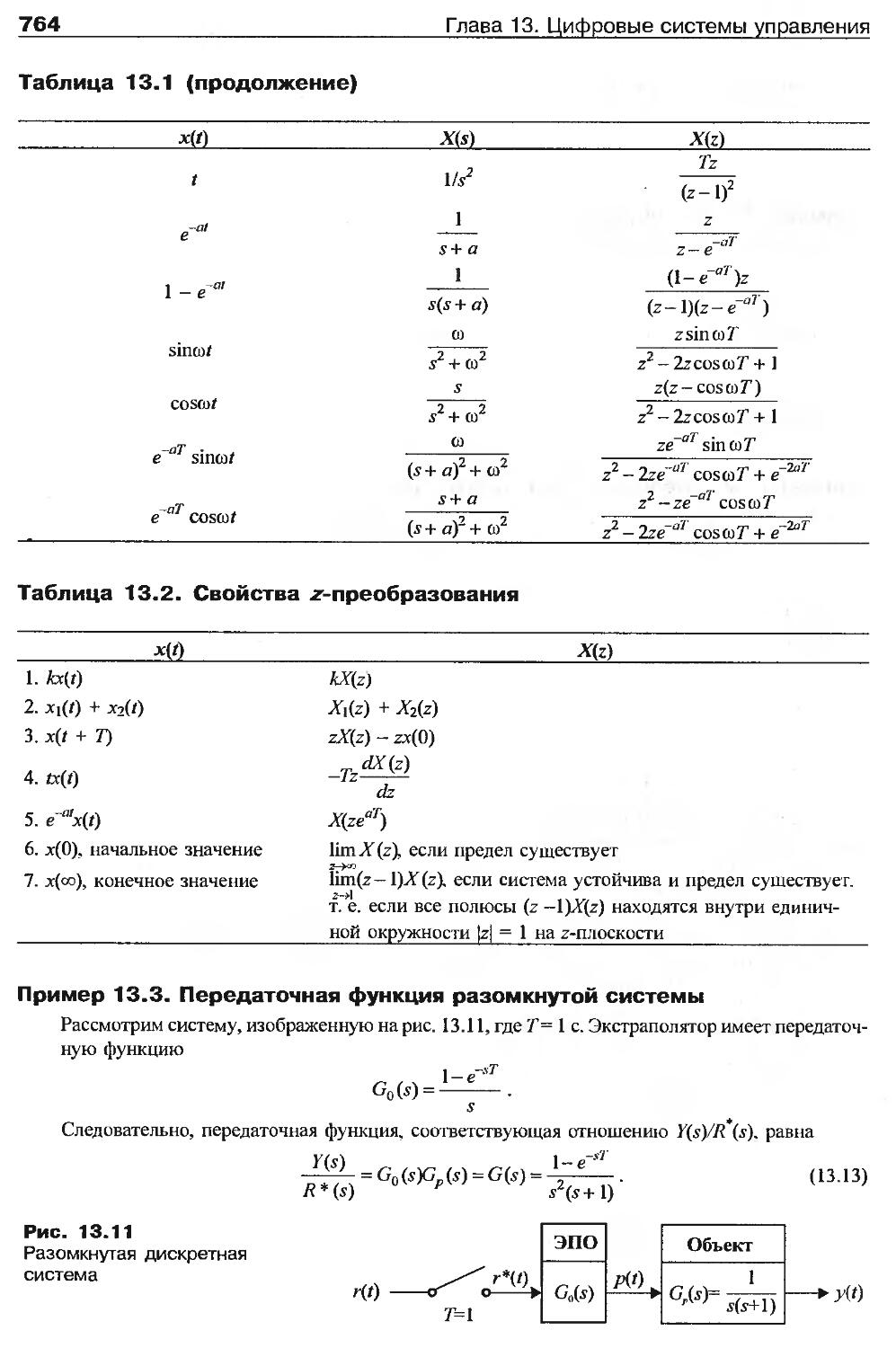
13.4. ^-преобразование............................................762
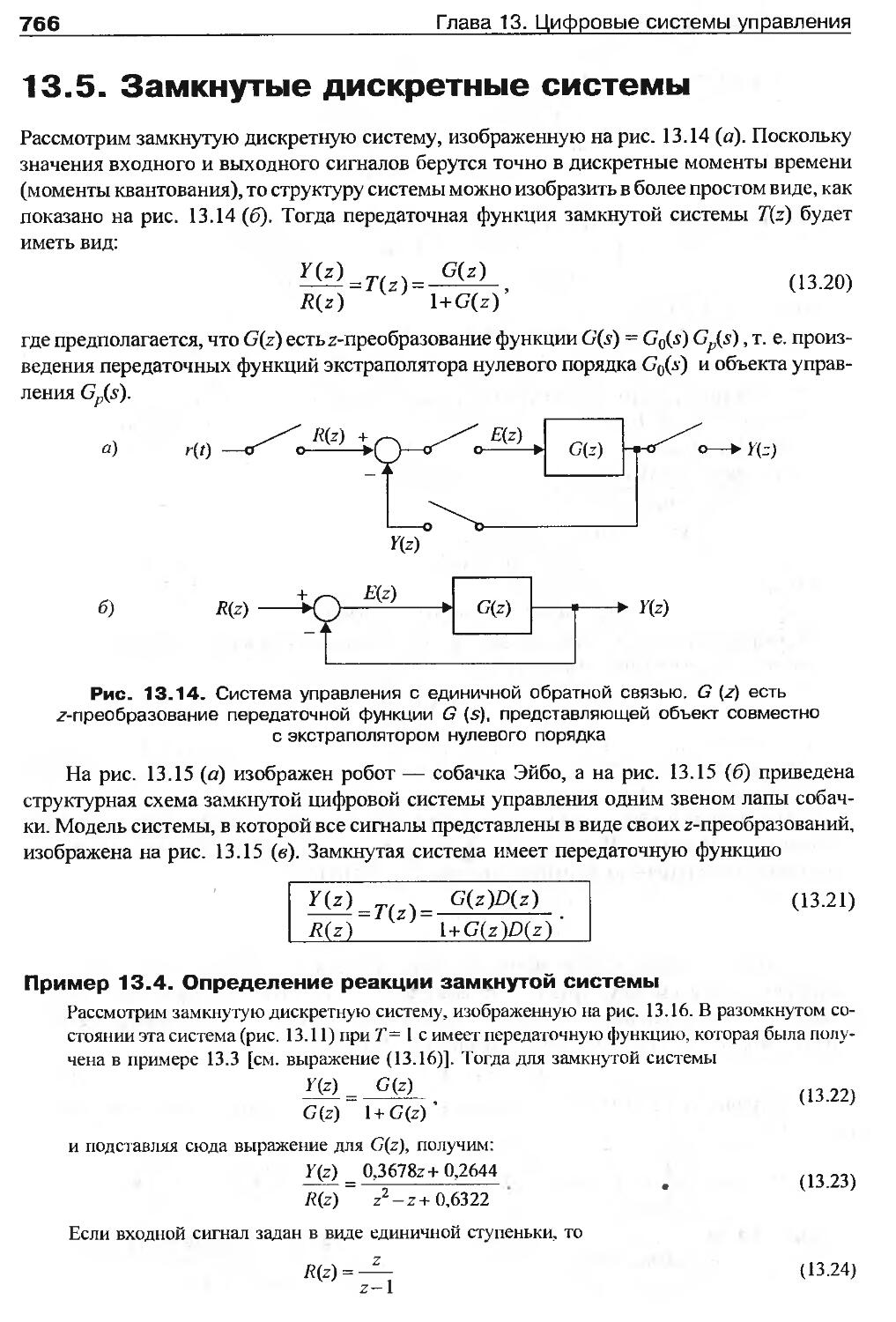
13.5. Замкнутые дискретные системы................................766
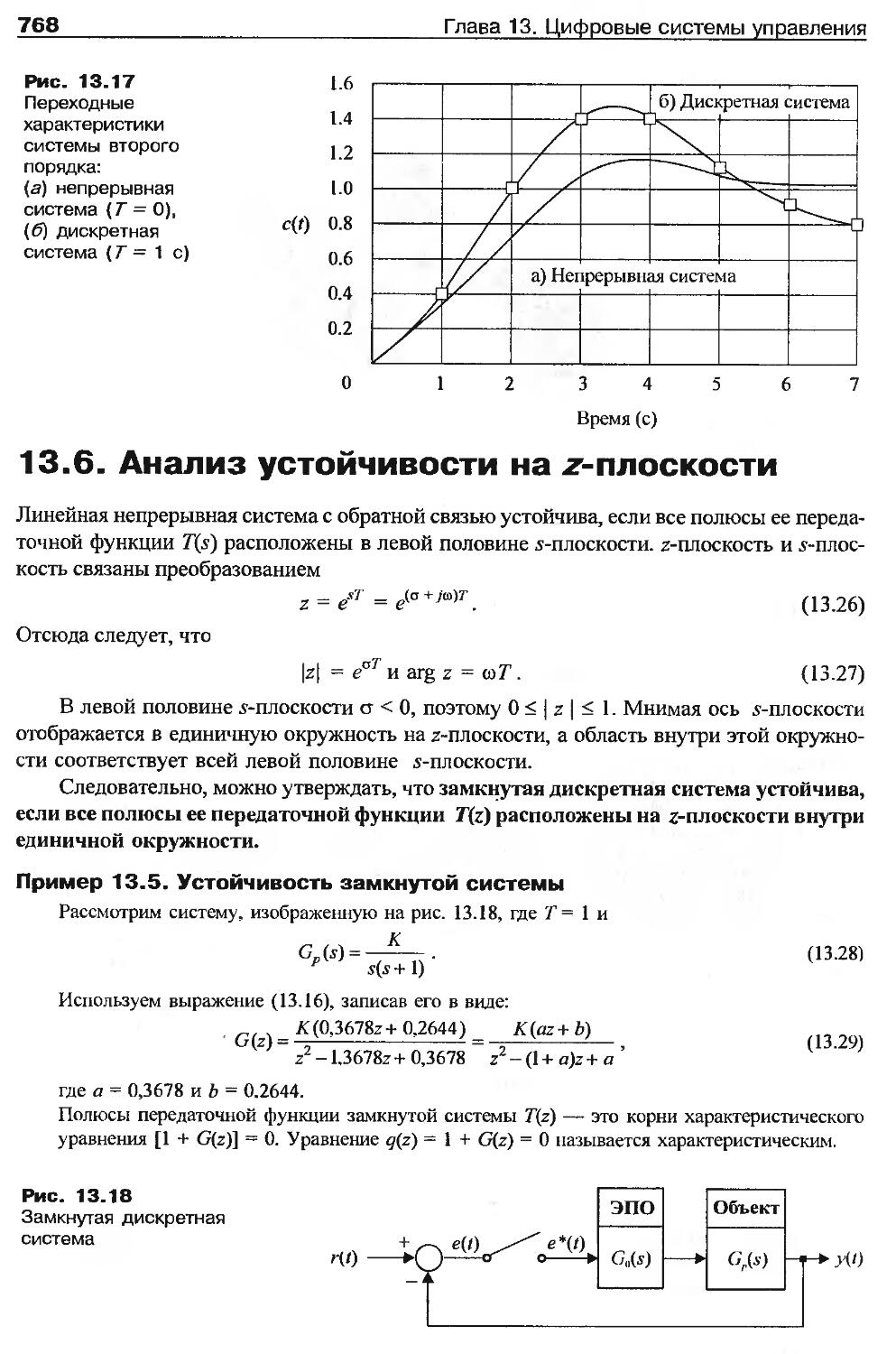
13.6. Анализ устойчивости на z-плоскости..........................768
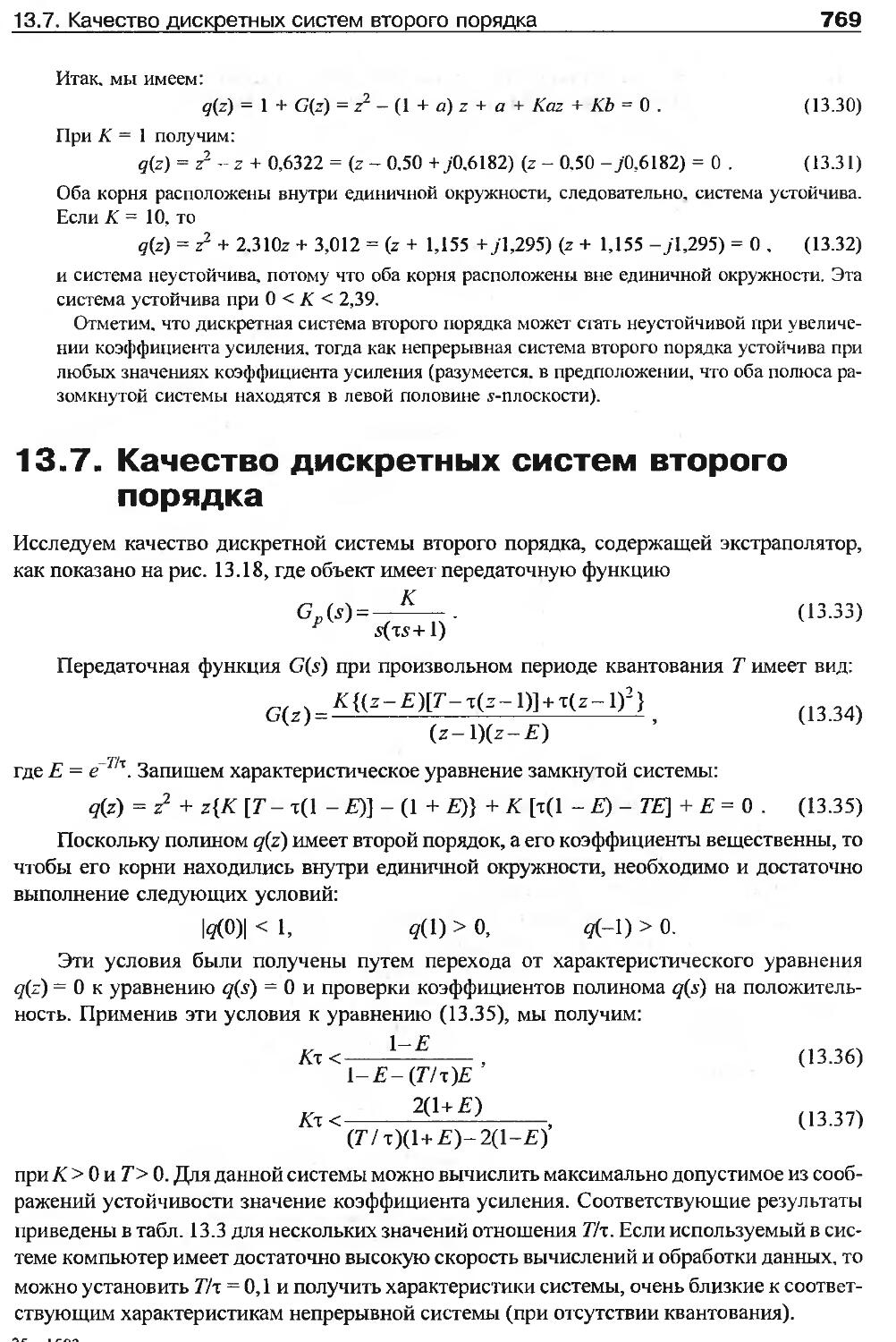
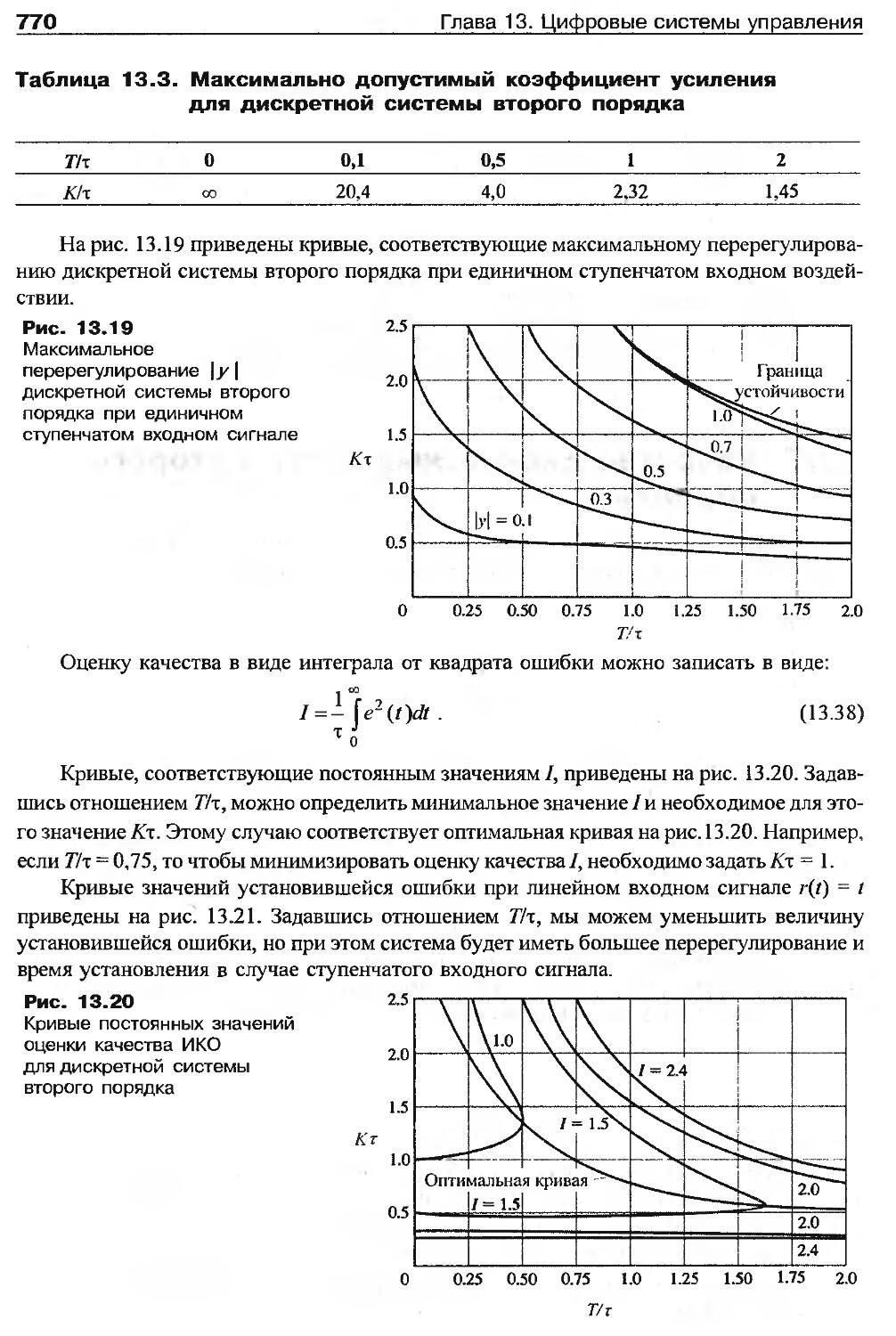
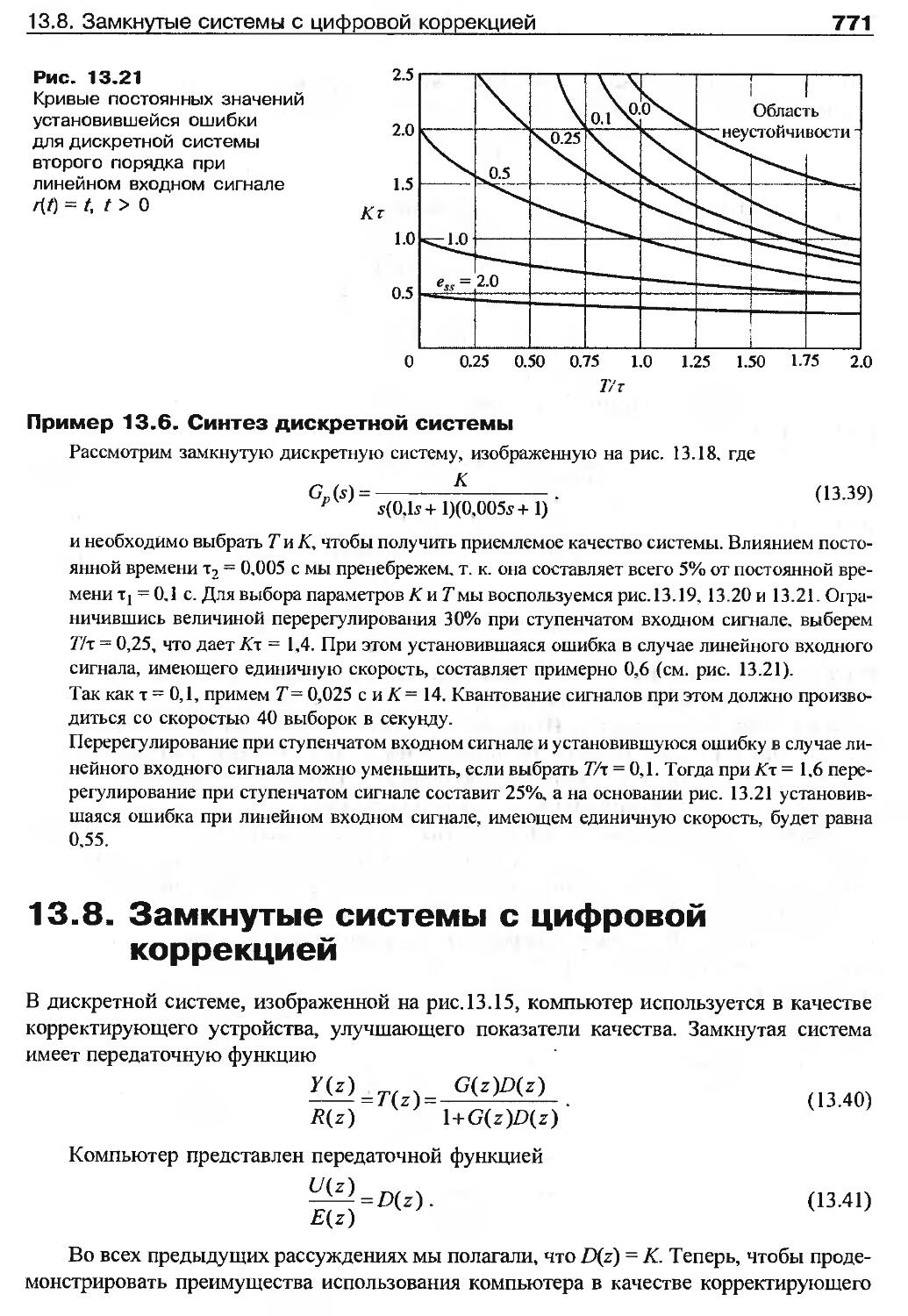
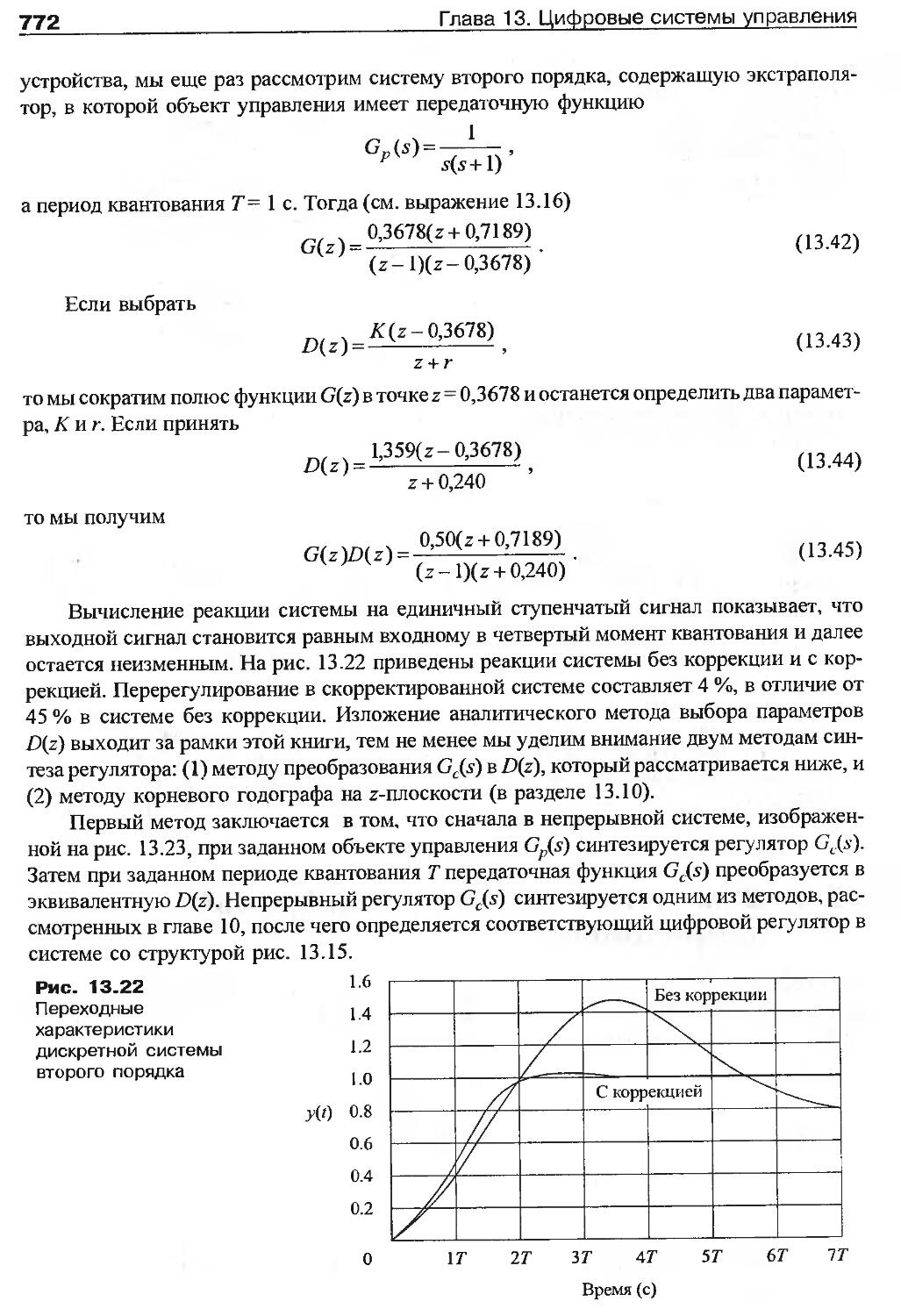
13.7. Качество дискретных систем второго порядка..................769
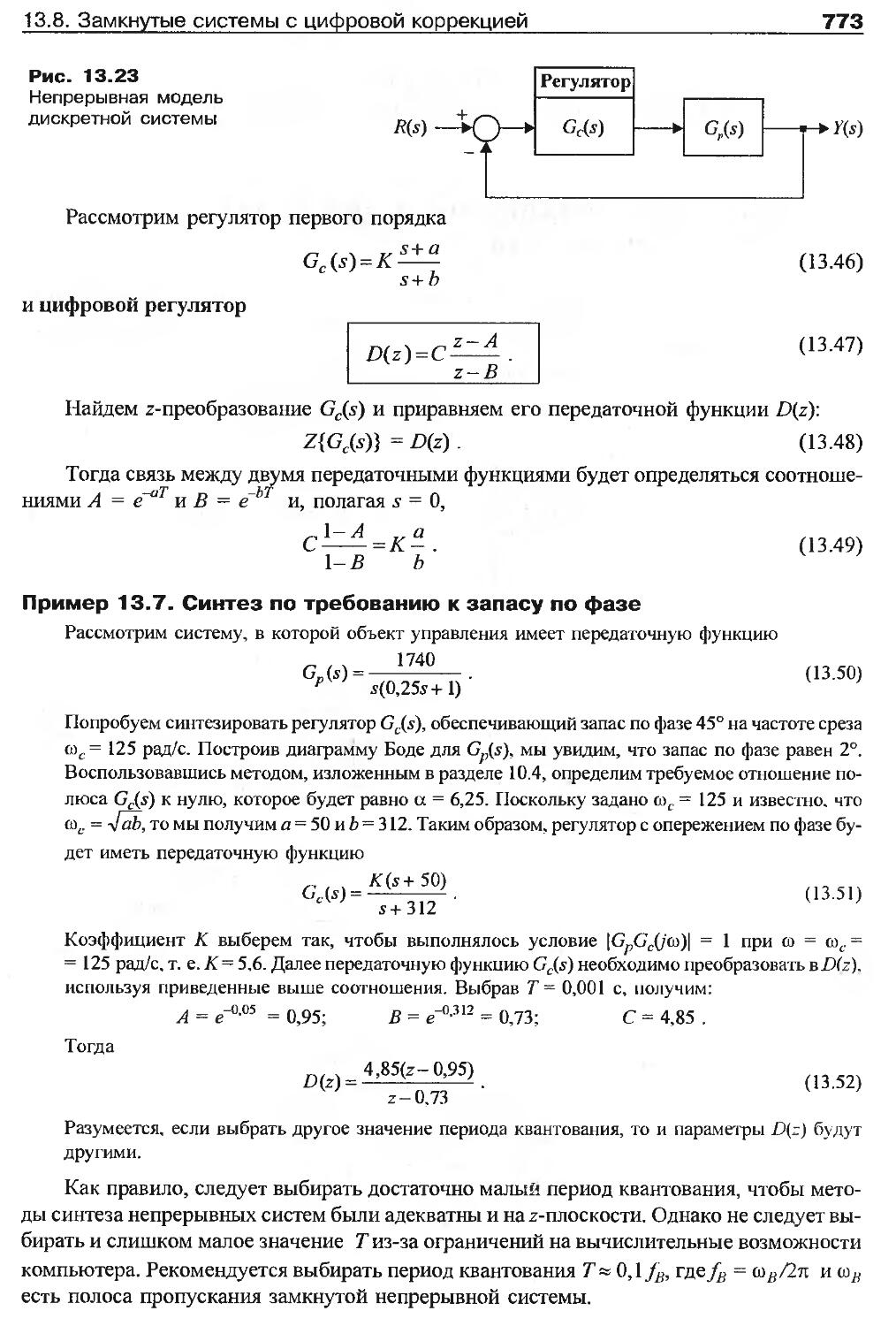
13.8. Замкнутые системы с цифровой коррекцией.....................771
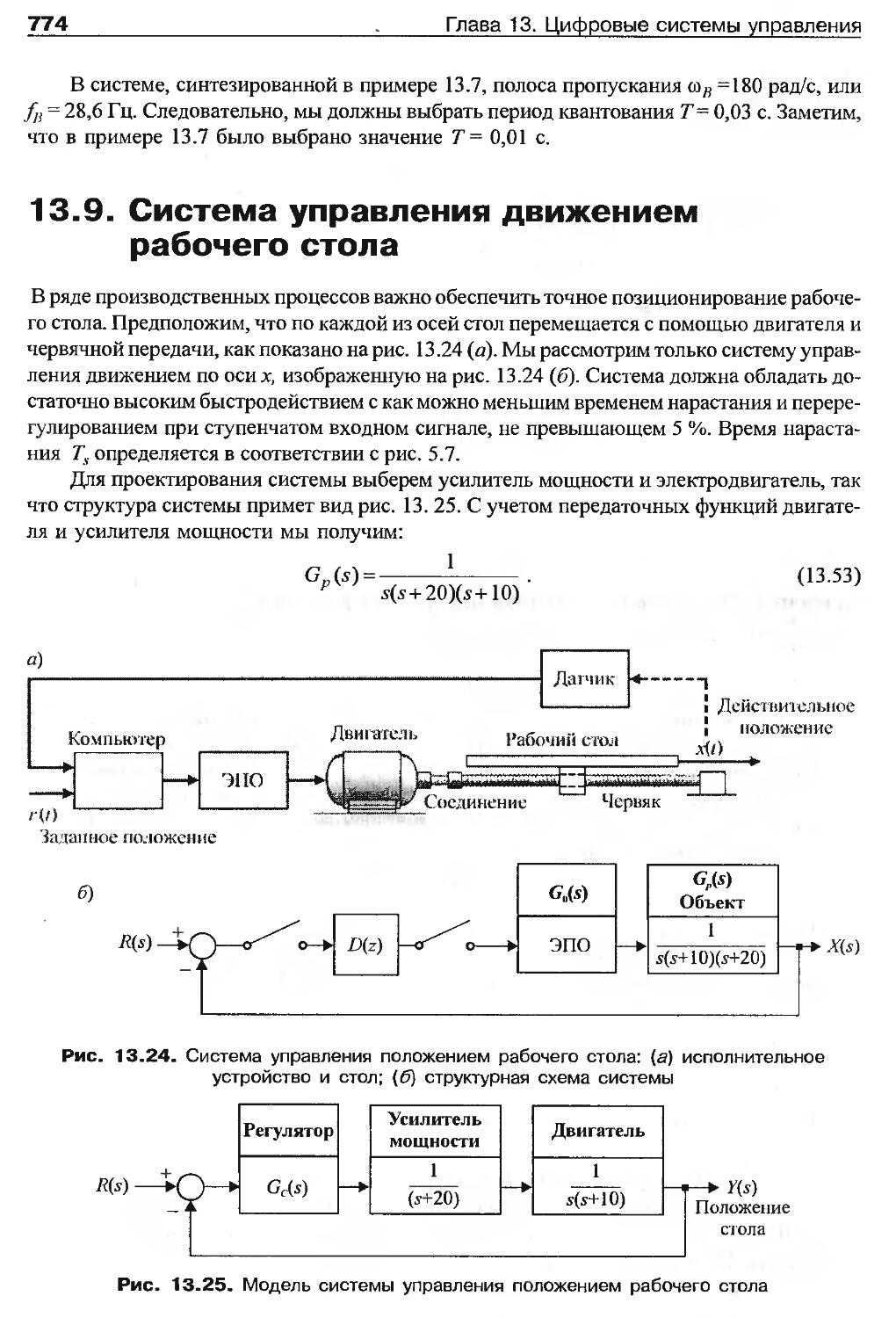
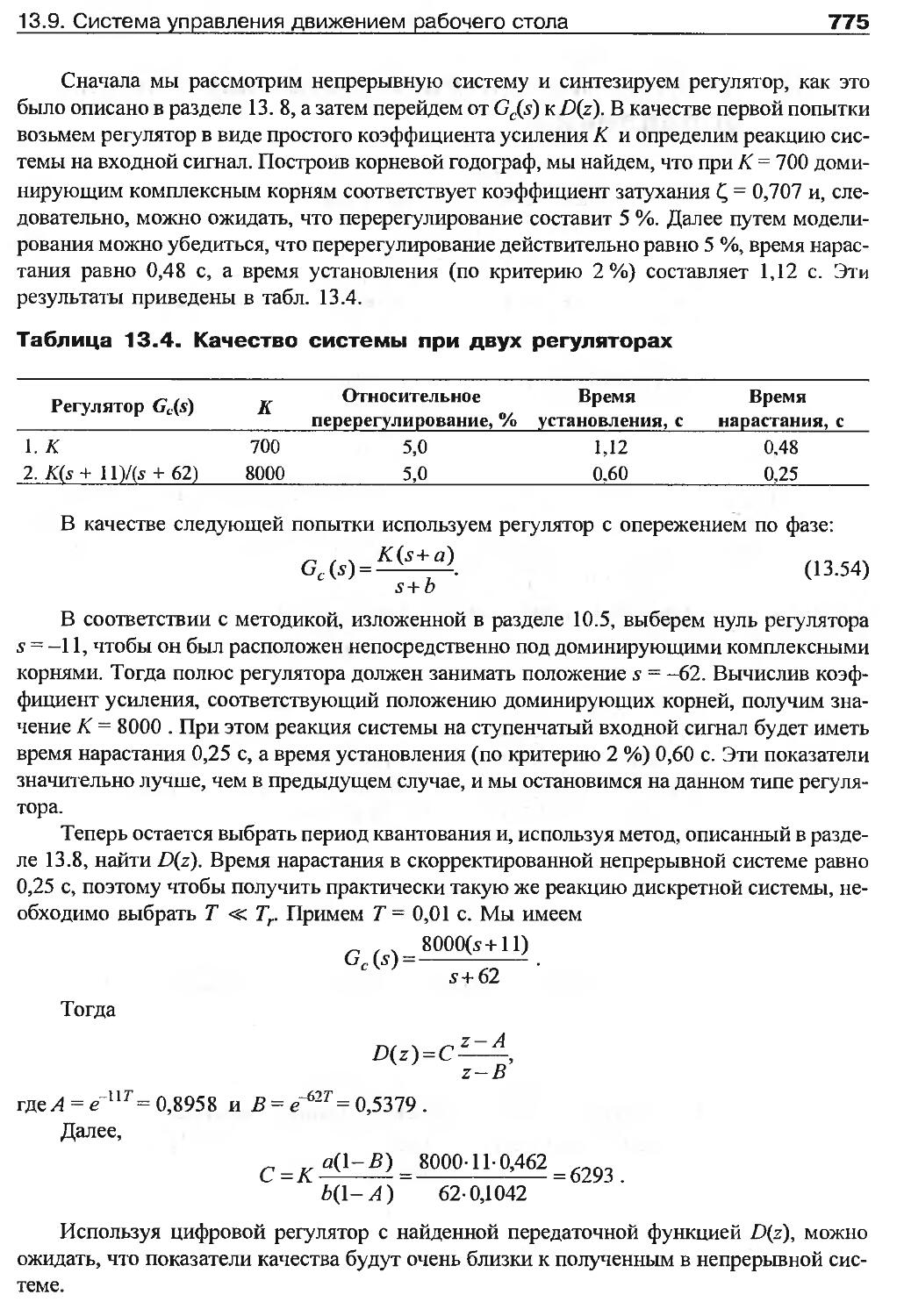
13.9. Система управления движением рабочего стола.................774
13.10. Корневой годограф цифровых систем управления...............776
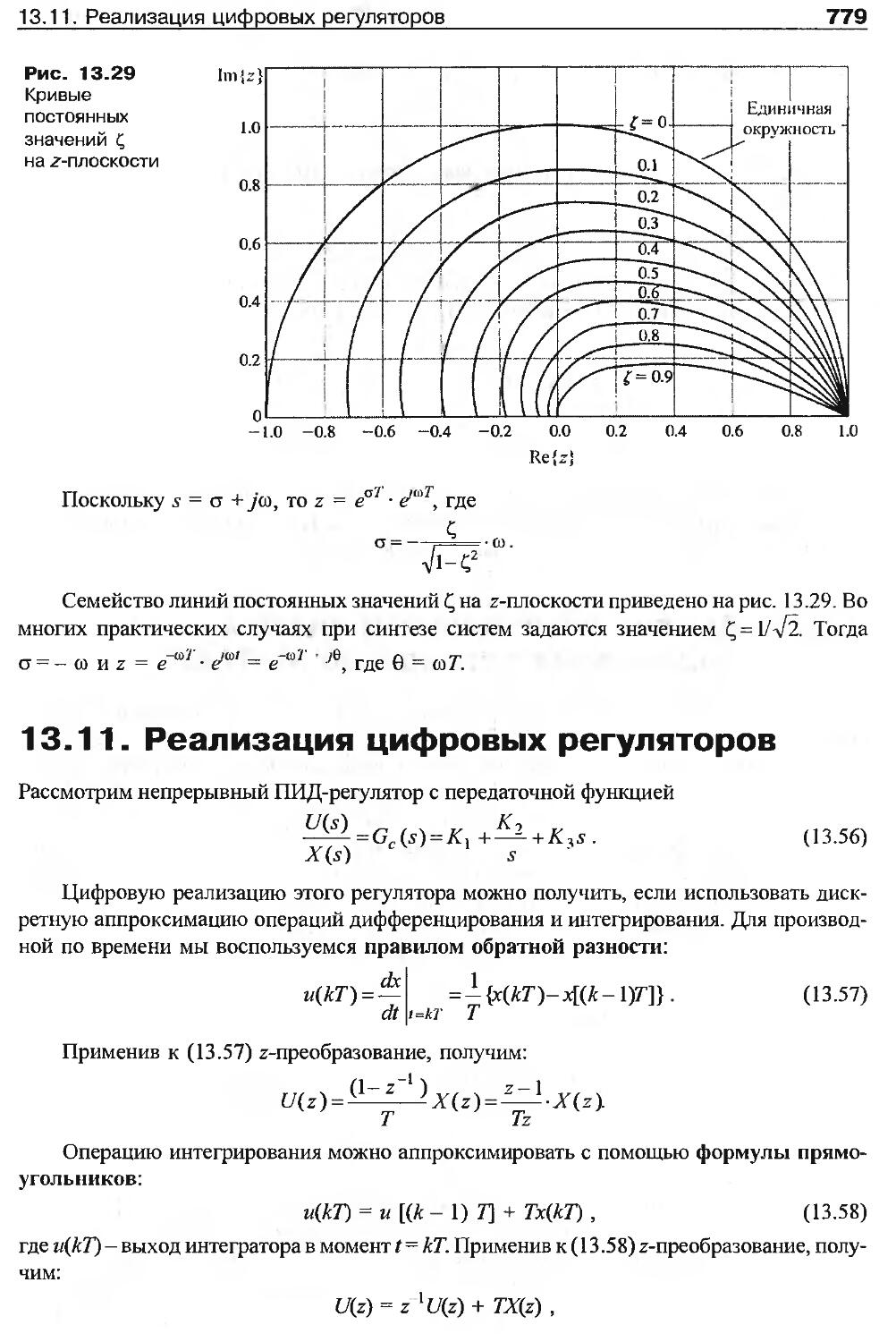
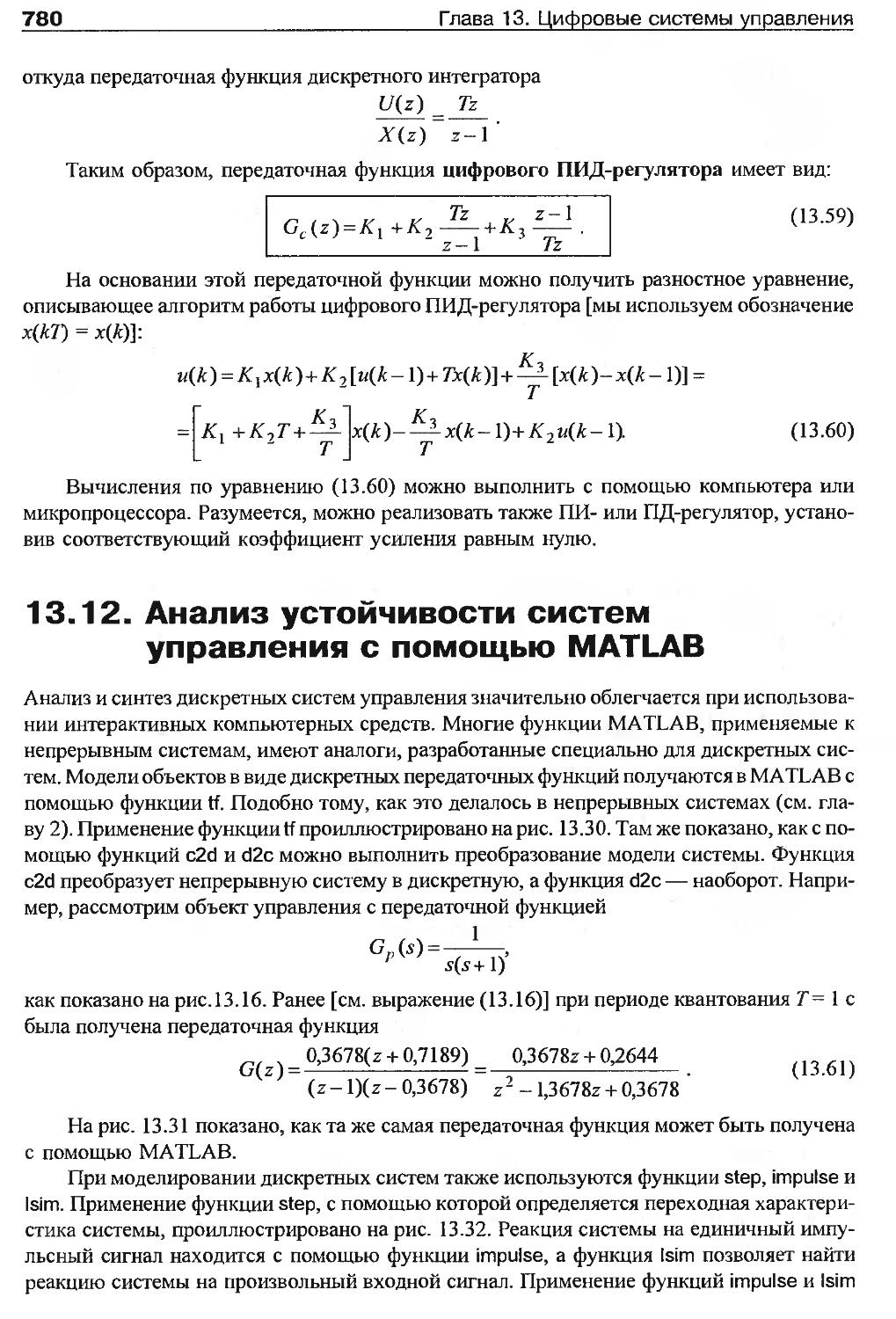
13.11. Реализация цифровых регуляторов . .........................779
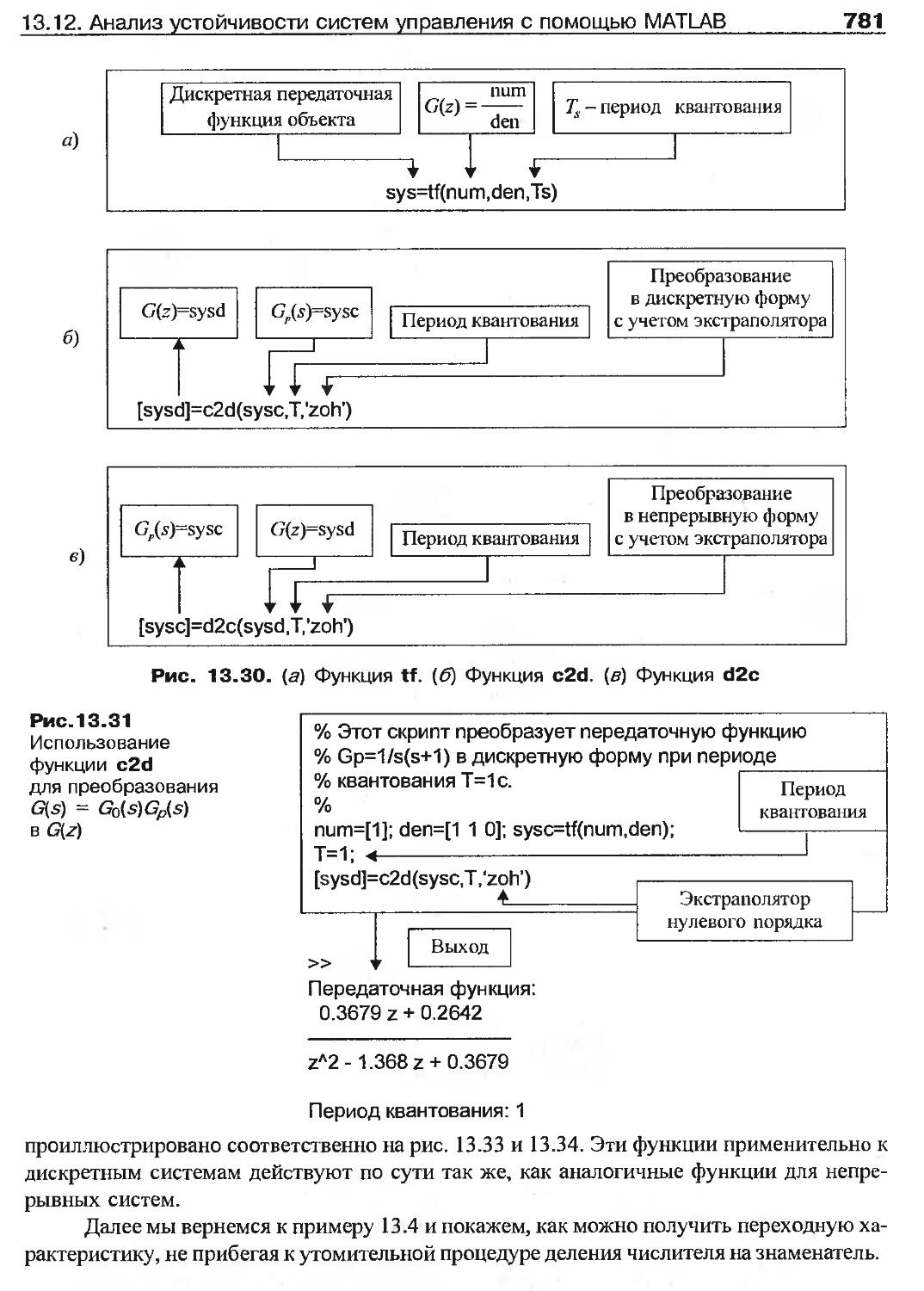
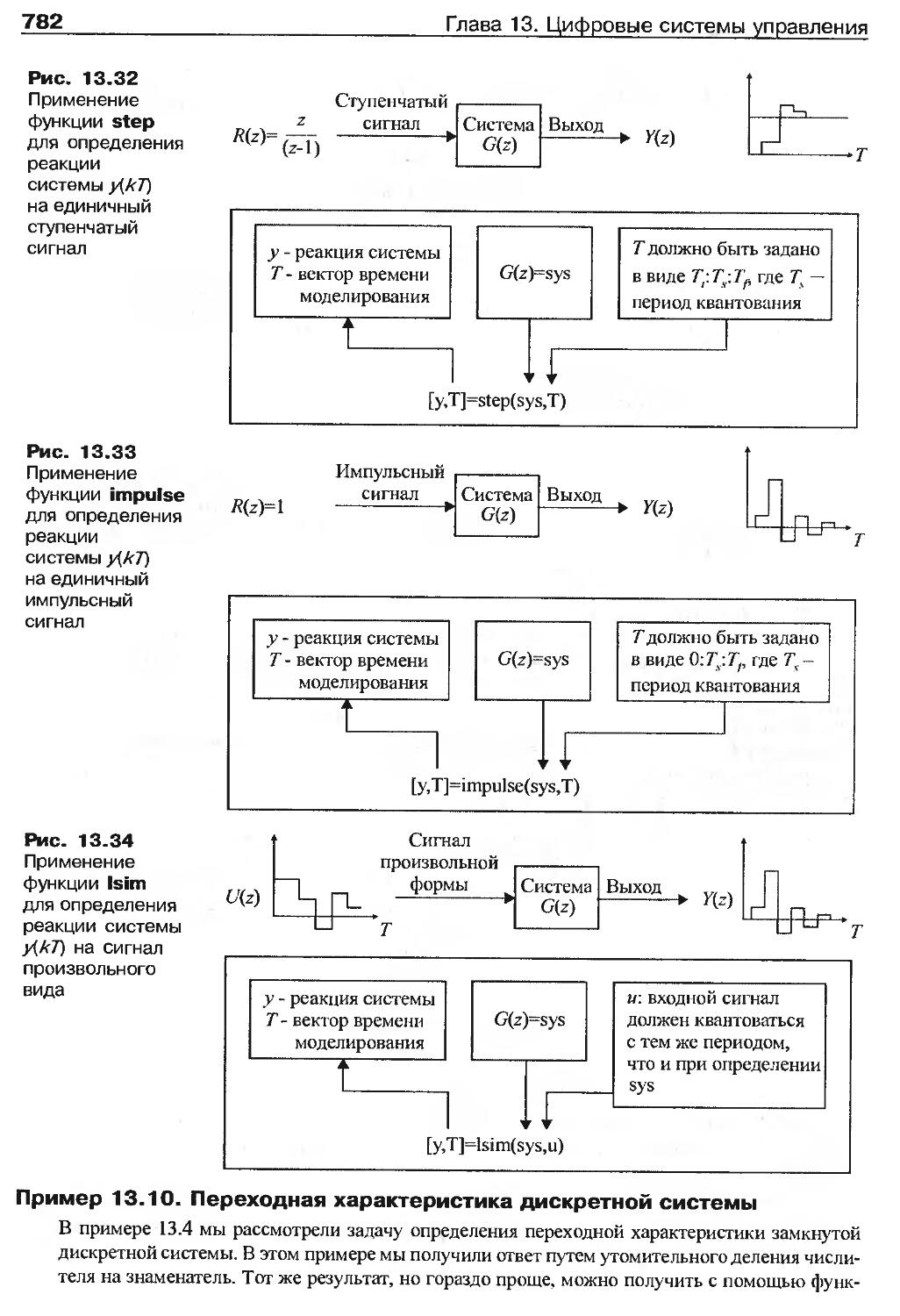
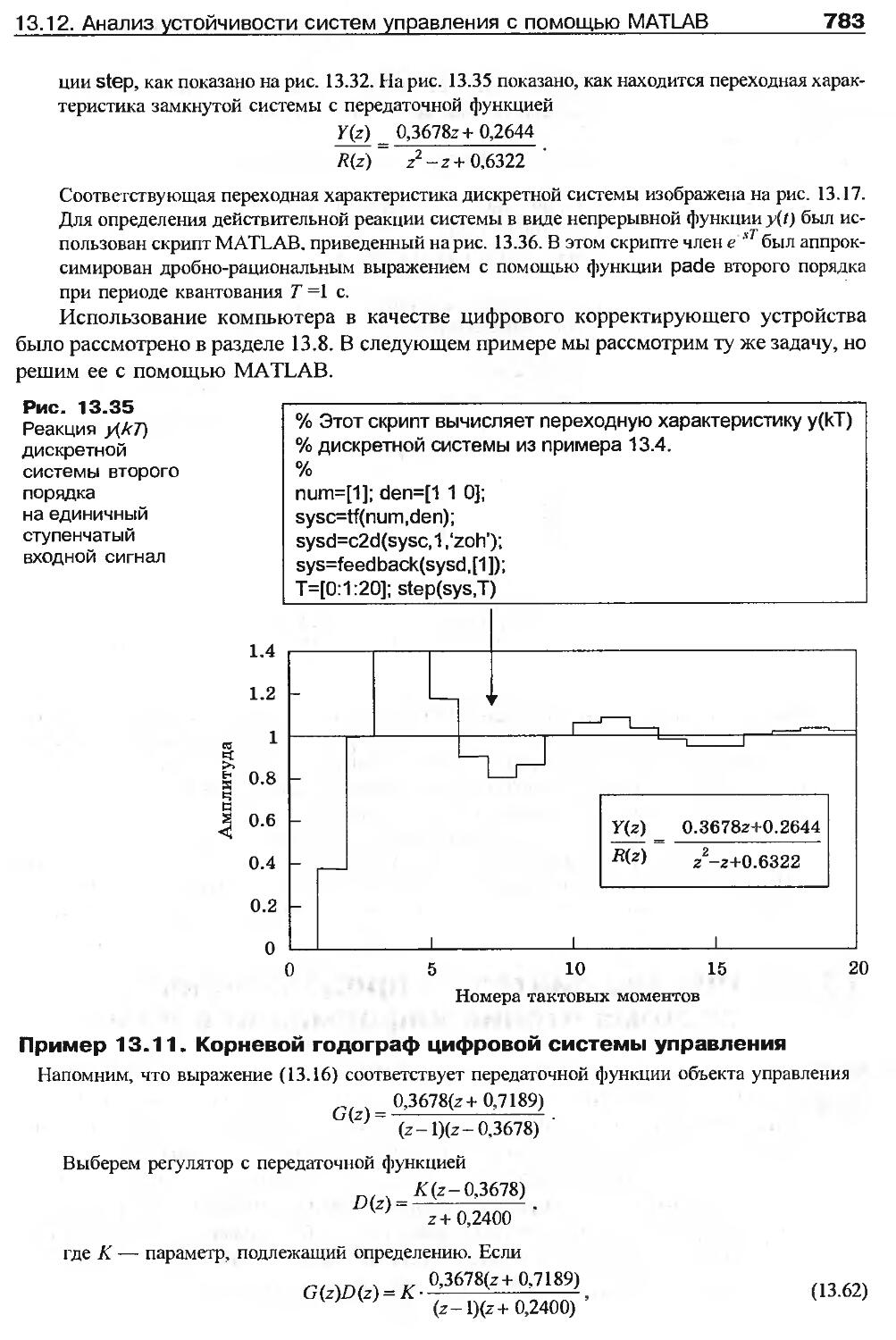
13.12. Анализ цифровых систем управления с помощью MATLAB.........780
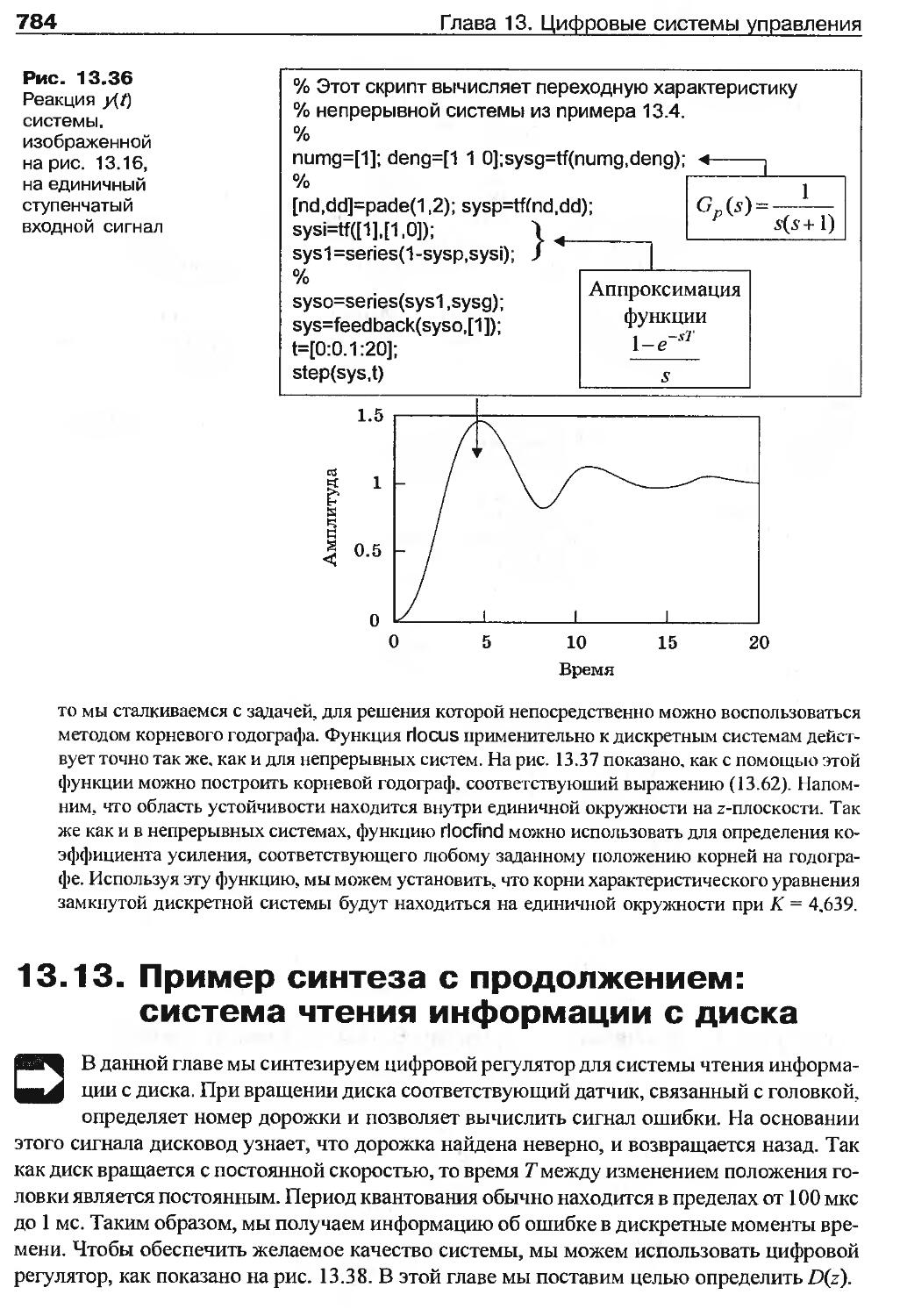
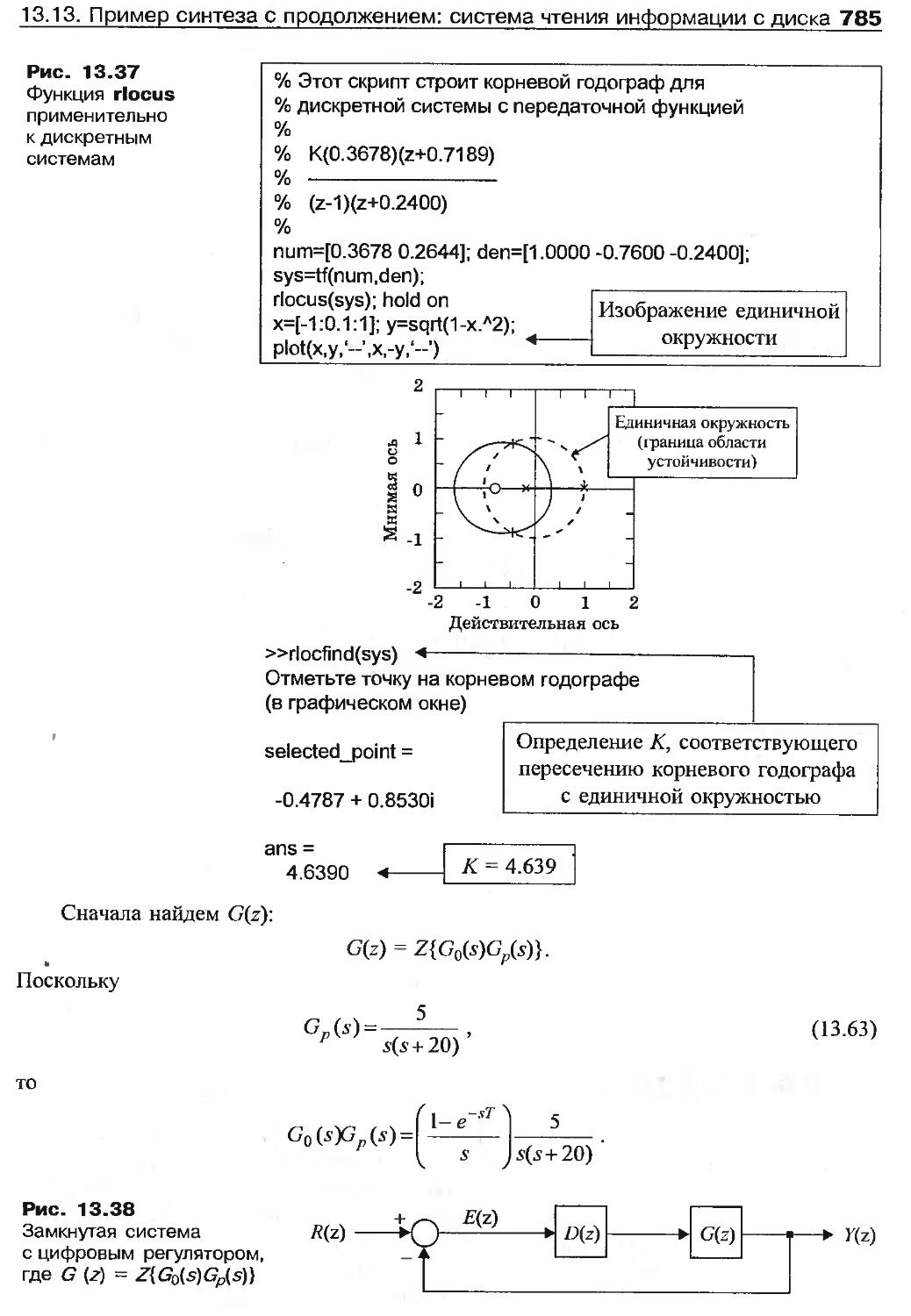
13.13. Пример синтеза с продолжением: система чтения информации с диска . . 784
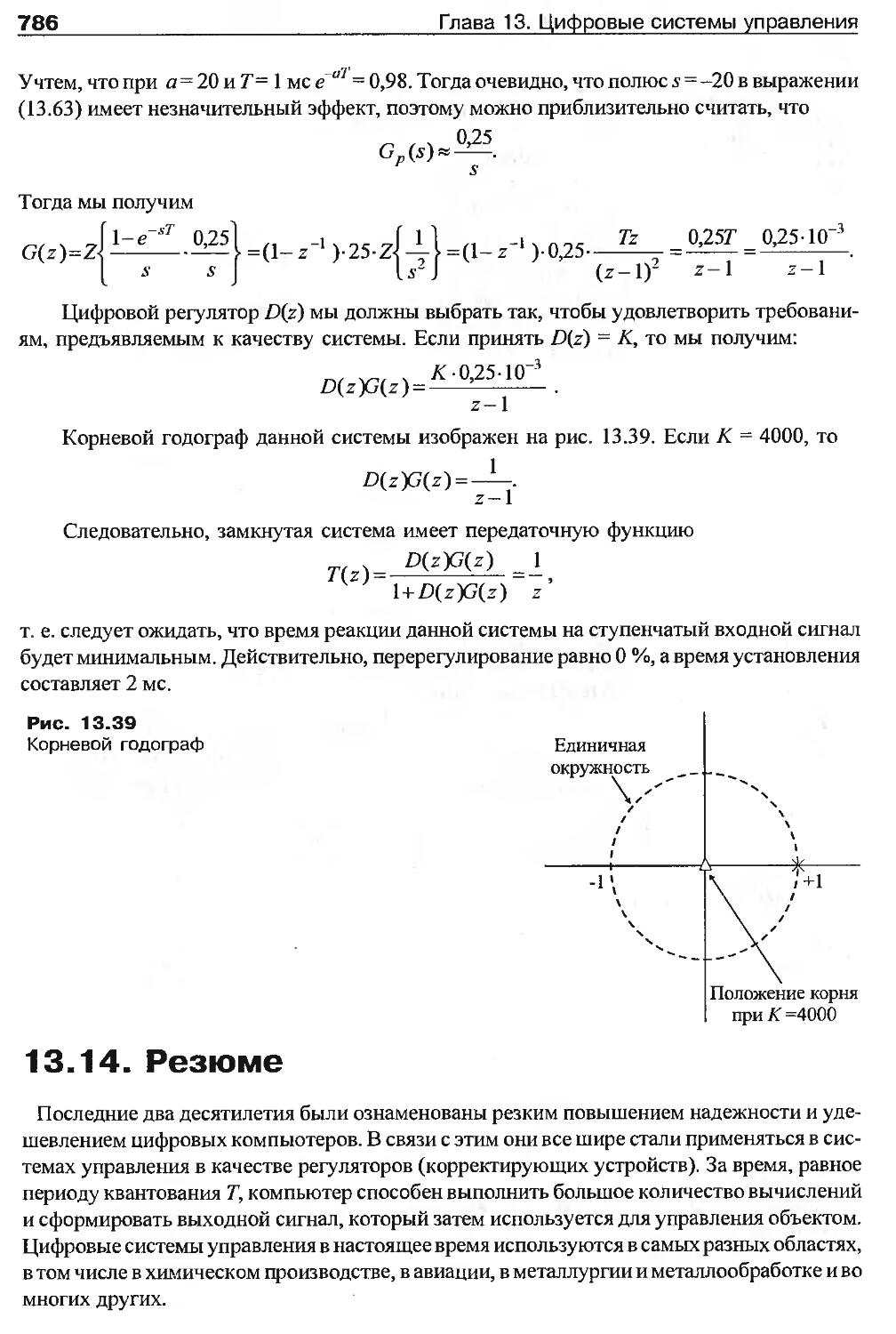
13.14. Резюме.....................................................786
Упражнения........................................................787
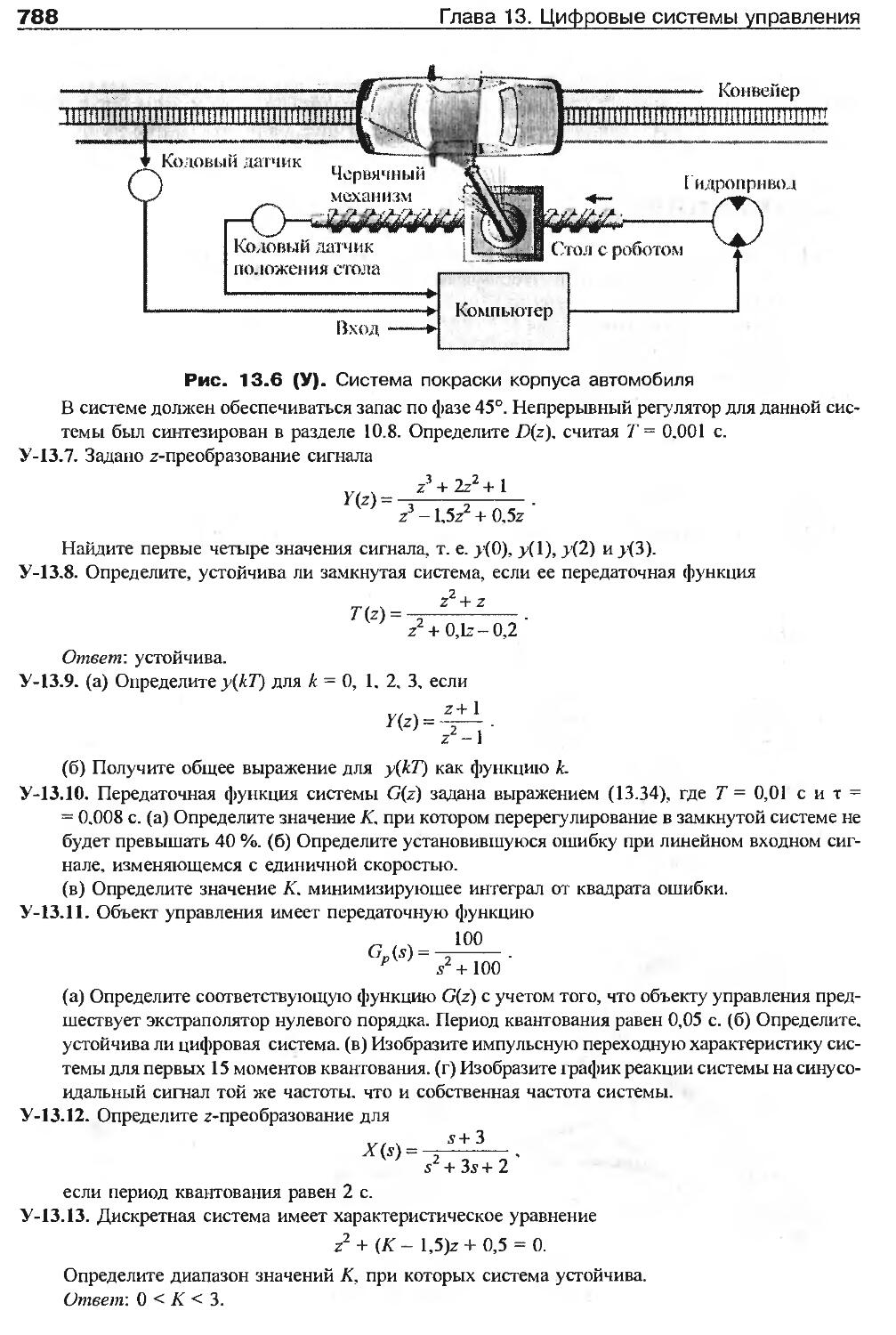
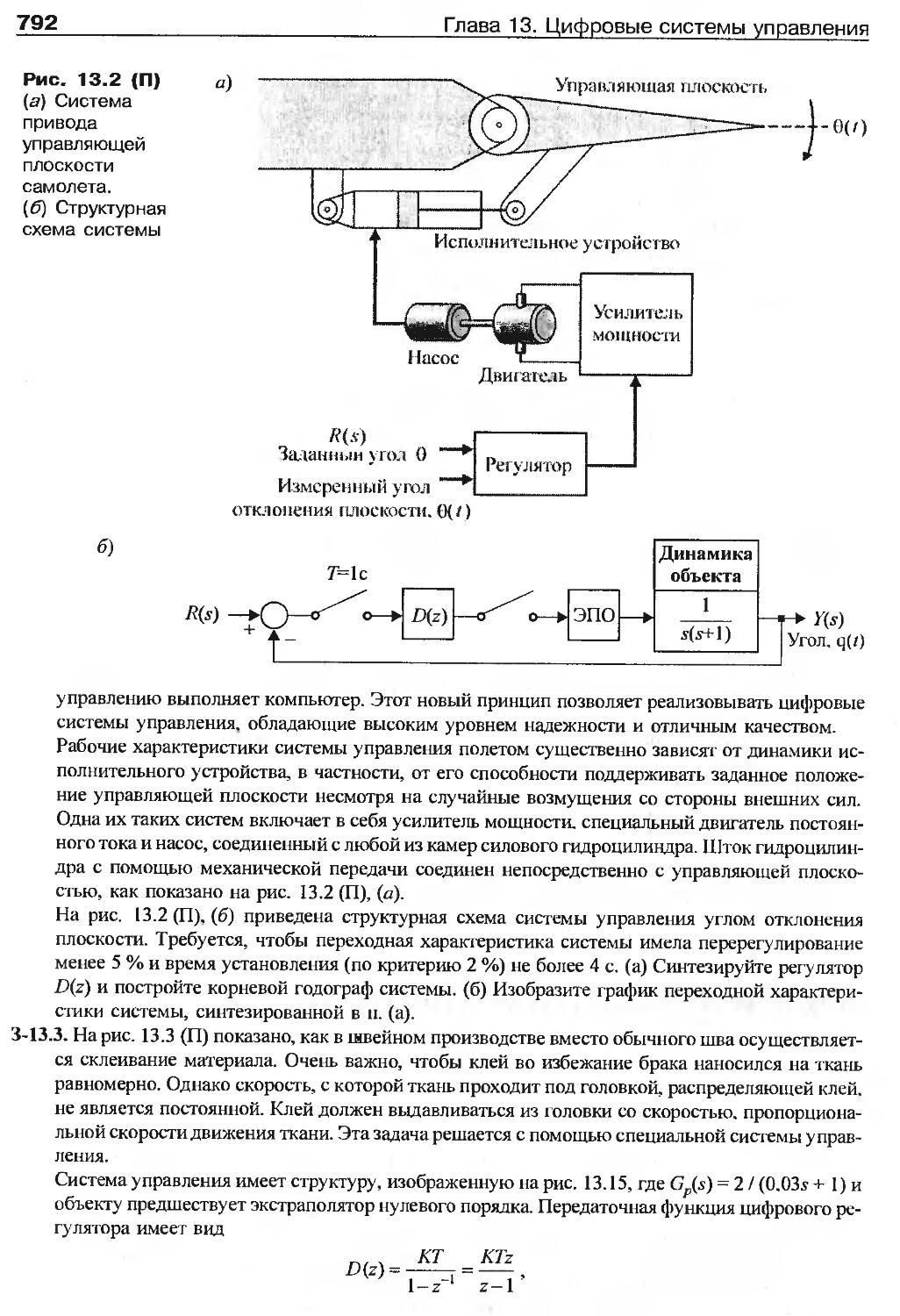
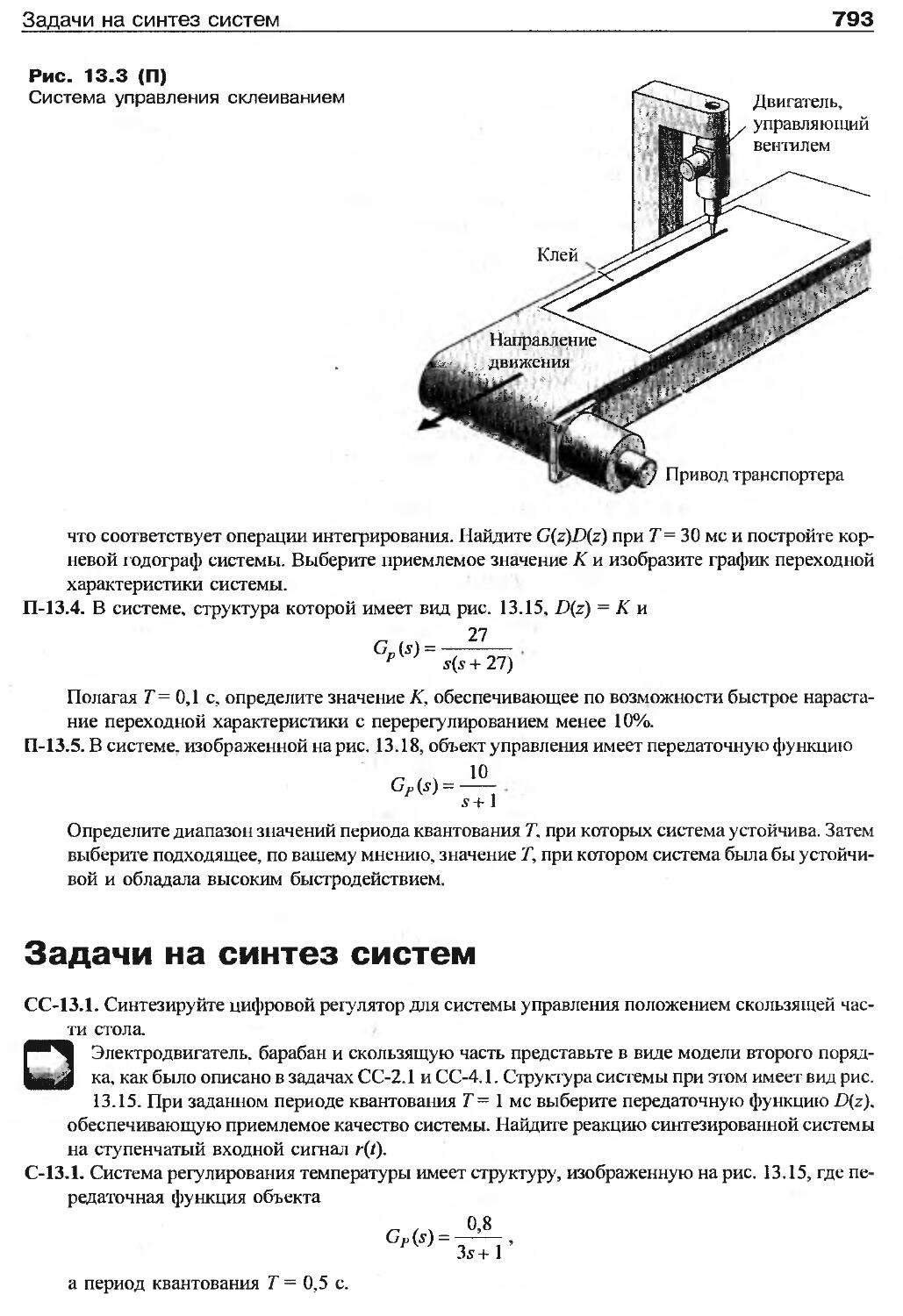
Задачи .......................................................... 789
Задачи повышенной сложности.......................................791
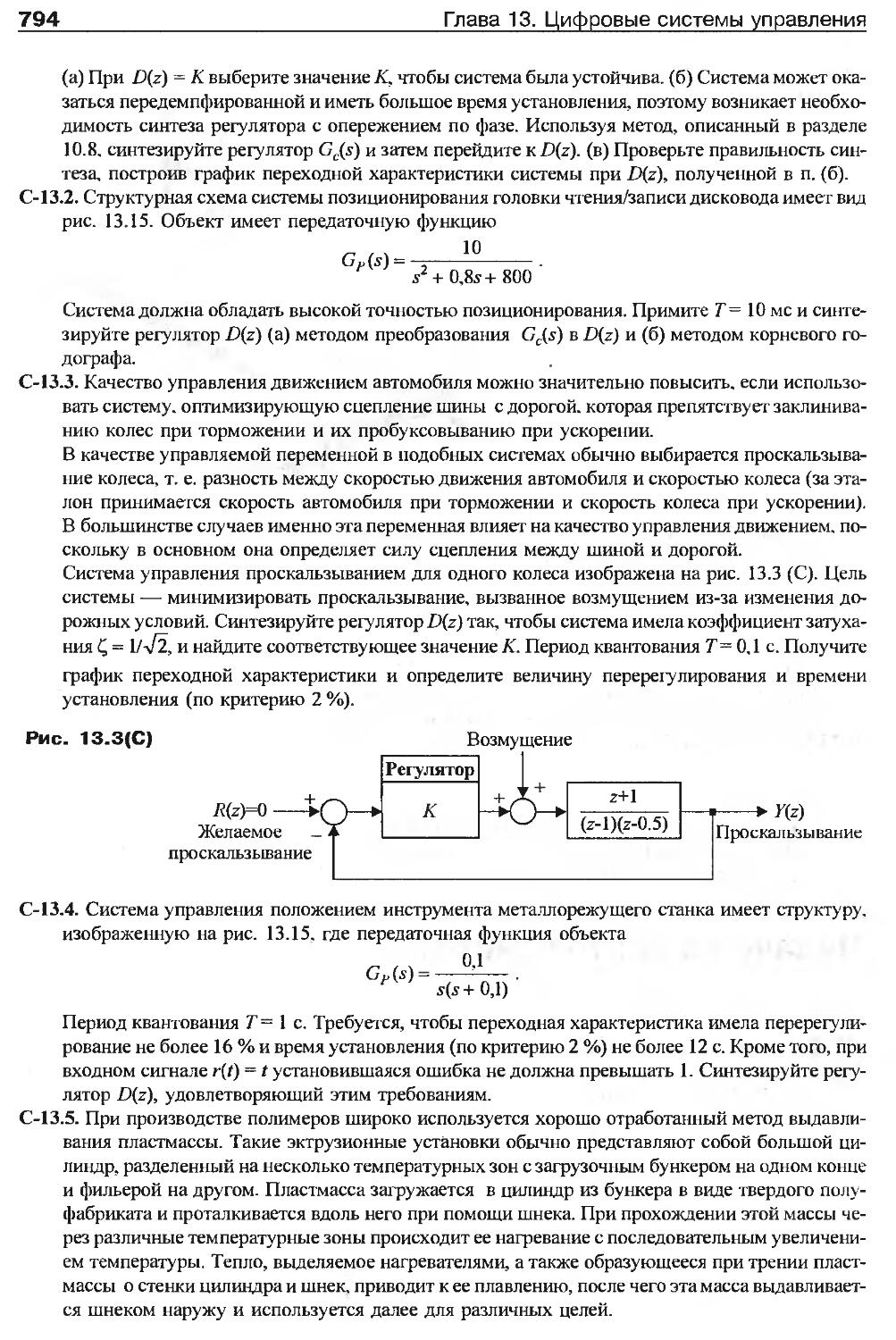
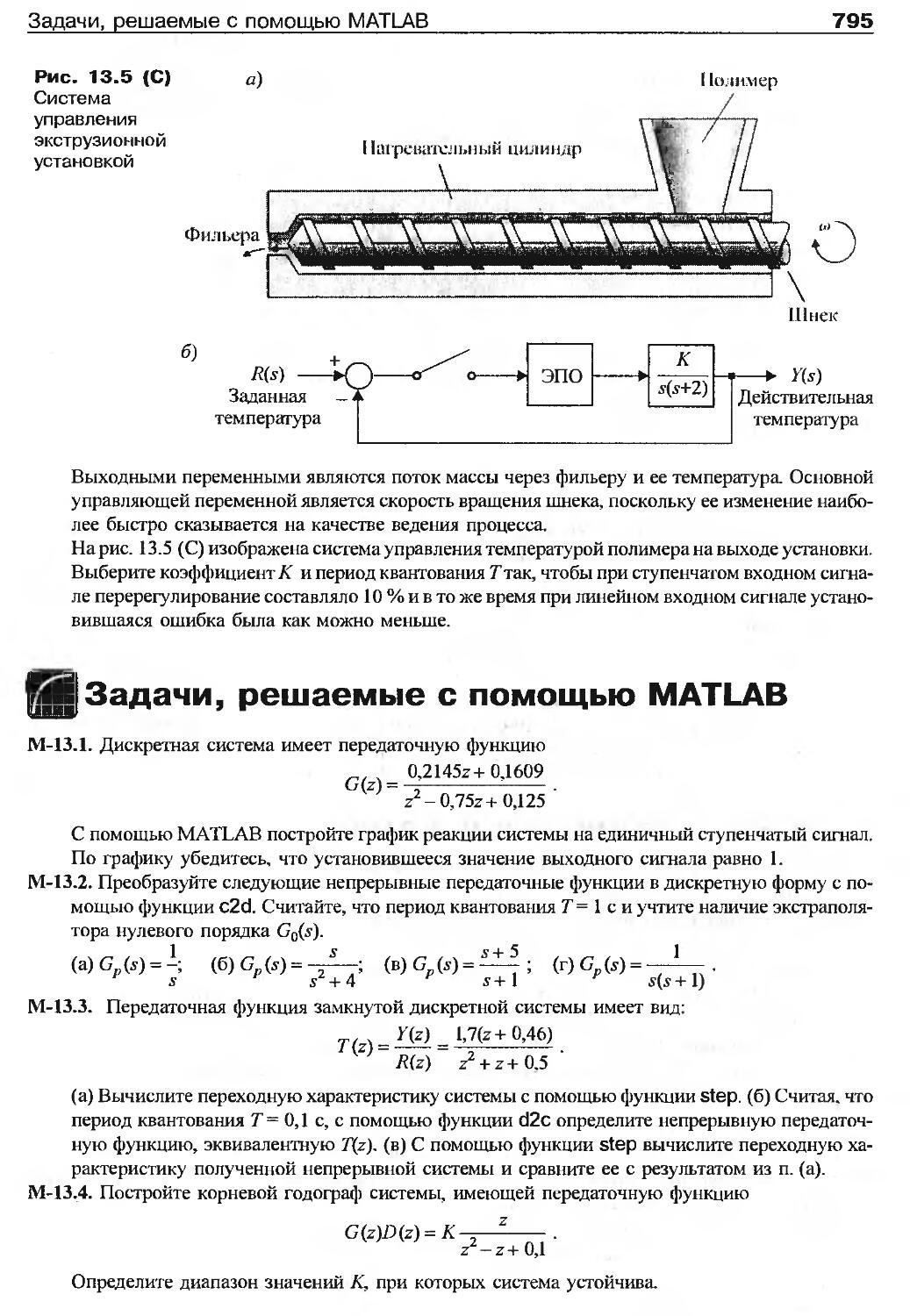
Задачи-«а синтез систем...........................................793
Задачи, решаемые с помощью MATLAB.................................795
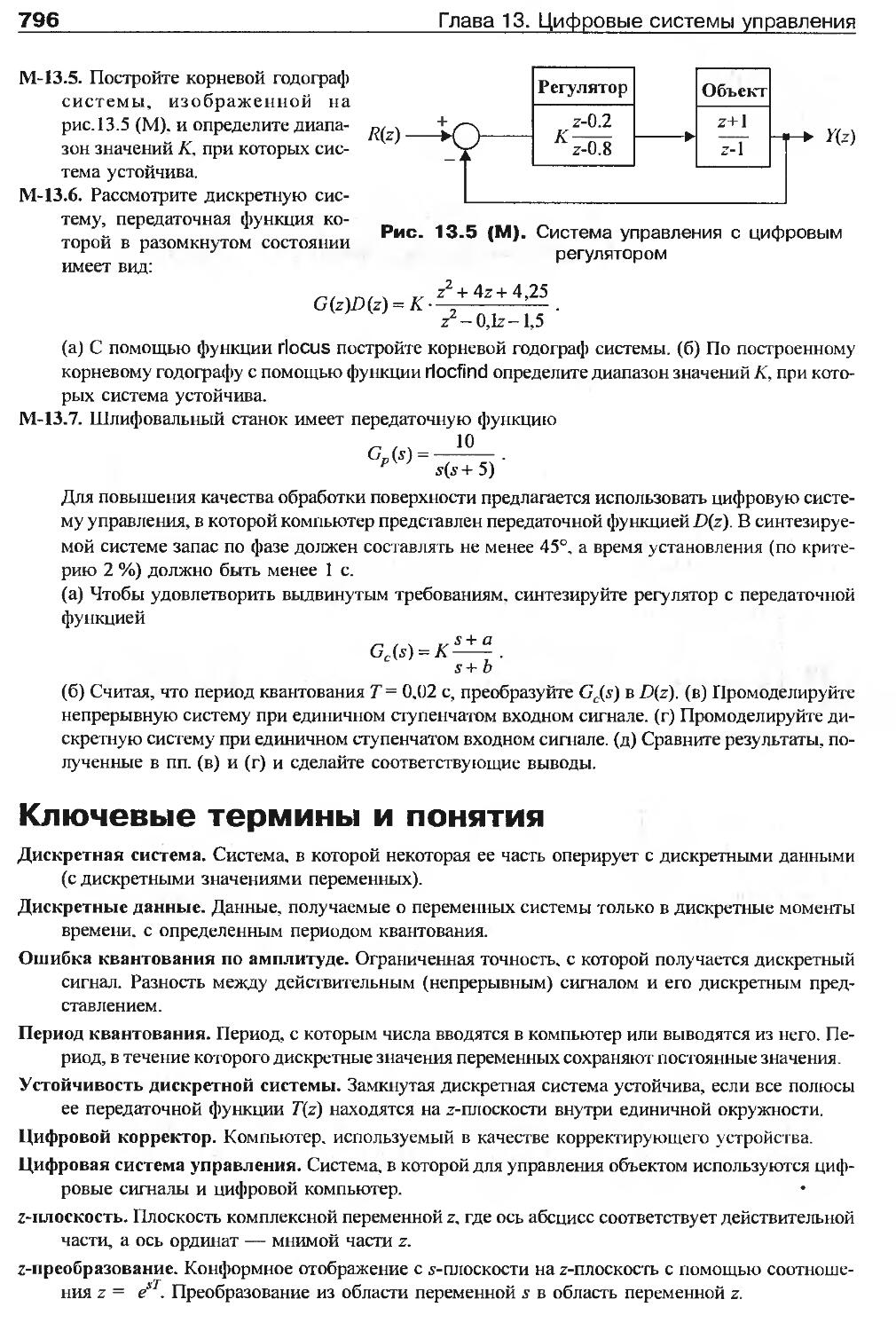
Ключевые термины и понятия........................................796
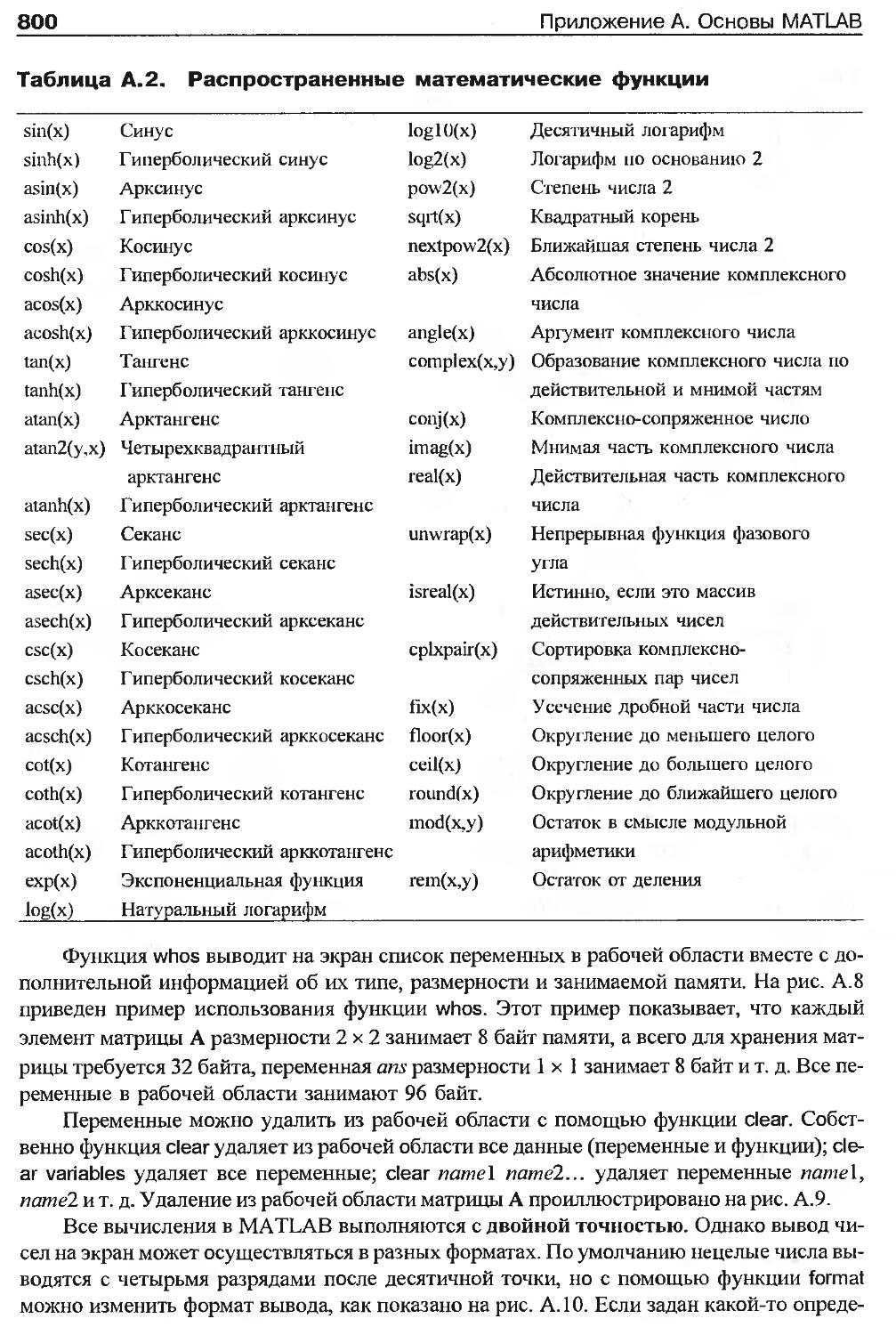
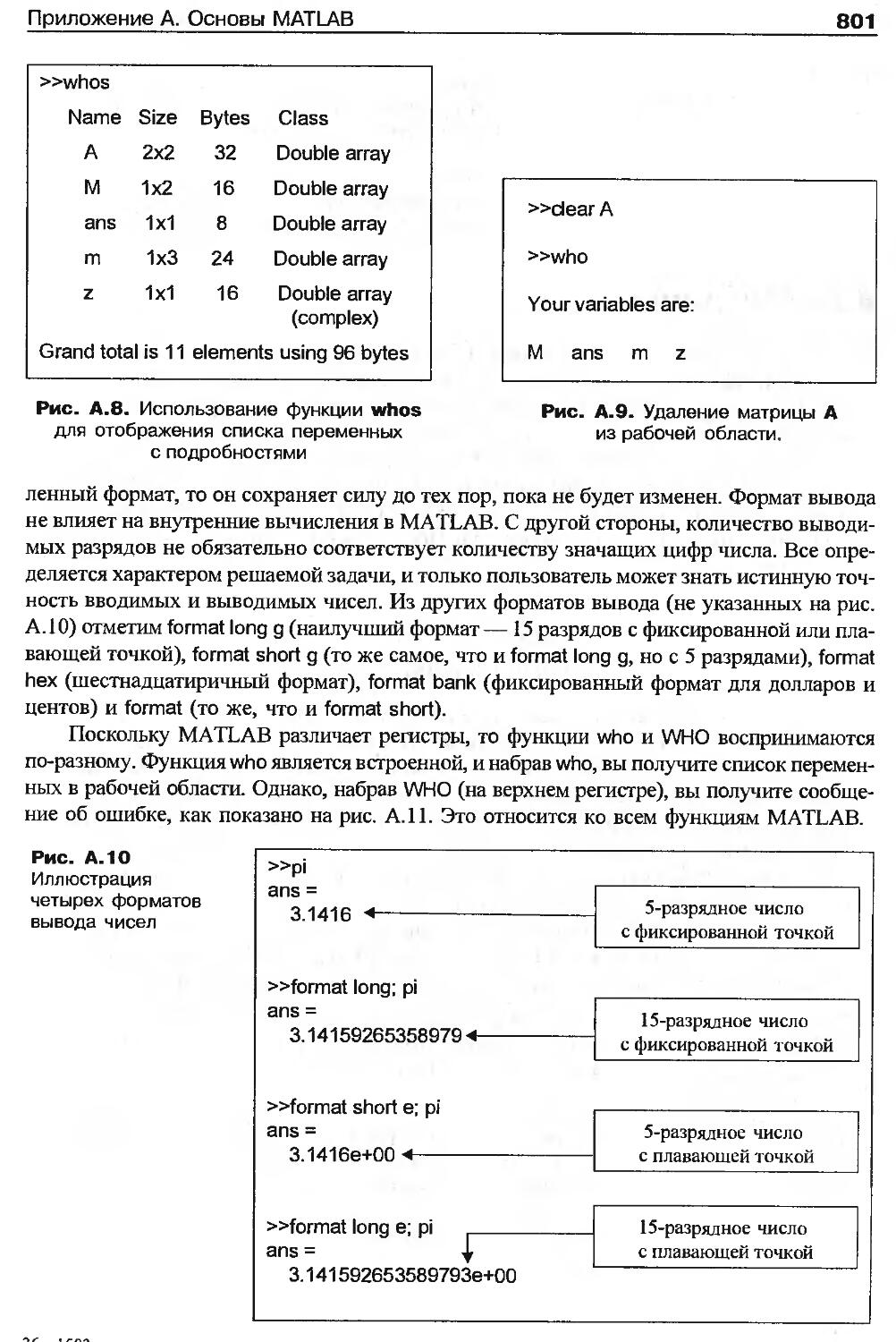
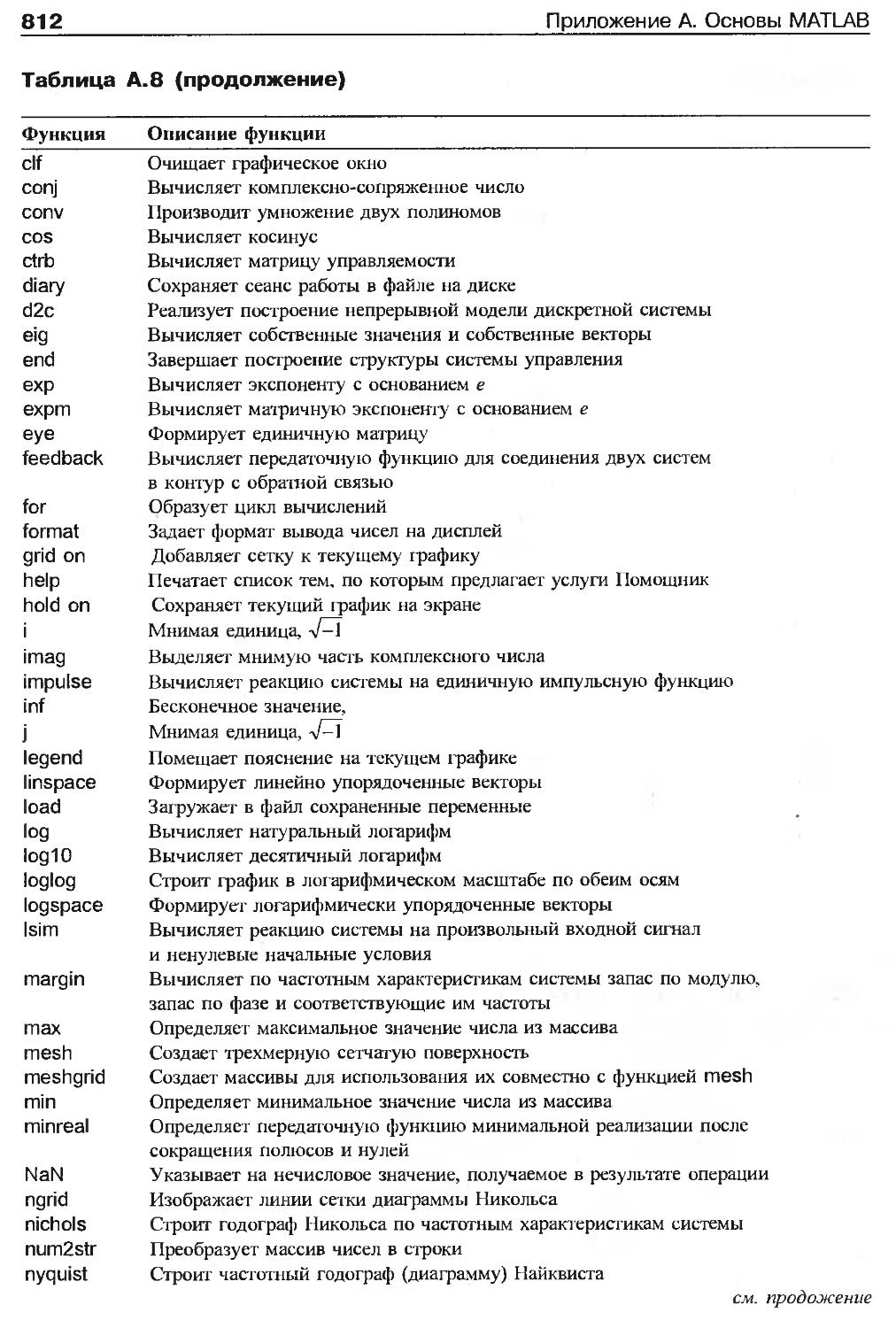
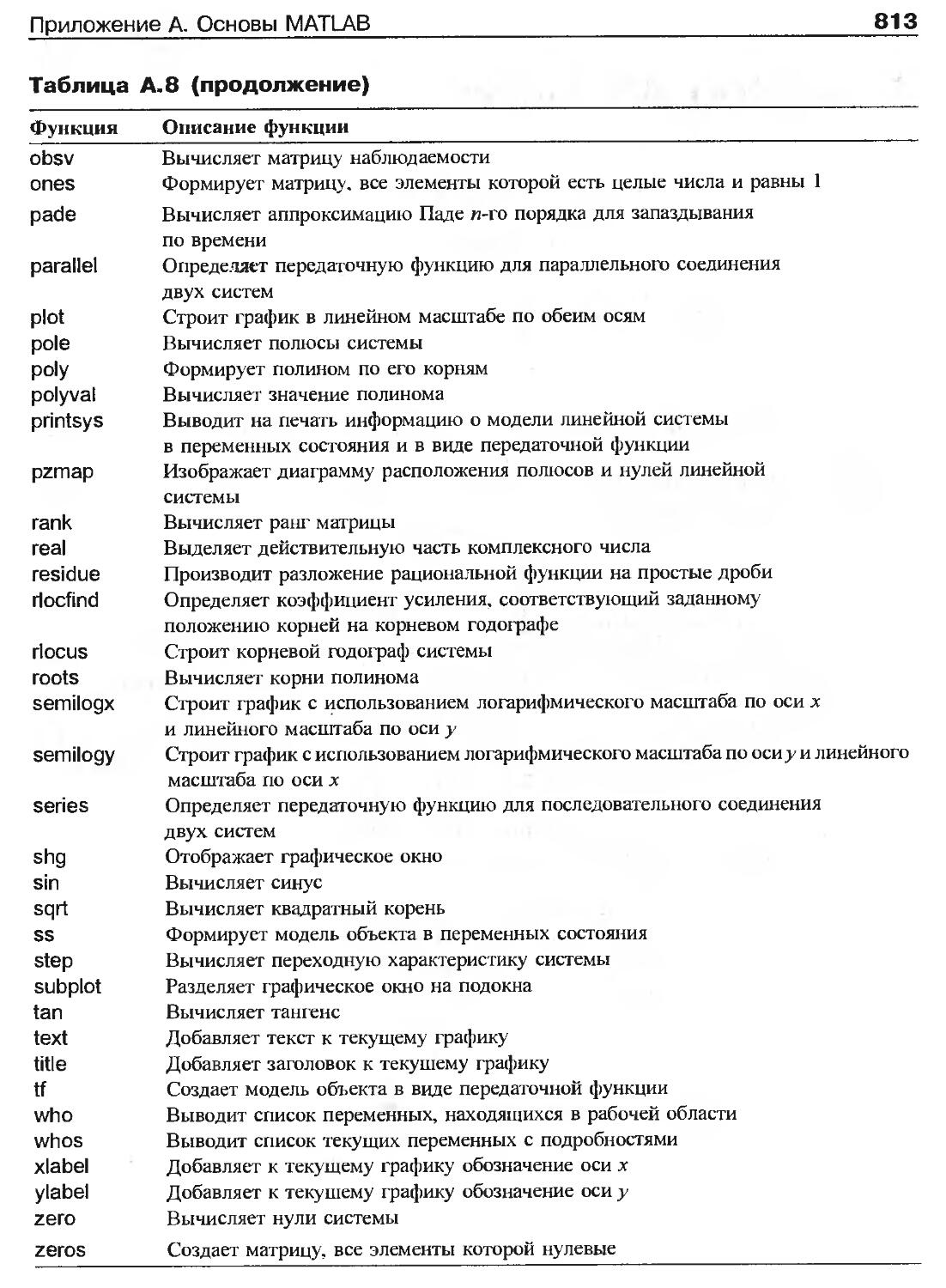
Приложение А. Основы MATLAB..........................................797
А.1. Введение.....................................................797
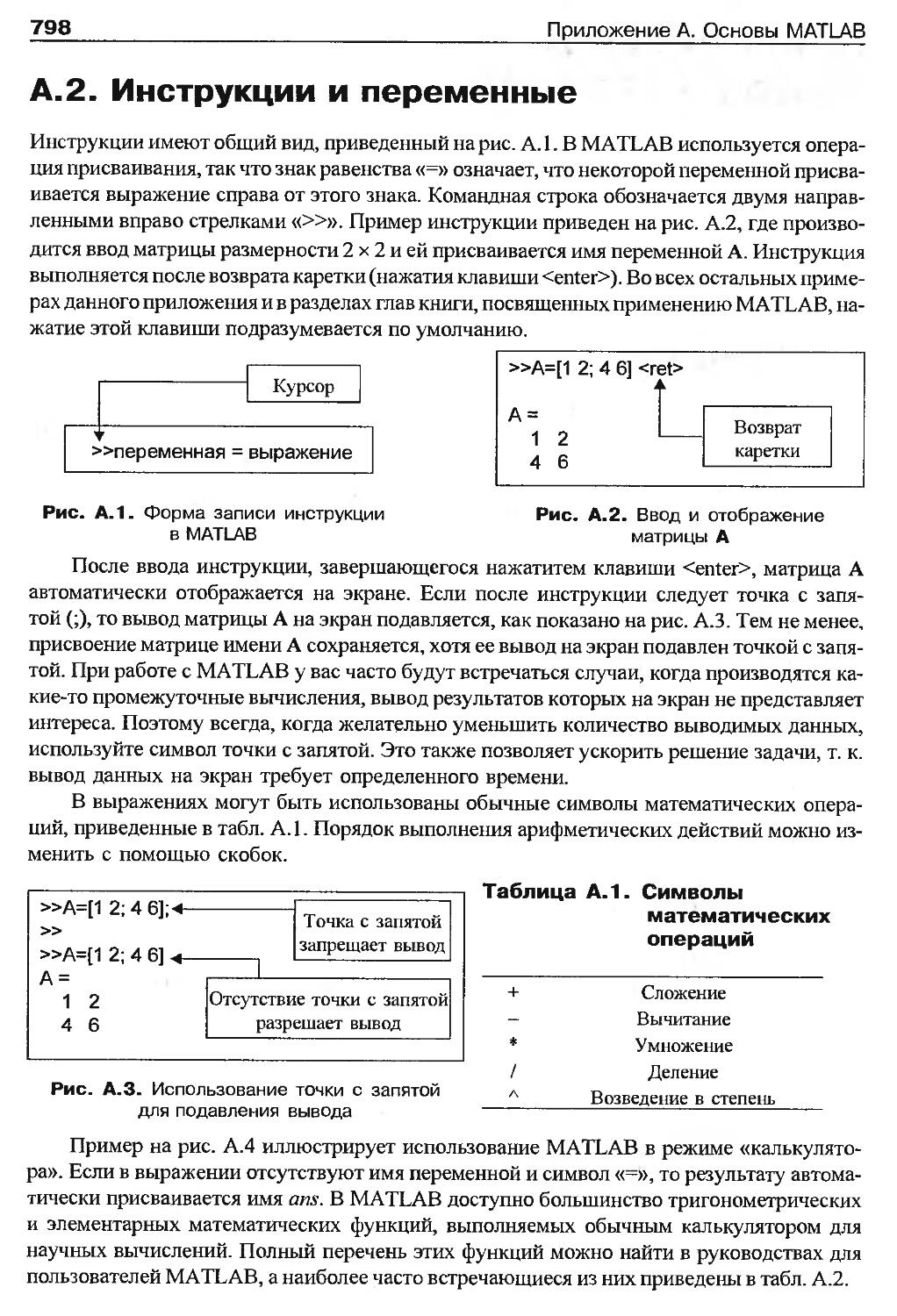
А.2. Инструкции и переменные......................................798
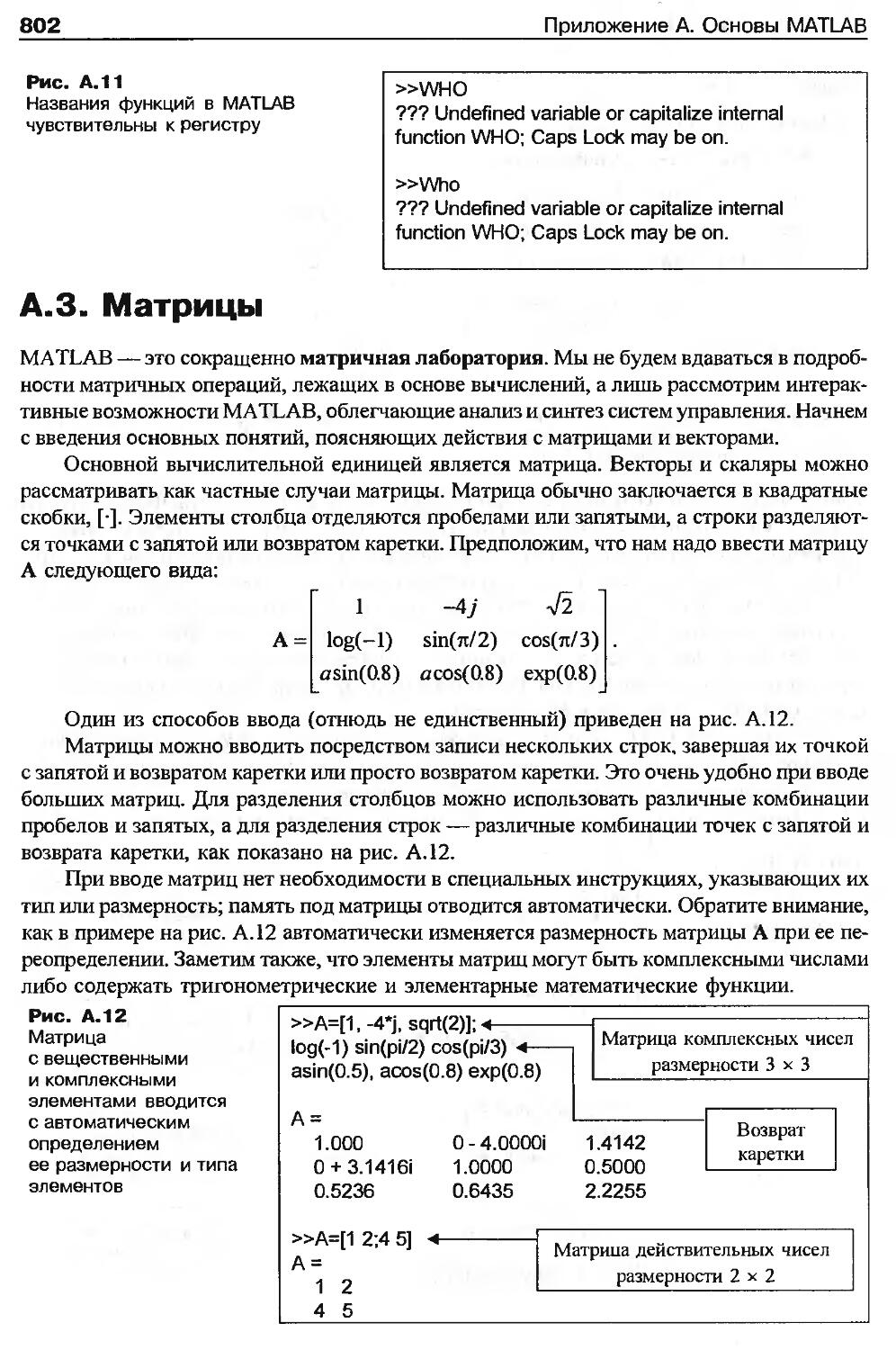
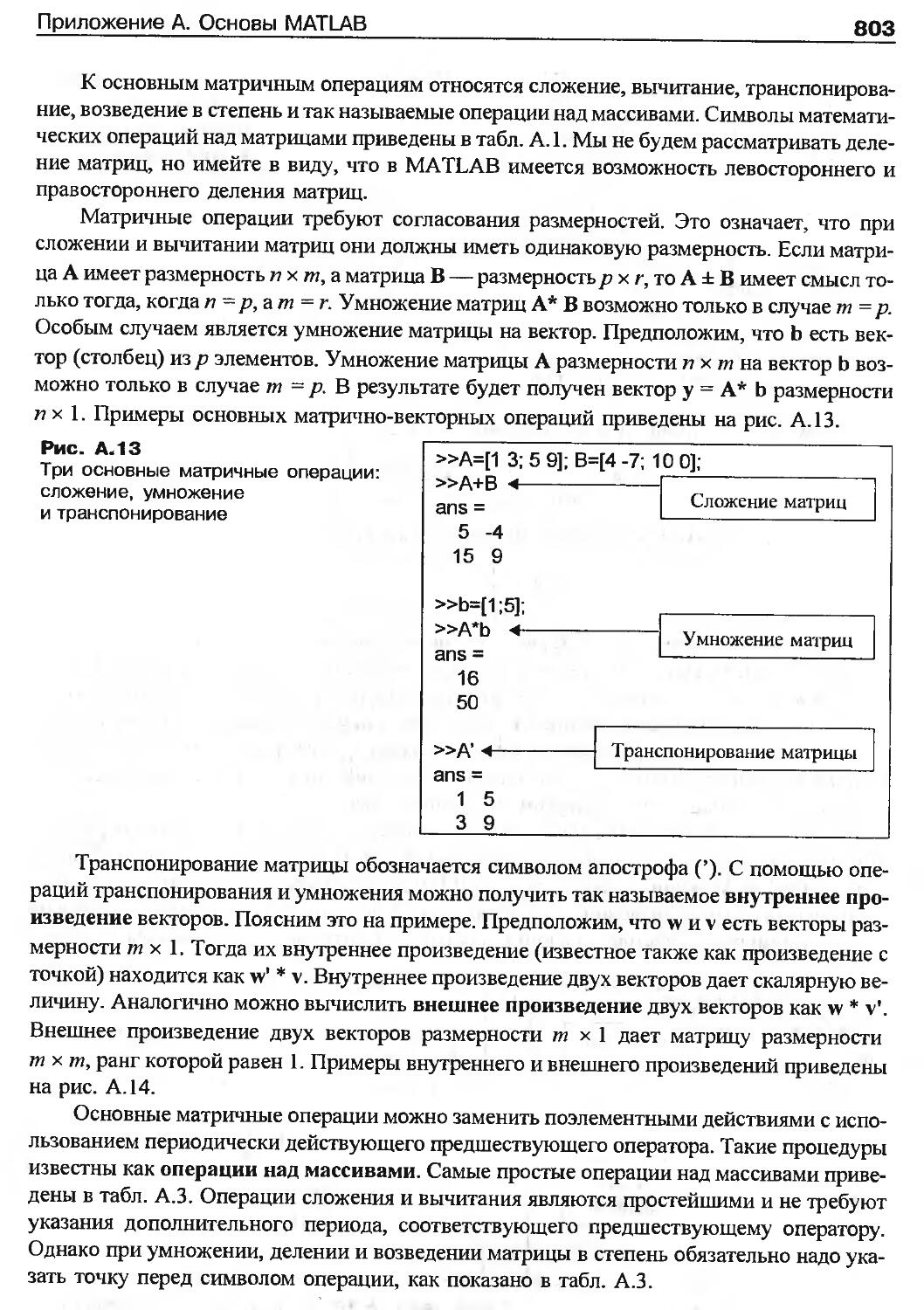
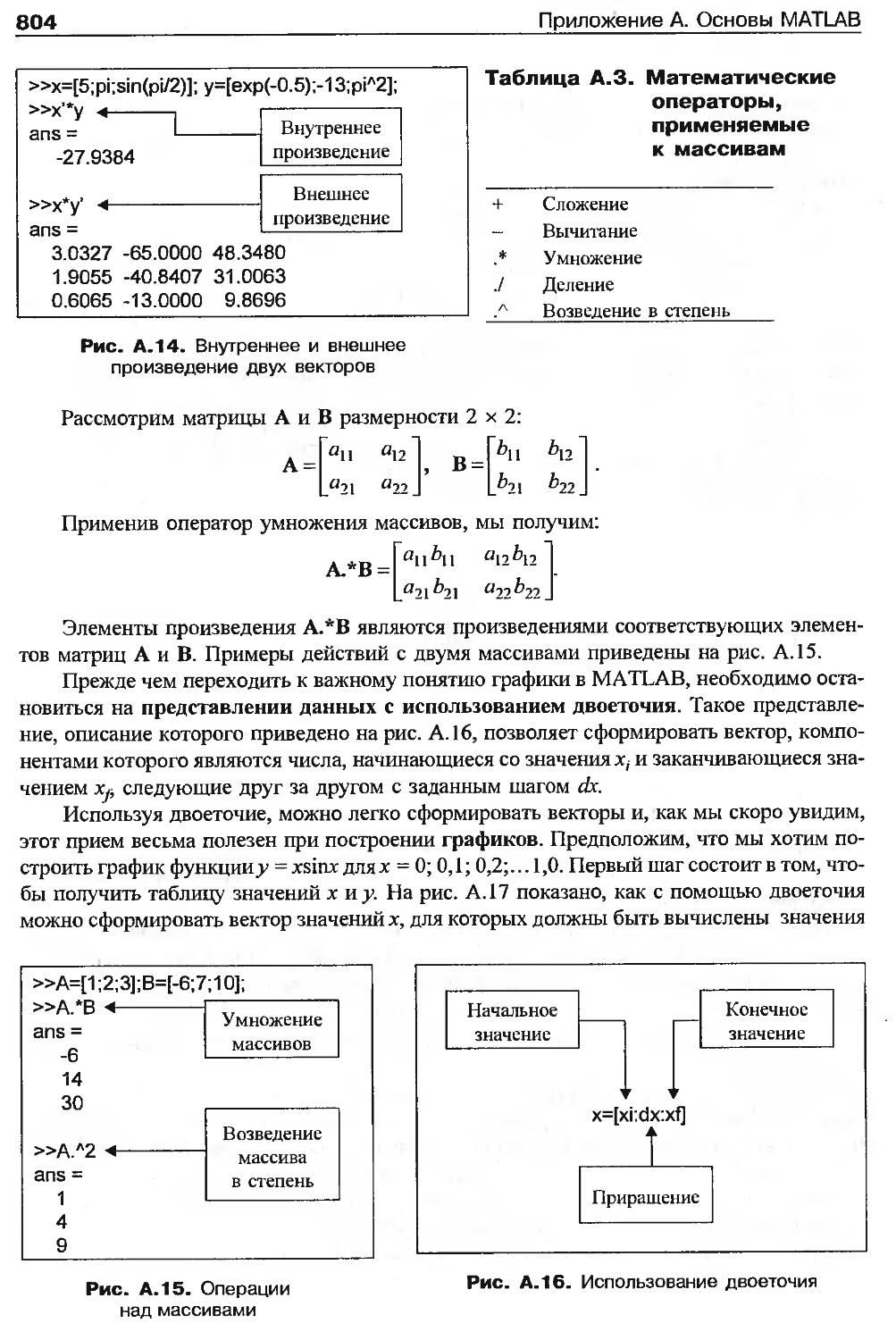
А.З. Матрицы......................................................802
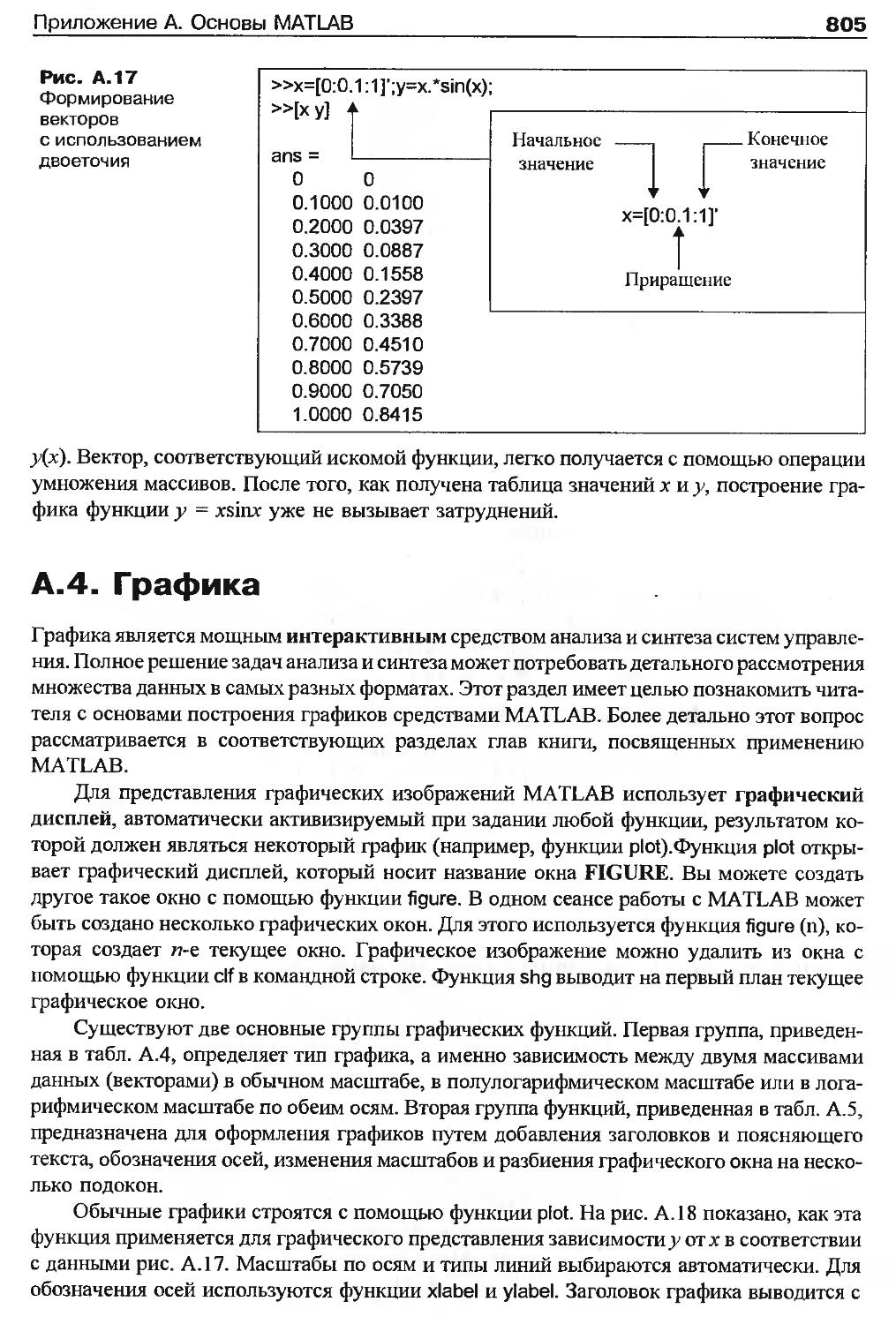
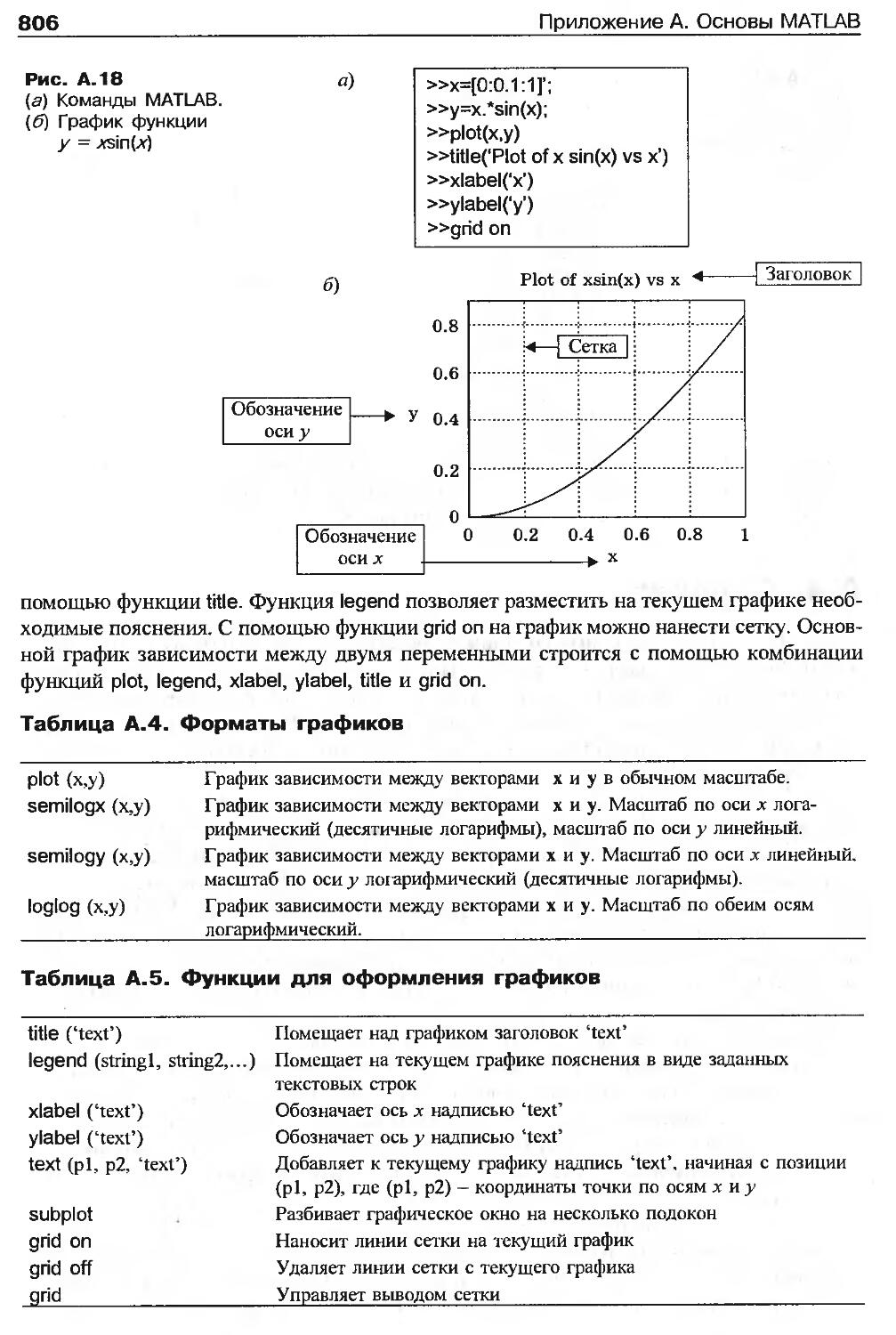
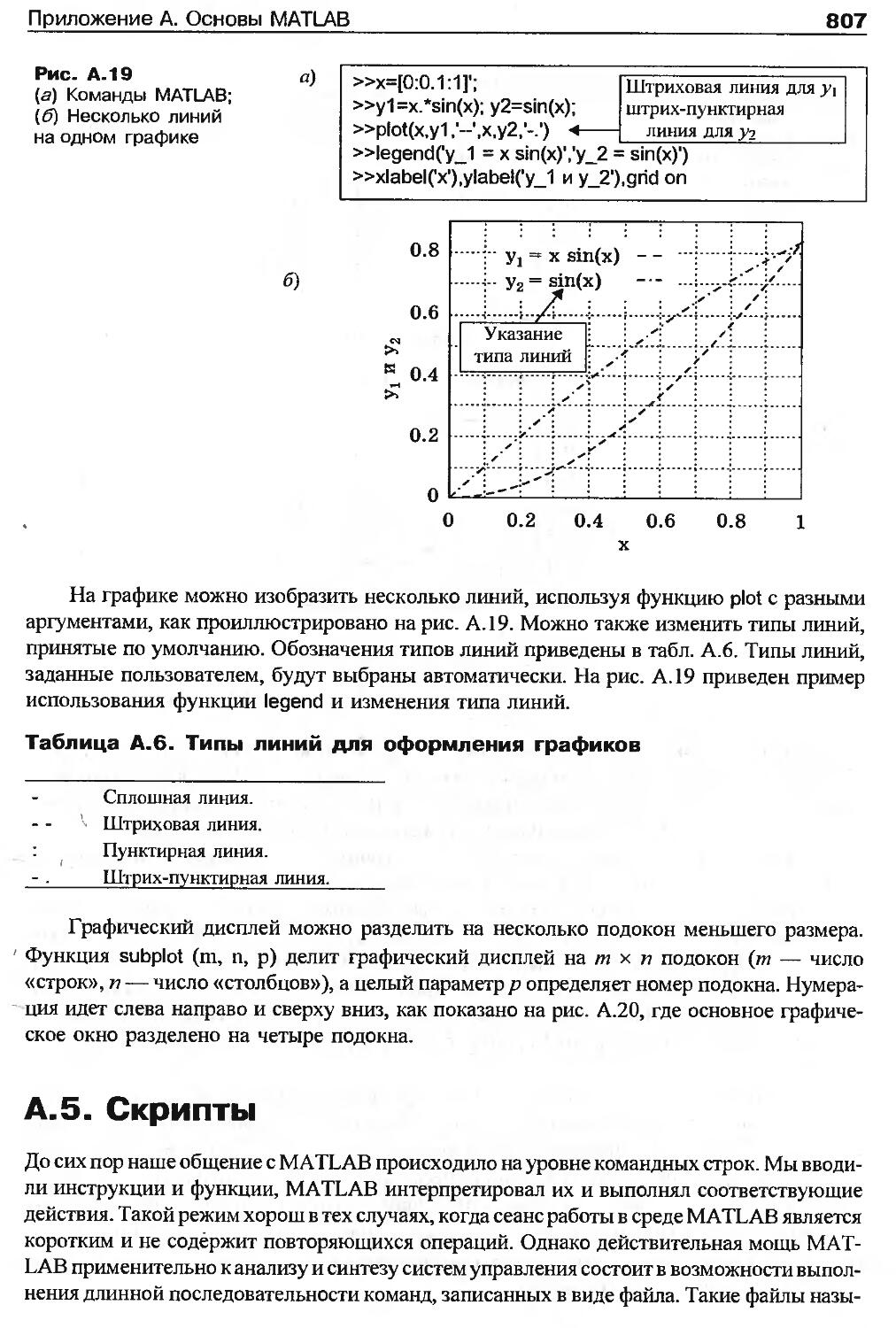
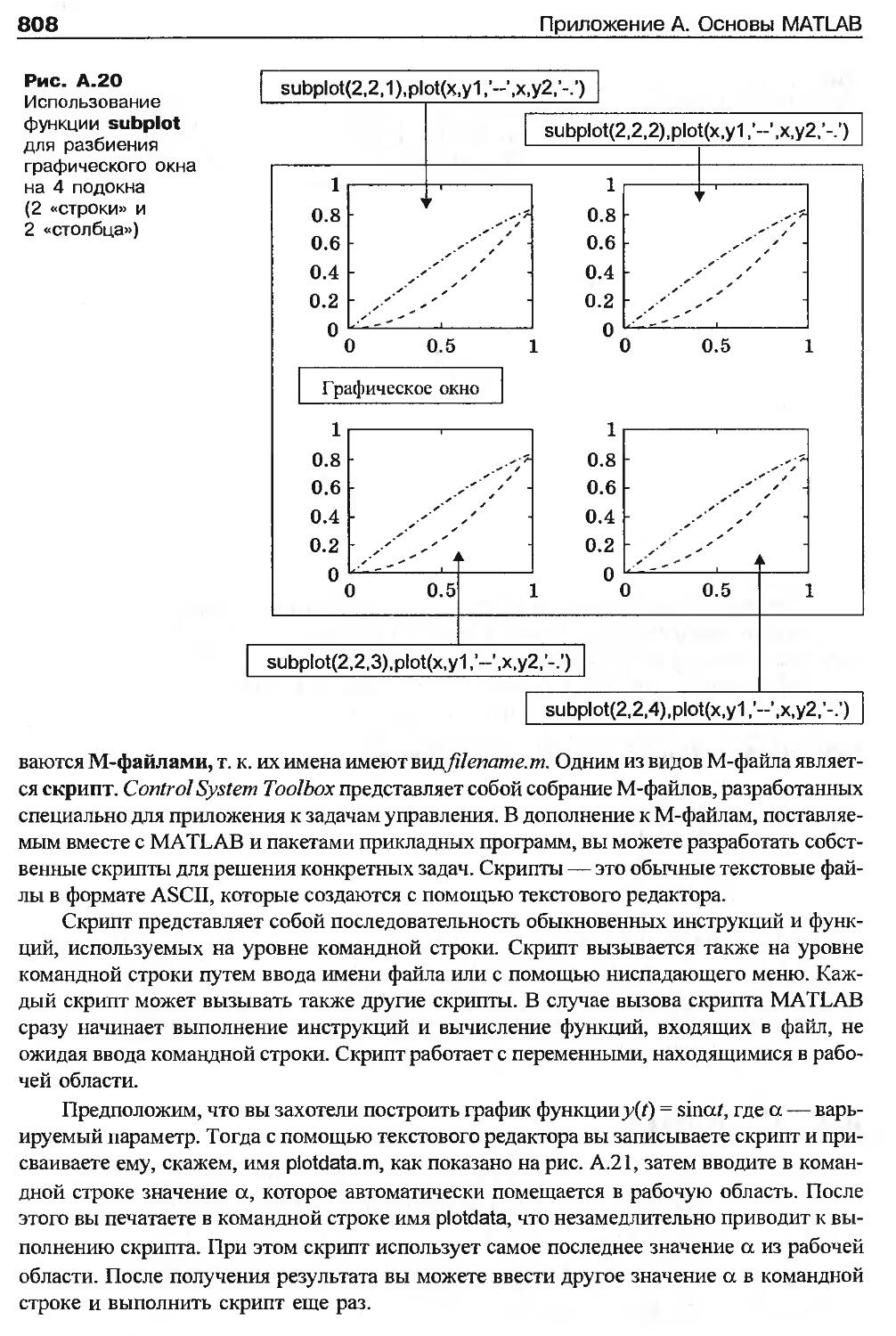
А.4. Графика......................................................805
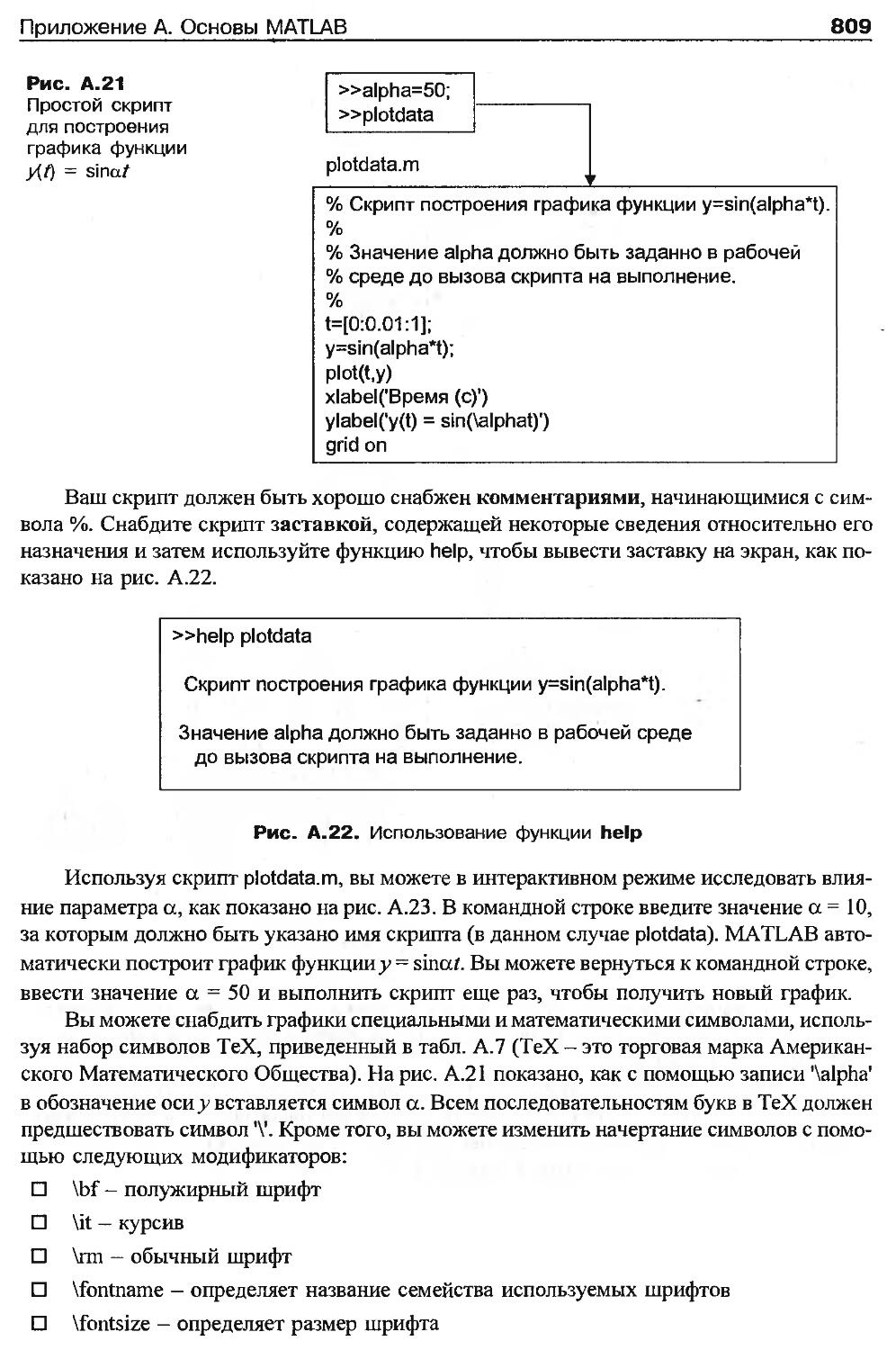
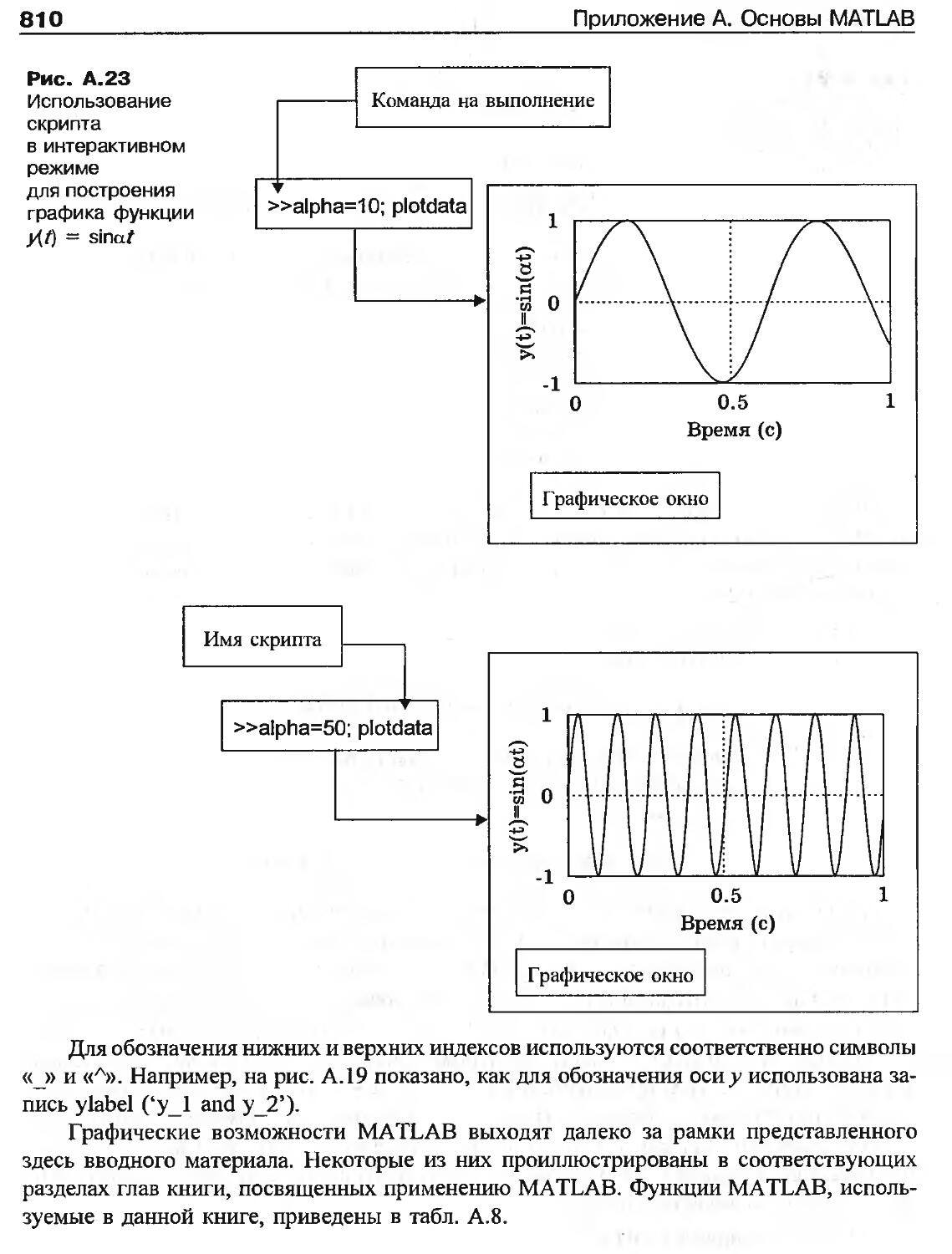
А.5. Скрипты......................................................807
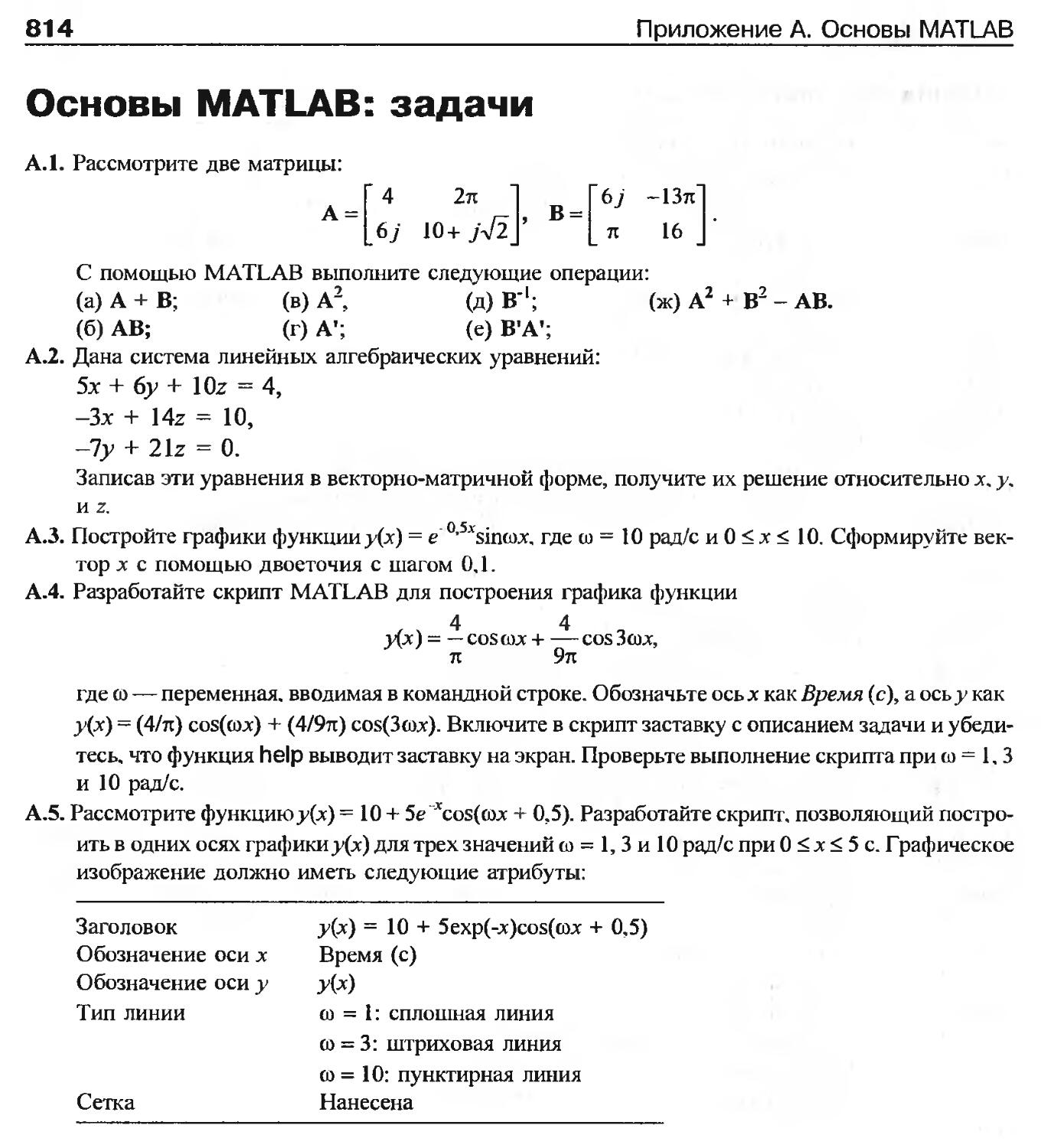
Основы MATLAB: задачи.............................................814
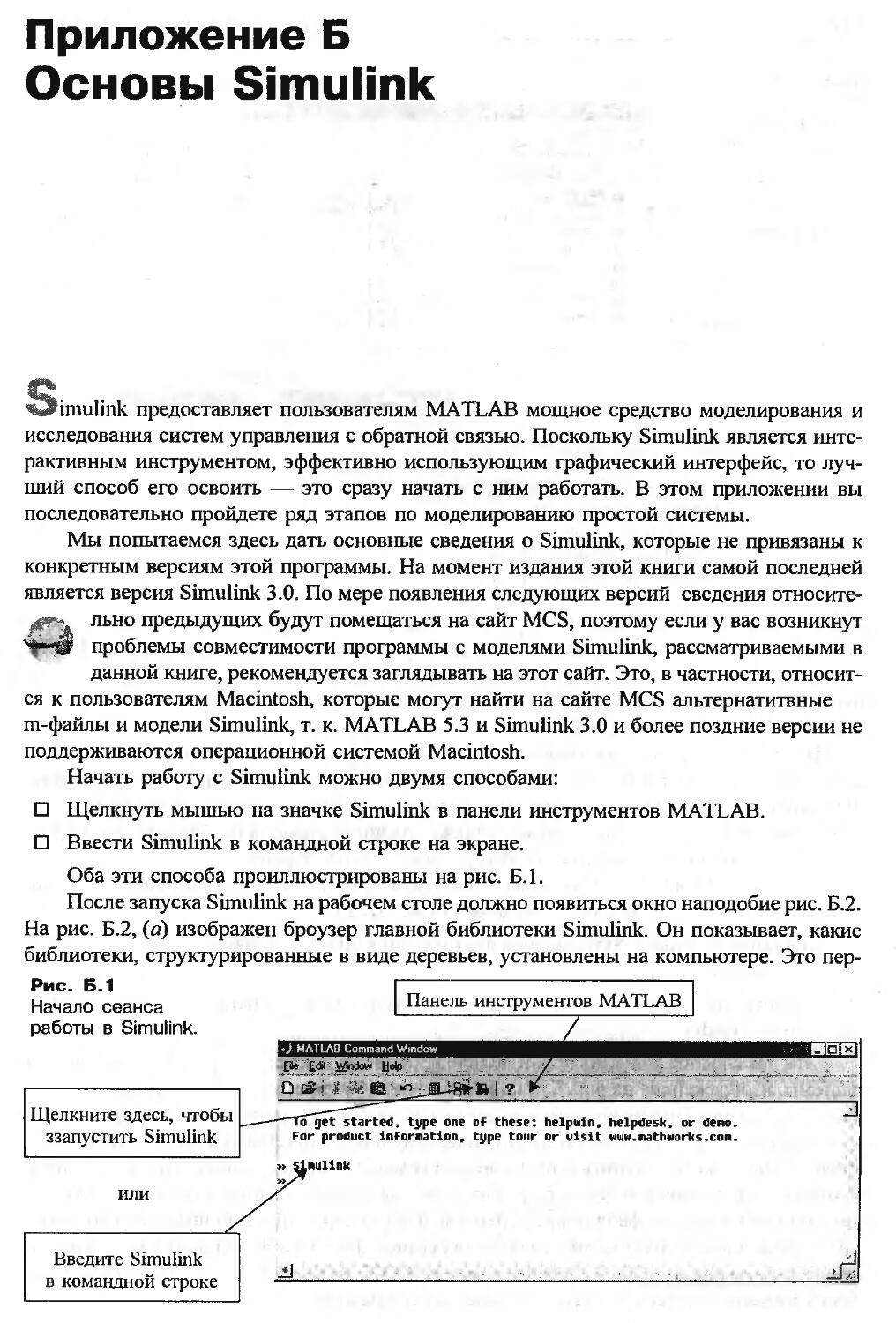
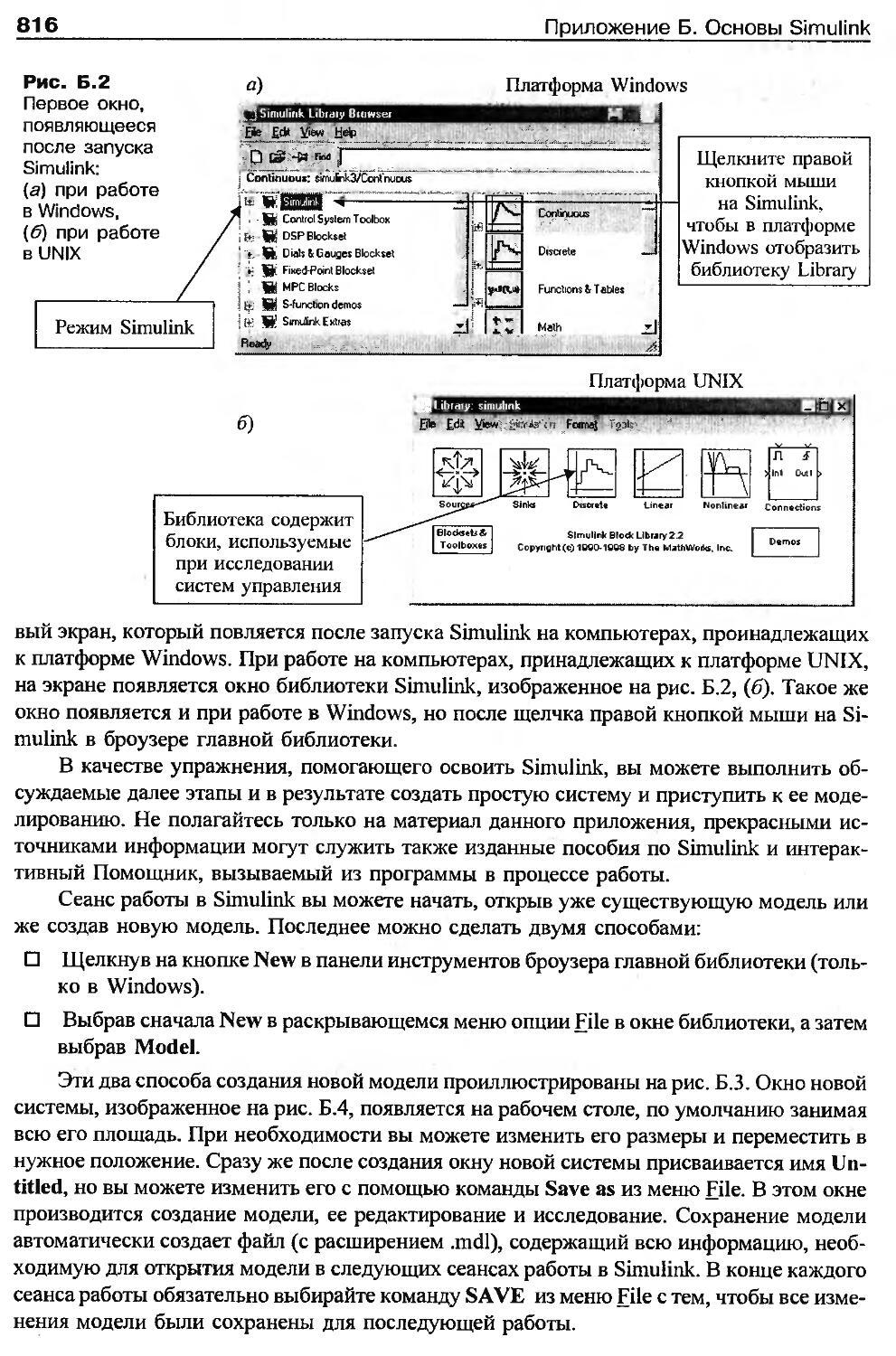
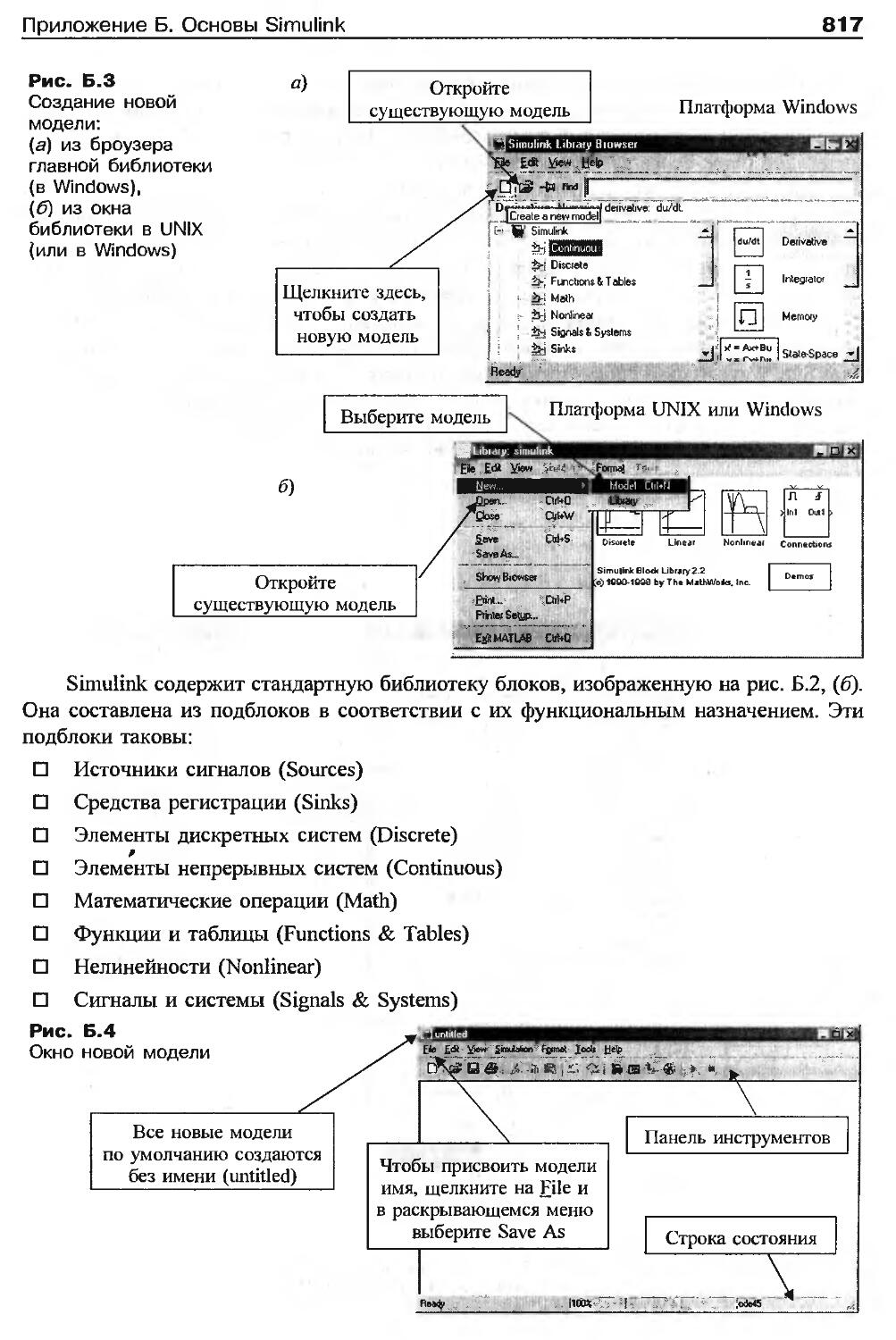
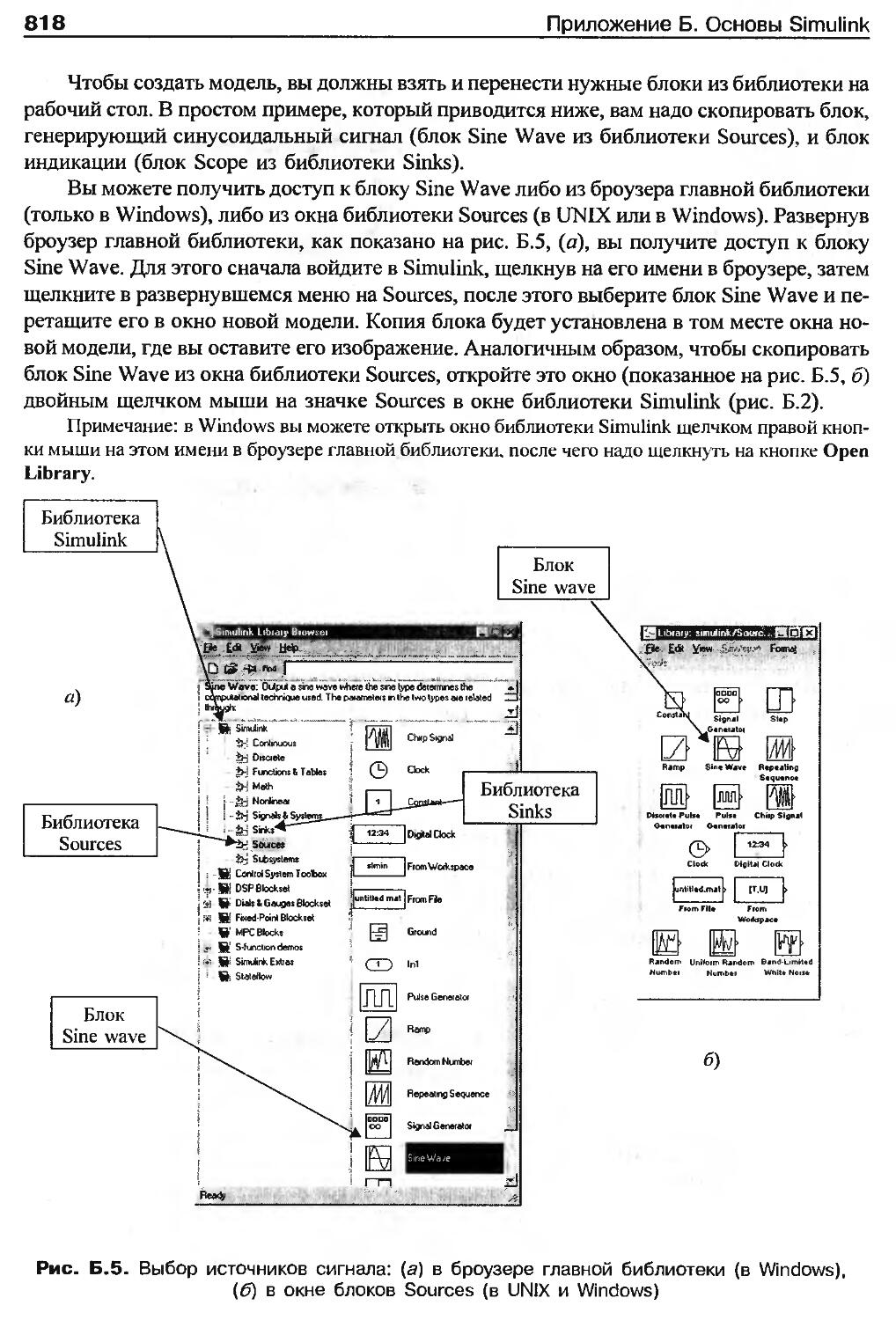
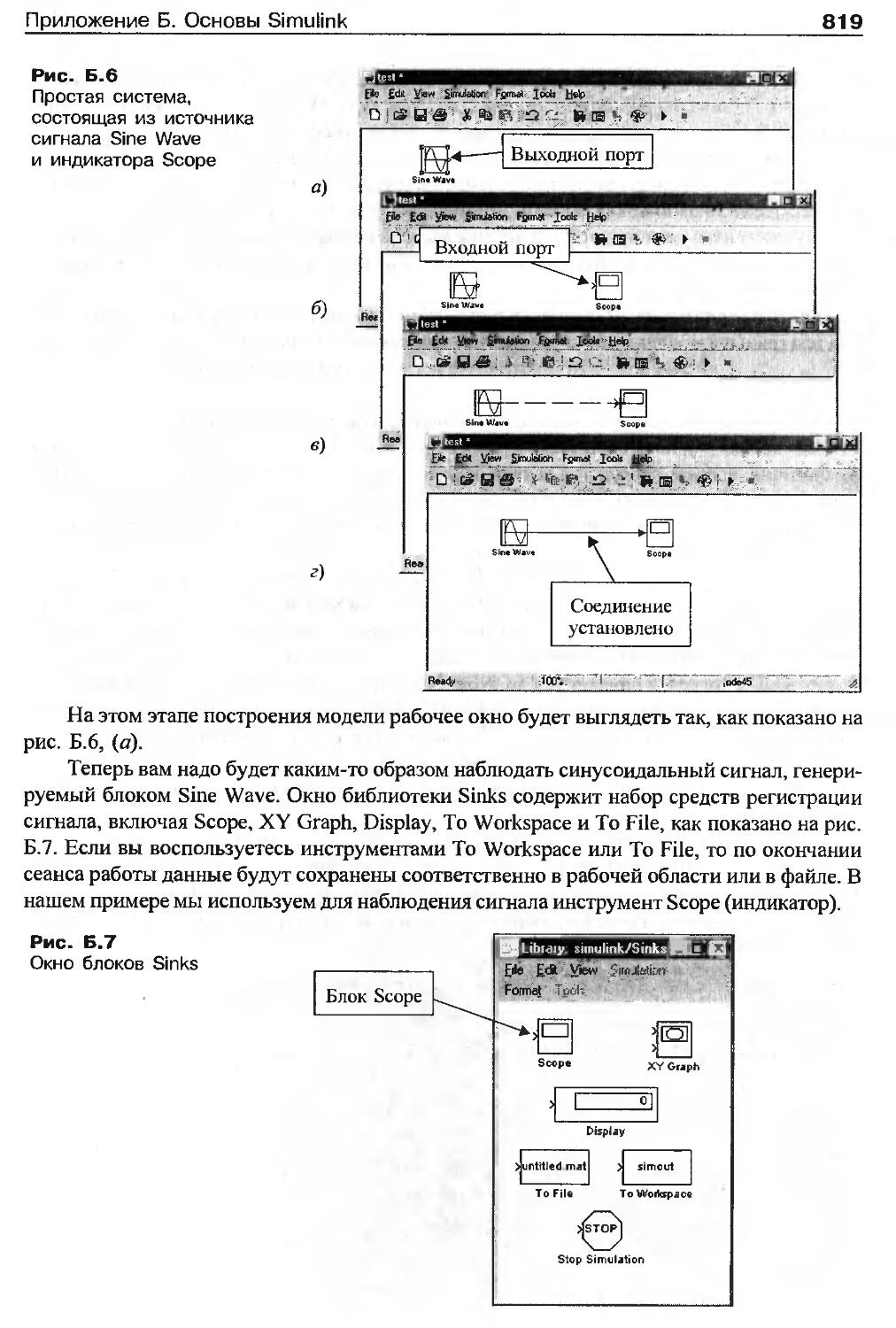
Приложение. Основы Simulink..........................................815
Предметный указатель.................................................823
Предисловие
Об этой книге
4 декабря 1996 г. с помощью ракеты-носителя Дельта-П был запущен космический аппарат «Патфайндер» (в переводе — следопыт), который в течение семи месяцев должен был достичь красной планеты — Марса. Спустя 20 лет после того, как со своей задачей успешно справился «Викинг», это был первый из запланированных НАСА запусков аппарата с посадкой на Марс. Пролетев более 497 418 000 км, космический аппарат 4 июля 1997 г. столкнулся с поверхностью Марса при скорости около 18 м/с. После столкновения аппарат подпрыгнул почти на 15 м, затем подпрыгивал еще 15 раз, пока не остановился примерно в 1 км от первоначальной точки касания. Место посадки известно как Мемориал Сагана, и расположено оно врайоне Долины Ареса с координатами 19°33' с. ш. и 33°55' з. д. На борту «Пат-файндера» находился автономный самоходный аппарат под названием «Соджорнер», который предназначался для исследования района места посадки. Он имел массу 10,5 кг и должен был за 30 дней обследовать район площадью 300 м2. Его солнечные батареи площадью 0,25 м2 были рассчитаны на энергию в 16 ватт-часов, а основной блок питания обеспечивал около 150 Втч. Высокоточная система управления движением этого аппарата в то же время должна была ограничивать потребляемую мощность.
В успешном выполнении программы исследования планет ведущая роль принадлежит инженерам по управлению. По мере совершенствования аппаратной части и операционных систем бортовых компьютеров будет постоянно возрастать и роль систем управления автономных космических станций-зондов. Так, упомянутый выше «Патфайндер» имел на борту выпускаемую серийно 32-разрядную защищенную от радиации рабочую станцию с памятью в 1 Гб, с многозадачной операционной системой, запрограммированной на языке С. Это значительно превосходит компьютеры кораблей «Аполлон», имевшие ПЗУ емкостью 36864 и ОЗУ емкостью 2048 16-разрядных слов. Языком их программирования был псевдокод, а написанные на нем и хранящиеся в памяти команды программой-интерпретатором переводились в последовательность выполняемых подпрограмм. В данной книге в качестве полезных иллюстративных примеров рассматриваются реальные задачи по управлению автономными космическими аппаратами. Такова, например, задача по синтезу системы управления движением аппарата по поверхности Марса (разд. 4.8).
Техника управления — это очень увлекательная и творческая область деятельности. По своей сути она является междисциплинарным предметом и играет роль стержневого курса в учебных планах технических университетов. Естественно ожидать различных подходов к овладению искусством техники управления и ее практическому применению. Поскольку этот предмет имеет солидные математические основы, им можно овладевать
Предисловие 15
строго теоретически, делая акцент на формулировку и доказательство различных теорем. С другой стороны, т. к. конечной целью является практическая реализация регуляторов в реальных системах, то при синтезе таких систем допустим и специфический метод, в основе которого лежат интуиция и личный опыт. Наш подход состоит в том, чтобы методика изучения данной дисциплины, имея солидные математические основы, в то же время делала акцент на моделирование реальных физических систем и их практическое проектирование с учетом накладываемых ограничений.
Мы убеждены, что наиболее эффективным является такой метод изучения определенной дисциплины, когда каждый еще и еще раз задает себе одни и те же вопросы и при этом постоянно открывает что-то новое. Идеальным было бы предложить студенту набор вопросов и задач, снабдив некоторые из них ответами, полученными за последние десятилетия. Использовать традиционный метод — не поставить перед студентом проблему, а дать сразу ее конечное решение — это значит лишить его творческого интереса, побудительного импульса, снизить тягу человечества к изобилию различных теорем. Поэтому наша книга предлагает читателю ряд задач, с которыми мы продолжаем сталкиваться в повседневной жизни, оставив их без ответов — чтобы каждый мог в итоге сказать: «Все, чему я действительно научился и что понял, сделал я сам».
Цель данной книги — представить четкую структуру теории систем с обратной связью, последовательно на протяжении всего материала побуждая читателя делать для себя ряд маленьких открытий. Если книга поможет студенту познать теорию и практику систем управления с обратной связью, мы будем считать свою задачу выполненной.
Круг читателей
Эта книга задумана как вводный курс по системам управления для студентов технических специальностей. С точки зрения практического использования систем управления в ней почти нет никакого разграничения между такими областями, как аэрокосмические исследования, химическая технология, электротехника, механика, промышленное производство; поэтому она написана сознательно без акцента на какую-то одну дисциплину. Мы надеемся, что книга будет одинаково полезна для изучения всех технических дисциплин и поможет проиллюстрировать преимущества, достигаемые применением систем управления. Многочисленные примеры и задачи взяты из самых разных областей (социология, биология, экология, экономика) и имеют целью дать читателю ясное представление об универсальной применимости теории управления ко многим аспектам нашей жизни. Мы убеждены, что разбор студентами одной специальности примеров и задач из других дисциплин позволит им с общих позиций взглянуть и за пределы своей узкой области. В результате многие студенты, специализирующиеся в каком-то одном направлении (скажем, механике или электротехнике), смогут успешно сделать карьеру и работать в дальнейшем бок о бок с инженерами, например, в аэрокосмической промышленности. Мы надеемся, что этот вводный курс даст студентам более широкое представление о методах анализа и синтеза систем управления.
Первые 8 изданий книги «Современные системы управления» с успехом использовались студентами старших курсов более чем 400 технических колледжей и университетов, а также их выпускниками, не имевшими базовой подготовки в области техники управле
ния.
16
Предисловие
Новое в девятом издании
Для студентов, использующих девятое издание книги, был создан специальный Web-сайт, который содержит все упражнения, задачи, m-файлы MATLAB и программы Simulink, приведенные в книге, а также таблицы преобразований Лапласа и z-преобразований, основные сведения по алгебре матриц, комплексным числам, список принятых обозначе-ний, таблицы единиц измерения и их перевода из одной системы в другую. В случае ссылки на Web-сайт на полях книги будет появляться соответствующий значок. Кроме того, поскольку Web-сайт может постоянно обновляться и пополняться материалами, представляющими интерес для студентов и преподавателей, рекомендуется регулярно посещать его в течение семестра при изучении соответствующего курса. Web-сайт «Современных систем управления» имеет адрес http://www.prenhall.com/dorf.
В девятом издании мы по-прежнему делаем акцент на синтез систем управления. Для этого мы воспользуемся реальной практической задачей, связанной с проектированием регулятора для системы считывания информации с диска. Эту задачу мы назвали приме-□ ром синтеза с продолжением (в тексте он отмечается на полях значком стрелки), который последовательно рассматривается в каждой главе с применением изложенных в ней методов и понятий. Дисководы компьютеров представляют собой весьма интересный объект с точки зрения техники управления. В каждой главе рассматриваются различные аспекты проектирования регуляторов для систем чтения информации с диска. Например, в главе 1 мы сформулируем цели управления, выявим переменные, на которые необходимо воздействовать, перечислим необходимые ограничения и изобразим начальную конфигурацию системы. Далее, в главе 2, мы разработаем модели объекта управления, датчиков и исполнительных устройств. В остальных главах мы продолжим процедуру синтеза, используя основные положения соответствующей главы.
В том же самом ключе, как и пример синтеза с продолжением, мы подготовили сквозную задачу на синтез (СС) (в тексте она отмечается на полях значком тройной стрелки), □ чтобы дать студентам возможность от главы к главе последовательно синтезировать прецизионную систему управления перемещением скользящей части металлообрабатывающего станка. При решении данной задачи для того, чтобы удовлетворить все предъявляемые к системе требования, студенту придется последовательно использовать методы, излагаемые в каждой главе книги.
Мы продолжили модернизацию разделов книги, посвященных компьютерным мето-
@дам анализа и синтеза систем управления. На задачи, решаемые с помощью MATLAB, указывает специальный значок. Кроме того, различные аспекты примера синтеза с продолжением также проиллюстрированы соответствующими программами MATLAB.
В 9-м издании мы предлагаем использовать пакет Simulink как эффективный инструмент имитационного моделирования и анализа систем управления. Поскольку Simulink является интерактивным средством, использующим графический интерфейс, мы считаем, что лучший способ его изучения — это непосредственное решение на его основе различных практических задач. Основы Simulink излагаются в Приложении Б, где студенту дается возможность последовательно пройти ряд этапов, связанных с проектированием и имитационным моделированием простой системы управления. Мы попытались дать только основные сведения, касающиеся Simulirfk; чтобы не привязываться к какой-то конкретной версии пакета. Во время подготовки девятого издания книги самой последней являлась версия Simulink 3.0. По мере появления следующих версий Simulink вся предыду
Предисловие
17
щая информация по его основам будет размещаться на Web-сайте — имейте это в виду, если у вас возникнут проблемы совместимости с моделями Simulink из этой книги.
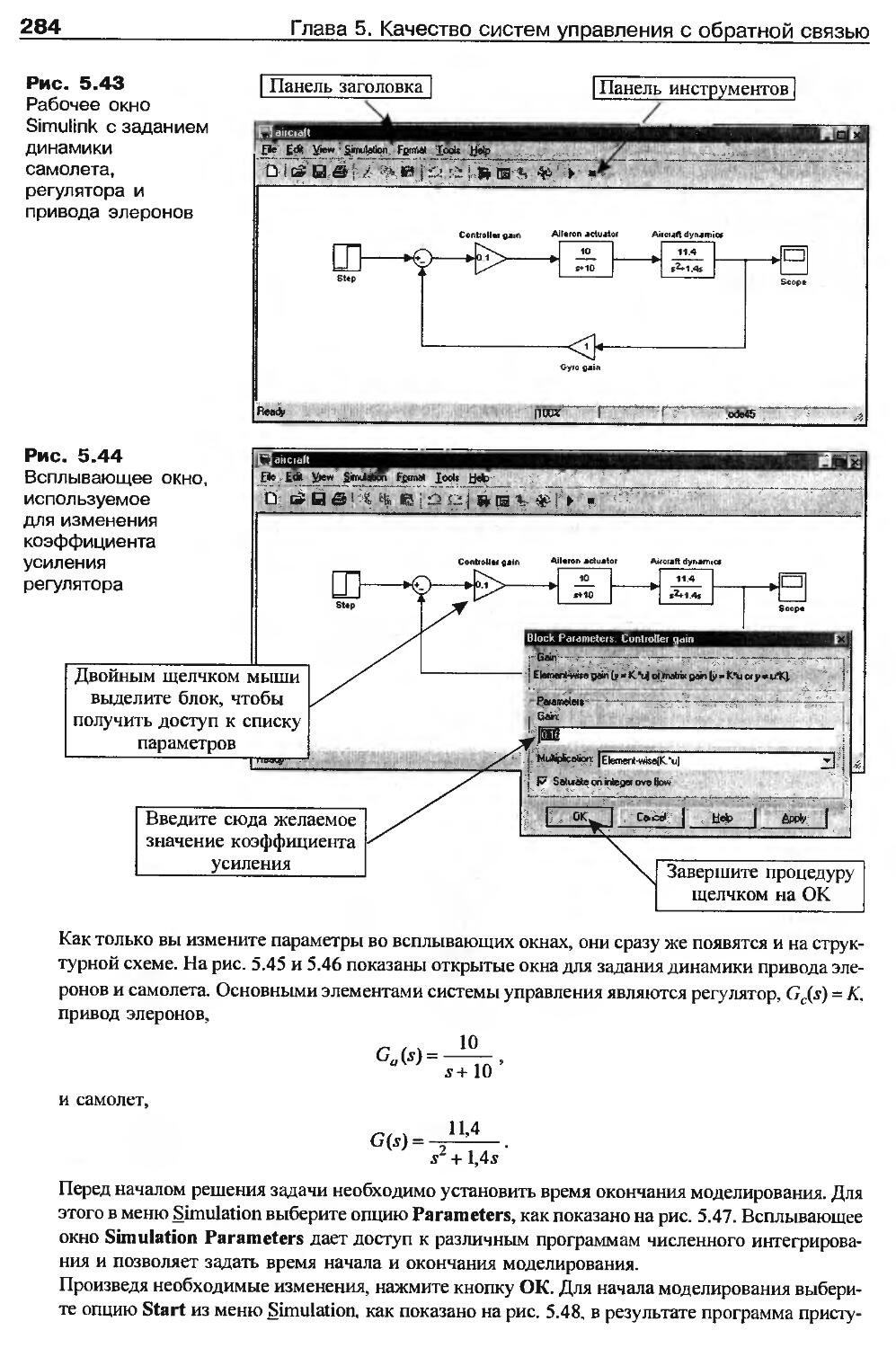
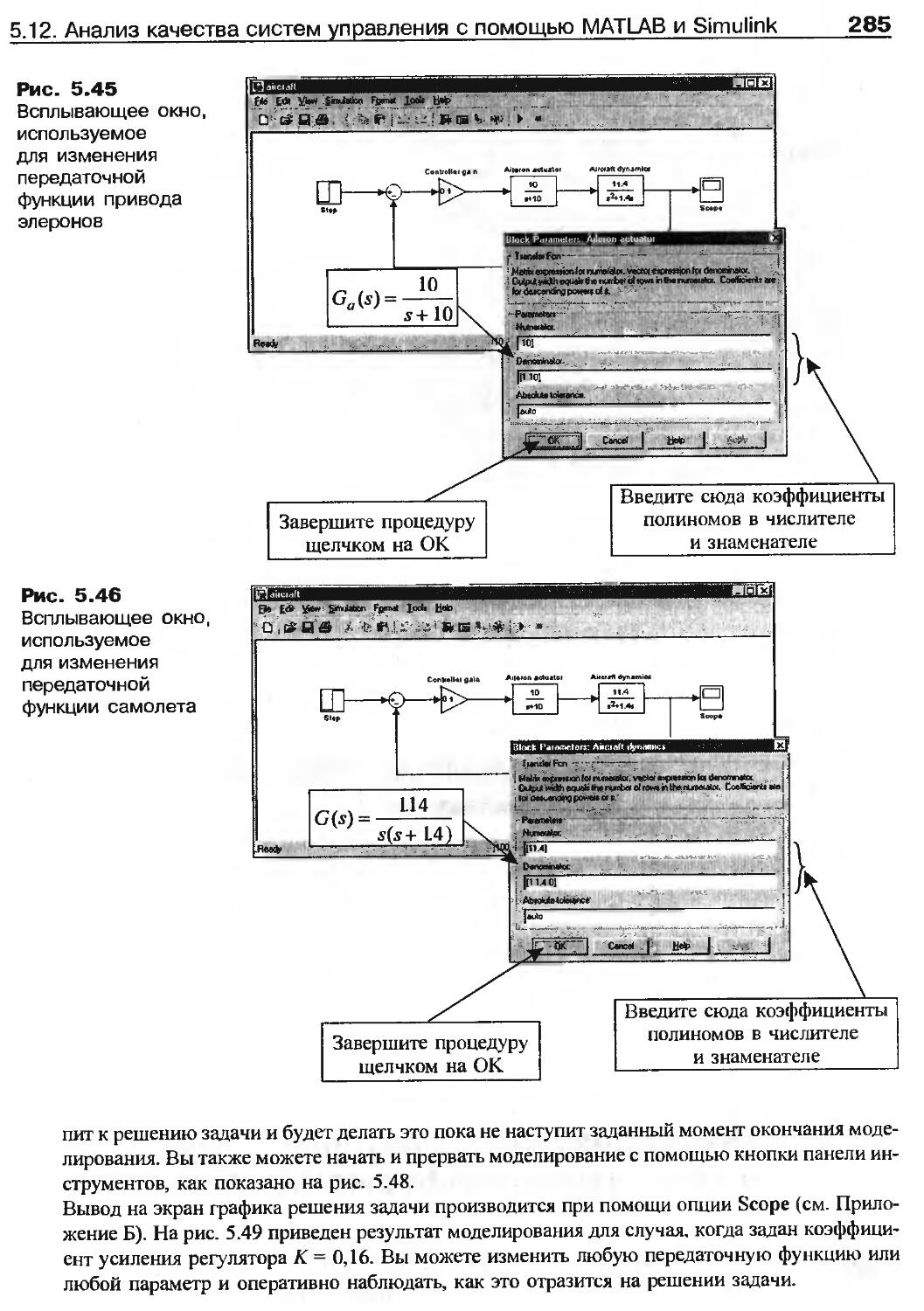
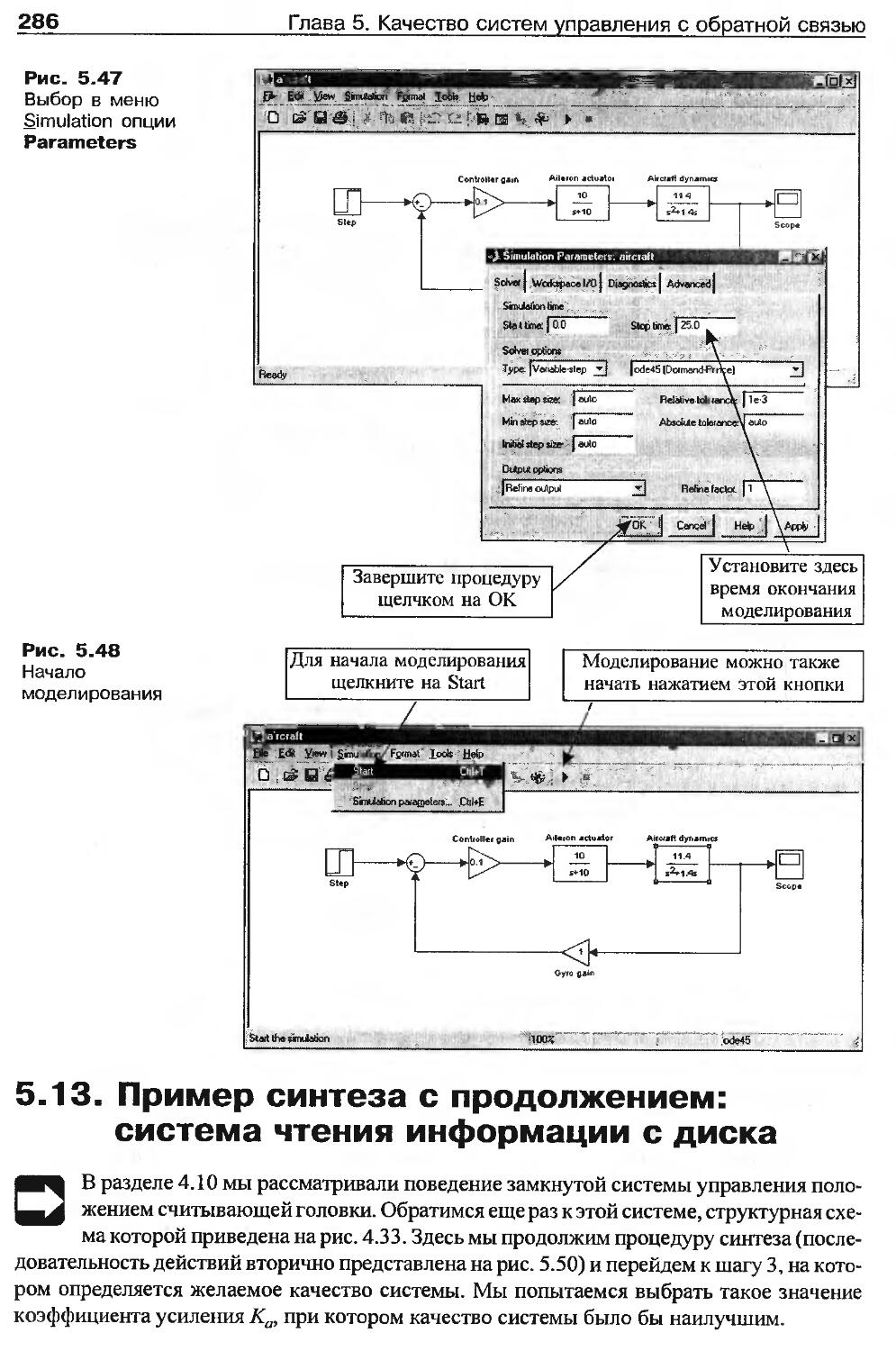
Примеры использования Simulink приведены в главах 5 и 11. В гл. 5 исследуется задача управления креном самолета, а в гл. 11 программа Simulink применяется для анализа системы, модель которой представлена в переменных состояния.
Основные особенности книги
Книга охватывает фундаментальные понятия теории систем управления в том виде, как они применяются в частотной и временной областях. Предпринята попытка отобрать для обсуждения, а также для примеров и задач такие системы, которые в истинном смысле являются современными. Именно поэтому в книге идет речь о робастных системах управления, о чувствительности систем, о моделях в переменных состояния, об управляемости и наблюдаемости, о цифровых системах управления, о регуляторах с внутренней (встроенной) моделью, о робастных ПИД-регуляторах, о компьютерном анализе и синтезе систем управления. Вместе с тем в книге сохранены и подробно изложены классические принципы теории управления, убедительно доказавшие свою практическую полезность.
Основные принципы построения материала: от классических методов к современным. Наша цель — дать четкое представление об основных методах синтеза систем в частотной и временной областях. В книге детально рассматриваются классические методы теории управления: преобразование Лапласа и передаточные функции; синтез с помощью метода корневого годографа; анализ устойчивости с помощью критерия Рауса-Гурвица; частотные методы Боде, Найквиста и Никольса; определение установившейся ошибки при типовых внешних воздействиях; аппроксимация системы в виде модели второго порядка; понятия запасов устойчивости по модулю и по фазе и полосы пропускания. Кроме того, существенно расширен раздел, посвященный методу переменных состояния. Обсуждаются фундаментальные понятия управляемости и наблюдаемости и их связь с сигнальными графами. Приводится формула Аккермана, определяющая заданное расположение полюсов с помощью полной обратной связи по состоянию; обсуждаются также ограничения метода синтеза путем обратной связи по состоянию.
Наряду с перечисленными выше основными методами в книге излагаются и многие вопросы, выходящие за рамки классической теории. Так, в главе 12 приводятся последние достижения в теории робастного управления, а в главе 13 рассматриваются способы реализации цифровых систем управления. В каждой главе, кроме первой, имеется раздел, знакомящий студента с применением среды MATLAB для анализа и синтеза систем управления.
Последовательное развитие навыков решения задач. Процесс обучения включает в себя чтение книги, посещение лекций и их конспектирование, а также разбор иллюстративных примеров. Настоящее же испытание подстерегает студента в виде задач в конце каждой главы. Решению задач в книге уделяется очень серьезное внимание. Каждая глава содержит 5 типов задач:
□ Упражнения (У)
□ Задачи (3)
□ Задачи повышенной сложности (П)
□ Задачи на синтез систем (С)
□ Задачи, решаемые с помощью MATLAB (М)
18
Предисловие
Например,' набор задач, завершающих 3 главу (Модели в переменных состояния), включает в себя 19 упражнений, 36 обычных задач, 6 задач повышенной сложности, 5 задач на синтез и 7 задач на применение MATLAB. Упражнения позволяют студенту на относительно несложных примерах прочувствовать применение на практике основных методов и понятий, рассмотренных в данной главе, прежде чем переходить к решению более сложных задач. К третьей части всех упражнений приведены ответы. Обычные задачи требуют применения основных положений главы к новым, нестандартным ситуациям. Далее, начиная с 7-го издания, следуют задачи повышенной сложности и задачи на синтез систем. Наконец, последняя группа позволяет студенту приобрести опыт решения задач на компьютере с помощью MATLAB. Всего в книге имеется более 800 задач. Большое количество задач повышенной сложности позволяет студенту приобрести уверенность в своей способности применять на практике полученные знания.
Акцент на синтез систем управления. Красной нитью через всю книгу проходит важнейшая тема синтеза реальных сложных систем управления. Каждая глава содержит по меньшей мере один пример на синтез, включая следующие:
Система управления введением инсулина (раздел 1.11)
Синтез фильтра низких частот (раздел 2.9)
Перемещение приводного ремня принтера (раздел 3.9)
Автономный самоходный аппарат для исследования Марса (раздел 4.8) Управление наведением космического телескопа «Хаббл» (раздел 5.11) Управление поворотом гусеничного транспортного средства (раздел 6.5) Система управления лазерным манипулятором (раздел 7.8) Система управления гравировальной машиной (раздел 8.7) Дистанционно управляемый разведывательный аппарат (раздел 9.8) Двухкоординатный графопостроитель (раздел 10.13) Система автоматического контроля (раздел 11.9)
Сверхпрецизионный токарный станок с алмазным резцом (раздел 12.12)
Система управления движением рабочего стола (раздел 13.9)
Разделы, посвященные применению MATLAB, помогут студентам освоить компьютерную поддержку анализа и синтеза систем и, возможно, заново решить многие задачи. Каждая программа содержит блоки с комментариями, обращающими внимание на ее важные фрагменты. Результат выполнения программы (обычно в виде графика) также снабжается комментариями, указывающими на существенные элементы. Эти программы с некоторыми изменениями могут быть использованы и для решения других подобных задач.
Дополнительные удобства. Каждая глава начинается с обзора, где кратко излагается то, с чем встретится студент при ее чтении. Завершается же каждая глава коротким резюме и разделом, в который сведены ключевые термины и понятия. Эти разделы акцентируют внимание на важнейшие положения главы и играют роль справочника для дальнейшего использования.
Структура книги
Глава 1. Введение в системы управления. Глава содержит историческую справку о развитии теории и практики автоматического управления. Она также имеет целью описать общий подход к синтезу и конструированию систем управления.
Глава 2. Математические модели систем. В этой главе разрабатываются математические модели физических систем в виде передаточной функции, связывающей вход и
Предисловие 19
выход системы. Рассматривается широкий круг систем, включая механические, электрические и гидравлические.
Глава 3. Модели в переменных состояния. В этой главе разрабатываются математические модели систем в переменных состояния. С помощью матричных методов исследуются переходные процессы и качество систем управления.
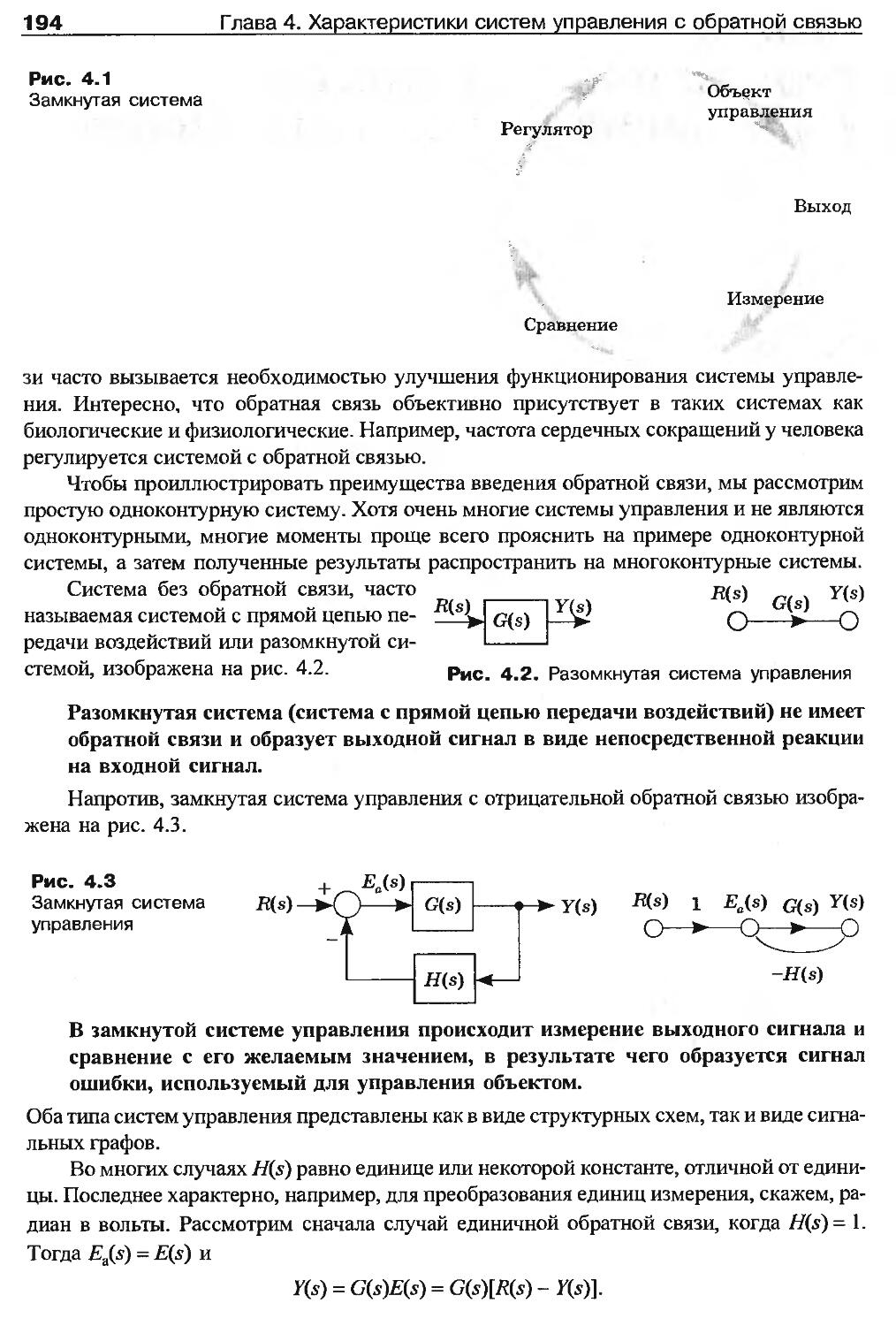
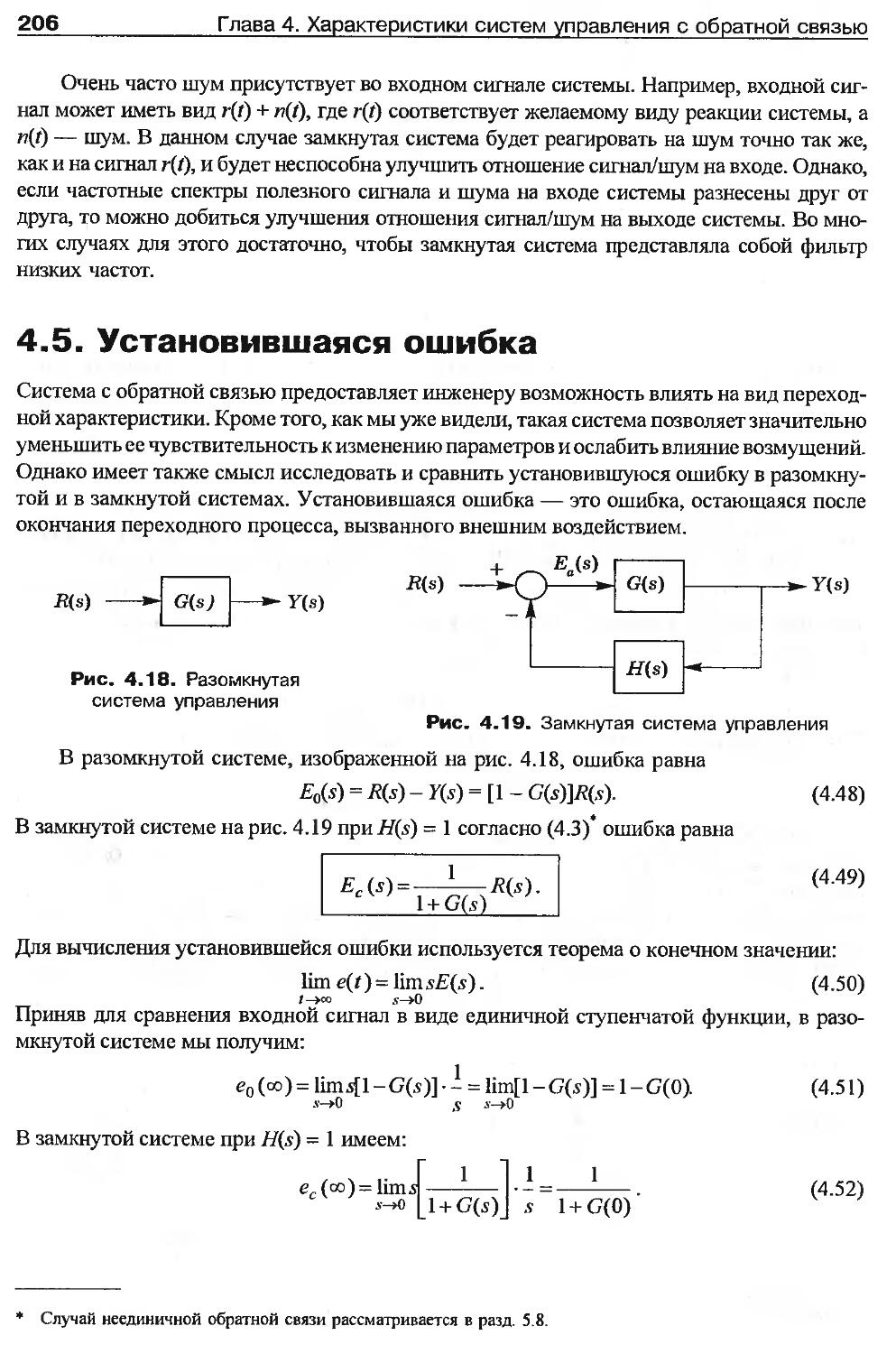
Глава 4. Характеристики систем управления с обратной связью. Здесь рассматриваются характеристики систем управления с обратной связью. Обсуждаются преимущества использования обратной связи, вводится понятие ошибки системы.
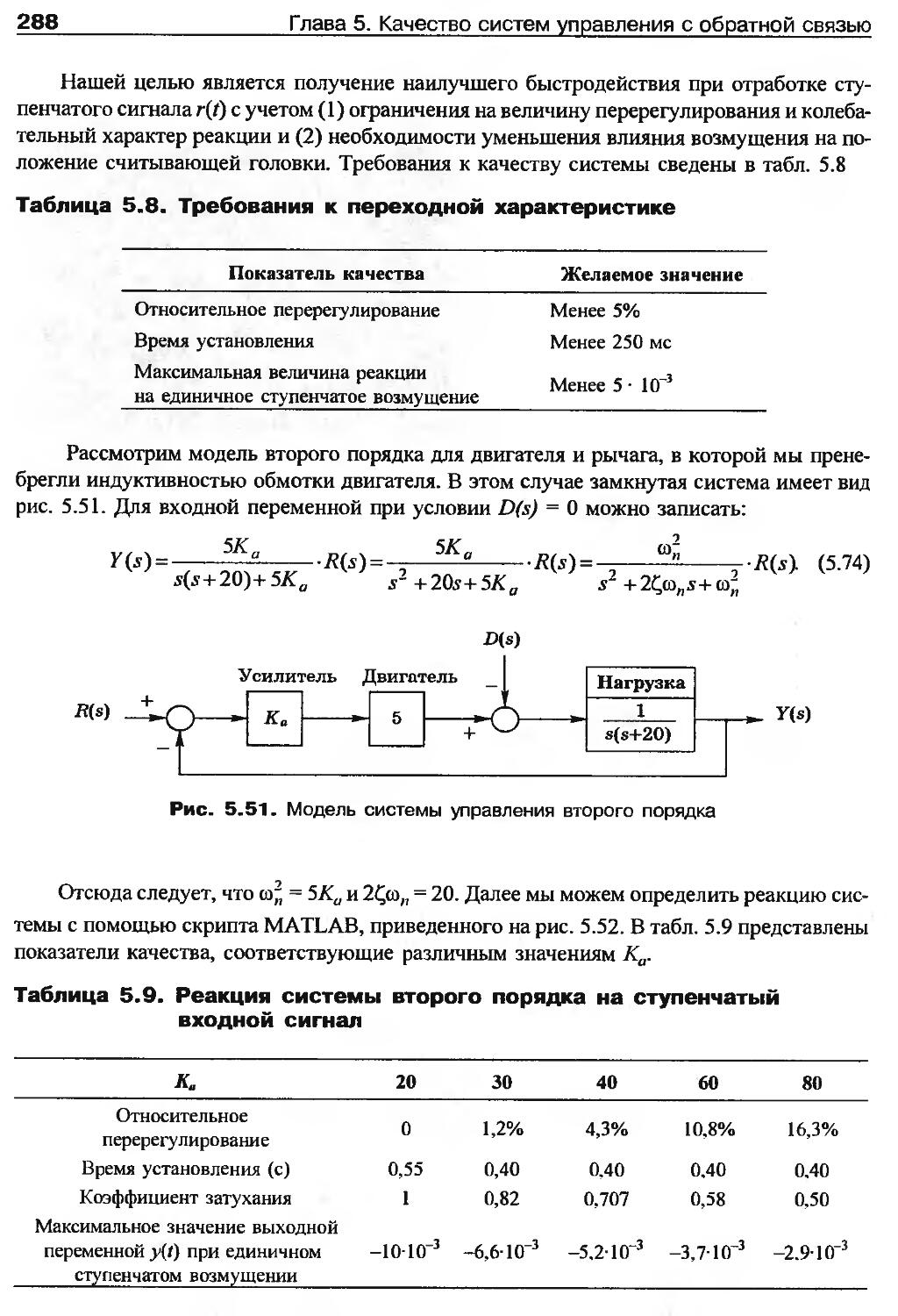
Глава 5. Качество систем управления с обратной связью. В этой главе исследуется качество систем управления. Показатели качества связываются с расположением на 5-плоскости полюсов и нулей передаточной функции.
Глава 6. Устойчивость линейных систем с обратной связью. В главе исследуется устойчивость систем с обратной связью. Устанавливается связь между устойчивостью системы и ее характеристическим уравнением. Вводится критерий устойчивости Рауса-Гурвица.
Глава 7. Метод корневого годографа. Здесь рассматривается движение корней характеристического уравнения на s-плоскости при изменении одного или двух параметров. Графическим методом определяются траектории корней Has-плоскости. Рассматривается также популярный ПИД-регулятор.
Глава 8. Метод частотных характеристик. Здесь исследуется установившееся движение системы при подаче на ее вход синусоидального сигнала и изменении его частоты. Рассматривается графическое представление частотных характеристик, называемое диаграммой Боде.
Глава 9. Анализ устойчивости методом частотных характеристик. В этой главе анализируется устойчивость систем с использованием частотных характеристик. Обсуждается критерий Найквиста, вводится понятие относительной устойчивости.
Глава 10. Синтез систем управления с обратной связью. Здесь описываются несколько методов синтеза и коррекции систем управления. Предлагаются различные варианты корректирующих устройств и показывается, как с их помощью можно улучшить показатели качества.
Глава 11. Синтез систем с обратной связью по состоянию. Основной вопрос этой главы - синтез систем управления на основе моделей в переменных состояния. Рассматривается проверка системы на управляемость и наблюдаемость, а также обсуждается метод синтеза с использованием внутренней модели.
Глава 12. Робастные системы управления. Эта глава посвящена синтезу высокоточных систем управления при наличии существенной неопределенности. Рассматриваются пять методов решения данной задачи: метод корневого годографа, метод частотных характеристик, методы синтеза робастных ПИД-регуляторов на основе взвешенных интегральных оценок, использование внутренних моделей и метод псевдоколичественной обратной связи.
Глава 13. Цифровые системы управления. Здесь рассматриваются методы математического описания и анализа качества цифровых систем управления. Обсуждаются вопросы устойчивости и качества дискретных систем.
Приложения. В качестве приложений приводятся следующие:
А. Основы MATLAB.
Б. Основы Simulink.
20 Предисловие
Благодарности
Мы хотим выразить искреннюю благодарность всем оказавшим нам помощь в подготовке девятого издания книги. Среди них: Махмуд А. Абдаллах, Центральный государственный университет (Огайо); Джон Н. Чиассон, Питтсбургский университет; Сами Эль-Савах, Калифорнийский государственный политехнический университет, Помона; Питер Дж. Гор-дер, Канзасский государственный университет; Дуэйн Ханзельман, Университет штата Мэн; Ашок Айер, Университет штата Невада, Лас-Вегас; Лесли Р. Ковал, Университет Миссури-Ролла; Л. Дж. Крафт, Университет штата Нью-Гэмпшир; Томас Курфесс, Технологический институт штата Джорджия; Хулио К. Мандоджана, государственный университет Манкато; Джури Меданик, У ниверситет штата Иллинойс, Урбана-Шампейн; Эдуардо А. Мисава, Оклахомский государственный университет; Медхат М. Моркос, Канзасский государственный университет; Марк Начурка, Университет Маркетт; Карла Шварц, корпорация MathWorks; Д. Суббарам Найду, Государственный университет, Айдахо; Рон Перец, Университет Висконсин-Милуоки; Мурат Таньел, Дордтский колледж; Хол Тарп, Аризонский университет; Джон Валасек, Техасский университет; Пол П. Вонг, Университет Дьюка; Рави У орриер, Институт техники и управления корпорации Дженерал Моторе.
Ричард К. Дорф Роберт X. Бишоп
Об авторах
Ричард К. Дорф — профессор электротехники и вычислительной техники в Калифорнийском университете, Дэвис. Он известен главным образом как преподаватель курса электротехники и ее применений в общественной и экономической сферах. Им написано и издано несколько получивших признание учебников и справочников, в том числе Технический справочник и Справочник по электротехнике. Проф. Дорф является членом Совета IEEE и работает в области проектирования систем управления и робототехнических систем. Д-р Дорф обладает патентом на оригинальный ПИД-регулятор.
Роберт X. Бишоп является стипендиатом Майрона Л. Биджмена на факультете аэрокосмической техники и механики Техасского университета в Остине. Будучи талантливым педагогом, проф. Бишоп заслужил признание за высокое качество преподавания, отмеченное премией компании «Локхид Мартин». Являясь активным членом Американского института аэронавтики и астронавтики (AIAA), IEEE и Американской ассоциации преподавателей технических дисциплин (ASEE), он был удостоен премии Джона Леланда Этвуда, периодически присуждаемой ASEE и AIAA «ведущему ученому, сделавшему весомый вклад в подготовку специалистов в области аэрокосмической техники». Д-р Бишоп известен своими работами в области аэронавигации и управления космическими аппаратами.
Глава 1
Введение в системы управления
Обзор
В этой главе мы рассмотрим в общих чертах процесс синтеза системы управления, т. е. системы определенного назначения, состоящей из взаимосвязанных элементов. Для понимания целей систем управления полезно будет обратиться к некоторым примерам таких систем, появлявшихся в различные исторические эпохи. Эти самые первые системы управления работали по тому же принципу обратной связи, который используется и в наше время.
Проектирование современных систем управления позволяет среди многих других задач решать и такие, как совершенствование производственных процессов, повышение эффективности использования энергии, оптимизация управления автомобилем путем регулирования скорости. Ниже мы разберем эти интересные с практической точки зрения приложения техники управления.
Мы обсудим также причины расхождения между свойствами сложного реального физического объекта и его модели, служащей основой для синтеза системы управления. Итеративный характер процедуры синтеза позволяет эффективно сглаживать эти расхождения путем принятия компромиссных решений в отношении сложности, качества и стоимости системы, причем критерием здесь служат выдвинутые ограничения.
В заключение мы приступим к разбору примера синтеза с продолжением: управление системой чтения информации с диска. Этот пример последовательно будет рассматриваться в каждой главе книги. Он наглядно иллюстрирует практические приемы синтеза и одновременно является полезным средством закрепления материала главы.
1.1. Введение
Прикладные науки занимаются изучением предметов материального мира и сил природы и управлением ими в интересах человечества. Сходные задачи решают и инженеры, занимающиеся проектированием систем управления. Разница лишь в том, что для инженера представляют интерес фрагменты окружающей его обстановки, часто называемые просто системами, а его целью является производство товаров и услуг, приносящих пользу обществу. Процессы изучения и управления неотделимы друг от друга, поскольку эффективное управление каким-либо процессом невозможно без его исследования и моделирования. Более того, в качестве объектов управления часто выступают плохо изученные процессы, например химические. По-настоящему трудной задачей для инженера является моделирование и управление современными сложными взаимосвязанными системами, такими как транспортные потоки, химические процессы, робототехнические комплексы. В то же время опытный инженер в состоянии проектировать многие весьма полезные и оригинальные промышленные системы управления. По-видимому, наиболее яркая особенность техники
22
Глава 1. Введение в системы управления
управления—это возможность целенаправленного воздействия на механизмы, производственные и экономические процессы в интересах общества.
Техника управления базируется на теории обратной связи и анализе линейных систем; она включает в себя также основные положения теории цепей и теории связи. Поэтому она не ограничивается только какой-то одной технической дисциплиной, а в равной степени применима к аэронавтике, химической технологии, механике, экологии, строительству, электротехнике. Очень часто, например, система управления включает в себя элементы электрической, механической и химической природы. Более того, по мере более глубокого понимания динамики бизнеса, социальных и политических процессов будет повышаться и способность управления этими процессами.
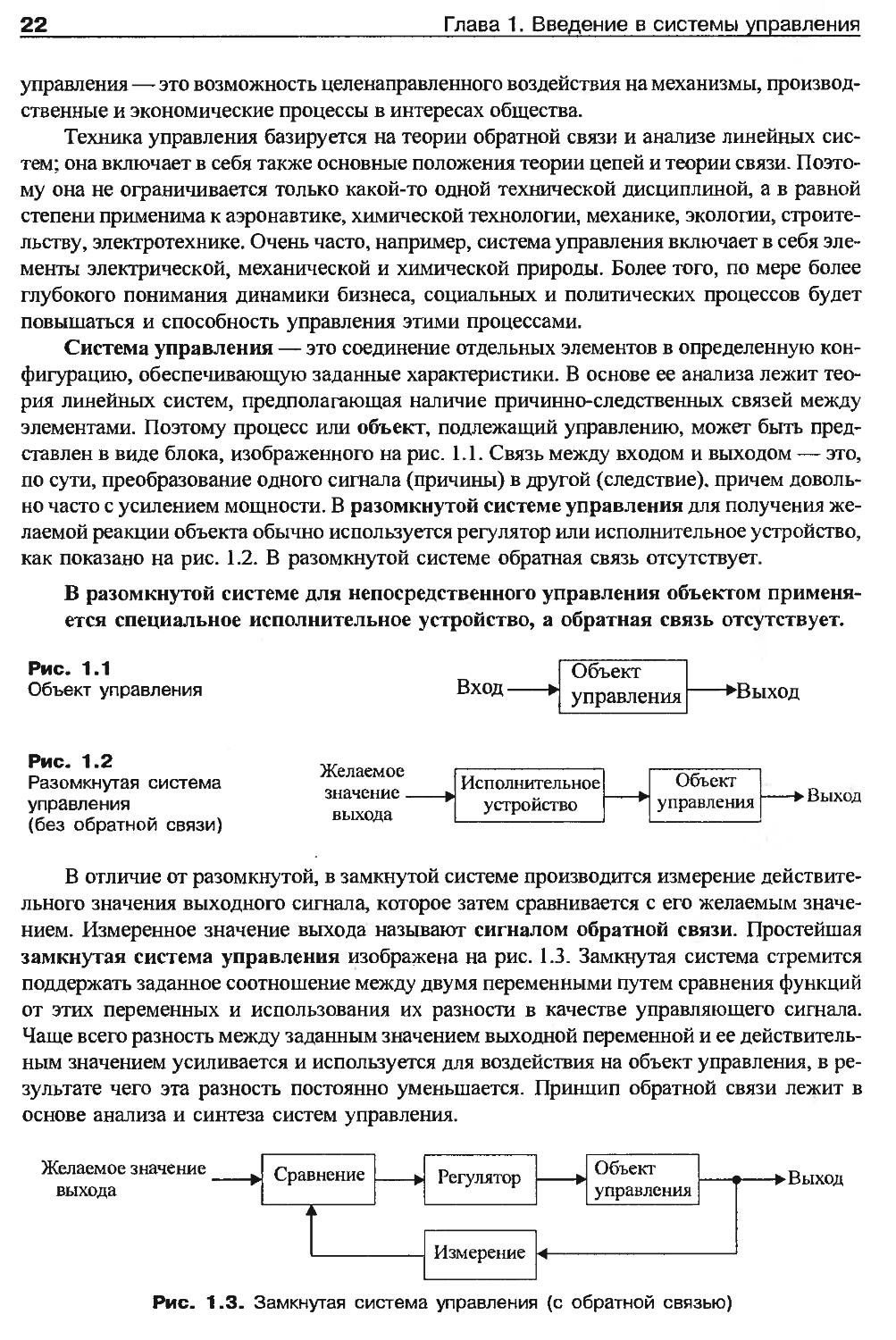
Система управления — это соединение отдельных элементов в определенную конфигурацию, обеспечивающую заданные характеристики. В основе ее анализа лежит теория линейных систем, предполагающая наличие причинно-следственных связей между элементами. Поэтому процесс или объект, подлежащий управлению, может быть представлен в виде блока, изображенного на рис. 1.1. Связь между входом и выходом — это, по сути, преобразование одного сигнала (причины) в другой (следствие), причем довольно часто с усилением мощности. В разомкнутой системе управления для получения желаемой реакции объекта обычно используется регулятор или исполнительное устройство, как показано на рис. 1.2. В разомкнутой системе обратная связь отсутствует.
В разомкнутой системе для непосредственного управления объектом применяется специальное исполнительное устройство, а обратная связь отсутствует.
Рис. 1.1
Объект управления
Вход
Объект управления
>Выход
Рис. 1.2
Разомкнутая система управления
(без обратной связи)
Желаемое значение выхода
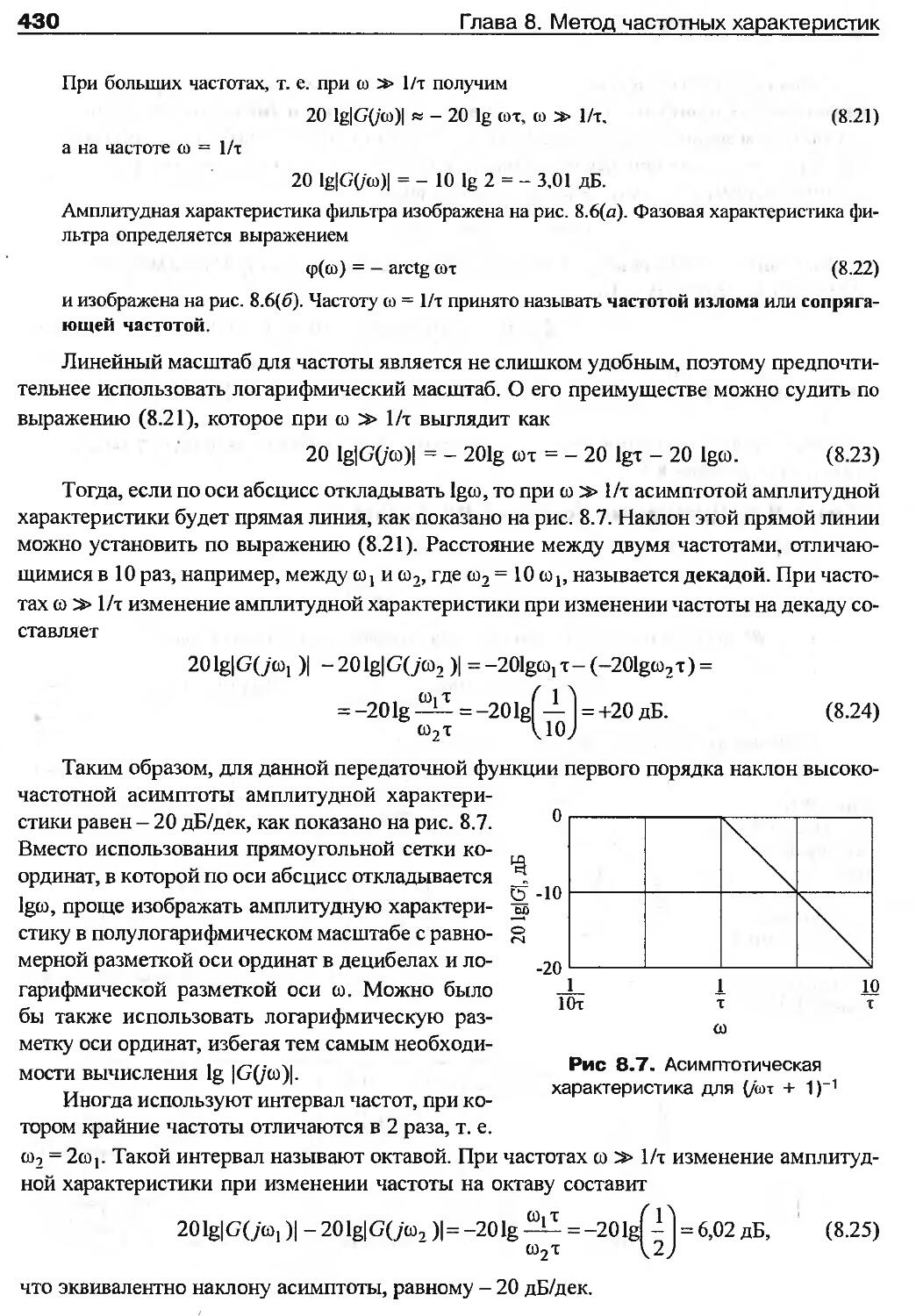
В отличие от разомкнутой, в замкнутой системе производится измерение действительного значения выходного сигнала, которое затем сравнивается с его желаемым значением. Измеренное значение выхода называют сигналом обратной связи. Простейшая замкнутая система управления изображена на рис. 1.3. Замкнутая система стремится поддержать заданное соотношение между двумя переменными путем сравнения функций от этих переменных и использования их разности в качестве управляющего сигнала. Чаще всего разность между заданным значением выходной переменной и ее действительным значением усиливается и используется для воздействия на объект управления, в результате чего эта разность постоянно уменьшается. Принцип обратной связи лежит в основе анализа и синтеза систем управления.
Желаемое значение выхода
Рис. 1.3. Замкнутая система управления (с обратной связью)
1.2. История автоматического управления
23
В замкнутой системе производится измерение выходной переменной и его результат в виде сигнала обратной связи сравнивается с эталонным входным сигналом, несущим информацию о заданном значении выходной переменной.
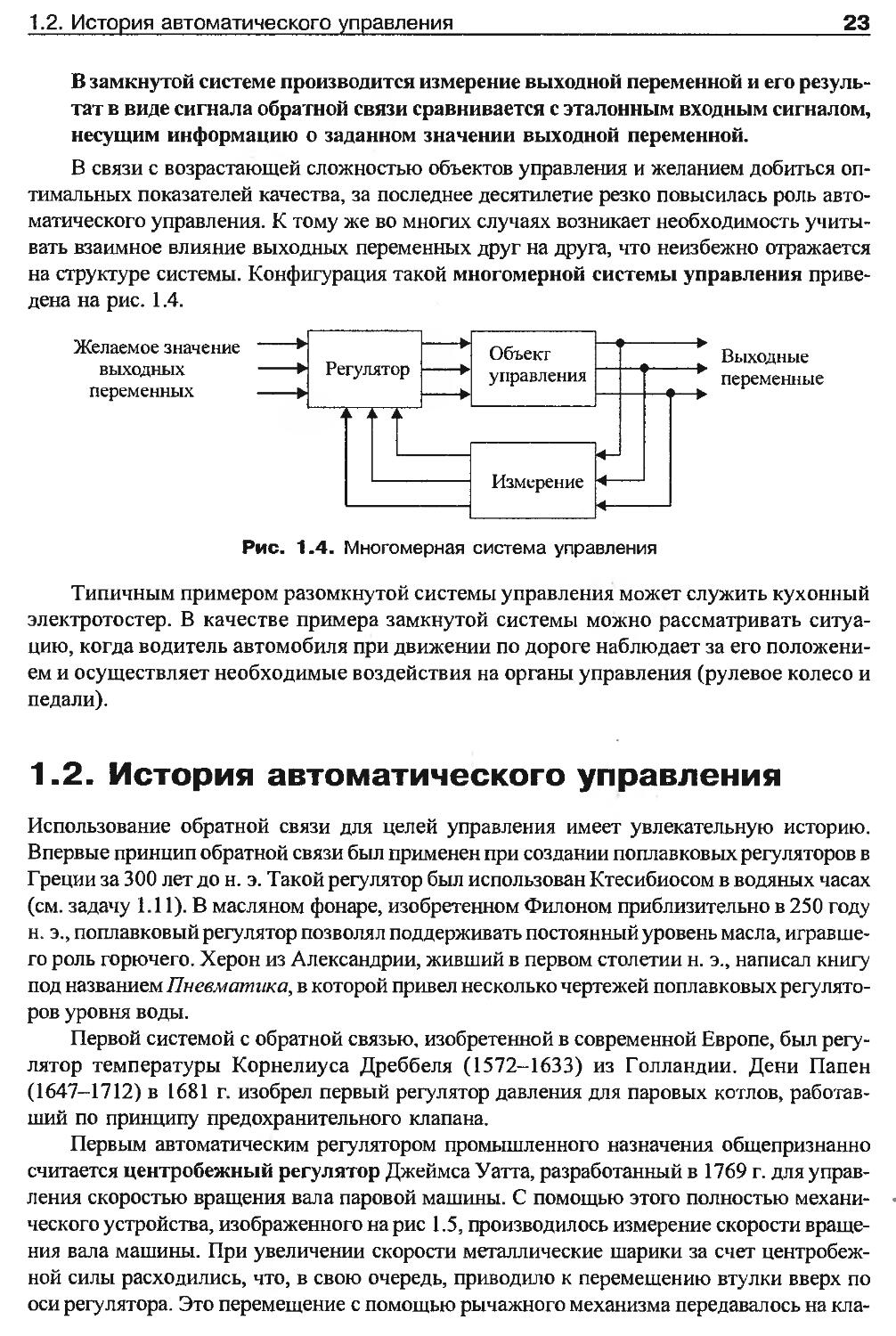
В связи с возрастающей сложностью объектов управления и желанием добиться оптимальных показателей качества, за последнее десятилетие резко повысилась роль автоматического управления. К тому же во многих случаях возникает необходимость учитывать взаимное влияние выходных переменных друг на друга, что неизбежно отражается на структуре системы. Конфигурация такой многомерной системы управления приведена на рис. 1.4.
Желаемое значение выходных переменных
Выходные переменные
Рис. 1.4. Многомерная система управления
Типичным примером разомкнутой системы управления может служить кухонный электротостер. В качестве примера замкнутой системы можно рассматривать ситуацию, когда водитель автомобиля при движении по дороге наблюдает за его положением и осуществляет необходимые воздействия на органы управления (рулевое колесо и педали).
1.2. История автоматического управления
Использование обратной связи для целей управления имеет увлекательную историю. Впервые принцип обратной связи был применен при создании поплавковых регуляторов в Греции за 300 лет до н. э. Такой регулятор был использован Ктесибиосом в водяных часах (см. задачу 1.11). В масляном фонаре, изобретенном Филоном приблизительно в 250 году н. э., поплавковый регулятор позволял поддерживать постоянный уровень масла, игравшего роль горючего. Херон из Александрии, живший в первом столетии н. э., написал книгу под названием Пневматика, в которой привел несколько чертежей поплавковых регуляторов уровня воды.
Первой системой с обратной связью, изобретенной в современной Европе, был регулятор температуры Корнелиуса Дреббеля (1572-1633) из Голландии. Дени Папен (1647—1712) в 1681 г. изобрел первый регулятор давления для паровых котлов, работавший по принципу предохранительного клапана.
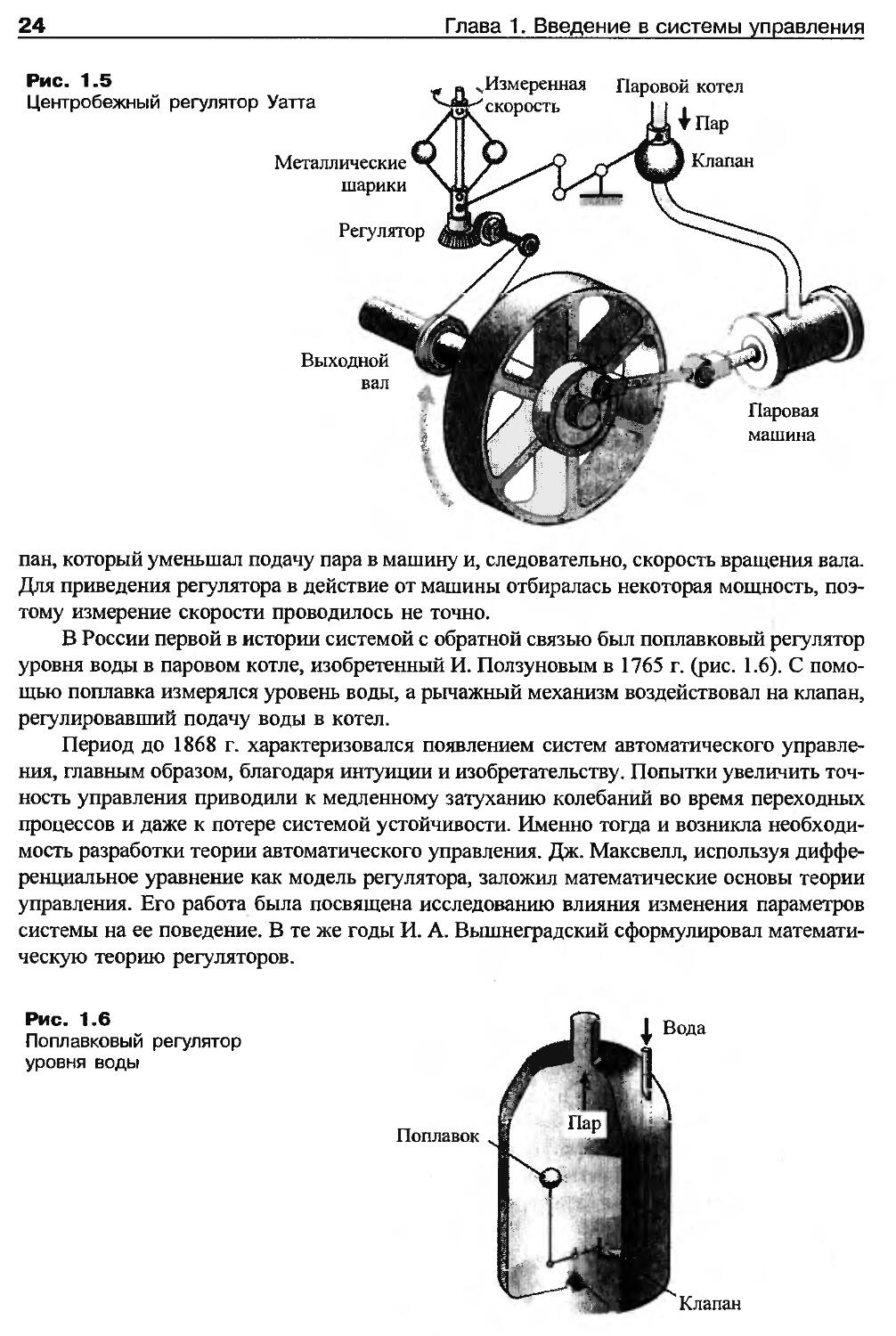
Первым автоматическим регулятором промышленного назначения общепризнанно считается центробежный регулятор Джеймса Уатта, разработанный в 1769 г. для управления скоростью вращения вала паровой машины. С помощью этого полностью механического устройства, изображенного на рис 1.5, производилось измерение скорости вращения вала машины. При увеличении скорости металлические шарики за счет центробежной силы расходились, что, в свою очередь, приводило к перемещению втулки вверх по оси регулятора. Это перемещение с помощью рычажного механизма передавалось на кла-
24
Глава 1. Введение в системы управления
Рис. 1.5
Центробежный регулятор Уатта
^Измеренная Паровой котел 4 Пар
Регулятор
Выходной вал
Металлические шарики
Клапан
Паровая машина
пан, который уменьшал подачу пара в машину и, следовательно, скорость вращения вала. Для приведения регулятора в действие от машины отбиралась некоторая мощность, поэтому измерение скорости проводилось не точно.
В России первой в истории системой с обратной связью был поплавковый регулятор уровня воды в паровом котле, изобретенный И. Ползуновым в 1765 г. (рис. 1.6). С помощью поплавка измерялся уровень воды, а рычажный механизм воздействовал на клапан, регулировавший подачу воды в котел.
Период до 1868 г. характеризовался появлением систем автоматического управления, главным образом, благодаря интуиции и изобретательству. Попытки увеличить точность управления приводили к медленному затуханию колебаний во время переходных процессов и даже к потере системой устойчивости. Именно тогда и возникла необходимость разработки теории автоматического управления. Дж. Максвелл, используя дифференциальное уравнение как модель регулятора, заложил математические основы теории управления. Его работа была посвящена исследованию влияния изменения параметров системы на ее поведение. В те же годы И. А. Вышнеградский сформулировал математическую теорию регуляторов.
Рис. 1.6
Поплавковый регулятор уровня воды
Клапан
1.2. История автоматического управления 25
Перед Второй мировой войной развитие теории и практики управления в США и Западной Европе шло по несколько иному пути, нежели в России и Восточной Европе. В США в это время основные усилия были направлены на применение обратной связи в системах телефонии и электронных усилителях. Главные достижения здесь принадлежат Боде, Найквисту и Блэку, которые предложили описывать работу усилителей с обратной связью с помощью частотных характеристик. Напротив, в бывшем Советском Союзе известные математики и механики опережали западных ученых в области собственно теории управления, причем акцент делался на анализ систем во временной области с использованием дифференциальных уравнений.
Большой толчок развитию теории и практики автоматического управления дала Вторая мировая война, когда возникла потребность в создании автопилотов, систем орудийной наводки, станций радарного слежения и других устройств военного назначения, работающих на основе принципа обратной связи. Сложность систем военного назначения и ожидаемые выгоды от их применения побудили расширить круг технических средств и обострили интерес к системам управления и разработке новых методов их синтеза и анализа. До 1940 г. в большинстве случаев синтез систем управления проводился методом проб и ошибок и являлся своего рода искусством. В 40-е годы значительно выросло число аналитических методов синтеза, и теория управления по праву стала настоящей инженерной дисциплиной.
После Второй мировой войны в теории управления по-прежнему преобладали частотные методы, но наряду с этим возросла роль преобразования Лапласа и комплексной s-плоскости. В 50-е годы акцент в теории управления был сделан на разработку методов, связанных с использованием s-плоскости, в частности, метода корневого годографа. В 80-е годы обычным делом стало применение цифровых компьютеров в системах управления. В настоящее время в США в системах прямого цифрового управления задействовано более 400000 компьютеров, благодаря чему появилась возможность одновременного измерения и управления многими переменными.
Запуск первого искусственного спутника Земли и начало космической эры дали новый толчок развитию техники управления. Возникла необходимость создания сложных, высокоточных систем управления для ракет и космических зондов, а возросшие требования к точности этих систем и желание минимизировать массу спутников обусловили повышенный интерес к теории оптимального управления. Именно поэтому в последние два десятилетия стали популярными методы анализа и синтеза во временной области, разработанные Ляпуновым, Минорским и другими учеными, в особенности Л. С. Понтрягиным в СССР и Р. Веллманом в США. Теперь не вызывает сомнения, что при решении задач анализа и синтеза систем одновременно должны использоваться как частотные, так и временные методы.
Некоторые этапы истории автоматического управления отражены в табл. 1.1.
26
Глава 1, Введение в системы управления
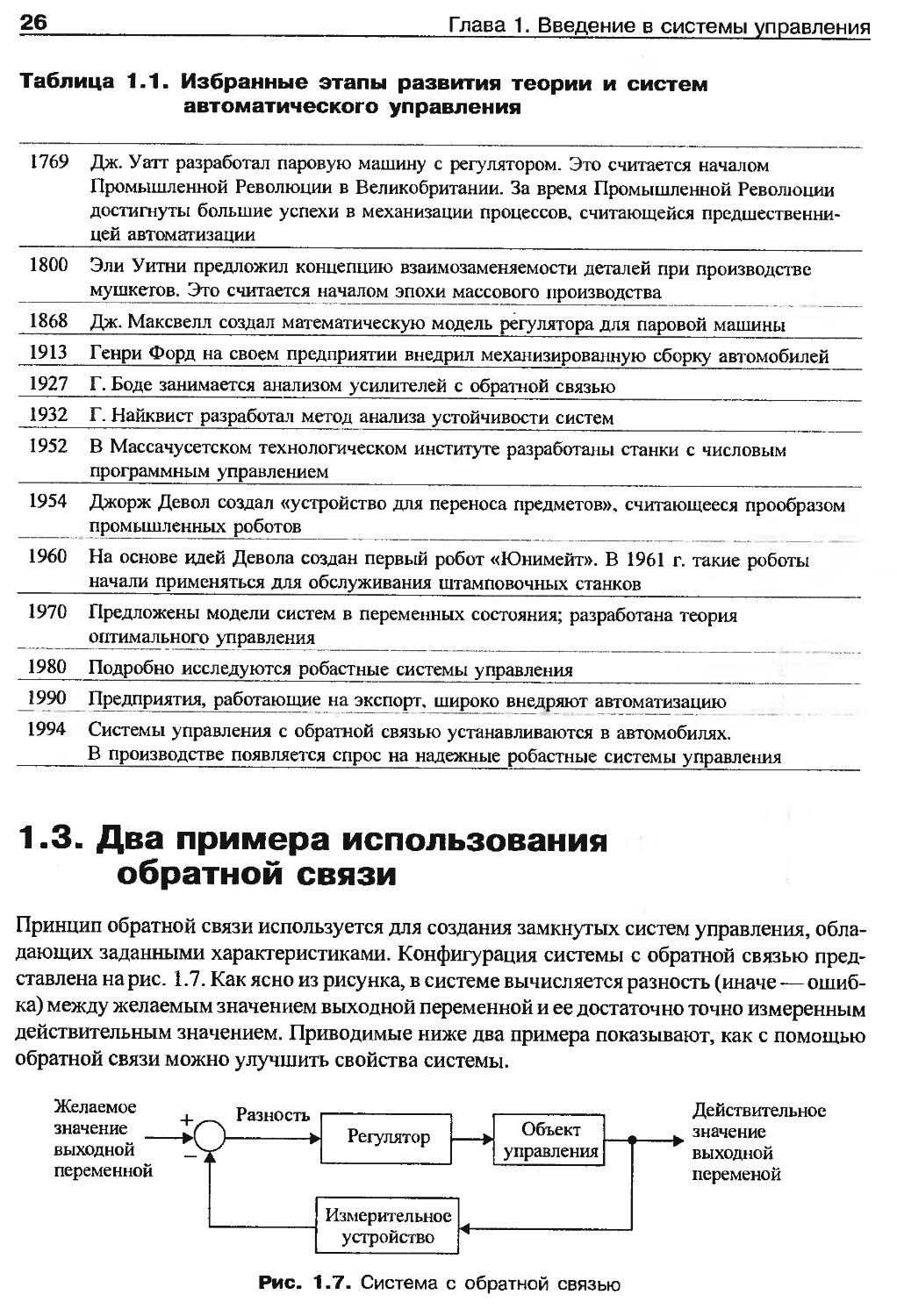
Таблица 1.1. Избранные этапы развития теории и систем автоматического управления
1769 Дж. Уатт разработал паровую машину с регулятором. Это считается началом Промышленной Революции в Великобритании. За время Промышленной Революции достигнуты большие успехи в механизации процессов, считающейся предшественницей автоматизации
1800 Эли Уитни предложил концепцию взаимозаменяемости деталей при производстве мушкетов. Это считается началом эпохи массового производства
1868 Дж. Максвелл создал математическую модель регулятора для паровой машины
1913 Генри Форд на своем предприятии внедрил механизированную сборку автомобилей
1927 Г. Боде занимается анализом усилителей с обратной связью
1932 Г. Найквист разработал метод анализа устойчивости систем
1952 В Массачусетском технологическом институте разработаны станки с числовым программным управлением
1954 Джорж Девол создал «устройство для переноса предметов», считающееся прообразом
1960 промышленных роботов На основе идей Девола создан первый робот «Юнимейт». В 1961 г. такие роботы начали применяться для обслуживания штамповочных станков
1970 Предложены модели систем в переменных состояния; разработана теория оптимального управления
1980 Подробно исследуются робастные системы управления
1990 Предприятия, работающие на экспорт, широко внедряют автоматизацию
1994 Системы управления с обратной связью устанавливаются в автомобилях.
В производстве появляется спрос на надежные робастные системы управления
1.3. Два примера использования обратной связи
Принцип обратной связи используется для создания замкнутых систем управления, обладающих заданными характеристиками. Конфигурация системы с обратной связью представлена на рис. 1.7. Как ясно из рисунка, в системе вычисляется разность (иначе -— ошибка) между желаемым значением выходной переменной и ее достаточно точно измеренным действительным значением. Приводимые ниже два примера показывают, как с помощью обратной связи можно улучшить свойства системы.
Действительное значение выходной переменой
Рис. 1.7. Система с обратной связью
1.3. Два примера использования обратной связи
27
Гарольд С. Блэк в 1921 г. окончил Вустерский политехнический институт и поступил на работу в фирму «Белл лабораториз» корпорации AT&T. В то время главной задачей, над которой работала фирма, было улучшение качества телефонной связи и используемых при этом усилителей сигналов. Блэку было поручено заняться линеаризацией и стабилизацией усилителей, устанавливаемых в тракте передачи голосовых сообщений на расстояния в тысячи миль.
Блэк вспоминает:
Было утро вторника 2 августа 1927 г., когда во время переправы на пароме через Гудзон по дороге на работу мне внезапно в голову пришла мысль об использовании в усилителе отрицательной обратной связи. Более 50 лет я размышлял, как и почему возникла эта идея, но даже и теперь я не могу сказать, как всё произошло. Я знаю только то, что после нескольких лет работы над проблемой я неожиданно понял, что если подать сигнал с выхода усилителя на его вход, причем в обратной фазе, и воспрепятствовать самовозбуждению усилителя (свисту, как мы позже назвали этот эффект), то я получу именно то, что хотел — способ устранения искажений выходного сигнала. Я раскрыл утреннюю газету Нью-Йорк Таймс и на полях набросал соответствующую схему, дополнив ее формулой для коэффициента усиления с учетом обратной связи. Я подписался под этой схемой, а 20 минут спустя, когда я прибыл в лабораторию на Уэст-стрит, 463, ее также заверил своей подписью ныне покойный Эрл К. Блессинг.
Я представил себе, что это решение может привести к разработке усилителей с высокой степенью линейности (при отрицательной обратной связи от 40 до 50 дБ), но оставался один важный вопрос: как я узнал, что смогу избежать самовозбуждения подобной схемы в широком частотном диапазоне, хотя многие вообще сомневались в ее устойчивости? Моя уверенность основывалась на работах, которые я проделал два года назад, занимаясь исследованием оригинальных осцилляторов, и три года назад, когда проектировал оконечные каскады и разрабатывал математические основы телефонной системы для междугородных переговоров.
Другим примером инженерного решения проблемы управления является создание системы наведения орудия, выполненное Дэвидом Б. Паркинсоном из «Белл Телефон Лабораториз». Весной 1940 г. 29-летний инженер Паркинсон занимался модернизацией автоматического самопишущего прибора, предназначенного для регистрации на диаграммной бумажной ленте изменяющегося напряжения. Самым капризным элементом в приборе был маленький потенциометр, с помощью которого через исполнительный механизм производилось управление перемещением пера самописца.
В мыслях у Паркинсона было орудие, которое чувствовало бы приближение самолета и уничтожало его. Вот что описывает Паркинсон:
После трех или четырех выстрелов один из членов орудийного расчета улыбнулся и попросил меня подойти поближе. Когда я это сделал, он указал мне на левую цапфу орудийной турели, и я увидел, что там установлен такой же потенциометр, что и в моём самописце!
На следующее утро Паркинсон воплотил свои мечты в реальность:
Если мой потенциометр был способен управлять перемещением пера самописца, то нечто похожее могло бы, с соответствующими техническими изменениями, управлять наводкой зенитного орудия.
После напряженной работы в этом направлении вооруженным силам США 1 декабря 1941 г. была предложена инженерная модель соответствующего устройства. В начале 1943 г. было налажено промышленное производство подобных систем, и на вооружение было принято около 3000 систем орудийной наводки. На вход регулятора поступал сигнал от радиолокатора о текущем положении самолета, а в системе управления вычислялось его будущее положение.
28
Глава 1. Введение в системы управления
1.4. Управление на практике
Современная теория управления имеет дело с системами, которые обладают качествами самоорганизации, приспосабливаемое™, робастности, обучаемости и оптимальности. Эти признаки постоянно поддерживают творческую инициативу инженеров, работающих в сфере автоматического управления.
Управление производственным процессом без непосредственного участия человека обычно называется автоматизацией. Среди прочих отраслей промышленности автоматизация преобладает в химической технологии, энергетике, в производстве стали, бумаги, автомобилей. Автоматизация играет ключевую роль в нашем индустриальном обществе. Различные автоматические устройства позволяют увеличить выпуск продукции в расчете на одного работающего, чтобы сбалансировать инфляционные издержки и рост заработной платы. Поэтому в промышленности используется термин производительность (в первую очередь — производительность труда), которая определяется как отношение выпуска продукции к реальным затратам в расчете на один час рабочего времени. Кроме того, промышленные предприятия стремятся постоянно улучшать потребительские качества выпускаемой продукции. За последнее десятилетие это наиболее заметно проявилось в автомобильной промышленности.
За сравнительно короткую историю Соединенных Штатов механизация и автоматизация резко изменили структуру рабочей силы, в результате страна из аграрной республики превратилась в мощную индустриальную державу. В 1820 г. более 70% рабочей силы было занято в сельском хозяйстве. К 1900 г. эта цифра составила уже менее 40%, а в настоящее время она меньше 5%.
В 1925 г. почти 558000 человек — около 1,3% всей рабочей силы страны — требовалось для добычи 520 млн т каменного и бурого угля, причем практически полностью из подземных разработок. К 1980 г. добыча угля выросла до 774 млн т, но количество рабочих при этом уменьшилось до 208000. Более того, только 136000 человек из общего количества было занято на подземных работах. Что же касается открытых разработок, то благодаря высокой степени механизации всего 72000 рабочих обеспечили добычу 482 млн т, или 62% от общего объема.
Процесс облегчения труда человека за счет технических достижений, начавшийся еще в доисторическую эпоху, вступает в новую фазу. Ускорение темпов технических нововведений, начавшееся с Промышленной Революции, до недавних пор сводилось главным образом к устранению физического труда из производственных процессов. В наши дни выдающиеся достижения в компьютерной технологии вызывают не менее важные социальные изменения: по способности собирать и обрабатывать информацию компьютеры всё больше приближаются к человеческому мозгу.
Автоматизация позволяет увеличить производительность и повысить качество выпускаемой продукции. Термин автоматизация впервые стал популярен в автомобильной промышленности. Полностью автоматизированные станки были связаны с помощью конвейера в длинную линию, способную производить детали двигателя, например, такие как блок цилиндров, без вмешательства оператора. При производстве кузовов высокоскоростные штамповочные прессы были связаны автоматическими подающими механизмами, что позволило повысить производительность формовки металлических листов. На многих других операциях, где процесс отличался достаточной стабильностью, например при изготовлении радиаторов, ручную работу заменили полностью автоматизированные линии.
1,5, Примеры современных систем управления
29
В 90-е годы возникла потребность в производстве мелких партий заказных изделий, а это стимулировало создание гибких автоматизированных систем и промышленных роботов.
В США, Японии и Европе в сфере автоматического управления занято около 150000 инженеров. Только в США за счет автоматизации извлекается доход более 50 млрд, долларов в год! Теория и практика автоматического управления — это многогранная, увлекательная и чрезвычайно полезная инженерная дисциплина, и каждый может легко осознать необходимость ее изучения.
1.5. Примеры современных систем управления
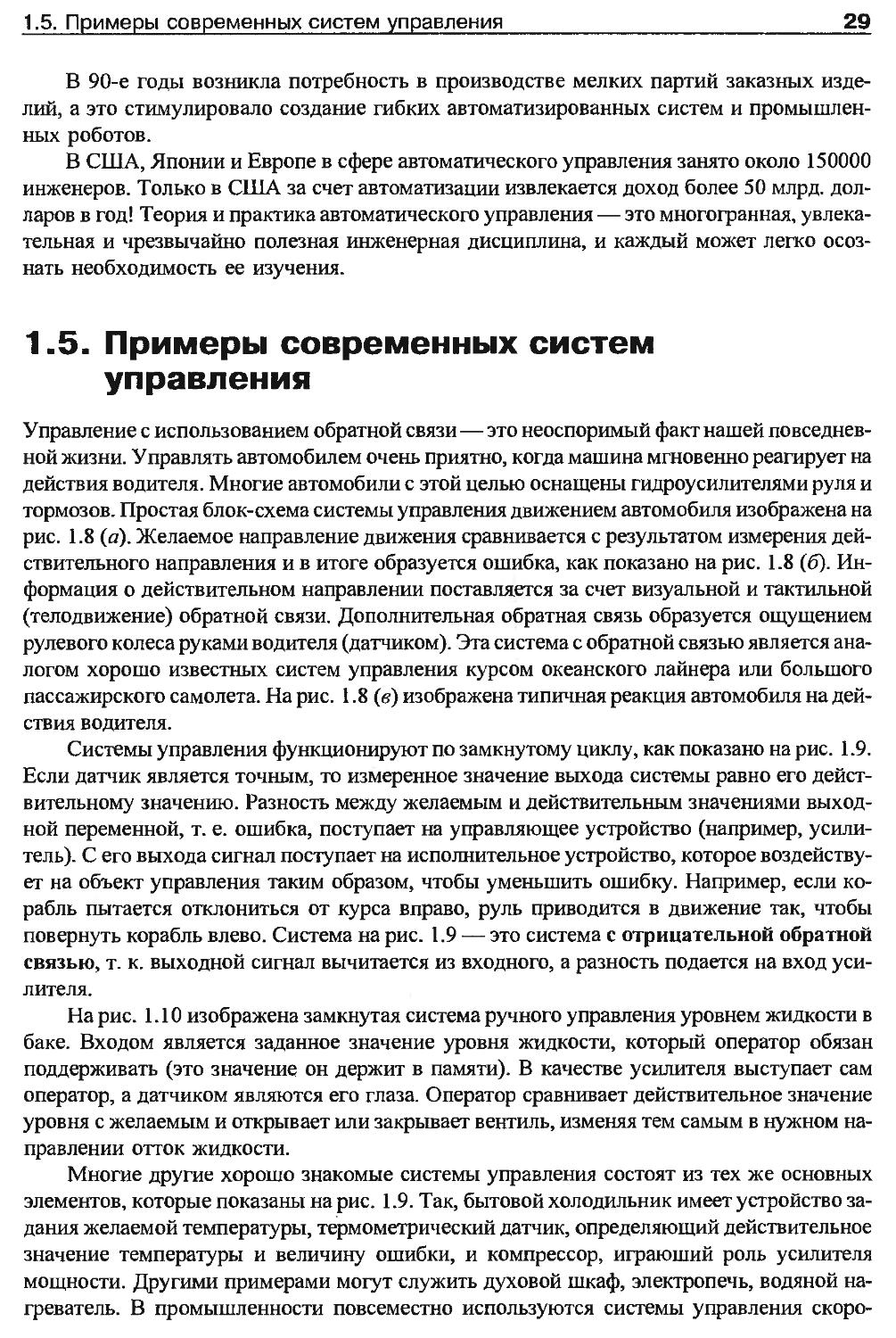
Управление с использованием обратной связи—это неоспоримый факт нашей повседневной жизни. Управлять автомобилем очень приятно, когда машина мгновенно реагирует на действия водителя. Многие автомобили с этой целью оснащены гидроусилителями руля и тормозов. Простая блок-схема системы управления движением автомобиля изображена на рис. 1.8 (а). Желаемое направление движения сравнивается с результатом измерения действительного направления и в итоге образуется ошибка, как показано на рис. 1.8 (6). Информация о действительном направлении поставляется за счет визуальной и тактильной (телодвижение) обратной связи. Дополнительная обратная связь образуется ощущением рулевого колеса руками водителя (датчиком). Эта система с обратной связью является аналогом хорошо известных систем управления курсом океанского лайнера или большого пассажирского самолета. На рис. 1.8 (в) изображена типичная реакция автомобиля на действия водителя.
Системы управления функционируют по замкнутому циклу, как показано на рис. 1.9. Если датчик является точным, то измеренное значение выхода системы равно его действительному значению. Разность между желаемым и действительным значениями выходной переменной, т. е. ошибка, поступает на управляющее устройство (например, усилитель). С его выхода сигнал поступает на исполнительное устройство, которое воздействует на объект управления таким образом, чтобы уменьшить ошибку. Например, если корабль пытается отклониться от курса вправо, руль приводится в движение так, чтобы повернуть корабль влево. Система на рис. 1.9 — это система с отрицательной обратной связью, т. к. выходной сигнал вычитается из входного, а разность подается на вход усилителя.
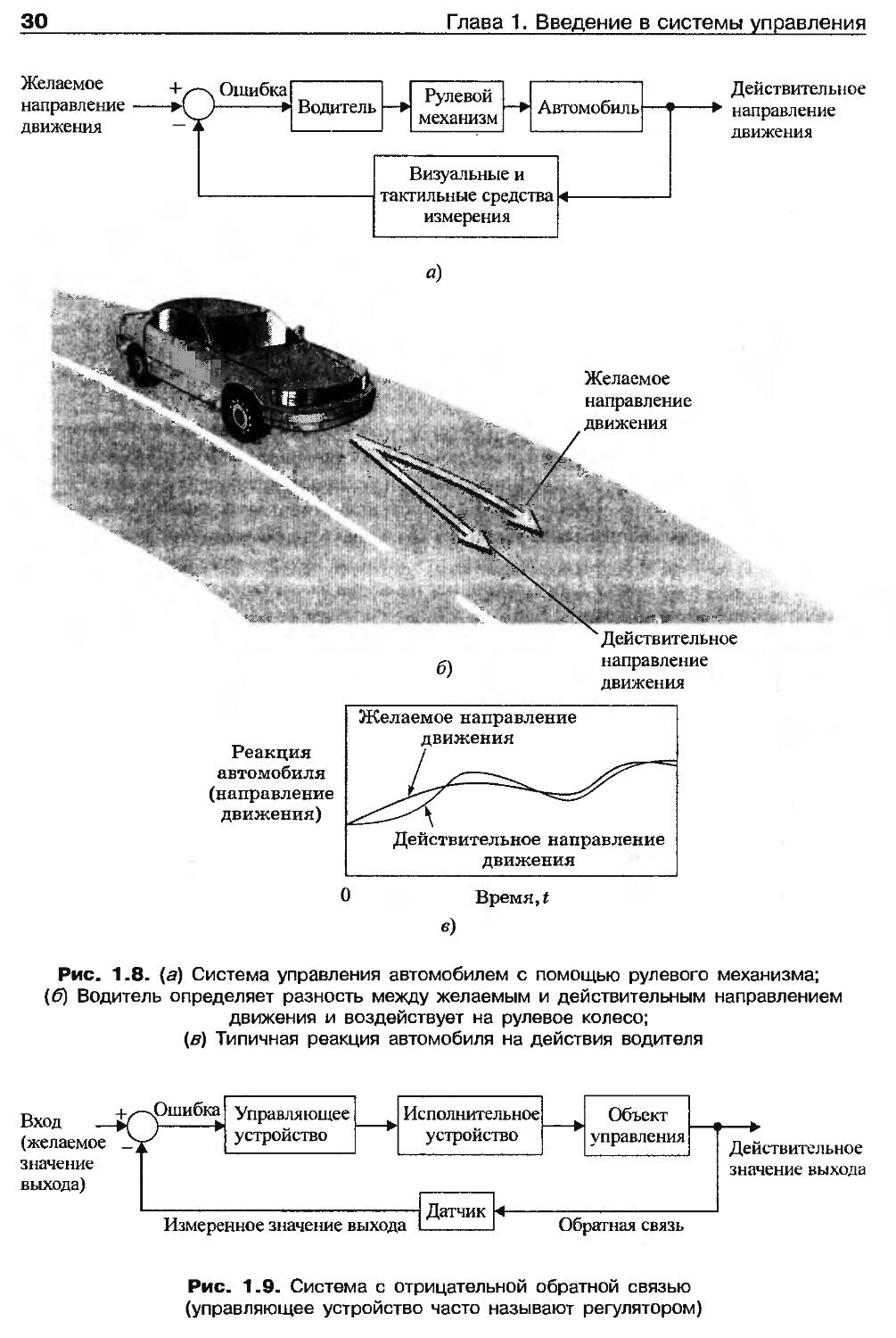
На рис. 1.10 изображена замкнутая система ручного управления уровнем жидкости в баке. Входом является заданное значение уровня жидкости, который оператор обязан поддерживать (это значение он держит в памяти). В качестве усилителя выступает сам оператор, а датчиком являются его глаза. Оператор сравнивает действительное значение уровня с желаемым и открывает или закрывает вентиль, изменяя тем самым в нужном направлении отток жидкости.
Многие другие хорошо знакомые системы управления состоят из тех же основных элементов, которые показаны на рис. 1.9. Так, бытовой холодильник имеет устройство задания желаемой температуры, термометрический датчик, определяющий действительное значение температуры и величину ошибки, и компрессор, играющий роль усилителя мощности. Другими примерами могут служить духовой шкаф, электропечь, водяной нагреватель. В промышленности повсеместно используются системы управления скоро-
30
Глава 1. Введение в системы управления
Желаемое направление движения
Действительное направление движения
направление движения
Реакция автомобиля (направление движения)
Желаемое направление движения
Действительное направление движения
О
Время, t
Рис. 1.8. (а) Система управления автомобилем с помощью рулевого механизма;
(б) Водитель определяет разность между желаемым и действительным направлением движения и воздействует на рулевое колесо;
(в) Типичная реакция автомобиля на действия водителя
Рис. 1.9. Система с отрицательной обратной связью (управляющее устройство часто называют регулятором)
1.5. Примеры современных систем управления
31
Рис. 1.10
Система ручного управления уровнем жидкости в баке
Приток жидкости
стью, температурой, давлением, положением, толщиной, составом вещества, качеством изделий.
На современном этапе автоматизацию можно определить как технологию, использующую запрограммированные команды, воздействующие на некоторый объект или процесс, и обратную связь, с помощью которой определяется, правильно ли исполнены эти команды. Автоматизация часто применяется к процессам, в управлении которыми ранее участвовал человек. После автоматизации процесс может функционировать без помощи или вмешательства человека. Фактически, большинство автоматизированных систем способны выполнять свои функции с большей точностью и намного быстрее, чем это было при ручном управлении. Встречаются и частично автоматизированные процессы, в управлении которыми участвуют и люди, и роботы. Например, многие работы на линии сборки автомобилей требуют совместных действий человека-оператора и интеллектуального робота.
Робот — это управляемая компьютером машина, функционирующая фактически на тех же принципах, которые используются в системах автоматизации. Робототехнику можно определить как отдельную ветвь автоматизации, в которой проектируются автоматические машины (т. е. роботы), призванные заменить труд человека. Поэтому роботы обладают определенными характеристиками, присущими человеку. Примером может служить механический манипулятор, воспроизводящий движения человеческой руки и кисти. Отметим, что некоторые задачи автоматическая машина выполняет лучше человека, тогда как с другими лучше справляется человек. Это отражено в табл. 1.2.
Таблица 1.2. Трудность задач для человека и автомата
Задачи, трудные для автомата Задачи, трудные для человека
Наблюдение за саженцами в питомнике Обследование системы в опасной токсичной
Вождение автомобиля по пересеченной среде
местности Однообразная сборка часовых механизмов
Определение наиболее ценных алмазов Посадка самолета ночью, в плохих погодных
на лотке условиях
Еще одной практически важной задачей является управление современным автомобилем. Уже разработаны и внедряются системы управления подвеской, рулевым механизмом и двигателем. Новые автомобили оснащаются также системами привода на все четыре колеса и системами, препятствующими заносу.
32
Глава 1, Введение в системы управления
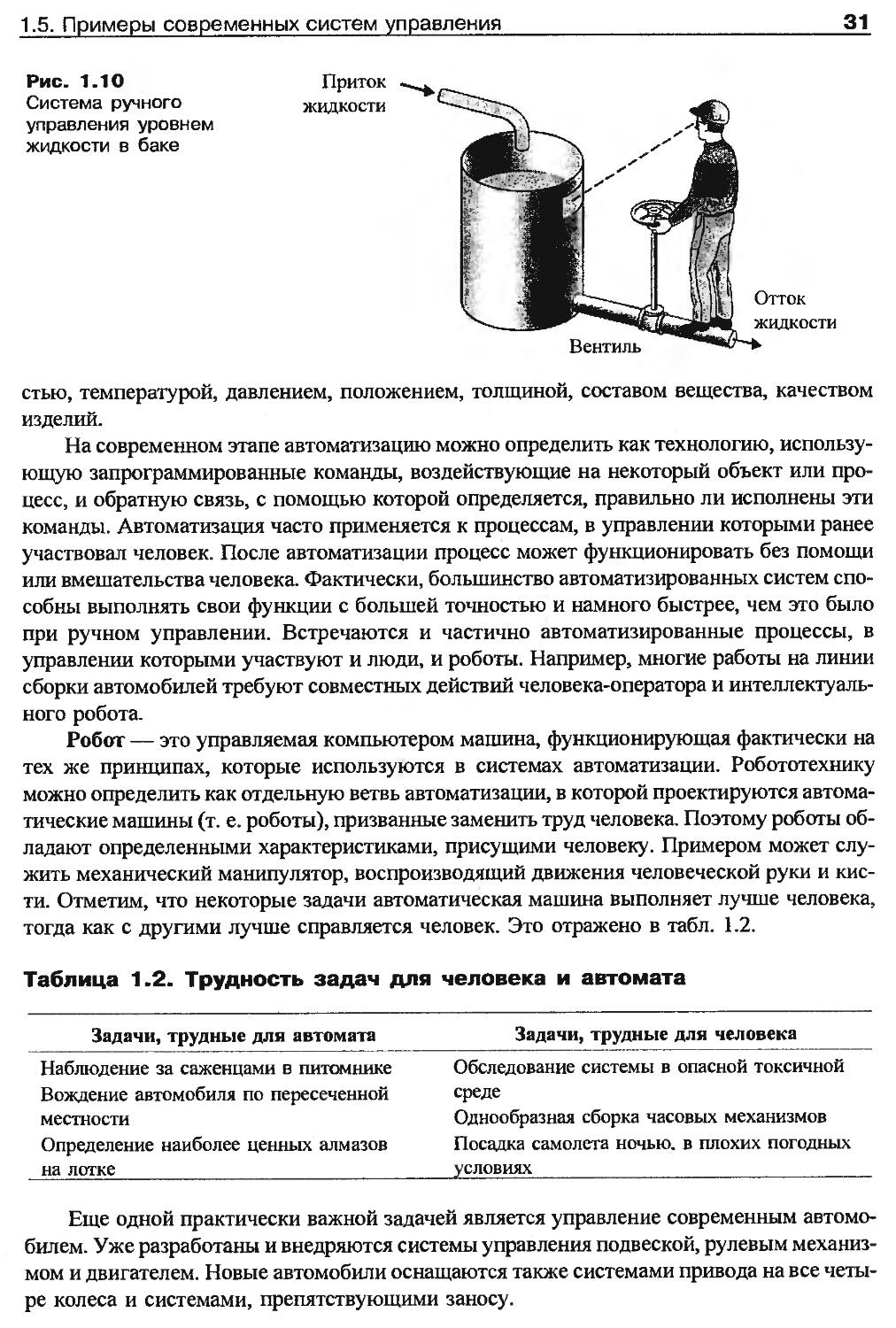
Рис. 1.11. Трехкоординатная система управления для контроля полупроводниковых пластин
На рис. 1.11 изображена трёхкоординатная система управления для контроля отдельных полупроводниковых пластин. Для перемещения элементов установки в заданное положение по всем трем осям используются соответственно три электродвигателя. Система предназначена для обеспечения плавного и точного перемещения по каждой оси. Она выполняет очень ответственные функции в производстве полупроводниковых приборов.
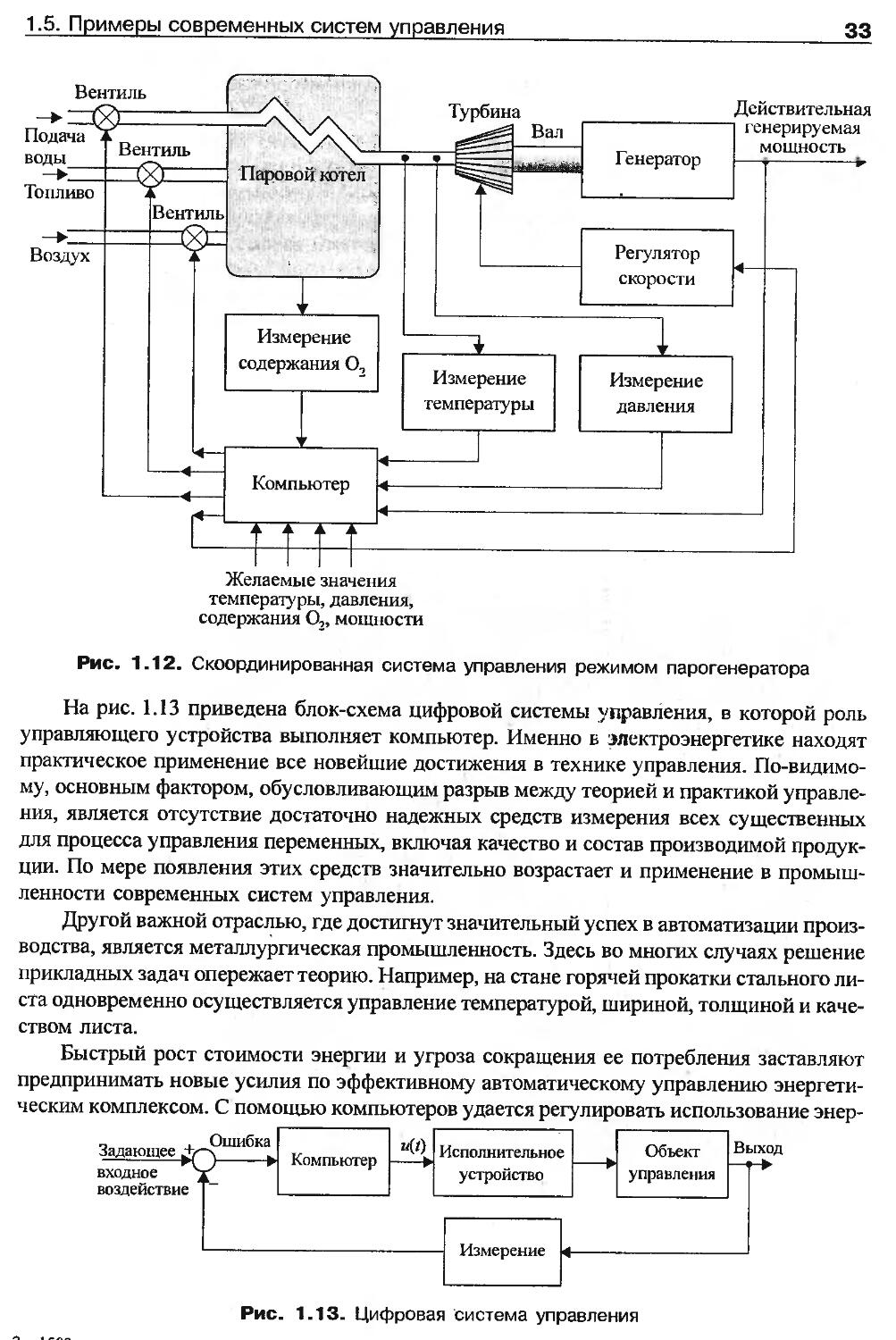
Не так давно разгорелась серьезная дискуссия по поводу разрыва между теорией и практикой управления. Совершенно естественно, однако, что во многих областях деятельности теория опережает ее практические применения. Тем не менее, интересно, что в электроэнергетике — крупнейшей отрасли США — этот разрыв не столь значителен. Эта отрасль главным образом связана с преобразованием, контролем и распределением энергии. Поэтому естественно, что для повышения эффективности использования энергетических ресурсов всё шире внедряются компьютерные системы управления. Кроме того, особую важность приобретает задача управления электростанциями с целью уменьшения выбросов в окружающую среду. В современных крупных электростанциях, мощность которых превышает сотни мегаватт, системы автоматического управления крайне необходимы для поддержания такого соотношения между отдельными переменными, при котором оптимизируется процесс производства энергии. Обычно скоординированное управление производится более чем 90 переменными. На рис 1.12 показана упрощенная схема системы управления важнейшими переменными крупного парогенератора. Этот пример показывает важность измерения многих переменных, таких как давление и содержание кислорода, что дает компьютеру информацию для вычисления управляющих воздействий. По оценочным данным, в США функционируют более 400000 цифровых систем управления.
1.5. Примеры современных систем управления
33
Желаемые значения температуры, давления, содержания О2, мощности
Рис. 1.12. Скоординированная система управления режимом парогенератора
На рис. 1.13 приведена блок-схема цифровой системы управления, в которой роль управляющего устройства выполняет компьютер. Именно в электроэнергетике находят практическое применение все новейшие достижения в технике управления. По-видимому, основным фактором, обусловливающим разрыв между теорией и практикой управления, является отсутствие достаточно надежных средств измерения всех существенных для процесса управления переменных, включая качество и состав производимой продукции. По мере появления этих средств значительно возрастает и применение в промышленности современных систем управления.
Другой важной отраслью, где достигнут значительный успех в автоматизации производства, является металлургическая промышленность. Здесь во многих случаях решение прикладных задач опережает теорию. Например, на стане горячей прокатки стального листа одновременно осуществляется управление температурой, шириной, толщиной и качеством листа.
Быстрый рост стоимости энергии и угроза сокращения ее потребления заставляют предпринимать новые усилия по эффективному автоматическому управлению энергетическим комплексом. С помощью компьютеров удается регулировать использование энер-
Рис. 1.13. Цифровая система управления
34
Глава 1. Введение в системы управления
гии в промышленности, а также стабилизировать и равномерно распределять нагрузку в целях экономии топлива.
В последние годы значительно повысился интерес к применению принципа обратной связи к управлению товарно-материальными запасами и их складированием. Растет также интерес к автоматизации управления сельскохозяйственным производством (фермами). Разработаны и прошли испытания автоматически управляемые силосные башни и тракторы. Важное значение имеют современные системы автоматического управления ветряными электрогенераторами, солнечными установками нагревания и охлаждения, автомобильными двигателями.
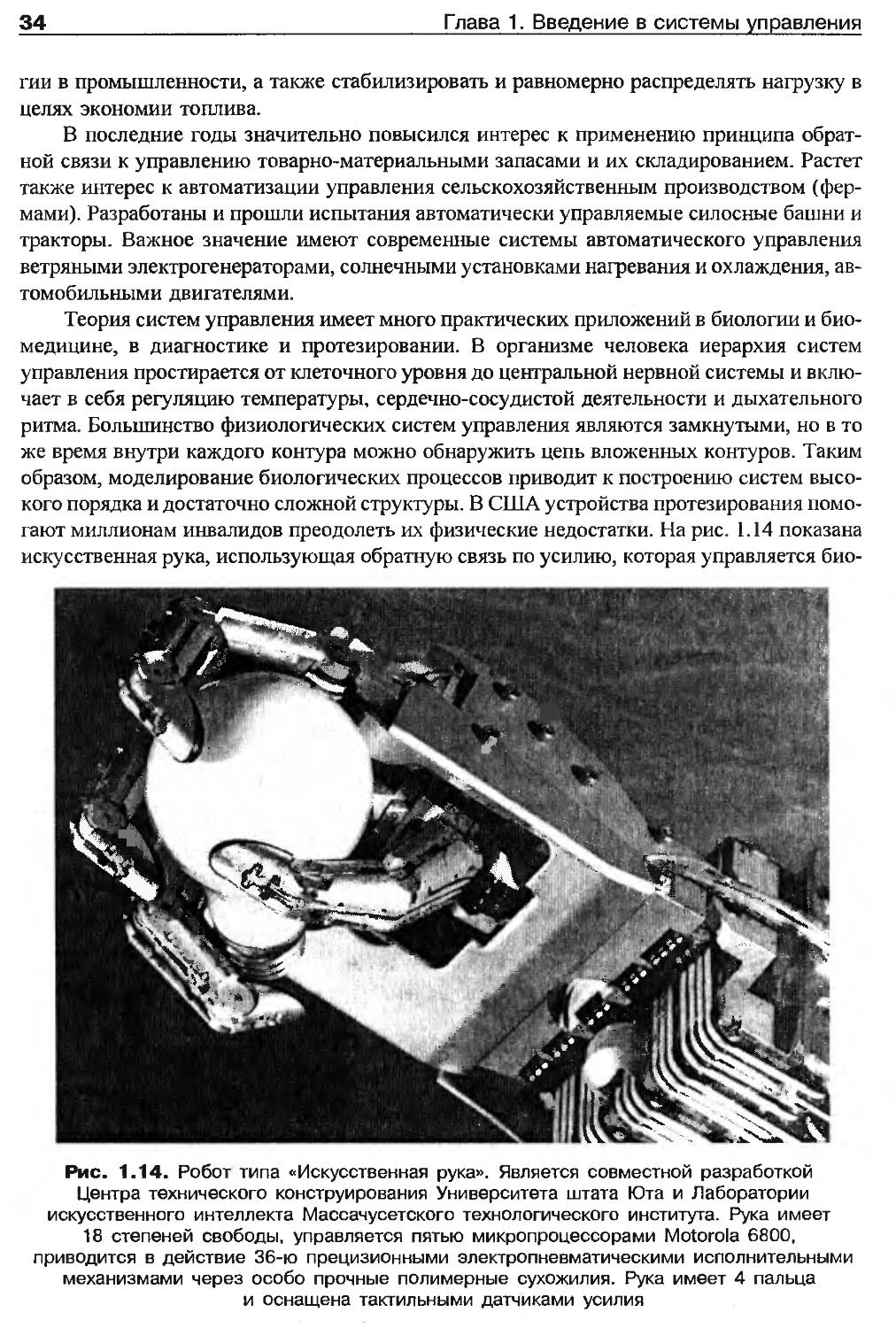
Теория систем управления имеет много практических приложений в биологии и биомедицине, в диагностике и протезировании. В организме человека иерархия систем управления простирается от клеточного уровня до центральной нервной системы и включает в себя регуляцию температуры, сердечно-сосудистой деятельности и дыхательного ритма. Большинство физиологических систем управления являются замкнутыми, но в то же время внутри каждого контура можно обнаружить цепь вложенных контуров. Таким образом, моделирование биологических процессов приводит к построению систем высокого порядка и достаточно сложной структуры. В США устройства протезирования помогают миллионам инвалидов преодолеть их физические недостатки. На рис. 1.14 показана искусственная рука, использующая обратную связь по усилию, которая управляется био-
Рис. 1.14. Робот типа «Искусственная рука». Является совместной разработкой Центра технического конструирования Университета штата Юта и Лаборатории искусственного интеллекта Массачусетского технологического института. Рука имеет 18 степеней свободы, управляется пятью микропроцессорами Motorola 6800, приводится в действие 36-ю прецизионными электропневматическими исполнительными механизмами через особо прочные полимерные сухожилия. Рука имеет 4 пальца и оснащена тактильными датчиками усилия
1,6, Автоматическая сборка и роботы
35
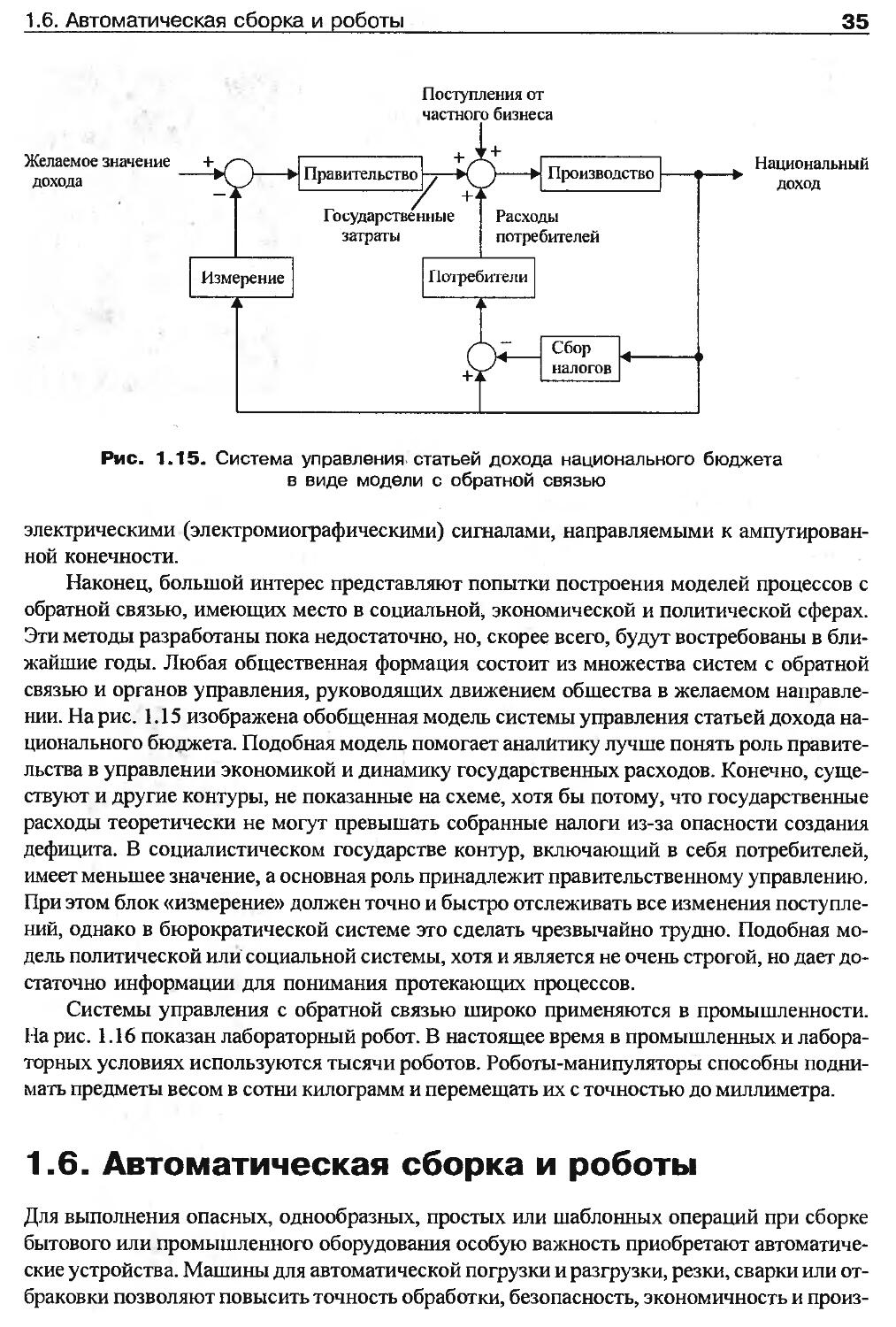
Поступления от частного бизнеса
Желаемое значение дохода
Национальный
доход
Рис. 1.15. Система управления статьей дохода национального бюджета в виде модели с обратной связью
электрическими (электромиографическими) сигналами, направляемыми к ампутированной конечности.
Наконец, большой интерес представляют попытки построения моделей процессов с обратной связью, имеющих место в социальной, экономической и политической сферах. Эти методы разработаны пока недостаточно, но, скорее всего, будут востребованы в ближайшие годы. Любая общественная формация состоит из множества систем с обратной связью и органов управления, руководящих движением общества в желаемом направлении. На рис. 1.15 изображена обобщенная модель системы управления статьей дохода национального бюджета. Подобная модель помогает аналитику лучше понять роль правительства в управлении экономикой и динамику государственных расходов. Конечно, существуют и другие контуры, не показанные на схеме, хотя бы потому, что государственные расходы теоретически не могут превышать собранные налоги из-за опасности создания дефицита. В социалистическом государстве контур, включающий в себя потребителей, имеет меньшее значение, а основная роль принадлежит правительственному управлению. При этом блок «измерение» должен точно и быстро отслеживать все изменения поступлений, однако в бюрократической системе это сделать чрезвычайно трудно. Подобная модель политической или социальной системы, хотя и является не очень строгой, но дает достаточно информации для понимания протекающих процессов.
Системы управления с обратной связью широко применяются в промышленности. На рис. 1.16 показан лабораторный робот. В настоящее время в промышленных и лабораторных условиях используются тысячи роботов. Роботы-манипуляторы способны поднимать предметы весом в сотни килограмм и перемещать их с точностью до миллиметра.
1.6. Автоматическая сборка и роботы
Для выполнения опасных, однообразных, простых или шаблонных операций при сборке бытового или промышленного оборудования особую важность приобретают автоматические устройства. Машины для автоматической погрузки и разгрузки, резки, сварки или отбраковки позволяют повысить точность обработки, безопасность, экономичность и произ-
36
Глава 1, Введение в системы управления
Рис. 1.16
Лабораторный робот для работы с медицинскими препаратами. Он манипулирует небольшими предметами, такими как бюретки, и с высокой скоростью помещает их в узкие сосуды и вынимает оттуда
водительность труда. Некоторые писатели предвидели создание машин, оснащенных компьютерами и способных действовать наподобие человека-оператора. В своей известной пьесе Р. У.Р., написанной в 1923 г., Карел Чапек назвал таких искусственных рабочих роботами (от чешского слова robota, т. е. работа).
Как уже говорилось, робот представляет собой комплекс из механизма и программируемого компьютера, и он часто заменяет труд человека при выполнении простых повторяющихся операций. Некоторые роботы даже имеют антропоморфные механизмы, которые можно рассматривать как механические руки, запястья и кисти. Пример антропоморфного робота приведен на рис. 1.17.
Рис. 1.17
Антропоморфный робот Хонда РЗ.
Робот способен ходить, подниматься по ступенькам и изменять направление движения
1.7. Перспективы развития систем управления
37
1.7. Перспективы развития систем управления
Развитие систем управления идет по пути совершенствования их гибкости и обеспечения высокой степени автономности. Как показано на рис. 1.18, в достижении этих целей можно наметить два разных пути. Считается, что современный промышленный робот является абсолютно автономным, т. к. будучи изначально запрограммированным, он не требует дальнейшего вмешательства в его работу. Из-за ограниченных возможностей чувствительных органов робототехнические системы обладают недостаточной гибкостью в приспособлении к изменению условий эксплуатации. Это, в свою очередь, стимулирует разработку устройств технического зрения. Системы управления обладают достаточной приспосабли-ваемостью, но лишь при участии человека-оператора. Совершенствование робототехнических систем идет за счет оснащения их чувствительными элементами обратной связи с улучшенными характеристиками. Исследовательские работы в области искусственного интеллекта, датчиков, компьютерного зрения, программирования комплексов компьютеризированного проектирования и производства должны сделать эти системы более универсальными и экономичными. Чтобы уменьшить нагрузку на человека-оператора и повысить эффективность его работы, ведутся интенсивные исследования в области супервизор-ного управления, человеко-машинного интерфейса и управления компьютерными базами данных. Многие исследования одинаково полезны для совершенствования как роботов, так и систем управления; их цель состоит в снижении затрат на изготовление и расширении области применения. Они связаны также с улучшением методов передачи информации и дальнейшим развитием языков программирования.
Высокая
Интеллектуальные системы
Низкая
Жесткая автоматизация
Станки ° сЧПУ
Механизмы с использованием вспомогательной мощности
Однонаправленные Ручное манипуляторы управление о________J 1
Усовершенствованные средства
Улучшения:
. Искусственное зрение
• Человеко-машинный интерфейс
• Супервизорное управление
Повышенная гибкость и автономность
Улучшения:
Роботы *Датчики
• Искусственное зрение
• Языки программирования
• Искусственный интеллект
Цифровые
системы управления
Программируемые системы управления Механические манипуляторы типа «хозянн-раб»
Низкая
Гибкость
Высокая
Рис. 1.18. Перспективы совершенствования роботов и систем управления
38
Глава 1. Введение в системы управления
1.8. Техническое проектирование
Техническое проектирование — основная задача деятельности инженера. Это сложный процесс, в котором главная роль принадлежит творческим навыкам и умению анализировать.
Проектирование — это процесс придумывания или изобретения таких компонентов системы, которые позволяли бы ей выполнять определенные задачи.
Процесс проектирования подразумевает планирование деятельности по созданию некоторого изделия или системы. В результате этой инновационной деятельности инженер творчески применяет свои знания и навыки для определения типа системы, ее функционального назначения и составных элементов. Основными этапами проектирования являются:
1) определение запроса на создание системы, основанного на оценках мнений различных общественных групп — от политиков до рядовых потребителей;
2) детальная проработка возможного решения проблемы на основе объединения различных мнений;
3) оценка альтернативных вариантов решения проблемы, удовлетворяющих выдвинутым требованиям;
4) выбор конкретного варианта и его реализация.
В реальной жизни проектирование ведется с учетом ряда ограничений, одним из которых является фактор времени. Проектирование обычно ведется по жестко установленному графику, поэтому в конечном счете выбирается такой вариант системы, который не является идеальным, но может рассматриваться как достаточно хороший. Во многих случаях выигрыш во времени является единственным определяющим фактором.
Главная задача проектировщика — это составить перечень требований, которым должно удовлетворять техническое устройство. Под требованиями имеются в виду точные формулировки того, каким должно быть устройство и что оно должно делать. Техническая система проектируется таким образом, чтобы удовлетворялись все выдвинутые требования. При этом неизбежно приходится иметь дело с такими объективными факторами, как сложность проектирования, возможные компромиссы, расхождения с практикой в процессе проектирования, а также определенные риски.
Сложность проектирования обусловлена широким диапазоном используемых для этого методов, знаний и литературы. И здесь при определении требований к системе необходимо учитывать очень много факторов, не только классифицируя их по относительной важности, но также задавая их либо в числовой форме, либо в виде словесного описания, либо обоими этими способами.
Под компромиссом понимают возможность выбора между двумя конфликтующими критериями проектирования, каждый из которых является приемлемым.
При создании технического устройства его окончательный вид бывает далеко не похож на то, как оно было задумано. Например, наше умозрительное представление о проблеме, подлежащей решению, не всегда совпадает с ее словесным описанием, в конечном счете выливающимся в задание требований к системе. Эти различия внутренне присущи процессу движения от абстрактной идеи к ее практической реализации.
Отсутствие абсолютной уверенности в том, что проектируемый технологический объект будет функционировать заранее предсказанным образом, есть причина для некоторой неопределенности. Эта неопределенность связана с возможностью появления не
1.9, Синтез системы управления 39
предвиденных последствий, или риска. Следовательно, процесс проектирования системы есть деятельность, сопряженная с риском.
Сложность, компромисс, расхождение с практикой и риск — всё это факторы, неотъемлемые от процесса создания новых систем и устройств. Иногда влияние этих факторов на процесс проектирования можно свести к минимуму, но исключить их полностью невозможно.
В процессе технического проектирования участвуют два типа мышления — анализ и синтез, между которыми имеется принципиальное отличие. При анализе основное внимание уделяется построению моделей физических систем. Целью здесь является более глубокое понимание процессов, происходящих в этих системах, и указание путей уточнения их моделей. Напротив, синтез — это деятельность, в результате которой создаются новые физические структуры.
Процесс проектирования может идти по многим направлениям, прежде чем окончательно будет выбрано какое-то одно из них. Это тщательно продуманный процесс, с помощью которого проектировщик создает нечто новое, удовлетворяющее определенным потребностям несмотря на практические ограничения. По своей природе этот процесс является итерационным — ведь с чего-то надо будет начать! Опытные инженеры обычно прибегают к упрощению сложных систем с целью их анализа и синтеза. При этом неизбежно возникает различие между сложной реальной системой и ее моделью. Подобные различия объективно присутствуют на всём пути От исходной концепции до конечного изделия. Интуитивно понятно, что намного проще постепенно совершенствовать исходную концепцию, чем пытаться сразу создать конечное изделие. Иными словами, техническое проектирование никогда не идет по жестко установленному пути. Это — итерационный, нелинейный, творческий процесс.
Основной метод, используемый в большинстве задач технического проектирования, — это метод анализа и оптимизации параметров. Он основан на (1) идентификации ключевых параметров, (2) формировании конфигурации системы и (3) оценке того, насколько данная конфигурация отвечает предъявляемым к системе требованиям. Эти три этапа образуют замкнутый цикл. Как только установлены ключевые параметры и синтезирована структура системы, проектировщик может приступить к оптимизации параметров. На практике число таких настраиваемых параметров обычно стремятся свести к минимуму.
1.9. Синтез системы управления
Синтез системы управления — это уникальный пример технического проектирования. Еще раз подчеркнем, что цель проектирования состоит в определении конфигурации системы, требований, которым она должна удовлетворять, и задании основных параметров, удовлетворяющих предъявляемым к системе требованиям.
Первый шаг процесса синтеза — это определение назначения системы. Например, мы можем заявить, что целью управления является поддержание заданного значения скорости вращения электродвигателя. Второй шаг — это указать те переменные, которые подлежат управлению (в нашем случае это скорость вращения). На третьем шаге мы должны предъявить требования к точности, с которой необходимо поддерживать скорость вращения электродвигателя. Последнее определяет выбор датчика, с помощью которого измеряется переменная, подлежащая управлению.
40
Глава 1. Введение в системы управления
Поставив себя на место инженера, первое, что мы должны сделать, — это попытаться создать конфигурацию системы, которая обладала бы желаемым качеством. Такая конфигурация обычно включает в себя датчик, объект управления, исполнительное устройство и регулятор, как показано на рис. 1.9. Следующий шаг состоит в выборе кандидата на роль исполнительного устройства. Принятие решения здесь зависит от типа объекта управления, но в любом случае выбранное устройство должно быть способно эффективно влиять на поведение объекта управления. Например, если мы хотим управлять скоростью вращения махового колеса, то в качестве исполнительного устройства нам надлежит выбрать электродвигатель. При этом датчик должен быть способен измерять скорость с высокой точностью. Наконец, мы должны получить модель для каждого из этих элементов.
Следующий шаг состоит в выборе регулятора, который часто представляет собой сумматор, выполняющий операцию сравнения желаемого и действительного значений выходной переменной объекта, и следующий за ним усилитель сигнала ошибки.
Заключительный шаг процедуры синтеза состоит в настройке параметров системы, которые обеспечивали бы желаемые показатели качества. Если в результате подбора параметров мы сможем достигнуть желаемого качества, то процесс синтеза на этом заканчивается и нам остается оформить рабочую документацию. В противном случае, возможно, потребуется заменить конфигурацию системы или выбрать исполнительное устройство и датчик с улучшенными характеристиками. После этого мы должны будем повторять все этапы синтеза до тех пор, пока не будут удовлетворены требования, предъявляемые к системе, или пока мы не решим, что эти требования являются слишком жесткими и их необходимо ослабить. Процесс синтеза системы управления наглядно изображен на рис. 1.19.
Требования к качеству замкнутой системы управления должны затрагивать ее основные характеристики, к которым относятся (1) хорошая компенсация возмущений, (2) желаемый вид реакции на задающее входное воздействие, (3) адекватные выходные сигналы исполнительного устройства, (4) малая чувствительность к изменению параметров и (5) робастность.
На техническое проектирование сильное влияние оказало появление мощных и сравнительно недорогих компьютеров, а также высокопроизводительных программных средств анализа и синтеза систем управления. Например, самолет Боинг-777, оснащенный самой современной бортовой аппаратурой, был почти полностью спроектирован с помощью компьютерных технологий. Высокоточное компьютерное моделирование крайне важно для проверки результатов синтеза систем. Во многих случаях сертификация системы управления путем натурного моделирования требует значительных затрат времени и денег. Тот же Боинг-777 около 2400 раз был испытан с помощью компьютерного моделирования, прежде чем был построен первый самолет этой серии.
Другим замечательным примером анализа и синтеза с применением компьютеров является создание экспериментальной ракеты DC-Х Дельта Клиппер корпорации МакДон-нелл Дуглас, которая была спроектирована, построена и испытана в полете всего за 24 месяца. Это позволило сэкономить примерно 80% финансовых вложений и 30% времени.
Подводя итог, можно дать следующую формулировку задачи синтеза регулятора: дана модель объекта управления (вместе с датчиком и исполнительным устройством), а также установлены цели управления; требуется определить соответствующий регулятор либо прийти к заключению, что таковой создать невозможно.
1.10. Пример синтеза: управление скоростью вращения диска
41
Рис. 1.19. Процесс синтеза системы управления
1.10. Пример синтеза: управление скоростью вращения диска
Во многих современных приборах используется диск, который должен вращаться с постоянной скоростью. Это, например, проигрыватель компакт-дисков или грампластинок, дисковод компьютера, требующие вращения с постоянной скоростью, несмотря на износ и изменение характеристик электродвигателя и вариацию других параметров. Наша задача состоит в синтезе системы управления скоростью вращения диска, которая гарантировала бы, что действительная скорость отличается от желаемой не более, чем на заданную величину. Мы рассмотрим два варианта решения этой задачи: разомкнутая система и система с обратной связью.
Чтобы обеспечить вращение диска, мы должны в качестве исполнительного устройства выбрать электродвигатель постоянного тока, скорость вращения которого пропорциональна приложенному напряжению. Этот входной сигнал двигателя должен иметь достаточную мощность, поэтому нам также потребуется выбрать усилитель.
42
Глава 1. Введение в системы управления
Батарея
Задание скорости
Усилитель постоянного тока
Рис. 1.20. (а) Разомкнутая система управления скоростью вращения диска; (б) Функциональная схема системы
Разомкнутая система (без использования обратной связи) изображена а рис. 1.20 (о). В этой системе для задания напряжения, пропорционального желаемой скорости, использована батарея. Затем это напряжение усиливается и подается на двигатель. Функциональная схема данной системы изображена на рис. 1.20 (б).
Чтобы реализовать систему с обратной связью, нам необходимо выбрать датчик. Одним из возможных решений является тахогенератор, выходное напряжение которого пропорционально скорости вращения его вала. Тогда замкнутая система будет иметь вид, изображенный на рис. 1.21 (а). Функциональная схема этой системы приведена на рис. 1.21 (б). Сигнал ошибки образуется как разность между входным напряжением и напряжением тахогенератора.
Рис. 1.21. (а) Замкнутая система управления скоростью вращения диска; (б) Функциональная схема системы
1.11. Пример синтеза: система управления введением инсулина
43
Можно ожидать, что замкнутая система по своим характеристикам будет превосходить разомкнутую, т. к. она всегда будет стремиться свести ошибку к минимуму. Если элементы системы обладают стабильными характеристиками, то в замкнутой системе можно добиться точности поддержания заданного значения скорости, в 100 раз превышающей аналогичный показатель разомкнутой системы.
1.11. Пример синтеза: система управления введением инсулина
В этом и последующих примерах на синтез мы воспользуемся процедурой, представленной на рис. 1.19. В данной главе мы подготовим предварительный план синтеза, выполнив этапы 1-4 схемы рис. 1.19, т. е. (1) установим цель управления, (2) определим переменные, на которые необходимо воздействовать, (3) сформулируем требования к системе и (4) разработаем одну, или несколько возможных конфигураций системы.
Системы управления широко используются в медицине для автоматического введения препаратов в организм пациента. Подобные системы могут применяться для регулирования кровяного давления, уровня сахара в крови, частоты сердечных сокращений. Наиболее распространены разомкнутые системы введения медицинских препаратов, в которых используются математические модели, описывающие связь между дозой введенного препарата и соответствующим эффектом. Имплантированная в тело человека система является разомкнутой, т. к. пока еще не разработаны миниатюрные датчики содержания глюкозы в крови. Наилучшим из известных решений является запрограммированный под конкретного пациента миниатюрный насос, который вводит в организм инсулин в соответствии с показаниями на основании истории болезни. Более сложные системы должны будут использовать обратную связь по результатам измерения содержания глюкозы в крови.
Наша цель (этап 1) заключается в синтезе системы регулирования концентрации сахара в крови больного диабетом. Изменение концентрации глюкозы и инсулина в крови здорового человека показано на рис. 1.22. Система должна вводить инсулин в кровь из баллончика, имплантированного в организм больного.
Таким образом, переменной, подлежащей управлению (этап 2), является концентрация глюкозы в крови. Требование к системе управления (этап 3) сводится к тому, чтобы
Рис. 1.22
Уровни глюкозы и инсулина в крови здорового челолвека
Время
44
Глава 1. Введение в системы управления
а)
на входе
микродвигателя
Скорость Действительный
Желаемый уровень глюкозы в крови
Рис. 1.23. Разомкнутая (а) и замкнутая (б) системы управления содержанием глюкозы в крови
она была способна поддерживать содержание глюкозы в крови диабетика, близкое к тому, как это имеет место для здорового человека (рис. 1.22).
На этапе 4 мы можем предложить предварительную конфигурацию системы управления. Разомкнутая система должна содержать заранее запрограммированный генератор сигнала и микродвигатель с насосом, регулирующий скорость введения инсулина, как показано на рис. 1.23 (о). Замкнутая система, изображенная на рис. 1.23 (б), должна содержать датчик, измеряющий действительное содержание инсулина в крови. Это измеренное значение затем сравнивается с желаемым, и, если есть необходимость, включается микродвигатель с насосом.
1.12. Пример синтеза с продолжением: система чтения информации с диска
□ Этот пример синтеза, обозначенный значком стрелки, будет последовательно рассматриваться в каждой главе. При этом мы будем следовать процедуре синтеза, изображенной на рис. 1.19. Например, в гл. 1 мы рассмотрели этапы 1- 4 данной процедуры, где мы (1) установили цель управления, (2) указали переменные, на которые необходимо воздействовать, (3) сформулировали ограничения, накладываемые на эти переменные, и (4) сделали набросок конфигурации системы.
Информация обычно легко накапливается на магнитных дисках. Составной частью портативных и более крупных компьютеров различных модификаций являются дисководы. В 1996 г. во всём мире согласно оценке было продано порядка 100 млн дисководов. Схематическое изображение дисковода представлено на рис. 1.24. Целью системы управления является позиционирование считывающей головки на определенной дорожке диска (этап 1). Переменная, которой нужно управлять с высокой точностью (этап 2), — это положение считывающей головки, закрепленной на конце рычага. Диск вращается со скоро-
Упражнения
45
Рис. 1.24
Схема дисковода
стью от 1800 до 7200 об/мин, а головка плавает над диском на расстоянии менее 100 нм. Исходное требование к точности позиционирования (этап 3) составляет 1 мкм. Кроме того, мы хотели бы, если это возможно, чтобы перемещение от дорожки а к дорожке b совершалось не более чем за 50 мс. Таким образом, мы выбираем исходную конфигурацию системы в виде рис. 1.25. В данной замкнутой системе для перемещения рычага со считывающей головкой в заданное положение относительно диска будет использован электродвигатель. Процедура синтеза этой системы будет продолжена в главе 2.
Рис. 1.25. Замкнутая система управления дисководом
Упражнения
(Упражнения являются простым применением основных понятий главы к практическим ситуациям.) Следующие системы могут быть представлены в виде функциональных схем, показывающих причинно-следственные связи между переменными и обратную связь (если она существует). Определите назначение каждого блока, а также входную, выходную и измеренную переменные. При необходимости используйте модель, представленную на рис. 1.9.
У-1.1. Прецизионный источник оптического сигнала способен устанавливать мощность излучения с точностью до 1%. Выходная мощность источника (лазера) определяется входным током, который, в свою очередь, формируется микропроцессором. Микропроцессор сравнивает желаемый уровень мощности с действительным, информацию о котором содержит сигнал с выхода датчика. Дополните функциональную схему замкнутой системы, представленной на рис. 1.1 (У), указав, что является входной, выходной, измеренной переменной, а также управляющим устройством.
У-1.2. Водитель автомобиля является частью системы управления, которая должна обеспечивать заданную скорость движения. Изобразите соответствующую данному случаю функциональную схему замкнутой системы управления.
46
Глава 1. Введение в системы управления
Рис. 1.1 (У)
Функциональная схема (частично) источника оптического излучения
переменная
У -1.3. Ужение на муху — это спортивное состязание, при котором участник забрасывает небольшую муху с помощью удилища и лески. Цель заключается в том, чтобы забросить муху точно в заданную точку на поверхности реки. Разработайте модель забрасывания мухи.
У -1.4. Поскольку парусная яхта не может двигаться непосредственно по ветру (ее движение в этом направлении обычно очень медленное), то кратчайший маршрут гонки редко представляет собой прямую линию. Поэтому яхтсмены попеременно перекладывают парус, переходя на другой галс, в результате движение имеет хорошо знакомый зигзагообразный характер. Исход гонки, таким образом, зависит от правильных тактических решений — когда именно и насколько надо изменить галс.
Опишите процесс изменения курса яхты в зависимости от изменения направления ветра. Изобразите функциональную схему, отражающую этот процесс.
У -1.5. В наступившем столетии, по-види.мому, получат распространение автоматизированные автострады. Рассмотрите случай, когда две таких дороги сливаются в одну, и опишите, как должна работать система управления, обеспечивающая выезд автомобилей с двух дорог на одну с заранее установленным интервалом между машинами.
У -1.6. Изобразите функциональную схему системы управления скоростью движения автомобиля, одним из элементов которой является водитель.
У -1.7. Опишите процесс биологической обратной связи в организме человека, с помощью которого он может в известной степени сознательно регулировать частоту пульса, реакцию на болевые ощущения и температуру тела.
Задачи
(Задачи связаны с применением основных понятий главы к новым ситуациям.)
Следующие ниже системы могут быть представлены в виде функциональных схем, отражающих причинно-следственные связи между элементами и обратную связь (если она присутствует). Каждый блок должен соответствовать функциональному назначению элемента. При необходимо
сти используйте в качестве модели схему на рис. 1.9.
3-1.1. Многие автомобили высшего класса оснащаются автоматическими системами кондиционирования воздуха для создания пассажирам комфортных условий. Изобразите функциональную схему такой системы, в которой значение желаемой температуры в салоне устанавливается водителем на приборном щитке. Установите функциональное назначение каждого элемента системы.
3-1.2. В прошлом одним из элементов замкнутых систем управления являлся человек-оператор. Изобразите функциональ-
Поток жидкости
Рис. 1.2 (3). Система управления потоком жидкости
ную схему системы управления потоком жидкости, представленной на рис. 1.2 (3).
Задачи
47
Рис. 1.3 (3). Управление химическим составом продукта
Регулирующий стержень
Ионизационная камера
Рис. 1.4 (3). Управление ядерным реактором
3-1.3. В химической технологии очень важно уметь управлять составом продукта. Чтобы это сделать, необходимо производить измерение состава с помощью анализатора, использующего инфракрасное излучение, как показано на рис. 1.3 (3). Вентилем в канале дополнительного потока можно управлять. Дополните рисунок обратной связью и изобразите функциональную схему, иллюстрирующую работу контура управления.
3-1.4. На атомных электростанциях важное значение имеет управление ядерным реактором. Считая, что количество нейтронов в активной зоне пропорционально уровню мощности, для измерения последнего используется ионизационная камера. Ток ионизационной камеры i0 пропорционален уровню мощности. Положение графитовых регулирующих стержней позволяет поддерживать заданный уровень мощности. Дополните обратной связью систему управления ядерным реактором [рис. 1.4 (3)] и изобразите функциональную схему данной системы.
3-1.5. На рис. 1.5 (3) изображена система управления, предназначенная для слежения за положением Солнца. На выходной оси, которая приводится во вращение с помощью электродвигателя через червячный редуктор, находится пластина с закрепленными на ней двумя фотоэлементами. На каждый фотоэлемент попадает одинаковый световой поток, когда источник света расположен точно посредине, как показано на рисунке. Дополните систему обратной связью так, чтобы она непрерывно отслеживала изменение положения источника света.
Рис. 1.5 (3)
Система слежения за источником света
Источник
Редуктор
48
Глава 1. Введение в системы управления
Рис. 1.6 (3)
Система с положительной обратной связью
3-1.6. В системах с обратной связью последняя не всегда является отрицательной. Экономическая инфляция, признаком которой служат непрерывно растущие цены, может быть представлена в виде системы с положительной обратной связью, как показано на рис. 1.6 (3). В этой системе сигнал обратной связи складывается со входным сигналом, а результирующий сигнал поступает на вход объекта управления. Это — простая модель инфляционной спирали цены-зар-плата. Чтобы стабилизировать систему, введите дополнительные обратные связи, учитывающие, например, законодательное регулирование или регулирование налоговых ставок. Предполагается, что рост зарплаты трудящихся после некоторой временной задержки приводит к росту цен. При каких условиях можно было бы стабилизировать цены путем фальсификации или сокрытия данных о стоимости жизни? Как на данную систему с обратной связью могла бы повлиять общегосударственная экономическая политика в области цен и зарплаты?
3-1.7. Рассказывают историю об одном сержанте, который каждое утро в 9 часов останавливался перед ювелирным магазином, сверял свои часы с показаниями хронометра в витрине и подводил их. Наконец, однажды он вошел в магазин и похвалил владельца за точность его хронометра. — Наверное, вы устанавливаете его по сигналам точного времени из Арлингтона? — спросил сержант.
— Нет, — ответил владелец, — я устанавливаю его ежедневно в 5 часов вечера по выстрелу пушки в форте. А скажите мне. сержант, почему вы каждый день останавливаетесь перед витриной и проверяете свои часы?
—А я служу артиллеристом в форте! — отреагировал сержант.
Какая в данном случае преобладает обратная связь — положительная или отрицательная? Хронометр в витрине каждые сутки отстаёт на 2 минуты, а часы сержанта за 8 часов отстают на 3 минуты. Чему будет равна чистая ошибка по времени выстрела пушки в форте спустя 12 дней?
3-1.8. Процесс обучения, участниками которого являются студент и преподаватель, характеризуется наличием обратной связи, в результате чего ошибка должна быть сведена к минимуму. На основе рис. 1.3 постройте модель процесса обучения и определите назначение каждого блока системы.
3-1.9. Специалистам медицинских профессий существенную помощь оказывают модели физиологических систем управления. Одна из них — система управление частотой сердечных сокращений — приведена на рис. 1.9 (3). Эта модель включает в себя обработку мозгом нервных
Частота
Частота
Частота
Рис. 1.9 (3). Управление частотой сердечных сокращений
Задачи
49
импульсов. Фактически, она представляет собой систему со многими перемеными, т. е. х, у, и>, v, z и и — это векторные переменные. Иными словами, переменная х образована компонентами X), х2.х„, характеризующими деятельность сердца. Проанализируйте предложенную мо-
дель и, если необходимо, добавьте или удалите некоторые блоки. Разработайте модель одной из следующих физиологических систем управления:
1. Система управления дыханием.
2. Система управления содержанием адреналина.
3. Система управления движением рук.
4. Система управления зрением.
5. Система управления деятельностью поджелудочной железы и содержанием сахара в крови.
6. Система управления кровообращением.
3-1.10. По мере увеличения интенсивности полетов возрастает роль систем управления авиарейсами. Во избежание столкновения самолетов в воздухе разрабатываются системы управления полетами, в основе которых лежит спутниковая навигационная система GPS (Global Positioning System — глобальная система определения положения). GPS дает возможность каждому самолету точно определять свое положение в воздухе на этапе приземления. Приведите вариант функциональной схемы, описывающей, как диспетчер полетов может использовать GPS с целью избежания столкновения самолетов.
3-1.11. Автоматическое управление уровнем воды использовалось на Ближнем Востоке для создания водяных часов. Эти часы [рис. 1.11 (3)]находили применение с начала новой эры и до 17-го века. Поясните принцип действия водяных часов и то, как поплавок в качестве элемента обратной связи обеспечивает точность отсчета времени. Изобразите структурную схему системы с обратной связью.
3-1.12. Автоматический поворотный механизм для ветряных мельниц был изобретен Мейкле около 1750 г. Подобное устройство показано на рис. 1.12 (3). Малое ветряное колесо, установленное под правильным углом к основному колесу, автоматически поворачивает турель навстречу ветру. Передаточное число редуктора составляет порядка 3000 : 1. Проанализируйте действие ветряной мельницы и попытайтесь обнаружить обратную связь, за счет которой основное колесо постоянно поворачивается навстречу ветру.
Рис. 1.12 (3)
Поворотный механизм ветряной мельницы
50
Глава 1. Введение в системы управления
3-1.13. Типичным примером системы управления с двумя входами является бытовой смеситель с отдельными кранами для горячей и холодной воды. Он предназначен для получения (1) желаемой температуры воды на выходе и (2) желаемого расхода воды. Изобразите функциональную схему замкнутой системы управления указанными двумя переменными.
3-1.14. Адам Смит (1723-1790) в своей книге «Богатство народов» рассмотрел проблему свободной конкуренции между участниками экономического процесса. Можо сказать, что он для объяснения своей теории использовал механизм социальной обратной связи. Смит пришёл к заключению, что (1) работники сравнивают различные возможные предложения и нанимаются туда, где они могут получить наибольшее вознаграждение за труд, и (2) что на любом предприятии вознаграждение уменьшается с ростом числа конкурирующих рабочих. Пусть г — суммарное количество выплачиваемых денег, усредненное по всем видам деятельности, с — суммарные выплаты в отдельно взятой отрасли, a q — приток рабочих в эту отрасль. Представьте этот процесс в виде системы с обратной связью.
3-1.15. В автомобилях используются небольшие компьютеры, позволяющие управлять выбросом выхлопных газов и оптимизировать расход горючего. Система управляемой компьютером инжекции горючего, которая автоматически устанавливает соотношение бензина и воздуха в цилиндрах, позволяет улучшить показатель расхода горючего на километр пути и значительно снизить нежелательный выброс выхлопных газов в окружающую среду. Изобразите функциональную схему данной системы.
3-1.16. Все люди испытывают высокую температуру, которой сопровождается болезнь. Это связано с изменением управляющего сигнала на входе системы терморегуляции организма. Эта система, находящаяся внутри мозга, в нормальных условиях поддерживает температуру тела в районе 36,6 °C, несмотря на изменение температуры окружающей среды в диапазоне от -18 до +38 °С(или даже большем), В случае болезни входной сигнал системы, или желаемое значение температуры, увеличивается. Однако многие ученые часто не понимают, что повышение температуры не есть признак того, что что-то разладилось в системе терморегуляции, а всего лишь следствие того, что в хорошо отрегулированной системе просто увеличилось значение входного сигнала. Изобразите функциональную схему системы терморегуляции человека и поясните, как прием аспирина может помочь сбить температуру.
3-1.17. Игроки в бейсбол используют обратную связь, чтобы оценить полет мяча и попасть в подающего. Опишите метод, используемый отбивающим для того, чтобы он на основании оценки положения подающего мог правильно нацелить биту и ударить мяч.
3-1.18. На рис. 1.18 (3) показан в разрезе широко распростаненный регулятор давления. Желаемое давление устанавливается поворотом откалиброванного винта. Винт сжимает пружину и определяет силу, которая стремится выпрямить диафрагму вверх. Нижняя часть диафрагмы под-
Рис. 1.18 (3)
Регулятор давления
Клапан
Задачи
51
вергается давлению воды, которое должно регулироваться. Таким образом, перемещение диафрагмы соответствует разности между желаемым и действительным давлением, т. е. диафраг-ма играет роль компаратора. С диафрагмой соединен клапан, который перемещается в зависимости от разности давлений до тех пор, пока эта разность не станет равна нулю. Изобразите функциональную схему образовавшейся замкнутой системы, в которой регулируемой переменной является давление воды на выходе.
3-1.19. Ихиро Масаки из корпорации Дженерал Моторе запатентовал систему, которая автоматически регулирует скорость движения автомобиля так, чтобы поддерживать безопасное расстояние от впереди идущей машины. Эта система с помощью видеокамеры определяет и запоминает эталонное изображение автомобиля, находящегося впереди. Затем происходит сравнение этого изображения с серией живых картинок, фиксируемых камерой в процессе движения двух автомобилей по дороге, и на основани этого вычисляется расстояние между ними. Масаки считает, что такая система способна кроме регулирования скорости управлять также рулевым колесом, что позволит водителю пристроиться за впереди идущим автомобилем и образовать «компьютеризированную сцепку». Изобразите функциональную схему этой системы.
3-1.20. На рис. 1.20 (3) изображен гоночный автомобиль с настраиваемым (аэродинамическим) крылом. Разработайте функциональную схему, иллюстрирующую способность аэродинамического крыла поддерживать постоянную степень сцепления между шинами автомобиля и полотном гоночной трассы. Почему важно поддерживать хорошее сцепление с дорогой?
3-1.21, Возможность применения двух или нескольких вертолетов для транспортировки грузов, которые слишком тяжелы для одного вертолета, представляет интерес для областей гражданского и военного вертолетостроения. Разумеется, эта
Рис. 1.20 (3). Гоночный автомобиль с аэродинамическим крылом
задача может быть решена путем использования небольшого вертолета, много раз переносящего заданный груз. Но в то же время эту задачу можно решить гораздо проще — путем использования нескольких более мощных вертолетов. В частном случае для этого могут использоваться два вертолета, как показано на рис. 1.21 (3).
Рис. 1.21 (3)
Перемещение груза двумя вертолетами
52
Глава 1. Введение в системы управления
Разработайте функциональную схему, отражающую действия пилотов, положение каждого вертолета и положение груза.
3-1.22. Перед инженерами-строителями стоит задача— спроектировать такую систему управления, которая позволяла бы зданию или иному сооружению противостоять силе, возникающей во время землетрясения, лучше, чем это сделал бы человек. Эта система должна противостоять данной силе, но лишь до тех пор, пока она не превысит порог разрушения. Разработайте функциональную схему системы управления, позволяющей уменьшить влияние разрушающей силы землетрясения.
3-1.23. Модернизация автомобильного стеклоочистителя (дворника) состоит в том. что цикл его работы настраивается в зависимости от интенсивности дождя. Изобразите функциональную схему системы управления работой дворника.
3-1.24. За последние 40 лет на орбиту вокруг Земли было выведено более 20000 т различного оборудования. За тот же период более 15000 т оборудования было возвращено на Землю. Размер объектов, остающихся на орбите, колеблется от крупных космических аппаратов до крошечных частиц краски. На орбите находится около 150000 объектов размером более 1 см. Примерно за 10000 из них с Земли ведётся постоянное наблюдение. Актуальной задачей становится «управление космическим движением», особенно для компаний, выводящих коммерческие спутники на орбиты, которые уже заняты другими объектами и где может находиться космический мусор. Изобразите структурную схему системы управления космическим движением, которую компании могли бы использовать в целях предотвращения столкновения своих спутников с другими объектами.
Задачи на синтез систем
(Задачи на синтез подразумевают решение проблем, связаных с синтезом систем управления. Сквозная задача на синтез (СЗ) требует применения знаний, полученных при изучении последовательных глав.)
СС-1.1. В современных высокоточных металлообрабатываю-_ ших станках особые требования предъявляются к систе-Г 1 мам, обеспечивающим скольжение их стола. Такие сис-•Ии® темы должны с высокой точностью управлять желаемым перемещением стола, как показано на рис. 1.1 (СС). Изобразите функциональную схему системы с обратной связью, которая выполняла бы данную задачу. Как показано на рисунке, стол может перемещаться в направлении х.
С-1.1. Дорожная обстановка и шум от транспортных средств, проникающий в кабину автомобиля, приводят к быстрой утомляемости водителя и пассажиров. Разработайте функциональную схему противошумовой системы с обратной связью, которая снижала бы влияние нежелательных шумов. Укажите конкретное устройство, соответствующее каждому блоку.
С-1.2. Многие автомобили оснащены системой, которая позво-
Рис. 1.1 (СС). Станок со скользящим столом
ляет в результате простого нажатия на кнопку автоматически поддерживать заданную скорость движения. Таким образом, водитель может ехать с ограниченной или экономически выгодной скоростью, не контролируя показания спи-
дометра. Представьте данную систему в виде функциональной схемы.
С-1.3. На молочных фермах внедряются системы автоматического доения коров. Спроектируйте доильный апппарат, позволяющий доить коров 4-5 раз в день, когда для этого наступает время
Ключевые термины и понятия
53
(момент доения определяется самой коровой). Изобразите функциональную схему такой сис темы и укажите конкретное устройство, соответствующее каждому блоку.
С-1,4. На рис. 1.4 (С) показана размещенная на подставке большая рука робота, пред-назначеного для сварки крупногабаритных деталей. Разработайте функциональную схему замкнутой системы, которая должна точно управлять положением сварочного наконечника.
С-1.5. Автоматическое управление силой сцепления позволяет исключить появление юза при торможении и пробуксовку при ускорении, что существенно облегчает управление автомобилем. Цель подобной системы управления состоит в обеспечении максимального сцепления шины с дорогой. В качестве управляемой переменной выбирается пробуксовка колеса, т. е. разность между скоростью автомобиля и скоростью вращения колеса, поскольку именно эта величина оказывает наибольшее влияние на силу сцепления между шиной и дорогой. Коэффициент сцепления колеса с дорогой достигает максимума при низкой пробуксовке. Разработайте функциональную схему системы управления силой сцеления для
Рис. 1.4 (С). Сварочный робот
одного колеса.
С-1.6. В декабре 1993г. был отремонтирован космический телескоп «Хаббл». Но до сих пор остается нерешенной проблема устранения дрожания изображений, возникающего каждый раз, когда аппарат входит или выходит из тени Земли. Наиболее сильные колебания имеют период около 20 с, что соответствует частоте 0,05 Гц. Спроектируйте систему с обратной связью, которая была бы способна уменьшить колебания телескопа «Хаббл».
Ключевые термины и понятия
Автоматизация. Автоматическое управление объектом или процессом.
Замкнутая система управления. Система с обратной связью, в которой происходит измерение выходной переменной и сравнение с ее желаемым значением.
Компромисс. Решение о том, как можно удовлетворить нескольким конфликтующим критериям синтеза системы.
Многомерная система управления. Система управления с более чем одной входной и более чем одной выходными переменными.
Объект управления. Устройство, установка или процесс, подлежащие управлению.
Оптимизация. Подбор параметров системы, обеспечивающих её наилучшее функционирование согласно принятому критерию качества.
Отрицательная обратная связь. Канал, по которому выходной сигнал возвращается на вход системы и вычитается из входного сигнала.
Положительная обратная связь. Канал, по которому выходной сигнал возвращается на вход системы и складывается со входным сигналом.
54
Глава 1. Введение в системы управления
Производительность. Отношение реального выхода производственного процесса к его реальному входу.
Разомкнутая система управления. Система, в которой отсутствует обратная связь, т. е. выходная переменная объекта управления никак не влияет на вход этого объекта.
Расхождение при синтезе. Различие между сложной физической системой и ее моделью, выступающей в качестве основы для синтеза, объективно присущее движению от исходной концепции к конечному изделию.
Риск. Неопределенности, присущие процедуре синтеза системы управления.
Робот. Манипулятор со встроенным программируемым компьютером. Перепрограммируемый многофункциональный манипулятор.
Сигнал обратной связи. Результат измерения выходной переменной системы, используемый для формирования управляющего воздействия.
Синтез. Процесс, в результате которого создается новое физическое изделие. Объединение разрозненных элементов в единое целое.Щроцесс проектирования или изобретения элементов, частей или блоков системы определенного целевого назначения.)
Система. Соединение элементов и устройств в структуру определенного функционального назначения.
Система управления. Соединение элементов в структуру, обладающую заданными свойствами.
Сложность проектирования. Проблема, возникающая вследствие множественности привлекаемых для проектирования методов и технических средств.
Техническое проектирование. Процесс создания технической системы.
Требования. Формулировки, определяющие, каким должно быть устройство или изделие и что оно должно делать. Совокупность предписанных критериев качества.
Центробежный регулятор. Механическое устройство для регулирования скорости паровой машины.
Глава 2
Математические модели систем
Обзор
При анализе и синтезе систем управления мы используем математические модели физических объектов. Их динамика в общем случае описывается обыкновенными дифференциальными уравнениями. Мы будем рассматривать широкий круг систем, включая механические, гидравлические и электрические. Поскольку большинство реальных систем являются нелинейными, мы рассмотрим методы их линейной аппроксимации, что позволит воспользоваться преобразованием Лапласа. Затем мы получим связь между входом и выходом элементов и систем в виде передаточных функций. На основании передаточных функций могут быть построены структурные схемы или сигнальные графы, отражающие взаимные связи между элементами систем. Структурные схемы (и сигнальные графы) являются очень удобным и естественным средством анализа и синтеза сложных систем управления. В завершение этой главы мы воспользуемся передаточными функциями в примере синтеза с продолжением (система чтения информации с диска).
2.1. Введение
Для того чтобы изучить свойства сложной физической системы и научиться управлять ей, необходимо получить ее математическую модель. Для этого требуется установить все взаимосвязи между переменными, характеризующими поведение системы. Поскольку все реальные системы по своей природе являются динамическими, то для их описания естественно использовать дифференциальные уравнения. Если, кроме того, эти уравнения могут быть линеаризованы, то тогда можно воспользоваться преобразованием Лапласа. В действительности, сложность системы и игнорирование нами ряда привходящих факторов обуславливают возникновение некоторых допущений, связанных с функционированием данной системы. Поэтому часто бывает полезным игнорировать эти допущения и произвести линеаризацию системы. В результате на основании физических законов, описывающих поведение эквивалентной линейной системы, мы можем получить систему дифференциальных уравнений. Наконец, используя математический аппарат, такой как преобразование Лапласа, мы сможем получить решение, характеризующее поведение данной системы. В итоге алгоритм исследования динамики системы сводится к следующему:
1. Определить систему и ее компоненты.
2. Составить математическую модель и выдвинуть необходимые допущения.
3. Записать дифференциальные уравнения, описывающие поведение модели.
4. Решить уравнения относительно желаемых выходных переменных.
5. Проанализировать решения и допущения.
6. При необходимости провести повторный анализ или синтез системы.
56
Глава 2. Математические модели систем
2.2. Дифференциальные уравнения физических систем
Дифференциальные уравнения, описывающие динамику физической системы, получаются на основании фундаментальных физических законов. Этот метод в равной степени применим к механическим, электрическим, гидравлическим и термодинамическим системам. Рассмотрим крутящуюся систему пружина-масса, изображенную на рис. 2.1, к которой приложен момент Г„(Г). Предположим также, что упругий элемент (пружина) обладает пренебрежимо малой массой по сравнению с диском. Допустим, что нам необходимо измерить момент Ts(t), передаваемый массе т. Поскольку согласно допущению пружина не обладает массой, то сумма действующих на нее моментов должна равняться нулю, т. е.
та (О - т, (Г) = О,
откуда имеем Г, (/) = Ти (/). Мы видим, что внешний момент Ta(t), приложенный к концу пружины, передается сквозь этот упругий элемент. По этой причине мы будем называть момент сквозной переменной. Аналогичным образом, разность угловых скоростей концов упругого элемента равна
0)(/) = £0,(0 - (0а(Г).
Эта разность характеризует угловую скорость одного конца упругого элемента относительно другого, поэтому мы будем называть ее относительной переменной. Подобные рассуждения можно сделать и в отношении большинства известных физических переменных (таких как сила, ток, объем, поток и т. п.). В табл. 2.1 приведены сводные данные о сквозных и относительных переменных динамических систем. Информацию относительно Международной системы единиц СИ, применяемой ко многим переменным в этом разде-ле, можно найти на Web-сайте MCS (Modern Control Systems). Например, темпера-тура в системе СИ измеряется в градусах Кельвина, а длина — в метрах. На этом же Web-сайте приведена таблица соответствий между английской системой единиц и системой СИ. Дифференциальные уравнения линейных динамических элементов с сосредоточенными параметрами приведены в табл. 2.2. Заметим, что эти уравнения являются идеализированным описанием динамики элементов, т. е. представляют собой всего лишь аппроксимацию их реального поведения (например, когда элемент с распределенными параметрами аппроксимируется линейной моделью с сосредоточенными параметрами).
Рис. 2.1
(а) Крутящаяся система пружина-масса;
(б) Упругий элемент
2.2. Дифференциальные уравнения физических систем 57
Обозначения:
Сквозные переменные: F— сила, Т — момент, i — ток, Q — объемный расход жидкости, q — тепловой поток.
Относительные переменные: v — поступательная скорость, <о — угловая скорость, и — напряжение, Р — давление, Т— температура.
Индуктивные накопители: L — индуктивность, У к — обратный коэффициент жесткости, 1 — инертность жидкости.
Емкостные накопители: С — емкость, М—масса, J—момент инерции, Q —жидкостная емкость, С, — тепловая емкость.
Рассеиватели энергии: R — сопротивление, Ь — вязкое трение, Rf— гидравлическое сопротивление, Rt — тепловое сопротивление.
Таблица 2.1. Сквозные и относительные переменные физических систем
Система Сквозная переменная Интеграл от сквозной переменной Относительная переменная Интеграл от относительной переменной
Электрическая Ток, i Заряд, q Разность напряжений. V21 Потокосцепление. Х21
Механическая с поступательным движением Сила. F Поступательный момент силы, Р Разность скоростей. V?! Разность перемещений, у?!
Механическая с вращательным движением Момент, Т Угловой момент, h Разность угловых скоростей. o)2i Разность угловых перемещений, 02|
Гидравлическая Тепловая Объемный расход жидкости. О Тепловой поток, q Объём, V Тепловая энергия. И Разность давлений, /Д Разность температур. Момент давления, Y21
Обозначение v(t) используется как для напряжения в электрических цепях, так и для скорости поступательного движения в механических системах, поэтому смысл этой переменной следует понимать в контексте каждого дифференциального уравнения. Для описания механических систем используются законы Ньютона, а для электрических систем — законы Кирхгофа. Например, простой механический амортизатор, изображенный на рис. 2.2(h), описывается вторым законом Ньютона. (Подобное устройство может, например, представлять собой модель автомобильного амортизатора.)
Рис. 2.2
(а) Система пружина-масса с демпфированием.
(б) Условное обозначение
Сила
58
Глава 2. Математические модели систем
Таблица 2.2. Дифференциальные уравнения идеальных элементов
Тип элемента Физический Дифференциаль- Энергия E или Обозначение
элемент ное уравнение мощность P
Электрическая - I di v2] - L— E = -Li2 L i
at 2 ^2 Q_y V V V \—►—О
Индуктивные накопители Пружина сжатия 1 dF 2 к dt еЛЕ £ vi
2 к г IT2 Е - 2 к p 1 Q P —>—O-* j
Пружина кручения Инерция жидкости 1 dT “21 " к dt P -1*Q 21 1 dt
Электрическая i = C^ Е = -Cvl / 1. C v,
емкость dt 2 V2O ► 1 | О
Масса Av 1
с линейным F = M—^-dt E = -Mv} 2
перемещением constant
Емкостные Вращающаяся „ . dto, г 1 I 2 E = -
накопители масса dt 2 2 constant
Г идравлическая емкость Q=cf^ 1 dt £="C7p22 ri
Тепловая емкость .. F = C,Z2 q^c^=
constant
Электрическое 1 ' =— V21 ^=-v22,
сопротивление R R v2o-EZ_r-*-°v(
Амортизатор линейного F = bvi} J°=bv21 F-*°—1
действия V2
Рассеиватели Вращающийся T = btt>2i J>- few2. 7’->°—1| ° co,
МОЩНОСТИ амортизатор 10 2 ЛЬ
Г идравлическое Q = — P2I p2l Rf Q
сопротивление Rj Rf 1 ►“O-'l
Тепловое 1 J>= — Z2. A ?
сопротивление Rj A, 21 1 ►
Схематическое изображение динамики массы М показано на рис. 2.2(6). В этом примере мы будем считать, что трение груза о стенки является вязким, т. е. сила трения линейно зависит от скорости движения груза. В действительности сила трения может описываться более сложной зависимостью. Например, трение о стенки может быть кулоно-вым. Сила кулонова, или сухого, трения является нелинейной функцией скорости груза, которая имеет разрывный характер вблизи нулевой скорости. Для хорошо смазанной гладкой поверхности наиболее адекватным является вязкое трение, поэтому в данном и всех последующих примерах, где рассматривается механическая система, состоящая из
2.2. Дифференциальные уравнения физических систем
59
массы и пружины, будет использоваться именно вязкое трение. В соответствии со вторым законом Ньютона, суммируя все силы, действующие на массу М, запишем:
+ + = (2.1)
dt' dt
где к — коэффициент упругости пружины, а b — коэффициент трения. Уравнение (2.1) есть дифференциальное уравнение второго порядка с постоянными коэффициентами.
Точно так же можно с помощью закона Кирхгофа для токов описать электрическую АТС-цепь, представленную на рис. 2.3. В результате мы получим следующее интегро-дифференциальное уравнение:
Рис. 2.3. /?2С-цепь
(2.2)
Решение дифференциального уравнения, описывающего динамический процесс, может быть получено классическим методом — путем интегрирования с использованием неопределенных коэффициентов. Например, если груз сместить в начальное положение y(t) = ХО) и затем отпустить, то движение такой недодемпфированной системы описывается выражением
y(/) = Kle-“',sm(P1r + ei). (2.3)
Аналогичное решение имеет место для напряжения v(t) RLC-цегм, если она находится под воздействием постоянного тока г(/) = 7:
v(/) = A2e-“2' cos(p2r + 62). (2.4)
Типичный характер изменения напряжения в недодемпфированой АТС-цепи показан на рис. 2.4.
Чтобы обнаружить более близкое сходство между дифференциальными уравнениями механических и электрических систем, перепишем уравнение (2.1) относительно скорости
dt
Рис. 2.4
Типичный характер изменения напряжения в недодемпфированной АТС-цепи
Напряжение
60
Глава 2. Математические модели систем
В результате получим:
A7-^™ + Z?v(/)+A Jv(/)tA =г(/). (2.5)
Сразу же можно отметить эквивалентность уравнений (2.5) и (2.2), только в одном из них переменная v(t) обозначает скорость, а в другом — напряжение. Поэтому данные переменные обычно называют переменными-аналогами, а соответствующие системы — подобными системами. Следовательно, закон изменения скорости будет также иметь вид (2.4), которому соответствует кривая на рис. 2.4. Понятие подобия систем является очень полезным и эффективным методом при моделировании. Аналогия между напряжением и скоростью, часто называемая аналогией сила-ток, вполне естественна, поскольку она характеризует связь между подобными сквозными и относительными переменными электрических и механических систем. Однако часто используется и другая аналогия, называемая аналогией сила-напряжение, при которой рассматривается подобие скорости и тока.
Подобные системы с одинаковыми решениями можно обнаружить среди электрических, механических, тепловых и гидравлических систем. Наличие таких систем позволяет исследователю распространить решение, полученное для одной системы, на все подобные системы, описываемые аналогичными дифференциальными уравнениями. Следовательно, результаты, полученные, скажем, при анализе и синтезе электрических систем, сразу можно применить для представления о поведении гидравлических, тепловых и механических систем.
2.3. Линеаризация физических систем
Подавляющее большинство физических систем являются линейными в некотором диапазоне изменения переменных. Однако при неограниченном возрастании этих переменных все системы в конечном счете становятся нелинейными. Например, система, образованная массой и пружиной (рис. 2.2), является линейной и описывается уравнением (2.1) лишь при условии малых отклонений y(f). Если же y(t) будет постоянно увеличиваться, то может наступить чрезмерное растяжение и разрыв пружины. Поэтому вопрос о линейности и диапазоне применимости этого понятия должен решаться индивидуально для каждой конкретной системы.
Систему можно определить как линейную, если воспользоваться действующим на нее возмущением и реакцией на это возмущение. В случае рассмотренной выше электрической цепи возмущением является входной ток r(Z), а реакцией — напряжение v(t). В общем случае необходимым условием линейности системы является соответствующая связь между возмущением x(t) и реакцией y(t). Если к системе, находящейся в состоянии покоя, приложить возмущение х,(г), то на выходе появится реакция у} (/). Если при тех же условиях подвергнуть систему возмущению х2(г), то она даст соответствующую реакцию у2(0- Необходимым условием линейности является то, чтобы при возмущении Х](Г) + х2(Г) система давала реакцию y\(t) +y2(f). Это положение обычно называют принципом суперпозиции.
Кроме того, в линейной системе должен выполняться фактор масштабирования. Опять-таки будем считать, что входом системы является переменная х, а выходом — переменная у. Тогда необходимо, чтобы при умножении входной переменной на константу
2.3. Линеаризация физических систем
61
Р реакция (выходная переменная) системы изменилась в такое же число раз, т. е. оказалась равна Ру. Это свойство носит название гомогенности.
Линейная система удовлетворяет свойствам суперпозиции и гомогенности.
Если система характеризуется зависимостью у = х2, то она не является линейной, т. к. для нее не выполняется принцип суперпозиции. Система с уравнением у-тх + Ь также не является линейной, поскольку она не обладает свойством гомогенности. Однако последнюю систему можно считать линейной в окрестности рабочей точки х0, у0 относительно малых приращений Ах и Ду. Если х = х0 + Ах и у = у0 + Ду, то мы получим
у = тх + Ь, или
у0 + Ду = тх0 + /пАх + b
и, следовательно, Ду - тДх, что удовлетворяет необходимым условиям.
Многие механические и электрические элементы в достаточно широком диапазоне изменения переменных можно считать линейными. Этого нельзя сказать о тепловых и гидравлических элементах, которые чаще всего по принципу своего действия оказываются нелинейными. Однако к счастью нелинейные элементы часто удается линеаризовать при условии малых отклонений сигналов от их стационарных значений. Такой прием обычно используется для получения линейных моделей транзисторов и электронных схем. Рассмотрим общий случай, когда некоторый элемент характеризуется возмущением (сквозной переменной) х(/) и реакцией на него (относительной переменной) y(t). Некоторые примеры динамических систем с такими переменными приведены в табл. 2.1. Связь между переменными определяется уравнением
АО = «МОИ (2.6)
где g[x(Z)] показывает, чтоy(t) является функцией x(z). Обозначим координату рабочей точки через х0. Непрерывную функцию в окрестности рабочей точки можно разложить в ряд Тейлора:
(2.7) ах х=хп 1! dx~ х=л, 2!
Значение производной:
^g_\ dx 'х=х“
характеризует наклон касательной к кривой функцииу=g(x) в рабочей точке х0. Эта касательная может служить хорошей аппроксимацией исходной кривой в случае малых значений (х -х0), т. е. отклонения от рабочей точки. В таком предположении можно записать:
y=g(Jo)+TL-, (х-х0) = у0 +т(х-х0), (2.8)
dx ,х~Хп
где т есть тангенс угла наклона касательной к кривой в рабочей точке. Окончательно уравнение (2.8) можно записать в виде
(у - у0) = т(х - х0),
или
Ду = тиАх.
(2.9)
62
Глава 2. Математические модели систем
Масса М
Рис. 2.5. (а) Масса М, расположенная на нелинейной пружине; (б) Зависимость упругой силы от у
Рассмотрим случай, когда груз массы М расположен на нелинейной пружине, как показано на рис. 2.5(a). Рабочая точка имеет место в положении равновесия, когда упругая сила пружины равна весу груза Mg, где g — ускорение силы тяжести. Таким образом, f0 = Mg, как показано на рис.2.5(6). Если нелинейная пружина характеризуется зависимостью f = у2, то в положении равновесия у0 = -jMg. Для малых отклонений линейная мо
дель описывается уравнением
kf=m Ду,
где
dy
как показано на рис. 2.5(6). Следовательно, т = 2у0. Данную линейную аппроксимацию можно считать точной, поскольку допущение о малости приращений переменных полностью применимо к этой механической системе.
Если переменная у зависит от нескольких возмущений хь х2,..., х,„ то функциональная зависимость имеет вид:
у = g(xb х2, ..., х„). (2.10)
К нелинейной функции нескольких переменных также можно применить разложение в ряд Тейлора в окрестности рабочей точки с координатами х10, х20, ..., х„0. Пренебрегая членами высшего порядка малости, линейную аппроксимацию можно представить в виде:
3g 8g
y = g(xio>x2o, -,xno)+— (xi-*10) +— (x,-x20)+... +
5x1 x=x„ dXj
~ л-л(|
6x„
(Xn Хц0 i
(2.11)
где x0 — рабочая точка. Ниже приводится пример, иллюстрирующий применение метода линеаризации.
2.4. Преобразование Лапласа
63
Пример 2.1. Модель маятника
Рассмотрим колебания маятника, изображенного на рис. 2.6(a). Момент, действующий на массу, равен:
Т = MgLsinQ, (2.12)
где g — ускорение силы тяжести. Условие равновесия маятника соответствует значению 0О = 0°. Нелинейная зависимость между Г и 0 графически представлена на рис. 2.6(6). Вычисление первой производной в точке равновесия дает линейную аппроксимацию уравнения (2.12), которая имеет вид:
(0-0о1 (70
где То = 0. Следовательно, мы имеем:
Т = Mg£(cosO°)(0 - 0°) = MgLf).
(2.13)
Подобная аппроксимация является достаточно приемлемой в диапазоне -л/4 < 0 < л/4. Например, колебания линейной модели в диапазоне ±30° от положения равновесия отличаются всего на 2% от действительных колебаний маятника.
Рис. 2.6
Колебания
маятника
б)
2.4. Преобразование Лапласа
Возможность линеаризации физических систем предоставляет в распоряжение исследователя аппарат преобразования Лапласа. Метод преобразования Лапласа позволяет заменить достаточно сложное решение дифференциальных уравнений относительно простым решением алгебраических уравнений. Определение реакции системы на входное воздействие подразумевает следующие действия:
1. Получение дифференциальных уравнений.
2. Преобразование по Лапласу этих дифференциальных уравнений.
3. Решение полученных алгебраических уравнений относительно переменной, представляющей интерес.
Для того чтобы функция f(t) имела преобразование Лапласа, достаточно, чтобы выполнялось условие
ОО
<°о,
О’
т. е. данный интеграл должен сходиться для некоторого действительного положительного ст [. Если |/(1) | < Меа1 для всех положительных t, то интеграл будет сходиться принта.Таким образом, область сходимости определяется неравенством °о > > а, где Qj известна
как абсцисса абсолютной сходимости. Все физически реализуемые сигналы имеют преоб-
64
Глава 2. Математические модели систем
разевание Лапласа. Преобразование Лапласа функции времени/}/) определяется выражением
F(s)=f /(Oe"edif=Z{/(O}. Jo~
Обратное преобразование Лапласа имеет вид
га+ 1<а
= F(s)e ds.
(2.14)
(2-15)
• При решении большинства практических задач используются таблицы преобразо-ваний Лапласа, полученные на основании выражения (2.14). В табл. 2.3 приведены основные прямые и обратные преобразования Лапласа, а более подробную таблицу можно найти на Web-сайте MCS.
Таблица 2.3. Некоторые важные преобразования Лапласа
ДО
Ступенчатая функция, u(t)
F(s) 2
s
1
s+ а
sin((Df)
cos(coz) s
2 2 S’ + CD
n!
/wW = ^2 dr sk F(s)-sk-{ Д0")-
Импульсная функция. 8(r) 1
e a' sin(coC) CD
(s2 + a2) + to2
(s+a)
e cos(coi) ч (s2 + a2)+o>2
1 [(a -a)2 + co2] ni • f •. CD -e sin(co/ + cp), cp = arctg a — a s+ a
CD (s + a)2 + w2
e- tB"'sin(<oJi-^2/), ;<i
Vi-c2 s2 + 2^<o„s + co2
1 1 „П/ . , -CD 1
a2 + Gj2 CO Vlo2 + co2 a s[(s + a)2 + (o2 ]
1 — e 1’ш”' sin(<s..Jl-H2t + col co = arccost. t < 1 w2
Vi-^2 s(s2 + 2^wlfs + w2)
a 1 (a - a)2 + co2 2 • z . ч . GJ . -® (s+ a)
2 2 1 a + co co a2 + U>2 e sin(cot + cp), cp = arctg arctg— a — a a s[(s + a)2 + co2 ]
2.4. Преобразование Лапласа
65
Переменную 5 в преобразовании Лапласа можно рассматривать как оператор дифференцирования, т. е.
s = —. (2.16)
dt
Аналогично можно ввести оператор интегрирования
s •'о-
(2-17)
Обратное преобразование Лапласа обычно находят путем разложения F(s) на простые дроби с помощью правила Хевисайда. Этот метод, в частности, полезен при анализе и синтезе систем управления, т. к. он позволяет легко выявить влияние каждого корня характеристического уравнения системы.
Чтобы проиллюстрировать преимущества преобразования Лапласа, рассмотрим еще раз механическую колебательную систему, описываемую уравнением (2.1), которое имеет вид
А/^ + й^ + 4у = г(О (2.18)
Л2
Нам необходимо получить решение этого уравнения, т. е. выражение Х0- Преобразование Лапласа уравнения (2.18) имеет вид:
М
s2Y{s)-sy(S) )-—,° ) dt
+ 6[дУ(5)-Х0 )] + kY(5) = R(s)
(2.19)
Еслиг(0 = 0, ХО У~Уо и — dt »=ir
= 0, то мы получим:
Ms2Y(s) - Msy0 + bsY(s) - by0 + kY(s) = 0. (2.20)
Выражая отсюда У(л), получим:
у(д)= (22|)
Ms' +bs+k q(s)
Если полином q(s~), стоящий в знаменателе, приравнять нулю, то мы получим характеристическое уравнение, названное так потому, что его корни определяют характер движения системы. Корни характеристического уравнения называют также полюсами системы. Корни полиномаp(s), стоящего в числителе, называют нулями системы; например, выражение (2.21) имеет нуль .v = - b/М. В полюсах функция У(а) обращается в бесконечность, а в нулях она становится равной нулю. Расположение полюсов и нулей на комплексной 5-плоскости определяет характер собственного (свободного) движения системы.
Рассмотрим частный случай, когда к/М = 2 и ЫМ= 3. Тогда выражение (2.21) примет вид:
У («) = . (2.22)
(s+l)(s + 2)
Положение полюсов и нуля этой функции на 5-плоскости показано на рис. 2.7. Разложив (2.22) на элементарные дроби, получим:
У(5)=-^- + Д-, (2.23)
5+1 5+2
66
Глава 2. Математические модели систем
Рис. 2.7
Расположение полюсов и нуля на s-плоскости
-X-
-1
X — Полюс О — Нуль
где к{ и Л2 есть коэффициенты разложения. Коэффициенты к, называются вычетами и определяются путем умножения (2.22) на член знаменателя, соответствующий к» и присваивания переменной s значения, равного данному полюсу. Так, если положить у0 = 1, то вычисление коэффициента кх дает:
(s-s,)p(s) = (s+l)(s+3)| =2 (224)
q(s) •’=•'1 (s + l)(.v + 2)' 'i=-1
Аналогичным образом получим значение к2 — -1. Другой способ нахождения вычетов X(s) в соответствующих полюсах основан на графических операциях, производимых на s-плоскости. Так, например, (2.24) можно записать в виде:
ki =— = ^-±2 =2 (2.25)
S + 2 Л’=А)=—1 ,S] + 2.V|=-1
Графическое представление выражения (2.25) приведено на рис. 2.8. Графический способ нахождения вычетов имеет особую ценность в тех случаях, когда характеристическое уравнение имеет высокий порядок и когда некоторые полюсы образуют комплексно-сопряженные пары.
Рис. 2.8
Графическое определение вычетов
Теперь применим обратное преобразование Лапласа к выражению (2.22):
y(t) = L~'l — 1+Z71/—I. (2.26)
(s+lj l-s + 2)
С помощью таблицы 2.3 находим:
y(t) = 2е~' - е2'.
(2.27)
Часто бывает необходимо определить установившееся, или конечное, значение y(t). Например, требуется найти установившееся значение положения уже знакомой нам механической колебательной системы. Теорема о конечном значении гласит, что:
Ит >>(/) = lim л-У (s), (2.28)
I —>оо .у—>0
2,4, Преобразование Лапласа
67
где допускается наличие простого полюса У(.\) в начале координат, но не допускается наличие полюсов на мнимой оси и в правой полуплоскости, а также кратных полюсов в начале координат. Следовательно, для системы масса-пружина мы получим:
lim y(t) = lim.vy(.v) = 0, (2.29)
l-*x> ,v->0
т. e. конечное положение массы соответствует положению равновесия у = 0.
Чтобы лучше продемонстрировать достоинства метода преобразования Лапласа, рассмотрим еще раз систему масса-пружина для случая недодемпфированного движения. Выражение для У(а) можно записать в виде:
у (s) = (s+b/M)y0 = (s + 2fo„)y0 , (2 зо)
s1 +{Ы M)s+(k/М) s1 +2C,ans+aj,
где С, — безразмерный коэффициент затухания, а со„ — собственная частота колебаний системы. Корни характеристического уравнения равны:
±мид/^2 -1> (2.31)
где, в нашем случае, со,, = -^к/М и С, = Ь/2-jkM. Если С, > 1, то корни являются вещественными; при С, < 1 корни являются комплексно-сопряженныМи. При = 1 корни являются вещественными и кратными, что соответствует так называемому критическому затуханию.
Если < 1, то реакция системы является недодемпфированной, и
(2.32)
На рис. 2.9 показано расположение полюсов и нуля функции У(.\), где 6 = arccos С,. При изменении Q и сохранении постоянным значения со„ комплексно-сопряженные полюсы перемещаются по окружности, как показано на рис. 2.10. Переходная характеристика все более приобретает колебательный характер по мере того, как полюсы приближаются к мнимой оси при Q -> 0.
Обратное преобразование Лапласа можно найти путем графического определения вычетов. Разложение (2.30) на элементарные дроби дает:
У(д) = -^—+ -^-. (2.33)
5-^! S-S-,
Поскольку а’[ и s2 являются комплексно-сопряженными, то вычет Л2 также является комплексно-сопряженным вычету kit и мы имеем:
у(^)=—+-^4-,
Рис. 2.10. Перемещение полюсов при изменении (, и условии а>„ = const
Рис. 2.9. Расположение на s-плоскости полюсов и нуля Hs)
68
Глава 2. Математические модели систем
Рис. 2.11
Определение вычета к-\
7“
где звездочка обозначает комплексно-сопряженное значение. На основании рис. 2.11 вычет кг находится как
А = Уо(д + 2С%) = JpAfi ej6
S] — S| М2^п12
(234)
где Мх есть модуль (s, + 2£со„), а М2 — соответственно модуль (s1 - s, ) Основные сведения по комплексным числам и операциям с ними приведены на Web-сайте MCS. В данном случае мы получим:
2^./(п/2—6)
Уо
(2.35)
где 9 = arccos^. Следовательно,
Л, = -.2°—е^/2~е). (2.36)
2VR2
Окончательно, введя обозначение -Jl-^2 =₽, мы получим:
y{t) = kxe^ + к-,е* = + е'(я/2-е) е-О„< ) =
271-^
=-^=e-/“»'sin(®n71^Tr + e). (2.37)
То же самое решение можно получить с помощью п. 11 таблицы 2.3. Переходные характеристики для случаев передемпфированной (^ > 1) и недодемпфированной (£ < 1) системы приведены на рис. 2.12. Переходной характеристике при С, < 1 свойственно уменьшение со временем амплитуды колебаний, поэтому она носит название затухающих колебаний.
Между расположением полюсов и нулей на s-плоскости и видом переходной характеристики существует прямая и однозначная зависимость. В то же время степень влияния каждого полюса, представляемая соответствующим вычетом, очень легко прослеживается, исходя из графического определения вычетов на s-плоскости. Преобразование Лапласа и использование s-плоскости являются очень ценными методами анализа и синтеза систем, когда акцент делается на определение переходных режимов и точность в установившемся состоянии. Поскольку при исследовании систем управления в первую очередь представляют интерес именно два указанных фактора, то в связи с этим трудно переоценить метод преобразования Лапласа.
2.5. Передаточные функции линейных систем
Рис. 2.12 Переходные характеристики системы масс а-пружина
2.5. Передаточные функции линейных систем
Передаточная функция линейной системы определяется как отношение преобразования Лапласа выходной переменной к преобразованию Лапласа входной переменной при условии, что все начальные условия равны нулю. Передаточная функция системы (или элемента) однозначно описывает динамическую связь между этими переменными.
Передаточная функция существует только для линейных стационарных (с постоянными параметрами) систем. В нестационарных системах один или несколько параметров зависят от времени, поэтому преобразованием Лапласа воспользоваться нельзя. Передаточная функция описывает поведение системы в терминах вход-выход и не несет никакой информации о внутренних переменных и характере их изменения.
Передаточная функция системы масса-пружина получается, если в исходном уравнении (2.19) все начальные условия положить равными нулю:
Ms2Y(s) + bsY(s) + kY(s) = R(s).
Отсюда находим передаточную функцию:
выход У (а ) 1
-----= G(s) = = —------------ вход-R(s) Ms3 + bs+k
Передаточная функция 7?С-цепи, изображенной на рис. 2.13, получается путем записи в операторной форме уравнений Кирхгофа относительно напряжений:
И,(5)ф + ±
V Cs
(2.38)
(2.39)
(2-40)
и далее
+ о-
K2(S)=/(s)-L
Cs
Выражая /(.v) из (2.40) и подставляя его в (2.41), получим:
(2.41)
R
Рис. 2.13. АС-цепь
Г2(5) = -^гГ1(5) R + l/Cs
70
Глава 2. Математические модели систем
Тогда передаточная функция будет иметь вид:
ч 1 1
G(s) =----=--------=------=------,
^(.s) AC.s+1 Т5+1 5+1/т
(2.42)
где т = RC есть постоянная времени цепи. Единственный полюс функции G(,v) равен .у = - 1/т. Выражение (2.42) можно было бы получить сразу, если рассматривать цепь как обычный делитель напряжения, т. е.
, (2.43)
^(5) Z,(S)+Z2(s)
где Z[(s) = R, Z2(s) = 1/Cs.
Многоконтурная электрическая цепь или подобная ей механическая система с неско-лькими массами описываются системой уравнений относительно переменной пре-образования Лапласа. Решать такие уравнения обычно удобнее с помощью матриц и определителей. С матрицами и определителями можно познакомиться на Web-сайте MCS.
Теперь рассмотрим поведение системы высокого порядка и найдем ее реакцию на входной сигнал после затухания собственного (свободного) движения. Пусть дифференциальное уравнение системы имеет вид:
а у d у dr dr ...
+ -Т^-+ -+Я0У = Рп-х + (2.44)
at at at at
где ХО есть реакция системы, a r(t) — входной сигнал, т. е. возмущающая функция. Если все начальные условия равны нулю, то вход и выход системы можно связать передаточной функцией:
Y(.v) = G(s)R(s) = R(s) = ----+Pl’-2_S +-+Ро (2.45)
4(.s) sn + qn-\ s'1 +...+q0
Реакция системы состоит из свободного движения (определяемого начальными условиями) и вынужденного движения, обусловленного входным сигналом. В результате можно записать:
ум = ^»РЧ’ад,
<7(s) q(s)
где q(s) = 0 есть характеристическое уравнение системы. Если изображение по Лапласу входного сигнала представляет собой дробно-рациональную функцию
ад=^.
ТО
у(,),^+£<£>ЧЛ.у1(а)+у,м+узМ,
(2.46)
где У, (л) — составляющая, характеризующая свободное движение, У2(.г) — составляющая, обусловленная сомножителями q(s), а У3(л-) — составляющая, включающая в себя сомножители d(s).
Обратное преобразование Лапласа дает:
У(0 = У1 (О + У2(0 + Уз(0-
2.5. Передаточные функции линейных систем
71
Переходный процесс в системе обусловлен составляющими^]^) +y2(f), ay3(t) есть установившееся движение системы.
Пример 2.2. Решение дифференциального уравнения
Рассмотрим систему, описываемую дифференциальным уравнением d2y , dy , „ ,,
-f+4-^+3y=2r(/) dt2 dt
dy с начальными условиями j’(OJ = 1. — dt i=o
Преобразуя это уравнение по Лапласу, получим:
[?Г(5) - sy(0)] + 4[sT(s) - у(0)1 + 3T(s) = 2R(s).
Поскольку A(s) = - и у(0) = 1, то s
= 0 при r(t) = 1, t > 0.
2
K(s) = ,
sz+4s+3 s(sz+4s+3)
где q(s) = s2 + 4s + 3 = (s + 1 )(s + 3) — 0 есть характеристическое уравнение, a d(s) = s. Тогда разложение T(s) на простые дроби дает:
1/3 1
2/3
+--= ВД+ВД>+W
s
3/2 1/2
№) = ----7
_s+ 1 s+ 3_
Следовательно, реакция системы описывается уравнением:
у(О = Г-е-'~е-3' L2 2
/л 2 а в установившемся режиме пт ju) = ~ • /->« 3
-е~3'-е 3
2
3’
Пример 2.3. Передаточная функция операционного усилителя
Операционный усилитель (ОУ) относится к важному классу аналоговых интегральных схем, обычно используемых в качестве элементов систем управления и во многих других устройствах. Операционные усилители являются активными элементами (т. е. они имеют внешний источник питания) с высоким коэффициентом усиления при работе в линейном режиме. Модель идеального операционного усилителя приведена на рис. 2.14.
Для идеального ОУ характерным является следующий режим работы: (1) /| = i2 = 0, что соответствует бесконечному входному сопротивлению, и (2) v2 _ И = 0 (т. е. v, = vi)- Связь между входом и выходом идеального ОУ определяется соотношением:
v0 = K(v2 - V]) = -K(vi - v2),
где К —> от. В данном примере мы будем считать, что имеем дело с идеальным ОУ, работающим в линейном режиме.
Рассмотрим инвертирующий усилитель, изображенный на рис. 2.15. При указанных выше условиях можно считать, что q = 0, и для данной схемы справедливо соотношение
Рис. 2.14
Идеальный операционный усилитель
+11 2о =Q
Инвертирующий вход
72
Глава 2. Математические модели систем
Так как v, = v, (см. рис. 2.14) и v2 = О (см. рис. 2.15), отсюда следует Vj = 0. Таким образом,
_2±_1о =о,
Л, R2
откуда имеем
vo _
v, Aj
Рис. 2.15. Идеальный инвертирующий операционный усилитель
Если принять = R2, то данная схема просто инвертирует знак входного напряжения.
Пример 2.4. Передаточная функция системы
Рассмотрим механическую систему, изображенную на рис. 2.16(c) и ее аналог в виде электрической цепи на рис. 2.16(6). Как было показано в табл. 2.1, сквозными переменными-аналогами в механической и электрической схемах являются, соответственно, сила и ток. Скорости v,(Z) и v2(Z) механической системы являются прямыми аналогами напряжений v,(Z) и v2(Z) в электрической цепи. Уравнения, описывающие движение механической системы, в случае нулевых начальных условий имеют вид:
MisVi(s) + (bi + Шй - biK2(s) = /?(s), (2.47)
у М
M2sV2{s)+ ЭДК2(я)- El(s)]+ к-^ = 0. (2.48)
s
Эти уравнения получены на основании сложения сил, действующих на элементы механической системы. Перегруппируя члены, входящие в (2.47) и (2.48), получим:
[М,5 + (b, + b2)]Ki(s) - biK2(s) = R(s), ( к\
—ijl7! (a) + M2s + bj + — K2(s) = 0,
или то же самое в матричной форме:
M}S + bj+ t>2
-ь.
ь Г W|
fc
M2s+bj + — y.(s)
/?(s) 0
(2.49)
Рис. 2.16. (а) Механическая система с двумя массами;
(б) Электрическая цепь с двумя узлами — аналог механической системы. Параметры-аналоги: Cj = Му, С?_ = М2, L = 1//г, /?, = 1/Лц, /?2 = 1//?2
2.5, Передаточные функции линейных систем
73
Считая выходной переменной скорость массы Л/(, с помощью обращения матрицы либо по правилу Крамера получим:
=------(^5+VAZ®)------------ (2.50)
(Л/,х + 4) + 4>2)(Л/2х + А) + k/s)- fcj2
Тогда передаточная функция механической (или электрической) системы будет равна:
G (S) = =________(A/2s+fc,+АЛ)_______=_________(M^ + t^s + k)_____
R(s) (Mts + А)+ b2)(M2s + А) + k/s)-bf (Л/]Х+А)+4>2)(Л/2х2+Ajs+
Если за выходную переменную принять перемещение X](Z), то передаточная функция примет вид:
*i(s) = = G(s) (2 52)
R(s) sR(s) s
В качестве еще одного примера получим передаточную функцию очень важного элемента электрических систем управления — двигателя постоянного тока. Подобные двигатели используются для перемещения нагрузки и носят название исполнительных устройств.
Исполнительное устройство — это элемент системы управления, обеспечивающий поступление на вход объекта управления сигнала достаточной мощности.
Пример 2.5. Передаточная функция двигателя постоянного тока
Двигатель постоянного тока — это мощное исполнительное устройство, снабжающее нагрузку энергией, как показано на рис. 2.17(c); схематическое устройство двигателя показано на рис. 2.17(6). На рис. 2.18 изображена в разрезе конструкция такого двигателя. Двигатель преобразует электрическую энергию постоянного тока в механическую энергию вращательного движения. Основная часть момента, создаваемого ротором (якорем) двигателя, используется для управления внешней нагрузкой. Благодаря таким качествам, как высокий вращающий момент, возможность регулирования скорости в широком диапазоне, компактность, хорошие нагрузочные характеристики и одинаковая способность быть использованными в различных системах управления, двигатели постоянного тока широко применяются в роботах-манипуляторах, лентопротяжных механизмах, дисководах, в машиностроении и исполнительных устройствах следящих систем.
Рис. 2.17. Двигатель постоянного тока: (а) эквивалентная электрическая схема и (6) схематическое устройство
74
Глава 2. Математические модели систем
Рис. 2.18. Двигатель постоянного тока плоской конструкции с постоянными магнитами. Двигатели данного типа способны создавать высокий момент при малом моменте инерции ротора. Типичное значение механической постоянной времени — порядка 15 мс.
1 — защитная алюминиевая крышка, 2 — плоская форма, обеспечивающая компактность конструкции, 3 — подшипники со смазкой длительного действия, 4 — щетки с большим сроком службы, 5 — постоянные магниты из сплава алнико, обеспечивающие высокое отношение мощность/вес, 6 — принудительная вентиляция, 7 — обмотка, зафиксированная в эпоксидной среде с высоким диэлектрическим сопротивлением, 8 — медный коллектор, специально обработанный для увеличения срока службы, 9 — якорь с малой индуктивностью, не содержащий деталей из железа, 10 — тарельчатая форма якоря, обеспечивающая малый момент инерции, 11 — вал, изготавливаемый на заказ под специфические нужды потребителя
Передаточную функцию двигателя постоянного тока мы получим путем линейной аппроксимации реальных характеристик, пренебрегая такими второстепенными эффектами, как гистерезис и падение напряжения на щетках. Входное напряжение может быть подано на обмотку возбуждения либо на якорь. Если отсутствует насыщение, то магнитный поток в воздушном зазоре пропорционален току возбуждения, т. е.
Ф = К/ it. (2.53)
Предполагается, что момент, развиваемый двигателем, линейно зависит от Ф и тока якоря:
Тт = ’« (0 = К1Кf ifWu (0 (2.54)
Из уравнения (2.54) вытекает, что для того чтобы двигатель можно было считать линейным элементом, один из токов должен быть постоянным, а второй следует рассматривать в качестве входного тока. Сначала мы рассмотрим двигатель, управляемый по цепи возбуждения, за счет чего обеспечивается значительное усиление по мощности. Преобразуя (2.54) по Лапласу, получим:
Ta(S) = (KlKfJu)IJ(S) = KmIf(S),
(2.55)
2.5. Передаточные функции линейных систем
75
где ia - 1а есть постоянный ток якоря, а К,„ носит название постоянной электродвигателя. Ток возбуждения связан с напряжением возбуждения соотношением
Vf(S)=(Rf+LfS)Jf(S). (2.56)
Развиваемый двигателем момент прикладывается к нагрузке. При этом можно записать:
7„J(5) = 7/.(s)+7’</(5), (2.57)
где T,(s) — момент нагрузки, a TJs) — возмущающий момент, которым часто можно пренебречь. Однако возмущающий момент в ряде случаев принципиально надо учитывать, например. когда на систему действуют внешние силы (скажем, сила от порыва ветра, действующая на антенну). Момент нагрузки в случае ее вращательного движения (см. рис. 2.17) записывается как
TL(s) - Js2Q(s)+ bsQ(s).
(2.58)
Из (2.55)-(2.57) имеем:
Tl(s) = T„,(s) - T^s), Tm(s) = K,„
>7(5)
(2-59)
(2.60)
7,(5) =
7 R, + Lfs
(2.61)
Следовательно, при T^s) = 0 передаточная функция двигателя равна 6(5) К„, _ Km!JLf
(2.62)
Vf (5) s(Js + i)(£zs + Rf) 5(S + Ы J)(s + RfILf)
Модель электродвигателя, управляемого по цепи возбуждения, в виде структурной схемы приведена на рис. 2.19. Альтернативное выражение для передаточной функции можно получить, если ввести в рассмотрение постоянные времени:
= G(J) =----KJ"lbRJ.----,
Vj (5) 5(Ty S+ 1)(Т/5+ 1)
(2.63)
где tf ~ Lf/Rj Vi iL = ЛЬ. Обычно тЛ > Xj, и постоянной времени обмотки возбуждения можно пренебречь.
В двигателе, управляемом по цепи якоря, входным (управляющим) воздействием является ток якоря ia. Поле, создаваемое статором, может быть образовано током в обмотке возбуждения или постоянными магнитами. В первом случае, если ток возбуждения является постоянным, момент, развиваемый двигателем, определяется как
7» = (KxKfIf)lu (5) = Knllo (s). (2.64)
При использовании постоянных магнитов мы имеем:
ВД = W-
где Кт — коэффициент, зависящий от магнитной проницаемости. Ток в цепи якоря связан с напряжением, приложенным к якорю, соотношением
Ип(5) = (R, + £И5)7О(5) + Vb(s), (2.65)
где Vb(s) — противоЭДС. пропорциональная скорости вращения. Следовательно,
r*(s) = Kb со(5) (2.66)
Рис. 2.19. Структурная схема двигателя, управляемого по цепи возбуждения
76
Глава 2. Математические модели систем
Рис. 2.20. Структурная схема двигателя, управляемого по цепи якоря
и ток якоря
f , х Г (s)-KAw(s)
W = - " р , (2.67)
+ Las
Из уравнений (2.58)-(2.59) получим выражение для момента нагрузки:
T/(s) = Л26(л) + bsQfs) = Tm(s) - T^s). (2.68)
Связь между переменными, характеризующими динамику двигателя, управляемого по цепи якоря, схематически показана на рис. 2.20. С помощью уравнений (2.64), (2.67) и (2.68) или непосредственно по структурной схеме, полагая T/s) = 0, получим передаточную функцию двигателя:
G (S) = -----------= — -----^2!------- (2.69)
К, (S) 4(Я„ + + b)+ К bKm] s(s2 + 2^Ш);5 + со2)
Для многих двигателей, однако, постоянной времени якоря т = La /11а можно пренебречь. Тогда
G (5) = -------- = K’"l^R‘>b+ KhKn:) (2,70)
К, О (-Л + Ь) + КьКт ] + 1)
где эквивалентная постоянная времени т, = RctJI(Rab + Л^т).
Интересно заметить, что Кт = Кь. Это можно показать, если рассмотреть установившийся режим работы двигателя и баланс мощностей в предположении, что сопротивлением якоря можно пренебречь. Мощность, подводимая к якорю, равна Kbu>ia, а мощность, сообщаемая валу, равна 7со. В установившемся режиме эти мощности равны, так что Kbatio = Ты: поскольку Т= Кт1а (см. 2.64), то отсюда следует, что Кь = Кт.
Электродвигатели применяются для перемещения нагрузки в тех случаях, когда не требуется высокого быстродействия и развиваемой мощности. Типичные параметры такого двигателя приведены в табл.2.4.
Таблица 2.4. Типичные параметры электродвигателя постоянного тока мощностью в доли л. с.
Постоянная двигателя, К„, 50 • 10“3 Н-м/А
Момент инерции ротора, J„, 10-3 Н-м с2/рад
Постоянная времени цепи возбуждения, т/ 1 мс
Постоянная времени цепи якоря, то 100 мс
Максимальная выходная мощность 1/4 л. с. = 187 Вт
2.5. Передаточные функции линейных систем
77
Рис. 2.21
Сравнение по быстродействию и развиваемой мощности электромеханических и электрогидравлических устройств
500
400
300
200
100
70
50
40
30
20
Прокатные станы
Возможные? гидроприводы ;
10
7
5
4
3
2
Пока не
... -уПравлеН|4е антеннами 'Типичные Роботы
электромеханические; устройства
^Регуляторы уровня
существующие устройства
Краны и подъемники;
Типичные: электрогидравлические устройства
Станки
1
0.7
0.5
0.4
0.3
0 2 5 7 10 20 30 40 50 70 100 200 300 1000
400 700
: Регуляторы автбмббильйыхдвигателей
Быстродействие (в обратных единицах)
Более значительной нагрузочной способностью обладают гидравлические исполнительные устройства. На рис. 2.21 показаны в сравнении обычные сферы применения электромеханических и электрогидравлических приводов.
Пример 2.6. Передаточная функция гидравлического исполнительного устройства
Для линейного перемещения массы может быть использовано гидравлическое исполнительное устройство, приведенное в табл. 2.5 (поз. 9). Подобное устройство способно обеспечить значительное усиление по мощности. Будем считать, что жидкость подается от источника под постоянным давлением и что ее сжимаемостью можно пренебречь. Перемещение золотника вниз, обозначенное через x(t), приводит к поступлению жидкости в верхнюю часть гидроцилиндра и, соответственно, поршень также перемещается вниз. Малая мощность, необходимая для перемещения x(t), преобразуется в высокую мощность, связанную с перемещением поршня у(?). Объемный расход жидкости Q зависит то перемещения х(1) и разности давлений, действующих на поршень, т. е. Q = g(x, Р). Воспользовавшись методом линеаризации путем разложения в ряд Тейлора, запишем:
0 = 1 — 1 л+1 — 1 Р=кгх—крР. (2.71)
И J, \ЭР)Х , '
где g = g(x, Р) и (х0, Ро) — координаты рабочей точки. Сила, развиваемая поршнем гидроцилиндра, равна произведению его площади А на давление Р, т. е.
АР = М^+Ь^ . (2.72)
dt2 dt
Подставляя (2.71) в (2.72), получим
±(кхХ-<2) = М^+Ь^ (2.73)
к„ dt dt
78
Глава 2. Математические модели систем
Кроме того, объемный расход жидкости связан с перемещением поршня соотношением
di
Тогда, подставляя (2.74) в (2.73) и перегруппируя члены, получим:
dt '
(2-74)
(2.75)
Далее, используя преобразование Лапласа, получим передаточную функцию
%(s) s(Ms+В)
где
Заметим, что по форме передаточная функция гидравлического исполнительного устройства совпадает с передаточной функцией электродвигателя. Кроме того, если это исполнительное устройство работает при высоких давлениях и от него требуется большое быстродействие, то в расчетах должен быть принят во внимание эффект сжимаемости жидкости.
Обозначения многих переменных в табл. 2.5 и единицы их измерения помещены на Web-сайте MCS. Там же можно найти таблицы взаимных преобразований единиц измерения между Международной системой СИ и английской системой единиц.
Понятие передаточной функции и основанные на нем методы являются очень важными, поскольку они предоставляют в распоряжение исследователя и проектировщика столь ценное средство, как математическая модель элементов систем управления. Следует признать, что передаточная функция оказывает неоценимую помощь в попытках получения моделей динамических систем. Особая ценность передаточной функции заключается в том, что ее нули и полюсы на s-плоскости дают полное представление о переходной характеристике системы. В табл. 2.5 приведены передаточные функции некоторых динамических элементов.
В технике часто требуется передавать вращательное движение от одного вала к другому. Например, в автомобиле мощность, развиваемая двигателем, передается вращающимся колесам через коробку передач и дифференциал. Коробка передач позволяет водителю выбирать то или иное передаточное отношение в зависимости от дорожных условий, тогда как дифференциал находится в неизменном положении. В этом случае скорость движения не является постоянной — водитель может менять ее по своему усмотрению. Другим примером является система редукторов, с помощью которой вращение вала электродвигателя преобразуется в поворот антенны вокруг ее оси. Примерами механических преобразователей данного типа могут служить зубчатые, цепные и ременные передачи. В электрических системах типичным преобразователем является трансформатор. Примером устройства, преобразующего вращательное движение в поступательное, является передача зубчатое колесо-рейка (см. поз. 17 в табл. 2.5).
2.5. Передаточные функции линейных систем
79
Таблица 2.5. Передаточные функции динамических элементов и цепей
Элемент или система
G(s)
1. Интегрирующая цепь, фильтр
И2(5) . 1
И,(5) RCs
2. Дифференцирующая цепь
-RCs
b'2)s)
З.Дифференнирующая цепь
V2(s) R^Rp+l)
^(s) Д
4. Фильтр с интегрированием
V2(s)_ (^,5+1)(Л2С>+1)
W RP2s
5. Двигатель постоянного тока с управлением по цепи возбуждения (вращательное движение)
6(5) _ Km
Vj(s) s(Js + b)(LfS + Rt)
80
Глава 2. Математические модели систем
Таблица 2.5 (продолжение)
Элемент или система
G(s)
6. Двигатель постоянного тока с управлением по цепи якоря (вращательное движение)
6(s) ? __________
r„(s) s[(Ra + LaS)(JS+b)+KhKm]
7. Двухфазный двигатель переменного тока (вращательное движение)
ад кт
ГДх) s(ts+1) т = J/(b - т) т - наклон линеаризованной зависимости скорости от момента нагрузки (обычно отрицательный)
8. Электромашинный усилитель
K,(s) (K/RcRg)
Vc(s) (sxc + 1)(st9 + 1)
Tc Lc/Ra Lq/Rq
В режиме холостого хода id ~ 0. Тс » Xq 0,05 с < Тс < 0,5 с Г12=^, Г34=К,
9. Гидравлическое исполнительное устройство
ад к
X(s) s(Ms + В)
ЬР=^-р дР
kx=^ дх
S = g(x, Р) = поток А — площадь поршня
2.5, Передаточные функции линейных систем
81
Таблица 2.5 (продолжение)
Элемент или система
10. Шестеренчатый редуктор (передача вращения)
G(s)
.V
Передаточное число п =
NiQl =N\Qm, 0/. = И0,„ ыь = пыт
11. Потенциометр
И2(5) r2 r2
Pi(s) R Rt + R2
r2 _ e
12. Потенциометрическая схема формирования ошибки
Иг(5) = ks(fi\(s) - 02(j)) ISU) = A.,0e(.s)
13. Тахогенератор (датчик скорости)
V2(s) = Ktw(s) = KtsO(s) Kt = const
14. Усилитель постоянного тока
+ о 0 +
— © 0 —
W. ka
K|(j) st + 1
Ro — выходное сопротивление Co — выходная емкость т = RoCo. т « 1 с и можно пренебречь, если усилитель предшествует сервоприводу
82
Глава 2. Математические модели систем
Таблица 2.5 (продолжение)
Элемент или система
15. Акселерометр (датчик ускорения)
GU)
sZ + (b/M)s+ к/М Для низкочастотных колебаний, где со < сол.
Л'оО'ы) to2
к/М
16. Система подогрева
Входной у поток —> жидкости
Нагревательный
Выходной поток жидкости
элемент
17. Зубчатое колесо и рейка
q(s) C,s+(QS +1/A)’
T- To- У — разность температур С, — теплоемкость
Q — расход жидкости = const 5 — удельная теплоемкость воды R, — тепловое сопротивление изоляции
q{s) — тепловая мощность нагревательного элемента
х = 7'0 преобразует круговое движение в прямолинейное
2.6. Структурные схемы
Динамические системы, в том числе и системы автоматического управления, на языке математики описываются системой обыкновенных дифференциальных уравнений. Как было отмечено в предыдущих разделах, использование преобразования Лапласа сводит задачу решения дифференциальных уравнений к решению системы линейных алгебраических уравнений. Поскольку в системах управления путем изменения одних переменных производится целенаправленное воздействие на другие переменные, то необходимо установить связь между этими переменными. Данную связь обычно представляют в виде передаточной функции, которая является одним из основных понятий теории управления.
Преимущество передаточной функции заключается в том, что она позволяет изобразить причинно-следственную связь между переменными в наглядной схематической форме. В теории управления преобладает представление различных динамических систем в
2.6, Структурные схемы
83
Рис. 2.22
Структурная схема двигателя постоянного тока
Рис. 2.23
Система с двумя входами и двумя выходами
виде структурных схем. Структурные схемы состоят из блоков направленного действия, каждому из которых соответствует определенная передаточная функция. Так, на рис. 2.22 изображена структурная схема двигателя постоянного тока, управляемого по цепи воз
буждения, которая отражает связь между углом поворота 6(5) и приложенным напряжением Vf(s).
Для описания системы с несколькими управляемыми переменными используется структурная схема с перекрестными связями. Например, в системе на рис. 2.23 имеются две входных и две выходных переменных. С помощью передаточных функций мы можем
записали связывающие их уравнения:
ВД = + G12(s)/?2(s), (2.77)
y2(S) = С21(5)ад + G22(s)tf2(s), (2.78)
где G(/(s)—передаточная функция оту'-го входа к /-му выходу. Структурная схема, отражающая записанные выше уравнения, представлена на рис. 2.24. В общем случае, при наличии ./входов и/выходов, связывающие их уравнения можно записать в матричной форме:
(5)' GH(S) . • Gu(s)’ */?, (5)'
Y, (s) = G2I (s) . G2J(s) /?2(S)
Л (s) Gzl(s) . G/ y (s)_ Л (s).
(2.79)
или в компактном виде
Y = GR.
(2.80)
Здесь Y и R есть, соответственно, матрицы-столбцы, элементами которых являются 1 выходных и J входных переменных, a G — матричная передаточная функция размерности /х J.
Подобное матричное представление имеет особую ценность при анализе много-связных (многомерных) систем управления. Для читателей, не знакомых с алгеброй матриц, основные сведения из этой области приводятся на Web-сайте MCS.
Рис. 2.24
Структурная схема системы с перекрестными связями
84
Глава 2. Математические модели систем
Пользуясь определенными правилами, структурную схему сложной системы можно упростить, сведя ее к конфигурации с меньшим числом блоков, чем в исходной системе. Поскольку передаточные функции являются средством описания линейных систем, им присуще свойство коммутативности. Следовательно, для поз. 1 из табл. 2.6 мы можем записать:
-ВД = G2(^2(s) =
Если два блока соединены последовательно, то предыдущее уравнение можно записать также в виде
ВД = G2(s)G,(S)X1(s).
При этом предполагают, что если выход первого блока соединен со входом второго, то влияние нагрузки на первый блок является незначительным. Если же нагрузка оказывает существенное влияние на выходную переменную предшествующего блока, то инженер обязан учесть этот фактор и внести соответствующее изменение в передаточную функцию.
Таблица 2.6. Правила преобразования структурных схем
Преобразование
Исходная диаграмма
Эквивалентная диаграмма
1. Последовательное соединение блоков
2. Перенос сумматора через блок с передаточной функцией по ходу движения сигнала
3. Перенос узла через блок с передаточной функцией против движения сигнала
4. Перенос узла через блок с передаточной функцией по ходу движения сигнала
5. Перенос сумматора через блок с передаточной функцией против движения сигнала
6. Исключение контура с обратной связью
2.6. Структурные схемы
85
Методы преобразования структурных схем основаны на рассмотрении алгебраических соотношений между отдельными переменными. Например, рассмотрим структурную схему, изображенную на рис. 2.25. В этой системе с отрицательной обратной связью сигнал на входе объекта управления записывается в виде :
£„(s) = 7?(s) - B(s) = 7?(s) - //(х)У(х). (2.81)
Поскольку выходная переменная связана с этим сигналом передаточной функцией G(s), то
У(х) = G(s)£„(s) (2.82)
и, следовательно,
У(х) = G(5)[£(s) - //(х)У(х)]. (2.83)
Группируя члены при У(х), получим:
У(х)[1 + С(х)Я(х)] = G(s)R(s). (2.84)
Отсюда получим передаточную функцию, связывающую выход со входом:
П£) =----^2------ (2.85)
/?(s) l+G(s)/7(s)
Это выражение, известное как передаточная функция замкнутой системы, представляет особую ценность, т. к. оно свойственно большинству реальных систем управления.
Сведение структурной схемы, представленной на рис. 2.25, к одному-единственному блоку является лишь одним примером элементарных преобразований, приведенных в табл. 2.6. Анализ систем путем преобразования структурных схем дает гораздо лучшее представление о роли каждого элемента, чем это было бы при рассмотрении уравнений. Правила преобразования структурных схем мы проиллюстрируем на примере сведения многоконтурной системы к более простому виду.
Рис. 2.25
Система с отрицательной обратной связью
Пример 2.7. Упрощение структурной схемы
На рис. 2.26 изображена структурная схема многоконтурной системы управления. Заметим, что сигнал /7]($)У($) подается на сумматор со знаком плюс, поэтому контур, образованный блоками G3(s)G4(s)H3(s), называют контуром с положительной обратной связью. Упрощение этой структурной схемы основано на применении правила 6 из табл. 2.6, которое связано с исключением изолированных контуров. Поэтому необходимо будет использовать и другие правила, чтобы подготовить схему к применению правила 6. Сначала, чтобы исключить контур G3G4H}, мы перенесем узел через блок G4 по ходу движения сигнала (см. правило 4) и получим схему, изображенную на рис. 2.27(a). Исключая контур G3G4Ht по правилу 6, мы получим схему рис. 2.27(6). Затем, исключая внутренний контур, содержащий H2/G4, получим схему рис. 2.27(e). Наконец, исключая контур, содержащий Н3, мы получим передаточную функцию замкнутой многоконтурной системы, как показано на рис. 2.27(a). Стоит обратить внимание на вид числителя и знаменателя этой передаточной функции. Можно видеть, что числитель образован произведением передаточных функций блоков, находящихся в прямой цепи от входа R(s) к выходу У($). Знаменатель равен единице минус сумма произведений передаточных функций блоков, образующих замкнутые контуры. Произведение G3G4Ht берется со
86
Глава 2. Математические модели систем
Рис. 2.26. Многоконтурная система управления
знаком плюс, поскольку это контур с положительной обратной связью, а произведения и С2С3Нг — со знаком минус, т. к. в этих контурах обратная связь отрицательная.
Чтобы лучше это проиллюстрировать, знаменатель можно записать в виде
= 1 — (+G3G4//1 — G2G3H2 — G\G2G3G4H3). (2.86)
Как мы увидим в следующем разделе, такой вид числителя и знаменателя характерен для многоконтурных систем управления.
Рис. 2.27. Упрощение структурной схемы системы рис. 2.24
21. Модели в виде сигнальных графов 87
Метод структурных схем широко распространен в теории и практике автоматического управления. Он дает очень наглядное графическое представление о взаимосвязи управляемых и входных переменных. Кроме того, проектировщик легко может обнаружить необходимость введения в существующую структурную схему дополнительных блоков с целью улучшения характеристик системы. Наряду со структурными схемами существует альтернативный метод представления модели систем в виде сигнального графа. Этот метод будет представлен в следующем разделе.
2.7. Модели в виде сигнальных графов
Структурные схемы адекватно представляют взаимосвязь между управляемыми и входными переменными. Однако для систем достаточно сложной конфигурации процедура упрощения их структурных схем является весьма трудоемкой и часто трудно выполнимой. Мейсоном был предложен альтернативный метод представления взаимосвязи между переменными системы, основанный на использовании сигнальных графов. Преимущество этого метода состоит в том, что по сигнальному графу, без каких-либо его преобразований, с помощью специальной формулы сразу можно установить связь между переменными системы.
Сигнальный граф представляет собой диаграмму, состоящую из узлов, соединенных между собой отдельными направленными ветвями, и является графическим средством описания линейных соотношений между переменными. Сигнальные графы особенно важны для систем управления с обратной связью, поскольку теория этих систем в первую очередь рассматривает распространение и преобразование сигналов. Основным элементом сигнального графа является однонаправленный отрезок, называемый ветвью, который отражает зависимость между входной и выходной переменной наподобие того, как это делает отдельный блок в структурной схеме. Например, ветвь, связывающая выход двигателя постоянного тока 6(s) с напряже-
нием возбуждения Vf(s), изображенная на q q
рис. 2.28, подобна структурной схеме на
рис. 2.22. Точки входа и выхода, на рисун- Рис. 2.28. Сигнальный граф двигателя ке похожие на клеммы, называются узла- постоянного тока
ми. Аналогично, сигнальный граф, соот-
ветствующий уравнениям (2.77), (2.78) и рис. 2.24, изображен на рис. 2.29. Преобразование каждой переменной охарактеризовано надписью около направленной стрелки. Все ветви, выходящие из узла, предают сигнал другому (выходному) узлу каждой ветви, причем однонаправленно. Сумма всех сигналов, входящих в узел, образует соответствующую этому узлу переменную. Путь — это ветвь или последовательность ветвей, которые могут быть проведены от одного узла к другому. Контур — это замкнутый путь, который начинается и заканчивается в одном и том же узле, причем вдоль этого пути ни один другой узел не встречается дважды. Некасающимися называются такие контуры, которые не имеют общего узла. Два касающихся контура имеют один или более общих узлов. Рассмотрев еще раз рис. 2.29, мы можем записать:
У,(5) = 6п(5)ад + G12(S)7?2(S), (2.87)
y2(s) = G2l(s)J?t(s) + G22(s)7?2(s), (2.88)
88
Глава 2. Математические модели систем
Рис. 2.29. Сигнальный граф для системы
Рис. 2.30. Сигнальный граф для двух алгебраических уравнений
с перекрестными связями
Сигнальный граф — это просто наглядный метод записи системы алгебраических уравнений, показывающий взаимосвязь между переменными. В качестве еше одного примера рассмотрим следующую систему алгебраических уравнений:
ЯцХ, + а12х2 + Г] = х1, (2.89)
«21х1 + а22х2 + г2 = х2. (2.90)
Здесь Г] и г2 — входные переменные, a Xj и х2 — выходные переменные. Сигнальный граф, соответствующий уравнениям (2.89) и (2.90), изображен на рис. 2.30. Уравнения (2.89) и (2.90) можно записать в ином виде:
*1(1 - «п) + х1(- «12) = П, (2.91)
х1( - «21) + хг0 - «22) = г2 (2-92)
Решая последнюю систему по правилу Крамера, получим:
X, =----(lZ«22>i +q12>b---=(1.-q22)ri +^2. (2 93)
(1-«п )(1—а22)—а12а21 Д Д
= О-»., = (1^+
(1-Яц )(1—а22)—n12n21 Д " Д
В этих решениях знаменатель равен определителю, составленному из коэффициентов при неизвестных, и его можно записать так:
Д = (1 — «ц)(1 — а22) — <2i2n21 = 1 — <jh — а22 + — «12а21. (2.95)
В данном случае знаменатель равен единице минус коэффициенты передачи отдельных контуров at ], «22 и «12«21 плюс произведение коэффициентов передачи двух некасающихся контуров aj 1 и а22. Контуры а22 и п12а21 являются касающимися, так же, как и контуры (и «21«12-
В решении для X! по отношению ко входу г1 числитель равен единице, умноженной на (1 - а22), т. е. значению определителя некасающегося пути от rj к xt. В решении для X] по отношению ко входу г2 числитель просто равен а13, т. к. этот путь касается всех контуров. Числитель выражения для х2 симметричен соответствующему числителю для хР
В общем случае линейная зависимость Т,} между независимой переменной х, (часто называемой входной переменной) и зависимой переменной х, определяется по формуле Мейсона:
Л/*
----> (2-96)
2.7. Модели в виде сигнальных графов
89
где Рчк — коэффициент передачи к-го пути от переменной х, к переменной х;,
Д — определитель графа,
Л,/(1 — дополнительный множитель для пути Р,/А, а суммирование производится по всем возможным к путям от х, к х}. Дополнительный множитель Д,/А равен определителю всех касающихся контуров при удалении к-го пути. Определитель Д находится как
N М,О
Д = 1-£1„ + &,VW+-- (2.97)
И=1 т=1,0=:1
где L(J есть коэффициент передачи g-го контура. Таким образом, правило вычисления Д через значения L2, L3,..., LN таково:
Д = 1 - (сумма коэффициентов передачи всех отдельных контуров) +
+ (сумма произведений всех возможных комбинаций из 2 некасающихся контуров) -- (сумма произведений всех возможных комбинаций из 3 некасающихся контуров) + + ...
Формула Мейсона часто используется в несколько упрощенном виде для определения связи между выходной переменной K(s) и входной переменной R(s), т. е.
(2.98)
•j'___ к__________
Л
где 7(s) = Y(s)/R(s). Коэффициент передачи пути Рк (или Р,;А) определяется как непрерывная последовательность ветвей, простирающихся в направлении, указанном стрелками, причем ни один узел не встречается в этой цепи более одного раза.
Простоту и удобство применения данного метода мы проиллюстрируем несколькими примерами. Хотя формула (2.96) на первый взгляд кажется трудно воспринимаемой, всё же следует помнить, что она представляет обычный процесс суммирования, а не сложных преобразований.
Пример 2.8. Передаточная функция системы с параллельными путями
На рис. 2.31 изображен сигнальный граф с двумя параллельными путями. Примером системы управления, граф которой имеет несколько путей, может служить шагающий робот с несколькими конечностями. От входа R(s) к выходу K(s) ведут следующие пути: путь 1 — Pt = G^GgG,, и путь 2 — Р2 = G5G6G7Gg.
Граф содержит четыре контура:
Л, = G2H2, L2 = G3H3, L3 = Cl6Hb, Л4 = G2H2.
Рис. 2.31
Сигнальный граф с двумя параллельными путями
90
Глава 2. Математические модели систем
Контуры Lt и Ь2 не касаются контуров £3 и Д4. Следовательно.
Д = 1- (L) + Lq + Lq + L4 Х+ (ДДз + + LqLq + LqLq ). (2.99)
Дополнительный множитель определителя для пути 1 вычисляется в результате удаления из Д контуров, касающихся пути 1. Поэтому
Д, = L2 = 0 и Л, = 1 - (L3 + L4).
Аналогично, дополнительный множитель для пути 2 принимает вид
Д? = 1 — (Д| ч- Д2).
Таким образом, передаточная функция системы
T(s) = + ^2^2 _ (1 - Д - Д,) ч- GgGgG^g (1 - Д - Д)
Д(з) Д 1 Д Lj2 L, — £4 + ДДз Ч* ДД4 Ч* Д2Д ч* /^Д4
(2.100)
Пример 2.9. Двигатель, управляемый по цепи якоря
На рис. 2.20 изображена структурная схема двигателя постоянного тока, управляемого по цепи якоря. Схема отражает связь между переменными в виде уравнений (2.64)-(2.68). Сигнальный граф может быть получен либо на основании тех же уравнений, либо непосредственно по структурной схеме. Этот граф изображен на рис. 2.32. Полагая T/s) = 0. получим передаточную функцию 0(s)/ Va(s) с помощью формулы Мейсона. Граф имеет прямой путь Р । (s), касающийся одного контура Lt(s), где
/j(s) = -G,(s)G2(.s) и Д,Д) = -KhGi(s)G.,(s). s
Следовательно, передаточная функция имеет вид гм = J&L. = =
1-Д(5) 1+ад(5)С2(5) 4(яа + до5)(л+/,)+дАдт]'
что полностью совпадает с выражением (2.69). полученным ранее.
Формула Мейсона дает достаточно простой метод анализа сложных систем. Чтобы сравнить этот метод с методом упрощения структурных схем, который является ненамного более сложным, рассмотрим еще раз систему из примера 2.7.
Кт
Пример 2.10. Передаточная функция многоконтурной системы
На рис. 2.26 приведена структурная схема многоконтурной системы. Здесь нет особой необходимости перерисовывать эту схему в виде графа, поэтому мы сразу применим формулу Мейсона (2.98). Схема имеет один прямой путь Д, = G}G2G3G^ . Контуры в схеме таковы:
Li - — G2G3/A. 1^2 — G3G4H1, Lj = — G1G2G3G4//3. (2.101)
Рис. 2.32. Сигнальный граф двигателя постоянного тока, управляемого по цепи якоря
2.8, Компьютерный анализ систем управления
91
Все контуры имеют общие узлы, поэтому они являются касающимися. Кроме того, путь Pt касается всех контуров, поэтому Д( = 1. Тогда передаточная функция замкнутой системы определяется выражением
Т(з) = — =---------------=---------------------------------, (2.102)
Пример 2.11. Передаточная функция сложной системы
В заключение мы рассмотрим достаточно сложную систему, для которой метод упрощения струю урной схемы представлял бы значительные трудности. Такая система с несколькими контурами и прямыми путями изображена на рис. 2.33. Прямые пути следующие:
= GjG2G3G4G3G6, /*2 = ^3 = ^|^2^3^4^8-
Кроме того, имеем следующие контуры:
Z.] = - G2G3G4G5£/2, £2 = _ G>sGbH\> = — GgH^ L4 = - GjHjG^, Ls = - G^H^, Lf, = — G ^G^G-^G ^G 3G^H3^ Lj ~ — G&Н3, L% — — G|G2G3G4Gg£/3.
Контур Ls не касается контура £4 или контура £7; контур L3 не касается контура £4; все остальные контуры являются касающимися. Поэтому определитель графа
Л = 1 — (£| + £2 + £з + Ьд + £5 + £& + Lj + Lg ) + (£j£7 + L5L4 + £з£д). (2.103)
Дополнительные множители:
Л| = Д3 = 1 и Д2 = 1 - £5 = 1 + G^H^.
Окончательно, передаточная функция имеет вид:
2.8. Компьютерный анализ систем управления
В процессе проектирования, еще до создания реального образца системы управления, для исследования различных ее характеристик может быть использована компьютерная модель, основанная на математическом описании системы. При имитационном моделировании модель ставится в те же условия и подвергается тем же внешним воздействиям, при которых будет работать реальная система.
В распоряжении инженера имеются различные уровни достижимой точности моделирования. На первых этапах синтеза весьма эффективным являются интерактивные прикладные пакеты САПР. При этом не так важно быстродействие компьютера, как то, сколько времени потребуется инженеру для получения начального решения и доведения его
92
Глава 2. Математические модели систем
итеративным путем до окончательного проекта. Решающее значение здесь имеют качественные графические средства. В данном случае моделирование характеризуется невысокой точностью, т. к. при построении модели обычно делаются различные допущения и упрощения (например, линеаризация). В данной книге в качестве программного средства моделирования мы используем MATLAB, хотя существуют и с успехом могут применяться и другие похожие пакеты прикладных программ.
По мере совершенствования процедур синтеза возникает потребность в проведении числовых экспериментов в условиях, наиболее приближенных к реальности. Например, если вы проектировали систему управления положением космического аппарата, предполагая, что аэродинамическое сопротивление отсутствует, то было бы чрезвычайно полезно учесть этот эффект на заключительной стадии моделирования. В результате вы сможете получить количественные оценки поведения космического аппарата, находящегося на орбите. В данном случае быстродействие компьютера приобретает особую важность, т. к. чем продолжительнее время моделирования, тем меньше можно провести компьютерных экспериментов и тем, соответственно, больше будут затраты. Обычно подобное моделирование высокой точности связано с программированием на языках Фортран, С, C++, Ада или им подобных.
Следует отметить основные преимущества компьютерного моделирования:
1. Поведение системы можно пронаблюдать при самых разных условиях.
2. Путем исследования модели можно предсказать, как поведет себя реальная система при натурных испытаниях.
3. По данным испытаний можно сделать некоторые умозаключения относительно систем, которые еще предстоит синтезировать.
4. Всесторонние испытания системы можно выполнить за сравнительно короткий промежуток времени.
5. Результаты моделирования можно получить с гораздо меньшими затратами, чем при натурном эксперименте.
6. Можно изучить поведение системы в таких гипотетических условиях, которые в настоящее время вряд ли могут реально иметь место.
7. Компьютерное моделирование часто является единственным или безопасным методом анализа поведения системы.
Анализ и синтез системы управления осуществляется более эффективно, если этот процесс сопровождается имитационным моделированием, как показано на рис. 2.34.
Рис. 2.34
Анализ и синтез с использованием модели системы
2.9. Примеры на синтез систем управления
93
2.9. Примеры на синтез систем управления
Пример 2.12. Управление устройством электрической тяги
Большинство современных поездов дальнего и пригородного сообщения работают на электрической тяге. На рис. 2.35(a) изображена функциональная схема системы управления приводом электровоза, предназначенная для обеспечения заданной скорости движения. Цель синтеза состоит в получении модели системы, ее передаточной функции в замкнутом состоянии. co(s)/co^s), выборе надлежащих номиналов резисторов Rt. R2, R-j и R4 и предсказании характеристик системы.
Первый шаг состоит в получении передаточной функции каждого блока. В качестве датчика скорости мы используем тахогенератор, выходное напряжение которого. пропорциональное скорости, подадим на один из входов дифференциального усилителя, как показано на рис. 2.35(6). Усилитель мощности обладает нелинейной характеристикой, которая приближенно может быть описана зависимостью v2 = 2е3"‘ = 2exp(3v1) = g(v,). Рабочей точке на этой
Рис. 2.35. Система управления скоростью электропривода
94
Глава 2, Математические модели систем
характеристике соответствует значение v,0 = 1.5 В. Воспользовавшись методом, изложенным в разд. 2.3. получим линейную модель усилителя мощности:
dg(y})
(2.105)
Av, = 2[3exp(3vl0)]Avl = 540Av, . vio_
Далее, отбрасывая символы приращений и воспользовавшись преобразованием Лапласа, получим:
Ду-
rfv,
(2.106)
K2(s) = 540F,(s).
Для дифференциального усилителя можно записать: 1 + R7/R, r7
v. =-----~у0 —- Vl-
l+R3/R4 Rt
Потребуем, чтобы входной управляющий сигнал v() численно был равен заданному значению скорости, т. е. =v0, где измеряется в рад/с. a v0 — в вольтах. Тогда, если v0 = 10 В. то установившееся значение скорости должно быть равно 10 рад/с. Заметим, что в установившемся режиме v, = К/ <od и следует ожидать, что выходное напряжение дифференциального усилителя будет равно
(2.107)
1+ R7i Rt R7 v. =------—Lv0 -K,v0
1+R3/R4 ° Rt
Когда система находится в равновесии, то v, = 0 и если К, = 0,1. то
1 + R2/Ri _ R2 & _ ।
1+Я3/Я4 R, '
Это условие выполняется, если Д,/Я, = 10 и R3/R4 = 10. Параметры двигателя и нагрузки приведены в табл. 2.7.
Таблица 2.7. Параметры мощного двигателя постоянного тока
Кт = 10 7=2
R., = 1 b = 0,5
Lo=l К,, = 0,1
Полная схема системы изображена на рис.2.3 5(6). Используя формулу Мейсона, по сигнальному графу на рис.2.35(г) получим:
f.>(s) _ 540 G,(s)G2(s) = 540G,G2 =
<s>d(s) ~ 1+ 0,10,0,4-5400,0, - 1+ 540.1G,G, "
5400 5400 2700 1ПОА
=--------------------= —---------------— —-----------------. (2.10о)
(s-ь l)(2s + 0.5)4- 5401 2? 4- 2,5s4- 5401,5 s2 4- 1,25s4- 2700,75
Поскольку характеристическое уравнение имеет второй порядок, то можно видеть, что со„ = 52 и С, = 0,012, т. е. следует ожидать, что реакция системы будет сильно колебательной.
Пример 2.13. Механический акселерометр
На рис. 2.36 изображен механический акселерометр, предназначенный для измерения ускорения салазок, подвешенных на магнитной подушке. Эти салазки от направляющего рельса отделяет зазор величиной 8. Измерение ускорения салазок a(t) обеспечивается за счет того, что положение у массы М относительно корпуса акселерометра пропорционально ускорению этого корпуса (и, соответственно, салазок). Задача состоит в синтезе акселерометра, обладающего заданными динамическими характеристиками. В частности, желательно, чтобы результат измерения, y(t) = qa(t), где q = const, был достигнут за приемлемое время.
2.9. Примеры на синтез систем управления
95
Рис, 2.36. Акселерометр на базе салазок с реактивным двигателем
Сумма сил. действующих на массу, равна , dy . d2 z .
-b— -ky=M—y(y+x), dt dt
или ,, d2y , dy ,, d2x
M—%-+b—+ky=-M—z-. (2.109)
dt2 dt dt2
Поскольку сила, развиваемая реактивным двигателем, равна
F{t) = Ms^. dt"
то
Niy+ by+ ky = -^-F(t), или М М Ms
Зададимся значениями ЫМ= 3, к!М= 2, обозначим F(t)/M1. = Q(t) и примем начальные условия у(0) = -1 и у(0) = 2. Если внешнее воздействие и, следовательно, Q(t) есть ступенчатая функция, то преобразование Лапласа последнего уравнения дает:
(?У(5)- sy(0)- 5<0)) + 3(sK(s)- Я0)) + 2K(s) = -g(s). (2.111)
Поскольку (?(s) = P/s. где Р — амплитуда ступенчатой функции, то
(s2K(s)+ s- 2)+ 3(sK(s)+ 1)+ 2Г($) = -- ,
5 ИЛИ
(?+35+2)Г(5) = -(Д +s+P\ (2.112)
5
96
Глава 2. Математические модели систем
Таким образом, преобразование Лапласа для выходной переменной имеет вид:
V/-A (s2+s+P) (s2+s+P)
г (s) =--=-------=-------------.
s(s2 + 3s + 2) s(s + l)(s + 2)
Разложение этого выражения на простые дроби дает:
У(,)=*1+2з_+_*3_.
s s+1 s+ 2
Дальнейшие действия дают следующее:
s1 + S+ Р Р
(s + l)(s + 2) д=о 2
Аналогично, к2 = Р и к2 =-----. Таким образом.
T(s) = -—+ —----------
2s s + 1 2(s + 2)
(2.113)
(2.114)
(2.115)
(2.116)
Следовательно, измеряемое значение выходной переменной равно ЯО = ±[~Р + 2Ре~' - (Р + 2)е*а ], t > 0.
График y(t) для Р = 3 представлен на рис. 2.37. Как видно из графика, y(t) становится пропорциональным величине силы спустя 5 секунд. Если это время считается недопустимо большим, то следует увеличить жесткость пружины к и коэффициент трения b с одновременным уменьшением массы М. Если выбрать значения ЫМ= 12 и к/М= 32, то акселерометр будет обеспечивать правильные показания через 1 секунду. (Читателю предоставляется возможность убедиться в этом самостоятельно.)
Рис. 2.37
Реакция акселерометра
Пример 2.14. Синтез лабораторного работа
В этом примере мы попытаемся показать все сложности реального проектирования лабораторного устройства. Одновременно мы представим ряд элементов, которые обычно входят в состав систем управления.
Робот, предназначенный для использования в лабораторных условиях, показан на рис. 1.16. Рабочее пространство робота должно позволять ему достигать любой точки и манипулировать имеющимися в распоряжении приспособлениями. Кроме того, должна быть предусмотрена достаточная площадь для складирования материалов, не участвующих в текущих операциях. Лабораторный робот может выполнять три типа задач в процессе исследований. Первая задача состоит в том, что роботу поручается захватывать различные подносы, каркасы и контейнеры
2,9, Примеры на синтез систем управления
97
и вносить их в рабочую зону. Второй круг задач включает в себя транспортировку образцов между пунктами приготовления химических препаратов и их анализа. В третьей группе задач роботу предоставляется возможность имитировать работу человека-оперетора в процессе различных лабораторных экспериментов.
Фирма Хьюлетт-Паккард создала лабораторный робот ORCA, смонтированный на рельсовых направляющих, имеющий антропоморфную руку, оптимально приспособленную для аналитических операций. Рельс может быть расположен как спереди, так и сзади рабочего пространства. либо по его центру, если необходим доступ по обе его стороны. С помощью простой программы рука робота может перемещаться с одной стороны рельса на другую, сохраняя ориентацию кисти (чтобы переносить открытый контейнер) или фиксируя угловое положение кисти (при переносе объектов с произвольной ориентацией). Прямолинейная геометрия, в отличие от цилиндрической геометрии многих роботов, дает больше возможностей для размещения предметов в рабочем пространстве и установки самого робоза в лаборатории. Движение всех сочленений координируется программными средствами, которые облегчают использование робота, задавая его ориентацию в более привычных декартовых координатах.
Основные технические характеристики робота ORCA приведены в табл 2.8.
Таблица 2.8. Технические характеристики робота ORCA
Рука Сочлененная на направляющем рельсе Обучающее устройство Джойстик с аварийным выключением
Степени свободы 6 Время цикла 4 с (движения: 1 дюйм вверх. 12 дюймов в сторону. 1 дюйм вниз, возврат)
Предел досягаемости ±54 см Максимальная скорость Время задержки 75 см/с Типичное значение 50 мс
Высота 78 см Полезная на- (для движений в пределах зоны действия) Постоянная — 0,5 кг. кратковре-
Длина рельса 1 и 2 м грузка менная — 2.5 кг (с ограничениями)
Масса 8,0 кг Отклонение по вертикали Менее 1,5 мм при постоянной нагрузке
Точность Размер захвата Вращение захвата ± 0,25 мм 40 мм ± 77 оборотов Площадь рабочей зоны 1 м2
Синтез лабораторного робота ORCA заключался в выборе компонентов, необходимых для сборки всего устройства. Робот в разобранном виде изображен на рис. 2.38. В нем использованы шесть двигателей постоянного тока, редукторы, ременные передачи, рельс и тележка. При синтезе основной задачей проектировщика являлась разработка точных моделей компонентов системы и исследование их взаимодействия.
Пример 2.15. Синтез фильтра низких частот
Цель состоит в синтезе низкочастотного фильтра первого порядка, который пропускал бы сигналы с частотой менее 106.1 Гц и ослаблял сигналы с частотой выше указанной. Кроме того, фильтр должен иметь коэффициент передачи по постоянному току, равный 1/2.
98
Глава 2. Математические модели систем
Рис. 2.38. Элементы робота ORCA в разобранном виде:
1 — ячеистая платформа, 2 — рельс и тележка, 3 — привод тележки, 4 — шасси,
5 — литой корпус, 6 — привод плеча, 7 — ременные передачи, 8 — крышка предплечья, 9 — литое предплечье, 10 — захват руки в сборке, 11 — литая рука, 12 — локтевое сочленение, 13 — плечевое сочленение, 14 — печатная плата управления корпусом,
15 — печатная плата и двигатели, управляющие локтем и запястьем, 16 — крышка руки
В качестве искомого фильтра может служить двухзвенная цепь с одним реактивным элементом, изображенная на рис. 2.39(a). Заметим, что эта схема действительно будет иметь требуемый коэффициент передачи, поскольку конденсатор для постоянного тока представляет собой разомкнутую цепь. Выражения для токов и напряжений имеют вид:
Л = (Г, - Г2)С.
Л = (^2 - W
Г, = (/, - I2)R,
И3 = I2Z.
где G = l/R. Z(s) = 1/Cs и J{(s) = /, (опуская зависимость от s). Эти четыре уравнения отражает сигнальный граф, приведенный на рис. 2.39(6). Граф содержит три контура: = -GR = -1. L2 = -GR = -1 и L3 = -GZ. Все контуры касаются прямого пути, а контуры Lt и £3 'не касаются друг друга. Поэтому передаточная функция равна
Л _ GZ 1 1/3RC
+ Ц + 3+2GZ 3RCs+2 S+2/3RC
2.10. Моделирование систем управления с помощью MATLAB
99
Рис. 2.39. (а) Двухзвенная цепь и (б) ее сигнальный граф
Заметим, что коэффициент передачи равен 1/2 , как и ожидалось. Желаемое значение полюса р= 2л 106,1 = 666,7 = 2000/3. Отсюда следует, что RC = 0.001. Выберем Л = 1 кОм и С = 1 мкФ. Тогда фильтр будет иметь передаточную функцию
T(s) =
333,35
s + 666,7
2.10. Моделирование систем управления с помощью MATLAB
Многие программные средства анализа и синтеза систем управления (как классическими, так и современными методами) основаны на использовании математических моделей. При описании систем передаточными функциями для этих целей может быть использован MATLAB*.
В этом разделе мы сначала покажем, насколько полезным может оказаться MATLAB при анализе математической модели механической системы масса- пружина. Используя нотацию MATLAB, мы создадим программу, позволяющую в интерактивном режиме исследовать влияние собственной частоты колебаний и коэффициента затухания на свободное движение массы. При этом мы воспользуемся аналитическим решением, описывающим свободное движение массы.
Далее мы рассмотрим, как MATLAB оперирует с передаточными функциями и структурными схемами. В частности, будет показано, как MATLAB работает с алгебраическими полиномами, вычисляет полюсы и нули передаточных функций, определяет передаточные функции замкнутых систем, производит упрощения структурных схем, вычисляет реакцию систем на единичное ступенчатое воздействие. В заключение мы проиллюстрируем применение MATLAB к синтезу системы управления устройством электрической тяги из примера 2.12.
Введение в MATLAB — см. приложение А
Глава 2, Математические модели систем
100
В этом разделе мы познакомимся с функциями MATLAB roots, tf, series, parallel, feedback, pole, zero, poly, conv, polyval, minreal, pzmap, step.
Система масса—пружина. На рис. 2.2 изображена механическая система масса-пружина с демпфированием. Перемещение массы ХО описывается дифференциальным уравнением
My(t)+ by(t)+ ky(t)=r(t).
Движение системы при отсутствии внешней силы г(Г) описывается выражением
~^-e sin(co,J 'l-^2 i-^2r+e)
где 0 = arccos ау(О) — начальное отклонение. При < 1 реакция системы является недодемпфированной, при С, >1 — передемпфированной, а при С, = 1 — критически демпфированной. С помощью MATLAB мы можем пронаблюдать характер изменения положения массы как реакцию на начальное отклонение ХО)- Рассмотрим случай недодемпфированной системы:
ХО) = 0,15 м, <о„ = 72 рад/с, С=—(к/М = 2, ЫМ = 1).
27 2
Программа MATLAB для построения графика свободного движения системы приведена на рис. 2.40. Прежде всего, перед запуском программы, в качестве входных данных для основного блока должны быть заданы значения ХО), <о„, t и С>. После этого выполняется основная программа unforced.m, которая представляет результат в графической форме. Если возникает необходимость исследовать влияние на свободное движение собственной частоты колебаний и коэффициента затухания, то просто необходимо ввести новые значения со,, и и еще раз выполнить программу. На рис. 2.41 приведен график свободного движения системы. Заметим, что программа автоматически указывает на графике значение коэффициента затухания и собственной частоты колебаний. Это позволяет избежать недоразумений при многократном проведении моделирования.
Рис. 2.40
Скрипт анализа движения системы «пружина-масса»
»y0=0.15;
»wn—sqri(Z;, »zeta=1/(2*sqrt(2)); •<—_________
»t=[0:0.1:10J; »unforced
unforced.m_____________________________________
%Вычисление реакции на начальное условие % с= (yO/sq rt( 1 -zeta А2)); <-
y=c*exp(-zeta*wn*t).*sin(wn*sqrt(1-zetaA2)*t+acos(zeta)); % bu=c*exp(-zeta*wn*t); bl=-bu; <—________ % plot(t,y,t,bu,'—',t,bl,'—'), grid х1аЬе1('Время (c)'), ylabel(’y(t) (метры)’)
Iegend(['\omega n=',num2str(wn),’ \zeta=',num2str(zeta)]);
е огибающая
2.10. Моделирование систем управления с помощью MATLAB
101
Рис. 2.41 Свободное движение системы «пружина-масса»
Время (с)
В рассмотренной выше задаче мы воспользовались известным аналитическим решением однородного дифференциального уравнения. В общем случае, при моделировании замкнутых систем управления, подверженных влиянию различных внешних воздействий, а также при разных начальных условиях, аналитическое решение бывает получить очень трудно. Здесь можно прибегнуть к помощи MATLAB, который численно решит поставленную задачу и представит результат в графической форме.
MATLAB позволяет исследовать системы, описываемые передаточными функциями. Поскольку передаточная функция имеет вид отношения двух полиномов, мы сначала рассмотрим, как MATLAB оперирует с алгебраическими полиномами. При этом не будем забывать, что в передаточной функции должны быть заданы оба полинома — ив числителе, и в знаменателе.
Полиномы в MATLAB представляются в виде векторов-строк, состоящих из коэффициентов в убывающем порядке степеней. Например, полином р(з) = у + З.у2 + 4 задается так, как показано на рис. 2.42. Обратите внимание, что даже если коэффициент при какой-то степени равен нулю, он все равно включается в представление полинома p(s).
Рис. 2.42
Ввод полинома p(s) = s3 + 3s2 + 4 и вычисление его корней
102
Глава 2. Математические модели систем
Если р есть вектор-строка, состоящая из коэффициентов p(s) в порядке убывания степеней, то функция roots(p) определяет вектор-столбец, содержащий корни этого полинома. И наоборот, если г — вектор-столбец, содержащий корни полинома, то функция poly(r) дает вектор-строку из коэффициентов полинома в убывающем порядке степеней. На рис. 2.42 показано, как с помощью функции roots вычисляются корни полинома p(s) = = s3 + 3 s2 + 4. На рис. 2.42 показано также, как можно восстановить полином по его корням с помощью функции poly.
Умножение полиномов производится с помощью функции conv. Предположим, что мы хотим получить полином n(s) в развернутой форме, где n(s) = (3.v“ + 2.у + l)(.v + 4). Эта процедура выполняется так, как показано на рис. 2.43. В результате умножения получаем полином n(s) = 3s3 + 14.V2 + 9s + 4. Для вычисления значения полинома при заданном значении переменной используется функция polyval. Как показано на рис. 2.43, полином n(s) имеет значение и(-5) = -66.
В пособиях по применению MATLAB модели линейных стационарных систем рассматриваются в качестве объектов, позволяя манипулировать ими как единым целым. При использовании аппарата передаточных функций модели систем создаются с помощью функции tf; если модель должна быть представлена в переменных состояния, то применяется функция ss (см. главу 3). Применение функции tf проиллюстрировано на рис. 2.44(a). Благодаря возможностям объектно-ориентированного программирования, присущим MATLAB, модели систем обладают свойствами объектов, которые легко можно изменять; аналогично, функции, применяемые для работы с объектами, принято называть методами. Например, если вы имеете две модели систем,
= --- и
S2 +2л+5
5 + 1
то вы можете сложить их с помощью оператора «+»:
G(5) = GI (5) + G2 (5) = .
s + 3s' +7s+5
Соответствующая программа MATLAB приведена на рис. 2.44(5), где sys1 представляет передаточную функцию G{(s), a sys2 — G2(.v). Вычисление полюсов и нулей передаточной функции производится при работе с ней как с объектом путем применения функций pole и zero. Это проиллюстрировано на рис. 2.45.
В следующем примере мы покажем, как с помощью функции pzmap (рис. 2.46) можно указать расположение на комплексной плоскости полюсов и нулей передаточной функции. Нули на диаграмме обозначаются кружочками, а полюсы — крестиками. Если функция pzmap вызывается без аргументов, то диаграмма строится автоматически.
Рис. 2.43
Использование функций conv и polyval для умножения полиномов (3s2 + 2s + 1 )(s + 4) и вычисления значения произведения
»р=[3 2 1]; q=[1 4];
»n=conv(p,q) <—
п =
3 14 9 4 *
»value=polyval(n,-5) value =
-66
Умножение р и q
n(s) = 3s3 + 14s2 + 9s + 4
Вычисление n(s) при s = -5
2.10. Моделирование систем управления с помощью MATLAB
103
Рис. 2.44
(а) Функция tf;
(б) Применение функции tf для образования передаточных функций объектов и их сложение с помощью оператора «+»
»num1=[10J; den1=[1 2 5] »sys1=tf(num1,den1) Transfer function: 10 -4 G](s)
Передаточная функция объекта „, ч num GM = -— den sA2 + 2 s + 5 »num2=[1]: den2=[1 1]; »sys2=tf(num2,den2) Transfer function: 1 Gj(5)
S) к /s = tf(num,d г en)
s.1 »sys=sys1 +sys2 Transfer function: sA2 + 12 s + 15
G,(5) + G2(5)
sA3+ 3 sA2 + 7 s + 5
Рис. 2.45
(а) Функции pole и zero;
(б) Применение функций pole и zero для вычисления полюсов и нуля линейной системы
а}
Пример 2.16. Передаточные функции
Рассмотрим передаточные функции
GM =
6?+1 № + 3s2 + З5+1
и
/7(5) =
(?+!)(?+2) (5 + 2i)(5- 2i)(5 + 3)
С помощью программы MATLAB мы можем вычислить полюсы и нули G(s). получить характеристические уравнение для H(s), разделить G(s) на H(s), а также получить на комплексной плоскости картину расположения полюсов и нулей функции
104
Глава 2, Математические модели систем
Рис. 2.46
Функция pzmap
Р: полюсы в виде вектора-столбца Z: нули в виде вектора-столбца
[P,Z]=pzmap(sys)
Рис. 2.47
Расположение полюсов и нулей функции G(s)/H(s)
Расположение полюсов и нулей передаточной функции G(s)/H(s) показано на рис. 2.47, соответствующие инструкции MATLAB приведены на рис. 2.48. На картине ясно видно расположение пяти нулей и всего двух полюсов. В действительности этого не может быть. т. к. известно, что число полюсов дожно быть больше или равно числу нулей. Используя функцию roots, мы можем убедиться, что на самом деле четыре полюса находятся в одной и той же точке s = -l. Таким образом, функция pzmap не позволяет различить кратные полюсы или нули.
Модели в виде структурных схем. Предположим, что мы получили математические модели объекта управления, регулятора и, возможно, многих других элементов системы, таких как датчики и исполнительные устройства, причем эти модели представлены в виде передаточных функций. Дальнейшая цель состоит в том, чтобы объединить все эти элементы в единую структуру, создав тем самым систему управления. С помощью MATLAB можно выполнить все необходимые преобразования структурной схемы.
Простейшую разомкнутую систему управления можно получить, соединив последовательно объект управления и регулятор, как это показано на рис. 2.49. Как с помощью MATLAB определить передаточную функцию, связывающую R(s) и L(.s), будет продемонстрировано в следующем примере.
2.10. Моделирование систем управления с помощью MATLAB
105
Рис. 2.48
Операции с передаточными функциями G(s) и H(s)
»numg=[6 0 1]; deng=[1 3 3 1]; sysg=tf(numg,deng);
»z=zero(sysg)
z= < Вычисление
0 + 0.40821 полюсов и нулей G(s)
О - 0.4082i
»p=pole(sysg)
Р =
-1.0000
-1.0000 + O.OOOOi
-1.0000 - O.OOOOi
Представление H(s) в развернутом виде
»n1=[1 1]; n2=[1 2]; d1 =[1 2*i]; d2=[1 -2*i];d3=[1 3]; »numh=conv(n1 ,n2); denh=conv(d1 ,conv(d2,d3));
»sysh=tf(numh,denh)
Transfer function: sA2 + 3 s + 2
sA3 + 3 sA2 + 4 s + 12
»sys=sysg/sysh
H(s)
G(s)
—— = sys W(s)
Transfer function:
6 sA5 + 18 sA4 + 25 sA3 + 75 sA2 + 4 s + 12
sA5 + 6 sA4 + 14 sA3 + 16 sA2 + 9 s + 2
» pzmap(sys) -<
Картина расположения полюсов и нулей
Рис. 2.49
Разомкнутая система управления
Пример 2.17. Последовательное соединение
Пусть объект управления задан передаточной функцией G(s) = 1/500 s2. а регулятор имеет передаточную функцию GJs) = (s + l)/(s + 2). На рис. 2.50 изображено последовательное соединение двух систем с передаточными функциями G((s) и G2(s), а также проиллюстрирован смысл функции series, а на рис. 2.51 показано, как с ее помощью определяется произведение Gc(s)G(s). Результирующая передаточная функция имеет вид
Gc(s)G(s) =
5+ 1
500s3 + 1000s2
= sys,
где sys есть обозначение передаточной функции в программе MATLAB.
В структурных схемах очень часто встречается параллельное соединение элементов. В таких случаях для определения передаточной функции соединения используется функция parallel. Смысл этой функции поясняет рис. 2.52.
106
Глава 2. Математические модели систем
Рис. 2.50
(а) Структурная схема;
(6) Функция series
Рис. 2.51
Применение функции series
Рис. 2.52
(а) Структурная схема;
(б) Функция parallel
Мы можем ввести в рассмотрение сигнал обратной связи, замкнув контур единичной обратной связью, как показано на рис. 2.53. В этом случае Eu(s) есть изображение по Лапласу сигнала ошибки, a R(s) — эталонного входа. Передаточная функция замкнутой системы определяется выражением
Г,г)_ сс(^)
(l+Gc(s)G(s))'
С помощью функции feedback мы имеем возможность упростить структурную схему, вычислив передаточную функцию замкнутой системы. Эта функция применима как к одноконтурным, так и к многоконтурным системам управления.
2.10. Моделирование систем управления с помощью MATLAB
107
Рис. 2.53
Система управления с единичной обратной связью
У(5)
Часто встречается случай, когда замкнутая система имеет единичную обратную связь, как показано на рис. 2.53. Применение функции feedback в данном случае проиллюстрировано на рис. 2.54.
На рис. 2.55 изображена система с неединичной обратной связью и проиллюстрировано применение к ней функции feedback. Если в аргументах этой функции не указан знак обратной связи sign, то по умолчанию она предполагается отрицательной.
Рис. 2.55
(а) Структурная схема;
(б) Функция feedback
Рис. 2.54
(а) Структурная схема;
(6) Применение функции feedback в случае единичной обратной связи
Пример 2.18. Применение функуции feedback к системе с единичной обратной связью
Пусть передаточные функции объекта и регулятора на рис. 2.51(a) соответственно равны G(s) и Gc(s). Чтобы воспользоваться функцией feedback, сначала нам необходимо применить функцию series, чтобы вычислить произведение G(s)Gc(s). Эта последовательность действий приведена на рис. 2.56(6). В соответствии с рис. 2.56(6), передаточная функция замкнутой системы равна
„. , GAs)G(s) 5+1
T(s) =--v =-------------------------= Sys.
l + Gc(s)G(s) 500s3+ 1000?+ 5+1
108
Глава 2. Математические модели систем
Рис. 2.57
Система с регулятором в цепи обратной связи
Рис. 2.56 .
(а) Структурная '
схема;
(б) Применение
функции feedback
б)
Другая конфигурация системы с обратной связью приведена на рис. 2.57. В данном случае регулятор находится в цепи обратной связи. Замкнутая система имеет передаточную функцию
T(s) =
G(s) l+G(s')H(s')
Пример 2.19. Функция feedback
Пусть объект и регулятор имеют, соответственно, передаточные функции G(s) и H(s), как показано на рис.2.58(а). Для определения передаточной функции замкнутой системы воспользуемся функцией feedback. Соответствующая программа приведена на рис. 2.58(6). В результате получим
Т (л) =---т--------------= sys.
500? + 1000?+ j+1
Рис. 2.58
Применение функции feedback: (а) Структурная схема;
(б) Скрипт MATLAB
а)
б)
2.10, Моделирование систем управления с помощью MATLAB
109
Функции MATLAB series, parallel и feedback могут оказаться полезными при упрощении структурных схем многоконтурных систем.
Пример 2.20. Упрощение многоконтурной системы
Многоконтурная система изображена на рис. 2.26. Наша цель — определить передаточную функцию T(s) = Y(s)/R(s), если
1 1 v2 +1 с +1
Gi^ = —G2(5) = -i-, G3(5) = ^—-------С4(у) = —, ВД=2. H3B)=L
5+10 5+1 5 +45+4 5+6
В данном примере все действия сводятся к пяти этапам:
□ Этап 1. Ввести все передаточные функции в программу MATLAB.
□ Этап 2. Перенести узел через блок G4 в направлении движения сигнала.
□ Этап 3. Исключить контур G^GJR.
□ Этап 4. Исключить контур, содержащий Нг.
□ Этап 5. Заменить оставшийся контур одним блоком и записать выражение T(s). Соостветствующие операции показаны на рис. 2.27, а программа, выполняющая их, приведена на рис. 2.59. Выполнение программы дает следующий результат:
55 + 454 + б55 + б52 + 55 + 2
SyS ” 12s6 + 20555 + IO6654 + 251753 + 312852+ 21965 + 712 ’
При определении передаточной функции замкнутой системы следует соблюдать осторожность. Передаточная функция определяет соотношение между входом и выходом после сокращения одинаковых нулей и полюсов. Если мы вычислим полюсы и нули T(s), то обнаружим, что полиномы в числителе и знаменателе имеют одинаковый сомножитель (5 + 1) . Эти сомножители необходимо сократить, прежде чем утверждать, что мы действительно получили передаточную функцию. В сокращении нуля и полюса нам может помочь функция minreal. Ее смысл поясняет рис. 2.60. Заключительная процедура в упрощении структурной схемы состоит в удалении одинаковых сомножителей из числителя и знаменателя Tts), как показано на рис. 2.61. Итоговый результат также приведен на этом рисунке. После применения функции minreal можно видеть, что порядки полиномов в числителе и знаменателе уменьшились на единицу за счет сокращения одного полюса и одного нуля.
Рис. 2.59
Упрощение многоконтурной системы
»ng1=[1); dg1=[1 10]; sysg1=tf(ng1,dg1); »ng2=[1]; dg2=[1 1]; sysg2=tf(ng2,dg2); »ng3=[1 0 1 ]; dg3=[1 4 4]; sysg3=tf(ng3,dg3); »ng4-[1 1]; dg4-[1 6 ]; sysg4-tf(ng4,dg4); »nh1=[1 1J; dh1=[1 2]; sysh1=tf(nh1,dh1);
Этап 1
»nh2=[2]; dh2=[1]; sysh2=tf(nh2,dh2); »nh3=[1]; dh3=[1 ]; sysh3=tf(nh3,dh3); »sys 1 =sysh2/sysg4; »sys2=series(sysg3,sysg4);
Этап 2
»sys3=feedback(sys2,sysh1 ,+1); »sys4=series(sysg2,sys3); »sys5=feedback(sys4,sys1); »sys6=series(sysg1 ,sys5); Этап 3
Этап 4
»sys=feedback(sys6,[1]) Этап 5
Transfer function: sA5 + 4 sA4 + 6 sA3 + 6 sA2 + 5 s + 2
12 sA6 + 205 sA5 + 1066 sA4 + 2517 sA3 + 3128 sA2 + 2196 s + 712
110
Глава 2. Математические модели систем
Рис. 2.60
Функция minreal
Одинаковых сомножителей нет
Возможны одинаковые сомножители
T(s) = sys
sys=minreal(sys1)
G(s) = sys
Рис. 2.61
Применение функции minreal
»num=[1 4 6 6 5 2]; den=[12 205 1066 2517 3128 2196 712];
»sy s 1 =tf(num, den);
»sys=minreal(sys1);
Сокращение одинаковых сомножителей
Transfer function:
0.08333 sA4 + 0.25 sA3 + 0.25 sA2 + 0.25 s + 0.1667
sA5 + 16.08 sA4 + 72.75 sA3 + 137 sA2 + 123.7 s + 59.33
Пример 2.21. Управление устройством электрической тяги
В заключение мы еще раз вернемся к системе управления устройством электрической тяги из примера 2.12. Структурная схема этой системы приведена на рис. 2.35(g). Здесь мы вычислим передаточную функцию замкнутой системы и исследуем реакцию скорости со(.у) на задающее воздействие ы/з). Первый этап, проиллюстрированный программой на рис. 2.62, состоит в определении передаточной функции T(s) = си(.у)/ш(/.у). Характеристическое уравнение замкнутой системы имеет второй порядок, причем а>„- 52 и £ = 0,012. Поскольку коэффициент затухания очень мал, следует ожидать, что реакция системы будет иметь сильно колебательный характер. Реакцию <и(Г) на эталонный вход сог//) можно исследовать с помощью функции step. Эта функция, смысл которой поясняет рис. 2.63, вычисляет реакцию линейной системы на единичное ступенчатое воздействие. Ступенчатая функция имеет важное значение потому, что качество систем управления обычно оценивается по их реакции на воздействие данного вида.
Если единственной целью исследований является получение графика у(/), то функцию step можно использовать без указания аргументов в левой части инструкции. График будет получен автоматически с указанием переменных по осям координат. Если жеу(г) необходимо для каких-то других целей кроме построения графика, то функцию step надо использовать с указа-
Рис. 2.62 Упрощение структурной схемы системы электрической тяги
»num1=[10]; den1=[1 1]; sys1=tf(num1,den1); »num2=[1]; den2=[2 0.5]; sys2=tf(num2,den2); »num3=[540]; den3=[1]; sys3=tf(num3,den3); »num4=[0.1]; den4=[1]; sys4=tf(num4,den4); »sys5=series(sys1 ,sys2); ч »sys6=feedback(sys5,sys4); »sys7-series(sys3,sys6); Исключение внутреннего контура
»sys=teedback(sys7,[1J) ч Transfer function: Определение передаточной функции замкутой системы
5400 <o(s)
2 sA2 + 2.5 s + 5402
2.11. Пример синтеза с продолжением: система чтения информации с диска 111
Рис. 2.63
Функция step
нием всех аргументов в левой части инструкции, после чего вывод графика осуществляется с помощью функции plot. Переменная t определяется как вектор-строка, состоящая из моментов времени, в которые мы желаем получить значения выходной переменной y(t).
В программе MATLAB можно также задать значение t = tp так что переходная характеристика будет вычислена на интервале от t = 0 до t = tj, и кроме того указать число точек в этом интервале.
Переходная характеристика электропривода приведена на рис. 2.64. Как и ожидалось, выходная переменная у(/) = со(г), т. е. скорость вращения, имеет сильно колебательный характер.
Время (с)
mresp.m
%Эта программа вычисляет %переходную характеристику %электропривода
%
num=[5400J; den=[2 2.5 5402];
sys=tf(num,den);
t=[0:0.005:3];
[y,t]=step(sys,t);
Plot(t,y),grid
х1аЬе1('Время (c)’)
у!аЬе1(‘Скорость вращения')
Рис. 2.64. (а) Переходная характеристика электропривода; (6) Скрипт MATLAB
2.11. Пример синтеза с продолжением: система чтения информации с диска
□ В разд. 1.12 мы поставили исходную задачу управления дисководом: позиционировать считывающую головку точно на заданную дорожку и при возможности обеспечить переход от одной дорожки к другой в пределах 10 мс. В этой главе мы выполним этапы 4 и 5 процесса синтеза (см. рис. 1.19).
Нам необходимо выбрать исполнительное устройство, датчик и регулятор (этап 4). Затем следует разработать модель объекта, G(s), и датчика. Для приведения в действие
112
Глава 2, Математические модели систем
Рис. 2.65
Считывающая головка дисковода
рычага считывающей головки используется двигатель с постоянными магнитами (см. рис. 1.24). При производстве дисководов его называют двигателем со звуковой катушкой. Головка считывания закреплена на скользящем элементе, закрепленном на рычаге, как показано на рис. 2.65. Гибкая пластина дает возможность головке плавать над диском с зазором менее 100 нм. Тонкопленочная головка воспринимает магнитный поток и формирует сигнал, поступающий на усилитель. Сигнал ошибки на рис. 2.66(a) формируется на основании заданного номера дорожки. Полагая, что положение считывающей головки определяется точно, можно считать, что передаточная функция датчика H(s) = 1, как показано на рис. 2.66(6). На этом рисунке также приведены модели двигателя с постоянными магнитами и линейного усилителя. Двигатель, управляемый по цепи якоря, достаточно хорошо представляется в виде модели на рис. 2.20 при Кь = 0. В полной модели системы на рис. 2.66(6) предполагается, что пластина является жесткой, а не слишком гибкой. В гл. 4 мы рассмотрим модель, в которой это допущение не имеет силы.
Рис. 2.66. Структурная схема считывающей системы дисковода
2.11. Пример синтеза с продолжением: система чтения информации с диска 113
Таблица 2.9. Типичные параметры дисковода
Параметр Обозначение Типичное значение
Момент инерции рычага и считывающей головки J 1 Н • м с2/рал
Коэффициент трения b 20 кг/м/с
Коэффициент усиления Ни 10-1000
Сопротивление якоря R 1 Ом
Коэффициент передачи двигателя кт 5 Н м/А
Индуктивность якоря L 1 мГн
Типичные параметры дисковода приведены в табл. 2.9. Следовательно, мы имеем:
G(s) =----------------=-------— --------. (2.117)
s(Js+ b)(Ls + R) s(s+2(f)(s +1000)
Выражение G(s) можно также представить в виде
(2.118)
S(T£S+1)(Т5+1)
где xL = J/fe = 50 мс и т = L/R = 1 мс. Поскольку т «: т£, мы можем пренебречь величиной т. Тогда
С(,).. WS.— 5(Т£5+1) 5(0,055+1)
или
1 J I —---- •
s(s+20)
Структурная схема замкнутой системы приведена на рис. 2.67. На основании правил преобразования структурных схем (см. табл. 2.6) можно записать:
KoG(s)
R(s) l+KaG(s)
Используя аппроксимацию G(s) вторым порядком, мы получим
Г(Д)_ 5Ка
R(s) s2+20s+5Ku
Если Ка = 40, то
У(5) =
200
s2 + 20s+ 200
A(s).
Полагая r(t) = 0,1 рад, т. е. R(s) = 0,1 Is, с помощью функции step мы получим реакцию системы, изображенную на рис. 2.68.
Рис. 2.67
Структурная схема замкнутой системы
А(5)
114
Глава 2. Математические модели систем
Рис. 2.68
Реакция системы, изображенной на рис. 2.67, на воздействие f?(s) = 0,1/s
2.12. Резюме
В этой главе были рассмотрены количественные математические модели систем управления и их элементов. При построении этих моделей в основу были положены дифференциальные уравнения, описывающие поведение физических систем. В числе этих систем были рассмотрены механические, электрические, гидравлические и термодинамические. В отношении нелинейных элементов был применен метод линеаризации, основанный на разложении нелинейной функции в ряд Тейлора в окрестности рабочей точки. После такой линеаризации к системе применимо преобразование Лапласа и вытекающее из него понятие передаточной функции. С помощью передаточной функции исследователь может определить реакцию системы на различные входные воздействия. Было также показано, как образуются модели систем в виде структурных схем и сигнальных графов. Продемонстрировано, как с помощью формулы Мейсона можно получить связь между отдельными переменными системы сложной конфигурации. Преимущество моделей в виде сигнальных графов заключается в том, что формула Мейсона позволяет получить связь между переменными системы, не прибегая к сложным преобразованиям. Итак, в этой главе мы получили такие ценные средства описания систем управления, как их математические модели в виде передаточных функций, структурных схем и сигнальных графов. Мы оценили также преимущества компьютерного моделирования для исследования поведения систем при различных комбинациях их параметров и внешних воздействий. И, наконец, мы продолжили разработку системы управления считыванием информации с диска, получив передаточные функции элементов этой системы.
Упражнения
У-2.1. В системе с единичной отрицательной обратной связью, изображенной на рис. 2.1 (У), нелинейный элемент описывается зависимостью у =fie) = е~. При задании входного сигнала в диапазоне от 0 до 4 постройте график зависимости у(г) как для разомкнутой, так и для замкнутой системы и покажите, что при наличии обратной связи характеристика становится более линейной.
Обратная связь действует при замыкании ключа
Рис. 2.1 (У). Разомкнутая и замкнутая система
Упражнения
115
У-2.2. Сопротивление термистора R описывается зависимостью R = Лое'0’17',
где Rq = 10 кОм, а 7'—температура в градусах Цельсия. Получите линейную модель термистора для случая малых отклонений температуры от номинального значения Т = 20 °C.
Ответ: AR = -135 АГ.
У-2.3. Механическая система пружина-масса, изображенная на рис. 2.2, имеет зависимость между силой и перемещением как на рис. 2.3(У). Графическим путем определите коэффициент упругости в точке равновесия у= 0,5 см при отклонениях Ду = ±1.5 см.
У-2.4. Для быстрого вывода на печать документов из компьютера используется лазерный принтер. Положение луча принтера задается управляющим воздействием r(f), так что y(j) = ^±ioo) ? +60s+500
(а) Если r(f) — единичное ступенчатое воздействие, то каков закон изменения положения луча И0?
(б) Чему равно конечное значение у(7)?
Ответ: (a) y(t) = 1 - 1,125е"10' + 0,125е-50'; (б) ум
У-2.5. На рис. 2.5(У) изображен неинвертирующий усилитель на ОУ. Считая операционный усилитель идеальным, определите v0/v,.
1.
Рис. 2.5 (У). Неинвертирующий усилитель
Ответ: — =
Vj
У-2.6. Нелинейное устройство описывается зависимостью у = f(x) = -Jx . Рабочая точка задана значением входной переменной х0 = 1/2. Получите линейную аппроксимацию характеристики в случае малых отклонений Ах. Ответ: Ду = Иьх/Л.
У-2.7. Для поддержания постоянной яркости свечения лампы накаливания используется фототранзистор, включенный в цепь обратной связи. При уменьшении напряжения в сети яркость лампы также уменьшается и фототранзистор вырабатывает меньший ток. В результате увеличивается проводимость мощного транзистора, управляющего зарядом конденсатора. Напряжение конденсатора подается непосредственно на лампу. На рис. 2.7(У) изображена структурная схема этой системы. Определите передаточную функцию l(s)/R(s), где l(s) — яркость лампы, a R(s) — управляющий сигнал, соответствующий желаемому значению яркости.
У-2.8. В 1930-е годы инженер Н. Минорский разработал для ВМС США новую систему управления курсом судна. Эта система представлена на рис. 2.8(У) в виде структурной схемы, где Г(х) —
а)
ад
б)
Фильтр
Диафрагма
Непрозрачная трубка
Рис. 2.7 (У). Регулятор яркости
116
Глава 2, Математические модели систем
Рис. 2.8 (У). Система управления курсом судна курс судна, R(s) — заданное значение курса, a A(s) — угловое положение руля. Определите передаточную функцию Y(s)/R(s). F(s) KG}(s)G2(s)/s
Ответ-.------ =-----------------------—.
R(s) 1 + G1(j)//3(j) + G1(sX'2(j)[^i(-s')+ H2(s)]+ KGt(s)G2(s)/s
У-2.9. В системе торможения автомобиля применяется электронная цепь обратной связи, с помощью которой автоматически вырабатывается тормозное усилие на каждое из колес. На рис. 2.9(У) приведен упрощен- ________ ?
ный сигнальный граф этой систе- —Hx(s) '
мы, где Ff(s) и Fpfs) есть, соответ- /
ственно, тормозные усилия на пе-редкие и задние колеса, a R(s) — / / G,(j)
желаемая реакция автомобиля на । / G,(j) _/
скользкой дороге. Определите пе- R(s) Q------* Q----- ►
редаточную функцию Ff(s)/R(s). X X.
У-2.10. Опыт эксплуатации внедорож- х, G,(j)
ных автомобилей показывает, что при движении по пересеченной местности они подвергаются дей- ~H2(s) -------\
ствию многих возмущений. В этом случае может быть примене- Рис. 2.9 (У). Система управления торможением на система активной подвески, управляемая с помощью датчика, который предвидит изменение дорожной обстановки. Пример такой простой системы, смягчающей влияние неровностей, приведен на рис. 2.10(У). Определи-
Подпрыгивание автомобиля или отклонение от горизонтали
Рис. 2.10 (У). Система активной подвески
Упражнения
117
те значение коэффициента Kt, при котором автомобиль не подпрыгивал бы при действии возмущения D(s) и при желаемом отклонении R(s) = 0. Ответ: К^2 = 1.
У-2.11. Зависимость упругой силы от деформации пружины показана на рис. 2.11 (У). Определите значение коэффициента упругости при малых отклонениях от рабочей точки х0, если
(а) х0 = - 1,4; (б) х0 = 0; (в) х0 = 3,5.
У-2.12. Одной из наиболее полезных автомобильных систем является система управления активной подвеской. В такой системе используется амортизатор, состоящий из цилин-
4
Рис. 2.11 (У). Характеристика пружины
дра, заполненного сжимаемой жидкостью, которая обеспечивает возникновение упругой и демпфирующей сил. Цилиндр включает в себя плунжер, управляемый электродвигателем, поршень и датчик, измеряющий перемещение поршня. Перемещение поршня вызывает появление упругой силы, которая сжимает жидкость. Для целей управления демпфированием используется разность давлений по обе стороны поршня, возникающая при его перемещении. Плунжер изменяет объем внутренней полости цилиндра. Данная система с обратной связью изображена на рис. 2.12(У).
Рис. 2.12 (У). Амортизатор
Разработайте линейную модель амортизатора в виде структурной схемы.
У-2.13. Определите передаточную функцию Y^sj/R^s) для многомерной системы, изображенной на рис. 2.13(У).
У-2.14. Запишите дифференциальные уравнения относительно токов q и i2 для схемы, изображенной на рис. 2.14(У).
Рис. 2.13 (У). Многомерная система
118
Глава 2. Математические модели систем
У-2.15. Система управления положением космической платформы описывается сле-
дующими уравнениями:
d2p „ ф _ —£-+2—+ 4р=0. <*2 dt
v\=r-p ,
dB
— = 0,6v9, v9 = 7v..
dt 2 21
Рис. 2.14 (У). Электрическая схема
Переменные в уравнениях имеют следу-
ющий смысл:
г(0 — желаемое положение платформы. p(t) — действительное положение платформы,
v](/) — напряжение на входе усилителя, v2(/) — напряжение на выходе усилителя,
0(0 — положение вала двигателя.
Изобразите сигнальный граф системы, обозначив все элементы и указав связь между ними; затем определите передаточную функцию системы P(s)/R{s) .
У-2.16. Пружина, используемая в автомобильном амортизаторе, создает силу f определяемую уравнением f=kx\ где х—деформация пружины. Получите линейную модель пружины при х0 = 1.
У-2.17. Выход у и вход х устройства связаны соотношением
у = X + 0,79х3.
(а) Определите значения выходной переменной в двух рабочих точках: л0 = 1 и х0 = 2.
(б) Получите линеаризованные модели устройства в этих рабочих точках и сравните их.
У-2.18. Передаточная функция системы имеет вид:
У(5) 10(5+2)
7?(s) ~ j2 + 8j+15 ’
Определите y(t), если r(t) имеет вид единичной ступенчатой функции.
Ответ: у(р) = 1,33 + 1,67е-3/ — Зе-5'.
У-2.19. Определите передаточную функцию Ко($)/И($) для схемы на операционном усилителе, изображенной на рис. 2.19(У). Считайте, что операционный усилитель — идеальный. Вычислите передаточную функцию при А1 = Л2 = 100 кОм, С] = 10 мкФ и С2 = 5 мкФ.
У-2.20. На рис. 2.20(У) изображена скользящая каретка, обеспечивающая прецизионное позиционирование щупа. Определите передаточную функцию Хр (s)IXt (sj, если коэффициент трения приводного вала bd = 1, коэффициент упругости приводного вала kd = 3, тс = 2/3 и коэффициент трения скольжения bs = 1.
Рис. 2.19 (У). Схема на операционном усилителе
Рис. 2.20 (У). Каретка с прецизионным позиционированием
Упражнения
119
Рис. 2.21 (У). Спутник
У-2.21. Угловая скорость вращения спутника со, изображенного на рис. 2.21(У), зависит от длины штанги L. Передаточная функция, связывающая co(s) и приращение длины штанги ДЛ(л ), имеет вид:
сф) _ 2,5(5+2)
М(л) ~ (л + 5)(л + I)2 ’
Изменение длины штанги происходит в соответствии с выражением AL(j) = 114s. Определите закон изменения скорости со(С).
„ ,, 1 з -5/ 35 5
Ответ: (Mt) =—I------е--------е------te .
4 128 128 32
У-2.22. Определите передаточную функцию замкнутой системы T(s) = Y(s)/R(s), соответствующую сигнальному графу на рис. 2.22(У).
У-2.23. На рис. 2.23(У) изображена структурная схема системы. Определите переда-
точную функцию системы T(s) = = Y(s)/R(s).
У-2.24. Усилитель может обладать зоной нечувствительности, как показано на рис. 2.24(У). Для линейного участка характеристики воспользуйтесь аппроксимацией вида у = ах3. Выберите значение а и линеаризуйте характеристику усилителя
Рис. 2.23 (У)
в окрестности рабочей точки х = 0.6.
У-2.25. Определите передаточную функцию X2(s)/F(s) для системы, изображенной на рис. 2.25(У). Оба груза скользят по повехности без трения, а коэффициент жесткости пружины к= 1 Н/м.
Рис. 2.24 (У). Усилитель с зоной нечувствительности
Рис. 2.25 (У)
120
Глава 2. Математические модели систем
Рис. 2.26 (У)
Система при наличии возмущения
У-2.26. Определите передаточную функцию Y(s)/D(s) для системы, изображенной на рис. 2.26(У).
У-2.2 7. Определите передаточную функцию V0(s)!V(s) для схемы на операционных усилтелях, изображенной на рис. 2.27(У). если R} = 167 кОм, Т?2 = 240 кОм, R3 = 1 кОм, Т?4 = 100 кОм и С = 1 мкФ. Операционные усилители считаются идеальными.
Рис. 2.28 (У)
Рис. 2.27 (У)
Схема на операционных усилителях
Ф)
б)
У-2.28. Для стуктурной схемы на рис. 2.28(У)(б) определите G(s) и H(s) так, чтобы эта схема была эквивалентна структурной схеме на рис.2.28(У), (а).
Для схемы на рис. 2.28(У), (б) запишите передаточную функцию Y(s)/R(s).
У-2.29. Для системы на рис. 2.29(У):
(а) Определите передаточную функцию
Y(s)/R(s), если R(s)
Рис. 2.29 (У)
10
G(s) = 2----
(? + 2s+10)
(б) Запишите выражение У($), если входной сигнал г(/) есть единичная ступенчатая функция.
(в) Найдите выражение у(1).
У-2.30. Найдите вычеты для разложения 1/(л) на простые дроби путем (а) вычислений и (б) графических построений на ^-плоскости:
Г(*) = 2 400---
s2+8s+400
Задачи
121
Задачи
3-2.1. Запишите систему интегродифференциальных уравнений, характеризующую процессы в электрической схеме на рис. 2.1(3).
3-2.2. На рис. 2.2(3) изображен динамический поглотитель вибраций. Подобная схема типична для многих ситуаций, связанных с вибрацией механизмов, содержащих несбалансированные компоненты. Параметры М2 и кх2 можно подобрать так, что основная масса Мх будет избавлена от вибраций при F(t) = osinco0r. Запишите дифференциальные уравнения, описывающие поведе-
ние системы.
3-2.3. На рис. 2.3(3) изображена система из двух масс, соединенных пружиной. Предполагается, что массы и пружины одинаковы. Запишите дифференциальные уравнения, описывающие поведение системы.
Сила до
y.W
Рис. 2.2 (3). Поглотитель вибраций
Рис. 2.
1 (3). Электрическая схема
Рис. 2.3 (3). Система с двумя массами
3-2.4. Нелинейный усилитель описывается следующей зависимостью:
vo(O =
v,2, v, > О, -у,2, у, < 0.
В рабочей точке входное напряжение изменяется в диапазоне ± 0.5 В. Получите линейную аппроксимацию усилителя, если рабочей точке соответствует (a) у, = 0 или (б) v, = 1 В. Для каждого случая изобразите график нелинейной функции и ее линейной апроксимации.
3-2.5. Поток жидкости через трубку можно описать нелинейным уравнением Q = К(РХ - Р2)т.
где К = const, а смысл остальных переменных ясен из рис. 2.5(3).
(а) Получите линейную аппроксимацию для уравнения по- Q тока жидкости.
(б) Что произойдет с полученной аппроксимацией, если рабочей точке будет соответствовать Рх - Р2 = 0?
3-2.6. С помощью преобразования Лапласа получите выражение для тока l2(s) из задачи 2.1. если считать, что все начальные условия равны нулю, напряжение у(1) = 0, а начальные значения напряжений на конденсаторах С, и С2 соответственно равны 0 и 10 В.
122
Глава 2. Математические модели систем
Рис. 2.7 (3). Дифференцирующая цепь
Рис. 2.8 (3). Мостовая Т-образная схема
3-2.7. Получите передаточную функцию для дифференцирующей цепи, изображенной на рис. 2.7(3).
3-2.8. В системах управления, работающих на переменном токе, в качестве фильтра часто применяются мостовые Т-образные схемы. Одна из таких схем приведена на рис. 2.8(3). Покажите, что передаточная функция этой схемы равна
Ц, (5) _ 1 + 2Rps + Rfi^s2
V, (s) - 1 + (2R} + R2)Cs + R}R2C2s2 '
Укажите расположение на комплексной плоскости полюсов и нулей, если Rx = 0,5, R-, = I и С =0,5.
3-2.9. Получите передаточную функцию Xl(s)/F(s) для системы с двумя связанными массами из задачи 2.3. Определите положение на s-плоскости полюсов и нулей, если М = 1. Ык = I и
3-2.10. Определите передаточную функцию Yx(s)/F(s) для поглотителя вибраций из задачи 2.2. Установите, при каких значениях параметров М2 и к12 в случае F(t) = a sincoof вибрация массы Мх будет отсутствовать.
3-2.11. В электромеханических системах, требующих значительного усиления по мощности, часто применяются электомашинные усилители (ЭМУ). Такой ЭМУ и сервопривод изображены на рис. 2.11(3). Определите передаточную функцию 0(s)/rc,(s) и изобразите структурную схему системы Считайте, что vcl = k2iq и vq = kxic.
Цепь управления
Рис. 2.11 (3). Электромашинный усилитель и двигатель, управляемый по цепи якоря
Задачи
123
3-2.12. На рис. 2.12(3) изображена емкость, в которую поступает несжимаемая жидкость. Можно считать. что изменение расхода на выходе из емкости, A(92- пропорционально изменению уровня жидкости АН. В установившемся режиме Qt = Q2 и Q2 = k^fH. Используя линейную аппроксимацию, получите передаточную функцию объекта де^/де^).
3-2.13. На рис. 2.13(3) изображена разомкнутая электромеханическая система управления. Генератор. якорь которого вращается с постоянной скоростью, вырабатывает напряжение, поступающее на обмотку возбуждения двигателя. Двигатель обладает моментом инерции Jm и коэффициентом трения Ьт. Определите передаточную функцию 0L(s)/V j(s) и изобразите структурную схему системы. Предполагается, что напряжение гене-
с потоком жидкости
ратора vg пропорционально току возбуждения if.
Рис. 2.13 (3). Система генератор-двигатель
3-2.14. Двигатель постоянного тока с управлением по цепи возбуждения через редуктор приводит во вращение нагрузку. Характеристика двигателя предполагается линейной. В результате испытаний при подаче на обмотку двигателя ступенчатого напряжения величиной 80 В нагрузка через 0.5 с достигает скорости 1 рад/с . Установившееся значение скорости равно 2.4 рад/с .
Определите передаточную функцию двигателя 0(s)/l^(s) с размерностью рад/В . Индуктивностью обмотки возбуждения можно пренебречь (см. рис. 2.17).
3-2.15. Рассмотрите систему масса-пружины, изображенную на рис. 2.15(3). Получите дифференциальное уравнение, описывающее движение массы т. Найдите реакцию системы на начальное условие х(0)= 1.
3-2.16. Постройте сигнальный граф для следующей системы алгебраических уравнений, считая Х| и х2 зависимыми пере-меными, а 6 и 11 — входами:
Рис. 2.15 (3). Масса на пружинных подвесках
+ 1,5л2 = 6, 2х1 + 4х2 =11.
124
Глава 2, Математические модели систем
По формуле Мейсона определите значение каждой зависимой переменной. Решение для х.
проверьте с помощью правила Крамера.
3-2.17. На рис. 2.17(3) изображена механическая система. в которой задается смещение х3(1) известного вида относительно стационарного значения этой переменной.
(а) Запишите два независимых уравнения движения.
(б) Получите уравнения движения в виде преобразований Лапласа, считая начальные условия нулевыми.
(в) Изобразите сигнальный граф, соответствующий этой системе уравнений.
(г) С помощью формулы Мейсона найдите связь между X](s) и A"3(.s). /|3(s). Сравните трудоемкость получения Ti3(s) с помощью матриц и с помощью формулы Мейсона.
3-2.18. На рис. 2.18(3) изобажена каскадная АС-цепь, для которой справедливы следующие уравнения:
А = (И - к, )У„ 1'я = (7, - 7Я )Z2.
4 = (с„-г2)У3, r2 = /„z4.
Изобразите сигнальный граф, соответствующий этим уравнениям, и определите передаточную функцию ^(sJ/Kjfs).
Рис. 2.18 (3) д
Каскадная АС-цепь о—►
+
Г,(5)
3-2.19. На рис. 2.19(3) изображен повторитель напряжения (буферный усилитель). Считая операционный усилитель идеальным, покажите, что Т- v0/v, = 1.
3-2.20. Повторители напряжения используются для существенного уменьшения выходного сопротивления источника сигнала. Схема такого повторителя на полевом транзисторе с коэффициентом усиления, практически равным единице, приведена на рис. 2.20(3) (а), а его малосигнальная эквивалентная модель — на рис.2.20(3) (б). Предполагается, что для создания смещения выбрано » Л, и что Rg » R,.
(а) Получите выражение для коэффициента усиления схемы.
(б) Вычислите коэффициент усиления, если gn, = 2000 мкмо и Rs = 10 кОм, где R, = Л, + Л2 .
(в) Изобразите сигнальный граф, отражающий уравнения для данной схемы.
Рис. 2.19 (3). Схема
на неинвертирующем операционном усилителе
Задачи
125
Рис. 2.20 (3) Повторитель напряжения на полевом транзисторе (схема с общим стоком).
Я)
3-2.21. На рис. 2.21(3) изображен гидравлический сервопривод с механической обратной связью. Площадь поршня силового гидроцилиндра равна А. Когда золотник перемещается на малую величину Az, то масло потекает через гидроцилиндр со скоростью y?Az, где р— степень открытия отверстия. Давление масла предполагается постоянным. Из геометрических соображений ясно, что Az = к -—- (х - у) - — у.
l} lt
(а) Изобразите сигнальный граф замкнутой гидромеханической системы.
(б) Определите передаточную функцию замкнутой системы y(s)Z¥(s).
Рис. 2.21 (3). Гидравлический сервопривод
Рис. 2.22 (3). Стержни длиной L, соединенные пружиной в точках Z./2
3-2.22. На рис. 2.22(3) показаны два маятника, соединенные пружиной точно в середине стержней, причем в их точках подвеса трение отсутствует. Предполагается, что каждый маятник представляет собой массу М на конце стержня длиной L, а массой стержня можно пренебречь. Кроме того, считается, что отклонения от положения равновесия являются малыми, поэтому для sin0 и cos0 применима линейная аппроксимация. При 0] = 02 деформация пружины отсутствует. Внешняя сила fit) приложена только к левому стержню.
(а) Запишите уравнения движения и представьте их в виде структурной схемы.
(б) Определите передаточную функцию T(s) = Ox(s)/F(s).
(в) Изобразите расположение на 5-плоскости полюсов и нулей T(s).
3-2.23. На рис. 2.23(3) изображена малосигнальная эквивалентная схема транзисторного усилителя с общим эмиттером. Обратная связь в усилителе осуществляется с помощью резистора Rj. Определите отношение vce/v,.
126
Глава 2, Математические модели систем
Рис. 2.23 (3)
Усилитель с общим эмиттером
Рис. 2.24 (3). Усилитель с обратной связью
3-2.24. На рис. 2.24(3), (а) изображен усилитель напряжения с обратной связью на двух соединенных последовательно транзисторах. В эквивалентной схеме для переменного тока опущены резисторы, необходимые для задания смещения, и шунтирующие конденсаторы. Соответствующий этой схеме сигнальный граф приведен на рис.2.24(3), (б). На графе не отражено влияние h,.e. обычно достаточно точно аппроксимируемого, а также предполагается, что (R, + Rt) » Я,, (а) Определите коэффициент усиления по напряжению v0/v,.
(б) Определите коэффициент усиления по току i^Hbx-
(в) Определите входное сопротивление
3-2.25. Часто не обращают внимание на тот факт, что Г. С. Блэк, предложивший в 1927 г. идею разработки усилителей с отрицательной обратой связью, тремя годами раньше изобрел метод синтеза схем, известный как метод коррекции по возмущению. Дальнейшие эксперименты показали. что этот метод открывает богатые возможности для создания усилителей с высокостабильными характеристиками. Усилитель Блэка изображен на рис. 2.25(3) (а) в том виде, как он был предложен им в 1924 г. Соответствующий сигнальный граф приведен на рис. 2.25(3). (б). Определите передаточные функции от входа R(s) к выходу y(s) и от возмущения D(s) к выходу У(л). Каждому усилителю, обозначенному как р на схеме (а), соответствует D(s) на графе.
д) б)
Рис. 2.25 (3). Усилитель Г. С. Блэка
Задачи
127
3-2.26. Если рука робота захватывает тяжелый груз, то в ее сочленениях появляется значительная гибкость. На рис. 2.26(3) изображена соответствующая данному случаю модель руки робота. Определите передаточную функцию Y(s)/F(s).
3-2.27. Транспортные средства на магнитной подушке отличаются большей скоростью и меньшим трением по сравнению с
Рис. 2.26 (3). Модель руки робота в виде демпфированной системы «масса-пружина»
традиционным железнодорожным транс-
портом. На рис. 2.27(3) схематически изображен поезд, плавающий над магнитным рельсом с воздушным зазором. Сила левитации FL регулируется током i в катушках подвески и может быть аппроксимирована выражением
где z — величина воздушного зазора. Эта сила направлена навстречу силе тяжести F= mg. Определите линеаризованную зависимость между воздушным зазором z и управляющим током в окрестности точки равновесия.
3-2.28. Многоконтурная модель экологической среды обитания в городских условиях может включать в себя следующие переменные: количество населения (Р), благоустройство (Л/), приток населения в город (Q, санитарные возможности (5), количество заболеваний (£>), число бактерий на единицу площади (В) и количество отходов на единицу пло-
Рис. 2.27 (3). Поезд на магнитной подушке (в разрезе)
щади (G). В скобках указан символ каждой переменной. Можно предположить наличие следу-
ющих замкнутых причинно-следственных цепочек:
1. P->G^>B->D^>P; 3.
2.Р->М-*С^>Р; 4. P-+M^»S^>B^»D-*P.
Изобразите сигнальный граф, отражающий эти связи, и укажите на нем соответствующие коэффициенты преобразования. Поясните, почему вы считаете каждое преобразование положительным или отрицательным. Например, преобразование 5 —> В является отрицательным, т. к. улучшение санитарных условий ведет к уменьшению числа бактерий на единицу площади. В каком из четырех контуров обратная связь является положительной и в каком — отрицательной?
3-2.29. Мы хотим удержать в равновесии шарик, который может катиться по вращающемуся брусу, как показано на рис. 2.29(3). Предположим, что вращающий момент двигателя определяется входным током I и при этом трением можно пренебречь. Будем также считать, что брус можно удержать в равновесии вблизи горизонтального положения (<р = 0), так что от-
Момент двигателя
Рис. 2.29 (3). Шарик на вращающемся брусе
клонения угла <р являются малыми.
128
Глава 2. Математические модели систем
Определите передаточную функцию A(s)//(s) и приведите структурную схему, на которой обозначьте <p(s), X(s) и /(s).
3-2.30. Точность систем управления в значительной степени определяется типом датчика, используемого в цепи обратной связи. Особенно важную роль играют динамические свойства датчика. Большинству датчиков свойственна передаточная функция
Я(5) = -Ц.
TS+ 1
Рассмотрите некоторые из современных промышленных датчиков и выявите, какой точностью и постоянной времени они обладают. Как пример, возьмите по два из следующих датчиков: (1) линейного перемещения. (2) температуры, (3) деформации, (4) давления.
Рис. 2.31 (3). Система управления скоростью сматывания кабеля с катушки
3-2.31. В системе, управляющей скоростью, с которой кабель сматывается с катушки, в качестве датчика используется тахогенератор. Выходное напряжение тахогенератора используется для управления скоростью двигателя, вращающего катушку. На рис. 2.31(3) изображена соответствующая система управления. Радиус катушки равен 4 м. когда она заполнена, и 2 м — когда она пустая. Момент инерции катушки J = 18.5R4 - 221. Скорость изменения радиуса
dR _ Р2а
dt 2nlV
где IV— ширина катушки, a D — диаметр кабеля. Действительная скорость сматывания кабеля v(f) = Rd>. Заданная скорость сматывания равна 50 м/с . Разработайте схему моделирования этой системы на цифровом компьютере и определите ее реакцию на интервале 0-20 с для трех значений коэффициента К = 0,2; 0.4 и 0,6. Угловая скорость катушки со = dQ/dt равна интегралу
от момента с коэффициентом 1/J. Обратите внимание, что момент инерции изменяется по мере
разматывания кабеля, однако при моделировании это будет учтено приведенным выше выражением. Выберите коэффициент К так. чтобы ограничить перерегулирование величиной 9% и в то же время добиться максимального быстродействия. Для моделирования примите, что при t = 0 И' = 2.0, D = 0,1 и R = 3,5.
3-2.32. На рис. 2.32(3) изображена система с двумя входами и двумя выходами. Полагая R, = 0. определите У](а)//?|(л') и r2(s)/R,(s).
Рис. 2.32 (3). Многомерная система
Задачи
129
Рис. 2.33 (3). Модель связанных электродвигателей
3-2.33. Система состоит из двух электродвигателей, соединенных между собой непрерывным гибким ремнем. Ремень также проходит через специальное приспособление, измеряющее его скорость и натяжение. Задача управления состоит в регулировании скорости и натяжения ремня путем изменения вращающих моментов двигателей.
Практическим примером такой системы может служить перемотка пряжи в текстильном производстве с одной бобины на другую с высокой скоростью. В промежутке между двумя бобинами пряжа подвергается определенной обработке, при которой может потребоваться регулирование в заданных пределах скорости и натяжения. Модель подобной системы приведена на рис. 2.33(3). Определите Y2(s)/Rl(s). Определите также, при каких условиях, предъявляемых к системе, У2 не будет зависеть от Rt.
3-2.34. Определите передаточную функцию Y(s)/R(s) для системы регулирования скорости (числа оборотов) на холостом ходу автомобильного двигателя с инжекцией топлива, изображенной на рис. 2.34(3).
Рис. 2.34 (3). Система регулирования числа оборотов автомобильного двигателя
130
Глава 2. Математические модели систем
3-2.35. На рис. 2.35(3) изображена система подвески колеса автомобиля-пикапа. Масса автомобиля равна тх, а масса колеса — т2. Коэффициент упругости рессоры равен к1г а коэффициент упругости шины — к2. Амортизатор обладает коэффициентом демпфирования Ь. Определите передаточную функцию y((5)/X(s), характеризующую реакцию автомобиля на неровности дороги.
3-2.36. Система управления с обратной свя-
Рис. 2.35 (3). Подвеска колеса автомобиля-пикапа
зью имеет структуру, изображенную на рис. 2.36(3). Определите передаточную функцию Y(s)/R(s): (а) путем преобразования (упрощения) струк-турной схемы и (6) с помощью формулы Мейсона по сигнальному графу. (в) Выберите коэффициенты и К2 так, чтобы реакция замкнутой системы на ступенчатое воздействие была критически демпфированной и оба полюса располагались в
точке 5 = -10. (г) Для последнего Рис. 2.36 (3)
случая изобразите график переходной функции системы. Через какое
время переходная функция достигает 90% от своего установившегося значения? 3-2.37. Для системы, представленной на рис. 2.37(3):
(а) Разложите передаточную функцию на элементарные дроби и определите реакцию y(t) R(s)--------►
на линейное входное воздействие, r(t) = t.t>0.
12
?+8?+ 195 +12
>У'(5)
(б) Постройте график полученной функции
Рис. 2.37 (3)
y(t) и найдите значение y(t) при t = 1.5 с.
(в) Определите импульсную переходную функцию системы у(() для
1>0.
(г) Постройте график импульсной переходной функции и найдите ее значение при t = 1,5 с.
3-2.38. На систему с двумя массами, изображенную на рис. 2.38(3), действует внешняя сила ?/(/). Считая т । = т2 = 1 и = К2 = 1, запишите систему дифференциальных уравнений, характеризующих движение системы.
3-2.39. Крутящийся маятник, изображенный на рис.2.39(3), состоит из двух
стальных шариков, находящихся на концах тонкого длинного стержня.
Стержень подвешен
на тонкой проволочке, __________________________________
которая выдерживает много оборотов без разрушения. Маятник закручивают на 4000 градусов. Сколько времени потребуется, чтобы возникшие колебания затухли до
А
I и
Рис. 2.38 (3)
Система с двумя массами
Рис. 2.39 (3). Крутящийся маятник
Задачи
131
амплитуды 10 градусов? Проволочка имеет коэффицент упругости при скручивании, равный 2 10-4 Н • м/рад, а коэффициент вязкого трения шариков в воздухе также равен 2 • 10-4 Н • м/рад. Масса каждого шарика равна 1 кг.
Рис. 2.40 (3)
Электрическая схема
3-2.40. В схеме, изображенной на рис. 2.40(3), определите изображение по Лапласу выходного напряжения Ио($). Предполагается, что при t < 0 схема находится в установившемся состоянии.
а в момент t = 0 ключ мгновенно переводится из положения 1 в положение 2.
3-2.41. Для уменьшения нежелательных вибраций механизмов применяются демпфирующие устройства. На рис. 2.41(3) показано одно из таких устройств: между двумя колесами помещается вязкая жидкость, например густое масло. Когда вибрация становится значительной, движение колес относительно друг друга создает демпфирующий эффект. Если механизм вращается без вибрации, то относительное движение колес отсутствует и демпфирования не происходит. Опре-
Рис. 2.41 (3). Демпфирующее устройство в разрезе
делите 0|(s) и 02(s). Коэффициент упругости вала равен К, коэффициент вязкого трения — Ь. а
вращающий момент, передаваемый нагрузке — Т.
3-2.42. На рис. 2.42(3) изображена ракета, оснащенная двигателем с изменяемым вектором тяги. Отклонение ракеты по горизонтали от заданной траектории равно h, а скорость ее движения в направлении оси равна К. Момент, развиваемый двигателем (управляющий момент), равен Тс, а возмущающий момент — Td. Запишите уравнения, описывающие линейную модель системы, и изобразите соответствующую структурную схему.
3-2.43. На рис. 2.43(3) схематически изображен оптический сканер, который часто используется для считывания штрих-кодов с товаров в супермаркетах, а также в полиграфии и ряде отраслей производства. При вращении зеркала возникает сила трения, пропорциональная угловой скорости. Коэффициент трения равен 0,06 Н • с/рад , а момент инерции — 0,1 кг м2. Выходной переменной является угловая скорость (<>(/). (а) Запишите дифференциальное уравнение для двигателя, (б) Определите реак-
Заданная Действительная
траектория траектория
Рис. 2.42 (3). Ракета с двигателем с изменяемым вектором тяги
132
Глава 2. Математические модели систем
Рис. 2.43 (3)
Оптический сканер
Зеркало
Рис. 2.45 (3). Электродвигатель, редуктор и нагрузка
цию системы на единичное ступенчатое изменение вращающего момента, если при t = 0 начальное значение скорости равно 0,7 рад/с.
3-2.44. В поз. 10 табл. 2.5 изображен идеальный шестеренчатый редуктор. Пренебрегая моментом инерции и трением между шестернями, а также считая, что обе шестерни выполняют одинаковую работу, докажите справедливость приведённых в таблице соотношений. Определите связь между моментами Тт и TL.
3-2.45. Электродвигатель через идеальный шестеренчатый редуктор вращает массивную цилиндрическую нагрузку, как показано на рис. 2.45(3). Момент инерции вала двигателя с закрепленной на нем шестеренкой G2 равен Jm. Определите (а) момент инерции нагрузки JL и (б) момент Т на валу двигателя. Коэффициенты трения нагрузки и вала двигателя соответственно равны bL и bm. Плотность материала диска равна р.
3-2.46. Робот по сравнению с человеком-оператором способен развивать гораздо большие усилия: в свою очередь, человек по сравнению с роботом способен совершать разумные действия. Объединение этих положительных качеств приводит к созданию класса манипуляторов, называемых экстендерами. Экстендер определяется как активный манипулятор, управляемый человеком и увеличивающий прикла
Рис. 2.46 (3)
Модель экстендера
Корректирующий фильтр
Задачи
133
дываемые им усилия. Человек задает входное воздействие U(s), как показано на рис. 2.46(3). Выходом экстендера является P(s). Определите P(s) как функцию U(s) и F(s) в виде
Л$) = + 7’2(s)F(s).
3-2.47. Груз, перевозимый автомобилем, приводит к появлению силы F. действующей на пружину амортизатора и деформирующей шину, как показано на рис.2.47(3), (а). Модель данной системы изображена на рис. 2.47(3), (б). Определите передаточную функцию X^sj/Fis).
Рис. 2.47 (3)
Модель опоры автомобиля
2
3-2.48. Уровень воды в баке регулируется с помощью разомкнутой системы, изображённой на рис.2.48(3). Двигатель постоянного тока, скорость вращения которого определяется током якоря ia, изменяет степень открытия вентиля. Индуктивностью якорной обмотки двигателя Lir а также коэффициентом трения при вращении его вала и вентиля, Ь, можно пренебречь. Уровень воды в баке определяется уравнением
h(f) = J[l,6t)(Z) —
Рис. 2.48 (3). Разомкнутая система управления уровнем воды в баке
Постоянная электродвигателя Кт = 10, а момент инерции его ротора совместно с вентилем J =6 • 10-3 кг • м". Получите дифференциальное уравнение, связывающее h(t) и v(Z), а также определите передаточную функцию Pf(s)/F(s).
3-2.49. Схема, изображеная на рис. 2.49(3), представляет собой фильтр, обладающий как опережением, т ак и отставанием по фазе.
(а) Определите передаточную функцию ^(syK^s). считая, что операционный усилитель является идеальным.
Рис. 2.49 (3). Фильтр с опережением и отставанием по фазе
134
Глава 2. Математические модели систем
ад
Рис. 2.50 (3)
______14000____ ?+45?+3100s + 500
R(s)
+ Y(s)
(б) Вычислите если R} = 100 кОм, R2 = 200 кОм, Ct = 1 мкФ и С2 = 0,1 мкФ.
(в) Разложите выражение K2(s)/K|(s) на элементарные дроби.
3-2.50, На рис. 2.50(3) изображена замкнутая система управления.
(а) Определите передаточную функ-
цию T(s) = Y(s)/R(s).
(б) Вычислите полюсы функции T(s).
(в) Считая, что входной сигнал есть единичная ступенчатая функция, т. е.
R(s) = 1/s. разложите У($) на элементарные дроби с помощью вычетов.
(г) Постройте график y(t) и проанализируйте влияние вещественного и комплексных полюсов T(s). Какие полюсы — вещественный или комплексные оказывают преобладающее влияние на вид у(/)?
3-2.51, На рис. 2.51(3) изображена замкнутая система управления.
(а) Определите передаточную функ-
цию T(s) = Y(s)/R(s).
(б) Вычислите полюсы функции T(s).
(в) Считая, что входной сигнал есть единичная ступенчатая функция, т. е. R(s) = 1/s, разложите K(s) на элементарные дроби с помощью вычетов.
(г) Постройте график y(t) и проанализируйте влияние вещественного и комлексных полюсов T(s). Какие полюсы — вещественный или комплексные оказывают преобладающее влияние на вид у(/)?
(д) Предскажите конечное значение у(г) в случае единичного ступенчатого входного воздействия.
Рис. 2.51 (3)
Задачи повышенной сложности
П-2.1. Электродвигатель постоянного тока, управляемый по цепи якоря, приводит во вращение нагрузку. Входное напряжение равно 5 В. Спустя 2 секунды после включения двигателя его скорость равна 30 рад/с, а ее установившееся значение (при t —> °о) составляет 70 рад/с. Определите передаточную функцию <o(s)/K(s).
П-2.2. На рис. 2.2(H) изображен сигнальный граф системы. Определите передаточную функцию T(s) = Y2(s)/R}(s). Желательно, чтобы У2('')не зависело от A|(s), т. е. чтобы T(s) = 0. Найдите зависимость G5(s) от остальных C,(s), при которой будет выполняться данное условие.
Рис. 2.2 (П)
-Щ5)
Задачи на синтез систем
135
Задачи на синтез систем
СС-2.1. Перед нами поставлена задача:
обеспечить точное позиционирование скользящей части стола металлообрабатывающего стан-
ка, как показано на рис. 2.1(СС). Преобразование угла поворота
электродвигателя в линейное пере-
мещение с помощью вращающегося барабана и рейки обладает опре-
деленными премушествами по сравнению с более распростране-ной системой винт-гайка. В частности, такой привод характеризуется малым трением и отсутствием
люфта, однако он чувствителен к возмущениям. Необходимо разработать модель привода, изображенного на рис. 2.1(СС), (а), используя
Рис. 2.1 (СС). (а) Электродвигатель, барабан и скользящая часть стола.
(6) Модель в виде структурной схемы
параметры, приведенные в табл. 2.1(СС). В приводе применен двигатель постоянного тока, управляемый по цепи якоря, с валом которого соединен вращающийся барабан. Рейка обеспе-
чивает линейное перемещение скользящей части стола, удерживаемой воздушной подушкой, благодаря чему трение при движении практически отсутствует. На данном этапе решения задачи нам необходимо получить передаточную функцию системы без обратной связи в виде структуры на рис. 2.1(СС). Обратная связь будет введена позже.
Таблица 2.1 (СС). Типичные параметры двигателя с управлением по цепи якоря, барабана и скользящей части
М, Масса скользящей части 5,693 кг
Мь Масса рейки 6,96 кг
Момент инерции барабана, якоря 10,91 • 10'3 кг • м2
электродвигателя и тахогенератора
Г Радиус барабана 31,75- 10"3 м
Ьт Коэффициент демпфирования двигателя 0,268 Нм- с/рад
кт Постоянная электодвигателя 0,8379 Н м/А
Кь Коэффициент противоЭДС 0,838 В • с/рад
Rn Сопротивление якоря 1,36 Ом
Lm Индуктивность якоря 3,6 мГн
С-2.1. На рис. 2.1(C) изображена структурная схема системы управления. Передаточные функции G,(s) и H2(s) заданы. Определите, как надо выбрать G](s) и чтобы передаточная функция замкнутой системы Y(s)/R(s) была равна единице.
Рис. 2.1 (С). К выбору передаточных функций
136
Глава 2. Математические модели систем
С-2.2. На рис.2.2(С) изображена схема управления лучом кинескопа. Выберите неизвестную проводимость G так, чтобы напряжение v было равно 24 В. Каждая проводимость измеряется в сименсах (5).
С-2.3. На вход «черного ящика» с передаточной функцией G(s) подан сигнал r(f) = t, t > 0 . При нулевых начальных условиях выходной сигнал описывается выражением y(t) = 1 + sin t + 1ё~2‘, t>0.
Определите передаточную функцию G(s).
С-2.4. На рис. 2.4(C) изображена схема на операционном усилителе, которая может выполнять функции фильтра. Определите передаточную функцию схемы, считая операционный усилитель идеальным. Найдите v0(r), если v^/) = At, t > 0.
Рис. 2.2 (С). Схема управления лучом кинескопа
Задачи, решаемые с помощью MATLAB
М-2.1. Рассмотрите два полинома:
p(s) = s2 + 2s + 1,
q(s) = s + 1.
С помощью MATLAB вычислите следующее:
(a) p(s)q(s), (б) полюсы и нули G(s) = , (в) /Д-1).
P(s)
М-2.2. Рассмотрите систему с обратной связью, изображенную на рис. 2.2(М).
(а) Вычислите передаточную функцию замкнутой системы с помощью функций MATLAB series и feedback.
(б) Определите реакцию системы на единичное ступенчатое воздействие с помощью функции step и убедитесь, что конечное значение выходной переменной равно 2/5.
Рис. 2.2 (М). Система с отрицательной обратной связью
М-2.3. Дано дифференциальное уравнение у+4у+4у=г<, где у(0) = у(0) = 0 и u(t) есть единичная ступенчатая функция. Получите решение этого уравнения аналитически и проверьте результат с помощью MATLAB, одновременно построив график y(t) с помощью функции step.
М-2.4. Рассмотрите механическую систему, изображенную на рис. 2.4(М), где входом является fit), а выходом —y(t). Определите передаточную функцию, связывающую fit) uy(t), а также с помощью MATLAB получите график реакции системы на единичное ступенчатое воздействие. Параметры системы: т = 10, к = 1 и b = 0,5. Убедитесь, что максимальное значение выходной переменной равно 1.8.
Рис. 2.5 (М) Структурная схема системы управления положением спутника по одной координате
М-2.5. Система управления положением спутника по'одной координате может быть представлена структурной схемой, изображенной на рис. 2.5(М). Переменные к,аиЬ являются параметрами регулятора, a J есть момент инерции спутника. Примите следующие значения: J = 10.8Е+08. к= 10.8Е+08, а = 1 и b = 8.
(а) Напишите программу MATLAB, вычисляющую передаточную функцию замкнутой системы T(s) = 0(s)/0f/(s).
(б) Вычислите и постройте график реакции системы на ступенчатое изменение входного сигнала величиной 10°.
(в) Точное значение момента инерции спутника в общем случае неизвестно и может медленно изменяться во времени. Сравните реакции системы в случаях, когда J уменьшается на 20% и на 50%. Параметры регулятора при этом остаются неизменными. Проанализируйте полученные результаты.
М-2.6. Рассмотрите структурную схему системы, представленную на рис. 2.6(М).
(а) С помощью MATLAB упростите структурную схему и определите передаточную функцию замкнутой системы.
(б) С помощью функции pzmap определите положение полюсов и нулей передаточной функции замкнутой системы.
(в) С помощью функций pole и zero вычислите точные значения полюсов и нулей передаточной функции замкнутой системы и сравните результат с данными, полученными в п. (б).
Рис. 2.6 (М). Структурная схема многоконтурной системы управления
138
Глава 2, Математические модели систем
М-2.7. Связь между выходом y(Z) и входом х(1) нелинейной системы определяется уравнением у(х) = х2 + xsinx.
Линейная аппроксимация этой зависимости имеет вид:
у = ах,
где а — коэффициент, подлежащий определению. Определите параметр а экспериментально, разработав программу MATLAB, которая вычисляет и строит график разности между у и у в зависимости от переменного параметра а. Параметр а подбирайте так, чтобы максимальная разность между у и у не превышала значения 20 при 0 < х < 10. Когда будет найдено соответствующее значение а, постройте графики у(х) и у(х) в диапазоне 0 < х < 10.
М-2.8. Система имеет передаточную функцию
A(s) _ (15/z)(s + z) Л(я) ” s2+ 3s+15
Постройте график реакции системы на сигнал г(/) в виде единичной ступенчатой функции при значениях параметра z = 3, 6 и 12.
Ключевые термины и понятия
Затухающие колебания. Колебания, характеризующиеся убыванием амплитуды во времени.
Имитационное моделирование. Эксперимент, при котором исследуется поведение математической модели системы в условиях реальных входных сигналов.
Исполнительное устройство. Устройство, осуществляющее непосредственное воздействие на объект управления с целью обеспечения заданного значения его выходной переменной.
Коэффициент затухания. Безразмерный параметр, входящий в характеристическое уравнение второго порядка и определяющий степень затухания.
Критическое демпфирование. Случай, которому соответствует граница между недодемпфирова-нием и передемпфированием системы.
Линейная аппроксимация. Приближенное представление модели физического устройства в виде линейной зависимости между его входной и выходной переменными.
Линейная система. Система, удовлетворяющая условиям суперпозиции и гомогенности. Математическая модель. Описание поведения системы математическими средствами. Передаточная функция. Отношение преобразования Лапласа выходной переменной к преобразованию Лапласа входной переменной при нулевых начальных условиях.
Правило Мейсона. Правило, позволяющее получать передаточную функцию, прослеживая пути и контуры распространения сигналов внутри системы.
Преобразование Лапласа. Преобразование функции времени /(/) в функцию комплексной переменной F(s).
Сигнальный граф. Графическое представление системы линейных уравнений, состояшее из узлов, соединённых направленными ветвями.
Структурная схема. Конфигурация системы управления, образованная совокупностью блоков однонаправленного действия, каждому из которых соответствует определенная передаточная функция.
Характеристическое уравнение. Уравнение, получающееся приравниванием нулю знаменателя передаточной функции.
Электродвигатель постоянного тока. Электрическое исполнительное устройство, входным сигналом которого является напряжение.
Глава 3
Модели в переменных состояния
Обзор
В предыдущей главе мы воспользовались преобразованием Лапласа для получения передаточных функций линейных стационарных систем, описываемых обыкновенными дифференциальными уравнениями. Этот метод привлекателен тем, что он дает практическое средство анализа и синтеза систем и позволяет использовать структурные схемы для установления связей между подсистемами. В настоящей главе мы рассмотрим альтернативный метод моделирования систем, основанный на их представлении во временной области. Как и раньше, мы будем рассматривать физические системы, описываемые обыкновенным дифференциальным уравнением и-го порядка. Используя набор (неединственный) переменных, называемых переменными состояния, мы сможем перейти к системе из и дифференциальных уравнений первого порядка. Записав эти уравнения в компактной матричной форме, мы получим так называемую модель системы в переменных состояния. В таком виде модель уже вполне пригодна для компьютерного анализа. Мы рассмотрим также связь между моделями систем в виде сигнальных графов и моделями в переменных состояния. Будут описаны и исследованы некоторые интересные физические системы, включая ременный привод печатающего устройства принтера. Глава завершается дальнейшим развитием примера синтеза с продолжением, где будет получена модель в переменных состояния для системы чтения информации с диска.
3.1. Введение
В предыдущей главе мы рассмотрели некоторые методы анализа и синтеза систем с обратной связью. В частности, мы воспользовались преобразованием Лапласа, чтобы перейти от дифференциальных уравнений, описывающих поведение системы, к алгебраическому уравнению относительно комплексной переменной 5. На основании этого алгебраического уравнения мы смогли получить передаточную функцию, связывающую вход и выход системы.
Повсеместное применение цифровых компьютеров побуждает нас обратиться к описанию систем управления во временной области. Соответствующие методы могут быть применены к нелинейным, нестационарным и многомерным системам. Нестационарная система управления — это система, в которой один или более параметров являются функциями времени. Например, масса ракеты изменяется по мере расходования топлива в процессе полета. Многомерная система, как это было отмечено в разд. 2.6, — это система с несколькими входами и выходами. Для систем управления, описание которых представлено во временной области, решение многих задач облегчается путем примене-
140
Глава 3. Модели в переменных состояния
ния цифровых компьютеров. Поэтому нам имеет смысл еще раз обратиться к дифференциальным уравнениям как к средству описания систем во временной области. Временная область — это область, в которой поведение системы рассматривается как функция переменной t (времени).
Описание систем во временной области лежит в основе современной теории управления и методов оптимизации. Так, в гл. 11 мы рассмотрим задачу синтеза оптимальной системы управления с использованием методов временной области. А пока, в настоящей главе, мы ограничимся общим описанием систем управления во временной области, а также проиллюстрируем некоторые методы определения временных характеристик систем.
3.2. Переменные состояния динамической системы
Анализ и синтез систем управления во временной области основан на понятии состояния системы. Состояние системы—это совокупность таких переменных, знание которых, наряду со входными функциями и уравнениями, описывающими динамику системы, позволяет определить ее будущее состояние и выходную переменную. Для динамической системы ее состояние описывается набором переменных состояния [Х[(?), х2(?). - Лл(0]- Это такие переменные, которые определяют будущее поведение системы, если известно ее текущее состояние и все внешние воздействия. Рассмотрим систему, изображенную на рис. 3.1, гдеиy2(t) есть выходные переменные, a ux{f) и u2(f)— входные переменные. Для этой системы переменные (хь х2,..., хп) имеют следующий смысл: если в момент времени t0 известны начальные значения [Х[(70), х2(?0), ...,x„(Z0)] и входные сигналы ux(t) и u2(f) для t > t0, то этой информации достаточно, чтобы определить будущие значения всех переменных состояния и выходных переменных.
Рис. 3.1
Структурная схема системы управления
Входные сигналы
Ц(0 -
<4(П -
Система
Выходные сигналы
— y2(t)
Переменные состояния описывают поведение системы в будущем, если известны текущее состояние, внешние воздействия и уравнения динамики системы.
Общий вид динамической системы приведен на рис. 3.2.
Простым примером переменной состояния может служить положение выключателя электролампочки. Выключатель может быть в одном из двух положений — «включено» или «выключено», поэтому его состоянию соответствует одно из двух возможных значений. Если мы знаем, в каком состоянии (положении) находится выключатель в момент времени t0, и если мы прикладываем к нему воздействие, то мы всегда можем определить будущее состояние элемента.
Рис. 3.2
Динамическая система
х(0)
Начальные условия
u(Z)
Вход
_____iz____
Состояние т/ системы x(t)
-К 1/(0 v Выход
3.2. Переменные состояния динамической системы
141
Понятие о переменных состояния, описывающих динамическую систему, можно проиллюстрировать на примере механической системы «масса-пружина» с затуханием, изображенной на рис. 3.3. Число переменных состояния, выбираемых для описания системы, должно быть по возможности минимальным, чтобы среди них не было излишних. Для данной системы вполне достаточно иметь две переменные состояния — положение и скорость движения массы. Таким образом, мы примем в качестве переменных состояния совокупность (хь х2), где
*1(0 =Л0 и *2(О=^р-
at
Трение о стенки
Рис. 3.3. Система «масса-пружина» с затуханием
Дифференциальное уравнение, описывающее поведение системы, обычно записывается в виде
M^ + b^ + ky = u(t). (3.1)
dt2 dt
С учетом введенных выше переменных состояния это уравнение примет вид:
dx
M~^- + bx-, + кх^ =u(t). (3.2)
dt
Следовательно, исходное дифференциальное уравнение второго порядка мы можем представить в виде эквивалентной системы двух дифференциальных уравнений первого поряд-
ка:
dx-> к b 1
—- =------------JC,-------Х-, ч-------w.
dt М м - М
(3.3)
(3.4)
Эти уравнения по сути описывают поведение системы в терминах скорости изменения каждой переменной состояния.
Другим примером системы, которую можно описать переменными состояния, является АЛС-цепь, изображенная на рис. 3.4. Состояние системы характеризуется двумя переменными (хь х2) где Xj есть напряжение на конденсаторе vc(Z), и х2 — ток через индуктивность iL(t). Выбор этих переменных интуитивно понятен, т. к. общая энергия, за
пасенная в цепи, непосредственно зависит от них, как
E=(V2)Zz£ +(V2)Cvc2. (3.5)
Таким образом, xj(z0) и x2(z0) несут информацию о полной начальной энергии в цепи и, следовательно, о состоянии системы в момент t = t0. Для описания пассивной 7?/,С-цепи число необходимых переменных состояния равно числу независимых элементов, накапливающих энергию. Используя закон Кирхгофа для токов, запишем дифференциальное уравнение первого порядка, определяющее скорость изменения напряжения на конденсаторе: ic=C^- = u(J)-iL . (3.6)
at
142
Глава 3. Модели в переменных состояния
Закон Кирхгофа для напряжений, примененный к правому контуру, дает уравнение, определяющее скорость изменения тока через индуктивность:
L^~=-RiL+vc. (3.7)
Выход системы определяется линейным алгебраическим уравнением:
vo = (О-
Уравнения (3.6) и (3.7) мы можем переписать в виде системы двух дифференциальных уравнений относительно переменных состояния xt и х2:
^-=-lx2(3.8) at С С
dx2 1 R
— =-Х1--х2. (3.9)
dt L L
Тогда выходной сигнал будет равен
У1(0 = vo(O = Л х2. (3.10)
Используя уравнения (3.8) и (3.9), а также начальные условия [%|(/0), х2(/0)], мы сможем определить будущее поведение системы и ее выходную переменную.
Переменные состояния, описывающие систему, не являются единственными, и всегда можно выбрать альтернативную комбинацию таких переменных. Например, для системы второго порядка, такой как масса-пружина или RLC-цепь, в качестве переменных состояния можно выбрать любые две линейно независимые комбинации лД/) и x2(f). Так, для АТС-цепи мы могли бы принять за переменные состояния два напряжения, vc(/) и vL(f), где v, — напряжение на индуктивности. Тогда новые переменные состояния, их*2, будут связаны со старыми переменными и х2 соотношениями:
x\=vc=xx, (3.11)
х2 =vL = vc -RiL =х} -Rx2. (3.12)
Уравнение (3.12) связывает напряжение на индуктивности со старыми переменными состояния vc и iL. В реальной системе всегда можно образовать несколько комбинаций переменных состояния, которые определяют энергию, запасенную в системе, и, следовательно, адекватно описывают ее динамику. На практике в качестве переменных состояния часто выбирают такие физические переменные, которые легко могут быть измерены.
Альтернативный метод получения модели в переменных состояния основан на использовании графа связей. Такие графы могут быть построены для электрических, механических, гидравлических и тепловых элементов или систем, а также для комбинаций элементов различных типов. Графы связей позволяют получить систему уравнений относительно переменных состояния.
Переменные состояния характеризуют динамику системы. Инженера в первую очередь интересуют физические системы, в которых переменными являются напряжения, токи, скорости, перемещения, давления, температуры и другие аналогичные физические величины. Однако понятие состояния применимо к анализу не только физических, но также биологических, социальных и экономических систем. Для этих систем понятие состояния не ограничивается рамками представлений об энергии и подходит к переменным состояния в более широком смысле, трактуя их как переменные любой природы, описывающие будущее поведение системы.
3.3. Дифференциальные уравнения состояния
143
3.3. Дифференциальные уравнения состояния
Состояние системы описывается дифференциальными уравнениями первого порядка относительно каждой из переменных состояния. Эти уравнения в общем случае имеют следующий вид:
* 1 =0!]%! + «12*2 +—+«1л*л + *11м1 + +bl„d<nl ’
* 2 =«21*1 + «22*2 ++ «2»*л + fc21«l +•••+ fe2»,«m>
* л “ «л!*1 «л2*2 "*'' ’*' «ли*» + fe»lMl +•+ ^»m«m >
где х = dx/ dt. Эту же систему дифференциальных уравнений можно записать в матричной форме:
Матрица-столбец, состоящая из переменных состояния, называется вектором состояния
и имеет вид:
*1
*2
(3.15)
где полужирное начертание символа означает вектор. Вектор входных сигналов обозначается как и. Тогда систему можно описать в компактном виде дифференциальным уравнением состояния
х = Ах + Ви . (3.16)
Уравнение (3.16) часто называют просто уравнением состояния.
Матрица А является квадратной размерности п х и, а матрица В имеет размерность г*т . Уравнение состояния связывает скорость изменения состояния системы с самим состоянием и входными сигналами. В общем случае выходные сигналы линейной системы
связаны с переменными состояния и входными сигналами уравнением выхода y = Cx + Du, (3.17)
где у — совокупность выходных сигналов, представленная в виде вектора-столбца.
Воспользовавшись уравнениями (3.8) и (3.9), запишем уравнение состояния для
ЯАС-цепи, изображенной на рис. 3.4:
О
2 .L
1
С
R
L
(3-18)
Полужирные строчные буквы обозначают векторы, а полужирные прописные — матрицы. Введение в матрицы и элементарные матричные операции см. на Web-сайте MCS.
144
Глава 3. Модели в переменных состояния
Уравнение выхода будет иметь вид:
у=[0 R] х.
(3-19)
Если /? = 3, £ = 1иС = 1/2, то
и
Т = [0 3] х.
Решение дифференциального уравнения состояния (3.16) можно получить точно так же, как решается скалярное дифференциальное уравнение первого порядка. Рассмотрим уравнение
х = ах + Ьи, (3.20)
где х(/) и u(f) — скалярные функции времени. Решение будем искать в виде экспоненты еа1. Преобразуя уравнение (3.20) по Лапласу, получим:
sX(s) — х(0) = aX(s) + bU(s), откуда
X(s) = ^ + —U(s). (3.21)
s-a s-a
Обратное преобразование Лапласа уравнения (3.21) дает искомое решение:
x(t) = eal х(0) + Г еа^' }о
(3.22)
Аналогично получается и решение дифференциального уравнения состояния. Прежде всего введем в рассмотрение матричную экспоненциальную функцию, представив ее в
виде ряда
*2.2 ДЛ к
ем = ехр( А/) = I + А/+------------!-•••+-------+••,
2! к\
(3.23)
который сходится для всех конечных t и любой А. Тогда решение уравнения состояния будет иметь вид:
х(/) = ехр(А?)х(0)+ |ехр[А(Г-т)]Ви(т)с/т . (3.24)
о
Решение (3.24) можно также получить, применив преобразование Лапласа к уравнению
(3.16) и сгруппировав члены. В результате получим:
X(s) = [si - А]"1 х(0) + [si - A]'1 BU(s), (3.25)
где можно ввести обозначение [sI-A]~1= Ф(я), что является преобразованием Лапласа функции Ф(0=ехр(А/). Применив к (3.25) обратное преобразование Лапласа и учитывая, что второе слагаемое в правой части содержит произведение <J>(s)BU(s), мы и получим решение (3.24). Матричная экспоненциальная функция Ф(/) описывает свободное движение системы и называется фундаментальной матрицей или переходной матрицей состояния. Таким образом, решение (3.24) можно записать в виде:
t
х(/) = Ф(/)х(0)+ |ф(/-т)Ви(т)с/т.
о
(3.26)
3,4. Модели систем в переменных состояния в виде сигнального графа
145
В результате для свободного движения системы (в случае, когда и=0) решение можно запи-
сать очень просто:
*i (0 <Pii(0 Ф1„(0’ \ (0)’
*2 (О — Ф21 (0 • • Ф2»(0 х2(0)
_<Ри1(0 • Фпи(0. А (°).
(3.27)
Отсюда легко можно видеть, что для того чтобы определить переходную матрицу состояния, необходимо начальные значения всех переменных состояния кроме одной положить равными нулю и вычислить реакцию каждой переменной состояния на это ненулевое значение. Иначе говоря, элемент <р(/ (/) представляет собой реакцию i-й переменной состояния на начальное значение J-й переменной состояния при условии, что начальные значения всех остальных переменных состояния равны нулю. Мы воспользуемся этим свойством в последующих разделах при вычислении элементов переходной матрицы состояния. Однако сначала мы рассмотрим несколько моделей систем в переменных состояния, представленных в виде сигнальных графов, и покажем, как с их помощью можно исследовать устойчивость систем.
3.4. Модели систем в переменных состояния в виде сигнального графа
Выше мы рассмотрели случай, когда состояние системы и ее динамика описываются рядом дифференциальных уравнений первого порядка. В качестве альтернативы может быть использовано уравнение состояния вида (3.16). В любом случае будет полезно получить модель системы в виде сигнального графа, узлы которого соответствовали бы переменным состояния, а затем установить связь между таким графом и уже известным нам представлением системы в виде передаточной функции.
Как было показано ранее, система может быть полностью описана передаточной функцией G(s), связывающей ее входную и выходную переменные. Например, если нас интересует связь между входным и выходным напряжением в схеме на рис 3.4, то мы можем получить передаточную функцию
G(s)
Передаточная функция RLC-цепи на рис. 3.4 имеет вид
G(s) № + p.s + у
(3.28)
где а, Ри у являются функция ми параметров цепи R,LnC. Значения а, Р и у можно определить по сигнальному графу, отображающему дифференциальные уравнения, описывающие электрическую цепь. Для нашего случая (см. уравнения 3.8 и 3.9) мы имеем:
1 1 / X
*1 =~^х2 +qU^
1 R
Х2 = — *1--Х2,
v0 = Rx2.
(3.29)
(3.30)
(3.31)
146
Глава 3. Модели в переменных состояния
Рис. 3.5. Сигнальный граф для /РЛС-цепи
Граф, отражающий эту систему уравнений, изображен на рис. 3.5, где l/.v есть символ интегрирования. По формуле Мейсона мы получим передаточную функцию:
?о(з) = RILCs2 = R/LC (з
U(s) 1 + R/Ls+l/LCs2 s2 + (R/L')s+l/LC
К сожалению, многие электрические цепи, электромеханические системы и другие системы управления не так просты, как схема на рис. 3.4, и часто очень трудно получить дифференциальные уравнения первого порядка, описывающие динамику системы. Поэтому бывает проще получить передаточную функцию системы (хотя бы методами, изложенными в гл. 2) и затем на ее основании построить модель в переменных состояния.
Модель системы в виде графа с переменными состояния в узлах легко получить по передаточной функции. Но, как мы заметили в разд. 3.3, возможны несколько комбинаций переменных состояния и, следовательно, можно изобразить несколько различных сигнальных графов. В общем случае передаточную функцию можно представить в виде +-+blS + b0, (3 зз)
sl: + 1 +...+ арч а0
где и > т и все коэффициенты а и Ъ есть вещественные числа. Умножив числитель и знаменатель на s~n, мы получим:
-(и-m) . -(и-m+l) , , t Л -и
G(s) = ---. (3.34)
1+л,1 -ь.-.+ я^ 11 + aos n
Мы уже знакомы с формулой Мейсона, поэтому легко можем увидеть в знаменателе коэффициенты передачи контуров с обратной связью, а в числителе — коэффициенты передачи прямых путей. Напомним формулу Мейсона, приведенную в разд. 2.7:
Y( х ЕЛД*
G(s) = 7^=jL-r-- 0.35)
U(s) Д
Если все контуры с обратной связью являются касающимися, а все прямые пути в свою очередь касаются этих контуров, то выражение (3.35) сводится к следующему:
Ел
л _ Сумма коэффициентов передачи прямых путей
J —------------------— —— -------------.
А 1-Сумма коэффициентов передачи контуров
1 - 2-, Л
9=1
Передаточную функцию можно представить различными графами. Представляют интерес два частных случая таких конфигураций, основанных на формуле Мейсона, и мы рассмотрим их более подробно. В следующем разделе мы приведем еще две дополнительных конфигурации графов.
3.4, Модели систем в переменных состояния в виде сигнального графа
147
Чтобы проиллюстрировать получение сигнального графа в терминах переменных состояния, рассмотрим сначала передаточную функцию четвертого порядка:
r,x b° b°s~4 ГТТЛ
G(s) = —-7 = ------г------5----------=--------------Т2------5------ (3 -37)
U(s) s + a3s + a2s~ + axs+ a0 l+fljs + a2s + a3s + a^s
Прежде всего мы заметим, что система имеет четвертый порядок и поэтому нам потребуются четыре переменных состояния (хь х2, х3, х4). Имея в виду формулу Мейсона, напомним, что знаменатель можно рассматривать как 1 минус сумма коэффициентов передачи контуров, а числитель передаточной функции есть коэффициент передачи прямого пути графа. Сигнальный граф должен содержать минимальное число интеграторов, равное порядку системы. Следовательно, для графического представления данной системы нам потребуются четыре интегратора. Соответствующие узлы и интеграторы сигнального графа отображены на рис. 3.6. Наиболее простая конфигурация из этих элементов, соответствующая передаточной функции, представлена на рис. 3.7. Анализируя этот рисунок, мы можем заметить, что все контуры являются касающимися и, следовательно, передаточная функция имеет вид (3.37). Читатель легко может убедиться, что коэффициент передачи прямого пути действительно равен £>0А4, а знаменатель равен единице минус сумма коэффициентов передачи всех контуров.
Рис. 3.7. Граф состояния для G(s), соответствующей выражению (3.37)
Теперь рассмотрим передаточную функцию четвертого порядка, в которой числитель является полиномом переменной s, т. е.
х- b2s3 + b2s2 4-^s+feo b3s~'+ b2s~2 + bxs~3 + b0s~4
4 3 2 , -1 -2 -3 -4 ’ C3-3^)
s + a3s + a7s +axs+a0 i+a3s + a-,s + aos
Слагаемые в числителе представляют собой коэффициенты передачи прямых путей в формуле Мейсона. Прямые пути касаются всех контуров, поэтому сигнальный граф выглядит так, как представлено на рис. 3.8. Прямые пути имеют коэффициенты передачи b3/s, b2ls2, hx/s3 и b0/s4, что соответствует числителю передаточной функции. Еще раз напомним, что в числителе формулы Мейсона всегда содержатся члены числителя передаточной функции, т. е. сумма прямых путей от входа системы к ее выходу. Общий вид графа, представляющего передаточную функцию (3.3 8) на рис. 3.8, включает в себя п контуров с коэффициентами ап и т прямых путей с коэффициентами передачи Ьт. Такое изображение сигнального графа называется представлением в форме фазовой переменной.
148
Глава 3, Модели в переменных состояния
Рис. 3.8. Граф состояния для G(s) вида (3.38) в форме фазовой переменной
Переменные состояния на рис. 3.8 — это выходы каждого из элементов, накапливающих энергию, т. е. выходы интеграторов. Чтобы получить систему дифференциальных уравнений первого порядка, соответствующую графу на рис. 3.8, мы введем в граф дополнительные узлы, непосредственно предшествующие каждому интегратору. В этом случае каждый такой узел будет соответствовать производной выходной переменной интегратора. Сигнальный граф с дополнительными узлами изображен на рис. 3.9. По этому графу мы теперь можем записать следующую систему дифференциальных уравнений первого порядка, характеризующих состояние модели:
X] = х2, х2 =х3, х3 = х4,
х4 =-аох1 -а{х2 ~а2х3 -а3х4 + и, (3.39)
Выход определяется уравнением
Х^) = ^ох1 + Ь\х2 + ^2Х3 + &3Х4-
Те же уравнения в матричной форме имеют вид:
х = Ах + Ви,
или
(3.40)
(3-41)
(3.42)
d v х2 ' 0 0 1 0 0 1 0 ' 0 V х2 + 'o’ 0 г<(/)
dt *3 0 0 0 1 *3 0
.*4. —а0 -«1 -«2 -«з. .*4. 1
3.4. Модели систем в переменных состояния в виде сигнального графа
149
и
y(z) = Cx=[fe0 b\ b2 Ь3]
(3-43)
1*4 J
Структура графа, изображенная на рис. 3.8, не является единственно возможным представлением выражения (3.38); другая конфигурация графа, соответствующая той же передаточной функции, изображена на рис. 3.10. В этом случае коэффициенты передачи прямых путей образуются за счет заведения сигнала U(s) на вход каждого из интеграторов. Такую модель мы будем называть структурой с многомерным входом.
Для графа на рис. 3.10 выходной сигналy(t) равен первой переменной состояния (/). Коэффициенты передачи прямых путей равны b0/s4, b}/s3, Ь2/^, b3/s и все эти пути касаются контуров. Поэтому передаточная функция действительно соответствует выражению (3.38).
По графу, изображенному на рис. 3.10. можно записать следующую систему дифференциальных уравнений первого порядка:
Те же уравнения, но в
(3.44)
(3.45)
Хотя графы в виде структуры с многомерным входом и в форме фазовой переменной соответствуют одной и той же передаточной функции, но переменные состояния в них не равны друг другу. Это объясняется тем, что графы имеют разную структуру. Заметим также, что начальные условия в системе можно представить в виде начальных условий для интеграторов, Х](0), х2(0), ... , х„(0). Ниже мы рассмотрим систему управления и получим для нее уравнения состояния, воспользовавшись двумя разными конфигурациями модели.
Рис. 3.10. Альтернативный вид графа, соответствующего передаточной функции (3.38)
150
Глава 3. Модели в переменных состояния
Пример 3.1. Две модели в переменных состояния
Рис. 3.11
Одноконтурная система управления
ад
2(s + l)(s + 3) ' J s(s + 2)(s + 4)
Y(s)
На рис. 3.11 изображена одноконтурная система управления, которая в замкнутом состоянии имеет передаточную функцию
r(s)=2^ =
2s2 + 8s + 6
J
R(s) s3 + 8s2 + 16s + 6
Умножая числитель и знаменатель на s’3, получим:
T(S) = 2^2 = 2s '+ 2 + 6s 3
R(s) 1+8s~’+ 16s“2 +6s“3 ’
(3.46)
Первая модель в виде графа в форме фазовой переменной изображена на рис. 3.12. В этой модели выходной сигнал образуется как линейная комбинация переменных состояния. Для данного графа уравнение состояния имеет вид:
(3.47)
а уравнение выхода
ЯО = [6
(3.48)
Вторая модель имеет вид графа со структурой с многомерным входом (рис. 3.13). Для нее
уравнение состояния имеет вид:
'-8 1 01 Г2
х = —16 0 1 х + 8 u(t\ (3.49)
-6 о oj [б
а выход y(t) = xl(t).
-6
3.5. Альтернативные модели в виде сигнальных графов
151
Заметим, что оба сигнальных графа, соответствующих передаточной функции T(s), строятся достаточно просто, без разложения числителя и знаменателя на множители. Это позволяет избежать трудоемких вычислений, а по структуре графа легко можно записать уравнение состояния. Каждый из двух сигнальных графов является основой для компьютерного моделирования передаточной функции. Поскольку система имеет третий порядок, то для ее моделирования необходимы три интегратора. Следует, однако, еще раз подчеркнуть, что переменные состояния в модели на рис. 3.12 не идентичны соответствующим переменным в модели на рис. 3.13. В то же время одна комбинация переменных состояния связана с другой соответствующим линейным преобразованием. Используя соотношение z = Мх, мы можем преобразовать вектор х в вектор z с помощью матрицы М. В заключение отметим, что передаточная функция вида (3.33) описывает линейную систему с постоянными коэффициентами, имеющую один вход и один выход, связанные дифференциальным уравнением и-го порядка
dny d”~l у dmu L dm~lu .
яп-1-;—1-...+ «о y(t) —-1- bm_i---— +...+ bqu(j). (3.50) dt”---------------------------------------------------------dt”~l dtm dt"-1
В этом разделе на примере сигнальных графов было показано, как можно перейти от одного дифференциального уравнения л-го порядка к системе из п дифференциальных уравнений первого порядка и тем самым — к уравнению состояния.
3.5. Альтернативные модели в виде сигнальных графов
Очень часто при проектировании систем управления специалисту приходится иметь дело со структурной схемой, в которой каждый блок соответствует реальному устройству, а все переменные суть физические величины. Примером может служить разомкнутая система управления скоростью вращения двигателя постоянного тока, изображенная на рис. 3.14. В качестве переменных состояния желательно выбрать реальные физические переменные. Поэтому мы будем использовать следующие переменные: Xj = y(f), скорость вращения (она же — выходная переменная); х2 = i(t), ток возбуждения; и х3 = u(t), напряжение возбуждения. Сигнальный граф, содержащий эти физические переменные, изображен на рис. 3.15. Такая модель полезна, в частности, если физические переменные состояния могут быть измерены. Заметим, что на графе каждый блок структурной схемы представлен отдельно. Например, регулятор имеет передаточную функцию
U{s) 5(s+1) 5+5s-1
----— Crr (5) = =------ , R(s) s+5-1+5S-1
и на графе она представлена фрагментом между R(s) и U(s).
Регулятор Двигатель и нагрузка
Рис. 3.14. Структурная схема разомкнутой системы управления скоростью электродвигателя
152
Глава 3, Модели в переменных состояния
Рис. 3.15. Сигнальный граф с физическими переменными состояния
Уравнение состояния записывается непосредственно по графу на рис. 3.15:
(3.51)
а выходная переменная
у = [1 0 0] х.
(3.52)
Второй способ получения сигнального графа основан на разложении передаточной функции на элементарные составляюшие. Передаточная функция, связывающая вход и выход структурной схемы на рис. 3.14, имеет вид:
m = т,} = зо(5+1) = д(5)
R(s) (5 + 5)(5 + 2)(5 + 3) (5 - 5( )(5 - 52 )(5 - 53 ) ’
а переходная функция имеет три составляющие, определяемые полюсами 5Ь 52 и 53. Разложение передаточной функции на элементарные дроби дает:
^=r(5)=-^-+A-+^_.
Т?(5) 5+5 5 + 2 5 + 3
(3.53)
Используя прием, описанный в гл. 2, мы находим, что к} = -20, к2 = -10 и к3 = 30. Сигнальный граф, соответствующий выражению (3.53), представлен на рис. 3.16. Уравнения состояния и выхода для этого графа, записанные в матричной форме, таковы:
Я0 = [-20 -10 30] х. (3.54)
Заметим, что переменную состояния х( мы связали с полюсом 51 = -5, х2 — с полюсом 52 и х3 — с полюсом 53, как показано на рис. 3.16. Индексация переменных состояния в данном случае является произвольной; например, х, мы могли бы выбрать связанной с полюсом
5 =-2.
Развязывание переменных состояния в случае различных полюсов -5Ь -52, ...,-5„ приводит к тому, что в уравнении состояния матрица А приобретает диагональную, или каноническую форму. Если же среди полюсов системы имеются кратные, то все, что можно сделать, — это представить матрицу А в блочно-диагональной форме, известной как жорданова каноническая форма.
Рис. 3.16. Сигнальный граф с развязанными переменными состояния
3.5. Альтернативные модели в виде сигнальных графов
153
Пример 3.2. Распространение эпидемического заболевания
Распространение эпидемического заболевания можно описать системой дифференциальных уравнений. Исследуемое население делится на три группы — х,, х, и х3, так что группах, восприимчива к эпидемическому заболеванию, группах, инфицирована, а группа х3 исключается из первоначального числа исследуемых. Исключение х3 происходит по причине иммунизации, смерти или изоляции отх,. Данная система содержит обратные связи и может быть описана следующими уравнениями:
dx,
—L = - ах, - рх2 + г<,(/), dt
dx-,
= Рт, - ух2 + u2(t).
at
dx,
—- = ах, + ух,.
dt
Скорость, с которой появляются новые восприимчивые к заболеванию, равна г<,(/), а скорость, с которой появляются новые инфицированные, равна u,(t). В изолированном сообществе «,(/) = = u2(t) = 0. Интересно отметить, что эти же уравнения могут описывать и распространение в обществе информации или новой идеи.
В данной системе мы имеем физические переменные состояния х,, х2 и х3. На рис. 3.17 изображен сигнальный граф, отражающий систему дифференциальных уравнений. Уравнение состояния в векторно-матричной форме имеет вид:
Рис. 3.17. Сигнальный граф, отражающий распространение эпидемического заболевания
(3.55)
Анализ уравнения (3.55) и сигнального графа показывает, что переменная состояния х3 зависит от х, и х2, но не оказывает на них влияния.
Рассмотрим изолированное сообщество, в котором г<,(?) = u2(t) = 0. Положению равновесия системы в пространстве состояний соответствует dx/dt = 0. Анализ уравнения (3.55) показывает, что система будет находиться в равновесии прих, =х, = 0. Чтобы определить, прекратится ли в сообществе эпидемическое заболевание, нам необходимо получить характеристическое уравнение системы. Сигнальный граф на рис. 3.17 содержит три контура, два из которых не касаются друг друга, поэтому определитель графа
A(s) = 1 - (- as~1 - ys“’ - p2s“2) + ays”2 . (3.56)
Таким образом, характеристическое уравнение имеет вид:
q(s) - s2A(s) = s2 + (a + y)s + (ay + p2) = 0. (3.57)
Поскольку (a + y)>0 и (ay + p2)>0, то корни этого характеристического уравнения лежат в левой половине s-плоскости и, следовательно, свободное движение системы при t —> со стремится к нулю.
154
Глава 3. Модели в переменных состояния
Пример 3.3. Управление перевернутым маятником
На рис. 3.18 проиллюстрирована проблема балансирования палки с шариком, находящейся на ладони человека. Палка будет находится в равновесии только если 0(f) = 0 и dtildt = 0. Эта проблема по сути ничем не отличается от управления положением ракеты на начальной стадии полета. Эта проблема классически моделируется в виде перевернутого маятника, смонтированного на тележке, как показано на рис. 3.19. Тележка должна двигаться таким образом, чтобы масса т всегда занимала вертикальное положение. В качестве переменных состояния естественно принять угол отклонения маятника 0(f) и перемещение тележки y(t). Дифференциальные уравнения, описывающие движение данной системы, можно получить.-записав выражения для суммы сил, действующих в горизонтальном направлении, и суммы моментов относительно точки вращения. Будем считать, что М~» т и угол отклонения от вертикали 0 является малым, поэтому уравнения являются линейными. Сумма сил, действующих в горизонтальном направлении, равна
Му + mlQ - u(t) = 0, (3.58)
где u(f) — сила, приложенная к тележке, а /—расстояние от массы га до точки вращения. Сумма моментов относительно точки вращения равна
ml у + га/20 - mlgQ = 0. (3.59)
Переменные состояния для двух уравнений второго порядка выберем как (х,. х2. х3. х4) = (у, у, 0, 0).Тогда уравнения (3.58) и (3.59) можно записать с учетом этих переменных состояния:
Мх2 + mlx4 - u(t) = 0 (3.60)
и х2 + /х4 - gx3 = 0. (3.61)
Чтобы получить необходимые дифференциальные уравнения первого порядка, выразим из (3.61) I х4 и подставим его в (3.60):
Мх2 + mgx3 = u(t\ (3.62)
где учтено, что М» т. Далее, подставляя х2 из (3.60) в (3.61), получим:
Mlx4 - Mgx3 + u(t) = О (3.63)
Рис. 3.18. Перевернутый маятник на ладони человека. Для простоты полагают, что движение происходит в одной плоскости
Рис. 3.19. Перевернутый маятник на тележке
3.6, Связь между передаточной функцией и уравнениями состояния
155
Таким образом, четыре дифференциальных уравнения первого порядка будут иметь вид: mt? 1 . , х, = х-,, х-,=--------------------х, ч--u(t),
12 2 М М
х3 ~х4. х4 =уХ3 - — и(/). Ml (3.64)
Отсюда получаем матрицы системы: 0 1 0 О’ 0
А = 0 0- 0 0 (mglM) 0 0 1 ; в = мм 0 (3.65)
0 0 gH 0 -и Ml
3.6. Связь между передаточной функцией и уравнениями состояния
Если задана передаточная функция G(s), то, изобразив модель системы в виде сигнального графа, мы затем можем получить уравнения состояния. Теперь мы решим обратную задачу, т. е. покажем, как по уравнениям состояния системы с одним входом и одним выходом определить ее передаточную функцию. Напомним еще раз уравнения (3.16) и (3.17):
х = Ах + Вы (3.66)
и
у = Сх. (3.67)
Преобразуя эти уравнения по Лапласу, получим:
$Х($) = AX(s) + BG(s) (3.68)
И T(s) = CX(s), (3-69)
где В — матрица размерности их1, поскольку и есть единственный вход. Заметим, что в преобразовании Лапласа мы не учитывали начальные условия, поскольку определению подлежит передаточная функция. Группируя члены в уравнении (3.68), получим:
(Я - A)X(s) = BG(s).
Так как (sl-A)-1 = Ф(л), то
X(s) = Ф(4)В6/(5).
Подставляя X(s) в (3.69), получим:
У(л) = СФ($)В6/(л). (3.70)
Поскольку передаточная функция G(s) = Y(s)/U(s), то окончательно имеем:
G(s) = СФ(л)В. , (3.71)
156
Глава 3. Модели в переменных состояния
Пример 3.4. Передаточная функция Я£С-цепи
Определим передаточную функцию G(s) = Y(s)/U(s) для ALC-цепи. изображенной на рис. 3.4. Для этой цепи ранее были получены уравнения (см. уравнения 3.18 и 3.19):
-1/С'
-R/L
'1/С О
у=[0 /?] х.
Следовательно,
1/С (s+R/L)
Далее находим
<D(s) = (Я-АД1
1 s+R/L -1/С
4(s) [ 1/C s
где
A(s) = s2 +
R 1 — s+---
L LC
Тогда передаточная функция будет равна
G(s) = [0 А]
s+ R/L
A(s)
1
L\(s)
-1
CA(s)
S’ A^j.
R/LC _ R/LC
L LC
1
О
что совпадает с результатом (3.32), полученным с помощью формулы Мейсона по сигнальному графу цепи.
3.7. Временные характеристики и переходная матрица состояния
Довольно часто возникает необходимость оценить изменение переменных состояния во времени и тем самым судить о качестве системы управления. Переходные характеристики системы легко можно получить путем решения уравнения состояния. В разд. 3.3 такое решение было получено, и оно имеет вид:
х(/)=Ф(/)х(0)+ |ф(г-т)Ви(т)Л. (3.72)
о
Если известны начальные условия х(0), вектор входных воздействий u(r) и переходная матрица состояния Ф(/), то реакция системы х(/) может быть вычислена тем или иным способом. Таким образом, задача сводится к вычислению матрицы Ф(/), которая в основном и определяет реакцию системы. Один из способов вычисления переходной матрицы состояния базируется на использовании сигнального графа системы. Но, прежде чем рассматривать этот способ, следует упомянуть и некоторые другие методы, в частности вычисление ряда
со д к fk
Ф(О=ехр(А?)=£—— (3.73)
л=о А!
с ограниченным числом членов. Известны также весьма эффективные методы вычисления Ф(/) с помощью компьютерных алгоритмов.
3.7. Временные характеристики и переходная матрица состояния 157
В уравнении (3.25) было показано, что Ф(л) = (si- А)1. Тогда, если вычислить обратную матрицу, то мы сможем найти и Ф(/) как обратное преобразование Лапласа для Ф(д), т. е. Ф(/) = Т-1[Ф(^)]. К сожалению, для систем высокого порядка операция нахождения обратной матрицы является очень трудоемкой.
Преимущества сигнального графа при получении переходной матрицы состояния становятся очевидными, если рассмотреть преобразование Лапласа уравнения (3.72), считая входные сигналы равными нулю. Тогда при и(т) - 0 из (3.72) мы имеем:
X(s) = Ф(х)х(0). (3.74)
Это означает, что мы можем определить преобразование Лапласа для переходной матрицы состояния по сигнальному графу, установив связь между переменной состояния X,(s) (в виде изображения по Лапласу) и начальными условиями [хДО), х2(0),..., х„(0)]. Тогда переходная матрица состояния просто будет обратным преобразованием Лапласа от Ф(д), т. е.
Ф(Г) = Г'[Ф(х)]. (3.75)
Зависимость переменной состояния X, (s) от начальных условий х(0) определяется с помощью уже известной нам формулы Мейсона по сигнальному графу. Так, для системы второго порядка мы получим:
И = Ф11 (0) + Фи С*>2 (0>
Х2 (s) = ф21 (5>! (0) + <р22 (s)x2 (ОХ (3.76)
где связь между X2(s) их,(0) определяется с помощью формулы Мейсона по сигнальному графу. Все элементы переходной матрицы состояния, <py(s), могут быть получены путем установления связи между A,(s) и х;(0) по структуре сигнального графа. Данный способ определения переходной матрицы состояния иллюстрирует следующий пример.
Пример 3.5. Вычисление переходной матрицы состояния
Рассмотрим RLC-цепь. изображенную на рис. 3.4. и вычислим Ф(з-) двумя способами: (1) путем нахождения обратной матрицы Ф($) = (si - АТ* и (2) с помощью формулы Мейсона по сигнальному графу.
Сначала воспользуемся первым способом. Из уравнения (3.18) нам известна матрица А:
Тогда
Обратная матрица равна
, 1 F(s+3) -21
ф(5) = (si- АГ > = --- ' , (3.78)
A(s) [ 1 s
где A(s) = s(s + 3) + 2 = s2 + 3s + 2 = (s + l)(s + 2).
Сигнальный граф для этой цепи был приведен на рис. 3.5, где в качестве переменных состояния приняты Xj = vc и х2 = iL. Начальные условия xf(0) и х2(0) представляют собой соответственно начальное напряжение на конденсаторе и начальный ток через индуктивность. Сигнальный граф с учетом этих начальных условий изображен на рис. 3.20. Начальные условия учтены в виде начальных значений переменных состояния на выходе каждого интегратора.
158
Глава 3. Модели в переменных состояния
Рис. 3.20
Сигнальный граф для /?£С-цепи
Для вычисления Ф($) положим U(s) = 0. При R = 3, L - 1 и С = 1/2 сигнальный граф примет вид, изображенный на рис. 3.21. Входной и выходной узлы исключены, т. к. они не участвуют в вычислении Ф($). С помощью формулы Мейсона выразим зависимость A'i(s) от х,(0):
= (3.79)
Д(5)
где A(s) — определитель графа, a A((s) — дополнительный множитель для пути. Определитель графа
A(s) = 1 + 3s’1+ 2s’2,
а дополнительный множитель A|(s) = 1 + 3s ’, потому что путь otxj(O) к A)(s) не касается контура с коэффициентом передачи -3s’1. Таким образом, первый элемент переходной матрицы состояния равен
. , (1 + 3s”')(l/s) s + 3
4)11 5 1 + 3s’1 + 2s“2 ~ s2 + 3s + 2 ’
(3.80)
Элемент <p12(s) вычисляется как реакция A'i(s) на начальное условие х,(0):
(-2s’‘)[x2(0)/s] 1 + 3s'1 + 2s”2 ’
2f,(s) =
откуда <p12(s) = 2 (3.81)
s2 + 3s + 2 ’
Аналогичным образом находим элементы <p2i(s) и Ф22^)’
<p2l(s) = (s-'Xl/sr) = —7 (3.82)
1 + 3s 1 + 2s 2 s2 + 3s + 2
<p22(s) = 1 (1AQ = (3-83)
1 4- З.У 1 + 2s 2 s2 + 3s + 2
Итак, переходная матрица состояния в виде изображения по Лапласу равна
®(s) = (s + 3)/(s2 + 3s + 2) -2/(s2 + 3s + 2) (3.84)
l/(s2 + 3s + 2) s/(s2 + 3s + 2)
Рис. 3.21
Сигнальный граф для /?£С-цепи при U{s) = О
3.8. Дискретный способ вычисления временных характеристик
159
Характеристический полином s2 + 3s + 2 = (j + l)(s + 2), поэтому окончательно получим:
Ф(/) = £-’{Ф(5)} =
(2е”' - е”2') (-2е"' + 2е-2')’ (е-'-е’2') (-е“' + 2е’2')
(3.85)
Реакцию RLC-цепи на различные начальные условия и входные сигналы можно получить с по-
мощью выражения (3.72). Например, при х,(0) = х2(0) = 1 и u(t) = O мы имеем:
*,(<) х2(0
= ФЮ
ё~2'
е~2'
(3.86)
1
1
Реакция системы на эти начальные условия изображена на рис. 3.22. а на рис. 3.23 приведен годограф вектора состояния в координатах (х|5 х2).
Определение временных характеристик системы, как мы видели, значительно упрощается в результате вычисления переходной матрицы состояния. Необходимо, однако, заметить, что применимость этого метода ограничена только классом линейных систем.
Рис. 3.23
Годограф вектора состояния в координатах (х^ х2).
Рис. 3.22. Реакция переменных состояния /?£С-цепи на начальные условия х,(0) = х2(0) = 1
3.8. Дискретный способ вычисления временных характеристик
Временные характеристики системы, описываемой векторно-матричным дифференциальным уравнением состояния, можно получить, воспользовавшись дискретной аппроксимацией этого уравнения. Подобная аппроксимация основана на разбиении временной оси надостаточно малые отрезки. Тогда значения переменных состояния будут вычисляться в дискретные моменты времени t = О, Т, 2Т, ЗТ,..., где Тесть шаг дискретности по времени. Этот метод широко используется при численном анализе и при вычислениях на цифровых компьютерах. Если шаг дискретности Тявляется достаточно малым по сравнению с постоянными времени системы, то точность вычислений будет вполне приемлемой.
160
Глава 3. Модели в переменных состояния
Уравнение состояния линейной системы имеет вид: х = Ах + Ви.
Воспользуемся классическим определением производной: ... .. x(t + At)—x(t)
x(t) = 1ш1 —-------——.
Д/-»0 Дг
(3.87)
(3.88)
Этим определением мы воспользуемся для вычисления значений x(t) при разбиении t на малые отрезки Д/ = Т. Тогда, приняв аппроксимацию производной
x(t + T)-x(t) Т
(3.89)
подставим ее в уравнение (3.87) и получим:
x(r + 7’)-x(r) Л
—-----« Ах(/) + Bu(Z ).
Выразим отсюда x(t+T):
x(t + T)~ TAx(t) + х(/) + 7Bu(Z) = (ТА + I) x(t) + 7Bu(/), (3.91)
где t разбито на малые отрезки длительностью Т. Поэтому время t принимает дискретные значения t = кТ, к = 0, 1,2,3,... Тогда (3.91) будет записано в виде:
х[(А + 1)У]» (ТА + 1)х (кТ) + ТВи (кТ). (3.92)
Таким образом, значение вектора состояния в (Л+1)-й момент времени выражается через значения х и и в к-й момент времени. Выражение (3.92) можно записать иначе:
х(к + 1) ® \ii(T)x(k) + 7’Bu(/c), (3.93)
где у(Т) = (ТА +1), а символ Тв аргументах переменных опущен. Выражение (3.93) показывает, что определение x(f) сводится к вычислению его дискретной аппроксимации х(к+1) на основании предыдущего значения х(Л). Эта рекуррентная операция, известная как метод Эйлера, представляет собой последовательную цепочку вычислений и очень просто реализуется на цифровых компьютерах. Для вычислений по формуле (3.87) могут быть использованы и другие методы численного интегрирования, например методы Рунге-Кутта. Некоторые методы интегрирования реализованы в среде MATLAB. Метод дискретного (численного) определения временных характеристик мы проиллюстрируем ниже на примере Л'АС-цепи (рис. 3.4).
Пример 3.6. Временные характеристики RLC-цепи
Вычислим временные характеристики /lLC-цепи с помощью дискретной аппроксимации уравнения состояния, не прибегая к определению переходной матрицы состояния. Как и в примере
3.5, положим А = 3, L = 1 и С = 1/2. Тогда векторно-матричное уравнение состояния примет вид (см. уравнение 3.18):
О
1/L
-1/С
-RIL
'VC о
w(0 =
О -2
1 -3
«(О-
(3.94)
х =
2
О
Шаг дискретности Т мы должны выбрать достаточно малым, чтобы получить приемлемую точность аппроксимации производной (3.89) и, следовательно, как можно лучше приблизить вычисления по рекуррентной формуле (3.92) к точному решению уравнения состояния. Обычно Т выбирают так, чтобы он был по крайней мере вдвое меньше самой малой постоянной времени системы. Учитывая то, что наименьшая постоянная времени системы равна 0,5 с [напомним, что характеристический полином системы имеет вид (s + l)(s + 2)], выберем значение
3.8. Дискретный способ вычисления временных характеристик
161
Т = 0,2 с. Заметим также, что с уменьшением шага дискретности пропорционально увеличивается количество вычислений. Итак, при Т- 0,2 с уравнение (3.92) принимает вид:
х(А + 1)» (0.2А+1)х(А) + 0,2Ви(Л). (3.95)
Следовательно, ' 1 -0,4 у (7') = (3.96)
[0,2 0,4
и
0.4'
7В = 0 (3-97)
Предположим, что нас интересует реакция системы при Х|(0) = х2(0) = 1 и «(/) = 0. Реакция системы в первый момент времени, т. е. при t=T, или при к = 0, равна
Г 1 -0,41 Г0,61
х(1)« х(0) = (3.98)
0.2 0,4 j [0,6
Далее, при 1 = 2Т= 0,4 с, или при к = 1:
Г 1 -0,41 ГО,361
х(2)« х(1)= . (3.99)
0,2 0,4 0,36
Дальнейшие значения при к =2, 3, 4. ... вычисляются аналогично.
Сравним теперь точное значение реакции системы, полученное в предыдущем разделе с помощью переходной матрицы состояния, с приближенным значением, вычисленным в результате дискретизации времени. В примере 3.5 при х((0) = х2(0) = 1 мы получили точное решение для переменных состояния: x}(t) = x2(t) = e~2'. В табл. 3.1 приведены вычисленные точные значения Х|(0, а также приближенные значения при Т= 0,2 с и при Т = 0.1 с. В случае Т= 0.2 с ошибка остается приблизительно постоянной и равной 0,07, что составляет 7% от начального значения переменных состояния. При уменьшении Т до 0,1 с ошибка также уменьшается приблизительно до 3.5% от начального значения переменных состояния. Если взять Т = 0,05 с, то аппроксимация решения в момент t = 0,2 с дает значение Х](/) = 0,655, и ошибка уменьшается до 1,5% от начального значения переменных состояния.
Таблица 3.1
Время, t (с) 0 0,2 0,4 0,6 0,8
Точные значения xt(t) 1 0.67 0,448 0,30 0,20
Аппроксимация Xi(t), Г=0,1 с 1 0,64 0.41 0,262 0.168
Аппроксимация ж,(Г). 7’= 0.2 с 1 0.60 0,36 0.216 0,130
Пример 3.7. Динамика эпидемического заболевания
Рассмотрим еще раз модель в переменных состояния, отражающую распространение эпидемического заболевания, с которой мы познакомились в примере 3.2. Полагая в уравнении состоя-
ния (3.55) а = р = у = 1, получим:
(3.100)
Характеристическое уравнение системы [см. (3.57)] имеет вид s2 + 2s + 2 = 0, и, следовательно, его корни — комплексные. Определим динамику распространения заболевания, считая, что скорость появления новых восприимчивых к нему равна нулю, т. е. и, = 0. Скорость появления
162
Глава 3. Модели в переменных состояния
новых инфицированных определим как к2(0) = 1 и к2(Л) = 0 при к > 1; это означает, что в начальный момент времени появляется только один инфицированный (что эквивалентно импульсному входному воздействию). Постоянная времени, соответствующая комплексным корням, 1/^<о„ = 1 с, поэтому выберем Т = 0,2 с. (Заметим, что в действительности время может измеряться месяцами, а входное воздействие — тысячами человек.)
Запишем уравнение состояния в дискретной форме:
х(к + 1) =
’0,8 -0,2 О' ’ 0 '
0,2 0,8 0 х(Л) + 0,2 и^к). (3.101)
0,2 0,2 1 0
t = Т, т. е. при к = 0 и при условии, что
Реакция системы в первый момент времени Х](0) = х2(0) = х3(0) = 0, равна
х(1) =
0 0,2 0
(3.102)
После этого вход и2(к) при к > 1 становится равным нулю, и в момент t = 2Т реакция системы определяется как
'0,8 -0,2 О' ' 0 ' -0,04
х(2) = 0,2 0,8 0 0,2 = 0,16 (3.103)
.°’2 0,2 1 0 0,04
Аналогично в момент t = 3T получим:
'0,8 -0.2 О' '-0,04' '-0.064'
х(3) = 0,2 0,8 0 0,16 = 0,120
0,2 0,2 1 0,04 0.064
Последующие значения вычисляются так же просто. Разумеется, в действительности величина X! не может принимать отрицательные значения, но в нашем примере так получается из-за неадекватности модели.
Метод дискретизации уравнения состояния оказывается чрезвычайно полезным при вычислении временных характеристик нелинейных систем. В этом случае уравнение состояния имеет общий вид:
x = f(x,u,rX (3.104)
где f есть функция (не обязательно линейная) вектора состояния х и вектора входа и. Вектор f представляет собой матрицу-столбец функций от х и и. Если система является линейной по отношению к входным сигналам, то уравнение (3.104) принимает вид:
x = f(x,Z) + Bu. (3.105)
Если система является стационарной, т. е. описывается дифференциальным уравнением с постоянными коэффициентами, то уравнение (3.105) принимает вид:
x = f(x) + Bu. (3.106)
Рассмотрим уравнение (3.106) для нелинейной системы и получим его дискретную аппроксимацию. Используя аппроксимацию производной в виде (3.89), запишем:
) = f[x(f)] + Bu(t) (3.107)
T
Полагая t = кТ, выразим отсюда х(А+1):
х(А +1) = х(Л) + Z[f (х(/с)) + Ви(Л)]. (3.108)
3.8. Дискретный способ вычисления временных характеристик
163
Аналогично, для уравнения общего вида (3.104) дискретная аппроксимация записывается как
х(к +1) = х(к) + Tf [х(Л), и(к), &].. (3.109)
Далее мы рассмотрим систему из предыдущего примера с учетом того, что она является нелинейной.
Пример 3.8. Уточненная модель распространения эпидемического заболевания
Распространение эпидемического заболевания более точно описывается следующей системой нелинейных дифференциальных уравнений:
Х| = - oct] - рлул‘2 + ц(0,
х2 = Pxpc2 - Ух2 + 112^\ (3-110)
Х} = OCX] + ух2 ,
где взаимодействие между группами населения представлено нелинейным членом xtx2. Как и в предыдущем примере, будем считать, что а = Р = у=1, ut(t) = 0, и2(0) = 1 и и2(к) = 0 при к > 1. Выберем шаг дискретности Т- 0,2 с и зададим начальные условия в виде хт(0) = [1 0 0]. Тогда, подставляя в уравнения (3.110) t- кТ и
((|д (ЗШ)
получим:
х,(* + 1)-х,(*) = _ Х1(Л>2(ЛХ
х2(к + 1) - х2(к) = + ^(Л) , (3,112)
х3(Л+1)-х3(Л)=лД)+л2(п
Выражая из этих уравнений x,(fc+l) и помня, что Т= 0,2 с, получим: хх(к + 1) = 0,8х](к) - 0,2х}(к)х2(к) ,
х2(к+ 1) = 0,8х2(Л) + 0,2xi(kyx2(k) + 0.2и2(к), (3.113)
х3(к + 1) = х3(к) + 0,2х,(А) + 0,2х2(А).
Тогда в первый момент времени, при /= Т имеем:
х,(1) = 0.8х ,(()) = 0,8,
х2(1) = 0,2и2(0) = 0,2,
х3(1) = 0,2х,(0) = 0,2.
Еще раз используя уравнения (3.113) и учитывая, что н2(1) = 0, получим:
xi(2) = 0,8xi(l) - 0,2xi(1)x2(1) = 0,608.
х2(2) = 0,8х2(1) + 0,2х1(1>2(1) = 0,192, (3.114)
х3(2) =хз(1) + 0,2х,(1) + 0,2х2(1) = 0,40.
Аналогично, при t=3T имеем:
х,(3) = 0,463, х2(3) = 0,177, х3(3) = 0,56.
Дальнейшие вычисления не вызывают проблем. Нетрудно видеть, что реакция нелинейной системы существенно отличается от реакции ее линейной модели, рассмотренной в предыдущем примере.
164
Глава 3. Модели в переменных состояния
Вычисление временных характеристик линейных систем легко производится путем либо (1) использования переходной матрицы состояния, либо (2) с помощью дискретной аппроксимации уравнения состояния. Для нелинейных систем наиболее подходящим является метод дискретизации уравнения состояния, тем более, что он очень удобен при численных вычислениях на компьютере.
3.9. Пример синтеза: ременный привод печатающего устройства принтера
В обыкновенном недорогом принтере для компьютера горизонтальное перемещение печатающего устройства вдоль страницы осуществляется с помощью ременного привода. Печатающее устройство может быть струйным, матричным или термическим. Пример ременного привода принтера с исполнительным устройством в виде двигателя постоянного тока изображен на рис. 3.24. В данной конструкции положение печатающего устройства измеряется с помощью фотодатчика, а натяжение ремня изменяет его коэффициент упругости. Целью синтеза является выбор надлежащих параметров электродвигателя, шкива, регулятора и анализ влияния коэффициента упругости ремня на характеристики системы. Для решения поставленной задачи сначала нам потребуется разработать модель привода и выбрать многие из его параметров. На основании этой модели мы построим сигнальный граф и выберем переменные состояния. После этого определим передаточную функцию системы и выберем ее остальные параметры, кроме коэффициента упругости ремня. И, наконец, исследуем влияние коэффициента упругости, проварьировав его в разумных пределах.
На рис. 3.25 изображена модель ременного привода. Предполагается, что коэффици
ент упругости ремня равен А, радиус шкива — г, угол поворота вала двигателя — 6, угол
поворота правого шкива — Qp, масса печатающего устройства — т, а его положение — y(t). Выходом фотодатчика является напряжение vb пропорциональное перемещению у, т. е. V] = к^у. Регулятор вырабатывает выходное напряжение v2, являющееся функцией Напряжение v2 подается на обмотку возбуждения двигателя. Предположим, что мы можем использовать линейную зависимость
, I
— К') --------1~
dt
и выберем параметры к2 = 0,1 и к3 = 0 (т. е. будем использовать обратную связь по скорости).
Рис. 3.24 Ременный привод принтера
3.9, Пример синтеза: ременный привод печатающего устройства принтера 165
Момент инерции двигателя вместе со шкивом ./ = ./дв + 7ШК. Если мы выберем двигатель средней мощности в 1/8 л. с. (чуть менее 100 Вт), то для него J= 0,01 кгм2, индуктивностью обмотки возбуждения можно пренебречь, сопротивление обмотки возбуждения равно 2 Ом, постоянная двигателя Кт = 2 Н-м/А, а коэффициент трения совместно со шкивом b = 0,25 Н мс/рад. Радиус шкива г = 0,15 м. Все эти параметры сведены в табл. 3.2.
Таблица 3.2. Параметры устройств принтера
Масса Фотодатчик Радиус шкива Электродвигатель Индуктивность Коэффициент трения Сопротивление Постоянная электродвигателя Момент инерции двигателя и шкива m = 0,2 кг кх = 1 В/м г = 0,15 м £«0 Ъ = 0,25 Н мс/рад /? = 2 Ом Кт = 2 Н м/А J= 0.01 кг • м2
Перейдем к записи уравнений движения системы; заметим, что у = г0р. Тогда сила натяжения Тх равна:
1\ = к(гв - г0р) = Л(г0 - у).
Сила натяжения Т2 = к(у - гб). Сила, действующая на массу т:
Тх-Т2=т^- (3.115)
dt~ и Тх -Т2 =k(rf)~ у)-k(y-r&) = 2k(rQ - у) = 2кхх, (3.116)
(3.117)
где %] = (гб - у) примем за первую переменную состояния. Пусть второй переменной состояния будет х2 = dy/dt, тогда из (3.115) и (3.116) мы получим: dx, 2к ----------------------------- =-Xi . dt m
Если в качестве третьей переменной состояния выбрать х3 = dQ/dt, то dxx dQ dy
=r = ГХ? — X,. dt------dt dt
(3.118)
166
Глава 3, Модели в переменных состояния
Теперь нам потребуется дифференциальное уравнение, описывающее вращение электродвигателя. При L = 0 ток возбуждения г = v-,/R и момент на валу Тт = K„,i. Следовательно, Т =^L.V
m R 2’
т. е. момент, развиваемый двигателем, должен быть равен моменту, обеспечивающему движение ремня, плюс возмущающий момент нагрузки:
Tm = T+Td.
Момент Т обуславливает вращение шкива, поэтому
Т — J —— + Ъ — + r(7j -Ту). dt2 dt
Таким образом, мы замечаем, что
dx3 _ d2Q
dt ~ dt2 ’
из чего следует:
dx3 Т„,—Td b 2kr
—- =—-------x3-----x.
где
Tm= — v2 и v, =-kxky — =-k}kyXy. R - ~ dt
В результате мы получаем: dx2 К mkxk2 b 2kr Td
----- — ----------ЗС'у Хэ '--------Xi dt JR - J J J
(3.119)
Уравнения (3.117—3.119) полностью описывают динамику нашей системы. Дифференциа-
льное уравнение состояния в векторно-матричном виде т аково:
0 -1 Г 0
X = 2к m 2кг . J 0 JR 0 ь J. X + 0 _2 j. Td- (3.120)
Сигнальный граф, соответствующий этому уравнению, изображен на рис. 3.26, где дополнительно включен узел, отражающий наличие возмущающего момента Td.
По графу мы теперь можем определить передаточную функцию Xx(s)/TJ(s). По этой передаточной функции легко можно будет установить, как уменьшить влияние возмущения Td на характеристики системы. С помощью формулы Мейсона находим:
_ r
___________J!___________
Td (5) 1- (Л + Т2 + Л3 + Л4 ) + L} L2
Рис. 3.26
Сигнальный граф для ременного привода принтера
3,9. Пример синтеза: ременный привод печатающего устройства принтера 167
где
2k _> — s '
т
L2 =
2Ь'2 -2 г _ 2ЛЛтА1Л2 з
—------Л , Ъл —------------5
J mJR
Следовательно,
*,(*)____________________~С/)д__________________
Td(s) 3 (ъ\-у ( 2к 2кг2 \ (2kb 2кКткхкэг\
\J) ут J j \Jm JmR J
С учетом численных значений параметров из табл. 3.2 получим:
X, (s) _________________-15s___________________
Td (s) s3 + 25s2 + 14,5/cs + 1000/c (0,25 + 0,15A2) ’
(3.121)
Нам желательно иметь такой коэффициент упругости к и коэффициент регулятора к2, при которых переменная состояния как можно быстрее принимала бы малое значение после появления возмущения. Для проверки примем возмущение в виде ступенчатой функции, т. е. 7j(s) = a/s. Имея в виду, что xt = г0 -у, упомянутое выше требование эквивалентно тому, чтобы переменная у стала практически равной заданному значению г0. Если ремень является абсолютно жестким, т. е. к —> <х>, то у в точности будет равно тб. При ступенчатом возмущении T/s) = a/s мы имеем:
2/1 (s) = --------------—----------------------. (3.122)
s3 + 25s2 + 14,5/cs + 1000/с (0,25 + 0,15Л2)
По теореме о конечном значении lnnx1(z) = limsA'1(s) = 0, (3.123)
Г—>00 5—>0
т. е. установившееся значение Xj(z) будет равно нулю. Зададимся реалистичным значением к в диапазоне 1< к < 40. Пусть это будет 20. Тогда при к2 = 0,1 мы получим:
, х -15a -15a
Jf! (s) — -----------------------------------------------------. (3.124)
s3 + 25s2 + 290s + 5300 (s + 22,56) (s2 + 2,44s + 234,93)
Характеристическое уравнение имеет один вещественный и два комплексных корня.
Разложение 2f](s) на простые дроби дает:
--------------+--------(3.125) a s +22,56 (s+1,22)2 +(15,28)2
где вычисление неопределенных коэффициентов приводит к результатам: А = -0,0218, В = 0,0218, С = -0,43 81. Очевидно, что при таких малых значениях вычетов реакция системы на единичное возмущение будет незначительной. Так как А и В существенно меньше, чем С, то 2/((s) можно аппроксимировать выражением:
2/t(s)_ -0,4381
а ~ (s+1,22)2 + (15,28)2 ’
Найдем оригинал этого выражения, воспользовавшись табл. 2.3:
==-0,0287е’1-22' sin 15,28z. (3.126)
168
Глава 3, Модели в переменных состояния
Рис. 3.27
Реакция переменной x?(t) на ступенчатое возмущение: максимальное значение = - 0,0325
График этой функции приведен на рис. 3.27, откуда следует, что влияние нежелательного возмущения является весьма незначительным. Таким образом, поставленная задача синтеза нами выполнена.
3.10. Анализ моделей в переменных состояния с помощью MATLAB
Анализ систем управления во временной области предполагает задание ее модели в пространстве состояний:
x=Ax+B?z и y=Cx + D?z. (3.127)
Вектор х характеризует состояние системы, матрица А есть матрица коэффициентов размерности их/?, В — матрица входа размерности пхт, С — матрица выхода размерности рхп, D — матрица обхода размерности рхт. Мы ограничиваемся рассмотрением систем с одним входом и одним выходом, поэтому в данном случае т=р = 1, а у» и и являются скалярными переменными (полужирное начертание для них не используется).
Основными элементами модели в пространстве состояний (3.127) являются вектор х и матрицы (А, В, С, D). Подобное описание как нельзя лучше подходит для использования среды MATLAB, в которой основной рабочей единицей является матрица. В действительности MATLAB охватывает так много различных методов, базирующихся на пространстве состояний, что рассмотреть их все мы просто не имеем возможности. В данном разделе мы познакомимся с двумя новыми функциями: ss и Isim. Кроме того, мы рассмотрим функцию ехрт, с помощью которой вычисляется переходная матрица состояния.
Если задана передаточная функция, то мы можем получить эквивалентную модель системы в переменных состояния и наоборот. Для этого в MATLAB имеются две функции: функция ss позволяет перейти от передаточной функции к представлению системы в пространстве состояний, функция tf выполняет обратную задачу. Смысл этих функций раскрывает рис. 3.28.
Например, рассмотрим систему третьего порядка:
У (О 2?+8.5 + 6
---= —------------ . . IZOJ
A(s) s3+8?+16^+6
3.10. Анализ моделей в переменных состояния с помощью MATLAB
169
Рис. 3.28
(а) Функция ss.
(б) Преобразование модели линейной системы
Объект в переменных состояния
х = Ах + Ви у = Сх + Dn
sys=ss(A,B,C,D)
б)
а)
На рис. 3.29 показано, как с помощью функции ss происходит переход от передаточной функции (3.128) к описанию системы уравнениями (3.127), где
А =
-8
8
0
-2
0
1
, С = [1 0,5 0,375], D = [0].
Представление передаточной функции (3.128) в виде модели в переменных состояния приведено на рис. 3.30.
Рис. 3.29
Преобразование передаточной функции (3.128) в форму фазовой переменной в пространстве состояний: (а) Скрипт MATLAB.
(6) Распечатка результата
а)
convert.m
%Преобразование
G(s)=(2sA2+8s+6)/(sA3+8sA2+16s+6) %в модель в переменных состояния % num=[2 8 6]; den=[1 816 6];
sys_tf=tf(num ,den); sys ss=ss(sys tf)
»convert
a = x1 x2 x3
x1 -8 -2 -0.75
x2 8 0 0
x3 0 1 0
b = u1
x1 2
x2 0
x3 0
c = x1 x2 x3
y1 1 0.5 0.375
d =
u1
y1 0
170
Глава 3, Модели в переменных состояния
Рис. 3.30. Структурная схема системы, где л, есть самая левая переменная состояния
Решение первого из уравнений (3.127) имеет вид:
x(Z)=exp(AZ)x(O) + |ехр[А(Г-т)]Вг/(т)с?т . (3.129)
о
Матричная экспоненциальная функция в (3.129) есть переходная матрица состояния Ф(Г), т. е. Ф(Г) = ехр(АТ). Для вычисления переходной матрицы состояния при заданном шаге дискретности по времени используется функция ехрт, как это показано на рис. 3.31. Функция ехрт(А) вычисляет еА. Напротив, функция ехр(А) вычисляет для каждого элемента я,у матрицы А.
Рассмотрим, например, RLC-цепь на рис. 3.4, описываемую уравнением состояния (3.18), где
А =
О -2
1 -3 ’
С = [1 0], D = [0].
Зададимся начальными условиями х/0) = х2(0) = 1 и будем считать, что входной сигнал i^t) = 0. При шаге дискретности 0,2 с вычисленная переходная матрица состояния приведена на рис. 3.31. На основании этих данных можно определить состояние системы в момент времени t = 0,2 с:
\ _ Г0,9671 -0,29681 ГX]'
x2J,=0>2 "L°>1484 °’5219J [X2j,=0
0,6703
0,6703
Временные характеристики системы, заданной передаточной функцией (3.128), можно также получить с помощью функции Isim. Эта функция допускает как задание ненуле-
Рис. 3.31
Вычисление переходной матрицы состояния при заданном шаге дискретности Д/ = dt
» А=[0 -2; 1 -3]; dt=0.2; Phi=expm(A*dt)
Phi =
0.9671 -0.2968
0.1484 0.5219
Переходная матрица состояния при А/ = 0,2 с
3.10. Анализ моделей в переменных состояния с помощью MATLAB
171
Рис. 3.32
Функция Isim для вычисления состояния и выходной переменной
u(t)j
Произвольный входной —►
t сигнал
Система
х = Ах + Ви у = Сх + Du
—► Выход
у(Г) — выход в момент t, Т: вектор времени, x(t) — состояние в момент t
t — моменты времени, в которые вычисляется реакция
Начальные условия (по выбору)
и = вход
[y,T,x]=lsim(sys,u,t,xO)
вых начальных условий, так и входной функции, что проиллюстрировано на рис. 3.32. На рис. 3.33 показано, как с помощью функции Isim вычисляется реакция /iLC-цепи. Состояние цепи в момент времени t = 0,2 с, вычисленное с помощью функции Isim, равно х,(0,2) = х2(0,2) = 0,6703. Как видим, этот результат полностью совпадает с данными, полученными ранее путем умножения переходной матрицы состояния на вектор начальных условий.
Рис. 3.33
Вычисление с помощью функции Isim временных характеристик при ненулевых начальных условиях и отсутствии входного сигнала
А=[0 -2;1 -3]; В=[2;0]; С=[1 0]; D=[0]; sys=ss(A,B,C,D); <— х0=[1 1]; ч--------- .
t=[0:0.01:1]; _
u=O*t; 4--------------------1
[y,T,x]=lsim(sys,u,t,xO); |
subplot(211),plot(T,x(:,1))
xlabelfBpeMH (c)’),ylabel(‘X_1 ’) subplot(212),plot(T,x(:,2)) х!аЬе1(‘Время (c)'),ylabel(‘X 2’)
Модель в переменных состояния
Начальные условия
Нулевой входной сигнал
172
Глава 3. Модели в переменных состояния
3.11. Пример синтеза с продолжением: система чтения информации с диска
□ Высококачественные диски имеют до 5000 дорожек на см. Ширина дорожек обычно порядка 1 мкм. Поэтому предъявляются очень жесткие требования к точности позиционирования считывающей головки и к ее перемещению от одной дорожки к другой. В этой главе мы разработаем модель дисковода в переменных состояния, которая будет учитывать эффект изгиба пластины.
Рассмотрим еще раз конструкцию считывающего устройства, изображенную на рис. 2.65. Поскольку для быстрого перемещения головки необходимо иметь малую массу рычага, то нам придется учесть эффект изгиба пластины, изготовленной из очень тонкой упругой стальной ленты. Еще раз отметим, что нам необходимо с высокой точностью управлять положением головки y(t), как это показано на рис. 3.34(a) (шаг 2 процедуры синтеза на рис. 1.19). Прежде всего мы попытаемся разработать модель системы, изображенной на рис. 3.34(a). Обозначим массу двигателя через Л/ь а массу головки через М2. Изгиб пластины будем характеризовать коэффициентом упругости к. Сила u(f), приводящая в движение массу Му, создается двигателем постоянного тока. Если пластина является абсолютно жесткой (не подверженной изгибу), то мы получим упрощенную модель, изображенную на рис. 3.34(6). Типичные параметры этой системы с двумя массами приведены в табл. 3.3.
Масса
u(t)
Сила
!/(*)
Масса ' Положение
двигателя пластина головки ГОЛОВКИ
— м2 —7WAW— k М2 М = Мх+ М2
Ьг ь2 Ъг
а) 6)
Рис. 3.34. (а) Модель системы с двумя массами и упругой пластиной. (6) Упрощенная модель с жесткой пластиной
Таблица 3.3. Типичные параметры системы с двумя массами
Параметр Обозначение Величина
Масса двигателя М} 20 г = 0,02 кг
Коэффициент упругости пластины к 10<Л<оо
Масса головки М2 0,5 г =0,0005 кг
Положение головки У® переменное, мм
Коэффициент трения массы 1 by 410 10-3 кГ/м/с
Сопротивление обмотки возбуждения R 1 Ом
Индуктивность обмотки возбуждения L 1 мГн
Постоянная электродвигателя К„, 125 Н • м/А
Коэффициент трения массы 2 Ь1 4,1 • 10‘3кГ/м/с
3,11, Пример синтеза с продолжением: система чтения информации с диска 173
Сначала мы получим передаточную функцию упрощенной модели на рис. 3.34(6) (шаг 5 процедуры синтеза на рис. 1.19). Учтем, что М= Мх+М2 = 20,5 г = 0,0205 кг. Тогда мы имеем:
мЦ + Ьх — = u(t}. (3.130)
dt' dt
Следовательно, передаточная функция модели
У(5) _ 1
U(s) 5(AZs+Z?!)
С учетом параметров в табл. 3.3 получим:
У(д)__________1 _ 40
(7(5) ~ 5 (0,02055 + 0,410) " 5 (5 + 20) ’
Структурная схема считывающего устройства с учетом обмотки электродвигателя приведена на рис. 3.35. При R = 1 Ом, L = 1 мГн и Кт = 125 мы имеем:
ад=Щ=-------------, (3.Ш)
Г(5) 5(5+20) (5+1000)
что совпадает с передаточной функцией, полученной в гл. 2.
Рис. 3.35
Структурная схема считывающего устройства с жесткой пластиной
Обмотка двигателя Масса
JC. U(s) 1 w WcA
Ls + В Сила s(Ms + bj) ** I JSJ
Теперь получим модель в переменных состояния для системы с двумя массами, изображенной на рис. 3.34(a). Дифференциальные уравнения имеют следующий вид:
d
для массы ЛА: М, —+ Ъ, — + k(q- у) = u(t\
dt2 dt
d2 у dy
для массы Л/,: М-> —+ b-, — + к(у-д) = 0.
dt" " dt
Выберем в качестве переменных состояниях! = q их2 =у. Тогда dq dy
--- - PJ JQ — - . dt-------------dt
Уравнение состояния в векторно-матричной форме:
х = Ах + Ви,
где
q 0 0 0 1 0
X = У q , B = 0 1/MX , A = 0 -k/Mx 0 k/Mx 0 -fe] !MX 1 0 (3.132)
_y 0 k/M2 -k!M2 0 -b2IM2
174
Глава 3, Модели в переменных состояния
Заметим, что выходом является y(t )=х4. Кроме того, пренебрегая индуктивностью обмотки двигателя (L = 0, имеем u(f) = K„,v(0- Выбрав значение к = 10 и используя остальные параметры из табл. 3.3, получим:
И0
Вг=[0 0 50 0]
0 0 1 0
0 0 0 1
А = -500 500 -20,5 0
20000 -20000 0 -8,2
Реакция переменной у при v(f) = 1 В, t > 0 изображена на рис. 3.36. Характер процесса является сильно колебательным, поэтому ясно, что необходимо иметь пластину с большой жесткостью, т. е. выбирать к > 100.
Рис 3.36
Реакция переменной у на ступенчатое входное воздействие в модели с двумя массами при к = 10
Единицы; к — кг/м, b — кг/(м/с) т — кг
% Параметры модели к=10;
№1=0.02; №2=0.0005;
Ь1=410е-03; Ь2=4.1е-03;
1=10:0.001:1.5];
% Модель в переменных состояния
А=[0 0 1 0; 0 0 0 1; -к/М1 к/М1 -Ы/М1 0; к/М2 -к/М2 0
-Ь2/М2];
В=[0;0;1/М1 ;0]; С=[0 0 0 1]; D=[0]; sys=ss(A,B,C,D);
% Вычисление переходной характеристики step(sys,t), grid
х1аЬе1(‘Время (с)‘), у!аЬе1(‘Скорость (м/с)')
о
0.5
Время (с)
1
1.5
Упражнения
175
3.12. Резюме
В этой главе мы рассмотрели метод описания и анализа систем во временной области. Были введены понятия состояния и переменных состояния системы. Показано, что в качестве переменных состояния целесообразно выбирать такие переменные, которые характеризуют накопление энергии в системе; в то же время было замечено, что набор переменных состояния не является единственным. Рассмотрено дифференциальное уравнение состояния и способы получения его решения х(Г). Было продемонстрировано, что передаточную функцию (или дифференциальное уравнение) системы можно представить двумя различными конфигурациями сигнального графа. Затем было показано, как по этим сигнальным графам можно легко записать дифференциальное уравнение состояния. Проиллюстрировано применение к сигнальным графам формулы Мейсона и показано, как с ее помощью можно определить переходную матрицу состояния, а с помощью последней — временные характеристики системы. Рассмотрен также дискретный способ получения временных характеристик нелинейных и нестационарных систем. Установлено, что дискретная аппроксимация временных характеристик и переходной матрицы состояния линейных систем хорошо поддается программированию и решению задач на цифровом компьютере. Обсуждено и проиллюстрировано на примерах применение MATLAB для преобразования одного вида модели системы (передаточной функции) в другой (уравнение состояния) и вычисления переходной матрицы состояния. В заключительной части главы была разработана модель в переменных состояния для системы чтения информации с диска.
Упражнения
У-3.1. Укажите, что бы вы приняли в качестве переменных состояния для цепи, изображенной на рис. 3.1 (У).
У-3.2. Дифференциальное уравнение, описывающее движение одного сочленения руки робота, имеет вид: dv - = - k}v(f) - k2y(t) + k3i(t\ at
Рис. 3.1 (У). /?£С-цепь
где v(Z) — скорость, y(t) — положение, а i(t) — ток в обмотке двигателя, управляющего сочленением. Запишите уравнения состояния и определите соответствующие матрицы
для случая кх = к2 = 1.
У-3.3. Система описывается уравнением состояния (3.16), где
Определите корни характеристического уравнения системы.
Ответ: s = -1/2 ± /л/З/2
У-3.4. Получите в переменных состояния описание системы, дифференциальное уравнение которой имеет вид:
t/3 у d2y dy
2^2 + 4 L2 + + 8у= 10iz(z).
dt3 dt2 dt
176
Глава 3. Модели в переменных состояния
У-3.5. На рис. 3.5(У) изображена структурная схема системы. Запишите уравнения состояния для этой системы в форме (3.16) и (3.17).
У-3.6. Система описывается уравнением (3.16), где
О 1
О о
(а) Определите матрицу Ф(?). (б) Определите x(Z) при начальных условиях х((0) = х2(0) = 1.
Ответ: (б) Xj = (1 + Z), х2 = 1, Z > 0.
У-3.7. Рассмотрите систему из пружины и массы, изображенную на рис. 3.3, где М= 1 кг, к = 100 Н/м, 6 = 20Н/м/с.
(а) Запишите векторно-матричное уравнение состояния.
(б) Определите корни характеристического уравнения данной системы.
I
0
-100 -20
о
1
Отвепг. (а) х =
и; (б) 5 = -10,-10.
х
У-3.8. Посадка на борт небольшого судна в условиях неблагоприятных погодных условий затруднена из-за качки. Динамика качки описывается матрицей А:
о о о
1
о
-5
О 1 -2
Юм
— »-г2= хг
Т
1 Ф —— 0.5 Ом
2 ф щ Выходная
переменная
Рис. 3.9 (У). /УС-цепь
А =
Определите корни характеристического уравнения.
У-3.9. На рис. 3.9(У) изображена электрическая цепь, находящаяся в режиме свободного движения. В качестве физических переменных состояния выбраны заряды на конденсаторах, т. е. -Xj = <7j и х2 = 92- (а) Изобразите сигнальный граф с физическими переменными состояния и запишите вектор-
но-матричное дифференциальное уравнение, (б) Перейдите к диагональной (канонической) форме графа и соответствующему дифференциальному уравнению. Учтите, что ц = dq}/dt = dxt/dt и i2 = dx2/dt. В качестве выходной переменной примите ток i2.
У-3.10. Система управления посадкой летательного аппарат а описывается двумя переменными состояния, и матрица А имеет вид:
6
О
-1 -5
(а) Вычислите корни характеристического уравнения.
(б) Определите переходную матрицу состояния Ф(/). Ответ: (a) s = -3, —2.
~3е’2' - 2е’3'
е-3' - е'21
(б) Ф(0 =
У-3.11. Составьте описание функцией
—бе 3/ + бе 2'
Зе’3' - 2'е *
в форме фазовой переменной для системы, заданной передаточной
У(5) 4(5+3)
J (s) =-- =-----------
A(s) (s+2)(s+4)
Упражнения
177
У-3.12. Получите модель в переменных состояния для электрической цепи, изображенной на рис. 3.12(У). Определите реакцию цепи на единичное ступенчатое входное воздействие, считая начальные значения тока и напряжения на конденсаторе нулевыми.
У-3.13. Система описывается двумя дифференциальными уравнениями:
В = 4 Ом L = 0.10 Гн
+
С = 1000 мкФ Vr
Рис. 3.12 (У). /?£С-цепь
— + у - 2и + aw = 0. dt
-----by + 4и = О, dt
где w и у есть функции времени, a u(f) — входное воздействие, (а) Выберите переменные состояния. (б) Запишите матричное дифференциальное уравнение и определите элементы матриц. (в) Определите корни характеристического уравнения системы как функцию параметров а и Ь.
Ответ', (в) s = — 1/2 ± V1 - 4 ah /2
У-3.14. Опишите в пространстве состояний радиоактивное вещество с массой М, которая пополняется со скоростью r(t) = Ku(t), где К = const. Поясните смысл переменных состояния.
Рис. 3.15 (У). Система с двумя массами
Рис. 3.16 (У). Две связанные тележки
У-3.15. Рассмотрите систему с двумя взаимосвязанными массами, изображенную на рис. 3.15(У). Коэффициент трения скольжения каждой массы равен Ь. Запишите векторно-матричное уравнение состояния.
У-3.16. На рис. 3.16(У) изображены две тележки, трением качения которых можно пренебречь. Внешняя сила равна u(t). Выходом является положение тележки 2, т. е. у(/) = q(t). Запишите векторно-матричное уравнение состояния.
У-3.17. Запишите векторно-матричное дифференциальное уравнение состояния для цепи, представленной на рис. 3.17(У).
У-3.18. Запишите векторно-матричное дифференциальное уравнение состояния для цепи, изображенной на рис. 3.18(У). В качестве переменных состояния примите Х| = х2 = i2 и х3 = v.
Рис. 3.17 (У). /?С-цепь
Рис. 3.18 (У). Я£С-цепь
178
Глава 3. Модели в переменных состояния
У-3.19. Система с одним входом и одним выходом описывается уравнениями
у =[10 0] х.
Определите передаточную функцию G(s) = Y(s)/U(s).
Ответ'. G(s) = -z-------.
s2 + 4s + 3
Задачи
3-3.1. На рис. 3.1(3) изображена RLC-цепъ. (а) Выберите переменные состояния, (б) Запишите систему дифференциальных уравнений первого порядка относительно переменных состояния, (в) Запишите векторно-матричное уравнение состояния.
3-3.2. На рис. 3.2(3) изображена схема уравновешенного моста. В качестве переменных состояния примите (х1; х2) = (vc, iL). (а) Покажите, что для данной схемы матрицы А и В имеют вид:
’-2/(/?j + R2)C 0 1 ] Г VC ’
А — , В —--------
о -2л|/?2/(а1 + a2)zJ ri + r2\_r2/l -r2/l_
(б) Изобразите структурную схему в переменных состояния, приняв (х|5 х7) = (vc, i£).
3-3.3. На рис. 3.3(3) изображена электрическая цепь, в которой переменными состояния являются Xj = iL и х2 = vc. (а) Получите дифференциальное уравнение состояния.
Ответ (частично); А =
Рис. 3.3 (3). RLC-цепь
0
-1/C -1/RC
3-3.4. Система имеет передаточную функцию
У(х) s2 + 2s + 5
1 (.у) =--= —------_•......— .
R(s) s3 + 2s2 + 3s + 10
1/L
Изобразите модель системы в виде сигнального графа и запишите векторно-матричное уравнение состояния для двух вариантов конфигурации графа: (а) в форме фазовой переменной и (б) в виде структуры с многомерным входом.
3-3.5. На рис. 3.5(3) изображена замкнутая система управления, (а) Определите передаточную функцию системы T(s) = Y(s)/R(s). (б) Изобразите сигнальный граф для случая, когда он представлен в форме фазовой переменной, и запишите матричное дифференциальное уравнение состояния. (в) Изобразите сигнальный граф и запишите матричное дифференциальное уравнение состояния относительно физических переменных, указанных на рис. 3.5(3).
3-3.6. Запишите матричное уравнение состояния для электрической цепи, изображенной на рис. 3.6(3). Переменными состояния являются Xj = v(, х7 = v2 и х3 = i.
Задачи
179
Рис. 3.5 (3). Замкнутая система управления
Рис. 3.6 (3). /?£С-цепь
3-3.7. На рис. 3.7(3) изображена система автоматического регулирования глубины погружения подводного исследовательского робота. Глубина погружения измеряется датчиком давления. Установленный на корме привод имеет коэффициент передачи К = 1 при вертикальной скорости 25 м/с. Передаточная функция робота
Рис. 3.7 (3). Система управления подводным роботом
G(s) =
I)2 „2.1
а передаточная функция датчика в цепи обратной связи H(s) = 2s+ 1.
(а) Запишите уравнение состояния, (б) Определите, является ли система устойчивой.
3-3.8. На рис. 3.8(3) схематически изображен процесс мягкой посадки лунного модуля. Примите в качестве переменных состояния Х| = у, х2 = dy/dt, х3 = т, а в качестве управляющего воздействия и = dm/dt. Гравитационная постоянная Луны обозначена через g. Запишите уравнения со
стояния для этой системы. Является ли данная модель линейной?
3-3.9. В системах управления скоростью часто применяются элементы, принцип действия которых основан на использовании потока жидкости или газа. В таких системах совершенно отсутствуют движущиеся механические части. Они способны поддерживать заданное значение скорости с точностью до 0,5% за счет использования регулируемого ответвления потока и золотникового исполнительного устройства. Такие системы обладают также малой чувствительностью к возмущениям и высокой надежностью в широ-
Рис. 3.8 (3). Управление посадкой лунного модуля
ком диапазоне температур, электромагнитного и ядерного излучения, ускорений и вибрации.
180
Глава 3, Модели в переменных состояния
Рис. 3.9 (3). Система управления паровой турбиной
Рис. 3.10 (3). Двухкоординатная система управления
Усиление в системе достигается за счет использования форсунки с отклонением потока. Система подобного рода может управлять паровой турбиной мощностью 500 кВт со скоростью 12000 об/мин. Структурная схема такой системы изображена на рис. 3.9(3).
Параметры системы заданы безразмерными единицами: 6 = 0,1, J= 1 и А] = 0,5. (а) Определите передаточную функцию замкнутой системы T(s) = w(s)//?(s). (б) Запишите векторно-матричное дифференциальное уравнение состояния, (в) Определите характеристическое уравнение системы, использовав для этого матрицу А.
3-3.10. На рис. 3.10(3) изображена двухкоординатная система управления. Коэффициенты передачи по каналам соответственно равны К] и К2, а переменные состояния обозначены на рисунке.
(а) Запишите дифференциальное уравнение состояния, (б) Получите характеристическое уравнение системы, использовав для этого матрицу А. (в) Определите переходную матрицу состояния при = 1 и К2 = 2.
3-3.11. Система описывается уравнением (3.16), где Г1 -2’ А = 2 -3
Известно, что u(t) = 0. Х](0) = х2(0) = 10. Определите -х,(/) и x2(t).
3-3.12. Система описывается передаточной функцией
Y(s) 8(s+5)
/ (|У) — — а ~
R(s) s3 + 12s2 + 44s + 48
(а) Представьте систему в форме фазовой переменной, (б) Определите канонический вид матричного уравнения состояния, (в) Определите переходную матрицу состояния Ф(/).
3-3.13. Рассмотрите еще раз RLC-цепь из задачи 3.1, полагая R = 2.5, L= 1/4 и С= 1/6.
(а) С помощью матрицы А определите характеристическое уравнение системы и исследуйте ее устойчивость, (б) Определите переходную матрицу состояния цепи, (в) Определите реакцию системы, если начальное значение тока через индуктивность равно 0.1 A. vc(0) = 0 и v(t) = 0.
(г) Повторите п. (в), если все начальные условия равны нулю, a v(t) = Е = const при t > 0.
3-3.14. Получите векторно-матричное уравнение состояния для системы, имеющей передаточную функцию
т/.л _ y(s) _ s2 + 7s + 2
R(s) s3 + 9s2 + 26s + 24
Задачи
181
3-3.15. Изобразите сигнальный граф и запишите матричное уравнение состояния для системы с передаточной функцией
Г(5) 5(5+6)
1 (S~ ч
Я(5) S3 + 1052 + 315+ 30
представив ее (а) в форме фазовой переменной и (б) в канонической (диагональной) форме. 3-3.16. На рис. 3.16(3), (а) изображена система распределения в капсулы радиоактивной жидкости.
Движение поддона с капсулами в горизонтальном направлении осуществляется с помощью линейного привода. Структурная схема системы управления этим движением приведена на рис. 3.16(3), (б). Полагая К = 500. (а) представьте систему в переменных состояния и (6) вычислите ее реакцию на единичное ступенчатое входное воздействие, (в) Определите корни характеристического уравнения замкнутой системы.
Рис. 3.16 (3)
Автоматическое распределительное устройство
а)
Вид сверху
О Р О С; ОООС'
Заполненные капсулы
_ _ Заполняющие
Трубка головки
Поддон с пустыми капсулами
Ось х
Стол
Вид сбоку
Двигатель с червячной передачей
Линеиныи привод
3-3.17. Динамические характеристики подводной лодки существенно отличаются от аналогичных характеристик самолета, ракеты или надводного корабля. Это различие объясняется в первую очередь наличием момента в вертикальной плоскости, возникающего за счет выталкивающей силы. Поэтому представляет интерес рассмотреть задачу управления глубиной погружения подводной лодки. Уравнения, описывающие динамику подводной лодки, можно получить с помощью законов Ньютона из рассмотрения углов, обозначенных на рис. 3.17(3). Чтобы упростить эти уравнения, предположим, что угол 0 является малым, а скорость у постоянна и равна 7, 5 м/с. Рассматривая движение только в вертикальной плоскости, примем в качестве переменных состояния X] = 0, х, = dQ/dt и х3 = а, где а — угол атаки. В этом случае векторно-матричное уравнение состояния имеет вид:
182
Глава 3. Модели в переменных состояния
О
0
О
х = -0,0071
1
-0,111
0,07
0,12
-0.3
-0,095
0.072
х +
0
где u(t) = 8s(t) — отклонение кормового руля глубины.
(а) Определите, является ли система устойчивой, (б) Используя дискретную аппроксимацию уравнения состояния, определите реакцию системы на ступенчатое изменение угла 8„ равное 0,285°, считая начальные условия нулевыми. Примите шаг дискретности по времени Т= 2 с. (в) Задав шаг дискретности Т= 0.5 с, с помощью цифрового компьютера вычислите реакцию каждой переменной состояния в течение 80 секунд. Сравните реакции, полученные в пп. (б) и (в).
3-3.18. Система описывается уравнениями состояния:
Рис. 3.17 (3). Управление глубиной погружения подводной лодки
у =[20 30 10] х.
Определите G(s) = Y(s)/U(s).
Рис. 3.19 (3)
Фрагмент промышленного робота
3-3.19. Рассмотрите задачу управления роботом, схематически представленную на рис. 3.19(3). Двигатель в локтевом сочленении приводит в движение запястье через предплечье, обладающее определенной гибкостью, как показано на рисунке в виде пружины. Пружина имеет коэффициент упругости к и коэффициент трения Ь. Пусть переменными состояния являются = ч>1 -<р2 и х, = (о/ыо, где сод = A(J( + J2)/(J}J2). Запишите уравнение состояния в векторно-матричной форме, если х3 = <й2/<й0.
3-3.20. В ряде случаев производную аппроксимируют следующим выражением:
х(г) « [Зх (Л + 1) - 4х (к ) + х (Л -1)].
При такой аппроксимации для оценки производной нужно знать два предшествующих значения сигнала, тогда как при использовании выражения (3.89) — только одно. Используя данную аппроксимацию, повторите вычисления примера 3.6. Сравните значения хДг), полученные при Т= 0,2 с, с данными, приведенными в табл. 3.1. Является ли данная аппроксимация более точной?
3-3.21. Ядерный реактор, работавший при постоянном уровне мощности и при высокой плотности потока тепловых нейтронов, внезапно останавливают. В момент остановки плотность ксено-на-135 (Л) и йода-135 (7) составляет соответственно 7 • 1016 и 3 • 1015 атомов в единице объема.
Задачи
183
Рис. 3.21 (3)
Характеристики ядерного реактора
Период полураспада радионуклидов йод-135 и ксенон-135 составляет соответственно 6,7 и 9.2 час. Уравнения распада имеют вид:
6,7
9,2
Определите концентрации йода-135 и ксенона-135 как функции времени после остановки реактора (а) путем вычисления реакции с помощью переходной матрицы состояния и (6) путем
дискретного вычисления этих характеристик. Убедитесь, что реакция системы имеет вид.
изображенный на рис. 3.21(3).
3-3.22. Существует несколько различных эквивалентных способов представления сигнального графа в переменных состояния. Две таких эквивалентных модели, соответствующие передаточной функции (3.38), изображены на рис. 3.8 и 3.10. Еще одна возможная конфигурация сигнального графа приведена на рис. 3.22(3). В данном случае
Рис. 3.22 (3). Модель системы второго порядка
система имеет второй порядок и ее передаточная функция
G(J) = I(£)=_^+A_
U (s) s2 + ats + а0
(а) Убедитесь, что граф на рис. 3.22(3) действительно соответствует этой передаточной функции. (6) Покажите, что векторно-матричное дифференциальное уравнение, соответствующее графу, имеет вид:
х =
0
-°о
А LAJ
где Л] = h] и h2 = b0 - btaj.
184
Глава 3. Модели в переменных состояния
Рис. 3.23 (3). /УЛС-цепь
3-3.23. Определите вид матричного дифференциального уравнения состояния для электрической цепи, изображенной на рис. 3.23(3). Переменными состояния являются xt = i, х2 = v( и = v2. Выходная переменная есть v0(t).
3-3.24. На рис. 3.24(3) изображена система с двумя проточными баками. Электродвигатель изменяет степень открытия входного вентиля и в конечном счете влияет на скорость выходного потока. Система имеет передаточную функцию
7'(s) = ^----,
s3 + 10s2 + 31s + 30
а ее структурная схема представлена на рис. 3.24(3), (б). Изобразите сигнальный граф и запишите матричное дифференциальное уравнение состояния для следующих конфигураций графа: (а) в форме фазовой переменной, (б) в виде структуры с многомерным входом, (в) в физических переменных состояния и (г) с развязанными переменными состояния.
Рис. 3.24 (3) Система с двумя проточными баками.
(а) Физическая модель и
(6) структурная схема.
поток
сигнал
3-3.25. Представляется очень заманчивым поддерживать постоянную температуру в здании с помощью регуляторов, использующих накопление солнечной энергии. Одна из таких систем описывается уравнениями:
= ЗХ| + И) + «2 ,
dx->
—- = 2х, + щ + а , dt 2 *2 ’
где X] — отклонение температуры от желаемого значения, а х2 — температура среды, накапливающей энергию (например, резервуар, наполненный водой). Соответственно ut и и2 есть тепловые потоки, отдаваемые в окружающую среду и поступающие от источника (Солнца), где транспортной средой является движение воздуха. Возмущение со стороны поступающей солнечной энергии, изменяющее температуру накопителя (например, из-за сплошной облачности), представлено переменной d. Запишите матричное уравнение состояния и определите реакцию системы при Wj = 0, «2 = 1 и d= 1 в случае нулевых начальных условий.
Задачи
185
3-3.26. Система описывается следующим дифференциальным уравнением:
О
r(Z).
Определите матрицы Ф(я) и Ф(/) для данной системы.
3-3.27. На рис. 3.27(3) изображена структурная схема -R(s) системы. Запишите дифференциальное уравнение состояния и определите переходную матрицу состояния Ф($).
3-3.28. На рис. 3.28(3) изображен гироскоп с одной степенью свободы. Гироскопические датчики измеряют угловое перемещение и используются в системах управления полетом. Ось вращения гироскопа смещается относительно направления ОБ (выходной переменной). Входная переменная есть угловое перемещение относительно оси ОА. Уравнение движения относительно выходной оси получается путем приравнивания скорости изменения угловых моментов сумме действующих моментов. Составьте описание гироскопической системы в переменных состояния.
3-3.29. На рис. 3.29(3) изображена система с двумя массами. Коэффициент трения качения равен Ь. Запишите уравнение состояния в матричной форме, если выходная переменная есть у2(/).
3-3.30. В настоящее время значительные усилия направлены на поиск способов манипулирования с объектами в космосе — например, при сборке космической станции или снятии спутника с орбиты. Для выполнения этих задач в грузовом отсеке космического челнока размешается дистанционно управляемый манипулятор. Эффективность использования
Коэффициент трения качения = Ъ
Рис. 3.29 (3). Система с двумя массами
такого манипулятора подтверждена последними полетами челноков, но теперь уже рассматривается проект создания нового устройства — манипулятора типа руки с надувными сегментами. Это позволит примерно в четыре раза уменьшить вес манипулятора и в восемь раз — объем, занимаемый им в грузовом отсеке космического челнока.
На рис. 3.30(3), (а) схематически показано применение манипулятора для сборки некоторой конструкции, а на рис. 3.30(3), (б) изображена модель гибкой руки манипулятора, где J— момент инерции приводного двигателя, а £ — расстояние до центра тяжести элемента, играющего роль нагрузки. Запишите уравнения состояния для этой системы.
186
Глава 3, Модели в переменных состояния
б)
а) Многозвенная
рука робота
Космическая конструкция
Приводной двигатель
Рис. 3.30 (3). Дистанционно управляемый манипулятор
3-3.31. Получите уравнения состояния для электрической цепи с двумя входами и одним выходом, изображенной на рис. 3.31(3), считая выходной переменной ток i2.
3-3.32. Экстендер — это особый тип манипуляторов, увеличивающий силу человеческой руки при различных действиях с нагрузкой, как показано на
Рис. 3.31 (3). /?ДС-цепь с двумя входами
рис. 3.32(3). Передаточная функция такой системы
^ = С(5) = (7(5)
30
s2 + 45 + 3 ’
где (7(5) — усилие человеческой руки, прикладываемое к манипулятору, а У(5) — усилие, прикладываемое манипулятором к нагрузке. Взяв за образец структуру графа на рис. 3.7, т. е. использовав его представление в форме фазовой переменной, запишите уравнения состояния и определите переходную матрицу состояния.
Рис. 3.32 (3)
Экстендер, увеличивающий силу человеческой руки
3-3.33. Лекарство, принимаемое внутрь, усваивается со скоростью г. Масса лекарства, находящегося в желудочно-кишечном тракте, равна т,, а масса лекарства в кровеносной системе — т2. Скорость изменения массы лекарства в желудочно-кишечном тракте равна разности скоростей его усвоения и поступления в кровеносную систему, причем считается, что она пропорциональна текущему значению массы. Скорость изменения массы лекарства в кровеносной системе пропорциональна его количеству, поступающему из желудочно-кишечного трата минус скорость, с которой масса теряется за счет метаболизма, которая пропорциональна текущему значению массы лекарства в крови. Разработайте модель этой системы в переменных состояния.
Задачи повышенной сложности
187
Для частного случая, когда элементы матрицы А равны единице (с соответствующими знаками), определите реакцию системы на начальные условия W7j (0) = 1 и т2(0) = 0. Постройте график изменения переменных состояния в зависимости от времени, а также соответствующую траекторию на плоскости (хь х2).
3-3.34. Динамика ракеты описывается передаточной функцией
U(s) s1
причем используется обратная связь по состоянию и = -х2-0,5х], где X] =y(t) и х2 = у(/). Определите корни характеристического уравнения системы и ее реакцию на начальные условия Х|(0) = 0 их2(0) = 1. U(s) и У(я) соответствуют приложенному моменту и положению ракеты.
3-3.35. Система имеет передаточную функцию
2^ = r(s) = __8-------------.
R(s) ? + Is2 + 14s + 8
(а) Запишите матричное дифференциальное уравнение состояния для данной системы. (6) Определите элемент <ри(7) переходной матрицы состояния.
3-3.36. Изобразите сигнальный граф в переменных состояния для системы, изображенной на рис. 3.36(3). Индуктивностью обмотки двигателя и трением можно пренебречь. Постоянная двигателя Кт = 10, а коэффициент противоЭДС Кь = 0,0706. Момент инерции двигателя и вентиля J- 0,006, а площадь сечения бака равна 50 м2. Учтите, что двигатель управляется током якоря Переменные состояния х1 = Л. х2 = 0 и х3 = dQ/dt. Считайте также, что расход ^, = 800. где 0 — угол поворота вала двигателя. Расход на выходе из бака д0 = 50Л(/).
Рис. 3.36 (3)
Система с проточным баком
Задачи повышенной сложности
П-3.1. Рассмотрите систему электромагнитной подвески, изображенную на рис. 3.1(П). В верхней части экспериментальной установки находится электромагнит. С помощью электромагнитной силы f необходимо удерживать стальной шарик в подвешенном состоянии. Заметим, что такая простейшая система является неработоспособной, поэтому требуется использовать обратную связь. Для этого под шариком помешается датчик, измеряющий величину зазора по значению наведенного в нем вихревого тока.
Предположим, что в качестве переменных состояния выбраны х, = х, х2 = dx/dt их3 = /. Катушка электромагнита имеет индуктивность L = 0,508 Гн и сопротивление R = 23.2 Ом. Для определения электромагнитной силы используйте разложение в ряд Тейлора. Ток 1, = /0 +». где 10= 1,06 А соответствует рабочей точке, a i есть величина переменная. Масса шарика т = 1,75 кг. Величина зазораxg = А'о + х, где рабочей точке соответствует^^ 4.36 мм, ах есть
188
Глава 3. Модели в переменных состояния
малое отклонение. Электромагнитная сила определяется уравнением /= k(i Jx)2, где к = 2,9-10 4 Н • м2/А2. Запишите матричное дифференциальное уравнение и определите передаточную фуНКЦИЮ Л"(5)/Г(5).
П-3.2. Рассмотрите массу т, установленную на тележке, как показано на рис. 3.2(П). Определите передаточную функцию T(s)/t7(s) и на ее основании запишите матричное дифференциальное уравнение состояния.
Рис. 3.1 (П). Система электромагнитной подвески
П-3.3. Движение автономного транспортного средства из одного пункта в другой требует управления его положением с высокой точностью. Подобную задачу решает система, изображенная на рис. З.З(П). Опре-
управления положением
делите каноническую диагональ- рис_ 3.3 (П). Система ную форму матричного дифференциального уравнения (или приблизьтесь к такой форме по возможности точнее).
П-3.4. В горных велосипедах применяется пружинная амортизация передней вилки. По сравнению с жесткой вилкой, с помощью которой переднее колесо крепится к раме, такая подвеска поглощает ударные импульсы, защищая раму и велосипедиста от тряски. Однако в подобных амортизаторах используется только одна пружина, которая совершенно одинаково реагирует на ударные воздействия как при больших, так и при малых скоростях, хотя эти воздействия значительно отличаются по силе.
Очень хорошим решением является амортизатор с несколькими
Масса т
Рис. 3.4 (П). Модель амортизатора
упругими элементами, которые могут настраиваться во время движения велосипеда. Существуют модели, у которых амортизатор имеет две пружины — одну обычную и вторую в сочетании с масляным демпфером. Такой амортизатор позволяет регулировать коэффициент упругости, приспосабливая его к профилю
трассы и весу велосипедиста. На рис. 3.4(П) показана схема такой подвески, где параметр h является настраиваемым. Выберите соответствующее значение Ь, позволяющее велосипеду приспосабливаться (а) к сильным ударам при больших скоростях и (6) к слабым ударам при малых скоростях. Примите значения = 1 и к2 = 2.
Задачи на синтез систем
П-3.5. На рис. 3.5(П) изображена масса Л/, подвешенная к другой массе пг с помощью легкого стержня длиной L. Считая угол 0 малым, т. е. используя линейную модель системы, запишите матричное дифференциальное уравнение состояния.
П-3.6. На рис. 3.6(П) изображен подъемный кран, тележка которого перемещается в направлении х, тогда как груз массой т смещается в направлении z. Двигатели, осуществляющие эти перемещения, являются достаточно мощными по отношению к массе тележки, подъемного
189
Рис. 3.5 (П). Масса, подвешенная к тележке
троса и груза. В качестве входных управляю-
щих переменных рассмотрите расстояния DwR. Примите также, что 0 <50°. Разработайте линейную модель системы и запишите дифференциальное уравнение состояния.
Рис. 3.6 (П) Подъемный кран с горизонтальным перемещением тележки и вертикальным перемещением груза
Задачи на синтез систем
СС-3.1. Вернитесь к линейному приводу с барабаном и рейкой, изображенному на рис. 2.1(СС). Пренебрегая индуктивностью обмотки двигателя и трением скользящей части стола, полу-
L*,.J чите модель системы в переменных состояния. Параметры системы приведены в табл. 2.1(СС).
С-3.1. Система «масса-пружина» с затуханием, изображенная на рис. 3.3, используется в качестве амортизатора в мотоциклах высокого класса. Заданы следующие параметры системы: т = 1 кг. b = 9 Н • с/м, к= 20 Н/м. (а) Определите матричное уравнение состояния системы, корни характеристического уравнения и переходную матрицу состояния Ф(0- Примите следующие начальные условия: у(0) = 1 и dy/dt\, = 0 = 2. (б) Изобразите графически процессы у(/) и dy/dt для первых двух секунд, (в) Измените коэффициент упругости пружины и коэффициент т рения таким образом, чтобы уменьшить величину ускорения d'y/dr, действующего на мотоциклиста. Масса при этом должна оставаться постоянной и равной 1 кг.
С-3.2. Система описывается следующим уравнением состояния в форме фазовой переменной:
х =
0 1
-а —Ь
0 d
х +
Выходная переменная у= lQx(. Необходимо записать уравнение состояния в канонической диагональной форме:
и, у = [-5 5] z.
Определите параметры а, b и d, при которых уравнение будет иметь требуемый вид.
о
-1
-3
0
z =
190
Глава 3. Модели в переменных состояния
Рис. 3.3 (С). Система остановки самолета на палубе авианосца
С-3.3. На рис. 3.3(C) изображена система остановки самолета при его посадке на палубу авианосца. Линейная модель каждого поглотителя энергии обладает тормозящей силой fD = КГ)ху Необходимо, чтобы самолет останавливался через 30 м после захвата им удерживающего троса. В момент посадки скорость самолета равна 60 м/с. Выберите требуемое значение коэффициента KD и изобразите график изменения переменных состояния.
С-3.4. Компания, производящая спортивное оборудование, заказывает вам проектирование корда для прыжков, при котором прыгун не мог бы удариться о землю, если его масса находится в диапазоне от 50 до 100 кг. Дополнительное требование сводится к тому, чтобы время прыжка (т. е. движение вверх и вниз) составляло от 25 до 40 секунд. Определите характеристики корда, считая, что прыгун стоит на платформе в 90 м над землей, а корд прикреплен к перекладине, находящейся в 10 м над платформой. Считайте, что рост прыгуна равен 2 м, а корд пристегнут к поясу (т. е. в точности на уровне 1 м).
Задачи, решаемые с помощью MATLAB
М-3.1. С помощью функции SS получите модель в переменных состояния для систем, имеющих в разомкнутом состоянии следующие передаточные функции:
. 1 . 3s2+ 105+1 5+14
(a) G (5) =-—; (б) G (5) = (в) G (5) = ——— --------.
5+ 10 5 + 85+ 5 5 + 35 + 35 + 1
М-3.2. С помощью функции tf определите передаточные функции для систем, модели которых в пе-
ременных состояния представлены следующими матрицами:
(а) А = 0 1 2 4 ,в = т 1 ,С = [1 0]; (б) А = 1 -2 6 1 0 0 4 ,в= 0 0 1 ,С=[0 1 0];
2 10
' 0 Г 01
(в) А = -1 - ,в 2 = ! >С = [1 1].
Задачи, решаемые с помощью MATLAB
191
М-3.3. Рассмотрите схему, изображенную на рис. З.З(М). Считая операционный усилитель идеальным, определите передаточную функцию
(а) Представьте схему в переменных состояния, если R\ = 1 кОм, R2 = 10 кОм, С( = 0,5 мФ и С, = 0,1 мФ. (б) На основании модели в переменных состояния из п. (а) с помощью функции step получите график переходной характеристики.
М-3.4. Рассмотрите систему, заданную уравнениями
у=[1 0 0] х.
(а) С помощью функции tf определите передаточную функцию Y(s)/U(s).
(б) Постройте график реакции системы на начальные условия х(0) = [0 -1 I]7 для 0 < t < 10.
(в) С помощью функции ехрт вычислите переходную матрицу состояния и определите х(г) при t= 10 для начальных условий из п. (б). Сравните полученный результат с данными из п. (б).
М-3.5. Рассмотрите две системы:
0,5000
х2 = -0,5000
-6,3640
0.5000
-0.5000
-0,7071
0,7071
0,7071
-8,0000
у = [0,7071 -0.7071 0] х2.
(2)
(а) С помощью функции tf определите передаточную функцию Y(s)/U(s) для системы (1).
(б) Проделайте то же самое для системы (2).
(в) Сравните результаты пп. (а) и (б) и прокомментируйте их.
М-3.6. Рассмотрите замкнутую систему, представленную на рис. 3.6(М).
(а) С помощью MATLAB получите модель в переменных состояния для регулятора.
(б) Проделайте то же самое для объекта.
(в) Используя результаты пп. (а) и (б), с помощью функций series и feedback получите модель в переменных состояния для замкнутой системы и постройте график ее реакции на импульсное входное воздействие.
М-3.7. Рассмотрите систему
у=[1 0]х
при начальных условиях х(0) = [1 О]7.
Рис. 3.6 (М)
Замкнутая система управления
R(s)
Y(s)
192
Глава 3. Модели в переменных состояния
С помощью функции Isim вычислите и изобразите графически реакцию переменных Х](/) и x2(t) при u(t) = 0.
Ключевые термины и понятия
Вектор состояния. Вектор, компонентами которого являются все п переменных состояния, хц
Х2. ...,Хп.
Временная область. Математическая область, в которой описание системы задается функциями времени t.
Дискретная аппроксимация. Аппроксимация, используемая для вычисления временных характеристик системы путем деления интервала времени на малые отрезки А/.
Дифференциальное уравнение состояния. Дифференциальное уравнение относительно вектора состояния: х = Ах + Ви.
Нестационарная система. Система, в которой один или несколько параметров могут зависегь от времени.
Обратная связь по состоянию. Способ формирования сигнала, прикладываемого к объекту управления, при котором он является непосредственной функцией всех переменных состояния.
Переменные состояния. Совокупность переменных, полностью описывающих поведение системы.
Переходная матрица состояния Ф(/). Матричная экспоненциальная функция, описывающая свободное движение системы.
Состояние системы. Совокупность таких чисел, которые при известных входной функции и уравнениях динамики системы позволяют определить будущее состояние системы.
Фундаментальная матрица. См. переходная матрица состояния.
Глава 4
Характеристики систем управления с обратной связью
Обзор
Во 2-й и 3-й главах основное внимание уделялось математическому моделированию физических систем. В настоящей главе мы дадим дальнейшее развитие идей моделирования, включив сюда такие вопросы, как чувствительность модели к неточности задания ее параметров, определение установившейся ошибки и переходных характеристик систем при тестовых входных сигналах, компенсация внешних возмущений. Мы рассмотрим важную роль сигнала ошибки, который образуется за счет действия обратной связи и используется для управления объектом. Вообще говоря, целью любой системы с обратной связью является минимизация сигнала ошибки.
Мы также введем понятие чувствительности системы к изменению ее параметров, поскольку с ее помощью можно оценить влияние подобных изменений на характеристики системы и разработать способ уменьшения этого влияния. Далее мы рассмотрим качество переходного режима системы с обратной связью и покажем, как можно добиться повышения этого качества.
Любая система управления всегда должна проектироваться так, чтобы по возможности уменьшить влияние нежелательных входных сигналов, называемых возмущениями, на выходной сигнал. Мы покажем, как этого можно добиться при решении задачи синтеза. Разумеется, при синтезе системы управления получение определенных выгод сопровождается также и издержками. Мы покажем, как эти издержки связаны с выбором датчика в цепи обратной связи. И, наконец, в завершение главы будет проведен анализ качества системы на уже известном примере синтеза с продолжением (система чтения информации с диска).
4.1. Разомкнутые и замкнутые системы управления
Теперь, когда мы уже умеем получать математические модели элементов систем управления, можно приступать к исследованию характеристик этих систем. В разд. 1.1 система управления была определена как соединение отдельных элементов в определенную кон-фшурацию, обеспечивающую получение заданных характеристик. Поскольку известна желаемая реакция системы, то можно сформировать сигнал, пропорциональный ошибке между желаемой и действительной реакциями. Использование этого сигнала для управления объектом приводит к появлению замкнутой последовательности операций, как показано на рис. 4.1. В результате образуется система с обратной связью. Введение обратной свя-
194
Глава 4. Характеристики систем управления с обратной связью
Рис. 4.1
Замкнутая система
Регулятор
Объект управления '<4
Выход
Измерение
Сравнение
зи часто вызывается необходимостью улучшения функционирования системы управления. Интересно, что обратная связь объективно присутствует в таких системах как биологические и физиологические. Например, частота сердечных сокращений у человека регулируется системой с обратной связью.
Чтобы проиллюстрировать преимущества введения обратной связи, мы рассмотрим простую одноконтурную систему. Хотя очень многие системы управления и не являются одноконтурными, многие моменты проще всего прояснить на примере одноконтурной системы, а затем полученные результаты распространить на многоконтурные системы.
Система без обратной связи, часто называемая системой с прямой цепью передачи воздействий или разомкнутой системой, изображена на рис. 4.2.
P(S) G(s) Y(s)
Рис. 4.2. Разомкнутая система управления
Разомкнутая система (система с прямой цепью передачи воздействий) не имеет обратной связи и образует выходной сигнал в виде непосредственной реакции на входной сигнал.
Напротив, замкнутая система управления с отрицательной обратной связью изображена на рис. 4.3.
Рис. 4.3
Замкнутая система управления
ВД 1 Ea(s) G(s) Y(s)
-H(s)
В замкнутой системе управления происходит измерение выходного сигнала и сравнение с его желаемым значением, в результате чего образуется сигнал ошибки, используемый для управления объектом.
Оба типа систем управления представлены как в виде структурных схем, так и виде сигнальных графов.
Во многих случаях H(s) равно единице или некоторой константе, отличной от единицы. Последнее характерно, например, для преобразования единиц измерения, скажем, радиан в вольты. Рассмотрим сначала случай единичной обратной связи, когда H(s)= 1. Тогда E.d(s) = E(s) и
У(5) = G(s)£(s) = G(s)[/?(s) - У(5)].
4,2. Чувствительность систем управления к изменению параметров
195
Выражая отсюда У($), получим:
(4-1)
1 + G(s)
Для сигнала ошибки имеем:
1 + G(s)
Таким образом, чтобы ошибка была незначительной, модуль выражения [ 1 +G(s)] должен быть много больше единицы в рассматриваемом диапазоне переменной $.
Теперь рассмотрим случай, когда H(s) Ф 1. Выход замкнутой системы определяется выражением
У(5) = ОДВД = G(s)[/?(s) -Я(5)У(5)], следовательно
Ж*). (4-2>
1 + GH(s)
Для сигнала ошибки имеем:
Отсюда следует, что ошибка будет тем меньше, чем сильнее неравенство |l+G/7(s)| > 1 в рассматриваемом диапазоне переменной 5. В действительности сигнал E.Js) является оценкой ошибки E(s). Эта оценка будет тем точнее, чем незначительнее динамика H(s) и чем ближе H(s) к единице в рассматриваемом диапазоне переменной 5.
4.2. Чувствительность систем управления к изменению параметров
Объект управления, представленный передаточной функцией G(s), какова бы ни была его природа, подвержен влиянию окружающей среды, старению, отсутствию точной информации о его параметрах и других объективных факторов, которые негативно сказываются на его поведении. В разомкнутой системе все эти факторы приводят к отклонению выходной переменной от желаемого значения. Замкнутая система, напротив, чувствует это отклонение, обусловленное изменениями параметров объекта, и пытается скорректировать выходную переменную. Поэтому чувствительность системы управления к изменению параметров есть вопрос первостепенной важности. Основное преимущество систем с обратной связью состоит в их способности снижать чувствительность к изменению параметров.
В случае замкнутой системы, если GH(s) » 1 для всех представляющих интерес значений комплексной частоты, то из (4.2) мы имеем:
у(5)«-^-А(5). (4.4)
7/(5)
Следовательно, выход определяется только передаточной функцией H(s), которая может быть и константой. Если H(s) = 1, то мы в точности достигаем желаемого результата, т. е. выход становится равным входу. Однако прежде чем использовать эту идею для синтеза
196
Глава 4. Характеристики систем управления с обратной связью
систем управления, мы должны заметить, что условие G(a)/7(.v)» 1 может привести к тому, что реакция системы будет сильно колебательной или даже к потере системой устойчивости. Но, тем не менее, тот факт, что увеличивая модуль функции G(s)H(s), мы уменьшаем влияние изменений в G(s) на выходную переменную, является исключительно ценным. Таким образом, первым преимуществом системы с обратной связью является то, что в ней уменьшается влияние изменений параметров объекта управления.
Чтобы проиллюстрировать сказанное выше, рассмотрим случай, когда за счет изменения параметров объекта его передаточная функция приняла выражение G(s)+AG(s). Тогда, если система является разомкнутой, выходная переменная (в виде изображения по Лапласу) получит приращение
ДГ($) = AG(s)A(s). (4.5)
В замкнутой системе мы имеем:
Y (л) + ДУ (5) =-G(a) —G(,<)----A(s). (4.6)
l + [G(s)+AG(s)]tf(s)
Отсюда приращение выходной переменной:
ДУ(л) =-----------------------------R(s). (4.7)
[1 + GH(s) + AG H(s)] [1 + GH(s)]
Если GH(s)» AGH(s), как это часто имеет место, то
ДУ(5)= AG(5) (4.8)
[l+G/7(s)]2
Анализ выражения (4.8) показывает, что в замкнутой системе изменение выходной переменной уменьшается в [l+G/7(x)] раз; в свою очередь член [l+G//(s)] обычно много больше единицы в представляющем интерес диапазоне комплексной частоты. Сомножитель ]+GH(s) играет очень важную роль в определении характеристик систем с обратной связью.
Чувствительность системы определяется как отношение процентного изменения передаточной функции системы к процентному изменению передаточной функции объекта. Система имеет передаточную функцию
д5) = И£2 (4.9)
R(s)
и, следовательно, чувствительность определяется, как
s _ A7W) AG(.?)/G(i) ’
В пределе, переходя к малым изменениям, (4.10) приводится к виду:
дт/т _ a in г dG/G ~ d\nG ’
(4.Н)
Чувствительность системы — это отношение изменения ее передаточной функции к изменениям передаточной функции (или параметров) объекта управления при условии их малости.
4.2. Чувствительность систем управления к изменению параметров
197
Из (4.5) следует, что чувствительность разомкнутой системы равна единице. Чувствительность замкнутой системы легко можно получить из (4.11). Замкнутая система имеет передаточную функцию
Г(д) = G(5)
l + GH(s)
Следовательно, ее чувствительность равна
S1 -- 1_________G
G ~ Sg' Т~ (1+ GH)2 G/(1 + GH)’
ИЛИ
£ 1 —__________
С \ + G(s)H(s)
(4.12)
Отсюда еще раз видно, что чувствительность замкнутой системы можно сделать меньше, чем ее чувствительность в разомкнутом состоянии, путем увеличения GH(s) в представляющем интерес диапазоне частот.
Чувствительность замкнутой системы к изменению передаточной функции элемента обратной связи H(s) равна
S* = (4.13)
дН Т \\ + GH) G/(1+GH) 1 + GH
Если произведение GH достаточно велико, то чувствительность близка к единице и изменения передаточной функции H(s) непосредственно сказываются на выходной переменной. Поэтому в качестве элементов обратной связи необходимо выбирать такие, которые обладали бы стабильными характеристиками, не зависящими от внешних факторов.
Часто бывает необходимо определить чувствительность S ’, где а — параметр передаточной функции G(.s). Используя правило дифференцирования сложной функции, можно записать:
S'l =s£ S%. (4.14)
Встречаются также случаи, когда передаточная функция системы T(s) имеет вид дроби:
T(s,a)
7V(s,a) £>(5, ос)
(4.15)
где а—параметр, подверженный изменениям за счет внешних факторов. Тогда чувствительность системы к изменению а можно записать, используя выражение (4.11):
sr _dlnT _d\nN “ д In а д In а
<Э1п£> Sin а
_ Г. N
Г» (У
(4-16)
О
где а0 — номинальное значение параметра.
Способность уменьшать влияние изменения параметров путем введения обратной связи — одно из положительных качеств замкнутых систем управления. Чтобы добиться высокой точности управления в разомкнутых системах, необходимо очень тщательно подходить к выбору элементов, образующих передаточную функцию G(.s). Напротив, замкнутые системы допускают определенные вариации параметров G(.v), поскольку их влияние ослабляется в l+G//(.s) раз. Это свойство замкнутых систем лежит в основе проектирования электронных усилителей, используемых в каналах связи. Мы проиллюстрируем данный факт на простом примере.
198
Глава 4. Характеристики систем управления с обратной связью
Пример 4.1. Усилитель с обратной связью
Во многих практических приложениях используется усилитель, имеющий коэффициент усиления - Хо, как показано на рис. 4.4(a). Выходное напряжение равно
v0 = -KaVi. (4.17)
Часто с помощью потенциометра вводится обратная связь, как показано на рис. 4.4(6). Усилитель без обратной связи имеет передаточную функцию
Т=-Ка,
и ее чувствительность к изменению коэффициента усиления равна
Sk =!
(4.18)
(4.19)
Коэф, усиления
-О
а)
Рис. 4.4. (а) усилитель; (6) усилитель с обратной связью
Рис. 4.5. Структурная схема усилителя с обратной связью при Rp » /?о
Передаточная функция усилителя
Структурная схема усилителя с обратной связью приведена на рис. 4.5, где ₽ = ^
(4.20)
Rp = R\ + R2.
(4.21)
обратной связью равна Ка
Т =-------.
1+0
а ее чувствительность к изменению Ка определяется как 1
(4.22)
(4.23)
о
и
с
Если Ка достаточно велико, то чувствительность является малой. Например, если
Ка= 104, Р = 0,1, (4.24)
то
1
с7'
К- 1+10;
(4.25)
что практически в 1000 раз меньше, чем для усилителя без обратной связи.
К понятию чувствительности мы еще вернемся в последующих главах, чтобы подчеркнуть его особую важность при синтезе и анализе систем управления.
4.3. Воздействие на переходную характеристику систем управления
199
4.3. Воздействие на переходную характеристику систем управления
Одна из наиболее важных характеристик систем управления — это переходная характеристика, т. е. реакция системы на входное воздействие, представленная как функция времени. Поскольку система управления должна обеспечивать желаемый вид этой реакции, то переходную характеристику часто приходится подгонять до тех пор, пока она не будет удовлетворять выдвинутым требованиям. Если система разомкнутая и ее переходная характеристика не является удовлетворительной, то, скорее всего, наиболее радикальное решение проблемы — это заменить объект. Напротив, в замкнутой системе часто можно добиться желаемого вида переходной характеристики настройкой параметров контура с обратной связью. Правда, и в разомкнутой системе иногда удается решить ту же задачу, включив последовательно с объектом (но перед ним) регулятор с передаточной функцией G^s), как показано на рис.
4.6. В этом случае синтез состоит в том, чтобы определить передаточную функцию Gx(s)G(s), обеспечивающую желаемый вид реакции системы.
Чтобы лучше понять сказанное выше, рассмотрим систему управления, которая может работать и как разомкнутая, и как замкнутая. Это система управления скоростью двигателя, изображенная на рис. 4.7. Подобная система, например, используется в прокатных станах для перемещения стальной полосы через валки. Передаточная функция такой системы без обратной связи была получена ранее [см. выражение (2.70)], откуда для a>(s)/Fa(j) мы имеем:
GJs) G(s)
H(s) О------►—О-----------*—О Y(s)
Регулятор Объект
Рис. 4.6. Разомкнутая система управления с последовательно включенным регулятором
РДу) -цл
где
(4-26)
RnJ
К
и т, =-------------
Rab + KbKni
Rab + KbKm
В прокатном стане валки обладают очень большим моментом инерции, поэтому необходим мощный двигатель, управляемый по цепи якоря. Если выдается команда на ступенчатое изменение скорости вращения валков, то
s
(4.27)
Рис. 4.7
Разомкнутая система управления скоростью двигателя
Е -±"
= постоянный ток возбуждения
Скорость co(t)
200
Глава 4. Характеристики систем управления с обратной связью
и реакция системы определяется выражением
a>(s) = G(s)Eo(s). (4.28)
Переходная характеристика, описывающая изменение скорости, имеет вид:
и(0 = Л:1/с2£(1-е"'/т'). (4.29)
Если процесс установления скорости идет очень медленно, то можно попытаться взять другой двигатель, чтобы изменить постоянную времени тР Однако поскольку Т[ определяется в основном моментом инерции нагрузки J, то вряд ли таким образом удастся повлиять на вид переходной характеристики.
Замкнутую систему управления скоростью легко реализовать, если использовать тахогенератор, выходное напряжение которого пропорционально скорости вращения. Это напряжение вычитается из напряжения, снимаемого с потенциометра, и разность затем подается на усилитель, как показано на рис. 4.8(a). На рис. 4.8(6) изображена полученная таким образом замкнутая система с маломощным транзисторным усилителем. Передаточная функция замкнутой системы имеет вид:
= KaG{s} = КОКХ = КОКХ!^
R(s) l + KoKtG(s) Txs+l+KaK,Kx s + (\ +КаК,Кх)1тх
Для того чтобы удовлетворить требованиям, предъявляемым к переходной характеристике системы, есть две возможности: варьирование параметров Ки (коэффициента усиления усилителя) и Кх (коэффициента передачи тахогенератора).
б)
Рис. 4.8. Замкнутая система управления скоростью двигателя, (а) Структурная схема, (б) Принципиальная схема
Переходная характеристика системы при ступенчатом изменении входного сигнала
определяется выражением
co(z) =—--------к2Е(1 — е~р1),
1 + КоК,Кх
(4-31)
4.3. Воздействие на переходную характеристику систем управления
201
гдер = (1+КоКД^/тр В предположении, что момент инерции нагрузки достаточно велик, путем увеличения коэффициента K.d мы можем приближенно описать реакцию системы
выражением
/ч 1 , J. (~^aKtKxt
1-expl--------—
(4-32)
Если, например, полюс разомкнутой системы равен 1/ti = 0,1, то полюс замкнутой системы можно сделать равным K-J^K^y = 10, т. е. тем самым в 100 раз повысить быстродействие системы. Заметим, однако, что для обеспечения надлежащего значения коэффи-
циент усиления усилителя Ки должен быть достаточно большим, и соответственно должно быть больше напряжение, прикладываемое к якорю двигателя (в сравнении с разомкнутой системой). Поэтому чтобы избежать насыщения двигателя, он должен быть выбран с большим запасом по мощности. На рис. 4.9 представлены переходные характеристики разомкнутой и замкнутой систем. Обратите внимание, насколько увеличилось быстродействие
замкнутой системы.
Рис. 4.9 Переходные характеристики разомкнутой и замкнутой систем управления скоростью двигателя При Т-) = 10 с и KxKgKt = 100.
Для достижения 98% установившегося значения скорости в разомкнутой и замкнутой системе требуется соответственно 40 с и 0,4 с
Время (с)
Хотя сейчас речь идет об улучшении быстродействия системы управления скоростью двигателя, имеет смысл также определить чувствительность разомкнутой и замкнутой систем. Как и прежде, чувствительность разомкнутой системы к изменению коэффициента передачи двигателя Кт или коэффициента передачи потенциометра к2 равна единице. Чувствительность замкнутой системы к изменению Кп равна
S г = SfSG = 1 =______-_____=______S + _____ (433)
К'“ С Кп l + GH(s) l + KaK,G(s) s+(KaK,Kx + 1)/т1 ’
Используя значения параметров, приведенные в предыдущем разделе, получим: у _ s + 0,1 О И ----------------------- ----
" s + 10
(4-34)
Мы видим, что чувствительность является функцией переменной s и должна вычисляться для различных значений частоты. Этот анализ не столь сложен, но мы отложим его до некоторого времени. Тем не менее, ясно, что при некоторой низкой частоте — например, при s=j(£>— jl — чувствительность составляет примерно \S£° |«0,1.
202
Глава 4. Характеристики систем управления с обратной связью
4.4. Возмущения в системах управления с обратной связью
Третьей важной функцией обратной связи в системах управления является частичная компенсация влияния возмущений. Возмущение — это нежелательный входной сигнал, который оказывает влияние на выходной сигнал системы. Многие системы управления подвержены влиянию внешних воздействий, приводящих к отклонению выходного сигнала от желаемого значения. Так, в электронных усилителях всегда имеет место шум, возникающий в транзисторах или интегральных схемах; на антенны радиолокаторов влияют порывы ветра; во многих системах также возникают искажения за счет присутствия в них нелинейных элементов. Системы с обратной связью обладают тем преимуществом, что в них влияние всех этих негативных факторов может быть существенно снижено.
В качестве примера системы с нежелательным возмущением рассмотрим уже знакомую нам систему управления скоростью вращения привода валков прокатного стана.
Валки, через которые проходит стальная полоса, подвержены значительному изменению нагрузки, играющей роль возмущения, к вал-
кам (см. рис. 4.10), они по существу вращаются без нагрузки. Однако когда полоса по- Рис- 4.10. Прокатный стан
падает между валками, то нагрузка на них
мгновенно становится значительной. Этот эффект может быть учтен в виде ступенчатого изменения возмущающего момента, как показано на рис. 4.11. Тот же эффект можно проиллюстрировать, используя нагрузочные (внешние) характеристики типичного электродвигателя, изображенные на рис. 4.12.
Пока стальная полоса приближается
Возмущение
Рис. 4.12
Нагрузочные характеристики двигателя
Рис. 4.11. Разомкнутая система управления скоростью (без главной обратной связи)
4.4. Возмущения в системах управления с обратной связью
203
Для двигателя постоянного тока, управляемого по цепи якоря, в примере 2.4 была получена модель в виде структурной схемы. Эта модель воспроизведена на рис. 4.11, причем предполагается, что La~ 0. Ошибка системы на рис. 4.11 равна
E(s) = R(s) - co(.v),
где R(s) = w^s) есть желаемое значение скорости. Для упрощения вычислений положим R(s) = 0 и будем исследовать E(s) = - со (л), т. е. изменение скорости, вызванное возмущением:
1
E(s) = - <»(.$) =------------Td (.v).
Js+b + KmKb/Ra
При ступенчатом изменении момента нагрузки 7j(.v) = D/s, и с помощью теоремы о конечном значении мы можем определить установившуюся ошибку:
lim e(f) = lim £(.?) = lim.s--?---------— =-------—-----= -и0(со} (4.36)
,^о ,->о Js + b + K„,Kb/Ra s b + KmKb/Ra
Замкнутая система управления скоростью в виде структурной схемы изображена на рис. 4.13. Та же система, но в виде сигнального графа, изображена на рис. 4.14, где G](s) = KJtJRa, G2(s) = l/(Js + b) и H(s) = K( + Kb !KU. По сигнальному графу с помошью формулы Мейсона можно получить выражение для ошибки E(s) = - co(.v):
G2(s)
(4.35)
£(s) = -w(s) =----------------7 (S).
1 + Gi(s)G2(s)//(s)
Если в некотором диапазоне комплексной переменной s выполняется условие G\G2H(s) » 1, то можно считать, что
£(s)«-----!----Td(s).
G\(s)H(s)
Следовательно, если произведение G[(.?)£(.?) сделать достаточно большим, то влияние воз-
мущения можно существенно уменьшить. Заметим, что
C1(s)77(S)=£^l
Rn
Кь\~КаКтК, К
R
(4.37)
(4-38)
поскольку Ка » Кь. Поэтому мы должны постараться получить большой коэффициент усиления Ка и сохранить Ra<2 Ом. В системе на рис. 4.14 ошибка E(s) = R(s) - <»(.$), где R(s) = со j(s) есть желаемое значение скорости. Как и в разомкнутой системе, положим R(s) = 0 и исследуем со(.$).
Td(s)
Рис. 4.13. Замкнутая система управления скоростью
204
Глава 4. Характеристики систем управления с обратной связью
Рис. 4.14
Замкнутая система управления скоростью, (а) Модель в виде структурной схемы.
(б) Модель в виде графа
Выражение для выходной переменной системы на рис. 4.13 при /?(.$) = 0 можно получить с помощью формулы Мейсона:
co(.v) -------------------------------------------------Td (s) =
1 + (KtKaK„,!Ra )[1/(Л + ft)] + (KmKh!Ra)[1/(Л + ft)]
---------------------------Td(s).
Js+b + (KmIRa)(KtKa + Kb)
По теореме о конечном значении находим:
lim <»(/) = lim.vo)(.s) =---------------------D:
.v—>o b + (Km/RaKKtKa + Kb)
(4.40)
если коэффициент усиления Ка достаточно велик, то
со(оо)»-
KaKmKt
D = ac(co).
(4-41)
Сравнивая изменение скорости из-за нежелательного возмущения в замкнутой и разомкнутой системах, получим:
аЛ™) _Rab + KmKb ®о(°°) КаКтК,
(4-42)
Обычно это отношение не превышает 0,02.
Преимущество замкнутой системы управления скоростью можно также проиллюстрировать на примере нагрузочных характеристик этой системы, приведенных на рис. 4.15. Мы видим, что эти характеристики почти горизонтальны, а это указывает на то, что скорость почти не зависит от момента нагрузки.
300 —
200
100
10 20 30
Vz=50 В
Vz=40B
V)=30B
Момент нагрузки (Н - м)
Рис. 4.15. Нагрузочные характеристики замкнутой системы
4.4. Возмущения в системах управления с обратной связью
205
Основная причина введения обратной связи состоит в ее способности уменьшать влияние внешних возмущений и шумов, возникающих внутри системы. Во многих системах шум возникает на выходе измерительного элемента (датчика). Этот шум можно представить в виде сигнала N(s), как показано на рис. 4.16. Влияние шума на выходную переменную оценивается выражением
-G1G2//2(,)
l + GlG2HlH2(s)
или, приближенно,
(4.44) ^10)
Очевидно, что проектировщик должен стремиться получить как можно большее значение Нх(я), что эквивалентно максимизации отношения сигнал/шум на выходе датчика. Кроме того, элементы обратной связи /7(л) должны работать при минимальном шуме, дрейфе и изменении параметров. Это требование вытекает из функции чувствительности (4.13), которая показывает, что ~ 1 Следовательно, необходимо принять все меры, чтобы датчик и элементы обратной связи обладали стабильными характеристиками. Как правило, этого всегда удается добиться, т. к. элементы обратной связи работают при малом уровне мощности и с незначительными затратами могут быть изготовлены с высоким качеством.
Эквивалентность чувствительности и реакции замкнутой системы на внешнее возмущение можно проиллюстрировать с помощью рис. 4.14. Чувствительность системы к изменению G2 равна
т 1 1
S’! =------------®----------. (4.45)
2 l + G^/YCs) GxG2H(s)
Влияние возмущения на выходную переменную при 7?(s) = 0 оценивается выражением
У (5) _ G2(s)_________1_
Td(s) \ + GxG2H(s)~ GxH(s)
(4.46)
В обоих случаях мы видим, что нежелательные эффекты можно ослабить путем увеличения коэффициента Ка, входящего в G[(s). Примечательно, что меры по уменьшению влияния изменения параметров системы или внешних возмущений эквивалентны и по счастливому стечению обстоятельств действуют одновременно. В качестве заключительной иллюстрации этого факта мы отметим, что для системы, изображенной на рис. 4.17, влияние
шума или возмущения на выходную переменную оценивается выражением
Y(s) _ 1
Td(s) l + GH(Sy
что полностью совпадает с чувствительностью .
(4-47)
Рис. 4.16. Замкнутая система управления при наличии шума датчика
Рис. 4.17. Замкнутая система управления при наличии шума на ее выходе
206
Глава 4. Характеристики систем управления с обратной связью
Очень часто шум присутствует во входном сигнале системы. Например, входной сигнал может иметь вид r(t) + «(/), где r(t) соответствует желаемому виду реакции системы, а и(0 — шум. В данном случае замкнутая система будет реагировать на шум точно так же, как и на сигнал r(t), и будет неспособна улучшить отношение сигнал/шум на входе. Однако, если частотные спектры полезного сигнала и шума на входе системы разнесены друг от друга, то можно добиться улучшения отношения сигнал/шум на выходе системы. Во многих случаях для этого достаточно, чтобы замкнутая система представляла собой фильтр низких частот.
4.5. Установившаяся ошибка
Система с обратной связью предоставляет инженеру возможность влиять на вид переходной характеристики. Кроме того, как мы уже видели, такая система позволяет значительно уменьшить ее чувствительность к изменению параметров и ослабить влияние возмущений. Однако имеет также смысл исследовать и сравнить установившуюся ошибку в разомкнутой и в замкнутой системах. Установившаяся ошибка — это ошибка, остающаяся после окончания переходного процесса, вызванного внешним воздействием.
Б(в) -----► G(s)
У(8)
Рис. 4.18. Разомкнутая система управления
Т?(8)
Рис. 4.19. Замкнутая система управления
В разомкнутой системе, изображенной на рис. 4.18, ошибка равна ад=ад - ад=п - ОД]ад.
В замкнутой системе на рис. 4.19 при H(s) = 1 согласно (4.3) ошибка равна
£с^=-г4т^Л(л)-
_______1 + Сг(.у)_
(4.48)
(4.49)
Для вычисления установившейся ошибки используется теорема о конечном значении:
lim e(r)= lim.sE(.s). (4.50)
__ s->0
Приняв для сравнения входной сигнал в виде единичной ступенчатой функции, в разомкнутой системе мы получим:
е0 (оо)= lim41 -G(s)] • - = lim[l - <7(.s)] = 1 -G(0).
v-»0 s .'->0
В замкнутой системе при H(s) = 1 имеем:
e.(oo) = lims
Ll + G(s)
1 =1
s 1 + 0(0)
(4.51)
(4-52)
1
Случай неединичной обратной связи рассматривается в разд. 5.8.
4.5. Установившаяся ошибка
207
Значение G(s) при 5 = 0 часто называют коэффициентом усиления на нулевой частоте (по постоянному току), и это значение обычно больше единицы. Следовательно, в разомкнутой системе мы получим большую установившуюся ошибку, а в замкнутой системе она будет незначительной.
Анализ выражения (4.51) показывает, что в разомкнутой системе установившаяся ошибка может равняться нулю, если обеспечить выполнение условия G(0) = 1. Тогда возникает естественный вопрос: а в чем же заключается преимущество замкнутой системы? Чтобы ответить на этот вопрос, нам придется вернуться к понятию чувствительности. Действительно, в разомкнутой системе можно так подобрать ее параметры, чтобы выполнялось условие G(0) = 1. Однако в процессе эксплуатации системы ее параметры наверняка будут изменяться под влиянием внешних факторов, что приведет к отклонению коэффициента усиления G(0) от единицы. Значит, появится отличная от нуля установившаяся ошибка, устранить которую можно только перенастроив систему. Напротив, в замкнутой системе происходит непрерывное измерение ошибки и вырабатывается сигнал, приводящий к уменьшению ее установившегося значения. Таким образом, мы приходим к выводу, что побудительным мотивом к введению отрицательной обратной связи является снижение чувствительности системы к дрейфу ее параметров, неточности их настройки и внешним возмущающим факторам. Пример оригинальной системы с обратной связью приведен на рис. 4.20.
Рис. 4.20
Грип-П — это искусственная рука в виде протеза, управляемая с помощью троса. Она может быть использована для переключения скоростей автомобиля, забивания гвоздей, нарезания помидоров и выполнения других несложных задач, требующих двух рук. Ее действие основано на тяговом усилии троса, а сила захвата изменяется в диапазоне от 0 до 110 фунтов. Рука воспроизводит движение большого и указательного пальцев и осуществляет захват, когда на трос воздействуют спинные мышцы человека. Обратная связь осуществляется человеком визуально, но он не испытывает нормального ощущения прикосновения, присущего большинству людей при осторожных действиях с предметом
Способность замкнутой системы уменьшать установившуюся ошибку, вызванную изменениями параметров и неточностью их настройки, мы проиллюстрируем следующим примером. Рассмотрим систему, в которой объект управления имеет передаточную функ
цию
G(5) =
К
T.S+ 1
(4-53)
Такая передаточная функция характерна для тепловых объектов, регуляторов напряжения или емкостей с жидкостью при регулировании уровня. При задании входной переменной в
208
Глава 4. Характеристики систем управления с обратной связью
виде единичной ступенчатой функции мы имеем 7?(а) = l/s. Тогда в соответствии с (4.51) в разомкнутой системе установившаяся ошибка будет равна
e0(oo)=l-G(0)=l-X (4.54)
при согласованных единицах измерения R(s) и К. В замкнутой системе (рис. 4.19) мы имеем:
Ec(s) = R(s) - T(s)R(s), где T(s) = G(s)/[1 + G//(.s)]. Установившаяся ошибка равна ес (оо) = limsfl - T’(.s)] 1 = 1- 7(0). -v->0 5
Если H(s) = 1/(tjS + 1), то Я(0) = 1 и G(0) = К. Следовательно, , . , К 1 ес (°о) = 1------------------------------=------.
1 + Х 1 + Х
(4.55)
В разомкнутой системе можно было бы, к примеру, задать К = 1, тогда установившаяся ошибка будет равна нулю. В замкнутой системе можно задать большое значение К, например, К = 100. Тогда установившаяся ошибка в ней составит ес(а>) = 1/101.
Если теперь в силу каких-то факторов начальное значение К изменится на 10%, т. е. ЬК/К = 0,1, то в разомкнутой системе появится абсолютное приращение установившейся ошибки Ле0(со) = 0,1, а относительное приращение составит Ле0(со) _ о,1 KOI "Т
т. е. также 10%. При таком же приращении l\K!K = 0,1 в замкнутой системе установившаяся ошибка составит ес(оо) = 1/91 (при отрицательном приращении К). Следовательно, абсолютное изменение установившейся ошибки будет равно
. ч 1 1 Дес(со) =-------,
91 101
а относительное приращение составит
Ас,. (оо)
—=0,0011, KOI
или 0,11%. Как говорится, результат в комментариях не нуждается.
(4.56)
(4.57)
(4.58)
4.6. Издержки обратной связи
В предыдущих разделах подчеркивались преимущества, которые получает система управления при введении обратной связи. В то же время эти преимущества отчасти сопровождаются издержками. В первую очередь это связано с тем, что реализация обратной связи увеличивает число элементов и сложность системы. Чтобы ввести обратную связь, необходимо иметь несколько элементов, из которых ключевую роль играет датчик. Очень часто датчик оказывается самым дорогим элементом системы, к тому же он вносит погрешности, а его выходной сигнал сопровождается шумом.
Второй издержкой обратной связи является уменьшение коэффициента усиления. Например, если одноконтурная система в разомкнутом состоянии имеет операторный коэффициент усиления (передаточную функцию) G(s), то при введении единичной отрица
4.7. Пример синтеза: бурильные машины для тоннеля под Ла-Маншем
209
тельной обратной связи он уменьшается до G(x)/[1+G(5)], т. е. умножается на 1/[1+G(5)], что совпадает с уменьшением чувствительности системы к изменению параметров и внешним возмущениям. Обычно желательно иметь некоторый запас в отношении коэффициента усиления разомкнутой системы, чтобы тем самым можно было влиять на переходную характеристику.
Следует отметить, что обратная связь уменьшает только коэффициент передачи от входа системы к ее выходу. Что же касается усилителя мощности и исполнительного устройства, то их коэффициенты усиления сохраняют свои значения, и возможности этих элементов полностью используются в замкнутой системе.
И, наконец, третья издержка обратной связи состоит в возможной потере системой устойчивости. Если разомкнутая система является устойчивой, то это еще не значит, что всегда будет устойчива и замкнутая система. Вопрос об устойчивости замкнутой системы мы отложим до главы 6, где он будет рассмотрен достаточно подробно.
Введение обратной связи в динамические системы создает дополнительные проблемы для проектировщика. Однако в большинстве случаев преимущества, получаемые за счет обратной связи, перевешивают недостатки, что и обуславливает широкое применение систем с обратной связью. Поэтому при синтезе системы управления увеличивается ее сложность и, как следствие, возникает проблема обеспечения устойчивости.
Не вызывает сомнения, что желательно, чтобы выход системы У(д) был равен ее входу Л(л). Однако задумавшись, можно задать себе вопрос: почему же просто не сделать передаточную функцию G(s) = Y(s)/R(s) равной единице? (См. рис. 4.2.) Ответ на этот вопрос становится очевиден, если мы вспомним, что передаточная функция G(s) соответствует реальному объекту, динамикой которого нельзя пренебрегать. Если предположить, что G(s) = 1, это будет означать, что выходная переменная системы полностью совпадает со входной. Но выходной переменной может быть, например, температура, угол поворота вала или скорость двигателя, тогда как входной переменной — напряжение, снимаемое с пот енциометра, и передаточная функция G(s) отражает физический процесс преобразования R(s') в У(д). Поэтому условие G(s) = 1 является нереализуемым, и нам приходится иметь дело с реальной передаточной функцией G(s~).
4.7. Пример синтеза: бурильные машины для тоннеля под Ла-Маншем
Сооружение тоннеля под Ла-Маншем между Францией и Великобританией началось в декабре 1987 г. Проходка осуществлялась с двух сторон, и первая стыковка тоннелей сост оялась в ноябре 1990 г. Тоннель имеет протяженность 37,8 км и проходит на глубине 60 м ниже уровня моря. Его строительство обошлось в 14 млрд, долларов и было завершено в 1992 г. Тоннель позволяет ежедневно пропускать 50 поездов. Он является кратчайшим путем между Европой и Великобританией, а поездка из Лондона в Париж занимает всего 3 часа.
Во время проходки тоннеля машины с двух сторон двигались навстречу друг другу. Чтобы соединиться в середине Ла-Манша с заданной точностью, направление движения машин задавалось прецизионной лазерной системой. На рис. 4.21 изображена структурная схема системы управления бурильной машиной, где У(.$) соответствует действительному угловому направлению движения машины, a R(s) — заданному углу. Влияние нагрузки на машину представлено возмущением D(s).
210
Глава 4. Характеристики систем управления с обратной связью
Рис. 4.21 Структурная схема системы управления бурильной машиной
У(8)
Угол
Цель синтеза состоит в выборе такого значения коэффициента К, при котором реакция системы на входное воздействие, соответствующее заданному значению угла, имела бы желаемый вид и при этом ошибка, вызванная возмущением, была минимальной. По формуле Мейсона выходную переменную с учетом двух входных сигналов можно представить в виде:
Г(х) = П5)Л(5) + Td(s)D(s) = / + 1Ь ад + -----------i-----ад.
s~ + 12s + К s2 + 12s + К
(4-59)
Чтобы уменьшить влияние возмущения, коэффициент К желательно иметь больше 10. Если выбрать К = 100 и положить d(t) = 0, то переходная характеристика системы при единичном ступенчатом воздействии г(<) будет иметь вид, представленный на рис. 4.22(a). Если же положить г(/) = 0 и считать, что возмущение имеет вид единичной ступеньки, то реакция системы примет форму, представленную на рис. 4.22(6). Мы видим, что влияние возмущения очень незначительно. При К = 20 реакции системы на еди-
Рис. 4.22
Реакции y(t) на
(а) единичную ступеньку r{f) и (б) на единичную ступеньку d{t) при К = 100
а)
У(0> град.
0
4.7. Пример синтеза: бурильные машины для тоннеля под Ла-Маншем
211
Рис. 4.23
Реакции Я0 на единичную ступеньку 40 (сплошная кривая) и на единичную ступеньку (пунктирная кривая) при К = 20
град.
Время, (с)
ничные ступенчатые воздействия r(t) и d(t) изображены на рис. 4.23. Поскольку перерегулирование на переходной характеристике небольшое (менее 4%), а установившееся значение достигается за 2 секунды, можно остановиться на величине К = 20. Результаты сведены в табл. 4.1.
Установившаяся ошибка системы при единичном ступенчатом воздействии r(t), т. е. при R(s) = 1/s, равна
lim е(/) = lim s---------Д—— - = 0.
.v-»0 К + 1 LS 5
(4.60)
1
(4-61)
s(s +1)
Установившееся значение y(i) при единичном ступенчатом воздействии d(f), т. е. при D(s) = IZs, и в случае r(t) = 0 равно
Imi V(t) = 1Ш1---------= — .
~оф +12) + К К
Это значение при К = 100 и 20 составляет соответственно 0,01 и 0,05.
В заключение найдем чувствительность системы к изменению передаточной функции объекта G(s). Используя выражение (4.12), имеем:
с 7 •_ s(s+l) W] —----------- .
5(5+12) + К
На низких частотах (|.v| < 1) чувствительность приближенно равна
S'g •
К
Мы видим, что чувствительность обратно пропорциональна значению К. Поэтому в данном случае можно считать, что выбор К = 20 является приемлемым компромиссом при синтезе системы.
Таблица 4.1. Реакции системы управления бурильной машиной при разных значениях К
(4.62)
(4.63)
Коэффициент К Перерегулирование реакции на г(0=1(Г) Время достижения установившегося значения реакции на г(Г)=1(7) (критерий 2%) Установившееся значение у(0 при </(/)= 1(7) и г(Г)=О Установившаяся ошибка при г(0=1(Г) и </(Г)=0
100 22% 0,7 с 0,01 0
20 4% 1,0 с 0,05 0
212
Глава 4. Характеристики систем управления с обратной связью
4.8. Пример синтеза: автономный самоходный аппарат для исследования Марса
На рис. 4.24 изображен самоходный аппарат для исследования Марса с питанием от солнечных батарей. Он может управляться с помощью команд с Земли, г(/). Входной сигнал представляет собой линейную функцию r(t) = t,t> 0. Система управления может быть разомкнутой, как на рис. 4.25(a), или замкнутой, как на рис. 4.25(6). Аппарат должен функционировать так, чтобы возмущения (например, камни на его пути) сказывались незначительно, а чувствительность к изменению параметра К была малой.
Разомкнутая система имеет передаточную функцию
R(s) s~ + 4s + 5
а замкнутая система — соответственно
zf(s)=^=-T—L.____.
R(s) s2+4s+3 + K
(4.64)
(4-65)
Рис. 4.24
Аппарат с солнечными батареями для исследования Марса совершил посадку 4 июля 1997 г. и 5 июля был отправлен в путешествие по поверхности планеты. Аппарат весит 10,5 кг и управляется оператором с Земли
B(s)
л)
ад
ад
Положение
аппарата
б)
D(s)
Y(s)
Положение аппарата
Рис. 4.25. Система управления самоходным аппаратом: (а) разомкнутая и (б) замкнутая
4.8, Пример синтеза: автономный аппарат для исследования Марса 213
Тогда, при К = 2 мы имеем: 2 T(s) = То (s) = Тс (5) = ----------------------------.
s +4s+ 5
Теперь мы можем сравнить чувствительность разомкнутой и замкнутой систем, имеющих одну и ту же передаточную функцию.
Чувствительность разомкнутой системы равна
Л dK То а чувствительность замкнутой системы — соответственно sr^dTc К _ ?+4х+3 к dK Тс s2+4s+3 + K
(4.66)
(4-67)
Чтобы определить чувствительность на низких частотах, положим s =усо и получим:
ST‘ (3-co2) + j'4co К (3 + K-ш2) + у4(0
При К = 2 на низких частотах (со < 0,1) мы имеем |5 Iе |» 0,6
График модуля чувствительности изображен на рис. 4.26. Отметим, что на низких частотах
(4.68)
Влияние возмущения можно оценить, положив А(х) = 0 и задав D(s) = l/s. Тогда в разомкнутой системе установившееся значение y(t) будет равно
у(а>) = lim
•v^o[(s+l)(5+3)
i=_i
s 3
(4.69)
Рис. 4.26
Модуль чувствительности замкнутой системы управления самоходным аппаратом
1
214 Глава 4. Характеристики систем управления с обратной связью
При тех же условиях в замкнутой системе получим:
у(°о ) = lim s —-5---— - = ——. (4.70)
.v-»o +4s+3 + ^J 3 + К
Если К = 2, то у (со) =1/5. Поскольку мы хотели бы минимизировать влияние возмущения, то желательно иметь как можно большее значение К. Увеличив значение К до 50, мы еще более уменьшим влияние возмущения, а также модуль чувствительности (4.68). Однако при К > 50 сильно ухудшится реакция системы на линейный входной сигнал r(t).
4.9. Определение характеристик систем управления с помощью MATLAB
В этом разделе мы с помощью MATLAB на двух примерах проиллюстрируем преимущества введения обратной связи в системы управления. В первом примере мы покажем, как за счет обратной связи можно добиться компенсации возмущений в системе управления скоростью двигателя. Эта система была рассмотрена в разделе 4.3. Во втором примере мы покажем, как в системе управления бурильной машиной (см. разд. 4.7) обратная связь позволяет уменьшить чувствительность к изменению параметров объекта, скорректировать вид переходной характеристики и уменьшить установившуюся ошибку.
Пример 4.2. Система управления скоростью
Структурная схема разомкнутой системы управления скоростью вращения двигателя при наличии возмущающего момента T/s) приведена на рис. 4.11. Параметры этой системы приведены в табл. 4.2. Система имеет 2 входа: V^s) и T/s). В соответствии с принципом суперпозиции, применимом к линейным системам, мы можем рассматривать каждый вход отдельно от другого. Чтобы исследовать влияние возмущений на систему, мы положим Г„(^) = 0 и будем рассматривать только вход T/s). И наоборот, чтобы исследовать реакцию системы на эталонный входной сигнал, мы положим T^s) = 0 и будем рассматривать вход Го(5).
Таблица 4.2. Параметры системы управления скоростью электродвигателя
Лг, Кт J Ь Кь Ка Kt
1 10 2 0,5 0,1 54 1
Структурная схема замкнутой системы с тахогенератором в цепи обратной связи изображена на рис. 4.13. Параметры Ка и К, также приведены в табл. 4.2.
Если система хорошо компенсирует возмущения, то мы можем ожидать, что T/s) слабо будет влиять на скорость co(s). Рассмотрим сначала разомкнутую систему на рис. 4.11. Мы можем с помощью MATLAB определить передаточную функцию от T/s) к co(s) и вычислить реакцию выходной переменной на единичное ступенчатое возмущение, т. е. T/s) = l/s. Эта реакция приведена на рис. 4.27(a). Вычисления произведены с помощью скрипта opentach.m, приведенного на рис. 4.27(6).
Разомкнутая система имеет передаточную функцию
co(s) 1
----=---------= sys о,
Td(s) 2s +1,5
где sys_O в срипте MATLAB соответствует передаточной функции разомкнутой системы. Поскольку желаемое значение <в(/) равно нулю [напомним, что V^s) = 0], то установившаяся
4,9, Определение характеристик систем управления с помощью MATLAB
215
Рис. 4.27
Анализ разомкнутой системы управления скоростью.
(а) Реакция на возмущение и (6) скрипт MATLAB
а)
Реакция разомкну гой системы на сгупенчаюе кюзмущенне
б)
opentach, m
% Система управления скоростью двигателя (пример) %
Ra=1; Km=10; J=2; b=0.5; Kb=0.1;
num1=[1]; den1=[J,b]; sys1=tf(num1,den1);
num2=[Krn*Kb/Ra]; den2=[1]; sys2=tf(num2,den2);
sys_o=feedback(sys1 ,sys2);
% sys_o=-sys_o; •<-----------
%
[yO,T]=step(sys_o);-<------
plot(T.yO)
Изменение знака передаточной функции, т. к. возмущение имеет знак минус
Вычисление реакции на ступенчатое возмущение
йИе(‘Реакция разомкнутой системы на ступенчатое возмущение ) х1аЬе1(‘Время (с)’), ylabel('\omega_0’),grid
% Установившаяся ошибка = последнее
yO(length(T)) значение выхода уО
ошибка просто будет совпадать с конечным значением <о(Г), которое мы обозначим через <о0(Г), чтобы подчеркнуть, что речь идет о разомкнутой системе. Установившаяся ошибка, показанная на графике на рис. 4.27(a), приблизительно равна значению скорости спустя время t = 7 с. Это значение можно рассматривать как последнее значение вектора выхода у0, вычисленное в процессе построения графика на рис. 4.27(a). Приблизительное значение а>0(со) равно:
ы0(оо) « соо (7) = - 0,66 рад/с.
График показывает, что система действительно достигает установившегося состояния.
Аналогичным образом мы начнем анализ замкнутой системы с определения передаточной функции от T/s) к <d(j) и вычисления реакции co(Z) на единичное ступенчатое возмущение. Эта реакция и соответствующая программа closedtach.m приведены на рис. 4.28. Передаточная функция замкнутой системы по отношению к возмущению равна
to(s) 1
—— =--------------= sys с
Td(s) 2s + 541,5
Как и ранее, установившаяся ошибка равна конечному значению го(Г), которое мы обозначим через сос.(О, чтобы подчеркнуть, что речь идет о замкнутой системе. Эта ошибка отмечена на графике на рис. 4.28(a). Ее можно рассматривать как последнее значение вектора выхода ус.
216
Глава 4. Характеристики систем управления с обратной связью
б)
Рис. 4.28 а)
Анализ замкнутой системы управления скоростью.
(а) Реакция на возмущение и (6) скрипт MATLAB
closedtach.m
% Система управления скоростью двигателя (пример) %
Ra=1; Km=10; J=2; b=0.5; Kb=0.1; Ka=54; Kt=1;
num1=(1]; den1=[J,b]; sys1=tf(num1,den1);
num2=[Ka*Kt]; den2=[1J; sys2=tf(num2,den2);
num3=[Kb]; den3=[1]; sys3=tf(num3,den3);
num4=[Km/Ra]; den4=[1]; sys4=tf(num4,den4);
sysa=parallel(sys2,sys3);
sysb=series(sysa,sys4);
sys_c=feedback(sys1 ,sysb); %
sys_c=-sys_c; ◄------------
%
[yc,T]=step(sys_c); ◄------
plot(T,yc)
title(‘Реакция замкнутой системы на ступенчатое возмущение’) х1аЬе!(‘Время (с)’), ylabel(‘\omega_c (pafl/c)’),grid
% гтт-----------------г-------------------
VCdenath(T)) <________Установившаяся ошибка = последнее
у } значение выхода ус
вычисленное в процессе построения графика на рис. 4.28(a). Установившееся значение со приблизительно равно
сос(оо) и сос(0.02) = - 0,002 рад/с.
Сравнение установившегося значения скорости в замкнутой и разомкнутой системах при единичном ступенчатом возмущении дает результат:
^> = 0,003.
Ю0(оо)
Отсюда видно, что введение отрицательной обратной связи позволило значительно умень-шить влияние возмущения на выходную переменную. Это демонстрирует свойство замкнутых систем компенсировать возмущения.
4.9. Определение характеристик систем управления с помощью MATLAB
217
Пример 4.3. Бурильные машины для тоннеля под Ла-Маншем
Структурная схема системы управления бурильной машиной для проходки тоннеля под Ла-Маншем представлена на рис. 4.21. При наличии двух входов выходной сигнал представля-
ется выражением
... . К + 1Is .
П*) = ———~^) + s" + 12s + Л
------------D(s)
s- + 12s + К
На рис. 4.29 представлены графики, иллюстрирующие влияние коэффициента К на переходную характеристику, а также скрипт englishl.m, с помощью которого они получены. Из сравнения двух графиков видно, что при уменьшении К уменьшается и перерегулирование. Хотя из графиков на рис. 4.29 это и не так очевидно, но при уменьшении К увеличивается время установления. В этом можно убедиться, если проанализировать данные расчетов, на основании кото-
рых построены графики. Этот пример показывает, как можно изменить вид переходной характе-
Рис. 4.29 а)
Реакция системы на ступенчатый входной сигнал при (а) К = 100 и (6) при К = 20. (в) Скрипт MATLAB
Переходная хараюерис! ика при
О 0.2 0.4 О.6 0.8 1 1.2 1.4 1.6 1.8 2
Время (с)
в) englishl.m
Передаточные функции замкнутой системы
% Переходные характеристики при К=20 и К=100 %
numg=[1]; deng=[1 1 0]; sysg=tf(numg,deng);
К1=100; К2=20;
num1=[11 K1J; num2=[11 К2]; den=[O 1];
sys1=tf(num1,den);
sys2=tf(num2,den);
%
sysa=series(sys1 ,sysg); sysb=series(sys2,sysg);
sysc=feedback(sysa,[1]); sysd=feedback(sysb,[1]);
%
t=[0:0.01:2.0]; ◄---------------------[ Задание интервала времени
[у 1 ,t]=step(sysc,t); [y2,t]=step(sysd,t);
subplot(211),plot(t,y1), Ш1е(‘Переходная характеристика при К=100')
х1аЬе1(‘Время (с)’), ylabel(‘y(t)’),grid
subplot(212), plot(t,y2), Ш1е(‘Переходная характеристика при К=20’)
х!аЬе1(‘Время (с)’), ylabel(‘y(t)’).gnd 4--Построение графиков
с разметкой осей л и у
218 Глава 4, Характеристики систем управления с обратной связью
ристики с помощью коэффициента К. На основании полученных результатов по-видимому предпочтительнее выбрать значение К = 20. Однако нужно принять к рассмотрению и некоторые другие соображения, прежде чем окончательно завершить процедуру синтеза.
Учитывая сказанное выше, полезно рассмотреть реакцию системы на единичное ступенчатое возмущение, как показано на рис. 4.30. Мы видим, что увеличение К приводит к уменьшению установившегося значения y(t). Это значение равно 0,05 и 0,01 при К= 20 и 100, соответственно. Показатели качества (установившаяся ошибка еуст. максимальное относительное перерегулирование <т1пах и время установления Ts при критерии 2%) сведены в табл. 4.3. Установившиеся значения y(f) можно также предсказать с помощью теоремы о конечном значении:
lim ХО = Um s ------------- -
а->0 [_s(.s+12)+/к] 5
Если целью синтеза является только компенсация возмущения, то предпочтительнее выбрать К= 100.
Рис. 4.30
Реакция системы на ступенчатое возмущение при (а) К = 100 и (б) при К = 20. (а) Скрипт MATLAB
Время(с}
в) english2.m
% Реакция на возмущение D(s)=1/s при К % numg=[1]; deng=[1 1 0]; sysg=tf(numg, deng); K1=100; K2=20; =20 и К=100
num1=[11 К1]; num2=[11 К2]; den=[0 1]; sys1=tf(num1,den); sys2=tf(num2,den); Передаточные функции замкнутой системы
% sysa=feedback(sysg,sys1); sysa=minreal(sysa); < sysb=feedback(sysg,sys2); sysb=minreal(sysb); % t=[0:0.01:2.5]; [y1 ,t]=step(sysa,t); [y2,t]=step(sysb,t); subplot(211), plot(t,y1), бИе(‘Реакция на возмущение при К=100’) х!аЬе1(‘Время (с)’), ylabel(‘y(t)’),grid subplot(212), plot(t,y2), Ш!е(‘Реакция на возмущение при К=20’)
х!аЬе1(‘Время (с)'), ylabel(‘y(t)’),grid ◄—— Построение графиков с разметкой осей х и у
4.9. Определение характеристик систем управления с помощью MATLAB 219
Таблица 4.3. Показатели качества системы управления бурильной машиной при К = 20 и К = 100
А>20 К = 100
°max 4% 22%
Ts 1,0 с 0,7 с
Сует 5% 1%
Мы уже встречались с распространенной ситуацией поиска компромисса при синтезе системы управления. В данном примере увеличение К приводит к лучшей компенсации возмущения; с другой стороны, при уменьшении К улучшается качество системы (меньше перерегулирование). Окончательное решение по поводу выбора К остается за проектировщиком.
Хотя MATLAB может оказать существенную помощь при синтезе системы управления, он ни в коем случае не может заменить интуицию инженера и его способность принимать решения.
В завершение анализа необходимо оценить чувствительность системы к изменению параметров объекта. Эта чувствительность определяется выражением (4.62);
st Ф+1)
G ф+ 12)+ К'
Мы можем вычислить значения S^(s) для различных значений 5 и изобразить чувствительность в виде графика. На низких частотах приближенно можно считать
К
Увеличение коэффициента К приводит к уменьшению чувствительности системы. Графическое изображение зависимости чувствительности от 5 =jco при К = 20 приведено на рис. 4.31.
Рис. 4.31
(а) Чувствительность системы к изменению параметров объекта (s = /и).
(6) Скрипт MATLAB
Чувств» гслы юсн. системы к изменению караморов обыгкта
б)
220
Глава 4. Характеристики систем управления с обратной связью
4.10. Пример синтеза с продолжением: система чтения информации с диска
□ Синтез системы чтения информации с диска является примером оптимизации и принятия компромиссных решений. Система должна точно позиционировать считывающую головку и в то же время обладать способностью уменьшать влияние изменения параметров и внешних ударов и вибраций. Механический рычаг и пластина могут резонировать на частотах, с которыми появляются внешние возмущения, например тряска портативного компьютера. К числу возмущений относятся также физические удары, износ или биения в подшипниках привода, изменение параметров элементов системы. В этом разделе мы исследуем реакцию системы на возмущения и ее поведение при изменении параметров. Кроме того, получим оценку установившейся ошибки при ступенчатом изменении задания и пронаблюдаем, как повлияет на переходную характеристику изменение коэффициента усиления усилителя Ка. Таким образом мы выполним шаги 6 и 7 процедуры синтеза, представленной на рис. 1.19.
Возмущение
Рис. 4.32. Система управления положением считывающей головки дисковода
Рассмотрим систему, изображенную на рис. 4.32. В этой системе в качестве регулятора используется усилитель с настраиваемым коэффициентом усиления. С учетом параметров, приведенных в табл. 2.11, мы получим структурную схему, изображенную на рис. 4.33. Сначала определим установившуюся ошибку при единичном ступенчатом входном воздействии, R(s) = \/s, полагая D(s) = 0. Поскольку H(s) = 1, то
1
Е(з) =----------------R(s).
l + KaGj(5)G2(5)
Следовательно,
lim e(t) = lim s —------------
/->« .v—>o |^l + KaG1(s)G2(s)
(4.71)
Отсюда следует, что e(°o) = 0 несмотря на любые изменения параметров системы.
Возмущение
В(8)
У(з)
Рис. 4.33. Система рис. 4.32 с параметрами из табл. 2.11
4.10. Пример синтеза с продолжением: система чтения информации с диска 221
Теперь получим переходную характеристику системы при разных значениях коэффициента Ка. Передаточная функция замкнутой системы с учетом условия D(s) = 0 имеет вид:
г(5) = Л£) = =__________5000Х,___________ (4 л)
R(s) 1 +KaGl(s)G2(s) ?+1020? + 20000s+ 5000Хо '
С помощью скрипта MATLAB, приведенного на рис. 4.34(a), мы получим переходные характеристики системы при значениях Ка = 10 и Ка = 80. Эти характеристики изображены на рис. 4.34(6). Очевидно, что система быстрее отрабатывает задающее воздействие в случае Ка = 80, но реакция имеет колебательный характер, что, по-видимому, неприемлемо.
Рис. 4.34 Переходные характеристики замкнутой системы, (а) Скрипт MATLAB. (б) Переходные характеристики при Ка = 10 и Ка = 80
Ка=10; -----------------------------
nf=[5000J; df=[1 1000]; sysf=tf(nf,df); ng=[1];dg=[1 20 0]; sysg=tf(ng,dg); sysa=series(Ka*sysf,sysg);
sys=feedback(sy sa, [1 ]);
t=[0:0.01:2];
step(sys.t);
ylabel(‘y(t)’),xlabel(‘BpeMH (c)‘),grid
Выбор Ka
Время (c)
222
Глава 4. Характеристики систем управления с обратной связью
Теперь определим влияние возмущения D(s) = 1/s, полагая R(s) = 0. Желательно, чтобы это влияние было незначительным. На основании рис. 4.33 имеем:
У(5) =
__----^).
l + V,^)
(4-73)
С помощью скрипта MATLAB, приведенного на рис. 4.35(a), при Ка = 80 и D(s) = 1/s мы получим реакцию системы, изображенную на рис. 4.35(6). Чтобы еще сильнее уменьшить влияние возмущения, нам потребовалось бы взять коэффициент Ка больше, чем 80. Однако при этом реакция системы на сигнал r(t) = 1, t > 0 была бы сильно колебательной. В следующей главе мы попытаемся определить оптимальное значение Хо, предъявив определенные требования к быстродействию системы и величине перерегулирования.
Рис. 4.35
Реакция на ступенчатое возмущение.
(а) Скрипт MATLAB.
(б) Реакция на возмущение при Ка = 80
Ка=80; ◄--------------------------
nf=[5000]; df=[1 1000]; sysf=tf(nf,df); ng=[1];dg=[1 20 0]; sysg=tf(ng,dg); sys=feedback(sysg,Ka*sysf);
sys=-sys;4-t=[0:0.01:2]; step(sys.t); ylabel(‘y(t)’),xlabelf Время (c)‘),grid
б)
Выбор Ku
Возмущение подается на сумматор со знаком минус
4.11. Резюме
Основные мотивы использования обратной связи, несмотря на сопутствующие этому издержки и увеличение сложности системы, сводятся к следующему:
1. Уменьшение чувствительности системы к изменению параметров объекта управления.
2. Возможность воздействовать на вид переходной характеристики.
3. Ослабление влияния внешних возмущений и шумов, возникающих внутри системы.
4. Уменьшение установившейся ошибки системы.
4,11. Резюме
223
Преимущества введения обратной связи можно проиллюстрировать на примере системы, изображенной на рис. 4.36(a). При этом коэффициенту усиления К можно придавать разные значения. В табл. 4.4 приведены результаты исследования разомкнутой системы при К = 1 и замкнутой системы при трех различных значениях К. Из таблицы видно, что увеличение коэффициента усиления в замкнутой системе приводит к уменьшению времени нарастания переходной характеристики, чувствительности системы к изменению параметров и установившейся ошибки. На рис. 4.36(6) изображена реакция системы на единичное ступенчатое возмущение [при R(s) = 0], причем отчетливо видно, что увеличение коэффициента усиления также ослабляет влияние возмущения.
Рис. 4.36
(а) Одноконтурная система управления.
(6) Изменение ошибки
при единичном ступенчатом возмущении в случае fl(s) = О
Таблица 4.4. Характеристики системы, изображенной на рис. 4.36(a)
Разомкнутая система* Замкнутая система
К= 1 А = 1 А = 8 К=10
Время нарастания (от 10% до 90% установившегося значения), с 3,35 1.52 0.45 0.38
Максимальное перерегулирование, % 0 4.31 33 40
Конечное значение у(1) при возмущении D(s)=l/s 1,0 0,50 0.11 0.09
Относительное значение установившейся ошибки при единичном ступенчатом входном воздействии 0 50% 11% 9%
Относительное изменение установившейся ошибки при уменьшении К на 10% 10% 5,3% 1,2% 0,9%
Разомкнутую систему имеет смысл рассматривать только при К=1.
Системы управления с обратной связью обладают многими полезными свойствами, и неудивительно, что большое число таких систем можно встретить в промышленности, природе и общественной жизни.
224
Глава 4. Характеристики систем управления с обратной связью
Упражнения
У-4.1. В устройствах электропитания от солнечных батарей используются системы с обратной связью, которые следят за положением Солнца с целью получения максимума отдачи мощности от батарей. Такая следящая система может быть представлена в виде рис. 4.3, где H(s) = 1 и
G(s) =
100 ts + 1
причем номинальное значение т = 3 с. (а) Определите чувствительность системы к малым изменениям т. (б) Определите постоянную времени замкнутой системы.
Ответы. S = —3s/(3s+ 101); тс = 3/101 с.
Рис. 4.2 (У)
Цифровая аудиосистема
У-4.2. Цифровая аудиосистема проектируется так, чтобы минимизировать влияние возмущений и шума, как показано на рис. 4.2(У). В качестве аппроксимации можно принять G(s) = K2.
(а) Вычислите чувствительность системы к изменению К2. (б) Оцените влияние возмущения на Уо. (в) Какое значение Кх вы бы выбрали, чтобы минимизировать влияние возмущения?
У-4.3. На рис. 4.3(У), (а) показано, как можно использовать для сбора фруктов руку робота и телекамеру. Телекамера играет роль канала обратной связи, по которому сигнал поступает в микрокомпьютер, управляющий рукой. Объект имеет передаточную функцию
К (s+3)2'
(а) Определите установившуюся ошибку захвата при ступенчатом изменении задания величиной А как функцию параметра К.
(б) Укажите, что для данной системы может играть роль возмущающего воздействия.
д Ответ', (a) evrT =---.
уст 1+Х/9
Рис. 4.3 (У). Робот — сборщик фруктов
У-4.4. В дисководе компьютера позиционирование головки записи/считывания над дорож
ками вращающегося магнитного диска осуществляется с помощью электродвигателя, как показано на рис. 4.4(У). Двигатель и головкамогут быть представлены передаточной функцией
G(s) =
10
s(ts + 1)
где т = 0,001 с. Контроллер определяет разность между желаемым и действительным положением головки и вырабатывает сигнал ошибки, который затем усиливается усилителем с коэффициентом К. (а) Чему равна установившаяся ошибка при ступенчатом изменении желаемого положения? (б) Определите требуемое значение К, при котором установившаяся ошибка составит 0,1 мм, если входной сигнал изменяется линейно со скоростью 10 см/с.
Ответ: еуст = 0; К= 100.
Упражнения
225
Рис. 4.4 (У)
Система позиционирования головки записи/считывания дисковода.
1 — Магнитный диск,
2 — Желаемое положение,
3 — Контроллер,
4 — Сигнал датчика,
5 — Головка записи/считывания
6 — Вход двигателя,
7 — Двигатель
У-4.5. Большинству людей знакома ситуация нечеткой фокусировки диапроектора. Проектор с автоматической фокусировкой настраивается к изменению положения слайда и температурным возмущениям. Изобразите структурную схему системы автофокусировки и опишите принцип действия этой системы. Примером установившейся ошибки может служить визуальное наблюдение несфокусированного изображения слайда.
У-4.6. В странах, где зимой дороги скользкие из-за снега и льда, большой популярностью пользуются полноприводные автомобили. В таких автомобилях в приводе на каждое из четырех колес используется датчик, позволяющий поддерживать постоянную силу сцепления. Структурная схема подобной системы изображена на рис. 4.6(У).
R(s)
Y(s)
Скорость вращения колеса
Рис. 4.6 (У). Система управления скоростью вращения колеса полноприводного автомобиля
Определите переходную характеристику этой системы, если она должна поддерживать постоянную скорость вращения колеса. С помощью компьютерной программы получите реакцию
системы, если R(s) = A/s.
У-4.7. Аппараты для подводного плавания с корпусом из прозрачного пластика могут произвести настоящую революцию в сфере досуга и развлечений. Один из таких небольших аппаратов имеет систему регулирования глубины, изображенную на рис. 4.7(У).
(а) Определите передаточную функцию замкнутой системы T(s) = Y(s)/R(s).
(б) Определите чувствительности системы 5'^ и S^.
(в) Определите установившуюся ошибку, вызванную возмущением D(s) - l/s.
Возмущение £(s)
Рис. 4.7 (У). Система регулирования глубины погружения
226
Глава 4. Характеристики систем управления с обратной связью
Рис. 4.8 (У) Замкнутая система управления
(г) Вычислите реакцию y(t) на воздействие R(s) = l/s, если К = К2 ~ 1 и 1 < Kt < 10. Выберите значение Kt. соответствующее максимальному быстродействию системы.
У-4.8. Рассмотрите замкнутую систему управления, изображенную на рис. 4.8(У). (а) Определите установившуюся ошибку при ступенчатом входном воздействии как функцию коэффициента усиления К. (б) Определите максимальное перерегулирование на переходной характеристике при 40 < К < 400. (в) Постройте графики зависимости перерегулирования и установившейся ошибки от параметра К.
Задачи
3-4.1. Передаточная функция проточного бака, полученная в задаче 2.12, может быть записана в виде
G(s) =
Ag2(5) =___1
AQi(s) ts + Г
где т = RC. Здесь R-— константа, эквивалентная гидравлическому сопротивлению выходного отверстия, так что 1/7? = (1/2)А//(|1,2, а С — площадь поперечного сечения бака. Так как Н- RAQ2. то передаточная функция, связывающая изменение уровня жидкости с приращением входного потока, имеет вид:
ДН(5) R
11 ' Ле,(я) RCs + 1'
Для образования замкнутой системы регулирования уровня можно использовать поплавковый датчик и вентиль, как показано на рис. 4.1(3). Пренебрегая массой поплавка, можно считать, что вентиль уменьшает величину входного потока пропорционально увеличению уровня, т. е. A(2i = КДН. Изобразите сигнальный граф или структурную схему замкнутой системы. Определите и сравните следующие показатели разомкнутой и замкнутой систем: (а) чувствитель-
Рис. 4.1 (3). Регулирование уровня в проточном баке
ность к изменению эквивалентного па-
раметра R и коэффициента обратной связи К; (б) способность к уменьшению влияния возмущений по уровню A//(s); (в) установившуюся ошибку по уровню при ступенчатом изменении входного потока Д(?|(я).
3-4.2. На морских судах очень важно создать пассажирам комфортные условия за счет ослабления качки, обусловленной волнами. Большинство систем стабилизации используют для этого специ-
Задачи
227
а) б)
Рис. 4.2 (3). Система стабилизации судна. Влияние волн характеризуется моментом 7^ (s), приложенным к судну
альные плавники или подводные крылья, посредством которых судну сообщается стабилизирующий момент. Принцип действия такой системы стабилизации поясняется рис. 4.2(3). Бортовую качку судна можно рассматривать как колебания маятника с отклонением от вертикали в 6 градусов и периодом 3 с. Качке судна в этом случае соответствует передаточная функция
G(S)=~2-----—------2’
s + 2^w„s +
где сов = 3 рад/с и £ = 0.20. При таком малом значении коэффициента затухания Q колебания продолжаются в течение нескольких периодов, а их амплитуда может достигать 18° при обычных морских волнах. Определите и сравните следующие показатели для разомкнутой и замкнутой систем: (а) чувствительность к изменению коэффициентов исполнительного устройства Ка и датчика качки Kt; (б) способность уменьшать влияние ступенчатых возмущений со стороны волн. Учтите, что желаемое значение угла 6 равно нулю.
3-4.3. В промышленности и химической технологии одной из наиболее важных переменных, подлежащих управлению, является температура. Простой пример системы регулирования температуры приведен на рис. 4.3(3). Температура У внутри объекта создается нагревателем с сопротивлением R. В линейном приближении теплоотдача от объекта в окружающую среду пропорциональна разности температур (У- 7^,). Последнее справедливо в случае, когда разность температур относительно невелика и когда накоплением энергии нагревателем и стенками объекта можно пренебречь. Предполагается также, что напряжение, подводимое к нагревателю, ей, пропорционально желаемому значению ed. т. е. eh = kEb = kCJEbe(t), где Ка — коэффипи-
Рис. 4.3 (3). Система регулирования температуры
228 Глава 4. Характеристики систем управления с обратной связью
ент передачи исполнительного устройства. Тогда для линеаризованной системы без обратной
связи можно записать уравнение:
Г(Л.) = М^ВД+.£Ж
TS + 1 TS + 1
где
т = МС/рА, М — масса внутри объекта, А — площадь поверхности объекта, р — коэффициент теплопередачи. С — удельная теплоемкость, к{ — размерный коэффициент, етп — выходное напряжение термопары. Определите и сравните следующие показатели разомкнутой и замкнутой систем: (а) чувствительность к изменению коэффициента К = кхк^ь\ (б) способность уменьшать влияние ступенчатого изменения температуры окружающей среды A7^(s); (в) установившуюся ошибку регу-
лятора температуры при ступенчатом изменении входного сигнала ed.
3-4.4. Система управления имеет два прямых пути передачи сигнала, как показано на рис. 4.4(3). (а) Определите передаточную функцию T(s) = Y(s)/R(s). (б) Используя выражение (4.16). определите чувствительность S/;. (в) Зависит ли чувствительность от U(s) или от Mis)?
Рис. 4.4 (3)
Система с двумя прямыми путями
J?(s)
Вход
Y(s)
Выход
3-4.5. В радиоастрономии и системах слежения за спутниками используются большие антенны, работающие в микроволновом диапазоне. На такую антенну, имеющую диаметр 18 м, действует возмущающий момент, создаваемый сильными порывами ветра. Предположим, что ошибка в положении антенны не должна превышать 0,1 ° при скорости ветра 60 км/ч. Экспериментально установлено, что ветер такой силы создает возмущающий момент 27600 кгм, что эквивалентно напряжению на входе электромашинного усилителя, равному 10 В. Следящая система управления антенной изображена на рис. 4.5(3), где возмущение представлено сигналом T/s). Передаточная функция антенны, приводного двигателя и электромашинного усилителя имеет вид:
G(s) = —-------------------,
s(s + + <u„)
где о>в = 15 и £ = 0,707. Усилитель мощности имеет передаточную функцию G((s) = KJ(ts+\). где т = 0,15 с. (а) Определите чувствительность системы к изменению параметра Ка. (б) На систему действует возмущение T^s) = 10/s. Полагая R(s) = 0, определите требуемое значение коэффициента К„, при котором установившаяся ошибка не будет превышать 0,1 °, (в) При том же возмущении T/s) = 10/s и R(s) = 0 определите ошибку системы, если она является разомкнутой (Ks = 0).
Рис. 4.5 (3). Система управления антенной
Задачи
229
Момент нагрузки AD(s)
V(s) Скорость
Рис. 4.6 (3). Система управления скоростью автомобиля
3-4.6. Легковые автомобили, движущиеся по автоматизированным автострадам будущего, должны будут оснащаться системами автоматического управления скоростью. Модель такой системы с обратной связью изображена на рис. 4.6(3), где также показано возмущение AD(s) в виде момента нагрузки из-за подъема дороги. В различных моделях автомобилей коэффициент передачи двигателя Ке варьируется в диапазоне от 10 до 1000. Постоянная времени двигателя те = 20 с. (а) Определите чувствительность системы к изменению параметра Ке. (б) Определите влияние момента нагрузки на скорость, (в) Определите величину постоянного угла подъема AD(s) = Ad/s, при котором автомобиль остановится, т. е. скорость V(s) станет равна нулю, и выразите эту величину в зависимости от коэффициентов передачи элементов системы. Учтите, что поскольку угол подъема — постоянный, то достаточно исследовать установившийся процесс. Предположите, что R(s) = 3Qls км/ч и что КеКх » 1. Если = 2, то при каком угле подъема At/ автомобиль остановится?
3-4.7. В роботах обратная связь используется для управления углом поворота в каждом сочленении. Изменение нагрузки, обусловленное переносимыми объектами, в конечном счете приводит к изменению положения руки робота. Таким образом, рука робота будет отклоняться от желаемой траектории за счет нагрузки, переносимой захватом. Система управления может быть представлена в виде рис. 4.7(3), где момент нагрузки TL(s) = Dis. Предположим, что в исходном состоянии R(s) = 0. (а) Определите влияние TL(s) на У(л). (б) Определите чувствительность замкнутой системы к изменению параметра к2. (в) Чему будет равна установившаяся ошибка, если R(s) = 1/s и TL(s) = 0?
3-4.8. Большие перепады температур часто приводят к отказу электронных схем. Для уменьшения влияния низкой температуры окружающей среды используется система с обратной связью, включающая в себя нагревательный элемент. Структурная схема такой системы изображена на рис. 4.8(3). Влияние понижения температуры окружающей среды отражено ступенчатым
Возмущение (нагрузка)
Рис. 4.7 (3). Система управления угловым положением в сочленении робота
230 Глава 4. Характеристики систем управления с обратной связью
Рис. 4.8 (3)
Система регулирования температуры
возмущением D(s). Действительному значению температуры электронной схемы соогветству-ет l’(s). Динамика изменения температуры схемы характеризуется передаточной функцией
G(s) =
100
s2 + 20s + 100 ’
(а) Определите чувствительность системы к изменению параметра К. (б) Оцените влияние возмущения D(s) на выходную переменную E(s).
3-4.9. В качестве чувствительных элементов часто применяются датчики, в состав которых входит излучатель света (светодиод). Световой поток излучателя, который зависит от протекающего через него тока, изменяет сопротивление фоторезистора. Светодиод и фоторезистор находятся в одном корпусе с четырьмя выводами. Такой прибор обладает большим коэффициентом усиления и обеспечивает полную электрическую развязку. На рис. 4.9(3), (я) изображена схема с обратной связью, использующая этот прибор, а на рис. 4.9(3), (б) приведена нелинейная зависимость сопротивления от тока для прибора Рейтон СК1116. Эта зависимость может быть описана выражением
. „ 0,175
(1 - 0,005)12 ’
где I—ток, протекающий через излучатель. Рабочей точке соответствуют значения е0 = 35 В и е; = 2,0 В. (а) Определите передаточную функцию замкнутой системы, (б) Определите чувствительность системы к изменению параметра К.
3-4.10. В бумажном производстве очень важно поддерживать постоянное натяжение полосы бумаги между двумя рулонами, с одного из которых бумага сматывается, а на другой наматывается. Это натяжение меняется в зависимости от толщины рулонов, поэтому необходимо управлять скоростью вращения двигателя на приемной стороне, как показано на рис. 4.10(3). Если скорость двигателя не регулировать, то по мере перемотки бумаги скорость v0 падает, что приводит к уменьшению натяжения. Для измерения натяжения бумаги используется комбинация из трех роликов и пружины. Упругая сила равна-Ajy, а линейный дифференциальный трансформатор, выпрями-
б)
а)
Рис. 4.9 (3). Система с фотодатчиком
Задачи
231
Рис. 4.10 (3). Система управления натяжением бумаги
1 — Разматываемый рулон, 2 — Двигатель, 3 — Линейный дифференциальный трансформатор, 4 — Выпрямитель, 5 — Усилитель, 6 — Наматываемый рулон
тель и усилитель можно описать уравнением е0 = -к^у. Таким образом, степень натяжения описывается соотношением 27’(s) = ку, где у— отклонение от равновесного состояния, a T(s) - вертикальная составляющая отклонения натяжения от эталонного значения. Двигатель имеет постоянную времени т = LJRa, а линейная скорость приемного рулона в два раза больше угловой скорости двигателя, т. е. т0(г) = 2ы0(/). Тогда двигатель можно описать уравнением
Ео (s) = ~~ [та£°0 («) + “о («)] + к3ЛТ (s\
где ДГ — возмущение по натяжению бумаги, (а) Изобразите структурную схему замкнутой системы с учетом возмущения ДДж). (б) В полученной структурной схеме учтите дополнительно возмущение со стороны скорости разматываемого рулона ДГД5). (в) Определите чувствительность системы к изменению постоянной электродвигателя Кп. (г) Определите установившуюся ошибку по натяжению, вызванную ступенчатым изменением скорости tA\(s) = A/s.
3-4.11. При производстве бумаги очень важно поддерживать постоянную плотность исходной массы перед тем, как она поступает на сушку и протяжку. На рис. 4.11(3), (а) приведена схема управления плотностью бумажной массы. Плотность определяется количеством добавляемой в смеситель воды. Структурная схема данной системы изображена на рис. 4.11 (3), (б). Предположим, что H(s) = 1 и
Gc(s) = —— . G(s) = —^— 8j+1 4s + 1
Производство бумаги
б)
Рис. 4.11 (3). Система управления производством бумаги
232 Глава 4. Характеристики систем управления с обратной связью
Определите (а) передаточную функцию замкнутой системы T(s) = Y(s)/R(s), (б) чувствительность и (в) установившуюся ошибку при ступенчатом изменении заданного значения плот
ности R(s) = A/s. (г) Вычислите значение К, при котором установившаяся ошибка будет составлять 1% от заданного значения плотности.
3-4.12. На рис. 4.12(3) изображены структурные схемы двух систем с обратной связью, (а) Определите передаточные функции T}(s) и T2(s) для этих систем в замкнутом состоянии, (б) Покажите, что при К{ = К2 = 100 Г, = Т2 = 100. (в) Сравните чувствительности двух систем по отношению к параметру К, при номинальных значениях Xj = К2 = 100.
3-4.13. Передаточная функция некоторой замкнутой системы представ-
Рис. 4.12 (3). Две системы с обратной связью
лена в виде
т 0,(5) + A:G2(s)
G3(s) + kG^s)'
(а) Используя выражение (4.16), покажите, что
_ k(G2G3 - G(j^) k (G3 + kG^(Gl + kG2)'
(б) С помощью того же выражения определите чувствительность системы, граф которой изображен на рис. 4.13(3).
Рис. 4.14 (3)
Система управления скоростью сверхзвукового самолета
Рис. 4.13 (3)
Система с обратной связью
3-4.14. Проектируемый сверхзвуковой самолет должен лететь со скоростью 6000 км /ч на высоте 30 км и пересекать. Тихий океан за 2 часа. Система управления скоростью такого самолета может быть представлена в виде модели, изображенной на рис. 4.14(3). Определите чувствительность передаточной функции замкнутой системы T(s) к малым изменениям параметра а.
3-4.15. На рис. 4.15(3) изображена структурная схема системы управления курсом движения современного морского судна. При К = 5 и К = 25 определите в установившемся режиме эффект, создаваемый ветром постоянной силы, т. е. возмущением D(s) = 1/s. (а) Решите задачу в предположении, что положение руля R(s) = 0, т. е. оно не изменяется, (б) После этого покажите, что за счет изменения положения руля отклонение судна от заданного курса можно свести к нулю.
3-4.16. На рис. 4.16(3) изображена модель системы, состоящей из двух баков, где То есть температура жидкости, втекающей в первый бак, &Т2 — температура жидкости, вытекающей из второго бака. Последний снабжен нагревателем, тепловой мощностью которого, Q, можно управлять. Значения постоянных времени Tj = 10 с и т2 = 50 с. (а) Получите выражение для T2(s) в зависи-
Задачи
233
Возмущение, создаваемое ветром
D(s)
Рис. 4.16 (3)
Регулирование температуры в системе из двух баков
Рис. 4.15 (3). Система управления курсом движения судна
мости от Г0(у) и T2/s). (б) В случае, когда заданное значение температуры меняется скачком от T2/s) = A/s до T2/s) = 2A/s, причем Tn(s) = A/s, определите переходную характеристику T2(t) при Gc(s) = К = 500. (в) Для условий из п. (б) определите установившуюся ошибку е,,, считая, что E(s) = T2/s) — T2(s).
3-4.17. Захват робота, изображенный на рис. 4.17(3), (а), должен управляться таким образом, чтобы он замыкался на заданный угол 0. Это осуществляется с помощью системы, включающей двигатель постоянного тока, которая схематически изображена на рис. 4.17(3), (6). Модель данной системы управления представлена на рис. 4.17(3), (в), где К,„ = 30, Rf= 1 Ом, Kf= К,= 1. J = 0,1 и b= 1. (а) Определите реакцию системы. 0(f), на ступенчатое изменение при К = 20. (б) Полагая 0(Д/) = 0, оцените эффект, создаваемый возмущением по нагрузке Tj/s) = A/s. (в) Определите установившуюся ошибку ем. при входном сигнале r(t) = t, f > 0. (Предположите, что Та = 0.)
Рис. 4.17 (3). Система управления захватом робота
234
Глава 4. Характеристики систем управления с обратной связью
Td(s)
Рис. 4.17 (3). (продолжение)
Задачи повышенной сложности
П-4.1. На рис. 4.1(П), (а) изображена система регулирования уровня жидкости в баке. Задача состоит в поддержании постоянного уровня h вне зависимости от возмущения q3. На том же рисунке ниже приведена структурная схема системы для малых отклонений переменных от состояния равновесия, так что заданное значение hj/t) = 0. Получите выражение для ошибки в виде E(s) и найдите ее установившееся значение в случае единичного ступенчатого возмущения, если (а) G{s) = K и (6) G(s) = K/s.
П-4.2. Для управления движением плеча руки робота используется двигатель постоянного тока, управляемый по цепи якоря, причем вал двигателя соединен с редуктором. На рис. 4.2(П) изображена структурная схема системы управления, на которой указано возмущение в виде момента нагрузки D(s). Определите установившуюся ошибку, если заданное значение угла поворота 0,/s) = A/s, Gc(s) = К и возмущение отсутствует. Определите также установившуюся ошибку, если 0(Х«) = 0. а возмущение D(s) = M/s, в случаях (a) Gc(s) = К и (б) Gc.(s) = K/s.
П-4.3. Рабочий орган станка должен перемещаться по траектории, задаваемой уравнением г(0 = (2-г + 0,5/2)и(/),
где и(<) — единичная ступенчатая функция. На рис. 4.3(П) изображена структурная схема системы управления перемещением рабочего органа.
(а) Определите установившуюся ошибку при заданном сигнале r(t) в случае, когда D(s) = 0.
(6) На основании п. (а) изобразите график e(t) для 0 < I < 10 с.
H(s)
Отклонение уровня
уровня
Рис. 4.1 (П). Регулятор уровня жидкости в баке
Задачи повышенной сложности
235
Возмущение (нагрузка)
Рис. 4.2 (П). Система управления звеном руки робота
Влияние
Рис. 4.3 (П). Система управления положением рабочего органа
(в) В случае г(Г) = 0 определите установившуюся ошибку при £>(s) = 1/s.
(г) На основании п. (в) изобразите график е(г) для 0 < I < 10 с.
П-4.4. На рис 4.4(П) приведена структурная схема двигателя постоянного тока с управлением по цепи якоря и тахометрической обратной связью. Параметры системы: Кт = 10, J = 1 и Rn — 1. (а) Определите значение К, при котором установившаяся ошибка при отработке линейного входного воздействия v(Z) = t, Г > 0 не будет превышать значения 0,1 (в предположении, что D(S) = O).
(б) При коэффициенте К, найденном в п. (а), получите выражение и изобразите график для ошибки e(t) при действии линейного возмущения d(t) = t, 0 < t < 5 с.
П-4.5. В настоящее время создана и прошла испытания система, регулирующая среднее артериальное давление во время анестезии. Было показано, что уровень артериального давления является показателем глубины анестезии во время хирургической операции. На рис. 4.5(П) изображена структурная схема такой системы, где хирургическое вмешательство учтено в виде возмущения D(s).
(а) Полагая R(s) = 0, определите установившуюся ошибку, вызванную возмущением £>(s)=l/s.
Рис. 4.4 (П). Двигатель постоянного тока с тахометрической обратной связью
236
Глава 4. Характеристики систем управления с обратной связью
Хирургическое вмешательство
Рис. 4.5 (П). Система регулирования кровяного давления
Рис. 4.6 (П). Цепь с опережением по фазе
(б) Полагая D(s) = 0, определите установившуюся ошибку в случае линейного входного воздействия r(f) = t, t > 0.
(в) Выберите некоторое значение К < 10 и изобразите реакцию системы y(t) на единичное ступенчатое возмущение (считая r(f) = 0).
П-4.6. На рис. 4.6(П) изображена электрическая цепь с опережением по фазе, с которой мы встретимся в гл. 10. (а) Определите передаточную функцию G(s) = V0(s)/V(s). (6) Определите чувствительность G(s) по отношению к параметру С.
(в) Найдите и изобразите графически реакцию v0(/) на ступенчатое входное воздействие И(л) = Us.
П-4.7. На рис. 4.7(П) изображена структурная схема системы с обратной связью с учетом возмущения D(s) и шума датчика N(s). Необходимо уменьшить влияние шума и возмущения. Полагая 7?(s) = 0, определите: (а) Влияние возмущения на выход системы У($);
(6) Влияние шума датчика на У(л).
(в) Выберите наилучшее значение К из диапазона 1 <К< 100. при котором влияние шума и возмущения на установившуюся ошибку будет минимальным. В данном случае примите D(s) = A/s и N(s) = Bls.
П-4.8. На рис. 4.8(П) изображена структурная схема системы управления рабочим органом станка, (а) Определите передаточную функцию T(s) = Y(s)/R(s).
(6) Определите чувствительность 5'^.
(в) Выберите К из диапазона 1 < К < 50, при котором влияние возмущения на У($) и чувствительность S], будут минимальны.
Рис. 4.7 (П)
Система при наличии шума
N(s) датчика
Задачи на синтез систем
237
Рис. 4.8 (П)
Система управления рабочим органом станка
Задачи на синтез систем
СС-4.1. В задаче СС-2.1 был описан привод скользящей части стола металлообрабатывающего □ станка. Положение скользящей части, х, измеряется с помощью емкостного датчика, как показано на рис. 4.1(СС), который обладает высокой точностью и линейной характеристикой. Изобразите модель системы с обратной связью и определите ее реакцию на ступенчатое входное воздействие в случае, когда H(s)= 1, а регулятор является обычным усилителем. Gc(s) = Ка. Решение получите для нескольких значений коэффициента Аа.
Рис. 4.1 (СС). Структурная схема системы с емкостным датчиком в цепи обратной связи. В системе дополнительно может быть использована тахометрическая обратная связь по скорости вращения электродвигателя (контакты реле являются нормально разомкнутыми)
С-4.1. Замкнутая система управления скоростью подвержена влиянию возмущения по нагрузке, как показано на рис. 4.1(C). Заданное значение скорости го/г) =100 рад/с, а возмущение представлено единичной ступенькой, D(s) = IZs. При отсутствии нагрузки установившееся значение скорости равно 100 рад/с. (а) Определите влияние нагрузки в установившемся режиме и (б) изобразите графически реакцию ы(1) на ступенчатое возмущение при нескольких значениях коэффициента К из диапазона 10 < К < 25. Установите наиболее подходящее значение коэффициента К.
Рис. 4.1 (С)
Система управления скоростью
Возмущение (нагрузка) D(s)
238
Глава 4. Характеристики систем управления с обратной связью
С-4.2. Управление углом крена самолета осуществляется с помощью момента, создаваемого элеронами. На рис. 4.2(C) изображена линейная модель системы управления углом крена небольшого тренировочного самолета; на схеме системы </(/) есть поток жидкости, втекающей в гидро-
цилиндр, и
G(s) = -.. *—
" + 4s +
Цель управления состоит в поддержании небольшого угла крена 0, возникающего за счет действия возмущений. Полагая = 0. выберите значение ККХ, позволяющее снизить влияние возмущения и одновременно получить приемлемый вид переходного процесса, если возмущение имеет ступенчатый характер. Для получения желаемого вида переходного процесса задайтесь ограничением КК} < 35.
Рис. 4.2 (С)
Система управления углом крена самолета
Td(s)
С-4.3. В систему управления скоростью на рис. 4.1(C) внесены изменения, так что теперь G(s) = l/(s+5), а в цепи обратной связи находится тахогенератор с коэффициентом передачи Лр Данная система изображена на рис. 4.3(C). (а) Определите диапазон значений Кх. при которых установившаяся ошибка не будет превышать 1%.
(б) Определите, при каких значениях К, и А' в случае возмущения d(t) = 2t мрад/с. О < t < 5 с. установившаяся ошибка не будет превышать 0.1 мрад.
Рис. 4.3 (С) Система управления скоростью
С-4.4. Уже более 25 лет в офтальмологии с успехом применяются лазеры. Они оказывают помощь при удалении части ткани или в процессе ее коагуляции. Лазер позволяет врачу-о^ггальмологу управляемым образом осуществлять локализованное тепловое воздействие на глаз пациента. Во многих процедурах мишенью лазера является сетчатая оболочка глаза, которая тонким чувствительным слоем покрывает внутреннюю поверхность глазного яблока и преобразует световую энергию в электрические импульсы. Иногда сетчатка отслаивается от поверхности яблока, что приводит к потере ее кровоснабжения и, как следствие, к частичной или полной утрате зрения. В этом случае с помощью лазера можно «приварить» сетчатку на ее место на внутренней поверхности глазного яблока и восстановить зрение.
Автоматическое управление положением луча лазера позволяет офтальмологу дать команду регулятору определить, где находится поврежденная ткань. Регулятор сканирует сетчатку и управляет положением лазера, наводя его точно на поврежденное место. Для определения смещения сетчатки используется широкоугольная видеокамера, как показано на рис. 4.4(C). Если глаз во время облучения совершает движение, то лазер должен либо быть переориентирован, либо выключен. На рис. 4.4(C). (б), приведена структурная схема управления положением лазера. Выберите подходящее значение коэффициента усиления регулятора. К, так. чтобы переходный процесс, вызванный ступенчатым изменением r(t), имел приемлемый характер, а влияние возмущения (шум системы) было бы минимальным. Убедитесь также, что при ступенча-
Задачи, решаемые с помощью MATLAB
239
б)
Рис. 4.4 (С). Операционная система с использованием лазера;
1 — регулятор, 2 — аргоновый лазер, 3 — лазерная система, 4 — волоконно-оптическая линия, 5 — пациент, 6 — видеокамера, 7 — офтальмолог
том изменении задания г(/) установившаяся ошибка будет равна нулю. Для получения приемлемого вида переходной характеристики воспользуйтесь ограничением К < 10.
С-4.5. Для генерирования коротких импульсов специальной формы можно использовать схему на операционном усилителе. Схема, изображенная на рис. 4.5(C), при входном напряжении v(t) типа единичной ступеньки позволяет получить на выходе импульс v0(l) = Se"100', t > 0. Предполагая, что операционный усилитель является идеальным, выберите со-
Рис. 4.5 (С). Схема на операционном усилителе
ответствующие номиналы резисторов и конденсатора.
Задачи, решаемые с помощью MATLAB
М-4.1. Разомкнутая система имеет передаточную функцию
С(5) =
5
s2 + 2s + 25
При единичном ступенчатом входном воздействии желаемое установившееся значение выходной переменной равно 1. С помощью функции step покажите, что установившаяся ошибка в этом случае равна 0,8.
М-4.2. Система с передаточной функцией G(s) = 50/s(s+1) охвачена единичной отрицательной обратной связью. С помощью MATLAB получите переходную характеристику системы и опре
240
Глава 4. Характеристики систем управления с обратной связью
делите максимальное относительное перерегулирование. Чему равна установившаяся ошибка?
М-4.3. Система в замкнутом состоянии имеет передаточную функцию
ч ЮК
T(s) = -t--------.
s2 + 20s + К
Получите семейство переходных характеристик (при единичном ступенчатом воздействии) для К= 10, 100 и 500. Изобразите их на одном графике и оформите в виде таблицы основные результаты: относительное перерегулирование, время установления, установившуюся ошибку.
М-4.4. Рассмотрите замкнутую систему управления, изображенную на рис. 4.4(М). Подготовьте программу MATLAB, которая позволяла бы найти значение к, при котором относительное перерегулирование при единичном ступенчатом воздействии было бы более 1%, но менее 10%. Программа должна вычислять передаточную функцию замкнутой системы T(s) - Y(s)/R(s) и строить график переходной характеристики. По графику убедитесь, что установившаяся ошибка равна нулю.
Рис. 4.4 (М)
Система управления с отрицательной обратной связью
Y(s)
М-4.5. На рис. 4.5(М) изображена замкнутая система управления. Регулятор имеет коэффициент усиления К = 2. Номинальное значение параметра объекта а = 1. Это значение принято только для решения задачи синтеза, т. к. действительное значение этого параметра т очно не известно. В данной задаче целью исследований является определение чувствительности замкнутой системы к параметру а. (а) Полагая а = 1, покажите аналитически , что при единичном ступенчатом входном воздействии r(t) установившееся значение >(/) = 2. Убедитесь, что реакция на данное воздействие спустя 4 с отличается от установившегося значения не более чем на 2%. (б) О чувствительности системы к изменению параметра а можно судить по виду переходной характеристики. Постройте графики этой характеристики при значениях а = 0,5; 2; 5 и сделайте соответствующие выводы.
Рис. 4.5 (М)
Замкнутая система управления с неопределенным параметром а
ад
ад
М-4.6. На рис. 4.6(М), (а), изображена механическая система с вращательным движением. Упругий момент, обусловленный скручиванием оси. равен -кв; момент трения, создаваемый тормозным устройством, равен -Ь&„ возмущающий момент равен d(t); входной момент равен r(Z); момент инерции механической системы равен J. Передаточная функция данной системы имеет вид:
ч I/-7
G(s) = ----------------
s2 + (Ы J)s + к/J
Замкнутая система управления механической системой изображена на рис. 4.6(М), (б). Для расчетов примите заданное значение угла 0г,= 0°, к = 5, Ь = 0,9 и J= 1.
(а) С помощью MATLAB, полагая r{t) = 0, определите реакцию 0(1) разомкнутой системы на единичное ступенчатое возмущение d(t).
Задачи, решаемые с помощью MATLAB
241
d(t)
Рис. 4.6 (М). (а) Механическая система с вращательным движением (1 — гибкая ось, 2 — возмущающий момент, 3 — входной момент, 4 — тормозное устройство); (б) Система с обратной связью, управляющая угловым положением механической системы
(б) С помощью MATLAB, при коэффициенте усиления регулятора Ко = 50 определите реакцию 0(0 замкнутой системы на единичное ступенчатое возмущение d(t).
(в) Изобразите на одном графике две полученные кривые. Обсудите полученные резулы аты и сделайте вывод о преимуществах использования обратной связи для уменьшения влияния возмущения.
М-4.7, На рис. 4.7(М) изображена система управления с отрицательной обратной связью. Допустим, что целью синтеза является выбор регулятора Gc(s) минимальной сложности, причем система должна отрабатывать единичное ступенчатое входное воздействие с нулевой установившейся ошибкой.
(а) В качестве первой попытки рассмотрите простой пропорциональный регулятор Gc(s) = К, где К — фиксированный коэффициент усиления. Полагая К = 2. с помошью MATLAB постройте график реакции системы на единичную ступеньку и определите величину установившейся ошибки.
(б) Далее рассмотрите более сложный регулятор,
Gc(s)=K0 + ^,
S
где К0 = 2иК1 = 20. Такой регулятор извесзен под названием ПИ-регулятор (пропорционально-интегральный). Постройте график реакции системы на единичную ступеньку и определите величину установившейся ошибки.
(в) Сравните результаты пп. (а) и (б) и сделайте выводы относительно компромисса между сложностью регулятора и способностью систем минимизировать установившуюся ошибку.
К(з)
У(з)
Рис. 4.7 (М). Простая одноконтурная система управления
242
Глава 4. Характеристики систем управления с обратной связью
Ключевые термины и понятия
Замкнутая система. Система, в которой производится измерение выходного сигнала, сравнение его с желаемым значением и образование сигнала ошибки, воздействующего на исполнительное устройство.
Переходная характеристика. Реакция системы на входное воздействие как функция времени.
Разомкнутая система. Система без обратной связи, в которой выходной сигнал является непосредственной реакцией на входной сигнал.
Сигнал возмущения. Нежелательный входной сигнал, оказывающий влияние на выходной сигнал системы.
Сигнал ошибки. Разность между желаемым выходным сигналом /?(л) и действительным выходным сигналом У(х), т. е. £($) = R(s) - У(л).
Установившаяся ошибка. Ошибка, остающаяся спустя достаточно большой промежуток времени, достаточный для полного затухания переходного процесса.
Чувствительность системы. Отношение изменения передаточной функции системы к малому изменению передаточной функции (или параметра) объекта управления.
Глава 5
Качество систем управления с обратной связью
Обзор
При синтезе систем управления появляется благоприятная возможность влиять на вид переходной характеристики и поведение системы в установившемся режиме. Одним из первых этапов процедуры синтеза является задание показателей качества. В этой главе мы введем такие общепринятые показатели, используемые для характеристики переходного процесса, как относительное перерегулирование, время установления, время максимума, время нарастания и установившаяся ошибка. Для определения реакции системы мы воспользуемся типовыми входными сигналами в виде ступенчатой и линейно нарастающей функции. Мы обсудим связь между качеством системы и расположением ная-плоскости полюсов и нулей ее передаточной функции. Мы установим полезные соотношения между показателями качества системы второго порядка и ее собственной частотой и коэффициентом затухания. Используя понятие доминирующих полюсов, мы распространим методы опенки качества систем второго порядка на системы более высокого порядка.
Мы введем ряд общепринятых количественных показателей, которые адекватно характеризуют качество системы управления. Это позволит нам заняться оптимизацией системы по тому или иному критерию качества. Глава заканчивается анализом качества системы чтения информации с диска (пример синтеза с продолжением).
5.1. Введение
Важным преимуществом систем управления с обратной связью является возможность влиять на качество системы в переходном и установившемся режимах. Прежде чем приступать к анализу или синтезу системы, необходимо договориться о том, как определять и измерять ее качество. И только определив желаемое качество системы, можно заняться настройкой ее параметров. Поскольку системы управления объективно являются динамическими, их качество обычно оценивается по поведению как в переходном, так и в установившемся режимах. Переходная характеристика — это реакция системы, затухающая с течением времени. Установившийся режим — это реакция системы, которая остается спустя большой промежуток времени с момента приложения входного сигнала.
Исходные данные для синтеза систем управления обычно включают в себя некоторые показатели реакции системы на входной сигнал определенного вида, а также желаемую точность в установившемся режиме. Часто в процессе синтеза эти данные пересматриваются ради достижения некоторого компромисса. Таким образом, исходные данные редко когда представляют собой жесткий набор требований — скорее всего они являются первой попыткой перечисления желаемых показателей качества. На рис. 5.1
244
Глава 5. Качество систем управления с обратной связью
графически изображен поиск компромисса между различными требованиями к системе. Параметрр может минимизировать показатель качества М2, если выбирать очень малые его значения. Но при этом становится очень большим показатель что может быть нежелательным. Если оба показателя качества одинаково важны, то наилучшим компромиссом является точка пересечения двух кривых прир = р мин. Ясно, что если исходные ограничения, накладываемые и на Мх, и на М2, близки к нулю, то они не могут быть удовлетворены одновременно, и их надо изменить таким образом, чтобы добиться разумного компромисса.
Требования к системе, сформулированные в виде ее показателей качества, в конечном счете позволяют ответить на вопрос: насколько хорошо система выполняет задачу, ради которой она была спроектирована?
5.2. Тестовые входные сигналы
Важнейший интерес при анализе качества представляет поведение систем управления во времени, т. к. эти системы объективно являются динамическими. Прежде всего необходимо определить, устойчива ли система управления (методы анализа устойчивости будут рассмотрены в последующих главах). Если она устойчива, то показатели качества можно оценить по реакции системы на определенный входной сигнал. Но, поскольку обычно заранее неизвестно, каким в реальных условиях будет этот сигнал, при анализе качества выбирается некоторый тестовый входной сигнал. Такой подход вполне оправдан, т. к. имеется корреляция между реакцией системы на типовой входной сигнал и ее поведением в реальных рабочих условиях. Кроме того, использование типового входного сигнала позволяет проектировщику сравнить несколько вариантов создаваемой системы. К тому же многие системы управления в процессе эксплуатации подвергаются внешним воздействиям, которые по виду очень близки к тестовым сигналам.
В качестве типовых тестовых сигналов обычно используются ступенчатый, линейный и параболический сигналы, изображенные на рис. 5.2. В табл. 5.1 приведены выражения для этих сигналов как функции времени, а также их преобразования по Лапласу, полученные с помощью табл. 2.3. Линейный сигнал является интегралом от ступенчатого, а параболический — интегралом от линейного.
5,2. Тестовые входные сигналы
245
r(t)
А ----------------
О __________________
о t —
а)
Рис. 5.2. Тестовые входные сигналы:
(а) ступенчатый, (б) линейный, (а) параболический
Таблица 5.1. Тестовые входные сигналы
Тестовый сигнал r(0 /?(.s)
Ступенчатый r(t) = A, t>0 . = 0,г<0 R(s^A,s
Линейный
Параболический r(t) ==0.’t<0 R(s} =
В качестве тестового сигнала может также служить единичная импульсная функция, получаемая из прямоугольного импульса
1/е, -е/2<Г<е/2;
О, при остальных t.
А(')=
(5.1)
(5.2)
где е > 0. При е —> 0 импульс/Ё(0 стремится к единичной импульсной функции 8 (г), обладающей следующими свойствами:
Г б(г)<* = 1, Г 8(r-a)g(/)r/r=g(a) J— СО *—СО
Импульсный входной сигнал может оказаться полезным, когда выходной сигнал y(t) записывается в виде интеграла свертки
y(t) = f g(t -т)г(т)^ =Г1 [G(5)7?(5)]. J-oo
Эта связь изображена в виде структурной схемы на рис. 5.3. Если входной сигнал яв--------------- ляётся единичной импульсной функцией,то
X(s)—► G(s) —►Y(S) ,
-------— ХО=( g(t^)8(T)ch.
*—СО
(5.3)
Рис. 5.3. Разомкнутая ~ _
система управления Этот интеграл отличен от нуля только при т = 0, поэтому
МО = МО,
что соответствует импульсной переходной функции системы с передаточной функцией G(s). Реакция системы на импульсный тестовый сигнал может представлять интерес, если в реальных условиях система подвержена воздействию очень коротких импульсов с большой амплитудой и площадью А.
Типовые тестовые сигналы имеют общий вид
Г(О =
(5-4)
246
Глава 5. Качество систем управления с обратной связью
для которых преобразование Лапласа
п!
Л(5) = — .
Х+'
Отсюда следует, что реакцию на один тестовый сигнал всегда можно выразить через реакцию на другой тестовый сигнал. Поскольку ступенчатый входной сигнал является наиболее простым, то его обычно и выбирают для оценки качества системы.
Найдем реакцию системы, изображенной на рис. 5.3, на единичную ступеньку, если
9 G(s) = ^-.
5+ 10
Тогда преобразование по Лапласу для выходного сигнала
9 у^)=—~, s(s+10)
(5.5)
переходный процесс описывается выражением
Х0 = О,9(1-е"10'),
а его установившееся значение X00) = ОД Для установившейся ошибки, приняв E(s) = R(s) - У(5), имеем
=lim5£(.s) = 0,L
5.3. Качество системы второго порядка
Рис. 5.4. Замкнутая система управления
Рассмотрим одноконтурную систему второго порядка и найдем ее реакцию на единичное ступенчатое воздействие. Для системы, изображенной на рис. 5.4. можно записать:
С(5) 1 + G(s)
У(5) =
•Л(5) =
К
s2 + ps + K
Л(5).
(5.6)
Используя обозначения, введенные в разд. 2.4, перепишем (5.6) в виде
2
Г(*)=-------~----7^(Х-
5" +2^С0и5+С0"
При единичном ступенчатом входном воздействии получим:
П*) = —;-----(5.8)
SV" + 2цсол54- С0“ )
Воспользовавшись таблицей преобразований Лапласа (табл. 5.3), найдем оригинал:
XO = 1-|sin(co„pr + 6), (5.9)
где р = д^1-^2,6 = arccos Q и 0 < Q < 1. На рис 5.5 (а) изображены переходные характеристики этой системы для различных значений коэффициента затухания С уменьшением
5,3. Качество системы второго порядка
247
корни характеристического уравнения замкнутой системы приближаются к мнимой оси и реакция становится сильно колебательной. На рис. 5.5 (б) приведены те же переходные характеристики в зависимости от параметра Q и времени.
В случае единичной импульсной функции, для которой изображение по Лапласу
R(s) = 1, можно записать:
Г(5) = ------------у
5" +2^С0„5+<В'
(5.Ю)
Рис. 5.5
(а) Переходные характеристики системы второго порядка при ступенчатом входном сигнале.
(б) Те же характеристики в зависимости от £ и времени
а)
248
Глава 5, Качество систем управления с обратной связью
Рис. 5.6
Реакция системы второго порядка на импульсную входную функцию
что совпадает с передаточной функцией замкнутой системы T(s) = Y(s)/R(s). Реакция системы на единичную импульсную функцию определяется выражением
sin ш„р/,
(5-11)
которое является производной от реакции на единичную ступеньку. На рис. 5.6 изображены реакции системы второго порядка на единичную импульсную функцию для различных значений параметра При определении показателей качества проектировщик может использовать реакцию системы как на ступенчатую, так и на импульсную функцию.
Типовые показатели качества обычно определяются по виду реакции на ступенчатое входное воздействие, как показано на рис 5.7. Быстродействие системы напрямую связа
Рис. 5.7 Реакция системы управления на ступенчатое воздействие
5,3. Качество системы второго порядка 249
но с временем нарастания Тг и временем максимума переходной характеристики Тр. Для недодемпфированных систем, переходная характеристика которых обладает перерегулированием, время нарастания определяется как время изменения реакции от 0 до 100% заданного значения выходной переменной. Если система передемпфирована, то перерегулирование отсутствует, время максимума смысла не имеет, а в качестве времени нарастания 7]. рассматривается интервал, в течение которого переходная характеристика изменяется от 10% до 90% ее значения. Насколько хорошо действительная реакция системы соответствует ступенчатому входному сигналу, оценивается по относительному перерегулированию и времени установления Ts. При единичном ступенчатом воздействии относительное перерегулирование (ОП) определяется как
Мп — к.з.
О.П. = —р-------100%, (5.12)
к.з.
где Мр — максимальное значение переходной характеристики, а к.з. — ее конечное значение. Обычно к.з. совпадает с величиной входной ступеньки, но во многих системах оно существенно отличается от желаемого значения, определяемого входным сигналом. Для системы, описываемой уравнением (5.8), к.з. = 1.
Время установления Ts определяется моментом, после которого переходная характеристика остается полностью внутри зоны, отличающейся от величины входного воздействия на +8%. Данная зона изображена на рис 5.7. Для системы второго порядка, реакция которой описывается выражением (5.9), время установления Ts можно найти по моменту, начиная с которого реакция отличается от своего конечного значения не более, чем на 2%, т. е. если
<0,02,
ИЛИ
Ts « 4.
Следовательно,
Ts « 4.
(5-13)
Таким образом, время установления можно считать равным четырем постоянным времени т, где т = 1/£со„ — постоянная времени, соответствующая доминирующим корням характеристического уравнения. По реакции системы на ступенчатое воздействие можно также определить установившуюся ошибку, как это показано на рис. 5.7.
Реакцию системы на ступенчатое воздействие можно охарактеризовать двумя факторами:
1. Быстродействием, которое определяется временем нарастания и временем максимума.
2. Близостью к желаемому виду, которая определяется перерегулированием и временем установления.
По своей сути эти факторы являются противоречащими друг другу, что заставляет искать определенный компромисс.
Чтобы получить зависимость показателей Ми Тр от параметра С,, можно продифференцировать выражение (5.9) и приравнять производную нулю. Другой способ основан на
250
Глава 5. Качество систем управления с обратной связью
использовании свойства дифференцируемости преобразования Лапласа, которое записы-
вается в виде
1^(0'
dt
= sY(s),
при условии, что начальное значение y(t) равно нулю. В результате мы можем получить производную от_у(0> умножив выражение (5.8) на 5, что даст нам правую часть выражения (5.10). Применив обратное преобразование Лапласа к последнему выражению, мы получим (5.11), которое обращается в нуль при со„ р/ = л. Отсюда выражение для времени максимума переходной характеристики системы второго порядка:
(5.14)
а максимальное значение переходной характеристики, Мр=1+е~^^.
В результате относительное перерегулирование составляет ОП = ЮОе 01/л^\
(5-15)
(5-16)
Зависимость относительного перерегулирования от коэффициента затухания Q представлена на рис. 5.8. Здесь же изображена зависимость нормированного времени максимума от коэффициента затухания Для некоторых значений коэффициента затухания С, величина относительного перерегулирования представлена в таблице 5.2. И снова мы сталкиваемся с необходимостью поиска компромисса между скоростью реакции и допустимым перерегулированием.
Таблица 5.2. Относительное перерегулирование (в %) в зависимости от коэффициента затухания для системы второго порядка
Коэффициент затухания
0,9 0,8 0,7 0,6 0,5 0.4 0.3
Относительное перерегулирование 0,2 1,5 4,6 9,5 16,3 25,4 37.2
Рис. 5.8
Зависимость относительного перерегулирования и нормированного времени максимума от коэффициента затухания для системы второго порядка
ф о я д ч
К Ф с м ь с ф с и л § g к о й d 2
к к d р о ft к ч
100
90
80
70
60
50
40
30
20
10
0.0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1.0
Коэффициент затухания, £
Ф
к
о
5,3, Качество системы второго порядка
251
Рис. 5.9
Зависимость нормированного времени нарастания Г. от С для системы второго порядка
Скорость реакции системы на ступенчатое воздействие можно оценить временем ее нарастания от 10% до 90% величины ступеньки. В таком определении время нарастания Д указано на рис. 5.7. Нормированное время нарастания в зависимости от С, (0,05 < С, < 0,95) изображено графически на рис 5.9. Действительную кривую Тг< трудно описать аналитически, однако можно воспользоваться линейной аппроксимацией
2,16^+0,60
(5.17)
которая является достаточно точной для 0,3 < < 0,8. Данная аппроксимация приведена на рис. 5.9.
Скорость реакции на ступенчатый входной сигнал, описываемая выражением (5.17), зависит от С, и ы„. При данном С. реакция тем быстрее, чем больше (о,„ как показано на рис 5.10. Заметим, что перерегулирование не зависит от а>„.
При данном сол реакция тем быстрее, чем меньше С,, как показано на рис. 5.11, однако ее скорость ограничивается допустимым перерегулированием.
Рис. 5.10
Реакция системы второго порядка на ступеньку при £ = 0,2, в>л = 1 и oin = 10
1.6
1.4
1.2
>> 1.0 0.8 0.6 0.4 0.2 0
Амплит
Ора, С/с
“п"1 рад/<
0123456789 10
Время (с)
252
Глава 5. Качество систем управления с обратной связью
Рис. 5.11
Реакция системы второго порядка на ступеньку при = 5, £ = 0,7 и £ = 1
5.4. Влияние третьего полюса и нуля на характеристики системы второго порядка
до
Кривые, изображенные на рис. 5.8, являются точными только для системы второго порядка, определяемой выражением (5.8). Тем не менее они являются весьма полезными и для многих других систем, обладающих парой доминирующих корней, реакция которых на ступенчатое воздействие может быть представлена в виде рис. 5.8. Такой подход, хотя и является приближенным, позволяет обойтись без применения обратного преобразования Лапласа для оценки относительного перерегулирования и других показателей качества. Например, для системы третьего порядка, имеющей в замкнутом состоянии передаточную функцию
T(s) = —---------------, (5.18)
(s2 + 2<^+l)(ys+l)
расположение ее корней показано на рис. 5.12 (здесь предполагается, что со„ = 1). Экспериментально было установлено, что относительное перерегулирование, ОП, и время установления, Ts, для данной системы соответствуют кривым для системы второго порядка, если
|1/у| > 10 Ксо„|.
Иными словами, реакцию системы третьего порядка можно аппроксимировать с помощью доминирующих корней системы второго прядка, если только действительная часть этих корней меньше 1/10 действительной части третьего корня,
на s-плоскости
А=корни замкнутой системы
1
с
-с
1
У
Рис. 5.12. Положение корней системы третьего порядка
5,4. Влияние третьего полюса и нуля на характеристики системы
253
С помощью вычислений на компьютере для £ = 0,45 можно найти реакцию системы на единичное ступенчатое воздействие. При у = 2,25 реакция является монотонной (система передемпфирована), т. к. действительная часть комплексных полюсов равна - 0,45, тогда как вещественный полюс равен — 0,444. Время установления (по критерию 2% от конечного значения) составляет 9,6 с. При у = 0,90, или 1 /у = 1,11, в сравнении с = 0,45 мы видим, что перерегулирование составляет 12%, а время установления равно 8,8 с. Если бы комплексные корни были доминирующими, то перерегулирование составляло бы 20%, а время установления равнялось бы 4/<^шн = 8,9 с. Результаты расчетов сведены в табл. 5.3.
Таблица 5.3. Влияние третьего полюса при С, = 0,45
У 1/у Относительное перерегулирование,% Время установления*
2,25 0,444 0 9,63
1,5 0,666 3,9 6,3
0,9 1,111 12,3 8,81
0,4 2,50 18,6 8.67
0,05 20,0 20,5 8,37
0 СО 20,5 8,24
* Примечание-. Время установления нормировано, т. е. приведено в значениях <о„7) и определено по критерию 2%.
Следует также заметить, что показатели качества, отмеченные на рис. 5.8, имеют силу только тогда, когда передаточная функция не имеет конечных нулей. Если же передаточная функция содержит конечные нули, которые располагаются достаточно близко к доминирующим комплексным полюсам, то эти нули будут оказывать существенное влияние на вид переходной характеристики системы.
На переходную характеристику системы с одним нулем и двумя полюсами сильное влияние оказывает положение нуля. На рис. 5.13(a) приведена номограмма для определения относительного перерегулирования при ступенчатом входном воздействии для системы с передаточной функцией
од. ,
5" +2^(оп5Ч-ш;
причем кривые построены для С, < 1 в зависимости от а/^<оп. Сами же переходные характеристики для нескольких значений а!С(лп приведены на рис. 5.13(6). Важнейшие показатели качества для этих значений а/С,<£>„ при С, = 0,45 представлены в табл.5.4.
Связь между положением на s-плоскости полюсов передаточной функции замкнутой системы и ее переходной характеристикой играет важную роль при выборе требований, предъявляемых к системе. Чтобы проиллюстрировать это, мы рассмотрим простой пример.
254
Глава 5. Качество систем управления с обратной связью
Таблица 5.4. Показатели качества системы второго порядка с параметром ^=0,45 при наличии нуля
я/^со„ Относительное перерегулирование,% Время установления Время максимума
5 23,1 8,0 3.0
2 39,7 7,6 2,2
1 89,9 10,1 1,8
0,5 210,0 10,3 1,5
Примечание'. Время нормировано, т. е. приведено в значениях со„/, а время установления определено по критерию 2%.
Рис. 5.13
(а) Зависимость относительного перерегулирования от С и <оп для системы второго порядка, передаточная функция которой содержит нуль.
(б) Переходные характеристики системы второго порядка с параметром £ = 0,45, передаточная функция которой содержит нуль, для четырех значений
отношения а/£а>„: А = 5, В = 2, С = 1 и D = 0,5
б)
5,4. Влияние третьего полюса и нуля на характеристики системы
255
Пример 5.1. Выбор параметра
На рис. 5.14 изображена одноконтурная система управления. Необходимо выбрать коэффициент усиления К и параметр р гак, чтобы удовлетворить требования, предъявляемые к переходной характеристике системы. Пусть система должна обладать как можно большим быстродействием и при
Рис. 5.14. Одноконтурная система управления
этом перерегулирование не должно превы-
шать 5%. Время установления переходной характеристики внутри зоны 2% от ее конечного
значения должно быть не более 4 с. Коэффициенту затухания С, = 0,707 соответствует перерегулирование 4,3%. Линия постоянного коэффициента затухания для £ = 0,707 изображена на рис. 5.15. Поскольку время установления
Г, = — < 4 с.
то мы должны потребовать, чтобы действительная часть комплексных полюсов передаточной функции T(s) удовлетворяла условию > 1. Область «-плоскости, удовлетворяющая обоим требованиям к переходной характеристике, отмечена на рис. 5.15 штриховкой.
Если выбрать корни замкнутой системы г j = -1 +J и /j = -1 - j, то мы будем иметь Ts = 4 с и перерегулирование 4,3%. Следовательно, £ = 1/-Т2 и <аи = 1/£ = -72. Передаточная функция замкнутой системы r(s) = = К = .
1+G(s) s2 + ps + K s2 + 2^ы,/.+ а2
Рис. 5.15. Область расположения корней на s-плоскости, отвечающая требованиям к качеству системы
Таким образом, нам необходимо иметь К = <в2 = 2 и р = 2£<в„ = 2 . Исследователь и проектировщик систем управления должен отчетливо представлять связь между положением корней замкнутой системы и ее
переходной характеристикой. Поэтому данному вопросу мы уделим большее внимание в последующих разделах.
Пример 5.2. Доминирующие полюсы Ц«)
Рассмотрим систему, передаточная функция которой в замкнутом состоянии имеет вид:
= г(«) =__________£________-______
R(s) (s2 + 2£co„s + w2)(l + rs)
На переходную характеристику могут оказывать влияние как нуль, так и вещественный полюс. Если а э> и г « то это влияние будет незначительным.
Предположим, что мы имеем 62,5(«+2,5)........................................
(s2 + 6s + 25)(s + 6,25)
Заметим, что Г(0) = 1, т. е. коэффициент усиления системы на нулевой частоте равен единице, поэтому следует ожидать, что при ступенчатом входном сигнале установившаяся ошибка будет равна нулю. В нашем случае = 3. т = 0,16 и а = 2,5. Положение полюсов и нуля на
256
Глава 5. Качество систем управления с обратной связью
s-плоскости показано на рис. 5.16. В качестве первого приближения пренебрежем вещественным полюсом и получим:
r(s)^..^+2^ .
. ОС
Теперь при £ = 0,6 и = 5 мы имеем пару доминирующих полюсов и один нуль, для которого а/(^ои) = = 0,833. С помощью рис.5.13(a) находим, что относительное перерегулирование составляет 55%. Ожидаемое время установления (по критерию 2% от конечного значения) равно
4 4
Т'= — = —— = 1,33 с.
0,6-5
Моделирование на компьютере исходной системы
/со
X /4
-3 }2
- 6.25 -2.5
X -j4
Рис. 5.16. Положение на s-плоскости полюсов и нуля для системы третьего порядка
третьего порядка дает следующие результаты: пеерегулирование составляет 38%, а время установления равно 1,6 с. Таким образом, влияние третьего полюса T(s) сводится к уменьшению перерегулирования и увеличению времени установления (а. следовательно, вещественным полюсом пренебрегать нельзя).
5.5. Оценка коэффициента затухания
Коэффициент затухания можно оценить по реакции системы на ступенчатый входной сигнал. Реакция системы второго порядка на единичную ступеньку была получена ранее [см. выражение (5.9)]. Приведем ее еще раз:
y(t) = 1-- еsin((o„p/ + 6), Р
где р = -Jl- Q2 и 6 = arccos С,. Следовательно, при С, < 1 частота затухающего синусоидального члена
“ = “nV1-C2 =<оп₽,
а число колебаний за одну секунду равно си/2 л.
Постоянная времени затухающей экспоненты т = 1/(£со„) (в секундах). Число колебаний затухающей синусоиды за время т равно:
(число колебаний/с)х т = —-— = .
2л^со„ 2л£сои 2л£
Полагая, что реакция системы затухает за п постоянных времени, получим:
иР
число различимых колебаний = —— . (5.19)
2л£
Для системы второго порядка ее реакция не выходит из зоны 2% от конечного значения спустя 4т. Следовательно, п = 4, и
к „ 4Р 4д/1- С2 0,55 _л.
число различимых колебании = —— = —--» —-— (5.20)
2л£ 2лС С
для 0,2 < С, < 0,6 .
5,6, Связь между переходной характеристикой и положением корней
257
В качестве примера рассмотрим реакцию системы для £ = 0,4, изображенную на рис. 5.5(a). Первый минимум имеет место приу(0 = 0. До тех пор, пока реакция не установится в зоне 2% от конечного значения, можно различить 1,4 колебания. Поэтому для £ получаем следующую оценку:
£=-------^5------= Д55 = 0 3ft
число колебаний 1,4
Такую аппроксимацию можно применять к системам с доминирующими комплексными
полюсами, т. е. когда
------
S +2^о„5+ю'
Подобным образом можно оценивать коэффициент затухания по переходной характеристике реальной физической системы.
Альтернативный метод оценки С, состоит в использовании рис. 5.8, который связывает относительное перерегулирование с коэффициентом затухания. Например, на рис. 5.5(a) значению С, = 0,4 соответствует перерегулирование 25%. По графику на рис. 5.8 этому перерегулированию соответствует С, = 0,4, как и следовало ожидать.
5.6. Связь между переходной характеристикой и положением корней на s-плоскости
Переходную характеристику замкнутой системы управления можно связать с положением полюсов ее передаточной функции. В общем случае передаточная функция замкнутой системы имеет вид:
Ж*) Д(^)
где A(s) = 0 есть характеристическое уравнение системы.
Для одноконтурной системы, изображенной на рис. 5.14, характеристическое уравнение записывается в виде 1+ G(s) = 0. Переходная характеристика, вообще говоря, определяется полюсами и нулями T(s). Но для замкнутой системы полюсами l\s) являются корни характеристического уравнения Л(^) = 0 и полюсы выражения У ДА, (s) При еди
ничном ступенчатом воздействии и отсутствии кратных корней (если коэффициент усиления системы равен 1) изображение по Лапласу выходного сигнала можно представить в виде разложения на дроби:
Y (л) = - + У —— + >, —---------\----—
s —fs+Oi k=l s- + 2aks+(ak +о* )
(5-21)
где Ап ВкиСк — константы. Корни системы должны быть либо вещественными, вида s = -о„ либо образовывать комплексно-сопряженные пары типа s = -ak+jak. Тогда обратное преобразование Лапласа для (5.21) дает переходную характеристику системы в виде суммы членов:
М N
уЮ = 1+ £ А,е-^ +^Пк е~а^ sm(o* t + Qk\ (5.22)
i=i t=i
258
Глава 5, Качество систем управления с обратной связью
Рис. 5.17. Реакция системы на импульсное воздействие при различном положении корней на s-плоскости (комплексно-сопряженные корни не показаны)
где константа Dk выражается через Вк, Ск, акиа)к. Переходная характеристика образована установившимся значением y(t), экспоненциальными членами и затухающими синусоидальными компонентами. Чтобы переходная характеристика была ограниченной (а система — соответственно, устойчивой), необходимо, чтобы вещественные части корней, -с, и -ак, были расположены в левой половине s-плоскости. На рис. 5.17 изображены реакции системы на импульсное воздействие, соответствующие различному положению корней на s-плоскости. Такое наглядное графическое представление очень полезно при выборе желаемого расположения корней на s-плоскости.
При анализе линейной системы управления важно понимать связь между ее представлением в области комплексной частоты в виде полюсов и нулей передаточной функции и поведением системы во времени в виде реакции на ступенчатое и иные входные воздействия. Например, многие вычислительные методы анализа и синтеза в таких прикладных задачах, как управление и обработка сигналов, применяются именно на основе представления модели системы в виде полюсов и нулей передаточной функции 7'(s). С другой стороны, качество системы часто оценивается по ее переходной характеристике, в особенности когда речь идет о системах управления.
Опытный проектировщик должен ясно представлять, как повлияет на временные характеристики системы добавление, удаление или перемещение на s-плоскости полюсов и нулей 7l(s). Он также должен понимать, как следует изменить полюсы и нули T(s), чтобы добиться желаемого вида временных характеристик.
Опытный проектировщик всегда представляет, как влияют нули передаточной функции на реакцию системы. Полюсы T(s) определяют отдельные составляющие переходной характеристики, а нули 7{s) определяют относительный вес каждой из этих составляющих. Например, чем ближе нуль передаточной функции расположен к какому-то ее полюсу, тем меньше вклад в переходную характеристику составляющей, соответствующей данному полюсу.
Можно написать компьютерную программу и задать в ней произвольный набор полюсов и нулей передаточной функции линейной системы. Затем компьютер рассчитает и
5.7, Установившаяся ошибка систем управления с обратной связью
259
построит графики реакции системы на импульсное и ступенчатое воздействия. Кроме этого можно изобразить те же характеристики в уменьшенном масштабе вместе с диаграммой размещения полюсов и нулей. После того, как программа будет выполнена для исходного набора полюсов и нулей, пользователь может изменить положение одного или нескольких из них. В результате будет получена диаграмма, отражающая старое и новое расположение полюсов и нулей и старые и новые реакции системы на импульсное и ступенчатое воздействия.
5.7. Установившаяся ошибка систем управления с обратной связью
Одним из основных мотивов использования обратной связи, несмотря на усложнение системы и неизбежные издержки, является возможность уменьшения установившейся ошибки. Как было показано в разд. 4.5, в устойчивой замкнутой системе установившаяся ошибка на несколько порядков меньше, чем аналогичный показатель в разо-
мкнутой системе. Рассмотрим замкнутую систему, изображенную на рис. 5.18. Сигнал, по которому можно судить об ошибке системы, обозначен через Eu(s~). Однако действительная ошибка характеризуется выражением E(s) = R(s) - Y(s). Тогда
£(s) = £(s)-
l+GHfs') 1+G£(s)
Ошибка системы совпадает с сигналом Ea(s) при H(s) = 1. В этом случае
£(5) =
1
1+G(s)
R(s\
и установившаяся ошибка определяется выражением
z \ sR(s) е = Iim e(t) = Inn-----.
/->« s-Я) 1+G(s)
(5.23)
Полезно определить установившуюся ошибку системы в случае единичной обратной связи, H(s) - 1, для трех типовых тестовых входных сигналов.
Ступенчатый входной сигнал. При ступенчатом входном сигнале амплитуды А
установившаяся ошибка равна
е,Л.
s(A/s) А
= lim------ =-------
-^oi + G(s) 1+G(O)
т. е. она определяется передаточной функцией разомкнутой системы G(s). Последняя в общем случае записывается в виде
м
£Р[(л+г,)
G(S) =-------------. (5.24)
*=1
260
Глава 5. Качество систем управления с обратной связью
Таким образом, значение G(s) при 5 —> 0 зависит от N, т. е. количества содержащихся в разомкнутой системе интеграторов. Если N > 0 , то G(0) = » и установившаяся ошибка равна нулю. Часто используют термин тип системы, который просто равен количеству интеграторов N. Так, для системы типа 0 ( N = 0 ) установившаяся ошибка равна
А
А
1+G(O)
' м о
1+ *П2»/Па
\ 1=1 к=\
(5.25)
Константа G(0), обозначаемая через Кр, называется коэффициентом ошибки по положению и определяется как
К =limG(s).
г х->0
Таким образом, установившаяся ошибка при отработке ступенчатого воздействия с амплитудой А определяется выражением
А ess ~----------
Д’Л’
(5.26)
Если система содержит один или более интеграторов, т. е. TV > 1, то при единичном ступенчатом воздействии установившаяся ошибка равна нулю, т. к.
^oi+(^pjz.+(^P[Zj/П А )
Линейный входной сигнал. Установившаяся ошибка в случае линейного входного сигнала (изменяющегося с постоянной скоростью А) определяется выражением:
s(A/s2) v А .. А
е... = lim-= lim--= lim--. (5.28)
s->o 1+G(s) s->o s+sG(s) -'->o iSG(a)
Напомним, что установившаяся ошибка зависит от количества интеграторов, N. Для системы типа «ноль» N = 0, и установившаяся ошибка равна бесконечности. Для системы типа «один» N = 1, и ошибка
е =Цп1_________________А________________
(.s-+ Z,)] / [sf] (s+ рк )]}’
или
А _ А
*"кГЬ/Па ~к* ’
(5.29)
где Kv носит название коэффициента ошибки по скорости. Этот коэффициент вычисляется по выражению
Kv =limsG(s)i х—>0
В отечественной литературе коэффициенты ошибки определяются несколько иначе. — Прим, перев.
5,7. Установившаяся ошибка систем управления с обратной связью
261
Если передаточная функция включает в себя два или более интеграторов, N> 2, то установившаяся ошибка равна нулю. При N = 1 установившаяся ошибка отлична от нуля, но скорость изменения выходной переменной равна скорости входного сигнала (см. рис. 5.20).
Квадратичный входной сигнал. Если на вход системы поступает сигнал r(f) = Аг/2, то установившаяся ошибка имеет вид:
s^A/s3) А
ess = lim—-----= шп—-------.
‘ .'->о 1+G(.?) >->os2G(s)
(5.30)
При наличии одного интегратора установившаяся ошибка равна бесконечности; при двух интеграторах, N = 2, мы получим
(5.31)
где Ка — коэффициент ошибки по ускорению, определяемый выражением
Ка =lims2G(s).
•v-»0
Если количество интеграторов N > 3, то установившаяся ошибка равна нулю.
Системы управления часто характеризуют их типом и коэффициентами ошибки Кр, Kv и Ка. Установившиеся ошибки для трех входных сигналов в зависимости от типа системы приведены в табл. 5.5. Пользу от использования коэффициентов ошибки мы проиллюстрируем на простом примере.
Таблица 5.5. Установившиеся ошибки
Количество интеграторов в G(s), тип системы Входной сигнал
Ступенчатый, г(0=Д Я(«) = A/s Линейный, r(0 = At, R(s) = A/s1 Квадратичный, r(l) = Ai/2, R(s) = A/s3
А
0 е = 00 00
А
1 ess = 0 Kv 00
A
2 ess = 0 0 Ka
Пример 5.3. Управление рулевым механизмом подвижного робота
Тяжело больной человек может воспользоваться подвижным роботом в качестве помощника или обслуживающего устройства. Система управления рулевым механизмом такого робота представлена в виде структурной схемы на рис. 5.19.
Регулятор имеет передаточную функцию
g1(s) = a:1+a:2/s. (5.32)
262
Глава 5, Качество систем управления с обратной связью
Рис. 5.19. Структурная схема системы управления рулевым механизмом подвижного робота
При К2 = 0 и G](s) = Kj установившаяся ошибка системы при ступенчатом входном сигнале
равна
А
1+^р ’
(5.33)
где Кр = ККХ. Если К2 * 0, то мы имеем систему типа 1, т. е.
G)(s)=
Kxs +
S
и установившаяся ошибка при ступенчатом входном сигнале равна нулю.
Если управляющий входной сигнал является линейным, то установившаяся ошибка
л
^=4-. (5.34)
Av
где
На рис. 5.20 изображена реакция системы на периодический сигнал треугольной формы при Gj(j) = (К/S + + Kj)ls. На переходной характеристике отчетливо прослеживается появление установившейся ошибки, которая может не иметь существенного значения, если Ку достаточно велико. Заметим, что хотя в устано-
К = limjG|(y)G(s)= К2К. s-fO
Рис. 5.20. Реакция системы на колебания треугольной формы
вившемся режиме ошибка отлична от нуля, но выходной сигнал изменяется с заданной скоростью.
Коэффициенты ошибки Кр, Kv и Ки характеризуют способность системы управления уменьшать или устранять установившуюся ошибку. Поэтому они используются как количественные показатели качества системы в установившемся режиме. Проектировщик определяет коэффициенты ошибки для конкретной системы и пытается найти способы их увеличения, сохраняя в то же время приемлемое качество переходной характеристики. В примере с системой управления рулевым механизмом подвижного робота желательно увеличивать произведение КК2, чтобы увеличить Kv и тем самым уменьшить установившуюся ошибку. Однако увеличение КК2 приводит к одновременному уменьшению коэффициента затухания С, и, следовательно, к более колебательному характеру реакции системы на ступенчатое входной воздействие. Поэтому в данном случае должен быть найден разумный компромисс между значениями параметров К„ и
263
5,8. Установившаяся ошибка систем с неединичной обратной связью
5.8. Установившаяся ошибка систем с неединичной обратной связью
Общая структура системы с неединичной обратной связью приведена на рис. 5.21, причем H(s) Ф 1. Для подобных систем единицы, в которых измеряется входная переменная, обычно отличны от выхода датчика. Например, на рис. 5.22 изображена система управления скоростью, где H(s) = К2. Коэффициенты Кх и К2 отвечают за преобразование одних единиц измерения в другие (в данном случае это — преобразование рад/с в вольты). Коэффициент Кх можно выбирать достаточно произвольно, поэтому если задать Кх = К2, то блоки Кх и К2 можно перенести через сумматор, в результате чего мы получим эквивалентную структурную схему, изображенную на рис. 5.23. Эта схема имеет уже единичную обратную связь, что обычно является желательным.
Обратимся к системе на рис. 5.21, содержащей H(s).
Если
К2
TS+ 1 ’
то коэффициент передачи этого блока на нулевой частоте
lim/7(s) = /G.
5'—>0
Этот коэффициент характеризует преобразование единиц измерения. Если принять К2 = Кх, то система преобразуется к виду рис. 5.23 (для нулевой частоты или анализа установившегося режима). Для этой системы можно записать:
E(j)=fl(s)-y(s)=[l-WM
поскольку Y(s) = T(s)R(s). Заметим, что
(5.35)
7(,) =
1 + Х,С(5)
и, следовательно,
--------£(*) 1+X,G(5)
Рис. 5.21
Система с неединичной обратной связью
Жз)
G(s)
У(з)
Рис. 5.22
Система управления скоростью
H(s)
Рис. 5.23
Система управления скоростью (рис. 5.22) при Ку = А2
264
Глава 5. Качество систем управления с обратной связью
(5.36)
Тогда при единичном ступенчатом воздействии установившаяся ошибка будет равна е..,. =limj£(^) =-------------------------------
хт s—>о 1+£(G(O)
В общем случае установившуюся ошибку всегда можно определить, используя выражение (5.23).
Пример 5.4. Установившаяся ошибка
Рассмотрим систему, изображенную на рис. 5.21, определим соответствующее значение £, и вычислим установившуюся ошибку при единичном ступенчатом воздействии, если
„ Л 40 , ,, , 20 К2
G(s) =--- и H(s) =----=------—
5+5 5+10 0,h+l
Мы можем записать H(s) в виде
2 H(s) = —— . O,Ls+l
Выбрав = К2 — 2, с помощью выражения (5.36) определим:
1 1 1 е.... =--------=--------= —,
1+£,G(O) 1+2-8 17
что составляет 5,9% от величины ступенчатого входного воздействия.
Пример 5.5. Система с обратной связью
Рассмотрим систему, изображенную на рис. 5.24, и предположим, что мы не можем включить в цепь входного сигнала R(s) блок с коэффициентом Ки как это делали в системе на рис. 5.21. Тогда ошибка будет определяться выражением (5.35):
-R(s)
£(л) = [1-Г(5)]/?(5). Рис. 5.24. Система
Определим такое значение коэффициента К, с обратной связью Н (s)
при котором установившаяся ошибка в случае единичного ступенчатого воздействия была бы минимальной. Установившаяся ошибка
ев = 1ш15[1-7’(5)] - , л’—>0 д’
где
G(5) _ £(5+4)
l + G(5)//(5) ” (5+ 2)(5+ 4)+ 2£ ’
Отсюда
Г(0) =
4Л~
8+2Х
и установившаяся ошибка е„ = 1 - ДО).
Таким образом, чтобы установившаяся ошибка равнялась нулю, необходимо положить
Г(0) = -^—= 1,
8+2£
или 8 + 2К = 4£ Отсюда ясно, что при К = 4 мы получим нулевую установившуюся ошибку.
5.9. Оценки качества
265
5.9. Оценки качества
В новейшей литературе, посвященной автоматическому управлению, подчеркивается важность математической формулировки понятия качества системы управления и методов его оценки. Современная теория управления предполагает, что инженер способен количественно определить требуемое качество системы. Количественная оценка качества крайне важна для работы адаптивных систем управления, для автоматической оптимизации параметров систем управления и для синтеза оптимальных систем.
Оценка качества — это численный показатель качества системы, который выбирается так, чтобы подчеркнуть наиболее важное требование, предъявляемое к системе.
Система считается оптимальной системой управления, если ее параметры выбраны таким образом, что оценка качества принимает экстремальное (обычно минимальное) значение. Чтобы оценка качества имела реальный смысл, она должна представлять собой число, которое всегда положительно или равно нулю. Тогда наилучшей системой будет та, в которой эта оценка имеет минимальное значение.
Одним из видов оценки качества может служить интеграл от квадрата ошибки (ИКО), который определяется как
г7’ >
ИКО= [ e2(t}dt. (5.37)
•*0
Верхний предел интегрирования Т выбирается достаточно произвольно, так, чтобы интеграл стремился к конечному значению. Обычно удобно выбирать Т равным времени установления Ts. На рис. 5.25 (б) изображена реакция некоторой системы управления с обратной связью на ступенчатое воздействие, а на рис. 5.25 (в) изображен график ошибки системы. Соответственно на рис. 5.25 (г) приведен график квадрата ошибки, а на рис.5.25 (б) — интеграла от квадрата ошибки. Этот критерий позволит выделять системы с очень большим и очень малым затуханием. Минимальное значение интеграла будет иметь место при компромиссном коэффициенте затухания. Оценка (5.37) удобна в практическом применении, т. к. легко могут быть реализованы схемы возведения в квадрат. К тому же квадрат ошибки удобен с математической точки зрения при аналитических расчетах и вычислениях на ЭВМ.
Другим легко используемым видом оценки качества является интеграл от модуля ошибки (ИМО), имеющий вид
г7’
ИМО= Г 1е(0|б*. (5.38)
Jo
Этот показатель в частности удобен при имитационном моделировании систем на компьютере.
Чтобы уменьшить вклад большой начальной ошибки в интеграл (5.38) и учесть ошибку, появляющуюся в дальнейшем, была предложена следующая оценка:
г7’
ИВМО= [ (5.39)
которая определяется как интеграл от взвешенного модуля ошибки (ИВМО). Весьма схожим показателем является интеграл от взвешенного квадрата ошибки (ИВКО):
ИВКО= f te2(/)dt. (5.40)
Jo
266
Глава 5, Качество систем управления с обратной связью
Рис. 5.25
Вычисление интеграла от квадрата ошибки
Оценка качества ИВМО является наилучшей из рассмотренных, т. к. с ее помощью проще всего находить минимальное значение интеграла при изменении параметров системы. В общем случае интеграл, оценивающий качество системы, имеет вид
1 = fo , (5.41)
где f есть функция ошибки, входного и выходного сигналов, а также времени. Используя различные комбинации переменных системы и времени, можно получить много разных оценок качества. Отметим только, что практическую ценность чаще всего представляют оценки ИМО и ИКО. Например, минимизация одной из оценок качества может быть непосредственно связана с минимизацией расхода топлива самолетом или космическим аппаратом.
Оценки качества играют большую роль при анализе и синтезе систем управления. Их использование мы проиллюстрируем двумя примерами.
Пример 5.6. Критерии качества
На рис 5.26 изображена одноконтурная система управления, где принято нормированное значение собственной частоты = 1. Замкнутая система имеет передаточную функцию
T(s) = ~.-----
? + 2С?+1
(5-42)
5,9, Оценки качества
267
Рис. 5.27. Три оценки качества для системы второго порядка
Рис. 5.26. Одноконтурная система управления
На рис. 5.27 представлены три оценки качества — ИКО, ИВКО и ИВМО, вычисленные для различных значений коэффициента затухания при ступенчатом входном воздействии. Эти кривые показывают хорошую избирательность оценки ИВМО по сравнению с показателем ИКО. На основе оценки ИВМО целесообразно выбрать значение коэффициента затухания С, = 0,7, что для данной системы второго порядка обеспечивает наиболее быстрое протекание переходного процесса с перерегулированием 4,6%.
Пример 5.7. Система управления орбитальным телескопом
На рис 5.28 изображен сигнальный граф системы наведения орбитального телескопа. Требуется выбрать значение коэффициента К3, позволяющее минимизировать влияние возмущения D(s). которое в данном случае эквивалентно начальной ошибке по положению. Передаточная функция замкнутой системы по отношению к возмущению, полученная с помощью формулы Мейсона, имеет вид:
Г(5) P^x(s) 1(1+К^Г1)
D(s) 4(s) I + KxK3s~' + KlK2Kps^2
s(s + KXK3)
s2 + KtKis+KxK2Kp ‘
(5.43)
Коэффициенты имеют следующие типичные значения: Кх = 0,5 и КхК2Кр = 2,5. Следовательно, собственная частота аппарата fn = -/2Л/2л = 0,25. При единичном ступенчатом возмущении минимальное значение оценки ИКО можно вычислить аналитически. Положение у(Г) описыва-
ется выражением
(5.44)
где Р = К3д/(А'з/8) 5. Возведение у(/) в квадрат и интегрирование дает:
1 = fl2e-o.5^'sin2fP.z+V(/L/= [“12е-°.5^'Г1_1СО5(рг+2ур)Ъ/ = — +ОДА:,. (5.45) Jop2 U J Jop2 L2 2 J К3
Продифференцировав (5.45) и приравняв результат нулю, получим:
сП >
~ = ~К32 + 0,1 = 0. (5.46)
dK3 3
Таким образом, минимум ИКО имеет место при К3 = 710 = 3,2. Это значение Х'3 соответствует
коэффициенту затухания Q = 0,50. На рис. 5.29 приведены графики оценок ИКО и ИМО. Мини-
268
Глава 5, Качество систем управления с обратной связью
а)
Возмущение
-D(s)
б)
J?(s)
Рис. 5.28. Система управления наведением орбитального телескопа, (а) Структурная схема, (б) Сигнальный граф
Рис. 5.29
Оценки качества системы управления орбитальным телескопом
в зависимости от параметра К3
мум ИМО получается при К3 = 4,2 и £ = 0,665. Хотя критерий ИКО и не столь избирателен, как ИМО, тем не менее очевидно, что минимум этой оценки может быть вычислен аналитически. Что касается минимума ИМО, то он находится путем измерения этого показателя для нескольких значений варьируемого параметра системы.
Если выбранная оценка качества принимает минимальное значение, то система считается оптимальной. Однако оптимальные значения параметров непосредственно определяются тем, на основании какой оценки качества они получены. Так, в примерах 5.6 и 5.7 мы обнаружили, что оптимальная настройка системы является разной для разных оценок качества.
5,9. Оценки качества
269
Для передаточной функции замкнутой системы общего вида
7(^ =---------------------
Ж*) sn-1+...+ZV+^
(5.47)
были определены значения коэффициентов, которые минимизируют оценку ИВМО в случае ступенчатого входного сигнала. Заметим, что подобная система обладает нулевой установившейся ошибкой, а ее передаточная функция имеет п полюсов и не содержит нулей. Оптимальные значения коэффициентов по критерию ИВМО приведены в табл. 5.6. На рис. 5.30 изображены переходные характеристики, соответствующие оптимальным значениям коэффициентов для критериев ИКО, ИМО и ИВМО, причем графики построены в зависимости от нормированного времени, со „Л Кроме рассмотренных, существуют и другие оценки качества, которые могут помочь проектировщику при решении конкретной задачи выбрать область изменения коэффициентов. Ниже приводится заключительный пример, иллюстрирующий использование оценки ИВМО.
Рис. 5.30 Переходные характеристики, соответствующие оптимальным коэффициентам нормированной передаточной функции, для критериев (а) ИКО, (б) ИМО, и (д) ИВМО.
Характеристики изображены в зависимости от нормированного времени, o>nt.
0
5
10 15
Нормированное время
20
270
Глава 5, Качество систем управления с обратной связью
Рис. 5.30 (продолжение)
Пример 5.8. Управление двумя камерами
Чтобы дать возможность актерам выступать на фоне сложных миниатюрных декораций, необходима высокоточная и быстродействующая система управления. На рис. 5.31(a) изображена такая система, состоящая из двух камер, одна из которых направлена на актера, а другая — на
миниатюрную декорацию.
Задача состоит в получении быстрой и точной координации двух камер путем использования информации, поступающей отдатчика, связанного с камерой переднего плана, для управления движением камеры заднего плана. На рис 5.31(6) приведена структурная схема системы управления движением камеры заднего плана по одной оси.
Замкнутая система имеет передаточную функцию
какЛ
Т = “3---------2---2---------2 ‘
5 + + КиКт<ой
(5.48)
В соответствии с табл. 5.6, для системы третьего порядка необходимо выполнение условий:
2Ссо0 = 1,75со„, (о2 = 2.15со2. КиК„,ы2 = со3.
Таблица 5.6. Оптимальные значения коэффициентов Д«), основанные на критерии ИВМО, при ступенчатом входном сигнале
S + со„ s2 + 1.4<o„s + со2 № + 1,75<о,^2 + 2,15a>Js + <о3 s4 + 2,1со,^3 + 3,4cojs2+ 2,7(o,^s + ы}, s5 + 2,8(о,/ + 5,0ы2^3 + 5,5со3^2 + 3,4 (о,4 5 + со,5,
s6 + 3,25со„? + б.бОы2/ + 8,6Осо,У + 7,45(0*? + 3.95со,> + со*
5.9. Оценки качества
271
Из рис. 5.30(e) мы видим, что для п = 3 время установления (нормированное) равно приблизительно 14 с. Следовательно, со„7\. = 8. Поскольку желательно иметь как можно большее быстродействие, то со„ следует выбрать достаточно большим, чтобы время установления было менее 1 с. Поэтому примем <о„ = 10 рад/с. Тогда согласно критерию ИВМО параметры T(s) должны быть следующими:
со0 = 14,67 рад/с и Q = 0,597.
Далее определяем коэффициент усиления усилителя и двигателя:
Кокт = 4 = = — = 4,65.
соо 2,15coj; 2,15
В результате передаточная функция замкнутой системы принимает окончательный вид: -----------------------------------------------------------------------. (5.49) ? + 17,5? + 215s + 1000 (s+ 7,08)(s + 5,21+ j’10,68)(s+ 5,21- >10.68)
Положение полюсов замкнутой системы, предписываемое критерием ИВМО, приведено на рис. 5.32. Комплексным полюсам соответствует коэффициент затухания Q = 0,44, однако эти полюсы не являются доминирующими. Действительная реакция на ступенчатое входное воз
«)
б)
Рис. 5.31. Камера переднего плана, которая может быть либо кино- либо видеокамерой, направлена на голубой вогнутый экран. Электронная следящая система позволяет управлять одновременно двумя камерами. Камера заднего плана нацелена на миниатюрную декорацию и одновременно с помощью перископических датчиков воспроизводит в миниатюре все движения камеры переднего плана. Видеоконтроллер позволяет объединять изображения и вести их прямую запись.
1 — голубой матовый экран, 2 — видеоконтроллер, 3 — камера заднего плана, 4 — электронная система управления, 5 — камера переднего плана, 6 — датчики
272
Глава 5, Качество систем управления с обратной связью
действие, полученная путем компьютерного моделирования, показывает, что перерегулирование составляет всего 2%, а время установления (до вхождения реакции в зону 2% от конечного значения) равно 0,75 с.
Для передаточной функции замкнутой системы общего вида
T{s}=--------------------
5"+^1S-,+...+ ^+fc0
(5.50)
были определены значения коэффициентов, которые минимизируют оценку ИВМО в случае линейного входного сигнала. Заметим, что такая система отрабатывает линейный входной сигнал с нулевой установившейся ошибкой. Оптимальные значения коэффициентов приведены в табл. 5.7. Передаточная функция (5.50) предполагает, что G(s) содержит два или более интегратора, как и требуется для получения нулевой установившейся ошибки.
Рис. 5.32
Полюсы замкнутой системы, дающие минимум ИВМО
Таблица 5.7. Оптимальные значения коэффициентов 7{s), основанные на критерии ИВМО, при линейном входном сигнале
s2 + 3,2co„s + С0д
.V3 + 1,75со,^2 + 3,25co^s + со3 s4 + 2,41cu;rs-3 + 4,93co^s2 + 5,14co^s + fi>4 ss + 2,19ет,,г4 + 6,5Oco2^3 + 6,30o3^2 + 5,24fi>45 + co3
5.10. Упрощение линейных систем
Сложные системы, передаточные функции которых имеют высокий порядок, полезно изучать, используя их аппроксимацию моделями пониженного порядка. Например, систему четвертого порядка можно аппроксимировать моделью второго порядка, что позволит оценивать ее показатели качества с помощью рис. 5.8.
Существует несколько методов понижения порядка передаточных функций. Сравнительно простым способом является удаление несущественных полюсов, которые имеют достаточно большую отрицательную действительную часть и, следовательно, слабо влияют на вид переходной характеристики.
5,10. Упрощение линейных систем
273
Например, если система имеет передаточную функцию
G(j) =-----------,
j(j+2Xj+30)
то мы безболезненно можем пренебречь полюсом s = -30. Однако мы должны сохранить коэффициент передачи системы на нулевой частоте, поэтому новая передаточная функция
будет иметь вид
G(s) =
К/30 j(s+2)
Более сложный метод заключается в том, что частотную характеристику системы пониженного порядка стараются подогнать как можно ближе к исходной частотной характеристике. Хотя частотные методы будут рассматриваться в главе 8, данный метод аппроксимации связан в основном с алгебраическими манипуляциями и поэтому мы его представим в данном разделе. Пусть система высокого порядка описывается передаточ-
ной функцией
bnSn +b„_xSn l+...+f>!.S+l
(5.51)
все полюсы которой находятся в левой половине .s-плоскости и т < п. Аппроксимирующая передаточная функция пониженного порядка имеет вид
Us) = K
C^+.-.+^S+i dgsg +...+dxs + l
(5-52)
гдеp < g < n. Заметим, что коэффициент К — один и тот же для исходной и аппроксимирующей передаточных функций (это необходимо для совпадения свойств систем в установившемся режиме). Метод, который поясняется примером 5.9, основан на подборе с, и d, так, чтобы частотная характеристика для L(s) была как можно ближе к частотной характеристике для H(s). Это эквивалентно утверждению, что отношение U(ja)/L(Ja) должно на всех частотах как можно меньше отличаться от единицы. Коэффициенты с и d определяются с помощью следующих выражений:
,к
(5.53)
dsk
и
,k
dk\s) = ^—^s), (5.54)
dsk
где M(s) и A(s) есть, соответственно, полиномы в числителе и в знаменателе дроби H(s)/L(s). Введем обозначение
^(-l)^M^(O^-^(O)
-1 k\(2k-q)\
и аналогичное выражение для A2fy. Коэффициенты с и d определяются из условия
M2lJ = Д29 > (5-56)
где q = 1,2,... ит. д. до числа, необходимого для определения всех неизвестных коэффици
ентов.
274
Глава 5. Качество систем управления с обратной связью
Применение данного метода поясним следующим примером.
Пример 5.9. Упрощенная модель
Рассмотрим систему третьего порядка:
W(s) = -=------—1 , , . . . (5.57)
s3 + 6s2+lls+6 l+(,/^)s + s2 + (/l^)s3
Воспользовавшись моделью второго порядка
W = , 1 , 2 , (5.58)
1 + dts + d2s
запишем:
M(s) = 1+ dts + d2s2 и A(s) = 1 + ('10S+s2 + ()0s3.
Тогда
A/°(s) = 1 + d\s + t/2-s2 (5.59)
и Л7°(0) = 1. Аналогично получим
М} = — (1 + dts + d2s2) - dt + 2d2s. (5.60)
ds
Таким образом, AZ*(0) = dt. Продолжая этот процесс, получим:
Л/°(0)=1 Л°(0)=1,
Л/*(0) = 4 Л‘(0) = %. (.61)
M2(0) = 2d2 А2(0)=2,
Л/3(0)=0 д3(0)=1
Теперь приравняем М2с/ = Д2г; для Q - 1 и q = 2. Для q = 1 имеем _ М°(0)М2(0) М'(0)Л7‘(0) М2(0)М°(0) _ 2 2
М2- (-1)-----------+-----j----+ (-1)-------------d2 + dt -d2- + d,. (5.62)
Аналогично для Д2:
Д2 = + АЧ0)А3(0) + M)A2(0)AO(0) = + 121 _! = 49 (5 63)
21 2 36 36
Из (5.56) следует, что при q = 1 М2 = Д2, следовательно
—2t/2 + t/| = 4%6. (5.64)
Завершая процесс, для Л/4 = Д4 получим:
^2 = %8- (5-65)
Совместное решение (5.64) и (5.65) дает результат: dt = 1,615 и d2 = 0,625. (Другие решения отбрасываем, т. к. они дают полюсы в правой половине s-плоскости.) Таким образом, система пониженного порядка имеет передаточную функцию
1
1,60
L(s) = , - ,----------------
1 + 1,615s + 0,625s2 s2 + 2,584s + 1,60
(5.66)
Интересно отметить, что H(s) имеет полюсы s = -1, -2, -3, тогда как полюсы L(s) равны s =-1,029 и -1,555. Поскольку модель пониженного порядка имеет два полюса, можно оценить, что система будет обладать слегка передемпфированной переходной характеристикой со временем установления (по критерию 2% от конечного значения) приблизительно 3 с.
5,11. Пример синтеза: управление ориентацией телескопа «Хаббл
275
Рис. 5.33. Пример современной системы управления — рука робота, способная выполнять деликатные операции, связанные с захватом предметов
Иногда бывает желательно сохранить в модели пониженного порядка доминирующие полюсы исходной системы. Этого можно добиться, если включить в знаменатель L(s) доминирующие полюсы H(s), а аппроксимацию обеспечивать за счет подбора числителя L(s). Примером системы высокого порядка, которую удобно представить в виде модели пониженного порядка, является рука робота, изображенная ни рис. 5.33.
Еще одним новым и полезным методом понижения порядка является метод аппроксимации Рауса, в основе которого лежит идея усечения таблицы Рауса, составляемой для анализа устойчивости системы. Приближения Рауса можно определить с помощью конечного рекурсивного алгоритма, пригодного для реализации на цифровом компьютере.
5.11. Пример синтеза: управление ориентацией телескопа «Хаббл»
Орбитальный космический телескоп «Хаббл» является самым сложным и дорогим прибором научных исследований из всех, которые когда-либо были созданы. Этот телескоп, запущенный 24 апреля 1990 г. на орбиту высотой 610 км над поверхностью Земли, существенно раздвинул границы технических возможностей. Его зеркало диаметром 2,4 м имеет самую гладкую поверхность среди всех когда-либо созданных зеркал, а его система наведения способна обеспечить ориентацию на центр 10-центовой монеты, находящейся на
276
Глава 5, Качество систем управления с обратной связью
расстоянии 650 км. Зеркало имеет сферическую аберрацию, которая во время экспедиций на шаттле в 1993 и 1997 гг. была подвергнута существенной коррекции. Рассмотрим модель системы управления ориентацией телескопа, изображенную на рис. 5.34.
Цель синтеза состоит в выборе таких значений Кх и К, чтобы (1) относительное перерегулирование выходной переменной при ступенчатом задающем сигнале r(t) не превышало 10%, (2) установившаяся ошибка при линейном входном сигнале была минимальной и (3) был значительно снижен эффект от ступенчатого возмущения. Поскольку система содержит внутренний контур, то прежде всего необходимо упростить структурную схему, сведя ее к виду рис. 5.34 (б).
Для системы на рис. 5.34 (б) выражение для выхода, обусловленного двумя входными сигналами, можно получить с помощью формулы Мейсона:
У(а) = T\s)R(s) + [7fc)/K]Z)(s) ,
(5-67)
где
KG{s) _KG(s)
} \+KG(s) \+L(s)
Для ошибки имеем:
E(s) =--— R(s)—D(s) .
1 + L(s~) 1 + L(s)
(5.68)
Сначала выберем такие значения К и Кх, которые удовлетворяли бы ограничению на отно-
сительное перерегулирование при ступенчатом входном сигнале, R(s) = A/s. Полагая
D(s) = 0, запишем:
----*-------------------±.
\+KG(s) s(s+Kx)+K s s- +Kxs+K s
(5-69)
Чтобы обеспечить перерегулирование менее 10%, используя рис. 5.8, выберем £ = 0,6; так-
же на основании (5.16) определим, что при С, = 0,6 перерегулирование составит 9,5%. Далее
исследуем установившуюся ошибку при линейном входном сигнале r(t)=Bt, t > 0. На осно-
вании (5.28) имеем:
= lim
л—>0
В 1kG(s)
В
К!КХ
(5.70)
Установившаяся ошибка при единичном ступенчатом возмушении равна -1/К. (Убедитесь в этом самостоятельно.) Зависимость ошибки от возмущения можно уменьшить путем увеличения К [см. (5.68)]. Подводя итоги, нам необходимо иметь большое значение К и большое отношение К!КХ, чтобы получить малое значение установившейся ошибки при линейном входном сигнале [см. (5.70)]. Однако сохраняется требование иметь £ = 0,6, чтобы ограничить величину перерегулирования.
В нашей задаче прежде всего надо выбрать величину К. При £ = 0,6 характеристическое уравнение системы имеет вид:
s2 + 2£(d„s + т2п = ? + 2 • (0,6) co)fs + К = 0. (5.71)
Следовательно, со„ = 4к, и второй член в знаменателе (5.69) должен давать Кх = 2 (0,6) со,,. Тогда, Кх = 1,2-jK, или отношение К/Кл принимает вид
_ А?
Кх 1,2-ч/Х 1,2
5.11. Пример синтеза: управление ориентацией телескопа «Хаббл
277
Рис. 5.34
(а) Система управления ориентацией телескопа «Хаббл», (б) преобразованная структурная схема, (в) синтезированная система и (г) реакции системы на единичные ступенчатые задающий и возмущающий сигналы
Если выбрать К = 25, то мы получим Кх = 6 и К/Кх = 4,17. Если же выбрать К = 100, то мы получим Кх = 12 и KJKX = 8,3 3. В действительности мы не можем безгранично увеличивать К, чтобы система не выходила из линейного режима работы. При значении К= 100 структурная схема системы имеет вид рис. 5.34 (в). Реакция системы на единичные ступенчатые воздействия со стороны задания и возмущения изображены ни рис. 5.34 (г). Обратите внимание, что влияние возмущения является крайне незначительным.
278
Глава 5, Качество систем управления с обратной связью
В завершение заметим, что установившаяся ошибка при линейном входном сигнале [см.(5.70)] равна
Таким образом, при К = 100 решение задачи синтеза системы можно считать превосходным.
5.12. Анализ качества систем управления с помощью MATLAB и Simulink
В этом разделе предметом нашего интереса будут показатели качества, характеризующие реакцию системы на входной сигнал, а также установившаяся ошибка, с которой система отслеживает этот сигнал. Мы завершим дискуссию об упрощении линейных систем. Будет введена в рассмотрение функция MATLAB impulse. Мы еще раз вернемся к функции Isim (введенной в гл. 3) и покажем, как эти две функции используются при имитационном моде-лировании линейных систем. Для той же цели мы воспользуемся и пакетом Simu-cLI\ link. Основы Simulink рассматриваются в Приложении Б, а более подробную информацию о нем с рядом примеров можно найти на Web-сайте MCS.
Качество систем во временной области. Качество системы обычно характеризуется ее реакцией на входной сигнал заданного вида. Но поскольку входные сигналы, которые могут реально действовать на систему, заранее неизвестны, то о ее качестве судят по реакции на типовой тестовый входной сигнал. Рассмотрим систему второго порядка, изображенную на рис. 5.35 выходной сигнал в замкнутой системе определяется выражением (в виде изображения по Лапласу):
Ж)—---------------7-^(5). (5.72)
s +2C,ans+an
Рис. 5.35
Одноконтурная система второго порядка
Мы уже знакомы с применением функции step, с помощью которой вычисляется реакция системы на ступенчатый входной сигнал. Теперь мы рассмотрим еще один важный тестовый сигнал — импульс. Реакция системы на импульсный сигнал является производной по времени от ее реакции на ступеньку. Мы будем вычислять эту реакцию с помощью функции impulse, схематически изображенной на рис. 5.36.
С помощью функции step мы можем построить графики, подобные рис 5.5 (а); они приведены на рис. 5.37. Функция impulse позволит нам получить графики, подобные рис. 5.6. Реакция системы второго порядка на импульсный входной сигнал приведена на рис. 5.38. В скрипте принято сои = 1, что эквивалентно вычислению реакции системы в функции от со„ t. Этот прием позволяет в общем случае получать графики для любых (о„>О.
5.12. Анализ качества систем управления с помощью MATLAB и Simulink
279
Рис. 5.36
Функция impulse
u(t)
Импульсный г, « -О
* ---Система —► Выход
yW
1/(0 _ реакция в момент t Т — время
моделирования
t=T‘. предлагаемый вектор времени или /“Tfinoi: конечное время моделирования (по выбору)
G(s)=sys
Рис. 5.37
(а) Реакция системы второго порядка на ступенчатый входной сигнал.
(б) Скрипт MATLAB
[y,T]=impulse (sys,t)
б)
stepresp.m
% Вычисление переходной характеристики системы 2-го порядка
% Повторение рис. 5.5(a) %
t=[0:0.1:12];num=[1];
zeta1=0.1; den1=[1 2*zeta1 1]; sys1=tf(num,den1);
zeta2=0.2; den2=[1 2*zeta2 1]; sys2=tf(num,den2);
zeta3=0.4; den3=[1 2*zeta3 1]; sys3=tf(num,den3);
zeta4=0.7; den4=[1 2*zeta4 1]; sys4=tf(num,den4);
zeta5=1.0; den5=[1 2*zeta5 1]; sys5=tf(num,den5);
zeta6=2.0; den6=[1 2*zeta6 1]; sys6=tf(num,den6); %
[y 1 ,T 1]=step(sys1 ,t);[y2,T2]=step(sys2,t);
[y3,T3]=step(sys3,t);[y4,T4]=step(sys4,t);
[y5,T5]=step(sys5,t);[y6,T6]=step(sys6,t);
%
plot(T1 ,y1 ,T2,y2,T3,y3,‘—',T4,y4,‘—’,T5,y5,':’,T6,y6,‘:’) xlabel(‘\omega_n*t’), ylabel(‘y(t)’)
title(‘\zeta=0.1,0.2,0.4,0.7,1.0,2.0’ ),grid
Вычисление переходной характеристики
Построение графиков и обозначение осей
280
Глава 5. Качество систем управления с обратной связью
б)
Рис. 5.38
(а) Реакция системы второго порядка на импульсный входной сигнал.
(б) Скрипт MATLAB
impresp.m
% Вычисление импульсной переходной характеристики системы % второго порядка % Повторение рис. 5.6 % t=[0:0.1.10J; num=[1]; zeta1=0.1; den1=[1 2*zeta1 1]; sys1=tf(num,den1); zeta2=0.25; den2=[1 2*zeta2 1]; sys2=tf(num,den2); zeta3=0.5; den3=[1 2*zeta3 1]; sys3=tf(num,den3); zeta4=1.0; den4=[1 2*zeta4 1]; sys4=tf(num,den4); %
[y1 ,T1]=impulse(sys1 ,t); [y2,T2]=impulse(sys2,t); * Вычисление импульсной переходной характеристики
[yd, 13j=impuise(sysd,t[; Построение графиков [y4,T4]=impulse(sys4,t); и обозначение осей % I | plot(t,y 1 ,t,y2,t,y3,‘—’,t,y4,‘—') -< 1 xlabel(‘\omega_nt’),ylabel(‘y(t)Aomega_n’) title(‘\zeta = 0.1,0.25,0.5,1.0’),grid
Часто возникает необходимость определения реакции системы на произвольный входной сигнал известного вида. В этих случаях используется функция Isim, способ применения которой проиллюстрирован на рис. 5.39. С данной функцией мы имели дело в гл. 3, где она применялась к моделям систем в переменных состояния; теперь мы воспользуемся функцией Isim в случае, когда система задана своей передаточной функцией. Пример 5.10 демонстрирует применение функции Isim.
5,12. Анализ качества систем управления с помощью MATLAB и Simulink
281
Рис. 5.39
Функция Isim
Пример 5.10. Управление рулевым механизмом подвижного робота
На рис. 5.19 изображена структурная схема системы управления рулевым механизмом подвижного робота. Допустим, что регулятор имеет передаточную функцию
С,(5) = ^ + Д
S
Если входной сигнал является линейным, то установившаяся ошибка
(5.73) Av
где Kv = К2К. Влияние коэффициента усиления регулятора К2 на установившуюся ошибку очевидно из (5.73): чем больше К2, тем меньше установившаяся ошибка.
Реакцию замкнутой системы на линейный входной сигнал можно вычислить с помощью функции Isim. В скрипте MATLAB можно предусмотреть ввод различных значений коэффициентов Ку, К2 и К и тем самым исследоаать их влияние на реакцию системы. На рис. 5.40 приведены результаты, полученные при Ку = 1, К2 = 2 и т = 0,1.
Упрощение линейных систем. Для системы высокого порядка всегда возможно разработать аппроксимирующую модель пониженного порядка, у которой связь между входным и выходным сигналами будет очень близка к аналогичной зависимости для исходной системы. Процедура подобной аппроксимации рассмотрена в разделе 5.10. В следующем примере показано, как с помощью MATLAB можно сравнить реакции исходной системы и аппроксимирующей ее модели.
Пример 5.11. Упрощенная модель
Рассмотрим систему третьего порядка:
Аппроксимация второго порядка (см. пример 5.9) имеет вид:
Z(s) = .
s2+ 2,584s+1,60
На рис. 5.41 для сравнения приведены переходные характеристики этих моделей.
282
Глава 5. Качество систем управления с обратной связью
Рис. 5.40
(а) Реакция системы управления рулевым механизмом подвижного робота на линейный входной сигнал.
(б) Скрипт MATLAB
а)
б) mobilerobotm
% Вычисление реакции % роботом на сигнал т % numg=[10 20]; deng=[1 1 [sys]=feedback(sysg,[1]) t=[0:0.1:8.2]’; v1=[0:0.1:2]’;v2=[2:-0.1:-< u-[v1 ;v2;v3]; [y,T]=lsim(sys,u,t); ◄— plot(T,y,t,u,‘—'), х1аЬе1(‘Время(с)’),у1аЬе! системы управле реугольной форм 0 0]; sysg=tf(num< 2]’;v3=[-2:0.1:0]’; Вычисление реакции системы ‘\theta (рад.)’),дпс гни ы я подвижн гпд); <— Вычислен ВХОДНОГО треугольн формы ым GG,(s) не сигнала эй
Пример 5.12. Анализ системы управления креном самолета с помощью Simulink
Каждый раз, когда вы летите на самолете, вы на личном опыте можете оценить все достоинства систем автоматического управления, помогающих пилотам вести машину. Точная математическая модель, описывающая поведение самолета в воздухе, представляет собой систему нелинейных дифференциальных уравнений с переменными параметрами. В нашем примере при синтезе автопилота мы воспользуемся упрощенной моделью динамики самолета в виде передаточной функции, связывающей отклонение элеронов и угол крена самолета, как это схематически показано на рис. 5.42 (а). На рис. 5.42 (б) изображена замкнутая система управления положением самолета в воздухе, цель которой состоит в поддержании угла крена, близкого к нулю градусов, т. е. <рг, = 0, в условиях непредвиденных внешних возмущений.
На рис. 5.43 показано, как использовать Simulink для анализа системы управления. Вы можете двойным щелчком кнопки мыши на соответствующем блоке (коэффициент усиления регулятора, привод элеронов, динамика самолета, гироскопический датчик крена) открыть всплывающее окно и задать в нем нужные вам параметры. Например, на рис. 5.44 показано, какие действия надо совершить, чтобы задать коэффициент усиления регулятора. Чтобы всплываюшее окно не заслоняло структурную схему, вы можете щелкнуть мышью в любом месте строки заголовка главного окна, а затем щелкнуть на всплывающем окне и перетащить его в нужное положение на рабочем столе.
283
5,12. Анализ качества систем управления с помощью MATLAB и Simulink
Рис. 5.41
(а) Сравнение переходных характеристик исходной системы третьего порядка и ее аппроксимации моделью второго порядка.
(6) Скрипт MATLAB
(б)
stepcomp.m
% Сравнительная оуенка переходных характеристик %
num1=[6J; den1=[1 6 116]; sys1=tf(num1,den1);
num2=[1.6]; den2=[1 2.584 1.6]; sys2=tf(num2,den2);
t=[0:0.1:8];
[y1,T1]=step(sys1,t);
[y2,T2]=step(sys2,t);
plot(T1 ,y1 ,T2,y2,‘—’),grid
х!аЬе1(‘Время (с)‘),у1аЬе1('Переходная характеристика')
Рис. 5.42
(а) Управление углом крена самолета с помощью элеронов. (б) Автопилот, управляющий углом крена
H(S) = ----------------
5 + 65 + 115 + 6
L6
£(s) = , s2 +2.584s+16
Плоскость симметрии
284
Глава 5, Качество систем управления с обратной связью
Рис. 5.43
Рабочее окно
Simulink с заданием динамики самолета, регулятора и привода элеронов
| Панель инструментов
| Панель заголовка^
л
IdHcialt
Рис. 5.44
Всплывающее окно, используемое для изменения коэффициента усиления регулятора
Двойным щелчком мыши выделите блок, чтобы получить доступ к списку параметров ------------------ггляку
О, а Я» ч ш в j a e j » и % » I >
Завершите процедуру щелчком на ОК
Введите сюда желаемое значение коэффициента _______усиления______
Controller («in Aileron actuator Aireutt dynarrucs
Как только вы измените параметры во всплывающих окнах, они сразу же появятся и на структурной схеме. На рис. 5.45 и 5.46 показаны открытые окна для задания динамики привода элеронов и самолета. Основными элементами системы управления являются регулятор, Gc(s) = К, привод элеронов.
С^) =
10
s+10
и самолет,
G(s) =
11,4
s2 + 1,4s
Перед началом решения задачи необходимо установить время окончания моделирования. Для этого в меню Simulation выберите опцию Parameters, как показано на рис. 5.47. Всплывающее окно Simulation Parameters дает доступ к различным программам численного интегрирования и позволяет задать время начала и окончания моделирования.
Произведя необходимые изменения, нажмите кнопку ОК. Для начала моделирования выберите опцию Start из меню Simulation, как показано на рис. 5.48, в результате программа присту-
5.12. Анализ качества систем управления с помощью MATLAB и Simulink 285
Рис. 5.45
Всплывающее окно, используемое для изменения передаточной функции привода элеронов
S ВепОйИЫа- , |iTioi ~
№* | I
Введите сюда коэффициенты полиномов в числителе и знаменателе
Завершите процедуру щелчком на ОК
Рис. 5.46
Всплывающее окно, используемое для изменения передаточной функции самолета
пит к решению задачи и будет делать это пока не наступит заданный момент окончания моделирования. Вы также можете начать и прервать моделирование с помощью кнопки панели инструментов, как показано на рис. 5.48.
Вывод на экран графика решения задачи производится при помощи опции Scope (см. Приложение Б). На рис. 5.49 приведен результат моделирования для случая, когда задан коэффициент усиления регулятора К = 0,16. Вы можете изменить любую передаточную функцию или любой параметр и оперативно наблюдать, как это отразится на решении задачи.
286
Глава 5, Качество систем управления с обратной связью
Рис. 5.47
Выбор в меню
Simulation опции
Parameters
Установите здесь время окончания моделирования
Завершите процедуру щелчком на ОК
Рис. 5.48
Начало моделирования
Для
начала моделирования щелкните на Start
Моделирование можно также начать нажатием этой кнопки
5.13. Пример синтеза с продолжением: система чтения информации с диска
□ В разделе 4.10 мы рассматривали поведение замкнутой системы управления положением считывающей головки. Обратимся еще раз к этой системе, структурная схема которой приведена на рис. 4.33. Здесь мы продолжим процедуру синтеза (последовательность действий вторично представлена на рис. 5.50) и перейдем к шагу 3, на котором определяется желаемое качество системы. Мы попытаемся выбрать такое значение коэффициента усиления Ка, при котором качество системы было бы наилучшим.
5,13. Пример синтеза с продолжением: система чтения информации с диска 287
Рис. 5.49
Реакция на ступенчатый входной сигнал системы управления углом крена самолета, полученная путем моделирования в Simulink
Щелкните правой кнопкой мыши в области экрана, чтобы вызвать всплывающее окно для задания параметров графика
Рис. 5.50. Процесс синтеза системы управления
288
Глава 5. Качество систем управления с обратной связью
Нашей целью является получение наилучшего быстродействия при отработке ступенчатого сигнала г(0 с учетом (1) ограничения на величину перерегулирования и колебательный характер реакции и (2) необходимости уменьшения влияния возмущения на положение считывающей головки. Требования к качеству системы сведены в табл. 5.8
Таблица 5.8. Требования к переходной характеристике
Показатель качества Желаемое значение
Относительное перерегулирование Время установления Максимальная величина реакции на единичное ступенчатое возмущение Менее 5% Менее 250 мс Менее 5 • 10 3
Рассмотрим модель второго порядка для двигателя и рычага, в которой мы пренебрегли индуктивностью обмотки двигателя. В этом случае замкнутая система имеет вид рис. 5.51. Для входной переменной при условии D(s) = 0 можно записать:
------------R(s) = -—---------К(з) = ---(5.74) s(s+20)+5Xo s2+20s+5Ka s2+2(^ns+u2
Рис. 5.51. Модель системы управления второго порядка
Отсюда следует, что ш“ = 5Ка и 2^со„ = 20. Далее мы можем определить реакцию системы с помощью скрипта MATLAB, приведенного на рис. 5.52. В табл. 5.9 представлены показатели качества, соответствующие различным значениям Ка.
Таблица 5.9. Реакция системы второго порядка на ступенчатый входной сигнал
Л. 20 30 40 60 80
Относительное перерегулирование 0 1,2% 4,3% 10,8% 16,3%
Время установления (с) 0,55 0,40 0,40 0.40 0.40
Коэффициент затухания 1 0,82 0,707 0,58 0.50
Максимальное значение выходной
переменной у(1) при единичном -10-Ю-3 -6,6-10-3 -5.210“3 -3,710’3 -2.9-10’3
ступенчатом возмущении
5.14. Резюме
289
Рис. 5.52
Реакция системы на единичный ступенчатый входной сигнал, r\t) = 1, t > 0. (а) Скрипт MATLAB, (б) Реакции системы при Ка = 30 и Ка = 60
а)
Ка=30; <— t=[0:0.01:1];
nc=[Ka*5]; dc=[1]; sysc=tf(nc,dc);
ng=[1]; dg=[1 20 0]; sysg=tf(ng.dg);
sys1=series(sysc,sysg); 1 ___________
sys=feedback(sys1,[1]); j
[y,T]=step(sys,t);
plot(T,y),grid
х!аЬе1(‘Время (c)‘) ylabel(‘y(t)’)
Выбор К„
Вычисление передаточной функции замкнутой системы
На рис. 5.53 изображены зависимостиy(i), полученные при единичном ступенчатом возмущении для Ка = 30 и Ка = 60. При увеличении Ко до 60 влияние возмущения уменьшается почти в 2 раза. Если мы хотим удовлетворить требования, предъявляемые к системе, то нам придется выбрать компромиссное значение Ка. Очевидно, в данном случае наилучшим компромиссом будет значение Ка = 40. Однако это значение не удовлетворяет всем требованиям. В следующей главе мы вернемся к процедуре синтеза, изображенной на рис. 5.50, и изменим конфигурацию системы, как это предусмотрено шагом 4.
5.14. Резюме
В этой глав мы познакомились с определением качества системы управления и способами его измерения. Было обсуждено понятие показателей качества и подчеркнута важность использования типовых тестовых сигналов. Были приведены некоторые показатели качества, характеризующие систему при типовых тестовых сигналах. Сюда относятся, например, перерегулирование, время максимума и время установления переходной характеристики при ступенчатом входном сигнале. Было отмечено, что часто требования к качеству системы вступают в противоречие и требуется компромиссное решение. Была рассмотрена связь между расположением на 5-плоскости корней характеристического уравнения системы и ее временными характеристиками. Наиболее важным показателем качества системы является ее установившаяся ошибка при входном сигнале заданного вида. Эта зависимость
290
Глава 5. Качество систем управления с обратной связью
Рис. 5.53
Реакция системы на единичное ступенчатое возмущение, D(s) = 1/s.
(а) Скрипт MATLAB.
(б) Реакции системы при Ка - 30 и Ка = 60
Ка=30;
t=[0:0.01:1];
пс=[Ка*5]; dc=[1]; sysc=tf(nc,dc); ng=[1]; dg=[1 20 0]; sysg=tf(ng,dg); sys=feedback(sy sg ,sy sc);
sys=-sys; <----------------------------
step(sys.t); х!аЬе1(‘Время (c)‘),ylabel(‘y(t)’)
Выбор К„
Возмущение приложено к сумматору со знаком минус
была установлена с помошью теоремы о конечном значении функции. Данное свойство системы с обратной связью проиллюстрировано на рис. 5.54. В заключение была подчеркнута важность применения интегральных оценок качества, и на ряде примеров было показано, как можно минимизировать соответствующую оценку. Таким образом мы сделали акцент на определение и количественные оценки качества систем управления с обратной связью.
Рис. 5.54
Реакция системы с обратной связью на линейный входной сигнал при К = 1, 2 и 8 в случае G (s) = K/s{s + 1)(s + 3).
Установившаяся ошибка уменьшается с ростом К, но приобретает колебательный характер при К = 8
Упражнения
291
Упражнения
Рис. 5.2 (У). Система управления скоростью гоночного автомобиля
У-5.1. Система управления двигателем дисковода компьютера должна ослаблять влияние возмущений и изменения параметров, а также минимизировать установившуюся ошибку. Желательно, чтобы система позиционирования головки, имеющая вид рис. 5.18 при H(s) = 1, обладала нулевой установившейся ошибкой, (а) К какому типу должна относиться данная система? (Сколько интеграторов она должна содержать?) (б) Если входной сигнал является линейным, то каким должен быть тип системы, чтобы установившаяся ошибка равнялась нулю?
У-5.2. На рис. 5.2(У) изображена модель системы управления скоростью гоночного автомобиля, (а) Определите установившуюся ошибку при ступенчатом изменении заданной скорости, (б) Определите относительное перерегулирование y(f) при ступенчатом изменении входного сигнала.
Ответ: (а) е„ = Л/11; (б) 20,8%.
У-5.3. Долгие годы железнодорожная компания Амтрак пытается привлечь пассажиров для поездок на Средний Запад, используя транспортные средства, разработанные десятилетия назад. В то же время иностранные компании проектируют новые железнодорожные системы, которые успешно могут конкурировать с авиаперевозками. Две из таких систем — французская ГС К и японская Шинкансен — способны обеспечивать скорость движения до 250 км/ч. На рис. 5.3(У), (а) изображен американский экспериментальный поезд на магнитной подушке Трансрапид-06.
Использование магнитной подушки и электромагнитной силовой установки обеспечивает движение поезда без контакта с направляющими, что принципиально отличает его от существующей конструкции Метролайнср. Днище вагона ТР-06 (где у обычного вагона располагались бы колеса) охватывает направляющий рельс. Взаимодействие магнитов на рельсе и электромагнитов на днище вагона удерживает вагон в подвешенном состоянии примерно в сантиметре над рельсом (см. задачу 2.27).
Рис. 5.3 (У)
Система управления подвеской вагона
I(s)
Ток в обмотке электромагнита
Динамика изменения зазора К s(s+14)
^(s)
Зазор
292
Глава 5. Качество систем управления с обратной связью
На рис. 5.3(У), (б) изображена система управления подвеской вагона, (а) С помощью табл. 5.6 выберите значение К. обеспечивающее оптимальную реакцию системы на ступенчатый входной сигнал по критерию ИВМО. (б) С помощью рис. 5.8 определите ожидаемое перерегулирование при ступенчатом входном сигнале I(s).
Ответ: К = 100; 4,6%.
У-5.4. Система в разомкнутом состоянии имеет передаточную функцию
G(s) =
2(5+8) s(s + 4)
(а) Определите передаточную функцию замкнутой системы с единичной отрицательной обратной связью, T(s) = Y(s)/R(s). (б) Определите реакцию системы у(1) на ступенчатый входной сигнал г(/) = A, t > 0. (в) С помощью рис. 5.13(a) определите относительное перерегулирование. (г) Используя теорему о конечном значении, определите установившееся значение у(Г). Ответ: (б) y(t) = 1—1,07е~3' sin(V7< + 1,2) .
У-5.5. На рис. 5.5(У), (а) изображен малоинерционный плоттер, а на рис 5.5(У),(б) — его структурная схема, (а) Определите установившуюся ошибку при линейном входном сигнале, (б) Выберите значение К, обеспечивающее максимально возможное быстродействие системы при отсутствии перерегулирования.
Укажите положение полюсов и нулей данной системы и обсудите доминирующую роль комплексных полюсов. Какое перерегулирование вы ожидаете в случае ступенчатого входного сигнала?
У-5.6. Существенную помощь людям, страдающим диабетом, может оказать система автоматической инъекции инсулина, включающая в себя насос и датчик, измеряющий содержание сахара в крови. Структурная схема такой системы изображена на рис. 5.6(У). Выберите значение К, при котором реакция системы на ступенчатое входное воздействие имела бы перерегулирова-
Рис. 5.5 (У)
(а) Плоттер фирмы Хьюлетт-Паккард.
(б) Структурная схема плоттера
а)
Обратная связь по положению
Упражнения
293
Рис. 5.6 (У)
Система управления содержанием сахара в крови
ние порядка 7%. На схеме R(s) соответствует желаемому содержанию сахара в крови, a Y(s) — его действительному значению. (Подсказка-, воспользуйтесь рис.5.13(a).) Ответ-. К - 1,67.
У-5.7. Система позиционирования головки дисковода гибкого диска в замкнутом состоянии имеет передаточную функцию
0,313(s+0,8)
(s + 0,6)(s2 + 4s + 5)
Изобразите диаграмму расположения полюсов и нулей данной системы и обсудите доминирующую роль комплексных полюсов. Какое перерегулирование можно ожидать при ступенчатом входном сигнале?
У-5.8. Система, передаточная функция которой в разомкнутом состоянии имеет вид
s(s + V2X) ’
охвачена единичной отрицательной обратной связью.
(а) Определите относительное перерегулирование и время установления (по критерию 2% от конечного значения) при отработке единичного ступенчатого входного сигнала.
(б) При каких значениях К время установления будет менее 1 с?
У-5.9. Система управления второго порядка имеет в замкнутом состоянии передаточную функцию T(s) = y(s)ZR(s). При ступенчатом входном воздействии к качеству системы предъявляются следующие требования:
1) Относительное перерегулирование < 5%;
2) Время установления < 4 с ;
3) Время максимума переходной характеристики Тр < 1 с.
Укажите допустимую область расположения полюсов T(s), при которой будут обеспечены выдвинутые требования. Время установления определяется по критерию 2% от конечного значе-
ния.
У-5.10. На рис. 5.10(У) изображена система с единичной отрицательной обратной связью. Определите установившуюся ошибку при ступенчатом и линейном входных сигналах, если
G(s) =_____10(Д+4)
s(s + l)(s + 3)(s + 8)
Y(s)
vru о л. Рис. 5.10 (У). Система с единичном
У-5.Н. Всем известна карусель Ферриса, используе- Г '
* * з обратной связью
мая в качестве аттракциона на ярмарках и карна-
валах. Джордж Феррис родился в 1859 г. в Гейлс-
берге, шт. Иллинойс. Позже он переехал в Неваду и в 1881 г. закончил Ренсселерский политех-
нический институт. К 1891 г. Феррис уже имел большой опыт строительства металлических
конструкций и мостов. Он задумал и построил свою знаменитую карусель для выставки в честь Колумба, проходившей в Чикаго в 1893 г. Во избежание падения пассажиров потребуем, чтобы
294
Глава 5. Качество систем управления с обратной связью
Рис. 5.11 (У). Регулирование скорости вращения карусели Ферриса
в системе на рис. 5.11(У) установившаяся скорость удерживалась в пределах 5% от желаемой скорое,и.
(а) Определите значение К, при котором будет выполняться предъявляемое к системе требование. (б) При коэффициенте К, найденном в п. (а), вычислите и изобразите графически ошибку <?(Г), вызванную возмущением D(s) = 1/ s. Изменяется ли при этом скорость более чем на 5%? [Для простоты вычислений примите A(s) = 0.]
У-5.12. Для системы с единичной обратной связью на рис. 5.10(У) определите установившуюся ошибку в случае ступенчатого и линейного входных сигналов, если
ю
G(s) = -=-------.
s2 + 14s+50
Ответ: eS!S = 0,83 при ступенчатом сигнале и е„ = от при линейном входном сигнале.
У-5.13. На рис. 5.13(У) изображена система с обратной связью.
(а) Определите установившуюся ошибку при единичном ступенчатом входном сигнале, если К = 0,4 и Gp(s) = 1.
(б) Выберите такое значение G;,(s), при котором в случае единичного ступенчатого входного сигнала установившаяся ошибка
Рис. 5.13 (У). Система с обратной связью
будет равна нулю.
У-5.14. Замкнутая система управления имеет передаточную функцию
Ш = Л£) =---------122------.
R(s) (s + 10)(s2 + 10s+50)
В случае ступенчатого входного сигнала 7?(s) постройте графикиу(/), если (а) используется исходное выражение T(s) и (б) используются только доминирующие комплексные полюсы. Сравните результаты.
У-5.15. Дана система второго порядка:
A(s) (s+l)(s+8)
Рассмотрите случай, когда 1 < z < 8. Разложите T(s) на простые дроби и изобразите графикиу(/) в случае ступенчатого входного сигнала г(1) для значений z = 2; 4; 6.
У-5.16. Передаточная функция замкнутой системы T(s) имеет два доминирующих комплексно-сопряженных полюса. Выделите в левой половине s-плоскости область, в которой должны находиться эти полюсы, чтобы система удовлетворяла следующим требованиям.
(а) 0,6 < £ < 0.8 и <о„ < 10.
(б) 0,5 < £ < 0,707 и ы„ > 10.
Задачи
295
(в) С > 0,5 и 5 < w„ < 10. а)
(г) С < 0,707 и 5 < со,, < 10.
(д) С > 0,6 <о„ < 6.
У-5.17. Для системы, изображенной на рис.5.17(У), (а), реакция на единичное ступенчатое воздействие О при К = 1 приведена на рис.
5.17(У), (б). Определите значение К, при котором установившаяся ошибка равнялась бы нулю.
Ответ: К = 1,25.
Рис. 5.17 (У)
Задачи
3-5.1. В телевидении серьезную проблему представляют скачки или подергивания изображения, возникающие из-за перемещения камеры. Этот эффект особенно проявляется тогда, когда камера находится на движушемся автомобиле или на самолете. Чтобы исключить это явление, специально была спроектирована система Диналенс, изображенная на рис. 5.1(3). Предполагается, что максимальная скорость сканирования составит 25 °/с. Будем считать, что Kg = К, = 1, а постоянной времени Tg можно пренебречь, (а) Получите выражение для ошибки системы E(s). (б) Определите, каким должен быть коэффициент усиления в контуре, если допускается установившаяся ошибка в 1 °/с. (в) Двигатель имеет постоянную времени тт = 0,40 с. Определите, каким должен быть коэффициент усиления в контуре, чтобы время установления (по критерию 2% от конечного значения vb) не превышало 0,03 с.
3-5.2. Необходимо синтезировать замкнутую систему управления, которая обладала бы передемп-фированной реакцией на ступенчатое входное воздействие. К качеству системы предъявляются следующие требования:
20% > относительное перерегулирование > 10%;
время установления < 0,6 с.
Рис. 5.1 (3)
Система управления телекамерой
296
Глава 5. Качество систем управления с обратной связью
(а) Укажите желаемую область расположения доминирующих полюсов системы, (б) Определите наименьшее значение третьего полюса, если реакция в основном должна определяться комплексно-сопряженными полюсами, (в) Передаточная функция замкнутой системы T(s) (при единичной обратной связи) имеет третий порядок. Определите передаточную функцию прямой цепи G(s) = Y(s)/E(s). если задано время установления (по критерию 2% от конечного значения) 0,6 с и относительное перерегулирование 20%.
3-5.3. Лазерный луч можно использовать для сварки, сверления, гравировки, резки и разметки металлических деталей, как показано на рис. 5.3(3), (а). Предположим, что нам необходимо с помощью замкнутой системы управления на рис. 5.3(3), (б) начертить на металле параболическую линию. Определите, каким должен быть коэффициент усиления, чтобы при r(t) = Г см установившаяся ошибка составляла не более 5 мм.
Рис. 5.3 (3)
Система управления лучом лазера
Y(s)
3-5.4. Разомкнутая система имеет передаточную функцию
C(s) =------.
s(s+2)
При замыкании единичной отрицательной обратной связи реакция системы на ступенчатый входной сигнал должна удовлетворять следующим требованиям:
время максимума Тр = 1,1 с; относительное перерегулирование = 5%.
(а) Определите, могут ли оба требования быть удовлетворены одновременно, (б) Если невозможно одновременно удовлетворить оба требования, то определите компромиссное значение К. при котором показатели качества меньше всего отличались бы от заданных.
3-5.5. Для выполнения астрономических наблюдений на орбиту выводится космический телескоп. Система управления наведением должна обладать точностью 0,01 угловой минуты и следить за движением объектов со скоростями до 0,21 угловой минуты в секунду. Космический телескоп изображен на рис. 5.5(3), (а), а система управления — на рис.5.5(3), (б). Пусть т, = 1 с, а т2 = 0 (примем такую аппроксимацию), (а) Определите значение К = KtK2, при котором реакция на ступенчатый входной сигнал будет иметь как можно меньшее время установления, а перерегулирование не будет превышать 5%. (б) Определите установившуюся ошибку системы при отработке ступенчатого и линейного входных сигналов, (в) Определите значение KtK2 для системы, оптимальной по критерию ИВМО, в случае (1) ступенчатого и (2) линейного входного сигнала.
Задачи
297
а)
Рис. 5.5 (3). (а) Космический телескоп. (6) Система управления наведением телескопа
3-5.6. Робот запрограммирован так, чтобы обеспечивать движение инструмента по заданной траектории. Пусть эта траектория представлена графиком пилообразного вида на рис. 5.6(3), (а).
В системе на рис. 5.6(3), (6) передаточная функция G(s) имеет вид:
G(s)= 50(д+1) .
s(s + 6)(s + 9)
Время (с)
б)
ад
Y(s)
Траектория движения
Определите установившуюся _ _ _ ,,
_ Рис. 5.6 (3). Управление движением робота
ошибку.
3-5.7. Астронавт Брюс МакКендлесс 7 февраля 1984 года совершил первую прогулку в космосе без страховочного фала, используя газовый реактивный двигатель. Его фото во время этой прогулки приведено на рис. 5.7(3), (а). Регулятор можно представить в виде коэффициента К2, как показано на рис. 5.7(3), (б). Момент инерции человека вместе с оборудованием, которое он держит в руках, составляет 25 кг • м2. (а) Определите значение коэффициента К3, необходимое для поддержания установившейся ошибки, равной 1 см, при входном воздействии r(t) = / (в метрах), (б) Приняв это значение К3, определите коэффициент КХК2, при котором величина перерегулирования не будет превышать 10%. (в) Аналитически найдите величину КХК2, при которой в случае ступенчатого входного сигнала оценка качества ИКО будет минимальной.
298
Глава 5. Качество систем управления с обратной связью
Рис 5.7 (3)
(а) Астронавт Брюс МакКендлесс в нескольких метрах от находящегося на орбите космического челнока «Челленджер».
Он пользуется управляемым вручную реактивным устройством, создающим струю газа азота.
(6) Структурная схема системы
а)
б)
3-5.8. Солнечные батареи генерируют напряжение постоянного тока, которое может быть использовано для питания электродвигателей или преобразовано в напряжение переменного тока, направляемое в электросеть. Мощность на выходе батарей желательно поддерживать максимальной, независимо от изменения положения Солнца в течение дня. Одна из возможных систем, предназначенных для решения этой задачи, приведена на рис. 5.8(3). Передаточная функция объекта
G(s) = ——.
s+10
где К = 20. Определите (а) постоянную времени замкнутой системы и (б) время установления (по критерию 2% от конечного значения выходной переменной) при действии возмущения (например, при появлении облаков).
Возмущение
Рис. 5.8 (3). Система управления солнечными батареями
Задачи
299
Рис. 5.9 (3). Антенна для связи со спутником Телстар в Андовере, шт. Мэн
3-5.9. Антенна, с помощью которой осуществляется связь с телекоммуникационным спутником Телстар, является самой крупной из когда-либо построенных антенн рожкообразной формы. Эта антенна, работающая в сантиметровом диапазоне, имеет длину 54 м, весит 340 т и вращается на рельсах по окружности. На рис. 5.9(3) приведено фото этой антенны. Спутник Телстар имеет диаметр 85 см и вращается вокруг Земли на высоте 4000 км со скоростью 26000 км/ч. Антенна должна быть направлена на спутник с точностью 0,1°. т. к. микроволновый луч имеет ширину 0,2° и сильно уменьшает свою мощность с увеличением расстояния. Если антенна должна следить за движущимся спутни-
ком, определите, какое значение Av для этого должна иметь система управления.
3-5.10. При управлении по цепи якоря скоростью вращения двигателя постоянного тока в качестве сигнала обратной связи используется япротивоЭДС. (а) Изобразите структурную схему такой системы (см. пример 2.5). (б) Определите установившуюся ошибку системы, если на вход подается ступенчатый сигнал, в соответствии с которым скорость должна принять новое значение. Примите Ra = La = J = b = Km- Kh = 1. (в) Выберите коэффициент противоЭДС таким образом, чтобы переходная характеристика имела перерегулирование 15%.
3-5.11. Разомкнутая система имеет передаточную функцию
С^ = ТД = £-
E(s) s
Данная система охватывается единичной отрицательной обратной связью, и на вход подается ступенчатый сигнал амплитуды А. Задано начальное условие у(10) = Q, где y(t) — выходной сигнал системы. Качество системы определяется оценкой
/ = ['e2(t)dt. Jo
(а) Покажите, что 7= (А - Q)2HK. (б) Определите параметр К, минимизирующий данную оценку качества. Имеет ли этот коэффициент практическую ценность? (в) Выберите величину К. имеющую практический смысл, и определите соответствующее значение оценки качества.
3-5.12. По мере создания высокоскоростных электропоездов будет возраст ать интенсивность пассажиропотоков, т. к. поездка из города в город по времени станет сравнима с авианерелетом. В Японии между Токио и Осакой уже циркулирует экспресс, покрывающий расстояние в 515 км за 3 ч 10 мин со средней скоростью 163 км/ч. Эта скорость еще более увеличится при использовании новых систем, таких как магнитная подвеска над алюминиевым направляющим рельсом. Для поддержания заданной скорости предлагается система управления, обеспечивающая нулевую установившуюся ошибку при линейном входном сигнале. Для этого достаточно иметь систему третьего порядка. Определите оптимальную передаточную функцию замкнутой системы T(s), исходя из оценки качества ИВМО. Оцените время установления (по критерию 2% от конечного значения) и перерегулирование при ступенчатом входном сигнале, если со,, = 10.
3-5.13. Систему четвертого порядка требуется аппроксимировать моделью более низкого порядка. Исходная система имеет передаточную функцию
,,, , ? + 7s2 + 24s+ 24 s3 + 7? + 24i+24
Н (s) = —--------------------=-----------------------.
s4 + 10s3 + 35s~ + 50s +24 (s + l)(s + 2)(s + 3)(s + 4)
300
Глава 5. Качество систем управления с обратной связью
Покажите, что применение метода, описанного в разделе 5.10, если не заданы полюсы и нуль L(s), позволит получить модель второго порядка с передаточной функцией
т, ч 0,2917s+l 0,731(5+3,428)
0,399s2 + 1,3 75s + 1 (s + l,043)(s + 2,4)
3-5.14. Для исходной системы из задачи 5.13 требуется получить модель пониженного (второго) порядка, если заданы ее полюсы, равные -1 и -2, а ее единственный нуль не определен. Покажите, что эта модель имеет передаточную функцию
г, . 0,986s + 2 0,986(s + 2,028)
£(s) = -3------------------------.
?+3s+2 (s+l)(s+2)
3-5.15. На рис. 5.15(3) изображен магнитный усилитель с малым выходным сопротивлением, соединенный последовательно с низкочастотным фильтром и , предусилителем. Усилитель ' имеет высокое входное сопротивление, коэффициент усиления, равный 1. и используется в качестве сумматора. Выберите значение емкости С так, что-
Рис. 5.15 (3). Усилитель с обратной связью
бы передаточная функция E0(s)/F,(s) имела коэффициент затухания 1/-J2. Постоянная времени
магнитного усилителя т = 1 с, а его коэффициент усиления К = 10. Определите время установления (по критерию 2%) для данной системы.
3-5.16. Электрокардиостимулятор способен регулировать частоту сердечных сокращений. На рис. 5.16(3) изображена замкнутая система, включающая в себя кардиостимулятор и датчик частоты сердечных сокращений. Передаточная функция кардиостимулятора и объекта управления (сердца) имеет вид:
G(s) =----------
s(s/12+ 1)
Определите коэффициент К. при котором в случае ступенчатого возмущения время установления будет менее 1 с. Перерегулирование реакции на ступенчатое изменение заданной частоты сердечных сокращений не должно превышать 10%. (а) Определите подходящий диапазон значений К. (б) Если номинальное значение К = 10, определите чувствительность системы к малым изменениям К. (в) Оцените чувствительность из п. (б) на нулевой частоте (при s = 0). (г) Оцените величину чувствительности при нормальной частоте сердечных сокращений 60 ударов/ мин.
Возмущение
Рис. 5.16 (3). Электрокардиостимулятор
Задачи повышенной сложности
301
3-5.17. Обратитесь к исходной системе третьего порядка из примера 5.9. Определите аппроксимирующую модель первого порядка, в которой нуль отсутствует, а полюс не задан.
3-5.18. В замкнутой системе управления с единичной отрицательной обратной связью прямая цепь имеет передаточную функцию
8
Y(s)
G(s) = —---------.
s(s2 + 65+12)
(а) Определите передаточную функцию замкнутой системы T(s). (б) С помощью метода, описанного в разделе 5.10, аппроксимируйте T(s) моделью второго порядка, (в) С помощью MATLAB или любой другой компьютерной программы постройте графики реакции исходной системы и ее аппроксимации на единичный ступенчатый сигнал и сравните полученные результаты.
3-5.19. Рассмотрите систему, изображенную на рис. 5.19(3). (а) Пола-гая £(s) = R(s) - T(s), определите зависимость установившейся ошибки от К и Кх в случае единичного ступенчатого входного ₽ис 5 w (3) Система с предусилителем к, сигнала, (б) Выберите значение Кх так, чтобы установившаяся ошибка была равна нулю.
Задачи повышенной сложности
П-5.1. Передаточная функция замкнутой системы имеет вид:
Г(5) 96(5+3)
1 (5) =---=-------=--------- .
R(s) (s+8)(s2+8s+36)
(а) Определите установившуюся ошибку при единичном ступенчатом входном воздействии, R(s) = 1/s.
(б) Полагая, что доминирующими являются комплексные полюсы, определите величину перерегулирования и время установления (по критерию 2% от установившегося значения).
(в) Получите график переходной характеристики исходной системы и сравните его с оценками, полученными в п. (б).
П-5,2. На рис. 5.2(П) изображена замкнутая
система управления. Постройте графики R(s) реакции системы на единичное ступенчатое воздействие при тг = 0; 0,05; 0,1; 0,5. Представьте в виде таблицы показатели качества — относительное перерегулирование. время нарастания, время установления (по критерию 2%) для раз-
ных значений т_. Проанализируйте влияние изменения т_. Сравните относительное положение нуля, 1/tz, с положением полюсов замкнутой системы.
П-5.3. На рис. 5.3(П) изображена замкнутая система управления. Постройте графики реакции системы на единичное ступен- R(s) чатое воздействие при т = 0; 0,5; 2; 5. Представьте в виде таблицы показатели качества — относительное перерегулирование. время нарастания, время уста- । новления (по критерию 2%) для разных
+rQ г 5440(t2s+1)
s(s2+28s+432)
Y(s)
Рис. 5.2 (П). Система с варьируемым нулем
s(s+2)(t^+1)
Рис. 5.3 (П). Система с варьируемым полюсом объекта управления
Y(s)
302
Глава 5. Качество систем управления с обратной связью
Рис. 5.4 (П) Система управления скоростью
Возмущение
J?(s)
Y(s)
Скорость
значений тр. Проанализируйте влияние изменения тр. Сравните относительное положение полюса разомкнутой системы, 1/тр, с положением полюсов замкнутой системы.
П-5.4. На рис. 5.4(П) изображена система управления скоростью пассажирского поезда-экспресса. Получите выражение для установившейся ошибки в зависимости от К при единичном ступенчатом воздействии r(t).
(а) Вычислите установившуюся ошибку при значениях К, равных 1.10 и 100.
(б) Вычислите и изобразите графически реакции у(г) на (1) единичный ступенчатый сигнал r(t) и (2) на единичное ступенчатое возмущение d(t).
(в) Сведите в таблицу следующие показатели качества: относительное перерегулирование, время установления (по критерию 2%), еи. при отработке r(t) и \y/d\ max для трех заданных значений К. Выберите наилучшее компромиссное значение К.
Рис. 5.5 (П) Система, в которой регулятор содержит параметр а
Возмущение
П-5.5. На рис. 5.5(П) изображена система с регулятором, нуль которого может варьироваться. Пусть а = 0; 10; 100.
(а) Определите установившуюся ошибку при ступенчатом входном сигнале для а = 0 и а 0.
(б) Изобразите графически реакцию системы на ступенчатое возмущение для трех значений а.
Сравните результаты и выберите наилучшее из трех значений а.
П-5.6. На рис. 5.6(П) изображена структурная схема двигателя постоянного тока, управляемого по цепи якоря.
(а) Найдите зависимость установившейся ошибки от параметров К, Кь и Кт в случае линейного входного сигнала, r(t) = t, t > 0.
Рис. 5.6 (П). Система управления электродвигателем
Задачи на синтез систем
303
(б) Примите Кт - 10, Kh = 0,05 и выберите К так. чтобы установившаяся ошибка была равна 1.
(в) Вычислите и изобразите графически реакции системы на единичный ступенчатый сигнал и на сигнал, изменяющийся единичной скоростью, на интервале до 20 с. Являются ли эти реакции приемлемыми?
Задачи на синтез систем
СС-5.1. Система управления приводом скользящей части стола металлообрабатывающего станка (см. задачи СС-1.1-СС-4.1) подвержена возмущению за счет того, что обработка детали про-□ должается несмотря на удаление части материала. Регулятор представлен обычным усилителем Gc(s) = Ки. Оцените влияние единичного ступенчатого возмущения и определите наилучшее значение коэффициента Ка, при котором перерегулирование в случае ступенчатого задающего сигнала г(г) = A. t > 0, будет менее 5%. а влияние возмущения будет по возможности
минимальным.
Рис. 5.1 (С)
Система управления углом крена
Ф(я)
Угол крена
С-5.1. На рис. 5.1(C) приведена система управления углом крена реактивного истребителя. Задача заключается в выборе коэффициента К, при котором реакция системы на ступенчатый входной сигнал <р(Г) = А, t > 0, имела бы перерегулирование не более 20% и как можно меньшее время установления, (а) Определите передаточную функцию замкнутой системы Ф(.7)/Ф^/л). (б) Найдите корни характеристического уравнения при К = 0,7; 3; 6. (в) Используя понятие доминирующих корней, предскажите ожидаемое перерегулирование и время максимума переходной характеристики в аппроксимирующей системе второго порядка, (г) Постройте график реакции исходной системы и сравните показатели качества с полученными в п. (в), (д) Выберите значение К, при котором от носительное перерегулирование было бы равно 16%. Каково при этом время максимума?
С-5.2. При синтезе системы управления положением наконечника сварочного аппарата необходим тщательный подбор параметров. Такая система изображена на рис. 5.2(C), где С, = 0,2, а коэффициент К и собственная частота со„ могут быть выбраны, (а) Найдите такие значения К и ш„, при которых реакция системы на единичный ступенчатый входной сигнал будет иметь время максимума (момент первого выброса за заданное значение, равное единице), не превышающее 1 с, и перерегулирование не более 5%. (Подсказка: попробуйте выбрать 0.1 < К/ып < 0,3.) (б) Постройте график реакции полученной системы на ступенчатый входной сигнал.
Рис. 5.2 (С) Система управления положением наконечника сварочного аппарата
B(s)
304
Глава 5, Качество систем управления с обратной связью
Рис. 5.3 (С)
Система активной подвески автомобиля
С-5.3. Применяемые в современных автомобилях системы активной подвески обеспечивают комфортабельные условия при поездке. При синтезе таких систем используется идея настройки амортизаторов, приспосабливая их к дорожным условиям. Как показано на рис. 5.3(C), небольшой электродвигатель изменяет положение (проходное сечение) вентиля гидросистемы. Выберите значения параметров К и д, обеспечивающие наилучшее качество системы по критерию ИВМО при отработке ступенчатого задающего сигнала, причем время установления (по критерию 2%) при этом не должно превышать 0,5 с. Прежде чем завершить синтез, попытайтесь предсказать величину перерегулирования при ступенчатом входном сигнале.
Рис. 5.4 (С) Система управления спутником
С-5.4. Для изменения ориентации спутника, изображенного на рис. 5.4(C), (с), используется система управления, представленная на рис. 5.4(C), (б).
(а) Аппроксимируйте замкнутую систему моделью второго порядка.
(б) Используя модель второго порядка, выберите коэффициент К так, чтобы при отработке ступенчатого входного сигнала перерегулирование не превышало 15%, а установившаяся ошибка была менее 12%.
(в) Проверьте правильность синтеза, определив действительные показатели качества системы третьего порядка.
С-5.5. Для удаления заусениц с поверхности обработанных на станке деталей может быть использован робот, который перемещает инструмент по заранее заданной траектории, определяемой входным сигналом. На практике обычно возникают ошибки из-за неточности робота, погрешностей обработки, больших допусков и износа инструмента. Эти ошибки можно исключить, используя обратную связь по усилию, за счет чего траектория движения инструмента корректируется во время зачистки поверхности.
Хотя управление усилием в известной степени способно решить проблему точности, одновременно становится более трудным обеспечение устойчивости системы. Действительно, установив упругий датчик усилия на запястье руки робота и замкнув соответствующую обратную связь, мы напрямую сталкиваемся с проблемой устойчивости системы.
Задачи, решаемые с помощью MATLAB
305
Желаемое положение
Желаемое усилие
Рис. 5.5 (С). Робот для зачистки поверхности деталей
На рис. 5.5(C) изображена модель системы управления описанным выше роботом. Определите область устойчивости системы в плоскости параметров и К2, считая, что оба они положительны.
С-5.6. На рис. 5.6(C) изображена система управления положением, в которой используется двигатель постоянного тока. Целью синтеза является выбор значений Кх и К2, при которых в случае ступенчатого входного сигнала время максимума переходной характеристики составляло бы 0,5 с, а перерегулирование было незначительным (от 0,5% до 2%).
B(s)
Рис. 5.6 (С). Система управления положением
Задачи, решаемые с помощью MATLAB
М-5.1. Замкнутая система имеет передаточную функцию
T(s) =
4
s2 + 4s + 4
Получите импульсную переходную характеристику аналитически и сравните ее с результатом вычислений с помощью MATLAB (функция impulse).
М-5.2. Система в разомкнутом состоянии имеет передаточную функцию
G(s) =
s+7 s2(s+10)
Считая, что система охвачена единичной отрицательной обратной связью, воспользуйтесь функцией Isim и получите реакцию замкнутой системы на линейный входной сигнал, 7?(s) = 1/s2. Рассмотрите интервал времени 0 < t < 25 с. Чему равна установившаяся ошибка?
В(з)
s2+2£cons+co2
Рис. 5.3 (М). Простая система второго порядка
306
Глава 5. Качество систем управления с обратной связью
М-5.3. Для синтеза систем управления очень важно твердо знать связь между расположением полюсов системы второго порядка, изображенной на рис. 5.3(М), и ее переходной характеристикой.
Имея это в виду, рассмотрите следующие четыре случая:
(1) ш„ = 2 . С = 0;
(2) со„=2,С = 0,1;
(3) = 1 , С = 0;
(4) сои = 1 , С = 0,2.
С помощью функций impulse и subplot создайте в окне на экране монитора четыре диа-
Y(s)
граммы, каждая из ко- Рис. 5.4 (М). Система управления с отрицательной торых соответствовала обратной связью
бы импульсной пере-
ходной характеристике для указанных выше случаев. Сравните диаграммы с изображенными на рис. 5.17 в разделе 5.6 и проанализируйте результаты.
М-5.4. Рассмотрите систему управления, изображенную на рис. 5.4(М).
(а) Покажите аналитически, что при ступенчатом входном сигнале переходная характеристика замкнутой системы имеет перерегулирование около 50%.
(б) С помощью MATLAB получите график реакции системы на ступенчатый входной сигнал и оцените по нему величину перерегулирования. Сравните результат с предсказанным в п. (а).
М-5.5. Передаточная функция прямой цепи в системе с единичной отрицательной обратной связью
имеет вид:
C(s) =
50
,v(.v + 10)
С помощью MATLAB постройте переходную характеристику замкнутой системы и определите по графику приблизительные значения ее максимума, Мр, времени максимума, Тр, и времени установления, Тя (по критерию 2%). Дополните график соответствующими численными значениями Мр, Т и
М-5.6. Для удержания самолета на заданном курсе и высоте обычно используется автопилот. Система управления в данном случае имеет вид рис. 5.6(М).
(а) Предположим, что регулятор представлен обычным коэффициентом усиления, т. е. 6',.(.v) = 2. С помощью функции Isim вычислите и постройте график реакции системы на воздействие = at, где а — 0.5 °/с. Определите ошибку по положению спустя 10 с.
(б) Если взять более сложный регулятор, то можно уменьшить установившуюся ошибку при отработке входного сигнала. С этой целью выберем регулятор с передаточной функцией
C£.(s) = A:1 + ^ = 2 + - .
Регулятор такого типа известен как пропорционально-интегральный (ПИ) регулятор. Повторите для такого регулятора те же действия, что и в п. (а), и сравните установившиеся ошибки.
Рис. 5.6 (М). Структурная схема системы управления с автопилотом
Задачи, решаемые с помощью MATLAB
307
Рис. 5.7 (М). Система управления скоростью ракеты
М-5.7. На рис. 5.7(М) изображена структурная схема системы управления скоростью ракеты. С помощью известных формул для системы второго порядка предскажите значения показателей Мр, Тр и Тч для замкнутой системы в случае единичного ступенчатого входного сигнала. С помощью MATLAB получите точную реакцию исходной системы и сравните показатели качества с предсказанными по упрощенной модели. Объясните возникшие различия.
Ключевые термины и понятия
Время максимума. Момент времени, в который реакция системы на ступенчатый входной сигнал достигает максимального значения.
Время нарастания. Время, в течение которого реакция системы на ступенчатый входной сигнал становится равной определенной процентной доле от величины входного сигнала. Время нарастания Тг определяется изменением выходной переменной от 0 до 100% величины входного сигнала. Как альтернатива, время нарастания Тг определяется изменением выходной переменной от 10% до 90% ее установившегося значения.
Время установления. Время, в течение которого выходная переменная системы устанавливается в пределах определенной процентной доли от величины входного сигнала.
Доминирующие корни. Корни характеристического уравнения, в основном определяющие вид переходной характеристики системы.
Коэффициент ошибки по скорости Kv. Коэффициент, вычисляемый как 1ш1л_>о[«С(5)]. Установившаяся ошибка системы при линейном входном сигнале, изменяющемся со скоростью А. равна AIKV.
Оптимальная система управления. Система, параметры которой настроены так, что оценка качества имеет экстремальное значение.
Оценка качества. Количественная мера качества системы.
Перерегулирование. Величина, на которую реакция выходной переменной превышает желаемое значение.
Тестовый входной сигнал. Входной сигнал типового вида, используемый для проверки способности системы реагировать адекватным образом.
Тип системы. Число N полюсов передаточной функции G(s), расположенных в начале координат, где G(s) соответствует разомкнутой системе (прямой цепи от входа к выходу).
Требования, выдвигаемые при синтезе. Набор заранее установленных критериев качества.
Глава 6 Устойчивость линейных систем с обратной связью
Обзор
При проектировании системы управления с обратной связью ключевой проблемой является обеспечение ее устойчивости. С полным пониманием того, что неустойчивая система не имеет практического смысла, мы прежде всего должны разработать методы анализа и синтеза устойчивых систем. Система считается устойчивой, если при ограниченном входном сигнале ее выходной сигнал также является ограниченным. Подобное представление об устойчивости красной нитью проходит через всю данную главу.
Устойчивость системы с обратной связью непосредственно связана с расположением корней ее характеристического уравнения. В этой главе мы рассмотрим весьма полезный метод анализа устойчивости, известный как критерий Рауса-Гурвица. Этот метод позволяет определить число корней характеристического уравнения, расположенных в правой полуплоскости, не прибегая к вычислению значений корней, т. е. не обременяя себя рутинными и трудоемкими операциями. Ценность этого метода также в том, что с (его помощью становится возможным выбор некоторых параметров системы, гарантирующих ее устойчивость в замкнутом состоянии. Для устойчивых систем мы введем понятие относительной устойчивости, с помощью которого будем характеризовать степень устойчивости. Глава завершается примером, в котором показано применение критерия Рауса-Гурвица к синтезу регулятора, обеспечивающего устойчивость системы чтения информации с диска.
6.1. Понятие устойчивости
При анализе и синтезе систем управления с обратной связью первостепенное значение имеет их устойчивость. С практической точки зрения неустойчивая система не имеет никакого смысла. Декларируя это, мы должны признать, что, конечно, могут быть и исключения, но в дальнейшем мы будем считать, что все синтезируемые системы управления должны быть устойчивыми. Многие реальные системы объективно неустойчивы в разомкнутом состоянии, а некоторые даже и проектируются, будучи таковыми. Большинство современных истребителей, если не использовать активную обратную связь, помогающую пилоту управлять машиной, являются неустойчивыми и просто не могут летать. Инженер-проектировщик в первую очередь должен обеспечить устойчивость системы управления неустойчивым объектом (например, самолетом), после чего позаботиться об удовлетворении других требований к динамике системы. С помощью обратной связи мы можем обеспечить устойчивость неустойчивого объекта, а затем надлежащим выбором параметров регулятора удовлетворить такие показатели качества, как установившаяся ошибка, от
6.1. Понятие устойчивости
309
носительное перерегулирование, время установления, время максимума переходной характеристики и другие, которые подробно были рассмотрены в главах 4 и 5.
Всегда можно сказать, что замкнутая система является либо устойчивой, либо неустойчивой. При таком подходе речь обычно идет о так называемой абсолютной устойчивости. Систему, обладающую абсолютной устойчивостью, называют просто устойчивой, отбрасывая слово «абсолютная». Если же замкнутая система является устойчивой, то речь может идти о степени этой устойчивости, и тогда пользуются понятием относительной устойчивости. С этим понятием хорошо были знакомы пилоты на заре развития авиации — чем более устойчив был самолет, тем труднее было совершать различные маневры (например, развороты). Одним из показателей относительной устойчивости современных истребителей является их высокая маневренность. Истребитель менее устойчив, чем пассажирский самолет, поэтому он способен маневрировать намного легче. Действительно, движения, совершаемые истребителем, могут быть весьма болезненными для «пассажиров». Как мы увидим позже в этом разделе, система будет устойчива (в абсолютном смысле), если все полюсы ее передаточной функции или, что то же самое, все собственные значения матрицы А находятся в левой половине j-плоскости. Если же окажется, что все полюсы (или собственные значения) находятся в левой половине j-плоскости, то далее речь может идти об относительной устойчивости, которая определяется положением этих полюсов.
Устойчивую систему определяют как систему, обладающую ограниченной реакцией. Иначе говоря, если система подвергается воздействию ограниченного входного сигнала или возмущения и ее реакция также является ограниченной по модулю, то такую систему называют устойчивой.
Устойчивая система — это динамическая система, обладающая ограниченной
реакцией на ограниченный входной сигнал.
Понятие устойчивости можно проиллюстрировать на примере конуса, находящегося на плоской горизонтальной поверхности. Если конус поставить на основание и слегка на
клонить, он вернется в первоначальное положение равновесия. Говорят, что такое положение равновесия и соответствующая реакция являются устойчивыми. Если конус положить на бок и слегка толкнуть, то он покатится, тем не менее оставаясь все время на боку. Такое положение равновесия называют нейтрально устойчивым. Если же конус поставить на вершину и отпустить, то он упадет на бок, поэтому данное положение равновесия является неустойчивым. Соответствующие ситуации представлены на рис. 6.1.
Устойчивость динамической системы определяется аналогичным образом. Реакция системы на отклонение, или начальные условия, будет либо затухать, либо оставаться нейтральной, либо нарастать. Согласно определению, линейная система устойчива тогда и только тогда, если интеграл в бесконечных пределах от абсолютного значения ее импульсной переходной функции g(f) является конечным. Иначе говоря, необходимо, чтобы
Рис. 6.1
Устойчивость положения конуса
а) Устойчивое
б) Нейтральное
в) Неустойчивое
310
Глава 6, Устойчивость линейных систем с обратной связью
.00
при ограниченном входном сигнале интеграл |g(Z)| dt был конечным. Положение по-
люсов системы на s-плоскости определяет вид ее переходной характеристики. Полюсы, расположенные в левой половине s-плоскости, дают затухающую реакцию на входное воздействие, а полюсы на мнимой оси или в правой половине s-плоскости, соответственно, нейтральную или расходящуюся реакцию. Это наглядно проиллюстрировано на рис. 6.2. Очевидно, что все полюсы синтезируемых систем управления должны находиться в левой половине s-плоскости.
Рис. 6.2
Иллюстрация устойчивости на s-плоскости
Устойчивая
Нейтральная Неустойчивая
Типичным примером дестабилизирующего действия обратной связи является система микрофон-динамик, используемая в аудиториях для общения с публикой. В этом случае динамик создает звуковой сигнал, представляющий собой усиленную версию сигналов, принимаемых микрофоном. Микрофон, помимо иных звуков, чувствителен также и к аудиосигналу, создаваемому динамиком. Насколько сильным будет влияние последнего, зависит от расстояния между динамиком и микрофоном. Поскольку распространение звука в воздушной среде сопровождается его затуханием, то чем больше будет это расстояние, тем слабее будет сигнал, приходящий к микрофону. Кроме того, из-за конечной скорости распространения звуковых волн появляется задержка между сигналом, создаваемым динамиком, и сигналом, достигающим микрофона. Последний суммируется с основным внешним сигналом, в результате чего образуется положительная обратная связь. Если микрофон и динамик расположены очень близко друг к другу, то система будет неустойчивой. Неустойчивость проявляется в виде чрезмерного усиления и искажения аудиосигналов и возникновения пронзительного свиста.
Еще один пример неустойчивой системы изображен на рис. 6.3. Первый мост через пролив Такома в Паджет Саунде, шт. Вашингтон, был открыт для движения 1 июля 1940 г. Было замечено, что когда дует ветер, мост начинает раскачиваться. Спустя четыре месяца, 7 ноября 1940 г., ветер привел к нарастанию амплитуды колебаний, и в итоге мост развалился на части. На рис. 6.3(a) показан момент начала колебаний, а на рис. 6.3(6) — катастрофическое разрушение.
Что касается линейных систем, то требования устойчивости сводятся к заданию положения полюсов передаточной функции замкнутой системы. Эта передаточная функция может быть записана в виде:
м кП(*+г,)
7(л) = £П =----о-------’ (6J)
Q\s) N ГТ/ лТТг 9 о /2 м
S ||(5+аЛ)||[5-+2ат5+(ат+а)-)]
Л=1 т=1
где q(s) - A(s) = 0 есть характеристическое уравнение, корни которого являются полюсами замкнутой системы. Реакция системы на импульсный входной сигнал (при N = 0) определяется выражением:
Q к ( 1 'l
У(О=ЁА^С‘' — ka”' sin(w„/ +е„,), (6.2)
Л=1 m=l \Ют J
6.1. Понятие устойчивости
311
Рис. 6.3. Мост через пролив Такома, (а) Начало колебаний и (б) катастрофическое разрушение
312
Глава 6. Устойчивость линейных систем с обратной связью
где Ак и Вт - константы, зависящие от z„ ат, Киая. Чтобы реакция была ограниченной, все полюсы замкнутой системы должны находиться в левой половине ^-плоскости. Таким образом, необходимое и достаточное условие того, чтобы замкнутая система была устойчива, состоит в том, чтобы все полюсы передаточной функции системы имели отрицательную действительную часть. Если не все из этих полюсов находятся в левой полуплоскости, то мы будем считать систему неустойчивой. Если характеристическое уравнение системы имеет простые корни, расположенные на мнимой оси, а все остальные корни находятся в левой половине ^-плоскости, то реакция системы на ограниченный гармонический входной сигнал, частота которого равна модулю чисто мнимых корней, будет представлять собой неограниченно нарастающие колебания. Такую систему принято называть находящейся на границе устойчивости, т. к. только отдельные входные сигналы (гармонические сигналы, частота которых совпадает с полюсами системы) обусловливают неограниченное нарастание реакции системы. У неустойчивой системы по крайней мере один корень характеристического уравнения находится в правой половине ^-плоскости или это уравнение имеет кратные корни на мнимой оси. В этом случае выходная переменная будет неограниченно нарастать при любом входном сигнале.
Например, если характеристическое уравнение замкнутой системы имеет вид
(s + 10)(? + 16) = О,
то говорят, что система находится на границе устойчивости. Если на вход такой системы подать синусоидальный сигнал с частотой со = 4, то выходной сигнал станет неограниченным.
Чтобы определить, устойчива ли система управления, необходимо найти корни характеристического полинома q(s). Вычисление этих корней даст гораздо больше информации, чем требуется для ответа на вопрос: является ли система устойчивой? Ведь именно этот вопрос интересует нас в первую очередь. И для получения ответа «да» или «нет» на данный вопрос можно воспользоваться любым их трех методов:
(1) методом анализа на ^-плоскости;
(2) методом анализа в частотной области;
(3) методом анализа во временной области.
Частотный метод анализа устойчивости будет рассмотрен в гл. 9, а анализ во временной области — в разделе 6.4.
6.2. Критерий устойчивости Рауса-Гурвица
Проблема устойчивости издавна волновала умы многих ученых и инженеров. Впервые вопрос устойчивости динамических систем был исследован Максвеллом и Вышнеградским. В конце XIX века А. Гурвиц и Э. Дж. Раус независимо друг от друга опубликовали работы, посвященные методу анализа устойчивости линейных систем. Метод Рауса-Гурвица позволяет ответить на вопрос об устойчивости путем анализа характеристического уравнения системы, записанного в виде
A(?) = q(s) = a„s" + ап_ ~ 1 + ... + ats + а0 = 0 . (6.3)
Для ответа на поставленный вопрос необходимо установить, находится ли хотя бы один из корней этого уравнения в правой половине ^-плоскости. Уравнение (6.3) можно
6.2. Критерий устойчивости Рауса-Гурвица 313
записать в виде произведения сомножителей:
а,/-* - г,) (5 - г2) ... (5 - г„) = 0, (6.4)
где через г, обозначен i-й корень характеристического уравнения. Перемножение скобок приводит к результату:
9(5) = а/’ - а„(г1 + г2 + ... + r„)s”~ 1 + an(rxr2 + r2r3 + г{г3 + ... )sn~2 -
-«„(г^Уз + rir2r4 + ... )5п 3 + ... + ^(-l/’r^jrj ... rn = 0 . (6.5)
Иначе говоря, для уравнения л-й степени можно записать:
9(5) = а,^' — а„(сумма всех корней^’’ “1 +
+ а„(сумма произведений всех корней, взятых по 2)s" ~ 2 -
— а„(сумма произведений всех корней, взятых по З)5п-3 + ...
+ а„(-1/’(произведение всех п корней) = 0 . (6.6)
Анализ уравнения (6.5) показывает, что если все корни расположены в левой полуплоскости, то все коэффициенты характеристического полинома должны иметь один и тот же знак. Необходимо также, чтобы все коэффициенты были отличны от нуля (если система устойчива). Однако эти условия являются лишь необходимыми, но не достаточными. Это означает, что если данные условия не выполняются, то сразу можно сказать, что система неустойчива; но если даже эти условия выполняются, то для ответа на вопрос об устойчивости системы необходимы дальнейшие исследования. Например, если характеристический полином имеет вид
9(5) = (5 + 2)(52 - 5 + 4) = 53 + 52 + 25 +8, (6.7)
то система является неустойчивой, хотя все коэффициенты полинома положительны.
Критерий Рауса-Гурвица дает необходимое и достаточное условие устойчивости линейных систем. Первоначально он был предложен в форме определителей, но мы приведем его в более удобной табличной форме.
В основе критерия Рауса-Гурвица лежит упорядочение коэффициентов характеристического уравнения
а,^п + а„_ 15п-1 + an_2sn~2 + ... + axs + а0 = 0 (6.8)
в виде следующей таблицы:
5 ап-2
5П ' ^и-1 ®л-3
Следующие строки таблицы образуются по приведенному ниже правилу:
®п—2 @п-4
&п-1 ап-3 ^п-5
^n-i ь„_5
сп-\ сп-3 сп-5
где
^и-1 -
_(^l)(g»-2)-g»(gn-3)_ -1
^п-1
ап-1 «и-1
ап-2
ап-3
314
Глава 6. Устойчивость линейных систем с обратной связью
®»-4
5
1 ап-1 ап-3
Ь„-\ ^л-1 ^и-3
и т. д. Алгоритм вычисления элементов таблицы можно построить на основе определителей или на основе выражения для Ьп _ Р
Критерий Рауса-Гурвица утверждает, что число корней полинома q(s) с положительной действительной частью равно числу изменений знака в первом столбце таблицы Рауса.
Этот критерий требует, чтобы для устойчивой системы в первом столбце таблицы Рауса не было изменений знака. Данное условие является и необходимым, и достаточным.
Необходимо рассмотреть четыре различных случая, относящихся к виду первого столбца таблицы, причем для каждого из них в отдельности должны быть указаны специфические правила вычисления элементов таблицы. Эти частные случаи таковы:
1. В первом столбце нет ни одного нулевого элемента;
2. В первом столбце имеется нулевой элемент, но некоторые другие элементы строки, содержащей нуль в первом столбце, отличны от нуля;
3. В первом столбце имеется нулевой элемент, и все остальные элементы соответствующей строки также равны нулю;
4. Тот же случай, что и (3), но характеристический полином имеет кратные корни на мнимой оси.
Проиллюстрируем эти случаи несколькими примерами.
Случай 1. В первом столбце нет ни одного нулевого элемента
Пример 6.1. Система второго порядка
Характеристический полином системы второго порядка имеет вид: q(s) = a2s2 + Q|S + aQ .
Составим таблицу Рауса:
S2 Oq s' Ц о
4) О,
где
qoj)-(0) a2 _ -1 а2
«с
О
Следовательно, условие устойчивости системы второго порядка сводится к тому, чтобы все коэффициенты характеристического полинома были положительными или отрицательными.
Пример 6.2. Система третьего порядка
Характеристический полином системы третьего порядка имеет вид: q(s) = ц353 + c2s2 + Qjs + а0 .
6,2. Критерий устойчивости Рауса-Гурвица
315
Составим таблицу Рауса:
? а, Ц
S2 °2 аО s' 1} О 5° q 0.
где
L й2а| — аОаЗ .. _ ^аО
А =------------- и С| - —-
«г *)
Для устойчивости системы третьего порядка необходимо и достаточно, чтобы все коэффициенты были положительны и выполнялось неравенство а2ах > а^у При а2а1 = аоа3 система находится на границе устойчивости и пара корней расположена на мнимой оси. Эта предельная ситуация соответствует случаю (3), поскольку в первом столбце таблицы Рауса оказывается нулевой элемент, а второй элемент этой строки также равен нулю. Данный случай будет проиллюстрирован позже.
В заключение рассмотрим характеристический полином, который не дает нулевых элементов в первом столбце таблицы Рауса:
q(s) = (s -1 + j V7)(s -1 - jV7)(s + 3) = s3 + s2 + Is + 24 . (6.9)
Этот полином удовлетворяет необходимым условиям, т. к. все коэффициенты существуют и являются положительными. Составив таблицу Рауса, мы получим:
S3 1 2
S2 1 24
s' -22 0
s° 24 0.
Поскольку в первом столбце дважды происходит изменение знака, то мы приходим к выводу, что два корня q(s) расположены в правой половине s-плоскости; это подтверждает и факторизованное представление полинома q(s) в выражении (6.9).
Случай 2. В первом столбце имеется нулевой элемент, но некоторые другие элементы строки, содержащей нуль в первом столбце, отличны от нуля. Если только один элемент первого столбца равен нулю, его можно заменить малым положительным числом е, которое после завершения таблицы необходимо устремить к нулю. Например, рассмотрим следующий характеристический полином:
q(s) = s5 + 2s4 + 2s3 + 4s2 + Ils + 10. (6.10)
Таблица Рауса принимает вид:
1
2 Е
С1
10
6с. -Юе
—----------->6.
С1
2 11
4 10
6 0
10 0
0 0
0 0,
4е-12 -12 ,
где q =-----=----- и П|
Е Е
316 Глава 6. Устойчивость линейных систем с обратной связью
В первом столбце дважды происходит изменение знака из-за наличия бесконечно большого отрицательного числа cj = -12/е. Следовательно, система является неустойчивой, а два корня полинома q(s) расположены в правой полуплоскости.
Пример 6.3. Неустойчивая система
В качестве еще одного примера на случай (2) рассмотрим характеристический полином q(s) = s4 + ? + s2 + j + К , (6.11)
где необходимо определить коэффициент К, при котором система будет находиться на границе устойчивости. Составим таблицу Рауса:
/ 1 1 К
? 1 1 О
S2 Е К О s' q О О s° К О О,
E-X К где q =--->--
E
Отсюда следует, что при любых положительных значениях К система является неустойчивой. Кроме того, поскольку последний элемент в первом столбце равен К, то и отрицательные значения К также будут соответствовать неустойчивой системе. Значит, данная система неустойчива при любых значениях К.
Случай 3. В первом столбце имеется нулевой элемент, и все остальные элементы соответствующей строки также равны нулю. Этот случай имеет место, когда все элементы какой-либо строки равны нулю или когда строка состоит из одного элемента, равного нулю. Такое возможно, если корни характеристического полинома расположены симметрично относительно начала координат ^-плоскости, например, если полином содержит сомножители (s + a)(s - и) или (s + yco)(.v -Ja). Возникающую при этом проблему можно обойти путем использования вспомогательного полинома U(s), который образуется из элементов строки, предшествующей нулевой строке таблица Рауса. Порядок вспомогательного полинома является четным и равным количеству симметричных корней. Проиллюстрируем сказанное на примере характеристического полинома
q(s) = s2 + 2s2 + 4s + К , (6.12)
где К — варьируемый коэффициент. Составим таблицу Рауса:
? 1 4
s2 2 К
? О
2 5° К о.
Чтобы система была устойчива, должно выполняться условие 0 < К < 8. При К= 8 два корня расположены на мнимой оси и система находится на границе устойчивости. Заметим, что при К = 8 мы получаем строку, состоящую из нулей. Вспомогательный полином U(s) образуется с помощью элементов предшествующей строки, т. е. строки, соответствующей s2. Напомним, что эта строка образована коэффициентами при четных степенях s, следовательно, в данном случае
U(s) = 2? + Ks° = 2s2 + 8 = 2(? + 4) = 2(s + J2)(s -j2). (6.13)
6.2. Критерий устойчивости Рауса-Гурвица
317
Чтобы показать, что вспомогательный полином действительно входит сомножителем в характеристический полином, разделим q(s) на U(s):
s3 + 2s~ + 4s +8 | 2s" + 8
s3 + 4s И5+1
2s2 +8
Ъ1 +8
При К = 8 характеристический полином представляется в виде сомножителей:
9(s) = (s + 2)(s+j2)(s-j2). (6.14)
Очевидно, что система находится на границе устойчивости, а ее реакция имеет вид незатухающих колебаний.
Случай 4. Характеристический полином имеет кратные корни на мнимой оси. Если корни характеристического уравнения, расположенные на мнимой оси, являются простыми, то система не является ни устойчивой, ни неустойчивой — говорят, что она находится на границе устойчивости, т. к. в ней возникают незатухающие синусоидальные колебания. Если же корни на мнимой оси являются кратными, то реакция системы будет расходящейся, вида r[sin(coZ + \р)]. В этом случае критерий Рауса-Гурвица данный вид неустойчивости обнаружить не может.
Рассмотрим систему с характеристическим полиномом
q(s) = (s + l)(s + f)(s -f)(s + j)(s -j) = s5 + s4 + 2s3 + 2s2 + 5 + 1.
Таблица Рауса имеет вид:
s
s
4
1 2 1
1 2 1
E E О
1 1
E 0
1 ,
где e —> 0. Заметим, что отсутствие перемены знака в первом столбце ошибочно указывает на то, что система находится на границе устойчивости. Однако импульсная переходная характеристика системы возрастает со временем по закону t sin(Z + \р). Вспомогательные полиномы для ? и? равны соответственно (s2 + 1) и (s4 + 2s2 + 1) = (s2 + I)2, что указывает на наличие кратных корней на мнимой оси.
Пример 6.4. Управление роботом
К 2000 году во всем мире в эксплуатации находилось около 100 000 роботов. На рис. 6.4 изображен шестиногий микроробот, каждая нога которого обладает высокой подвижностью и управляется регулятором с большим коэффициентом усиления. За счет этого соответствующая система управления может стать неустойчивой, и в ней возникнут незатухающие колебания. Характеристический полином системы имеет вид:
q(s) = s5 + s4 + 4s3 + 24s2 + 3s + 63 . (6.15)
318
Глава 6, Устойчивость линейных систем с обратной связью
Рис. 6.4. Шестиногий робот, обладающий большой подвижностью. Ноги робота оснащены уникальной системой датчиков, обеспечивающих взаимодействие с окружающей средой. Эта система включает в себя 150 датчиков 12 различных типов. Ноги сконструированы так, что робот способен распознавать рельеф местности, фактуру поверхности, ее твердость и даже цвет. С помощью видоискателя и стабилизированной видеокамеры, установленных на роботе, он может сразу же после доставки по назначению приступать к сбору данных об окружающей обстановке. Совершенная система управления способна обеспечивать быстрое перемещение робота, преодоление препятствий и выполнение различных активных манипуляций
Составим таблицу Рауса:
? 1 4 3
s4 1 24 63
? -20 -60 0
s2 21 63 0
s1 ООО.
Вспомогательный полином
t/(s)=21s2 + 63 = 21(s2+3) = 21(s + jV3)(s-jV3) (6.16)
указывает на то, что два корня находятся на мнимой оси. Чтобы определить положение остальных корней, разделим q(s) на вспомогательный полином:
= ? + ? + 5+21.
?+3
Составляя таблицу Рауса для этого полинома, получим:
? 1 1
s2 1 21
? -20 0
5° 21 0.
Два изменения знака в первом столбце говорят о наличии двух корней в правой полуплоскости. следовательно система неустойчива. Эти корни имеют значения 5 = 1+ у-/б.
6.2. Критерий устойчивости Рауса-Гурвица
319
Рис. 6.5
Система позиционирования наконечника сварочного узла
Пример 6.5. Управление сваркой
На современных автомобильных заводах широко применяются большие сварочные роботы. Наконечник сварочного узла подводится к различным местам кузова автомобиля и быстро и точно совершает необходимые действия. На рис. 6.5 изображена структурная схема системы позиционирования наконечника. Требуется определить диапазон значений параметров Киа, при которых система будет устойчивой. Характеристическое уравнение системы имеет вид:
1+ G(s) = 1 +
К (s + а) s(s+l)(s+2)(s+3)
Следовательно, q(s) = s4 + 6s3 + 1 Is2 + (К + 6)s + Ка = 0. Составим таблицу Рауса:
/ 1 11 Ка
? 6 (К + 6)
s2 ij Ка
sl с3
Ка,
где
г 60-Х
bi=—T
Ь3(К + б)-6Ка
Коэффициент с3 устанавливает связь между параметрами К и а, с другой стороны анализ Ь3 требует, чтобы К было меньше 60. Полагая с3 = 0, получим:
(К - 60)(К + 6) + ЗбКа = 0.
Отсюда вытекает требуемая зависимость между К и а:
(60-К)(К + 6) а <--------------,
36К
где а — положительная константа. Так, если принять К = 40, то получим а < 0,639.
Система л-го порядка имеет характеристическое уравнение общего вида: sn + а„ + ап _2s" '2 + ... + яр' + со" = 0 .
Если разделить все члены уравнения на со" и ввести обозначение s* = s/an, то мы получим запись характеристического уравнения в нормированном виде: s*n + to*"'1 + cs*n~2 +... + 1=0.
Например, если уравнение
№ + 5s2 + 2s + 8 = 0
разделить на 8 = со’, то мы получим:
s3 5 s2 2 s
— +------v +------ + 1 = 0,
со„ 2 со- 4 со,,
320
Глава 6. Устойчивость линейных систем с обратной связью
или
s*3 + 2,5s*2 + 0,55* +1=0.
В данном случае Ь = 2,5 и с = 0,5. Используя нормированную запись характеристического уравнения, мы можем составить сводную таблицу условий устойчивости систем до 6-го порядка включительно (см. таблицу 6.1). Заметим, что для нашего примера Ьс = 1,25, следовательно система устойчива.
Таблица 6.1 Критерий устойчивости Рауса-Гурвица
п Характеристическое уравнение Критерий
2 s2 + fcs + 1 = О b>О
3 № + bs2 + cs +1=0 be — 1 > О
4 s4 + bs3 + cs2 + ds + 1 = 0 bed — d2 - b2 > 0
5 s5 + bs4 + cs3 + ds2 + es + 1 = 0 bed + b - d2 — b2e > 0
6 56 + bs3 + cs4 + ds3 + es2, + fs +1=0 (bed + bf— d2 — b~e)e + b2c — bd — bc2f— f' + bfe + cdf> 0
Примечание-. Уравнения нормированы делением на со".
6.3. Относительная устойчивость систем управления с обратной связью
Критерий Рауса-Гурвица дает только частный ответ на вопрос об устойчивости, а именно, он исследует абсолютную устойчивость системы, проверяя, расположены ли какие-либо корни характеристического уравнения в правой половине 5-плоскости. Однако, если система удовлетворяет критерию Рауса-Гурвица и является абсолютно устойчивой, полезно установить ее относительную устойчивость, т. е. исследовать затухание, обусловленное каждым корнем характеристического уравнения. Относительную устойчивость системы можно определить как свойство, оцениваемое действительной частью каждого корня или пары корней характеристического уравнения. Так, например, корень г2 на ум
рис. 6.6 относительно «более устойчив», чем Га 2
А А
корни и Относительную устойчивость СИС- I
темы можно также оценивать по коэффициентам ____2_____[_____,,______о
затухания соответствующим каждой паре комплексно-сопряженных корней, и, следовательно, по скорости нарастания ее реакции и величине перерегулирования.
Анализ влияния каждого корня на относительную устойчивость принципиально необходим, потому что, как мы выяснили в гл. 5, положение полюсов замкнутой системы на 5-плоскости определяет и ее качество. Это обязывает нас еще раз обратиться к характеристическому полиному q(s) и рассмотреть некоторые методы определения относительной устойчивости.
।
Рис. 6.6. Положение корней на «-плоскости
6,4. Устойчивость систем, описываемых переменными состояния
321
Первый из этих методов, связанный с использованием s-плоскости, предполагает распространение критерия Рауса-Гурвица для определения относительной устойчивости. Идея метода состоит в замене переменной, приводящей к сдвигу оси s-плоскости. Анализ рис. 6.6 показывает, что если сдвинуть ось ординат влево на величину оь то корни г, и т, окажутся на этой оси. Правильную величину сдвига можно получить только путем проб и ошибок. Тогда, не прибегая к решению уравнения пятого порядка, можно будет определить действительную часть доминирующих корней иг,.
Пример 6.6. Сдвиг оси координат
Рассмотрим простой характеристический полином третьего порядка:
q(s) = s3 + 4s1 + 6s + 4 . (6.17)
В качестве первой попытки возьмем sn = s + 2, при этом обнаружим, что таблица Рауса не будет содержать нулей в первом столбце. Однако при замене (сдвиге) переменной s„ = s + 1 мы получим:
(s„ -1)3 + 4(s„ -1)2 + 6(s„ -1) + 4 = s3 + s2 + s„ + 1. (6.18)
Тогда таблица Рауса примет вид:
s3 1 1
s2 1 1
4 О О s° 1 0.
На сдвинутой мнимой оси оказываются два корня, которые можно определить по вспомогательному полиному:
U (Ли) = + 1 = (Л» + j)U> - j) = (s + 1 + j)(s + 1 - j). (6.19)
Определение относительной устойчивости путем сдвига оси ординат является очень полезным методом, особенно для систем высокого порядка, имеющих в замкнутом состоянии несколько пар комплексно-сопряженных полюсов.
6.4. Устойчивость систем, описываемых переменными состояния
Устойчивость системы можно определить и по ее модели в переменных состояния. Если система задана своей передаточной функцией
тед-А!>,
гдеp(s) и g(s) — полиномы от переменной s, то ее устойчивость определяется корнями характеристического уравнения g(s) = 0. Чтобы система была устойчива, все корни этого уравнения должны быть расположены в левой половине s-плоскости. Итак, для ответа на вопрос об устойчивости системы, описываемой передаточной функцией, мы используем характеристическое уравнение и применяем критерий Рауса-Гурвица. Если же система представлена в виде сигнального графа в переменных состояния, то определитель этого графа совпадает с характеристическим полиномом, к которому легко применить уже известный критерий. Проиллюстрируем это несколькими примерами.
322
Глава 6. Устойчивость линейных систем с обратной связью
Пример 6.7. Устойчивость системы
Рассмотрим систему из примера 3.1, которая имеет передаточную функцию „ . 2s2 4- 8s 4- 6
Г (s) = -5-5--------
s3 4- 8s2 4- 16s 4- 6
(6.20)
Характеристический полином этой системы
q(s) = s3 4- 8s2 4- 16s 4- 6 . (6.21)
Этот характеристический полином также легко можно получить по любой из моделей системы в виде сигнального графа, представленных на рис. 3.12 и рис. 3.13. С помощью критерия Рауса-Гурвица можно убедиться, что все корни g(s) расположены в левой полуплоскости, следовательно, система устойчива.
Часто модель системы бывает задана в виде совокупности дифференциальных уравнений относительно переменных состояния. В этом случае удобно изобразить альтернативную модель в виде сигнального графа, по которому легко записать его определитель A(s) и, следовательно, характеристическое уравнение. Освоить этот прием нам поможет следующий пример.
Пример 6.8. Устойчивость системы второго порядка
Система второго порядка описывается двумя дифференциальными уравнениями первого порядка:
х, = -ЗХ] 4- х2, х2 = х2 - KXj 4- Ки, где u(t) — входной сигнал, а точки над х, символизируют производные по времени. Модель в виде сигнального графа, соответствующая этим уравнениям, изображена на рис. 6.7. Граф содержит три контура:
£t = s"', L2 = -3s-1 и £, = -Ks~2,
причем и L2 не имеют общего узла. Следовательно, по правилу Мейсона, определитель графа
Л = 1 — (£j 4- £2 4- £3) 4- LtL2 = 1 - (s’1 - 3s*' - Xs"2) 4- (-3s"2) .
Умножив А на №, получим характеристическое уравнение
s2 4- 2s 4- (X - 3) = 0 .
Поскольку для устойчивости все коэффициенты должны быть положительны, то мы приходим к условию X > 3.
Рис. 6.7
Сигнальный граф для системы из примера 6.8
Метод получения характеристического уравнения непосредственно по векторному дифференциальному уравнению основан на том, что для свободного движения системы решение имеет вид экспоненциальной функции. При отсутствии входных сигналов векторное дифференциальное уравнение имеет вид
х = Ах, (6.22)
где х — вектор состояния. Поскольку решение такого уравнения представляет собой экспоненту, то мы можем найти такие константы X, при которых решение для каждой пере
6.4. Устойчивость систем, описываемых переменными состояния
323
менной состояния будет иметь видх, (/) = к,ек‘'. Константы X, называются характеристическими числами или собственными значениями системы, они же являются корнями характеристического уравнения. Если положить х = kez', то подставив это выражение в (6.22), получим:
Хк?' = Ак/', (6.23)
или
Хх = Ах. (6.24)
Уравнение (6.24) можно переписать в виде
(XI - А)х = 0, (6.25)
где I — единичная матрица, 0 — нулевая матрица. Нетривиальное решение этой системы однородных уравнений существует тогда и только тогда, если обращается в нуль определитель матрицы (XI — А), т. е. если
det(Xl - А) = 0. (6.26)
Раскрывая определитель, мы получим уравнение и-го порядка относительно X, которое и будет характеристическим уравнением системы. Далее не составит труда исследовать устойчивость системы. Для иллюстрации этого метода рассмотрим систему третьего порядка, с которой мы имели дело в примере 3.2.
Пример 6.9. Замкнутая система распространения эпидемии
В примере 3.2 была рассмотрена модель динамики эпидемического заболевания. Соответствующее векторное дифференциальное уравнение имеет вид (3.55). и мы воспроизведем его еще
раз:
dx ~dt
—а -₽ 0] Г1
Р -у 0 х+ 0
а у 0 0
0
1
0
1'1 |_«2.
Отсюда получим характеристическое уравнение:
Р о (Х+у) 0 -у X.
= Х[(Х+ а)(Х+у) + р2] = Х[Х2 + (а + у)Х+ (ау + р2)]= 0.
Это уравнение очень похоже на характеристическое уравнение (3.57), полученное по сигнальному графу. Дополнительный корень X = 0 появился из-за того, что имеется переменная х3. являющаяся интегралом от (алу + ух2), но х3 не влияет на остальные переменные состояния. Поэтому корень X = 0 указывает просто на наличие интегратора, формирующего переменную х3. Характеристическое уравнение показывает, что при (а + у) > 0 и (ау + Р") > 0 система будет находиться на границе устойчивости.
В заключение рассмотрим еще раз перевернутый маятник, модель которого была получена в примере 3.3. Система имеет матрицу
'0 1 0 О'
А 0 0 -mg! М 0
_ 0 0 0 1
00 g!l о
324
Глава 6, Устойчивость линейных систем с обратной связью
Характеристическое уравнение det(XI - А) = 0 принимает вид:
X -I О О X mg!M 0 0 X 0 0 -g!l
0
Анализ этого уравнения показывает, что имеются два корня X = 0, корень X = у и корень X = Следовательно, система неустойчива, т. к. один из корней расположен в правой полуплоскости. Два корня в начале координат будут приводить к возникновению неограниченно нарастающей реакции.
6.5. Пример синтеза: управление поворотом гусеничной машины
Синтез системы управления поворотом гусеничной машины заключается в выборе двух параметров. На рис. 6.8(a) изображена функциональная, а на рис. 6.8(6) — структурная схема этой системы. Чтобы осуществить поворот, две гусеницы работают с разными скоростями. Необходимо выбрать Киа так, чтобы система была устойчива и чтобы при линейном входном сигнале установившаяся ошибка не превышала 24% от величины этого сигнала.
Характеристическое уравнение замкнутой системы имеет вид:
1 + GcG(s) = 0,
или
1+_____K(s+a)_____=0.
s(s+ l)(s+ 2)(s+ 5)
(6.27)
с)
Дроссель Руль
Момент на гусенице
----------- Правая -
Регулятор и двигатель ----------- Левая -
Машина
- Y(s)
Направление движения
Разность скоростей гусениц
б)
Рис. 6.8. (а) Система управления поворотом гусеничной машины, (б) Структурная схема системы
6.5, Пример синтеза: управление поворотом гусеничной машины
325
Отсюда имеем:
s(s + l)(s + 2)(s + 5) + K(s + a) = О, или
s4 + 8? + 17? + {К + 10)5 + Ка = 0 . (6.28)
Чтобы найти область устойчивости в плоскости параметров К и а, составим таблицу Рауса:
1 17 Ка
8 (А+ 10) 0
сз
Ка,
s
5°
где
136-{к +10)
Ь-, =------------ и
3 8
*з(/с + ю)-8/Га
Сз=' ъ.
Чтобы элементы первого столбца были положительны, Ка, Ь3 и с3 должны быть больше нуля. Следовательно, должны выполнятся неравенства:
Л? <126,
Ка>0, (6.29)
(К + 10)(126-A? )-64Ка > 0.
Область устойчивости изображена на рис. 6.9. Установившаяся ошибка при линейном входном сигнале r(t) =At,t> 0, равна
где
Таким образом,
Рис. 6.9
Область устойчивости
ess = A/Kv,
326
Глава 6. Устойчивость линейных систем с обратной связью
Если выбрать Ка=42, то мы получим ess = 23,8%. Это условие можно удовлетворить, задав точку в области устойчивости с параметрами К= 70 и а = 0,6, как показано на рис. 6.9. Другое возможное сочетание параметров: К = 50 и а = 0,84. Можно определить и ряд других комбинаций параметров, дающих произведение Ка = 42 и лежащих в области устойчивости. Однако, как видно из рис. 6.9, параметр К не может превышать 126.
6.6. Анализ устойчивости с помощью MATLAB
Этот раздел мы начнем с критерия Рауса-Гурвица и покажем, какое простое и удобное средство предоставляет MATLAB для вычисления корней характеристического уравнения. Если характеристическое уравнение содержит один варьируемый параметр, то можно отразить в виде диаграммы изменение положения корней в зависимости от этого параметра.
В данном разделе будет введена функция for, с помощью которой последовательность инструкций повторяется заданное число раз.
Критерий Рауса-Гурвица. Как было отмечено выше, критерий Рауса-Гурвица определяет необходимое и достаточное условие устойчивости. Если задано характеристическое уравнение с постоянными коэффициентами, то с помощью критерия Рауса-Гурвица можно определить число корней, расположенных в правой полуплоскости. Например, рассмотрим характеристическое уравнение замкнутой системы, изображенной на рис. 6.10:
q(s) = № + s2 + 2s + 24 = 0 .
Рис. 6.10
Замкнутая система управления с передаточной функцией 7{s) = =
= 1/Gs3 + s2 + 2s + 24)
7?(s)
Y(s)
Соответствующая таблица Рауса приведена на рис. 6.11. Два изменения знака в первом столбце указывают на наличие двух корней уравнения в правой полуплоскости; следовательно, замкнутая система неустойчива. С помощью MATLAB мы можем проверить этот результат, непосредственно вычислив корни характеристического уравнения, как это показано на рис. 6.12. Для этого необходимо использовать функцию pole, которая вычисляет корни алгебраического полинома.
Рис. 6.11
Таблица Рауса для замкнутой системы с передаточной функцией 7]s) = 1/($з + s2- + 2s + 24)
6,6, Анализ устойчивости с помощью MATLAB
327
Рис. 6.12
Использование функции pole для вычисления полюсов замкнутой системы, изображенной на рис. 6.10
»numg=[1]; deng=[1 1 2 23]; sysg=tf(numg,deng);
»sys=feedback(sysg,[1]);
»pole(sys)
ans =
-3.0000
1.0000+ 2.6458i <
1.0000-2.6458!
Корни в правой полуплоскости
Если характеристическое уравнение является функцией единственного параметра, то с помощью критерия Рауса-Гурвица можно определить диапазон значений этого параметра, при которых система будет устойчивой. Рассмотрим замкнутую систему, изображенную на рис. 6.13. Характеристическое уравнение имеет вид:
q(s) = ? + 2? + 4s + К = 0 .
Рис. 6.13
Замкнутая система с передаточной функцией 7(s) = =
= КЦ& + 2s2 + 4s + К)
ад
У(8)
С помощью критерия Рауса—Гурвица мы нашли (см. уравнение 6.12), что система устойчива при 0 < К < 8. Этот результат можно проверить графически с помощью MATLAB. Как показано на рис. 6.14(a), мы задали диапазон значений К, при которых хотим вычислить корни характеристического уравнения. Затем с помощью функции roots вычислили и изобразили траектории корней. Как видно из графика, с увеличением К корни характеристического уравнения смещаются вправо, при К = 8 они оказываются на мнимой оси, а при К > 8 попадают в правую полуплоскость.
Программа на рис. 6.14 содержит функцию for. Эта функция обеспечивает выполнение одной и той же серии инструкций заданное число раз. Она в сочетании с инструкцией end образует цикл повторяющихся вычислений. На рис. 6.15 приведен формат функции for, а также пример ее использования. В примере цикл повторяется 10 раз. На /-м шаге, где 1 < i < 10, i-й элемент вектора а устанавливается равным 20, а скаляр b пересчитывается.
Критерий Рауса-Гурвица позволяет получить однозначный ответ на вопрос об абсолютной устойчивости линейной системы, В то же время он не позволяет судить об относительной устойчивости, которая непосредственно связана с положением корней характеристического уравнения. Критерий Рауса-Гурвица говорит о том, сколько корней находится в правой полуплоскости, но не указывает конкретного положения этих корней. С помощью MATLAB мы можем вычислить точные значения корней и тем самым судить об относительной устойчивости системы.
Пример 6.10. Управление поворотом гусеничной машины
На рис. 6.8 изображена структурная схема системы управления поворотом гусеничной машины. Цель синтеза состоит в выборе параметров К и а, при которых система будет устойчива и установившаяся ошибка при линейном входном сигнале не будет превышать 24% от величины этого сигнала. Для решения этой задачи можно воспользоваться критерием Рауса-Гурвица. Характеристическое уравнение замкнутой системы имеет вид:
q(s) = / + 8s3 + 17s2 + (К + 10)s + Ка = 0 .
328
Глава 6. Устойчивость линейных систем с обратной связью
Рис. 6.14
(а) Траектории корней уравнения q (s) = s3 + 2s2 + + 4s + К = О при О < К < 20.
(б) Скрипт MATLAB
б)
Цикл для вычисления корней в функции от К
% Этот скрипт вычисляет корни характеристического
% уравнения q(s)=sA3+2sA2+4s+K при 0<К<20 %
К=[0:0.5:20];
for i=1:length(K)
q=[1 2 4 K(i)]; U--------
p(:.i)=roots(q); J
end
plot(real(p),imag(p),‘x’),grid
х!аЬе1(‘Действительная ось‘),у1аЬе!(‘Мнимая ось')
Рис. 6.15
Функция for и иллюстративный пример
Общий формат
Пример
b — скаляр, изменяющий значение при увеличении i
6.6, Анализ устойчивости с помощью MATLAB
329
Составив таблицу Рауса, мы получим два условия устойчивости: К < 126 и Ка > 0. Это значит, что мы можем ограничить область поиска значениями 0 < К < 126 и а > 0. Сначала с помощью MATLAB мы найдем границу устойчивости в плоскости параметров Киа. Затем мы сможем найти пары значений (К, а), принадлежащих области устойчивости, таких, которые удовлетворяли бы ограничению на установившуюся ошибку. Эта процедура, показанная на рис. 6.16, включает в себя задание диапазона значений К паи вычисление корней характеристического уравнения для конкретных значений этих параметров. Для каждого К мы найдем первое значение а, при котором по крайней мере один корень характеристического уравнения попадает в правую полуплоскость. Этот процесс повторяется до тех пор, пока не будет пройден весь диапазон значений Киа. Найденные пары чисел (К, а) определяют границу между областями устойчивости и неустойчивости.
На рис. 6.16 область слева от графика зависимости a =f (К) является областью устойчивости.
Если считать, что r(t) = At, t > 0, то установившаяся ошибка
.. s(s + l)(s + 2)(s + 5) А 10^4
е,ч. = lims------------------------------- =-----,
s(s + l)(s + 2)(s + 5) + K(s + a) s2 Ka
где мы использовали тот факт, что
£(s) =---------K(s) =-----5(5 + 2)(д + 5)---/?(5).
l + GcG(s) s(s+l)(s+2)(s+5)+X'(s+c)
ЮЛ
При заданном ограничении < 0,24Л мы имеем:-------< 0,24 А, или
Ка
Ка > 41,67.
Рис. 6.16
(а) Область устойчивости в плоскости параметров (К, а) для системы управления поворотом гусеничной машины.
(6} Скрипт MATLAB
a)
К
% Определение области устойчивости для системы % управления поворотом гусеничной машины
% f— а=[0.1:0.01:3.0];К=[20:1:120]; ’ Диапазон значений Киа
х=0*К; у=О*К; ◄ n=length(K); m=length(a); for i=1 :n Задание начальных значений векторов диаграммы соответствующей длины
forj=1:m
Характеристический ПОЛИНОМ
HI1 -°- 1 1 «’47 ' 47 p=roots(q);
if max(real(p))>0, x(i)=K(i);y(i)=a(j-1); break; end end 4
end Определение первого значения a, приводящего к неустойчивости при заданном К
plot(x,y),grid,xlabel(‘K’), ylabel('a')
(6.31)
330
Глава 6. Устойчивость линейных систем с обратной связью
Любые значения К и а, лежащие в области устойчивости на рис. 6.16 и удовлетворяющие условию (6.31), будут считаться приемлемыми. Например, значения К = 70 и а = 0,6 будут удовлетворять всем выдвинутым требованиям. При этих значениях передаточная функция замкнутой системы примет вид:
70$+42 Т (S) = —-г-----=--------- .
$4 + 8$3 + 17$2+ 80$ + 42
Полюсы замкнутой системы будут иметь значения:
$ = -7,0767, $ = -0,5781, $ = -0.1726 + 3,1995/ и $ = -0,1726 - 3,1995/.
Реакция системы на линейный входной сигнал, изменяющийся с единичной скоростью, приведена на рис. 6.17. Установившаяся ошибка менее 0,24, как и требовалось.
Рис. 6.17
(а) Реакция системы управления поворотом гусеничной машины на линейный входной сигнал при К = 70 и a = 0,6. (б) Скрипт MATLAB
и — входной сигнал
% Реакция системы управления поворотом гусеничной
% машины при а=0.6 и К=70
%
t=[0:0.01:16]; u=t;
numgc=[1 0.6];dengc=[1 1]; sysgc=tf(numgc,dengc);
numg=[70];deng=[1 7 10 0]; sysg=tf(numg,deng); -4-sysa=series(sysgc,sysg);
sys=feedback(sysa,[1]);
(y,T]=isim(sys,u,t); _____
plot(T,y,t,u,‘—'),grid
х1аЬе!(‘Время(с)’), ylabel(‘y(t)’)
а = 0.6 и К = 70
Моделирование реакции
Устойчивость систем, описываемых переменными состояния. Обратимся теперь к анализу устойчивости систем, представленных моделью в переменных состояния. Предположим, что мы имеем дело с системой, описываемой уравнением (6.22). Ее устойчивость можно определить по характеристическому уравнению, которое записывается через матрицу А:
det(.vl - А) = 0 .
(6.32)
6.6. Анализ устойчивости с помощью MATLAB
331
Левая часть этого уравнения является полиномом от я. Если все корни характеристического уравнения имеют отрицательные действительный части, т. е. Re s, < 0, то система устойчива.
Если модель системы представлена в переменных состояния, то прежде всего необходимо найти ее характеристический полином. Это можно сделать несколькими способами. Один из них предполагает раскрытие определителя (si — А) вручную. После этого можно либо вычислить корни характеристического уравнения с помощью функции MATLAB roots, либо использовать критерий Рауса-Гурвица, чтобы установить, имеются ли корни в правой полуплоскости. К сожалению, ручные вычисления могут вызвать затруднения, особенно при большой размерности матрицы А. Избежать подобных неприятностей можно, если прибегнуть к помощи MATLAB.
Характеристическое уравнение можно получить с помощью функции poly, рассмотренной в разделе 2.10. Напомним, что эта функция позволяет образовать полином по вектору его корней. Ее также можно использовать для вычисления характеристического уравнения матрицы А, как показано на рис. 6.18, где матрица А задана в виде
-8 -16 -6
о о
1 о
0
а в результате вычислений получен полином
s3 + 8s2 + 16s + 6 .
Если А — матрица размерности и х и, то функция poly(A) возвращает вектор-строку из п + 1 элементов, являющихся коэффициентами характеристического уравнения.
Рис. 6.18
Вычисление
характеристического полинома матрицы А с помощью функции poly
332
Глава 6. Устойчивость линейных систем с обратной связью
Пример 6.11. Определение области устойчивости в случае неустойчивого объекта
На рис. 6.19 изображена система управления реактивным самолетом. Предположим, что z > 0 и р > 0. В разомкнутом состоянии система неустойчива, т. к. ее характеристическое уравнение имеет вид:
s(s - l)(s + р) = s[j2 + (р - l)s -р] = 0 .
Рис. 6.19. Система управления реактивным самолетом
Заметим, что поскольку один член в квадратных скобках является отрицательным, то характеристическое уравнение имеет по крайней мере один корень в правой полуплоскости. Характеристическое уравнение замкнутой системы имеет вид:
? + (р -1)? + (К-p)s + Kz = 0 .
Определим область устойчивости в пространстве параметров К, р и г. Составим таблицу Рауса:
/ 1 (К-р>>
S2 (/? — !) Kz
sl
s°
b2 Kz,
где
, _ (p-l)(K-p)-Kz
d2----------------
p-1
Согласно критерию Рауса-Гурвица, мы должны потребовать выполнения условий Kz > 0 и р > 1. Полагая Ь2 = 0, получим:
(р - l)(K-p) — Kz = К[(р — 1) - z] -р(р - 1) = 0 . Следовательно, должно выполняться условие:
к> Р(Р~1) (p-l)-z
(6.33)
Рассмотрим три случая:
1. z > (р - 1). Т. к. р > 0, то любое значение К > 0 будет удовлетворять условиям устойчивости.
2. z=(p-l). Не существует таких К, (0 < К< от), при которых система была бы устойчива.
3. z < (р - 1). При заданных р и z существует значение К. (0 < К < от), удовлетворяющее условию устойчивости (6.33).
Условия устойчивости можно изобразить графически. На рис. 6.20 приведен скрипт MATLAB, позволяющий построить границу устойчивости в трехмерном пространстве. В скрипте использована функция mesh для построения трехмерной поверхности и функция meshgrid для вычисления массивов данных, входных для mesh.
На рис. 6.21 приведена трехмерная диаграмма для определения области устойчивости в координатах К, р и z.
6.7. Пример синтеза с продолжением: система чтения информации с диска 333
Рис. 6.20
Скрипт MATLAB для определения области устойчивости
% Определение области устойчивости
% системы управления реактивным
% самолетом в трехмерном пространстве %
[p,z]=meshgrid(1.2:0.2:10,0.1:0.2:10); ч----
к=р.*(Р-1 )-/(р-1 -z);-<—------
Область значений р и z для построения сетки
Рис. 6.21
Г раница
устойчивости
в трехмерном
пространстве
mesh(p,z,k)^
Поверхность устойчивости
Построение трехмерной диаграммы
6.7. Пример синтеза с продолжением: система чтения информации с диска
□ В разделе 5.13 в задаче синтеза системы управления положением считывающей головки мы занимались подбором коэффициента Ка. Теперь мы займемся анализом устойчивости этой системы в зависимости от параметра Ка и изменим конфигурацию системы, как это предусмотрено шагом 4 процедуры синтеза (см. рис. 5.42).
Рассмотрим систему, изображенную на рис. 6.22. Это та же самая система с моделью двигателя и нагрузки, с которой мы имели дело в главе 5, за исключением того, что теперь в нее добавлен датчик обратной связи по скорости. Сначала рассмотрим случай, когда ключ разомкнут. Тогда передаточная функция замкнутой системы будет иметь вид:
Г(*) = КаС^2{з)
R(s) l+KaGl(Sy32(s)’
где
z ч 5000 G. (s) =-----
s+1000
и G2(s) =---------.
.s(s+20)
334
Глава 6. Устойчивость линейных систем с обратной связью
Рис. 6.22. Замкнутая система управления положением считывающей головки с возможностью реализации обратной связи по скорости
Характеристическое уравнение системы:
s(s + 20)(s + 1000) + 5000Л„ = 0 ,
(6-35)
или
s3 + 1020? + 20000s + 5000Х„ = 0 . Составим таблицу Рауса:
s3 1 20000
s2 1020 5000Х„
s'
s° 5000Хи ,
где
, 20000-1020-5000Х„
£>----------------------
1020
Случай fej = 0 соответствует нахождению системы на границе устойчивости, при этом Ка = 4080. Вспомогательное уравнение имеет вид:
1020s2 + 5000 4080 = 0 ,
откуда следует, что на мнимой оси находятся корни s = ±/141,4.
Чтобы система была устойчива, должно выполняться условие Ка < 4080.
Теперь введем обратную связь по скорости, замкнув ключ на рис. 6.22. Передаточная функция замкнутой системы примет вид:
Ffr) =X„G,(s)G2(s)
7?(s)
поскольку обратная связь теперь представлена фактором (1 + X^s), как изображено на рис. 6.23.
Запишем характеристическое уравнение:
1 + [XflG1(s)G2(s)](l + K1S) = 0 ,
или
s(s + 20)(s + 1000) + 5000ХД1 + X,s) = 0 .
6.7. Пример синтеза с продолжением: система чтения информации с диска 335
D(s)
Y(s)
Рис. 6.23. Эквивалентная система с обратной связью по скорости (ключ замкнут)
Отсюда имеем:
? + 1020? + (20000 + 5000^05 + 5000А„ = 0 . Составим таблицу Рауса:
? 1 (20000+ 5000КаКх)
s2 1020 5000Ка
sl Ьх
s° 5000Л„ ,
где
, (20000+5000АоА.)-1020-5000А„
ь, =-----------------------------.
1020
Чтобы обеспечить устойчивость системы, параметры Ка и Кх надо выбрать так, чтобы было Ь\ > 0, где Ка > 0. На рис. 6.24 приведена реакция системы, рассчитанная с помощью MATLAB при Кх = 0,05 и Ки = 100. Время установления (по критерию 2%) приблизительно равно 260 мс, а перерегулирование отсутствует. Показатели качества системы приведены в табл. 6.2. Требования, предъявляемые к качеству системы, практически удовлетворены, однако требуется некоторая подгонка коэффициента Кх, чтобы добиться желаемого времени установления 250 мс.
Таблица 6.2. Показатели качества системы управления положением считывающей головки при наличии обратной связи по скорости
Показатель качества Желаемое значение Действительное значение
Относительное к. со/ Менее 5% перерегулирование Время установления Менее 250 мс Максимум реакции Менее 5 . 1()_3 на единичное возмущение 0% 260 мс 2 10-’
336
Глава 6. Устойчивость линейных систем с обратной связью
Рис. 6.24
Переходная характеристика системы с обратной связью по скорости, (а) Скрипт MATLAB, (б) Реакция системы при Кд = 100 и Ку = 0,05
а)
Ка=100; К1=0.05; ◄---------------------------
ng1=[5000]; dg1=[1 1000]; sys1=tf(ng1,dg1);
ng2=[1J; dg2=[1 20 0]; sys2=tf(ng2,dg2);
nc=[K1 1]; dc=[0 1];sysc=tf(nc,dc);
sysO=series(Ka*sys1 ,sys2);
sys=feedback(sysO,sysc); sys=minreal(sys); t=[0:0.001:0.5]; step(sys.t); ylabel('y(t)’),xlabel(‘BpeMa (c)‘),grid
Задание коэффициентов X, и Ka
б)
6.8. Резюме
В этой главе мы познакомились с понятием устойчивости систем управления с обратной связью. Устойчивая система была определена как система, обладающая ограниченной реакцией на входной сигнал. Также было показано, что устойчивость системы непосредственно связана с расположением полюсов ее передаточной функции на s-плоскости.
Был рассмотрен и проиллюстрирован примерами критерий устойчивости Рауса—Гурвица. Было введено понятие относительной устойчивости, также связанное с расположением на s-плоскости полюсов передаточной функции системы. Рассматривался метод анализа устойчивости систем, представленных моделью в переменных состояния.
Упражнения
У-6. 1. Система имеет характеристическое уравнение s3 + 3Ks 2 + (2 + K)s + 5 = 0. Определите диапазон значений К, при которых система является устойчивой.
Отеет\ К > 0,63.
У-6.2. Система имеет характеристическое уравнение s3 + 9s2 + 26s + 24 = 0. С помощью критерия Рауса-Гурвица покажите, что система устойчива.
У-6.3. Найдите корни характеристического уравнения s4 + 9,5s3 + 30,5s2 + 37s + 12 = 0 .
У-6.4. На рис. 6.4(У) изображена структурная схема системы управления. Определите значения коэффициента К, при которых система будет устойчива.
Ответ'. 0 < К < 1,5 .
Упражнения
337
Рис. 6.4 (У) Система управления с параллельными каналами в прямой цепи
B(s)
Y(s)
У-6.5. Разомкнутый контур системы с обратной связью имеет передаточную функцию
К
GH(s) =
(s + l)(s + 3)(s + 6)
где К = 20. Вычислите корни характеристического уравнения замкнутой системы.
У-6.6. Для упражнения У-6.5 определите значение К, при котором два корня будут находиться на мнимой оси. Вычислите значения всех трех корней.
Ответ: s = —10, + j'5,2.
У-6.7. Разомкнутый контур системы с отрицательной обратной связью имеет передаточную функцию
GH(s)=K(S+2) .
s(s-l)
(а) Определите значение коэффициента К, при котором коэффициент £ в замкнутой системе будет равен 0,707.
(б) Определите значение К, при котором два полюса замкнутой системы будут находиться на мнимой оси.
У-6.8. Конструкторами создан небольшой скоростной истребитель с вертикальным взлетом, невидимый для радаров (известный как Стеле). Управление таким самолетом осуществляется с помощью реактивных двигателей с поворачивающимися соплами. На рис. 6.8(У) изображена система управления направлением полета самолета. Определите максимально допустимое значение коэффициента К, исходя из условия устойчивости замкнутой системы.
У-6.9. Дано характеристическое уравнение системы:
? + 3? + (К + l)s + 4 = 0 .
Определите диапазон значений К. при которых система устойчива. Ответ: К < 1/3.
У-6.10. Для сохранения равновесия каждый человек использует органы зрения и слуха. Наша систе-
ма ориентации позволяет нам сидеть или поддерживать вертикальное положение даже во время движения. Эта система действует главным образом на основе информации, принимаемой внутренним ухом, где полукружные каналы реагируют на угловое ускорение, а отолиты — на линейное ускорение. Однако измерение этих ускорений обязательно должно быть поддержано визуальной информацией. Попытайтесь проделать следующий эксперимент: (а) Поставьте одну ногу впереди другой в одну линию, а согнутые в локтях руки поставьте на бедра, (б) Закройте глаза. Не ощущаете ли вы, что начинаете медленно раскачиваться со все увеличивающейся амплитудой, пока, наконец, совсем не потеряете равновесие? Является ли ваше исходное положение устойчивым, если вы используете зрительный аппарат или, наоборот, выключаете его из действия?
У-6.11. Система имеет передаточную функцию
/(а) 24(5+1)
A(s) s4 + 6s3 + 2s1 + s + 3
Рис. 6.8 (У) Система управления направлением полета самолета
338
Глава 6, Устойчивость линейных систем с обратной связью
Определите установившуюся ошибку при единичном ступенчатом входном сигнале. Является ли система устойчивой?
У-6.12. В тяжелой и легкой промышленности все более широкое применение находит магнитная (бесконтактная) подвеска роторов электрических машин. Матричное дифференциальное уравнение системы магнитной подвески имеет вид:
О 1 О
х= -3 -1 Ох,
-2 -1 О
где х7 = [>>, dyldt. /], у — величина зазора, i — ток электромагнита. Определите, является ли система устойчивой.
Ответ: система устойчива.
У-6.13. Система имеет характеристическое уравнение
q(s) = s6 + 9? + 31,25s4 + 61.25? + 67,75? + 14.75s +15 = 0.
(а) Определите, устойчива ли система, воспользовавшись критерием Рауса-Гурвица, (б) Найдите корни характеристического уравнения.
Ответ: (а) система находится на границе устойчивости;
(б) s = -3; -4; -1 ± 2j; ± 0,5 j.
У-6.14. Система имеет характеристическое уравнение
q(s) = ? + 9s3 + 45s2 + 87s + 50 = 0 .
(а) Определите, устойчива ли система, воспользовавшись критерием Рауса-Гурвица, (б) Найдите корни характеристического уравнения.
У-6.15. Модель системы в переменных состояния задана матрицей
А = ‘ 0 1 -1 -6-11 6 -6 -И 5
(а) Получите характеристическое уравнение системы, (б) Определите, является ли система устойчивой, (в) Найдите корни характеристического уравнения.
Ответ: (a) q(s) = s3 + 6s2 + 1 Is + 6 = 0.
У-6.16. Система имеет характеристическое уравнение
q(s) = ? + 20s2 + 5s + 100 = 0.
(а) Определите, устойчива ли система, воспользовавшись критерием Рауса-Гурвица, (б) Найдите корни характеристического уравнения.
У-6.17. Определите, устойчива или неустойчива каждая из систем, заданных своим характеристическим уравнением:
(а) ? - 4s2 + 6s + 100 = 0;
(б) s4 - 6s3 - ? - 17s - 6 = 0;
(в) ? + 6s + 3 = 0.
У-6.18. Найдите корни следующих уравнений:
(а) ? + 10,4s2 + 36,2s + 40,8 = 0;
(б) s3 + 9s2 + 27s + 27 = 0 .
У-6.19. Система имеет характеристическое уравнение
q(s) = ? + 10s2 + 29s + К = 0 .
Сдвиньте ось ординат вправо на 2 путем замены s = s„ - 2 и определите значение К, при котором комплексные корни будут равны s = -2 + j.
У-6.20. Система имеет передаточную функцию 7(s) = l(s)//?(s) = 1/s. (а) Является ли система устойчивой? (б) Определите реакцию системы у(/), если rW — единичная ступенчатая функция.
Задачи
339
У-6.21. Система описывается уравнением (6.22), где
О 1 О
А= О О 1
-1 -К -2
Определите диапазон значений К, при которых система устойчива.
Задачи
3-6.1. С помощью критерия Рауса-Гурвица исследуйте устойчивость систем со следующими характеристическими полиномами:
(a) s1 + 5s + 2;
(б) s3 + 4s2 + 6s + 6;
(в) s3 + 2s2 - 4s + 20;
(г) s4 + s3 + 2s2 + 10s + 8;
(д) s4 + s3 + 3s2 + 2s + K\
(e) s3 + s4 + 2s3 + s + 5;
(ж) s5 + s4 + 2s3 + s” + s + K.
Определите число корней (если таковые имеются), расположенных в правой полуплоскости. При наличии в полиноме параметра К определите диапазон значений К, при которых система устойчива.
3-6.2. В задаче 4.5 анализировалась система управления антенной и было установлено, что для уменьшения влияния возмущений (порывов ветра) коэффициент усиления магнитного усилителя Ка должен быть как можно больше, (а) Определите предельно допустимое значение этого коэффициента, исходя из соображений устойчивости системы, (б) Система должна обладать временем установления, равным 1,5 с. Используя сдвиг оси ординат и критерий Рауса-Гурвица, определите значение Ка, удовлетворяющее этому условию. Предположите, что переходная характеристика в основном определяется комплексными полюсами замкнутой системы. (Справедливо ли в данном случае подобное допущение?)
3-6.3. Одним из наиболее важных применений промышленных роботов является дуговая сварка. В большинстве ситуаций неопределенность размеров деталей, геометрии стыка и самого сварочного процесса требует применения специальных датчиков для обеспечения качества сварки. Некоторые роботы оснащены системой технического зрения, с помощью которой измеряется геометрия пудлинга расплавляемого металла. Подобная система изображена на рис. 6.3(3). Эта система обеспечивает постоянную скорость движения сварочного стержня вдоль шва. (а) Определите максимально допустимое значение коэффициента К, исходя из соображений устойчивости системы, (б) Выбрав значение К. в 2 раза меньшее найденного в п. (а), определите корни характеристического уравнения, (в) При значении К из п. (б) определите величину перерегулирования в случае ступенчатого входного сигнала.
Заданный диаметр
Диаметр пудлинга
Рис. 6.3 (3). Система управления сваркой
340
Глава 6, Устойчивость линейных систем с обратной связью
Рис. 6.4 (3). Система с обратной связью
3-6.4. На рис.6.4(3) изображена система с обратной связью, в которой передаточные функции соответственно имеют вид: G(s) = ^(s+40) —L_
s(s+10) s+20
(а) Определите предельно допустимое значение коэффициента К. исходя из соображений устойчивости системы.
(б) При коэффициенте К, найденном в п. (а), при котором система находится на границе устойчивости, определите значения мнимых корней, (в) Уменьшите коэффициент К, найденный в п. (а), в 2 раза и определите относительную устойчивость системы (1) путем сдвига оси ординат и применением критерия Рауса-Гурвица и (2) путем определения положения полюсов. Покажите. что полюсы расположены между —1 и -2.
3-6.5. Определите относительную устойчивость систем, заданных своими характеристическими уравнениями, путем (1) сдвига оси ординат и применения критерия Рауса-Гурвица и (2) путем определения положения комплексных корней на s-плоскости: (a) s3 + 3s2 + 4s + 2 = 0;
(б) s4 + 9s3 + 30s2 + 42s + 20 = 0;
(в) s3 + 19s2 + 110s+ 200 = 0.
3-6.6. На рис. 6.6(3) изображена система с единичной обратной связью. Определите относительную устойчивость сис- jR(s) темы по положению комплексных полюсов на s-плоскости для следующих случаев: . . , 65+ 33s
(а) 6(л) = : s (s + 9) 24
G(s)
Рис. 6.6 (3). Система с единичной обратной связью
Y(s)
(б) G(s) + 10s2 + 35s + 50) ’ (b)G(s>3(*+4)(^-
s(s + 5)
3-6.7. Линейная модель фазового детектора (контура синхронизации фазы) может быть представлена в виде рис. 6.7(3). Устройства синхронизации фазы проектируются с целью поддержания нулевой разности фаз между входным несущим сигналом и сигналом местного генератора, управляемого напряжением. Подобные устройства применяются в цветном телевидении, в системах слежения за ракетами и в космической телеметрии. В частном случае фильтр имеет передаточную функцию
F(s) = 10(*+10).
(s + l)(s + 100)
Требуется минимизировать установившуюся ошибку при изменении фазы входного сигнала по линейному закону.
Рис. 6.7 (3). Система синхронизации фазы
Задачи
341
(а) Определите предельно допустимое значение коэффициента Kv = KJC, исходя из условия устойчивости системы, (б) Считается приемлемым, если установившаяся ошибка будет равна 1° при скорости изменения входного сигнала 100 рад/с. Определите положение полюсов системы при соответствующем значении коэффициента Kv.
3-6.8. Весьма оригинальная система была спроектирована для управления скоростью движения инвалидного кресла на колесах. Такая система дает возможность людям, парализованным ниже шеи, передвигаться, находясь в моторизованном кресле. Структурная схема подобной системы изображена на рис. 6.8(3). Датчики скорости, закрепленные на головном уборе, формируют выходные сигналы, пропорциональные амплитуде движения головы. Датчики установлены под углами 90°, так что человек может отдать команду на движение вперед, назад, влево или вправо. Постоянные времени имеют типичные значения т, = 0,5 с, т3 = 1 с и т4 = 0,25 с.
(а) Определите предельно допустимое значение К = К}К2К3, исходя из условия устойчивости системы, (б) Если коэффициент К выбрать равным 1/3 от предельного значения, проверьте, возможно ли в этом случае обеспечить в системе время установления (по критерию 2%) меньше 4 с. (в) Найдите значение К. при котором время установления будет равно 4 с. Вычислите соответствующие этому коэффициенту корни характеристического уравнения.
Рис. 6.8 (3). Система управления движением инвалидного кресла
3-6.9. На рис. 6.9(3) изображена система управления скоростью ленты кассетного накопителя информации. (а) Определите предельно допустимое значение коэффициента К, исходя из соображений устойчивости системы, (б) Определите значение К, при котором в случае ступенчатого входного сигнала перерегулирование составит примерно 5%.
3-6.10. В производственных операциях, требующих точности, быстроты и разнообразия действий, могут быть использованы роботы. Система управления движением руки такого робота в разомкнутом состоянии имеет передаточную функцию
,,,,,,,, K(s+10)
G(s)H(s) =--------=--------
s(s + 3)(s2 + 4s+ 8)
(а) Определите значение К, при котором в замкнутой системе возникнут незатухающие колебания. (б) Вычислите корни характеристического уравнения замкнутой системы при значении К, найденном в п. (а).
3-6.11. Система управления с обратной связью имеет характеристическое уравнение
? + (1 + K)s2 + 10s + (5 + 15 А") = 0 ,
причем параметр К положителен. До какого значения можно увеличивать К, прежде чем система станет неустойчивой? Если коэффициент К будет равен этому значению, в системе возникнут незатухающие колебания. Определите частоту этих колебаний.
Рис. 6.9 (3)
Система управления скоростью ленты
J?(s)
342
Глава 6, Устойчивость линейных систем с обратной связью
3-6.12. Система имеет характеристическое уравнение
s6 + 2? + 9s4 + 16? + 24? + 32s + 16 = 0 .
Определите, является ли система устойчивой, и вычислите корни характеристического уравнения.
3-6.13. Проблема устойчивости системы мотоцикл-водитель является весьма актуальной, т. к. многие гоночные машины трудно поддаются управлению. При построении модели такой системы надо учитывать характеристики как самой машины, так и ее водителя. В разомкнутом состоянии эту систему можно представить передаточной функцией [см. рис. 6.4(3)]
K(s2 + 30s +1125)
Gtf(s) = -------, , -
s(s+ 20)(s2+ 10s+ 125)(?+ 60s + 3400)
(а) Аппроксимируйте систему более простой моделью, пренебрегая полиномом в числителе (нулями) и сомножителем (s2 + 60s + 3400) в знаменателе, и определите диапазон значений К. при которых замкнутая система будет устойчива.
(б) Определите действительный диапазон значений К. при которых система будет устойчива, учитывая все нули и полюсы передаточной функции.
3-6.14. Система имеет передаточную функцию
T(s) = -5----------.
? + 5? + 2s+6
(а) Определите, устойчива ли система, (б) Вычислите корни характеристического уравнения, (в) Постройте график реакции системы на единичный ступенчатый входной сигнал.
3-6.15. 16 июля 1993 г. в 70-этажном здании Ландмарк Тауэр в Йокогаме был введен в эксплуатацию лифт, развивающий максимальную скорость 45 км/ч. Он был признан самым быстрым из всех существующих в мире лифтов. Чтобы достичь такой скорости, нс вызывая у пассажиров неприятных ощущений, лифт ускоряется в течение несколько большего времени, чем это технически возможно. Двигаясь вверх, он достигает полной скорости только к 27-му этажу; спустя еще 15 этажей, он начинает тормозиться. В результате его ускорение почти равно ускорению, развиваемому лифтами других небоскребов — чуть менее одной десятой ускорения силы тяжести.
Чтобы сделать лифт безопасным и комфортабельным, были проявлены чудеса изобретательности. Были разработаны специальные керамические тормоза, т. к. стальные просто расплавились бы. Управляемые с помощью компьютера системы обеспечивали гашение вибраций. Конструкция лифта имела обтекаемую форму, чтобы уменьшить сопротивление воздуха во время движения. На рис. 6.15(3) приведена система управления вертикальным положением лифта. Определите диапазон значений К, при которых система устойчива.
3-6.16. Рассмотрите ситуацию с кроликами и лисами в Австралии. Число кроликов равно х(, и если бы не было хищников, то увеличивалось бы до бесконечности (если, конечно, не исчезнут источники пищи), так что Xj = kxv Однако на континенте существуют и лисы, поэтому можно считать, что х, = кх} - ах2, гдех, — число лис. Далее, лисам, чтобы существовать, необходимо наличие кроликов, поэтому х2 = —hx2 + bxv Определите, является ли система устойчивой, и, следовательно, при t —> оо придет к состоянию х 1 (Г) = х2(0 = 0. Каким должно быть соотношение между a, b, h и к, чтобы система была устойчивой? Что будет, если к больше, чем Л?
Рис. 6.15 (3)
Система управления положением кабины лифта
Задачи повышенной сложности
343
Рис. 6.17 (3) Система управления вертикальным взлетом самолета
3-6.17. Самолеты с вертикальным взлетом и посадкой конструируются специально для того, чтобы они могли использовать небольшие аэропорты, а в воздухе летать как обычно. Вертикальный взлет самолета напоминает старт ракеты, поэтому объект управления объективно является неустойчивым (см. пример 3.3, где рассматривалось поведение перевернутого маятника). В системе управления самолетом, изображенной на рис. 6.17(3), используются реактивные двигатели с регулируемым вектором тяги, (а) Определите диапазон значений К, при которых система устойчива, (б) Определите значение К. при котором система находится на границе устойчивости, и вычислите корни характеристического уравнения, соответствующие этому коэффициенту.
3-6.18. На рис. 6.18(3), (а) изображен самолет с вертикальным взлетом, который обеспечивается четырьмя двигателями, вращающимися вокруг горизонтальной оси. Система управления высотой подъема самолета приведена на рис. 6.18(3), (б).
(а) Определите, является ли система устойчивой при К = 1 .
(б) Считая К > 0, определите диапазон значений К, при которых система устойчива.
Рис. 6.18 (3)
(а) Самолет с вертикальным взлетом.
(б) Система управления
б)
7?(s)
Задачи повышенной сложности
П-6.1. Система телеуправления включает в себя человека-оператора и удаленный объект управления. В простейшем случае такая система работает по принципу однонаправленной связи от оператора к объекту и располагает ограниченными возможностями обратной связи. В более сложном варианте реализуется двусторонний обмен информацией между человеком и объек-
344
Глава 6, Устойчивость линейных систем с обратной связью
том управления, за счет чего улучшается качество функционирования системы. Например, при дистанционном управлении роботом бывает полезно обратную связь по положению дополнить каналом обратной связи по усилию. Характеристическое уравнение системы телеуправления, изображенной на рис. 6.1(П), имеет вид:
s4 + 20? + Krs2 + 4s + К, = 0,
Команды оператора
Человек -оператор
Обратная связь
Удаленный объект управления
Рис. 6.1 (П). Модель системы телеуправления
где Kt и К2 — коэффициенты соответствующих обратных связей. Определите и представьте графически область устойчивости этой системы в плоскости параметров Kt и К2.
Пилот
Самолет
Рис. 6.2 (П). Система управления горизонтальным положением самолета при посадке на палубу авианосца
П-6.2. Рассмотрим ситуацию с посадкой самолета на палубу авианосца. Пилот имеет три основные задачи. Во-первых, он должен обеспечить заход на посадку точно по центру посадочной полосы. Во-вторых, он должен выдерживать правильную глиссаду и, в-третьих, поддерживать правильную скорость. На рис. 6.2(П) приведена модель системы управления горизонтальным положением самолета. Определите диапазон устойчивости системы по параметру К > 0.
П-6.3. На рис. 6.3(П) изображена система управления. Требуется, чтобы система была устойчива и установившаяся ошибка при единичном ступенчатом входном сигнале не превышала 0,05 (5%). (а) Определите диапазон значений параметра а, удовлетворяющий ограничению на величину ошибки, (б) Определите диапазон значений а, удовлетворяющий условию устойчивости. (в) Выберите значение а, удовлетворяющее обоим требованиям.
Рис. 6.3 (П)
(s + а)
J?(s)
s3 + (1 + а)в2+ (а - l)s + (1 - а)
Y(s)
П-6.4. На рис. 6.4(П) изображена линия разлива жидкости в бутылки, в которой используется червячный подающий механизм. Точное значение скорости ленты поддерживается за счет тахометрической обратной связи. Определите и представьте графически область устойчивости системы в плоскости параметровКпр.
Задачи на синтез систем
СС-6.1. В системе управления приводом скользящей части стола металлообрабатывающего станка □ (см. задачу СС-5.1) регулятор был представлен обычным усилителем. Определите, до каких пор можно увеличивать коэффициент Ка, прежде чем система станет неустойчивой.
Задачи на синтез систем
345
Регулятор
Наполнение бутылок
Рис. 6.4 (П) Система управления скоростью ленты на линии разлива жидкости в бутылки.
(а) Общий вид. ((5) Структурная схема
1ахометрическая обратная связь
Направление
Движения
Рис. 6.1 (С) Система управления зажиганием автомобильного двигателя
С-6.1. Система управления зажиганием автомобильного двигателя должна нормально работать в широком диапазоне изменения параметров. Структурная схема такой системы изображена на рис. 6.1 (С), где выбору подлежит коэффициент усиления регулятора К. Параметрр для многих автомобилей равен 2, но для машин высокого класса он может равняться нулю. Выберите такой коэффициент К, при котором система будет устойчива в любом из указанных случаев.
С-6.2. Автоматический самоходный аппарат для исследования поверхности Марса можно представить структурной схемой на рис. 6.2(C). Аппарат имеет два рулевых колеса, расположенных спереди и сзади, а по условиям синтеза H(s) = Ks + 1. Определите (а) диапазон значений К. при которых система устойчива, (б) значение К, при котором один корень характеристического уравнения будет равен j = -5, и (в) значения двух остальных корней при коэффициенте К, найденном в п. (б), (г) Определите реакцию системы на ступенчатый входной сигнал при коэффициенте К, найденном в п. (б).
346
Глава 6. Устойчивость линейных систем с обратной связью
Рис. 6.2 (С)
Система управления движением самоходного аппарата
С-6.3. Прямая цепь системы с единичной отрицательной обратной связью имеет передаточную функцию
C(s) =----Х(5+2)— ,
s(l + ts)(1 + 2s)
где выбору подлежат два параметра, (а) Определите и представьте графически область устойчивости системы в плоскости этих параметров, (б) Выберите такие значения т и К, при которых в случае линейного входного сигнала установившаяся ошибка не превысит 25% от величины этого сигнала, (в) При параметрах т и К, выбранных в п. (б), определите относительное перерегулирование реакции системы на ступенчатый входной сигнал.
Рис. 6.4 (С) Система управления положением космического челнока
2?(s)
С-6.4. На рис. 6.4(C) изображена система управления положением космического челнока, (а) Определите и представьте графически область устойчивости системы в плоскости параметров К и т. (б) Выберите такие значения параметров, чтобы при линейном входном сигнале установившаяся ошибка не превышала 10% от величины входного сигнала, (в) При параметрах, выбранных в п. (б), определите относительное перерегулирование реакции системы на ступенчатый входной сигнал.
Рис. 6.5 (С). Система управления дорожным движением
С-6.5. Система управления дорожным движением, изображенная на рис. 6.5(C). предназначена для обеспечения определенной дистанции между движущимися транспортными средствами, (а) Определите диапазон значений К, при которых система устойчива, (б) Если Кт есть максимальное значение К, при котором корни характеристического уравнения оказываются на мнимой оси, то примите К - Kn/N, где 6 < Д' < 7. Требуется, чтобы время максимума переходной характеристики было менее 2 с, а перерегулирование не превышало 18%. Выберите соответствующее значение N.
С-6.6. На рис. 6.6(C). (а) показано, как с помощью робота можно управлять мотоциклом. Соответствующая структурная схема приведена на рис. 6.6(C), (б). Определите диапазон значений К, при которых система устойчива, если а । =g/h = 9, а, = V~lhc= 2,7 иа3 = Vlhc- 1,35. Предполагается, что мотоцикл движется с постоянной скоростью У= 2 м/с. Постоянная времени регулятора т = 0,2 с, а К > 0.
Задачи, решаемые с помощью MATLAB
347
Рис. 6.6 (С) (а) Мотоцикл, управляемый роботом.
(б) Структурная схема системы
а)
б) Z>(s)
Возмущение
Задачи, решаемые с помощью MATLAB
М-6.1. Найдите корни характеристических уравнений:
(a) q(s) = s3 + 3s2 + 5s + 7 = 0;
(б) q(s) = s4 + 3s3 + 4s2 + 4s +10 = 0;
(в) q(s) = s4 + 2s2 +1 = 0.
М-6.2. Рассмотрите систему с единичной отрицательной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
G(s) =
K(s2-s+Z) s + 2s + 1
С помощью MATLAB найдите корни характеристического уравнения замкнутой системы при К = 1, 2 и 5. При каких значениях К замкнутая система устойчива?
М-6.3. Система с единичной отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
G(s) = —--------------.
s3 + 4s2 + 6s + 10
С помощью MATLAB получите передаточную функцию замкнутой системы и покажите, что ее характеристическое уравнение имеет корни S] = -2,89 и s2 3 = -0,55 ± j'1.87.
М-6.4. Дана передаточная функция
T(s) = -т---з----т----5------
s5 + 2s4 + 2s3 + 4s2 + s + 2
(а) С помощью критерия Рауса-Гурвица определите, является ли система устойчивой. Если она неустойчива, то сколько полюсов находится в правой полуплоскости? (б) С помощью MATLAB вычислите полюсы T(s) и проверьте результат, полученный в п. (а), (в) Постройте график реакции системы на ступенчатый входной сигнал и обсудите результат.
348
Глава 6, Устойчивость линейных систем с обратной связью
Рис. 6.5 (М). Самолет с пилотом в контуре управления
Рис.6.6 (М)
Одноконтурная система управления с параметром К
Y(s)
М-6.5. При синтезе и анализе систем управления самолетами часто используется модель «бумажного пилота», которая включается в замкнутый контур. Структурная схема самолета с пилотом «в контуре» изображена на рис. 6.5(М). Вносимое пилотом запаздывание представлено параметром т. Для пилота с замедленной реакцией можно принять т = 0,5 с, а для пилота с более
быстрой реакцией т = 0,25 с. Остальные параметры модели пилота имеют следующие значе-
ния: /С = 1. Tj = 2 с. т, = 0.5 с. С помощью MATLAB вычислите полюсы замкнутой системы, соответствующие разным пилотам, и прокомментируйте результаты. Чему равно максимально допустимое время запаздывания пилота, при котором система еще остается устойчивой?
М-6.6. Рассмотрите систему с обратной связью, изображенную на рис. 6.6(М). Используя функцию for, составьте программу MATLAB, которая вычисляла бы полюсы замкнутой системы для
0 < К < 5 и строила диаграмму их расположения, помечая символом «х». С помощью критерия Рауса-Гурвица определите диапазон значений К, при которых система устойчива. Вычислите корни характеристического уравнения при значении К, минимально допустимом из соображе-
ний устойчивости.
М-6.7. Система представлена в переменных состояния следующими уравнениями:
у=[1 1 0]х.
(а) С помощью функции poly получите характеристическое уравнение системы, (б) Вычислите корни характеристического уравнения и определите, является ли система устойчивой (в) Изобразите графически реакцию системы y(t), если u(t) — единичное ступенчатое воздействие, а начальные условия — нулевые.
Ключевые термины и понятия
Вспомогательный полином. Выражение, образованное с помощью элементов строки, непосредственно предшествующей нулевой строке таблицы Рауса.
Критерий Рауса—Гурвица. Правило, позволяющее исследовать устойчивость системы путем анализа ее характеристического уравнения. Критерий утверждает, что число корней характеристического уравнения с положительной действительной частью равно числу изменений знака элементов первого столбца таблицы Рауса.
Относительная устойчивость. Свойство системы, оцениваемое величиной действительной части корней характеристического уравнения.
Устойчивая система. Динамическая система, обладающая ограниченной реакцией на ограниченный входной сигнал.
Устойчивость. Важнейшее свойство системы. Система является устойчивой, если все полюсы ее передаточной функции имеют отрицательные действительные части.
Глава 7
Метод корневого годографа
Обзор
В предыдущих главах мы выяснили, что качество системы с обратной связью тесно связано с положением на 5-плоскости корней характеристического уравнения. Мы также узнали, что желаемые показатели качества замкнутой системы управления можно обеспечить путём разумного выбора одного или нескольких параметров системы. Поэтому интересно выяснить, как будут перемещаться по 5-плоскости корни характеристического уравнения при изменении какого-либо параметра системы.
Положение корней на 5-плоскости можно определить графическим методом. Траектории корней при изменении одного параметра системы и образуют так называемый корневой годограф, являющийся эффективным средством анализа и синтеза систем управления. В этой главе мы рассмотрим практические приёмы построения корневого годографа как вручную, так и с помощью компьютера. Будет также показано, какую пользу может принести метод корневого годографа при синтезе широко распространенного на практике ПИД-ретулятора.
Мы покажем, что метод корневого годографа можно использовать и в тех случаях, когда варьируемыми являются два или три параметра системы. Подобная задача характерна для ситуации, когда в системе используется ПИД-регулятор, имеющий три настраиваемых параметра. Мы научимся определять степень чувствительности какого-либо корня к малому изменению параметра системы. Глава завершается примером синтеза с продолжением (система чтения информации с диска), где иллюстрируется применение метода корневого годографа к синтезу регулятора.
7.1. Введение
Относительная устойчивость и качество переходного режима замкнутой системы управления непосредственно связаны с положением корней ее характеристического уравнения на 5-плоскости. Чтобы обеспечить надлежащее расположение этих корней, часто необходима настройка одного или нескольких параметров системы. Поэтому имеет смысл исследовать, как перемещаются на 5-плоскости корни характеристического уравнения при изменении параметров системы; иначе говоря, представляют интерес траектории корней на 5-плоскости. Метод корневого годографа был предложен Эвансом в 1948 г. и впоследствии получил широкое распространение в инженерной практике. Он позволяет инженеру оценить чувствительность полюсов системы к изменению какого-либо параметра. Наибольшую пользу метод корневого годографа приносит в сочетании с критерием Рауса-Гурвица.
350
Глава 7. Метод корневого годографа
Метод корневого годографа является графическим, а сам годограф позволяет получить качественную информацию об устойчивости и динамических показателях системы. Он с одинаковым успехом применяется как к одноконтурным, так и к многоконтурным системам. Если положение корней характеристического уравнения почему-либо не устраивает проектировщика, то по корневому годографу он легко может определить, как необходимо изменить варьируемый параметр системы.
7.2 Понятие корневого годографа
Динамические свойства замкнутой системы управления определяются её передаточной функцией
= , (7.1)
А(5) q(s)
где p(s) и q(s) — полиномы относительно переменной s. Корни полинома q(s) определяют составляющие реакции системы. Для простой одноконтурной системы, изображённой на рис. 7.1, характеристическое уравнение имеет вид:
1 + KG(s) = 0, (7.2)
где К — варьируемый параметр. Корни характеристического уравнения системы в общем случае являются комплексными, поэтому (7.2) можно записать в ином виде:
|XG(s)| е ’ ^C(i) = -1 + jO. (7.3)
Следовательно, необходимо выполнение условий:
и
|XG(s)| = 1
argXG(s) = 180° ± £360°,
(7-4)
где к = 0, ±1, ±2, ±3,...
Корневой годограф — это траектории корней характеристического уравнения системы на s-плоскости при изменении какого-либо параметра системы.
На рис. 7.2 изображена простая система второго порядка, которая рассматривалась нами в предыдущих главах. Характеристическое уравнение имеет вид:
A(s) = l+KG(s) = 1+—^— = О,
s(s+2)
или
q(s) = s2 + 2s+K = s2 +2C,<£>ns+a2 =0.
(7.5)
Рис. 7.1
Замкнутая система управления с варьируемым параметром К
ОД
7.2 Понятие корневого годографа
351
Рис. 7.2
Система с единичной обратной связью и варьируемым параметром К
R(s)
Траектории корней при изменении К находятся из условии:
и
arg G(s) = ± 180°, ±540°,... (7.7)
Коэффициент К может изменяться от 0 до со. Для системы второго порядка корни её характеристического уравнения
Sl,s2=-^n±a„4^, (7-8)
причём известно, что при < 1 arccos С, = 0 . Как изображено графически на рис. 7.3, при £ < 1 траектории корней должны иметь вид вертикальной .линии, чтобы выполнялся угловой критерий (7.7). Например, как показано на рис. 7.4, для корня К arg---------------------
s(s+2)
= -arg31 -arg(.vt + 2) = -[(18О°-0)+0] = -18О°.
(7.9)
Угловой критерий выполняется в любой точке вертикальной линии, перпендикулярной отрезку действительной оси от 0 до —2 и проходящей через его середину. Значение К, соответствующее точке можно найти с помощью выражения (7.6):
Рис. 7.3. Корневой годограф системы второго порядка для Кв < А) < Лг
Рис. 7.4. Вычисление модуля и аргумента G (я) для точки при К = К\
352
Глава 7. Метод корневого годографа
откуда
К = hl |5i + 2|, (7.11)
где h| — модуль вектора, проведенного из начала координат в точку , a h + 2| — модуль вектора, начало которого находится в точке —2, а конец — в точке ду.
Для многоконтурной системы в разделе 2.7 применение формулы Мейсона к сигнальному графу дало результат:
N M^N
д(5)=1-Х4 + + ..., (7.12)
м=1 m,q
где LCJ есть коэффициент передачи q-ro контура. Следовательно, мы можем записать характеристический полином в виде:
q(s) = &(s) = 1 + F(s). (7.13)
Чтобы найти корни характеристического уравнения, приравняем (7.13) нулю:
1 + F(s) = 0. (7.14)
Последнее уравнение можно переписать в виде:
F(s) = - 1 + j'O , (7.15)
и корни характеристического уравнения должны удовлетворять этому соотношению.
В общем случае функцию F(s) можно представить в виде:
= K(s+zx )(s + z2)(5+Z3)....(5+ZH,)
(s + pl} (s + p2 )(s + p3 )• •. (s + pn)
Тогда амплитудный и угловой критерий для корневого годографа принимают вид: |^>1<|д+г;,||д+гф--. (7.16)
|s+Pil|s+p2l---
и
argF(s) =arg(s+ Zj ) + arg(s+z2 )+...-arg(s+ pt )-arg(s+ p2 )-... = 180° ± g360°,(7.17) где q — целое число. Амплитудный критерий (7.16) позволяет определить значение К, соответствующее определённому положению корня s1. Принадлежность точки .у j корневому годографу подтверждается, если выполняется условие (7.17). Все углы отсчитываются от горизонтальной линии против часовой стрелки.
Теперь на примере системы второго порядка, изображённой на рис. 7.5 (а), мы покажем, как с помощью корневого годографа можно исследовать влияние варьируемого параметра а на свойства системы. Для этого характеристическое уравнение необходимо привести к такому виду, чтобы параметр а входил множителем в числитель соответствующего слагаемого. В данном случае исходное характеристическое уравнение имеет вид:
l+KG(s) = l+ К =0, s(s+a)
или
s2 + as + К - 0.
Поделив это уравнение на (s2 + К), получим:
1+---—— = 0. (7.18)
s2 +К
7,3 Построение корневого годографа
353
Рис. 7.5. (а) Одноконтурная система, (б) Корневой годограф как функция параметра а
Для корня s, амплитудный критерий выполняется, если
=1 (7.19)
ki +*1
Угловой критерий имеет вид:
args, -arg(s1 + jjK )-arg(s1 -j^K ) = ±180°, ±540°,...
В принципе корневой годограф можно построить путём определения точек на s-плоскости, которые удовлетворяют угловому критерию. В следующем разделе мы опишем 12-этапную процедуру построения корневого годографа. На рис. 7.5 (б) изображён корневой годограф, соответствующий характеристическому уравнению (7.18). В частности, значение параметра а, соответствующее корню sb определяется из (7.19):
,, >-A'xil*.+л/*1 (720)
kil
Оба корня сходятся на действительной оси в точке s2, при этом реакция системы на ступенчатое воздействие является критически демпфированной. Корням s9 = о, соответствует значение параметра а, равное
а = 1^2 -7'У^1|р2 = °2 +к (72!)
^2 СТ2
где о2 находится как длина векторов на s-плоскости, т. е. о, = -JK.
При дальнейшем увеличении параметра а оба корня являются действительными и различными, один из них больше, чем о2, другой — меньше.
Вообще говоря, желательно как-то упорядочить процедуру построения корневого годографа, сведя её к последовательности отдельных операций. Этим мы займемся в следующем разделе.
7.3 Построение корневого годографа
Корни характеристического уравнения несут ценную информацию о поведении системы во времени. Здесь мы рассмотрим процедуру из двенадцати этапов, позволяющую быстро построить корневой годограф.
354
Глава 7. Метод корневого годографа
Этап 1: Записать характеристическое уравнение в виде
1 + F(s) = 0 (7.22)
и, если необходимо, модифицировать его так, чтобы варьируемый параметр К входил в уравнение как множитель:
1 + KP(s) = 0. (7.23)
Этап 2: Представить Pts') в виде дроби, используя полюсы и нули этой функции: м
1 + К -------= 0 . (7.24)
П<5+Л/)
/=1
Этап 3: Разместить полюсы и нули на 5-плоскости, отметив их выбранными условными обозначениями. Обычно представляют интерес траектории корней при изменении параметра Л от 0 до со. Из (7.24) мы имеем: и м
П(*+/’/)+кП(5+2>)=°- <7-25)
7 = 1 1=1
При К - 0 корни характеристического уравнения просто совпадают с полюсами P(s\ а при К = оо они совпадают с нулями P(s). Следовательно, при изменении К от 0 до оо траектории корней характеристического уравнения 1 +KP(s) = 0 начинаются в полюсах P(s) и заканчиваются в нулях P(s). У большинства функций P(s), с которыми мы будем иметь дело, некоторые нули располагаются в бесконечности на 5-плоскости. Это объясняется тем, что у этих функций P(s) полюсов больше, чем нулей. При п полюсах и М нулях, если п>М, м - Л/ветвей корневого годографа стремятся к п -Мнулям, расположенным в бесконечности.
Этап 4: Выделить отрезки действительной оси, которые принадлежат корневому годографу. Участки корневого годографа, совпадающие с действительной осью, всегда лежат слева от нечетного числа полюсов и нулей. Этот факт вытекает из анализа углового критерия (7.17). Все четыре первых этапа построения корневого годографа мы проиллюстрируем примером.
Пример 7.1. Система второго порядка
Одноконтурная система управления имеет следующее характеристическое уравнение (этап 1): 1 + GH (5) = 1 + A(O,5gtJ2 = о. (7.26)
5(0,255 + 1)
Этап 2: Передаточную функцию GH(s) перепишем с использованием её полюсов и нулей: 1+2Х’(5+2) _ о , (7.27)
5(5+ 4)
где варьируемый параметр представлен в виде явного множителя 2К . Для построения корневого годографа (этап 3) мы сначала поместим на действительную ось полюсы и нуль разомкнутой системы, как показано на рис. 7.6 (а). Наконец, заметим, что угловой критерий удовлетворяется на действительной оси между точками 0 и —4, т. к. аргумент полюсав начале координат равен 180°, а аргументы нуля и полюсар2 в точке 5 = -4 равны нулю. Корневой годограф начинается в полюсах и заканчивается в нулях, как показано на рис. 7.6 (б), причём направление возрастания параметра К отмечено стрелками. Заметим также, что поскольку ра-
7.3 Построение корневого годографа
355
Рис. 7.6. (а) Нуль и полюсы системы второго порядка,
(б) участки корневого годографа и (а) модули каждого вектора при корне а, зомкнутая система имеет два действительных полюса и один действительный нуль, то второй участок годографа заканчивается в нуле в минус бесконечности. Чтобы найти значение К, соответствующее определённому положению корней, воспользуемся амплитудным критерием (7.16). Например, если один из корней, s = .v, = - 1 , то мы имеем:
2^к, + 2|
|5)||У| + 4|
или
|-1||-1+4|_3 2|-1+2| 2’
(7.28)
Это значение можно также найти графически, как показано на рисунке 7.6 (в). При К = 3/2 второй корень располагается слева от полюса в точке -4 . Положение этого корня определяется графически: он находится в точке s = - 6 , как показано на рис. 7.6 (е).
Теперь перейдем к следующим этапам построения корневого годографа.
Этап 5: Определить число ветвей корневого годографа, SL. Поскольку корневой годограф начинается в полюсах и заканчивается в нулях передаточной функции разомкнутого контура, а число полюсов всегда больше или равно числу нулей, то число отдельных ветвей годографа равно числу полюсов. Так, корневой годограф на рис. 7.6 состоит из двух ветвей, поскольку система имеет два полюса и один нуль.
Этап 6: Корневой годограф должен быть симметричен относительно действительной оси, т. к. комплексные корни могут появляться только комплексно-сопряжёнными парами.
Этап 7: К нулям, расположенным в бесконечности, корни стремятся вдоль асимптот, проведенных из центра в точке под углами <р^. Если число конечных нулей функции P(s), п:, меньше числа её полюсов, пр, то А ветвей корневого годографа должны при К -> оо заканчиваться в нулях, расположенных в бесконечности (здесь N=np- и.). Асимптоты корневого годографа образуют А-лучевую звезду, центр которой находится на действительной оси. Координата центра определяется выражением:
л М
ст _ L полюсов P(s)-^ нулей P(s) _ J=l_______
А np~nz "р-”:
Углы наклона асимптот к действительной оси имеют значения:
<Рл = -^^-180, и -и.
д = 0, 1,2, ... ,(«/>-«--!). (7.30)
356
Глава 7, Метод корневого годографа
Это правило особенно полезно при определении примерного вида корневого годографа. Выражение (7.30) легко может быть получено из рассмотрения точки корневого годографа, расположенной на s-плоскости на большом расстоянии от конечных полюсов и нулей. Чистое изменение аргумента в этой точке равно 180°, потому что она принадлежит корневому годографу.
Конечные полюсы и нули функции Р($) находятся на большом расстоянии от этой удалённой точки, поэтому углы <р векторов, проведенных в неё из каждого полюса и нуля, одинаковы и, следовательно, собственный аргумент этой точки равен (р (пр - и,), где пр и п: есть соответственно число конечных полюсов и нулей. Таким образом, мы имеем:
<р(«р - л_) = 180°, или, что то же самое,
180°
<р=-------.
лр -п.
Произведя вычисления для всех возможных ветвей корневого годографа, мы получим формулу (7.30).
Центр симметрии прямолинейных асимптот, часто называемый центроидом, находится по характеристическому уравнению 1 + GH(s) = 0 (уравнение вида 7.24). При больших значениях s определяющую роль играют члены высшего порядка, поэтому характеристическое уравнение сводится к виду:
Однако при такой аппроксимации центр симметрии (п - М) асимптот находится в начале координат, s = 0. Лучшей аппроксимацией является представление характеристического уравнения в виде:
1 +-----
(s-о, ГМ
где центроид находится в точке иА.
Положение центроида определяется из рассмотрения первых двух членов уравнения (7.24), записанного в виде:
м TCPICs+z,)
/I
П<5+л) ./=1
2+. (дЛ/1+--.+^о)
(sn + +...+а0)
На основании выражения (6.5) можно записать:
Л/ п
ьм-\ = XZ' и ап-1 = Xpi-
,=1 7=1
Учитывая только два первых члена разложения функции P(s), имеем
1 + ---------—-------------= 0.
7.3 Построение корневого годографа
357
В свою очередь, уравнение
, К 1+--------
(з-аА у
с учетом первых двух членов принимает вид:
з”~м — (n-M)<3Asn~M~x
Приравнивая коэффициенты при sn~ м~ *, получим:
-1 - Ьм -О = - (и - М)оА, что эквивалентно выражению (7.29).
Например, для системы, изображённой на рис. 7.2, характеристическое уравнение имеет вид:
Поскольку пр - и. = 2, то следует ожидать, что две ветви корневого годографа будут заканчиваться в нулях, расположенных в бесконечности. Асимптоты корневого годографа имеют центр в точке
и составляют с действительной осью углы
(р^ = 90°, д = 0 и = 270°, q = 1.
Следовательно, легко можно построить корневой годограф, как это и было продемонстрировано на рис 7.3. Ниже мы ещё на одном примере покажем, как можно использовать асимптоты корневого годографа.
Пример 7.2. Система четвёртого порядка
Одноконтурная система с обратной связью имеет характеристическое уравнение
1 + G/7(5)=1+--K{S+ ° . (7.31)
ф + 2)(s + 4 )2
Найдём вид корневого годографа в зависимости от параметра К. Положение на 5-плоскости полюсов и нуля показано на рис. 7.7 (а). Участки корневого годографа, принадлежащие действительной оси, должны быть слева от нечётного числа полюсов и нулей; на рис. 7.7 (а) это показано жирными линиями. Центр асимптот находится в точке
_ (-2)+2(-4)-(-1) _ _9 _ _3
А 4-1 3
Поскольку пр - и. = 3, то мы имеем три асимптоты, расположенные под углами tpA = + 60°, q = 0 , Ча = 180°, <7=1, <рл = 300°, q = 2 .
Кроме этого, мы знаем, что ветви корневого годографа должны начинаться в полюсах, поэтому два корня начнут своё движение из кратного полюса в точке s = - 4 . Располагая асимптотами, мы можем изобразить вид корневого годографа, как это показано на рис. 7.7 (б). Точный вид годографа вблизи центроида сА при необходимости можно определить графически.
358
Глава 7. Метод корневого годографа
Рис. 7.7 Корневой годограф системы четвертого порядка
Участки корневого годографа
--Ж--
о-ж
-2 -1
Кратный
ПОЛЮС
«)
Продолжим рассмотрение этапов построения корневого годографа.
Этап 8: Определить точки, в которых корневой годограф пересекает мнимую ось (если такие точки имеются). Пересечение корневым годографом мнимой оси легко установить с помощью критерия Рауса-Гурвица.
Этап 9: Определить точки отрыва корневого годографа от действительной оси (если такие точки имеются). Точка отрыва корневого годографа от действительно оси — это то место, где сходятся несколько корней, как правило, два. На рис. 7.8 (а) показана точка отрыва для системы второго порядка, а на рис. 7.8 (6) — для частного случая системы четвёртого порядка. Согласно угловому критерию, касательные к корневому годографу в точке отрыва разделены углами, составляющими целую часть от 360°. Так, на рис. 7.8 (а) мы видим, что в точке отрыва угол между двумя ветвями корневого годографа составляет 180°, а на рис. 7.8 (б) четыре ветви разделены углами в 90°.
Точку отрыва на действительной оси можно определить графически или аналитически. Наиболее простой метод состоит в модификации характеристического уравнения так, чтобы варьируемый параметр К был выделен в одной части от знака равенства. Иначе говоря, характеристическое уравнение записывается в виде:
p{s) = К . (7.33)
Например, для системы с единичной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
(s+2)(s+4) ’
Рис. 7.8
Иллюстрация точки отрыва
(а) для системы второго порядка и (б) для системы четвертого порядка
7.3 Построение корневого годографа
359
характеристическое уравнение имеет вид:
1+G(s) = l+
К (з+ 2Хз+4)
= 0.
(734)
Это уравнение преобразуется к виду:
К = p(s) = - (s + 2)(s + 4) . (7.35)
Корневой годограф этой системы изображен на рис. 7.8 («). Мы ожидаем, что точка отрыва будет находиться вблизи з = а = - 3, поэтому в окрестностях этой точки построим график Хз)|Л = п, как это показано на рис. 7.9. В данном случае р(з) = 0 в полюсах з = - 2 и з - - 4. Г рафик Дз) симметричен относительно точки а, а его максимум имеет место при з = а = - 3, что соответствует точке отрыва.
Тот же результат можно получить аналитически путём нахождения максимума функции р(з) = К. этого необходимо приравнять нулю производную функции р(з) и найти корни полученного уравнения:
dK _ dp(s) ds ds
Уравнение (7.36) просто является аналитической интерпретацией графической процедуры, представленной на рис. 7.9, и оно даёт правильный результат только если его порядок меньше, чем общее количество полюсов и нулей (т. е. пр + и_- 1).
Доказательство (7.36) вытекает из рассмотрения характеристического уравнения 1+F(3) = 1+^^ = Q ЛГ(з)
которое можно переписать в виде:
Jf(s) + ХУ(з) = 0.
Придав параметру К малое приращение, получим:
Х(з) + (К + АХ)У(з) = 0.
Деление последнего уравнения наЛ(з) + KY(s) даёт: i+_^2^_=o. X(s)+K-Y(s)
(7.37)
(7.38)
Поскольку знаменатель дроби есть исходный характеристический полином, то в точке отрыва находится несколько корней, и
----— = С' . (7.39)
X(s)+KY(s) (s-s,)” (As,)"
Тогда (7.38) можно записать в виде:
1+ДКСц=о5 (7 40)
(Лз,)"
360
Глава 7. Метод корневого годографа
или, иначе:
АХ _ -(Ау)11"1 Ау ~ С,
Устремляя Ау к нулю, получим условие
^=0, ds
(7.41)
(7.42)
которое должно выполняться в точках отрыва.
Теперь рассмотрим частный случай, когда
G(5) =
К (s+2)(j+4)
Отсюда:
К = p(s) = -(s+2)(s + 4) = -(s2 +6у+8)
Дифференцируя p(s), имеем:
ds
(7-43)
(7.44)
откуда следует, что точка отрыва находится при s = - 3 . Далее мы рассмотрим более сложный пример, с помощью которого проиллюстрируем графический метод определения точки отрыва.
Пример 7.3. Система третьего порядка
На рис. 7.10 изображена система управления, характеристическое уравнение которой имеет вид:
1+ G(s)H(s) = 1 +
K(s+ 1) ф + 2)(s+ 3)
Рис. 7.10
Замкнутая система управления
(7.45)
Разность числа полюсов и нулей, пр - п. = 2, поэтому имеются две асимптоты под углами ± 90° с центром в точке сА=-2. Асимптоты и участки корневого годографа, принадлежащие действительной оси, показаны на рис. 7.11 (а). Точка отрыва находится между s=-2ns~ 3. Чтобы найти её точное положение, перепишем характеристическое уравнение и выделим параметр К:
ф + 2)(s + 3) + K(s + 1) = 0,
или
/ч -ф+2)(у+ 3)
p(s) =----------= к.
(7.46)
7.3 Построение корневого годографа
361
Рис. 7.11. Определение (а) асимптот и (6) точки отрыва
Результат вычисления p(s) при различных значениях s между s = -2 и s = -3 отражён в табл. 7.1 и представлен в виде графика на рис. 7.11 (б). Альтернативный способ заключается в дифференцировании выражения (7.46) и приравнивании производной нулю:
</f-s(s+2)(s+3H _ (s3 + 5s2 + 6s) - (s + l)(3s2 + 10s + 6) _
ds I s +1 J (s +1)2
ИЛИ
2s3 + 8s2 + 10s + 6 = 0 . (7.47)
Вещественный корень этого уравнения s = - 2.45 определяет максимальное значение p(s). Из этого примера очевидно, насколько эффективным является применение вычислений функции p(s) вблизи ожидаемой точки отрыва для определения её истинного положения.
Таблица 7.1
P(s) 0 +0.412 +0.420 +0.417 +0.390 0
s -2.00 -2.40 -2.45 -2.50 -2.60 -3.00
Этап 10: Используя угловой критерий, определить угол выхода корневого годографа из полюса и угол его входа в нуль. Угол выхода корневого годографа из полюса равен разности между суммой аргументов векторов, проведённых в данный полюс из всех остальных полюсов, и суммы аргументов векторов, проведённых в данный полюс из всех нулей, плюс угловой критерий +(2<? + 1)180°. То же самое справедливо для угла входа корневого годографа в нуль. Углы выхода и входа представляют интерес в случае комплексных полюсов и нулей, т. к. эта информация позволяет уточнить вид корневого годографа. Например, рассмотрим систему третьего порядка, передаточная функция которой в разомкнутом состоянии имеет вид:
F(s) = G(s)H(s) =---------------------- (7.48)
(s+p3 )(s- + 2^co„s+co")
На рис. 7.12 (а) показано расположение трёх полюсов и отмечены аргументы векторов, проведенных в комплексный полюср{. Сумма аргументов всех векторов для точки s,, находящейся на бесконечно малом расстоянии отpt, должна удовлетворять угловому критерию. Таким образом, учитывая, что 62 = 90°, мы имеем:
61 + е2 + е3 = е1 + 90° + е3 = 180°,
362
Глава 7. Метод корневого годографа
Рис. 7.12. Определение угла выхода: (а) проверка углового критерия в точке, находящейся на бесконечно малом расстоянии от Р\, и
(б) действительное направление выхода из полюса Р\
а это значит, что угол выхода из полюса рх равен
0! = 90° - 03,
как показано на рис. 7.12 (6). Угол выхода из полюса р2 отличается от 01 лишь знаком (минус), поскольку р{ и р2 являются комплексно-сопряжёнными. Другой пример определения угла выхода приведён на рис. 7.13. В данном случае угол выхода находится из выражения
0, - (01 + 03 + 90° ) = 180°.
Поскольку (02 - 03)=у, то угол выхода 01 = 90° + у.
Заключительные два этапа процедуры построения корневого годографа связаны с определением положения корней и значения параметра К„ соответствующего этому положению.
Этап 11: Определить положение корней s„ х = 1, 2,..., пр, которые удовлетворяют угловому критерию. Угловой критерий (см. выражение 7.17)
Рис. 7.13. Определение угла выхода
имеет вид:
arg P(s) = 180° ± <7360°, q = 1, 2, ...
Этап 12: Используя амплитудный критерий (7.16), определить значение параметра К„ соответствующее корню sv. Для корня амплитудный критерий имеет вид:
7.3 Построение корневого годографа
363
Теперь полезно собрать воедино все 12 этапов, связанных с построением корневого годографа, что и сделано в табл. 7.2, а затем проиллюстрировать их завершающим примером.
Таблица 7.2. 12 этапов построения корневого годографа
Этап
Уравнение или правило
1. Записать характеристическое уравнение так, чтобы варьируемый параметр К входил в него в виде множителя.
2. Записать P(s), используя пр полюсов и п-нулей этой функции.
1 + KP(s) = 0.
Г[(^+2,) 1+АГ--^--------= 0.
/ ।
3. Выбрав подходящие символы, отметить на 5-плоскости положения полюсов и нулей разомкнутой системы.
4. Отметить участки действительной оси, принадлежащие корневому годографу.
5. Определить число отдельных ветвей корневого годографа, SL.
6. Траектории корней симметричны относительно действительной оси.
7. К нулям, расположенным в бесконечности, корни стремятся вдоль асимптот с центром в точке oj. образующих с действительной осью углы <рд.
х — полюсы, О — нули, □ или Д — корни характеристического уравнения замкнутой системы. Траектории корней начинаются в полюсах и заканчиваются в нулях.
Эти участки расположены слева от нечетного числа полюсов и нулей.
SL = пр, если пр > п~, пр — число конечных полюсов. nz — число конечных нулей.
=-------------------------.
и,, - п.
180°. ч = 0,1, 2,...,(« - п.-1).
И/, - и.
8. С помощью критерия Рауса-Гурвица определить точки, в которых корневой годограф пересекает мнимую ось (если такие точки имеются).
9. Определить точки отрыва корневого годографа от действительной оси (если такие точки имеются).
10. С помощью углового критерия определить углы выхода корневого годографа из комплексных полюсов и углы входа в комплексные нули.
11. Определить положение корней, при котором выполняется угловой критерий.
12. Определить параметр К, соответствующий каждому корню •
См. раздел 6.2
а) Положить К = р(з);
б) Получить уравнение dp(s)/ds = 0;
в) Найти корни (б) или графически определить положение максимума p(s).
arg />(s)=180° ± 360° при з = р, или z, .
arg P(s) = 180° ± <у360° при корне
Г11(*+Pj}\
7=1
Пк*+г>)|
364
Глава 7, Метод корневого годографа
Пример 7.4. Система четвертого порядка
1. Построим корневой годограф для системы, имеющей характеристическое уравнение
1 + ~---- К ----------= °-
s4 + 12? + 64s2 + 128s-
где К — варьируемый параметр (К > 0).
2. Определив полюсы передаточной функции, запишем:
1 +----------—--------------= 0. (7.49)
s(s + 4)(s + 4 + J4)(s + 4-/4)
Параметр К будем менять от 0 до да. Заметим также, что система не имеет конечных нулей.
3. Отметим на s-плоскости положение полюсов, как показано на рис. 7.14 (а).
4. Участок корневого годографа, принадлежащий действительной оси. расположен между s = 0 и s = - 4.
5. Поскольку мы имеем 4 полюса (пр = 4), то корневой годограф содержит 4 ветви.
6. Траектории корней симметричны относительно действительной оси.
7. Асимптоты расположены под углами
<^=^^180°. q = 0.1, 2,3; 4
= + 45°, 135°. 225°, 315°.
Центр асимптот находится в точке
-4-4-4 с, =---------= -3.
Л 4
Эти асимптоты изображены пунктирными линиями на рис. 7.14 (а).
8. Перепишем характеристическое уравнение в виде:
Рис. 7.14. Корневой годограф для примера 7.4: (а) положение полюсов и (б) асимптоты
7.3 Построение корневого годографа
365
Составим таблицу Рауса:
s4 1 64 К
? 12 128
s2 Ь, К
s' С|
5° К,
t 12-64-128 53,33-128-12Л’
где Ь =-----------= 53,33 и с, =---------------.
1 12 1 53,33
Следовательно, система находится на границе устойчивости при К= 568,89. исходя из чего нетрудно найти корни вспомогательного уравнения:
53,33? + 568,89 = 53,33(? + 10,67) = 53,33(s + j3,266)(s -j’3.266). (7.51)
Точки, в которых корневой годограф пересекает мнимую ось, показаны на рис. 7.14 (а).
9. Точка отрыва находится путём вычисления выражения
К = p(s) = -s(s + 4)(j + 4 +j’4)(s + 4 -j4)
при значениях s между s = -4 и j = 0. Можно ожидать, что эта точка лежит где-то между s = - 3 и s — — 1, поэтому будем искать максимум p(s) в этом диапазоне. Для некоторых значений s вычисления сведены в табл. 7.3, откуда видно, что максимум p(s) имеет место приблизительно при 5 =— 1.5. Более точной оценки положения точки отрыва обычно не требуется. Точка отрыва указана на рис. 7.14 (а).
Таблица 7.3
P(s)
5
о
-4.0
51 68.5 80 85 75 0
-3.0-2.5-2.0 -1.5 -1.0 0
10. Угол выхода из комплексного пол юса р, можно определить с помощью углового критерия:
6) + 90° + 90° + 63 = 180°.
где 03 — угол, образованный вектором, проведённым в полюс р, из полюса р3 . Каждый из углов, образованных векторами, проведёнными в р, из полюсов при s = -4hs = -4 - J4, равен 90°. Поскольку 03 = 135°, то мы имеем:
0] =- 135° = + 225°,
как показано на рис. 7.14 (а).
11. Определяем положение корней, удовлетворяющее угловому критерию, как показано на рис. 7.14 (б).
12. Находим значение К при s = $].
Информации, полученной за 12 перечисленных этапов, достаточно для того, чтобы полностью построить корневой годограф. Для рассматриваемой в примере системы корневой годограф изображён на рис. 7.14 (б). Если комплексным корням, расположенным вблизи начала координат, соответствует коэффициент затухания Q = 0.707, то по рис. 7.14 (б) можно графически определить значение параметра К. Для этого достаточно вычислить модули векторов, проведенных в точку .V| из полюсов разомкнутой системы. В результате мы получим:
К =|j1||sl + 4||s|-p1||51-fl|=(1.9)(2,9)(3,8)(6.0)= 126. (7.52)
Другая пара комплексных корней при К= 126 занимает положение s2 и s2. Влияние этих корней на переходную характеристику будет незначительным по сравнению с корнями s, и s,. В этом можно убедиться, оценив степень затухания реакции, обусловленной каждой парой корней. Затухание за счёт корней s, us, определяется экспонентой
366
Глава 7. Метод корневого годографа
а за счёт корней s2 и s2 — экспонентой
=е-°2'>
где с2 почти в 5 раз больше, чем Oj . Поэтому составляющая реакции системы, обусловленная корнем s2, будет затухать намного быстрее, чем составляющая, обусловленная корнем В результате реакцию системы на единичное ступенчатое воздействие можно представить в виде: XO = l+c1e-t’1' si^coH + O, )+с2е~а2' sin(co2/ + 62)»l+c1e'‘'’‘' sin(co1/ + 01 ). (7.53)
Комплексно-сопряжённые корни, которые среди всех корней ближе всего расположены к началу координат s-плоскости, называются доминирующими корнями, поскольку именно они в основном определяют вид переходной характеристики системы. В системе третьего порядка при наличии двух комплексно-сопряжённых корней их можно считать доминирующими, если значение третьего (действительного) корня не менее чем в 5 раз превышает действительную часть комплексно-сопряжённых корней.
Преобладание второго члена в выражении (7.53) зависит также от относительной величины коэффициентов с, и с2. Эти коэффициенты, которые определяются как вычеты в комплексных полюсах, в свою очередь зависят от положения нулей на s-плоскости. Поэтому понятие доминирующих корней, хотя и является полезным для оценки реакции системы, но должно использоваться с осторожностью и с пониманием указанных выше факторов.
Точку отрыва и другие характерные точки корневого годографа легко можно определить с помошью MATLAB. Например, в примере 7.2 точка отрыва появляется при К = 1,925, когда два действительных корня сходятся при s = - 2,6. Если К = 200, то два корня находятся на мнимой оси при s = ± j’4.82.
В примере 7.4 (опять-таки с помощью MATLAB) можно найти, что точка отрыва от действительной оси, s = - 1,57, появляется при К= 84, а при К= 600 два корня, s = ±у'3,33, находятся на мнимой оси.
7.4. Пример анализа и синтеза системы управления с помощью метода корневого годографа
Анализ и синтез системы управления можно выполнить с помощью преобразования Лапласа, сигнального графа, s-плоскости и метода корневого годографа. В данном разделе мы рассмотрим конкретную систему управления и выберем надлежащие значения её параметров, воспользовавшись методом корневого годографа.
На рис. 7.15 изображены автоматически уравновешивающиеся весы, в которых взвешивание предмета производится за счёт использования цепи электрической обратной связи. Весы изображены находящимися в положении равновесия, где х — смещение противовеса Wc при отсутствии груза. Взвешиваемый груз W помещается на расстоянии 5 см от оси вращения, а расстояние от этой оси до демпфирующего устройства Z, = 20 см.
Требуется выполнить следующее:
1. Выбрать параметры системы и задать требования к её качеству.
2. Получить модель системы в виде сигнального графа.
3. На основании корневого годографа выбрать значение параметра К.
4. Определить доминирующую составляющую реакции системы.
7.4, Пример анализа и синтеза системы управления
367
Зададимся моментом инерции весов, равным 0,05 кг-м2. Напряжение батареи должно быть достаточным, чтобы обеспечить приемлемое значение коэффициента передачи датчика положения, поэтому выберем Еьь = 24 В. Будем считать, что винтовой стержень создаёт смещение противовеса с коэффициентом пропорциональности 20 об/см, а длина потенциометра, играющего роль датчика положения х, равна 6 см. Точность взвешивания должна быть высокой, поэтому для измерения координаты у выберем вспомогательный потенциометр длиной 0,5 см. Демпфирующее устройство выберем с коэффициентом вязкого трения Ь = 1О7з кг/(м/с). Наконец, противовес Wc выберем так, чтобы он был способен уравновешивать любой груз IV в ожидаемом диапазоне. Все выбранные параметры системы представлены в табл. 7.4.
Таблица 7.4
(К = 2 Н / = 0,05 кг • м2 1„ = 5 см /, = 20 см b = 10-/з кг/(м/с) Коэффициент передачи винтового стержня = 1/4 00л м/рад Коэффициент передачи вспомогательного потенциометра К, = 4800 В/м Коэффициент передачи потенциометра обратной связи Kf = 400 В/м
Требования к качеству системы. Желательно, чтобы система автоматического взвешивания обладала высоким быстродействием и имела малую установившуюся ошибку. Поэтому мы потребуем, чтобы система относилась, по крайней мере, к типу 1, при котором ошибка измерения будет равна нулю. Допускается колебательный характер реакции системы на ступенчатое изменение веса W, поэтому зададимся относительным коэффициентом затухания С, = 0,5. Потребуем также, чтобы после помещения на весы груза время установления (по критерию 2 % от конечного значения) было не более 2 с. Эти основные требования сведены в табл. 7.5.
Таблица 7.5. Требования к качеству системы
Установившееся ошибка Кр = °о, еи = 0 при ступенчатом входном воздействии
Колебательный характер реакции системы £ = 0,5
Время установления (по критерию 2%) Менее 2 с
368 Глава 7. Метод корневого годографа
Модель электромеханической системы взвешивания можно получить на основании уравнений движения. При малых отклонениях от положения равновесия угол отклонения 6 можно представить как
(7-54)
Движение коромысла весов можно описать уравнением
, d2Q -г-,
1 —— = 2, моментов,
что приводит к результату:
= (7.55)
Входное напряжение двигателя
vm(t) = K,y-Kfx. (7.56)
Передаточная функция двигателя равна
z-y g у, Гт(Я) sfw+1)’
где т будем считать пренебрежимо малой в сравнении с постоянными времени системы, а 6„, — угол поворота вала двигателя. Сигнальный граф, отражающий уравнения (7.55)47.57), изображён на рис. 7.16. Исследуя прямой путь от W kX(s), мы можем видеть, что система относится к типу 1 за счёт наличия интегратора перед У(х). Следовательно, установившаяся ошибка системы будет равна нулю.
Передаточную функцию замкнутой системы найдём с помощью формулы Мейсона: *(*) =________________________иЛК,КтК,Нз*)________________________ (7 5g)
W{S) \+{12Ы Is)+{KmK fKs! s)+{ljKjKmWcIIsi )+(l2bKmKsK f/Is2)' ' '
где числитель есть коэффициент передачи пути от И7 к Л, второй член в знаменателе соответствует контуру L\, третий — контуру L2, четвёртый — контуру £3, а пятый образован двумя некасающимися контурами Lx L->. Окончательно передаточная функция замкнутой системы имеет вид:
W = /„/ЛЛА________________ (7
ИДх) s{Js + l2b'}(,s^KmKsKf^WcKmKsK,ll ’
Отсюда следует, что коэффициент передачи системы в установившемся режиме равен
Рис. 7.16 Модель автоматических весов Л в виде сигнального "V) Д графа „ О ► Q Взвешиваемым ' груз lim^-^ =— = 2,5 см/кг, (7.60) s-o H'(s) Wc Вспомогательный Винтовой —If) потенциометр стержень \ Двигатель / £| \$ф) ф) \ г (s) K„,/s 0 / Результат —>—Q—>—Q.—k—-Q-—»—О—,,змеРсния 'Vй j_ к> x(S) ——4
ТА. Пример анализа и синтеза системы управления
369
если W^s) = | W\ / s. Чтобы построить корневой годограф в зависимости от постоянной электродвигателя Кт, подставим в характеристическое уравнение, т. е. в знаменатель выражения (7.59), значения выбранных параметров и получим:
s(s+8V3)fs+^ | + ^^=0. (7.61)
Л 10л) 10л
Чтобы привести это уравнение к виду, удобному для построения корневого годографа, прежде всего выделим в нём члены, содержащие Кт:
s2(s+8V3) + s(s+8V3)^- + ^^ = 0. (7.62)
10л 10л
Далее приведём (7.62) к виду уравнения корневого годографа:
1 + КР(_ । + (Ки /10л)[ф + 873)+ 96] _
1 -t- -Л-Г W— 1 + Т г~ ~
s2(s+W>)
(Хт/10л)(я+ 6,93 + 7’6,93)(s + 6,93-76,93)
= 1 +-------------5------F-------------= 0 ('-63)
s'(s+ 8V3)
Корневой годограф в функции от параметра Кт изображен на рис. 7.17. При С, = 0,5 доминирующие корни занимают положение, указанное на рисунке, если ^=25,3= K„J Юл. Отсюда следует, что постоянная электродвигателя, как часть общего коэффициента передачи системы, должна быть равна
Кт = 795 = 7600°б/МИН . (7.64)
В В
Вещественная часть доминирующих корней по модулю больше 4, поэтому время установления, оцениваемое как 4/ст, будет менее 1 с, что удовлетворяет выдвинутым требованиям. Третий корень характеристического уравнения s = - 30,2 (вещественный), поэтому реакция системы полностью определяется доминирующими корнями. Таким образом, метод корневого годографа позволил нам провести анализ системы и выбрать надлежащее значение параметра Кт. Тем самым данный пример отчётливо продемонстрировал эффективность методов s-плоскости и корневого годографа при исследовании систем управления.
Рис. 7.17. Корневой годограф при изменении параметра Кт. С увеличением К две ветви годографа выходят из двух полюсов в начале координат и стремятся к двум комплексным нулям.
Третья ветвь годографа находится слева от полюса s = -14
370
Глава 7. Метод корневого годографа
7.5. Выбор параметров с помощью корневого годографа
Изначально метод корневого годографа был разработан как средство определения траекторий корней характеристического уравнения системы при изменении её коэффициента усиления К от 0 до со. Однако, как мы видели, с помощью этого метода можно исследовать и влияние изменения других параметров системы. Метод корневого годографа основан на использовании характеристического уравнения системы вида
1 + F(s) = 0 . (7.65)
В данном случае мы можем воспользоваться уже известными приёмами. Однако возникает вопрос: а как быть, если надо исследовать влияние двух варьируемых параметров — скажем, а и Р? Обычный метод корневого годографа предполагает, что варьируется один параметр системы. Но этот метод тем и хорош, что позволяет исследовать влияние двух и более параметров. Поэтому метод корневого годографа можно использовать как метод выбора параметров системы.
Характеристическое уравнение динамической системы в общем случае имеет вид: а,рп + ап_ {sn~1 + ... + a{s + а0 = 0. (7.66)
Следовательно, мы можем исследовать влияние коэффициента ah приведя это уравнение к виду:
1+----------------------5-----------------= 0 . (7.67)
ansn +a„_lsn l+...+a2s~ +а0
Если интересующий нас параметр а не входит явно в это уравнение как коэффициент, то мы можем выделить его в следующем виде:
ans” + an_I s'7-1 +.. ,+(а„_9 — a )sn~11 + asn~4 +.. ,+at s + a0 =0. (7.68)
Например, для системы третьего порядка это может выглядеть так:
? + (3 + а)? + 3s + 6 = 0 . (7.69)
Для того чтобы исследовать влияние параметра а, мы выделим его и произведём следующие действия:
s3 + 3? + as2 + 3s + 6 = 0; (7.70)
1 + ^-----------=0. (7.71)
s3 + 3s" + 3s + 6
Далее, чтобы исследовать влияние двух параметров, нам потребуется дважды повторить все действия, связанные с построением корневого годографа. Так, если в характеристическое уравнение входят два варьируемых параметра а и р, то мы имеем:
a„s” + +...+(an_rj - a)s”~/J + as"~g +...+(a„_r -P)s”~r +Ps"_r+...+a1s + a0 = 0.
(7.72)
Таким образом, два параметра оказываются выделенными, и можно будет исследовать влияние р после того, как будет исследовано влияние параметра а. Например, предположим, что характеристическое уравнение системы третьего порядка содержит два параметра, а и Р:
s3 + s2 + Ps + а = 0. (7.73)
7.5. Выбор параметров с помощью корневого годографа
371
В данном случае аир являются коэффициентами характеристического уравнения. Влияние изменения р от 0 до оо можно определить по уравнению корневого годографа:
1 + ^-^----=0. (7.74)
s' +s~ + а
Заметим, что в (7.74) знаменатель представляет собой характеристический полином системы при р = 0. Поэтому сначала можно оценить влияние параметра а с помощью уравнения s3 + s2 + а = О,
переписав его в виде
1+^—=0. (7.75)
s' (s+1)
что эквивалентно заданию р - 0 в уравнении (7.73). Далее, исследовав влияние а, выбирается конкретное значение этого параметра, которое подставляется в (7.74), после чего оценивается влияние р. В этой двухшаговой процедуре мы сначала строим корневой годограф, считая варьируемым параметр а и выбираем его значение, соответствующее приемлемому расположению корней. Затем строим корневой годограф, считая варьируемым параметр Р; при этом полюсы в (7.74) определяются корнями, найденными на основании уравнения (7.75). Данный метод, к сожалению, имеет одно ограничение, а именно — не всегда можно записать характеристическое уравнение, в которое варьируемый параметр входил бы линейно.
Чтобы наглядно проиллюстрировать описанный метод, построим корневой годограф по уравнению (7.73), проварьировав сначала параметр а, а затем р. Траектории корней для уравнения (7.75) при изменении а показаны на рис. 7.18 (а); там же отмечено положение корней, соответствующее двум значениям параметра а. Если выбрать а = а1; то корни уравнения (7.75) становятся полюсами (7.74). Далее в уравнении (7.74) можно проварьи-ровать параметр р и по корневому годографу на рис. 7.18 (б) на основании желаемого расположения корней выбрать конкретное значение р.
Рассмотрим ещё один пример, иллюстрирующий применение метода корневого годографа для выбора параметров системы.
«) б)
Рис. 7.18. Траектории корней при изменении параметров аир: (а) корневой годограф при изменении а;
(6) корневой годограф для а = а, и изменения р
372
Глава 7. Метод корневого годографа
Пример 7.5. Управление положением наконечника сварочного узла
При сборке автомобильных кузовов требуется точное позиционирование наконечника сварочного узла. Для этого замкнутая система управления должна удовлетворять следующим требо-
ваниям:
1. Установившаяся ошибка при линейном входном сигнале не более 35% по отношению к ско-
рости изменения входного сигнала.
2. Коэффициент затухания, соответствующий доминирующим корням, С, > 0,707.
Рис. 7.19
Структурная схема системы позиционирования наконечника сварочного узла
3. Время установления (по критерию 2% от конечного значения) — не более 3 с.
Структура системы управления приведена на рис. 7.19, а выбору подлежат коэффициенты Kt и К2. Установившуюся ошибку можно представить в виде:
е„ = lime(Z) = lims£(s) = lim ) , (7.76)
/->® ,v-»0 .«->o 1 + G2(s)
где G2(s) = G(s)/(1 + G(s)H(s)). Таким образом, ограничение на установившуюся ошибку при-
водит к соотношению:
^=2±*&<0,35 |Л| к,
(7.77)
У читывая данное неравенство, мы выберем малое значение К2. Заданный коэффициент затухания требует, чтобы корни характеристического уравнения замкнутой системы находились ниже линии под углом 45° в левой половине s-плоскости. Время установления можно выразить через действительную часть доминирующих корней:
4
Д=-<Зс. (7.78)
о
расположения корней на «-плоскости
Отсюда следует неравенство о > 4/3; вместе с ограничением на это позволяет определить область расположения корней на s-плоскости. Эта область отмечена темным цветом на рис. 7.20. Параметры, подлежащие выбору, можно обозначить как а = Kt и Р = К2 К}. Тогда характеристическое уравнение примет вид:
1 + G//(s) = s2 + 2s + Ps+a = 0. (7.79)
Полагая р = 0 и считая варьируемым параметр а = Kt, получим уравнение корневого годографа:
1+—-— = 0. (7.80)
s(s+2)
На корневом годографе, изображённом на рис. 7.21 (а), отмечено положение корней при Kt = а = 20. Далее мы исследуем положение корней при Р = 20Л2, для чего построим корневой годограф по уравнению:
l-b-T-^-----= 0, (7.81)
s + 2s + а
7.5. Выбор параметров с помощью корневого годографа
373
причем в данном случае полюсы являются корнями на годографе рис. 7.21 (а). Результат построения второго корневого годографа представлен на рис. 7.21 (б), а корни, соответствующие С, = 0,707, получаются при Р = 4,3 = 20К2> откуда К2 = 0,215.
Действительная часть этих корней с = 3,15 и. следовательно, время установления (по критерию 2 % от конечного значения) равно 1,27 с, что значительно меньше заданного ограничения в 3 с.
Рис. 7.21
Траектории корней в зависимости (а) от параметра а и
(б) от параметра р
Метод корневого годографа можно распространить и на случай, когда имеется более двух варьируемых параметров. При этом просто увеличивается число этапов, подобных рассмотренным выше. Более того, можно построить семейство траекторий корней при одновременном изменении двух параметров. Например, исследуем влияние изменения параметров а и Р, входящих в следующее характеристическое уравнение:
№ + з№ + 2s + р^ + а = 0. (7.82)
Уравнение корневого годографа в зависимости от а (при Р = 0) имеет вид:
1 +-----“-----= о. (7.83)
s(s+ l)(s+2)
В свою очередь, корневой годограф в зависимости от р имеет уравнение
1+------Р--------= 0. (7.84)
S3 +З.Т +25+СС
Корневой годограф, соответствующий уравнению (7.83), как функция а, изображён сплошными линиями на рис. 7.22. Корни на этом годографе, обозначенные чёрточками, становятся полюсами для уравнения (7.84). Построенный по этому уравнению годограф изображён на рис. 7.22 пунктирными линиями, а на ветвях, соответствующих некоторым значениям а, отмечено положение корней при различных р. Семейство таких траекторий, часто называемое линиями корней, позволяет оценить влияние параметров а и р на корни характеристического уравнения системы.
374
Глава 7. Метод корневого годографа
Рис. 7.22
Корневой годограф для случая двух варьируемых параметров
7.6. Чувствительность системы и корневой годограф
Одной из основных причин использования отрицательной обратной связи в системах управления является её свойство уменьшать влияние изменения параметров системы. Как мы установили в разделе 4.2, это влияние можно оценить с помощью чувствительности характеристик системы к изменению её параметров. Мы также ввели понятие логарифмической чувствительности в виде
ST _ dlnT _ дТ/Т
К ~ dlnK ~ дК/К ’
(7.85)
где T(s) — передаточная функция системы, а К — параметр, подверженный изменению.
В последнее время, в связи с возросшим интересом к использованию s-плоскости для анализа свойств системы, возникла необходимость оценивать чувствительность системы по расположению корней её характеристического уравнения. Это связано с тем, что изменение параметров системы приводит к изменению положения корней характеристического уравнения, а последние, в свою очередь, определяют вид переходной характеристики системы. Поэтому мы можем ввести понятие чувствительности корней характеристического уравнения системы с передаточной функцией T(s) как
Sr' = д—= д—, к dlnK 5К/К
(7.86)
где г, есть i-й корень характеристического уравнения, и
(7.87)
7.6. Чувствительность системы и корневой годограф
375
а К — параметр системы. Эта чувствительность связывает изменение положения корня на s-плоскости с изменением параметра системы. Чувствительность корней связана с логарифмической чувствительностью соотношением
= -ltlX|- - V --------— (7.88)
сЧпЛ tj'alnX (s+r,)
при условии, что нули T(s) не зависят от параметра К, т. е.
—^-=0. 51пХ
Логарифмическую чувствительность легко определить, взяв производную T(s) [выражение (7.87)] по параметру К. В частном случае, когда коэффициент усиления системы не зависит от параметра К, мы получим:
si-tv—
(7.89)
что даёт непосредственную связь между двумя чувствительностями.
Чувствительность корня характеристического уравнения системы довольно просто можно оценить, воспользовавшись методом корневого годографа. Для этого нам потребуются уже известные линии корней, соответствующие изменению параметра К. Мы можем придать параметру К малое конечное приращение ДК и оценить новое положение корня г, + Аг,. Затем, в соответствии с (7.86), мы получим
к лк/к
(7.90)
Это выражение является аппроксимацией действительного значения чувствительности, которое может быть получено при АК —> 0. Оценку чувствительности корня мы проиллюстрируем следующим примером.
Пример 7.6. Чувствительность корня системы управления
Характеристическое уравнение для системы с обратной связью, изображенной на рис. 7.23, имеет вид:
—-— = 0, s(s + P)
ИЛИ
? + ps + /C = O. (7.91)
В качестве параметра а мы будем рассматривать коэффициент К. Тогда влияние изменения каждого параметра можно будет определить, если задать
а = а0 + Да. Р = ро + ДР,
Рис. 7.23
Система с обратной связью
376
Глава 7. Метод корневого годографа
рим случай, когда ро = 1 и а0 = К= 0,5. На рис. 7.24 изображен корневой годограф в зависимо-
сти от параметра а = К, который построен по уравнению
1+---------= 1+
ф + Ро) s(s+l)
(7.92)
При номинальном значении К = а = 0,5 мы имеем два комплексных корня, rt - - 0,5 + /0,5 и r2 = »j, как показано на рис. 7.24. Чтобы исследовать влияние неизбежных вариаций параметра К, произведём замену а = а0 + Да и приведем характеристическое уравнение к виду:
s2 + s + а0 ± Да = s2 + s + 0.5 ± Да = 0,
или
, ±Да , ±Да
1 + —-------= 1 +------------~ = 0.
s +S+0.5 (s+r,)(s+ij)
(7.93)
Таким образом, изменение коэффициента усиления К можно оценить по корневому годографу на рис. 7.24. При изменении а на 20% мы имеем ±Да = ± 0,1. С помощью корневого годографа легко установить новое положение корней при а = 0,4 и а = 0,6, как это показано на рис. 7.24. При а = К = 0,6 корень во 2-м квадранте s-плоскости занимает положение
Г1 + Д г, = - 0,5 + /0,59,
что соответствует изменению корня Д rt = + /0,09. Если же а = К - 0.4 , то корень во втором квадранте равен
г, + Д Г| = - 0,5 + /0.387,
что соответствует изменению корня Дг, = -/0,11. Таким образом, чувствительность корня г, равна
S'+ak = = +j0’°9 = /0,45 = О,45е'90
+ДЛ к+ +0,2 J
при положительном приращении К. Для отрицательных изменений К чувствительность равна
5^ = 52 =-^- = 2^^ = -/0,55 = 0.55е’'9°°.
к~ ЬК/К +0,2
(7.94)
При бесконечно малых изменениях параметра сК чувствительность будет равна отрицательным или положительным приращениям К. Аргумент чувствительности корня указывает на направление его смещения при изменении параметра. В точке а - а0 направление смещения корня при + Да всегда равно 180° минус направление смещения при -Да.
7.6. Чувствительность системы и корневой годограф
377
Полюс Р может претерпевать изменения из-за влияния окружающей среды, и мы можем представить его как Р = Ро + ДР, где р0 =1. Тогда характеристическое уравнение примет вид s2 + s + ДР s + К = О, или, в форме, удобной для построения корневого годографа:
1+ = Ц (7.95)
s2+s+K
Знаменатель во втором слагаемом есть характеристический полином системы при Д Р = 0. Для
Рис. 7.25. Корневой годограф в зависимости от параметра р
этого случая корневой годограф в зависимости от К изображен на рис. 7.24. Если по условиям синтеза требуется иметь С, = 0,707, то корни должны занимать положение
Г| = -0,5 + /0.5 и г2 = ^ - 0,5- 7'0,5.
Поскольку корни являются комплексно-сопряженными, то чувствительность корня будет сопряжённой чувствительности корня = r2. С помощью метода, изложенного в предыдущем разделе, мы можем построить корневой годограф при изменении Др — результат приведён на рис. 7.25. Нас обычно интересует влияние изменения параметра, поэтому, считая, что р = р0 + Д Р, и задав отрицательное приращение Д Р , мы получим уравнение корневого годографа:
1+ -(Лр)5 (7.96)
S+S+ К
Легко можно заметить, что это уравнение представлено в форме
1 - ДР P(s) = 0.
Сравнивая последнее уравнение с (7.23) (см. раздел 7.3), мы видим, что оно отличается лишь знаком второго слагаемого. Поэтому в соответствии с правилами, изложенными
в разд. 7.3, мы приходим к выводу, что корневой годограф должен удовлетворять условиям
| ДР P(s) | = 1. arg P(s) = 0° ± 9З6О0,
(7.97)
где 9 = 0, 1, 2,.... Заметим, что в угловом критерии фигурирует угол 0°, в отличие от 180°, как это было в рассмотренном ранее методе. Однако правила построения корневого годографа, сформулированные в разд. 7.3, легко можно модифицировать применительно к данному случаю. На рис. 7.25 эффект уменьшения параметра р отмечен пунктирной траекторией. На том же рисунке показано положение корня при изменении Р на + Д р = + 0,20. Чувствительность
корня можно оценить графически, и для положительного изменения Р она равна ОДбе’7131'
= U,lbc "— = 0.80е 7'31".
₽ (Др/Р) 0,20
(7.98)
(7.99)
При отрицательном изменении Р чувствительность корня будет равна S- =-^=^< = 0,625е'3Г ₽' (ДР/Р) 0,20
При уменьшении относительного изменения Др/р чувствительности S'^ и S^_ будут стремиться
к одинаковым значениям по модулю и к разности аргументов в 180°. Так, если др/р < 0.10. то
|5'\| = |5'1| (7.100)
378
Глава 7. Метод корневого годографа
и
argS^ =180°+arg5pL . (7.101)
Обычно чувствительность корня определяется при малых изменениях параметра. При относительном изменении параметра Др/р = 0,10 можно воспользоваться аппроксимацией корневого годографа. На рис. 7.25 корневой годограф при ДР — 0 выходит из полюса под углом 0(/. Значение этого угла легко вычислить, и тогда изменение корня можно установить, аппроксимировав корневой годограф прямой линией с наклоном как показано на рис. 7.25. Но подобная аппроксимация является точной только при малых приращениях Др. Однако она позволяет исследователю не прибегать к построению полного корневого годографа. Так, на рис. 7.25 чувствительность корня при Др/р = 0,10, вычисленная с помощью прямой, проведённой под углом выхода, даёт значение
= ?-,0?4е 7-'-35- = 0.74е-'135’ . (7.102)
₽ 0,10
Оценка чувствительности корней к изменению параметров очень полезна тогда, когда надо сравнивать влияние различных параметров при различном положении корней. Сравнение выражений (7.102) и (7.94) показывает, что модуль чувствительности к изменению р приблизительно на 50% больше показателя для параметра а, а аргумент S^_ говорит о том, что смещение корня в сторону мнимой оси более чувствительно к изменению параметра р. Следовательно, на изменения р должны быть наложены более строгие ограничения, чем на изменения а. Эта информация даёт возможность установить требуемые допуски на изменение каждого параметра.
Пример 7.7. Чувствительность корня к изменению параметра
Система с единичной обратной связью содержит в прямой цепи передаточную функцию
G(j)= (7.ЮЗ)
s(s + 2)(з + р)
где р = р0 + Др и р0 = 8. Характеристическое уравнение системы имеет вид:
5(5 + 2)(s + 8 + ДР) + 20,7(5 + 3) = 0 , или
5(5 + 2)(s + 8) + ДР$(я + 2) + 20,7(5 + 3) = 0. (7.104)
Если Др = 0, то корни уравнения равны
Tj = -2.36+ j2,48: r2 = r£ r3 = -5.27.
Корневой годограф в зависимости от ДР определяется уравнением
1 +---ДР5(5+2)-----= 0 (7 105)
(5+Aj)(5+/j)(5+r3)
Полюсы и нули уравнения (7.105) показаны на рис. 7.26. Угол выхода корневого годографа из полюса Г| вычисляется следующим образом:
180° = -(Oj + 90 ° +0^) + (0. + 0^) = ~(6d + 90° + 40°) +(133° + 98°). (7.106)
Следовательно, 0(, = - 80°, и в окрестности корня Г] годограф аппроксимируется прямой линией с углом наклона Qcl. Изменению корня Дг, = О,2е-780 вдоль прямой линии соответствует приращение + Др, которое оценивается с помощью длины векторов, проведенных в точку г1 из остальных полюсов и нулей. Таким образом, мы имеем: 4^8075X02)^ (3,25)(2,3)
В результате чувствительность корня rt равна ^_=0^= 8о;
р др/р 0,48/8
(7.107)
(7.108)
7.6. Чувствительность системы и корневой годограф
379
Рис. 7.26. Положение полюсов и нулей, соответствующее параметру р
Рис. 7.27. Положение полюсов, соответствующее параметру у
а это значит, что корень очень чувствителен к изменению параметра р на 6%. Для сравнения полезно определить чувствительность ?у к изменению нуля s = - 3. В этом случае характеристическое уравнение принимает вид:
ф + 2ф + 8) + 20,7(s + 3 + Ду) = О,
или
1 +-----------------= 0 (7 109)
(s+ 7j)(s + Aj)(s+ Г3)
На рис. 7.27 показано положение полюсов уравнения (7.109). Угол выхода корневого годогра-
фа из полюса Г] определяется из соотношения 180° = - (0(/ + 90° + 40°), или
= + 50°. (7.110)
Изменению корня Д/у = О,2е/50’’ соответствует положительное приращение Ду, которое рассчитывается с помощью длины векторов как
|ду|= 5,22(4.18X0,2) =
20,7
Следовательно, чувствительность корня rt при + Ду равна
= = 2.84е'5°”
Ду/у 0,21/3
(7.112)
Отсюда видно, что модули чувствительностей корня г, к изменению полюса Р и нуля у приблизительно равны. Однако можно считать, что чувствительность системы к изменению полюса меньше, чем её чувствительность к изменению нуля, потому что аргумент 5'' равен + 50°, а это соответствует смещению корня ближе к мнимой оси.
Аналогичным образом можно показать, что чувствительность корня лу к изменению полюса s = — 50 = - 2 равна
5^.=2,1е/27°. (7.113)
Таким образом, модуль чувствительности корня по отношению к параметру 5 меньше, чем по отношению к другим параметрам, но направление его смещения является более критическим, чем при изменениях Р и у.
380
Глава 7. Метод корневого годографа
Применение метода оценки чувствительности корней при анализе и синтезе систем управления требует большого количества вычислений для различного расположения полюсов и нулей передаточной функции разомкнутой системы. Этот факт, а также то, что далеко не всегда очевидно, в каком направлении должны быть изменены параметры с целью снижения чувствительности, несколько ограничивает применение данного метода при синтезе систем управления. Что же касается задач анализа, то этот метод является довольно хорошим инструментом, позволяющим оценить и сравнить чувствительность систем различной конфигурации. Недостаток метода заключается в том, что он основан на связи между положением корней на s-плоскости и качеством системы. Но как мы выяснили в предыдущих главах, во многих системах положение корней адекватно определяет показатели качества, однако в ряде случаев надо учитывать и положение нулей передаточной функции замкнутой системы. В целом же метод оценки чувствительности корней является вполне приемлемым при анализе и синтезе систем управления.
7.7. Трёхканальные (ПИД) регуляторы
В промышленных системах управления широко используется так называемый трёхканальный, или ПИД-регулятор. Он имеет передаточную функцию
Gc(s>Kp+^ + KDs.
S
Во временной области выходная переменная, регулятора и его входная переменная e(t)
связаны уравнением
М(0 = Х/,е(0+Х7 je(t)dt + KD^. (7.115)
Своим названием ПИД-регулятор обязан тому, что его выходной сигнал равен сумме составляющих, пропорциональных как самому входному сигналу, так и его интегралу и производной. В действительности канал производной имеет передаточную функцию
Grf(s) = -^-, (7.116)
TjS+1
но обычно Tj много меньше, чем постоянные времени объекта управления, и ей можно пренебречь.
Если положить KD = 0, то мы получим пропорционально-интегральный, или ПИ-регулятор:
S
В случаеKt= 0 мы получим пропорционально-дифференциальный, или ПД-регулятор:
Gc(s) = Кр + К&.
Управление многими производственными процессами осуществляется с помощью ПИД-регуляторов. Их популярность отчасти объясняется способностью обеспечить высокое качество ведения процессов в широком диапазоне режимов, а отчасти функциона
7.7. Трёхканальные (ПИД) регуляторы
381
льной простотой, позволяющей инженерам эксплуатировать их без каких-либо проблем. Если задан объект управления, то подлежат определению три параметра ПИД-регулято-ра: коэффициент пропорциональности, коэффициент при интеграле и коэффициент при производной.
Рассмотрим ПИД-регулятор
СД,) , К, + £1+К,, , feilteLb ,e(7,, 8)
S S S S
где а=Кх/Ку и b = К21К2. Таким образом, ПИД-регулятор вносит в передаточную функцию разомкнутой системы один полюс в начале координат и два нуля, которые могут быть размещены в любом месте левой половины s-плоскости.
Напомним, что корневой годограф начинается в полюсах передаточной функции и заканчивается в её нулях. Если, например, мы имеем систему, изображённую на рис. 7.28, где
(s+2)(s+3) ’
и используем ПИД-регулятор с комплексными нулями zx иг2, гдег1 = -3 +jl и z2 = zx, то можем построить корневой годограф, как это показано на рис. 7.29. С увеличением коэффициента К3 комплексные корни стремятся к нулям. Замкнутая система имеет передаточную функцию
= Gc(s)G(s) = X3(s+Z] )(s+ z, )
1+Gc (s)G(s) (s + r2 )(s + /j )(s + /j)
Реакция такой системы на ступенчатый входной сигнал будет иметь переретулирова-ние менее 2%, а установившаяся ошибка будет равна нулю. Время установления будет равно приблизительно 1 с. Это довольно хорошие показатели. Если желательно умень-
382
Глава 7. Метод корневого годографа
шить время установления, то zt и z2 надо выбрать в левой полуплоскости ещё дальше от мнимой оси, а коэффициент задать таким, чтобы корни характеристического уравнения замкнутой системы располагались вблизи этих комплексных нулей.
Проблему использования ПД-регулятора мы обсудим позже в данной главе (см. разд.
7.11) в примере синтеза с продолжением.
7.8. Пример синтеза: система управления лазерным манипулятором
В хирургии с помощью лазера можно высверлить углубление в берцовой кости для последующего вживления искусственного сустава. Соответствующая установка должна иметь достаточное быстродействие и высокую точность позиционирования. В системе, изображенной на рис. 7.30, лазерный манипулятор управляется с помощью двигателя постоянного тока. Коэффициент усиления К должен быть выбран так, чтобы при линейном входном сигнале r(f) = At (где Л = 1 мм/с) установившаяся ошибка не превышала 0,1 мм и при этом система оставалась устойчивой.
Рис. 7.30
Система управления лазерным манипулятором
Чтобы обеспечить требуемую точность и высокое быстродействие, выберем электродвигатель с постоянной времени обмотки возбуждения Т! = 0,1 с и с электромеханической постоянной времени (с учётом нагрузки) т2 = 0,2 с. Тогда мы получим:
T(s) = =---------—---------=--------К ---------= —----------------.(7.119)
l+KG(s) s(t,s+1)(t2s+1)+K 0,02?+0,3s2+s+K s3+15s2+50s+50K
Согласно (5.29), при линейном входном сигнале, R(s) =A/s~, установившееся ошибка равна
А А
~ К ~К
Поскольку при А = 1 мм/с должно выполнятся условие е„. < 0,1 мм, то отсюда следует требование К > 10.
Убедимся, что при К = 10 система будет устойчива. Для этого на основании (7.119) запишем характеристическое уравнение:
? + 15? + 50s + 50К = 0.
Далее составим таблицу Рауса:
?
з s~
1 50
15 50К
Ьх 0
5 0К,
, 750-50Х
откуда следует 6] =-—----
7.8. Пример синтеза: система управления лазерным манипулятором 383
Таким образом, система устойчива при О <К < 15. Выбрав значение К= 10, при котором система устойчива, исследуем вид корневого годографа при К > 0. Поскольку годограф имеет три ветви, а центроид находится в точке с = - 5, то мы получим картину, изображённую на рис. 7.31. Точка отрыва имеет координату s = - 2,11, а при К = 10 равны г2 = - 13,98, Г] = -0,51 + у'5,96 и . Комплексным корням соответствует значение С, = 0,085 и = 0.51. Считая эти корни доминирующими, мы можем ожидать, согласно (5.16) и (5.13), что при ступенчатом входном сигнале перерегулирование составит 76%, а время установления (по критерию 2% от конечного значения) будет равно
4 4
Г. = ——=—— = 7,8 с.
0,51
Рассчитав и построив действительную реакцию системы на ступенчатый сигнал, мы обнаружим, что перерегулирование составляет 72%, а время установления равно 7,9 с. Таким образом, комплексные корни явно являются доминирующими. Очевидно, что система, обладающая сильно колебательной реакцией на ступенчатый сигнал, не может быть исполь
зована в лазерной хирургии, поэтому скорость изменения управляющего сигнала должна быть ограничена. Реакция той же системы на линейный входной сигнал приведена на
рис. 7.32.
Рис. 7.31
Корневой годограф системы управления лазерным манипулятором
Рис. 7.32
Реакция системы управления лазерным манипулятором на линейный входной сигнал
'(c)
384
Глава 7. Метод корневого годографа
7.9. Синтез системы управления роботом
Понятие воспроизводства роботов объяснить можно довольно просто. Идея заключается в том, что роботы воспроизводят себе подобных и создают завод, который автоматически выпускает продукцию в виде роботов. Процесс воспроизводства роботов изображён на рис. 7.33. Чтобы создать быстродействующую и высокоточную систему управления роботом, важно обеспечить жёсткость и в то же время малую массу руки робота.
Рис. 7.33
Процесс воспроизводства роботов
Система управления движением руки робота должна удовлетворять следующим требованиям: (1) время установления (по критерию 2%) должно быть не более 2 с, (2) перерегулирование при ступенчатом входном сигнале допускается не более 10%, и (3) установившаяся ошибка должна быть равна нулю.
В структурной схеме системы управления рукой робота, изображенной на рис. 7.34, кроме регулятора Gc(s) предусмотрена также обратная связь по скорости. Если рука робота является очень лёгкой и тонкой, то её передаточная функция
ru) _( 1 V
(4
где
_ (.у2 + 4^+10004)(? +12^+90036) (5+10)(? + 2у+2501)(? +&+22509)
(7.120)
Таким образом, комплексные нули находятся в точках
s = -2 ±j'100 и s = - 6 ± /300 , а комплексные полюсы в точках
s = - 1 ± j’50 и s = - 3 ± J150.
Рис. 7.34. Структурная схема системы управления легкой рукой робота
7.9. Синтез системы управления роботом
385
Рис. 7.35. Корневой годограф системы на рис. 7.34 при Gc(s) = Ку, К2 = 0 и изменении Ку от 0 до и
Рис. 7.36. Корневой годограф системы на рис. 7.34 при Gc (s) = Ку после введения нуля в точку s = -0,2
При К2 = 0 и регуляторе, представленном коэффициентом усиления, Gc(s) = Ку, корневой годограф в зависимости от параметра Ку изображён на рис. 7.35. Поскольку два корня характеристического уравнения при Ку > 0 всегда находятся в правой полуплоскости, то замкнутая система неустойчива.
Ясно, что в данном случае принципиально необходима обратная связь по скорости, К2 > 0. Тогда мы получим H(s) = 1 + K2s, и разомкнутая система будет иметь передаточную функцию
s+— (? + 4s+10004 )(?+12s+ 90036)
f4Ww)=—5 K1 >-----------------------
Is2 J ?(s+10)(? + 2s + 2501)(№ + 6s+22509)
где Ky — коэффициент усиления регулятора Gt.(s). Теперь мы можем варьировать два параметра, Ку и К2. Выберем 5 < К2 < 10, чтобы разместить нуль близко к началу координат.
При К2 = 5 и изменении параметра Ку корневой годограф имеет вид рис. 7.36. Если Ку = 0,8 и К2 = 5, то переходная характеристика системы имеет перерегулирование 12% и время установления 1,8 с. Это — наиболее оптимальный вариант. Если попытаться взять К2 = 7 или К2 = 4, то перерегулирование будет больше допустимого. Следовательно, в системе данной конфигурации мы добились наилучшего качества. Если продолжить процесс синтеза, то можно попытаться, сохранив обратную связь по скорости с коэффициентом К2 = 5, применить регулятор, передаточная функция которого имеет полюс и нуль. Одним из возможных решений является
Gc(s) = Ki(s+--k (7.121)
(.s + p)
Если теперь выбрать z = 1 и р = 5, то при Ку = 5 мы получим переходную характеристику с перерегулированием 8% и временем установления 1,6 с.
386
Глава 7. Метод корневого годографа
7.10. Построение корневого годографа с помощью MATLAB
Приблизительный вид корневого годографа можно получить с помощью последовательности операций, приведённых в табл. 7.2. Альтернативным методом является точное построение корневого годографа с помощью MATLAB. Однако не стоит полагаться только на MATLAB и пренебрегать ручными операциями, определяющими приблизительный вид корневого годографа. Основные принципы корневого годографа воплощены именно в этих ручных операциях, и это особенно важно для полного понимания их смысла.
Этот раздел мы начнём с обсуждения того, как с помощью MATLAB строится корневой годограф. Затем установим связь между разложением на простые дроби, доминирующими полюсами и реакцией замкнутой системы. В заключение рассмотрим применение MATLAB для оценки чувствительности корней.
В данном разделе будут рассмотрены функции rlocus, rlocfind и residue. Функции rlo-cus и rlocfind используются для построения корневого годографа, a residue позволяет получить разложение дробно-рациональных функций на простые дроби.
Построение корневого годографа. Рассмотрим замкнутую систему управления, изображённую на рис. 7.10. Система имеет передаточную функцию
T(S) = ^}= *(*+1Х*+3)
7?(s) s(5 + 2)(s+3)+^(5+1)’
Характеристическое уравнение можно представить в виде:
1 + Х----------=0.
s(s + 2)(s+ 3)
(7.122)
Именно в таком виде должно быть записано характеристическое уравнение, чтобы можно было воспользоваться функцией rlocus. Эта функция применяется к характеристическому уравнению общего вида
l+XG(s) = l+X^ = 0, (7.123)
g(s)
где К— варьируемый параметр, изменяемый в диапазоне 0 < К < со. Смысл функции rlocus поясняет рис. 7.37. Этапы построения корневого годографа по уравнению (7.122) приведены на рис. 7.38. Вызов функции rlocus без указания аргументов в левой части автоматически приводит к графическому изображению корневого годографа. При задании аргументов в левой части функция rlocus возвращает матрицу положения корней и вектор соответствующих коэффициентов.
Рис. 7.37
Функция rlocus
[r.K]=riocus(sys)
7.10. Построение корневого годографа с помощью MATLAB
387
Рис. 7.38
Корневой годограф для характеристического уравнения (7.122)
»р=[1 1]; q=[1 5 6 0]; sys=tf(p,q); (r,K]=rlocus(sys); plot(r.’x’)
Корневой годограф: альтернативный метод
Этапы построения корневого годографа с помощью MATLAB таковы:
1. Записать характеристическое уравнение в форме (7.123), где К — варьируемый параметр.
2. Использовать функцию rlocus для построения корневого годографа.
Обратившись к рис. 7.38, мы можем видеть, что при увеличении К две ветви корневого годографа отрываются от действительной оси. Это значит, что при некоторых значениях К характеристическое уравнение замкнутой системы будет иметь два комплексных корня. Предположим, что мы хотим найти значение К, соответствующее этой паре комплексных корней. Для этого можно воспользоваться функцией rlocfind, но только после того, как с помощью функции rlocus будет построен сам корневой годограф. Вызов функции rlocfind приведёт к появлению на корневом годографе маркера в виде черты, пересекающей траекторию. Вы подводите маркер к интересующему вас положению на корневом годографе и нажимаете клавишу Enter. На дисплей будет выведено значение параметра К и координаты выбранной точки. Применение функции rlocfind проиллюстрировано на рис. 7.39.
Продолжая наш пример с построением корневого годографа системы третьего порядка, мы находим, что при К = 20, 5775 передаточная функция замкнутой системы имеет
три полюса и два нуля:
полюсы:
f-2,0505+/4,3227'
s= -2,0505-7’4,3227
-0,8989
Если принять во внимание только положение полюсов замкнутой системы, то, казалось бы, доминирующую роль должен играть полюс s = - 0,8989. Чтобы проверить это, имеет смысл исследовать реакцию системы на ступенчатый сигнал, R(s) = l/s.
В этом случае мы имеем:
20,5775(5+1X^+3) 1
5(5+2)(5+3)+20,5775(5+1) 5
(7.124)
388
Глава 7. Метод корневого годографа
Рис. 7.39
Применение функции rlocfind
-6 -4 -2 0 2 4 6
Действительная ось
Первый этап вычисления у(0 состоит в разложении (7.124) на простые дроби. Для этой цели используется функция residue, как показано на рис. 7.40. Смысл этой функции поясняет рис. 7.41.
Рис. 7.40
Разложение выражения (7.24) на простые дроби
7.10. Построение корневого годографа с помощью MATLAB
389
Рис. 7.41
Функция residue
Разложение (7.124) на простые дроби выглядит так:
-1,3786+Д7010 —1,3786—j'1,7010 -0,2429 3
- 5 + 2,0505 + j’4,3228 + 5 +2,0505-j’4,3228 + 5+0,8989 + 5
Сравнивая значения вычетов, мы видим, что коэффициент при члене, соответствующем полюсу 5 = - 0,8989, значительно меньше коэффициентов при членах, соответствующих комплексно-сопряженным полюсам 5 = - 2,0505 ± у’4,3228. Следовательно, можно ожидать, что влияние полюса 5 = - 0,8989 на реакцию системы Х0 не будет доминирующим. Тогда время установления следует оценивать по комплексно-сопряженным полюсам. Полюсам s = - 2,0505 ±у’4,3228 соответствует коэффициент затухания £ = 0,4286 и собственная частота ап = 4,7844. Таким образом, ожидаемое время установления
4
Т. ==——— = 1,95 с.
Переходная характеристика, построенная с помощью функции step, изображена на рис. 7.42, откуда видно, что Ts» 1,6 с. Следовательно, предсказанное значение Т, ~ 1,95 с является довольно хорошей аппроксимацией. Относительное перерегулирование можно оценить с помощью рис. 5.13, т. к. на вид переходной характеристики будет оказывать влияние и нуль передаточной функции T(s\ s = - 3. Согласно рис. 5.13, этот показатель равен 60%. В действительности, как показывает рис. 7.42, перерегулирование составляет 50%.
Рис. 7.42 Переходная характеристика замкнутой системы на рис. 7.10 при К = 20,5775
»К=20.5775; num=K*[1 43]; den=[1 56+К К]; sys=tf(num,den); »step(sys)
390
Глава 7. Метод корневого годографа
В этом примере мы проиллюстрировали влияние нулей передаточной функции на переходную характеристику системы. Близость нуля s = - 1 к полюсу s = - 0,8989 уменьшает влияние этого полюса, а основной вклад в переходную характеристику вносят комплексно-сопряжённые полюсы j = 2,0505 + /4,3228 и нуль s = - 3.
Сделаем ещё одно замечание в отношении функции residue. Вы можете с её помощью перейти обратно от разложения на сумму простых дробей к дробно-рациональному выражению, задав вычеты (г), положение полюсов (р) и постоянный член (Л), как это проиллюстрировано на рис. 7.43.
Рис. 7.43
Переход от разложения на простые дроби к дробно-рациональной функции
г — вычеты,
р — положение полюсов, к — постоянный член
Y(s) = T(sjU (5) = ^ den
[num,den]=residue(r,p,k)
Чувствительность и корневой годограф. Корни характеристического уравнения играют важную роль при определении реакции замкнутой системы на входной сигнал. Поэтому крайне полезно иметь оценку чувствительности этих корней к изменению параметров системы. Чувствительность корня г, определяется как
дг, дК/К ’
(7.125)
Если параметру К придать малое конечное приращение ДА" и определить новое значение корня г, + Дг„ то чувствительность будет равна
sr> - Лг>
к лк/к
(7.126)
Чувствительность 5 £ -— это комплексное число. Вернёмся ещё раз к системе третьего порядка на рис. 7.10 и уравнению 7.122. Если изменить параметр К на 5%, то один из комплексно-сопряжённых полюсов, s = - 2,0505 + /4,3228 получит приращение Дг, = - 0,0025 - /0,1168. Так как параметр К изменился от К = 20,5775 до К = 21,6064, то согласно (7.126) чувствительность будет равна
=-0,0025-/0,1168 =
Л 1,0289/20,5775
Эту чувствительность можно представить и в иной форме: Sr‘ = 2,34е>268’79°.
Модуль и аргумент являются показателями чувствительности корня. Программа с помощью которой вычисляется эта чувствительность, приведена на рис. 7.44.
Показатель S£ может оказаться очень полезным для сравнения чувствительности по отношению к различным параметрам системы при разных положениях корней.
7.11. Пример синтеза с продолжением: система чтения информации с диска 391
Рис. 7.44
Вычисление чувствительности корня
при изменении параметра
% Вычисление чуствительности системы % к изменению параметра % К=20.5775; den=[1 5 6+КК]; r1=roots(den); %
dK=1.0289; ч Изменение К на 5%
/о Km=K+dK; denm=[1 5 6+Km Km]; r2=roots(denm); dr=r1-r2; ◄ , O, 1 Ar
/0 S=dr/(dK/K); Формула для чувствительности
7.11. Пример синтеза с продолжением: система чтения информации с диска
□ В главе 6 мы рассмотрели новую конфигурацию системы управления, в которой была использована обратная связь по скорости (см. разд. 6.7). В данной главе мы разберём случай, когда заданное качество системы обеспечивается с помощью ПИД-регулятора. Мы снова начнём с этапа 4 процедуры синтеза на рис. 5.50. Затем с новой моделью перейдём к этапу 5, после чего на этапе 6 выберем регулятор. И, наконец, на этапе 7 мы оптимизируем параметры регулятора и исследуем качество системы. Для выбора параметров регулятора в данной главе мы воспользуемся методом корневого годографа.
ПИД-регулятор имеет передаточную функцию
Gc(s~) = Ki + ^ + K2s. (7.127)
Поскольку в модели объекта G2(s) уже присутствует операция интегрирования, то мы примем К2 = 0. В результате мы получим ПД-регулятор:
Gc(s) = К{ + K3s, (7.128)
а целью синтеза является выбор параметров Кх и К3, удовлетворяющих требованиям к качеству системы. Структурная схема системы приведена на рис. 7.45. Передаточная функция замкнутой системы равна
УМ = r(j) = Gc(s)Gl(s)G2(s)
K(s) 1+GC адг ад2 (s)H(s) ’
гдеН(х)= 1.
Рис. 7.45. Система управления положением считывающей головки с ПД-регулятором
392
Глава 7. Метод корневого годографа
Чтобы построить корневой годограф, представим Gc(s)Gl(s')G2(s)H(s) в виде:
GcGxG2H{s) =
5000(^! + /С35) _ 5000X3(j+z) 5(5+ 20)(5+ 1000) ~ 5(5+ 20)(5+ 1000) ’
где z = Кх/Ку Параметр Кх мы выберем, чтобы задать положение нуля z, а затем построим корневой годограф в зависимости от А3. По интуиции (см. разд. 6.7) примем z = 1, тогда
GcGxG2H(s) =
5000^3 (5+1) 5(5+20)(5+1000)
(7.129)
Разность между числом полюсов и числом нулей равна 2, поэтому можно ожидать, что
асимптоты будут расположены под углами = ± 90, а их центроид будет в точке
-1020+1
2
= -509,5,
как это показано на рис. 7.46. На этом же рисунке изображён набросок корневого годографа. С помощью MATLAB определены значения корней при разных значениях Кх. Корни, соответствующие К2 = 100, показаны на рис. 7.46. При этом показатели качества системы, также определённые с помощью MATLAB, приведены в табл. 7.6, откуда следует, что синтезированная система удовлетворяет всем выдвинутым требованиям. Время установления, равное 20 мс, — это время, необходимое системе для того, чтобы переходная характеристика «практически» достигла установившегося значения. В действительности реакция системы, достигнув 97% от конечного значения, очень медленно приближается к последнему.
Рис. 7.46
Набросок корневого годографа
Таблица 7.6. Требуемые и действительные значения показателей качества системы чтения информации с диска
Показатель качества
Относительное перерегулирование Время установления
Максимум реакции на единичное возмущение____________________
Желаемое значение Действительное значение
менее 5% 0%
менее 250 мс 20 мс
менее 5 10-3 2 10'3
• 7.12. Резюме
393
7.12. Резюме
Относительная устойчивость и основные показатели качества замкнутой системы управления непосредственно связаны с расположением корней характеристического уравнения системы. Поэтому мы использовали метод корневого годографа, чтобы определить перемещение корней характеристического уравнения на j-плоскости при изменении параметров системы. Этот графический метод может служить основой для предварительного определения структуры системы и значения её параметров, Определение точного расположения корней на j-плоскости обычно производится с помощью компьютера. Корневые годографы для 15 типичных случаев приведены в табл. 7.7.
Далее мы распространили метод корневого годографа на случай, когда варьируемыми являются несколько параметров системы. Затем была исследована чувствительность корней характеристического уравнения системы к изменению ее параметров. Из всего материала ясно, что метод корневого годографа является эффективным средством анализа и синтеза современных систем управления и он остаётся одним из наиболее важных инструментов, применяемых в этой области.
Таблица 7.7. Корневые годографы для типовых передаточных функций
G(s) Корневой годограф G(s) Корневой годограф
К + 1 м Корневой годограф ◄ X £ к (sTj + 1)(st2 +1) > “ X X 1 1 3 К (st, + 1)(st2 + 1)(ST3 + 1) ‘ —ox—x/x ► ► 1 i \ 1 a ° T, T, \ r, Ul'2 4 — s —> ◄ X—► о о
394
Глава 7, Метод корневого годографа
Таблица 7.7 (продолжение)
G(s)_______________Корневой годограф
Упражнения
395
Таблица 7.7 (продолжение)
Упражнения
У-7.1. Рассмотрим устройство, состоящее из шарика, который катается по внутренней поверхности обруча. Данная модель аналогична случаю колебаний жидкого топлива в ракете. Обруч вращается относительно горизонтальной оси, как показано на рис. 7.1(У). Угловое положение обруча изменяется за счёт момента Т, сообщаемого ему электродвигателем. В случае использования отрицательной обратной связи характеристическое уравнение этой системы имеет вид:
Рис. 7.1 (У). Шарик внутри обруча
i+-^L = o s2 + 2s + 2
(а) Постройте корневой годограф, (б) Определите значение К. при
котором оба корня равны, (в) Вычислите значения этих корней, (г) Определите время установления для случая равных корней.
У-7.2. Система управления скоростью протяжки ленты в магнитофоне имеет передаточную функ-
цию
К
G(s) =------z— —
s(s+2)(?+4s+5)
При этом предполагается, что используется отрицательная обратная связь, H(s) = I.
396
Глава 7. Метод корневого годографа
(а) Постройте корневой годограф в зависимости от параметра К и покажите, что при К = 6.5 доминирующие корни равны s=- 0.35 ±j'0.80. (б) Определите время установления и относительное перерегулирование, соответствующие этим доминирующим корням, если на вход системы подан ступенчатый сигнал.
У-7.3. Система управления, применяемая для проверки автомобильной подвески, имеет передаточную функцию
K(s2+4s+8)
G (s) =--=--------.
s2(s+ 4)
Желательно, чтобы доминирующие корни занимали положение, при котором коэффициент затухания имел бы значение С, = 0,5. С помощью метода корневого годографа покажите, что это возможно при К = 7,35 и что при этом доминирующие корни равны s = - 1.3 + j2.2.
У-7.4. Рассмотрите систему с единичной обратной связью, имеющую в разомкнутом состоянии передаточную функцию
K(s+ 1) s2 + 4s + 5 ’
(а) Определите угол выхода корневого годографа из комплексных полюсов, (б) Определите точку входа корневого годографа в действительную ось.
Ответы: + 255°: —2.4.
У-7.5. Рассмотрите систему управления, для которой разомкнутый контур имеет передаточную функцию
s2 + 2s+10
GH(s) = —-----=-----т-------------
s4 + 38? + 515s2 + 2950s + 6000
(а) Определите точку отрыва корневого годографа от действительной оси. (б) Определите положение центроида асимптот, (в) Определите значение К, соответствующее точке отрыва.
У-7.6. США планируют к 2004 году иметь на орбите действующую космическую станцию. Возможная конфигурация такой станции изображена на рис. 7.6(У). Важнейшей задачей является поддержание заданной ориентации станции на Солнце и Землю с целью производства электроэнергии и осуществлении связи. Система ориентации, включающая в себя регулятор и исполнительное устройство, имеет единичную обратную связь, а её прямая цепь представлена передаточной функцией
G(s) = 2^+25> .
s(s2+24s + 100)
Изобразите корневой годограф системы в зависимости от параметра К. Определите значение К, при котором реакция системы будет иметь колебательный характер.
Ответ: К > 5,15.
Рис. 7.6 (У)
Космическая станция
Космический челнок
Упражнения
397
У-7.7. Лифт в современных административных зданиях способен развивать скорость до 7,5 м/с и останавливаться на заданном этаже с точностью до 3 мм. Система управления положением лифта имеет единичную обратную связь, а её передаточная функция в разомкнутом состоянии равна
K(s +
s(s+ l)(.v + 20)(s + 50) ’
Ю)
Определите значение К, при котором комплексным корням будет соответствовать коэффициент затухания С, = 0,8.
У-7.8. Изобразите корневой годограф системы с единичной обратной связью, если
K(s+1) s2(s+
(а) Определите значение К, при котором все три корня будут действительными и одинаковыми. (б) Вычислите значение этих корней.
Ответы: К = 27 ; s = — 3.
У-7.9. Крупнейший в мире телескоп расположен на Гавайских островах. Его главное зеркало имеет диаметр 10 м и состоит из 36 пятиугольных сегментов, причём ориентацией каждого сегмента можно управлять индивидуально. Система управления ориентацией сегмента имеет единичную обратную связь, а её передаточная функция в разомкнутом состоянии равна
. К
G(s) = —z--------.
s(s2 + 2s + 5)
(а) Определите асимптоты корневого годографа и изобразите их Has-плоскости, (б) Определите углы выхода годографа из комплексных полюсов, (в) Определите значение К. при котором два корня будут находиться на мнимой оси. (г) Изобразите вид корневого годографа.
У-7.10. Система с единичной обратной связью в разомкнутом состоянии имеет передаточную функцию
KG(s) = ^^.
s(s+ 1)
(а) Определите точку отрыва корневого годографа от действительной оси и точку входа в неё. (б) Определите значение К и соответствующие ему корни, если действительная часть комплексных корней равна -2. (в) Изобразите вид корневого годографа.
Ответы: (а) — 0,59; — 3,41. (б) К= 3; s = -2± /л/2.
У-7.11. Система управления усилием, развиваемым роботом, имеет единичную обратную связь, а её передаточная функция в разомкнутом состоянии равна
1- K(s +2,5)
J(> (s2 + 2s + 2)(s2 + 4s + 5)
(а) Определите значение К, при котором доминирующим корням будет соответствовать коэффициент затухания С, = 0,707. Изобразите корневой годограф, (б) Определите действительные значения относительного перерегулирования и времени максимума переходной характеристики при К, найденном в п. (а)
У-7.12. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
KG{S) = -^-. s(s2 + 4s + 8)
(а) Изобразите корневой годограф для К > 0.
(б) Найдите значения корней при К = 10 и К = 20.
(в) Вычислите время нарастания переходной характеристики от 0 до 100%, относительное перерегулирование и время установления (по критерию 2%) при значениях К = 10 и К = 20.
398
Глава 7. Метод корневого годографа
У-7.13. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(5) =--4(5+ 2) .
5(5 + 1)(5 + 3)
(а) Изобразите корневой годограф при изменении 2 от 0 до 100. (б) Используя корневой годограф и считая, что на вход системы подан ступенчатый сигнал, оцените величину относительного перерегулирования и время установления (по критерию 2%) при z = 0.6; 2; 4. (в) Определите действительные значения перерегулирования и времени установления при z = 0,6; 2; 4.
У-7.14. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
5(5+ 5)
(а) Определите точки отрыва и входа корневого годографа и изобразите его вид при К >0.
(б) Определите значение К, при котором двум корням характеристического уравнения будет соответствовать С, = 1 /V2. (в) Вычислите значения этих корней.
У-7.15. (а) Постройте корневой годограф, если
G//(5)=^+1)(-3)
(б) Определите диапазон значений К. при которых замкнутая система устойчива, (в) Предскажите величину установившейся ошибки при линейном входном воздействии.
Ответы', (а) К > 3/4; (б) = 0.
У-7.16. Система с единичной отрицательной обратной связью имеет в разомкнутом состоянии передаточную функцию
ч Ке~хГ
G(s) =------
где Т = 0,1 с. Покажите, что для запаздывания можно воспользоваться аппроксимацией -st 2/7-5 е »--------------------------------------------.
2/7 + 5
Используя замену
е-о,ь _ 20-5
20+5 ’
постройте корневой годограф системы для К > 0. Определите диапазон значений К, при которых система устойчива.
У-7.17. В системе, изображённой на рис.
7.17(У), объект управления имеет передаточную функцию
G(5) = ——.
Рис. 7.17 (У). Система с обратной связью
(а) Изобразив вид корневого годог-
рафа. покажите, что при Gc(s) = К система всегда будет неустойчива, (б) В случае
Gc(5) = ^)
(5+20)
изобразите корневой годограф и определите диапазон значений К. при которых система будет устойчива. Определите значение К, при котором два корня будут находиться на мнимой оси. и вычислите эти корни.
Задачи
399
У-7.18. Для управления курсом реактивного истребителя-перехватчика используется система с единичной отрицательной обратной связью, имеющая в разомкнутом состоянии передаточную функцию
К
G(s) = - .
s(s + 3)(s2 + 2s + 2)
(а) Определите точку отрыва корневого годографа, (б) Определите значение К, при котором два корня окажутся на мнимой оси, и укажите, чему равны эти корни. Изобразите вид корневого годографа.
Ответ: (а) s = -2,29 ; (б) К = 8 , s = ± J1.09.
У-7.19. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
К
G(s) = ----, —
s(s+ 3)(s2+ 6s + 64)
(а) Определите углы выхода корневого годографа из комплексных полюсов, (б) Изобразите вид корневого годографа, (в) Определите значение К, при котором корни будут находиться па мнимой оси, и укажите положение этих корней.
У-7.20. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) = —g(5+1) .
s(s-l)(s+4)
(а) Определите диапазон значений К, при которых система устойчива, (б) Изобразите вид корневого годографа, (в) Определите наибольшее значение коэффициента затухания соответствующее комплексным корням устойчивой системы.
Ответы: (а) К > 6 ; (б) £ = 0,2.
У-7.21. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
Ks
G(s) = -5------.
s2+ 5s+ 10
Изобразите вид корневого годографа. Определите значение К. при котором комплексным корням характеристического уравнения соответствует £ » 0,86.
У-7.22. Система управления ракетой, выводящей на орбиту искусственный спутник, имеет единичную обратную связь, а её передаточная функция в разомкнутом состоянии равна
K(?+20)(s+l)
’ (?-2)(j+10)
Изобразите корневой годограф в зависимости от параметра К.
У-7.23. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(,) = ^>
5(5 + а)
Постройте корневой годограф для 0 < а < °о.
Задачи
3-7.1. Постройте корневые годографы для системы, изображённой на рис. 7.1(3), при 0 < К < °о и следующих передаточных функциях:
(а)СЯ(5) =----
f(s+ 10)2
400
Глава 7. Метод корневого годографа
(6)GH(s) =
К
(b)GH(s) =
(f)GH(s) =
Рис. 7.1 (3)
(? + 2s + 2)(s + 2) ’ X(s+6) s(s + 2)(s + 7)’ K(s2+4s+8) s2(s+ 4)
3-7.2. В задаче 6.7 была представлена линейная
модель фазового детектора. Изобразите корневой годограф в зависимости от коэффициента Определите значение Kv, при котором комплексным корням соответствует коэффи-
циент затухания С, = 0,60.
3-7.3. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
К
G(s) =------------.
5(s + 2)(s + 5)
Определите (а) точку отрыва корневого годографа от действительной оси и соответствующее этой точке значение К, (б) коэффициент К. при котором два корня находятся на мнимой оси. и положение этих корней и (в) положение корней при К= 6. (г) Изобразите вид корневого годографа.
3-7.4. В задаче 4.5 рассматривалась система управления положением большой антенны. Изобразите корневой годограф этой системы при 0 < Ка < оо. Определите максимально допустимое значение коэффициента усиления усилителя, исходя из соображений устойчивости системы.
3-7.5. Задача автоматического управления вертолётом является весьма актуальной, т. к. в отличие от обычного самолёта, объективно обладающего некоторой степенью устойчивости, вертолёт — это принципиально неустойчивый объект. На рис. 7.5(3) изображена система управления вертолётом, в которой наряду с контуром автоматической стабилизации участвует пилот, манипулирующий рукояткой управления. Если пилот не пользуется рукояткой управления, то ключ на схеме системы можно считать разомкнутым. Динамика вертолёта описывается передаточной функцией
25(5+0,03)
G2(s) = 2------------
(s+0.4 )(s2-0,36л + 0,16)
(а) При разомкнутом контуре ручного управления изобразите корневой годограф контура автоматической стабилизации. Определите значение К2, при котором комплексным корням соответствует коэффициент затухания С, = 0,707. (б) При значении К2. полученном в п. (а), определите установившуюся ошибку, вызванную порывом ветра, Tj(s) = l/s. (в). Сохранив значение К2, найденное в п. (а), добавьте контур ручного управления и изобразите корневой годограф системы при изменении Kt от 0 до оо . (г) На основании корневого годографа выберите подходящее значение Kt и определите новую величину установившееся ошибки.
Рис. 7.5 (3). Система управления вертолетом
Задачи
401
Рис. 7.6 (3). Система управления положением ракеты-носителя
3-7.6. На рис. 7.6(3) изображена система управления положением ракеты-носителя при прохождении земной атмосферы. Передаточные функции имеют следующий вид:
= X (5 +0,20) с = (5+2+Д5)(5+2-Д5)
J(S (s+0,90)(s-0,60)(s-0,10)’ >с (s+4,0)
(а) Изобразите корневой годограф системы при изменении К от 0 до оо. (б) Определите значение К, при котором система обладала бы временем установления (по критерию 2%) не более 12 с, а комплексным корням соответствовал бы коэффициент затухания С, > 0,50.
3-7.7. На рис. 7.7(3) изображена система управления скоростью турбогенератора. Вентиль управля-
Момент нагрузки
коэффициент
Рис. 7.7 (3). Система управления скоростью турбогенератора
ет подачей пара в турбину, чтобы компенсировать изменение нагрузки AA(s), вызванное потреблением электроэнергии в сети. При номинальном значении скорости вращения турбины частота генератора равна 60 Гц . Параметры генератора: момент инерции J = 4000 и коэффициент трения b = 0,75. Настраиваемый коэффициент обратной связи, R » (соо - <и,.)/АА, где со,. — скорость вращения при нагрузке, соо — скорость на холостом ходу. Значение R желательно иметь как можно меньше, обычно менее 0,10.
(а). С помощью метода корневого годографа определите величину R, при которой коэффициент затухания, соответствующий комплексным корням системы, будет удовлетворять неравенству С, > 0,60. (б) Убедитесь, что при изменении момента нагрузки AL(s) = AL/s отклонение скорости в установившемся режиме будет приблизительно равно RAL. где R < 0.1.
3-7.8. Рассмотрите ещё раз задачу 7.7, предположив, что паровая турбина заменена гидравлической турбиной. В этом случае существенно изменяется постоянная времени объекта за счёт большей инерционности потока воды. Передаточная функция гидравлической турбины может быть представлена выражением
(t/2)s+1’
где т = 1 с. Если остальные части системы остаются теми же, что и в задаче 7.7, то выполните пп. (а) и (б) задачи 7.7.
* 60 Гц — стандарт США (прим, игрек.)
402
Глава 7. Метод корневого годографа
Рис. 7.9 (3). Система управления транспортным средством
3-7.9. На производственных предприятиях будущего важная роль должна принадлежать автоматически управляемым транспортным средствам. В целях безопасности при движении этих средств между ними необходимо поддерживать определённую дистанцию. Система управления движением должна исключать влияние возмущений (например, в виде разлитого на полу масла), а также точно поддерживать заданную дистанцию. Структурная схема такой системы изображена на рис. 7.9(3). Динамика транспортного средства представлена передаточной функцией
G (s) = (s+0,l)(s2+2s+289)
s(s - 0,4 )(s + 0,8)(s2 + 1,45s +361)’
(а) Изобразите вид корневого годографа системы, (б) Определите все корни при К = К1К2 = 4000.
3-7.10. В отличие от самолёта Конкорд, сверхзвуковой пассажирский лайнер будущего должен обладать дальностью полёта, позволяющей «в один прыжок» пересекать Тихий океан, и в то же время быть достаточно экономичным. Такой самолёт, изображённый на рис. 7.10(3), (а), потребует использования термостойких легких материалов и усовершенствованых компьютерных систем управления.
Самолет должен перевозить 300 пассажиров со скоростью, в три раза превышающей скорость звука, на расстояние до 12000 км. Система управления должна обладать высоким качеством и обеспечивать комфортабельные условия полёта. Структурная схема такой системы изображена на рис. 7.10(3), (б). Желательно, чтобы доминирующим корням этой системы соответствовал коэффициент затухания С, = 0,707. Передаточная функция самолёта имеет параметры
Задачи
403
а>„ = 2,5, С, = 0,30 и т = 0,1, Однако коэффициент Kt будет изменяться от 0,02 при крейсерской скорости до 0,20 при малой скорости во время снижения.
(а) Изобразите вид корневого годографа в зависимости от KtK2. (б) Определите значение К2, при котором система управления в условиях крейсерской скорости будет иметь доминирующие корни, соответствующие £ = 0,707. (в) При значении К2. найденном в п. (б), определите величину С, если коэффициент X, соответствует условиям снижения самолёта.
3-7.11. Лентопротяжные механизмы, используемые в компьютерной технике, должны удовлетворять довольно жёстким требованиям. Окружающие условия, в которых работают такие механизмы, диктуют необходимость тщательных испытаний системы управления протяжкой магнитной ленты. На рис. 7.11 (3) изображена такая система, где г — радиус бобины, a J— момент инерции бобины и ротора двигателя постоянного тока. Полное изменение направления вращения бобины должно занимать 6 мс, а ступенчатый входной сигнал должен отрабатываться лентопротяжным механизмом за 3 мс или менее. Протяжка ленты обычно совершается со скоростью 250 см/с. Параметры двигателя и элементов системы имеют следующие значения:
Кь = 0,40 г = 0,2 Кр = 1
= 2,0 т( = т„ = 1 мс KjJLJ = 2,0
К2 — настраиваемый параметр.
Момент инерции бобины и ротора двигателя равен 2,5 • 10-3. когда бобина пустая, и 5,0 10 3, когда она полная. Ошибка системы определяется с помощью ряда фотоэлементов. Постоянная времени двигателя L/R = 0,5 мс.
(а) Изобразите вид корневого годографа при К2 -IO,J= 5,0 10 3 и 0 < Ка < оо . (б) Определите значение Ка, при котором система будет хорошо демпфирована, т. е. всем корням будет соответствовать £ > 0,60. (в) При значении Ка, найденном в п. (б), изобразите вид корневого годографа для 0 < К2 < оо.
Рис. 7.11 (3)
(а) Лентопротяжный механизм.
(б) Структурная схема системы управления
Бобины и двигатели
404
Глава 7, Метод корневого годографа
Рис. 7.12 (3). Система управления скоростью
3-7.12. В гироскопических устройствах и при испытаниях инерциальных систем навигации используется прецизионная система управления скоростью, изображённая на рис. 7.12(3). В такой системе двигатель постоянного тока используется напрямую, без введения редуктора, которому присущи такие негативные качества, как люфт и трение. Благодаря этому обеспечивается (1) поддержание заданной скорости в диапазоне от 0,01 % до 600 °/с и (2) максимальное значение установившейся ошибки при ступенчатом изменении входного сигнала, равное 0.1%. При этом также полностью используется вращающий момент двигателя, достигается высокий к.п.д., а постоянная времени двигателя имеет минимальное значение. Параметр двигателя Кт имеет номинальное значение Кт = 1,8, но возможны его вариации в пределах до 50%. Коэффициент Ка обычно более 10, но и его вариации могут достигать 10%.
(а) Определите минимально необходимое значение коэффициента усиления контура, при котором удовлетворялось бы ограничение на величину установившейся ошибки, (б) Определите предельно допустимое значение этого коэффициента, исходя из соображений устойчивости системы, (в) Изобразите вид корневого годографа системы при 0 < Ка < оо. (г) Определите значения корней при Ка = 40 и оцените показатели качества системы при ступенчатом входном воздействии.
3-7.13. Система с единичной обратной связью в разомкнутом состоянии имеет передаточную функцию
s(s + 3)(s2 + 4s + 7,84)
(а) Определите точку отрыва корневого годографа от действительной оси и соответствующее этой точке значение К. (б) Определите значение К, при котором двум комплексным корням, расположенным ближе всего к мнимой оси, соответствует коэффициент затухания £ = 0,707. (в) Являются ли корни, найденные в п. (б), доминирующими? (г) Определите время установления (по критерию 2%) при значении К, найденном в п. (б).
3-7.14. Передаточная функция разомкнутой одноконтурной системы с отрицательной обратной связью имеет вид
GH(s) = 2 .
s2(s+ l)(s+ 10)(s+ 50)
Такая система является условно-устойчивой, т. к. она сохраняет устойчивость только при К} < К < К2. Используя критерий Рауса-Гурвица и метод корневого годографа, определите диапазон значений К, при которых система устойчива. Изобразите вид корневого годографа при 0 < К < оо.
3-7.15. Вернёмся к проблеме устойчивости и качества системы управления мотоциклом из задачи 6.13. Динамика гонщика и мотоцикла представлена передаточной функцией
ГН1^ Л'(s2 + 30s + 625)
0/1 (S) ---------„-----------~.
s(s + 20)(s2 + 20s + 200)(s2 + 60s + 3400)
Задачи
405
Изобразите вид корневого годографа системы. Определите значение С,, соответствующее доминирующим корням, при К = 3 -104.
3-7.16. В металлургической промышленности используются системы управления, позволяющие поддерживать постоянное натяжение стальной полосы при её горячей прокатке. Подобная система изображена на рис. 7.16(3). Устройство, являющееся датчиком натяжения, состоит из барабана, укреплённого на рычаге длиной от 60 до 90 см. который прижимается к стальной полосе в промежутке между валками, одна пара из которых приводится во вращение электродвигателем. Скорость протяжки полосы обычно составляет 600 м/мин. Напряжение, пропорциональное положению барабана, сравнивается с эталонным значением езад, и разность между ними зазем интегрируется. При этом предполагается, что изменение положения барабана пропорционально натяжению стальной полосы. Постоянная времени фильтра, т. пренебрежимо мала по
сравнению с другими постоянными времени системы.
(а) Изобразите вид корневого годографа системы при 0 < Ка < «>. (б) Определите значение К1Р при котором корням будет соответствовать коэффициент затухания С, = 0,707 или более, (в)
Исследуйте влияние т на вид корневого годографа при увеличении этой постоянной времени
от пренебрежимо малого значения.
3-7.17. Рассмотрите динамический поглотитель вибраций, с которыми мы имели дело в задачах 2.2 и 2.10. С помощью корневого годографа исследуйте влияние параметров М2 и kl2. Определите такие значения М2 и Л|2, при которых отсутствовали бы колебания массы Мх. если /•](/) =
= a sin<oo t. Примите значения Мх = 1, kx = 1 и b = 1. Кроме того, предположите, что кп < 1 и членом Л|2 можно пренебречь.
3-7.18. На рис. 7.18(3) изображена система с обратной связью. Фильтр Gc(s) часто называют регулятором, а зада- R(s) чей синтеза является выбор параметров а и р. С помощью метода корневого годографа исследуйте
влияние изменения этих параметров Рис. 7.18 (3). К синтезу фильтра
и найдите такие их значения, при которых время установления (по
критерию 2%) было бы не более 4 с, а доминирующим корням соответствовал бы коэффициент затухания С, < 0,60.
3-7.19. В последние годы на промышленных предприятиях стали использоваться автоматически управляемые тележки для транспортировки грузов. В одной из таких систем движение тележ-
406
Глава 7. Метод корневого годографа
Рис. 7.19 (3)
(а) Автоматически управляемая тележка.
(б) Структурная схема
а)
ки по заданному пути осуществляется с помощью вмонтированного в пол кабеля. Отклонение тележки от заданного пути определяется с помощью двух катушек, чувствительных к магнитному полю, создаваемому током в кабеле. Пример такой тележки приведён на рис. 7.19(3), (а). Предположим, что
Ха(?+ 3,fe+ 81) U s(s+l)(s+5) ’
где Ка—коэффициент усиления усилителя, (а) Определите вид корневого годографа и найдите значение Ка, при котором комплексным корням соответствовал бы коэффициент затухания Q — 0,707. (б) Определите чувствительность комплексного корня г । как функцию (1) Ка и (2) полюса G(s) в точке s = — 1.
3-7.20. Определите чувствительность доминирующих корней из задачи 7.18 для К = 4 а/p и полюса s = — 2.
3-7.21. Определите чувствительность доминирующих корней системы управления турбогенератором из задачи 7.7. Вычислите эту чувствительность по отношению к изменению (а) полюсов s = - 4 и (6) коэффициента обратной связи 1/Л.
3-7.22. Определите чувствительность доминирующих корней системы из задачи 7.1(a), если К имеет значение, которому соответствует коэффициент затухания £ = 0,707. Вычислите и сравните чувствительности корней по отношению к полюсам GH(s).
3-7.23. Повторите задачу 7.22 для передаточной функции GH(s) из задачи 7.1(b).
3-7.24. Корневой годограф для систем относительно высокого порядка часто может принимать весьма неожиданную форму. На рис. 7.24(3) приведены корневые годографы четырёх различных систем, имеющих третий или более высокий порядок. На рисунке отмечено положение полюсов и нулей передаточной функции разомкнутого контура KF(s), а траекториям корней соответствует изменение К от 0 до оо. Убедитесь в правильности построения этих корневых годографов.
3-7.25. Твердотельные интегральные схемы включают в себя распределённые элементы Л и С. Поэтому цепи с обратной связью, реализованные на основе таких интегральных схем, должны быть исследованы на предмет получения их передаточных функций. Было установлено, что наклон амплитудно-частотной характеристики ЛС-цепи с распределёнными параметрами равен -10и дБ/дек, где п — порядок передаточной функции фильтра. Такой наклон отличается от
Задачи
407
Рис. 7.24 (3). Корневые годографы четырех систем
привычного наклона -20 дБ/дек, характерного для цепей с сосредоточенными параметрами. (Понятие наклона АЧХ рассматривается в главе 8. Если читатель ещё не знаком с этим понятием, то он может обратиться к предлагаемой задаче после изучения главы 8.) Очень интересен случай, когда цепь с распределёнными параметрами используется в качестве обратной связи в транзисторном усилителе. Передаточная функция разомкнутого контура при этом имеет вид:
GH(s) =
К (s - Y)(s + 3~)V2 (s+ l)(s+ 2)12
(а) Определите вид корневого годографа при изменении К от 0 до от . (б) Вычислите значение К, при котором замкнутая система будет находиться на границе устойчивости, и определите частоту незатухающих колебаний.
3-7.26. Одноконтурная система с отрицательной обратной связью имеет в разомкнутом состоянии передаточную функцию
GH(s) =
K(s+2)2 s(s2 + l)(s + 8)
(а) Определите вид корневого годографа при 0 < К < от и укажите его характерные особенности. (6) Определите диапазоны значений К, при которых система устойчива, (в) При каком значении К (К > 0) корни являются чисто мнимыми? Каковы значения этих корней? (г) Правомерно ли при больших значениях К (К > 50) использовать доминирующие корни для оценки времени установления?
408
Глава 7. Метод корневого годографа
3-7.27. Система с единичной отрицательной обратной связью имеет в разомкнутом состоянии передаточную функцию
= K(s2 + 0,105625) = K(s + j'0,325)(s - j'0,325) s(s2 + 1) s(s2 + 1)
Изобразите вид корневого годографа в зависимости от К. Вычислите точные значения координат точек входа корневого годографа на действительную ось и точек отрыва от неё.
3-7.28. В США в последнее время уделяется большое внимание контролю за выхлопом автомобильных двигателей, особенно в части выбросов в атмосферу НС (углеводорода) и СО (окиси углерода). Нормы выбросов NOX (окисей азота) регулируются главным образом за счёт применения методов рециркуляции выхлопных газов. Однако по мере ужесточения норм выброса NOX с 2,0 г/милю до 1,0 г/милю эти методы оказываются недостаточными.
Хотя рассматривается несколько разных методов, уменьшающих вредное влияние трех упомянутых выше выбросов, один из наиболее перспективных состоит в применении трехступенчатого катализатора, действующего на НС, СО и NOX в дополнение к замкнутой системе управления работой двигателя, представленной на рис. 7.28(3). Датчик содержания выхлопных газов определяет, выше или ниже последние допустимой нормы, и сравнивает показания с заданным значением. Сигнал рассогласования поступает на вход регулятора, который в свою очередь изменяет уровень разрежения в карбюраторе, чтобы достигнуть наилучшего соотношения воздух/горючее для оптимальной работы катализатора. Передаточная функция разомкнутого контура управления в данном случае имеет вид:
GH (s) = *1—?5 + 20) s3 + 10s2 + 25s
Постройте корневой годограф в зависимости от коэффициента К. Вычислите точные значения координат точек, где корневой годограф входит в действительную ось и отрывается от неё. Определите значения корней при К=2. Предскажите вид переходной характеристики системы при К = 2.
Рис. 7.28 (3). Система управления выхлопом двигателя автомобиля
3-7.29. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
X(s2+6s+12)
s2(s+6)
Желательно, чтобы доминирующим корням соответствовал коэффициент затухания £ = 0,707. Определите значение К, при котором удовлетворяется это требование. Покажите, что при данном значении К комплексные корни равны s = - 2,3 + j2,3.
3-7,30. На рис. 7.30(3) изображена ЯЛС-схема. Номинальные ___________________
значения параметров равны L = С = 1 и R = 2,5. Пока- + ° Г — жите, что чувствительности двух корней полного вход- д5) 5 £ ~~ С
ного сопротивления Z(s) к изменению R отличаются в 4 <
раза. _ £
Рис. 7.30 (3). /?£С-схема
Задачи
409
3-731. При конструировании новых сверхзвуковых самолётов и космических ракет крайне необходимо знание их аэродинамических характеристик. Определение этих важных параметров производится в аэродинамических трубах, в которые с большой скоростью нагнетается сжатый воздух, имитирующий поток ветра. Поскольку давление воздуха уменьшается по мере его истечения, то необходимо увеличивать открытие вентиля, чтобы поддерживать постоянную скорость потока. Эта задача может быть решена с помощью специальной системы управления. При единичной обратной связи такая система в разомкнутом состоянии имеет передаточную функцию
K(s+ 4) s(s + 0,16)(s + p)(s + p) ’
где p = — 7,3 + j’9,7831. Изобразите вид корневого годографа и укажите положение корней при А>326 и Х = 1350.
3-732. Для выполнения охранных функций в ночное время вполне пригоден мобильный робот. В отличие от человека он не может заснуть и способен постоянно контролировать большую территорию склада и прилегающие окрестности. Система управления курсом такого робота (при наличии единичной обратной связи) ймеет в разомкнутом состоянии передаточную функцию
K(s+ 5)
s(s + l,5)(s + 2)
(а) Найдите значения К, соответствующие всем точкам отрыва корневого годографа от действительной оси и точкам входа на нее. (б) Определите значение К, при котором комплексным корням будет соответствовать коэффициент затухания £ = 0,707. (в) Определите минимальное значение коэффициента затухания и соответствующее ему значение К. (г) При значениях К, найденных в пп. (б) и (в), определите величину перерегулирования и время нарастания (по критерию 2%) в случае ступенчатого единичного входного воздействия.
3-733. Летательный аппарат Белл-Боннг V-22 может одновременно выполнять функции как самолёта, так и вертолета. Его преимущество заключается в том, что он может отклонять двигатели на 90° при взлёте и посадке и возвращать их в горизонтальное положение во время нормального полёта [см. рис. 7.33(3)]. На рис. 7.33(3), (б) изображена система управления высотой аппарата, когда он функционирует как вертолёт, (а) Изобразит е вид корневого годографа системы и определите диапазон значений К, при которых система устойчива, (б) В случае единичного ступенчатого воздействия, г(г), полагая К = 280. определите реакцию системы y(t) и оцените величину относительного перерегулирования и время установления (по критерию 2%). (в) При К = 280 и г(0 = 0 найдите у(Г) при единичном ступенчатом возмущении, D(s) = 1/j.
б)
R(s)
Рис. 7.33 (3)
(а) Самолет-вертолет и (б) его система управления
D(S)
Регулятор
Динамика аппарата
К(?+15л+0 5)
(20.r+l)(l0.v+l)(0 5j+l)
Высота
s
410
Глава 7. Метод корневого годографа
(г) В цепь сигнала R(s) до его приложения к сумматору введите дополнительный фильтр, чтобы получить
0,5
Gp^ s2+1,5s+0,5’
и выполните задание п. (б).
3-7.34. Система управления подачей топлива в дизельный двигатель автомобиля подвержена влиянию изменения параметров. В разомкнутом состоянии эта система имеет передаточную функцию
G(s) =
K(s + 1,5) (s + l)(s + 2)(s + 4)(s +10)
(а) Изобразите вид корневого годографа при изменении К от 0 до 2000. (б) Определите значения корней при К = 400, 500, 600. (в) Предскажите, как будет изменяться относительное перерегулирование в случае ступенчатого входного воздействия в зависимости от К (учитывая только доминирующие корни), (к) Определите действительное время установления при всех трёх значениях коэффициента К, а также сравните действительные значения перерегулирования с предсказанными.
3-7.35. Мощный электрогидравлический грузоподъёмник может использоваться для доставки на подмостки на высоту 10 м поддонов со строительными материалами весом в несколько тонн. Система управления таким подъёмником с единичной отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
G(s) =
£(s+l)2 s(s2 + 1) ‘
(а) Изобразите вид корневого годографа при К > 0. (б) Определите параметр К, при котором двум комплексным корням будет соответствовать коэффициент затухания £ = 0,707, и вычислите значения всех трёх корней, (в) Определите точку входа корневого годографа на действительную ось. (г) Оцените ожидаемое перерегулирование при ступенчатом входном сигнале и сравните его с действительным значением, полученным с помощью компьютерной программы.
3-7.36. Для исследования очень маленьких объектов, таких как биологические клетки, был создан микроробот с прецизионным манипулятором. Система управления микро роботом имеет единичную отрицательную обратную связь, а её передаточная функция в разомкнутом состоянии равна
K(s+l)(s+2)(s+3) s3(s-l)
(а) Изобразите вид корневого годографа для К > 0. (б) Найдите значение К. при котором два корня будут чисто мнимыми, и вычислите эти корни, (в) Вычислите значения всех корней при К = 20 и К = 100. (г) При К = 20 оцените ожидаемое перерегулирование в случае ступенчатого входного сигнала и сравните его с действительным значением, полученным с помощью компьютерной программы.
3-7.37. На рис. 7.37(3) изображена система с обратной связью. Если входной сигнал представляет собой единичную ступенчатую функцию, то выходной сигнал имеет перерегулирование, но стремится к установившемуся значению, равному 1. Если входной сигнал является линейным, то
выходной сигнал отслеживает его с конечной установившейся ошибкой. Если значение К увеличить в 2 раза, то реакция системы на импульсный входной сигнал будет чисто синусоидальной с периодом 0,314с. Определите параметры К, а и Ь.
(s+40)(s+a)(s+Z>)
Рис. 7.37 (3). Система с обратной связью
К
> Ks)
Задачи повышенной сложности
411
3-7.38. Система, неустойчивая в разомкнутом состоянии, имеет передаточную функцию
G(5) =
X(s+1) s(s - 3)
и охвачена единичной обратной связью, (а) Определите диапазон значений К. при которых система устойчива, (б) Изобразите вид корневого годографа, (в) Найдите значения корней при К = 10. (г) С помощью рис. 5.13, приняв К= 10, предскажите величину перерегулирования при ступенчатом входном сигнале, (д) Получите график переходной характеристики и определите действительное значение перерегулирования.
3-7.39. Скоростные электропоезда должны обладать хорошей способностью преодолевать повороты железнодорожного полотна. В обычных поездах оси колёсных пар жестко закреплены на стальных рамах, называемых тележками. Когда поезд входит в поворот, тележки поворачиваются, но оси остаются параллельными друг другу даже если передняя ось стремится изменить направление относительно задней. При высокой скорости движения это может привести к сходу тележки с рельсов. Возможным решением проблемы является конструкция, когда оси поворачиваются независимо друг от друга. Чтобы противодействовать сильным центробежным силам, возникающим при повороте, поезд оснащён компьютеризированной гидравлической системой, которая наклоняет каждый вагон, когда он входит в поворот. Специальные датчики определяют скорость поезда и радиус поворота, и соответствующие сигналы поступают на гидроприводы, установленные под днищем каждого вагона. Угол наклона вагона может достигать 8 градусов, что очень напоминает поведение гоночного автомобиля на вираже трассы. На рис. 7.39(3) изображена система управления наклоном вагона. Изобразите вид корневого годографа и определите значение К, при котором комплексным корням соответствует максимальный коэффициент затухания. Предскажите реакцию этой системы на ступенчатый входной сигнал.
Рис. 7.39 (3)
Система управления наклоном вагона
Задачи повышенной сложности
П-7.1. На рис. 7.1(П), (а) изображен вид сверху многоцелевого реактивного истребителя. Найдите вид корневого годографа и определите значение К, при котором комплексным корням, ближайшим к мнимой оси, будет соответствовать максимально возможное значение коэффициента затухания Вычислите значения корней при данном К и предскажите вид переходной характеристики (реакции системы на ступенчатый входной сигнал). Определите действительную реакцию системы и сравните её с предсказанной.
Рис. 7.1 (П). (а) Многоцелевой истребитель. (6) Система управления углом атаки
412
Г лава 7, Метод корневого годографа
П-7.2. Скоростной поезд на магнитной подушке «летит» благодаря воздушному зазору между ним и направляющим рельсом. Система управления зазором имеет единичную обратную связь, а её передаточная функция в разомкнутом состоянии равна
Х(5+1)(5+3) s(s-l)(s+4)(s+8) ’
Требуется выбрать такое значение К, при котором реакция системы на единичное ступенчатое воздействие была бы достаточно демпфирована, а время установления не превышало 3 с. Изобразите вид корневого годографа и выберите такое значение К. при котором всем комплексным корням соответствовал бы коэффициент затухания С, > 0,6. Получите действительную переходную характеристику и определите величину относительного перерегулирования.
П-7.3. Портативный проигрыватель компакт-дисков должен обладать эффективным подавлением помех и прецизионным позиционированием чувствительного оптического элемента. Система управления положением этого элемента имеет единичную обратную связь, а ее передаточная функция в разомкнутом состоянии равна
10
G(s) = s(s + 1)(1' + р)
Параметр р определяется характеристиками двигателя постоянного тока. Изобразите вид корневого годографа в зависимости отр. Выберите значениер, при котором комплексным корням соответствовал бы коэффициент затухания приблизительно равный 1А/2.
П-7.4. Система управления дистанционным манипулятором имеет единичную обратную связь, а её передаточная функция в разомкнутом состоянии равна
_., 5 + а
G(s) = -г------------------------.
j + (1 + а )5 + (а -1)5 + 1 - а
Желательно, чтобы при ступенчатом входном сигнале установившаяся ошибка была менее или равна 10% от амплитуды ступеньки. Изобразите вид корневого годографа в зависимости от параметра а. Определите диапазон значений а, при которых будет удовлетворяться ограничение на величину установившейся ошибки. Задайте положение корней, соответствующее одному из допустимых значений а, и оцените переходную характеристику системы.
П-7.5. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G($) = -5----5--------
s’ + 1052+ 75-18
(а) Изобразите вид корневого годографа и определите значение К, при котором система устойчива и комплексным корням соответствует £ = 1/V2. (б) Определите чувствительность комплексных корней из п. (а), (в) Определите процентное изменение К (увеличение или уменьшение), при котором корни будут находиться на мнимой оси.
П-7.6. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G ( А’(52 + 35 + 3,25)
S 52(5+ 1)(5+10)(5+20)’
Изобразите вид корневого годографа при К > 0 и выберите значение К, при котором переходная характеристика будет достаточно приемлемой.
П-7.7. На рис. 7.7(П) изображена система с положительной обратной связью. При К > 0 корневой годограф должен удовлетворять условию
KG(s) = e±jk 160\ к = 0,1,2,....
Изобразите корневой годограф при 0 < К < оо.
Задачи повышенной сложности
413
Рис. 7.8 (П)
Система управления положением вала двигателя с обратной связью по скорости
Рис. 7.7 (П)
Система с положительной обратной связью
П-7.8. На рис. 7.8(П) изображена система управления положением вала двигателя постоянного тока. Изобразите вид корневого годографа в зависимости от коэффициента обратной связи по скорости К и найдите значение К, при котором все корни характеристического уравнения будут вещественными (два из них — одинаковыми). Оцените вид переходной характеристики при данном значении К и сравните его с действительной реакцией.
П-7.9. На рис. 7.9(П) изображена система управления с единичной обратной связью. Изобразите вид корневого годографа при следующих передаточных функциях Gc(s):
(a) G^) = К; (б) Gc(s) = K(s + 1) ; (в) Gc(s) = ; (г) Cc(s) = Х(5+ 1)(* + 32 .
S+ 10 5+ 10
Рис. 7.9 (П)
Система с единичной обратной связью
П-7.10. Для системы, изображенной на рис. 7.10(П). изобразите вид корневого годографа в зависимости от К (К. > 0). Определите значение К, при котором реакция системы на ступенчатый входной сигнал будет иметь перерегулирования не более 5% и время установления (по критерию 2%) не более 2,5 с.
П-7.11. Рассмотрите ещё раз задачу об у прав ле-
Рис. 7.10 (П). Система с неединичной обратной сваязью
нии мотоциклом с помощью робота (зада-
ча С-6.6). Изобразите вид корневого годографа при К > 0 и выберите значение К. обеспечиваю-
щее устойчивость мотоцикла при появлении возмущения.
П-7.12. Для системы управления, изображённой на рис. 7.12(П), изобразите вид корневого годографа и выберите такое значение К, при котором переходная характеристика системы имела бы перерегулирование не более 20% и время установления (по критерию 2%) не более 5 с.
Рис. 7.12 (П)
Система управления с параметром К
414
Глава 7, Метод корневого годографа
Рис. 7.13 (П)
Система управления с ПИ-регулятором
Регулятор
Объект
ад
П-7.13. На рис. 7.13(П) изображена система управления ПИ-регулятором. (а) Примите K/IK? = 0,2 и определите значение Кр, при котором комплексным корням соответствовал бы максимальный коэффициент затухания, (б) Предскажите вид переходной характеристики системы при значении Кр, найденном в п. (а).
Задачи на синтез систем
СС-7.1. В системе управления положением скользящей части стола металлообрабатывающего станка используется тахогенератор, закреплённый на валу электродвигателя (это соответствует замкнутому ключу на рис. 4.1(СС)). Выходное напряжение тахогенератора vr = К fl. Коэффициент обратной связи по скорости является варьируемым. Выберите наиболее
подходящее значение коэффициентов Kt и Кп, чтобы при этом переходная характеристика системы имела перерегулирование не более 5% и время установления (по критерию 2%) не более 300 мс.
С-7.1. На рис. 7.1(C), (а) изображен многоцелевой истребитель, положение которого в воздухе изменяется с помощью элеронов, руля высоты и руля направления. Система управления углом атаки на высоте 10000 м при скорости 0,9 М может быть представлена в виде рис. 7.1(C). (б), где
ч -18(5+ 0.015)0+ 0,45) (?+ 1,2j+ 12)(52+ 0,015+ 0,0025)
(а) Изобразите вид корневого годографа, когда регулятор представлен просто коэффициентом усиления, т. е. Gc(s) = К, и определите значение К, при котором корням с параметром > 2 соответствует коэффициент затухания £ > 0,15 (найдите максимальное значение Q. (б) При найденном значении К постройте график реакции системы q(f) на ступенчатый входной сигнал r(t). (в) Проектировщик предлагает использовать регулятор с предварением, т. е. Gc(s) = К t + + K2s = K(s + 2). Изобразите вид корневого годографа в зависимости от К и определите значение К, при котором всем корням характеристического уравнения замкнутой системы будет соответствовать С, > 0,8. (г) При значении К, найденном в п. (в), постройте график реакции системы на ступенчатый входной сигнал.
Рис. 7.1 (С)
(а) Многоцелевой истребитель.
(б) Система управления углом атаки
Задачи на синтез систем
415
Рис. 7.2 (С)
Система управления скоростью двухвинтового вертолета
С-7.2. У больших вертолетов имеются два несущих винта, вращающихся в противоположных направлениях, как показано на рис. 7.33(3), (а). При помощи регулятора изменяется угол наклона осей несущих винтов и тем самым обеспечивается движение вертолета вперёд. Соответствующая система управления изображена на рис. 7.2(C). Динамика вертолета представлена передаточной функцией
С(5) =
10 s2+ 4,5s + 9
а регулятор имеет передаточную функцию Gc(j) = K, + b s
X(s+1)
s
(а) Изобразите вид корневого годографа системы и определите значение К, при котором комп-
лексным корням соответствует коэффициент затухания £ = 0,6. (б) При К, найденном в п. (а), постройте график реакции системы на ступенчатый сигнал r(f) и определите время установления (по критерию 2%) и перерегулирование. Чему в этом случае равна установившаяся ошиб-
ка? (в) Повторите пп. (а) и (б), если комплексным корням соответствует £ = 0,41. Сравните результаты с полученными в пп. (а) и (б).
Рис. 7.3 (С)
Система управления роботом марсианского вездехода
С-7.3. Самоходный аппарат «Скиталец» был разработан для обследования поверхности Марса при движении по ней со скоростью 400 м/ч. Поскольку Марс находится на расстоянии 304 млн км от Земли, то на обмен сигналами с Землей потребовалось бы 40 мин. Поэтому «Скиталец» должен действовать автономно и достаточно надёжно. По виду напоминая нечто среднее между небольшим пикапом и джипом-вездеходом, «Скиталец» будет состоять из трёх сочлененных секций, каждая из которых — с собственными двумя независимыми колёсами конической формы (диаметр основания — 1 м). Две руки — одна для бурения и откалывания образцов, а другая для манипулирования с крупными объектами — выступают наподобие клешней из передней части аппарата. Система управления каждой рукой может быть представлена в виде структурной схемы на рис. 7.3(C).
(а) Изобразите вид корневого годографа в зависимости от Л? и определите положение корней при К = 4,1 и К = 41. (б) Определите значение К, при котором реакция системы на ступенчатый входной сигнал будет иметь перерегулирование около 1%. (в) Определите значение К. минимизирующее время установления (по критерию 2%) с сохранением величины перерегулирования менее 1%.
С-7.4. Работа сварочного аппарата в опасных условиях и при изменении окружающей обстановки осуществляется с помощью системы дистанционного управления. На рис. 7.4(C) изображена система управления положением руки сварочного аппарата, где изменение окружающей обстановки отражено в виде возмущения D(s}. (а) В случае £>($) = 0 выберите коэффициенты Л) и К, обеспечивающие высокое качество системы управления положением. Задайтесь критериями (показателями) качества, по вашему мнению играющими определяющую роль, и оцените
416
Глава 7. Метод корневого годографа
Рис. 7.4 (С). Система дистанционного управления сваркой
результаты синтеза, (б) При Kt и К. найденных в п. (а), считая R(s) = 0. исследуйте влияние единичного ступенчатого возмущения £)(s) = 1/s, построив для этого график y(t).
С-7.5 На рис. 7.5(C) изображена система управления реактивным самолетом.
пилот. Изобразите вид корневого годографа и предскажите характер реакции системы на ступенчатый входной сигнал. Определите действитель-
ную реакцию системы и сравните ее с предсказанной.
Автопилот
K(s + 1)
5
Динамика самолета 1
(s-l)(s2+10s+41)
Рис. 7.5 (С). Система управления реактивным самолетом
Рис. 7.6 (С). Система управления движением ноги
С-7.6. Для помощи при ходьбе частично парализованному человеку может использоваться система управления движениями ноги. Такая система, которая в разомкнутом состоянии неустойчива, изображена на рис. 7.6(C). По корневому годографу выберите значение К, при котором комплексным корням соответствовал бы максимально возможный коэффициент затухания Предскажите вид переходной характеристики системы и сравните ее с действительной характеристикой, полученной расчетным путем.
С-7.7. Большинство серийных операционных усилителей проектируются таким образом, чтобы они были устойчивы в режиме повторителя напряжения с единичным коэффициентом усиления. Однако с целью получения более широкой полосы пропускания требования к их устойчивости в данном режиме несколько смягчаются. Один из таких операционных усилителей имеет коэффициент усиления по постоянному току 105 и полосу пропускания 10 кГц. Усилитель с передаточной функцией G(s) охвачен обратной связью, как показано на рис. 7.7(C). (а). Полученная таким образом система с обратной связью изображена на рис. 7.7(C), (б), где Ка = 105. Изобразите вид корневого годографа системы в зависимости от параметра К. Определите минимальное значение коэффициента усиления по постоянному току схемы с обратной связью, обеспечивающее ее устойчивость. Выберите надлежащее значение этого коэффициента усиления и номиналы резисторов R} и R2.
С-7.8. На рис. 7.8(C), (а) изображена рука робота, имеющая сочленение в локтевом суставе. Рука приводится в движение исполнительным устройством, система управления которым приведе-
Задачи на синтез систем
417
Рис. 7.7 (С), (а) Операционный усилитель с обратной связью и (б) соответствующая структурная схема
на на рис. 7.8(C). (б). Изобразите вид корневого годографа при К> 0. Выберите Cp(s) так, чтобы при ступенчатом входном сигнале установившаяся ошибка равнялась нулю. При данном Gp(s) постройте графикиу(1), соответствующие значениям К= 1; 1,5; 2,85. Зафиксируйте время нарастания, время установления (по критерию 2%) и относительное перерегулирование для трёх данных значений К. Если желательно ограничить перерегулирование величиной 6%. обеспечив при этом минимально возможное время нарастания, то выберите соответствующее значение К из диапазона 1 < К < 2,85.
С-7.9. Автомобиль с независимым приводом каждого из четырёх колёс обладает рядом преимуществ. Подобная система управления предоставляет водителю большую свободу действий. Автомобиль становится более податливым при самых разных дорожных условиях, водитель получает возможность плавно совершать резкие перестроения на трассе. Система также препятствует появлению юза при неожиданных поворотах рулевого колеса. Кроме того, использование независимого привода колёс делает автомобиль более маневренным и облегчает водителю парковку в тесных городских кварталах. Установка дополнительных цифровых систем управления может помочь устранить скольжение автомобиля на обледеневшей или мокрой дороге.
о)
Рис. 7.8 (С), (а) Рука робота, приводимая в движение в локтевом сочленении, и (б) система управления исполнительбным устройством
418
Глава 7. Метод корневого годографа
Принцип действия системы основан на том. что она воздействует на задние колёса в зависимости от угла поворота передних колёс. В системе производится измерение угла поворота передних колёс, и эта информация поступает на исполнительное устройство, которое управляет положением задних колёс.
При заданном угле поворота задних колёс относительно передних автомобиль будет изменять своё угловое ускорение в соответствии с передаточной функцией
1+(1+W+(1+;4)V
0(51 = Л-----------------.
41+(2<;/со,>+(1/ь)> ]
где А = 2g(l -q),q — отношение угла поворота задних колес у углу поворота передних колёс. Будем считать, что 7, = Т2 = 1с и со,, = 4. Синтезируйте систему с единичной обратной связью, выбрав надлежащую совокупность параметров (А, К, Q, при которой реакция системы будет обладать достаточной скоростью нарастания и в тоже время имегь умеренное перерегулирование. Параметр q изменяется в диапазоне от 0 до 1.
С-7.10. На рис. 7.10(C), (а) изображена тележка подъёмного крана, перемещаемая силой Fit). Управлению подлежат переменные х(С) и <р(С). Модель системы управления представлена на рис. 7.10(C). (б). Считая, что передаточная функция регулятора Gc(s) = К, выберите значение К. обеспечивающее эффективное управление указанными переменными.
С-7.11. На рис. 7.11 (С), (а) изображён самоходный аппарат, который может использоваться для исследования планет и их спутников. Система управления движением аппарата изображена на рис. 7.11(C), (б), где
(s+l)(s+2)(s+4)(s+10)
(а) Полагая Gc(s) = К. изобразите вид корневого годографа при 0 < К < 1000. Определите положение корней при значениях К, равных 100, 300 и 600. (б) Имея в виду доминирующие корни, предскажите величину перерегулирования, время установления (по критерию 2%) и установившуюся ошибку при отработке системой ступенчатого входного сигнала, (в) Получите действительную переходную характеристику для трёх указанных значений К и сравните показатели качества с предсказанными.
б)
Задачи на синтез систем
419
Рис. 7.11 (С) (а) Самоходный аппарат для исследования планет.
{б) Система управления движением
С-7.12. В настоящее время электронные системы, применяемые в автомобиле, составляют около 6% его стоимости. В будущем эта цифра вырастет до 20% за счет оснащения автомобиля компьютерными системами управления тормозами, активной подвеской и другими устройствами. Применение компьютеров позволит также создать интеллектуальные системы автомо-биль/дорога, что очень важно для скоростных магистралей. Подобные системы включают в себя большое количество электронных средств, которые в реальном времени предоставляют водителям и регулировщикам движения информацию об авариях, пробках, дорожных условиях и службах автосервиса. Интеллектуальные системы позволят также придать автомобилю большую автономность: они смогут помочь избежать столкновений, предупреждая водителя об опасном сближении, и даже дадут возможность автомобилю двигаться в полностью автоматическом режиме.
Боковая информ ационая система
Определение дистанции
Автомобиль со встроенным электронным оборудованием
Линии связи
Контроллер сети дорог
Комплексная дорожная структура
Контроллер участка
Пассивные маркеры для контроля дистанции
Рис. 7.12 (С), (а) Автоматизированная система управления дорожным движением, (б) Система управления расстоянием между автомобилями
420
Глава 7. Метод корневого годографа
На рис. 7.12(C). (я) приведён пример автоматизированной системы управления дорожным движением, а на рис. 7.12(C). (б) изображена система, позволяющая поддерживать заданную дистанцию между автомобилями. Выберите значения Ка и К, так, чтобы при линейном входном сигнале R(s) = A/s установившееся ошибка не превосходила 25% от скорости А изменения этого сигнала. При ступенчатом входном сигнале реакция системы должна иметь перерегулирование не более 3% и время установления (по критерию 2%) не более 1.5 с.
С-7.13. Система автоматического управления самолётом является типичным примером, когда используется обратная связь по нескольким переменным. В такой системе положение самолёта в воздухе изменяется с помощью элеронов, рулей высоты и руля направления, как показано на рис. 7.13(C), (а). Манипулируя этими органами управления, пилот устанавливает желаемую траекторию полёта.
Автопилот, который мы рассмотрим в данной задаче, представляет собой систему автоматического управления, изменяющую угол крена <р путём отклонения элеронов. Отклонение элеронов на угол 0 приводит к возникновению вращающего момента благодаря давлению воздуха на их поверхность. За счёт этого момента происходит вращение самолёта относительно горизонтальной оси. Элероны отклоняются с помощью гидравлического исполнительного механизма с передаточной функцией 1/s.
Действительный угол крена измеряется и сравнивается с его заданным значением <р(/. Разность между <prf и <р усиливается и подаётся на вход исполнительного механизма, который управляет отклонением элеронов.
На рис. 7.13(C), (б) приведена упрощенная модель, в которой вращение самолёта относительно горизонтальной оси рассматривается независимо от движений в других направлениях. Предположим, что = 1, а скорость изменения угла <р измеряется гироскопическим датчиком и используется как дополнительный сигнал обратной связи. Выберите параметры Ка и К2 так. чтобы переходная характеристика имела перерегулирование не более 10% и время установления (по критерию 2%) не более 9 с.
Задачи, решаемые с помощью MATLAB
421
Задачи, решаемые с помощью MATLAB
М-7.1. С помощью функции rlocus постройте корневой годограф системы, изображённой на
рис. 7.1(М), при 0 < К < оо в случае приведенных ниже передаточных функций.
(a) G(s) =
(6)G(s) =
(b)G(s) =
s3 + 4s2 + 6s + 1 j+20
s2 + 5s + 20 ’
s2 + s + 1
s(s2 + 4s+ 6) ’
(r) G(s) =
s5 + 4s4 + 6s3 + 8s2 + 6s + 4
s6 + 2s5 + 2s4 + s3 + s2 + 10s+ 1
A(s)
KG(s)
М-7.2. Система с единичной отрицательной обрат-
Рис. 7.1 (M). Одноконтурная система с параметром К
ной связью в разомкнутом состоянии имеет передаточную функцию
KG(s) = К
s2-2s+ 2 s(s2 + 3s + 2)
С помощью MATLAB постройте корневой годограф и, используя функцию riocfind, покажите, что максимальное значение К, при котором система ещё является устойчивой, равно 0,79.
М-7.3. Выполните разложение на простые дроби выражения
T(s) =
s+ 2 s(s2 + 6s + 5)
и проверьте результат с помощью MATLAB (функция residue).
М-7.4. Система с единичной отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
G(s) =
(l + p)s-p s2 + 3s + 6
С помощью MATLAB постройте корневой годограф при изменениир от 0 до оо. При каких значениях р замкнутая система является устойчивой ?
М-7.5. Рассмотрите систему с обратной связью, изображённую на рис. 7.1(М), где
G(s) = .
s
При каком значении К доминирующим полюсам замкнутой системы соответствует коэффициент затухания £ = 0,707?
М-7.6. Рассмотрите систему с обратной связью, изображённую на рис. 7.6(М). В данной системе могут быть использованы регуляторы трёх разных типов:
(1) Gc(s) = К (П-регулятор);
(2) Gc(s) = K/s (И-регулятор);
(3) Gc(s) = A^l+l/s) (ПИ-регулятор).
При синтезе системы выдвигаются следующие требования: время установления Ts < 10 с и максимальное относительное перерегулирование Мр < 10% (в случае единичного ступенчатого воздействия).
(а) В случае использования П-регулятора, с помощью MATLAB постройте корневой годограф при 0 < К < оо и определите значение К, удовлетворяющее выдвинутым требованиям к качеству системы.
(б) Повторите п. (а) при использовании И-регулятора.
(в) Повторите п. (а) при использовании ПИ-регулятора.
422
Глава 7. Метод корневого годографа
Рис. 7.6 (М)
Одноконтурная система управления
с регулятором Gc (s)
(г) Изобразите на одном графике переходные характеристики замкнутых систем с каждым из регуляторов, полученных в пп. (а)-(в).
(д) Дайте сравнительную оценку трём регуляторам, полученным в пп. (а)-(в), с точки зрения установившейся ошибки и показателей переходной характеристики.
М-7.7. На рис. 7.7(М) изображена система управления положением космического аппарата относительно одной из осей. В системе использован ПД-регулятор, причём Кх/К2 = 5. С помощью MATLAB определите значения K2U и K\U. при которых реакция системы на единичное ступенчатое воздействие будет иметь время установления Ts (по критерию 2%) не более 4 с и перерегулирование не более 10%.
Рис. 7.7 (М)
Система управления положением космического аппарата
с ПД-регулятором
Ключевые термины и понятия
Асимптота. Линия, к которой стремится корневой годограф при увеличении варьируемого параметра до бесконечности. Количество асимптот равно разности между числом полюсов и числом нулей передаточной функции разомкнутой системы.
Количество ветвей корневого годографа. Равно числу полюсов передаточной функции (подразумевается, что это число больше или равно числу нулей передаточной функции).
Корневой годограф. Траектория корней характеристического уравнения системы на s-плоскости при изменении какого-либо параметра.
Метод корневого годографа. Метод определения положения корней характеристического уравнения 1 + KP(s) = 0 при изменении К от 0 до оо.
Синтез параметра. Выбор одного или двух параметров системы на основе метода корневого годографа.
Точка отрыва. Точка, в которой корневой годограф отрывается от действительной оси.
Траектория. Кривая, вычерчиваемая на комплексной плоскости при изменении какого-либо параметра системы.
Угол выхода. Угол, под которым ветвь корневого годографа выходит из комплексного полюса на s-плоскости.
Участки корневого годографа, принадлежащие действительной оси. Отрезки действительной оси, расположенные слева от нечетного числа полюсов и нулей.
Центроид асимптот. Центр прямолинейных асимптот с координатой
Чувствительность корней. Чувствительность корней к отклонениям параметра системы от номинального значения. Определяется как отношение бесконечно малого изменения корня к столь же малому изменению параметра.
Глава 8
Метод частотных характеристик
Обзор
В предыдущих главах мы имели дело со ступенчатым и линейным тестовыми сигналами. В данной главе мы рассмотрим реакцию системы в установившемся режиме на синусоидальный тестовый сигнал. Мы покажем, что в этом случае выходной сигнал также является синусоидальным той же частоты, что и входной, однако отличается от него по амплитуде и по фазе, причём эти отличия зависят от частоты входного сигнала. Поэтому нас будет интересовать реакция системы на синусоидальный сигнал, частота которого изменяется во всём возможном диапазоне.
С помощью замены s =/со мы перейдём от передаточной функции G(s) к G(ja) и рассмотрим способы графического представления комплексного выражения G(/w) в зависимости от частоты и. Один из наиболее эффективных методов анализа и синтеза систем управления связан с применением диаграмм Боде, поэтому мы уделим данному вопросу серьёзное внимание. Мы рассмотрим также способы изображения частотных характеристик в полярных координатах (на комплексной плоскости) и в логарифмическом масштабе. Мы покажем, как некоторые показатели качества системы во временной области можно оценить по её частотным характеристикам, а также введём понятие полосы пропускания системы. Главу мы завершим примером синтеза с продолжением, в котором проиллюстрируем применение частотных характеристик к анализу системы чтения информации с диска.
8.1. Введение
В предыдущих главах суждение о качестве системы и её реакции на внешние воздействия основывалось на расположении на комплексной плоскости переменной ,v полюсов и нулей передаточной функции. Альтернативным методом анализа и синтеза систем управления, имеющим важное практическое значение, является метод частотных характеристик.
Частотная характеристика определяется как реакция системы в установившемся режиме на синусоидальный входной сигнал при изменении его частоты во всём возможном диапазоне. При этом в линейной системе как входной сигнал, так и сигнал в любой другой точке в установившемся режиме являются синусоидальными; они отличаются от входного сигнала только по амплитуде и по фазе.
424
Глава 8. Метод частотных характеристик
Рассмотрим выражение для выходного сигнала системы У(х) = T(s)R(s) в случае, ког-
да r(f) = ylsinco/. Запишем
^=^4
S +С0
и
T(s) =
ГТл /
11 0 + Р,) /=1
где все полюсыр, предполагаются различными. Тогда, раскладывая У(х) на простые дроби, получим:
... X к\ CLS + P
s+px s+pn S-+C1T
Обратное преобразование Лапласа от этого выражения даёт:
j^(/) = A1e +...+кпе
+ Г1
Q5 + P
,S~ + СО"
где аир — константы. Если система устойчива, т. е. все р, имеют отрицательные ненулевые действительные части, то
ax + p
~ T
_s~ + co" _
lim y(t) = lim L 1 t —>00 I —>00
поскольку все экспоненциальные составляющие вида А, е Pi' стремятся к нулю при t —> <х>.
В пределе при t —> <ю, т. е. в установившемся режиме, мы получим:
Х0=^*
ax+p 7 2
Lx" + со J
= — |j4co7’(jco)|sin(cD/ + cp) = ^|7’(yco)|sin(co/ + cp)
(8-D
где cp = argT(/co).
Таким образом, выходной сигнал в установившемся режиме при определённом значении частоты со зависит только от модуля и аргумента Г(/со). Подчеркнём, что выражение (8.1) справедливо только в случае, когда система является устойчивой.
Важным преимуществом метода частотных характеристик является то, что он может применяться при тестовых синусоидальных сигналах всех возможных частот и амплитуд. Так, например, легко могут быть экспериментально получены частотные характеристики системы, и это наиболее простой и надёжный способ анализа её свойств. Как будет показано в разделе 8.4, по экспериментально полученным частотным характеристикам можно определить передаточную функцию системы. Кроме того, при синтезе системы в частотной области инженер получает ценную информацию о полосе пропускания системы и может оценить её реакцию на нежелательные шумы и возмущения.
Ещё одно преимущество метода частотных характеристик заключается в том, что поведение системы в установившемся режиме при синусоидальном входном сигнале можно описать путём замены х =/со в передаточной функции T(s). В результате мы получаем комплексную функцию Г(/со), модуль и аргумент которой, будучи представлены графически, дают полезную информацию, необходимую для анализа и синтеза систем управления.
Недостаток метода частотных характеристик заключается в том, что отсутствует прямая связь между свойствами системы во временной и частотной областях. Такая связь
425
8.1. Введение
прослеживается лишь частично, и на практике вид частотных характеристик обычно подбирается так, чтобы они в какой-то степени удовлетворяли требуемому поведению системы во временной области.
В разделе 2.4 были введены прямое и обратное преобразования Лапласа, имеющие следующий вид:
и
, 1 _ст+ /<0
/(/) = Г1 [F(s)] = -^ J F(s) е'1 ds ,
2л;
(8.2)
(8.3)
где s есть комплексная переменная, s = ст +усо. Аналогично, прямое и обратное преобразования Фурье записываются как
^(» = ^-[/(/)]= Г /(/)<Г'“'Л,
со
1 1 f+°°
/(/) = [F(;co)] = f /Д»cto .
2л J-oo
Преобразование Фурье существует для функций, удовлетворяющих условию
f L/(OI dt —00
Сравнивая выражения (8.2) и (8.4), можно видеть, что преобразования Фурье и Лапласа очень тесно связаны. Если функция /)/) определена только для t > 0, как это часто бывает, то нижние пределы интегралов совпадают. В этом случае мы видим, что два выражения отличаются только комплексной переменной. Поэтому, если F{(s) есть преобразование Лапласа функции то преобразование Фурье той же самой функции, F{(Ja\ можно получить простой заменой s =ус) в выражении Fx (s).
Зададим себе вопрос: если преобразования Фурье и Лапласа так тесно связаны, почему же мы не пользуемся всегда только преобразованием Лапласа ? И почему мы вообще пользуемся преобразованием Фурье? С помощью преобразования Лапласа мы можем определить положение на ^-плоскости полюсов и нулей передаточной функции T(s\ как это было рассмотрено в гл. 7. Однако с помощью частотных характеристик, и конкретно с помощью функции Д/со), мы можем определить амплитудные и фазовые характеристики системы и тем самым получить сведения, полезные при анализе системы управления.
Если речь идёт о частотных характеристиках замкнутой системы, то мы можем использовать преобразование Фурье входного сигнала r(t) в виде:
А(»= J+“r(/)e“7K,'cZ/ .
Тогда для одноконтурной системы управления выходной сигнал можно получить
простой заменой s в выражении УД) = T(s)R(s), т. е.
У(7(о) = 7’(7Ы)Л(» =
(8.6)
426
Глава 8. Метод частотных характеристик
Применяя обратное преобразование Фурье, получим выражение для выходного сигнала:
у(/) = ^-,[У(»]= — f У(»е'“'с/со. (8.7)
2л •'-«>
К сожалению, этот интеграл, за исключением простейших случаев, с трудом поддаётся вычислению, поэтому можно воспользоваться графическим методом интегрирования. Но, как мы увидим в дальнейшем, о некоторых показателях качества во временной области можно судить по частотным характеристикам и использовать эту зависимость при синтезе систем управления.
8.2. Графики частотных характеристик
(8.9)
= А2(со) + АГ2(со).
Im(G)=X(co)
--------- Re(G)=A(co)
Рис. 8.1. Комплексная плоскость
Передаточную функцию системы G(s) можно представить в частотной области с помощью соотношения
G(yco) =G(s)|v=Jlfl = Л(о>)+ jX^\ (8.8)
где 7?(со) = Re[G(/co)J и Л(со) = Im[G(/co)].
Иным способом то же выражение можно представить как G(/co) = |G(/co)|e'<₽!“), где , _ -ЛДш) „2
<p(cj)=arctg—— и |G(/co)|2 7?(w)
Для графического изображения частотных характеристик можно воспользоваться выражениями (8.8) или (8.9). Выражение (8.8) позволяет представить частотные характеристики в полярных координатах (на комплексной плоскости), где изображаются действительная и мнимая части G()co), как показано на рис. 8.1. Проиллюстрируем сказанное на простом примере.
Пример 8.1. Частотные характеристики RC-фильтра
+ о L "J R W С~ - О 1 ’ 0 + На рис. 8.2 изображён простейший ЛС-фильгр. Пере- даточная функция фильтра имеет вид Г C(S).W = _L_. (8.Ю) K(s) RCs+l > о —
а его частотная функция соответственно равна
Рис. 8.2. /?С-фильтр 1
G(jco) =----i----=------------.
jco(RC)+l Дсо/coJ+l
где co, = 1/AC.
Тогда это выражение можно представить следующим образом:
„ „ , 1- /(со/со.) 1 со/со,
G (До) = Л(со) + jX (со) = —-------=--------------у - j-----------у
l+(co/cot)2 1+(со/со,)2 1+ (со/со,)2
(8-12)
Сначала определим /?(со) и Л (со) при двух частотах, со = 0 и со = оо. При со = 0 мы имеем Л(со) = 1 и Л(со) = 0, а при со = оо Д(со) = 0 и Л(со) = 0. Эти две точки показаны на рис. 8.3. Г одограф векто-
8,2. Графики частотных характеристик
427
Рис. 8.3
Частотная характеристика АС-фильтра в полярных координатах
pa G(/co) также изображён на рис. 8.3 и легко можно показать, что он представляет собой полуокружность с центром в точке (1/2,0 ). При со = со j действительная и мнимая части G(/co) равны и угол ср(со) = — 45°. Функцию G(/co) можно представить в виде
G(/co) = |G(/co)| (8.13)
где
|G(jco)| = . 1 и ср(со) = - arctg (со/со,).
-у 1+ (со / со,)2
Таким образом, при со = со, |G(jco,)| = 1/V2 и ср(со,) = - 45°. Кроме того, при со —> оо мы имеем | G(/co) | -> 0 и ср(со) = - 90°. Аналогично, при со = 0 |G(/co)| = 1 и ср(со) = 0.
Пример 8.2. Изображение передаточной функции в полярных координатах
Представление передаточной функции в полярных координатах полезно при анализе устойчивости систем, как это будет рассмотрено в главе 9. Поэтому здесь уместно привести ещё один пример. Рассмотрим передаточную функцию
G(s)L=,o = G(>) = . t (8.14)
/Со( JCOT +1) jco - со т
Тогда выражения для её модуля и аргумента будут иметь вид:
|G(jco)|= , * и cp(co) = -arctg| — I.
7со2 + со4т2
По этим выражениям легко вычислить аргумент и модуль функции G(/co) при частотах со = 0, со = 1/т и со = оо. Эти значения приведены в табл. 8.1, а график G(yco) в полярных координатах изображен на рис. 8.4.
Таблица 8.1
со 0 1/2т 1/т СО
|G(co)| со 4Лд/Т5 Кл/Л 0
-90° - 117° - 135° - 180°
Альтернативным способом является использование действительной и мнимой частей функции GO'co):
G(jco) = К 2 = = Я(со) + . (8.15)
jco- со т со + со т
428
Глава 8. Метод частотных характеристик
Рис. 8.4. Частотная характеристика
G(/<i>) = + 1) в полярных координатах
Рис. 8.5. Вычисление <j(/o>i) по двум векторам на s-плоскости
где //(со) = - К со2т/Л/(со) и Х(а>) = - со К / М(а>), при обозначении Л/(со) = со2 + со4 т2. Тогда при со =0 мы имеем А(со) = -Ат иА^со) =-оо, а при со = со соответственно А(ш) = 0 и Л(со) = 0. Если со = 1/т, то А(со) = Х(со) = - Лт/2. как показано на рис. 8.4.
Другой метод предполагает графическое определение вектора G(/co) при разных частотах со. т. е. фактически при изменении переменной j вдоль мнимой оси. j =jco. Рассмотрим функцию
G(s) = —---—
5(5+ 1/т)
и отметим на s-плоскости два её полюса, как это показано на рис. 8.5. Тогда при s =jco мы получим
, К/т C(ja) =------------,
jco(jco + p)
гдер= 1/т. Модуль и аргумент G(/co) при частоте СО] можно определить с помощью рис. 8.5:
|G(jCO|)|= ——-----------
IjcoJIjc^ + pI
и argG(/cO[) = ср(сО]) = - argO'cO]) - arg(/cO] + р) = - 90° - arctg(<o,/p).
Частотные характеристики системы могут быть графически изображены в разных координатах. Как только что было показано, это можно сделать в полярных координатах (на комплексной плоскости) с использованием выражения (8.8). Однако сразу же обнаруживается недостаток этого метода. При добавлении в передаточную функцию полюсов или нулей частотные характеристики системы надо вычислять заново, как нетрудно видеть из примеров 8.1 и 8.2 (см. табл. 8.1). К тому же вычисление частотных характеристик подобным методом представляет собой трудоёмкую процедуру и не позволяет оценить влияние на их вид отдельных полюсов или нулей.
8.2. Графики частотных характеристик
429
Решение задачи существенно упрощается при использовании логарифмических частотных характеристик, часто называемых диаграммами Боде. Последнее название обязано своим происхождением X. У. Боде, который широко использовал логарифмические характеристики при исследовании усилителей с обратной связью. Передаточная функция системы в частотной области имеет вид:
G(/co) = |G(/co)| (8.16)
Усиление системы обычно характеризуется десятичным логарифмом модуля G(j со) и измеряется в децибелах (дБ):
Коэффициент усиления = 20 1g |G( усо)| . (8.17)
Амплитудно-частотную характеристику, выраженную в децибелах, и фазовую частотную характеристику <р(со) обычно изображают на отдельных графиках, как показано на рис. 8.6.
В качестве иллюстрации построим диаграмму Боде, соответствующую передаточной функции из примера 8.1.
Пример 8.3. Диаграмма Боде для /?С-фильтра
Напомним передаточную функцию из примера 8.1:
G(jco) =-------=----—.
jcoAC + 1 Jcot+Г
(8.18)
где т = RC есть постоянная времени фильтра. Коэффициент усиления равен
1
(8-19)
2Olg|G(jco)|= 201g ———j 1+ (сот)
-|l/2
= -101g[l+ (сот)2].
При малых частотах, т. е. при со 1/т мы имеем:
Рис. 8.6 Диаграмма Боде для функции GQio) = = 1/(/»т + 1): (а) амплитудная характеристика и (б) фазовая характеристика
б)
430
Глава 8, Метод частотных характеристик
При больших частотах, т. е. при со » 1/т получим
20 lg|G(/co)| » - 20 1g сот, со » 1/т, (8.21)
а на частоте со = 1/т
20 lg|G(/co)| = - 10 1g 2 = - 3,01 дБ.
Амплитудная характеристика фильтра изображена на рис. 8.6(a). Фазовая характеристика фильтра определяется выражением
ср(со) = - arctg сот (8.22)
и изображена на рис. 8.6(6). Частоту со = 1/т принято называть частотой излома или сопрягающей частотой.
Линейный масштаб для частоты является не слишком удобным, поэтому предпочтительнее использовать логарифмический масштаб. О его преимуществе можно судить по выражению (8.21), которое при со » 1/т выглядит как
20 lg|G(/co)| = - 201g сот = - 20 IgT - 20 Igco. (8.23)
Тогда, если по оси абсцисс откладывать Igco, то при со » 1/т асимптотой амплитудной характеристики будет прямая линия, как показано на рис. 8.7. Наклон этой прямой линии можно установить по выражению (8.21). Расстояние между двумя частотами, отличающимися в 10 раз, например, между со, и со2, где со2 = 10 со,, называется декадой. При частотах со » 1/т изменение амплитудной характеристики при изменении частоты на декаду составляет
201g|G(yco, )| -2Olg|G(yco2 )| =-201gco,T-(-201gco,T) =
= -20 lg = -20 Igf — | = +20 дБ. (8.24)
со2т \10j
Таким образом, для данной передаточной функции первого порядка наклон высокочастотной асимптоты амплитудной характеристики равен - 20 дБ/дек, как показано на рис. 8.7. 0 Г\~
Вместо использования прямоугольной сетки ко- \
ординат, в которой по оси абсцисс откладывается , \
Igco, проще изображать амплитудную характери- \
стику в полулогарифмическом масштабе с равно- Й мерной разметкой оси ординат в децибелах и логарифмической разметкой оси со. Можно было бы также использовать логарифмическую раз-метку оси ординат, избегая тем самым необходимости вычисления lg |G(/co)|.
Иногда используют интервал частот, при котором крайние частоты отличаются в 2 раза, т. е. со2 = 2со,. Такой интервал называют октавой. При частотах со » 1/т изменение амплитудной характеристики при изменении частоты на октаву составит
201g|G(yco, )| - 201g|G(jco, )| = -201g = -201gf-1 = 6,02 дБ, (8.25)
со2т \2)
что эквивалентно наклону асимптоты, равному - 20 дБ/дек.
-20------------------------------*
1 1 10
Ют т т
со
Рис 8.7. Асимптотическая характеристика для (дот + 1)-1
8,2, Графики частотных характеристик
431
Основное преимущество логарифмических частотных характеристик состоит в том, что сомножители вида (/сот + 1), входящие в передаточную функцию, при построении учитываются в виде суммы членов 201g Ijcdt + 1|. Это легко проиллюстрировать, если рассмотреть передаточную функцию общего вида:
о
О(» =---------------------. (8.26)
(»W П(1 + 7<0Т„^П[1+(2^/(0,)>+(7“7(Ола. )2]
т=1 А=1
Эта передаточная функция имеет Q нулей, Л’ полюсов в начале координат, М полюсов на действительной оси и R пар комплексно-сопряжённых полюсов. Для такой функции построение частотных характеристик в полярных координатах было бы чрезвычайно затруднительным. В логарифмическом же масштабе для амплитудной характеристики мы получим:
о
2Olg|G(jco)| = 201gKh + £201g| 1 + jon,,|-201g|(»w | -
i=l
-X201g|l + 7t0Tm|-X201g
?я=1 Л=1
l+fe I “л*
X
7(0+ /
< “«Л
(8.27)
и диаграмма Боде легко получается путём сложения характеристик, соответствующих каждому отдельному сомножителю. Аналогичным образом, фазовая частотная характеристика получается сложением соответствующих характеристик отдельных сомножителей:
Q MR
ф((о) = 22 arctg “Ь - (V(90°) - 22 arctS ютт ~ 2^ arctS z=l ra=l t=l
2^(to/(o„t)
1-((0/<0„( )2
. (8.28)
Итак, передаточная функция может содержать четыре разного вида сомножители:
1. Постоянный коэффициент усиления Aj>.
2. Полюсы (или нули) в начале координат (/со).
3. Полюсы (или нули) на действительной оси (/сот +1).
4. Комплексно-сопряжённые полюсы (или нули) [1 + (2^/ю„) /со + (/со/со,,)2].
Для каждого из этих сомножителей можно найти вид амплитудной и фазовой частотных характеристик и затем использовать их для построения диаграммы Боде, соответствующей передаточной функции общего вида. Эти характеристики, вообще говоря, являются криволинейными, однако процедуру построения диаграммы Боде можно упростить, если воспользоваться их аппроксимацией асимптотами, а точные значения получать только при отдельных частотах, представляющих особый интерес.
Постоянный коэффициент усиления Кь. Логарифмическая амплитудная характеристика определяется выражением
201g Кь = const, дБ,
а фазовая характеристика
ф((о) = 0.
432
Глава 8. Метод частотных характеристик
На диаграмме Боде амплитудная характеристика изображается просто в виде горизонтальной линии.
Если коэффициент усиления является отрицательным, т. е. - Kh, то логарифмическая амплитудная характеристика по-прежнему равна 201gKfc, а знак минус учитывается сдвигом по фазе на — 180°.
Полюсы (или нули) в начале координат (jca). Полюсу в начале координат соответствует логарифмическая амплитудная характеристика
201g 1 = -201g и, дБ,
(8.29)
а фазовая характеристика
ф(ы) = - 90°.
Как видно из (8.29), амплитудная характеристика имеет вид прямой линии с наклоном - 20 дБ/дек. Аналогично, если в начале координат находится полюс кратности /V, то
201g 1 = -20N 1g <o
(8.30)
и
ф(т) = - N • 90°.
В этом случае наклон логарифмической амплитудной характеристики равен - 20 Л' дБ/дек.
Если в начале координат находится нуль передаточной функции, то мы имеем:
20 lgl/co| = + 20 lg<o, (8.31)
что соответствует уравнению прямой с наклоном + 20 дБ/дек.
Фазовая характеристика
ф(ю) = + 90°.
Рис. 8.8. Диаграммы Боде для (/o)±/v
8.2. Графики частотных характеристик
433
Полюсы или нули на действительной оси. Наличие полюса на действительной оси обусловлено сомножителем вида ( 1 + /сот)-1, и этот случай уже был нами рассмотрен. Напомним, что амплитудная характеристика определяется уравнением
201g 1 1 + /сот = -lOlg(l+co2T2 ).
(8.32)
Прямолинейные асимптоты имеют следующие уравнения: при со « 1/т 201gl = 0 дБ и при го » 1/т -201g <вт, что соответствует наклону -20 дБ/дек. Две асимптоты пересекаются в точке, определяемой уравнением
20 1g 1 = 0 дБ = -20 lg(BT,
т. е. при со = 1/т, называемой частотой излома. Точное значение амплитудной характеристики при со = 1/т равно -3 дБ. Фазовая характеристика имеет уравнение ср(со) = - arctg сот, а диаграмма Боде для сомножителя (1 + у'сот)-1 представлена на рис. 8.9.
Диаграмма Боде, соответствующая нулю передаточной функции, т. е. сомножителю (1 + /сот), получается аналогичным образом с той лишь разницей, что наклон высокочастотной асимптоты амплитудной характеристики равен + 20 дБ/дек, а ср(<о) = + arctg сот.
На рис. 8.9 приведена также линейная аппроксимация фазовой частотной характеристики, которая совпадает с точной характеристикой на частоте излома, а при всех остальных частотах отличается о неё не более, чем на 6°. Подобная аппроксимация может оказаться полезной для предварительного суждения о фазовой характеристике системы с передаточной функцией G(s). Однако часто необходимо иметь точный вид фазовой характеристики, поэтому для сомножителей первого порядка соответствующие кривые можно вычислить на компьютере, скажем, с помощью простой программы MATLAB. В табл. 8.2 приведены точные значения частотных характеристик, соответствующих полюсу передаточной функции, т. е. члену (1 + усот)-1, а также для сравнения даны значения, полученные при аппроксимации характеристик прямолинейными отрезками.
б)
СО
Рис. 8.9. Диаграмма Боде для функции (1 + /сот) 1
Глава 8. Метод частотных характеристик
434
Таблица 8.2
СОТ 0,10 0,50 0,76 1 131 2 5 10
201g |(1+/(от)-1|, дБ -0.04 -1,0 -2,0 -3,0 -4,3 -7,0 -14,2 -20,04
Линейная
аппроксимация, дБ 0 0 0 0 -2,3 -6,0 -14,0 -20,0
<р(со), град -5,7 -26,6 -37,4 -45,0 -52,7 -63,4 -78,7 -84,3
Линейная
аппроксимация, град 0 —31,5 -39,5 -45,0 -50,3 -58,5 -76,5 -90,0
Комплексно-сопряжённые полюсы или нули [1 + (2Q'<on) jca + (/<о/<о„)2].
Квадратичный член, соответствующий паре комплексно-сопряжённых полюсов, можно представить в виде
[1 и- и2]’1, (8.33)
где и = а/ап. Тогда для пары комплексно-сопряжённых полюсов логарифмическую амплитудную характеристику можно представить в виде
201g |G(/<o)| = - 10 lg [(1 - w2)2 + 4CV] , (8.34)
а фазовую характеристику в виде
ф(<л) = -arctg ' 2fyi ' U-w2>
Если и<к 1, то
201g |G(/co)| = - 10 Igl = 0 дБ, а фазовая частотная характеристика близка к 0°. Если и з> 1, то логарифмическая амплитудная характеристика
20 lg |G(/<o)| = - 10 Igw4 = - 40 Igw, что соответствует наклону - 40 дБ/дек. При и »1 фазовая характеристика стремится к значению -180°. Асимптоты амплитудной характеристики пересекаются при значении 0 дБ, если и = <о/<л„ = 1. Однако расхождение между точной амплитудной характеристикой и её аппроксимацией зависит от коэффициента затухания и принципиально должно учитываться при < 0,707. Диаграмма Боде, соответствующая квадратичному члену в передаточной функции, изображена на рис. 8.10. Максимальное значение амплитудной характеристики, Л-/д имеет место на резонансной частоте <ог Если коэффициент затухания стремится к нулю, то шг—> со,,, что соответствует частоте колебаний при отсутствии затухания. Резонансная частота определяется путём приравнивания нулю производной от выражения (8.33) по нормированной частоте и. Таким образом, резонансная частота определяется выражением
С < 0,707, (8.36)
а максимальное значение | G(/co) | равно
Q < 0,707, (8.37)
=<flJl-2C2,
Л/д =|GO4)l = (2;7^?’r1,
8.2. Графики частотных характеристик 435
Рис. 8.10. Диаграмма Боде для функции = [1 + (2</<on)yco + (/и/сол)2]-1
в случае пары комплексно-сопряженных полюсов. На рис. 8.11 приведена зависимость максимума амплитудно-частотной характеристики и резонансной частоты сог от коэффициента затухания С,, соответствующего паре комплексно-сопряженных полюсов. В предположении, что пара комплексно-сопряженных полюсов является доминирующей для замкнутой системы, эти кривые могут служить средством оценки качества системы по её частотным характеристикам, определённым в результате эксперимента.
Частотные характеристики можно получить также из геометрических соображений путём определения модулей и аргументов векторов, проведенных на ^-плоскости из полюсов передаточной функции в точку на мнимой оси s=ja, при изменении со от 0 до со. Рассмотрим, например, передаточную функцию второго порядка с комплексно-сопряжёнными полюсами
G(s) =------—*----------= ——--- . (8.38)
(х/ со„ ) + 2£s/ со,, +1 .s' + 2Qion s+со,,
436
Глава 8. Метод частотных характеристик
Рис. 8.11 Зависимость максимума амплитудной характеристики Л/р и резонансной частоты со,- от параметра соответствующая паре комплексносопряженных полюсов
Полюсы располагаются на окружности радиуса со„; в частном случае, при определённом значении £ их положение указано на рис. 8.12 (я). Произведя замену s = Ja, запишем передаточную функцию в виде
G(» =----------------- =-------------(8-39)
(5~5, )0'-5t ) 4=/ю 0(0-5! )0'(0—5| )
где 5] и — комплексно-сопряжённые полюсы. На рис. 8.12(я) показаны также векторы (до - 50 и (/ <о- 5t), проведённые из полюсов в точкуую. Тогда, задавая различные значения частоты, можно определить модуль и аргумент функции G(/co):
2
|G(»I=-------------г (8-40)
|j(0-5i||;(0-51|
8.2, Графики частотных характеристик
437
Рис. 8.12
Вычисление частотных характеристик с помощью векторов для некоторых значений to
и
ip(co) = -arg(7co-j1 )-argO-si).
На рис. 8.12 (б, в, г) соответственно показано, как определяются эти характеристики для трёх конкретных значений частоты: со = 0, со = сог и со = (Oj. Соответствующие этим частотам значения амплитудной и фазовой характеристик показаны на рис. 8.13.
Рис. 8.13 Частотные характеристики, соответствующие паре комплексно-сопряженных полюсов
Пример 8.4. Диаграмма Боде двойного Т-образного фильтра
В качестве примера определения частотных характеристик, основанного на расположении полюсов и нулей передаточной функции и использовании векторов, направленных к точке ju>, рассмотрим двойной Т-образный фильтр, изображённый на рис. 8.14. Передаточная функция этого фильтра имеет вид:
438
Глава 8. Метод частотных характеристик
Рис. 8.14
Двойной Т-образный фильтр
иоС5) (хт)2+1
0(5) = --- =------z-------- ,
r,(s) (st)-+ 4sr + 1
(8.41)
где т = RC. Нули этой функции на плоскости переменной st расположены в точках +/!, а полюсы — в точках -2± -/З, как показано на рис. 8.15(a). При со = 0 мы имеем |G(/co)| = 1 и ср(со) = 0°. При со = 1/т |G(/co)| = 0, а аргумент вектора, начало которого находится в нуле st=j1, при прохождении усот через эту точку претерпевает скачок на 180°. При со —> со |G(/'co)| = 1 и ср(со) = 0°. Произведя вычисления при нескольких промежуточных значениях частоты, нетрудно убедиться, что частотные характеристики будут иметь вид, изображённый на рис. 8.15(6).
В табл. 8.3 приведены асимптотические частотные характеристики для основных типовых сомножителей, входящих в передаточные функции.
В предыдущих примерах полюсы и нули функции G(s) были ограничены принадлежностью к левой полуплоскости. Однако система может иметь нули, расположенные в правой половине 5-плоскости и при этом быть устойчивой. Передаточные функции, нули которых расположены в правой полуплоскости, классифицируются как создающие неминимальный фазовый сдвиг. Если нули двух передаточных функций расположены симметрично относительно мнимой оси, то этим функциям соответствуют одинаковые амплитудные характеристики, а отличаются они только фазовыми характеристиками. Если сравнить фазовые характеристики двух этих систем, то легко можно увидеть, что при изменении частоты от 0 до оо система, все нули которой находятся в левой полуплоскости, будет давать меньший фазовый сдвиг. Поэтому передаточная функция G](s), все
<р(<в)
б)
Рис. 8.15. Двойной Т-образный фильтр: (а) расположение полюсов и нулей и (6) частотные характеристики
°)
8.2. Графики частотных характеристик
439
Таблица 8.3. Асимптотические частотные характеристики для основных сомножителей передаточных функций
2. Нуль, G(/co)= (l+yw/w,)
40 20 дБ 0 -20 -40
0.1(0, ю, Юсо,
3. Полюс, G(/w)= (1+jco/w,)
4. Полюс в начале координат, G(/co)=l//co
со
5. Два комплексных полюса, 0.1<C<l,G(/w)=
и=со/со„
нули которой расположены в левой полуплоскости, называется минимально-фазовой. В свою очередь, передаточная функция G2(s), удовлетворяющая условию | G2(/a>)| = (/со)|,
но все нули которой расположены в правой полуплоскости симметрично нулям относительно мнимой оси, называется неминимально-фазовой.
440
Глава 8, Метод частотных характеристик
Передаточная функция называется минимально-фазовой, если все её нули расположены в левой половине .v-плоскости. Если передаточная функция имеет нули в правой полуплоскости, то она называется неминимально-фазовой.
На рис. 8.16 (я) и (б) показаны расположения полюса и нуля, которым соответствует одинаковая амплитудная характеристика, что совершенно очевидно из анализа длины векторов. Однако фазовые характеристики, соответствующие рис. 8.16(a) и (б), совершенно отличны. На рис. 8.17 изображены минимально-фазовая характеристика для полюса и нуля на рис. 8.16 (а) и неминимально-фазовая характеристика для полюса и нуля на рис. 8.16 (б). Ясно, что передаточной функции
^(5) = — 5+ р
соответствует изменение фазового сдвига в пределах 80°, тогда как для передаточной функции
G2(s) = — s+ р
фазовый сдвиг изменяется в пределах 180°. Таким образом, рис. 8.17 иллюстрирует смысл понятия минимальный фазовый сдвиг. При одинаковых амплитудно-частотных характеристиках минимально-фазовой передаточной функции соответствует наименьший возможный фазовый сдвиг, тогда как для неминимально-фазовой передаточной функции фазовый сдвиг всегда больше первого.
Весьма интересной неминимально-фазовой схемой является четырёхполюсник, пропускающий все частоты, изображённый на рис. 8.18 (в). Нули его передаточной функции расположены симметрично полюсам относительно мнимой оси, как показано на рис. 8.18 (я). Ещё раз можно убедиться, что |G(/co)| является постоянным и в данном случае он равен единице. Однако фазовая характеристика изменяется от 0° до -360°. Поско-
JW1
Л
-р Gi(.v) —z 0
k/wl
"А
~Р G2(.v) 0 +Z
а) б)
Рис. 8.16. Расположения полюса и нуля, соответствующие одинаковым амплитудным и разным фазовым характеристикам
Рис. 8.17
Фазовые характеристики для минимально-фазовой и неминимально-фазовой передаточных функций
8,3, Пример построения диаграммы Боде
441
Рис. 8.18. Четырехполюсник, пропускающий все частоты: (а) расположение полюсов и нулей, (б) частотные характеристики и (а) электрическая схема
льку 02 = 180° — 0j и 6* =180° — 0,, то фазовая характеристика определяется уравнением (р(ю) = -2(01 + 0[ ). Амплитудная и фазовая частотные характеристики данного четырёхполюсника изображены на рис. 8.18 (б).
8.3. Пример построения диаграммы Боде
Диаграмма Боде для передаточной функции G(s), содержащий несколько нулей и полюсов, строится путём суммирования частотных характеристик, соответствующих каждому отдельно взятому полюсу и нулю. Простоту и удобство данного метода мы проиллюстрируем на примере передаточной функции, включающей в себя все сомножители, рассмотренные в предыдущем разделе. Эта передаточная функция имеет следующий вид:
G(jco) =---------5(l + j'O,lco)------ (g 42)
jco(l + j'O,5(oXl + j0,6(cj/50)+(jW50)']
Расположим эти сомножители в порядке начала их влияния с ростом частоты:
1- Постоянный коэффициент усиления К = 5;
2. Полюс в начале координат;
3. Полюс при со = 2;
4- Нуль при со = 10;
442 Глава 8. Метод частотных характеристик
со
Рис. 8.19. Асимптотические амплитудные характеристики для отдельных сомножителей функции <?(/») вида (8.42)
5. Пара комплексно-сопряжённых полюсов при со = со„ = 50.
Сначала мы изобразим амплитудные характеристики, соответствующие каждому полюсу и нулю и постоянному коэффициенту усиления.
1. Коэффициенту усиления соответствует логарифмическая амплитудная характеристика 20 lg5 = 14 дБ, как показано на рис. 8.19.
2. Амплитудная характеристика, соответствующая полюсу в начале координат, при всех частотах от 0 до оо имеет вид прямой с наклоном -20 дБ/дек, пересекающей уровень 0 дБ в точке со = 1, как показано на рис. 8.19.
3. Амплитудную характеристику, соответствующую полюсу при со = 2, аппроксимируем двумя асимптотами. Высокочастотная асимптота справа от точки излома со = 2 имеет наклон — 20 дБ/дек, а низкочастотная (слева от точки излома ) проходит на уровне 0 дБ (см. рис. 8.19).
4. Нулю при со = 10 также сопоставим две асимптоты, из которых высокочастотная (правее точки излома) имеет наклон +20 дБ/дек (см. рис. 8.19).
5. Наконец, если воспользоваться асимптотами для построения амплитудной характеристики, соответствующей паре комплексных полюсов, то точка излома будет иметь место на частоте со = со„ = 50, а наклон высокочастотной асимптоты составит -40 дБ/дек в силу наличия в сомножителе квадратичного члена (см. рис. 8.19). Однако при коэффициенте затухания С, = 0,3 точная амплитудная характеристика существенно отличается от асимптотической, поэтому в построение необходимо внести поправки, как это сделано на рис. 8.20.
Таким образом, результирующая асимптотическая амплитудная характеристика изображается путём суммирования асимптот, соответствующих каждому сомножителю передаточной функции, как показано сплошной линией на рис. 8.20. Анализ рис. 8.20 показывает, что эта характеристика может быть получена непосредственно путём добавления каждой асимптоты в порядке возрастания частоты. Так, прямая с наклоном -20 дБ/дек, соответствующая члену (/со)-1, пересекает уровень 14 дБ при со = 1. Далее, при со = 2 наклон изменяется до - 40 дБ/дек за счёт полюса и снова становится равным -20 дБ/дек за счёт нуля при со = 10. Наконец, при со = 50 наклон становится равным -60 дБ/дек из-за пары комплексных полюсов.
8.3. Пример построения диаграммы Боде
443
Рис. 8.20
Амплитудная характеристика
Точную амплитудную характеристику можно получить, воспользовавшись данными табл. 8.2, где приведены расхождения между точной и асимптотической характеристикой, соответствующими единственному полюсу или нулю. Что касается точной амплитудной характеристики, соответствующей паре комплексных полюсов, то для её изображения следует воспользоваться кривыми на рис. 8.10(a). Точная характеристика для функции G(ja) показана на рис. 8.20 пунктирной линией.
Фазовую частотную характеристику можно построить точно так же, суммируя соответствующие кривые для каждого отдельного сомножителя. Для единственного полюса или нуля в качестве первого приближения обычно бывает достаточно линейной аппроксимации фазовой характеристики. Такая аппроксимация изображена на рис. 8.21.
1. Для постоянного коэффициента усиления фазовая характеристика равна 0°.
2. Полюсу в начале координат соответствует фазовый сдвиг -90°.
3. Для полюса при и = 2 на рис. 8.21 приведена соответствующая линейная аппроксимация фазовой характеристики, причём на частоте а =2 фазовый сдвиг равен - 45°.
Рис. 8.21. Фазовая характеристика
444
Глава 8. Метод частотных характеристик
4. Для нуля при ю = 10 на рис. 8.21 также приведена линейная аппроксимация фазовой характеристики, и на частоте ю = 10 фазовый сдвиг равен +45°.
5. Действительная фазовая характеристика, соответствующая паре комплексных полюсов, заимствованная с рис. 8.10(6), также приведена на рис. 8.21.
Таким образом, результирующая фазовая характеристика <р(со) получается простым сложением характеристик, соответствующих каждому сомножителю передаточной функции, как показано на рис. 8.21. Поскольку полученная зависимость является лишь аппроксимацией истиной характеристики, её следует рассматривать только в качестве первого приближения. Например, как мы увидим ниже, особый интерес представляет частота, при которой <р(со) = - 180°. Аппроксимация показывает, что <р(<о) = - 180° на частоте со - 46. Попробуем вычислить действительный фазовый сдвиг при ю = 46:
2Гп
<р(ю) = -90° -arctgcoTj +arctg(OT2 -arctg-- , (8.43)
1- и"
где т, = 0,5 ; т2 = 0,1 ; д = ю/<ои = со/50. Вычисления дают результат:
<р(46) = - 90° - arctg 23 + arctg 4,6 - arctg 3,55 = - 175°, (8.44)
т. е. аппроксимация фазовой характеристики при со = 46 даёт ошибку в 5°. Однако всегда имеется возможность, определив интересующую частоту по аппроксимирующей характеристике, уточнить её значение в окрестности найденной точки с помощью выражения (8.43). Этот метод обычно является предпочтительным при вычислении точного значения фазового сдвига в пределах нескольких декад. Наконец, с помощью линейной аппроксимации амплитудной и фазовой характеристик можно установить диапазон частот, представляющий интерес для анализа свойств системы с передаточной функцией G(Ja). После этого в данном диапазоне всегда можно вычислить действительные значения частотных характеристик, пользуясь их точными уравнениями, такими как, например, (8.43).
Частотные характеристики, соответствующие функции G(/co), легко можно вычислить и изобразить графически с помощью компьютера, например, в среде MATLAB. Для примера, рассмотренного в данном разделе, построенная таким образом диаграмма Боде приведена на рис. 8.22. Диаграмма занимает 4 декады, на ней указаны уровни 0 дБ для амплитудной характеристики и -180° — для фазовой. Данные над диаграммой показывают, что при и = 0,1 амплитудная и фазовая характеристики соответственно равны 34 дБ и -92,36°. По выводимым табличным данным можно также найти, что 20 lg|G(/co)| = 0 дБ при со = 3, а <р(<о) = -180° при ю = 50.
Рис. 8.22
Диаграмма Боде для G(/“) вида (8.42)
Max. mag = 33.96906 dB
Max. phase = -92.35844 deg Min. mag = -112.0231 dB
The gain is 2500 Min. phase = -268.7353 deg
Частота, рад/с
8.4. Измерение частотных характеристик
445
8.4. Измерение частотных характеристик
Синусоидальный сигнал можно использовать для измерения частотных характеристик разомкнутой системы управления. На практике это связано с получением графиков зависимости амплитуды и фазового сдвига выходного сигнала от частоты. Затем по этим графикам можно определить передаточную функцию разомкнутой системы GH(ju). Аналогичным образом можно получить и частотные характеристики замкнутой системы, после чего определить её передаточную функцию
Существуют специализированные приборы, позволяющие измерять частотные характеристики и восстанавливать по их виду выражения для передаточных функций разомкнутых и замкнутых систем.
Анализатор 3562А, созданный фирмой Хьюлетт-Паккард, позволяет измерять частотные характеристики в диапазоне от 0 до 100 кГц. Средства данного устройства дают возможность не только определять полюсы и нули передаточной функции по экспериментально полученным частотным характеристикам, но и строить эти характеристики для введенной пользователем модели системы. Благодаря этому появляется возможность производить сравнение частотных характеристик введённой модели системы с реальными характеристиками, полученными экспериментально (см. рис. 8.10(У)).
В качестве примера определения передаточной функции по частотным характеристикам рассмотрим диаграмму Боде, изображённую на рис. 8.23. которая соответствует устойчивой системе, состоящей из резисторов и конденсаторов. Поскольку в диапазоне 100 < со < 1000 амплитудная характеристика имеет наклон -20 дБ/дек, а на частоте со = 300 рад/с фазовый сдвиг равен —45° и амплитудная характеристика равна -3 дБ, мы можем заключить, что один из сомножителей соответствует полюсу р\ = 300. Далее можно сделать вывод, что передаточная функция содержит пару комплексных нулей, соответствующих квадратичному члену с параметрами = 0,16 и со,, = 2450. Это следует из того, что фазовая характеристика резко изменяется почти на + 180°, проходя через значение 0° на частоте со = 2450. Кроме того, после этой частоты наклон амплитудной характеристики изменяется с -20 дБ/дек на +20 дБ/дек. Таким образом, мы уже можем изобразить асимптоты амплитудной характеристики, обусловленные полюсомр\ и числителем ожидаемой передаточной функции T(s) в соответствии с выражением (8.45); эти построения приведены на рис. 8.23(a).
T(s)= (./с0,1)2+(2С/со„>+1 (8 45)
(s/pi + l)(s/p2 +1)
Разность между точной и асимптотической амплитудными характеристиками на частоте излома со = 2450 составляет 10 дБ; на основании выражения (8.37) это соответствует значению С, = 0,16. (Сравните частотные характеристики для квадратичного члена в числителе передаточной функции с характеристиками для такого же члена в знаменателе, приведёнными на рис. 8.10. Обратите внимание, что в случае комплексных нулей эти характеристики просто надо перевернуть «вверх ногами», при этом фазовая характеристика будет изменяться от 0° до +180°, а не до -180°, как при комплексных полюсах.) Поскольку при частотах, превышающих 50000, наклон амплитудной характеристики вновь становится равным 0 дБ/дек, можно заключить, что в передаточной функции появляется второй полюс. Этот полюс равен р2 = 20000, т. к. в этой точке амплитудная характеристика на 3 дБ меньше асимптотической, а фазовый сдвиг равен +45° (-90° для первого полюса, +180°
446
Глава 8. Метод частотных характеристик
Рис. 8.23
Диаграмма Боде для системы с неизвестной передаточной функцией
а)
для пары комплексных нулей и —45° для второго полюса). Следовательно, передаточная функция имеет вид:
(д/2450)2 + (0,32/2450>+1 (s/300+l)(s/20000 +1)
Такие частотные характеристики действительно соответствуют Т-образному четырёхполюснику (см. задачи 2.8 и 8.3 и рис. 8.14).
8.5. Требования к качеству системы в частотной области
Мы постоянно должны задавать себе вопрос: какая связь существует между частотными характеристиками системы и ожидаемым видом её переходной характеристики ? Другими словами, если задан набор требований к поведению системы во временной области (к виду её переходной характеристики), то каким требованиям должны отвечать частотные характеристики этой системы ? Для простой системы второго порядка мы уже получили ответ на
8,5, Требования к качеству системы в частотной области
447
этот вопрос, рассмотрев такие показатели качества во временной области, как перерегулирование, время установления и ряд других, включая интегральные оценки. Замкнутая система второго порядка, изображена на рис. 8.24, имеет передаточную функцию
Рис. 8.24. Замкнутая система второго порядка
со-
Т($)= s~ +
(8.46)
Амплитудно-частотная характеристика этой системы выглядит так, как показано на рис. 8.25. Поскольку система имеет второй порядок, то её коэффициент затухания однозначно связан с максимумом амплитудной характеристики Л/д , который имеет место на частоте аг (см. рис. 8.25).
Максимальное значение амплитудно-частотной характеристики, Мр , имеет место на резонансной частоте сог.
Полоса пропускания <ов определяет способность системы правильно воспроизводить входной сигнал.
Полоса пропускания определяется частотой сов, на которой амплитудно-частотная характеристика системы уменьшается на 3 дБ относительно её значения на низких частотах.
Рис. 8 25. Амплитудная характеристика системы второго порядка
Можно установить связь между резонансной частотой и полосой пропускания системы и скоростью нарастания её переходной характеристики. Так, при увеличении полосы пропускания (ой будет уменьшаться время нарастания переходной характеристики. Кроме того, относительное перерегулирование переходной характеристики можно связать с показателем Л/ , который в свою очередь определяется коэффициентом затухания С,. Кривые на рис. 8.11 связывают резонансную частоту и максимум амплитудно-частотной характеристики с коэффициентом затухания системы
второго порядка. А с помощью рис. 5.8 или путём непосредственных вычислений по выражению (5.15) можно оценить величину относительного перерегулирования реакции системы на ступенчатый входной сигнал. Поэтому легко установить, что при увеличении резонансного пика Мр будет возрастать и величина перерегулирования. Таким образом, показатель Мр в определённой степени является оценкой устойчивости системы.
Полоса пропускания системы сов лишь приблизительно может быть связана с собственной частотой колебаний оп. На рис. 8.26 приведена зависимость отношения юн/а>„ от коэффициента затухания £ для системы второго порядка с передаточной функцией (8.46). Реакция такой системы на единичный ступенчатый сигнал определяется выражением
ХО=1+Ве-с^' cos((o,r + 0). (8.47)
Отсюда ясно, что при Q = const, чем больше значение соп, тем быстрее переходная характеристика достигает установившегося значения. Таким образом, желательно, чтобы частотные характеристики системы удовлетворяли следующим требованиям:
448
Глава 8. Метод частотных характеристик
Рис. 8.26
Зависимость нормированной полосы пропускания ыд/ып от С для системы второго порядка (8.46). Линейная аппроксимация ^в1^п= -1.19^ + 1,85 является точной для 0,3 < С. < 0,8
1. Максимум амплитудно-частотной характеристики должен быть достаточно малым, например, Мр < 1,5.
2. Полоса пропускания системы должна быть достаточно большой, чтобы постоянную времени т = 1/£и„ можно было считать малой.
Насколько эти требования в действительности будут соответствовать желаемым показателям переходной характеристики, зависит от того, удастся ли произвольную систему аппроксимировать моделью второго порядка, выделив в её передаточной функции T(s) пару доминирующих полюсов. Эта проблема обсуждалась ранее в разделе 7.3. Если вид частотных характеристик в основном определяется парой комплексных полюсов, то обсуждаемая в данном разделе связь между частотными и временными характеристиками будет вполне обоснованной. К счастью, на практике для большей части систем управления высказанные соображения действительно являются справедливыми.
Требования к величине установившейся ошибки также можно описать в терминах частотных характеристик замкнутой системы. Как мы выяснили в разделе 5.4, установившуюся ошибку в случае входного сигнала заданного вида можно связать с коэффициентом усиления разомкнутой системы и числом интеграторов, входящих в её передаточную функцию. Например, для системы, изображённой на рис. 8.24, установившаяся ошибка при линейном входном сигнале определяется коэффициентом ошибки по скорости, Kv:
, х А lime(r) = — , Kv
где А - скорость изменения входного сигнала. Для системы на рис. 8.24 коэффициент ошибки по скорости равен
2
Kv = limxG(.s) = lim.s---------—-------
,v->0 5-Я) х(х + 2^(Ои )
(8.48)
Выделив в передаточной функции G(.s) постоянную времени, её можно представить в виде
G(s) =
ш„/2^ _ Kv
s(s/ 2^(0„ +1) s(xs +1) ’
(8.49)
8.6. Логарифмические амплитудно-фазовые диаграммы
449
откуда видно, что для данной системы типа 1 коэффициентом усиления является Kv. Например, вернувшись к примеру из раздела 8.3, напомним, что мы имели дело с системой типа 1, передаточная функция которой
G(;(o) =
_______5(1 + 7<от2 )___ 7ю(1+7ЮТ1 )(1+flfiu-к2)
(8.50)
где и = <в/со„ . Следовательно, в данном случае Kv = 5. В общем случае, если передаточную функцию разомкнутой системы записать в виде
Л'П(1+7®Т/)
G(ja) =-----------------, (8.51)
(уи)ЛП(1 + >Ч)
Л=1
то она относится к типу 7V, и установившаяся ошибка определяется коэффициентом К. Так, система типа 0 имеет в разомкнутом состоянии передаточную функцию
GO) =---------------,
(1 + 7Cot1)(1+>t2)
(8-52)
и коэффициент ошибки по положению Кр = К определяет вид диаграммы Боде в области низких частот.
Аналогично, для системы типа 1 низкочастотный участок амплитудной характеристики на диаграмме Боде определяется коэффициентом К = Kv. Действительно, ограничившись в выражении (8.50) только коэффициентом усиления и полюсом в начале координат, мы получим:
G(7<d) = —=^, (0<Фт,. (8.53)
7’w 7’со
Отсюда ясно, что коэффициент Кг численно равен частоте, при которой продолжение низкочастотного участка амплитудной характеристики пересекает уровень 0 дБ. Например, на рис. 8.20 продолжение низкочастотной асимптоты пересекает уровень 0 дБ при со = 5, как и следовало ожидать.
Таким образом, частотные характеристики позволяют достаточно адекватно оценивать качество системы, и при наличии определённых навыков они могут служить очень полезным инструментом анализа и синтеза систем управления.
8.6. Логарифмические амплитудно-фазовые диаграммы
Для графического изображения частотных характеристик можно воспользоваться различными методами. Выше были рассмотрены методы, позволяющие использовать для этой цели (1) полярные координаты ( комплексную плоскость) и (2) диаграмму Боде. Альтернативный метод предполагает изображение зависимости амплитуды в децибелах от фазового сдвига для различных частот. Проще всего это сделать, предварительно построив диаграмму Боде, а затем просто перенести соответствующие точки на плоскость с указанными выше координатами.
450 Глава 8. Метод частотных характеристик
В качестве иллюстрации приведём два примера логарифмических амплитудно-фазовых диаграмм. На рис. 8.27 приведена такая диаграмма, соответствующая передаточной функции
GH, (усо) =-------------------. (8.54)
jw(O,5j(O+l)(j<o/6+l)
Числами рядом с кривой отмечены значения частоты <о.
На рис. 8.28 приведена логарифмическая амплитудно-фазовая диаграмма для системы с передаточной функцией
GH, (» =----------------(8.55)
j<d(0,5уса +1)[1 + j0,6((£>/ 50) + (jco/ 50)" ]
рассмотренной в разделе 8.3. Эта диаграмма построена очень просто — путем перенесения на неё точек с диаграммы Боде для данной системы, изображённой на рис. 8.20 и 8.21. Отметим существенные различия кривых, определяемых выражением (8.54) и рис. 8.27, а также выражением (8.55) и рис. 8.28. Особую важность представляют точки диаграмм, соответствующие фазовому сдвигу —180° и модулю функции GH(ja), равному 0 дБ. В главе 9 мы установим критерий устойчивости замкнутой системы управления, для которого ценную информацию будет представлять логарифмическая амплитудно-фазовая диаграмма. По ней, в частности, можно будет судить и об относительной устойчивости систем управления.
Рис. 8.27. Логарифмическая амплитуднофазовая диаграмма для G/-/i(/u>)
Рис. 8.28. Логарифмическая амплитуднофазовая диаграмма для G/-/2(/a)
8.7. Пример синтеза: система управления гравировальной машиной 451
8.7. Пример синтеза: система управления гравировальной машиной
В гравировальной машине, изображённой на рис. 8.29(a), с помощью двух двигателей и направляющих винтов осуществляется перемещение гравировальной иглы вдоль координаты х. Перемещение иглы в направлении осей;/ и z осуществляется отдельными двигателями, как показано на рисунке. На рис. 8.29(6) изображена структурная схема системы управления положением иглы по координате х. Цель синтеза заключается в выборе коэффициента усиления К, обеспечивающего приемлемое качество переходной характеристики. Решение задачи должно быть получено с использованием частотных характеристик.
Сначала мы построим диаграммы Боде для разомкнутой и замкнутой систем. Затем на основании последней мы предскажем ожидаемый вид переходной характеристики и сравним его с действительным результатом.
Для построения частотных характеристик зададимся произвольным значением К = 2; если при этом качество синтезированной системы окажется неприемлемым, коэффициент усиления можно будет изменить.
Отдельные значения частотных характеристик для G(/co) представлены в табл. 8.4, а соответствующая диаграмма Боде изображена на рис. 8.30. Замкнутая система имеет передаточную функцию
2
T{s) = ---------. (8.56)
5 +3sz +2у+2
Рис. 8.29. (а) Система управления гравировальной машиной, (б) Модель системы в виде структурной схемы
452
Глава 8. Метод частотных характеристик
Рис. 8.30
Диаграмма Боде ДЛЯ G(Ja)
Таблица 8.4. Частотные характеристики для 6(до)
СО 0,2 0,4 0,8 1,0 1,4 1,8
20 lg|G| 14 7 -1 -4 -9 -13
<2 -107° -123° -150.5° -162° -179,5° -193°
Полагая s =j(o, получим:
2
(2- Зю" )+jco(2- <»")
(8-57)
Диаграмма Боде для замкнутой системы представлена на рис. 8.31, откуда видно, что на резонансной частоте сог = 0,8 201g|7’(/co)| = 5 дБ. Следовательно,
201g Л/д = 5, или Мд = 1,78.
Рис. 8.31
Диаграмма Боде для замкнутой системы
8.8. Использование MATLAB в методе частотных характеристик
453
Если предположить, что система обладает двумя доминирующими полюсами, то мы можем воспользоваться частотными характеристиками, изображенными на рис. 8.10. Так как Мр = 1,78, то по номограмме на рис. 8.11 это соответствует значению = 0,29.
С помощью той же номограммы находим, что значению = 0,29 соответствует отношение ш/сон = 0,91, т. е.
Поскольку мы теперь аппроксимировали систему моделью второго порядка, то её передаточная функция будет равна
7(5) = —---------- = -------°тГ7^---- . (8.58)
s' + 2<Х,5+ со2 s1 + 0,5 Е + 0,774
Используя рис. 5.8, можно предсказать величину перерегулирования. Для = 0,29 оно составляет 37%. Время установления можно ожидать равным
4 4
Д = — =--------------= 15,7 с.
s (0,29)(0,88)
Действительное значение перерегулирования и времени установления равны соответственно 34% и 17с. Таким образом, мы видим, что в данном случае аппроксимация системы моделью второго порядка вполне уместна и её можно использовать для выбора соответствующего параметра системы. Если желательно иметь меньшее значение перерегулирования, то параметр К надо было бы уменьшить, скажем до 1, и повторить рассмотренную процедуру.
8.8. Использование MATLAB в методе частотных характеристик
Этот раздел мы начнём с построения диаграм мы Боде, а затем обсудим связь между частотными характеристиками и требованиями к качеству системы во временной области. В завершение мы приведём пример, иллюстрирующий синтез системы с помощью частотных характеристик.
Здесь мы рассмотрим функции MATLAB bode и logspace. Функция bode используется для построения диаграммы Боде, а функция logspace задаёт необходимый для этого логарифмический масштаб частоты.
Диаграмма Боде. Рассмотрим передаточную функцию
G(s) =---------5(l+0j£)---- (8,59)
s(l+0,5s)[l+ (0,6/50>+(1/502 )52]
Соответствующая этой функции диаграмма Боде изображена на рис. 8.32, где представлены зависимости от частоты со амплитудная и фазовая характеристики. Как и в методе корневого годографа, построение этих характеристик предпочтительнее производить с помощью MATLAB. Всегда пытайтесь использовать MATLAB как одно из средств анализа и синтеза систем управления. В то же время не забывайте, что всегда полезно вручную произвести набросок диаграммы Боде — трудно придумать лучший способ ясного понимания теоретических основ метода.
454
Глава 8. Метод частотных характеристик
Рис. 8.32
Диаграмма Бодо, соответствующая G{s) вида (8.59)
Пример изображения диаграммы Боде, полученной с помощью функции bode, приведён на рис. 8.33. Эта диаграмма строится автоматически, если при вызове функции bode не указываются её аргументы. В противном случае амплитудная и фазовая характеристики выводятся на рабочий стол заданием переменных mag и phase. Диаграмма Боде строится с помощью функций plot или semilogx, использующих значения mag, phase и со. Вектор со содержит значения частоты в рад/с, для которых должны быть вычислены кривые диа-
Рис. 8.33
Применение функции bode к заданной G{s)
[mag,phase, w]=bode(sys,w)
8.8. Использование MATLAB в методе частотных характеристик
455
Рис. 8.34
Функция logspace
Частота (рад/с)
граммы Боде. Если значения со не указаны, то MATLAB будет выбирать их автоматически, задавая больше точек в тех диапазонах со, где частотные характеристики отличаются значительной крутизной. Если вы хотите точно задать интервал частот для построения диаграммы, то вектор со целесообразно определять с помощью функции logspace. Смысл этой функции проиллюстрирован на рис. 8.34.
Диаграмма Боде рис. 8.32 построена с помощью скрипта, приведённого на рис. 8.35. Диапазон частот был выбран функцией bode автоматически. Впрочем, этот диапазон может быть задан и пользователем с помощью функции logspace. Функцию bode можно применять также в случае, когда модель системы задана в переменных состояния, как показано на рис. 8.36. При этом функция bode действует так же, как и при задании модели системы в виде передаточной функции.
Рис. 8.35
Скрипт для построения диаграммы Боде, изображенной на рис. 8.32
% Скрипт для построения диаграммы Боде, % изображенной на рис. 8.32 % num=5*[0.1 11;
f1=[1 0]; f2=[0.5 1]; f3=[1/2500 .6/50 1]; den=conv(f1 ,conv(f2,f3)); ◄ % Вычисление S(l+O.55)(l+—5+Д-?) 50 502
sys=tf(num,den); bode(sys)
456
Глава 8. Метод частотных характеристик
Рис. 8.36
Применение функции bode к модели в переменных состояния
bode(sys) t bode(sys)
Модель в виде передаточной функции sys = tf(num.den)
Модель в переменных СОСТОЯНИЯ sys = ss(A,B,C,D)
Имея в виду, что нашей целью является синтез системы управления, удовлетворяющей заданным требованиям к её переходной характеристике, прежде всего надо установить связь между временными и частотными характеристиками системы. Достоверность этой связи будет зависеть от того, насколько хорошо удаётся аппроксимировать систему моделью второго порядка на основании пары доминирующих полюсов.
Рассмотрим систему второго порядка, изображённую на рис. 8.24, которая в замкнутом состоянии имеет передаточную функцию
Г(5) = ------------у (8-60)
s~ + 2C,ans + со”
Соответствующая ей логарифмическая амплитудная характеристика изображена на рис. 8.25. Связь между резонансной частотой со„ максимумом амплитудно-частотной характеристики Мр , коэффициентом затухания Q и собственной частотой ы„ приведена на рис. 8.37 (а также на рис. 8.11). Данная информация чрезвычайно полезна, когда синтез системы производится в частотной области, а желаемые показатели качества заданы в виде требований к временным характеристикам.
Рис. 8.37
(а) Зависимость Мр и /с>„ от параметра £ для системы второго порядка.
(б) Скрипт MATLAB
£
б)
zeta=[0.15:0.01:0.7]; ч-----------
wr_over_wn=sqrt(1-2*zeta.A2);
Mp=(2*zeta.*sqrt(1-zeta.A2)).A(-1);
%
subplot(121), plot(zeta,Mp),gnd xlabel(‘\zeta'), ylabel(‘M_{p\omega}’) 4— subplot(122), plot(zeta,wr_over_wn),grid
Построение графиков
xlabel(‘\zeta’), ylabel(‘\omega rAomeqa n')
Пример 8.5. Система управления гравировальной машиной
Вернёмся к структурной схеме на рис. 8.29. Надлежит выбрать значение К, обеспечивающее приемлемое качество реакции системы на ступенчатый входной сигнал. На рис. 8.38 схематически изображён алгоритм процесса синтеза в частотной области. В качестве первого приближения мы выберем значение К = 2, а затем, если качество системы окажется неприемлемым, будем решать задачу итерационным методом с помощью программы, представленной на
8,8. Использование MATLAB в методе частотных характеристик
457
Рис. 8.38
Функциональная схема определения характеристик системы управления гравировальной машиной
Начальное значение К
Изменение значения К Вычисление передаточной функции замкнутой системы 5(5+1)(5+2)+Л:
Диаграмма Боде
Проверка требований к временным характеристикам:
М=\+е^
Если требования удовлетворяются, то выйти из программы и продолжить анализ
Определение Мр^ и w,
Определение <о„ и С,
рис. 8.39. Значение К задаётся в командной строке, после чего программа производит необходимые вычисления и строит диаграмму Боде для замкнутой системы. По этой диаграмме определяются показатели Мр и со,, а затем с помощью рис. 8.36 — соответствующие значения £исоп.
По полученным значениям С и <о„ оцениваются время установления и относительное перерегулирование:
4
Г, »----; Перерегулирование » 100ехр
£со„
Если эти параметры оказываются неприемлемыми, то необходимо изменить значение К и повторить процедуру.
458
Глава 8. Метод частотных характеристик
Рис. 8.39
Скрипт, используемый при синтезе системы управления гравировальной машиной
При К = 2 мы получим следующие оценки: £ = 0,29 и <о„ = 0.88, что позволяет предсказать ожидаемое значение перерегулирования в 37% и времени установления Ts = 15,7 с. Переходная характеристика, изображённая на рис. 8.40, показывает, что предсказанные показатели качества очень хорошо совпадают с действительными, т. е. замкнутая система адекватно реагирует на входное воздействие.
В данном примере аппроксимация системы моделью второго порядка является оправданной и упрощает решение задачи синтеза. Однако в общем случае такая аппроксимация не всегда даёт хорошие результаты. К счастью, MATLAB включает в себя большое количество классических и современных методов синтеза, позволяющих решать задачу в интерактивном режиме, сведя к минимуму рутинные ручные вычисления.
8.9. Пример синтеза с продолжением: система чтения информации с диска
□ В дисководе считывающая головка закреплена на гибкой пластине, как показано на рис. 2.65. Как отмечалось в разделе 3.11, эту пластину можно представить в виде модели, состоящей из пружины и массы (см. рис. 3.34). В данной главе мы к модели двигателя и нагрузки добавим эффект гибкости пластины.
8.9. Пример синтеза с продолжением: система чтения информации с диска 459
б)
Рис. 8.40 а)
(а) Переходная характеристика системы управления гравировальной машиной при К = 2.
(6) Скрипт MATLAB
engraves.m
К=2; num=[K]: den=[1 3 2 К]; sys=tf(num,den): t=[0:0.01:20];
step(sys.t) х!аЬе1(‘Время (c)'). ylabel('y(t)’)
Представим модель пластины с закреплённой на ней головкой в виде массы М, пружины с жёсткостью к и элемента трения с коэффициентом Ъ, как показано на рис. 8.41. Будем предполагать также, что сила «(/), прикладываемая к пластине, создаётся рычагом (см. рис. 2.65). Передаточная функция системы, состоящей из пружины и массы, была получена в гл. 2:
Пл) =G (j)_ _ 1
U(s) 3 s1 + 2^CO„S + CO,2, 1+2<^s/co„+(х/сои )2
Типичные параметры пластины и головки: С, = 0,3 и собственная резонансная частота = 3000 Гц. Следовательно, со,, = 18,85 103, как показано на структурной схеме системы (рис. 8.42).
Сначала мы построим амплитудные характеристики (асимптотическую и точную) диаграммы Боде для разомкнутой системы (они приведены на рис. 8.43). Заметим, что на резонансной частоте (со = со,,) точная характеристика имеет превышение над асимптотической в 10 дБ. Эти характеристики построены для системы, изображённой на рис. 8.42, при К = 400 согласно выражению 2Olg|X(/co + 1) 01(/со)С2(/со)бз(/со)|. Поскольку амплитудная характеристика имеет всплеск на частоте со,,, то естественным является избежать возбуждения системы на этой частоте.
Рис. 8.41
Модель пластины и головки в виде пружины, массы и трения
Трение Ь
460
Глава 8, Метод частотных характеристик
Рис. 8.42. Система управления положением головки дисковода с учетом упругости пластины
Амплитудные характеристики разомкнутой и замкнутой систем представлены на рис. 8.44. Полюса пропускания замкнутой системы равна = 2000 рад/с. Считая, что для этой системы С,® 0,8 и ши = ав = 2000 рад/с, мы можем оценить время установления (по критерию 2%) с помощью выражения
что составляет 2,5 мс. И пока выполняется условие К < 400, резонанс, свойственный упругой пластине с головкой, находится вне полосы пропускания системы.
Рис. 8.43 Амплитудная характеристика диаграммы Боде для системы, изображенной на рис. 8.42
8.10. Резюме
В этой главе мы рассмотрели частотные характеристики систем управления, представляющие собой реакцию системы в установившемся режиме на синусоидальный входной сигнал. Были рассмотрены несколько альтернативных способов графического изображения частотных характеристик, включая изображение в полярных координатах и в логарифмическом масштабе (последний способ часто называют диаграммой Боде). Была отмечена простота построения диаграммы Боде для отдельных сомножителей функции G(Ja), что наглядно проиллюстрировано примером. Построение диаграммы Боде значительно облег-
8.10. Резюме
461
Рис. 8.44
Амплитудные характеристики диаграмм Боде (а) для разомкнутой и (б) для замкнутой систем
Частота, (рад/с)
Частота, (рад/с)
чается при использовании асимптотической аппроксимации частотных характеристик. В табл. 8.5 приведены диаграммы Боде для 15 типичных передаточных функций. Были рассмотрены некоторые параметры частотных характеристик, характеризующие качество системы; среди них важнейшими являются максимум амплитудной характеристики Мр и резонансная частота сог Была отмечена связь между диаграммой Боде и коэффициентами ошибки Кр и К„. И, наконец, было показано, как частотные характеристики системы можно представить в виде логарифмической амплитудно-фазовой диаграммы.
462
Глава 8. Метод частотных характеристик
Таблица 8.5. Диаграммы Боде для типичных передаточных функций
G(s)
Диаграмма Боде G(s)
Диаграмма Боде
8.10. Резюме
463
Таблица 8.5 (продолжение)
G(s) Диаграмма Боде
G(s) Диаграмма Боде
+ 1)(5ТЛ + 1)
K(sxa + 1)
J2(sT| + 1)
К(5Т„ + 1)(5ТЛ + 1)
S2(sT| + 1)($т2 + 1)
464
Глава 8. Метод частотных характеристик
Упражнения
У-8.1. Для компьютерных дискет высокой плотности очень важно точное позиционирование головки дисковода. Система управления имеет передаточную функцию
G(s) =-------- .
(s + I)2
Изобразите в полярных координатах частотные характеристики этой системы при К = 4. Вычислите модуль и аргумент G(/co) при со = 0,5; 1; 2, и т. д.
Ответ: |G(/0,5)| = 3,2 и argG(/0.5) = - 53°.
У -8.2. В исскуственой руке, изображённой на рис. 1.14, используется пневматическое исполнительное устройство. Его передаточная функция имеет вид:
, 2572 2572
G(s) = —-------------=-------------------.
s2+3865+ 15434 (5 + 45,3)(5 + 340,7)
Изобразите частотные характеристики, соответствующие этой функции, и покажите, что амплитудная характеристика имеет значения—15.8 дБ при со = 10 и-30 дБ при со = 200. Покажите также, что при со = 700 <р(со) = -150°.
У -8.3. Система управления звеном руки робота в разомкнутом состоянии имеет передаточную функцию
300(5+ 100) 0(5) — -------------- .
s(s+10)(s+40)
Докажите, что фазовый сдвиг ср(со) = - 180° имеет место на частоте со = 28,3 рад/с. Определите значение |G(/co)| на этой частоте.
Ответ: |G(/28,3)| = - 2,5 дБ.
У -8.4. На рис. 8.4(У) изображены частотные характеристики объекта с передаточной функцией
(s+ а)(52+ 205+ 100)
По данным характеристикам определите параметры К и а.
У-8,5. На рис. 8.5(У) изображена амплитудная характеристика, соответствующая передаточной функции
„ , К (1 + 0.5s)(l + os)
G(s) = ---------------------- .
5(1+5/8)(l+fc5)(l+5/36)
По этой характеристике определите параметры К. а и Ь.
Ответ: К= 8, а = 1/4, b = 1/24.
У-8.6. Существует ряд проектов, в которых предлагается создать робот, способный перемещаться относительно космической станции и выполнять различные операции. Управление рукой робота осуществляет система с единичной обратной связью имеющая в разомкнутом состоянии передаточную функцию
G(s) =-------------------
5(5/10+ l)(s/100+ 1)
Изобразите диаграмму Боде при К= 100 и определите частоту, при которой 2Olg|G(/co)| = 0 дБ.
У-8.7. Рассмотрите систему, передаточная функция которой в замкнутом состоянии имеет вид:
4
r(s) = — = 2 2
R(s) (52 + s + l)(s2 + 0,4 5 + 4)
Установившаяся ошибка в данной системе при ступенчатом входном сигнале равна нулю.
(а) Изобразите графически частотные характеристики данной системы и обратите внимание на наличие двух всплесков на амплитудной характеристике, (б) Предскажите вид переходной характеристики системы с учётом того, что она имеет 4 полюса и не может быть аппроксимирована моделью второго порядка, предполагающей наличие доминирующих полюсов, (в) Получите график переходной характеристики.
У-8.8. Система с обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s)tf(s) =
50(5-2)
52+115+10 ‘
(а) Определите частоты изломов, необходимые для построения диаграммы Боде, (б) Определите наклоны низкочастотной и высокочастотной асимптот амплитудной характеристики. (в) Изобразите амплитудную характеристику на диаграмме Боде.
У-8.9. На рис. 8.9(У) изображена диаграмма Боде для некоторой системы. Определите передаточную функцию системы G(s).
Рис. 8.9 (У). Диаграмма Боде
466
Глава 8. Метод частотных характеристик
У-8.10. На рис. 8.10(У), (а) изображён анализатор частотных характеристик, позволяющий получать их графическое изображение. Показан также механизм позиционирования головки дисковода, в котором использован двигатель с линейным перемещением. На рис. 8.10(У), (б) изображена реальная частотная характеристика этого механизма. Оцените значения полюсов и нулей передаточной функции устройства позиционирования головки. Приведенные данные Л= 1.37 кГц и AX = 1.275 кГц соответствуют положению первого курсора и расстоянию от него до второго курсора.
б)
Рис. 8.10 (У)
(а) Совмещенное фото, на котором изображены позиционер головки и анализатор сигналов 3562А.
(б) Частотная характеристика
а)
Задачи
467
Задачи
3-8.1. Изобразите в полярных координатах частотные характеристики, соответствующие следующим передаточным функциям:
(a) GH(s) =-------!-----;
(l+0,5s)(l+2s)
1+ 0,5s
s2 ;
s-10
s2+ 6s+ 10 ’
(r)G//(s)=
s(s+ 2)(s + 4)
(6)Gtf(s) =
(B)GH(s) =
3-8.2. Представьте в виде диаграмм Боде частотные характеристики для передаточных функций из
задачи 8.1.
3-8.3. Вместо двойного Т-образного фильтра, рассмотренного в примере 8.4, можно использовать мостовую схему, изображённую на рис. 8.3(3). Схема имеет передаточную функцию
2 2
G(s) = -----S—^--------
s + 2(co,^/Q)+ со2
( можете ли вы это доказать ?), где Рис. 8.3 (3). Мостовая Т-образная
©2 = 2/LC, Q = (£>„L/Ri, a R2 настраивается схема
исходя из соотношения R2 = (со^)2/4Л].
(а) Определите положение полюсов и нулей передаточной функции и с помощью векторов оцените примерный вид частотных характеристик, (б) Сравните частотные характеристики фильтра из примера 8.4 и данной схемы, если Q = 10.
3-8.4. На рис. 8.4(3) изображена система регулирования давления в закрытой камере. Измерительный элемент имеет передаточную функцию
100 , s2+15s+100
а передаточная функция вентиля равна
(0,1s + l)(s/15 + 1) '
Регулятор имеет передаточную функцию
Gc(s) = s + 1.
Получите частотные характеристики, соответствующие передаточной функции разомкнутого контура
Gc(s)G1(s)H(s)[l/s] .
3-8.5. Внедрение роботов в отрасли промышленности США увеличивается ежегодно на 30%. Типичный промышленный робот имеет шесть степеней свободы. Система управления положением одного из звеньев робота имеет передаточную функцию
(l+s/5)(l+s)(l+s/10)(l + s/50) ’
где H(s) = 1 и К = 10. Изобразите диаграмму Боде для этой системы.
468
Глава 8, Метод частотных характеристик
Рис. 8.4 (3) а) (а) Регулятор давления.
(б) Структурная схема
QJ&
Рис. 8.6 (3)
Логарифмические амплитудные характеристики
а)
> 1g со
б)
3-8.6. На рис. 8.6(3) изображены асимптотические амплитудные характеристики, соответствующие двум передаточным функциям. Для каждой из систем постройте соответствующую асимптотическую фазовую характеристику. Определите передаточную функцию каждой системы в предположении, что они являются минимально-фазовыми.
3-8.7. В аэропортах, складских помещениях и других зданиях могут использоваться транспортные средства, не требующие наличия водителя. Заданное направление движения выдерживается с помощью вмонтированного в пол токонесущего кабеля и пары передних направляющих колёс, как условно показано на рис. 8.7(3), (а). Чувствительные катушки, связанные с передними
Задачи
469
Рис. 8.7 (3) Система управления направлением движения
Направляющие колеса
Чувствительные катушки
Токонесущий кабель
колёсами, определяют отклонение от заданного направления движения, в результате чего формируется воздействие на рулевой механизм. Функциональная схема замкнутой системы управления изображена на рис. 8.7(3), (б). Передаточная функция разомкнутого контура имеет вид:
s(s+7t)2 s(s/tt+1)2
К s(s+5)
>Г(5)
Требуется, чтобы полоса пропускания замкнутой системы была не менее 2 рад/с. (а) Примите Kv = 2л и изобразите диаграмму Боде, (б) На основании диаграммы Боде постройте логарифмическую амплитудно-фазовую диаграмму.
3-8.8. На рис. 8.8(3) изображена система с обратной свя-зью. От замкнутой системы требуется, чтобы пере- R(s) —►( регулирование при ступенчатом входном сигнале не превышало 10%. (а) Определите соответствующее требование к параметру Мр, частотной функции Рис. 8.8 (3)
замкнутой системы
П>) =
И»
(б) Определите значение резонансной частоты со,., (в) Определите полосу пропускания замкнутой системы.
3-8.9. Изобразите логарифмические амплитудно-фазовые диаграммы для передаточных функций (а) и (б) из задачи 8.1.
3-8.10. Для управления положением груза массой Л/используется исполнительное устройство с линейным перемещением, как показано на рис. 8.10(3). Действительное положение массы измеряется с помощью потенциометрического датчика, имеющего передаточную функцию H(s) = 1. Коэффициент усиления К должен быть выбран так. чтобы установившаяся ошибка не превышала 1 % от величины задающего сигнала R(s). Катушка электромагнита исполнительного устройства имеет сопротивление Rf = 0,1 Ом и индуктивность Lj = 0,2 Гн. Масса груза М= 0,1 кг, коэффициента трения Ь = 0,2 Нс/м. Коэффициент упругости пружины к = 0,4 Н/м. (а) Определите требуемое по условию задачи значение К, эквивалентное тому, что коэффициент ошибки по положению Кр должен быть больше 99. (б) Изобразите диаграмму Боде для передаточной функции разомкнутого контура GH(s). (в) Изобразите логарифмическую амплитудно-фазовую диаграмму для функции G/7(/co). (г) Изобразите диаграмму Боде для замкнутой системы с передаточной функцией У(/ (о)//?(/со). Определите Мр,, со,, и полосу пропускания.
470
Глава 8. Метод частотных характеристик
Рис. 8.11 (3) Частотные характеристики системы управления курсом танкера
Рис. 8.10 (3)
Система управления линейным исполнительным механизмом
3-8.11. Знание теории оказывает неоценимую помощь при разработке систем управления курсом корабля. В сложных условиях очень важно точно выдерживать заданный курс. Автоматическая система справляется с этой задачей гораздо лучше, чем рулевой, время от времени осуществляющий корректирующие действия. Математическая модель такой системы управления была разработана для судов, движущихся с постоянной скоростью при условии малых отклонений от заданного курса. Например, для большого танкера соответствующая передаточная функция имеет вид:
„, , £(s) 0,164 (s + 0,2)(-s + 0,3 2)
G(s) =----= —5-------------------,
8(s) s2(s+0,25)(s- 0,009)
где £(s) — изображение по Лапласу отклонения от заданного курса, 5(s) — изображение по Лапласу угла поворота руля.
Убедитесь, что частотные характеристики танкера, £(/о>)/5(/а>), имеют вид, изображённый на рис. 8.11(3).
3-8.12. На рис. 8.12(3), (а) изображена структурная схема системы с обратной связью. Передаточные функции элементов системы представлены на рис. 8.12(3), (б) своими частотными характеристиками. (а) В предположении, что блок G3 отсутствует, определите коэффициент затухания для данной системы, (б) Определите коэффициент при включенном блоке G3. Считайте, что все передаточные функции являются минимально-фазовыми.
3-8.13. Система управления положением может быть создана на основе элементов, работающих на переменном токе, как показано на рис. 8.13(3). Сельсин-датчик можно рассматривать как обыкновенный трансформатор с вращающейся обмоткой. Ротор сельсина-датчика поворачи-
Задачи
471
Im
Характеристика Gt(jb>) на комплексной плоскости
•--------------------- Re
10
Возрастание со |
со=1 °
9.54
Логарифмическая амплитудно-фазовая диаграмма для G,(ja>)
___I__________________________________L_
-360° -270“ -180” -90"
б)
Рис. 8.12 (3). Система с обратной связью
вается вместе с нагрузкой на угол 0О. Обмотка ротора питается от сети переменного тока, например, напряжением 115 В и частотой 60 Гц. Входной эталонный сигнал R(s) = Qm(s) есть угол поворота ротора второго сельсина, играющего роль приёмника. Сигнал ошибки, пропорциональный разности углов 60 и 0,, усиливается и подаётся на обмотку двухфазного электродвигателя, управляющего положением нагрузки. К преимуществам системы на переменном токе относятся (1) отсутствие эффекта дрейфа и (2) простота и точность её элементов. Чтобы экспериментально получить частотные характеристики разомкнутой системы, надо просто разорвать связи %-Г иХ'-Г. к клеммам У-У'приложить модулирующий синусоидальный сигнал и измерить реакцию между клеммами Х-Х1. [ Перед началом эксперимента ошибку (0Q 0,) надо сделать равной нулю. ] Полученные частотные характеристики GH(j(t>) приведены на рис. 8.13(3), (б). Считая, что все элементы системы являются минимально-фазовыми, определите передаточную функцию GHfjoi).
3-8.14. Эквивалентная схема полосового усилителя может быть представлена в виде схемы на рис. 8.14(3). Считая, что Rt = R2 = 1 кОм, Cj = 100 пФ, С2 — 1 мкФ и К = 100, покажите, что
(j+1000)(s+107) ’
472
Глава 8. Метод частотных характеристик
«)
Рис. 8.13 (3). (а) Система управления двигателем переменного тока, (б) Частотные характеристики
6)
(а) Изобразите диаграмму Боде для функции G(j со), (б) Определите коэффициент усиления на средних частотах (в дБ), (в) Найдите нижнюю и верхнюю частоты, на которых коэффициент усиления из п. (б) уменьшается на 3 дБ.
3-8.15. Для получения передаточной функции некоторого обьекта были экспериментально измерены его частотные характеристики. Данные приведены в таблице. Определите передаточную функцию объекта G(j).
Рис. 8.14 (3)
Полосовой усилитель
Задачи
473
со, рад/с |G(/co)| <р(со), град
0,1 50 -90
1 5,02 -92,4
2 2,57 -96,2
4 1,36 -100
5 1.17 -104
6,3 1,03 -ПО
8 0,97 -120
10 0,97 -143
12,5 0,74 -169
20 0,13 -245
31 0,026 -258
3-8.16. Ремонт находящихся на орбите спутников и телескопа «Хаббл» осуществляется с помощью космического челнока. На рис. 8.16(3) показано, как астронавт, ноги которого пристёгнуты к платформе на конце руки робота, собственными руками останавливает вращение спутника и запускает его двигательную установку. Система управления рукой робота в замкнутом состоянии имеет передаточную функцию
У(з) _ 22,5
R(s) ~ s2 + 6.1s +22,5
Рис. 8.16 (3). Ремонт спутника
(а) Определите реакцию .+(/) на еди-
ничное ступенчатое воздействие, (б) Определите полосу пропускания системы.
3-8.17. На рис. 8.17(3) изображён экспериментальный самолёт с поворачивающимся крылом. При
малых скоростях крыло занимает обычное положение, но при сверхзвуковых скоростях может поворачиваться для улучшения полётных характеристик. Система управления самолётом имеет передаточные функции H(s) = 1 и
G ------------4(0^1)----------
s(2s+ 1)[(s/8)2+(s/20)+1]
(а) Изобразите диаграмму Боде, (б) Найдите частоту И], при которой амплитудная характеристика равна 0 дБ, и частоту со2, при которой <р(со) = —180°.
3-8.18. Работа в экстремальных условиях — например, на ядерно-опасных объектах, при высоких температурах, в космосе — требует применения систем телеуправления. Однако несмотря на многочисленные попытки, до сих пор ещё не созданы такие системы, действие которых было бы сравнимо с непосредственной работой человека-оператора. Совершенствование систем телеуправления шло по пути организации обрат ной связи
Рис. 8.17 (3). Самолет с поворачивающимся крылом (вид сверху и сбоку)
474
Глава 8. Метод частотных характеристик
от робота к оператору, создающей у последнего иллюзию личного ощущения или присутствия. Такой эффект получил название виртуального ощущения или виртуального присутствия. Система виртуального присутствия включает в себя оператора, которому доступны зрительные и слуховые ощущения, управляющего компьютера и антропоморфного робота, оснащённого механизмом передвижения и рукой с семью степенями свободы. В управляющий компьютер вводится информация о движениях головы, правой руки и правой кисти оператора и о других второстепенных движениях. Туда же с помощью специальных устройств технического стереозрения и слуха, смонтированных на шее робота, вводится информация о состоянии среды, в которой он работает. Вся эта информация выводится на стереодисплей и создаёт у оператора ощущение присутствия. Система управления передвижением робота имеет в разомкнутом состоянии передаточную функцию
12(5+ 0,5)
s2 + 13s + 30 '
Постройте диаграмму Боде для GH(Jw) и определите частоту, при которой 201g|G(/co)| » 0 дБ.
3-8.19. В автомобилях широко применяются регуляторы, одним из элементов которых является двигатель постоянного тока. Функциональная схема подобного регулятора изображена на рис. 8.19(3), (а). Экспериментально полученные частотные характеристики 0(/со)//(/со) приведены на рис. 8.19(3), (б). Определите передаточную функцию 0(s)//(s).
3-8.20. В настоящее время весьма актуальной является проблема создания космических роботов. В успешном осуществлении космических проектов ключевую роль предстоит сыграть роботам и автоматическим системам. Во многих операциях в космосе автономные «разумные» роботы могут уменьшить напряжённость труда астронавтов и повысить эффективность их работы. Такой «свободно плавающий» робот изображён на рис. 8.20(3). Главным отличием космических роботов от роботов, работающих в земных условиях, является отсутствие опоры. Любое движение руки манипулятора будет вызывать ответную реакцию в виде силы или момента, которые нарушат пространственную ориентацию робота.
Рис. 8.19 (3)
(а) Система управления двигателем постоянного тока.
(б) Экспериментально полученные частотные характеристики
Ш)
а)
Задачи
475
Систему управления одним из звеньев руки робота можно представить передаточной функцией
GH(s) =
781(s + 10)
52 + 22s+484 '
(а) Изобразите диаграмму Боде для функции GH(jat). (б) Определите максимальное значение 20 lg|G7/(/co)|, частоту, на которой это имеет место, и фазовый сдвиг на этой частоте.
3-8.21. Основной причиной авиапроише-ствий в США являются порывы ветра на малой высоте. Большинство этих
Рис. 8.20 (3). Космический робот с тремя руками захватывает спутник
происшествий вызываются либо вос-
ходящими потоками воздуха от поверхности земли во время грозы, либо горизонтальными порывами ветра, предшествующими началу грозы. Подобные ситуации представляют серьёзную проблему как при взлёте, так и при посадке самолёта, поскольку на малой высоте скорость самолёта составляет лишь около 25% от крейсерской.
Управление самолётом, подвергнувшимся влиянию порыва ветра после отрыва от взлётной полосы, сводится к задаче удержания заданной скорости набора высоты. При этом регулятор использует информацию только о текущей скорости набора высоты.
Типичная система управления скоростью набора высоты с единичной отрицательной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) =
-200я2
л3 + 14s2 + 44л + 40
Обратите внимание на знак «минус» у G(s). Изобразите диаграмму Боде и определите усиление (в дБ), когда <р(со) = -180°.
3-8.22. На рис. 8.22(3) изображены частотные характеристики, соответствующие функции G(/w). Определите передаточную функцию G(s).
3-8.23. На рис. 8.23(3) изображены частотные характеристики разомкнутой системы управления. Установите тип системы (число входящих в неё интеграторов). Определите передаточную функцию G(s). Вычислите значение установившейся ошибки при единичном ступенчатом воздействии.
Рис. 8.22 (3)
476
Глава 8, Метод частотных характеристик
Рис. 8.24 (3)
3-8.24. На рис. 8.24(3) приведены частотные характеристики замкнутой системы управления протяжкой киноплёнки, (а) В предположении, что передаточная функция Т(з) имеет два доминирующих комплексно-сопряжённых полюса, определите наилучший вид модели второго порядка, аппроксимирующей систему, (б) Определите полосу пропускания системы, (в) Предскажите значения относительного перерегулирования и времени установления (по критерию 2%) при ступенчатом входном сигнале.
3-8.25. Система с единичной обратной связью в замкнутом состоянии при входном сигнале г(/)=Яг/2 имеет установившуюся ошибку, равную Л/10. Частотные характеристики разомкнутой системы приведены на рис. 8.25(3). Определите передаточную функцию C(s).
Рис. 8.25 (3)
Задачи повышенной сложности
477
3-8.26. Определите передаточную функцию схемы на операционном усилителе, изображённой на рис. 8.26(3). Считайте, что ОУ является идеальным. Изобразите частотные характеристики схемы, если R = 10 кОм, Л, = 9 кОм, R2 = 1 кОм и С = 1 мкФ.
Рис. 8.26 (3). Схема на операционном усилителе
Задачи повышенной сложности
П-8.1. На рис. 8.1(П), (а) изображена механическая система пружина-масса-амортизатор, а на рис. 8.1(П), (б) — её частотные характеристики (в виде диаграммы Боде), полученные экспериментально. Определите численные значения параметров т, Ь, и к.
Амортизатор, Ь
М)
Рис, 8.1 (П). Система из пружины и массы с демпфированием
11-8.2. На рис. 8.2(П) изображена система с обратной связью. Параметр Ъ имеет номинальное значение 4,0. Определите чувствительность S’J и изобразите диаграмму Боде для функции 201g|5^(ja>)|, если К = 2.
Рис. 8.2 (П). Система с параметром b
П-8.3. При движении автомобиля по неровной дороге вертикальные перемещения шин эквивалентны возмущениям, действующим на систему подвески. На рис. 8.3(П) схематически изображена упрощённая модель автомобильной подвески, где предполагается, что входной сигнал является синусоидальным. Определите передаточную функцию X(s)/R(s) и постройте диаграмму Боде, если М = 1 кг, Ъ = 4 Нс/м и к = 18 Н/м.
П-8.4. На рис. 8.4(П), (а) изображён вертолёт с грузом, подвешенным на тросе. На рис. 8.4(П), (б) приведена структурная схема системы управления положением груза, где визуальная обратная связь, осуществляемая пилотом, представлена передаточной функцией H(s). Изобразите диаграмму Боде для функции
Рис. 8.3 (П). Модель автомобильной подвески
478
Глава 8, Метод частотных характеристик
Рис. 8.4 (П). Система управления вертолетом, переносящим груз
П-8.5. Замкнутая система с единичной обратной связью имеет передаточную функцию
s2 + 9s+ 10
(а) Определите передаточную функцию разомкнутой системы G(s). (б) По образцу рис. 8.27 изобразите логарифмическую амплитудно-фазовую диаграмму и отметьте на ней точки, соответствующие со = 1; 10; 50; ПО; 500. (в) Устойчива ли разомкнутая система? А замкнутая?
Задачи на синтез систем
СС-8.1. В данной главе мы используем ПД-регулятор с передаточной функцией Gc(s) - K(s + 2), а тахометрическую обратную связь [ см. рис. 4.1 (СС) ] считаем разорванной. Изобразите диаграмму Боде для системы, если К = 40. Определите переходную характеристику системы и оцените значения перерегулирования и времени установления (по критерию 2%).
С-8.1. Проблема поведения человека за рулём автомобиля по-прежнему является весьма актуальной. Проектирование и внедрение систем раздельного привода на все четыре колеса, активной подвески, независимых тормозов и других устройств, облегчающих управление автомобилем, даёт инженерам большую свободу качественного улучшения условий вождения, нежели это было в прошлом.
Систему автомобиль-водитель можно представить в виде модели, изображённой на рис. 8.1(C), где роль водителя сводится к выдерживанию заданного расстояния от осевой линии. Считая К = 1, изобразите диаграммы Боде (а) для разомкнутой системы. Gc(s)G(s), и (б) замкнутой системы с передаточной функцией Т(з). (в) Повторите все построения для случая К = 50. (г) Водитель может выбирать значение К по своему усмотрению. Определите коэффи
Рис. 8.1 (С) Система управления автомобилем с водителем в контуре
Заданное + расстояние —>( от осевой -л линии _ Ошибка J ► • ад водитель K{s+2) > G(s) автомобиль 1 s2(i+12) — У(5) Расстояние —> от осевой линии
Задачи на синтез систем
479
циент К. обеспечивающий величину Мр < 2 и максимально возможную полосу пропускания замкнутой системы, (д) Определите установившуюся ошибку системы в случае линейного входного воздействия r(t) = t.
С-8.2. Автоматические аппараты для исследования планет, например Марса, должны обладать большой степенью автономности, т. к. управление ими из наземных центров затруднительно в силу наличия значительного запаздывания, связанного с распространением радиосигналов. Это касается всех элементов и систем аппарата, отвечающих за его действия на поверхности планеты. Такая степень автономности может быть достигнута только если каждый робот будет оснащён системой очувстсвления, позволяющей получать достоверную информацию об окружающей обстановке. В институте робототехники Университета Карнеги-Меллона разработан шестиногий шагающий робот, оснащённый такой системой. Внешний вид этого робота приведён на рис. 8.2(C), (а), а на рис. 8.2(C), (б) изображена структурная схема системы управления одной его ногой.
(а) Изобразите диаграмму Боде для Ge(s)G(s) при К = 20. Определите (1) частоту, при которой <р(<1>) = -180° и (2) частоту, при которой 201g|Gc(/<o)G(7Co)| = 0 дБ. (б) Изобразите диаграмму Боде для замкнутой системы с передаточной функцией T(s) при том же значении К. (в) Определите Мр , со,, и сол для замкнутой системы при К = 20 и К = 40. (г) Из двух указанных коэффициентов усиления выберите наиболее подходящий, если требуется, чтобы при ступенчатом входном сигнале r(t) перерегулирование не превышало 35%, а время установления было как можно меньше.
Рис. 8.2 (С)
(а) Шестиногий робот-иноходец.
(б) Структурная схема системы управления одной ногой
а)
R(s)
С-8.3. На рис. 8.3(C), (а) изображён специальный стол, используемый для подведения ампул под головку распределительного устройства. Система управления положением стола, изображенная на рис. 8.3(C), (б), должна обеспечивать быстрое и точное позиционирование, в то же время сохраняя плавность движения, чтобы избежать расплёскивания препарата. Поскольку при ступенчатом входном воздействии желательно иметь малое перерегулирование и одновременно короткое время установления, то в замкнутой системе целесообразно ограничить значение 20 IgA/ величиной 3 дБ. Изобразите диаграмму Боде при некотором значении К, соответствующем устойчивой системе. Затем подберите коэффициент К из условия 201gA/;, = 3 дБ и определите полосу пропускания замкнутой системы и величину установившейся ошибки.
480
Глава 8, Метод частотных характеристик
а)
б)
Рис. 8.3 (С). Автоматически управляемый стол и распределительное устройство
С-8.4. Процессом обезболивания можно управлять автоматически. При некоторых операциях, например, в нейрохирургии и офтальмологии, непроизвольные мускульные сокращения могут повлечь серьёзные последствия для пациента и даже привести к его гибели. Чтобы создать хирургу необходимые условия для проведения операции, пациенту вводятся расслабляющие медикаментозные средства, препятствующие мускульным сокращениям.
Обычный метод, применяемый анестезиологами, заключается в инъекции пациенту большой дозы наркотика, величина которой определяется опытным путём и, если потребуется, во введении дополнительной дозы. Однако в ряде случаев анестезиолог может оказаться неспособным поддерживать постоянный уровень расслабления, и чтобы достичь этого, пациенту придётся вводить избыточные дозы наркотика. Значительно более эффективным является автоматическое управление уровнем расслабления, при котором существенно уменьшается потребление пациентом наркотического средства.
На рис. 8.4(C) изображена модель процесса обезболивания. Выберите параметры регулятора К и т так, чтобы замкнутая система имела максимально возможную полосу пропускания и при этом выполнялось условие Мр < 1,5. Определите величину полосы пропускания.
Рис. 8.4 (С). Модель системы управления обезболиванием
Задачи, решаемые с помощью MATLAB
481
ЩЦ Задачи, решаемые с помощью MATLAB
М-8.1. Рассмотрите замкнутую систему с передаточной функцией
, 25
T(s) = -2-—
sz + s + 25
С помощью MATLAB постройте диаграмму Боде и убедитесь, что резонансная частота равна 5 рад/с, а максимум амплитудной характеристики Мр^ равен 14 дБ.
М-8.2. Для следующих передаточных функций вручную сделайте набросок диаграмм Боде, а затем проверьте построения с помощью MATLAB:
(a)G(s)= 1
(6)G(s) =
(b)G(s) =
(s+l)(s+10)’ s+10
(s+ l)(s+ 20) ’ 1
s2 + 2s + 50
s- 5
(r)G(s) = ,------- .
(s + l)(s2+ 12s+ 50)
М-8.3. Система с единичной отрицательной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) = ———
100 5(^+6)
Рис. 8.4 (M). Замкнутая система управления второго порядка
С помощью MATLAB постройте диаграмму Боде для замкнутой системы и определите её полосу пропускания. Отметьте на диаграмме значение полосы пропускания.
М-8.4. На рис. 8.4(М) изображена структур-
ная схема системы второго порядка. +
(а) По диаграмме Боде для замкнутой —►(
системы определите величину резонанс- _
ного пика Мр , резонансную частоту со,.
и полосу пропускания ыв. Для построения диаграммы Боде в диапазоне частот от со = 0,1 до со = 1000 рад/с воспользуйтесь функцией logspace, (б) С помощью рис. 8.11 оцените коэффициент затухания системы £ и собственную частоту со„. (в) По передаточной функции замкнутой системы определите действительные значения параметров С, и со„ и сравните результаты с оценочными значениями из п. (б).
М-8.5. С помощью MATLAB постройте диаграммы Боде как для разомкнутой, так и для замкнутой системы, структурная A(s) схема которой приведена на рис. 8.5(М).
М-8.6. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) = —
s(s+ 2р)
* *V)
Рис. 8.5 (М). Система управления с обратной связью
Получите график зависимости полосы пропускания замкнутой системы от параметра р при 0<р< 1.
482
Глава 8. Метод частотных характеристик
М-8.7. Рассмотрите задачу об управлении перевернутым маятником, находящимся на подвижном основании, как показано на рис. 8,7(М), (а). Передаточная функция маятника имеет вид:
G(s) =
-MMbL
s2 ~(Mb +Ms)g/MkL
Цель синтеза заключается в приведении маятника в состояние равновесия (6 к 0) при наличии возмущения. Соответствующая задаче структурная схема изображена на рис. 8.7(М), (б). Заданы параметры: Ms = 10 кг, Мь = 100 кг, L = 1 м, g = 9,81 м/с2, а = 5 и Ь = 10. При ступенчатом входном воздействии к системе предъявляются следующие требования:
1. Время установления (по критерию 2%) — не более 10 с;
2. Перерегулирование — не более 40%;
3. Установившаяся ошибка — не более 0,1° при наличии возмущения.
Разработайте в интерактивном режиме ряд программ MATLAB, которые будут способствовать синтезу системы управления. Первая из программ должна выполнять следующие задачи: 1. Вычислить передаточную функцию от возмущения к выходу системы, считая К варьируемым параметром;
2. Построить диаграмму Боде для замкнутой системы:
3. Вычислить и вывести на дисплей значения Мр, и со,..
В качестве предварительной оценки воспользуйтесь номограммой на рис. 8.11, чтобы определить значения параметров С, и <о„. Вторая программа должна дать вам значения времени установления и относительного перерегулирования как функций оценок Q и со„.
Если окажется, что требуемые показатели качества не удовлетворяются, то измените значение К и повторите операции, предусмотренные двумя первыми программами. Результат выполнения этих двух программ проверяется путём моделирования. Третья программа имеет следующее назначение:
1. Представить графически реакцию системы 0(C) на единичное ступенчатое воздействие при разных значениях коэффициента К;
а)
Рис. 8.7 (М). (а) Перевернутый маятник на движущейся тележке. (б) Структурная схема системы управления
Ключевые термины и понятия 483
2. Отметить на графиках соответствующие значения показателей качества.
С помощью этих интерактивных программ синтезируйте регулятор, который удовлетворял бы требованиям, предъявляемым к частотным характеристикам системы (на основании диаграмм Боде). Предварительно аналитически вычислите минимальное значение К, удовлетворяющее ограничению на величину установившейся ошибки. Это значение К используйте в качестве первого приближения при решении задачи синтеза.
Ключевые термины и понятия
Децибел (дБ). Единица измерения логарифмической амплитудной характеристики.
Диаграмма Боде. Логарифм модуля частотной функции и одновременно аргумент этой функции, или фазовый сдвиг в зависимости от логарифма частоты to.
Логарифмическая амплитудная характеристика. 2Olg|G(/co)|.
Логарифмические частотные характеристики. См. диаграмма Боде.
Максимальное значение частотной характеристики. Значение амплитудной характеристики на резонансной частоте, обусловленное парой комплексно-сопряжённых полюсов передаточной функции.
Минимальный фазовый сдвиг. Фазовый сдвиг, когда все нули передаточной функции расположены в левой половине s-плоскости.
Неминимально-фазовая система. Система, передаточная функция которой имеет нули в правой половине s-плоскости.
Передаточная функция в частотной области. Отношение выходного сигнала системы ко входному, если последний имеет синусоидальную форму. Получается из G(s) заменой s ->ja>, обозначается G(J(o).
Полоса пропускания. Частота, при которой амплитудная характеристика уменьшается на 3 дБ по сравнению с её значением на низких частотах.
Преобразование Фурье. Отображение функции времени /(О в частотную область.
Резонансная частота. Частота <в,, при которой имеет место максимальное значение амплитудной характеристики системы.
Собственная частота. Частота собственных колебаний системы, соответствующая двум комплексным полюсам передаточной функции при отсутствии затухания.
Частота излома. Частота, при которой асимптотическая амплитудная характеристика, соответствующая полюсу (или нулю) передаточной функции, изменяет свой наклон.
Частотная характеристика. Реакция системы на синусоидальный входной сигнал в установившемся режиме.
Частотная характеристика в полярных координатах. Изображение частотной характеристики в осях ReG(/o>) - lmG(/co).
Глава 9
Анализ устойчивости методом частотных характеристик
Обзор
В предыдущих главах мы рассмотрели проблему устойчивости систем управления и обсудили различные методы анализа устойчивости и оценки относительной устойчивости. В данной главе мы еще раз вернемся к этой проблеме и покажем, как можно исследовать устойчивость с помощью частотных методов. На примере диаграмм Боде и Найквиста будут проиллюстрированы такие важные понятия, как запас устойчивости по модулю, запас по фазе и полоса пропускания. Будет рассмотрен критерий устойчивости Найквиста, связанный с использованием частотных характеристик; применение критерия Найквиста иллюстрируются рядом интересных примеров. Мы исследуем влияние чистого запаздывания по времени на устойчивость и качество систем управления. Будет показано, что запаздывание является дестабилизирующим фактором и может привести к потере устойчивости системой, которая при отсутствии запаздывания была устойчивой. Глава завершается примером синтеза с продолжением (система чтения информации с диска), где показана роль частотных характеристик в оценке качества системы управления.
9.1. Введение
Для любой системы управления всегда необходимо определить, является ли она устойчивой. Но даже если система устойчива, важно знать степень ее устойчивости, т. е. исследовать относительную устойчивость. В главе 6 было введено понятие устойчивости и рассмотрено несколько методов определения абсолютной и относительной устойчивости систем. Один из них — критерий Рауса-Гурвица — применяется, когда система задана своим характеристическим уравнением относительно комплексной переменной 5 = с +jw. В главе 7 было показано, как можно оценить относительную устойчивость системы с помощью корневого годографа, который также строится в области комплексной переменной 5. В данной главе мы покажем, как можно исследовать устойчивость системы управления, используя для этого ее частотные характеристики, подробно рассмотренные в главе 8.
Частотные характеристики системы содержат достаточно информации для определения ее устойчивости. Эти характеристики могут быть получены экспериментально путем подачи на вход системы синусоидального воздействия и варьирования его частоты; это позволяет исследовать относительную устойчивость системы даже тогда, когда значения ее параметров неизвестны. Частотный критерий устойчивости может также подсказать, как следует изменить параметры системы, чтобы повысить ее относительную устойчи
вость.
9.2. Отображение контуров на s-плоскости
485
Частотный критерий устойчивости был предложен в 1932 г. Г. Найквистом, и до сих пор он остается фундаментальным методом анализа устойчивости линейных систем управления. Критерий Найквиста основан на известной в теории функций комплексного переменного теореме Коши. Эта теорема имеет непосредственное отношение к отображению контуров на 5-плоскости и, к счастью, ей легко дать геометрическую интерпретацию, не прибегая к формальному доказательству.
Для определения устойчивости замкнутой системы необходимо исследовать ее характеристическое уравнение:
F(s) = 1 +L(s) = 0.
Для одноконтурной системы, изображенной на рис. 9.1, L(s) = G(s)H(s). Для многоконтурных систем в разделе 2.7 характеристическое уравнение было получено на основании сигнального графа; оно имеет вид:
f(5)=a(5)=i-X4 +S4A-=Q
Рис. 9.1. Одноконтурная система управления
где Д(5) — определитель графа. Таким образом, как для одноконтурных систем, так и для многоконтурных систем характеристическое уравнение можно записать в виде (9.1), где L(s) есть рациональная функция переменной 5. Чтобы убедиться, что система устойчива, надо доказать, что все нули функции F(s) расположены в левой половине 5-плоскости. Найквист предложил отображать правую половину 5-плоскости на плоскость F(s). Поэтому, чтобы понять и научиться использовать критерий Найквиста, нам сначала надлежит рассмотреть задачу отображения контуров на комплексной плоскости.
9.2. Отображение контуров на s-плоскости
Рассмотрим отображение контуров на 5-плоскости функцией F(5). Контур — это некоторая замкнутая траектория на одной плоскости, отображаемая на другую плоскость соотношением F(s). Поскольку 5 есть комплексная переменная, 5 = с + До, то функция F(s) также является комплексной; ее можно представить в виде F(s) = u+jvn изобразить на комплексной F(5)-ilhockocth в координатах и и v. В качестве примера рассмотрим функцию F(s) = 25 + 1 и контур на 5-плоскости, изображенный на рис. 9.2(a). Отображение с 5-плос-
Рис. 9.2. Отображение квадратного контура с помощью функции F{s) = 2s+1 = 2(s+1/2)
486 Глава 9. Анализ устойчивости методом частотных характеристик
кости этого квадрата со стороной, равной единице, на F(s)-плоскость производится с помощью функции F(s), т. е.
и +jv = F(s) = 2s + 1 = 2(<т + ja) + 1. (9.2)
Следовательно, мы имеем:
и = 2с + 1 (9.3)
и
v = 2ay. (9.4)
Таким образом, на F(s)-iuiockocth мы получаем контур такой же формы, т. е. квадрат, центр которого сдвинут на единицу, а сторона увеличена в 2 раза. Такой тип отображения, при котором формы контуров на s-плоскости и ^(5)-плоскости являются подобными, называется конформным отображением. Отметим также, что замкнутый контур на s-плоскости отображается также в замкнутый контур на F(s)-iuiockocth.
Точки Л, В, CaD, отмеченные на контуре Has-плоскости, отображаются в точки Л, В, С и D на F(s)-nnocKOcni, как показано на рис. 9.2. Направление обхода контура на s-плоскости, указанное стрелками, сохраняется и при обходе контура на F(s)-wiockocth. По соглашению, площадью, охватываемой контуром, считается область внутри контура, т. е. справа от направления его обхода. Мы будем также считать обход контура по часовой стрелке положительным, хотя это и противоречит общепринятому в теории функций комплексного переменного. Однако это не должно смущать читателя, поскольку является чистой условностью, а подобное соглашение часто используется в теории управления. Чтобы избежать недоразумений, читатель может просто называть это правило «движением по часовой стрелке со взглядом, обращенным направо».
Обычно мы имеем дело с дробно-рациональными функциями F(s). Поэтому полезно рассмотреть еще один пример отображения контура. Пусть на s-плоскости мы опять имеем контур в виде квадрата со стороной, равной единице, а функция F(s) имеет вид:
С
F(s) = ——. (9.5)
s + 2
Некоторые значения F(s) при обходе контура на s-плоскости приведены в табл. 9.1, а контур, полученный при этом на ^(5)-плоскости, изображен на рис. 9.3(6). Контур на ^(5)-плоскости охватывает начало координат, т.к. соответствующий контур на s-плоскости также охватывает начало координат.
JCO
«)
б)
Рис. 9.3. Отображение квадратного контура с помощью функции F[s) = s/(s + 2)
9,2. Отображение контуров на s-плоскости
487
Таблица 9.1. Значения ^(s)
точка А точка В точка С точка D
S = с + усо 1 +./1 1 1-у1 -Л -1-J1 -1 -1 +у 1 Л
F(s) = и + jv 4 + 2J 1 4-2у 1-2J +/ 1+2у
10 3 10 5 -J -1 5
Теорема Коши применяется к функции F(s), которая имеет конечное число полюсов и нулей, так что ее можно представить в виде
Л?Р[(5+5,)
F^=4r----------’ (9’6)
п<-.>
Л=1
где S, — нули функции F(s), a sk — ее полюсы. Функция F(s) — это характеристический полином, т. е.
F(s) = 1 + L(s) , (9.7)
где
D(5)
Таким образом, мы имеем:
F(s) = l+I(s)«l+— ------ (9.8)
й(-.)
откуда следует, что полюсы L(s) совпадают с полюсами F(s). Однако корнями характеристического уравнения системы являются нули функции F(s), и именно они определяют поведение системы во времени. Это достаточно очевидно, если вспомнить, что выход системы определяется выражением
У (5) = T(s)R(s) = Я(5) , (9.9)
Д(^) F(5)
где Рк и ДА есть соответственно коэффициенты передачи путей графа и их дополнительные множители, как это было показано в разделе 2.7.
Вернемся к примеру, где мы рассмотрели функцию F(s) = 2(s + 1/2). Эта функция имеет нуль 5 = -1/2, как показано на рис. 9.2. Контур на 5-плоскости, который мы выбрали (т. е. квадрат со стороной, равной единице), охватывает этот нуль. Аналогично, при функции F(s) = s/(s + 2) квадрат с единичной стороной охватывает нуль этой функции в начале координат, но не охватывает полюс 5 = -2. Охваты полюсов и нулей функции F(s) контуром на 5-плоскости можно связать с охватом начала координат А(5)-плоскости при помощи теоремы Коши, обычно называемой принципом аргумента:
Если контур rs на s-плоскости при движении по нему по часовой стрелке охватывает Z нулей и Р полюсов функции F(s), не проходя при этом ни через один нуль или полюс, то соответствующий контур Г/- на ^(х)-плоскости охватывает начало координат N = Z-P раз в направлении по часовой стрелке.
488
Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.4. Отображение квадратного контура с помощью функции /Д-s) = s/(s + 1/2)
Так, для примеров, изображенных на рис. 9.2 и рис. 9.3, контур на Т(5)-плоскости ровно один раз охватывает начало координат, потому что N=Z—P= 1, что и следовало ожидать. Рассмотрим теперь функцию F(s) = s/(s + 1/2). При контуре в виде единичного квадрата на 5-плоскости, изображенном на рис. 9.4(a), соответствующий контур на /^-плоскости показан на рис. 9.4(6). В данном случае N = Z—P = 0, поскольку контур ГF не охватывает начало координат.
Теорему Коши гораздо проще*понять, если рассматривать изменение аргумента функции F(s) при движении по контуру Г, в направлении по часовой стрелке. Рассмотрим в качестве примера функцию
(910) (5+7?! )(5+Р2)
где z, — нули функции F(s), а рк — ее полюсы. Выражение (9.10) можно записать в виде:
F(s) = I F(^)| е ' aIS F W e j[arg('+ z,)+arg(.«- z2)-arg(.v+fl)-aig(.s+/)2)J (9 11)
|s+Pill5+.P2l
Введем обозначения rp, = arg(5 + z{ ), rp,=arg(5+ z2 ), rpfl=arg(5+ px \ rpp, = arg(5 + p2). Далее выберем на 5-плоскости некоторый контур Г4, как показано на рис. 9.5(a), и определим изменение аргумента каждого вектора при изменении переменной 5 вдоль этого контура. Ясно, что при полном обходе переменной 5 по контуру Г, результирующее изменение аргументов грд, грй и гр,, будет равно нулю. Однако вектор, соответствующий нулю zb при этом совершит полный оборот на 360° по часовой стрелке. Таким образом, при полном обходе контура Гх результирующее изменение аргумента F(s) будет равно 360°, т. к. этот контур охватывает только один нуль F(s). Если бы внутри контура Гл. находились Z нулей, то результирующее изменение аргумента F(s) было бы равно гр, = 2nZ рад. Продолжая эти рассуждения, можно придти к выводу, что если бы внутрь контура Г4. попали Z нулей и Р полюсов функции F(s), то при полном обходе этого контура изменение аргумента F(s) было бы равно 2л2 - 2пР. Поэтому на Д5)-плоскости вектор F(s), конец которого находится на контуре ГF, просто повернется на угол
Фд - Фг — (?/‘ >
9.2. Отображение контуров на s-плоскости
489
Рис. 9.5. Вычисление изменения аргумента Г/г
или
2nN = 2nZ - 2лР, (9.12)
т. е. число охватов им начала координат будет равно N = Z — Р. Так, при контуре Г„ изображенном на рис. 9.5(a), который охватывает один нуль, контур Гг на рис. 9.5(6) один раз охватывает начало координат по часовой стрелке.
В качестве иллюстрации применения теоремы Коши рассмотрим расположение полюсов и нулей некоторой функции на 5-плоскости и выберем контур Г„ как показано на рис. 9.6(a). Этот контур охватывает три нуля и один полюс. Поэтому мы имеем
N=3 — 1=+2, и контур Г{. два раза охватывает по часовой стрелке начало координат /’’(.^-плоскости, как показано на рис. 9.6(6).
Рис. 9.6. Пример применения теоремы Коши при трех нулях и одном полюсе внутри контура Ts
490
Г лава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.7. Пример применения теоремы Коши при одном полюсе внутри контура Гж
Если полюсы и нули расположены на 5-плоскости так, как показано на рис. 9.7(a), то при выбранном контуре ГЛ. внутрь него попадает только один полюс. Поэтому мы имеем
7V = Z-P = -1,
и следует ожидать, что контур Гг на Е(5)-плоскости один раз охватит начало координат. Но, поскольку N имеет знак минус, то этот охват происходит в направлении против часовой стрелки, как показано на рис. 9.7(6).
И вот теперь, когда мы рассмотрели и проиллюстрировали принцип отображения контуров на 5-плоскости с помощью функции F(s), можно приступить к формулировке критерия устойчивости, предложенного Найквистом.
9.3. Критерий Найквиста
Чтобы исследовать устойчивость системы управления, необходимо проанализировать ее характеристическое уравнение F(s) - 0, или
*П(5 + 5,)
Е(5) = 1+£(5) = ^-----=0. (9.13)
Л=1
Система будет устойчива, если все нули функции F(s) расположены в левой половине 5-плоскости. Иначе говоря, в устойчивой системе все корни характеристического уравнения [нули Е(5)] должны находиться слева от мнимой оси на плоскости комплексной переменной 5. Поэтому, на основании теоремы Коши, нам нужно выбрать на 5-плоскости контур ГБ, который охватывал бы всю ее правую половину, и исследовать, не находятся ли внутри этого контура какие-либо нули F(s). Это эквивалентно тому, что мы можем построить на Е(5)-шюс кости контур Г?- и подсчитать число N охватов этим контуром начала координат. Тогда число нулей F(s), находящихся внутри контура Г4. (т. е. расположенных в правой полуплоскости), будет равно
Z = N + P. (9-14)
9,3, Критерий Найквиста
491
Рис. 9.8
Контур Найквиста на s-плоскости
Так, если Р = 0 (наиболее типичный случай), то число корней характеристического уравнения системы, находящихся в правой полуплоскости, просто равно 2V — числу охватов контуром начала координат на /?(5)-плоскости.
На рис.9.8 изображен контур Найквиста, охватывающий всю правую половину 5-плоскости. Контур Гл. включает в себя всю мнимую ось от —j«> до +у<х>, и эта его часть дает нам уже знакомую функцию F(/a>). Контур замыкается полуокружностью радиуса г, где г —> ».
Согласно критерию Найквиста, необходимо получить отображение контура Найквиста с помощью характеристического полинома
F(s)=l+Z(s) (9.15)
и подсчитать число охватов начала координат на /’’(^-плоскости. Иначе это можно сделать, используя функцию F'(s):
F'(s)-F(s)- 1 =L(s). (9.16)
Последний способ обладает тем преимуществом, что L(s) обычно представляется в виде произведения отдельных сомножителей, тогда как функция [1 + /,($)] таким свойством не обладает. Тогда отображение контура Ts должно осуществляться с помощью функции F'(s) = L(s) на £(5)-плоскость. В этом случае охваты по часовой стрелке начала координат на /^-плоскости эквивалентны охватам по часовой стрелке точки -1 на L(s)-плоскости, т. к. L(s) = F(s) - 1. В результате формулировка критерия устойчивости Найквиста приобретает вид:
Если разомкнутая система устойчива, т. е. число полюсов функции L(s) в правой половине s-плоскости равно нулю (Р = 0), то замкнутая система устойчива тогда и только тогда, когда контур Г/, на £(5)-плоскости не охватывает точку (-1J0).
Если же число полюсов L(s) в правой полуплоскости отлично от нуля, то критерий Найквиста формулируется так:
Замкнутая система устойчива тогда и только тогда, когда число охватов против часовой стрелки контуром Г, точки (—1,у0) равно числу полюсов функции £(s), имеющих положительную действительную часть.
492
Глава 9, Анализ устойчивости методом частотных характеристик
Приведенные выше формулировки основаны на том, что при отображении контура Найквиста с помощью функции F'(s) - L(s) число корней характеристического уравнения замкнутой системы [или нулей полинома 1 + £(5)], находящихся в правой половине 5-плоскости, определяется выражением
Z = N + P.
Отсюда ясно, что если L(s) не имеет полюсов в правой полуплоскости (Р = 0), а для устойчивости замкнутой системы необходимо потребовать выполнение условия Z = 0, то контур Г; не должен охватывать точку (-1, J0). Аналогично, если Р Ф 0, а замкнутая система должна быть устойчива, т. е. Z = 0, то отсюда мы имеем А = -Р, т. е. контур Г; должен охватывать точку (-1,у0) в направлении против часовой стрелки Р раз.
Применение критерия Найквиста нагляднее всего проиллюстрировать несколькими примерами.
Пример 9.1. Система с двумя действительными полюсами
Рассмотрим одноконтурную систему, изображенную на рис. 9.1, где
GH(s) =
К
(TjS+ 1)(t2S+ 1)
(9.17)
В данном случае L(s) = GH(s), и мы воспользуемся контуром rL = TGH на С//($)-плоскости. Контур Ts на s-плоскости изображен на рис. 9.9(a), а соответствующий контур Гси — на рис. 9.9(6). Последний построен при т( = 1, т2 = 0,1 и К = 100. Значения модуля и аргумента GH(j<t>) для отдельных частот <о приведены в табл. 9.2. Эти значения использованы для построения частотной характеристики в полярных координатах на рис.9.9(6).
Таблица 9.2. Модуль и аргумент функции <7Л/(/ш)
CD 0 0,1 0,76 1 2 10 20 100 CO
|G/f(/<o)| 100 96 79,6 70,7 50,2 6,8 2,24 0,1 0
argG//(7<o), град. 0 -5,7 -41,5 -50,7 -74,7 -129,3 -150,5 -173,7 -180
а)
Рис. 9.9. Контур Найквиста и его отображение с помощью функции
GH(s) =-------—--------
(s + 1)(s/10 + 1)
9,3, Критерий Найквиста
493
Положительная часть мнимой оси отображается в сплошную кривую на рис. 9.9(6), а ее отрицательная часть — в пунктирную кривую на том же рисунке. Полуокружность бесконечного радиуса на ^-плоскости отображается в начало координат на 6//(л)-плоскости.
Заметим, что функция GH(s) не имеет полюсов в правой полуплоскости, т. е. Р = 0. Следовательно. чтобы система была устойчива, должно выполняться условие N = Z = 0, т. е. контур на G//(i-)-плоскости не должен охватывать точку -1. Анализ рис. 9.9(6) и выражения (9.17) показывает. что ни при каких значениях К контур не охватит точку -1 и система всегда будет устойчива при любых положительных значениях К.
Пример 9.2. Система с полюсом в начале координат
Рассмотрим еще раз одноконтурную систему на рис. 9.1 и будем считать, что
G//(5) = —Ц-.
s(is+ 1)
В этом случае L(s) = GH(s) и нам необходимо построить контур Гл = rG// на 67/(л)-плоскос1и. На рис. 9.10(a) изображен контур Гд на ^-плоскости, причем полюс в начале координат обходится по полуокружности радиуса е, где е —> 0. Этот обход продиктован условиями теоремы Коши, в соответствии с которой контур не может проходить через полюс. Общий вид контура Го// приведен на рис. 9.10(6). Лено, что участок контура Г6//, соответствующий частотам от со = 0+ до со = +оо, это обычная частотная характеристика GH(j\o), изображенная в полярных координатах. Рассмотрим детально каждый участок контура Найквиста Гд. и определим соответствующие участки контура Г(:и на 6//($)-плоскости.
(а) Начало координат на s-плоскости. Обход полюса в начале координат по дуге бесконечно малого радиуса можно представить функцией GH(s), положив в ней j = ее79 и считая, что е изменяется от -90° при со = 0~ до +90“ при со = 0+. Так как е -> 0, то отображение GH(s) принимает вид:
limG//(s) = lim ----
t->o е—*о(Ее/9.
= limf—\~79 . е )
(9.18)
Следовательно, аргумент контура на G//(s)-nnocKOCTH изменяется от 90° при со = 0 до -90° при со = 0+, проходя через значение 0° при со = 0. Этот участок контура на С//(л-)-плоскости, изображенный на рис. 9.10(6), имеет вид полуокружности бесконечного радиуса. Точки, обо-
а) 6)
Рис. 9.10. Контур Найквиста и его отображение с помощью функции GH(s) = K/s{xs +1)
494
Глава 9. Анализ устойчивости методом частотных характеристик
злаченные А, В и С на рис. 9.10(a), отображаются в соответствующие точки Л. В и С на рис. 9.10(6).
(б) Участок от <о = 0 до <в = +оо. Этот участок контура Г, отображается с помощью функции GH(s) путем простой замены s =jkij, т. е.
GH(s)\s=J<a=GH(j<»), (9.19)
что соответствует частотной характеристике системы, построенной в полярных координатах. Соответствующий участок контура П, изображен на рис. 9.10(6). При w —> +оо мы получаем
К К -/(— +arctg сот)
lim GH(jo>) = lim-----------= lim —e 2 . (9.20)
JCO(/COT + 1) w->+« T<02
Таким образом, при <в -» +co |G//(/o>)| -> 0, a arg GH(Jk>) —> -180°.
(в) Участок от co = +oo до co = -оо. Участок контура Г,, от co = +оо до со = -оо с помощью функции GH(s) отображается в начало координат 6//0)-плоскости. Это отображение описывае тся выражением
limGH(s)| „=Нт-^е-2«‘. (9.21)
г-^-хг
где ср изменяется от +90° при со = +оо до -90° при со = -оо. Поэтому на контуре Гс;и происходит скачок аргумента с -180° при со = +со на +180° при со =-оо. Что касается модуля GU(s) при г = оо, то он всегда равен нулю или постоянному значению.
(г) Участок от со = -оо до со = 0". Этот участок контура Гх отображается с помощью функции GH(s) при s = -/со, т. е.
Сад=-,со=0//(:/со). (9.22)
Так как функция G//(-/co) является комплексно-сопряженной с GH(+Ja>). то участок контура ГЯ№ соответствующий -оо < со < 0”. симметричен относительно действительной оси участку для со > со > 0+, как это показано на рис. 9.10(6).
Для ответа на вопрос об устойчивости данной системы второго порядка мы сначала заметим, что функция GH(s) не имеет полюсов в правой полуплоскости, т. е. Р = 0. Следовательно, система будет устойчива только если Z=N= 0, а это значит, что контур V не должен охватывать точку —1. Из рис. 9.10(6) ясно, что ни при каких значениях Хит контур никогда не охватит точку -1 и система всегда будет устойчива. Как и в главе 7, мы рассматриваем только положительные значения коэффициента К. Если К может быть отрицательным, то в выражении GH(s) просто надо изменить знак у К, а все рассуждения остаются в силе.
Из рассмотренного примера можно сделать два общих вывода:
1- Участок контура Гс для -оо < со < 0 всегда симметричен относительно действительной оси участку этого контура для 0+ < со < +оо. Поэтому для анализа устойчивости достаточно построить контур только для положительных значений частоты, 0+ < со < +оо.
2. Модуль GH(s) при s = reW и г —> оо всегда стремится к нулю или к постоянной величине.
Пример 9.3. Система с тремя полюсами
Рассмотрим еще раз одноконтурную систему на рис 9.1 и будем считать, что
GH(s) = --------(9.23)
s(t(s + 1)(t2s + 1)
Контур Найквиста для этого случая изображен на рис. 9.10(a). Напомним, что отображения для GH(ja>) и GH(-ju>) симметричны относительно действительной оси, поэтому достаточно исследовать годограф GH(j&). Начало координат s-плоскости, как и в примере 9.2. отображается в полуокружность бесконечного радиуса. Кроме того, полуокружность re?v, где г —> оо. отображается в точку GH(s) = 0, как и следовало ожидать. Следовательно, для анализа устой
9,3, Критерий Найквиста
495
чивости достаточно построить участок контура Гкоторый представляет собой частотную характеристику GH(jw) для ()’<«< +оо. Для 5 = +/ю мы имеем:
СН( . . =___________К____________= -К(т, + т2)- JK(1/<о)(1 - <о2т,т2) =
7 ./(оС/ит, + 1)(уыт2 +1) 1+<1)2(т2+Т2)+<1)4Т2Т2
_____________К______________
[co4(Tj + т2)2 + <о2(1-оА^)2]'12
-/(— + arctg шт, + arctg шт2) е 2
(9.24)
При со = 0+ \GH(ja )| = от, a arg GH(ju) = —90°.
При со —> +оо мы имеем:
/ л
1 -/ — + arctg tOTj + arctg шт2
lim GH(jai)= lim —--------e
Ш-»+=о (0JTjT2
lim —j-------
(0->-Ko 0) T|T2
.3л e'^
(9.25)
Таким образом, |G//(/co)| становится равным нулю, когда arg GHfjai) = -270°. Чтобы это произошло, годограф GH(j(o) должен пересечь действительную ось, как показано на рис. 9.11, и, следовательно, может охватить точку -1. В ситуации, изображенной на рис. 9.11. годограф дважды охватывает точку —1, т. е. система является неустойчивой и два корня ее характеристического уравнения находятся в правой полуплоскости. Точку, в которой годограф GH(ja) пересекает действительную ось, можно найти, приравняв нулю мнимую часть функции
GH(Ja>) = и + jv. Из (9.24) имеем:
-KQ/coXI-cd2^) 1+ со2(т2 + т2)+ со4т2т2
(9.26)
Таким образом, v = 0, если 1 -со2Т|Т2 = О, или <в= 1 / д/т|Т2. эт°й частоте действительная
часть GH(/to) равна
„ = ~ЛА| + т2) = -*(Т| + Т2)Т|Т2 = ~КТ|Т2
1 + ю2(т^+т2)+ю4т2т2и2=1/т1г т|т2+(т^ + т2)+т|т2 т, + т2
Следовательно, система будет устойчива, если
Ti+T2
или
Рис. 9.11
Диаграмма Найквиста для функции GH(s) = K/s^s + 1)(t2s + 1). Штрихом слева от начала координат отмечена точка -1
496 Глава 9, Анализ устойчивости методом частотных характеристик
Действительная ось
Рис. 9.12. Диаграмма Найквиста для функции GH(s) = K/s(s + 1)2 при (а) К = 1, (б) К = 2 и (в) К = 3
1.5
I
g 0.5
О к « о
§
S-0.5
-1
Действительная ось
Если, например, Tj = т2 = 1, то G(s)H(s) = A7s(s+1)2 и, используя условие (9.28), находим, что система будет устойчива при К < 2. Диаграммы Найквиста для трех различных значений К приведены на рис. 9.12.
Пример 9.4. Система с двумя полюсами в начале координат
Обратимся еще раз к анализу устойчивости одноконтурной системы на рис.9.1, но в данном случае будем считать, что
= . (9.29)
s (ts + 1)
Путем замены s = /со перейдем к частотной характеристике:
G//(/co) = —т—6 ,/2е,(~л~агс‘8Ют) (9-30)
-со2(/сот + 1) (со4 + T2CO6)V2
Заметим, что argG//(/co) всегда отрицателен и превышает -180°, следовательно, годограф GH(j<o) при всех значениях со находится выше действительной оси. При со —> 0 мы имеем:
lim GH(ja) = | lim . (9.31)
Если to —> +оо, то мы получаем:
lim G//(/co) = | lim -^-|е“'3л'2 . (9.32)
СО—>+<* \ (0 /
При обходе начала координат s-плоскости по полуокружности бесконечно малого радиуса, т. е. при s = ее1'1', мы имеем:
limG//(s)=lim4e"'2<p, (9.33)
Е—>0 Е—>0 £
где -л/2 < ср < тг/2. Поэтому контуру Г6И соответствуют аргументы +л при со = 0", -л при со = 0+, а при изменении со от со = (Г до со = 0+ контур дополняется полной окружностью бесконечного радиуса. Полный вид контура ГС1Н приведен на рис. 9.13. Поскольку этот контур дважды охватывает точку -1, то два корня характеристического уравнения замкнутой системы находятся в правой полуплоскости и система неустойчива при любых значениях К.
9.3, Критерий Найквиста
497
Пример 9.5 Система с полюсом в правой половине s-плоскости
Рассмотрим систему управления с неустойчивым объектом и ПД-регулятором (рис. 9.14). Сначала будем считать, что канал производной в регуляторе отсутствует, т. е. К2 = 0. В этом случае разомкнутая система имеет передаточную функцию
GH(s) = -^— (9.34)
s(s-l)
Эта передаточная функция имеет один полюс в правой полуплоскости, поэтому Р = 1. Чтобы замкнутая система была устойчива, необходимо выполнение условия Л = -Р = -1, т. е. контур на 6//($)-плоскости должен один раз охватить точку —1 в направлении против часовой стрелки. При обходе начала координат по полуокружности мы полагаем s = ee/'p. где -л/2 < <р < л/2. В этом случае мы имеем:
limG/ZG) = lim-= Гнт^]ея"180О"ф). (9.35)
Е—>0 Е—>0 ^£—>0 £ J
Следовательно, соответствующий участок контура PGH представляет собой полуокружность бесконечного радиуса в левой половине С//($)-плоскости, как показано на рис. 9.15. При j = > мы имеем:
GH( 7С0) =____—_____ =______—____J(-n/2-aragM) _ ^1 ;(п/2+arctg u) /д
j >0-1) (оэ2 + <о4),/2 (ГО2 + 0)4)12 • (
Наконец, для полуокружности радиуса г —» сс мы имеем:
( К Г2,<р
limG//(s)| lim-^ , (9.37)
г л I P—>oo J
где угол <p изменяется от л/2 до - л/2 по часовой стрелке. Следовательно, аргумент контура Гв начале координат С/»-плоскости скачком изменяется на 2л рад в направлении против часовой стрелки, как показано на рис. 9.15. Некоторые важные значения, необходимые для по-
498
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.15
Диаграмма Найквиста
для функции GH(s) = K-Js\s - 1)
строения годографа GH(s), приведены в табл. 9.3. Контур Г(;н на С//(л )-плоскости один раз охватывает точку -1 по часовой стрелке, т. е. N = +1. Следовательно.
Z = N + P = 2, (9.38)
и система неустойчива, т. к. два корня ее характеристического уравнения всегда находятся в правой полуплоскости, независимо от величины коэффициента Кх.
Таблица 9.3. Значения GH(s)
S' J0~ ,/0+ 71 +700 -/00
\GH\/Kt 00 oo 1/V2 0 0
arg GH -90° +90° +135° +180° -180°
Теперь рассмотрим случай, когда в системе на рис. 9.14 задействован канал производной (К2 > 0). Передаточная функция разомкнутой системы принимает вид
GH(s) = К'+ , где К= К->/Кх. (9.39)
s(j-l) j(j-1)
Участок контура ГGH при s = Ее1'1' — тот же самый, что и при отсутствии канала производной, как показано на рис. 9.16. Однако при s = r^'f и к-»со мы получаем:
limGW(s)| ^ = lim^e“2,p. (9.40)
S~IC r-vn r
и аргумент контура в начале координат О/7($)-плоскости претерпевает скачок на л рад в направлении против часовой стрелки, как показано на рис. 9.16; Годограф GH(juZ) определяется выражением
GH( /со) = = -/С|(соЧсо^)+./(со-^Х, (9 41)
-со — /со со + со
Точку пересечения этого годографа с действительной осью можно определить, приравняв нулю мнимую часть GH(j(o):
а - Ка3 = 0,
откуда следует со2 = 1/К. При этом действительная часть GH(ja) имеет значение
-со2Х,(1+К)
= о2=1/К
(9.42)
9.4. Относительная устойчивость и критерий Найквиста
499
Рис. 9.16
Диаграмма Найквиста для функции GH(s) = ^i(1 + Ks)/s(s - 1)
Следовательно, если -KtK < -1, или К}К > 1, то контур Гяй один раз охватывает точку -1 в направлении против часовой стрелки, т. е. JV = —1. Тогда число корней характеристического уравнения системы, находящихся в правой полуплоскости, будет равно
Z = 7V + P = -l + l=0.
Отсюда следует вывод, что система будет устойчива при К}К > 1, т. е. при К2 > 1.
Пример 9.6. Система с нулем в правой половине s-плоскости
Рассмотрим систему, изображенную на рис. 9.1, если
GH(S)=K{S~2^ . (s+1)2
Заметим, что в разомкнутом состоянии эта система устойчива. После замены j = /со получим:
( /со + I)2 (1 - со2) + /2со
(9-43)
При со —> +оо мы имеем
lim GH( /со) = [ lim — |е“'л/2.
При со = у[5 GH(ja>) - К/2, а при со = 0+ GH(ja>) = —2К. Диаграмма Найквиста для GH(jvt)IK изображена на рис. 9.17. Годограф GH{jai) пересекает точку (-1+/0) при К = 1/2. Следовательно, система устойчива только в диапазоне 0 < К < 1/2. Если К > 1/2, то число охватов точки -1, N= 1. Число полюсов GH(s) в правой полуплоскости, Р = 0. Таким образом, мы имеем
Z=N+P= 1.
т. е. система неустойчива. Анализ диаграммы Найквиста, изображенной на рис. 9.17 для GH(jvs)IK, показывает, что система будет неустойчива при всех К>1/2.
9.4. Относительная устойчивость и критерий Найквиста
В разделе 6.3 мы рассматривали понятие относительной устойчивости, связывая его с расположением на 5-плоскости корней характеристического уравнения. Это понятие мы определили как свойство системы, оцениваемое по времени установления переходной характе-
500
Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.17. Диаграмма Найквиста к примеру 9.6 для GH(jo)/f<
ристики, обусловленному каждым корнем или парой комплексно-сопряженных корней. Мы установили, что чем короче время установления, тем большей относительной устойчивостью обладает система. Было бы крайне полезно получить похожую оценку относительной устойчивости, используя частотные характеристики системы. Критерий Найквиста позволяет определить абсолютную устойчивость системы, но, что не менее важно, может быть использован и для оценки относительной устойчивости.
Для критерия Найквиста важна точка (-1,JO) на комплексной плоскости или соответствующие ей значения 0 дБ и -180° на диаграмме Боде. Ясно, что близость годографа
к этой точке может служить мерой относительной устойчивости системы. На рис. 9.18 изображена частотная характеристика, соответствующая функции
GH{ja) =--------------------, (9.44)
jcoCjcotj +1)(j’£0T2 +1)
построенная для трех разных значений К. При увеличении К годограф GH(ja) приближается к точке -1, а при К = К3 даже охватывает ее. В примере 9.3 мы нашли, что годограф пересекает действительную ось в точке
и=_Хт1т2 . (9.45)
т, +т2
Следовательно, два корня характеристического уравнения системы будут находиться на мнимой оси, если
и = 1 или К =
9,4. Относительная устойчивость и критерий Найквиста
501
Рис. 9.18
Годограф Найквиста для (?//(/<«) при трех значениях коэффициента усиления
Чем меньше X относительно этого критического значения, тем более устойчива система, и разность между К= (т1+т2)/Т|Т2 и, скажем, К-К2 может служить мерой относительной устойчивости. Эта мера относительной устойчивости называется запасом по модулю и определяется как величина, обратная модулю на частоте, при которой фазовый сдвиг равен -180° (т. е. v = 0). Запас по модулю показывает, во сколько раз можно было бы увеличить коэффициент усиления системы, чтобы годограф прошел через точку и = -1. Так, на рис. 9.18 при К = К2 запас по модулю равен обратной величине ког-
да v = 0. Поскольку фазовый сдвиг равен -180° при частоте со = 1 /7'Г1т2, то запас по моду
лю определяется выражением
1
1
X2TtT2
Т1 +т2
(9.46)
Запас по модулю можно также измерять в децибелах:
-201g d, дБ.
(9-47)
Например, если Tj = т2 = 1, то система устойчива при К < 2.
Полагая К = К2 = 0,5, мы получим запас устойчивости
1 _ Х2Т!Т2 d т> +т2
= 4,
(9.48)
или
201g4 = 12 дБ. (9.49)
Таким образом, запас по модулю показывает, что коэффициент усиления системы можно увеличить в 4 раза (или на 12 дБ), прежде чем она окажется на границе устойчивости.
Запас по модулю — величина, определяемая при фазовом сдвиге -180° и показывающая во сколько раз может быть увеличен коэффициент усиления системы, прежде чем она окажется на границе устойчивости, т. е. диаграмма Найквиста пройдет через точку -1 + уб.
502 Глава 9. Анализ устойчивости методом частотных характеристик
Другим показателем относительной устойчивости может служить запас по фазе. Он показывает, на какой угол должен быть повернут годограф GH(ja), чтобы при частоте, на которой |G//(/co)| = 1' он прошел через точку (-1, J0). Эта мера относительной устойчивости эквивалентна дополнительному запаздыванию по фазе, при котором система оказывается на границе устойчивости. Запас по фазе легко определить по диаграмме Найквиста на рис. 9.18. При коэффициенте К = К2 это величина <р2, а при К = Кх это <рь т. е. такие дополнительные фазовые сдвиги, при которых система оказывается на границе устойчивости.
Запас по фазе — величина, определяемая на частоте, при которой | GH(ja>)\ = 1 и показывающая, какой дополнительный отрицательный фазовый сдвиг допустим в системе, прежде чем она окажется на границе устойчивости, т. е. диаграмма Найквиста пройдет через точку -1+/0.
Поскольку частотные характеристики предпочтительнее изображать не в полярных координатах, а в виде диаграммы Боде, то запасы устойчивости по модулю и по фазе могут быть определены по этой диаграмме. При анализе устойчивости с помощью диаграммы Найквиста критической точкой является точка с координатами и = -1, v = 0. На диаграмме Боде ей соответствуют значения 0 дБ для модуля |Gf/(/co)| и 180° (или -180°) для фазового сдвига.
По диаграмме Найквиста достаточно просто определяется устойчивость минимально-фазовых систем. При этом запасы устойчивости по модулю и по фазе легко вычисляются с помощью компьютерной программы. Однако, если система неминимально-фазовая, то для определения ее устойчивости надо иметь полный вид диаграммы Найквиста.
Покажем, как определяются запасы устойчивости по диаграмме Боде для функции
1
GH(ja) =----------------------,
jco(jco+l)(O,2jco+l)
изображенной на рис. 9.19. На частоте, при которой 201g| G//(/co)| = 0 дБ, фазовый сдвиг равен -137°, поэтому запас по фазе составляет 180° - 137° = 43°. На частоте, при которой <р(со) = -180°, 2Olg|G//(/co)| =-15 дБ, следовательно, запас по модулю составляет 15 дБ. Эти запасы устойчивости отмечены на рис. 9.19.
(9.50)
Рис. 9.19
Диаграмма Боде для функции
+ 1)(О,2/со + 1)
9.4. Относительная устойчивость и критерий Найквиста
503
Рис. 9.20
Логарифмические амплитудно-фазовые диаграммы для функций GHy и (?/72
<p(w)
Частотные характеристики системы графически можно представить в виде логарифмической амплитудно-фазовой диаграммы, по которой тоже легко определить запасы устойчивости. На рис. 9.20 изображена логарифмическая амплитудно-фазовая диаграмма
для функции
1
GH, (» =---------------------.
jco(jco+1)(0,2jo+1)
(9-51)
На диаграмме отмечены запас по фазе в 43° и запас по модулю, равный 15 дБ. Для сравнения на той же диаграмме построена кривая, соответствующая функции
=(9.52) j€o(jco+l)'
В этом случае запас по модулю составляет 5,7 дБ, а запас по фазе равен 20°. Отсюда следует, что система с передаточной функцией GHjQG) относительно менее устойчива, чем система с передаточной функцией GH1(j(o'). Остается, однако, вопрос: насколько она менее устойчива? На этот вопрос мы дадим ответ в следующем разделе применительно к системе второго порядка, а также покажем, что связь между показателями качества во временной и частотной областях является достаточно сильной только при наличии доминирующих корней.
Теперь давайте рассмотрим, какая связь существует между запасом по фазе и относительным коэффициентом затухания С, системы второго порядка. Пусть передаточная функция системы, изображенной на рис. 9.1, имеет вид:
GH(s)=— (9.53)
5(5+2уВ„ )
504
Глава 9. Анализ устойчивости методом частотных характеристик
Замкнутая система имеет характеристическое уравнение: s2 + 2^С0„5 + С02 =0.
Корни этого уравнения:
5 =
В частотной области функция (9.53) приобретает вид:
GH(Ja') =-----.
ja(j®+2fyo„)
На частоте сос (обычно называемой частотой среза) мы имеем |6Я(/со)| = 1, т. е.
7
сос(а>2 +4£2со2 )1/2 1
Преобразуя (9.55), получим:
(со2)2 +4^со2(со2)-со^=0.
Решая это уравнение относительно сос, находим, что
4 = (< +1)1/2-2^2.
Запас по фазе в данной системе равен
<^„,=180°-90°-arctg
со..
= 90°-
(9-54)
(9.55)
(9.56)
arctg 2С (4^+1)1/2 _2|г2_
(9.57)
£=0,01<рр„,
Выражение (9.57) определяет связь между коэффициентом затухания и запасом по фазе и это соотношение связывает между собой временные и частотные характеристики системы. Зависимость между и <ррт приведена на рис. 9.21. Действительная кривая может быть аппроксимирована пунктирной линией на этом рисунке. Наклон этой прямой равен 0,01, поэтому связь между коэффициентом затухания и запасом по фазе можно представить выражением
(9.58)
где запас по фазе измеряется в градусах. Эта аппроксимация, достаточно точная для С, < 0,7, может служить хорошим показателем связи между частотными характеристиками системы и ее показателями качества во временной области. Соотношение (9.58) относится только к системам второго порядка, но может быть использовано и применительно к системам более высокого порядка, если их переходная характеристика в основном определяется парой доминирующих корней характеристического уравнения. Аппроксимация системы высокого порядка моделью второго порядка — это поистине великолепная вещь! И хотя к этому методу оценки качества системы следует подходить с осторожностью, многие инженеры считают его простым и достаточно надежным при предъявлении требований к системе управления.
9,4. Относительная устойчивость и критерий Найквиста
505
Рис. 9.21
Связь между коэффициентом затухания и запасом по фазе для системы второго порядка
Исходя из изложенного, для системы с передаточной функцией
=------------------ (9.59)
7со(уи+ l)(0,2jco+1)
мы на основании рис. 9.19 нашли, что запас по фазе равен 43°. Поэтому коэффициент затухания приблизительно равен
С = 0,01фр,„ = 0,43. (9.60)
Тогда относительное перерегулирование при ступенчатом входном сигнале будет составлять примерно:
перерегулирование = 22%, (9.61)
как это можно получить с помощью рис. 5.8 для £ = 0,43.
Можно написать компьютерную программу, которая вычисляла бы и изображала графически зависимость запаса по модулю от коэффициента К для конкретной функции Рассмотрим, например, систему на рис. 9.1, если
Коэффициент усиления, при котором система находится на границе устойчивости, равен К = К =128. Зависимости запаса по модулю и запаса по фазе от коэффициента К представлены соответственно на рис. 9.22(a) и 9.22(6). А на рис. 9.22(b) изображена связь между запасами устойчивости по модулю и по фазе, где параметром является коэффициент усиления К. Заметим, что для оценки качества системы можно использовать как запас устойчивости по модулю, так и запас устойчивости по фазе. В дальнейшем мы обычно будем при оценке качества системы по частотным характеристикам отдавать предпочтение запасу по фазе.
Запас устойчивости по фазе достаточно хорошо характеризует вид ожидаемой переходной характеристики системы. Другим полезным показателем качества является максимум амплитудно-частотной характеристики замкнутой системы , и далее мы рассмотрим этот важный с практической точки зрения показатель.
506
Глава 9, Анализ устойчивости методом частотных характеристик
Запас по фазе в зависимости от К
Рис. 9.22. (а) Зависимость запаса по модулю от коэффициента усиления К.
(б) Зависимость запаса по фазе от коэффициента усиления К.
(в) Связь между запасами устойчивости по модулю и по фазе
9.5. Критерии качества во временной и частотной областях
Качество замкнутой системы управления, оцениваемое по ее переходной характеристике, можно связать с ее частотными характеристиками. Частотные характеристики замкнутой системы определяются по ее передаточной функции T(s). Частотные характеристики одноконтурной системы с обратной связью в разомкнутом и замкнутом состоянии связаны соотношением
= Г(7со) = G(7to) . (9.62)
R(jG) l+GH(Ja)
Критерий Найквиста и понятие запаса по фазе применяются к частотной характеристике разомкнутой системы GH(ja). Однако, как было установлено в разделе 8.2, максимум амплитудно-частотной характеристики замкнутой системы второго порядка можно связать с коэффициентом затухания соотношением
Мр<л =|T(jar )| = )-*, Q< 0,707. (9.63)
Эта зависимость графически представлена на рис. 8.11. Учитывая важность связи между частотными характеристиками замкнутой системы и переходным процессом, необходимо уметь оценивать величину Мр по диаграммам, с помощью которых исследуется устойчивость системы методом Найквиста. Иначе говоря, надо уметь определять частотные харак
9.5, Критерии качества во временной и частотной областях 507
теристики замкнутой системы по ее частотным характеристикам в разомкнутом состоянии. Конечно, мы могли бы найти корни характеристического полинома 1 + GH(s) и затем построить частотные характеристики замкнутой системы по ее передаточной функции Т(з). Но, затратив массу усилий по определению корней характеристического уравнения замкнутой системы, у нас отпадет необходимость построения ее частотных характеристик, т. к. зная эти корни, можно сразу найти вид переходной характеристики.
Связь между частотными характеристиками разомкнутой и замкнутой систем легко установить, используя выражение (9.62) при H(ja) = 1. Если в действительности обратная связь не является единичной, то за выход системы просто надо принять точку после блока H(ja). Итак, на основании (9.62) мы имеем:
T(ja) = M(a)e'v^ = G(J^ . (9.64)
1+G(jw)
Эту зависимость удобнее выразить через координаты и и v комплексной плоскости, на которой изображается годограф G(/co). Тогда
G(/co) = и +jv и модуль частотной характеристики замкнутой системы w + jv
(9.65)
G(Ja) 1+G(jco)
/2 2 \1/2
(и- +V-)
1+u + jv [(1+и)2 +v2]
Возводя (9.66) в квадрат и перегруппируя члены, получим: (1-Л/2>2 +(1-A/2)v2 -2M2u=M2.
(9.66)
(9-67)
Разделим (9.67) на (1 -Л72) и добавим к левой и правой части этого уравнения член [Л/2/(1 -Л72)]2. В результате получим:
т 7 2М2и u~+v~---------
1-М2
м2 1-М2
м
1-М2
М 1-м2
(9.68)
М =
Группируя члены, приходим к уравнению:
( М2 f Г 1—Л/2 .
м 1-М2
(9.69)
которое представляет собой уравнение окружности с центром в точке
Л/2 _
и =------, v = 0.
1-Л/2
Радиус этой окружности равен |Л7/(1 -Л/)|. Придавая Мразличные постоянные значения, можно на плоскости (и, jv) построить окружности, каждой из которой будет соответствовать одно и то же М. Несколько таких линий постоянного значения М изображены на рис. 9.23. Окружностям слева от и = — 0,5 соответствуют значения М> 1, а окружностям справа от и = - 0,5 — значения М < 1. При М = 1 окружность вырождается в прямую линию и = - 0,5, как это очевидно из (9.67).
На рис. 9.24 изображены частотные характеристики разомкнутой системы при двух разных значениях коэффициента усиления, причем К->>К\- При Л1 годограф G(/co) касается окружности, соответствующей М\, и точка касания характеризуется частотой со,.. Ана-
508
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.23
Окружности постоянных значений М
логично, при К2 годограф на частоте аГг касается окружности, соответствующей М2. Поэтому амплитудно-частотные характеристики замкнутой системы имеют примерно такой вид, как на рис. 9.25. Таким образом, мы можем получить частотные характеристики замкнутой системы, используя годограф G(/co) на комплексной плоскости и семейство окружностей постоянного значения М. Если нас интересует только максимальное значение амплитудной характеристики замкнутой системы, то это значение можно определить непосредственно по частотным характеристикам разомкнутой системы, построенным в полярных координатах. Это значение М р равно показателю М, соответствующему той окружности, которой касается годограф G(/co). Точке касания соответствует резонансная частота замкнутой системы. Полный вид амплитудной характеристики замкнутой системы можно определить, просто считывая значения М с тех окружностей, которые пересекает годограф G(/co) на разных частотах. Поэтому при К = К2 амплитудная характеристика замкнутой системы имеет значение на частотах со! и со2, как ясно из рис. 9.24 и 9.25. Полоса пропускания замкнутой системы при К = К\ на рис. 9.25 обозначена как <лй|.
Рис. 9.24. Частотные характеристики для в полярных координатах для двух значений коэффициента усиления (К2 > Ку)
Рис. 9.25. Амплитудно-частотные характеристики замкнутой системы для двух значений коэффициента усиления (Я"2 > К)
9,5. Критерии качества во временной и частотной областях
509
Эмпирически можно показать, что частота среза разомкнутой системы <а( связана с полосой пропускания замкнутой системы cofl приближенным соотношением 1,6cot для в диапазоне от 0,2 до 0,8.
Аналогичным образом можно получить окружности, соответствующие постоянному фазовому сдвигу замкнутой системы. Из выражения (9.64) мы имеем:
<р =arg T(j(o) = arg --М + =arctg — -arctg —— . (9.70)
(l+w + jv) и 1+и
Взяв тангенс от обеих частей этого уравнения, после несложных преобразований мы получим:
u2+v2+и—— = 0, (9.71)
А
где N = tg<p = const. Добавив к правой и левой части (9.71) член (1/4)( 1+1/А2), приведем (9.71) к виду:
(m + 0,5)2+[v—L| =2h + _L| (9.72)
V 2N ) 4^ A2 J
что представляет собой уравнение окружности с центром в точке н = - 0,5 и v = 1/2А. Радиус окружности равен (1/2)( 1+1/А2)1/2. На основании (9.72) может быть построено семейство окружностей, соответствующих различным постоянным значениям А.
Окружности постоянных значений М и А на комплексной плоскости можно использовать при анализе и синтезе систем управления. Но поскольку частотные характеристики системы удобнее представлять в виде диаграммы Боде, то имеет смысл окружности постоянных значений М и А перенести на логарифмическую амплитудно-фазовую диаграмму. Это впервые было сделано Н. Б. Никольсом, и соответствующая сетка кривых линий на логарифмической амплитудно-фазовой диаграмме получила название диаграммы Никольса. Координаты диаграммы Никольса — те же самые, что были введены в разделе 8.6. Линиям постоянных значений М соответствуют децибелы, а линиям постоянных А — градусы, как показано на рис. 9.26. Применение диаграммы Никольса для определения частотных характеристик замкнутой системы мы проиллюстрируем двумя примерами.
Пример 9.7. Анализ устойчивости с помощью диаграммы Никольса
Рассмотрим систему с обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
G(» =---------------------. (9.73)
ЛХ>+ 1X0,270+ 1)
Годограф G(/co), нанесенный на диаграмму Никольса, изображен на рис. 9.27. Максимум амплитудной характеристики МРа, равный +2,5 дБ, имеет место на частоте <о,. = 0,8. На этой же частоте фазовый сдвиг в замкнутой системе равен -72°. На рис. 9.27 также показано, что полоса пропускания замкнутой системы, определяемая значением ее амплитудной характеристики, равным -3 дБ. составляет сов= 1,33. Фазовый сдвиг на частоте <ов равен -142°.
Пример 9.8. Система третьего порядка
Рассмотрим систему с единичной отрицательной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
О 64
G(^) = • г/ >2 „ ’ <9-74)
./'ЧО'») + 7“+ 1]
510
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.26. Сетка диаграммы Никольса
т. е. комплексным полюсам соответствует коэффициент затухания £ = 0,5. Диаграмма Никольса для данной системы приведена на рис. 9.28. Запас по фазе, определенный по этой диаграмме, равен 30°. На основании этого показателя можно оценить коэффициент затухания в замкнутой системе: С, = 0,30. Максимум амплитудной характеристики имеет место на частоте со,. = 0,88 и равен +9 дБ, т. е.
201gA/ft = 9 дБ, или = 2,8 .
9.5. Критерии качества во временной и частотной областях
511
Рис. 9.27
Диаграмма Никольса
ДЛЯ = 1//<о(/<о + + 1)(0,2/ш + 1).
На частотной характеристике отмечены три точки соответственно для со = 0,5; со = 0,8; со = 1,35
Соотношение (9.63) дает оценку £ = 0.18.
Итак, мы получили два противоречащих друг другу значения, из которых одно является оценкой по запасу устойчивости по фазе, а другое — по максимуму амплитудной характеристики. Это свидетельствует о том, что в данном примере не прослеживается четкая связь между свойствами системы в частотной и временной областях. Отмеченное несоответствие объясняется особенностью годографа G(/co). который, начиная с уровня 0 дБ. довольно быстро стремится к линии, соответствующей фазовому сдвигу -180°. Если мы найдем корни характеристического уравнения замкнутой системы 1 + GH(s) = 0, то получим
q(s) = (s + 0,77)(s2 + 0,225s + 0,826) = 0. (9.75)
Коэффициент затухания, соответствующий комплексно-сопряженным корням, равен 0,124, однако эти корни не являются доминирующими. В действительности затухание в системе будет больше за счет вещественного корня, поэтому приблизительная оценка £ скорее всего будет ближе к той, которая получена по показателю Мр , т. е. t, = 0,175. Отсюда следует, что проектировщик с большой осторожностью должен использовать связь между временными и частотными характеристиками системы. Однако в целях большей безопасности при решении задач анализа и синтеза всегда рекомендуется использовать меньшее из значений коэффициента затухания, полученных по показателю Мр или по запасу устойчивости по фазе.
Диаграмму Никольса можно использовать при синтезе систем управления. Для этого достаточно изменить вид годографа G(/co) так, чтобы получить желаемые значения запаса по фазе и показателя Мр . По диаграмме Никольса очень просто определить, как надо из-
512
Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.28
Диаграмма Никольса для G (/со) = 0,64//ш[(/ш)г + + /со + 1]
менять коэффициент усиления системы К, чтобы получить желаемое значение запаса по фазе и показателя MR . Например, вернемся к примеру 9.8, где
G(jco) =-------*--------. (9.76)
J£O[(JCO)- +JCO + 1]
На рис. 9.28 изображен годограф G(/co), нанесенный на диаграмму Никольса при К = 0,64. Попробуем определить, как надо изменить К, чтобы коэффициент затухания системы был больше, чем 0,30. По рис. 8.11 находим, что требуемое значение Мдолжно быть меньше, чем 1,75 (4,9 дБ). По рис. 9.28 находим, что годограф G(/co) будет касаться линии, соответствующей значению 4,9 дБ, если |G(/co)| уменьшить на 2,2 дБ. Следовательно, К надо уменьшить на 2,2 дБ, или, что то же самое, в 1,28 раза. Таким образом, если мы хотим, чтобы коэффициент затухания системы был не менее 0,30, то коэффициент усиления системы К должен быть меньше, чем 0,64/1,28 = 0,50.
9.6. Полоса пропускания системы
Полоса пропускания замкнутой системы управления является прекрасным средством оценки того, насколько хорошо она отрабатывает внешние воздействия. Для систем, у которых коэффициент усиления на низких частотах равен 0 дБ, полоса пропускания опреде-
9.6. Полоса пропускания системы
513
ляется частотой, на которой коэффициент усиления принимает значение -3 дБ. Чем больше полоса пропускания системы тем больше скорость нарастания ее реакции на ступенчатый входной сигнал и тем меньше время установления. Поэтому элементы системы следует выбирать так, чтобы ее полоса пропускания была как можно больше.
Рассмотрим две передаточные функции замкнутой системы:
и
7’2(s) = -1
(9.77)
Для сравнения на рис. 9.29(a) приведены амплитудно-частотные характеристики этих систем, а на рис. 9.29(6) соответственно их реакции на ступенчатое входное воздействие. В части (в) того же рисунка изображены реакции этих систем на линейный входной сигнал. Система с большей полосой пропускания быстрее реагирует на ступенчатый сигнал и лучше воспроизводит линейный входной сигнал.
Рассмотрим теперь две системы второго порядка, которые в замкнутом состоянии
«)
Рис. 9.29. Реакции двух систем первого порядка
514
Глава 9. Анализ устойчивости методом частотных характеристик
и
T4(s)=
900
s2 + 30s+900
(9.78)
Обе системы имеют коэффициент затухания £ = 0,5. Амплитудно-частотные характеристики этих систем изображены на рис. 9.30(a). Собственная частота колебаний систем с передаточными функциями Т3(з) и T4(s) соответственно равна 10 рад/с и 30 рад/с, а их полоса пропускания—соответственно 15 рад/с и 40 рад/с. Обе системы обладают одинаковым перерегулированием в 15%, но время максимума переходной характеристики у них разное — 0,12 с для системы с передаточной функцией T4(s) и 0,3 6 с для системы с передаточной функцией 7з(х), как это видно из рис. 9.30(6). Заметим также, что и время установления у этих систем разное: 0,37 с для T4(s) и 0,9 с для T3(s). Система с большей полосой пропускания обладает большим быстродействием.
Рис. 9.30
Реакции двух систем второго порядка
20Zg|7]
9.7. Устойчивость систем управления с запаздыванием
В предыдущих разделах критерий устойчивости Найквиста рассматривался применительно к системам, передаточные функции которых имели дробно-рациональный вид. Однако во многих системах управления присутствует запаздывание по времени, существенно влияющее на устойчивость. Запаздывание по времени—это промежуток времени между моментом, когда в каком-то месте системы произойдет некоторое событие, и моментом,
9,7. Устойчивость систем управления с запаздыванием
515
когда это событие проявит себя в другом месте. Критерий Найквиста обладает тем преимуществом, что он позволяет учесть влияние этого запаздывания на устойчивость системы. Идеальное запаздывание по времени можно охарактеризовать передаточной функцией
G/s) = esr, (9.79)
где Тесть время запаздывания. Критерий Найквиста остается в силе и для систем с запаздыванием, поскольку множитель е i J не приводит к появлению дополнительных полюсов или нулей в передаточной функции разомкнутой системы. Этот множитель, не влияя на амплитудную характеристику системы, вносит только дополнительный отрицательный фазовый
сдвиг.
Подобное запаздывание свойственно системам, в которых имеет место перемещение
материалов, когда между точкой, где произошло какое-то изменение некоторой переменной, и точкой, где проявляется соответствующий эффект, проходит определенное (конечное) время.
В качестве примера приведем систему управления прокатом стальной полосы, изображенную на рис. 9.31. Электродвигатель управляет скоростью валков таким образом, чтобы минимизировать ошибку в толщине полосы. Если скорость движения полосы равна v, то запаздывание между точкой изменения скорости валков и точкой изме
Скорость V
толщина
Рис. 9.31. Система управления прокатным станом
рения толщины полосы равно
Таким образом, для уменьшения запаздывания необходимо уменьшать расстояние от валков до точки измерения толщины полосы. Но, так или иначе, влияние запаздывания полностью исключить невозможно, поэтому передаточную функцию разомкнутой системы управления надо рассматривать в виде
G(s)Gc(.s)e“sT. (9.80)
При этом частотная функция системы приобретает вид
GH(Ja)=GGc(JayJ,aT . (9.81)
Обычно мы исследуем устойчивость замкнутой системы, построив годограф GH(jw) на комплексной плоскости и исследуя его положение относительно точки -1. Аналогично, мы можем построить диаграмму Боде и исследовать вид частотных характеристик в окрестности точки с координатами 0 дБ и —180°. Множитель е~;и / приводит к дополнительному фазовому сдвигу
<р(со) = -со 7) (9.82)
который должен быть добавлен к фазовому сдвигу, создаваемому функцией GGc(j($). (Обратите внимание, что выражение (9.82) определяет угол в радианах.) Следующий пример иллюстрирует, как просто учесть запаздывание при анализе устойчивости с помощью диаграммы Боде.
516
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.32
(а) Система управления уровнем жидкости.
(<5) Структурная схема системы
а)
Пример 9.9. Система управления уровнем жидкости
На рис. 9.32(a) изображена система управления уровнем жидкости, а на рис. 9.32(6) — ее структурная схема. Запаздывание между вентилем и точкой ввода жидкости в резервуар составляет Т= div с. Если, например, поток жидкости равен 5 м3/с. площадь поперечного сечения трубопровода 1 м2. а расстояние d= 5 м. то запаздывание Т- 1 с. Тогда передаточная функция
разомкнутого контура запишется в виде:
GH(s) = GA(syj{s')Gf{s)e~sl
31.5
---------------------------------е (s+ l)(30s + 1)[(s2/9)+ (s73)+ 1]
(9.83)
Соответствующая этой функции диаграмма Боде изображена па рис. 9.33. На диаграмме приведены две фазовые характеристики — одна без учета запаздывания, другая с учетом запазды-
Рис. 9.33 Диаграмма Боде для системы управления уровнем жидкости
9,8, Пример синтеза: дистанционно управляемый разведывательный аппарат 517
вания. Логарифмическая амплитудная характеристика пересекает уровень 0 дБ при со = 0.8. Следовательно, при отсутствии запаздывания запас по фазе составлял бы 40°. Однако при наличии запаздывания на частоте со = 0,8 фазовый сдвиг равен -183°, и система является неустойчивой. Поэтому, чтобы иметь достаточный запас устойчивости по фазе, необходимо уменьшить коэффициент усиления. Так, если мы хотим получить запас по фазе в 30°, коэффициент усиления надо уменьшить на 5 дБ, т. е. его новое значение должно быть равно К = 31,5/1.78= 17.7.
Звено запаздывания всегда вносит дополнительный отрицательный фазовый сдвиг и. следовательно, ухудшает устойчивость замкнутой системы. Поскольку во многих системах запаздывание присутствует объективно, то для обеспечения устойчивости часто приходится уменьшать коэффициент усиления. Однако расплатой за это является неизбежное увеличение установившейся ошибки.
9.8. Пример синтеза: дистанционно управляемый разведывательный аппарат
Пришло время подумать об использовании миротворческими силами ООН дистанционно управляемых разведывательных аппаратов. Один из проектов такого аппарата изображен на рис. 9.34(a), а структурная схема системы управления скоростью его движения приведена на рис. 9.34(6). Информация о заданной скорости передается аппарату по радиоканалу; возмущение D(s) обусловлено встречающимися на пути неровностями. Система управления в случае ступенчатого входного сигнала R(s) должна обеспечивать малую установившуюся ошибку и малое относительное перерегулирование.
Сначала мы получим выражение для установившейся ошибки:
/?(5)
1
1
е,.. = JimxEC?) = lim 5
4->о [ 1 + GcG(s)J l + GcG(0) 1 + A72
(9.84)
Рис, 9.34
(а) Дистанционно управляемый разведывательный аппарат.
(б) Система управления скоростью аппарата
518
Глава 9, Анализ устойчивости методом частотных характеристик
Если выбрать К = 20, то установившаяся ошибка будет составлять 9% от амплитуды входного ступенчатого сигнала. Приняв это значение, приведем выражение GcG(s) к виду, удобному для построения диаграммы Боде:
ч 10(1+5/2)
Gt.G(s) =-----------------
(l + s)(l+s/2+?/4)
(9.85)
Необходимые для построения вычисления при 0 < со < 6 приведены в табл. 9.4, а диаграмма Никольса изображена на рис. 9.35. Из диаграммы следует, что Мр = 12 дБ, а запас по фазе равен 15°. При этом система является недодемпфированной, и мы можем ожидать, что перерегулирование составит примерно 61%.
Таблица 9.4. Частотные характеристики к примеру на синтез
CD 0 1,2 1,6 2,0 2,8 4 6
дБ 20 18,4 17,8 16,0 10.5 2,7 -5.2
Г радусы 0 -65 -86 -108 -142 -161 -170
Рис. 9.35
Диаграмма Никольса к примеру на синтез системы при К — 20 и двух меньших значениях коэффициента усиления
Фазовый сдвиг разомкнутого контура G (град.)
9.8, Пример синтеза: дистанционно управляемый разведывательный аппарат 519
Чтобы уменьшить перерегулирование, мы можем изменить в меньшую сторону коэффициент усиления системы. Так, чтобы ограничить перерегулирование величиной 25%, мы на основании рис. 5.8 выберем значение соответствующее доминирующим корням, равным 0,4, а на основании рис. 8.11 получим оценку Мр = 1,35 или 201g М р = 2,6 дБ. Уменьшение коэффициента усиления эквивалентно смещению частотной характеристики вертикально вниз, как показано на рис. 9.35. При частоте со, = 2,8 эта характеристика как раз коснется линии, соответствующей значению 2,6 дБ. При этом смещение частотной характеристики составит 13 дБ, что эквивалентно уменьшению коэффициента усиления в 4,5 раза, т. е. он будет равен К = 20/4,5 = 4,44. При таком значении К установившаяся ошибка будет равна
е,., =-----=0,31
1 +4,4/2
т. е. 31% от амплитуды входного ступенчатого сигнала.
В действительности реакция системы на ступенчатое воздействие при А' = 4,44 имеет перерегулирование 32 %, как показано на рис. 9.36. Если принять коэффициент усиления равным 10, то мы получим перерегулирование в 48 % и установившуюся ошибку, равную 17% от амплитуды входного воздействия. Показатели качества системы сведены в табл. 9.5. В качестве компромиссного решения мы выберем значение К= 10 и сдвинем исходную частотную характеристику на диаграмме Никольса на 201g2 = 6 дБ, как показано на рис. 9.35.
Таблица 9.5. Показатели качества при разных значениях К
К 4,44 10 20
Относительное перерегулирование 32,4% 48,4% 61,4%
Время установления, с 4,94 5,46 6.58
Время максимума переходной характеристики, с 1Д9 0,88 0.67
31% 16,7% 9,1%
Примечание: Относительное перерегулирование определяется по формуле (5.12).
По диаграмме Никольса при К = 10 мы имеем Мр = 7 дБ и запас по фазе 26°. Поэтому доминирующим корням соответствует оценка С, = 0,34, при которой перерегулирование должно составить 30%. Действительные показатели качества приведены в табл. 9.5 Полоса пропускания системы ® 5. Поэтому прогнозируемое время установления равно (по критерию 2%)
4 4
Г. = — =--------------------= 3,3 с,
' (0,34 )(сой/1,4)
т. к. при С, = 0,34 сол ® 1,4со„. Действительное же время установления равно приблизительно 5,4 с, как показано на рис. 9.36.
Влияние возмущения (если оно также имеет ступенчатый характер) можно оценить с помощью теоремы о конечном значении, полагая R(s) = 0, т. е.
G(5)
1
у(оо) = lims
a-ю |_l + GGc(s)JU
1
4 + 2А ’
(9.86)
520
Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.36
Реакция системы на единичный ступенчатый входной сигнал r{t) при трех значениях коэффициента Д'
Время (с)
Это значит, что если возмущение имеет единичную амплитуду, то его влияние уменьшается в (4 + 2К) раз. При К = 1ОХ00)= 1/24, т. е. ошибка, вызванная возмущением, составляет 4 % от амплитуды возмущения. Таким образом, можно считать, что значение К = 10 является наиболее приемлемым, исходя из общих требований к качеству системы.
Как итог наших рассуждений, можно констатировать, что наилучшего компромисса мы достигли при К = 10. Если же перерегулирование и время установления являются неприемлемыми, то необходимо изменить форму годографа G(/co) на диаграмме Никольса. Об этом речь пойдет ниже в главе 10.
9.9. Частотные характеристики ПИД-регуляторов
ПИД-регулятор имеет три канала: соответственно пропорциональной, интегральной и дифференциальной составляющей (см. раздел 7.7). Его передаточная функция имеет вид:
Gc (s) = К, + + K3s . (9.87)
S'
ПриХ3 = 0 мы получим ПИ-регулятор:
Gc(s) = *1+^, (9.88)
S
а при К2 = 0 получим ПД-регулятор:
Gc(s) = Кх + K3s .
(9.89)
9,10, Анализ устойчивости с помощью MATLAB
521
Заметим, что ПИД-регуляторы достаточно эффективны с точки зрения уменьшения установившейся ошибки и улучшения вида переходной характеристики, когда объект G(s) имеет один или два полюса (или может быть аппроксимирован моделью второго порядка).
Эффект от использования ПИД-регулятора можно проиллюстрировать, если изобразить его частотные характеристики.
Передаточную функцию ПИД-регулятора (9.87) можно представить в следующем виде:
К2 -^-5"+—Ls+1 КД-и+П -s + 1 i К? \ ос
GC(S} = ------?---' =------------=
(9.90)
Функции (9.90) соответствует диаграмма Боде, изображенная на рис. 9.37 при К2 = 2 и а = 10 (по оси абсцисс отложено сот). Возможен, конечно, и такой случай, когда передаточная функция регулятора будет иметь комплексные нули и вид диаграммы Боде будет зависеть от параметра соответствующего этим нулям. Вклад таких нулей в диаграмму Боде можно оценить, если рассмотреть рис. 8.10, где явно видна зависимость амплитудной и фазовой характеристик от параметра но только для комплексных полюсов. В случае комплексных нулей ПИД-регулятора мы получим:
Сс(7Ю) = Х2С1+(2С/Ю"^^^ • (9.91)
/со
Обычно принято выбирать 0,9 > С, > 0,7.
Рис. 9.37
Диаграмма Боде для ПИД-регулятора с асимптотической аппроксимацией амплитудной характеристики
9.10. Анализ устойчивости с помощью MATLAB
Настало время приступить к анализу устойчивости систем управления с помощью MATLAB. В данном разделе мы еще раз обратимся к диаграмме Найквиста, диаграмме Никольса и диаграмме Боде в связи с анализом устойчивости. Применение этих диаграмм при синтезе систем управления мы проиллюстрируем двумя примерами. Мы покажем, что при этом можно использовать как частотные характеристики замкнутой системы, так и
522
Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.38
Функция nyquist
частотные характеристики разомкнутой системы, GH(ja). Мы также покажем, что запаздывание по времени можно приближенно аппроксимировать формулой Паде.
В этом разделе мы познакомимся с функциями MATLAB nyquist, nichols, margin, pade и ngrid.
Вручную обычно диаграмму Найквиста построить намного труднее, чем диаграмму Боде. С помощью MATLAB, а именно с использованием функции nyquist решение этой задачи значительно облегчается. Задание функции nyquist проиллюстрировано на рис. 9.38. Если не указаны аргументы в левой части равенства, то диаграмма Найквиста строится автоматически; в противном случае функция nyquist возвращает действительную и мнимую части частотной характеристики (вместе с вектором частоты со). Применение функции nyquist проиллюстрировано на рис. 9.39.
Как было показано в разделе 9.4, показатели относительной устойчивости системы (запас по модулю и запас по фазе) можно определить как по диаграмме Найквиста, так и по диаграмме Боде. Запас по модулю показывает, во сколько раз надо увеличить коэффициент усиления, чтобы годограф GH(ja>') прошел через точку (-1, j'O) и система оказалась на границе устойчивости.
9.10. Анализ устойчивости с помощью MATLAB
523
Рис. 9.40
Пример замкнутой системы управления для анализа относительной устойчивости с помощью диаграмм Боде и Найквиста
* Г(у)
Рассмотрим систему, изображенную на рис. 9.40. Ее относительную устойчивость можно определить по диаграмме Боде с помощью функции margin, смысл которой иллюстрирует рис. 9.41. Использование функции margin совместно с функцией bode позволяет вычислить запасы устойчивости по модулю и по фазе. Если функция margin вызывается без указания аргументов в левой части, то диаграмма Боде строится автоматически, и на ней отмечаются запасы по модулю и по фазе. Это проиллюстрировано на рис. 9.42 применительно к системе, изображенной на рис. 9.40.
Скрипт, который осуществляет построение диаграммы Найквиста, и результат его выполнения приведены на рис. 9.43. В данном случае число полюсов функции GH(s) с положительной действительной частью равно нулю, число охватов точки -1 также равно нулю, следовательно, замкнутая система устойчива. По диаграмме Найквиста также можно определить запасы по модулю и по фазе, как это показано на рис. 9.43.
Диаграмма Никольса. Для построения диаграммы Никольса используется функция nichols, приведенная на рис. 9.44. Если эта функция вызывается без указания аргументов в левой части, то диаграмма Никольса строится автоматически; в противном случае функция nichols возвращает значения модуля частотной характеристики и фазового сдвига в градусах (вместе со значениями частоты со). Криволинейная сетка координат наносится на диаграмму Никольса с помощью функции ngrid. На рис. 9.45 приведен пример построения диаграммы Никольса для системы
С(7ю) =----------’--------. (9.92)
7®(J“+ l)(O,2jco-l-1)
[mag, phase, w]=bode (sys);
[Gm, Pm, Wcg, Wcp]=margin(mag,phase,w);
[Gm, Pm, Wcg, Wcp]=margin(sys);
Пример
num=[0.5]; den=[l 2 1 0.5]; sys=tf(num,den);
margin(sys)
Gm — запас по модулю (дБ) Pm — запас по фазе (град.) Wcg — частота, на которой <р(о) — -180° Wcp — частота, на которой модуль равен 0 дБ
Рис. 9.41. Функция margin
524
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.42
Диаграмма Боде для системы, изображенной на рис. 9.40, с указанием запасов устойчивости по модулю и по фазе
Gm=9.6445 dB (at 1.СОО1 rad/see). Рт*46.979 deg. (at 0.64348 rad/sec)
Частота (рад/с)
num=[0.5J; Ч--------------
den=[1 2 1 0.5];
sys=tf(num,den);
%
w=logspace(-1,1,200); 4—
%
[mag,phase,w]=bode(sys,w);
%
margin(mag, phase.w);
Разомкнутая система
Задание диапазона частот
Рис. 9.43
(а) Диаграмма
Найквиста для системы, изображенной на рис. 9.40, с указанием запасов устойчивости по модулю и по фазе.
(б) Скрипт MATLAB
Вычисление запасов по модулю и по фазе
Обозначение на диаграмме запасов устойчивости
% Диаграмма Найквиста для
% 0,5
% G(s)=-----------------
% sA3+2sA2+s+0.5
% с вычислением запасов по модулю и по фазе.
%
num=[0.5]; den=[1 2 1 0.5]; sys=tf(num,den);
%
[mag,phase,w]=bode(sys); -4--------------------
[Gm,Pm,Wcg,Wcp]=margin(mag,phase.w);
% -----------------------------------------------
nyquist(sys); 4--- Построение диаграммы Найквиста
title([‘G m- ,num2str(Gm),‘, Pm- , num2str(Pm)J)
9.10, Анализ устойчивости с помощью MATLAB
525
Рис. 9.44
Функция nichols
Рис. 9.45
Диаграмма Никольса для системы с передаточной функцией (9.92)
[mag,phase,w]=nichols(sys,w)
Пример 9.10. Система управления уровнем жидкости
Рассмотрим систему управления уровнем жидкости, структурная схема которой изображена на рис. 9.32 (см. пример 9.9). Заметим, что в этой системе присутствует запаздывание по времени. В разомкнутом состоянии система имеет передаточную функцию
31,5e“iT
(9.93)
GH(s)=----------
(s+1)(30j+1)(s2/9+s/3 + 1)
Сначала мы приведем эту передаточную функцию к такому виду, чтобы числитель и знаменатель имели вид алгебраических полиномов. Для этого мы воспользуемся аппроксимацией е"'7
526
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.46
Функция pade
с помощью функции pade (рис. 9.46). Например, предположим, что Т= 1 с и мы хотим получить аппроксимацию, соответствующую и = 2. Применение функции pade дает результат:
s2-6s+12
s2 + 6s + 12
(9.94)
Подставляя (9.94) в (9.93), получим:
GH(s) =-----------31,y-6s+12) ------------
(s + l)(30s + 1)(s2/9 + s/3 + l)(s2 + 6s + 12)
Теперь можно подготовить программу для исследования относительной устойчивости системы по диаграмме Боде. Пусть, например, мы хотим иметь запас по фазе в 30°. Тогда в программе, приведенной на рис. 9.47, мы предусмотрим возможность изменения коэффициента К в интерактивном режиме на уровне командной строки вне ядра основной программы. После задания некоторого значения К выполним программу, определим запас по фазе, и если он не будет отвечать требованиям, изменим величину К. В конечном счете поставленной задаче будет отвечать значение К = 16.
Пример 9.11. Дистанционно управляемый разведывательный аппарат
Рассмотрим систему управления скоростью дистанционно управляемого разведывательного аппарата (рис. 9.34). Система должна обеспечивать малые значения установившейся ошибки и перерегулирования при отработке ступенчатого входного сигнала. Подготовим программу, которая позволит нам решить задачу синтеза с минимальным количеством итераций. Сначала мы учтем ограничения на величину установившейся ошибки, которая равна
1 в,... =----
1 + К/2
(9.95)
Это выражение позволяет оценить влияние К на установившуюся ошибку. Так. если К = 20. то ошибка составит 9% от амплитуды входного сигнала; при К= 10 она увеличится до 17%. Теперь мы зададимся допустимой величиной перерегулирования и свяжем ее с частотными характеристиками системы. Предположим, что перерегулирование не должно превышать 50%. Тогда из оценки
г2
Перерегулирование » ЮОе' ’ < 50
мы найдем соответствующее значение С, > 0,215. По рис. 8.11 находим также Мр < 2.45 . Следует не забывать о том, что кривые на рис. 8.11 действительны только для систем второго порядка, и в нашем случае мы можем пользоваться ими только в качестве приближенной оценки. Теперь мы можем построить диаграмму Боде для замкнутой системы и проверить значение . Любой коэффициент К. при котором Л/Л не будет превышать значения 2.45. может быть приемлемым решением задачи синтеза, но, тем не менее, мы обязаны будем продолжить исследования: необходимо определить действительную величину перерегулирования по пере-
9.10. Анализ устойчивости с помощью MATLAB
527
Рис. 9.47
(а) Диаграмма Боде для ситемы управления уровнем жидкости.
(6) Скрипт MATLAB
б)
»К=16; liquid ♦
Командная строка
liquid.m
% Анализ системы управления уровнем жидкости %
[np,dp]=pade(1,2);
sysp=tf(np,dp);
num=K;
d1=[1 1]: d2=[30 1]; d3=[1/9 1/3 1];
den=conv(d1 ,conv(d2,d3));
ходной характеристике системы. Эту задачу поможет нам решить программа, приведенная на рис. 9.48. Повторяя рассуждения, выполненные в разделе 9.8, исследуем характеристики системы при значениях К = 20, 10 и 4.44 (даже если при К= 20 окажется Л/;) >2,45 ). Программа вычисления переходных характеристик и результат ее выполнения приведены на рис. 9.49. Решению нашей задачи может также помочь диаграмма Никольса, построение которой проиллюстрировано на рис. 9.50.
Результаты анализа приведены в табл. 9.5 для значений К = 20,10 и 4,44. Из трех вариантов мы можем выбрать К= 10. Далее мы построим диаграмму Найквиста (рис. 9.51) и определим показатели относительной устойчивости системы. В нашем случае запас по модулю равен 49,56 дБ, а запас по фазе 26,11°.
528
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.49
(а) Переходные характеристики системы управления разв е ды вате л ьн ы м аппаратом;
(б) Скрипт MATLAB
Рис. 9.48
(а) Диаграмма Боде для замкнутой системы управления разведывательным аппаратом;
(б) Скрипт MATLAB
а)
И|К-1« (с)
Задание трех значений К = 20; 10; 4,44
t=[0:0.01:10]; К=[20,10,4.44]; < % for i=1:3
numgc=K(i)*[1 2]; dengc=[1 1]; sysgc=tf(numgc,dengc);
numg=[1]; deng=[1 2 4]; sysg=tf(numg,deng);
syss=series(sysgc,sysg);
sys=feedback(syss,[1]);
y(:,i)=step(sys,t); ◄--------
end %
plot(t,y(:,1).t,y(:,2),t,y(:,3)),grid
х!аЬе1(‘Время (c)‘); ylabel(‘y(t)’),grid on
Вычисление переходной характеристики
9.11. Пример синтеза с продолжением: система чтения информации с диска 529
б)
Рис. 9.50
(а) Диаграмма Никольса
для системы управления разведывательным аппаратом;
(6) Скрипт MATLAB
а)
Фа юный сдвиг ра'юмкнун»! системы {град )
% Дистанционно управляемый разведывательный аппарат %
numgc=[1 2]; dengc=[1 1]; sysgc=tf(numgc,dengc);
numg=[1]; deng=[1 2 4]; sysg=tf(numg,deng);
sys=series(sysgc,sysg); <-----------1 Вычисление
w=logspace(-1,1,200);
% ------------------------------------------------------
K=f20 10 4 44] ◄________________ Задание трех значений
hold off, elf ’ К = 20; 10; 4.44
for i=1:3
nichols(K(i)*sys,w), ngrid hold on
end
9.11. Пример синтеза с продолжением: система чтения информации с диска
□ В этой главе мы исследуем систему, изображенную на рис. 8.42, в которой учтены резонансные свойства пластины и введен ПД-регулятор, имеющий нуль s = -l. С помощью MATLAB определим запасы устойчивости по модулю и по фазе при значении К = 400.
Диаграмма Боде для данной системы приведена на рис. 9.52. Запас по модулю составляет 22,9 дБ, а запас по фазе равен 37,2°. График переходной характеристики приведен на рис. 9.53, из которого следует, что. время установления Ts = 9,6 мс.
530
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.51 а)
(а) Диаграмма Найквиста для системы управления разведывательным аппаратом при К = 10;
(6) Скрипт MATLAB
Действительная ось
б)
% Дистанционно управляемый аппарат
% Диаграмма Найквиста при К=10
%
numgc=10*[1 2]; dengc=[1 1]; sysgc=tf(numgc,dengc);
numg=[1]; deng=[1 2 4]; sysg=tf(numg,deng);
sys=series(sysgc,sysg);
%
[Gnfi,Pm,Wcg,Wcp]=margin(sys);
%
nyquist(sys);
title([‘Gm=’,num2str(Gm), ‘,Rm=’,num2str(Pm)])
Рис. 9.52
Диаграмма Боде для системы, изображенной на рис. 8.42
9.12. Резюме
531
Рис. 9.53
Реакция системы на ступенчатый входной сигнал
Время (с)
9.12. Резюме
Устойчивость систем управления с обратной связью можно исследовать с помощью частотного критерия Найквиста. Этот критерий позволяет также определить два показателя относительной устойчивости — запас по модулю и запас по фазе. Эти показатели могут быть использованы для оценки качества системы во временной области, т. к. имеется достаточно сильная связь между частотными и временными характеристиками системы. С помощью окружностей постоянных значений модуля и фазы на комплексной плоскости можно по частотным характеристикам разомкнутой системы определить соответствующие характеристики замкнутой системы. Для той же цели можно использовать логарифмическую амплитудно-фазовую диаграмму, называемую диаграммой Никольса. Диаграмма Никольса позволяет найти максимальное значение амплитудной характеристики замкнутой системы Мр , которое также может служить показателем относительной устойчивости. Значение Мр можно связать с относительным коэффициентом затухания, который определяет вид переходной характеристики системы. Наконец, с помощью частотных характеристик можно исследовать свойства систем с запаздыванием теми же методами, которые применяются к системам, не содержащим запаздывания. В табл. 9.6 приведены представленные в различной форме частотные характеристики и некоторые другие полезные данные, соответствующие ряду типовых передаточных функций.
Данные, приведенные в табл. 9.6, содержат ценную информацию для исследователя или проектировщика систем управления. Если известны модель объекта, G(s), и передаточная функция регулятора, Gc(s), то их произведение, Gc(s)G(s) есть передаточная функция разомкнутой системы. Первый столбец табл. 9.6 содержит 15 типовых передаточных функций. Для каждой из них приведены диаграммы Найквиста, Боде, Никольса, а также корневой годограф. На основании этой информации проектировщик может оценить качество системы управления и при необходимости ввести в нее корректирующее устройство или изменить передаточную функцию регулятора Ос(л).
532
Глава 9, Анализ устойчивости методом частотных характеристик
Таблица 9.6. Типовые передаточные функции и соответствующие им характеристики
G(s)
Частотные характеристики в полярных координатах
Диаграмма Боде
К st, +1
<5Т| + 1)(ST2 + 1)
(ST, + 1)(ST2 + 1)(ST3 + 1)
5. —---------
s(st( + 1)
9.12. Резюме
533
Диаграмма Никольса
Корневой годограф
Примечания
Система устойчива: запас по модулю = со
Простейший регулятор; система устойчива;
запас по модулю = со
Регулятор с дополнительным элементом, накапливающим энергию; система неустойчива, но может стать устойчивой при уменьшении коэффициента усиления
Идеальный интегратор; система устойчива
Простой сервопривод;
система изначально устойчива;
запас по модулю = со
см. продолжение
534
Глава 9. Анализ устойчивости методом частотных характеристик
Таблица 9.6 (продолжение)
G(s)
Частотные характеристики в полярных координатах
Диаграмма Боде
К
s(jt1 + 1)С?Т2 + 1)
7 К(зтц + 1)
+ l)(sr2 + О
8?
9.—
s2 (st, + 1)
К(зтц + 1) J2(ST! + 1) Т„>Т|
9.12. Резюме
535
Диаграмма Никольса
Корневой годограф
Примечания
Сервопривод с управлением по цепи возбуждения; согласно приведенным характеристикам система устойчива, но может стать неустойчивой при увеличении коэффициента усиления
Простой сервопривод совместно с регулятором с опережением по фазе; система устойчива
Система изначально на границе устойчивости; необходима коррекция
Система изначально неустойчива; необходима коррекция
Система устойчива при любых К
см. продолжение
536
Глава 9. Анализ устойчивости методом частотных характеристик
Таблица 9.6 (продолжение)
G(.v)
Частотные характеристики в полярных координатах
Диаграмма Боде
K(sta + 1)
9.12. Резюме
537
Диаграмма Никольса
Корневой годограф
Примечания
Система изначально неустойчива
Система изначально неустойчива
Система условно устойчива; становится неустойчивой при очень малых коэффициентах усиления
Система условно устойчива; устойчива при малых К, при увеличении К становится неустойчивой, затем снова становится устойчивой, и при очень больших К опять оказывается неустойчивой
Система условно устойчива; становится неустойчивой при больших значениях К
538
Глава 9. Анализ устойчивости методом частотных характеристик
Упражнения
У -9.1. Система имеет передаточную функцию
4(1+s/3)
G(i) =-------------------,
5(1 + 2j)(1 + j/7 + 52/49)
Постройте диаграмму Боде в диапазоне 0,1 < о < 10. Покажите, что запас по фазе приблизительно равен 30, а запас по модулю — около 16 дБ.
У -9.2. Система имеет передаточную функцию
G(5)= К(1+Д/5) .
5(1+5/2)(1+5/10)
где К = 6,14. С помощью компьютера или калькулятора покажите, что амплитудная характеристика на диаграмме Боде пересекает уровень 0 дБ на частоте 3,5 рад/с и что запас по фазе ра-
вен 45°.
У -9.3. В качестве регулятора выходного напряжения источника питания может быть использована интегральная схема. При этом диаграмма Боде для разомкнутой системы с передаточной функцией GH(ja>) имеет вид, приведенный на рис. 9.3(У). Оцените значения запасов устойчивости по модулю и по фазе.
Ответ: запас по модулю = 25 дБ, запас по фазе = 75°.
У -9.4. Рассмотрите систему с единичной отрицательной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
Л 100
G(5) =--------
5(5+10)
Рис. 9.3 (У). Частотные характеристики регулируемого источника питания
Фаза
Пусть в замкнутой системе максимальное значение амплитудной характеристики Мр должно быть равно 3.0 дБ. Однако в действительности это значение составляет только 1,25 дБ и имеет место на частоте между 6 и 9 рад/с. Постройте диаграмму Никольса для диапазона 6 < со < 15 рад/с. Покажите, что для достижения заданного значения Мр коэффициент усиления системы надо увеличить на 4,6 дБ, т. е. сделать его равным 171. Определите резонансную частоту полученной системы. Ответ: со,. = 11 рад/с.
У-9.5. На рис. 9.5(У) изображена диаграмма Боде для цифровой интегральной схемы. (а) Определите запасы устойчивости по модулю и по фазе, (б) Оцените, насколько надо уменьшить коэффициент усиления (в децибелах), чтобы за-
Рис. 9.5 (У). Частотные характеристики КМОП-интегральной схемы
пас по фазе был равен 60°.
Упражнения 539
У -9.6. Система в разомкнутом состоянии имеет передаточную функцию G X(.+ ipO)' 5(5 + 1 0)(j + 40)
При К = 500 замкнутая система неустойчива. Покажите, что если коэффициент усиления уменьшить до значения К = 50, то максимум амплитудной характеристики составит 3.5 дБ. Определите запас по фазе при К= 50.
У -9.7. Передаточная функция разомкнутой системы имеет вид
C(s) = -^-.
5-1
Изобразив частотные характеристики в полярных координатах, определите диапазон значений К, при которых замкнутая система будет устойчива.
У -9.8. Рассмотрите систему с единичной обратной связью, для которой
5(5 + l)(s + 2)
(а) Покажите, что при К= 4 запас по модулю равен 3,5 дБ. (б) Определите значение К, при котором запас по модулю будет равен 16 дБ.
Ответ: (б) К = 0,95.
У-9.9. Определите запас по фазе для системы из упражнения 9.8 при К = 3.
У-9.10. Рассмотрите систему управления скоростью потока воздуха в аэродинамической трубе из задачи 7.31. Постройте диаграмму Боде и покажите, что запас по фазе равен 25°, а запас по модулю равен 10 дБ. Покажите также, что полоса пропускания замкнутой системы равна 6 рад/с.
У-9.11. Рассмотрите систему с единичной обратной связью, для которой
40(1+0,45)
G(s) =----------------------у- .
5(1 + 25)(1+ 0,245+ 0,0452)
(а) С помощью программы MATLAB или иным способом постройте диаграмму Боде.
(б) Определите запасы устойчивости по модулю и по фазе.
У-9.12. В замкнутой системе, изображенной на рис. 9.1, H(s)= 1 и
5(Т|5 + 1)(t2s + 1)’
где т( = 0,02 сит2 = 0,2 с. (а) Выберите значение К так, чтобы при линейном входном сигнале r(f) = At, t>0 установившаяся ошибка составляла 10% от скорости / входного сигнала, (б) Постройте диаграмму Боде, соответствующую G(s), и определите запасы по фазе и по модулю, (в) С помощью диаграммы Никольса определите полосу пропускания замкнутой системы <лв, максимум ее амплитудной характеристики Мр° и резонансную частоту <л,..
Ответы: (а) К=10;
(б) Запас по фазе = 32°, запас по модулю =15 дБ;
(в) 10,3; 1/^=1,84; о\= 6,5.
У-9.13. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
, 150
0(5) = —---— •
5(5+ 5)
(а) С помощью диаграммы Никольса определите максимальное значение амплитудной характеристики замкнутой системы, (б) Определите полосу пропускания и резонансную частоту этой системы, (в) Используя найденные показатели, оцените величину перерегулирования при ступенчатом входном сигнале.
Ответы: (а) 7,5 дБ; (б) <лв= 19, со,. = 12,6.
540 Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.14 (У)
Диаграмма Никольса для функции G(/<o)
У-9.14. На рис. 9.14(У) изображена диаграмма Никольса с нанесенной на нее частотной характеристикой G(/o)). Используя приведенную ниже таблицу, определите (а) величину Мр„ в децибелах: (б) резонансную частоту о),.; (в) полосу пропускания (по уровню 3 дБ); (г) запас устойчивости по фазе.
0)1 СО? О)3 (1)4
рад/с 1 3 6 10
У-9.15. Рассмотрите систему с единичной обратной связью при
G(s) =
1000
5+100 '
Определите полосы пропускания разомкнутой и замкнутой систем и сравните полученные результаты.
Ответы: В разомкнутой системе о)в = 100, в замкнутой системе 1100.
У-9.16. Идеально запаздывание по времени е'47 можно аппроксимировать выражением
_лТ 1—Ts/2
е и----------
1+ Tsl2
в диапазоне 0 < w < 2IT. Постройте диаграммы Боде для действительной передаточной функции звена запаздывания и ее аппроксимации при 7’=2и0<о)<1.
Упражнения
541
У-9.17. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(5) =
К (5+10) ? + 2?+15s
(а) Постройте диаграмму Боде и (б) определите значение коэффициента К, при котором запас по фазе будет равен 40°. Чему равна установившаяся ошибка при линейном входном сигнале и коэффициенте усиления, найденном в п. (б)?
У-9.18. Для подавления колебаний с частотой около 60 Гц в дисководах применяется специальная амортизирующая подвеска. На рис. 9.18(У) приведена диаграмма Боде, соответствующая передаточной функции G(s) системы управления подавлением колебаний, (а) Определите ожидаемое относительное перерегулирование в замкнутой системе при ступенчатом входном сигнале. (б) Оцените полосу пропускания замкнутой системы, (в) Оцените время установления (по критерию 2%).
в)
X: 486.93 Y: -4.5924m Y: 0.0
X: 486.93 Y: 36.215 Y:0.0
Рис. 9.18 (У). Диаграмма Боде для системы управления дисководом
542
Глава 9, Анализ устойчивости методом частотных характеристик
У-9.19, В системе с единичной обратной связью Gc(s) = К и
-о.ь
Выберите коэффициент К так, чтобы запас по фазе в системе был равен 50°. Определите, чему равен в этом случае запас по модулю.
У-9.20. Рассмотрите упрощенную модель системы управления скоростью автомобиля, изображенную на рис. 9.20(У). Водитель движется по шоссе с большой скоростью вслед за другим автомобилем. В системе учтено время реакции водителя, Т. У одного водителя Т= 1 с, а у другого Т= 1,5 с. Определите реакцию системы y(t) для обоих водителей, если входной сигнал системы отражает ситуацию резкого торможения впереди идущего автомобиля, т. е. R(s) = -Als.
Рис. 9.20 (У)
У-9.21. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) =
_____К._____ s(s+2)(s+50)
Определите запас по фазе, частоту сос, при которой амплитудная характеристика пересекает уровень 0 дБ, и запас по модулю, если К = 1300.
Ответы: Запас по фазе = 16.6°, cot. = 4,9, запас по модулю = 4 (или 12 дБ).
У-9.22. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функ-
цию
G(s) =
K(S+1) (s-2)(s-4)
(а) С помощью диаграммы Боде определите запас по фазе, если К = 6. (б) Выберите значение К так. чтобы запас по фазе был по крайней мере равен 30%.
У-9,23. Рассмотрите систему из упражнения 9.21 в случае, когда К = 438. С помощью диаграммы Никольса определите полосу пропускания замкнутой системы, ее резонансную частоту и максимальное значение амплитудной характеристики Мр .
Ответы: сов = 4.25 рад/с, со,. = 2.7 рад/с. Мр = 1.7.
У-9.24. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) =
К
(-1+та)
где К = 1/2 и т = 1. Частотная характеристика G(/'to) в полярных координатах приведена на рис. 9.24(У). С помощью критерия Найквиста определите, устойчива ли замкнутая система.
У-9.25. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
И.7
G(s) =---------------------.
s(l + 0,05s)(l + 0,1s)
Определите запас по фазе и частоту, при которой амплитудная характеристика системы пересекает уровень 0 дБ.
Ответы: Запас по фазе = Т1,Т, ыс — 8,31 рад/с.
Задачи
543
У-9.26. С помощью диаграммы Никольса определите значения Мр^, со,, и сов для замкнутой системы из упражнения 9.25.
У-9.27. Система с единичной образ ной связью имеет в разомкнутом состоянии передаточную функцию
G(s) =
К s(s+6)2 '
Определите максимальное значение К, при котором запас по фазе по крайней мере равен 40°, а запас по модулю — по крайней мере 6 дБ. Чему при этом равны действительные значения за-
пасов устойчивости?
У-9.28. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) =--------.
s(s+0,2)
(а) Определите запас по фазе при К = 0,16. (б) По найденному значению запаса по фазе оцените величину £ и предскажите, чему будет равно перерегулирование, (в) Вычислите действительную переходную характеристику и проверьте оценку, полученную в п. (б).
У-9.29. Задана передаточная функция
gh^-TT2-
На s-плоскости задан контур, изображенный на рис. 9.29(У). Определите соответствующий ему контур на ОЯ(5)-плоскости. Точка В имеет координаты -l+j.
JW
Рис. 9.29 (У)
Задачи
3-9.1. По частотным характеристикам, полученным в задаче 8.1, с помощью критерия Найквиста исследуйте устойчивость замкнутых систем. Для каждого случая определите N, Р и Z.
3-9.2. Для заданных передаточных функций постройте в полярных координатах частотные характеристики и с помощью критерия Найквиста определите, устойчива ли каждая из систем в зам-
кнутом состоянии.
(a)Gtf(s) =
К s(s2 + s + 4)
(6)GH(s) =
K(s+2) s2(s+ 4)
Если система устойчива, определите максимально допустимое значение К по точке, в которой годограф пересекает действительную ось.
3-9.3. (а) Найдите такой контур Г, на s-плоскости, с помощью которого можно было бы определить, всем ли корням характеристического уравнения соответствует коэффициент затухания, превышающий значение (б) Найдите такой контур Г, на s-плоскости, с помощью которого можно было бы определить, все ли корни характеристического уравнения имеют действительные части меньше, чем s = -о,. (в) С помощью контура из п. (б) и теоремы Коши определите, имеет ли следующее характеристическое уравнение корни, действительная часть которых меньше, чем s =-1:
g(s) = s3 + 1 Is2 + 56s + 96 = 0 .
544
Глава 9, Анализ устойчивости методом частотных характеристик
3-9.4. На рис. 9.4(3) приведена частотная характеристика условно-устойчивой системы, построенная в полярных координатах при некотором значении К. (а) Определите, является ли система устойчивой, и укажите, сколько корней ее характеристического уравнения расположены в правой половине s-плоскости (если таковые имеются). Передаточная функция GH(s) не имеет полюсов в правой полуплоскости, (б) Определите, устойчива ли система, если координата и = -1 занимает положение, отмеченное точкой на оси.
3-9.5. На рис. 9.5(3) изображена система управления числом оборотов (скоростью) двигателя внутреннего сгорания. Ограничение на впрыск горючего в карбюратор и пропускную способность трубопровода обусловливает появление
Jv
Рис. 9.4 (3). Частотная характеристика условно-устойчивой системы в полярных координатах
постоянной времени т, = 1 с. Двигатель имеет
постоянную времени те = ЛЬ = 3 с. Постоянная времени датчика скорости тт = 0,4 с. (а) Определите значение К, при котором установившаяся ошибка не будет превосходить 10% от заданного значения скорости, (б) При найденном значении К с помощью критерия Найквиста исследуйте устойчивость системы, (в) Определите запасы устойчивости по фазе и по модулю.
Рис. 9.5 (3)
Система управления числом оборотов двигателя внутреннего сгорания
3-9.6. Одна из новых разработок — механическая рука с непосредственным приводом —- отличается тем, что в ней между двигателями и соответствующими нагрузками отсутствуют редукторы. Благодаря этому каждый привод характеризуется отсутствием люфта, малым трением и высокой механической жесткостью, что очень важно для быстрого и точного позиционирования рабочего органа при выполнении сложных операций.
Подобная-механическая рука, проектируемая в Массачусетском Технологическом Институте, должна обладать скоростью перемещения звеньев около 10 м/с и развивать момент до 660 Н-м. Привод каждого звена реализован с использованием обратной связи и системы датчиков положения и скорости. На рис. 9.6(3), (а), приведены частотные характеристики системы управления положением одного из звеньев руки. Двум полюсам системы соответствуют частоты 3.7 Гц и 68 Гц. На рис. 9.6(3), (б), приведена переходная характеристика системы управления, в которой использована обратная связь по положению и по скорости. Постоянная времени замкнутой системы равна 82 мс. Разработайте структурную схему этой системы и докажите, что 82 мс — это вполне приемлемый результат.
3-9.7. Самолет с вертикальным взлетом является неустойчивым объектом, поэтому необходима система его автоматической стабилизации. На рис. 9.7(3) приведена структурная схема системы стабилизации положения самолета К-16В. Динамику самолета в первом приближении можно представить передаточной функцией
G(s) =
10
s2 + 0,36
Задачи
545
Рис. 9.6 (3). (а) Частотные характеристики системы управления рукой; (б) Изменение положения руки под влиянием ступенчатого входного сигнала
Регулятор и исполнительное устройство имеют передаточную функцию
s+ 3
(а) Постройте диаграмму Боде, соответствующую передаточной функции разомкнутого контура G|(s)G(s)/7(s) при Kt = 2. (б) Определите запасы по модулю и по фазе в этой системе, (в) Определите установившуюся ошибку, вызванную возмущением (ветром) Tlt= 1/s. (г) определите максимальное значение амплитудной характеристики замкнутой системы и ее резонансную частоту, (д) По значениям Мр и запаса по фазе оцените величину коэффициента затухания системы.
Рис. 9.7 (3). Система стабилизации положения самолета с вертикальным взлетом и посадкой
3-9.8. Электрогидравлические сервомеханизмы используются в системах управления тогда, когда необходимо иметь высокое быстродействие и большие развиваемые усилия. Такой сервомеханизм может обладать выходной мощностью 100 кВт или более. На рис. 9.8(3). (а), приведена
546
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.8 (3)
(а) Электрогидравлический сервомеханизм;
(б) Структурная схема системы управления
фотография объединенных в одном корпусе сервоклапана и исполнительного устройства. Положение рабочего органа исполнительного устройства измеряется с помощью датчика и сравнивается с заданным значением Сигнал ошибки усиливается и управляет положением клапана, который изменяет поток жидкости, направляемой в исполнительное устройство. На рис. 9.8(3), (б), изображена структурная схема электрогидравлического сервомеханизма, в котором для обеспечения демпфирования использована обратная связь по давлению. Типичные значения параметров системы таковы: т = 0,02 с. со2 = 7-2тт, С,2 = 0,05, со! = 10-2тс, = 0.05. Коэффициент усиления контура КАКХК2 = 1,0. (а) Постройте диаграмму Боде и определите запас устойчивости по фазе, (б) В системе можно увеличить коэффициент затухания до величины
= 0,25, что достигается путем рассверливания небольшого отверстия в плунжере. Постройте соответствующую диаграмму Боде и определите запас устойчивости по фазе.
3-9.9. Космический челнок, изображенный на рис. 9.9(3). (с), служит для доставки на орбиту полезного груза и возвращения его на землю. Такой челнок, размерами примерно с самолет DC-9 и весящий без груза около 75 т, оснащен элеронами в задней части крыльев и тормозным двигателем в хвосте, с помощью которых осуществляется управление его полетом. На рис. 9.9(3), (б), приведена структурная схема системы управления скоростью снижения. Датчик представлен обычным коэффициентом усиления, т. е. H(s) = 0,5, а передаточная функция собственно челнока имеет вид:
х 0,30(5+0.05)(?+1600) - —г-------------------.
(? + 0,055+16)(я+70)
Регулятор Gc(s) может быть представлен либо коэффициентом усиления, либо передаточной функцией соответствующего вида, (а) Изобразите диаграмму Боде при Gc(s) = 2 и определите запасы устойчивости системы, (б) Изобразите диаграмму Боде, если Gc(s) = Кх + К2/з, где К-,1К{ = 0,5. Выберите коэффициент так, чтобы запас по модулю был равен 10 дБ.
Задачи
547
Рис. 9.9 (3)
(а) Фото космического челнока Колумбия на фоне черного неба, сделанная со спутника 22 июня 1983 г.
Из раскрытого грузового отсека выдвинут дистанционный робот-манипулятор. (б) Система управления скоростью снижения
3-9.10. Управление инструментами металлорежущих станков часто производится автоматически, как показано на рис. 9.10(3). Такие системы обычно называют системами с ЧПУ (числовым программным управлением). Если рассматривать перемещение инструмента только по одной координате, то его желаемое положение сравнивается с действительным и разность между ними используется для воздействия на катушку соленоида и вал гидравлического исполнительного устройства. Это устройство имеет передаточную функцию (см. табл. 2.5)
Рис. 9.10 (3). Система управления положением инструмента металлообрабатывающего станка
548
Глава 9. Анализ устойчивости методом частотных характеристик
где Ка = 1 и тя = 0,4 с. Выходное напряжение дифференциального усилителя (по Лапласу) равно
где x/t) есть заданное положение инструмента. Сила, действующая на золотник, пропорциональна току i, так что F=K2i(t), где А, = 3,0. Коэффициент жесткости пружины К,= 1.5; Я = 0,1 и! = 0,2.
(а) Определите значение А,, при котором система будет иметь запас по фазе 30°. (б) При коэффициенте К, из п. (а) определите показатели замкнутой системы tvlp,, со,, и Wg. (в) Оцените величину относительного перерегулирования при ступенчатом входном сигнале, X/s) = 1/s, а также время установления (по критерию 2% от конечного значения).
3-9.11. На рис. 9.11(3) изображена система управления концентрацией продукта химической реакции. В системе производится измерение потоков смешиваемых компонентов, а на выходе желательно иметь постоянную концентрацию продукта реакции. Передаточная функция химического реактора имеет вид:
G(s) = -^~, 5s +1
а регулятор имеет передаточную функцию Gc(s) = Kl + ^.
s
Подача реагента по транспортеру обусловливает появление запаздывания Т= 1,5 с.
(а) Изобразите диаграмму Боде в случае Кх = К2 = 1 и исследуйте устойчивость системы, (б) Изобразите диаграмму Боде при = 0,1 и К2 = 0,04 и исследуйте устойчивость системы.
(в) Положив Кх = 0, с помощью критерия Найквиста определите максимально допустимое значение К2, ПРИ котором система еще будет оставаться устойчивой.
Рис. 9.11 (3) Система управления концентрацией химического продукта
Дозатор
A(s)
Задачи
549
Рис. 9.12 (3) Система управления апертурой зрачка человеческого глаза
Интенсивность света /(5)
3-9.12. На рис. 9.12(3) представленная упрощенная модель системы управления апертурой зрачка человеческого глаза. Коэффициент передачи зрачка К= 4, а его постоянная времени т = 0,5 с. Время запаздывания Т= 0,1 с.
(а) Изобразите диаграмму Боде в предположении, что запаздывание отсутствует. Определите запас устойчивости по фазе, (б) Добавьте к фазовой характеристике сдвиг, создаваемый звеном запаздывания, и определите запас устойчивости по фазе.
3-9.13. При производстве деталей из пластмассы возникает необходимость регулирования температуры изложницы. Структурная схема предназначенной для этого системы изображена на рис. 9.13(3). Время запаздывания Т- 1,2 с. (а) С помощью критерия Найквиста исследуйте устойчивость системы, если Ко = К = 1. (б) Считая, что К = 1, определите значение Ки. обеспечиваю-щее запас по фазе более 50°.
Рис. 9.13 (3)
Система регулирования температуры
3-9.14. В системах управления автомобилем все чаще встречаются компьютеры и электронные устройства. На рис. 9.14(3) изображена система управления поворотом экспериментального автомобиля, в котором вместо руля используется управляющая рукоятка. Время реакции типичного водителя Т= 0,2 с. (а) С помощью диаграммы Никольса определите коэффициент К. при котором максимальное значение амплитудной характеристики замкнутой системы Мр будет меньше или равно 2 дБ. (б) Оцените величину коэффициента затухания системы (1) по значению Л/А и (2) по запасу устойчивости по фазе. Сравните результаты и, если они отличаются, объясните почему, (в) Определите полосу пропускания замкнутой системы по уровню ЗдБ.
Рис. 9.14 (3)
Система управления поворотом автомобиля
550
Глава 9, Анализ устойчивости методом частотных характеристик
Рис. 9.15 (3)
Система автоматического управления курсом корабля
3-9.15. Рассмотрите систему автоматического управления курсом корабля из задачи 8.11. Частотные характеристики разомкнутой системы приведены на рис. 8.11(3). Отклонение танкера от заданного направления движения измеряется радаром, в результате чего формируется сигнал ошибки, как показано на рис. 9.15(3). Этот сигнал используется для управления углом поворота руля 8(s).
(а) Является ли данная система устойчивой? Что является признаком неустойчивости, если рассматривать переходную характеристику системы? Напомним, что целью системы является обеспечение движения танкера строго по прямой линии, (б) Возможно ли сделать систему устойчивой путем уменьшения коэффициента усиления, входящего в передаточную функцию 6(5)? (в) Возможно ли вообще сделать эту систему устойчивой? Можете ли вы предложить подходящий для этого регулятор, который должен находиться в цепи обратной связи?
(г) Повторите пп. (а), (б) и (в), если ключ S замкнут.
3-9.16. На рис. 9.16(3), (а), изображен электрокар, который автоматически движется вдоль дорожки на полу складского помещения. Направление и скорость движения обеспечиваются с помощью замкнутых систем управления. Электрокар распознает путь движения при помощи матрицы из 16 фототранзисторов. Структурная схема системы управления движением изображена на рис. 9.16(3), (б). Выберите значение коэффициента К так. чтобы запас по фазе был приблизительно равен 30°.
Рис. 9.16 (3)
(а) Автоматически управляемый электрокар.
(б) Структурная схема системы управления
Задачи
551
Рис. 9.17 (3) Система управления химическим реактором
3-9.17. Основная цель многих систем управления состоит в поддержании заданного значения выходной переменной при наличии действующих на систему возмущений. На рис. 9.17(3) изображена типичная структура системы управления химическим процессом. Возмущение представлено в виде l/(s), а химический процесс — передаточными функциями G3(s) и G4(.v). Датчик в цепи обратной связи имеет передаточную функцию H(s), но везде в дальнейшем будем считать H(s) = 1. Передаточные функции G2(.s), G3(.v) и G4(.v) имеют одинаковую форму:
где т3 = т4 = 4 с, и К3 = К4 = 0,1 с. Параметры передаточной функции вентиля К2 = 20 и т2 = 0,5 с. Система должно поддерживать установившуюся ошибку не более 5% от заданного значения выходной переменной.
(а) Полагая G((.v) = Кх, определите значение этого коэффициента, удовлетворяющее ограничению на величину установившейся ошибки. При найденном значении Кх оцените ожидаемую величину перерегулирования реакции системы на ступенчатый входной сигнал r(t). (б) Если в системе используется ПИ-регулятор. т. е. Gj(.s) = K/l+l/s), определите значение Кх, при котором перерегулирование будет менее 30%, но более 5%. В пп. (а) и (б) воспользуйтесь аппроксимацией коэффициента затухания £ = 0,01<р,„, где (р„, — запас устойчивости по фазе. Во всех вычислениях считайте, что O'(.s) = 0. (в) Оцените время установления переходной характеристики системы при регуляторах из пп. (а) и (б), (г) Система подвержена ступенчатому возмущению, т. е. U(.s) = A/s. Для простоты предположите, что r(f) = 0. Определите реакцию системы из п. (б) на возмущение.
3-9.18. На рис. 9.18(3) изображена модель водителя автомобиля, пытающегося изменить направление движения, где К= 5,3. (а) Постройте частотные характеристики и определите запасы по модулю и по фазе, если время реакции Т=0. (б) Определите запас по фазе, если Г =0,1 с. (в) Определите время реакции водителя Т, при котором система окажется на границе устойчивости (запас по фазе будет равен нулю).
Рис. 9.18 (3). Система управления, образованная взаимодействием водителя и автомобиля
3-9.19. В США ежегодно более 5 млрд долларов тратится на сбор и утилизацию твердых бытовых отходов. Одна из систем для сбора отходов, в которой используется дистанционно управляе-
552
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.19 (3). Система сбора бытовых отходов
мая механическая рука, изображена на рис. 9.19(3). Система управления рукой в разомкнутом состоянии имеет передаточную функцию
GH(s) =-----—-------.
s(5s+ 1)(j + 2)
(а) Постройте диаграмму Никольса и покажите, что запас по модулю приблизительно равен 19 дБ. (б) Определите запас по фазе и максимальное значение амплитудной характеристики замкнутой системы Мр . Определите также полосу пропускания замкнутой системы.
3-9.20. Летательный аппарат Белл-Боинг V-22 может функционировать как обычный самолет и как вертолет. Его преимущество заключается в том, что при взлете и посадке двигатели могут поворачиваться на 90°, как показано на рис. 7.33(3), (а), а в режиме крейсерской скорости они занимают горизонтальное положение и аппарат ведет себя как самолет. На рис 9.20(3) изображена система управления положением аппарата, когда он ведет себя как вертолет.
(а) Постройте частотные характеристики системы при К= 100. (б) Определите запасы устойчивости по модулю и по фазе, (в) Найдите значение К, при котором запас по фазе будет равен 40°. (Это требует уменьшения коэффициента усиления по сравнению со значением К= 100.) (г) Определите реакцию системы на ступенчатый входной сигнал при значении К из п. (в).
Рис. 9.20 (3). Система управления положением в воздухе самолета-вертолета
3-9.21. рассмотрите систему с единичной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
G(s) =
К s(s + 1)(г + 4)
(а) Постройте диаграмму Боде при К = 4. Определите (б) запас по модулю, (в) значение К, при котором запас по модулю будет равен 12 дБ, и (г) значение К, при котором установившаяся ошибка будет равна 25% от величины скорости А линейного входного сигнала/ (I) = At.t> 0. Будет ли система при таком коэффициенте обладать приемлемым качеством?
3-9.22. На рис. 9.22(3) приведена диаграмма Никольса с частотной характеристикой GH(J<£>). Точкам, отмеченным на кривой, соответствуют следующие частоты:
точка 1234 5 6789
1 2,0 2,6 3,4 4,2 5,2 6,0 7,0 8,0
со
Задачи
553
Рис. 9.22 (3)
Диаграмма Никольса
Определите (а) резонансную частоту замкнутой системы и (б) ее полосу пропускания, (в) запас по фазе и (г) запас по модулю, (д) Оцените перерегулирование и время установления (по критерию 2%) реакции системы на ступенчатый входной сигнал.
3-9.23. Контур замкнутой системы образован передаточной функцией
GH(s) =------------.
s(s+2)(s+3)
(а) Определите значение К, при котором запас по фазе равен 60°. (б) При К, найденном в п. (а), определите запас устойчивости по модулю.
3-9.24. Система с единичной обратной связью в разомкнутом состоянии имеет передаточную функцию
G{s)H^ = ^^.
s
(а) Определите значение К, при котором запас по фазе будет равен 60°. (б) При К, найденном в п. (а), определите запас по модулю, (в) Предскажите, чему будет равна полоса пропускания замкнутой системы.
3-9.25. В замкнутой системе передаточная функция контура имеет вид
(а) Считая Т— 0,2, определите значение К, при котором запас по фазе будет равен 60°. (б) При К, найденном в п. (а), постройте график зависимости запаса по фазе от времени запаздывания Т.
554
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.26 (3)
Система управления шлифовальной машиной
б)
3-9.26. В мастерских по ремонту металлоизделий может быть использован шлифовальный станок, позволяющий повысить качество обработки поверхности. Существующие станки обладают механической надежностью, но управляются вручную. Автоматизация станка освободит оператора для других задач и позволит увеличить пропускную способность мастерской. В шлифовальном станке, изображенном на рис. 9.26(3), (а), перемещение абразивного круга по всем трем осям осуществляется автоматически при помощи электродвигателей и систем с обратной связью. Система управления перемещением круга по оси у изображена на рис. 9.26(3), (б). Чтобы минимизировать установившуюся ошибку при линейном входном сигнале, выберем значение К = 10. Изобразите диаграмму Боде для разомкнутой системы и перенесите данные на диаграмму Никольса. Определите запасы устойчивости по модулю и по фазе, а также полосу пропускания замкнутой системы. Оцените величину коэффициента затухания С, и предскажите значения перерегулирования и времени установления (по критерию 2%).
Задачи повышенной сложности
П-9.1. За время существования на орбите космического аппарата происходит изменение его массы и геометрической конфигурации. Например, может произойти существенное изменение момента инерции. На рис. 9.1(H) изображена структурная схема системы ориентации космического аппарата.
Рис. 9.1 (П). Система управления ориентацией космического аппарата
Задачи повышенной сложности
555
(а) Изобразите диаграмму Боде и определите запасы по модулю и по фазе, если = 15267. (б) Повторите п. (а) при со^ = 9500. Обратите внимание на эффект, связанный с изменением на 38%.
П-9.2. Серьезной проблемой в хирургии является разная восприимчивость пациентов к введению анестезирующих средств. К тому же. во время операции может меняться и реакция пациента. На рис. 9.2(П) изображена система управления вводом анестезирующего препарата. Показателем глубины наркоза является артериальное кровяное давление.
(а) Полагая Т= 0.05 с, постройте диаграмму Боде и определите запасы устойчивости по модулю и по фазе, (б) Повторите п. (а) при Т= 0,1 с. Оцените эффект от увеличения времени запаздывания в 2 раза, (в) По величине запаса по фазе предскажите значение перерегулирования в случае ступенчатого входного сигнала для условий пп. (а) и (б).
Рис. 9.2 (П). Система управления кровяным давлением при анестезии
П-9.3. В последние десятилетия достигнут определенный успех в автоматизации процессов сварки. Однако при сварке отсутствует возможность непосредственного измерения качества сварного соединения. Поэтому необходим какой-то косвенный способ контроля за качеством сварки. Наиболее полную текущую информацию о качестве сварного шва можно было бы получить как по его геометрическим параметрам (в поперечном сечении это ширина, глубина и высота шва), так и по температурным характеристикам (таким как ширина зоны разогрева и скорость охлаждения). Глубину сварного шва. которая в большинстве случаев является основным геометрическим параметром, очень трудно измерить непосредственно, но существует метод его оценки, основанный на температурных измерениях. Модель системы управления качеством сварного шва изображена на рис. 9.3 (П).
(а) Определите запасы по модулю и по фазе в системе при К = 1. (б) Повторите п. (а) при К= 1,5. (в) С помощью диаграммы Никольса определите полосу пропускания системы при К= 1 и при Х= 1,5. (г) Предскажите время установления переходной характеристики (по критерию 2%) при К = 1 и при К = 1,5.
Рис. 9.3 (П). Система управления глубиной сварного шва
556
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.4 (П). Система управления машиной для производства бумаги
П-9.4. Управление машиной для производства бумаги — очень сложная задача. Цель управления состоит в том, чтобы нужное количество древесной массы (пульпы) вводилось с соответствующей скоростью и в нужной концентрации. Последовательно выполняются операции обезвоживания. осаждения древесной массы, проката и сушки. Очень важно выдерживать постоянный вес бумаги на единицу площади. В системе управления, изображенной на рис. 9.4(П), выберите такое значение К, при котором запас по фазе был бы не менее 40°, а запас по модулю — не менее 10 дБ. Постройте график переходной характеристики при найденном значении К. Определите полосу пропускания замкнутой системы.
П-9.5. В проекте НАСА — несколько запусков на Марс автономных исследовательских аппаратов. Типичный самоходный аппарат оснащен солнечными батареями питания, имеет шесть колес, весит 10 кг и наблюдает за окружающей средой с помощью двух миниатюрных телекамер, а расстояние до объектов измеряет с помощью пяти лазерных дальномерных устройств. Он способен преодолевать подъем в 30° и оснащен спектрометром для определения химического состава камней на поверхности Марса. Управление аппаратом производится дистанционно с Земли. Система управления положением аппарата изображена на рис. 9.5(П). Определите значение К, при котором запас по фазе будет максимальным. При найденном значении К определите величину перерегулирования реакции системы на ступенчатый входной сигнал.
Рис. 9.5 (П)
П-9.6. Кислотность воды, отсасываемой из угольной шахты, часто определяется путем добавления в нее извести. Подача извести регулируется с помощью вентиля, а кислотность измеряется установленным ниже по течению датчиком. Модель системы управления кислотностью изображена на рис. 9.6(П). Определите значения KuD, при которых система является устойчивой. Расстояние D должно быть более 2 метров, чтобы произошло полное перемешивание до момента измерения кислотности.
Рис. 9.6 (П). Система управления кислотностью воды
Задачи на синтез систем
557
ОД)
Рис. 9.7 (П). Система управления положением лифта
П-9.7. Использование лифтов в зданиях-небоскребах ограничено высотой 800 м. т. к. в противном случае тросы становятся слишком толстыми и тяжелыми. Решение состоит в отказе от использования тросов и переходе на линейный привод, аналогичный тому, который применяется в транспортных системах с магнитной подвеской. Один из проектов предусматривает использование линейного синхронного привода, обеспечивающего движение пассажирской кабины вдоль направляющей по оси шахты. Принцип действия такого привода основан на взаимодействии электромагнитного поля, создаваемого катушками на направляющей, с магнитами, вмонтированными в кабину лифта.
Если пренебречь трением в таком приводе, то систему управления положением кабины лифта можно представить в виде структурной схемы на рис. 9.7(П). Определите значение К. при котором запас по фазе будет равен 45°. Определите полосу пропускания системы при найденном значении К. Вычислите также максимальное значение выходной переменной при данном К в случае единичного ступенчатого сигнала.
Рис. 9.8 (П) К выбору коэффициента усиления
П-9.8. На рис. 9.8(П) изображена замкнутая система управления, в которой коэффициент К больше 500, но меньше, чем 3000. Найдите такое значение К, при котором переходная характеристика системы будет иметь перерегулирование, не превышающее 18%. Постройте диаграмму Никольса и определите запас по фазе.
П-9.9. Рассмотрите систему с ПИ-регулятором из задачи П-7.13. Считая, что К^Кр = 0.2. определите коэффициент Кр, при котором запас по фазе будет максимальным.
Задачи на синтез систем
СС-9.1. В системе из задачи СС-4.1 использован регулятор с передаточной функцией Gc(s) = Ka. Определите значение Ка, при котором запас по фазе будет равен 70°. Получите график реакции этой системы на ступенчатый входной сигнал.
С-9.1. На рис. 9.1(C), (а), изображен мобильный робот для сборки токсичных отходов. Замкнутая система управления скоростью движения робота имеет структуру, представленную на рис. 9.1. где H(s) = 1. Диаграмма Никольса на рис. 9.1(C), (б), соответствует годографу G(jc.s)/K. где отмеченные точки характеризуются следующими значениями частоты со:
точка 12345 со 2 5 10 20 50
(а) Определите запасы устойчивости по модулю и по фазе при К = 1. (б) Определите значение Мр в децибелах и резонансную частоту замкнутой системы при К = 1. (в) Определите полосу пропускания системы и оцените время установления (по критерию 2%) и относительное пере-
558 Глава 9, Анализ устойчивости методом частотных характеристик
регулирование реакции системы на ступенчатый входной сигнал, (г) Найдите такое значение К, при котором перерегулирование составит 30%, и оцените, чему будет при этом равно время установления.
б)
Рис. 9.1 (С)
(а) Мобильный робот для уборки токсичных отходов.
(6) Диаграмма Никольса
Фазовый сдвиг разомкнутой системы, град.
Задачи на синтез систем
559
Рис. 9.2 (С)
Система управления гибкой рукой робота
R(s)
С-9.2. Гибкие руки роботов изготавливаются из легких материалов, а управляющие ими системы в разомкнутом состоянии обладают слабым демпфированием. На рис. 9.2(C) изображена структурная схема системы управления гибкой рукой робота. Выберите такое значение К. при котором система будет иметь максимально возможный запас по фазе. На основе найденного запаса по фазе предскажите величину перерегулирования при ступенчатом входном сигнале и сравните его с действительным значением. Определите полосу пропускания замкнутой системы. Предскажите время установления (по критерию 2%) переходной характеристики и сравните его с действительным значением. Обсудите практическую пригодность данной системы
управления.
С-9.3. Пациентам, страдающим от сердечной недостаточности, может помочь система автоматического введения лекарственного препарата. Такая система предназначена для поддержания стабильного состояния пациента в достаточно узких границах. На рис. 9.3(C) изображена система управления кровяным давлением за счет введения лекарственного препарата.
Динамика
пациента
Рис. 9.3 (С). Система управления вводом медицинского препарата
-> ГМ Кровяное давление
Выберите такое значение коэффициента
К, при котором отклонение кровяного давления от заданного было бы по возможности минимальным и одновременно обеспечивалась бы хорошая динамика переходного процесса.
Рис. 9.4 (С)
(а) Робот с двумя сочленениями, играющий в теннис.
(б) Упрощенная система управления
С-9.4. На рис. 9.4(C), (а), изображен робот, играющий в теннис, а на рис. 9.4(C), (б). — упрощенная система управления углом 02(Г). Система управления должна обеспечивать наилучший вид переходной характеристики путем настройки коэффициента Kv. Выбрав значения К = 0,325 и К,, = 0,45, определите запасы устойчивости по модулю и по фазе, а также полосу пропускания замкнутой системы. Для каждого значения Kv оцените вид переходной характеристики и выберите наилучшее значение коэффициента К.
С-9.5. В системах, где требуется развитие значительных усилий, используются электрогидравличе-ские исполнительные устройства. Структурная схема такой системы изображена на рис. 9.5(C). Желательно, чтобы при ступенчатом входном воздействии установившаяся ошибка была минимальна. Однако при этом перерегулирование не должно превышать 10%. Время запаздывания Г =0,8 с.
560 Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.5 (С)
Электрогидравлический сервопривод
(а) Полагая Gc(s) = К, выберите значение К и определите действительные значения перерегулирования, времени установления (по критерию 2 %), а также установившуюся ошибку, (б) Повторите п. (а) при Gc(s) = Kt + K2/s, т. е. выберите значения Kt и К2. Постройте диаграмму Никольса при найденных значениях К, и К2.
Рис. 9.6 (С). Система управления толщиной стальной полосы
С-9.6. Прокатный стан для производства стальной ленты физически можно представить в виде модели, собственное движение которой имеет характер затухающих колебаний. Датчик толщины ленты расположен очень близко к выходу из прокатного стана, а цель системы управления состоит в поддержании толщины как можно ближе к заданному значению. Любое изменение толщины ленты на входе прокатного стана рассматривается как возмущение. Система имеет неединичную обратную связь, как показано на рис. 9.6(C). В зависимости от условий эксплуатации прокатного стана параметр b изменяется в пределах от 80 до 300.
Определите запасы устойчивости по модулю и по фазе для двух крайних значений параметра b при номинальном значении К = 170. Коэффициент усиления К рекомендуется уменьшить так. чтобы запас по фазе был более 40°, а запас по модулю — более 8 дБ во всем диапазоне изменения параметра Ь.
С-9.7. Аппараты, которые будут заниматься исследованием поверхности Луны и созданием на ней различных сооружений, столкнутся с условиями, принципиально отличными от земных. Кроме того, управляться они будут дистанционно. Структурная схема системы управления таким аппаратом изображена на рис. 9.7(C). Полагая Т= 0,5 с, выберите значение К, исходя из того, что система должна иметь как можно большее быстродействие и при этом перерегулирование не должно превышать 20%.
Рис. 9.7 (С). Система управления лунным аппаратом
Задачи на синтез систем
561
Рис. 9.8 (С)
Система управления прокатным станом
Л(5) -Заданная толщина
Динамика
К 5(s+25)(52+100^+2600)
-> K(s) Толщина
полосы
С-9.8. Управление скоростным прокатным станом представляет собой весьма непростую задачу. Система управления толщиной стальной полосы должна обладать высокой точностью и быть легко настраиваемой. На рис. 9.8(C) изображена структурная схема такой системы. Осуществите синтез этой системы, выбрав такое значение К, при котором реакция на ступенчатое воздействие имела бы перерегулирование не более 0,5% и время установления (по критерию 2%) менее 4 с. Для выбора К воспользуйтесь корневым годографом, после чего вычислите значения всех корней. Укажите доминирующий корень (или корни) системы.
С-9.9. На рис. 9.9(C), (а), изображена система из двух проточных емкостей с подогревателем, а на рис. 9.9(C), (б), — соответствующая ей структурная схема. На схеме То — температура жидкости, втекающей в первую емкость, а Т2 — температура жидкости на выходе из второй емкости. Нагреватель находится в первой емкости и создает регулируемый поток тепла Q. Постоянные времени т, = 10 с и т2 = 50 с.
(а) Выразите T2(s) через T0(s) и Tj/s). (б) Если Тт/s), соответствующее заданному значению температуры на выходе, мгновенно изменяется от T2l/(s) = A/s до T2/s) = 2A/s, определите переходную характеристику T2(t) при Gc(s) = К= 500. По предположению, до скачка заданного значения температуры система находилась в стационарном состоянии, (в) Определите величину установившейся ошибки ещ. для системы из п. (б), считая E(s) = T2tfs) - T2(s). (г) Повторите пп. (б) и (в), если Gc(s) = K/s. Значение К выберите так, чтобы перерегулирование не превышало 10%. (д) Считая, чТО
GC = K, + ^, s
проведите синтез регулятора, обеспечивающего время установления (по критерию 2%) Ts < 150 с и относительное перерегулирование менее 10%. (е) Для сравнения сведите в таблицу значения относительного перерегулирования, времени установления и установившейся ошибки, полученные в пп. (б)-(д).
Рис. 9.9 (С)
Система управления температурой в двухъемкостном объекте
562
Глава 9. Анализ устойчивости методом частотных характеристик
Рис 9.10 (С)
Система управления роботом для сбора горячих брусков
В системе определяется разность между положениями захвата и бруска по координатам х и у
б)
ОД
Положение захвата по оси х
С-9.10. На рис. 9.10(C), (а), показан регулятор для робота, который захватывает горячие бруски и помешает их в корыто для охлаждения. Робот находится над конвейером и способен совершать движения по осям х и у. Система управления положением захвата изображена на рис. 9.10(C), (б), где
G(s) = ——J , (s+1)2
а 7’= л/4 с. Регулятор имеет передаточную функцию
Gc = К, + .
s
Проведите синтез регулятора, исходя из того, что установившаяся ошибка не должна превышать 10% от величины ступенчатого входного сигнала, а перерегулирование должно быть менее 10%.
Щ Задачи, решаемые с помощью MATLAB
М-9.1. Рассмотрите систему с единичной отрицательной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
_ 100
G(s) = ---------.
s + 4 s +10
С помошью MATLAB убедитесь, что запас по модулю равен со, а запас по фазе составляет 24°.
М-9.2. С помощью nyquist постройте в полярных координатах частотные характеристики для следующих передаточных функций:
10
(a)G(s) = —
(б) G(s) = 15 ; (в) G(s) = 3
s2+8s+5 s +3s2 + 3s+1
Задачи, решаемые с помощью MATLAB
563
М-9.3. С помощью функций nichols и logspace постройте в соответствующих координатах диа-
граммы Никольса для следующих передаточных функций:
(a) G(s) =
1 5+0.1
(6)G(s) =
1
s2 + 2s+l
(b)G(s) =
24
? + 9s2 + 26s + 24
По диаграмме Никольса определите приблизительные значения запасов устойчивости по модулю и по фазе и отметьте их на диаграмме.
М-9.4. Система с отрицательной обратной связью имеет в разомкнутом состоянии передаточную функцию
G(s) =-----
(а) Воспользовавшись функцией margin и полагая Т= 0,1 с. определите такое значение К. при котором запас по фазе будет равен 45°. (б) Изобразите графически зависимость запаса по фазе от Т, где 0 < Т < 0,2 с, при К, найденном в п. (а).
М-9.5. Рассмотрите систему управления машиной для производства бумаги, изображенную на рис. 9.4(H). С помощью MATLAB постройте график зависимости полосы пропускания замкнутой системы от коэффициента К, 1 < К < 50.
Заданное значение
Рис. 9.6 (М). Система управления ускорением ракеты
М-9.6. На рис. 9.6(М) изображена структурная схема системы управления ускорением ракеты при совершении ею маневра, связанного с изменением курса. Входной и выходной сигналы есть соответственно заданное и действительное значения ускорения (в единицах g). В системе использован ПИ-регулятор. Номинальное значение параметра Ьо равно 0,5.
(а) Предполагая, что Ьо имеет номинальное значение, с помощью функции margin вычислите запасы устойчивости по фазе и по модулю, а также частоту, при которой амплитудная характеристика разомкнутой системы пересекает уровень 0 дБ. (б) Используя значение запаса по модулю из п. (а), определите максимально допустимое из соображений устойчивости значение параметра Ьо. Проверьте ответ, применив к характеристическому уравнению системы критерий Рауса-Гурвица.
М-9.7. Научно-исследовательская лаборатория подготовила программу выполнения задач спутником на околоземной орбите. Управление спутником предполагается осуществлять с наземной станции. Структурная схема системы управления представлена на рис. 9.7(М). Сигнал с Земли достигает спутника через Г секунд и столько же времени необходимо для получения ответного сигнала центром управления. В системе предлагается использовать ПД-регулятор, находящийся в наземном центре управления, т. е.
Gc(s) = К} + K2s .
(а) В предположении, что запаздывание отсутствует (т. е. Т= 0), проведите синтез регулятора, удовлетворяющего следующим требованиям: (1) относительное перерегулирование при ступенчатом входном сигнале не более 20% и (2) время максимума переходной характеристики не более 30 с. (б) Вычислите запас по фазе при отсутствии запаздывания. На основании полу-
564
Глава 9. Анализ устойчивости методом частотных характеристик
Рис. 9.7 (М). Система управления спутником с наземной станции
ченного результата найдите предельно допустимое из соображений устойчивости время запаздывания. (в) Аппроксимируйте каждое звено запаздывания с помощью функции Паде второго порядка. Подготовьте программу MATLAB, включающую использование функции pade. которая вычисляла бы полюсы замкнутой системы как функцию времени запаздывания Т. С помощью этой программы определите максимально допустимое время запаздывания Ттю1 и сравните результат с данными, полученными в п. (б). Для расчетов примите J= 150 кг • м~.
Ключевые термины и понятия
Диаграмма Никольса. Сетка кривых, устанавливающая связь между частотными характеристиками разомкнутой и замкнутой систем.
Запаздывание по времени. Чистая задержка на время Т, приводящая к тому, что некоторое событие в момент t в одной точке системы проявляется в том же виде в другой точке системы позже, в момент t + Т.
Запас по модулю. Величина, определяемая при фазовом сдвиге -180° и показывающая во сколько раз может быть увеличен коэффициент усиления системы, прежде чем она окажется на границе устойчивости, т. е. диаграмма Найквиста пройдет через точку —1+/0.
Запас по фазе. Величина, определяемая на частоте, при которой |G/7(/<o)| = 1 и показывающая, какой дополнительный отрицательный фазовый сдвиг допустим в системе, прежде чем она окажется на границе устойчивости, т. е. диаграмма Найквиста пройдет через точку —1+/0.
Контур. Замкнутая траектория на одной плоскости, отображаемая на другую плоскость с помощью функции F(s).
Конформное отображение. Отображение контура с s-плоскости на Р(5)-плоскость.
Критерий устойчивости Найквиста. Замкнутая система устойчива тогда и только тогда, когда контур на С($)-плоскости не охватывает точку (—1,j0) при условии, что функция G(s) не имеет полюсов в правой полуплоскости. Если G(s) имеет Р полюсов в правой полуплоскости, то чтобы замкнутая система была устойчива, контур на G(s)-iuiockocth должен охватывать точку (—1,7'0) Р раз в направлении против часовой стрелки.
Принцип аргумента. См. Теорема Коши.
Теорема Коши. Если некоторый контур охватывает Z нулей и Р полюсов функции F(s) в направлении по часовой стрелке, то соответствующий ему контур на /•'(5)-плоскости охватывает начало координат этой плоскости N = Z-P раз в направлении по часовой стрелке.
Частотная характеристика замкнутой системы. Зависимость от частоты передаточной функции замкнутой системы, 7’(/со).
Глава 10
Синтез систем управления с обратной связью
Обзор
В данной главе мы основное внимание уделим синтезу корректирующих устройств. Используя материал предыдущих глав, мы рассмотрим несколько методов синтеза в частотной области, позволяющих обеспечить заданное качество систем управления. На ряде примеров мы проиллюстрируем положительные стороны регуляторов с опережением и с отставанием по фазе. Будет показано, что синтез таких регуляторов можно выполнить как с помощью корневого годографа, так и с помощью диаграммы Боде. Применение ПИ-регуля-торов будет рассмотрено в контексте обеспечения высокой точности воспроизведения входных сигналов. Синтез систем управления методами пространства состояний рассматривается в главе 11. Настоящая глава завершается примером синтеза ПД-регулятора для системы чтения информации с диска.
10.1. Введение
Понятие качества систем управления детально обсуждалось в главе 5, где были введены основные количественные показатели качества. Мы установили, что система управления должна быть устойчивой и обладать адекватной реакцией на входные эталонные сигналы, она должна быть как можно менее чувствительной к изменению параметров, иметь по возможности минимальную установившуюся ошибку и, наконец, быть в состоянии компенсировать влияние нежелательных возмущений. Замкнутая система, которая изначально обладала бы оптимальным качеством, без дополнительной коррекции ее характеристик - это весьма редкий случай. Обычно бывает невозможно удовлетворить одновременно все требования, предъявляемые к качеству системы, поэтому возникает проблема поиска компромисса между рядом требований, среди которых могут быть и противоречащие друг другу.
В предыдущих главах мы уже частично касались вопросов синтеза и настройки параметров системы, имея целью обеспечить желаемые показатели качества. В главе 5 мы ввели в рассмотрение некоторые важные количественные оценки качества. Далее, в главе 6, мы рассмотрели метод анализа устойчивости систем управления, поскольку если система неустойчива, то она просто неработоспособна. В главе 7 мы применили метод корневого годографа к синтезу автоматически уравновешивающихся весов (разд. 7.4), а затем показали, как с помощью того же метода можно подобрать нужные параметры системы (разд. 7.5). Далее, в главах 8 и 9, мы установили связь между качеством системы и ее частотными характеристиками и воспользовались этой связью для синтеза ряда систем управления. Таким образом, в предыдущих главах мы касались отдельных вопросов, имеющих
566
Глава 10. Синтез систем управления с обратной связью
отношение к синтезу систем управления. Задачей настоящей главы является более глубокое изучение различных методов синтеза и коррекции систем, базирующихся на рассмотренном ранее материале.
В предыдущих главах было показано, что иногда желаемое качество системы можно обеспечить просто путем настройки ее параметров. Однако часто этого оказывается недостаточно, и для достижения желаемого результата должна быть изменена структура системы. Поэтому в общем случае синтез системы связан с выбором ее типа и структуры и последующей настройкой параметров. Например, если мы хотим, чтобы несколько показателей качества были меньше заданных значений, то мы часто можем попасть в конфликтную ситуацию. Так, если относительное перерегулирование не должно превышать 20 % и при этом ®пТр = 3,3, то это накладывает противоречивые требования к коэффициенту затухания как можно видеть из рис. 5.8. Поэтому, если нельзя ослабить ограничения на указанные показатели качества, необходимо каким-то образом изменить саму систему. Подобное изменение системы, имеющее целью обеспечение желаемых показателей качества, называется коррекцией.
Для получения требуемых показателей качества в структуру системы вводится дополнительный элемент, корректирующий ее характеристиками. Такой корректирующий элемент или устройство может быть электрическим, механическим, гидравлическим, пневматическим или иным, называемым обычно регулятором. Наиболее часто в системах управления в качестве регуляторов используются электрические схемы.
Корректирующее устройство — это элемент или схема, дополнительно вводимые в систему управления с целью исправления ее динамических характеристик.
Передаточная функция регулятора (корректирующего устройства) обозначается как Gc(s) = E0(s)/Et(s), а место его расположения в структуре системы определяется исходя из конкретных соображений. Для простой одноконтурной системы управления несколько вариантов коррекции приведены на рис. 10.1. Корректирующее устройство, введенное в
Рис. 10.1. Виды коррекции, (а) Последовательная коррекция, (б) Корректирующее устройство в цепи обратной связи, (а) Коррекция по выходу, или по нагрузке.
(г) Коррекция по входу
10.2. Подходы к синтезу системы 567
прямую цепь передачи сигнала [как показано на рис. 10.1(a)], называется последовательным. Аналогично, другие варианты носят название корректирующих устройств в цепи обратной связи, на выходе системы (или по нагрузке) и на входе системы, как соответственно показано на рис. 10.1(6), (в) и (г). Выбор места размещения корректирующего устройства зависит от конкретных требований к качеству системы, от уровня мощности сигнала в различных точках системы и от имеющихся в наличии конкретных технических устройств. Обычно выход системы У(л) — это выход объекта управления G(s~) и поэтому схема на рис. 10.1(e) вряд ли может считаться реализуемой. Мы не можем рассмотреть здесь все возможные способы коррекции, поэтому заинтересованного читателя отсылаем к главам 11 и 12 после изучения им основных положений данной главы.
10.2. Подходы к синтезу системы
Качество системы управления может быть описано как с помощью ее временных, так и частотных характеристик. Требования к качеству могут быть заданы, например, в виде величины максимального перерегулирования, времени максимума переходной характеристики и времени ее установления. Кроме того, обычно необходимо задать максимально допустимую установившуюся ошибку при различных тестовых входных сигналах и внешних возмущениях. Все эти требования к качеству можно связать с желаемым расположением полюсов и нулей передаточной функции замкнутой системы 7\s). Как было установлено в главе 7, достаточно просто можно построить корневой годограф замкнутой системы при изменении какого-либо ее параметра. Однако, если корневой годограф не позволяет найти желаемое расположение корней, то в систему необходимо ввести корректирующее устройство (рис. 10.1), которое повлияет на вид корневого годографа и даст возможность, варьируя параметр системы, разместить корни в соответствии с требованиями к ее качеству.
Качество замкнутой системы управления можно также оценить по ее частотным характеристикам, главным образом по таким показателям, как максимальное значение амплитудной характеристики Мр , резонансная частота ©г, полоса пропускания и запас устойчивости по фазе. Чтобы удовлетворить требования, предъявляемые к качеству системы, при необходимости в нее вводится корректирующее устройство. Синтез этого устройства можно произвести, пользуясь любой формой представления частотных характеристик — в полярных координатах, в виде диаграммы Боде или в виде диаграммы Никольса. В случае последовательной коррекции предпочтительнее использовать диаграмму Боде, т. к. в этом случае частотные характеристики корректирующего устройства просто складываются с соответствующими характеристиками исходной системы.
Таким образом, синтез системы предполагает изменение вида ее частотных характеристик или корневого годографа так, чтобы удовлетворить требования, предъявляемые к качеству системы. Некоторые методы синтеза были проиллюстрированы нами в предыдущих главах. Так, в примере 7.5 было показано, как применяется метод корневого годографа к синтезу корректирующего устройства, а в главе 9 мы выяснили, как путем изменения коэффициента усиления системы можно обеспечить требуемое значение запаса по фазе и, следовательно, получить удовлетворительные показатели относительной устойчивости.
С практической точки зрения наилучшим и наиболее простым способом улучшения качества системы является, если это возможно, изменение самого объекта управления. Иначе говоря, если проектировщик способен в процессе синтеза изменить передаточную
568
Глава 10. Синтез систем управления с обратной связью
функцию объекта управления G(s), то тем самым можно улучшить и качество системы. Например, чтобы улучшить динамику сервопривода, часто бывает достаточно выбрать двигатель с наилучшими параметрами. При проектировании системы управления самолетом разумнее всего сначала изменить его аэродинамические свойства так, чтобы улучшить полетные характеристики. Поэтому проектировщик систем управления должен ясно понимать, что улучшение качества системы в первую очередь связано с изменением свойств собственно объекта управления. Однако часто объект либо вообще невозможно изменить, либо он уже был изменен настолько, насколько возможно, но качество системы все еще остается неудовлетворительным. Тогда остается единственная возможность -— добиться желаемого качества системы за счет введения корректирующего устройства.
В следующих разделах мы будем предполагать, что передаточная функция G(s), соответствующая объекту управления, не может быть изменена. Сначала мы рассмотрим так называемую коррекцию с опережением по фазе и разработаем методы синтеза соответствующего корректирующего устройства с помощью корневого годографа и с помощью частотных характеристик. Затем мы покажем, как теми же методами можно решить задачу синтеза корректирующих устройств, обладающих интегрирующими свойствами.
10.3. Схемы последовательной коррекции
В этом разделе мы рассмотрим процедуру синтеза последовательного корректирующего устройства или корректирующего устройства в цепи обратной связи, как соответственно показано на рис. 10.1(a) и 10.1(6). В любом случае корректирующее устройство Gc(s) включается последовательно с неизменяемым объектом G(s), и в итоге передаточная функция контура приобретает вид Gc(s)G(s)/7(.s). Корректирующее устройство (или регулятор) выбирается так, чтобы изменить либо вид корневого годографа, либо форму частотных характеристик. В любом случае можно подобрать такое устройство, передаточная функция которого будет иметь вид:
м
GC(S> = ^------• (Ю.1)
П<5+Л/) г=1
Далее задача сводится к надлежащему выбору полюсов и нулей функции Gc(s). Для иллюстрации основных свойств схем коррекции мы ограничимся рассмотрением корректирующих устройств первого порядка. Разработанный на этой основе метод коррекции можно будет распространить и на более сложные схемы, например, соединяя последовательно несколько корректирующих устройств первого порядка.
Сначала параметры корректирующего устройства выбираются так, чтобы система удовлетворяла заданному ограничению на величину установившейся ошибки. После этого параметры настраиваются таким образом, чтобы изменить динамику системы в желаемом направлении, не влияя при этом на установившуюся ошибку.
Рассмотрим корректирующее устройство первого порядка с передаточной функцией
Gc(j) = /C(j+z)
(Ю.2)
10.3. Схемы последовательной коррекции 569
Рис. 10.2 Расположение полюса и нуля для схемы с опережением по фазе 7 (0
-Р -Z
Проблема синтеза заключается в выборе параметров i,p и К, обеспечивающих заданное качество системы. Если |z|<|p|, то соответствующее устройство обладает опережением по фазе, и относительное расположение нуля и полюса на s-плоскости приведено на рис. 10.2. Если полюсом можно пренебречь, т. е. |р|»|z|, а нуль находится в начале координат, то
Gc(s)«|-|s, (10.3)
\Р)
и мы имеем дело с дифференциатором. Корректирующее устройство с передаточной функцией (10.3) имеет следующую частотную характеристику:
GcU’co)=/— lco=[— -“V9°° . (10.4)
\.Р) \P J
откуда следует, что создаваемый им фазовый сдвиг равен +90°. Аналогично, частотная характеристика, соответствующая передаточной функции (10.2), имеет вид:
KQco+z) (Kz/Jp)[X<»/z) + l] ^(l+jcoccr)
Gc(7ю) = —------= r.z , x л— =----------~------ (1 °-5)
ju+p |7(ЮМ +1] 1+усот
где т = Ир, р = az и К] = К/a. Частотные характеристики такой схемы с опережением по фазе приведены на рис. 10.3. Фазовая характеристика определяется уравнением
<р(со) = arctg асот - arctg сот . (10.6)
Поскольку влияние нуля на частотные характеристики проявляется ранее, то они имеют вид, изображенный на рис. 10.3. Как видно, схема обладает опережением по фазе, а наклон среднечастотной асимптоты амплитудной характеристики равен +20 дБ/дек.
со (логарифмический масштаб)
Рис. 10.3. Диаграмма Боде для схемы с опережением по фазе
570
Глава 10. Синтез систем управления с обратной связью
Рис. 10.4
Четырехполюсник, обладающий опережением по фазе
Л,
Т----------° +
I'2(.V)
I__________
Корректирующее устройство с опережением по фазе можно реализовать с помощью схемы, изображенной на рис. 10.4. Эта схема имеет передаточную функцию
Я^я+1
G (s) = —— = И(5)
r2
Rx(VCs)
pi +(i/o)]
*2
+ /?
Я]Я2 (Я^+яД
Cs + Г
(10.7)
Полагая
R
R\Ri „ Я| +Я9 т=---——С и ос =—!---------
(Я1+Я2) мы получим передаточную функцию устройства с опережением по фазе
_ . 1+CCTS Gc (.s) =-------,
qc(1+ts)
(10.8)
которая совпадает с выражением (10.5) с точностью до дополнительного коэффициента^.
Фазовый сдвиг имеет максимальное значение на частоте сот, где со„, — среднее геометрическое значений р = 1/т и z = 1/ост; если частоту откладывать в логарифмическом масштабе, то фазовая характеристика имеет максимальное значение как раз посредине между частотами, соответствующими нулю и полюсу передаточной функции. Таким образом,
Чтобы получить выражение для максимума фазового сдвига, запишем аргумент функции (10.5) в виде
ср = arctg
оссот-сот 1+(сот)2 ос
(Ю.9)
Подставив сюда значение частоты сот = 1/т-Уос, получим:
(a/Va)-(vV^) a_!
tg Ф™ =-----т-?------ =~f=
1+1 2-Voc
(10.10)
Далее, используя соотношение между тригонометрическими функциями, можно записать:
сс- 1 sin<P>» =-----;
a + 1
(10.11)
10,3. Схемы последовательной коррекции
571
Рис. 10.5
Зависимость максимального фазового сдвига <рт от параметра а для схемы с опережением по фазе
Выражение (10.11) очень полезно для вычисления требуемого соотношения а между полюсом и нулем корректирующего устройства, обеспечивающего заданный максимальный фазовый сдвиг. Г рафик зависимости <рт от а приведен на рис. 10.5. Из графика, в частности, видно, что фазовый сдвиг не может быть больше 70°. Кроме того, поскольку а = (Ryi-R^/R^ то существуют практические ограничения на максимально достижимое значение а. Поэтому, если требуется иметь максимальный фазовый сдвиг больше, чем 70°, то в этом случае придется использовать две схемы, соединенные последовательно. Тогда эквивалентная передаточная функция корректирующего устройства будет равна GCi(s)GC2(i) при условии, что эффект нагрузки со стороны GCi (s) на GCi (5) незначителен.
Часто возникает необходимость использования корректирующего устройства, обладающего отставанием по фазе. Схема с отставанием по фазе изображена на рис. 10.6. Ее передаточная функция имеет вид:
ч W Л2+(1/С5)
Сгг (S) =---=----------7---Г- =------------
V,(s) Ri+R2+(1/Cs) (Ri+R2)Cs + \
Обозначив т = R2C и а = (7?]+А2)/А2, запишем (10.12) в виде:
T?2Cs+l
(10.12)
о1М=-!±л.1.ЮЦ, l+otTs a (s+р)
(10.13)
гдег = 1/ти/?= 1/ат. В данном случае, поскольку а > 1, полюс расположен ближе к началу координат, чем нуль, как показано на рис. 10.7. Схемы такого типа часто называют интегрирующими, поскольку их частотные характеристики в ограниченном интервале частот близки к соответствующим характеристикам интегратора. Диаграмма Боде для устройства с отставанием по фазе строится на основании выражения
1+уют Gc(7®) = t-2---
1+усоост
(10.14)
Рис. 10.7. Расположение полюса и нуля для схемы с отставанием по фазе
Рис. 10.6. Схема с отставанием по фазе
572
Глава 10. Синтез систем управления с обратной связью
Рис. 10.8. Диаграмма Боде для схемы с отставанием по фазе
и приведена на рис. 10.8. Сравнивая рис. 10.8ирис. 10.3,можно заметить,что амплитудные характеристики симметричны относительно уровня 0 дБ, а фазовые — относительно значения 0°. Точно так же максимальный фазовый сдвиг устройства с отставанием по фазе имеет место на частоте com =-Jzp.
В следующих разделах мы используем эти корректирующие устройства для получения желаемого вида частотных характеристик или заданного расположения корней на 5-плоскости. Устройство с опережением по фазе обычно применяется для увеличения запаса устойчивости по фазе. Устройство с отставанием по фазе вносит дополнительный отрицательный фазовый сдвиг, что обычно является дестабилизирующим фактором, поэтому его применение скорее продиктовано необходимостью влияния на амплитудную характеристику системы и уменьшения установившейся ошибки. Соответствующие методы синтеза рассматриваются в последующих шести разделах.
10.4. Коррекция с опережением по фазе: синтез с помощью диаграммы Боде
При синтезе корректирующих устройств с опережением по фазе диаграмма Боде обладает существенным преимуществом по сравнению с иными способами представления частотных характеристик. Суть в том, что при этом частотные характеристики последовательного корректирующего устройства просто складываются с частотными характеристиками нескорректированной системы. Это значит, что если в системе на рис. 10.1(a) контур имеет передаточную функцию G^a^Gda'jHfja), то сначала надо построить диаграмму Боде для
10.4. Коррекция с опережением по фазе: синтез с помощью диаграммы Боде 573
функции Анализ этой диаграммы должен дать ответ на вопрос, в каком интер-
вале частот необходимо скорректировать форму частотных характеристик. Иначе говоря, таким образом определяются значения полюсар и нуля z передаточной функции корректирующего устройства. Диаграмма Боде для нескорректированной системы изображается с учетом коэффициента усиления, обеспечивающего заданную точность системы в установившемся режиме. Затем необходимо определить запас по фазе и ожидаемую величину Мр и оценить, удовлетворяют ли эти показатели требованиям к качеству системы. Если запас по фазе является недостаточным, то к фазовой характеристике нескорректированной системы необходимо в соответствующем интервале частот добавить положительные приращения за счет вводимого корректирующего устройства. Чтобы обеспечить максимальный дополнительный фазовый сдвиг, желательно, чтобы частота ат совпадала с частотой, на которой амплитудная характеристика скорректированной системы пересекает уровень О дБ. (Вспомните определение запаса по фазе.) Величина дополнительного фазового сдвига позволит определить необходимое значение а по выражению (10.11) или по рис. 10.5. Нуль z = 1/ссг определяется из условия, что максимальный фазовый сдвиг, создаваемый корректирующим устройством, имеет место на частоте tom = -Jzp, т. е. посредине между частотами, соответствующими полюсу и нулю. Поскольку наибольшее усиление корректирующего устройства равно 201ga, то на частоте сот следует ожидать усиления в lOlga. Таким образом, синтез корректирующего устройства с опережением по фазе сводится к следующим этапам:
1. Оценить запас по фазе в нескорректированной системе при условии удовлетворения требований к коэффициентам ошибки.
2. Определить необходимый дополнительный фазовый сдвиг <р,„.
3. Вычислить параметр а по выражению (10.11).
4. Вычислить lOlga и найти частоту, при которой амплитудная характеристика нескорректированной системы имеет значение -lOlga дБ. Поскольку на частоте <о,„ корректирующее устройство обладает усилением lOlga, то эта частота одновременно будет соответствовать пересечению амплитудной характеристикой скорректированной системы уровня 0 дБ.
5. Вычислить значения полюса р = ат -Уа и нуля z = р/а.
6. Построить частотные характеристики скорректированной системы, проверить полученное значение запаса по фазе и, если необходимо, повторить предыдущие этапы. И, наконец, в завершение синтеза скомпенсировать уменьшение коэффициента усиления за счет члена 1/а.
Пример 10.1. Коррекция с опережением по фазе системы типа 2
Рассмотрим простую одноконтурную систему, структура которой имеет вид рис. 10.1 (а), где G(s) = ^ (10.15)
s
и H(s) = 1. Нескорректированная система относится к типу 2 и. казалось бы. обладает приемлемой точностью при отработке как ступенчатых, так и линейных входных сигналов. Однако в замкнутом состоянии система является недемпфированной, т. к.
T’(s) = ^2 = —^1—. (10.16)
J?(s) s2 + К.
574
Глава 10. Синтез систем управления с обратной связью
Следовательно, в систему надо ввести корректирующее устройство. Пусть к системе предъявлены следующие требования: время установления Ts <4 с, коэффициент затухания С, > 0.45. Используя выражение для времени установления (по критерию 2 %)
/;. = — = 4,
получим
1 1
со,, = — =--------= 2,22 .
" (, 0,45
Возможно, наиболее простой способ проверить значение сои — это использовать связь между собственной частотой и полосой пропускания замкнутой системы сов. Согласно рис. 8.26 для (, = 0,45 мы имеем сов = 1.33сои. Следовательно, полоса пропускания замкнутой системы должна быть равна сов = 1,33 2.22 = 3,00. В нескорректированной системе <ов= 1,33 со,,, где со,, = -/К. Следовательно, достаточно иметь коэффициент усиления К = coj; ~ 5. но чтобы с гарантией получить заданное время установления, примем К = 10. При этом значении К диаграмма Боде для нескорректированной системы с передаточной функцией
(»
изображена на рис. 10.9.
Используя соотношение (9.58), определяем приблизительное значение требуемого запаса по
фазе:
с 0.45
0,01 0,01 '
(10.17)
В нескорректированной системе запас по фазе равен 0°, т. к. фазовая характеристика, соответствующая двум интеграторам, на всех частотах имеет значение -180°. Следовательно, на частоте, при которой амплитудная характеристика скорректированной системы будет пересекать уровень 0 дБ, мы должны добавить к фазовой характеристике 45°. Найдем значение параметра а:
СС — 1
-----= sin(p„, = sin45° , (10.18)
а + 1
откуда а = 5,8. Выберем с запасом значение а = 6. Тогда 101ga = 7,78 дБ, т. е. корректирующее устройство на частоте <о,„ добавит к амплитудной характеристике 7,78 дБ. Поэтому надо потребовать, чтобы амплитудная характеристика скорректированной системы пересекала уровень 0 дБ именно на частоте <о,и. По амплитудной характеристике нескорректированной систе
Рис. 10.9. Диаграмма Боде к примеру 10.1
10.4. Коррекция с опережением по фазе: синтез с помощью диаграммы Боде 575
мы находим, что она имеет значение -7,78 дБ при со = 4,95. Таким образом, максимальный дополнительный фазовый сдвиг мы должны иметь на частоте со = сога = 4,95, как показано на рис. 10.9. На основании этапа 5 процедуры синтеза находим значения полюса р = co„,Vcx = 12,0 и нуля z = р/а = 2.0.
Полосу пропускания скорректированной системы можно определить с помощью диаграммы Никольса. На рис. 9.26 линии -3 дБ для замкнутой системы принадлежит точка, которой соответствуют модуль GH(jai), равный -6 дБ, и фазовый сдвиг приблизительно -140°. Поэтому достаточно посмотреть на частотные характеристики разомкнутой системы й определить частоту, при которой 201g|G/7(/co)| = -6 дБ. Так, для нескорректированной системы мы получим сов = 8,4. В данном случае коррекция с опережением по фазе привела практически к удвоению полосы пропускания, и требование ыв >3,00 выполнено. Следовательно, коррекция системы выполнена, и ее качество отвечает заданным показателям. В тоге для разомкнутого контура мы имеем
GJjuMjuyHlja) = 10[(7cu/2-0)+1] . (10.19)
(/со)2[(/со/12.0) + 1]
В соответствии с выражением (10.8) передаточная функция корректирующего устройства при-
нимает вид:
„ , . 1+ аи 1 1+ 5/2,0
Gas) =---------=------------
a(l+Ts) 6 1+5/12,0
(10.20)
Поскольку коэффициент передачи пассивной АС-схемы равен 1/6, то в контур необходимо ввести усилитель с коэффициентом усиления, равным 6, чтобы в разомкнутой системе коэффициент усиления остался равен 10, как того требует выражение (10.19).
Результирующая передаточная функция скорректированной системы [напомним, что H(s) = 1] имеет вид:
ГС fvl = 10(1+5/2) = 60<*+2) ?(l+s/12) 52(s+12)
Передаточная функция замкнутой системы
60(5+2) 60(5+2)
53 + 1252 + 605 + 120 (52 + 65 + 20)(5 + 6)
откуда ясно, что на вид переходной характеристики будут оказывать влияние нуль 5 =-2 и третий полюс 5 = -6. Построив переходную характеристику, можно обнаружить, что перерегулирование составляет 34%, а время установления равно 1,4 с.
Пример 10.2. Коррекция с опережением по фазе системы второго порядка
Рассмотрим систему, имеющую в разомкнутом состоянии передаточную функцию
СЯ(5) = —(10.21) 5(5 + 2)
Требуется, чтобы при линейном входном сигнале установившаяся ошибка была равна 5% от величины скорости этого сигнала. Следовательно, необходимо иметь
К = — = —^— = 20. (10.22)
ем. 0,05/1
Кроме того, желательно, чтобы запас по фазе был равен по крайней мере 45°. Первый этап состоит в построении диаграммы Боде для нескорректированной системы с передаточной функ
цией
GH(j<a) =
К,. /со(0,5 /со + 1)
20
/со(О,5 /со + 1)
(10.23)
576
Глава 10. Синтез систем управления с обратной связью
Результат построений приведен на рис. 10.10(a). Частота, при которой амплитудная характеристика пересекает уровень 0 дБ, равна 6,2 рад/с. Фазовая характеристика определяется уравнением
<р (со) = argG//(/co) = -90° - arctg О,5со, (10.24)
что при со = сос = 6,2 рад/с дает значение
Ф(со)=-162°. (10.25)
Следовательно, запас по фазе равен 18°. Для определения запаса по фазе проще воспользоваться уравнением (10.24) вместо того, чтобы строить всю фазовую характеристику, изображенную на рис. 10.10(a). Ясно, что для увеличения запаса по фазе до нужной величины 45° необходимо ввести в систему корректирующее устройство с опережением по фазе. После введения коррекции частота, при которой амплитудная характеристика пересечет уровень 0 дБ, будет больше, чем в исходной системе. Соответственно, будет больше и отставание по фазе в нескорректированной системе. Учитывая это обстоятельство, следует потребовать, чтобы максимальный фазовый сдвиг, создаваемый корректирующим устройством, был не 45° - 18° = 27°, а, скажем, на 10% больше, т. е. 27° + 3° = 30°. Тогда можно вычислить параметр а:
—- = sin 30° = 0,5, (10.26)
а +1
откуда а = 3.
Корректирующее устройство обладает максимальным фазовым сдвигом на частоте <о,и, поэтому она должна совпадать с частотой, при которой амплитудная характеристика скорректированной системы будет пересекать уровень 0 дБ. Амплитудная характеристика корректирующего устройства на частоте <ога имеет значение 1 Olga = 101g3 = 4,8 дБ. Поэтому частоту wc. для системы с коррекцией определить достаточно просто: это будет частота, где 201g|G/7(/co)| = -4,8 дБ, т. е. a>m = toc = 8,4. Построив амплитудную характеристику скорректированной системы’ так, чтобы она пересекала уровень 0 дБ при <и = о>с - 8,4. находим, что z = 4,8 и р = az = 14,4. Тогда корректирующее устройство будет иметь передаточную функцию
1 (l+s/4.8)
Gc(s) = - ’ ?-----4 (Ю.27)
3 (l+s/14,4)
Коэффициент усиления полученной системы надо увеличить в 3 раза, чтобы скомпенсировать множитель 1/а = 1/3. Тогда скорректированная система в разомкнутом состоянии будет иметь передаточную функцию
Gc(s)G(s)H(s) =----.^/4’8) + Ц-----. (Ю.28)
s(0,5s+ l)[(s/14,4)+ 1]
Чтобы проверить, чему теперь равен запас по фазе, вычислим аргумент функции Gc(/<u)G(/a>)//(/cp) при частоте со,„ = cot. = 8,4:
ф(шс) = -90°- arctg О,5<ос - arctg-^ + arctg= -90°- 76,5°- 30.0°+ 60,2°= -136,3°. (10.29) 14,4 4,8
Таким образом, запас по фазе в скорректированной системе равен 43,7°. Если требуется получить точно 45°, то необходимо повторить этапы синтеза при большем значении а — скажем, при а = 3,5. В этом случае отставание по фазе в нескорректированной системе увеличится на 7° между <о = 6,2 и со = 8,4, поэтому допуск в 3° при вычислении а явно недостаточен. Переходная характеристика скорректированной системы имеет перерегулирование 28%. а время установления равно 0,75 с.
Диаграмма Никольса для скорректированной и нескорректированной систем, приведенная на рис. 10.10(6), отчетливо демонстрирует изменение формы частотных характеристик. Диаграм-
10.4. Коррекция с опережением по фазе: синтез с помощью диаграммы Боде 577
Рис. 10.10
(а) Диаграмма Боде к примеру 10.2.
(6) Диаграмма Никольса к примеру 10.2
о)
(с коррекцией)
Фазовый сдвиг разомкнутой системы, град.
578
Глава 10. Синтез систем управления с обратной связью
ма показывает как увеличение запаса по фазе в скорректированной системе, так и уменьшение Мрмаксимума амплитудной характеристики замкнутой системы. В данном случае Мр с +12 дБ в нескорректированной системе уменьшилось до приблизительно +3,2 дБ в системе с коррекцией. Можно также видеть, что полоса пропускания замкнутой системы увеличилась до 12 рад/с в скорректированной системе по сравнению с 9,5 рад/с в системе без коррекции.
Примеры 10.1 и 10.2 показывают, что задача синтеза решается успешно, если амплитудная характеристика 201g|GGc(/to)| пересекает уровень 0 дБ с наклоном -20 дБ/дек.
10.5. Коррекция с опережением по фазе: синтез с помощью корневого годографа
Синтез корректирующего устройства с опережением по фазе можно выполнить с помощью корневого годографа. Такое устройство имеет передаточную функцию
О»-30’
[5+(1/т)] S + P
где а ит для АС-схемы определяются из выражения (10.7). Нуль и полюс выбираются так, чтобы корневой годограф скорректированной системы имел приемлемую форму. Желаемое положение доминирующих корней определяется исходя из требований к качеству системы. Данный метод синтеза включает следующие этапы:
1. На основании требований к качеству системы определить желаемое расположение доминирующих корней на 5-плоскости.
2. Построить корневой годограф нескорректированной системы и определить с его помощью, можно ли добиться желаемого расположения доминирующих корней.
3. Если необходима коррекция, то поместить нуль корректирующего устройства непосредственно под одним из желаемых корней (или слева от двух первых вещественных полюсов разомкнутой системы).
4. Определить положение полюса корректирующего устройства так, чтобы сумма аргументов векторов, проведенных из нуля и полюса к желаемому корню, составила 180° и, следовательно, этот корень действительно принадлежал корневому годографу скорректированной системы.
5. Вычислить коэффициент усиления системы, соответствующий желаемому положению корня, и определить значение коэффициента ошибки.
6. Если коэффициент ошибки не удовлетворяет требованиям к точности системы, повторить процедуру синтеза.
Итак, сначала мы должны указать желаемое расположение доминирующих корней, удовлетворяющих параметрам £ и со,,, как показано на рис. 10.11(a). Затем необходимо построить корневой годограф нескорректированной системы [см. рис. 10.11(6)]. Далее слева от первых двух вещественных полюсов помещается нуль, за счет которого будет создано опережение по фазе. При этом следует соблюдать осторожность, потому что этот нуль не должен повлиять на желаемое положение доминирующих корней; нуль не должен находиться ближе к началу координат, чем второй полюс на действительной оси, иначе реакция системы будет определяться в основном вещественным корнем, расположенным вблизи начала координат. Так, на рис. 10.11(e) показано, что желаемый корень находится прямо над вторым полюсом, и мы поместим нуль z чуть левее второго вещественного полюса.
10.5, Коррекция с опережением по фазе
579
о) Положение желаемого корня
б) Корневой годограф нескорректированной системы
Рис 10.11, Иллюстрация на s-плоскости коррекции с опережением по фазе
Если вещественный корень будет расположен близко к вещественному нулю, то в разложении на простые дроби изображения по Лапласу выходной переменной коэффициент при члене, соответствующем данному корню, будет достаточно малым и влияние этого корня на реакцию системы окажется незначительным. Однако проектировщик должен постоянно помнить, что реакция скорректированной системы определяется не только корнями ее характеристического уравнения, но и нулями передаточной функции. Поэтому всегда целесообразно во избежание ошибок при синтезе проверять показатели качества скорректированной системы путем компьютерного моделирования.
Поскольку желаемый корень должен принадлежать корневому годографу скорректированной системы, то надо потребовать, чтобы алгебраическая сумма аргументов векторов, проведенных к этому корню, была равна 180°. Поэтому остается вычислить угол 6р, соответствующий аргументу вектора, проведенного из полюса корректирующего устройства к желаемому корню, затем провести прямую линию, проходящую через желаемый корень под углом 6р, и тем самым определить положение полюса корректирующего устройства, как показано на рис. 10.11 (г).
Преимущество метода корневого годографа заключается в том, что проектировщик всегда может указать желаемое расположение доминирующих корней, определяющих характер реакции системы. Недостаток данного метода в том, что он не позволяет непосредственно определить коэффициенты ошибки (например, Xv), как это возможно при исполь
580
Глава 10. Синтез систем управления с обратной связью
зовании диаграммы Боде. Здесь после завершения синтеза надо сначала определить коэффициент усиления системы, при котором корни занимают желаемое положение (а он будет зависеть от р и z), и только после этого вычислить соответствующий коэффициент ошибки скорректированной системы. Если этот коэффициент окажется неприемлемым, то придется повторить процедуру синтеза, изменив положение желаемых корней, а также полюса и нуля корректирующего устройства. Далее мы вернемся к примерам 10.1 и 10.2 и покажем, как производится синтез корректирующего устройства с помощью метода корневого годографа.
Пример 10.3. Синтез корректирующего устройства с опережением по фазе методом корневого годографа
Рассмотрим систему из примера 10.1, которая при отсутствии коррекции имеет в разомкнутом состоянии передаточную функцию
GH(s) = ^± (10.31)
Характеристическое уравнение нескорректированной системы имеет вид:
l + G//(5)=l+^ = 0. (10.32)
s
и соответствующий корневой годограф совпадает с мнимой осью. Следовательно, в систему необходимо ввести корректирующее устройство с передаточной функцией
с 4- 7
Gc(s) =---• (Ю.ЗЗ)
s+ р
где |z| < |р|. Требования к качеству системы заключаются в следующем: время установления (по критерию 2%) Ts < 4 с. относительное перерегулирование при ступенчатом входном сигнале не более 35%. Следовательно, коэффициент затухания должен удовлетворять неравенству £ > 0,32. Для времени установления мы имеем соотношение
и, следовательно, = 1. Поэтому выберем желаемое расположение доминирующих корней
г„^ = -1± /2, (10.34)
как показано на рис. 10.12 (это соответствует £ = 0,45).
Нуль корректирующего устройства мы разместим как раз под желаемым корнем, т. е. s = -z = -1, как показано на рис. 10.12. Для желаемого корня сумма аргументов векторов составляет
<р =-2 116°+90° = -142°.
Следовательно, чтобы удовлетворялся угловой критерий для желаемого корня, аргумент вектора, соответствующего неизвестному полюсу, 0р, должен быть равен
0Р = 180° - 142° = 38°. (10.35)
Прямая линия, проходящая через желаемый корень под углом вр = 38°, изображена на рис. 10.12. Она пересекает действительную ось в точке s = -р = -3,6. Следовательно, корректирующее устройство имеет передаточную функцию
S + 1
Gc(s) =—77- (1036)
s+ 3,6
а передаточная функция скорректированной системы имеет вид:
G/f(s)Gc(5) = -^M-. (10.37)
sz(s+ 3,6)
10.5. Коррекция с опережением по фазе
581
Рис. 10.12
К синтезу корректирующего устройства с опережением по фазе (пример 10.3)
Коэффициент определяется путем измерения длин векторов, проведенных из полюсов и ну-
лей в точку расположения желаемого корня, т. е.
(2,23 )2 (3,25)
Л) = -------------~ 0,1 .
1 2
(10.38)
Итак, мы можем вычислить все коэффициенты ошибки для данной системы. В нашем случае для системы с двумя интеграторами в прямой цепи мы имеем нулевую установившуюся ошибку в случае ступенчатого и линейного входных сигналов. Коэффициент ошибки по ускорению равен
К = — = 2.25. (10.39)
3,6
В установившемся режиме качество системы является вполне приемлемым, поэтому можно считать, что коррекция выполнена надлежащим образом. Если сравнить корректирующее устройство, полученное с помощью метода корневого годографа, с аналогичным устройством, полученным с использованием диаграммы Боде, то мы заметим, что их амплитудные и фазовые характеристики несколько отличаются. Однако скорректированные системы обладают одинаковыми показателями качества, поэтому не смысла останавливаться на некоторых различиях. Фактически эти различия объясняются тем, что на этапе 3 синтеза методом корневого годографа нуль корректирующего устройства размещался точно под желаемым корнем характеристического уравнения скорректированной системы. Если бы мы поместили нуль корректирующего устройства в точке s = -2,0, то оказалось бы, что полюс, найденный с помощью метода корневого годографа, приблизительно равен полюсу, полученному на основании диаграммы Боде.
Требования к переходной характеристике данной системы изначально были заданы в виде величины перерегулирования и времени установления. На основе аппроксимации системы моделью второго порядка они были преобразованы в эквивалентные значения £ и со,, и, следовате
582
Глава 10. Синтез систем управления с обратной связью
льно, в желаемое расположение корней на 5-плоскости. Однако исходные требования будут удовлетворяться, только если эти корни являются доминирующими. За счет введения корректирующего устройства порядок системы повышается до третьего и при этом ее передаточная функция приобретает нуль. Обоснованность аппроксимации такой системы моделью второго порядка без нуля зависит от того, действительно ли два корня будут являться доминирующими. Поэтому проектировщику рекомендуется путем компьютерного моделирования получить действительную переходную характеристику и проверить, удовлетворяются ли требования к качеству системы. В данном случае моделирование системы показало, что перерегулирование составляет 46%, а время установления (по критерию 2%) равно 3,8 с. Эти значения достаточно хорошо согласуются с заданными показателями 35% и 4 с, что подтверждает обоснованность гипотезы о наличии доминирующих корней. Отличие в величине перерегулирования объясняется наличием нуля, которым нельзя пренебрегать. Таким образом, мы можем констатировать, что синтез системы с использованием доминирующих корней является достаточно хорошим методом, но пользоваться им следует с осторожностью и осмысленно. В разделе 10.10 будет сделана вторая попытка коррекции данной системы с использованием предшествующего фильтра, позволяющего исключить влияние нуля передаточной функции замкнутой системы.
Пример 10.4. Синтез корректирующего устройства с опережением по фазе для системы типа 1
Рассмотрим систему из примера 10.2 и синтезируем корректирующее устройство с помощью корневого годографа. Разомкнутая система имеет передаточную функцию
GH(s) = —. (10.40)
s(s + 2)
Требуется, чтобы коэффициент затухания, соответствующий доминирующим корням, был равен Q = 0,45 и коэффициент ошибки по скорости равнялся 20. Требование к коэффициенту ошибки по скорости сводится к необходимости иметь К = 40. При данном значении К характеристический полином нескорректированной системы имеет вид:
s2 + 2s + 40 = (s + 1 + у 6,25)(s + 1 - j'6.25). (10.41)
Коэффициент затухания, соответствующий корням этого полинома, приблизительно равен 0,16 и, следовательно, система нуждается в коррекции. Чтобы получить малое время установления, выберем действительную часть желаемых корней £со„ — 4, таким образом получим Тх = 1 с. При этом собственная частота со„ = 9, и следует ожидать, что коэффициент ошибки по скорости будет достаточно большим. Желаемое положение корней (одного из них) при ;со„ = 4, Q - 0,45 и со„ = 9 приведено на рис. 10.13(a).
Нуль корректирующего устройства поместим в точке s = -z = -4, т. е. непосредственно под желаемым корнем. Тогда сумма аргументов векторов, проведенных к желаемому корню из двух полюсов и нуля, будет равна
Ф =-116°-104°+ 90° = -130° . (10.42)
Следовательно, аргумент вектора, проведенного к желаемому корню из неизвестного полюса корректирующего устройства, будет определяться уравнением
-180° =-130°- ер,
откуда 0р = 50°. Проведя под таким углом прямую, проходящую через желаемый корень, до пересечения ее с действительной осью, находим, что s = -p=-10,6, как показано на рис. 10.13(a). Тогда можно определить коэффициент К скорректированной системы: /с=9Л2540Л=96;5.
(10.43)
8
Скорректированная система будет иметь передаточную функцию
Gc(s)GH(s) = .
s(s+ 2)(s+ 10.6)
(10.44)
10.5. Коррекция с опережением по фазе
583
Рис. 10.13
(а) Иллюстрация на s-плоскости коррекции с опережением по фазе
(к примеру 10.4).
(б) Переходная характеристика скорректированной системы из примера 10.4
а)
б)
Вычислим коэффициент ошибки скорректированной системы:
Kv = lims[G(s)/7(s)Gt.(s)]= % 5-| = 18,2
«->о 2-10,6
(10.45)
Это значение меньше заданного, поэтому процедуру синтеза надо повторить, выбрав другое значение желаемого корня. Если взять со„ = 10, то коэффициент К увеличится, а также изменится положение нуля и полюса корректирующего устройства. Читателю предоставляется возможность в порядке упражнения убедиться, что при <о„ = 10 коэффициент ошибки по скорости А„ = 22,7, а нуль и полюс корректирующего устройства соответственно равны ’ = -4.5 и р = —11,6.
Полученное ранее корректирующее устройство имеет передаточную функцию „ , , 5-4-4 5 4- 1/ат
G.(s) =------=--------
S 4-10.6 S4-1/T
(10.46)
Реализовать такое устройство можно в виде АС-схемы, изображенной на рис. 10.4. для которой
RiCs+ 1
Gc(s) = -A
Я, 4- Я2 [Я|Я2/(Я14- Я2)]С5 4-1
(10.47)
В нашем примере
1 л Я, 4-Я, 10.6
---= 4 и а = —------ =--
RP Я2
4
584
Глава 10. Синтез систем управления с обратной связью
Выбрав значение С = 1 мкФ, мы получим R, = 250 кОм и R2 = 152 кОм. Переходная характеристика скорректированной системы имеет перерегулирование, равное 32%, и время установления 0,8 с, как показано на рис. 10.13(6). Вид переходной характеристики можно проверить с помощью компьютера.
Корректирующие устройства с опережением по фазе применяются для улучшения показателей качества систем управления, в частности для увеличения запаса устойчивости по фазе. Такие устройства позволяют изменить форму корневого годографа на л-плоскости и обеспечить желаемое расположение корней характеристического уравнения. Если предъявляется требование к коэффициенту ошибки, то синтез предпочтительнее производить с помощью диаграммы Боде, поскольку размещение нуля и полюса корректирующего устройства на 5-плоскости не позволяет непосредственно указать, чему равен коэффициент усиления системы, и требуются дополнительные вычисления. Поэтому, если при синтезе задается требование к коэффициенту ошибки, решение задачи с помощью корневого годографа может представлять собой итерационный процесс. С другой стороны, метод корневого годографа хорош тогда, когда требования к качеству заданы в виде величины перерегулирования и времени установления. В этом случае можно найти эквивалентные значения параметров и со„ и затем определить желаемое расположение доминирующих корней на л-плоскости. Применение корректирующих устройств с опережением по фазе всегда расширяет полосу пропускания замкнутой системы, что может оказаться нежелательным для систем, подверженных влиянию шумов. Кроме того, корректирующие устройства с опережением по фазе не позволяют обеспечить высокую точность системы в установившемся режиме, которая определяется соответствующими коэффициентами ошибки. Для получения больших значений коэффициентов ошибки, обычно Кр и Kv, как правило применяются корректирующие устройства интегрирующего типа. Такие устройства являются предметом рассмотрения следующего раздела.
10.6. Синтез систем с применением интегрирующих устройств
Для большей части систем управления основной целью является достижение высокой точности в установившемся режиме. Следующей по значимости целью является поддержание в разумных рамках качества переходного режима. Как мы выяснили в главах 4 и 5, точность системы с обратной связью можно повысить за счет увеличения коэффициента усиления в прямой цепи. Однако при этом переходная характеристика может оказаться совершенно неприемлемой или даже система может стать неустойчивой. Поэтому для достижения необходимой точности в прямую цепь часто бывает необходимо ввести корректирующее устройство.
Рассмотрим одноконтурную систему управления, изображенную на рис. 10.14. Необходимо выбрать корректирующее устройство так, чтобы получить большое значение коэффициента ошибки. Установившаяся ошибка в данной системе определяется выражением
Т?(5)
lim e(t)= lim 5
z-х» >•—>о l+Gc(s)G(s')H(s')
(10.48)
Рис. 10.14
Одноконтурная система с обратной связью
10.6, Синтез систем с применением интегрирующих устройств
585
В разделе 5.7 мы установили, что установившаяся ошибка зависит от числа полюсов функции Gc(s)G(s)/f(s), расположенных в начале координат. Полюс в начале координат соответствует операции интегрирования, поэтому можно сказать, что точность системы в установившемся режиме зависит от количества интеграторов, входящих в передаточную функцию Gt(s)G(s)/7(s). Если точность системы недостаточна, то необходимо ввести корректирующее устройство Gc(s) интегрирующего типа, чтобы скомпенсировать дефицит интеграторов в исходной передаточной функции G(s)H(s).
Одним из типов широко используемых регуляторов является пропорционально-интегральный (ПИ) регулятор, имеющий передаточную функцию
Gc(s) = K +^~ s
(10.49)
В качестве примера рассмотрим систему регулирования температуры, в которой Н(х) - 1, а тепловой объект имеет передаточную функцию
(tj.s+1)(t2s+1)
Если на вход нескорректированной системы подается ступенчатый сигнал, т. е. R(s) = A/s, то установившаяся ошибка будет равна
1- , ч Л/s /1
1шт е( t) = lim s ------ =-------
»->«> [l + G(s)H(s)J 1+А)
(10.50)
Чтобы получить малую установившуюся ошибку (например, менее чем 0,05/1), коэффициент должен быть достаточно большим. Однако при этом вид переходной характеристики системы, скорее всего, окажется неприемлемым. Поэтому необходимо ввести в систему корректирующее устройство Gc(s). как показано на рис. 10.14. Чтобы вообще исключить установившуюся ошибку, можно применить корректирующее устройство с передаточной функцией
Gc(s) = K, + — =—-------(10.51)
5 S
Такую коррекцию можно реализовать с помощью ПИ-регулятора, соединив параллельно интегратор и усилитель и просуммировав их выходные сигналы. Можно убедиться, что при ступенчатом входном сигнале установившаяся ошибка всегда будет равна нулю:
lim е( г) = lim s-----------
5—>0 1+GC (s)GH(s)
= lim---------------
A
Kt .СЧ5 + 1)(t25+ 1)
= 0.
(10.52)
Требования, предъявляемые к виду переходной характеристики системы, можно удовлетворить путем настройки коэффициентов К2 и К3. По-видимому, лучше всего это сделать с помощью корневого годографа, построив его в функции от варьируемого параметра K2Kt после того, как на s-плоскости будет размещен нуль регулятора s = -К21К2 (соответствующая процедура была рассмотрена в предыдущем разделе).
Введение дополнительного интегратора можно использовать также для уменьшения установившейся ошибки при линейном входном сигнале r(t) = t,t>0. Например, если нескорректированная система GH(s) содержит один интегратор, то за счет дополнительного интегратора, входящего в передаточную функцию регулятора Gc(s), установившуюся
586
Глава 10. Синтез систем управления с обратной связью
ошибку при линейном входном сигнале можно свести к нулю. Чтобы проиллюстрировать синтез корректирующего устройства интегрирующего типа, рассмотрим более подробно систему регулирования температуры.
Пример 10.5. Система регулирования температуры
Система регулирования температуры при отсутствии коррекции имеет в разомкнутом состоянии передаточную функцию
GH(s) =-------------,
(2j+l)(0,5s+1)
(10.53)
причем коэффициент/С। можно настраивать. Чтобы при ступенчатом входном сигнале установившаяся ошибка равнялась нулю, мы введем в систему ПИ-регулятор
Gc.(s) =К2 + ^- = K^S- Хз//Ц (10.54)
5 V s )
Кроме того, требуется, чтобы переходная характеристика системы имела перерегулирование не более 10%. Поэтому доминирующие комплексные корни должны находиться на (или ниже) линии £ = 0,6, как показано на рис. 10.15. Нуль регулятора мы выберем так, чтобы действительная часть комплексных корней была равна £а>„ = 0,75 и, следовательно, время установления (по критерию 2%) равнялось Ts = 4/£<о„ = 16/3 с. Как и в предыдущем разделе, положение нуля z = -К2/К2 мы определим так, чтобы сумма аргументов всех векторов, проведенных к желаемому корню из трех полюсов и нуля передаточной функции, составила —180°. Получим следующее равенство:
Рис. 10.15. Иллюстрация на s-плоскости синтеза корректирующего устройства интегрирующего типа
-180° = -127° - 104° - 38° + 0.,
где 0_—аргумент вектора, начало которого находится в точке, где должен располагаться неизвестный нуль. Отсюда мы имеем 0_ = +89°, а это значит, что нуль занимает положение z = -0,75. Наконец, чтобы определить значение коэффициента КХК2, при котором корень занимает желаемое положение, вычислим длину векторов, проведенных в эту точку из полюсов и нуля, и получим
А= =
1,0
Корневой годограф скорректированной системы и положение нуля ее передаточной функции приведены на рис. 10.15. Следует заметить, что нуль z = -К2/К2 должен быть расположен левее полюса 5 = —0.5 с тем. чтобы переходная характеристика в основном определялась комплексными доминирующими корнями. В действительности третий корень характеристического уравнения скорректированной системы занимает положение 5 = -1,0, т. е. он в 4/3 раза больше действительной части комплексных корней. И хотя комплексные корни являются доминирующими, эквивалентный коэффициент затухания системы все же несколько меньше, чем С = 0,60 из-за наличия третьего вещественного корня и нуля.
Передаточная функция замкнутой системы, изображенной на рис. 10.14, равна GGcG(s) 2,08(5+0,75^(5) 1 (5) =---------------------------------= —--------------—
1 + GcG(5) , t ... v ".
с (5 + 1)(5 + Aj)(5 + Zj)
(10.55)
10.7. Коррекция с отставанием по фазе
587
где Г| = —0,75 +/1. Влияние нуля сводится к увеличению перерегулирования (см. рис. 5.13). Если мы хотим добиться перерегулирования, равного 5%, то можно использовать предшеству-
ющий фильтр с передаточной функцией Г ( л °’75 GAs) =--------------------------------,
р 5+0,75
(10.56)
с помощью которого удается исключить нуль из передаточной функции T(s). Заметим, что общий коэффициент усиления замкнутой системы (полагая s = 0) 7(0) = 1 в случае, если Gp(s) = I или если мы используем предшествующий фильтр с передаточной функцией (10.56). При отсутствии предшествующего фильтра перерегулирование составляет 17,6%, а при наличии такого фильтра оно равно 2%. Более подробно проблема использования предшествующих фильтров будет рассмотрена в разделе 10.10.
10.7. Коррекция с отставанием по фазе: синтез с помощью корневого годографа
ЛС-схема, изображенная на рис. 10.6, обладает отставанием по фазе и может быть использована для увеличения коэффициента ошибки системы управления. В разделе 10.3 мы выяснили, что передаточная функция такой схемы имеет вид:
Gc(5) = 2.2±£, (10.57)
a s+ р
где
Установившаяся ошибка нескорректированной системы
Т?(5)
lim e(t) = lim л
s->0 |_1+ СЯ(л)
(10.58)
Тогда, например, для системы типа 1 коэффициент ошибки по скорости (как было показано в разделе 5.7) равен
Kv =lims[GZ/(5)]. (10.59)
S-*0
Следовательно, если GH(s) записать в виде м хП(5+г<)
GH(s) = ------, (10.60)
./=1
то для коэффициента ошибки по скорости мы получим м
kv =-^— • (Ю.61)
гь ./=1
Теперь введем в систему устройство с отставанием по фазе и определим коэффициент ошибки по скорости в скорректированной системе. Если коэффициент ошибки нескоррек-
588
Глава 10. Синтез систем управления с обратной связью
тированной системы (10.61) обозначить как Кт, то для системы с коррекцией мы получим г м '
KVK = lim 4G с (syjH(s)\ = lim[Gc (a)Xvh Л'-»0 5-»0
К
. (10.62)
о
Желаемому положению корней на годографе скорректированной системы теперь будет соответствовать коэффициент К/a. Если полюс и нуль корректирующего устройства выбрать так, что |z| = а|/>| < 1, то в результате значение Kv, соответствующее желаемому расположению корней, увеличится к zip = а раз. Если, например, z = 0,1 кр = 0,01, то коэффициент Kv увеличится в 10 раз. Если полюс и нуль корректирующего устройства расположены на 5-плоскости близко друг от друга, то их влияние на положение желаемых корней будет незначительным. Поэтому, поместив полюс и нуль корректирующего устройства вблизи начала координат 5-плоскости по сравнению с со,,, можно будет увеличить коэффициент ошибки в а раз, практически не изменив при этом положение желаемых корней. Параметр а имеет верхний предел, обычно порядка 100, т. к. в противном случае номиналы резисторов и конденсаторов становятся слишком большими. Например, если? = 0,1 ир = 0,01,то z = 0,1 = —— и а = 100 = R' +^2 .
r2c r2
ВыбравС= 10 мкФ, мы получим Т?2= 1 МОми/?| = 99 МОм. Если увеличивать а, то это потребует и увеличения номинала резистора R2. Следует, однако, заметить, что применение пневматических регуляторов, частотные характеристики которых имеют вид рис. 10.8, позволяет получить значения а, достигающие 1000 и более.
Процедура синтеза корректирующего устройства с отставанием по фазе методом корневого годографа включает следующие этапы:
1. Построить корневой годограф нескорректированной системы.
2. Сформулировать требования к качеству переходного режима системы и определить на корневом годографе нескорректированной системы положение доминирующих корней, удовлетворяющих этим требованиям.
3. Вычислить коэффициент К, соответствующий желаемому положению корней, и, следовательно, определить значение коэффициента ошибки.
4. Сравнить полученный коэффициент ошибки с его желаемым значением и вычислить параметр а, т. е. определить, во сколько раз необходимо увеличить коэффициент К за счет надлежащего выбора полюса и нуля корректирующего устройства.
5. При известном отношении zip = а определить соответствующее положение полюса и нуля корректирующего устройства так, чтобы корневой годограф скорректированной системы по-прежнему проходил через точки, в которых расположены желаемые корни. Для этого полюс и нуль корректирующего устройства должны быть расположены близко к началу координат 5-плоскости по сравнению с сои.
Пятый этап имеет силу только в том случае, если нуль и полюс корректирующего устройства по модулю значительно меньше, чем собственная частота со,,, соответствующая доминирующему корню, так что для него эти нуль и полюс практически сливаются в одну точку. Это означает, что аргументы векторов, проведенных из нуля и полюса корректирующего устройства к желаемому корню, почти одинаковы. Практически считает
10.7, Коррекция с отставанием по фазе
589
ся, что если эти аргументы отличаются менее чем на 2°, то условия пятого этапа синтеза будут удовлетворены. Сказанное выше проиллюстрируем следующим примером.
Пример 10.6. Синтез корректирующего устройства с отставанием по фазе
Рассмотрим систему из примера 10.2, которая при отсутствии коррекции имеет в разомкнутом состоянии передаточную функцию
6Я(4) = —— . (10.63)
s(s + 2)
Требуется, чтобы коэффициент затухания, соответствующий доминирующим комплексным корням, был равен 0,45, а коэффициент ошибки по скорости равнялся бы 20. Корневой годограф нескорректированной системы изображен на рис. 10.16. Вертикальный участок этого годографа начинается в точке s = -1, а его пересечение с линией £ = 0,45 дает значение корня s = -l+/2. Вычисление значения К. соответствующего этому корню, дает результат К =(2,24)'= 5. Следовательно, коэффициент ошибки по скорости для нескорректированной системы равен
Кх. = — = - = 2,5.
2 2
Требуемое отношение нуля корректирующего устройства к его полюсу
20
2,5
= 8.
(10.64)
Если принять z = 0,1 и р = 0,1/8, то разность аргументов векторов, проведенных из нуля и по-
люса к желаемому корню, приблизительно будет равна 1°. поэтому доминирующие корни
практически останутся в точках s = -1 ± /2. Корневой годограф скорректированной системы изображен на рис. 10.17. Скорректированная система имеет передаточную функцию
Gc(s)GH(s) =
5(s + 0,1) s(s+2)(s+0,0125)
(10.65)
где KJ a = 5, или К = 40, чтобы
скомпенсировать ослабление, вносимое корректирующим
устройством.
Рис. 10.16. Корневой годограф нескорректированной системы из примера 10.6
Рис. 10.17. Корневой годограф скорректированной системы из примера 10.6. Обратите внимание, что действительное положение корня будет немного отличаться от желаемого. Корневой годограф отрывается от действительной оси в точке с = -0,95
= а =
590
Глава 10. Синтез систем управления с обратной связью
Пример 10.7. Синтез корректирующего устройства с отставанием по фазе
Теперь мы рассмотрим систему, для которой трудно подобрать корректирующее устройство с опережением по фазе. Эта система в разомкнутом состоянии имеет передаточную функцию
GH(s) =---. (10.66)
s(s + 10)2
Требуется, чтобы система имела коэффициент ошибки по скорости, равный 20, а коэффициент затухания, соответствующий доминирующим корням, должен быть равен 0,707. Чтобы получить Kv = 20. коэффициент К должен удовлетворять условию
Kv = 20 = -^-.
102
откуда К = 2000. Однако, применив критерий Рауса-Гурвица, легко убедиться, что при К = 2000 корни характеристического уравнения находятся на мнимой оси и равны ±уЮ. Эти корни очень далеки от того, чтобы удовлетворять требованию к коэффициенту затухания, и их очень трудно будет сдвинуть с мнимой оси на линию L = 0.707 с помощью корректирующего устройства с опережением по фазе. Поэтому попытаемся удовлетворить требования к Kv и, используя коррекцию с отставанием по фазе. Корневой годограф нескорректированной системы изображен на рис. 10.18, откуда видно, что при С, = 0,707 желаемые корни занимают положение s = —2,9 + j'2,9. Измерив модули векторов, проведенных в одну из этих точек (в верхней полуплоскости), мы получим значение К = 236. Следовательно, требуемое отношение нуля корректирующего устройства к его полюсу согласно (10.64) равно
2000 о ,
236
z
Р
а =
Выберем z = 0,l ир = 0,1/9(с некоторым запасом). Анализ рис. 10.18 показывает, что разность аргументов векторов, проведенных из нуля и полюса функции Gc(s) к желаемому корню, крайне незначительна. Таким образом, скорректированная система будет иметь передаточную функцию
236(5 4-0,1) s(s4-10)2(s+0,0111)
где К/а = 236 и а = 9.
Рис. 10.18
К синтезу корректирующего устройства с отставанием по фазе
Gc(s)GH(s) =
(10.67)
10.8. Коррекция с отставанием по фазе: синтез с помощью диаграммы Боде 591
Синтез корректирующего устройства с отставанием по фазе очень хорошо иллюстрируется на s-плоскости с использованием корневого годографа. Далее мы рассмотрим еще один, не менее полезный, метод синтеза, связанный с применением диаграммы Боде.
10.8. Коррекция с отставанием по фазе: синтез с помощью диаграммы Боде
Синтез АС-схемы с отставанием по фазе, используемой в качестве корректирующего устройства, достаточно просто можно осуществить с помощью диаграммы Боде. Преимущество диаграммы Боде очевидно: чтобы получить приемлемые частотные характеристики, мы просто должны к частотным характеристикам исходной системы добавить соответствующие характеристики корректирующего устройства. Передаточная функция системы с отставанием по фазе, записанная в виде, удобном для построения диаграммы Боде, имеет вид:
Сс0ю)=-^^- (Ю.68)
1+ /соат
Соответствующая диаграмма Боде изображена на рис. 10.8 для двух значений а. Заметим, что полюс и нуль корректирующего устройства по модулю должны быть много меньше, чем наименьший полюс нескорректированной системы. Отметим также, что отрицательный фазовый сдвиг, вносимый корректирующим устройством, в общем случае является дестабилизирующим фактором и поэтому нежелательным. Но вместе с тем такое устройство вносит в контур ослабление, равное —201ga. За счет этого уменьшается частота, на которой амплитудная характеристика пересекает уровень 0 дБ, а это, в свою очередь, приводит к увеличению запаса по фазе. Таким образом удается удовлетворить требования, предъявляемые к качеству системы. Процедура синтеза корректирующего устройства с отставанием по фазе в данном случае сводится к следующим этапам:
1. Построить диаграмму Боде для нескорректированной системы при коэффициенте усиления, необходимом для получения требуемого значения коэффициента ошибки.
2. Определить запас по фазе в нескорректированной системе и, если он недостаточен, выполнить последующие этапы.
3. Выбрать частоту, на которой будет обеспечиваться заданное значение запаса по фазе, т. е. частоту со'с, на которой амплитудная характеристика скорректированной системы будет пересекать уровень 0 дБ. (При этом необходимо учитывать, что на данной частоте корректирующее устройство даст дополнительный фазовый сдвиг, равный -5°.)
4. Частоту излома, соответствующую нулю корректирующего устройства, выбрать на декаду левее новой частоты со'с, чтобы гарантировать, что корректирующее устройство добавит только -5° к результирующей фазовой характеристике (см. рис. 10.8).
5. Определить, насколько нужно уменьшить усиление системы на частоте со'с, чтобы амплитудная характеристика скорректированной системы на этой частоте действительно пересекала уровень 0 дБ.
6. Вычислить параметр а, зная, что корректирующее устройство на частоте со’с вносит ослабление, равное —201ga.
592
Глава 10. Синтез систем управления с обратной связью
7. Вычислить частоту излома, соответствующую полюсу корректирующего устройства, ар = 1/сст = <й2/а. На этом процедура синтеза заканчивается.
Проиллюстрируем данную методику синтеза простым практическим примером.
Пример 10.8. Синтез корректирующего устройства с отставанием по фазе
Рассмотрим еще раз систему из примера 10.6, для которой синтезируем корректирующее устройство с отставанием по фазе, исходя из заданного запаса устойчивости по фазе. Для нескорректированной системы мы имеем
GH(j<n) =--------=------------. (10.69)
jco( усо + 2) усо(О,5усо + 1)
где Kv = КН. К системе предъявляются следующие требования: коэффициент ошибки по скорости Kv = 20 и запас по фазе, равный 45°. Диаграмма Боде для нескорректированной системы изображена сплошной линией на рис. 10.19. В системе без коррекции запас по фазе составляет 20°, поэтому он должен быть увеличен. С учетом того, что корректирующее устройство будет вносить дополнительный фазовый сдвиг величиной -5°, в качестве новой частоты со', выберем
Рис. 10 19. (а) Синтез корректирующего устройства с отставанием по фазе с помощью диаграммы Боде (к примеру 10.8). (б) Переходные характеристики скорректированной (сплошная линия) и нескорректированной (штриховая линия) систем из примера 10.8
10.8, Коррекция с отставанием по фазе: синтез с помощью диаграммы Боде 593
частоту, где ср(со) = -130°. В нашем случае эта частота (»'. = 1,5 (с некоторым запасом). На этой частоте усиление системы уменьшится на 20 дБ. На рис. 10.19 изображены асимптотические амплитудные характеристики скорректированной и нескорректированной систем. В действительности эти характеристики располагаются на 2 дБ ниже тех, что изображены на рисунке. На частоте (o' = 1,5 усиление уменьшается на 20 дБ.
Таким образом, мы имеем 20 дБ = 201ga, или a = 10. Выбрав нуль корректирующего устройства так, чтобы соответствующая ему частота излома находилась на декаду левее частоты со', мы получим со. = си'./10 = 0,15 и соответственно для полюса cof = со./10 = 0,015. В итоге скорректированная система будет иметь передаточную функцию
Gc(jco)Gff (Jco) = . тУ(6,6^“+А1)---п (10'70)
jco(0.5 jco + 1)(66,6 усо + 1)
Частотные характеристики скорректированной системы изображены на рис. 10.19(c) штриховыми линиями. Из диаграммы видно, что корректирующее устройство на средних и высоких частотах вносит ослабление, за счет этого амплитудная характеристика пересекает уровень 0 дБ на более низкой частоте, нежели без коррекции, а это в свою очередь приводит к увеличению запаса по фазе. Заметим также, что отрицательный фазовый сдвиг, создаваемый корректирующим устройством, почти полностью исчезает на частоте со'. В качестве проверки можно вычислите запас по фазе на частоте со' и убедиться, что он равен 45°, как и требовалось. С помощью диаграммы 11икольса можно также установить, что полоса пропускания замкнутой системы уменьшилась с 10 рад/с в системе без коррекции до 2,5 рад/с в скорректированной системе. За счет этого следует ожидать более медленного нарастания переходной характеристики.
Переходные характеристики сист емы изображены на рис. 10.19(6). В скорректированной системе перерегулирование составляет 25%, а время максимума переходной характеристики равно 2 с, поэтому можно считать, что качество системы вполне приемлемое.
(10.71)
Пример 10.9. Синтез корректирующего устройства с отставанием по фазе
Рассмотрим еще раз систему из примера 10.7, для которой
К к
GH(Ju) =----------у =----------г ,
X jco + 10)2 ><о(0,1 jco + I)2
где Kv = К/100. Коэффициент ошибки но скорости должен быть равен 20, а доминирующим корням должен соответствовать коэффициент затухания <^ = 0,707. По рис. 9.21 можно оценить требуемое значение запаса по фазе, оно равно 65°. Частотные характеристики нескорректированной системы изображены на рис. 10.20, откуда видно, что запас по фазе равен нулю. Сделав допуск в 5° на фазовый сдвиг корректирующего устройства, частоту со'. выберем там, где фазовая характеристика нескорректированной системы имеет значение -110°. В нашем случае это 1,74 рад/с, но в целях осторожности мы примем со'. = 1,5. Измерив, насколько корректирующее устройство должно уменьшить усиление на этой частоте, получим 23 дБ. Следовательно, 23 = 201ga, откуда a = 14,2. Частоту излома, соответствующую нулю корректирующего устройства, выберем на декаду левее, чем со^, т. е.
со. = ^ = 0,15 .
* 10
Тогда для полюса получим:
со. 0.15
со = — =-------.
' а 14,2
В итоге передаточная функция скорректированной системы будет иметь вид:
„ , • хх-гг/ • ч 20(6.66jco + 1)
G (ico)G/7(jco) =-------------------------.
jco(0,l ja>+ 1)(94,6 jco + 1)
(10.72)
594
Глава 10. Синтез систем управления с обратной связью
Рис. 10.20. Синтез корректирующего устройства с отставанием по фазе с помощью диаграммы Боде (к примеру 10.9)
Соответствующие частотные характеристики приведены на рис. 10.20. Вычислив в качестве проверки запас по фазе на частоте со'. = 1.5, получим значение 67°, что удовлетворяет выдвинутому требованию.
Таким образом, мы выяснили, что при помощи корректирующего устройства с отставанием по фазе можно изменить вид частотных характеристик системы так, чтобы они удовлетворяли требованиям к качеству системы. Примеры 10.8 и 10.9 еще раз показывают, что задача синтеза успешно решается тогда, когда амплитудная характеристика скорректированной системы пересекает уровень 0 дБ с наклоном —20дБ/дек. Частота, на которой это происходит, за счет ослабления, вносимого корректирующим устройством, сдвигается влево — в точку, где запас по фазе является приемлемым. Кроме того, в отличие от коррекции с опережением по фазе, при коррекции с отставанием по фазе происходит уменьшение полосы пропускания замкнутой системы.
Возникает вопрос: почему бы не выбрать частоту, соответствующую нулю корректирующего устройства, более чем на одну декаду левее новой частоты со'с (см. этап 4 процедуры синтеза) и тем самым сделать отрицательный фазовый сдвиг, вносимый корректирующим устройством на частоте to'c, еще меньше, чем 5 °? На этот вопрос можно ответить, если рассмотреть требования, предъявляемые к номиналам резисторов и конденсаторов АС-схемы, реализующей корректирующее устройство. С уменьшением полюса и нуля корректирующего устройства с отставанием по фазе пропорционально должны увеличиваться номиналы элементов АС-схемы. Согласно выражению (10.12) нуль корректирующего устройства z = 1/А2С, а параметр а = (Rl+R2')/R2. Так, в примере 10.9 нуль z = 0,15 можно получить при С = 1 мкФ и R2 = 6,66 МОм. Однако при а = 14 нам потребуется резистор A, =R2(a— 1) = 88 МОм. Это очень большая величина, поэтому проектировщику не рекомендуется выбирать нуль корректирующего устройства далее, чем на одну декаду левее частоты со'.
10.9. Синтез с помощью диаграммы Боде
595
Рис. 10.21
Четырехполюсник с опережением и отставанием по фазе
Корректирующие устройства с опережением по фазе и с отставанием по фазе каждое по-своему изменяет вид частотных характеристик. Первое добавляет положительный фазовый сдвиг, второе уменьшает усиление, но в конечном счете и то и другое приводит к увеличению запаса устойчивости по фазе. Поэтому было бы разумным реализовать положительные стороны каждого из этих устройств с помощью одной 7?С-схемы. И такая схема, действительно, существует. Она называется схемой с опережением и отставанием по фазе и имеет вид, изображенный на рис. 10.21. Передаточная функция такой схемы
И2(5)_ (А|С1.у+1)(А2С2.у+1)
СО + T?iC2 + ^2^2 X "t" 1
(10.73)
Если обозначить ₽т2 = Я2С2 и Т]Т2 = то легко заметить, что
ctP= 1 и передаточная функция (10.73) принимает вид
V2(s) _ (l+ar^Xl+Px^) K,(S) (l + TjSXl+ToS)
(10.74)
где a> 1 и P< 1. Первые сомножители в числителе и знаменателе, зависящие от Тр соответствуют части схемы, вносящей опережение по фазе. Вторые сомножители, зависящие от т2, обусловливают отставание по фазе. Параметр р выбирается так, чтобы обеспечить необходимое уменьшение усиления в низкочастотной области частотных характеристик, а параметр а выбирается исходя из условия создания дополнительного положительного фазового сдвига на новой частоте, при которой амплитудная характеристика будет пересекать уровень 0 дБ. Ту же задачу можно решить на л-плоскости. Сначала полюс и нуль фазоопережающей части корректирующего устройства размещаются так, чтобы обеспечить желаемое положение доминирующих корней. Затем синтезируется часть корректирующего устройства, обладающая отставанием по фазе, с тем, чтобы желаемому положению корней соответствовало увеличение коэффициента ошибки в 1/р раз. Синтез обеих частей корректирующего устройства производится согласно описанным выше процедурам.
10.9. Синтез с помощью диаграммы Боде и использования аналитических методов и компьютеров
Всегда, когда имеется возможность, желательно использовать компьютеры, чтобы помочь проектировщику в выборе параметров корректирующего устройства. Разработка соответствующих алгоритмов и программ является альтернативой методам проб и ошибок, рассмотренным в предыдущих разделах. Большинство программ, созданных для выбора параметров корректирующих устройств, основаны на удовлетворении требований, предъявляемых к частотным характеристикам системы, в частности к запасу по фазе.
596
Глава 10. Синтез систем управления с обратной связью
Применительно к диаграмме Боде разработан аналитический метод выбора параметров корректирующих устройств с опережением или с отставанием по фазе. Простое однозвенное корректирующее устройство с передаточной функцией
Gc(5)=1±^H (Ю.75)
1+TS
при а < 1 обладает отставанием по фазе, а при а > 1 создает опережение по фазе. Из выражения (10.9) можно получить формулу, определяющую вклад корректирующего устройства в фазовую характеристику на желаемой частоте юс:
P = tg<P =
асост-<ост 1+(юст)2 а
(10.76)
На той же частоте <ос вклад корректирующего устройства в амплитудную характеристику составит
c = , (,0.77)
1+(оет)2
где М измеряется в децибелах.
Исключая юст из (10.76) и (10.77), получим нетривиальное уравнение относительно а: (р2 -с+1)а2 +2р2са + р2с2 + с~ -с = 0. (10.78)
Для однозвенного корректирующего устройства с опережением по фазе необходимо, чтобы выполнялось неравенство с> р~ + 1. Если решить (10.78) относительно а, то можно будет получить выражение для т:
1 I 1-с
т=— -L-L.. (10.79)
<вс V с-а'
Процедура синтеза корректирующего устройства с опережением по фазе состоит из следующих этапов:
1- Выбрать желаемое значение частоты юс.
2. Задать требуемое значение запаса по фазе, т. е. угол <р в выражении (10.76).
3. Убедиться, что необходимо именно опережение по фазе: ф > 0 и М> 0.
4. Определить, достаточно ли для коррекции одного звена при условии с>р2+1.
5. Определить а по уравнению (10.78).
6- Вычислить т по выражению (10.79).
Если необходима коррекция с отставанием по фазе, то ф < 0 и Л7 < 0 (этап 3). На этапе 4 необходимо, чтобы выполнялось неравенство с < [ 1/( 1+/?)]. Остальные этапы остаются без изменений.
Пример 10.10. Синтез с использованием аналитического метода
Рассмотрим систему из примера 10.1 и синтезируем аналитическим методом корректирующее устройство с опережением по фазе. Обратимся к рис. 10.9 и посмотрим на частотные характеристики нескорректированной системы. Выберем йс = 5 и, как и ранее, потребуем, чтобы запас по фазе был равен 45°. Это значит, что такой фазовый сдвиг должно создавать корректирующее устройство. Отсюда имеем:
10.10, Системы с предшествующим фильтром
597
p = tg45°=l. (10.80)
Корректирующее устройство должно дать вклад в амплитудную характеристику, равный 8 дБ. т. е. М — 8, поэтому
с = 108/|о = 6,31 . (10.81)
Подставляя с и р в (10.78), получим уравнение:
-4,31а2 + 12.62а + 73.32 = 0. (10.82)
Решение этого уравнения дает а = 5,84. Далее из (10.79) находим т = 0,087. В результате получим передаточную функцию корректирующего устройства:
Gc(s) = 1+0---Л' . (10.83)
1+ 0,087s
Эта функция имеет полюс р = 11,5 и нуль z = 1,94. Результат синтеза близок к тому, что был получен итерационным методом в разделе 10.4.
10.10. Системы с предшествующим фильтром
В предыдущих разделах мы использовали корректирующие устройства с передаточной функцией вида
г t.X S+Z
S + р
за счет которой изменяется положение корней характеристического уравнения замкнутой системы. Однако передаточная функция замкнутой системы Т(з) в качестве нуля будет содержать и нуль функции Gc(s). Этот нуль будет оказывать существенное влияние на переходную характеристику замкнутой системы.
Рассмотрим систему, изображенную на рис. 10.22, где
0(5) = --
S
Используем в данной системе ПИ-регулятор с передаточной функцией
„ , , „ K^s + Kj
Gc(s) = Kx + -^=—‘-----=- .
S S
Передаточная функция замкнутой системы с учетом предшествующего фильтра равна {Kxs + K2y3p(s) 1:—
(10.84)
э Т Л] д т Л9
Будем считать, например, что время установления (по критерию 2%) должно быть равно 0,5 с, а перерегулирование — приблизительно 4%. Тогда зададимся значением Q= 1/V2 и
Рис. 10.22. Система управления с предшествующим фильтром Gp(s)
598
Глава 10. Синтез систем управления с обратной связью
заметим, что
7, =— •
Отсюда получим ^со„ = 8, или со,, = 8-/2. Поэтому
Кх =2Qan =16 и К2 =а2п =128.
Если Gp(s) = 1, то передаточная функция замкнутой системы равна 7(5) = 16^±8) .
s2 +165+128
Влияние нуля на переходную характеристику весьма существенно. По рис. 5.13(a) определяем, что при a/Cf£>n = 1 и £= 1/V2 следует ожидать перерегулирования в 21%.
Чтобы исключить нуль из передаточной функции T(s), используем предшествующий фильтр, сохранив в то же время коэффициент усиления системы на нулевой частоте. Тогда
5+8
и в результате мы получим
7(5) = ——--------.
52 +165+128
В данном случае перерегулирование составит 4,5%, как и требовалось.
Анализ рис. 5.13(a) показывает, что нуль 5 = - а оказывает существенное влияние на переходную характеристику при а/^ю„ < 5, где -^со„ есть действительная часть доминирующих корней характеристического уравнения замкнутой системы.
Теперь рассмотрим еще раз систему из примера 10.3, для которой было синтезировано корректирующее устройство с опережением по фазе. С учетом предшествующего фильтра (рис. 10.22) передаточная функция замкнутой системы равна
8,1(5 + 1X^(5)
7(5) =
(5+ 1+ /2)(5+ 1- /2)(5+ 1,62)
Если Gp(s) = 1 (предшествующий фильтр отсутствует), то переходная характеристика имеет перерегулирование 46,6% и время установления 3,8 с. Если же использовать предшествующий фильтр с передаточной функцией
Gp(5) = -L, 1 5+1
то перерегулирование составит 6,7%, а время установления по-прежнему будет равно 3,8 с. Вещественный корень 5 = -1,62 положительно сказывается на демпфировании переходной характеристики. Предшествующий фильтр играет очень большое значение, т. к. он позволяет проектировщику за счет нуля корректирующего устройства обеспечить желаемое положение корней (полюсов) передаточной функции замкнутой системы и в то же время исключить влияние нуля функции 7(5) на переходную характеристику.
Обычно предшествующий фильтр используется в системах, содержащих корректирующие устройства с опережением по фазе или ПИ-регуляторы. В системах, содержащих корректирующие устройства с отставанием по фазе, предшествующие фильтры не приме
10.10. Системы с предшествующим фильтром
599
няются, поскольку в них влияние нуля на переходную характеристику незначительно. Чтобы в этом убедиться, рассмотрим систему из примера 10.6. Для этой системы было синтезировано корректирующее устройство с отставанием по фазе, в результате ее передаточная функция в разомкнутом состоянии имеет вид:
G(s)Gc(s) =
5(5 + 0,1) 5(54-2)15 + 0,0125) ’
Передаточная функция замкнутой системы
rw._—, (52 +1,985 + 5,1)(5 + 0,095) s2 +1,985 + 5,1
т. к. нуль 5 = -0,1 и полюс 5 = -0,095 приблизительно сокращаются.
При параметрах, заложенных в основу синтеза (£ = 0,45 и = 1), следует ожидать, что перерегулирование составит 20%, а время установления (по критерию 2%) будет равно 4,0 с. Однако действительная реакция системы имеет перерегулирование 26% и несколько большее время установления — 5,8 с, что объясняется влиянием вещественного полюса 5 = -0,095 функции T(s). Этот пример проясняет, почему в системах, содержащих корректирующие устройства с отставанием по фазе, предшествующие фильтры не применяются.
Пример 10.11. Синтез системы третьего порядка
Рассмотрим систему, имеющую структуру рис. 10.22, в которой
1
G(5) =
5(5 + 1)(5 + 5)
Синтезируем систему, переходная характеристика которой имела бы перерегулирование не более 2% и время установления не более 3 с. Данную задачу решим, используя как Gc(s). так и Gp(s).
Выберем корректирующее устройство с опережением по фазе,
5+10
и найдем такое К, при котором комплексным корням будет соотвез ствовачъ £ = 1 /V2. Можно показать, что К = 78,7, при этом передаточная функция замкнутой системы будет иметь вид:
т =_________________78.7(5+ 1,2^ (5)______________* 7,1(5+ 1.2)ОД5)
(5 + 1,71 + j 1,71)(5 + 1,71 - jl.71)(5 + 1,45)(5 + 1,11) “ (52 + 3.455 + 5,85)(s + 1.45)
Если принять
Gp(5) = -^-. (10.85)
г $+ р
то передаточная функция замкнутой системы будет равна
—w+lj)------------------
(52 + 3,455 + 5,85)(5 + l,45)(s + р)
Выбравр = 1,2, мы скомпенсируем влияние нуля. Показатели качества (во временной области) системы с предшествующим фильтром приведены в табл. 10.1. Желаемые показатели можно обеспечить выбором надлежащего значения р. Заметим, что при р = 2,40 реакция системы тоже может оказаться приемлемой, т. к. она обладает меньшим временем нарастания, чем при р = 1.20. Таким образом, предшествующий фильтр содержит еще один, дополнительный параметр, который можно варьировать с целью достижения желаемого качества системы.
600
Глава 10. Синтез систем управления с обратной связью
Таблица 10.1. Влияние предшествующего фильтра на переходную характеристику
б>(«) = 1 р = 1,20 р = 2,40
Относительное перерегулирование 9.9% 0% 4.8%
Время нарастания (от 10 % до 90 %), с 1,05 2,30 1,60
Время установления, с 2,9 3,0 3,2
10.11. Синтез систем с апериодической реакцией
Довольно часто от системы управления требуется, чтобы ее переходная характеристика как можно быстрее стремилась к установившемуся значению с минимальным перерегулированием. Системы такого типа принято называть системами с апериодической реакцией. В качестве меры близости переходной характеристики к установившемуся значению принимают зону, равную 2% от этого значения. Тогда временем установления считают время Т„ за которое переходная характеристика входит в указанную зону, как проиллюстрировано на рис. 10.23. Апериодическая реакция характеризуется следующими показателями:
1. Установившаяся ошибка = 0.
2. Быстродействие -> минимальное время нарастания и время установления.
3. 0,1% ^относительное перерегулирование < 2%.
4. Относительный выброс ниже установившегося значения < 2%.
Показатели (3) и (4) требуют, чтобы после того как в момент Тх переходная характеристика войдет в зону 2% от установившегося значения, она все время оставалась в пределах этой зоны.
Нормированное время
Рис. 10.23. Апериодическая реакция системы (А - амплитуда входной ступеньки)
10.11. Синтез систем с апериодической реакцией
601
Чтобы определить коэффициенты передаточной функции замкнутой системы T(s), при которых реакция будет иметь апериодический характер, приведем сначала эту передаточную функцию к нормированному виду. Покажем это на примере системы третьего порядка:
T(s) = ------------------- . (10.86)
5 +aw„5" +рСОи5+СО„
Разделим числитель и знаменатель на со’:
Л^) = —------------------• (Ю.87)
5' 5 О 5 1
-у + а —+ р— + 1 <в„ со,,
Введя обозначение 5 = 5/со„, получим:
T(s)=---------}------. (10.88)
5 + 05 " + р5 + 1
Выражение (10.88) — это нормированная передаточная функция замкнутой системы третьего порядка. Тем же самым способом определяются и нормированные передаточные функции систем более высокого порядка. Коэффициентам а, р, у и т. д. придаются значения, при которых система будет иметь апериодическую реакцию. Коэффициенты, приведенные в табл. 10.2, выбраны таким образом, чтобы получить апериодическую реакцию и минимизировать время установления и время нарастания до 100% от заданного значения. В выражении (10.88) фигурирует нормированная переменная 5 = s/co,,. Поэтому частота со,, определяется по заданному времени установления или времени нарастания. Так, если в системе третьего порядка необходимо иметь время установления, равное 1,2 с, то согласно табл. 10.2 мы имеем нормированное время установления
со,,/;. = 4,04.
Отсюда находим частоту со,,:
4,04 4,04 . „ со,, =---=-----= 3,37.
т; 1,2
Таблица 10.2. Коэффициенты и параметры переходной характеристики системы с апериодической реакцией
3 S ф X о X О я X Й X о X о X О я X и X о X 5 х я X = к? я W X X о Ч X
X 2 £ i 5 £ £ i 5 £ а. о4 я о = ? = 2 = ъ CJ
ei W О. о Коэффициенты х а. н о О х a. н о О 5 £ 1 а. С/ РЗ S ° S 4 а. X S
с а Р У 5 Е со
2-й 1,82 0,10% 0,00% 3,47 6,58 4,82
3-й 1,90 2,20 1,65% 1,36% 3,48 4.32 4,04
4-й 2,20 3,50 2,80 0,89% 0,95% 4.16 5,29 4,81
5-й 2,70 4,90 5,40 3,40 1,29% 0,37% 4,84 5.73 5.43
6-й 3.15 6,50 8.70 7,55 4,05 1,63% 0.94% 5,49 6.31 6.04
Примечание', все времена нормированные
602
Глава 10. Синтез систем управления с обратной связью
После этого можно записать передаточную функцию замкнутой системы в виде (10.86). При синтезе системы с апериодической реакцией выбирается тип корректирующего устройства и записывается выражение для передаточной функции замкнутой системы. Эта передаточная функция приводится к виду (10.86), после чего нетрудно определить параметры корректирующего устройства.
Пример 10.12. Синтез системы с апериодической реакцией
Рассмотрим систему с единичной обратной связью, корректирующим устройством GJs) и предшествующим фильтром (см. рис. 10.22).
Объект имеет передаточную функцию
X К
G(s) = —--- ,
s(s+ 1)
а корректирующее устройство — передаточную функцию
Ge(s) =-----
j + p
Предшествующий фильтр должен иметь передаточную функцию
Gp(j) = —.
S + Z
В этом случае передаточная функция замкнутой системы равна
Г (s) - -------5--------------
s3 + (1 + p)s2 + (Л' + p)s + Kz
С помощью табл. 10.2 находим требуемые значения коэффициентов: а = 1.90 и р = 2,20. Если время установления (по критерию 2%) должно быть равно 2 с, то <ви7’„ = 4,04 и, следовательно, а>„ = 2,02. Тогда желаемый характеристический полином замкнутой системы будет иметь вид: q(s) = s3 + асо,р2 + рЮ,2д + со3 = s3 + 3,84 s2 + 4,44s + 8,24.
Отсюда находим, что р = 2,84, z = 1,34 и К = 6,14. Переходная характеристика системы имеет значения Ts = 2 с, Тг = 2,14 с и Тг<)0 = 1,72 с.
10.12. Пример синтеза: система управления намоткой ротора
Назначение данной системы состоит в исключении ручных операций при намотке медной проволоки на роторы небольших электродвигателей. Каждый двигатель имеет три отдельных обмотки по нескольку сотен витков. Важно получить высокое качество намотки, чтобы каждая обмотка была достаточно плотной и однородной. Оператор просто вставляет в машину пустой ротор, нажимает пусковую кнопку, а потом вынимает полностью намотанный ротор. Для точной и быстрой намотки используется двигатель постоянного тока. Поэтому задачей системы управления является обеспечение высокой точности отработки заданного положения и скорости ротора в процессе намотки. Система управления изображена на рис. 10.24(a), а соответствующая ей структурная схема — на рис. 10.24(6). При ступенчатом входном сигнале система обладает нулевой установившейся ошибкой, а при линейном входном сигнале установившаяся ошибка равна
А
где
К =lim^^
.v->o 50
10.12. Пример синтеза: система управления намоткой ротора
603
Рис. 10.24
(а) Система намотки ротора.
(б) Структурная схема системы
а)
б)
Если Gc(s) = К, то Kv = К/50. Выбрав К = 500, мы получим Kv = 10, но при этом перерегулирование реакции системы на ступенчатый входной сигнал составит 70%, а время установления будет равно 8 с.
Сначала попытаемся использовать корректирующее устройство с опережением по фазе, для которого
(10.89)
GC(S) = K{S+Z'} s+Pl
Выбрав = 4 и полюс р} так, чтобы комплексным корням соответствовало значение
Q = 0,6, мы получим
Ccw-W(it4> 5+7,3
При этом переходная характеристика будет иметь перерегулирование 3%, а время установления будет равно 1,5 с. Однако коэффициент ошибки по скорости будет равен
=1^1 =2,1,
7,3-50
(10.90)
что явно недостаточно.
Теперь попробуем применить коррекцию с отставанием по фазе, при которой gc(S)=k(s+-Z2\
s+p2
чтобы получить значение Kv - 38. В этом случае коэффициент ошибки по скорости будет определяться как
Kv=^.
5Qp2
С помощью корневого годографа определим значение К, при котором перерегулирование переходной характеристики нескорректированной системы не будет превышать 10%. Получим К = 105. Далее выберем отношение zip = а так, чтобы обеспечить заданное значе
604
Глава 10. Синтез систем управления с обратной связью
ние Kv:
а = 50^=^8 =
К 105
Выбрав z2 = 0,1, чтобы исключить его влияние на корневой годограф нескорректированной системы, мы получим р2 = 0,0055. В этом случае переходная характеристика будет иметь перерегулирование 12% и время установления 2,5 с. Результаты, соответствующие различным типам коррекции (различным регуляторам), приведены в табл. 10.3.
Таблица 10.3. Результаты, полученные при синтезе
Регулятор Коэффициент К С опережением по фазе С отставанием по фазе С опережением и отставанием по фазе
Перерегулирование 3% 12% 5%
Время установления, с 8 1,5 2.5 2,0
Установившаяся ошибка 10% 48% 2,6% 4,8%
при линейном сигнале Kv 10 2,1 38 21
Теперь вернемся к системе, в которой использовано корректирующее устройство с опережением по фазе, и включим последовательно с ним корректирующее устройство с отставанием по фазе. В результате регулятор будет иметь передаточную функцию
Gc(s) = K^S+Zl^S+Z2\ (10.91)
(*+ Pi )(s+p2)
Для фазоопережающей части выражения (10.91) К= 191,2, Zj = 4 ирх = 7,3. При этом корневой годограф системы имеет вид рис. 10.25. Напомним, что при коррекции с опере-
Рис. 10.25
Корневой годограф системы с регулятором, обладающим опережением по фазе
10.13. Пример синтеза: двухкоординатный графопостроитель
605
Рис. 10.26
Реакции системы управления намоткой ротора
(а) на ступенчатый и (б) на линейный сигналы
а)
жением по фазе мы имеем Kv = 2,1 (см. табл. 10.3). Чтобы получить Kv = 21, примем значение а = 10, выберем z2 = 0,1 и тогда найдем р2 = 0,01. Передаточная функция скорректированной системы примет вид:
С№(5) =______+ ________________
ф + 5)(5 +10)(s + 7,28)(з + 0,01)
(10.92)
Переходная характеристика и реакция системы на линейное воздействие изображены соответственно на рис. 10.26(a) и (б), кроме того, результаты отражены также в табл. 10.3. Очевидно, что синтез с использованием корректирующего устройства с опережением и отставанием по фазе вполне отвечает поставленной задаче.
10.13. Пример синтеза: двухкоординатный графопостроитель
Многие физические явления характеризуются параметрами, которые изменяются во времени. Зарегистрировав изменение этих параметров, результаты можно накапливать для последующего анализа или сравнения. Для этой цели разработан ряд электромеханических устройств, среди которых и двухкоординатный графопостроитель (плоттер). В этом устройстве перемещение вдоль оси Xсоответствует времени или некоторой переменной, а перемещение вдоль оси Y — функции времени или какой-то другой переменной.
606
Глава 10. Синтез систем управления с обратной связью
Рис. 10.27
Двухкоординатный плоттер HP 7090А
Подобные самопишущие устройства можно встретить во многих лабораториях, занимающихся регистрацией экспериментальных данных, таких как изменение температуры, изменение выходных сигналов датчиков, зависимость деформации от приложенного усилия и т. д. На рис. 10.27 в качестве примера изображен графопостроитель HP 7090А.
Назначение графопостроителя состоит в том, чтобы точно отслеживать изменение входных сигналов. Мы будем рассматривать перемещение только по одной оси, т. к. динамика движения по обеим осям одинакова, и поставим цель — с высокой точностью управлять положением и движением пера вслед за изменением входного сигнала.
Потребуем, чтобы (1) реакция системы управления положением пера на ступенчатый входной сигнал имела перерегулирование не более 5% и время установления (по критерию 2%) не более 0,5 с и (2) чтобы при этом установившаяся ошибка равнялась нулю. Если нам удастся удовлетворить эти требования, то можно будет считать, что система обладает высоким качеством.
Поскольку нам нужно управлять движением пера, то в качестве исполнительного устройства выберем двигатель постоянного тока. В цепи обратной связи используем оптический кодовый датчик с 500 штрихами. С помощью такого датчика можно получить 2000 отсчетов на каждый полный оборот вала двигателя. Такое разрешение датчика соответствует перемещению кончика пера на 0,025 мм. Кодовый датчик закреплен на валу двигателя. Поскольку выход датчика представляется в виде цифрового кода, он сравнивается со входным сигналом с помощью микропроцессора. Разность двух сигналов соответствует ошибке системы, а микропроцессор преобразует ее по алгоритму, который определяется требуемой передаточной функцией регулятора. Затем выход регулятора (цифровой код) преобразуется в аналоговый сигнал, используемый для управления двигателем.
Модель замкнутой системы управления положением пера изображена на рис. 10.28. Поскольку скорость вычислений в микропроцессоре намного выше, чем скорость изменения входного сигнала и выходного сигнала кодового датчика, можно считать, что модель системы в непрерывных переменных является достаточно точной.
Передаточная функция двигателя вместе с кареткой пера равна
G(s) =-------1-------, (10.93)
s(s+ 10)(.s+1000)
10.13. Пример синтеза: двухкоординатный графопостроитель 607
Рис. 10.28
Модель системы управления пером плоттера
и сначала мы попробуем использовать в качестве регулятора обыкновенный усилитель,
т. е.
Gc(5) = К.
В этом случае мы имеем возможность варьировать только один параметр, а именно коэффициент К. Чтобы получить переходный процесс, близкий к оптимальному, мы должны выбрать такое значение К, чтобы двум доминирующим корням на 5-плоскости соответствовал коэффициент затухания, равный 0,707, при этом перерегулирование составит около 4,5%. Вид корневого годографа представлен на рис. 10.29 (обратите внимание на разрыв действительной оси).
Выбрав значение К = 47200, мы получим систему, переходная характеристика которой имеет перерегулирование 3,6% и время установления 0,8 с. Так как передаточная функция разомкнутой системы имеет полюс в начале координат, то установившаяся ошибка будет равна нулю.
Эта система не удовлетворяет нашим требованиям, поэтому попробуем подобрать регулятор, который позволит уменьшить время установления. Возьмем регулятор с опе-
Рис. 10.29
Корневой годограф системы управления пером плоттера.
На годографе указано положение доминирующих корней s = - 4,9 ± /4,9, которым соответствует коэффициент затухания £ = 1/V2
608 Глава 10. Синтез систем управления с обратной связью
режением по фазе, для которого
Gc(s)=Ka{S+Z^, (10.94)
5+ р
где р = az. Синтез регулятора проведем с использованием метода, описанного в разделе 10.5, где необходимые построения выполнялись на 5-плоскости. Нуль регулятора поместим в точке s = -20 и определим положение полюса р, при котором доминирующие корни будут лежать на линии, соответствующей коэффициенту затухания Q= 1/^2. В результате найдем, что р = 60, а = 3 и тогда
(10.95)
142600(5 + 20) " 5(5+10)(5+60)(5+1000)’
Построив действительную переходную характеристику, найдем, что перерегулирование составляет 2%, а время установления равно 0,35 с. Это полностью удовлетворяет выдвинутым требованиям. Третий вариант решения задачи синтеза основан на том, что с помощью кодового датчика можно получить сигнал, пропорциональный скорости, для чего достаточно определить скорость, с которой штрихи датчика пересекают фиксированную точку. Это возможно сделать с помощью того же микропроцессора. Поскольку и положение и скорость доступны измерению, мы можем описать регулятор передаточной функцией
Gc(s) = Ку + K2s, (10.96)
где Ку — коэффициент усиления сигнала ошибки, а К? — коэффициент усиления сигнала, пропорционального скорости. Тогда мы можем записать:
Ст(5)=^^1.
5(5+10)(5+1000)
Если выбрать К}/К2 = 10, то произойдет сокращение с полюсом 5 = -10, и мы получим
(10.98)
G(5X7C(5) =--------.
С 5(5+1000)
Характеристическое уравнение замкнутой системы примет вид
? + 10005 + К2 = 0, (10.97)
а нам необходимо иметь ^ = 1/V2. Учитывая, что 2^<в„= 1000, мы получим <в„ = 707 и К2 = =5-105. Скорректированная система будет иметь передаточную функцию
G(5>7c(5)= 5 105
5(5+1000)
Переходная характеристика замкнутой системы будет обладать перерегулированием 4,3% и временем установления 8 мс.
Результаты трех вариантов синтеза системы для сравнения приведены в табл. 10.4. Наилучший результат получается при использовании обратной связи по скорости, и именно такое решение реализовано в графопостроителе HP 7090А.
10.14. Синтез систем с помощью MATLAB
609
Таблица 10.4. Результаты трех вариантов синтеза
Настраиваемые параметры Переходная характеристика Относительное _ Время установления, мс перерегулирование, %
Коэффициент усиления Коэффициент усиления и корректирующее устройство с опережением по фазе Коэффициент усиления плюс коррекция по скорости с помощью Кг 3,6 800 2,0 350 4,3 8
10.14. Синтез систем с помощью MATLAB
В этом разделе коррекция систем управления иллюстрируется путем применения частотных характеристик и 5-плоскости. На примере системы управления намоткой ротора из раздела 10.12 мы продемонстрируем, как с помощью программ MATLAB можно эффективно синтезировать системы, обладающие хорошими показателями качества. Мы рассмотрим применение в данной системе корректирующих устройств как с опережением, так и с отставанием по фазе и научимся получать с помощью MATLAB изображение временных и частотных характеристик системы.
Пример 10.13. Система управления намоткой ротора
Рассмотрим систему управления намоткой ротора, изображенную на рис. 10.24. Цель синтеза— обеспечить высокую точность при отработке системой линейного входного сигнала. Если этот сигнал имеет единичную скорость, то R(s) = l/s~ и установившаяся ошибка равна 1
riv
где
Ку = lim^^ .
.«->0 50
Наряду с требованиями к установившейся ошибке при линейном входном сигнале надо учитывать и ограничения на величину перерегулирования и время установления реакции системы на ступенчатый сигнал. По всей видимости, регулятор в виде обычного усилителя не позволит получить желаемое качество, поэтому мы рассмотрим также варианты коррекции с опережением и с отставанием по фазе. Для синтеза соответствующих корректирующих устройств мы воспользуемся как диаграммой Боде, так и корневым годографом. С этой целью мы приведем ряд программ MATLAB, облегчающих процедуру синтеза.
Рассмотрим сначала самый простой регулятор с передаточной функцией Gc(s) = К. В этом случае установившаяся ошибка при линейном входном сигнале будет равна
50
&ss ~ v
Л.
Чем больше мы сделаем К, тем меньше будет установившаяся ошибка. Однако следует считаться с тем, что увеличение К будет негативно сказываться на переходной характеристике, как это видно из рис. 10.30. При К = 500 установившаяся ошибка в случае линейного входного сигнала составляет 10% от скорости этого сигнала, но при ступенчатом воздействии величина перерегулирования равна 70%, а время установления — примерно 8 с. Такое качество, очевидно, неприемлемо, поэтому мы займемся коррекцией системы.
610
Глава 10. Синтез систем управления с обратной связью
Рис. 10.30
(а) Переходные характеристики системы с пропорциональным регулятором.
(6) Скрипт MATLAB
а}
К=[50 100 200 500]; ___г
%
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
t=[0:0.01:5]; % for i=1:4
sys=feedback(K(i)*sysg,[1]); ◄— y=step(sys,t); -----------
Ys(:,i)=y; < end %
plot(t,Ys(:,1),t,Ys(:,2),t,Ys(:,3),t,Ys(:,4)) х!аЬе1(‘Время (c)‘),ylabel(‘y(t)’)
Задание четырех коэффициентов усиления
Передаточная функция замкнутой систем
Запоминание реакции у(1), соответствующей i-му коэффициенту усиления
Сначала мы попытаемся использовать корректирующее устройство с опережением по фазе, т. е.
Gc(s) =-------,
s + p
где |z| < |р|. Такое устройство позволит нам изменить вид переходной характеристики в лучшую сторону, а для его синтеза мы воспользуемся частотными характеристиками.
Требование, чтобы установившаяся ошибка не превышала 10% от скорости линейного входного сигнала, приводит к тому, что необходимо иметь Kv = 10. Кроме этого, предъявляются определенные требования к реакции системы на ступенчатый сигнал, а именно: время установления (по критерию 2%) Ts < 3 с и относительное перерегулирование < 10%. Имеем следующие соотношения:
/|_х2 Д
Перерегулирование =100e‘v =10 и Ts =------= 3.
Из них находим С, = 0,59 и сои = 2,26. Следовательно, можно определить требование к запасу по фазе:
10.14. Синтез систем с помощью MATLAB
611
Процедура синтеза включает следующие этапы:
1. Построить диаграмму Боде для нескорректированной системы при К = 500 и определить запас по фазе.
2. Определить, какой дополнительный фазовый сдвиг должно создавать корректирующее устройство.
3. Вычислить а по выражению sin<p„, = (а - 1)/(а + 1).
4. Вычислить lOlga и найти на диаграмме Боде частоту со„„ при которой амплитудная характеристика нескорректированной системы имеет значение -lOlga.
5. Провести прямую линию с наклоном —20 дБ/дек, пересекающую уровень 0 дБ на частоте ыт, и
продолжить ее влево до пересечения с амплитудной характеристикой нескорректированной системы, чтобы тем самым определить положение нуля корректирующего устройства. Затем вычислить положение полюса корректирующего устройства как р = az.
6. Построить диаграмму Боде для скорректированной системы и проверить полученное значение запаса по фазе. Если необходимо, выполнить повторно какой-либо из этапов.
7. Ввести в систему дополнительный усилитель, компенсирующий ослабление 1/а, вносимое корректирующим устройством.
8. Проверить результат синтеза, получив путем моделирования переходную характеристику системы. Если необходимо, выполнить повторно какой-либо из этапов.
При решении данной задачи в среде MATLAB мы используем три программы, приведенные на рис. 10.31-10.33. Первая программа предназначена для построения диаграммы Боде нескорректированной системы и выполнения этапов 1-4 процедуры синтеза (см. рис. 10.31). На рис.
10.32 приведены диаграмма Боде для скорректированной системы и программа, осуществляю-
Рис. 10.31 а)
(а) Диаграмма
Боде.
(б) Скрипт MATLAB
К=500;
numg=[1]; deng=[1 15 50 O];sysg=tf(numg,deng);
sys=K*sysg;
% I------
[Gm,Pm1Wcg,Wcp]=margin(sys);-<--------1
%
Phi=(60-Pm)‘pi/180; ◄------------------------
alpha=(1+sin(Phi))/(1-sin(Phi)) ◄-----
[mag, phase, w]=bode(sys); mag_save(1 ,:)=mag(:,1 % -------------------------------------------
M=-10*log10(alpha)*ones(length(w),1); «— Нанесение линии-101g(a),
% помогающей выбрать o>„,
semilogx(w,20*log10(mag_save),w,M),grid х1аЬе!(‘Частота (рад/с)‘),у1аЬе1(‘Амплитуда (дБ)')
612
Глава 10. Синтез систем управления с обратной связью
Рис. 10.32
Регулятор с опережением по фазе:
(а) диаграмма Боде скорректированной системы,
(б) скрипт MATLAB
°)
Gm.1t.S1 dB (at 17.309 rad/sec). Pm.SS.1S6 doq. (at 5.4134 rad/sec)
K=1800; «_________________________
numg=[1]; deng=[1 15 50 0]; numgc=K*[1 3.5]; dengc=[1 25]; ◄— sysg=tf(numg,deng);
Увеличение К с целью компенсировать ослабление 1/а
sysgc=tf(numgc,dengc); sys=series(sysgc,sysg); margin(sys)
Корректирующее устройство с опережением по фазе
Рис. 10.33
Регулятор с опережением по фазе: (а) переходная характеристика, (б) скрипт MATLAB
К=1800;
%
numg=[1]; deng=[1 15 50 0]; sysg=tf(numg,deng);
numgc=K*[1 3.5]; dengc=[1 25]; sysgc=tf(numgc,dengc);
%
syso=series(sysgc,sysg);
sys=feedback(syso,[1]);
%
t=[0:0.01:2];
step(sys.t)
ylabel(‘y(t)’)
10.14, Синтез систем с помощью MATLAB
613
щая ее построение. На рис. 10.33 приведены переходная характеристика системы и программа, с помощью которой она построена. В окончательном виде передаточная функция корректирующего устройства выглядит как
1800(5+3,5) Ge(^) =-----~---- >
s+ 25
где значение К = 1800 получено итеративным способом с помощью соответствующей программы.
С помощью синтезированного корректирующего устройства мы удовлетворили требования к времени установления и перерегулированию, но Kv = 5, а это значит, что при линейном воздействии установившаяся ошибка будет равна 20% от скорости этого воздействия. Хотя, как и ожидалось, корректирующее устройство с опережением по фазе позволило увеличить запас по фазе и улучшить вид переходной характеристики, можно продолжить синтез и попытаться дополнить коррекцию устройством интегрирующего типа.
Чтобы уменьшить установившуюся ошибку за счет увеличения Kv, применим корректирующее устройство с отставанием по фазе, имеющее передаточную функцию
S+ р
где |р| < |z|. Для синтеза такого устройства воспользуемся методом корневого годографа, хотя с равным успехом это можно было бы сделать и с помощью диаграммы Боде. Область желаемого расположения доминирующих корней определяется параметрами 4 = 0,59 и и>„ = 2,26. Процедура синтеза включает следующие этапы:
1. Построить корневой годограф нескорректированной системы.
2. Найти такое положение желаемых корней на корневом годографе нескорректированной системы, чтобы они находились в области, определяемой параметрами С, = 0,59 и со,, = 2,26.
3. Вычислить значение К, соответствующее желаемому положению корней, и определить коэффициент ошибки по скорости нескорректированной системы Кгн.
4- Вычислить а = Кгк/Кт, где Кп =10.
5. Зная а, определить требуемое положение полюса и нуля корректирующего устройства так, чтобы корневой годограф скорректированной системы по-прежнему проходил через желаемые корни.
6. Путем моделирования проверить результат синтеза и, если необходимо, выполнить повторно какой-либо из этапов.
Методику синтеза иллюстрируют рис. 10.34-10.36. С помощью функции rlocfind мы можем вычислить коэффициент К, соответствующий выбранному положению корней на корневом годографе нескорректированной системы. После этого мы можем вычислить параметр а, чтобы убедиться в том, что коэффициент Kv принял желаемое значение. Полюс и нуль корректирующего устройства необходимо разместить так, чтобы они не оказывали существенного влияния на корневой годограф нескорректированной системы. На рис. 10.35 показано, что полюс и нуль корректирующего устройства располагаются очень близко к началу координат, z = -0.1 и /? = —0,01.
В результате синтеза требования к времени установления и перерегулированию практически удовлетворены, и Kv = 10, как и было задано. Можно было бы продолжать процесс синтеза и далее, чтобы еще более улучшить качество системы, но проделанных операций вполне достаточно, чтобы сделать вывод о роли корректирующих устройств с опережением и с отставанием по фазе. По итогам синтеза мы получили корректирующее устройство с отставанием по фазе, передаточная функция которого равна
100(5+0,1)
с 5+0,01
614
Глава 10. Синтез систем управления с обратной связью
Рис. 10.34
Регулятор с отставанием по фазе:
(а) корневой годограф нескорректированной системы,
(б) скрипт MATLAB
а)
Построение области желаемого качества
numg=[1]; deng=[1 15 50 0];
sysg=tf(numg,deng);
elf; rlocus(sysg); hold on %
zeta=0.5912; wn=2.2555; %
x=[-10:0.1 :-zeta*wn]; y=-(sqrt(1 -zetaA2)/zeta)*x; xc=[-10:0.1 :-zeta*wn]; c=sqrt(wnA2-xc.A2);
%
plot(x,y,‘:’,x,-y,‘:’,xc,c,‘:’,xc,-c,‘:’) axis([-15,1,-10,10]);
Рис. 10.35
Регулятор с отставанием по фазе: (а) корневой годограф скорректированной системы, (б) скрипт MATLAB
numg=[1]; deng=[1 15 50 O];sysg=tf(numg,deng);
numgc=[1 0.1]; dengc=[1 0.01];
sysgc=tf(numgc,dengc);
sys=series(sysgc,sysg);
elf; rlocus(sys); hold on
%
zeta=0.5912; wn=2.2555;
x=[-10:0.1 :-zeta*wn]; y=-(sqrt(1-zetaA2)/zeta)*x;
xc=[-10:0.1 :-zeta*wn]; c=sqrt(wnA2-xc.A2);
plot(x,y,‘:’.x,-y,‘:’,xc,c,,:’,xc,-c,‘:’)
axis([-15,1,-10,10]);
10.15. Пример синтеза с продолжением: система чтения информации с диска 615
Рис. 10.36
Регулятор с отставанием по фазе: (а) переходная характеристика, (б) скрипт MATLAB
Основные результаты синтеза приведены в табл. 10.5.
Таблица 10.5. Результаты синтеза корректирующего устройства с помощью MATLAB
Регулятор Коэффициент К С опережением по фазе С отставанием по фазе
Перерегулирование при ступенчатом входном сигнале 70% 8% 13%
Время установления, с 8 1 4
Установившаяся ошибка при линейном входном сигнале 10% 20% 10%
Kv 10 5 10
10.15. Пример синтеза с продолжением: система чтения информации с диска
□ В этой главе мы синтезируем ПД-регулятор, удовлетворяющий заданным требованиям к переходной характеристике системы. Эти требования приведены в табл. 10.6.
Таблица 10.6. Заданные и действительные показатели качества системы чтения информации с диска
Показатель качества Заданное значение Действительное значение
Относительное перерегулирование Время установления Максимальное значение реакции на единичное возмущение Менее 5 % 0,1 % Менее 150 мс 40 мс Менее 5 • 10~3 6,9 • 10“5
616
Глава 10. Синтез систем управления с обратной связью
Рис. 10.37. Система управления дисководом с ПД-регулятором (модель второго порядка)
Структурная схема системы управления изображена на рис. 10.37. Предшествующий фильтр необходим для исключения нежелательного влияния члена (s + z) в числителе передаточной функции замкнутой системы. Мы зададимся целью получить систему с апериодической реакцией (см. раздел 10.11), которая в замкнутом состоянии имеет передаточную функцию вида
Ф)
^) = ^—7 s" + aco„s+co"
Для системы второго порядка, изображенной на рис. 10.37, необходимо иметь a = 1,82(см. табл. 10.2). В этом случае нормированное время установления со,, Д. = 4,82. Поскольку время установления должно быть менее 50 мс, выберем значение со,, = 120. Тогда можно ожидать, что мы получим Ts = 40 мс. Знаменатель в выражении (10.99) принимает вид
(10.100)
(10.99)
s2 + 218,4s + 14400.
Замкнутая система (рис. 10.37) имеет характеристическое уравнение s2+(20+5Я3 >+5/^ =0.
Сравнивая (10.100) и (10.101), имеем:
218,4 = 20 + 5^3 и 14400 = 5^.
Следовательно, Кх = 2880 и А3 = 39,68. Тогда
Gc(s) = 39,68(s + 72,58), и предшествующий фильтр должен иметь передаточную функцию < ч 72,58 G (s) =--------------------------------------- •
р s+ 72,58
В данном примере мы пренебрегли инерционностью двигателя. Тем не менее, результаты синтеза, отраженные в табл. 10.6, говорят о том, что все требования к качеству системы удовлетворены.
(10.101)
10.16. Резюме
В этой главе мы рассмотрели несколько альтернативных методов синтеза систем управления. В первых двух разделах мы обсудили подходы к синтезу систем и выявили причины, вызывающие необходимость коррекции их характеристик. Затем мы исследовали возможность введения последовательных корректирующих устройств в контур системы с обратной связью. С помощью таких устройств можно изменить форму корневого годографа или вид частотных характеристик системы. В качестве претендентов пароль корректирующих устройств были рассмотрены схемы с опережением и с отставанием по фазе. Далее деталь
10.16. Резюме
617
но была изложена методика синтеза корректирующих устройств с опережением по фазе с помощью как диаграммы Боде, так и корневого годографа. Было отмечено, что такие устройства увеличивают запас по фазе и, следовательно, повышают устойчивость системы. Если предъявляются требования к коэффициенту ошибки, то синтез предпочтительнее производить с помощью диаграммы Боде. Если же коэффициент ошибки не задан, а предъявляются определенные требования к перерегулированию и времени установления переходной характеристики, то синтез корректирующего устройства с опережением по фазе проще выполнить с помощью корневого годографа. Если требуется иметь большие значения коэффициентов ошибки, то для коррекции систем обычно применяются устройства интегрирующего типа, обладающие отставанием по фазе. Мы отметили также, что коррекция с опережением по фазе приводит к увеличению полосы пропускания замкнутой системы, а коррекция с отставанием по фазе—наоборот, к ее уменьшению. Полоса пропускания может быть очень важным фактором, если система подвержена влиянию внешних шумов или если шум возникает внутри самой системы. Мы обратили внимание на то, что синтез успешно выполняется только в том случае, если амплитудная характеристика скорректированной системы на диаграмме Боде пересекает уровень 0 дБ с наклоном -20дБ/дек. Основные данные корректирующих устройств с опережением и с отставанием по фазе суммированы в табл. 10.7. В табл. 10.8 приведены схемы на операционных усилителях, реализующие различные типы регуляторов и корректирующих устройств. Применение таких регуляторов многократно было проиллюстрировано в этой и предыдущих главах.
Таблица 10.7. Основные данные корректирующих устройств
Корректирующее устройство
С опережением по фазе С отставанием по фазе
Назначение Создание дополнительного положительного фазового сдвига вблизи частоты, при которой амплитудная характеристика на диаграмме Боде пересекает уровень 0 дБ. Обеспечение желаемого положения доминирующих корней на s-плоскости Увеличение коэффициентов ошибки при сохранении желаемого положения доминирующих корней на s-плоскости или запаса по фазе на диаграмме Боде
Результаты 1. Увеличивает полосу пропускания 2. Увеличивает усиление на высоких частотах 1. Уменьшает полосу пропускания
Преимущества 1. Обеспечивает желаемый вид характеристик системы 2. Улучшает динамику системы 1. Подавляет высокочастотный шум 2. Уменьшает установившуюся ошибку
Недостатки 1. Требует введения дополнительного усилителя 2. Повышает чувствительность к шумам за счет увеличения полосы пропускания 3. Реализация может потребовать больших номиналов элементов КС-схемы 1. Замедляет протекание переходного процесса 2. Реализация может потребовать больших номиналов элементов КС-схемы
Применяется 1. Когда необходимо увеличить быстродействие системы 1. Когда заданы требования к коэффициентам ошибки
Не 1. Когда фазовая характеристика резко па- 1. Когда не существует такой об-
применяется дает в окрестности частоты, при которой амплитудная характеристика пересекает уровень 0 дБ ласти низких частот, в которой обеспечивался бы заданный запас по фазе
618
Глава 10. Синтез систем управления с обратной связью
Таблица 10.8. Схемы на операционных усилителях, применяемые в качестве регуляторов
С опережением или отставанием по фазе Опережение, если Aj С] > А2С2 Отставание, если RtC} < R2C2
q _ RgR^iRf^+ 1) е RiRi(R2C2s+1)
Упражнения
У-10.1. Система с отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
G(s) = ~ s+ 3
Для обеспечения нулевой установившейся ошибки при ступенчатом входном сигнале выбран регулятор с передаточной функцией
Gc(s) = — .
s
Выберите значения а и К так, чтобы переходная характеристика имела перерегулирование около 5%, а время установления (по критерию 2%) равнялось приблизительно 1 с.
Ответ: К= 5, а = 6,4.
У-10.2. Система с единичной отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
40)
Упражнения 619
и в ней использован ПИ-регулятор
Gc(s) = Kt + —.
s
Заметим, что установившаяся ошибка этой системы при линейном входном сигнале равна нулю, (а) Примите К2 - 1 и определите значение К1г при котором переходная характеристика будет иметь перерегулирование, приблизительно равное 20%. (б) Чему равно ожидаемое время установления (по критерию 2%) скорректированной системы?
Ответ: — 0,5.
У-10.3. Объект управления в системе с единичной отрицательной обратной связью имеет передаточную функцию
В системе предлагается использовать ПИ-регулятор с передаточной функцией
Gc(s) = K| 1+ —| .
V isj
чтобы при ступенчатом входном сигнале перерегулирование было равно 5%. Покажите, что это возможно при К — 0,5 и т = 1.
У-10.4. Система с отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
I О f у.
s(s+2)(s+3)
где выбрано значение К = 20, чтобы получить заданный коэффициент ошибки по скорости Kv = 3,33. В системе использовано корректирующее устройство с опережением и отставанием по фазе,
G (5 + 0,15)(5 + 0,7) Д ’ (s+0,015)(s+7)‘
Покажите, что в скорректированной системе запас по модулю равен 24 дБ, а запас по фазе составляет 75°.
У-10.5. Рассмотрите систему с единичной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию
I J > -
s(s+2)(s+4)
Желательно, чтобы доминирующим корням соответствовали параметры <и,. = 3 и(= 0.5. Кроме того, необходимо иметь Kv = 2.7. Покажите, что для этого необходим регулятор с передаточной функцией
7,53(5+2,2)
О As) =----------.
с s+16,4
Какое значение К должно быть выбрано?
Ответ: К = 22.
У-10.6. Рассмотрите систему управления из задачи 7.31. Определите T(s) при К = 326 и оцените ожидаемую величину перерегулирования и время установления (по критерию 2%). Сравните данные вами оценки с действительными значениями 60% и 4 с соответственно. Объясните, в чем причина расхождений.
У-10.7. На рис. 10.7(У), (а) показано, как астронавты снимают с орбиты спутник и помещают его в грузовой отсек космического челнока. Модель системы управления рукой робота изображена на рис. 10.7(У), (б). Если Т= 0,5 с, определите значение К, при котором запас по фазе будет равен 50°.
Ответ: К- 11,7.
620
Глава 10, Синтез систем управления с обратной связью
Рис. 10.7 (У)
Снятие спутника с орбиты
Я(5)
Визуальная обратная связь
У-10.8. Объект управления в системе с единичной отрицательной обратной связью имеет передаточную функцию
G(s) =
2257
5(15 + 1)
где т = 2,8 мс. Выберите регулятор GJs) = + K2/s таким образом, чтобы доминирующим
корням характеристического уравнения соответствовал параметр (, = 1 /V2. Получите график
реакции системы на ступенчатый входной сигнал.
У-10.9. Рассмотрите систему управления, изображенную на рис. 10.9(У). Выберите К{ и К2 так, чтобы при ступенчатом входном сигнале перерегулирование составляло 5%, а коэффициент ошибки по скорости К„ был равен 5. Проверьте результат синтеза.
У-10.10. Рассмотрите систему управления, изображенную на рис. 10.10(У). Задано значение К2 = 4. Определите коэффициент Къ при котором запас по фазе будет равен 60°. Определите время максимума
Рис. 10.9 (У). К синтезу регулятора
Рис. 10.10 (У). К синтезу ПИ-регулятора
переходной характеристики и величину перерегулирования.
У-10.11. Система с единичной обратной связью в разомкнутом состоянии имеет передаточную фун-
кцию
G(s) =
1350
5(5 + 2)(s + 30)
В системе используется корректирующее устройство с опережением по фазе.
Gc(s) =
1+0,255
1+0,0255
Задачи
621
Определите максимальное значение амплитудной характеристики и полосу пропускания замкнутой системы с помощью (а) диаграммы Никольса и (б) диаграммы Боде.
Ответ: Мр„ = 2,3 дБ, сов = 22.
У-10.12. Управление зажиганием в двигателе автомобиля осуществляется с помощью системы с единичной отрицательной обратной связью, которая в разомкнутом состоянии имеет передаточную функцию Gc(s)G(s), где
К к
иСсЦ) = Х, + -Л s(s+10) s
Проектировщик выбрал K2IK} = 0,5 и просит вас определить KKi так, чтобы доминирующим корням соответствовал коэффициент затухания £ = 1/V2, а время установления (по критерию 2%) было менее 2 с.
У-10.13. В примере 10.3 было синтезировано корректирующее устройство с опережением по фазе. Цель коррекции состояла в том, чтобы обеспечить желаемое положение корней характеристического уравнения замкнутой системы со структурой, приведенной на рис. 10.1(a). Тот же результат мы получили бы, если захотели включить корректирующее устройство в цепь обратной связи, как показано на рис. 10.1(6). Определите передаточную функцию замкнутой системы T(s)=Y(s)/R(s) для каждой из этих двух структурных схем и убедитесь, что результаты различны. Поясните, чем будут отличаться реакции двух систем на ступенчатый входной сигнал.
У-10.14. НАСА предполагает создать робот, который будет заниматься строительством постоянно действующей лунной станции. Система управления положением захватывающего устройства робота имеет структуру, изображенную на рис. 10.1(a), где H(s) = 1 и
3
G(s) = s(s+l)(0,5s+l)
Синтезируйте корректирующее устройство с отставанием по фазе, которое будет обеспечивать запас по фазе 45°.
1 + 20s
Ответ: О As) =-------.
l+106s
У-10.15. Объект управления в системе с единичной обратной связью имеет передаточную функцию G(s) = -^-s(s + 2)
Требуется, чтобы при линейном входном сигнале r(f) = At установившаяся ошибка была менее 0.05Л, а запас по фазе должен быть равен 30°. Кроме того, необходимо, чтобы частота сос, при которой амплитудная характеристика скорректированной системы пересекала бы уровень 0 дБ, равнялась 10 рад/с. Используя методы, описанные в разделе 10.9, определите, какое для этого необходимо корректирующее устройство—с опережением или с отставанием по фазе.
У-10.16. Выполните упражнение 10.15, если частота ос = 2 рад/с.
У-10.17. Рассмотрите систему из упражнения 10.9. Выберите К, и К2 так. чтобы система обладала апериодической реакцией на ступенчатый входной сигнал и время установления (по критерию 2%) было менее 2 с.
Задачи
3-10.1. На рис. 10.1(3) приведена структурная схема системы управления положением лунного исследовательского аппарата. Затухание в динамике аппарата является пренебрежимо малым, а управление положением осуществляется с помощью реактивных двигателей. Создаваемый ими момент в первом приближении можно считать пропорциональным сигналу ГЦ), так что T(s~) = K2V(s'). Коэффициент усиления в контуре проектировщик может выбрать так, чтобы обеспечить необходимое затухание. Требуется, чтобы коэффициент затухания £ был равен 0,6.
622
Глава 10, Синтез систем управления с обратной связью
Рис. 10.1 (3) Система управления положением лунного модуля
а время установления (по критерию 2%) не превышало 2,5 с. Подберите передаточную функцию Gc(s) корректирующего устройства с опережением по фазе, пользуясь (а) частотными характеристиками и (б) методом корневого годографа. Для расчетов примите J= 90.
3-10.2. Система управления лентопротяжным механизмом накопителя в современных компьютерах должна обладать высокой точностью и быстродействием. К такой системе могут быть, например, предъявлены следующие требования: (1) время запуска ленты до полной скорости и время ее остановки — 10 мс и (2) система должна обеспечивать считывание 45000 символов в секунду. Эта система рассматривалась ранее в задаче 7.11. Требуется при J= 510'3 выбрать К.ъ исходя из максимально допустимой ошибки по скорости ленты. В данном случае необходимо поддерживать скорость с установившейся ошибкой менее 5%. Мы будем использовать в системе тахогенератор и зададим значения Ка = 50000 и К2 = 1. Для обеспечения требуемого качества в систему непосредственно после фотопреобразователя вводится корректирующее устройство Gc(s). Выберите Gc(s) так, чтобы при ступенчатом входном сигнале перерегулирование не превышало 25 %. Будем предполагать, что Т| = то= 0.
3-10.3. На рис. 10.3(3) изображена упрощенная модель системы управления скоростью самолета типа F-94 или Х-15. При скорости полета, в 4 раза превышающей скорость звука, на высоте 10000 м передаточная функция самолета имеет следующие параметры: 1/то= 1,0, Kt = 1,0, = 1,0, к>о = 4. Синтезируйте корректирующее устройство Gc(s) так. чтобы реакция системы на ступенчатый входной сигнал имела перерегулирование менее 5% и время установления (по критерию 2%) менее 5 с.
Рис. 10.3 (3)
Система управления положением самолета
3-10.4. Электромагнитные муфты сцепления широко используются в качестве исполнительных устройств благодаря тому, что они могут развивать на выходе высокую механическую мощность (до 200 Вт). Они обладают высоким отношением развиваемого момента к моменту инерции и малой постоянной времени. На рис. 10.4(3) изображена система управления положением стержня ядерного реактора, в которой используется такая муфта. Двигатель вращает в противоположных направлениях две части сцепления, которые через параллельные редукторные пе-
Рис. 10.4 (3). Система управления положением стержня ядерного реактора
Задачи
623
редачи связаны с выходным валом. Направление вращения выходного вала зависит от того, какая муфта в данный момент активизирована. Постоянная времени 200-ваттной муфты равна 1/40 с. Остальные параметры таковы, что KjnlJ= 1. Требуется, чтобы при ступенчатом входном сигнале максимальное перерегулирование находилось в пределах от 10% до 20%. а время установления (по критерию 2%) не превышало 2 с. Синтезируйте корректирующее устройство, удовлетворяющее этим требованиям.
Рис. 10.5 (3). Система управления скоростью стола
3-10.5. В системе стабилизации скорости стола обрабатывающего станка используются прецизионный тахогенератор и двигатель постоянного тока прямого действия, как показано на рис. 10.5(3). При управлении скоростью желательно поддерживать высокую точность в установившемся режиме. Для получения нулевой установившейся ошибки при ступенчатом входном сигнале выберите ПИ-регулятор согласно методике, описанной в разделе 10.6. Определите надлежащие значения параметров, про которых система будет иметь перерегулирование около 10 % и время установления (по критерию 2%) от 0,4 до 0,6 с.
3-10.6. Повторите задачу 10.5, используя корректирующее устройство с опережением по фазе, и сравните результаты.
3-10.7. Система регулирования температуры в первом контуре ядерного реактора содержит транспортное запаздывание, обусловленное движением теплоносителя из активной зоны до точки, в которой измеряется температура [см. рис. 10.7(3)]. Регулятор имеет передаточную функцию
Gf(s) = K, + ^ .
s
Передаточная функция реактора с учетом запаздывания равна
где Т = 0,4 с и т = 0,2 с. Используя частотные характеристики, определите параметры регулятора, при которых величина перерегулирования будет менее 10 %. Оцените время установле-
Рис. 10.7 (3) Система управления ядерным реактором: 1 — парогенератор, 2 — активная зона реактора, 3 — регулирующие стержни, 4 — исполнительные механизмы, 5 — измеренная температура, 6 — заданная температура
624
Глава 10, Синтез систем управления с обратной связью
Рис. 10.8 (3) Система управления химическим реактором
ния (по критерию 2%) синтезированной системы. Определите действительные значения перерегулирования и времени установления.
3-10.8. Производительность химического реактора непосредственно зависит от добавления катализатора, как показано на структурной схеме рис. 10.8(3). Время запаздывания Т= 50 с, а постоянная времени т « 40 с. Коэффициент усиления объектах - 1. Требуется, чтобы при ступенчатом входном сигнале, R(s)=Als, установившаяся ошибка была меньше, чем 0,Ы. С помощью диаграммы Боде синтезируйте корректирующее устройство, обеспечивающее приемлемый вид реакции системы. Для скорректированной системы оцените время установления.
Рис. 10.9 (3). Система управления положением револьверной головки станка
3-10.9. Весьма актуальной задачей является достижение высокой точности позиционирования головки револьверного станка с числовым программным управлением. На рис. 10.9(3) изображена структурная схема системы управления таким станком. Коэффициент передачи редуктора п = 0,1, J= 10“3 и b = 10-2. Требуемая точность позиционирования составляет 12,5-Ю"4 см, и, следовательно, при линейном входном сигнале установившаяся ошибка должна составлять 2,5% от скорости этого сигнала. Синтезируйте корректирующее устройство с отставанием по фазе, предшествующее блоку тиристоров, исходя из того, что при ступенчатом входном сигнале перерегулирование не должно превышать 5%. Коэффициент затухания скорректированной системы должен быть равен 0,7. Блок тиристоров имеет коэффициент усиления KR = 5. Синтез проведите двумя методами: (а) с помощью диаграммы Боде и (б) с помощью корневого годографа.
3-10.10. На рис. 10.10(3), (а), изображен паром «Авемар» водоизмещением 670 т, построенный для обслуживания средиземноморских линий. Он способен развивать скорость в 45 узлов (примерно 84,5 км/ч). Появление таких судов с подобными качествами стало возможным благодаря созданию обтекаемого корпуса, который ведет себя в воде подобно гоночному автомобилю-болиду в обычных условиях. Помимо обычного корпуса паром имеет третий, скрытый корпус, который обеспечивает дополнительную стабилизацию в условиях волнения на море. Перевозимый таким паромом груз, включая 900 пассажиров, экипаж, автомобили, грузовики и автобусы, может быть равен его собственному весу. Паром «Авемар» может курсировать при высоте волн до 2,5 м при скорости 40 узлов благодаря системе автоматической стабилизации. Стабилизация осуществляется посредством крыльев, установленных на днище парома, главным образом с помощью кормовых крыльев. Система автоматической стабилизации обеспечивает постоянный уровень парома над поверхностью моря в условиях волнения. С этой целью была спроектирована система, минимизирующая отклонения от заданной подъемной силы, или, что то же самое, угол килевой качки. Структурная схема системы управления горизонтальным положением парома изображена на рис. 10.10(3), (б). В условиях волнения требуется, чтобы паром сохранял при движении строго горизонтальное положение. Задайте необходимые требования к качеству системы и синтезируйте регулятор Gc(s), который удовлетворял
Задачи
625
а)
Рис. 10.10 (3). (а) Паром «Авемар», построенный для обслуживания линии между Барселоной и Балеарскими островами, (б) Система управления подъемной силой
бы этим требованиям. Считайте, что возмущающее воздействие, обусловленное волнением моря, имеет частоту о = 6 рад/с.
З-Ю.П.Объект управления в системе с единичной обратной связью, структура которой представлена на рис. 10.1(a), имеет передаточную функцию
4,19
G(s) =-------------
s(s+l)(s+5)
(а) При Gc(s) = 1 получите переходную характеристику системы и определите время установления; найдите также установившуюся ошибку при линейном входном сигнале r(z) = t, I > 0. (б) С помощью корневого годографа синтезируйте корректирующее устройство с отставанием по фазе, позволяющее увеличить коэффициент ошибки по скорости до 8.4. Определите время установления (по критерию 2%) скорректированной системы.
3-10.12. В системе с единичной обратной связью, изображенной на рис. 10.1(a), объект управления представлен передаточной функцией
х 160 G(s) = -у-s
Подберите корректирующее устройство с опережением и отставанием по фазе так, чтобы при ступенчатом входном сигнале перерегулирование было не более 5%, а время установления (по критерию 2%) — не более 1 с. Также требуется, чтобы коэффициент ошибки по ускорению Ка был более 7500 (см. табл. 5.5).
3-10.13. Объект управления в системе с единичной обратной связью имеет передаточную функцию
s(l+0,ls)(l+0,05s) '
Синтезируйте корректирующее устройство так, чтобы запас по фазе составлял по крайней мере 75°. Для решения задачи воспользуйтесь двухзвенным устройством с опережением по фазе,
G , , = *0+ s/co1)(1+ s/to3) с (1+ s/co2)(l+ s/o4)
Кроме того, требуется, чтобы при линейном входном сигнале установившаяся ошибка составляла 0,5% от скорости этого сигнала (Kv = 200).
626
Глава 10. Синтез систем управления с обратной связью
Рис. 10.14 (3)
3-10.14. Проблема испытания различных материалов требует создания систем управления, которые правильно воспроизводили бы условия, в которых будут работать изделия из этих материалов. Такую систему управления можно рассматривать как сервомеханизм, обеспечивающий закон изменения нагрузки в соответствии с входным сигналом произвольной формы. Структурная схема системы управления приведена на рис. 10.14(3).
(а) Считая Gc(s) = К, выберите такое значение К, при котором запас по фазе будет равен 50°. Определите, чему в этом случае равна полоса пропускания замкнутой системы, (б) Предъявляется дополнительное требование, чтобы коэффициент ошибки по скорости Kv был равен 2. Синтезируйте корректирующее устройство с отставанием по фазе так, чтобы запас по фазе оставался равен 50°. но при этом обеспечивалось бы Kv = 2.
3-10.15. К системе из задачи 10.14 предъявляется дополнительное требование: кроме запаса по фазе, равного 50°, необходимо, чтобы время установления (по критерию 2%) было менее 4 с. Синтезируйте корректирующее устройство с опережением по фазе, удовлетворяющее этим требованиям. Коэффициент Kv, как и прежде, должен быть равен 2.
3-10.16. Нагрузку на руку робота можно рассматривать в качестве возмущения, как показано на рис. 10.16(3). Считая Л(л') = 0, определите Gc(s) так, чтобы в замкнутой системе влияние возмущения было менее 10% от того эффекта, который оно оказывает при отсутствии обратной связи.
Рис. 10.16 (3)
Система управления роботом
Рис. 10.17 (3)
Система управления скоростью автомобиля
r>(s)=l/s Возмущение
3-10.17. Систему водитель-автомобиль можно представить в виде упрощенной модели, изображенной на рис. 10.17(3). Задача системы сводится к тому, чтобы при ступенчатом входном сигнале, соответствующем заданной скорое™, она устанавливалась (по критерию 2%) за 1 с с перерегулированием не более 10%. Выберите ПИ-регулятор, обеспечивающий выполнение этих требований. Определите действительную реакцию системы (а) при Gp(s) = 1 и (б) при использовании предшествующего фильтра Gp(s), устраняющего нуль из передаточной функции замкнутой системы T(s~).
3-10.18. Система управления подводным роботом имеет единичную обратную связь, а объект в ней представлен передаточной функцией
s(s+10)(s+50) '
Требуется, чтобы при ступенчатом входном сигнале перерегулирование составляло примерно 7,5 %, а время установления (по критерию 2 %) было равно 400 мс. С помощью корневого годографа синтезируйте корректирующее устройство с опережением по фазе. Считая, что нуль корректирующего устройства находится в точке s = —15, определите положение полюса. Вычислите, чему в этом случае равен коэффициент Kv.
Задачи
627
Рис. 10.19 (3). (а) Дистанционный манипулятор на поверхности Луны, управляемый с Земли. (6) Структурная схема системы управления манипулятором
( Т - время запаздывания видеосигнала)
3-10.19. НАСА разрабатывает дистанционные манипуляторы для исследования Луны, которые управляются человеком по радиоканалу, как показано на рис. 10.10(3), (а). Структурная схема системы управления манипулятором изображена на рис. 10.19(3), (б). Поскольку среднее расстояние от Земли до Луны составляет 384318 км, то время запаздывания Т. связанное с прохождением сигнала, равно 1,28 с. Управление манипулятором, находящимся на поверхности Луны, оператор осуществляет с помощью рукоятки, а результат выполняемых действий наблюдает на экране монитора. Постоянная времени манипулятора равна 0,25 с. (а) Выберите коэффициент К] так, чтобы система имела запас по фазе, приблизительно равный 30°. Вычислите установившуюся ошибку (в процентах от амплитуды ступенчатого входного сигнала), (б) Чтобы уменьшить установившуюся ошибку до 5 %, введите последовательно с К, корректирующее устройство с отставанием по фазе. Получите график переходной характеристики.
3-10.20. В последнее время достигнуты большие успехи в разработке роботов для обслуживания ядерных энергетических установок. В первую очередь такие роботы используются при переработке выгруженного ядерного топлива и при работе с отходами производства. Сейчас они начинают также применяться для контроля начальной загрузки, ремонтных работ на реакторной установке, дезактивации оборудования и ликвидации последствий аварий. Применение таких дистанционно управляемых роботов позволяет существенно снизить радиационное облучение персонала и повысить качество регламентных работ на реакторе.
Сейчас разрабатываются специализированные робототехнические системы для выполнения ответственных работ в реакторном помещении. Одна из таких систем, IRIS (Industrial Remote Inspection System), предназначена для обследования ядерного реактора и выполнения на нем различных работ, не подвергая персонал высоким дозам облучения. Эта система изображена на рис. 10.20(3). Разомкнутая система имеет передаточную функцию
(S+l)(5+3)'
628
Глава 10. Синтез систем управления с обратной связью
Рис. 10.20 (3) Дистанционно управляемый робот для обслуживания ядерно-опасных объектов
(а) Считая, что Т= 0,5 с, определите значение К, при котором перерегулирование, вызванное ступенчатым входным воздействием, не будет превышать 30%. Определите также установившуюся ошибку, (б) Синтезируйте регулятор с передаточной функцией
с помощью которого можно улучшить вид переходной характеристики системы из п. (а) и получить установившуюся ошибку менее 12%. Считайте, что структура замкнутой системы имеет вид рис. 10.1(a).
3-10.21. Объект управления в системе с единичной обратной связью имеет передаточную функцию
G(s) =
К
Требуется получить коэффициент ошибки по скорости Kv = 20. запас по фазе приблизительно 45° и полосу пропускания замкнутой системы больше, чем со = 4 рал/с. Для решения задачи используйте два одинаковых корректирующих устройства с опережением по фазе, соединенных последовательно.
3-10.22. Для системы из задачи 10.21 подберите корректирующее устройство с отставанием по фазе, удовлетворяющее тем же требованиям за исключением того, что полосу пропускания допускается иметь больше или равной 2 рад/с.
3-10.23. Для системы из задачи 10.21 требуется получить те же самые значения запаса по фазе и коэффициента Ку. но полоса пропускания должна находиться в интервале от 2 рад/с до 10 рад/с. Для решения задачи используйте корректирующее устройство с опережением и отставанием по фазе, имеющее передаточную функцию.
с (1+s/10a)(l+s/й) (1+s/a)(l+s/lOb) ’
где подлежат выбору параметр а для части устройства, обладающей отставанием по фазе, и параметр Ъ для части, обладающей опережением по фазе. Параметр а для обеих частей корректирующего устройства должен быть равен 10.
3-10.24. В системе с единичной обратной связью [рис. 10.1(a)]
G(s) = —
Требуется, чтобы при ступенчатом входном сигнале установившаяся ошибка приблизительно была равна 4%. а запас по фазе должен быть около 45°. Синтезируйте корректирующее устройство с отставанием по фазе, удовлетворяющее этим требованиям.
Задачи
629
Рис. 10.25 (3). Система управления положением робота
3-10.25. Серьезная проблема возникает при обеспечении устойчивости и высокой точности системы управления поворотом руки робота. Такая система должна иметь большой коэффициент усиления, чтобы обладать высоким разрешением по углу; в то же время не допускается большое перерегулирование. На рис. 10.25(3) изображена структурная схема электрогидравличе-ской системы управления поворотом руки. Динамика объекта управления представлена передаточной функцией
si ----1---+ 1
(^6400 50 J
Скорректированная система должна иметь Kv = 20. Синтезируйте регулятор, который обеспечивал бы при ступенчатом входном сигнале перерегулирование не более 10%.
Рис. 10.26 (3). Система управления величиной воздушного зазора
3-10.26. Во всем мире исследуется возможность борьбы с трением, износом и вибрацией, сопровождающими движение пассажирских транспортных средств. Один из проектов предполагает использование магнитной подвески за счет создания отталкивающей силы между вагоном и направляющим рельсом. При этом требуется точно поддерживать величину воздушного зазора. На рис. 10.26(3) приведена структурная схема управления величиной воздушного зазора, в которой используется корректирующее устройство в цепи обратной связи. С помощью корневого годографа определите значения Kt и Ь. при которых доминирующим корням будет соответствовать коэффициент затухания = 0,50. Если потребуется, полюсом корректирующего устройства s = -200 можно пренебречь.
3-10.27. При выводе информации из компьютера на принтер важно точно управлять положением бумаги при ее протяжке. Передаточная функция двигателя вместе с усилителем, входящих в состав системы с единичной обратной связью, имеет вид:
s(s+ l)(5s + 1)
Синтезируйте корректирующее устройство с опережением по фазе так. чтобы замкнутая система имела полосу пропускания 0,75 рад/с, а запас по фазе был равен 30°. В корректирующем устройстве примите параметр а= 10.
3-10.28. Группа инженеров пытается решить задачу управления объектом, изображенным на рис. 10.28(3). Предлагаемая ими система содержит регулятор, но они нс в состоянии определить его передаточную функцию Gc(s). Они согласны только с тем. что система должна обладать запасом по фазе в 50°. Вас просят помочь определить Gc(s).
630
Глава 10. Синтез систем управления с обратной связью
Рис. 10.28 (3)
К синтезу регулятора
Сначала примите Gc(s) = К и определите (а) значение К, при котором запас по фазе будет равен 50°, и переходную характеристику системы при этом коэффициенте усиления, (б) Определите время установления, относительное перерегулирование и время максимума переходной характеристики. (в) Получите частотные характеристики замкнутой системы и определите Мр и полосу пропускания.
Группа инженеров решила использовать регулятор с передаточной функцией
s+20
и проделать пп. (а), (б) и (в). Определите значение К, при котором запас по фазе будет равен 50°, после чего получите переходную характеристику и частотные характеристики замкнутой системы. Подготовьте таблицу, в которую сведите для сравнения следующие показатели, полученные при использовании двух разных регуляторов: время установления (по критерию 2%), относительное перерегулирование, время максимума переходной характеристики. Мр и полоса пропускания.
3-10.29. В аппарате с адаптивной подвеской используется принцип шагающего движения. Система управления ногой такого аппарата имеет единичную обратную связь, а ее передаточная функция в разомкнутом состоянии равна
$($+ 10)(s+ 14)
Требуется, чтобы при линейном входном сигнале установившаяся ошибка была равна 10% от скорости этого сигнала, а доминирующим корням должен соответствовать коэффициент затухания £ = 0,707. Синтезируйте необходимое корректирующее устройство с отставанием по фазе и определите действительные значения перерегулирования и времени установления (по критерию 2%).
3-10.30. Передаточная функция разомкнутого контура системы управления уровнем жидкости (см. рис. 9.32) равна Gc(s)G(s)H(s), где H(s) = 1. Gc(s) — передаточная функция регулятора, а объект управления имеет передаточную функцию
Юе'^ s2(s+ 10) ’ где Т= 50 мс. Синтезируйте регулятор так, чтобы максимум амплитудной характеристики замкнутой системы Мр не превышал 3,5 дБ, а ее резонансная частота приблизительно была равна 1,4 рад/с. Считая, что на вход системы подан ступенчатый сигнал, предскажите величину перерегулирования и время установления (по критерию 2%). Постройте график действительной реакции системы.
3-10.31. Перевозка материалов на промышленных предприятиях и в складских помещениях может осуществляться с помощью автоматически управляемых электрокаров. Для большинства таких электрокаров необходима специальная система, обеспечивающая движение по заданном) маршруту. Проблема устойчивости таких систем управления до сих пор еще полностью не решена. В общем случае допускается небольшое «рыскание» электрокара относительно заданной траектории движения, хотя это может служить признаком неустойчивости системы. Большинство автоматизированных электрокаров должны обладать максимальной скоростью движения около 1 м/с, но на практике их скорость обычно в два раза меньше. На полностью автоматизированном предприятии персонал должен быть сведен к минимуму, поэтому от элект-
Задачи
631
Рис. 10.31 (3) Система управления транспортным средством
рокаров требуется, чтобы они могли двигаться с полной скоростью. Но с увеличением скорости труднее обеспечить устойчивость системы управления и плавность движения электрокара. На рис. 10.31(3) изображена структурная схема системы управления курсом электрокара, где Т] = 40 мс и т2 = 1 мс. Коэффициент ошибки по скорости Kv должен быть равен 100. чтобы при линейном входном сигнале установившаяся ошибка составляла 1% от скорости этого сигнала. Пренебрегая постоянной времени т2, синтезируйте регулятор с опережением по фазе так. чтобы запас по фазе в системе находился в пределах от 45° до 65°. Попытайтесь решить задачу для двух крайних значений запаса по фазе и сравните результаты синтеза, определив действительные значения перерегулирования и времени установления реакции системы на ступенчатый входной сигнал.
3-10.32. В системе из задачи 10.31 используйте регулятор с отставанием по фазе и попытайтесь обеспечить запас по фазе приблизительно 50°. Определите действительные значения перерегулирования и времени максимума переходной характеристики.
3-10.33. Когда электродвигатель управляет перемещением гибкой конструкции, то основной вклад в ошибку результирующего движения обусловлен собственными частотами этой конструкции. если сравнивать их с полосой пропускания сервопривода. В современных промышленных роботах приводы относительно медленные, а управляемые ими конструкции достаточно жесткие, поэтому перерегулирование и другие показатели качества определяются в основном сервоприводом. Однако в зависимости от требуемой точности изгиб перемещаемой конструкции может начать оказывать существенное влияние на качество управления. Гибкость конструкции можно считать основной причиной ошибок при управлении движением манипуляторов и элементов космических станций. Из-за ограничений на массу космических конструкций элементы типа рычага, имеющие большую длину, объективно становятся гибкими. Кроме того, промышленные роботы будущих поколений должны работать с более легкими и более гибкими манипуляторами.
Рис. 10.33 (3) Система управления гибкой рукой манипулятора
632
Глава 10. Синтез систем управления с обратной связью
Чтобы исследовать влияние гибкости конструкций и оценить, как различные по структуре системы управления могут уменьшить нежелательные колебания, была создана экспериментальная установка, состоящая из двигателя постоянного тока, вращающего тонкий алюминиевый стержень. Цель эксперимента заключалась в том, чтобы установить простую и эффективную стратегию управления гибкой конструкцией.
Экспериментальная установка изображена на рис. 10.33(3), (я), а соответствующая система управления положением стержня с укрепленной на его конце нагрузкой—на рис. 10.33(3), (б). Требуется, чтобы система имела коэффициент Kv = 100. (а) Считая Ct(s) = К, определите необходимое значение К и постройте диаграмму Боде. Найдите запасы устойчивости по фазе и по модулю, (б) С помощью диаграммы Никольса определите со,.. Мр и <ов. (в) Синтезируйте корректирующее устройство так, чтобы запас по фазе был больше 35°, и определите со,,. Мр и сов для скорректированной системы.
3-10.34. Способность человека выполнять различные задачи, требующие применения механических усилий, ограничена не столько его интеллектуальными, сколько физическими возможностями. Если связать в единое целое руку человека, управляемую его мозговой деятельностью, и механизм, способный развивать большие механические усилия, то получится полностью автоматизированный робот.
Особый класс роботов-манипуляторов составляют так называемые экстендеры, которые усиливают действия руки человека, сохраняя всю последовательность выполняемых ею операций. Отличительным свойством экстендера является двухсторонняя передача сигналов за счет физического контакта между ним и человеком-оператором. Благодаря такому оригинальному интерфейсу управление движением экстендера выполняется без применения джойстика, клавиатуры или других подобных устройств. Человек для экстендера является своеобразной системой управления, тогда как экстендер дает человеку почувствовать, какие усилия надо приложить для выполнения задачи. Человек как бы становится частью экстендера и в известном пропорциональном отношении начинает «чувствовать» величину нагрузки, с которой имеет дело экстендер. В то же время экстендер имеет принципиальное отличие от системы «хозяин-раб»; в данном случае человек-оператор, независимо от того, находится ли он далеко от манипулятора или в непосредственной близости от него, не имеет с ним прямого физического контакта в смысле передачи мощности. Пример экстендера приведен на рис. 10.34(3), (а). Структурная схема системы управления экстендером изображена на рис. 10.34(3), (б). Система должна
Рис. 10.34 (3)
Система управления экстендером
а)
Задачи
633
Рис. 10.35 (3)
Система управления поездом на магнитной подвеске
иметь коэффициент ошибки по скорости Kv = 80, время установления (по критерию 2%) 1,6 с, перерегулирование 16% и коэффициент затухания, соответствующий доминирующим корням, С, = 0,5. Синтезируйте с помощью корневого годографа корректирующее устройство, удовлетворяющее этим требованиям.
3-10.35. В Берлине действует линия, по которой поезда движутся с помощью магнитной подвески. Эта линия имеет протяженность 1600 м и отражает текущее состояние данного направления развития железнодорожного транспорта. Полностью автоматизированные поезда могут следовать друг за другом с малыми интервалами и с высокой эффективностью использования электроэнергии. На рис. 10.35(3) изображена структурная схема системы управления подвеской вагона. Выберите регулятор так, чтобы запас по фазе в системе был в пределах от 45° до 55°. Предскажите вид переходной характеристики и для сравнения получите действительную переходную характеристику.
3-10.36. Инженерная мысль работает над созданием новых датчиков для металлообрабатывающих станков и других производственных процессов. Один из новых методов основан на получении информации о процессе фрезерования с помощью акустических сигналов. Метод основан на измерении слабых высокочастотных механических напряжений, возникающих при быстром высвобождении энергии в однородной среде. Этот метод обладает чувствительностью к материалу, геометрии режущего инструмента, износу инструмента и параметрам процесса фрезерования, таким как подача материала и скорость вращения фрезы. В качестве датчиков обычно используются пьезоэлектрические кристаллы, чувствительные к частотам в диапазоне от 100 кГц до 1 МГц. Они обладают сравнительно низкой стоимостью и могут быть установлены на большинстве фрезеровальных станков.
Последние исследования в данной области были связаны с извлечением из акустических сигналов информации о глубине фрезерования. Была установлена связь между уровнем акустиче-
Рис. 10.36 (3)
Система управления фрезеровальным станком
Акустический сигнал
Пьезоакустический датчик
Рабочий стол станка
ж (и
Фреза Обрабатываемая
деталь
634
Глава 10. Синтез систем управления с обратной связью
ского сигнала и малыми изменениями глубины погружения в материал вращающейся алмазной фрезы. Фрезеровальный станок с использованием пьезоакустического датчика изображен на рис. 10.36(3), (а). Система управления глубиной погружения фрезы приведена на рис. 10.36(3), (б). Синтезируйте регулятор так. чтобы при ступенчатом входном сигнале перерегулирование не превышало 20%. а коэффициент ошибки по скорости был не менее 8.
3-10.37. Разомкнутая система предст авлена звеном чистого запаздывания, где время запаздывания Т = 0.5 с, так что G(s) = e^'5s. Синтезируйте регулятор Gc(s) так. чтобы при ступенчатом входном сигнале установившаяся ошибка не превышала 2% от амплитуды этого сигнала, а запас по фазе был больше 30°. Определите полосу пропускания скорректированной системы и получите график ее переходной характеристики.
3-10.38. Система с единичной отрицательной обратной связью в разомкнутом состоянии имеет передаточную функцию
1
G(s) = s(s+10)(s+20)
Задача синтезом состоит в том, чтобы доминирующим корням соответствовал коэффициент затухания С, = 0,707, а установившаяся ошибка при линейном входном сигнале равнялась бы нулю. Выберите такой ПИ-регулятор, при котором удовлетворялись бы выдвинутые требования. Определите время максимума переходной характеристики скорректированной системы и время ее установления (по критерию 2 %).
3-10.39. В системе с единичной обратной связью [ рис. 10.1(a)]
1
G(s) = (j+ 1)(j+ 10)
Синтезируйте регулятор Gc(s) так, чтобы при ступенчатом входном сигнале перерегулирование было менее 10%, а установившаяся ошибка — менее 5% от амплитуды входного сигнала. Определите полосу пропускания замкнутой системы.
3-10.40. Объект управления в системе с единичной обратной связью имеет передаточную функцию
G(s) = —.
s(s+2)
Требуется получить запас по фазе 30° и достаточно большую полосу пропускания. Выберите частоту = 10 рад/с и синтезируйте корректирующее устройство с опережением по фазе аналитическим методом, рассмотренным в разделе 10.9. Проверьте результат синтеза, построив диаграмму Боде для скорректированной системы.
3-10.41. Объект управления в системе с единичной обратной связью имеет передаточную функцию
ч 40
G(j) = —---— •
s(s + 2)
Запас по фазе в системе должен быть равен 30°. Установившаяся ошибка при линейном входном сигнале, r(l) = t, должна быть равна 0,05. С помощью методики, рассмотренной в разделе 10.9, синтезируйте корректирующее устройство с отставанием по фазе, удовлетворяющее этим требованиям. Проверьте результаты путем построения диаграммы Боде.
3-10.42. Для системы из задачи 10.41, сохранив те же требования, найдите корректирующее устройство, если необходимо, чтобы при линейном входном сигнале установившаяся ошибка была равна 0,02.
3-10.43. Проделайте пример 10.12, если требуется, чтобы время нарастания переходной характеристики до 100% от установившегося значения было равно 1 с.
3-10.44. Рассмотрите еще раз пример 10.4. Используя в системе, изображенной на рис. 10.22. регулятор с передаточной функцией (10.46), найдите соответствующий предшествующий фильтр. Сравните переходные характеристики системы при наличии и при отсутствии предшествующего фильтра.
Задачи повышенной сложности
635
Задачи повышенной сложности
П-10.1. Задача, связанная с захватом и перемещением предметов, требует высокой точности движения руки робота в трех измерениях, как показано на рис. 10.1(П). Рука должна совершать линейные перемещения так, чтобы избежать контакта с другими частями установки. При ступенчатом входном воздействии перерегулирование не должно превышать 13%.
(а) Полагая Gc.(s) = К. определите значение К, удовлетворяющее выдвинутому требованию. Определите, чему при этом будет равно время установления (по критерию 2%). (б) С помощью корректирующего устройства с опережением по фазе добейтесь уменьшения времени установления до величины менее 3 с.
Л(5)
1
j(s+1)(5+4) *
У(5)
П-10.2. Система из предыдущей задачи по-прежнему должна иметь относительное перерегулирование менее 13%, но дополнительно требуется, чтобы при линейном воздействии, изменяющемся с единичной скоростью, установившаяся ошибка была не более 0,125 (Kv = 8). Синтезируйте корректирующее устройство с отставанием по фазе, удовлетворяющее этим требованиям. Определите действительные значения перерегулирования и времени установления (по критерию 2%) в скорректированной системе.
П-10.3. Сохраняя все требования к системе из задачи П-10.1 (т. е. перерегулирование меньше 13% и коэффициент Kv = 8), синтезируйте ПИ-регулятор, удовлетворяющий этим требованиям.
П-10.4. На рис. 10.4(П) изображена структурная схема системы управления электродвигателем постоянного тока. Выберите такие значения К} и К2, чтобы переходная характеристика системы имела время установления (по критерию 2%) менее 0.6 с, а перерегулирование не более 5%.
П-10.5. На рис. 10.5(П) изображена система с единичной обратной связью. Требуется, чтобы переходная характеристика системы имела перерегулирование около 16% и время установления (по критерию 2%) около 1,8 с. (а) Синтезируйте корректирующее устройство с опережением по фазе, обеспечивающее желаемое расположение доминирующих корней, (б) При Gt.(j) = 1 определите переходную характеристику системы, (в) Выберите предшествующий фильтр и получите соответствующую переходную характеристику.
636
Глава 10. Синтез систем управления с обратной связью
Рис. 10.5 (П)
Система
с предшествующим фильтром
Рис. 10.4 (П)
Система p(sj
управления двигателем
П-10.6. Вернитесь к примеру 10.12 и решите его, если при условии К < 52 необходимо минимизировать время установления. Синтезируйте соответствующее корректирующее устройство. Получите график переходной характеристики системы.
П-10.7. В системе со структурой вида рис. 10.22. где
1
G(s) = s(s+ 2)(s+ 8)
используется корректирующее устройство с передаточной функцией
^(5+3)
ОДД) -------- •
5+28
Определите значение К, при котором комплексным корням соответствует £ = 1 /V2. Предшествующий фильтр имеет передаточную функцию
GPW = — с4- ы
(а) Определите перерегулирование и время нарастания в случаях, когда Gp(s) = 1 и р = 3. (б) Выберите значение р, при котором перерегулирование будет равно 1%, и сравните это значение с полученным в результате построения действительной переходной характеристики.
П-10.8. Робот Manutec, изображенный на рис. 10.8(П), (а), имеет длинную руку и большой момент инерции, что создает определенные проблемы при управлении им. Структурная схема системы управления роботом приведена на рис. 10.8(П), (б). Динамика объекта управления представлена передаточной функцией
250
G(s) = s(j + 2)(s + 40)(s + 45)
°)
Рис. 10.8 (П). (а) Робот «Manutec». (6) Система управления роботом
Задачи на синтез систем
637
При ступенчатом входном сигнале перерегулирование должно быть менее 20 %, время нарастания — менее 0,5 с, а время установления (по критерию 2%) — менее 1.2 с. Кроме того, система должна иметь коэффициент ошибки по скорости Kv > 10. Синтезируйте регулятор с опережением по фазе, удовлетворяющий этим требованиям.
П-10.9. Динамика химического процесса представлена передаточной функцией
100
G(j) = s(s + 5)(5 +10)
Требуется, чтобы при линейном входном сигнале установившаяся ошибка была достаточно малой, поэтому задано значение Kv = 100. Запас по модулю должен быть не менее 10 дБ. а за-
пас по фазе не менее 40°. Синтезируйте регулятор с опережением и с отставанием по фазе, удовлетворяющий этим требованиям. Считайте, что структура системы управления имеет вид рис. 10.1(a) при H(s) = 1.
П-10.10. На рис. 10.10(П) изображена схема на операционном усилителе, обладающая опережением по фазе, (а) Определите передаточную функцию этой схемы, (б) Изобразите частотные характеристики схемы, если Ri = 10 кОм, R2 = 10 Ом. С] - 0.1 мкФ и С2 = 1 мФ.
Рис. 1O.1O (П). Схема с опережением по фазе на операционном усилителе
Задачи на синтез систем
СС-10.1. В системе на рис. 4.1 (СС) используется ПД-регулятор. Определите значения коэффициен-
□ тов ПД-регулятора. при которых система будет обладать апериодической реакцией. Кроме того, необходимо, чтобы время установления (по критерию 2%) было менее 250 мс. Прове-
рьте полученные результаты.
С-10.1. На рис. 10.1(C) показана совместная работа двух роботов при введении длинного стержня в отверстие блока, находящегося на столе. Это наглядный пример того, какие преимущества можно получить от кооперации двух роботов. Система управления звеном одного робота имеет структуру, изображенную на рис. 10.1(a), где H(s) = 1 и
G(s) =--------.
5(5+0,5)
К системе предъявляются следующие требования: при линейном сигнале, изменяющемся с единичной скоростью, установившаяся ошибка должна быть равна 0,0125, а реакция системы на ступенчатый сигнал должна иметь перерегулирование не более
Рис. 10.1 (С). Взаимодействие двух роботов
25% и время установления (по критерию 2%) менее 2 с. Синтезируйте регулятор с опережением и с отставанием по фазе.
638
Глава 10. Синтез систем управления с обратной связью
Рис. 10.2 (С) а)
(а) Биплан.
(б) Система управления самолетом
Возмущение
удовлетворяющий этим требованиям, и постройте графики реакций скорректированной и нескорректированной систем на ступенчатый и линейный сигналы.
С-10.2. Система управления курсом биплана [рис. 10.2(C), а] изображена на рис. 10.2(C). (б), (а) Считая Gc(s) = К, определите минимальное значение К, при котором эффект, производимый единичным ступенчатым возмущением, D(s) = 1/s, в установившемся режиме не превышал бы 5% [у(°°) = 0,05]. (б) Определите, устойчива ли система при значении К. найденном в п. (а), (в) Синтезируйте однокаскадный регулятор с опережением по фазе, обеспечивающий запас устойчивости по фазе 30°. (г) Синтезируйте двухкаскадный регулятор с опережением по фазе, чтобы получить запас по фазе 55°. (д) Сравните полосы пропускания систем из пп. (в) и (г), (е) Изобразите реакции у(1) систем из пп. (в) и (г) на ступенчатый входной сигнал и сравните значения перерегулирования, времени установления (по критерию 2%) и времени максимума реакции.
С-10.3. Космическая программа НАСА предусматривает создание крупных разворачиваемых конструкций, изготавливаемых из легких материалов и состоящих из большого количества сочлененных секций. К таким конструкциям могут быть предъявлены жесткие требования, касающиеся сохранения с высокой точностью их формы и подавления вибраций, возникающих при работе на орбите.
Рис. 10.3 (С)
Система управления мачтовой конструкцией
Задачи на синтез систем
639
Одна из таких конструкций в виде многосекционной мачты изображена на рис. 10.3(C). (а). Основным элементом конструкции является ферма длиной 60,7 м, основанием прикрепленная к космическому челноку. На конце фермы находятся исполнительные устройства, а по всей ее длине расположены необходимые датчики. Предусмотрена вспомогательная система развер-тывания/складывания, которая также служит для защиты конструкции во время запуска и приземления.
Система, обеспечивающая перемещение конструкции, в качестве исполнительного устройства содержит электродвигатель большой мощности, а ее структурная схема изображена на рис. 10.3(C), (б). Переходная характеристика системы должна иметь перерегулирование не более 16%; поэтому коэффициент затухания системы С, должен быть равен 0.5. а запас по фазе должен составлять 50°. Считая Gc(s) = К, проварьируйте К в диапазоне от 0,1 до 1.0 и зарегистрируйте величину перерегулирования, времени нарастания и запаса по фазе для выбранных значений К.
С-10.4. На рис. 10.4(C) изображен мобильный робот, использующий в качестве измерительного устройства систему технического зрения. Система управления роботом имеет структуру, изображенную на рис. 10.14, где
G(5) =
1
(s+ 1)(0,5j +1)'
a Gc(s) — ПИ-регулятор, выбранный с той целью, чтобы при ступенчатом входном сигнале установившаяся ошибка была равна нулю. Таким образом,
Gc(s) = Kx + ^ = s
Рис. 10.4 (С). Робот и система технического зрения
т -*^2
5
Определите параметры регулятора, исходя из следующих требований: перерегулирование не более 5%, время установления (по критерию 2%) менее 6 с, Kv > 0,9 и время максимума переходной характеристики — по возможности минимальное.
С-10.5. По железной дороге в Техасе планируется пустить скоростной поезд, разрабатываемый на основе французского прототипа TGV. Ожидается, что поезд будет развивать скорость до 300 км/ч. Чтобы сделать безопасным прохождение поворотов на такой большой скорости, каждый вагон будет иметь независимые колесные тележки в сочетании с устройствами, обеспечивающими его наклон. Гидроцилиндры, соединяющие пассажирский вагон с колесными тележками, позволят ему на повороте наклоняться подобно мотоциклу на вираже. На передней тележке каждого вагона установлен датчик, напоминающий маятник. Датчик реагирует на вхождение вагона в поворот и передает соответствующую информацию гидравлической системе. Система наклона не делает поезд более безопасным, но создает более комфортабельные условия пассажирам.
Рассмотрите систему управления наклоном вагона, изображенную на рис. 10.5(C). Синтезируйте регулятор Gc(s) так, чтобы при ступенчатом входном сигнале перерегулирование не превышало 5%, а время установления (по критерию 2%) было менее 0.6 с. Кроме того, требуется, чтобы при линейном входном сигнале, r(t) -At,t> 0, установившаяся ошибка не превышала 0.15А. Проверьте правильность выполненного синтеза.
Рис. 10.5 (С)
Система управления скоростным поездом
640
Глава 10. Синтез систем управления с обратной связью
Рис. 10.6 (С)
Система управления положением антенны
С-10.6. На рис. 10.6(C), (а), изображена большая антенна, предназначенная для приема сигналов со спутника. Антенна должна с высокой точностью следить за изменением положения спутника на орбите. Система управления антенной включает в себя двигатель, управляемый по цепи якоря, и регулятор, который подлежит выбору. Структурная схема этой системы приведена на рис. 10.6(C), (б). Требуется, чтобы при линейном входном сигнале, r(f) = Bt, установившаяся ошибка не превышала 0,01В. В случае ступенчатого входного сигнала перерегулирование не должно превышать 5 %, а время установления (по критерию 2 %) должно быть менее 2 с. (а) Синтезируйте регулятор Gc.(j) и постройте график переходной характеристики системы, (б) Полагая R(s) = 0. определите влияние возмущения £>(s) = Qis на выходную переменную У(4
С-10.7. В настоящее время разрабатываются высококачественные механизмы, осуществляющие протяжку магнитной ленты через головки чтения/записи, в которых приемные катушки приводятся во вращение с помощью двигателей постоянного тока. Скорость протяжки ленты достигает 500 см/с. причем время с момента пуска до достижения полной скорости должно быть как Можно меньше, но при этом надо не допускать разрыва ленты. Поскольку требуется управлять как скоростью, так и натяжением ленты, то в качестве датчика скорости мы используем тахогенератор, а в качестве датчика положения — потенциометр. Исполнительным устройством будет служить двигатель постоянного тока. В этом случае при H(s) = 1 передаточная функция разомкнутой системы может быть представлена выражением
Г(5) = С( , =X(s+4000)
E(s) s(s + 1 000)(j + 3000)(s + /J, )(5 + /J,)
где p( = 2000 + j’2000, a K(s) соответствует положению.
К системе предъявляются следующие требования: время установления менее 12 мс. перерегулирование при ступенчатом входном сигнале менее 10 %, установившаяся ошибка при линейном входном сигнале менее 5% от скорости этого сигнала. Синтезируйте корректирующее устройство, удовлетворяющее этим достаточно жестким требованиям.
С-10.8. Последние несколько лет ознаменованы повышенным интересом к разработке моделей автомобильных двигателей, что вызвано внедрением автоматических систем управления их работой. В этих моделях представлены дроссель, явление сжатия, процесс подачи и впрыска горючего, получение момента на валу и момент инерции вращения.
Задачи на синтез систем
641
Рис. 10.8 (С)
Система управления автомобильным двигателем
Регулятор Возмущение
-> ф) Обороты двигателя
В 1980-е годы, когда началась борьба за уменьшение выброса в атмосферу отработанных газов, основной проблемой стало управление соотношением горючего и воздуха в автомобильном карбюраторе. Усилия инженеров были направлены на создание автоматических систем, управляющих этим соотношением. Работа двигателя в заданном режиме требует управления подачей как воздуха, так и горючего.
В системе управления, структурная схема которой приведена на рис. 10.8(C), за вход принят расход горючего, а выходной величиной считаются обороты двигателя. Считая Т= 0,066 с. синтезируйте регулятор, обеспечивающий нулевую установившуюся ошибку при ступенчатом входном сигнале и перерегулирование не более 10%. Время установления (по критерию 2%) не должно превышать 10 с.
Рис. 10.9 (С). Система управления углом крена реактивного самолета
С-10.9. На рис. 10.9(C), (с) изображен современный реактивный самолет, а на рис. 10.9(C), (б) — система управления углом его крена. Синтезируйте регулятор Cc(s) так, чтобы переходная характеристика имела «хорошую» форму, а установившаяся ошибка была равна нулю.
С-10.10. Для демонстрации ПИ-закона управления радиометром типа ветряной мельницы была предложена простая система с обратной связью. Этот радиометр изображен на рис. 10.10(C), (а), а структурная схема системы управления — на рис. 10.10(C), (б). Управляемой переменной является угловая скорость to, с которой вращаются лопасти радиометра, когда на них на
Рис. 10.10 (С), (а) Демонстрационная модель с датчиком инфракрасного излучения, (б) Система управления
642
Глава 10. Синтез систем управления с обратной связью
правлен поток инфракрасного излучения. Экспериментальная установка, включающая в себя фотоэлектрический датчик и электронную схему, дает возможность синтеза и реализации системы управления с высокими показателями качества.
Передаточная функция источника излучения и радиометра равна
где т = 20 с. Синтезируйте ПИ-регулятор так, чтобы система обладала апериодической реакцией с временем установления менее 25 с.
Задачи, решаемые с помощью MATLAB
М-10.1. Рассмотрите систему управления, изображенную на рис. 10.1(М), где /?(’)
10 9
G(s) =----- и Gc(s) =--.
5+1 S+ 1
С помощью MATLAB покажите, что рис. 10.1 (М). Замкнутая система управления запас по фазе приблизительно равен
12°, а относительное перерегулирование при ступенчатом входном сигнале составляет 70%.
М-10.2. На рис. 10.2(М) изображена система с отрицательной обратной связью. Подберите П-регу-лятор, Cc(s) = К, так, чтобы запас по фазе был равен 45°. С помощью MATLAB постройте диаграмму Боде и убедитесь, что выдвинутое требование удовлетворяется.
Рис. 10.2 (М)
Одноконтурная система с пропорциональным регулятором
М-10.3. Рассмотрите систему, изображенную на рис. 10.1(М), где
Синтезируйте регулятор Gc(s) так, чтобы при линейном входном сигнале установившаяся ошибка равнялась нулю, а время установления (по критерию 2%) было менее 5 с. Получите реакцию системы на линейный сигнал, A(s) = 1/s2, и убедитесь, что выдвинутые требования удовлетворяются.
М-10.4. Передаточная функция истребителя имеет вид:
6 -10(s+ l)(s+0,01)
6 ~ (s2 + 2s + 2)(s2 + 0.02s + 0,0101) ’
где 0 —- угловая скорость самолета относительно поперечной оси (рад/с), а 5 — отклонение руля высоты (рад). Структурная схема системы управления переменной 0 изображена на рис. 10.4(М).
е.-ЧЭ—* — А Регулятор с опережением по фазе Исполнительное устройство 5 ( Самолет
Gc(s) -10 s+10 -10(s+l)(s+0.01)
(s2+2s+2)(sz+0.02s+0.01 01)
Рис. 10.4 (М). Система управления самолетом
Задачи, решаемые с помощью MATLAB
643
(а) Пусть Gc(s) соответствует регулятору с опережением по фазе, т, е. Ct(s) = Х(—+г) ,
где |z| < |р|. С помощью диаграммы Боде выполните синтез регулятора на основании следующих требований к качеству системы: при единичном ступенчатом входном сигнале время установления (по критерию 2%) должно быть менее 2 с, а относительное перерегулирование — меньше 10%. (б) Промоделируйте систему, считая, что входная ступенька имеет амплитуду 10%. и получите график изменения переменной 0.
М-10.5. Изменение углового положения жесткого спутника описывается уравнением JQ = и, где J— момент инерции, а. и — приложенный к спутнику вращающий момент. В системе управления угловым положением использован ПД-регулятор
Gc(s) = Kt + K2s .
(а) Изобразите структурную схему системы управления. Выполните синтез системы в соответствии со следующими требованиями: полоса пропускания замкнутой системы должна примерно равняться 10 рад/с. а при ступенчатом входном сигнале с амплитудой 10° перерегулирование не должно превышать 20%. Синтез выполните в интерактивном режиме с помощью предварительно подготовленной программы в среде MATLAB, (б) Проверьте результат синтеза, получив путем моделирования реакцию системы на ступенчатый сигнал указанной величины, (в) Постройте диаграмму Боде для замкнутой системы и проверьте, выполнено ли требование к полосе пропускания.
М-10.6. Рассмотрите систему управления, изображенную на рис. 10.6(М). Вам предлагается с помощью корневого годографа синтезировать регулятор с отставанием по фазе, исходя из следующих требований: при ступенчатом входном сигнале установившаяся ошибка системы не должна превышать 10%, запас по фазе должен быть более 45°, а время установления (по критерию 2%) должно быть менее 5 с.
(а) Выполните поставленную задачу, воспользовавшись методом корневого годографа. Для облегчения процесса синтеза разработайте ряд программ MATLAB, (б) Проверьте результат синтеза, получив с помощью моделирования переходную характеристику замкнутой системы, (в) Применив функцию margin, вычислите действительное значение запаса по фазе.
М-10.7. На рис. 10.7(М) изображен внутренний контур системы обеспечения горизонтального положения самолета в воздухе. Динамика самолета представлена передаточной функцией . 23
G(s) =-----.
s+23
В контуре используется ПИ-регулятор
CJs) = К} + .
5
Рис. 10.7 (М)
Внутренний контур радиолокационной системы определения положения самолета
Рис. 10.6 (М)
Система управления с единичной обратной
644
Глава 10. Синтез систем управления с обратной связью
(а) Синтезируйте регулятор так, чтобы система удовлетворяла следующим требованиям: при ступенчатом входном сигнале время установления (по критерию 2%) должно быть менее 1 с, а при линейном сигнале, изменяющемся с единичной скоростью, установившаяся ошибка не должна превышать 0,1. (б) Путем моделирования проверьте результаты синтеза.
М-10.8. Рассмотрите систему из примера 10.3, для которой было синтезировано корректирующее устройство с опережением по фазе. Действительное значение перерегулирования в скорректированной системе равно 46%. Требуется уменьшить перерегулирование до 32%. С помощью MATLAB определите необходимое для этого значение нуля функции Gc(s).
М-10.9. Постройте частотные характеристики схемы, изображенной па рис. 10.10(П).
Ключевые термины и понятия
Апериодическая реакция. Реакция системы на ступенчатый входной сигнал, при которой установившаяся ошибка равна нулю, а время установления и перерегулирование имеют минимально возможные значения.
Корректирующее устройство. Элемент или схема, дополнительно вводимые в систему с целью улучшения ее качества.
Корректирующее устройство с опережением по фазе. Устройство, создающее положительный фазовый сдвиг в заданном интервале частот и применяемое для обеспечения в системе требуемого запаса устойчивости по фазе.
Корректирующее устройство с опережением и отставанием по фазе. Устройство, характеристики которого соответствуют свойствам корректирующих устройств как с опережением, так и с отставанием по фазе.
Корректирующее устройство с отставанием по фазе. Устройство, создающее отрицательный фазовый сдвиг и уменьшающее усиление системы в заданном интервале частот.
Коррекция. Изменение вида частотных характеристик системы или настройка ее параметров с целью обеспечения заданных показателей качества.
ПИ-регулятор (пропорционально-интегральный). Регулятор, содержащий два параллельных канала: один канал формирует сигнал, пропорциональный ошибке системы, другой канал формирует сигнал, пропорциональный интегралу от ошибки. Выходной сигнал регулятора равен их сумме.
Последовательное корректирующее устройство. Корректирующее устройство, помещаемое в контур системы последовательно с обьектом управления.
Предшествующий фильтр. Элемент с передаточной функцией Gp(s), помещаемый в цепь входного сигнала R(s) перед сумматором, формирующим сигнал ошибки системы.
Регулятор. См. Корректирующее устройство.
Синтез системы управления. Многоэтапная процедура, связанная с выбором структуры системы и определением входящих в нее элементов и их параметров.
Устройство интегрирующего типа. Элемент или схема, которые действуют, хотя бы в некоторой степени, подобно интегратору.
Глава 11
Синтез систем с обратной связью по состоянию
Обзор
Эта глава посвящена синтезу регуляторов с использованием обратной связи по состоянию Сначала мы рассмотрим проверку системы на управляемость и наблюдаемость, а затем приведем одну процедуру синтеза оптимальной системы управления. Используя понятие обратной связи по состоянию, мы рассмотрим метод синтеза, основанный на размещении полюсов замкнутой системы. Мы покажем, как можно с помощью формулы Аккермана определить матрицу коэффициентов обратной связи по состоянию, позволяющую разместить полюсы в произвольно заданных точках s-плоскости. Будет доказано, что это возможно только в том случае, если система является полностью управляемой по состоянию. Мы рассмотрим, как производится синтез внутренней модели, с помощью которой обеспечивается нулевая установившаяся ошибка при отработке системой входных сигналов заданного вида. И, как обычно, главу мы завершим рассмотрением примера синтеза с продолжением, где покажем, как используется обратная связь по состоянию в системе чтения информации с диска.
11.1. Введение
Метод переменных состояния с успехом можно использовать для коррекции систем управления. Обычно это производится с помощью управляющего сигнала u(Z), который является функцией нескольких доступных измерению переменных состояния. На основании информации об этих переменных реализуется регулятор состояния. Этот принцип коррекции является мощным средством оптимизации систем управления, и он будет рассмотрен в данной главе.
Сначала мы рассмотрим метод синтеза оптимального регулятора для системы, описываемой переменными состояния. Затем будет показано, как производится синтез обратной связи по состоянию, обеспечивающей заданное расположение корней характеристического уравнения системы. После этого мы кратко рассмотрим метод синтеза внутренней модели и отметим ограничения, присущие обратной связи по состоянию.
11.2. Управляемость
Говорят, что система, описываемая матрицами (А, В), является управляемой, если суще ствует такое неограниченное управление и, которое может перевести систему из произво
646
Глава 11. Синтез систем с обратной связью по состоянию
льного начального состояния х(0) в любое другое заданное состояние х(1). Управляемость системы, описываемой уравнением
х = Ах + Ви, можно определить, исследуя алгебраическое условие
ранг [В АВ А2В... А"~‘В] = и. (11.1)
Для системы с одним входом и одним выходом вводится понятие матрицы управляемости Рс, которая выражается через А и В как
Рс =[ВАВ А2В...А”-1В], (11.2)
и имеет размерность ихи. Если определитель матрицы Рс отличен от нуля, то система является управляемой.
Ответить на вопрос, является ли система управляемой, можно и другим способом. Для этого надо изобразить граф системы в переменных состояния и определить, имеются ли пути от управляющего сигнала и к каждой из переменных состояния. Если такие пути существуют, то система может быть управляемой.
Система, структура которой представлена в форме фазовой переменной, всегда является управляемой.
Пример 11.1. Управляемость системы
Рассмотрим систему, описываемую передаточной функцией
Рис. 11.1. Модель системы третьего порядка в виде графа
Модель этой системы в виде графа изображена на рис. 11.1. Видно, что существуют пути от u(f) ко всем переменным состояния, следовательно, система является управляемой.
Матричное дифференциальное уравнение имеет вид:
Отсюда имеем:
11.3. Наблюдаемость
647
Матрица управляемости
О О
Pt. = О 1
1 -а2
1
-а2
(а2 — Я|)
Определитель матрицы Рс отличен от нуля, тем самым мы еше раз убеждаемся, что система управляема.
Пример 11.2. Управляемость системы с двумя переменными состояния
Рассмотрим систему, переменные состояния которой описываются дифференциальными уравнениями
л, = -2Xj + и, х2 = -Зх2 + ,
и найдем условие, при котором система будет управляемой. Из графа системы, представленного на рис. 11.2. видно также, что у = х9. Анализ графа показывает, что система будет управляе
мой, если cl 0. При d = 0 сигнал и не имеет пути к переменной х9. Подтвердим этот вывод, образовав матрицу Рс.
Следовательно,
определитель этой матрицы равен d, и он будет отличен от нуля, только если с/ * 0.
11.3. Наблюдаемость
Все корни характеристического уравнения можно разместить в заданных точках л-плоско-сти только в том случае, когда система является наблюдаемой и управляемой. Наблюдаемость связана со способностью оценивать переменные состояния. Говорят, что система может быть наблюдаемой, если каждая переменная состояния вносит свой вклад в выходной сигнал системы. Это эквивалентно тому, что на модели системы в виде графа от каждой переменной состояния существует путь к выходной переменной.
Система является наблюдаемой тогда и только тогда, если существует конечное время Т такое, что начальное состояние х(0) может быть определено в результате наблюдения выходной переменной y(f), t & Т, при заданном управлении и(7).
Рассмотрим систему с одним входом и одним выходом, описываемую уравнениями х = Ах + Ви и у = Сх,
648
Глава 11, Синтез систем с обратной связью по состоянию
где С есть вектор-строка, ах — вектор-столбец. Система является наблюдаемой, если определитель матрицы Q размерности ихи (называемой матрицей наблюдаемости) отличен от нуля, где
(Н.З)
СА
Система, структура которой представлена в форме фазовой переменной, всегда является наблюдаемой.
Пример 11.3. Наблюдаемость системы
Рассмотрим систему из примера 11.1, модель которой в виде графа приведена на рис. 11.1. Видно, что от каждой переменной состояния существует путь к у(/), поэтому система может быть наблюдаема.
Подтвердим это, образовав матрицу Q. Имеем:
1 О
О 1
и С = [1 0 0] .
—<2g at а2
Следовательно,
Таким образом.
СА = [0 1 0] и СА2 = [0 0 1].
0 0
1 0
0 1
det Q = 1, т. е. система является наблюдаемой.
Пример 11.4. Наблюдаемость системы с двумя переменными состояния
Рассмотрим систему, описываемую уравнениями
0
I
и и у = [1
1] X.
Модель этой системы в виде графа изображена на рис. 11.3. Анализ графа говорит о том, что. казалось бы, система является управляемой и наблюдаемой. Проверим, так ли это, образовав матрицы Pt. и Q.
Рис. 11.3
Граф к примеру 11.4
11.4. Оптимальные системы управления
649
Имеем
АВ =
2
-2
Следовательно,
1
-1
и
2
-2
В =
det Рс = 0. т. е. система не является управляемой.
Далее,
С = [1 1] и СА = [1 1] .
Следовательно,
det Q = 0, т. е. система не является наблюдаемой.
Попробуем разобраться, почему это так. Если еще раз посмотреть на граф системы, то можно заметить, что
у = Х( + х2 .
Однако
х, + х2 = 2Х] + (х2-х\) + и-и = xt + х2 .
Таким образом, переменные состояния не зависят от и, и система неуправляема. Аналогично, выходу' = xt + х, зависит от суммы Х)(0) + х2(0). а это не позволяет определить раздельно х,(0) и х9(0). Поэтому система ненаблюдаема.
11.4. Оптимальные системы управления
Синтез систем автоматического управления — одна из важнейших технических задач. Целью синтеза является создание системы, состоящей из реальных элементов, которая удовлетворяла бы требуемым показателям качества. Последние могут быть заданы во временной области, например, в виде величины перерегулирования и времени нарастания переходной характеристики. Когда представляет интерес поведение системы управления в установившемся и переходном режимах, ее качество обычно оценивается по временным характеристикам. Поэтому естественно, что процедуру синтеза мы будем выполнять во временной области.
Качество системы управления можно характеризовать интегральными оценками, с которыми мы познакомились в разделе 5.9. Поэтому синтез системы должен быть основан на минимизации оценки качества, такой, например, как ИКО (см. раздел 5.9). Системы, в которых обеспечивается минимум соответствующей оценки качества, часто называют оптимальными системами управления. В этом разделе мы рассмотрим проблему синтеза оптимальной системы, которая описывается переменными состояния. Метод решения задачи основан на измерении переменных состояния и формировании из них управляющего сигнала w(Z), оптимизирующего качество системы.
В общем случае качество системы управления можно характеризовать интегральной оценкой
tj
J=f g(x,u,t)dt, (П.4)
Jo
650
Глава 11. Синтез систем с обратной связью по состоянию
где х — вектор состояния, и — вектор управления, tf— конечное время управления*.
Мы заинтересованы в том, чтобы минимизировать ошибку системы; поэтому, если желаемый вектор состояния обозначить как xt/ = 0, то мы можем считать, что ошибка тождественно равна вектору состояния. То есть, если мы хотим, чтобы система находилась в положении равновесия, х = xd = 0, то любое отклонение от этого положения следует рассматривать как ошибку. Поэтому в данном разделе мы рассмотрим метод синтеза оптимальных систем управления с использованием обратной связи по состоянию и интегральных квадратичных оценок качества.
РИС. 11.4 Управляющие Переменные
Система управления, описываемая сигналы
переменными х и и и,-------->
иг—------►
«—=------►
Рассмотрим систему управления, изображенную на рис. 11.4, которая описывается векторно-матичным дифференциальным уравнением
х =Ах + Ви . (11.5)
Выберем регулятор в цепи обратной связи так, чтобы и было некоторой функцией измеряемых переменных состояния, т. е. u = к(х). Например, можно сформировать компоненты вектора управления как
Щ = кххх, и2 = к2х2, .... ит = к„^т. (11.6)
Или:
их = + х2), и2 — к2(х2 + х3) , ... (11.7)
Выбор управляющих сигналов является достаточно произвольным и зависит от конкретного качества, которое необходимо обеспечить, и от того, сколь сложной допускается иметь структуру обратной связи. Количество переменных состояния, используемых для формирования управляющих сигналов, часто является ограниченным, т. к. не все они могут быть доступны непосредственному измерению.
В нашем случае мы будем считать, что управление и является линейной комбинацией переменных состояния, т. е. и = Кх, где К — матрица размерности /ихи. В развернутой форме это выглядит так:
Подставляя (11.8) в (11.5), получим:
х = Ах + ВКх = Нх, (11.9)
где Н—матрица размерности ихи. получаемая путем сложения элементов матриц А и ВК.
* Заметам, что для оценки качества мы здесь пользуемся обозначением J, а не /, как было в главе 5. Это сделано с той целью, чтобы отличать оценку качества от единичной матрицы, которую мы будем обозначать полужирной буквой I.
11.4. Оптимальные системы управления
651
Возвращаясь к интегральным квадратичным оценкам качества, напомним, что согласно разделу 5.9 в случае одной переменной состояния мы можем записать
./ = ^[хДг)]2^ . (11.10)
В случае двух переменных состояния интегральная квадратичная оценка будет иметь вид:
./ = f'Z(x2+x2)dr . (11.11)
Jo
Поскольку мы собираемся представить оценку качества в виде интеграла от суммы квадратов переменных состояния, то для этого можно воспользоваться следующей матричной операцией:
где хт есть результат транспонирования матрицы х. Тогда оценку качества можно представить в функции от вектора состояния:
J= (хтх)4Й . (11.13)
Jo
Оценка качества общего вида (11.4) включает в себя также управление и, но пока этого делать не будем, оставив для обсуждения в дальнейшем.
Теперь в (11.13) мы положим конечное время управления tf= <ю. Для получения минимального значения ./ будем считать, что существует производная
— (хтРх)=-хтх, (11.14)
dt 7
где матрица Р нуждается в определении. Чтобы упростить алгебраические преобразования, без потери общности матрицу Р можно выбрать симметричной. Симметричность этой матрицы означает, что ptJ = pjr Выполняя дифференцирование в левой части выражения (11.14), получим:
— (х'Рх) = хтРх + хтРх .
dA 7
Подставляя сюда (11.9), запишем:
— (хтРх) = (Нх)тРх + хтР(Нх) = хтНтРх + хтРНх=хг(НтР+РН)х , (11.15) dtv 7
где (Нх)т = хтНт по правилу транспонирования произведения матриц. Если положить (НТР + PH) = —I, то (11.15) примет вид:
— (хтРх^ = -хтх , (11.16)
dt 7
что совпадает с производной, которую мы определили в виде (11.14). Подставляя теперь (11.16) в (11.13), получим:
./ = С-— (хтРх)Л=-хтРх|“ =хт(0)Рх(0). (11.17)
Jo dt 10
652
Глава 11. Синтез систем с обратной связью по состоянию
При подстановке верхнего предела интегрирования мы предполагали, что система устойчива и, следовательно, х(°о) = 0. Таким образом, чтобы минимизировать оценку качества J, мы должны рассмотреть два уравнения:
J= ГхтхЛ =хт(0)Рх(0)
Jo
(11.18)
и
НтР + РН = -1 .
(11.19)
Таким образом, процедура синтеза сводится к двум этапам:
1. Считая матрицу Н известной, определить матрицу Р, удовлетворяющую уравнению (11.19).
2. Минимизировать J, найдя минимум выражения (11.18) путем настройки одного или нескольких параметров системы.
Пример 11.5. Обратная связь по состоянию
Рассмотрим систему управления, представленную’ в виде графа на рис. 11.5. Переменные состояния обозначены как х, и х2. Качество этой системы нельзя считать приемлемым, потому что при ступенчатом входном сигнале или при возмущении того же типа реакция системы имеет неограниченно возрастающий характер. Система описывается дифференциаль-
но)
х(О)
Рис. 11.5. Граф системы к примеру 11.5
ным уравнением
0
0
т. е.
d X] dt[_x2
1 %,
oJlx2
(11.20)
Управляющий сигнал выберем в виде линейной комбинации двух переменных состояния: u(t) = - к2^2 . (11.21)
Обратите внимание, что знаки в правой части (11.21) выбраны так, чтобы обратная связь была отрицательной. Тогда (11.20) примет вид:
Х\=Х2 ,
х2 = -к^х - к-^2 ,
или, в матричной форме,
х = Нх
(11.22)
(11.23)
Заметим, что если речь идет о системе управления положением, то переменная х, соответствует положению, передаточная функция системы Q(s) = \IMs~. где М = 1, а трение считается пренебрежимо малым. Чтобы избежать излишних алгебраических операций, выберем значение
0
0
1
0
и В =
о
1
11.4. Оптимальные системы управления
653
кл = 1 и определим к2 так, чтобы минимизировать оценку качества. Тогда, используя (11.19), запишем:
НтР+РН = -1,
ИЛИ
0 -1 Рп
1 —к2 р2\
Р|2 + Р1
P22J LP2I
Д2 01 -10
р77 1 к2 0 1
(11-24)
Произведя умножение и сложение матриц и учитывая, чтор12 = р2\ (матрица Р — симметричная), придем к системе уравнений
-Pi2-Pl2 = -L
Pll ~' ^2^12 ” Р22 ~
Р12 — &2Р22 + Р12 “ ^2Р22 = “1- (11.25)
Эта система имеет следующее решение:
1 1 к2 + 2
Р12-_> Р12~ . Pl!-
2 К-2 2/ь2
Интегральная оценка качества
J = хт(0)Рх(0) , (11.26)
и мы рассмотрим случай, когда в начальный момент времени каждая из переменных состояния имеет отклонение от положения равновесия на 1,т. е. хт(0) = [1 1]. Тогда (11.26) примет вид:
Р\\ Р12
_Р\2 P22JLI.
Pll+Pl2 _Pl2 + P22.
Подставляя в (11.27) элементы матрицы Р, получим: к2 + 2 , 1 Л2 + 2Г + 4 2к2 к2 2к2
Чтобы найти к2, соответствующее минимуму J, продифференцируем J по к2 и приравняем производную нулю:
J = [ll]
= [И]
= (Р||+Р12)+(Р|2 + Р22) = Р11+2Р12 + Р22 (П-27)
(11.28)
1
SJ 2к2(2к2 + 2) - 2(к2 + 2Л2 + 4) дк2 ~ (2к2)2
Отсюда к2 = 4 и к7 = 2. Минимальное значение J найдем, подставив А-2 = 2 в (11.28): j = з 'min
Матрица Н для скорректированной системы примет вид: 0 1'
-1 -2
(11.29)
(11.30)
Н =
Следовательно, характеристическое уравнение замкнутой системы будет равно
det[ ).I - Н ] = det
-1
Х+2
= ?2 + 2Х+1 = 0.
(11.31)
Поскольку система имеет второй порядок, то ее характеристический полином имеет вид (? + 2Lp>ns + со2), откуда следует, что коэффициент затухания замкнутой системы С, = 1. Можно считать, что скорректированная система является оптимальной, т. к. оценка качества в ней имеет минимальное значение. Однако следует отдавать отчет в том, что система является оптимальной только при определенном сочетании начальных условий. Граф скорректированной системы изображен на рис. 11.6. Зависимость оценки качества от параметра к2 приведена на рис. 11.7. Из графика видно, что система обладает малой чувствительностью к изменению к2
654
Глава 11. Синтез систем с обратной связью по состоянию
Рис. 11.6. Система с коррекцией из примера 11.6
Рис. 11.7. Зависимость оценки качества от параметра Zr2
при малых отклонениях этого параметра от оптимального значения. Определим чувствительность оптимальной системы как
= ДУ/У Ьк/к
где к — параметр, выбираемый при синтезе. Тогда в нашем случае мы имеем к = /2 и
опт = Д08/3 = 0 j
0,5/2
Пример 11.6. Синтез оптимальной системы
Теперь мы рассмотрим ту же систему из примера 11.5. но будем считать, что неизвестны оба коэффициента обратной связи, А, и к2. Не меняя сути проблемы, ради упрощения алгебраических операций примем кх=к2 = к. Читатель может убедиться, что если неизвестны kt и то минимум оценки качества (11.18) будет обеспечиваться при условии к} = к2. Тогда уравнение (11.23) примет вид:
1
х = Нх =
0
—к -к
х.
(11.34)
Для определения матрицы Р воспользуемся уравнением (11.19):
НтР + РН = -1. (11.35)
Решение системы уравнений, полученных на основании (11.35), дает следующий результат:
1 _ к + 1 _ 1+2/
Р'2~ 2к' Р22~ 2к2 ' Р"~ 2к
Рассмотрим случай, когда в начальный момент времени только одна из переменных состояния имеет отклонение на 1 от положения равновесия, т. е. х*(0)= [1 0]. Тогда оценка качества (11.18) примет вид:
(11.36)
(11.37)
J = [ yJ xdi = хт(0)Рх(0) = д । .
•’ll
Следовательно, необходимо минимизировать оценку , 1+24 , 1
2к 2к
Ясно, что минимальное значение Умы получим при к —> от, и Jimrl = 1. Г рафик зависимости J от к приведен на рис. 11.8. Должно быть понятно, что при к—>от сигнал обратной связи u(Z) = -А[Х|(1) + х,(/)] будет очень большим. Однако величина этого сигнала физически всегда ограничена. Поэтому мы обязательно должны накладывать ограничение на сигнал и(1). и, зна-
11,4. Оптимальные системы управления
655
Рис. 11.8
Зависимость оценки качества от коэффициента обратной связи к
(пример 11.6)
чит, коэффициент к не может быть слишком большим. Например, если мы наложим на u(t) ограничение
|и(1)| < 50 , (11.38)
то максимально допустимое значение к в нашем случае будет равно
^=^^- = 50. (11.39)
тах х,(0)
тогда минимальное значение J окажется равным
•/m.n = l+^- = WL (11.40)
2*max
что весьма близко к абсолютному минимуму.
До сих пор мы пользовались оценкой качества вида (11.13). которая не зависела от величины управляющего сигнала и(Г). Однако во многих случаях мы вынуждены считаться с энергетическими затратами на создание управляющего сигнала. Так, в системе управления транспортным средством, работающим на электроэнергии. [«(/)]" представляет собой потребление энергии от аккумулятора и поэтому должно быть ограничено, чтобы обеспечить достаточную дальность поездки. Чтобы учесть затраты энергии на выработку управляющего сигнала, мы будем использовать оценку качества
J= Г (хт1х +Хити)Л , (И-41)
Jo
где X — скалярный весовой коэффициент, а I — единичная матрица. Весовой коэффициент X следует выбирать так, чтобы вклад переменных состояния в оценку качества был сопоставим со вкладом в нее второго слагаемого подынтегрального выражения, учитывающего ограниченные энергетические возможности системы. Как и ранее, мы представим обратную связь по состоянию в виде матричного уравнения
u = Кх , (П42)
а уравнение системы с обратной связью в виде
х = Ах + Ви = Нх. (11.43)
Подставляя (11.42) в (11.41), получим:
J = f[x‘lx + Х(Кх)т (Кх)]Л = Г[хт (1 + ХКтК)х= f xTQx<* , (11.44)
Jo Jo Jo
где Q = (I + KTK) есть матрица размерности ихи. По образу и подобию выражений (11.13)-(11.17) будем считать, что существует производная
— (xTPx) = -xrQx. (11.45)
dt
656
Глава 11. Синтез систем с обратной связью по состоянию
Тогда в нашем случае мы придем к уравнению
HTP + PH = -Q. (11.46)
и, как и раньше [см. (11.17)], получим:
J = хт(0)Рх(0) . (11.47)
Дальнейшая процедура синтеза содержит те же этапы, что и при работе с уравнениями (11.18) и (11.19), за исключением того, что левая часть (11.46) приравнивается матрице -Q. а не -I. Конечно, если X = 0, то (11.46) сводится к (11.19). Ниже мы рассмотрим пример 11.5 в случае, когда X * 0, и учтем затраты энергии на формирование управляющего сигнала.
Пример 11.7. Оптимальная система с учетом затрат энергии на управление
Рассмотрим еще раз систему из примера 11.5, граф которой изображен на рис. 11.5. В этой сис-
теме мы используем обратную связь по состоянию, так что
к
О
О
к
и = Кх =
= Л1х.
(11.48)
.2.
Следовательно, матрица Q равна
Q = (I + ХКТК) = (1+ ХА2!) = (1+ ХА2)!. (11.49)
Какивпримере 11.6, зададим хт(0) = [1 0]. поэтому ./ = /7,Элементнайдем из уравнения (11.46):
HTP + PH=-Q = -(1+XA2)!. (11.50)
В результате получим:
7 = Д] = (1+ХА2)|1+ — | , (11.51)
откуда видно, что при Х = 0 правая часть этого выражения сводится к (11.37). Минимальное значение J найдем, приравняв производную этого выражения по к нулю:
dJ X I 4ХА3 + ХА2-!
— = 2ХА +-------у =------=----
dk 2 2к- 2к2
(11.52)
Таким образом, минимум оценки качества будет иметь место при к = где Ат1|1 есть решение уравнения (11.52).
Завершим пример рассмотрением случая, когда при оценке качества одинаково важно учиты-
вать как переменные состояния, так и ограничения, накладываемые на управляющие сигналы. Тогда Х = 1 и (11.52) принимает вид 4А3 + 1с - 1 = 0, откуда следует, что Amjn = 0,555. При этом значение оценки качества значительно больше, чем в предыдущем примере, потому что появляются дополнительные издержки, связанные с ограничением на затраты энергии. Зависимость J от к для этого случая приведена на рис. 11.9. где для сравнения также изображена аналогичная зависимость для примера 11.6.
Из рассмотренных выше примеров ясно, что действительный минимум оценки качества зависит от начальных условий, от того, какой вид оценки принят за основу, и от величины весового коэффициента X.
Рис. 11.9. Зависимость оценки качества от коэффициента обратной связи к (пример 11.7)
11.5. Размещение полюсов с помощью обратной связи по состоянию
657
По методике, проиллюстрированной примерами, может быть выполнен синтез системы, связанный с выбором нескольких параметров. Похожим образом может быть также решена задача синтеза в случае систем более высокого порядка. Однако при этом для определения матрицы Р, входящей в уравнение (11.19), придется прибегнуть к помощи компьютера. Компьютер может оказаться полезным и при вычислении минимального значения J в случае настройки одного или большего количества параметров. Однако решение уравнения (11.46) может оказаться затруднительным, особенно если порядок системы достаточно высокий (и > 3). Альтернативный метод, ориентированный на использование компьютера, без доказательства приводится в следующем абзаце.
Рассмотрим систему с одним входом и одним выходом, которая описывается уравнением
х = Ах + Bw.
и обратную связь, определяемую выражением
и = -Ктх = -[Л1 к2 ...кп]х.
Оценка качества принимается в виде
J = Г (xTQx + пг )dt , Jo
где г — скалярный весовой коэффициент. Эта оценка имеет минимальное значение, если К РВ/1.
Матрица Р размерности п х п находится из решения уравнения
ATP+PA-PBBTPr-1+Q = 0 , (11.53)
где во многих случаях Q = I. Уравнение (11.53), часто называемое уравнением Риккати, легко может быть запрограммировано для решения на компьютере, а также решено с помощью MATLAB. Оптимальная система, полученная таким образом, носит название линейный квадратичный регулятор.
11.5. Размещение полюсов с помощью обратной связи по состоянию
В разделе 11.4 мы рассмотрели использование обратной связи по состоянию для оптимизации интегральной оценки качества системы. Теперь мы покажем, как с помощью обратной связи по состоянию можно обеспечить заданное расположение полюсов передаточной функции замкнутой системы T(s). Соответствующий метод основан на использовании обратной связи по всем переменным состояния, т. е.
и = Кх. (11.54)
При этом корни характеристического уравнения размещаются так, чтобы переходная характеристика системы удовлетворяла выдвинутым требованиям.
Пример 11.8. Синтез системы третьего порядка
Рассмотрим систему третьего порядка, описываемую дифференциальным уравнением 4'+54'+з^ dt3 dt2 dt
и.
658
Глава 11. Синтез систем с обратной связью по состоянию
В качестве переменных состояния мы можем выбрать фазовые переменные (см. раздел 3.4), т. е. %! =у, х2 = dy/dt, х3 = cfy/dt1. тогда можно записать в матричной форме:
где у = Л|. Если матрица обратной связи по состоянию равна
К — [А| к2 А3],
и и = - Кх, то х = Ах - ВКх = (А - ВК)х.
Матрица системы с обратной связью имеет вид:
s -1
О s
(sI-A+BK) =
2+ 3 + к2
О
-1 s+ 5 + к3
а ее характеристический полином
det(sl-А + ВК) = s3 + (5+ k3)s2 + (3+ k2)s+ (2+ kt).
Если мы хотим получить быстрое нарастание переходной характеристики и малое перерегулирование, то характеристический полином должен иметь вид [см. выражение (5.18) и табл. 5.2]: (s2 + 2£со„5 + co2)(s + £со„) .
Чтобы обеспечить минимальное перерегулирование, выберем £ = 0,8 и со,,, удовлетворяющее требованию к времени установления. Если время установления (по критерию 2%) должно быть равно 1 с, то
0.8-со,,
Если выбрать со,, = 6, то характеристический полином будет иметь вид: (? + 9,6s + 36)(s+4,8) = ?+ 14,4? + 82.Е + 172.8.
Следовательно, необходимо выбрать = 9,4, к-, = 79,1 и к3 = 170,8. При этом переходная характеристика не имеет перерегулирования, а время установления равно 1 с, как и требовалось.
В качестве практического примера использования обратной связи по состоянию рассмотрим систему, изображенную на рис. 11.10. В этой системе используется двигатель
Рис. 11.10 Система управления положением с обратной связью по состоянию (выходная переменная у = 6)
11.5. Размещение полюсов с помощью обратной связи по состоянию 659
постоянного тока, управляемый по цепи возбуждения. Его передаточная функция была получена в разделе 2.5, и она имеет вид:
К
G(s) =-------------------,
s(s+b/J)(s + Rf ILj )
где К = KJCJJLf. Будем считать, что bU = 1 и R^Lf = 5. Как показано на рис. 11.10, система содержит обратные связи по трем переменным состояния: положению, скорости двигателя и току возбуждения. Допустим, что коэффициент обратной связи по положению равен 1, как показано на графе этой системы, приведенном на рис. 11.11. Если обратная связь по переменным х2 и х3 отсутствует, т. е. К3 = К2 = 0, то мы имеем:
G(s) =-------------------
.v(.s + l)(s + 5)
(11.55)
При К > 30 система будет неустойчива. Однако, если использовать обратную связь по всем трем переменным, то можно сделать ее устойчивой и обеспечить желаемый вид переходной характеристики.
К 1 1
Рис. 11.11. Граф системы с обратной связью по состоянию
Граф системы, изображенный на рис. 11.11, можно перерисовать в виде структурной схемы, как показано на рис. 11.12. Передаточная функция G(s) остается той же [см. выражение (11.55)], a H(s) учитывает обратную связь по состоянию. Следовательно,
1
«з
H(s} = K2 52 +
3J2
К,
(11.56)
и
Mis2 +Qs+ 1/К,1
G(s)H(s)= L J
л'(л' + l)(.v + 5)
(11-57)
Л’(5)
а)
Рис. 11.12. Представление системы с обратной связью по состоянию в виде эквивалентной структурной схемы
А(л-)
К s(.s-+i)(.v+5)
— КУ+(К,+К,)у+1 «—1
1(5)
660
Глава 11. Синтез систем с обратной связью по состоянию
где М = КК3 и Q = {К3+Кт)1Ку Поскольку К2 и К3 можно выбрать независимо друг от друга, это позволяет проектировщику задать нули функции G(s)H(s') по своему усмотрению.
Для примера выберем нули G(s)H(s) так, чтобы они сократились с вещественными полюсами G(s). Для этого необходимо иметь
= S2 + 05+— =Х3(5+1)(5+5) (11.58)
Отсюда очевидно, что К3 = 1/5, Q = 6 и, следовательно, К2 = 1. Тогда
О(5)Я(5) = .^+1)^-+5) , (11.59)
5(5+ 1)(5+ 5)
где М = КК3. При этом передаточная функция замкнутой системы примет вид: = д5) =-----------------------------------9^1----=---------*--------. (11.60)
Д(.\) \+G(s)H{s) (5+1)(л+5)(5 + М)
Таким образом, хотя мы могли бы выбрать М = 10, что гарантирует устойчивость системы, тем не менее переходная характеристика замкнутой системы в основном будет определяться полюсами 5 = -1 и s = —5. Отсюда следует вывод, что обычно нули функции G(s)H(s) следует выбирать так, чтобы обеспечить желаемое положение корней характеристического уравнения замкнутой системы в левой половине s-плоскости.
Пример 11.9. Синтез обратной связи по состоянию
Давайте еще раз рассмотрим систему, изображенную на рис. 11.12(6) и выберем нули функции G(s)H(s) в точках s = -4+j2hs = -4 -J2. Тогда получим
W(s) = X3|s2+gs+— =X3(s+4 + j’2)(s+4-/2) = X3(s2+8s+20) . (11.61)
Отсюда очевидно, что К3 = 1/20, Q = 8 и, следовательно, К2 = 7/20. Корневой годограф, соответствующий функции
М(?+85+20) G(s)H(s) = —---—---—- ,
s(s + l)(s + 5)
изображен на рис. 11.13. Система устойчива при всех значениях М = КК3. При М = 10 комплексным корням соответствует £ = 0,73, но при этом ожидаемое перерегулирование составля-
Рис. 11.13
Корневой годограф
скорректированной системы
11.5, Размещение полюсов с помощью обратной связи по состоянию
661
ет примерно 5%, а время установления приблизительно будет равно 1 с. Передаточная функция замкнутой системы
Г(*) , G(s) 200
----= / (х)=-------------=---------------------------------------.
А(х) 1 + G(s)H (s) (x + 3,45 + J3,2)(x + 3,45 - j'3,2)(x + 9,1)
Альтернативный метод заключается в том, чтобы задать желаемое расположение корней характеристического уравнения замкнутой системы 1 + G(s)H(s) = 0, а затем определить требуемые значения коэффициентов К, К3 и К2- Например, если мы зададим значения корней характеристического уравнения х = —10, х = —5 +/ их = —5 -j, то это уравнение будет выглядеть так: q(s) = (х + 10)(х2 + 1 Ох + 26) = х’ + 20х2 + 126х + 260 = 0 . (11.62)
Поскольку
1 + G (х)// (х) = х(х + 1)(х + 5) + М х2 + Qs + — = 0 , (11.63)
к Кз)
то, приравнивая (11.62) и (11.63), мы получим М= 14, Q= 121/14, К'3 = 14/260 и Л'2 = 0,41.
Во многих случаях все переменные состояния доступны для измерения, и, используя обратную связь по состоянию, мы можем получить устойчивую систему с хорошим качеством.
Пример 11.10. Управление перевернутым маятником
Формирование управляющего сигнала n(t) в функции от переменных состояния может служить эффективным средством обеспечения устойчивости системы. При синтезе системы управления большое значение также имеет правильный выбор ее структуры. Так. в задаче с тележкой и неустойчивым перевернутым маятником (см. рис. 3.19), чтобы маятник всегда сохранял вертикальное положение, надо измерять переменные состояния системы и использовать соответствующие сигналы для управления тележкой (см. пример 3.3). Для измерения переменной состояния х3 = 0 можно использовать потенциометр, связанный с осью вращения маятника. Скорость изменения углового положения маятника, х4 = 0, можно измерить с помощью тахогенератора. Использовав соответствующие датчики, можно также измерить переменные х, и х2, представляющие соответственно положение и скорость тележки. Если все эти переменные доступны измерению, то их можно использовать для синтеза регулятора, описываемого уравнением и = Кх, где К — матрица коэффициентов обратной связи. Вектор х представляет состояние системы; поэтому, если известны х(г) и уравнения, описывающие динамику системы, то этой информации достаточно для синтеза устойчивой системы управления.
Чтобы проиллюстрировать использование обратной связи по состоянию, рассмотрим неустойчивую часть системы, состоящей из тележки с перевернутым маятником, и синтезируем устойчивую систему управления. Таким образом, мы будем рассматривать систему пониженного порядка. Если считать, что управляющий сигнал пропорционален ускорению и что массой тележки можно пренебречь, то нас будет интересовать только динамика перевернутого маятника. Если и(г) соответствует ускорению, то уравнение (3.61) принимает вид gx3-lx4 = х2 = y=u(t).
Для системы пониженного порядка, где управляющим сигналом является ускорение, скорость и положение тележки получаются последовательным интегрированием и(1). Нас же интересует часть вектора состояния с компонентами [х3,х4 ] = [0,0]. Поэтому для данной подсистемы матричное дифференциальное уравнение состояния имеет вид:
d х3 _ 0 dt х4 g/l
1
0
г/(Г) .
(11.64)
В уравнении (11.64) матрица А — это просто правый нижний блок матрицы А в уравнении (3.65). Характеристическое уравнение системы X" - (g/Г) = 0 имеет один корень в правой поло-
662 Глава 11. Синтез систем с обратной связью по состоянию
вине 5-плоскости. Чтобы сделать систему устойчивой, мы сформируем управляющий сигнал в функции от двух переменных состояния, х3 и х4. Тогда получим:
u(t) = Кх = [Aj к2]
= крс3 + £3X4
Подставляя это выражение в (11.64), имеем:
О 11 Гх31 О
g/Z 0 + -(^(Ц + ад
Далее объединим два слагаемых в правой части:
О 1
(l//)(g-A,) -(Л2//)
Теперь получим характеристическое уравнение системы с обратной связью по состоянию:
- у (> Д«)] +т) ’ ;4'''++ /<Л| -г) ‘ “ •
(11.65)
Чтобы система была устойчивой, должно быть (kjl) > 0 и А| > g. Таким образом, измерив переменные состояния х3 и х4 и образовав управляющий сигнал и = к,х3 + ктх4, мы получили устойчивую систему. Если желательно иметь переходную характеристику с быстрым нарастанием и малым перерегулированием, то можно выбрать а>„ = 10 и £ = 0,8. Тогда необходимые коэффициенты к} и к2 найдем из уравнений
= 16 и = 100.
I I
Можно убедиться, что при этом переходная характеристика имеет перерегулирование 1.5% и время установления 0,5 с.
11.6. Формула Аккермана
Для системы с одним входом и одним выходом матрицу коэффициентов обратной связи по состоянию К = [А1 к2 ... кп], с помощью которой формируется управляющий сигнал и = —Кх, можно определить с помощью формулы Аккермана.
Если задан желаемый характеристический полином замкнутой системы
q(s) = sn+o.\Sn~{ +...+ап ,
то матрица коэффициентов обратной связи по состоянию определяется выражением
К = [0 0 ... 1]РС-19(А), (11.66)
где д(А) = А" +а1А',-1+...+аи_1 А + аД
аРс — матрица управляемости [см. выражение (11.2)].
Пример 11.11. Система второго порядка
Рассмотрим систему второго порядка с передаточной функцией
G(5) = l
5
и определим коэффициенты обратной связи, позволяющие разместить полюсы замкнутой системы в точках s = — 1 ± j. Следовательно, q(s) = s“ + 2s + 2 и ос, = а, = 2. Матричное уравнение
11.8. Синтез внутренней модели
663
х =
состояния исходной системы имеет вид: О О
1
о
о
1
и.
Матрица управляемости
1> = [В АВ]
о
1
1
о
Следовательно.
о
1
1
о
где
с/(А) =
К = [01]
су(А).
р;
-1
о
'о fl2 о о
и
О
2
~1 -1
0
0
1
О
о
1
Г1 ' о
1
о
о
1
2 2
О 2 '
Окончательно получим:
0 1
1 0
2 2
О
2
2
о
2
К = [01]
= [01]
= [22].
2
11.7. Ограничения обратной связи по состоянию
Есть две причины, по которым обратную связь по состоянию нецелесообразно использовать. Первая заключается в том, что эта обратная связь по своему действию эквивалентна ПД- или ПИД-регуляторам, которые имеют бесконечную полосу пропускания, тогда как реальные элементы и регуляторы всегда имеют конечную полосу пропускания. Вторая причина в том, что обычно просто невозможно измерить все переменные состояния и использовать их в качестве сигналов обратной связи. Реально измерению доступны только некоторые из переменных состояния или их комбинации. Поэтому на практике любой регулятор использует информацию только о входных, выходных сигналах системы и ограниченном числе переменных состояния.
11.8. Синтез внутренней модели
В этом разделе мы рассмотрим проблему синтеза регулятора, который позволяет асимптотически отслеживать изменение эталонного входного сигнала с нулевой установившейся ошибкой. В качестве эталонных входных сигналов могут выступать ступенчатые, линейные и такие периодические сигналы, как, например, синусоидальный. Нам известно, что при ступенчатом входном сигнале нулевую установившуюся ошибку можно обеспечить, если использовать систему управления типа 1. Эта идея лежит в основе введения в структуру регулятора внутренней модели эталонного сигнала.
664
Глава 11. Синтез систем с обратной связью по состоянию
Рассмотрим модель объекта, описываемого уравнениями состояния
х = Ах + Ви, у = Сх, (11.67)
где х — вектор состояния, и—входная переменная объекта, у—его выходная переменная. Будем считать, что входной эталонный сигнал генерируется линейной системой, описываемой уравнениями
xr =Агхг, г-дгхг (11.68)
при неизвестных начальных условиях. Эквивалентная модель эталонного входного сигнала r(t) имеет вид:
/•(и) + а„_2А2)+...+а1г+аог, (11.69)
где есть п-я производная сигнала r(f).
Начнем с хорошо знакомой задачи, а именно, с задачи синтеза регулятора, при котором система отрабатывает ступенчатый эталонный сигнал с нулевой установившейся ошибкой. В этом случае входной сигнал генерируется системой с уравнениями
хг =0, г = хг , (11.70)
или, что то же самое,
г = 0, (П-71)
а ошибка воспроизведения этого сигнала равна
е = у- г.
Дифференцируя сигнал ошибки, получим
ё = у - Сх ,
где были использованы модель входного сигнала (11.71) и модель объекта в виде (11.67). Если ввести две вспомогательные промежуточные переменные, z и w, как
z = х и w = й , то можно записать:
Если система, описываемая уравнениями (11.72), является управляемой, то можно сформировать сигнал обратной связи
w = -К}е - K2z (11.73)
таким образом, чтобы при этом система (11.72) была устойчивой. Это значит, что и ошибка е будет асимптотически стремиться к установившемуся значению, равному нулю, т. е. цель синтеза будет достигнута. Управляющий сигнал, поступающий на вход объекта, получим путем интегрирования уравнения (11.73):
u(t') = -Kl |е(т)<7т-К2х(/). о
Структурная схема полученной таким образом системы управления изображена на рис. 11.14. Мы видим, что регулятор включает в себя внутреннюю модель (т. е. интегратор) эталонного ступенчатого входного сигнала.
11.8. Синтез внутренней модели
665
Рис. 11.14. Синтез внутренней модели в случае ступенчатого входного сигнала
Пример 11:12. Синтез внутренней модели при единичном ступенчатом входном сигнале
Рассмотрим объект управления, описываемый уравнениями
О 1
х =
-2 -2
у=[1 0]х.
(11-74)
Требуется в системе управления этим объектом синтезировать такой регулятор, который обеспечивал бы отработку эталонного ступенчатого сигнала с нулевой установившейся ошибкой.
На основании (11.72) мы имеем:
(11.75)
Проверочный расчет показывает, что система, описываемая уравнениями (11.75), является управляемой. При = 20 и К, = [20 10] корни характеристического уравнения замкнутой системы будут занимать желаемые положения s = -1 +j 1 и s = -10. В данном случае система является асимптотически устойчивой, поэтому при любом начальном значении ошибки е(0) можно гарантировать, что e(t) --> 0 при / —> ®. График изменения ошибки при единичном ступенчатом входном сигнале изображен на рис. 11.15.
Рис. 11.15
Изменение ошибки системы с внутренней моделью при единичном ступенчатом входном сигнале
Время, (с)
Рассмотрим структурную схему системы управления, изображенную на рис. 11.14, где объект представлен передаточной функцией G(s), а соединенный последовательно с ним регулятор имеет передаточную функцию Gc(s) = Kv!s. Принцип внутренней модели утверждает, что если G(s)Gc(s) содержит Л(х), то реакция системыy(t) асимптотически будет стремиться к г(/). В данном случае R(s) = 1/s, и этот сомножитель входит в выражение G(s)Gc(s), как и ожидалось.
666
Глава 11. Синтез систем с обратной связью по состоянию
Рассмотрим проблему синтеза регулятора, обеспечивающего отработку линейного входного сигнала, г(7) = Ml, t > 0, с нулевой установившейся ошибкой. В этом случае модель генерирования эталонного линейного сигнала описывается уравнениями:
0 1'
0 0
X,. = А.Х
хг,
r = drxr =[1 0]хг , (11.76)
или, в терминах вход-выход модели, г = 0. Как и ранее, определим ошибку в виде е = у - г и, продифференцировав это выражение дважды, получим:
ё = у = Сх.
Введя вспомогательные переменные z = х и w = й, запишем:
(11.77)
Если система, описываемая уравнениями (11.77), является управляемой, то можно найти такие коэффициенты Kh i = 1,2,3, при которых в случае
(11.78)
она будет асимптотически устойчивой и, следовательно, ошибка e(f) -> 0, t -> Управляющий сигнал и находится путем двукратного интегрирования выражения (11.78). На рис. 11.16 мы видим, что полученный таким образом регулятор содержит два интегратора, которые представляют собой внутреннюю модель эталонного линейного входного сигнала.
Метод внутренней модели можно развить применительно к эталонным сигналам иного вида, при этом процедура синтеза остается той же самой, как это было проиллюстрировано на примере ступенчатого и линейного сигналов. Кроме того, данный метод можно использовать также с целью компенсации возмущений, для чего в регулятор необходимо включить внутреннюю модель генерирования возмущения.
Рис. 11.16. Синтез внутренней модели в случае линейного входного сигнала. Передаточная функция G(s)Gc{s) содержит сомножитель 1/з2, соответствующий изображению по Лапласу входного сигнала /? (з)
11.9, Пример синтеза: система автоматического контроля
667
11.9. Пример синтеза: система автоматического контроля
На рис. 11.17 изображена автоматическая система приемочного контроля, в которой перемещение тестируемых щупов осуществляется с помощью двигателя постоянного тока. При ручном контроле различных панелей с переключающими реле и индикаторными лампами очень низка производительность и велика вероятность ошибок. При автоматическом контроле от системы требуется подвести тестирующие щупы к испытываемой детали и проверить ее на отсутствие обрыва цепи, сопротивление или общую работоспособность. Для измерения положения и скорости на валу двигателя закрепляется кодовый датчик, как показано на рис. 11.18. Параметры системы указаны на структурной схеме (рис. 11.19), где К есть коэффициент усиления усилителя мощности.
В качестве переменных состояния выберем лу = 0, х2 = dQ/dt их3 = if, как показано на рис. 11.20. Все эти переменные состояния доступны измерению, поэтому можно записать уравнение обратной связи как
М = [-Х, -К2 -К3]х,
или
и = -Кхх1 -К2х2 ~К3х3 , (11.79)
как показано на рис. 11.21. В результате синтеза необходимо найти такие значения коэффициентов обратной связи, при которых реакция системы на ступенчатый входной сигнал имела бы время установления (по критерию 2%) менее 2 с и перерегулирование менее 4%.
Рис. 11.17
Система автоматического контроля
Червячная передача
Кодовый датчик
Направляющий стержень
.к Декодирующее
J) устройство
Двигатель
Тестирующие щупы
Панель с переключателями
Рис. 11.19 Структурная схема
Напряжение возбуждения
Рис. 11.18 Двигатель постоянного тока с встроенным кодовым датчиком
668
Глава 11. Синтез систем с обратной связью по состоянию
Рис. 11.21. Система с обратной связью
Чтобы в установившемся режиме взходной сигнал (положение) точно соответствовал заданному, выберем Кх = 1 и определим К, К2иК3. Характеристическое уравнение системы можно получить несколькими способами.
На основании рис. 11.20 запишем:
Подставив сюда и, определяемое уравнением (11.79), и учитывая, что X] = 1, получим:
(11.81)
Характеристическое уравнение также можно получить на основании рис. 11.21, считая, что G(s) есть передаточная функция прямого пути, a H(s) - эквивалентная передаточная функция цепи обратной связи (см. рис. 11.22). В нашем случае
.s(.s +1)(л + 5)
H(s) = Ki +KtS + K3(s+1)s = K3 s2 + K2+Ki- s + —
(11.82)
Тогда характеристическое уравнение замкнутой системы будет иметь вид: t, KK3(s2 +as+b) s(s+l)(s+5)
где параметры а и b определяются выбором коэффициентов К2 и К3. Теперь мы можем построить корневой годограф в зависимости тКК3. При Кх = 1 можно выбрать а = 8 и b = 20,
(11.83)
Рис. 11.22
Эквивалентная модель системы, изображенной на рис. 11.21
ОД о
G(s)
У(5)=%,(5)
-ад
и
К3
11.10. Применение MATLAB и Simulink для синтеза систем
669
Рис. 11.23
Корневой годограф системы автоматического контроля
Рис. 11.24
Переходная характеристика
чтобы нули находились в точках s = —4 ±J2 и корневой годограф закручивался влево на .v-плоскости. Тогда мы имеем:
К, +К3
= 8 и — =20,
следовательно, ^=1, Д', = 0,35 и К3 = 0,05. Вид корневого годографа изображен на рис. 11.23. При КК3 - 12 корни расположены на линии С, = 0,76, как показано на рисунке. Поскольку = 0,05, то К = 240. При этом корни имеют значения х = -10,62 и х = -3,69 ±у3,00. Переходная характеристика системы изображена на рис 11.24. Перерегулирование составляет 3%, а время установления равно 1,8 с, что полностью удовлетворяет выдвинутым требованиям.
11.10. Применение MATLAB и Simulink для синтеза систем с обратной связью по состоянию
Управляемость и наблюдаемость систем, описываемых уравнениями состояния, можно определить с помощью функций MATLAB ctrb и obsv, соответственно. Как показано на рис. 11.25, аргументами функции ctrb являются матрица коэффициентов А и матрица входа В, а результатом применения этой функции является матрица управляемости Рс. Аналогично для функции obsv аргументами являются матрица коэффициентов А и матрица выхода С, а результатом применения этой функции является матрица наблюдаемости Q.
670
Г лава 11. Синтез систем с обратной связью по состоянию
Рис. 11.25
Функции ctrb и obsv
Матрица х=Ах+Ви управляемости y=Cx+Du
Pc=ctrb(A.B)
Q=obsv(A.C)
Матрица х=Ах+Вг/ наблюдаемости у=Сх
Заметим, что матрица управляемости Рс зависит только от А и В, а матрица наблюдаемости Q — только от А и С.
Пример 11.13. Управление траекторией спутника
Рассмотрим спутник, находящийся на экваториальной круговой орбите на высоте 450 км над
поверхностью Земли, как показано на рис. 11.26. Движение спутника (в плоскости орбиты) описываются нормированными уравнениями состояния:
’0 1 0 О' 'О' 'О'
Зсо2 0 0 2(ii 1 0
X = X + и,.+ и,, (11.84)
0 0 0 1 0 0
0 -2со 0 0 0 1
где вектор состояния х соответствует отклонениям от экваториальной круговой орбиты. иг и и, — входные сигналы, характеризующие соответственно тягу двигателей в радиальном и тангенциальном направлениях, а со = 0,0011 рад/с (приблизительно один оборот за 90 мин) есть орбитальная скорость спутника на указанной высоте. При отсутствии возмущений спутник все время остается на заданной круговой экваториальной орбите. Однако возмущения в виде аэродинамического торможения будут стремиться отклонить спутник от номинальной траектории.
Рис. 11.26 Спутник на круговой экваториальной орбите
Круговая экваториальная орбита
11.10. Применение MATLAB и Simulink для синтеза систем
671
Поэтому возникает проблема синтеза регулятора, который заставлял бы корректирующие двигатели включаться с тем, чтобы действительная орбита оставалась близкой к заданной. Прежде чем начинать синтез, мы исследуем управляемость спутника, причем независимо для радиального и тангенциального двигателей.
Предположим, что тангенциальный двигатель отключен (т. е. и, = 0), и работает только радиальный двигатель. Является ли спутник управляемым за счет сигнала zz,.? На этот вопрос мы ответим с помощью MATLAB. Выполнив программу, приведенную на рис. 11.27. мы обнаружим, что определитель матрицы Рс равен нулю. Это значит, что при использовании только радиального двигателя спутник не является полностью управляемым.
Теперь предположим, что отключен радиальный двигатель (т. е. иг = 0) и что тангенциальный двигатель работает надлежащим образом. Является ли спутник управляемым за счет сигнала iz,? Выполнив программу, приведенную на рис. 11.28 мы обнаружим, что спутник является полностью управляемым при использовании только тангенциального двигателя.
Далее мы рассмотрим задачу синтеза регулятора для системы автоматического контроля, используя ее модель в переменных состояния. Для решения задачи воспользуемся корневым годографом, построение которого выполним с помощью MATLAB.
a) radial, m
Рис. 11.27. Проверка управляемости при использовании только радиальных двигателей: (а) скрипт MATLAB, (б) результат выполнения скрипта
Пример 11.14. Система автоматического контроля
Система автоматического контроля описывается уравнением
(11.85)
К качеству системы предъявляются следующие требования: реакция на ступенчатый входной сигнал должна иметь время установления (по критерию 2%) менее 2 с и перерегулирование менее 4%. Предполагается, что все переменные состояния доступны измерению и можно сформировать управляющий сигнал согласно уравнению
и = [-Х, -К2 -К^ ]х = Кх . (11.86)
672
Глава 11. Синтез систем с обратной связью по состоянию
с) tangent.m
% Этот скрипт определяет управляемость спутника с помощью только % тангенциального двигателя (т.е.при выключенном радиальном двигателе)
ТО w-0.0011; А=[0 1 0 0;3*wA2 0 0 2*w;0 0 0 1;0 -2*w 0 0]; НО—ГП-П- П-11- Матрица входа, соответствующая работе тангенциального двигателя
Вычисление матрицы управляемости
Hc-ctib(A.bZ). д
п — определитель матрицы управляемости
if abs(n) < eps dispfnpn работе только тангенциального else dispfnpn работе только тангенциального end
двигателя спутник неуправляем!1) двигателя спутник управляем!’)
Выполнение скрипта tangent.m
б) »tangent ♦ __________
При работе только тангенциального двигателя спутник управляем!
tangent.m output
Рис. 11.28. Проверка управляемости при использовании только тангенциальных двигателей: (а) скрипт MATLAB, (б) результат выполнения скрипта
Подлежат определению коэффициенты К, К}, К2 и К3. удовлетворяющие выдвинутым требованиям. Используя приближенные соотношения
4 /|_г2
»----< 2 и перерегулирование » lOOe^ 4 <4,
находим > 0,72 и со„ > 2,8. Это определяет область требуемого расположения доминирующих корней на s-плоскости, как показано на рис. 11.29. Подставляя (11.86) в (11.85), получим:
х =
0 1
0 -1
-KKt -КК2
0
1
-(5 + КК3)
х = Нх ,
(11.87)
где Н = А — ВК. Характеристическое уравнение замкнутой системы, det(sl - Н) = 0. приводится к виду:
s(s + l)(s + 5) + КК3( S2 + s + j = 0
А кз кз)
Если выбрать КК3 в качестве варьируемого параметра и принять K^l. то (11.88) можно записать в виде:
(11.88)
\+КК
= 0.
2 К2+К, 1
: + - ’-S +
*3
s(s + l)(s + 5)
Поместим нули в точках s = —4 ± J2, чтобы корневой годограф закручивался влево на s-плоскости. Тогда полином в числителе примет вид s" + 8s + 20. Сравнивая коэффициенты при степенях s, находим, что (К2+К3)/К3 = 8 и 1/К3 = 20, следовательно, К2 = 0,35 и К3 = 0,05. Корневой годограф изображен на рис. 11.29.
Характеристическое уравнение системы принимает окончательный вид: s2+8s+20 1 + КК.------------------------------------------= 0.
s(s + l)(s + 5)
11.10. Применение MATLAB и Simulink для синтеза систем
673
ДсЖ.ЦииС,.(ЬЖ1Я ось
б)
% Скрипт для построения корневого годографа
% для системы автоматического контроля с указанием
% области желаемого качества
num=[1 8 20]; den=[1 6 5 0]; sys=tf(num,den);
elf; rlocus(sys); hold on Сохранение построений с целью
% — добавления области желаемого качества
zeta=0.72; wn=2.8;
х=[-10:0.1 :-zeta*wn]; y=-(sqrt(1-zetaA2)/zeta)*x;
хс=[-10:0.1 :-zeta*wn]; c=sqrt(wnA2-xc.A2);
plot(x,y,‘:’,x,-y,‘:’,xc,c,‘:’,xc,-c,‘:’)
Если выбрать KK3 = 12, то доминирующие корни будут находиться в области желаемого качества. как показано на рис. 11.29. Это значение КК3 можно найти, указав желаемое расположение корней на годографе и воспользовавшись функцией rlocfind. Окончательно получим коэффициенты К = 240. Кх = 1, Л, = 0.35 и К3 = 0.05. В результате синтеза получим время установления около 1,8 с и перерегулирование 3%, как показано на рис. 11.30.
Пример 11.15. Моделирование систем управления с помощью Simulink
Рассмотрим систему, заданную в переменных состояния уравнением х = Ах + Вд
где
Рис. 11.30
Переходная характеристика системы автоматического контроля
Время (с)
674
Глава 11. Синтез систем с обратной связью по состоянию
При моделировании в Simulink’e может возникнуть потребность использовать полную обратную связь по состоянию, что означает, что все компоненты вектора состояния (в данном случае л, и х2) должны быть доступны для заведения по ним обратной связи. Один из способов, как этого добиться, заключается в выборе таких матриц С и D, чтобы выполнялось равенство у = х. т. е.
у = Сх + Dz<,
где
1 О
О
О
Закон управления с полной обратной связью по состоянию записывается в виде
и = - Кх + v,
где v — эталонный входной сигнал. Структурная схема замкнутой системы управления при моделировании ее в Simulink’e изображена на рис. 11.31. Эталонный входной сигнал задается блоком Signal Generator.
Выходные сигналы блока State-Space соответствуют двум переменным состояния, х, и х2. Эти сигналы поступают на вход блока Matrix Gain, который формирует сигнал обратной связи Кх. Он, в свою очередь, суммируется (со знаком минус) с эталонным входным сигналом. в результате чего образуется сигнал и = —Кх + v. поступающий на вход объекта управления.
675
11.10. Применение MATLAB и Simulink для синтеза систем
Рис. 11.33
Введение матрицы обратной связи в структурную схему моделируемой системы
Гй
; MiA’piicaim
Матрица коэффициентов полной обратной связи по состоянию
Carcri | ЬеЬ | ам» I
Вы можете выбрать вид и параметры эталонного входного сигнала, как показано на рис. 11.32. В случае, приведенном на рисунке, таким сигналом является синусоидальный сигнал. Другим часто используемым сигналом являются колебания прямоугольной формы, пилообразной формы и случайный сигнал.
Элементы матрицы коэффициентов обратной связи К и матриц системы А, В, С и D задаются с помощью всплывающих окон, как показано на рис. 11.33 и 11.34. В данном случае матрица К выбрана в виде
К = [1 I].
Это позволяет разместить полюсы замкнутой системы (т. е. собственные значения матрицы А - ВК) в точках 5, = -1 и s2 = -3. Simulink обеспечивает легкость доступа к матрице обратной связи и тем самым дает возможность исследовать поведение модели при различных параметрах цепи обратной связи.
Обратите внимание, что на рис, 11.34 в качестве входных данных заданы также начальные условия. В данном конкретном примере задано
Рис. 11.34
Задание модели в переменных состояния с помощью матриц
в
Модель системы:
Введите начальные условия в порядке номеров переменных состояния
676
Глава 11. Синтез систем с обратной связью по состоянию
Рис. 11.35
Результат моделирования, отражающий изменение переменных состояния
Если вы задали все параметры, то можете приступить к моделированию (за дополнительной информацией о начале моделирования и установке параметров при необходимости обратитесь к приложению Б и главе 5). Результат решения данной задачи, отражающий изменение переменных состояния, приведен на рис. 11.35. Simulink позволяет легко выполнять численные эксперименты и исследовать качество замкнутой системы при самых разных условиях.
11.11. Пример синтеза с продолжением: система чтения информации с диска
□ В этой главе мы синтезируем систему с обратной связью по состоянию, которая удовлетворяла бы выдвинутым требованиям к ее качеству. Эти требования приведены в табл. 11.1. Структурная схема разомкнутой системы изображена на рис.
11.36. Сначала мы реализуем обратную связь по состоянию для этой модели второго порядка, а затем проверим результат синтеза как для этой модели, так и для модели третьего порядка.
Таблица 11.1. Требования к системе чтения информации с диска и действительные показатели качества
Показатель качества Желаемое значение Реакция модели второго порядка Реакция модели третьего порядка
Относительное <5% < 1% 0%
перерегулирование
Время установления < 50 мс 34.3 мс 34,2 мс
Максимум реакции на единичное <5- 10 3 5,2 • 10 5 5.2 10"5
ступенчатое возмущение
Сначала мы выберем в качестве переменных состояния х1(0=Х0 и x2(t)=dyldt = = dxx/dt, как показано на рис. 11.37. На практике действительно возможно измерить положение и скорость перемещения считывающей головки. Именно эти переменные мы и ис-
11.11. Пример синтеза с продолжением: система чтения информации с диска 677
У(5)
Положение головки
Рис. 11.36. Разомкнутая система управления дисководом
Рис. 11.37. Система с обратной связью по двум переменным состояния
пользуем для образования обратной связи (см. рис. 11.37). Выберем коэффициент = 1. поскольку выходная переменная y(t) должна по возможности точно отслеживать изменения сигнала r(f). Разомкнутая система описывается следующим уравнением в переменных состояния:
"О 11 Го х +
0 —20J [5ХО
г(Г).
На основании рис. 11.37 замкнутая система будет описываться уравнением
О
О
^К1Ка
1
-(20+5К2Ко)
КО-
Характеристическое уравнение замкнутой системы при Кх = 1 имеет вид:
s2 + (20 + 5K2Ka)s + 5Ка =0.
Чтобы удовлетворить требования, предъявляемые к качеству системы, выберем С, = 0,90 и =125. Тогда желаемое характеристическое уравнение примет вид:
s2 + 2£>ans+a2 =s2 +2505+19290 = 0.
Отсюда имеем 5Ка = 19290, или Ка = 3858, а также 20 + 5К2Ка = 250, или К2 = 0,012.
Система с моделью второго порядка удовлетворяет предъявляемым требованиям, как это отражено в табл. 11.1. Если учитывать индуктивность обмотки возбуждения двигателя, равную 1 мГн, то мы получим модель третьего порядка, в которой
. 5000
G, (.s) =----.
s+1000
Сохранив все остальные параметры системы, полученные ранее, можно проверить показатели качества с учетом того, что модель имеет третий порядок. Соответствующие данные также приведены в табл. 11.1, откуда следует, что и в этом случае все выдвинутые требования выполнены. Этот пример также показывает, что модель второго порядка является вполне адекватной для синтеза системы с обратной связью по состоянию.
678
Глава 11. Синтез систем с обратной связью по состоянию
11.12. Резюме
В этой главе кратко были рассмотрены основы синтеза систем управления во временной области. Особое внимание было уделено синтезу оптимальных систем на основе интегральных оценок качества. Кроме того, были затронуты проблемы синтеза регуляторов с использованием обратной связи по состоянию с привлечением для этой цели корневого годографа, а также синтеза внутренней модели.
Упражнения
У-11.1. Способность сохранять равновесие является ключевой проблемой для устройства, передвигающегося прыжками на одной подрессоренной ноге, как показано на рис. 11.1(У). Управление положением этого устройства осуществляется с помощью гироскопа и обратной связи по
состоянию с уравнением и = Кх, где ’-1 О'
О к '
И В = I.
Определите значение к, при котором система управления будет обладать критическим демпфированием.
У-11.2. Поведение стального шарика, подвешенного в магнитном поле, описывается уравнением
Обе переменные состояния (положение xj и скорость х2) доступны измерению. Найдите вид обратной связи, при котором система управления шариком будет обладать критическим демпфированием, а время установления (по критерию 2%) будет равно 2 с.
У-11.3. Система описывается уравнениями
и у = 2х2.
Определите, является ли система управляемой и наблюдаемой.
Рис. 11.1 (У). Управление устройством, передвигающимся на одной ноге:
1 — воздушные клапаны, 2 — подвес, 3 — компас, 4 — сервоклапан,
5 — двухосевой гироскоп, 6 — гидропривод и датчики положения/скорости, 7 — нога, 8 — поворот ноги
Ответ: управляема, но не наблюдаема.
У-11.4. Система описывается уравнениями
и У = Х|.
Определите, является ли система управляемой и наблюдаемой.
У-11.5. Система описывается уравнениями
х +
-1 -2
и у = Хр
к =
х =
х =
А =
О 1
1 О
О
О
О 1
Определите, является ли система управляемой и наблюдаемой.
У-11.6. Система описывается уравнениями
О 1
О
1
х =
и
-1 -2
и у = х,.
Определите, является ли система управляемой и наблюдаемой. Ответ: управляема и наблюдаема.
Задачи
679
Задачи
3-11.1. Система описывается дифференциальным уравнением первого порядка
х = х + и.
Требуется синтезировать регулятор с уравнением «(f) = -кх. переводящий систему из начального состояния х(0) = 72 в положение равновесия x(t) = 0 при /-»<». Интегральная оценка качества задана в виде
J = °jx2dt.
о
Найдите значение к, обеспечивающее минимум оценки J. Является ли это значение физически реализуемым? Выберите реальное значение к и вычислите соответствующую этому коэффициенту интегральную оценку качества. Является ли устойчивой система без обратной связи?
3-11.2. Чтобы учесть расход энергии и ресурсов, в интегральную оценку качества включают также управляющий сигнал, поскольку он всегда является ограниченным. Одна из таких оценок качества имеет вид:
J= J[x2(Z)+Xu2(z)]rfZ .
о
(а) Повторите задачу 11.1, используя эту оценку, (б) Полагая 2. = 2, найдите значение к, мини-
мизирующее оценку J, и вычислите ее минимальное значение.
3-11.3. Система управления роботом описывается уравнением
т 1
d X)
dt х2
1
-1
О X]
2 х2
u(t).
Обе переменные состояния доступны измерению, поэтому можно сформировать управляющий сигнал «(<) = -Л(Х| + х2). Используя метод, описанный в разделе 11.4. найдите значение к. минимизирующее интегральную оценку качества. Вычислите минимум оценки J Определите чувствительность оценки качества к параметру к. Начальные условия заданы в виде
х(0)= ‘
Является ли устойчивой система без обратной связи?
3-11.4. В примере 11.6 определите коэффициент обратной связи к, минимизирующий оценку качества
J = jxTx dt.
о
Начальные условия заданы в виде хт(0) = [1 1]. Изобразите графически зависимость J от к. 3-11.5. В примере 11.7 определите коэффициент обратной связи к. минимизирующий оценку качества
оо
J = j(x1x + uTu)Jz.
о
Начальные условия заданы в виде хт(0)= [1 1]. Изобразите графически зависимость J от к. 3-11.6. Для решений задач 11.3, 11.4и 11.5 определите корни характеристического уравнения оптимальной замкнутой системы. Обратите внимание, что эти корни зависят от выбранной оценки качества.
3-11.7. Система описывается векторно-матричным уравнением (11.20). Требуется, чтобы обе переменные состояния были использованы для формирования сигнала обратной связи
680
Глава 11. Синтез систем с обратной связью по состоянию
и(Г) = -ktx} - к2х2. Кроме того, собственная частота соп полученной таким образом системы должна быть равна 2. Определите коэффициенты kt и к2, при которых в случае выбранной оценки качества (11.13) система была бы оптимальной. Начальные условия заданы в виде хт(0) = [1 0].
3-11.8. Для системы из примера 11.5 определите оптимальное значение к2. если kt = 1 и хт(0) = [1 0].
3-11.9. С точки зрения управления очень интересной является задача о шарике, находящемся на коромысле [см. рис. 11.9(3)]. Жесткое коромысло может вращаться относительно своего центра, а шарик катается по канавке вдоль коромысла. Проблема состоит в том, чтобы можно было остановить шарик в заданной точке коромысла, используя в качестве управляющего сигнала момент, прикладываемый к коромыслу относительно точки его вращения.
В линейной модели этой системы предполагается, что измерению доступны угол <р и угловая скорость ckfldt. Реализуйте такую обратную связь, чтобы при ступенчатом входном сигнале в замкнутой системе перерегулирование было равно 4 %. а время установления (по критерию 2%) составляло 1 с.
3-11.10. Динамика ракеты представлена передаточной функцией
W Г(. 1
----= G (.v) = l/(s) s2
а в системе управления используется обратная связь по состоянию, где х, = у(1) и и = —2х3 - х,. Найдите корни характеристического уравнения этой системы и ее реакцию на начальные условия Х](0) = 0 и х2(0) = 1.
3-11.11. Объект управления задан передаточной функцией
U(s) s2+5s+4
С помощью обратной связи по состоянию добейтесь того, чтобы при ступенчатом входном сигнале установившаяся ошибка была равна нулю. Коэффициенты обратной связи выберите так, чтобы время установления (по критерию 2%) было менее 1 с. а перерегулирование составляло примерно 1%.
3-11.12. Двигатель постоянного тока имеет передаточную функцию
ч Ю
G(s) = —z--------------.
?(5 +!)(? + 2s +2)
Определите, является ли данный объект управляемым и наблюдаемым.
Рис. 11.9 (3)
(а) Шарик на коромысле.
(б) Модель шарика на коромысле
Сигналы обратной связи, подлежащие выбору
Задачи
681
3-11.13. Объект управления имеет передаточную функцию
G(s) =
К s(s+70)
Требуется, чтобы система управления объектом имела коэффициент ошибки по скорости Kv = 35. а перерегулирование при ступенчатом входном сигнале составляло примерно 4%. что соответствует коэффициенту затухания С, = 1 /V2. Кроме того, желательно иметь время установления (по критерию 2%) 0,11 с. Определите необходимую обратную связь по переменным состояния.
3-11.14. Объект управления имеет передаточную функцию
Г(5) 1
U (s) s(s+10)
Определите коэффициенты обратной связи по состоянию, при которых время установления (по критерию 2%) было бы равно 1 с, а перерегулирование составляло около 10%. Изобразите граф полученной системы и выберите необходимый коэффициент усиления в цепи между входом R(s) и переменной U(s), исходя из того, что при ступенчатом входном сигнале установившаяся ошибка должна равняться нулю.
3-11.15. Система управления роботом описывается уравнениями
(а) Определите передаточную функцию G(s) = Y(s)/U(s). (б) Изобразите граф системы в переменных состояния, (в) Определите, является ли система управляемой, (г) Определите, является ли система наблюдаемой.
3-11.16. В фильме «Парк юрского периода» динозавры передвигались при помощи гидравлических исполнительных механизмов большой мощности (до 1,2 кВт). Движение одной конечности описывается передаточной функцией
G(s) =---— .
s(s+2)
Полюсы замкнутой системы управления конечностью требуется разместить в точках s = -2 ± J2. С помощью формулы Аккермана определите соответствующие коэффициенты обратной связи. Считайте, что обе переменные состояния (положение и скорость) доступны измерению.
3-11.17. Система имеет передаточную функцию У($) _ s+ а
R(s) s4 + 5s3 + 10s2 + 10s+ 4
Определите значение вещественного параметра а, при котором система будет либо неуправляемой, либо ненаблюдаемой.
3-11.18. Объект управления имеет передаточную функцию
2^=С(5) = _Ц. R(s) (S+1)2
(а) Запишите матричное дифференциальное уравнение для объекта. Изобразите граф объекта в переменных состояния, (б) Выберите такие коэффициенты обратной связи по состоянию, при которых реакция системыу(?) на начальные условия х,(0) = 1 и х2(0) = 0. где х, = у((). обладала бы критическим затуханием. Кратные корни должны находиться в точке s =—V2.
3-11.19. На рис. 11.19(3) изображена структурная схема системы управления. Определите, является ли эта система управляемой и наблюдаемой.
682
Глава 11. Синтез систем с обратной связью по состоянию
Рис. 11.19 (3)
/?(5)
3-11.20. Рассмотрите систему автоматического управления курсом корабля из задач 8.11 и 9.15. Си-
стема описывается следующим уравнением
i(r) =
'-0,05
-10~3
1
0
-6 - 0,15 0
1
о о о о
в переменных состояния:
гдехт(/) = [т со, у 0]. Переменные состояния имеют следующий смысл: л, = v — скорость в
поперечном направлении, х2 = со, — угловая скорость корпуса корабля, х3 =у — отклонение корабля по оси, перпендикулярной курсу, х4 = 0 — угловое отклонение от курса, (а) Определите, является ли система устойчивой, (б) Дополните систему обратной связью с уравнением
5(c) = -кххх - к3х3. Определите, будет ли система устойчивой при надлежащем выборе к.л и к3 3-11.21. На рис. 11.21(3) изображена RL-cxe-
ма. (а) Выберите две переменных состояния и запишите векторно-матричное дифференциальное уравнение, считая выходной переменной v0(c). (б) Определите, являются ли переменные состояния наблюдаемыми при RX!LX = R,!L2. (в) Определите условия, при которых характеристическое уравнение схемы имеет два одинаковых корня.
3-11.22. В системе управления манипулятором объект с передаточной функцией
G(s) =
1
s(s + 0,4)
охвачен единичной отрицательной обратной связью. Представьте эту систему в виде графа в переменных состояния и в виде векторно-матричного дифференциального уравнения, (а) Постройте график реакции системы на ступенчатый входной сигнал, (б) Для управления объектом используйте обратную связь по состоянию так, чтобы перерегулирование составляло 5%. а время установления (по критерию 2%) равнялось 1,35 с. (в) Постройте график реакции системы с обратной связью по состоянию на ступенчатый входной сигнал.
3-11.23. Рассмотрите еще раз систему из примера 11.11 при условии, что установившаяся ошибка при ступенчатом входном сигнале должна быть равна нулю, а характеристическое уравнение должно иметь корни s = -2 +jl и s = -10.
3-11.24. Рассмотрите систему из примера 11.11 при условии, что установившаяся ошибка при линейном входном сигнале должна быть равна нулю, а характеристическое уравнение должно иметь корни s = -2 ± J2 и s = -20.
Задачи повышенной сложности
683
Задачи повышенной сложности
П-11.1. На рис. 11.1(П) изображена система управления двигателем постоянного тока. Все три переменных состояния доступны измерению; выходной переменной является положение х,(/). Выберите такие коэффициенты обратной связи, чтобы установившаяся ошибка при ступенчатом входном сигнале равнялась нулю, а перерегулирование не превышало 3%.
Рис. 11.1 (П) Двигатель постоянного тока, ... , управляемый по ' ' цепи возбуждения 2К X(s) = 4(s) 2 1 Ь. Y (v\
г s+4 Ток возбуждения .v+1 Скорость 5 Положение
П-11.2. Объект управления имеет передаточную функцию
ч 3sz+4s-2
G(s) = -ч--5------
Введите обратную связь по состоянию так, чтобы замкнутая система имела полюсы s = —4. —4 и -5.
П-11.3. Система описывается матричным дифференциальным уравнением
1 О'
О 2
А’ _^2.
х =
и.
Как должны быть выбраны коэффициенты fej и Ь2, чтобы система была управляемой?
Считая, что все переменные состояния доступны измерению, реализуйте обратную связь по этим переменным так, чтобы характеристическое уравнение системы имело корни s = -2 + j. -5 и -5.
П-11.5. Система автомобильной подвески имеет три физических переменных состояния, как показано на рис. 11,5(П). В системе использована обратная связь по состоянию, причем К{ = 1. Выберите коэффициенты К2 и К3 так, чтобы характеристическое уравнение системы имело три вещественных корня, расположенных между s = -3 и s = -6. Выберите также Кр, чтобы установившаяся ошибка при ступенчатом входном сигнале была равна нулю.
A(s)
Рис. 11.5 (П). Система автомобильной подвески
684
Глава 11. Синтез систем с обратной связью по состоянию
П-11.6. Система описывается дифференциальным уравнением d2y „ dy du
—ir + 2— + у = — + и . dt2 dt dt
где у — выходная переменная, и — входная переменная.
(а) Представьте систему в форме фазовой переменной и покажите, что она является управляемой. (б) Примите в качестве переменных состояния х, = у и х2 = dyldt -ни определите, является ли в этом случае система управляемой. Обратите внимание, что управляемость системы зависит от выбора переменных состояния.
П-11.7. Новое судно «Radisson Diamond» оснашено понтонами и стабилизаторами, сглаживающими бортовую качку, как показано на рис. 11.7(П), (а). Структурная схема системы стабилизация качки приведена на рис. 11.7(П), (б). Определите коэффициенты К2 и К3 так, чтобы характеристическое уравнение системы имело корни s = -15 и s = —2 + J2. Постройте график изменения угла качки <р(/) при единичном ступенчатом возмущении.
П-11.8. Рассмотрите систему управления уровнем жидкости, описанную в задаче 3.36.
(а) Синтезируйте систему с обратной связью только по одной переменной состояния, h(t). так чтобы переходная характеристика имела перерегулирование менее 10% и время установления (по критерию 2%) не более 5 с. (б) Синтезируйте систему с обратной связью по двум переменным состояния — уровню жидкости hit) и положению вала двигателя 0(f). Система должна удовлетворять требованиям, указанным в п. (а), (в) Сравните результаты пп. (а) и (б).
П-11.9. Систему управления движением больничной каталки можно представить в виде модели из двух масс и пружин, как показано на рис. 11.9(П), где mt = т2 = 1 и кл = к2 = 1.
(а) Запишите векторно-матричное дифференциальное уравнение, (б) Определите корни характеристического уравнения системы, (в) Требуется стабилизировать систему за счет обратной связи и = -kXj, где и— сила, действующая на нижнюю массу, ах, — одна из переменных состояния. Выберите соответствующую переменную состояния х,. (г) Изобразите вид корневого годографа в зависимости от параметра к.
Рис. 11.7 (П). (а) Паром «Radisson Diamond».
(б) Система управления, ослабляющая влияние возмущения
Задачи на синтез систем
685
Рис. 11.9 (П). Модель больничной каталки
Рис. 11.10 (П). Двигатель и перевернутый маятник
П-11.10. Рассмотрите перевернутый маятник, закрепленный на валу двигателя, как показано на рис. 11.10(П). Предполагается, что трение в подшипниках отсутствует. В одном корпусе с двигателем находится тахогенератор, поэтому измерению доступна скорость вращения, но информация об угловом положении отсутствует. Если на двигатель не подано напряжение, то маятник займет обычное положение, а при небольшом возмущении будет совершать незатухающие колебания. Если же маятнику придать вертикальное (перевернутое) положение, то это положение будет неустойчивым. Придумайте такой регулятор в цепи обратной связи, Gc(s), который использовал бы только информацию о скорости, получаемую от тахогенератора.
Рис. 11.11 (П)
Система управления с внутренней моделью
П-11.11. Определите регулятор с внутренней моделью, Gc(s), для системы, изображенной на рис.
11.11 (П). Требуется, чтобы при ступенчатом входном сигнале установившаяся ошибка равнялась нулю, а время установления (по критерию 2%) должно быть менее 5 с.
П-11.12. Повторите задачу П-11.11, если требуется, чтобы при линейном входном сигнале установившаяся ошибка равнялась нулю, а время установления (по критерию 2%) было менее 6 с.
Задачи на синтез систем
СС-11.1. Систему управления положением скользящей части стола требуется реализовать с использованием обратной связи по состоянию. Для этой цели воспользуйтесь моделью в переменных состояния, разработанной в задаче СС-3.1. Переходная характеристика должна иметь перерегулирование менее 2% и время установления менее 250 мс.
С-11.1. Рассмотрите устройство, позволяющее удерживать стальной шарик в подвешенном состоянии в магнитном поле, как показано на рис. 11.1 (С), (а) и (б). Считая, что переменные у и dy/dt доступны измерению, синтезируйте систему управления, которая обеспечивала бы заданное положение шарика с точностью 10%.
686
Глава 11. Синтез систем с обратной связью по состоянию
-15
Ток------
электромагнита
/-1784
---►Y(s)
Вертикальное положение шарика
а) б)
Рис. 11.1 (С), (а) Подвеска шарика с помощью электромагнита.
(б) Модель электромагнита и шарика
С-11.2. Борьба за уменьшение выброса в атмосферу выхлопных газов привела к тому, что в 1980-е годы в автомобильной промышленности задачей первостепенной важности стало управление соотношением горючего и воздуха в карбюраторе. И конструкторы автомобильных двигателей решили использовать для этой цели системы с обратной связью. В выхлопную трубу помещался датчик, выходной сигнал которого подавался на вход регулятора. Последний управлял степенью открытия жиклера, через который горючее поступало в карбюратор.
Подберите необходимые технические устройства и разработайте линейную модель системы управления. Считайте, что датчик практически без запаздывания определяет действительное соотношение горючего и воздуха. На основании этой модели синтезируйте оптимальный регулятор, если система должна обладать нулевой установившейся ошибкой при ступенчатом входном сигнале, а перерегулирование не должно превышать 10%.
С-11.3. Коэффициент полезного действия дизельного двигателя сильно зависит от скорости вращения вала. Поэтому задача управления этой скоростью весьма актуальна для железнодорожных дизельэлектровозов. Локомотив приводится в движение с помощью мощных электродвигателей постоянного тока, связанных с каждой из его осей. Рассмотрите модель такого электропривода, приведенную на рис. 11.3 (С), где степень открытия дросселя соответствует смешению движка потенциометра.
Скорость вращения вала электродвигателя <оо измеряется с помощью тахогенератора, вырабатывающего сигнал обратной связи v0. Тахогенератор может быть связан с валом электродвигателя ременной передачей. Сигнал ошибки v,.-v0 усиливается электронным усилителем и в виде напряжения гу подается на обмотку возбуждения генератора постоянного тока.
Якорь генератора вращается с постоянной скоростью coj, сообщаемой ему дизелем. Напряжение генератора подается на якорную обмотку двигателя и для последнего играет роль управляющего сигнала, а ток i в обмотке возбуждения двигателя поддерживается постоянным. Двигатель развивает вращающий момент Т и приводит в движение нагрузку на своем валу, так что скорость <оо стремится сравняться с ее заданным значением со,..
Известно, что коэффициент передачи генератора Kg = 100. а коэффициент передачи двигателя Кт = 10. Коэффициент противоЭДС Кь = 31/50. Параметры двигателя J= 1. b = 1, /.„ = 0,2 и Ra = 1. Параметры обмотки возбуждения генератора Rj = 1 и Lj = 0,1. Кроме того, известно, что коэффициент передачи тахогенератора К, = 1, а якорная обмотка генератора имеет Lg = 0,1 и Rg = 1. Все три параметра заданы в соответствующих единицах СИ.
(а) Разработайте линейную модель системы и исследуйте ее качество в зависимости от общего коэффициента усиления К. Чему равна установившаяся ошибка при фиксированном положении дросселя, т. е. при v,. = А? (б) Учтите в модели системы влияние возмущающего момента Тс1 со стороны нагрузки и определите, как он отразится на скорости соо(5). Для результатов
Задачи на синтез систем
687
Рис. 11.3 (С). Система управления скоростью дизельэлектровоза
п. (а) оцените установившуюся ошибку, обусловленную возмущением, (в) Выберите три переменных состояния, которые легко могут быть измерены, и запишите векторно-матричное дифференциальное уравнение системы. Затем введите обратную связь по состоянию, обеспечива-
ющую приемлемое качество системы.
С-11.4. На рис. 11.4(C) изображен современный вертолет, для которого управляемой переменной
является угол наклона 0, изменяемый за счет углового положения несущего винта 5.
Движение вертолета описывается уравнениями
d2f) dt2
dQ dx _
= -о,------a,------г no
clt dt
d2x
li2
dx
= g0-a9— -c2— + go, ~ dt dt
где x — перемещение в горизонтальном направлении. Вертолет боевого назначения характеризуется следующими параметрами:
а, = 0.415, с2 = 0,0198, а, = 0,0111, а2=1,43, и = 6,27, g = 9,8.
Все параметры заданы в соответствующих единицах СИ.
Получите (а) модель системы в переменных состояния и (б) передаточную функцию 0(s)/5(s). (в) С помощью обратной связи по состоянию обеспечьте требуе-
Рис. 11.4 (С). Управление углом наклона вертолета 0 относительно поперечной оси.
мое качество системы.
688
Глава 11. Синтез систем с обратной связью по состоянию
Требуется, чтобы (1) при ступенчатом изменении заданного угла наклона 0г/установившаяся ошибка составляла менее 20% от амплитуды входного сигнала; (2) перерегулирование при ступенчатом входном сигнале было менее 20%; и (3) время установления (по критерию 2%) не превышало 1,5 с.
С-11.5. На одном из этапов производства бумаги из жидкой пульпы формируется струя диаметром 2 см, которая распределяет пульпу по ячеистой ленте. Чтобы обеспечить желаемое качество бумаги, пульпа должна заполнять ленту как можно равномернее, а для этого необходимо поддерживать заданное соотношение между скоростью струи и скоростью движения ленты. Одной из основных управляющих переменных является давление в распределительной камере, которое определяет скорость истечения струи жидкой пульпы. Давление в этой камере складывается из давления слоя жидкой пульпы и давления сжатого воздуха, нагнетаемого в камеру. Поскольку камера с пульпой, находящаяся под давлением, представляет собой объект со сложной динамикой, то при ручном управлении нельзя обеспечить высокое качество бумажной полосы.
Модель распределительной камеры в переменных состояния, линеаризованная в окрестности рабочей точки, имеет вид:
-0,8 0,02
-0,02 0
0,05 1
0,001 0
и и У=[х, хД.
Переменными состояния являются уровень жидкой пульпы х, и давление х2, а управляющими переменными — поток пульпы и, и степень открытия клапана и2. Синтезируйте систему с обратной связью по состоянию, характеристическое уравнение которой имело бы корни, по модулю большие пяти.
С-11.6. На рис. 11.6(C) изображен механизм со связанным вра-щением. Он состоит из двух шкивов, соединенных элас- «Т
тичным ремнем, натяжение которого обеспечивается тре-тьим шкивом, подвешенным на пружине, так что вся систе- Пружина ШЮ1В> ма оказывается недодемпфированной. Один из основных <С задающии
. Г натяжение
шкивов, шкив А, приводится во вращение двигателем по-стоянного тока. Шкивы Ан В снабжены тахогенераторами, /( /Ж)
напряжение которых пропорционально скорости вращения \ ^ластичныи
шкивов. Если включить двигатель, то шкив А приобретет Г/ \ремень
ускорение, определяемое общим моментом инерции всей / / \
системы. Шкив В на другом конце эластичного ремня так- / ___\
же начнет вращаться с ускорением, но с некоторым запаз-дыванием, обусловленным эффектом эластичности ремня.
Интегрирование сигналов, пропорциональных скорости ^=s2.------------
каждого шкива, дает информацию об их угловом положе- Шкив А Шкив В
НИИ.
Данная механическая система описывается следующими
Рис. 11.6 (С)
уравнениями:
Реализуйте обратную связь по состоянию, при которой в случае ступенчатого входного сигнала система обладала бы апериодической реакцией (см. раздел 10.11) с временем установления (по критерию 2%) менее 0,5 с.
Задачи, решаемые с помощью MATLAB
689
||™| Задачи, решаемые с помощью MATLAB
М-11.1. Рассмотрите систему, описываемую уравнениями
О’
1
1
С помощью функций Ctrb и obsv покажите, что система является управляемой и наблюдаемой. М-11.2. Рассмотрите систему, описываемую уравнениями
0
-2 -4,5
и и у= [1 0] х.
X =
Определите, является ли система управляемой и наблюдаемой. Найдите передаточную функцию, связывающую и и у.
М-11.3. Система описывается уравнениями
1
‘ 0
-1 2
1
1
и и у= [1 -1] X .
X =
Используя обратную связь по состоянию и = -Кх, найдите такую матрицу К. при которой замкнутая система будет иметь полюсы S( =-1 и s2 = -2.
М=11.4. Модель движения с постоянной скоростью управляемой ракеты представлена уравнения-
ми
(а) С помощью функции ctrb получите матрицу управляемости и убедитесь, что система не является управляемой.
(б) Получите модель в переменных состояния, которая была бы управляемой, для чего сначала найдите передаточную функцию от и к у и сократите одинаковые сомножители в числителе и знаменателе. Затем к полученному выражению примените функцию ss и определите модифицированную модель системы в переменных состояния.
(в) Убедитесь, что система, полученная в п. (б), является управляемой.
(г) Является ли движение ракеты с постоянной скоростью устойчивым?
(д) Поясните, какая связь существует между управляемостью и сложностью модели в переменных состояния (где сложность определяется числом переменных состояния).
М-11.5. Линеаризованная модель самолета с вертикальным взлетом и посадкой описывается уравнениями
х = Ах + + В21<2 .
где
-0,0366 0,0482 0,1002 0
0,0271
-1,0100 0,3681 0
0,0188 0.0024 -0.7070
1
-0,4555
-4,0208 1.4200
0
0,4422 3,5446
-5,5200 0
и В2 =
0,1761
-7,5922
4,4900
Компонентами вектора состояния являются горизонтальная скорость х, (в узлах) , вертикальная скорость (в узлах) х2, скорость изменения угла наклона относительно поперечной оси х3
1 узел = 1,85 км/ч.
690
Глава 11. Синтез систем с обратной связью по состоянию
(градусы/с) и сам угол наклона х4 (градусы). Входной сигнал и, используется, главным образом, для управления движением в вертикальном направлении, а и2 — для управления движени-
ем в горизонтальном направлении.
(а) Вычислите собственные значения матрицы А. Является ли система устойчивой? (б) С по-
мощью функции poly определите характеристический полином, соответствующий матрице А.
Вычислите корни характеристического уравнения и сравните их с собственными значениями, найденными в п. (а), (в) Является ли система управляемой, если использовать только сигнал и(? А если только и21 Прокомментируйте результаты.
М-11.6. Желание сделать доступной для изучения обратную сторону Луны стимулировало работы по исследованию возможности запуска спутника связи, который вращался бы за Луной вокруг точки равновесия (центра масс) системы Земля-Солнце-Луна. Такая орбита спутника, известная как гало-орбита, изображена на рис. 11.6(М). Цель системы управления состоит в удержании спутника на гало-орбите, видимой с Земли, так, чтобы связь с ним действовала бесперебойно. Канал связи должен быть направлен от Земли к спутнику и от него к обратной стороне Луны, как показано на рис. 11.6(М).
Рис. 11.6 (М). Спутник на гало-орбите за Луной
Линеаризованные (и нормированные) урав-
нения движения спутника по гало-орбите
имеют вид:
0 0 0 1 0 О’ 0 "О' ’О’
0 0 0 0 1 0 0 0 0
0 0 0 0 0 1 0 0 0
X = X 4- и1+ «3
7.3809 0 0 0 2 0 1 0 0
0 -2,1904 0 -2 0 0 0 1 0
0 0 -3,1904 0 0 0 0 0 1
Компоненты вектора состояния х характеризуют положение спутника и его скорость, а входные сигналы и,. i = 1, 2, 3, соответствуют ускорению, создаваемому двигателями соответственно в направлении осей £, т] и £.
(а) Устойчиво ли движение спутника по гало-орбите? (б) Является ли система управляемой при использовании только сигнала и,? (в) А только сигнала и2? (г) А если используется только и3? (д) Предположим, что мы можем наблюдать перемещение спутника вдоль оси т]. Определите передаточную функцию от и2 к т]. (Подсказка', примите у =[0 1 000 Ojx.) (е) на основании передаточной функции из п. (д) с помощью функции ss получите модель системы в переменных состояния. Убедитесь, что система является управляемой, (ж) Используя обратную связь по состоянию и2 = -Кх, синтезируйте регулятор (т. е. определите матрицу К) для системы из п. (е) так, чтобы характеристическое уравнение имело корни s, 2 = -1 +j и s3 4 = -10.
М-11.7. Рассмотрите систему, описываемую уравнениями
0 1 0
х(/) =00
1 х(Г), у(Ц = [1 0 0]х(г).
-6
Ключевые термины и понятия 691
Предположим, что известны три значения y(tt), i = 1,2,3:
ХЛ) = 1 при = О,
>’(Z2) = -0.0256 при 12 = 2,
y(t3) = -0,2522 при t3 = 4.
Используя эти три наблюдаемых значения, разработайте метод определения начального состояния системы х(/0), при котором ее моделирование с помощью функции Isim даст те же значения >’((,). (б) Основываясь на заданных значениях y(t,), вычислите х(/0) и обсудите условия, при которых эта проблема может быть вообще решена, (в) Подтвердите результат, получив путем моделирования реакцию системы на вычисленные начальные условия. [Подсказка: напомним, что х(г)= е^'^'^х^о).]
М-11.8. Система с одним входом описывается уравнением состояния, в котором
Используя метод, рассмотренный в разделе 11.4 (уравнение 11.19), и единичную отрицательную обратную связь, синтезируйте оптимальную систему, если хт(0) = [1 0].
М-11.9. Система первого порядка задана уравнением
х = —х + и
с начальным условием х(0) = х0. Требуется синтезировать регулятор с уравнением и = -кх, при котором оценка качества
J = J[x2(0+I«2(01^
о
имела бы минимальное значение.
(а) Примите X = 1. Получите формулу для вычисления У в функции от к и с помощью MATLAB постройте график зависимости У/х2 от к. По этому графику найдите приблизительное значение к = kmin, которое минимизирует Лх^. (б) Проверьте аналитически результат, полученный в п. (а), (в) С помощью процедуры, разработанной в п. (а), получите график зависимости /:т|п от ?., где /:т1П — значение коэффициента к, минимизирующее оценку качества.
Ключевые термины и понятия
Наблюдаемая система. Система является наблюдаемой на интервале [/о. tj\, если любое ее начальное состояние х(/о) однозначно определяется наблюдением выходной переменной Х0 на интервале [Zo, /у].
Обратная связь по состоянию. Обратная связь, при которой сигнал u(t), поступающий на вход объекта управления, является непосредственной функцией всех переменных состояния.
Оптимальная система управления. Система, параметры которой выбраны таким образом, что оценка качества принимает экстремальное значение.
Управляемая система. Система является управляемой на интервале [Го, tj\, если существует непрерывный входной сигнал u(t) такой, что из любого произвольного начального состояния х(/о) систему можно перевести в любое наугад заданное состояние х(Гу) за конечное время tf-10 > 0.
Глава 12
Робастные системы управления
Обзор
В предыдущих главах мы показали, как с помощью регуляторов и корректирующих устройств можно обеспечить желаемое качество системы управления с обратной связью. Теперь мы уделим внимание понятию робастности. Проектировщик, перед которым стоит задача синтеза высококачественной системы в условиях значительной неопределенности, вынужден искать решение в классе робастных систем. В этой главе мы рассмотрим пять методов синтеза робастных систем, основанных на использовании корневого годографа, частотных характеристик и интегральных оценок качества. Многие современные подходы к синтезу делают акцент на робастность систем — робастность устойчивости и робастность качества—в условиях неопределенности. Эти подходы прежде всего учитывают тот факт, что реальные физические системы и окружающие условия, в которых они работают, не могут быть смоделированы абсолютно точно, они могут изменяться непредсказуемым образом и могут подвергаться всевозможным возмущениям. Однако мы должны также понимать, что и классические методы синтеза могут привести к созданию робастных систем управления. Инженеры, владеющие этими методами, успешно могут решать задачи синтеза робастных ПИД-регуляторов, робастных корректирующих устройств с опережением и отставанием по фазе и т. д. В этой главе мы также обсудим синтез робастных систем с использованием внутренней модели и псевдоколичественного метода. Глава завершается примером синтеза системы чтения информации с диска, робастность которой обеспечивается надлежащим выбором ПИД-регулятора.
12.1. Введение
Методы синтеза систем управления, рассмотренные в предыдущих главах, предполагали, что модели объекта и регулятора известны и они имеют постоянные параметры. Однако модель реальной физической системы всегда будет неточной по следующим причинам:
□ Изменение параметров в силу тех или иных обстоятельств
□ Динамические свойства, не учтенные в модели
□ Не учтенное запаздывание по времени
□ Изменение положения рабочей точки (положения равновесия)
□ Шум датчика
□ Непредсказуемые внешние возмущения
12.2. Робастные системы управления и чувствительность
693
Целью синтеза робастной системы является гарантия требуемого качества независимо от погрешностей и изменения параметров модели. Система, обладающая допустимыми изменениями качества при изменении или неточности ее модели, называется робастной.
Робастная система управления обладает требуемым качеством несмотря на существенную неопределенность характеристик объекта управления.
Структура системы, включающая потенциальные неопределенности, изображена на рис. 12.1. Данная модель учитывает шум датчика N(s), непредсказуемое возмушение D(s) и объект управления G(s) с неучтенной динамикой или параметрами, подверженными изменению. Все эти факторы могут быть весьма значительными, поэтому проблема заключается в том, чтобы синтезируемая система сохраняла желаемое качество.
Рис. 12.1. Структурная схема замкнутой системы управления
12.2. Робастные системы управления и чувствительность
Синтез систем высокой точности в условиях неопределенности является классической проблемой теории управления. Основы решения этой проблемы были заложены в начале 1930-х годов Г. С . Блэком и X. У. Боде в связи с анализом чувствительности систем с обратной связью. С тех пор было опубликовано большое количество работ, затрагивающих данную проблему. От проектировщика требуется, чтобы создаваемая им система функционировала надлежащим образом в широком диапазоне изменения неопределенных параметров. Говорят, что система является робастной, если она обладает достаточной надежностью, грубостью и гибкостью.
От робастной системы требуется, чтобы она (1) обладала низкой чувствительностью, (2) сохраняла устойчивость и (3) удовлетворяла требованиям, предъявляемым к ее качеству, в достаточно большом диапазоне изменения ее параметров. Робастность по сути дела характеризуется чувствительностью системы к факторам, которые не учитывались на этапах анализа и синтеза — например, к возмущениям, шуму датчика и не отраженным в модели системы параметрам, влияющим на ее динамику. Система должна быть способна противодействовать влиянию этих факторов при выполнении задач, ради которых она проектировалась.
При малых изменениях параметров в качестве меры робастности можно использовать дифференциальные чувствительности, о которых речь шла в разделах 4.2 (чувствительность системы) и 7.6 (чувствительность корней).
694
Глава 12. Робастные системы управления
Чувствительность системы определяется как
г _дт/т
“ да/а ’
(12.1)
где а — параметр, а Т — передаточная функция системы.
Чувствительность корня определяется как
дг, да/а
(12.2)
Для системы и-го порядка ранее было показано, что если нули функции T(s) не зависят от параметра а, то
(12.3)
м (*+>;)
Например, если в замкнутой системе, изображенной на рис. 12.2, а есть варьируемый параметр, то T(s) = l/[s + (а + 1)] и
sTa =----—
(s+a + 1)
Кроме того, корень Г] = + (а + 1) и
(12.4)
(12.5)
Следовательно,
s'l =-s2---------
(s+a + 1)
Исследуем чувствительность системы второго порядка, изображенной на рис. 12.3. Замкнутая система имеет передаточную функцию
ч К T(s) = —~--
(12.6)
(12.7)
Согласно выражению (4.12) чувствительность системы к параметру К равна s т = 1 = 1)
К \ + GH(s~) s2+s + K
(12.8)
На рис. 12.4 изображены в виде асимптот диаграммы Боде для 201g |7’(/со)| и 201g |5,(/co)j при К = 1/4, что соответствует критическому затуханию. Заметим, что на низких частотах чувствительность является малой, тогда как передаточная функция соответствует полному пропусканию этих частот. Интересно также, что в данном случае T(s) = = 1-ЭД-
Рис. 12.2. Система первого порядка
Рис. 12.3. Система второго порядка
12.2. Робастные системы управления и чувствительность
695
со
Рис. 12.4. Асимптотические Рис. 12.5. Переходные характеристики
характеристики для функции при трех значениях коэффициента К
чувствительности и 201g | Д/“)1 системы, изображенной на рис. 12.3, при /<=1/4
Разумеется, чувствительность 5 характеризует робастность системы только при малых изменениях коэффициента К. Если изменить К от 1/4 до К = 1/16 в одну сторону и до К = 1 в другую, то мы получим переходные характеристики, изображенные на рис. 12.5. Поэтому, если ожидать, что коэффициент К будет изменяться в широком диапазоне, то, очевидно, такую систему нельзя считать робастной. Робастная система должна обладать реакцией на выбранный входной сигнал, достаточно близкой (в пределах оговоренных допусков) к той, которая соответствует номинальному значению параметра.
Пример 12.1. Чувствительность системы управления
Рассмотрим систему, изображенную на рис. 12.6, в которой G(s) = 1/s2 , а передаточная функция ПД-регулятора Gc(s) = b} + b2s. В этом случае чувствительность системы к изменению G(s) равна
т 1 S2
Sc, =---!----= -j—, (12.9)
l + GGc(s)
(12.10)
Пусть при нормальных условиях
£ = 1 и а>„ = . Тогда, чтобы полу-
чить £ = 1, надо иметь Ь2 = 2а>„. На R(s) рис. 12.7 изображены диаграммы Боде, соответствующие 20 1g Д и 20 lg |7{/w)|. Заметим, что частота ып является границей между областью частот, в которой важным критери-
Рис. 12.6. Система с ПД-регулятором
ем синтеза является чувствительность системы, и областью, в которой важную роль играют за-
пасы устойчивости. Поэтому, если должным образом задать частоту соп. принимая во внимание
возможные погрешности модели и частоту внешнего возмущения, то можно ожидать, что система будет обладать приемлемой степенью робастности.
696
Глава 12. Робастные системы управления
Рис. 12.7
Характеристики для функции чувствительности и 201g 7[s) системы, изображенной на рис. 12.6
Рис. 12.8
Система второго порядка
Пример 12.2. Система с нулем в правой полуплоскости
Рассмотрим систему, изображенную на рис. 12.8, в которой передаточная функция объекта имеет нуль в правой полуплоскости. Передаточная функция замкнутой системы
T(s) = -2----.
s2 + (2+ (1-/С)
(12.11)
Система устойчива при -2 < К < 1.
Обратим внимание, что ДО) = - Л7( 1 - К) и для значений 0 < К < 1 коэффициент передачи замкнутой системы отрицателен. Поэтому, если считать, что требуемое значение выходной переменной у(°о) = 1, то на вход системы необходимо подать единичный ступенчатый сигнал со знаком минус, т. е. H(s) = — 1/s. В этом случае установившаяся ошибка будет равна , К \-2К е„ = 1-----------------------------=-------
\-К \-К
(12.12)
На рис. 12.9 изображена реакция системы на сигнал R(s) = - 1/s при К = 1/2. Видно, что еи. = О, а при t — 1 с реакция имеет отрицательный выброс. Показатели качества системы в зависимости от параметра К сведены в табл. 12.1. Как следует из таблицы, система весьма чувствитель-
нее)
12.3, Анализ робастности
697
Таблица 12.1. Результаты примера 12.2
К 0.25 0,45 0,50 0,55 0,75
Ы 0,67 0,18 0 0,22 2,0
Отрицательный выброс 5% 9% 10% И % 15%
Время установления (с) 15 24 27 30 45
12.3. Анализ робастности
Рассмотрим систему, изображенную на рис. 12.1. Требуется, чтобы ошибка воспроизведения входного сигнала r(t), e(t) = r(t) была достаточно малой, а возмущение d(t) дол-
жно по возможности мало сказываться на выходной переменнойШум датчика n{t) должен быть малым в сравнении с г(1), т. е. | г | »| п |.
Функция чувствительности равна
ЭД = [1 + GXsMs)]-1,
а передаточная функция замкнутой системы при Gp(s) = 1 имеет вид
l+G„(s)G(g)
Таким образом,
ЭД+ЭД=1. (12.13)
Функцию S(s) желательно иметь малой. В физически реализуемых системах коэффициент усиления контура L(s) = GcG(s) на высоких частотах должен быть малым. Это значит, что на высших частотах SQ'a) —> 1.
Аддитивное отклонение характеризует набор возможных передаточных функций объекта управления [здесь мы предполагаем, что Gc(s) =1]:
Ga(s) = G(s) + A(s),
где G(s) есть номинальная передаточная функция, a A (s) ее изменение, ограниченное по модулю. Предполагается, что Gu (s) и G(s) имеют одинаковое число полюсов в правой половине 5-плоскости (если таковые существуют). Тогда устойчивость системы не изменится, если
I AQ'a) | < |1 + G(/co)| для всех со. (12.14)
Это условие гарантирует только устойчивость, но не относится к динамическим показателям качества.
При мультипликативном отклонении передаточная функция объекта управления принимает вид:
Gm(5) = G(s)[l + ЛЭД].
Изменение M(s) также считается ограниченным по модулю и по-прежнему предполагается, что Gm(s) и G(s) имеют одинаковое число полюсов в правой полуплоскости. Тогда
698 Глава 12. Робастные системы управления
устойчивость системы не изменится, если
|М(7®)|< 1 +
для всех <в.
(12-15)
Выражение (12.15) называют робастным критерием устойчивости. Он служит проверкой робастности по отношению к мультипликативному отклонению. Такой вид отклонения используется довольно часто благодаря его следующим интуитивным свойствам: (1) он является малым на низких частотах, где номинальная модель объекта обычно хорошо известна и (2) он является большим на высоких частотах, где номинальная модель объекта всегда неточная.
Пример 12.3. Система с мультипликативным отклонением
Рассмотрим систему, изображенную на рис. 12.1, где Gp(s) = 1, Gc(s) = К и
170000(s+0,l)
s(s+3)(s2 + 10s +10000)
При К = 1 эта система неустойчива, но ее можно сделать устойчивой, уменьшив коэффициент К до значения К= 0,5. Теперь оценим влияние не учтенного в модели полюса, которому соответствует со = 50 рад/с. В этом случае мультипликативное отклонение имеет вид
или M(s) - -s/(s+50). Для модуля Л/(/со) имеем:
Графики | Лфсо) | и 11+l/KG(j(o)\ приведены на рис. 12.10 (а), откуда видно, что критерий (12.15) не удовлетворяется. Поэтому система может и не быть устойчивой.
Если взять регулятор с отставанием по фазе, имеющий передаточную функцию
то это позволит изменить вид частотнай характеристики GcG(/co) в диапазоне частот 2 <ш < 25. Тогда график для нового значения
GCG (7со)
примет вид, изображенный на рис. 12.10 (б). При этом неравенство для робастного критерия устойчивости удовлетворяется и система остается устойчивой.
При синтезе системы со структурой, изображенной на рис. 12.1, есть две степени свободы, а именно выбор такого предшествующего фильтра Gp(s) и регулятора Gc(s), удовлетворяющих требования к переходному и установившемуся режимам, а также к частотным характеристикам системы. При этом, однако, полоса пропускания регулятора должна быть достаточно малой. Это условие вызвано, главным образом, тем, что при измерении выходного сигнала системы неизбежно возникает шум, а в случае большого уровня шума может произойти насыщение последних каскадов регулятора или входных устройств объекта управления.
12,4. Системы с неопределенными параметрами
699
Рис. 12.10
Критерий робастной устойчивости к примеру 12.3
12.4. Системы с неопределенными параметрами
Многие системы имеют ряд параметров, которые являются постоянными, но их значения находятся в некотором диапазоне. Например, рассмотрим систему с характеристическим уравнением
У’ + + a„_2s^2 + .. .+а0 = 0. (12.16)
Известно только, что коэффициенты этого уравнения находятся в интервалах
а, < а, < Р,, i = 0,...и, где ап =1.
Чтобы исследовать устойчивость системы, надо было бы перебрать все возможные сочетания параметров. Но, к счастью, задачу можно свести к исследованию ограниченного числа полиномов наихудшего вида. Например, для системы третьего порядка, имеющей характеристическое уравнение
№ + а2х2 + axs + а0 = 0, (12.17)
достаточно исследовать четыре полинома:
<71 СО = № + а2? + P]S + р0 ,
q2(s) = № + р2г + 0С]5 + «о >
q2(s) = s3 + Р2.Г + Pjs + а0 , q4(s) = s3 + а2№ + eqs + Ро .
700
Глава 12. Робастные системы управления
Один из этих четырех полиномов будет представлять наихудшим случай и может указать на то, что система либо неустойчива, либо, по крайней мере, имеет наихудшее качество.
Пример 12.4. Система третьего порядка с неопределенными коэффициентами
Рассмотрим систему третьего порядка с неопределенными коэффициентами, где
8 < а0 < 60 => а0 = 8, ро = 60 ,
12 < Я] < 100 => а, = 12, ₽! = 100 ,
7 < а2 < 25 => а2 = 7, р2 = 25 .
Образуем следующие четыре полинома:
q{(s) = s3 + ls~ + 100s + 60, g2(s) = s3 + 25s2 + 12s + 8, q3(s) = s3 + 25s2 + 100s + 8, q4(s) = s3 + 7s2 + 12s + 60.
Исследовав эти четыре полинома с помощью критерия Рауса-Гурвица, можно убедиться, что система устойчива во всем диапазоне неопределенных параметров.
Пример 12.5. Устойчивость системы с неопределенными параметрами
Рассмотрим систему с единичной обратной связью, в которой объект управления имеет передаточную функцию (при номинальных значениях параметров)
G(s) =----—------.
s(s+l)(s+2)
В этом случае характеристическое уравнение замкнутой системы имеет вид: g(s) = s3 + 3s2 + 2s + 4,5 = 0.
Применение критерия Рауса-Гурвица показывает, что данная система устойчива. Однако, если параметры системы являются неопределенными, так что
4 < а0 < 5 => а0 = 4. р0 = 5 .
1 < < 3 => а1 = 1, р1 = 3 ,
2 < а2 - 4 => а2 = Р’ = 4 >
то мы должны исследовать следующие четыре полинома:
<7i(s) = s3 + 2s2 + 3s + 5, g9(s) = s3 + 4s2 + Is + 4, q3(s) = s3 + 4s2 + 3s + 4, q4(s) = s3 + 2s2 + Is + 5.
По критерию Рауса-Гурвица полиномы gps) и g3(s) соответствуют устойчивой системе, а полином g2(s) — системе, находящейся на границе устойчивости. Для q4(s) составим таблицу Рауса:
s3 1 1
s2 2 5
s1 -3/2 0 с s 5
12,5, Синтез робастных систем управления
701
Следовательно, при а2 = min, а! = min и (i0 = max система является неустойчивой. Эта ситуация будет иметь место при наихудшей передаточной функции объекта вида
ID ---------------.
s(s + l)(s + 2)
Заметим, что при этом третий полюс переместился к мнимой оси до своего крайнего значения 5 = -1, а коэффициент усиления увеличился до крайнего значения К = 5. Часто бывает достаточно исследовать передаточную функцию G(s), чтобы предсказать наихудшую из возможных ситуаций.
12.5. Синтез робастных систем управления
Синтез робастных систем управления включает в себя две задачи: определение структуры регулятора и настройку его параметров с целью получить «оптимальное» качество системы. Процедура синтеза обычно выполняется в предположении о наличии «полной информации об объекте». Кроме того, объект обычно представляется в виде линейной непрерывной модели с постоянными параметрами. Структура регулятора выбирается так, чтобы реакция системы удовлетворяла определенным критериям качества.
При постановке задачи синтеза одно из возможных требований может заключаться в том, чтобы выходная переменная системы мгновенно и точно воспроизводила все изменения входного сигнала. Это означает, что передаточная функция системы должна быть равна единице:
7X.s) = —= 1 (12.18)
Иными словами, на диаграмме Боде амплитудная характеристика такой системы при всех частотах должна иметь значение 0 дБ ( что соответствует бесконечной полосе пропускания), а фазовая характеристика при всех частотах должна равняться нулю. На практике это невозможно, поскольку любая система содержит элементы емкостного и индуктивного типа, накапливающие энергию того или иного вида. Именно эти элементы в сочетании с элементами, рассеивающими энергию, обусловливают динамику системы управления. Та
кие системы одни входные сигналы могут воспроизводить достаточно точно, в то время
как другие могут вовсе не суметь воспроизвести — и все это потому, что полоса пропускания реальной системы не является бесконечной.
Сознавая, что динамику системы нельзя игнорировать, мы должны цель управления выбрать несколько иначе. Один из вариантов постановки задачи предполагает, что амплитудную характеристику системы надо стремиться сделать как можно ближе к единице в как можно большем интервале частот.
Другой вариант постановки задачи может включать требование минимизировагь влияние возмущений на выходную переменную системы. Здесь уже надо минимизировать Y(s)/D(s) в как можно большем интервале частот.
Рассмотрим систему, изображенную на рис. 12.11. где G(s) = GlG)G-1G') есть передаточная функция объекта управления, a D(s) — возмущение. Тогда мы имеем:
R(s) l+GcG,G2(s)
(12.19)
702
Глава 12. Робастные системы управления
и
Рис. 12.11
Система при наличии возмущения
(12.20)
У(5)_ G2(s)
D(s) 1+GcG1Gt(s)
Заметим, что передаточные функции как по отношению к эталонному входному сигналу, так и по отношению к возмущению имеют один и тот же знаменатель, т. е. система имеет одно характеристическое уравнение:
1 + G^G^G^s) = 1 + Z(s) = 0.
Напомним также, что чувствительность T(s) к изменению G(s) равна
=-----------,
l+GcG1G2(i)
(12.21)
(12.22)
т. е. характеристический полином оказывает существенное влияние на чувствительность системы. Выражение (12.22) показывает, что для получения малой чувствительности S' необходимо иметь большое усиление в контуре но>как известно, это может привести к
неустойчивости системы или к существенному ухудшению ее качества. Поэтому проектировщик должен стремиться обеспечить следующее:
1. T(s) с широкой полосой пропускания и правильным воспроизведением R(s).
2. Контур L(s) с большим усилением, чтобы минимизировать чувствительность S'.
3. Большое усиление в контуре L(s) главным образом за счет Gc(s)Gi(s), поскольку Y(s)/D(s)« l/GcGj(s).
Задача синтеза робастной системы в частотной области связана с определением такого регулятора Gc(s), при котором чувствительность замкнутой системы была бы меньше некоторого допустимого значения, а минимизация чувствительности требует выбора такого регулятора, чтобы эта чувствительность была равна или достаточно близка к минимальному значению. Аналогично, задача обеспечения заданного запаса устойчивости по модулю связана с отысканием соответствующего регулятора, а максимизация запаса по модулю опять-таки требует выбора такого регулятора, при котором этот запас был бы наиболее близок к максимальному. Иллюстрируя подход к синтезу робастной системы с помощью диаграммы Боде для GtG(/co), изображенной на рис. 12.12, можно сформулировать следующие требования, которым должны удовлетворять частотные характеристики:
1. Для получения хороших показателей относительной устойчивости амплитудная характеристика 20 lg|GcG(/co)| в определенном интервале частот, прилегающем к сос, должна иметь наклон не более, чем -20 дБ/дек.
2. Точность системы в установившемся режиме должна быть обеспечена за счет надлежащего усиления на низких частотах.
3. Динамическая точность, определяемая полосой пропускания сой, должна быть гарантирована тем, чтобы |GcG(/co)| в этой полосе был не менее заданного значения.
4. Компенсация возмущения должна обеспечиваться за счет большого значения |€?с(/со)| в полосе пропускания системы.
12.5, Синтез робастных систем управления
703
Рис. 12.12
Диаграмма Боде для 201g | GcG{j<s>) |
Используя понятие чувствительности корней, необходимо потребовать, чтобы чувствительность Sra имела минимальное значение, тогда как расположение доминирующих корней T(s) должно обеспечивать надлежащую реакцию системы и минимизировать влияние D(s). И снова мы приходим к выводу, что необходимое усиление в контуре в первую очередь должно быть обеспеченно за счет Gc(s). Предположим, например, что в системе на рис. 12.11 Gc(s) = К, G^s) = 1 и G2(s) = 1/5(5 + 1). Характеристическое уравнение системы имеет два корня, и мы выберем коэффициент К так, чтобы минимизировать Y(s)/D(s), минимизировать и чтобы доминирующие корни занимали желаемое положение. В
этом случае чувствительность корня
$r _ dr К _ ds К К dK г dK s=r г
а характеристическое уравнение имеет вид:
5(5 + 1) + К = 0.
Отсюда К = -5(5 + 1) и dKJds - -(25 + 1). Тогда
1 |1-5(5+1)|
2s+1 5
(12.23)
(12.24)
(12.25)
Если Q < 1, то корни являются комплексными и г = -0,5 + jo. Тогда
/ , \1/2
^JO^+cr . (12.26)
\ 4“' >
На рис. 12. 13 изображена зависимость модуля чувствительности отХв диапазоне от К = 0,2 до К = 5. Там же приведен график для относительного перерегулирования при ступенчатом входном сигнале. Чувствительность желательно уменьшить, но при этом ограничить К значением 1,5 или даже меньше. В этом случае мы достигнем определенного компромисса, поскольку одновременно с уменьшением чувствительности сохраним приемлемое качество при отработке ступенчатого входного сигнала. В обшем случае процедуру синтеза можно свести к следующим этапам:
1. Изобразить корневой годограф скорректированной системы, выбрав Gt(5) так, чтобы обеспечить желаемое положение доминирующих корней.
2. Сделать коэффициент усиления Gc(s) максимально возможным, чтобы уменьшить влияние возмущения.
704
Глава 12. Робастные системы управления
Рис. 12.13
Чувствительность и относительное перерегулирование системы второго порядка
3. Определить и добиться минимального значения чувствительности при сохранении требований к переходной характеристике, соответствующих этапу 1.
Пример 12.6. Чувствительность и коррекция системы.
Рассмотрим систему из примера 10.1, в которой G(s) = 1/у2, H(s) = 1 и Gc(s) должно быть выбрано с помощью частотных характеристик. Корректирующее устройство должно обеспечить надлежащие запасы устойчивости по модулю и по фазе, а также минимизировать чувствительность системы и влияние возмущения. Коррекцию реализуем в виде
G;.(s)=A'(;/z+1). (12.27)
s!p+ 1
Как и в примере 10.1, выберем К = 10, чтобы уменьшить влияние возмущения. Чтобы обеспечить запас по фазе 45°, выберем z = 2,0 ир = 12,0. В результате получим диаграмму Боде для скорректированной системы, которая приводится еще раз на рис. 12.14. Напомним, что полоса пропускания замкнутой системы = 1,6сос. Поэтому с помощью корректирующего устройства мы увеличим полосу пропускания и улучшим качество воспроизведения входных сигналов.
Рис. 12.14. Диаграмма Боде к примеру 12.6
12.5, Синтез робастных систем управления
705
Чувствительность на частоте сос можно оценить по выражению
1
ISgC/CO^I-
l + GcG(jco)
(12.28)
Для нахождения этой оценки можно воспользоваться диаграммой Никольса, которая позволяет определить
|7(»|=
l + GcG(Jco)
(12.29)
(12.30)
Мы можем нанести на диаграмму Никольса несколько точек функции GcG(/co) и прочитать соответствующие значения |7[/<и)1- Тогда
|^ОМ-|Г(А11
где со1 выбрано произвольно как со । = сос /2,5. Диаграмма Никольса для скорректированной системы приведена на рис. 12.15. Для со, = сос /2,5 = 2 мы имеем 201g |GCG| = 9 дБ и 201g |7] = = 2,5 дБ. Следовательно,
1Г1 133
|SO.)|=JLL=—= 0,47. 1 |GCG| 2,8
Пример 12.7. Чувствительность при коррекции с опережением по фазе
Рассмотрим еще раз систему из примера 12.6 и используем в ней корректирующее устройство, полученное с помощью корневого годографа в примере 10.3: г,, 8,l(s+l)
Gc(s) =---—
s+ 3,6
(12.31)
Доминирующие корни имеют значения s = -1 + J2. Так как у корректирующего устройства К= 8,1, то влияние возмущения ослаблено и переходная характеристика системы удовлетворяет выдвинутым требованиям. Чувствительность корня г можно определить, полагая, что при наличии доминирующих корней систему можно аппроксимировать моделью второго порядка
К К
T(s) = -=--------= -=-------,
s2 + 2&„s + K s2+2s+K
поскольку £со„ = 1. Характеристическое уравнение системы имеет вид 5" + 2s + К = 0.
Отсюда К = -(s"+2s) и dK/ds = - (2s+2). Следовательно, r _ 1 -(s2+2s) _ s+2
К 2s+2 s .»•=, 2s + 2 j=I. ’
(12.32)
где г = -1 + j2. В результате подстановки s = г получим:
И= 0,56.
Если увеличить коэффициент К до 10, то корни займут положение г » -1,1 + J2.2. В этом случае чувствительность будет равна
1ЭД= 0,53.
Таким образом, при увеличении К чувствительность уменьшается, но качество переходного режима ухудшается.
706
Глава 12. Робастные системы управления
Фазовый сдвиг разомкнутой системы, град.
Рис. 12.15. Диаграмма Никольса к примеру 12.7
П(5)
Рис. 12.16. Система управления с обратной связью. R (s) - заданный эталонный сигнал, D (s) - нежелательное возмущение
ПО
12.6. ПИД-регуляторы
707
12.6. ПИД-регуляторы
ПИД-регулятор имеет передаточную функцию
Gc(s) = X, +^- + K3s.
s
Популярность ПИД-регуляторов можно в какой-то степени объяснить их робастностью в самых разных условиях работы и с другой стороны их функциональной простотой, облегчающей инженерам их эксплуатацию. Чтобы применить такой регулятор в системе управления конкретным объектом, надо просто настроить три параметра: коэффициент пропорциональности, коэффициент в канале интегрирования и коэффициент в канале дифференцирования.
Рассмотрим ПИД-регулятор
с /ч K3s2+Kxs+K2 K3(s2+as+b) K3(s+z, )(s+z2)
Uc \S) = A J 4-b A 3 S =-----------=--------------=---------------- , J )
S S S S
где a=K3!K3 и b=K2/K3. Таким образом, ПИД-регулятор вносит в передаточную функцию разомкнутой системы один полюс, расположенный в начале координат, и два нуля, которые модно разместить в любом месте в левой половине s-плоскости.
Напомним, что корневой годограф начинается в полюсах и заканчивается в нулях передаточной функции разомкнутой системы. Если в системе на рис. 12.16 считать, что
1
G(s) =----------,
(s + 2)(s+5)
и использовать ПИД-регулятор с комплексными нулями, то мы можем получить корневой годограф, изображенный на рис. 12.17. При увеличении коэффициента Х3 комплексные корни движутся в сторону нулей. Замкнутая система имеет передаточную функцию
Т( ч _ (s№p (5) _ X3(5+Zj )(s+Z! ) ч
l+G(s)Gc(s) (s + r2 )(s+/j )(s+Jj) s + r2
так как нули и комплексные корни приблизительно равны (r3 ~ Zj). Полагая Gp(s) = 1, получим:
(12.34)
708
Глава 12. Робастные системы управления
если К3 з> 1. Единственным ограничивающим фактором является допустимая величина сигнала u(t) (см. рис. 12.16) при больших К3.
Если взять К3 = 100, то система будет обладать высоким быстродействием и нулевой установившейся ошибкой. Кроме того, существенно будет уменьшено влияние возмущения.
Вообще следует заметить, что ПИД-регуляторы особенно полезны с точки зрения уменьшения установившейся ошибки и улучшения вида переходной характеристики, когда объект управления G(s) имеет один или два полюса (или может быть аппроксимирован моделью второго порядка).
12.7. Синтез робастных систем с ПИД-регуляторами
Выбор трех коэффициентов ПИД-регулятора по сути есть задача отыскания нужной точки в трехмерном пространстве. Каждая точка этого пространства соответствует различным комбинациям трех параметров ПИД-регулятора. Выбирая различные точки в пространстве параметров, мы можем, например, получить различный вид реакции системы на ступенчатый входной сигнал. ПИД-регулятор можно подобрать путем поиска нужной точки в пространстве параметров методом проб и ошибок.
Главная проблема в выборе указанных трех коэффициентов заключается в том, что этим коэффициентам не так-то просто поставить в соответствие показатели качества и робастности, которые хотел бы иметь проектировщик. Для решения этой проблемы был предложен ряд правил и методов. В этом разделе мы рассмотрим методы, связанные с использованием корневого годографа и оценок качества.
Первый метод синтеза основан на использовании оценки качества ИВМО (см. раздел 5.9) и оптимальных значений коэффициентов характеристического полинома замкнутой системы (см. табл. 5.6 для ступенчатого и табл. 5.7 для линейного входных сигналов). Таким образом мы можем выбрать три коэффициента ПИД-регулятора, минимизирующие оценку ИВМО, при которой система обладает прекрасной реакцией на ступенчатый (рис.5.30, в) или линейный сигнал. Процедура синтеза включает в себя следующие этапы:
1- По заданному времени установления определить параметр со„ замкнутой системы.
2. Используя соответствующее выражение из табл. 5.6 и значение со„ из этапа 1, определить три коэффициента передаточной функции Gc(s).
3. Определить предшествующий фильтр Gp(s) так, чтобы передаточная функция замкнутой системы не имела нулей, как этого требует выражение (5.47).
Пример 12.8. Робастная система регулирования температуры
Рассмотрим систему управления, изображенную на рис. 12.16, и синтезируем регулятор температуры объекта, имеющего передаточную функцию
С^ = 7-1Т1 (12.36)
(s+l)z
Если Gc(s)=l, то при ступенчатом входном сигнале установившаяся ошибка составляет 50%, а время установления (по критерию 2%) равно 3,2 с. Требуется, чтобы время установления было менее 0,5 с, а система была оптимальной по критерию ИВМО. Для
12.7. Синтез робастных систем с ПИД-регуляторами
709
(12.37)
(12.38)
этой цели мы используем ПИД-регулятор
С К2
S
При отсутствии предшествующего фильтра [Gj,(.s) = 1] замкнутая система будет иметь передаточную функцию
Т (s) = Г(д) = = K3s2 + K^ + K2
' R(s) l + GcG(s) s3 + (2 + X3)s2 + (1+A:1)s+K2
Оптимальные значения коэффициентов характеристического полинома, обеспечивающие минимум оценки ИВМО, найдем по табл. 5.6:
s3 + l,75co„s2 + 2,15co2,s + со3 . (12.39)
Параметр <в„ надо выбрать, исходя из требования к времени установления. Поскольку Ts = , а С, неизвестно, но близко к 0,8, выберем со„ =10. Тогда, приравнивая знаменатель (12.38) выражению (12.39), найдем значения коэффициентов Кх = 214, = 15,5,
Кг = 1000.
Тогда (12.38) примет вид:
г = 15,5s2 + 214s+1000 _ 15,5(s + 6,9+ j4,l)(s + 6,9- >4,1) ‘ s3 + 17,5s2 + 215s+1000 s3 + 17,5s2 + 215s + 1000
Реакция этой системы на ступенчатый входной сигнал имеет перерегулирование 32%, как указанно в табл. 12.2.
Выберем предшествующий фильтр Gp(s), чтобы получить желаемую реакцию, соответствующую минимуму оценки ИВМО. Для этого передаточная функция замкнутой системы должна иметь вид:
GCGG„ (s)
T(s) = —-—----------,-----.-----------
1 + GcGGp (s) s3 + 17,5s2 + 215s + 1000
Следовательно, чтобы исключить из (12.40) нули и обеспечить в числителе Т(з) коэффициент 1000, надо иметь
(12.40)
1000
(12.41)
. 64,5
G(s) = -=-----------
р s2+13.8s+64,5
Показатели качества системы с передаточной функцией T(s) приведены в табл. 12.2. Система имеет малое перерегулирование, время установления меньше, чем 0,5 с, и нулевую установившуюся ошибку. Кроме того, при возмущении D(s) = 1/s максимальное значение выходной переменной Х0 составляет всего 0,4 % от амплитуды возмущения. Можно считать, что синтез дал прекрасные результаты.
(12.42)
Таблица 12.2. Результаты примера 12.8
Регулятор Gc(s)=l ПИД-регулятор, ПИД-регулятор при наличии Gp(s)
Относительное перерегулирование 0 31,7 % 1,9 %
Время установления, с 3,2 0,20 0.45
Установившаяся ошибка 50,1 % 0.0 % 0.0 %
1 1 max 52 % 0,4 % 0.04 %
710
Глава 12. Робастные системы управления
Пример 12.9. Синтез робастной системы
Рассмотрим еще раз систему из примера 12.8, но будем считать, что объект управления под-
вержен значительным изменениям, так что
G(s) =
К
(т я + I)2
(12.43)
где 0,5 <т < 1 и 1 < К < 2 . Требуется синтезировать робастную систему, т. е. добиться того, чтобы она при наличии предшествующего фильтра была оптимальной по критерию ИВМО и имела перерегулирование менее 4 % и время установления (по критерию 2 %) менее 2 с, если параметры передаточной функции G(s) могут принимать любые значения в указанных диапазонах. Чтобы удовлетворить требование к времени установления, выберем со„ = 8 и определим коэффициенты характеристического полинома замкнутой системы, соответствующие минимуму оценки ИВМО, при К = 1 и т - 1. Произведя необходимые вычисления, для системы без предшествующего фильтра (Gp(s) = 1] получим:
T1(s) = ^+11.38^67) s3 + 14s2 + 137,6s+512
И
ед= 12^+1138^+42,67) (1245)
S
Выбрав предшествующий фильтр с передаточной функцией
G (s) = ---~---------, (12.46)
р s2 + 11,38s + 42,67
мы получим передаточную функцию системы, оптимальной по критерию ИВМО:
512
T(s) = ^---5—1----------• (12.47)
s3 + 14s2 + 137.6s + 512
Кроме значений К = 1,т = 1, можно также задать и другие комбинации этих параметров: К = 1, т = 0,5; К = 2, т = 1; А' = 2, т = 0,5. Соответствующие показатели качества приведены в табл. 12.3, откуда следует, что система действительно является робастной.
Таблица 12.3. Результаты примера 12.9 при = 8
Параметры объекта II II * н К= 1, т = 0,5 н II II — 3й К = 2 т = 0,5
Относительное перерегулирование 2 % 0 % 0 % 1 %
Время установления, с 1,25 0,8 0,8 0.9
Значение параметра со,,, которое должно быть выбрано при решении задачи, должно быть ограничено максимально допустимой величиной u(t) — выходного сигнала регулятора, как показано на рис. 12.16. Если максимальное значение e(t) равно 1, то сигнал zz(Z) должен быть ограничен величиной 100 или менее. Например, рассмотрим систему на рис. 12.16 с ПИД-регулятором, где G(s)=l/s(s+l), и предшествующим фильтром Gp(s), необходимым для обеспечения требуемого качества в соответствии с критерием ИВМО. Если задать значения со,, =10,20 и 40, то сигнал u(t) будет иметь максимальные значения, приведенные в табл. 12.4. Если u(f) должно быть ограничено максимальным значением 100, то в выборе со„ мы не не можем превышать значения 16. Таким образом, мы приходим к необходимости ограничить достижимое время установления.
12.7. Синтез робастных систем с ПИД-регуляторами 711
Таблица 12.4. Максимальное значение входного сигнала объекта управления
(0„ 10 20 40
Максимум и(1) при R(s) = 1/s 35 135 550
Время установления, с 0.9 0.5 0,3
Далее мы рассмотрим проблему синтеза ПИД-регулятора для системы, содержащей запаздывание, и решим задачу с помощью частотных характеристик. В данном случае объект управления имеет передаточную функцию
Ke~Ts
G(s) = ^—~. (12.48)
Т5 + 1
Такая передаточная функция характерна для многих производственных процессов. Выберем ПИД-регулятор, передаточная функция которого имеет два одинаковых нуля:
GC(J)=K(V+1)2- (12.49)
Процедура синтеза заключается в следующем:
1. Построить диаграмму Боде для K2G(s)/s при коэффициенте К2, удовлетворяющем требованию к установившейся ошибке.
2. Выбрать два нуля Gc.(s) совпадающими с частотой сос, при которой амплитудная характеристика из этапа 1 пересекает уровень 0 дБ, или близкими к этому значению.
3. Проверить результаты синтеза и, если необходимо, изменить К2 или положение нулей.
Пример 12.10. ПИД-регулятор в системе с запаздыванием
Рассмотрим систему, структура которой имеет вид рис. 12.16, где
А'е'0-1'
G(5) = —----. (12.50)
0,15+1
причем К = 20. чтобы обеспечить малую установившуюся ошибку при ступенчатом входном сигнале, и Gp(s) = 1. Требуется, чтобы переходная характеристика имела перерегулирование менее 5 %.
Построив диаграмму Боде для G(/co), можно убедиться, что система имеет отрицательный запас по фазе и, следовательно, неустойчива.
Зададимся желаемым запасом по фазе 70° и для достижения этого используем ПИД-регулятор вида (12.49). Тогда передаточная функция разомкнутой системы примет вид:
GGC(5)^ 20 1)2 , (12.51)
С 5(0,15+1)
где К2К= 20. Построив диаграмму Боде без учета двух нулей (рис. 12.18), мы найдем, что запас по фазе равен -32°, т. е. система неустойчива.
Поскольку введение ПИД-регулятора добавляет в передаточную функцию разомкнутой системы полюс в начале координат, то это обеспечит нулевую установившуюся ошибку, и мы имеем право уменьшить К2К. Из рис. 12.18 следует, что ы„ = 11, поэтому выберем нули так, чтобы они были близки к этому значению, например, примем со =16.7. Тогда т1 = 0.06, и, уменьшив коэффициент усиления до К2К = 4,5, получим передаточную функцию скорректированной системы
GcG(5)=4’5^Qfa+1)-e—. (12.52)
‘ 5(0,15+1)
712
Глава 12. Робастные системы управления
Рис. 12.18
Диаграмма Боде для G(s)/s к примеру 12.10
Рис. 12.1S
Диаграмма Боде для GcG(s) к примеру 12.10
Соответствующая диаграмма Боде приведена на рис. 12.19. Теперь мы имеем новое значение а>„ = 4,5 и запас по фазе 70°. Переходная характеристика системы не имеет перерегулирования, а время установления (по критерию 2 %) равно 0,8 с, что удовлетворяет выдвинутым требованиям. Однако, если продолжить синтез, то можно было бы увеличить К2К до 10 и несколько повысить быстродействие системы, а перерегулирование при этом оставалось бы менее 5 %.
12.8. Пример синтеза: автопилот
713
Завершая рассмотрение синтеза робастных систем с ПИД-регуляторами, отметим, что для этой цели можно воспользоваться также корневым годографом. Соответствующая процедура включает в себя следующие этапы:
1. Разместить на s-плоскости полюсы и нули функции G(s)/s.
2. Выбрать положение нулей Gc(s) таким образом, чтобы обеспечить надлежащий вид корневого годографа и желаемое расположение доминирующих корней.
3. Определить вид переходной характеристики скорректированной системы и, если необходимо, повторить этап 2.
Применение метода корневого годографа проиллюстрируем ниже на примере синтеза автопилота.
12.8 . Пример синтеза: автопилот
Типичная система управления самолетом с помощью автопилота состоит из электрических, механических и гидравлических устройств, осуществляющих перемещение закрылков и рулей высоты, регуляторов расхода топлива и других элементов, влияющих на режим полета. Датчики обеспечивают информацию о скорости и направлении полета, о скорости вращения относительно осей и о других переменных. Эта информация вместе с заданными полетными характеристиками в виде электрических сигналов вводится в автопилот. Последний должен быть способен удерживать самолет на заданном курсе и в режиме, задаваемых пилотом. При синтезе автопилота основной задачей часто является обеспечение движения самолета прямо по курсу на заданной высоте с компенсацией небольших отклонений вверх или вниз, без поворота вправо или влево и без вращения относительно продольной оси (характерного покачивания крыльями). Такую задачу называют обычно стабилизацией самолета относительно поперечной оси. Динамику системы в этом случае можно представить передаточной функцией
G(s) =---------(12.53)
s(s+1/t)(s + 2^1co1s+го[)
где т — постоянная времени исполнительного устройства.
Будем считать т — 1/4, со! = 2 и = 1/2. Тогда на s-плоскости мы будем иметь два комплексных полюса, полюс в начале координат и полюс в точке s = - 4, как показано на рис. 12.20. Комплексные полюсы, соответствующие динамике собственно самолета, могут дрейфовать в пределах областей, обозначенных пунктирными линиями. Нули регулятора мы выберем в точках s = - 1,3 +J2, как показано на рисунке. Затем коэффициент К выберем так, чтобы комплексным корням г2 и г2 соответствовал коэффициент затухания С, = 1/V2. Другие комплексные корни q и q будут расположены рядом с нулями. Поэтому передаточную функцию замкнутой системы приблизительно можно представить выражением
-------------- = ---------, (12.54) s" + 2£co,;s + to" s" + 3,16s + 5
поскольку со„ = V5 и С, = 1/V2. В результате реакция системы на ступенчатый входной сигнал имеет перерегулирование 4,5 % и время установления (по критерию 2 %) 2,5 с, как и следовало ожидать.
714
Глава 12. Робастные системы управления
Рис. 12.20
Корневой годограф для системы управления самолетом с помощью автопилота. Комплексные полюсы могут занимать любое положение внутри областей, отмеченных штриховыми линиями
12.9 . Синтез системы управления орбитальным телескопом
Ученые предложили создать в космосе специальную платформу, на которой производились бы испытания различной аппаратуры, предназначенной в дальнейшем для использования на обитаемой космической станции. Эта платформа должна все время оставаться на орбите, а астронавты смогут работать с ней только когда к ней пристыкован космический челнок.
Мы рассмотрим ситуацию, когда на платформе в космосе проводится некоторый эксперимент, но управление им осуществляется с Земли. Суть эксперимента в том, чтобы управляя небольшим телескопом, направить его точно в определенную точку планеты. Система управления должна иметь нулевую установившуюся ошибку, а в то же время как можно большее быстродействие и перерегулирование менее 5 %. Модель телескопа вместе с маломощным исполнительным устройством изображена на рис. 12.21. Командный сигнал принимается с наземной станции с запаздыванием на л/16 с. Датчик с высокой точностью определяет направление на точку, в которую нацелен телескоп, но информация об этом возвращается обратно на Землю также с запаздыванием на л/16 с. Та
ким образом, общая передаточная функция телескопа, исполнительного устройства, датчика и двойного запаздывания (рис. 12.22) имеет вид:
e~snli
G(s)=—------(12.55)
(5+1)2
1
---------►ад
Угловое положение телескопа
од---------------
Управляющий сигнал с наземной станции
Рис. 12.21. Модель маломощного исполнительного устройства и телескопа
12.9. Синтез системы управления орбитальным телескопом
715
Рис. 12.22. Система управления телескопом
(12.56)
(12.57)
В системе предлагается использовать ПИД-регулятор с передаточной функцией
Gc(s)=*i +^- + /С35 = -!-----?---L-
S S
Использование только пропорционального канала регулятора неприемлемо, поскольку нам необходимо иметь нулевую установившуюся ошибку при ступенчатом входном сигнале. Поэтому коэффициент К2 должен иметь конечное значение, и мы можем выбрать либо ПИ-закон, либо ПИД-закон регулирования.
Сначала попробуем использовать ПИ-регулятор с передаточной функцией
Так как система содержит чистое запаздывание е , то для синтеза регулятора мы воспользуемся частотными характеристиками. Ограничение на величину перерегулирования трансформируем в эквивалентное требование в частотной области. Если характеристическое уравнение имеет два доминирующих корня, то перерегулированию 5 % соответствуют коэффициент затухания С, = 0,7 или запас по фазе около 70°.
Если выбрать Кх = 0,022 и К2 = 0,22, то мы получим г 0,22(0,15+1>-'л/8
Gc (sjG(s) =---------—
5(5+I)2
Соответствующая диаграмма Боде изображена на рис. 12.23. Нуль 5 = -10 был добавлен в передаточную функцию, чтобы создать дополнительный положительный фазовый сдвиг и обеспечить заданный запас по фазе. Методом итераций можно попытаться зада
(12.58)
Рис. 12.23
Диаграмма Боде для системы с ПИ-регулятором
716
Глава 12. Робастные системы управления
вать разные значения и К2 до тех пор, пока не будет достигнут нужный запас по фазе. Заметим, что в нашем случае запас по фазе составляет около 63°. Была построена действительная переходная характеристика, которая имеет перерегулирование 4,7 % и время установления ( по критерию 2 %) 16 с, как это отражено в табл. 12.5.
Можно использовать ПИД-регулятор с передаточной функцией
. (12.59)
s
Теперь в нашем распоряжении имеются три параметра, которые можно варьировать, чтобы добиться желаемого запаса по фазе. Если после нескольких итераций мы выберем К} = 0,8, К2 = 0,5 и К2 = 10-3, то получим запас по фазе 64°. Перерегулирование при этом составит 3,7 %, а время установления (по критерию 2 %) будет равно 5,8 с. Возможно, самый простой способ выбора коэффициентов заключается в том, чтобы задать малое ненулевое значение К2 , после чего построить частотные характеристики при К} = К2 = 0. В данном случае было заданно К3 = 10-3 и построена диаграмма Боде. Затем мы приняли Кх ® К2 и методом итераций получили подходящие значения этих коэффициентов.
Показатели качества системы с ПИ- и ПИД-регуляторами приведены в табл. 12.5. ПИД-регулятор является более приемлемым, поскольку он обеспечивает меньшее время установления.
Таблица 12.5. Показатели качества системы управления орбитальным телескопом
Установившаяся ошибка Перерегулирование Время установления, с ПИ-регулятор 0 4,7 % 16,0
ПИД-регулятор 0 3,7 %5,8
12.10 . Синтез робастного привода катушки
Нейлоновая нить производится путем выталкивания ее из соответствующего отверстия с постоянной скоростью. Нить наматывается на катушку, которая вращается с максимальной скоростью 2000 об/мин. Натяжение нити должно удерживаться в пределах от 80 до 240 г, чтобы не допускать ее удлинения. Диаметр намотки изменяется от 5 до 10 см.
Нить укладывается на катушку с помощью рычага, перемещаемого механизмом червячного типа в ту и иную сторону с постоянной скоростью, как показано на рис. 12.24 (я). Рычаг должен быстро менять направление движения в конце рабочего пути. Требуемая скорость червяка составляет 60 об/мин. Основное требование, предъявляемое к приводу катушки — обеспечивать управляемое натяжение нити. Поскольку диаметр намотки изменяется в 2 раза, натяжение будет уменьшаться на 50 % от начала к концу процесса.
Структурная схема системы управления приводом изображена на рис. 12.24 (б). В ней мы впоследствии используем ПИД-регулятор. Номинальные значения параметров Кт = 2 ир = 4, а диапазоны их изменения соответственно 1,5 < Кт < 2,5 и 3 <р < 5. Кроме того, в модели объекта управления не учтен третий полюс s = -50. Требуется, чтобы перерегулирование не превышало 2,5 %, а время установления (по критерию 2 %) должно быть менее 0,4 с. Величина сигнала и(/) должна быть меньше 100.
12.10. Синтез робастного привода катушки
717
Рис. 12.24
Намотка нити на катушку
Используя ПИД-регулятор, оценку качества ИВМО и номинальные значения параметров, на основании требований к времени установления определим частоту w„. При ожидаемом значении С, ® 0,8 имеем:
4 Г. = —— <0,4. ' 0,8®„
Выберем со„= 23, как максимально допустимое значение при ограничении | и | < 100. Тогда при
Gc(s) = Kx +^- + K3s s
получим Кх = 568,68, К, = 6083,5 и/С3 = 18,13. При использовании предшествующего фильтра реакция системы на единичный ступенчатый сигнал будет иметь показатели, приведенные в табл. 12.6. Система не является робастной, т. к. требование к величине перерегулирования не удовлетворяется при наихудшем сочетании параметров.
Исследуем также качество системы при номинальных значениях параметров, но добавив в передаточную функцию объекта не учтенный в предыдущей модели третий полюс, так что
2-50
G(s) =----^2——. (12.60)
s(s+4)(s+50)
(Заметим, что коэффициент усиления системы, limsG(s), остается равным 0,5.) Показатели качества системы с ПИД-регулятором и с учётом третьего полюса также приведены в табл. 12.6. Как видим, система вновь не удовлетворяет требованию робастности.
Необходимо внести такие изменения, чтобы качество системы было приемлемым даже при самом худшем сочетании параметров.
Посмотрим на корневой годограф системы, построенный при номинальных значениях параметров, который изображен на рис. 12.25. Введем перед регулятором Gc(s) дополнительный коэффициент усиления К, так что передаточная функция разомкнутой систе-
718
Глава 12. Робастные системы управления
Рис. 12.25. Корневой годограф для случая номинальных параметров и для худшего случая при К = 1 и К = 3
мы будет равна KGcG(s). На годографе показано положение корней при К = 1 и при X = 3. Поскольку наихудшее качество мы получаем, когда коэффициент передачи двигателя Кт уменьшается до 1,5, то задав К= 3, мы передвинем корни влево на s-плоскости, чтобы они оказались в желаемой области.
Таблица 12.6. Показатели качества системы управления приводом катушки при единичном ступенчатом воздействии (предварительный синтез)
Параметры Относительное перерегулирование Время уста-новления, с и(1) r(t) max
Номинальные параметры сч II £ а. 1,96 % 0,318 98
Наихудшее сочетание параметров Номинальные параметры Кт= 1,5 , Р = з 7,48 % 0,375 95 /
с учетом третьего полюса s =-50 9.82 % 0,732 9С
Показатели качества системы при К= 3 приведены в табл. 12.7. В данном случае система удовлетворяет всем требованиям. Прием, связанный с введением правильно выбранного дополнительного усилителя, позволяет переместить доминирующие корни ближе к комплексным нулям ПИД-регулятора. Тогда, даже если параметры системы изменятся в худшую сторону, ее качество все равно будет удовлетворять заданным требованиям.
12.11. Робастная система с внутренней моделью
719
Таблица 12.7. Показатели качества системы управления приводом катушки при единичном ступенчатом воздействии (с дополнительным усилителем К=3)
Относительное перерегулирование Время установления, с
Номинальные параметры • 0,12% 0,218
Наихудшее сочетание параметров 0,47 % 0,214
Номинальные параметры с учетом третьего полюса 0,50 % 0.242
12.11 . Робастная система с внутренней моделью
На рис. 12.26 изображена система управления с внутренней моделью, назначение которой рассматривалось ранее в разделе 11.8. Здесь мы еще раз займемся синтезом внутренней модели, имея целью обеспечить робастность системы. Принцип внутренней модели утверждает, что если Gc(s)G(s) содержит R(s), то y(f) будет асимптотически воспроизводить сигнал г(?) (в установившемся режиме) и это воспроизведение будет робастным.
Анализ системы, изображенной на рис. 12.26, показывает, что в случае объектов невысокого порядка обратная связь по состоянию может не потребоваться и требуемого качества можно добиться только за счет надлежащего выбора регулятора Gc(s). Однако когда объект имеет достаточно высокий порядок, может потребоваться введение обратной связи по всем переменным состояния.
Рассмотрим простой случай, когда G(s) = 1/s, а система должна отрабатывать линейный входной сигнал с нулевой установившейся ошибкой. Для этого достаточно использовать ПИ-регулятор, и мы положим К = 0 (обратная связь по состоянию отсутствует). Тогда мы получим
GcG(s) = (K} +^y± = Kis+Ki . (12.61)
s s s~
Заметим, что для линейного входного сигнала R(s) = 1/s2, и этот сомножитель содержится в выражении (12.61). Передаточная функция замкнутой системы равна
T(s) = KlS+Kl . (12.62)
5 + K^S +
В соответствии с оценкой ИВМО для линейного входного сигнала (табл. 5.7) находим:
Рис. 12.26
Система управления с внутренней моделью
720
Глава 12. Робастные системы управления
Частоту со,, выберем так, чтобы она удовлетворяла требованию к времени установления. Если это время (по критерию 2 %) должно быть равно 1 с, то можно принять со„ = 5. Тогда мы получим К{ = 16 и К2 = 25. Реакция системы входит в установившийся режим через 1 с и затем отслеживает линейный входной сигнал с нулевой ошибкой. Если на вход этой системы (рассчитанной применительно к линейному сигналу) подать ступенчатый сигнал, то ее реакция будет иметь перерегулирование 5 % и время установления 1,5 с. Система обладает робастностью по отношению к параметрам объекта управления. Например, если G(s) = K/s и коэффициент К получит отклонение от номинального значения К = 1 на ± 50 %, то реакция системы на линейный входной сигнал изменится очень незначительно.
Пример 12.11. Синтез системы управления с внутренней моделью
Рассмотрим систему, изображенную на рис. 12.27, в которой использованы обратная связь по состоянию и регулятор Ge(s). Требуется, чтобы при ступенчатом входном сигнале установившаяся ошибка была равна нулю. Поэтому мы выберем ПИД-регулятор с передаточной функцией
3
чтобы функция G(s)Gc(s) содержала в качестве сомножителя R(s) = 1/s, изображение по Лапласу входного сигнала. Заметим, что в данном случае мы используем обратную связь по обеим переменным состояния и соответствующие сигналы добавляем (со знаком минус) к выходному сигналу регулятора, чтобы сохранить интегратор в составе Gc.(s).
Требование к системе сводится к тому, чтобы она обладала апериодической реакцией (см. раздел 10.11) с временем установления (по критерию 2 %) менее 1 с и одновременно являлась робастной. Предполагается, что два полюса передаточной функции G(s) могут изменяться на ± 50 %, Тогда худшему случаю будет соответствовать выражение
и IJ .
(з+0,5)(з+1)
К решению данной задачи есть два подхода. В первом случае можно выполнить синтез системы, ориентируясь на наихудшее сочетание параметров. Второй способ, которым мы здесь воспользуемся, основан на том, что синтез проводится при номинальных значениях параметров, но время установления принимается в два раза меньше заданного. Это позволяет ожидать, что таким образом мы получим робастную систему с высоким быстродействием, удовлетворяющую требованию к времени установления. Заметим, что в системе предусмотрен предшествующий фильтр Gp(s), с помощью которого передаточной функции T(s) придается желаемая форма.
Рис. 12.27. Система управления с внутренней моделью, обратной связью по состоянию и регулятором Gc(s)
12.12. Синтез сверхпрецизионной системы управления
721
Система третьего порядка будет обладать апериодической реакцией, если ее передаточная функция согласно табл. 10.2 имеет вид:
T(s) = -г------? , (12.64)
j3 + 1,9со,^2 + 2,20со2^ + со,3,
а время установления (по критерию 2 %) Ts = 4.04/ <о„. Задав Ts = 0,5 с, получим со,, = 8,08.
После выбора надлежащего предшествующего фильтра Gp(s) замкнутая система на рис. 12.27 будет иметь передаточную функцию
T(s) = ----------------у—------------------------. (12.65)
? + (3 + К3 + Kb)s2 + (2+ Л, + Ка + 2Kb)s + К2
Задав два коэффициента, Ки = 10 и Къ = 2, получим значения остальных: Kt = 127,6. К2 = 527,5 и К3 = 10,35. Заметим, что нужное выражение T(s) можно получить и при других значениях коэффициентов, в том числе и при Кь = 0.
Переходная характерист ика синтезированной системы имеет апериодический вид с перерегулированием 1.65 % и временем установления 0,5 с. Если полюсы G(s) изменятся на ± 50 %, то перерегулирование увеличится до 1,86 %, а время установления будет равно 0,95 с. Поэтому можно считать синтез завершенным, а полученная система обладает высокой робастностью и апериодической реакцией.
12.12 . Синтез сверхпрецизионной системы управления токарным станком с алмазным резцом
(12.66)
Задача создания сверхпрецизионного токарного станка с алмазным резцом решалась в Ли-верморской Национальной Лаборатории им. Лоуренса. Этот станок предназначен для придания с очень высокой точностью заданной формы поверхностей оптических деталей, таких, например, как зеркала. В данном случае мы рассмотрим задачу управления положением резца только по одной координате. Экспериментально, с помощью подачи синусоидального сигнала на вход исполнительного устройства, была получена передаточная функция объекта управления
ч 4500 G(s) =-----
s+ 60
Столь большой коэффициент усиления для системы не представляет опасности, т. к. входной эталонный сигнал r(t) представляет собой последовательность ступенек очень малой амплитуды (доли микрона). Внешний контур системы образован за счет обратной связи по положению, датчиком которого является лазерный интерферометр с точностью измерения 0,1 мкм. В системе также имеется внутренний контур, образованный за счет обратной связи по скорости, как показано на рис. 12.28.
Требуется выбрать регуляторы Gj(s) и G2(s) так, чтобы система обладала высокой робастность), широкой полосой пропускания и при этом имела большой коэффициент затухания. Робастность системы должна позволять ей приспосабливаться к изменению нагрузки, обрабатываемых материалов и условий резания. Поэтому мы должны потребовать, чтобы она обладала достаточными запасами устойчивости по модулю и по фазе во внутреннем и внешнем контурах и малой чувствительностью корней. Требования к качеству системы приведены в табл. 12.8.
722
Глава 12. Робастные системы управления
Рис. 12.28. Система управления токарным станком
Таблица 12.8. Требования к системе управления токарным станком
Требования Передаточная функция
По скорости, F(s)/I7(s) По положению, Т(5)/А(5)
Минимальная полоса пропускания 950 рад/с 95 рад/с
Установившаяся ошибка при ступенчатом о 0
входном сигнале
Минимальный коэффициент затухания. £ 0,8 0,9
Максимальная чувствительность корней, |5£| 1.0 1,5
Минимальный запас по фазе 90° 75°
Минимальный запас по модулю 40 дБ 60 дБ
Поскольку мы желаем получить нулевую установившуюся ошибку в контуре управления скоростью, то выберем регулятор G,(s) = G3(j)G4(s) , где G3(s) есть передаточная функция ПИ-регулятора, a G4(j) соответствует корректирующему устройству с опережением по фазе. Тогда примем
G, (5) = G3 (5)G4 (5) = l +
A 3$ | Ад |
3 a 1+—-s
\ a J
и выберем K3 = 0,00532, K4 = 0,00272 и а = 2,95. В результате получим
г' 5' + 188 5+368
Ст? (5) — К. 2---------
S л+1085
Корневой годограф, соответствующий функции G2(5)G(5), изображен на рис. 12.29. При К2 = 2 передаточная функция внутреннего контура с обратной связью по скорост и примет вид:
(12.67)
Т (5)-- 9000(5+188)(5+368) _ 104
2 G(5) (5 + 20S)(5+305)(5+104 ) 5+104’
что соответствует системе с очень большой полосой пропускания. Действительные значения полосы пропускания и чувствительности корней приведены в табл. 12.9. Заметим, что требования к контуру управления скоростью выполнены с большим превышением.
12.12. Синтез сверхпрецизионной системы управления
723
Рис. 12.29
Корневой годограф внутреннего контура системы (выходная переменная — скорость) в зависимости от Л"г
Таблица 12.9. Результаты синтеза системы управления токарным станком
Полученный результат Контур управления скоростью, V(s)IV(s) Контур управления положением, Y(s)/R(s)
Полоса пропускания 4000 рад/с 1000 рад/с
Установившаяся ошибка 0 0
Коэффициент затухания 1,0 1,0
Чувствительность корней ,|5£| 0,92 1,2
Запас по фазе 93° 85°
Запас по модулю СО 76 дБ
В контуре управления положением мы используем корректирующее устройство с
опережением по фазе:
Gi(5) = ^
1 + Xj5
(. К5 у
а 1+—-s
I а J
причем выберем а = 2,0 и К5 = 0,0185, так что
^(5+54)
Сг| (S) ------- .
1 5+108
Затем построим корневой годограф для системы с передаточной функцией
Gi(5)T2(5).-.
S
Если использовать приближенное выражение для T2(s) [см. (12.67)], то мы получим корневой годограф, изображенный на рис. 12.30 (а). Если же взять действительное выражение для T&s), то мы получим картину, изображенную на рис. 12.30 (б). Выбрав значение Кх = Ю00, мы получим результаты, приведенные в последнем столбце таблицы 12.9. Син-тезированная система обладает большим запасом по фазе, малой чувствительностью, широкой полосой пропускания и затуханием выше критического, т. е. она является в сильной степени робастной.
724
Глава 12. Робастные системы управления
V У | Увеличение Кх СО х _
-104 1 1 J < F4 СУ
а) б)
Рис. 12.30. Корневой годограф для Ку > О при (а) аппроксимации r2(s) и (б) при точном значении 7^(а)
12.13. Псевдоколичественный метод синтеза системы с обратной связью
В количественной теории обратной связи робастность системы управления достигается за счет надлежащего выбора регулятора Gc(s), как показано на рис. 12.31. Цель синтеза при этом заключается в обеспечении широкой полосы пропускания замкнутой системы за счет большого значения коэффициента усиления К. Типичные методы синтеза при этом включают в себя графические и численные процедуры в сочетании с использованием диаграммы Никольса. Обычно количественные методы синтеза систем приводят к необходимости иметь большой коэффициент усиления в контуре и достаточный запас по фазе, которые и должны гарантировать робастность системы.
В этом разделе мы обсудим простой метод реализации количественной обратной связи, позволяющий с помощью корневого годографа выбрать коэффициент усиления К и регулятор Gc(s). Этот метод, очень похожий на псевдоколичественный, включает в себя следующие этапы:
1. Разместить на s-плоскости п полюсов и т нулей передаточной функции G(s), имеющей и-й порядок. Дополнить картину какими-либо полюсами Gt(s).
2. Начиная с области, ближайшей к началу координат, разместить нули Gc(s) непосредственно слева от каждого из (и - 1) полюсов в левой половине s-плоскости. Один полюс должен остаться далеко слева.
3. Увеличить коэффициент К так, чтобы корни характеристического уравнения (поло-
сы передаточной функции замкнутой системы) оказались близко к нулям функции
GcG(s).
Рис. 12.31
Система с обратной связью
12.13, Псевдоколичественный метод синтеза системы с обратной связью 725
Этот метод позволяет задать нули таким образом, чтобы все ветви корневого годографа кроме одной заканчивались в конечных нулях. Если коэффициент К будет достаточно большим, то полюсы T(s) окажутся почти равными нулям GcG(s). В результате при разложении T(s) на простые дроби останется практически один член, коэффициент при котором, найденный с помощью вычетов, будет иметь наибольшее значение, и именно этот член будет в основном определять реакцию системы. Ясно, что в этом случае запас по фазе будет приблизительно равен 90° (в действительности около 85°).
Пример 12.12. Синтез системы псевдоколичественным методом
Рассмотрим систему, изображенную на рис. 12.31, в которой
\ J J----------,
(я + Д|)(я+й)
причем номинальные значения pt = 1 ир2 = 2, а отклонения этих параметров могут составлять + 50 %. Худшему случаю соответствуют значения pt = 0,5 ир2 = 1. Требуется, чтобы при ступенчатом входном сигнале установившаяся ошибка равнялась нулю. Для решения задачи мы используем ПИД-регулятор с передаточной функцией
ад=(£+5Х£+^) s
Здесь мы воспользовались принципом внутренней модели и включили R(s) = 1/s в состав передаточной функции GcG(s). Согласно этапу 1 процедуры синтеза разместим на 5-плоскости полюсы GcG(s), как показано на рис. 12.32. Эти три полюса находятся в точках 5 = 0. -1 и -2. Согласно этапу 2 один нуль поместим слева от полюса в начале координат, а другой — слева от полюса в точке -1, как показано на рис. 12.32.
Передаточная функция регулятора примет вид:
(s+0,8)(s+1,8)
= -—-----------. (IZ.ooJ
5
Рис. 12.32 JCO
Корневой годограф для KGcG{s)
-1.8 -0.8
-1--------х-о--------х-о-------эе-—► о
-3 -2 -1
726
Глава 12. Робастные системы управления
Выберем К — 100, чтобы корни характеристического уравнения оказались вблизи нулей. Тогда передаточная функция замкнутой системы будет равна
T(s) =100(*+<W+l80) к 100 (s+0,798)(s+l,797)(s+100,4) (s+100)
Полученная система обладает высоким быстродействием, а запас по фазе в ней приблизительно равен 85°. Основные показатели качества приведены в табл. 12. 10.
Таблица 12.10. Показатели качества системы, синтезированной псевдоколичественным методом
Относительное перерегулирование Время установления
Номинальная G(s) 0,01 % 40 мс
Худший случай G(s) 0,97 % 40 мс
Если взять худший случай (pj = 0,5 ир2 = 1), то, как видно из табл. 12.10, качество системы существенно не изменится. Таким образом, псевдоколичественный метод позволяет синтезировать систему с высокой степенью робастности.
12.14. Синтез робастных систем с помощью MATLAB
Этот раздел мы посвятим исследованию робастных систем с помощью MATLAB. В частности, рассмотрим систему со структурой вида рис. 12.1, в которой используется ПИД-регулятор. Заметим, что в этой системе присутствует также предшествующий фильтр Gp(s)-Назначение такого фильтра и его роль в оптимизации качества были рассмотрены в разделе 10.10.
ПИД-регулятор имеет передаточную функцию
K3s2+KlS+K2
Gc (s) = —--------.
s
Отметим, что это выражение не соответствует физически реализуемой рациональной функции (т. е. степень полинома в числителе выше, чем степень полинома в знаменателе). Целью синтеза является выбор таких параметров Кх, К2 и К3, которые удовлетворяли бы требованиям к качеству системы и обеспечивали ее робастность. К сожалению, сразу нельзя дать однозначный ответ на вопрос, как именно должны быть выбраны параметры ПИД-регулятора, чтобы система была робастной. На конкретном примере мы покажем, что эти параметры можно подобрать методом итераций, а робастность системы проверить путем имитационного моделирования.
Неоценимую поддержку здесь способен оказать MATLAB, с помощью которого наиболее эффективно выполняются итерационные процедуры синтеза.
Пример 12.13. Робастный регулятор температуры
Рассмотрим систему, изображенную на рис. 12.1, в которой объект имеет передаточную функцию /
12.14, Синтез робастных систем с помощью MATLAB
727
причем номинальное значение с0 = 1 и Gp(s) = 1. Проведем синтез регулятора при с0 = 1 и путем моделирования проверим робастность системы. Требования к качеству системы таковы: 1. Время установления (по критерию 2 %) Ts < 0,5 с.
2. При ступенчатом входном сигнале оценка качества ИВМО должна быть минимальной. При синтезе мы не будем использовать предшествующий фильтр, с помощью которого обычно удовлетворяется требование 2. Вместо этого мы покажем, что приемлемое качество (в данном случае малое перерегулирование) можно обеспечить за счет введения в контур дополнительного усилителя.
Замкнутая система имеет передаточную функцию
______K3s2 + Kts + К2___
’ ? + (2 + K3)j2+(1+Xi)s+K2 '
(12.70)
Этой функции соответствует уравнение корневого годографа
где
К = К3 + 2, а =
3 2+/Г3
Требование к времени установления Ts < 0,5 приводит нас к тому, что корни полинома (s2 + as + b) должны находиться слева от линии s = — = -8, как показано на рис. 12.33, для
того чтобы корневой годограф был направлен в область желаемого качества. Выберем а = 16 и b = 70, чтобы корневой годограф прошел влево через линию s = —8. Далее выберем на годографе желаемое положение корней в соответствующей области и с помощью функции rlocfind найдем значения параметров К и к»и . Для выбранного положения корней (см. рис. 12.33) мы имеем К = 118. Затем, зная К, а и Ь. получим уравнения для определения коэффициентов ПИД-регулятора:
А'з=^-2 = 116.
К] = а (2 + К3)- 1 = 1187 ,
К2 = b (2 + К3) = 8260 .
Чтобы удовлетворить требование, предъявляемое к перерегулированию, мы используем усилитель с коэффициентом К, включенный последовательно с ПИД-регулятором, а значение К найдем методом итераций с помощью функции Step, как показано на рис. 12.34. При К = 5 пе
Рис. 12.33
Корневой годограф системы управления температурой с ПИД-регулятором в зависимости от К
728
Глава 12. Робастные системы управления
реходная характеристика имеет приемлемое перерегулирование, равное 2 %. Передаточная функция ПИД-регулятора с учетом дополнительного коэффициента К = 5 принимает окончательный вид:
GC(S)= К + = 5^- + lljZ£^60 (12 71)
s s
Напомним, что мы здесь не использовали предшествующий фильтр, как в примере 12.8, а вместо этого для получения приемлемого вида переходной характеристики увеличили коэффициент усиления К. Теперь можно рассмотреть вопрос о робастности системы по отношению к изменению параметра объекта управления с0.
Анализ робастности предполагает построение переходных характеристик системы с ПИД-ре-гулятором (12.71) при изменении параметра объекта в диапазоне 0.1 <с0< 10. Результаты отображены на рис. 12.35. Программа написана для построения переходной характеристики при конкретном значении с0. Чтобы сделать программу более интерактивной, можно было бы предусмотреть ввод значений с0 на уровне командной строки.
Результаты моделирования показывают, что синтезированный ПИД-регулятор делает систему робастной по отношению к изменению параметра с0. Отличия переходных характеристик при 0,1 < с0 < 10 на графике являются едва заметными. Если бы результаты получились иными, то процедуру синтеза можно было бы продолжить и методом итераций добиться приемлемого качества системы. MATLAB позволяет легко проверить робастность системы путем имитационного моделирования.
Рис. 12.34
Переходные характеристики системы управления температурой с ПИД-регулятором
12.15. Пример синтеза с продолжением: система чтения информации с диска 729
Рис. 12.35
Анализ влияния параметра <?о на робастность системы управления температурой с ПИД-регулятором
с0=10 ◄ —
numg=[1]; deng=[1 2*с0 с0л2]; numgc=5*[116 1187 8260]; dengc=[1 0]; sysg=tf(numg,deng); sysgc=tf(numgc,dengc); % syso=series(sysgc,sysg); % sy s=feedback(syso, [1 ]); % step(sys) Задание параметра объекта
12.15. Пример синтеза с продолжением: система чтения информации с диска
В этой главе мы синтезируем ПИД-регулятор, обеспечивающий желаемый вид реакции системы. Во многих реальных дисководах такой регулятор применяется для того, чтобы движение головки к заданной дорожке осуществлялось с максимально возможной скоростью. Это соответствует отработке системой линейного эталонного сигнала r(t). В то же время сигнал r(t) может иметь и ступенчатую форму. Поэтому от системы требуется, чтобы она обладала нулевой установившейся ошибкой как при линейном, так и при ступенчатом входных сигналах. В системе, изображенной на рис. 12.36, прямая цепь содержит два интегратора, поэтому резонно ожидать, что при входном сигнале r(f) = At, t> 0 установившаяся ошибка будет равна нулю.
ПИД-регулятор имеет передаточную функцию
Gc (s) = Кj d-+ К 3s =----------------.
5 5
Параметры обмотки возбуждения двигателя таковы, что ее передаточная функция
/ ч 5000 с
G, (s) =------~ 5.
s + 1000
730 Глава 12. Робастные системы управления
ОД
Рис. 12.36. Система управления дисководом с ПИД-регулятором
Используя такую аппроксимацию, мы понизим порядок передаточной функции двигателя вместе с нагрузкой до второго и при синтезе регулятора будем рассматривать именно такую модель.
Задачу мы будем решать с помощью корневого годографа методом, рассмотренным в разделе 12.6. На рис. 12.37 показано расположение полюсов и нулей разомкнутой системы с передаточной функцией
s2(s+20)
Выберем z = - 120+J40 и определим 5К3 так, чтобы корни характеристического уравнения замкнутой системы находились слева от линии s = -100. Если выполнить это требование, то мы будем иметь
Д. <—,
100
а перерегулирование при ступенчатом входном сигнале составит менее 2 %, потому что комплексным корням будет соответствовать коэффициент затухания приблизительно равный 0,8. Разумеется, построения на рис. 12.37 — это только предварительный набросок. Далее с помощью MATLAB мы можем путем итераций определить значение Л3. На рис. 12.38 изображен корневой годограф, построенный с помощью MATLAB приХ3 = 800.По-казатели качества системы приведены в табл. 12.11, откуда следует, что система удовлетворяет всем требованиям.
Рис. 12.37 Примерный вид корневого годографа при увеличении А"з и оценка положения корней при заданном качестве системы усо - у120 - д / - 7501 ( 2 полюса 74° / л « ► 1 1 1 1 1—«—1 1 1 -140\ -120 -100 -80 -60 -40 -20 \ \ - -у40\ \ -Z1 \ - -;50 ^^<доо . ' - -у120
12.16. Резюме
731
Рис. 12.38
Действительный вид корневого годографа для модели второго порядка
Таблица 12.11. Показатели качества системы управления дисководом
Показатель качества Желаемое значение Действительное значение
Относительное перерегулирование < 5 % 4.5 %
Время установления реакции на ступенчатый входной сигнал < 50 мс 6 мс
Максимальное значение реакции на единичное ступенчатое возмущение < 5 • 10“3 7.7 • 10’
12.16. Резюме
Синтез систем высокой точности при наличии существенной неопределенности объекта вынуждает проектировщика искать решение в классе робастных систем. Робастная система обладает малой чувствительностью и сохраняет устойчивость при изменении ее параметров в широком диапазоне.
Мы показали, как можно обеспечить робастность системы путем использования в ней ПИД-регулятора. Синтез ПИД-регулятора состоит в выборе его коэффициента усиления и двух нулей передаточной функции. Мы рассмотрели три метода синтеза ПИД-регу-лятора: метод корневого годографа, метод частотных характеристик и метод, основанный на использовании оценки качества ИВМО. На рис. 12.39 приведена схема на операционных усилителях, которая может выполнять функции ПИД-регулятора. Вообще ПИД-ре-/гулятор — это мощное средство в руках проектировщика, позволяющее синтезировать ро- бастные системы управления.
Мы показали, как можно получить робастную систему, используя внутреннюю модель и обратную связь по состоянию. И, наконец, мы выяснили, что с помощью псевдоко-личественной обратной связи также можно обеспечить робастность системы управления.
На рис. 12.40 показано, как с увеличением неопределенности параметров и возмущений совершенствуется тип систем управления и возрастают требования к уровню необходимого для их реализации машинного интеллекта.
732
Глава 12. Робастные системы управления
Рис. 12.39
Схема на операционных
Ио(5) _ А4А2(А,С> + 1)(А2С> + 1)
усилителях, используемая в качестве
ПИД-регулятор а
Высокий
Адаптивные
Рис. 12.40
Зависимость между требуемым уровнем машинного интеллекта в современных системах управления и неопределенностью параметров и возмущений
системы
я я к 3 rd S
Средний
Робастные системы
о
Низкий
Системы с обратной связью
Разомкнутые системы
Низкая Средняя Высокая
Неопределенность параметров и возмущений
Упражнения
У-12.1. Рассмотрите систему, изображенную на рис. 12.16, где
g(5) = -!-.
Используя оценку качества ИВМО при ступенчатом входном сигнале, определите необходимую передаточную функцию Gc(s). В соответствующем полиноме из табл. 5.6 примите ои = 20. Получите переходную характеристику при наличии предшестаующего фильтра Gp(s) и без него.
У-12.2. Для системы, синтезированной в упражнении 12.1, получите реакцию на возмущение D(s) = 1/s.
У-12.3. Система с единичной обратной связью имеет в разомкнутом состоянии передаточную функцию /
/ G(s) =—-—,
| s(s + p)
где параметр р ймеет номинальное значение 3. Определите и постройте диаграммы Боде
для Щ7®)1 и |5jQ«)l-
Ответ'. Sj, = —-——-----.
Упражнения
733
У-12.4. В системе, изображенной на рис. 12.16, используется ПИД-регулятор, причем
(s+ 2)(s + 8)
Коэффициент/С, регулятора [см. (12.33)] ограничен значением 180. Выберете нули регулятора так, чтобы пара корней характеристического уравнения замкнутой системы примерно равнялась этим нулям. Получите переходную характеристику системы для ее аппроксимации вида (12.35), а также действительную переходную характеристику и сравните их.
У-12.5. В системе с единичной отрицательной обратной связью объект управления имеет передаточную функцию
, 15900
G(s) --------------------
s(s7100 + l)(s7200 + 1)
и в системе используется ПД-регулятор
Gc(s) = К, + K2s.
Требуется определить такие параметры передаточной функции Gc(s), чтобы при ступенчатом входном сигнале перерегулирование не превышало 20 % и время установления ( по критерию 2 % ) было менее 60 мс. Определите передаточную функцию регулятора Gc(s) .
У-12.6. Рассмотрите систему управления, изображенную на рис. 12.6 (У), где G(s) = l/(s+4) и выберете ПИ-регулятор, чтобы при ступенчатом входном сигнале и оценке качества ИВМО время установления (по критерию 2 %) было менее 1 с. Постройте график реакции y(t') на ступенчатый входной сигнал r(t) при наличии предшествующего фильтра и без него. Постройте график реакции системы y(t) на ступенчатое возмущение. Сделайте выводы по поводу эффективности системы.
ед Вход
ед Возмущение
Рис. 12.6 (У). Система с регулятором
У-12.7, В системе, изображенной на рис. 12.16. передаточная функция объекта управления равна
G(s) =
1
G+4)2'
Выберите такой ПИД-регулятор, чтобы при ступенчатом входном сигнале и оценке качества ИВМО время установления (по критерию 2 %) было менее 1 с. Получите график реакции y(t) при наличии предшествующего фильтра и без него. Постройте график реакции уД) на ступенчатое возмущение. Сделайте выводы относительно эффективности системы.
У-12.8. Повторите упражнение 12.6, пытаясь получить минимальное время установления при нали-чий ограничения |п(1)| < 80, t > 0, в случае единичного ступенчатого воздействия r(t) = 1, t > 0.
1 л 3600+ 80s
Ответ: Gc(s) =---------.
/ 5
У-12.9.,'Система имеет структуру вида рис. 12.6 (У), где
/ К
/ s(s+l)(s+4)
734
Глава 12. Робастные системы управления
причем номинальное значение К= 1. Синтезируйте ПД-регулятор, позволяющий поместить доминирующие полюсы передаточной функции замкнутой системы в точках s=-l,5 ± j2. Определите переходную характеристику системы. Предскажите, как отразится на этой характеристике изменение К на ± 50 %. Получите переходную характеристику, соответствующую худшему случаю.
У-12.10. Система имеет структуру вида рис. 12.6 (У), где
s(s+ l)(s + 4)
причем номинальное значение К= 1. Синтезируйте ПИ-регулятор. позволяющий поместить доминирующие корни в точках s = -0,365 + j'0,514. Определите переходную характеристику системы. Предскажите, как отразится на этой характеристике изменение К на ± 50 %. Получите переходную характеристику, соответствующую худшему случаю.
Задачи
3-12.1. В последние годы значительно возрос интерес к созданию автоматических подводных аппаратов различного назначения. Они могут быть использованы для доставки со дна предметов, обнаружения мин, наблюдения за прилегающим пространством. Независимо от назначения таких аппаратов, системы управления ими должны обладать высокой надежностью и робастностью. Один из таких подводных аппаратов изображен на рис. 12.1 (3), (а). Он имеет длину около 10 м, в его носовой части установлено вертикальное крыло. Управление положением аппарата осуществляется с помощью кормовых крыльев, руля направления и гребного винта. В данной задаче речь идет об управлении углом наклона аппарата относительно продольной оси с помощью кормовых крыльев. Структурная схема системы управления изображена на рис. 12.1 (3), (б), где заданное значение угла R(s) = 0, a £>(s) = 1/s. Выбран регулятор с передаточной функцией Gc(s) = K(s+2), где К = 4.
(а) Изобразите диаграмму Боде для 20 lg|7’(/w)| и 201g|S^(jo))|, где T(s)~Y(s)/R(s). (б) Оцените чувствительность |5^| при частотах ыв, ыв/2 и шй/4 (шв — полоса пропускания системы).
3-12.2. На рис. 12.2 (з), (а) изображена дистанционно управляемая подвешенная видеокамера, созданная для обслуживания профессиональной футбольной лиги. Камера может перемещаться в любом из трех направлений, за счет чего ее обзору доступно все поле. Система управления приводом каждого рычажного блока изображена на рис. 12.2 (3), (б), где Т| = 20 мс и т2 = 2 мс.
Рис. 12.1 (3)
Система управления подводным аппаратом
Задачи
735
Рис. 12.2 (3) Дистанционно управляемая видеокамера
(а) Выберите коэффициент К, обеспечивающий максимальное значение амплитудной характеристики замкнутой системы Мр = 1,84. (б) Изобразите диаграмму Боде для 20 1g |Г(/а>)1 и 201g|S^(j‘co)|. (в) Оцените при частотах <ofi, <пй/2 и а>е /4 . (г) Считая R(s) = 0, оцените влияние возмущения D(s) = l/s на выходную переменную у(/), построив ее график при коэффициенте К, найденном в п. (а).
3-12.3. Поезда на магнитной подвеске могут заменить самолеты при перевозке пассажиров на расстояние до 350 км. Один из таких поездов, разработанный в Германии, способен перевозить до 400 пассажиров со скоростью 480 км/ч. Однако очень трудно поддерживать постоянный зазор между днищем поезда и направляющим рельсом, величина которого составляет всего 6 мм. На рис. 12.3(3), (а) схематически изображен поезд на магнитной подвеске, а на рис. 12.3(3), (б) приведена структурная схема системы управления величиной воздушного зазора. Регулятор имеет передаточную функцию
^+2>
GCU) =--—
Рис. 12.3 (3) Система управления поездом на магнитной подвеске
736
Глава 12. Робастные системы управления
б)
Рис. 12.4 (3). Робот для покраски автомобилей
(а) Определите диапазон значений К, при которых система является устойчивой.
(б) Выбрав К в 2 раза меньше значения, предельно допустимого из соображений устойчивости, определите реакцию системы у(г) на единичный ступенчатый входной сигнал.
(в) Определите y(t). если К отклоняется на +10 % от значения, полученного в п. (б).
3-12.4. На рис. 12.4 (3), (а) изображена система управления роботом, осуществляющим покраску корпуса автомобиля. Требуется исследовать поведение системы при значениях К=1. 10 и 20. (а) Для указанных трех значений К определите сои, относительное перерегулирование, время установления (по критерию 2 %) и установившуюся ошибку при ступенчатом входном воздействии. Оформите результаты в виде таблицы, (б) Определите чувствительность |S^| при трех значениях К. (в) Выберите наилучшее из трех значений К. (г) При значении К из п. (в), считая R(s) = 0, найдите реакцию системы y(t) на возмущение D(s) = 1/s.
3-12.5. На рис. 12.5 (3), (а) изображено автоматически управляемое транспортное средство, а на рис. 12.5(3), (б) — структурная схема системы управления. Система должна обеспечивать движение точно по заданному маршруту, быть нечувствительной к изменению коэффициента К} и эффективно ослаблять влияние возмущения. Номинальные значения параметров К) = 1 и т = 1/25 с.
(а) Выберите регулятор Gc(s) так. чтобы при ступенчатом входном сигнале перерегулирование не превышало 10 %, время установления (по критёрию 2 %) было менее 100 мс и коэффициент ошибки по скорости Kv равнялся 100. \
(б) При регуляторе, полученном в п. (а), определит^ чувствительность системы к малым изменениям К|, S'K) или S^. (в) При том же регулятор Gc(s), считая, что А) увеличивается до 2. определите переходную характеристику системы и сравните показатели качества с заданными в п. (а), (г) Считая R(s) = 0, получите график реакции системы y(t) на возмущение D(s) = 1/s.
3-12.6. На бумажных комбинатах специальна^ мйшина принимает, обертывает и маркирует большие роли бумаги. Эта машина состоит из нескольких основных станций: станции позиционирования, станции ожидания, станции обертывания и т. д. Мы рассмотрим только станцию позиционирования, изображенную на рис. 12.6(3), (а). Эта станция является первой из всех, которые имеют дело с бумажным ролем. Она должна принять и взвесить роль, измерить его диа-
Задачи
737
а)
АккумулятопныЙ отсек
Вмонтированная в пол бирка транспондера
Рис. 12.5 (3). Автоматически управляемое транспортное средство
метр и ширину, определить желаемую обертку, позиционировать роль для обработки на следующем этапе и, наконец, выдать его на этот этап.
С функциональной точки зрения данную машину можно рассматривать как сложный объект, потому что каждая операция (например измерение ширины роля) требует большого количества отдельных действий со стороны оборудования и использования соответствующих датчиков.
На рис. 12.6(3), (б) изображена система управления позиционированием роля для измерения его ширины. Параметр р передаточной функции объекта управления (устройства измерения ширины) в номинальном режиме равен 2, но он может изменяться под влиянием нагрузки и неправильной настройки машины, (а) Прир = 2 синтезируйте регулятор так, чтобы комплексные корни замкнутой системы имели значения s = -2± J2-J1. (б) Получите график у(/) при ступенчатом входном сигнале R(s) = 1/s. (в) Считая R(s) = 0, получите график реакции y(t) на ступенчатое возмущение D(s)= 1/s. (г) Повторите пп. (б) и (в), если р изменяется до 1. а регулятор Gc(s) остается тем же, который был получен в п. (а). Сравните регуляторы, полученные для двух значений параметра р.
Рис. 12.6 (3)
Система управления машиной для обертки бумажных рблей
Вид спереди
738
Глава 12. Робастные системы управления
а)
Возмущение D(s)
б)
Рис. 12.7 (3). Система управления слябингом
3-12.7. Обжимный прокатный стан (слябинг) предназначен для превращения разогретых заготовок в стальные пластины заданного размера и толщины. Конечным продуктом являются пластины прямоугольной формы шириной до 3300 мм и толщиной 180 мм.
Схематически слябинг изображен на рис. 12.7(3), (а). Он имеет две основных позиции с валками, обозначенные номерами 1 и 2. Валки, диаметр которых достигает 508 мм. приводятся во вращение мощными (до 4470 кВт) электродвигателями. Необходимый зазор между валками и развиваемое ими усилие обеспечиваются с помощью больших гидроцилиндров.
Работу слябинга кратко можно описать следующим образом. Заготовки, выдаваемые из печи для разогрева, сначала проходят через позицию №1, которая должна довести их до заданной ширины. Затем они проходят через позицию №2, которая обеспечивает заданную толщину, и. наконец, попадают на выравнивающее устройство, которое придает пластине гладкую поверхность.
На рис. 12.7 (3), (б) изображена структурная схема системы управления валками, обеспечивающими заданную толщину пластин. Объект управления имеет передаточную функцию
s(s2 + 4s + 5)
Передаточная функция ПИД-регулятора Gc(s) имеет два одинаковых вещественных нуля, (а) Выберете нули и коэффициенты ПИД-регулятора так, чтобы характеристическое уравнение замкнутой системы имело две пары одинаковых корней, (б) Считая, что предшествующий фильтр отсутствует, т. е. Gp(s) = 1, получите переходную характеристику системы, синтезированной в п. (а), (в) Повторите п. (б) при наличии надлежащего предшествующего фильтра, (г) Считая, что г(Г) = 0, определите реакцию системы на единичное ступенчатое возмущение.
3-12.8. На рис. 12.8(3) изображена система управления, в состав которой входят двигатель и нагрузка с пренебрежимо малым трением, а также преобразователь напряжения в ток с коэффициентом Ка. Инженер решил использовать в этой системе ПИД-регулятор
Gc(s) = Kl + ^ + K3S, \ s где = 5, К2 = 500 и К3 = 0,0475. \
Рис. 12.8 (3)
Задачи
739
(а) Определите значение К1Г при котором запас по фазе в системе будет равен 42°. (б) Постройте корневой годограф системы и определите положение корней, соответствующее коэффициенту найденному в п. (а), (в) При Ка из п. (а) определите максимальное значение у(О- если D(s) = l/s и R(s) = 0. (г) Определите реакцию системы на ступенчатый входной сигнал г(?) при наличии и при отсутствии предшествующего фильтра.
3-12.9. Система с единичной обратной связью в номинальном режиме имеет характеристическое уравнение
q(s) = s3 + 3s2 + 3s + 6 = 0.
Коэффициенты уравнения изменяются в следующих пределах:
2 < а2 < 3. 1 < а, < 3, 3 < а0 < 5.
Определите, является ли система устойчивой при этих неопределенных коэффициентах.
3-12.10. В будущем астронавты смогут передвигаться по луне в герметизированном аппарате, изображенном на рис. 12.10(3). (а). Этот аппарат будет иметь радиус действия 1000 км и может быть использован в экспедициях длительностью до шести месяцев. Инженеры корпорации Боинг, изучив лунный вездеход, использовавшийся в программе «Аполлон», разработали новый аппарат, внеся улучшения в системы радиационной и тепловой зашиты, в противоударные и антивибрационные устройства, в системы смазки и герметизации.
На рис. 12.10(3), (б) изображена система управления движением лунного вездехода. Система должна обеспечивать отработку ступенчатого задания на изменение курса с нулевой установившейся ошибкой, с перерегулированием не более 20 % и временем максимума менее 0,3 с при | u(t) | < 50. Необходимо также исследовать реакцию на ступенчатое возмущение D(s) = l/s при R(s) = 0, чтобы оценить и по возможности минимизировать влияние неровностей лунной поверхности. Синтезируйте сначала ПИ-регулятор, затем ПИД-регулятор. и оформите в виде таблицы
Рис. 12.10 (3) (а) Лунный самоходный аппарат.
(б) Система управления поворотом аппарата
740
Глава 12. Робастные системы управления
Рис. 12.12 (3). (а) Трехкоординатный копир.
(б) Система управления перемещением по оси х
основные результаты, характеризующие качество системы. Сравните соответствующие показатели качества. В случае необходимости используйте предшествующий фильтр Gp(s).
3-12.11. Объект управления имеет передаточную функцию
G(s)=™.
s
В системе управления с единичной отрицательной обратной связью должен быть использован ПИД-регулятор. Предусмотрено также применение предшествующего фильтра. При оценке качества ИВМО время максимума переходной характеристики должно быть равно 0.75 с. Предскажите величину перерегулирования и время установления (по критерию 2 %).
3-12.12. На рис. 12.12 (3), (а) изображен трехмерный копир, позволяющий реализовывать функцию двух переменных. Переменные х и 0 можно изменять с помощью соответствующих систем управления положением. Система управления перемещением по координате х изображена на рис. 12. 12(3), (б), где двигатель постоянного тока вместе с нагрузкой имеет передаточную функцию
К
G(s) =
s(s + p)(s + 4)
причем 1<^<3и1</><3. Номинальные значения К = 2 и р = 2. Используя оценку качества ИВМО, синтезируйте ПИД-регулятор так, чтобы в наихудшем случае время максимума переходной характеристики было менее 2,5 с.
Задачи повышенной сложности
П-12.1. Чтобы минимизировать влияние вибраций на положение телескопа, используется магнитная подвеска. Благодаря этому также исключается трение в системе управления азимутальной ориентацией. ФотодатЧцки этой системы вместе с электрическими соединениями можно смоделировать в виде пружины, имеющей коэффициент упругости 1 кг/м. Масса телескопа равна 100 кг. Структурная cxe^ia системы приведена на рис. 12.1 (П). Синтезируйте ПИД-регулятор
Рис. 12.1 (П)
Система управления положением телескопа на магнитной подвебке
Задачи повышенной сложности
741
так, чтобы коэффициент ошибки по скорости Kv был равен 100, а максимальное перерегулирование при ступенчатом входном сигнале не превышало 5 %.
П-12.2. Возможным решением проблемы пробок на автодорогах является использование автопоездов на магнитной подвеске. Такие поезда движутся вдоль специального направляющего рельса над автомагистралью за счет электромагнитных сил, обеспечивающих как подвеску, так и поступательное движение. В идеале поезд на магнитной подвеске сочетает в себе преимущества отдельных видов транспорта: экологичность и безопасность обычных скоростных поездов, скорость и отсутствие трения, присущие самолету, и комфортность автомобиля. Благодаря этим факторам, системы магнитной подвески становятся действительно новым видом транспорта, снимая проблему перегруженности автомагистралей. Поезда на магнитной подвеске смогут развивать скорость от 250 до 500 км/ч.
Рис. 12.2(П), (о) и (б) иллюстрируют задачу управления наклоном вагона поезда на магнитной подвеске. Динамика объекта управления подвержена изменениям, так что 1 < К < 2, а полюсы передаточной функции G(s) могут находиться в затененных областях на рис. 12.2(П), (в). Цель синтеза состоит в том. чтобы получить робастную систему, реакция которой на ступенчатый входной сигнал имела бы перерегулирование менее 10 % и время установления (по критерию 2 %) менее 2 с при ограничении |и(/)| <100. Проведите синтез, используя ПИ-. ПД- и ПИД-регуляторы, и сравните полученные результаты. При необходимости используйте предшествующий фильтр Gp(s).
П-12.3. Система, препятствующая пробуксовке автомобиля с точки зрения теории управления представляет большой интерес, т. к. ее параметры мЙгут существенно изменяться (например, за счет изменения коэффициента трения тормозных дисков, изменения уклона дороги или плохих дорожных условий). Такая система должна обеспечивать максимальное трение между шиной и дорогой при любом качестве поверхности последней. Нетрудно догадаться, что это трение будет наибольшим при сухом асфальте, немного уменьшится при мокром асфальте и существенно уменьшится при гололеде.
Упрошенная модель системы управления торможением имеет структуру, изображенную на рис. 12.16, где
G(s) = 1^2 =----J------,
U (s') (s + a)(s + b)
а номинальные значения a = 1 и b = 4.
(а) Считая, что параметры а и J могут изменяться на ±50 %, и используя ПИД-регулятор, синтезируйте систему с высокой степенью робастности, которая при ступенчатом входном сигнале обладала бы перерегулированием менее 4 % и временем установления (по критерию 2 %), равным 1 с или менее. Установившаяся ошибка при этом должна быть менее 1 %, (б) Синтезируйте систему, удовлетворяющую требованиям из п. (а), используя оценку качества ИВМО. Предскажите величину перерегулирования и время установления.
П-12.4. Для помощи в проведении хирургической операции по замене берцовой кости протезом был создан робот, названный РоБоДок. Этот робот предназначен для того, чтобы с высокой точностью позиционировать инструмент, с помощью которого производится сверление отверстия для последующей фиксации протеза. Ясно, что система управления положением хирургического инструмента должна обладать высокой степенью робастности, т. к. второй возможности просверлить кость уже не будет. Система управления имеет структуру, изображенную на рис. 12.16. где
причем 2<а<4и5<6<9.
Выберите ПИД-регулятор, обеспечивающий высокую степень робастности системы. Для решения задачи воспользуйтесь методом корневого годографа. Выберите необходимую функцию Gp(s) и постройте график реакции системы на ступенчатый входной сигнал.
742
Глава 12. Робастные системы управления
б)
Рис. 12.2 (П)
(а) и (б) Система управления наклоном вагона на магнитной подвеске.
(в) Области расположения полюсов объекта управления
Поддерживающий усгой
П-12.5. На рис. 12.5 (П) изображен космический аппарат с установленной на нем телекамерой. Камера может наклоняться на 16° относительно своего основания. Реактивные двигатели обеспечивают стабилизацию основания камеры, противодействуя моментам реакции, возникающим при вращении камеры. Система управления скоростью вращения камеры имеет структуру, изображенную на рис. 12.16, где
G(s) =
(s+ l)(s+ 2)(s+ 4)
I
Задачи повышенной сложности
743
Телекамера
Рис. 12.5 (П)
Космический аппарат с телекамерой
Панель солнечных батарей
В системе используется ПИД-регулятор с передаточной функцией
K(s + о+ jl)(.v + о- jl) Gc(s) =----------------------.
5
Всем корням характеристического уравнения замкнутой системы должен соответствовать коэффициент затухания С У-/2. при 1 < о < 2 (о изменяется с шагом 0,25). Определите соответствующее этому требованию значение коэффициента К и вычислите корни характеристического уравнения. Определите чувствительность корней к изменению К.
П-12.6. В системе на рис. 12.16
G(s) = —, ф+10)
где номинальное значение = 1. Синтезируйте ПИД-регулятор, при котором запас по фазе в
системе будет равен 50°. Регулятор имеет передаточную функцию
K(s2+20s+b)
Gc(s) =-----------,
5
причем нули являются комплексными. Выберете надлежащий предшествующий фильтр. Исследуйте влияние изменения на ± 25 %, представив в табличной форме основные показатели качества системы.
П-12.7. В системе на рис. 12.16
G(s) = -b—
s(ts + 1)
где Л ] = 1и т = 0,001 с (этой постоянной времени можно пренебречь — проверьте, что это действительно так, в процессе синтеза). Синтезируйте ПИД-регудятор так, чтобы при ступенчатом входном сигнале время установления (по критерию 2 %) было менее 0,8 с, а перерегулирование не превышало 5 %. Кроме того, реакция выходной переменной на возмущение не должна выходить за рамки 5 % от амплитуды возмущения. Выберете частоту <о„ и используйте метод синтеза, основанный на оценке качества ИВМО.
П-12.8. Рассмотрите систему, изображенную на рис. 12.16, где
G(5)=l.
5
Используя оценку качества ИВМО, выберите ПИ-регулятор, который при единичном ступенчатом входном сигнале обеспечивал бы его отработку системой с учетом ограничения |i/(f)| <1. Определите время установления (по критерию 2 %). При решении задачи используйте предшествующий фильтр.
744
Глава 12. Робастные системы управления
П-12.9. Рассмотрите систему, изображенную на рис. 12.16, где
3
G(s) = ^ s(s2 + 4s + 5)
Синтезируйте ПИД-регулятор, чтобы получить (а) коэффициент ошибки по ускорению Ко = 2. (б) запас по фазе 45° и (в) полосу пропускания больше, чем 2,8 рад/с. Выберите необходимый предшествующий фильтр и постройте график реакции системы на ступенчатый входной сигнал. П-12.10. На рис. 12.10 (П) изображена система управления положением инструмента станка. Передаточная функция усилителя мощности, первичного привода и оправки с инструментом равна 50
G(s) = s(s+ l)(s+ 4)(s+ 5)
При ступенчатом входном сигнале система должна иметь перерегулирование менее 25 % и время максимума реакции менее 3 с. Рассмотрите варианты с использованием ПД-регулятора, ПИ-регулятора и ПИД-регулятора и выберите наилучший из них.
П-12.11. Рассмотрите систему, изображенную на рис. 12.16, где
x-z х К
— 2 _ 2 ’
s + 2as + а
причем 1<а<Зи2<К'<4. Синтезируйте ПИД-регулятор для случая наихудшего сочетания параметров. Требуется, чтобы при оценке качества ИВМО время установления (по критерию 2 %) было менее 0,8 с.
П-12.12. В системе, изображенной на рис. 12.16,
G(s) =---—-----.
(s+p)(s+?)
где 3 <р < 5, 0<д<1и!<г<2. Регулятор имеет передаточную функцию
K(s+z,)(s+z2)
(s+ p,)(s+/?2)
причем все полюсы и нули являются вещественными. Выберите параметры регулятора так. чтобы система была робастной.
Рис. 12.10 (П). Система управления положением инструмента: 1 — эксцентрик, 2— дифференциальный усилитель, 3— усилитель мощности, 4— внешний источник энергии, 5— первичный привод, 6— червяк, 7 — перемещаемая оправка с инструментом, 8 — блок редукторов, 9— инструмент, 10 — обратная связь по положению
Задачи на синтез систем
745
П-12.13. В системе, изображенной на рис. 12.31, объект имеет передаточную функцию
(j+ 2)(s+ 4)(s + 6)
Требуется, чтобы при ступенчатом входном сигнале установившаяся ошибка была по возможности минимальной. Используя псевдоколичественный метод синтеза, выберите регулятор Gc(s) и коэффициент К и определите качество системы, если все полюсы G(s) изменятся на -50 %. Убедитесь в том, что система является робастной.
Задачи на синтез систем
СС-12.1. Синтезируйте ПИД-регулятор для использования в системе управления положением скользящей части стола, изображенной на рис. 4.1(СС). Реакция системы на ступенчатый входной сигнал r(t) должна иметь относительное перерегулирование менее 3 % и время установления (по критерию 2 %) менее 250 мс. После завершения синтеза определите реакцию системы на ступенчатое возмущение.
«)
Рис. 12.1 (С). Система управления поворотным столом
С-12.1. На рис. 12.1(C), (а) изображена система управления положением большого поворотного стола, а на рис. 12.1(C), (б) — структурная схема этой системы. Вращающий момент создается мощным электродвигателем с коэффициентом передачи Кт = 15. Система должна удовлетворять следующим требованиям: при ступенчатом изменении нагрузки ее влияние на выходную переменную в установившемся режиме должно составлять 5 % от амплитуды возмущения, в то же время реакция системы на ступенчатый входной сигнал г(/) должна быть достаточно быстрой с перерегулированием менее 5 %. Выберите коэффициент и регулятор, если (a) Gc(s) = К и (б) Gc(s) = К2 + K3s (ПД-регулятор). Получите графики реакции системы как на ступенчатый входной сигнал, так и на возмущение в случае двух разных регуляторов. Определите, необходим ли предшествующий фильтр, чтобы удовлетворить требование к перерегулированию.
С-12.2. Цифровое записывающее устройство (ЦЗУ) способно накапливать информацию объемом 1.3 гигабайта в кассете размером с кредитную карту — это примерно в 9 раз больше, чем катушечный накопитель с лентой шириной полдюйма или кассетный накопитель с лентой в чет-
746
Глава 12. Робастные системы управления
а)
Ведущий ролик (на входе)
Головка записи
Ф(/)
Вращающийся барабан
Фиксатор положения
Место натяжения
Фиксатор положения
Вал
- Ведущий ролик
Ф иксатор положен и я
ролик
Ведущий ролик (на выходе)
Фиксатор положения
Прижимной
Головка чтения
Рис. 12.2 (С). Система управления лентопротяжным механизмом
верть дюйма шириной. Стоит такое устройство несколько долларов — примерно столько же, сколько гибкий диск, хотя на нем умещается в 1000 раз больше информации. Запись на ЦЗУ может продолжаться в течение двух часов (больше, чем на любой катушечный или кассетный накопитель). А это значит, что оно проще в эксплуатации и требует меньше замен и прерываний при передаче данных. Доступ к любому файлу данных в ЦЗУ занимает не более 20 с, тогда как в катушечных или кассетных накопителях это время может достигать нескольких минут. Приводные механизмы управляются с помощью электроники так, чтобы выдерживать заданные относительные скорости барабана и ленты, как показано на рис. 12.2(C). (д). Система управления в данном случае гораздо более сложная, чем в случае компакт-диска, так как необходимо точно поддерживать скорость большего числа двигателей: барабана, приемной и подающей катушек, тонвала и обеспечивающего натяжение ленты.
Рассмотрим систему управления скоростью, изображенную на рис. 12.2 (С), (б). Параметры передаточной функции двигателя и нагрузки изменяются в процессе перемотки ленты с одной катушки на другую. Эта передаточная функция имеет вид
К„,
G(s) =
(s + ^Xs+ft)
где номинальные значения К,„ = 4,р{ = 1 ир2 = 4. Однако эти параметры изменяются в следующих диапазонах: 3<Кт< 5. 0,5 <р| <1,5 и 3,5 <р,<4.5. Реакция системы на ступенчатый входной сигнал должна быть достаточно быстрой, с перерегулированием менее 13 % и временем установления (по критерию 2 %) менее 0,5 с. Поскольку допускается перерегулирование, а момент его наступления должен быть как можно раньше, поэтому передемпфирование системы не допускается. Синтезируйте ПИД-регцлятор, который обеспечивал бы заданное качество во всем диапазоне изменения параметров. Дополнительное условие: произведение КтК3 должно быть не более 20, если номинальное значение К,„ = 4, а К3 — коэффициент из выражения (12.33).
С-12.3. К предстоящему максимуму солнечной активности НАСА готовит эксперимент, связанный с установкой гамма-телескопа на воздушном шаре, находящемся на большой высоте и рассчитанном на длительный период полета. Такой гамма-телескоп способен качественно улучшить
Задачи на синтез систем
747
Рис. 12.3 (С)
Система управления гамма-телескопом
а)
воздушном} шар>
I елее koi юм
Солнечный
Платформа с гамма-
датчик
б)
направление
к
регистрацию жесткого рентгеновского излучения, возникающего при вспышках на Солнце, при «сверхгорячих» термических явлениях, исходящего от солнечной короны и сопровождающего микровзрывы. На рис. 12.3 (С), (а) изображена платформа с гамма-телескопом, подвешенная к воздушному шару. Основными компонентами, участвующими в эксперименте, являются высотный воздушный шар, гондола с установленным на ней гамма-телескопом и трос, соединяющий гондолу с воздушным шаром. В процессе эксперимента наведение прибора на Солнце должно выдерживаться с точностью 0,1 градуса при его тенденции к изменению со скоростью 0.2 угловых секунды За 4 мс.
Оптический солнечный датчик обеспечивает измерение угла между ориентацией телескопа и направлением на Солнце и может быть представлен в виде модели первого порядка с коэффициентом усиления и полюсом s = -500. Двигатель создает момент, заставляющий поворачиваться гондолу. На рис. 12.3 (С), (б) изображена система управления азимутальным углом, (а) Коллектив инженеров решил использовать в системе ПИД-регулятор с передаточной функцией
СД5)=Кз(? + а5+г,).
5
где а = 6, а параметр b подлежит выбору. В системе также используется предшествующий фильтр. Определите К'3 и Ь так, чтобы доминирующим корням соответствовал коэффициент затухания £ = 0,8, а перерегулирование при ступенчатом входном сигнале было менее 3 %. Определите действительные значения перерегулирования, времени установления и времени максимума переходной характеристики, (б) Синтезируйте ПИД-регулятор, используя оценку качества ИВМО и значение со„ = 8. Сравните показатели качества с полученными в п. (а).
С-12.4. Во многих университетах и научных лабораториях созданы роботы - искусственные руки, способные захватывать различные предметы и манипулировать ими. Но обучение таких роботов выполнению даже самых простых операций требует составления очень сложных компьютерных программ. Теперь, однако, разработано устройство, названное Dexterous Hand Master (DHM), которое можно надеть на руку человека и зарегистрировать разведение и сгибание суставов пальцев. Каждый сустав снабжен датчиком, выходной сигнал которого зависит от положения сустава. Сигналы от всех датчиков оцифровываются и вводятся в компьютер, который впоследствии управляет рукой робота.
На рис. 12.4 (С), (а) и (б) изображено устройство DHM, а в части (в) этого рисунка приведена структурная схема управления положением сустава. Номинальное значение Кт = 1. Требуется синтезировать ПИД-регулятор так, чтобы при линейном входном сигнале установившаяся
748
Глава 12, Робастные системы управления
в)
а)
Рис. 12.4 (С). Система управления искусственной кистью руки робота
ошибка была равна нулю, а время установления (по критерию 2 %) было менее 3 с. Передаточная функция регулятора имеет вид
K3(s2 + 65+18) Gc(s) =-------------.
5
(а) Выберите коэффициент К3 и постройте график реакции системы на линейный входной сигнал. Изобразите корневой годограф, считая варьируемым коэффициент К3. (б) Найдите реакцию системы на линейный входной сигнал, считая, что Кт уменьшилось вдвое по сравнению с номинальным значением, а регулятор остался неизменным. Сравните результаты пп. (а) и (б) и сделайте выводы относительно робастности системы.
С-12.5. Современная наука и техника проявляет особый интерес к объектам, размеры которых меньше длины волны видимого света. Биологи изучают отдельные молекулы протеинов или ДНК: материаловеды исследуют дефекты и включения атомных размеров в кристаллах; специалисты по микроэлектронике создают схемы, элементы которых составляют десятые доли от размера атомов. Совсем недавно этот микромир можно было сделать видимым только с помощью сложных, а часто и разрушающих методов, таких как электронная микроскопия и гамма-спектроскопия. Этот мир лежит вне пределов доступности для таких простых приборов, как хорошо всем известные оптические микроскопы. Но теперь на вооружении науки появились совершенно новые установки — сканирующие туннельные микроскопы.
Система управления позиционированием туннельного микроскопа должна обладать точностью порядка нанометров. Одним из основных ее элементов является пьезодатчик, который изменяет свой размер в зависимости от приложенного к кристаллу напряжения. «Апертура» туннельного микроскопа обеспечивается тончайшим вольфрамовым зондом, конец которого заточен так, что он может состоять только из одного-единственного атома и иметь ширину 0,2 нм. Пьезоэлектрическая система управления подводит конец зонда к поверхности проводящего образца на расстояние одного-двух нанометров — так близко, что электронные облака атома на конце зонда и ближайшего к нему атома образца частично перекрываются. Датчик
Задачи на синтез систем
749
Рис. 12.5 (С). Система управления туннельным микроскопом.
обратной связи определяет изменение туннельного тока и преобразует его в напряжение, используемое для управления перемещением по оси z. Пьезоэлектрическое управляющее устройство перемещает зонд по вертикали так, чтобы стабилизировать туннельный ток и поддерживать постоянным зазор между концом зонда и поверхностью образца. Система управления положением зонда изображена на рис. 12.5 (С), (а), а ее структурная схема приведена в части (б) этого рисунка. Объект управления имеет передаточную функцию
G(j) =
17640 s(s2 + 59,4s+1764)
а регулятор выбран так, что Gc(s) имеет два различных вещественных нуля, т. е.
K2(TjS+ 1)(t2s + 1) -
5
(а) Определите Gc(s), используя метод синтеза, основанный на оценке качества ИВМО. (б) Определите переходную характеристику системы при наличии предшествующего фильтра и без него, (в) Определите реакцию системы на возмущение, если D(s) = l/s. (г) При регуляторе Gc(s), полученном в п. (а), и при использовании предшествующего фильтра найдите действительную переходную характеристику, если передаточная функция объекта станет равна
, 16000
G(s) = —-------------.
s(s2 +40s+1600)
С-12.6. Система из задачи С-12.5 должна быть синтезирована с помощью метода, описанного в разделе 12.6. Регулятор имеет передаточную функцию
с = K2(t,s+ 1)(t2s+ 1)
s
Выберите параметры Gc(s) так, чтобы запас по фазе в системе был примерно равен 70°. Определите переходную характеристику системы при наличии предшествующего фильтра Gp(s) и без него.
750
Глава 12. Робастные системы управления
Рис. 12.7 (С). Система управления движением частично парализованного человека
С-12.7. Применение теории управления для понимания нейрофизиологических процессов имеет давнюю историю. Еше в самом начале XX века многие исследователи описали явление управления мускулами за счет обратной связи от мускульных волокон и биодатчиков, определяющих длину мускулов и скорость их сокращения.
Анализ управления мускулами основан на теории систем с одним входом и одним выходом. Одно из предложений основывалось на экспериментальном наблюдении и сводилось к гипотезе о том, что управление длиной отдельного двигательного мускула осуществляется мускульными волокнами. Позже другие исследователи предложили рассматривать процесс изменения напряженности отдельного мускула (измеряемой датчиками как длины, так и силы) как стратегическую задачу управления двигательной реакцией.
На рис 12.7 (С) изображена модель механизма сохранения равновесия человека в положении стоя. Рассмотрим случай с человеком, у которого парализованы нижние конечности и он не может без посторонней помощи сохранять равновесие. Предлагается снабдить его искусственным регулятором, который даст человеку возможность стоять и управлять движениями ног. (а) Считая, что номинальные значения параметров К = 10, а = 12 и b = 100, синтезируйте регулятор, который при ступенчатом входном сигнале обеспечивал бы перерегулирование менее 10 %, установившуюся ошибку менее 5 % и время установления (по критерию 2 %) менее 2 с. Попробуйте использовать пропорциональный. ПИ- , ПД- и ПИД-регуляторы. (б) У уставшего человека параметры могут измениться до значений Х=15, а = 8ий = 144. Определите качество этой системы при использовании регуляторов из п. (а). Подготовьте таблицу для сравнительной оценки показателей качества, полученных в пп. (а) и (б).
С-12.8. Система управления лифтом должна обеспечивать высокую скорость его движения и остановку точно на заданном этаже, как показано на рис. 12.8 (С). В лифту может находиться от одного до трех пассажиров, однако вес лифта должен быть больше, чем вес всех пассажиров. Считайте, что кабина лифта весит 400 кг, а вес каждого пассажира равен 60 кг. Синтезируйте систему управления положением кабины лифта, обладающую точностью 1 см. В качестве исполнительного устройства используйте мощный двигатель постоянного тока, управляемый по цепи возбуждения. Считайте, что постоянная времени двигателя вместе с нагрузкой равна 1 с. постоянная времени усилителя мощности, предшествующего двигателю, равна 0,5 с, а постоянная времени
Двигатель v(0
0(0, «(0
Барабан
Сигнал от компьютера
Ремень
Трос
Третий этаж
Второй этаж
3 м
Первый
,, этаж
z(Z)
Лифт
Шахта лифта
Рис. 12.8 (С). Система управления положением кабины лифта
Задачи на синтез систем
751
обмотки возбуждения пренебрежимо мала. Требуется, чтобы при ступенчатом входном сигнале перерегулирование не превышало 6 %, а время установления (по критерию 2 %) было менее 4 с.
С-12.9. Кардиологическим больным, у которых ослаблена деятельность сердечной мышцы, может оказывать помощь искусственное электрическое устройство, выполняющее функции желудочка сердца. Это устройство преобразует электрическую энергию в поток крови за счет действия клапана, заменяющего желудочек сердца. Этот клапан возвратно-поступательного действия нагнетает кровь в фазу систолы, позволяя желудочку наполняться в фазу диастолы. Устройство может быть имплантировано последовательно или параллельно с естественным сердцем без операции на последнем, как показано на рис. 12.9 (С), (а). Это устройство питается от аккумуляторов, заряжающихся с помощью системы передачи энергии через кожу. Благодаря этому ограничивается накопление энергии в аккумуляторах и минимизируется ее расходование.
Входным сигналом устройства является напряжение, подаваемое на двигатель, а выходным — скорость циркуляции крови. Система управления данным устройством выполняет две основные задачи: она обеспечивает такое напряжение на входе двигателя, при котором клапан работает с заданным тактом, и устанавливает скорость циркуляции крови, соответствующую естественному ритму сердечных сокращений.
На рис. 12.9 (С), (б) изображена модель системы управления кардиостимулирующим устройством. Двигатель, насос и желудочек сердца представлены блоком запаздывания с временем Т = 1 с. Задача системы состоит в том, чтобы переходная характеристика имела перерегулирование менее 10 %, а установившаяся ошибка составляла не более 5 %. Кроме того, чтобы продлить срок службы аккумуляторов, их напряжение ограничено величиной 30 В. Синтезируйте (а) регулятор с передаточной функцией Gc(s) = K/s (б) ПИ-регулятор и (в) ПИД-регулятор. Сравните результаты синтеза трех разных регуляторов, отразив в виде таблицы следующие
Рис. 12.9 (С)
(а) Электрическая система стимуляции кровообращения;
(б) Система управления потоком крови
752
Глава 12. Робастные системы управления
показатели качества: относительное перерегулирование, время максимума переходной характеристики, время установления (по критерию 2 %) и максимальное значение v(f).
С-12.10. На рис. 12.10 (С), (а) изображена одна рука космического робота, а на рис. 12. 10 (С), (б) — структурная схема системы управления рукой. Электродвигатель и рука имеют передаточную функцию
G(s) =--------
s(s+10)
(а) Полагая G(s) = К, определите коэффициент К, при котором перерегулирование будет равно 4,5 %, и постройте графим переходной характеристики, (б) Синтезируйте ПД-регулятор, применив оценку качества ИВМО и считая, что соп = 10. Подберите надлежащий предшествующий фильтр Gp(s). (в) Синтезируйте ПИ-регулятор и подберите предшествующий фильтр, используя оценку качества ИВМО. (г) Синтезируйте ПИД-регулятор и предшествующий фильтр, используя оценку качества ИВМО при = 10. (д) При использовании каждого из регуляторов определите эффект, вызванный единичным ступенчатым возмущением, для чего зарегистрируйте максимальное и установившееся значения y(t). (е) При использовании каждого из регуляторов определите в случае ступенчатого входного сигнала r(t) величину перерегулирования. время максимума переходной характеристики и время установления (по критерию 2 %), (ж) Параметры объекта управления подвержены изменению за счет влияния нагрузки. Определите модуль чувствительности |5,д(7о))| при частоте ш = 5, где
П*) =
GGc(s) l+GGc(s)
(з) На основе результатов пп. (д), (е) и (ж) выберите наилучший регулятор.
С-12.11. Обеспечение космической станции электроэнергией осуществляется с помощью солнечных батарей. Панели солнечных батарей с высокой точностью должны следить за положением Солнца, чтобы максимизировать выработку электроэнергии. В системе управления используется двигатель постоянного тока, так что его передаточная функция вместе с панелями батарей
равна
G(s) =
1 s(s+25)
Необходимо выбрать регулятор Gc(s) в предположении, что фотодатчик точно отслеживает положение Солнца, т. е. H(s) = 1.
б)
A(s)
Рис. 12.10 (С)
Управление космическим роботом
Задачи, решаемые с помощью MATLAB
753
Выполните синтез регулятора, исходя из того, что (а) при ступенчатом входном сигнале перерегулирование должно быть менее 7 % и (б) при линейном входном сигнале установившаяся ошибка не должна превышать 1 %. Выберите наилучший вариант регулятора с опережением по фазе. Определите робастность системы при изменении постоянной времени двигателя на 10 %.
С-12.12. В поездах на воздушной подушке используются системы электромагнитной подвески со сверхпроводящими катушками. Такой подвеске объективно присуща неустойчивость, и связь между величиной воздушного зазора x(t) и напряжением v(z), приложенным к катушке электромагнита, характеризуется передаточной функцией
L(s) (t|S+ 1)(s2-co2)’
где Tj — постоянная времени электромагнита, a cdj — собственная частота. В системе управления используется датчик величины зазора с пренебрежимо малой постоянной времени. Для поезда, движущегося со скоростью 250 км/ч, характерны параметры т, = 0,75 с и о), = 75 рад/с. Синтезируйте регулятор так, чтобы система управления величиной воздушного зазора была устойчивой и обладала высокой точностью при наличии возмушений. возникающих в процессе движения. Структура системы управления имеет вид рис. 12.1.
С-12.13. Вернитесь к задаче об управлении аппаратом доля исследования Марса (задача С-6.2). В системе должен быть использован ПИД-регулятор и желательно, чтобы она была робастной. Система должна удовлетворять следующим требованиям: (1) максимальное перерегулирование — 18%, (2) время установления (по критерию 2 %) менее 2 с, (3) время нарастания больше или равно 0,2 с, исходя из ограничений на расходуемую энергию, (4) запас по фазе более 65°. (5) запас по модулю более 8 дБ, (6) максимальная чувствительность комплексных корней менее 1. Выберите наилучшее значение коэффициента усиления К.
С-12.14. На рис. 12.14 (С) изображена система из двух масс и пружины, где тх = m2 = 1 и 0,5 < Л < 2,0. Переменные х( и х2 доступны измерению, и на их основе можно сформировать управляющий сигнал u(t). Получите описание этой модели, выберите структуру системы управления и синтезируйте ее так, чтобы
она обладала робастностью. Определите реакцию системы на единичное ступенчатое возмущение. Считайте, что выходной переменной системы, подлежащей управлению, является х2(/).
Рис. 12,14 (С)
Задачи, решаемые с помощью MATLAB
М-12.1. На рис. 12.1 (М) изображена система с обратной связью. С помошью MATLAB постройте
график зависимости |5^| от ш, а также совместите с ним график зависимости |Г(/со)| от го, где T(s) — передаточная функция замкнутой системы.
М-12.2. Элерон самолета можно представить в виде объекта первого порядка:
Рис. 12.1 (М). Система управления с обратной связью
GW = — S+ р
где параметр р имеет разное значение для раз-
ных самолетов. Получите семейство переходных характеристик системы управления положением элерона, изображенной на рис. 12.2 (М).
754
Глава 12. Робастные системы управления
Элерон
Рис. 12.2 (М). Система управления элероном самолета
Ф)
Рис. 12.3 (М). Система управления с регулятором Gc(s)
Номинальное значение р = 10. Найдите значение К, при котором переходная характеристика (в случаер = 10) имела бы перерегулирование менее 5 % и время установления менее 0.1 с. После этого, при найденном значении К, с помощью MATLAB получите переходные характеристики для 0,1 < р < 20.
М-12.3. Рассмотрите систему управления, изображенную на рис. 12.3 (М), где cw=i-
Рис. 12.4 (М). Система управления с неопределенным параметром b
Известно, что значение J медленно изменяется с течением времени, однако для синтеза системы принято J= 10. (а) Синтезируйте ПИД-регулятор Gc(s), чтобы обеспечить запас по фазе более 45° и полосу пропускания менее 5 рад/с. (б) Используя регулятор, полученный в п. (а), разработайте скрипт MATLAB, который позволял бы строить график зависимости запаса по фазе от параметра J для диапазона 1 < J < 30.
М-12.4. Рассмотрите систему управления, изображенную на рис. 12.4 (М). Точное значение параметра b неизвестно, однако при синтезе принято номинальное значения b = 4. Что касается параметра а, то достоверно известно, что он равен 8. (а) Синтезируйте П-регулятор так, чтобы реакция замкнутой системы на единичное ступенчатое воздействие
имела время установления (по критерию 2 %) менее 5 с и перерегулирование менее 10 %. При синтезе используйте номинальное значение b = 4.
(б) Исследуйте влияние изменения параметра b на переходную характеристику замкнутой системы. Задайте значения b = 0, 1, 4 и 40 и постройте семейство переходных характеристик. Во всех случаях считайте, что в системе используется П-регулятор, синтезированный в п. (а). Сделайте выводы из полученных результатов.
М-12.5. Модель гибкой конструкции имеет передаточную функцию
= (l+to2)?+2^+w2 s2(№ + + о2)
где сои — собственная частота, а С, — коэффициент затухания. В общем случае нельзя указать точное значение коэффициента затухания, тогда как собственная частота известна достаточно точно. В качестве номинальных значений примите сои = 2 рад/с. £ = 0,005 и к - 0,1.
(а) Синтезируйте регулятор с опережением по фазе, удовлетворяющий следующим требованиям: (1) реакция замкнутой системы на единичный ступенчатый входной сигнал должна иметь время установления (по критерию 2 %) менее 200 с и (2) перерегулирование менее 50 %, (б) При регуляторе, синтезированном в п. (а), получите переходные характеристики замкнутой системы для £ = 0; 0,005; 0,1; 1. Совместите их на одном графике и проанализируйте результаты. (в) С точки зрения системы управления, какой, по вашему мнению, предпочтительнее иметь коэффициент затухания конструкции — больше или меньше номинального? Поясните ваш ответ.
Ключевые термины и понятия
755
Рис. 12.6 (М). Система управления производственным процессом при наличии запаздывания в контуре
М-12.6. Известно, что в системе управления промышленным объектом, изображенной на рис.
12. 6 (М), имеется запаздывание. На практике часто случается так, что точное значение запаздывания неизвестно. Оно может меняться непредсказуемым образом в зависимости от условий работы объекта. От робастной системы управления требуется, чтобы она функционировала в соответствии с заданными требованиями при наличии изменяющегося запаздывания.
(а) Подготовьте скрипт MATLAB, позволяющий вычислить и построить график зависимости запаса по фазе в системе на рис. 12.6 (М), если время запаздывания Т изменяется в пределах от О до 5 с. Элемент запаздывания аппроксимируйте дробно-рациональным выражением с помощью функции pade. Изобразите график указанной зависимости.
(б) Определите максимально допустимое время запаздывания, исходя из соображений устойчивости системы. Для приближенной оценки этого времени воспользуйтесь графиком, полученным в п. (а).
М-12.7. Контур системы с единичной отрицательной обратной связью имеет передаточную функцию
GH(s) =
Ф-1) s2+2s+l
Известно, что из физических соображений параметр а может изменяться только в диапазоне О < а < 1. Разработайте скрипт MATLAB, позволяющий получить следующие графики: (а) Зависимость установившейся ошибки от параметра а при отработке системой отрицательного единичного ступенчатого сигнала [т. е. R(s) = -1/s].
(б) Зависимость максимального относительного перерегулирования от параметра а.
(в) Зависимость запаса по модулю от параметра а.
(г) На основании результатов, полученных при выполнении пп. (а)-(в), сделайте выводы относительно робастности системы. В качестве критерия используйте степень влияния параметра а на установившуюся ошибку, относительную устойчивость и вид переходной характеристики.
Ключевые термины и понятия
ПИД-регулятор. Регулятор, передаточная функция которого образована тремя слагаемыми, соответственно пропорциональным звеном, интегратором и дифференциатором, выходные сигналы которых суммируются. При этом коэффициент усиления в каждом из трех каналов может настраиваться.
Предшествующий фильтр. Фильтр с передаточной функцией Gp(.v), преобразующий входной сигнал /?(s), прежде чем будет образован сигнал ошибки.
Робастная система управления. Система, обладающая заданным качеством при значительной неопределенности характеристик объекта управления.
Глава 13
Цифровые системы управления
Обзор
В системе управления с обратной связью функции регулятора или корректирующего устройства может выполнять цифровой компьютер. Поскольку ввод информации в компьютер осуществляется через определенные интервалы времени, то необходимо разработать специальный метод математического описания и анализа качества цифровых систем управления.
Цифровая система оперирует с данными, получаемыми из непрерывного сигнала путем выборки его значений в равноотстоящие моменты времени. В результате получается временная последовательность данных, называемая дискретным сигналом. Эту последовательность можно преобразовать в область переменной i и, в конечном счете, в область переменной z с помощью соотношения z = esi. Область комплексной переменной z обладает свойствами, очень похожими на свойства области переменной s преобразования Лапласа.
Для анализа устойчивости и качества цифровой системы можно использовать z-npe-образование передаточной функции. Таким образом достаточно просто можно определить характеристики замкнутой системы управления, в которой компьютер выполняет функции корректирующего устройства (или регулятора). Для определения положения корней характеристического уравнения также можно использовать метод корневого годографа. Цифровые системы управления находят широкое применение в промышленности. Они играют важную роль в управлении производственными процессами, в которых совместная работа компьютера и исполнительного устройства обеспечивает выполнение ряда ответственных операций. Данная глава по традиции завершается примером синтеза с продолжением, где будет синтезирован цифровой регулятор для системы чтения информации с диска.
13.1. Введение
Последние два десятилетия были ознаменованы резким повышение надежности и удешевлением цифровых компьютеров. В связи с этим они все шире стали применяться в качестве регуляторов (корректирующих устройств). На рис. 13.1 приведена функциональная схема одноконтурной цифровой системы управления. Компьютер в этой системе по определенной программе обрабатывает представленную в цифровой форме ошибку и выдает на выходе сигнал также в цифровой форме. Программа может быть написана так, что качество системы в целом будет равно или очень близко к заданному. Многие компьютеры способ-
13.2. Применение цифровых систем управления
757
Рис. 13.1. Функциональная схема цифровой системы управления, содержащая преобразователи сигналов. На схеме указаны типы сигналов (аналоговые или цифровые)
ны принимать и обрабатывать несколько входных сигналов, поэтому цифровые системы управления часто бывают многомерными.
Компьютер получает и обрабатывает сигнал в цифровом (численном) виде, а не в виде непрерывной переменной. В цифровой системе управления обязательно присутствует компьютер, входной и выходной сигнал которого представлены в виде числового кода. Преобразование непрерывного сигнала в цифровую форму осуществляет аналого-цифровой преобразователь (АЦП), как показано на рис. 13.1. Выходной сигнал компьютера (цифровой) преобразуется в непрерывную форму с помощью цифроаналогового преобразователя (ЦАП).
13.2. Применение цифровых систем управления
За последние тридцать лет общее число цифровых систем управления, используемых в промышленности, значительно выросло, и сейчас их насчитывается около 100 миллионов, хотя имеется большой разброс по размеру и производительности компьютеров, входящих в состав этих систем. Если учитывать только достаточно сложные системы управления, например системы управления химическими процессами пли самолетами, то число таких систем составляет примерно 20 млн.
В состав компьютера входит центральный процессор (ЦП), устройства ввода - вывода и запоминающее устройство. Размер и производительность компьютера зависят от размера, быстродействия и производительности ЦП, а также от объема, быстродействия и структуры запоминающего устройства. После 1980 г. получили широкое распространение небольшие компьютеры, называемые миникомпьютерами, а в настоящее время пользуются популярностью мощные и недорогие 16- или 32-разрядные микрокомпьютеры. В качестве ЦП в микрокомпьютерах используется микропроцессор. Выбор типа компьютера, используемого в системе управления, определяется характером поставленной задачи, объемом данных, подлежащих запоминанию, и требуемой скоростью вычислений.
Габариты компьютеров и стоимость логических элементов, используемых для их создания, уменьшаются по экспоненте. Количество активных элементов в одном см3 выросло настолько, что это позволило создать сравнительно недорогие и высокопроизводительные портативные компьютеры, вычислительные возможности которых вполне могут удовлетворить как студентов, так и специалистов-профессионалов, и которые по сути могут заменить традиционные настольные микрокомпьютеры. Быстродействие компьютеров также имеет экспоненциальный характер роста. На рис. 13.2 показано, как в последние 30 лет увеличивалась плотность транзисторов (а вместе с ней и производительность)
758
Глава 13. Цифровые системы управления
Рис. 13.2
Темпы совершенствования микропроцессоров корпораци INTEL. На оси ординат указано количество транзисторов (в млн шт.) в одном микропроцессоре
в микропроцессорах корпорации INTEL. Фактически, в соответствии с «законом Мура», плотность транзисторов удваивается каждый год, и по-видимому эта тенденция сохранится в течение следующих 20 лет. Простые подсчеты показывают, что к 2012 году микропроцессоры будут содержать более миллиарда транзисторов, а их рабочая частота достигнет 10 ГГц! Со времени появления в 1976 г. популярного тогда процессора серии 8086, содержащего всего 29 000 транзисторов и работавшего с частотой 10 МГц, был достигнут небывалый прогресс в увеличении вычислительной мощности микропроцессоров, и этот процесс продолжается и поныне. Все эти достижения буквально внесли переворот в применение теории управления и в проектирование современных цифровых систем управления. Благодаря наличию быстродействующих, недорогих и миниатюрных микропроцессоров появилась возможность автоматизировать многие производственные процессы, используя компьютер непосредственно в контуре системы управления.
Цифровые системы управления применяются во многих областях — при управлении металлорежущими станками, в металлургии, в химических процессах, при управлении самолетами и движением автомобилей и других. На рис. 13.3 приведен пример использования цифровых систем управления в авиастроении. Цифровые системы применяются для столь различных целей, как, например, объективное измерение коэффициента преломления зрачка человеческого глаза и управление моментом зажигания в автомобильном двигателе или соотношением горючего и воздуха в карбюраторе. Последнее необходимо для снижения вредных выбросов в атмосферу и уменьшения расхода горючего.
Цифровое управление имеет ряд преимуществ, куда относятся: повышенная точность измерений; использование цифровых сигналов (кодов), датчиков и преобразователей и микропроцессоров; меньшая чувствительность к шумам и помехам; возможность легко изменять алгоритм управления в программном обеспечении. Повышенная точность (чувствительность) измерений объясняется тем, что цифровые датчики и устройства работают с маломощными сигналами. Наличие цифровых сигналов дает возможность использовать широкий спектр цифровых устройств и линий коммуникации. Цифровые датчики и преобразователи способны эффективно измерять, передавать сигналы и связывать между собой различные устройства. Кроме того, многие системы объективно являются цифровыми, потому что они работают с импульсными сигналами. Примерами таких систем могут служить радиолокационные системы слежения и системы управления спутниками.
13,3. Дискретные системы
759
Рис. 13.3. Приборная доска кабины самолетов Боинг 757 и 767. Все устройства индикации и органы управления доступны каждому из двух пилотов. Цифровая система управления полетом выполняет функции навигации, пилотирования и обработки информации. В совокупности с автопилотом эта система оптимальным образом устанавливает режим работы двигателей и обеспечивает точное выдерживание курса и высоты на всех фазах полета — непосредственно с момента взлета и до приземления в конечном пункте. Система способна также выдавать рекомендации относительно наиболее выгодных с точки зрения экономии топлива скорости и высоты полета
13.3. Дискретные системы
Компьютеры, используемые в системах управления, соединяются с объектом и исполнительным устройством при помощи преобразователей сигнала. Выходной сигнал компьютера поступает на цифроаналоговый преобразователь. Мы будем считать, что все числа водятся в компьютер и выводятся из него с одним и тем же фиксированным периодом Т, называемым периодом квантования. Например, на рис. 13.4 эталонный входной сигнал представляет собой последовательность дискретных значений г(кГ). Переменные г(кТ), т(кТ) и и(кГ) являются дискретными сигналами, в отличие от m(t) которые суть непрерывные функции времени.
г(Л7) Входной эталонный сигнал
У«)
Выходной сигнал (аналоговый)
Рис. 13.4. Цифровая система управления
760
Глава 13. Цифровые системы управления
Данные, получаемые о переменных системы только в дискретные моменты времени и обозначаемые как х(кТ), называются квантованными данными или дискретным сигналом.
Квантователь
Непрерывный Квантованный
сигнал сигнал
Рис. 13.5. Идеальный
квантователь
Квантователь можно рассматривать как ключ, который замыкается каждые Т секунд на бесконечно малый отрезок времени. Рассмотрим идеальный квантователь, изображенный на рис. 13.5. Его входной сигнал обозначен как r{t), а выходной — г*(<) , где пТ есть текущий момент замыкания, а текущее значение г (f) равно г(пТ). Тогда можно записать г (Z) = г(и7)8(г - пТ), где 8 — единичная импульсная функция (8-функция).
Предположим, что мы квантуем сигнал г(Г), как показано на рис. 13.5, и получаем г (,). Тогда сигнал г (I) можно представить в виде последовательности импульсов, начинающихся при 1 = 0, разделенных интервалами в Т секунд и имеющих амплитуды г(кТ). Например, если квантуется сигнал r(f), изображенный на рис. 13.6 (а), то полученный дискретный сигнал можно изобразить в виде импульсов с амплитудами г(кТ), условно обозначенных вертикальными стрелками на рис. 13.6 (б).
Рис. 13.6
(а) Входной непрерывный сигнал r{t) и (б) дискретный (квантованный) сигнал г*(П= Хг(/гГ)б(Г-Хг7).
*=о
Вертикальными стрелками отмечены импульсы на выходе квантователя
Время (А7')
Цифроаналоговый преобразователь — это устройство, которое преобразует дискретный сигнал г (?) в непрерывный сигнал p(t). Обычно его можно представить в виде фиксатора (экстраполятора нулевого порядка, ЭПО), как показано на рис. 13.7. Экстраполятор воспринимает значение г(кТ) и сохраняет его постоянным на интервале kT<t < (А+1)7', как проиллюстрировано на рис. 13.8 для к = 0. Таким образом, значение г{кТ) имеет место на выходе экстраполятора в течение всего периода квантования.
Квантователь и фиксатор могут достаточно точно воспроизводить входной сигнал, если только он незначительно изменяется за время, равное периоду квантования Т. Реак-
Рис. 13.7
Квантователь и фиксатор (экстраполятор нулевого порядка) г(/)
Квантователь
Экстраполятор нулевого порядка
* Р(О
13.3. Дискретные системы
761
1
ХО
-----------------►
О т
Время
Время
Рис. 13.9. Реакция квантователя и экстраполятора нулевого порядка на линейный входной сигнал r\t) = t
Рис. 13.8. Реакция экстраполятора нулевого порядка на единичный импульсный входной сигнал г{к7) = 1 при к = О и z(Xr7) = О при к * О, т. е. /*(/) = 40)8(/)
ция квантователя и фиксатора на линейный входной сигнал изображена ни рис. 13.9. Аналогичная реакция на убывающий сигнал экспоненциальной формы при двух значениях периода квантования приведена на рис. 13.10. Ясно, что при Т -+ 0 (при очень высокой частоте квантования) выходной сигнал p(t) будет приближаться ко входному г(/).
Рис. 13.10
Реакция квантователя и экстраполятора нулевого порядка на сигнал r(f) = е'* при двух значениях периода квантования
б) Г= 0.2 с
Время (с)
762
Глава 13, Цифровые системы управления
Реакция экстраполятора нулевого порядка на единичный импульсный сигнал приведена на рис. 13.8, а его передаточная функция имеет вид
G0(s)=---e
S’ S
\-е-*г s
(13.1)
Цифровой компьютер и соответствующие преобразователи сигналов обладают ограниченной точностью. Под точностью в данном случае следует понимать разрешение, с которым определяются отдельные переменные. Так, точность компьютера ограничена конечной длиной машинного слова. Точность АЦП ограничена конечным числом двоичных разрядов его регистра. Поэтому говорят, что преобразованный сигнал т(кТ) включает в себя ошибку квантования по амплитуде. Если эта ошибка, а также ошибка, обусловленная конечной длиной машинного слова, малы в сравнении с амплитудой сигнала, то цифровая система является достаточно точной и эффектом квантования по амплитуде можно пренебречь.
13.4. ^-преобразование
Поскольку выходной сигнал идеального квантователя г *(/) представляет собой последовательность импульсов с амплитудами г(кТ), то его можно описать выражением
г*(/)=^г(Л7’)5(Г-А:7’), (13.2)
к=0
где предполагается, что сигнал г(/) существует для t > 0. Преобразовав (13.2) по Лапласу, получим:
. (13.3)
к=0
Это выражение представляет собой бесконечный ряд по степеням члена esI. Введем переменную
z = е'1' , (13.4)
которая осуществляет конформное отображение с 5-плоскости на z-плоскость. Тогда мы можем определить новое преобразование, называемое z-преобразованием:
Z{r(Z)} = Z{r*(0}=£r(A7>~*. (13.5)
к=0
В качестве примера найдем z-преобразование единичной ступенчатой функции u(t) [не путать с обозначением управляющего сигнала г/(/)]. Имеем:
Z[u(t)] = J w(AT)z-* = £ z~k , (13.6)
k=0 k=0
т. к. u(kT) = 1 для всех к > 0. Этот ряд можно представить в замкнутой форме, используя выражение для суммы членов геометрической прогрессии’:
1 Z
U{z) = -!—-=— (13.7)
1-z-1 z—1
* К тому же результату можно придти, воспользовавшись известным разложением (1 - Ьх) 1 = 1 + Ьх + + (Ьх)2 + (Ьх)1 + ... при условии (Ьх)2 < 1.
13,4. z-преобразование
763
В общем случае мы будем определять z-преобразование функции ДО как
Z{f(t)} = F(z)=Xf(kT)z-k.
к=0
Пример 13.1. Преобразование экспоненты
Получим z-преобразование функции Дс) = е'п/ для t > 0. Имеем
Z{e~u’} = F(z) = Ye-akrz-k =
Л=0 Л=0
Этот ряд можно представить в замкнутой форме:
F(Z}= '
Можно показать, что
Z{eu%)} = F(euTz) .
(13.8)
(13.9)
(13.10)
Пример 13.2. Преобразование синусоиды
Получим z-преобразование функции Д/) = sincu/ для t > 0.
Прежде всего представим sincnZ в виде
е/°' _ е-/“' sin a>t =-------.
2j
Иначе,
sin coz --------.
2j 2j
Тогда
F = 1 ( Z _ z = J_r z^'-e^') (Z) 2j\z-^ z-e-,a'J 2J z2-z(elu' + £-'“')+ 1
z sin coz z2 -2zcoscoZ + 1
(13.11)
(13.12)
Таблица 13.1 содержит z-преобразования часто встречающихся функций, а с более полной таблицей можно познакомиться на сайте MCS. Основные свойства z-преобразований приведены в табл. 13.2. Как и в преобразовании Лапласа, нас в конечном счете интересует выходная переменная системы y(Z). Поэтому нам необходимо научиться находить обратное z-преоб-разование, позволяющее определять y(t) по Y(z). Это можно сделать (1) путем разложения }(z) в степенной ряд, (2) разложением T(z) на простые дроби и нахождением с помощью табл. 13.1 обратного z-преобразования для каждого слагаемого или (3) с помощью формулы обращения. В этом разделе мы используем только первые два метода.
Таблица 13.1. ^-преобразования
x(t) X(s) X(z)
fl. t = 0, S(z)=J [0, 1 = кГ,к*0 1 1
fl. t = kT, -kT) = \ [0, t*kT -kTs e zk
u(t), единичная ступенчатая функция 1/s z z— 1
764
Глава 13. Цифровые системы управления
Таблица 13.1 (продолжение)
Х(Г) X(s) X(z)
Tz
t Us (z-\)2
-at 1 z
s+ a z-e°T
1 - 1 (l-e-°r)z
s(s + a) (z-l)(z-e"°7)
sinco/ CO zsin co?
s2 + co2 z2 - 2zcosco7’ + 1
COSCO/ z(z-cosco7’)
?+co2 z2-2zcosco7’ + 1
е~аТ sinw/ (0 ze~aT sin co T
(s + a)2 + co2 z2 - 2ze~aT cosco7’ + e-2°7
еаТ cosco/ s+ a z2 -ze~al cos co Г
(s + a)2 + co2 z2 — 2ze~aT cos co Г + e'2"7
Таблица 13.2. Свойства ^-преобразования
x(t) X(z)
1. fct(Z) 2. *i(0 + x2(t) 3. x(t + 7) kX(z) X,(z) + X2(z) zX(z) — zx(0)
4. tx(f) T:dX(z) dz
5. ea'x(t) 6. x(0), начальное значение 7. x(oo), конечное значение X(ze°7) limA'(z), если предел существует lim(z— l)A'(z), если система устойчива и предел существует, т. е. если все полюсы (z -l)2((z) находятся внутри единичной окружности |z| = 1 на z-плоскости
Пример 13.3. Передаточная функция разомкнутой системы
Рассмотрим систему, изображенную на рис. 13.11, где Т= 1 с. Экстраполятор имеет передаточную функцию
G0(s) =------.
S
Следовательно, передаточная функция, соответствующая отношению Y(s)/R (s). равна
^ = G0(s)G/s) = G(s) = -^4-. (13.13)
/?*(s) r(s+l)
Рис. 13.11
Разомкнутая дискретная система
эпо Объект
r(t) сГ о ► Т=1 G„(s) Р(') г s(s+l) —►У(0
13.4. z-преобразование
765
Разложение этого выражения на простые дроби дает:
G(s) = (1-е-'7 +_кД
Vs s s+ IJ
G(z) = Z{G(s)} = (l-z-)z(l -1 + -Ц. s s+lj
(13.14)
(13.15)
Выбирая из табл. 13.1 z-преобразования для каждого слагаемого, окончательно получим:
G(z)=(l-z-,)[-^-^- + —Цг (z-1)2 z—1 z—е ‘
_ (ze-r - z + 7z) + (1 - е-г - Те-7') (z-l)(z-e-7)
(13.16)
Поскольку Т = 1, то
„, , ze-1 + 1 - 2е-1 0,3678z + 0,2644 0,3678г + 0,2644
(z—l)(z—е“) (z-l)(z-0,3678) z2-l,3678z+ 0,3678
Реакцию этой системы на единичный импульсный сигнал можно найти, положив R(z) = 1, так
что Y(z) = G(z) 1. Y(z) мы можем получить путем деления числителя на знаменатель:
0,3678z + 0,2644 | z2- l,3678z + 0,3678
0,3678z -0,5031 +0,13 53z-1 0,3678z-1 + 0,7675z-2 + 0,9145z-3 + ...
0,7675 — 0,1353z-1
0,7675 - l,0497z-1 + 0,2823z-2
0,9145z-1 - 0,2823z-2
(13.17)
Итак,
Y(z) = 0,3678z-1 + 0,7675z-2 + 0,914 5z-3 + ...
Эти вычисления дают реакцию системы в моменты квантования и могут быть продолжены насколько это необходимо. В соответствии с (13.5) мы имеем:
r(z) = XX^)z-*.
А=0
Следовательно, в нашем случае мы получаем следующие значения у(кТ): у(0) = 0: у(Т) = 0,3678: у(2Т) = 0,7675; у(ЗТ) = 0,9145 ит. д. Заметим, что у(кГ) соответствуют значениям y(t) при t = кТ.
Мы получили выражение для У(г), т. е. z-преобразования выходного сигнала системы в моменты квантования. Входной сигнал имеет z-преобразование 7?(z). Поэтому можно определить передаточную функцию системы в z-области как
^=G(z). ад
(13.18)
Поскольку значения непрерывного входного сигнала берутся только в моменты квантования, то мы можем отразить этот факт, введя дополнительный (фиктивный) квантователь, как показано на рис. 13.12. При этом предполагается, что оба квантователя работают синхронно с одним и тем же периодом. Тогда очевидно, что
Y(z) = G(z) R(z) . (13.19)
Соотношение (13.19) можно отобразить в виде одного блока, как показано на рис.13.13.
Рис. 13.12. Система с квантованием выходного сигнала
Рис. 13.13. Изображение дискретной передаточной функции в виде блока структурной схемы
766
Глава 13. Цифровые системы управления
13.5. Замкнутые дискретные системы
Рассмотрим замкнутую дискретную систему, изображенную на рис. 13.14 (а). Поскольку значения входного и выходного сигналов берутся точно в дискретные моменты времени (моменты квантования), то структуру системы можно изобразить в более простом виде, как показано на рис. 13.14 (б). Тогда передаточная функция замкнутой системы T(z) будет иметь вид:
A(z) 1+G(z)
(13.20)
где предполагается, что G(z) естьг-преобразование функции G(s) = G0(s) Gp(s), т. е. произведения передаточных функций экстраполятора нулевого порядка G0(s) и объекта управления Gp(s).
б)
Рис. 13.14. Система управления с единичной обратной связью. G (z) есть z-преобразование передаточной функции G (s), представляющей объект совместно с экстраполятором нулевого порядка
На рис. 13.15 (а) изображен робот — собачка Эйбо, а на рис. 13.15 (б) приведена структурная схема замкнутой цифровой системы управления одним звеном лапы собачки. Модель системы, в которой все сигналы представлены в виде своих z-преобразований, изображена на рис. 13.15 (в). Замкнутая система имеет передаточную функцию
У(г) ч C(z)Z?(z) -----= 1 (z) =-----------.
A(z) l + G(z)£>(z)
(13.21)
Пример 13.4. Определение реакции замкнутой системы
Рассмотрим замкнутую дискретную систему, изображенную на рис. 13.16. В разомкнутом состоянии эта система (рис. 13.11) при 7"= 1 с имеет передаточную функцию, которая была получена в примере 13.3 [см. выражение (13.16)]. Тогда для замкнутой системы
УФ) G(z)
G(z) 1+G(z)’
и подставляя сюда выражение для G(z), получим:
T(z) _ 0,3678z + 0,2644
R(z)~ z2-z+0,6322
Если входной сигнал задан в виде единичной ступеньки, то
(13.22)
(13.23)
(13.24)
13.5. Замкнутые дискретные системы
767
в)
Рис. 13.16
Замкнутая дискретная система
Рис. 13.15. (а) Эйбо — игрушечный робот с большими возможностями. Он очень напоминает собаку породы чихуахуа, способен вилять хвостом, ходить вперевалку и играть с мячом. Эйбо оснащен большим количеством датчиков — осязания, зрения (с помощью миниатюрной цветной видеокамеры), обнаружения шарообразных предметов, скорости. Внутри робота находится 64-разрядный микропроцессор RISC и запоминающее устройство емкостью 16 Мб. Органы передвижения имеют 18 сочленений и управляются 18 микродвигателями, (б) Замкнутая система с цифровым регулятором, (а) Структурная схема системы, где G (z) = Z{G0(s)Gp(s)}
и
z(0,3678z+0,2644) _ 0,3678z2 + 0,2644z
(Z) ~ (z-l)(z2—z+ 0,6322) ~ z3 - 2z2 + l,6322z- 0.6322
Выполнив деление числителя на знаменатель, получим:
T(z) = 0.3678г-1 + z-2 + l.4z3 + 1,4г-4 + 1.147z-5 + ... (13.25)
Значения у(кТ) отмечены на рис. 13.17 символом □. На этом же рисунке приведена полная реакция системы, полученная с помощью MATLAB (см. раздел 13.12), а также для сравнения — реакция непрерывной системы (при Т = 0). В дискретной системе перерегулирование равно 45%. тогда как в непрерывной системе оно составляет всего 17 %. Кроме того, в дискретной системе время установления в два раза больше, чем в непрерывной.
768
Глава 13. Цифровые системы управления
Рис. 13.17 Переходные характеристики системы второго порядка: (а) непрерывная система (Г = 0), (б) дискретная система (7=1 с)
[б) Дискретная система
a) Her ферывн 1я систег ла
О 1 2 3 4 5 6 7
Время (с)
13.6. Анализ устойчивости на ^-плоскости
Линейная непрерывная система с обратной связью устойчива, если все полюсы ее передаточной функции T(s) расположены в левой половине «-плоскости, z-плоскость и «-плоскость связаны преобразованием
z = esT = е(п + /т)7'. (13.26)
Отсюда следует, что
|z| = еоГи arg z = <оГ. (13.27)
В левой половине «-плоскости ст < 0, поэтому 0 < | z | < 1. Мнимая ось «-плоскости отображается в единичную окружность на z-плоскости, а область внутри этой окружности соответствует всей левой половине «-плоскости.
Следовательно, можно утверждать, что замкнутая дискретная система устойчива, если все полюсы ее передаточной функции T(z) расположены на z-плоскости внутри единичной окружности.
Пример 13.5. Устойчивость замкнутой системы
Рассмотрим систему, изображенную на рис. 13.18, где Т = 1 и
G/«) = —. (13.28)
у s(s + 1)
Используем выражение (13.16), записав его в виде:
X (0.3678z+ 0.2644) K(az+b)
Cr (z) = —--------------= —------------, (13.29)
z2 - 1.3678z + 0,3678 z2 - (1 + a)z + a
где a = 0,3678 и b = 0.2644.
Полюсы передаточной функции замкнутой системы T(z) — это корни характеристического уравнения [1 + G(z)] = 0. Уравнение q(z) = 1 + G(z) = 0 называется характеристическим.
Рис. 13.18
Замкнутая дискретная система
40
13.7. Качество дискретных систем второго порядка
769
Итак, мы имеем:
q{z) = 1 + G(z) = z2-(l + a) z + а + Kaz + Kb = 0 . (13.30)
При К = 1 получим:
q(z) = z2 - z + 0,6322 = (z - 0.50 + >0.6182) (z - 0,50 ->0,6182) = 0 . (13.31)
Оба корня расположены внутри единичной окружности, следовательно, система устойчива. Если К = 10, то
q(z) = z2 + 2,310z + 3,012 = (z + 1,155 + >1,295) (z + 1,155 ->1,295) = 0 , (13.32)
и система неустойчива, потому что оба корня расположены вне единичной окружности. Эта система устойчива при 0 < К < 2,39.
Отметим, что дискретная система второго порядка может стать неустойчивой при увеличении коэффициента усиления, тогда как непрерывная система второго порядка устойчива при любых значениях коэффициента усиления (разумеется, в предположении, что оба полюса разомкнутой системы находятся в левой половине s-плоскости).
13.7. Качество дискретных систем второго порядка
Исследуем качество дискретной системы второго порядка, содержащей экстраполятор,
как показано на рис. 13.18, где объект имеет передаточную функцию
Gp(s) =
К s(ts+ 1)
(13.33)
(13.34)
(13.35)
Передаточная функция G(s) при произвольном периоде квантования Т имеет вид: £{(z-£)[7-t(z-1)] + t(Z-1)2} О( Z ) —---------------------------------------------- ,
(Z-l)(Z-£)
где Е = е~г1\ Запишем характеристическое уравнение замкнутой системы:
q(z) = z2 + z{K [Г- т(1 - £)] - (1 + £)} + К [т(1 - Е) - ТЕ] + Е = 0 .
Поскольку полином q(z) имеет второй порядок, а его коэффициенты вещественны, то чтобы его корни находились внутри единичной окружности, необходимо и достаточно выполнение следующих условий:
19(0)1 < 1, 9(1) > 0, 9(-1) > 0.
Эти условия были получены путем перехода от характеристического уравнения 9(z) = 0 к уравнению q(s) = 0 и проверки коэффициентов полинома 9(5) на положительность. Применив эти условия к уравнению (13.35), мы получим:
1-£
1-£-(77т)£ ’ 2(1+£)
(Т/т)(1 + £)-2(1-£)’
(13.36)
(13.37)
при К > 0 и Т> 0. Для данной системы можно вычислить максимально допустимое из соображений устойчивости значение коэффициента усиления. Соответствующие результаты приведены в табл. 13.3 для нескольких значений отношения Т/т. Если используемый в системе компьютер имеет достаточно высокую скорость вычислений и обработки данных, то можно установить Т/т = 0,1 и получить характеристики системы, очень близкие к соответствующим характеристикам непрерывной системы (при отсутствии квантования).
770
Глава 13. Цифровые системы управления
Таблица 13.3. Максимально допустимый коэффициент усиления для дискретной системы второго порядка
Пт 0 0,1 0,5 1 2
К/т 00 20,4 4,0 2,32 1,45
На рис. 13.19 приведены кривые, соответствующие максимальному перерегулированию дискретной системы второго порядка при единичном ступенчатом входном воздействии.
Рис. 13.19
Максимальное перерегулирование |у | дискретной системы второго порядка при единичном ступенчатом входном сигнале
Оценку качества в виде интеграла от квадрата ошибки можно записать в виде:
7 = - fe2(t)dt . то
(13.38)
Кривые, соответствующие постоянным значениям 1, приведены на рис. 13.20. Задавшись отношением 77т, можно определить минимальное значение I и необходимое для этого значение Кт. Этому случаю соответствует оптимальная кривая на рис. 13.20. Например, если 77т = 0,75, то чтобы минимизировать оценку качества 7, необходимо задать Кт = 1.
Кривые значений установившейся ошибки при линейном входном сигнале r(t) = t приведены на рис. 13.21. Задавшись отношением 77т, мы можем уменьшить величину установившейся ошибки, но при этом система будет иметь большее перерегулирование и время установления в случае ступенчатого входного сигнала.
Рис. 13.20
Кривые постоянных значений оценки качества ИКО для дискретной системы второго порядка
Г/г
13.8, Замкнутые системы с цифровой коррекцией
771
Рис. 13.21
Кривые постоянных значений установившейся ошибки для дискретной системы второго порядка при линейном входном сигнале r[t) = t, t > О
Пример 13.6. Синтез дискретной системы
Рассмотрим замкнутую дискретную систему, изображенную на рис. 13.18, где
s(0.1j+ l)(0,005s+ 1) ’
(13.39)
и необходимо выбрать Т и К, чтобы получить приемлемое качество системы. Влиянием постоянной времени т2 = 0,005 с мы пренебрежем, т. к. она составляет всего 5% от постоянной вре-мениТ] = 0,1 с. Для выбора параметров X и Умы воспользуемся рис.13.19, 13.20и 13.21.Ограничившись величиной перерегулирования 30% при ступенчатом входном сигнале, выберем 77т = 0,25, что дает Кт = 1,4. При этом установившаяся ошибка в случае линейного входного сигнала, имеющего единичную скорость, составляет примерно 0,6 (см. рис. 13.21).
Так как т = 0,1, примем 7’= 0,025 с и К= 14. Квантование сигналов при этом должно производиться со скоростью 40 выборок в секунду.
Перерегулирование при ступенчатом входном сигнале и установившуюся ошибку в случае линейного входного сигнала можно уменьшить, если выбрать Т/т = 0,1. Тогда при Кт = 1,6 перерегулирование при ступенчатом сигнале составит 25%, а на основании рис. 13.21 установившаяся ошибка при линейном входном сигнале, имеющем единичную скорость, будет равна 0,55.
13.8. Замкнутые системы с цифровой коррекцией
В дискретной системе, изображенной на рис. 13.15, компьютер используется в качестве корректирующего устройства, улучшающего показатели качества. Замкнутая система имеет передаточную функцию
R(z) ’ \+G{z)D{z) ’
(13.40)
Компьютер представлен передаточной функцией
(13.41)
£(z)
Во всех предыдущих рассуждениях мы полагали, что £>(z) - К. Теперь, чтобы продемонстрировать преимущества использования компьютера в качестве корректирующего
772
Глава 13, Цифровые системы управления
устройства, мы еще раз рассмотрим систему второго порядка, содержащую экстраполятор, в которой объект управления имеет передаточную функцию
Gp(s) =
1
s(s +1)
а период квантования Т= 1 с. Тогда (см. выражение 13.16) ч 0,3678(2+0,7189)
G(z ) =---------------.
(z-l)(z-0,3678)
(13.42)
Если выбрать
Д(2)Л-^-0^
(13.43)
то мы сократим полюс функции G(z) в точке z = 0,3678 и останется определить два парамет-
ра, К и г. Если принять 1359(2-03678) z +0,240
то мы получим
G(z)Z)(z) =
0,50(z + 0,7189) (z-l)(z + 0,240)
(13.45)
Вычисление реакции системы на единичный ступенчатый сигнал показывает, что выходной сигнал становится равным входному в четвертый момент квантования и далее остается неизменным. На рис. 13.22 приведены реакции системы без коррекции и с коррекцией. Перерегулирование в скорректированной системе составляет 4 %, в отличие от 45 % в системе без коррекции. Изложение аналитического метода выбора параметров D(z) выходит за рамки этой книги, тем не менее мы уделим внимание двум методам синтеза регулятора: (1) методу преобразования Gc(s) в D(z), который рассматривается ниже, и (2) методу корневого годографа на z-плоскости (в разделе 13.10).
Первый метод заключается в том, что сначала в непрерывной системе, изображенной на рис. 13.23, при заданном объекте управления Gp(s) синтезируется регулятор Gc(s). Затем при заданном периоде квантования Т передаточная функция Gc(s) преобразуется в эквивалентную £>(z). Непрерывный регулятор Gc(s) синтезируется одним из методов, рассмотренных в главе 10, после чего определяется соответствующий цифровой регулятор в системе со структурой рис. 13.15.
Рис. 13.22 Переходные характеристики дискретной системы второго порядка
Без коррекции
С корр екцией
О IT 2Т ЗТ 4Т 5Т 6Т 1Т
Время (с)
13,8, Замкнутые системы с цифровой коррекцией
773
Рис. 13.23
Непрерывная модель дискретной системы
№)
Рассмотрим регулятор первого порядка
с 4- п
Gc(s) = K-—- (13.46)
s+ о и цифровой регулятор
Найдем z-преобразование Gc(s) и приравняем его передаточной функции D(z):
Z{Gc(s)} = £>(z). (13.48)
Тогда связь между двумя передаточными функциями будет определяться соотношениями А = е“т и В = е~ьт и, полагая s = О,
С^-=К~. (13.49)
1-В b
Пример 13.7. Синтез по требованию к запасу по фазе
Рассмотрим систему, в которой объект управления имеет передаточную функцию
, ч 1740 G„ (s) =---------
р 5(0,25s+1)
(13.50)
Попробуем синтезировать регулятор Gc(s), обеспечивающий запас по фазе 45° на частоте среза сос = 125 рад/с. Построив диаграмму Боде для Gp(s), мы увидим, что запас по фазе равен 2°. Воспользовавшись методом, изложенным в разделе 10.4, определим требуемое отношение полюса Gc(s) к нулю, которое будет равно а = 6,25. Поскольку задано сос = 125 и известно, что лу. = Jab, то мы получим а = 50 и b = 312. Таким образом, регулятор с опережением по фазе бу-
дет иметь передаточную функцию
Gc(s) =
K(s+ 50) s+312
(13.51)
Коэффициент К выберем так, чтобы выполнялось условие |GpGc(/co)| = 1 при со = сос = = 125 рад/с, т. е. К= 5,6. Далее передаточную функцию Gc(s) необходимо преобразовать вD(z). используя приведенные выше соотношения. Выбрав Т ~ 0,001 с, получим:
А = е-°-05 = 0,95; В = е~°-312 = 0,73; С = 4,85 .
Тогда д ^-0,95) z—0,73
Разумеется, если выбрать другое значение периода квантования, то и параметры D(z) будут другими.
Как правило, следует выбирать достаточно малый период квантования, чтобы методы синтеза непрерывных систем были адекватны и Haz-плоскости. Однако не следует выбирать и слишком малое значение Т из-за ограничений на вычислительные возможности компьютера. Рекомендуется выбирать период квантования 7» 0,1 fB, где fB = сой/2л и ав есть полоса пропускания замкнутой непрерывной системы.
774
Глава 13, Цифровые системы управления
В системе, синтезированной в примере 13.7, полоса пропускания £ой =180 рад/с, или fB = 28,6 Гц. Следовательно, мы должны выбрать период квантования Г= 0,03 с. Заметим, что в примере 13.7 было выбрано значение Т= 0,01 с.
13.9. Система управления движением рабочего стола
В ряде производственных процессов важно обеспечить точное позиционирование рабочего стола. Предположим, что по каждой из осей стол перемешается с помощью двигателя и червячной передачи, как показано на рис. 13.24 (а). Мы рассмотрим только систему управления движением по осих, изображенную на рис. 13.24 {б). Система должна обладать достаточно высоким быстродействием с как можно меньшим временем нарастания и перерегулированием при ступенчатом входном сигнале, не превышающем 5 %. Время нарастания Тх определяется в соответствии с рис. 5.7.
Для проектирования системы выберем усилитель мощности и электродвигатель, так что структура системы примет вид рис. 13. 25. С учетом передаточных функций двигателя и усилителя мощности мы получим:
s(s + 20)(.s+10) ’
(13.53)
Рис. 13.24. Система управления положением рабочего стола: (а) исполнительное устройство и стол; (б) структурная схема системы
Рис. 13.25. Модель системы управления положением рабочего стола
13,9. Система управления движением рабочего стола 775
Сначала мы рассмотрим непрерывную систему и синтезируем регулятор, как это было описано в разделе 13. 8, а затем перейдем от Gc(s) к D(z). В качестве первой попытки возьмем регулятор в виде простого коэффициента усиления К и определим реакцию системы на входной сигнал. Построив корневой годограф, мы найдем, что при К = 700 доминирующим комплексным корням соответствует коэффициент затухания С, = 0,707 и, следовательно, можно ожидать, что перерегулирование составит 5 %. Далее путем моделирования можно убедиться, что перерегулирование действительно равно 5 %, время нарастания равно 0,48 с, а время установления (по критерию 2%) составляет 1,12 с. Эти результаты приведены в табл. 13.4.
Таблица 13.4. Качество системы при двух регуляторах
Регулятор (7t(.v) К Относительное перерегулирование, % Время установления, с Время нарастания, с
1. К 700 5,0 1,12 0.48
2. K(s + ll)/(s + 62) 8000 5,0 0.60 0,25
В качестве следующей попытки используем регулятор с опережением по фазе: Gc(s) = K(s+al (13.54)
s+b
В соответствии с методикой, изложенной в разделе 10.5, выберем нуль регулятора №—11, чтобы он был расположен непосредственно под доминирующими комплексными корнями. Тогда полюс регулятора должен занимать положение 5 = -62. Вычислив коэффициент усиления, соответствующий положению доминирующих корней, получим значение К = 8000 . При этом реакция системы на ступенчатый входной сигнал будет иметь время нарастания 0,25 с, а время установления (по критерию 2 %) 0,60 с. Эти показатели значительно лучше, чем в предыдущем случае, и мы остановимся на данном типе регулятора.
Теперь остается выбрать период квантования и, используя метод, описанный в разделе 13.8, найти D(z). Время нарастания в скорректированной непрерывной системе равно 0,25 с, поэтому чтобы получить практически такую же реакцию дискретной системы, необходимо выбрать Т « Тг. Примем 7= 0,01 с. Мы имеем
г . . 8000(5+11)
GC(S) =-----—----
5+62
Тогда
D(z) = C — z-B
где Л = е пг= 0,8958 и В = еЬ2Т = 0,5379 .
Далее,
а(1-2?) 8000 11 0,462
С = л-------=-------------= О29э .
6(1-Л) 62 0,1042
Используя цифровой регулятор с найденной передаточной функцией D(z), можно ожидать, что показатели качества будут очень близки к полученным в непрерывной системе.
776
Глава 13. Цифровые системы управления
13.10. Корневой годограф цифровых систем управления
Рассмотрим систему, изображенную на рис. 13.26. Напомним, что G(s) = G0(s) Gp(s). В замкнутом состоянии система имеет передаточную функцию
Рис. 13.26. Замкнутая система с цифровым регулятором. Характеристическое уравнение системы имеет вид
1 + KG(z) D(z) = 0 ,
что по форме аналогично характеристическому уравнению непрерывной системы, имеющей в разомкнутом состоянии передаточную функцию KG(s). Поэтому мы можем, варьируя коэффициент усилениях, построить корневой годограф дискретной системы. Правила построения корневого годографа приведены в табл. 13.5.
Таблица 13.5. Корневой годограф на .аг-плоскости
1. Корневой годограф начинается в полюсах и заканчивается в нулях передаточной функции G(z)£>(z).
2. Корневой годограф включает в себя отрезки действительной оси, расположенные слева от нечетного числа полюсов и нулей.
3. Корневой годограф симметричен относительно действительной оси.
4. Корневой годограф может отрываться от действительной оси и возвращаться на нее. Точки отрыва и точки входа определяются из уравнения
^=_^(£)=F(Z)
£(z)
при z = ст. Значения ст находятся путем решения уравнения
^(а)_0
tfc
5. Точки, принадлежащие корневому годографу, должны удовлетворять уравнению
1 + XG(z)£»(z) = 0 ,
или
| KG(z)D(z) 1 = 1 и arg G(z)D(z) = 180° ± А360°, А: = 0, 1, 2, ...
Пример 13.8. Корневой годограф системы второго порядка
Рассмотрим систему, изображенную на рис. 13.26, при £>(z) = 1 и G;?(.v) = 1/s2. Тогда KG(z) = kt2(z+^\ 2(z-l)2
Примем T = 42 и построим корневой годограф. Мы имеем:
KG(z)=K(z+1} .
(z-1)2
13,10, Корневой годограф цифровых систем управления
777
Рис. 13.27
Корневой годограф к примеру 13.8
Положение на z-плоскости полюсов и нуля этой функции показано на рис. 13.27. Характеристическое уравнение системы имеет вид:
l+XG(z) = l+X(z+^ = 0.
(z-1)2
Положим z = ст и выразим отсюда К'.
х = -^£ = к(о).
с+ 1
Из условия dF\c)ldG - 0 найдем корни Ст| = -3 и ст2 = 1. Корни выходят из двух полюсов при ст2 = 1 и возвращаются на действительную ось в точке Ст] = -3, как показано на рис. 11.27. На этом рисунке изображена также единичная окружность. Оба корня всегда расположены вне единичной окружности, поэтому система неустойчива при любых значениях К > 0.
Теперь мы вернемся к синтезу цифрового регулятора D(z), обеспечивающего заданное качество системы, и воспользуемся для этого методом корневого годографа. Выберем регулятор с передаточной функцией
z- Ь
Числитель (z - а) выберем так, чтобы сократить один из полюсов, лежащих на положительном направлении действительной оси. Затем выберем (z - Ъ) так, чтобы обеспечить желаемое положение комплексных корней скорректированной системы внутри единичной окружности.
Пример 13.9. Синтез цифрового регулятора
Вернемся к системе из примера 13.8, где Gp(s) = 1/s2 , и синтезируем регулятор, обеспечивающий устойчивость и заданное качество системы. Если D(z) = 1, то, как мы видели, система неустойчива. Выберем £)(z) в виде
D(z) = —
Z— о
так что
KG(z)D(z) = X(z+P(z д) . (z—l)2(z—b)
778
Глава 13, Цифровые системы управления
Если принять а = 1 и b = 0,2, то мы получим:
KG(z)D(z) = K^z+1} .
(z-l)(z-0,2)
Используя выражение для F(o), мы найдем точку входа корневого годографа на действительную ось z = -2,56, как показано на рис. 13.28. Единичную окружность корневой годограф пересекает при К = 0,8. Таким образом, система устойчива при К < 0,8. Если принять К = 0,25, то реакция системы на ступенчатый входной сигнал будет иметь перерегулирование 20 % и время установления (по критерию 2 %), равное 8,5 с.
Если полученное качество является неудовлетворительным, то можно изменить вид корневого годографа, выбрав а = 1 и Ъ = -0,98, так что
KG(z)D(z) =----(г+.У— « 2L
(z-l)(z+0,98) z-1
В этом случае корневой годограф будет расположен на действительной оси. При К = 1 корень характеристического уравнения находится в начале координат и T(z) = = 1/z = z’1. Реакция дискретной системы на ступенчатый входной сигнал (в моменты квантования) равна этому сигналу, но с задержкой на один период квантования.
На z-плоскости можно изобразить линии постоянных значений Связь между а-плоскостью и z-плоскостью определяется соотношением z = esl. Линии постоянных значений С, на s-плоскости представляют собой пучок прямых, выходящих из начала координат и определяемых уравнением
— = - tg6 = -tg(arcsinQ = —. .
“ л/1-С2
13.11. Реализация цифровых регуляторов
779
Рис. 13.29
Кривые постоянных значений £ на z-плоскости
Поскольку 5 = ст + ja, то z = е°7 • е1’"1, где
Семейство линий постоянных значений С, на z-плоскости приведено на рис. 13.29. Во многих практических случаях при синтезе систем задаются значением <^=1/V2. Тогда ст = - со и z = е““7 • е"0' = е"“7 ’ /е, где 6 = тТ.
13.11. Реализация цифровых регуляторов
Рассмотрим непрерывный ПИД-регулятор с передаточной функцией
^-=Gc(s) = K}+^+K,s. (13.56)
X (S) s
Цифровую реализацию этого регулятора можно получить, если использовать дискретную аппроксимацию операций дифференцирования и интегрирования. Для производной по времени мы воспользуемся правилом обратной разности:
dx 1
w(^) = - =^{х(ЛТ)-х[(А-1)7]}. (13.57)
dt i=kT Т
Применив к (13.57) z-преобразование, получим:
U(z) = (lz^-) X(z) = X(z ).
Т lz
Операцию интегрирования можно аппроксимировать с помощью формулы прямоугольников:
и(кТ) = и[(к-1)Т] + Тх(кТ) , (13.58)
где и(кТ) - выход интегратора в момент t—кТ. Применив к (13.58) z-преобразование, полу
чим:
(7(z) = z *(7(z) + TX(z) ,
780
Глава 13. Цифровые системы управления
откуда передаточная функция дискретного интегратора U(z) Tz хй)"7й ’
Таким образом, передаточная функция цифрового ПИД-регулятора имеет вид:
Tz z-1
Gc(z) = Kx + К2—— + К3 — z— 1 Tz
(13.59)
На основании этой передаточной функции можно получить разностное уравнение, описывающее алгоритм работы цифрового ПИД-регулятора [мы используем обозначение х(кТ) = х(Л)]:
и{к) = Кхх(к)+К2\и(к-\)+Тх(к)\ + ^-[х{к)—х{к-\)\^= Г К-
К К
= КХ+К2Т + -^- х(к)—^-х(к-\)+К2и(к-Т).
(13.60)
Т
Вычисления по уравнению (13.60) можно выполнить с помощью компьютера или микропроцессора. Разумеется, можно реализовать также ПИ- или ПД-регулятор, установив соответствующий коэффициент усиления равным нулю.
13.12. Анализ устойчивости систем управления с помощью MATLAB
Анализ и синтез дискретных систем управления значительно облегчается при использовании интерактивных компьютерных средств. Многие функции MATLAB, применяемые к непрерывным системам, имеют аналоги, разработанные специально для дискретных систем. Модели объектов в виде дискретных передаточных функций получаются в MATLAB с помощью функции tf. Подобно тому, как это делалось в непрерывных системах (см. главу 2). Применение функции tf проиллюстрировано на рис. 13.30. Там же показано, каке помощью функций c2d и d2c можно выполнить преобразование модели системы. Функция c2d преобразует непрерывную систему в дискретную, а функция d2c — наоборот. Например, рассмотрим объект управления с передаточной функцией
как показано на рис. 13.16. Ранее [см. выражение (13.16)] при периоде квантования Т= 1 с была получена передаточная функция
ч 0,3678(z + 0,7189) 0,3678z+ 0,2644 ,,,,,,
G(z ) =----------------= —-----------------. (13.61)
(z- l)(z- 0,3678) z2 - l,3678z + 0,3678
На рис. 13.31 показано, как та же самая передаточная функция может быть получена с помощью MATLAB.
При моделировании дискретных систем также используются функции step, impulse и Isim. Применение функции step, с помощью которой определяется переходная характеристика системы, проиллюстрировано на рис. 13.32. Реакция системы на единичный импульсный сигнал находится с помощью функции impulse, а функция Isim позволяет найти реакцию системы на произвольный входной сигнал. Применение функций impulse и Isim
13.12. Анализ устойчивости систем управления с помощью MATLAB
781
Рис. 13.30. (а) Функция tf. (б) Функция c2d. (а) Функция d2c
Рис.13.31
Использование функции c2d для преобразования G(s) = G0(s)Gp(s) в <ад
% Этот скрипт преобразует передаточную функцию
% Gp=1/s(s+1) в дискретную форму при периоде % квантования Т=1с.
%
num=[1]; den=[1 1 0]; sysc=tf(num,den);
Т=1; ч-----------------------------
Период квантования
[sysd]=c2d(sysc,T,'zoh’)
Экстраполятор нулевого порядка
Выход
Передаточная функция: 0.3679 z + 0.2642
гЛ2-1.368 z +0.3679
Период квантования: 1
проиллюстрировано соответственно на рис. 13.33 и 13.34. Эти функции применительно к дискретным системам действуют по сути так же, как аналогичные функции для непрерывных систем.
Далее мы вернемся к примеру 13.4 и покажем, как можно получить переходную характеристику, не прибегая к утомительной процедуре деления числителя на знаменатель.
782
Глава 13. Цифровые системы управления
Рис. 13.32 Применение функции step для определения реакции системы у(кТ) на единичный ступенчатый сигнал
Ступенчатый сигнал
Система G(z)
^Х°-Д ► ГЦ)
G(z)=sys
Т должно быть задано в виде T-.T^.Tf, где Ц — период квантования
^=(Г1)
[y,T]=step(sys,T)
Рис. 13.33 Применение функции impulse для определения реакции системы у(кТ) на единичный импульсный сигнал
ЛЦ)=1
Импульсный сигнал
Система Выход СЦ)
♦ К*)
Рис. 13.34 Применение функции Isim для определения реакции системы у(кТ) на сигнал произвольного вида
Пример 13.10. Переходная характеристика дискретной системы
В примере 13.4 мы рассмотрели задачу определения переходной характеристики замкнутой дискретной системы. В этом примере мы получили ответ путем утомительного деления числителя на знаменатель. Тот же результат, но гораздо проще, можно получить с помощью функ
13.12. Анализ устойчивости систем управления с помощью MATLAB 783
ции step, как показано на рис. 13.32. На рис. 13.35 показано, как находится переходная характеристика замкнутой системы с передаточной функцией
Y(z) 0,3678г + 0,2644
R(z)~ г2-2+0,6322
Соответствующая переходная характеристика дискретной системы изображена на рис. 13.17. Для определения действительной реакции системы в виде непрерывной функции y(t) был использован скрипт MATLAB, приведенный на рис. 13.36. В этом скрипте член е лУ был аппроксимирован дробно-рациональным выражением с помощью функции pade второго порядка при периоде квантования Т =1 с.
Использование компьютера в качестве цифрового корректирующего устройства было рассмотрено в разделе 13.8. В следующем примере мы рассмотрим ту же задачу, но решим ее с помощью MATLAB.
Рис. 13.35
Реакция у(кТ) дискретной системы второго порядка на единичный ступенчатый входной сигнал
% Этот скрипт вычисляет переходную характеристику у(кТ) % дискретной системы из примера 13.4.
%
num=[1]; den=[1 1 0];
sysc=tf(num,den);
sysd=c2d(sysc, 1 ,‘zoh’);
sys=feedback(sysd,[1]);
T=[0:1:20]; step(sys.T)
Пример 13.11. Корневой годограф цифровой системы управления
Напомним, что выражение (13.16) соответствует передаточной функции объекта управления ч 0.3678(2+0,7189) (j(Z) =-------------------------------------------- .
(z-l)(z-0,3678)
Выберем регулятор с передаточной функцией
*(2-0,3678) z+0,2400
где К — параметр, подлежащий определению. Если гппм г 0,3678(2+0,7189) (2 -l)(z + 0,2400)
(13.62)
784
Глава 13. Цифровые системы управления
Рис. 13.36
Реакция системы, изображенной на рис. 13.16, на единичный ступенчатый входной сигнал
10 15 20
Время
то мы сталкиваемся с задачей, для решения которой непосредственно можно воспользоваться методом корневого годографа. Функция rlocus применительно к дискретным системам действует точно так же. как и для непрерывных систем. На рис. 13.37 показано, как с помощью этой функции можно построить корневой годограф, соответствующий выражению (13.62). Напомним, что область устойчивости находится внутри единичной окружности на z-плоскости. Так же как и в непрерывных системах, функцию rlocfind можно использовать для определения коэффициента усиления, соответствующего любому заданному положению корней на годографе. Используя эту функцию, мы можем установить, что корни характеристического уравнения замкнутой дискретной системы будут находиться на единичной окружности при К = 4,639.
13.13. Пример синтеза с продолжением: система чтения информации с диска
□ В данной главе мы синтезируем цифровой регулятор для системы чтения информации с диска. При вращении диска соответствующий датчик, связанный с головкой, определяет номер дорожки и позволяет вычислить сигнал ошибки. На основании этого сигнала дисковод узнает, что дорожка найдена неверно, и возвращается назад. Так как диск вращается с постоянной скоростью, то время Тмежду изменением положения головки является постоянным. Период квантования обычно находится в пределах от 100 мкс до 1 мс. Таким образом, мы получаем информацию об ошибке в дискретные моменты времени. Чтобы обеспечить желаемое качество системы, мы можем использовать цифровой регулятор, как показано на рис. 13.38. В этой главе мы поставим целью определить D(z).
13.13. Пример синтеза с продолжением: система чтения информации с диска 785
Рис. 13.37
Функция rlocus применительно к дискретным системам
% Этот скрипт строит корневой годограф для
% дискретной системы с передаточной функцией %
% K(0.3678)(z+0.7189)
% ----------------------
% (z-1)(z+0.2400)
%
num=[0.3678 0.2644]; den=[1.0000 -0.7600 -0.2400]; sys=tf(num,den);
rlocus(sys); hold on
x=[-1:0.1:1]; y=sqrt(1-x.A2);
plot(x,y,‘-’,x,-y,‘-’)
Изображение единичной окружности
»rlocfind(sys) <--------------------
Отметьте точку на корневом годографе (в графическом окне)
selectedpoint =
-0.4787 + 0.8530I
Определение К, соответствующего пересечению корневого годографа с единичной окружностью
ans =
4.6390
К = 4.639
Сначала найдем G(z):
G(z) = Z{G0(s)Gp(5)}.
Поскольку
Gp(s) =
5
5(5+ 20)
(13.63)
то
G0(s)Gp(S) =
\-esT> 5
s ) 5(5+20)
Рис. 13.38
Замкнутая система с цифровым регулятором, где G (z) = Z{G0(s)Gp(s)}
R{z)
786
Глава 13. Цифровые системы управления
Учтем, что при а = 20 и Т= 1 мс е а1 - 0,98. Тогда очевидно, что полюс 5=-20 в выражении (13.63) имеет незначительный эффект, поэтому можно приблизительно считать, что
Gp(s)«
0,25
s
Тогда мы получим
G(z)=Z<
l-e~sT
s s
=(1- z-1 )-25-zJ-Ц =(1-) 0,25-
s~
Tz _ 0,25T _ 0,25-10~3
(z-l)2 z-l” z-1
Цифровой регулятор D(z) мы должны выбрать так, чтобы удовлетворить требованиям, предъявляемым к качеству системы. Если принять D(z) = К, то мы получим:
£>(z)G(z) =
Л:0,25 10~3 z-1
Корневой годограф данной системы изображен на рис. 13.39. Если К = 4000, то D(z)G(z) = -L.
Следовательно, замкнутая система имеет передаточную функцию
l+£)(z)G(z) z
т. е. следует ожидать, что время реакции данной системы на ступенчатый входной сигнал будет минимальным. Действительно, перерегулирование равно 0 %, а время установления составляет 2 мс.
Рис. 13.39
Корневой годограф
13.14. Резюме
Последние два десятилетия были ознаменованы резким повышением надежности и удешевлением цифровых компьютеров. В связи с этим они все шире стали применяться в системах управления в качестве регуляторов (корректирующих устройств). За время, равное периоду квантования Т, компьютер способен выполнить большое количество вычислений и сформировать выходной сигнал, который затем используется для управления объектом. Цифровые системы управления в настоящее время используются в самых разных областях, в том числе в химическом производстве, в авиации, в металлургии и металлообработке и во многих других.
Упражнения
787
Основным математическим аппаратом теории дискретных систем является ’-преобразование. С его помощью решаются задачи анализа устойчивости и качества, а также синтеза систем управления, в состав которых входит цифровой компьютер.
Упражнения
У—13.1. Укажите, какие из следующих величин являются непрерывными, а какие дискретными.
(а) Линии равной высоты на географической карте.
(б) Температура в помещении.
(в) Показания цифровых часов.
(г) Счет в баскетбольной игре.
(д) Выходной сигнал громкоговорителя.
У-13.2. (а) Определите значения у(кТ) для к = 0, 1, 2, 3, 4, если
Y(z) = ^-----
z2-3z+2
(б) По полученным значениям у(кТ) найдите общий вид этой зависимости как функции к. Ответ'. у(0) = 0; у(Т) = 1; у{2Т) = 3; у(37) = 7; у(47) = 15.
У-13.3. Реакция системыу(кТ} = кТ при к>0. Найдите соответствующее z-преобразование У(г),
Tz Ответ: Y(z) =-----х .
(z-1)2
У-13.4. Дана функция
T(j) =-----------------
s(s + l)(s + 5)
Используя разложение на простые дроби и табл. 13.1, найдите T(z) при Т= 0.2 с.
У-13.5. На рис. 13.5 (У), (а) изображен космический челнок с рукой робота. Астронавт управляет рукой робота и захватом, пользуясь визуальным наблюдением через иллюминатор и изображением на экране монитора, получаемым от телекамер. Обсудите возможность использования для этих целей цифровой системы управления и изобразите ее функциональную схему, где компьютер участвует как в управлении, так и в формировании изображения на экране.
У-13.6. На рис. 13.6 (У) изображена система управления роботом, осуществляющим покраску корпуса автомобиля. Структура системы имеет вид рис, 13.26, где
KG(s) =---—-----
р s(0.5s+l)
Рис. 13.5 (У), (а) Космический челнок и рука робота, (б) Астронавт управляет рукой робота
788
Глава 13. Цифровые системы управления
Рис. 13.6 (У). Система покраски корпуса автомобиля
В системе должен обеспечиваться запас по фазе 45°. Непрерывный регулятор для данной системы был синтезирован в разделе 10.8. Определите £)(z), считая Т = 0.001 с.
У-13.7. Задано z-преобразование сигнала
K(z) = / + 2f+1 z3 - 1.5z2 + 0,5z
Найдите первые четыре значения сигнала, т. е. у(0), у( 1), у(2) и у(3).
У-13.8. Определите, устойчива ли замкнутая система, если ее передаточная функция
z2 + z
Т (z) = -=-------.
z2+0,lz-0,2
Ответ', устойчива.
У-13.9. (а) Определите у(кТ) для к = 0, 1. 2, 3, если
(б) Получите общее выражение для у(к7) как функцию к.
У-13.10. Передаточная функция системы G(z) задана выражением (13.34), где Т = 0,01 с и т = = 0,008 с. (а) Определите значение К. при котором перерегулирование в замкнутой системе не будет превышать 40 %, (б) Определите установившуюся ошибку при линейном входном сигнале, изменяющемся с единичной скоростью.
(в) Определите значение К. минимизируюшее интеграл от квадрата ошибки.
У-13.11. Объект управления имеет передаточную функцию г . . юо gp^ = —2—— р S2 + 100
(а) Определите соответствующую функцию G(z) с учетом того, что объекту управления предшествует экстраполятор нулевого порядка. Период квантования равен 0,05 с. (б) Определите, устойчива ли цифровая система, (в) Изобразите импульсную переходную характеристику системы для первых 15 моментов квантования, (г) Изобразите график реакции системы на синусоидальный сигнал той же частоты, что и собственная частота системы.
У-13.12. Определите z-преобразование для
Х(з) = /+-?......
52 + 3s+2
если период квантования равен 2 с.
У-13.13. Дискретная система имеет характеристическое уравнение z2 + (К - l,5)z + 0,5 = 0.
Определите диапазон значений К, при которых система устойчива.
Ответ: 0 < К < 3.
Задачи
789
У-13.14. В системе, изображенной на рис. 13.18, объект имеет передаточную функцию
Gp(s) =
К s(s + 3)
а период квантования Т= 0,5 с. Определите, устойчива ли система, если К - 5. Найдите максимально допустимое значение К из соображений устойчивости.
Задачи
3-13.1. Сигнал r(t) = sinw/, где со = 1/л, подвергается квантованию с периодом Т= 0.25 с. Представьте графически этот сигнал и выходной сигнал квантователя г (t) для первых 2 секунд.
3-13.2. Сигнал r(t) = sinco/, где со = 1/л. подвергается квантованию с периодом Т= 0,25 с. Квантованный сигнал поступает на вход экстраполятора нулевого порядка, как показано на рис. 13.7. Представьте графически выходной сигнал экстраполятора p(f) для первых 2 секунд.
3-13.3. В системе, изображенной на рис. 13.3 (3). G(s)= l/(.v + 1), а входной сигнал r(<) = i, t > 0. Определите у(кТ) для первых 4 моментов квантования. Период квантования Т= 0.2 с.
3-13.4. В замкнутой системе, содержашей экстраполятор. объект имеет передаточную функцию
GrU) = — 1 s+ 2
Определите G(z), если Т = 1 с.
3-13.5. В системе из задачи 3-13.4 r(t) есть единичный
ступенчатый сигнал. Вычислите реакцию системы
путем деления числителя на знаменатель. Рис. 13.3 (3). Дискретная система
3-13.6. Для системы из задачи 3-13.4 найдите начальное
и конечное значения выходного сигнала непосредственно по Y(z).
3-13.7. В системе, изображенной на рис. 13.18, объект управления имеет передаточную функцию Gp(s) = K/[s (0,5s + 1)]. Выберите коэффициент усиления К и период квантования 7'так, чтобы при единичном ступенчатом входном сигнале перерегулирование не превышало 0.3, а при линейном входном сигнале, изменяющемся с единичной скоростью, установившаяся ошибка была менее 1,0.
3-13.8. Рассмотрите систему с цифровой коррекцией, изображенную на рис. 13.26, где 7'= 1 с и
KG (s) =—-—.
р s(s+W)
Считая, что
77(2)=
z-0,3678
Z+ г
выберите параметры К и г из диапазонов 1<К<2иО<г<1 . Определите реакцию скорректированной системы на ступенчатый входной сигнал и сравните ее с реакцией системы без коррекции.
3-13.9. На рис. 13.9 (3) изображена дистанционно управляемая подвешенная камера, созданная для обслуживания профессиональной футбольной лиги. Система управления позволяет перемещать камеру по любой из трех координат и делает возможным обозревать все поле. Система управления приводом каждого рычажного блока имеет структуру, изображенную на рис. 13.18, где
j(s+1)(0,1s+1) ’
790
Глава 13. Цифровые системы управления
Рис. 13.9 (3)
Видеокамера для наблюдения за футбольным полем
В случае непрерывной системы необходимо подобрать Gc(s) так, чтобы запас по фазе был равным 45°. Выберите необходимое значение частоты среза и периода квантования, чтобы перейти к D(z). Воспользуйтесь методом преобразования Gc(s) в D(z).
3-13.10. Рассмотрите систему, изображенную на рис. 13.15. в состав которой входит экстраполятор нулевого порядка, а объект имеет передаточную функцию
Период квантования 7= 0,1 с.
(а) Примите D(z) = К' и определите передаточную функцию G(z)D(z). (б) Определите характеристическое уравнение замкнутой системы, (в) Вычислите максимально допустимое значение К из соображений устойчивости системы, (г) Найдите значение К, при котором перерегулирование было бы менее 30 %. (д) При значении К, найденном в п. (г), определите передаточную функцию замкнутой системы T(z) и постройте график ее переходной характеристики, (е) Определите положение корней характеристического уравнения замкнутой системы и величину перерегулирования, если коэффициент К будет в 2 раза меньше значения, найденного в п. (в), (ж) Постройте график переходной характеристики при значении К из п.(е).
3-13.11. (а) Предположите, что система, описанная в задаче 3-13.10, является непрерывной и. используя методы главы 10, синтезируйте регулятор с отставанием по фазе Gc(s), обеспечивающий при ступенчатом входном сигнале перерегулирование менее 30 % и установившуюся ошибку при линейном входном сигнале менее 0,01. (б) Теперь считайте, что система является цифровой, содержит квантователь и экстраполятор, и путем преобразования Gc(s) в D(z) определите цифровой корректор, обеспечивающий показатели качества, указанные в п. (а). Период квантования 7’= 0,1 с. (в) Изобразите переходные характеристики непрерывной системы с регуля-тором Gc(s) из п. (а) и цифровой системы с D{z) из п. (б). Сравните полученные результаты, (г) Проделайте задание п. (б) при 7= 0,01 с, а затем повторите п. (в), (д) Получите реакцию цифровой системы на линейный входной сигнал при 7= 0,1 си сравните ее с аналогичной реакцией непрерывной системы.
3-13.12. Передаточная функция объекта управления совместно с экстраполятором нулевого порядка (рис.13.18) равна
С(2) = ^Ж
z(z-l)
(а) Постройте корневой годограф системы, (б) Определите диапазон значений К, при которых система устойчива.
3-13.13. Система управления ориентацией космической станции, описанная в упражнении У-7.6, реализована с использованием квантователя и экстраполятора и имеет передаточную функцию (рис. 13.18)
. A(z2 + l,1206z- 0,0364)
G(z) = —-------------------------.
z3 - l,7358z2 + 0.871 k~ 0.1353
(а) Постройте корневой годограф системы, (б) Определите значение К. при котором характеристическое уравнение будет иметь два одинаковых корня, (в) Определите все корни характеристического уравнения при коэффициенте К, найденном в п. (б).
Задачи повышенной сложности
791
3-13.14. В дискретной системе, изображенной на рис. 13.18, период квантования Т= 0,05 с. а ее передаточная функция
ч K(z+ 10.3614z2 + 9,758г + 0.8353)
G(z) — ---------z---------х—--- - .... -
z4 -3,7123z3+ 5,1644z2-3,195z+ 0.7408
(а) Постройте корневой годограф системы, (б) Определите значение К, при котором два вещественных корня отрываются от действительной оси. (в) Определите максимально допустимое значение К из соображений устойчивости системы.
3-13.15. В системе, структура которой имеет вид рис. 13.18, объект управления имеет передаточную функцию
"(5) s-2
Вычислите и изобразите графически значения у{кТ) на интервале 0 < г < 0,6 с, если период квантования 7’= 0,1 с. Входной сигнал системы — единичная ступенька.
3-13.16. В системе, изображенной на рис. 13.18. объект имеет передаточную функцию
Gv(s) =—— . р s(s+l)
На вход системы подан единичный ступенчатый сигнал. Вычислите и изобразите графически значения у(кТ) для 0 < к < 8, если период квантования Т = 1 с.
3-13.17. В системе, изображенной на рис. 13.18, объект имеет передаточную функцию
GP^=~7------п ’
5(5 + 1)
а период квантования Т = 1 с. Постройте корневой годограф при К > 0 и определите значение К, при котором два корня характеристического уравнения оказываются на единичной окружности (на границе устойчивости).
3-13.18. В системе, изображенной на рис. 13.18, объект имеет передаточную функцию
у—’ Z \ К
G„ (s) =----•
р s(s+ 1)
Если система является непрерывной (Т= 0), то при К = 1 переходная характеристика имеет перерегулирование 16% и время установления (по критерию 2 %) 8 с. При К = 1 постройте семейство переходных характеристик дискретной системы, варьируя период квантования в диапазоне 0<7’< 1,2 сс шагом 0,2 с. Отразите в виде таблицы зависимость перерегулирования и времени установления от периода квантования Т.
Задачи повышенной сложности
П-13.1. В системе, изображенной на рис. 13.18, объект управления имеет передаточную функцию
К(1+®) Gp(s) =----j---,
где параметр а может настраиваться, исходя из требований к качеству системы. Постройте корневой годограф системы при а = 10. Определите диапазон значений К. при которых система устойчива. Период квантования Т — 1 с.
П-13.2. Ужесточение требований к весу, расходу горючего, надежности и эксплуатационным качествам систем управления полетом самолетов стимулировало поиск принципиально новых решений. Одна из таких разработок отличается от традиционных тем, что взаимодействие отдельных элементов системы управления осуществляется электрически, а не механически, причем все основные задачи по сбору информации, координации действий и непосредственному
792
Глава 13. Цифровые системы управления
Рис. 13.2 (П) (а) Система привода управляющей плоскости самолета.
(б) Структурная схема системы
а)
0(0
отклонения плоскости, 0(/)
управлению выполняет компьютер. Этот новый принцип позволяет реализовывать цифровые системы управления, обладающие высоким уровнем надежности и отличным качеством. Рабочие характеристики системы управления полетом существенно зависят от динамики исполнительного устройства, в частности, от его способности поддерживать заданное положение управляющей плоскости несмотря на случайные возмущения со стороны внешних сил. Одна их таких систем включает в себя усилитель мощности, специальный двигатель постоянного тока и насос, соединенный с любой из камер силового гидроцилиндра. Шток гидроцилиндра с помощью механической передачи соединен непосредственно с управляющей плоскостью, как показано на рис. 13.2 (П), (а).
На рис. 13.2 (П), (б) приведена структурная схема системы управления углом отклонения плоскости. Требуется, чтобы переходная характеристика системы имела перерегулирование менее 5 % и время установления (по критерию 2 %) не более 4 с. (а) Синтезируйте регулятор D(z) и постройте корневой годограф системы, (б) Изобразите график переходной характеристики системы, синтезированной в и. (а).
3-13.3. На рис. 13.3 (П) показано, как в швейном производстве вместо обычного шва осуществляется склеивание материала. Очень важно, чтобы клей во избежание брака наносился на ткань равномерно. Однако скорость, с которой ткань проходит под головкой, распределяющей клей, не является постоянной. Клей должен выдавливаться из головки со скоростью, пропорциональной скорости движения т-кани. Эта задача решается с помощью специальной системы управления.
Система управления имеет структуру, изображенную на рис. 13.15, где Gp(s) = 2 /(0.03s + 1) и объекту предшествует экстраполятор нулевого порядка. Передаточная функция цифрового ре-
гулятора имеет вид
D(z) =
КТ l-z~l
KTz
z-1 ’
Задачи на синтез систем
793
Рис. 13.3 (П)
Система управления склеиванием
что соответствует операции интегрирования. Найдите G(z)D(z) при 7= 30 мс и постройте корневой годограф системы. Выберите приемлемое значение К и изобразите график переходной характеристики системы.
П-13.4. В системе, структура которой имеет вид рис. 13.15, D(z) = К и
Gp(s) =
Z1 s(s + 27)
Полагая 7’= 0,1 с, определите значение К, обеспечивающее по возможности быстрое нарастание переходной характеристики с перерегулированием менее 10%.
П-13.5. В системе, изображенной на рис. 13.18, объект управления имеет передаточную функцию
Определите диапазон значений периода квантования Т. при которых система устойчива. Затем выберите подходящее, по вашему мнению, значение Т, при котором система была бы устойчивой и обладала высоким быстродействием.
Задачи на синтез систем
СС-13.1. Синтезируйте цифровой регулятор для системы управления положением скользящей час-
ти стола.
□ Электродвигатель, барабан и скользящую часть представьте в виде модели второго порядка, как было описано в задачах СС-2.1 и СС-4.1. Структура системы при этом имеет вид рис. 13.15. При заданном периоде квантования Т— 1 мс выберите передаточную функцию D(z). обеспечивающую приемлемое качество системы. Найдите реакцию синтезированной системы на ступенчатый входной сигнал г(/).
С-13.1. Система регулирования температуры имеет структуру, изображенную на рис. 13.15, где передаточная функция объекта
г 0,8
сг(Л') = -—
3s + 1
а период квантования Т = 0,5 с.
794
Глава 13. Цифровые системы управления
(а) При D(z) = К выберите значение К, чтобы система была устойчива, (б) Система может оказаться передемпфированной и иметь большое время установления, поэтому возникает необходимость синтеза регулятора с опережением по фазе. Используя метод, описанный в разделе 10.8, синтезируйте регулятор Gc(s) и затем перейдите к D(z). (в) Проверьте правильность синтеза, построив график переходной характеристики системы при £)(z), полученной в п. (б).
С-13.2. Структурная схема системы позиционирования головки чтения/записи дисковода имеет вид рис. 13.15. Объект имеет передаточную функцию
ч 10 бДл) = —-----------.
? + 0,8j+ 800
Система должна обладать высокой точностью позиционирования. Примите Т= 10 мс и синтезируйте регулятор D(z) (а) методом преобразования Gc(s) в £>(z) и (б) методом корневого годографа.
С-13.3. Качество управления движением автомобиля можно значительно повысить, если использовать систему, оптимизирующую сцепление шины с дорогой, которая препятствует заклиниванию колес при торможении и их пробуксовыванию при ускорении.
В качестве управляемой переменной в подобных системах обычно выбирается проскальзывание колеса, т. е. разность между скоростью движения автомобиля и скоростью колеса (за эталон принимается скорость автомобиля при торможении и скорость колеса при ускорении). В большинстве случаев именно эта переменная влияет на качество управления движением, поскольку в основном она определяет силу сцепления между шиной и дорогой.
Система управления проскальзыванием для одного колеса изображена на рис. 13.3 (С). Цель системы — минимизировать проскальзывание, вызванное возмущением из-за изменения дорожных условий. Синтезируйте регулятор D(z) так, чтобы система имела коэффициент затухания С = 1/V2, и найдите соответствующее значение К. Период квантования 7’= 0,1 с. Получите график переходной характеристики и определите величину перерегулирования и времени установления (по критерию 2 %).
Рис. 13.3(C) Возмущение
С-13.4. Система управления положением инструмента металлорежущего станка имеет структуру, изображенную на рис. 13.15. где передаточная функция объекта
Период квантования Т= 1 с. Требуется, чтобы переходная характеристика имела перерегулирование не более 16 % и время установления (по критерию 2 %) не более 12 с. Кроме того, при входном сигнале r(Z) = t установившаяся ошибка не должна превышать 1. Синтезируйте регулятор D(z), удовлетворяющий этим требованиям.
С-13.5. При производстве полимеров широко используется хорошо отработанный метод выдавливания пластмассы. Такие эктрузионные установки обычно представляют собой большой цилиндр, разделенный на несколько температурных зон с загрузочным бункером на одном конце и фильерой на другом. Пластмасса загружается в цилиндр из бункера в виде твердого полуфабриката и проталкивается вдоль него при помощи шнека. При прохождении этой массы через различные температурные зоны происходит ее нагревание с последовательным увеличением температуры. Тепло, выделяемое нагревателями, а также образующееся при трении пластмассы о стенки цилиндра и шнек, приводит к ее плавлению, после чего эта масса выдавливается шнеком наружу и используется далее для различных целей.
Задачи, решаемые с помощью MATLAB
795
Рис. 13.5 (С)
Система управления экструзионной установкой
Шнек
Выходными переменными являются поток массы через фильеру и ее температура. Основной управляющей переменной является скорость вращения шнека, поскольку ее изменение наиболее быстро сказывается на качестве ведения процесса.
На рис. 13.5 (С) изображена система управления температурой полимера на выходе установки. Выберите коэффициент^ и период квантования Ттак, чтобы при ступенчатом входном сигнале перерегулирование составляло 10 % и в то же время при линейном входном сигнале установившаяся ошибка была как можно меньше.
Задачи, решаемые с помощью MATLAB
М-13.1. Дискретная система имеет передаточную функцию
ч 0.2145z+ 0,1609 G(z) = -т------:---.
z2-0,75z+0,125
С помощью MATLAB постройте график реакции системы на единичный ступенчатый сигнал.
По графику убедитесь, что установившееся значение выходного сигнала равно 1.
М-13.2. Преобразуйте следующие непрерывные передаточные функции в дискретную форму с помощью функции c2d. Считайте, что период квантования Т= 1 с и учтите наличие экстраполятора нулевого порядка G0(s).
1 v v+ 5 1
(a)G/5) = -; (6)0/5) =-у—; (b)G/5) =-----(г) Gp(s) = —— .
S г 5+4 5+1 5(5+1)
М-13.3. Передаточная функция замкнутой дискретной системы имеет вид:
у L(z) l,7(z+0,46)
A(z) z2 + z+ 0.5
(а) Вычислите переходную характеристику системы с помощью функции step, (б) Считая, что период квантования 7’= 0,1 с, с помощью функции d2c определите непрерывную передаточную функцию, эквивалентную T(z). (в) С помощью функции step вычислите переходную характеристику полученной непрерывной системы и сравните ее с результатом из п. (а).
М-13.4. Постройте корневой годограф системы, имеющей передаточную функцию
G(z)J(z) = K 2 Z
z — z + 0,1
Определите диапазон значении К, при которых система устойчива.
796
Глава 13. Цифровые системы управления
М-13.5. Постройте корневой годограф системы, изображенной на рис. 13.5 (М). и определите диапазон значений К. при которых система устойчива.
М-13.6. Рассмотрите дискретную систему, передаточная функция которой в разомкнутом состоянии имеет вид:
G(z)D(z) = K-
/?(z)
ОД
Рис. 13.5 (М). Система управления с цифровым регулятором
z2 + 4z+4,25 z2-0,1z-1,5 '
(а) С помощью функции rlocus постройте корневой годограф системы, (б) По построенному корневому годографу с помощью функции rlocfind определите диапазон значений К, при которых система устойчива.
М-13.7. Шлифовальный станок имеет передаточную функцию
Для повышения качества обработки поверхности предлагается использовать цифровую систему управления, в которой компьютер представлен передаточной функцией £>(z). В синтезируемой системе запас по фазе должен составлять не менее 45°. а время установления (по критерию 2 %) должно быть менее 1 с.
(а) Чтобы удовлетворить выдвинутым требованиям, синтезируйте регулятор с передаточной функцией
Gc(s) = KS-^ S+ Ъ
(6) Считая, что период квантования Т= 0,02 с, преобразуйте Cc(s) в £>(z). (в) Промоделируйте непрерывную систему при единичном ступенчатом входном сигнале, (г) Промоделируйте дискретную систему при единичном ступенчатом входном сигнале, (д) Сравните результаты, полученные в пп. (в) и (г) и сделайте соответствующие выводы.
Ключевые термины и понятия
Дискретная система. Система, в которой некоторая ее часть оперирует с дискретными данными (с дискретными значениями переменных).
Дискретные данные. Данные, получаемые о переменных системы только в дискретные моменты времени, с определенным периодом квантования.
Ошибка квантования по амплитуде. Ограниченная точность, с которой получается дискретный сигнал. Разность между действительным (непрерывным) сигналом и его дискретным представлением.
Период квантования. Период, с которым числа вводятся в компьютер или выводятся из него. Период, в течение которого дискретные значения переменных сохраняют постоянные значения.
Устойчивость дискретной системы. Замкнутая дискретная система устойчива, если все полюсы ее передаточной функции 7(z) находятся на z-плоскости внутри единичной окружности.
Цифровой корректор. Компьютер, используемый в качестве корректирующего устройства.
Цифровая система управления. Система, в которой для управления объектом используются цифровые сигналы и цифровой компьютер.
z-плоскость. Плоскость комплексной переменной z, где ось абсцисс соответствует действительной части, а ось ординат — мнимой части z.
z-преобразование. Конформное отображение с s-плоскости на z-плоскость с помощью соотношения z = eiJ. Преобразование из области переменной s в область переменной z.
Приложение А Основы MATLAB
А.1. Введение
MATLAB — это интерактивная среда для научных и инженерных вычислений. В состав MATLAB входят основная программа (ядро) и специализированные пакеты прикладных программ (toolboxes),состоящие из так называемых М-файлов, расширяющих функциональные возможности основной программы. Один из этих пакетов, Control System Toolbox, в сочетании с основной программой дает возможность использовать MATLAB для анализа и синтеза систем управления. Везде в этой книге, где имеется ссылка на MATLAB, подразумевается, что решение той или иной задачи производится с помощью основной программы и пакета Control System Toolbox.
Независимо от того, к какой платформе принадлежит ваш компьютер или какую ооперационную систему вы используете, большинство инструкций, функций и команд MATLAB применяются совершенно одинаково. В данном приложении на этот момент обращается особое внимание. Обычно при работе в среде MATLAB пользователь взаимодействует с компьютером с помощью четырех основных объектов. Это (1) инструкции и переменные, (2) матрицы, (3) графические изображения и (4) скрипты. MATLAB интерпретирует и обрабатывает входные данные в виде одного или нескольких этих объектов. Цель данного приложения — рассмотреть каждый из перечисленных объектов, чтобы читатель получил начальную подготовку по решению в среде MATLAB задач анализа и синтеза систем управления.
Способ взаимодействия MATLAB с конкретной операционной системой зависит от платформы, к которой принадлежит компьютер. Специфичными для каждой платформы являются инсталляция MATLAB, файловая структура, получение твердой копии графических изображений, вызов программы и выход из нее, а также распределение памяти. Эти специфичные для каждой платформы вопросы в данном приложении не рассматриваются. Это вовсе не означает, что они не являются существенными, однако вместо того, чтобы останавливаться на них в данной книге, мы предлагаем читателю для получения необходимой информации воспользоваться каким-либо руководством для пользователей MATLAB или обратиться за консультацией к специалисту.
Дальнейший материал приложения сгруппирован в четыре раздела соответственно четырем типам перечисленных выше объектов. В первом разделе мы рассмотрим основы понятий инструкций и переменных. Следующий раздел посвящен матрицам. Третий раздел содержит введение в графику, а в четвертом обсуждаются важные понятия * скриптов и М-файлов. Все рисунки, приведенные в данном приложении, можно получить, используя соответствующие ти-файлы, находящиеся на сайте MCS.
798
Приложение А. Основы MATLAB
А.2. Инструкции и переменные
Инструкции имеют общий вид, приведенный на рис. А. 1. В MATLAB используется операция присваивания, так что знак равенства «=» означает, что некоторой переменной присваивается выражение справа от этого знака. Командная строка обозначается двумя направленными вправо стрелками «»». Пример инструкции приведен на рис. А.2, где производится ввод матрицы размерности 2 х 2 и ей присваивается имя переменной А. Инструкция выполняется после возврата каретки (нажатия клавиши <enter>). Во всех остальных примерах данного приложения и в разделах глав книги, посвященных применению MATLAB, нажатие этой клавиши подразумевается по умолчанию.
Рис. А.1. Форма записи инструкции Рис. А.2. Ввод и отображение
в MATLAB матрицы А
После ввода инструкции, завершающегося нажатитем клавиши <enter>, матрица А автоматически отображается на экране. Если после инструкции следует точка с запятой (;), то вывод матрицы А на экран подавляется, как показано на рис. А.З. Тем не менее, присвоение матрице имени А сохраняется, хотя ее вывод на экран подавлен точкой с запятой. При работе с MATLAB у вас часто будут встречаться случаи, когда производятся какие-то промежуточные вычисления, вывод результатов которых на экран не представляет интереса. Поэтому всегда, когда желательно уменьшить количество выводимых данных, используйте символ точки с запятой. Это также позволяет ускорить решение задачи, т. к. вывод данных на экран требует определенного времени.
В выражениях могут быть использованы обычные символы математических операций, приведенные в табл. А.1. Порядок выполнения арифметических действий можно изменить с помощью скобок.
»А=[1 2; 4 6];< »
»А=[1 2; 4 6] <
А =
1 2
4 6
Таблица А.1. Символы математических операций
Рис. А.З. Использование точки с запятой для подавления вывода
+ Сложение
- Вычитание
* Умножение
/ Деление
А Возведение в степень
Пример на рис. А.4 иллюстрирует использование MATLAB в режиме «калькулятора». Если в выражении отсутствуют имя переменной и символ «=», то результату автоматически присваивается имя ans. В MATLAB доступно большинство тригонометрических и элементарных математических функций, выполняемых обычным калькулятором для научных вычислений. Полный перечень этих функций можно найти в руководствах для пользователей MATLAB, а наиболее часто встречающиеся из них приведены в табл. А.2.
Приложение А. Основы MATLAB
799
Рис. А.4 Использование MATLAB в режиме калькулятора
>>12.4/6.9
ans =
1.7971
Рис. А.5
Имена переменных в MATLAB чувствительны к регистру
»М=[1 2]
»т=[3 5 7]
Имена переменных должны начинаться с буквы, за которой может следовать любое число букв или цифр (включая символ подчеркивания). Старайтесь, чтобы имя переменной было ограничено 19 символами, т. к. MATLAB запоминает только первые 19 символов. Всегда желательно, чтобы имя переменной отражало смысл той величины, которую она представляет. Например, для переменной, которая представляет скорость самолета (aircraft velosity), можно было бы использовать имя vel. Обычно не рекомендуется использовать очень длинные имена переменных, хотя MATLAB это и допускает.
MATLAB различает верхний и нижний регистры, поэтому переменные М и тп будут иметь разный смысл, как показано на рис. А.5.
В MATLAB имеется несколько переменных с заранее закрепленными за ними именами. Это pi, Inf, NaN, i и j. На рис. А.6 приведены три примера. NaN (сокращение от Not-a-Number) используется для обозначения неопределенного (нечислового) результата операции. Inf соответствует +°о, a pi — числу л. Переменные i и j обозначают мнимую единицу и используются при арифметических операциях с комплексными числами. Избегайте применять эти переменные без лишней необходимости. Конечно, их можно использовать и для других целей. Например, если вы привыкли обозначать мнимую единицу через j, то переменную i можете зарезервировать для имени целого числа. Однако старайтесь во избежание недоразумений не прибегать к этим переменным, т. к. и без того существует достаточно много других имен.
Матрица А и переменная ans (на рис. А.З и А.4 соответственно) автоматически запоминаются в рабочей области и могут быть использованы в течение всего сеанса работы с MATLAB. С помощью функции who можно вывести на экран список всех переменных, хранящихся в рабочей области, как это проиллюстрировано на рис. А.7. MATLAB имеет множество встроенных функций. Полный их перечень можно найтм в руководствах для пользователя MATLAB либо обратиться для этого к помощнику On-line Help. В данном приложении каждая функция будет описана при возникновении в этом необходимости.
»z=3+4*i z =
3.0000 + 4-OOOOi
»lnf ans =
Inf
»0/0
Warning: Divide by zero ans =
NaN
»who
Your variables are:
A M ans m z
Рис. А.6. Три переменные с заранее закрепленными за ними именами: /, Inf и NaN
Рис. А.7. Использование функции who для отображения списка переменных
800
Приложение А. Основы MATLAB
Таблица А.2. Распространенные математические функции
sin(x) Синус loglO(x) Десятичный логарифм
sinh(x) Гиперболический синус log2(x) Логарифм по основанию 2
asin(x) Арксинус pow2(x) Степень числа 2
asinh(x) Гиперболический арксинус sqrt(x) Квадратный корень
cos(x) Косинус nextpow2(x) Ближайшая степень числа 2
cosh(x) Гиперболический косинус abs(x) Абсолютное значение комплексного
acos(x) Арккосинус числа
acosh(x) Гиперболический арккосинус angle(x) Аргумент комплексного числа
tan(x) Тангенс complex(x,y) Образование комплексного числа по
tanh(x) Гиперболический тангенс действительной и мнимой частям
atan(x) Арктангенс conj(x) Комплексно-сопряженное число
atan2(y,x) Четырехквадрантный imag(x) Мнимая часть комплексного числа
арктангенс real(x) Действительная часть комплексного
atanh(x) Гиперболический арктангенс числа
sec(x) Секанс unwrap(x) Непрерывная функция фазового
sech(x) Гиперболический секанс угла
asec(x) Арксеканс isreal(x) Истинно, если это массив
asech(x) Гиперболический арксеканс действительных чисел
csc(x) Косеканс cplxpair(x) Сортировка комплексно-
csch(x) Гиперболический косеканс сопряженных пар чисел
acsc(x) Арккосеканс fix(x) Усечение дробной части числа
acsch(x) Гиперболический арккосеканс floor(x) Округление до меньшего целого
cot(x) Котангенс ceil(x) Округление до большего целого
coth(x) Гиперболический котангенс round(x) Округление до ближайшего целого
acot(x) Арккотангенс mod(x,y) Остаток в смысле модульной
acoth(x) Гиперболический арккотангенс арифметики
exp(x) Экспоненциальная функция rem(x,y) Остаток от деления
log(x) Натуральный логарифм
Функция whos выводит на экран список переменных в рабочей области вместе с дополнительной информацией об их типе, размерности и занимаемой памяти. На рис. А. 8 приведен пример использования функции whos. Этот пример показывает, что каждый элемент матрицы А размерности 2x2 занимает 8 байт памяти, а всего для хранения матрицы требуется 32 байта, переменная ans размерности 1 х 1 занимает 8 байт и т. д. Все переменные в рабочей области занимают 96 байт.
Переменные можно удалить из рабочей области с помощью функции clear. Собственно функция clear удаляет из рабочей области все данные (переменные и функции); clear variables удаляет все переменные; clear namel пате2... удаляет переменные namel, пате2 и т. д. Удаление из рабочей области матрицы А проиллюстрировано на рис. А.9.
Все вычисления в MATLAB выполняются с двойной точностью. Однако вывод чисел на экран может осуществляться в разных форматах. По умолчанию нецелые числа выводятся с четырьмя разрядами после десятичной точки, но с помощью функции format можно изменить формат вывода, как показано на рис. А. 10. Если задан какой-то опреде-
Приложение А. Основы MATLAB
801
»whos
Name Size Bytes Class
А 2x2 32 Double array
М 1x2 16 Double array
ans 1x1 8 Double array
m 1x3 24 Double array
z 1x1 16 Double array (complex)
Grand total is 11 elements using 96 bytes
Рис. A.8. Использование функции whos для отображения списка переменных с подробностями
»dear А
»who
Your variables аге:
М ans m z
Рис. A.9. Удаление матрицы А из рабочей области.
ленный формат, то он сохраняет силу до тех пор, пока не будет изменен. Формат вывода не влияет на внутренние вычисления в MATLAB. С другой стороны, количество выводимых разрядов не обязательно соответствует количеству значащих цифр числа. Все определяется характером решаемой задачи, и только пользователь может знать истинную точность вводимых и выводимых чисел. Из других форматов вывода (не указанных на рис. А. 10) отметим format long g (наилучший формат— 15 разрядов с фиксированной или плавающей точкой), format short g (то же самое, что и format long g, но с 5 разрядами), format hex (шестнадцатиричный формат), format bank (фиксированный формат для долларов и центов) и format (то же, что и format short).
Поскольку MATLAB различает регистры, то функции who и WHO воспринимаются по-разному. Функция who является встроенной, и набрав who, вы получите список переменных в рабочей области. Однако, набрав WHO (на верхнем регистре), вы получите сообщение об ошибке, как показано на рис. А. 11. Это относится ко всем функциям MATLAB.
Рис. А.1О
Иллюстрация четырех форматов вывода чисел
»pi
ans = 5-разрядное число с фиксированной точкой
0.1410 4
»format long; pi
ans = O -1 Л 1KQ9RKQCOQ7Q -4 15-разрядное число
с фиксированной точкой
»format short e; pi ans =
5-разрядное число с плавающей точкой
»format long e; pi 15-разрядное число с плавающей точкой
ans = 4
3.141592653589793e+00
802
Приложение А. Основы MATLAB
Рис. А.11
Названия функций в MATLAB чувствительны к регистру
»WHO
??? Undefined variable or capitalize internal function WHO; Caps Lock may be on.
»Who
??? Undefined variable or capitalize internal function WHO; Caps Lock may be on.
А.З. Матрицы
MATLAB — это сокращенно матричная лаборатория. Мы не будем вдаваться в подробности матричных операций, лежащих в основе вычислений, а лишь рассмотрим интерактивные возможности MATLAB, облегчающие анализ и синтез систем управления. Начнем с введения основных понятий, поясняющих действия с матрицами и векторами.
Основной вычислительной единицей является матрица. Векторы и скаляры можно рассматривать как частные случаи матрицы. Матрица обычно заключается в квадратные скобки, [•]. Элементы столбца отделяются пробелами или запятыми, а строки разделяются точками с запятой или возвратом каретки. Предположим, что нам надо ввести матрицу А следующего вида:
А= log(-l)
asin(0.8)
-4 j -Л
sin(7t/2) cos(n/3) acos(0.8) exp(0.8)
Один из способов ввода (отнюдь не единственный) приведен на рис. А. 12.
Матрицы можно вводить посредством записи нескольких строк, завершая их точкой с запятой и возвратом каретки или просто возвратом каретки. Это очень удобно при вводе больших матриц. Для разделения столбцов можно использовать различные комбинации пробелов и запятых, а для разделения строк -— различные комбинации точек с запятой и возврата каретки, как показано на рис. А. 12.
При вводе матриц нет необходимости в специальных инструкциях, указывающих их тип или размерность; память под матрицы отводится автоматически. Обратите внимание, как в примере на рис. А. 12 автоматически изменяется размерность матрицы А при ее переопределении. Заметим также, что элементы матриц могут быть комплексными числами либо содержать тригонометрические и элементарные математические функции.
Рис. А.12 Матрица с вещественными и комплексными элементами вводится с автоматическим определением ее размерности и типа элементов
»А=[1, -4*j, sqrt(2)]; ◄--------
log(-1) sin(pi/2) cos(pi/3) <— asin(0.5), acos(0.8) exp(0.8)
А = 1.000 0 + 3.14161 0.5236
0 - 4.0000i
1.0000
0.6435
Матрица комплексных чисел размерности 3x3
1.4142
0.5000
2.2255
Возврат каретки
»А=[1 2;4 5]
А = 1 4
◄ Матрица действительных чисел размерности 2x2
2
5
Приложение А. Основы MATLAB
803
К основным матричным операциям относятся сложение, вычитание, транспонирование, возведение в степень и так называемые операции над массивами. Символы математических операций над матрицами приведены в табл. А. 1. Мы не будем рассматривать деление матриц, но имейте в виду, что в MATLAB имеется возможность левостороннего и правостороннего деления матриц.
Матричные операции требуют согласования размерностей. Это означает, что при сложении и вычитании матриц они должны иметь одинаковую размерность. Если матрица А имеет размерность п х т, а матрица В — размерность р х г, то А ± В имеет смысл только тогда, когда п = р, а т = г. Умножение матриц А* В возможно только в случае т=р. Особым случаем является умножение матрицы на вектор. Предположим, что b есть вектор (столбец) из р элементов. Умножение матрицы А размерности п х т на вектор b возможно только в случае т = р. В результате будет получен вектор у = А* b размерности их1. Примеры основных матрично-векторных операций приведены на рис. А. 13.
Рис. А.13
Три основные матричные операции: сложение, умножение и транспонирование
»А=[1 3; 5 9]; В=[4 -7; 10 0];
»А+В < ans =
5 -4
15 9
Сложение матриц
»Ь=[1;5];
»А*Ь 4-ans =
16
50
»А’ <-ans =
1 5
3 9
Умножение матриц
Транспонирование матрицы
Транспонирование матрицы обозначается символом апострофа (’) С помощью операций транспонирования и умножения можно получить так называемое внутреннее произведение векторов. Поясним это на примере. Предположим, что w и v есть векторы размерности т х 1. Тогда их внутреннее произведение (известное также как произведение с точкой) находится как w' * V. Внутреннее произведение двух векторов дает скалярную величину. Аналогично можно вычислить внешнее произведение двух векторов как w * v'. Внешнее произведение двух векторов размерности т х 1 дает матрицу размерности т х т, ранг которой равен 1. Примеры внутреннего и внешнего произведений приведены на рис. А. 14.
Основные матричные операции можно заменить поэлементными действиями с использованием периодически действующего предшествующего оператора. Такие процедуры известны как операции над массивами. Самые простые операции над массивами приведены в табл. А.З. Операции сложения и вычитания являются простейшими и не требуют указания дополнительного периода, соответствующего предшествующему оператору. Однако при умножении, делении и возведении матрицы в степень обязательно надо указать точку перед символом операции, как показано в табл. А.З.
804
Приложение А. Основы MATLAB
»x=[5;pi;sin(pi/2)]; y=[exp(-0.5);-13;piA2];
»х’*у ч--------, --------------
ans = I________ Внутреннее
-27.9384 произведение
Внешнее
»х у •«-----------------
ans _ произведение
3.0327 -65.0000 48.3480
1.9055 -40.8407 31.0063
0.6065 -13.0000 9.8696
Таблица А.З. Математические операторы, применяемые к массивам
+ Сложение
- Вычитание
* Умножение
./ Деление
.А Возведение в степень
Рис. А. 14. Внутреннее и внешнее произведение двух векторов
Рассмотрим матрицы А и В размерности 2x2: д_ flU а12 ^11
а21 а22 ^21
Z>12
/>22
Применив оператор умножения массивов, мы получим: flll^ll °12^12 я2!^21 а22^22
А.*В =
Элементы произведения А.*В являются произведениями соответствующих элементов матриц А и В. Примеры действий с двумя массивами приведены на рис. А. 15.
Прежде чем переходить к важному понятию графики в MATLAB, необходимо остановиться на представлении данных с использованием двоеточия. Такое представление, описание которого приведено на рис. А. 16, позволяет сформировать вектор, компонентами которого являются числа, начинающиеся со значениях; и заканчивающиеся значением следующие друг за другом с заданным шагом dx.
Используя двоеточие, можно легко сформировать векторы и, как мы скоро увидим, этот прием весьма полезен при построении графиков. Предположим, что мы хотим построить график функции у = xsinx для х = 0; 0,1; 0,2;... 1,0. Первый шаг состоит в том, чтобы получить таблицу значений х и у. На рис. А. 17 показано, как с помощью двоеточия можно сформировать вектор значений х, для которых должны быть вычислены значения
»А=[1;2;3];В=[-6;7;10];
»А.*В < ans =
-6
14
30
Умножение массивов
»А.Л2 < ans =
1
4
9
Возведение массива в степень
Рис. А. 15. Операции над массивами
Рис. А. 16. Использование двоеточия
Приложение А. Основы MATLAB
805
Рис. А.17 Формирование векторов с использованием двоеточия
»x=[0:0.1:1]’;y=x.*sin(x);
»[ху] ♦ ans = --------
О О 0.1000 0.0100 0.2000 0.0397 0.3000 0.0887 0.4000 0.1558 0.5000 0.2397 0.6000 0.3388 0.7000 0.4510 0.8000 0.5739 0.9000 0.7050 1.0000 0.8415
Начальное значение
____Конечное значение
х=[0:0.1:1]’
Приращение
XX- Вектор, соответствующий искомой функции, легко получается с помощью операции умножения массивов. После того, как получена таблица значений х и у, построение графика функции у = xsinx уже не вызывает затруднений.
А.4. Графика
Графика является мощным интерактивным средством анализа и синтеза систем управления. Полное решение задач анализа и синтеза может потребовать детального рассмотрения множества данных в самых разных форматах. Этот раздел имеет целью познакомить читателя с основами построения графиков средствами MATLAB. Более детально этот вопрос рассматривается в соответствующих разделах глав книги, посвященных применению MATLAB.
Для представления графических изображений MATLAB использует графический дисплей, автоматически активизируемый при задании любой функции, результатом которой должен являться некоторый график (например, функции plot).Функция plot открывает графический дисплей, который носит название окна FIGURE. Вы можете создать другое такое окно с помощью функции figure. В одном сеансе работы с MATLAB может быть создано несколько графических окон. Для этого используется функция figure (п), которая создает п-е текущее окно. Графическое изображение можно удалить из окна с помощью функции elf в командной строке. Функция shg выводит на первый план текущее графическое окно.
Существуют две основные группы графических функций. Первая группа, приведенная в табл. А.4, определяет тип графика, а именно зависимость между двумя массивами данных (векторами) в обычном масштабе, в полулогарифмическом масштабе или в логарифмическом масштабе по обеим осям. Вторая группа функций, приведенная в табл. А.5, предназначена для оформления графиков путем добавления заголовков и поясняющего текста, обозначения осей, изменения масштабов и разбиения графического окна на несколько подокон.
Обычные графики строятся с помощью функции plot. На рис. А. 18 показано, как эта функция применяется для графического представления зависимости у отх в соответствии с данными рис. А. 17. Масштабы по осям и типы линий выбираются автоматически. Для обозначения осей используются функции xlabel и ylabel. Заголовок графика выводится с
806
Приложение А. Основы MATLAB
Рис. А.18 а)
(а) Команды MATLAB.
(б) График функции у = xsin(x)
»х=[0:0.1:1]’;
»y=x.*sin(x);
»plot(x,y)
»title(‘Plot of х sin(x) vs x’)
»xlabel(‘x’)
»ylabel(‘y’)
»grid on
помощью функции title. Функция legend позволяет разместить на текущем графике необходимые пояснения. С помощью функции grid on на график можно нанести сетку. Основной график зависимости между двумя переменными строится с помощью комбинации функций plot, legend, xlabel, ylabel, title и grid on.
Таблица A.4. Форматы графиков
plot (х,у) График зависимости между векторами х и у в обычном масштабе.
semilogx (х,у) График зависимости между векторами х и у. Масштаб по оси х логарифмический (десятичные логарифмы), масштаб по оси у линейный.
semilogy (х,у) График зависимости между векторами х и у. Масштаб по оси х линейный, масштаб по оси у логарифмический (десятичные логарифмы).
loglog (х,у) График зависимости между векторами х и у. Масштаб по обеим осям логарифмический.
Таблица А.5. Функции для оформления графиков
title (‘text’) Помещает над графиком заголовок ‘text’
legend (stringl, string2,.. ..) Помещает на текущем графике пояснения в виде заданных текстовых строк
xlabel (‘text’) Обозначает ось х надписью ‘text’
ylabel (‘text’) Обозначает ось у надписью ‘text’
text (pl, p2, ‘text’) Добавляет к текущему графику надпись ‘text’, начиная с позиции (pl, р2), где (pl, р2) - координаты точки по осям х и у
subplot Разбивает графическое окно на несколько подокон
grid on Наносит линии сетки на текущий график
grid off Удаляет линии сетки с текущего графика
grid Управляет выводом сетки
Приложение А. Основы MATLAB
807
Рис. А.19
(а) Команды MATLAB;
(б) Несколько линий на одном графике
а)
»х=[0:0.Т.1]';
»y1=x.*sin(x); y2=sin(x);
»pfot(x,y1 ,'-',х,у2,'-.')
»legend(‘y_1 = х sin(x)','y_2 = sin(x)‘)
»xlabel(,x‘),ylabei(y_1 и y_2‘),grid on
Штриховая линия для у, штрих-пунктирная
ЛИНИЯ ДЛЯ У2
б)
На графике можно изобразить несколько линий, используя функцию plot с разными аргументами, как проиллюстрировано на рис. А.19. Можно также изменить типы линий, принятые по умолчанию. Обозначения типов линий приведены в табл. А.6. Типы линий, заданные пользователем, будут выбраны автоматически. На рис. А.19 приведен пример использования функции legend и изменения типа линий.
Таблица А.6. Типы линий для оформления графиков
Сплошная линия.
Штриховая линия.
Пунктирная линия.
Штрих-пунктирная линия.
Графический дисплей можно разделить на несколько подокон меньшего размера. ' Функция subplot (m, п, р) делит графический дисплей на т х и подокон (т — число «строк», и — число «столбцов»), а целый параметр р определяет номер подокна. Нумерация идет слева направо и сверху вниз, как показано на рис. А.20, где основное графическое окно разделено на четыре подокна.
А. 5. Скрипты
До сих пор наше общение с MATLAB происходило на уровне командных строк. Мы вводили инструкции и функции, MATLAB интерпретировал их и выполнял соответствующие действия. Такой режим хорош в тех случаях, когда сеанс работы в среде MATLAB является коротким и не содержит повторяющихся операций. Однако действительная мощь MATLAB применительно к анализу и синтезу систем управления состоит в возможности выполнения длинной последовательности команд, записанных в виде файла. Такие файлы назы-
808
Приложение А. Основы MATLAB
Рис. А.20 Использование функции subplot для разбиения графического окна на 4 подокна (2 «строки» и 2 «столбца»)
subplot(2,2,3),plot(x,y1х,у2,’-.')
subplot(2,2,4),plot(x,y1,'--’,x,y2,’-.’)
ваются М-файлами, т. к. их имена имеют вид///енотие.ги. Одним из видов М-файла является скрипт. Control System Toolbox представляет собой собрание М-файлов, разработанных специально для приложения к задачам управления. В дополнение к М-файлам, поставляемым вместе с MATLAB и пакетами прикладных программ, вы можете разработать собственные скрипты для решения конкретных задач. Скрипты — это обычные текстовые файлы в формате ASCII, которые создаются с помощью текстового редактора.
Скрипт представляет собой последовательность обыкновенных инструкций и функций, используемых на уровне командной строки. Скрипт вызывается также на уровне командной строки путем ввода имени файла или с помощью ниспадающего меню. Каждый скрипт может вызывать также другие скрипты. В случае вызова скрипта MATLAB сразу начинает выполнение инструкций и вычисление функций, входящих в файл, не ожидая ввода командной строки. Скрипт работает с переменными, находящимися в рабочей области.
Предположим, что вы захотели построить график функцииy(t) = since/, где а — варьируемый параметр. Тогда с помощью текстового редактора вы записываете скрипт и присваиваете ему, скажем, имя plotdata, m, как показано на рис. А.21, затем вводите в командной строке значение а, которое автоматически помещается в рабочую область. После этого вы печатаете в командной строке имя plotdata, что незамедлительно приводит к выполнению скрипта. При этом скрипт использует самое последнее значение а из рабочей области. После получения результата вы можете ввести другое значение а в командной строке и выполнить скрипт еще раз.
Приложение А. Основы MATLAB
809
Рис. А.21
Простой скрипт для построения графика функции = si па/
»alpha=50; »plotdata
plotdata.m
% Скрипт построения графика функции y=sin(alpha*t). %
% Значение alpha должно быть заданно в рабочей
% среде до вызова скрипта на выполнение.
%
t=[0:0.01:1J;
y=sin(alpha*t);
plot(t,y)
х1аЬе!('Время (с)')
ylabelfy(t) = sin(\alphat)')
grid on
Ваш скрипт должен быть хорошо снабжен комментариями, начинающимися с символа %. Снабдите скрипт заставкой, содержащей некоторые сведения относительно его назначения и затем используйте функцию help, чтобы вывести заставку на экран, как показано на рис. А.22.
»help plotdata
Скрипт построения графика функции y=sin(alpha*t).
Значение alpha должно быть заданно в рабочей среде до вызова скрипта на выполнение.
Рис. А.22. Использование функции help
Используя скрипт plotdata.m, вы можете в интерактивном режиме исследовать влияние параметра а, как показано на рис. А.23. В командной строке введите значение а = 10, за которым должно быть указано имя скрипта (в данном случае plotdata). MATLAB автоматически построит график функцииу - since/. Вы можете вернуться к командной строке, ввести значение а = 50 и выполнить скрипт еще раз, чтобы получить новый график.
Вы можете снабдить графики специальными и математическими символами, используя набор символов ТеХ, приведенный в табл. А.7 (ТеХ - это торговая марка Американского Математического Общества). На рис. А.21 показано, как с помощью записи '\alpha' в обозначение оси у вставляется символ а. Всем последовательностям букв в ТеХ должен предшествовать символ 'V. Кроме того, вы можете изменить начертание символов с помощью следующих модификаторов:
□ \bf - полужирный шрифт
□ \it — курсив
□ \пп — обычный шрифт
□ \fontname - определяет название семейства используемых шрифтов
□ \fontsize — определяет размер шрифта
810
Приложение А. Основы MATLAB
Рис. А. 23 Использование скрипта в интерактивном режиме для построения графика функции = sinaZ
Имя скрипта
»alpha=50; plotdata
Графическое окно
Для обозначения нижних и верхних индексов используются соответственно символы «_» и «Л». Например, на рис. А.19 показано, как для обозначения оси у использована запись ylabel (‘у_1 and у_2’)-
Графические возможности MATLAB выходят далеко за рамки представленного здесь вводного материала. Некоторые из них проиллюстрированы в соответствующих разделах глав книги, посвященных применению MATLAB. Функции MATLAB, используемые в данной книге, приведены в табл. А.8.
Приложение А. Основы MATLAB
811
Таблица А.7. Специальные и математические символы ТеХ
Последовательность букв Символ Последовательность букв Символ Последовательность букв Символ
\alpha 01 \upsilon u \sim
\beta ₽ \phi Ф \leq
\gamma Y \chi X \infty 00
\delta 8 \psi V \clubsuit *
\epsilon E \omega (0 \diamondsuit ♦
\zeta c \Gamma г Xheartsuit V
\eta n \Delta A \spadesuit A
\theta e \Theta e Meftrightarrow <->
\vartheta Э \Lambda A \leftarrow <—
\iota I \Xi \uparrow T
\kappa к \Pi П \rightarrow ->
\lambda X \Sigma s \downarrow г
\mu и Wpsilon Y \circ о
\nu V \Phi Ф \pm +
\xi \Psi \geq
\pi 71 \Omega Q \propto co
\rho p \forall V \partial a
\sigma CT \exist 3 \bullet •
\varsigma 5 \ni Э \div 4-
\tau T \cong \neq *
\equiv = \approx as \aleph N
\Im 3 \Re \wp P
\otimes \oplus © \oslash 0
\cap о \cup u \supseteq ZD
\supset ZD \subseteq c \subset (Z
\int J \in e \o О
Таблица А.8. Функции MATLAB
Функция Описание функции
abs Вычисляет абсолютное значение числа
acos Вычисляет арккосинус
ans Выводит результат последней операции
asin Вычисляет арксинус
atan Вычисляет арктангенс (в 2 квадрантах)
atan2 Вычисляет арктангенс (в 4 квадрантах)
axis Задает ручное масштабирование осей координат при выводе графиков
bode Строит частотные характеристики в виде диаграммы Боде
c2d Реализует построение дискретной модели непрерывной системы
clear Удаляет переменные и функции из рабочей области
см. продолжение
812
Приложение А. Основы MATLAB
Таблица А.8 (продолжение)
Функция Описание функции
elf conj conv cos ctrb diary d2c eig end exp expm eye feedback Очищает графическое окно Вычисляет комплексно-сопряженное число Производит умножение двух полиномов Вычисляет косинус Вычисляет матрицу управляемости Сохраняет сеанс работы в файле на диске Реализует построение непрерывной модели дискретной системы Вычисляет собственные значения и собственные векторы Завершает построение структуры системы управления Вычисляет экспоненту с основанием е Вычисляет матричную экспоненту с основанием е Формирует единичную матрицу Вычисляет передаточную функцию для соединения двух систем в контур с обратной связью
for format grid on help hold on i Образует цикл вычислений Задает формат вывода чисел на дисплей Добавляет сетку к текущему графику Печатает список тем, по которым предлагает услуги Помощник Сохраняет текущий график на экране Мнимая единица, V-T
imag impulse inf j legend linspace load log Iog10 loglog logspace Isim Выделяет мнимую часть комплексного числа Вычисляет реакцию системы на единичную импульсную функцию Бесконечное значение. Мнимая единица, V-T Помещает пояснение на текущем графике Формирует линейно упорядоченные векторы Загружает в файл сохраненные переменные Вычисляет натуральный логарифм Вычисляет десятичный логарифм Строит график в логарифмическом масштабе по обеим осям Формирует логарифмически упорядоченные векторы Вычисляет реакцию системы на произвольный входной сигнал и ненулевые начальные условия
margin Вычисляет по частотным характеристикам системы запас по модулю, запас по фазе и соответствующие им частоты
max mesh meshgrid min minreal Определяет максимальное значение числа из массива Создает трехмерную сетчатую поверхность Создает массивы для использования их совместно с функцией mesh Определяет минимальное значение числа из массива Определяет передаточную функцию минимальной реализации после сокращения полюсов и нулей
NaN ngrid nichols num2str nyquist Указывает на нечисловое значение, получаемое в результате операции Изображает линии сетки диаграммы Никольса Строит годограф Никольса по частотным характеристикам системы Преобразует массив чисел в строки Строит частотный годограф (диаграмму) Найквиста
см. продожение
Приложение А. Основы MATLAB 813
Таблица А.8 (продолжение)
Функция Описание функции
obsv ones pade Вычисляет матрицу наблюдаемости Формирует матрицу, все элементы которой есть целые числа и равны 1 Вычисляет аппроксимацию Паде и-го порядка для запаздывания по времени
parallel Определяет передаточную функцию для параллельного соединения двух систем
plot pole poly polyval printsys Строит график в линейном масштабе по обеим осям Вычисляет полюсы системы Формирует полином по его корням Вычисляет значение полинома Выводит на печать информацию о модели линейной системы в переменных состояния и в виде передаточной функции
pzmap Изображает диаграмму расположения полюсов и нулей линейной системы
rank real residue rlocfind Вычисляет ранг матрицы Выделяет действительную часть комплексного числа Производит разложение рациональной функции на простые дроби Определяет коэффициент усиления, соответствующий заданному положению корней на корневом годографе
rlocus roots semilogx Строит корневой годограф системы Вычисляет корни полинома Строит график с использованием логарифмического масштаба по оси х и линейного масштаба по оси у
semilogy Строит график с использованием логарифмического масштаба по оси у и линейного масштаба по оси х
series Определяет передаточную функцию для последовательного соединения двух систем
shg sin sqrt ss step subplot tan text title tf who whos xlabel ylabel zero Отображает графическое окно Вычисляет синус Вычисляет квадратный корень Формирует модель объекта в переменных состояния Вычисляет переходную характеристику системы Разделяет графическое окно на подокна Вычисляет тангенс Добавляет текст к текущему графику Добавляет заголовок к текущему графику Создает модель объекта в виде передаточной функции Выводит список переменных, находящихся в рабочей области Выводит список текущих переменных с подробностями Добавляет к текущему графику обозначение оси х Добавляет к текущему графику обозначение оси у Вычисляет нули системы
zeros Создает матрицу, все элементы которой нулевые
814
Приложение А. Основы MATLAB
Основы MATLAB: задачи
А.1. Рассмотрите две матрицы:
4 2л I Г6j -13л
А= г- , В =
6j 10+jV2j [л 16.
С помощью MATLAB выполните следующие операции:
(а) А + В; (в) А2, (д) В’1; (ж) А2 + В2 - АВ.
(б) АВ; (г) А'; (е) В'А';
А.2. Дана система линейных алгебраических уравнений:
5х + бу + 10z = 4,
-Зх + 14z = 10,
—ly + 21z = 0.
Записав эти уравнения в векторно-матричной форме, получите их решение относительно х, у. и z.
А.З. Постройте графики функции у(х) = е 0,5лsinew, где си = 10 рад/с и 0 <х < 10. Сформируйте вектор х с помощью двоеточия с шагом 0,1.
А.4. Разработайте скрипт MATLAB для построения графика функции
4 4
у(х) - — COSCOX ч-cosЗсох,
л 9л
где со — переменная, вводимая в командной строке. Обозначьте ось х как Время (с), а ось у как у(х) = (4/л) cos(cox) + (4/9л) cos(3cox). Включите в скрипт заставку с описанием задачи и убедитесь, что функция help выводит заставку на экран. Проверьте выполнение скрипта при со = 1, 3 и 10 рад/с.
А.5. Рассмотрите функциюу(х) = 10 + 5е *cos(cox + 0,5). Разработайте скрипт, позволяющий построить в одних осях графики у(х) для трех значений cu = 1, 3 и 10 рад/с при 0 < х < 5 с. Графическое изображение должно иметь следующие атрибуты:
Заголовок у(х) = 10 + 5exp(-x)cos(cox + 0,5)
Обозначение оси х Время (с)
Обозначение оси у У(х)
Тип линии со = 1: сплошная линия со = 3: штриховая линия со = 10: пунктирная линия
Сетка Нанесена
Приложение Б Основы Simulink
fl"*
"Wnnulink предоставляет пользователям MATLAB мощное средство моделирования и исследования систем управления с обратной связью. Поскольку Simulink является интерактивным инструментом, эффективно использующим графический интерфейс, то лучший способ его освоить — это сразу начать с ним работать. В этом приложении вы последовательно пройдете ряд этапов по моделированию простой системы.
Мы попытаемся здесь дать основные сведения о Simulink, которые не привязаны к конкретным версиям этой программы. На момент издания этой книги самой последней является версия Simulink 3.0. По мере появления следующих версий сведения относите-- льно предыдущих будут помещаться на сайт MCS, поэтому если у вас возникнут проблемы совместимости программы с моделями Simulink, рассматриваемыми в данной книге, рекомендуется заглядывать на этот сайт. Это, в частности, относится к пользователям Macintosh, которые могут найти на сайте MCS альтернатитвные m-файлы и модели Simulink, т. к. MATLAB 5.3 и Simulink 3.0 и более поздние версии не поддерживаются операционной системой Macintosh.
Начать работу с Simulink можно двумя способами:
□ Щелкнуть мышью на значке Simulink в панели инструментов MATLAB.
□ Ввести Simulink в командной строке на экране.
Оба эти способа проиллюстрированы на рис. Б.1.
После запуска Simulink на рабочем столе должно появиться окно наподобие рис. Б.2. На рис. Б.2, (а) изображен броузер главной библиотеки Simulink. Он показывает, какие библиотеки, структурированные в виде деревьев, установлены на компьютере. Это пер-
816
Приложение Б. Основы Simulink
Рис. Б.2 а)
Первое окно, появляющееся после запуска Simulink: (а) при работе в Windows, (б) при работе в UNIX
s_____________
Efc £d* Help
7p cs j-
Simulink Library Browser
। Continuous: $imu^3/Cont‘nuous
Режим Simulink
ь/ийМЯГ -W—---------------
| Control System Toolbox ifo DSP Blockset
’ t. Wt Dials 8c Gauges Blockset
’ ]jj( Fixed-Point Blockset ; MPC Blocks
• Ф: S-function demos
I & Simulink Extras
Платформа Windows
Continuous
Discrete
Functions & T ables
Math
Щелкните правой кнопкой мыши на Simulink. чтобы в платформе Windows отобразить библиотеку Library
Библиотека содержит блоки, используемые при исследовании систем управления
Платформа UNIX
вый экран, который повляется после запуска Simulink на компьютерах, проинадлежащих к платформе Windows. При работе на компьютерах, принадлежащих к платформе UNIX, на экране появляется окно библиотеки Simulink, изображенное на рис. Б.2, (б). Такое же окно появляется и при работе в Windows, но после щелчка правой кнопкой мыши на Simulink в броузере главной библиотеки.
В качестве упражнения, помогающего освоить Simulink, вы можете выполнить обсуждаемые далее этапы и в результате создать простую систему и приступить к ее моделированию. Не полагайтесь только на материал данного приложения, прекрасными источниками информации могут служить также изданные пособия по Simulink и интерактивный Помощник, вызываемый из программы в процессе работы.
Сеанс работы в Simulink вы можете начать, открыв уже существующую модель или же создав новую модель. Последнее можно сделать двумя способами:
□ Щелкнув на кнопке New в панели инструментов броузера главной библиотеки (только в Windows).
□ Выбрав сначала New в раскрывающемся меню опции File в окне библиотеки, а затем выбрав Model.
Эти два способа создания новой модели проиллюстрированы на рис. Б.З. Окно новой системы, изображенное на рис. Б.4, появляется на рабочем столе, по умолчанию занимая всю его площадь. При необходимости вы можете изменить его размеры и переместить в нужное положение. Сразу же после создания окну новой системы присваивается имя Untitled, но вы можете изменить его с помощью команды Save as из меню File. В этом окне производится создание модели, ее редактирование и исследование. Сохранение модели автоматически создает файл (с расширением .mdl), содержащий всю информацию, необходимую для открытия модели в следующих сеансах работы в Simulink. В конце каждого сеанса работы обязательно выбирайте команду SAVE из меню File с тем, чтобы все изменения модели были сохранены для последующей работы.
Приложение Б. Основы Simulink
817
Рис. Б.З
Создание новой модели:
(а) из броузера главной библиотеки
(в Windows),
(б) из окна библиотеки в UNIX (или в Windows)
Выберите модель
б)
Откройте существующую модель
Платформа UNIX или Windows
Simulink содержит стандартную библиотеку блоков, изображенную на рис. Б.2, (б). Она составлена из подблоков в соответствии с их функциональным назначением. Эти подблоки таковы:
□ Источники сигналов (Sources)
□ Средства регистрации (Sinks)
□ Элементы дискретных систем (Discrete)
□ Элементы непрерывных систем (Continuous)
□ Математические операции (Math)
□ Функции и таблицы (Functions & Tables)
□ Нелинейности (Nonlinear)
□ Сигналы и системы (Signals & Systems)
818
Приложение Б. Основы Simulink
Чтобы создать модель, вы должны взять и перенести нужные блоки из библиотеки на рабочий стол. В простом примере, который приводится ниже, вам надо скопировать блок, генерирующий синусоидальный сигнал (блок Sine Wave из библиотеки Sources), и блок индикации (блок Scope из библиотеки Sinks).
Вы можете получить доступ к блоку Sine Wave либо из броузера главной библиотеки (только в Windows), либо из окна библиотеки Sources (в UNIX или в Windows). Развернув броузер главной библиотеки, как показано на рис. Б.5, (а), вы получите доступ к блоку Sine Wave. Для этого сначала войдите в Simulink, щелкнув на его имени в броузере, затем щелкните в развернувшемся меню на Sources, после этого выберите блок Sine Wave и перетащите его в окно новой модели. Копия блока будет установлена в том месте окна новой модели, где вы оставите его изображение. Аналогичным образом, чтобы скопировать блок Sine Wave из окна библиотеки Sources, откройте это окно (показанное на рис. Б.5, б) двойным щелчком мыши на значке Sources в окне библиотеки Simulink (рис. Б.2).
Примечание: в Windows вы можете открыть окно библиотеки Simulink щелчком правой кнопки мыши на этом имени в броузере главной библиотеки, после чего надо щелкнуть на кнопке Open Library.
Библиотека Simulink
а)
--3
^untitled mat | From File
Ground
iimulink Library Browser
Библиотека Sources
Блок
Sine wave
j from Voikipace
Wave: Output a sme wave where the sme type determines the *.|
technique used. The parameters n the two types are related 33
ги Chirp Signal © dock
Pulse Generator
Ramp
Random Humber
Repeating Sequence
Sine Waze
Библиотека Sinks
Блок
Sine wave
/ Sk SkrnJink'*
Continuous ihj Discrete Ъ-] Functions Ь Tables
| |-fel Nonlinear
| Signals&S
= -ij Sirks
Source»
Subsystems -B Control System Toolbox я В DSP Blockset «Й В Dials l Gauger Blockset В Fixed-Point Blockset В MFC Blocks B' S-Junction demos В Simulink Extras В Slataflow
]овЫ Clock
6)
Signal Generator
Be ,ta JBj» H<*
D tS fl? 1~
Рис. Б.5. Выбор источников сигнала: (а) в броузере главной библиотеки (в Windows), (б) в окне блоков Sources (в UNIX и Windows)
Приложение Б. Основы Simulink
819
Рис. Б.6
Простая система, состоящая из источника сигнала Sine Wave и индикатора Scope
’□ j es хча р h ci she ►.
Выходной порт
Sjn« Wjv* Scop*
£te $йшЫюп jFfirmat j
. hjf'ilaij a q„ s ► „
На этом этапе построения модели рабочее окно будет выглядеть так, как показано на рис. Б.6, (я).
Теперь вам надо будет каким-то образом наблюдать синусоидальный сигнал, генерируемый блоком Sine Wave. Окно библиотеки Sinks содержит набор средств регистрации сигнала, включая Scope, XY Graph, Display, То Workspace и То File, как показано на рис. Б.7. Если вы воспользуетесь инструментами То Workspace или То File, то по окончании сеанса работы данные будут сохранены соответственно в рабочей области или в файле. В нашем примере мы используем для наблюдения сигнала инструмент Scope (индикатор).
Рис. Б.7
Окно блоков Sinks
Блок Scope
820
Приложение Б. Основы Simulink
Блок Scope вы можете скопировать либо из броузера главной библиотеки (только в Windows), либо из окна библиотеки Sinks (в UNIX или в Windows). Как и в случае с библиотекой Sources, развернув броузер главной библиотеки, вы получите доступ к блоку Scope. Для этого войдите в Simulink, щелкнув на его имени в броузере, затем щелкните в развернувшемся меню на Sinks, после этого выберите из библиотеки Sinks блок Scope и перетащите его в окно новой модели. Другой способ доступа к блоку Scope состоит в том, что для этого надо сделать двойной щелчок мышью на значке Sinks в окне библиотеки Simulink (рис. Б.2). После этой операции рабочее окно будет выглядеть так, как показано на рис. Б. 6, (б).
Обратите внимание, что на рис. Б.6 окно с моделью переименовано, оно теперь имеет имя test (раньше модель имела имя untitled, как показано на рис. Б.4). Обязательно сохраните модель, чтобы вы могли открыть ее для исследования в следующих сеансах работы в Simulink.
Теперь задача состоит в том, чтобы соединить между собой блоки Sine Wave и Scope. Угловая скобка (>), появляющаяся у правого края блока Sine Wave — это выходной порт. Аналогично, угловая скобка (>), появляющаяся у левого края блока Scope — это входной порт. Всегда, когда такая скобка направлена к блоку, это соответствует входному порту, а если от блока — то выходному порту. Если блоки соединены, то входной и выходной порты исчезают.
Чтобы соединить выходной порт блока Sine Wave с входным портом блока Scope, поместите курсор на выходной порт в правой части блока Sine Wave, при этом обратите внимание, что курсор принял форму крестика. Удерживая нажатой кнопку мыши, перемещайте курсор к входному порту блока Scope. Соединительная линия при этом будет штриховой, а когда вы доведете ее до входного порта блока Scope, курсор превратится в жирный крестик, как показано на рис. Б.6, (в). После этого отпустите кнопку мыши, и соединение между двумя портами будет установлено. Когда это произойдет, угловые скобки исчезнут и на соединительной линии появится стрелка, указывающая направление передачи информации. Это отражено на рис. Б.6, (г). Теперь почти все готово, чтобы начать моделирование.
Вы можете наблюдать и редактировать параметры моделирования, выбрав из меню Simulation опцию Parameters. При этом экран будет иметь вид, изображенный на рис. Б.8. Установите время окончания моделирования (по умолчанию оно равно 10 с), равное 1000.0, как показано на рис. Б.8. Выполнив эту операцию, закройте окно диалога нажатием кнопки ОК.
Рис. Б.8
Установка параметров моделирования
4 Simulation Parameters: test
Solver] Workspace I/O j Diagnostics | Advanced |
Skrdaliori time
Start time: 10 О
Solver options
Type: | Variable-step у |
Stop time: 11666.0◄
| ode45 (Domiand Prince)
5 Max step size.. |auto Miri step size: | auto
Relative tolerance; 11e-3
Absolute tcterarce (auto
Установите время окончания моделирования
IrAial step size: ( auto
Output options
«-j Refine cxApul
Reline factor: |T
Завершив процедуру, щелкните на ОК
OK I Cancel | Help
Приложение Б. Основы Simulink
821
Hock Parameters: Sine Wave
S'iriMRe
= Output a sine wave.
. Parameters — i Ampitude:
Apply
Frequency frad/secE |005
Fhase (rad):
|o
Sample time:
•l°
Установите to = 0.05
Чтобы начать моделирование, щелкните на Start
Рис. Б.9. Установка частоты синусоидального сигнала га = 0.05 рад/с
Рис. Б. 10. Начало моделирования выбором опции Start из меню Simulation
Параметры синусоидального сигнала (например, частоту) вы можете задать (а при необходимости и изменить), сделав двойной щелчок мышью на блоке Sine Wave в окне модели. Диалоговое окно примет вид, изображенный на рис. Б.9. На этом рисунке показано, что частота синусоиды установлена равной 0.05 рад/с.
Перед началом моделирования откройте индикатор двойным щелчком мыши на блоке Scope в окне модели. Далее выберите опцию Start из меню Simulation, как показано на рис. Б. 10. Начнется процесс моделирования, и на экране появится изображение, приведенное на рис. Б. 11. График динамически изменяется по мере того, как блок Sine Wave генерирует синусоидальный сигнал. По окончании времени моделирования изображение на экране будет выглядеть так, как показано на рис. Б. 11.
Теперь вы закончили создание простой модели и провели первый эксперимент. Перед тем, как выйти из Simulink, не забудьте выбрать из меню File опцию Save, чтобы сохранить всю информацию о модели для последующей работы.
Рис. Б. 11 Результат моделирования простой системы из источника сигнала Sine Wave и индикатора Scope. Частота сигнала га = 0.05 рад/с
822
Приложение Б. Основы Simulink
Рис. Б.12
Полезные блоки для моделирования систем управления, находящиеся в библиотеке Simulink Extras
Закончить сеанс работы в Simulink вы можете, выбрав из меню File опцию Close. После этого у вас есть возможность продолжить работу в MATLAB, вернувшись в командную строку. Если вам нужно закончить работу только в Simulink, но не в MATLAB, просто закройте все окна Simulink. Если же нужно выйти и из Simulink и из MATLAB, то выберите команды Exit MATLAB (в Windows) или Quit MATLAB (в UNIX).
Для анализа и синтеза систем управления Simulink предоставляет пользователю набор блоков с передаточными функциями и моделями в переменных состояния. Некоторые такие блоки с указанием их нахождения в библиотеке Simulink приведены на рис. Б.12 и Б. 13. Например, популярный ПИД-регулятор можно найти в библиотеке Simulink Extras.
Рис. Б.13
Элементы, находящиеся в блоке Continuous библиотеки Simulink и полезные для моделирования непрерывных систем управления
Matrix Gam
Slider Gain
Предметный указатель
Автоматизация 28
Автоматические весы 366
Автоматическое распределительное устройство 181
Автопилот 713
Акселерометр 82, 94
Анализ робастности 697
Аналого-цифровой преобразователь (АЦП) 759
Апериодическая реакция 600
Аппарат для исследования Марса 212, 345, 415, 753
Аппроксимация запаздывания формулой Паде 526, 783
Асимптота корневого годографа 355
Асимптотическая аппроксимация диаграммы Боде 430
Биологическая система управления 34
Блэк Г. С. 27, 126
Боде X. У. 429
Бурильная машина для тоннеля под Ла-Маншем 209, 217
Вектор состояния 143
Вектор-столбец 143
Водяные часы 49
Возмущающий входной сигнал 75, 193, 202
Временная область 140
Временная характеристика 199, 243
- дискретная аппроксимация 159-160
- связь с расположением корней 257
- системы второго порядка 246-247
Время максимума 249
Время нарастания 249
Время установления 249
Вспомогательный полином 316
Входные сигналы 244
Выбор параметра 370
Вычеты 66
Вышнеградский И. А. 24, 312
824
Предметный указатель
Гидравлическое исполнительное устройство 77, 80
Гироскоп 185
Гомогенность 61
Граф. См. Сигнальный граф
Графическое определение вычетов 66
Двигатель постоянного тока 73
— с управлением по цепи возбуждения 74
— с управлением по цепи якоря 75, 90
Двойной Т-образный фильтр 438
Двухкоординатный графопостроитель 605
Декада 430
Децибел (дБ) 429
Диагональная матрица 152
Диаграмма Боде 429
- асимптотическая 430
Диаграмма Никольса 509, 523
Динамика физических систем 55
Дискретная система 759
- замкнутая 766
Дистанционно управляемый аппарат 517
Дистанционные манипуляторы 186, 627
Дифференциальное уравнение состояния 143
Дифференциальные уравнения 56
Доминирующие корни 255, 366, 488
Единичная импульсная функция 245
Жорданова каноническая форма 152
Задачи на синтез систем управления 52,135,189,237,303,344,414,478,557,637,
685, 745, 793
Законы Кирхгофа 69
Запаздывание по времени 514
Запас по модулю 501
Запас по фазе 502
Затухающие колебания 68
Издержки обратной связи 208
Имитационное моделирование 91
Импульсный сигнал 245
Интеграл от взвешенного квадрата ошибки (ИВКО) 265
Интеграл от взвешенного модуля ошибки (ИВМО) 265
Интеграл от квадрата ошибки (ИКО) 265
Интеграл от модуля ошибки (ИМО) 265
Интеграл свертки 245
Искусственная рука 34
Предметный указатель
825
Исполнительное устройство 73
История автоматического управления 23
Качество системы управления 243
— требования в частотной области 446, 578
Квантованные данные 760
Компромисс 38
Компьютерное моделирование 91
Контур Найквиста 491
Контуры корней 373
Контуры на 5-плоскости 486
— отображение 486
Конформное отображение 486
Корневой годограф 350
— асимптоты 355
— на z-плоскости 776
— понятие 350
- построение с помощью MATLAB 386
- процедура построения 353
— синтез параметров 370
- точка отрыва 358
- угол выхода 361
— участки действительной оси 354
Корни характеристического уравнения 320
Корректирующее устройство 566
- интегрирующего типа 585
Коррекция 566
- с помощью устройств с опережением по фазе (методом диаграммы Боде) 572
— (синтез на 5-плоскости) 578
— с помощью устройств с отставанием по фазе (методом диаграммы Боде) 591
— (синтез на 5-плоскости) 587
Космическая станция 185, 396
Космический телескоп 714
Космический челнок 473, 546, 787
Коэффициент затухания 67
— оценка 256
Коэффициент ошибки по положению 260
Коэффициент ошибки по скорости 260
Коэффициент ошибки по ускорению 261
Критерий устойчивости Найквиста 491
Критерий устойчивости Рауса-Гурвица 313
Критическое затухание 67
Лабораторный робот 36, 96
Лентопротяжный механизм 403
Линейная аппроксимация 62
Линейная система 61
826
Предметный указатель
Линейный входной сигнал 245
Логарифмическая амплитудная характеристика 429
Логарифмическая амплитудно-фазовая диаграмма 449
Магнитная подвеска 127, 633, 741
Максвелл Дж. 24, 312
Максимальное перерегулирование 249
Максимум амплитудно-частотной характеристики 434
Математические модели 55
Матрица управляемости 646
Матричная форма дифференциального уравнения 143
Матричная экспоненциальная функция 144
Маятник 63
Метод Эйлера 160
Минимально-фазовая передаточная функция 440
Минорский Н. 115
Многоконтурная система 85—86
Моделирование систем с помощью MATLAB 99
Модель гидравлического исполнительного устройства 77
Модель двигателя постоянного тока 73
Модель перевернутого маятника на тележке 154, 661
Модель распространения эпидемического заболевания 153, 323
Найквист Г. 485
Неминимально-фазовая передаточная функция 440
Неопределенные параметры 699
Нули 65
Обратная связь 22
- отрицательная 29
- положительная 48
- по состоянию 650, 652
— псевдоколичественная 724
Объект управления 22
Ограничение 654
Ограниченная реакция 309
Окружности постоянного модуля (постоянного М ) 508
Окружности постоянной фазы (постоянного N ) 509
Октава 430
Оператор дифференцирования 65
Оператор интегрирования 65
Операционный усилитель 618, 732
Определение корней полиномов 327
Определение характеристик системы с помощью MATLAB 214
Определитель графа 89
Оптимальные коэффициенты T(s) при оценке ИВМО 270
Оптимизация 265, 649
Предметный указатель
827
Относительная устойчивость320
— определение с помощью критерия Найквиста 501
— критерия Рауса-Гурвица 321
Относительное перерегулирование 249
- для системы второго порядка 250
Отображение контуров на 5-плоскости 485
Оценки качества 265, 651-652
Параболический входной сигнал 245
Паркинсон Д. Б. 27
Перевернутый маятник 154, 661, 683
Передаточная функция 69
- гидравлического исполнительного устройства 77
- двигателя постоянного тока 73
- замкнутой системы 85
Переменные-аналоги 60
Переменные состояния 140
- развязанные 152
- физические 151
Переменные физических систем 56
Перерегулирование 249
Переходная матрица состояния 144, 156
Переходная характеристика 243
— построение с помощью MATLAB 111, 174
Период квантования 759
ПИД-регулятор 707
- робастный 708
ПИ-регулятор 549, 626
Подвижный робот 261
Положение равновесия 153
Полоса пропускания 447, 508, 512
Полюсы 65
Полярные координаты 426
Постоянная времени 70
Правило обратной разности 779
Предшествующий фильтр 597
Преобразование Лапласа 64
- обратное 64
Преобразование Фурье 425
Привод катушки 716
Пример синтеза с продолжением 44,111,172,220,286,333,391,458,529,615,676, 729, 784
Принцип аргумента 487
Принцип суперпозиции 60
Производительность 28
828
Предметный указатель
Разложение на простые дроби 65
Размещение полюсов с помощью обратной связи по состоянию 657
Реализация цифровых регуляторов 779
Редуктор 81
Резонансная частота 434, 447
Ременный привод принтера 164
Риск 39
Робастный критерий устойчивости 698
Робот 31, 36, 229
Робот «Искусственная рука» 34
Самолет с вертикальным взлетом и посадкой 343, 689
Сигнал обратной связи 22
Сигнал ошибки 195
Сигнальный граф 87
- контур 87
— модель в переменных состояния 145
— определитель 89
- путь 87
- узлы 87
— формула Мейсона 88
Синтез 89
Синтез внутренней модели 663, 719
Синтез корректирующих устройств
— аналитическими методами 595
— интегрирующего типа 584
Синтез системы управления 39, 566
- во временной области 645
- с использованием устройств интегрирующего типа 584
- с использованием устройств с опережением по фазе (методом диаграммы Боде) 573
— (на 5-плоскости) 578
- с использованием устройств с отставанием по фазе (методом диаграммы Боде) 591
— (на 5-плоскости) 587
- с помощью обратной связи по состоянию 645
Система 21
— автоматического контроля 667, 671
— введения инсулина 43, 292
— второго порядка 246
— наблюдаемая 648
- недодемпфированная 59, 100
— нестационарная 139
— неустойчивая 309
- передемпфированная 100
- ручного управления 31
— с неединичной обратной связью 263
— с неопределенными параметрами 699
— стабилизации судна 227, 624
Предметный указатель
829
— управляемая 645
- условно устойчивая 404
- устойчивая 309
Система управления 22
- автомобилем 30, 478
- вертолетом 400, 409
— гравировальной машиной 451, 456
- гусеничной машиной 324
- движением рабочего стола 774
— замкнутая 22, 194
— курсом корабля 550
— лазером 296
- многомерная 23, 83
— намоткой ротора 602, 609
- оптимальная 265, 649
— подводной лодкой 182
— прокатным станом 515, 738
- разомкнутая 22, 194
- робастная 693
- самолетом 232, 411, 638
— сверхзвуковым самолетом 402
— скоростью 199-200, 214
--автомобиля 229
— вращения диска 42
— турбогенератора 401
- телескопом «Хаббл» 53, 275
— токарным станком 721
- уровнем воды 24, 31, 133, 226
- цифровая 33, 757
- ядерным реактором 47, 182
Сложность синтеза 38
Собственная частота 67
Состояние системы 140
Структура с многомерным входом 149
Структурная схема 82-83
Ступенчатый входной сигнал 245, 259
Схема последовательной коррекции 568
Таблица преобразований Лапласа 64
Теорема Коши 487
Теорема о конечном значении 66
Тестовый входной сигнал 244
Техника управления 21-22
Техническое проектирование 38
Тип системы 260
Требования 38, 244
830 Предметный указатель
Уатт Дж. 23
Упрощение линейной системы 272
Усилитель с обратной связью 198
Установившаяся ошибка 206, 259
— системы с неединичной обратной связью 263
Устойчивость 308
— анализ в пространстве состояний 321, 330
— анализ на z-плоскости 768
- анализ с помощью критерия Найквиста 490-491
- анализ с помощью критерия Рауса 312
- анализ с помощью MATLAB 326, 521
- во временной области 310, 312
— в частотной области 484
Устройство с опережением и с отставанием по фазе 595
Устройство с опережением по фазе 569
Устройство с отставанием по фазе 571
Устройство электрической тяги 93, ПО
Фазовые переменные 148
Фильтр низких частот 97
Формула Аккермана 662
Формула Мейсона 88
Формула прямоугольников 779
Фундаментальная матрица. См. Переходная матрица состояния
Характеристическое уравнение 65
Центробежный регулятор 24
Центроид асимптот 356
Цифроаналоговый преобразователь (ЦАП) 760
Цифровой регулятор 771-773
Частота излома 430, 433
Частотная передаточная функция 426-427
Частотные характеристики 423
— графики 426
— замкнутой системы 507
— измерение 445
- построение с помощью MATLAB 453
Четырехполюсник, пропускающий все частоты 441
Чувствительность корней 375
Чувствительность системы 196, 694
Шум
- выхода 205
- измерения 205
831
Предметный указатель
Эванс У. Р. 349
Экстендер 186, 632
Экстраполятор нулевого порядка 760
Электрогидравлическое исполнительное устройство 77
Электромашинный усилитель 80, 122
MATLAB 92, 99, 797
- анализ моделей в переменных состояния 168
— графика 805
- моделирование 99
- построение диаграммы Боде 453
- построение переходной характеристики 111, 174
- скрипты 807
- функции 811-813
Simulink 815
Z-преобразование 762-764
Серия «Технический университет»
Дорф Ричард, Бишоп Роберт Современные системы управления
Художник Н. Лозинская Компьютерная верстка В. Носенко
Лицензия на издательскую деятельность №066140 от 12 октября 1998 г.
Подписано в печать 25.02.02. Формат 70х100‘/16.
Гарнитура Таймс. Бумага офсетная. Печать офсетная.
Усл. печ. л. 67,08. Тираж 3000 экз. Заказ иоз
Издательство «Лаборатория Базовых Знаний» Адрес для переписки: 103473, Москва, а/я 9 Телефон (095)955-0398, E-mail: lbz@aha.ru
Гигиеническое заключение 77.99.2.953.П.9816.3.00 от 22.03.2000 г.
Отпечатано с готовых диапозитивов в полиграфической фирме «Полиграфист». 160001, г. Вологда, ул. Челюскинцев, 3.