/

































































































































































































Автор: Григорьев Н.В.
Теги: общая энергетика машиностроение электрооборудование электроэнергетика
Год: 1974



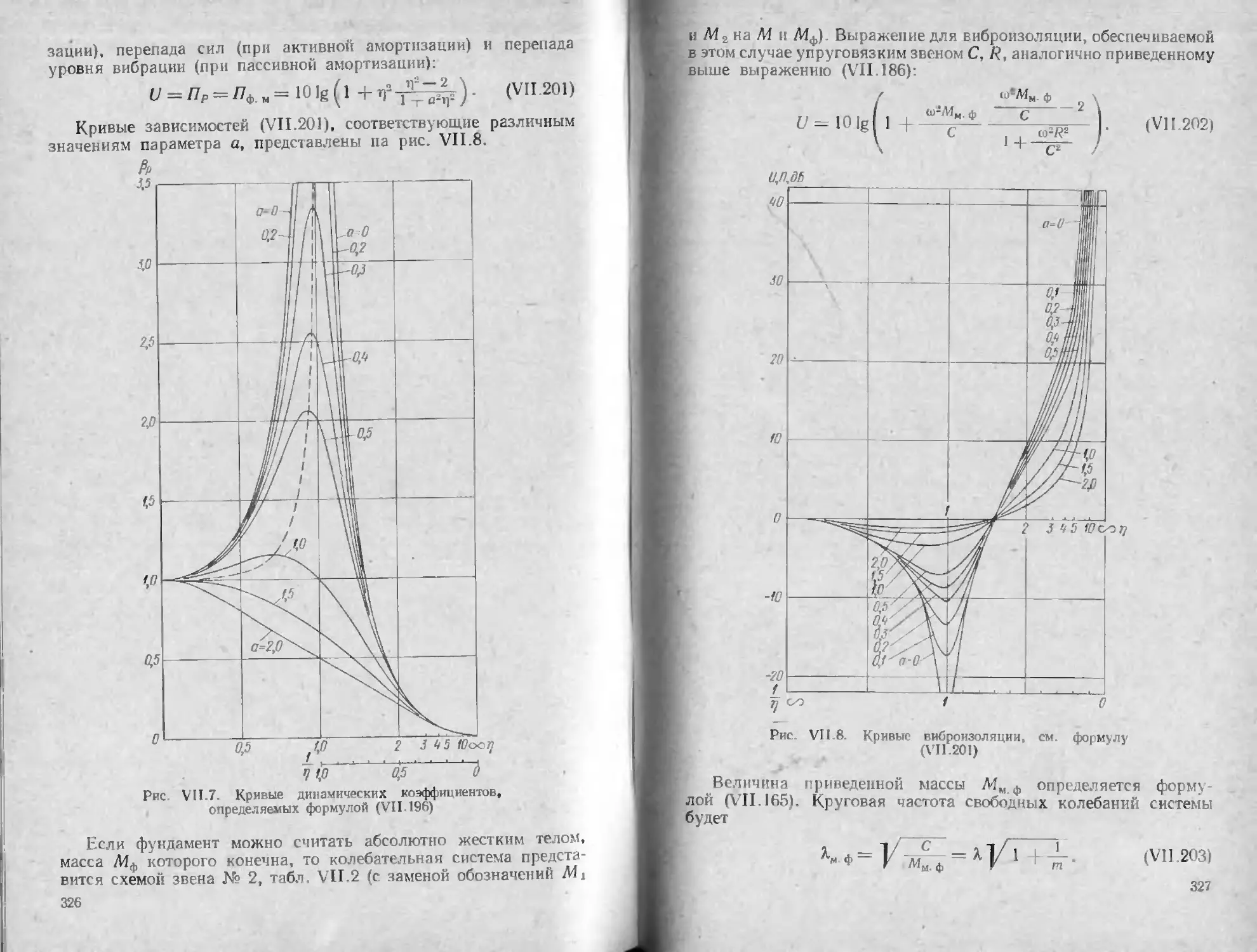
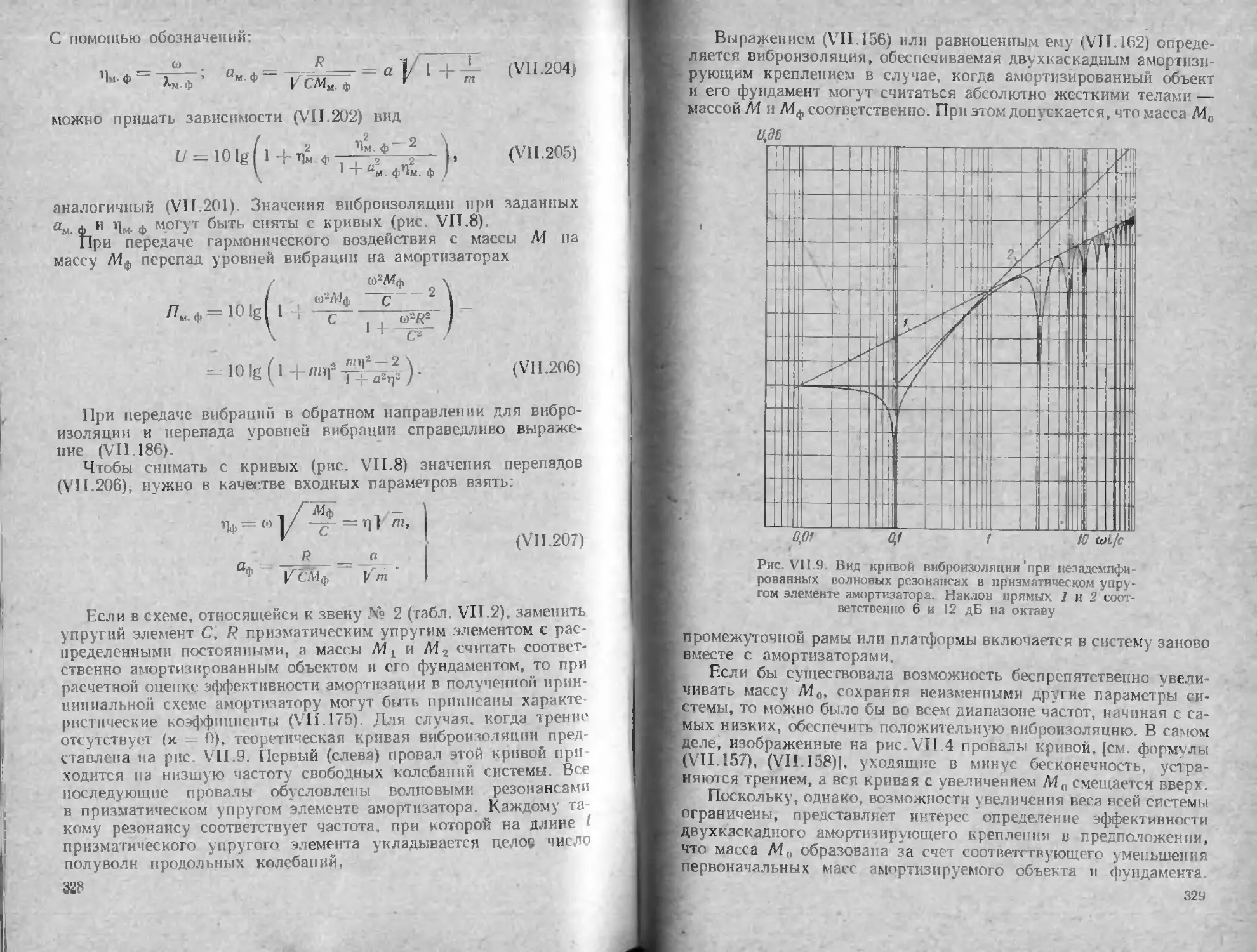
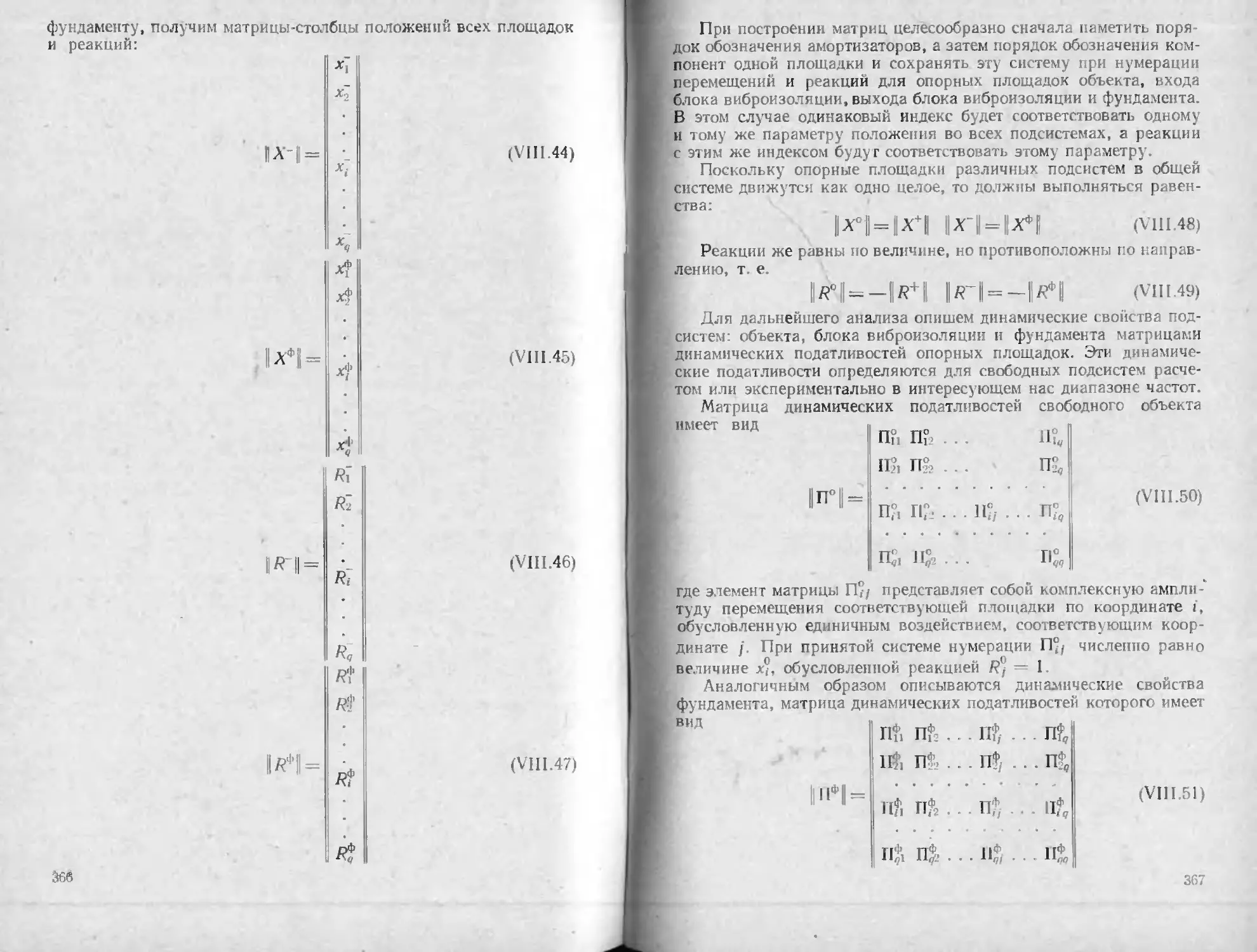
Текст
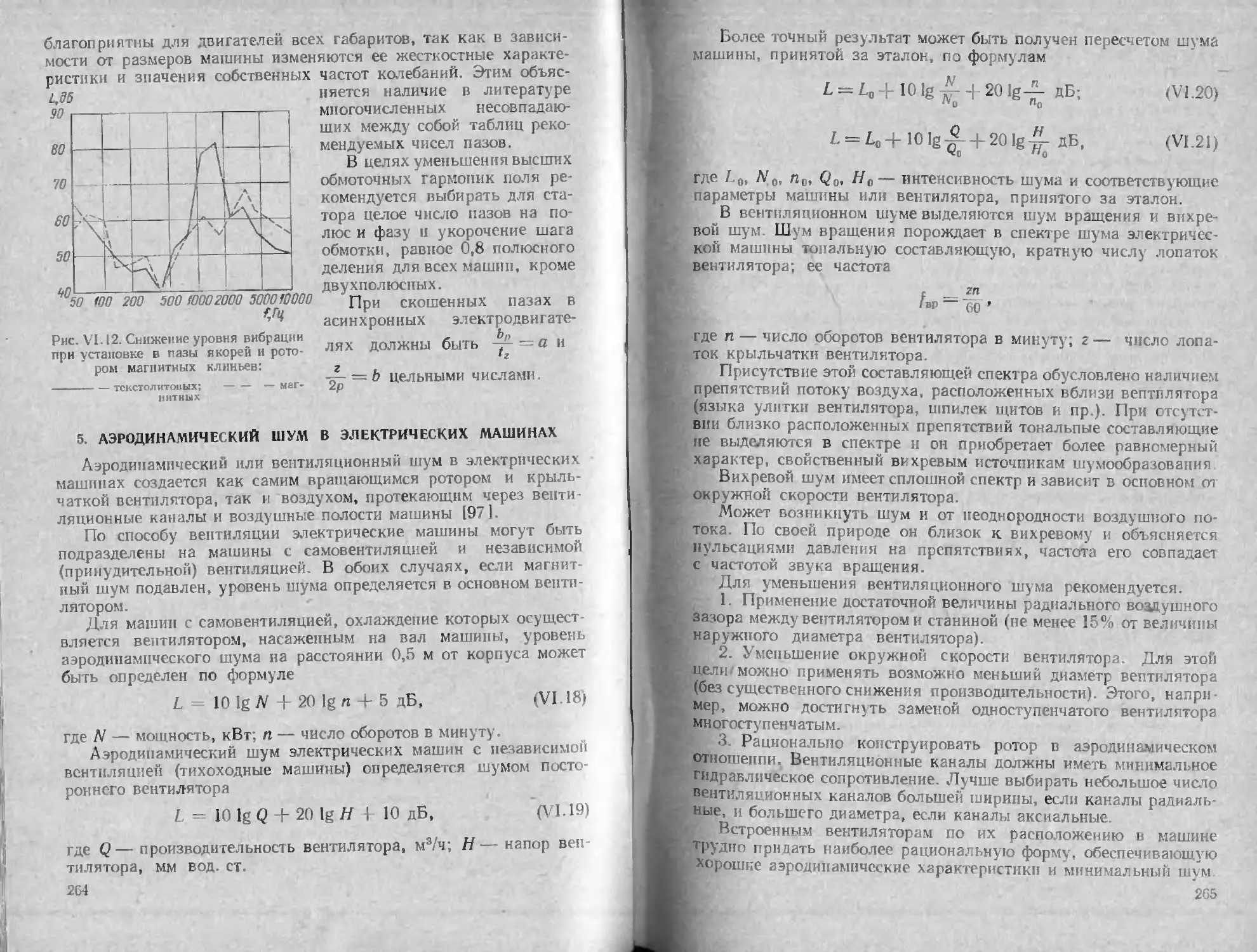
ВИБРАЦИЯ
ЭНЕРГЕТИЧЕСКИХ
МАШИН
СПРАВОЧНОЕ ПОСОБИЕ
Под редакцией
доктора технических наук
профессора Н. В. ГРИГОРЬЕВА
ЛЕНИНГРАД
«МАШИНОСТРОЕНИЕ»
ЛЕНИНГРАДСКОЕ ОТДЕЛЕНИЕ
1974
В41
УДК 620.94 62-752
Вибрация энергетических машин. Справочное пособие. Под ред. д-ра техн-
наук проф. Н- В. Григорьева. Л.» «Машиностроение», (Ленингр. отд-пие),
1974. 464 с.
В справочном пособии изложена методика последовательного определения
причин вибрации в турбинах, компрессорах, насосах и других энергетических
машинах. Рассмотрены методы борьбы с вибрацнен в источнике и па пути рас-
пространения колебаний в самой машине- Указаны мероприятия по стабили-
зации виброакустических характеристик в процессе длительной эксплуатации
машин. *
Справочное пособие предназначено для инженерно-технических работни-
ков, занимающихся вопросами вибрации энергетических машин; оно также
может быть использовано студентами вузов соответствующих специальностей.
Табл. 17. Ил. 176. Список лит. 175 назв.
Авторы книги: ГРИГОРЬЕВ Н. В.,
ДОНДОШАНСКИЙ В. К.» ДУАН И- И.»
БЕЛЯКОВСКИЙ Н. Г..
ПОПКОВ В. И., ТУЗОВ Л-
В.
Рецензент др
техн, наук проф. П. А. И ГОМИН
30301—114
В 038 (01)—74
114 -74
Издательство «Машиностроение»» 1974 г.
ПРЕДИСЛОВИЕ
М На современном этапе научно-технической революции перед
машиностроением поставлена задача создания надежных и долго-
вечных машин н механизмов, обладающих малой виброактив-
ностью, которая является сейчас одним из основных критериев
качества.
Предлагаемая читателю книга должна помочь решению этой
актуальной для машиностроения (и особенно энергетического)
задачи. Книга является первой попыткой создания справочного
пособия для лиц, проектирующих, изготовляющих и эксплуати-
рующих малошумные машины.
Книга начинается главой, посвященной основам нормирова-
ния вибрации машин и их контролю в процессе эксплуатации. Она
написана канд. техн, паук Н. И. Дуаном.
Общие вопросы динамики роторов турбомашин изложены
в гл. II, написанной канд. техн, наук В. К. Дондошанским.
Гл. III посвящена методам борьбы с вибрацией роторов турбо-
машин, а также методам уменьшения динамических сил, пере-
даваемых от роторов через опоры на корпус машин. Параграфы 1
и 2 написаны канд. техн, наук В. К. Дондошанским. В них изло-
жены основные вопросы теории и практики балансирования жест-
ких и деформируемых роторов. Введение и параграф 3 написаны
д-ром техн, наук проф. Н. В. Григорьевым. В п. 3 приведены
конструктивные способы борьбы с колебаниями роторов, а также
описаны методы разгрузки опор машин от динамических усилий
я с помощью упругих опор (линейных и нелинейных), упругодемп-
Жферных и демпферных опор и пр. Здесь же приводится теория
1 работы новых виброизолирующих опор. Эта теория названа
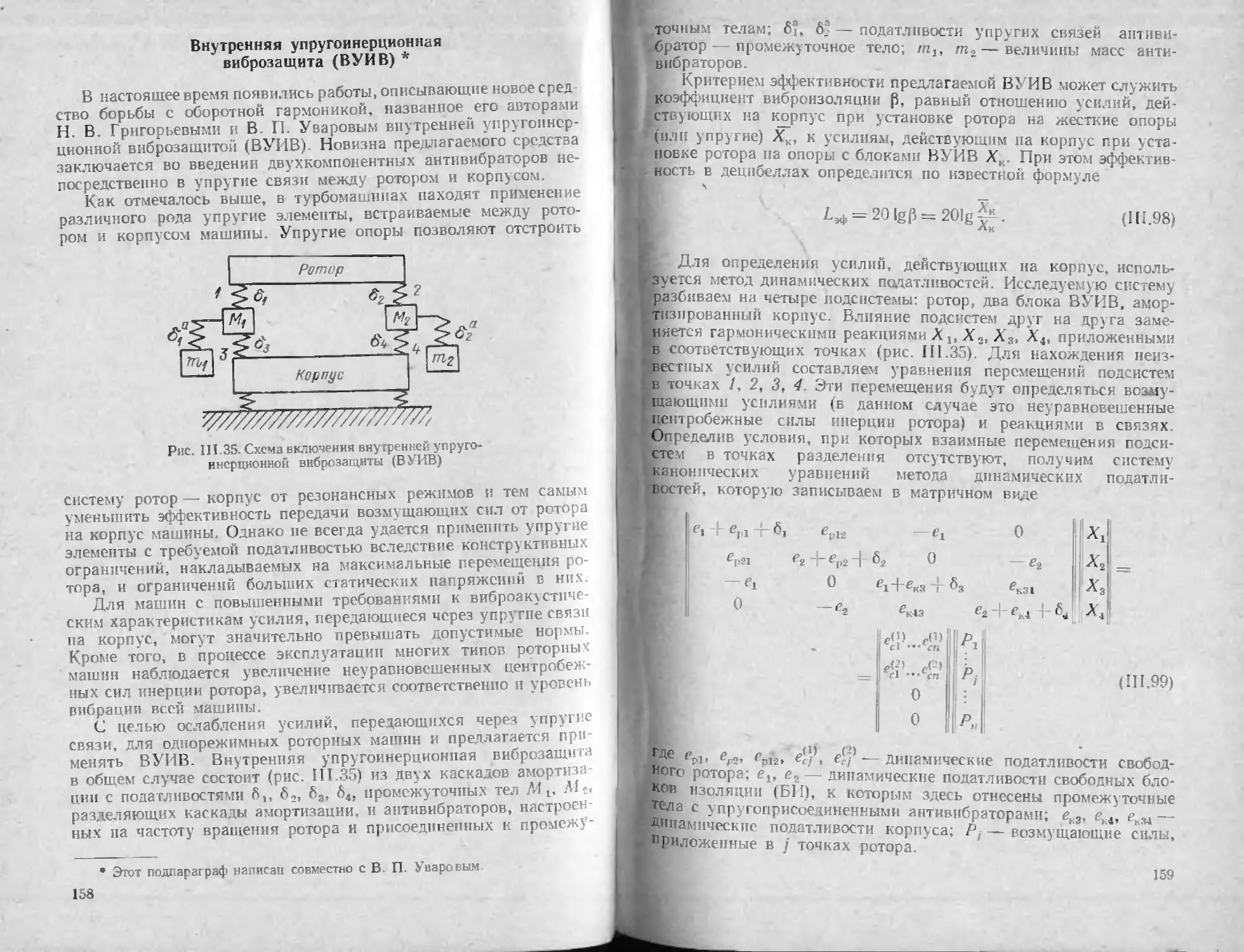
внутренней упругоинерциопной виброзащитой роторных машин.
Основные вопросы виброакустической активности насосов pac-
в. смотрены в гл. IV. В этой главе проанализированы особенности
В вибрации различных типов насосов, гидродинамические и меха-
нические ее источники» описаны особенности динамики, изло-
I Жены основные пути снижения их виброактивности. Глава на-
Iписана канд. техн, наук Н. И. Дуаном совместно с кандидатами
техн, наук В. М. Рогачевым и Я. А. Кимом.
л ш Гл. V посвящена вибрации ДВС. Значительное внимание в этой
1 главе уделено разработке динамических моделей ДВС, экспери-
ментальному определению параметров этих моделей и методике
расчета вибрации. Она написана канд. техн, наук доц. Л. В. Ту-
ровым.
1*
В гл. VI систематизированы основные источники вибрации
электрических машин, описана их природа и даны практические
рекомендации по улучшению виброакустических характеристик
этих машин. Глава написана д-ром техн, наук проф. Н. В. Гри-
горьевым совместно с В. П. Уваровым и М. А. Федорович.
В гл. VII изложены вопросы амортизации машин. В ней рас-
смотрены в основном такие системы амортизации, которые могут
быть представлены в виде упругоподвешениого твердого тела.
В главе изложены наиболее важные принципы проектирования
систем амортизации и описаны распространенные типы амортиза-
торов. Она написана д-ром техн, наук Н. Г. Беликовским.
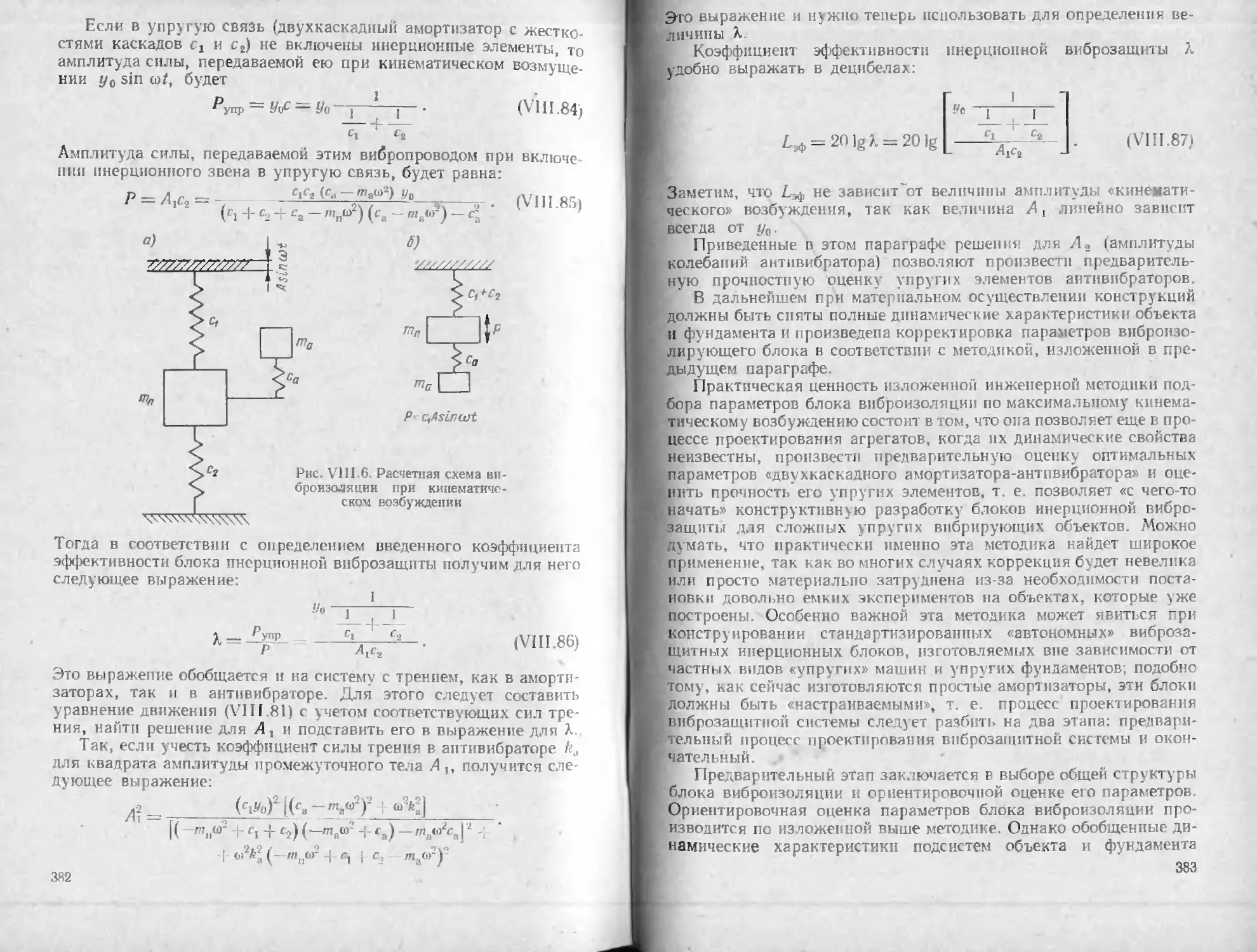
В гл. VIII на конкретных расчетных моделях показана прак-
тическая возможность учета упругих свойств машин при выборе
системы их амортизации; в ней изложены вопросы анализа про-
извольных виброзащитных систем и их оптимального синтеза
с учетом динамических свойств элементов виброзащитных систем;
приведена теория одно- и двухкомпоиентных амортизаторов-аити-
вибраторов, которая была названа авторами внешней упругоинер-
ционной виброзащитой. Глава написана д-ром техн, паук проф.
Н. В. Григорьевым, пп. 3—7 данной главы написаны совместно
с канд. техн, паук доц. В. М. Рогачевым, а п. 9 написан совместно
с В. Ф. Ивановой.
Гл. IX и X посвящены проблеме изучения машин методом обоб-
щенных динамических характеристик. Основное внимание при
этом уделяется способам практического определения этих харак-
теристик и их применению при проектировании машин, разра-
ботке методов борьбы с вибрацией и вопросам влияния динамиче-
ских свойств фундамента на виброакустпческие характеристики
машин. Обе главы написаны канд. техн, наук В. И. Попковым.
В заключительной гл. XI, написанной д-ром техн, наук проф.
Н. В. Григорьевым, излагаются принципы и основные правила
конструирования малошумных машин и механизмов, а также даны
основы виброакустической надежности машин и намечены способы
ее обеспечения.
Книга не содержит сведений о колебаниях отдельных элемен-
тов машин (лопаток, дисков, трубопроводов и пр.), так как их
вибрация, как правило, слабо выходит на опорные узлы и не яв-
ляется определяющей для общей вибрации машин. В главе о ДВС
крутильные колебания коленчатых валов опущены по причине
наличия большого количества хороших справочников на эту тему.
В связи с тем, что данная книга охватывает широкий круг
вопросов, связанных с теорией и практикой конструирования мало-
шумных машин, и является первом попыткой такого рода, она,
по-видимому, не свободна от недостатков. Авторы заранее выра-
жают свою глубокую признательность организациям и лицам, ко-
торые пожелают сообщить в редакцию свои замечания по этой
книге.
ВВЕДЕНИЕ
Научно-техническая революция приводит ко все большим мас-
штабам применения машин и механизмов. При этом для совре-
менного машиностроения характерно развитие противоречия
между двумя основными и прогрессивными тенденциями:
а) уменьшение веса, объема, занимаемой площади;
б) улучшение качества, в частности увеличение надежности и
долговечности машин и механизмов.
Статистические данные для различных машин и механизмов
показывают, что с годами уменьшаются их удельные веса, но одно-
временно интенсивно растет динамическая напряженность машин,
характеризуемая общей вибрацией. Эти объективные закономер-
ности превратили борьбу с шумом и вибрацией машин в одну из
«проблем века», связанную с борьбой за очищение среды, в которой
существует человек.
В каждой отрасли машиностроения (стационарные машины,
судостроение, авиация и пр.) зарождаются свои нормы на вибра-
цию машин и механизмов.
Кроме отрицательного воздействия вибрации машин на на-
дежность, долговечность, к. п. д. и пр. рна оказывает вредное
влияние еще и на следующее:
1) на окружающую среду;
2) на сооружения, аппараты, в которых установлены машины;
на оборудование, установленное в этих объектах, особенно на
системы автоматического управления;
3) на производительность труда и здоровье человека.
Статистические данные показывают, что большое число поло-
мок и аварий в машиностроении порождено повышенной вибра-
цией.
Вредное действие вибрации на здоровье человека состоит в сле-
дующем: изменение в нервной и костно-сосудистой системах, по-
вышение артериального давления, ослабление памяти, спазмы
сосудов сердца, нарушение остроты зрения, падение мышечной
силы, падение веса и др. У людей, работающих в условиях повы-
шенного шума, развивается гипертоническая болезнь и неврал-
гия. Исследования показывают, что под действием длительного
Шума производительность труда падает до 60%, а число ошибок
в расчетах увеличивается более чем на 50*!<». Шум не допустим
е только на производстве, но и в средствах транспорта, на
Улице, в зоне отдыха и в быту.
5
Таким образом, снижение виброактивности машин является
одной из актуальных задач современности, в связи с этим можно
утверждать, что машины будущего — малошумные машины и сей-
час необходимо закладывать научный фундамент проектирования
и технологии изготовления таких машин. Виброакустическая
активность машин является их важнейшим качеством и уже
сейчас заводы-изготовители все у большего числа типов машин
контролируют этот параметр и отбраковывают по нему про-
дукцию.
Уровень виброактивности машин и механизмов закладывается,
прежде всего, в процессе ее конструирования, при этом будет ве-
лика роль виброакустического расчета машины, если его сделать
обязательным; заложенный же в машину конструктором уровень
виброактивпости обеспечивается технологией изготовления узлов
машины, технологией ее сборки и научной организацией ее экс-
плуатации. Сейчас, как правило-, машины, в том числе и мало-
шумные, проектируются в соответствии со своими традиционными
формами, которые не всегда являются оптимальными с точки зре-
ния малой виброактивпости. Это приводит к тому, что доводка
уровней виброактивности машин занимает много времени и тре-
бует больших материальных затрат, а иногда такая доводка просто
и невозможна без коренной переделки машины или создания совсем
нового образца. При этом у конструктора нет уверенности, что
в новом образце будут решены поставленные задачи по обеспече-
нию нужного уровня внброактивности. Это проистекает, по нашему
мнению, прежде всего из-за того, что до сих пор не были четко
сформулированы и систематизированы принципы и правила кон-
струирования малошумных машин и механизмов и не были на их
базе разработаны научно обоснованные технические требования
к малошумпым машинам.
Указанные принципы и правила должны быть ядром разви-
вающейся сейчас новой науки — виброакустики машин и меха-
низмов, т. е. науки о генерировании колебаний в машинах, рас-
пространении этих колебаний в машинах и о методах борьбы
с ними.
Предлагаемая читателю книга содержит некоторые основные
положения этой новой пауки, которая должна помочь конструкто-
рам проектировать малошумные машины.
Особенно актуальными эти задачи являются сейчас для слож-
ных многомашинных агрегатов. Одной из целей предлагаемой
книги и является формулирование указанных задач и оказание
помощи читателю в их решении.
В соответствии с широко распространенным мнением считаем,
что колебания, генерируемые машинами и механизмами, целесо-
образно рассматривать по отдельным диапазонам: диапазон низких
частот (от единиц до 200—300 Гц), диапазон средних частот (от
200—300 до 1000—2000 Гц); диапазон высоких частот (свыше
100Q 2000 Гц).
6
Полезность такого деления объясняется тем, что каждому
диапазону свойственны свои возмущающие силы, для каждого
диапазона характерны своя физическая модель машины как
колебательной упругой системы и соответствующие ей матема-
тические методы описания колебательных процессов. Более того,
для каждого диапазона можно выделить и свои характерные
методы борьбы с колебаниями в источнике и на путях распро-
странения. Наиболее вероятными причинами низкочастотных ко-
лебаний являются.
1. Неуравновешенность вращающихся масс.
2. Несоосности приводов отдельных агрегатов (в совокуп-
ности с соединительными муфтами).
3. Нарушение геометрии узлов шип—подшипник.
4. Периодические силы, создаваемые рабочим процессом.
Следует отметить, что гармоники колебаний именно этого диа-
пазона определяют динамическую прочность элементов машин в не-
сут с собой подавляющую долю колебательной энергии; более
того, эти колебания хорошо распространяются на болыпи^ рас-
стояния из-за слабого демпфирования. Эти обстоятельства делают
данный диапазон наиболее важным, и ему в книге уделено наиболь-
шее внимание.
Динамическая модель машины для исследования колебаний
низкочастотного диапазона представляет собой комбинацию пла-
стинчатых, балочных элементов, а также точечных масс, сосредо-
точенных или распределенных упругодемпферных элементов. Наи-
более простые модели состоят и?сосредоточенных масс, связанных
между собой упругими безынерционными элементами.
Силы в этих моделях носят обычно детерминированный харак-
тер. Вся машина рассматривается как единая упругая система,
исследование свойств которой производится обычно методами при-
кладной теории колебаний.
Колебания среднечастотного диапазона обычно генерируются:
1) высшими гармониками сил, порожденных неуравновешен-
ностью ротора и обусловленных наличием нелинейных элементов
в системе ротор—статор;
. 2) нарушением геометрии кинематических пар;
3) динамическим взаимодействием элементов ротора и статора
(тина «зубцовой» частоты в электромашинах, «лопаточной» —
в насосах). Эти возмущения часто вызывают резонансные
колебания элементов корпуса, деталей амортизации и фунда-
ментов.
В этом диапазоне частот машина описывается совокупностью
каналов распространения колебаний («вибропроводов») от точек
приложения сил к выбранным точкам наблюдения. Конкретный
анализ динамического состояния машины производится обычно
с помощью рассечения общей системы на ряд независимых под-
систем и описания их свойств в точках взаимодействия этих под-
истем обобщенными динамическими характеристиками типа
динамической жесткости, импеданса, механической проводи-
мости и т. п.
Характеризуя этот метод описания среднечастотных колеба-
ний, следует отметить, что он, во-первых, достаточно громоздок
(каждый полюс описывается многими параметрами); во-вторых,
применим для расчета виброактивности уже построенных кон-
струкцией, так как характеристики полюсов определяются боль-
шей частью экспериментально, и, в-третьих, он не позволяет учи-
тывать всегда имеющиеся в машине нелинейные элементы, часто
влияющие кардинальным образом на поведение системы в диапа-
зоне не только низких, по еще более в диапазоне средних частот,
где этот метод и должен получить наибольшее применение. От-
метим, что, например, нелинейность соединения шип—подшипник
в подшипнике скольжения порождает высокие гармоники, созда-
ваемые дисбалансом, т. с. имеет место возникновение «пучка»
гармоник. Если бы соединение было линейным, то дисбаланс мог бы
создавать только первую («оборотную») гармонику.
Несмотря па отмеченные недостатки, другого метода описания
колебаний машин в среднечастотном диапазоне сейчас не пред-
лагается.
В диапазоне высоких частот механические колебания машин
представляют собой упругие волны, распространяющиеся по эле-
ментам конструкции. Их расчет следует вести обычными акусти-
ческими методами, развитыми для сложных по геометрии и струк-
туре сплошных сред. Для колебаний этих частот характерным
является то, что они несут небольшую часть колебательной энергии
всего спектра и при распространении хорошо демпфируются.
Г Л Л В А I
НОРМИРОВАНИЕ ВИБРАЦИОННЫХ
ПАРАМЕТРОВ МАШИН
1. НАУЧНЫЕ» ТЕХНИКО-ЭКОНОМИЧЕСКИЕ
И САНИТАРНО ГИГИЕНИЧЕСКИЕ ОСНОВЫ
НОРМИРОВАНИЯ ВИБРАЦИИ МАШИН
Превращение в машинах и механизмах одних видов энергии
в другие, преобразование форм движения, осуществление рабочих
процессов неизбежно связаны с появлением переменных сил, по-
рождающих вибрацию. Она отрицательно влияет на прочность и
надежность работы машин, несущих конструкции, сооружений
и оказывает вредное влияние па физиологическое состояние людей.
При достижении определенных значений вибрация может вызвать
нарушение рабочих процессов, привести к расстройке управления
и регулирования, искажению показаний приборов, к усиленному
износу и поломкам машин. Статистика показывает» что более
двух третей поломок и аварий машин происходит по причине
вибрации.
Большинство современных машин уже недостаточно харак-
теризовать энергетическими, весогабаритными и экономическими
показателями, а необходимо также оценивать их виброактивность.
Это приводит к необходимости контроля вибрации машин на основе
замеров, которые являются исходными данными для ее нормиро-
вания.
С целью ограничения вибрации в различных областях техники
существуют требования и нормы по ее регламентации. Разнообра-
зие подходов к ограничению вибраций, обусловленных различ-
ными требованиями, сильно затрудняет разработку единых норм.
В большинстве случаев нормы устанавливаются с учетом всех
наиболее важных условий и, поскольку они не могут в равной
степени удовлетворить всем требованиям, являются результатом
компромиссного решения. Так как снижение вибрации ниже
определенного предела отражается на других показателях, в том
числе на стоимости и сроках изготовления, весогабаритных и эконо-
мических характеристиках, уровни вибрации каждой конкретной
машины должны находиться в оптимальном сочетании с другими
се параметрами, а их нормирование должно осуществляться на
научной основе.
Прежде чем перейти к более подробному рассмотрению
Зтого вопроса, следует конкретизировать два понятия, которые
9
часто смешивают, — требования и нормы по ограничению ви-
брации.
Согласно установившейся практике под требованиями
принято подразумевать те предельно допустимые уровни вибрации,
которые необходимы для полного удовлетворения определенных
частных условий, без учета возможности их выполнения в данный
момент.
Под нор м а м и обычно понимаются установленные с по-
мощью статистических методов реально достижимые минимальные
уровни вибрации, выполнение которых является обязательным.
К разряду требовании, по-существу, относятся большинство дей-
ствующи х сан ита р ио-гигиен и-
ческих нормативов по ограни-
чению вибраций, а также ряд
специальных ведомственных тех-
Таблица 1.1
Нормы вибрации для стационарных
паровых турбин
1 Число оборотов ротора в минуту Двойная амплитуда колебательного смещения, мкм
при пол- ной и по- ловинной нагрузке при холос- том ходе без воз буждення генера- тора
1500 3000 5000 и более 60 40 20 90 60 30
нических требований, обуслов-
ленных назначением машин.
Существующие нормы по
ограничению вибрации машин
можно подразделить на следую-
щие основные категории:
нормы, регламентирующие
виброактивность конструкций
и качество изготовления машин;
эксплуатационные нормы до-
пустимой вибрации машин;
санитарно - гигиенические
нормы;
нормы на вибростойкость
машин при воздействии внеш-
ней вибрации.
Нормы, регламентирующие в иб ро актив-
ность конструкций машин и качество их
изготовления, являются критерием оценки уровней виб-
рации серийно изготовляемых машин и механизмов.
Интенсивное развитие энергомашиностроения в нашей стране
в послевоенные годы вызвало необходимость создания единых норм
по ограничению уровней вибрации однотипных машин. На основе
накопленного опыта в пятидесятых годах были разработаны и
введены в действие ГОСТ 5908—51 и 5616—50, регламентирующие
уровни вибрации паровых турбин и гидрогенераторов, В част-
ности, ГОСТ 5908—51 для паровых стационарных турбин устанав-
ливает допустимые уровни вибрации па крышках подшипников
в грех взаимно перпендикулярных направлениях: вертикальном,
осевом и поперечном (табл. 1.1).
ГОСТ 5616—53, переработанный в 1963 г., предусматривает
следующие нормы вибрации для гидрогенераторов: размах (уд-
военная амплитуда смещения) вибрации подшипников на всех
10
режимах работы при поминальной скорости вращения не должен
превышать следующих значений в мкм:
До 187,5 об/мин ............... ........................ 180
» 375 » ......................................120
> 750 * . ...................................ЮО
приведены
Рис. 1.1. Нормы вибрации тур-
бомашнп VDh
/ — яедопустпмо: 2 — улучшение
желательно; 3 — грпгодно; 4 —
уровень восприятия человеком
Нормы вибрации турбогенераторов и возбудителей
в ГОСТ 533—68. При 3000 оборотах ротора в минуту значение
удвоенной амплитуды смещения не должно превышать 10 мкм.
Министерством энергетики и элек-
трификации в порядке обновления
действующих ГОС 5616—63, 5908—
51 и 533—68 подготовлен проект но-
вого стандарта, устанавливающего
нормы вибрации па все типы стацио-
нарных паровых турбоагрегатов и их
основных узлов (турбин, синхронных
генераторов и их возбудителей).
Л1инистерством электротехниче-
ской промышленности подготовлен
проект ГОСТа на допустимые уровни
вибрации электрических машин об-
щего и специального назначения.
Величины допустимой вибрации пред-
полагается выражать в нем через эф-
фективное значение вибрационной
скорости.
Нормы вибрации для новых дизе-
лей и газовых двигателей установ-
лены отраслевым стандартом (отрас-
левой нормалью) НД 38—67 и опре-
деляются общими уровнями вибра-
ционного ускорения, выраженными
С целью унификации требований
ственных с точки зрения вибрации техноло] ических операций,
в частности балансировки роторов, по предложению МЭП Комите-
том стандартов введен в действие ГОСТ 12327—66. Он устанав-
ливает нормы на допустимую остаточную неуравновешенность ро-
децибелах.
в
к качеству наиболее ответ-
торов электрических машин.
Страны Западной Европы в качестве критерия при оценке ви-
брации машин в основном пользуются нормативами, разработан-
ными Комитетом вибрационной техники (VDI), Эти нормативы
подразделяются на ряд групп, охватывающих всю основную но-
менклатуру машин, механизмов и приборов. На рис. 1.1 в качестве
примера приведены нормы вибрации VDI для турбомашин, где
в качестве нормируемой величины принята амплитуда смешения х.
Нормирование вибрации машин и механизмов осуществляется
нв странах, входящих в СЭВ. В настоящее время Институтом
Т а б л н и а 1.2
Нормы вибрации турбогенераторов *,
установленные «Правилами техниче-
ской эксплуатации электрических
станций н сетей» (ПТЭ)
Число оборотов ротора в минуту Двойная амплитуда вибрации, мкм 1
- • — Отлично Хорошо Удовле- твори- тельно
1500 <зо <50 <70
3000 <20 <30 <40
5000 <10 ^2 1 о <25
8000 и более <10 15
* На турбогенераторах блочных установок мощностью 150 МВт н более вибрация не должна превы- шать 30 мкм.
стандартизации Совета экономической взаимопомощи подготавли-
вается проект единых норм вибрации машин.
Другой вид норм — эксплуатационные нормы
допустимой вибрации—устанавливается главным образам с целью
контроля по вибрационным параметрам технического состояния
машин в процессе работы.
Вследствие непосредственной связи между техническим со-
стоянием машины, параметрами происходящих в ней рабочих про-
цессов и вибрацией каждому
состоянию машины соответст-
вует вполне определенная по
характеру и интенсивности ви-
брация. Замеренная с помощью
соответств у ющей аппаратуры,
она может служить прямым или
косвенным показателем каче-
ства работы и технического со-
стояния машины. Поэтому пер-
вой ступенью диагностики тех-
нического состояния машины
являются контроль ее вибрации
в процессе работы и сопостав-
ление с установленными нор-
мами. Выход за пределы экс-
плуатационных норм свидетель-
ствует либо о нарушении рабо-
чего процесса машины, либо
о ее неисправности. Такие нор-
мы устанавливаются на основе
опыта эксплуатации и включа-
ются в правила обслуживания
машин и установок.
Состояние турбогенераторов, находящихся в эксплуатации,
оценивается по нормам, содержащимся в «Правилах технической
эксплуатации электрических станций и сетей» (табл. 1.2). Эти
нормы установлены для двойной амплитуды вибрационного сме-
щения, измеряемого в трех главных направлениях на крышках
подшипников. Для осуществления непрерывного контроля за ви-
брацией подшипников ПТЭ рекомендуют применение много-
канальной виброизмерительной аппаратуры, обеспечивающей
дистанционные измерения. Согласно этим же правилам у верти-
кальных гидрогенераторов вибрация крестовины со встроен-
ными в нее подшипниками, а также вибрация подшипников син-
хронных компенсаторов не должны превышать следующих зна-
чений:
Скорость вращения, об/мии .... 1000/500 375/214 187/62,5
Вибрация, мкм
100 120 180
12
Вибрация электродвигателей, измеренная на подшипниках, со-
гласно ПТЭ должна находиться в следующих пределах:
Синхронная скорость вращения, об/мин 3000 1500 1000 750
и менее
Допустимая амплитуда вибрации под-
шипника, мкм ................. 50 100 130 1С0
Эксплуатационные нормы вибрации для гидрогенераторов сред-
них размеров, разработанные ОРТ РЭС, приведены в табл. 1.3-
I Таблица 1.3
Эксплуатационные нормы вибрации для гидроагрегатов
с диаметром рабочего колеса ^5 м на частотах до 50 Гц
включительно
Число обо ротов ротора в минуту Двойная амплитуда вибрации, мм
Отлично Хорошо Удовлетвори- тельно Плохо
62,5 0,0—0,05 0,05—0,10 0,10—0,16 Св. 0.16
150 0,0—0,04 0,04—0,09 0,09—0,14 Ь 0,14
187 0,0—0,04 0,04—0,09 0,09-0,14 » 0.14
214 0,0—0,03 0,03—0,08 0,08—0,13 » одз
250 0,0—0,03 0,03—0,08 0,08—0,13 » 0,13
300 0,0—0,02 0,02—0,07 0,07—0,12 » 0,12
375 0,0—0,02 0,02—0,06 0,06—0,11 » 0,11
500 0,0—0,02 0,02—0,05 0,05—0,10 » 0,10
600 0,0—0,02 0,02—0,04 0,04—0,09 » 0,09
750 0,0—0,01 0,01—0,03 0,03—0,08 » 0,08
1000 0,0—0,01 0,01—0,03 0,03-0,07 » 0,07
Примечание Рекомендуется для агрегатов с диаметрами рабочих ко-
лес больше или меньше 5 мпроизводнть пересчет по формуле 2 А == 2ЛВ 1/ р ь »
г о
где 2А — искомая двойная амплитуда вибрации для агрегата с диаметром рабо-
чего колеса Dp к, м; 2АЛ — двойная амплитуда вибрации для агрегата с диа-
метром рабочего колеса 5 м.
Аналогичные нормы вибрации машинного оборудования суще-
ствуют и в других областях техники. Для крупных машин индиви-
дуального производства иногда в качестве эксплуатационных
норм принимаются приемно-сдаточные уровни вибрации, устанав-
ливаемые для вновь изготовленного оборудования.
Санитарно-гигиенические нормы пресле-
дуют цель ограничения вредного воздействия вибрации на орга-
низм человека. Такие нормы существуют в различных отраслях
промышленности и транспорта. В основу санитарных норм закла-
13
дываются чувствительность человека к вибрации и ее переносимость
в зависимости от параметров и характера вибрационного процесса,
продолжительности воздействия и некоторых других факторов.
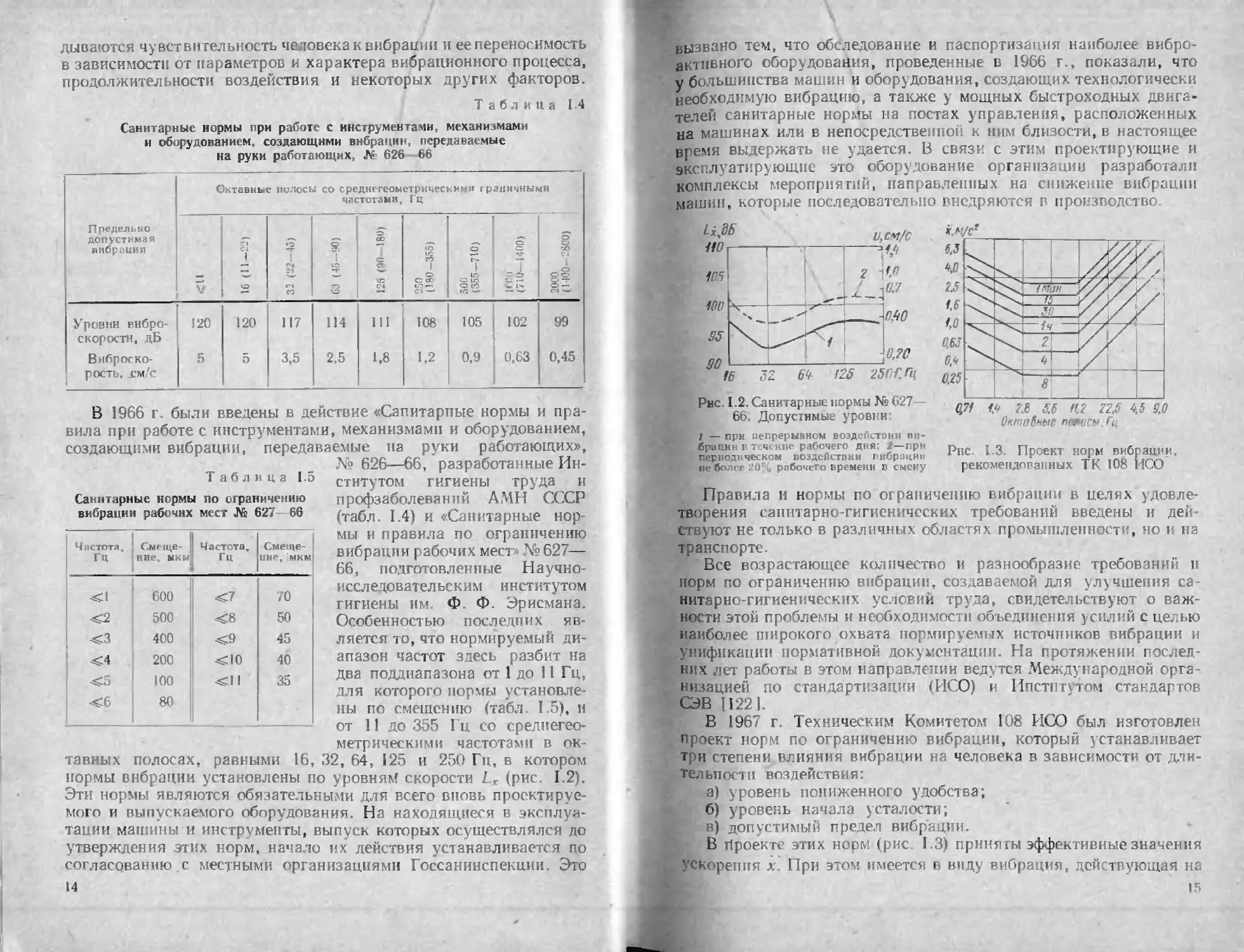
Таблица 1.4
Санитарные нормы при работе с инструментами, механизмами
и оборудованием, создающими вибрации, передаваемые
на руки работающих, № 626 66
1 Октавные полосы со среднегеометрическими граничными частотами, Гц
Предельно допустимая вибрация 91 ♦о 1 гч со 63 (45-90) 125 (90- 180) 250 (180 —355) 500 (355-710) о —MS 1 ~ о 1*. (0097-000) 0003
Уровни вибро- скорости, дБ 120 120 117 114 111 108 105 102 99
Виброско- рость, хм/с 5 5 3,5 2,5 1.8 1.2 0,9 0,63 0,45
В 1966 г. были введены в действие «Сапитарпые нормы и пра-
вила при работе с инструментами, механизмами и оборудованием,
создающими вибрации, переда
Таблица 1.5
Санитарные нормы по ограничению
вибрации рабочих мест № 627- 66
Частота. ГЦ Смеще- ние, мкм Частота, Гц Смеще- ние, мкм
1 600 ^27 70
<2 500 С8 50
<3 400 <9 45
<4 200 <10 40
<5 100 1 35
«6 80
емые на руки работающих»,
№ 626—66, разработанные Ин-
ститутом гигиены труда и
профзаболеваний АМН СССР
(табл. 1.4) и «Санитарные нор-
мы и правила по ограничению
вибрации рабочих мест» № 627—
66, подготовленные Научно-
исследовательским институтом
гигиены им. Ф Ф. Эрисмана.
Особенностью последних яв-
ляется то, что нормируемый ди-
апазон частот здесь разбит на
два поддиапазона от 1 до 11 Гц,
для которого нормы установле-
ны по смешению (табл. 1.5), и
от 11 до 355 Гц со среднегео-
метрическими частотами в ок-
тавных полосах, равными 16, 32, 64, 125 и 250 Гц, в котором
нормы вибрации установлены по уровням скорости Lx (рис. 1.2).
Эти нормы являются обязательными для всего вновь проектируе-
мого и выпускаемого оборудования. На находящиеся в эксплуа-
тации машины и инструменты, выпуск которых осуществлялся до
утверждения этих норм, начало их действия устанавливается по
согласованию с местными организациями Госсанинспекции. Это
14
вызвано тем, что обследование и паспортизация наиболее вибро-
активного оборудования, проведенные в 1966 г., показали, что
у большинства машин и оборудования, создающих технологически
необходимую вибрацию, а также у мощных быстроходных двига-
телей санитарные нормы на постах управления, расположенных
на машинах или в непосредственной к ним близости, в настоящее
время выдержать не удается. В связи с этим проектирующие и
эксплуатирующие это оборудование организации разработали
комплексы мероприятий, направленных на снижение вибрации
машин, которые последовательно внедряются в производство.
Рис 1.2. Санитарные нормы № 627
66. Допустимые уровни:
/ — при непрерывном воздействии пи-
браннн в течение рабочего дня; J—при
периодическом воздействии вибрации
«е более 20% рабочего времени в смену
Октавные полисы. Гц
Рпс. 1.3. Проект норм вибрации,
рекомендованных ТК 108 ИСО
Правила и нормы по ограничению вибрации в целях удовле-
творения санитарно-гигиенических требований введены и дей-
ствуют не только в различных областях промышленности, но и на
транспорте.
Все возрастающее количество и разнообразие требований и
норм по ограничению вибрации, создаваемой для улучшения са-
нитарно-гигиенических условий труда, свидетельствуют о важ-
ности этой проблемы и необходимости объединения усилий с целью
наиболее широкого охвата нормируемых источников вибрации и
унификации нормативной документации. На протяжении послед-
них лет работы в этом направлении ведутся Международной орга-
низацией по стандартизации (ИСО) и Институтом стандартов
СЭВ [1221.
В 1967 г. Техническим Комитетом 108 ИСО был изготовлен
проект норм по ограничению вибрации, который устанавливает
три степени влияния вибрации на человека в зависимости от дли-
тельности воздействия:
а) уровень пониженного удобства;
б) уровень начала усталости;
I в) допустимый предел вибрации.
В Проекте этих норм (рис. 1.3) приня гы эффективные значения
ускорения х. При этом имеется в виду вибрация, действующая на
15
сидящего или стоящего человека в вертикальном направлении
снизу вверх. При оценке горизонтальной вибрации значения уско-
рений в диапазоне частот 0,71—2,8 Гц должны быть уменьшены на
30%. При одновременном воздействии вибрации в нескольких
направлениях нормы должны соблюдаться для каждого из на-
правлений.
В соответствии с принятой здесь градацией воздействия вибра-
ции на физиологическое состояние людей для нахождения «уровня
пониженного удобства» величину эффективного значения ускоре-
ния, снятую с кривых (рис. 1.3), следует поделить на 3,15 (при
выражении виброускорения в дБ вычитается 10 дБ). Для на-
хождения допустимого предела эффективное значение х нужно
умножить на 2 (прибавить 6 дБ).
Общая особенность большинства санитарно-гигиенических
норм заключается в ограничении уровней вибрации рабочих мест.
Требований же или норм по ограничению вибрации механизмов и
машин, создающих вибрацию рабочих мест, за исключением «Са-
нитарных норм» № 62Б—66, практически не существует. Однако
для успешной борьбы с вибрацией в первую очередь ее следует
снижать в источнике, т. е. в самой машине или механизме, а для
этого необходимо к разработчикам и поставщикам предъявлять
вполне определенные требования по ограничению вибрации меха-
низмов и машин и введению контроля и нормирования их вибра-
ционных параметров.
Нормы на в и б р о с т о й к о с т ь м а ш и н при воз-
действии внешней вибрации создаются для предохранения их от
вибрационной перегрузки. Большинство механизмов, создавая
при работе вибрацию, подвергается воздействию внешней вибра-
ции от других источников. При достижении определенных зна-
чений она может отрицательно влиять на качество рабочих
процессов, надежность и усталостную прочность узлов и де-
талей.
Особенно чувствительны к вибрациям приборы и аппаратура.
Для большинства отраслей точного машиностроения в ка-
честве нормы, обеспечивающей вибростойкость приборов и аппара-
туры, принято считать величину, равную 0,1 g (L у ~ 70 дБ).
Практикой установлено, что такая вибрация не оказывает вред-
ного влияния на работу аппаратуры и приборов.
Применительно к машинам роторного типа эта норма увели-
чивается до 1 g (L х 90 дБ). В то же время у современных высоко-
оборотных газотурбинных двигателей и быстроходных дизелей
уровни вибрации достигают (8- 10)£ и не лимитируют надеж-
ности их работы.
Так как прочность деталей машин и несущих конструкций за-
висит от действующих на них сил, которые пропорциональны уско-
рению, вибрационная напряженность машин в некоторых областях
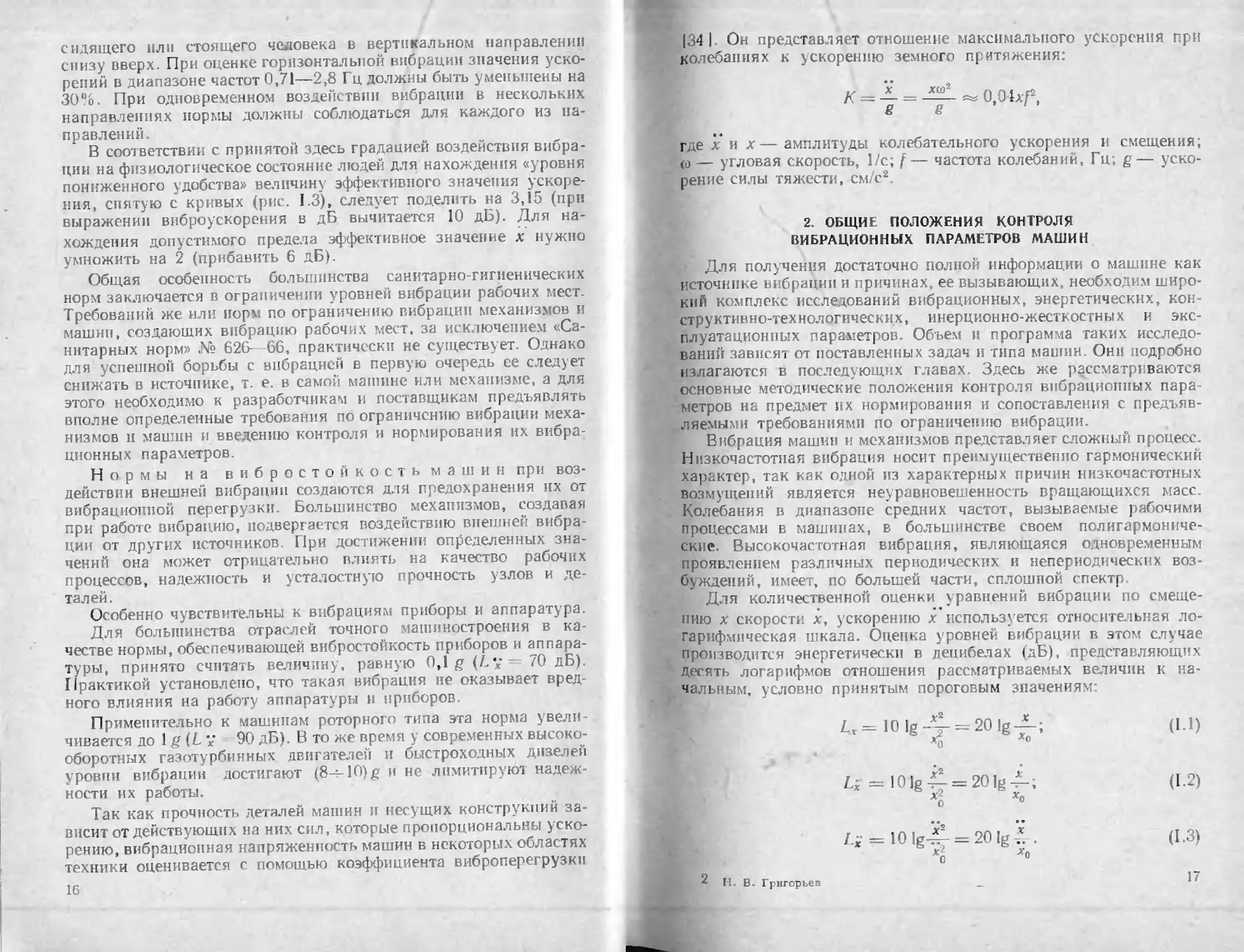
техники оценивается с помощью коэффициента виброперегрузки
16
|34 |. Он представляет отношение максимального ускорения при
колебаниях к ускорению земного притяжения:
хсо2
Я
~0,04xf,
где хих— амплитуды колебательного ускорения и смещения;
со — угловая скорость, 1/с; f— частота колебаний, Гц; g— уско-
рение силы тяжести, см/с2.
2. ОБЩИЕ ПОЛОЖЕНИЯ КОНТРОЛЯ
ВИБРАЦИОННЫХ ПАРАМЕТРОВ МАШИН
Для получения достаточно полной информации о машине как
источнике вибрации и причинах, ее вызывающих, необходим широ-
кий комплекс исследований вибрационных, энергетических, кон-
структивно-технологических, инерционно-жесткостных и экс-
плуатационных параметров- Объем и программа таких исследо-
ваний зависят от поставленных задач и типа машин. Они подробно
излагаются в последующих главах. Здесь же рассматриваются
основные методические положения контроля вибрационных пара-
метров на предмет их нормирования и сопоставления с предъяв-
ляемыми требованиями по ограничению вибрации.
Вибрация машин и механизмов представляет сложный процесс.
Низкочастотная вибрация носит преимущественно гармонический
характер, так как одной из характерных причин низкочастотных
возмущений является неуравновешенность вращающихся масс.
Колебания в диапазоне средних частот, вызываемые рабочими
процессами в машинах, в большинстве своем полигармониче-
ские. Высокочастотная вибрация, являющаяся одновременным
проявлением различных периодических и непериодических воз-
буждений, имеет, по большей части, сплошной спектр.
Для количественной оценки уравнений вибрации по смеще-
нию х скорости х, ускорению х используется относительная ло-
гарифмическая шкала. Оценка уровней вибрации в этом случае
производится энергетически в децибелах (дБ), представляющих
десять логарифмов отношения рассматриваемых величин к на-
чальным, условно принятым пороговым значениям:
(1.1)
(1.2)
(1.3)
Н. В. Григорьев
17
Числители этих выражений представляют абсолютные значе-
ния оцениваемых величин, а знаменатели—их пороговые (ус-
ловно нулевые) значения:
по смещению х0 = 8-Ю-10 см;
по скорости xQ = 5-Ю"6 см/с;
по ускорению х0 = 3*10"2 см/с2.
Пороговое значение получено, исходя из прямой зависи-
мости между звуковым давлением и колебательной скоростью,
которые связаны между собой соотношением
£ = 20lg р- = 201g4,
Ро х0
(1.4)
где р — эффективное значение звукового давления, дин/см2 (бар);
— 2-10"1 дин/см2— пороговое значение звукового давления,
соответствующее порогу слышимости на частоте 1000 Гц. Это дав-
ление соответствует пороговой интенсивности звука /0 —
= 10"9 эрг/с-см2 = 10"16 Вт/см2.
Учитывая, что для плоской волны в воздухе р0 = рох0, где
удельное акустическое сопротивление рс = 41 акустических Ом,
из соотношения
Р ________Р _ = Л
ptx0 2 10 1 х0
(L5)
находим
5- 10^6 см/ с.
Пороговые значения х0 и х0 приняты условно.
Принимая во внимание, что
х (0 =
dx (/) __ d2x (/)
~~dt~ dt* 9
для случая гармонических колебаний получим:
= -|-20Igf —60 дБ;
Ы = 4-201g/ — 60 дБ;
Lx = Lx —40 Igf 4-120 дБ.
(1-6)
(1.7)
(1-8)
(1.9)
Для установления соотношения между амплитудами смещения
и уровнями вибрации по ускорению, с чем часто приходится иметь
дело на практике, может быть использована номограмма, представ-
ленная на рис. 1.4.
Совокупность отдельных частотных составляющих колебатель-
ного процесса представляет спектр вибрации. В зависимости от
характера вибрации спектры могут подразделяться на дискретные,
сплошные, смешанные. Спектр вибрации может быть выражен
18
£
^8
10
6
e
10s
180
180
ю
103
!C2
i^10
-9
170
160
10s
130 & S
£
ю-3-
Zflam
10s-3
1. От-
вет
8
6
Qj
10\
10
1С'г-
10~d-
10'^-
5
Схема 3.16-10Л
пользования
ZOrrT
Bern
1.Да»<1
;>1.Дано
> >2.Дано
£
- §>
100
. Cb 5’
90
80
70
60
50
40
30
20
10
0
«*□
£
Примеры
1.Дано:
- Z-x^^W
f =500 Гц
Ответ:
*=0,05 мм
2 Д(1Н0:
X=0,15MM
f=120 Гц
Ответ:
L^W5,5A5
Частота, Гц
^10‘
-9
8
6
-4
—10
Рис. I 4 Номограмма доя пересчета уровней вибрационного ускорения
в амплитуды смещения л и обратно
19
в виде амплитудных составляющих на отдельных частотах, или
в виде их уровней в полосах частот (октавных, полуоктавпых,
третьоктавных, 10, 6, 3, 0,5% и др.).
Вибрация в полосах частот оценивается суммарным (общим)
уровнем L* всех спектральных составляющих, входящих в дан-
ную частотную полосу.
Для смещения, скорости и ускорения суммирование осуще-
ствляется в соответствии с выражением
£* = 201g-—дБ. (1.10)
Если уровни отдельных составляющих вибрации в рассматри-
ваемой полосе частот выражены в децибелах, то общий уровень
вибрации может быть найден по формуле
£*= lOlgt Ю^дБ. (1.11)
Т-1
где Lz (i = 1, 2, . . ., п) — значения уровней спектральных со-
ставляющих вибрации.
В частном случае, при одинаковых уровнях /V отдельных со-
ставляющих вибрации их общий уровень будет
L
£*= lOlg/VIO10, или £* = £+10]gA7. (1.12)
При контроле вибрации в частотных полосах, осуществляемом
с помощью полосовых фильтров, возникает затруднение, свя-
занное с установлением, к какой конкретной частоте в данной по-
лосе следует относить замеренный уровень вибрации. Поэтому
приходится оперировать с центральной частотой
где fi и f2 — соответственно нижняя и верхняя границы полосы.
В этом случае пересчеты уровней вибрации в связи с переходом
от одних кинематических параметров к другим в соответствии
с формулами (1.7)—(1.9) могут сопровождаться ошибками. Ве-
личина ошибок будет возрастать по мере увеличения ширины
полосы пропускания фильтров.
Для третьоктавных полос ошибка может достигать ± 1 дБ, для
полуоктавных —± 1,5 дБ, а для октавных полос — ±3 дБ. В связи
с этим при выдвижении требований по ограничению вибрации и на-
значении методов ее контроля и нормирования необходимо стре-
миться так выбирать параметры вибрационного процесса, чтобы
исключить необходимость их пересчета.
Один из п е р в ы х вопросов оценки виброактивности машин
заключается в установлении частотного диапазона, в котором дол-
жен производиться контроль вибрации.
20
До настоящего времени в машиностроении широко используется
способ контроля и нормирования вибрации по максимальному
размаху смещения на одной из частот колебательного процесса.
Об этом говорят приведенные выше действующие ГОСТы и нормы.
Контроль низкочастотной вибрации машин позволяет получить
представление о развиваемой вибрационной мощности, которая
пропорциональна квадрату амплитуды смещения. Низкочастот-
ные вибрации, вызываемые переменными нагрузками в элементах
машин, являются также косвенным показателем их технического
состояния.
Недостаток этого способа заключается в отсутствии информа-
ции о гармонических составляющих вибрационного процесса, не-
обходимой как для более полного контроля технического состоя-
ния машин, так и для оценки вибрации с позиции санитарно-ги-
гиенических требований.
Практика показывает, что достаточно надежное наблюде-
ние за техническим состоянием машин может быть обеспечено
только при контроле вибрации в частотном диапазоне до 6—
8 кГц.
Санитарно-гигиенические требования также предусматривают
необходимость ограничения вибрации по спектру в диапазоне ча-
стот от долей герца до 200—300 Гц. Если же при этом учесть по-
рождаемый вибрацией воздушный шум и его вредное влияние на
организм человека в широком диапазоне частот (требования по
ограничению воздушного шума обычно охватывают диапазон ча-
стот до 10 кГц), то становится очевидной необходимость контроля
вибрации в инфразвуковом и звуковом диапазонах частот. Все
это говорит в пользу того, что для полной и всесторонней оценки
виброактивности машин контроль и нормирование их вибрацион-
ных параметров целесообразно осуществлять от минимальной ча-
стоты колебательного процесса до 8—10 кГц.
В течение последних лет многие машиностроительные пред-
приятия в нашей стране и за рубежом приступили к осуществле-
нию приемно-сдаточного контроля машин по спектральному со-
ставу вибрации. Такой контроль применяется в автомобилестрои-
тельной, дпзелестроительной, турбостроительной, электромашино-
строительной и других отраслях промышленности.
В частности, ГОСТ 12379—66, определяющий методы оценки
вибрации электрических машин общего и специального назначе-
ния, предусматривает спектральный анализ вибрации до частоты
не ниже 2000 Гц.
ГОС 13019—67, устанавливающий порядок испытаний порш-
невых холодильных компрессоров, содержит указание о контроле
вибрации в диапазоне от 2 до 10 000 Гц Этим условиям удовле-
творяет большинство типов современной виброизмерительной ап-
паратуры, которая обеспечивает возможность контроля ви-
брации в частотном диапазоне, ограничиваемом десятками
тысяч герц.
21
Второй вопрос контроля и нормирования вибрационных
параметров заключается в выборе оптимальной ширины полосы
частотного анализа.
Несмотря па то, что наиболее полная характеристика вибра-
ционного процесса может быть получена при гармоническом ана-
лизе, он малоприемлем для целей нормирования вследствие флюк-
туации параметров вибрации. Поэтому возникает необходимость
использования при нормировании частотно-полосового анализа
вибрации, что способствует также сокращению времени испытаний
в условиях серийного производства. Для сопоставления уровней
вибрации серийно изготовляемых машин с предъявляемыми тре-
бованиями обычно ограничиваются контролем и нормированием
вибрационных параметров в октавной полосе частот.
С целью увеличения объема информации о техническом со-
стоянии машин в эксплуатационных условиях и получения пред-
варительных данных о причинах возможных дефектов контроль
и нормирование вибрации предпочтительнее осуществлять в треть-
октавной или полуоктавной полосах частот.
При необходимости детальной расшифровки спектра, что по
существу уже относится к области исследований, а не контроля,
применяется узкополосный анализ вибрации.
Для оценки вибрации с точки зрения санитарно-гигиенических
требований Комитет ТК 108 ИСО рекомендует октавные полосы
измерений. С этими рекомендациями согласуются санитарные
нормы № 626—66 и № 627—66, а также большинство ведомствен-
ных нормативов.
Третий вопрос контроля и нормирования вибрации машин
состоит в выборе параметров для характеристики интенсивности
вибрационного процесса.
В общем случае для этих целей могут использоваться кинема-
тические параметры (смещение, скорость, ускорение), а также
комплексный параметр — вибрационная мощность. Несмотря на
то, что вибрационная мощность дает наиболее полную характери-
стику вибрационного процесса, из-за практических трудностей
осуществления ее замеров она пока не используется при нормиро-
вании.
Контроль и нормирование низкочастотной вибрации в соответ-
ствии с большинством действующих в настоящее время как тех-
нических, так и медицинских требований осуществляются через
амплитуды вибрационного смещения. Для этих целей наряду
с электронной аппаратурой все еще широко используются, про-
стейшие механические измерители (виброметры, вибрографы).
При переходе к контролю и нормированию вибрации по спектру
оценку вибрационного процесса по смешению осуществлять за-
труднительно, так как механические измерители вибрации для
этой цели непригодны, а электронная аппаратура оборудована,
как правило, вибродатчиками, реагирующими на ускорение и ско-
рость. Для перевода этих параметров в смещение необходимо ин-
22
тегрирование, требующее усложнения аппаратуры и ведущее к до-
полнительным погрешностям. Кроме того, точность замеров вы-
сокочастотных составляющих вибрационных смещений может
страдать от того, что такие замеры будут осуществляться вблизи
нижней границы разрешающей способности приборов.
Выбор в качестве нормируемого параметра вибрационного
ускорения имеет ряд преимуществ, одно из которых состоит в том,
что виброускорение при определенных условиях является пока-
зателем динамической нагрузки, действующей на тело. При этом
наиболее чувствительные и малогабаритные пьезоэлектрические
вибродатчики, используемые в подавляющем большинстве совре-
менных приборов, реагируют непосредственно на ускорение. Од-
нако вследствие увеличения вибрационного ускорения с ростом
частоты его спектр не согласуется со спектральным распределе-
нием вибрационной мощности.
Исходным параметром для определения вибрационной мощности
является скорость. Вибрационная скорость используется в неко-
торых медицинских требованиях и нормах как фактор, непосред-
ственно влияющий на физиологическое состояние людей. С по-
мощью этого параметра достаточно удобно осуществлять контроль
и нормирование вибрации с целью оценки технического состояния
машин как после их изготовления, так и в процессе эксплуатации.
Вибрационная скорость принята в качестве основного пара-
метра в санитарно-гигиенических нормах Ns 626—66 и № 627—66.
Она находит все более широкое применение при виброакустической
диагностике и комплексной оценке технического состояния машин
и механизмов.
Четвертый вопрос выбора параметров на предмет кон-
троля и нормирования вибрации состоит в том, какое значение
вибрации следует принимать за основу: амплитудное (максималь-
ное), среднеарифметическое или среднеквадратическое (эффектив-
ное). При гармонических или близких к ним по форме колебаниях
наиболее простым выражением величины этих колебаний являются
амплитудные значения, которые представляют наибольший прак-
тический интерес с точки зрения механической прочности машин
и физиологического воздействия на людей. Поэтому амплитудные
значения положены в основу большинства требовании по ограни-
чению низкочастотной вибрации.
Такая оценка вибрации не вызывает неудобств при ее контроле
на определенной частоте. В случае же контроля и нормирования
вибрации в полосах частот амплитудное значение характеризует
только один наивысший уровень в данном частотном диапазоне
без привязки его к определенной частоте. Кроме того, наклады-
ваемые на стационарный случайный процесс приходящие извне
помехи при измерении амплитудного значения вибрации пол-
ностью входят в результат и искажают его.
Использование в качестве меры вибрации среднеарифметиче-
ского значения неудобно тем, что показания приборов в этом
23
случае (также как и при замерах амплитуд) зависят от фазового
смещения составляющих. Такой способ оценки вибрации вследствие
несопоставимости измеряемых величин особенно неудобен при
нормировании.
Отмеченные недостатки устраняются при использовании в ка-
честве меры вибрации среднеквадратической величины от всех
мгновенных значений вибрации за период. Среднеквадратическое
(эффективное) значение переменного параметра, определяемое как
Рис. 1.5. Уровни вибрации электродвигателя в различных точках опорной по-
верхности лад амортизаторами
/ f-T
9зфф = 1- ] q2 представляет равноценную ему по энергии
t
величину постоянного во времени параметра. Поэтому эффектив-
ное значение приводит к единому эквиваленту как чистогармони-
ческие, так и сложные колебательные процессы и тем самым до-
пускает их сравнение.
Оценка вибрации с помощью среднеквадратических значений
исключает необходимость определения фазового угла между от-
дельными составляющими. Все это свидетельствует о целесообраз-
ности использования при контроле и нормировании вибрации ее
среднеквадратического значения.
Пяты й вопрос контроля и нормирования вибрационных
парахметров заключается в выборе места и направления измерений.
Колебания, возникающие в различных элементах машины, по-
разному проявляются на отдельных ее участках. Это объясняется
многими причинами, в том числе наложением колебаний, возбу-
ждаемых различными источниками, резонансными явлениями
в структуре машины, демпфированием и виброизоляцией на пути
распространения колебаний. На рис. L5 показаны спектрограммы
24
уровней вибрации электродвигателя, замеренных в различных
точках опорной поверхности над амортизаторами. Эти данные
свидетельствуют о значительном разбросе уровней вибрации в ши-
роком диапазоне частот. Еще более существенная разница в уров-
нях вибрации имеет место при замерах ее в различных узлах. На
рис. 1.6 приведены уровни спектральных составляющих вибрации
электронасоса, замеренные на крышке подшипника, на корпусе
н на опорных лапах. Сравнение спектрограхММ, снятых в различ-
ных точках одной и той же машины при неизменном режиме ра-
боты, свидетельствует о существенном их различии.
Рис. 1.6. Уровни вибрации в различных точках многоступенчатого насоса
с горизонтальным расположением ротора:
-----—подшипник; —— — корпус (ни линии разъема). —•-------основание
Не менее важное значение имеет направление измерения вибра-
ции в выбранной точке (вертикальное, горизонтальное, осевое).
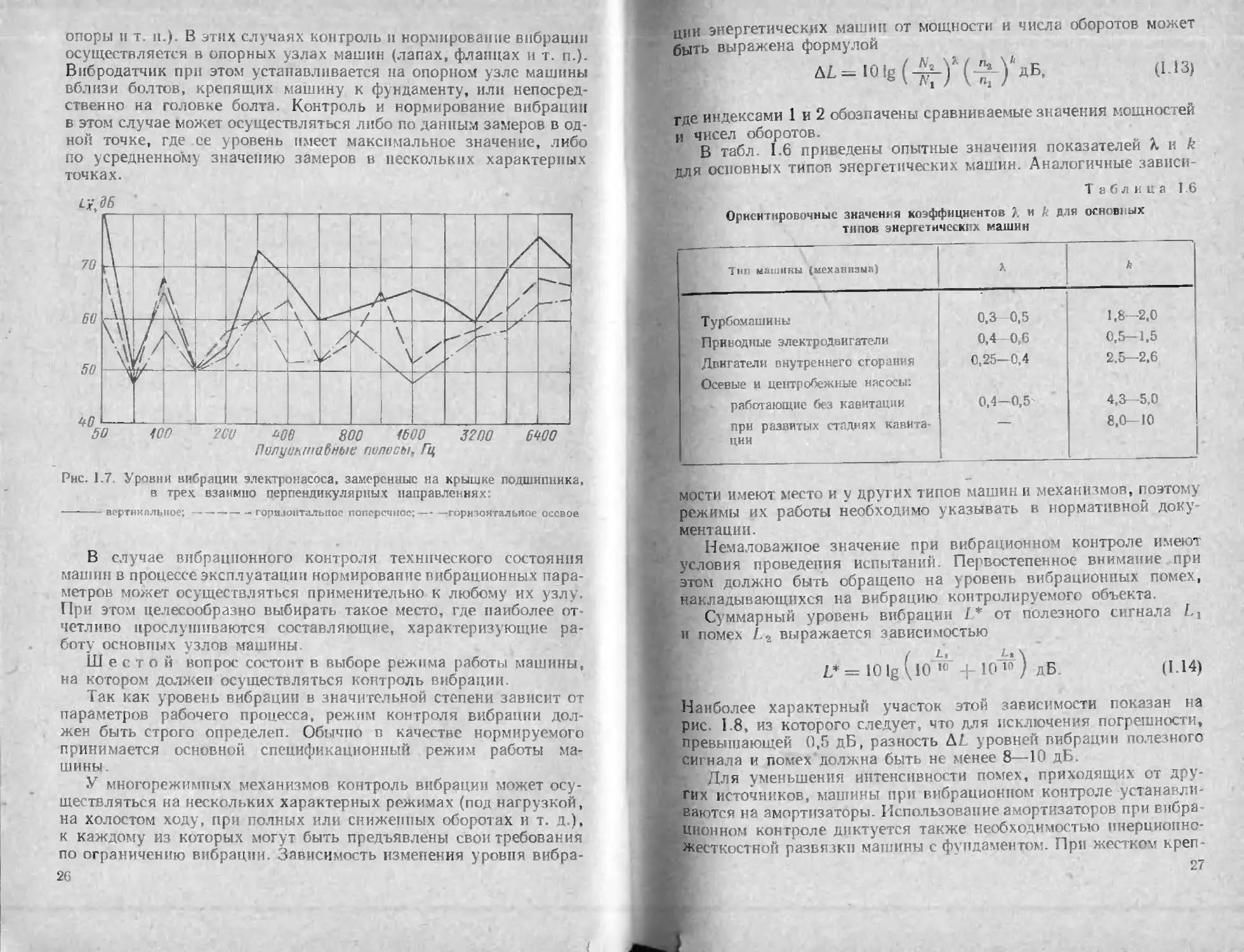
На рис. 1.7 приведены спектрограммы уровней вибрации электро-
насоса, замеренных в трех взаимно перпендикулярных направле-
ниях на крышке подшипника. Как эти, так и многие другие дан-
ные показывают на существенное несоответствие уровней вибра-
ции, замеренных в одном и том же месте, по в разных направле-
ниях. Поэтому возникает необходимость строгой регламентации
места и направления измерения вибрации при ее нормировании
и контроле.
Большинство нормативных документов, ограничивающих ви-
брацию машин с позиций механической прочности, предусматри-
вает ее контроль на крышках подшипников в трех взаимно пер-
пендикулярных направлениях.
Для решения задач, связанных с распространение.м вибрации,
первоочередной интерес представляет информация о вибрации,
излучаемой машиной в несущие конструкции (фундаменты, полы,
25
опоры и т. и.). В этих случаях контроль и нормирование вибрации
осуществляется в опорных узлах машин (лапах» фланцах и т. п.).
Вибродатчик при этом устанавливается на опорном узле машины
вблизи болтов, крепящих машину к фундаменту, или непосред-
ственно на головке болта. Контроль и нормирование вибрации
в этом случае может осуществляться либо по данным замеров в од-
ной точке, где се уровень имеет максимальное значение, либо
по усредненному значению замеров в нескольких характерных
точках.
Рис. 1.7. Уровни вибрации электронасоса, замеренные на крышке подшипника,
в трех взаимно перпендикулярных направлениях:
------вертикальное; —------горизонтальное поперечное;---горизонтальное осевое
В случае вибрационного контроля технического состояния
машин в процессе эксплуатации нормирование вибрационных пара-
метров может осуществляться применительно к любому их узлу.
При этом целесообразно выбирать такое место, где наиболее от-
четливо прослушиваются составляющие, характеризующие ра-
боту основных узлов машины.
Шестой вопрос состоит в выборе режима работы машины,
на котором должен осуществляться контроль вибрации.
Так как уровень вибрации в значительной степени зависит от
параметров рабочего процесса, режим контроля вибрации дол-
жен быть строго определен. Обычно в качестве нормируемого
принимается основной спецификационный режим работы ма-
шины.
У многорежимпых механизмов контроль вибрации может осу-
ществляться на нескольких характерных режимах (под нагрузкой,
на холостом ходу, при полных или сниженных оборотах и т. д.)»
к каждому из которых могут быть предъявлены свои требования
по ограничению вибрации. Зависимость изменения уровня вибра-
26
I
ции энергетических машин от мощности и числа оборотов может
быть выражена формулой
AL=101g(^-Y (-£-)*ДБ, (1.13)
' П1 / \ “1 /
где индексами 1 и 2 обозначены сравниваемые значения мощностей
и чисел оборотов.
В табл. 1.6 приведены опытные значения показателей X и k
для основных типов энергетических машин. Аналогичные завися-
Таблица 1.6
Ориентировочные значения коэффициентов X и А для основных
типов энергетических машин
Тип машины (механизма)
k
I
Турбомашины
Приводные электродвигатели
Двигатели внутреннего сгорания
Осевые и центробежные насосы:
работающие без кавитации
при развитых стадиях кавита-
ции
0,40,6
0,25—0,4
0,4—0,5'
о,
8,0—10
мости имеют место и у других типов машин и механизмов, поэтому
режимы их работы необходимо указывать в нормативной доку-
ментации.
Немаловажное значение при вибрационном контроле имеют
условия проведения испытаний. Первостепенное внимание при
этом должно быть обращено на уровень вибрационных помех,
накладывающихся на вибрацию контролируемого объекта.
Суммарный уровень вибрации £* от полезного сигнала Lr
и помех £2 выражается зависимостью
К £* = 10 lg ( 10 ,с~ 4- 10 10 ) д Б (1.14)
Наиболее характерный участок этой зависимости показан на
рис. 1.8, из которого следует, что для исключения погрешности,
превышающей 0,5 дБ» разность AL уровней вибрации полезного
сигнала и помех должна быть не менее 8—10 дБ.
t Для уменьшения интенсивности помех, приходящих от дру-
гих источников, машины при вибрационном контроле устанавли-
ваются на амортизаторы. Использование амортизаторов при вибра-
ционном контроле диктуется также необходимостью ииерииоино-
Жесткостной развязки машины с фундаментом. При жестком креп-
27
лёнии машины к фундаменту ее вибрационные характеристики су-
щественным образом зависят от массы и жесткости последнего.
В практике машиностроения неоднократно отмечались случаи,
когда машина, нормально работающая на одном фундаменте, до-
стигала аварийного состояния при перестановке ее на другое осно-
вание. Возрастание вибрации происходило, главным образом,
вследствие наступления резонанса системы машина—фундамент.
Поскольку истинные вибрационные характеристики этой системы
могут быть получены только при испытании в реальных эксплуа-
тационных или достаточно близких к ним условиях, нормы по
ограничению уровней вибрации турбо- и гидрогенераторов, со-
Разность уровнейAL Lt-Li дБ
Рис. 1.8. График для определения
суммарного уровня вибрации двух
источников
Рис. 1.9. Рекомендуемая область
частотной расстойки системы ма-
шина — амортизаторы —фундамент
(заштрихованная полоса)
держащиеся в ГОСТах, предусматривают контроль вибрационных
характеристик этих машин в нормальных рабочих условиях.
Такой подход к отдельным машинам индивидуального изготов-
ления можно считать оправданным. Однако он неприемлем при
крупносерийном производстве, когда контроль вибрационных
характеристик машин необходимо осуществлять на сдаточных
заводских стендах. Так как большинство действующих требований
и норм по ограничению вибрации одновременно распространяется
на различные машины, в том числе и на одинаковые машины, уста-
навливаемые на различные фундаменты, необходимо создавать
условия испытаний, которые позволяли бы получать объективные
вибрационные характеристики. Для этого при установке машины
на амортизаторы должна обеспечиваться такая частотная рас-
стройка вынужденных и собственных колебаний, которая не вно-
сила бы существенных резонансных искажений в амплитудные
характеристики. В большинстве действующих нормативов выдви-
гаются требования к частотной расстройке, при которых частота
свободных колебаний fc машины, установленной на амортизаторы,
должна в 2—4 раза быть ниже частоты возмущающей силы /
основного рабочего процесса машины (числа оборотов в секунду).
На резонансной диаграмме (рис. 1.9) штриховкой обозначена
рекомендуемая область частотной расстройки стендовой системы
машина—-амортизаторы—фундамент. Достижение верхнего пре-
28
дела трудно выполнимо для тихоходных механизмов, кроме того,
при агрегатной сборке податливые амортизаторы будут способ-
ствовать расцентровке машин при работе их под нагрузкой и,
как следствие, усилению вибрации. Поэтому для механизмов и
машин, у которых на половинной частоте основного рабочего про-
цесса отсутствуют возмущающие силы, допустима установка их на
стенде на амортизаторы, обеспечивающие нижний из указанных
пределов коэффициента расстройки.
Некоторые методики рекомендуют вибрационный контроль ма-
шин осуществлять при жестком креплении их к промежуточной
платформе, которая, в свою очередь, должна устанавливаться на
амортизаторы. Это вызывается желанием за счет присоединения
дополнительной массы и увеличения жесткости приблизить работу
машины к естественным условиям и тем самым улучшить возхмож-
ность выявления резонансных явлении. Следует однако иметь
в виду, что установка машин на амортизаторы все шире и шире
находит применение в эксплуатационных условиях, поэтому ви-
брационные испытания машин па амортизаторах в большей мере
отвечают действительности. Во всяком случае во избежание воз-
можных разногласий при установлении требований (норм) по
ограничению вибрации машин одним из обяза гельных условий
должно являться указание о способе крепления машины к фун-
даменту .
3. ПРИМЕНЕНИЕ МЕТОДОВ МАТЕМАТИЧЕСКОЙ СТАТИСТИКИ
К ОЦЕНКЕ И НОРМИРОВАНИЮ ВИБРАЦИОННЫХ ПАРАМЕТРОВ
МАШИН
Результаты контроля серийно изготовляемых машин различных
типов свидетельствуют о значительных разбросах их уровней
вибрации, замеренных в сопоставимых условиях. Разброс проис-
ходит под влиянием факторов, которые не могут быть полностью
устранены или стабилизированы в силу принципиальных или прак-
тических причин. Влияние этих факторов носит случайный харак-
тер, в результате чего уровни вибрации машин, рассматриваемые
в широком диапазоне частот, являются случайными величинами,
т. е. такими» которые невозможно предсказать на основе анализа
совершившегося процесса.
К случайным факторам, оказывающим первостепенное влияние
на уровни вибрации машин, например, относятся:
технологические поля допусков на обработку, балансировку
и сборку деталей и узлов;
неоднородность структуры материала изделий (отливок, поко-
вок, сварных конструкций);
погрешности регулировки рабочего процесса и др.
Случайный характер вибрации машин в значительной степени
Затрудняет ее определение с помощью расчета, поэтому основным
средством оценки уровней вибрации является эксперимент. В силу
29
отмеченного свойства вибрационного процесса для объективной
оценки уровней вибрации и ее нормирования могут быть приме-
нены статистические методы.
Ниже приводятся некоторые сведения из теории вероятности
н математической статистики в преломлении к рассматриваемой
задаче.
В генеральной совокупности, над которой производится на-
блюдение, значение уровня вибрации машины данного типораз-
мера характеризуется математическим ожиданием (генеральной
средней) L
N
L = g U-15)
и генеральной дисперсией о2 (величиной рассеивания)
N
или средним квадратическим отклонением в генеральной сово-
купности а
(1.16)
где и Q — возможные значения уровней вибрации и их вероят-
ности; Л’—количество машин в генеральной совокупности.
Выборочная совокупность, с которой приходится иметь дело
на практике, характеризуется средней L
N
L = l^~ (И8)
и эмпирической дисперсией S2 (показателем изменчивости отдель-
ных уровней вибрации в выборке)
и
(1.19)
или эмпирическим средним квадратическим отклонением S
(1.20)
30
В данном случае п обозначает количество машин в выборке.
При n—>оо L L и S о.
Так как объем выборки, как правило, невелик, то следует де-
лать оценку этих приближенных равенств.
Значения L и 5 являются оценками для теоретических пара-
метров L и а. Статистическая оценка этих параметров заключается
в определении по выборочным значениям L и S наименьших (до-
верительных) интервалов, в которые с заранее заданной вероят-
ностью Q = 1 — 2р будут укладываться In а (здесь 20 означает
вероятность риска).
Вследствие того, что L и S—случайные величины, ширина до-
верительного интервала зависит от объема выборки.
При допущении, что в генеральной совокупности распределе-
ние уровней вибрации следует нормальному закону, приближен-
ное равенство L L оценивается с точностью tc^L, где — пара-
метр, зависящий от применяемой величины вероятности нахожде-
ния теоретического среднего в доверительном интервале; ~
среднее квадратическое отклонение среднего
f (1.21)
у п — 1
Доверительный интервал для среднего значения генеральной со-
вокупности в этом случае может быть представлен в следующем
виде:
/. lQaL
(1.22)
к Так как среднее квадратическое отклонение средней L в J п — 1
раз меньше эмпирического среднего квадратического отклоне-
ния S, то и отклонение среднего значения уровня вибрации
в | п — 1 раз меньше отклонения отдельного результата
Поэтому более надежной величиной для оценки уровней вибрации
является средняя.
Формула (1.21) выражает ошибку выборочного среднего, ко-
торая уменьшается по мере увеличения количества машин в вы-
борке.
> Для определения доверительных интервалов среднего значе-
ния в генеральной совокупности необходимо задаться вероятностью
ее попадания в доверительный интервал. Параметр tq определяется
по известным величинам Q и п с помощью вспомогательных таблиц,
содержащихся в РТМ 44—62 195 ]у а также в специальной литера-
туре по математической статистике, например [49, 169].
Г. Доверительный интервал среднего квадратического отклоне-
ния оценивается тем же методом, что и для среднего значения
к S — e<g < S + е, (1.23)
31
где
E = S<7 = /QCTjr.
Задаваясь вероятностью L (qt k) нахождения теоретического о
в доверительном интервале, с помощью таблиц [95] по значе-
ниям k = п— 1 и L (q, k) определяют коэффициент q.
При обработке эмпирических данных статистическими мето-
дами используют также критерии:
размах варьирования /? (широта выборки), т. е. разность между
наибольшим и наименьшим уровнями вибрации в выборке
R ~ max — min’ (1.24)
коэффициент относительной асимметрии
ат--Ц^; (1.25)
0T I
коэффициент относительного рассеивания
U-26)
гдебт = ——половина поля допуска; Дт = -Ц-~ if‘-----ко-
ордината середины поля допуска; tt и — соответственно нижний
и верхний толерантные пределы, методика определения которых
приводится ниже.
Индекс т обозначает теоретическое значение величины.
Для нахождения теоретических значений коэффициентов от-
носительной асимметрии ат и относительного рассеивания
также необходимо по экспериментальным данным определить до-
верительные интервалы.
Подставляя в (1.25) вместо L границы доверительного интер-
вала согласно (1.22), получаем границы доверительного интер-
вала для ат
(1.27)
Доверительный интервал для kT определяется путем подста-
новки в выражение коэффициента относительного рассеивания
(1.26) вместо а ее верхней и нижней границ согласно (1.23)
Научно-техническая основа нормирования вибрации заклю-
чается в нахождении таких предельных уровней, которые бы с наи-
большей объективностью позволяли установить критерии отбра-
ковки машин при вибрационном контроле.
32
Решение поставленной задачи может вестись различными ме-
тодами, каждый из которых выражает определенную форму от-
вета и характеризуется своим алгоритмом. Наибольший практи-
ческий интерес представляет метод, основывающийся на стати-
стическом подходе к решению поставленной задачи. В качестве
исходной предпосылки здесь считаются известными распределе-
ния вероятностей уровней вибрации на каждой частоте для вы-
борки данного объема. Накопленные к настоящему времени ста-
тистические данные по машинам различных типов показывают,
что распределение вероятностей уровней вибрации, выраженных
в децибелах, с достаточной степенью приближения следует нор-
мальному закону.
Сущность статистического метода заключается в определении
на основе экспериментальных данных поля допуска для уровпей
вибрации на интересуемых частотах интервалах частот), которое
характерно для машин данного типа и дает вероятность брака не
более некоторой наперед установленной величины.
Для решения этой задачи прежде всего должно быть принято
значение вероятности брака, обычно обозначаемое через 20. За-
тем по известным величинам эмпирической дисперсии и среднего
значения определяются толерантные пределы tr и t2, устанавли-
вающие поле допуска:
К G = L —ZS;
Г ’ /2 = L + IS.
При этом необходимо задаться таким значепием надежности Р,
при котором будет обеспечено попадание в эти пределы доли сово-
купности замеренных уровпей вибрации не меньше установленной
доли вероятности Q = 1 — 20.
д- Приближенное значение коэффициента Ц являющегося функ-
цией Р, Q и объема выборки п, может быть найдено с помощью
вспомогательных таблиц [951.
Пример 1.
Рассмотрим пример определения толерантных пределов уровней вибрации
на одной из частот по выборке небольшого объема.
В результате замеров уровней вибрации десяти электродвигателей на частоте
вращения получены следующие значения выборки: = 67дБ; Ь2 ,== 70 дБ;
= 72 дБ; /-« = 69 дБ; Ls = 75 дБ; Lt - 78 дБ; L, = 72 дБ; = 70 дБ; L, =
— 68 дБ; L10 = 69 дБ.
Определяем среднее значение
Е ‘
Si.-
.т 1=л 67 + 704-72-F69 + 754-781 72 + 70 + 68 + 69
Е - —п = - io--------------------=71 дБ
и эмпирическую дисперсию
11.33 дБ
3 Н. В. Григорьев
33
Эмпирическое реднее квадратическое отклонение при этом будет равно
S = 1.33 = 3,36 дБ.
Задаемся надежностью определения толерантных пределов. Положим, что Р =
- 0,9.
Задаемся вероятностью брака. Положим, что fl = 0,025» тогда Q = 1 — 20 =
= 1—2 0.025 — 0,95.
Для принятых значений Р и Q и заданного объема выборки с помощью таб-
лиц [95] находим значение коэффициента I = 3,02.
Располагая значениями L, S и /, определяем толерантные пределы;
/г —L — IS 71 —3.02 3,36^61 дБ;
/2 —E + ZS = 71 + 3.02-3,36^81 дБ.
Далее находим координату середины поля допуска А и половину поля до-
пуска 6:
* G-Ma 61+81 7| к
Д--+^-= 4-----------=71 дБ;
Л — /, S1—61 „
= 10дБ.
Если в качестве поля допуска рассматривать величину t2 — tt ~ 20 дБ, то
с надежностью Р — 0,9 уровни вибрации на данной частоте 95% всех электро-
двигателей последующего выпуска будут лежать в этом интервале.
Нижний толерантный предел представляет практический
интерес только при контроле технического состояния машин в про-
цессе эксплуатации, так как снижение вибрации ниже установлен-
ной нормы является сигналом нарушения нормальной работы
машины (отключение отдельных элементов или навешенных меха-
низмов, уменьшение числа оборотов мощности и т. п.).
Когда допуск при нормировании вибрации определяется только
одним верхним пределом, как например при установлении сани-
тарных норм, то вероятность брака в силу симметрии вероятности
уменьшится примерно в два раза по сравнению с рассмотренными
в примере условиями. В этом случае при той же надежности Р =-
=0,9 вероятность брака будет не 20, a fl — 0,025, соответственно
Q — 1 — 0,025 — 0,975, т. е. 97,5% всех электродвигателей по-
следующего выпуска будут удовлетворять норме.
При нормировании вибрации по спектру частот кривая, про-
веденная через значения верхних толерантных пределов, для каж-
дой частоты (диапазонов частот) будет являться спектральной
нормировочной кривой (нормой). Вероятность брака при этом
будет возрастать по мере увеличения числа контролируемых
частот, так как машины, удовлетворяющие норме на одной из
частот, могут превышать эту норму на другой. Теоретически
процент брака при этом должен резко возрасти, поскольку вероят-
ности брака по частотам суммируются. Однако практика наблю-
дения за машинами многих типов показывает, что при нормиро-
вании вибрации по спектру в 16—24 частотных полосах резуль-
тирующая вероятность брака значительно меньше суммы вероят-
34
костей на отдельных частотных составляющих. Это, прежде всего,
объясняется коррелятивной связью между уровнями вибрации
у механизмов на отдельных зависимых частотах.
В качестве границ поля допуска при нормировании кроме толе-
рантных пределов могут использоваться и другие статистические
критерии, например размах варьирования
R L*i max mln’
Обычно размахом R пользуются как статистической характери-
стикой при объеме выборки п 10.
Установление норм по размаху варьирования в количествен-
ном отношении мало чем отличается от так называемых трехснг-
мовых норм:
где о — среднее квадратическое отклонение в генеральной сово-
купности.
I При нормировании вибрации машин по спектру в широком
диапазоне частот могут быть использованы двухсигмовые пре-
делы. В этом случае при распределении уровней вибрации по нор-
мальному закону вероятность брака может считаться вполне при-
емлемой при крупносерийном производстве машин.
Д При нормировании вибрации машин, изготовляемых малыми
партиями, для ограничения поля допуска иногда используют и
другие пределы, в том числе значение эмпирической диспер-
сии ±S2, а также диктуемые некоторыми частными соображе-
ниями значения ±Д£. Однако установление таких пределов ли-
шает нормирование объективной основы, а получаемые при этом
нормы по существу являются требованиями по ограничению уров-
ней вибрации, приведенными применительно к некоторым кон-
кретным условиям. Такие нормы основываются не столько на
возможности, сколько на необходимости достижения определенных
уровней вибрации.
► Следует отметить, что нормирование вибрации, осуществляе-
мое на статистической основе, открывает возможность выбороч-
ного контроля и установления наиболее эффективного объема вы-
борки, позволяющего получить достаточно обоснованные выводы
относительно всей партии выпускаемых машин. Сокращение объ-
ема выборки способствует экономии времени и удешевлению про-
изводства машин.
4. ПОРЯДОК ОБРАБОТКИ РЕЗУЛЬТАТОВ ЗАМЕРОВ
И СОСТАВЛЕНИЯ НОРМ ВИБРАЦИИ МАШИН
I Уровни вибрации, замеренные с помощью любого измеритель-
ного тракта, не являются истинными величинами вследствие не-
избежных погрешностей, вносимых элементами измерительных
I 3* эб
трактов (вибродатчиками, соединительными кабелями, измери-
тельными усилителями, фильтрами), и подлежат корректировке
на основе данных калибровки.
Калибровочные поправки учитывают все частные коррективы
на отдельные элементы виброизмерительного тракта (на чувстви-
тельность вибродатчика, неравномерность частотной характерис-
тики тракта, различие параметров и нулевых уровней, принятых
для разных приборов, потери в соединительных кабелях
и т. д.).
Вследствие того, что все современные виброизмерительные
тракты являются сложными системами, в которых неизбежна не-
которая расстройка, они периодически, не реже одного раза в год,
подвергаются калибровке.
Виброизмерительные тракты калибруются по ускорению с по-
мощью вибростендов (калибровочных устройств) в соответствии
с указанными в инструкции по калибровке правилами относи-
тельно стандартного порогового значения (х0 ~ 3 10“2 см^с2).
Исключение составляет прибор ИВПШ, в котором индикатор гра-
дуирован относительно порогового значения х0 = 6,31 10 4 см/с2.
В этом случае поправка для пересчета уровней вибрации по уско-
рению относительно стандартного порогового значения будет со-
ставлять
1п = 201ё-Щ^- = 33,5дБ.
Значение этой поправки должно вычитаться из показаний прибора
ИВПШ.
Эффективное значение истинного уровня ускорения вибростола
стенда £ист подсчитывается по величине амплитуды смещения х
и частоте колебаний вибростола f по формуле
Кист = 20|б-^|^дБ. (1-30)
Разность между LHCT и показанием калибруемого тракта £зам,
датчик которого закреплен на вибростоле, представляет по-
правку ±А£ на данной частоте f. Совокупность таких поправок
в контролируемом диапазоне частот представляет калибровочную
характеристику, которая оформляется в табличной форме или
в виде графика.
При обработке результатов измерений, выполненных с по-
мощью измерительных трактов, имеющих почастотные калибро-
вочные поправки, должны учитываться только эти поправки.
В этом случае никакие другие коррективы на измерительные
тракты, в том числе указанные фирмой в паспорте или на самом
приборе, в расчет не принимаются.
Приближенное значение поправок \L в полосах частот (октав-
ных, полуоктавных, третьоктавных и др.) определяется с помощью
36
калибровочной характеристики измерительного тракта как средне-
алгебраическое из поправок к отдельным частотны м составляющим,
входящим в данную частотную полосу,
К Д (± Д£,)
К Д£ = ——7----------» (1.31)
где —поправки, определяемые по калибровочной харак-
теристике измерительного тракта на отдельных частотах, входя-
щих в данную полосу; i — число частотных составляющих, учи-
тываемых в данной полосе.
Истинная величина уровня вибрации в полосе частот опре-
деляется как алгебраическая сумма замеренного уровня и найден-
ной поправки
Н /.„ет = L ± AL. (1.32)
Л.. При определении поправок к общим уровням вибрации, из-
меряемым в заданных диапазонах частот, принимаются во внима-
ние лишь поправки к уровням вибрации тех составляющих, ко-
торые определяют уровень вибрации в заданном диапазоне.
Поэтому в тех случаях, когда уровень вибрации в заданном
диапазоне частот серийных машин измеряется одним и тем же
трактом, можно пользоваться постоянной поправкой, определен-
ной не менее чем по трем машинам, как средним алгебраическим.
Поправки к замеряемым величинам уровней вибрации подле-
жат определению:
I при проведении контроля уровней вибрации машин с целью
сопоставления их е предъявляемыми требованиями или при раз-
работке норм вибрации;
после каждой калибровки внброизмеригельпого тракта;
после внесения конструктивных или технологических измене-
ний в машину.
L Уточненное значение поправок AL3 к уровням вибрации, из-
меренным в полосах частот, определяется следующим образом.
В данной полосе частот с помощью узкополосного анализатора
измеряются уровни дискретных составляющих. Затем по замерен-
ным дискретным составляющим и известным поправкам к ним вы-
числяются интегральные уровни с поправками
и без поправок
П
L" = 101g У 10“^““ дБ
i=i
L'—101g У 1010 дБ.
(1.33)
(134)
37
Уточненное значение поправки к уровням вибрации в данной
полосе частот определяется как разность этих величин
Д£у = Ln — U дБ.
(1.35)
Для упрощения процесса суммирования уровпей вибрации как
отдельных составляющих в рассматриваемой полосе частот, так
Разность суммируемых уровней lf и / 2>вБ
J.
Довавка к Большему уровню AL ,дБ
10
13 # 1в
W ОД ОД ОД
Рис. 1.10. Номограмма для суммирования уровней вибрации
и составляющих различных источников на данной частоте или
в диапазоне частот удобно пользоваться номограммой, приведен-
ной на рис. 1.10. При подсчете с помощью номограммы суммар-
Рис. 1.11. Образец спектрограммы вибрации:
J — уроини помех; 2 — уровни вибрации
него уровня от нескольких составляющих (источников) произ-
водится попарное последовательное сложение уровней в порядке
их возрастания.
Пример 2. Требуется определить суммарный уровень вибрации трех со-
ставляющих 74 дБ, = 80 дБ и £3 =. 82 дБ.
Вычисляем разность между наименьшим и последующим по значению vdob-
нем £2 — = 80 — 74 —6 дБ.
38
С помощью номограммы (рис. 1.10) нахадим добавку к большему из этих уров*
Пей Д£1 = I дБ и прибавляем ее к нему:
Bh '2 == ^*2 u A£j = и ~ 1 = 81 дБ.
Вычисляем далее разность между уровнями £3 и £п, которая равна 1 дБ,
находим по номограмме соответствующую этой разности добавку Д£2 — 2,5 дБ
и прибавляем ее к большему из суммируемых значений:
Р £d = £3 + ДЦ = 82 + 2,5 = 84.5 дБ.
Значение £3 = 84,5 дБ является суммарным уровнем трех заданных состав-
ляющих.
Результаты контроля вибрации оформляются в виде протоко-
лов и спектрограмм с указанием на них основных характеристик
машин и условий проведения замеров. Примерная форма прото-
кола для контроля вибрации в октавных полосах представлена
на стр. 40, а оформление спектрограмм в этих же полосах показано
на рис. 1.11.
Нормы вибрации разрабатываются на все машины, которые не
удовлетворяют предъявляемым требованиям по ограничению ви-
брационных параметров.
Для вновь созданных и модернизированных машин нормы •
вибрации можно устанавливать по данным испытаний пяти первых
образцов с последующим уточнением по 10 серийным образцам.
Г При возникновении необходимости создания вибрационных
норм для серийно изготовляемых машин последние разрабаты-
ваются по данным испытаний не менее чем 10 серийных образцов.
Разработка норм вибрации осуществляется предприятием-по-
ставщиком машин, которое представляет их на согласование или
утверждение уполномоченным па то организациям.
В нормах должны указываться:
наименование и номер машины;
номер технических условий пли стандарт на машину;
п редп риятие-изготов ител ь;
основные характеристики машины;
способ крепления машины к фундаменту;
место и направление замера вибрации;
перечень использованных приборов;
режим работы машины.
I Примерный образец норм вибрации показан на рис. 1.12.
Контроль уровней вибрации серийных машин на соответствие
Установленным нормам осуществляется при соблюдении тех же
Условий; при которых производились замеры вибрации для со-
ставления норм.
Машины, уровни вибрации которых в одной или нескольких
частотных полосах превышают значения, указанные в нормах,
подлежат отбраковке.
39
ФОРМА
ПРОТОКОЛ №
контроля вибрации
«__> --------— 19__г.
Наименование и номер машины ----------------------
Номер ТУ или стандарта на машину -----------------
П редпрнятие-изготовител ь------------------------
Основные характеристики машины -------------------
Способ крепления машины к фундаменту--------------
Место и направление замера вибрации --------------
Перечень приборов —----------------------------—
Режим работы машины -------------------------------
Замеры производились по: ускорению, скорости, смещению
в к Е £ Граничные частоты октав- ных полос, Гц Среднегеометри- ческие частоты октавных полос, Гц Уровень помех in. дь Показания при- бора L, дБ Поправка на не- равномерность частотной харак- теристики трак- та ДА, дБ Истинный уро- вень вибрации в полосе Z-HCT « = L 4" AL, дБ Примечание
1 1,4—2,8 2 1
2 2,8—5,6 4
3 5,6—11,2 8
4 11,2—22,4 16
5 22,4—45 31,5
6 45—90 63
7 90—180 125
8 180—355 250
9 355-710 500
10 710—1400 1000
11 1400—2800 2000
12 2800—5600 4000
13 5600—11 200 8000
Замеры произвел . . .
40
Оценка и нормирование вибрационных параметров машин
с помощью рассмотренных выше методов способствуют:
установлению фактических вибрационных характеристик ма-
шин и сравнению их с предъявляемыми требованиями или нор-
мами ;
Поставщик | Л/g ТУ \Срок действия
Норма вибрации
Основные характеристики: Условия измерений'.
Примечание:
Тип и количество амортизаторов:
Замеры произведены приборами'
Согласовано
Утверждено
Рис. 1.12. Образец пормы вибрации
ограничению уровней вибрации серийно изготовляемых машин
на объективной основе;
I последовательному снижению виброактивности машин до уров-
ней, обусловленных технико-экономическими и санитарно-гигие-
ническими требованиями;
разработке реально выполнимых и экономически оправданных
требований по ограничению уровней вибрации машин.
ГЛАВА II
КОЛЕБАНИЯ РОТОРНЫХ МАШИН
(ТУРБИН И КОМПРЕССОРОВ)
Основным источником колебаний в турбомашинах, наиболее
существенно влияющим на общий уровень вибрации на их лапах,
являются неуравновешенные силы инерции, возбуждающие по-
перечные колебания роторов. Поэтому вопросы динамики вра-
щающихся роторов составляют основное содержание этой главы.
В частности, здесь рассмотрены различные аспекты задачи о на-
хождении критических скоростей вращения валов (влияние упру-
гости опор, несимметрии упругих и инерционных свойств ротора,
влияние гироскопического эффекта дисков и т. п.) и дана общая
постановка задачи об исследовании устойчивости их вращения и
о вынужденных колебаниях роторов (влияние внутреннего и внеш-
него трений, условия самовозбуждения автоколебаний на масляной
пленке подшипников скольжения и т. д.). Описаны также раз-
личные методы расчета собственных частот изгибных колебаний
и критических скоростей валов и, в частности, современные
методы, ориентированные на применение ЭВМ.
Наиболее существенную роль в обеспечении динамической
прочности турбомашин играют колебания их лопаток. Эти коле-
бания, вообще говоря, надо рассматривать совместно с колеба-
ниями дисков, а иногда и совместно с крутильными колебаниями
роторов [25 1. Однако в спектре вибрации, выходящей на лапы
турбомашипы, колебания ее лопаток играют обычно второстепен-
ную роль и поэтому в настоящем пособии они не рассмотрены;
это тем более оправдано, что колебаниям лопаток осевых турбо-
машин посвящена обширная специальная литература [86, 160, 561.
1. ОСНОВЫ ДИНАМИКИ ВРАЩАЮЩЕГОСЯ РОТОРА
Понятие о критических скоростях вращения роторов
Критической скоростью вращения ротора называют такую
скорость, при которой возможен значительный рост уровня коле-
баний ротора, возбужденных его неуравновешенностью (небалан-
сом). Это увеличение амплитуд колебаний часто связывают с ре-
зонансом частоты возмущающих сил от небаланса с собственной
частотой плоских изгибных колебаний певращающегося ротора.
Такое толкование не отражает однако полностью существа явле-
ния. Дело заключается в том, что обычно в теории колебаний
упругих систем рассматриваются малые колебания около поло-
42
-
женин устойчивого равновесия; это значит, что
▼ при отсутствии возмущающих сил любые (не слишком большие)
начальные отклонения системы от положения ее равновесия
вызовут лишь малые, постепенно затухающие ее колебания.
Упомянутое затухание колебаний обусловлено силами трения,
однако устойчивость ее в том только смысле, что малые отклонения
остаются малыми, обычно предполагается обеспеченной соответ-
ствующими конструктивными факторами и без наличия трения.
Поэтому при изучении колебаний таких упругих систем можно
опираться на следующие основные выводы теории.
1. Наличие трения всегда как бы «усиливает» устойчивость
системы, превращая просто малые колебания в затухающие;
поэтому пренебрежение силами трения всегда допустимо в том
смысле, что оно идет «в запас устойчивости».
2. Вынужденные колебания системы, возбужденные периоди-
ческими возмущающими силами, всегда можно отождествлять
с так называемыми «чисто вынужденными» колебаниями, не за-
висящими от начальных условий, поскольку начальные возмуще-
ния из-за наличия трения быстро затухают. С другой стороны,
малые силы трения оказывают заметное влияние на развитие вы-
нужденных колебаний только в непосредственной близости от
резонансов, а во всех остальных случаях этими силами можно
пренебречь.
В 3. Амплитуды вынужденных колебаний системы зависят от
частоты возмущающих сил таким образом, что максимальные
значения этих амплитуд достигаются при частотах, близких
к резонансным, равным собственным частотам рассматриваемой
системы, найденным без учета сил трения.
। Указанные предположения позволяют большинство задач
о расчете колебаний упругих механических систем существенно
упростить путем отбрасывания ряда факторов (таких, как силы
трения), для которых известен качественный характер влияния
их на развитие колебаний.
В случае же колебаний вращающегося вала необходимо рас-
сматривать уже не колебания его около положения статического
равновесия, а поведение во времени малых возмущений уста-
новившегося движения вала — вращения его с по-
стоянной угловой скоростью. Именно этой особенностью, дела-
ющей указанные выше упрощения не всегда оправданными, и
отличается задача о критических скоростях роторов от других
задач теории колебаний упругих систем.
I Изучим простейший случай этой задачи: невесомый, идеально
круглый упругий вал на абсолютно жестких опорах, имеющий
один весомый диск, который может рассматриваться просто как
точечная масса. Ось подшипников предполагаем вертикальной
и совпадающей с осью z декартовой системы координат. Всеми
видами трения пренебрегаем. Проекция на плоскость ху той точки
I Деформированной оси вала, к которой присоединен диск, обозна-
йена па рис. 11.1 точкой О', проекция ц. т. диска — точкой С.
В деформированном положении диска па него действует сила упру-
гости вала, пропорциональная отклонению оси вала w = 00’
и направленная от точки О’ к точке О, т. е.
Рх = —си>Л; Py = —cwu, (II.1)
где wX9 w, — координаты точки О'; с— жесткость вала (напри-
мер, если вал имеет постоянное сечение и диск расположен на
середине его длины, то с = 48EJ13).
Так как никаких других сил, кроме силы Р на диск не дей-
ствует, эта сила должна проходить через его центр тяжести, т. е.
точки О, О и С должны лежать на одной прямой. Уравнения дви-
жения диска будут такие:
тх — Рх =—cwx = — с(х —ecoscp);
ту = Р — — cwu = — с (у — е sin (р).
(IL2)
Здесь х, у—координаты точки С (ц. т. диска); е — длина от-
резка О'С, называемая эксцентриситетом; <р — угол между на-
правлением 00' и осью х.
Уравнения (II.2) имеют очевидное решение, соответствующее
вращению ротора с постоянной угловой скоростью со:
ср—ш/; Х“Х0—acosco/; у = yQ = a sin o)Z; | (П.З)
ес ।
а с — mtn2 ’ I
л. £
Это решение невозможно только при ог = —; предполагая
пока» что о)2 =/= -~9 исследуем поведение вала при малых откло-
нениях его от движения, описываемого формулами (11.3). Вычитая
из уравнений произвольного движения вала (II.2) уравнения
установившегося вращения (П.З), получим:
ти си =
rnv Ц- си =
Г(11.4)
где и — х — ха, v — у — у0 — проекции отклонений ц. т. диска
от его положения, соответствующего стационарному вращению
ротора.
Таким образом, уравнения для отклонений и, v отделились
друг от друга, а каждое из них оказалось тождественным с урав-
нением изгибных колебаний в одной плоскости невращающегося
невесомого вала с одной сосредоточенной массой т. Собственная
частота таких колебаний равна
К
(П-5)
44
а амплитуда их не зависит от времени и равна своему начальному
значению, т. е. движение вала, описываемое уравнениями (П.З),
оказалось устойчивым. Заметим, что при отсутствии небаланса,
т. е. когда е = 0, уравнения ста-
ционарного вращения диска станут
особенно простыми:
>” = Уо = °; ф = со/, (11.6)
а уравнения для отклонений u, v
останутся теми же самыми и они
в точности совпадут по форме с ис-
ходными уравнениями движения
(II.2), в которых, как было уже ска-
зано, е = 0. Это заключение остается
верным всегда: для составления урав-
нений подобных (П-4) достаточно со-
ставить общие уравнения движения
идеально уравновешенного ротора.
Отметим некоторые особенности
стационарного движения ротора,
описываемого формулами (I L3).
1. Точка С (ц. т. диска) описы-
вает при вращении окружность:
*6 4- У о = ----• х ’
j I____:_ 1
\ л2 ) Рис. 11.1. Схема вала
2. При < А вал при вращении все время прогнут в сторону
небаланса (рис. П.2) и плоскость его изгиба вращается с той же
скоростью, что и сам вал; прогибы вала остаются постоянными,
Рис. II.2. Схема прецессии вращающегося вала
так что изгибные напряжения в его волокнах также постоянны.
Такое движение плоскости изгиба вала называется прямой п р е -
Ц е с с и е йо
45
3, При со > А. вал прогнут в сторону, противополож-
ную его небалансу; вращение плоскости изгиба вала такое же,
как и в первом случае. При со —> оо точка С стремится к точке О,
т. е. центр тяжести стремится совместиться с осью вращения.
Это явление называется самоцентрированием.
4. Прогиб оси вала в точке присоединения к нему диска зависит
от скорости вращения ротора со и увеличивается при подходе к
(U = (0кр = Л = ]/Z. (11.7)
Эта угловая скорость называется критической.
При со = сокр решения уравнения (II.2), аналогичного (II.3),
не существует; это значит, что для анализа явления в этом случае
необходимо обратиться к более точным уравнениям, в частности,
учесть трение.
Таким образом, в рассмотренном простейшем случае крити-
ческая угловая скорость вращения ротора действительно совпала
с собственной частотой его плоских изгибных колебаний в одной
плоскости. Этот вывод справедлив однако далеко не всегда.
Уравнения типа (11.4) для малых отклонений вала от его стацио-
нарного вращения в общем случае не совпадают с уравнениями
изгибных колебаний невращающегося вала, а оказываются суще-
ственно их сложнее. Более общая постановка задачи об исследо-
вании характера возможных колебаний вращающегося ротора
дана ниже.
Строгая постановка задачи о колебаниях
вращающегося однодискового ротора
В общем случае постановка задачи об устойчивости и коле-
баниях вращающегося вала состоит в следующем.
1. Составляются общие уравнения малых колебаний ротора
около стационарного его движения, соответствующего вращению
с постоянной скоростью. При составлении этих уравнений можно
всегда принимать, что неуравновешенные массы на всем роторе
отсутствуют. Исследованием полученных таким образом уравне-
ний выясняются области устойчивости и неустойчивости соответ-
ствующего стационарного движения — вращения вала с постоян-
ной угловой скоростью.
2. Внутри областей устойчивости выясняется характер зави-
симости прогибов вращающегося вала от скорости его вращения
(при некоторой фиксированной величине неуравновешенности).
Те угловые скорости, при которых прогибы вала достигают макси-
мальных значений, могут оказаться в эксплуатации опасными;
такие скорости называют критическими.
3. Внутри областей неустойчивости характер движения ротора
может быть выяснен только с помощью нелинейной теории коле-
46
4
баним. Обычно это автоколебания с частотой» близком к собствен-
ной частоте ротора. В некоторых случаях амплитуда этих авто-
колебаний столь невелика, что их наличие оказывается совершенно
безопасным; такие автоколебания могу г ла ко подавляться чисто
вынужденными колебаниями, возбужденными небалансом. В дру-
гих случаях амплитуды автоколебаний могут быть значительными.
Практические расчеты критических скоростей роторов очень
часто могут тем пе менее выполняться без предварительного ис-
следования устойчивости вращения ротора, так как в ряде доста-
точно общих случаев эта устойчивость заведомо обеспечена. Наи-
более важные для практики особенности роторов, влияющие па их
критические скорости и характер устойчивости их вращения,
рассмотрены ниже на примере колебаний невесомого ротора с од-
ним диском.
Введем две системы декартовых координат;
а) — оси абсолютно неподвижные; £— ось подшипников,
q — ось при горизонтальном вале вертикальная, в других слу-
чаях направление ее будет выбрано позднее;
Н б) хуг—оси подвижные и по отношению к диску и в про-
странстве; ось z совпадает с осью с, оси х, у вращаются вокруг
оси z с угловой скоростью <о, равной скорости вращения ротора,
так что по отношению к этим осям диск совершает лишь малые
колебания, но не вращается; направлены оси х, у по
главным осям инерции диска.
Начала координат осей и xyz совмещены с центром тяжести
диска в недеформированном положении ротора. Системы осей
и xyz — правые.
W Проекции сил и перемещений считаем положительными, если
они направлены по соответствующим осям.
ж Углы поворота и моменты сил считаем положительными при
вращении от оси х к у, или от у к z, или от z к х.
Ж Далее обозначим: г — вектор, начало которого лежит на оси
вращения, а конец—в ц. т. диска; вектор г параллелен пло-
скости J-ij; х, у — проекция вектора г на оси х, у, а Е, ц — проек-
ции того же вектора на оси a, Р (ср, ф) — углы поворота пло-
скости диска относительно осей, проходящих через и. т. диска
и соответственно параллельных осям х, у (£, т]).
При малых колебаниях углы а, Р и <р» ф в течение всего дви-
жения остаются малыми и могут рассматриваться как проекции
I на различные оси координат одного и того же вектора поворота О.
Уравнения малых колебаний диска от-
носительно его стационарного движения представляют собой
переписанные в проекциях на соответствующие оси координат
| Уравнения:
= -dt-<П-8)
47
где Q, L — векторы количества движения и момента количества
движения диска; Р, М — главный вектор и главный момент всех
сил, действующих на диск со стороны вала.
В проекциях па оси х, у эти уравнения имеют вид [501:
т (х — 2(лу — со2х) = Рх;
т (у + 2сох*—or у) = Ру\
Аа + [0 — (А -I- В)] 4- (0 — В) со2а = Мх,
Bfi — [0 — (Д + В)) еоа 4- (0 — A) w2[} = М
(II.9а)
Здесь т — масса диска; А, В —'массовые моменты инерции диска
относительно осей х, у соответственно, а 0 — относительно оси
вращения.
Те же самые уравнения в проекциях на неподвижные оси коор-
динат ёП будут такими:
= Л1-:
0-Ф со0ф 4- (Л — В) со (ф — ьхр) cos 2<о/ —
— со (<р 4- соф) sin 2(и/ 4" ’Р sin 2со/
6,,!) — <О0ф 4" (А — В) <0 (ф 1 соф) COS 2<i)t —
— со (ф — ьмр) sin 2<о/ -|- - <р sin 2(ot = М
(11.96)
Здесь
©^ = A cos2 со/ В sin2 coZ;
0T1 = A sin2 A- В cos2 (fit.
Отметим, что уравнения (П.9а) имеют постоянные коэффици-
енты, уравнения же (П-96) являются уравнениями с переменными
(периодическими) коэффициентами; лишь при осесимметричном
диске, когда А = В, уравнения (11.96) резко упрощаются и при-
нимают вид:
«1= Ръ,
Д«р <о0ф = М&
тц==Р^
Дхр — а>0ф = М ’.
(11.10)
В общем случае опоры вала нельзя считать абсолютно жест-
кими, поэтому, выражая усилия РХРУМХМУ через изгибные пере-
мещения вала, необходимо учесть возможные перемещения шеек
вала в его опорах. Обозначим (рис. II.3): х°, г/°, а0, 0° — проекции
перемещения и поворота, которые имел бы диск при недеформиро-
ванном роторе (за счет соответствующих смещений опор). Тогда
величины
х = х— х°; у = у — а = а — а°; р = 0 — р° (11.11)
48
характеризуют перемещения и поворот диска за счет изгибяой
деформации ротора. Ясно, что в общем случае усилия РЛ, . . М
выражаются через х, . . р точно так же, как они выражались бы
через проекции перемещений х, у и поворотов а, р диска при абсо-
лютно жестких опорах.
Предположим, что оси координат х, у являются главными
осями изгибпой жесткости вала; тогда усилия, действующие
в плоскости zx (yz), вызовут изгиб его только в этой же плоскости.
При наличии сил внутреннего трения в материале вала в этом
случае будем иметь для плоскости zx:
— Рх - СрХ + Ф + ЬрХ I ftp; [ 1
сх + с.ф-1 Ьх + Ьм$
и аналогичные формулы для плоскости yz:
— Ру — Сру — с а -|- Ьру — b'a\
• •
— мх = — су -f- сма — ь*у + Ьма.
(11.13)
Здесь сР. с, .... см— коэффициенты изгибной жесткости вала;
Ьр9 Ь. . . Ьм— коэффициенты линеаризованного внутреннего
трения.
В общем случае, когда главные оси инерции диска и главные
оси жесткости вала нессвпадают, соотношения, аналогичные (II. 12)
и (11.13), сильно услож-
няются, так как в каждое
из этих соотношений будут
входить все перемещения и
повороты (и их производные).
В частном случае осесим-
метричного по своим жест-
Рис. 11,3. Схема вала с диском в пролете
част-
ксстпым свойствам вала ко-
эффициенты в формулах
(И.12) и (11.13) будут, очевидно, одинаковыми*. В этом
ном случае уравнения (II. 12) и И.13) сохраняют постоянные ко-
эффициенты и при замене координат на неподвижные координаты
Л» принимая в этих координатах вид:
К —= +^ф +‘Ы1 + ЙН 6(Ф
R -wn = <%> -| смф + b (f-|- 0)1]) I- Ьм (ф охр);
। — Рч = М — 4 ьР (rj — wg) — Ня- + й);
— МЬ ~ — AI + W — b 0) — О)Е) -1- Ьм (ф I соф). J
(П.14)
Разные знаки при коэффициентах с и b в формулах (11.12) и (IIЛЗ) пе-
Whmo поставить именно для того, чтобы в случае осевой симметрии коэффи-
^-нты жесткости и трения для разных плоскостей изгиба оказались бы одипа-
л
JН. В. Григорьев
49
В большинстве практически важных случаев можно считать,
что в опорах вала не возникает реактивных изгибающих моментов;
кроме того оси | и i] можно считать направленными по главным
осям жесткости опор, так как для опор горизонтальных валов
вертикальная плоскость является обычно плоскостью их сим-
метрии, а для валов вертикальных направления осей Ец ранее
не фиксировалось.
При расчете роторов на шариковых подшипниках сделанные
предположения приводят к следующим простым формулам для
реакций опор: <
Д6 = —^п = —СпЯл. (4.15)
где ^—перемещения шейки вала в опоре А; Д^, Дп—проек-
ции реакции опоры Д; —Q, — ц— соответствующие коэффициенты
жесткости опорной конструкции.
Аналогичные формулы будут иметь место и для другой опоры
ротора.
Формулы
примут вид:
(11.15) во вращающейся системе координат xyz
А с = — (с^ cos2 со/ + sin2 wZ) хА—
-уА sin 2(0/;
л„ = — Ф sin 2со/хЛ —
2
(П.16)
— уА (с^ sin2 со/ + cos2 со/),
т. е. они дают уравнения с переменными коэффициентами.
При наличии подшипников скольжения существенную роль
в развитии поперечных колебаний роторов играют упругие и
демпфирующие свойства масляного клина этих подшипников;
с учетом этих свойств реакции опор могут быть представлены
формулами вида 150]:
— Д* — Сц£л 4“ щ
— Дл = C-21L1 Ч~ ^22*44 Ч~ "I ^22*1.4,
гдесд/ — коэффициенты жесткости, а &о= Ьц—коэффициенты тре-
ния масляного клина.
Уравнения (11.17) во вращающейся системе координат в общем
случае будут представлять собой уравнения с периодическими
коэффициентами, которые мы выписывать не будем. Только в част-
ном случае, когда все свойства опор и подшипников осесимме-
тричны, соответствующие уравнения опор во вращающихся осях
координат будут уравнениями с постоянными коэффициентами
Условие осевой симметрии применительно к уравнениям (II. 17*
имеет вид:
Сц Г22» ^12 “ ^21» ^11 ^2 2* ^12 ~ ^21 (П-1
50
н в этом случае уравнения типа (11.16) будут такими:
— А — си <4 (см И^и) У а 4 Ь^Хд,
К — А = — (с12 + <Ai) + СцУа + Ьг1уА .
(11.19)
или ДЛЯ упругой опоры с подшипниками качения:
Л = — <\хА; Ау = — с$А. (11.20)
Для получения замкнутой системы уравнений необходимо
к выписанным выше уравнениями (II.9)—(11.20) добавить уравне-
ния равновесия вала, свя-
зывающие действующие на
диск усилия Р\\ Л4 с реак-
циями опор, и чисто гео-
метрические соотношения»
определяющие перемеще-
ния х°, ₽° через пере-
мещения шеек вала в опо-
рах. Эти уравнения раз-
личны для разных случаев
расположения опор вала.
Например, для вала на
двух опорах с диском в
пролете (рис. II.4, а) имеем:
уравнения равнове-
сия*:
Л1
Ay ’F Ру ~~ 1—
аРч— 1ВУ — Мл = 0;
f Ах-^Вх-Рх = 0;
арх _ iBx + Мь = 0;
(П.21)
И
Рис. 11.4. Схема вана с упругой опорой
кинематические j сло-
вия:
В “°= Т ~ Р° = т —*л):
HL У° = у(аув-}-ЬуАу, х° = -7-(^в4-Лхл).| (П’22)
ml
I Для консольного вала, левая опора В которого абсолютно
жесткая (рис. II.4, б), имеем:
Отметим, что на рис. V.4 показаны усилия Ру, Мх, действующие от лиска
Лвад> в то время как в уравнения (II.9) входят усилия, действующие па диск:
. =пому усилия Ру, Мх и направлены в отрицательные стороны, как это показано
4*
51
уравнения равновесия:
(П.23)
кинематические условия:
(11.24)
Аналогично могут быть составлены уравнения, подобные
(11.21)—(11.24), и для других случаев. Ясно, что эти уравнения
будут иметь точно такую же форму и в неподвижных осях коор-
динат так как в них входят только проекции векторов сил
и перемещений, но не их производные.
Уравнения (П-9)—(11.24) образуют замкнутую систему урав-
нений, число неизвестных которой всегда совпадает с числом
уравнений.
Из сказанного выше следует, что в общем случае получится
система линейных дифференциальных уравнений с периодическими
коэффициентами. Методы численного решения и анализа таких
уравнений в общих чертах известны [911, однако в настоящее
время в связи с большими математическими трудностями эти
уравнения почти не применяются для решения конкретных задач,
хотя отдельные такие работы уже появились [163].
Уравнения с постоянными коэффициентами могут быть полу-
чены в двух частных случаях.
1. Весь ротор осесимметричен; опоры любые. В этом случае
необходимо использовать уравнения в неподвижной системе
координат gq£.
2. Опорные конструкции (включая подшипники) полностью
осесимметричны; ротор любой. В этом случае необходимо исполь-
зовать уравнения во вращающейся системе координат xyz.
Эти выводы распространяются на роторы с любым числом опор.
Ниже рассматриваются подробнее эти два частных случая.
Осесимметричный ротор. Критические скорости
прямой и обратной процессии
Предположим, что не только сам ротор, но и опорные кон-
струкции осесимметричны, а внутреннее трение и трение в подшип-
никах отсутствуют. Кроме того примем, что диск находится на
консоли (рис. П.4, б), а левая опора вала жесткая.
Уравнения движения диска—(П.10). Уравнения изгиба вала
(П.14), в которых все коэффициенты трения b равны нулю, урав-
нения равновесия вала (П-23) и кинематические соотношения
(IL11) и (П.24), записанные в проекциях на неподвижные
52
осп а так?ке краевые условия (II 17) в рассматриваемом слу-
чае приводятся к виду:
— 4
Л/у] — < ’л/Ф»
— РГ1 =СрГ) — су; 1
— Л45 = —crj + cMcp,J
(11.25)
где
Величины сР, с, см являются, очевидно, коэффициентами жест-
кости вала, найденными с учетом податливости опоры А.
Подставив Р^. . . Л'1Рв (11.10), получим систему четырех
дифференциальных уравнений для четырех неизвестных |, . . ф:
£рЦ- Й’ = °;
тг\ -|- сРт) — с<р =0;
А(р ф- <о0ф — ст] -ф сЛ1(р = 0;
Лф — <о0<р -|- cl -ф сЛ1ф = 0.
(11.26)
Если искать решение этой системы уравнений в форме:
| = г coski;
Т) = г sin kt;
ср = — Ф sin kt; '
ф = Ф cos kt, J
(П.27)
то для амплитуд г и Ф получим, взяв 1-е и 4-е уравнения:
(сР — ткг) г 4 - сФ = 0; |
ст 4- (См — + 6<оЛ.) Ф = 0. ]
(11.28)
Второе и третье уравнения системы (11.26) приведут к тем же
самым уравнениям; поэтому система (II.26), действительно, имеет
решение специального вида (11.27), если определитель системы
(11.28) равен нулю.
Вещественным корням характеристического уравнения^
сР — тк?
D(X) =
с См — I А — 0 ) А.2
(II.29)
соответствует согласно (11.27) колебательный характер движения,
Что означает, что вращение вала в этом случае будет устойчивым.
53
ствующего системе (11.26),
Рис. IL5. График зависимости
собственной частоты от скорости
вращения
Уравнение (II.29) совпадает по форме с частотным уравнением
плоских изгибных колебаний невращающегося вала с диском,
массовый момент инерции которого заменен на фиктивный момент
инерции Лф = А — ©ю/Л. Это уравнение при любом значении (о
имеет четыре вещественных корня (два положительных и два отри-
цательных), характер зависимости которых от <о показан на
рис. II.5. Можно доказать, что если Х2, суть веществен-
ные корни уравнения (11.29), обозначенные так, что все \ >0,
то все корни характеристического уравнения 8-й степени, соответ -
будут равны ±Л€. (i = 1, 2, 3, 4).
Поэтому можно утверждать, что ре-
шениями вида (П.27) исчерпываются
все возможные решения системы
уравнений (П.26).
При Л 2> 0 ц. т. диска двигается
по окружности радиуса г в направ-
лении, совпадающем с направлением
вращения вала, т. е. ось вала со-
вершает прямую прецессию.
При 7. <Г 0 точки Е, 11 также дви-
гаются по окружности, но уже в сто-
рону, противоположную вращению
вала; такое движение осп вала назы-
вают обратной прецессией.
Поскольку на вращающемся валу
всегда имеются неуравновешенные
массы, особый интерес представляет
исследование характера вынужден-
ных колебаний, вызванных именно такими массами, которым
в уравнениях (П.26) соответствуют синусоидальные возмущающие
силы, имеющие частоту со. Поэтому при тех значениях со, при
которых корни Л уравнения (11,29) будут равны ±со, возможен
резонанс.
Условию со = X соответствуют критические ско-
рости прямой прецессии; согласно рис. II 3 для валя
с одним диском имеется только одна критическая скорость прямой
прецессии (точка А ф на рис. II.5). При со = "к фиктивный массо-
вый момент инерции диска
Д£,р’=Л— 0. (II.30а)
Поэтому для нахождения критической скорости прямой прецессии
достаточно найти собственную частоту поперечных колебаний
невращающегося вала, массовый момент инерции которого А
заменен на ЛфПр1 по формуле (II.30а); величина оказывается
практически всегда отрицательной (именно поэтому критическая
скорость прямой прецессии получается только одна).
Этот вывод справедлив для валов с любым числом дисков,
для нахождения критических скоростей прямой прецессии доста-
54
тоЧно найти все собственные частоты изгибных колебаний невра-
щаюшегося вала, заменив массовые экваториальные моменты
инерции его дисков на фиктивные по формуле (П.ЗОа).
Важной особенностью решения уравнений (11.26), соответ-
ствующих критической скорости прямой прецессии, является то»
что это решение сохраняет свою силу и при наличии внутреннего
трения в материале вала. Формально это можно вывести из фор-
мул (П-14): физически это легко понять, если вспомнить, что при
прямой круговой прецессии со скоростью, равной скорости вра-
щения ротора, ось его просто вращается в прогнутом положении
относительно оси подшипников, не деформируясь в про-
цессе движения. Поэтому изгибные напряжения в любом волокне
вала остаются постоянными и, стало быть, внутреннее трение
не может оказывать какое-либо влияние на процесс колебаний.
Это обстоятельство делает критические скорости прямой прецес-
сии особенно опасными, так как амплитуды вынужденных коле-
баний от небаланса па этих скоростях вращения могут ограни-
чиваться только внешним трением, например трением
в масляном клине подшипников скольжения или трением о воз-
дух.
Условию со — —2. соответствуют критические ско-
рости обратной прецессии; согласно рис. П-5
для вала с одним диском всегда имеются две критических скорости
обратной прецессии (точки Лобр на рис. II.5). Для нахождения
критических скоростей обратной прецессии достаточно в случае
любого числа дисков найти все собственные частоты изгибных
колебаний невращающегося вала, заменив массовые экваториаль-
ные моменты инерции его дисков на фиктивные по формуле
= А 4- В. (11.306)
Если под «критической скоростью» понимать такую, при кото-
рой увеличиваются амплитуды вынужденных колебаний, воз-
бужденных небалансом, то для осесимметричного вала критиче-
ские скорости обратной прецессии иа самом деле не являются
критическими, так как можно показать [50 ]. чго в этом случае
возмущающие силы от небаланса ортогональны к собственной
форме колебаний вала (т. е. работа этих сил за оборот равна нулю),
и поэтому они не могут поддерживать колебания вала указанной
формы. Увеличение амплитуд колебаний при прохождении крити-
ческих скоростей обратной прецессии может иногда наблюдаться
только по причине наличия возмущающих сил другой природы,
нежели силы небаланса, или же в случае отсутствия осевой сим-
метрии жесткостных свойств опор (см. ниже). Резонансы с крити-
ческими скоростями обратной прецессии менее опасны еще и по-
тому, что в этом случае внутреннее трение гасит колебания, так
как изгибные напряжения в каждом волокне за каждый оборот
нала дважды меняются с плюса на минус и наоборот.
55
В практике машиностроения какого-либо увеличения амплитуд
колебания вала при прохождении критических скоростей обрат-
ной прецессии обычно не наблюдается, вследствие чего отстройка
от этих резонансов считается необязательной.
В заключение отметим, что в расчетной практике часто находят
критические скорости, пренебрегая массовыми моментами инер-
ции дисков; это допустимо, если все большие массы ротора распо-
ложены близко к серединам пролетов, где повороты сечений вала
при колебаниях малы по сравнению с прогибами; для консольных
роторов учет инерции поворота дисков является обязательным.
Во всех случаях, когда инерция поворота дисков существенна,
было бы грубой ошибкой учитывать ее так же, как при расчете
изгибных колебаний невращающегося вала; правильно в этих
случаях фактические массовые моменты инерции дисков заменять
па фиктивные по формулам (II.30а) и (II.306), что соответствует
учету гироскопических сил.
Влияние на динамические свойства ротора
несимметричности опор вала
Если упругие свойства опор различны в разных направлениях,
задача сильно усложняется; для анализа качественных особен-
ностей движения рассмотрим наиболее простой вариант этой
задачи: главные оси жесткости опоры Л совпадают с осями i],
а опора В вообще жесткая и внутреннее трение в роторе отсут-
ствует. Тогда реакции опоры А выражаются формулами (11.15),
а остальные уравнения (11.25) и (11.10) останутся прежними. По-
этому движение fописывается четырьмя дифференциальными
уравнениями, отличающимися от (11.26) только тем, что теперь
С£ А ГЛГ1| И =Ь Срц'
-|- сР£ + = 0;
Лф — ©охр 4- 4- = 0;
4- Ср711] + = 0;
Л<р ©О)ф 4- = 0.
(11.31)
Решение уравнений (11.31) ищется в форме:
g = acosAZ;
т] = b sin А/;
<р = — Osin AZ;
ф = Yeos AZ,
(П.32)
соответствующей уже не круговой, а эллиптической процессии
(из написанных выше формул видно, что |2/а2 ( »|2/b2 = 1).
56
Характеристическое уравнение, соответствующее решению
в форме (11.32), имеет вид:
d (<».=
0 0 с₽п — т>? ** £ч 0 со?.® Си» — —
0. (11.33)
Анализ его показывает, что при любых о оно имеет восемь
вещественных корней, т. е. согласно форме решения
(И-32) вращение вала является всегда устойчивы м. Для
нахождения всех корней уравнения (11.33) достаточно найги
положительные его корни, так как любому корню
X - X* соответствует еще один корень X = —X*. Это видно из
того, что при раскрытии определителя (11.33) X будет входить
только с четными степенями. Паре корней! и—Xсоответствуют ре-
шения, отличающиеся друг от друга только сдвигом фазы, поэтому
достаточно найти только четыре положительных корня уравне-
ния (11.33). Если какому-либо корню отвечает собственная форма
колебаний, у которой знаки а и b (а также Ф и ф) одинаковы,
то решение соответствует прямой прецессии, в противном слу-
чае— обратной прецессии.
Ч. Для нахождения к р и т и ч е с к и х скоростей со ~ (оьр
следует положить в (11.33) ю = X; таким образом, уравнение,
определяющее критические скорости прямой и обрат-
н о й прецессии, будет таким:
: %
; 0
о
— Аы2 О
О сР1] — muf
<о20
О
<о20
=0.
£п
(П.34)
В данном случае оно не разделяется на два независимых урав-
нения и без нахождения формы колебаний, соответствующей
каждому из корней уравнения (11.34), вообще говоря, нельзя
сказать прямой или обратной прецессии соответствует найденная
критическая скорость.
Как это видно из (11.34), в случае несимметричности упругих
свойств опор и при необходимости учета инерции поворота дисков
задача о нахождении критических оборотов ротора не сво-
дится к задаче о нахождении собственных частот его плоских
Изгибцых колебаний.
57
Только при полном пренебрежении инерцией поворота всех
дисков критические скорости с учетом несимметрии упругих
свойств опор равны соответствующим собственным частотам пло-
ских изгибных колебаний невращающегося вала, найденным для
каждой из двух главных плоскостей изгиба по отдельности.
Следует отметить, что при малой несимметрии упругих свойств
опор (т. е. когда разности ср*— сРп, . . — сМц сравнительно
малы) собственные частоты прямой и обратной прецессий будут
весьма мало отличаться от соответствующих собственных частот
полностью симметричного вала с усредненными коэффициентами
жесткости; однако эллиптичность траектории ц. т. диска может
быть при этом весьма значительной (форма колебаний значит чльно
сильнее искажается при малых изменениях параметров системы,
нежели собственные частоты). Из этого следуют два вывода:
а) внутреннее трение все же влияет на колебания вала при кри-
тических скоростях прямой прецессии, так как некоторая несим-
метрия в упругих свойствах опор обычно всегда имеется, что и
приводит к заметной эллиптичности реальных траекторий ц. т
дисков, а стало быть, и к переменности изгибных напряжений
в вале;
6) точная ортогональность возмущающих сил от небаланса
к форме колебаний вала при критических оборотах обратной пре-
цессии не имеет места также в силу эллиптичности реальных тра-
екторий; поэтому некоторое увеличение амплитуд колебаний вала
при прохождении критических оборотов обратной прецессии
все же возможно.
Эти выводы остаются справедливыми для валов с произвольным
числом дисков.
Влияние на динамические свойства ротора
внутреннего и внешнего трения
Примем, что опоры вала жесткие, и будем пренебрегать инер-
цией поворота диска и внешним трением. Тогда все уравнения
задачи сведутся к следующим:
"'I =
-Р. = с1 + Ь(^+^, (П35)
mi] Р$
—Л1 = сп + ^01 — <°В)-
Соответствующее системе (V.35) характеристическое уравне-
ние, если искать решение в форме
J = ЛеХ/; т] = Be \ (II.36)
может быть преобразовано к виду
(с + Ьк + /пА2)2 + &2<о2 = 0. (11.37)
58
Если положить здесь Z = р + »v, то вместо (11.37) легко
получить систему двух уравнений для р и v:
.2 __ fc2“2
'*-(& + 2mu)= •
(11.38)
На рис. П.6 показаны кривые, соответствующие зависимостям
от и правых частей этих уравнений; точки пересечения кривых
Рис. II.6. К построению границы области устой
чивости
дают корни системы (11.38). Как видно из рис. П.6, при <о2 < —
всем точкам пересечения соответствуют р <1 0, т. е. имеет место
устойчивость. Прп со2 > с/т одна из точек пересечения
дает р > 0 и движение ротора оказывается и е у с т о й ч и -
в ы м.
I Таким образом, внутреннее трение не всегда оказывает стаби-
лизирующее воздействие на колебания вращающегося ротора,
а может в некоторых случаях порождать неустойчивость этого
движения. Поэтому в тех случаях, когда другие источники трения
несущественны (например, при изучении колебаний сравнительно
гладкого ротора, вращающегося в подшипниках качения) и тре-
буется изучить вопрос об устойчивости вращения в закритической
области, пренебрегать силами внутреннего трения нельзя. Однако
У любых жестких роторов, у которых ю < <окр, внутреннее трение
способствует устойчивости и поэтому пренебрежение им допустимо.
Невелика роль внутреннего трения и у роторов с подшипниками
скольжения, так как трение в них значительно превосходит по
величине трение в материале. Для таких роторов основной вид
тРения — это внешнее трение в смазочном слое подшипников.
59
Масляный клин подшипников скольжения обладает двумя
важными особенностями, отличающими его от простой упругой
опоры, рассмотренной выше. Это, во-первых, некопсервативиость
упругих составляющих его реакции, вследствие чего в уравне-
ниях (11.17) с12 4 c2ii и» во-вторых, сравнительно большая вели-
чина коэффициентов трения, матрица которых симметрична [1131.
Рассмотрим простейший вариант этой задачи: внутреннее трение
в материале вала отсутствует, а инерцией поворота дисков можно
пренебречь. Кроме того предположим, что вал вертикален, а кон-
струкция его опоры А осесимметрична, т. е. выполнены усло-
вия (11.18). Тогда можно получить следующую систему урав-
нений:
mi 4- с (I - = 0;
/лт) + с (1) — vit,) = 0;
&11L1 — vc (I — vb) + спёл -Ь С12»1Л = °;
(П.39)
— VC 01 — vr) л) — С^Л + СцП.4 = 0.
Здесь v = (а -р 0^-
Положив, как обычно,
g = ae’-'; n = 6ew; §д = Ле«; т)4 = Вех', (11.40)
получим характеристическое уравнение, которое приводится к виду
[(С 4 rntf) (сп + bnl -1 v2c) — v2c2]2 4-
"|— (с 4 fTlk \ С|о,=— 0.
(И.41)
Если с12 = 0, то уравнение (11.41) превращается в кубическое
mbn№ т (сп с\г) X2 cbnk 4 сси = 0,
(П.42)
все корни которого, как легко показать, опираясь на критерии
Гурвица [241, имеют отрицательную вещественную часть. Поэтому
при с12 = 0 трение в подшипнике всегда демпфирует колебания,
обеспечивая устойчивость вращения ротора.
При с12 =г 0 нетрудно найти границу области устойчивости.
С этой целью необходимо [24 ], положив X = ip в (IL41), прирав-
нять пулю по отдельности вещественную и мнимую части урав-
нения. Область устойчивости расположена слева от точки па
оси со, соответствующей значению
c12 = feu0JKp, (П.43.
где сокр - ] cclt/m (сц )- v2c)— критическая скорость, найден-
ная с учетом податливости масляного клина, но без учета его не-
консервативности (т е. с12 — 0) и демпфирования.
60
Коэффициенты демпфирования и податливости масляного слоя
согласно 11021 существенно зависят от скорости вращения ротора
и определяются формулами вида:
К: = (И.44)
где |i — динамическая вязкость масла; I — осевая длина подшип-
ника; ф—относительный зазор (ф ~ Д//?, где Д—абсолютный
зазор); Кц — некоторые функции от коэффициента пагружеи-
пости подшипника £ — //ip/pco, где q—абсолютная величина
удельной нагрузки на подшипник.
В рассмотренном выше случае (ротор осесимметричен) можно
также показать, что /12 = Дц/2, и поэтому условие устойчиво-
сти (II -43) примет вид
НЁ со < 2сокр. (II 45)
Экспериментально находимая граница устойчивости вращения
обычно соответствует еще большим значениям to. Это происходит
потому, что вначале потеря устойчивого вращения приводит лишь
к возникновению автоколебаний очень малой амплитуды» зафикси-
ровать которые не удается, так как они подавляются чисто вы-
нужденными колебаниями, возбужденными небалансом; интен-
сивные же автоколебания, частота которых не связана с оборо-
тами, а близка к первой собственной частоте вращающегося
ротора, возникают и легко фиксируются только при оборотах со,
уже заметно превышающих 2<окр 1102].
Очень важно отмстить, что при <о < 2шкр масляный клин под-
шипииков скольжения не просто способствует устойчивости вра-
щения ротора, но и интенсивно гасит его колебания, значительно
превосходя по демпфирующему воздействию другие виды трения
Поэтому роторы па подшипниках скольжения часто проекти-
руются гибкими и практика эксплуатации таких машин пока-
зывает, что у них переход через первую критическую скорость
сопровождается лишь вполне допустимым по условиям эксплуа-
тации ростом амплитуд вынужденных колебаний от небаланса,
к При отсутствии осевой симметрии подшипника условия (V.18)
не выполнены; однако можно показать, что и в этом случае гра-
ница области устойчивости находится вблизи о = 2сокр.
Анализ устойчивости в общем случае неосесимметричного
подшипника скольжения для однодискового ротора на двух оди-
наковых подшипниках выполнен в работе [1021; согласно выводам
этой работы и в общем случае:
а) граница устойчивости вращения ротора находится обычно
вблизи удвоенной первой критической скорости ротора;
‘ б) внутри области устойчивости демпфирующее действие масля-
ного клина весьма эффективно и резко уменьшает амплитуды вы-
нужденных колебаний ротора от небаланса.
61
Аналогичные выводы верны и для многодисковых роторов;
это, в частности, следует из анализа большого количества чи-
сленных расчетов, результаты которых сообщаются в ра-
боте [114] (расчеты выполнялись с учетом податливости и трения
подшипников скольжения на ЭВМ методом «начальных параме-
тров», см. § 3).
Осесимметричный ротор в общем случае
Анализ совместного действия всех рассмотренных выше фак-
торов, даже когда ротор однодисковый, затруднителен. Можно,
однако, указать ряд особенностей осесимметричных роторов,
хорошо подтверждаемых конкретными расчетами.
Угловая скорость вращения ротора м = со*, соответствующая
потере его устойчивости, обычно выше первой критической ско-
рости, найденной в предположении абсолютной жесткости опор
и отсутствия сил внутреннего трения. Поэтому в широком диа-
пазоне скоростей, часто перекрывающем рабочие режимы ма-
шины, задача об устойчивости ротора может не решаться.
Максимумы амплитуд вынужденных колебаний от небаланса
находятся вблизи угловых скоростей его вращения, равных соб-
ственным частотам вращающегося ротора.
Задача о нахождении этих собственных частот в общем случае
должна ставиться с учетом податливости опор и притом различ-
ной в разных направлениях (но без учета неконсервативных
сил реакции масляного клина), а также с учетом гироскопического
эффекта диска. Эта задача, см. уравнение (П. 34), не сводится
к нахождению собственных частот изгибных колебаний невраща-
ющегося ротора.
Нахождение критических чисел оборотов формально может
быть сведено к нахождению собственных частот невращающегося
ротора путем введения фиктивных массовых моментов инерции
в случае, если упругие опоры ротора осесимметричны.
Собственные частоты вращающегося ротора не зависят от
частоты его вращения только при условии полного пренебреже-
ния силами инерции поворота плоскостей дисков. В этом случае
упомянутые частоты могут быть найдены как частоты изгибных
колебаний невращающегося ротора для каждой из двух главных
плоскостей жесткости его опор по отдельности. «
Наибольшую опасность представляют собой критические ско-
рости прямой прецессии. При осесимметричных опорах критиче-
ские скорости прямой и обратной прецессии различаются просто
по способу их нахождения, см. (П.ЗОа) и (11.306); в общем же
случае для установления характера прецессионного движения
вала при найденной критической скорости его вращения необ-
ходимо найти соответствующую ей форму свободных коле-
баний.
62
Для расчета амплитуд вынужденных колебаний ротора вблизи
критических скоростей необходим учет сил трения в подшипниках
скольжения и в материале вала и неконсервагивных сил реакции
масляного клина.
Неосесимметричный ротор на осесимметричных опорах.
Критические скорости некруглого вала
Отсутствие осевой симметрии ротора может быть вызвано двумя
причинами: разные жесткостные свойства вала в разных направ-
лениях (нскруглый вал) или разные главные массовые моменты
инерции диска. В обоих случаях необходимо применить уравне-
ния, при написании которых использована вращающаяся система
координат: уравнения движения (II.9а), уравнения изгиба вала
(11.12) и (11.13), краевые условия (11.19), уравнения равновесия
(11.21) или (11.23) и добавочные геометрические соотношения
(11.11) и (11.22) или (11.24).
Будем сначала вообще пренебрегать инерцией поворота диска;
тогда из (II.9а) получим:
Г т (х — 2соу — (й2х) = Л: | , ц 46)
** т (у + 2ых — ®2у) = Ру. I
Предполагая, что коэффициенты внутреннего трения b = Ь*
1см. (11.12) и (11.13)], а диск расположен в середине пролета двух-
опорного вала, вращающегося на абсолютно жестких опорах,
получим такую систему дифференциальных уравнений:
т (х — 2ыу —со2х) сх. + Ьх — 0; I
Е m (у 1 2сох — со2//) + Л/ + by = 0. I
Характеристическое уравнение, соответствующее решению:
х = у =
приводится к виду (обозначено (О] = с!т\ со2 ~ с т)
-4 , 2Ь А.Ч . / 2 , '2 I Л. 2 . \ <12 .
Л» _L — - Д - t- I СО] —1 ZC0 г q I Л
т \ 1 ' 1 т2 J
|||L -
-|- — (со? -L col — 2со2) Л + (со2 — о>1) (со2 — со2) = 0. (II.48)
Границы области устойчивости на плоскости параметров Ь, со,
соответствующие этому уравнению, будут такие (см. рис. IV.8):
А> 40)4 — 4"2w’-------Г (Ш1 ~• “г)2
| со = (i)x; и = ыа; ~ -----------------------з---, (11.49)
т со; — со~
гДе обозначено 2со* — + со2.
Устойчивость вращения имеет место только в области ю <
и в узкой полоске между прямой со = и кривой L (при построе-
нии рис. II.7 принято, что со 2 > со J-
Если с самого начала пренебречь и внутренним трением Ь,
то кривая L на рис. II.7 исчезнет и вся зона cor <2 со < со2 станет
зоной неустойчивости, но зато при со > <о2 будет иметь место
устойчивость. Таким образом, в закритической области, как
и в закритической области для круглого вала, внутреннее трение
может быть причиной возникновения неустойчивости.
Для того чтобы сделать вращение вала устойчивым в более
широком диапазоне оборотов, необходимо введение внешнего
Рис. 1L7. Области устойчи-
вости вращения вала
трения, в частности, трения в подшип-
никах скольжения. Однако неконсер-
вативные силы реакции масляного кли-
на сх 2 могут, как показывают числен-
ные расчеты, привести к появлению
новых зон неустойчивости. Таким об-
разом, лишь при со < min (со ь о>2) можно
с уверенностью считать условия устой-
чивости вращения ротора обеспечен-
ными и, не обращая внимания на все
виды трения, исследовать характер вы-
нужденных колебаний ротора.
Аналогичный результат получается
и при учете инерции поворота и гироскопического эффекта дис-
ков. В этом случае система уравнений движения вместо (11 47)
будет такой:
tn (х — — о?х) сРх — <?Р + Ьр 'х — Ьь = 0;
Bfi + (Л 4- В — 0) ыа + (0 — Л) ю2р 4-
4- сх 4- сЛ1р 4- Ьх 4- &Л1р = 0;
т (у 2сох — <о у) -| СрУ — с а 4> ЬРу — Ь<% = 0;
Ла —(Л рВ—6)<ор } (0 — В)со2а — с*у »
4- сма — by 4- Ьма = 0.
(II .50)
Анализ этой системы в общем виде весьма сложен (102 ]; не-
трудно лишь показать, что к числу границ области устойчивости
принадлежат такие два значения угловой скорости со: <о = (ор
где Wjl—положительный корень уравнения
(сР — ты2) (см — (Л — 0)о?] — <? = 0; (П.51)
со = со2, где со2—положительный корень уравнения
(ср — /ясо2) с*м — (В — 0) о> |
— с =0
(11.52)
64
Сравнивая эти уравнения с уравнением (11.29), взятым при
= X, видим, что cof. (i — I, 2) совпадают с критическими ско-
ростями прямой прецессии, найденными по коэффициентам жест-
кости и массовым моментам инерции диска для каждой из двух
плоскостей zx и yz в отдельности. Таким образом, при со< min (соР
(02) движение ротора будет устойчивым.
~ Рассмотрим теперь вынужденные колебания неосесимметрич-
пого ротора.
Во вращающихся вместе с валом осях координат силы, созда-
ваемые небалансом, постоянны. Поэтому, например в случае
абсолютно жестких опор, вынужденные колебания, создаваемые
ими, описываются уривнениями (11.46), в которых
= — сх — bx -hQx\ PtJ = —(*y—by+Qy, (11.53)
где Qx, Qy — проекции на осп координат ху неуравновешенной
силы инерции.
Частное решение, соответствующее правым частям получен-
ных таким образом уравнений,, находится сразу:
о _. Q* . о Qy
с — тсо2 5 J с* — ты2 ‘
(11.54)
Если перейти теперь к проекциям на неподвижные оси коорди-
нат, то окажется, что
Нг Е = ]/х02 + yQ2 cos (<о/ — г);
Е Я = Г X02 + с/02 sin (w/ — V); (II 551
К v = arctf?-----, = ).
V х02 +t/02 /
Таким образом, ротор совершает прямую круговую
прецессию ! внутреннее трение не сказывается на величине сме-
щения осн вала. Максимумы амплитуд и //п достигаются в окрест-
ности критических скоростей = l elm и ю2 -= i с* Im.
Однако этим не исчерпываются возможные резонансы, по-
скольку во вращающейся системе координат х, у постоянная
в пространстве сила будет иметь своими проекциями синусоидаль-
ные (с частотой <о) функции времени. Поэтому у всякого неосе-
симметричного горизонтального вала возможен резонанс, вызван-
ный постоянной силой, например его весом. Действительно, поло-
жим, что вес диска G направлен по оси т]; тогда
В Л = 0; = G
11• стало быть,
Рк = G sin со/; Р, — G cos cot
5 Н. В. Григорьев
(11.56)
65
Подставив эти силы в правые части уравнений движения (11.46),
будем иметь (без учета трения):
т (х — 2<х>у — со2*) сх = G sin w/;
tn (у + 2сох — to-у) с*У == G cos tot.
Эти уравнения имеют частное решение:
х ~ a sin tol\ у — b cos tot, (11.57)
где
__ с* — 4/по)2 _ с —*4л?т2 ~ /тт гл.
а сс* — 2/псо2 (с -р с*) * сс* — 2/ясй2 (с -р с*)
а -р b \2
а — b
2
2
Решению (11.57) соответствует в неподвижных осях коорди-
нат Е, л такое движение:
Е = xcos tot — у sin tot = (а — b) sin 2аЗ; I
. n-h (П.59)
Л = X sin tot -| ycos tot — -------n— COS 2tott I
L L |
откуда
(11.60)
Таким образом, ц. т. диска совершает прямую круговую пре-
цессию со скоростью 2d), описывая окружность радиуса (с — fe)/2;
эта прецессия отсутствует лишь при а = Ь, т. е. для осесимметрич-
ного ротора. Неподвижный датчик зафиксирует соответствующие
этой прецессии колебания опор, происходящие с частотой 2(о.
Амплитуда колебаний нарастает по мере приближения со к зна-
чению
“ = “»=] • <"•*'>
называемому обычно критической скоростью второго рода.
Из (11.61) видно, что сокр меньше каждой из критических скоростей
cda = с/т и со2 -= сЧт и близка к половине их среднего
значения, поэтому сокр всегда лежит внутри области устойчивости.
Критические скорости первого и второго рода имеют место и
при учете инерции поворота и гироскопического эффекта дисков.
Ч гобы в этом убедиться, добавим в правую часть уравнений (II.50),
взятых без коэффициентов внутреннего трения, соответствующие
66
небалансу постоям ные силы Рх ~ С)х и Р„ — Q, и силы
веса (П.56):
। т(х — 2ыу — w2x) 1 сРх ф = Qx -г- G sin со/;
Вр+(Д + В-0)соа+(е- - Л) ©2Р + « + Сл1₽ = 0;
........ | (11.62)
см \у + 2<ох — со У) 4 срУ — с а = Q, + 6 cos со/;
Ла— (Л В — 0)co"p L (0— В ) со а— с?*//-| см«=0.
Частное решение этих уравнений, соответствующее посте-
я н и ы м Q, и Qa, разыскиваем также в виде постоянных х = а;
у=- Ь; ₽ = Ф; а = Ч'.
Тогда получим:
(ср — ты1) а сФ = Qx\ |
са + [с.м 4- (0 - Л) со2] Ф = 0;
(ср — nico2) b — eV = Qb.',
— cb -Р [сд( — (В — 0) со2] 'Г — 0.
(11.63а)
(II.636)
Таким образом» уравнения для колебаний в плоскости zx
(11.63а) отделились от уравнений для плоскости yz (11.636) и
каждая из этих пар уравнений совпадает с уравнениями для
амплитуд вынужденных изгибных колебаний невращающегося
вала с фиктивны м массовым моментом инерции диска,
соответствующим прямой прецессии. Приравнивая нулю
определители этих систем уравнений, получим уравнения (11.51)
и (11.52), определяющие две критические скорости
первого рода ©j и cos.
Частное решение уравнений (11.62), соответствующее сину-
соидальным правым частям, можно искать в форме:
х = a sin of;
Р — Ф sin cof;
у = b cos со/; a = 4е cos <ot
Соответствующее частотное уравнение имеет вид:
Ср — Ъты2
с
2/шо‘
0
с
СМ — ИО)2
0
ИО)2
2тсо2
0
Ср — 2то)2
— с*
0
ХО)2
«
с
СМ —
(II.64)
гДе обозначено х = А + В — 0.
В Корни этого уравнения и определяют критические скорости
второго рода. Массовые моменты инерции диска входят в (11.64)
Только в комбинации, обозначенной буквой х. Для сравнительно
к 5* б?
тонких дисков х всегда весьма мало, так как у таких дисков
А + В 0; с другой стороны, можно показать, что при х —* 0
корни уравнения (11.64) стремятся к единственному корню сокр,
см. (11.61). Поэтому при определении критических скоростей вто-
рого рода все диски можно, как правило, считать точечными
массами.
Краткие выводы
Ниже сформулированы некоторые общие положения динамики
вращающихся роторов, справедливые для роторов с любым числом
дисков и частично проиллюстрированные ранее на примере одно-
дискового ротора.
1. Решение задачи о колебаниях вращающегося ротора может
быть получено с помощью хорошо разработанного аппарата
теории обыкновенных линейных дифференциальных уравнений
с постоянными коэффициентами только в двух
частных случаях:
а) весь ротор по своим жесткостным и инерционным свойствам
осесимметричен; опоры ротора любые;
б) опоры ротора (в смысле их жесткостных свойств и коэффи-
циентов трения) осесимметричны; ротор любой.
Одновременное нарушение осевой симметрии в роторе
и его опорах может быть учтено только с помощью аппарата
линейных дифференциальных уравнений с периодиче-
скими коэффициентами.
2. Вращение ротора с постоянной угловой скоростью н е
всегда является устойчивым даже при учете сил
внешнего и внутреннего трения; эта устойчивость всегда обеспе-
чена только* при угловых скоростях, меньших, чем первая
критическая скорость ротора (первого рода). Внутреннее
трение в материале ротора, как правило, мало способствует устой-
чивости его вращения и даже может явиться причиной появления
зон неустойчивости в закритической области. Внешнее трение,
в частности трение в масляном клипе подшипников скольжения,
обычно способствует устойчивости; однако наличие неконсерва-
тивных сил реакции масляного клина приводит к появлению но-
вых зон неустойчивости, начинающихся вблизи удвоенной первой
к р итической скорост и.
3. Критические скорости вращения ротора могут быть найдены
формально как собственные частоты плоских изгибных колебаний
невращающегося ротора в следующих частных случаях:
а) как ротор, так и его опоры полностью осесимметричны;
при этом инерция поворота дисков должна учитываться совместно
с гироскопическим эффектом с помощью введения фиктив-
ных массовых моментов инерции прямой и обратной прецессии;
б) симметричный ротор расположен па неосесимметричных
опорах, но все его «диски» таковы, что инерцией их поворота можно
68
полностью пренебречь и полагать массы точечными; в этом случае
критические скорости находятся для каждой из главных плоско-
стей жесткости опор по отдельности;
в) ротор не является осесимметричным, ио все его диски и
упругие участки имеют общие главные направления осей
инерции и жесткости, а опоры — осесимметричные- Критические
скорости первого рода (г. е. критические скорости для
сил небаланса) такого ротора равны собственным частотам его
изгибных колебаний в каждой из главных плоскостей по отдель-
ности (с использованием фиктивных массовых моментов инерции
дисков, как для прямо и прецессии).
В более сложных случаях даже задача нахождения критиче-
ских оборотов ротора (не говоря уже об исследовании устойчивости
его вращения) не сводится к задаче о плоски х изгибных его коле-
баниях.
2. ПРАКТИЧЕСКИЕ СПОСОБЫ РАСЧЕТА
! КРИТИЧЕСКИХ СКОРОСТЕЙ РОТОРОВ
В большинстве практически важных случаев (см. п.1) задача
о нахождении критических скоростей роторов сводится к задаче
о нахождении собственных частот их плоских изгибных колебаний,
для решения которой могут быть'применены Bte методы расчета
собственных частот изгибных колебаний балок с сосредоточенными
и распределенными массами (см., однако, выводы п. 1 о необхо-
димости замены при расчете фактических массовых моментов инер-
ции дисков фиктивными). Ниже описаны наиболее распростра-
ненные приближенные методы таких расчетов. Методы расчетов
критических скоростей валов в более сложных случаях (когда
задача не сводится к плоской), расчетов их областей устойчивости
и вынужденных колебаний, а также более точные методы расчета
собственных частот изгибных колебаний в настоящее время должны
предполагать использование ЭВМ; некоторые из таких методов
изложены в п. 3.
• Методы, основанные на применении
точных формул для собственных частот
В ряде случаев реальная конструкция вала может быть пред-
ставлена настолько упрощенной расчетной схемой, что становится
осуществимым определение ее собственных частот по известным
формулам; использование таких формул может оказаться полез-
НЫМ и в более сложных случаях для прикидочных оценок.
В табл. IIЛ даны значения корней частотны к уравнений для
Ряда расчетных схем балок; собственная частота определяется
Для всех этих случаев по формуле
t Гц ~ 9,55 "К У пер,'мин, (11.65)
69
Таблица И.I
где Е — модуль нормальной упругости материала вала; J — мо-
мент инерции поперечного сечения вала; F — площадь поперечного
сечения вала; у — удельный вес материала вала; g — 981 см/с2 —
ускорение силы тяжести; I —- характерная длина, указанная
на всех схемах балок в табл. ПЛ; а — корень частотного управ-
ления, указанный в табл. ПЛ или на соответствующих графиках
(номера которых даны в этой таблице),
Если схема балки представляет собой систему с несколькими
степенями свободы, то можно найти собственные частоты, решая
точное частотное уравнение, которое имеет вид:
для системы с одной степенью свободы
z— яьап — 0; (П.66‘
для системы с двумя степенями свободы
z3 — (nz3au -j- т2а22) z + = 0;
(П.67)
70
71
для системы с гремя степенями свободы
23 — (/HiCCjjL + ni&i2 шда3з) z* + 4- m2tn3\p23 -]~
+ т3т^31) г — т^ит3 (au4^ + а2аф31 + а3эФ12 —
‘ 2а 11^22^33 ~j * x"Z^L2^'QJ^3l — 0. (11.68)
Здесь
4bfe —- фл/ — ^H^kk &ik 0", — 1> 3)j (II.69j
af/ — а;«. — коэффициенты влияния, о способах определения ко-
торых ниже даны исчерпывающие указания; т£ — инерционные
КОЭ
Рис. 11.10. Графики корней частотного уравнения для
вала с упругими опорами
пциенты
для обобщенной координаты.
соответствующей
t-й степени свободы: это либо соответствующие сосредоточенные
массы,, либо массовые моменты инерции этих масс (фиктивные
при определении критических скоростей).
Собственные частоты Л после нахождения z из уравнений
(11.66)—(11.68) вычисляются по формуле
X = — 1^!” Гц = 9>55 У 4” пеР/мип - (П.70)
X»«L г £ F
Для приближенного учета распределенной массы вала можно
пользоваться указанными в табл. II.2 коэффициентами приведе-
те
нпя; для каждой исходной схемы балки показана приведенная
схема, в которой какая-то часть распределенной массы заменена
сосредоточенной; участки с распределенной массой показаны
двумя линиями, а невесомые— одной. Б последних двух строках
таблицы даны формулы, позволяющие путем приведения одних
сосредоточенных масс к другим уменьшить число этих масс на
балке и тем самым получить расчетную схему с минимальным
(1—3) числом сосредоточенных масс; этими формулами можно
пользоваться для приближенной оценки одной-двух первых соб-
ственных частот.
Таблица 11.2
Коэффициенты приведения масс
Схема балки
приведенная
- Hi t1
Коэффициент
приведении
Коэффициент^
Схема балки Инерционный коэффициент Коэффициент влияния для балки на абсолютно жестких опорах
/I Jt в /г, м t i, ft; — М Р н> 00 Гт] •*. ю Ю ьо tsT* + к** to*4 I
а№
ЗЕЛ
тг — М
а№
а" " 3EJit
тх = Л11
т2 — Л12
аЬ/2(дЧ /1)
6E-G/1
р/г == Л1
1И., ~ /I + 6
р*
а-Ьг
п" " ЗЕЛ
вЬ SL X
йл(ь-а}
а* + Ьэ
’ ЗЕ Л~
ml = М
74
Таблица И .3
Схема балки
Инерционный
коэффициент
Коэффнцнант влнянин для балки
на абсолютно жестыих опорах
М
— .И
т2 = М2
mt =Л!
т2 = М2
Ш3 - /I + 0
mt =.= М
ш2 = М2
2,2
«1*1
а“ “ ЗЕЛ
012 ~ 6EJI
с
aib2
aaa - ЗЕЛ
«13 = —
2
0123 = 'ЗЁЛ
/о
лл
“53 “ 2ЕЛ
033 ~ EJ
л
ауЬ2
U1S“ 6ЕЛ
«13
aV
3EJJ
‘ - -7 £
6ЕЛ/
*21.2
а\Ьл
I- я
31^1
^2 I
ЗЕЛ
о
"TO-J215-^
а
агз~~ЗЁЛ
а23= ЗЕТ/
Р — Зс262
а®э ~ ЗЕЛ
76
Продолжение табл. 11.3
Эпюра моментов для нахождения
Коэффициент влияния длн бвлкй иа подат-
ли вых опорах
а12 “ а12 4" £ 4* ^1^2Сд)
*2
1
а12 = а12 + "7Г |а (4 + У еВ —' ^]Гд)
*1
77
Определение коэффициентов влияния а,-/ для балок, в каждом
из пролетов которых сечение балки постоянно, а опоры абсолютно
жесткие, производится по формулам, приведенным в табл. 11.3.
В первой графе этой таблицы на схемах балок сосредоточенные
точечные массы показаны зачерненными кружками, а сосредото-
ченные массы, для которых необходимо учесть инерцию поворота
и гироскопический эффект, показаны прямоугольниками. В сле-
дующих двух графах табл. П.З даны формулы для подсчета инер-
ционных коэффициентов mi и им соответствующих (по номерам
индексов) коэффициентов влияния ai;-; в формулах для mz обозна-
чено: М - Gig—величины соответствующих сосредоточенных
масс; А — массовые экваториальные моменты инерции сосредо-
точенных масс относительно оси, проходящей через ц. т. этих
масс перпендикулярно к плоскости изгиба; 0— массовые моменты
инерции сосредоточенных масс относительно оси вращения вала.
Для статически определимых схем балок нетрудно найти
коэффициенты влияния по формуле Максвелла-—.Мора
а,* = |' М/ (л) Мк (x)/[EJ (л)1} dx
1
и с учетом переменности сечения балки. Необходимые для этого
эпюры изгибающих моментов от соответствующих единичных на-
грузок даны в 4-м столбце табл. П.З.
В последнем столбце табл. П З приведены формулы для опре-
деления коэффициентов влияния af, с учетом податливости опор
вала; в этом столбце через а?,- обозначены коэффициенты влияния
для балок на абсолютно жестких опорах, а через еА, iB — коэф-
фициенты податливости (см/кг) соответствующих опор вала.
Формулы верны для балок постоянного и переменного сечений.
Отметим, что все корни уравнений (II.66)—(11.68) веще-
ственны; следует, однако, иметь в виду, что при расчете критиче-
ских скоростей прямой прецессии, когда фиктивный массовый
момент инерции ЛфР) = А — 0 будет отрицательным, один из
корней уравнений (11.67) или (II.68) также получится отрица-
тельным. Этот корень можно просто не определять, так как фи-
зического смысла он не имеет.
Энергетические методы. Метод Рэлея Ритца
Энергетические методы нахождения собственных частот из-
гибных колебаний балок основаны на формуле Рэлея, получаемой
приравниванием амплитуд кинетической и потенциальной энер-
гии колеблющейся балки
J EJ(x)[r(x)pdx+ J
^2 —___ _Л_ •__________L ______________ (П.71)
J Vf W у 2 (х) dx 4 [у V= («) + AkY'* (х*)]
L Ь
78
J
где У (х) — форма колебаний (т. е. кривая прогибов колеблю-
щейся балки в амплитудном положении); F (х) и J (х) — площадь
и момент инерции поперечного сечения балки; Gk — вес сосредото-
ченной в точке х — xk массы, а Ак — ее массовый момент инерции
относительно оси, проходящей через ц. т и перпендикулярной
к плоскости изгиба; ci — коэффициенты жесткости упругих опор,
расположенных в точках х — х4 балки.
Формула эта была бы точной и верной для любой (а не только
1-й) собственной частоты изгибных колебаний балки, если бы в нее
подставлялась действительно соответствующая этой
частоте форма изгиба балки Y (х); однако при таком ее понимании
она не дает возможности нахождения собственных частот Л, по-
скольку задача нахождения форм колебаний более сложна, не-
жели задача нахождения этих частот.
Основная идея приближенных методов расчета, основанных па
формуле (П.71), заключается в том, что входящей в эту формулу
функцией У (х) задаются исходя из тех или иных качественных
соображений; этим путем нетрудно получить хорошее приближе-
ние, особенно для 1-й собственной частоты, поскольку структура
формулы (П.71) такова, что результат вычислений по ней слабо
зависит от конкретного вида задаваемой функции, лишь бы она
была похожа качественно на истиниу ю форму прогиба при колеба-
ниях и, в частности, удовлетворяла всем геометрическим гранич-
ным условиям задачи. При этом имеет место следующая теорема
Рэлея:
вычисляемое по формуле
|£7(х)(Г(х)РЛс
Х2 = —--—-------------------_____________([] 72)
L k
число Л при произвольном * задании функции /' (х), лишь бы она
удовлетворяла тем же самым геометрическим граничным условиям,
что и неизвестная нам форма колебаний балки У (х), не меньше,
чем значение первой собственной частоты колебаний этой балки;
X X, тогда и только тогда, когда f (х) — Yr (х).
Эта теорема делает особенно надежной приближенную фор-
мулу (П.72) для отыскания именно первой собственной частоты
колебаний, тем более, что и качественный характер 1-й формы
колебаний предвидеть всегда значительно проще, чем качествен-
ный характер сравнительно более высокочастотных форм. На
рис II. 11 показаны первые формы колебаний для некоторых про-
стейших случаев опирания ротора.
* Задаваемая j (х) должна, конечно, быть «достаточно хорошей», например,
обладать непрерывной и кусочно-дифференцируемой первой производной
79
Существуют два способа такого обобщения теоремы Рэлея,
которое делает возможным ее использование для нахождения
других (2, 3-й и т. д.) собственных частот 1105], однако их
нахождение по этой формуле значительно труднее, чем нахожде-
ние 1-й собственной частоты. Поэтому в настоящее время, в осо-
бенности в связи с наличием ЭВМ, энергетические методы нахожде-
ния собственных частот лучше всего применять только для на-
хождения 1-й (низшей)
Рис. 11.11. Первые формы коле-
баний различных валов
частоты, обращаясь для нахождения
высших собственных частот (если это
необходимо) к другим методам, по-
добным описанному ниже, в п. 3,
см. также ]50, 159 и др. ].
Сформулированная выше теорема
Рэлея позволяет применить для на-
хождения Xj метод Ритца. С этой
цельно задаются входящей в (11.72)
f (х) в виде суммы
f (>') - <ЧФ1 (-') + Сг<Г* W +
--------------1- С„Фл W. (П.73)
где ф, (х) некоторые функции,
каждая из которых удовлетворяет
геометрическим граничным усло-
виям.
Далее задача ставится так: вы-
брать постоянные ск (k — 1, 2, . . ., л)
из условия получения минимума X
по формуле (11.72); легко показать,
что эта задача на minimum приводит
к следующему' значению для 1:
Х = /^,' (П.74)
где — первый (т. е наименьший по абсолютной величине)
корень алгебраического уравнения
«п — zbn гЬ12 • а1п -
D (г)= 021 — • zh2n
°л1~ ап2 zbr,2 апп ?Ьпп
= 0, (11.75)
где обозначено:
аЦ = [ EJ {х) ф" (х)Ф7 (х) dx + S СФ/ W Ф/ (*»):
ьи = J 'Pi (х) Ф/ W +
+ У, I C’g Ф. (**) ф,- (Ха) + Лф,: (л'а) ф/ (ха)] .
(11-76)
80
Можно показать, что при выполнении некоторых достаточно
общих условий, накладываемых на функции <pf (х), следующие
по величине корни уравнения (11.75) будут близки (и притом
больше) к следующим собственным частотам балки. Этим условиям
заведомо удовлетворяют, например для балки на двух опорах
функции (рис. II.12):
(| ft (х) = sin /гл . (И .77)
Для балки на двух опорах с короткой консолью можно взять
(рис. 11.13)
<Pi (*') = sin л * — sin л ;
XX I (Ч ‘ 8)
<р2 (Л) = sin 2л L-{ sin 2л
и т. д.
В большинстве случаев уже при п — 2 метод Ритца дает до-
статочно хорошее приближение для первой собственной частоты.
Ошибка метода Ритца будет при прочих равных условиях тем
большей, чем более резко изме-
няется сечепие вала по его дли-
не, хотя эти изменения и учиты-
Рис 11.13. К заданию формы колеба-
ний консольной балки
Рнс. 11.12. Две формы ^колебаний
ваются при вычислении коэффициентов Ьц по формулам (11.76);
поэтому для валов с резко переменным сечением методом Ритца
лучше пе пользоваться.
Для нахождения собственных частот может использоваться и
метод Галеркина 1105]; однако в этом случае метод Галеркина
эквивалентен методу Ритца и отличается от него только способом
ввода формул (II 76) для коэффициентов aih Ь , поэтому на нем
мы не останавливаемся.
К р последнее время получил распространение также метод
Фридмана [160|, являющийся модификацией метода Галеркина,
Обеспечивающей в задачах о нахождении собственных частот из-
» Ных колебаний существенно более высокую точность при рав-
Ом количестве варьируемых параметров cf.
ЪОчень важным преимуществом метода Ритца (а также, есте-
Венно, методов Галеркина и Фридмана) является то, что
ВL® Н- В. Григорьев . 81
в рамках этого метода объем расчета не увеличивается, если схема
вала является статически неопределимой, поскольку кривая
прогиба вала задается, а не вычисляется.
При применении метода Ритца к мпогс пролетным валам необ-
ходимо помнить, что угол наклона касательной к задаваемой кри-
Рис. 11.14. Форма колебаний двухпро-
летного вала
вой пре гибов на всех промежу-
точных опорах (также, впрочем,
как и внутри пролетов) должен
меняться непрерывно.
Пренебрежение этим условием
может привести к грубым ошиб-
кам. Еще лучше, если задавае-
мая кривая прогибов такова, что
обеспечивается и непрерывность вторых производных; это требо-
вание, не являясь обязательным, споссбствует повышению точ-
ности расчетов.
Например, для трехопорного вала можно задать форму про-
гиба так (рис. 11.14):
(П. 79)
Использование формулы Рэлея с построением
кривой прогибов от задаваемых нагрузок
Наиболее сильным источником погрешностей при непосред-
ственном вычислении частоты по формуле (11.72) является то
обстоятельство, что если даже сама кривая прогибов функцией
f (х) изображается достаточно точно, го вторые ее производные
могут сильно отличаться от истины (при дифференцировании
приближенных кривых погрешность может резко нарастать).
Вычисление же числителя формулы (11.72), равного удвоенной
потенциальной энергии изгиба вала, предполагает именно задание
второй производной функции / (х); в то же время известен и дру-
гой способ вычисления потенциальной энергии — через работу
внешних сил, при котором производные в формулу для
нее не входят.
Эти соображения приводят к идее в качестве f (х) в формуле
(11.72) взять статический прогиб рассчитываемого
вала, вызванный какими-либо задаваемыми нагрузками, которые
подобраны так, чтобы они по возможности близко совпадали
с истинными нагрузками при колебаниях по первой форме, а саму
формулу (11.72) видоизменить, заменив в ней вычисление потен-
циальной энергии деформации нахождением равной этой энергии
работы внешних сил.
82
Если обозначить: q (х) — задаваемая распределенная нагрузка;
рь — задаваемые в точках х - хЛ сосредоточенные силы;
У (х) — кривая прогибов вала, вызванных нагрузками Рк
и q (*)» го получим таким образом формулу
(11.80)
Обычно нагрузки Pk, q (х) отождествляют с собственным
весом вала, что представляется целесообразным, поскольку силы
инерции при колебаниях также пропорциональны весам его масс.
Однако ни в коем случае нельзя забывать, что для многопролетных
валов или валов с консолями силы инерции при колебаниях на-
правлены в разных пролетах и на консолях в разные сто-
роны (см. рис. 11.11); поэтому и задаваемые в этих пролетах
силы q (х) обязательно надо направить в разные стороны,
а не так, как действуют фактически силы веса.
При задании в качестве нагрузок Р/{. q сил, численно равных
весам соответствующих масс и направленных, как это было только
что объяснено, формула (11.80) перепишется так:
[ yFYc (х) dx + Me U>)
___________________k__________________
[ “Г ^G w t J R I'g (Xk) + (xk)
nt Q
k
(11.81)
где VG (x) — прогиб вала от сил Pk и q (х).
Формула (11.81) наиболее часто применяется в практических
расчетах, правда в большинстве источников она написана без
учета инерции поворота дисков.
Еще раз напомним: при расчете критических скоростей мас-
совые моменты инерции дисков Af, должны быть заменены на
фиктивные по формулам (11.30а) для прямой прецессии или по
(П.ЗОб) — для обратной.
Точность формулы (11.81) может быть несколько улучшена
практически без всякого увеличения объема вычислений. С этой
Целью достаточно принять:
fl (*) = (х) У (х); |
Рк = W *
(11.82)
»Де У (х) — любая функция, качественно похожая на 1-ю форму
Колебаний, которая может быть задана самым грубым
образом.
6‘ 83
Поскольку при пользовании формулой (11.81) все равно надо
находить статический прогиб балки переменного сечения, что
проще всего делается графоаналитическим способом [1161, то
объем вычислений совершенно не изменится, если силы принять
по формулам (П 82), нарисовав график функции F (х) просто от
руки.
По формулам (11.80) и (II.81) можно найти собственные ча-
стоты балок и с учетом податливости опор; для этого надо только
соответствующие прогибы (или Yo) находить с учетом упомя-
нутых податливостей.
Формулы (11.80) и (11.81) наиболее эффективны, когда расчет-
ная схема вала является статически определимой, так как тогда
нахождение прогибов его от заданных нагрузок не встречает за-
труднений. Для расчета многопролетных валов или для других
статически неопределимых случаев удобен метод Ритца. Он может
привести к цели значительно быстрее, поскольку при применении
этого метода объем расчетов не зависит от степени статической
неопределимости. Еще лучше применить к расчету статически не-
определимых валов метод Фридмана [1601.
Пример 1. Определим различными, описанными выше способами крити-
ческое число оборотов ротора, представленного на рис. 11.15, о.
Воспользуемся прежде всего частотным уравнением (11.67), полностью пре-
небрегая распределенной массой вала, т. е. заменяя его расчетной схемой с двумя
степенями свободы: прогиб и поворот конца консоли, на которой насажен диск.
Согласно табл. II. 3. (третья строка) имеем:
Разбивая участки интегрирования иа части, на протяжении которых J =
const, и выполняя интегрирование, можно найти (принято Е = 2,1 • 10е кгс/см2):
Пц = 21,82 - 10~в см/кгс; а22 -= 6,96-10"® 1/кгс-см;
ап= 1,048-10"® 1/кгс.
Заменяя приближенно диск телом, размеры которого указаны на рис. 11.15» -
можно найти (у — 7,85-10"3 кгс/см3):
массу диска т = 0,0758 кгС'См"1^2;
момент инерции диска относительно оси вращения 0О = 44 кгссм-с3 и от"
носитопьно диаметра ~ 24,96 кге см с2.
84
Частотное уравнение (11.67) примет вид
тпОф («п^22 '—ан) 2 — 2 + 1=0,
где
£ = вД---^0»
0,607 10“12z”3 + 0,3288 Ю"^"1 — 1 = 0;
zfl = 1,04-106
(второй корень отрицательный и физического смысла нс имеет).
Рнс 11.15. Построение эпюры прогибов балки
Окончательно находим
®крпт = Уй 1 = 1020 1/с = 9740 об/мип.
Отметим, что без учета инерции поворота диска и гироскопического эффекта
**Ы получили бы
шкрнТ ~ I’Jmaji — 780 I /с 7435 об/мин.
, формулой (II-81), находя кри-
i [116]- Отметим, что с помощью
В приведенном выше решении распределенная масса вала вообще не учиты-
валась; для ее учета можно воспользоваться энергетическими методами, причем
лучше всего взять за обнову один из методов, основанных на построении кривой
Прогиба вала от задаваемых нагрузок, поскольку расчетная схема вала стати-
чески определимая. Воспользуемся, прежде всего t
ВУЮ прогибов вала графоаналитическим способом _________________ ____________
Обычного построения (рис. 11.16, в) кривая прогибов получается в некотором мас-
штабе znnp (прогиб истинный ^пр?/черт);если при этом для осевых размеров вала
выбран масштаб тлл (/ = /ИдЛ/чсрт, где I —г любой осевой размер), то масштаб
|Ля производных от прогиба У' (х) будет, очевидно, таким: л = тщ/тдл-
85
Учитывая, что для графического построения распределенный вес участков
вала заменяют сосредоточенными силами, прикладываемыми в серединах соответ-
ствующих участков, формулу (II.81) можно переписать так:
i____g
1 mnp
k
gAk
„2
дл
k
где V — кривая прогибов, см чертежа.
Приводим табл. 11.4 значений весов участков (в кгс) и прогибов (в см чертежа),
полученных графическим построением, в котором тдл= 2; тпр = 1,91-10"4.
По этим данным без учета гироскопического эффекта и инерции поворота
диска получилось бы
*
™крнт
1/~ 980-1256 30 ,,
= I j,91.10-*-18 320 • Т = °700 Об/МИН
Для учета гироэффекта диска (первая сосредоточенная масса в табл. 11.4
найдем
где Ах — 3,4 — расстояние по оси вала в см чертежа между массами 1 и 2.
Поскольку 6ф=Л1~ —19,04 кгс см с2, найдем
^крит —
980’1256
= 7470 об/мин.
18 320 — 19,04-980-1,3242
1,91 - Ю~*
Таблица II.4
Расчет сумм, входящих в формулы
для частоты колебаний
Ё Ё £ Р-, кгс vl- см чертежа piYi P-Y2. i i
> —76,08 -15,3 1165 17 800
2 —2,37 — 10,8 25,6 277
3 —5,00 —6 30,0 180
4 —3.10 - 2,5 7.8 19.4
5 —3,55 -0.7 2,5 1.7
6 4,01 0.9 3.6 3,2
7 5,56 2,0 11.1 22,2
8 5,56 1.7 9,5 16,1
9 1.73 0,5 0,9 0,5
1256 18 320
Отметим, что нахождение
смирит по формуле (11.80), в ко-
торой в качестве нагрузки были
приняты собственные веса, пред-
варительно умноженные на ор-
динаты «нарисованной от руки»
ориентировочной кривой проги-
бов, дало следующие значения:
соКрит — 5600 об/мин без учета
гнроэффскта; (0j<piIT—7400 об/мин
с учетом гнроэффскта.
Формула Дон керли
и ее обобщения
Энергетические методы
н а хож ден и я собственн ы х
частот дают всегда завы-
шенные их значения: в то
же время для практики
важнее знать нижний пре-
дел возможных значений
собственной частоты. Про-
стейшей приближенной
86
формулой такого типа является формула Донкерли. Для ее об-
основания достаточно заметить» что частотные уравнения типа
(П.66)—(11.68) для систем с п степенями свободы имеют при zn~l
коэффициент, равный — У а сумма корней алгебраиче-
i
ского уравнения n-й степени равпа упомянутому коэффициенту
с обратным знаком:
Н -
+ гп = 4-
1ппсх>пп. 1 83)
Поскольку с увеличением их номера собственные частоты
быстро возрастают, числа быстро убывают; воспользо-
вавшись этим, отбросим в (11.83) все zi9 кроме тогда и полу-
чится формула Донкерли
, Zj = — < (m/x,, 4 /и2а22 ----1- /п„а,м).
Эту формулу обычно переписывают так:
(П.84)
вводя очевидные обозначения
' ^* = ^-(' = 1. 2,.... n). (11.85)
• «
Ясно, что X* есть собственная частота такой системы, которая
получилась бы из исходной, если бы в'ней все инерционные коэф-
фициенты, кроме i-го, оказались равными нулю (числа иногда
называют «парциальными» собственными частотами).
Из приведенного вывода хороню видно, что точность формулы
Донкерли будет тем выше, чем быстрее с ростом их номера растут
собственные частоты. Поэтому формулой Донкерли можно поль-
зоваться для приближенных оценок для однопролетных валов па
жестких опорах (квадраты частот таких валов растут обычно бы-
стрее, чем члены ряда: 1, 4, 9, 16. . .) и нельзя пользоваться для
многопролетных валов. Например для валов постоянного сечения
(рис. 11.16) можно найти:
I для вала (рис. 11.16, с)
В 1? = 33.9 (Ц); 11 = 19,2 (%) ,
’ \mPJ ’ \rnPJ
ошибка около 25%; '
для вала (рис. 11.16, б)
ошибка около 5,5%.
87
Дальнейшим развитием идеи, на основе которой получена
приближенная формула (11.84), является метод «спектральной
функции» Бернштейна, позволяющий дать различные, вообще го-
воря, сколь угодно точные оценки как снизу, так и сверху для
любой искомой собственной частоты системы с п степенями сво-
боды. Например, для 1-й собственной частоты можно получить
такую оценку:
(11.86)
Рис. 11.16. Схема балок
Здесь
п
Hi =
f=l
где — коэффициенты влияния; tni — инерционные коэффи-
циенты.
Уже из формулы (11.86) хорошо видно, что объем вычислений,
необходимых для получения более точных оценок по формулам
Бернштейна, резко растет (в сравнении с формулой Донкерли)
из-за необходимости предварительного нахождения всех коэф-
фициентов влияния alk (а не только а/£). Более подробно элемен-
тарное изложение метода Бернштейна дано в 3-м томе моногра-
фии [116].
3. МЕТОДЫ РАСЧЕТОВ ДИНАМИКИ РОТОРОВ,
ОРИЕНТИРОВАННЫЕ НА ПРИМЕНЕНИЕ ЭВМ
При выполнении практических расчетов динамики сложных
роторов целесообразно в качестве расчетной схемы использовать
всегда схему ротора с сосредоточенными массами (дисками) и
безынерционными участками вала, не вводя в рассмотрение уча-
стки вала с распределенной массой, поскольку реальные кон-
струкции роторов, как правило, состоят из большого числа уча-
стков постоянного сечения, меняющегося скачком от участка
к участку, и задание исходной информации для ЭВМ не упро-
щается принятием схемы вала с распределенной массой *; с другой
стороны, сам алгоритм расчета для дискретной схемы несколько
проще. Поэтому в дальнейшем мы остановимся только на методах
расчетов, основанных на дискретной расчетной схеме
ротора. Математический аппарат таких методов—это специальные
способы решения линейных алгебраических уравнений с квази-
трехдиагональной матрицей коэффициентов.
Методы матричном прогонки и начальных параметров
Рассмотрим систему линейных алгебраических уравнений
частного вида, у которой (рис. II. 17, а) все коэффициенты, кроме
стоящих на трех главных диагоналях ее матрицы, равны нулю.
. Ь„хо-\-.сох1 = /?0;
«1*0 F'lAa ~
В «2*1 bzx-2 : с,хя -R2-
^n^n-l F ЬпХп “ Gl-^n+1 ~ ^/1»
ал+1Ап г ^л+1-^л+1 == Г
Применим для ее решения метод последовательного исключения
неизвестных (алгоритм Гаусса). Исключая х0 из первых двух урав-
нений, найдем
-рС]Х2 = /?j,
(П.88)
где
Ьг = Ь\ — a\bQ VqJ /?i = Ri — а\Ь$ 1 Z?o. П.89)
Исключая из полученного уравнения (11.88) и третьего уравне-
ний системы (11.87) хь получим уравнение, содержащее только х2
и х3. Продолжая действовать аналогичным образом, получим це-
почку формул для вычисления коэффициентов b\ и 7?f- преобра-
зованной системы:
К ^‘ = ^1—«1(^-1) G-f,
, 1 , (11.90)
К Ri = Ri —ai(b, /?,_! (i — 1, 2, . .n, n f-1). .
Здесь просто обозначено
Ьи -е b0", Ro = Ro- (11.91)
p * Если бы сечение вала вдоль его оси менялось плавно, то вместо задания его
Характеристик во всех расчетных точках было бы проще задать их всего в несколь-
ких точках по длине вала с тем, чтобы в остальных точках находить эти характе-
ристики интерполяцией.
89
Система уравнений (II.87) после этого преобразуется к виду:
bk^k 1 = Rk (Л = О, 1,. .н); j /п 091
l^M i I ~ I
Совокупность проделанных вычислений называют прямой
прогонкой.
Теперь находим хп+1 из последнего уравнения
х„н = (&; О (11.93)
и затем одну за другой определяем все остальные неизвестные:
= (Л = п, п — 1,..., 1, 0). (11.94)
Вычисления по формулам
(11.93) и (11.94) называют об-
ратной прогонкой.
Прямая и обратная про-
гойкн по рекуррентным фор-
мулам (11.90), (11.91), (11.93)
и (П .94) и и редставл яютсобой
алгоритм метода прогонки.
Положим теперь, что у
матрицы коэффициентов ис-
ходной системы уравнений
равны нулю все коэффициенты, стоящие вне двух, симметрично
относительно диагонали расположенных, жирных ломаных ли-
ний на рис. II 18; разбивая эту матрицу на клетки, как это
показано на рис. 11.18, штриховыми линиями и вводя для
каждой из клеток (не состоящих из сплошных нулей) соответ-
ствующие матричные обозначения, можно и эту систему переписать
в форме (11.87), где только все. буквы являются уже обозначениями
не чисел, а матриц. Это либо отдельные клетки матрицы (таковы <?,,
Ь и cz), либо столбцы неизвестных xt или правых частей R(. Не-
трудно убедиться в том, что все матрицы bt обязательно окажутся
квадратными (хотя, возможно, и разных порядков); матрицы же «,
и ct будут, вообще говоря, прямоугольными. При этом все вы-
кладки, проделанные выше с числами . . ., /?( при выводе
формул (11 90). (11.93) и (11.94), окажутся выполнимыми и с ма-
трицами аД, . . ., /?„ а формулы (11.90), (11.91), (П.93) и (11.94)
дают в матричной форме решение исходной системы уравнений.
Это замечание и обосновывает метод матричной прогонки в самом
его общем виде, если только не останавливаться на несуществен-
ных для дальнейшего тонкостях, связанных с тем, что па каком-то
этапе вычислений одна из матриц может оказаться случайно
90
особой *, и поэтому продолжение вычислений сделается невоз-
можным. Отметим в заключение, что для применения метода про-
гонки матрица коэффициентов исходной системы не обязательно
| должна быть строго трехдиагональной (или квазитрехдиагональ-
I ной в случае матричной прогонки); необходимо лишь, чтобы в каж-
11 дое следующее уравнение входило не более чем одно
новое неизвестное (или один новый неизвестный столбец). Напри-
мер, идея метода может быть с успехом применена для составления
В аналогичных ранее выведенным рекуррентных формул прямой и
Ж обратной прогонки, когда отличные от нуля элементы матрицы
Н коэффициентов исходной системы
ж расположены в ней так, как это
проиллюстрировано на схеме
I рис. 11.17, б.
w Вернемся к системе уравнений
t (11.87), в которой будем снова счи-
тать все буквы обозначениями чи-
' сел, а не матриц.
Заметим, что если бы значение
было известно, то все осталь-
t ные неизвестные можно было бы
вычислить одно за другим из 1-го,
I 2-го, ..л-го уравнений системы
(при этом п + 1-е уравнение ока-
залось бы неиспользованным);
в этом смысле все эти неизвестные
ЯВЛ iRj i , очевидно, линенпыми Рис. 11.18. Схема квазитрехдИаго-
фуНКЦИЯМИ ОТ Хо нальной матрицы коэффициентов
+ (/е=1, 2....n-J-1). (11.95)
v Коэффициенты Ak и В проще всего находить численно с помощью
следующего приема.
Из (11.87) видно, что если все Rk — 0 (k = О, 1, . . /1), то
неизвестные хк будут пропорциональными х0, т. с. все Вь обра-
тятся в нуль. Поэтому величины Л; можно в соответствии с П.95У
подсчитать по формулам:
Ак = 4 (k = 1, 2.....п -ь 1), (П.96)
где 4 — значения неизвестных хь, которые они приняли бы, если
ж бы все Rk — 0 (k — О, 1, . . ., л), a xn = 1.
IС другой стороны, из формул (11.95) видно, что
К Вк = 41 (k = 1, 2....n + I), (П-97)
где xV — значения неизвестных xk, которые получатся, если при-
нять, что х0 = 0.
е _ • Отметим, что при ч и с л с ином расчете вообще трудно ожидать, чтобы опре
Делитель матрицы Ьь. полученной из каком то этапе расчета, оказался бы машин-
Г иым нулем.
Таким образом, выполнив две цепочки вычислении:
1-й расчет:
/?Л = 0 (/е = 0, 1,..., п);
*о = 1; *1 = —Со
*1 = —сГ-1 (ak-i*l-2 -j- ^-1*1-1)
(k = 2, 3,..., n-f-1);
2-й расчет:
*о = 0; x‘i’=cj'/?0;
*V = Qlli — ait—1*Г-2 — bk _i**-1) •
(ft = 2, 3,..., n+1),
(П.98)
(П.99)
согласно формулам (11.96) и (11.97) найдем численные значения
всех коэффициентов Ак и Вк формул (11.95), соответствующю
заданной системе (11.88).
Теперь воспользуемся последним уравнением системы (П.87);
подставляя в это уравнение значения неизвестных хп и хп+1 из
(П.95), получим*
хо = “1“ ^п+1^п+11 1 ‘ [^+1 — ал+1^п WUL (П. 10
Найдя таким образом х0> можно затем вычислить по формулам
(11.95) и все остальные неизвестные Xj, хг, . . хп+1. Указанный
алгоритм расчета и составляет содержание метода начальных пара-
метров в его простейшей форме.
Представим себе теперь, как и раньше, что в исходной системе
(11.87) хк и R суть матрицы-столбцы, а «коэффициенты» аЛ, Ьк —
прямоугольные матрицы, а все матрицы ск являются неособыми и
квадратными. Тогда снова можно было бы написать, рассуждав
в точности аналогично предыдущему, формулы (11.95), причем
в них уже Ak были бы, вообще говоря, прямоугольными матри-
цами, а Вь — столбцами.
Точно так же, как и раньше, легко видеть, что
хк = Л,хп |при (й = 0, 1,..., п). (П.101)
К
Вводя явные обозначения для элементов матриц:
110
• • $20 ♦
ап fe а I? k CCla
k а«22 • ’ * k a2o
k k а$2 • • • k ^SG
(И. 102)
92
I
s — число элементов стобца а — число элементов столбца xG,
перепишем матричное равенство (11.101) в числах:
= а11|10 -+" tt‘ • + ttlc£(3(b
?2Л = CXJI^IC + Ot*>^20 -!“•••+ ОС?и^оО> h (] [ JQ3)
Isfc = ®sl|«o + ®s2&20 • • + asola0-
Из (П.103) видно, что если принять 5ю — 11 5ао 5зо ~
.. — |00 = 0, то окажется
t U = 4i(i=l, 2________s). (11.104)
Аналогичные равенства можно написать и для других столбцов
матрицы Ак, беря значение £(0 по схеме (1, 0, 0, . . ., 0); (0, 1,
0, . . ., 0); (0, 0, 1,0.0); . . .; (0, 0, . . ., 0, 1).
Поэтому матрицу ЛА можно полагать составленной из столб-
(V)
цов Хй
В (Н.Ю5)
где Хк *(v = 1, 2, . . ., о) — есть столбец значений хк, которые
они получили бы, если бы в исходной системе уравнений все столб-
цы Rk (k = 0, 1, . . п) равнялись бы нулю, а столбец х0 был бы
равен:
0
для v= 1;
для v — 2,
ДЛЯ V = О.
(11.106)
0
Таким образом, для нахождения элементов матриц по фор-
мулам (11.105) достаточно выполнить о расчетов по указанным
вьтше формулам 1-го расчета, принимая в этих расчетах столбец х0
согласно (II. 106).
Элементы столбцов Bk можно вычислять по указанным выше
формулам (11.97), поскольку из (11.95) видно, что хк I Хс =о — Вь*
Независимо от того, входят в (11.95) числа или матрицы. Сохра-
няются и формула (П.100) для столбца х0 и все формулы (11.95)
^я нахождения всех остальных неизвестных столбцов-
93
Итак, метод начальных параметров в «матричном случае»
превращается из метода двух расчетов в метод о 1 расчетов,
где а — число элементов столбца х0.
Следует отметить, что метод начальных параметров обладает
некоторыми серьезными недостатками, которых лишен метод про-
гонки. Первый из этих недостатков заключается в том, что алго-
ритм метода не осуществим в описанном простейшем виде, если
одна из матриц с, исходной системы особая (или вообще равна
пулю). Эта трудность может быть преодолена ценой некоторого
усложнения алгоритма [50 I и, таким образом, не является прин-
ципиальной, однако она все же ведет к существенному усложне-
нию логики расчета. Указанная ситуация будет при расчетах ди-
намики роторов методом начальных параметров обязательно иметь
место каждый раз, когда у ротора имеются промежуточные
жесткие опоры; поэтому при расчете таких роторов метод прогонки
представляется более простым.
Второй недостаток метода начальных параметров более важен,
но оказывается существенным лишь для сравнительно длинных
роторов н в особенности — для роторов многоопорных или имею-
щих участки, аппроксимируемые сплошным упругим основанием
(это, например, может оказаться важным при расчете роторов
насосов, щелевые уплотнения которых воздействуют на ротор
подобно упругому основанию). Заключается он в плохой устой-
чивости вычислительного процесса метода, вследствие чего на-
хождение столбца по формуле (11.100) может оказаться прак-
тически невозможным.
Однако в тех случаях, когда нет основания опасаться указан-
ного явления, метод начальных параметров весьма удобен для
программирования и может с успехом конкурировать с методом
прогонки.
Расчетная схема ротора
При выполнении расчета на современной вычислительной ма-
шине нет особого смысла делать такие упрощающие предположе-
ния, которые, с одной стороны, не очень существенно
упрощают задачу, а с другой стороны, иногда могут заметно по-
влиять на количественный результат расчета. В то же время не
следует, конечно, пытаться учитывать «все на свете»; расчетчика
не должно покидать чувство меры, ибо и возможности ЭВМ огра-
ничены, и время и труд, необходимые для составления и откладки
программы, могут понадобиться немалые и, главное, нет смысла
в очень точной постановке задачи, если для выполнения практи-
ческих расчетов при такой постановке нет достоверных исходных
данных. Исходя из этих соображений, наиболее целесообразным
представляется пока ограничиться расчетной схемой ротора, ис-
следование которой может быть выполнено с помошыо аппарата
теории обыкновенных дифференциальных уравнений с постоян-
ными коэффициентами.
94
Итак, в соот ветствии с выводами п. 1, предположим следующее.
1. Могут быть рассмотрены два варианта схематизации реаль-
ной задачи: а) ротор (по своим упругим и инерционным свойствам)
осесимметричен, но его опоры — любые; б) все опоры осесимме-
тричны (по своим упругим свойствам), а ротор — любой.
Г 2. Ротор состоит из безынерционных упругих участков и «ди-
сков», т. е. сосредоточенных масс, инерционные свойства которых
описываются величиной этих масс, положением ц. т. по отноше-
нию к точке их закрепления на оси ротора и массовыми моментами
инерции относительно главных центральных осей инерции каж-
дой массы. Все упругие участки ротора можно, не уменьшая общ-
Рнс. 11.19. Расчетная схема вала
иости, полагать участками постоянного сечения, а все
массы — расположенными па стыках таких участков (если на
самом деле там масс нет, то надо положить равными нулю соответ-
ствующие инерционные коэффициенты).
К 3. Ротор оперт на упругие опоры, которые будем считать рас-
положенными также только на стыках различных его участков,
т. е. на «дисках»; все внешние силы, не уменьшая общности, можно,
конечно, считать также приложенными только к «дискам».
^Такпм образом, получаем расчетную схему, изображенную
на рис. 11.19, при этом считаем, что ротор начинается и кончается
сосредоточенной массой; все массы занумерованы от 1 до п, а
безынертные участки между ними—от 1 до п— 1; эти же индексы
Целесообразно присвоить и всем параметрам соответствующих
масс и участков. Внутренние усилия, действующие в сечениях
Ротора, расположенных непосредственно слева и справа от каждой
из его масс, обозначим индексами oi 1 до 2л, считая, что на массу
с индексом k действуют усилия с индексами 2k — 1 слева и 2k
справа. Все обобщенные координаты (смещения и повороты) будем
считать положительными, если они направлены по положительным
Направлениям выбранной системы координат. Правило знаков
^1я внутренних усилий принимаем такое: положительные усилия
совпадают с соответствующими им положительными
К 95
перемещениями, если они действуют на левую отсеченную часть
вала, ипротивоположны положительным перемещениям,
если они действуют па правую отсеченную часть вала; при
таком правиле знаков можно не вводить особых обозначений для
одних и тех же внутренних усилий в зависимости от того, рассма-
тривается действие этих усилий на левую или правую отсеченную
часть ротора. Внешние силы считаются положительными, если
направлены по положительным перемещениям (поворотам).
Для получения замкнутой системы уравнений динамики ро-
тора достаточно составить:
а) уравнения движения каждого из «дисков»;
б) уравнения деформации каждого из безынерционных участ-
ков ротора.
Условия на опорах мы не выделяем в отдельную позицию, так
как предполагается, что любой из «дисков» может быть оперт и
реакции опоры входят в уравнение движения этого «диска».
Система уравнений динамики для произвольного ротора,
вращающегося на осесимметричных опорах
Уравнения движения дисков будут иметь вид уравнений
(Н.9а): ' *
т* (7а — 2(оул — со%) = Pxk RXk — Sx, 2а-ъ
Mfi (Уь 1 2(0Х*> — = Pyk "Г Ryk ! •$£/. 2k Sy. 2A-1J
Afok ' 1®A— Иа + ^a)] C0Pa -I (^A <,ГаА = щ |Qy
== ^xk R x, 2k R x. 2А-1»
BA - - (4 + BA.)| + (0A - ДА) 0>2pft =
= Myk 4“ I/. 2k 2А-1»
где P, Л1 (с индексами) — внешние силы и моменты; R — реакции
соответствующей опоры; S, N— внутренние усилия, действующие
на «диск» от ротора.
Реакции опоры могут быть выражены через соответствующие
перемещения соотношениями вида (II. 19), которым во вращаю-
щихся осях координат соответствуют уравнения:
Rxk — —CkXk — (mbk + **) У к — bk^k,
Ryk = 4 «*) xk—скУк—ькУь-
(11.108)
Здесь буквами ch и Ьк обозначены одинаковые для обеих главных
направлений коэффициенты жесткости и трения, а буквами
косо симметричные составляющие коэффициентов жесткости.
Перепишем уравнения (11.107) и (11.108), заменив в них:
хь на хА.е pft на |\.еш;
i (м- ” ) »(*'+-?-)
Ук на z/*e ' ; aft на afte
(11.109)
и аналогично для всех усилии:
Лс, Rx> $х, Myt Ny — на Px&\ ..Nytat\
i i Ъ—f-.
p, Ryt S{/ — на Pye ’ . • Sy^
i (**+ vl 1 I
/Их, A\ — на Afxe , ЛЛе
(II.НО)
Все множители вида еш сократятся, а для «амплитуд» полу-
чится уравнение (в матричной форме)
H'kQk — Рk ~I' Qtk Qzf’-X’
(11.111)
где обозначено
^xk
Mylt
Pyk
Mxk
|Sx
(индексы у Q
опущены)
ск — (<o2 + X2) x
X tnk + ihbk
0
0 — i (wb* +
+ Hk) — 2<f>hnh
0
(0, - Ak) X 0
X co2 — ВД2
[0* — 0* Ч-
-r 5JJ Xco
I©* _ (4 -u.
т Bk) 1 coX
0
(®fe — Bk) x
X co2 — Ak№
(11.112)
Для написания уравнений деформации участков вала приведем
результат решения элементарной задачи сопротивления материа-
лов: выражения усилий и моментов, действующих на концах балки
постоянного сечения, через прогибы и повороты этих концов
(см. рис. 11.20):
— S’,, = 6c[Jt — Зс/еОл — 6cf np — 3c/eflnp:
К - f- 2сГ*Пл + 3c/^np -I-
I 5пр = -6с/л Зс/₽1*>л 6cfnp 3c/Eflnp;
Л лр = - Зс/е/л -4- г/2Лл + Зс/е/пр + 2еГЛпр.
В формулах (11.112) обозначено:
(11.113)
М’ /пр — прогибы; йл, fl'np — углы поворота; 5Л, 5пр — перерезы-
ва ощие силы; Л?л, Azni, — изгибающие моменты на левом и правом
Н* В. Григорьев 9/
концах балки; е
правил знаков; в
тем плоскости yz, е = -f
— +1 или е = — 1 —в зависимости от принятых
случае, показанном на рис. 11.20» а, соответствую-
I. а на рис. 11.20, б, соответствующем
плоскости zx, —е = —1.
Рис. Н.20. Схема безынертного участка
вала
В соответствии с форму-
лами (П.ИЗ) при отсутствии
внутреннего трения в мате-
риале вала уравнения дефор-
мации его ft-го участка по-
сле перехода от самих пере-
менных к «амплитудам» в со-
ответствии с (11.109) и(11.1Ю)
будут такими:
--Qik
►
Qjfc+i = Bktfh
(11.114)
где
6c*
klk
iCklk
^Cklk
6c*
— 3c*/*
2c*/*
0 0
0 0
6c* 3c*/*
3c*Z* 2c */*
0 0
0 0
6c* — 3c*/*
— ^cklk %ckl~k
0 0
0 0
— 6c* ‘3c*/*
--- 3Cklk CJk
к —
0
0
0
0
0
0
0
0
k
vk
^k^k
0
0
0
0
(11.115)
Bk — матрица, транспонированная по отношению к В*
ck — ,?> “ ’
lk
* 2EJд., yZ ,
-73—’
lk
j момент инерпии площади поперечного сечения роте
•на fc-м его участке) при изгибе его в плоскости zx (т. е. это мо-
мент инерции /,); J*,w — то же, но при изгибе в плоскости .«‘
98
Учет внутреннего трения в материале вала представляется наи-
более целесообразным производить с помощью простейшей ги-
потезы линейного трения, гипотеза Г. Бока [481, согласно которой
напряжение ст в каждом волокне материала связано с деформа-
цией е этого волокна формулой:
df. \
dT ) ’
о ~ Е ( е -]- -~-
\ 1 лЛ
(II.116)
где р. — логарифмический декремент колебаний материала вала,
определенный па образцах при частоте их вибрации, рав-
ной А.
к Можно показать [501, что при использовании этой гипотезы
[уравнения для «амплитуд» (11.114) заменяются на следую-
щие ♦:
К —Qu — (1 ~ 1 v) ~г Btflk+i]'-
I • (II. 117)
| <b+l = (1+ i -£-) Blqk -I- Dkqk ,|
Граничные условия на концах ротора можно всегда считать одно-
родными
I Qi = Q2n = 0, (11.118)
поскольку внешние силы и реакции упругих опор уже были уч-
тены.
г Таким образом, получена система Зп уравнений (II. 111),
. (11.117) и (11.118) для Зп неизвестных q^ (k — 1, 2, . . ., я) и
Qk (k = 1, 2, . . ., 2п) столбцов «амплитуд». Эта система написана
в предположении, что главные направления инерции всех дисков
и главные направления жесткости всех участков ротора совпадают
(это и есть направления ху вращающейся вместе с ротором си-
стемы координат). Если это не так, то надо вводить свои оси
координат для каждого диска и для каждого участка вала. Это не
приведет, однако, к каким-либо существенным трудностям, так как
между проекциями одних и тех же векторов перемещения и
поворота на разные главные оси будут иметь место линейные за-
'писимости с постоянными коэффициентами (так как все
эти оси неподвижны по отношению друг к другу).
1 Об учете абсолютно жестких опор и совместных с ротором ко-
лебаний многомассовых опорных конструкций см., например,
п работе [50].
В Это, впрочем, почти очевидно, так как при замене а на oeiXi и е на ееШ
|>ормула (1J. 116) приобретает вид ст Е (1 + fit 'л) ₽, откуда и видно, что в (I ] 1 И)
достаточно заменить Е па Е (1 4- iu/n).
И7’ 99
Система уравнении динамики для осесимметричного ротора
на произвольных опорах
Уравнения движения «дисков» ротора в проекциях на непо-
движные оси примут вид (11.96).
т£к= ~г 2к * ** |
гад* = 2fe-b } (11.119)
= M5fc л^.д— I
— »”®йЧЛ ~ МцЛ 2 М). 2Й —
Реакции R. и Rn в общем случае упругодемпферных опор вы-
ражаются через перемещения формулами типа (11. )•
— Ryt = с£к + х,гти -ф bhkk -Ь 1 /и д 20)
= —Vj&-j -t-o/(fe-t-«fciifc. »
где коэффициенты жесткости ck, dk, щ, vlt и коэффициенты тре-
пня h ft, 6», вообще говоря, все разные.
" Заменим аналогично предыдущему в этих формулах:
Ь, Фь Л^-на .. N^-,
n. Р ... R^. S„t — на T|fee‘ * \ 5Пйе 2 ;
.. i (?•<+-”)
Л^е -
<Pfc. М&, Nik
<р*е
(11.121)
Тогда вместо (11.119)
литуд» T]ft, ...
и (11.120) получим уравнения для «амп-
yyi)fc которые запишем в матричной форме
_р — О-7Ь_1. (11.12—j
где
Пй
<Гй
— тк№ 4-
0
— SfcX — ivk
0
^1»)Л
I Mfc*
0
о
k —
N.
•“"и
6ftX — /хй
0
dA — тДг —
0
(индексы у Q
опущены)
0
о
- 4 А2
(11.123)
юо
Уравнения деформации безынертпых участков ротора можно
получить из (11.114) формальным преобразованием координат;
после довольно громоздких выкладок [501, при выполнении кото-
рых надо положить, что J ,г. * = получим:
— Qzk — + Bkqk^ i:
Q2/MI =
(И. 124)
Входящие в (11.124) матрицы СЛ1 ВА,, Dk 4-го порядка удобнее
всего записать в форме клеточный матриц:
где обозначено:
^Cklk
— Cklk
Присоединяя к уравнениям (П.124) краевые условия
Qi = <?2« = 0, (П.126)
получим, как и раньше, систему Зя уравнений для Зя неизвестных
(£=1,2...........я) и Qk (k 1, 2........2л).
101
Расчет вынужденных колебаний ротора
В случае, когда ротор осесимметричен, возмущающими силами»
происхождение которых связано с конструкцией и вращением
самого ротора, могут быть только неуравновешенные силы инерции.
При наличии на диске одного неуравновешенного грузика, создаю-
щего статический и динамический небалансы (см. гл. III), на этот
диск будут действовать сила и момент, проекции которых на не-
подвижные оси Ет) таковы (рис. 11.21):
А = /V cos (м/ + fl) = Re );
Рц = N sin (со/ -j- fl) = ReGve
— i I O/+ -
Me
= N'a cos (co/ -|- fl) = Re (Afez<df)»
(11.127)
где W = rnrco2 — центробежная сила грузика, линия действия ко-
торой проходит на расстоянии а от серединной плоскости диска
д/ = We™; М = Me™ = Wne™; fl — угол, фиксирующий поло-
жение грузика на диске по отношению к какой-лпбо общей для
всех дисков вращающейся вместе с валом отметке.
Поэтому в общем случае произвольной неуравновешенности:
Р& = Re(Рке™)- Mlll=Re -Че Н
P1jk = Re ' Рке ' ~ = Re
где Pfe, Mk — комплексные амплитуды небаланса Л-го диска.
Таким образом, выражения комплексных амплитуд возмущаю-
щих сил совпадут с принятыми ранее, если только положить 1 — со.
Задача расчета вынужденных колебаний ротора оказалась
поэтому сведенной к задаче решения Зл уравнений (11.122), (11.124)
и (11.126) с Зл неизвестными qk. Qki но при вычислении «коэффи-
циентов» всех этих уравнений по формулам (II. 123) и (11.125)
необходимо положить, что X — со.
Структура этой системы уравнений аналогична квазитрехдиа-
гональной, и к ней поэтому может быть применен как метод матрич-
ной прогонки, так и метод начальных параметров (первый из них
в литературе по теории колебаний называется обычно методом ди-
намических жесткостей).
Для получения имеющего физический смысл веществе и -
н о г о решения исходных дифференциальных уравнений необ
ходимо после нахождения всех комплексных амплитуд и Qi-
отделить в соответствующем комплексном решении действитель-
на
ную часть. Например, если было найдено для какого-то диска,
что <р — то это значит, что на самом деле
<Г— Re Фе’^е
У
Рис. П.21. Диск со статическим и дина-
мическим небалансами
Поскольку силы небаланса обычно неизвестны, а расчет вы-
нужденных колебаний ротора делается только для нахождения
возможных зон повышенной его вибрации (критических чисел
оборотов), целесообразно в практических расчетах принимать,
что эти силы имеются только
их можно взять равными до-
пускаемому чертежом ротора
остаточному небалансу.
L На первом этапе расчета
полезно также положить
равными пулю все коэффи-
циенты трения и перекрест-
ные коэффициенты жесткости
опор хЛ и vA.. Тогда все урав-
нения задачи сделаются ве-
щественными, что существен-
но упрощает их решение.
Следует однако иметь в
виду, что при этом вблизи
к р и т и ч е с к и х значе-
ний w будет происходить
на одном из дисков, а по величине
неограниченный рост всех
амплитуд; поэтому в программе следует предусмотреть, что при
получении амплитуд перемещений, превосходящих по абсо-
лютной величине некоторый заданный заранее предел, должна
быть произведена автоматически замена <о на w 4- Лю. При при-
менении метода матричной прогонки следует предусмотреть ана-
логичную сдвижку по частоте со и в случае получения «почти»
особой матрицы bk на каком-то этапе прямой прогонки (см. сноску
на стр. 91).
жх Учет сил трения и неконсервативных составляющих реакций
масляного клина подшипников скольжения при расчете вынужден-
ных колебаний нужен лишь при скоростях вращения, сравни-
тельно близких к критическим в тех случаях, когда делается
попытка оценить возможные значения максимальных прогибов
ротора и реакций в подшипниках при медленном проходе через
критические обороты и некотором задаваемом небалансе. Учет
всех этих сил необходим также при анализе устойчивости вра-
щения ротора.
1 В заключение еще раз подчеркнем, чго частные решения, со-
ответствующие чисто вынужденным колебаниям, имеют смысл
лишь внутри области устойчивости.
103
Анализ движения, соответствующего «чисто вынужденным
колебаниям», никогда не может заменить собой анализ устойчи-
вости ротора, так как и внутри области неустойчивости, где соот-
ветствующее решение не имеет смысла, оно может быть ограничен-
ным [501.
Вопрос о характере установившихся вынужденных колебаний
в области неустойчивости сложен и может быть решен только в рам-
ках нелине й и о й постановки задачи.
В случае пеосесимметричпого ротора возму-
щающими силами могут быть те же самые силы небаланса и по-
стоянные силы (силы веса). Силы небаланса (11.127)
в проекциях на вращающиеся оси координат превращаются
просто в постоянные (вообще говоря, комплексные). Поэтому для
нахождения решения, соответствующего таким силам, надо поло-
жить в формулах (11.112) X — 0 и решить систему уравнений
(11.111), (11.114) и (11.118) при известных столбцах Pk.
Силы веса во вращающейся системе координат ху имеют проек-
ции:
Pxk = Gk sin = Im (G^e,o9;
Mxk M yk — 0.
(П.129)
Поэтому, приняв все столбцы Pk в (11.111) равными
О
к —
0
и положив в формулах (II. 112) 1 — ю, мы найдем искомое решение
задачи, отделив мнимую часть от всех комплексных ампли-
туд Pk и Qk, удовлетворяющих системе Зл уравнений (11.111),
(11.114) и (11.118).
Нахождение границ области устойчивости
Обычный метод разыскания возможных границ области устой-
чивости установившегося движения некоей механической системы
(произвольное движение которой, мало отклоняющееся
от исследуемого, описывается системой линейных дифференциаль-
ных уравнений с постоянными коэффициентами) заключается в по
строении так называемого D-разбиения в пространстве параме-
тров [24 I.
После того, как D-разбиение построено, надо, вообще говоря,
в одной из точек каждой области, на которые разбивается им
пространство параметров, найти фактические значения всех кор
104
ней характеристического уравнения с тем, чтобы отличить области
устойчивости от областей неустойчивости. Однако- этой
наиболее трудоемкой части вычислений можно часто избежать.
В частности, в динамике роторов одним из упомянутых параме-
тров выбирается всегда со, а при ш = 0 ротор заведомо устойчив.
Это простое соображение сразу позволяет указать на D-разбиении
одну область устойчивости; стало быть, соседняя
с ней есть область неустойчивости (см., например, рис. П.7) и т. д.
Используя это соображение в практических расчетах динамики
роторов, обычно можно ограничиться только построением воз-
можных границ области устойчивости в некотором, интересующем
конструктора диапазоне угловых скоростей вращения ротора.
Поскольку выше при написании уравнений (П.122), (II.124)
и (П.126) для осесимметричного ротора, а также и уравнений
(11.111), (П.114) и (II. 118) для пеосесимметричного ротора решение
искалось именно в форме хеш; . . Л1пё*хг, для нахождения
границ области устойчивости достаточно найти такие значения
параметров системы (например, со), при которых определитель
соответствующей системы Зп уравнений обращается в нуль.
При решении системы уравнений методом прогонки условию
обращения в нуль определителя системы соответствует условие
обращения в нуль определителя последней матрицы btl н t (см.
формулу (11.93)1; это видно из того, что согласно (11.93) при вы-
полнении этого условия однородная система уравнений для х,
соответствующая исходной системе, наверняка имеет ненулевое
решение.
I Таким образом, для нахождения границ области устойчивости
необходимо, положив все столбцы внешних сил Pk — 0 (k ~ 1,
2, . . /0, решать методом матричной прогонки полученную си-
стему однородных уравнений и приравнять пулю определитель
последней «прогоночной» матрицы, аналогичной матрице bn j t
в (II.93)» который зависит от X, со и других параметров системы и
является некоторой комплексной функцией этих параметров
К Z7 = fRe (Л, (0) 4-i/iin (^, W) = 0. (11.130)
L Приравнивая нулю вещественную и мнимую части этого урав-
нения, получим параметрические уравнения возможных границ
области устойчивости; фактическое построение этих границ вы-
полняется путем численных расчетов при задаваемых 1, to и дру-
гих параметрах.
ГЛАВА HI
МЕТОДЫ БОРЬБЫ
С КОЛЕБАНИЯМИ РОТОРНЫХ МАШИН
I. УРАВНОВЕШИВАНИЕ ЖЕСТКИХ РОТОРОВ.
СТАТИЧЕСКАЯ И ДИНАМИЧЕСКАЯ НЕУРАВНОВЕШЕННОСТИ
При вращении твердого тела относительно неподвижной оси
возникают центробежные силы инерции (ЦБС); ЦБС любого эле-
мента AG тела определяется по формуле
и направлена по радиусу» соединяющему этот элемент с осью
вращения. В формуле (II1.1) обозначено: g = 981 см/са — уско-
рение силы тяжести; со (п) — скорость вращения ротора в 1/с
(об/мин); г— радиус расположения на роторе элемептаДС; ДС—
вес элемента.
Поскольку все ЦБС пересекают ось вращения, произвольная
неуравновешенность ротора статически эквивалентна силе и
моменту» создаваемым некоторыми неуравновешенными грузи-
ками тг и т2 (рис. Ш.1); грузик пг3 создает неуравновешенную
силу, а пара одинаковых грузиков т2 — неуравновешенный мо-
мент (сила и момент могут лежать в различных плоскостях).
Неуравновешенность ротора, соответствующая ЦБС эквива-
лентного грузика zzij, называется его статическим небалансом, а
соответствующая пара грузиков /п2 — динамическим небалансом.
Происхождение этих названий такое.
Статический небаланс может быть в принципе обнаружен из
статического опыта: исследуемый ротор ставится своими шейками
на ножи и под действием грузика тА поворачивается, пока этот
грузик не остановится в крайнем нижнем положении. Динами-
ческий небаланс может быть обнаружен только при вращении
ротора, т. е. из динамического опыта, но воздействию создавае-
мого им момента на опоры ротора.
Под статической балансировкой ротора подразумевают про
цесс ликвидации его статического небаланса независимо от того,
выполняется эта балансировка на ножах или на станках для дина-
мической балансировки. Под динамической балансировкой ротора
подразумевают процесс ликвидации всего его небаланса, как ста-
тического, так и динамического; такая балансировка ротора может
производиться только на станках для динамической балансировки.
106
Произвольная неуравновешенность ротора, в принципе, может
быть полностью ликвидирована постановкой двух уравновеши-
вающих грузов, расположенных в двух любых (но обязательно
различных) плоскостях, перпендикулярных оси вращения и.назы-
ваемых плоскостями исправления, поскольку центробежную
силу Р_ любого элемента ротора (рис. Ш.2) можпо заменить ста-
тически эквивалентными ей двумя силами Р\ и Р' , действующими
в плоскостях исправления.
Ясно, что уравновешивающие силы и Q2 (рис. Ш.2) факти-
чески могут быть созданы различной величины грузами, установ-
ленными на соответствующих
расстояниях от оси враще-
ния. Поэтому за меру не-
Рис. III.2. Приведение произвольного
небаланса к силе и паре сил
Рис. Схема неуравновешен-
ного вала
уравновешенности принимают не вес соответствующего уравно-
вешивающего груза, а величину
К А = Gr, (Ш.2)
измеряемую обычно в гс см.
Если ротор является абсолютно твердым телом, то расстояния
до оси вращения любого элемента ротора останутся одинаковыми
при вращении этого ротора с любой скоростью. Поэтому центро-
бежные силы элементов ротора и уравновешивающих грузов хотя
и будут с изменением скорости вращения меняться, но геометри-
ческая их сумма будет оставаться равной нулю (г. е. ротор оста-
нется уравновешенным). Итак, абсолютно твердый (абсолютно
жесткий) ротор, будучи уравновешенным на какой-либо скорости
вращения, останется уравновешенным и на любой другой скорости
вращения. Это положение лежит в основе метода уравновешивания
роторов на балансировочных станках, на которых, как правило,
ротор вращается с оборотами существенно более низкими. чем его
рабочие обороты.
На первый взгляд кажется, ч го с достаточной дл й практических
Целей точностью можпо и для реальных машин считать расстояния
элементов ротора и уравновешивающих грузов по оси вращения
107
неизменными при вращении ротора с различными скоростями во
всем рабочем диапазоне его оборотов. Однако на самом деле это не
так, и обычная балансировка ротора на оборотах, значительно от-
личающихся от рабочих, может обеспечить удовлетворительную
уравновешенность его на рабочих оборотах лишь при соблюдении
следующих условий.
1. Рабочие обороты ротора значительно ниже первого крити-
ческого числа его оборотов на абсолютно жестких опорах; роторы,
удовлетворяющие этому условию, обычно называют жесткими.
Однако для получения удовлетворительных результатов баланси-
ровки можно всегда считать, что достаточно только 40—50% запаса
попкрнт(т. е. = 0,65-0,7 У
х лкрпт /
2. Ротор не должен иметь перед началом балансировки большой
начальный небаланс, для чего в конструкции его не должно быть,
по возможности, нарушений осевой симметрии и, кроме того, все
концентрические поверхности ротора и особенно места посадки и
шейки должны обязательно обрабатываться с одной установки;
вообще должны быть приняты все конструктивные и технологи-
ческие меры к тому» чтобы точнее соблюдалась концентричность
всех деталей ротора; нарушения этого требования не компен-
сируются увеличением точности последующей балансировки,
если эта балансировка производится обычным способом.
При соблюдении этих условий балансировка реального ротора
может производиться как балансировка ротора абсолютно жест-
кого.
При назначении допусков на точность балансировки жестких
роторов обычно исходят из частного случая, соответствующего
наличию на роторе чисто статического остаточного небаланса.
В этом случае удобно ввести величину так называемого удельного
небаланса
е = 4‘ <ПГЗ)
где G — вес ротора.
Величина е имеет размерность длины (гс см/гс) и численно
равна смещению оси ротора по отношению к оси вращения (экс-
центриситету), эквивалентному по величине ЦБС статическому
небалансу Д. Обычно величину е выражают в микрометрах.
Неуравновешенность ротора нельзя, конечно, полностью ха-
рактеризовать одной величиной е (или Д), а следует обязательно
указывать две величины Д, и Л2» соответствующие балансировоч-
ным грузам в выбранных плоскостях исправления. Однако если»
исходя из заданной чисто статической неуравновешенности Л
(или*?), найти соответствующие ей Лх = Д-иД2 - Д2 Для выбран-
ных плоскостей исправления, то можно показать, что при любом
виде неуравновешенности ротора, удовлетворяющей условиям:
108
реакции его опор будут меньше, чем если он будет на самом деле
иметь максимально возможную, но еще укладывающуюся в рамки
заданного допуска чисто статическую неуравновешенность.
Точность балансировки роторов различных машин выбирается
обычно, исходя из следующих соображений:
1) центробежная сила от небаланса па рабочих оборотах для
горизонтальных машин должна быть меньше веса ротора с тем,
чтобы обеспечить хорошую работу подшипников;
2) вибрация опор ротора, вызванная его небалансом, не должна
превосходить заданных для данного типа машин пределов. Кроме
этого, должны учитываться различные особые требования, предъ-
являемые к машинам специального назначения.
Следует особо подчеркнуть, что фактическое выполнение этих
требований в работающей машине в большинстве случаев зависит
не только и даже не столько от точности окончательной
балансировки ротора в сборе, даже если ротор является жестким,
сколько от выполнения ряда других конструктивных и технологи-
ческих условий, о которых было выше упомянуто и подробнее
будет сказано ниже (см. п. 2), поскольку роторы современных
машин почти никогда нельзя считать абсолютно жест-
кими.
Наиболее распространенные отечественные и зарубежные нор-
мативы на допустимую точность балансировки роторов устанав-
ливают для определенного типа и назначения машин величину е
как функцию от номинальной скорости вращения п:
L e = F(n). (Ш.4)
При заданной величине е допустимые неуравновешенности
и Л2 в каждой из плоскостей исправления находятся из условия
статической эквивалентности этих неуравновешенностей и не-
уравновешенности, соответствующей эксцентриситету с:
2 ' Ч
(111.5)
где G— вес ротора, кг; е— эксцентриситет, мкм; — размеры,
характеризующие расположение ц. т. ротора по отношению к вы-
бранным плоскостям исправления (рис. II 1.3).
; Конкретный вид зависимости (II 1.4) разными стандартами и
авторами рекомендуется различным. Например, ГОСТ 12327—66,
распространяющийся на электрические машины с роторами весом
До 1000 кгг дает для машин разных классов точности серию прямых,
представленных на рис. II 1.4. В ряде источников рекомендуется
зависимость (VI.6) в форме еп — const, причем величина этой кон-
109
станты меняется также в весьма широких пределах (оООО— 30 ООО);
для турбостроения, например, характерны значения 10000 15 000.
Методика балансировки роторов на станках для динамической
балансировки хорошо известна 1141, 1421, и мы на ней не останав-
ливаемся.
Окончательный контроль достигнутой точности уравновеши-
вания выполняется либо по показаниям прибора станка, замеряю-
щего амплитуды вибрации его
опор (в этом случае прибор должен
быть предварительно протариро-
ван применительно к опорам дан-
ного типа и размера), либо мето-
дом обхода пробным грузом.
Тарировка показывающего
прибора станка применительно
к балансировке каждой конкрет-
ной детали может быть выполнена
так:
Рис. IIL4. Значения допусков на
остающуюся неуравновешен нос гь
п
Рис. 111.3. Схема вала
Плоскости
исправления
а) устанавливается на станок одна из деталей данной партии
(предварительно, по возможности, хорошо отбалансированная);
в тарируемой плоскости исправления устанавливается на деталь
пробный груз, небаланс которого А должен быть заранее точно
замерен;
б) производится запись показаний указывающего прибора при
различных положениях груза по окружности детали, причем
окружность делится не менее чем на шесть равных частей;
в) пена деления определяется по формуле
а —-----г----(П1.6)
Утах *Ь !/mlu
где Утат //mm — максимальное и минимальное показания прибора
из числа его показаний, соответствующих различным положениям
(по окружности) пробного груза;
г) величина пробного груза должна быть такой, чтобы даже
у п превосходило в 2—3 раза показание прибора при отсутствии
пробного груза.
по
Определение точности балансировки без предварительной та-
рировки станка выполняется так: в каждом из плоскостей исправ-
ления обе операции производятся с обязательным соблюдением
указанного условия.
Остаточный небаланс находится по формуле
д = - У’ д. (1II.7)
i/niax + J/inin
Формулы (III.6) и (III.7) справедливы только при условии, что
балансировка каждый раз производится на одних и тех же обо-
ротах; вывод их основан на предположении, чго показания при-
бора станка пропорциональны величине имеющегося на роторе
остаточного небаланса и предполагает, кроме того, выполнение
упомянутого выше условия.
2. УРАВНОВЕШИВАНИЕ НЕАБСОЛЮГНО
ЖЕСТКИХ РОТОРОВ
Физическая сущность явления разбалансировки
ротора при увеличении скорости его вращения
Центробежные силы неуравновешенных масс очень быстро ра-
| стут с увеличением скорости вращения. Если, например, ротор
балансировался при л — 300 об/мин, а работает при л —
р = 12 000 об/мин., то в рабочих условиях ЦБС в 1600 раз больше,
чем они были при балансировке. Положим, что ротор до баланси-
ровки имел небаланс порядка 500 гс«см; тогда при л = 300 об/мин
: этому соответствовала сила 0,5 кг, а при п — 12 000 об/мин —
' сила 800 кгс. Если расположение исходного небаланса и уравнове-
I шиваюших грузов было примерно такое, как это показано на
рис. Ш.З, то при оборотах балансировки упругая деформация
вала будет совершенно ничтожной, под действием же усилий по-
рядка 500 1000 кгс вал может деформироваться весьма суще-
ственно и во всяком случае величина его деформации будет порядка
начального эксцентриситета и более. Поэтому несмотря на то, что
исходный небаланс и уравновешивающие грузы будут, по-преж-
нему, уравновешивать друг друга, ротор на рабочих оборотах
ь окажется разбалансированным вследствие появления новых экс-
Е центриситетов из-за упругих деформаций. В этом и заключается
механизм нарушения сбалансированности ротора по мере увели-
чения скорости его вращения.
В Для возможности количественной оценки описанного явления
введем коэффициент качества балансировки Лб, определяемый
формулой
*б = Ф-. ((11.8)
г где /?и> — главный вектор реакций опор ротора, предварительно
уравновешенного с некоторой заданной точностью г на низкообо-
I III
ротном балансировочном станке и вращающегося с угловой ско-
ростью со на реальных, вообще говоря, упругих опорах; —
то же самое, ио в предположении, что с самого начала ротор был
идеально осесимметричным и лишь затем его опорные шейки были
проточены с эксцентриситетом е, равным по величине максимально
возможному остаточному небалансу при принятой точности ба-
лансировки.
Таким образом, с помощью коэффициента k6 сопоставляются
друг с другом два одинаковых по конструкции реальных ротора
на реальных опора х, которые на ппзкооборотиом балансировочном
станке имеют одинаковый небаланс (соответствующий остаточному
эксцентриситету е); отличаются же эти роторы только тем, что
в одном случае имелся, как обычно, сравнительно большой на-
чальный небаланс, который был (с погрешностью е) ликвидирован
постановкой двух уравновешивающих грузов, а в другом — ротор
с самого начала был почти в точности осесимметричным (имел
эксцентриситет в). Поэтому коэффициент kC1 характеризует только
качество балансировки, выполненной па низкооборотпом баланси-
ровочном станке, в том смысле, насколько удачно были в процессе
этой балансировки расположены (по длине ротора) уравновеши-
вающие грузы.
Точное вычисление коэффициента Л,- представляет собой, ко-
нечно, очень сложную задачу и не может быть выполнено при
проектировании хотя бы уже потому, что истинное расположение
небаланса ротора по его длине всегда является неизвестным.
Однако приближенная оценка порядка его величины в диапазоне
оборотов 0 < со < 1,2-5- 1,3(о!, где й, — первая критическая ско-
рость рассматриваемого ротора, вычисленная в предположени
абсолютной жесткости его опор, может быть для двухопориого
ротора выполнена по указанной ниже формуле (II 1.9); эта оценка
достаточна для того, чтобы иметь представление о возможности
(или недопустимости) для данного ротора ограничиться баланси-
ровкой его на низкооборотном балансировочном станке. Эга фор-
мула имеет вид
(0 < со < 1,2 —- l.ScoJ. (Ш.9)
Здесь v=z~^— • где — начальный (до балансировки) небаланс
ротора; Во т — остаточный (т. е. соответствующий задаваемой
чертежом точности балансировки на станке) небаланс;
Ь>1
gBo
2 »
(x)dB0(x)4 SbP’VctK) ,
i—1 I
(III 10)
где /ст (x) — кривая статического прогиба ротора под действием
сил его веса; dB0 (х) — начальный (т. е. до балансировки) небаланс
112
ротора на его участке (х, х 4- dx)\ Врр) (г = 1. 2) — небаланс
уравновешивающего груза ((гс см) для i-й плоскости исправления,
находящейся па роторе там, где х — х .
При выводе формулы (III.9) исходный небаланс и уравновеши-
вающие грузы предполагаются расположенными в одной диа-
метральной плоскости; dB0 (х) и В{ надо подставлять в (Ш.10)
с учетом знака, так что обычно при dB0 (х) > О В < 0.
Совершенно ясно, что если на рабочих оборотах ротора зна-
чения коэффициента kc велики (3—5 в более), то достигнутая
на станке точность уравновешивания ротора будет па этих оборо-
тах совершенно потеряна. Для оценки величины Лб помимо w
надо как-то оцепить коэффициенты v и и.
Ясно, что коэффициент v == — в первмо очередь зависит от
конструкции, а также технологии и качества изготовления и сбор-
ки ротора. Этот коэффициент невозможно рассчитать, однако его
значение может быть с достаточной для практических целей точ-
ностью принято на основании статистических данных по баланси-
ровке роторов аналогичной конструкции и технологии. Для этого
необходимо знать, сколько в среднем для таких роторов приходится
в процессе их уравновешивания ставить балансировочных грузов
в каждой из плоскостей балансировки. Тогда коэффициент v
можно определить по формуле
(Ш.11)
где Qr— суммарная величина уравновешивающих грузов (в обеих
плоскостях балапсировки), гс см; Л — заданная .чертежом точ-
ность балансировки, гс см.
। Реальные значения коэффициента v могут для различных ро-
торов колебаться в весьма широких пределах: от 10—20—• в случае
весьма точно изготовленных роторов, лишенных каких-либо
конструктивных нарушений симметрии, и до 100 и более — для
роторов, имеющих конструктивные небалансы, недостаточно точно
сделанных и собранных.
| Значительно сложнее обстоит дело с определением безразмер-
ного коэффициента р, поскольку для его нахождения необходимо
знать характер распределения по длине ротора исходной его
неуравновешенности, что, строго говоря, конструктору никогда
не бывает известно, так как в процессе балансировки всегда на-
ходятся только главный вектор и главный момент сил исходного
небаланса. Однако реальная конструкция ротора и технология его
изготовления всегда могут подсказать наиболее вероятные источ-
ники появления на роторе неуравновешенных масс, чем и можно
воспользоваться как для оценки величины коэффициента р, так и
Кля оптимального выбора плоскостей исправления (т. е.
такого их выбора, при котором р достигает минимума).
& Н. В. Григорьев ] 13
Рассмотрим в качестве примера ротор постоянного сечения
с эксцентрично выполненной расточкой и двумя симметрично рас-
положенными плоскостями исправления (рис. Ш.5). Для такого
ротора легко найти:
2 {WLJ
“1 = ’
(III.12)
где В = л*//; С — вес ротора.
Возьмем теперь такие, близкие к одному реальному ротору,
цифры: G = 300 кгс; начальный эксцентриситет расточки е0 =
= 0,03 мм; при весе металла в объеме расточки, равном 200 кгс,
это создает начальный небаланс всего ротора Во — 600 гс см,
причем, если других источников небаланса нет, до балансировки
было dB0 (х) = -у dx = Bod%.
Так как уравновешивающие грузы имеют, очевидно, небаланс
В\ = В2 — —то:
GP
ll~ GPB9 24 EJ
(I4 - 2|3 + В) Bod? - 2 -4 - 2Й + Ь)
Ю£-5ЕО).
Здесь == хА/1 и 1 — L = x.2fl — координаты расположения
плоскостей исправления.
Подсчитанный по этой формуле коэффициент р существенно
зависит от выбора плоскостей исправления; в частности, при
Еа 0.22 р = 0 наибольшее его значение (при Еа — 0) равно
0,814. Отметим, что в нашем примере коэффициент v = 60( 10 =
= 60, так что даже для^весьма жесткого ротора, у которого a ап <•
< 0,5, реакции опор на рабочих оборотах могли бы при неудачном
выборе плоскостей исправления во много раз (в 10 и более) пре-
восходить реакции того же ротора, если бы его расточка с самого
начала была выполнена с эксцентриситетом, соответствующим
небалансу 10 гс см (но для этого упомянутый эксцентриситет
должен был бы быть не более 0,5 мкм).
Из приведенного примера видно, что коэффициент р может
колебаться в весьма широких пределах, однако ясное понимание
его физического смысла позволяет конструктору, отталкиваясь
от реальной конструкции и технологии изготовления ротора, путем
ряда вариантных расчетов не только оценить возможное значение
этого коэффициента в каждом конкретном случае, но и выбрать
найлучшим образом положение плоскостей исправления.
114
Рис. И 1.5. Схема вала с рас-
пределенным небалансом
Оценив коэффициенты т и ц и зная величину первой критиче-
ской скорости ротора <оь можно по формуле (II 1.9) найти диапазон
скоростей вращения ротора 0 < со < со , внутри которого значе-
ния коэффициента к6 (II 1.9) не превосходят 2—3. Если внутри
этого диапазона лежат и все рабочие скорости ротора, то можно
считать, что достигнутая на балансировочном станке точность
уравновешивания сохраняется (с точностью до порядка) и на ра-
бочих оборотах; в этом случае для уравновешивания ротора до-
статочно обычной динамической ба-
лансировки его на станке (на низких
оборотах). Если рабочие скорости
вращения ротора выходят за границы
указанного диапазона и никакими
мерами, влияющими на возможные
значения коэффициентов р и v, не
L удается так расширить этот диапа-
зон, чтобы (праб оказались внутри
его, то обычная динамическая балан-
сировка ротора на станке является,
,вообще говоря, недостаточной, а лю-
бое увеличение точности этой балан-
сировки — самообманом, так как оно
все равно не приведет к снижению
уровня вибрации ротора на рабочих
его оборотах. Такое положение, в
частности, практически всегда будет
иметь место при использовании гиб-
к и х роторов, т. е. когда (ораб2> wi-
‘f Подытожив сказанное выше, можно сделать следующие выводы.
1. Применение только одной окончательной динамической
балансировки ротора в сборе на станке (низкооборотном) при лю-
бом увеличении точности этой балансировки может оказаться до-
статочным для очень низкооборотных роторов, для которых прак-
тически при любом начальном небалансе Вс значение коэффици-
ента оказывается не более 2—3.
I 2. Существенное расширение диапазона рабочих оборотов,
внутри которого сохраняется полученная при балансировке на
. станке уравновешенность ротора, может быть достигнуто ком-
плексом конструкторских и технологических мероприятий, влияю-
I тих на диапазон возможных значений коэффициентов v и р,
как-то:
а) ликвидация любых конструктивных причин появления на
роторе небаланса; увеличение точности изготовления всего ротора
Ж (проточка всех его элементов по возможности с одной установки);
> подетальная балансировка отдельных деталей ротора; увеличение
I точности всех посадочных поясков и других деталей конструкции,
•влияющих на точность окончательной сборки ротора; все эти ме-
> роприятня необходимы для уменьшения возможного значения
в* 115
начальной неуравновешенности ротора Во (до его окончательной
балансировки в сборе), влияющей на величину коэффициента v
в (Ш.9);
б) расположение на роторе плоскостей исправления в извест-
ном смысле оптимальным образом по отношению к наиболее ве-
роятным местам появления неуравновешенных масс; этим способом
можно существенно повлиять на величину коэффициента р
в (Ш.9).
3. Если независимо от принятия всех возможных мер, указан-
ных в п. 2, рабочие скорости вращения ротора таковы, что при
(о = to значения коэффициента k6 могут быть велики (3—5 и
более), то снижение уровня вибрации ротора при работе машины
может быть достигнуто главным образом путем специальных
мероприятий, таких как балансировка на рабочих оборотах, ба-
лансировка по формам колебаний и т. п. (см. ниже). Следует,
впрочем, иметь в виду, что и в этом случае будут безусловно
полезны м и все мероприятия, указанные выше в п. 2, однако
простое увеличение точности окончательной балансировки на
станке ротора в сборе никак не отразится на уровпе его вибра-
ции на рабочих оборотах и будет поэтому совершенно беспо-
лезным.
Основы теории уравновешивания упругого ротора
Вращение неотбалаисированного упругого и весомого ротора
есть по сути дела движение, соответствующее чисто выну-
жденным колебаниям, возбужденным неуравновешенными
центробежными силами инерции его масс; эти колебания проис-
ходят около стационарного движения, которое совершал бы
идеальный осесимметричный ротор с прямой осью, вращающийся
с постоянной угловой скоростью вокруг этой оси.
Однако в отличие от обычной задачи нахождения чисто вы-
нужденных колебаний упругой системы вомущающие силы —
небаланс ротора — в данном случае неизвестны, а задача теории
и практики уравновешивания состоит в том, чтобы по замерам тех
пли иных величин, характеризующих движение ротора,
найти соответствующие ему возмущающие силы и затем путем
добавления уравновешивающих грузов свести их к возможному
минимуму.
Обычным методом исследования чисто вынужденных колебаний
является метод главных координат, позволяющий найти соответ-
ствующее решение в форме суммы или ряда по формам свободных
колебаний; этот метод применяется теперь почти во всех работах
по теории уравновешивания упругих роторов, начиная со статьи
Мельдаля 1173]. В случае систем с п степенями свободы упомяну-
тый метод основывается на одном алгебраическом предложении,
ыб
относящемся к задаче нахождения решения системы л алгебраиче-
ских уравнений относительно неизвестных Ар
S (cs/ — /«„со2) Aj = Qs (s = 1, 2,..., n), < IП. 13)
коэффициенты которой удовлетворяют условиям:
(111.14)
Чтобы сформулировать это предложение, введем обозначения:
zv (v = 1, 2, . . ., л) — корни алгебраического уравнения п-й
степени относительно неизвестной z
D(z)— c(i — ztnif |=0, (III. 15)
получающегося приравниванием нулю определителя системы
(III .13) и заменой <в2 на z\ aV (v = 1, 2, . . л;/=1,2, . . ., н)—
совокупность л2 чисел, удовлетворяющих тождествам
X (csi — nis/ZvJa} =0 (s=l,2....n; v = 1, 2,..n). (III.16)
/=1
Отметим, что при условии (111.14) все корни уравнения ЦП. 15)
вещественны [5], и, кроме того, предположим, что все эти корни
различны, а существование отличных от нуля чисел ар8 гаран-
тируется тем, что согласно (111.15) при z — zv определитель си-
стемы (III. 16) равен нулю.
I Теорема 1. Решение системы (III. 13) при условии (III. 14)
может быть при любых со2 =£ zv представлено в форме:
п
(Ш.17)
где обозначено
п
(111.18)
Обычно в теории колебаний уравнение (III 15) является ча-
стотным уравнением соответствующей колебательной системы,
числа zv равны квадратам собственных частот, а числа опре-
деляют v-ю форму свободных колебаний. Однако (и это важно
Для дальнейшего) и в том случае, когда некоторые из кор-
ней уравнения (III. 15) отрицательны и, стало быть, не равны
квадратам собственных частот, сформулированная теорема также
верна.
Очень часто бывает, что все mSJ- при s =£ / равны нулю; тогда
формы колебаний ctjv) удовлетворяют обобщенному условию
117
ортогональности
при р v
при р = v
(III.19)
с помощью которого из (II 1.18) можно получить
п
V=1
(i— 1, 2,..., п),
(III.20)
а сама исходная система уравнений (III. 13) в этом случае может
быть переписана так:
л
4 = S 6s; (Q + (Ш.21)
где б । — матрица, обратная матрице cs/ ||.
Указанная выше теорема является частным случаем соответ-
ствующей теоремы теории интегральных уравнений с симметрич-
ным ядром. Чтобы иметь возможность сформулировать эту тео-
рему, примем такое обозначение:
ь -
| (f (х) f (х) dx 2 ф (xz) FI = J ф (х) df (х). (III.22)
a i ab
Здесь имеется в виду следующее: на отрезке (ab) дан ряд точек
х = xt, в каждой из которых функция f (х) обращается в бесконеч-
ность, но так, что если точка xz лежит внутри промежутка Axz,
lim f (х) Ах = Ft. (Ш.23)
Дх(->0
Например, если имеются на участке (ab) балки распределен-
ная q (х) и сосредоточенные в точках х = xf нагрузки Qn то можно
обозначить dQ (х) нагрузку на длине dx (т. е. это либо q (х) dx,
либо если точка х4- лежит внутри промежутка dx). Тогда, ска-
жем, момент всех нагрузок относительно начала координат, рав-
ный
ь
М = I xq (х) dx 4- 2 xfii,
а
с помощью принятого выше обозначения (II 1.22) может быть пред,
ставлен в виде
М = [xdQ(x).
ab
Интегралы, отмеченные чертой сверху в (III.22), называют
«нагруженными»; они являются частным случаем интегралов
в смысле Стильтьеса [5 J.
118
Интегралы Стильтьеса обладают многими свойствами обычных
интегралов Римана и на них может быть распространена обычная
теория интегральных уравнении [51 вида
I f (х) = (О2 j К (X, £) If © dy (Е) 4- dz (5)1 (III.24)
ab
с симметричным ядром
А'(х, £) - К а, х). (Ш.25)
Обозначим через Z собственные числа, а через (х) собствен -
ные функции соответствующего однородного уравнения, так что:
[ «Р, (X) = А, К (х, й «г, (В dy (|). (II1.26)
ab
Известно [51, что при условии (Ш.25) имеется счетно-бесконечное
множество вществениых чисел для которых существует ненуле-
вое решение ср£ (х) однородного уравнения (111.26); кроме того,
предположим, что каждому соответствует единственное (опре-
деленное с точностью до произвольного постоянного множителя)
решение <р, (х).
К Теорема 2. Интегральное уравнение (Ш.24) при условии
(Ш.25) и любом ш2 =^= \ имеет решение
№) = S
V=1
фу (Х) ?У
(Xv — ы2) ’
(III.27)
где обозначено
| Fv = f <pv (х) dz (х) (v = 1, 2,...). (111.28)
ab
К этому надо добавить, что функции <pv (х) удовлетворяют обоб-
щенному условию ортогональности
К' J<Pv(x)<pM(x)d//(x)= nPHv=fcP. (Ш.29)
ab 1 при v = p
В теории колебаний, как правило, числа Xv являются квадра-
тами собственных частот, а функции (к) — соответствующими
им формами свободных колебаний; однако для дальнейшего важно,
что теорема 2 верна и тогда, когда некоторые из \ отрицательны
и, стало быть, не могут быть интерпретированы указанным выше
образом
I Применим теперь метод главных координат к задаче о выну-
| жденных колебаниях упругого ротора, возбужденных центробеж-
| ными силами инерции неуравновешенных масс, причем будем пое-
небрегать всеми видами трения и некопсервативными составляю-
119
щими реакций масляного клипа подшипников скольжения и,
прежде всего, рассмотрим для простоты колебания однодиско-
вого осесимметричного ротора.
Уравнения движения такого ротора имеют вид 1ср. с уравне-
ниями (11.31) при отсутствии небаланса!:
mt + ~ср& -\ c^ = N cos {м{ + ft);
Дф _. еЮф4. eg + г.мх'Г = Л'а COS {Mt ft);
/ИГ) Cpql] — спф = N Sin (co/ ft )>
Лф 4- ©соф — cni] сМпФ = — Na sin (co/4ft).
(111.30)
(Ш.31)
Здесь N — статический, a Na — динамический небаланс^диска
1см. формулы (11.127)]; 0— угол, отсчитываемый от какой-либо
отметки на диске до неуравновешенного грузика.
Положив _
В = В cos (со/ + ft); ф = 4COS <wZ + v)'.
ti = sin (<o/ -j- ft); ф — — ч>sin (“z + °)«
получим для амплитуд £, - - ф уравнения:
(сР‘ — /псо2) В 4- с«ф = N;
cj + {с.Ml — Лю’2) Ф -Ь — Ж
(сР1| — /псо2) 1] + сп<р = Л’;
0со2ф 4 G)1! I" (смп — ф = Л'а.
Эти уравнения совпадают по форме с уравнениями (111.13),
если обозначить:
41 -= 42 - Ф; Ча = п;
41 = q; Qi = N\ Q2 = Na-,
Q3 = N-, Na-
ni
0
0
0
~ci 0
c,mS °
0 Cj>q
0 c,)
0 0
A 0
0 tn
—e о
(III.33)
120
Уравнение (III.15) в данном случае, при обычных для дисков
соотношениях величин Л и 6 (т. е. при О > Л), имеет три положи-
тельных корня. Эти корни, очевидно, равны квадратам критиче-
ских скоростей. Один же корень уравнения (111.15) — отрица-
тельный и физического смысла не имеет.
Отметим, что в данном случае уравнение (III 15) не совпадает
с частотным уравнением для системы однородных дифференциаль-
ных уравнений, соответствующих (III.30). Упомянутое частотное
уравнение — это уравнение (П.33) и оно имеет для 2 = Z2 все че-
тыре корня положительных. Уравнение (111.15) совпадает с урав-
нением, определяющим критические с к о р о с т и» т. е.
только такие корни частотного уравнения (11.33), которые равны
угловой скорости вращения ротора.
Наибольший интерес представляет случай осесимметричных
УПРУГИХ ОПОр (ИЛИ ЖеСТКПХ ОПОр), ДЛЯ КОТОРОГО = С,р Cpt =
f= и сИ| ~ сЛПг Непосредственно раскрыв определитель си-
стемы (111.3^), нетрудно убедиться, что он в этом случае раскла-
дывается на множители (ниже обозначено с- = сп = с; сР^ = срц ==
— См* ~ смц " См):
сР — niz
с
D (г) =
сЛ1 — Аг
0
02
О
0
сР — tnz
с
О
02
сД! — Az
0
0
= I(Ср — tnz) [См — М — 0)2] — С2 X
X |(Ср — mz) (сЛ1 — (Л 4 в)z] — с2|.
(III 34)
Корням первого множителя соответствуют собственные формы,
для которых:
Е — if. ф = Т-
(II 1.35)
Действительно, при условии (111.35) соответствующие (II 1.32)
уравнения распадаются на две одинаковые пары:
(Ср — mm2) Е 4 сф = А’;
4 — И — 0) <о2] ф = Na, I
(Ш.36)
определитель которых (при z = ы2) совпадает с первой скобкой
разложен и я (111.31).
Аналогичным образом легко показать, что корням второго
множителя соответствуют собственные формы, для которых
£ = — щ ф =
(111.37)
Таким образом, первому из этих множителей соответствуют крити-
ческая скорость прямой прецессии и один отрицательный корень,
второму — две критические скорости обратной прецессии.
121
Огметим, что система уравнений (II 1.36) формально совпадает
с соответствующими уравнениями для амплитуд плоских изгибных
колебаний невращающегося вала, у которого фактические массо-
вые моменты инерции заменены фиктивными (11.30).
Однако поскольку в случае прямой прецессии при обычных
для дисков соотношениях размеров Лфикт < 0, полной аналогии
с плоскими изгибными колебаниями здесь нет; в частности, именно
поэтому обычно имеет место только одна (а не две) критическая
скорость. Если перенумеровать корни уравнения (Ш.34) так, чтобы
было: zKS—корни первого множителя (т. е корни частотного
уравнения прямой прецессии); 23 4 — корни второго множителя
(т. е. квадраты критических скоростей обратной прецессии),
то легко видеть, что определенные формулами (111.18) величины Р3
и Р4 всегда равны нулю, т. е. усилия от небаланса всегда орто-
гональны к собственным формам колебаний, соответствующим
обратной прецессии. В самом деле из (III.18) и (III.37) следует,
что
Р( = Е /V + ф Na + (—£) /V 4- (— ф) Na = 0 (Ш.38)
(i = 3, 4).
Таким образом, разложение чисто вынужденных колебаний по
собственным формам в данном случае содержит только два (а не
четыре) отличных от нуля слагаемых.
Для нахождения этих собственных форм надо найти ненулевые
решения однородных уравнений:
(сл — mzL) 14- сф = 0;
-|- км — (Л — 0) zj ф = 0.
(Ш.39)
Поскольку определитель этой системы равен нулю, второе уравне-
ние есть следствие первого и может быть отброшено; стало быть,
можно принять
Е = <4'’; ф = - (i = l,2), (Ш.40)
где at" — произвольный масштабный множитель, который должен
быть определен из условия нормировки собственных форм.
Соответствующие формуле (111.40) величины *— 1,
согласно (Ш.18), (Ш.ЗЗ) и (111.40) будут такими:
(Ш.41)
122
а окончательное решение для амплитуд чисто вынужденных ко
лебаний будет иметь вид (III. 17):
(111.42)
Возвращаемся теперь к ротору на произвольных (неосесим-
метричных) опорах.
Формулы для амплитуд вынужденных колебаний в этом случае
получаются аналогично предыдущему. Обозначив через z{ корни
уравнения
сР£— тг 0 0
0 с^— Аг 0 0 Срч— тг 6г c>i = 0 (Ш.43)
0 0г cii
получим для определения собственных форм а|и уравнения:
(гр. — /иг,) <4° + QaV’ = 0;
qa'1’ + (Cmj — Лг^аР 4 ' = 0;
(<?рп — mzi) а’ ! СцаУ’ = 0
(/•= 1.2,3, 4).
(Ш.44)
Здесь четвертое уравнение уже отброшено, так как при z = zi
оно является следствием остальных трех уравнений Из этих урав-
нений можно найти
I аУ> = хУЧ°; с#’ = хМ»; а?'’ = х^аР, (Ш.45)
123
где
(О _ ('ps .
Л> — i
с£
х<о _ 4 1° (г>) ~ ®zi 6р£ fr2iM .
3
(О____ ®г/ (cpg — mzi) ~~ D (zi) .
*4 — ёУ71 ’
i е
D (Zi) = cl — [cA(t — 0 -f- W) г,- ] (Ср.- — niZi).
(III .46)
Далее согласно (III. 18) будем иметь
Pv = cdv) [/V -J xiv)(Va+ 4- xT’WaJ =
= j 4 +
(1П.47)
и, наконец:
4
+ C(zP+x<v>)|(q}v>f
2V — CO2
(HI.48)
Г1 Jv) 4-a r (afv)Vx(.v)
I 1 X3 r~x4 J ] \Ц1 f 4 др
Zv — (02
Допустим, что z£ перенумерованы так, что Zj >> О — корень
уравнения (III.43), соответствующий критической скорости пря-
мой процессии; z2 — корень отрицательным, a z3 и z4 — корни,
соответствующие критическим скоростям обратной процессии.
Тогда в общем случае возможность резонансов обусловливается
1, 3 и 4-м членами разложения (111.48); второй же член этого
разложения остается всегда ограниченным. Полезно заметить,
что, если ср^ — сР)] = сР; Ct — = G то из формул (1П.46)
следует, так как тогда D (z3) D (z4) “ 0:
^(3) _.(4) i . (3) _ (3). (4) __ _ (4)
Хз = Х.з = ---- 1; Х1 = -— Хо , Х4 — — Ко
и, стало быть, Ря Pt — 0 и два члена (из четырех) в разложе-
нии (Ш.48) пропадают; два же других члена, как легко пока-
124
зать, оказываются равными соответствующим членам разложе-
ний (II 1.42). и. таким образом» снова получаем решение, соот*
ветствующее осесимметричному валу.
Рассмотрим вкратце неосесимметричный однодисковый ро-
тор (т. е. либо упругие свойства ротора нсосесимметричны —
некруглый-вал, либо диск имеет два различных экваториальных
массовых момента инерции). Исследование вынужденных коле-
баний такого ротора при вращении его на произвольных (т. е.
неосесимметричпых) упругих опорах, как уже отмечалось в гл. П,
сводится к задаче исследования частного решения дифференциаль-
ных уравнений с переменными (периодическими) коэффициен-
тами, и ввиду сложности этой задачи мы на ней не останавли-
ваемся.
В случае же наличия осесимметричных упругих опор и при
условии, что главные плоскости изгиба вала и инерции диска
совпадают» применяя описание движения во вращающейся вместе
с ротором системе координат, получим дифференциальные урав-
нения движения (11.50), в которых только [в отличие от (1L50)]
в правых частях стоят не нули, а некоторые постоянные (так как
проекции силы и момента от неуравновешенного грузика на
вращающиеся вместе с валом оси координат будут постоянными).
Отыскание частного решения, соответствующего таким правым
частям, приводит нас к исследованию двух независимых систем
уравнений вида (11.63а) и (11.636); эти системы уравнений ничем
не отличаются по своей структуре от уравнений (II 1.36). Таким
образом, для каждой из двух главных плоскостей изгиба вра-
щающегося неосесимметричного ротора будет иметь место решение
вида (II 1.42), содержащее два слагаемых, одно из которых при
соответствующем резонансе обращается в бесконечность. Для
формального нахождения этого решения, как и в случае осесим-
метричного ротора, можно, вводя фиктивные массовые моменты
инерции диска:
К Лф,1М=л-е; вфикт^в-е, (Ш.49)
рассмотреть две задачи (для двух главных плоскостей вала)
о плоских изгибных колебаниях невращающегося вала в соответ-
ствующей главной плоскости колебаний, массовые моменты инер-
ции которого заменены па фиктивные.
? Рассмотрение колебаний вращающегося вала независимо в двух
его главных плоскостях становится невозможным, если главные
плоскости жесткости некруглого вала не совпадают
с главными плоскостями инерции диска; в этом случае, анало-
гично случаю, когда ротор осесимметричен и расположен на
произвольных упругих опорах, четыре уравнения для амплитуд
колебаний ротора не распадаются на две независимые группы:
и задача принципиально не сводится к рассмотрению колебаний
в одной плоскости.
125
Отмеченные здесь особенности задачи о возбужденных силами
небаланса вынужденных колебаниях вращающегося однодиско-
вого ротора следующим образом распространяются на ротор
с п дисками 1501.
1. Рассмотрение колебаний вращающегося ротора формально
сводится к задаче о плоских изгибных колебаниях в двух про-
стейших частных случаях:
а) все упругие и инерционные свойства как самого ротора,
так и его опор осесимметричны;
б) все упругие опоры ротора осесимметричны (или абсолютно
жесткие), по сам ротор не обязательно осесимметричен, однако
в этом случае главные плоскости изгиба всех безынертных уча-
стков ротора и главные плоскости инерции всех дисков ротора
совпадают с некоторыми взаимно перпендикулярными плоско-
стями xoz и yozt жестко связанными с вращающимся ротором.
В обеих этих случаях фактические массовые моменты инер-
ции всех дисков должны быть при решении упомянутой задачи
заменены на фиктивные по формулам (11.30), так что при обычных
для дисков соотношениях размеров все они становятся отрица-
тельным и. Вследствие этого характеристическое уравнение,
аналогичное (111.34), в первом случае имеет п корней (п— число
дисков) положительных, равных квадратам критических скоро-
стей прямой прецессии, и и корней отрицательных (эти корни
физического смысла не имеют). Соответственно этому представление
решения в виде суммы по собственным формам содержит 2п членов,
аналогично решению (111 42), половина из которых остается огра-
ниченной при любой скорости вращения о; остальные 2п членов
этих разложений (в соответствии с порядком уравнений для ампли-
туд колебаний n-дискового вращающегося ротора, колеблю-
щегося в двух взаимно перпендикулярных плоскостях, в упомя-
нутых разложениях должно бы было быть 4п членов), анало-
гично (111.38), тождественно равны нулю, так как и в случае
п дискового ротора все усилия от небаланса ортогональны к соб-
ственным формам, соответствующим критическим скоростям об-
ратной прецессии.
Во втором случае для каждой из главных плоскостей вала
получается свое решение, полностью аналогичное описанному
только что, т. е. также содержащее только 2п членов разложения
по собственным формам, поскольку усилия от небаланса орто-
гональны к собственным формам обратной прецессии и в этом
случае.
2. У осесимметричного ротора с п дисками, вращающегося на
произвольных (т. е. неосесимметричных) опорах, равно как и
в случае расположенного на осесимметричных опорах неосесим-
метричпого вала, разные диски которого имеют разные главные
плоскости инерции (или какие-то некруглые участки вала имеют
разные главные плоскости изгиба), также может быть получено
решение для чисто вынужденных колебаний от сил небаланса
12(5
в виде суммы по собственным формам, аналогичное (111.48),
однако в этом случае задача уже не сводится даже фор-
мально к задаче о плоских изгибных колебаниях и при ее реше-
нии необходимо исходить из полной системы уравнений, учиты-
вающей возможность колебаний ротора в двух взаимно перпен-
дикулярных плоскостях.
3. В самом общем случае, когда нарушения осевой симметрии
имеют место (точнее говоря, учитываются исследователем) как
в конструкции самого ротора, так и в упругих свойствах его опор,
изложенная выше элементарная теория о нахождении частного
решения, соответствующего чисто вынужденным колебаниям от
небаланса в виде суммы по собственным формам вообще непри-
менима, поскольку общая задача сводится к системе дифферен-
циальных уравнений с переменными (периодическими) коэффи-
циентами.
В работах, посвященных проблеме уравновешивания гибких
роторов, ограничиваются обычно рассмотрением указанного выше
частного случая, при котором задача может быть с формальной
точки зрения сведена к задаче о плоских изгибных колебаниях;
очень во многих случаях допустимо и дальнейшее ее упрощение—
полное пренебрежение инерцией поворотов и вращения дисков,
т. е. рассмотрение расчетной схемы, состоящей из безынертных
упругих участков вала (который к тому же предполагается круг-
лым) и точечных сосредоточенных масс. В последнем слу-
чае задача уже в точности эквивалентна задаче о плоских изгиб-
ных колебаниях рассматриваемого вала; соответствующие ей
уравнения для амплитуд прогибов вала чаще всего записывают
с помощью коэффициентов податливого вала (а не его коэффи-
циентов жесткости) в форме (III.21):
^ = «2
Ук =
i
Xi i J.
i J
(III.50)
Здесь xk, yk—прогибы А-й массы вращающегося вала по направ-
лению связанной с этим валом системы координат xyz (z напра-
влена по оси. вала); б/Л = (теорема взаимности) — так назы-
ваемые коэффициенты влияния, равные прогибу вала в точка i
под действием единичной силы, приложенной к нему в точке k\
Nkx, N/ty — проекции на оси ху небаланса А-й сосредоточенной
массы, выраженного в гс-см.
Уравнения (111.50) показывают, что в каждой из плоскостей
и прогиб любой (Ай) точки вала вызван приложенными ко
всему этому валу силами:
L —проекции на соответствующие оси"центро-
бежной силы инерции i-й массы (i = 1, 2t. . n); JV/x-o)a;
127
N t. {02 — проекции центробежной силы от небаланса t-й массы
(«*= 1. 2,. . п). „
Уравнения (111.50) удобно переписать в комплексной форме,
вводя новую неизвестную,
rk = -4 + iyk (< = /=0- (Ш.51)
Модуль комплексного числа гк представляет собой, очевидно, абсо-
лютное значение вектора прогиба вала в точке k, а аргумент его
определяет направление этого прогиба. Для гь получаем систему
уравнений
гк — Л,) б/(/, (1II .52)
где N = ЛГ,-, + IN i,, — комплексный вектор небаланса /-Й массы
J J J
сала.
Решение для комплексных прогибов rk, соответствую-
щих (111.52), может быть также записано в форме, аналогич-
ной (111.17):
V
(111.53)
где —собственные формы для системы уравнений (111.52), т. е.
числа, удовлетворяйте однородной системе уравнений,
2 т^каГ = -ЬаГ (s = 1, 2, ..., n); (Ш.54)
к -
zv — квадраты собственных частот, т. е. числа, равные
уравнения
П2]_6|) —• ~ ^2® 12 • • • ^л®1п
р. . ^2®22 7 * * ^П^2П __, л
(г) = с —v
Ш|6л-| Я?2®П*2 • ^й®ПЛ '
корням
(IIL55)
р. — коэффициенты разложения совокупности комплексных уси-
лий от небалансов в суммы по формам свободных колебаний,
определяемые формулами
Pv-«2V/V,4v). (111.56)
к
Формулы (II 1.53) и (111,56) с помощью аппарата интеграль-
ных уравнений легко распространяются на случай, когда на валу
имеются сосредоточенные и распределенные массы; если обозна-
126
чить: dG (z) — вес участка (z, z + dz) вала; dBv (z), dB (z) —
проекции на оси л, у небаланса на участке (z, г + dz); 6 (z, £) —
прогиб в точке z от единичной силы, приложенной в точке
то прогибы х (z), у (z) любой точки вала выразятся очевидньши
формулами, аналогичными (II 1.50):
х (г) = и2 J 6 (г, ?) [х (?) dG (£) + dBx (£)];
ab
у (г) = со2 ( 6 (z, 0 [0 (0 dG (£) + dBy (Qi.
ab
(Ш.57)
Эти два интегральных уравнения можно объединить в одно
г (z) = о2 [б (z, 0 [г (Q dG (£) + dB ,
ab
где
r(z) = x(z) + iz/(z);
dB (z) = d Bx (?) + i dB. (z).
(Ш.58)
Согласно теореме 2 решение уравнения (IB.58) может быть
представлено в форме, аналогичной (III.53):
r(2)=S
РуУу(г) .
Zv —G}2 ’
У=1
Pv = ®2 [ Yv(z)dB(z),
ab
причем здесь Yv (г) — ненулевые решения уравнения
ab
6(z, 0Vv(0dGQ.
(Ш.59)
(Ш.60)
При необходимости учета гироскопического эффекта уравне-
ния, аналогичные (II 1.50), примут, например, для прогибов хк
следующий вид:
г «
*п
о
1
Здесь Аф = Д — 6—фиктивные массовые моменты инерции тех
Дисков, для которых представляется необходимым учет гироско-
t пического эффекта (Л — экваториальный, а 0 — осевом моменты
инерции); *фу- — углы поворотов в плоскости колебаний для соот-
ветствующих дисков; ykf — прогиб в точке k от единичного мо-
мента, приложенного в точке /; — динамический небаланс
9 Н. В- Григорьев
129
(в плоскости хог, т. е. момент, вращающий относительно оси </)
соответствующего диска.
К этим уравнениям надо добавить аналогичные им уравнения
для углов поворота ф/
(IIL62)
(s = 1, 2, . . т),
где Р — угол поворота в сечении s от единичной силы, прило-
женной в сечении i; 0S7- — угол поворота в сечении s от единич-
ного момента, приложенного в сечении /.
Отметим, что в соответствии с теоремой взаимности
Г« = р». 0П.63)
Поэтому, если чисто формально обозначить:
хп+/ ' Фр ^А, п+/ Va/»
mn+j = ^ф/> “ п+/, * = !У'
*-*rt+s, п+/ =~ $sj
(s, j = 1, 2, . .
Л=1, 2, .. п)
(III.64)
и учесть соотношение (111.63), то совокупность уравнений (111.61)
и (Ш.62) можно переписать в форме, в точности совпадающей
с (111.50),
xk = “2 2 (mtxt + 6аг (* = 1. 2. • • •» Л' = « + "О-
1 = 1 (111.65)
Таким образом, и в этом случае можно общее решение записать
в форме (111.53) с заменой там п па N = п + /и; надо только
иметь в виду, что, как это уже подробно разъяснялось выше,
в силу отрицательности фиктивных моментов инерции Лф неко-
торые (именно т) корни уравнения (II 1.55) будут отрицательными
и не имеющими физического смысла и лишь п положительных
корней равно квадратам соответствующих критических скоростей
прямой прецессии.
Выше было показано, что прогибы вала, вращающегося с не-
уравновешенными массами, могут быть всегда представлены
в виде сумм (рядов) по собственным формам, а коэффициенты
в этих суммах [числа Pv в формулах (111.53) и (111.59)1 зависят
от исходного неизвестного нам распределения небаланса по длине
вала и тех же самых собственных форм, При этом существенно то *
обстоятельство, что если скорость вращения вала приближается
к одному из чисел zv, то соответствующий член в формуле для г (z)
130
резко возрастает и становится большим по величине, чем все
другие, так что изгиб вала при таких ш практически определяется
не всем небалансом, а только соответствующим числом Pv. Этим
обстоятельством можно воспользоваться для опытного (прибли-
женного) определения не только главного вектора и главного
момента небаланса, но и в какой-то степени его распределения
по длине вала (заменив эту задачу задачей последовательного
нахождения коэффициентов Pv)\ эта идея лежит в основе боль-
шинства работ [161, 82], посвященных практическим методам
уравновешивания гибких роторов, часть которых рассмотрена
в следующем параграфе.
Методы уравновешивания гибких роторов
Все практические методы уравновешивания гибких роторов
можно разбить на две группы:
а) уравновешивание на низкооборотных балансировочных стан-
ках;
б) уравновешивание в собственных подшипниках на высоких
оборотах, принадлежащих к диапазону рабочих оборотов машины,
или на специальных балансировочных станках, допускающих
уравновешивание на любых оборотах, вплоть до рабочих.
Г Что касается методов первой группы, то их проблематика
сводится к двум основным вопросам:
L технологические меры, обеспечивающие при изготовлении
ротора по возможности точное устранение возможных небалансов
в тех сечениях по его длине, где эти небалансы возникают;
I оптимальный выбор плоскостей исправления, а также коли-
чества балансировочных грузов (хотя в принципе для уравнове-
шивания ротора, как твердого тела, достаточно двух грузов;
можно, конечно, выполнить его с большим числом грузов, подчи-
нив их величины каким-либо добавочным условиям, выбор ко-
торых и составляет существо поставленной задачи).
I Ясно, что полезность упомянутых мероприятий может быть
количественно оценена только в той мере, в какой мы можем
оценить влияние их на значения коэффициентов р и v в фор-
I муле (Ш.9);сэтой точки зрения очень важно располагать стати»
стическими сведениями о возможных значениях и о характере
распределения по длине ротора начальных его небалансов. Ника-
ких рекомендаций (помимо данных в п.1), не связанных со зна-
нием конкретных особенностей конструкции и технологии И31 о-
товлеиия и сборки данного ротора, дать, как нам кажется, просто
невозможно. В каждом же конкретном случае, оценивая
описанным выше способом коэффициенты р и v, можно разрабо-
тать наиболее целесообразную методику балансировки ротора
(поэлементной и в сборе) на низкооборотном балансировочном
станке, которая во всех случаях должна предшествовать его
балансировке на высоких оборотах.
9*
131
Переходим теперь к методам второй группы.
Любой процесс уравновешивания ротора основан на предпо-
ложениях о том, что сам этот ротор осесимметричен, а вся машина
вместе с ротором и фундаментом представляет собой линейную
колебательную систему» и поэтому составляющие колебаний
любой точки машины на частоте вращения ротора в любом направ-
лении (на корпусе подшипника или где-то па лапах или на фун-
даменте), возбужденных каким-либо неуравновешенным грузом,
будут по амплитуде пропорциональны величине небаланса этого
груза (т. е. величине Gr, где G — вес груза, аг — радиус его
вращения). Фаза же этих колебаний по отношению к моменту
прохождения какой-либо отметки на роторе около неподвижного
датчика при сохранении углового положения груза на роторе
не меняется, а при закреплении груза в положении, отличаю-
щемся от первоначального только на некоторый угол v (отсчиты-
ваемый от исходного положения по направлению вращения ро-
тора) увеличивается на тот же самый угол v.
Сделанные предположения позволяют ввести понятие дина-
мического коэффициента влияния х
«л — «и' = (111 • 66)
где иА — комплексная амплитуда вибрации, замеренной в ка-
ком-либо направлении в некоторой точке машины А (точнее —
гармонической (на частоте вращения ротора) составляющей этой
вибрации); 1 иА | равен амплитуде вибрации, a arg (цл) — ее
фазе, определяемой, как было объяснено, выше. Индексом О
отмечена вибрация в некотором исходном состоянии ротора,
а без него — вибрация после постановки балансировочного груза
в некоем k-м сечении ротора; Nk — комплексный небаланс
груза; | Nk 1 — величина небаланса Gr; arg (Af*) — угловое поло-
жение точки крепления небаланса, отсчитываемое от некоторой
(одинаковой для всех грузов) отметки на роторе; HAk — динами-
ческий коэффициент влияния (также комплексный).
Определенный формулой (Ш.66) динамический коэффициент
влияния может быть найден на любой скорости вращения ротора
и для любых точек kt А (ротора и корпуса) эксперимен-
тально в процессе балансировки путем заме-
ров вибраций иА и производимых до и после установки на
ротор известного (пробного) балансировочного груза Nk\ для
этого надо только наряду с вибрацией записать для отсчета фаз
на осциллограмму отметку оборотов и затем вычислить nAk из
формулы (Ш.66).
Аналогичным образом может быть введено понятие динами-
ческого коэффициента влияния и по отношению к целой сово-
купное т’и балансировочных грузов, расположенных в одной
132
плоскости и пропорциональных одному параметру. Если поло
жить:
7/, = Рах; 7/, = Ра2; .
N, = Pas,
(Ш.67)
где at (i = 1, 2,. . s) — заданные безразмерные числа; Р —
общий комплексный множитель, модуль которого имеет размер-
ность небаланса гс см, то соответствующий этой совокупности
грузов динамический коэффициент влияния определяется форму-
лой
— ^А — ^дР j
(Ш.68)
где arg (Р) — это угол» отсчитываемый от исходной отметки на
роторе до плоскости расположения грузов Л\- (i — 1, 2,. .
s); — динамический коэффициент влияния для данной системы
грузов и точки машины А.
Балансировка по формам свободных колебаний. Выберем
IMI'
систему балансировочных грузов следующим образом:
Nk = Pa(ks}mk (k = 1, 2...........n), (1П.69)
где aV— числа, определяющие s-ю собственную форму
1см. (111.54)1. Тогда, согласно (III.18) и (111.19), будем иметь
, 0, при v =/= s
I Pv — Pv0) + Pv = pv * + , и' £ pmh (<4”) — (^Р, при v = s »
I k I
f (II 1.70)
где Р\'' — коэффициент, соответствующий имеющейся на роторе
исходной неуравновешенности; Pv — то же, но только соответ-
ствующий уравновешивающим грузам.
В соответствии с (Ш.70) комплексное перемещение любой
массы ротора будет [см. формулу (III.53)] таким:
_ (Р<°’ + <о2Р)
Гк- 2S~-------------
V S
Zv—СО2
(III.7!)
При со я» ] rzs можно приближенно принять
(Р<°) + <й2р)
zs~-со2
ОС k
(III 72)
Отсюда ясно, что если подобрать комплексный множитель Р так.
чтобы
Р<°'фР = 0, (III. 73)
133
то амплитуды колебаний всех масс ротора будут равны нулю,
а значит, исчезнет вибрация на этой частоте и в любой точке кор-
пуса машины. Сказанным можно воспользоваться для экспери-
ментального нахождения комплексного параметра Р при балан-
сировке. С этой целью достаточно записать на осциллограммах
вибрации в какой-либо точке машины при вращении ротора точно
на критической скорости со= в исходном его состоянии («д )
и при наличии пробной системы грузов (Ш.69), для которой Р =
= Р*; последнюю вибрацию обозначим Нд.
Тогда из (III.68) найдем
“Л - иА ’
р*
(II 1.74)
При любом другом Р коэффициент динамического влияния оста-
нется тем же, и поэтому вибрация в точке А будет согласно (II 1.68)
равна
и — И(0)
(0) J .4 иА
A j р*
(111.75)
приравнивая ил пулю, найдем
и'°>
Р = (Ш.76)
При таком выборе комплексного параметра системы гру-
зов (II 1.69) исчезнет- вибрация в точке А; если эта точка была
выбрана так, что в пей вибрация была сравнительно велика *,
то вместе с этим практически исчезнет вибрация (на частоте вра-
щения ротора) и у всего ротора, так как согласно предыдущему
при работе на критической скорости вибрация в любой точке
машины приблизительно пропорциональна одному параметру.
Указанный процесс балансировки теоретически можно при-
менить последовательно для всех членов суммы (III.53), подби-
рая на каждой из критических скоростей систему балансировоч-
ных грузов так, чтобы обратить в нуль соответствующий член
этой суммы. Поскольку система грузов (II 1.69) ортогональна ко
всем формам колебаний, кроме s-й, наличие ее никак не скажется
на колебании ротора на других критических скоростях, и поэтому
процесс балансировки на каждой из критических скоростей никак
не зависит от наличия на роторе поставленных ранее на других кри-
тических скоростях систем балансировочных грузов.
В этом и состоит методика балансировки гибкого ротора по
формам свободных колебаний, так сказать, в идеале; практически,
конечно, произвести балансировку на всех критических скоро-
стях не представляется возможным и приходится вносить в опи-
* Это условие застраховывает нас от того, что точка замера Д случайно ока-
жется близкой к узлу формы колебаний машины на соответствующей частоте.
134
санный выше идеализированный процесс балансировки различ-
ные упрощения.
Упрощения эти основаны иа том, что при вращении ротора
в диапазоне скоростей 0 > со < cos влияние членов разложения
в формуле (111.53) с номерами, начиная примерно от s Н 2-го
и выше, на величины rk совершенно незначительно. Поэтому не
обязательно устранять балансировкой все члены этого разложе-
ния, а можно ограничиться только несколькими первыми и,
если } z;— последняя критическая скорость, лежащая внутри
рабочего диапазона оборотов, вполне достаточно ограничиться
устранением первых s + 1 членов. При этом при устранении 1-й,
2-й . . . форм колебаний не обязательно оперировать системами
балансировочных грузов (Ш.69), распределенными по всем мас-
сам вала в соответствии с устраняемой формой колебаний, а до-
статочно иметь систему ограниченного числа грузов; например,
используя систему s грузов, следует их распределить так, чтобы
они были ортогональны к s—1-й форме колебаний. Подробно эти
вопросы разобраны в статье (841 и ряде работ, собранных в сбор-
никах [155 и 156).
Часто используется также следующее упрощение описанной
выше методики, применимое для роторов, рабочая скорость вра-
щения которых ниже 2-й критической скорости.
Устраняются только две формы колебаний— 1 и 2-я. Пер-
вая считается приближенно симметричной, и для ее устранения
используется симметричная система небольшого числа грузов,
а вторая — кососимметричной и устраняется кососимметричной
системой грузов. Балансировка при этом производится не на двух
критических скоростях, а па 1-й критической скорости (где устра-
няется 1-я форма) и на максимальной рабочей скорости [161, 170].
Комбинированные способы балансировки
Методы балансировки по формам свободных колебаний обла-
дают рядом недостатков, связанных с тем, что в полном объеме
такую балансировку выполнить практически никогда не пред-
ставляется возможным; разные ее упрощения часто существенно
ухудшают результаты балансировки в связи с тем, что отбрасы-
ваемые при этом члены разложений (111.53) могут оказаться не
очень малыми. В связи со сказанным большое значение приоб-
ретает такая постановка вопроса: найти в каком-то смысле о п т и -
м а л ь и ы е расположения и величину ограниченного
количества балансировочных грузов. При этом естественно под
оптимальным уравновешиванием понимать сведение к возможному
минимуму величин реакций подшипников ротора в некотором
заданном диапазоне его рабочих оборотов. При такой постановке
вопроса сразу становится очевидным, что помимо устранения
наиболее низкочастотных собственных форм желательно поставить
135
Другие условия, ограничивающие выбор балансировочных Гру-
зов, как, например, обращение в нуль реакций опор вместо того,
чтобы устранить еще одну или две более высокочастотные формы
колебаний. Различные авторы, идя по этому пути, предлагают
много разных рецептов балансировки, обладающих теми или
иными преимуществами. Наибольшего внимания, по-видимому,
заслуживают здесь предложения К. Федерна [171] и Ден Гар-
тога [1701. Сущность первого из них заключается в уравновеши-
вании различных форм свободных колебаний блоками грузов,
каждый из которых имеет равные нулю главный вектор и глав-
ный момент (два условия ) всех центробежных сил, а стало быть,
не может вызвать реакций опор ротора.
Например, при строго симметричном роторе можно взять лю-
бую симметричную систему трех грузов, главный вектор которой
равен нулю. Тогда в силу симметрии будет равен нулю и глав-
ный момент и кроме того эта система грузов будет ортогональ-
ной ко 2-й форме колебаний (кососимметричной). Устраняя сим-
метричную составляющую вибрации опор на 1-й критической
скорости таким блоком грузов, мы тем самым, во-первых, не на-
рушим достигнутой в процессе предварительной балансировки на
станке самоуравновешенности имеющихся на роторе небалан-
сов и, во-вторых, устранив 1-ю форму колебаний, не внесем нового
небаланса, имеющего составляющую по 2-й форме. Таким обра-
зом, можно ожидать после этого хорошей уравновешенности ротора
во всем диапазоне оборотов, захватывающем 1-ю критическую
его скорость, в котором влияние 2-й формы колебаний еще не
слишком велико.
Аналогичным образом можно, конечно, подобрать блок гру-
зов и в случае произвольного ротора.
Для роторов более высокооборотных (или просто для полу-
чения большей точности) можно брать большее число грузов
в каждом из блоков и выбирать их так, чтобы помимо условий
статики они удовлетворяли требованиям ортогональности уже
не к одной, а к двум, трем,. . . собственным формам; при этом
конкретная величина грузов в блоке находится в процессе балан-
сировки при устранении той формы колебаний, для которой этот
блок предназначен.
Способ Ден Гартога [1701 в том, что касается самого процесса
балансировки, заключается в следующем. Допустим, что мы
хотим уравновесить ротор с помощью п балансировочных грузов,
устанавливаемых в выбранных плоскостях исправления. Выби-
раем несколько (a, b, с9. . .) точек замера вибраций и несколько
угловых скоростей (<Dn со2,. . .), лежавших в диапазоне рабочих
оборотов * машины. Затем для каждой точки замера на каждой
из скоростей определяем с помощью постановки пробного балан-
* Если в этот диапазон попадает какая-то критическая скорость, то ее целе-
сообразно включить в число скоростей балансировки.
136
сировочного груза в каждой из плоскостей исправления соответ-
ствующий комплексный динамический коэффициент влияния по
формуле (111.74) и кроме того замеряем в каждой точке на скоро-
стях (о исходную (комплексную) вибрацию, т. е. вибрацию при
отсутствии балансировочные грузов. Тогда при наличии на ро-
торе (неизвестных нам пока) балансировочных грузов с комплекс-
ными небалансами /V, (i = 1, 2,. . п) вибрация, например,
в точке а на скорости cov, которую мы хотим выбором этих грузов
свести к нулю, будет такой:
u = WyJ’ Сбд?Л/1 4“ • • • 4“ ОСдпЛ п- (III.77)
Здесь ид — вибрация в точке А на скорости в исходном со-
стоянии; ал/ — динамический коэффициент влияния для вибра-
ции в точке А от груза , определенной на скорости cov.
Общее количество точек замера и скоростей cov должно быть
таким, чтобы можно было написать ровно п соотношений (111.77).
Тогда, приравнивая все векторы вибраций и нулю, получим п
уравнений для определения п комплексных небалансов (i =
= 1, 2,. . п); для того, чтобы эти уравнения оказались неза-
висимыми, необходимо для каждой из скоростей cov выбирать не
более чем т точек замера, если ротор имеет tn опор (т. е. для
обычного двухопорного ротора не более двух точек замера на
каждой скорости cov), и желательно, чтобы эти точки замера на-
ходились поблизости к различным опорам ротора.
Ясно, что выбор п грузов из уравнений (111.77) устраняет,
вообще говоря, только вибрацию в выбранных точках замерз
и только на скоростях (ov. Однако, как легко доказать (см. [170]),
если исходный ротор является всего л-массовым, то вибрация
исчезнет и во всех точках машины во всем диапазоне рабочих
скоростей. Известно, что в некотором диапазоне скоростей 0 <3
<7 со <7 a>max динамические свойства ротора могут быть с доста-
точной точностью описаны моделью с п степенями свободы; при
этом выбор числа п зависит как от конструкции ротора, так и от
того, сколько критических скоростей попадает в диапазон его
рабочих оборотов. Практически можно считать достаточным брать
л равным s 4- 2, максимум s 4- 3, где s — число критических
скоростей, лежащих внутри диапазона рабочих оборотов. На
основании этого, выбрав соответствующее число п = (s + 2)-г-
4-(s 4* 3) балансировочных грузов и определив их эксперимен-
тально с помощью описанного выше процесса из уравнений
вида (III.77), можно быть уверенным в достаточно хорошей урав-
новешенности ротора любой конструкции во всем диапазоне его
рабочих скоростей вращения.
Ряд других методов балансировки и много практических реко-
мендаций даны в работах, собранных в упоминавшихся уже
ранее сборниках [155, 156].
137
3. МЕТОДЫ БОРЬБЫ С КРИТИЧЕСКИМИ РЕЖИМАМИ
И РАЗГРУЗКА ОПОР РОТОРОВ ТУРБОМАШИН
Методы общей динамики и расчета критических режимов
роторов позволяют более или менее точно исследовать физич_е-
ские явления, имеющие место в системе вала, и избежать в ка-
кой-то степени критические режимы работы. Однако это направ-
вление обладает ограниченными возможностями для роторов,
имеющих широкий диапазон рабочих чисел оборотов, а также
в тех случаях, когда конструкция машины уже осуществлена
и критический режим оказался в диапазоне рабочих чисел обо-
ротов.
В связи с этим в последнее время интенсивно развивается новое
направление, основной задачей которого является изыскание
средств и методов борьбы с критическими режимами и с другими
явлениями, обусловленными вращением неуравновешенных ча-
стей машин с большой скоростью. В последнем случае речь идет
обычно либо о минимизации сил, передаваемых на неподвижные
части машины, либо о минимизации колебаний самих вращаю-
щихся частей. Конкретная постановка задачи зависит от целевого
назначения машины и требований, предъявляемых к ней.
В настоящее время конструктор уже располагает определен-
ным арсеналом методов борьбы с критическими режимами и явле-
ниями, обусловленными неуравновешенностью. Наиболее из-
вестными среди них являются следующие:
применение упругих опор с линейной или нелинейной харак-
теристиками;
применение упругодемпферных и демпферных опор;
применение аитивибраторов.
Упругие опоры с линейными и нелинейными
характеристиками
Упругие опоры включают в себя упругие элементы, помешен-
ные между фундаментом и концом вала. Конструктивные моди-
фикации таких опор чрезвычайно разнообразны. Упругий эле-
мент может устанавливаться непосредственно на ротор между
вкладышем и корпусом подшипника и между корпусом подшип-
ника и фундаментом. Если учесть конечную жесткость жидкост-
ных пленок подшипников скольжения, а также зазоры в подшип-
никах качения, то расчетная схема ротора будет иметь вид, пред-
ставленный на рис. II 1.6. Величина cQ характеризует жесткость
самой опоры; тц и /Ип характеризуют некоторые промежуточные
массы, a ct—эквивалентную жесткость самого подшипника.
Очевидно, что при установке упругого элемента на цапфы ротора
жесткости ct и с0 необходимо поменять местами.
На практике величины тп и гпп обычно невелики, а суще-
ственно превышает с0, поэтому часто рассматривается более про-
138
стая расчетная модель ротора с одним диском на упругих опорах
(рис. III.7).
Для пояснения качественных особенностей, вносимых упру-
гими опорами, рассмотрим осесимметричную систему вала с одним
диском, расположенным на равных расстояниях от опор. Уравне-
ния вынужденных колебаний такой системы в проекциях па вер-
тикальную и горизонтальную оси координат имеют вид:
тх сх = тем2 cos со/;
ту ~[-су = тем2 sin со/,
(111.78)
скорость вращения; с =
крепления диска с учетом
где т — масса диска; со — угловая
= . —-Ef° — жесткость вала в точке
2с0 + св
Рис. II 1.6. Схема ротора на
упругих опорах с промежу-
точными массами
Рис. IIL7. Схема ротора
на упругих опорах
жесткости опор; е — эксцентриситет массы диска; св — жесткость
вала в точке крепления диска в случае абсолютно жестких опор.
Умножая второе уравнение (III.78) на i — —1 и складывая
оба уравнения этой системы, получим
г m2 = (III.79)
где г = х + ty — комплексная координата.
Решением уравнения (Ш.79) является функция
Г z(Z) = pe‘w,
где
е 2 с
9 — V И С°кр — ~гп ‘
/ 1°кр \ ______ | т
\ <0 /
Критическая скорость ротора на абсолютно жестких опорах равна
| 1Ь‘кр’ — т •
♦
а отношение критических скоростей роторов на жестких и упру-
гих опорах выражается зависимостью а2 =—— ) = 14”^-.
\ ыкр / 2 -О
Выражение а показывает, что введение упругих опор приводит
всегда к снижению критической скорости и это снижение опреде-
139
ляется отношением жесткости вала к сумме жесткостей опор cjic0.
Предельным значением критической скорости на упругих опорах
является нулевое значение, которое имеет место при с0 — 0.
Амплитуда сил, передаваемых на фундамент через жесткие
опоры ротора, равна
Ъ = Свр* = —2-------------С.
\ КР' 1
(И 1.80)
а через упругие опоры
/? = Ср = _—-----------с. (111.81)
(Икр У 1
\ <0 / «.
Из сравнения R и R, при одинаковых относительных скоростях
роторов <окр/ш и сокр/<о видно, что
г\ С ZCq
Из последнего выражения следует вторая качественная осо-
бенность, которая заключается в том, что применение
упругих опор приводит к снижению ампли-
туд сил, передаваемых фундаменту при
одинаковых относительных скоростях (окр/й).
Таким образом, применение упругих опор позволяет вывести
критические режимы из зоны рабочих оборотов, а также обеспе-
чить снижение реакций на фундаменте. Если роторы сравниваются
на определенной фиксированной угловой скорости, то соотно-
шение между реакциями имеет вид
(III .83)
р
Для правильно спроектированной опоры должно быть — *> 1.
Задаваясь требуемым отношением /?*//?, по выражению (111.82)
можно определить необходимую для этого жесткость опор. Ана-
логичным образом по (Ш.82) проводится определение жесткости
опор, если задана требуемая величина а. Практически минималь-
ная жесткость опор определяется прочностью упругих элемен-
тов. в связи с этим эффективность упругих опор оказывается огра-
ниченной.
Отмеченные выше свойства упругих опор сохраняются и для
многодисковых роторов, и для роторов с распределенной массой.
В таких системах упругие опоры не создают каких-либо новых
критических режимов, а смещают спектр критических скоростей
140
В сторону более низких частот. Наибольшее изменение при ИбМ
претерпевает низшая критическая скорость, смещение остальных
критических скоростей оказывается, примерно, обратно пропор-
циональным номеру скорости, т. е. смещение второй критической
скорости меньше, чем первой, смещение третьей меньше, чем
второй, и т. д. Рассмотрению этих вопросов посвящен ряд ра-
бот [2, 5]. Расчет роторов с упругими опорами может быть выпол-
нен методами, приведенными в предыдущей главе.
Конструктивное выполнение упругих опор чрезвычайно разно-
образно. В качестве упругого элемента опор используются кольца,
пластины, ленты, пружины и т. п. Пример одной из таких кон-
Рис. II 1.8. Опора ротора с на
бором упругих колец
Рис. Ш.9. Упругая"опорз с изме-
няемой жесткостью
струкций приведен на рис. Ш.8. Конструкция состоит из трех
гладких колец 7, 2, 3, между которыми расположены упругие
кольца 4 и 5 с выступами. Внутренние выступы колец 4 и 5 сме-
щены по окружности относительно наружных выступов этих же
колец. Упругость обеспечивается деформацией колец с высту-
пами. Толщина гладких колец составляет величину в 2—3 мм.
Толщина упругих колец гзависит от диаметра и числа выступов,
поскольку эти два параметра и ширина кольца определяют его
жесткость. Высота выступов равна 0,1—0,2 мм. Упругие кольца
изготовляются из пружинной стали 60С2А или 40ХНМА, сопря-
жение их с гладкими кольцами выполняется по посадке скольже-
ния. Жесткость таких опор определяется экспериментально.
Опыт применения такой опоры показал, что критические скоро-
сти могут быть снижены на 40—50%.
В упругой регулируемой опоре (рис. III.9) деформируется
гладкое упругое кольцо 3, а выступы 6 и 5 выполняются на жест-
ких втулках 2 и 7. Втулка 7 может поворачиваться с помощью
хвостовика 4, вследствие чего жесткость опоры может 1 регули-
роваться.
Применение упругих опор с линейной характеристикой позво-
ляет смещать критические числа оборотов из диапазона рабочих
оборотов без конструктивной переделки самого ротора, без уве-
личения его веса и веса всей машины. Однако несмотря на всю
эффективность (в ряде случаев) и простоту этого метода борьбы
с критическими режимами следует указать и на его ограничен-
х
пек
бол
щ а ю
в ст
Рис. ШЛО. Характери-
стика нелинейной упру-
гой опоры
ность, так как в этом случае диапазон рабочих оборотов, сво-
бодный от критических чисел, ограничивается минимально допу-
стимой величиной жесткости опор. Это обстоятельство оказывается
решающим для мпогорежимных машин, у которых большой диапа-
зон изменения чисел оборотов.
Отмеченная ограниченность применения линейных опор устра-
няется при переходе к нелинейным упругим опорам [34, 35 J.
В отличие от линейных опор, только с м е •
т р критических режимов
ее низких частот, нелиней-
ные опоры позволяют вообще
уничтожать критические
режимы. В этом качественное отличие
нового метода борьбы с критическими ре-
жимами .
Основная идея этого метода состоит
в таком изменении упругих свойств систе-
мы ротор — опоры во время работы машин,
при котором не могли бы развиваться зна-
чительные прогибы вала и значительные
реакции на опорах. В нелинейной опоре
изменение жесткости происходит автома-
тически и зависит от остаточной вели-
чины неуравновешенной центробежной
силы (дисбаланса), оказывающей давление
на нелинейную опору.
Для пояснения этого метода рассмотрим вертикальный вал
с одним диском, вращающийся со скоростью со в опорах, нели-
нейная характеристика которых имеет вид, представленный на
рис. II).10. Легко видеть, что перемещение опоры будет отсут-
ствовать до тех пор, пока сила воздействия на нее не превысит
величину предварительного натяга t/0, т. е. при значениях реак-
ции
—Uo <R<U.
(III.84)
перемещения опоры отсутствуют. Когда R превысит значение U0,
то при перемещении, равном /у 0, в опоре возникает сила
7? — “Ь
(111.85)
и, наконец, при уоп = £/оп опора снова становится жесткой.
Предположим, что при вращении вала с неуравновешенным
диском возникающие на опоре реакции меньше силы предвари-
тельного натяга (7П. В этом случае опоры являются абсолютно
жесткими, а колебания диска описываются дифференциальным
уравнением
mz Ч- cBz = тем е 1, (111.86)
142
решение которого имеет вид:
iwt
z = ре ; р —
£в
т
(111.87)
Из (Ш.87) следует, что р > 0 при cjtn > ю2 и р < 0 при cjtn <
< (О2.
Здесь важно отметить, что движение диска происходит по
круговой траектории, в каждой точке которой имеет место ра-
венство упругих сил, сил инерции и неуравновешенных сил, т. еа
cDp = т (е + р)ю2- (III.88)
Выражение (III.88) следует из уравнения (II 1.86) после подста-
новки в него z. Это выражение вследствие своей наглядности
и используется в дальнейшем.
При значении р0, когда реакция в каждой из опор достигнет
значения
2 бРо “
жесткость системы скачкообразно изменится от величины св до
величины с, определяемой соотношением
д _ I д 1
с св 2г0
Условие равенства упругих сил, сил инерции и сил
шенности для этого участка имеет вид, зависящий
I» ш (р -|“ е) со" = 2t/0 с (р p0)j |
। т{— р+фог = — 217О —с(р —Ро)-
Разрешая каждое из уравнений относительно
неуравнове-
от знака р,
(III.89)
р, получим
(III.90)
Из рассмотрения (II 1.90) следует, что прогиб может иметь два
значения, соответствующие знакам плюс или минус перед первым
членом числителя. Одно из этих значений является устойчивым,
а другое — неустойчивым, вследствие чего на практике не реали-
зуется.
Очевидно, что, дальнейшее поведение системы зависит от вида
зависимости р; если р начинает уменьшаться, то при р ~ рю
жесткость системы изменяется скачком от с до св и прогиб опи-
сывается функцией (III.90).
Если р продолжает возрастать^ то при некоторой со 1() значе-
ние перемещения в опоре может достигнуть значения £/Оп» тогда
Жесткость системы в точке крепления диска изменится скачком
ИЗ
от значения с до значения с„. Прогиб вала при этом будет описы-
ваться алгебраическим уравнением
т (р ± е) со® = с^о + с (plo — Со) ~НВ (Р ~ Pw)
или
т (р ± е)со2 = —(св — с) (рш — Ро) + свР> (II1.91)
где pio—прогиб вала в точке крепления диска» когда переме-
щение опоры равно (/оп- Эту величину можно определить, исполь-
зуя (II 1.91) или находя из условия
^ВрО “Ь (рю Ро) ” 2 (Ц Q “Ь ^onf/on)»
откуда следует, что
* г 2с<жУоп
Р10 — Ро = —“
V
Учитывая (Ш.91) и (Ш.92), получим
-^ОП^оП 1
т
Св 2
-----ш2
т
(Ш.92)
(Ш.93)
Таким образом, как и при работе на втором участке» в данном
случае имеют место две ветви решений; при этом каждому числу
оборотов св соответствуют два решения этих ветвей, одно из кото-
рых является устойчивым.
Для построения амплитудно-частотных характеристик
(рис. III.И) необходимо вычислить предварительно р10 и р0
и соответствующие им угловые скорости (о1о и соо. При медленном
изменении со от 0 до соо прогиб ротора изменяется по кривой А,
определяемой уравнением (III.87). Однако при (в = соо проис-
ходит скачкообразное изменение жесткости системы, и дальней-
шее изменение прогиба определяется формулой (II 1.90).
Можно показать, что на участке (оо> «ю устойчивой, т. е.
физически реализуемой, будет ветвь, соответствующая большим
значениям прогибов. В связи с этим дальнейшее изменение будет
происходить по верхней ветви решения (II 1.90), представленной
кривой СС". Очевидно, что при (о = (о0 происходит скачок вели-
чины прогиба от значения р0 до ро.
При дальнейшем увеличении угловой скорости прогибы вала,
изменяясь по кривой СС", уменьшатся до значения р10 и снова
произойдет скачкообразное изменение жесткости системы, вслед-
ствие чего при (о s> (Oj о прогибы будут изменяться по кривой А 'А ",
соответствующей решению (Ш.87).
Таким образом, при соответствующем выборе параметров
амплитудно-частотная характеристика системы представляется
ломаной кривой ОВВ ’В'А". Существенной особенностью этой
кривой является ограниченность прогибов даже при отсутствии
W4
демпфирующих сил, в то время как системы на жестких и упру-
гих опорах имеют критические режимы на скоростях:
402=)/^-; (02=]/—
при которых прогибы обращаются в бесконечность, если не учи-
тывать демпфирующих сил. В этом заключается основной прин-
цип уничтожения критических режимов. Отметим, что эта воз-
можность имеется при выполнении условия
2{/0
ес
св
(Ш.94)
Условие (III.94) является необходимым для нормальной работы
нелинейной опоры, однако недостаточным, поскольку и при
Рис. III. 11. Изменение прогибов ротора, имею-
щего нелинейную характеристику в опоре
Рис. III. 12. Конструкция не-
линейной упругой опоры
с кольцевыми пружинами
выполнении этого условия прогибы у ротора могут быть боль-
шими, особенно в момент скачка. Одна из задач поэтому заклю-
чается в максимально возможном уменьшении ро, что обеспечи-
вается выбором минимальной жесткости опоры, которая ограни,
чивается прочностью упругого элемента опоры. Для существен.
Г кого уменьшения ро необходимо, чтобы суммарная жесткость с
была в три-четыре раза меньше жесткости вала fR.
К При расчете надо учитывать, что величина z/оп должна не-
сколько превышать величину скачка прогиба ро—р0.
Величина предварительного натяга должна удовлетворять
условию (II 1.94), однако ее нельзя назначать слишком малой.
!Это обстоятельство связано с тем, что могут получаться слишком
большие перемещения в самой опоре. Поэтому целесообразно
предварительно задаваться несколькими значениями i70, затем
вычислить перемещения в опоре в момент скачка и принять при-
емлемое (по конструктивным соображениям) значение.
МК Конструкция нелинейной опоры рассмотренного типа пред-
ставлена на рис. III.12, Упругий элемент / выполнен в виде
|10 н. В. Григорьев 145
Н-образиого кольца» ножки которого имеют разрезы по образую-
щей, олнако эти разрезы доходят только до центральной (сплош-
ной) части кольца. Число разрезов равно» например, 12. Предва-
рительное сжатие этого кольца обеспечивается двумя обжимными
кольцами 2 и 3, которые могут выполнять и роль ограничителей
деформации при возникновении больших деформаций у Н-образ-
пого пружинного кольца. Из рисунка видно, что упругая опора
имеет нелинейную характеристику типа предварительный натяг —
упругость — ограничитель, что и обеспечивает ее эффективную
работу при устранении критических режимов.
Другим более общим типом нелинейной опоры является опора
с дополнительной (промежуточной) массой которая совер-
шает только поступательное движение. Анализ поведения ротора
с такой опорой проводится изложенным выше методом кинето-
статики. Действительно, па первом участке опора не будет про-
являть своих упругоинерционных свойств. Когда реакция на
опоре сделается равной силе предварительного натяга t/0, жест-
кость системы изменится скачком от величины си до с и масса т;]
придет в движение. Эта масса будет оказывать на систему дина-
мическое воздействие, которое и следует учесть в уравнениях
кинетостатики.
Опуская выкладки [34, 35], выпишем выражение прогиба
ротора на втором участке
Из рассмотрения знаменателя (111.95) следует, что ротор
с такими опорами имеет две критические скорости <ot и со2, одна
из которых появилась вследствие введения промежуточной массы.
Однако с помощью соответствующего подбора параметров опоры
(в первую очередь гип) можно избежать развития этой дополни-
тельной критической скорости.
Амплитудно-частотные характеристики ротора на опорах с про-
межуточной массой имеют вид, примерно совпадающий с характе-
ристикой» представленной на рис. 111.11. Основное отличие
заключается в изменении характера кривой ГС» которая уже бу-
дет являться частью амплитудно-частотной характеристики двух-
массовой системы, имеющей два резонансных пика. Условиями
эффективной работы такой опоры являются:
СО 1 << СО о И СО о СО 1 О*
Величина скачка ро—р0 существенно зависит от параметров
опоры, при этом она уменьшается при увеличении тп. Однако
146
очень большие массы тп создают повышенные прогибы на высо-
ких оборотах и сильно приближают дополнительную критическую
скорость со 2 к Расчеты показывают, что оптимальной
является масса промежуточного тела, равная (0,1 -н0,2) т. Прак-
тически величина промежуточной массы опреде-
ляется исходя из конструктивных соображений,
так как вводить лишний вес в конструкцию нех
целесообразно.
В Конструкция нелинейной опоры с промежу-
точной массой представлена на рис. 111.13. Роль
промежуточной массы выполняет внутреннее
кольцо 1. Наружная обойма подшипника 2 упруго
соединяется со статором. Пружины 4 установлены
в стакан 5. Каждый стакан имеет два сухаря-
ограничителя 5, 6. Сухарь 3 ввернут в стакан
и является неподвижным. С помощью этого су-
харя можно получить различные предваритель-
ные натяги пружин.
В заключение раздела отметим, что при ис-
пользовании нелинейных упругих опор дости-
гается:
1) уничтожение критических режимов рото-
ров;
2) создание саморазгрузки опор при резком
Рис. Ш.13. Кон-
струкция упру-
гой опоры с ра-
диальными пру-
жинами
возрастании неуравновешенности ротора.
Существенное преимущество нелинейных упругих опор заклю-
чается также в том, что величина наибольших прогибов опреде-
ляется не величиной сил демпфирования системы, которые неста-
бильны и трудно определяемы, а стабильными механическими
параметрами опоры.
Упругодемпферные и демпферные опоры
Е Применение упругодемпферных и демпферных опор позволяет
произвести отстройку от критических режимов и вместе с тем
существенно ограничить уровень амплитуд колебаний ротора при
переходе через критическую скорость. Конструкции таких опор,
а также методика их подбора изложены в работах 1132, 134].
В Классическим примером упругодемпферной опоры является
опора акад. П. Л. Капицы (рис. III.14), где упругий элемент 5
выполнен в виду втулки с аксиальными прорезями и напоминает
беличье колесо. Наружная обойма подшипника 4 установлена
в колеблющейся втулке /, называемой иногда вибратором. Этот
вибратор выполнен заодно с упругим элементом 5. Неподвижная
часть 2, жестко связанная с корпусом, называется также стато-
ром. Между вибратором и статором находится демпфирующая
Жидкость 5.
10*
147
Жесткость упругого элемента по нормали к оси определяется
формулой
_ nEWi(fca + hs)
С — 2/3 >
где Е — модуль упругости; п — число балочек; b, h, I — ширина,
высота и длина балочек.
При колебаниях ротора в опоре П. Л. Капицы действуют силы
упругости, пропорциональные перемещениям подшипника, и
силы демпфирования, возникающие при всасывании и выдавли-
вании масла из демпферного зазора и пропорциональные скорости
Рис. III.14. Опора с упругим
элементом «беличье колесо»
Рис. III. 15. Упругодемпферная опора
перемещения подшипника. Регулирование сил демпфирования
производится изменением величины зазора между вибратором и
статором.
Упругий элемент опоры может быть выполнен и в виде про-
стых колец, как сделано, например, в демпферном подшипнике,
представленном на рис. II 1.15. В данной конструкции разъем-
ная втулка 4 является вибратором, а втулка 2, укрепленная
в корпусе 1 на сухарях 5, — статором. Вибратор и статор имеют
выступы 6У на которые опирается упругий элемент 3. В выступах
сделаны проточки для циркуляции жидкости.
Размеры упругого элемента определяются по формуле
6 = «i(l
Z \ JIQ /Г LL
где б — толщина упругого элемента; £ — модуль упругости;
а — числовой коэффициент (а = 0,3~0,5); г — число выступов;
d— диаметр упругого элемента; t — ширина выступа; с—• жест-
кость элемента; L — длина подшипника.
При проектировании и монтаже упругодемпферных опор для
тяжелых роторов необходимо учитывать величину статического
прогиба под действием веса ротора, поэтому необходимо преду-
сматривать компенсацию статических перемещений опоры,
а также принимать меры для уменьшения размеров упругих
элементов. Последнее вынуждает выполнять упругие элементы
148
в вйде многорядных «беличьих» колес илй свертывать нх в виде
петель.
I Примером такой конструкции является упругодемпферный
подшипник с двухвенцовым упругим элементом (рис. IIL16).
Конструкция состоит из статора 3 и вибратора /, между которыми
находится демпфирующая жидкость 2. Упругий элемент 4 выпол-
нен в виде венца, в котором выфрезерованы балочки. Такие упру-
гие элементы с петлеобразными балочками обладают и осевой
податливостью и могут быть использованы для демпфирования
не только поперечных, но и осевых колебаний.
Частным случаем описанных выше конструкций упругодемп-
ферных опор являются демпферные опоры жидкостного трения.
Рис. Ш.16. Опора с двумя уп-
ругими элементами
, Масло
Рис. П1.17.*Демпферная опо-
ра с втулками
у которых упругие элементы отсутствуют. Такие опоры разви-
вают только силы демпфирования, пропорциональные скорости.
Одной из наиболее ранних опор этого типа является демпфер-
ная опора Парсонса (рис. 111.17). В опоре Парсонса вкладыш
подшипника 1 помещен внутри нескольких (2—4) стальных ста-
канов 2, вставленных один в другой с зазором 0,10—0,15 мм.
Смазочное масло подается по каналам 5, попадая в зазоры между
стаканами. Во время колебаний вкладыша происходит попере-
менное всасывание жидкости в зазоры и ее вытеснение из них.
за счет чего и возникает гидродинамическая сила трения, которая
демпфирует колебания,
К Опора Парсонса применяется как несущая, вследствие чего
ее свойства получаются анизотропными. Анизотропия свойств,
а также некоторая нелинейность характеристик приводят к не-
возможности достаточно достоверного расчета и к необходимости
^трудоемкой отладки после изготовления.
Идея Парсонса нашла свое отражение в целом ряде современ-
ных демпферных опор. Демпфер для роторов турбомашин
^(рис. III. 18) состоит из наружной обоймы 1 Г-образного сечения
• н внутренней обоймы 2, собранных с зазорами 3 и 5, а также пло-
ского спирального демпфирующего элемента с углублениями
149
(стальная лента) 4. Пространство между витками стальной ленты
заполнено маслом. Зазоры 3 и 5 ограничивают деформации демп-
фера при перегрузках. Настройка демпфера осуществляется за
счет установления шага и величины углублений в ленте, ее тол-
щины, числа витков, вязкости жидкости [133, 1341.
Отметим также демпферную опору П. Л. Капицы (рис. III.19),
разработанную для высокооборотного турбодетандера. При
колебаниях ротора / возникают колебания дополнительного под-
шипника 2, связанного с емкостями, заполненными маслом.
В этих емкостях и возникает сила демпфирования. Основной не-
достатоктакихопорзаклю-
чается во введении допол-
нительного подшипника.
Рис. III. 19. Схема работы дсмп
фера акад. П. Л. Капицы
Рис. III. 18. Упруго-
демпферная опора с
топкими втулками
Демпфирование колебаний роторов можно производить и
с помощью специальных конструкций подшипников скольжения
и качения. Примером этого может являться специальная кон-
струкция подшипника качения (рис. II 1.20). В этой конструкции
демпфирующая жидкость подается под давлением по кольцевому
каналу 4 через дросселирующие отверстия 2 в гнезда 3 и, выталки-
вая тела качения 6, перемещает их до упора с беговой дорожкой.
Перемещения кольца 1 при колебаниях ротора и создают силу
демпфирования, передающуюся на обойму 5.
Наряду с отмеченными демпферными опорами существует
большое количество других типов таких опор. К демпферным опо-
рам, в частности, можно отнести и подшипники с качающимися
(самоустанавливающимися) колодками, сила демпфирования в ко-
торых создается за счет выдавливания и засасывания масла под
колодки при колебаниях. Примеры таких конструкций можно
найти, например, в работах (133, 134 L
Общим недостатком упругодемпферных и демпферных опор
жидкостного трения является сильная зависимость их свойств о г
вязкости демпфирующей жидкости, которая, в свою очередь,
150
определяется тепловым режимом опоры. Наиболее предпочти-
тельно выбирать в качестве демпфирующих жидкостей кремнеор-
гапические жидкости («вискасин»), вязкость которых зависит от
температуры в меньшей степени. Однако эти жидкости не при-
I годны для смазки деталей, поэтому приходится применять раз-
дельные каналы для смазки и для идущей в демпфер кремнеорга-
нической жидкости. Если для демпфирования и смазки применять
одно
и то же масло, что существенно упрощает конструкцию, то
Маблб
Рис. III.20. Шарикоподшипниковая опора с повышенным
демпфированием
необходимо термостатировать подаваемое масло или считаться
с трех-, четырехкратным изменением коэффициента сопротивле-
ния.
F Наряду с демпферами жидкостного трения применяются
демпферы сухого трения 1341. Величина силы сухого трения,
развиваемого в этих демпферах, полагается не зависящей от
относительной скорости контактирующих поверхностей
тается постоянной,
и счи-
тр =
где f— коэффициент трения, зависящий от материала и состоя-
ния трущихся поверхностей; 7V — нормальная реакция на по-
верхности контакта тел.
Д Особенность применения демпферных опор сухого трения за-
ключается в том, что в ряде случаев введение сухого трения не
ограничивает резонансных колебаний, а перемещения в таких
опорах появляются после того, как реакции в них превысят
величину сухого трения. Следовательно, в зависимости от величины
возмущающей силы и угловой скорости опора сухого трения
может выступать в роли абсолютно жесткой (демпфер «заперт»)
«ли в роли демпфирующей (демпфер «открыт»). Это обстоятель-
ство также можно использовать для уничтожения критических
режимов.
151
Рассмотрим вал с одним неуравновешенным диском» имею-
щим две основные опоры и одну промежуточную (рис. III.21).
Промежуточная опора выполнена в виде опоры сухого тре
ния [341. Очевидно» что при низких скоростях вращения реак
ция в опоре будет меньше силы сухого трения и, следовательно,
рассматриваемая система представляет собой ротор на трех жест-
ких опорах, который имеет некоторую резонансную частоту (Окр.
При возрастании угловой скорости прогиб диска будет изменяться
согласно амплитудно-частотной характеристике трехопорного ро-
тора (кривые ОА и А'А" на рис. III.22). Однако развитие коле-
баний по этой характеристике будет происходить до тех пор, пока
величина силы в промежуточной
опоре не сравняется с величи-
Опора с сухим
Рис. II 1.21. Схема трехопорного ро-
тора с демп рером сухого трения
Рис. 111.22. Кривая изменения про-
гибов ротора с демпфером сухого
трения
ной силы сухого трения; в этот момент трехопорный вал пре-
вращается в двухопорный, критическая скорость которого рав-
на сокр, а амплитудно-частотная характеристика представляется
кривыми ОВ и В В”. Следовательно, происходит скачок прогибов,
и дальнейшее развитие колебаний диска происходит по кривой
В'В".
Таким образом, амплитудно-частотная характеристика ро-
тора с промежуточной опорой сухого трения представляется кри-
вой ОСС'В , акритический режим, соответствую-
щий со = (ой1, уничтожается. Условием уничтожения
критического режима является wCK coip -
Конструкция опоры сухого трения представлена на рис. III.23.
Она состоит из подвижного диска 2. в котором помещается под-
шипник /, и неподвижного 3, которые поджаты один к другому
с помощью шпильки 4 и пружины 5. Ограничение перемещения
опоры осуществляется упором 6, который образует с подвижным
диском 2 зазор р0.
Подбор параметров такой опоры сводится к определению
затяжки пружины, при которой выполняется условие уничто-
жения МкР\ т. е. toCK >> (Окр. Очевидно, что если дисбаланс ро-
тора окажется большим, то условие
<oCK>«(K2i (П1.96)
может не выполняться, и в системе будет наблюдаться критический
режим на скорости to = (Окр- Поэтому условие (II 1.96) должно
452
выполняться при всех дисбалансах, которые могут встретиться на
практике. Величина зазора р0 устанавливается, исходя из конструк-
тивных соображений относительно возможных прогибов ротора.
Рис. II 1.23. Схема кон-
струкции |ОПОрЦ* с сухим
трением
Рис. II 1.24 Схема кон-
струкции упругой опо-
ры с сухим трением
Рис. IIL25. Схема сепаратора
L Схема ротора с промежуточной опорой позволяет, кроме того,
осуществить монтаж подшипников, обеспечивающий нормальные
Г условия работы всех трех подшипников, что весьма сложно для
I ротора на трех жестких опорах. Это
обстоятельство связано со всегда
имеющей место несоосностью под-
I 1ПИПНИКОВ. Влияние несоосности у ро-
тора с промежуточной опорой ис-
ключается технологией сборки, ког-
I да затяжка шпилек опоры происхо-
дит после установки ротора на обе
жесткие опоры.
। Качественные особенности демп-
I феров сухого трения сохраняются
( и при постановке их в несущую
опору. Конструкция такой опоры
представлена на рис. 111.24. Основ-
ной частью демпфера является упру-
гий элемент 3. Поджатие дисков к кор-
пусу 1 осуществляется пружинами 4.
Усилие поджатия регулируется
Шпильками 5. Вал опирается через
подшипники качения на подвижный
Диск 2 и сообщает ему поступательное движение. Анализ колеба-
ний роторов с такими опорами приведен в работе [34]. Еше
Ш раньше демпфер сухого трения в несущей опоре нашел применение
в центробежных сепараторах СЦ-1,5 (рис. III.25).
153
В конструкцию этого сепаратора входит барабан 1, яв-
ляющийся консольным ротором с вертикальной осью вращения
с двумя подшипниковыми опорами: верхней подпружиненной 2
и нижней шарнирной 5. Вращение
Рис. II 1.26. Схема верхней опоры
сепаратора
барабану передается от электро-
двигателя 4 через ускоряющую
передачу 3. Скорость барабана
7000 об/мин, его вес 28 кг.
Верхняя опора сепаратора
(рис. II 1.26) состоит из подшип-
ника, помещенного во втулку с на-
ружной шестигранной поверхно-
стью, в грани которой упираются
буферы, имеющие радиальные
направляющие. Буферы- прижима-
ются к втулке пружинами, уста-
новленными с некоторым предва-
рительным поджатием. Такая
схема сочетает в себе свойства упру-
гой опоры и опоры сухого трения. И здесь необходимо так по-
добрать силу сухого трения, чтобы она была больше реакции
в опоре при прохождении критической скорости, соответствую-
щей ротору на упругой опоре.
Антивибраторы
Аптивибратор (поглотитель колебаний) представляет собой
дополнительную систему, обладающую упругоиперционными свой-
ствами, которая присоединяется к главной системе. Классиче-
ская схема основной системы с антивибрагором представлена
на рис. III.27. Она состоит из массы т и жесткости с основной
системы и антивибратора, состоящего из массы и жесткости сл.
Исследования таких систем [43, 1461 показывают, что при выпол-
нении равенства
где со — частота возмущающей силы, колебания основной массы
отсутствуют.
Амплитудно-частотная характеристика основной массы имеет
при этом вид
(III.97)
где Аст—статическая деформация главной системы; ю0
= с/т — парциальная собственная частота главной системы.
154
Эта характеристика представлена на рис. Ш.28, из которого
видны основные изменения в системе при введении в нее антивиб-
ратора, выражающиеся в следующем:
В 1) амплитуда колебаний основной массы на частоте со = соа
становится равной нулю;
2) в системе появляется дополнительная резонансная частота.
Рис. III.27. Дина-
мическая модель
одномассовой си-
стемы с антивибра-
тором
Рис. 111.28. Амплитудно-частотная
характеристика
Расположение резонансных ча-
стот таково, что собственные часто-
системы с антивибратором 04 и ш2 удовлетворяют условиям:
<о2 со0; со 2 > если wa > (ooi
0 тпошение
:> <с если со0 < <о0
называется настройкой антивибратора. Приведенная на рис. II 1.28
характеристика построена для f = 1.
V При введении в гаситель сопротивления обращение в нуль
амплитуды колебаний основной массы оказывается невозможным,
однако и в этом случае имеет место снижение этих амплитуд коле-
। банки. При этом амплитуды колебаний основной массы и массы
гасителя при со = сог и со = со2 оказываются ограниченными.
^Основные результаты классической теории антивибратора при
ведены в работах (5, 22].
Nk Наиболее распространенными конструкциями антивибраторов
Являются конструкции стержневые (рис’ II 1.29, рис. II 1.30), со-
стоящие из грузов, укрепленных на стержне. Стержень является
Упругим элементом' антивибратора. Настройка антивибратора
Осуществляется с помощью перемещения груза по резьбе стержня.
Вследствие этого изменяются расстояние I от центра массы
Ко точки крепления, а следовательно, и жесткость антивибратора,
Определяемая формулой
3EJ
I са — р ’
155
где Е — ыъдулъ упругости материала стержня; J — момент инер-
ции сечения стержня.
Приведенные конструкции устанавливаются обычно непосред-
ственно на корпусе машины и предназначены для устранения
колебаний корпуса.
Конструкция, приведенная на рис. Ш.31, предназначена для
устранения вертикальных колебаний турбомашины, а конструк-
ция, приведенная на рис. II 1.32, позволяет устранить горизон-
тальные колебания.
Основным недостатком применения рассмотренных антиви-
браторов является то, что они оказываются эффективными
в сравнительно узком диапазоне частот вследствие небольших
Рнс. II 1.29. Внешний стержневой
антивибратор с единым стержнем
Рис. II1-30 Внешний антивибратор
с составным стержнем
значений масс антивибраторов, допускаемых в машиностроении.
В связи с этим их применение дает большой эффект лишь для машин
с достаточно узким диапазоном регулирования скоростей.
Выходом из этого положения является применение, например,
антивибраторов с регулируемыми параметрами. Идея автомати-
ческой настройки антивибратора на частоту возмущающей силы
осуществлена в электродинамическом антивибраторе [61, состоя-
щем из сердечника /, корпуса с катушкой 2 и основной массы 3.
Принципиальная схема электродинамического антивибратбра
представлена на рис. III 33. Амплитуды колебаний основной
массы могут быть представлены в виде
где
с
В выписанных выражениях с представляет собой некоторую
эквивалентную жесткость, являющуюся функцией постоянных
параметров электромагнитной системы и величины тока в катушке.
Эту жесткость можно изменять вручную или автоматически
путем изменения тока в катушке. Благодаря этому электродина-
мический демпфер дает возможность получить эффект гйшення
156
антивибратора, предназна-
колебаний в более широком диапазоне скоростей. В некоторых
случаях несколько большие возможности по сравнению с обыч-
ными аптнвибраторами дают также и маятниковые антивибра-
торы. Принципиальная схема такого
ценного для гашения вертикальных
колебаний корпуса, представлена на
рис. Ш.34. Вал маятников вра-
РисЛ III 32. Аити-
вибратор для гаше-
ния горизонталь-
ных колебаний
Рис. Ill-31- Внешний антввибратор
для гашения вертикальных колебаний
щается с угловой скоростью Q = ко, где i — передаточное от-
ношение. Проведенное в работе [125] теоретическое и экспери-
ментальное исследование такого антивибратора показало, что эф-
фективность его работы зависит от
величины сопротивления в конструк-
Рис. 111.33 Схема
электродинамического
аптивибратора
Рис. III.34 Схема маятникового анти-
вибратора
Нии с. трения в антивибраторе, относительной массы тг/т и величи-
ны нагрузки. Такой антивибратор эффективен в более широкой по-
лосе частот, так как собственная частота колебаний маятников,
находящихся в поле центробежных сил, автоматически изменяется
с изменением возмущающей силы.
Маятниковые антивибраторы применяются также и для умень-
шения изгибных колебаний. Примеры различных типов таких
Рчтивибраторов приведены в работе [68].
157
Внутренняя упругоинерционная
виброзащита (ВУИВ) *
В настоящее время появились работы, описывающие новое сред-
ство борьбы с оборотной гармоникой, названное его авторами
Н, В. Григорьевыми и В. П. Уваровым внутренней упругоинер-
ционной виброзащитой (ВУИВ). Новизна предлагаемого средства
заключается во введении двухкомпонентных антивибраторов не-
посредственно в упругие связи между ротором и корпусом.
Как отмечалось выше, в турбомашипах находят применение
различного рода упругие элементы, встраиваемые между рото-
ром и корпусом машины. Упругие опоры позволяют отстроить
Рис. Ш.35. Схема включения внутренней упруго-
инерционной виброзащиты (ВУИВ)
систему ротор — корпус от резонансных режимов и тем самым
уменьшить эффективность передачи возмущающих сил от ротора
на корпус машины. Однако не всегда удается применить упругие
элементы с требуемой податливостью вследствие конструктивных
ограничений, накладываемых на максимальные перемещения ро-
тора, и ограничений больших статических напряжений в них.
Для машин с повышенными требованиями к виброакустпче-
ским характеристикам усилия, передающиеся через упругие связи
на корпус, могут значительно превышать допустимые нормы.
Кроме того, в процессе эксплуатации многих типов роторных
машин наблюдается увеличение неуравновешенных центробеж-
ных сил инерции ротора, увеличивается соответственно и уровень
вибрации всей машины.
С целью ослабления усилий, передающихся через упругие
связи, для однорежимных роторных машин и предлагается при-
менять ВУИВ. Внутренняя упругоинерционпая виброзащита
в общем случае состоит (рис. II 1.35) из двух каскадов амортиза
ции с податливостями б1# б.2, 63, S4, промежуточных тел
разделяющих каскады амортизации, и антивибраторов, настроен-
ных па частоту вращения ротора и присоединенных к промежу-
Этот подпараграф написан совместно с В. П. Уваровым.
158
точным телам; 6“, 6* — податливости упругих связей аптиви-
.Оратор — промежуточное тело; mit т.г—величины масс анти-
вибраторов.
1 Критерием эффективности предлагаемой ВУИВ может служить
коэффициент виброизоляции 0, равный отношению усилий, дей-
ствующих на корпус при установке ротора на жесткие опоры
(пли упругие) Хк, к усилиям, действующим па корпус при уста-
новке ротора па опоры с блоками ВУИВ X,. При этом эффектив-
ность в децпбеллах определится по известной формуле
= 2Olg0 = 201g
(Ш.98)
fc Для определения усилий, действующих иа корпус, исполь-
зуется метод динамических податливостей. Исследуемую систему
разбиваем на четыре подсистемы: ротор, два блока ВУИВ, амор-
тизированный корпус. Влияние подсистем друг на друга заме-
няется гармоническими реакциями X lf Х21 Х3, Х4, приложенными
в соответствующих точках (рис. 111.35). Для нахождения неиз-
I вестпых усилий составляем уравнения перемещений подсистем
• в точках /, 2, 3, 4. Эти перемещения будут определяться возду-
! тающими усилиями (в данном случае это неуравновешенные
центробежные силы инерции ротора) и реакциями в связях.
И Определив условия, при которых взаимные перемещения подси-
। стем в точках разделения отсутствуют, получим систему
канонических уравнений метода динамических податли-
востей, которую записываем в матричном виде
ГД€ fDi2> €cf । 4/ — динамические податливости свобод-
рого ротора; — динамические податливости свободных бло-
Ков изоляции (БИ), к которым здесь отнесены промежуточные
«гела с упругоприсоединенными антивибраторами; ек31 eKi. е 34 —
^вшампческие податливости корпуса; Р, — возмущающие силы,
приложенные в / точках ротора.
159
Матрица ён определяет связь между ротором и корпусом
— е2 О
Е =
О — е2
Значение элементов этой матрицы можно получить, рассмотрев
вынужденные колебания БИ под действием единичной гармони-
ческой силы, приложенной к промежуточному телу
е,=-------
(й2/П/
G =1.2),
(Ш.100)
где соа ~ \JV mfiai — частота настройки антивибраторов; со —
частота возмущающей силы; v£ =
При равенстве = со динамические податливости ес = О
и система распадается на две независимые подсистемы: ротор на
упругих опорах (подсистема, содержащая возмущающие силы!
и амортизированный корпус. При этом Х3 = Х4 = 0 независимо
от величины возмущающих сил, действующих на ротор и опреде-
ляющих величины реакций в образовавшихся узлах, и соответ-
ственно величины амплитуд вибрации аитивибраторов г,-
ц = -X£6J.
Усилия, действующие на корпус, при установке ротора на
упругие опоры с податливостями бь бц определяются из уравнения
Если опоры жесткие, то б1 = бн == 0.
Для определения влияния параметров ротора, корпуса, самих
блоков ВУИВ на ширину эффективной частотной зоны, опреде-
ляемой значениями |р j > 1, необходимо проанализировать выра-
жения для усилий при со =/= (оа. Наиболее важно при этом опре-
делить необходимые податливости первого и второго каскадов
амортизации при наличии всегда имеющих место конструктивных
ограничений:
61 62^ IS2I;
63 1631; 64 ^ [64].
(III. 102)
Анализ функций Х3 — [ (6П бг, 63, б4); Х4 ~ f (Лъ бг, 63, 64'
показывает, что при наличии ограничений (III. 102) для двух-
опорных бесконсольных роторов оптимальным (обеспечивающим
160
необходимую ширину эффективной частотной зоны) может быть
один из следующих вариантов.
1. 6/= I6J; б2 = [621; 63 = [б3 I; 64 = [6J.
2. 6t = [6J; 60 = [6,]; б3 - 64 - 0.
3. 6Х = б2 = 0; 6S = [б31; й, = [б4].
4. = 62 = 63 = б4 = 0.
Реализация того или иного варианта зависит от конкретных
параметров ротора и корпуса.
На величину суммарной массы антпвибраторов и промежуточ-
ного тела практически всегда накладываются ограничения
тщ + М; Л10> (III.103)
определяемые габаритными и весовыми характеристиками ма-
шины.
Из (III.100) с учетом (III.103) получается, что необходимо стре-
миться к соотношениям гп1 ~ Л10; - Л4Х- = 0. Однако практиче-
ски Л1£- получается существенной величиной. Она определяется
конструктивными соображениями и требованиями повышенной
жесткости для промежуточного тела.
Были разработаны конструкции предлагаемых блоков ВУИВ
и проведены экспериментальные исследования на двухопорной
модели ротора (принципиальная схема на рис. 111.35). Экспери-
ментальное исследование показало высокую эффективность ЕУИВ
(10—15 дБ) в диапазоне частот 8—10% от номинальной частоты
вращения ротора при относительно небольших величинах масс
антивибраторов (суммарный вес антивибраторов не превышал 7%
от веса установки).
В результате вышеизложенного можно сделать следующие
выводы: 1) применение ВУИВ особенно эффективно для тех одно-
режимных роторных машин, у которых в процессе эксплуатации
происходит рост дисбаланса; 2) использование ВУИВ делает
возможным применение более простой внешней амортизации,
подбирая се из условия эффективности на средних и высоких
частотах; 3) ВУИВ позволяет конструировать виброизолирующий
узел, представляющий собой органически целое с подшипнико-
выми опорными узлами роторных машин; это дает возможность
уменьшить габариты и вес виброзащитных систем и сделать их
«невидимыми» для заказчика; 4) ВУИВ состоит из масс и жест-
костей и не требует подналадки и ухода в процессе эксплуатации
машины.
Виброустойчивые подшипники скольжения
| Проблема проектирования подшипников скольжения, удовлет-
ворительных в вибрационном отношении, состоит в решении дв\ х
основных групп задач. Первая группа задач заключается в опре-
делении границ устойчивости движения ротора, оценке опасности
амплитуд самовозбуждающихся колебаний и изыскании конструк-
11 Н= В. Григорьев 161
тивных средств смещения границы устойчивости или ослабления
автоколебаний. Вторая группа задач состоит в оценке влияния
упругих и демпфирующих сил жидкостного слоя на смещение
критических скоростей, на формы колебаний ротора и характер
сил, передаваемых через подшипники на опоры, а также на усло-
вия уравновешивания ротора.
Проблеме устойчивости движения ротора, вращающегося в под-
шипниках скольжения, посвящена обширная литература. Наибо-
Рис. Ш-36. Конструктивные схемы
вкладьппей подшипников повышенной
виброустойппвости
лее полное изложение резуль-
татов приведено в [15, 1131.
Основная суть этих результа-
тов заключается в том, что при
определенных скоростях враще-
ния роторов возникают само-
возбуждающиеся колебания ро-
тора, происходящие либо с ча-
стотой, равной примерно поло-
вине частоты вращения, либо
с собственной частотой ротор-
ной системы. Эти колебания
имеют место наряду с вынуж-
денными колебаниями ротора,
обусловленными неуравнове-
шенностью ротора, и могут
быть чрезвычайно интенсив-
ными.
Получастотные колебания
возникают при достижении не-
которой скорости вращения, за-
висящей от статической нагруз-
ки подшипников. Наиболее вероятно возникновение получастотных
колебаний в случае слабонагруженных подшипников скольжения,
когда точка стационарного равновесия центра цапфы удалена от
центра вкладыша на небольшое расстояние. Известно, что верти-
кальные роторы, вращающиеся в обычных цилиндрических под-
шипниках, когда статическая нагрузка на них отсутствует, под-
вержены автоколебаниям с половинной частотой при всех скоро-
стях вращения.
Самовозбуждающиеся колебания на основной собственной
частоте роторной системы могут возникнуть при скорости враще-
ния, в два раза превышающей эту собственную частоту. Интен-
сивность таких колебаний нарастает с ростом скорости. Эти само-
возбуждающиеся колебания являются значительно более интен-
сивными и, следовательно, опасными, чем самовозбуждаюшиеся
колебания с половинной частотой.
Основными методами борьбы с автоколебаниями являются при-
менение подпружиненных вкладышей или применение специа-
альпых конструкций виброустойчивых подшипников. В настоя-
162
шее время предложено большое число таких подшипников. К ним
относятся цилиндрические подшипники с масляными карманами,
эллиптические, многоклиновые подшипники с неподвижными и
упругими элементами пт. п. Некоторые из упомянутых конструк-
ций представлены на рис. IIL36, где приведены конструкции
цилиндрического подшипника с карманом в разгруженной части I
и с кольцевой камерой //, глиптического подшипника без кар-
мана III и с карманом в верхней части /V, клинового подшип-
ника V и с плавающими подушками VI.
Общая особенность проектирования таких подшипников со-
стоит в необходимости их экспериментальной доводки в условиях
конкретной роторной системы.
При решении задач второй группы подшипник выступает
в роли пассивного элемента, обладающего упругими и демпфирую-
щими свойствами, т. е. в роли упругодемпферной опоры. Нали-
чие масляной пленки приводит к снижению критических скоро-
стей ротора, вычисленных в предположении ее отсутствия, к бо-
’ лее сложной форме колебаний ротора и вносит ряд особенностей
в методику уравновешивания. Этот комплекс вопросов изучен
еще недостаточно. Некоторые данные по вопросам приведены в ра-
ботах [85, ИЗ и др. 1.
Нелинейный характер динамических характеристик подшип-
ника скольжения обусловливает возникновение составляющих,
кратных частоте вращения, а также различного рода нелинейные
резонансы (субгармонический, ультрагармопический и др.).
Подшипники скольжения с водяной смазкой, а также сухого
и полусухого трения выполняются с вкладышами из специальных
антифрикционных материалов (графиты с различными наполни-
телями, пластические массы, резины и т. п.). Большинство этих
материалов, а также вкладышей из ник нормализовано. В част-
ности, резинометаллические подшипники для энергетического
оборудования изготавливаются в соответствии с ГОСТ 7199—54.
Вкладыши из этих материалов по сравнению с металлическими
обладают повышенной демпфирующей способностью, а также
свойствами компенсировать неизбежные отклонения форм и поло-
жений цапф.
ГЛАВА IV
ВИБРАЦИЯ НАСОСОВ
L ПРИЧИНЫ ВИБРАЦИИ НАСОСОВ
Характер спектрального состава вибрации и ее интенсивность
определяются типом насоса и режимом его работы. Лопастные
насосы (центробежные, осевые, радиально-осевые, вихревые)
имеют спектр вибрации, существенно отличающийся от спектра
объемных насосов (поршневых, винтовых, шестереночных и т. п.),
в то же время природа отдельных составляющих (частота вращения,
подшипниковые частоты) этих пасосов одинакова. Обособленную
группу представляют струйные насосы, не имеющие составляю-
щих, связанных с движением рабочих органов.
В общем случае спектральные составляющие вибрации насос-
ного агрегата обусловлены гидродинамическими и механическими
источниками собственно насоса, двигателя и передаточного меха-
низма. Интенсивность этих составляющих зависит от энергети-
ческих и конструктивных параметров, технологических особен-
ностей и динамических свойств входящих в агрегат элементов.
а
Центробежные насосы
Основными источниками вибрации центробежных насосов яв-
ляются различные формы кавитации 110, 24, 32, 36]. В качестве
примера па рис. IV. 1 представлена зависимость общего уровня
вибрации Li' лопастного насоса центробежного типа от числа обо-
ротов п на подобных режимах работы H/Q2 = const и при постоян-
ном кавитационном запасе АЛ — const, которая имеет три харак-
терные области 1,2,3. При переходе от бескавитационной работы
насоса (область /) к режиму с газовой кавитацией (область 2)
происходит резкое возрастание вибрации, которое становится
менее интенсивным в области паровой кавитации 3.
Газовая кавитация вызывает рост вибрации в основном в диа-
пазоне частот (1—10 кГц). Начальные стадии паровой кавитации
наиболее отчетливо проявляются в диапазоне 5—30 кГц и выше,
а ее дальнейшее развитие приводит к интенсивной вибрации во
всем звуковом диапазоне частот. Одна из основных причин
снижения кавитационных качеств центробежных насосов заклю-
чается в интенсивном вихреобразовании во входном патрубке и
большой неравномерности скоростей на выходе из него.
164
Другие гидродинамические источники (неоднородность потока
и вихреобразование) возбуждают вибрацию в области частот 300—
5000Гц. Неоднородность потока вызывает появление лопастной
частоты /1Л = z Jr (z— число лопастей; — частота вращения)
и кратных ей частот. Интенсивность этих составляющих зависит,
главным образом, от величины радиального зазора между рабочим
колесом и языком спирали или направляющим аппаратом, соот-
ношения чисел лопастей рабочих ко-
лес и направляющих ;аппаратов,
а также типа направляющего аппа-
рата и форм обратных каналов Зна-
чительное снижение интенсивности
вибрации имеет место при использо-
Рис. IV. 1. Зависимость общего уровня ви-
брации лопастных насосов от числа оборо-
тов на подобных режимах работы при по-
стоянном кавитационном запасе энергии:
— число оборотов, соответствующее на-
чалу газовой кавитации; п2 — число оборо-
тов, соответствующее началу паровой ка-
витации
Рис- IV-2- Направляющий ап-
парат многоступенчатого центро-
бежного насоса с безлопаточиым
кольцевым конфузорным обрат-
ным каналом:
1 — корпус; 2 — передняя стенка;
3 — задняя стенка; 4 — уплотни-
тельное кольцо; 5 — безлопаточный
кольцевой конфузорный обратный
канал
вании безлопаточного конфузорного аппарата [71], конструкция
которого представлена на рис. IV.2, а также при уменьшении
радиального зазора и при выборе оптимального соотношения чи-
сел лопастей рабочего колеса и направляющего аппарата.
Наиболее интенсивное вихреобразование возникает при входе
и выходе потока из колеса и направляющего аппарата, а также
при входе в камеру напорного патрубка. Оно обусловлено отры-
вом потока от задней стороны лопасти колеса в межлопастном диф-
фузорном канале, разностью давлений у передней и задн ей сторон
лопасти, конечностью толщины выходных кромок и дисков, не-
постоянством циркуляции по ширине лопасти, а также изменением
скорости и направления набегающего на лопасти потока.
t Наличие гидродинамического следа за вращающимися лопа-
F стями вызывает периодический срыв вихрей с входных кромок ло-
пастей направляющего аппарата, что создает импульс давления.
В связи с этим необходимо уменьшать градиент давления в следе,
I 165
а также обеспечивать однородность и стационарность поля ско-
ростей на входе в рабочее колесо. Последнее обстоятельство ока-
зывается существенным, поскольку в диффузорном канале колеса
происходит усиление пестационарности потока.
Причиной вихрсобразования является также резкое изменение
сечений потока и смещение отдельных потоков в напорном пат-
рубке или на участке между рабочим колесом и направляющим
аппаратом.
Осевые насосы
Природа спектральных составляющих вибраций осевых насо-
сов в основном та же, что и у центробежных. Спектр вибрации одного
из осевых насосов представлен на рис. IV.3. Зависимость общего
уровня вибрации от числа оборо-
тов имеет примерно тот же харак-
тер, который приведен на рис. IV. 1.
Отличие заключается в том, что
резкий рост общего уровня на-
блюдается при относительно мень-
ших окружных скоростях рабо-
чего колеса.
Интенсивность вибрации осе-
вых насосов зависит от следующих
основных факторов:
коэффициента напора kH =
= Hln2D\ увеличение которого
Рис. IV.3. Спектр вибрации осевого
насоса (п = 1500 об/мин)
приводит к снижению интенсивности вибрации;
величины относительного радиального зазора б == 6/7?»
с уменьшением которой снижается интенсивность вибрации;
„ „. . д X (со)
Рис. IV.4. Резонансная характеристика в — -----— лопасти
М*>)
рабочего колеса осевого насоса при возбуждении его в воде
гармонической" силой q
распределения циркуляции вдоль лопасти рабочего колеса,
уменьшение которой на 25—30% в периферийном сечении относи-
тельно среднего значения снижает интенсивность начальных форм
166
кавитации в радиальном зазоре и соответственно уровни вибра-
ции в высокочастотном диапазоне.
Немаловажное влияние на виброактивность осевых насосов
оказывает также выбор профилей облопачивания и их шагового
отношения. Наилучшими в этом отношении являются кавита-
ционно-стойкие профили, разработанные ВНИИгидромаш.
Одна из особенностей вибрации осевых насосов заключается
в проявлении резонансных колебаний лопастей, обусловливаю-
щих дискретные спектральные составляющие в области частот
500—1500 Гц. Резонансные характеристики лопасти рабочего
колеса в воде представлены на рис. IV.4, где отчетливо выделяются
собственные частоты, на которых возможно появление так назы-
ваемого пения лопастей 1108].
В остальном причины вибрации лопастных насосов сходны
между собой.
Объемные насосы
В спектре вибрации поршневого насоса с электроприводом
и зубчатой передачей обычно отчетливо выделяются дискретные
составляющие, обусловленные механическими источниками: ча-
стота вращения коленчатого вала и кратные ей гармоники, частота
вращения электродвигателя, частота контактного зацепления
элементов зубчатой передачи и магнитная частота электродвига-
теля.
Наряду с отмеченными причинами вибрацию собственно порш-
невых насосов вызывают удары клапанов, пульсации давления
в рабочих камерах, колебания давления в нагнетательном тракте
и кавитация.
Одной из существенных причин вибрации насосов этого типа
является возбуждение резонансных колебаний элементов кон-
струкции.
В объемных роторных насосах вибрация обусловлена почти
мгновенным переходом от давления всасывания до давления нагне-
тания и импульсной подачей жидкости в напорную магистраль.
Интенсивность вибрации при этом возрастает с увеличением дав-
ления нагнетания и числа оборотов вала.
г У шестереночных насосов источником вибрации является также
местное повышение давления жидкости при проходе межзубцовой
камеры через уплотняющую перемычку. Частота вибрации при
этом равна произведению частоты вращения на число камер
(зубцов).
Г Другая причина вибрации шестереночных п винтовых насосов
заключается в неполном заполнении жидкостью межзубцовых
камер, что приводит к появлению пульсирующих радиальных
нагрузок на рабочие органы.
Некоторые причины вибрации обусловлены конструктивными
особенностями отдельных разновидностей насосов этого типа.
167
К ним относятся: трение пластин о корпус у пластинчатых на-
сосов, упругие деформации и геометрические погрешности зубьев
у шестереночных и винтовых насосов, перекладка поршней у порш-
невых и др.
Струйные насосы
Виброактивность струйных насосов полностью определяется
гидродинамическими причинами, которые подробно рассмотрены
в следующем параграфе. К главным из них относятся кавитация
и вихреобразование.
2. ГИДРОДИНАМИЧЕСКИЕ ИСТОЧНИКИ ВИБРАЦИИ ^НАСОСОВ
Г идродинамические источники являются определяющими
в спектрах вибрации большинства насосов, однако природа их
происхождения не одинакова для различных типов.
У лопастных насосов к гидродинамическим источникам вибра-
ции, как было установлено ранее, относятся: вихреобразования
в потоке рабочей среды, неоднородность потока, турбулентные
пульсации давления, воздушная и паровая кавитации.
У поршневых насосов гидродинамическими источниками
вибрации являются: пульсация давления в рабочих камерах, не-
равномерность давления во всасывающем и нагнетательном трактах,
удары клапанов, гидравлические удары, собственные колебания
столбов жидкости в каналах гидроблока, вихреобразования при
обтекании потоком жидкости местных сопротивлений внутри
гидроблока, кавитационные явления.
К гидродинамическим источникам вибрации у винтовых, шесте-
реночных и пластинчатых насосов в первую очередь можно от-
нести: вихреобразования и отрыв вихрей у стенок плохо обтекае-
мых деталей, турбулентные пульсации потока жидкости и гид-
родинамические пульсации, обусловленные принципом действия
этих насосов.
Рассмотрим более подробно физическую природу каждого из
названных гидродинамических источников вибрации.
Вихреобразование
При обтекании тела вязким потоком за ним образуются вихри.
Они за счет энергии потока постепенно увеличиваются в размере
и по достижении определенной (критической) величины отрываются
от тела. При достаточно больших числах Re (102ч-105) вихри
отрываются поочередно с двух сторон от тела и образуется регу-
лярная вихревая дорожка Кармана (104]. При отрыве вихря на
теле возникает импульс силы, который приводит к образованию
вибрации и шума.
168
В случае образования вихревой дорожки Кармана частота
вибрации обтекаемого тела определяется по формуле
f=Sh£,
где Sh — число Струхаля: ц—скорость набегающего на тело
потока; D — характерный диаметр.
Рассмотренная схема образования вибрации и шума предпо-
лагает существование регулярной вихревой дорожки Кармана.
Однако в действительности значения чисел Re в лопастных на-
сосах больше вышеуказанных и регулярной дорожки Кармана
может не быть, кроме того, характерные скорости и размеры ме-
няются от сечения к сечению лопасти. Поэтому спектр вибрации
от вихреобразования в лопастном аппарате становится широко-
полосным.
Неоднородность потока
Если перед рабочим колесом лопастного насоса имеется ка-
кое-то тело (направляющая лопатка, стойка подшипника и т. д.),
вследствие вязкости жидкости за обтекаемым телом в потоке обра-
зуется кромочный след, местные скорости в котором резко отли-
чаются от средней скорости потока. При попадании лопасти ко-
леса в кромочный след входная относительная скорость, равная
векторной сумме абсолютной и окружной скоростей, изменяется
по величине и по направлению, что влечет за собой изменение
угла атаки.
В момент резкого изменения угла атаки с лопасти сбегает вихрь.
Этот вихрь индуцирует циркуляцию вокруг профиля, которая
согласно теореме Жуковского порождает на нем импульс силы.
Последний возбуждает вибрацию лопасти и звуковой импульс
в рабочей среде.
Лопасть рабочего колеса при вращении регулярно набегает
на неоднородность потока, вследствие чего возбуждаемые при этом
вибрация и шум проявляются на лопастной частоте.
Вибрация на этой частоте возникает также при взаимодей-
ствии неоднородного потока, выходящего из рабочего колеса,
с лопастями сзади стоящего направляющего (спрямляющего)
аппарата.
Вибрация и шум насосов от неоднородности потока снижаются
при увеличении зазора между лопастями рабочего колеса и непод-
вижными (статорными) лопатками, а также путем подбора рацио-
нального сочетания их чисел (54, 65 1.
При равномерной частотной характеристике корпуса насоса во
всем диапазоне лопастных частот интенсивность вибрации и шума
от неоднородности потока растет в 4—6-й степени от окружной
скорости.
i
169
Турбулентные пульсации давления
Поток жидкости, движущейся вдоль поверхности твердого
тела, при определенных числах Re становится турбулентным в при-
стеночном слое. Возникновение вибрации обтекаемого тела в этом
Рис. IV.5. Безразмерный
спектр мощности пульса-
ционного давления, дей-
ствующего на стенку
случае связано с непосредственным воз-
действием на поверхность тела пульсаций
поля давлений, вызванных пульсацией
скоростей турбулентного пограничного
слоя. Величина квадрата среднеквадратич-
ного давления, пропорциональная интен-
сивности вибрации, зависит в четвертой
степени от скорости потока, т. е. ампли-
туда пульсаций давления определяется ди-
намическим напором. Спектр вибрации об-
текаемой поверхности аналогичен спектру
пульсаций давления на стенке. На
рис. IV5 показан безразмерный спектр
мощности пульсационного давления, дей-
ствующего на стенку [23]. Здесь Е (со) —
спектральная плотность среднего квадрата
пульсационного давления; q — динамиче-
ский напор; б* — толщина вытеснения;
v — скорость потока; со — частота.
Турбулентные пульсации давления, как гидродинамические
источники вибрации, в лопастных машинах имеют второстепенное
значение.
Кавитация
Кавитация является одним из самых мощных источников виб-
рации и шума насосов. Причем на виброакустические характери-
стики насосов существенное влияние оказывает уже начальная
стадия кавитации, возникающая в небольших по площади областях.
Существует несколько различных форм начальной стадии ка-
витации. В лопастных (осевых и центробежных) насосах принято
различать пузырьковую, профильную и вихревую формы.
Процесс возникновения кавитационных импульсов давления
от пузырьковой кавитации схематически представляется следую-
щим образом. В набегающем на тело потоке содержится очаг ка-
витации — пузырек. Попав в зону разрежения вблизи обтекае-
мого тела, он начинает расти под действием растягивающих на-
пряжений. Рост продолжается до тех пор, пока кинетическая
энергия присоединенной к пузырьку массы воды полностью не
израсходуется, т. е. рост пузырька заканчивается за зоной раз-
режения; увеличивающийся пузырек сносится потоком в область
повышенного давления, где он начинает сокращаться. Если бы
пузырек не содержал газа, то скорость его сокращения в конце
была бы бесконечно большой. Но находящийся внутри пузырька
170
газ оказывает демпфирующее влияние, и пузырек, прежде чем
захлопнуться, совершает несколько сжатий и расширений. Эти
I процессы сопровождаются выделением виброакусгической энер-
гии, причем основная доля энергии излучается на стадии
1 сжатия.
Пузырьковая форма кавитации обычно развивается около тел
с плавными обводами, например стоек водорезов.
Рис.ЧУ.б. Стадии развития вихревой кавитации па копце^ лопасти рабочего
колеса осевого насоса по мере увеличения числа его оборотов
При профильной кавитации на обтекаемом теле (профиле)
образуется прозрачная или непрозрачная каверна. Как правило, на
лопастях рабочих колес насосов имеет место профильная кавитация
с непрозрачной каверной. Каверна начинает свое развитие у вход-
ной кромки обтекаемого профиля. От хвостовой части каверны
непрерывно отделяются различных размеров и форм участки, ко-
торые затем сносятся потоком и замыкаются. Вся каверна при
этом заполнена отдельными пузырьками, которые в месте, где
она начинается, существуют нсзависмо друг от друга и сливаются
воедино в средней ее части.
Вихревая кавитация развивается в ядрах вихрей, образую-
щихся на свободных концах лопастей осевых колес. Стадии раз-
вития этой формы кавитации показаны на рис. IV 6.
Возникновение перечисленных форм кавитации подвержено
масштабному эффекту и происходит при давлениях в зоне разре-
жения больших, чем давление упругости водяных паров. Под
масштабным эффектом кавитации понимается влияние не только
17 1
геометрических размеров, но и величин скорости, давления, тем-
пературы, степени насыщенности воды воздухом — вообще всех
параметров, которыми могут различаться потоки, обтекающие
геометрически подобные тела.
Наиболее полно вопросы ^кавитации и ее роль в акустиче-
ском балансе освещены в работе [108].
Из названных форм начальной стадии кавитации наибольшей
виброакустической мощностью обладают вихревая (в осевых на-
сосах) и профильная (в центробежных насосах).
Эти формы кавитации по мере увеличения ее интенсивности
проходят газовую и паровую стадии. При снижении давления
(увеличении скорости потока) наступает такой момент, когда газо-
вые пузырьки в результате анизотропной направленной диффузии
растворенного в воде газа начинают резко расти в объеме. Проис-
ходит дегазация жидкости, которую часто называют газовой
кавитацией; так как при дегазации возникают импульсы давлений,
то рост пузырька имеет циклический характер.
При дальнейшем понижении давления, т. е. с увеличением рас-
тягивающих жидкость напряжений, возникает паровая стадия
кавитации.
Вибрация и шум, вызываемые кавитацией, занимают широкий
спектр частот. Причем ранние стадии кавитации проявляются
в высокочастотной части спектра; с увеличением интенсивности
кавитации спектр расширяется в область средних и низких частот.
Когда кавитация переходит в срывную стадию, низкочастотные
вибрации бывают настолько сильными, что могут вызвать по-
ломку насоса.
Интенсивность кавитационного шума насосов сильно зависит
от окружной скорости колеса. Эта зависимость может быть выра-
жена следующим образом:
J ~ tfi.
Величина показателя Р изменяется в зависимости от стадии ка-
витации. В осевых насосах (см. рис. IVJ) в начальный момент
развития паровой кавитации (область 2) р = 30н-20, а в зоне
развитого кавитационного шума (область 5) р 9 В центробеж-
ных насосах величины Р соответственно равны: в области 2 р —
= 12-И4; в области 3 Р 6|
Неравномерность и пульсации давления
в поршневых насосах
Неравномерность давления во всасывающем и, главным обра-
зом, нагнетательном трактах у поршневых насосов вызывается
неравномерностью подачи, которая изменяется за цикл от нуля
до максимума в каждой рабочей полости. Периодическое измене-
ние давления порождает гидравлическую возмущающую силу и
172
неравномерную нагрузку на приводную часть насоса. Спектр
вибрации, обусловленный неравномерностью давления, имеет
дискретный характер с составляющими, кратными основной ча-
стоте вращения в низкочастотном диапазоне.
Г Гидродинамические силы, связанные с неравномерностью
давления во всасывающих и нагнетательных коллекторах, вы-
зывают периодические упругие деформации элементов насоса.
В результате их взаимодействия с инерциоппо-жесткостнымн
характеристиками они, в конечном счете, проявляются в виде
вибрации корпуса гидроблока и опорных узлов. Кроме того, эти
силы при определенных условиях возбуждают собственные коле-
бания столбов жидкости в каналах гидроблока и присоединенных
трубопроводах, которые передаются корпусу и другим элементам
насоса. Частота собственных колебаний столба жидкости в трубо-
проводе будет равна
а
Р ~~ ~2Г 1
где а— скорость распространения звука в жидкости; I— высота
столба жидкости.
Микропульсации давления в рабочих полостях поршневого
насоса, являющиеся результатом вихреобразовапий в потоке,
а также газовой и паровой кавитации, в значительной степени
носят случайный характер. Они возбуждают силы, действующие
на гидроблок и другие элементы, вызывая их вибрацию в диапазоне
средних и высоких частот.
f Гидравлические удары — явления, сопровождаю-
щиеся скачкообразным повышением давления.
При работе поршневых насосов гидравлический удар может
возникать в двух случаях. В первом случае поток жидкости при
ходе всасывания отрывается от поршня вследствие разности уско-
рений движения поршня и жидкости, а затем во второй половине
хода всасывания поток догоняет поршень с гидравлическим уда-
ром. Подача насоса при этом нс изменяется. Если давление в ци-
линдре будет ниже или равно давлению парообразования, может
возникнуть и кавитация.
Причиной гидравлических ударов могут являться резкие изме-
нения скорости потока в трубопроводе вследствие быстрого его
перекрытия краном или задвижкой. Местное повышение давления
перед задвижкой со скоростью звука распространяется против
направления движения жидкости, воздействуя в виде ударной
волны на элементы насоса и вызывая их вибрацию на звуковых
частотах. 1
Во втором случае всасываемый поток встречается с поршнем
только вначале нагнетания. Это приводит к сильному гидравли-
ческому удару потока о поршень, ударной посадке всасывающих
клапанов и возбуждению вибрации на частотах, соответствую-
щих тактам всасывания.
173
Вихреобразования и турбулентные пульсации давления
в объемных роторных насосах
Вихреобразования обусловлены взаимодействием рабочих
элементов этих насосов (шестерен винтов, пластин) между собой
и корпусом. В основном вихреобразования носят случайный ха-
рактер. Вихревые дорожки вследствие высокой вязкости перека-
чиваемых этими насосами жидкостей появляются сравнительно
редко. Спектр вибрации, вызываемой вихреобразованиями, преи-
мущественно высокочастотный, сплошной, обычно маскируется
другими более интенсивными источниками.
Микропульсации давления в этих насосах так же, как и в ло-
пастных, могут быть обусловлены турбулентностью потока
жидкости.
В турбулентном пограничном слое возникают напряжения
сдвига, которые вызывают деформацию элементарных объемов
жидкости. Каждый такой элемент представляет излучатель зву-
ковой вибрации, причем излучение происходит за счет деформации
элемента без изменения объема. На твердой границе — на поверх-
ности обтекаемого тела — при этом действуют хаотические пуль-
сации давления.
Как источник вибрации турбулентные пульсации давления
в дозвуковом потоке малоэффективны.
Спектр вибрациЦ от турбулентных пульсаций давления в по-
токе жидкости занимает широкую область частот и в значительной
степени неравномерен по интенсивности.
3. МЕХАНИЧЕСКИЕ ИСТОЧНИКИ ВИБРАЦИИ
И ДИНАМИКА НАСОСОВ
Механические источники вибрации насосов обусловлены как
конструкцией и технологией изготовления собственно насоса,
так и элементов сочленения его с приводом и самого привода.
Основными источниками первой группы являются неуравнове-
шенные силы инерции движущихся масс и возмущения в подшип-
никах. Ко второй группе относятся возмущения, связанные с муф-
тами, передаточными механизмами и приводными двигате-
лями.
Причины и способы устранения неуравновешенности роторов
изложены в гл. III. Здесь следует отметить, что часть причин
неуравновешенности уже потенциально закладывается при проек-
тировании ротора насоса. К таким причинам относятся: несим-
метрия расположения элементов колес, отверстий и шпонок,
радиальные и торцовые биения, погрешности, связанные с
посадками сочленяемых деталей, и погрешности баланси-
ровки.
Особенностью роторов насосов является возможность появ-
ления неуравновешенности, обусловленной несимметрией каналов
рабочих органов и их заполнения.
174
Одним из важных моментов проектирования является выбор
посадок рабочих колес на вал. Еще в 1968 г. авторами было уста-
новлено, что роторы со скользящей посадкой рабочих колес на-
сосов секционно-корпусного типа могут обладать неконтролируе-
мой неуравновешенностью, в десятки раз превышающей допу-
скаемую [127, 129]. Причина появления этой неуравновешенности
заключается в необходимости разборки ротора после окончатель-
ной балансировки и последующей его сборки по рискам в машине.
Схемы двух предельно возможных положений колес относительно
вала приведены на рис. IV.7. Максимальная величина статической
неконтролируемой неуравновешенности до балансировки будет
равна
s - У мд,
/-1
i
где М — масса /-го рабочего колеса; б/ — радиальный зазор;
п — число рабочих колес.
После балансировки вследствие установки на крайние колеса
уравновешивающих грузов со статическими моментами Un
Рис. IV-7. Возможные положения рабочих колес относительно
вала: а — перед балансировкой; б — после сборки насоса
максимальная величина статической неконтролируемой неурав-
новешенности может достигать величины, равной
So - 2 У МД.
I I
Нетрудно видеть, что балансировка таких роторов может ока-
заться даже вредной, так как после сборки по рискам статические
моменты уравновешивающих грузов £7, и Un могут вдвое увечи-
чить первоначальную неуравновешенность, обусловленную нали-
чием зазоров.
Неуравновешенность роторов возрастает также в процессе
эксплуатации. Это обстоятельство связано с нарушением весовой
симметрии вследствие влияния местных повышений температур»
отложений, износа и т. п. Особенно значительной является раз-
балансировка у составных роторов со штифтовыми, болтовыми
и тому подобными соединениями рабочих колес между собой
и с валом.
Возникновение, вибрации может вызываться нарушением гео-
метрии элементов подшипников и дефектами их посадки в гнезда.
175
Это обстоятельство особенно проявляется у подшипников качения
(см. гл. V). Подшипники скольжения при малых нагрузках или
при очень больших скоростях могут явиться причиной автоколе-
баний с половинной частотой вращения или с собственной часто-
той [100, 149 1.
Возможной причиной вибрации насосов на частоте вращения
может явиться неконцентричность цапф и щелевых уплотнений
на колесе относительно оси ротора.
Соединительные муфты вызывают вибрации как на частоте
вращения, так и в области более высоких частот. Такой характер
вибрации наиболее отчетливо проявляется при применении ком-
Рис. ГУ-8. Спектрограмма вибрации насоса при вращении
ротора в воздухе
пенсирующих жестких муфт, например зубчатых. Упругие ком-
пенсирующие муфты, например втулочно-пальцевые, могут воз-
буждать колебания с частотой вращения, а также с частотой,
кратной числу пальцев. Это обстоятельство связано с погрешно-
стями изготовления элементов полумуфт и неравной жесткостью
манжет.
Геометрическая неточность изготовления в наибольшей сте-
пени проявляется в кинематических парах пасосов. Эти неточности
являются причиной как широкополосных, так и дискретных спек-
тров вибрации.
Вследствие расширения элементов конструкции при нагре-
вании или значительных усилиях, передаваемых на машину при-
соединенными трубопроводами, могут появиться задевания по-
движных элементов о неподвижные. Возникающее при этом тре-
ние порождает широкополосный спектр вибрации, отличающийся
нестабильностью.
Источники вибрации передаточных механизмов описаны в ра-
боте [17], а двигателей — в соответствующих главах.
Интенсивность различных спектральных составляющих суще-
ственным образом зависит от динамических свойств конструкции.
Например, на рис. IV.8 представлена спектрограмма виброуско-
рений наспса при вращении ротора в воздухе, из которой следует
176
резкое возрастание уровня в диапазоне 500 Гц При некоторых
изменениях конструкции эта составляющая исчезает, что сви-
детельствует о наличии в этом диапазоне резонансной частоты.
В настоящее время обычно определяются только резонансные
частоты амортизированного насоса и первая собственная частота
ротора. Исследования показывают, что в ряде случаев, особенно
в многоступенчатых центробежных насосах, расчеты графо-ана-
литическим методом [89 ] приводят к существенно завышенным
значениям собственных частот. В связи с этим рекомендуется
использовать более точные методы [19, 94 1. При этом целесооб-
разно рассчитывать несколько первых собственных частот ротора
и не допускать их близости как к частоте вращения, так и к ло-
пастной частоте. На практике наблюдались случаи усиленной виб-
рации роторов с лопастной частотой при невыполнении этого усло-
вия. Наиболее полные методы расчета системы ротор—корпус
на свободные и вынужденные колебания изложены в работах 428,
129].
Необходимость расчета собственных частот насоса оказывается
очень важной еще по ¥ой причине, что насос в отличие от осталь-
ных типов машин является весьма консервативной системой,
трудно поддающейся отстройке от резонанса. Например, один
из распространенных способов отстройки с помощью упругих
опор в насосах не всегда себя оправдывает- Это объясняется суще-
ственным влиянием щелевых уплотнений.
Наличие щелевых уплотнений порождает ряд особенностей
балансировки машины в сборе, так как при этом необходимо
устранение усилий, передающихся как через опоры, так и систему
щелевых уплотнений. В этом случае задача устранения передачи
сил на корпус совпадает с задачей устранения динамического
прогиба. При этом необходимо использовать либо специальные
методы уравновешивания двумя грузами [451, либо увеличивать
число грузов.
4. ПУТИ СНИЖЕНИЯ ВИБРОАКТИВНОСТИ НАСОСОВ
Виброактивность пасоса, как и любой другой машины, опреде-
ляется тремя основными факторами: конструкцией, технологией
изготовления и условиями эксплуатации. В соответствии с этим
различают конструктивные, технологические и эксплуатацион-
ные способы снижения виброактивности насосов. Между отмечен-
ными способами не всегда можно провести четкую грань, поскольку
они взаимосвязаны между собой. Эксплуатационные параметры
во многом определяют конструкцию, а последняя, в свою очередь,
определяет технологию изготовления.
Анализ виброактивности насосов различного копструктив-
ного исполнения и различных энергетических параметров пока-
зывает, что к основным причинам повышенной виброактивности^
обусловленной конструкцией, в первую очередь следует отнести;
12 Н. В. Григорьев 177
проектирование насоса без должного учета взаимосвязи энер-
гетических параметров с уровнями вибрации;
неполное использование возможностей уменьшения интенсивно-
сти возмущающих сил в источнике;
проектирование элементов насосов без достаточного учета
влияния их кинематических и динамических свойств на виброак-
тивность;
нерациональную компоновку насосных агрегатов;
недостаточное использование средств виброизоляции и вибро-
поглощения.
В соответствии с перечисленными причинами могут быть на-
званы н основные конструктивные пути снижения виброактивности
насосов.
Первый путь состоит в объективном согласовании энерге-
тических, виброакустнческих и весо-габаритных параметров.
Это приводит к необходимости уменьшения скоростей вращения
роторов и скоростей движения потока, так как уровни вибрации
насосов, вызываемые механическими источниками, пропорцио-
нальны квадрату окружной скорости вращения ротора, а гидро-
динамическими — четвертой и выше степеням скорости. Снижение
же скоростей приводит к уменьшению напора ступеней и, следова-
тельно, к увеличению их числа.
Другим эффективным средством снижения виброактивности
является увеличение жесткостей корпусных конструкций, что дости-
гается увеличением толщин стенок корпуса и других элементов.
Оба эти средства приводят к увеличению весо-габарптных па-
раметров и соответствующему удорожанию конструкции, поэтому
они не всегда реализуются в должной мере. Следует однако под-
черкнуть, что установление оптимального соотношения между
энергетическими, весо-габаритными и виброакустическими па-
раметрами является первоочередным условием на пути снижения
виброактивности насосов в стадии их проектирования.
Особенно важное влияние па виброактивность оказывает ве-
личина подпора на всасывании, с уменьшением которой ухуд-
шаются кавитационные качества насосов. Это обстоятельство
должно учитываться как при выборе расчетных параметров насо-
сов, так и при установлении требований по ограничению их уров-
ней вибрации.
Второй путь заключается в наиболее полной реализации
средств уменьшения интенсивности возмущающих сил. В целях
улучшения кавитационных качеств рабочих колес центробежных
насосов и в первую очередь рабочего колеса первой ступени мно-
гоступенчатых насосов следует уменьшать диффузорность вход-
ного кольцевого канала, применять лопасти двоякой кривизны
с увеличенными радиусами поворота каналов, а также устанавли-
вать направляющие кольца на уплотнения для уменьшения вих-
реобразований в потоке, поступающем из уплотнения в рабочее
колесо.
178
Для уменьшения амплитуды импульса давления на выходе
из рабочего колеса центробежного насоса в периферийных сече-
ниях межлопаточных каналов колеса полезно устанавливать
1 Дополнительные короткие лопатки, а также увеличивать в до-
^^устимых пределах радиальный зазор между выходными кром-
ками колеса и направляющим аппаратом.
МК Улучшение организации потока на входе в последующую сту-
, .пень, ведущее к уменьшению неоднородности потока, вихреобра-
(зований и турбулентных пульсаций давления, может быть достиг-
нуто" за счет увеличения высоты канала направляющего аппарата
п образования в нем хорошо развитого безлопаточного осесиммет-
ричного кольцевого конфузорного канала, образования па пери-
ферии направляющего аппарата кольцевой безлопаточной камеры,
уменьшения диффузорпости обратных каналов, а также в отдель-
ных случаях путем установки тонких направляющих лопаток
в обратных каналах. Наиболее совершенная организация потока,
однако, достигается применением направляющих аппаратов с без-
лопаточнымн конфузорными обратными каналами.
’ Для снижения возмущающих сил гидродинамического проис-
| хождения у осевых насосов в первую очередь необходимо расчет
и проектирование протечной части осуществлять при минимальных
’ запасах энергетических параметров, так как у осевых насосов,
I 1 в силу высокой чувствительности их виброакустических харак-
I терпстик, к углу атаки недопустим обычно применяемый в насо-
• состроении метод доводки путем подрезки лопасгей рабочего ко-
леса. При этом проточная часть должна проектироваться на повы-
I шенный коэффициент быстроходности с использованием кавнта-
циопно-стойких профилей облопачивапия.
| В целях получения равномерного распределения нагрузки
вдоль лопасти рабочего колеса расчетные значения циркуляции
вдоль радиуса, начиная с относительного радикса г 0,75,
I должны резко убывать к периферии и плавно к корню. Величина
радиального зазора между торцами лопастей рабочего кплеса и
стенкой камеры должна быть минимальной, а расстояние между
। колесом и спрямляющим аппаратом — максимально возможным
(при экспериментальном отработке проточной части величина
радиального зазора должна моделироваться).
ВТ С целью снижения дискретной составляющей вибрации на
лопастной частоте эксцентриситет радиального зазора между
рабочим колесом и стенкой камеры должен быть минимальным
и не превышать 10—15% от средней величины зазора.
в Для уменьшения интенсивности дискретной составляющей
вибрации от неоднородности потока за рабочим колесом выход-
ные кромки лопастей рабочего колеса и входные кромки лопаток
> направляющего аппарата не должны быть параллельны, а числа
Д лопастей рабочего колеса и спрямляющего аппарата должны быть
Я взаимно простыми, причем число лопастей рабочего колеса же-
лательно принимать нечетным.
К 12*
179
Для уменьшения вихреобразований следует обеспечивать
плавные переходы и закругления возможно больших радиусов по
всей длине проточной части, включая приемный и напорный па-
трубки.
Снижение интенсивности гидродинамических источников
вибрации у поршневых насосов может быть получено при выпол-
нении следующих основных условий:
ослаблении силы удара клапанов о гнезда при их посадке пу-
тем уменьшения скорости посадки клапанов и их массы;
уменьшении неравномерности давления в нагнетательном тракте
за счет увеличения числа цилиндров и установки воздуш-
ных колпаков на нагнетательных трубопроводах, включения
в систему трубопроводов дополнительных емкостей, а также со-
ответствующего выбора конфигурации п материала трубопро-
водов;
увеличении жесткостей гидроблока и колонн (стоек), связы-
вающих гидроблок со станиной.
У объемных роторных насосов наиболее эффективный путь
снижения интенсивности гидродинамических источников вибрации
заключается в уменьшении их быстроходности. Снижение их
виброактивности, вызываемой механическими источниками, сво-
дится к совершенствованию технологии производства и в первую
очередь повышению точности изготовления элементов зацепления
рабочих органов (шестерен, винтов).
Третий путь снижения виброактивности насосов заклю-
чается в отстройке собственных частот колебаний элементов на-
соса от частот возмущающих сил. При проектировании обычно
принимают меры только по частотной отстройке амортизации и
первой критической скорости ротора от частот проявления основ-
ных возмущающих сил. Между тем, для удовлетворения требова-
ний по ограничению вибрации в широком диапазоне частот от-
стройке подлежат и высшие критические скорости ротора, в том
числе от лопастных частот. Аналогичным образом от частот прояв-
ления возмущающих сил должны отстраиваться и другие элементы:
рабочие колеса, кронштейны подшипников, трубопроводы, про-
межуточные рамы и т. п.
Следует отметить, что под действием гидродинамических воз-
мущающих сил, охватывающих широкую область частотного
спектра, вследствие резонансов могут резко проявляться почти
любые собственные частоты конструкции. В связи с этим необ-
ходим тщательный анализ динамических свойств конструкции
насосов и принятие соответствующих мер по отстройке частот
собственных и вынужденных колебаний во всем диапазоне,
обусловленном требованиями по ограничению вибрации. На со-
временном этапе борьбы с вибрацией насосов решение задачи
частотной отстройки наиболее успешно может осуществляться экс-
периментальным путем. Методы и средства такой отстройки подроб-
но рассматриваются в X гл.
180
Четвертый способ снижения виброактнвности состоит
в рациональной компоновке насосных агрегатов. Здесь в первую
очередь следует отметить следующие мероприятия:
компоновку насосных агрегатов из узлов с относительно низ-
кими по своей природе уровнями вибрации: использование ро-
торных конструкций вместо кривошипно-шатунных, отказ от
редукторных передач в пользу прямодействующих приводов,
применение малошумных электродвигателей и гидромоторов, за-
мена подшипников качения подшипниками скольжения, приме-
нение упругих муфт и т. п.;
моноблочную компоновку насосных агрегатов (привод и на-
сос имеют общий ротор и общий корпус);
вертикальное расположение роторов, максимально возможное
их облегчение и обеспечение симметрии системы относительно
осн вращения.
> Пятый способ снижения виброактивности насосов состоит в
использовании средств виброизоляции и вибропоглощеиия. К числу
первых относится применение внутренней амортизации и вибро-
задерживающих масс, ко вторым — применение вибропоглощаю-
щих материалов и покрытий, а также различного рода гаси-
телей.
Назначение внутренней амортизации заключается в локализа-
ции возмущений внутри проточной части и устранение их передачи
на корпус насоса. Сложность этой задачи состоит в большой пло-
щади контакта жидкости и стенок проточного тракта, через ко-
торую передаются возмущения. Ее решение в отдельных случаях
можно осуществить, применяя многослойные конструкции кор-
пусов насосов и трубопроводов, включающие виброизоляцпонные
материалы.
Частным решением этой задачи является использование упру-
гих подвесов направляющих аппаратов и их звукоизоляция [39]
Наряду с этим мероприятием целесообразно использование спе-
циальных вкладышей под подшипники из материалов с высоким
декрементом затухания (слоистые и металловолокнистые мате-
риалы, резины и пластмассы). Рассеивание энергии звуковых
колебаний в трубопроводах достигается применением вставок
с податливыми стенками, например резинометаллических патруб-
ков, сильфонов и пр.
I Другими средствами виброизоляции являются упругие про-
кладки, шинопневматические и рессорные устройства, устанав-
ливаемые между корпусом и станиной насоса для уменьшения
передачи вибрации на опорные лапы или фланцы.
| Эффективным средством снижения виброактивности насосов
является изготовление деталей из материалов, обладающих вы-
сокими демпфирующими свойствами. К таким материалам отно-
сятся пластмассы, металлорезины, сплавы марганца и меди, ни-
келево-титановые сплавы и т. п. Сплав из марганца (70%) и меди
(30%) наряду с высокими демпфирующими свойствами обладает
181
и хорошими механическими качествами, что делает возможным
его применение для изготовления вибронагруженных деталей.
Замена чугунного корпуса насоса корпусом, выполненным из
сплава марганца и меди, приводит к снижению вибрации на сред-
них и высоких частотах до 10—15 дБ.
Пока еще недостаточно широко для борьбы с вибрацией на-
сосов используются гасители колебаний. Сравнительно малое
распространение имеют гасители колебаний звуковых частот,
рассеивание энергии в которых осуществляется с помощью гид-
равлических сопротивлений, устанавливаемых на пути пульсирую-
щего потока жидкости.
Для гашения дискретных составляющих колебаний насосов
в отдельных случаях применяются динамические гасители [1).
Основными недостатками таких гасителей являются их сложность
при применении автоматической настройки и узкий диапазон
гашения у нерегулируемых виброгасителей.-Однако 'их исполь-
зование может дать существенный эффект снижения вибрации,
если насос имеет постоянное число оборотов. Применение гаси-
телей оказывается весьма полезным для устранения резонансных
колебаний отдельных элементов конструкции, когда их переделка
затруднительна.
Технология изготовления насосов оказывает также существен-
ное влияние на спектральный состав и интенсивность их вибрации.
Достаточно отметить, что достигнутое за последнее десятилетие
значительное снижение виброактивности машин получено глав-
ным образом за счет улучшения технологии их изготовления —
повышения точности обработки и сборки, применения малошум-
ных подшипников, поэлементной балансировки роторов и балан-
сировки их в сборе. Однако возможности совершенствования
технологии изготовления насосов еще не исчерпаны и должны
использоваться для дальнейшего снижения их виброактив-
ности.
Одним из важнейших вопросов технологии является назначе-
ние допустимого уровня остаточной неуравновешенности ротора.
Этот уровень обычно задается на чертежах и в технологических
картах либо в виде остаточного эксцентриситета ротора в мкм,
либо в виде произведения веса ротора иа этот эксцентриситет,
который выражается в г-см. В настоящее время действует целый
ряд недостаточно согласующихся между собой рекомендаций по
назначению остаточной неуравновешенности. Существующие нор-
мативы также не дают однозначного ответа на установление до-
пустимой неуравновешенности роторов в зависимости от требо-
вании, предъявляемых к уровням вибрации насосов. В то же
время для амортизированных насосов с жесткими роторами при
использовании амортизации, обеспечивающей частоту свободных
колебаний насосов в два и более раза ниже частоты вращения,
допустимый эксцентриситет е может быть однозначно определен
из условия обеспечения требуемого уровня вибрации £ждБ на
182
частоте вращения на лапах насоса по формуле [51]
L- - и
м
см>
где р. — отношение массы ротора tnp к массе насоса mH; п — число
оборотов ротора в минуту.
Существенное влияние на характер спектра и интенсивность
вибрации насосов оказывает качество подшипников качения.
Необходимо однако отметить, что предъявление повышенных тре-
бований к уровням вибрации подшипников имеет смысл только
при выполнении обработки и сборки, связанных с ними элемен-
тов и узлов на соответствующем технологическом уровне. С этой ‘
целью в первую очередь необходимо:
повышение точности обработки посадочных мест под подшип-
ники качения и приведение ее в соответствие с точностью обработки
колец применяемых подшипников;
исключение натягов при посадке подшипников, приводящих
к деформации колец;
повышение точности центровки спариваемых роторов насоса
и двигателя, при этом величина радиального биения от смещения
или излома роторов, отнесенная к подшипниковым опорам, не
должна превышать значения остаточного эксцентриситета.
В целях предупреждения повышения вибрации в процессе
эксплуатации должны приниматься меры по обеспечению:
соответствия режимов работы спецификационным условиям,
предусмотренным правилами эксплуатации, основное внимание
при этом должно уделяться обеспечению требуемого подпора
на всасывании;
исключения деформаций и смещений элементов и узлов под
действием температур, давлений и т. п.;
поддержания работы насосных агрегатов в полностью исправ-
ном и отрегулированном состоянии.
Необходимо иметь в виду, что под действием несимметричных
деформаций, температурных напряжений, ползучести материала,
коррозии, износа, отложения осадков и т. п. в процессе эксплуата-
ции происходит разбалансировка роторов. Для исключения не-
желательных последствий, связанных с нарушением балансировки,
прежде всего необходим периодический, а в некоторых условиях
и постоянный контроль уровней вибрации насосов. Это обстоя-
тельство должно учитываться при конструировании насосов
с тем, чтобы обеспечивалась наибольшая простота контроля и
добалансировки роторов в процессе эксплуатации.
ГЛАВА V
РАСЧЕТ И ПУТИ СНИЖЕНИЯ ВИБРАЦИИ
ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ
1. ОСОБЕННОСТИ МЕТОДОВ
ИССЛЕДОВАНИЯ ДВИГАТЕЛЕЙ
В связи с ростом нагруженности и быстроходности двигателей
в настоящее время значительно повысились требования к регла-
ментации предельных уровней вибрации двигателей.
Уровни вибрации и шума связаны с динамической напряжен-
ностью и надежностью двигателей.
Основными задачами при исследовании вибрационного со-
стояния двигателей являются снижение вибрации в источнике
их возникновения, выявление возможности уменьшения передачи
колебательной энергии через опорные связи, изучение основных
закономерностей передачи этой энергии, уменьшение интенсив-
ности звуковой вибрации с помощью демпфирующих покрытий,
а также установки глушителей шума на впуске и выпуске.
Следует подчеркнуть, что частотный состав вибрации двига-
телей охватывает диапазон от 5 до 10 000 Г ц, а уровень колеба-
тельной энергии очень мал и составляет 10” 4—КУ- 7 от мощности
двигателя.
Методы исследования виброактивностн двигателей можно
условно разделить на три вида в соответствии с тремя поддиапа-
зонами частот; низкочастотный диапазон (НЧД) 20—300 Гц,
среднечастотный диапазон (СЧД) 300—1500 Гц и высокочастот-
ный диапазон (ВЧД) 1500-10 000 Гц.
Каждому диапазону свойственны свои особенности возмущаю-
щих сил, частотных характеристик конструкций двигателей и
процесса передачи колебательной энергии. В низкочастотном диа-
пазоне возбуждение вибрации происходит от сил инерции посту-
пательно движущихся масс, моментов этих сил, центробежных
сил инерции вращающихся масс, сил давления газов при сгора-
нии топлива и т. д.
В этом диапазоне возмущаюшие силы имеют практически ди-
скретный, детерминированный характер, а двигатель как коле-
бательная система достаточно хорошо определяется конечным
числом сосредоточенных параметров, хотя некоторые детали кон-
струкции (коленчатые валы, картеры и другие) могут рассматри-
ваться как системы с распределенными параметрами. Исследова-
184
ние низкочастотных составляющих вибрации двигателей осуще-
ствляется методами прикладной теории колебаний.
В среднечастотном диапазоне возбуждение вибрации двига-
телей определяется высшими гармониками возмущающих сил,
действующих в низкочастотном диапазоне, трением и ударами в под-
вижных сочленениях при перекладке зазоров.
L Возмущающие силы в этом частотном диапазоне также можно
считать детерминированными. 1 ак как в низкочастотном и средне-
частотом диапазонах находятся собственные частоты деталей и
узлов двигателей, то конструкции двигателей уже нельзя считать
абсолютно жесткими, недеформируемыми.
Исследование вибрации двигателя в СЧД производится путем
сочетания аналитических и экспериментальных методов. Осно-
вой такого сочетания следует считать теорию линейных четырех-
полюсников. При этом в двигателе определяются возмущающие
силы и механические сопротивления в точках соединения между
собой отдельных узлов и деталей, а затем используя теорию че-
тырехполюсников, вычисляются колебания в этих точках.
Аналитический расчет вибрационного состояния двигателя
даст возможность оценить эффективность различных мероприя-
тий ио снижению виброактивности двигателей еще в процессе
проектирования.
। Учитывая, что выходные параметры двигателя — силы и меха-
нические сопротивления на опорных поверхностях определяются
спектром возмущающих сил и переходными механическими сопро-
тивлениями от мест силового воздействия до опорных поверх-
ностей двигателя, т. е. конструктивными и технологическими
свойствами двигателя и режимами его работы, можно, изменяя
величины механических переходных сопротивлений, менять вы-
ходные параметры с целью снижения виброактнвности двигателей,
г Снижения передаваемой колебательной энергии можно до-
стигнуть путем «рассогласования» механических сопротивлений
сочленяемых деталей, узлов и конструкций.
I Повышение механического сопротивления двигателя и фунда-
мента приводит к уменьшению виброактивности двигателя.
г Присоединение дополнительных масс и активных виброга-
сителей к фундаменту и двигателю позволяет повышать их меха-
нические сопротивления.
Следует отметить, что при исследовании вибрации двигателей
в высокочастотном диапазоне ВЧД возмущающие силы и их выс-
шие гармоники те же, что и в СЧД, однако эти силы в ВЧД отли-
чаются относительно большой флюктуацией и могут рассматри-
ваться как случайные.
В Здесь значительно возрастает роль шумового фона с плавно
меняющейся огибающей спектральной плотности, происхожде-
ние которого можно отнести к трению в деталях и узлах, газоди-
f намическим колебаниям при сгорании топлива в цилиндрах, кави-
тационным явлениям в охлаждающей жидкости и др.
Двигатель может быть представлен совокупностью взаимно
связанных источников и каналов распространения колебательной
энергии (вибропроводов). Следует подчеркнуть, что распростране-
ние колебательной энергии является волновым процессом, имею-
щим сложный характер распространения по разным направлениям.
В этом диапазоне частот некоторые элементы двигателя, та-
кие, как пластины, кожухи, рамы, фундаменты, можно рассма-
тривать как системы с распределенными параметрами. Однако
аналитический расчет ограничен сложностью учета краевых усло-
вий и направления распространения волны.
Следует отметть, что при исследовании виброактивности
двигателей последняя определяется активной мощностью коле-
баний, отдаваемой опорной конструкции.
Реактивная мощность характеризует свойство двигателя
отражать колебательную энергию, уменьшая тем самым долю
энергии, передаваемой в опорные конструкции.
Отношение активной составляющей к реактивной мощности
является основным критерием виброактивности двигателя. Этот
критерий учитывает конструктивные особенности, вес двигателя
и интенсивность сил, определяемых рабочим процессом.
Необходимо отметить, что некоторые экспериментальные
исследования вибрации двигателей могут быть с успехом прове-
дены путем электромоделирования вибрационных процессов.
Известно, что любая колебательная система, в том числе и ди-
зель, характеризуется как излучатель структурного шума пото-
ком колебательной энергии, проходящей через опорные связи
в поддерживающую конструкцию [4, 171.
На двигатель, обладающий инерционпо-жесткостиыми и дис-
сипативными свойствами, воздействуют переменные возмущаю-
щие силы. В соответствии со спектральными характеристиками
возмущающих сил и частотными характеристиками (импедансами)
двигателя возникает вибрация. Изложенное выше позволяет на-
метить направления исследований виброактивности дизелей в тео-
ретическом и экспериментальном плане. Так. для осуществления
исследования вибрации двигателей необходимо иметь данные
о действующих возмущающих силах и их спектральных функциях,
частотных характеристиках, инерпионно-жесткостных и дисси-
пативных свойствах двигателя и его деталей и узлов.
В символах сказанное можно записать так: F (0 —> F (со) —>
—* Кх (со) * X (со) х (0 —> Z (со) > U7. Здесь F (0 — сила,
приложенная к колебательной системе (дизелю); Г (со) — спек-
тральная функция этой силы; Ах (to) — частотная характеристика
системы (по скорости); X (со)— спектральная функция скорости
колебательного движения системы, вызываемого действием силы
F (0; х (0 — скорость колебательного движения системы; Z (со) —
сопротивление механической системы на входе; W — активная
составляющая колебательной мощности [901.
186
2. ВОЗМУЩАЮЩИЕ СИЛЫ Б ДВИГАТЕЛЯХ
Двигатель внутреннего сгорания является энергетической
машиной, преобразующей поступательное движение поршней под
действием сил давления газов во вращательное движение колен-
чатого вала, при этом поршни и шатуны перемещаются со значи-
тельно изменяющимися скоростями, благодаря чему возникают
периодические действующие силы инерции. Давление газа в ци-
линдрах также широко изменяется во время движения поршней.
Периодический характер изменения сил давления газов и сил
инерции движущихся частей механизма двигателя вызывает вибра-
цию двигателя. Действие этих периодических возмущений при-
водит к возникновению сложной картины вибрации двигателей.
Однако надежное теоретическое определение основных возмущаю-
щих усилий, возникающих в двигателях различных конфигура-
ций, затруднительно, так как в двигателях имеются и другие
источники вибрации, которые теоретически трудно учесть. Среди
них остаточные дисбалансы многочисленных вращающихся частей,
удары поршней при перекладке зазоров, газодинамические коле-
бания, воспламенение и сгорание топлива в цилиндрах, удары
в зубчатой передаче, удары клапанов, импульсы выхлопных га-
зов и разновес комплекта шатунно-поршневой группы и др. [46].
Некоторые из предположений, на которых основано теорети-
ческое определение вибрации, в практических случаях не под-
тверждаются.
Важным из этих предположений является идентичность изме-
нения давления во времени во всех цилиндрах. Любая неправилъ-.
ность в циклах цилиндров нарушает это предположение. Эти не-
правильности могут возникнуть от изменений воспламенений,
распределения топлива по цилиндрам, неправильной работы кла-
панов и т. д. Они обычно возбуждают основную гармонику цикла
давления газов четырехтактных двигателей, которая становится
очень интенсивной, и возникает повышенная низкочастотная ви-
брация двигателя. Эти неправильности также могут содей-
ствовать высокочастотным вибрациям двигателя. Как пра-
вило, фазовые соотношения сил инерции в многоцилиндровых дви-
гателях приводят к тому, что внешняя неуравновешенная сила
или полностью отсутствует или мала для двигателя в целом,
В двигателях с двумя и более цилиндрами при равномерном рас-
положении колен по окружности кривошипов центробежные силы
инерции от отдельных цилиндров для двигателя в целом взаимно
уравновешиваются. Однако эти силы, действующие в плоскостях
расположения цилиндров, создают моменты, которые необяза-
тельно уравновешиваются между собой для двигателя в целом.
Вибрацию двигателей обычно подразделяют на низкочастотную и
звуковую- Под низкочастотной вибрацией будем понимать меха-
нические колебания, длина волн которых значительно превышает
размеры двигателя, и поэтому двигатель можно заменить жесткой
массой на упругом креплении, имеющей шесть степеней свободы.
Основными возмущающими силами, вызывающими низкочастот-
ную вибрацию двигателя, являются силы давления газов, силы
инерции возвратно-поступательно движущихся и вращающихся
частей, моменты этих сил и переменная составляющая опроки-
дывающего момента, а также разновесность поступательно дви-
жущихся деталей и неравномерность нагрузок по цилиндрам.
Если считать двигатель (рис. V I) абсолютно жестким телом,
то сила давления газов Р, действующая на опоры коленчатого
Рис. v.1. Внут-
ренняя уравно-
вешенность сил
давления газов
вала, не оказывает внешнего воздействия на фун-
даментную раму, так как к остову двигателя при-
ложена равная и обратная по знаку сила давле-
ния газов, действующая на головку цилиндра
двигателя [98].
Таким образом, силы давления газов являются
взаимно уравновешенными, не оказывающими воз-
действия на фундамент, но вызывающими напря-
жение растяжения в остове двигателя.
Силы давления газов вызывают крутящий
и опрокидывающий моменты. Крутящий момент,
вращающий коленчатый вал (рис. V.2), опреде-
ляется по формуле
М
кр COS р
(V.1)
Силу P/cos р в подшипниках коленчатого вала
можно разложить на вертикальную составляю-
щую Р и горизонтальную составляющую Р tg р.
Силы, приложенные к фундаменту двигателя (рис. V.2), вызы-
вают опрокидывающий момент двигателя
мопр = Pl tg р.
(V-2)
Как видно из рис. V.2, I = г cos a/sin р, поэтому
М =
*гхопр
Pr cos а
cos р
(V.3)
Это выражение тождественно выражению крутящего момента.
Поэтому любая неравномерность в величине крутящего момента,
приложенного к коленчатому валу, отражается на фундаменте дви-
гателя. Опрокидывающий момент невозможно устранить уравно-
вешиванием [135].
Схема основных низкочастотных возмущающих сил приведена
на рис. V.3. Вертикальная низкочастотная вибрация вызывается
силами инерции поступательно движущихся частей и вертикаль-
ной составляющей центробежных сил. Горизонтальная низко-
- частотная вибрация обусловливается горизонтальной составляю-
щей центробежных сил. Поворотные колебания двигателя относи-
188
тельно оси х вызываются переменной составляющей опрокидываю-
щего момента и горизонтальной составляющей центробежных сил.
Поворотные колебания двигателя относительно оси у (галопи-
рование двигателя) вызываются моментами сил инерции поступа-
тельно движущихся частей и вертикальных составляющих цен-
тробежных сил. Поворотные колебания двигателя относительно
оси z (рыскание двигателя) вызываются моментом горизонтальных
составляющих центробежных сил. Силы инерции поступательно
cosfi
Рис. V.2. Крутящий момент и опро-
кидывающий момент
движущихся и вращающихся
частей н моменты от этих сил
определяются путем геометри-
ческого суммирования.
У двигателей, конструктив-
но полностью уравновешенных,
Рис. V.3. Схема основных возмущаю-
щих сил
некоторая неуравновешенность имеет место за счет равновес-
ности поступательно движущихся деталей. Естественно, что
имеется определенная корреляция между вибрациями и возмущаю-
щими усилиями в соответствующей плоскости.
На рис. V.4 приведена кривая горизонтальных усилий дизеля
14 8,5/11 в плоскости, перпендикулярной оси коленчатого вала
и осциллограмма вибрации блока дизеля. Из кривых видно, что
между вибрацией и возмущающими усилиями существует опреде-
ленная корреляционная связь 11351.
Ужесточение допусков на неравномерность нагрузок по ци-
линдрам, уменьшение до минимума равновесности деталей ша-
тунно-поршневой группы, а также проведение тщательной стати-
ческой и динамической балансировок вращающихся деталей по-
зволяют значительно уменьшить амплитуды низкочастотной виб-
рации. Двигатель, упруго закрепленный на фундаменте, в диапа-
зоне звуковых частот представляет собой систему с распределен-
ными параметрами.
189
Для эффективной борьбы с звуковой вибрацией двигателей
необходимо применять мероприятия по снижению звуковых коле-
баний в первую очередь к тем источникам, которые являются
определяющими в общем уровне звуковой вибрации двигателя.
С этой целью необходимо определить удельный вес отдельных
Рис. V.4. Кривые усилий, осциллограммы давления в цилиндре и вибрации
блока дизеля 14 8,5/11:
1 — горизонтальная составляющая центробежных сил; 2 — нормальное усилие; 3 —
суммарное горизонтальное усилие; 4 — давление в цилиндре; 5 — вибрации блока (
смещению); 6 — отметка в м. т.
источников колебаний в общем уровне вибрации двигателя. Их
выявление начинается с измерения общих уровней вибрации п
контуру двигателя и построения вибродиаграмм, па основании
которых определяются зоны максимальной вибрации и источники
колебаний в этих зонах. Обычно для оценки удельного веса исто1 -
ников звуковой вибрации используется метод гармонического
анализа.
Для расшифровки спектрального состава вибрации и выделе-
ния основных источников колебаний необходимо знать основные
190
частоты источников звуковой вибрации и их гармоники. Возму-
щающие усилия можно разложить на ряд гармонических состав-
ляющих. Некоторые из частот могут быть близки к частотам сво-
бодных колебаний различных деталей и узлов двигателей.
К Этим объясняется наличие в спектрах вибрации двигателей
наряду с низкочастотным составом, обусловленным возмущаю-
• -шими усилиями, высокочастотных составляющих, вызванных ко-
лебаниями деталей на собственных частотах. Для полной расшиф-
ровки спектров вибрации необходимо знать частоты собственных
колебаний основных узлов двигателя: блока, картера, крышки и т. д.
I Однако данные исследований методом спектрального анализа
вибрации не дают возможности точно установить причины возник-
новения звуковой вибрации в данном источнике колебаний. По
этим данным можно сделать лишь самые общие выводы о тех или
иных источниках, причем разделение некоторых источников виб-
рации затруднительно вследствие совпадения частот их состав-
ляющих. Поэтому для более точного определения источников зву-
ковой вибрации двигателей необходимы исследования с последо-
вательным исключением источников вибрации.
Исследование методом последовательного исключения источ-
ников заключается в измерении уровня и спектрального состава
вибрации двигателя с исключенным источником и последующим
сравнением с ранее замеренным уровнем и спектральным соста-
вь вом вибрации. По различию спектра вибрации определяется
11 влияние исключенного источника на вибрацию двигателя .
II Проведенные исследования вибрации двигателей позволили
| произвести оценку удельного веса отдельных источников коле-
баний в общем уровне звуковой вибрации двигателей.
Основными источниками звуковой вибрации в порядке убы-
вания их интенсивности являются: 1) процесс сгорания; 2) удары
поршней при перекладках; 3) топливовпрыскивающая аппара-
тура; 4) клапанно-распределительный механизм; 5) зубчатые пе-
~ . редачи (рис. V.5). Оценка удельного веса ^основных источников
| в общем уровне звуковой вибрации позволяет определить степень
[эффективности мероприятий по снижению звуковых колеба-
ний [152].
jr В настоящее время оценка вибрационного состояния двига-
» телей производится по кинематическим параметрам вибрации
на опорах. Однако знания кинематических параметров недоста-
|точно при исследовании виброактивности двигателей, так как они
не могут характеризовать взаимодействие двигателя с опорными
конструкциями.
Поэтому наряду с кинематическими параметрами используют
энергетические параметры вибрации — колебательную мощность,
излучаемую в опорные конструкции. Колебательная мощность №
пределяется по формуле:
п
191
Водяной насос
Рис. V.5. Источники вибрации дизелей: а —
дизель 44 8,5/11;б— дизель 24 10,5/13; е —
дизель 64 12/14
192
где i = 1, 2, . . ., п — число опор; Vf — эффективное значение
колебательной скорости на i-й опоре; Z — модуль точечного
механического сопротивления i-й опоры вертикальному уси-
лию.
Для сравнения виброактивности двигателей как источников
вибрации может служить безразмерный коэффициент виброактив-
ности К:
X FtVt
К = п Itn7^ й "тёк/— • (V.5)
где GT — часовой расход топлива дизелем, кг/ч; На — теплотвор-
ная способность топлива, ккал/кг; —мощность дизеля, л. с.
Этот коэффициент К представляет собой значение полной коле-
бательной мощности, измеряемой на опорах двигателя при же-
стком креплении его к фундаменту, отнесенное к «мощности потерь»,
т. е. разности между энергией, вносимой в единицу времени с топ-
ливом, и эффективной мощностью двигателя. Числитель выраже-
ния учитывает веса двигателей, их конструктивные особенности,
интенсивность внутренних взаимодействий, а знаменатель —
интенсивность сил, определяемых рабочим процессом 127].
3. СНИЖЕНИЕ ВИБРАЦИИ В ИСТОЧНИКАХ
В настоящее время проведены большие работы по снижению
возмущающих сил в источнике их возникновения в двигателях
внутреннего сгорания [27, 135 ].
Исследование вибрационного состояния двигателей показы-
вает, что колебательная мощность, излучаемая и передаваемая
двигателем, зависит от трех основных факторов: конструкции дви-
гателя, технологии изготовления и условий его эксплуатации.
Снижение вибрации в источнике достигается в основном за
счет совершенствования рабочего процесса, балансировки, юсти-
ровки, сборки и др.
Хотя возможности совершенствования технологии и конструк-
ции еще не исчерпаны, рассчитывать на дальнейшее существен-
ное снижение вибрации на этом пути не представляется воз-
можным.
Известно, что уровни и спектральный состав вибрации опре-
деляются конструкцией двигателей и являются следствием дей-
ствия в них различных по характеру и величине периодических
возмущающих сил, поэтому снижение вибрации двигателей путем
рационального их конструирования заслуживает внимательного
отношения.
[ Снижение виброактивности двигателей в широком диапазоне
частот осуществляется путем уменьшения вибрации в источнике
возникновения па пути распространения и передачи вибрации
присоединенным конструкциям (фундаменту).
13 Н. В. Григорьев 193
Любой двигатель является одновременно и источником воз-
мущающих сил и своеобразным преобразователем этих сил в не-
который параметр колебаний на опоре (выходе). Это условие можно
записать в виде
А (ю) = L(co) F (со),
(V.6)
где Л (со) — параметр колебаний; £(ю) — оператор преобразова-
ния; F (ю) — силовая функция.
Для уменьшения параметра колебаний необходимо воздействие
как на величину возмущающих сил, так и па оператор преобра-
зования. Оператор преобразования характеризует конструкцию
с точки зрения восприимчивости к переменным во времени воз-
действиям и преобразованиям воздействия в параметр колебаний
на лапе двигателя. Очевидно, что оператор преобразования пол-
ностью определяется конструкцией двигателя.
Силовая функция определяется процессами, протекающими
в двигателе. Таким образом, снижение виброактивности двига-
телей осуществляется как путем совершенствования конструкций
и поисков материалов для улучшения динамических свойств дви-
гателя, так и в отработке рабочего процесса с целью уменьшения
возмущающих сил.
Периодические возмущающие силы могут быть разделены на
две основные категории: силы давления газов при сгорании топ-
лива в цилиндрах и силы, сопровождающие рабочие процессы, —
удары и трение в подвижных сочленениях, неуравновешенные
силы инерции.
Силы первой категории определяют заданные энергетические
параметры процесса и не могут быть произвольно уменьшены.
В то же время силы, сопровождающие рабочие процессы,
необходимо доводить до минимума с целью совершенствования
виброакустических и энергетических характеристик двигателя.
Причинами вибрации двигателей являются недостаточная
жесткость деталей и узлов, недостаточная отстройка частот сво-
бодных колебаний элементов и узлов от частот действия возму-
щающих периодических сил, недостаточное использование вну-
тренних средств вибропоглощения и виброизоляции.
Основными причинами вибрации, возникающими в процессе
эксплуатации, являются разбалансировка и рас центровка дета-
лей, температурные перекосы элементов и узлов.
Центробежные силы инерции в плоскости каждого цилиндра
можно уменьшить уравновешиванием неуравновешенных вращаю-
щихся частей с помощью противовесов. Силы инерции 1-го и 2-го
порядков, создаваемые возвратно-поступательно движущимися
частями кривошипно-шатунного механизма двигателей, нельзя
уменьшить простой установкой вращающихся противовесов, так
как эти силы действуют только по осям цилиндров двигателя.
194
Для уравновешивания этих сил применяют специальные
устройства, представляющие собой систему противовесов, при*
водимых во вращение через зубчатые передачи.
Неравномерность крутящего момента для многоцилиндровых
двигателей является причиной низкочастотной вибрации двига-
телей. В многоцилиндровых четырехтактных двигателях при рав-
ных интервалах между вспышками главными гармониками опро-
кидывающего момента будут гармоники, равные половине числа
цилиндров или кратные, а в двухтактных двигателях главные гар-
моники равны числу цилиндров и кратны им. Например, для
шестицилипдрового четырехтактного двигателя главные гармо-
ники— 3, 6, 9 и т. д., для шестинвлиндрового двухтактного дви-
гателя главные гармоники опрокидывающего момента—6, 12,
18. . . Переменная составляющая опрокидывающего момента мо-
жет быть несколько уменьшена путем уменьшения максимального
давления в цилиндре и отношения максимального давления
к давлению сжатия Рг'Рс. Применение наддува позволяет уве-
личить равномерность крутящего момента.
Одним из существенных факторов, определяющих вибрацию
двигателей, являются процессы, происходящие в период воспла-
менения и сгорания топлива. Поэтому организация протекания
процессов воспламенения и сгорания оказывает большое влияние
на общий уровень и спектральный состав вибрации двигателя.
Протекание процесса сгорания характеризуется скоростью на-
растания давления. В период сгорания, характеризуемый резким
повышением давления в цилиндре детали двигателя испытывают
сильные динамические нагрузки. Интенсивность этих нагрузок ха-
рактеризуется не только скоростью нарастания давления, но и про-
должительностью действия максимальных скоростей нарастания
давления.
Кроме того, в периоды, следующие за процессом быстрого
нарастания давления, имеют место высокочастотные газодина-
мические колебания газов в цилиндре двигателя.
Амплитуды высокочастотных газодинамических колебаний
зависят в основном от «жесткости» его работы, организации сме-
сеобразования и сгорания топлива в цилиндре.
Частота колебаний, вызываемых ударной волной при вспышке,
характеризуется в основном скоростью распространения ударной
волны и линейными размерами камеры сгорания. Одним из основ-
ных факторов, определяющих протекание процесса сгорания,
является конструктивная форма выполнения камеры сгорания.
I Создание полуразделенных камер, обеспечивающих пленочное
смесеобразование (по типу камеры МАИ) или камер в поршне с
объемно-пленочным смесеобразованием по типу камеры конструк-
ции ЦНИДИ является одним из основных методов снижения вибра-
ции от процесса сгорания.
Кроме того, вибрация двигателя от процесса сгорания суще-
ственно зависит от периода задержки воспламенения, поэтому
13* 195
все факторы, которые при прочих равных условиях сокращают
период задержки воспламенения, тем самым уменьшают вибра-
цию двигателя от процесса сгорания.
Наддув повышает давление и температуру воздуха в цилиндре,
в связи с чем период задержки воспламенения сокращается. Повы-
шение температуры выходящей воды также сокращает период
задержки воспламенения. Известно, что при возвратно-поступа-
тельном движении поршня все звенья цилиндро-поршневой группы
воспринимают переменные нагрузки. Эти нагрузки достигают
больших величин и носят ударный характер, вызывая интенсивные
колебания двигателя в широком диапазоне частот. В основном
вибрации двигателя, обусловленные работой цилиндро-поршне-
вой группы, возникают от перекладки поршней и трения поршне-
вых колец.
Уровень вибрации or ударов поршней о цилиндровые втулки
зависит от материала втулки, массы и жесткости ее, от характера
площади соприкосновения при ударах, величины излучающих
поверхностей блока. Вибрации цилиндровых втулок двигателей
передаются блоку и крышке цилиндров, распространяются по
конструкции двигателя и передаются па фундамент.
Одним из способов уменьшения вибрации цилиндро-поршне-
вой группы является применение дезаксажа поршневого пальца
или коленчатого вала.
В случае дезаксажа поршень перекладывается за в. м. т.,
в результате чего уменьшается интенсивность вибрации, обуслов-
ленной ударами поршней.
Следует выбирать оптимальные зазоры, отвечающие наиболее
благоприятным условиям смазки и наименьшей интенсивности
удара поршня.
Как показывает практика, топливовпрыскивающая аппаратура
является одним из основных источников звуковой вибрации.
Наиболее вцброакгивнымп являются многоплунжерные насосы
с высоким давлением распыливания и отсечки топлива. По ча-
стотному составу вибрации топливной аппаратуры — средне- и
высокочастотные.
Исследованиями установлено, что вибрации наружных поверх-
ностей корпуса топливного насоса имеют вынужденный характер.
Основной вынуждающей силой является поперечная составляющая
сил давления топлива, действующих на плунжер топливного на-
соса.
В результате действия переменных по времени поперечных
сил корпус насоса испытывает изгибине колебания, определяе-
мые давлением затяжки иглы форсунки, профилем кулачка
и т. д.
В связи с изложенным уменьшение поперечного усилия будет
способствовать уменьшению вибрации топливной аппаратуры.
Одним из основных методов снижения вибрации топливовпрыски-
вающей аппаратуры является применение бескулачкового привода
196
топливного насоса. Наличие теплового зазора в клапанном меха-
низме приводит к тому, что начало и конец движения клапана осу-
ществляется в моменты, когда скорость, определяемая профилем
кулачка, отлична от нуля. Вследствие этого клапан открывается
и садится на седло с ударом, что и является причиной вибрации
клапанного механизма. Интенсивность вибрации клапаипо-рас-
пределительного механизма зависит от скорости посадки клапанов
и конструкции передачи. Вибрация клапанного механизма за-
висит от типа и конструкции привода. Привод клапанного меха-
низма осуществляется с нижним и верхним расположением ку-
лачковых валиков. Привод с нижним расположением кулачко-
вого валика, снабженного длинными толкателями с пониженным
сопротивлением продольному изгибу, вызывает более повышенную
вибрацию клапанного механизма, чем привод с верхним распо-
ложением кулачкового валика.
Основным методом снижения вибрации клапанного механизма
является понижение скорости начала и конца движения клапана
за счет применения специальных компенсирующих устройств,
автоматически обеспечивающих неизменность тепловых зазоров
при любым режимах работы двигателя, либо за счет установки
на двигателе коррегированных кулачков.
I В качестве компенсирующих устройств широкое применение
находят гидравлические компенсаторы.
, В некоторых дизелях (37Д, 64 23 30 и др.) одним из основных
источников вибрации являются зубчатые передачи.
Крутильные колебания зубчатых колес, определяющие уро-
вень вибрации, при работе под нагрузкой происходят с вынужден-
ной частотой, равной частоте зацепления. При зацеплении в осно-
вании нагруженного зуба имеет место концентрация напряжений,
возникающая в начале зацепления и исчезающая в конце зацеп-
ления.
Концентрация напряжений вызывает распространение волн
напряжений по зубчатому колесу, порождая в результате вибра-
цию.
I Контактное движение зубьев включает в себя движения
скольжения и качения, из которых движение скольжения зани-
мает большую часть времени контакта. В этом случае трение ста-
новится эффективной возбуждающей силой, вызывающей вибра-
цию упругих элементов на их собственных частотах. Остаточные
дисбалансы зубчатого колеса и шестерни вызывают вибрацию на
частоте вращепия. Интенсивность вибрации зубчатой передачи
существенно зависит от окружной скорости колес, качества их
изготовления и сборки, а также от нагрузки. Уменьшение вибра-
ции зубчатых колес достигается повышением точности изготовле-
ния профиля зуба и качественной сборкой. Для улучшения плав-
ности зацепления вместо прямых зубьев применяют шестерни с
косыми и шевронными зубьями.
197
4. РАСЧЕТНЫЕ СХЕМЫ ДВИГАТЕЛЕЙ ДЛЯ ОПРЕДЕЛЕНИЯ
НИЗКОЧАСТОТНОЙ ВИБРАЦИИ
Приближенный расчет низкочастотных колебаний двигателя
В расчетной схеме, приведенной на рис. V.6, двигатель пред-
ставляется абсолютно жестким телом, имеющим шесть степеней
свободы, а возмущающими силами являются силы инерции и
переменная составляющая опрокиды-
вающего момента.
Составив и решив дифференциаль-
ные уравнения колебаний двигателя как
жесткого тела (см. гл. VII), получим
значения амплитуд низкочастотных со-
ставляющих вибраций двигателя 1139].
Следует отметить, что расчетные ам-
плитуды низкочастотной вибрации дви-
гателей, полученные при использова-
нии упрощенной схемы, представляю-
щей двигатель сосредоточенной массой
на упругом креплении, часто не согла-
суются с действительными значениями
вибрации двигателей, о чем свидетель-
ствует сравнение следующих расчетных
данных вибрации с экспериментами на
частоте вспышек 180 Гц:
хвр, мкм ..............................0,26
хеэ, мкм............................7,2
I-ер» дБ ........................ • Б I
......................
Причиной такого расхождения рас-
четных и экспериментальных значений
уровпей вибрации является неудовлет-
ворительная расчетная схема,
Рис. V.6. Схематическое представление дизеля
12ЧН 18/20 как жесткого тела
Расчетное определение низкочастотной вертикальной вибрации
двигателя как дискретной упругомассовой системы
Ранее двигатель рассматривался как абсолютно жесткое тело,
и в качестве возмущаюших сил принимались во внимание только
силы инерции поступательно движущихся и несбалансированных
вращающихся масс; силы же давления газов не учитывались.
198
Отсутствие учета сил давления газов при расчетах уровней
вибрации двигателей приводило к большим погрешностям. Это
. объясняется тем, что головка, картер и кривошипно-шатунный
механизм имеют конечную жесткость и внутренняя сила давления
газов вызывает вибрацию значительной величины. В настоящее
время уровни низкочастотных составляющих вибрации двига-
телей в вертикальном направлении нормируются.
л В связи с этим возникает необходимость предварительного
расчетного определения с достаточной для практики точностью
уровней низкочастотной вибрации двигателей и возможности
конструктивно обеспечить допустимые уровни низкочастотной
вибрации. Исследование вибрации двигателя производится при
помощи обобщенной механической модели.
При построении такой модели для двигателя отбрасываются
малосущественные деформации, вследствие чего некоторым эле-
ментам двигателя приписываются свойства «абсолютной же-
сткости». Это позволяет двигатель свести к идеализированной
{линейной колебательной системе с несколькими степенями сво-
боды.
Крупные, массивные детали и элементы двигателя наделяем
только инерционными свойствами» а легко деформируемые детали
с малой массой — только упругими свойствами.
к' Считаем также, что абстрагированная демпфирующая сила
не зависит от массы и упругости и обусловлена лишь внутренним
трением материала или относительной скоростью перемещения
трущихся поверхностей.
I Следовательно, несмотря на то» что каждая деталь или эле-
мент двигателя является по всему своему объему одновременно
носителем свойств инерции, упругости и демпфирования, эти
отдельные свойства нами приписываются отдельным элементам
и деталям двигателя. Таким образом, при исследовании вибрации
двигателя в вертикальном направлении, учитывая конструктивные
особенности, представляем его дискретной упругомассовой си-
стемой, в которой отдельные элементы рассматриваются как со-
средоточенные параметры массы» жесткости и демпфирования.
Такая динамическая модель двигателя позволяет учесть как
различия в упругомассовых характеристиках отдельных эле-
ментов двигателя, так и силы давления газов в цилиндрах дизеля.
Учет гармоник сил давления газов позволяет получить уровни
низкочастотной вибрации двигателей в зависимости от особен-
ностей процесса воспламенения и сгорания топлива в цилиндрах
. двигателя. Все эти особенности оказываются учтенными при этой
расчетной схеме двигателя.
г Приближенные расчеты низкочастотных колебаний двигателя
могут быть произведены и без учета демпфирования.
1- Предполагается, что каждая масса может совершать только
поступательное колебательное движение вдоль вертикальной
Ж оси х, т. е. обладает одной степенью свободы За начало отсчета
199
координаты каждой массы принимается -положение ее статиче-
ского равновесия па упругих и демпфирующих элементах.
Положительное направление оси отсчета принимается по вер-
тикали вниз.
Рассмотрим эти расчеты на примере дизелей 14 8,5/11 и
124Н 18/20.
На рис. (V.7) приведена расчетиа схема дизеля 14 8,5,11.
4исловые значения упругомассовых характеристик
четырехтактного одноцилиндрового дизеля
конструкции следующие:
: элементов
14 8,5 11 блочной
т-10», кгс'См^’.с1
mt = 0,163
~~ 5,3
т3 = 10
= 0,93
Л.10-», кгс*см“.
— 3,33
/гКр- 100
Агк = 20_
/Сд.г 2,оЗ
С, КГС«СМ-‘.С
Cyj “ /
скр = 10
ск = 12
Сд.Г ===’ 16
Здесь — масса поршня
приведенной массой верхней
енчатого вала с приведенной
массой нижней головки ша-
туна; тд — масса картера
с массой блока в сборе; гп4 —
масса головки дизеля в сбо-
ре; Лш> сш — коэффициенты
жесткости и демпфирования
шатуна; feKP, скр — коэффи-
циенты жесткости и демпфи-
рования коленчатого вала;
Л,, ск —- коэффициенты жест-
кости и демпфирования кар-
тера; /га. r, са г— суммарные
коэффициенты жесткости и
демпфирования последова-
тельного соединения анкер-
ных шпилек и головки дви-
гателя.
Коэффициенты 'жесткости
элементов дизеля вычислены
в предположении, что они
работают па растяжение—
сжатие. Коэффициенты дем-
. в фи ров ап и я определяются
Рнс. V 7. Расчетная схема дизеля 14 8,5/Н ПО данным эксперимента.
Экспериментальным путем
определялись логарифмические декременты колебания d основ-
ных элементов дизеля, а затем по известным соотношениям
вычислялись величины коэффициентов демпфирования
d пТ,
200
где Т — период свободных колебаний;
с
2m
откуда
с = 2md f0.
Из последней формулы видно, что коэффициент демпфирова-
ния зависит от массы элемента его частоты свободных коле-
баний и величины d.
На систему действуют вертикальные возмущающие силы:
силы давления газов Р и приложенные: Рг к mt и Рт к тп4;
приведенная сила инерции поршня и кривошипно-шатунного
механизма Ри, приложенная к mx.
Возмущающие силы изменяются по синусоидальному закону:
Рг = sin (,>^ Р» = ^ио sin о)/. При этом: Рг = Рг0; Р2 =
~ Р vO ^нО-
Расчет низкочастотных составляющих вибрации дизеля был
произведен на номинальном режиме при п ~ 1500 об/мин -
Числовые значения основных возмущающих сил и импедан-
сов подмоторного фундамента следующие:
/. Гц <о, 1/с ГТо* кгс ^ио* кгс 2фЛ0 4. КГС«СМ "’*с X,- пр» МКМ * J’S ^*ЙЭ« ди Х4Р» мкм 7 4Р« ДБ Г4Р» ДБ ,
25 157 1595 22! 4,7 40 71 72 113 79 82
50 314 674 59.3 6 20 76,<5 77 45,6 83 85
Записывая дифференциальные уравнения движения каждой
из масс, получим систему линейных неоднородных дифферен-
циальных уравнений 2-го порядка с постоянными коэффициентами:
• • • •
lrnLxL + (*1 — *2) + Gb Ui — *2) = ^2 sin св/;
^3^3 ^кр ^2) К ^кр (-^8 ^2) “ С^З Н (V-<)
+ &а.г(*4 — *3) +g г Сч — *з) = —Ру sin о Г;
d *ф*5 + %ХЪ -I Лк (Л'5 — х3) + Q (х3 — Д) = 0.
£ Решение системы (V.7) складывается из двух частей: общего
решения соответствующей однородной системы и некоторого
частного решения неоднородной системы (V.7).
Наибольший интерес представляег часть решения, соответ-
ствующая установившимся вынужденным колебаниям.
1 Для нахождения частного решения системы (V.7) применяем
метод неопределенных коэффициентов.
201
Частное решение системы имеет вид:
Xh Л2*л s'11 Ask cos <of (k = 1, 2, 3, 4, 5).
(V.8)
Подставляя частное решение (V.8) в систему (V.7) и приравнивая
коэффициенты при sin (at и cos (at в левых и правых частях,
получим систему линейных неоднородных алгебраических урав-
нений относительно Л2, . . Решив ее, для рассматри-
ваемого примера находим амплитуду колебательного движения
на лапе двигателя, равную 0,02 мм.
Аналогично можно определить величину амплитуды колеба-
тельного движения в любой другой расчетной точке двигателя.
На рис. (V.8) приведена расчетная схема дизеля 12ЧН 18 20.
Числовые значения уиругомассовых характеристик элементов
дизеля 12ЧИ 18/20 следующие:
ГН, КГС’СМ-|*С~2 /г.10~•, кгс.см"1 с, кгс»см_,*с
0,01 . . . . •.................. 6,5 8
0,032 3,1 10
0,146 12,8 16
0,897 ........................ 0,424 26
0,286 19,2 25
0,6 . . . ... 200 12
Как показывает практика, уровни вибрации опорных кон-
струкций двигателей в значительной степени зависят от харак-
теристик фундамента, поэтому в расчетную схему включены
характеристики фундамента.
Движение элементов многомассовой системы, представленной
на рис. (V.8), описывается системой дифференциальных уравнений:
/71 „X,
(V.9)
Здесь mt (i — 1, 2, . . ., 6) — сосредоточенные массы элементов
двигателя; k; (i 1, 2, .... 6) — коэффициенты жесткости,
подсчитываемые в предположении, что элементы конструкции
двигателя работают парастяжение—сжатие; с; (Г—1, 2, . . ., 6)—
коэффициенты затухания, определяемые по данным эксперимента.
202
Частные решения системы, соответствующие установившимся
вынужденным колебаниям, снова ищем в виде
xk — A2k-i sin со/ + A2k cos cot (6=1,2,.. 6).
Подставляя частные решения в систему и приравнивая коэф-
фициенты при sin со/ и cos (о/ в левых и правых частях, получим
систему линейных неоднородных алгебраических уравнений отно-
сительно А 2, . . Л12. Решив ее, находим амплитуду коле-
бательного движения на опорах двигателя.
Числовые значения основных возмущающих сил Р, импеданса
подмоторного фундамента (Z), расчетных и экспериментальных
уровней и амплитуд вибрации на лапе двигателя и на фундаменте
(£, х) следующие:
Г. Гц со. 1/с Plt кге кге КГС СМ”1-с Х0р» мкм -4Q 1 сэ. дБ X <р» мкм ‘.т 7Э* ДБ
180 ИЗО 2,042-104 2,036-104 3,16-10s 5 86 87 0,525 Я 67 68
Рассмотренный на приме-
рах двигателей 14 8,5/11 и
12ЧН 18/20 расчетный метод
определения амплитуд низко-
частотной вибрации может быть
применен к определению ам-
плитуд вибрации любых двига-
телей, элементы которых в ос-
новном работают на растяже-
• ние—-сжатие и изгибом кото-
рых можно пренебречь.
Следует иметь в виду, что
современные быстроходные дви-
гатели являются сложными по
конструкции и поэтому в об-
щем случае задача расчета и
анализа вибрационного состоя-
ния двигателей включает как
дискретные, так и распределен-
ные массы (коленчатый вал,
картер).
Наличие ЭВМ, обладающих
высоким быстродействием, по-
зволяет произвести вычисление
частот свободных колебаний и
амплитуд вынужденных колеба-
ний таких сложных систем.
| При составлении расчетных
Уравнений применяется метод
Рис. V.8 Расчетная схема дизеля 12ЧН
18/20
203
динамических жесткостей и используется символика матричной
алгебры, позволяющей в компактной форме производить различ-
ные преобразования с системами линейных уравнений.
Развернутая расчетная модель двигателя 12ЧН 18/20 при-
ведена на рис. V 9. Массы частей, движущихся поступательно,
принято считать сосредоточенными, а коленчатый вал и картер,
работающие на изгиб, заменены элементами с распределенными
Рис. V.9. Развернутая расчетная схема 12ЧН 18/20
массами (при постоянном поперечном сечении). Таким образом,
при расчете низкочастотной вибрации в этой развернутой расчет-
ной схеме двигателя учитываются основные конструктивные
особенности двигателя, порядок работа цилиндров, различные
виды деформации деталей и узлов двигателя.
Систему с распределенными массами можно привести к ди-
скретной цепной системе, состоящей из сосредоточенных масс,
связанных между собою безынертными упругими связями (при-
чем масса каждого участка системы разносится по его концам).
Точность вычисления низкочастотных колебаний двигателя в этом
случае удовлетворительная, хотя расчетная схема содержит ряд
допущений и соответствие ее действительной мпогосвязной си-
стеме условно.
При наличии па границах участков значительных сосредо-
точенных масс динамическая стойкость в граничной точке будет
204
в основном определяться соответствующей сосредоточенной мас-
сой, а не приводимыми к пей распределенными массами.
Все расчетные уравнения составляются в безразмерной форме,
так как при этом происходит автоматическое масштабирование вхо-
L дящих в уравнение параметров, которые, будучи размерными,
менялись бы в очень широком диапазоне.
, К Для перехода к безразмерным параметрам выбирается пеко-
£ торый условный участок, обладающий жесткостью, длиной и
массой. Все величины действительных участков относятся к ве-
личинам условных. Также вводится условная частота колебаний
(V.10)
где EgJ0—изгибпая жесткость участка; /л0—масса участка;
длина участка.
Основным матричным уравнением, позволяющим вычислить
перемещения в каждой характерной точке цепной системы, яв-
ляется
Plbn = Hlkn-qk, (V.11)
। где Рд1 — матрица эквивалентных возбудителей в точке k си-
стемы, заменяющая действие всех возбуждающих сил, действу-
ющих в различных точках системы; Я1 — матрица динамической
> стойкости системы в точке k\ qk — матрица перемещений (угловых
и линейных) в точке k [50] Матрицы Р}? и /Д вычисляются
Ь по реку рентным формулам, удобным для программирования.
На основании матричных уравнений (V. 11), составленных для
всех характерных точек системы от 1 до и» приходим к системе
i линейных уравнений, решая которые и определяем величины
j перемещений [6, 10].
Ж Для определения собственных частот колебаний системы, до-
£ статочно приравнять нулю определитель матрицы и найти
корни полученного уравнения А .
» Собственные частоты колебаний определяются по соотношению
IB Л,= ) = ] А (00. (V. 12}
I I Vo
Г 5. РАСЧЕТ СОБСТВЕННЫХ ЧАСТОТ КОЛЕБАНИЙ
g КОНСТРУКЦИЙ ДВИГАТЕЛЕЙ
-
Для расшифровки спектрального состава вибрации двигателя
и выделения основных источников колебаний необходимо знание
основных частот источников колебаний и их гармоник. При этом
JL следует учитывать возможность возникновения резонансных ко-
В лебаний. В результате импульсных динамических нагрузок в кон-
205
струкции двигателя возникает широкий спектр вынуждающих
сил. Вместе с тем двигатель, представляющий собой сложную
колебательную систему, состоящую из множества отдельных
деталей и узлов, имеет целый спектр собственных частот колеба-
ний. При распространении вибраций по конструкции двигателя
могут наблюдаться случаи, когда собственные частоты отдельных
деталей оказываются близкими или равными частотам гармони-
ческих составляющих вынуждающих сил (т. е. возникают резо-
нансные колебания). Этим объясняется наличие в спектрах виб-
рации двигателей наряду с низкочастотными составляющими,
обусловленными возмущающими усилиями (т. е. вынужденными
колебаниями) высокочастотных составляющих, обычно вызывае-
мых колебаниями различных элементов двигателя па собственных
частотах. Само по себе явление резонанса по является источником
вибрации. Однако при резонансе может возникнуть такое поло-
жение, при котором частоты наиболее интенсивных составляющих
вибрации, определяющие их общие уровни, не совпадают с рас-
четными.
Поэтому для более полной расшифровки спектров вибрации
двигателей необходимо знать собственные частоты связанных коле-
баний основных узлов двигателя: блока, картера, головки и т. д.
Следует отметить, что до настоящего времени рассмотрение
двигателя как жесткого тела не позволяло аналитически рассчи-
тывать собственные частоты связанных колебаний деталей и узлов
двигателя.
Собственные частоты отдельных деталей и узлов двигателя
определялись, как правило, экспериментальным путем. При этом
экспериментальное определение собственных частот деталей и
узлов двигателя производилось без учета взаимной связи между
деталями, что связано с большими погрешностями.
Следовательно, только расчетная схема двигателя, рассматри-
ваемого как дискретная упругомассовая система позволяет доста-
точно точно определять собственные частоты связанных колеба-
ний деталей и узлов.
Имея график возмущающих усилий, зная собственные частоты
колебаний элементов двигателей и спектр вибрации, можно опре-
делить возможные резонансные зоны узлов конструкции дви-
гателя, а также возмущающие усилия, вызывающие повышенные
колебания.
Для расчета частот собственных колебаний элементов дизеля
14 8,5/11, расчетная схема которого представлена па рис. V.7,
необходимо приравнять пулю определитель A (w2), составленный
из коэффициентов при неизвестных системы уравнений (V.7).
Аналогично производится расчет собственных частот колеба-
ний дизеля 12ЧН 18/20, установленного на амортизаторах
АКСС-400И. В этом случае определитель А (<о2) составляется из
коэффициентов при неизвестных системы уравнений (V.9). Опре-
деление корней полученного уравнения пятой степени отно-
206
сителыю or можно производить, например, с помощью прибли-
женного метода Греффе.
На рис. V. 10 представлены спектры вибрации дизелей 14 8,5 11
и 12ЧН 18/20.
Из спектров видно, что расчетные значения собственных
частот с достаточной для практики точностью определяют резо-
Рис. V.10. Спектры вибрации дизелей: д — 14 8,5/11; б —
— 124 Н 18/20
напспые зоны вибрации этих дизелей; это подтверждает, что рас-
смотренный метод расчета собственных частот деталей и узлов
дизелей с учетом упругомассовых характеристик его элементов
позволяет с достаточной точностью определять резонансные зоны
в спектрах вибрации дизелей 11391.
6. МЕТОДИКА ПЕРЕСЧЕТА НИЗКОЧАСТОТНОЙ
ВИБРАЦИИ ДВИГАТЕЛЯ В СЛУЧАЕ ЕГО ПЕРЕСТАНОВКИ
Как указывалось выше, двигатель в диапазоне низких частот
можно представить дискретной упругомассовой системой со мно-
гими степенями свободы, состоящей из сосредоточенных масс,
г 207
соединенных упругими и демпфирующими элементами. Низко-
частотные колебания двигателя при помощи механической обоб-
щенной модели целесообразно исследовать посредством метода
импедансов [1391. Следует отметить, что если уравнение движе-
ния системы с одной степенью свободы линейно, то установившаяся
реакция системы на гармоническое возмущение есть гармониче-
ская функция с частотой, равной частоте возмущения.
Можно показать, что если уравнения движения, описывающие
дискретную упругомассовую систему линейны, то установившаяся
реакция (отклик) системы на гармоническое возмущение является
Рис. V. 11. Векторы гармонических сил и многоугольник векто-
ров сил
также гармоническим движением, совершаемым с частотой воз-
мущения. Поэгому импедансный метод применим к сложным
линейным колебательным системам.
Этот метод по сравнению с классическим методом значительно
упрощает расчет установившейся реакции системы.
Если возмущение и установившаяся реакция есть гармони-
ческие функции, имеющие одинаковую частоту, то их можно
представить векторами, вращающимися с одинаковой угловой
скоростью. Представляем гармоническую возмущающую си лу
в виде F • =
Если реакция системы отстает от возмущения н^фазовый угол О,
то вектор перемещения можно записать как X = Хое/(сИ^0).
Векторы скорости и ускорения представляют собой первую и
вторую производные от вектора перемещения.
Величины гармонических сил системы получают умножением
перемещения на соответствующие импедансы.
На рис. V.11 показаны векторы этих сил и соответствующий
многоугольник векторов сил.
Импедансный метод исследования и анализа колебаний слож-
ных колебательных систем непосредственно следует из вектор-
ного представления гармонических (упругой, инерционной, демп-
фирующей и возмущающей) сил.
208
Так, уравнение вынужденных колебании простого осциллятора
имеет вид
k тх + сх + kx = F sin tof. (V. 13)
При этом произведение —m<o2 на перемещение есть инерционная
сила, произведение /ссо на перемещение — демпфирующая сила,
а произведение k на перемещение — упругая сила. Величины
—ты2, /со и k называются механическими сопротивлениями
(импедансами) элементов массы, демпфирования и упругости.
Величина k — mco2 + /ссо есть полное механическое сопро-
тивление (импеданс) системы. Понятие импеданса используется
в электротехнике при исследованиях переменного тока.
Метод импедансов дает возможность анализировать сложные
колебательные системы путем применения ряда правил, заим-
ствованных из теории электрических цепей. Задача определения
кинематических п араметров колебательной системы сводится
к определению импедансов элементов механической расчетной
схемы.
Для определения импеданса в любой точке системы исполь-
зуются методы расчета импеданса комбинации элементов.
К Так, импеданс параллельного соединения механических эле-
ментов равен сумме импедапсов отдельных элементов.
I Проводимость (величина обратная импедансу) последователь-
ного соединения механических элементов равна сумме проводи-
мостей отдельных элементов.
Методика определения параметров вибрации двигателя методом
импедансов сводится к двум простым правилам:
1) построение импедансного аналога по принятой расчетной
схеме;
2) составление алгебраических уравнений движения по полу-
ченному импедансному аналогу.
При составлении импедансных аналогов на основании принятых
расчетных схем все идеализированные элементы механических
систем следует соединять так же, как в расчетной схеме, кроме
масс, которые дополнительно одним полюсом соединяются с не-
подвижной системой отсчета — землей.
В Для составления уравнений движения полученных узловых
точек импедансных схем в каждой точке с общим перемещением
возмущающую силу следует приравнять сумме импедансов эле-
ментов, сходящихся в узел, умноженной на перемещение рассма-
триваемого узла, за вычетом этих же импедапсов. умноженных на
перемещения других точек их соединения.
> Для определения виброакустических параметров дизеля
’12ЧН 18/20 методом импедансов построим по его расчетной схеме
(см. рис. V.8) импедансную схему, приведенную па рис. VJ2, а.
Схема содержит два генератора силы Р1#и Р2. Их величины из-
вестны, частоты одинаковы, а векторы сдвинуты по фазе на 180 \
4 Н. Б. Григорьев 2Q9
Записывая уравнения движения в величинах импедансов и пере-
мещений для каждой узловой точки» получим уравнения» иден-
тичные уравнениям (V.9), ранее выведенным классическим ме-
тодом.
Используя правило определения импеданса комбинации меха-
нических элементов при анализе сложной механической системы,
можно акцентировать внимание на одной или двух точках без
б)
Рис. V. 12. Импедансная схема дизеля
124 И 18/20
полного анализа всей системы. Для этой цели исследуемую си-
стему следует представить на рассматриваемой частоте эквивалент-
ной схемой, содержащей источник постоянной силы FK в парал-
лельно с единственным импедансом ZH, присоединенным к за-
данной нагрузке ZH (риск V. 12, г).
Аналитически импеданс источника Z„ может быть вычислен
определением внутреннего импеданса системы с удаленным источ-
ником колебательной энергии при условии, что значения сопро-
тивлений (импедансов) всех элементов системы известны. Вели-
чина силы может быть также определена аналитически и экспери-
ментально путем замера величины силы, передаваемой жестко
закрепленной точке.
I !ри отсутствии нагрузки система движется свободно. Если
замерить свободное перемещение а„ системы в исследуемой точке,
2Ю
то параллельный импеданс источника эквивалентной схемы будет
равен
Рассмотрим импендансную схему дизеля 12ЧН 18/20, пред*
ставленную на рис. V. 12, а. Для определения влияния различных
условий крепления двигателей к фундаменту (фундаментной
раме) найдем зависимость для определения амплитуды смеще-
ния Л] любого объекта, на котором установлен двигатель. Точка /
является точкой присоединения нагрузки.
I Найдем эквивалентную схему, состоящую из источника силы Г„
и внутреннего импеданса источника Zu.
Для определения силы источника на эквивалентной схеме
дизеля следует (рис. V. 12, а) жестко закрепить точку 1 и опре-
делить при этом перемещение точки 2 (рис. V. 12, б).
Уравнение сил для узловых точек 2 и 3:
Решая их относительно х2, получим:
У _____ Р1 (^а. г — —Рг_________
К 2 (Лк -I- ka. г (*а r-OTX)-^. г ’
Тогда
р v 1, _ _ (^a. г а*) — fVa-r] __
> 1,- 21 ~(*к + *а fW. г’
Импеданс источника ZM системы находится согласно правилам
определения суммарного импеданса комбинации элементов при
исключенных источниках колебательной энергии.
На рис. V.12, в приведена схема для нахождения импеданса
источника двигателя
и
о 1 Ла .г
т3(о2 -ъ ~
а, г
I г \
(V.16)
и
\ “а. г — /
Амплитуда колебательного перемещения объекта, на котором
установлен двигатель, может быть определена по формуле
t = (V.17)
г Таким же путем систему можно представить схемой с двумя
соединениями, выделив промежуточный элемент, колебательные
параметры па входе и выходе которого легко могут быть опре-
делены методом импедансов. Таким образом, метод импедансов
211
позволяет упростить процесс определения вибрационных харак-
теристик линейных механических систем, которыми могут быть
представлены двигатели внутреннего сгорания.
Посредством этого метода можно провести как подробный
анализ системы, так и определять искомые параметры колебатель-
ного движения в одной или двух наиболее важных точках, ис-
пользуя правила построения эквивалентных схем.
Применение метода импедансов можно рекомендовать для
пересчета стендовых уровней вибрации двигателей на уровни
вибрации их в реальных условиях эксплуатации.
7. РАСЧЕТНОЕ ОПРЕДЕЛЕНИЕ УРОВНЯ ВЫСОКОЧАСТОТНОЙ
ВИБРАЦИИ. ВОЗБУЖДАЕМОЙ ГАЗОДИНАМИЧЕСКИМИ
КОЛЕБАНИЯМИ ДАВЛЕНИЯ В ЦИЛИНДРАХ ДВИГАТЕЛЕЙ
Процесс сгорания является наиболее интенсивным источником
вибрации и воздушного шума двигателей.
Для оценки динамики процесса сгорания существуют различ-
ные критерии. Динамика рабочего процесса и виброактивность,
связанная с процессом сгорания, не определяются только одним
критерием, а зависят от комплекса критериев, таких как ДР/Дер,
dpldy, Ap/Ai, dp/dt, угол перехода от линии сжатия к линии
сгорания и степень повышения давления при сгорании X.
На рис. V.13 приведены осциллограмма давления сгорания
в цилиндре и жесткость рабочего процесса.
Новый способ оценки динамичности рабочего процесса по его
спектру давления учитывает весь комплекс факторов, определя-
ющих динамику (рис. V.14).
Особенности индикаторной диаграммы, связанные с динамич-
ностью цикла и виброактивностью рабочего процесса, находят
отражение в его спектре.
В целях снижения виброактивностн от процесса сгорания
необходимо снизить уровень высших гармоник, которые, как
правило, находятся в диапазоне частот собственных колебаний
дет ал ей дви г ател ей.
На уровень высокочастотных составляющих влияют как
форма индикаторной диаграммы, так и скоростной режим двига-
теля.
Проанализируем звуковую вибрацию, возникающую от газо-
динамических колебаний давления в цилиндрах. На рис. V. 14
представлен спектр давления в цилиндре двигателя.
На высоких частотах отдельные детали двигателя можно пред-
ставлять не в виде сосредоточенных элементов, а в виде набора
вибропроводов, т. е. элементами с распределенными параметрами-
Единый подход к колебаниям и волнам различной физической
природы, единые законы колебаний и волн, охватывающие как
механические, так и электрические явления, дают возможность
в данном случае использовать для расчета механических колеба-
212
йий методы расчета электрических цепей — методы расчета
длинных линий.
I Динамическая модель для расчета вибрации картера двига-
теля от действия газодинамических колебаний давления при сго-
рании топлива представлена на рис. V.15.
dp/dp
d?p/dyz
Рис. V. 13. Осциллограмма давления сгорания в цилиндре и жесткость рабочего
процесса
[ Конструкция двигателя разбита на три части: 1) источник
вибрации (источник э. д. с.); 2) пути распространения вибрации
(длинная линия); 3) нагрузка.
213
Кратко остановимся на обосновании подобного представления
конструкции двигателя. Газодинамические колебания действуют
в камере сгорания на площадь головки блока и поршень, и, таким
образом, вынуждающая сила имеет определенную область дей-
ствия.
Возбужденные в головке колебания распространяются по
конструкции моноблока, линейные размеры которого больше
'У>дг>
Рис. V. 14. Спектр давления в цилиндре дизеля
Рис. V. 15. Динамическая модель для расчета вибрации
дизеля от действия газодинамических колебаний давле-
ния при сгорании топлива
длины волны. Нагрузкой для моноблока является картер, име-
ющий контрольную точку замера вибрации на лапе.
Каждая из трех частей системы описывается уравнениями,
анализ которых дает возможность принимать соответствующие
решения по снижению виброактивности двигателя за счет изме-
нения характеристик отдельных элементов системы. Таким обра-
зом, открывается возможность для целенаправленной борьбы
с вибрацией в самом двигателе.
214
Двигатель представляется как источник вибрации с опре-
деленным механическим сопротивлением, измеренным со стороны
опорных лап и известной выходной колебательной скоростью.
Сложность применения этого метода расчета для двигателя
заключается в том, что на расчетной частоте может оказаться
несколько источников возбуждения, создающих-на лапе двига-
теля некоторый суммарный уровень вибрации. Пользуясь прин-
ципом независимости источников возбуждения и опираясь на
значительный экспериментальный материал, удалось провести
подобные расчеты и наметить основные пути уменьшения высоко-
частотной вибрации от действия газодинамических колебаний
давления.
При исследовании звуковой вибрации элементы двигателя
можно представить комбинацией вибропроводов длиной lir пло-
щадью поперечного сечения S/9 плотностью р; и скоростью рас-
пространения волн напряжения (см. рис. V.15).
Анализ методами линий передач дает следующие соотношения
для определения силы и скорости на выходе четырехполюсника,
т. е. па лапе двигателя:
(V. 18)
Hl / 7 .
cos ₽,/< X / (
= _________________Евг
и/ //
COS р,./; + / ( 5
(V. 19)
Импеданс вибропровода
7 __________________ 7 ZU|* cos 4
— Л0х у ft /. •
(V.20)
1 /^Нх Pi»i
Скорость распространения волн напряжения в упругом теле
где Е — модуль нормальной упругости; р — плотность материала.
; Для длинных тонких вибропроводов, скорость волн напряже-
ния V—c. Для вибропроводов, поперечные размеры которых много
больше длины волны напряжения, скорость V — 0t6 с.
Импеданс массы на высоких частотах, т. е. распределенной
массы, получим, если в выражение (V.20) подставить ZU|- == О,
I Ш
Zoi = рД -S^.
Для вибропровода, возбуждаемого источником силы с импе-
дансом источника Zvi (см. рис. V. 15), силы и скорости обоих
215
концов вибропровода определяются через известную силу Fn{
следующим образом:
(V.22)
(V.23)
(V.24)
(V.25)
Вычислим для дизеля 12ЧН 18/20 уровень вибрации на лапе
двигателя от высокочастотных газодинамических колебаний давле-
ния в цилиндре, зависящих от организации смесеобразования
и сгорания топлива в цилиндре.
Частота газодинамических колебаний определяется скоростью
распространения ударной волны и линейными размерами камеры
сгорания.
Конкретно для дизеля 124Н 18/20 при диаметре цилиндра
D = 180 мм и скорости распространения ударной волны су =
= 1000 м с
-=Й- = 2^8 = 2700
Экспериментальное определение частоты газодинамических
колебаний на спектре давления показало /г к= 2700 Гц, т. е.
подтверждает расчетное значение частоты.
Учитывая, что амплитуда газодинамических колебаний давле-
ния имеет порядок рг к = 2 кг/см2, определим возмущающую
силу источника
= PSU,
где р— амплитудное значение газодинамических колебаний дав-
ления, определенное из развернутой индикаторной диаграммы
давления в цилиндре (см. рис. V.I3) или из спектра колебаний
давления (см. рис. V.14); 5Ц—площадь головки моноблока над
цилиндром. Тогда Fy ===== 4,96-102 кгс.
Таким образом, предполагается, что на головку моноблока
действует плоская волпа.
Характеристическое сопротивление моноблока
—— pcS6.
где рис — плотность материала и скорость звука соответственно
(для алюминия); S6 — площадь поперечного сечения моноблока.
В Данном случае пЛощаДь вибропровода, по которому происходит
распространение колебаний от места своего возникновения до
опоры (нагрузки). Рассматриваемое возбуждение в любой про-
извольно выбранный момент времени действует только в одном
цилиндре, т. е. на часть поперечной площади моноблока, и о сип-
фазпости возбуждения всей площади моноблока говорить нельзя.
Как некоторая жесткая площадка, колеблется только определен-
ный участок поперечной поверхности 5б, который находится
в непосредственной близости от того цилиндра (т. е. источника),
Рис. V. 16- Моноблок дизеля 124 Н 18/20 в разрезе
где в данный момент времени происходит вспышка. На рис. V. 16
эта площадь заштрихована.
Выбор подобной жесткой площадки диктуется также и кон-
струкцией самого моноблока, в которой связь между соседпими
достаточно массивными участками осуществляется через сравни-
тельно тонкие стенки, а следовательно, и влияние отдельных
участков конструкции, т. е. вибропроводов, друг на друга сравни-
тельно мало. Подобное допущение справедливо в области высоких
частот, где конструкции возможно представлять совокупностью
несвязанных жестких площадок, на которые действуют возму-
щающие силы 14 ].
В Для рассматриваемого дизеля: \ — 2,83*10“ 2 м2; Zt =
I = 3,9-105 кг/с.
Импеданс нагрузки ZH в данном случае принимаем равным
импедансу сосредоточенной массы картера Л4к = 7И — 65 кг,
находящейся под принятой жесткой площадкой моноблока,
f Z„ = /со/Ип = j 1,135-10е кгс-см^-с.
С учетом того что Zfl = /соЛ7н, выражение (V.20) можно преоб-
разовать к виду
ZBx — /Zo
Zo sin gJ + Zn cos p/
ZQ cos pZ -p ZH sin р/
где I =- 0,27 m; sin p/ = 0,796; cos PZ = 0,606.
Тогда ZBX = —/5,9-10ь кгс-см"1 -с,
217
Внутреннее механическое сопротивление источника силы Z„
принимаем равным Z„ = juM» где 7Ии — масса головки моно-
блока над цилиндром, тогда ZH — /8,5-104 кгс-см’ 1»с.
Подставляя вычисленные значения параметров, для ампли-
туды скорости на лапе дизеля получим:
у- 3,34 -10”8 + /0,86- IO" 3; |£| = 3,44 ‘ 10~3 м/с.
Амплитудное значение ускорения
у = шу = 59,8 м/с2.
Среднеквадратичный расчетный уровень ускорения равен
» •
Lp = 20Ig^-—3= 103 дБ.
/7о
Экспериментальное значение соответствующей частотной со-
ставляющей равно 102 дБ. Некоторое превышение расчетного
уровня ускорения над экспериментальным можно объяснить
тем, что в соседние участки, принятые в расчете не связанными
друг с другом, происходит распространение колебательной энер-
гии, т. е. происходит ее утечка в прилегающие вибропроводы.
Полученное совпадение расчетных и экспериментальных уров-
ней вибрации показало правомерность применения предложенной
динамической модели для определения уровней вибрации от газо-
динамических колебаний давления, возникающих при сгорании
топлива.
Проанализируем возможности снижения высокочастотной виб-
рации от действия давления газов. Из выражения видно (V.25),
что колебательная скорость па лапе двигателя прямо пропор-
циональна величине возмущающей силы. Добиться значительного
снижения газодинамических колебаний давления для быстро-
ходного двигателя за счет более правильной организации рабочего
процесса в цилиндре затруднительно.Таким образом, необходимо
увеличивать знаменатель выражения (V.25).
Этого можно достигнуть изменением Zc, ZH, Z( и в некоторой
степени величины I — длины моноблока.
8. МЕТОДЫ СНИЖЕНИЯ ВИБРАЦИИ ДВИГАТЕЛЕЙ
Двигатель на упругих опорах, представляющий собой слож-
ную механическую сйстему, можно рассматривать как состоящий
из трех частей: источника вибрации, путей распространения виб-
рации и фундаментной рамы. На рис. V.1- схематично показаны
эти части. Все части колебательной системы описываются урав-
нениями, не зависящими от других частей. Такое же деление
производится при анализе электрических цепей, поэтому исполь-
зуем механические аналоги этих электрических цепей.
218
Следует подчеркнуть, что электрические аналоги не являются
необходимыми, но при решении задачи снижения вибрации дви-
гателей оказываются очень полезными и удобными.
Задачу снижения низкочастотной и звуковой вибрации дви-
гателя рассмотрим в общих чертах. Сначала исследуем источники
вибрации и мероприятия по уменьшению возмущающих сил
в источнике, а затем исследуем пути распространения вибрации
от источника.
При проведении анализа воспользуемся понятиями механиче-
ского источника и параметров четырехполюсника. Пусть меха-
нический источник иа выходе создает силу F и скорость V, рас-
пространяющиеся по системе (двигателю), представляющей собой
Рис. V.17. Схематичное представление дизеля тремя частями
четырехполюсник, сила и скорость которого при входе связаны
с силой и скоростью на выходе двумя линейными уравнениями.
Сила и скорость на выходе четырехполюсника передаются на
фундамент, который характеризуется ого механическим импедан-
сом 7ф. Источник вибрации в зависимости от силового или кине-
матического возбуждения описывается любым из двух уравнений:
(V.26)
где Ги — сила, действующая на неподвижную выходную часть
источника; 1’и — свободная скорость источника, равная ско-
рости на выходе, которую развивает незакрепленный источник;
Z„ — механический импеданс источника.
L Эти уравнения являются механическими аналогами электри-
ческих контуров с генераторами тока или напряжения. Работа же
четырехполюсника в процессе колебаний или соотношение между
входом и выходом определяется уравнениями:
(V.27)
I * Iх 1 — 2 -4- ct22V 2»
где aik — параметры четырехполюсника:
Л
а11 == г • «12 = ~ТГ"
(V.28)
219
В точке 2 четырехполюсник присоединяется к фундаменту. В этой
точке импеданс фундамента равен
= (V.29)
г 2
Уравнения (V.26—V.29) решаются относительно сил и ско-
ростей Flt V'lt F2, 1/2, действующих в точках 1 и 2 (рис. V.17).
Анализ этих уравнений позволяет определить эффективность
различных мероприятий по уменьшению интенсивности вибрации.
Силы и скорости описываются уравнениями:
Рис. V.18. Эквивалентная схема
с источником силы
Z) — сси/ф 1 ai2 а21^ф^и 4“ а22^и- (V-34)
Аналогичные уравнения получаются, если вместо источника
силы используется источник скорости. Для анализа не имеет
значения форма уравнения, характеризующая источник. Выбран-
ная форма уравнения имеет существенное значение, если тре-
буется экспериментально измерить параметры источника Ги
или VB. Например, с помощью вибродатчика можно легко изме-
рить свободную скорость источника вибрации. Замерить же
силу источника не всегда возможно. Поэтому форму уравнения,
характеризующего источник вибрации, следует выбирать с учетом
обеспечения простоты измерения его параметров.
На рис. V/18 приведена эквивалентная система с источником
силы. Скорость на выходе источника равна
^ = ^4^-- (V.35)
Определяем возмущающие усилия, действующие в нем. Для
низкочастотной вибрации лапу двигателя будем рассматривать
как выходную точку источника (двигателя). Так как источник
вибрации полностью характеризуется двумя параметрами Ри,
то от изменения этих параметров зависит уменьшение вибра-
ции источника.
Из формулы (V.35) видно, что вибрация (по скорости) прямо
пропорциональна Следовательно, уменьшая FH, уменьшаем
вибрацию двигателя.
Уменьшения вибрации двигателей можно добиться путем
изменения импедансов источника ZH и фундамента 2ф.
220
Из выражения (V.35) видно, что вибрация фундамента, не-
посредственно соединенного с источником, пропорциональна ве-
личине у , у .
Ли ~г хф
Следовательно, уменьшение колебательной скорости (вибра-
ции) фундамента зависит от увеличения механического импеданса
источника и фундамента.
I Так, например, дизели с большим удельным весом имеют
низкие уровни вибрации за счет высокого значения механического
импеданса двигателя (источника).
к Изменить механический импеданс двигателя можно как уве-
| лнчением веса двигателя, так и введением динамического гаси-
теля колебаний.
I Теория динамического гасителя колебаний достаточно под-
робно изложена в технической литературе 1146].
В' Так как колебательная энергия источника (двигателя) обус-
ловливается большим числом возмущающих усилий, то при
анализе колебаний двигателя методами импедансов применяем
принцип суперпозиции (наложения), а законы Кирхгофа позво-
|ляют записать уравнения для определения скоростей на болтах
двигателя.
Г Весьма перспективным направлением снижения виброактив-
ности является уменьшение потока активной колебательной мощ-
ности на лапах двигателя. Задавшись картиной распределения
скоростей в поперечных сечениях системы двигатель—аморти-
зирующее устройство—фундаментная рама, можно найти ннер-
ционно-жесткостные и диссипативные характеристики отдельных
элементов и узлов двигателя, обеспечивающие минимум потока
активной колебательной мощности на лапах двигателя на любой
частоте.
V Составим выражение активной колебательной мощности на
лапах двигателя как функции скоростей отдельных элементов и
узлов двигателя и фундаментной рамы и их импедансов, для чего
I отдельные элементы системы и звенья будем полагать линейными
четырехполюсниками 117, 28], у которых поток колебательной
энергии на выходе выражается через скорость и импеданс (см.
рис, V.9):
г, = j-Не =
2" Йо + у /4-1Й1 ’. oV’/o);
«7/+1=lRe(F/+1y;+i.o) =
(V.36)
2 /+1
Ь У /b/ok/H,O^
221
где F, Z, V* — комплексные и комплексно-сопряженные ампли-
туды силы, импеданса и скорости соответст венно в сечениях /
и / f- 1. Из разности IV, — + j можно найти потерю энергии
ДЧ7 внутри звена.
Приведенные формулы позволяют составит ь выражение по-
тери колебательной энергии внутри двигателя, представленного
совокупностью линейных четырехполюсников. Потери колеба-
тельной энергии внутри двигатетя выражаются линейной функ-
цией относительно импедансов его отдельных двигателей и узлов.
На эти величины из конструктивных соображений накладываются
ограничения.
Таким образом, задача сводится к задаче линейного про-
граммирования: отыскание максимума линейной формы AIY
при некоторых ограничениях.
В результате решения задачи одним из методов линейного
программирования [55] можно определить значения импедансов
отдельных элементов и узлов двигателя, при которых обеспечи-
вается максимум потерь колебательной энергии внутри двига-
теля при заданных возмущающих силах и скорости.
Крутильные колебания коленчатою вала, могущие быть при-
чиной повышенной виброактивности двигателей в ограниченном,
а не во всем диапазоне изменения оборотов, достаточно полно
изложены в тредах ппоф. В Н. Терских и П. А. Истомина 163,
145].
Иногда исследование эффективности снижения колебаний
двигателей удобно заменить исследованием электрической системы,
которая описывается тождественным дифференциальны и урав-
нением.
Эта замена основывается на том, что законы движения Ньютона
для массы строго аналогичны по форме законам Кирхгофа для
электрических цепей.
Вопросы электромоделирования механических колебаний ма-
шин рассматриваются в работах [64].
Эффективным методом снижения вибрации двигателей является
изготовление малонагружеппых деталей и узлов из материалов
с высоким внутренним трением. К этим материалам относятся
сплавы мет а.тлов
Относительно высокое внутреннее трение имеют чу Гуны, сплавы
магния и титана и сплавы на основе марганца с 15—20% меди.
Однако в связи с тем, что конструктивные материалы, применяе-
мые в дизелестроении в настоящее время, имеют малое внутрен-
нее трение, а по условиям прочности основные детали и узлы
не могут быть изготовлены из материалов с высоким внутрен
ним грением, одним из средств уменьшения вибрации, распро-
страняющейся по конструкции двигателя, следует считать нане
сение вибродемпфирующего покрытия, характеризуемого дост а
точно высоким внутренним трен нем. В этом случае энергия меха
нических колебаний, передающихся демпфирующему покрытию
222
за счет его внутреннего трения, необратимо переходит в тепло.
В отличие от виброизоляции целью применения демпфирующих
покрытий является не предупреждение распространения вибрации
по конструкции двигателя, а ее ослабление как на пути распро-
странения, так и в месте непосредственного излучения.
Детали, облицованные покрытием, при достаточно жестком
соединении будут вести себя в отношении возбу ждения, как детали
из материала с более высоким внутренним трением. Демпфиру-
ющие покрытия ослабляют колебания в любом направлении.
При изгибных колебаниях детали покрытие испытывает деформа-
цию сжатия или растяжения в направлении, параллельном по-
верхности детали.
Именно на изгибине колебания покрытие оказывает наиболь-
шее влияние.
Некоторые виды волн, распространяясь по конструкциям, не
передают движения поверхностному слою в направлении, тре-
буемом для эффективного рассеяния в демпфирующем покрытии.
Эффективность демпфирующих покрытий определяется не
только свойствами материала покрытия, по и величиной трения
в наружных поверхностях двигателя и покрытия.
В результате действия динамических нагрузок в двигателях
возникает широкий спектр вынуждающих сил. Отдельные детали
двигателя вибрируют на собственных частотах. При распростра-
нении вибрации по корпусу двигателя могут наблюдаться такие
случаи, когда собственные частоты отдельных деталей оказы-
ваются близкими или равными частотам гармонических состав-
ляющих вынуждающих сил. При этом амплитуды вибрации зна-
чительно увеличиваются.
Следует иметь в виду, что двигатель, представляющий собой
сложную колебательную систему, состоящую из множества от-
дельных деталей, имеет целый спектр собственных частот колеба-
ний, что еще более увеличивает вероятность возникновения резо-
нансных колебаний.
В случае, если энергия, сообщаемая при импульсных возбуж-
дениях конструкции двигателей, находится в фазе с вибрацией,
происходящей па собственной частоте, то возникает условие
псевдорезопанса. Эффективность демпфирования по снижению
среднего уровня вибрации схематично показана на рис. V.19.
Теория изгибных колебаний показывает, что оптимальные
Материалы покрытий должны иметь как высокий коэффициент
потерь, так и достаточно высокую жесткость, так как коэффи-
циент демпфирования покрытия зависит от произведения коэф-
фициента потерь и модуля Юнга.
Коэффициент потерь детали, облицованной покрытием, при-
ближенно можно определи гь по формуле
I (V.37)
223
где £lpIlV7I — модуль Юнга, плотность и вес материала детали;
Е.2, р2, 1172, 1]2—модуль Юнга, плотность, вес и коэффициент по
терь материала демпфирующего покрытия.
При увеличении толщины демпфирующего покрытия эффектив-
ность демпфирования возрастает прямо пропорционально тол-
щине, что может быть объяснено увеличением расстояния от ней-
трального слоя до наружной поверхности покрытия и возраста-
нием напряжения в наружном слое покрытия. Вибропоглощающие
свойства материалов, используемых в качестве демпфирующих
Рис. V. 19. Снижение среднего уровня вибрации за счет дем-
пфирования
покрытий, в значительной степени зависят от температуры.
С увеличением температуры эффективность демпфирующих ма-
териалов уменьшается, так как при этом уменьшается величина
модуля упругости Е. Кроме того, эффективность демпфирующих
покрытий в значительной степени зависит от качества соединения
материала покрытия с металлом.
Известно, что демпфирующие покрытия наиболее эффективны
при снижении вибрации пластин, в спектре которых наблю
даются колебания па собственных частотах. Но спектры вибрации
двигателя внутреннего сгорания являются более сложными,
поэтому требуется установить более общие представления о коли-
чественном эффекте демпфирования в том случае, когда в спектре
не наблюдается ярко выраженных дискретных частот, а спектр
является сплошным.
Практический интерес представляет рассмотрение общего обо-
снования для распространения понятия сосредоточенного пара-
метра демпфирования при облицовке систем с распределенными
параметрами. При рассмотрении некоторых общих свойств коле-
224
бательных систем с распределенными параметрами можно пока-
зать, что реакции систем, колеблющихся с соответствующими
собственными формами, регулируются демпфированием так же,
как в системах с сосредоточенными параметрами 1138].
Вынужденные колебания систем с распределенными пара-
метрами описываются дифференциальным уравнением
т1 + Е'Ц = Е0^, (V.38)
где F,,— амплитуда внешней гармонической силы, отнесенной
к единице площади; т, Е' — равномерно распределенная масса
и упругость материала соответственно (для продольных колеба-
ний Е' — динамический модуль упругости, для изгибных коле
баний — изгибная жесткость); L — дифференциальный оператор,
характеризующий упругую деформацию материала; |— ампли-
туда смещения элементарной площадки по перпендикуляру
к излучающей поверхности; со — круговая частота возбуждающей
силы.
Демпфирование можно учесть введением комплексного дина-
мического модуля упругости
£* = £’(14-/11),
где 1] — коэффициент внутренних потерь материала.
Коэффициент потерь не зависит от координат, т. е. предпола-
гается, что демпфирование равномерно распределено по всему
материалу, особенно, если размеры пластиды больше длины
волпы колебательного движения.
Общее решение дифференциального уравнения (V.38) может
быть получено как сумма собственных форм колебаний при соот-
ветствующих граничных условиях,
со
Подставляя решение в виде 5„ = У %>пе'ы‘ в дифференциальное
П—1
уравнение, получим
- 2 ln Е £' (1 + n) L& е'“' = £oe'“'. (V.39)
1 л 1 n=l J
Можно свести ряд к единственному члену, сокращая множи-
тель е'а( в правой и левой частях уравнения, умножая обе части
уравнения на £т и производя интегрирование по всей системе
и используя ортогональность собственных функций для опреде-
ления амплитуды каждой формы колебаний, получим:
т [— 4 (14- /и) <£]) S ds — J /Дп ds, (V.40)
где [ 5л ds — (5n) — квадрат усредненной в пространстве абсо-
лютной величины смещения собственных колебаний n-го порядка
15 н. в. Григорьев 225
по площади интегрирования 5; ю„ — круговая частота собствен-
ной формы; F — возбуждающая сила, отнесенная к единице
площади.
Таким образом, среднеквадратичная амплитуда каждой соб-
ственной формы колебаний определяется характером распределе-
ния прилагаемой силы.
Этим уравнением определяются амплитуды собственных функ-
ций; его можно представить в более удобном виде, разделив на
значение собственной функции (Л) в точках измерения хл,
zA. Тогда уравнение принимает вид
Л«L-<»• 4-(1 + /Ч4](Л) = J(V41)
где М — rnS — полная масса системы.
Множители в левой части и в правой части Е„/Еп (Л)
зависят только от координаты точки измерения и собственных
функций системы.
Геометрический параметр формы колебания (Л) обо-
значим qn. Это отношение пе зависит от распределения нагрузки
и выражает только соответствующую усредненную реакцию
формы колебания по отношению к амплитуде реакции этой формы
колебания, которая имеет место в точке измерения. Обозначим
Мп qnM. Определим амплитуду возбуждающей силы, дей-
ствующей на систему, как F0 = j F (х, у) ds.
s
Получим постоянные возбуждения для каждой из собственных
форм в виде:
J &П
S
Мп & (.4) [- со2 4- (1 + /Т])«’,] = Кп (Л) Fo. (V.42)
Постоянную К„ (Л) можно интерпретировать как часть полной
силы F0, необходимой для возбуждения п формы собственных
колебаний системы, и называть постоянной возбуждения. Искус-
ственный прием, состоящий в том, что коэффициент Фурье для
силы представляют в виде произведения полной силы на постоян-
ную возбуждения, позволяет ввести постоянные возбуждения
в параметры форм собственных колебаний системы.
Разделив уравнение на Кп (Л) и заменяя M,JKn (Л) на М„ (Л),
введем эту постоянную в параметры форм собственных колебаний
системы
/Илт,(Л)[ -иГ I (1 /П)^] = Гп. (V.43)
226
Введение этого параметра преобразует уравнение к простой
форме, которая ясно показывает зависимость реакции формы
колебания от демпфирования и частоты возбуждения.
Это выражение является идентичным по форме с уравнением
вынужденных колебаний простого осциллятора. Идентификация
[ между реакцией формы колебания и реакцией системы со сосредо-
j точенными параметрами позволяет рассматривать параметр формы
колебания Мп (Л) как приведенную массу системы и определять
приведенную жесткость и приведенное демпфирование через
этот параметр. Соответствуйте эквивалентные сосредоточенные
параметры п формы собственных колебаний определяются как:
Кц (Л) = Юп/И„(Л);
М = (тг) 1А"
[ тогда уравнение (V.43) примет вид
(Л) - /ш/?„ (Л) 4- Кп (Л)] (Л) = Fo. (V.44
Уравнение (V.44) по форме не отличается от уравнения установив-
I* шейся реакции системы с одной степенью свободы.
Выполненное преобразование, которое сводит реакцию любой
собственной формы колебания к реакции эквивалентной системы
со сосредоточенными параметрами, является удобным методом
в обшей идеализации систем с распределенными параметрами.
' Эта идеализация устанавливает, что амплитуда смешения в любой
точке Л сложной колебательной системы, гармонически возбуж-
даемой на данной частоте, может быть получена как сумма ампли-
I туд смещений соответствующих собственных форм колебаний
системы £„ (Л) и что действие каждой собственной формы при-
нимает форму эквивалентной системы со сосредоточенными пара-
метрами с резонансной частотой <оп.
Таким образом, возбуждение сложной колебательной системы
на одной из ее собственных частот приводит к амплиту де смещения
в этой точке, которая включает реакции одной резонансной формы
колебания и бесконечного множества нерезопансных форм коле-
баний, а возбуждение системы между собственными частотами
приводит к амплитуде смещения, которая состоит из бесконечного
множества нерезонансных форм колебаний.
Амплитуда смещения в точке Л определяется суммой реакций
форм колебаний
ъ (4) = И) = Fo S ~«SA1„(A)T jwft.4- Кп(Л)' (V,43>
П-1 п— 1
Это выражение позволяет распространить теорию колебаний
систем со сосредоточенными параметрами на колебания систем
I с распределенными параметрами, в частности, оно обосновывает
15* 227
Применение соотношений демпфирования систем со сосредоточен-
ными параметрами при снижении резонансных колебаний за счет
демпфирования, а также может выразить колебания упругих
распределенных систем в случае, когда резонанс низшей (основ-
ной) формы колебаний достаточно изолирован от соседних соб-
ственных частот, т. е. реакции всех нерезонансных форм являются
пренебрежимо малыми.
Кроме того, это выражение позволяет сделать вывод о коли-
чественном снижении за счет демпфирования реакций форм коле-
баний высшего порядка. Иными словами, понятие эффективности
демпфирования может быть распространено на весь спектр вибра-
ции сложпых колебательных систем.
Для практических целей эффекты демпфирования удобно
выражать зависимостью усредненной скорости вибрации по по-
верхности распределенной системы
< Ё > - со Fo (Л) + + Кп (Д)1а ' (V’46)
П=1
Поскольку интересно знать зависимость демпфирования от
действительной средней скорости, то суммирование производится
в отдельных интересующих исследователя частотных диапазонах
При этом следует иметь в виду, что при увеличении частоты ширина
полосы резонансных форм колебаний становится равной интер-
валу частот или большей, чем интервал частот, расположенных
между последовательными формами колебаний. Следовательно,
в спектре реакции системы с определенными граничными усло-
виями существует некоторая критическая частота, ниже которой
отдельные реакции форм будут отчетливо различаться и выше
которой реакции форм сливаются в плавную кривую. Эта частота
определяется как еп = Люп, где еп— интервал частот, распо-
ложенный между последовательными формами; До»„—ширина
полосы п формы колебания на уровне половинной мощности.
Так как ширина полосы формы для достаточно малого демпфи-
рования (т)8 1) равна то критическая частота опреде-
ляется по формуле (чХр —Для всех частот возбуждения
ниже этой.1 критической частоты квадрат усредненной скорости
сложной Колеблющейся системы будет определяться реакциями
нескольких форм без заметного влияния этих форм друг на друга.
Это позволяет осуществить полную идентификацию теории коле-
баний систем со сосредоточенными и распределенными параметрами
с измеряемыми характеристиками изолированных форм низших
порядков, которые лежат достаточно низко относительно крити-
ческой частоты системы. Следовательно, резонансы пластин низ-
шего порядка непосредственно регулируются демпфированием.
Согласно выражению (V.44), распределенное сопротивление
формы колебания Rn (Д) связано с коэффициентом потерь и
228
эквивалентно вязкому демпфированию. Однако выше критической
частоты использование аналогии с системами со сосредоточенными
параметрами позволяет определить действительную реакцию си-
стемы только посредством суперпозиции соответствующих форм
колебаний.
Измерения в высокочастотном диапазоне не показывают ди-
скретных резонансных реакций, ширина полосы которых могла
бы быть измерена, тем не менее и в этом случае колебательная
скорость регулируется демпфированием. В этом случае ни один
из членов суммы уравнения (V.45) не превалирует и дискретный
процесс суммирования заменяется интегрированием. При доста-
Рис. V.20 Спектры вибрации дизеля 12ЧН 18/20, облицо-
ванного «Антивибритом»
точно малом демпфировании интегрирование производится точно
и дает хорошее приближение для квадрата усредненной скорости
в зависимости от демпфирования сложной системы в высокоча-
стотном диапазоне 1172]
n<)nF0
2toAf2e,1i] *
(V.47)
Из формулы видно, что высокочастотная усредненная коле
бательная скорость сложной системы обратно пропорциональна
корню квадратному из коэффициента демпфирования. Если
амплитуды дискретных резонансных низкочастотных вибраций
при увеличении демпфирования в два раза уменьшаются на
6 дБ, то в сплошном спектре амплитуда высокочастотной вибра-
ций уменьшается на 3 дБ.
В настоящее время наиболее эффективным вибропоглошающим
покрытием является мастика «Антивибрит-3». обладающая боль-
шой вибропрочностью, масло-, бензо- и водостойкостью, с коэф-
фициентом потерь I] - 0.44, модулем потерь £2 — ЗЮ4 кге-см"2,
Р2 = 1,57 г-см-3 и диапазоном рабочих температур 20—100'С.
На рис. V.20 представлены спектры вибрации серийного дизеля
12ЧН 18/20 и двигателя, облицованного мастикой «Антивибрит-З».
Из рис. V.20 видно, что демпфирующее покрытие обеспечивает
эффективное снижение вибрации в высокочастотной области
229
Спектра, а Также отдельных составляющих в среднечастотной
части спектра вибрации, обусловленных, по-видимому, колеба-
ниями отдельных деталей двигателя на собственных частотах 1271.
9 ОСОБЕННОСТИ ВИБРОИЗОЛЯЦИИ ДВИГАТЕЛЕЙ
Предполагая, что деформации всех амортизаторов, с помощью
которых двигатель кренится к основанию, происходят по гармо-
ническому закону синхронно и синфазно, можно рассматривать
совокупность амортизаторов как механический четырехполюсник,
параметры которого (i, k — 1, 2) являются комплексными
функциями от частоты ы передаваемой вибрации, устанавливаем
связь между амплитудами сил и скоростей иа входе и на выходе
четырехполюсника:
^Ф = «1Л. 1
+ 1 ' ’ '
Здесь Уф и V„ — амплитуды скоростей вибрации в точках
крепления амортизаторов к основанию (фундаменту) и к двига-
телю; Рф и F„ — амплитуды усилий, действующих на аморти-
заторы в тех же точках.
При оценке эффективности виброизоляции необходимо учи-
тывать свойства источника вибрации и основания как упруго-
диссипативных систем. Эти свойства характеризуются импедан-
сами источника Z„ основания (фундамента) Хф. Уменьшение
амплитуды гармонической силы, действующей на основание, по
сравнению со случаем жесткого крепления определяется следу-
ющим соотношением:
I on । I аи^Ф “is ' -ф a22ZH [ . .
L = 2()lg' ---------------------|, (V.49)
где L — уменьшение амплитуды, дБ.
Эффективность виброизоляцпи может характеризоваться также
отношением работ, совершаемых силами, приложенными к источ-
нику вибрации и основанию. Это отношение определяет долю
колебательной энергии, передаваемой амортизаторами. Для него
может быть получена следующая зависимость:
' “11^ф “12 4" а21^»^Ф Г122^И
ф 2ф
= 2£. (V.50)
£э = 40 1g
Для простейшего амортизирующего крепления, состоящего из
упругого элемента с жесткостью k и диссипативного элемента
с коэффициентом сопротивления с, формула (V.50) принимает
такой вид:
L, = 24 = 40lg|l I- . М—T/"5*-k (V.51)
э ь , k ф кос ’и ф- /ф
230
Из приведенных формул видно, что эффективность виброизо-
ляцип оказывается различной на различных частотах. В связи
с широким спектром возмущающих сил и частот свободных коле-
баний возникает необходимость обеспечить эффективность на всех
частотах в широком диапазоне ы, < со фы.,, охватывающем
одну или несколько резонансных частот системы. Это требование
сводится к условию
I а12 + а2177ф Ч- O22ZU I /V ПО
I I < 1 • 'v -b2’
Если пренебречь инерционными свойствами амортизаторов и их
собственной диссипацией, то это условие приводится к такому
виду [77, 154]:
6<Кр(М|. (V.53
где k — жесткость системы амортизации; Хр — резонансная ча-
стота системы, лежащая в выбранном диапазоне;
Г *ч»= .. Re2np = V ( z„ -у -54)
Это условие должно быть положено в основу при выборе жесткости
амортизаторов k. При этом возникает необходимость в определе-
нии резонансных частот систем Ар и значения vnp на этих частотах.
Для определения А и v, р применяется экспериментальный способ.
С этой целью экспериментально определяются динамические
жесткости двигателя dfl (ы) и фундамента dB (ю).
•Приведенная динамическая жесткость рассматриваемой си-
стемы определяется по формуле
d (Ю)=—(V.55)
,,р’ > dA((a) + dB(w) • ’ ’
Выделяя в dnp (со) вещественною и мнимую части, получим
4Р (®) - Рпр («) + »ЧР (f*>) (V.56)
Строятся графики функций р|р(ю) и т> (со) Далее на графике
Игр (<") проводится прямая и„р (со —k. Абсциссы точек пере-
сечения этой прямой с кривой рлр (со) дают значения Хр. Затем
по графику vnp (со) проверяется выполнение условия (V.53).
Если оно не выполняется, то выбирается меныпее значение k
и для пего повторяются построения. Как правило, в реальных
механических системах величина vnp (Ар) оказывается наимень-
шей для самой низкой из резонансных частот. Поэтому можно
ограничиваться проверкой условия (V.53) только па этой частоте.
Рассмотрим в качестве примера определение эффективное! и
системы амортизации дизеля 12ЧП 18 20, установленного
на восемь амортизаторов типа АКСС-400И. Экспериментально
были определены величины динамической жесткости дизеля
23)
232
и фундаментной рамы. Вычислена величина приведенной динами-
ческой жесткости системы, затем построены графики зависимостей
Pop (®) и vnP (®) (Рис- V.21).
Суммарная динамическая жесткость восьми амортизаторов
типа АКСС400И равна k = 41,55-103 кге см. На графике р,П) (со)
’ (рис. V.21) проведена прямая рпг =—41,55« 103. Резонансные
частоты системы таковы: 1 = 929 1/с; = 1727 1/с; %3 —
* - = 12 874 1/с; = 13 816 1/с; = 25 120 17с; 1б = 57 776 1/с;
= 62 172 1/с.
I По графику V|P (со) (рис. 21) проверено выполнение условия
’ (5.53) для найденных значений Хр. В данном случае условие (V.53)
выполняется для всех семи значений Хр. Таким образом, аморти-
зация двигателя 12ЧН 18/20, установленного на восьми аморти-
заторах типа АКСС-400И; оказывается эффективной на всех
резонансных частотах системы [77, 154].
10. ТЕОРЕТИЧЕСКОЕ ИССЛЕДОВАНИЕ ЭФФЕКТИВНОСТИ
СИСТЕМЫ АМОРТИЗАЦИИ ДВИГАТЕЛЕЙ
При проектировании дизелей и их амортизирующих устройств
возникает необходимость учета влияния инерциоппо-жесткостны к
и диссипативных свойств отдельных элементов дизеля и фунда-
F(t)
V
ментной рамы на величину коэффи-
k циента эффективности системы аморти-
зации. В данном параграфе даются ус-
ловия зависимости качества виброизо-
{ лирующей амортизации от динамиче-
ских свойств дизеля и его отдельных
• элементов, фундаментной рамы и пара-
метров амортизирующего устройства,
г Приведенная динамическая жесткость
I системы и ее резонансные частоты мо-
гут быть определены теоретически. Это
> делается на примере дизеля 12ЧН 18/20.
К Для решения задачи используется
модель системы (рис. V.22), где —
масса картера, коленчатого вала и ша-
тунно-поршневы к групп; т2, т3—мас-
сы моноблока и фундаментной рамы со- •
ответственно; с2» Сз — коэффициенты
демпфирования амортизаторов, анкер-
ных шпилек, фундаментной рамы;
^2» ^з—коэффициенты жесткости амор-
тизаторов, анкерных шпилек, фундаментной рамы. За обобщен-
I ные координаты приняты абсолютные перемещения масс х
К (/ 1, 2, 3) от положения статического равновесия. Движение
системы дизель — фундаментная рама в силу ее линейности
ZZZZZZ^ZZZzZZZZZz
Рис. V-22. Динамическая мо-
дель системы
233
может быть описано системой линейных дифференциальных урав-
нений:
fHjp2 + С2р +
------^2р----
О
—с^р — k.2
m2fr + СгР + ^2
О
Fosin <i>t
—Fosln ы/
О
т3р2 -т с3р + k3
(V.57)
Динамические свойства системы дизель—фундаментная рама
в точке крепления амортизирующего устройства к дизелю харак-
теризуются скалярной функцией
Е (р) = -д- (/7ijp2 4- с# + k.2), (V .58)
где
Д — mLm.2m3p* (mxm2ka mlmJk2 + т,гп3к2 4- mxc2c3 4-
+ m>c.2c3) p* (myktks 4- m2k2ka) p2 4- (пцт^ 4- tnjm3c2 4-
4- m.2m^c.2) Pb + + m2c2k3 4- m.2c3k2 ) ps.
Подставляя p — ico и отделяя вещественную и мнимую части,
получаем:
Нпр (to) = Re E~l (ito) =
[— -f- (тхт2к3 mxmak2 -|- m2m9k2 4- тхС£3 + m^2c3) —
— 4- m2kjt3) co2] (/?2 — тх(02)____________
(k2 — m^)2 — (c2to)-
[(гг^гПоСц mjnac2) ю5 -f-
-|- 4~ fa)3] c2co - ^yj
(AT -^fa)2)--h(c2(D)2 ’ * ’ 7
v„p (w) = Im £-1 (i<0) =
[—(Zf2j/713A3 “1“ “I** fTl/n3^2 П ^1C2C3 “I- rtt2^2Cs)
--(/HjA2/^34* ^2^’2^з) Ц2! C2(0______________ 4.
-F (c2o>)2
[(т^оСз + mymsc.2 + m2w3c2) tn6 +
I if 3^2 И- ШоС^^З T~ (feg • ffljfa)-) fif))
(As — тг to2)2 + (^co)2
Напомним, что условие эффективности системы виброизолиру-
ющей амортизации (V.52) получено в предположении малости
диссипации. С учетом (V 60) запишем его в виде
< Vnp (Л„) 4- 2vnp (М сА„, (V.61)
где X (п = 0. 1, 2)— резонансные частоты системы; они опре-
деляются из уравнения
Нир (М I- *1 = 0, (V .62)
234
причем рпр (Хп) получается при подстановке с2 == Сз — 0 в (V.59).
После преобразований имеем
(Л2)3 —
Я /п^з^ 4- m2m3k2
(I2)2
.&3 + tn2k2ks 4- /п1Л1
т^т.^пг^
__^1^2_
mj/n2ni3
(V.63)
Решения уравнения (V.63) выражаются с помощью круговых
функций [5]. Так, для одной из резонансных частот оно имеет
вид:
~Т
Зт1т2т3
(rfiLm2k3 4- 4- /п2т3£2)2
9 (т^тз)2
(т^&з 4- г?цт3А’2 4- m2ni3k2)3
27 (тлт2т3)3
X COS
— arccos
(mlni2k3 4" ftlirn3^2 + X
X (n^krfcz -j- 4- miA)
6 2mlm2m8
[tfljAgfcg 4~ 4“ "ll^l
3mLm2m3
(mtfn2k3 + mxni3k2 4- т2тдА2)3 ’^2
9 {mKm2m3V
fnYm2k3 4~ 4- m2m3k2
/?z1m2m3
Условие (V.61) должно выполняться на резонансных частотах
Кп (п = 0, 1, 2) всей системы. Подставляя найденные значения
в (V.61), получим условие эффективности амортизации. Нера-
венства (V.61) позволяют сделать заключение о способах дости-
жения эффективности амортизирующих устройств еще на стадии
проектирования как дизелей, так и этих устройств.
И. ИССЛЕДОВАНИЕ МЕХАНИЧЕСКИХ СОПРОТИВЛЕНИЙ
ДЕТАЛЕЙ И ^ЗЛОВ ДВИГАТЕЛЕЙ
Экспериментально определяемые уровни вибрации двигателей
не позволяют учитывать влияния их основных динамических
параметров на возникновение и передачу вибрации. Наиболее
полно динамические свойства конструкции характеризуются пол-
ным механическим сопротивлением (импедансом) Z, величина
которого может быть представлена в виде Z - ~ е/ф» где Г—
возмущающая сила; V—скорость колебательного движения;
<р — угол сдвига фазы между силой и скоростью.
Передача колебательной энергии от источников возмущения
к приемникам колебании, которыми в большинстве случаев
235
являются опорные поверхности конструкций, зависит не только
от возмущающих усилий, но и от динамических свойств кон-
струкции двигателя и фундамента.
Экспериментальное определение механического сопротивле-
ния сводится к измерению возмущающей силы, скорости коле-
баний и угла сдвига фаз между ними.
В общем случае уровни вибрации двигателя на спорах опре-
деляются как функции обобщенных усилий и механических
сопротивлений в болтовых соединениях. Усилия на лапах дви-
гателя определяются силами давления газов и инерции. Таким
образом, виброактивность двигателей определяется возмуща-
ющими усилиями, действующими в нем, механическими сопро-
тивлениями его и опорной конструкции, которые зависят от
механических сопротивлений их узлов.
Поэтому задача определения вибрации дизелей может быть
сведена к определению возмущающих усилий и переходных и
точечных механических сопротивлений.
Для определения механических сопротивлений узлы двига-
теля подвешивались па резиновых шнурах так, что частоты соб-
ственных колебаний узлов на подвесках составляли менее 10 Гц,
т. е. были значительно ниже частоты возбуждения.
Основным условием в процессе экспериментального опреде-
ления механических сопротивлений деталей и узлов двигателя
является требование приложения переменной возбуждающей
силы в том же месте и направлении, в каком приложена возму-
щающая сила в реальных условиях на работающем двигателе.
Механические сопротивления деталей и узлов двигателя опре-
делялись при помощи измерительного устройства, представлен-
ного на рис. V.23.
Основным элементом этого измерительного устройства является
импедансная головка. Задающий тракт состоит из звукового гене-
ратора /, электродинамического (пьезоэлектрического) вибра-
тора 2. В импедансной головке установлены датчик ускорения 9
и датчик переменной силы 10. Напряжения с обоих датчиков
усиливаются предварительными усилителями 3 и 5 и поступают
на измерительные усилители 4 и 6. С выхода каждого измери-
тельного усилителя напряжение поступает на фазометр 7 и катод-
ный осциллограф 8. Импедансная головка крепится к исследуе-
мой детали 11 при помощи резьбового соединения или клея.
На практике удобно измерять величины не скорости, а уско-
рения и фазовый угол между силой и ускорением.
Импеданс исследуемой детали может быть представлен в виде
__ -л , . Fo -а
— — е — ко/ис — ко..- е — йот
с Хо с’
где Гп — амплитуда силы; х0, х0—амплитуды колебательной
скорости и колебательного ускорения; 0, 0 — фазовые углы
соответственно между возбуждающей силой и скоростью колеба-
236
иий и между той же силой и ускорением, при колебаниях; ia>mr —
импеданс «массы связи» тс.
В тригонометрической форме выражения механического со-
противления имеют вид
(V.64)
Исследование механических сопротивлений двигателя в целом,
его отдельных деталей и узлов и фундаментной рамы было про-
ведено для дизеля 12ЧН 18^20 [153].
Исследования проводились в диапазоне частот 20—104 Гц.
На рис. V.21, а приведена схема размещения датчиков при иссле-
Рис. V 23. Блок-схема из-
мерительного устройства
довании импедансов моноблока. При действии возбуждающей
силы вдоль оси цилиндра замерялись входной и переходной
импедансы. В месте удара поршня при основной перекладке за-
мерялся входной импеданс моноблока. На рис. V. 24, б дана
схема размещения датчиков при исследовании импедансов ша-
туна. Импедансная головка размещалась в верхней головке
шатуна; по показаниям датчиков силы и ускорения в импеданс-
ной головке и на свободном конце шатуна определялись входной
и переходной импедансы.
На рис. 25 приведена схема размещения датчиков при исследо-
вании импедансов тракта поршень—шатун—коленчатый вал—
картер. При действии возмущающей силы вдоль оси цилиндра
измерялся переходной импеданс названного тракта от поршня
до опорной поверхности крепления двигателя к фундаменту.
Г На рис. V.26 приведены зависимости модуля, активной и
реактивной составляющих входного импенданса шатуна от час-
тоты. Анализ этих зависимостей показывает, что в области низких
частот от 30 до 400 Гц импенданс изменяется по линейному зако-
ну. Выше 400 1ц начинаются различные резонансные явления.
На рис. V 27, а приведен график зависимости модуля
входного импеданса моноблока при осевом его возбуждении.
237
рис. V.24. Схемы размещения датчиков при исследовании импедан-
сов: а — моноблока; б — шатуна
Рис. V.25. Схема разме-
щения датчиков при ис-
следовании импедансов
тракта поршень—шагун—
коленчатый вал—картер
23R
Рис. V.26. Зависимость модуля активной и реактивной составляющих импеданса
шатуна: а -— входного: б — переходного;
—-------модуль нмиедзпса;-------- активная составляющая; —X- — реактивная со-
стамляющаи
Рис. V.27. Графики импедансов: а — моноблока при осевом возбуждении; 6
моноблока при поперечном возбуждении; в — узла поршень - шатун -коленча
тый нал—картер
239
Рис. V28. Спектры импедансов: а — вещественная часть импеданса фун
12чН 18/20; в — мнимая часть импеданса дизеля типа 124 Н
240
6)
Дамеитной рамы; б — вещественная часть импеданса дизеля типа
& 20t г — мнимая часть импеданса фундаментной рамы
16 Н. В. Григорьев
241
Из графика видно, что в области низких частот импеданс изме-
няется по линейному закону и имеет характер массы, а в области
высоких частот— характер упругости. Следует отметить большое
количество резонансов в области высоких частот.
На рис. V.27, б показан график зависимости входного импе-
данса моноблока в месте удара поршня при его перекладке вбли-
зи верхней м. в. т. Возбуждающая переменная сила прикладыва-
лась перпендикулярно к оси цилиндровой втулки. |й|
На рис. V.27, в представлен график зависимости переходного
импеданса тракта поршень—шатун—коленчатый вал—картер.
График показывает, что характер зависимости импеданса от час-
тоты принципиально отличается от предыдущих. Так, например,
в диапазоне 1000—2000 Гц имеет место явно выраженный провал
импеданса, что в реальных условиях дает значительное увеличе-
ние уровня вибрации дизеля. В диапазоне 2000—10 000 Гц наблю-
дается существенное увеличение импеданса. Анализ полученных
результатов позволяет сделать вывод о том, что составляющие
в спектре вибрации на опорных лапах дизеля на частотах 2000—
10 000 Гц могут быть обусловлены распространением колебаний
по тракту моноблок—картер дизеля. Наличие в спектре вибра-
ции дизеля значительных составляющих в области 1000—2000 Гц
можно объяснить распространением составляющих колебаний
в тракте поршень—шатун—коленчатый вал—картер дизеля.
На рис. V.28 изображены графики зависимости вещественных
и мнимых частей импедансов дизеля 12ЧН 18/20 в целом и фун-
даментной рамы от частоты. Приведенный анализ является одним
из элементов акустической диагностики дизеля, позволяющей
ускорить определение причин, вызывающих повышенные, вибра-
ции дизеля в стендовых и эксплуатационных условиях.
Полученные в результате анализа данные могут быть исполь-
зованы при рациональном с точки зрения виброакустики кон-
струировании дизелей с применением обобщенных динамических
характеристик, а также в процессе доводки вновь создаваемых
дизелей.
При проектировании и опенке реально существующих систем
амортизации дизеля необходимо знать обобщенные динамические
характеристики (динамическую жесткость) дизеля в целом и
фундаментной рамы в точках крепления амортизирующего уст-
ройства к дизелю и фундаментной раме.
Экспериментальное определение динамических жесткостей
дизеля и фундаментной рамы проводилось с помощью этого же
измерительного устройства.
Величины динамической жесткости определялись по формуле
(V.65)
ГЛАВА VJ
ВИБРАЦИЯ И ШУМ электрических МАШИН
Проблема вибрации и шума электрических машин приобретает
все большее значение. Это обстоятельство связано как с непре-
рывным возрастанием скоростей и мощностей машин, так и с пос-
тоянным ужесточением требований к уровням вибрации и шума.
Если ранее проблема сводилась, в основном, к обеспечению дина-
мической прочности машин, для чего достаточно изучения колеба-
ний в низкочастотном диапазоне, то в настоящее время уровни
вибраций и шума регламентируются уже в широком диапазоне
частот (до 10 000 Гц).
L Естественно, что проектирование электрических машин,
удовлетворяющих указанным требованиям, представляет весьма
сложную задачу, многие аспекты которой остаются еще неясными.
Одпако конструктор располагает в настоящее время определенным
арсеналом методов, позволяющих еще при проектировании вы-
брать оптимальный вариант конструкции и предусмотреть соответ-
ствующие конструктивные меры на случай, если вибрации машины
превысят уровень требований.
В настоящее время существует обширная литература по коле-
баниям роторов и устранению этих колебаний. Поэтому в настоя-
щей главе приведены только элементарные сведения по этим воп-
росам, которые более полно изложены в гл. III.
I Основное внимание в главе уделяется источникам вибраций и
средствам уменьшения их интенсивности. Вопросы динамических
свойств конструкции изложены в разделах, связанных с соответ-
ств у ющи м и и сточ н и к а ми.
I. ОСНОВНЫЕ ПРИЧИНЫ ВИБРАЦИИ
Электрическая машина представляет сложное сочетание взаи-
мосвязанных колебательных систем с несколькими источниками
возмущающих усилий, основные из которых . представлены
в табл. VI. 1.
L Каждый из указанных источников имеет свой характерный
спектр вибрации.
В зависимости от типа, конструктивного исполнения и скорости
вращения электрических машин в спектре вибрации может преоб-
ладать тот пли иной источник.
16*
243
Таблица VI. 1
Классификация источников вибрации и шума электрических машин
и способов их снижения
Источники шума Причины возник иоиения Основные частоты возмущения, Гц Мероприятия по снижению
1 -II.... Механический Дебаланс рото ра 4 п 60 Тщательная ба- лансировка Упругие опоры и др.
Двойная жест- кость ротора 2 — 60 Фрезеровка до- полнительных па- зов Упругодемп- ферные опоры
Овальность цапф ротора 2-5- 60 Тщательная об- работка цапф ва- ла Упругие опоры
Подшипники качения п 2л 60 ’ 60 г У V-Do ₽/60’ 2 (’ "“D0,OSP/60’ (1 - ~ cos р) X \ D5 / z t п Х 2“ k 60 Применение подшипников скольжения Пружинный подпор Упругие под- шипниковые кап- сули Применение специальных ма- лоптумных под- шипников
Щетки kn . 1 60 Тщательное из- готовление рель- ефа коллектора и контактных ко- лец
Магнитный в машинах: ПОСТОЯН- НОГО тока Периодическое изменение маг- нитной проводи- мости воздуш-во- го зазора zn 60 Скос пазов яко- ря Эксцентричны»! воздушный зазор Ступенчатые полюса Магнитные клинья Упругая под- веска магнитной системы
244
Продолжение табл, VI. 1
Источники шума Причины возник* новемня Основные частоты возмущения. Гц Мероприятия по снижению
асинхронных Периодическое изменение маг- нитной проводи- мости воздуш- ного зазора «Г г» . А [± 2 X xd-S) ; t = l. 2. 3. . . Скос пазов ро- тора или статора Благоприятный выбор чисел па- зов статора и ро- тора Упругая под- веска магнитной системы
синхронных 2fck Упругая под- веска магнитной системы Скос пазов ста- тора
Аэродинами- р ческий Вентилятор zn во Применение во- дяного охлажде- ния Установка глу- шителей шума
Разрабатывая мероприятия по снижению вибрации, необхо-
димо прежде всего постараться снизить шум в каждом из источ-
ников его возмущения (табл. VI. 1).
2. МЕХАНИЧЕСКИЕ ИСТОЧНИКИ ВИБРАЦИИ И ШУМА
ЭЛЕКТРИЧЕСКИХ МАШИН
Неуравновешенность ротора
По степени неуравновешенности согласно ГОСТ 12327—66
{^электрические машины делятся на три класса: нулевой (машины
общепромышленного назначения), первый (машины с повышен-
ными требованиями к спокойствию хода) и второй (машины с
особо жесткими требованиями по уровню вибрации). Остаточная
неуравновешенность может появляться не только вследствие це-
лого ряда механических причин (дефекты конструкции, механи-
j ческой обработки, монтажа), но и вследствие неравномерности
нагрева и охлаждения ротора, причинами которой могут быть:
W* витковое замыкание в обмотке возбуждения:
неравномерная толщина пазовой изоляции обмотки ротора;
ИГ несимметричная циркуляция охлаждающей воды по парад-
А Лельным ветвям обмотки возбуждения из-за частичного перекры-
1тия отдельных каналов [109 ];
245
нарушение системы вентиляции в конструкциях роторов тур-
богенераторов с форсированным охлаждением обмотки водородом
ИЗ];
разъединение посадки железа якоря па вал в крупных быстро-
ходных машинах постоянного тока.
Уменьшение вибрации, вызываемой неуравновешенностью ро-
тора, может быть достигнуто за счет уменьшения остаточной
неуравновешенности, а также с помощью специальных конструк-
тивных мероприятий (см. гл. III.)
Неодинаковые главные моменты инерции
поперечного сечения ротора
У роторов двухполюсных турбогенераторов поперечное сече-
ние обладает различными значениями главных моментов инерции
из-за больших зубцов в пазовой зоне бочки ротора. Это приводит
к вибрациям двойной оборотной частоты. Иногда возникают повы-
шенные колебания двойной частоты консольных участков роторов
турбогенераторов. Двоякая жесткость консоли может возникнуть
из-за несимметрип токоподвода к контактным кольцам или двух
пазов для размещения водопроводов к катушкам обмотки.
Средствами борьбы с этими вибрациями являются.
1. Выравнивание жесткости бочки ротора. Для этого выпол-
няют в больших зубцах бочки ротора ряд прорезей или дополни-
тельные пазы.
2. Применение упругодемпферных подшипников.
Вибрации двойной оборотной частоты могут возникнуть и
из-за овальности цапф ротора.
Подшипники качения
Подшипники качения являются активными источниками виб-
раций в широком диапазоне частот, в основном в диапазоне
50—3000 Гц.
Уровень вибраций, обусловленных подшипниками качения,
определяется их конструкцией, размерами, классом точности,
скоростью врашения ротора, нагрузкой, а также конструкцией
и точностью изготовления подшипниковых узлов машины. Мно-
гообразие факторов, влияющих иа уровень вибраций, а также то
обстоятельство, что электромашиностроительные предприятия
подшипников качения не изготавливают, делают необходимым их
рассмотрение с позиции конструктора машин.
Подшипниковая промышленность разработала специальные
малошумныс подшипники с регламентированным уровнем виб-
рации ТУ 4477-Э—68, которые в соответствии с ГОСТ 520—56
устанавливают дополнительные технические требования по огра-
ничению уровней вибрации радиальных, радиально-упорных и
упорных шариковых подшипников, а также роликовых с корот-
246
кими цилиндрическими роликами. Согласно этим ТУ для одно-
рядных шариковых подшипников с индексом LII1, общие уровни
вибрации в диапазоне частот от 50 до 10 000 Гн , измеренные на на-
ружном кольце при вращении внутреннего кольца с числом оборо-
тов п = 1500 об/мин, не должны превышать значений, аппрок-
симируемых выражением
I =72 4-0,18D0 дБ, (VI. 1)
где £)0—диаметр внутреннего кольца подшипника, мм.
Общий уровень виброактивности подшипников при изменении
скорости вращения внутреннего кольца можно оценить по формуле
I = -£??> = 201g-"2- дБ, (VI.2)
л л л Дд
7 7
где L 7, L — общие уровни виброактивпости подшипника,
соответствующие числам оборотов л2 и nr.
Приведенная зависимость показывает, что скорость вращения
оказывает весьма существенное влияние на уровень виброактив-
ности подшипников.
К» Увеличение радиальной нагрузки на подшипник оказывает
значительно меньшее влияние на рост виброактивпости. Это вли-
яние оценивается зависимостью
ДЛ-- = — ДЬ(-!’ = 0,3 дБ. (VI.3)
л л» 1
Исключение составляют малые нагрузки, при которых наблю-
дается заметное возрастание общего уровня, обусловленное неупо-
рядоченным движением тел качения.
При выборе типа подшипника необходимо учитывать, что уро-
вень вибрации роликовых подшипников выше, чем у шариковых,
на 5 и более дБ. Такую же величину составляет превышение уров-
ней вибрации подшипников тяжелой серин по сравнению с под-
шипниками средней серин. Снижение уровней вибрации имеет
место также у подшипников более высокого класса точности (1—
2 дБ [97] при переходе в следующий класс) и для однорядных под-
шипников [81 по сравнению с двухрядными (рис. VI.1).
Определенный эффект дает применение консистентной смазки
по сравнению с капельной (3—5 дБ в области средних и высоких
частот), а также повышение вязкости масла. Это объяспяется
упорядочением движения элементов подшипника вследствие
заполнения всех зазоров, а также демпфирующими свойствами
смазки.
Ж Существенными факторами, влияющими на виброактивность
подшипников качения, являются их посадка, в гнездо и на вал,
а также обработка соответствующих посадочных мест Степень
точности обработки посадочных мест должна отвечать качеству
обработки колец подшипников и назначаться в соответствии
247
с ГОСТ 10356—63. Первостепенное влияние при этом должно
уделяться ограничению радиального биения, некруглости,
нецилиндричности и несоосности. Любое из этих нарушений вы-
зывает деформацию колец подшипника и приводит к росту их
виброактивности.
Нарушение геометрии посадочных мест вызывает не только
радиальную, но и аксиальную вибрацию. Последнее имеет место
при перекосе внешнего кольца, обусловленного нецилиндрично-
стью одного посадочного места или несоосностью двух посадочных
мест. Эксперименты, проведенные на роторах серийных электри-
Рис. VI. 1 Влияние размеров и типа подшипника
на его шумность:
1 — роликовый 32310; 2 — сферический двухрядный
1310: 3, 4, 5 — радиальные шариковые 310, 307, 306
ческих машин, имеющих массу от 6,5 до 17 кг, показали, что чем
больше угол перекоса, тем интенсивнее аксиальные колебания.
Здесь важно отметить, что возникновение интенсивных аксиаль-
ных колебаний имеет место даже при перекосах в пределах до-
пусков ~ 0,5° [97].
Интенсивность вибраций, связанных с подшипниками каче-
ния, возрастает с повышением плотности посадок колец на вал
и в корпус. Для уменьшения деформаций колец подшипников их
посадку целесообразно производить либо совсем без натяга, либо
с минимальным натягом» Наиболее благоприятными посадками
является скользящая посадка наружного кольца С1п и плотная
посадка внутреннего кольца П1п. Во избежание проскальзывания
колец в местах посадки они могут стопориться в торец любым из-
вестным способом.
В ряде случаев уменьшение виброактивности подшипников
достигается с помощью осевого поджатия наружного кольца,
что исключает вибрации, обусловленные произвольным движением
ненагруженных элементов качения. Осевой натяг создается при
этом с помощью цилиндрических пружин или изогнутых пружин-
248
пых колец. Значительное внимание при этом уделяетея равномер-
ности распределения усилия по окружности наружного кольца
и сохранению гарантированного зазора между этим кольцом и
корпусом.
Известно, что спектр структурного шума наружного кольца
свободного подшипника существенно отличается от спектра под-
шипникового узла, куда помещен подшипник. Это обстоятельство,
помимо указанных выше причин, связано с динамическими свой-
ствами самого подшипникового узла. Наличие резонансных час-
тот в узле приводит к резкому выделению отдельных составля-
ющих спектра, совпадающих или близко расположенных к этим
частотам. И наоборот, влияние присоединенных масс, а также
демпфирование может привести к уменьшению ряда составля-
ющих.
* Из вышеизложенного видно, что хотя конструктор получает
в свое распоряжение уже изготовленные подшипники качения,
однако он располагает определенным арсеналом средств для неко-
. торого уменьшения их виброактивности.
у Эффективным средством снижения вибраций, обусловленных
подшипниками, является применение специальных упругих
виброизолирующих вкладышей. Их назначение состоит не только
в компенсации геометрического несовершенства посадочных мест,
но и в виброизоляции корпуса от подшипника. Материал и конст-
руктивное исполнение таких вкладышей могут быть различными.
На рис. VI.2 представлены конструкции упругих виброизоли-
рующих вкладышей. Вкладыши могут быть изготовлены из мате-
риалов с высоким коэффициентом затухания (металловолокнистых
материалов, резин, пластмасс и т. п.). Данные по эффективности
применения резиновых вкладышей приведены, например, в работе
[97]. Из металловолокнистых материалов интерес представляют
материалы из прессованного медного волокна различной порис-
тости.
t Установка подшипников качения в такие упру] одемпферные
опоры приводит к существенному сни жению уровня вибраций в об-
ласти средних и высоких частот (до 12—15 дБ). С помощью таких
опор представляется возможность некоторого изменения крити-
ческих чисел оборотов ротора и осуществления резонансной
отстройки системы ротор—корпус—основание.
МВ Природа возникновения вибрации в подшипниках качения
очень сложна, так как она зависит от множества причин. Вибра-
ция внешнего кольца создается, в основном, двумя видами ис-
точников: циклическими изменениями податливости элементов
подшипника при нагрузке (эти вибрации имеют место даже в слу-
чае геометрически идеальных <]>орм элементов) и геометрическими
Н несовершенствами элементов подшипника. Порождаемые этими
|£ причинами вибрации имеют широкий спектр, состоящий как
Дискретных составляющих (кратных частоте вращения,
К произведению частоты вращения на число элементов качения и
249
других), так и зон сплошного спектра. Характерной является
частота, совпадающая с частотой вращения и обусловленная ради-
альным биением вращающегося кольца вследствие его разностен-
ности или биением невращающейся поверхности.
Кроме того, в подшипниках качения может иметь место целый
ряд других явлений, возбуждающих вибрацию: перемещения тел
качения в пределах зазоров, перемещения сепаратора, соударе-
Рис. VI 2. Канструкции упругих виброизолирующих вкладышей под под-
шипники качения: а, б — упругие стаканы; в. г — упругие кольца;
д — упругое кольцо и стакан; е — пластинчатый вкладыш; ж — мем-
бранный корпус и упругий вкладыш; з — упругое кольцо н вкладыш
из диссипативного материала
ния деталей подшипников и другие. Указанные причины приводят
как к появлению гармонических составляющих, кратных, напри-
мер, частоте вращения, так и к возбуждению колебаний с собст-
венной частотой. В табл. VI. I отмечаются основные дискретные
частоты, порождаемые подшипниками качения. В таблице обо-
значены:
п — число оборотов ротора в минуту; D0—диаметр окруж-
ности, по которой расположены центры тел качения; — диа-
метр тел качения; z—число тел качения; Л —число граней па
поверхности шарика.
Наличие зазоров приводит к появлению частот
/' - (VI.4)
где — — частота вращения внутреннего кольца; i = I,
2,3 . . .
250
Вибрации, вызываемые упругими деформациями тел и Доро-
жек качения, а также случайными дефектами дорожек качения
(трещины, выкрашивания), проявляются на частотах
В f = (V1.5)
где ₽ — угол давления.
Частота вибрации, возникающей вследствие перемещения
сепаратора на величину зазора, равна
(VI.6)
т. е. оказывается более чем в два раза ниже частоты вращения.
Спектр частот, порождаемых геометрическими несовершенст-
вами элементов подшипников, очень широк и насыщен. Наиболее
резко на характере спектра сказываются геометрические погреш-
ности тел качения, затем внутреннего кольца и потом — наруж-
ного. Геометрические погрешности обусловлены технологией
изготовления подшипников. Одним из характерных видов по-
грешности беговых дорожек и тел качения является волнистость.
Можпо считать, что вибрации, обусловленные геометриче-
скими несовершенствами, происходят на частотах, определяемых
формулой (IV.5).
f Геометрические погрешности тел качения вызывают вибрацию
на частотах
(VI .7.)
Наиболее важной здесь является частота, вызываемая оваль-
ностью тел качения, когда i = z.
Приведенные формулы справедливы и тогда, когда вращается
наружное кольцо. Для этого достаточно частоту вращения
заменить частотой вращения наружного кольца /ц, а в скобках
поменять знак на обратный.
Частоты, вычисленные по этим формулам, не всегда могут быть
четко выявлены при испытаниях. Это обстоятельство объясняется
сложностью электрической машины как колебательной системы,
а также многочисленностью источников возбуждения. Поэтому
зависимость виброакустических характеристик подшипниковых
узлов от различных факгоров определяется в настоящее время
эмпирически на основании статистического анализа опытных
Данных.
Одним из важнейших параметров, определяющих виброактив-
ность подшипников качения, является величина радиального
зазора. Наличие этого зазора является причиной прецессии вала.
Но время которой вал сталкивается с телами качения. Вследствие
этих ударных взаимодействий генерируется широкий спектр
251
Вибраций. Вместе с тем» подшипник выступает в роли элемента,
существенным образом влияющего на динамику системы.
Простейшая модель колебаний ротора в подшипнике с зазором
рассмотрена в ряде работ и, в частности, в работах [34» 1571.
При этом было установлено, что даже в такой модели передава-
емая на корпус сила имеет негармонический характер. Характер
движения цапфы определяется относительным коэффициентом
неуравновешенности 11581
Рис. VI.3. Движение цапфы в под-
шипнике с зазором
где Р — динамическая нагрузка на подшипник от неуравновешен-
ных центробежных сил инерции; Q — статическая нагрузка на
подшипник.
На первом режиме работы (Е < 1) центр цапфы совершает
колебательное движение по дуге окружности радиусом S (6 —
радиальный зазор в подшипнике, рис. VI.3). Чем выше уровень
динамической нагрузки, тем боль-
ше амплитуда качания центра
цапфы.
При Е = 1 наступает второй,
самый неблагоприятный режим
работы подшипника. Амплитуда
колебаний центра цапфы достигает
90е. В этот момент цапфа отры-
вается от подшипника и движение
ее центра происходит внутри ра-
диуса Ь до тех пор, пока цапфа не
ударится о подшипник. Эти удары
будут происходить с частотой,
равной частоте вращения ротора.
Когда центробежная нагрузка от дебаланса превышает вес
ротора (Е > 1), происходит обкатывание цапфы, т. е. наступает
третий режим работы подшипника.
Наступление второго режима зависит не только от величины
дебаланса, но и от величины зазора [34, 157]. По мере износа
деталей и увеличения зазора динамическая нагрузка в сопряже-
нии вал—подшипник возрастает и может превысить статическую
нагрузку Q, приходящуюся на подшипник. Наступит второй ре-
жим работы, недопустимый как вследствие повышенной вибро-
активности, так и преждевременного износа подшипника.
Однако и при работе на первом режиме при определенной вели-
чине зазора могут возникнуть опасные колебания 134]. Условия,
при которых возникают эти колебания, можно определить, рас-
смотрев перемещения цапфы в горизонтальной и вертикальной
плоскостях за один оборот ротора (рис. VI.4). Здесь
^min 0 ^1П фо max)» //о — б Sin фо max» ф == Фо ^1П (О/.
252
Из рисунка видно, что при вращении ротора цапфа совершает
в вертикальной плоскости колебания с двойной частотой враще-
ния. Эти колебания достигают наибольшей величины при равен-
стве скорости вращения ротора половине критической скорости
ротора на жестких опорах
К
g 2 КР* ж‘
Но особенно неблагоприятный случай будет при вращении
ротора на оборотах, соответствующих свободным колебаниям
цапфы в подшипнике
О] = X л ^кр. ж»
где X = 1 g/б -— частота свободных малых колебаний цапфы
в подшипнике; g— ускорение силы тяжести.
При больших же амплитудах колебаний цапфы подшипник
с зазором ведет себя как нелинейная упругая опора. Собственные
2 Чу
Рис. VI 4 Перемещение цапфы в горизонталь-
ном (у) и вертикальном (z) направлениях при ее
колебательном движении в подшипнике
частоты колебаний цапфы при этом зависят от величины амплитуд
колебаний — с ростом амплитуд они растут. Поэтому, если ради-
альный зазор в подшипнике будет таким, что
. Л ___1 , g ~ I
2 ^кр. ж»
то при возрастании амплитуд колебаний цапфы в подшипнике
частота свободных колебаний цапфы, увеличиваясь, может дос-
тичь величины, равной (окр. А это, как отмечалось выше, спо-
собствует появлению интенсивных колебаний с двойной частотой
вращения. Таким образом, желательно, чтобы начальный зазор
в подшипнике имел такую величину, при которой выполняется
условие
min
кр- ж
253
Естественно, что приведенные результаты следует рассматри-
вать как весьма качественное приближение.
Для малошумных машин целесообразно применять вместо
подшипников качения подшипники скольжения. Они резко сни-
жают составляющие высокочастотной части спектра.
В заключение необходимо отметить существенное влияние
подшипников качения на динамику самого ротора. Подшипники
качения обладают нелинейной упругой характеристикой. Так,
сближение центров внутреннего и наружного колец при действии
на подшипник радиальной нагрузки R для стандартных подшип-
ников со сферическими телами качения можно определить по
формуле (8]
a = alO~G I - —j— —- см, (VI.8)
> 22(/ш cos2 у
где у — угол контакта тел качения; 4Ш — диаметр тел качения»
см; R — радиальная нагрузка на подшипник, кгс; а — коэффи-
циент, зависящий от типа подшипника.
Из формулы видно, что сближение тел, определяемое их мест-
ным упругим смятием, нелинейно связано с величиной силы R.
В работе [101] проведен теоретический анализ влияния нели-
нейных упругих свойств контактирующих тел шарикоподшипни-
ков на динамику ротора. Выявлена связность всех форм коле-
баний (аксиальных, радиальных и угловых). Поэтому при дей-
ствии возмущающей силы по одному из направлений с частотой,
близкой к собственной частоте другого направления, возможно
появление в системе резонанса.
Шум щеток
В электрических машинах постоянного тока иногда проявля-
ется щеточный шум, основная частота которого равна
где k — число коллекторных пластин; / = 1, 2, 3 . . . гармо-
ники шума.
Причинами шума щеточного узла машины могут быть несовер-
шенство геометрии рельефа коллектора и контактных колеи,
трение рабочей поверхности щетки о коллекторные пластины и
соударения между ними.
Виброактивпость щетки определяется также и параметрами
пружины и щетки, влиянием упругопластичного контактного
слоя между коллектором и щеткой.
254
Применение ВУИВ для снижения вибраций машин
с подшипниками качения
Как отмечалось выше, спектр вибраций машин, выполненных
с подшипниками качения, имеет большое число значительных
дискретных составляющих вибрации во всем диапазоне частот.
> Л Теоретические и экспериментальные исследования, выпол-
ненные на кафедре теории и проектирования машин СЗПИ
М. А. Федорович под руководством проф. Н. В. Григорьева,
С показывают, что отмеченный недостаток подшипников качения,
по сравнению с подшипниками скольжения, может быть устранен
Рис. VI.5. Спектрограмма модели роторной машины без ВУИВ
в опорах (кривая 1) и с ВУИВ (кривая 2)
с помощью применения в опорах машины внутренней упруго-
инерционной виброзащиты (ВУ1 IB).
Эффективность ВУИВ в отношении оборотной (дебаланспой)
гармоники с подшипниками качения в общих чертах объяс-
няется теорией, изложенной в гл. III, п. 3.
it Спектральный анализ показал, что ВУИВ обладает большой
эффективностью не только в области оборотной гармоники до
10—20 дБ, но и в области средних и высоких частот до 30—40 дБ
при соответствующем подборе параметров ВУИВ (рис. VI5).
Заштрихованная на рисунке область характеризует эффект сни-
жения виброактивности ротора при применении ВУИВ в опорах.
Эффективность работы устройства в зоне средних и высоких
частот обеспечивается высоким механическим сопротивлением
каскадов упругих колец и расположенной между ними жесткой
промежуточной массы.
р, Можно показать, что работу ВУИВ можно рассматривать как
новый способ автоматической балансировки. При этом уравнове-
шивающие массы (антивибраторы), прикрепленные к промежу-
£ точным массам опор, не совершают вращательного движения
вместе с ротором и не требуют специально] о подшипника. В этом
случае балансировка осуществляется центробежными силами,
развиваемыми антивибраторами. Эти центробежные силы возни-
Кают как результат векторного сложения двух инерционных сил,
Н
создаваемых массами антивибраторов при их одновременных коле-
баниях в вертикальной и горизонтальной плоскостях. Эти
центробежные силы антивибраторов находятся в противофазе
(без учета сил сопротивления) с неуравновешенной силой, созда-
ваемой дебалансом ротора и передающейся от него на соответ-
ствующую опору.
Указанная автоматическая балансировка обладает хорошей
эффективностью в диапазоне оборотов, составляющих 10—15%
от номинальной скорости вращения ротора.
Таким образом, ВУИВ обеспечивает существенное снижение
вибрации корпуса машины с подшипниками качения как при
возникновении блуждающего дебалапса у ротора машины, так и
при существенном росте абсолютной величины дебаланса в про-
цессе эксплуатации, что особенно важно для электрических машин.
3. ИСТОЧНИКИ МАГНИТНОГО ШУМА
ЭЛЕКТРИЧЕСКИХ МАШИН
Во всех типах электрических машин в той или иной степени
проявляется магнитный шум. Сам принцип работы электрической
машины таков, что он связан с возбуждением магнитных полей,
которые, периодически изменяясь, и являются источниками виб-
рации и шума 161, 97].
При вращении зубчатого якоря в машинах постоянного тока
происходит периодическое изменение магнитной проводимости
воздушного зазора в зависимости от того, находится ли в данной
точке зубец или паз. Вместе с колебаниями магнитной проводи-
мости колеблется и индукция в воздушном зазоре, а следователь-
но, и магнитная сила притяжения между полюсом и якорем.
Полный цикл колебаний якоря совершается при повороте
якоря на одно пазовое деление /2, поэтому частота возмущающих
магнитных сил кратна числу пазов якоря г и числу оборотов п
(VI.9)
/м h *
где i == I, 2, 3 . . .
Характер действия возмущающих усилий на полюсе зависит
от числа пазовых делений, приходящихся на полюсное деление,
— Ь, и числа пазовых делений на полюсную дугу = о;
а, & — целые числа.
На рис. VI 6 показано несколько случаев возникновения
переменных усилий в машинах постоянного тока при различных
z Ьр
сочетаниях чисел _ и —' .
2d t2
Случай /: & = а; ~~ — Ь. На левую половину полюса дей-
ствует большая суммарная сила, чем на правую, поэтому полюс
256
оказывается под действием вращающегося момента М9 направлен-
ного против часовой стрелки, а так как равно целому числу,
то под всеми полюсами взаимное расположение зубцов якоря и
полюса будет одинаковым, следовательно, процесс изменения
моментов на всех полюсах машины будет происходить синфазно
и число волн деформаций по окружности статора равно числу
полюсов г — 2р.
Случай //: — а\ -А- — b + Величин а момента в этом
случае окажется такой же, как в случае /, но моменты на соседних
— В этом случае распре-
На полюс дейст-
Рцс. VI.6. Возмущающие усилия, действующие на полюсы машины постоянного
тока в зависимости от числа пазовых делений, приходящихся на полюсное де-
2 Ьг
ленке -- — Ь> и числа пазовых делений на полюсную дугу —— = а
2р
полюсах будут находиться в противофазе. Число волн деформаций
статора г — р и узлы колебаний находятся в точках крепления
полюсов.
ц Случай III: -р-
деление сил относительно средней линии полюса будет симметрич-
ным и изгибающий момент не возникает. На полюса будут дей-
ствовать результирующие синфазные радиальные силы- Станина
будет колебаться как пульсирующий цилиндр.
F Случай /V:= а 4- -*-; ~
вует радиальная сила в противофазе с силой, действующей на
соседний полюс. Форма колебаний та же, что и в случае //, г == р»
по узлы колебаний находятся посередине между полюсами.
Анализируя приведенные случаи, видим, что значение —
влияет па характер возбуждения (сила или момент), а величина
влияет лишь на фазы изменения сил и моментов.
Когда значения *- и fr) отличаются от приведенных выше»
I ^Р f z
то будет возникать смешанная форма колебаний.
I7 н. в. Григорьев
2р
257
Величину изгибающих сил и моментов можно найти, зная
закон распределения индукции в воздушном зазоре. Для случая
равномерного воздушного зазора индукция в любой точке, от-
стоящей на расстоянии х от оси полюса (рис. VI.7), равна
Вх = jB64-Bncos (tot — ^х ). (VI.10)
Сила, действующая на единичную площадку,
Интегрируя выражение (VI. 10) по всей ширине полюса и де-
лая некоторые допущения, можно получить значение полного
усилия, действующего на полюс,
г* ( Вл / L. sin Л О _ 4
^'“(бОбб) 1РЬР^6 по Со “ ’
( V 1.1 1)
-51 = kb — 1 (kb — коэффициент Картера),
Вб
где
, 1,4 106 Ьр
^ = -Й-Гоб; C = V
Величина изгибающего момента может быть получена из выра-
жения
М = I
[ Fx dx.
и •
2
Решая этот интеграл и пренебрегая величинами второго по-
рядка малости, получим выражение для изгибающего момента
л л f Вл х . . » 11 лsin лп \ /х 7т 1 о \
м = Ыо) (VI12>
Из выражений (VI. 11) и (VI. 12) видно, что возмущающие пере-
менные сила и момент зависят от квадрата магнитной индукции,
размеров полюсной поверхности, коэффициента Картера и от
некоторых функций Qr (а) и QM (а). Для возмущающей силы
Qr (а)
sin ЛА
па
а для возмущающего момента
. COS ЛА
(а) =
sin лп
л-а2
258
На рис. VL8 приведены графики этих функций для удобства
вычислений.
Возникновение магнитного шума в асинхронных и синхронных
машинах переменного тока имеет много общего с машинами посто-
янного тока |97]. Отличие заключается
лишь в том» что в машинах постоянного
тока деформация возникает под дей-
ствием сосредоточенных сил, а в маши-
нах переменного тока — под действием
синусоидально распределенных сил.
Магнитное поле в асинхронной ма-
шине слагается из бесконечного числа
гармонических составляющих, прямых
и инверсных, созданных токами статора
и ротора.
Каждая из гармоник имеет свое чи-
сло полюсов, свою скорость вращения
и частоту изменения и создает в дан-
ной точке воздушного зазора опреде-
ленную индукцию, являющуюся функ-
цией пространственных и временных
координат.
Наиболее опасными являются радиальные магнитные силы,
возникающие от воздействия высших гармонических колебаний
статора и ротора.
Рис. VI .7. Индукция в воз-
душном зазоре
sin ла
ла
„ , . cos ла
И QM (а) «
Частоты возмущающих магнитных сил при инверсном поле
высших гармоник определяются по формуле
i (1 — S) ± 2
(VI 13)
где [с — частота сетевого напряжения; г2 число пазов ротора;
Р— число пар полюсов основного поля; S — скольжение в ре-
жиме холостого хода; i 1, 2, 3 . . . —-порядок гармоник.
>7* 259
Частота возмущающих радиальных сил при прямом поле выс-
ших гармоник
f = fc^i(l-S). (VI.14)
В синхронных машинах закономерность возникновения виб-
рационных сил аналогична характеру сил асинхронных машин.
Отличие обусловлено конструкцией ротора. В синхронных маши-
нах с массивными роторами высокочастотные магнитные вибра-
ции значительно ослабляются увеличенным воздушным зазором
между статором и ротором» а также демпфирующим действием
массива ротора. Поэтому в спектре вибраций синхронных машин
обычно проявляются лишь гармоники низких порядков. Частоты
этих сил определяются по формуле
к=2/Л (VI. 15)
Важно отметить, что переход от режима холостого хода к но-
минальной нагрузке приводит к повышению уровней магнитных
вибраций иа зубцовых частотах на величину до 6 дБ.
Это приращение ДА уровня вибраций в зоне зубцовых частот
может быть определено по следующей эмпирической формуле,
предложенной ВНИИЭМ,
AL = 121g/a- + 3 дБ, (VI.16)
'X. X
где I — сила номинального тока двигателя; х— ток холостого
хода.
4. ПУТИ СНИЖЕНИЯ МАГНИТНОГО ШУМА
ЭЛЕКТРИЧЕСКИХ МАШИН
Снижение магнитных вибраций и шума может идти по двум
направлениям:
снижение амплитуд возмущающих сил и моментов;
изменение механических сопротивлений элементов машин.
Амплитуду возмущающих сил и моментов можно уменьши гь
снижением магнитной индукции в воздушном зазоре. Но это сред-
ство не рационально, так как пропорционально снижению индук-
ции увеличиваются габариты и вес машины. Более рационально
устройство скошенных пазов, ( кос пазов якоря и ротора способ-
ствует более равномерному распределению магнитного потока
в воздушном зазоре и уменьшает интенсивность зубцовых магнит-
ных полей, что приводит к значительному снижению шума ма-
шины.
В этом случае радиальная сила FrC, действующая на полюс,
будет равна
= F sin И - лсд), (VI. 17)
rL г ЛСд ' я
где — число пазовых делений скоса пазов якоря по длине.
260
Выражение для изгибающих моментов имеет аналогичный
вид-
Из формулы (VI. 17) видно, что при скосе пазов на целое число
пазовых делений сила Fr и момент М равны нулю и, следователь-
но, колебаний изгиба не будет. Значительный эффект достигается
при скосе пазов па одно зубцовое деление ротора, дальнейший
скос не приводит к ослаблению шума. Эффект от скоса пазов
несколько снижается ввиду возникновения крутящих моментов,
действующих на полюс в радиальном и тангенциальном направ-
лениях. В связи с этим в крупных машинах переменного тока с от-
носительно большой осевой длиной пакета статора скос пазов
приводит иногда к увеличению магнитного шума.
Опыт испытаний многих машин постоянного тока показывает,
что полный скос пазов, столь существенно влияющий на подавле-
ние магнитного шума, следует осуществлять только при соблю-
дении условий
где т — полюсное деление.
В случае, если выполнение этого условия по каким-либо при-
чинам неосуществимо, то следует применять неполный скос пазов,
т. е. скос наполовину или три четверти пазового деления. В маши-
нах постоянного тока скос пазов дает лучший эффект уменьшения
шума, когда ~ и ------целые числа. Скос пазов позволяет сни-
зить магнитные вибрации на 10—15 дБ.
L Магнитный шум электрических машин постоянного тока можно
уменьшить, применяя эксцентричный воздушный зазор, увеличи-
вающийся от середины полюса к его краям. В этом случае магнит-
ная индукция по краям полюса уменьшится, уменьшатся пуль-
сации магнитного потока и возмущающие силы. На практике
для снижения магнитного шума обычно применяют эксцентрич-
ность воздушного зазора: половина и одна треть. Эксцентрич-
ность более одной трети значительно увеличивает индукцию
в зазоре под серединой полюса, что может привести к повышению
напряжения между смежными коллекторными пластинами. Сни-
жение магнитного шума благодаря применению эксцентричного
зазора может достичь 3—-5 дБ. Самое большое снижение вели-
чины возмущающих сил и моментов в машинах постоянного тока
достигается комбинацией скоса пазов с эксцентричностью воздуш-
ного зазора. При холостом ходе наивыгоднейшими условиями
с точки зрения подавления магнитного шума являются скос лаза
на одно деление, эксцентричный воздушный зазор, соотношения
7“ = а, = Ъ* где aw Ь — целые числа.
В последнее время начали применять ступенчатые полюсы
Для снижения магнитного шума в машинах постоянного тока
261
(рис. VI.9). Отличительная особенность конструкции сердечника
главного полюса состоит в том, что полюс в осевом направлении
разбивается па четное число элементов, из которых два соседних
смещены относительно друг друга в тангенциальном направлении
так, чтобы действие магнитных усилий на них взаимно уравнове-
шивалось. При этом практически исключается появление момен-
тов, вызывающих колебания полюса в продольной плоскости.
составляющие магнитных сил и момен-
тов, действующих на весь полюс, бу-
дут значительно ослаблены, что при-
ведет к снижению вибраций. Эффек-
тивность снижения вибраций при ис-
пол ьзов ап и и ступениаты х п ол юсов
зависит от выбора величины смеще-
ния элементов и их длины. Приме-
нение полюсов ступенчатой конфигу-
Результирующие зубцовые
упругой
элемент
Рис. VI.9. Ступенчатый по-
люс машины постоянного
Phc.VI.I9. Упругая подвеска магнит-
ной системы
тока
рации позволяет снизить вибрацию машины в режиме нагрузки
на зубцовой частоте па 16 дБ. В условиях скоса пазов якоря на
одно зубцовое деление применение ступенчатых полюсов позволило
снизить вибрацию этих машин на зубцовой частоте па 10 дБ.
Для снижения магнитных вибраций, передаваемых на корпус
электродвигателей, осуществляется упругая подвеска магнитной
системы (в машинах постоянного тока) или железа статора (в ма-
шинах переменного тока).
Физический смысл снижения магнитных вибраций ясен из
рис. VI. 10. Передаваемое усилие Р становится меньше за счет
введения упругости, которая ведет к уменьшению механической
проводимости. Конструктивные варианты могут быть различны
(рис. VI.10, рис. VI.11).
Упру неамортизированная подвеска магнитной системы в ма-
шинах постоянного тока легче всего осуществляется в электродви-
гателях, имеющих поворотную магнитную систему, позволяю-
щую производить замену полюсов без демонтажа электродвига-
теля. Поворотная магнитная система 1 скользит на особых упру-
гих опорах 2 в корпусе электродвигателя 3 (рис. VL10). Осповны-
2G2
Рис. VI. 11. Упругая подвеска статора
ми условиями для количества и размещения упругих опор в маши-
нах постоянного тока являются следующие:
а) количество опор должно быть равно числу полюсов 2р;
б) опоры должны быть размещены:
? t J Ьп
по оси главных полюсов при^ — г =
~Р *2
по оси добавочных полюсов при -£- = Ь + ~.у, ~г~— а + -»-•
При выполнении указанных выше условий опоры попадают
в узлы колебаний, а поэтому передача вибраций с магнитной сис-
темы на корпус электродви-
гателя будет минимальной.
Варианты конструкций
упругих подвесок железа ста-
тора в машинах переменного
тока приведены на рис. VI. 11.
В асинхронных электродви-
гателях упругие элементы
создаются в продольных реб-
рах статора 1 за счет проре-
зей 2 в них (рис. VI.11, я).
В преобразователях упругая
подвеска осуществляется при
помощи упругих колец 1 и
двух сдвинутых относительно
друг друга систем ребер 2
(рис. V 1.11, б).. Эффективность
упругой подвески статбра тем
больше, чем меньше ее жест-
кость. Однако уменьшение
жесткости подвески может
привести к недопустимому
эксцентриситету между ротором и статором. В указанных кон-
струкциях предусмотрены ограничители деформации, обеспечи-
вающие ударостойкость конструкции. Применение упругих подве-
сок позволяет снизить магнитные вибрации на 8—10 дБ.
I Для снижения магнитных вибраций в машинах постоянного
и переменного тока в пазы якорей и роторов иногда забивают маг-
нитные клинья. Магнитные клинья приводят к более равномер-
ному распределению индукции в воздушном зазоре мантии и тем
самым спижают возмущающие силы (рис. VI. 12).
Асинхронные короткозамкнутые электродвигатели рекомендует-
ся выполнять с учетом следующих дополнительных положений.
Динамические деформации, возникающие под действием радиаль-
ных магнитных сил зубцовых гармоник, могут быть уменьшены
выбором благоприятного соотношения чисел пазов статора гд
н ротора z2. Ие представляется возможным дать универсальные
рекомендации по выбору чисел пазов, которые были бы одинаково
L 263
благоприятны для двигателей всех габаритов, так как в зависи-
мости от размеров машины изменяются ее жесткостные характе-
ристики и значения собственных 1___ ____"
частот колебаний. Этим объяс-
Рис. VI. 12. Снижение уровня вибрации
при установке в пазы якорей и рото-
ром магнитных клиньев:
---------текстолитовых;--------— маг-
нитных
няется наличие в литературе
многочисленных несовпадаю-
щих между собой таблиц реко-
мендуемых чисел пазов.
В целях уменьшения высших
обмоточных гармоник поля ре-
комендуется выбирать для ста-
тора целое число пазов на по-
люс и фазу п укорочение шага
обмотки, равное 0,8 полюсного
деления для всех машин, кроме
двухполюсных.
При скошенных пазах в
асинхронных электродвигате-
лях должны быть —-=а и
*г
— = Ь цельными числами.
5. АЭРОДИНАМИЧЕСКИЙ ШУМ
В ЭЛЕКТРИЧЕСКИХ МАШИНАХ
Аэродинамический или вентиляционный шум в электрических
машинах создается как самим вращающимся ротором и крыль-
чаткой вентилятора, так и воздухом, протекающим через венти-
ляционные каналы и воздушные полости машины [971.
По способу вентиляции электрические машины могут быть
подразделены на машины с самовентиляцией и независимой
(принудительной) вентиляцией. В обоих случаях, если магнит-
ный шум подавлен, уровень шума определяется в основном венти-
лятором.
Для машин с самовентиляцией, охлаждение которых осущест-
вляется вентилятором, насаженным на вал машины, уровень
аэродинамического шума на расстоянии 0,5 м от корпуса может
быть определен по формуле
L = 10 1g N + 20 1g п 4- 5 дБ, (VI. 18)
где N — мощность, кВт; п — число оборотов в минуту.
Аэродинамический шум электрических машин с независимой
вентиляцией (тихоходные машины) определяется шумом посто-
роннего вентилятора
L = Ю 1g Q + 20 lg Н -I- 10 дБ, '(VI49)
где Q—производительность вентилятора, м3/ч; Н—напор вен
тилятора, мм вод. ст.
264
Более точный результат может быть получен пересчетом шума
машины, принятой за эталон, по формулам
L = Lo + 101g + 20 lg-?- дБ; (VI.20)
*vo п0
L = Le+101g-£- + 201g-g-дБ, (VI.21)
где Lo, Л/о, л0, Qo, Но— интенсивность шума и соответствующие
параметры машины или вентилятора, принятого за эталон.
В вентиляционном шуме выделяются шум вращения и вихре-
вой шум. Шум вращения порождает в спектре шума электричес-
кой машины тональную составляющую, кратную числу лопаток
вентилятора; ее частота
г __zn
'W ~~ 60 ’
где п — число оборотов вентилятора в минуту; г — число лопа-
ток крыльчатки вентилятора.
Присутствие этой составляющей спектра обусловлено наличием
препятствий потоку воздуха, расположенных вблизи вептвлятора
(языка улитки вентилятора, шпилек щитов и пр.). При отсутст-
вии близко расположенных препятствий тональпые составляющие
не выделяются в спектре и он приобретает более равномерный
характер, свойственный вихревым источникам шумообразования
Вихревой шум имеет сплошной спектр и зависит в основном от
окружной скорости вентилятора.
Может возникнуть шум и от неоднородности воздушного по-
тока. Но своей природе он близок к вихревому и объясняется
пульсациями давления на препятствиях, частота его совпадает
с частотой звука вращения.
I Для уменьшения вентиляционного шума рекомендуется.
1. Применение достаточной величины радиального воздушного
зазора между вентилятором и станиной (не менее 15% от величины
наружного диаметра вентилятора).
К 2. Уменьшение окружной скорости вентилятора. Для этой
цели можно применять возможно меньший диаметр вентилятора
(без существенного снижения производительности). Этого, напри-
мер, можно достигнуть заменой одноступенчатого вентилятора
многоступенчатым.
К 3. Рационально конструировать ротор в аэродинамическом
отношении, Вентиляционные каналы должны иметь минимальное
гидравлическое сопротивление. Лучше выбирать небольшое число
вентиляционных каналов большей ширины, если каналы радиаль-
ные, и большего диаметра, если каналы аксиальные.
fr Встроенным вентиляторам по их расположению в машине
/трудно придать наиболее рациональную форму, обеспечивающую
^хорошие аэродинамические характеристики и минимальный шум
265
Основное внимание при конструировании следует уделять вы-
полнению щита, образующего полость для вентилятора.
Эта плотность на внутренней поверхности не должна иметь
ребер жесткости и проходных шпилек. Кромки окон, через кото-
рые выходит воздух, должны иметь закругления.
Наиболее радикальным средством снижения вентиляционного
шума является применение водяного охлаждения, обеспечиваю-
щего снижение аэродинамического шума на 8 —10 дБ.
Одним из эффективных способов снижения вентиляционного
шума является установка глушителей.
Разработка и применение наиболее эффективных глушителей
для электрических машин осложняется необходимостью соблю-
дения при этом других, не менее важных условий: применение
глушителей не должно значительно увеличивать аэродинами-
ческое сопротивление машины и ее габариты, чтобы не нарушить
тепловой режим ее работы.
Наиболее приемлемыми для электрических машин оказались
глушители активного типа, затухание шума в которых зависит
от типа примененного звукопоглощающего материала, от его
толщины и площади покрытия.
В машинах с самовентиляцией местом максимального излу-
чения шума обычно являются отверстия, через которые всасыва-
ется и выдувается воздух. Как правило, глушители пристраива-
ются к этим отверстиям. В машинах с принудительной вентиля-
цией глушители пристраиваются к улитке электровентиляторов.
Следует отметить сложность предварительного определения
эффективности гашения шума глушителем, так как принятая
формула Белова
О
где р, I, S — соответственно периметр, длина и площадь глушителя
со звукопоглощающим материалом, имеющим коэффициент по-
глощения а, дает лишь ориентировочную оценку ожидаемого
эффекта. Оценка эффекта гашения производится в основном по
экспериментальным данным. Простейшим глушителем является
металлический цилиндр, облицованный внутри звукопоглощаю-
щим материалом. Такие глушители обладают наименьшим
аэродинамическим сопротивлением, но недостаточная их эффектив-
ность вынудила перейти к более сложным конструктивным фор-
мам. Опыт применения глушителей разнообразной конструкции
показал, что они позволяют снизить шум на 6—10 дБ.
ГЛАВА VII
АМОРТИЗАЦИЯ МАШИН И МЕХАНИЗМОВ
L ОБЩИЕ ПОЛОЖЕНИЯ
Основные определения
Конструктивная амортизация машины или механизма состоит
в осуществлении специального крепления, называемого аморти-
зирующим, которое устраняет непосредственный контакт машины
с несущими конструкциями и другими присоединяемыми к ней
внешними связями и ослабляет передачу через эти связи динами-
ческих воздействий.
Составными частями амортизирующего крепления служат
отдельные амортизирующие конструкции, к которым относятся:
опорные амортизаторы, несущие нагрузку от веса амортизи-
рованного объекта;
К пеопорные амортизаторы (называемые также упорными),
обычно такую нагрузку не воспринимающие; они вступают в дей-
ствие при деформациях амортизирующего крепления, а в случае
установки с зазором — только при достаточно больших деформа-
циях, когда этот зазор выбирается;
к амортизирующие вставки (сильфоны, гибкие патрубки, дюри-
ты, рукава и шланги) в подведенные к машине трубопроводы;
I амортизирующие вставки (гибкие муфты) в присоединенные
к амортизированному объекту валопроводы, рычажные передачи
и др.;
гибкие участки подключенных к машине кабелей.
L Амортизация машины, осуществляемая с целью изоляции
создаваемых ею возмущающих водействий, передача которых
окружающим конструкциям нежелательна, называется а к т и в-
и о й.
Амортизация, целью которой является зашита машины от
динамических воздействий, распространяющихся со стороны со-
седних конструкций, называется пассивной.
Амортизирующее крепление называют противоудар-
и ы м, если оно способно ослаблять передачу ударных воздейст-
вий. *
В Амортизирующее крепление обычно называется виброизо-
л и р у ю щ и м, если в результате его осуществления ослабляется
передача гармонических или близких к ним динамических
К 267
воздействий. Виброизолирующее крепление, эффективное в области
звуковых частот, часто называют звукоизолирующим.
Амортизирующее крепление, в котором все амортизаторы рабо-
тают параллельно, называется однокаскадным.
Два однокаскадных амортизирующих крепления, будучи после-
довательно соединены друг с другом, образуют двухкаскад-
ное амортизирующее крепление и в качестве его составных час-
тей становятся внутренним (примыкающим к амортизированному
объекту) и наружным (примыкающим к несущим конструкциям)
амортизирующими каскадами. Между двумя каскадами обычно
имеются промежуточные конструкции, чаще всего рама или плат-
форма.
Два основных типа приложения
возмущающего воздействия* Общие зависимости
Обычно различают два основных типа приложения возмуща-
ющего воздействия к колебательной системе, состоящей из амор-
тизируемого объекта и его амортизирующего крепления:
1) непосредственное приложение внешних усилий к объекту;
2) так называемое кинематические воздействие, передавае-
мое объекту со стороны фундамента, совершающего переносное
движение.
Считая колебательную систему одномерной линейной, допус-
тим, что амортизируемый объект, имеющий массу /И, является
абсолютно жестким, а его амортизирующее крепление, опираю-
щееся на абсолютно жесткий фундамент, безынерционно и обла-
дает жесткостью С и коэффициентом вязкого трения R.
При непосредственном приложении возмущающей силы Р (0
к массе М абсолютная координата z центра тяжести массы, отсчи-
тываемая от его равновесного положения, находится из дифферен-
циального уравнения
Mz+ Rz + Cz = Р (0.
(VII. 1)
Последнее записывается в виде
г -j- 2nz -I- Жг = Р-$, (VII.2)
если использовать обозначения:
х = ]/5: <V1L3’
Величина X в (VII.3) представляет собой круговую частоту
свободных колебаний амортизированного объекта на амортиза-
268
торах, лишенных трения (R = 0), параметром п в (VI 1.4) охарак-
теризовано трение, введенное в колебательную систему.
При нулевых начальных условиях (г0 = 0, z0, = 0)
Р (т) е-п
sin X* (t — т) dr.
(VII.5)
где
X* = КХ2 - п2
(VII.6)
— круговая частота затухающих свободных колебаний амортизи-
рованного объекта на амортизаторах, обладающих трением
(R * 0).
| Когда z0 и г0 либо одна из этих величин отличны от нуля, то
(VI 1.5) не является общим интегралом, но остается частным реше-
нием дифференциального уравнения (VII.2). Для получения
общего интеграла надо просуммировать движение, определяемое
формулой (VI 1.5), с затухающими свободными колебаниями
£ = Л—]/ ^2Zo-|-zo4’2nzoZoSin (x^ + arctg—^5“У (VII.7)
Л* * \ , Zq /
если Л > п, и с затухающим апериодическим движением
г — е й ' z0 ch |/ П“ — X2 /
J?q±A. sh 1/r? - Л21
рпв — Ks
(VI 1.8)
если п > К. Если же п = X, то (VII.7) и (VII.8) вырождаются в
I(nz0 + zQ)t +z0I,
(VII .9)
и тогда общий интеграл представляет сумму (VI 1.5) и (VI 1.9).
[ Очевидно, что в рассматриваемом случае неподвижного фунда-
мента z является динамической деформацией амортизирующего
крепления. Она накладывается на его статическую деформацию,
‘Соответствующую равновесному положению колебательной сис-
темы .
В результате приложения к массе М силы Р (/) фундаменту
передается сила
Рф = Сг+= | Р(т)е ” 'sin
о
К (' - т) +
(VII.10)
269
При так называемом кинематическом возмущении, когда дви-
жение колебательной системы вызывается переносным движением
фундамента,
гф = 2ф(/). (VII. 11)
для определения деформации
(VII. 12)
амортизирующего крепления может служить дифференциальное
уравнение
Z4-2nZ r*2Z = — гф. (VII.13)
Оно подобно дифференциальному уравнению (VI 1.2) и при
подобии начальных условий приводит к подобным же решениям.
Деформация Z является одновременно величиной перемещения
массы М по отношению к фундаменту. Выражением (VII. 12)
относительное движение амортизированного объекта определя-
ется как разность между его абсолютным движением и абсолютным
движением фундамента. При нулевых начальных условиях (Zo —
= О, Zo = 0)
/
Z = — -J- J ?ф (т) e~n - sin (/ — т) dx.
* о
(VII.14)
Если Zo =h 0, Zo =h 0, то общим интегралом дифференциального
уравнения (VII. 13) служит сумма движения, определяемого
формулой (VII. 14), и одного из затухающих движений, подобных
(VII.7), (VII.8) или (VII.9). Например, при Л > п надо (VII.14)
сложить с
е~п'
I KZl + Zo + SnZoZo sin I V +
А
4 arctg
(VII. 15)
Определив из (VII 13) величину Z как функцию времени,
нетрудно найти переменное абсолютное ускорение амортизиро-
ванного объекта
z = — X2Z — 2nZ =
2пАж
2
А.2 I
Ч
п (г-т) sin х*(/—т) 4 arctg -г
А,; — п
dx, (VII. 16)
сообщенное ему в результате возникновения в начальный момент
(/ = 0) переносного движения фундамента.
Выражение (VI 1.16) аналогично (VIL10).
270
для получения абсолютного движения г массы М следует в со-
с (VI 1.12) сложить и Z. Если Z ранее не было опре-
для непосредственного нахождения абсолютного дви-
ответствии
делено, то
жения амортизированного объекта можно воспользоваться диф-
ференциальным уравнением
г 2nz 4 X2z = 2л2ф + Х22ф.
(VI 1.17)
Дважды дифференцируя по времени его левую и правую части,
получаем аналогичное дифференциальное уравнение второго
порядка относительно абсолютного ускорения z амортизирован-
ного объекта
К . ft + 2пЧГ + = 2п ^ГГ + (VII.18)
Полезно заметить, что в первом из рассмотренных случаев
сила (VII. 10) удовлетворяет дифференциальному уравнению
j Ль + 2лРф Н - А2РФ = 2пР -Ь Х2Р, (VI 1.19)
которое подобно дифференциальным уравнениям(\П 1.17) и (V 11.18).
? Если амортизирующее крепление не обладает трением (/? = 0),
то л = 0, X* = X, и дифференциальные уравнения (VII.2), (VII.13),
(VII.17), (VII.18), (VII.19) упростятся. При одинаковых законо-
мерностях изменения во времени их правых частей и при подобии
начальных условий все они приведут к подобным решениям.
| Случай, рассмотренный первым, является примером активной
амортизации. В результате ее осуществления можно уменьшить
силу, передаваемую работающей машиной фундаменту. Обычно
требуется, чтобы определяемое согласно (VII. 10) значение пере-
менной силы было по модулю существенно меньше силы Р:
(VII.20)
Во втором случае, когда амортизаторы ставятся для уменьшения
передачи оборудованию нежелательных составляющих кинемати-
ческого воздействия, амортизацию называют пассивной. При ее
осуществлении обычно стремятся к тому, чтобы абсолютное уско-
рение z или абсолютное перемещение 2 амортизированного объекта
или то и другое одновременно были по модулю существенно меньше
аналогичных параметров движения фундамента:
|^| гк I /ф ,
I г| С | гф'.
(VI 1.21)
(VII .22)
Иногда от амортизирующего крепления достаточно потребо-
вать сравнительно небольшой эффективности. Если, например,
вызванное сотрясением ускорение несущих конструкций
(Фундамента) лишь немногим выше ускорения ?доп, допустимого
271
для того или иного оборудования, то цель амортизации — обеспе-
чить сохранность оборудования — достигается при
|2|^|г|доп<|гф1- №23)
В рассматриваемом частном случае возмущающее воздействие,
с которым приходится иметь дело и при активной, и при пассивной
амортизации, изменяется во времени по гармоническому (синусо-
идальному) закону. Установившемуся гармоническому изменению
силы Р (г) соответствует передача фундаменту гармонической силы
Р (/), имеющей ту же частоту; с этой же частотой совершает
вынужденные гармонические колебания амортизированный объект.
Установившееся вынуждающее гармоническое движение г$ (t)
фундамента возбуждает колебания амортизированного объекта,
происходящие с той же частотой.
Передача гармонических воздействий характеризуется приво-
димыми ниже формулами (VII.182), [VII.185), (VII.198) и графи-
ками (рис. VII.6).
Выражения (VII.5) и (VII.10) позволяют, в частности, опреде-
лить эффект впезапного приложения постоянной силы Р, а фор-
мулы (VII. 14) и (VI 1.16) — результат впезапного возникновения
равноускоренного (z$ = const = w) переносного движения фун-
дамента. При отсутствии трения, например, перечисленные фор-
мулы дают соответственно:
2 = £ (1—coskl); Рф = Р( 1 — cos М); (VII .24)
Z = — -^-(1—cos Л/); z = u>(l — cosX/). (V1I.25)
Л
Таким образом, при длительности впезапного воздействия,
достигающей полупериода ~ свободных колебаний амор-
тизированного объекта на амортизаторах, последние удваивают
наибольшую величину передаваемого воздействия по сравнению
со случаем статического (достаточно медленного) его приложения.
Динамический коэффициент р, равный | 1 — cos kt max — 2 при
достаточно большой длительности внезапного воздействия, умень-
шается по мере того, как эта длительность (ее удобно обозначить
через —Л убывает, будучи меньше :
p = 2sln£^X, -^->1- (<П.26)
Л 1 с 1 в
Высокая эффективность амортизирующего крепления чаше
всего обеспечивается за счет придания ему большой податливости.
В условиях эксплуатации малая жесткость крепления может
приводить к значительным его деформациям, а следовательно, и
к перемещениям амортизированного оборудования под действием
272
сравнительно небольших статических и динамических нагрузок.
Последние в случае установки оборудования без амортизаторов
обычно остаются вне поля зрения, а решение о применении амор-
тизации принимается с целью защиты от других динамических
воздействий.
Из сказанного вытекает необходимость тщательной оценки
жесткостных характеристик амортизирующего крепления.
2. ЖЕСТКОСТИЫЕ ХАРАКТЕРИСТИКИ АМОРТИЗАТОРА
И АМОРТИЗИРУЮЩЕГО КРЕПЛЕНИЯ
Характеристики жесткости амортизатора
Отдельно взятый амортизатор можно в большинстве случаев
рассматривать как систему трех сходящихся в одной точке взаим-
но перпендикулярных безынерционных пружин; каждая из них
обладает жесткостью по отношению к деформациям растяжения —
сжатия вдоль своей оси и кручения вокруг нее; другим деформа-
циям пружина не сопротивляется.
U При отсутствии нагрузки на амортизатор оси пружин совпа-
дают с осями неподвижной прямоугольной системы координат
Oaxuyaza- Направления этих осей являются направлениями глав-
ных деформаций амортизатора, а сами оси называются его осями
жесткости. Только в том случае, если внешняя сила или вектор
внешнего момента, нагружающего амортизатор, совпадают
с осью жесткости, вызванная ими деформация амортизатора сов-
падает по направлению с деформирующим усилием.
t Обозначим поступательные (линейные) жесткости амортиза-
тора по отношению к осям ха, yat za через cyai сга, а его
поворотные (крутильные) жесткости — через kxa, kya. Ка-
Пусть в точке Оа амортизатора приложена сила Р9 направление
которой относительно координатных осей ха, уа, га задано направ-
ляющими косинусами аР, 0р. ур. В свою очередь, косинусы ah
Pz, у/ определяют направление деформации /, которую вызвала
сила Р.
Косинус угла между силой и деформацией
К COS (Р, 1} = ощ + рРр2 -h уРу2. (VII .27)
Г Составляющая Р/ силы Р, совпадающая с направлением де-
формации /,
Pi = Р -|- уРу2). (VII .28)
L Составляющая 1Р деформации /, совпадающая с направлением
силы Р,
R 1р = | РрР/- ТрТ/)- (VI 1.29)
Г Пользуясь очевидными соотношениями
| арР = atcxal- ррР = р2с^/; урР = у2сга/, (VII .30)
*8 Н. В. Григорьев 2< 3
можпо выражение (VI 1.27) преобразовать к виду
Pi = (г^сха &с„а -| у]сга) /,
а из (VI 1.29) получить
1р = (сСрСха -\~fipCya ~Г УРсга )Р-
Величина
С[ — С1[Сха 1~ Р/^£/д । У/^га
(VI 1.31)
(VIL32)
(VII.33)
есть поступательная (линейная) жесткость амортизатора, дефор-
мируемого в заданном направлении L
Величина
Ср 1 = <ZpCxal 4- PpCyQ1 + ypCza 1 (VIL34)
представляет собой поступательную (линейную) податливость,
а величина сР —- жесткость свободно установленного амортизато-
ра в направлении Р.
Геометрическое место концов отрезков длиной ~ откла-
дываемых от начала координат в произвольно задаваемых направ-
лениях /, есть эллипсоид
(VII.35)
называемый эллипсоидом поступательных жесткостей направленно
деформируемого амортизатора. __
Геометрическим местом концов отрезков, длины которых ] Ср
откладываются от начала координат Оа в произвольно задавае-
мых направлениях Р, является эллипсоид поступательных (ли-
нейных) податливостей свободно установленного амортизатора
С^Ха 4- С~-Г СГа ’4=1- (VII -36)
При малой величине сообщенной амортизатору поворотной
деформации %, вектор которой образует с положительными направ-
лениями координатных осей ха, уа, углы, характеризуемые
соответственно их косинусами Рх, проекциями этого век-
тора на оси координат определяются поворотные (угловые) дефор-
мации амортизатора по трем главным направлениям.
Если вектор нагружающего амортизатор внешнего момента ЭД
не совпадает ни с одним из главных направлений, то соответству-
ющие ему направляющие косинусы аэд* Р$оь Ж отличаются от
косинусов ах, pv, определяющих направление вызванной
моментом деформации /. Считая эту деформацию достаточно
малой, можно выписать аналогичные приведенным выше форму-
лам (VI 1.27)ч-(VII.36) следующие выражения:
274
-— для косинуса угла между векторами 5)1 и /:
I cos (юг, х) = «ЯП«х + РаяРх + ТаяТ«: (VII.37)
— для составляющих момента Ф1 по главным направлениям:
1 адаф? = ахАхох, РаяЭД = РАпХ. Тяя-те = Тх^аХ; (VII.38)
— для составляющей момента 2К, совпадающей по на-
правлению с вектором вызванной им деформации %:
я)1х = (аэдах РэлРх 4" ТалТх) =
— {^kxa 4~ Тх^га) Х^ (VII .39)
— для составляющей деформации х> совпадающей по
направлению с вектором момента :
Хая = (^«х + РапРх + ТялТх) X =
I = (а^1 + pfe1 -|- yfc') (VII .40)
— для поворотной жесткости амортизатора по отношению
к деформации кручения вокруг оси, проходящей через точку Оа
в заданном направлении х*
Г *z = + РХо + VzA»; (VII .41)
— для поворотной податливости которая обратна вели-
чине kgn поворотной жесткости свободно установленного аморти-
затора по отношению к моменту ®i:
I Д? 1 — 1 + РяЛ уа1 1J (V11.42)
I — для эллипсоида поворотных жесткостей направленно дефор-
мируемого амортизатора (на поверхности этого эллипсоида рас-
положены концы отрезков -4=, откладываемых в произвольно
) ^х
задаваемых направлениях х от начала координат):
I V» + kyatfa 1 k2azl = 1; (VI1.43)
-— для эллипсоида поворотных податливостей свободно уста-
новленного амортизатора (т. е. для i еометрического места концов
отрезков । отложенных от начала координат в произвольно
задаваемом направлении вектора 3R):
) kxa Ха -|- kya Уа~\~&га %а — 1- (VII.44)
К Может быть осуществлена такая установка амортизатора, при
Которой возможными его деформациями будут только поступатель-
ная вдоль и поворотная вокруг некоторой оси / (т. е. направления
и х совпадают). При одновременном возникновении обеих резуль-
тирующую деформацию амортизатора можно назвать винтовой.
L 18* 275
Характеристики жесткости амортизирующего крепления
Если к амортизаторам, установленным на неподвижном осно-
вании, присоединен абсолютно жесткий амортизированный объ-
ект, то перемещениями последнего вполне определяются деформа-
ции амортизаторов.
Пусть в неподвижной прямоугольной координатной системе
Oxyz заданы перемещения амортизированного объекта — посту-
пательные и01 u0, w0 вдоль и поворотные (малые углы поворота)
ср, ф, $ вокруг координатных осей х, г/, г. Шесть величин u0, v0,
м°гут быть названы приведенными к точке О и осям
х, //, z деформациями каждого из п амортизаторов, входящих
в амортизирующее крепление, равно как и деформациями амор-
тизирующего крепления в целом.
При переходе к координатной системе Oa£-xaft/ax-zfl/, образован-
ной главными осями i-oro амортизатора, и приведении к точке
OU£ (*,, yl9 z{) совокупность перемещений амортизированного
объекта (деформаций амортизирующего крепления) составится
из величин иа , vait (ра/, Первые три представляют
собой поступательные (линейные) перемещения (деформации)
в направлении осей ха[1 yai. zai> остальные—поворотные пере-
мещения (деформации) вокруг тех же осей.
Усилия, деформирующие i-ый амортизатор, сводятся к трем
силам:
-Рxai = ^xai^ab ^yai = CyajPai) ^zai ^ztii^al (VI1.45)
и трем моментам:
= kjeaffait ^yai = kyaityab ^zai ^zafiai* (VII.46)
Они могут быть приведены вместе с аналогичными усилиями
для всех прочих амортизаторов к точке О, и при суммировании
с ними дадут результирующую силу Р и результирующий момент
Эй.
Для выполнения необходимых вычислений нужно знать взаим-
ное положение координатных систем Oxyz и Оа1ха1уа^аг Оно
определяется заданием для каждого амортизатора его координат
х,, //;, zL (координат точки Oai в системе Oxyz). а также таблицы
направляющих косинусов
У al %О1
aU ^21
у Рн Рг/ Рз/
z 1 Уи Тг,- Тз/
(VII.47)
276
Проекции Р и Ж на координатные оси х, у, г выразятся через
деформации амортизирующего крепления следующим образом
(везде аи = а.л)\
Рх = а11и0 “Г «12^0 "Г а13^о Н ' °1*Ф 4" c16^ i
Pv = ацио + a22v0 4- a23w0 4 - ам<р + а25ф 4- а260;
Р, = а31и0 4- a32v0 4- ОэзК-'о 4 а31ф 4- а35ф + а3(Д
9Хх = аии0 4- ai2v0 4- ai3w0 4- ow<p 4- а4>ф а4в0;
ЭЛу = а61ио 4- a32v0 4- а53ш0 4- аь4<р 4- а65ф 4- а58д;
= ав1и0 -t- aQiv0 4- avsw0 4- a64q: f- а05ф 4- fcee<h
(V1I.48)
n n
V (O V j 2 1 -
Gil — Zj Gii —
»=1 i=l
1
n Л
G22 = G22 — (Ph’Cxe.' d “4 p. i^zG«) i
i=l i‘=!
n n
^33 == G33 = d T2if yai ~|“
1=1 /-1
(VII 49)
n
G13 = У GiP
I 1
n
==^
i-1
~T °^2iT2xC//a/ ^SxYSi^za/)’»
<—I
~F Рг/Тг+ МзАа.);
(V1I.50)
Gy
«35
^45 —
fl46 —
Ц$6 —
(VI 1.50)
(VU .51)
Матрица
a ju g12 a13 a15 a16
^21 ^22 ^23 C24 ^25 ^26
^31 ^32 Я33 G34 G35 G36
Gjl G42 fl43 Л44 C45 С4в
fl51 fl52 ao3 a51 fl56 Go6
fl01 fl62 fl83 ^(54 fl65 G66
(VI 1.52)
278
К^стемы линейных уравнений (VI 1.48), называемая матрицей
жесткостей амортизирующего крепления, симметрична. Ее верх-
нюю левую четверть занимают коэффициенты (У 11.49), имеющие
размерность поступательной жесткости. В нижней правой чет-
верти сосредоточены коэффициенты (VII.51) поворотной жестко-
сти- Остальные коэффициенты (VI 1.50) могут быть названы пово-
ротно-поступательными жесткостями.
Полезно иметь в виду» что
аП «512 4“ а33 — («ла/ Г су<Ц ' Gflj)-
«14 “Н «25 “Е «36 — 0;
a^Zt — а^х, = аИМ + аИ X} — 2a^xizi',
„И)г „(П,. . /7<Н„2 ,, •
«26 Xi — G16 Hi = CL22 xi "Г «II — ^«12 Х1УЬ
«.45 Vi — a'2h — «14 Zi — €Lm xi —
— «13 У U T «23 Xi%i «33 Xi«12 z n
«36 !/i — 4 — «24 Xi — «U t/x —
__ zyHly*/ i t/ 7 rt^Y.7 n &
— «;3 Xxt/i H ^12 £/Л «22 XiZi «13 Уц
«16 Zi — «36 xi — «25 xi — «15 У[ —
(VI 1.53)
(VII.51)
(VII.55)
Л(Оу 7 I г.иУу n{ihl 7 n^Y1
= «12 xizi «13 XilJi — «11 ”i2i «23 Xl*
Если амортизаторы не обладают поворотными жесткостями, то,
как это следует из формул (VII.51), в шести выражениях (VII.55)
по каждую сторону от знака равенства оказываются соответственно
i Л Ji J J J
величины «5», «66* «45» «46, «56-
При повороте координатной системы вокруг ее начала коэф-
фициенты (VII.49), (VII.50), (VIL51) каждой четверти изменяются
как составляющие тензора второго ранга. Так, при переходе от
системы Oxyz к новой системе Ox'y'z'. когда углы между старыми
и новыми осями задаются таблицей косинусов
X- у' г'
X <11 «2 «3
У ₽1 р2 ₽3
Z Yi Y2 Y3
(VII .56)
279
коэффициенты верхней левой четверти для новой матрицы жестко-
стей могут быть вычислены по формулам
г о 2 2 I
Оц = Pi^22 “ ~ Т 1*^33 ‘ f
4~ 2ос1у1£213 4" 2рАу10аз,
П22 = «2<211 ~г Pz^22 4~ T2fl33 4“
“1“ 2сС2Р2Й12 4" 20С2У2Д13 “F 2p2Y2^23>
С33 = ССзОц -ф Рз^23 ф Т»п33. 4“
Л|- 2«зрз£212 + 2a3ydn13 2р3т3а23;
Qu = оадли + Р1Р2О22 * Ь ТфОзз +
+ «и (*1Р> + a2Pi) + о13 («йъ + a3Ti) +
+а2з (P1T2 : РзТх)»
013 = «1«з£2Ц - P1P3O22 4“ Т1Т3Я33 4~
4- о12 («Л 4- asPi) 4- Ojg («1Тз 4- a3Yi) iL
4 о23(Р1Тз РзТ1);
£223 = 0^2«зО11 | Р?РзО?2 4“ Y2Y3GS3 4“
+ 012 («гРз 4“ «зРг).4- Огз («2?з + «зТг) 4-
+ 023 (РгТ.з 4- РзТг).
(VI (.57)
Если в формулах (VII.57) увеличить на 3 единицы каждый из
двух цифровых индексов, которыми снабжены коэффициенты жест-
кости, то получатся совершенно аналогичные формулы для вы-
числения коэффициентов нижней правой четверти новой матрицы
жесткостей.
Соответствующие формулы для коэффициентов правой верхней
четверти, которая в общем случае несимметрична относительно
своей главной диагонали, несколько более громоздки:
Оу — «Г^14 4- Р1д25 4“ Т1*$36 4-
4- «1Р1 (ci6 4- 021) 4“ aiYi (Яге + ям) 4-
4" PiYi (я2б 4~ я35);
£215 = ai«2^U 4” alp2^15 4- alY2a16 '
+ «2pl«24 + Р1Р2Я25 4- Р1Т2Я20 4- «271^34 4-
I" РгУг^зо 4*" YiY2gso*
£Zi6 = ai«3<44 + «1Рза15 4 «1Y^16 4~
4 «3Pjq24 + ₽i₽3«25 4- Р1У3я20 + a3YAi+
+ PsYAis + YiYs^36;
(VII.58)
280
а >4 = <Х 1CT6Z14 -}- (X jpiGis + ОС 4
4 0Cl?2«24 4~ Р1Рз«25 р2?1«26 4* а172«34
4~ Pi?2g35 4~ Т1Т2а3б;
«25 “ оЛ«Ц 4" р2«25 + Т2«36 4“ СС-’Р? (« 15 4“ «24) 4“
а2?2 («16 4~ «8-1) 4" Р2Т2 (С2б 4* «Зй)э
«26 — CZ-CC3G14 CC2P3G15 Сб2Уз^16 “I” C^fJjGiy 4"*
+ р2р3«25 4* РгТз«2б а3у2«31 + ₽ф«35 4- ТгйАю;
«31 “ ОС1ОСз«Ц азР1«15 4" ®ЗТ1«16 4* #1рЗ«54 4~
4 Р1Р;#25 + ₽зТ1«2б 4~ «17^34 4- РгТа^зо + TiVAgJ
(VII.58)
«33 = CX -CC^O-J I п - ССзР2ь*15 -г- ОСвУ?«16 aJp3«24
4- p2psG25 4 Р^Тг«2в 4 а2?з«з4 4” РзУз^зб 4* YsYAe»
>
При параллельном переносе системы координатных осей с пере-
мещением ее начала в точку (У (*cr, у0', ?о') сохранятся углы
между осями координатной системы и осями xai, yait zai каждого
амортизатора, но изменятся координаты амортизаторов.
Поэтому параллельный перенос осей не скажется на коэффи-
циентах (VII.49) верхней левой четверти матрицы жесткостей, но
приведет к изменению коэффициентов (VII.50) и (V1I.51).
Координаты i-го амортизатора в новой координатной системе
О'х'у'г' будут
Xi = Xi — Хо--, y'i =У1 — Уо-\ А = Zi ~Zo’. (VH.59)
Поворотно-поступательные и поворотные жесткости аморти-
зирующего крепления, отнесенные к новой системе, можно вы-
числить, имея матрицу (VII.52), по формулам:
«14 = «14 + «IjZo* — «13#0‘ ’>
«15 == «15 + «13*0' — «11^0';
«1б — «16 4 аиУог — «12*о':
<224 = «24 4" «22^0' «23//О* 5
«25 — «25 4“ «23*0' — «12^0г»
«26 = «26 Ч ' «Г?!/О' ---«22*0'J
Й34 = «34 4" «23^0' «33{/О*»
«35 — «35 4“ «33*0' — «13^0*;
«36 = «36 4 «13^/0* — «23*0* J J
(VII.60)
281
£7Я = П44 + ?0' (а24 + ^2ц) — УО’ (G3-l
6255 = 6Z55 + Xq- (а35 + ЛЗэ) — *0' (^15 Ois)*,
^66 — G66 -г Уо’ (G16 } ale)—Хо*(^збЧ Фе);
6Z45 = ^45 + (031 + Я34) — (с35 4" ЯЗб) +
4—~ (а25 + 025 — Ой — oil);
z -* X »
<246 = 016 + —(Q26 «2б)----(024 + O24) +
yn, , *
4—(о и H- 014 — Озб Озб);
л*
056 = ^.6 + ^TjT (fl10 + O15)---t~(a’6 + aiб) -
4---b— (O36 + O36 — (225 — O95).
Коэффициенты податливости
Решением системы линейных уравнений (VI1-48)
деформации амортизирующего крепления
и0 = coii-Px 4“ aoi^y “Г oouPz 4~
4~ О014ЭЛ х —L” OoisHRy 4* O016®^z»
Vq = а^21Рх 4" #022^у 4- Оо23<Р2 4~
х 4~ у О02б^г»
wo = Gq31Px 4“ аМ*Ру 4~ ООЗзР2 4~
4~ О034Ф1х 4- 0035^1/ + Созб^г!
I .-1 1 1
(р = Сои Рх 4- 4- CIq^qPг 4“
G044®ix Я045~1С/ 4" 0046^2»
ф — 6/551 Рх 4“ вО&Ру Яо&Рг |
4~ й05*3)?х 0055^1/ 4“ с056^2>
О = flOGlPx 4' 0(jG2^tf 4" al&P2 F
4~ ao6'i2)ix I ^oQ^Sly 4“ ОиббЗЯг*
(VII.61)
являются
(VI 1.62)
282
I В написанных выражениях коэффициентами при усилйяк
рл9 ...» 9Хг служат коэффициенты податливости амортизирую-
1 щего крепления.
У Матрица податливостей
—1 “ОН —I 0012 —1 0013 -1 <2011 —1 0015 -- I 0016
—1 0021 —1 0022 —1 0Ц23 —1 0021 —1 “025 —I 0026
—1 0оз1 —I 0032 —1 “033 -I 0034 0035 —1 0036 (VII.63)
—1 0(141. —1 #042 —1 0043 —1 Ou44 —1 0045 —1 “046
-1 0051 1 “052 go4 —I 0054 —1 “055 -1 0056
—I CZoci —1 0062 -1 0Q63 —1 “064 -1 “065 —1 0066
обратная матрице жесткостей (VI 1.52), симметрична относи-
тельно главной диагонали (“о?/ = 0од)- Коэффициенты поступа-
тельной (линейной) податливости занимают верхнюю левую чет-
верть матрицы (VII.63), коэффициенты поворотной податливости —
ее нижнюю правую четверть; в остальных двух четвертях нахо-
дятся коэффициенты поворотно-поступательной податливости. Раз-
мерность коэффициента податливости “щ/ обратна размерности
соответствующего коэффициента жесткости
г Для каждого может быть написана формула
(VII.64)
где Д —основной определитель системы уравнений (VI 1.48), или,
Что то же, определитель матрицы жесткостей (VII.52); А— ал-
гебраическое дополпение элемента аи этого определителя.
При повороте координатных осей Oxyz около начала коорди-
нат коэффициенты податливости изменяются по такому же закону,
Какой был указан выше для коэффициентов жесткости. Поэтому
в формулах (VII:57) и (VII.58) можно заменить все а// и соот-
ветственно на и cozy-
> Если нужно перейти от координатной системы Oxyz к си-
стеме O'xy’z’ с осями х', у\ г9, параллельными соответственно
реям х, у* zt а координаты точки О в первоначальной системе
есть хоч z/os то при известной матрице (VII.63) элементы новой
283
матрицы податливостей, отнесенной к системе О'х у г , можно
вычислить по формулам:
0Q14 = 0014 Ч~ 0045^0'----0046^0'»
0015 = 0015 4“ 0055^0' “ 0О56?/О'»
0016 = 0Q16 “F 0056^0' — 0ОббУог»
—V —1 । •
0024 = 0024 и- 0О4бЛО' 01M4ZO'»
0Ц25 = 0025 Нг 0056^0* 0045^0'’ 1 (VI1-6 j
0026 = 0026 0066^0* -0046^0’»
0034 = 0№4 " 0044/0' — 0015*0'»
—V —I . —1 —1 v •
0035 = 0035 1 0045^0* — 0Ц55ЛО' >
0036 = 0Ц36 Ч" 0046^0' — 0056*0'» ,
Д011 = %Q' (0015 4“ 0015 ) —У О’ (0016 “Г 0016 )•
0022 = 0022 + ХО' (0026 “] ' fl026 )---20‘ + 0024 )i
0033 = 0033 4“ У О* (0034 Ч” 0034 " — %О' (0035 0035 )t
___«г ] / __1 _1*------У()' 1 —1 । •! '\ ।
a012 = Cot2 + -r- Woie + °«1G 9- \c026 OlCG » I
£,
-|---(O025 4" 0025 — 0014 ’— 0014 )>
—Г -L I
0013 = 0013 +
(0OI5 1 0015 ) 4
(VI 1.66]
Уо^ / — i 1 — i' —1 г\.
+ (0014 + 0014 — 0036 — 0036 A
p ______1 Уг}* i ______1 __1F\ ”0* / •—1 I —t
0(P3 = 0023 -) • 0 (0024 “[ 0024 ) (0034 , 0034 J
d—(00 4 + 0036
0025
Нетрудно заметить сходство между формулами (VIT.60) ’
(VII-65), а также между (VII-51) и (VII.66).
Коэффициенты поворотной податливости амортизирующего
крепления, занимающие нижнюю правую четверть матрицы пп
датливостей (V 11.63), при параллельном переносе клордина!
системы не изменяются.
284
Оси жесткости
Если направленная вдоль некоторой прямой внешняя сила
! сообщает амортизирующему креплению одну только поступатель-
> ную (линейную) деформацию вдоль той же прямой, то последняя
* называется осью поступательной жесткости амортизирующего
крепления.
К Если вдоль некоторой прямой направлен вектор внешнего
крутящего момента, сообщающего амортизирующему креплению
одну только поворотную (крутильную) деформацию вокруг той же
I прямой, то последняя называется осью поворотной жесткости амор-
тизирующего крепления.
L Точка пересечения двух или нескольких (но не всех) осей
жесткости называется частным центром жесткости. Если все осп
жесткости пересекаются в одной точке, то последняя называется
центром жесткости амортизирующего крепления.
В числе поворотов координатной системы Oxyz, преобразую-
’ щих матрицы (VII.52) и (VI 1.63), существуют такие, в результате
которых те или иные элементы новой матрицы примут' нулевые
значения.’
| Представляет, в частности, интерес разыскание тех направле-
ний координатных осей, при отнесении к которым матрицы (VI; .52)
’ в ее верхней левой четверти остаются нс равными нулю только
элементы, стоящие па главной диагонали. Эти направления яв-
ляются главными для матрицы поступательных жесткостей, пред-
ставляющей верхнюю левую четверть полной матрицы (V1I.52).
Для их определения нужно разыскать корни o£(s= 1, 2, 3)
кубического уравнения
Q13
= О
О
^23
(VII .67)
G31
аза а
^3S
которые при поочередной
уравнений
подстановке в систему алгебраических
(a33-c)Z = Q
позволят найти соответствующие каждому корню два отношения
(V7A)S, (Z/X)s, где Х9 Y, Z могут рассматриваться в качестве
проекций некоторого вектора с началом в точке О, имеющего ис-
комое направление.
285
&тот способ применим и для нахождения главных направлении:
матрицы поворотных жесткостей
П44 Д45 С4в
G34 G55
flG4 G€5 С6в
матрицы поступательных податливостей
_] -1 -1
Поп О 012 По13
-I Z-,-1
“ По21 Я 02; ПойЗ
-1
ПоЭ1 Я032 Яозз
матрицы поворотных податливостей
1 1
и 044 По45 g04G
—I -I —I
1 ^054 fl055 «05G
—1 —I —1
П(.«С4 Яи65 аи66
Полная матрица жесткостей (VII.52) после поворота осей,
ориентируемых по найденным из (VII.6/) и (VII.68) направлениям,
приобретает вид
аи 0 0 014 П1э °1в
0 Cl-io 0 #24 О05 С2б
0 0 азз И35 fl3G (VI 1.69)
П42 Оц П45 G46
Сз1 0.3 «.-Ц П55 G56
оС1 Пб2 ^вз flf.4 Ogg
Обращаясь к формулам (VII.60), в которых теперь надо поло-
жить а12 — а13 = = 0, заметим, что параллельный перенос
координатных осей не скажется на величине коэффициентов
g26’ Q3«- „ Л„_„
Остальные коэффициенты поворотно-поступательной жесткое < и
изменятся и примут отмеченные штрихами новые значения:
й26 и ass, если Хо- + 0;
П16 И П34, если у0- + 0;
я 15 И #24, если ?о' =± 0.
286
При этом:
а26 = 0, если хо' = <22g/^22»
Оз5 — 0, если х0* = — а^/а33;
Q16 = 0, если уо* = — flieMib
аз4 = 0, если у0' = ^Мзз;
oi5 = 0, если Zo-^a^/a^
а'м = 0, если z0' = —
Если при параллельном переносе осей переместить их начало
в точку 0\ координаты х0’т Уог, ?ор которой взяты из числа только
что выписанных, то в новой матрице жесткостей появятся по каж-
дую сторону от главной диагонали дополнительно к имеющимся
в (VI 1.69) еще три пулевых элемента.
При наличии исходной матрицы жесткостей (VII.69) первая
из формул (VII.61) приобретает, если учесть (VII.60), следующий
вид:
с44 — 4“ ^22^0' йЗЗ!/сг 4“ 2^24^0' -2034^0'. (VII. 70)
Величина (VII.70), рассматриваемая как функция у<у и г0^
принимает при уо> = ам!а33 и zo- = —си12 наименьшее зна-
чение
2 2
| (<4»)m«n = a«——(VI 1.71)
«22 «S3
Поэтому прямая, определяемая уравнениями
Ухо
°34
сзз ’
АО -- z. f
«22
(VI 1.72)
параллельная оси х и обозначаемая как х0, может быть названа
Ж осью наименьшей поворотной жесткости амортизирующего креп-
ления по отношению к поворотным деформациям в плоскости yOz.
В Аналогичным образом определяются оси у0 и z0 наименьшей
поворотной жесткости по отношению к поворотам в плоскостях xOz
и хОу. Уравнения этих осей будут соответственно:
ЛТ _ л .
, уя—(VI1.74)
“и
287
Величины наименьших поворотных жесткостей, аналогичные
(VII.71), равны:
2 2
Kj,0 = (cs5)min = a55 — -Tf- — V2-’ (VI 1.75)
* ttll азз
• 2 / * \ «10 Kzo ~ \йбб)пип = ^66 ~ аи «26 а23 (VII.76)
Отметим еще параллельные коордипатньш осям прямые х*,
гж, определяемые уравнениями:
Gia «А. = — V ’ = а11 g15 . °11 (VII.77)
й — а > — to to ^2в . С22 (VII.78)
п33 аз& °33 (VI 1.79)
Каждая из них пересекается с двумя из трех осей наименьшей
поворотной жесткости (VII.72), (VII.73), (VII.74).
Ни прямые (VII.77), (VII.78), (VII.79), ни оси наименьшей
поворотной жесткости между собой в обще^м случае не пересе-
каются.
Прямые (VII.77), (VII.78), (VII.79) особенно интересны тем, что
каждая из них становится осью поступательной жесткости амор-
тизирующего крепления в том частном случае, когда оказывается
равным нулю соответствующий ей элемент матрицы (VII.69) из
числа расположенных па диагонали а14 — азе. Если, например,
а25 = о, то осью поступательной жесткости у* является прямая
(VII.78); достаточно при параллельном переносе координатных
осей поместить точку О на эту прямую и совместить таким образом
с ней новую координатную ось О'у'3 чтобы во второй строке и
втором столбце преобразованной матрицы жесткостей элемент а22
остался единственным не равным нулю элементом.
Если в матрице (VI 1.69) ни один из элементов au, не
равен нулю, то амортизирующее крепление не имеет осей посту-
пательной жесткости.
Важнейшие частные случаи
Может оказаться, что благодаря обращению в ноль части эле-
ментов матрицы жесткостей (VI 1.52) утрачивается связь между не-
которыми деформациями и усилиями. В результате система урав-
нений (VII.48) распадается на более простые независимые системы
или отдельные уравнения.
Так, при симметрии амортизирующего крепления относительно
одной плоскости, которую в этом случае удобно включить в число
288
координатных плоскостей, обращаются в ноль 18 жесткостных
коэффициентов. Если, например, крепление симметрично отно-
сительно плоскости zOx, то матрица (VIL52) принимает вид
°п 0 fl13 0 Й15 0
0 й22 0 O94 0 Й2С
Й31 0 0 °42 азя 0 0 й35 0 0 С46 (V1I.80)
°51 0 °53 0 °55 0
0 йв2 0 Об4 0 й6«
Таким образом, система уравнений распадается на две:
Р* = йпйо + а1:Д’о + а^ф;
Рг — a3iu0 -|- OS3W() 4 ’
(VII .81)
24^ — o6iii() 4- аъзи>о 4- a55i|';
Ру = a2iv0 4- «24<Г + а2Л.
-^4 — й42й0 4" Й41Ф 4" й46^> ’
(VI 1.82)
= a62v0 4- а61<р + асе$.
Рассмотрим сначала систему (VI 1.81). Осуществим параллельный
перенос координатных осей с перемещением начала координат
в точку О (хо-, уо-, Zo-), которую выберем так, чтобы новые зна-
чения Я15 и аз5, вычисляемые по формулам (VII.60), были нулями.
Из этого условия получим:
v ____ fl13g15 ClLg35 .
*0' -* • 2 ,
с11с33 —
~ а1ЬаЗЗ с 13^35
?О' =----------------2---•
Матрица новых жесткостных коэффициентов системы
Он 013 й15
9 9
Оз1 Озз 035
л л
05 г ^52 O55
Оц
О31
013
где в соответствии с
(VI 1.60) и (VII 61)
(VI 1.83)
(VI 1.84)
0
О
О
О
O55
С11<135 + «зз°и 2J13a15a35
“““ “* п ~
спс33 й13
1? Н. В. Григорьев
(VI1.85)
28?
Выражения (VI!.83) могут рассматриваться как уравнения оси
наименьшей поворотной жесткости по отношению к поворотам
в плоскости гОх. Они отличаются от (VII.73) тем, что а]3 =/= 0.
Этим же выражение (VII.85) для поворотной жесткости отличается
от (VII.75). Коэффициент — единственный не равный нулю
элемент в последней строке и последнем столбце матрицы (VII.84).
Следовательно, внешний момент, действующий в плоскости гОх,
сообщает амортизирующему креплению только поворотную де-
формацию относительно оси (VII.83). Последняя является, таким
образом, одной из осей поворотной жесткости амортизирующего
крепления — осью уё.
Если поворачивать вокруг нее систему координатных осей,
начальному положению которой отвечает матрица (VII.84), можно
найти такое положение этой системы, которому соответствует диа-
гональная матрица жесткостей. Действительно при повороте на
угол ф переход к новым значениям жесткостных коэффициентов
произойдет в соответствии с формулами (VII.57), причем
а2 а3 COS ф 0 sin ф
Р1 Рз Рз •— 0 1 0
Т1 Та Тз — sin ф. 0 COS Ф
(VI 1.86)
Таким образом, новые коэффициенты at5 и а35 будут равны
пулю, а
С1з = -4- (он —О33) sin 2ф -j- й1зcos2ф. (VII.8< i
Приравнивая (VII.87) нулю, найдем отвечающее этому условию
значение угла ф, которое обозначим через if. Оно определится вы-
ражением
(V1I.88)
Здесь опущены штрихи при жесткостных коэффициентах, что
позволительно сделать на основании выражения (VIL84): выпол-
ненный ранее параллельный перенос координатных осей не из-
менил’ первоначальных значений этих коэффициентов.
Обратимся теперь к системе (VII. 82). Параллельный перенос
координатных осей с перемещением начала координат в точк
0“ (хо", О, Zo-), где
Х£г = ^, г0„ = —*4 (VII.89)
290
приводит к новой матрице жест костиы к
коэффициентов
* w W
#22 #24 #26
w л гг
аА2 #44 #46
rr ft и
&& #64 #6С
#32 0 0
о #44 в 10 1«Э #40 °24а26
V а22 °23
о /7 а24°2в #68 с2б
V/ #40 а22 а22
(VII.90)
Повернув после этого координатную систему вокруг оси О”у"
на угол ф, определяемый выражением
tg 2ф =
2°46
И 9t
в66“ С44
(VH.91)
получим диагональную матрицу жесткостных коэффициентов
0
«44 COS2 if + Ода Sin2 ф —
— 046 sin 2if
О
О
044 sin2 ip 4- о66 cos' ip +
+ o« sin 2ip
(VII.92)
О
£ На рис. VII.1 схематически показано взаимное положение двух
систем координатных осей и 0"х^у^. Первой отвечает
К диагональная матрица жесткостных коэффициентов, получаемая
из (VI(.84) путем поворота на угол ф согласно (VII.88), второй
I соответствует матрица (VI 1.92).
В Новые обозначения осей, введенные дополнительно к перво-
начальным, отличают от прочих оси ул, z# поступательной и
оси х„, у,;, zB поворотной жесткости амортизирующего крепления.
• Точки О' и О являются его частными центрами жесткости.
В распространенном частном случае оси х* и Лё, у* и у? по-
парно параллельны, а оси г* и 27 совмещены друг с другом, однако
точки О и О не совпадаю!. Один из вариантов характерной для
Такого случая схемы амортизирующего крепления представлен
на рис. VII.2. Все амортизаторы, входящие в крепление, одина-
ковы. Их одноименные оси жесткости xai горизонтальны и парал-
лельны плоскости симметрии амортизирующего крепления, а оси
Жесткости га1 образуют с нею одинаковые углы 0. Центры жест-
кости всех амортизаторов лежат в одной горизонтальной плоскости
на расстоянии b от плоскости симметрии.
> 19* 291
Рис. VII. L Взаимное расположение двух систем коор-
динатных осей O'x*z/oz* и О"хйу*г<>9 образованных осями
жесткости
Рис. VII 2. Принципиальная схема амортизирующего крепле-
ния, симметричного относительно плоскости xz, с наклонным
расположением осей жесткости амортизаторов- Частный центр
жесткости Ox*z* лежит в горизонтальной плоскости, вмещаю-
щей центры жесткости амортизаторов
292
При такой схеме плоскость х^О'у^ совпадает с горизонтальной
плоскостью, вмещающей центры жесткости амортизаторов, а
плоскость находится над нею на расстоянии
I* =г,=Ь , (VII.93)
где
1 k = ^S-. (VII.94)
G/Д
Если k < 1, то величина (VII.93) отрицательна, т. е. плоскость
х»О"у* расположена ниже плоскости х*(Уу^.
Наибольшее по абсолютной величине значение величины (VII.93)
соответствует углу
(VII.95)
(VIL96)
Одно и то же значение (VII.93). меньшее по абсолютной ве-
личине, чем (VII.95), может быть получено при двух различных
значениях угла 6, определяемых выражением
(VII.97)
Из (VI 1.93) и (VIJ.95) следует, что частный центр жесткости О
может быть вынесен из плоскости размещения амортизаторов на
расстояние тем большее, чем больше отличается от единицы от-
ношение (VII.94) жесткостей амортизаторов в двух главных на-
правлениях.
При справедливости схемы (рис. VII.2) от угла 0 зависят пять
из шести главных жесткостей амортизирующего крепления:
хо
(VI 1.98)
п
Кгё-К°г0 \-C,a(k I)sin-6£x’.
i=l
293
Здесь верхним нулевым индексом отмечены значения этих
жесткостей при 0 = 0:
С2< — чсга — kCy^t
K°XD = &гс°. = b2kc°y-
n n (VI 1.99)
Л
Что касается главной жесткости
Сх, — №ха.
(VII. 100)
то она от угла 0 не зависит и представляет собою сумму жестко-
стей сжа всех п амортизаторов, составляющих крепление.
Если амортизирующее крепление имеет две плоскости симме-
трии, то в матрице жесткостей (VIT.80) появляются сверх уже имею-
щихся добавочные нулевые коэффициенты. Взяв, например, пло-
скости симметрии за координатные плоскости уОг и гОх, придем
к матрице жесткостей
ап 0 0 0 а16 0 11
0 0 с24 0 0
0 0 а33 0 0 0
О а4» 0 а41 0 0
0 0 0 0
0 0 0 О 0 авв I
(VII.101)
Один из двух частных центров жесткости амортизирующего
крепления находится в точке О (0, 0, с15/дп), второй — в точке
О" (О, О, — a2Ja22).
Трем взаимно перпендикулярным плоскостям симметрии, при-
нятым за координатные, соответствует диагональная матрица жес
костей.
Если центры жесткости всех аморт изаторов расположены в од-
ной плоскости, а одна из осей жесткости каждого амортизатора
перпендикулярна этой плоскости, то последнюю можно рассма
тривать как плоскость симметрии. Выбрав е^ в качестве одной из
координатных плоскостей, получим матрицу жесткостей, анало-
гичную (VII.80), с разделением системы уравнений (VII.48) па
две системы, аналогичные (VII.81) и (VII.82).
294
В частном случае благодаря обращению в ноль соответствующих
жесткостных коэффициентов из системы (VII.48) могут выделиться
| одна, две или три самостоятельные пары уравнений, каждая из
= которых объединяет поступательную и поворотную деформации
I относительно одной и той же оси. Последняя может быть названа
винтовой осью жесткости амортизирующего крепления.
Последовательное соединение амортизаторов
К При последовательном соединении отдельных амортизаторов
пли групп амортизаторов складываются их податливости.
Ь Пусть, например, асы}— произвольный элемент матрицы подат-
ливостей (VII.52) амортизирующего каскада, отнесенной к коор-
jr дипатной системе Оху г. а —
соответствующий элемент апало-
И пгчной матрицы второго каскада.
Если оба каскада присоединены
И к разделяющей их абс< лютножест-
В кой конструкции, не имеющей
других связей, и образуют, таким
ИГ образом. два хкаскадпое амортизи-
рующее крепление, то все элемен-
ты Пщ/ матрицы податливостей это-
го крепления, отнесенной к коор-
динатной системе Олт/z, вычисля-
ются по формуле
К = aOill -I a0-fl. (VI (102)
Зависимости между коэффи-
цпентами жесткости двухкаскад-
. ного амортизирующего крепления
и составляющих его каскадов в об-
щем случае очень громоздки. Од-
пако во многих частных случаях
они существенно упрощаются.
Если расположение осей жест-
&
Рис. VII.3. Частный случай взаим-
ного расположения осей жесткости
двухкаскадного амортизирующего
крепления и входящих в пего амор-
тизирующих каскадов
кости х*, хс. у^ у^ одного и
: ' уоЪ другого каска-
да соответствует показанному па
рис. VI 1.3, то по отношению к
внешним статическим нагрузкам,
приложенным к одному из двух каскадов, двухкаскадное крепле-
иие равноценно однокаскадному с двумя частными центрами жест-
кости Oij* и осями поступательной жесткости х* и 14,
осями поворотной жесткости х0 и уо1 осью поступательной и пово-
В ротной жесткости z*.
295
Вертикальная координата точки Ох,?.» отсчитанная от частного
центра жесткости 0ХЛ» равна где ^*х—отсчи-
танная от 0х^ вертикальная координата частного центра жест-
кости Ох^2^ Можно видеть, что
Л*х = Л(М—Zx. I" Zixel . (VII.103)
Вертикальная координата точки отсчитанная от частного
центра жесткости равна О-^КХС1 1Де — отсчл"
тайная от О вертикальная координата частного центра жест-
кости Оу^ z<1. Очевидно, что
h*y = hQi — zy* zly^ (VI 1.104)
Поступательные жесткости двухкаскадного амортизирующего
крепления вдоль осей х*, у*, г* будут соответственно
(VI 1.105)
Поворотные жесткости двухкаскадного амортизирующего
крепления относительно осей х0, у0, г* соответственно равны
1S . ,_
•Ххо --- hT \ if ’
"Г ЛхО1
KyvKyoi .
У° ~ Куо + Кт ’
KZK2J
к2 ч- к21
(VI 1.106)
Частные центры жесткости Охд* и совпадут, образуя
единый центр жесткости двухкаскадного крепления, при соблю-
дении условия
I а I /I. ° у \
Kxot = у* * 01 (VI1.107)
Н"£°Г
Формулы (VI 1.105) и (VII. 106) во всем аналогичны зависимо-
стям для поступательных и поворотных жесткостей амортизат ор
с промежуточной массой, в которых жесткости амортизатора вы-
ражены через жесткости его последовательно соединенных уп] '
гих элементов и через расстояние между центрами жесткости п
следних,
296
3. ХАРАКТЕРИСТИКИ КОЛЕБАТЕЛЬНОЙ СИСТЕМЫ,
ОБРАЗОВАННОЙ ЖЕСТКИМ АМОРТИЗИРУЕМЫМ ОБЪЕКТОМ
И ЕГО АМОРТИЗИРУЮЩИМ КРЕПЛЕНИЕМ
Абсолютно жесткий амортизированный объект вместе с безынер-
ционным амортизирующим креплением, опирающимся па непо-
движное основание, образует колебательную систему с шестью
степенями свободы.
Пусть с осями координатной системы Oxyz совмещаются в по-
ложении равновесия главные центральные оси инерции аморти-
зированного объекта, масса которого /И, а главные центральные
моменты инерции /v, Jtn Jz. При наличии матрицы жесткостей
(V 11.52), отнесенной к указанной координатной системе, свободные
колебания амортизированного объекта на амортизаторах будут
в случае отсутствия трения описываться системой шести диффе-
ренциальных уравнений:
— Ми0 = апи0 + al3wo 4-
4" И- ,
— Mv0 = апи0 -| - a.^v0 -{- a23w0 +
1 «24? + + адО;
— Mw0 = а31и0 + a32v0 4- a33w0 4-
4~ С31ф + СЗоФ 4“
— Аф = aullo awvo п ° &wo
’ Jyty = ^51^0 4“ ^52^0 “Г “Г
4- с54(р + аБьф 4-
“ °61W0 “ ^G3^’o 4~
4" С61Ф 4 CG5,| 4“ • )
Подстановкой
uo =---X2Z/Ot • •
эти уравнения обращаются в алгебраические:
(°п. ^-2А1) Uq -|- flj.t’o ci1;iw0 |-
+ аыФ -I- <М1 + «icfl = °; I
..........................................
^BI^O “I- ®62^0 “I” ^est^O “I” ^в4*1- 4“
+ «вбФ + («вв — о = о.
(VI 1.108)
(VII. 109)
(VII. 110}
297
Квадраты круговых частот свободных колебаний X; (s — I. . ..
. ., 6) на йдутся из частотного уравнения
аи — Л2М а12 013 ^15 016 *
С-21 а22 — Л23 0,4 025 026
031 П32 д33 — ХМ ^34 035 03fl
°13 о44 — j 045 0дв
0.51 ^Ь3_ 05Б 0»б
ав1 062 «64 0fl5 0ee
^0 (VII.Ill)
Форма s-ro свободного колебания может быть охарактеризована
пятью отношениями (v0/u0)st (w0/u0)s, (<p/«0)s» Ot uo)$» I J
которые находятся из системы уравнений (VII. НО) после подста-
новки в нее значения К- Для определения указанных отношений
берутся пять из шести уравнений (VII. 110).
Решениями системы (VII. 108) являются функции времени:
где
uOs = «os (0) cos Kt 4- sin M (s = 1 ...............6). (VI1.113)
'*S
Из (VII. 112) следует, что s-я главная координата
4qs — т5~ (Al«O гА-2ГО As^-'o + Ai'l
-|-Л^ + АЛ).
Здесь
1 ... 1
/ vp \ /ур\
п _ \ «о Л ’ ’ ' ио ) в
9 • ♦ • •
/ О \
\ «оЛ ’ * ч «о /6
(VII. 114)
(VII. 115)
298
представляет собою основной определитель системы (VII. 112),
а Лл, — алгебраическое дополнение элемента, занимающего в этом
определителе место на пересечении Л-й строки с s-м столбцом.
Формулы (VII. 112) при подстановке (VII. 113) описывают сво-
бодные колебания амортизированного объекта на амортизаторах.
Входящие в (VII. 113) начальные значения ио$ (0) шести главных
координат находятся при помощи выражения (VI 1.114) по началь-
ным значениям и0 (0), .... 0 (0) шести первоначальных обобщен-
ных координат. Совершенно аналогичным образом начальные зна-
чения (0) скоростей, соответствующих главным координатам,
определяются по начальным значениям и0 (0), .... й (0) обоб-
щенных скоростей.
При наличии трения, пропорционального скорости деформи-
рования (-го амортизатора, выражения для действующих на
него в главных направлениях сил и моментов будут по сравнению
с (VII.45) и (VII.46) более сложными:
F f^xai ~ CxaiUai rxa№ab
К Pyat :— cyafiat “Ь
1 Л» = +<•»,%,.;. (V1[116)
— ^xai^ai “F
I : kzai&oi 4“ kzai&ai-
Здесь гЛЙ/, ryai, — коэффициенты пропорциональности
между силами вязкого сопротивления и поступательными (ли-
нейными) скоростями деформирования амортизатора; kxai 1 kyal »
k'2ai — аналогичные коэффициенты пропорциональности между
моментами и угловыми скоростями.
В результате усложняются по сравнению с (VII. 108) и диффе-
ренциальные уравнения свободных колебаний.
Их правые части станут такими же, как у приводимых ниже
дифференциальных уравнений (VII. 122). К каждому присутствую-
щему в (VII. 108) слагаемому, являющемуся произведением коэф-
фициента жесткости а и обобщенной координаты, добавится еще
одно слагаемое — произведение коэффициента вязкого сопротив-
ления bif и соответствующей обобщенной скорости.
В Коэффициенты вязкого сопротивления амортизирующего
крепления выражаются через коэффициенты rxa[i rya^ rzQb kxaix kyai>
ksai вязкого сопротивления входящих в крепление аморти-
заторов совершенно так же, как жесткостные коэффициенты —
через жесткости cxah cyaf, czaif kxait kyai, k^. Рассмотрение ана-
логичной матрице (VII 52) матрицы коэффициентов (матрицы
вязкости) приводит к понятиям осей и центров вязкого сопротив-
299
ления (осей и центров вязкости). В общем случае эти оси и центры
не совпадают с осями и центрами жесткости.
Решение систем линейных дифференциальных уравнений, ана-
логичных (VII.108) и (VII.122), рассматривается в курсах теорети-
ческой механики и теории колебаний, во многих справочниках и
пособиях [5, 12, 43, 81, 1491.
Очень распространенным частным случаем является такой,
когда для всех коэффициентов амортизирующего крепления вы-
полняется соотношение
(VII. 117)
где х — постоянная величина, имеющая размерность времени;
если не задано иное ее значение, можно принимать для резиновых
упругих элементов амортизирующих конструкций х (1:2) 10“8с.
В этом случае трение не влияет на формы свободных колебаний,
но сами колебания становятся затухающими либо вырождаются
в затухающее апериодическое движение. В зависимостях (VII. 112)
теперь надо будет вместо функций (VII.113) брать
2-^Os(0) + «Os(0)
К jA—
/~2
1-
(VII.118)
Затухать по апериодическому закону б^дутте uOs, для которых
(VII. 119)
X
Знаку неравенства в выражении (VII. 119) соответствуют мни*
мне значения квадратного корня в (VII .118). Если это имеет место,
то на основании известных формул Эйлера, связывающих триго-
нометрические и гиперболические функции, можно взамен выра-
жения (VII. 118) написать
Uos (0) ch As
-2- (0) 4 UOS (0)
shXs
(VII. 120)
300
Если же реализуется равенство (VII. 119), то
uOs = e“V|uOs (0) -I- [MOs (0) - lios (0)] /}. (VII. 121)
При наличии в амортизаторах вязкого трения и приложении
к амортизированному объекту возмущающих усилий (сил РХ1
Л. Рг и моментов Э»Л, дифференциальные уравнения
вынужденных колебаний объекта имеют вид:
Рх — Ми0 = auii0 4 а12и0 4~ a^wo 4
4 ^нФ 4~ ^1оФ 4 ®llWO 4 ®12£?0 “!*
+bis^o 4 Ьцф 4 ” ^16^1
Ру — MVq = а21и0 ’ - C^22VO 4 ^23^0 4
4 Л21Ф 4 4" С2С® 4" ^21иО 4" ®22^0 4"
4- ®23%) ®21Ф 4" ^2bV 4- ®2Сг>>
Р2 — Mwq = g31£Zo 4” , G33wo 4
4 Дз4ф 4 ЯзбФ 4- ^36® 4- ^31ио 4- ®32VO 4
4~ ®зз^о 4“ ®з$Ф ®заЧ 4“ ®зв®»
Э)1Х — <7хср = + a^Vo 4~ gm№o +
4* 4” “* 4 41^0 4" ®42^О 4"
4- biSwo 4“ / 444 4“ 145Ф 4~ ®4с® >
аЪ1иО 4- сй2^’о 4~ ab3wo 4*
+ ^ыф 4* fl5s4' I ЬЬ1и0 4- bbiv0 4-
4- Ь5?№о 4“ ®ыФ 4" ®БьФ + ^Б6®>
= dQ1u0 4- ae2vo 4- d^wo +
4* Яьчф 4 Д0&Ф 4 свв® ^ei^O r ®в2^О d
4 ®бз^'о 4~ ®64Ф 4“ 4 ®вв®*
(VII.122)
Их правые части представляют собою соответственно величины
^фхэ Рфу, Рфг. Э1фд-, 9)?ф^ усилий, передаваемых фунда-
менту.
301
При соблюдении условия (VII. 117) и при нулевых началь-
ных условиях решениями системы (VII. 122) являются функции
(VII. 112), где
(VII.123)
(VII.124)
(VII. 125)
(VII. 126)
Если же начальные значения uOs (0) главных координат и
(или) иОя (0) главных скоростей в (VII. 113) отличны от нуля, то
для получения uOs (/) должны быть просуммированы правые части
выражении (VII. 113) и (VII 123).
Если соответствующая s-й главной координате возмущающая
сила Ps изменяется по гармоническому закону, то стационарное
решение для этой координаты находится так же, как в случае
системы с одной степенью свободы.
Например, выражение (VII. 196) для динамических коэффи-
циентов и кривые (см. рис. VII.7) этих коэффициентов могут
быть отнесены к любой главной координате; при этом ее
изменение отстает во времени от возмущающей силы па угол,
определяемый по формуле (VII. 199). Аналогичным образом
302
можно использовать формулы (VII. 185), (VII. 198) и кривые (см.
рис. VII.6) коэффициентов передачи гармонического воздействия,
соответствующего главной координате.
4. АМОРТИЗАТОР КАК ДВУХКОНЕЧНОЕ МЕХАНИЧЕСКОЕ
ЗВЕНО, АНАЛОГИЧНОЕ ЭЛЕКТРИЧЕСКОМУ
ЧЕТЫРЕХПОЛЮСНИКУ
Основные соотношения
Пусть амортизатор является внутренним звеном некоторой цеп-
ной одномерной линейной механической системы. В установившем-
ся режиме передачи гармонических воздействий его удобно
рассматривать как пассивное двухконечное механическое звено,
аналогичное электрическому четырехполюснику.
Между гармонической силой Рх и колебательной скоростью Vj
на входе амортизатора и силой Р2, а также скоростью на вы-
ходе существуют соотношения:
(VI 1.127)
причем характеристические коэффициенты Аа. Bat Са, Da свя-
заны зависимостью
= I- (VII. 128)
Величины Аа и Da безразмерны, Ва имеет размерность меха-
нического сопротивления, Са — обратную ей размерность меха-
нической проводимости, называемой также подвижностью. Двух-
конечное механическое звено (в^ данном случае амортизатор)
называется симметричным, если Аа = Da.
Силы и Р2 считаются положительными, когда они направ-
лены внутрь двухконечного механического звена; для скоростей t»j
и и2 в качестве положительного взято направление от входа к вы-
ходу.
г Соотношения (VII. 127)"справедливы и для электрического че-
тырехполюсника, включенного в цепь переменного тока 1169].
При использовании 1-й системы электромеханических аналогий
в них вместо сил должны быть подставлены напряжения, вместо
скоростей — значения силы тока. Если рассматривается режим пе-
редачи крутильных колебаний, то усилиями на входе и выходе
двухконечного механического звена будут крутящие моменты,
а скоростями — угловые скорости поворота концевых сечений.
При перемене местами входа и выхода, т. е. для перевернутого
амортизатора, в уравнениях (VII.127) поменяются местами коэф-
фициенты Аа и Da.
303
Зависимости (VII. 127) могут быть переписаны в виде, разре-
шенном относительно сил (при Си =f= 0):
(VII.129)
где коэффициенты при скоростях имеют размерность механиче-
ского сопротивления.
Разрешая (VII. 127) относительно скоростей, получим (при
В, + 0):
(VII. 130)
где коэффициенты при скоростях имеют размерность подвижности
(механической проводимости).
Величины
(VII.131)
представляют собою входные механические сопротивления двух-
конечного механического звена соответственно при заторможенном
(и2 = 0) и свободном (Р2 = 0) выходе. Их обратными величи-
нами являются входные механические проводимости (подвиж-
ности).
Для обращенного двухконечного механического звена спра-
ведливы аналогичные (VII. 131) выражения:
Zlo = —, К = (VII. 132)
Со Аа
Коэффициент при и.2 в первой из формул (VII. 129) является
переходным механическим сопротивлением
zu = U-. (vii. 133)
Си
Коэффициентом при во второй из формул (VII. 130) служит
переходная механическая проводимость (подвижность)
7Й12 = г4 . (VII. 134)
Ва
Считая» что амортизирующее крепление, которое можно рас-
сматривать как составной амортизатор, размещено на фундаменте
под машиной—источником гармонических возмущений, обозначим
304
1 2
измеренные со стороны амортизирующего крепления входные
мехап ячеек не соп рот ивлени я:
[ неработающей машины через Z,;
I фундамента вместе с примыкающими к нему несущими кон-
струкциями через
г На основании формул (VII. 127) могут быть написаны
ния для исчисляемых в децибелах:
L логарифмического перепада сил на амортизаторе
выра же-
1
перепада уровня вибрации на амортизаторе
n = Z.1-La = 201g
(VII.136)
1
ф-т
Здесь Л] (= LM) и Л2 (— L(]1) — выраженные в децибелах
уровни вибрации соответственно па входе и выходе амортизатора
(на лапе машины и на фундаменте).
Предположим, что возмущающая сила, развиваемая работа-
ющей машиной, не зависит от наличия или отсутствия амортиза-
тора. Обозначая силу и скорость на входе фундамента при наличии
амортизатора через Р$' и сф", а при его отсутствии через Р\
и Гф, охарактеризуем эффективность установки амортизатора
величиной виброизоляции
(VII. 137)
к Выражение (VII. 137) определяет виброизоляннонную эффек-
тивность включения двухкопгчногомеханического звена с харак-
теристическими коэффициентами Ао. Ва, Са, Dc в выбранном
весте цепной системы — между измеренными со стороны этого
звена механическими сопротивлениями Z,. и 2ф.
В Из формул (VII. 136) и (VI 1.137) следует, что разность
гДе величина
П — U = 20 1g । Д —
I *1 ^аф
(VI 1.138)
(VII. 139)
20
Н. В. Григорьев
305
I
представляет собою механическое сопротивление, измеряемое на
входе амортизирующего крепления, когга к его выходу подклю-
чено механическое сопротивление 2ф.
Величиной
£ = 201g
(VII. 140)
может быть охарактеризовано уменьшение модуля механического
сопротивления основания, на которое опирается машина, в ре-
зультате установки под нею амтртизатсров. Учитывая выражения
(VII. 135) и (VII.136), можно представить £ в виде разности между
перепадом уровней вибрации и логарифмическим перепадом сил
на амортизаторе
£ = П-77р. (VII.141)
Величина £ чаше всего положительна, так как обычно Z^l <
<141.
Если механическое сопротивление ZM машины велико по сравне-
нию с 2Ф и 2Сф, то виброизоляция U в (VII. 137) и перепад П
в (VII. 136) мало отличаются друг от друга:
U^20 \g\CaZ* + Da\ = n.
(VII.142)
Если же в числителе и знаменателе в (VII. 137) преобладающее
значение имеют слагаемые, содержащие 2ф, то
и 20 lg I Аа 4- CaZu |. (VII.143)
При этом условии виброизоляцня практически совпадает
с перепадом уровней вибрации
Пф. м ~ — 20 lg Аа < |,
(VII. 144)
соответствующим случаю ее передачи через амортизаторы с
стороны фундамента.
Отношения, обратные тем, чьи абсолютные значения стояч
под знаком логарифма в (VII. 135) и (VII. 136),
- р.+4~Г' - |V,LI45’
-JL = (сагф + Д )-n = (VI1.146)
va
306
указывают масштаб и фазу передаваемого воздействия. Они могут
быть названы комплексными коэффициентами
передачи амортизирующим креплением соответственно гар-
монической силы и гармонической вибрации.
Нетрудно заметить, учитывая выражение (VII. 139), что
(VII.147)
Модули комплексных коэффициентов роР и являются
отношениями амплитудных либо эффективных значений соответ-
ственно сил и скоростей и называются коэффициентами
передачи амортизирующим креплением гармонической силы
и гармонической вибрации. Они определяют масштаб передачи,
но не учитывают ее фазу.
[ I С учетом сказанного выражение (VII .136) для перепада уровней
вибрации на амортизаторах перепишется как
п = 20 lg I ₽up Г1 = - 20 lg ft,, - 20 lg . (VII. 148)
Чра
Иногда вводят в рассмотрение коэффициент амортизации,
определяя его как отношение к амплитуде воздействия, переда-
ваемого абсолютно жестким креплением, разности между нею
и амплитудой воздействия, прошедшего через амортизаторы.
Так, коэффициент амортизации усилия Рф, которое достигло бы
фундамента в случае абсолютно жесткого крепления,
будет
(VII. 149)
Из формул (VII. 149) и (ATI.137) следует, что
U--20Ig|l-^l-
(VII.150)
Свойства составных звеньев
Двухконечное пассивное механическое звено,
|вумя последовательно соединенными звеньями,
ческие
коэффициенты которых равны А'г В\
, само обладает характеристическими
образованное
характеристи-
С', D‘ и А\ В",
коэффициентами:
— * — V
В = АВ 4- В D
D = СВ" 4- D D".J
(V1I.151)
307
Два параллельно соединенных звена эквивалентны одному,
обладающему характеристическими коэффициентами:
(VI 1.152)
Распространение этих формул на случай п параллельно ра-
ботающих звеньев (например, амортизаторов) не представляет
затруднений.
Зная характеристические коэффициенты простых двухконеч-
ных механических звеньев, из которых состоят сложные двух-
конечные звенья, можно и для них определить характеристиче-
ские коэффициенты путем последовательного применения формул
(VII. 151) и (VII. 152).
Коэффициенты для простейших звеньев приведены в табл. VII .1
вместе с некоторыми другими характеристиками.
В качестве примера определим характеристические коэффи-
циенты двухконечного звена, состоящего из двух последовательно
соединенных упруговязких звеньев.
Для одного упруговязкого звепа, которое представляет собой
параллельно соединенные пружину и демпфер, в согласии
с табл. VII. 1 и формулами (VII. 152) найдем:
Д = О=1; .Д = 0;
(VII. 153)
308
Таблица VII.1
Простевшие двухконечные механические звенья и их
характеристики
Применяя после этого формулы (VII. 151) для двух последо-
вательно соединяемых звеньев, получим:
/1 = 0=1; В = 0;
(VII. 154)
Зп9
Представляя теперь С в виде
найдем:
(VII. 155)
Таким образом, двум последовательно соединенным упруго-
вязким звеньям эквивалентно одно упруговязкое звено, в котором
жесткость С3 и коэффициент вязкого трения R3 определяются
зависимостями (VII. 155). Видно, что обе указанные величины яв-
ляются функциями частоты <о.
Табл. VIL2 содержит характеристики некоторых составных
двухконечных механических звеньев. В виде звена № 2 показана
принципиальная схема обычного амортизатора. Его рабочий
элемент аппроксимирован параллельно соединенными пружиной С
и демпфером R. Массы М± и Л42 представляют жесткие металли-
ческие детали, присоединяемые одна к амортизируемому объекту,
другая — к его фундаменту. Если амортизированный объект
и фундамент можно считать жесткими телами, то схема звена № 2
дает упрощенное представление о механической системе, возник-
шей в результате установки амортизатора. Если при этом масса
деталей амортизатора мала по сравнению с массами фундамента
и амортизированного объекта, то она практически не влияет на
основные характеристики колебательной системы; поэтому, го-
воря об амортизаторе, часто имеют в виду именно его вязко-
упругий элемент, который и называют амортизатором.
Схемой звена № 3 может быть охарактеризован рабочий эле-
мент амортизатора с промежуточной массой М 0, помещенной
между двумя упруговязкими элементами. Схему звена № 4
можно отнести к такому амортизатору в целом, если учесть массу
его внешних металлических деталей (например, верхней и нижней
опорных плит). Как и в схеме № 2, массы М, и М 2 могут представ-
лять жесткий амортизированный объект и жесткий фундамент.
Переходя в этом случае к другим обозначениям обеих масс —- ДО
(вместо Л41) и Л4ф (вместо М2), применим общую формулу (VII-1
для получения зависимости, характеризующей эффективность
несимметричного амортизатора с промежуточной массой, ycja
новленного между М и /Иф; в качестве коэффициентов Аа,
310
Таблица VIL2
Некоторые составные двухконечные механические звенья и их
характеристические коэффициенты
Схема звена
ф
И Л
О
сАИ
А
В
<о2А1
о/? w-Af
(□/? coaAf
(D2/?-
(D3/?2
U)*jR
С2
о/? (о2 AfjAfg
С ~с Щ
н
icoAf
б)2 ALAI
г
СО2^2
С2
R — i
(9 С
со/?
(!)
(02/?2
^Ri' ' ~С
6)2 И
ы/? (АМ2
Ы2/?2
С2
311
Продолжение табл. VI 1.2
Характеристические
коэффициенты
312
Продолжение табл. VI 1.2
Схема звена
(см на стр 312)
3
313
Продолжение табл. VII.2
Са, Da примем приведенные в табл. VII.2 для звеиа № 3. Тогда
виброизоляция
М0 + Мф ы2Мф M0-i М V ,
С, МВА-М]-Мф С2 М0 + М[-Мф) 1
o?/?i о2/?2 / j ьгМ& Мб -I- М
сГ + “Tf \1 ~7/ Мо+М4Л1ф
ы2/?^ / (02Л1 -Мо.+^ф V
+ ~cf \ ~~сГ М0 + М + Мф J
с со7?1 со/?2 a-М Мф а2Мф М
~ ~СГ ~С« Ct ~М~^М , ~~С^ Afp + M |- Мф
(VII. 156)
314
При отсутствии трения (/?j = /?2 = 0)
и = 20 1g (1 4-
6\ 1 М-|-Л4ф>
f а>-М Мв 4 Мф
м0
где
, что то же.
Мо
4-41,
'-'2
___ ю2Мф________
С*2 ^0
IVII. 157)
(О2
со1
(VII.158)
(i)sAf ©~Мф
I
>
^2
<-л
м
г тр 1X | z 1 Cz С2 у_б?! Се Мо М ' Мф /VII 159)
г 4 \ Мо ~^М • Л1ф/ М Мф Мо \ ' /
Величины и Х2 представляют собой не равные нулю круговые
частоты свободных колебаний трехмассовой механической си-
стемы, отличающейся от звена № 4 (табл. VI 1.2) отсутствием
элементов, содержащих трение.
Hr Внброизоляция U в формулах (VII. 157), (VII. 158) при
ш!=4«-5-«=4(-^+-§-+^) (vii.160)
принимает экстремальное значение
V Г /
г — 90 [дг ММф । __Ci (. . Мп \- | . __ Са Мф I
ёМс(М-ЬМф) 1-г4СД1*1 мЛ* Мо •
L \ мГ/ ,
’ (VII.161)
К Первое слагаемое внутри квадратных скобок формулы (VII. 156)
можно видоизменить аналогично тому, как это сделано при пере-
ходе от (VII.157) к (VII.158).
Иь Тогда вместо (VII. 156) получим
315
Обычный вид кривой U показан на рис. VII.4 и VII.5, где
проиллюстрировано влияние на ход кривой различных видов
трения.
При частотах возмущающей силы to, достаточно больших по
сравнению со второй резонансной частотой системы X2l дости-
Рис. VI 1.4. Виброизоляция U, обеспечиваемая амортизатором с промежуточной
массой (или двухкаскадным амортизирующим креплением с разделяющей
каскады жесткой конструкцией, имеющей массу Л40) при отсутствии трения и
при вязком трепни в упругих элементах амортизатора. Для сравнения штрихами
показаны кривые виброизоляции, соответствующие случаю, когда амортизатор
не имеет промежуточной массы; при этом Са = СГ2 = CaiCaJ(Cal -г
~ Riz — Наклон прямолинейных участков кривых
составляет 6, 12 и 24 дБ па октаву
гается виброизоляция лучшая, чем в схеме без промежуточной
массы при той же жесткости амортизирующего крепления. Для
больших со формула (VII. 157) приближенно запишется в виде
и 201g _!_ 201g =.
с12 Cj -J- С2
= 20lg Jpt + 201g -------------20 lg ( Ц , (VII .163)
C*12 *^1 Г '^‘2 \ J
316
Т где
В- С12 = ; (VII ,161)
С1 "Г С2
«».♦= тАй? = —V - <VII16S)
""= м- (VII.166)
У,дБ
Рис. VI [.5. Виброизоляния Г7, обеспечиваемая амортизатором с большой и ма-
рлей промежуточными массами Л40 (или днухкаскадным амортизирующим крепле-
1Нием с разделяющей каскады жесткой конструкцией, имеющей массу Мо), а
также амортизатором без промежуточной массы, при отсутствии трения в упру-
[ п< х элементах (тонкие сплошные линии, уходящие в минус бесконечность при ре-
Иэнансах); при малом трении, пропорциональном амплитуде деформации vnpvrRx
элементов (утолщенные линии); гри большом трении того же. типа (черно-белые ли-
нии). Наклон прямолинейных участков кривых составляет 12 и 24 дБ па октаву
Иj** Если же Л10 = 0, так что для рассматриваемой механической
I системы становится справедливой схема № 2 в табл. VII.2, где
надо считать R - О, С - С12, то вместо (VII. 163) получим
L'^20lg = 201g-^--20lg( 1 (VII.167)
1 w *12 * £
317
Следовательно, приращение виброизоляцин, обеспечиваемое
в области высоких частот включением промежуточной массы
в амортизатор, не обладающий трением, составляет 20 1g дБ.
Эта величина возрастает на 12 дБ с увеличением частоты на октаву.
При наличии вязкого трения зависимость (VII .156) в области
высоких частот дает
20 |g
^12
= 20 lg-^- + 20 lg - 20 Ig (1 + -1-). (VI1.168)
где
(VII.169)
В случае отсутствия промежуточной массы, т. е. при справедли-
вости схемы № 2 (табл. VII.2), где надо принять С = Сэ, R — R3
в соответствии с формулами (VII. 155), причем для больших со
эквивалентный коэффициент трения R3 /?Х2> будем иметь
вместо (VII. 168)
U^201g-^^ = 20lg^--20lgfl 4-4-)- (VII.170)
К12 *'12 \ Ш '
Таким образом, амортизатор с вязким сопротивлением при
включении в него промежуточной массы повышает виброизоля-
цию в области высоких частот на величину 20 дБ;
последняя возрастает на 6 дБ с увеличением частоты на октаву.
Если силы трения, развиваемого упруговязкими элементами
амортизатора, пропорциональны амплитудам деформации, а п
знаку противоположны скорости деформирования, то в выражен.
(VII. 156) для вибропаоляции следует положить:
= (VII.171)
ц с2
где tzx и а2 — постоянные.
Тогда при достаточно больших со
и ъ 201g ца^м-ф 4 201g -
с13 I С 2
— 101g(l ui)(l+Os) =
= 20 lg'4*
С12
— 10Ig(l Й1)(1 +#) — 201g(l +
(VII. 172)
318
В случае, когда /Ио.= 0, вместо (VII.172) надо взять
U 201g
+ 10 1g 1 + (
QiCt ~1~ CgCg V
^1 + ^-2 / -
— 101g(l 4-O?)(l+a;) = 20lg^ +
С12
.4-ioig
- 101g(l +я?)(1 + al)-201g(1 + А) .
(VI LI 73)
Сравнение формулы (VII. 172) с (VII. 173) показывает, что вклю-
чение промежуточной массы в амортизатор с трением, характери-
зуемым параметрами (VII. 171), повышает в области высоких ча-
стот виброизоляцию на величину
A(/ = 20Igz^r — 101g 1 -L
(VII.174)
несколько меньшую, чем в случае применения амортизатора,
I лишенного трепня. Эта величина возрастает на 12 дБ с увеличе-
нием частоты возмущающего воздействия на октаву.
В выражении (VII. 156) и вытекающих из него нужно положить
С\ = С2\ /?1 = R2\ — а2, если рабочий элемент амортизатора
с промежуточной массой симметричен.
л Правые части формул (VII.163), (VIL167), (VII.168). (VII.170),
^^pi.172), (VI 1.173) содержат член —20 1g (1 + ~)» характе-
ризующий влияние на виброизоляцию отношения (VII .166) массы
фундамента к массе амортизированного объекта. При Л4± —>оо
он обращается в ноль, в остальных случаях принимает отрицатель-
ные значения.
Как следует из только что перечисленных формул, увеличение
в k раз промежуточной массы Л40 повышает виброизоляцию в пб-
X ласти высоких частот на 20 1g k (дБ).
к Табл. VII.I, VII.2 и приведенные вслед за ними результаты
относятся к механическим системам с сосредоточенными постоян-
ными .
Приведем теперь выражения для характеристических коэф-
Д фициентов принадлежащего амортизатору упругого элемента,
К представляющего материальный призматический стержень —
двухконечное механическое звено с распределенными постоян-
К 319
ными, вдоль которого распространяются гармонические колеба-
ния (продольные волны):
(VI 1.175)
Здесь I — длина стержня; S — площадь его поперечного сечения;
Е — модуль нормальной упругости материала стержня; с —
скорость звука в этом материале; х — коэффициент, который при
его умножении на скорость изменения относительной деформации
растяжения—сжатия дает пропорциональную этой скорости со-
ставляющую нормального напряжения в поперечном сечении
стержня.
При выкладках, которые связаны с использованием выраже-
ний (VII. 175) в зависимостях для виброизоляции и перепада вибра-
ций, полезно иметь в виду, что
(VII. 176)
где р — плотность материала стержня (упругого элемента амор
тизатора).
Масса упругого элемента
Ма = p/S,
его продольная (осевая) жесткость
I Ма
с г С '
Таким образом,
(VII. 177)
(VII. 178)
(VII. 179)
5. ВИБРОИЗОЛ Я ЦИОННАЯ ЭФФЕКТИВНОСТЬ
АМОРТИЗИРУЮЩЕГО КРЕПЛЕНИЯ
Выражение (VII. 137) для виброизоляции; обеспечиваемой
амортизирующим креплением в одномерной системе, справедлив''
для обоих прямо противоположных направлений передачи гарм°"
320
нического воздействия — от машины к фундаменту и с фундамента
на машину.
I В предельном случае бесконечно большого механического
-сопротивления 7Ф равенство (VII. 143) из приближенного стано-
вится точным. Учитывая также (VII. 144), можно для этого случая
написать
I ^ = 201ё|Ла + СЛ1 = /7ф.м- (VII. 180)
В то же время очевидно, что при возбуждении, распространяю-
щемся с машины на фундамент, перепад (VII .136) уровня вибрации
на амортизаторах стремится к бесконечности, а перепад (VJL135)
сил — к значению
ПР = 201g | I.
(VII.181)
При бесконечно большом входном механическом сопротивле-
в нии фундамента колебания последнего не зависят от присоедине-
ния либо отключения механической системы, характеризуемой
конечными значениями параметров механического сопротивления
I и возмущающих воздействий. Говоря в этом случае об изоляции
фундамента от источника возмущений, величиной виброизоляции
оценивают степень уменьшения силы, передаваемой фундаменту.
Если амортизирующее крепление представить упруговязким
звеном с характеристическими коэффициентами (VII. 153), а амор-
тизируемый объект—массой М, то схемой № 1 (табл. VII.2)
изобразится готовый к установке на фундамент амортизируемый
объект вместе с амортизирующим креплением. Считая, что
к массе М будет приложена гармоническая воЗмущаюшая сила Р,
а механическое сопротивление фундамента весьма велико, найдем
комплексный коэффициент передачи силы фундаменту
(VII. 182)
Э где А взято из табл. VI 1.2 для схемы № 1,
результате использованы обозначения
а в окончательном
К ч = «1/-% = ~ (VII. 183)
Т С А
.Для отношения частоты возмущающей силы к частоте свободных
колебаний одномассовой системы без трения, и
К ° = TtiT = ТГ “ ТЯ- (VH.184)
г Для коэффициента демпфирования,
|21 Н. В» Григорьев 321
Выражением (VII. 182) определяется как масштаб, так и фаза
силы Рф по отношению к Р.
Переходя к амплитудному отношению сил, равному модулю
комплексного коэффициента передачи (VII. 182), получим извест-
ное выражение для коэффициента передачи массивному жесткому
фундаменту силы, приложенной к массе М,
Сдвиг фаз между силами Р и Рф выражением (VII. 185) не учи-
тывается. Исчисляемый в децибелах логарифмический перепад
сил на звене № 1 (табл. VII.2), присоединенном к абсолютно
жесткому массивному фундаменту,
/7Р = 20 1g = - 201g рф =
г фа
= 20 lg| Д | = 101g I
(VII.186)
Величина, стоящая внутри прямых скобок выражения
(VII, 144), в рассматриваемом случае совпадает с характеристи-
ческим коэффициентом А звена № 1 (табл. VI 1.2). Поэтому оконча-
тельный результат (VI 1.186) справедлив не только для перепада
сил на участке от входа до заторможенного выхода звена № 1,
возбуждаемого действующей на массу М гармонической силой.
Он представляет также величину:
перепада уровня вибрации на амортизаторах в режиме гармо-
нического возбуждения, распространяющегося со стороны фун-
дамента;
виброизоляции, обеспечиваемой амортизаторами (в предполо-
жении, что при отсутствии амортизаторов крепление массы V
к фундаменту было бы абсолютно жестким).
Аналогично комплексный коэффициент передачи силы (VII. 162)
и его модуль (VII. 185) являются соответствующими коэффициеН'
тами передачи вынуждающего гармонического движения фундя
мента амортизированной массе М.
При заданном гармоническом движении фундамента
гф = ?фа sin (VII-18')
322
которое является переносным движением для пассивного аморти-
зированного объекта, абсолютное движение последнего будет
г = ₽ф?ф, (VII 183)
или, что то же,
I z = zasin(<o/ — еф) = Рф?фа sin (w/— еф), (VI 1.189)
где Рф определяется выражением (VII. 182), а его модуль — фор-
мулой (VII.185).
Относительное движение амортизированного объекта (массы Л1)
может быть записано в виде
*~Ф Рм^ф
(VII. 190)
либо
При этом
Z = 2фа sin (ю/ — Ем) = Рмгфа sin (<о/ — ем). (VII .191)
Г’О — ч2)2 + « V ’
(VI 1.192)
(VII. 193)
Приведем еще выражение для гармонического перемещения z
массы М, опирающейся на амортизатор С, р, под действием при-
ложенной к ней силы Р = Р„ sin со/:
а
В г — р
L ‘ ~ ~ icoZio ‘
Здесь Z10 должно быть взято в соответствии с (VII.131) для
звена № 1 (табл. VII.2). Таким образом,
В ? = С * С г _
коЛ /. <o2M\2 со2/?2 С
I * U-----с~) + ~С^~
Р В24 <04 „5 р 1О,,
V- С (1 — т]8)24-<А)2 С ‘ (VII.М)
21*
323
В полученном выражении величина 2 динамической деформа-
ции системы представлена в виде произведения комплексного ди-
намического коэффициента рР и статической деформации Р/С,
зависящей только от внешней силы Р и жесткости системы С.
Амплитуда динамической деформации
(VII.195)
где коэффициент динамичности
Рр = |Рр| = |1— Т)2 -I-fail Г1 ==
= 1 = — 1 . (VII.196)
/(1—»12)2T a2n2 I (, (ЛИ \2
1V С } С3
На рис. VII.6, VII.7 представлены кривые коэффициентов р^
и рР. Величину коэффициента рм можно снять с кривых рис. VII. <
для рр, так как
₽.(n) = Pf(v)- <VII197>
Из выражения (VII. 182) для комплексного коэффициента рф
следует, что сила отстает по фазе от Р на угол
еф = arctg
ат|3
(VI 1.198)
На этот же угол отстает по фазе от переносного вынуждающего
движения (VII.187) вынужденное движение (VII.188), (VII.189)
амортизированного объекта.
Выражение (VI 1.192) для комплексного коэффициента Р„
показывает, что относительное движение (VII. 190) амортизиро-
ванного объекта отстает от вынуждающего движения (VII. 187)
фупдамен га на угол
е. = агс1е14у. (VII.199)
На этот же угол отстает от гармонической силы Р, приложет
ной к амортизированному объекту, вынужденное движение п
следнего (VI1.194).
Можно видеть, что
£М 01) 31 Ем ( ) •
(VII.200)
324
В формулах (VII. 198) и (VII. 199) знаки числителя и знамена-
теля дроби, стоящей под знаком арктангенса, совпадают соответ-
ственно со знаками его синуса и косинуса. Нетрудно заметить,
что вф и еы являются углами первой либо второй четверти.
Рис. VI 1.6. Кривые коэффициентов передачи, опреде-
ляемых формулой (VII-185)
Переписывая результат (VII. 186) с учетом сделанных относи-
тельно него замечаний и переходя одновременно к обозначениям,
определенным формулами (VII. 183), (VII. 184), получим следующее
выражение для обеспечиваемых упруговязким звеном в одномас-
совой системе виброизоляции (при активной и пассивной аморти-
Г 325
зации), перепада сил (при активной амортизации) и перепада
уровня вибрации (при пассивной амортизации):
(У = /7р = /7ф.м=101б(1+т]3-р^1=)- (VII.201)
Кривые зависимостей (VIL201), соответствующие различным
значениям параметра а, представлены па рис. VII.8.
Если фундамент можно считать абсолютно жестким телом,
масса Л4ф которого конечна, то колебательная система предста-
вится схемой звена № 2, табл. VII.2 (с заменой обозначений Mi
326
и Л42 на М и Л4ф). Выражение для виброизоляции, обеспечиваемой
в этом случае упруговязким звеном С, R, аналогично приведенному
выше выражению (VII. 186):
ф _ 2
(VI 1.202)
ф
С*
Рис. VI 1.8. Кривые виброизоляции» см. фоi мулу
(VII 201)
Величина приведенной массы Л1м ф определяется форму-
лой (VII. 165). Круговая частота свободных колебаний системы
будет
т
^М- ф
(VI] 203)
327
С помощью обозначений:
со R 1 I I 1
Чм- ф л . ’ ^м. ф --- О I/ 1
лм.ф 4 к СЛ4М. ф г 171
можно придать зависимости (VII.202) вид
17 = 10lg 1 -Нм Ф
*.2 <ч \
Чм. Ф 2 1
ам. фЧм. ф /
(VI 1.204)
(VI 1.205)
аналогичный (VII.201). Значения внброизоляцин при заданных
и 11ф мргут быть сняты с кривых (рис. VIT.8).
При передаче гармонического воздействия с массы М на
массу МI, перепад уровней вибрации на амортизаторах
м.ф=Ю1ё 1
<»гМф
лп)2— 2
= 10 1g
( 1 -f- /П1|а
(VI 1.206)
При передаче вибраций в обратном направлении для вибро-
изоляции и перепада уровней вибрации справедливо выраже-
ние (VII. 186).
Чтобы снимать с кривых (рис. VII.8) значения перепадов
(VII.206), нужно в качестве входных параметров взять:
___R __ а
ф ’ |<с7Йф '
(VII.207)
Если в схеме, относящейся к звену № 2 (табл. VII .2), заменить
упругий элемент С, /? призматическим упругим элементом с рас-
пределенными постоянными, а массы Л4г и М2 считать соответ-
ственно амортизированным объектом и его фундаментом, то при
расчетной оценке эффективности амортизации в полученной прин-
ципиальной схеме амортизатору могут быть приписаны характе-
ристические коэффициенты (VII. 175). Для случая, когда трение
отсутствует (к = О), теоретическая кривая вибронзоляцпи пред-
ставлена на рис. VII.9. Первый (слева) провал этой кривой при-
ходится на низшую частоту свободных колебаний системы. Все
последующие провалы обусловлены волновыми резонансами
в призматическом упругом элементе амортизатора. Каждому та-
кому резонансу соответствует частота, при которой на длине
призматического упругого элемента укладывается целое число
полуволн продольных колебаний,
32?
Выражением (\ 11.156) или равноценным ему (VII. 162) опреде-
ляется виброизоляция, обеспечиваемая двухкаскадным амортизи-
рующим креплением в случае, когда амортизированный объект
и его фундамент могут считаться абсолютно жесткими телами —
массой М и Мф соответственно. При этом допускается, что масса
Рис. VI 1.9. Вид кривой виброизоляции 'при незадемпфи-
рованных волнопых резонансах в призматическом упру-
гом элементе амортизатора. Наклон прямых 1 и 2 соот-
ветственно би 12 дБ на октаву
промежуточной рамы или платформы включается в систему заново
вместе с амортизаторами.
Если бы существовала возможность беспрепятственно увели-
чивать массу Мо, сохраняя неизменными другие параметры си-
стемы, то можно было бы во всем диапазоне частот, начиная с са-
мых низких, обеспечить положительную виброизоляцню. В самом
деле, изображенные на рис. VI 1.4 провалы кривой, [см. фopмvлы
(VII.157). (VH-158)b уходяшие в минус бесконечность, устра-
няются трением, а вся кривая с увеличением Мо смещается вверх.
Поскольку, однако, возможности увеличения веса всей системы
ограничены, представляет интерес определение эффективности
двухкаскадного амортизирующего крепления в предположении,
что масса Мп образована за счет соответствующего уменьшения
первоначальных масс амортизируемого объекта и фундамента.
329
При таком предположении оцениваемая снижением уровня вибра-
ции фундамента (массы Л4ф) эффективность двухкаскадного креп-
ления
Э = и — 201g (1 +
М 4 Мф ) ’
где U определяется выражением (VII. 156) или (VII. 162). Перепад
уровней вибрации на двухкаскадном креплении (с массы М на
массу Мф)
йЛМф
шзм со2Мф Л
Сг С, °
JrI
<АИф Л
. мо + Мф f
or--------
1
2
со2/?| <Л?М
о/?! <оРа ®2уМФ ю2/ИФ
Ci Сг
.2
(VI 1.208)
2
При неограниченном возрастании частоты со
и|,| со/Иф
90 1р — .
2 g R, Rt
В предположении, что Л40 — 0, из (VII.208) можно
вместо формулы (VII.209) получить для высоких частот
«г.
2
м. ф
(VII.209)
было бы
Ф 201g соЛ1ф
(V1I.210)
Если трение отсутствует, то из (VII.208) получим
где
Пи. ф = 201g
ы-Мф
Ci
(VII.211)
(VH.212)
330
При этом в случае достаточно больших <о
*/ ММл,
Пн.ф ~ 801g со У . (VII.213)
При Мо = 0 выражение (VII.2I1) приводит для высоких ча-
стот к значениям перепада, приблизительно равным
Ф40 1g(о ]/. (VII.214)
Заметим, что в области высоких частот, как при наличии, так
и при отсутствии трения, независимо от величины промежуточной
массы Мо значения (VII.209), (VII.210), (VII.213), (VII.214)
перепадов уровней вибрации отличаются от соответствующих
значений виброизоляцин на одну и ту же величину
м
(VII .215)
Производя в (VII.208) замену согласно (VII. 171), получим вы-
ражение для перепада применительно к случаю трения, пропор-
ционального амплитудам деформации. При больших со
(ЛМф
Пм. ф 20 1g
osA40
С,
— 10 lg (1 +^0(1 +al).
(VU.216)
2
Сравнение (VII.216) с (VII. 172) показывает» что и в данном случае
справедливо равенство (VII.215).
Зависимости, характеризующие эффективность двухкаскадного
крепления, существенно усложняются, если массу нельзя
считать жесткой. Аналогично показанному на рис. VII.4 и VII.5
эффекту одной промежуточной массы крутизна кривой виброизо-
ляции увеличивается после каждого нового незадемпфированного
резонанса. Однако при большом числе таких близких друг к другу
резонансов возникает положение, сходное с представленным иа
рис. VII.9: провалы, обусловленные резонансами, отклоняют
кривую U вниз от прямой 2, к которой эта кривая вплотную при-
близилась после низкочастотного резонанса. Может оказаться,
что густо расположенные незадемпфированные или слабо за демпфи-
рованные резонансы будут значительно удалены в сторону более
высоких частот от резонанса, обусловленного колебаниями
массы Л40 на амортизаторах. Тогда кривая U успеет на ограничен-
ном участке после этого резонанса подняться выше соответству-
ющей штриховой прямой, указывающей, как это сделано на
рис. VIL4, ход кривой виброизолянии при А10 — 0.
При нежестком фундаменте и нежестком амортизированном
объекте отклонения от закономерностей, характеризующих вибро-
изоляцию без учета этих обстоятельств, также бывают весьма зна-
чительны.
331
Из-за недостатка места здесь не могли быть приведены схемы
расчета и способы оценки эффективности противоударных аморти
зирующих креплений. Необходимо подчеркнуть, что всякое амор-
тизирующее крепление, даже не противоударное, должно быть рас-
считано на ударные нагрузки, если ожидается, что они возможны
в условиях эксплуатации. Простейшие из применяемых расчетных
схем даны в работах [10, 60], В ряде случаев передача ударных
воздействий через двухкаскадное крепление более значительна,
чем через однокаскадгое.
Работа амортизаторов при ударных нагрузках рассмотрена,
в частности, в книгах [10, 20, 99].
6. ТИПЫ АМОРТИЗАТОРОВ
Существует много различных конструкции амортизаторов-
Чаще других употребляются амортизаторы с резиновыми и с ме-
таллическими (пружинными) упругими элементами. В последнее
время находят все более широкое применение пневматические
амортизаторы. В них роль упругого элемента выполняет некоторый
объем воздуха или газа, рабо-
тающий при увеличении внеш-
ней нагрузки на сжатие, а при ее
уменьшении расширяющийся.
Рис VT1.I0 Двух пластинчатый ре-
зин''металл«1че< кий амортизатор-
/ — нижняя пластина: 2 — верхняя
пластина; 3 — резиновый упругий
элемент
Рис. VII.11. Двухпластгнча-гый ре-
зи нометал л-ческий амортизатор
с наклонно расположенным упру-
гим элементом:
1, 2 — металлические пластины; 3 —
резиновый упругий элемент
Имеется также довольно много смешанных видов амортизаторов:
в них одновременно используются упругие элементы разного рода,
напоимео металлические (пружинные) и резиновые; металлические
и пневматические и т. д. Некоторые типы резинометаллических и
металлических амортизаторов весьма просты по конструкции.
Например, изображенный па рис VII. 10 двухпластинчатый амор-
тизатор состоит всего из двух стальных пластин, привулканизо-
ванных к разделяющему их резиновому упругому элементу, имею
щему форму прямоугольного параллелепипеда (плоской прямо-
угольной прокладки). Сходную конструкцию имеют амортизаторы
типа К АС [981.
Верхняя и нижняя пластины двухпластинчатого амортизатора
иногда выполняются так, что их поперечное сечение имеет форму
клина (рис. VII. 11). При монтаже такого амортизатора на гори
332
зонтальнои плоскости его резиновый упругий элемент получает
наклон, чем облетает осуществление амортизирующего крепле
нпя с поднятым над плоскостью размещения амортизаторов цен-
тром жесткости крепления (dhc. VII.2).
Амортизатор типа АКИО (рис. VII 12) представляет собой
ста пьную пружину с одним рабочим витком. Для предупреждения
жесткого соударения головок крепежных болтов на одну из них
издевается резиновый буферный колпачок 110, 98].
Рис. VI [.12. Амортизатор
типа АКПО, установленный
под оборудованием:
1 — амортизатор (одновитков а я
пружина); 2 — амортизированный
объект; 3 — резиновый буферным
колпачок; 4 — фундамент
Рис. VII-13- Амортизатор
типа АКСС. установленный
под оборудованием:
J — амортизированный объект; 2,
3. 4 — детали металлической арма-
туры амортизатора, прнвулканизи-
рованные к резиновому массиву:
5 — накладка, приваренная к фун-
даменту; 6 — фундамент
Получившие широкое распространение резинометаллические
амортизаторы типа АКСС (рис. VII-13) характеризуются наличием
у них так называемой конструктивной страховки. В случае разру-
шения резинового упругого элемента или его отслоения от метал-
лических деталей амортизатора последний продолжает удерживать
амортизированный объект на фундаменте [10, 72, 98].
I На рис. VI 1.14 показан резипометаллический сварной аморти-
затор с промежуточной массой (амортизатор типа А ПА'? Его прин-
ципиальное отличие от двухпластинчатого (рис VII 1П) состоит
в том, что в состав амортизатора введена добавочная металличе-
ская деталь — инертная масса, разделяющая резинов! 1й массив
на два слоя — верхний и нижний. Из рис V] I 14 видно что про-
межуточная масса амортизатора типа АПМ имеет з поперечном
сечении форму двух сомкнутых вершинами клиньев Этим дости-
гается увеличение момента инерции массы от ноегте пьно продоль-
ной оси, способствующее повышению виброизо,чяционныу свойств
амортизатора по отношению к высокочастотным поворотным
ззз
колебаниям. Для увеличения податливости амортизатора
в вертикальном направлении каждый из резиновых слоев образо-
ван из двух разделенных воздушным зазором упругих элемен-
тов
Амортизаторы типов АКСС. АПМ и двухпластинчатые являются
резинометаллическими сварными. Их резиновые упругие элементы
привулканизованы («прива-
рены») к металлическим дета-
лям. После вулканизации
в прсссформе, куда перед
этим закладывают металличе-
ские детали, из пее выни-
мают готовый амортизатор.
Изображенный на рис.
VII. 15 амортизатор типа ACT
с тороидальным упругим эле-
ментом принадлежит к числу
резипометаллических сбор-
Рис. VII 15. Сборный резинометалли-
ческий амортизатор типа ЛСТ:
I — втулка верхняя; 2 — отток; 3—коль-
цо опорное верхнее: 4 — тор резиновый;
5 — кольцо опорное ннжиее; 6 — втулка
нижняя: 7 — корпус; 8 — кольцо; 9
буфер резиновый
Рис. VII 14 Амортизатор
типа ЛИМ.
/ — нижняя пластина: 2 — проме-
жуточная масса; 3 верхняя пла-
стина; 4 — резиновый массив
ных амортизаторов. Его резиновый элемент изготовляется от-
дельно, а зятем поступает на сборку вместе с металлическими
деталями. Достоинством такого амортизатора является отсут-
ствие сварного резинометаллического контакта, надлежащее
качество которого можно получить только при хорошо отлаженной
технологии и при существенно ограниченном выборе марок мате-
риала для изготовления металлической арматуры амортизатора
По истечении срока службы и при повреждении резинового эле-
мента он мпжет быть заменен новым, причем металлические детали
остаются годными для дальнейшего использования.
Недостатками сборных резинометаллических амортизаторов
являются более сложная конструкция и большие размеры, чем
у аналогичных сварных амортизаторов.
334
Амортизатор типа АПС (рис VI1.16) относится к резинометал-
лическим сборносварным и в то же время представляет одну из
разновидностей резинопневматических амортизаторов. Резино-
металлический сварной вкладыш при деформации амортизатора
вдоль оси za работает параллельно с воздушной подушкой внутри
корпуса амортизатора. Дополнительным упругим элементом слу-
жит резиновый буфер, установленный с зазором по отношению
к воспринимающей нагрузку от веса амортизированного объекта
втулке резинометаллического вкладыша. Отверстие в корпусе,
через которое накачивается воздух, можно после этого заглушить
пробкой. Иногда бывает удобно предусмотреть регулярную под-
качку воздуха для всех
амортизаторов, составляю-
щих крепление, от нахо-
дящейся поблизости воз-
душной магистрали, от
баллона или компрессора.
При этом в корпусах амор-
тизаторов делают для под-
ключения воздухопровода
по два отверстия и стоящие
рядом амортизаторы соеди-
няют трубками последова
тельно.
Амортизатор типа АПС
сохраняет в определенной
Рис. VI 1.16. Амортизатор типа АПС:
/ — рсзинометаллнчсский вкладыш: 2 — гайка
внертная: 3 — ниппель: 4 — буфер резиновый:
5 —штуцер; 6 — кольцо: 7 — крышка: 8 — кор-
пус, 9 — манжета резиновая
степени амортизи рующие
свойства, главным образом, за счет резинового упругого эле-
мента, и при свободном сообщении внутренней воздушной полости
с атмосферой.
Повышенной температуростойкостью по сравнению с резино-
выми упругими элементами обладают элементы из металлических
волокнистых и плетеных пористых структур. Созданные на их
основе амортизаторы зачастую сходны по внешнему виду со сбор-
ными резинометаллическими. Например, в амортизаторе типа
ACT (рис. VII.15) резиновый тороидальный упругий элемент мо-
жет быть заменен такой же формы металлическим элементом, прес-
сованным из плетеной проволочной заготовки. Металлические
пористые структуры способны выдерживать значительно большие
упельные нагрузки, чем резина. Их существенным недостатком
является малая по сравнению с резиной величина относительной
упругой деформации.
На рис. VI 1.17 схематически изображены некоторые типы пнев-
матических резннокордных амортизаторов Последние получи пи
значительное развитие и изготовляются в разнообразных модифи-
кациях преимущественно для использования в амортизирующих
подвесках автомобилей. В автомобилестроении применяются
также многочисленные конструкции телескопических амортиза-
ЗЗд
торов — пневматических, гидропневматических и гидравлических.
Почти все они проектируются и получают окончательное кон-
структивное оформление применительно к конкретным характери-
стикам той или иной марки автомобиля 131, 32, 441.
Рис. VII.17. Резинокордные пневматические амортизаторы:
а — баллонный с удлиненным двухсекционным пневмобал-
лоном; б — баллонный с удлиненным односекцнопным
пневмобаллоном; в—диафрагменный; г — трехсекциониый
круглый пиевмобаллон амортизатора
7. ОБ ИСПЫТАНИЯХ АМОРТИЗАТОРОВ
И АМОРТИЗИРУЮЩИХ КРЕПЛЕНИЙ
В амортизирующих креплениях машин желательно применять
амортизаторы, серийно выпускаемые промышленностью. Под-
твержденные экспериментальными данными характеристики этих
амортизаторов, необходимые для проектирования амортизирую-
щего крепления, могут быть заранее почерпнуты из соответствую-
щей технической документации.
В первую очередь нужны данные о жесткости и трении, свои
ствениых амортизаторам; об их статической и динамической проч
ности: о стабильности этих характеристик в различных эксплуата
ционных условиях 12, 3, 10, 20, 31, 32, 60, 69, 72, 98, 99, 1721
В тех случаях, когда приходится проектировать новые аморти-
заторы, также следует стремиться к получению их эксперименталь-
ных характеристик прежде, чем принять решение об окончатель-
ЗЗЬ
ном варианте амортизирующего крепления. Сказанное относится
• не только к амортиза горам с резко выраженной нелинейностью си-
| докой характеристики и ко всем амортизаторам с резиновыми
Ипругими элементами. Полезно производить предварительную
V экспериментальную проверку расчетных характеристик даже та-
ких, казалось бы, простых изделий, как намечаемые к использо-
ванию в качестве амортизаторов обычные винтовые пружины.
Рис. VII.19. Кривые сила—
деформация для амортиза-
тора с резиновым упругим
элементом, снятые в усло-
виях ударного нагружения
при пониженной (/), нор-
мальной (2) и повышенной (3)
температурах. Па форму ги-
стерезисной петли зна штель-
но повлияли ограничители
свободного хода, входящие
в конструкцию амортизатора
Рис. VII. 18. Кривые сила—дефор-
мация для амортизатора с резино-
вым упругим элементом:
1. 2, 3 —последовательные циклы ста-
тического нагружения н разгрузки
амортизатора
В зависимости от цели, с которой осуществляется амортизи-
I рующее крепление, могут потребоваться более или менее подроб-
ные дополнительные данные о свойствах входящих в пего аморти-
заторов.
Иногда бывают н^жны амортизаторы с меньшей разницей в
в жесткостных характеристиках, чем это гарантируется техниче-
скими условиями на серийную продукцию. При отсутствии марки-
ровки или паспорта, характеризующих каждый амортизатор в от-
дельности, приходится производить испытания, отбирая для амор-
тизирующего крепления амортизаторы, близкие посвоим свойствам,
Глибо следя за некоторыми средними параметрами комплекта амор-
тизаторов.
|.Для одних и тех же амортизаторов с упругими элементами из
। резиноподобного материала диаграммы «сила—деформация» (сп-
1 левые характеристики) получаются различными, если они сняты
, при разных скоростях деформирования упругого элемента и при
разных температурах. В качестве примера на рис. VII. 18 и VII 19
। 22 н. в. Григорьев 337
показаны кривые, полученные в режимах нагружения и разгрузки
амортизатора с упругим элементом из синтетической резины.
Динамические модули и коэффициенты механических потерь
резиноподобных материалов являются функциями частоты, с ко-
торой производится деформирование материала. Динамическая
жесткость резинового упругого элемента амортизатора также зави-
сит от частоты.
При большой скорости деформирования резинового элемента
сопротивление трения может стать довольно значительной состав-
ной частью его полного сопротивления деформированию. Однако
возрастание эффективной
жесткости амортизатора с ре-
зиновым упругим элементом
по мере увеличения скорости
деформирования объясняется
в основном тем, что не успе-
вает произойти релаксация-
переход к новому равновес-
ному состоянию, при котором
пропорциональность между
напряжением и деформацией
характеризуется статическим,
а не динамическим модулем.
Упругие деформации резино-
вых элементов амортизирую
щих конструкций под дейст-
вием постоянной нагру'зки
увеличиваются, асимптоти-
чески приближаясь к некото-
Рис. VII.20. Полное сопротивление Рг
амортизатора с резиновым упругим эле-
ментом, имеющего деформацию Z, которая
возрастала от 0 до Z монотонно в течение
времени t
рому предельному значению, в течение длительного времени.
На рис. VI 1.20 изображены кривые, приближенно показываю-
щие характер зависимости между величиной силы, нагружающей
амортизатор с резиновым упругим элементом, и параметром, учи
тывающим время возрастания деформации амортизатора до задан-
ной величины. Для компактности графиков на шкале аргумента
можно взять логарифмический масштаб. Нетрудно видеть, что
различным режимам нагружения амортизатора соответствуют раз-
ные значения его жесткости при одной и той же величине деформа-
ции *.
Статическая жесткость амортизатора в одном из главных на-
правлений (например, в направлении z), строго говоря, должна
* Следует иметь в виду, что кривые (рис. VII.20) охватывают диапазон де-
формаций резинового упругого элемента амортизатора, определяемых в основном
так называемым высокоэластическим модулем резины. При продолжении этих кри
вых влево, в область еще более быстрого деформирования, большая их часть, от
носящаяся к достаточно большим деформациям, обрывается Кривые для болыип*
деформаций при продолжении вправо также обрываются: при большой длител
ности существования этих деформаций происходит разрушение.
338
быть определена как соответствующая неограниченно долго суще-
I ствующей деформации (Z) н постоянной поддерживающей ее силе
(dP \
, (Рг\ величина первой производной силы по деформации 1.
Этим определением учитываются как явления релаксации, за-
। метко выраженной у амортизаторов с упругими элементами из ре-
зиноподобного материала, так и нелинейность зависимости «сила—
деформация». При нелинейной упругой характеристике часто поль-
зуются значениями средней жесткости амортизатора на том или
। ином ее участке.
При экспериментальном определении статических жесткостей
амортизаторов с резиновыми упругими элементами скорость де-
формирования амортизаторов (которую обязательно нажно вно-
сить в протокол испытаний) может быть довольно значительной.
Г Данные, полученные при таких испытаниях, должны быть допол-
нены сведениями о деформациях амортизаторов при длительном
действии постоянных нагрузок. В расчетах на такого рода на-
I грузки следует пользоваться значениями статических жесткостей
со сделанными к ним поправками на большую длительность дей-
ствия нагружающих амортизатор усилий. В иных случаях, напри-
мер при расчетной оценке перемещений амортизированного
оборудования относительно основания при непродолжительных
наклонах во время транспортировки, указанные поправки не
потребуются.
При свободных и вынужденных колебаниях амортизированного
I объекта на амортизаторах с резиновыми упругими элементами
эффективными жесткостями амортизаторов являются их так назы-
ваемые вибрационные жесткости (динамические жесткости в ви-
брационном режиме) Их зависимостью от амплитуды деформации
упругого элемента можно в первом приближении пренебречь,
[ если нелинейность упругой характеристики элемента невелика
Если снята резонансная кривая колебательной системы, жест-
кость и деформации которой в резонансном режиме определяются
f жесткостью и трением, свойственными упругому элементу аморти-
* затора, то в линейном приближении динамическая (вибрационная)
жесткость и коэффициент эквивалентного вязкого сопротивления
амортизатора будут соответственно:
CB = WpC3M, (VI 1.217)
(VII 218)
Рргз
Здесь М — масса системы; <оргз — резонансная частота (круговая!;
Р„ез — коэффициент динамичности при резонансе.
Для амортизаторов, работающих в вибрационном режиме и
предназначаемых для изоляции высокочастотных возмущений,
обязательно должна быть определена частота первого волнового
[ резонанса в каждом из главных направлений. Кроме того, крайне
желательно получить графики зависимости от частоты возмущаю-
22* ззе
щего воздействия для характеристических коэффициентов Аа, Ва,
Си, Ьа амортизатора, определяющих ei о виброизоляционные свой-
ства по отношению к действующим по главным направлениям си-
лам и моментам.
Применительно к условиям разнообразных ударны: нагрузок,
создающих особенно большие деформации амортизаторов, кривые
«си.ча-деформацж1Я'> (см. рис VII 20) служат основным фактическим
материалом для оцен км динамических ударных жесткост ей и ме-
ханических потерь в элементах амортизаторов. При соответствую-
щих испытаниях должно быть уделено надлежащее внимание опре-
делению остаточных деформаций и оценке изменяемости характе-
ристик амортизатора при повторных нагружениях.
В ПРИМЕР ИСПОЛНЕНИЯ И ПОВЕРОЧНОГО РАСЧЕТА
АМОРТИЗИРУЮЩЕГО КРЕПЛЕНИЯ
Отмечена нежелательная вибрация стоек с установленной н?
них аппаратурой при работе электромашипного преобразователя
расположенного на отдельном фундаменте в соседнем помещении.
Измерениями установлено, что частота вибрации — 50 Ги совпа-
дает с числом оборотов преобразователя — 3000 об/мин Вибрация
фундамента невелика: ее амплитуды, судя по виброграмме, меньше
0,01 мм.
Принято решение установить преобразователь на амортизаторы
с резиновыми упругими элементами. Благодаря наличию в них
затухания будут ограничены амплитуды колебаний агрегата на
амортизаторах при прохождении через резонанс во впемя пуска
и остановки. Для большей эффективности амортизации желательно
получись достаточно низкими все частоты свободных колебаний.
Исходные данные, характеризующие
амортизируемый объект
В плане основание агрегата представляет прямоугольник дли-
ной 2,40 м и шириной 1,42 м. Be'' агрегата - 11,4 т (следова-
тельно, масса М я» 11,62 кгс-см" ’-с2). Центр тяжести Оцт рас-
положен в диамет ралыю^ плоскости zHOu.Txtl на высоте 0,67 м нал
опорной поверхност ью; проходящая через пего вертикальная по-
перечная плоскость г/иОцтги делит длину основания на отрезкг
1,05 м и 1,35 м. Главные центральные оси инерции Оитхи (продоль
ная, практически совпадающая с осью ротора) и Оцтии (попереч-
ная! горизонтальны, Оцтги — вертикальна (положительноенаправ
ление—снизу вверх). Главные центральные моменты инерции
J, =4,69-1Пл кгс-см-с®, Ju = 8,38-1 б4 кгс-см-с®, Л ~ 7,48
х ГО4 кгс-см-с2.
Теоретически агрегат полностью уравновешен Однако оста-
точный небаланс ротора приводит к возникновению следующие
34П
ИвОзмушающих усилий, имеющих частоту вращения = 50 Гц
^ЗЗМеТНМ, ЧТО Ру.} Эс^а ^2и)'
Ри — Руй sin со/ = P,JL sin 2nfj = Ру1 Sir 314.;
! Р2 = - Pzt cos at = P/Ai sin | 2л, J — " ’] — — P c cos 314/;
91?. — ?.Rya sin (col 4 a) — 3^s.. sin (314/ -| - a);
ЗЛг = — cos| wl + cc) = ”’</B sin (314/ 4 a-=
= !R, cos 014- 4 aj
Благодаря тому что ось ротора совпадает с главной центральной
осью инерции Оц.тхп, силы, об} словленные ост аточным н ебалансом,
не создают момента 3J0.
Предварительный выбор амортизаторов
I Из предоставленных в распоряжение а юр г/затоьов под номи-
нальную статическую на1 рузку 1200 кгс и 800 кгс, опорные пла-
стины которых при одинаковой ширине 120 мм имеют длину соот-
ветственно 360 мм и 240 мм, выбираем первые, лак как они лучше
Кодходят к опорной поверхности агрегата. Пять пар этих одина-
кого нагруженных амо[ т в зал оров I 2 12рс/ *=« 5 1 надо располо-
жить по длине основания так, чтобы агрегат стоял без перекоса.
Кроме того, желательно, чтобы при монтаже, под действием веса
преобпазователя, деформация его амортизирующего крепления
была строго вертикальной. Оба требования у дззлетзоряются, если
амортизирующее крепление имеет вертикальную ось статической
пост упа тельной жесткости, проходящую через цен гр тяжести амор-
тизируемою объекта (наличие у амортизирующею крепления
центра жесткости не обязательно).
; Размещаем амортизаторы длинными стиронами их опорных
пластин вдоль боковых кромок основания аморлизируемого
объекта О< и xui поступательной жесткости всех десяти амортиза
тиров расположатся в одной горизонтальной плоскости парал-
лельно оси Ои т хи на расстоянии R5 см от диаметральной пло-
скости. Четыре амортизатора, составляющие первую и пэследнюю
пары, устанавливаем по углам прямоугольного основания агре-
гата Тем самым определяются абсциссы (— 87 и 11 < м) центров
Жесткости этих пар. После нескольких проб выбираем следующие
значения абсцисс для центров жесткости остальных трех пар:
г-49; —10: 29 (см) Сумма всех абсцисс равна нулю Эк го в нашем
Сслучае достаточно для обращения в ноль взя гых с 'носительно пло-
- скости уиО т.-н стат ических моментов жест кости эморти щруюшего
крепления, поскольку оно состоит из несуши х одинаков} ю на
грузку однотипных амортизаторов, расположенных симметрично
341
св
:fl=7¥-i.
по отношению к плоскости гиОцтхн. Следовательно, центр жест-
кости крепления находится в плоскости yaOUTzu. Но благодаря
симметрии относительно плоскости г,|Оц тхи он должен быть также
и в этой плоскости- таким образом, он должен лежать на верти-
кальной оси 0цтзн. Эта ось является одновременно осью г* посту-
пательной жесткости амортизирующего крепления. Частный
центр жесткости 0ГЛ есть точка пересечения оси г* с осью Л
поступательной жесткости крепления, параллельной оси О, р.
и лежащей в той же горизонтальной плоскости, что и оси ха1 амь .
тизаторов.
Выпишем статические и вибрационные жесткости выбранных
амортизаторов (кгс/см):
₽й = < = 400; =2800;
с*а = свуа = 600; сва = 4200
Их поворотными жесткостями пренебрегаем, так как они мало
влияют на величину поворотных жесткостей амортизирующего
крепления.
Поскольку отношение
сст
k = -га-
сст
уа
то амортизаторы обладают тем свойством, что при установке их
по схеме рис. VI 1.2 центр жесткости амортизирующего крепления
раздваивается. Над частным центром жесткости 0х,г, распола-
гается другой частный центр жесткости Oyj_ на расстоянии, зави-
сящем от угла наклона й осей zai жесткости амортизаторов к пло-
скости симметрии амортизирующего крепления (диаметральной
плоскости 2и0дтХи).
Сближение, а еще в большей степени совмещение частного цен-
тра жесткости О,.,г, и центра тяжести амортизированного объекта
способствует уменьшению более высокой из двух частот его сво-
бодных колебаний на амортизаторах вдоль оси O^iytl и вокруг оси
Оц-Л- Поэтому совпадение указанных центров желате льно. Если
оно достигается, то свободные колебания вдоль оси Оц туп (с кото-
рой в этом случае совпадает ось у* посгупателыюй жесткости
амортизирующего крепления) станут односвязными, как и поворот-
ные колебания вокруг оси 0UTx„ (с которой при этом совместится
ос ь поворотной жест кося и крепления).
Воспользуемся наличием следуюши х трех модификаций подби-
раемых амортизаторов;
1) опорные плоскости резиновых упругих элементов парал-
лельны основанию опопчых пластин (аналогично рис VII > '*•
2) опорные плоскости упругих элементов наклонены к основа-
нию на угол 15 ^будучи, таким образом, повернуты на этот у гоЛ
вокруг осн xai)-
342
3) наклон плоскости упр) гих элементов к основанию составля-
ет 25°.
l В последних двух случаях опорные пластины амортизаторов
сходны с показанными на рис VI 1.11 при их установке на гори-
зонтальную плоскость оси za; амортизаторов составят с вертикалью
угол сос гветственно 15° и 25е.
Определим угол 6, на который должны быть наклонены оси
К,,-, чтобы частный центр жесткости совпал с центром тяжести
агрегата. При отсу тствии наклона возвышение /г, т центра тяжести
над 0у>2, равно расстоянию до горизонтальной плоскости, содер-
жащей оси хо;, и составляет около 72 см (это несколько больше
указанного выше расстояния 67 см от опорной плоскости основа-
ния агрегата, так как центры жесткости амортизаторов располо-
жены ниже лее на величину, приблизительно равную половине их
высоты). Формула (VII.97) после подстановки в пее соответствую-
щих нашему случаю значений b — 65 (см), k = 7, zy, — hu l =
= 72 (см) дает
«= 0.387 ± 0,084.
I 0j = arctg 0,471 25е 13'; 02 = arctg 0,303 « 16° 50'.
1 Выбираем амортизаторы, обеспечивающие при их установке
на горизонт альную плоскость получение у гла 0 = 25' Частный
центр жесткости 0^2, при этом практически совместится с центром
тяжести.
Расчетная оценка характеристик
амортизирующего крепления
Статическая вертикальная жесткость крепления, г соответствии
к формулами (VI 1.98) и (VII 99),
С2’ — пс^а (cos 0 ф —• sin2 и )
IU-2800 |(0,9')6)2 + 4- (0,1231= ] «= 23 700 кгс/см.
Вертикальная статическая деформация амортизиру ющет о
крепления под действием веса амортизированного объекта
£ст Mg 11200 п । л -
— “Ут ~ ’23700' "" '4 cv — 4>' МА1
Статическая деформация сжатия упругого 3темен га аморти-
затора
6" = 6" cns 0 ~ 4,7.0,91 «= 4,3 мм.
343
Сжимающее усилие
-<Ж=-2800-0,43 «= 1200 кге
равно номинальной нагрузке Заметим, что при отсутствии на
клона (0 = 0) было бы
Р" = ^ = =1120 кге.
Статическая деформация сдвига, сообщенная упругому эле
мечту,
6” = 6 sin 0 4,7 - 0,42 2.0 мм.
Сила, вызывающая сдвиг,
Р" = с'Х = 400-6,2 =• 80 кге.
Динамические вибрационные жесткости амортизирующет
крепления вычисляем по формулам (VII.98), (VII.99), (VII.10
пользуясь приведенными выше значениями вибрационных жесть з-
стей амортизаторов:
CXif - пс, 2 - - 10-000 = 6001) кгс/см;
С,,* = псиа (cos’2 О 4 k sin® 0) =
= 10-600[(0,9П6)2 +7(0.423)2]«tf 12440 кгс/см;
— ПС7(| (COS2 6 - -* Sin2 0^ =
= 10-4200 [(0.906)2 +-L (0.423)2] 35 600 кгс/см;
Ь2псга
Т/ ___ п-ПСга 65M0-42U0 _ г С-7 1П7
^хо — :qS2 и k sin2 0 — 2^07 8,57 -10 Ki с -см;
ю
У. V?
1
k
= 4200-0,847-2(87® 49®4 Ю2 4 29s 117?)=<
да 1,75-10? кге-см;
= Ь*СХ. + суа (со§2 ° Ь k sinZ 0) 2 xi =
i 1
= 652.G00o h 000.2,07-49 290 ^8,65-10’ кгс-см.-
Из показанных на обшей схеме рис. VII.2 осей жесткости амор
тезирующего крепления в нашем случае совпадают с равновесны'1
положением главных центральных осей инерции амортизирова’
ного объекта оси хп . и совмещенные друг с другом оси z* и
344
позволяет сразу же вычислит ь частоты четырех не связан ных
Kt прочими свободных колебаний амортизированного объекта:
1 J_ поворотных вокруг осн Xi (оси нперции х,):
1 ___ |/ Кх. ]/? _____* ' .49 7__-
— » ./х — V 4,69-IG1 ~ с ’
1— поступательных вдоль оси у* (оси инерции у„\
) = 1/^=1 ^^327-^ ;
Y М Т 11,62 ’ с ’
’ " 2 л 1
I — поступател ьных вдоль оси z* (оси инерции zj.
, 1/^ -./35600 _ 55 3 1 . •
ь=-¥~8’8 Гц;
I — поворотных вокруг оси Zo (оси инерции z„):
,.= «.5.4 Г«.
^Воответствующне этим частотам ст роки и столбцы частотного опре-
I делителя в левой части уравнения (VII. 111) содержат только рав-
Еные нулю жесткостные коэффициенты, за исключением плпадаю-
Вщих на главную диагональ: а22 = Св>: аэа С „. он = /Ст: flje
K>~i. В остальных строках и столбцах должны быть равны нулю
жесткостные коэффициенты, индексы которых содержат одн; из
М|1фр: 2,3.4,6. Таким образом, в числе самостоятельных уравнений,
на которые в рассматриваемом случае распадается полное час гот-
Вное уравнение (VII 111). будет
(VII.220)
34а
(VII 219)
Индексы х, ф, которыми снабжены обозначения двух круговых
частот А,,,,,! и 1Хф2, указывают на то, что соответствующие свободные
колебания состоят из перемещений амортизированного объекта
вдоль оси инерции хи и его поворотов вокруг оси инерции ун.
Соответствующая (VII.219) система двух алгебраических урав-
нений, выделяющаяся из (VII.ИО), имеет вид:
(ам — ГЛ1) ио Ч- с15ф = 0; ।
<,.«0+ (<.»- «,И-0. J ,V,L22"
Каждое из этих уравнений после подстановки в него одной из час-
тот (VI 1.220) даст возможност ь определить соотвстс гвующую форму
свободных колебаний. Последние могут рассматриваться как пово-
ротные вокруг оси. параллельной оси ук и пересекающей ось
0UTzH в точке с координатой z^ или z^2, отсчитываемой от равно-
весного положения центра тяжести'
2ф1 — р ~ у —
«11 -
~ф2 — Р—77 ~ (^xit-Jy Oss)-
ац —«15
При этом должно быть:
•2__ Jy
— 1У — '
(VI 1.222)
(VII.223)
Для вычислений по формулам (VII.220) и (VI 1.222) нужно
определить жесткостпые коэффициенты а15 = й51 и отнесенные
к координатной системе О Tx„^„zn, с которой в нашем случае сов-
падает показанная на рис. VII.2 координатная система (ыг'^уЛю
Чтобы их найти, воспользуемся известными значениями СХг и К, .
которые являются соответственно жесткостпыми коэффициентами
аи 11 а55> отнесенными к координатной системе Ох^х*г*, причем
отнесенный к nevi коэффициент а15 равен нулю. При параллельном
переносе этой координатной системы с перемещением начала коор-
динат в точку (0, 0, /1цт) новые жесткостные коэффициенты
определяются по формулам (VII.66) и (VI 1.61). Находя среди них
формулы для аг и Пз5 и отбрасывая штрихи при обозначениях
новых коэффициентов, найдем
= °11йц.т = Сх ft, г; I
п _к~ , r Л- (VII.224)
-- ^уи Г б'Х.Йц.7-
Подстановка (VH-224), а также в (VII.220) дает
\/~ 1 (СХ* [ ^«+СХ.ЙЦ.Т \2 Сх,^уо (VII 225)
V 4 \М 1 ' Jy I М Jy
346
Теперь
2 1 / 6000 17 500 -I-0,6 -72- 1П1\ _
2 1 11 6Z 8,38-10* ‘‘ ) 4
+ j/-L (516 4-2470)2 —516-2090^
«=-(1493 T 1072) 4’>
^^20,54; = Гц;
Щ Й 50,7 4: - 4~ 8,3 Гц.
По формулам (VI 1.222), учитывая также 07.1,1.224), получим
? —__________ftu-T _ _____72 __3Q1 rM-
1 Ml c
51C
„ ^Ц.т
Л M ]
Ax*2 ~7--------1
**
25^7 -18-1 CM-
516 1
Проверим, выполнено ли соотношение (VI 1.223). Произведение
^13ф2 = --391•18,1 =« —7080 см®
отличается от величины
о
J-J
.и
8,38-10*
~ 11,62
— 719-1 см2
приблизительно на 1,5%, что вполне допустимо.
Вычисленные выше шесть частот свободны к колебаний преобра-
зователя как твердого тела на амортизаторах расположены в диа-
пазоне от 3,3 до 8,8 Гц В наихудшем случае, относящемся к самой
высокой из этих частот, коэффициент передачи фу ндаменту гармо-
нической силы, имеющей частоту 50 I ц. в соответствии с формулой
(VII 185), будет (если пренебречь трением):
₽»=|1 -|Г'=11 -®Т'~ зга ~°-032-
>Эта величина р* может быть также снята с кривой рис. VII 6,
соответствующей случаю отсутствия трения (а — 01, для значения
50 1
[аргумента т] ==-<5,7 или для обратной его величины — «=;
«0,175. Из рисунка видно,что соседняя кривая, соответствующая
случаю относительно большого трения (а 0,2) также дает вели-
чину рф, близкую к 0,03.
347
Таким образом, установка преобразователя на аморгизатощ,)
должна уменьшить передачу фундаменту вредного возмущаюс гс
воздействия не менее чем в 30 раз.
После того как выбранное амортизирующее крепление преоб-
разователя было осуществлено, вибрация стоек с аппаратурой
оказалась едва ощутимой. Было отмечено также значите. ое
уменьшение шума, возникающего при работе преобразоватечя
в соседнем с ним помещении.
Рассмотренный пример установки на амортизаторы достачоч ,
прост. Расчет амортизирующего крепления пе потребовал слож-
ных вычислений. Все приведенные выше выкладки сделаны вр’ ч-
|ц ю, с помощью обычной логарифмической линейки. Подобные
случаи встречаются довольно часто, но при усложнении расчет >в
необходима их механизация. Сложные колебательные системы
с пространственным расположением амортизаторов рассчи гы
ваются на ЭЦВМ по разработанным для этой цели программам.
При этом во многих случаях оказываются предпочтительнее про-
чих матричные методы расчета 150, 59].
Учитывая большое разнообразие встречающихся в практике
случаев установки машин на амортизаторы, сделаем еще несколько
замечаний.
В примере с преобразователем колебания последнего могли
быть рассмотрены более подробно. В качестве главных координат
удобно взять
— четыре обычно используемые обобщенные координаты и0,
лу0, Ф«
— углы поворота ф] и ф2 вокруг горизонтальных осей, находя-
щихся в плоскости уи0ц.тги; их положение определяете я форму-
л1ми (VII.222).
Обобщенные координаты vo и ф связаны с ф, и ф2 соотноше-
ниями
ип — । (VII.226)
1|- - фч -|- ф2. I
Соответствующие |\ и ф2 обобщенные массы будут:
Л1Л1 Jt/ 4
41^,2 = Jу \
При указанных выше возмущающих силах установившие^1
вынужденные колебания преобразователя на амортизаторах н?
Д)тся раздельно для каждой главной координаты из дифферен-
циальных уравнений
&4 2nj)04-Ъ2ро = y^sinоф;
w0 4- 2л,иу, 4- '= — cos оф;
348
(VI 1.227)
Фг -г- 2пфгф3 -+• л;421|ч = - sin (со/ + а),
fl 2пой -| %- Й = - - ~^гг— cos (со/ J-а).
**2
Возмущение, соответп ву ющее главной координате <|, отсу г-
ствует- поэтому поворотных колебаний вокруг оси 0Ц1Тл'„ не будет.
Вводя аналогичные (VII. 1841 и .......
2ии 2/1,
а^1~'
Лл-ф2
(d Ш
<0
Яф2
_ Н
(VII.183) обозначения
; ; Ах,,. ’
„ _ Wo,
С(| ”1?’
<л
Hifl — ) 1
л*ф1
_ __ <0
\xif2 ’ * ^0 1
а также
C^i — ^-/'ф2 —: 4»х ''^г|:
нетрудно выписать стационарные решения вида (VI1 194) для всех
пяти главных координат, гармонически изменяющихся во времени'
с частотой со.
В первом приближении можно считать все величины с , . . .
. . ., ад. одинаковыми, близкими к значению а «= 0,15-: 0,2. При
ориентировочной оценке допустимо вовсе пренебречь трением, пэ-
ла1аяс О В последнем случае коэффициенты рФ и одинаковы,
а в зарезонансной области (со > Z) главная координата и соответ-
ствующее ей усилие, передаваемое фундаменту, противоположны
по фазе возмущающему усилию. Следовательно, при а -- 0 и
о > X и при отмеченном в исходных данных условии Pya = Pia\
— nJl’ia получим:
ЭД<Н1 = — ЭД^а (Пч4 — 1) 1 Sin («/ 4- а):
’|>г = — (rft, — 1 )-* Sin (at + а);
ЭД442 = - ЭД^а (т]ф2 — I)-1 sin (at -|- al
f> = -l)-lCOS((0/-|-e);
20
ЭДфг = ЭДга ('|O — 1) COS (at -| e);
^фф T ЭДф1|)2'
Подставляя теперь и i|-2 в формулы (VII.226), найдем:
4i- и ’
“о Г= ЭД ий
sin (at 4-a).
Выписанные выше выражения для усилий, передаваемых фун-
даменту, приведены к началу и осям координатной системы
Qu^y*Z* (рис. УП 2).
Таким образом, к опорной поверхности фундамента кроме сил
Р,., Рг и моментов ST/,W приложен еще создаваемый силой Р
момент
ЭДх, = —Р/Ц-т.
Когда величины возмущающих усилий известны, становится
возможным вычисление амплитуд колебаний амортизированног-1
объекта, а также деформаций амортизаторов и величины передавае-
мых фундаменту усилий.
Первоначальную ориентировочную оценку обычно производят,
не учитывая фазовых соотношений между колебаниями от несколь-
ких возмущающих усилий. Если допустить, что возможно арифме-
тическое сложение амплитуд и их сумма, от всчаюшая этому пред-
положению, будет признана допустимой, то более точные вычисле-
ния пе нужны В противном случае их следует выполни гь, гумми
руя колебания с учетом разницы в фазах 1601-
Допустимость вызываемых вибрацией деЛормапий резиновых
элементов амортизирующих конструкций во многом зависит от их
разогрева при вибрации. Поэтому исследованию температурного
поля в резиновых элементах посвящено большое число рабог.
350
В случае значительной неуравновешенности машины, работ а-
юшей в зарезонансной режиме (по отношению к частотам свободных
1 колебаний на амортизаторах), возможно возникновение интен-
сивных колебаний при ее пуске и остановке. Вопросы прохожде-
ния через резонанс, которые впервые детально рассмотрел
А. М. Кац [12, 1441, до настоящего времени продолжают привле-
кать внимание исследователей.
В стационарных установках нередко применяют амортизиру-
ющие крепления, <тбеспечивающие еще белее низкие, чем в приве-
денном примере, частоты свободных колебаний амортизирован -
ного объекта. При этом широко используются пружинные подвесы,
часто с введением резиновы х элементов или специальных демпфе-
। ров, позволяющих получить требуемые характеристики неупру-
гого сопротивления
ГЛАВА VI11
КОЛЕБАНИЯ УПРУГИХ АМОРТИЗИРОВАННЫХ МАШИН
НА УПРУГОМ ОСНОВАНИИ
В настоящее время уже нет сомнений в необходимости учета
упругопнерционных свойств как самих объектов, так и оснований
(фундаментов), на которые они устанавливаются. Хорошо известно,
что упругоиперционные свойства объектов и фундаментов сущест-
венным образом отражаются на динамическом поведении всей
системы, на эффективности и структуре различного рода вибро-
защитных систем й т. п. В связи с этим в настоящей главе рассма-
триваются вопросы, связанные с проектированием и расчетом ви -
брозащитных систем, включенных между двумя упругими подси-
стемами.
1. РАСЧЕТ СВОБОДНЫХ КОЛЕБАНИЙ МНОГОМАШИННОГО
АГРЕГАТА, ИМЕЮЩЕГО ОДНОКАСКАДНУЮ
АМОРТИЗАЦИЮ
По конструктивным, технологическим и эксплуатационным со-
ображениям целесообразно объединение многомашинных агрега-
тов с помощью промежуточных конструкций (рам,) которые вибро-
изолируются от фундамента.
В том случае, когда промежуточные конструкции имеют до-
статочно большую длину, а агрегаты являются тяжелыми, систему
агрегаты—рама нельзя рассматривать как абсолютно твердое тело
и применять классическую теорию амортизации. Расчеты показы-
вают, что кроме обычных частот амортизации появляются собст-
венные частоты, обусловленные конечной жесткостью рамы, пер-
вая из этих частот в два-три раза выше соответствующей частоты
амортизации. По правилам теории амортизации частота основной
возмущающей силы также в два-три раза должна быть больше
собственной частоты колебаний жесткого амортизированного
объекта. Отсюда следует, что подбор амортизации по обычной клас-
сической теории приводит к тому, что система будет работать в зоне
резонансной частоты, поэтому расчет виброзащитной системы
необходимо выполнять с учетом динамических свойств самих агре-
гатов 137].
В основу расчетной схемы такой системы целесообразно поло-
жить модель рамы-балки на упругом основании (рис. VIII. В-
Если роторы машин имеют сравнительно небольшие скорости вра-
щения, то длина волны упругих деформаций рамы много больше
352
Рис. VIII.!. Схема однокас-
кадной амортизации много-
машинного агрегата
геометрических размеров неоднородностей рамы и, следовательно,
I без больших погрешностей неоднородную раму можно заменить
однородной с распределенной массой и соответствующей изгибной
жесткостью. Массы корпусов машин полагаются жесткоприсоеди-
ненными к балке. Массы роторов считаются упругоприсоединен-
ными. В зависимости от размеров и жесткости корпусов их влияние
можно учесть в общей изгибной жесткости рамы или же считать
точечными, не оказывающими влияния на изгибпую жесткость
L рамы. В случае, когда на раме укреплены агрегаты с единым мно-
гоопорпым ротором, вращающимся
в подшипниках скольжения, этот ротор
можно не считать дополнительным за-
мыкающим силовым звеном вследствие
сравнительно небольших жесткостей са-
мого ротора и жидкостных пленок под-
шипников скольжения. Большое коли-
чество амортизаторов, расстояние
между которыми обычно существенно
I меньше четверти длины волны, позво-
? ляет заменить их некоторым упругим
I основанием, суммарная жесткость кото-
I рого равна суммарной жесткости всех
амортизаторов. Обычно ширина рамы значительно меньше длины,
, в этом случае она моделируется в виде балки. Если длина и ши-
рина сопоставимы, то она моделируется в виде пластины, опертой
по краям на упругое основание.
I Уравнение свободных колебаний амортизированной рамы имеет
вид
^> + ^ + ^ = 0, (VIII.1)
где £ (х, t) — функция прогиба, k—коэффициент постели;
р— интенсивность распределения масс; EJ— изгибная жесткость.
Ь Эти величины для призматической балки определяются соотно-
шениями:
(VI И.2)
где У cL — суммарная вертикальная жесткость всех амортизато-
i
ров; ЛТ — масса рамы; / — длина рамы (балки).
11ри определении изгибпой жесткости необходимо оценить
жесткость ряда сечений рамы и взять среднюю величину.
К Полагая
Б £ (х, 0 = f (х) sin (VIII 3)
после подстановки (VIII.3) в (VII 1.1) можно получить
t fiv — ~ О,
| 23 н. В. Григорьев
(VIII 4)
353
где
X4 = . (VIII.5)
Функция f должна удовлетворять свободным граничным условиям
Г (0) = Г (0) = (0 = Г (П = 0. (VI11.6)
Решение (VIII.4) с граничными условиями (VII 1.6), как изве-
стно, позволяет найти частотное уравнение и его корни:
X,/ = 0, Х2/ = 4,73, Х3/ = 7,853.
Беря, например, первый корень, получим
<0i= (VIII. 7)
Г*
что соответствует колебаниям рамы как твердого тела. При осталь-
ных значениях имеем
О? = (1)i » (VI 11
где соО1- — 4-я частота свободной балки,
<4,- = £/W.. (VIII.9)
г1*
У существующих конструкций многомашинных агрегатов низ-
шая <оО2 оказывается того же порядка, что и Wj. Это обстоятельство
и делает классическую теорию амортизации в данном случае не-
применимой.
Пусть теперь в точках с относительными координатами х = ах
и х — а2 расположены машины, массы которых можно считать то-
чечными, а роторы представлены упругоподвешеннымн массами.
Тогда формы колебаний рамы в функциях А. II. Крылова будут
искаться для каждого из участков с соответствующими гранич-
ными условиями. _
Так на участке 0 < х < а} общее решение имеет вид
h (х) = AS (Хх) + ВТ (Хх) + CU (Хх) + DV (Хх), (VIII. 10)
где А, В, С, D — произвольные постоянные, определяемые из
граничных условий; S, Т, U, V—функции А. Н. Крылова.
Поскольку конец балки при х = 0 свободен, то имеем
fr (х) = AS (Хх) + ВТ (Хх). (VIII• 11)
Выражение, подобное (VIII.10), может быть написано и для
второго участка. Используя затем условия равенства перемещений,
поворотов сечения и моментов сил при х = для первого и вто-
354
рбго участков, а также скачок поперечной силы на величину уси-
лия, развиваемого массами корпуса и ротора, получим
f2 (х) — A IS (Хх) + A\S (сг) V (х — fll) ] +
I + В (Т(Хх) + V(x-aj] (VIII.12)
Аналогичным образом перейдем к третьему участку, тогда
получим
/з (х) = A IS (Хх) 4- Л’ 1S (ci) V (х — a,) 4-
S (а2) JV2V (х — о») + 5 («О Aj/V, V (а2 — о,) V (х—
—• о«) 1 В I 7 (Хх) 4- Л’/7 (gJ V (х — «J 4*
4-7(g2) N2V (x - g2) + T(g.2) NtN2V (g2 — aJ V (x — g2)J. (VIII.13)
Удовлетворяя далее свободным граничным условиям на
х = 1, можно получить систему уравнений:
аиА + а12В = 0;
G2p4 а22В — 0,
конце при
(VIII.14)
откуда следует соответствующее частотное уравнение вида
F ® 1iu 2 2 (1\2о. 21 — 0. (VIII. 15)
Его можно решать, например, методом остатка.
В приведенных выражениях
I i !2L г —
I ^-Х-^4-—р------------, (V.II.16)
I Q EJ р/
где т- — масса корпусов; с,- — эквивалентная жесткость ротора;
т,- — масса ротора.
В общем случае многомашинного агрегата система модели-
руется в виде балки со ступенчатым изменением интенсивности
масс ц, куда входят также массы корпусов, изгибная жесткость В/
и коэффициент постели k. В этом случае вычисление удобно вести
матричным методом начальных параметров.
S При рассмотрении одного участка балки значение параметров
в произвольном сечении выражается матричным соотношением
2 (х) = Л" (х) Z (0), (VIII. 17)
где Z (х) и Z (0) — матрицы параметров в сечениях с координа-
тами х и 0
23*
Z(0) =
z(0)
(f(O)Z
М (0) /2
EJ
Q (0) Р
11
z(x)
<Г(х)/
М (х) Г-
EJ ’
Q W I3
EJ
(VIII. 18)
355
где г (0), г (х) — перемещение сечений с координатами 0 и х\
(0), ср (х) — углы поворотов в этих сечениях; М (0), М (х)
изгибающие моменты в этих сечениях; Q (0), Q (х) — перерезыва-
ющие силы в этих сечениях; Дп (х) — переходная податливость
участка балки, лежащего на упругом основании.
Для рамы, изгибная жесткость, и массовая плотность, и коэф-
фициент постели которой изменяется скачками при переходе от
одного участка к другому, существует матричное равенство:
Zn = -1... А- ... Д"Л?2о, (VIIL19)
где
1
с<=d? (ch —sln
(sh — sin Лг).
На концах амортизированной рамы равняются нулю изгибаю-
щие моменты и перерезывающие силы, поэтому из матричного
уравнения Z, (/) = AZ (0) можно выделить два однородных ли-
нейных уравнения относительно двух параметров. Условие полу-
чения ненулевого решения этой однородной системы, т. е. равен-
ство нулю ее определителя, и даст искомое частотное уравнение.
Вычисления проводятся с помощью ЭВМ.
Опираясь на приведенную методику, можно построить методику
расчета вынужденных колебаний рассмотренной системы
2. РАСЧЕТ СВОБОДНЫХ КОЛЕБАНИЙ МНОГОМАШИННОГО
АГРЕГАТА. ИМЕЮЩЕГО ДВУХКАСКАДНУЮ АМОРТИЗАЦИЮ
В этом случае реальная конструкция обычно бывает очень
сложной, однако описываемым методом можно оценить порядок
собственных частот системы с учетом упругости промежуточных
конструкций (рам) и, главное, выявить конструктивные элементы.
356
которые наиболее сильно влияют на частоты и формы свободных
колебаний. Эти сведения необходимы для успешного осуществле-
ния процесса отстройки от резонансных колебаний, который при-
ходится часто выполнять при доводке виброакустических характе-
ристик уже построенных конструкций.
к Следует отметить, что при проектировании конструкций таких
систем необходимо руководствоваться не только одними конструк-
тивными соображениями, но и осуществлять такую конструкцию,
чтобы для нее можно было составить достаточно четкую расчет-
ную динамическую модель. Эго дает возможность выполнять ее
виброакустический расчет в зоне хотя бы низких частот, несущих
основную долю колебательной энергии. Для примера будем рас-
сматривать только вертикальные коле-
бания. Исследуемую конструкцию пред-
ставим в виде двух балок (рис. VIII.2):
первой балки 2 (верхней платформы),
имеющей прогибы у? (л), жесткость E2J2
и погонную массу р 2, полученную с уче-
том «размазывания» масс агрегатов, ус-
тановленных на ней, и второй балки 1
(промежуточной рамы), имеющей соот-
ветствующие параметры у 1 (x), plf EXJ v
В силу того обстоятельства, что верхняя
платформа крепится на промежуточной
десятков амортизаторов, их все можно
Рис. VIII.2. Схема двухкас-
кадной амортизации много-
машинного агрегата
раме с помощью многих
также заменить упругим
основанием.
В общем случае будем считать, что к промежуточная балка ле-
жит на амортизаторах по всей длине; амортизаторы эквивалентны
упругой постели с погонной жесткостью k‘. Кроме того, предполо-
жим, ч го по концам обеих балок имеются особые граничные жест-
кости и могут быть установлены сосредоточенные массы, у кото-
। рых иногда нужно учитывать и инерцию поворота. Это замечание
важно для промежуточной рамы.
К Составим уравнения движения обеих балок и запишем гранич-
ные условия.
Уравнения движения балок при свободных колебаниях будут:
ЕуК + k (у. - уг) + /г'//г Н и, = 0;
£,Л -k(y^ у.г) -|- Иг = 0.
(VIH.20)
Из-за линейности системы свободные колебания будут опреде-
ляться решениями вида:
0 = У,(Х,)СО8®/;|
(л‘1, О = V2 (xjeosaf. j
(VI П.21)
357
Вводя безразмерную переменную х = -L и подставляя формулу
решения в исходное уравнение движения, получим:
E1J1 - ц^У1 + ЧЛ - У г) + *% » 0;
-1 - ц2со% - k (Уг - Г2) = 0,
(VIII.22)
или
где
(VIII.23)
И4
— EU» ^2*°' ~ EJ; ’
Решение полученной системы двух дифференциальных уравнений
четвертого порядка целесообразно свести к решению одного диффе-
ренциального уравнения, но уже восьмого порядка. С этой целью
определим из второго уравнения Y2
/му 1 bi i
Y1 “ С1 ~ е2* 2. r^e С*~ \ ~ tj ?1‘
Подставляя его в первое уравнение, получим
d*Y2
dx*
— fil + 02>Z2 = О,
1 dx4 1 2 2 ’
(VII 1.24)
где обозначено:
Oj = ах + bl,
0 2 — Й j i ^2^2*
Для составления его решения» как обычно, необходимо решить
характеристическое уравнение
s8 _ о15л е2 = о. (VIIL25)
Обозначая s4 = z, будем иметь:
z2_ 6iZ+ 02 = о; (VIIL26)
358
Если гЛ и z,будут, например, положительными и разными числами
то «будет иметь восемь разных значений:
Определенный интерес имеет анализ корней.
Общее решение для У2 (х) будет
8
L У2 (х) = с,е.
1=1
Общее же решение для промежуточной рамы будет
1 е
yiM = -^yiciesix(s*-bl).
2 1=1
(VIII.27)
(VII 1.28)
Граничные условия определят следующую систему восьми урав-
нений для определения произвольных постоянных.
Граничные условия платформы (верхней балки):
1) }<(0)=0;
2) У2(0)=0;
3) E.Jtfi (!) = — (J'2,w2 4- с’2)) Y'2 (1);
4) £;ЛУ2 (1) = (с(5) - /Л2) У2 (1).
Граничные условия нижней балки (промежуточной рамы):
5) Е^У, (0) ==.+ /1,ю2) И (0);
6) EJtY’i (0) = - (с(,) + 7?i(I’w2) У, (0);
7) Ei-hYi (1) = - (4" + /V) У J (1);
8) EJtY', (1) =(c(” 4-/п‘пш2)У1(1),
где обозначено: J®— массовый момент инерции, эквивалентный
присоединенным массам от привода к агрегатам платформ; —
угловая эквивалентная жесткост ь, обусловленная приводом к агре-
гатам; — поперечная жесткость, создаваемая приводом; тЛ2> -—
присоединенная эквивалентная масса от привода; — жест-
кость промежуточной рамы на поворот в концевых амортизаторах;
/(1) — массовый момент инерции масс, расположенных на концах
промежуточной рамы; — масса, расположенная по концам
промежуточной рамы; с(1) — вертикальная жесткость промежу-
точной рамы на концевых амортизатора*.
359
Подставляя Yi (х), \\ (х) в полученные восемь уравнений,
получим систему уравнений:
1) X ад = 0;
/=1
2) Sqs? = 0;
1=1
3) X cisie + Сф’ + J ^2) = 0;
f=i
4) £ qe (E2J2S1 — с{‘ — mUJ со2) — 0;
5) У (sf — b0 ~ 4° “ J 1 w) = °>
1=1
(VI11.29)
8) c( ~ e x (s) — bi) I £bAs? —c(U — m 1 co ) = 0.
/=i 2
Приравнивая нулю определитель этой системы» получим ча-
стотное уравнение. Далее» как обычно» по собственным частотам»
используя эту же систему восьми уравнений, следует определить
соответствующие формы колебаний. Можно рекомендовать нахо-
дить корни определителя с помощью подбора» начиная от единиц
и до (о — 300 1/с; счет следует сгущать вблизи корней.
В заключение следует отметить, что далеко не всегда реальные
конструкции с двухкаскадной амортизацией бывают близки к этой
расчетной схеме.
3. ОБОБЩЕННЫЕ ДИНАМИЧЕСКИЕ ХАРАКТЕРИСТИКИ СИСТЕМЫ
Синтез виброизолирующих систем заключается в выборе струк-
туры этих систем и определении оптимальных параметров. Реше-
ние задачи синтеза представляет весьма сложную проблему,
поэтому в практике КБ задача синтеза заменяется обычно рядом
задач анализа выбранных систем н последующим выбором опти-
мального варианта.
Важнейшей частью задач анализа является выбор расчетных
схем, которые целиком определяются тем частотным диапазоном,
в котором требуется достижение виброизолирующего эффекта.
360
Если этот диапазон достаточно широк, то, вообще говоря, расчет-
ные схемы для разных частей этого диапазона должны быть раз-
личными. Можно избежать построения различных схем, если ис-
пользовать некоторые обобщенные динамические характеристики
различных частей системы объект—блок виброизоляции—фунда-
мент.
Введение обобщенных динамических характеристик, кроме вно-
симой ими общности в постановку и решение задач, представляет
большие возможности для определения и учета реальных свойств
объекта, блока вибропзоляции и фундамента.
В настоящее время используется мною различных, на первый
взгляд, обобщенных динамических характеристик. Эти характери-
стики вводятся следующим образом.
L Представим гармоническую силу, действующую в некоторой
точке п в направлении /г, в виде вектора
I F = F*e/W' (г = ] — 1), (VIII.30)
а некоторый кинематический параметр колебании (перемещение,
скорость или ускорение) в точке m в направлении /, обусловлен-
ный этой силой, в виде вектора
L У = У,>‘°", (VI 11.31)
где Fn и Ylm в общем случае являются комплексными величинами-
Отношение величины (VIII.30) к величине (VIII.31), равное
I Fh
| < = (V1II.32)
' т
называется прямой обобщенной динамической характеристикой.
Отношение
г У?
L (Уш .зз)
I "
называется обратной обобщенной динамической характеристикой.
К Прямые и обратные обобщенные характеристики называются
главными или собственными, если точки т и п, а также направле-
ния k и / совпадают. В противном случае эти характеристики назы-
ваются побочными, несобственными пли смешанными. Термин
«переходные характеристики» употребляется в случае, когда точки
/и и п не совпадают.
Из (VI11.32) и (VIIJ.33) можно получить различные обобщенные
характеристики, если в качестве кинематического параметра взять
комплексные амплитуды перемещения x»t, скорости хт или ускоре-
ния хт. Очевидно, чго все эти характеристики будут отличаться
между собой только на некоторый общий множитель, поскольку
они связаны соотношениями
“7 - "I 2 f
Хт — №)Xtn — & Хт-
(VII (.34)
361
В настоящее время используются следующие термины: обоб-
щенная динамическая жесткость, динамическая стойкость, дина-
мическая податливость, динамический отклик, рецептанс, меха-
нический импеданс, механическое сопротивление, механический
адмиттанс, гармонический коэффициент влияния, механическая
проводимость, динамическая подвижность системы и т. д. Такое
обилие терминов для обозначения одних и тех же по существу ха-
рактеристик приводит к ряду затруднений, а иногда к «открытию»
уже известных методов решения задач.
Определим кратко приведенные термины. Обобщенная динами-
ческая жесткость или стойкость системы есть отношение комплекс-
ной амплитуды силы к комплексной амплитуде перемещения, т. е.
Fk
(VI п.35)
Отношение комплексной амплитуды перемещения к комплексной
амплитуде силы
= (VIII.36)
* п
называется динамической податливостью, динамическим откликом,
гармоническим коэффициентом влияния или рецептансом.
Отношение комплексной амплитуды силы к комплексной ам-
плитуде скорости
pk
zknlm = (VIII.37)
X.
л т
называется механическим импедансом или механическим сопро-
тивлением. И, наконец, отношение комплексной амплитуды ско-
рости к комплексной амплитуде силы
(VIII .38)
называется механической проводимостью, механическим адмит-
тансом или подвижностью системы.
Дальнейшие сведения об этих характеристиках приведены
в работах (105, 1721.
Механические системы характеризуются обычно матрицами
обобщенных динамических характеристик. Элементы этих матриц
симметричны относительно главной диагонали, т. е.
Симметрия элементов матриц является следствием выполнения
принципа взаимности в механических системах, что обычно имеет
место. Этот принцип имеет очень важное значение особенно при
экспериментальном определении динамических характеристик сп-
3G2
стемы, не всегда удобно поддающихся непосредственному измере-
нию. Практически этот принцип заключается в том, что при опре-
делении динамических характеристик вибратор, создающий гармо-
ническую силу, можно поменять местом с датчиком, измеряющим
колебания. От такой перестановки вибратора и датчика динамиче-
ская характеристика не изменяется.
Однако следует иметь в виду, что этот принцип не имеет места
в системах с непотенциальпыми силами, т. е. силами, работа кото-
рых зависит от пути, по которому система приводится в оконча-
тельное положение. Такими силами, в частности, являются силы
гидродинамического и электродинамического происхождения.
Так, например, роторы, вращающиеся в подшипниках скольже-
ния, в электромагнитном поле, роторы с учетом сил внутреннего
трения, являются неконсервативными системами и принцип взаим-
ности в этих системах не имеет места.
Приведем еще некоторые замечания по терминологии. Анализ
показывает, что наиболее логичными являются два понятия:
обобщенная динамическая жесткость и динамическая податливость.
Это объясняется естественным обобщением известных в механике
понятий жесткости п податливости, в то время как большинство
остальных понятий носит в большей или меньшей степени искус-
ственный характер. Вторым обстоятельством является то, что ме-
тоды динамической жесткости и податливости являются аналогами
метода сил и метода деформаций в строительной механике и обла-
дают в связи с этим большой простотой и наглядным физическим
смыслом. В связи с этим в дальнейшем используются отмеченные
два понятия: обобщенной динамической жесткости или просто
динамической жесткости и динамической податливости.
Из соотношений (VIII.32) и (VIII.33) видно, что для определе-
ния прямых динамических характеристик достаточно вычислить
силу, возникающую при единичном значении кинематического
параметра, а для определения обратных характеристик достаточно
вычислить значение кинематического параметра при воздействии
силы с единичной амплитудой. Экспериментальное определение
обратных характеристик систем оказывается технически более
простым.
4. ОБЩАЯ ТЕОРИЯ ВИБРОИЗОЛЯЦИИ УПРУГИХ СИСТЕМ
На рис. VII 1.3 представлена общая схема системы объект—блок
виброизоляции—фундамент. Блок виброизоляции состоит из не-
которой конечной совокупности элементов (амортизаторов), поме-
щенных между объектом и фундаментом и имеющих небольшие
площадки контакта с объектом и фундаментом. В силу небольших
размеров этих площадок они могут считаться абсолютно жесткими
во всем практически важном частотном диапазоне.
I Пусть в некоторых точках объекта действуют некоторые силы
и моменты. Разложим эти воздействия на компоненты по осям пря-
моугольной системы координат п перенумеруем их в определенном
363
порядке. После этого вся совокупность сил и моментов может быть
представлена в виде матрицы-столбца компонент воздействий
Обьект
Фундамент
Ьлпн
изоляции
Рис. VII1-3- Принципиальная схема
виброизоляции
(VIII.39) .
Задача анализа выбранной системы виброизоляции формули-
руется как задача определения эффективности этой системы сточки
зрения уменьшения передачи сил от объекта на фундамент.
Для получения аналитических зависимостей расчленим мыс-
ленно всю систему по опорным площадкам на три независимые
подсистемы: объект, блок виброизоляции и фундамент. Для сохра-
нения динамического состояния этих подсистем к опорным пло-
щадкам каждой из пих необходимо приложить силы, равные си-
лам воздействия одной из подсистем па другую, т. е. силы реакции.
Очевидно, что к опорным площадкам объекта будут приложены
силы, равные силам, действующим па те же площадки входа блока
виброизоляции, но имеющие другой знак. Аналогичное положение
имеет место на опорных площадках фундамента и выхода блоков
виброизоляции. Положение каждой из опорных площадок
в общем случае определяется шестью координатами: тремя ли-
нейными перемещениями центров площадок хъ х2, х3 и тремя
углами поворотов площадок вокруг осей координат х4. х5, хв.
Если число опорных площадок крепления объекта к входу блока
виброизоляции равно т, то, очевидно, полная совокупность пара-
метров, определяющих положение всех площадок объекта и входа
блока виброизоляции, равна q = 6/п. Перенумеруем все параметры
положения площадок и представим их в виде матриц-столбцов:
,о
1
(VIII.40)
364
(VIII.41)
где индекс (0) показывает, что матрица определяет положение пло-
щадок объекта, а индекс (+) показывает, что матрица определяет
положение площадок контакта входа блока виброизоляции.
Аналогичным образом можно перенумеровать реакции на пло-
щадках контакта объекта и блока виброизоляции и представить
их в виде матриц-столбцов:
R°
Rz
(V1II.42)
mu
(VI 11.43)
Проделав подобные операции с перемещениями и реакциями
опорных площадок выхода блока виброизоляции и фундамента и
присвоив индекс (—) выходу блока виброизоляции, а индекс (ф)
3fi5
фундаменту, получим матрицы-столбцы положений всех площадок
и реакций:
(VIII.44)
<?
(VIII.45)
а
Ri
R1
(VI11.46)
R<
(VIП.47)
пФ
j *\Q
566
При построении матриц целесообразно сначала наметить поря-
док обозначения амортизаторов, а затем порядок обозначения ком-
понент одной площадки и сохранять эту систему при нумерации
перемещений и реакций для опорных площадок объекта, входа
блока виброизоляции, выхода блока виброизоляции и фундамента.
В этом случае одинаковый индекс будет соответствовать одному
и тому же параметру положения во всех подсистемах, а реакции
с этим же индексом будут соответствовать этому параметру.
Поскольку опорные площадки различных подсистем в общей
системе движутся как одно целое, то должны выполняться равен-
ства:
II Xе||= ||Х+ II Х’||= Х*| (VIII .48)
Реакции же равны по величине, но противоположны по направ-
лению, т. е.
I ||/?°, = —1|/?+1| ||/?~| = — |ЯФ|| (VIII.49)
Для дальнейшего анализа опишем динамические свойства под-
систем: объекта, блока виброизоляции и фундамента матрицами
динамических податливостей опорных площадок. Эти динамиче-
ские податливости определяются для свободных подсистем расче-
том или экспериментально в интересующем нас диапазоне частот.
Матрица динамических податливостей свободного объекта
имеет вид
II п° I:=
П?1 п? > ... и?.
II?! П-22 ... П?„
П?! п?2... п°-...
(VIII.50)
Гй J .
Г1°
где элемент матрицы П°/ представляет собой комплексную ампли-'
туду перемещения соответствующей площадки по координате
обусловленную единичным воздействием» соответствующим коор-
динате /. При принятой системе нумерации П°/ численно равно
величине х®. обусловленной реакцией /?/ — 1.
Аналогичным образом описываются динамические свойства
фундамента, матрица динамических податливостей которого имеет
ВИД
П?! П?2 . . . П$ . . . nt,
111’, пФ.... nt ... nt
J “
nt nt... nt *.. nt,
в • • • • • • •
H*i 1$ ... II*/... н*
(VII 1.51)
367
Динамические свойства свободного блока вибронзоляцин опи-
сываются тремя матрицами динамических податливостей: входной
(индекс +), выходной (индекс —) и переходной от входа к выходу
или от выхода к входу. Поскольку блок виброизоляции обычно
удовлетворяет условию взаимности, то эти переходные матрицы
оказываются равными и им присваивается индекс (п). Указанные
матрицы динамических податливостей имеют вид
mi=
ПЙ Пй ... пй ... Ц
пй iti ... п ...
* •
п.й Пй ... пй ... п£
П?1 П,у2 . . • П;,- . . . Д,
(VIII.52)
Пн 1112 .. . П?, . . . ИГ,
1й и£» ... пз,... п?с
Пй Пй . . . II?, ... п?7
• • • ' • 9 • • * • •
ОД Ii£ . . . . 11^
Приведенные матрицы податливостей блока виброизоляции
обладают той особенностью, что многие элементы этих матриц
равны нулю. Действительно, поскольку элементы блока йзоляцпп
(амортизаторы) в свободном состоянии не связаны между собой, то
все элементы матриц, у которых разность индексов /, / по модулю
больше шести, обращаются в нуль, т. е.
ПГ/.= О; 11,7 = 0;
П?/ = 0 при [ i — j | > 6.
(VII1.53)
368
Наконец, для учета влияния внешних воздействий на объект
введем матрицу динамических податливостей свободного объекта
n(i п{2... п.;... <
Пл п£2 . . . Г& . . . nL
|П{| п{2 . . . П{, . . . fifv
| п£1 П^2 . . . . IT^v
(VIII.54)
где элемент представляет собой амплитудное перемещение
опорных площадок от кокшоненты силы Fr = 1.
I Л1атрица (VIII.54) в отличие от предыдущих матриц податливо-
стей является прямоугольной матрицей порядка qXv.
Рассмотрим перемещение опорных площадок свободных под-
систем. Эти перемещения свободного объекта будут определяться
реакциями на площадках и внешними воздействиями. В матричной
форме имеем
||ЛЫММ1+1|п'|1И
(VIII.55)
Перемещения на входе в свободный блок изоляции опреде-
ляются реакциями на входе R 1 и реакциями на выходе /?“ и в ма-
тричной форме выражаются соотношением
к+нМНМ!-1|пп||||/П
(VI II. 56)
Аналогичным образом получим матричные выражения для пере-
мещений:
на выходе из блока изоляции
||А“|= 11-|Ц/?-„-|ппВ||/?-,-|
опорных площадок фундамента
I М=|л*||;г‘|
(VIII .57)
( VIII .58)
Знак —в выражениях (V 111.56) и (VIII.57) обусловлен противо-
положным направлением реакций R и R~ , которые имеют место
при расчленении общей системы.
Используя соотношения (VIII.48) и (V1II.49), системы уравне-
ний (VIII.55)— (VIII.58) могут быть сведены к одному матричному
уравнению относительно матрицы реакций на фундаменте
[-(|п°Ц ||11|-|);п"Г+ (|пф|+ 1Г|)
+|n"|]|R‘l = |ll'lkl
(VIII.59)
Для оценки эффективности блока изоляции найдем реакции,
возникающие при непосредственной установке объекта на фунда-
24 Н. В. Григорьев 369
мент на те же опорные площадки. Рассматривая уравнения, ана-
логичные (VIII.55) и (VIII.58), из условий, подобных (VIII.48)
и (VIII.49), можно получить
(|n°|+||ii*|)l|/?*||= п'|И
(VIII .60)
где /?ф — матрица реакций на опорных площадках фундамента
при отсутствии блока виброизоляции.
Исключая из (VI 1.59) и (VII.60) перемещения, обусловленные
неизвестными внешними силами, получим матричное соотношение
между реакциями на фундаменте с изоляцией и без нее.
'-( п°||+||п+||)||Г11,Г1 ( п,,'|| + |,п-|) 4-[пп|| | ||/?* =
= (1П°| + ||Пф||)Аф
(VIII.61J
Эффективность виброизоляции оценивается, как известно, от-
ношением величины силы, передаваемой на фундамент при нали-
чии виброизоляции, к величине силы, передаваемой в случае от-
сутствия блока виброизоляции. Вследствие многокомпонентности
усилий, передаваемых одним амортизатором, и наличия многих
амортизаторов эффективность введения блока виброизоляции мо-
жет быть оценена только матрицей коэффициентов виброизоля-
ции по каждой из компонент (матрицей эффективности). Эта ма-
трица имеет вид диагональной матрицы
1п*11=
(VIII. 62)
о о
Для нахождения матрицы коэффициентов виброизоляции
умножим обе части матричного соотношения (VIII.61) справа на
матрицу-строку
1 1
Rg
(VIII .63)
Тогда из (VII 1.61) и (VIII,62) следует
h II = L( |ln' II4II н+1) Л пп || (|| пф ||+1| п-1|) -
-Цп’,|П-1(11п,’|4-Цпф||)||х|| (VHI.64)
370
где
Rg Rq
Ri R2
(VIII.65)
Соответствующая матрица эффективности (VIII.62) следует из
(VI 11.64), если в последней положить все элементы, кроме диаго-
нальных, равными нулю.
Отметим некоторые особенности виброизоляции в общем случае.
1. Эффективность блока изоляции определяется динамиче-
скими податливостями объекта и фундамента, входа и выхода
блока виброизоляции и его переходной податливостью.
2. Эффективность оценивается совокупностью коэффициентов
виброизоляции по каждой из компонент силового воздействия, не-
передаваемого на фундамент, т. е. матрицей эффективности. Это
обстоятельство показывает, что для однозначного решения о вы-
боре того или иного блока изоляции необходимы дополнительные
условия (ограничение максимальных амплитуд в некоторых точ-
ках фундамента, минимум колебательной энергии, передаваемой
фундаменту, и т. п.).
| 3. Элементы матрицы эффективности существенным образом
зависят от элементов матрицы (VII 1.66), т. е. соотношения компо-
нент усилий, передаваемых на фундамент.
Последняя особенность вызывает необходимость определения
реакций на опорных площадках при отсутствии блока изоляции.
При существующих методах определения усилий (см. гл. IX) эта
задача может быть решена экспериментально. Расчет матрицы
эффективности можно произвести, располагая матрицей перемеще-
ний опорных площадок фундамента при непосредственной уста-
новке объекта на фундамент или матрицей перемещений опорных
площадок свободного объекта при действии внешних сил (под*
вешенного, например, на достаточно гибких тросах). В этих слу-
чаях матрицы (VIII.64) преобразовываются с использованием из-
ложенной общей методики. Естественно, что определение реакций
или перемещений опорных площадок фундамента является более
предпочтительным, когда объектом являются работающие двига-
тели или машины, а во многих случаях и единственно возможным
с технической точки зрения,
I Если известна система сил, действующих на объект, то расчет
может быть проведен непосредственно согласно работе [1721.
24*
37J
5. ОСОБЕННОСТИ АНАЛИЗА УПРУГИХ СТЕРЖНЕВЫХ
ШАРНИРНЫХ ПОДВЕСОК ДВИГАТЕЛЕЙ
В технике часто применяются стержневые шарнирные подвески
двигателей. Особенностью таких подвесок является то, что при
пренебрежении трением в шарнирах через каждый из таких стерж-
ней передается только одна силовая компонента — усилие, на-
правленное вдоль оси стержня. Это обстоятельство позволяет су-
щественно упростить методику общего анализа, приведенную
выше.
Действительно, в этом случае динамические характеристики
двигателя и фундамента (фюзеляжа, корпуса ит. п.) следует опре-
делять только в направлении осей стержней. Динамические харак-
теристики блока изоляции (подвески) будут представлять собой
соответствующие диагональные матрицы, элементы которых легко
определяются расчетом или экспериментально.
Кроме отмеченных достоинств, стержневые шарнирные подвес-
ки представляют большие удобства для встраивания в стержни
различных упругих элементов, динамических гасителей колеба-
ний и т. п.
Рассмотрим, например, более подробно шестисгержпевую шар-
нирную подвеску двигателя. Пусть в стержни подвески встроены
два каскада амортизации с жесткостями с{л и с)?), а к промежуточ-
ной массе гл?, которая может имитировать массу самого стержня
при значительном превышении длины продольной волны над дли-
ной стержня, прикреплен динамический гаситель, состоящий из
массы тА и жесткости с*.
Для анализа эффективности такой подвески необходимо пред-
варительно измерить усилие передаваемое каждым из стерж-
ней подвески на фундамент, при отсутствии каскадов амортизации
и гасителя колебаний. Затем систему двигатель—подвеска—фюзе-
ляж разобрать. Подвесив неработающий двигатель на гибких тро-
сах, определить перемещения точки крепления i-го стержня в на-
правлении его оси от единичной амплитуды гармонической силы
вибратора, приложенной в точке крепления /-го стержня в направ-
лении оси последнего. Всего, таким образом, на двигателе необхо-
димо определить шесть собственных динамических податливостей
nft и 15 несобственных динамических податливостей П?/ (i ф j),
учитывая, что П?,- = П?/. Аналогичным образом определяются
шесть собственных динамических податливостей фундамента П*
и 15 несобственных динамических податливостей Ilf, (i=£ /)•
Располагая этими податливостями, можно построить матрицы
податливостей двигателя Пд и фундамента П*.
Для построения матриц податливостей подвески рассчитаем их
элементы. При принятой структуре элементов подвески расчетная
схема i-го стержня имеет вид, представленный на рис. VIII.4.
372
Легко видеть, что соответствующие динамические податливости
г го стержня равны:
а
с*
Я
о
m® ) —
w2^®) —(c®V
Пц
С® — <0“Г71®
(VIIL66J
I
С? — йЛп?
2
Приведенные выражения позволяют вычислить диагональные
элементы матриц П+, П~, Пп. Остальные элементы этих матриц
равны нулю.
Располагая величинами R „ можно составить матрицу X
(VIII.65), а после подстановки матриц Пд, П* П , ГН, Пп, X
в (VIII.64) получим матрицу эффективности, что и является целью
анализа подвески.
р Для оценки эффективности подвески при отклонении частот
возмущающих сил от номинальных значений необходимо динамиче-
ские податливости определить не только для номинальных частот,
но и для соответствующих диапазонов частот. В этом случае расчет
матрицы эффективности проводится для отдельных частот диапазо-
нов.
Приближенный расчет матрицы эффективности можно провести
более простым способом, если несобственные податливости малы
по сравнению с собственными. Тогда матрицы податливостей дви -
гателя и фундамента преобразуются в диагональные, а система
связанных вибропроводов — в систему независимых вибропрово-
дов. В этом случае не требуется предварительного эксперимен-
тального определения реакций а коэффициенты виброизоляции
по каждому из стержней определяются простыми выражениями
вида:
7= g _ (П* -| nft) п",___,
$ (п«+п+)(п* +П^)-(П^)2
а
(VIII .67)
6. ПРИВЕДЕНИЕ СЛОЖНЫХ ДИНАМИЧЕСКИХ СИСТЕМ
К ПРОСТЫМ СИСТЕМАМ С ДИСКРЕТНЫМИ ПАРАМЕТРАМИ
Изложенная выше общая методика анализа виброзащитных
систем сложна, особенно при проведении многочисленных ва-
риантов расчетов. В этом случае иногда бывает полезно заменить
системы, описанные экспериментально определенными динамиче-
скими податливостями или жесткостями, системами, состоящими из
дискретных масс и жесткостей. Такую замену можно произвести
на основании эквивалентности исходной и приведенной систем
по какому-либо критерию. При анализе виброзащитных систем
1 373
в качестве такого критерия можно принять минимум среднеквадра-
тичного отклонения динамических податливостей или жесткостей
исходной и приведенных систем. Определение параметров приве-
денной системы сводится к следующему.
Пусть, например, в диапазоне частот юх—<о2 требуется опреде-
лить параметры приведенной системы, заданной кривой динамиче-
ской податливости П (ш). В качестве приведенной системы выби-
раем некоторую дискретную систему, число резонансов в которой
равно числу максимумов функции Re П (со), где Re П (со) — дей-
ствительная часть П (со), или на один-два резонанса больше.
Последнее объясняется поведением ЯеП (со) на границах области
(соп со2). Если, например, ReH (со) на границах области является
возрастающей по абсолютной величине, то число резонансов
приведенной системы должно быть на два числа больше, чем
число максимумов Ren (со). Вводим обозначения масс rrtj жестко-
стей Су и демпфирования k , после чего отыскиваем аналитиче-
ски динамическую податливость системы в комплексной форме,
которая имеет вид
!fnp ИПр (Шу, Гу, fey, со).
Неизвестные дискретные параметры приведенной системы опреде-
ляются из условия минимума интеграла
со2
I = [ffl (ю) — 11пр (/Пу, Су, fey, co)]2dco. (VIII.68)
О>1
Потребовав обращения в нуль частных производных от I по пара-
метрам тп сп fep можно получить систему уравнений относительно
этих параметров, которые и позволяют определить наилучшие их
значения в смысле минимума среднеквадратичного отклонения
П (со) и Ппр (ту, Су, fey, со).
Можно показать также, что с точки зрения выхода системы i
внешняя сила, приложенная в точке г, может быть перенесена
в некоторую точку fe, если ее амплитуда будет удовлетворять
соотношению
Это соотношение позволяет соответствующим образом вводить
в приведенную систему и возмущающие силы. Изложенную мето-
дику легко обобщить и на многосвязные системы, однако при этом
потребуется применение вычислительной техники.
7. ОПТИМИЗАЦИЯ ПАРАМЕТРОВ
ИНЕРЦИОННЫХ ВИБРОЗАЩИТНЫХ СИСТЕМ
Оптимизация параметров виброзащитных систем производится
по определенному критерию с учетом конструктивных, монтажных
и технологических ограничений, наложенных на их конструкцию
и на условия сопряжения их с объектом и фундаментом. В ка-
374
честве критериев качества виброзащитных систем обычно выби-
раются следующие: минимум амплитуд колебаний точек объекта,
минимум коэффициента виброизоляции, минимум колебательной
энергии, передающейся фундаменту и др. Конкретный характер
критерия качества определяется назначением виброзащитной
системы.
В случае произвольных систем определение оптимальных пара-
метров представляет весьма слом<ную, не всегда разрешимую за-
дачу. В связи с этим задача оптимизации параметров сводится
часто к последовательному перебору вариантов и к выбору наи-
более подходящего из них. Для предварительной ориентации при
выборе вариантов лучше рассматривать упрощенные расчетные
схемы, позволяющие в ряде случаев оценивать качественное
влияние того или иного параметра.
Ниже рассматриваются некоторые вопросы оптимизации пара-
метров инерционных виброзащитных систем, включающие в себя
инерционные элементы. Применение таких систем оказывается
полезным не только с точки зрения низкочастотных воздействий,
но и высокочастотных. Основная трудность проектирования безы-
нерционных виброзащитных систем заключается в невозможности
применения или разработки обычных амортизаторов малой жест-
кости вследствие конструктивных ограничений перемещений объ-
екта или больших статических напряжений в них, а также вслед-
ствие возможности появления резонансов в объекте, фундаменте
или даже амортизаторах. В этом случае решение задачи можно
искать ня пути применения специальных конструкций амортиза-
торов, состоящих из двух каскадов амортизации, промежуточного
тела и присоединенного к нему антивибраторя. В дальнейшем
такой блок будем называть амортизатор-антивибратор. Схема
такого блока приведена на рис. VIII.4. Преимущества таких бло-
ков виброизоляции заключаются в следующем.
1. Введение антивибраторов снижает эффективную жесткость
системы без снижения статической жесткости.
2. Наличие промежуточного тела приводит к повышению эф-
фекта изоляции в области высоких частот вследствие возрастания
числа границ раздела сред с различными акустическими сопротив-
лениями.
Отметим одну из особенностей применения антивибраторов
в сложных системах [18]. Если в некотором числе точек сложной
системы без демпфирования поставить антивибраторы, настроен-
ные на определенную частоту возмущающей силы, то это эквива-
лентно «заделкам» точек присоединения антивибраторов. Ампли-
туда колебаний массы антивибратора определяется формулой,
подобной формуле в классической схеме применения ангивибра-
тора 1431
I = — (VIII .69)
375
+Вход
-Выход
где 4 — жесткость упругой связи ьго антивибратора; — реак-
ция, возникающая в системе с «заделками» во всех точках поста-
новки антивибраторов.
Очевидно, что при постановке антивибраторов на все связи
двух подсистем, эти подсистемы на данной частоте оказываются
независимыми, а соответствующие реакции определяются подси-
стемой, содержащей возмущающую силу и имеющей «заделки»
во всех точках постановки анттнбраторов.
Отмеченная особенность позволяет оценить ожидаемый уро-
вень амплитуд колебаний массы антивибратора расчетом или экс-
периментально. В последнем случае жестко закрепляются вы-
бранные точки постановки антивибрато-
ров и измеряются реакции в этих точках.
Если реакции оказываются чрезмерными,
то выбираются другие точки постановки
антивибраторов. Основное внимание при
этом должно уделяться тому, чтобы пар-
циальные собственные частоты подсистемы,
содержащей возмущающую силу, были
достаточно отстроены от частоты возму-
щающей силы.
Рассмотрим блок виброизоляции, пред-
Рис VIII 4 Блок упруго- ставленный на рис. VIII.4, который вклю-
инерционной виброизоля- чен между объектом, имеющим собствен-
ник пую податливость 11° (<о), и фундаментом
с податливостью Пф (to). Собственные и
переходные податливости этого блока определяются выраже-
ниями П+ (<о), П" (со) и П" (со) согласно формулам (VIII.52).
После определения указанных податливостей и подстановки их
в формулу (VIII.67) можно вычислить коэффициенты вибро-
изоляции па различных частотах возмущающих сил. Легко
видеть, что при со2 = cjrna переходная податливость блока
обращается в пуль, а вместе с ней обращается в нуль и коэффи-
циент виброизоляции. Таким образом, реакции на фундаменте
в этом случае равны нулю.
Обращение в нуль коэффициента виброизоляции имеет место
при прикреплении антнвибратора к любой точке блока изоляции,
однако амплитуды колебаний массы антнвибратора будут раз-
личными, что отражается на прочности упругой связи антивибра-
тора, Кроме того, выбор точки постановки антивибратора связан
с назначением виброзащптной системы. Если требуется устране-
ние колебаний объекта, то антивибратор следует устанавливать
непосредственно на объект. Выбор точки постановки антивибра-
тора при необходимости устранения реакций на фундаменте в ка-
ждом конкретном случае неоднозначен. Это обстоятельство свя-
зано с конструкцией блока, жесткостью упругих элементов
амортизатора и антивибратора и прочностью элементов послед-
него.
376
С учетом вышеизложенного на практике можно рекомендовать
постановку антнвибратора на промежуточную массу. Необходи-
мая прочность элементов антнвибратора должна обеспечиваться
выбором его массы и соответствующего затухания.
Одним из важных вопросов проектирования блока виброизо-
ляции является оптимальное распределение жесткостей по пер-
вому и второму каскаду. Обычно, исходя из конструктивных, мон-
тажных и эксплуатационных соображений, конструктор может
задать суммарную максимальную статическую податливость
обоих каскадов амортизации в виде
(VIII.70)
Оптимальное распределение жесткостей по каскадам амортизации
следует из минимума коэффициента виброизоляции >]. Динами-
ческие податливости блока в случае антивибратора имеют вид
Пп = у, (VIII.71)
где
b — са - ш2/на;
/ = (О2 [<1)2//га/Пп — (/«и d //la) Cab
(VIII. 72)
Подставляя П^, П~, Пп в выражение (V1II.67) и исключая из
него с2 с помощью соотношения (VIII.70), получим
(П° -h П*) 4^ + (ПФ + П-) 44 = О,
а затем и оптимальные податливости каскадов:
4 = I + i (ПФ - П°)Н
.±.=4-4 (№-и»).
(VIII. 73)
Вычитая из первого выражения второе, получим
J- + П° = J- 4 пф,
С1
(VIII.74)
т. е. оптимальным соотношением податливостей каскадов будет
такое, при котором суммарная податливость объекта и первого
каскада равна суммарной податливости фундамента и второго
каскада. Равномерное распределение ст = с2 имеет место только
при равенстве податливостей объекта и фундамента.
377
Рассмотрим случай, когда объект можно считать абсолютно
твердым телом, а фундамент— абсолютно жестким (рис. VIII.5)
При этих условиях имеем
, II* = 0.
Подставляя эти величины в (VII 1.74), получим
с, ты
откуда следует
OUT
2а3
(VIII.75)
где
Условие (VIII.75), как частный случай из (VIII. 74), в точности
совпадает с условием, полученным для данного частного случая
в работе 1111 I.
Строго говоря, условие (VII Г.74) является условием экстре-
мума функции (VIII.67), так как знак второй производной опре-
деляется величинами и знаками 11°, Пп. Введение в систему
демпфирования устраняет знакоперемену и позволяет принимать
(VIII.74) в качестве ориентировочного распределения при вари-
антных расчетах.
Распределение жесткостей по каскадам существенно влияет на
эффективность виброизоляции. Расчеты систем с реальными харак-
теристиками показывают, что только за счет оптимального рас-
пределения жесткостей можно существенно расширить зону эф-
фективности, а саму эффективность увеличить в 5—10 раз.
Второй важный вопрос заключается в выборе оптимального
соотношения между массой промежуточного тела и массой анти-
вибратора. В реальных конструкциях конструктор обычно может
выделить на инерционную виброзашиту определенную массу Л1,
равную
Л4 = /пп -г ти.
(VIII.76)
Можно показать, что масса антивибратора оказывается более
эффективной. В связи с этим при проектировании виброзащитных
систем масса промежуточного тела должна назначаться исходя из
конструктивных соображений и обеспечения требования высокой
жесткости промежуточного тела. Массу антивибратора следует
делать как можно больше.
Осталось два неизвестных параметра: жесткость упругой свя-
зи са и требуемый коэффициент затухания k&. Указанные величины
378
определяются неоднозначно. Затухание, например, может быть
определено, исходя из условия наивыгоднейших резонансных
амплитуд какой-либо точки системы. Для сравнительно простых
схем этот вопрос рассмотрен в [8].
Поскольку частоты возмущающих сил обычно изменяются
в определенных пределах (<olt (d2), то в качестве критерия опти-
мальности можно принять минимум интег-
рала
(ȣ
S= f Н((о)|</(.), (VIII.77)
со,
который пропорционален среднему коэффи-
циенту виброизоляции на рассматриваемом
интервале. Этот интеграл зависит от двух
неизвестных параметров са и ka. Минимиза-
ция интеграла S по с2 и k3 дает два уравне-
ния для их определения
Сложность решения указанной задачи за-
ключается в большинстве случаев в невоз-
можности отыскания интеграла (VIII.77).
В связи с этим рекомендуется воспользо-
ваться методами приближенного интегриро-
вания, например, методом трапеций. Разби-
вая интервал (соп со2) на л равных частей
и вычисляя значения u(wf0)| в точках
Рис. VIII.5. Схема
включения блока У1 IB
(oU) = (0ь (0<k\ . . . , В — оъ
можно получить приближенное значение интеграла в виде
। 1
(VI 11.78)
минимизация которого и дает необходнмыме уравнения для опре-
деления оптимальных вариантов.
Если в пределах (со>- со2) частоты возмущающих сил не яв-
ляются равновероятными, а их распределение характеризуется
нормированной функцией р (ю), то критерием оптимальности
будет являться интеграл
ЛЬ
I П (<°) | Р (С0)
(VIII.79)
С1)!
379
В случае, когда диапазон (соА» со2) невелик, можно определять
5=| 1] (са, со) dco (VIII.80)
«а
без учета трения (ka =0) — это приведет к существенному упро-
щению задачи поиска с&олт. Величина же ka определится выбором
материала для упругого элемента антивибратора.
8. ПЕРВОЕ ПРИБЛИЖЕНИЕ ВЫБОРА ОПТИМАЛЬНЫХ
ПАРАМЕТРОВ ИНЕРЦИОННОЙ ВИБР03АЩИТН0Й СИСТЕМЫ
Изложенная выше методика оптимизации параметров обладает
тем недостатком, что она не всегда может использоваться в про-
цессе проектирования для подбора параметров виброизоляции
для упругих объектов, так как необходимые для этого обобщен-
ные динамические характеристики в точках крепления виброизо-
лирующих элементов не определяются расчетным путем, теорети-
чески. Их можно получить только экспериментально, когда уже
построены объект и фундамент. Изложенная выше методика должна
быть использована в дальнейшем для уточнения оптимальных пара-
метров виброзащитной системы в процессе доводки объекта. В на-
стоящий момент даже для существенно упругих объектов известны
по паспорту машины только виброперегрузки или амплитуда коле-
баний в некоторых точках на периферии объекта, причем эти
точки могут быть расположены даже не в местах крепления вибро-
изолирующих узлов.
При таких условиях необходимо ввести в рассмотрение какую-
то новую автономную характеристику инерционного виброизо-
лирующего элемента, которая имела бы относительно самостоя-
тельное значение вне зависимости от динамических характеристик
соединяемых систем (упругого объекта и упругого фундамента),
между которыми он располагается, и вне зависимости от парал-
лельно включенных других вибропроводов. Этой характеристикой
следует пользоваться для предварительного подбора параметров
виброзащитной системы, являющихся оптимальными в обычном
смысле (в смысле минимальности коэффициента виброизоляции),
однако опа позволяет в инженерных расчетах сделать шаг вперед
в нужном направлении на данном этапе развития техники.
Здесь же отметим, что и методы динамической жесткости сей-
час используются в данной задаче в основном лишь для получения
качественных результатов, ибо в общей задаче виброизоляции
рассматриваются сейчас обычно одномерные (однокомпонент-
ные) упругие связи и часто как независимые друг от друга вибро-
проводы. Все это делает решения приближенными, качествен-
ными.
Имея в виду, что амортнзатор-антивибратор в месте его вклю-
чения в одномерную упругую связь создает узел колебаний, вве-
380
дем автономную характеристику элемента инерционной впброза-
щиты (состоящего из двух каскадов амортизации, разделяющего
их промежуточного тела и присоединенного к нему антивибратора).
I Эту характеристику назовем «коэффициентом э4фективности эле-
мента упругоинерционной виброзащиты при кинематическом воз-
буждении». Численно он равен отношению силы, передаваемой
через безыцнерционную упругую связь от абсолютно жесткого
I объекта к абсолютно жесткому фундаменту, к силе, передаваемой
на фундамент, в случае, когда эта упругая связь заменена на упру-
гоинерционный виброзащитпьтй элемент, состоящий из двух кас-
кадов амортизации промежуточного тела и присоединенного
к нему настроенного антивибратора.
I Это новое понятие призвано показать эффект ослабления силы,
передающейся через упругое звено при включении б него элемен-
тов, имеющих массу. Включение масс важно для тех случаев,
когда передающуюся силу уже нельзя уменьшить с помощью
> дальнейшего уменьшения жесткости пружин (амортизаторов)
( по конструктивным, прочностным и эксплуатационным сообра-
жениям.
В Выполнение оптимизации параметров должно проводиться при
выполнении указанных выше конструктивных требований.
| Для определения коэффициента эффективности элемента инер-
ционной виброзащиты рассмотрим колебательную систему, пред-
ставленную на рис. VIII.6, а. Она, очевидно, эквивалентна схеме,
представленной на рис. VIII.6, б.
Уравнения движения промежуточной массы и антивибратора
будут иметь вид (без учета в системе сил демпфирования):
тпху + (с2 + с2) хх + ca (ху — х2) = с^о Sin со/; 1
..
тах.2 — са (хх — х2) = О,
где у о—величина «кинематического» возбуждения, определяе-
мая по паспорту объекта.
Решение этой системы ищем в виде:
Xj = Лх sin at\
Х2 = Ai slnotf.
(VIII.82)
Подставляя (VII 1.82) в (VTII.81) и решая уже систему алге-
браических уравнений, получим
____________gyp (са — та<о2)____________.
+ с, 4- с& - (с„ - matf ) - с; ’
(С1 + q + са _ (са — тяч>2) — с2 '
(VIII.83)
Определим теперь силу, передаваемую через упругую связь
(вибропровод).
381
Если в упругую связь (двухкаскаднын амортизатор с жестко,
стями каскадов Ci и сг) не включены инерционные элементы, то
амплитуда силы, передаваемой ею при кинематическом возмуще-
нии у0 sin tot, будет
^упр У<Р — Уо' j j • 0 1II .84>
С1 "Т” С2
Амплитуда силы, передаваемой этим вибропроводом при включе-
нии инерционного звена в упругую связь, будет равна:
- пгг,^) (Са - «а®’)
(VI п.85)
— mBw«)
PCtAsLnart
Рис. VIII .6. Расчетная схема ви-
\ броизодяции при кипематичо-
| ском возбуждении
Тогда в соответствии с определением введенного коэффициента
эффективности блока инерционной виброзащиты получим для него
следующее выражение:
I
Уо 1 1
X = =,-----с,л . (VII1.86)
Это выражение обобщается и на систему с трением, как в аморти-
заторах, так и в антивибраторе. Для этого следует составить
уравнение движения (VIH.81) с учетом соответствующих сил тре-
ния, найти решение для Л1 и подставить его в выражение для X.
Так, если учесть коэффициент силы трения в аитивибраторе /<,
для квадрата амплитуды промежуточного тела А ъ получится сле-
дующее выражение:
382
Это выражение и нужно теперь использовать для определения ве-
личины X.
! Коэффициент эффективности инерционной виброзащиты 2-
удобно выражать в децибелах:
Ус
£.Ф-2О IgZ = 201g
(VI П.87)
Заметим, что не зависит'от величины амплитуды «кинемати-
ческого» возбуждения, так как величина И, линейно зависит
всегда от yG.
Приведенные в этом параграфе решения для Л.» (амплитуды
колебаний антнвибратора) позволяют произвести предваритель-
ную прочностную оценку упругих элементов антивибраторов.
В дальнейшем при материальном осуществлении конструкций
должны быть сняты полные динамические характеристики объекта
и фундамента и произведена корректировка параметров виброизо-
лирующего блока в соответствии с методикой, изложенной в пре-
дыдущем параграфе.
Практическая ценность изложенной инженерной методики под-
бора параметров блока виброизоляции по максимальному кинема-
тическому возбуждению состоит в том, что опа позволяет еще в про-
цессе проектирования агрегатов, когда их динамические свойства
неизвестны, произвести предварительную оценку оптимальных
параметров «двухкаскадного амортизатора-антивибратора» и оце-
нить прочность его упругих элементов, т. е. позволяет «с чего-то
начать» конструктивную разработку блоков инерционной вибро-
защиты для сложных упругих вибрирующих объектов. Можно
думать, что практически именно эта методика найдет широкое
применение, так как во многих случаях коррекция будет невелика
или просто материально затруднена из-за необходимости поста-
новки довольно емких экспериментов на объектах, которые уже
построены. Особенно важной эта методика может явиться при
конструировании стандартизированных «автономных» виброза-
щитных инерционных блоков, изготовляемых вне зависимости от
частных видов «упругих» машин и упругих фундаментов; подобно
тому, как сейчас изготовляются простые амортизаторы, эти блоки
должны быть «настраиваемыми», т. е. процесс проектирования
виброзащитной системы следует разбить на два этапа: предвари-
тельный процесс проектирования внброзашитной системы и окон-
чательный. .» '
Предварительный этап заключается в выборе общей структуры
блока виброизоляции и ориентировочной оценке его параметров.
Ориентировочная оценка параметров блока виброизоляции про-
изводится по изложенной выше методике. Однако обобщенные ди-
намические характеристики подсистем объекта и фундамента
383
задаются исходя из известных опытных данных аналогичных си-
стем или оценок по соответствующим динамическим моделям.
При этом предусматривается возможность достаточно простого
варьирования параметрами блока виброизоляции.
Основными упрощениями при предварительном подборе пара-
метров являются следующие:
а) пренебрежение взаимной связью виброприводов;
б) принятие динамических моделей объекта и фундамента либо
в виде абсолютно жестких тел конечной или бесконечной массы,
либо, наоборот, в виде абсолютно податливых тел;
в) замена силового возмущения кинематическим возбужде-
нием.
В общем случае возможна различная комбинация описанных
упрощений.
В дальнейшем после изготовления объекта и фундамента мо-
жно произвести требуемые согласно общей теории виброизоляции
экспериментальные измерения динамических характеристик и
произвести корректировку параметров блока ввброизоляции.
9. ТЕОРЕТИЧЕСКИЕ И ЭКСПЕРИМЕНТАЛЬНЫЕ ИССЛЕДОВАНИЯ
ДВУХКОМПОНЕНТНОГО АМОРТИЗАТОРА-АНТИВИБРАТОРА
Обычно колебания виброизолирующих объектов вызываются
неуравновешенными вращающимися массами машин и поэтому
являются двухкомпонентными, т. е. объект совершает верти-
кальные и горизонтальные (поперечные) колебания. Двухкомно-
нентиый амортизатор-антпЕибратор и предназначен для одно-
временного снижения вертикальных и горизонтальных коле-
баний.
Все неуравновешенные силы, создаваемые вращающимися
частями ротора, действуют в плоскостях, перпендикулярных
к продольной оси машины. И для того, чтобы двухкомпонентный
амортизатор-аитивибратор гасил вертикальные и горизонталь-
ные колебания одновременно, необходимо его крепить так, чтобы
его ось, проходящая через упругие элементы антивибраторов,
была параллельна продольной оси машины. Выбор же схемы и
типа конструкции двухкомпонентного амортизатора-автивибра-
тора зависит от способа крепления виброизолируемого объекта
к фундаменту.
Выбор динамической модели рассматриваемой системы вибро-
изоляции зависит от степени упругости объекта. В случае доста-
точно жестких и непротяженных объектов, для которых разра-
батывается виброизоляция, имеющая две плоскости симметрии,
можно использовать динамическую модель с силовым воздействием
объекта на блок виброизоляции. При этом объект виброизоляции
моделируется одно- или двухмассовой системой, а виброзащитный
элемент представляет сумму всех элементов (амортизаторов-анти-
вибраторов) данной системы виброизоляции (см. рис. VIII 5).
384
Для сложных и существенно упругих объектов, таких как авиа-
ционные двигатели, тяжелые многомашинные судовые агрегаты,
установленные на общую раму, и др., невозможно с достаточной
точностью определить усилия, действующие па амортизаторы-анти-
вибраторы, и поэтому силовое воздействие объекта целесообразно
заменить некоторым эквивалентным кинематическим возмуще-
нием, как это сделано в пп. 7, 8 при описании однокомпонентного
амортизатора-антивибратора. При этом за амплитуду кинемати-
ческого возмущения принимается максимальная амплитуда коле-
баний объекта, определяемая по паспорту машины или из рас-
О)
Рис. VIII.7. Схемы сравнения эффективности работы антивибраторов
чета вынужденных колебаний объекта, например по схеме на
рис. VIII.6, а.
Проведем сравнение классической схемы амортизации и клас-
сической схемы крепления антивибратора непосредственно на
объект со случаем применения амортизатора-аптивибратора. Ди-
намические модели различных видов виброизоляции представ-
лены на рис. VIII.7, где машина установлена на обычной аморти-
зации (рис. VI1L7, а), к амортизированной машине крепится анти-
вибратор по классической схеме (рис. VIII.7, б), машина уста-
новлена на амортизаторах-антивибраторах (рис. VIII .7. с). Во
всех схемах суммарная податливость амортизации принимается
постоянной: 1/с = l/cL + 1/с2 = сопзЦ
Эффективность введения в систему антивибратора по схеме
определится величиной равной отношению сил, передающихся
на фундамент (или амплитуд колебаний машины) при отсутствии
и наличии антнвнбратора,
ll(r-ml’w?) (“а”“2)
1
— гГ J-со k~ С — ОГ Л т\
и а I £ а | \ 1 а/ I
1
[(«2 _ W2)2 2 dLfl (С
25 н. в. Григорьев
(VIII.88)
3S5
где — масса машины; с—суммарная жесткость всех аморти-
заторов; kB — коэффициент сопротивления антивибратора.
Все остальные обозначения приведены выше.
Коз
ициент эффективности амортизатора-антивибратора опре-
делится выражением
(VIII.8J)
где
П(*ч(сг - Л^) -^.(Оф + (с, - т1<а*Н 2
(q — rn^2) — с^т^2
(VIII.90)
L.M
Рис. VIП.8. Графики эффективности ра-
боты аитивибраторов
На рис. VII 1.8 представлена эффективность (в дБ) введения в си-
стему амортизаторов-антивибраторов в зависимости от частоты воз-
мущающей силы по сравне-
нию с обычной упругой амор-
тизацией при различном рас-
пределении жесткостей по
каскадам амортизаторов-ан-
тивибраторов (кривые: 1 —
антивибратор крепится в не-
посредственной близости к
фундаменту; 2 — в середине
амортизатора; 3 — ближе к
фундаменту от среднего по-
ложения; 4 — ближе к ма-
шине; 5 — в непосредствен-
ной близости от нес).
Анализ показывает сле-
дующее:
1) применение амортиза-
торов-антивибраторов позво-
ляет значительно снизить пе-
редаваемые на фундамент
усилия;
2) величина снижения сил
и диапазон эффективной ра-
боты амортизаторов-антивибраторов существенно зависят от рас-
пределения суммарной жесткости амортизаторов по каскадам;
3) песимметрия зоны эффективной работы приводит к необхо-
димости смещения настройки антивибраторов. Как частный слу-
чай настройку антивибраторов можно находить из условия ра-
зве
венства сил, передающихся йа фундамент, или эффективностей
на границах заданного диапазона частот возмущающих сил
_ X (со,, (о3) = X (со2, соа).
Снижение вертикальных и горизонтальных колебаний, пере-
дающихся через виброизолирующее устройство на фундамент,
рассматривается раздельно.
1. Гашение вертикальных колебаний в случае кинематичес-
кого возмущения будет происходить аналогично тому» как это
уже описывалось при рассмотрении однокомпонентного аморти-
затора-антивибратора.
2. Расчетная модель для поперечных колебаний двухкомпо-
нентного амортизатора-антивибратора представляет собой заде-
ланную по концам невесомую балку с жесткосвязанной массой тп
и упругоподвешепной массой та, совершающую изгибные коле-
бания под действием «кинематического возмущения», действую-
щего в заделке.
Силы и моменты, передающиеся на фундамент, и амплитуда
колебаний промежуточного тела определяются выражениями:
D11) 9£Jz* 41EJ + ю2мпа2(/ — а)2] («“ — и2) + ь>2та<о2а‘ (I — а)'"
I ~ 1 6
(VIII.91)
... 3EJz* 16£ J I2 + и2т„с3 (I — a)21 (a2 — to ) + <o2mato2o3 (/ — a)2
M ~ I 0
(VIII .92)
a~ (3Z — 2fl) (to — co2)
zn = 3EJz* —----------P- a —+, (VI11.93)
где 0 = 13EJ/3 — cd mva (I — af (cbl — co2) — e^mdco a (/ — a) J
(VIII .94)
EJ и I — изгибная жесткость и длина амортизатора; а—от-
носительная координата точки крепления антивибратора; z* —
амплитуда «кинематического возмущения».
Выражение (VIII.91) представляет собой частотное уравнение
исследуемой системы. Амплитуда колебаний аптивибратора будет
определяться выражением
а = 3£/z*o)2 —~
(VI11.95)
При настройке антивибратора на частоту возмущающей силы
(эквивалентной «кинематическому возмущению») амплитуда коле-
баний промежуточного тела становится равной нулю. Это видно
из уравнения (VIII.93). Но в отличие от продольных колебаний
усилия, передающиеся на фундамент, не обращаются в нуль. Воз-
25* 387
нпкает вопрос, на какую частоту надо настраивать антивибратор,
чтобы он стал эффективным. Эту частоту можно найти из условия
равенства пулю усилий, передающихся па фундамент. Приравни-
вая пулю числители в выражениях (VIII.91) и (VIII.92) и решая
эти уравнения относительно а>а, получим:
<»
т& 1“^
, 4ЕЛ
т" -и <огв4 (/ — я)2.
(О = (О
(VIII.96)
Из рассмотрения формул (VII 1.96) можно сделать следующие
основные выводы:
1) частота настройки антивибратора должна быть меньше ча-
стоты возмущающей силы, т. е. соа = о/n, где п > 1;
2) оптимальная частота настройки для гашения силы со/?а
меньше оптимальной частоты настройки для гашения моментов
3) при увеличении массы антивибратора или уменьшении жест-
кости амортизатора частота настройки уменьшается, при этом
амплитудная характеристика получается более пологой, что обе-
спечивает лучшее гашение в заданном диапазоне частот.
Для поперечных колебаний коэффициент эффективности будет
определяться отдельно для сил и моментов:
__ 4 e 1 _________________________§___________________________.
3 Г’ 4 <о2а2 (/ — а)2 МJ ш2 — [4Е// 4~ К — а)2] 0)2 \
(VIII.97)
_ 2 0
Л1 ~ I ' [6EJ/2 aW (/ - а)- М] со2 — [6£V/2 + (о2/ипа3 (/ _ й)2] •
(VIII.98)
Как частный случай частоту настройки антивибратора можно
находить из условия равенства минимальных эффективностей
подвески относительно сил и моментов в заданном диапазоне ча-
стот возмущающих сил (соп <о2)» т- е-
(«1, <оа) = — (сог, wa). (VIII.99)
Совместное рассмотрение гашения вертикальных и горизон-
тальных колебаний показало, что частота настройки антивибра-
тора при вертикальных колебаниях не равна частоте настройки
при горизонтальных колебаниях. И для того, чтобы двухкомпо-
388
нентный амортизатор-антивибратор с помощью одной и той же
массы гасил вертикальные и горизонтальные колебания, необ-
ходимо, чтобы отношение жесткостей упругого элемента анти-
вибратора в вертикальной и горизонтальной плоскостях имело
вид
Рис. VIII.9. Схема экспериментальной уста-
новки с амортизаторами-антивибраторами
амортизаторов необходим также для
Суа Юу&
cza СО
za
В том случае, когда внешняя упругоиперционная виброзащита
разрабатывается для быстроходных роторных машин (п >
> 10 000 об мин), длина упругих продольных и поперечных волн
в амортизаторах становится сравнимой с размерами самого двух-
каскадного амортизатора.
Тогда расчет вертикальных
и поперечных колебаний
целесообразно выполнять
с учетом распределенных
параметров обоих каска-
дов амортизации [38, 57,
58J. Особенно это важно
I для резиновых амортиза-
торов, так как в резине
скорость распространения
волн упругой деформации
(скорость распространения
звука) мала и составляет
} ст.— 40-ь 150 м/с. Учет рас-
I пределенных параметров
лучшего учета влияния сил демпфирования резиновых массивов
амортизации (т. е. распределенного демпфирования) и кроме того
позволит применять теорию амортизатора-антивибратора в обла-
сти более высоких частот. Решения, полученные с учетом распре-
деленных параметров, полезны и для оценки погрешности, кото-
рая получается при замене реальной системы системой с сосре-
I доточенными параметрами. Расчеты показывают, что при такой
замене ошибка при определении усилий, передающихся па фун-
дамент, и эффективности амортизатора-антивибратора в области
частот возмущающих хил свыше 250—300 Гц может перевысить
| 50% [58].
3. На рис. VII 1.9 • представлена схема экспериментальной
установки для исследования внешней упругоинерционной вибро-
изоляции, содержащей четыре блока двухкомпопептных амортиза-
торов-аптивибраторов. В качестве одного из возможных вариантов
макета двухкомпонентного амортизатора-антивибратора исполь-
* зуется блок, состоящий из двух резиновых или резинометаллпчес-
I ких амортизаторов, разделенных промежуточным телом, к торцам
которого с двух противоположных сторон прикреплены с помощью
резьбы два антнвибратора. Антивибраторы представляют собой
389
консольные стержни с дисками, которые могут перемещаться
вдоль консолей, чем достигается точная настройка антивибрато-
ров на нужную частоту. Под блоками амортизаторов-аптивибра-
торов установлен еще один каскад амортизации, позволяющий
получить модель фундамента как упругого тела, а также произ-
водить замеры, например по виброускорениям, непосредственно
на этом упругом фундаменте. Измерения виброускорений можно
производить под блоками амортизаторов-антивибраторов в двух
плоскостях при отсутствии и при наличии в системе антивибра-
о)
24
20
16
12
8
4
О
П'Об/МЦН
Рис. VIII. 10. Экспериментальные кривые /, 2, 4 эффективности работы
амортизаторов-антивибраторов
торов. Эта установка позволяет определять коэффициент эффек-
тивности для каждого амертизатора-антивибратора соответ-
ственно для вертикальных и горизонтальных колебаний как от-
ношение К/Kt и эффективность L, равную 20 lg К/К1т где К ( и К —
виброускорсния соответственно при наличии и отсутствии анти-
вибраторов в блоках. С помощью описанной установки можно
смоделировать интересующую систему и определить эксперимен-
тально параметры амортизаторов-антнвибраторов.
Отметим некоторые результаты, полученные в ходе проведения
экспериментальных исследований описанной установки.
1. Применение упругоннерционной виброизоляции вместо
двухкаскадной амортизации той же суммарной податливости поз-
воляет значительно снизить основную гармонику колебаний
виброизолируемого объекта.
2. При уменьшении суммарной податливости двухкаскадпого
амортизатора эффективность включения антивибратора снижается.
3. Эффективность ампртизато ров-антивибрато ров существен-
ным образом зависит от распределения суммарной податливости
по каскадам амортизации.
390
4. На рис. VIII’. 10, а, б представлены кривые эффективности
демпфирования вертикальных и поперечных колебаний для четы-
рех амортизаторов, установленных по углам амортизируемой плат-
формы. Из кривых следует, что двухкомпопептный амортизатор-
антивибратор способен одновременно (на одной частоте) снижать
вертикальные и поперечные колебания фундамента. Для этого
для каждого блока амортизаторов-антивибраторов подбирались
индивидуально упругие элементы антивибраторов, поперечные
сечения которых были уже не круглыми, а, например, в виде эл-
липса. На графике (рис-. VIIТ. 10) видно, что оптимальное гашение
для вертикальных и поперечных колебаний происходит при числе
оборотов электродвигателя п = 3750 об/мин. При этом использо-
вались в обоих каскадах амортизаторы АКСС 25М, суммарный
вес антивибраторов— 12 кг.
5. Для тех же параметров установки был смоделирован более
жесткий фундамент. Для этого была увеличена жесткость допол-
нительного каскада амортизации. Эффективность по сравнению
с предыдущим случаем^-увеличилась как для вертикальных, так
и для поперечных колебаний.
Экспериментальное исследование единичного амортизатора-
антивибратора, рассчитанного на статическую нагрузку 1GOO кг
и имеющего вес антивибраторов 80 кг, показало, что в частотном
диапазоне, превышающем 10% от частоты настройки, снижение
уровня вибрации составляло величину 12—13 дБ, а максимальное
снижение составило 20 дБ.
ГЛАВА IX
ХАРАКТЕРИСТИКА МАШИН
КАК ИСТОЧНИКОВ ВИБРАЦИИ
1. ПАРАМЕТРЫ, ХАРАКТЕРИЗУЮЩИЕ МАШИНУ
КАК ИСТОЧНИК ВИБРАЦИИ
В процессе создания машин и энергетических установок,
а также при проведении научно-исследовательских работ возникает
необходимость в полной характеристике машины как источника
вибрации (дополнительно к нормированию по уровням вибрации),
позволяющей:
сравнивать между собой машины различного типа и принципа
действия для выбора оптимальной с вибрационной точки зрения;
осуществлять вибрационную диагностику машин и разраба-
тывать наиболее эффективные мероприятия по снижению их
шумности;
определять уже в процессе проектирования степень влияния
амортизирующих и виброизолирующих конструкций на уровни
вибрации машин во всем звуковом диапазоне частот;
выбирать наиболее оптимальную по виброизолирующим свой-
ствам амортизацию и т. д.
Полностью машина как источник вибрации характеризуется
[1211:
виброактивностью в конкретных условиях установки;
потенциальной ее способностью создавать вибрацию.
Виброактивность машины в конкретных условиях установки
оценивается тремя параметрами:
уровнем вибрации (по смещению, скорости или ускорению);
уровнем динамических сил, действующих со стороны машины
на опорные (амортизация, фундаменты) и неопорные (муфты,
патрубки, трубопроводы и т. д.) связи;
работой, затрачиваемой на возбуждение колебаний в опорных
и неопорных связях.
Силовое динамическое воздействие м а -
ш и н ы (при ее работе) на опорные и неопорпые связи осуществ-
ляется силами-векторами Q ($, /), изменяющимися во времени
и зависящими от точки их приложения.
В звуковом диапазоне частот (примерно до 10 000 Гц) с доста-
точной точностью можно считать, что силовое динамическое воз-
действие работающей машины на опорные и неопорные связи осу-
ществляется системой векторов Qn (/), действующих через болто-
392
вые соединения — узлы, связывающие машину с опорными и не-
опорными связями. Иными словами, можно считать, что система
сил воздействия на опорные и неопорные связи через болтовые
соединения полностью имитирует процесс возбуждения вибрации
машиной. В диапазоне частот примерно до 10 000 Гц болт и рас-
положенные в непосредственной к нему близости участки лапы
механизма и полки фундамента (или верхней пластины амортиза-
тора в случае амортизированной машины) колеблются как единое
целое. В связи с этим и усилие Qn (0, действующее через п-е
болтовое соединение, можно считать приложенным в точке.
Положение болтового соединения в пространстве определяется
с помощью шести координат: поступательного перемещения центра
отверстия в опоре под крепежный болт вдоль осей х9 у, z и поворот-
ного перемещения болтового соединения q, ф, Е вокруг осей х,
у, г. проходящих через точку приложения сил, например к амор-
тизатору или патрубку. Будем считать, что ось z нормальна
к опорной поверхности машины, а ось х параллельна оси вращения
ротора.
Обозначим составляющие перемещения n-го болтового соедине-
ния для выбранных координат х, у, zt ф» ф и Е через q^ (/), где
i ~ 1, 2, 3, 4, 5, 6. Обобщенным координатам соответствуют
обобщенные силы Q? (Z) (три вектора сил и три вектора моментов,
действующих вдоль осей х, у. г).
При установке машин на амортизаторы в диапазоне частот при-
мерно до 500—1000 Гц площадки контакта машин с амортизато-
рами, патрубками и трубопроводами являются жесткими. Поэтому
количество точек контакта машины в этом диапазоне частот может
быть еркращено до числа амортизаторов и патрубков (трубопро-
водов). Силовое воздействие машины в этом случае имитируется
системой векторов сил, приложенных в центрах площадок кон-
такта с амортизаторами и патрубками. Обобщенные координаты
характеризуют в этом случае положение в пространстве центров
этих площадок.
Вибрации машин являются обычно стационарными случай-
ными процессами. Каждый вектор силы Q? (t) характеризуется
частотным спектром.
Частотная составляющая Q? (о>) вектора силы представляет
собой гармоническую функцию
<?" (<•>)=q"a (<о) =1 («)
где Q"a (о)); (со) — амплитуда и эффективное значение
силы; со = 2л/ ‘
В акустике и электротехнике принято для сравнения степени
развития колебательных гармонических процессов в начальный
момент времени представлять вектор колебательного движения
или силы в комплексной плоскости с указанием двух его проек-
393
ций — па вещественную и мнимую координатные оси (рис. IX. 1),
используя при этом геометрическую интерпретацию комплексных
ч исел
Q"((D) = ReQ7(cD) + /ImQ?(co).
Обычно при записи выражения для гармонического колеба-
тельного процесса опускается член е~
Q?(uj) = | Q," (to) | cos a + j Q"(to) sin a,
где Re Q? (co) и Im QI (co) — вещественная и мнимая составляю-
щие вектора силы; Q? (со)1 — f Re QI (со) + Im Q? (co)j“ — мо-
модуль вектора силы; a—'фазовый угол, свидетельствующий
о степени развития колебательной силы в начальный момент вре-
мени.
В практике по ряду обстоятельств обычно измеряют эффектив-
ное значение колебательных величин и сил в полосе частот
<?7эфф (Дсо), например третьоктавной.
Среднеквадратичные значения векторов сил QT; Q5; Q? на
отдельных частотах или в полосе частот могут измеряться в динах
(система СГС) или ньютонах (система СИ). Большое удобство
представляет измерение уровней этих сил в децибелах относительно
= 2 -10 4 дин
!«?") = 201gдБ (IX.1)
при I — 1, 2, 3
Среднеквадратичные значения векторов моментов Q"; Qs’>
Q'1 могут измеряться в дин-см (система СГС), в Н-м (система СИ).
Уровни моментов в децибелах измеряются относительно
IO- 1 дин-см
о"
L(Q?) = 2016-^4- дБ (IX.2)
при i — 4; 5; 6.
Методы и средства измерения динамических сил воздействия
машин на опорные и неопорные связи приведены в п. 2.
Для примера на рис. IX.2 изображен механизм, установленный
на четырех амортизаторах. В местах крепления амортизаторов
отложены модули составляющих векторов сил.
Информация о спектрах сил воздействия машин на опорные
и неопорные связи позволяет уточнить диагноз повышенной ви-
брации машин, осуществить подбор амортизации с учетом не
только статических, но и динамических нагрузок на амортизаторы
и патрубки, а также является основой при разработке и внедре-
394
ним средств активного виброгашения, определении величины
сил, которые эти средства должны развивать.
Основным параметром оценки виброак-
тив и ост и машин в конкретных условиях их установки
является работа, затрачиваемая машиной на возбуждение колеба-
ний в опорных и неопорных связях. Принципиально только по ве-
личине этой работы можно полно оценивать виброактивность ма-
шин. Для машин, вибрационные процессы которых являются ста-
ционарными случайными, виброактивность может оцениваться по
Рис. I Х.1. Геометрическое изобра-
жение вектора силы и его состав-
ляющих в комплексной плоскости
Рис IX.2. Изображение составляю-
щих сил, действующих на амортиза-
торы
величине работы, производимой в единицу времени, т. е. по вели-
чине излучаемой машиной в опорные и неопорные связи колеба-
тельной мощности W'.
Колебательной мощностью, излучаемой машиной, является
среднее во времени значение интеграла скалярного произведения
векторов сил, действующих со стороны машины на опорные и не-
опорные связи, и колебательных скоростей q (t) точек контакта
машины с этими связями.
IV = V lim
I Qn (t) q" (/) dl =
~ ! <2? (/) q" (0 dl,
h
(IX.3)
где m — число точечных участков контакта машины; Л/- 1Л~ t2.
Иными словами, колебательная мощность П7, излучаемая
машиной в опорные и неопорные связи, равна сумме мощностей Wn,
395
излучаемых через отдельные участки контакта машины с опор-
ными и неопорными связями. В диапазоне частот до 10 000 Гц
такими участками являются болтовые соединения, а в диапазоне
частот до 500—1000 Гц—площадки контакта машины с от-
дельными амортизаторами, патрубками или трубопроводами.
В свою очередь колебательная мощность, излучаемая через
отдельный участок контакта машины, выражается следующим
образом:
6
1Г = £ W"i,
»=1
(IX.4)
где №"=НтЛ
ДГ><ю а
f Q? (/) q? (/) dt
ti
колебательная мощность.
излучаемая через л-й участок контакта машины при действии
со стороны i-й обобщенной силы.
При решении вопросов снижения шума машин представляет
интерес знание спектрального состава излучаемой колебательной
мощности.
Из формул (IX.3) и (IX.4) видно, что величина IV'7 есть
функция корреляции процессов Q? (0 и qf (t) при задержке вре-
мени между ними т = 0.
Вещественная часть преобразования Фурье функции корреля-
ции процессов Q” (/) и q” (I) есть спектральная плотность
W'i (со) колебательной мощности, излучаемой машиной за счет
действия силы Q? (/).
Спектры вибрации машин в зависимости от характера проте-
кания рабочего процесса могут содержать дискретные составляю-
щие и сплошные участки.
Дискретный характер обычно носят вибрации механического
я электромагнитного происхождений в диапазоне частот при-
мерно до 1000 Гц.
Колебательная мощность, излучаемая машиной на дискретной
составляющей при действии силы Qn(со), определяется
т
п7" Н = -Г J (<0) dt =
о
= <?"эфф И ?7эфф М cos a? (Q, q). (IX.5)
Здесь а? — угол сдвига фаз между Q? (оэ) и q“ (со).
В случае, если в рассматриваемой полосе частот, например
третьоктавной, спектр имеет сплошной характер или содержит
несколько составляющих, то колебательная мощность W? (Асо),
396
излучаемая машиной в полосе частот при действии силы Q? (Асо),
определится по формуле
Wn( (Дю) = Игл - д‘г ’ Q1 (Дю) # (Дю) dt =
= С7эФФ (Дю) <71'эфф (Дю) Re (Дю, Q. Я)- (IX.6)
где
Re £ (Дю,
Q. Я) =
ti
lim 4г [ <2? CM # RM <«
A/->cc Al J
____h___________________________
С?эфФ(Ла)) ^эфф(Д“)
действительная часть коэффициента корреляции между силой Q'!
и скоростью q" в рассматриваемой полосе частот Дсп. Верхние
индексы п и k у коэффициентов корреляции, механических сопро-
тивлений и податливостей обозначают по порядку их следования
точки приложения усилия и измерения скорости. Нижние ин-
дексы i и / обозначают составляющие усилия и скорости.
В случае потока энергии от машины в опорные и неопорные
связи величины IF? (<о) и IF? Асо) имеют положительное значе-
ние. На некоторых частотах колебательная энергия может посту-
пать в машину от расположенных рядом источников вибрации.
Возможны также случаи, когда колебательная энергия излучается
машиной в одной зоне контакта с амортизацией, а поступает об-
ратно в машину через другие участки контактов. При направле-
нии потока колебательной энергии в машину величины IF? (ап
и IF? (А<о) имеют отрицательное значение.
Колебательная мощность IF?, излучаемая во всем диапазоне
частот за счет действия силы Q? (/). определяется как сумма коле-
бательных мощностей IF? (А<о), излучаемых в отдельных частот-
ных полосах диапазона, или мощностей IF? (со), излучаемых на
отдельных дискретных составляющих в случае дискретного ха-
рактера спектра.
Силы и скорости во всех tn точках контакта машины связаны
между собой системой из 6 т линейных уравнений
ТТ\ 6
# И = S S (ю) ($ (ю) (IX .7)
или уравнений
т 6
<2? М = I X <w) М • dx 8)
Jt "1 /—1
Через коэффициенты механических сопротивлений Zu и податливо-
стей Ма опорных и неопорных связей машины. С учетом урав-
397
нений (IX.7) и (1Х.8) выражения (IX.5) и (IX.6) принимают вид:
(w) = [ # *ФФ (w)]2 Re Z^a (w) +
-I 1 X Re [2д‘а (w) qni эфф (<•>) я1 эфф (со) cos о# (д, 4)] (1X .9)
А=1 /=1
/ + i при k = П\
wl (Aw) = I 7?эфф (Aw)]2 Re ZX (Aw) +
+ X X Re[Z^(Aw)^^(Aw)^(Aw)R;/ft(Aw, q, ?)] (IX. 10)
fe-l /=1
j i при k -n.
При установке машин на амортизацию и присоединении трубо-
проводов через гибкие патрубки связью между болтовыми соедине-
ниями различных амортизаторов (через систему n-й амортизатор—
фундаментные конструкции—
fe-й амортизатор) можно пре-
Рис. IX.3. Частотная характеристика от-
ношения Д — / 0*з
небречь. Дело в том, что ви-
брация опорной пластины
n-го амортизатора в основ-
ном определяется силами,
действующими со стороны ма-
шины именно на этот аморти-
затор. Для подтверждения на
рис. 1X3 представлено отно-
шение А уровней вертикаль-
ной вибрации опорной пла-
стины двухпластинчатого
амортизатора при действии
силы на этот амортизатор и
соседний.
Учитывая это. для амортизаторов, имеющих одно болтовое
соединение, или для любого амортизатора в диапазоне частот до
1000 Гц (как упоминалось, в этом диапазоне площадки амортиза-
торов можно рассматривать колеблющимися как целое) выраже-
ния для W? (со) и W” (Дсо) можно записать в виде:
W? (w) = [ q" эфф (w)]2 Re Z^ax (w) -L
6
+ X Re [Z/,no*(w) <77Эфф(<д) qnt Эфф (w) cos a?" (q, 9)]; (IX.Il)
/=1
W? (Aw) = [ эфф (Aw)]2 Re Z-?ax (Aw)
6
+ X Re Z/wx(Aw) $эфф(Д©) <7"эфф(Aw)R/7(Aw, q, ?)] (IX.12)
/ =/**.
где a™ (q, q) — угол сдвига фаз между скоростями q" и q"',
R™ (Aw, q, q) — коэффициент корреляции в полосе частот между
398
J
скоростями (fl и (fj \ Z^ax — точечное сопротивление амортизаторов
при их установке па фундамент с бесконечно большим сопротив-
лением.
Обычно центры тяжести и жесткости амортизаторов располо-
жены на одной оси, нормальной к опорной поверхности и прохо-
дящей через ее центр (ось z), в силу чего опорная пластина амор-
тизатора под действием сил со стороны машины совершает незави-
симые колебания в направлении координат z и Е и взаимосвязан-
ные в направлениях у— и х—if.
В связи с этим уравнения (IX.И), (IX.12) принимают вид
W1 (со) = | #Эфф(о>)]2 ReZ?r0X(«) (IX. 13)
(=1.2,3, 6;
W" (Aw) = [ $ эфф (Aw); Re Z??ax (Aw) (IX. 14)
IF? (со) = | д? эфф (со)] Re Z?^ (w) 1 - K"lx (w) - ' - ]
i = 4, 5; при i = 4 / = 2; при f = 5 / = 1;
W? (Aw) = [ 7" эфф (Aw)] Re Z?£
uax
(IX.15)
y7(A<»)
(Aw) l-^Aco)^-] )
(IX. 16)
- 2; при i = 5 j = 1
i = 4, 5; при i — 4 j
где — ~Ц---------комплексные коэффициенты связи, определяе-
мые как отношение составляющей крутильных колебаний qlj
к линейной у при действии на амортизатор горизонтальной
силы Q?. Метод измерения этих коэффициентов будет рассмотрен
в следующем параграфе.
Величина колебательной мощности, излучаемой в амортизатор
с несколькими болтовыми соединениями в диапазоне частот выше
1000 Гц, определяется по следующим упрощенным
№?о (со) = та [ $ эфф (w)]‘ Re Z?*/ (со)
формулам:
(IX. 17)
Wnia (Ao>) - tna
№"о (со) = та\ q, эфф (СО)] Re |z&2 (со) | 1 -
i = 4, 5; при £ = 4 / — 2;
W^a (Aw) = tna ] q°i э,
о (£0)
при i
4°i (Aw)
fl (Aw)
J
4. 5; при i = 4 /=2; при ( = 5 j
399
где
70*s
iia ~ "a
— действующее сопротивление амортизатора, определяемое как от-
ношение силы, действующей на опорную пластину амортизатора
в его центральной точке, к скорости вибрации этой точки при
одновременном действии на амортизатор сил в других болтовых
соединениях. Используя принцип взаимности, действующее со-
противление можно определить и как отношение силы, приложен-
ной в центральной точке, к суммарной скорости вибрации опорной
пластины точек крепления болтовых соединений. Метод измере-
ния этого сопротивления рассмотрен в следующем параграфе.
Абсолютная величина излучаемой колебательной мощности
измеряется в ваттах. Уровень колебательной мощности опреде-
ляется в децибелах относительно нулевого уровня 10-1е Вт
£ (in =101gдБ, (IX.21)
где W — значение излучаемой колебательной мощности, Вт.
Параметр колебательной мощности следует рассматривать как
основной при оценке виброактивности машины в конкретных усло-
виях ее работы. Величина колебательной мощности концентрирует
в себе информацию, которую дают уровни вибрации машины и силы
воздействия машины на опорные и неопорные связи. Определенный
круг задач по созданию малошумных машин и агрегатов затруд-
нительно решить без информации об излучаемой машиной коле-
бательной мощности.
Прежде всего, по величине излучаемой колебательной мощности
удается производить сравнение (как источников механических
колебаний) машин различных принципов действия, типов, раз-
личных весов, габаритов и мест установки. Произвести такое
сравнение по уровням вибрации не удается. Дело в том, что раз-
виваемые в машинах силы тратятся на преодоление механических
сопротивлений собственных конструкций и присоединенных амор-
тизаторов, фундаментов. При значительных весах и габаритах
машины и фундамента даже большие силы могут возбуждать
вблизи машины вибрацию, по уровням сравнимую с вибрацией,
создаваемой малым и легким механизмом, установленным на по-
датливый фундамент. Целесообразность с точки зрения вибро-
активности того или иного типа энергетической машины (шатунно-
поршневой, роторной и др.) может быть оценена по коэффициенту
виброактивности т)в, определяемому как отношение полной
излучаемой машиной колебательной мощности к развивае-
мой па валу механической мощности №в
= г? •
400
При сравнении машин одного типоразмера, установленных на
одинаковые фундаменты, знание величины излучаемой колеба-
тельной мощности необязательно. Достаточно иметь информацию
об уровнях вибрации. Повышенные вибрации какой-либо машины
из серии свидетельствуют о повышенных значениях вибрационных
сил, действующих в этой машине.
При работе машины в опорных и пеопорных связях возбу-
ждаются шесть составляющих вибраций — три линейные и три
поворотные. Только по величине излучаемой машиной колебатель-
ной мощности удается оценить виброактивность машины с сум-
Рис. IX.4. Частотные характеристики отношения колебательной мощности,
излучаемой при возбуждении нормальной к опорам составляющей вибрации,
к полной колебательной мощности, излучаемой в опоры:
А электродвигатель; Q — генератор; ▲ дизель-гепсратор; — газовая турбина;
И — редуктор; • паровая турбина; - дизель
марным учетом всех шести составляющих вибрации. В то же время,
сравнивая колебательные мощности, излучаемые при возбужде-
нии отдельных составляющих вибрации, удается оценить значи-
мость каждой из составляющих в излучении колебательной энер-
гии. Это в значительной степени облегчает разработку эффектив-
ных мероприятий по снижению шумности машин.
Результаты измерений показывают, что применительно к энер-
гетическим машинам не представляется возможным выбрать ка-
кой-то один вид воздействия на опоры, определяющий излучение
энергии. Так, колебательная мощность, излучаемая в виде нор-
мальной к опорам вибрации, у разных машин имеет различные
значения в долях от полной колебательной мощности (рис. IX.4).
В отдельных областях частот наблюдаются случаи, когда при
наличии интенсивного потока энергии в опоры мощность, излучае-
мая при возбуждении нормальной к опорам составляющей вибра-
ции, практически равна нулю.
На низких частотах излучение машинами колебательной энер-
гии происходит в основном при действии на опоры сил трех
26 Н- В. Григорьев 40]
взаимно перпендикулярных направлений (рис. IX.5). Начиная
с частот 1000—2000 Гц, излучение за счет сил WF уже не является
определяющим. Значительную долю составляет работа, произ-
водимая моментами WM.
Кроме упомянутого информацию о спектре излучаемой коле-
бательной мощности следует считать основной при осуществлении
диагностики машины или агрегата, т. е. определении роли как
отдельных источников, рабочих узлов и процессов в создании ви-
брации машины, так и отдельных механизмов в блочных агрегатах.
Рассмотренные параметры, характеризующие впброактивность
машины в конкретных условиях ее работы, не позволяют оценит ь,
Рис. IX.5. Частотные характеристики отношения колебательной мощности, из-
лучаемой при возбуждении линейных составляющих вибрации, к полной коле-
бательной мощности, излучаемой в опоры:
А - электродвигатель: О — генератор: ▲ —дизель-генератор: X — газовая турбина:
□ — редуктор: • — пдровая турбиил
насколько изменится виброактивность машины, если она будет
установлена на другой фундамент.
Кроме того, излучаемой механизмом колебательной мощности,
сил воздействия на опорные связи и уровней вибрации недоста-
точно и для расчета виброизолирующего эффекта амортизации.
Эти вопросы могут быть решены при наличии дополнительных
данных о машинах, а именно о вибрационных силах, вызывающих
вибрацию машин, и собственных механических сопротивлениях
конструкций [118, 121J.
Характер вибрационных сил и механических сопротивлений
может быть различный. Рассмотрим три возможных случая опре-
деления уровней скорости вибрации qiQ амортизированного меха-
низма по информации о вибрационных силах и механических со-
противлениях.
Все приводимые для этой задачи уравнения приемлемы для
дискретных составляющих, т. е= для случаев нахождения машины
в состоянии гармонических колебаний.
402
Характеристика машин по силам,
возникающим в рабочих узлах,
и переходным податливостям конструкций машин
В рабочих узлах машин действуют вибрационные силы Q" (ы);
г = 1-5-6. Если эти силы известны, то скорость с/}а (») амортизи-
рованной машины может быть определена из системы уравнений
вида:
ПК 6
(to) X ?/а (w) X
k 1 j 1
m' 6
x<z$(cd) = S S Q" H «(<o)
n=l
по формуле
*П / x
Qia (и) —
(IX.22)
(IX.23)
Система уравнений написана для диапазона частот до 1000 Гц
в предположении, что отсутствует связь между колебаниями
опорных пластин амортизаторов через систему амортизатор—
фундамент—амортизатор, и обобщенные координаты различных
направлений одного амортизатора не связаны.
В этих уравнениях Д, — определитель системы уравнений
(IX.22); Д — определитель, полученный из Aj заменой членов при
qla (о>) свободными членами; Л4”"о (<о) — переходная податливость
конструкций свободного (т. е. не связанного с какими-либо меха-
ническими системами) механизма от источника до л-го амортиза-
тора, определенная в случае, когда из системы вибрационных
сил источников только Q" не равна нулю; Л4/"о — переходная
податливость конструкций свободного механизма от участка кон-
такта с /г-м амортизатором до участка контакта с n-м амортизато-
ром при действии на машину только силы Q*.
Значения TWJ7o (со) и Л4//о (со) во всем звуковом диапазоне
частот могут быть определены в настоящее время только экспери-
ментально в стендовых условиях. Способ их определения рас-
I смотрен в п. 2.
t Уравнение (IX.22) может с успехом использоваться для теоре-
; тических расчетов вынужденных колебаний на низких частотах,
когда машина колеблется как целое. В этом случае довольно четко
определяются силы Qr, развиваемые в рабочих узлах у таких
машин, как дизели, компрессоры, помпы, электрические машины
и т. д. Система действующих в машине сил приводится к ее центру
тяжести с учетом фазовых и амплитудных значений.
26* 403
Переходные податливости Л4""о (со) и М^о (со) в этом случае
рассчитываются по следующим формулам (схема машины представ-
лена на рис. 1X6).
Рис. 1X.G. Схема расположения опорных лап
Нормальные опорам вибрации:
AQ = 0 при r= 1, 2, 6;
Мззо = Мззо = Л4ззо = /Иззо = — —
« =
= -
V ап + Ьп
соб"
(IX.24)
М{до = clpWssoJ /Игзо “ — akM“go*
/Ибзо = Л1530? Af.^o — Л4“зо;
Мззо = М&ю — CkMsso h bkM^o-
В формулах /Ищи; 7И?зо и /Иззо значения ak-, bk и ck спелую
подставлять с учетом знака координаты вдоль соответствующей
координатной оси. Например, для механизма с расположением
лап, показанным на рис. IX.6, применительно к третьей лапе,
а3 — -1 ; Ь3 — — | Ь3|;
Q = ~|^3|,
а переходные податливости от третьей к первой точке равны
ЛЛзо = /И ззо
— | 631 /И430 -г | Сз | /Иззо!
М130 = — | Дз М530; /И230 = Дз ’ /И430.
404
Вибрации вдоль оси х:
М^о =----;
wm„
Мно = О при г = 2, 3, 4;
V* ]/4 + 4
Msw = — '-----шК----
Мы = I
.cos6* I *1+4
ь)02
(IX.25)
Мпо = Мио 4~ a^Msio —
Л4яи = СлЛ4б1Л
МзГо = —QM510.
Вибрации вдоль оси у:
M%Q = —
/ .
СЯПМ *
М£о — о при r= 1, 3, 5;
М120 =----Ь^М^2(}\
М320 = fr ьМдЛЬ
Мйо == М?2о -4- с^Мбзо —
(IX.26)
В уравнениях ИХ.24)—(IX.26) через обозначена масса
машины.
В ряде случаев вибрация болтовых соединений в i-м направле-
нии определяется силами в источнике и реакциями опор соответ-
ствующего направления. Тогда уравнение (УХ.22) принимает
вид
т
т
$а («) Л1&(со) &(со) Z^a(о) = 2 Q? (<о)Л1ГГо (со). (IX.27)
h =1 л =Л
Определение во всем звуковом диапазоне частот вибрационного
усилия Q* (t) и переходной податливости Л4"Ро является трудной
задачей и не всегда выполнимой, так как связано с установлением
места приложения, направления и вида вибрационного усилия,
а также с определением кинематического параметра, полностью
405
характеризующего результат действия вибрационных сил в рай-
оне рабочих узлов машины.
В связи с этим при определении влияния характеристик опор-
ных и неопорных связей па уровни вибрации (расчет ожидаемой
вибрации в рабочих условиях по результатам стендовых испытаний,
подбор оптимальной амортизации, оценка виброизолирующих
свойств амортизации и т. д.) в случае, когда конструкция машины
остается неизменной, целесообразны другие способы оценки ма-
шин как источников вибрации.
Характеристика машин по силам,
действующим в районе опорных и неопорных связей,
и сопротивлениям конструкций машин в районе контакта
с опорными и неопорными связями
Колебательная скорость связана с этими силами и сопротив-
лениями следующими зависимостями:
# (<о) (со) 4- £ Е (<о) (СО) $ («); (IX.28)
/=1
т 6
?"(“)+ L 2jM/"o(<>>) <7*(“)2/м(“) =
1 /—1
т 6
= X ХМ/?о(<о)Р|в(<о), (IX.29)
k =1 /- 1
где Q?o (<о) — приведенное усилие, вызывающее вибрацию /7-го
участка опорной поверхности машин в i-м направлении, равную
вибрации в случае работы машины в свободном состоянии, т. е.
на опорах с механическим сопротивлением, равным нулю; Г/в (со)—
усилие, действующее со стороны работающей машины через
£-й участок контакта в j-м направлении при установке машины на
опоры с бесконечно большим сопротивлением; Z"7o(w) = ———-----
точечное механическое сопротивление конструкций свободной
машины.
Уравнения (ГХ.28) и (IX 29) приемлемы в диапазоне до 500—
1000 Гц, когда участки контакта с амортизаторами и патрубками
колеблются как целое, и при условии, что свойства амортизаторов
обеспечивают отсутствие связи между колебаниями опорных пла-
стин амортизаторов через фундаментные конструкции, а также
независимость колебаний вдоль различных координат одного амор-
тизатора.
Механические сопротивления и податливости конструкций
машины определяются экспериментально в стендовых условиях.
При этом машина может быть подвешена на тросах таким образом,
чтобы частота свободных колебаний системы была бы меньше ниж-
406
ней граничной частоты исследуемого диапазона. На низких часто*
тах, когда машина колеблется как твердое тело, значения этих
сопротивлений и податливостей рассчитываются по формулам
(IX.24)—(IX.26).
* Силы Q?o (о>) или f/д (со) рассчитываются ио результатам
стендовых испытаний, для чего кроме механических сопротивле-
ний и податливостей свободной машины измеряются механические
сопротивления амортизации и уровни вибрации. Далее параметры
(со), м""о (со) и Mkii0 (со) либо f/„ (ш) и Af/ro (со) (в зависимости
от того, какие уравнения предполагается использовать) могут
быть занесены в паспорт машины. Тогда вибрационные скорости
машины в любых условиях ее установки определятся из уравне-
ний (IX.28) или (IX.29) по формуле (IX 23) уже по известным си-
лам и механическим сопротивлениям машин и опорных и не-
опорных связей.
При выполнении приближенных расчетов уровней вибрации
f-го направления реакциями опор других направлений можно
пренебречь и использовать уравнения вида:
т
(<•>) - q" («) ZZfo (со) + X Z»o («) » (co) Z?L (со) # (со); ([X.30)
т
qt (со) 4- L Л (со) Z?/L (со) $ ( со) -
fc=l
tn
Г « V М& (<о) F?B (со). (IX.31)
k=l
Применительно к машинам, у которых уровни вибрации различ-
ных опорных и неопориых участков равны и у которых установ-
лены однотипные амортизаторы под машиной, уравнения (IX.30)
и (1Х.31) можно еще более упростить:
Q7o (<о) - q- (со)
т
1 ZXv(co) L Z?fo(CO) (co)
ft-=l
(IX.32)
^7 (co)
m
1 + ZnaA(co) g (co)
k-\
rn
= X (co) & (co),
ft 1
(IX, 33)
2. МЕТОДЫ И СРЕДСТВА ОПРЕДЕЛЕНИЯ ДИНАМИЧЕСКИХ СИП.
ДЕЙСТВУЮЩИХ НА ОПОРНЫЕ И НЕОПОРНЫЕ СВЯЗИ
СО СТОРОНЫ МАШИНЫ. И КОЛЕБАТЕЛЬНОЙ МОЩНОСТИ,
ИЗЛУЧАЕМОЙ МАШИНОЙ
В настоящее время разработаны методы и средства определе-
ния только нормальной опорным или неопорным связям силы
воздействия на них со стороны машины через болтовые соелине-
ния 1118]. При этом электрический сигнал, пропорциональный
407
динамической силе, передаваемой болтовым соединением, выра-
батывается пьезоэлектрическим преобразователем (датчиком силы)
Датчик силы представляет собой сборную шайбу. Он обязательно
устанавливается в болтовом соединении и является элементом,
через который передается сила от машины к опорным или неопор-
ным связям.
В болтовом соединении датчик силы может быть установлен
между лапой машины и фундаментом, либо между лапой машины
и крепежной гайкой болта (рис. IX.7). Электрический сигнал,
вырабатываемый преобразователем силы, пропорционален его
Рис. IX.7. Схема расположения датчика силы в бол-
товом соединении
деформации. Деформация в свою очередь зависит от места уста-
новки преобразователя в болтовом соединении и от инерционно-
упругих свойств элементов болтового соединения.
При установке датчика силы между лапой машины и фундамен-
том (рис. IX.7, а) соотношение между величиной передаваемого
на фундамент болтовым соединением усилия Qz и силой, фикси-
руемой датчиком силы Qn, определяется из приближенного урав-
нения
(IX.34)
в
где Ci при I — 1, 2, . . 6 — гибкость верхней половины лапы
машины /, болта 2, нижней половины полки фундамента 5, ниж-
ней половины лапы машины 4, преобразователя силы 5 и верхней
половины полки фундамента 6 (рис. IX.7, а).
Из уравнения (IX .34) видно, что преобразователь усилий
фиксирует часть силы воздействия машины на фундамент. Вели-
чина этой части зависит от соотношения между гибкостями всего
узла болтового соединения и той его ветви, в которой установлен
408
преобразователь. Преобразователь фиксирует при этом от 70 до
90% силы воздействия на фундамент.
I Очевидно, что постановка преобразователя силы под машины
(особенно под энергетические установки) связана со значительными
трудностями и неудобствами- В связи с этим большой интерес
представляет вариант установки преобразователя под крепежную
гайку болта (рис. IX.7, б).
В этом случае имеем
6
С/
‘ <1Х -35>
Преобразователь при этом фиксирует примерно одну десятую
часть усилия воздействия на фундамент.
Гибкость болта и преобразователя определяется по формуле
при I = 2; 5.
(IX.36)
Величина
Л5 - 2/гьер,
где Лст — толщина стальных элементов преобразователя;
толщина керамических пластин.
Гибкости верхней и нижней половин лапы машины
^иер
(IX.37)
где — толщина лапы; D6 — диаметр головки крепежного
болта; Ел —модуль Юнга материала лапы; d0 — диаметр отвер-
стия под крепежный болт.
Гибкость верхней и нижней половин полки фундамента
_____________2/1ф__________
D6~ + Ч ( + ~32 )
(IX.38)
где Лф и Еф -— толщина полки фундамента и модуль Юнга мате=
риала, из которого изготовлен фундамент.
При установке машины на амортизаторы:
а) преобразователь установлен между лапой машины и амор-
тизатором
(IX.39)
б) преобразователь установлен между лапой машины и кре-
пежной гайкой болта
(IX 40)
409
где С, — гибкость шейки амортизатора.
Сш =
47/ 4- 7)щ dui
ЛЕ (D2 — d2 V
• ш\ ш ш/
(IX.41)
где D ; dIU — внешний и внутренний диаметры шейки аморти-
затора; Н — длина участка резьбового соединения крепежного
болта и амортизатора (если крепежный болт входит в амортизатор
на длину нарезки в шейке или большую величину, то Н — длина
резьбы в шейке амортизатора).
В уравнениях (IX.39) и (IX.40)
(1Х.42)
Рис. 1Х.8. Датчик силы:
/ — корпус; 2 — пъсзоксрамнка; 3 — полн-
хлорьиниловая пленка; 4 — шайба; 5 —
крышка
Конструкция преобразователя усилий представлена на
рис. IX.8. Он состоит из корпуса /, крышки 5, биморфного пьезо-
керамического элемента 2. Величина статического усилия, дей-
ствующего на преобразова-
тель в болтовом соединении,
не превышает допустимой для
пластин пьезокерамики на-
грузки. Однако наличие не-
равномерности распределения
усилия по поверхности пла-
стин, ввиду непараллельпости
крепежной гайки и лапы ма-
шины, приводит к разруше-
нию керамики даже при не-
больших усилиях. С целью по-
лучения более равномерного
распределения статических
сил по поверхности пьезопластин преобразователь необхо-
димо использовать с шайбой 4, выполненной в виде сочленения
двух колец с выпуклой и вогнутой сферическими поверхностями.
Кроме того, вплотную между стенками преобразователя и пьезо-
элементами необходимо укладывать, например, полихлорвипило-
вую пленку 3, которая препятствует выпадению сегментов пьезо-
пластин в случае, если они расколются.
Измерение пьезокерамическим датчиком сил может произво-
диться аппаратурой, принципиально ничем не отличающейся от
аппаратуры для измерения вибрационного ускорения (рис. IX.9).
Измерительный усилитель и анализатор (или фильтр) могут
быть специально отградуированы в децибелах для фиксирования
общего уровня действующей силы или уровня спектральной со-
ставляющей. Таким прибором является измеритель колебательной
мощности, который будет рассмотрен ниже.
Могут также использоваться усилитель и анализатор, фикси-
рующие абсолютное значение напряжения UF электрического си-
410
гнала в вольтах, поступающего с датчика силы. В этом случае
спектральная составляющая силы определится по формуле:
Г\п Ъ.А_____ ^/7Эфф(Ш) .
Vn эфф —
Хи (w) ’
(IX.43)
где X1 — чувствительность преобразователя силы.
Определение чувствительности и снятие частотной характери-
стики преобразователя целесообразно проводить на электродина-
мическом стенде. При этом преобразователь устанавливается на
Рис. IX.9. Блок-схема тракта для измерения силы:
f — датчик силы; 2 — предварительный усилитель-коммутатор;
3 — измерительный усилитель; 4 — анализатор; 5 — самописец;
6 — блок управления
совершающую гармонические колебания поверхность и нагру-
жается массой тгр. Ускорение движения массы измеряется
контрольным преобразователем ускорений.
Величина силы, действующей на преобразователь при кали-
бровке, <?эфф (ш) гпгр9грзфф (“): чувствительность преобразо-
вателя усилий (<о) — -------^иэфф^)---_
^гр <?гр эфф (w)
Резонансная частота преобразователя усилий составляет
обычно 40—50 кГц. Поэтому частотная характеристика его чув-
ствительности линейна в звуковом диапазоне частот. Пьезоэлек-
трический модуль пластин титаната бария зависит от величины
действующего на них статического усилия (рис. IX. 10). Поэтому
в процессе калибровки желательно воздействовать на преобразо-
ватель статическим усилием, равным действующему на него при
установке в болтовом соединении усилию затягивания. Для этого
груз крепится к вибрирующей плите шпилькой, а жесткость
шпильки выбирается гораздо меньшей жесткости преобразователя,
так что все инерционное усилие груза передается на преобразова-
тель. Если величины статических сил затягивания преобразова-
теля при калибровке и в процессе измерений не равны, следует
вносить поправку, используя зависимость, представленную на
рис. IX. 10.
411
Fcm, кгс
Рис. IX. 10. Зависимость чув-
ствительности преобразователи
силы от статического давления
Наиболее целесообразный порядок определения колебатель-
ной мощности, излучаемой машиной, следующий:
определение спектральных составляющих ТГ7 (со); (Дсо)
колебательной мощности, излучаемой через отдельные участки
или болтовые соединения контакта за счет действия i-й силы;
т т
определение спектральных составляющих У Р7? (со); X И(Ао>)
Л=1 Л=1
колебательной мощности, излучаемой через все вместе участки
(или болтовые соединения) контакта за счет действия на опорные
и неопорные связи i-й силы;
определение всего спектра коле-
т 6
бательной мощности У У, W’i (со);
л=1 / 1
т 6
У У U7?fAco), излучаемой маши-
и=1
ной через все участки контакта
с опорными и неопорными связями
за счет действия сил всех рассматри-
ваемых шести направлений;
определение полной колебатель-
ной мощности, излучаемой машиной
во всем исследуемом диапазоне частот.
При определении излучаемой мощности для измерения исполь-
зуются все или часть амортизаторов (патрубков, болтовых соеди-
нений), входящих в опорные и неопорные связи.
При числе амортизаторов (участков контакта) машины до 4
включительно для измерений используются все амортизаторы.
При числе амортизаторов, патрубков более 4 для измерений
используется часть амортизаторов, патрубков, минимальное коли-
чество которых должно составлять 30% от общего их числа, по
во всех случаях не менее четырех. При этом амортизаторы, па-
трубки для измерений должны выбираться равномерно по пери-
метру контакта машины с опорными и неопорными связями.
Уровни спектральных составляющих излучаемой машиной ко-
лебательной мощности за счет действия сил одного направления
определяются по формуле
(т \ р \
£ И =4 £ П +101g —, (IX.44;
л—! , 1 Р
I р \
где L ( IV, )— уровень спектральной составляющей колеба-
тельной мощности, излучаемой в амортизаторы (патрубки), на
которых производились измерения для данной составляющей
силы; р — число амортизаторов (патрубков), используемых для
измерений; т — общее число амортизаторов (патрубков), входя-
щих в крепление машины.
412
По аналогичной формуле определяются уровни спектральных
составляющих колебательной мощности, излучаемой машиной
за счет действия сил всех направлений:
/ гл 6 \ / Р 6 \
lA У S Z^i) + ’0lg4- (ix.45)
л=1 1=1 i \ Л=1 i=l / '
Подсчет суммарных уровней составляющих колебательной
мощности осуществляется путем последовательного попарного
логарифмического сложения отдельных уровней. Сначала опре-
деляется разность между складываемыми уровнями Lt—L.2,
затем по этой разнице определяется величина ДА, которую необ-
ходимо прибавить к большему из складываемых уровней, исполь-
зуя следующую связь:
Lt—дБ . .\ . . О 1 2 3 4 5 6
AL . . , . 3 2,5 2,1 1,75 1,45 1,2 1.0
Li 2* ДБ •
AL.............
7 8 9 10 11 12
0,8 0,65 0,55 0.45 0.35 0,3
В соответствии с формулами (IX 5), (1X 6), (IX.9)—(IX.20)
величины колебательных мощностей 1Г" (со), W / (Дсо), излучае-
мых на дискретных частотных составляющих или в полосах ча-
стот, могут быть определены двумя способами:
непосредственным как среднее произведение согласно выраже-
ниям (IX.5) и (IX.6) Ай составляющей силы па Аю составляющую
скорости вибрации болтового соединения (амортизатора или па-
трубка), а также по информации о среднеквадратичных значениях
силы ф”эфф» скорости (#эфф и фазовой cos a” (Q, q) или корреля-
ционной связи /?/ (Q, q) между скоростью и силой;
косвенным [согласно уравнениям (IX.9—IX.20); по данным о
скорости вибрации болтового соединения (амортизатора или па-
трубка) при работе машины и механических сопротивлениях амор-
тизаторов или патрубков.
Непосредственный способ
определения излучаемой мощности
В настоящее время непосредственным способом производятся
измерения мощности, излучаемой при действии сил, нормальных
к опорам [120]. Остальные составляющие излучаемой мощности
не могут быть определены непосредственным способом, так как
не разработаны методы измерения усилий Q и моментов Qq;
Сф- Qv
Для измерения колебательной мощности, излучаемой за счет
сил, нормальных к опорам, непосредственным способом на заводе
«Виброприбор» разработан прибор — измеритель колебательной
мощности (ИКМ). Общий вид прибора представлен на рис. IX 11,
413
Рис. IX.11. Общий вид измерителя колебательной мощности
Рис. IX. 12. Блок-схема измерителя колебатель-
ной мощности:
/. 2 — датчики силы и ускорения; .? — предвари-
тельные усилители-коммутаторы; 4 — интегрирующий
блок: 5 двухканальиос анализирующее устрой•
ство; б — умножитель; 7 — сямпписцы; 8 — бяок
управления
414
а блок-схема—на рис. IX. 12. В состав И КМ входят 36 преобразова-
телей силы шести типоразмеров (с отверстиями под болт от 12 до
40 мм) по 6 штук каждого типоразмера. ИКМ позволяет подклю-
чать с помощью коммутатора на расстоянии до 50 м любую из пар
датчиков силы и ускорения к анализирующему и измерительному
блокам. Поступающие с датчиков сигналы усиливаются и автома-
тически анализируются 2-канальным третьоктавным фильтром.
Особенность этих фильтров в том, что анализ сигналов силы и ско-
рости осуществляется без искажения пофазовым характеристикам.
Проанализированные сигна-
лы перемножаются, и про-
изведение усредняется во вре-
мени. ИКМ позволяет одно-
временно записывать на лен-
ты самописцев три спектраль-
ные характеристики: силу
воздействия на опорные и
неопорные связи, колебатель-
ную скорость (или ускорение)
и колебательную мощность,
излучаемую через данный
амортизатор (патрубок).
Измеренные ИКМ уровни
сил и мощностей корректи-
руются в зависимости от спо-
соба установки датчика силы
в болтовом соединении.
Пб
Пример. 1. Рис. IX. 13. Схема болтового соединения
Машина установлена на шести
амортизаторах. Чертеж болтового
соединения представлен на рис. IX ЛЗ, размеры элементов болтового соедине-
ния в см: hji = dQ = 2,5; Dg — = 3,6; — Н 4- ~ 5,75; Я — 1,7;
Ли — 3,8; ^кер = й,15; /Эщ : 4,9, — d^ *— 2,2.
С помощью прибора ИКМ произведены измерения в диапазоне 200—1000 Гц
спектра колебательной мощности, излучаемой в четыре амортизатора. Результаты
измерений приведены в табл. IX. 1.
Вычислить спектр и общий уровень колебательной мощности излучаемой
машиной за счет действия нормальных опорам сил.
Решение. Вычисление уровнен спектральных составляющих излучаемой
машиной колебательной мощности производим по формуле
' 4
£ Г* (Аш)
' 4
X К'г (Дю)
£-1
+ 1.8 дБ.
Результаты вьгчнелеиий уровней спектральных составляющих: 164,4, 170,4;
158,4; 168,4; 168,4; 148,4; 149.4, 158.4 дБ.
415
Таблица 1X1
Излучаемая колебательная мощность
Средние частоты треткоктапных полос. Гц
Номер амортизатора 200 250 | 320 400 500 630 800 1000
1 158 165 155 163 165 144 145 152
2 157 161 146 163 150 142 145 149
3 156 163 150 158 157 136 139 151
4 155 160 150 156 157 132 138 150
По формуле (IX-40) подсчитаем поправку А к показаниям датчика силы, а сле-
довательно. и колебательной мощности, вычисляя гибкости элементов болтового
соединения по формулам (IX.36), (IX. 37) и (IX.41):
я2 2-1013
2-2,5
3.63 — 2.52
5,75
2,2-1012-0,785-2,22
4-1.7-1-4,9 —2,2
л2.2-1012 (4.9- — 2.22)
2-2.5
л2,2 1012
4,92 - 2,52 + 2,5 ( )
I
3,65 4 0,3
2.2-1012 0,785-3.62
4-1,7 + 4,9 — 2,2
’ л2,2Ю12 (4,92 — 2.22)
Уровень излучаемой мощности следует откорректировать на величину
101g А — 101g 8,8 ^9.5 дБ, силы — на 201g А 19 дБ.
Уровни спектральных составляющих излучаемой мощности на частотах 200,
250, 320, 400, 500, 630 , 800 и 1000 Гц с учетом поправки на установку дат-
чика силы имеют значения соответствен по 174, 180, 168, 178, 158, 160 и 168 дБ.
Вычисление общего уровня излучаемой машиной мощности производится
путем попарного логарифмического сложения уровней мощностей, излучаемых
на отдельных частотных составляющих. Значение суммарного уровня излучаемой
мощности равно 184,3 дБ.
Косвенный способ определения
излучаемой колебательной мощности
В общем случае установки машины согласно косвенному ме-
тоду требуется большой объем информации о механических сопро-
тивлениях опорных и неопорных связей, а также о фазовом и кор-
реляционном соотношения к между колебательными скоростями
различных точек контакта машины с опорными и неопорными свя-
зями. При установке машины на амортизаторы число связей резко
416
сокращается и вычисления колебательной мощности упрощаются
В этом случае, как следует из уравнений (IX. 11)—(IX.20), для
определения излучаемой колебательной мощности в амортизаторы
с одним болтовым соединением в диапазоне частот до 10 000 Гц
и с несколькими болтовыми соединениями в диапазоне частот до
1000 Гц необходимо знать:
г?и i=l, 2, 3, 6 ReZ/j-дх (и); ReZ”[J,x (До); <??эфф (to);
<7?.=>ФФ ( Л<о);
при i = 4,5 дополнительно к упомянутому требуется информа-
ция о переходных сопротивлениях Z?^ и Z?"flje и о коэффициентах
корреляции R"? Cq, q) или фазовой связи cos a"" (q, q) между
составляющими вибрации одного амортизатора вдоль связанных
координат.
При наличии перечисленной информации уровни колебательной
мощности, излучаемой в n-й участок на дискретной частоте или
в полосе частот, определяются по формулам:
(IX.46)
£
(=1, 2, 3, 6;
(IX.47)
1 = 4; 5.
При определении колебательной мощности, излучаемой в амор-
тизаторы или патрубки с несколькими болтовыми соединениями
в диапазоне часто ! выше 1090 Гц, необходимо знать [см. уравнения
(IX. 17)— (1X20)1
, г при i 1, 2, 3, ^6 reZit-dX (со); ReZ?^ (Дсо); ^Эфф (to);
q^-u]^ IДto);
( при i = 4,5 дополнительно ftLx (©); К?5<и (со); К$4ах (Дю);
Кках (Дч>), а также коэффициенты корреляционной R и фазовой
связи между составляющими колебательных скоростей при работе
машины.
Уровень излучаемой мощности в n-й участок контакта опреде-
лится на дискретной частоте или в полосе частот по формулам:
L (Ц7?) = L ($ -| • 10 lgmc + -pg| Re
(=1, 2. 3, 6;
M^) = L($ + 101gmo4-
4- ~ ’£I Ж । 1 - 4) 11
1 L ' / JI
i = 4, 5,
2 H. В. Григорьев
(IX.48)
417
Рассмотрим методы экспериментального определения перечис-
ленных параметров.
Методы и средства измерения линейных составляющих вибра-
ции описаны подробно в литературе [721.
Измерение поворотных составляющих вибрации (рис. IX. 14)
производится с помощью двух пьезоэлектрических датчиков уско-
Рис. IX-14. Блок-схема устройства для измере-
ния поворотных колебаний:
/ — датчики колебаний; 2 — предварительные уси-
лители; 3 — измерительный усилитель
рения 1, установленных на исследуемые конструкции симметрично
относительно центра болта на некотором расстоянии I друг от
Сигналы с датчиков поступают на
предварительные усилители 2
и затем на измерительный
усилитель 3. Фазовые харак-
друга и в плоскости измерения.
Рис. IX .15. Измерение поворотных коле-
баний с помощью двух датчиков
теристики предварительных
усилителей отличаются на
180е, а их коэффициенты уси-
ления k<2 регулируются до
выполнения равенства
Ха Jtai — Xojtaz*
При такой настройке пред-
варительных усилителей из-
мерительный усилитель фиксирует мгновенную разность поступаю-
щих на его вход сигналов, В случае поворотных колебаний (или
одновременно поворотных, продольных и поперечных колеба-
ний) показания измерительного усилителя пропорциональны
<Э2 (sin <р)/<5£2 (рис. IX. 15), а при колебаниях с малой амплитудой—
ускорению поворотного колебательного движения <32<р/д/2.
Чувствительность датчиков совместно с предварительными уси-
лителями по отношению к поворотным колебаниям Хф опреде-
ляется по формуле
Ц = kOlXatl.
418
При наличии пьезоэлектрических датчиков, имеющих равные
чувствительности и отличающиеся на 180 фазовые характери-
стики, необходим только один предварительный усилитель.
Если датчики расположены симметрично относительно центра
поворотных колебаний изделия, сдвиг между колебаниями точек
поверхности в местах их установки равен 180°, и расстояние огра-
ничивается по величине только степенью затухания колебаний
при распространении волн. При несимметричном расположении
датчиков относительно центра поворота расстояние между датчи-
ками должно быть гораздо меньше длин распространяющихся волн
с тем, чтобы сдвиг фаз между колебаниями точек установки дат-
чиков, возникающий за счет различия хода волн от центра пово-
ротных колебаний до датчиков, не оказывал бы существенного
влияния на результат определения мгновенной разности поступа-
ющих с датчиков сигналов, т. е. на правильность замера поворот-
ных колебаний. Величина возможной максимальной относитель-
ной погрешности измерений, обусловленной разностью фаз колеба-
ний датчиков, определяется из выражения
6- = I — cos f 4-360У
ф L \ /J \ <р/ /
После усилителя 3 сигнал анализируется и фиксируется с по-
мощью обычной (упомянутой в гл. I) анализирующей н регистри-
рующей аппаратуры. Скорость поворотных колебаний может из-
меряться либо в абсолютных единицах (1/с), либо в децибелах
относительно нулевого уровня <р0 = 10'8 1/с
7. (<р) = 201g-?-.
Фо
Пример 2. Машина устанавливается на восемь амортизаторов типа АКСС.
Результаты измерений уровней линейных вибрационных скоростей на лапах ма-
шины в третьоктавных полосах частот трех взаимно перпендикулярных направ-
лений представ пены в табл. IX-2. Уровни направленных вибраций равны во
всех точках.
Значения уровней вещественной части механического сопротивления в де-
цибелах амортизатора АКСС в третьоктавных полосах частот по отношению к си-
лам трех взаимно перпендикулярных направлений представлены в табл. IX.3
(значения механических сопротивлений выбраны условно).
Таблица IX.2
Уровни колебательной скорости, дБ
Направление Частота. Гц
измерений 100 11'5 1 160 200 250 320 । 400 500 630 800 надо
1 90 80 85 91 86 87 95 94 85 86 87
2 89 88 90 85 90 92 91 87 88 85 86
3 95 100 99 107 Hi 105 113 99 105 111 115
27* 419
Таблица 1 Х.З
Уровни сопротивлений, дБ
Напраиленне намерений Частота. Гц
100 1 125 160 200 250 320 400 500 630 I 800 юоо
1 112 140 120 118 142 108 НО 72 75 102 66
2 ПО 122 112 128 136 96 120 96 66 60 78
3 • 125 123 120 117 114 108 107 107 107 107 106
Определить уровни спектральных составляющих излучаемой в амортизаторы
машиной колебательной мощности в диапазоне частот 100—1000 Гц за счет дей-
ствия линейных сил трех взаимно перпендикулярных направлений.
Решение. Уровни спектральных составляющих колебательной мощности
в каждый отдельный амортизатор по каждому из трех взаимно перпендикулярных
направлений вибрации определяются по формуле (IX-46)
L W" (Ла>)] L ??9фф (Лш) ] 4- ± L [Re (Д..>)]
i= I, 2, 3
Результаты расчета составляющих мощности, излучаемой в первый аморти-
затор, следующие:
f. Гц ... 100 125 160 200 250 320 400 500 630 800 1000
L (iFj) ... 146 150 145 150 157 141 150 130 120 117 120
L (iFj) ... 144 149 146 149 158 140 151 135 121 115 125
L (И) . . . 157,5 161,5 159 165.5 168 159 166,5 152.5 158,5 164.5 168
Определение уровней спектральных составляющих мощности, излучаемой
через каждый амортизатор за счет действия всех трех составляющих сил, осуще-
ствляется путем последовательного попарного логарифмического сложения
уровней спектральны с составляющих мощности, излучаемой при возбуждении
каждой из трех составляющих вибрации.
В результате подсчета уровней спектральных составляющих мощности, из-
лучаемой в каждый из восьми амортизаторов, получаем следующие значения:
Д Гц 100 125 160 200 250 320 400 500 630 800 1000
L(u4) 158 162 159,5 165,5 168,8 159 166,5 152,5 158,5 164,5 168
Вычисление уровня спектральных составляющих мощности, излучаемой
машиной во все восемь амортизаторов, производится по формуле (IX.45)
L
- 3 8
,i=ln=l
IF* (Лад)
+ 10 1g 8^
+ 9 дБ.
В результате расчета имеем следующие значения спектральных составляющих
полной излучаемой мощности: 167; 171; 168,5; 174.5; 177,8; 167; 175,5; 161,5;
167,5; 173,5; 177 дБ.
420
3. ОПРЕДЕЛЕНИЕ МЕХАНИЧЕСКИХ СОПРОТИВЛЕНИЙ
МАШИНЫ И СИЛ, ВЫЗЫВАЮЩИХ ВИБРАЦИЮ
Собственные механические сопротивления Zc (ш) и податли-
вости Л4о(<о) конструкций машины, необходимые для характе-
ристики машин как источников вибрации и расчета вибрации,
определяются методами и средствами, рассмотренными в гл. X,
п. 1. Для обеспечения свободного положения машина подвеши-
вается на упругих элементах. Частота собственных колебаний ма-
шины на этих элементах должна быть не менее чем в три раза
меньше низшей частоты исследуемого диапазона. Упругие эле-
менты подвески крепятся к корпусу машины в местах, удаленных
как от опорной поверхности, так и от рабочих узлов.
Согласно принципу взаимности
(<») = м?;0 и; му0 и = и.
Это позволяет в два раза сократить количество измеряемых вели-
чин. Для ускорения процесса измерений все коэффициенты сумм
т 6 т' 6
V ЦА1”д)(е)); У У (со) определяются при установке вибра-
/=1 и 1г- I
тора в n-й точке и действии силы в t-м направлении.
Для проведения расчетов силы Q” (со) представляются в ком-
плексном виде. Большая по величине сила принимается за опорную
и имеет только вещественную часть
Q«on (со) = ReQ?on (со) = Q,Hon (со) |.
Сдвиг по фазе между опорной силой и остальными силами опреде-
ляет величины вещественной и мнимой частей остальных сил.
Например, значение сдвига фаз силы Q" (со) относительно Q”on (со)
а = 30° свидетельствует о том, что Q” (со) опережает Q?On (со), ве-
личина 02 (со) представляется в виде
Q" ((О) = 0 (w) cos30° -I- /1Q" (<о) sin 30°.
Величины Q"o («) и Г"в (<о), как уже упоминалось, опреде-
ляются расчетным путем. Кроме величин механических податли-
востей машины и сопротивлен ий опорных и пеопорных связей для
расчета необходимы данные о скоростях вибрации участков кон-
такта машины с опорными и неопорнымп связями с учетом фазовых
соотношений между этими скоростями.
Сдвиг фаз измеряется относительно скорости вибрации «опор-
ного» болтового соединения. За «опорное» принимается болтовое
соединение с максимальными уровнями вибрации на основных ди-
скретных составляющих. Измерения производятся с помощью
средств, рассмотренных в гл. IX. п 2 Информация о комплексных
скоростях вибрации записывается в виде
<7? (ы) = 4"эфф(®>) COS а'10 -|- !д"э<ьф (ш) sin а'0.
421
Пример 3. Определить изменение уровня вертикальной вибрации машины
па частоте 1000 Гц при перестановке ее с амортизаторов с сопротивлениями
Z33a =2-JO8-}-/б-10®
на амортизаторы, имеющие значение механического сопротивления
Z^” = 4-1O8 + 71O9.
Машина установлена на четырех амортизаторах. Вертикальные вибрации
обусловлены только силами вертикального направления. Силы действу-
ющие в районе крепления машины к амортизаторам, равны.
Механические характеристики свободной машины по отношению к силам,
действующим в районе опор:
= 3- Ю8 — /6-108; М&о = б-10~9 + /21(Г"9.
Решен и е. Согласно уравнению (IX-28)
л1 11/7и i 7” \ I I7'/22 7*1 । 137зз лл31 7ц
*<30 — Яз \Z330 “Г Z33flJ + ? 3^3*^330^330 зАпо ™ В(/зМ) ~ -
+ ^З^ЗЗо^ЗЗО^ЗЗО’
Г)2 АЛ*2 722 < Д2/722 t 7*22 \
4*0 — ЯЗ^ЗЗа^ЗЗО^ЗЗО + ЧЗ \ АзЗО + z33aJ +
+ ^З^ЗЗв^ЗЗО^ЗЗО + ^З^ЗЗа^ЗЗО^ЗЗО’
«30 = Я З^ЗЗа^ЗЗО^ЗЗО + Чз^3о'4я(/з30 '
13 / „33 д 73i \ ( "4741 1л13 733 ,
+ Яз t/ззо + ^ЗЗа) Т Яз£ЗЗа/У1ЗЗО£ЗЗО^
Озо — Яз^ЗЗа ^330^330 + *7з^зза^ззо^ззо +
1 п^7^ 7^ i (7^ I 7^4 \
~Т Яз^ЗЗа 1330^330 + Яз Х^ЗЗй + л330)'’
Произведем расчет изменения уровня вертикальных вибраций в первой точке:
АпАп
Яз1 А1Д2П
Ввиду равенства
711 _ 722 _ 733 . 744 . ,Я2 __ ..13 л,*п.
л330 — л330 — ^330 — z330’ ;И330 — /И330 = Л1230*
уИ _ /22 _ 733 _ „44
л33д — — л33а — л33а»
имеем
С30 d d
<2зо ‘d d
Qlo d t d
$0 d d I
^Q^(d-l)- (l-d);
I d d d
d I d d
d d I d
d d d I
422
Тогда
я! _ ykkl ллкп упп —
° — ^ЗЗа т330^330 —
= (2* 10s -р /5- 10s) (5 10-1° + /2- 10-W) (3- 10я — J6- 10ч) = 1.44- iO8 + /0,87-108;
/‘ = Z^ |^о = 2-1О8 + /5-108 + 31О8 —j6-I0f = 5-108 —/108;
d" = = (4-10® + /Ю8) (5 IO’1® + /2.1О"10) X
X (3-108 — /6 108) = 2,88-108 + /1,44-108;
. J1' = z**11 4- Z&k = 4 - IO8 + /109 4- 3-108 —
—/6-108= 7-10Ч-/4 108;
(6,44 —/0,13) IO8 . ?з“
^ТГ V (9,88 + /5,44) 108 ’
Таким образом, вибрация машины уменьшится примерно на 4,9 дБ.
ГЛАВА X
РЕЗОНАНСНЫЕ ХАРАКТЕРИСТИКИ МАШИН
И ВИБРОПРОВОДИМОСТЬ ИХ КОРПУСОВ
Одним из основных условий создания малошумных машин
является исключение резонансных явлений при их работе. На
низких частотах в области первых гармоник частоты вращения
ротора резонансные частоты могут быть в системах машина как
твердое тело—амортизация—фундамент и машина как податливая
протяженная металлическая конструкция (блочные агрегаты)—
амортизация—фундамент, а также могут быть в системе роторов.
В области частот выше 100—200 Гц машины перестают коле-
баться как целое. На средних и высоких частотах их корпуса и
отдельные узлы представляют собой системы с распределенными
параметрами и поэтому резонансные характеристики элементов
корпусов машин в значительной степени определяют величину
передачи сил и вибраций от рабочих узлов до опорных и неопорных
связей, а также величину излучаемой колебательной мощности.
Учитывая значительное влияние характеристик корпусов ма-
шин па нх виброактивность в области средних и высоких частот,
специальное проектирование корпусов машин, направленное на
уменьшение их виброактивности и исключающее резонансные
явления, является одним из основных путей создания малошум-
ных машин. В настоящей главе даны общие рекомендации и упомя-
нуты основные направления повышения виброизолирующих
свойств корпусов машины.
1. ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ
^РЕЗОНАНСНЫХ ХАРАКТЕРИСТИК МЕХАНИЗМОВ
В сложных колебательных системах со многими степенями
свободы, какими являются конструкции машин с присоединен-
ными опорными и неопорными связями, в диапазоне частот дей-
ствия возмущающих сил всегда имеется большое количество частот
собственных колебаний. Задачей является исключение возможно-
сти совпадения частот вынужденных и собственных колебаний,
которые могут проявиться при действии на конструкции данной
системы сил. Только в такой постановке могут быть подучены
определенные положительные результаты. Поэтому при исследо-
вании резонансных характеристик конструкций машин необхо-
димо иметь четкое представление о системе действующих в ма-
шине вибрационных сил и определять реакцию конструкций
именно по отношению к такой (или близкой к ней) системе сил,
424
В случае, если механическая система подвергается воздействию
одной гармонической силы, резонансные свойства этой системы
характеризуются точечной или переходной механическими подат-
ливостями (сопротивлениями) в зависимости от того, совпадает
точка контроля вибрации с точкой воздействия силы или нет. То-
чечное механическое сопротивление равно комплексному отноше-
нию силы к возбуждаемой в точке действия силы колебательной
скорости
(со) =
Q? (<о)
qni М
Механическая податливость является величиной, обратной меха-
ническому сопротивлению, и определяется как комплексное отно-
шение скорости возбуждаемых колебаний к действующей силе.
fju
Рмс. ХЛ. Частотная характеристика податли-
вости корпуса машины
Для обнаружения и устранения резонансной вибрации зача-
стую достаточно иметь данные только о модуле сопротивления
или податливости. Информацию о модуле точечной и переход-
ной податливости конструкций следует представлять в виде ча-
стотной характеристики (рис. Х.1), которая соответствует частот-
ной характеристике уровня скорости колебаний в точке контроля,
возбуждаемых силой, постоянной во всем частотном диапазоне по
величине. Максимумы характеристики на частотах fr\ f2\ fz соот-
ветствуют резонансным колебаниям; минимумы характеристики
на частотах /5; fG — антирезонансным.
Механическое комплексное сопротивление (со) по отношению
к линейным силам при гармоническом характере колебаний изме-
ряется с помощью прибора— измерителя механических сопротив-
лений ИМС-69, разработанного заводом «Виброприбор» в Таган-
роге. Измеритель механических сопротивлений производит изме-
рение уровней ZF (со) по отношению к силам в децибелах относи-
тельно нулевого уровня ZFn (со) = 4’10“* 2 Н-с/м,
L (ZF) = 20 lg .
425
к
£
426
Общий вид прибора ИМС-69 представлен на рис. Х.2, блок-
схема для случая определения точечных сопротивлений представ-
лена на рис. Х.З.
Согласно определению для автоматического измерения частот-
ных характеристик) Zr (со) ; ReZF (со); IrnZp (со) необходимо [119]:
а) осуществить воздействие на исследуемые конструкции гар-
монической силой во всем исследуемом диапазоне частот;
б) получить информацию на каждой частоте о действующей на
конструкции силе и скорости возбуждаемых колебаний;
Рис. Х.З. Блок-схема измерителя механически сопротивлений:
1 — генератор'; 2 — блок компрессии; 3 — усилитель мощности; 4 — вибратор: 5 —
датчик силы; 6 — датчик ускорения; 7 —- переходник; 8 — исследуемые конструкции:
предварительные усилители; 10 — измерительный усилитель силы; 1/ — измеритель-
ный усилитель ускорсиия; 12 — блок компрессии; 13 — измерительный интегрирующий
усилитель; 14 — электронное умножающее устройство; 15 —* самописцы
в) определить модуль отношения сигнала, пропорционального
силе, к сигналу, пропорциональному скорости, с записью частот-
ной характеристики этого отношения;
г) произвести па каждой частоте умножение сигнала, пропор-
ционального модулю, на косинус и синус угла сдвига фаз между
силой и скоростью и зафиксировать частотные характеристики этих
произведений. Вычисляются эти операции следующим образом.
Электрический сигнал с генератора звуковой частоты / через блок
компрессии 2 и усилитель мощности 3 поступает на вибратор 4
Частота сигнала плавно изменяется, а величина регулируется
с помощью блока компрессии таким образом, чтобы уровень ско-
рости возбуждаемых колебаний поддерживался постоянным во
всем частотном диапазоне. В таком случае величина силового воз-
действия пропорциональна модулю сопротивления исследуемых
конструкций, а записанная на ленту самописца 15 частотная харак-
теристика действующего усилия соответствует частотной характе-
ристике модуля сопротивления. Произведение сигналов силы и
скорости с учетом косинуса угла сдвига фаз между ними пропор-
427
циональиа вещественной части сопротивления ReZr (со), а произ-
ведение сигналов силы и скорости с учетом синуса угла сдвига
фаз между ними — мнимой части сопротивления ImZF (со).
Воздействие на исследуемые конструкции осуществляется с по-
мощью электродинамических и пьезоэлектрических вибраторов.
Для получения информации о силе и уровне возбуждаемых коле-
баний используется комбинированный пьезоэлектрической датчик,
который либо специально изготовляется, либо комплектуется из
датчиков силы 5 и ускорений 6. Практика показывает, что послед-
ний вариант более надежен.
Рис. X 4. Блок-схема устройства к измерителю
механических сопротивлений:
/ генератор типа 1022, 1024; 2 — анализаторы
типа 2020; 3 — коррелятор фирмы <Днза»
Поступающий с датчика ускорений сигнал в дальнейшем с по-
мощью интегрирующего усилителя 13 преобразуется в сигнал»
пропорциональный колебательной скорости.
Операция перемножения [7F; Ug и cos а выполняется с помощью
электронного умножающего устройства 14. Величина VFUq cos а
пропорциональна постоянной составляющей напряжения на вы-
ходе умножающего устройства.
На ленте самописца автоматически фиксируется частотная ха-
рактеристика вещественной части сопротивления. С помощью ана-
логичного умножителя определяется и мнимая часть сопротивле-
ния, для чего перемножаются сигнал силы и сигнал, сдвинутый
относительно сигнала скорости на 90г. Последний получается с по-
мощью блока компрессии (автоматической регулировки усиле-
ния) 12, на вход которого поступает напряжение, пропорциональ-
ное вибрационному ускорению. Коэффициент усиления блока АРУ
регулируется собственным выходным сигналом таким образом»
чтобы выходной сигнал изменялся в малых пределах (5—10%).
Напряжение с умножителем записывается на самописец с линей-
ным потенциометром для возможности определения знака мнимой
и вещественной (при измерении переходных сопротивлений) частей
сопротивления.
428
Измерения ZF (о) могут быть также произведены с помощью
электронных приборов фирмы «Брюль и Кьер» в сочетании с корре-
лятором фирмы «Диза» (рис. Х.4). Возбуждение^может осуществ-
ляться с помощью генераторов 1022 и 102 L Эти генераторы имеют
блок компрессии, что позволяет поддерживать постоянство уровня
^возбуждаемой вибрации во всем диапазоне частот. Сигналы, про-
порциональные силе и скорости, после предварительногоусилепия
поступают через два анализирующих гетеродинных устройства
типа 2020 на коррелятор фирмы «Диза» типа 55Д70 для перемно-
жения.
В устройстве типа 2020 предусмотрена возможность поворота
одного из сигналов на 90°. Так что с коррелятора может быть полу-
чен сигнал, пропорциональный как вещественной, так и мнимой
части сопротивления. То, что анализирующие устройства типа
2020 позволяют автоматически отфильтровывать полезные сигналы
силы и скорости от помех, значительно повышает надежность и
точность измерений.
Для измерения модуля сопротивления | ZF (со) | можно исполь-
зовать приборы типов ВЭДС-100, ВЭДС-200, ВЭДС-10, изготовлен-
ные заводом «Виброприбор» в Таганроге, В комплект этих прибо-
ров входят мощные генераторы, усилители, вибраторы, датчики
ускорений, блоки автоматической регулировки усиления и измери-
тельные усилители.
Все рассматриваемые средства измерения ZF (со) приемлемы
также и для измерения податливости механических конструкций
по отношению к силам трех взаимно перпендикулярных направле-
ний MF (со). В этом случае следует поддерживать постоянным
уровень действующего усилия с помощью блоков компрессии и
автоматической регулировки усиления. В процессе измерений
могут быть определены как абсолютные значения податливостей,
так и их уровень в децибелах относительно пулевого уровня
= 2,5-10 м/Н*с
L(Mro) = 2Olg-gf-.
Измерение механических сопротивлений по отношению к мо-
менту ZM (со) может быть произведено с помощью устройства, блок-
схема которого приведена на рис. Х,5.
Принцип работы устройства заключается в следующем. Вибра-
тор /, возбуждаемый электрическими сигналами звуковой частоты,
поступающими с генератора, передает поперечное усилие на кон-
соль динамометрической балки 2 (которая связана с предваритель-
ным усилителем датчиков деформации S), прикрепленной к иссле-
дуемой конструкции 5. В результате в месте присоединения балки
к конструкции возникает изгибающий момент. Величина действу-
ющего па исследуемые конструкции момента фиксируется датчи-
ками 3 и 6 деформации пограничного слоя балки вблизи ее корне-
вого сечения. Под действием изгибающего момента в конструкции 5
429
возникают поворотные колебания, которые измеряются датчиками
ускорений 4 и 7 совместно с предварительными 9 и измеритель-
ным 10 усилителями. При наличии сигналов, пропорциональных
действующему моменту и ускорению возбуждаемых поворотных
колебаний, величины | ZM (<о) |; RcZM (ы) и ImZM (<о) могут быть
определены с помощью рассмотренного электронного устройства
для измерения ZF (<о).
Симметричное расположение датчиков ускорения относительно
точки приложения момента в процессе замера ZM практически не
ограничивает частотный диапазон измерений Z (ш) Для ис-
Рис. Х.5. Блок-схема устройства для измерения сопротивлений по
отношению к моменту
ключения погрешности измерений вещественной и мнимой частей
ZM пьезодатчики должны устанавливаться па расстоянии от по-
граничного слоя балки (месте установки датчиков деформации),
много меньшем длины возбуждаемых в изделии изгибных или сдви-
говых волн [119].
Чувствительность датчиков деформации по отношению к дей-
ствующему моменту может быть определена двумя путями: по
известному сопротивлению и резонансным способом.
В первом случае осуществляется возбуждение изделия с изве-
стным сопротивлением по отношению к моменту» например дисков.
С помощью двух пьезоэлектрических датчиков фиксируется ско-
рость возбуждаемых поворотных колебаний. Чувствительность
датчиков деформации определяется
где — электрическое напряжение, поступающее с датчиков
деформации. Этим способом удается производить калибровку в диа-
пазоне до 300—500 Г и.
430
При резонансном способе величина изгибающего момента
в корневом сечении консольной балки рассчитывается для случая
колебания балки на частотах, равных или близких резонансным*
по формуле
Vi
Л1 =
где — корни уравнения ch kJ cos kJ = —1; — скорость
поперечных колебаний свободного конца балки (определяется
экспериментально); J6— момент инерции балки: £б—модуль
Юнга материала балки; 1б — длина балки; kn — волновое число
изгибных колебаний.
Для стальных балок прямоугольного поперечного сечения на
частоте, соответствующей четвертьволновому резонансу,
где №б — момент сопротивления поперечного сечения балки.
При калибровке датчиков деформации резонансным способом
балка должна крепиться к изделию с сопротивлением по отноше-
нию к моменту, гораздо большим сопротивления балки.
При определении ZM большое значение может иметь размер
участка приложения момента. При определенных размерах уча-
стка приложения момента (сравнимого или меньшего толщины
пластин) деформация скручивания (сдвига) в значительной сте-
пени определяет реакцию пластины. Силовое воздействие машины
на опорные и пеопорные связи осуществляется на участках, раз-
меры которых гораздо больше толщины пластин, лап и полок фун-
даментов. При этом деформация сдвига не определяет реакции кон-
струкций машины и фундамента на действующий момент.
Поэтому при экспериментальном определении ZM машин, амор-
тизаторов и фундаментов размеры участка приложения момента
должны быть не менее чем в три раза больше толщины пластин
исследуемых конструкций.
Сопротивление по отношению к моменту может измеряться
в абсолютных величинах и децибелах относительно нулевого
уровня ZM0 — 1 (Н-м-с)
L (Z,U(1) = 20 lg .
Способ измерения сопротивления по отношению к моменту при-
годен и для определения податливости по отношению к мо-
менту Мм (со). В процессе измерения податливости по отношению*
к моменту с помощью блока АРУ или компрессии поддерживается
постоянной в исследуемом частотном диапазоне величина дейст-
вующего на исследуемые конструкции момента. При измерениях
431
уровня в децибелах податливости по отношению к моменту за ну-
левой уровень принимается величина /И.., = 1 —1—)
L (МА1) = 20 lg .
Действующее сопротивление Z^ амортизатора с несколькими
болтовыми соединениями в диапазоне частот выше 1000 Гц может
быть измерено с помощью устройств, предназначенных для изме-
рения точечных и переходных сопротивлений соответственно при
Рис. Х.6. Измерение действующего сопротивления
амортизатора
гармоническом или стационарном случайном характере силового
воздействия, В процессе измерения Z^ax силовое воздействие осу-
ществляется в центре амортизатора. Отличие измерения действу-
ющего сопротивления от точечного заключается только в том
(рис. X .6), что на вход измерительного усилителя тракта скорости 5
поступает сигнал, пропорциональный мгновенной сумме колеба-
ний всех болтовых соединений амортизатора. Для обеспечения
этого на каждом болтовом соединении устанавливается датчик
ускорения 1. Сигналы с этих датчиков поступают на предваритель-
ные усилители 2, коэффициенты усиления которых на каждой из
частот регулируются до выполнения равенства
где Хь Хп — чувствительности датчиков ускорения; kk. kn —
коэффициенты усиления предварительных (усилителей.
Сигналы, поступающие с предварительных усилителей, скла-
дываются суммирующим устройством 4. При измерении действую-
щего сопротивления в полосе частот сигналы с предварительных
усилителей поступают на суммирующее устройство через соответ-
ствующие каждому предварительному усилителю квадратичные
детекторы 3.
432
Па рис. Х.7 представлена блок-схема устройства для опреде-
ления комплексного коэффициента К“/а = —связи между
поворотными и горизонтальными составляющими колебаний опор-
ной пластины амортизатора 7, возбуждаемыми при действии на
амортизатор горизонтальной силы ($ (I — 1, 2). Силовое воздей-
ствие осуществляется с помощью вибратора 4, в качест ве преобра-
зователей поворотных колебаний используются два датчика уско-
рений 5. Линейные колебания измеряются датчиком 6. Через пред-
Рис. Х.7. Измерения коэффициента связи между по-
воротными и линейными колебаниями
варительные усилители 1 (для поворотных колебаний) и 2 (для
линейных) датчики соединены с измерительными усилителями 3.
Остальные приборы, обеспечивающие вычисление модуля, веще-
ственной и мнимой частей отношения поворотных колебаний к ли-
нейным, аналогичны приборам измерителей механических сопро-
тивлений. В данном случае по тракту силы проходит сигнал, про-
порциональный поворотным колебаниям амортизатора.
Конструкции машин подвергаются воздействию нескольких
сил, приложенных в различных точках. Например, к корпусу
электрической машины приложены силы и моменты в районе под-
шипников и в районе крепления статора. Вибрации в контрольной
точке ql (со) такой машины являются следствием действующих па
корпус сил. На низких частотах, когда вибрационные процессы
имеют гармонический характер, вибрационная скорость в таких
случаях определяется по формуле
т 6
?? (<•>) = S S (®) Q/ (®),
/-1
(Х.1)
где т — число точек действия сил,
2 II. В- Григорьев
433
Из уравнения (Х.1) видно, что отдельные переходные податли-
вости уже не характеризуют вибропроводящих свойств конструк-
ций. Эти свойства оцениваются суммой переходных податливостей.
Причем роль того или иного участка конструкций определяется
как величиной податливости участка, так и величиной соответ-
ствующей вибрационной силы.
При оценке впбропроводящих свойств конструкций корпуса
машины, подвергающейся воздействию нескольких сил, целесо-
образно ввести попятие действующей податливости конструкций.
Представим уравнение (Х.1) в виде
QZ (w)
т
Л=1
ql (со) = Q* (ш)
т
б
*=u i=i
Q'j (ы)
Q* (<>)
«/V («) М% (<>) = Q? (w) Мл (<о).
(Х.2)
Коэффициент
т 6
мя (w) = g a/v М м% (w)
рассматривается как «действующая» податливость Мд (о), которая
равна сумме переходных податливостей, складываемых с учетом
их «веса», определяемого значениями действующих сил.Частотная
характеристика действующей податливости соответствует резо-
нансной характеристике конструкций машины и присоединенных
к ней опор. Максимумы в частотной характеристике действующей
податливости имеются в областях частот повышенной виброактив-
ности конструкций. Роль того или иного участка или элемента
конструкций оценивается не их переходной податливостью, а ве-
личиной произведения (<о) (со).
На высоких частотах (выше 1000—2000 Гц для вибраций меха-
нического и электромагнитного происхождения и 400- 500 Гц —
гидродинамического происхождения) вибрационные процессы
имеют стационарный случайный характер. В этом случае при дей-
ствии на механическую систему одиночного усилия резонансные
свойства оцениваются с помощью податливости в полосе частот
М$ (Aw) =
<&фф
или сопротивления в полосе частот Z (Л<о).
434
Под модулем, вещественной и мнимой частями сопротивления
в полосе частот понимается:
I г™ (МI =
9"эфф<Д®) ’
ReZJ7 (A<o):= Z?f(Aw) ReZ?(Q7; q“);
ImZn (Д<о)= Z™(Aio)|lmR(Q?, q"),
где Re R и Im R — действительная и мнимая части коэффициента
корреляции между силой и скоростью в рассматриваемой полосе
частот при нулевой временной задержке.
Рис. Х-8. Блок-схема устройства для измерения комп-
лексного сопротивления в полосе частот
Измерение комплексных механических
сопротивлений в полосе частот Z (Лео) при ста-
ционарном случайном характере вибрационных процессов может
быть произведено с помощью устройства, блок-схема которого
представлена на рпс. Х.8.
При измерении Z (Дсо) средства возбуждения и преобразова-
тели обобщенных сил и ускорений такие же, как и при измерении
Z (со) в случае гармонических колебаний. Обличается только элек-
тронная схема устройства.
Сигнал на вибратор 1 поступает с генератора шума 4 через
блок компрессии <3 и усилитель мощности 2. В качестве генератора
используется либо магнитофонная завись вибрационного силового
процесса, воздействию которого подвергается исследуемая кон-
струкция при ее эксплуатации, либо генератор белого шума, если
вибрационные процессы в исследуемой конструкции аналогичны
по характеру белому шуму.
Поступающие с датчиков сигналы усиливаются предваритель-
ными 5 и измерительными 6 усилителями и анализируются в ис-
следуемом диапазоне частот синфазными фильтрами 7. Величина
28* 433
механического сопротивления В полосе частот зависит не только
от свойств исследуемых конструкций, но и от характера вибра-
ционного процесса и полосы частот анализирующего фильтра. По-
этому полоса пропускания фильтров в процессе измерения сопро-
тивлений должна соответствовать полосе» в которой осуще-
ствлялся анализ вибрационных процессов исследуемой конструк-
ции при ее эксплуатации.
После фильтра сигнал ускорения посредством интегратора 8
преобразуется в сигнал, пропорциональный скорости, и поступает
через детектор среднеквадратичных значений 9 на блок компрес-
сии тракта возбуждения 3. Детектор среднеквадратичных значений
используется для получения синусоидального сигнала, величина
которого пропорциональна среднеквадратичному значению ско-
рости в полосе частот.
С помощью блока компрессии среднеквадратичное значение
скорости возбуждаемых колебаний поддерживается постоянным
во всем диапазоне частот. Тогда <2эфф (Асо) пропорциональна
| Z (Aw) |. Уровень @зфф (Aw) фиксируется на лепте самописца 12.
Сигналы силы и скорости поступают на умножитель 13. По-
стоянная составляющая на выходе умножителя пропорциональна
ReZ (Aw). С целью определения ImZ(A(o) па другой аналогичный
умножитель 11 подаются сигнал силы и через блок компрессии 10
сигнал ускорения. Блок компрессии 10 совместно со среднеквадра-
тичным детектором 9 формируют сигнал с постоянным среднеква-
дратичным значением, комплексно сопряженный с вибрационной
скоростью. В результате постоянная составляющая на выходе
умножителя 11 получается пропорциональной Ini Z (Aw).
Для увеличения динамического диапазона измерений целесо-
образно и в тракте возбуждения включать фильтр 14. идентичный
фильтрам тракта измерения.
На практике для синфазного анализа могут быть использованы
третьоктавные фильтры измерителя колебательной мощности ИКМ,
либо два спектрометра фирмы «Брюль и Кьер» типа 2113.
В качестве умножителя — коррелятор фирмы «Диза» типа 55Д70,
либо фазочувствительный вольтметр типа ВФ-1, выпускаемый
. заводом «Радист» в Ленинграде.
В случае необходимости определения плавной частотной ха-
рактеристики Z (Aw) наиболее целесообразно использовать двух;
канальный гетеродинный анализатор, построенный на базе ана-
лизаторов типа С53. Оба канала такого анализатора питаются от
одного гетеродипа, что обеспечивает полную синхронность ана-
лиза сигналов силы п скорости [1201.
Измерение модуля | Z (Aw) | может быть произведено и с по-
мощью более простого устройства. В этом случае сигналы силы и
скорости подаются поочередно на фильтр и далее через детектор
среднеквадратичных значений— на самописец. Величина Z (Aw) ,
пропорциональна разнице в децибелах между записанными на
ленте самописца частотными характеристиками силы и скорости.
436
Комплексное сопротивление Z (Ao>) может быть измерено также
с помощью устройства, блок-схема которого представлена на
рис. Х.4. При этом следует использовать генератор типа 1021,
1022.
Эти приборы генерируют шум в полосах частот 3,16; 10; 31,6 и
100 Гц. Средняя частота генерируемого шума плавно перестраи-
вается. В контакте с генератором типа 1022 и 1024 могут работать
два гетеродинных устройства типа 2020, которые в этих полосах
осуществляют анализ шумовых сигналов. Проанализированные
сигналы поступают на умножитель или коррелятор «Диза». При-
бор типа 2020 имеет фазосдвигающее устройство, позволяющее
получить сигнал комплексно-сопряженный скорости или силе.
Для измерения коэффициентов корреляции R при нулевой вре-
менной задержке и косинуса угла сдвига фаз между вибрацион-
ными процессами используются рассмотренные уже двухканаль-
ные синхронные и синфазные анализирующие устройства (фильтры
измерителя колебательной мощности, двухканальный гетеродин-
ный анализатор на базе анализаторов типа С53, устройства типа
2020 фирмы «Брюль и Кьер») совместно с умножающим уст-
ройством, фазочувствительным вольтметром типа ВФ-1 или корре-
лятором фирмы «Диза» типа 55Д70. При отсутствии фазосдвига-
ющей цепи в измерительных трактах осуществляется измерение
вещественной части коэффициента корреляции и косинуса угла
сдвига фаз. Поворот фазы на 90 позволяет получить значе-
ния мнимой части коэффициента корреляции Im R и синуса
угла сдвига фаз между процессами. При синусоидальных процес-
сах показания умножителя, фазочувствительного вольтметра или
коррелятора пропорциональны косинусу угла сдвига фаз, а при
стационарном случайном характере в полосе частот — коэффи-
циенту корреляции между исследуемыми процессами. Для полу-
чения непосредственного отсчета R или cos а, например на шкале
коррелятора, необходимо (при автоматических измерениях) ис-
пользовать блоки автоматической регулировки усиления (АРУ)
с целью поддержания постоянной величины поступающих на корре-
лятор сигналов.
Определение действующей податливости может быть произ-
ведено двумя способами. Первый— расчетный по данным экспе-
риментального определения с помощью измерительного устрой-
ства, блок-схема которого приведена на рис. Х.З, отдельных коэф-
фициентов Л1рг, а также информации о коэффициентах а. Измере-
ние Л4/" производится на неработающей машине. Второй — экспе-
риментальный, сформулированный с использованием принципа
взаимности. В процессе замеров по этому способу вибратор уста-
навливается (рис. Х.9) в контрольной точке опорной поверхности
машины. Направление действующего со стороны вибратора усилия
соответствует направлению, в котором контролируется вибрация
машины при ее работе.
437
При измерении Л1Д на дискретных частотах на вибратор посту-
пает гармоническое напряжение; при измерении Л4 в полосе
частот—напряжение со спектром в виде узкополосного белого
шума с шириной полосы, соответствующей полосе контроля вибра-
ции механизма.
Возбуждающее усилие измеряется с помощью датчика силы,
устанавливаемого между вибратором и машиной, и измерительного
тракта, состоящего из предварительного и измерительного усили-
телей.
В точках приложения по направлениям действия вибрацион-
ных сил, развиваемых при работе машины, устанавливаются дат-
Рис. Х.9. Блок-схема устройства для определения действующей податливости:
/ • генератор гармонических колебаний: 2 — анализатор: 3 — генератор белого шума;
4 — усилитель мощности: 5 — измерительный усилитель силы; 6 — датчики ускорений;
7 - вибратор; 8 — предварительные усилители; 9 — квадратичные детекторы; 10
датчик силы; 11 — суммирующее устройство; 12 — измерительный усилитель ускоре-
ния
чпки ускорений. Сигналы с этих датчиков поступают на предвари-
тельные усилители. Коэффициенты усиления предварительных
усилителей на каждой из частот регулируются до выполнения
равенства
k п
где X/ и %i(j — чувствительности датчиков, установленных соот-
ветственно в точке действия силы Qi и в точке действия силы Qm
при работе машины; сила принимается за опорную при опре-
делении коэффициента со*; Л/ и kfo — коэффициенты усиления
включенных с упомянутыми датчиками предварительных усили-
телей.
При измерении действующей податливости на дискретных ча-
стотах мгновенные значения сигналов, поступающих с предвари-
тельных усилителей, складываются суммирующим устройством.
438
При измерении действующей податливости в полосе часто!
сигналы с предварительных усилителей поступают на суммирую-
щее устройство через соответствующие каждому предваритель-
ному усилителю квадратичные детекторы.
Действующая податливость па каждой и з частот определяется
по формуле
м______
л ~ 2”/ М ’
где U у—показания измерительного усилителя тракта ускорения;
Up— показания измерительного усилителя тракта силы; Xf —
чувствительность датчика силы; kr — коэффициент усиления
предварительного усилителя тракта измерения силы.
В случае экспериментального определения действующей подат-
ливости конструкций корпуса машины датчики ускорений уста-
навливаются в точках возбуждения корпуса вибрационными си-
лами при работе машины.
Практика показывает, что при определении приближенного
влияния конструкций машин на величину колебательной мощ-
ности, излучаемой в виде нормальных опорам вибраций, доста-
точно принимать во внимание только вибрационные силы трех
взаимно перпендикулярных направлений (без учета моментов).
2. СПОСОБЫ ПОВЫШЕНИЯ ВИБРОИЗОЛИРУЮЩИХ
СВОЙСТВ КОРПУСОВ МАШИН
В практике машиностроения давно используются демпфирую-
щие вкладыши для снижения вибрации роторов. Внося в систему
трение, демпфирующие вкладыши не обеспечивали заметной вибро-
изоляции ротора от корпуса из-за большой собственной жесткости.
Значительное снижение жесткости встраиваемых в подшипники
элементов является одним из путей уменьшения действующих
на корпус со стороны ротора усилий в области низких и средних
частот [40, 126]. Величина виброизоляции ротора на упругих
элементах определяется соотношением их жесткости и сопротивле-
ния системы корпус — опорные связи. Изменением жесткости по-
датливых элементов в подшипниках удается влиять на критиче-
ские числа оборотов ротора. С помощью податливых элементов
может быть осуществлен перевод ротора в за критический режим.
Если с помощью упругих опор ротор переведен с докрпгического
режима (30—40% запаса по критическому режиму) в закритичо-
ский (примерно с 30°ь запаса), то вибронзолйрующпй эффект си-
стемы машина—амортизация—фундамент увеличивается на пер-
вой гармонике частоты вращения примерно на 6—8 дБ.
Значительное снижение виброактивности механизмов обеспечи-
вается подшипниковыми щитами специальной конструкции: мно-
гослойными, типа диафрагм с чередующимися податливыми
439
и массивными элементами различной геометрии в зависимости от
типа и особенности машины. Такие щиты позволяют получить виб-
роизолирующий эффект на частотах выше 200—300 Гц, в то
время как упругие опоры ротора снижают передаваемое усилие
на первых гармониках частоты вращения.
Другим способом снижения вибрации, возбуждаемой силами
в цилиндрической части корпуса, является изготовление цилин-
дрической оболочки с поперечными массивными и жесткими коль-
Рис. Х.10. Спектр вибрации насоса:
---------исходный;-------с измененной рамой; X— X — прогнозируемый
(по измененпю Л(_\
Д'
цами-шпангоутами. При отношении толщины колец к толщине
корпуса 3—5 перепад вибрации на них составляет примерно 10 дБ
в области частот выше 300—500 Гц. Кольца следует располагать
между участками крепления к корпусу полюсов (или лопаточного
аппарата) и лап машины.
Для области частот выше 200 Гц особенно эффективным является
конструирование механизмов с промежуточными упругими эле-
ментами в районе опорных поверхностей. Для обеспечения боль-
шей виброизоляции па этих элементах, между ними и амортизи-
рующими (фундаментными) конструкциями следует располагать
массивную плиту пли раму. Виброизолирующий эффект упругих
элементов проявляется, начиная с частот, когда их механическое
сопротивление становится меньше сопротивления опорной рамы
440
нлп плиты. При проектировании упругих элементов в районе опор
не возникает трудностей, так как эти элементы не влияют на рабо-
чие процессы машины и должны удовлетворять только условиям
ударостойкости.
Важной особенностью виброизолирующих элементов в районе
опор является то, что они изолируют колебания от всех сил, дей-
ствующих на корпус, независимо от места и направления прило-
жения сил.
Агрегатированная компоновка механизмов также способствует
снижению потока колебательной энергии в опорные и неопорпые
связи.
Одним из средств борьбы с вибрациями является также увеличе-
ние вибродемпфирующих свойств конструкций корпусов машин за
счет:
изготовления корпусов и рам из материалов с повышенным
коэффициентом потерь;
нанесения на конструкции корпусов и рам вибродемпфирую-
щих покрытий;
изготовления корпусов в виде двустенных конструкций с вяз-
ким заполнением.
Следует иметь в виду, что эффект от применения средств вибро-
демпфирования может быть получен только в области резонансных
колебаний конструкций.
На рис. Х.10 для примера приведены результаты испытаний
насоса до и после внедрения в опорных узлах корпуса виброизоли-
рующих элементов, предложенных автором и Е. Н. Афониным.
Видно, что эти элементы обеспечили снижение вибрации насоса
в среднем па 10 и более децибел в области частот выше 200 Гц.
На этом же рисунке приведен график ожидаемой вибрации насоса
по результатам экспериментально определенного изменения дей-
ствующей податливости корпуса насоса после внесения упругих
элементов. Видно довольно хорошее совпадение прогнозируемых
результатов с результатами опыта. Величина действующей подат-
ливости корпуса насоса определялась при допущении, что верти-
кальная вибрация вызывалась силами трех взаимно перпендику-
лярных направлений, моменты не учитывались. Рассматривались
только силы, действующие на корпус в районе подшипников.
Силы считались некоррелированными между собой.
Определение действующей податливости различных конструк-
ций корпуса с целью выбора оптимальною варианта может произ-
водиться в стадии готовности только корпуса или на моделях кор-
пуса.
ГЛАВА XI
ПРИНЦИПЫ И ПРАВИЛА КОНСТРУИРОВАНИЯ
МАЛОШУМНЫХ МАШИН И МЕХАНИЗМОВ,
ИХ ВИБРОАКУСТИЧЕСКИЕ НАДЕЖНОСТЬ
И ДОЛГОВЕЧНОСТЬ
Развитие науки о надежности машин показывает, что она имеет
различную форму в зависимости от типа рассматриваемой машины.
Например, для энергетических и многих других машин интересна
трактовка надежности как способности их сопротивления разру-
шению, данная акад. УССР С. В. Серенсеном и др. В этом случае
«отказом» машины будет достижение ею первого предельного тех-
нического состояния, т. е. достижения в ней одного из следующих
пределов: прочности, текучести, выносливости или устойчивости.
Для таких же машин, как станки, характерен уже другой подход,
развиваемый проф. А. С. Пропниковым и др. Характерным отка-
зом для станков является падение ниже нормы точности обработки
изделий. В соответствии с этим подходом формируются и другие
понятия теории надежности станков.
Для большого класса разнородных машин, объединяемых тер-
мином «малошумные», существенный интерес представляют «вибро-
акустическая надежность» и долговечность машин, основные поня-
тия которой ниже сформулированы [36 L
Класс малошумных машин все более расширяется.
1. ПОНЯТИЕ О ВИБРОАКУСГИЧЕСКОЙ НАДЕЖНОСТИ
И ДОЛГОВЕЧНОСТИ МАШИН И МЕХАНИЗМОВ
Надежность — это свойство машины или механизма выполнять
заданные функции, сохраняя свои эксплуатационные показатели
в заданных пределах в течение определенного промежутка времени.
Если это понятие применить к малошумным машинам, то для
них виброакустическая надежность — это свойство работать с тре-
буемыми величинами внброакустичсских характеристик в течение
определенного промежутка времени.
Виброакустическая надежность машины оценивается коэффи-
циентом надежности, который равен вероятности того, что за
определенный промежуток времени при заданных условиях экс-
плуатации машины ее виброакустичсские характеристики не пре-
взойдут величины, определяемой техническими условиями (нор-
мами). В соответствии с этим «виброакустическим отказом» ма-
шины является событие, при котором величина, виброакустических
характеристик превысит допустимую, определенную нормами.
«Виброакустическая долговечность» машины это ее свойство
сохранять виброакустическую работоспособность до предельного
442
состояния с необходимыми перерывами для технического обслужи-
вания и ремонтов. Время же работы машины до предельного со-
стояния, определенного в технической документации, называется
ресурсом машины. Предельное состояние машины обусловливается
физической стойкостью машины, опасностью ее дальнейшей экс-
плуатации или другими факторами.
Виброакустическая долговечность машины характеризует ее
способность сохранять свои виброакустические характеристики
с минимальными затратами на ее «виброакустический» ремонт.
Очевидно, что чем меньше суммарные затраты средств и времени,
необходимых для восстановления виброакустической работоспо-
собности малошумпой машины в течение всего периода ее эксплуа-
тации, тем выше ее виброакустическая долговечность. В соответ-
ствии с обычным показателем долговечности виброакустическую
долговечность ^ожио характеризовать коэффициентом техниче-
ского использования или коэффициентом долговечности
где Гг — время работы машины в течение всей эксплуатации;
У Г/ — время простоя машины по причине виброакустнческого
отказа (ушедшее на ремонт за весь период эксплуатации).
Отметим, что коэффициент технического использования пока-
зывает вероятность того, что машина работает, а не ремонтируется.
Очень важным для малошумных машин является и понятие
«виброакустическая ремонтопригодность» — свойство данного
класса машин, выражающееся в их конструктивной и эксплуата-
ционной приспособленности к предупреждению, обнаружению и
устранению виброакустических отказов с помощью проведения
технического обслуживания и ремонта (за малые сроки и жела-
тельно в условиях эксплуатации).
Очевидно, что виброакустическая ремонтопригодность, опре-
деляющая время затрат на ремонт У Го является составной частью
долговечности.
Важными являются и экономические показатели при оценке
виброакустической надежности малошумпых машин, так как
повышение их виброакустической безотказности и долговечности,
с одной стороны, связано с дополнительными материальными
затратами, но, с другой стороны, они ведут к повышению эффектив-
ности капитальных вложений, уменьшению затрат общественного
труда на виброакустический ремонт этих машин, к устранению
потерь от простоя объектов на ремонте, особенно когда они уни-
кальны или имеют специальное назначение.
Для выявления путей повышения виброакустической надеж-
ности малошумных машин особую роль играет раскрытие законо-
мерностей (причин) виброакустических отказов, т. е. изучение
«физики» отказов.
443
Все машины и механизмы в процессе эксплуатации подвержены
действию различных процессов, как внутренних, так и внешних;
все они вызывают изменение характеристик машин, в том числе
и виброакустических. Особенно вредными являются необратимые
процессы, приводящие к прогрессивному ухудшению параметров
машин с течением времени.
Наиболее важными с этих позиций являются следующие необ-
ратимые процессы, происходящие в машинах:
изнашивание кинематических пар;
ползучесть материала сильно нагруженных элементов;
перераспределение внутренних напряжений и коробление де-
талей в процессе длительной эксплуатации;
коробление элементов машин и рам, вызванное внешними на-
грузками;
рост усталостных трещин в деталях, испытывающих динамиче-
ские нагрузки;
коррозия и пр.
Закономерности изменения во времени виброакустических
характеристик машин определяются, очевидно, характером изме-
нения во время вышеперечисленных процессов.
Мы укажем, в первую очередь, на характер трех наиболее
важных необратимых процессов, которые обязательно имеют место
в любой работающей машине или механизме: трение, ползучесть и
усталость материалов.
Закономерности износа кинематических пар
Процесс износа кинематических пар состоит из трех стадий
(рис. XI.1): стадия I— приработка, когда имеет место уменьше-
ние интенсивности износа; стадия II—нормальный износ, при
этом имеет место постоянная ско-
рость изнашивания
~= const; (XI.2)
стадия III — катастрофический
износ, когда появляется возраста-
ние во времени интенсивности из-
нашивания.
Закономерности ползучести
Графики зависимости пластических деформаций от времени,
называемые кривыми ползучести, имеют вид, представленный на
рис. XI.2. Вид этих кривых зависит от напряжения и температуры,
при которых работает материал детали. Процесс ползучести можно
разделить также на три стадии (периода). На стадии / скорость
444
пластической деформации постепенно уменьшается; на стадии II
процесса ползучесть протекает с минимальной постоянной ско-
ростью Эта минимальная скорость на второй стадии зависит от
еР[ _
напряжения и температуры; ее ча-
сто определяют с помощью зави-
симости
= (XL3)
где величины k и п для каждого
материала зависят от температуры
и определяются экспериментально.
Заметим, что с ростом темпера-
туры и напряжения скорость пла-
стической деформации растет.
Рис. XI.2. Кривая ползучести
а продолжительность второй (нормальной с точки зрения эксплуа-
тации машины) стадии ползучести уменьшается.
В стадии III ползучести (участок СД) скорость деформации
нарастает, пока не наступает разрушение.
Закономерности усталостного разрушения
Сейчас выдвинут ряд теорий, объясняющих явления усталости,
накопления усталостных повреждений. Наиболее физической,
по-видимому, является гипотеза Шен л и, по которой предпола-
гается, что разрушение при процессе усталости происходит из-за
h развития глубины трещин, распростра-
няющихся в материале по закону
h - ЛеР", (XI.4)
где h — глубина трещины; п — число
циклов изменения напряжений; р —
коэффициент, зависящий от амплитуды
напряжений.
Графически эта закономерность
имеет вид, представленный на рис. XI.3;
из рисунка видно, что имеется доста-
точно продолжительная первая стадия, на которой глубина тре-
щины нарастает по линейному закону, так как разложение функ-
ции Шенли при малом числе циклов имеет вид
h А (1 + ₽н)
(ХТ.5)
и обычно где-то в зоне (7ч-8) 106 циклов начинается стремительное
нарастание глубины трещины и делается большой вероятность
усталостного разрушения.
Сравнение границ всех трех фундаментальных закономерно-
стей, определяющих необратимые процессы в работающих маши-
нах и механизмах,, показывает, что катастрофические, ненормаль-
но
< пые явления наступают в общем довольно резко и следуют за дли-
тельным периодом «нормальных» изменений, протекающих с по-
стоянной скоростью.
В этой связи хочется заметить, что в рационально спроектиро-
ванной матине у всех ее элементов должны наступать одновре-
менно третий период на кривых износа и ползучести и второй
на кривой Шенли.
С характером изменения трех отмеченных кривых теснейшим
образом связаны и закономерности изменения вибрационных ха-
рактеристик машин и механизмов. Действительно основными
источниками вибрации в машинах являются неуравновешенность
вращающихся частей, несоосности, нарушения геометрии кинема-
тических пар, рост зазоров в сочленениях. Эти величины изме-
няются обычно пропорционально износам, пластическим дефор-
мациям, вследствие этого и вибрация машины должна нара-
стать линейно во времени в процессе второго периода эксплуа-
тации машины; только при наступлении третьего этапа в одной из
отмеченных закономерностей должно появиться резкое нарастание
вибрации машины. Теоретический график изменения средних
величин вибрации машины в общем по своему характеру должен
повторять приведенные выше три фундаментальных графика.
Рассмотрение физики виброакустических отказов позволило
сделать следующие основные выводы:
а) эти отказы по своей природе являются «йзносовыми» (в ши-
роком смысле этого слова);
. б) для первой гармоники вибрации характерным является
нормальный закон распределения;
в) в течение «нормального» периода эксплуатации машины
изменение во времени, средних значений виброакустических ха-
рактеристик должно происходить по линейному закону;
г) «виброакустический» отказ, как правило, предшествует от-
казу физическому.
Последние два пункта могут явиться отправными для развития
систем контроля надежности машин в процессе эксплуатации.
Развитие «виброакустической надежности» позволяет, в частности,
упорядочить и сформулировать основные принципы и правила
конструирования малошумных машин и механизмов.
2. ПРИНЦИПЫ КОНСТРУИРОВАНИЯ МАЛОШУМНЫХ МАШИН
И МЕХАНИЗМОВ
На основании указанных выше закономерностей изменения
износа кинематических пар ползучести материалов, а также разви-
тия трещин во времени можно сформулировать следующие основ-
ные принципы конструирования малошумных машин и механизмов.
I. Рационально спроектированная малошумная машина
должна обладать равнонадежпостью виброакустической и физи-
ческой, т. е. машиной должны быть одновременно достигнуты
446
к концу срока эксплуатации как пределы прочности, текуч .сти,
усталости, предельные износы узлов, так и предельные величины
виброакустических характеристик, т. е. максимально допустимая
величина виброакустической характеристики получится в момент
достижения машиной третьей стадии на первых двух фундамен-
тальных кривых «износа» и второй стадии на третьей кривой «из-
носа». Износ здесь понимается в широком смысле слова.
Практика показывает, что существующие машины выполнены
без учета этого принципа и предельно допустимые уровни вибра-
ции с трудом обеспечиваются лишь при сдаче машин на заводах-
поставщиках. Для обеспечения одинаковой физической в вибро-
акустической надежностей недостаточно технологических меро-
приятий, необходимо рациональное использование в конструк-
циях малошумных машин следующих виброзадержпвающих узлов
(наряду с мероприятиями по борьбе в источнике):
а) упругие элементы в опорах роторов и валов, вращающиеся
или неподвижные (внутренняя пружинная амортизация), гидрав-
лическая внутренняя амортизация, упругодемпферные опоры;
б) двухкаскадные упругие элементы с промежуточной массой;
в) двухкаскадные упругие элементы с промежуточной массой,
эффективность которой усилена антивибратором (линейным, нели-
нейным, с демпфированием или без него), т. е. применение блока
внутренней упругоинерционной виброзащиты, аналогичного внеш-
нему двухкаскадному амортизатору-антивибратору, только здесь
этот блок должен гасить «двухкомпанентпые колебания», создавае-
мые ротором;
г) демпферы трения в элементах конструкции;
д) применение под опорами и в диафрагмах виброзадерживаю-
щих «лабиринтов» и пр.;
е) применение отдельной амортизации у статора при наличии
«сильного» взаимодействия элементов ротора и статора.
В некоторых случаях при проектировании малошумной ма-
шины приходится идти на некоторое ухудшение ее главнейших
параметров— удельного веса и удельного объема, снижая окруж-
ные скорости; этот путь является непрогрессивным, к нему при-
ходится обращаться только в тех случаях, когда все остальные
мероприятия не дают требуемых результатов, а требования к мало-
шумности являются жесткими.
2. Малошумная машина должна иметь стабильные виброаку-
стические характеристики (принцип стабилизации виброакустиче-
ских характеристик). Для этой цели в машине используются раз-
личного типа узлы и выполняются мероприятия конструктивного
и технологического характера, обеспечивающие стабильность
виброакустических характеристик в течение длительного периода
эксплуатации; эти мероприятия сводятся к уменьшению углов
наклона кривых износа и ползучести вл второй стадии, что дости-
гается с помощью применения сочленений и деталей, обладающих
хорошим качеством поверхностей, меньшим износом и ползучестью,
447
большей сопротивляемостью деформированию, усталостным по-
ломкам, коррозии. Эти мероприятия обеспечивают стабилизацию
основных трех источников вибрации:
а) дисбалансов вращающихся частей машины;
б) несоосностей валов и опор;
в) нарушений геометрии элементов сопрягающихся узлов.
Из технологических мероприятий по монтажу машин, кроме
юстировки, важное значение имеет стабилизация динамических
и прочностных свойств элементов ротора в специальных агрегатах
Рис. XI-4. Изменение во времени
среднего значения величины ампли-
туды основной гармоники:
L9 — максимально допустимое экспе-
риментальное значение внброакустичс-
ского параметра; L3 — заводское зна-
чение внброакустнческого параметра
(разгонно-балансировочных уст-
ройствах). Уменьшение скорости
износа трущихся пар достигается
конструктивными приемами, в ча-
стности подбором материалов пар
и их взаимным расположением;
соблюдением принципа равномер-
ности износа по всей поверхности
трения пар; компенсацией износа
в парах; применением самоустана-
вливающихся сопряжений тру-
щихся поверхностей и пр.
Компенсация несоосностей ро-
торов осуществляется с помощью
упругих элементов в опорах; «из-
ломом» упругой линии ротора на
промежуточной дополнительной
опоре; применением промежуточ-
ных опор, соединенных с дем-
пферами сухого трения; применением податливых упругих муфт
и «муфт-механизмов», компенсирующих несоосность практически
без реактивных сил и моментов.
3. Малошумные машины должны быть ремонтопригодными
с позиций виброакустических характеристик. С этой целью при
проектировании необходимо предусмотреть включение в конструк-
цию таких узлов, постоянно вмонтированных датчиков, приспособ-
лений и пр-, которые могут обеспечить с минимальными затратами
труда и времени восстановление виброакустических характери-
стик машин в условиях эксплуатации с помощью воздействия на
источники вибрации.
Такими узлами могут быть: балансировочные головки или си-
стемы легко устанавливаемых грузов; датчики перемещений ро-
тора и опор; датчики динамических усилий, передаваемых опо-
рами; юстировочные приспособления для восстановления соос-
ности машин в сложных агрегатах; легкосъемные цапфы валов,
сменяемые при существенных износах; определенный интерес
имеют работы по созданию специальных смазывающих веществ,
обеспечивающих восстановление износа (в сочетании с нужным
подбором материалов трущихся пар). Смысл «внброакустического»
448
ремонта состоит в переходе с начальной наклонной прямой изме-
нения средних значений виброакустического параметра на более
низкую прямую» обеспечивающую достижение в конце срока экс-
плуатации машины (при достижении машиной предельного «физи-
ческого» состояния) предельного виброакустического состояния
(рис. XI-4); вообще говоря, такого типа ремонтов может быть
несколько за полный ресурс машины.
4. Малошумная машина должна быть оснащена такими дат-
чиками, которые позволяют осуществлять непрерывный контроль
виброакустических характеристик в процессе эксплуатации и
контроль ее общей надежности, что особенно важно для уникаль-
ных стационарных, судовых и авиационных машин, к которым
предъявляются повышенные требования с точки зрения надеж-
ности.
3. ОСНОВНЫЕ ПРАВИЛА И УКАЗАНИЯ
ПО ПРОЕКТИРОВАНИЮ МАЛОШУМНЫХ МАШИН
Обобщая современный опыт создания и доводки различных ти-
пов малошумных машин и механизмов, можно сформулировать
следующие конкретные рекомендации, которых следует придержи-
ваться при проектировании машин и механизмов.
1. Проектируемый малошумный агрегат должен иметь доста-
точно четкую теоретическую виброакустическую расчетную мо-
дель для возможности прогнозирования его виброакустических
свойств, в частности хотя бы резонансных состояний.
2. В машине должен быть осуществлен рациональный выбор
параметров рабочего процесса, выбор формы и геометрии взаимо-
действующих элементов ротора и статора с точки зрения обеспе-
чения минимальности динамических составляющих сил их взаимо-
действия. Так, например, в насосах с помощью этих мероприятий
можно существенно снизить «лопастную» гармонику, а в электро-
машинах •— «зубцовую».
3. Агрегат на рабочих оборотах не должен иметь резонансных
режимов, вызываемых основными источниками вибрации, харак-
терными для данного типа машины.
4. При изготовлении малошумной машины должны приме-
няться материалы и технология наивысшего уровня.
5. Использование «малошумных» узлов и агрегатов в сложных
машинах: предпочтение машинам с вращающимися массами: пред-
почтение подшипникам скольжения перед подшипниками качения
(даже «малошумных» серий); исключение из конструкции, где
можно, редуктора; отказ от «плавающих» муфт и шлицевых вали-
ков, их замена упругими безударными муфтами или «муфтами-
механизмами».
6. Применение в машинах узлов и деталей из сильно демпфи-
рующих материалов, особенно деталей «виброзвуковы.х мостов»,
таких как втулки под подшипниками качения; установочные
29 Ш В. Григорьев 449
клинья ПОД вкладыши подшипников скольжения; диафрагмы
(щиты); опорные лапы и пр.
В некоторых случаях быг ает рациональным применение обли-
цовки и покрытий некоторых поверхностей конструкции машин
специальными виброзвукопоглощающими материалами.
7. Рациональное конструирование узлов крепления машины;
при этом следует удовлетворить следующим требованиям: разме-
щение их в плоскости, проходящей через ось ротора; возможность
организации эффективной борьбы с вибрацией на внешних упругих
связях (амортизаторах), например с помощью применения «аморти-
заторов-антивибраторов» (одно- и двухкомпонентиых).
8. Применение внеопорных связей с возможно малой жест-
костью, установка в них устройств, задерживающих высокочастот-
ный структурный шум, распространяющийся по ним.
В заключение следует подчеркнуть: сформулированные прин-
ципы и правила проектирования являются той научной базой,
с помощью которой можно разработать техническое задание по
проектированию малошумных машин и механизмов.
4. НЕКОТОРЫЕ ЗАМЕЧАНИЯ2О ПУТЯХ РАЗВИТИЯ
МАЛОШУМНЫХ МАШИН И МЕХАНИЗМОВ
К малошумным машинам и механизмам следует последова-
тельно применить все известные средства, ведущие к сохранению
виброакустических характеристик и к стабилизации величины
самих источников вибрации, а именно:
1) стабилизация уравновешенности роторов, валов, муфт и
других вращающихся частей, в частности, недопустимо применение
конструкций, требующих в процессе общей сборки выполнения
сборки ротора;
2) стабилизация износа трущихся пар (подшипников, муфт
и пр.);
3) стабилизация соосности опор многоопорных роторов;
4) введение компенсирующих узлов в линию ротора:
а) компенсация дисбаланса простейшими балансировочными
устройствами;
6) «излом» линии многоопорного ротора с помощью применения
специальных шаровых муфт на промежуточных подшипниках;
эти муфты передают только крутящий момент и осевую силу, но не
передают изгибающего момента, который при обычной схеме ротора
может возникать из-за дефектов муфты, из-за несоосностей опор,
порождаемых различными причинами: податливостью общей рамы
или фундамента, температурными деформациями, старением, де-
формациями опорных конструкций и пр.;
в) применение упругих опор под подшипниками многоопорных
роторов, повышенная податливость (относительно малая жест-
кость) опор компенсирует вредное действие указанных выше несо-
осностей.
450
В малошумных машинах, где целесообразно следует последо-
вательно применять внутреннюю амортизацию (упругие элементы
под опорами ротора): она компактна, имеет малый вес и не увели-
чивает габариты машины. С помощью внутренней амортизации
большие массы машины, обязательные по конструктивным сооб-
ражениям (корпусы, статоры, рамы и пр.), превращаются в проме-
жуточные виброзащитные массы.
Внутренняя амортизация необходима для машин, у которых
имеется повышенная неконтролируемая нестабильность дисба-
ланса ротора (газовыетурбины, электромашины и др.). В машинах,
имеющих сильное динамическое взаимодействие (имеются в виду
знакопеременные силы) между элементами ротора и статора, можно
сделать два раздельных внутренних каскада амортизации: один —
в опорах ротора, а второй — между элементами статора и корпуса.
Приведем следующие примеры.
1. Турбины. В них можно иметь внутреннюю амортизацию
только в опорах ротора, так как в машинах этого типа имеется
только один сильный источник вибрации в зоне низких и средних
частот (дисбаланс ротора), переменное же газодинамическое взаи-
модействие между лопатками ротора и статора, с наших позиций,
не существенно. Для тяжелы к роторов следует применять внутрен-
нюю упругоинерционную виброзащиту (ВУИВ).
2. Электромашины. В них следует делать амортизацию для
ротора и для статора, так как в данном случае имеет место сильное
динамическое взаимодействие между элементами ротора и статора.
Таким образом, в этом случае кроме дисбаланса ротора сущест-
венный источник вибрации (гармоника «зубцовой» частоты) имеется
и у элементов статора.
3. Насосы. В зависимости от типа (осевой или центробежный)
следует разрабатывать свою систему внутренней амортизации как
для ротора, так и для статора раздельно.
4. Редукторы. Для этих механизмов характерно очень сильное
динамическое взаимодействие между элементами ротора и статора
(имеет место механическая связь), поэтому здесь целесообразно
упругое крепление неподвижных звеньев в корпусе или всего кор-
пуса, что менее конструктивно, и применение упругих опор у вы-
ходных валов.
Во всех перечисленных выше примерах машин и механизмов
с помощью внутренней амортизации можно превратить большие
массы корпусов с рамами в дополнительную промежуточную массу,
обладающую большим виброзащнтным эффектом; вместе с тем эти
массы необходимы для агрегатов по конструктивным соображе-
ниям, а не введены в нее специально для целей виброгашения;
внутренняя амортизация «не видна» потребителю. В этом и состоит
смысл применения «внутренней» амортизации по сравнению с обыч-
ной схемой двухкаскадной амортизации, у которой все элементы
(амортизаторы, промежуточная масса) вынесены за габариты ма-
шины и являются теми новыми элементами, которые ухудшают
29* 451
весовые и габаритные характеристики машин; более того, в некото-
рых случаях двухкаскадная внешняя амортизация вообще не
применима из-за требований центровки машин в многомашинных
агрегатах и не решает задачи борьбы с оборотной гармоникой.
Для завершения характеристики эффективности внутренней
амортизации необходимо указать и на два следующих важных
эффекта, создаваемых ею
1 Возможность перевода ротора на закритический режим и,
следовательно, уменьшение величины возмущающей силы, пере-
дающейся от ротора на опоры и далее в корпус (случай «легких»
и «средних» по тяжести роторов).
2 . Уменьшение возмущающих сил, возникающих за счет несо-
осности опор роторов, так как при наличии внутренней амортиза-
ции несоосностп легко компенсируются за счет деформации упру-
гих элементов, расположенных под опорами.
В тех случаях, когда роторы являются «тяжелыми» и когда они
имеют (по своей природе) большой и нестабильный в процессе дли
тельной эксплуатации дисбаланс, и особенно в случае, когда ма-
шина работает на закритическом режиме и без применения спе-
циальных упругих элементов (например, за счет большой длины
ротора), тогда обычная внутренняя амортизация иа низких часто-
тах не может быть осуществлена эффективной па частоте вращения
из-за большой потребной жесткости упругих элементов, ибо им
приходится в данном случае воспринимать большую статическую
силу (силу веса ротора). Такое положение имеет место, папримср,
во многих электрических машинах, турбинах. В этом случае оста-
точная периодическая сила, передающаяся через достаточно жест-
кую упругую связь, расположенную под опорами ротора, является
достаточно большой. Выполненные нами исследования показы-
вают, что эту силу можно существенно ослабить с помощью приме-
нения двухкаскадной амортизации с промежуточной массой, часть
которой является настроенным антивибратором (на частоту враще-
ния). Этот антивибратор создает (без учета сил трения) на проме-
жуточной массе узел колебаний у вертикальной и горизонтальной
компонент движения; следовательно, динамические усилия лока-
лизуются на промежуточном теле и не передаются далее на корпус
и опоры машины. Этот метод борьбы с колебаниями вблизи с источ-
ником мы назвали внутренней упругоинерпионной виброзащитой.
Она почти не изменяет габаритов и веса машины. Ее расчет описан
нами ранее.
5. НЕКОТОРЫЕ ВОПРОСЫ КОНСТРУИРОВАНИЯ
МНОГОМАШИННЫХ МАЛОШУМНЫХ АГРЕГАТОВ
Блочные конструкции агрегатов обладают определенными до-
стоинствами, главнейшими из них будут:
1) весовые и габаритные преимущества по сравнению с системой
«разъединенных» агрегатов;
452
2) монтажные и эксплуатационные удобства («все в одном
месте»);
3) облегченная задача звукоизоляции (борьба с воздушным
шумом);
4) удобство применения во многих случаях эффективной и кон-
структивно легко осуществляемой двухкаскадной амортизации
(для всех агрегатов сразу!),—это существенно ослабляет остроту
задачи борьбы со средиечастотным и высокочастотным структур-
ными шумами в окружающих конструкциях и среде, при этом, од-
нако, возрастает роль борьбы с низкочастотными колебаниями.
Решение этой части задачи виброизоляции является трудным из-за
отсутствия отработанных инженерных методик расчета таких
систем па свободные и вынужденные колебания. Подчеркиваем,
что здесь без учета упругоииерционных свойств промежуточных
конструкций невозможно получить даже качественно правиль-
ные результаты. Понятнее таких расчетах, их постановку мы дали
в предыдущей главе.
Наряду с достоинствами блочных конструкций агрегатов сле-
дует отметить следующие их недостатки и трудности их создания.
I. Появление большего числа гармоник возмущающих сил и
моментов, создаваемых роторами и валами сблокированных агре-
гатов; следовательно, существование большей трудности устране-
ния резонансных колебаний в системе.
2. Появление возмущающих гармоник, создаваемых статиче-
скими и динамическими несоосностями роторов и валов сблокиро-
ванных агрегатов.
3. Появление возмущающих гармоник, создаваемых соедини-
тельными муфтами.
4. Появление низкочастотных вынужденных колебаний типа
«биений», передающихся через амортизацию.
5. Отсутствие инженерной методики расчета на собственные
частоты единой системы рама, нагруженная агрегатами, — амор-
тизация—фундамент.
6. Отсутствие методики подбора амортизации, учитывающей
упругость промежуточных конструкций и фундаментов, т. е. от-
сутствие инженерной методики расчета этих конструкций на вы-
нужденные колебания и ударостойкость.
Оценив основные положительные и отрицательные свойства
блочных конструкций многомашинных агрегатов, можно сделать
следующий основной вывод: агрегаты такого типа могут быть ра-
циональными как обладающие лучшими весовыми, габаритными
и эксплуатационными характеристиками, если они будут пра-
вильно спроектированы с точки зрения их виброакустических
свойств на низких частотах. Для этого необходимо, прежде всего,
развить инженерные методы расчета низкочастотных колебаний и
методику подбора амортизации с учетом упругоинерционных ха-
рактеристик рам и других промежуточных конструкций, пригод-
ные для применения еще в стадии проектирования многомашин-
453
кого агрегата; необходимо, правильно назначать угловые скорости
и направления вращения роторов и валов агрегатов, входящих
в блок.
Анализ направлений развития блочных конструкций рассмо-
трим на примере двухмашинного агрегата, это наиболее часто
встречающийся ai регат; к агрегатам такого типа относятся:
1) турбокомпрессоры стационарные и авиационные (это ГТД);
2) турбонасосы;
3) турбогенераторы стационарные, судовые и пр.
Пусть к конструкции блока предъявляются повышенные весо-
вые и особенно габаритные требования, что имеет место, например,
в авиации. В соответствии с этим в результате довольно интенсив
него развития газотурбинных двигателей перешли от четырехопор-
ных схем роторов к трехопорным, как наиболее рациональным,
улучшившим габаритные и весовые характеристики силовых уста-
новок. Первоначальные конструкции были по существу механиче-
ским соединением двух самостоятельных агрегатов: компрессора
того или другого типа и газовой турбины; лишь позже появились
конструкции, в которых органически слиты между собой оба агре-
гата. Представляется, что и агрегаты типа турбогенераторов, если
к ним предъявляются повышенные требования сточки зрения габа-
ритов и веса что определяется их назначением, должны также
пройти аналогичный путь своего конструктивного совершенство
вания. Однако выбор типа ротора для двухмашинного агрегата
важен также и с точки зрения получения у него хороших вибро-
акустических характеристик. В этой связи мы и отметим положи-
тельные и отрицательные свойства агрегатов с трехроторным и
четырехроторным ротором.
Двухмашинный агрегат, имеющий четыре опоры, обладает
следующими недостатками.
1. Ухудшение габаритов и веса самого агрегата.
2. Удлинение промежуточной рамы, что ведет к сильному паде-
нию ее жесткости и увеличению виброактивности всего агрегата.
3. Наличие соединительной муфты, являющейся новым силь-
ным источником виброактивности, она же является одной из важ-
ных причин падения надежности всего агрегата.
4. Наличие двух упорных подшипников вместо одного (у трех-
опорной схемы).
5. Организационные трудности, возникающие при доводке
виброакустических характеристик спаренных агрегатов, когда
спариваемые агрегаты выполняются на различных предприятиях.
В том же случае, если практически невозможно организовать
проектирование и изготовление одной организацией обеих частей
двухмашинного агрегата (в случае, когда эти части сильно отли-
чаются по характеру технологии изготовления), может быть и
целесообразно делать двухмашинные спарки по схеме четырех
опор при условии, что общая динамика спарки обязательно и тща-
тельно прорабатывается еще в процессе проектирования.
СПИСОК ЛИТЕРАТУРЫ
! А л е к с е е в А. М., С б о р о в с к и й А. К. Судовые виброгасители.
Л., Судпромгнз, 1962, 196 с.
2. А и а и ь е в И. В. Справочник по расчету собственных колебаний упру-
гих систем. М.—Л., Гостехиздат, 1946, 223 с.
3. А н а н ь е в И. В., Тимофеев П. Г. Колебания упругих систем
в авиационных конструкциях и их демпфирование. М., «Машиностроение»,
1965, 526 с.
4 Артоболевский И. И., ГеикипМ. Д., Сергеев В. И. Аку-
стическая динамика машин.—«Вестник АН СССР», 19Q8, № 11, с. 50—59.
5. Бабаков Н М. Теория колебаний. М , «Наука», 1965, 560 с.
6. Б а б и ц к и й В- И Кобринский А. Е. Электродинамический
демпфер. — «Известия АН СССР. Механика и машиностроение», 1962, № 3,
с. 81-84.
7. Балансировка и вибрация электрических машин М., ЦИНТИЭП, 1961,
100 с.
8. Бейзельман Р Д., Цыпкин Б. В Подшипники качения. М
Машгиз, i960, 563 с.
9. Белецкий Д Г Прогрессивная технология насосостроения. М ,
«Машиностроение», 1970, 367 с.
10. Б е л я к о в с к и й II. Г. Конструктивная амортизация механизмов,
приборов и аппаратуры на судах. Л., «Судостроение», 1965, 523 с
11. Бидерман В. Л Прикладная теория механических колебаний.
М., «Машиностроение», 1972, 320 с.
12. Б и р гер И. А., Па нов ко Я Г Прочность, устойчивость, коле-
бания. Т. 3. М., «Машиностроение», 1968, 567 с.
13. Б р а л о в с к и й М. А., Л и с и ц ы и II. С., Сивков -А П. Иссле-
дование и устранение вибрации турбоагрегатов. М., «Энергия», 1969, 232 с.
14. Б р а в о в с к и й М. А., С и в к о в А. П Балансировка роторов турбо-
генераторов в собственных подшипниках. М-—Л., «Энергия», 1966, 143 с.
15. Б у р г в и ц А. Г., Завьялов Г. А. Устойчивость движения валов
в подшипниках жидкостного трения. М , «Машиностроение». 1964, 148 с
16. В а р а в а В. И. Анализ методов оптимизации внброзащитных систем —
«Прикладная механика», 1971. т. 7, вып. 3, с. 111 -118.
17. Виброакустическая активность механизмов с зубчатыми передачами
Под ред. М Д. Генкина. М , «Наука», 1971. 254 с
18. В л а д н м и р о в А. С. Исследование динамических гасителей для
самолетов с двухроторными двигателями. Автореф. днсс. Л., СЗП11, 1970, 18 с-
19. В л а д и м и р о в А. С., Р о г а ч е в В М. Расчет собственных частот
поперечных колебаний роторов многоступенчатых центробежных насосов. —
«Энергомашиностроение», 1970, К» 11, с. 25—28
20. ВольпертЭ. Г. Динамика амортизаторов с нелинейными упругими
элементами. М., «.Машиностроение», 1972, 136 с.
21. Воронецкий Б. Б О частотах собственных колебаний некоторых
узлов авиационных электромашин. —«Труды МАИ», 1959, вып. 110 с. 4 I—64-
22. Воронецкий Б. Б. Расчет частот собственных колебаний ярма
машин постоянного тока. — «Вестник электропромышленности», 1957, № 9,
с. 24—28
455
23. Воронецкий Б. Б. Собственные частоты колебаний статоров элек
тродвигателей^ переменного тока. — «Вестник электропромышленности», 1956,
24. Воронов А. А. Основы теории автоматического управления. Т. 1.
М.—Л., «Энергия», 1966, 372 с.
25. Гельфанд Э. Е. Расчет собственных крутильных колебаний уста-
новок с редукторами на ЭВЦМ. — В кн.: Машиностроение и металлургия Ки-
ровского завода. Л., «Машиностроение», 1970, с. 155—161.
26. Г е м к е Р. Г. Неисправности электрических машин. Л., «Энергия»,
1969, 272 с.
27. Двигатели внутреннего сгорания- Сборник статей НИИИиформтяж-
маша. М., 1972, с. 1—24.
28. Генкин М. Д., Яблонски й В. В. Поток энергии колебаний как
критерий виброактивпостн механизма. — «Машиностроение», 1965, № 5,
с. 55—58.
29. Г л а з ы р и и В С. Способы уменьшения динамических нагрузок,
передаваемых на несущие конструкции. — «Строительная механика и расчет
сооружений», 1971, Ns 3, с. 43—47.
30. Годунове. К., Рябенький В С. Введение в теорию разност-
ных схем. М., Физматгиз, 1962, 340 с.
31. Горелик А. М., Певзнер Я- М. Пневматические и гидропнев-
матнческие подвески. М., «Машиностроение», 1965, 319 с.
32. Г р и г о р ь е в Е. Т. Расчет и конструирование резиновых аморти-
заторов. М., Машгиз, 1960, 160 с.
33. Григорьев Н. В. Динамика и надежность машин и механизмов.
Тезисы докладов X НТК СЗП11. Л., 1969, с. 5—6.
34. Григорьев Н. В Нелинейные колебания элементов машин и со-
оружений. М-—Л., Машгиз, 1961, 256 с.
35. Григорьев Н. В. Динамические демпферы критических состояний
вращающихся роторов турбомашин-—В кн.: Колебания турбомашин. М..
изд. АП СССР, 1956, с. 57-68.
36. Григорьев Н. В. Принципы конструирования малошумных ма-
шин и механизмов, их виброакустическая надежность и долговечность. Тезисы
докладов VII Всесоюзной акустической конференции. Л., 1971, с. 146.
37. Григорьев Н. В. Расчет колебаний сблокированных и амортизи-
рованных машин и механизмов. Тезисы докладов VII Всесоюзной акустической
конференции. Л., 1971, с. 164—165.
38. Г р и г о р ь е в Н. В., И в а н о в а В. Ф. Теория работы двухкомпо-
нентного амортизатора-антивибратора. — «Труды МИХМа», 1971, выв. 39,
с. 154—157.
39. Григорьев 11. В., Рогачев В. М Двухкорпусиый центробеж-
ный насос. Авт. свид. Ns 276738.
40 Г р и н к е в и ч В. К-, Игнатьев Э. И. Упругие опоры подшип-
ников скольжения. В кн.: Виброакустическая активность механизмов с зуб-
чатыми передачами. М-, «Наука», 1971, с. 113—119.
41. Гуров А. Ф. Расчеты на прочность н колебания в ракетных двигате-
лях. М., «Машиностроение», 1966, 455 с.
42. Г у с а р о в А. А., Д и м е н т б е р г Ф. М. Уравновешивание гибких
роторов с распределенной и сосредоточенной массами. — В кп.: Проблемы проч-
ности в машиностроении. М., изд. АН СССР, 1960, вып. 6, с. 5 —37.
43. Д е и Гартог Дж. П. Механические колебания- М., Физматгиз,
1960, 580 с.
44 Дербаремдикер А. Д. Гидравлические амортизаторы автомо-
билей М . «Машиностроение», 1969, 238 с.
45. Д е т и н к о Ф. М., Загородная Г. А., Ф а с т о в с к и й В. М.
Прочность и колебания электрических машин. Л., «Энергия», 1969, 440 с.
46. Дизели. Справочник. Под ред. В. А. Ваншейдта. М- -Л., «Машино-
строение», 1964, 599 с.
47 Ди.ментбергФ М. Изгибные колебания вращающихся валов
М., изд. АП СССР, 1959. 247 с.
456 ’
48. Л и м е н т б е р г Ф. M., Ill а т а л о в К. Т., Г у с а р о в Л. Л. Коле-
бания машин. М„ «Машиностроение», 1964, 308 с.
49. Длин А. М. Математическая статистика в технике. М., «Сов. наука»,
1958, 466 с.
50. ДондошанскииВ. К- Расчет колебаний упругих систем на элек-
тронных вычислительных машинах. М.—Л., «Машиностроение», 1965, 368 с.
51. Ду ан Н. И- Анализ причин и рекомендации по снижению вибрации
судовых машин и механизмов на частоте вращения — «Технология судострое-
ния», 1965, № 4, с. 45—48.
52. Жи рицки й Г. С, С т р у н к и н В. А. Конструкция и расчет на
прочность деталей паровых и газовых турбин. М , «Машиностроение», 1968,
520 с.
53 Зинченко В И. Шум судовых двигателей. Л., «Судостроение»,
1957, 271 с.
54 Зотов Б Н. Выбор числа лопаток колеса и направляющего аппарата
центробежного насоса.—«Вестник машиностроения», 1972, Ns 11, с. 33—36.
55- 3 у х о в и ц к и й С. II., Авдеев а Л. И. Линейное и выпуклое i ро-
граммированпе. М , «Наука», 1967, 460 с.
56. Иванов В. П. Некоторые вопросы колебаний лопаточных венцов в
других упругих тел. обладающих циклической симметрией. — В кн . Проч
ность и динамика авиационных двигателей. М., «Машиностроение», 1971, вып. 6,
с. 113—132.
57. И в а н о в а В. Ф. Активная двухкомпонентная инерционная вибро-
защита роторных машин. — «Труды СЗПИ», 1972, № 18, с. 35—41
58. Ива н ова В. Ф. Теоретическое и экспериментальное исследование
двухкомпонентного амортнзатора-аптивибратора. Автореф. дисс. Л . 1972, 20 с.
59. И в о в и ч В. А. Переходные матрицы в динамике упругих систем-
М., «Машиностроение», 1969, 200 с.
60. Инструкция по проектированию н расчету виброизоляции машин с ди-
намическими нагрузками. М., Госстройиздат, 1956, 58 с.
61. Исакович М. М., Клейман Л. И., П е р ч а и о к Б- X. Устра-
нение вибраций электрических машин. Л., «Энергия». 1969. 215 с.
62. Истомин П. А. Динамика судовых двигателей внутреннего сгора-
ния- Л., «Судостроение», 1964, 288 с.
63 Исто м и н П. А. Крутильные колебания в судовых ДВС. Л., «Судо-
строение», 1968, 304 с.
64. PI о р и ш Ю. И. Защита самолетного оборудования от вибрации. М.,
Оборонгиз, 1949, 223 с.
65. Иоффе Р. Л., П а н ч е и к о В. И. К исследованию влияния чисел
лопастей рабочих колес гидродинамических машин на их виброакустические
характеристики. —«Машиноведение», 1972, № 1, с. 20—24.
66. Карман Т-, Био М. Математические методы в инженерном Деле
Пер. с англ. М., Гостехиздат, 1948, 424 с.
67. К е л ь з о н А. С., Яковлев В. И. Переход через зону автоколе-
баний жесткого ротора, вращающегося в подшипниках скольжения. Доклады
АП СССР. М., 1970, № 4, с. 780—783.
68. Кемпнер М- Л. Расчет маятниковых антивибраторов изгибных ко-
лебаний коленчатых валов. — В кн.: Поперечные колебания и критические
скорости. М., изд. АП СССР, 1953, вып. 2, с. 172—193.
69. Кер-Вильсоп У. Вибрационная техника М.. Машгиз, 1963,
70 К и .м Я- А. Кавитационные испытания рабочих колес турбонасосов —
В кн.: Турбостроение. Л., ЛДНТП, 1959, вып. 2, с. 38 -40.
71. К и м Я- А., Д у а и Н- И., Воронов В. Ф. Направляющий аппарат
многоступенчатого центробежного насоса. Авт. свид. № 281159.
«2. Клюкин И. И. Борьба с шумом и звуковой вибрацией на судах.
Л., «Судостроение», 1971, 416 с.
73. Ковалев М. И., М о р ж а к о в С. П., Терехова К. С. Дина
мическое уравновешивание роторов гироскопических систем. М., Оборонгиз,
4о7
74. К о з л я п и н о в Т. П., Бондаренко В. И. Особенности балан-
сировки роторов на радиальных шариковых подшипниках при малых дисбалан-
сах- — В кн.: Теория и практика уравновешивания машин и приборов. М-,
«Машиностроение’’, 1970, с. 45—47.
75. Колесил кН В. Статическая и динамическая балансировка. М —Л.,
Машгнз, 1954 , 244 с.
76. Колонский М 3. Нелинейная теория виброзащитных систем.
М.—Л., «Наука», 1966, 318 с
77. Ко лов с кий М 3. Исследование эффективности виброизоляции
двигателей.—«Труды СЗГ1И», 1972, As 18, с. 43—46.
78. К о р о в ч и н с к и й М. В. Теоретические основы работы подшип-
ников скольжения. М., Магпгиз, 1959, 403 с.
79. К р е н д е л л С. Случайные колебания. Пер. с англ. М., «Мир», 1967,
356 с.
80. Кривцов Ю. В.. П е р н и к А Д. Пение гребных винтов. — «Судо-
строение», 1957, Ns 10, с. 9—14.
81 К р ы л о в А. II. Вибрация судов. Л., ОПТИ, 1936, 442 с.
82. К у Д р я ш е в Л Н. Уравновешивание быстроходных роторов малым
1973°М 'Р^308 — В кн" Колебания и уравновешивания роторов. М., «Наука»,
83. К у р з о н А. Г Судовые, паровые и газовые турбины В 2 х т. Л-
Судпромгнз, 1958—1962, 724 с.
84. К у ш у л ь М Я . Ш л я х т и и А. В. Уравновешивание гибких ро-
торов. — «Известия АН CCG3 Механика и машиностроение», 1964, № 2, с. 61—
П а п п а М II Гибкие роторы судовых турбин. Л., «Судостроение»,
86. Лев и и А. В. Рабочие лопатки и диски паровых турбин. М-—Л-,
Госэнергоиздат, 1953, 624 с.
87. Л и зо ту б В. А. Деформация дорожек качения подшипников при
монтаже шпиндельных узлов станков — «Станки и инструменты», 1970, Ns 9,
88. Л и п с м а н С. Г!.. М у з ы к а А. Т., Л и п с м а и В. С Предупрежде-
ние и устранение вибрации роторных машин. Киев, «Техника», 1968, 196 с.
89 Л о м а к и и А. А. Расчет критического числа оборотов и условия обес-
печения динамической устойчивости роторов высоконапорных гидравлических
машин с учетом сил, возникающих в уплотнениях. — «Энергомашиностроение»
1958, № 4, с. I -5.
90. Л у к а и и н В. Н. Шум автотракторных двигателей внутреннего сго-
рания. М., «Машиностроение», 1971, 271 с.
1952^43^ а л к 11 11 И- Г. Теория устойчивости движения. М.—Л., Гостехиздат,
92. Масленников К- II. Устранение вибраций двойной и оборотной
частоты ротора турбогенератора типа ТВМ-300. — В кн.: Высокоиспользован-
ные^ турбо- и гидрогенераторы с непосредственным охлаждением. Л., 1971,
93. Мартышкин А. Е. Подшипник качения- Ант. евнд. №211159-
94. М а р ц и н к о в с к и й В. А. Гидродинамика и прочность центробеж
ных насосов. М., «Машиностроение». 1970, 271 с.
95. Методика статистической обработки эмпирических данных- РТМ 44—62-
М Стандартгиз, 1963, 112 с
96. Моисеев A. А-, Розенберг А. II. Расчет прочности судовых,
паровых и газовых турбозубчагых агрегатов М,, «Машиностроение», 1970, 432 с
97. М у р к е с Н. И.", Шпринеман В. Г. Шум и вибрация электри-
ческих машин. В кн.: Борьба с шумом. Под ред. Е. Я- Юдина М., 1964,
с. 301—337.
98. Найденко О. К., Петров П. П. Амортизация судовых Двига
телей и механизмов. Л , Судпромгиз. 1962, 288 с.
99. Никольский Л. 11. Фрикционные амортизаторы удара М-, «Ма
шиностроение», 1972, 171 с.
450
100 Новожилове. Я. Попков В. И. Селиванов К. И.
Устройство для измерения энергии колебаний излучаемой механизмами в опор
ные связи. Авт. свид. № 14778J.
101. Новиков Л. 3. Определение собственных колебаний электродви-
гателя, связанных с нелинейной упругостью i одшипннков. — «Известия АН
СССР. Механика и машиностроение», 1961, № 6, с 84—96
102. ОлимпиевВ И. Собственные и вынужденные колебания роторов
на подшипниках скольжения. —«Труды ЦКТИ», 1964, вып. 44, с. 54—70.
103. Олимпиев В. И. Экспериментальное исследование вибраций ро-
торов па подшипниках скольжения. — «Труды ЦКТИ», 1964, вып. 44, с. 97—
108.
104. Ополченцев А. М Исследование причин вибрации судовых порш-
невых насосов и разработка путей и средств ее снижения. Аеторсф. дисс М ,
1Э70, 20 с.
105. Пановко Я Г. Введение в теорию механических колебаний. М-,
Физматгиз, 1971, 240 с
106. Пановко Я. Г. Основы прикладной теории упругих колебаний
М., «Машиностроение», 1967, 316 с.
107. Панфилов Е. А. Некоторые особенности вибрации и уравновеши-
вания высокоскоростных роторов. В кн.; Уравновешивание машин и прибо-
ров. М., «Машиностроение», 1965, с. 91—99.
108. ПерникА Д. Проблемы кавитации. Л «Судостроение», 1966,
439 с.
109. ПерчанокБ X. Вибрационные характеристик!! ротора с водяным
охлаждением при несимметричной циркуляции воды. - «Электротехника».
1970, № 11, с. 32—33.
ПО- Петровский В. С. Гидродинамические проблемы турбулентного
шума. Л., «Судостроение», 1966, 252 с.
111. П и к у л е в Н. А. О колебаниях массы на шестпкомпонеитпых вибро-
изоляторах. — «Строительная механика и расчет сооружений», 1970, № 4
с. 37-40.
112- Подшипники качения Справочное пособие. Под ред. Спицына М
Машгиз, 1961, 628 с.
113. П о з н я к Э. Л. Влияние масляного слоя в подшипниках скольжения
на устойчивость и критические скорости высокоскоростных роторов. — В кп :
Колебания валов па масляной пленке. М «Наука». 1968, с. 10—38.
114. П о з н я к Э. Л., Ц ы р л и п А. Л. Вынужденные колебания и устой-
чивость произвольных роторных систем на подшипниках скольжения. — «Ме-
ханика твердого тела», 1967, № 2, с 25—37.
115. Покровский Б. В Исследование вибрации и шума центробежпы»
насосов. Автлреф дисс. М., 1968. 16 с
116. Пономареве. Д., Бидерман В- Л., ЛихаревК К. и ДР
Расчеты на прочность в машиностроении. Под ред. С. Д. Пономарева Т. 3. М
Машгиз. 1959, 118 с.
117. Поперечные колебания и критические скорости М-, изд АВ
СССР. 1951, 268 с
118. Попков В И. Виброакустпческая диагностика блокирован! ых
агрегатов. В кн Акустическая динамика машин и конструкций М-, «Н: ука».
1973, с. 50- 56.
119. П о п к о в В 11 Измерение механических сопротивлений по отноше-
нию к усилиям н моментам. — «Известия ЛЭТИ им. В Й Ульянова (Ленина!»,
1968, вып. 63, с 225 238
120. Попков В. И. Установка для измерения колебательной мощности,
излучаемой механизмами —«Вопросы метрологии», 1971, № 10, с 52 >'
121. Попков В. И. Характеристика механизмов как источников вибра-
ции. — «Известия ЛЭТИ им В. И. Ульянова (Ленина)», 1968. вып. 63, с. 276—
287.
122. Потемкин! А. Вибрационная защита и проблемы стандартная
ции. Комитет стандартов. 1969. 199 с
459
123. Прокофьев К- А., Самсонов Ю. А., Ч е р п о в С. К. Вибра-
ция деталей судовых турбоагрегатов. Л., «Судостроение», 1966, 292 с.
124. Развитие гидродинамической теории смазки подшипников быстроход-
ных машин. Сборник статей. Под ред. д-ра техн, наук проф. А. К. Дьячкова,
изд. Имаш АН СССР, 1962, 223 с.
125. Резников Л. М. Исследование работы центробежного маятнико-
вого гасителя колебаний. — «Машиноведение», 1970, № 5, с. 49—55.
126. Резников Л. М Оптимизация параметров динамических гасите
лей^с различными видами сопротивлений. — «Проблемы прочности», 1970, № 9,
127. Рогачев В. М. Исследование виброакустических свойств аморти-
зированных центробежных насосов. Автореф. дисс/ Л., 1970, 18 с.
128. Рогачев В. М. Свободные колебания амортизированных много-
ступенчатых центробежных насосов. — В кн.: Динамике гибких роторов М
«Наука», 1972, с. 122—130.
129 Рогачев В. М., Владимиров А. С. Расчет вынужденных ко-
лебаний амортизированных многоступенчатых центробежных насосов при за-
данной неуравновешенности ротора.—«Энергомашнностроенпе», 1973, № 1,
130. Р у в о в Б. Т. Уравновешивание турбоагрегатов на электростанциях.
М.—Л., Госэнергоиздат, 1963, 224 с.
131. Сергеев С. II. Демпфирование колебаний анизотропноуиругих
роторов. — В кн.: Колебания в турбомашинах. М., изд. АН СССР, 1959, с. 114
132. Сергееве. И. Демпфирование колебаний роторов с подшипниками
скольжения. - «Труды ЦКТИ», 1964, вып. 44, с. 109—119.
133. Сергеев С. И. Демпфирование колебаний тяжелых роторов.—
«Энергомашиностроение», 1962, .Vs 7, с 16—18.
134. Сергеев С. П. Демпфирование механических колебаний. М., Фнз-
матгиз, 1959, 408 с.
135- С к о б ц о в Е. А., И з о т о в А. Д., Т у з о в Л. В Методы снижения
вибраций и шума дизелей. М.—Л., Машгиз. 1962, 192 с.
136. Скубачевский Г. С. Авиационные газотурбинные двигатели.
М., Оборонгиз, 1955, 548 с.
137. С к у р и д и н А. А., Михеев Е. М. Борьба с шумом и вибрацией
судовых ДВС. Л., «Судостроение», 1970, 223 с.
138. С к у ч и к Е. Простые и сложные колебательные системы. Пер. с англ.
М., «.Мир», 1971. 558 с.
139. Снижение вибраций и колебаний дизелей. Сборник статей. М., изд.
11ИИ1 Тнформтяжмаша. 1969, вып. 8, 47 с.
140. С о й ф е р А. М. Демпфер для роторов турбомашин. Авт. свид. № 152596.
141. Теория и конструкция балансировочных машин. Под ред. В. А. Ще-
петильникова. М., Машгиз, 1963, 444 с.
142. Теория машин и механизмов. М., изд. АН СССР, 1963, вып. 96—97,
138 с.
143. Теория и практика уравновешивания машин и приборов. Под ред.
В. А. Щепетильникова. М., «Машиностроение», 1970, 440 с.
144 Терских В. П. Крутильные колебания валопровода силовых уста-
новок. Л , «Судостроение», 1970, 205 с.
145. Терских В. П. Метод цепных дробей в применении к исследова-
нию колебаний механических дробей. В 2-х т. Л., Судпромгнз. 1955, 708 с.
146. Т и м о ш е н к о С. П. Колебания в инженерном деле М., Физматгиз,
1959, 439 с.
147. ТимошенкоС. П., Бойцовски й-Кр игерС. Пластины и
оболочки Пер. с англ. М-, «Наука», 1966, 635 с.
148. Т и то в В В. Турбогенераторы. Л., «Энергия», 1967, 895 с
149. Т о н д л А. Динамика роторов турбоагрегатов. Пер. с англ. Л., «Энер-
гия», 1971, 387 с.
150. Траупель В Тепловые турбомашины. М.—Л., Госэнергоиздат,
460
151. ТузовЛ. В Вибрации двигателя СМД и пути их снижений.—
«Энергомашиностроение», 1965, Ле 2. с. 20—23.
152. ТузовЛ. В Основные источники вибрации и шума дизелей —
«Транспортное машиностроение», 1960, № 5, г. 27—36.
153. ТузовЛ. В., М и с е л е в М. А., Ч и р к о в И. М. Методы исследо-
вания вибрации быстроходных дизелей. Материалы Всесоюзного симпозиума.
Каунас, 1970, с. 35—36-
154. Т у з о в Л- В- Об оценке эффективности амортизации двигателя М-50.
Материалы Всесоюзной научно-технической конференции. Л-, 1972, с. 117—118.
155- Уравновешивание машин и приборов- Сборник статей. Под ред д-ра
техн наук проф В А. Щепетильникова. М., «Машиностроение», 1965, 571 с.
156- Уравновешивание роторов энергетических машин- М., изд. ЦИНТИЭП,
1962, 244 с-
157- Фесенко С. С. О динамических нагрузках в подншгнике с зазором
от неуравновешенного ротора. — «Вестник машиностроения», 1969, Ns 10,
с. 35- -36:
158. Ф е с е н к о С. С. О допустимой неуравновешенности роторов. —
«Вестник машиностроения», 1970, № 3, с. 37—38
159. Филиппов А П Колебания деформируемых систем. М., «Машино-
строение», 1970, 734 с.
160. Фридман В М~Об одном приближенном методе определения ча-
стот колебаний. В кн.: Колебания в турбомашннах. М., изд. АН СССР, 1956,
с. 69 -76.
161. Фридман В М. Уравновешивание гибких валов по формам сво-
бодных колебаний- - В кн.: Уравновешивание роторов энергетических машин.
М , ЦИНТИЭП, 1962, с. 42—53.
162. Фурдуев В- В- Электроакустика. М.—Л., Гостехиздат, 1948,
515 с-
163. Цырлин А. Л- Динамика роторов двоякой жесткости. —Б кн.:
Динамика гибких роторов. М. 1972. 27—44 с.
164. Ч у в и к о в с к и й В. С., Палий О. М., СпироВ Е. Решение
задач строительной механики методом парциальных откликов. — «Судострое-
ние», 1966, № 7, с. 15—21.
165. Ш п е п п В Б. Демпферный подшипник скольжения Авт. свид.
№ 200352.
166 Штернлихт В. Устойчивость и динамика роторов, опирающихся
на подшипники жидкостного трения. — «Энергетические машины и установки».
Труды Американского общ. инж.-механиков, 1963, №4. с. 81—94.
167. Прочность элементов паровых турбин. Под ред. Шубенко-Шубина Л. А
Москва—Киев, Машгиз, 1962, 567 С.
168. Юди н Е. Я. Исследование шума вентиляторных установок и методов
борьбы с ними. —«Труды ЦАГ11», 1958, вып. 713, 227 с.
169. Янко Я- Математико-статистические таблицы. Пер. с чешек. М ,
Госстатиздат, 1961, 243 с.
170. DenWartogJ. Р The babancing of flexible rotors. A. book «Air
Space and Instruments» dedicated to sixteen birthday prof. Stark Draper. 1962
(Ill).
171 Fredern K- Crundlagen einer systematischen Sehwingungsentsorung
wellenelast ischer rotoren, VDJ, Berichte, 1957 till).
172. Harris C., Cre de Ch. — «Shock and Vibration», Handbook. N. Y.
1961, v. 1, 2, 3.
173. M e 1 d a h 1 A. Ausrichten elasticlier rotoren, ZAMM, 1954
174- Rayleigh. Aeolian Tones. Phil. Mag. 29. 1915.
175. Ungar E. E.; Dietrich C. W. High—frequency vibration isola-
tion. «Journal of Sound and Vibration». 1966, v. 4, N 2.
ОГЛАВЛЕНИЕ
Предисловие......... .................. , . . . . . 3
Введение.............................. .............. . . 5
Глава I. Нормирование вибрационных параметров машин .... 9
I. Научные, технико-экономические н санитарно-гигиенические
2. Общие положения контроля вибрационных параметров
машин ... ......... ................... 17
3. Применение методов математической статистики к оценке н нор-
мированию вибрационных параметров машин................... 29
4. Порядок обработки результатов замеров и составления норм
вибрации машин . . ............................... 35
Глава II. Колебания роторных машин (турбин и компрессоров) . 42
1. Основы динамики вращающегося ротора..................
2. Практические способы расчета критических скоростей ро-
торов .................................................... 69
3. Методы расчетов динамики роторов, ориентированные иа при-
менение ЭВМ ............................................ 88
Глава III. Методы борьбы с колебаниями роторных машин 106
I. Уравновешивание жестких роторов. Статическая и динамиче-
ская неуравновешенности ...........................
2. Уравновешивание пеабсолютно жестких роторов . . . . III
3. Методы борьбы с критическими режимами и разгрузка опор
роторов турбомапшн..................................... 138
Глава IV. Вибрация насосов . . . ...................... 164
1. Причины вибрации насосов ............................... —
2. Гидродинамические источники вибрации насосов.......... 168
3. Механические источники вибрации и динамика насосов . . 174
4 Пути снижения виброактивноети насосов .... 177
Глава V. Расчет и пути снижения вибрации двигателей внутреннею
сгорания ................................................ .... 184
I Особенности методов исследования двигателей . —
2. Возмущающие силы в двигателях . .................. 187
3. Снижение вибрации в источниках .... . . . 193
4 Расчетные схемы двигателей для определения низкочастот
нон вибрации ......... ................... 198
5- Расчет собственных частот колебаний конструкций двига-
телей . 1. .................. . ... . 205
6. Методика пересчета низкочастотной вибрации двигателя в слу-
чае его перестановки ................................... 207
462
7. Расчетное определение уровня высокочастотной вибрации,
возбуждаемой газодинамическими колебаниями давления
в цилиндрах двигателей.................................... 212
8. Методы снижения вибрации двигателей ..................... 218
9. Особенности виброизоляции двигателей ...........230
10. Теоретическое исследование эффективности системы амортиза-
ции двигателей............................. .... . . . 233
II. Исследование механических сопротивлений деталей и узлов
двигателей .................................................. 235
Глава VI. Вибрация и шум электрических машин....................... 243
1 - Основные причины вибрации..............................
2 . Механические источники вибрации и шума электрических
машин ....................................................... 245
3 Источники магнитного шума электрических машин.............. 256
4 Пути снижения магнитного шума электрических машин .... 260
5 - Аэродинамический шум в электрических машинах............. 264
Цлава VII. Амортизация машин и механизмов..................... ... 267
1. Общие положения .......................................... —
2. Жесткостные характеристики амортизатора н амортизирующего
креплепня .... ........... _................ 273
3 Характеристики колебательной систе.мы.'образованной жестким
fc амортизируемым объектом _и его амортизирующим крепле-
нием ........................................................ 297
4. Амортихатор как двухконечное механическое звено, аналогич-
ное электрическому четырехполюснику.......................... 303
•. Виброизоляционная эффективность амортизирующего крепле-
ния ......................................... • 320
6. Типы амортизаторов ..................................... 332
7. Об испытаниях амортизаторов и амортизирующих крепле-
ний .............................................. ....... 336
8- Пример исполнения и поверочного расчета амортизирующего
крепления . . ....................................... 340
Глава VIII. Колебания упругих амортизированных машин на упру-
гом основании...................................................... 352
1. Расчет свободных колебаний многомашинного агрегата, имею-
щего однокаскадную амортизацию . ....................... —
2- Расчет свободных колебаний многомашинного агрегата, имею-
щего двухкаскадную амортизацию . .................... 356
3 Обобщенные динамические характеристики системы............. 360
4. Общая теория виброизоляции упругих систем................. 363
5. Особенности анализа упругих стержневых шарнирных подве-
сок двигателей .............................................. 3”2
6. Приведение сложных динамических систем к простым системам
с дискретными параметрами.................................. 373
7. Оптимизация параметров инерционных виброзащитных си-
стем ...................................................... 374
8 Первое приближение выбора оптимальных параметров инерцион-
ной виброзащитной системы ...... .......... 380
9. Теоретические и экспериментальные исследования дв^ хкомпо-
нентиого амортизатора-антивибратора.......................... 364
Глава IX. Характеристика машин как источников вибрации . . . 392
1. Параметры, характеризующие машину как источник вибра-
ции . ............................ —
2 Методы и средства определения динамических сил, действую-
щих на опорные и неопорные связи со стороны машины, и колеба-
тельной мощности, излучаемой машиной........................ 407
463
3. Определи ние механических сопротивлений машины и сил, вы-
зывающих вибрацию........................................... 421
Глава X Резонансные характеристики машин и вибропроводнмость
их корпусов .............. ............. 424
1, Экспериментальное определение резонансных характеристик
механизмов ................................................... —
2. Способы повышения виброизолирующих свойств корпусов
машин ...................................................... 439
Глава XI. Принципы и правила конструирования малошумных машин
и механизмов, их виброакустические надежность и долговеч-
ность ............................................................ 442
1. Понятие о виброакустической надежности и долговечности ма-
шин и механизмов .............................................. —
2. Принципы конструирования малошумных машин и механизмов . 446
3. Ос новьые правила и указания но проектированию малошумных
машин . .................................. 449
4 Некоторые замечания о путях развития малошумных машин и
механизмов .................... ... 450
5. Некоторые вопросы конструирования многомашинных мало-
шумных агрегатов ........................................... 452
Список литературы................................................. 455
Никита Васильевич ГРИГОРЬЕВ
Николай Георгиевич БЕЛЯКОВСКИЙ
Владимир Кириллович ДОНДОШАНСКДШ
Николай Иванович ДУАН
Владимир Иванович ПОПКОВ
Леонид Васильевич ТУЗОВ
ВИБРАЦИЯ
ЭНЕРГЕТИЧЕСКИХ
МАШИН
Редактор издательства Г Г. С т е и а и о в а
Переплет художника О- И. Цыплакова
Технический редактор Л. В. Щетинина
Корректоры: Н. К. Кротова, Н. Б. Семенова
Сдано в производство 20/Х1 1973 г.
Подписано к печати 5/V 1974 г. М-07696
Формат бумаги 60x90‘/ie
Бумага типографская № 2
Печ. Л- 29.0 Уч.-изд- л. 29 Тираж 8 000 экз.
Зак. № 6-16 Цена 1 р- 68 к.
Ленинградское отделение издательства
«МАШИНОСТРОЕНИЕ»
191065, Ленинград» ул. Дзержинского, 10
Ленинградская типография № 6 Союз пол пграфгтрома
при Государственном комитете Совета Министров СССР
ио делам издательств, полиграфии и книжной торговли
193144. Ленинград. С 144, ул. Моисеенко, 10