/





















































































































































































































































































































































































































































































Автор: Афанасьев Б.А. Бочаров Н.Ф. Жеглов Л.Ф.
Теги: техника средств транспорта автодорожный транспорт машиностроение механика
ISBN: 5-7038-1336-0
Год: 1999




Текст
ПРОЕКТИРОВАНИЕ
ПОЛНОПРИВОДНЫХ
КОЛЕСНЫХ МАШИН
Учебник для вузов
В двух томах
Под обш. редакцией д-ра техн, наук, проф. А.А. Полунгяна
Том 1
Рекомендовано Министерством общего
и профессионального образования Российской Федерации
в качестве учебника для студентов
высших технических учебных заведений
МОСКВА
Издательство МГТУ им. Н.Э. Баумана
1 9 9 9
УДК 629.113(075.8)
ББК 39.33-04
П79
Федеральная целевая программа
книгоиздания России
Рецензенты: д-р техн, наук, проф. И.В. Балабин,
д-р техн, наук, проф. В.П. Шалдыкин
Авторы: Б.А. Афанасьев, Н.Ф. Бочаров, Л.Ф. Жеглов, В.Н. Зузов.
А.А. Полунгян, А.Б. Фоминых, В.С. Цыбин
П79 Проектирование полноприводных колесных машин: В 2 т. Т. 1.
Учеб, для вузов / Б.А. Афанасьев, Н.Ф. Бочаров, Л.Ф. Жеглов и др.;
Под обш. ред. А.А. Полунгяна. - М.: Изд-во МГТУ им. Н.Э. Бауман-
на, 1999. - 488 с.
ISBN 5 - 7038- 1336- 0 (Т.1)
ISBN 5 - 7038 - 1335 -2
Рассмотрены основные принципы проектирования колесных машин высо-
кой проходимости с учетом экологичности, экономичности, надежности. Изло-
жены принципы математического и физического моделирования работы колесной
машины и ее агрегатов. Содержание учебника соответствует курсу лекций, ко-
торый авторы читают в МГТУ им. Н.Э. Баумана.
Для студентов высших технических учебных заведений машиностроитель-
ных специальностей.
УДК 629.113(075.8)
ББК 39.33-04
ISBN 5-7038- 1336- 0 (Т.1)
ISBN 5-7038- 1335-2
© Б.А.Афанасьев, Н.Ф.Бочаров,
Л.Ф. Жеглов и др., 1999
© Московский государственный
технический университет
им.Н.Э. Баумана, 1999
© Издательство МГТУ
им. Н.Э. Баумана, 1999
ПРЕДИСЛОВИЕ
Основой настоящего учебника послужили лекции, читаемые в
МГТУ им. Н.Э. Баумана студентам, обучающимся по специальности
"Многоцелевые гусеничные и колесные машины”. Учебник состоит
из двух томов. Первый том посвящен общим вопросам конструирова-
ния колесных машин, второй - проектированию агрегатов и систем
колесных машин.
Авторы стремились не только познакомить читателей с основа-
ми проектирования колесных машин, но и вооружить их современ-
ными методами расчета деталей и агрегатов колесных машин.
Особое внимание в учебнике уделяется созданию колесных ма-
шин высокой проходимости, отвечающих современным требовани-
ям экологичности, безопасности движения, экономичности, обладаю-
щих новейшими средствами автоматизации управления, удовле-
1воряющих разнообразным дорожным и климатическим условиям
и т.д. Расчетные методы изложены как для детерминированного,
так и для случайного нагружения, показаны методы определения
основных параметров на основе математического и физического мо-
делирования.
Авторы надеются, что настоящая книга будет полезной как для
студентов, так и для инженеров и научных работников, занимаю-
щихся проектированием колесных машин высокой проходимости, и
в какой-то мере устранит недостаток учебной литературы в этой
области.
ВВЕДЕНИЕ
Выделение колесных машин (КМ) высокой проходимости, в том чи-
сле полноприводных колесных машин, в обособленну» группу транспорт-
ных средств вызвано спецификой их конструктивного исполнения и усло-
виями применения. Основная область использования таких машин - ма-
лоосвоенные регионы страны с суровыми климатическими условиями, где
эксплуатация обычных автомобилей неэффективна или невозможна. Их
применяют в районах со слабо развитой дорожной сетью или совсем не
имеющих дорог. Это в основном районы Севера, Сибири и Дальнего Во-
стока России. В то же время КМ высокой проходимости находят все
большее применение в сельском хозяйстве на работах в зимний и весенне-
осеииий периоды, когда из-за климатических условий эксплуатация обыч-
ных машин затруднена.
В последнее десятилетие XX в. автомобильные фирмы многих стран
выпускают в больших количествах полноприводные легковые автомоби-
ли (малого, среднего и большого литража двигателей), которые в основ-
ном эксплуатируют на усовершенствованных дорогах. Появление этих
машин, созданных на базе машин с колесной формулой 4 х 2 с заднепри-
водной и переднеприводной компоновками, вызвано стремлением к повы-
шению активной безопасности движения на влажных, обледенелых, засне-
женных дорогах. Кроме того, развитие автотуризма требует повышения
тяговых возможностей машины-тягача.
Разнообразие задач, решаемых с помощью полноприводных КМ. и
необходимость специализации каждого типа машин для выполнения тон
или иной функции противоречат принципу унификации, ибо увеличение
номенклатуры машии существенно усложняет систему поддержания их
надежности в процессе эксплуатации, удорожает производство, эксплу-
атацию и ремонт, затрудняет процесс их создания. Поэтому в настоя-
щее время все большее внимание уделяют созданию унифицированных
семейств КМ на основе одной базовой. Реализация этого принципа позво-
ляет резко сократить количество моделей машин и обеспечить дальней-
шее повышение их эффективности.
4
КМ высокой проходимости с наибольшим эффектом используют на
грунтах с низкой несущей способностью, при эксплуатации по бездоро-
жью или грунтовым дорогам низкого качества, где они могут двигаться
с высокими средними скоростями, обеспечивая при необходимости и бук-
сировку прицепов большой массы. На рис. В1 показаны общие виды не-
которых современных КМ высокой проходимости, а в табл. В1 приведены
их основные данные. В настоящее время уже созданы КМ высокой прохо-
димости с колесной формулой 12 х 12 и более, что позволило существенно
увеличить их грузоподъемность.
Развитие конструкций КМ шло постепенно. Сначала были осуще-
ствлены конструктивные решения, обеспечивающие полное спользова-
иие сцепной массы, т.е. полноприводиость при сохранении идентичности
колесного движителя с иеполноприводными автомобилями, затем - ре-
шения, направленные на максимальное использование тяговых свойств
движителя путем специфической компоновки ходовой части и изменения
конструкции движителя.
В настоящее время сложились следующие принципы создания и со-
вершенствования полноприводных КМ.
1. Максимальная унификация одновременно выпускаемых полнопри-
водных и неполноприводных КМ. Она обеспечивает эффективное ис-
пользование производственной базы и способствует оптимальной эксплу-
атации техники. Унифицируют главным образом наиболее трудоемкие
в производстве и часто заменяемые в эксплуатации элементы (кабины,
двигатели, коробки передач, редукторы главных передач и т.д.). Это по-
зволяет максимально снизить себестоимость машин, упростить эксплуа-
тацию и ремонт.
2. Преемственность конструкций новых машин, разрабатываемых
взамен устаревших, т.е. рациональное использование конструкций уз-
лов и агрегатов, хорошо зарекомендовавших себя в предыдущих моделях.
Это расширяет возможности унификации машин, облегчает условия пе-
рехода производства иа новую модель, сохраняет технические средства
диагностики, обслуживания и ремонта.
3. Разработка модификаций полноприводных КМ в составе унифици-
рованных семейств автомобилей. Это очень важно в современных усло-
виях, когда расширяются области использования автомобилей вообще и
полноприводных машин в особенности. При унификации семейства авто-
мобилей базовую модель проектируют таким образом, чтобы ее конструк-
ция позволяла одновременно (или в дальнейшем) разрабатывать после-
дующие модификации. Это обеспечивается общей компоновкой базового
автомобиля, составом и параметрами его агрегатов и систем. Базовым,
как правило, является автомобиль общетраиспортиого назначения.
5
Рис. Bl. Колесные машины высокой проходимости;
а - БАЗ-135; б - ЗИЛ-135Э; в - “Татра-813”
6
Таблица Bl. Основные показатели полноприводных
колесных машин
Показатель МАЗ-73Ю (Белорусь) БАЗ-135 (Россия) “ТатРа-813” (Чехия) КрАЗ-260 (Украина) М-656 (США) Т-155 (Россия)
Колесная формула 8x8 8x8 6x6 6x6 8x8 2 х 2 + 2x2
Грузоподъем- ность, т 20 9 8,8 9 4,5 4
Масса, т: полная 44 20 21 21,8 11,8 8
прицепа 25 - 10 10 6 8
Мощность дви- гателя, кВт 386 2 х 131 189 220 135 121
Максимальная скорость, км/ч 60 60 70 80 80 45
Габаритные размеры, мм: длина 11700 9270 7760 9030 6055
ширина 3100 2800 2500 2720 - 2410
высота 2920 2530 2620 3230 - 2960
Дорожный просвет, мм 440 580 330 370 305 306
Разработка машин по такому принципу способствует более раци-
ональному использованию производственных мощностей автомобильной
промышленности и более полному удовлетворению потребностей народ-
ного хозяйства в транспортных средствах различного типа и назначения.
Степень полноты реализации изложенных принципов сказывается на
уровне унификации автомобилей. Поэтому при разработке новых кон-
струкций автомобилей вопросам унификации уделяют большое внимание.
Типичным примером рациональной разработки конструкций является со-
здание в составе унифицированных семейств автомобилей ЗИЛ, КамАЗ,
КрАЗ и др. На базе основных моделей их семейств разработаны автомо-
били различных типов с высоким уровнем конструктивной и технологи-
ческой унификации.
Удачным решением унификации полноприводных н неполнопрнвод-
ных КМ следует считать также разработку автомобилей “Унимог”, гру-
зовых автомобилей фирмы МАИ грузоподъемностью 5. 7 и 10 т, легковых
полноприводных автомобилей “Ауди”, “Пежо”, “Форд". “Тойета” и др.
Реализация изложенных выше принципов создания полноприводных
КМ обеспечила достаточно высокий уровень унификации современных
конструкций. Опыт производства и эксплуатации автомобилей в по-
следние годы свидетельствует, что достигнутый уровень унификации
является оптимальным; не сперживая дальнейшего развития конструк-
ций автомобиля, он в то же время обеспечивает реальность разрабо-
ток новых конструкций с учетом существующей (или совершенствуемой)
производственно-технической базы.
Развитие конструкций трансмиссий полноприводных легковых авто-
мобилей показывает, что вначале использовали блокированные трансмис-
сии с принудительным отключением переднего моста, затем с автомати-
ческим отключением и т.д. В последнее же время конструкторы в разных
странах все больше применяют постоянный привод всех ведущих колес
через межосевой дифференциал (как это впервые было сделано на машине
“Урал-375”) или через вязкостную муфту.
Характер и направления унификации базовых полноприводных и не-
полноприводных КМ в каждом конкретном случае могут быть различны-
ми и зависят от многих факторов. При этом на базе двухосных автомо-
билей 4x2 малой грузоподъемности создают, как правило, двухосные ав-
томобили 4 х 4. В этом случае унифицируют двигатели, агрегаты транс-
миссии и ходовую часть, а иногда кабины и кузова. На базе двухосных
автомобилей 4x2 средней грузоподъемности (типа ЗИЛ) целесообразно
создание трехосных автомобилей 6x6, так как в этом случае важнее сни-
зить осевую нагрузку и обеспечить хорошую проходимость автомобилю,
нежели стремиться сохранить унифицированными мосты. На базе трех-
осных КМ 6x4 создаются трех- и четырехосные полноприводные машины
8
6 х 6 и 8 х 8. При этом кроме двигателя, трансмиссии и ходовой части
унифицируют кабину, тормозную систему, электрооборудование, рулевое
управление и другие узлы.
Выбор того или иного подхода к созданию параллельной базовой пол-
ноприводной модели зависит от структуры общего автомобильного парка
и осуществляется исходя из экономической необходимости иметь соответ-
ствующий типоразмерный ряд полноприводных КМ.
В практике разработки полноприводных КМ (например, в США) бы-
ли случаи создания автономных семейств машин, не связанных с неполно-
приводными машинами общетраиспортиого назначения. Создание таких
семейств имело большие преимущества, особенно в части перекрытия не-
обходимого диапазона грузоподъемности КМ высокой проходимости, од-
нако при их реализации столкнулись с непреодолимыми экономическими
трудностями, в связи с чем разработка таких машин не была доведена др
конца.
В последние годы типовые ряды полноприводных КМ разрабатыва-
ют согласованно с типовыми рядами неполиоприводных КМ.
Современные типовые ряды КМ более рациональные и гибкие, а их
производство сопряжено с гораздо меньшими экономическими затратами.
Эффективность использования полноприводных КМ зависит от их
технического уровня, конструктивного совершенства и эксплуатадионио-
гехнических свойств. Поэтому при разработке новых полноприводных
КМ выдвигают также эксплуатационно-технические требования, реали-
зация которых обеспечила бы им максимальную рентабельность во всех
областях применения.
Объем и специфика требований, предъявляемых к конструкциям КМ,
в том числе и полноприводных, разнообразны. Это различного рода огра-
ничения по массе и габаритным размерам, требования типизации или
унификадни присоединительных размеров под установку комплектующе-
го оборудования и узлов, выбор показателей эксплуатационной техноло-
гичности, надежности (ресурса), ремонтопригодности и др. Одни тре-
бования соответствуют государственным или отраслевым стандартам,
другие - нормативно-техническим документам. Ряд требований тради-
ционно реализуется в конструкциях.
Полноприводные КМ целевого назначения - это чрезвычайно широ-
кий класс машин, предназначенных для использования в качестве транс-
портных средств, базы под монтаж функционального оборудования и спе-
циальной техники, инженерных машин и др. Он охватывает диапазон
категорий КМ грузоподъемностью 0,3.. .60 т.
Номенклатура отечественных полноприводных КМ формируется на
основе следующих основных типов базовых машин: автомобили-транс-
портеры грузоподъемностью до 0,4 т; грузопассажирские автомобили
9
грузоподъемностью 0,3... 1т; грузовые автомобили грузоподъемностью
2... 10 т; грузовые автомобили и специальные колесные шасси грузоподъ-
емностью свыше Ют.
На основе базовых машин путем изменения конструкций шасси, агре-
гатов и систем создают унифицированные модификации с более широки-
ми возможностями по отдельным свойствам.
Широкий диапазон грузоподъемности предполагает существенное
различие в конструкциях КМ разных классов. Вместе с тем они обладают
и определенной конструктивной общностью, обуславливаемой специфи-
кой использования полиопривоцных КМ. Особенности их эксплуатации
и применения заключаются в следующем:
широкий диапазон использования одной и той же КМ, начиная от
транспортирования оборудования, людей и грузов и кончая использова-
нием в качестве инженерно-тягового срецства;
применение в качестве тракспортко-технологической базы различно-
го оборудования для выполнения разнообразных технологических опера-
ций как при движении, так и на стоянке;
работа в тяжелых дорожных условиях, в отрыве от стационарных
баз, ремонтных мастерских и пунктов технического обслуживания;
хранение на открытых площадках при непосредственном воздей-
ствии различных климатических факторов, в том числе экстремальных.
Эти особенности диктуют необходимость реализации требований к
проходимости, универсальности использования, надежности, приспосо-
бленности к работе в различных природно-климатических условиях. Все
это требует применения однотипных по конструкции агрегатов и систем.
Поэтому при кажущихся различиях полноприводные КМ с различной гру-
зоподъемностью имеют много общего.
Глава 1
ОСНОВЫ ТЕХНОЛОГИИ ПРОЕКТИРОВАНИЯ
КОЛЕСНЫХ МАШИН
1.1. Процесс проектирования
Жизненный цикл колесной машины
Создание новой машины - сложный и длительный процесс, в
котором участвуют ученые, конструкторы, дизайнеры, испытатели,
специалисты в области производства и эксплуатации. Чем сложнее
машина, тем труднее, дороже и длительнее процесс ее создания. По-
этому для разработки и рационального использования такой слож-
ной машины, как автомобиль, важно знать во всех подробностях ее
жизненный цикл и влияющие на него факторы.
Жизненный цикл КМ представляет собой совокупность взаимо-
связанных процессов создания и последовательного изменения со-
стояния машины от формирования исходных требований к ней до
окончания ее эксплуатации. Согласно Единой системе государствен-
ного управления качеством продукции, жизненный цикл принято
делить на стадии - части жизненного цикла, устанавливаемые в
нормативно-технической документации и характеризуемые опреде-
ленным состоянием машины, видом предусмотренных работ и их
результатом.
Жизненный цикл КМ включает стадии создания, производства,
обращения и эксплуатации, каждая из которых содержит ряд этапов,
операций и процедур.
Создание машины. Эта стадия начинается с предпроектных
исследований и заканчивается созданием машины. На этапе под-
готовки и разработки проекта новой машины устанавливают прин-
ципиальную возможность и целесообразность ее создания. Необхо-
димость в новой машине должна вытекать из общественных потреб-
11
ностей, поэтому она нуждается в тщательном и глубоком обоснова-
нии с учетом технических и экономических возможностей, обусло-
вленных прогрессом науки и техники, а также развитием экономи-
ки страны. Для этого проводят поисковые исследования, которые
должны базироваться на результатах фундаментальных исследова-
ний, практическом опыте применения аналогичных машин, ретро-
спективном анализе и прогнозах развития техники в данной обла-
сти. Кроме того, необходима мотивация для побуждения к решению
данной технической проблемы. Она может вытекать из безуслов-
ных потребностей общества, необходимости практической реализа-
ции достигнутого научного потенциала и повышения экономических
показателей деятельности данной отрасли народного хозяйства. Об-
щество, наука, техника и экономика развиваются взаимозависимо.
Комплекс этих отношений можно иллюстрировать схемой, приве-
денной на рис. 1.1.
Рис. 1.1. Отношения в макросистеме общество - экономика -
наука и техника
Важными элементами поисковых исследований являются эк-
сперименты на макетах - физических моделях КМ (или отдель-
ных ее частей), воспроизводящих или имитирующих конкретные
12
ее свойства и изготовленных для проверки принципа действия и
определения характеристик машины. Макет с известной степе-
нью упрощений воспроизводит в определенном масштабе КМ (или
ее части) и позволяет исследовать отдельные ее характеристики,
а также оценивать правильность принятых технических и худо-
жественных решений. Макеты изготавливают в процессе выпол-
нения научно-исследовательских и опытно-конструкторских работ
(ГОСТ 2.118-83, ГОСТ 2.120-83).
Результатом поисковых исследований, проводимых в предпро-
ектный период, является постановка задачи проектирования, кото-
рая предусматривает разработку технических требований к КМ и
формирование технического задания (ТЗ) на ее создание.
Конструктор принимает участие во всех стадиях жизненного
цикла КМ. Однако основной процесс его творчества составляют
работы, связанные с созданием КМ и представляющие собой закон-
ченный пикл, состоящий из нескольких этапов: научно-технического
поиска, проектирования, изготовления образцов для испытания, до-
водки конструкции, ^ти этапы тесно взаимосвязаны, в значительной
мере совмещены и могут многократно повторяться. К работам по со-
зданию КМ примыкают работы по технологической подготовке про-
изводства, однако их следует отнести ко второй стадии жизненного
цикла аналогично тому, как предпроектные исследования, в процес-
се которых осуществляется научно-технический поиск, относятся к
стадии создания машины.
Этап проектирования охватывает большой перечень проект-
ных операций и процедур - от предварительных расчетов и эски-
зов до уточненных расчетов, деталировочных чертежей, описаний,
инструкций, технических условий и т.п. Результатом проектиро-
вания является комплект технической документации, содержащей
всю необходимую информацию для материализации создаваемой КМ
в пропессе производства и организации ее использования.
На всех этапах процесса создания КМ изготавливают макет-
ные, экспериментальные и опытные образцы машины и проводят
на них различные испытания: исследовательские, доводочные, пред-
варительные и др. (ГОСТ 16504-81). Исследовательские испыта-
ния предназначены для изучения свойств и характеристик КМ. Для
доводки конструкции и оценки влияния вносимых во время ее раз-
работки изменений на показатели качества проводят доводочные ис-
пытания. После завершения разработки конструкции и изготовления
опытных образцов возможность представления их на приемочные ис-
пытания проверяется на предварительных контрольных испытани-
ях, выполняемых в соответствии с ГОСТ 15.001-88.
13
Заключительным этапом стадии создания КМ являются прие-
мочные испытания, по результатам которых решают вопрос о целе-
сообразности ее производства. Приемочные испытания могут быть
государственными, межведомственными и ведомственными; порядок
их проведения предусмотрен ГОСТ 15.001-88. Разработка КМ счи-
тается выполненной в соответствии с ТЗ при условии ее утвержде-
ния актом приемки опытного образца или опытной партии, содер-
жащем рекомендации о постановке на производство, и выполнения
указаний приемочной комиссии о необходимой доработке. По резуль-
татам испытаний возможна корректировка технической документа-
ции и доработка опытных образцов.
Производство машины. Эта стадия включает постановку на
производство, установившееся производство и снятие с производ-
ства.
Постановку на производство, как правило, осуществляют в два
этапа: подготовка производства и его освоение. Работы по подготов-
ке производства направлены на обеспечение технологического про-
цесса изготовления КМ и могут быть начаты еще на стадии ее созда-
ния. Важнейшим этапом этих работ является технологическая под-
готовка производства, процессы организации и управления которой
регламентируются комплексом государственных стандартов Единой
системы технологической подготовки производства (ЕС ТПП), При
этом осуществляют выбор технологии и оборудования, организацию
материально-технического снабжения, планирование процесса про-
изводства во времени, распределение работ и т.д.
Освоение производства включает отработку и проверку подгото-
вленных технологических процессов, овладение практическими при-
емами изготовления продукции с требуемыми показателями и в за-
данном объеме выпуска.
Установившееся производство начинается после окончатель-
ной отработки конструкторской и технологической документации
(ГОСТ 14.004-83). Решение об освоении производства КМ прини-
мают по результатам квалификационных испытаний установочной
серии или первой промышленной партии (ГОСТ 16504-81). При не-
соответствии технического уровня КМ современным требованиям,
низких технологических показателях и показателях качества процес-
сов функционирования, отрицательном воздействии КМ на здоровье
людей и окружающую среду, отсутствии заказов и спроса, а так-
же при освоении в производстве аналогичной по назначению новой
машины с более высокими характеристиками выпускаемая машина
подлежит снятию с производства.
14
Обращение машины. Это часть жизненного цикла КМ от от-
грузки ее предприятием-изготовителем до получения потребителем.
Типичными этапами этой стадии являются: хранение на складе го-
товой продукции, реклама, упаковка, транспортирование, монтаж.
При обращении должно быть обеспечено максимальное сохранение
объемов и качества готовой продукции, установленных плановыми
заданиями, стандартами и техническими условиями.
Эксплуатация машины. На этой стадии реализуется, поддер-
живается и восстанавливается качество КМ (ГОСТ 25866-83). Экс-
плуатация КМ включает в общем случае ввод в эксплуатацию, ис-
пользование по назначению, техническое обслуживание, ремонт, мо-
дернизацию и хранение. Каждый из названных этапов может содер-
жать множество операций, направленных на достижение высоких
технико-экономических показателей КМ, обеспечение ее эффектив-
ной работы, повышение срока службы.
Наконец, вследствие морального или физического износа в про-
цессе использования КМ перестает отвечать предъявленным тре-
бованиям, становятся нецелесообразными дальнейшее ее использо-
вание по назначению и ремонт, и поэтому КМ подлежит снятию с
эксплуатации и последующей утилизации. Снятие с эксплуатации
машины оформляют документально в установленном порядке в со-
ответствии с ГОСТ 25866-83.
Рассмотренные стадии можно представить в виде замкнутого
цикла, в котором условия высокого качества и экономичности изго-
товления, сохраняемости, живучести и эффективного использования
создаваемой КМ в народном хозяйстве страны являются исходными
факторами для формирования технических требований к разработке
конструкции. Таким образом, все четыре стадии жизненного цикла
тесно взаимосвязаны и взаимообусловлены. Степень полноты учета
этих взаимосвязей на этапах предпроектных исследований и проек-
тирования определяет качество и технический уровень создаваемых
КМ и оказывает решающее влияние на показатели эффективности
достижения конечных народнохозяйственных результатов.
Особенности технологии проектирования колесных машин
В соответствии с ГОСТ 22487-77, проектирование - это процесс
составления описания, необходимого для создания еще несуществую-
щего объекта (алгоритма его функционирования или алгоритма про-
цесса), который осуществляется преобразованием первичного описа-
ния (технического задания), оптимизацией характеристик объекта и
15
алгоритма его функционирования, устранением некорректности пер-
вичного описания и последовательным представлением описаний де-
тализируемого объекта для различных этапов проектирования.
В процессе проектирования выполняют технические и экономи-
ческие расчеты, схемы, графики, макеты; составляют пояснитель-
ные записки, спецификации, сметы, калькуляции и описания.
Процесс проектирования реализуется в соответствии с опреде-
ленным планом, который можно представить в виде логической схе-
мы (логического графа) построения проекта. Такая схема отобра-
жает очередность выполнения основных проектных процедур и опе-
раций. Определения основных элементов процесса проектирования
даны в ГОСТ 22487-77.
Проектная процедура соответствует формализованной совокуп-
ности действий, выполнение которых заканчивается принятием про-
ектного решения. Под проектным решением понимается промежу-
точное или конечное описание объекта проектирования, необходимое
и достаточное для рассмотрения и определения дальнейшего напра-
вления или окончания проектирования. Проектная процедура состо
ит из элементарных проектных операций со строго установленным
порядком их выполнения и направлена на достижение локальной це-
ли в процессе проектирования. Проектная операция -это действие
или формализованная совокупность действий, часть проектной про-
цедуры, алгоритм, которые остаются неизменными для ряда про-
ектных процедур. Алгоритм проектирования представляет собой
совокупность предписаний, необходимых для выполнения проекти-
рования.
Примерами проектных процедур могут служить расчет пара-
метров трансмиссии, выбор кинематической схемы трансмиссии,
оформление сборочного чертежа механизма или узла, а примера-
ми проектных операций - решение системы алгебраических урав-
нений, описывающих статическое состояние какого-либо механизма
при определении средних нагрузок его элементов или машины при
определении реакций опорной поверхности на колеса; расчет показа-
телей эффективности очередного варианта конструктивной схемы;
вычерчивание типового графического изображения (зубчатого зацеп-
ления, шпоночного соединения, рамки чертежа и т.п.).
Последовательность выполняемых при проектировании объекта
проектных процедур называют маршрутом проектирования. Если
эта последовательность сохраняется для многих объектов данного
класса, то маршрут проектирования является типовым.
16
Процедуры проектирования опираются на язык проектирова-
ния, который служит средством лингвистического или графического
представления и преобразования описания при проектировании.
Результатом проектирования является проектное решение (со-
вокупность проектных решений), удовлетворяющее заданным тре-
бованиям, необходимое для создания объекта проектирования. По
окончании процесса проектирования получают проектные докумен-
ты и проект в целом. В проектном документе, выполненном по
заданной форме, представлено какое-либо проектное решение, полу-
ченное при проектировании. Проект - это совокупность проектных
документов в соответствии с установленным перечнем, в которых
представлен результат проектирования.
Современный этап развития техники характеризуется примене-
нием систем автоматизированного проектирования (САПР). Авто-
матизация проектирования требует пересмотра сложившихся тра-
диционных представлений и приемов выполнения проектных работ
в сторону большей формализации, большей строгости определения
понятий, однозначности толкования терминов, четкости классифи-
каций. Выполнение этих условий дает возможность перейти к но-
вой методологии проектирования, позволяющей разработать эффек-
тивную технологию выполнения проектно-конструкторских работ.
Методология проектирования при этом должна базироваться на об-
щей теории технических систем, динамике систем, системном анали-
зе, исследовании операций, теории надежности, экономике, методах
прикладной математики, теории принятия решений, теории инфор-
мации и т.п.
Проектирование КМ - творческий процесс, трудно поддающий-
ся формализации, а следовательно, и автоматизации. Однако наряду
с творческими задачами он содержит множество рутинных опера-
ций, автоматизация которых не встречает особых затруднений и да-
ет значительный эффект в сокращении времени их выполнения при
высоких показателях точности и качества проектных операций.
Решения творческих задач при проектировании технических
объектов разделяют на эвристические и систематические. Эвристи-
ческими называют решения, при которых важная часть творческого
процесса совершается в результате мыслительной деятельности че-
ловека и не может быть логически получена из предшествующего
опыта. Систематическими называют решения, полученные в ре-
зультате использования методов, стимулирующих творческую дея-
тельность (например, метода мозгового штурма, морфологического
метода, инверсии, аналогии, алгоритмов решения изобретательских
17
задач). Эти методы представляют собой отдельные систематизиро-
ванные эвристические приемы.
Систематические решения базируются на осознанном процессе
поиска и решения задачи в результате упорядочения мышления и
применения методов его активизации. Различия между решениями,
полученными эвристическими и систематическими методами, может
и не быть. Однако подходы к достижению результата и способы
его получения различны. Методы стимулирования творческой дея-
тельности основаны на логике и используют заранее определенную
последовательность действий и операций (технологию проектирова-
ния).
Сокращение сроков создания машин, повышение их технико-
экономических показателей и эффективности использования требу-
ют комплексного подхода к проектированию с учетом взаимосвязи и
взаимообусловленности различных элементов динамических систем
машин и процессов взаимодействия с окружающей средой на основе
соответствующей стратегии, нацеленной на достижение конечных
народно-хозяйственных результатов.
Такую стратегию может обеспечить системный подход - на-
правление методологии научного познания, в основе которого лежит
исследование объектов как систем.
Таким образом, характерными особенностями современной тех-
нологии проектирования являются: методология системного подхо-
да, базирующаяся на общей теории технических систем, динамике
систем, системном анализе, исследовании операций, теории надежно-
сти, экономики, методах прикладной математики, теории принятия
решений, теории информации; стратегия, нацеленная на достиже-
ние конечных народно-хозяйственных результатов; высокая степень
формализации и типизации проектных процедур и операций; авто-
матизация проектирования на всех стадиях и этапах с применением
комплекса технических средств САПР; создание базы данных и базы
знаний.
Проектирование как процесс, развивающийся во времени, рас-
членяется на стадии, этапы, проектные процедуры и операции. Наи-
более крупные этапы - внешнее и внутреннее проектирования.
Внешнее проектирование содержит ряд стадий. На стадии
научно-технического поиска и прогнозирования (предпроектные ис-
следования) на основе изучения потребностей общества, научно-
технических достижений в области автомобилестроения и в смежных
18
областях промышленности, а также имеющихся ресурсов обосновы-
вают необходимость создания и формируют замысел КМ; определя-
ют тенденции ее развития; проводят сбор информации и прогнози-
руют задачи и условия ее функционирования; разрабатывают новые
идеи и технические решения. Эта стадия характеризуется умствен-
ной творческой деятельностью конструкторов и завершается синте-
зом концепции создаваемой КМ.
Конечной целью внешнего проектирования является разработ-
ка ТЗ на проектирование КМ. Для количественного обоснования
критериев эффективности и технических требований к КМ проводят
моделирование и исследование альтернативных вариантов структур-
ного и принципиального построения КМ с учетом характеристик и
условий внешней среды.
Основа внешнего проектирования - правильный учет современ-
ного состояния техники, возможностей технологии, прогноз их раз-
вития на период времени, не меньший жизненного цикла КМ. Наря-
ду с техническими факторами необходимы учет экономических пока-
зателей, прогноз стоимости и сроков проектирования и изготовления.
На основе изучения состояния и перспектив научно-технического
прогресса группа экспертов формулирует первоначальный вариант
ТЗ на КМ. Оценку выполнимости сформулированного ТЗ и рекомен-
дации по его корректировке получают с помощью проектных проце-
дур внутреннего проектирования.
Таким образом, на этапе внешнего проектирования основная
проблема состоит в конкретизации целей и задач, выполняемых со-
здаваемой КМ при эксплуатации, а также определении ее основ-
ных характеристик и показателей качества. Решением этих вопро-
сов занимается группа ведущих конструкторов во главе с Генераль-
ным конструктором в тесном взаимодействии с научно-исследова-
тельскими учреждениями, вузами и отдельными учеными - круп-
ными специалистами в области автомобилестроения.
Внешнее проектирования принято называть этапом научно-
исследовательских работ. Во многих случаях этот этап частично
включает работы, выполняемые на стадии технического предложе-
ния.
Внутреннее проектирование необходимо для конкретизации ос-
новных конструктивных параметров, определяющих облик машины.
Оно включает этап опытно-конструкторских работ ( ОКР ) и завер-
шается разработкой рабочего проекта КМ. Этап ОКР объединя-
ет стадии технического предложения (частично), эскизного и техни-
ческого проектов, на которых отражаются вопросы детальной кон-
структорской проработки проекта. Внутреннее проектирование вы-
полняет конструкторская организация - исполнитель данного про-
екта (обычно ГСКБ или ОГК завода-изготовителя).
19
Следует отметить, что на начальных стадиях проектирования
сложных систем имеет место итерационный процесс, в котором по-
очередно выполняются процедуры внутреннего и внешнего проекти-
рования - формулировка ТЗ, его корректировка, оценка выполнимо-
сти, прогноз материальных и временных затрат на проектирование
и изготовление. Итерационный характер проектирования свойстве-
нен всем стадиям и этапам и является важным принципом проекти-
рования сложных объектов.
Перечень работ, осуществляемых в процессе разработки цикла
производства продукции, регламентирован ГОСТ 15.001-88. Разра-
ботку ведут в соответствии с требования Единой системы конструк-
торской документации (ЕСКД) согласно ГОСТ 2.103-68.
Рассмотрим основное содержание работ, выполняемых на этапе
внутреннего проектирования.
Техническое предложение содержит технико-экономическое
обоснование целесообразности разработки КМ, уточняет требова-
ния к ней, полученные на основании анализа технического за-
дания и проработки вариантов возможных технических решений.
Требования к выполнению технического предложения установлены
ГОСТ 2.118-73.
Эскизный проект представляет собой проектную конструктор-
скую документацию, в которой изложены принципиальные конструк-
торские решения, дающие общее представление о конструкции и
принципе работы КМ, а также данные, определяющие соответствие
ее назначению (ГОСТ 2.119-73).
Технический проект содержит окончательное техническое реше-
ние, дающее полное представление о конструкции разрабатываемой
КМ и включающее данные, необходимые для разработки рабочей
конструкторской документации (ГОСТ 2.180-73). Конструкторскую
документацию разрабатывают на стадии рабочего проекта и исполь-
зуют для технологической подготовки производства, изготовления,
контроля, приемки, поставки, эксплуатации и ремонта КМ.
Отметим, что понятия иерархического уровня и аспекта отно-
сятся к структурированию представлений о проектируемом объекте,
а стадии и этапа - к структурированию процесса проектирования.
Если решение задач высоких иерархических уровней предше-
ствует решению задач более низких уровней, то проектирование на-
зывают нисходящим. Если же раньше выполняются этапы, связан-
ные с низшими иерархическими уровнями, то проектирование будет
восходящим.
20
У каждого из этих двух видов проектирования имеются пре-
имущества и недостатки. При нисходящем проектировании систему
разрабатывают в условиях, когда ее элементы еще не определены, а
следовательно, сведения об их возможностях и свойствах носят пред-
положительный характер. При восходящем проектировании, наобо-
рот, элементы проектируют раньше системы и, следовательно, пред-
положительный характер имеют требования к ней.
В практике создания КМ применяют оба вида проектирования,
но преимущественно используют второй. Дело в том, что чаще
создают различные модификации, а при проектировании новых се-
мейств КМ широко практикуют конструктивную преемственность,
когда многие узлы и агрегаты выпускаемых машин, находящиеся
на высоком техническом уровне, отвечающие современным требова-
ниям и хорошо зарекомендовавшие себя в эксплуатации, применяют
на вновь создаваемых КМ. Имея набор типоразмерных рядов отра-
ботанных конструкций различных агрегатов, завершенных в функ-
циональном и монтажных отношениях, можно перейти к наиболее
перспективному блочно-модульному принципу проектирования, по-
зволяющему сократить сроки создания новой техники.
Нисходящее и восходящее проектирования имеют отличие на
стадии разработки ТЗ. При нисходящем проектировании формули-
ровка ТЗ на разработку элементов к-го иерархического уровня от-
носится к проектным процедурам этого же уровня. Иначе обстоит
дело с разработкой ТЗ на систему высшего иерархического уровня
или на унифицированную систему элементов, предназначенную для
многих областей применения. Здесь разработка ТЗ является само-
стоятельной стадией, завершающей этап внешнего проектирования.
В отличие от него стадии проектирования КМ по сформулирован-
ным ТЗ входят в состав этапа внутреннего проектирования.
Техническую документацию, получаемую в процессе проектиро-
вания и используемую на различных стадиях жизненного цикла КМ,
разделяют на исходную, проектную, рабочую, информационную.
К исходной документации относят заявку на разработку и осво-
ение продукции, исходные требования, рекомендации по разработ-
ке продукции, получаемые в процессе НИР, техническое задание,
аванпроект. Последний содержит обоснование разработки и включа-
ет пояснительную записку, чертежи, схемы, расчеты и проект ТЗ.
Утверждение аванпроекта заказчиком или основным потребителем
и разработчиком является необходимым условием для начала разра-
ботки КМ.
21
Проектную документацию разделяют на конструкторскую и
технологическую. Конструкторскую составляют материалы техни-
ческого предложения, эскизного и технического проектов, а техноло-
гическую - материалы предварительного проекта.
Рабочая документация состоит из конструкторской, технологи-
ческой, эксплуатационной и ремонтной документации.
К информационной документации относят карту технического
уровня и качества продукции (ГОСТ 2.116-84), патентный форму-
ляр, информационную карту расчета экономической эффективности
и цен новой (модернизированной) продукции, каталоги, отчеты о па-
тентных исследованиях, экспертное заключение, акты и протоколы
об испытаниях, решение о снятии продукции с производства и др.
Описание объектов проектирования
Применение принципов декомпозиции и иерархичности при про-
ектировании автомобильного транспортного средства дает возмож-
ность структурировать представление о проектируемом объекте,
выделяя при этом следующие его элементы: аспекты проектирова-
ния, иерархические уровни, блоки, базовые элементы (детали ма-
шин).
Каждый из этих элементов представляет собой объект проекти-
рования, результатом которого является абстрактный образ - про-
ект, имеющий определенное содержательное описание.
Описание проекта создаваемого объекта представляет собой
полный комплект схемной, конструкторской и технологической до-
кументации, оформленной по ЕСКД и предназначенной для исполь-
зования в процессе изготовления и эксплуатации объекта. Отметим,
что создаваемыми объектами при блочно-модульном проектирова-
нии являются не только машины, комплексы или машинные агре-
гаты, но и отдельные сборочные единицы и агрегаты, отвечающие
соответствующим требованиям, составляющие типоразмерные ря-
ды и используемые для разработки семейств унифицированных КМ.
Аналогичные описания имеют результаты проектирования на уров-
не аспектов, блоков, деталей и т.д.
Процесс проектирования на любой стадии или этапе состоит из
проектных процедур и операций и сопровождается проектными ре-
шениями, предназначенными для использования собственно при про-
ектировании. Это в особенности относится к современной техноло-
гии проектирования, используемой в САПР. Процесс проектирова-
ния при этом основан на оперировании математическими моделями.
22
Они являются основой описания проектных процедур, операций и
проектных решений.
Среди параметров необходимо выделить показатели эффектив-
ности, которые являются количественной оценкой степени соответ-
ствия объекта его целевому назначению. Они позволяют оценить
такие важные характеристики, как производительность, экономич-
ность, надежность, стоимость, материалоемкость, энергоемкость,
габаритные размеры и др. Показатели эффективности являются
выходными параметрами создаваемых КМ, поэтому чаще всего их
используют на высших иерархических уровнях проектирования.
Выходными параметрами также являются показатели качества,
по которым можно судить о правильности функционирования систе-
мы. Показатели качества используют для оценки систем на любом
иерархическом уровне. Если структура системы определена, то ее
выходные параметры зависят только от внутренних и внешних па-
раметров. К внутренним относятся параметры элементов систем,
к внешним - параметры внешней по отношению к объекту среды,
оказывающие влияние на его функционирование.
Выходные параметры характеризуют свойства системы и режи-
мы ее работы, а внутренние - свойства элементов системы.
При переходе к новому уровню проектирования внутренние па-
раметры могут стать выходными и наоборот.
В общем случае зависимость свойств системы от внутренних и
внешних параметров имеет вид
Г = /(Х,£), (1.1)
где Y = (yi, уз, •. •, Ут) ~ вектор выходных параметров; X =
= (®i, Ж2, •• •, хп) - вектор внутренних параметров; Q =
= (gi, Q2, • • • 1 Ql) - вектор внешних параметров.
Выражение (1.1) является примером математической модели
объекта. Наличие такой модели позволяет легко определить выход-
ные параметры технического объекта по известным значения век-
торов X и Q. Однако математическую модель вида (1.1) удается
получить только для простейших объектов. При проектировании
сложных объектов, таких как КМ, эту модель используют только
на определенных этапах. Прежде всего на стадии предпроектных
исследований, на верхнем иерархическом уровне функционального
проектирования при определении параметров типоразмерных рядов
или системы машин, при определении начальных приближений па-
раметров в процессе параметрического синтеза после предваритель-
ного выбора структуры и т.д.
23
В общем случае для описания сложного технического объекта
используют математическую модель в форме системы уравнений:
LV(^) = ^(Z), (1.2)
где L - некоторый оператор; V - вектор фазовых переменных (коор-
динат системы); Z - вектор независимых переменных, в общем слу-
чае включающий время и пространственные координаты; 7j?( Z ) -
вектор функции независимых переменных.
Фазовые переменные характеризуют физическое или информа-
ционное состояние объекта, а их изменения во времени выражают
переходные процессы в объекте. Вид фазовой переменной зависит от
физической природы описываемого процесса. В механических систе-
мах фазовыми переменными являются сила и скорость, в электриче-
ских - сила тока и напряжение, в гидравлических и пневматических
- расход и давление, в тепловых - тепловой поток и температура.
При блочно-иерархическом подходе к проектированию учитыва-
ются следующие особенности параметров в моделях объектов.
1. Внутренние параметры в моделях к-го иерархического уров-
ня становятся выходными параметрами в моделях более низкого
(к — 1)-го уровня. Так, передаточные числа трансмиссии являются
внутренними параметрами и в то же время выходными параметрами
трансмиссии при ее проектировании.
2. Выходные параметры и фазовые переменные, фигурирующие
в модели одной из подсистем, часто оказываются внешними параме-
трами в описаниях других подсистем. Эта же особенность характер-
на для аспектов проектирования. Можно привести такие примеры.
Тяговое сопротивление КМ является ее выходным параметром, а для
тягача - это внешний параметр. Угловые скорости и крутящие мо-
менты полуосей КМ представляют собой их фазовые координаты, а
для дифференциала (или коробки передач с учетом преобразований,
осуществляемых главной передачей) - это внешние параметры.
3. Большинство выходных параметров объекта представляют
собой функционалы фазовых координат, т.е.
У = Ж(Г)].
Для определения вектора выходных параметров Y необходимо при
заданных X и Q решить систему уравнений и по полученным ре-
24
зультатам вычислить У . Примерами выходных параметров, опре-
деляемых по изложенной схеме, являются тяговая мощность, тяго-
вый КПД, производительность КМ, амплитуды колебаний остова
машины или водителя на сиденье и т.д.
Рассмотренные виды описаний объектов проектирования каса-
лись представлений промежуточных и окончательных результатов
проектирования. Описание разработанного проекта технического
объекта состоит из совокупности проектных документов, предста-
вляющих собой комплект технической документации, оформленной
по ЕСКД и используемой на всех последующих этапах жизненно-
го цикла КМ - от производства до снятия с эксплуатации. Неко-
торые виды проектных документов окончательного описания упо-
минались выше. Основой описания проектных процедур операций,
осуществляемых в процессе проектирования технического объекта,
являются математические модели. Описание проектных процедур
и операций является промежуточным, а разработанного проекта -
окончательным описанием объекта проектирования. Но до начала
выполнения проектных работ должно быть представлено исходное
описание объекта проектирования, которое имеет форму техниче-
ских требований и (или) ТЗ.
1.2. Условия эксплуатации
Климатические условия
Полноприводные КМ используют в самых разнообразных при-
родно-климатических условиях. Обычно эти условия эксплуатации
характеризуются следующими факторами: влажностью и запылен-
ностью воздуха, количеством и интенсивностью осадков, скоростью
ветра, высотой над уровнем моря.
Температурный фактор существенно влияет на работу КМ.
Особенно сказывается влияние низких температур: чем ниже темпе-
ратурная граница использования машины, тем сложнее ее конструк-
ция. Это обусловлено необходимостью введения вспомогательных
систем, обеспечивающих надежную работу двигателя, трансмиссии
рулевого управления, тормозной системы, подвесок и т.д., а также
соответствующих условий труда водителя при низкой температу-
ре. Кроме того, требуется применение специальных топлив, масел,
резинотехнических изделий, а при особо низких температурах - и
хладостойких металлов.
25
Правильная оценка вероятных температурных условий исполь-
зования КМ необходима, во-первых, чтобы обеспечить рациональ-
ность конструкции при разработке и тем самым экономичность про-
изводства и, во-вторых, чтобы знать и правильно использовать экс-
плуатационные меры по поддержанию необходимой надежности и
эффективности КМ в тех или иных условиях.
В настоящее время при проектировании КМ принимают рабо-
чий диапазон температур воздуха —45... 4- 50°С, что соответствует
условиям эксплуатации в умеренных макроклиматических районах.
При этом кратковременно допускается работа машины при пониже-
нии температуры до — 50°С. Учет условий эксплуатации КМ при
температурах воздуха от —45°С (кратковременно —50°С) до -*-50°С
не влечет за собой существенных изменений в конструкции, произ-
водстве и применяемых материалах.
Влажность воздуха - существенный фактор в сочетании с повы-
шенной температурой, поскольку создаются условия для интенсив-
ной коррозии металлов, быстрого старения резинотехнических дета-
лей, деструкции масел.
Следует отметить, что переувлажненность воздуха (85... 100 %)
при относительно высокой температуре (30...35°С) характерна
лишь для районов с очень жарким климатом. Типичным является
сочетание очень высоких температур (40°С) с очень низкой влаж-
ностью (ниже 30 %). Высокая влажность в этих районах возможна
только при относительно низких температурах. Точно так же и в
других районах высокая влажность наблюдается лишь при невысо-
ких температурах воздуха. Поэтому при создании КМ предусма-
тривают мероприятия по обеспечению коррозионной стойкости для
средних условий - предельной относительной влажности 98 % при
температуре 25°С.
Запыленность воздуха - одна из важнейших характеристик
условий эксплуатации КМ. Полноприводные КМ предназначены,
как правило, для использования на грунтовых дорогах и бездоро-
жье, где в сухое время года возникает повышенная запыленность.
В связи с этим к их конструкциям, и в первую очередь к системам
питания двигателя топливом и воздухом, предъявляют повышенные
требования.
Обычно запыленность воздуха оценивают по содержанию пыли
в единице объема воздуха. Следует иметь в виду, что степень за-
пыленности воздуха неодинакова по высоте: у полотна дороги она
максимальна, а с увеличением высоты снижается. С учетом этого
критерий предельной запыленности определяют во многих случаях
26
на высоте 1,5 м от уровня дороги. Предельно допустимая массовая
концентрация пыли, при которой КМ должна длительно работать,
составляет 1,5... 2,5 г/м3. При этих значениях массовой концентра-
ции продолжительность работы КМ без смены и очистки фильтру-
ющих элементов устанавливают в пределах 12... 28 ч.
Однако характеристика запыленности только по содержанию
пыли в единице объема воздуха не достаточна для оценки степени
тяжести эксплуатационных условий. В зависимости от характера
грунта фракционный состав пыли может быть различным. Наи-
более неблагоприятное воздействие на работу КМ оказывает пыль
мелкофрикционного дисперсного состава. В этом случае с меньшей
эффективностью работают как инерционные фильтры, так и филь-
тры других типов, поглощающие частицы пыли.
Скорость ветра и интенсивность выпадения осадков оказыва-
ют меньшее влияние на конструкцию КМ, хотя и требуют учета,
главным образом в связи с обеспечением теплового режима работы
агрегатов (в зимнее время) и соответствующей комфортабельности
в кабине (салоне).
Интенсивность выпадения осадков на территории с умеренным
климатом, как правило, не превышает 3... 3,5 мм/мин в течение
кратковременного периода и 1,5... 1, б мм/мин при длительном вы-
падении. Однако эксплуатапионные технические требования к КМ
более жесткие (интенсивность выпадения осадков не должна превы-
шать 5 мм/мин) в связи с необходимостью обеспечения герметично-
сти кабин при движении по пыльным дорогам и при преодолении
бродов.
Высота над уровнем моря - географический фактор, влияющий
в основном на мощность двигателя и его тепловой режим. Этот
фактор учитывают, исходя из необходимости преодоления длитель-
ных подъемов и спусков при сниженной мощности двигателя и более
напряженной работы систем управления движением. Как известно,
мощность двигателя зависит от плотности воздуха и его темпера-
туры, а оба этих фактора - от высоты над уровнем моря. В ре-
зультате изменения плотности воздуха мощность двигателя с уве-
личением высоты существенно падает, причем наиболее интенсивно
у карбюраторных двигателей. Дизели, особенно с наддувом, менее
чувствительны к высотному фактору, чем и определяется предпо-
чтительность их использования в высотной местности.
С учетом географических особенностей и сложившейся дорож-
ной сети в горных районах эксплуатационно-техническими требо-
ваниями предусматривается использование КМ на местности и на
27
дорогах при высоте горных участков не более 4000 м. При этом до-
пускается некоторое ухудшение тягово-динамических и скоростных
свойств, обусловленное снижением мощности двигателя вследствие
уменьшения расхода воздуха.
Дорожные условия
КМ эксплуатируются в самых разнообразных дорожных усло-
виях. При этом оценить комплексно все многообразие воздействий
чрезвычайно сложно, особенно, если принять во внимание, что в за-
висимости от сезона и специфики региона однотипные дороги могут
иметь различные характеристики. Поэтому при создании и эксплу-
атации колесной техники оценку проводят не по комплексному воз-
действию, а по отдельным его составляющим. Основными из них
являются: сопротивление движению, сцепление движителя с опор-
ной поверхностью, микро- и макропрофиль дорожной поверхности
(бездорожья). Данные характеристики определяют условие движе-
ния:
— Л — Р<р->
где Р^ - сила сопротивления движению; Рк - сила тяги; Рр - макси-
мально реализуемая сила тяги; нагрузки, возникающие в элементах
и агрегатах КМ, а также энергетические затраты на ее движение.
Для сравнительной оценки условий эксплуатации используют
их укрупненную классификацию. Согласно ГОСТ 21624-81, автомо-
бильные дороги разделены на пять категорий по условиям эксплу-
атации, из которых две (IV и V) оценивают условия эксплуатации
КМ высокой проходимости. Однако такая классификация являет-
ся качественной характеристикой дорожных условий и не дает ин-
формации, необходимой для проектирования КМ. Поэтому широко
используются частные оценки.
Сопротивление движению машины. При эксплуатации КМ в
реальных условиях сопротивление движению определяется не только
взаимодействием колесного движителя с опорной поверхностью (со-
противлением качению), но и составляющей сцепного веса машины,
которая зависит от рельефа местности (подъемов, спусков). Общее
сопротивление движению в этом случае выражается через безраз-
мерный коэффициент сопротивления движению равный отноше-
нию силы сопротивления движения Р^ к полному весу машины GM:
i/> = [fcGM cosa± GMsina)/GM,
28
или
ф = fc cos а ± sin а,
где fc - коэффициент сопротивления качению колеса (безразмерная
величина), fc — Pfcl^iA\ Pfc ~ сила сопротивления качению колес;
а - угол подъема (спуска).
Коэффипиент fc определяют экспериментально в квазистатиче-
ских условиях на горизонтальном участке дороги. Он практически
не зависит от конструктивного решения КМ, но значительно изме-
няется при перемене дорожных условий. Значения коэффициента fc
при номинальном (числитель) и сниженном (знаменатель) давлениях
воздуха в шинах приведены ниже:
Дорога с асфальтобетонным
I категории............
II и III категорий.....
покрытием:
0,012...0,020
............. 0,030... 0,040
0,015...О,025
............. 0,030...0,040
Булыжная дорога:
0,020...0,030
в удовлетворительном состоянии...... - ----- —
О, 030... 0,050
ра3битая ............................ 0,040...0,060
Грунтовая дорога:
О, 025... 0,030
в удовлетворительном состоянии....... - —
О, 040 ... О, 050
0,060... 0,080
разбиТаЯ ............................ 0,050...0,075
0,150...0, 250
в период распутицы .................. ——--------—-
О, 250...О, 035
Укатанная заснеженная дорога............ ———-------———
н 0, 04о ... О, 060
0, 020... 0, 030
Сухои песок............................. 0. 100.. .0. 150
0,250.. .0,350
Снежная целина.......................... ..........
При движении КМ в любых условиях коэффициент сопротивле-
ния движению непрерывно изменяется, так как постоянно изменяют-
ся его составляющие: коэффициент сопротивления качению вслед-
ствие неоднородности опорной поверхности и макропрофиль пути.
29
Экспериментальными исследованиями установлено, что составляю-
щие, а следовательно, и сам коэффициент являются случайными ве-
личинами, которые подчиняются нормальному закону распределе-
ния:
v
где ф - текущее значение коэффициента сопротивления движению;
- среднее квадратическое отклонение коэффициента ф\ - ма-
тематическое ожидание коэффициента ф.
Следовательно, ф полностью определяется двумя параметрами
нормального закона распределения: математическим ожиданием
и средним квадратическим отклонением (дисперсией = <7^).
Данные параметры для конкретного вида дорожных условий опреде-
ляют по результатам обработки большого объема эксперименталь-
ной информации по известным выражениям
- при дискретном способе регистрации и
Li
тф = lim Т
} Lj—*oo Lj J
О
Lj
D^ = J
J 0
- при непрерывном. Здесь D^. - параметры, характеризующие
коэффициент ф в j-x дорожных условиях; ф^ - i-е значение фу, Lj -
протяженность j-го участка дороги; х, фу - текущие значения Lj и
ф в j-x дорожных условиях.
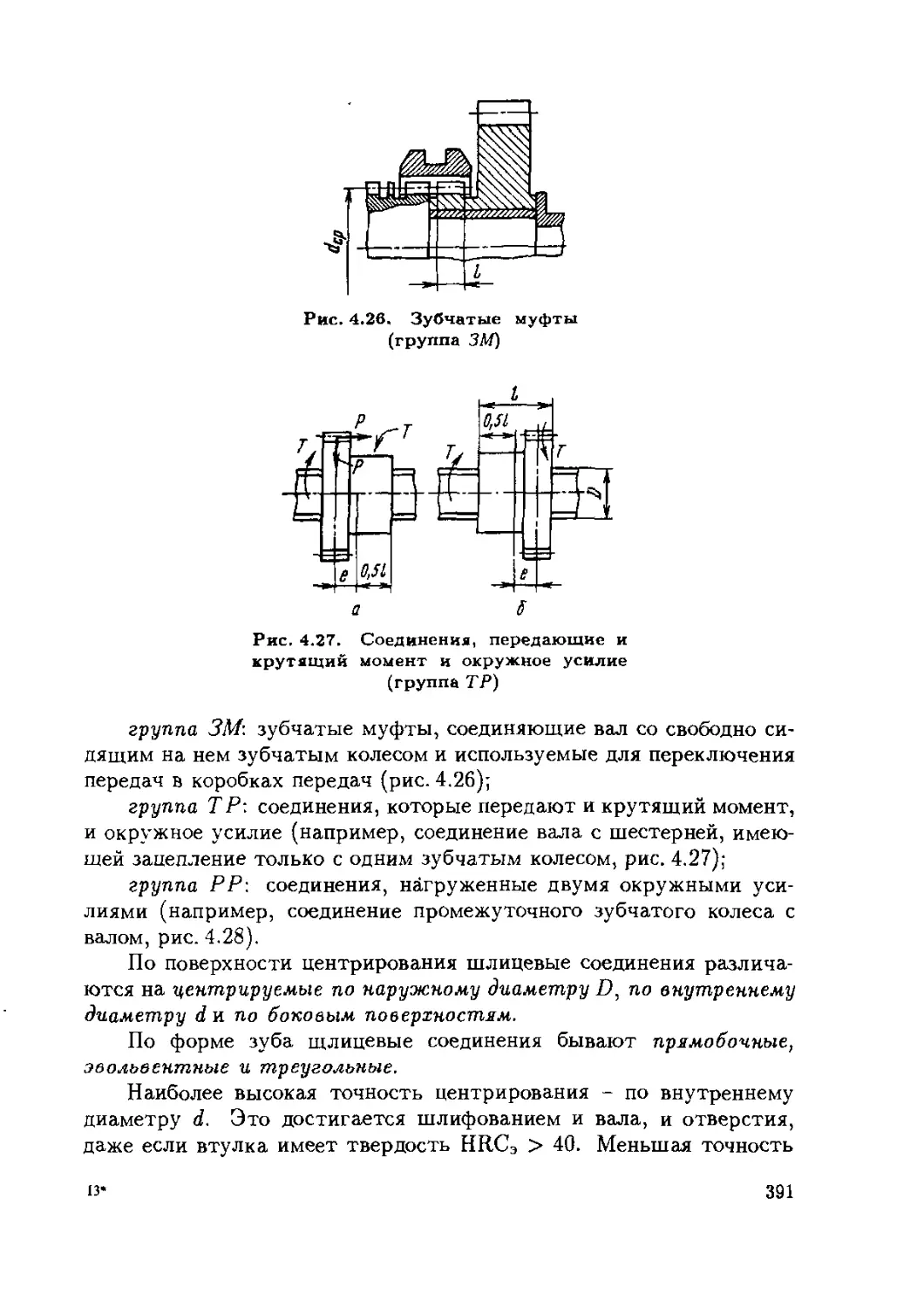
Рис. 1.2. Плотность распределения коэф-
фициента сопротивления движению КМ
при эксплуатации иа дороге с твердым по-
крытием (/), булыжной (2), грунтовой удо-
влетворительного состояния (3), грунто-
вой разбитой (4), по бездорожью (5)
При непрерывном способе определения параметров закона рас-
пределения предполагается, что ф(х) является эргодической случай-
ной функцией протяженности. На рис. 1.2 представлена плотность
распределения ф для различных дорожных условий, а в табл. 1.1 -
значения параметров и
Таблица 1.1. Значения параметров закона распределения ф для
различных типов дорог
1ип дороги т^, Тип дороги
С асфальтобетон- ным покрытием Булыжная, гравий- 0,022 0,012 Грунтовая: в удовлетвори- тельном состоянии 0,045 0,022
ная и щебеночная Бездорожье 0,032 0,16 ' 0,018 - 0,03 разбитая 0,08 0,03
Приведенные данные показывают, что при искусственном по-
крытии дороги значения ф более стабильны, так как поверхность
полотна постоянно поддерживается в рабочем состоянии. По извест-
ным значениям и D^, с учетом того, что коэффициент ф имеет
нормальный закон распределения, несложно определить с заданной
вероятностью диапазон возможных значений ф. Так, с вероятностью
99,73 % случайные значения ф находятся в интервале ± 3<т^.
С учетом вероятности использования КМ в соответствующих
дорожных условиях можно построить кривую распределения коэф-
31
фициента V’e для всей совокупности дорожных условий. Значения
вероятности эксплуатации КМ приведены ниже:
Дорога с асфальтовым покрытием................ 0,20
Булыжная, гравийная и щебеночная дороги. . . . 0,30
Грунтовая дорога:
в удовлетворительном состоянии.............. 0,30
разбитая.................................... 0,10
в период распутицы.......................... 0,05
Бездорожье, снежная целина ................... 0,05
Как видно на рис. 1.3, кривые плотности распределения коэф-
фициента V’e, определенные для КМ различных типов, существенно
отличающихся массой и конструктивным исполнением, мало отли-
чаются по форме и не подчиняются нормальному закону распределе-
ния.
Рис. 1.3. Плотность распределения коэф-
фициента сопротивления движению КМ
для всей совокупности дорожных условий:
1 - КМ (4x4) массой 2,3 т; 2 - КМ (6x6) массой
13,5 т; сплошные кривые - КМ с прицепом, штри-
ховые - КМ без прицепа
Сцепление движителя с опорной поверхностью. Следующим
важным условием движения является реализация силы тяги. По ана-
логии с сопротивлением движению (качению) машины сцепные свой-
ства движителя с опорной поверхностью оценивают коэффициентом
сцепления р>, который представляет собой отношение максимально
реализуемой силы тяги Р^> к весу машины GM:
<р — P<p]GM.
32
Вследствие разнообразия дорожных условий значения 9? изменя-
ются в широких пределах при номинальном (числитель) и снижен-
ном (знаменатель) давлениях воздуха в шинах:
„ 0,70...0,80
Дорога с асфальтобетонным покрытием.... jr-rr------—-
0, <5 ... 0,80
„ 0,60...0,70
Булыжная дорога.......................... 0,65...0,75
Грунтовая дорога:
0,50...0,60
уКаТанНаЯ............................... О75О...О,7О
0,40...0,50
разбнтаЯ............................... 0,45...0,55
0,25...0,35
в период распутицы............................... —
„ 0,30...0,40
Укатанная заснеженная дорога............. т-—------т-тт
0,35.. .0,50
0,05...0,15
Обледенелая дорога.......................
0,20...0,30
Сухоипесок............................... 010. .0.35
„ 0,35...0,50
Влажный песок.................................. ^..ДбО
0,15... 0,25
Снежная целииа........................... 77-тт----т—тт
Микро- и макропрофили дорожной поверхности. Первичной
абстракцией дорожных неровностей является поверхность дороги.
Эта абстракция очевидна по крайней мере для малодеформируемой
дороги, конкретный участок которой считается реализацией случай-
ной поверхности. Совокупность таких реализаций представляет со-
бой рельеф дороги, служащий исходным понятием для определения
характеристик или моделей дорожных неровностей.
Профиль дороги - это сечение рельефа дороги в направлении
движения КМ. Сечение поверхности конкретного участка дороги
является реализацией профиля, а совокупность таких реализаций
представляет собой профиль дороги как случайный процесс. Про-
филь дороги зависит от выбора сечения, поэтому его проводят обыч-
но по колее движения.
2-692
33
Профиль дороги делится на три составляющие - макропрофиль,
микропрофиль и шероховатость, что обусловлено различным воз-
действием на КМ. Макропрофиль, состоящий из длинных плавных
неровностей (длина Волны 100 м и более), практически ие вызывает
колебаний КМ, но заметно влияет на ее тягово-динамические показа-
тели. Микропрофиль состоит из неровностей (длина Волны от 10 см
до 100 м), оказывающих существенное, если не определяющее влия-
ние на многие эксплуатационные свойства КМ (надежность, устой-
чивость, плавность хода, быстроходность). Микропрофиль дороги
определяет нагруженность узлов и агрегатов КМ, а также ограни-
чивает возможность полной реализации скорости, мощности, мане-
вренности и грузоподъемности. Шероховатости (длина волны менее
10 см) сглаживаются шинами и не вызывают ощутимых колебаний
КМ, но влияют на работу шины (сцепление, шум и т.д.).
Рассмотрим более подробно микропрофиль дорожной поверхно-
сти как составляющую профиля, наиболее существенным образом
оказывающую влияние на нагрузочные режимы агрегатов КМ. Если
в качестве модели профиля дороги был принят случайный процесс,
то очевидно, что и микропрофиль следует представлять случайной
функцией.
При вероятностной оценке микропрофиля можно использовать
различные характеристики, такие, иапример, как функция и плот-
ность распределения высот и длин неровностей, которые являют-
ся исчерпывающими характеристиками случайных величин (функ-
ций). Ими обычно пользуются при определении сложности дорож-
ной обстановки. Однако для оценки различных эксплуатационных
свойств, а также при проектировании КМ применение таких харак-
теристик затруднено. Это связано с тем, что основной причиной
динамических нагрузок являются колебания систем КМ, которые
рассматривают как непрерывные функции изменения оценочных ве-
личин во времени для систем с сосредоточенными параметрами и во
времени и в пространстве для систем с распределенными параметра-
ми. Поэтому целесообразно представить микропрофиль дороги (как
один из основных источников возмущающего воздействия) в виде не-
прерывной функции изменения высот неровностей на протяженности
пути с последующим ее преобразованием во временную функцию.
Для упрощения вычисления вероятностных характеристик до-
рожную поверхность можно определить двумя случайными функци-
ями:
q(x) = 0,5
1(®) = [?л(®) - ЧлМ]Ж
кл(®) + 9п(г)];
34
где дл(х), gn(z) - случайные функции высот неровностей микропро-
филя сечений поверхности дороги соответственно под левыми и пра-
выми колесами относительно их некоторого постоянного значения;
В - расстояние между сечениями дороги (колея машины); х - неза-
висимая переменная (текущее значение длины пути).
Данные выражения получены в предположении, что взаимная
корреляционная функция Т?917(/) = 0. Результаты эксперименталь-
ных исследований подтверждают это. Поэтому можно определить
степень влияния каждой приведенной случайной функции на рассма-
триваемую систему.
В общем случае функции q(x) и 7(3;) являются нестационарны-
ми, и их характеристики меняются в зависимости от времени и дли-
ны участка дороги. Если же рассматриваемый участок дороги по
типу покрытия и степени износа однороден и можно пренебречь его
изменением во времени, то функции, определяющие поверхность до-
роги, с некоторым приближением принимают как случайные эрго-
дические функции с нормальным законом распределения.
Для удобства и упрощения ординату q(x) и угол наклона 7(3;)
отсчитывают от их средних значений, что дает право считать ма-
тематические ожидания m.q и т-» равными нулю.
Тогда вероятностные характеристики дорожной поверхности
можно определить по следующим выражениям:
L
Da = = lim — / q2(x) dx;
4 q L J 1 '
0
L
Dy = a2 = lim — I y2^x)dx-,
1 L J
0
L
Rq(l) = lim — / q(x)q(x + /) dx;
L—too L J
0
L
= Hm V I 'У(Х)'У(.Х + ^) ^x,
L—^co L J
0
где L - протяженность участка дороги; I - сдвиг аргумента х.
Дисперсия - характеризует разброс случайной величины отно-
сительно ее среднего значения. Корреляционная функция Rq у(1)
отражает вероятностную связь между координатами микропрофиля
2*
35
по длине участка дороги. Чем быстрее функция Rq,y(l) стремится
к нулю, тем слабее взаимосвязь между последующими значениями
?(г), 7(ж)-
В теории стационарных случайных процессов наряду с приве-
денными выше характеристиками широко используют еще один вид
характеристик статистических свойств - спектральные плотности
процессов. Спектральная плотность высот неровностей характери-
зует частотный состав микропрофиля поверхности дороги. Спек-
тральную плотность определяют как преобразование Фурье корре-
ляционной функции:
оо
Gq^fO) = 4 / cos(0/) dl, 0 < 0 < оо,
О
где Gq^fjty - односторонняя спектральная плотность; Q - частота
повторений неровностей микропрофиля дороги. О = 2тг//в; /в - длина
волны спектральной составляющей микропрофиля.
Применяя формулу обратного преобразования Фурье, можно по
спектральной плотности установить корреляционную функцию:
оо
= (27г)-1 У Gg,7(0) cos lf<№. (1.3)
о
Корреляционная функция в точке I = 0 равна дисперсии, и, со-
гласно выражению
оо
я,,7(0) = о,,7 = (27г)-11 Gq.-,(e)de,
О
представляет собой площадь, ограниченную кривой Gg^^O), с мас-
штабным коэффициентом (2тг)-1. Если взять на оси абсцисс графика
(79j-y(0) две частоты 01 и 02 с шагом Д0, то площадь, ограниченная
кривой спектральной плотности, пропорциональна дисперсии в дан-
ном интервале частот.
При определении спектральной плотности эргодического гаус-
совского случайного процесса приведенный способ определения спек-
тральной плотности во многих случаях нельзя признать простым и
36
экономичным. Он предполагает предварительное определение кор-
реляционной функции, что сопряжено с дополнительными вычисле-
ниями. Поэтому целесообразно для получения спектральной плотно-
сти применить метод непосредственного преобразования Фурье. Эту
операцию выполняют на ЭВМ (или анализаторах спектров), исполь-
зуя алгоритм быстрого преобразования Фурье для оценки односто-
ронней спектральной плотности вида
G9,7W = ilimo|m[|X9,7(9, <],
где т - символ математического ожидания; Xq^Q^L) - преобразо-
вание Фурье для функции q(x) или 7(х) на конечном интервале,
L L
Xq(6,L) = I q(x)<rjex dx- X7(0,L) = I -^x)^61 dx.
0 0
Применяемая в данном выражении односторонняя спектральная
плотность является той характеристикой, которую измеряют при
экспериментальных исследованиях прямой фильтрацией.
В настоящее время наиболее полно изучены статистические ха-
рактеристики микропрофиля в продольном сечении дорожного по-
лотна. Рассмотрим их более подробно.
Если разделить обе части выражения (1.3) на дисперсию Dq вы-
сот микропрофиля, то получим формулу для нормированной корре-
ляционной функции: pq(J) = Rq(l)jDq. Нормирование используемых
оценок применяют для большей наглядности и удобства использо-
вания при исследованиях и расчетах. На рис. 1.4 для различных
типов дорог представлена нормированная корреляционная функция,
которая может быть описана аналитической зависимостью. Общее
апроксимирующее выражение имеет вид
п
Pq(l) = zL А*е~а<1 cos Vi1’
1=1
где Aj, - коэффициенты, характеризующие степень нерегулярно-
п
сти микропрофиля, £2 А, = 1; &• - коэффициент, характеризующий
г=1
узкопоЛосность случайной функции микропрофиля поверхности до-
роги.
37
9,<l>
Рис. 1.4. Нормированная корреляционная функция
микропрофиля поверхности дорог различных типов:
1 - асфальтобетонная; 2 - булыжная. 3 - грунтовая
Следует отметить, что коэффициенты, входящие в аппроксими-
рующее уравнение, являются случайными, и в данном выражении
представлены их средние значения ( табл. 1.2). Эти связано с тем,
что точно определить характеристики случайной величины по вы-
борочным данным невозможно, т.е. всегда будет присутствовать
элемент случайности.
Таблица 1.2. Значения коэффициентов аппроксимации корреляцион-
ной функции микропрофиля поверхности дорог
Тип дороги Dq • 1 О'*, м2 Ai ai, м 1 Д:, м'1 Л1 02, М-1 3;, м 1
С асфальто- 0,790 1,000 0,080 0,143 0 0 0
бетонным 0,225 - 1,540 1,000 0,150 0 0 0 0
покрытием 0,640 - 1,880 0,850 0,200 0 0,150 0,050 0. био - 2, 000
1,600 0,650 0,250 0 0,350 0,050 (J 196
Булыжная 2,780 1,000 0,100 0,238 0 0 0
1,820 - 5, 240 1,000 0,450 0 0 0 0
4,330 1,000 0,320 0,640 0 0 0
6,350 0,953 0,213 0 0,047 0,049 1,367
38
Окончание табл. 1.2
Тип дороги D, 10', м’ А1 «1, м 1 /?1, м 1 Аз аг, м 1 02, М 1
Грунтовал: в удовлет- 7,400 1,000 0,400 0,900 0 0 0
воритель- 102,200 1,000 0,450 0,414 0 0 0
ном состоя- 110,320 0,634 0,017 0,144 0,366 0,153 0,581
НИИ разбитая 6,250 - 10, 760 0,850 0,150 0 0,150 0,200 2,000
47,200 - 64,000 0,644 0,110 0 0,356 0,150 0,360
90,000 - 100,000 0,550 0,085 0 0,450 0,080 0,235
Интегрируя выражение для нормированной корреляционной
функции, получаем формулу для определения нормированной спек-
тральной плотности высот неровностей микропрофиля поверхности
дороги:
3q 1 + 2(а? - 0?) + (а? + ft)2'
При этом спектральную плотность можно вычислить по соот-
ношению
= 4Dqgq(0').
Если спектральная плотность определяется преобразованием
Фурье на конечном интервале, то ее удобно после нормирования при
условии Gq(8) = Dqgq(9) аппроксимировать выражением
(1-4)
где fli, b - коэффициенты.
Эта зависимость хорошо согласуется с результатами обработки
экспериментальных данных (табл. 1.3). В логарифмических коор-
динатах графики, построенные по зависимости (1.4), изображаются
прямолинейными отрезками (рис. 1.5). Уравнением регрессии в виде
степенной функции описывается спектральная плотность микропро-
филя поверхности дорог, имеющего однородные неровности.
39
Таблица 1.3. Значения коэффициентов аппроксимации
спектральной плотности микропрофиля
поверхности дорог
Тип дороги D, 104, м2 О1, м , при Ь, м’1 при
0 < Q < 4 <?>4 0 < Q < 4 Q>4
С асфальтобетон- ным покрытием 1,08 1,37 1,06 2Д4 2,05
Булыжная 1,88 5,21 1,24 2,60 2,01
4,33 3,58 2,34 2,20 2,05
Грунтовая: в удовлетворите- льном состоянии 7,40 3,33 2,37 2,16 2,03
разбитая 64,00 0,86 0,86 2,04 2,04
Рис. 1.5. Нормированная спектральная плотность микро-
профиля поверхности дорог различных типов:
1 - асфальтобетонная; 2 - булыжная; 3 - грунтовая
40
В случае преобладания неровностей определенного вида может
быть использовано представление спектральной плотности в виде
дробнорациональной функции. Так, для грунтовых дорог, имеющих
длинные неровности, выражение для спектральной плотности имеет
вид
<?,(«) =
Ч2(02 + 61)
оц^ + о2)'
где а,2 - коэффициент; 01 , $2 _ частоты среза.
Значения параметров аппроксимации аг, #1, @2 зависят от состо-
яния дорожной поверхности (укатанная, разбитая, сильно разбитая)
и типа местности (равнинная, холмистая, горная):
а2, м ......................... 10“4...3,16-10-3
01,м-1....................... 3,10...3,16
02, м"1...................... 0,0316...3,16
Все представленные аналитические зависимости спектральных
плотностей можно использовать для оценки возмущающих воздей-
ствий на динамическую систему КМ и определения нагрузочных ре-
жимов ее элементов.
1.3. Требования, предъявляемые
к колесным машинам
К конструкции КМ предъявляют производственные, эксплуа-
тационные, потребительские, экологические требования; она также
должна обеспечить активную и пассивную безопасность при эксплу-
атации.
Производственные требования - это соответствие конструкции
КМ технологическим возможностям изготовителя или передовым
тенденциям новейшей технологии, минимальный расход материала
и энергии, необходимых для ее изготовления, наименьшая трудоем-
кость и себестоимость продукции.
Главное эксплуатационное требование - КМ должна соответ-
ствовать дорожным и климатическим условиям той страны или ре-
гиона, где она будет эксплуатироваться. Этим объясняется выпуск
машин “северного”, “тропического” и других вариантов. Сюда же
нужно отнести и требования по топливной экономичности, курсовой
устойчивости, управляемости, маневренности, плавности хода, про-
ходимости, надежности, технологичности обслуживания и ремонта,
минимальной себестоимости транспортных работ.
41
Потребительские требования - малая стоимость КМ и ее эксплу-
атации, возможность использования для различных технических и
потребительских нужд, безотказность, ремонтопригодность, актив-
ная и пассивная безопасность, комфортабельность, легкость упра-
вления.
Экологические требования сводятся к уменьшению вредных воз-
действий автомобиля на окружающую среду - загрязнения атмосфе-
ры выхлопными газами, парами топлива и смазки; загрязнения тро-
посферы Земли озоном, образующимся при сгорании органическо-
го топлива (этот озон при соединении с оксидами азота дает очень
вредные для окружающей среды вещества): загрязнения почвы и во-
доемов; снижению шума и вибрации.’ В конструкции должна быть
заложена возможность использования списанной КМ в качестве вто-
ричного сырья.
Основой формирования представлений о путях модернизации и
создания новых КМ является возникающая потребность народного
хозяйства в более эффективном выполнении транспортных операций.
Например, при освоении северо-востока страны решение задач
по перевозке крупногабаритных неделимых грузов обшей массой до
100 т и выше по бездорожью при обеспечении сохранности расти-
тельного покрова ( движение без образования колеи ) с помощью
уже имеющихся машин становится препятствием в темпах развития
материально-технической базы этого района. Выполнение поста-
вленных задач может быть обеспечено высоким качеством проекти-
рования и изготовления КМ высокой проходимости, эффективностью
использования новой техники. При проектировании КМ необходимо
учитывать накопленный опыт разработки таких конструкций, со-
временный мировой уровень техники и определять перспективные
направления дальнейшего их совершенствования и использования.
В настоящее время к числу важных требований, предъявляемых
к КМ высокой проходимости, относят ограниченное число базовых
моделей автомобилей (по грузоподъемности) и минимально возмож-
ное количество типов сборочных единиц.
КМ высокой проходимости и полноприводные легковые автомо-
били нужно создавать на базе обычных автомобилей с большой уни-
фикацией одинаковых элементов. Кроме шин с централизованной
накачкой воздуха и всех ведущих мостов КМ высокой проходимости
должны иметь дополнительные механизмы и устройства, повышаю-
щие их эксплуатационные качества. К таким механизмам и устрой-
42
ствам относятся блокирующиеся и самоблокирующиеся дифференци-
алы, межосевые дифференциалы, гидромеханические и гидрообъем-
ные коробки передач с автоматическим переключением, устройства
для изменения давления воздуха в шинах на ходу, системы подогре-
ва для трансмиссии и кабины при работе в условиях низких темпе-
ратур, кондиционеры для обеспечения необходимой температуры и
влажности воздуха в кабине и салоне.
К КМ высокой проходимости предъявляют следующие требова-
ния:
оптимальное сочетание скоростных и тяговых характеристик;
прочность, высокая износостойкость материала, простота и на-
дежность конструкции;
минимальная собственная масса, минимальные габаритные раз-
меры (выступающие детали должны легко сниматься);
низкий уровень звукового давления и вибрации в кабине и кузове
машины;
простота технического обслуживания (минимальное число мест
для смазывания и регулировки, легкий доступ к ним, безопасность
обслуживания) и ремонта;
возможность эксплуатации в различных климатических услови-
ях;
максимальная скорость движения по шоссе 70... 100 км/ч, мини-
мальная скорость 4 км/ч; двигатель должен обеспечивать хорошую
приемистость;
возможность преодоления водных преград глубиной до 1,8 м;
минимальное давление на грунт 0,01... 0,05 МПа;
минимальный дорожный просвет 400 мм;
максимальный угол подъема (при полной нагрузке) 30°;
предельный угол крена, при котором возможно движение без
уменьшения скорости, 11°;
наличие рабочей, запасной и стояночной тормозных систем;
(стояночная тормозная система должна надежно удерживать авто-
мобиль на дороге с предельным уклоном не менее 25 %);
высокая степень автоматизации управления и диагностирования
систем;
запас хода при движении по шоссе со скоростью 30... 60 км/ч
не менее 500... 600 км;
возможность эксплуатации без дополнительного оборудования
при температуре до —30° С, а с незначительными изменениями в
конструкции - до —40° С;
возможность перевозки КМ различными видами наземного, вод-
ного и воздушного транспорта.
43
1.4. Классификация колесных машин
На рис. 1.6 представлена общая классификация КМ. Отмечен-
ные на ней характерные классификационные признаки присущи для
различных типов машин. Например, машины, разделенные по на-
значению на транспортные и специальные, также класифицируются
по проходимости, колесной формуле, компоновке, типу несущей си-
стемы, типу силовой установки и передачи, типу движителя, типу
системы подрессоривания, типу рулевого управления и наличию до-
полнительного оборудования.
В данном параграфе приведена укрупненная классификация КМ.
Более подробная классификация по отдельным признакам дана в
соответствующих параграфах учебника (системы подрессоривания,
несущие системы, трансмиссии и т.д.).
Транспортные машины подразделяют на грузовые, тягачи, гру-
зопассажирские и пассажирские.
К грузовым автомобилям (а также прицепам и полуприцепам) в
зависимости от устройства кузова и других конструктивных специ-
фических особенностей относят машины общего назначения и специ-
ализированные КМ. Автомобили общего назначения (а также при-
цепы и полуприцепы) имеют неопрокидывающийся кузов и исполь-
зуются для перевозки грузов всех видов, кроме жидких. Их подраз-
деляют по грузоподъемности и конструктивным особенностям.
В зависимости от грузоподъемности (в тоннах; грузовые авто-
мобили подразделяются на три группы: не более 3.5 т. от 3.5 до 12 т
и более 12 т.
Тягачи - это автомобили, предназначенные для постоянной ра-
боты с прицепами и полуприцепами. По способу соединения с
прицепным подвижным составом различают седельные автомобили-
тягачи для работы с полуприцепами и автомобили-тягачи для рабо-
ты с прицепами. Тягач в сцепе с прицепом (прицепами) или полу-
прицепом образует автопоезд.
Пассажирские автомобили в зависимости от назначения, кон-
струкции и вместимости делятся на легковые и автобусы.
К легковым относятся автомобили вместимостью до 8 чело-
век, включая водителя. По объему двигателя (в литрах) различа-
ют 5 классов легковых автомобилей: особо малый (до 1.2). малый
(1,2...1,8), средний (1,8...3,5), большой (свыше 3,5) и высший
(объем не регламентируется).
44
Автобусы классифицируют:
по составу: одиночные, с прицепом, с полуприцепом, сочленен-
ные;
по числу осей: двухосные, трехосные, четырехосные;
по колесной формуле: неполноприводные (4 х 2, 6 х 2, 6 х 4, 8 х 2),
полноприводные (4 х 4, б х б);
по числу этажей: одноэтажные, 1 ^-этажные, 1 ^г-этажные,
двухэтажные;
по расположению двигателя относительно пассажирского поме-
щения (относительно кузова): вне пассажирского помещения, в пас-
сажирском помещении;
по наличию капота: капотные, короткокапотные (полукапот-
ные), вагонного типа;
по герметизации кузова: закрытые, с открывающимися окнами
(люками), открытые, с открывающейся крышей, со съемной кры-
шей;
по габаритной длине (в метрах): особо малые (до 5,0), ма-
лые (6,0... 7,5), средъие (8,0... 9,5), большие (10,5... 12,0) и особо
большие (сочлененные) (16,5 и более);
по назначению: городские (внутригородские и пригородные),
междугородние и туристические, местного сообщения, школьные.
К специальным КМ относятся пожарные автомобили, автокра-
ны, автолавки, автомобили с компрессорными установками, строи-
тельно-дорожные, сельскохозяйственные, военные, транспортеры,
автомобили на воздушной подушке, а также планетоходы.
По степени приспособления к работе в различных дорожных
условиях (проходимости) различают КМ обычной, повышенной и
высокой проходимости для движения по благоустроенным и небла-
гоустроенным дорогам и бездорожью соответственно, а также КМ,
эксплуатируемые в специфических условиях (Арктика, болота, пу-
стыни и т.п.).
В зависимости от способа преодоления водных преград КМ бы-
вают сухопутными, способными преодолевать водные преграды по-
сле специальной подготовки и плавающими. Для движения по воде
могут быть использованы разные виды движителей.
КМ подразделяют по общему числу колес и числу ведущих ко-
лес, или колесной формуле (первая цифра в обозначении - число ко-
лес, вторая - число ведущих колес): 4x2, 4x4, 6x2, 6x4, 6 х 6 и
т.д., а также по числу осей: 2, 3, ..., 8 и более. Наибольшее распо-
странение получили двух- и трехосные машины. КМ с числом осей
более трех могут иметь разные варианты их расположения.
45
Классификация колесных машин
| Тягачи |- ---------------------------
1 1 ~ ~~ Транспортные L-
Грузопассажирские I-
| Пассажирские ~~j-
] Пожарные ~|-
I Автокраны ~
I Стро»
| Доре
эительно-
дорожные
Сельско-
хозяйственные
—| Специальные "|—
| Военные |—
j Планетоходы ~~|—
Повышенной
проходимости
Высокой
проходимости
Эксплуатируемые
в узко ограничен-
ных условиях
(Артика, джунгли,
болота и т, д.)
Сухопутные
Способные пре-
одолевать водные
преграды после
специальной
подготовки
По способу
преодоления
водных преград
| По типу системы
I подрессоривания
ч
Без упругих
элементов
I Независимая
~| подвеска
С упругими
элементами
Зависимая
подвеска
С водным
движителем
Без водного
движителя
И По типу рулевого
управления
h
И
г- 1 По колесной I
' | формуле р
По расположению
силовой установки
По наличию
С управляемыми
колесами
Ч Балансирная
подвеска
С "ломающейся"
в горизонтальной
плоскости
несущей системой
С изменением
скорости враще-
ния колес по
бортам
Без дополнитель-
ного оборудо-
вания
По расположению
кабины
компоновке I
дополнительного -
оборудования
По расположению
грузового кузова
Рве. 1.6. Классификация КМ
С дополнителы
ным оборудова-
нием (лебедка,
кабестан, опро-
кидывающийся
кузов, индиви-
дуальные дом-
краты и т.д.)
Компоновочно КМ делят в зависимости от расположения сило-
вого агрегата, по числу и расположению осей и ведущих мостов, по
типу кузова, расположению кабины и грузовой платформы и т.п.
Например, по расположению силового агрегата и ведущих мостов
различают для легковых автомобилей:
классическую схему, когда двигатель, сцепление и коробка пере-
дач расположены впереди, а привод осуществляется на задние колеса
посредством карданных валов;
переднеприводную схему, при которой двигатель, сцепление, ко-
робка передач, главная передача и дифференциал расположены впе-
реди, а привод осуществляется на передние колеса;
заднее расположение двигателя, т.е. двигатель, сцепление, ко-
робка передач, главная передача, дифференциал расположены сзади,
и привод осуществляется на задние колеса;
для грузовых автомобилей:
двигатель расположен над передним мостом;
двигатель находится за передним мостом
и для автобусов:
двигатель расположен впереди;
двигатель находится под полом в пределах колесной базы;
двигатель установлен сзади продольно или поперек, вертикаль-
но или горизонтально.
Грузовые автомобили могут иметь следующие варианты распо-
ложения кабины:
кабина за двигателем (капотная компоновка);
кабина частично надвинута на двигатель (полукапотная или
короткокапотная компоновка);
кабина над двигателем (компоновка вагонного типа);
кабина максимально сдвинута вперед (передняя кабина).
По типам несущих систем КМ подразделяют на рамные и ку-
зовные, цельные и сочлененные. Рамы используются в легковых
и грузовых автомобилях, автобусах. Рамы легковых автомобилей
бывают лонжеронные (лестничного типа), хребговые, Х-образные,
периферийные (лонжероны замкнутого профиля проходят по пери-
ферии пола кузова, создавая естественный порог).
Рамы грузовых автомобилей бывают лонжеронные (лестничного
типа) и хребтовые.
Автобусы могут иметь рамы лестничного типа, раздельные и
объединенные. Рамно-раздельные силовые схемы имеют два раз-
дельных конструктивных элемента - рамное шасси и кузов с основа-
нием, соединенные между собой стремянками или болтами. Рамно-
48
объединенные системы имеют рамы с поперечинами, к концам внеш-
них консолей которых жестко крепятся шпангоуты кузова. Рама и
основание кузова объединены в одну конструкцию.
По способу восприятия внешних нагрузок различают ненесущие
и несушие (с несущим основанием или с несущим корпусом) кузова.
Кузова легковых автомобилей бывают закрытого типа (лимузин,
седан, купе), открытого типа (фаэтон, родстер) и грузопассажирские
(универсал, пикап, хэтчбек).
В зависимости от типа силовой установки различают КМ с дви-
гателем внутреннего сгорания (бензиновым, дизельным, газогенера-
торным), газотурбинные и электрические. В последние годы рас-
ширяется применение дизелей в связи с их большей экономичностью
по сравнению с карбюраторными. Совершенствуются и бензиновые
двигатели путем организации послойного распределения топливно-
го заряда в камере сгорания, впрыскивания топлива, электронно-
го дозирования подачи топлива и управления зажиганием, примене-
ния турбонаддува и т.п. Поскольку запасы нефти снижаются, то
перспективно использование альтернативных видов топлива, напри-
мер природных газов (в том числе и водорода). Газотурбинные дви-
гатели способны работать на разных видах топлива, имеют хоро-
шую внешнюю характеристику, но их использование ограничено из-
за низкой топливной экономичности. Во всем мире большое внима-
ние уделяется разработке электромобилей - наиболее экологически
чистых транспортных средств. Основным сдерживающим фактором
их широкого использования является малая энергоемкость аккуму-
ляторных батарей, их громоздкость и большая масса.
КМ могут иметь механическую, гидромеханическую, электро-
механическую трансмиссию.
По типу движителя КМ подразделяют на сухопутные и водные.
Последние используются при движении по воде и могут быть колес-
ными, винтовыми и водометными. В машинах, предназначенных для
движения только по суше, применяют колесные и комбинированные
(колесно-гусеничные) движители. В зависимости от эксплуатацион-
ного назначения колесные движители бывают дорожного, вездеход-
ного и универсального типа.
КМ могут иметь разные системы подрессоривания: жесткую
(без упругих элементов) и упругую (с упругими элементами). В
жесткой подвеске имеются только кинематические звенья, роль
упругих элементов выполняют шины. По типу направляющих
устройств различают машины с независимыми, зависимыми и ба-
лансирными подвесками.
По способу поворота КМ бывают с управляемыми колесами, а
также с поворачивающими путем складывания несущей системы или
изменения скорости вращения колес по бортам.
49
КМ могут быть дополнительно оборудованы коробкой отбора
мощности, лебедкой, кабестаном, подъемным оборудованием плат-
форм, кузовов и колесодержателей, индивидуальными домкратами
и др. В связи с этим различают машины без дополнительного и с
дополнительным оборудованием.
1.5. Компоновка колесных машин
Компоновка КМ - это взаимное расположение ее основных эле-
ментов: отделения управления, помещения для полезной нагрузки,
двигателя, ведущих и управляемых осей, трансмиссии и т.д. На
компоновку влияют: назначение машины, тип двигателя и силовой
передачи, число осей и их размещение по базе, тип несущей систе-
мы, подвеска колес и другие факторы. Она должна обеспечивать
рациональное размещение людей и грузов в машине, удобство входа
и выхода, легкость погрузки и разгрузки, безопасность, хорошую об-
зорность, удобство обслуживания, высокие эксплуатационные каче-
ства (проходимость, маневренность, устойчивость, плавность хода
и т.д.), а также удовлетворять различным ограничениям (правилам
дорожного движения, железнодорожным габаритам и т.п.).
В свою очередь компоновка оказывает влияние на массу маши-
ны, ее грузоподъемность, степень воздействия на дорогу (грунт),
технологию сборки, способность преодолевать препятствия и т.д.
Она в значительной степени определяет внешний вид и является
основой для архитектурной разработки формы КМ.
В качестве примера на рис. 1.7 представлены компоновки гру-
зовых многоосных КМ. Возможно последовательное размещение
основных элементов двигателя, кабины, кузова (схемы а - г) и
последовательно-параллельное размещение (схемы д-з]. В первом
случае обеспечивается хороший доступ к двигателю и кабине, одна-
ко длина машины при этом получается очень большой, что отрица-
тельно сказывается на ее маневренности и других характеристиках.
Во втором случае длина может быть существенно сокращена, однако
при этом неизбежно затрудняется доступ в кабину и к двигателю.
Расположение кабины в передней части машины (схемы 6 - з]
улучшает обзорность, что особенно важно при движении вне дорог,
однако в этом случае уменьшается защищенность людей в кабине
при авариях. Разнесение кабины и двигателя (схемы а, в - з] спо-
собствует улучшению обстановки в кабине, тогда как размещение
двигателя в кабине (схема б), наоборот, ухудшает ее.
50
ООО ООО 000 000. 000 000
В—• М- —1 .- 1
ОО ОО ОО TOOQQQ. оо^оооо
Рис. 1.7. Варианты компоновочных схем грузовых
многоосных КМ
При расположении кабины и двигателя под кузовом (схема з)
удается улучшить коэффициент использования габарита. В этом
случае длина машины будет определяться длиной кузова. Однако
при этом возникают определенные трудности с размещением каби-
ны, учитывая необходимость обеспечения достаточно большого про-
света под ним, что особенно важно для машин высокой проходимо-
сти.
Рассмотрим подробнее некоторые частные вопросы, связанные с
компоновкой КМ, например, влияние числа осей и их размещения по
базе на грузоподъемность машины и характер ее колебаний. Извест-
но, что число осей увеличивают для повышения грузоподъемности
машины при заданной нагрузке на ось, улучшения плавности хода и
проходимости. На рис. 1.8 показана зависимость грузоподъемности
КМ от числа осей, полученная П.В. Аксеновым в результате обоб-
щения показателей ряда машин. Здесь же дана зависимость базы £м
от по-
Не вдаваясь в подробности исследования колебаний многоосной
КМ, отметим, что собственная частота колебаний неподрессорен-
ной массы не зависит от числа осей и их размещения по базе. Она
определяется параметрами, закладываемыми при конструировании
подвески. Собственная частота вертикальных колебаний подрессо-
ренной массы при прочих равных условиях зависит только от числа
осей. С увеличением числа осей при сохранении жесткости подвес-
ки и подрессоренной массы частота колебаний возрастает. Но так
51
6гр,кН
Рис. 1.8. Зависимости грузоподъемности G-P и базы
£м некоторых многоосных КМ от числа осей пс
как потребность в увеличении числа осей возникает в связи с повы-
шением массы перевозимого груза, то пропорционально числу осей
возрастает и подрессоренная масса, а значит, частота собственных
колебаний подрессоренной массы в этом случае также не зависит от
числа осей и их размещения по базе. Она задается параметрами,
выбранными при конструировании подвески.
При постоянстве подрессореной массы с увеличением числа осей
для сохранения собственной частоты вертикальных колебаний, вли-
яющей на комфортабельность КМ, необходимо уменьшить жест-
кость подвески каждой оси.
Частота собственных продольно-угловых колебаний зависит от
числа осей и их размещения по базе. Чтобы рассмотреть влияние
компоновочных схем КМ воспользуемся коэффициентом гт размеще-
ния осей по базе (отношение расстояния /о между любыми смежны-
ми осями к базе LM шасси). При симметричном размещении осей
по отношению к центру тяжести, что характерно для большинства
многоосных КМ (табл. 1.4), имеется одно значение гт, определяющее
компоновку ходовой части.
52
Таблица I.J. Влияние компоновочной схемы на значение
коэффициента :т
Марка машины Колесная и осевая формулы База , мм Размешение осей по базе, мм т
МАЗ-537 8x8, 2-2 6040 1700-2640 - 1700 0,265
МАЗ-543 8x8, 2-2 7719 2210-3304 -2205 0,285
ЗИЛ-135 8x8, 1-2-1 6300 2400- 1500- 2400 0,380
КамАЗ-4310 6x6, 1-2 4660 3340- 1320 0,285
Т-813 8x8, 2-2 6200 1400- 2400- 1400 0,226
С ростом iT угловая частота заметно падает. Теоретически ?т
для четырехосной КМ может изменяться от 0 до 0,5. При гт = 0
четырехосная КМ трансформируется в условную двухосную машину
с четырехосной базой и удвоенной жесткостью подвески. При гт =
0,5 она представляет собой условную трехосную КМ с равномерным
расположением осей по базе и удвоенной жесткостью средней оси.
Важно отметить, что, учитывая реально возможные значения гт?
изменение угловой частоты не превышает 10 ... 12 %. Это означает,
что выбором схемы компоновки ходовой части нельзя существенно
повлиять на частоту угловых колебаний.
На рис. 1.9 показано изменение собственной частоты продольно-
угловых колебаний машины в зависимости от числа осей для реаль-
но возможных минимального и максимального значений ?т.
Рнс. 1.9. Зависимость собственной частоты про-
дольно-угловых колебаний КМ от числа осей по
53
Видно, что, начиная с по = 6, уменьшение частоты колебаний замет-
но снижается. Таким образом, можно считать, что с увеличением
числа осей плавность хода КМ улучшается.
Еще один пример, показывающий зависимость эксплуатацион-
ных качеств КМ от основных параметров компоновки: базы, перед-
него и заднего свесов, распределения массы по осям и т.д. Как
известно, в современных грузовых автомобилях получили распро-
странение компоновки с расположением кабины за двигателем и над
двигателем. Каждая из них имеет свои преимущества и недостатки,
поэтому для правильного выбора схемы компоновки и ее основных
характеристик большое значение отводят их качественной и коли-
чественной оценкам.
Важным конструктивным параметром КМ служит компоновоч-
ное расстояние /к от передней оси машины до задней стенки кабины.
Рассмотрим компоновку двухосного автомобиля, учитывая действу-
ющие законодательные ограничения. Предельное положение нижней
точки буфера ограничивается рекомендациями, предусматривающи-
ми минимальный угол въезда /?min — 25° и минимальную высоту бу-
фера 6min = 600 мм. Конструкцией кабины задается ее длина, рас-
стояние /к, а также минимальный зазор Дк между стенкой кабины и
передним бортом грузового кузова (рис. 1.10). Далее возникает во-
прос о длине грузового кузова £г.к и колесной базы LM. Так как £г.к
выбирают, ориентируясь на грузоподъемность и виды перевозимых
грузов, Ю.Ю. Беленький и М.С. Высоцкий предлагают выражать
колесную базу LM как функцию длины Тг.к:
г — ^г.к/2)
м ' ~ёгр - С1Г + Сщ ’
где Gjr; Gic ~ нагрузки на переднюю ось груженого и негруженого
автомобиля соответственно (приведенное выражение справедливо и
для трехосных автомобилей, если колесную базу принимать по край-
ним осям).
Используя выражение для LM, изобразим графически взаимо-
связь компоновочных параметров на примере автомобилей, имеющих
/к = 190 мм (кабина без спального места), /к = 640 мм (кабина со
спальным местом) и Дк = 100 мм. Параметры этих автомобилей:
GM = 145 кН; Grp = 85 кН; Gir = 60 кН; Gjc = 40 кН при колесной
формуле 4x2 и Сщ = 43 кН при 6x4.
Из графиков следует (см. рис. 1.10, в), что на колесную базу в
значительной степени влияет расстояние /к.
54
Рис. 1.10. Зависимость базы /,м от длины Лп платформы
Н компоновочного расстояния I, для двухосных (а), трех-
осных (б). двух- и трехосных (в) КМ
Рис. 1.11. Схема железнодорожного габарита погрузки 02-ВМ
55
Как отмечалось в начале этого параграфа, компоновка КМ свя-
зана с различными ограничениями. В этом отношении большое зна-
чение имеет вписываемость, в частности по ширине машины, в же-
лезнодорожный габарит. На рис. 1.11 представлена схема железнодо-
рожного габарита погрузки. Вся создаваемая автомобильная техни-
ка должна удовлетворять требованиям габаритов погрузки 02-ВМ.
1.6. Эксплуатационные характеристики
Эксплуатационные характеристики КМ - это объективные дан-
ные, дающие возможность принимать решение об эффективном ис-
пользовании этих машин в различных дорожных, климатических
и других условиях. Эти характеристики позволяют для конкрет-
ных транспортных операций выбрать тип КМ. конструктивные осо-
бенности которой позволили бы выполнить их наиболее рациональ-
но. Основными из них являются тягово-динамические, тормозные,
топливно-экономические характеристики, а также управляемость,
устойчивость, проходимость и плавность хода. Все эти эксплуата-
ционные характеристики связаны между собой.
Тягово-динамические характеристики в основном определяют
один из важнейших показателей КМ - среднюю скорость се движе-
ния. Сила тяги - это сумма всех тяговых сил, приложенных к каждо-
му ведущему колесу, которые вычисляют как отношение момента на
ведущем колесе к радиусу его качения. Тяговая характеристика КМ
выражает зависимость силы тяги от скорости движения машины
при разных передачах, включенных в коробке передач. Ее строят по
результатам стендовых или дорожных испытаний либо аналитиче-
ским методом. При аналитических расчетах тяговой характеристи-
ки необходимо знать скоростную характеристику двигателя.
Важным показателем, определяющим тяговые свойства КМ,
является динамический фактор Р, т.е. отношение разности силы
тяги Рк и силы сопротивления Pw воздушного потока к весу маши-
ны:
/) = Д-'У
Рм
Графическая зависимость динамического фактора от скоро-
сти КМ называется динамической характеристикой. На рис. 1.12
показана динамическая характеристика автомобиля ЗИЛ-131 при
включенной низшей передаче в раздаточной коробке.
56
Рис. 1.12. Динамическая характеристи-
ка автомобиля ЗИЛ-131 при включенной
низшей передаче в раздаточной коробке
( / - 5 - передачи)
При малых скоростях движения можно не учитывать действую-
щую на КМ силу сопротивления встречного потока воздуха, и тогда
динамический фактор превращается в удельную силу тяги:
D = Рул = Py/G„.
Очевидно, чем больше динамический фактор (при условии до-
статочного сцепления колес с грунтом), тем увереннее будет пре-
одолевать машина тяжелые дорожные условия. У грузовых машин
максимальное значение динамического фактора на низшей передаче
составляет 0, 3 ... 0,45, а у машин высокой проходимости 0,9 ... 1,0.
Динамическая характеристика КМ дает возможность определить це-
лый ряд важных скоростных и эксплуатационных параметров, таких
как возможная скорость движения, преодолеваемое КМ сопротивле-
ние и максимальный угол подъема, ускорение и возможная сила тяги
на крюке. Важным показателем, характеризующим разгонные ха-
рактеристики и среднюю скорость движения КМ, является удельная
мощность. У современных отечественных автомобилей ее значение
находится в пределах 6... 33 кВт/т, а у КМ высокой проходимости
доходит до 37 кВт/т. Выполняя тяговый расчет, определяют основ-
ные конструктивные параметры КМ, которые обеспечивают задан-
ные тяговые свойства для соответствующих дорожных условий.
57
Тормозные характеристики существенным образом влияют на
безопасность движения транспортных КМ, так как характеризуют
способность машины при необходимости замедлить движение и пол-
ностью остановиться за минимальный период времени. Следова-
тельно, машина должна иметь минимальный тормозной путь, ха-
рактеризующий расстояние, проходимое транспортным средством
от момента введения в действие тормозной системы до его полной
остановки. Для реализации тормозных характеристик КМ имеет
основную, или рабочую, стояночную и запасную системы тормозов,
а для некоторых типов машин еще и вспомогательную. Последнюю
устанавливают преимущественно на тяжелых колесных транспорт-
ных средствах, предназначенных для работы в горной местности.
Кроме того, у автопоездов имеются тормозные системы прицепов,
служащие для торможения и автоматической остановки их в случае
повреждения сцепки. Основными оценочными параметрами эффек-
тивности основной тормозной системы являются тормозной путь ST
или возможное замедление j3. Тормозной путь зависит от начальной
скорости движения КМ, времени срабатывания привода тормозов,
реакции водителя и возможного замедления. Длин; тормозного пу-
ти измеряют экспериментально. Условия эксперту--га определены
действующим ГОСТ 22895-77, в котором в зависим::ти ^т катего-
рии транспортного средства, способа испытаний и .-.=чал.ы-:ой скоро-
сти торможения указаны тормозной путь и возм-.т.ное замедление
(табл. 1.5). Испытуемые КМ в зависимости от их т иной массы де-
лят на следующие категории: АП - до 3,5 т. Л - з . 12 т: .V3 -
свыше 12 т.
Согласно рекомендации Европейской экономической комиссии
ООН (ЕЭКООН), тормозной путь на асфальтобетонном горизон-
тальном покрытии не должен превышать значений з метрах .опре-
деленных по следующим формулам:
ST = Vo/10
- для легковых автомобилей при начальной скорости 22 м с т.км/ч)
и силе нажатия на педаль тормоза 0,5 кН;
St = 0, 54«о + 0, Ivq
- для грузовых автомобилей малой и средней грузоподъемн :.. и с ги-
дравлическим тормозным приводом при начальной скорости 1 J.S м/с
(50 км/ч) и силе нажатия на педаль тормоза 0,7 кН и
St = о, 65и0 + о, 113и02
58
- для тяжелых грузовых автомобилей и автопоездов при начальной
скорости 11,5 м/с (41 км/ч) и силе нажатия на педаль тормоза 0,7 кН.
Эти нормы действительны для случая торможения транспортных
средств с полной нагрузкой.
По условиям безопасности движения желательно, чтобы все
транспортные средства имели бы одинаковые тормозные пути при
одинаковой скорости движения в начале торможения. Вследствие
разного времени срабатывания тормозных приводов различных кон-
струкций обеспечить это условие не удается. Наибольший тормоз-
ной путь у КМ с пневматическим тормозным приводом из-за. дли-
тельного времени срабатывания привода.
Эффективность стояночной тормозной системы характеризует-
ся надежным удержанием КМ на предельном для данного типа ма-
шин подъеме неопределенно долгое время. Стояночный тормоз слу-
жит иногда запасным. О его эффективности обычно судят по мини-
мальному тормозному пути и максимальному замедлению при при-
ложении к рычагу тормоза максимально возможной силы.
Вспомогательная тормозная система (как правило, это тормоза-
замедлители) должна обеспечивать допустимую по условиям безо-
пасности движения скорость транспортного средства при движении
его под уклон. В качестве тормоза-замедлителя применяют механи-
ческие, воздушные, аэродинамические, гидравлические и электроди-
намические тормозные устройства. Для торможения КМ использует
также двигательную установку.
Топливно-экономические характеристики КМ определяют ра-
циональный расход энергии сжигаемого топлива при различных
условиях эксплуатации. Топливо, применяемое для автомобиль-
ных двигателей, является пенным эксплуатационным материалом
- на него затрачивается 10... 15% всех эксплуатационных расхо-
дов. Расход топлива зависит от многих факторов: конструктивных
параметров, технического состояния эксплуатируемой машины, до-
рожных и климатических условий, квалификации водителя и т.д.
Основным измерителем топливной экономичности КМ служит путе-
вой расход топлива на 100 км:
Qn = 100Qa/S,
где Qa - абсолютный расход топлива, л; S ~ пройденный путь, км.
59
Таблица 1.5. Значения оценочных параметров эффективности основной тор-
мозной системы грузовых автомобилей и автопоездов при силе
нажатия на педаль тормоза 0,7 кН
Автотран- спортное средство Категория машины Начальная скорость торможения t>o, км/ч ST, м, при испытаниях h, м/с2, при испытаниях
холодных тормозных систем горячих тормозных систем на за- тяжных спусках холодных тормозных систем горячих тормозных систем на за- тяжных спусках
Грузовые 7V1 80 61,2 73,5 - 5,0 4,0 -
машины А2 60 36,7 43,6 - 5,0 4,0
^3 60 36,7 43,6 45,9 5,0 4,0 3,7
Грузовые 7V1 80 63,5 75,9 5,0 4,0
автопоезда А2 60 38,5 45,4 5,0 4,0
^3 60 38,5 45,4 47,7 5,0 4,0 3.7
Рис. 1.13. Топливно-эконоыические характеристики КМ
Показателем экономичности КМ по расходу топлива является
топливно-экономическая характеристика, т. е. зависимость путево-
го расхода топлива от скорости движения машины при установив-
шемся движении по дорогам с различными коэффициентами дорож-
ного сопротивления (рис. 1.13).
Такие характеристики строят на основании полученных экспе-
риментальных данных или расчетным путем для каждой переда-
чи. С увеличением уменьшаются скорости, при которых путевой
расход топлива минимален. Слева семейство кривых ограничивает
кривая, соединяющая точки, соответствующие минимально устой-
чивым скоростям движения, а справа - кривая, соединяющей точ-
ки, соответствующие максимально возможным скоростям движения
при данном На графике топливно-экономической характеристи-
ки имеется еще характерная точка, соответствующая минимальному
расходу топлива $nmin и экономичной скорости гэк при движении по
дорогам с коэффициентом сопротивления t/jj.
Влияние на топливную экономичность КМ конструктивных фак-
торов хорошо видно на примере применения дизельных двигателей
вместо карбюраторных. Такая замена снижает путевой расход топ-
лива у КМ, имеющих одинаковую массу, в среднем на 50 %. Связано
это с тем, что минимальные удельные расходы у дизелей примерно
на 30 % ниже, чем у карбюраторных двигателей. На топливную эко-
номичность влияют также передаточные числа в трансмиссии КМ и
их правильный выбор в различных условиях движения, конструкция
колесного движителя, число слоев корда и его расположение, схемы
61
трансмиссии и подвески и другие факторы. Выбор передачи зависит
от квалификации водителя, поэтому весьма перспективным являет-
ся разработка автоматизированных систем, которые осуществляют
оптимальный выбор передачи в зависимости от условий движения и
вне зависимости от квалификации водителя.
Для унификации оценочных параметров по топливной экономич-
ности в последнее время вводят оценку по данным выброса токсич-
ных веществ в отработанных газах, так как между ними и расходом
топлива есть прямая зависимость.
Под управляемостью подразумевается маневрирование КМ для
выдерживания заданного направления движения путем поворота
управляемых колес, торможением колес одного борта, а для сочле-
ненных машин - поворотом одного звена относительного другого.
От управляемости в большей степени зависит безопасность движе-
ния. Поворот управляемых колес осуществляется вокруг осей пово-
ротных цапф или шкворней, причем оси колес пересекаются в одной
точке, называемой центром поворота (если не учитывать увод эла-
стичных шин). КМ может иметь одну, две или более лар управляе-
мых колес. Очевидно, с увеличением числа пар управляемых колес
будет улучшаться маневренность, уменьшаться минимальный ра-
диус поворота КМ, что имеет большое значение, особенно для мно-
гоприводных, длиннобазных машин при движении их з городских,
горных и других специфических условиях. На рис 14 представле-
ны различные схемы поворота двух-, трех- и четырехосных КМ.
Применение передних и задних управляемых колес значительно
повышает маневренность КМ, однако усложняет конструкцию руле-
вого привода, ухудшает устойчивость движения, вносит трудности
при компоновке, уменьшает полезный объем машины из-за объемных
колесных ниш. В сочлененной КМ между звеньями располагаются
гидравлические силовые цилиндры. Поворот рулевого колеса влечет
за собой перемещение золотникового устройства. Жидкость под да-
влением направляется в соответствующие полости силовых цилин-
дров, укрепленных на одном звене машины, а поршни и связанные с
ними тяги, закрепленные на другом звене машины, перемешаются,
заставляя звенья сочлененной машины складываться. Таким обра-
зом происходит поворот сочлененной КМ (рис. 1.15).
Устойчивость КМ - важная эксплуатационная характеристи-
ка, существенно влияющая на безопасность движения. Для много-
приводных КМ высокой проходимости, имеюших высокое располо-
жение вертикальной координаты центра масс, эта эксплуатационная
62
Рис. 1.14. Схемы поворота двухосных (а, б), трехосных (в - д) н
четырехосных (е - з) КМ
Рис. 1.15. Схема поворота сочлененной КМ:
1 - ведущее звено; 2 - силовой цилиндр; 5 - ведомое звено
характеристика важна в связи с возможностями их движения в усло-
виях пересеченной местности с крупногабаритным грузом на борту.
Свойство КМ сохранять на заданном интервале пути направле-
ние движения н ориентацию продольной и вертикальной осей не-
зависимо от действия внешних и инерционных сил называется ее
устойчивостью. Различают продольную и поперечную устойчиво-
сти. Наиболее вероятно нарушение поперечной устойчивости, кото-
рое может возникнуть вследствие действия боковых сил. Показате-
лями поперечной устойчивости КМ являются максимально возмож-
ная (критическая) скорость движения по окружности и угол мак-
симального поперечного уклона дороги (косогора), преодолеваемый
машиной. Эти показатели могут быть определены из условия боко-
63
вого заноса или опрокидывания. Оценочными параметрами устой-
чивости являются значения удельных боковых сил, приложенных к
задней оси (для двухосных машин) или группе задних осей, распо-
ложенных сзади от центра масс (для многоосных машин), которые
вызывают занос.
Под проходимостью КМ в общем случае понимают ее способ-
ность двигаться в тяжелых дорожных условиях или вне дорог и
эффективно выполнять транспортные и другие виды работ, преду-
смотренные конструкцией данной машины. Различают опорную и
геометрическую проходимости. Опорная проходимость определяет
возможность движения КМ по грунтам с малой несущей способно-
стью, таким как рыхлый песок, заболоченные участки, снег и т.п. На
опорную проходимость влияют: силы тяги и сопротивления движе-
нию, размещение осей, схема рулевого управления и др. Для сравне-
ния КМ между собой по опорной проходимости можно использовать
фактор проходимости П, предложенный сотрудниками НАМИ:
tTQT ^uiQui
где mr - масса полезного груза; L - длина участка испытаний: i -
время движения; Q - расход топлива; индекс “т” относится к труд-
нопроходимому маршруту, а “ш” - к шоссе. Фактор П показывает,
насколько меняются полезная нагрузка, скорость и расход топлива
при переходе машины с шоссе на бездорожье.
Геометрическая проходимость определяется конструкцией и
компоновкой КМ, ограничивающими проходимость ее по неровно-
стям дороги. Для КМ высокой проходимости существенную роль
оказывают развитые горизонтальные и вертикальные поверхности
на днище корпуса или рамы машины. Отдельно выступающие ниже
этих поверхностей детали в связи с большими удельными мощно-
стями машин такого типа существенно на проходимость не влияют.
Потеря проходимости происходит при проявлении так называемого
бульдозерного эффекта, когда сопротивление движению превосходит
сопротивление качению. Для геометрической проходимости имеют
значение также передний аП и задний ct3 углы свеса (рис. 1.16;. а
также конструкция носовой и кормовой части машины.
Под плавностью хода понимают качество КМ, характеризую-
щее возможность ее длительного движения в интервале эксплуата-
ционных скоростей, причем водитель, пассажиры, оборудование и
64
Рис. 1.16. Передним и задний углы свеса КМ
перевозимые грузы должны быть защищены от быстрой утомляемо-
сти и повреждений, обусловленных динамическими нагрузками от
взаимодействия колесного движителя с дорожной поверхностью.
Восприятие человеческим организмом вибрационной нагрузки
очень сложно и не может быть определено однозначно. Для ее оцен-
ки используют скорость перемещений характерных точек подрессо-
ренной массы (например, сиденья водителя и пассажира), ускорение,
третью производную от перемещения и др. Важно, чтобы этот пока-
затель учитывал бы частоту и амплитуду перемещений, совместное
действие линейных и угловых колебаний.
В настоящее время вибронагруженность КМ оценивают по стан-
дартам, согласно которым воздействие на человека и перевозимый
специальный груз анализируют по уровням виброскорости или ви-
броускорения в трех взаимно перпендикулярных плоскостях по семи
октавным полосам в интервале частот от 0,7 до 90 Гц. Ощущения
человека приводят к трем уровням, имеющим верхние границы: ком-
форта, допустимого утомления от колебаний н воздействия колеба-
ний на здоровье человека. Повышение плавности хода существенно
улучшает эксплуатационные показатели КМ, делая ее многоцелевой,
сказывается на повышении производительности труда обслуживаю-
щего персонала.
1.7. Колесные машины
и защита окружающей среды
Вмешательство человека в окружающую природу увеличивает-
ся по мере развития цивилизации и промышленности. Этот процесс
нельзя ни остановить, ни затормозить. Промышленность и автомо-
бильный транспорт в устрашающем темпе загрязняют реки, отра-
вляют воду и воздух. Перед лицом угрозы постепенного вымира-
ния человек наконец понял, что для охраны природы необходимо
начать борьбу за чистоту окружающей среды. Проблема защиты
3-692
65
окружающей среды от отрицательного воздействий автомобильного
транспорта связана прежде всего с защитой атмосферного воздуха
от токсичных выбросов двигателей внутреннего сгорания.
В США, например, доля автомобилей в выбросе токсичных со-
единений в атмосферу составляет 60%, в странах Западной Евро-
пы - 40 %. Количество основных токсичных веществ, выделяемых
в США автомобилями в течение года, следующее, млн т: 66 СО,
6 NO, 12 СпНт, 1 SO2, 0,2 соединений свинца и 1 сажи.
О масштабах и степени загрязнения окружающей среды на зем-
ном шаре свидетельствует тот факт, что в настоящее время по доро-
гам мира движутся более 400 млн автомобилей, которые потребляют
около 3,5 млрд кг топлива на каждые 100 км пробега, а при сгорании
1 кг топлива в двигателе автомобиля выделяется около 450 г СО и
15 г NO и NO2.
Отработавшие газы являются не единственным источником за-
грязнения воздуха. Их доля в загрязнении составляет примерно
65 %, а доля газов, выделяемых из картера двигателя, карбюратора
н топливного бака, соответственно равна 20, 9 и 6 %.
Предельные концентрации вредных или токсичных компонентов
в воздухе установлены в качестве гигиенических норм. Однако не
следует забывать о большом вреде для здоровья человека длитель-
ного воздействия малых концентраций вредных веществ, а также
общего суммарного воздействия нескольких вредных компонентов.
Точно определить степень и диапазон вредного воздействия загряз-
ненного воздуха весьма сложно, тем более, что в разных условиях
они бывают различны.
Особенно опасны для здоровья человека оксид углерода СО и
оксид азота NO. Оксид углерода СО представляет собой ядовитый,
лишенный цвета и запаха газ тяжелее воздуха и поэтому опускаю-
щийся к земле. Как и углеводороды, СО является продуктом непол-
ного сгорания топлива. СО вызывает торможение функций центров
образования гемоглобина, что приводит к нарушению окислитель-
ных процессов в организме. При хроническом отравлении даже не-
большими дозами СО, что характерно для водителей, а также ра-
ботников службы движения и крупных гаражей, наступает общая
депрессия и понижение жизненного тонуса.
Оксид азота NO в соединении с водяными парами образует азот-
ную кислоту, которая разрушает легочную ткань. Диоксид азота
NO? разрушает слизистую оболочку глаз, легкие и вызывает необра-
тимые изменения в сердечно-сосудистой системе. Воздействие NO и
NO2 нельзя ослабить никакими нейтрализующими средствами.
66
Неполностью сгоревшие углеводороды CnHm представляют
смесь сотен химических соединений. Эта смесь является причи-
ной многих хронических заболеваний. Наиболее опасным соедине-
нием считается бензопирен, которому приписывают и концероген-
ные свойства. Некоторые ароматические углеводороды обладают
сильными отравляющими свойствами, они воздействуют на процес-
сы кровотворения, центральную нервную систему и мышцы челове-
ка.
Диоксид серы SO2 также оказывает вредное действие на кро-
ветворные органы (костный мозг и селезенку), слизистые оболочки,
вызывает бессонницу.
Сильнодействующими токсичными веществами являются сви-
нец и его соединения, содержащиеся в этилированном бензине. По-
падая в организм, они нарушают обмен веществ.
Вообще загрязнение окружающей среды токсичными компонен-
тами отработавших газов приводит к большим экономическим по-
терям в хозяйстве страны, так как они вызывают нарушения роста
растений, что приводит к снижению урожаев и потерям в живот-
новодстве. Отработавшие газы способствуют ускорению процессов
разрушения многих конструкционных материалов (коррозии метал-
лов, старению резины и др.).
Отрицательные последствия воздействия отработавших газов
на почву носят весьма ограниченный характер. Грунтовые и по-
верхностные воды в большой степени подвержены опасности загряз-
нения топливом, маслами, другими специальными жидкостями, рас-
ходуемыми в процессе обслуживания и эксплуатации автомобилей.
Даже минимальное количество этих веществ может сильно ухуд-
шить качество воды. Пленка из углеводородов на поверхности воды
затрудняет окислительные процессы, что отрицательно влияет на
обитающие в ней живые организмы.
Особенно опасным для лесов и зеленых массивов является
диоксид серы, разрушающий хлорофил. Установлено, что растения
чувствительны даже к очень малым концентрациям SO2 в воздухе.
Точно определить количество выбросов в атмосферу двигателя-
ми автомобилей практически невозможно. Оно зависит от многих
□акторов: типа двигателя, его конструктивных параметров, каче-
ства процесса подготовки и сгорания смеси топлива и воздуха, ре-
жимов работы двигателя, его технического состояния и т.д.
67
Ниже приведены данные о содержании вредных веществ, выбра-
сываемых разными двигателями, г/(кВт-ч):
Бензиновый карбюраторный
На сжиженном газе ....
Дизельный ..............
Дизельный предкамерный . .
Газовая турбина ........
СО CnHm NO2
38,0 3,7 22,0
35,0 4,1 17,6
4,9 3,0 11,6
2,3 0,3 7,9
5,9 1,2 2,7
Неполное сгорание в цилиндрах двигателя происходит из-за не-
достатка кислорода в горючей смеси, т.е. при сжигании богатых
смесей, а, например, карбюраторные двигатели довольно часто ра-
ботают на таких режимах, когда требуется именно богатая смесь.
Много вредных веществ образуется при работе двигателя на хо-
лостом ходу и при торможении, когда система холостого хода кар-
бюратора при закрытом дросселе дает очень богатую смесь, а из-за
недостаточной подачи воздуха в цилиндры она сгорает медленно и не
до конца. В этом случае правильная регулировка системы холостого
хода оказывает большое влияние на снижение образования вредных
веществ.
Карбюраторы регулируют так, чтобы при малых и средних на-
грузках, наиболее часто имеющих место в эксплуатации, двигатель
работал на бедных смесях. Это дает снижение расхода топлива и
делает сгорание более полным. Однако и в этом случае возмож-
но образование токсичных веществ из-за недостаточно равномерного
распределения смеси по цилиндрам (неодинаковая длина впускных
патрубков, разная шероховатость внутренних поверхностей и т.д.).
Наилучшая равномерность распределения смеси достигается
при переходе от карбюратора к системе впуска топлива в область пе-
ред впускающим клапаном с использованием насоса с электронным
управлением. Последнее учитывает большое количество факторов,
влияющих на работу двигателя: степень и скорость открытия дрос-
сельной заслонки, температурный режим двигателя, частоту вра-
щения коленчатого вала и т.д., и позволяет существенно снизить
количество токсичных веществ в отработавших газах.
Однако карбюратор дешевле и проще любых впрыскивающих
устройств, поэтому продолжаются работы по совершенствованию
его конструкций и характеристик. Весьма перспективно оборудо-
вание карбюраторов электронными системами управления.
68
Токсичные продукты неполного сгорания топлива в цилиндрах
двигателя удается нейтрализовать в выпускном трубопроводе мето-
дом дожигания или с помощью окислительных катализаторов. Про-
стейшим способом дожигания является подача дополнительного воз-
духа в область выпускного клапана выпускной трубы, где темпера-
тура газов еше очень высока. При смешивании отработавших газов с
воздухом несгоревшие углеводороды взаимодействуют с кислородом,
в результате чего происходит их окисление и образование безвред-
ных СОг и НгО (пар).
Окисление несгоревших компонентов отработавших газов проис-
ходит более полно в присутствии соответствующего катализатора,
помещенного в выпускной трубопровод, или в специальных реакто-
рах для бескаталитического дожигания, представляющих собой хо-
рошо изолированную камеру достаточного объема для задержания
на некоторое время отработавших газов, в которую подается насо-
сом свежий воздух.
Лучшими катализаторами являются благородные металлы; хо-
рошо зарекомендовали себя также оксиды меди, сплавы никеля. Их
тонким слоем наносят на поверхность керамических гранул, кото-
рыми заполняют камеры дожигателей.
Снизить воздействие КМ на окружающую среду можно и други-
ми методами. Постепенная замена парка устаревших автомобилей
означает существенное уменьшение выброса вредных компонентов
выхлопных газов, несмотря на то, что пробег каждого автомобиля
в среднем увеличивается. Это объясняется, в частности, тем, что
расход топлива автомобильным транспортом, начиная с конца семи-
десятых годов, во многих странах снизился почти на 25 %. Если тем-
пы снижения расхода топлива сохранятся, то к 2005 году он умень-
шится на 40 %. Это станет возможным благодаря внедрению усо-
вершенствованных конструкций и технологий, в частности систем
регулирования расхода топлива.
В этих целях предусматривается объединение усилий многих
стран. Создана специальная западноевропейская комиссия, которая
совместно с правительствами стран будет регулировать количество
выпускаемых автомобилей, проводить политику обеспечения эконо-
мической и экологической эффективности автомобильного транспор-
:а в результате применения экологически чистых КМ.
Предусматривается реконструкция автомагистралей и дорог;
намечается освоение и внедрение электронной системы управления
69
дорожным движением. Проведение этих и других мероприятий по-
зволит существенно уменьшить расход топлива и эмиссию выхлоп-
ных газов, улучшить экологическую обстановку, несмотря на суще-
ственное увеличение количества автомобилей в ближайшие годы.
В течение последних лет эмиссия СОг находится в центре вни-
мания дискуссии о глобальном изменении климата. Считают, что во
всем мире только около 3 % СОг генерируется человеком. Антропо-
генное воздействие этого газа является главным образом результа-
том сжигания природных и ископаемых топлив - древесины, камен-
ного угля, газов и минеральных Нефтяных продуктов. Однако из них
лишь 16 % приходится на долю эксплуатации автомобилей; 40 % вы-
деляют электростанции, 20 % - промышленные предприятия, 14 %
образуется в результате отопления помещений (производственных и
жилых), остальное приходится на прочие объекты.
За последние 20 лет автомобильная промышленность существен-
но уменьшила эмиссию газов, влияющих на изменение климата, как
в процессе производства, так и в процессе эксплуатации КМ. Так,
автомобили выпуска 1990 года по сравнению с автомобилями, из-
готовленными в 1970 году, выделяют при движении лишь половину
количества СОг и других газов, вызывающих “парниковый эффект”.
Это стало возможным благодаря все более широкому примене-
нию двигателей с эффективным использованием топлива, и в том
числе, дизельных двигателей.
Во многих публикациях по качеству атмосферного воздуха ука-
зываются случаи заболеваний людей, связанные с увеличением за-
грязнения воздуха. Тем не менее статистика показывает общее уве-
личение продолжительности жизни людей. Согласно данным Феде-
рального управления здравоохранения Германии, рост количества
заболеваний, например, астмой является результатом современного
стиля жизни, включая домашние условия и потребляемые средства
(например, химикаты), нежели загрязнения воздуха.
С загрязнением окружающего воздуха также связывают заболе-
вание раком легких людей, имеющих длительный контакт с выхлоп-
ными газами дизельных двигателей. Однако эпидемиологические
обследования работающих в лондонских автобусных парках, доке-
ров Швеции и работающих на железных дорогах Канады и США
показали, что имеется очень малый риск заболевания раком легких
по отмеченной причине, так как не учитывались другие факторы
(курение, нездоровый стиль жизни и т.д.). Исследования, проведен-
ные за последние 8 лет в Германии, также не выявили влияния вы-
хлопных газов дизельных двигателей на заболевания раком легких
людей, подвергшихся их длительному воздействию.
70
Таким образом, считают, что выхлопные газы дизельных и бен-
зиновых двигателей не являются причиной рака легких у людей.
Основываясь на этом выводе, в частности, Германская автомобиль-
ная промышленность планирует продолжать дальнейшее расшире-
ние внедрения дизелей, отличающихся низким расходом топлива.
При этом большое внимание будет уделено оптимизации камеры
сгорания двигателей, оптимизации характеристик и элементов ката-
литических конвертеров. Последние будут снабжаться специальным
электрическим подогревом с удельным расходом электроэнергии при
пуске двигателя менее 5 кВт-ч (может быть обеспечено обычным ав-
томобильным аккумулятором).
Проводится дальнейшая разработка так называемых уловителей
(сепараторов) углеводородов, обеспечивающих их более полное сго-
рание. Разрабатываются бортовые диагностические системы, позво-
ляющие водителю принимать соответствующие решения для умень-
шения выброса вредных для окружающей среды компонентов выхло-
па и испарений углеводородов из топливных баков.
Одним из эффективных направлений по уменьшению вредного
воздействия автомобилей на окружающую среду является, как уже
отмечалось, уменьшение расхода топлива. Он определяется главным
образом тремя факторами:
1) конструкцией автомобиля (типом двигателя - литровой мощ-
ностью , количеством цилиндров, эмиссией; силовым приводом - ти-
пом коробки передач и других элементов трансмиссии; массой авто-
мобиля; типом шин; аэродинамическими характеристиками);
2) стилем (манерой) вождения (скоростью, ускорением, загру-
женностью автомобиля);
3) внешним фактором (качеством дорог, погодными условиями,
плотностью потока автомобилей).
Особого внимания заслуживает такой показатель, как масса ав-
томобиля. Ее снижение приводит к существенному уменьшению рас-
хода топлива. Достигнуть этого можно различными путями, в том
числе более широким использованием в конструкции автомобиля лег-
ких конструкционных материалов (алюминиевых сплавов и компо-
зиционных полимерных материалов).
Строгие законы по защите и восстановлению окружающей сре-
ды и сокращающиеся площади под свалки заставляют автомобиле-
строителей по-новому относиться к утилизации автомобилей. Труд-
ности в этом вопросе начинаются с разборки машин, по тем или
иным причинам оказавшимся на свалке. Германская фирма БМВ,
71
например, создала специальное предприятие по утилизации, на ко-
тором процесс разборки легковых автомобилей состоит из шести ста-
дий.
Сначала с автомобиля снимают отдельные агрегаты и подсбор-
ки, в том числе двери, капот и крышку багажника, чтобы облег-
чить доступ к остальным частям. Удаляют элементы интерьера и
разделяют машину на подузлы. Далее демонтируют багажник, на-
ружние съемные панели кузова, элементы моторного отсека и шас-
си. Двигатель, коробку передач, оси, стартер, генератор и водяной
насос моют и, если надо, ремонтируют для перепродажи. После
отделения неметаллических деталей пустой кузов отправляют к ме-
таллургам на переплавку. Неметаллические детали сортируют по
группам (пластмассы, стекло, охлаждающая и тормозная жидкости,
масла, резина, алюминиевые детали, провода, электронные компо-
ненты, шины). Твердые отходы измельчают и отправляют или на
заводы для повторного использования, или на захоронение.
При утилизации стали плавку лома осуществляют в электроду-
говой печи. Такие нежелательные составляющие, хак свинец, цинк,
кадмий выжигаются на 99,99 % и выносятся с отходящими газами.
Около 1,5% обшей массы материала улавливается специальными
фильтрами. В США, например, ежегодно образуется около 500 тыс. т
такой пыли; из нее извлекают и продают цинк. Считается, что для
превращения скрапа стали в первоначальное состояние исходного
материала нужно затратить 52,5 кДж/кг энергии для алюминия
276,5, для пластмасс 82,7).
С утилизацией пластмасс и особенно реактивов дело обстоит
сложнее. Самое простое - это сжечь эти отходы и освободить за-
ключенную в них энергию. Но при этом образуется много золы,
которую надо отправить на свалку.
Некоторые фирмы уже начали применять другие способы пе-
реработки отходов реактопластов. Идея заключается в том. чтобы
разложить их на полезные составляющие, сохранив содержащуюся
в них энергию. Это и есть пиролиз - химическое разложение веще-
ства в вакууме нагреванием. Процесс происходит в цилиндре, на-
греваемом сжигаемым газом. Природный газ используется только
на начальной стадии в течение первых 15... 20 мин, далее необходи-
мое количество теплоты выделяется при разложении разрушающе-
гося пластика. Например, при разложении формовочного стеклопла-
стика, используемого для кузовных деталей, получается газ (метан,
углеводороды) и наполнитель (стекловолокно, карбонат кальция).
Наполнитель снова можно применять в таком же пластике, клеях,
72
бетоне и т.д. Энергии, содержащейся в метане и углеводородах, до-
статочно для эффективного ведения процесса пиролиза.
Однако надо иметь в виду, что для осуществления пироли-
за пластмасс их надо раздробить на кусочки размером не более
25x25 мм (чем мельче, тем лучше). Для этого нужны специальные
дробильные установки.
Что касается термопластов, то они пока не могут быть разложе-
ны (пиролизом) на составляющие. Сложность заключается в том,
что термопластовые отходы надо четко рассортировать по типам ма-
териала, а для этого детали, устанавливаемые на автомобили, долж-
ны быть кодированы и подобраны для переработки (дробления).
Дробленые термопласты могут быть вторично переработаны со-
ответствующими способами (например, литьем под давлением) в ме-
нее ответственные детали.
Еще хуже дело обстоит с такими элементами автомобилей, как
шины, количество которых на свалках увеличивается катастрофи-
ческими темпами. Так, в США ежегодно выбрасывается около 300
млн шин, выбывших из эксплуатации, 3 млрд шин свалены в ку-
чи около крупных городов (в основном незаконно). Все Подмосковье
также очень засорено брошенными шинами.
Самым простым решением является использование шин в ка-
честве альтернативного топлива, например, для бумагоделательных
предприятий. Однако на этом пути опять встают проблемы: измель-
чение шин (особенно большого размера), наличие в составе резины
большого количества серы и др. Поэтому предприятий, работающих
на “шинном топливе”, пока очень мало.
Динамика сгорания “шинного топлива” в каждом котле индиви-
дуальна, она зависит от многочисленных факторов, и поэтому требу-
ется тщательная настройка каждого агрегата. При неполном сгора-
нии и неправильной пропорции с другим топливом выделяется чрез-
мерное количество SO2- Шинную крошку пытаются использовать
в качестве наполнителя асфальта, но пока дальше опытного произ-
водства дело не пошло, так как при этом может быть использована
только незначительная часть старой шины (несколько процентов).
По мнению специалистов фирмы “Гудьир”, пиролиз не решает
проблему утилизации шин. При изучении этого процесса обнаруже-
но, что получаемая сажа настолько низкого качества, что ее нельзя
использовать для изготовления новых шин, а углеводородный оста-
ток годится только для сжигания.
73
Существует, как это не странно, и проблема скрапа автомобиль-
ного стекла. Фирмы-производители стекла заявляют, что их продук-
ция на 100 % может быть вторично переработана и не представляет
угрозы для окружающей среды. Это не так.
При утилизации автомобилей много стекла бьется и собирать
осколки просто невыгодно. Стекло каждого типа имеет свои не-
достатки. Так, многослойные ветровые стекла, имеющие сложную
форму, надо сначала расплавить, а затем отделить стекло от пласт-
массовой пленки (что весьма сложно). Из задних стекол с нагрева-
тельными элементами обязательно надо удалить металл, а с боковых
- приклеенные резиновые уплотнители.
1.8. Силовые установки
Основное назначение силовой установки - получение механиче-
ской мощности, необходимой для преодоления внешних сил сопроти-
вления движению КМ. Силовая установка в значительной степени
определяет эксплуатационные свойства КМ. Она включает двига-
тель и системы смазки, охлаждения, питания, зажигания, пуска, вы-
пуска отработавших газов и пускового подогревателя.
Эксплуатационно-технические характеристики и качество этих
систем определяет надежность, экономичность и эффективность ра-
боты двигателя при различных режимах и условиях эксплуатации
КМ. В соответствии с этим обслуживающие двигатель системы
и агрегаты в любых дорожных и климатических условиях должны
обеспечивать получение максимальной мощности: экономичность и
приемистость двигателя; поддержание требуемого теплового режи-
ма работы; надежную и эффективную смазку; надежную и эффектив-
ную очистку воздуха, поступающего в двигатель: быстрый подогрев
и запуск; удобство эксплуатации и технического обслуживания.
Выбор типа двигателя силовой установки и его параметров явля-
ется одним из важнейших этапов проектирования КМ. так как от
мощности двигателя зависят производительность, динамика и про-
ходимость КМ, от его типа - надежность, экономичность и способ-
ность к работе на топливах различных сортов; от параметров рабо-
чего процесса и общих характеристик двигателя - металлоемкость
трансмиссии и КМ в целом.
Основными показателями двигателя являются: литровая мощ-
ность, удельная масса, габаритные размеры, топливная экономич-
ность, надежность и ресурс, шумность и токсичность, способность
при необходимости обеспечивать повышение мощности в результате
74
форсирования, универсальность, затраты на техническое обслужи-
вание и ремонт и др.
В практике создания и конструктивной оценки КМ получил рас-
пространение параметр, представляющий собой отношение макси-
мальной мощности Аретах к полной массети машины и называемый
удельной мощностью:
____ Ne щах
уд — •
тм
Хотя удельная мощность Nya приблизительно соответствует
эксплуатационным показателям КМ, тем не менее ее использование
дает возможность распространять результаты расчетов одной или
нескольких машин на целую группу (типоразмер) машин, обладаю-
щих определенными признаками общности.
В современных КМ удельная мощность достигает 30... 37,
11... 15 и 9,5... 12 кВт/т у машин небольшой, средней и большой
грузоподъемности соответственно. Сравнение удельной мощности
,VV4 неполноприводных и полноприводных КМ показывает, что у по-
следних она несколько выше, так как они эксплуатируются в более
тяжелых дорожных условиях, что требует повышенных мощностей
силовой установки, да и потери мощности в трансмиссии и ходовой
части у полноприводных КМ могут быть выше, чем у неполнопри-
водных.
Хотя существуют аналитические методы определения необхо-
димой удельной мощности силовой установки КМ различного клас-
са и назначения, все же в практике проектирования часто выбор
мощности силовой установки определяется не теоретическими, а
организационно-техническими соображениями (в первую очередь во-
просами унификации и использования имеющейся производственной
базы), а также ориентацией на прототипы с учетом выявившихся
недостатков и преимуществ последних. Отсюда значительные коле-
бания значений удельной мощности для КМ одного и того же типа
и грузоподъемности. В результате эффективность КМ реализуется
не в полной мере. Этот недостаток устраняется, когда проектируют
новую машину, для которой создают свою силовую установку.
К основным параметрам, характеризующим современную сило-
вую установку, относят массу, объем и габаритные размеры дви-
гателя и всех обслуживающих его систем и агрегатов. Для срав-
нительной оценки различных конструкций двигателей пользуются
понятием габаритной мощности, которую определяют по формуле
____Ne max
£Г D и T ’
Одв ЛДВ^ДВ
75
где Вдв, Ядв, LaB - соответственно ширина, высота и длина двига-
теля, м.
Габаритная мощность Ясг характеризует в определенной степе-
ни универсальность использования данной модели двигателя в мо-
торных отсеках различной формы. В настоящее время наибольшее
распространение на полноприводных КМ получили только два типа
двигателей внутреннего сгорания: бензиновые, устанавливаемые на
машинах малой и средней грузоподъемности, и дизельные, исполь-
зуемые на машинах средней и большой грузоподъемности.
Двигатели каждого из этих типов имеют свои преимущества
и недостатки. Прежде всего они отличаются по основным ха-
рактеристикам. Дизельные двигатели экономичнее бензино-
вых: минимальный удельный расход топлива у них обычно со-
ставляет 220 ... 240 г/(кВт-ч), в то время как у бензиновых 280...
... 300 г/(кВт-ч). При этом дизельные двигатели обладают лучшей
приемистостью, что позволяет при одинаковой их мощности с бензи-
новыми обеспечить лучшую динамику разгона, а следовательно, бо-
лее высокие скорости движения КМ. Важным достоинством дизеля
является увеличение мощности вследствие наддува, что не приме-
нимо для бензиновых двигателей. Приспособленность конструкции
и рабочего процесса дизельного двигателя к работе на других видах
топлива - преимущество, имеющее важное значение при эксплуата-
ции КМ в условиях Крайнего Севера и Сибири.
Дизельные двигатели имеют более высокий уровень шума и по-
вышенное выделение отработавших газов по сравнению с бензиновы-
ми, однако токсичность этих газов у них меньше и содержание в них
СО значительно ниже. Поэтому в смысле загрязнения окружающей
среды дизельные двигатели имеют преимущество перед бензиновы-
ми. Дизели обладают также меньшей пожарной опасностью, что
особенно важно при эксплуатации военных и специальных КМ.
Вместе с тем дизельные двигатели по сравнению с бензиновыми
имеют недостатки. Основной из них - тихоходность. Максимальная
частота вращения коленчатого вала у них, исходя из необходимости
обеспечения нормального рабочего процесса, как правило, не превы-
шает 2600... 2800 мин-1, тогда как у бензиновых она значительно
выше. Отсюда более высокий крутящий момент у дизелей при той
же мощности, большая масса и габаритные размеры. Кроме того,
установка двигателя с большим крутящим моментом для сохране-
ния надежности на одинаковом уровне требует увеличения массы
трансмиссии КМ. Снаряженная масса КМ с дизельным двигателем
76
несколько выше, чем машины с бензиновым двигателем, при одина-
ковой их грузоподъемности.
Поэтому на КМ малой грузоподъемности, где особое внимание
уделяется снижению металлоемкости, шума и габаритных размеров,
чаще применяют бензиновые двигатели, а на КМ большой гру-
зоподъемности, для которых актуальной является экономичность,
устанавливают дизели.
Двигатели КМ по расположению цилиндров подразделяют на
однорядные и двухрядные (главным образом V-образные). При
V-образном расположении цилиндров снижаются высота и длина
двигателя, повышается жесткость конструкции. Уменьшение га-
баритных размеров двигателя позволяет высвободить необходимые
объемы для размещения кабины, платформы и агрегатов КМ, рас-
полагаемых в моторном отделении. Двигатели с однорядным рас-
положением цилиндров обычно применяют на КМ небольшой грузо-
подъемности. Для снижения высоты двигателя и уменьшения сред-
ней скорости поршня стремятся по возможности уменьшить его ход,
т.е. сделать двигатель короткоходным. Однако уменьшение хода
поршня рационально до определенного предела, обусловленного со-
ображениями экономичности работы двигателя и токсичности отра-
ботавших газов. У бензиновых двигателей отношение хода поршня
к диаметру цилиндра находится в среднем в пределах 0,8... 0,95, у
дизельных 0,9 ... 1,1. В отдельных случаях применяют двигатели с
оппозитным расположением цилиндров.
В зависимости от рабочего объема цилиндров двигатели пол-
ноприводных КМ условно подразделяют на микролитражные с ра-
бочим объемом менее 0,5 л; малолитражные с рабочим объемом
0,5... 2,0 л; среднелитражные с рабочим объемом 2,1... 4,0 л и на
двигатели большого литража с рабочим объемом свыше 4,0 л.
Газораспределение рассматриваемых двигателей клапанное, с
верхним или нижним расположением клапанов, охлаждение - жид-
костное или воздушное. Наибольшее применение находят двигатели
с жидкостным охлаждением, так как эта система эффективна в ши-
роком диапазоне температур охлаждающего воздуха и ее применение
требует меньших затрат мощности на привод вентилятора. Кроме
того, при этой системе охлаждения проще решаются вопросы пред-
пускового обогрева двигателя и обогрева кабины, кузова, корпуса.
В последнее время все шире начинают использовать двигатели
с системой воздушного охлаждения, у которых масса и габаритные
размеры всей силовой установки меньше, а надежность выше. Уве-
личение надежности обусловлено отсутствием опасности размора-
живания, меньшим коррозионным износом вследствие более высоких
77
температур стенок и головок на частичных нагрузках (пары воды и
продукты сгорания, содержащие серу, при этом не конденсируют-
ся и кислоты не образуются), повышенной готовностью к принятию
нагрузки двигателем.
При разработке конструкций двигателей различной мощности
широко используют унификацию их узлов и агрегатов, особенно у
дизелей. Создают двигатели с различным числом цилиндров, но
при этом сохраняют их основные конструктивные решения и раз-
мерности (степень сжатия, различные приводы и т. д.). В большей
степени подвергаются унификации узлы и детали, которые чаще за-
меняют в процессе эксплуатации - различные вкладыши, элемен-
ты систем питания, смазки, элементы шатунно-поршневой группы
и т.д. В некоторых конструкциях уровень унификации между мо-
делями двигателей достигает 90 %. Однако этот принцип не един-
ственный при унификации автомобильных двигателей. В послед-
ние годы успешно применяют принцип конвертирования двигателей,
т.е. создание дизелей на базе бензиновых двигателей, что стало воз-
можным благодаря наметившемуся их конструктивному сближению.
Конвертирование в большей степени относится к технологической
унификации (корпусные детали, ряд систем двигателей). Уровень
унификации при этом достигает 75%.
В силовых установках полноприводных КМ используются так-
же двигатели в многотопливном исполнении, способные работать
как на дизельном, так и на легких сортах топлива. Добиться этого,
можно или созданием двигателей внутреннего сгорания специальной
конструкции с рабочим процессом, обеспечивающим сгорание раз-
личных топлив, или приспособлением различных двигателей к ра-
боте на бензине и керосине. Последний способ более простой, однако
при переводе дизельного двигателя для работы на бензине мощность
его снижается на 15... 25 % при использовании обычной топливной
системы и на 7... 10 % при специальной регулировке топливного на-
соса. Опыт эксплуатации многотопливных двигателей показывает,
что лучшие мощностные показатели, облегченный запуск (особенно
в зимнее время), меньшая жесткость работы и дымность получа-
ются при использовании в этих двигателях не чистого бензина или
керосина, а их смесей с дизельным топливом в определенных соот-
ношениях.
Основные технические данные бензиновых и дизельных двига-
телей полноприводных отечественных КМ представлены в табл. 1.6.
78
Таблица 1.6. Технические данные двигателей отечественных
полноприводных КМ
Показатель ЗМЗ-66 ЗИЛ-131 ЗИЛ-375 КамЛЗ-740 ЯМЗ-238 ЯМЗ-238Н
Диаметр цилиндра, мм 92 100 108 120 130 130
Ход поршня, мм 80 95 95 120 140 140
Рабочий объем, л 4,25 6,0 7,0 10,85 14,86 14,86
Степень сжатия 6,7 6,5 6,5 17,0 16,5 15,2
Максимальная мощность, кВт 84,5 110,0 132,5 154,5 176,5 221
Частота вращения при максимальной мощности, мин-1 3200 3200 3200 2600 2100 2100
Максимальный крутящий момент, Н- м 284 400 465 638 882 1080
Частота вращения при максимальном крутящем моменте, мин-1 2250 1900 1900 1500 1500 1500
Примечание. Все КМ имеют 8-цилиндровые двигатели, в которых цилиндры расположены
под углом 90°.
a 6
Рис. 1.17. Схема одновального (а) и двух-
вального (б) газотурбинного двигателя
В силовых установках полноприводных КМ с успехом можно
применять газотурбинные двигатели (ГТД). По сравнению с дизеля-
ми ГТД обладают следующими преимуществами: высокой надежно-
стью в эксплуатации и большим ресурсом; меньшими габаритными
размерами и массой; высокой удельной мощностью; способностью
работать на любом жидком топливе, в том числе и на низкосорт-
ном; незначительным расходом масла; легким запуском при низких
температурах окружающего воздуха; меньшим уровнем токсично-
сти отработавших газов; динамической уравновешенностью; низким
уровнем шума. В то же время ГТД имеют большую стоимость, по-
вышенный расход топлива по сравнению с дизельными двигателями.
ГТД, используемые в силовых установках КМ, по конструк-
тивному исполнению подразделяют на одновальные и двухваль-
ные (рис. 1.17). Схема простейшего одновального ГТД показана на
рис. 1.7, а. От вала ГТД приводятся во вращение вал топливного
насоса 1, подающего топливо в камеру сгорания 3, и вал компрес-
сора 2. При сгорании топлива образуется горячий газ, который под
большим давлением подается на лопатки газовой турбины 4- В одно-
вальном ГТД уменьшение частоты вращения вала ведет к снижению
частоты вращения вала компрессора. При этом мощность и крутя-
щий момент резко уменьшаются, в связи с чем кратность рабочих
скоростей одновального ГТД невелика и оценивается выражением
Кск = ^ = 1,3...1,4,
k’min
где <jhom и u?mjn - соответственно номинальная и минимальная ча-
стота вращения вала ГТД, с-1.
Лучшие тяговые показатели имеют ГТД с турбинами, разделен-
ными на две части (см. рис. 1.17, б), из которых компрессорная 4
служит только для привода компрессора, а тяговая 5 используется
80
для привода трансмиссии КМ. В двухвальном ГТД частоту вра-
щения тяговой турбины можно изменять от нуля до максимального
значения при неизменном режиме работы компрессора.
В современных ГТД мощность, затрачиваемая на привод ком-
прессора, топливного насоса и других вспомогательных механизмов,
составляет 60 ... 70 % от мощности турбины. Остальная ее часть за
исключением мощности, расходуемой на вспомогательные нужды,
передается через трансмиссию к ведущим колесам КМ. На КПД
ГТД влияет температура газов на выходе из камеры сгорания, огра-
ничиваемая термостойкостью и механической прочностью матери-
ала лопаток турбины. Лопатки турбины ГТД силовых установок
транспортных машин работают при 750 ... 800°С и частотах враще-
ния до 40000 мин-1. КПД ГТД составляет 0,2... 0,25.
При конструировании полноприводной КМ компоновка силовой
установки должна обязательно учитывать не только рациональное
размещение агрегатов собственно двигателя, но и узлов крепления,
элементов систем управления двигателем и коробкой передач, маги-
стралей подвода топлива, охлаждающей жидкости, газов, воздуха и
Глава 2
ОБЩИЕ ВОПРОСЫ ПРОЕКТИРОВАНИЯ
ПОЛНОПРИВОДНЫХ КОЛЕСНЫХ МАШИН
2.1. Принципы системного подхода
Системный подход - это направление методологии научного по-
знания, в основе которого лежит рассмотрение объектов как систем.
Он ориентирует исследования на раскрытие целостности объекта, на
выявление многообразных типов связей в нем и сведения их в единую
теоретическую картину.
Система - множество элементов, находящихся между собой в
отношениях и связях, образующих определенную целостность, един-
ство.
Основной задачей системного подхода применительно к созда-
нию КМ является установление связей и закономерностей, присущих
транспортным системам. Системы могут быть относительно слож-
ными и относительно простыми. Все зависит от постановки задачи
и целей исследования данной системы. Например, поршневая груп-
па - простая система, если рассматривать ее как элемент двигателя
внутреннего сгорания. Если рассматривать ее как группу элементов
конструкции, работающих при переменных нагрузках, при действии
высоких температур, при движении с высокими скоростями и т.д.,
то это сложная система. Любая сложная система (кроме абсолют-
ной) является частью некоторой большой системы, т.е. все системы
относительны.
С принципом относительности взаимосвязано понятие иерархич-
ности, которая предполагает определенное расположение систем, от-
дельных элементов и частей в порядке от высшего уровня к низшему.
82
Целостность системы
Целостность системы определяют внутренние связи ее элемен-
тов. Элементы, входящие в систему, взаимовлияют через эти связи.
Изменение одного элемента влечет за собой изменение связанного с
ним элемента и системы в целом, в данном случае целое является
органическим. Когда такой взаимосвязи и взаимовлияния нет, то
целое является механическим. Например, если разобрать на детали
коробку передач, двигатель или другой узел КМ, то весь набор дета-
лей будет представлять механическое целое отдельных несвязанных
между собой элементов. Когда между деталями появляются функ-
циональные связи в результате их сборки в единый узел (коробку
передач, двигатель и др.), то механическое целое превращается в
органическое целое с единством формы и содержания.
Системный подход предусматривает классификацию систем.
Системы могут быть централизованными и децентрализованными.
Система с явно выраженной одной подсистемой - централизован-
ная. Если же такая подсистема отсутствует, то система называется
децентрализованной.
Двигатель - централизованная система с главной (центральной)
подсистемой - блоком цилиндров. Рама - система децентрализован-
ная, поскольку и левый, и правый лонжероны одинаково важны для
формирования системы.
Исходя из изложенных выше положений, можно сформировать
основные принципы решения сложных технических задач:
1) всякая система целостна, если она может быть разделена на
элементы конструкции, способна преодолевать воздействие окружа-
ющей среды и оказывать на нее влияние;
2) целостность системы характеризуется наличием связей меж-
ду ее элементами;
3) совокупность элементов и связей, их взаимообусловленность
определяются структурой системы;
4) специфический признак системы - иерархия ее строения.
Рассмотрим укрупненную структурную схему многоосной КМ
(рис. 2.1).
КМ является системой потому, что соответствует каждому из
четырех принципов решения сложных технических задач при си-
стемном подходе.
Максимальная эффективность решения задачи достигается
лишь в случае поэтапного анализа состояния системы: описания,
объяснения, прогнозирования, управления.
83
| Топливная система ]
[Система выпуска 1
отработавших газов |
Двигатель
I Система питания
воздухом
[ Смазочная система
| Система охлаждения [
(! Система воздушного
пуска двигателя
иис1вм<а пред- i
пускового разогрева [
| Гидротрансформатор
I Планетарная коробка!.
передач Г
| Система охлаждения^
' I Демпферное
I соединение
[Повышающая передача [
ъ
Силовая I
установка [
Трансмиссия [
| тТйдравлическая L
| система Г
Н”*1 Несущая П_
I система Г
[Карданные валы
трансмиссии
| Раздаточная коробка |~
| Ведущие мосты
| Ступица колеса 1
[ Система накачки шин ।
[ Колеса и шины )-
| Рама р" 1 ' - ~~
J Управление |-
I Поворотное устройство]-
| Тормозное
Подвеска |-
] Кабина |-
КМ высокой
проходимости
(8*8)
| Рулевое
| Левая кабина
| Правая кабина | L~
' - Водяной отопитель
_ ___ I кабины
| Капот двигателя |
( Крылья кожуха
| Рама платформы | 1
| Пол платформы |"
}
_____________
г-] Платформа 1»
' ........................................
"L | Электро- 'I
оборудование Г
| Потребители
|Топливо
Источники
]-
I- ” , " I | Материалы I
Смазочный и.,.риал |- функцион ния
[ охлаждающая [ < I
[_____жидкость Г~
[ Рабочая жидкость р
Провода
Рис. 2.1. Структурная схема КМ высокой проходимости
84
Единая система конструкторской документации устанавливает
(ГОСТ 2.101-68) следующие виды изделий: детали, сборочные еди-
ницы, комплексы, комплекты.
Системный подход позволяет рассматривать каждый из видов
изделий как систему, подсистему, элемент, определяющие соответ-
ствующий уровень. Выбор уровня, на котором следует рассматри-
вать изучаемый объект, зависит от поставленной задачи, решение
которой во многом сводится к выявлению связей и отношений между
структурными составляющими системы.
Связь предопределяет изменение одного элемента системы при
изменении другого, с ним связанного.
Отношения предопределяют взаимное расположение элементов
системы и их взаимозависимости: с изменением одного элемента не
обязательно изменение другого элемента.
Системный подход обуславливает классификацию связей. Свя-
зи бывают внутренние и внешние. Внутренние - это связи между
элементами системы (например, ступица - колесо), внешние - меж-
ду элементами системы и окружающей средой (например, колесо -
дорога).
Внутренние и внешние связи, в свою очередь, подразделяют на
связи: взаимодействия, характеризующиеся назначением каждого
взаимодействующего элемента; структурные, характеризующие не-
делимость элементов системы, и функционирования, обеспечиваю-
щие действие всего объекта.
Управляющие связи служат для выполнения задач управления
функционированием системы и поддержанием ее целостности, сохра-
нения заданных или задаваемых параметров состояния равновесия
или устойчивости системы.
Управляющие связи бывают информационные, командные и
субординарные.
Информационные связи необходимы для сбора и обработки
информации о состоянии функционирования системы. Командные
предназначены для передачи команд управления на элементы систе-
мы для выполнения задач управляющих связей. Субординационные
связи представляют собой связи подчиненности элементов в иерар-
хической структуре системы.
Управляющие связи необходимы для выполнения системой ее
целевого назначения.
Связи подразделют также на материальные (например, механи-
ческие, гидравлические, электромагнитные, электрические, тепло-
вые связи) и логические (абстрактные ).
85
В материальных системах могут быть как материальные, так
и логические связи. В абстрактных системах существуют только
логические связи.
Исследование связей является важной задачей. При этом необ-
ходимо: установить главные связи в системе; выявить закономерно-
сти действия различных связей при функционировании системы и
создать оптимальные управляющие связи и т.д.
Определение границ системы и ее элементов
Определение границ системы и ее элементов нужно для соста-
вления описания системы. При этом важно избежать объединения
в систему объектов, не имеющих между собой связей, не допустить
разделения на структурные составляющие неделимых объектов, по-
скольку нарушится их целостность. Например, электрооборудова-
ние нельзя объединить с системой охлаждения в случае, когда вен-
тилятор приводится в движение ремнем, одновременно принадле-
жащим приводу генератора. В данном случае это внедрение одной
системы в другую.
Границы системы в общем случае определяются наличием ко-
нечного числа элементов, необходимых для работы системы и обес-
печения ее непосредственных функций. В данном примере к таким
элементам относятся радиатор, жидкостной насос, система комму-
никаций, термостат, полости в двигателе для циркуляции жидкости,
охлаждающая жидкость, вентилятор, отопитель салона, расшири-
тельный бачок. Однако в случае, когда вентилятор, охлаждающий
создаваемым им потоком воздуха жидкость в радиаторе, приводится
в движение электромотором, имеющим электронную систему упра-
вления, связанную с температурными параметрами двигателя, си-
стемы охлаждения и электрооборудования становятся взаимосвязан-
ными.
Любая система получает на входе сигнал из окружающей среды,
а на выходе сама воздействует на нее.
Система, как правило, имеет иерархичную структуру. Она мо-
жет иметь различное число объектов, являющихся подсистемами.
Подсистемы, в свою очередь, состоят из элементов, которые могут
состоять, например, из нескольких сборочных единиц и образовы-
вать подсистему уже другого уровня или быть неделимыми.
Функционирование системы возможно только при выполнении
следующих условий:
все структурные составляющие (подсистемы, элементы) обеспе-
чивают работу системы;
86
часть структурных составляющих не обеспечивает функциони-
рование системы, но действие остальных структурных составляю-
щих это компенсирует.
Ведомые колеса (структурные составляющие системы) препят-
ствуют (противодействуют) движению машины, при этом расходу-
ется часть мощности. До тех пор, пока сила тяги на ведущих колесах
больше сопротивления, противодействие будет компенсироваться. В
противном случае машина двигаться не будет.
Глубокое изучение любой системы основано на внешнем и вну-
треннем анализе объекта. Внешний анализ характеризует взаимо-
действие системы с окружающей средой, внутренний - взаимодей-
ствие между структурными составляющими системы.
Структура - это внутреннее устройство объекта. В общем ви-
де структура любой машины может быть представлена двигателем,
трансмиссией, подвеской и системами управления.
Системный подход предусматривает три вида структур систе-
мы:
1) подсистема с входами - выходами;
2) подсистемы с последовательными выходами - входами;
3) подсистемы с несколькими выходами - входами.
Рассмотрим эти структуры на конкретных примерах.
1. Система состоит из рамы, подвески, ведущего моста, колеса.
Рассмотрим подсистему “колесо”. К колесу подводится мощность
(вход), преодолевая сопротивление качению оно катится (процесс) по
опорной поверхности с определенной скоростью, зависящей от кон-
струкции колеса. Если изменить конструкцию колеса (управление),
то изменится скорость (выход). Это первый вид структуры систе-
мы.
2. Система состоит из рамы, подвески, ведущего моста, колеса,
планетарной колесной передачи. Рассмотрим подсистемы “плане-
тарная колесная передача” и “колесо”. К зубчатому колесу плане-
тарной колесной передачи подводится мощность (вход), часть ко-
торой расходуется на преодоление сопротивления водила (процесс).
Затем мощность передается от водила колесу (выход). Этот вы-
ход является входом в предыдущем примере. Изменяя передаточное
число передачи (управление), можно при той же подводимой мощно-
сти изменить скорость вращения вала (выход из первой подсистемы
и одновременно вход во вторую). Прн этом изменится скорость вра-
щения колеса (выход из второй подсистемы). В общем случае вторая
подсистема тоже может иметь управление. Аналогичный результат
87
может быть достигнут в результате общего воздействия на обе под-
системы одновременно, т.е. изменением подводимой мощности. Это
второй вид структуры системы.
3. Система “трансмиссия колесной машины”. Расмотрим под-
системы “раздаточная коробка”, “передний и задний ведущие мо-
сты” (машина ( 4x4)). К раздаточной коробке подводится мощ-
ность (вход). Часть мощности передается переднему мосту, а часть
- заднему (выходы). При изменении входных параметров процесса
(управление) изменяются параметры на выходах, каждый из кото-
рых является входом для подсистем переднего и заднего ведущих
мостов. Это третий вид структуры системы.
Комплексная оценка сложных систем
Комплексная оценка сложных систем является важным принци-
пом и условием системного подхода. Количественная оценка необ-
ходима для обеспечения научного подхода к исследованию системы,
она нужна при выборе возможных альтернативных вариантов и по-
иска наилучшего из них.
Для этого надо, чтобы каждый элемент и система в целом имели
бы оценочный параметр, позволяющий определять степень их при-
способленности к достижению главной цели. Этот оценочный па-
раметр называют критерием системы. Выбор критерия системы -
сложная задача, зависящая от уровня системы, решаемой проблемы
и применяемых методов исследования.
При решении простых задач обычно пользуются одним критери-
ем, тогда как для сложных задач может потребоваться применение
многокритериального подхода.
Обычно деталь оценивают по трем критериям: массе, прочно-
сти и трудоемкости изготовления; сборочную единицу (например,
коробку передач) - по четырем критериям: массе, прочности, долго-
вечности, трудоемкости изготовления, а сложный объект (например
КМ) по большему числу критериев: массе, надежности, трудо-
емкостям изготовления, технического обслуживания и ремонта, по-
тенциальным свойствам объекта (плавности хода, управляемости,
проходимости, обитаемости и т.д.).
Очевидно, что с ростом числа критериев задача усложняется.
Во избежание излишних трудностей приходится из большого масси-
ва критериев выделять группу основных, а из них - главный кри-
терий, превращая задачу из многокритериальной в однокритериаль-
ную.
88
При проектировании КМ вначале определяют параметры, соот-
ветствующие техническим требованиям, а затем переходят к опти-
мизации конструкции по одному главному критерию. Если выпол-
няются требования грузоподъемности, плавности хода, проходимо-
сти, управляемости, то главным критерием будет масса машины
или трудоемкость ее изготовления. Это значит, что необходимо,
сохраняя характеристики объекта, обеспечить минимизацию массы
объекта. Иногда достижение желаемых результатов невозможно без
изменения одного или нескольких параметров, обусловленных ТЗ. В
этом случае решение принимают на основе глубокого анализа про-
тиворечий.
Допустим, необходимо обеспечить достаточно жесткие требова-
ния по массе изделия, причем заданы ограничения по номенклатуре
применяемых материалов. Решение проблемы базируется на оценке
целесообразности использования таких материалов, как магниевые,
алюминиевые или титановые сплавы, если при изготовлении из них
деталей будет обеспечено удовлетворение требований по массе.
Для правильного выбора варьируемых в оптимизационной зада-
че параметров и оценки их степени влияния на критерий системы
очень важно правильно описать объект, конкретизировать систему
и выделить основные составляющие и связи между отдельными эле-
ментами и подсистемами.
Объект в общем случае может быть представлен тремя описа-
ниями:
параметрическим - исходный уровень исследования любого объ-
екта, который основан на наблюдениях, описании свойств, признаков
и связей между исследуемым объектом и другими (см. рис. 2.2, а);
структурным ~ описание строения объекта, которое дает воз-
можность установить взаимосвязи свойств и признаков, выявленных
при параметрическом описании (см. рис. 2.2, б);
функциональным - описание функциональных зависимостей ча-
сти объекта на основе характеристики всего объекта; различа-
ют функционально-параметрическое и функционально-структурное
описания (см. рис. 2.2, в).
Параметрическое описание КМ в общем виде содержит следую-
щие параметры: колесную формулу; массу машины; грузоподъем-
ность (по дорогам с твердым покрытием и грунтовым); массу бук-
сируемого прицепа; двигатель (тип, рабочий объем); максимальную
89
a
в
Рис. 2.2. Схема общих принципов системного подхода
90
мощность двигателя; частоту вращения коленчатого вала двигате-
ля; максимальную скорость движения' машины; габаритные разме-
ры; передаточные числа коробки передач; внутренние размеры плат-
формы; базу, колею; дорожный просвет; наименьший радиус поворо-
та; размерность шин; вместимость топливных баков; контрольный
расход топлива на 100 км; запас хода по топливу и т.д.
Структурное описание несет информацию о следующих элемен-
тах структуры: двигателе, сцеплении, коробке передач, карданной
передаче, ведущем мосте, управляемом мосте, подвеске, колесах и
шинах, рулевом управлении, тормозной системе, раме, кабине и ку-
зове, электрооборудовании, дополнительном оборудовании.
Функционально-параметрическое описание объекта - это опи-
сание функциональных связей между его параметрами. Так, макси-
мальная скорость КМ зависит от мощности двигателя, его оборотов,
передаточных чисел трансмиссии, массы машины и т.д. Грузоподъ-
емность определяется общей массой машины, мощностью двигателя,
колесной формулой и т.д.
Функционально-структурное описание объекта - это описание
функциональных связей между его структурными составляющими.
В каждой системе имеет место жесткая связь между различными
элементами. Нельзя, например, увеличить или уменьшить длину
карданного вала (элемента структуры) без изменения других эле-
ментов - коробки передач или ведущего моста. Нетрудно убедиться,
что диаметр тормозного барабана зависит от размеров обода коле-
са, которые зависят от размеров шины и т.д. Выявление и описа-
ние этих связей и есть функционально-структурное описание объ-
екта. Поскольку функциональное описание системы наиболее слож-
ная и полная форма представления объекта, следует иметь в виду,
что функционально-структурное и функционально-параметрическое
описания взаимосвязаны.
Дорожный просвет - параметр, который может быть непосред-
ственно связан с габаритными размерами картера главной переда-
чи; наименьший радиус поворота непосредственно взаимодействует
с такими элементами структуры, как управляемый ведущий мост и
рулевое управление; база и колея - с наименьшим радиусом поворота
и т.д.
После установления состава системы и связей между ее элемен-
тами можно сформулировать задачу и переходить к ее решению.
При этом следует иметь в виду, что основные положения систем-
ного подхода дают возможность наметить пути решения многова-
риантных задач, в том числе проектно-конструкторских, научно-
исследовательских и организационно-технологических. Метод проб
91
и ошибок весьма трудоемок и не всегда дает возможность достичь
цели традиционным путем.
Системный подход ограничивает число вариантов и тем самым
обеспечивает эффективное решение технической многовариантной
задачи.
Рассмотрим в общем виде последовательность выполняемых в
этом случае операций. Главная задача сводится к формулированию
проблемы и построению по ней системной модели.
Системная модель проблемы включает в себя системные модели
общей и частной задачи, которые должны быть сформулированы.
Анализ многовариантной задачи должен дать ответ на следую-
щие вопросы.
1. Могут ли быть решены общая и частная задачи?
2. Могут ли быть использованы существующие зависимости?
3. Может ли быть решена задача существующими математиче-
скими методами?
4. Может ли быть разработан новый математический метод?
5. Достоверны ли результаты?
Ответ на каждый вопрос является решением поставленной за-
дачи на каждом этапе. Уместно отметить необходимость обратных
связей анализа - возврат к исходному положению при неудовлетво-
рительных результатах решения. Обратная связь содержит ввод из-
мененных данных, уточнение формулировки задачи или уточнение
математических зависимостей.
Решение задачи считается приемлемым при выполнении следу-
ющих условий:
определены необходимые действия, изменяющие параметры си-
стемы, для достижения поставленной цели (выход системы):
окончательные результаты получены в соответствующих едини-
цах измерения (грузоподъемность в тоннах, долговечность в часах и
т.д.);
условие задачи и найденное решение принадлежат одной систе-
ме;
частное решение согласовано с общим;
возможна проверка достоверности частного и общего решений.
В общем виде системный подход предполагает такую схему ре-
шения многовариантной задачи.
1. Постановка задачи: определение цели, выявление условий и
ограничений решения, установление границ исследуемой системы,
выбор критериев эффективности системы и ее структурных соста-
вляющих, выявление взаимосвязей элементов системы и их оценка.
92
2. Анализ задачи: установление границ структурных составля-
ющих, выявление существующих связей между структурными со-
ставляющими, уточнение данных по каждой структурной составля-
ющей, проверка возможности использования выбранных критериев,
разработка схемы решения задачи, установление возможных вари-
антов решения задачи и выбор оптимального.
3. Решение задачи: разработка плана решения задачи, количе-
ственная оценка связей между структурными составляющими, оцен-
ка частных и полных решений, принятие решения, подлежащего ре-
ализации.
При постановке задачи целесообразно пренебречь избыточными
данными и несущественными условиями, сгруппировать параметры
на известные и искомые.
В общем виде постановка задачи включает в себя четыре этапа:
1) формулировку задачи; (в связи с чем она возникла)
2) обоснование степени нерешенности задачи;
3) определение специфики рассматриваемой задачи;
4) установление возможных вариантов и нежелательных реше-
ний.
В качестве примера рассмотрим решение многовариантной зада-
чи: “Повышение долговечности карданной передачи КМ серийного
производства”.
Задача возникла в связи с тем, что карданная передача КМ обла-
дает недостаточной долговечностью по сравнению с другими узлами
трансмиссии. Это подтверждается многими исследованиями.
Задача рассматривается как нерешенная потому, что проведен-
ный ранее ряд мероприятий не обеспечил достижение цели.
Задача отличается от аналогичных условиями эксплуатации
объекта и конструктивными особенностями узла.
Возможные варианты решения: конструктивные изменения де-
талей и всего узла, изменение технологии и периодичности техниче-
ского обслуживания узла и т.д.
Нежелательные решения: конструктивные изменения узла с по-
терей взаимозаменяемости, конструктивные изменения узла с изме-
нением (увеличением) габаритных размеров и массы.
Таким образом, схема решения рассматриваемой задачи может
быть следующей.
1. Постановка задачи.
Определяем цель: увеличить долговечность карданной передачи
до заданного пробега в дорожных условиях, предусмотренных общи-
ми техническими требованиями и оценить средства ее повышения.
93
Выявляем условия и ограничения решения: обязательны взаимо-
заменяемость узла, большой типоразмер карданного шарнира, боль-
шая масса узла, использование стандартных смазочных материалов
и т.д.
Устанавливаем границы системы: система включает в себя кар-
данную передачу в сборе (карданные шарниры, компенсатор линей-
ных перемещений, сварной узел и т.д.), базовые узлы машины, воз-
действие элементов КМ и окружающей среды на карданную пере-
дачу, характеристики эксплуатационных условий и потенциальных
свойств машины.
Выбираем критерии эффективности системы и ее структурных
составляющих: для системы это будет наработка узла на отказ в
часах или километрах пробега, для подсистемы (карданный шарнир)
- износ шипа крестовины в микрометрах и т.д.
Выявляем взаимосвязь элементов системы: износ шипа кресто-
вины зависит от точности изготовления деталей карданного шар-
нира, качества контактируемых поверхностей, их физико-механи-
ческих свойств, нагрузки и скорости перемещения контактируемых
тел, наличия и качества смазочного материала и т.д,: скорость пе-
ремещения связана с частотой вращения карданного вала, углом из-
лома шарнира и т.д. Выполняем последовательную оценку взаимо-
связи элементов системы.
2. Анализ задачи.
Устанавливаем границы структурных составляющих: кардан-
ный шарнир включает в себя гнезда вилок с деталями крепления под-
шипников, крестовину с подшипниками и уплотнителями, смазоч-
ную систему; компенсатор линейных перемещений содержит шлице-
вой вал, скользящую вилку, манжету, смазочную систему и т.д,
Выявляем существенные связи между структурными составля-
ющими: компенсатор линейных перемещений нагружает карданные
шарниры под действием осевой силы, возникающей при взаимном
перемещении его деталей; в то же время сварной узел, связанный с
карданным шарниром структурной связью, при оптимальной проч-
ности не регламентирует долговечность карданной передачи (связь
несущественная) и т.д.
Уточняем данные по каждой структурной составляющей: тща-
тельный контроль качества изготовления деталей, материала, раз-
меров и т.д.
Проверяем возможность использования выбранных критериев:
обработка методов контроля формы и размеров деталей до и по-
сле износа, количества смазочного материала шарнира, его физико-
химических свойств и т.д.
94
Разрабатываем схему решения задачи (от общего к частному):
определяем, какой из элементов обладает наименьшей долговечно-
стью, устанавливаем и устраняем причины этого; проводим анализ
следующего элемента и так до полного анализа всех элементов узла.
Устанавливаем возможные варианты решения задачи и вы-
бираем оптимальный: увеличение долговечности возможно путем
улучшения эксплуатационных условий, потенциальных свойств уз-
ла, уменьшения вредного воздействия окружающей среды. В общем
виде оптимальными вариантами являются первый и второй, так как
на третий повлиять практически невозможно. Поэтому выбираем
вариант конструктивного исполнения элементов и узла в целом, обес-
печивающий общее повышение потенциальных свойств при частич-
ном улучшении условий эксплуатации или без этого (например, в ре-
зультате совершенствования смазочного режима, подачи смазочного
материала, повышения герметичности уплотнительных элементов,
снижения вибронагруженности карданного шарнира и т.д.).
3. Решение задачи.
Разрабатываем план решения задачи в соответствии с выбран-
ной во время анализа схемой решения. В схеме должна быть отра-
жена последовательность операций и мероприятий, выполнение ко-
торых обеспечивает решение задачи. Пути и средства достижения
планируемой долговечности карданной передачи должны включать
повышение точности изготовления деталей карданного шарнира, ис-
пользование оптимального по вязкости смазочного материала, обес-
печение герметичности уплотнительных элементов в течение всего
периода эксплуатапии, применение оптимальной схемы смазывания
каждого подшипника карданного шарнира и т.д. Все эти пути экс-
периментально должны быть проверены при проведении стендовых
испытаний и в условиях эксплуатации. Реализация рассмотренных
мероприятий и есть выполнение плана исследовательской работы по
настоящей теме.
Проводим количественную оценку связей между структурны-
ми составляющими,- количественный (расчетный) анализ зависимо-
сти долговечности карданного шарнира от контактных напряжений,
связанных с формами деталей, точностью их изготовления и т.д.
Обычно для этого можно воспользоваться одними из имеющихся ме-
тодов расчета, если же необходимо уточнение какого-либо параме-
тра, то следует разработать новую методику, по которой можно по-
лучить уточненную количественную оценку. Аналогично оцениваем
связи во всех остальных случаях, причем достоверность расчетов
целесообразно проверить экспериментально.
95
Осуществляем оценку частных и полных решений сравнением
экспериментальных и теоретических данных. Для карданного шар-
нира повышение долговечности связано со снижением контактных
напряжений, улучшением смазочного режима и герметичности узла.
Анализ количественных показателей частных решений регламенти-
рует выбор из них наиболее эффективных и требующих небольших
затрат на реализацию (внедрение в производство).
Принимаем решение, подлежащее реализации. Это последний
этап работы, который основан на результатах анализа и заключа-
ется в выдаче конструкторской документации или внесении в нее
соответствующих изменений.
2.2. Принцип модульного проектирования
Опыт развития отечественной и зарубежной промышленности
показал, что в современных условиях при частой сменяемости объ-
ектов производства стандартизация, унификация и агрегатирование
являются решающими условиями как для сокращения сроков освое-
ния новых изделий, так и для внедрения наиболее производительных
и экономичных методов их изготовления. Применение принципов
стандартизации, унификации и агрегатирования позволяет:
значительно сократить сроки и стоимость проектирования и из-
готовления изделий;
повысить конструктивную преемственность разработок:
в значительной степени уменьшить необходимость разработки
нового специального оборудования, технологической оснастки для
каждого нового изделия;
сократить номенклатуру применяемых деталей и сборочных
единиц;
организовать специализированное производство стандартных и
унифицированных деталей, сборочных единиц и модулей для центра-
лизованного обеспечения всех заинтересованных предприятий.
Применительно к КМ этого можно достигнуть, используя при
проектировании модульный принцип. В настоящее время в миро-
вой практике проектирования изделий на основе модулей наметились
три основных направления.
1. Применение функциональных модулей сравнительно малой
сложности.
96
2. Компоновка образцов изделий из крупных, функционально
законченных устройств и агрегатов.
3. Применение модульного принципа на всех уровнях конструк-
тивной иерархии (модули более высоких уровней иерархии составля-
ют из модулей более низких уровней).
Наиболее гибким и свободным от недостатков представляется
третье направление - иерархический метод построения систем, за-
ключающийся в том, что типовыми элементами замены являются
модули первого уровня, которые, в свою очередь, объединяются, со-
ставляя более крупные модули второго уровня, и т.д. Таким обра-
зом, фактически модули первого уровня являются “строительным
материалом” для создания модулей более высоких уровней и систе-
мы в целом. При этом все модули должны иметь единую сетку гео-
метрических и присоединительных размеров и обладать свойством
совместимости.
Возможны различные варианты модульного разбиения изделия.
Например, совокупность элементов изделия, представленная в одном
из вариантов в качестве модуля, в других вариантах описывается
двумя, тремя и более модулями. Таким образом, объединяемое из
двух, трех и более модулей изделие само является модулем. Необ-
ходимо иметь в виду, что при объединении нескольких модулей в
один существенную роль играют связи между ними. Характер этих
связей оказывает значительное влияние на тип и свойства общего
модуля.
При таком подходе к проектированию, когда изделие предста-
вляет собой сложный агрегат, в котором каждая функция выполня-
ется отдельным модулем, задача разработки изделия в целом подда-
ется расчленению. Это позволяет уделить больше внимания реше-
нию каждой задачи проектирования, так как работа распределяется
между группами проектировщиков и открывает большие возмож-
ности модификации и модернизации модульной системы при малых
затратах времени и ресурсов.
Если модернизацию изделия проводят в целях улучшения его па-
раметров и повышения эффективности, то модификацию выполняют
не столько для повышения эффективности, сколько для расширения
или изменения его назначения. Модификация изделия может быть
многократной, причем первичная модификация является базовой для
вторичной и т.д.
4-692
97
Модульный принцип построения изделий позволяет максималь-
но продлить срок их службы без существенного морального износа.
Это достигается путем поэтапной модернизации отдельных моду-
лей. В целом все направления модульного проектирования изделий
базируются на общетехническом принципе агрегатирования, кото-
рый заключается в следующем:
1) системы и другие сложные технические устройства должны
представлять собой агрегат, состоящий из нескольких независимых
устройств (модулей);
2) расчленение агрегата на устройства (модули) должно быть
таким, чтобы каждое из них выполняло определенную функцию и
имело конструктивно-техническую законченность;
3) виды устройств должны быть такими, чтобы их можно было
собрать в агрегат с заданными технико-эксплуатационными харак-
теристиками;
4) функциональное многообразие агрегатов должно достигаться
различным сочетанием устройств (модулей), а также возможностью
наращивания структуры агрегатов в процессе их эксплуатации;
5) средства одного функционального назначения должны образо-
вывать параметрические ряды.
Основным условием агрегатирования является совместимость
агрегатных средств (модулей).• Отдельными составляющими ши-
рокого понятия совместимости являются энергетическая, методоло-
гическая, конструктивная, эксплуатационная и информационная со-
вместимости.
Итак, в наиболее общем смысле модульный принцип проектиро-
вания заключается в создании того или иного изделия в виде сово-
купности различных самостоятельных модулей, соединенных между
собой. Такими модулями в КМ являются несущая система, каби-
на, двигатель, отдельные агрегаты трансмиссии, а также элементы
систем подрессоривания, управления, торможения и др.
Преимущество модульного принципа заключается в возможно-
сти проведения одновременной работы над многими узлами, что
уменьшает время на разработку всей КМ. Чтобы сократить объ-
ем оригинальной документации и сроки освоения в производстве, а
также облегчить обслуживание машины и уменьшить номенклату-
ру запасных частей, необходимо стремиться к уменьшению числа
98
модулей. Для этого нужно агрегаты и детали трансмиссии (главные
передачи, колесные редукторы, полуоси, карданные соединения и
др.), а также системы подрессоривания и торможения проектировать
одинаковыми для всех колес машины.
Этот принцип позволяет наиболее просто и с наименьшими
затратами организовать конструирование и производство семейств
КМ с колесными формулами 4x4, 6x6, 8x8 и т.д. на базе одних и
тех же агрегатов.
В качестве примера на рис. 2.3 приведено иерархическое постро-
ение конструкции самоходного тяжеловоза из модулей различных
уровней. Данная КМ имеет три модуля третьего уровня: кабину
водителя, моторный и колесный блоки, которые объединены в од-
ну сборочную единицу - самоходный тяжеловоз (рис. 2.4). Причем
наращивание модулей можно осуществлять и далее, что приведет к
увеличению длины и ширины тяжеловоза, а следовательно, к воз-
можности транспортировки негабаритных грузов различных разме-
ров и масс.
Любой из модулей третьего уровня состоит из модулей более
низкого уровня. Самый низкий уровень - уровень комплектующих
сборочных единиц, который принят за нулевой и не имеет модульной
иерархической структуры.
Если в колесном блоке (рис. 2.5) выделить в качестве модуля вто-
рого уровня трансмиссию, то ее можно составить из модулей первого
уровня, которыми являются шесть одинаковых независимых между
собой контуров привода колес опорных стоек (рис. 2.6).
В свою очередь, каждый контур привода колес выполнен из мо-
дулей нулевого уровня, в качестве которых выступают аксиально-
плунжерный насос, аксиально-поршневой гидромотор, муфта от-
ключения, двухступенчатый редуктор, блокируемый дифференциал
И Др.
Повышение производительности КМ, диктуемое возрастающи-
ми требованиями к их экономической эффективности, обусловило
увеличение полезной массы и средней скорости их движения, что
привело к созданию двигателей большой мощности.
Мировой опыт показал, что непрерывное повышение мощности
двигателей КМ существенно опережает темпы создания соответ-
ствующих этим мощностным показателям трансмиссий, или, точнее,
широкое применение мощных двигателей с наддувом сдерживается
созданием новых трансмиссий, соответствующих значительно воз-
росшим крутящим моментам.
99
Модуль
четвертого
уровня
Модуль
третьего
уровня
Модуль
второго
уровня
Модуль
первого
уровня
Модуль
нулевого
уровня
Рис 2.3. Иерархическая структура конструкции самоходного тяжеловоза
Рнс. 2.4. Самоходный тяжеловоз н составляющие его модули третьего уровня:
1- кабина водителя, 2- колесный блок, 3- моторный блок
о
Рис. 2.5. Колесный блок и составляю-
щие его модули второго уровня:
1 - рама хребтовая, 2 - трансмиссия, 3 -
стойка опорная, 4 ~ рулевой привод
Рис. 2.6. Трансмиссия и составляющие ее модули первого
уровня (2 - VI - контуры привода колес опорных стоек), а
также модули нулевого уровня (/ - 5), входящие в состав кон-
туров привода колес:
1 - аксиально-плунжерный насос; 2 - аксиально-поршневой гидромо-
тор; 3 - муфта отключения; 4 ~ двухступенчатый редуктор; 5 - блоки-
руемый дифференциал
102
Этот факт объясняется тем, что в двигателях наряду с ростом
размерных показателей (рабочий объем, степень наддува) имеется
модульный принцип построения, определяемый количеством цилин-
дров, что в совокупности позволило создать достаточно широкое
по мощностным показателями семейство двигателей. Для коробок
передач это сделать было сложнее, так как необходимо было под
возрастающие мощности двигателей каждый раз создавать новые
конструкции коробок передач увеличенных размеров, которые пол-
ностью исключали какую-либо унификацию и требовали нового про-
изводства, а чаще - новых технологических решений.
Одним из способов решения этого вопроса является использо-
вание комбинаций основных агрегатов трансмиссии, имеющих раз-
личные входные и выходные характеристики: коробки передач, до-
полнительных коробок передач спереди и сзади основной коробки,
раздаточной коробки, ведущего моста, которые являются основными
модулями на данном уровне, обеспечивающими требуемые техниче-
ские показатели трансмиссии.
Другим способом решения этого вопроса является производство
целой гаммы агрегатов трансмиссии, объединенных в ряды, рассчи-
танные на определенный диапазон передаваемых крутящих момен-
тов. В пределах каждого ряда предлагается различное число пере-
дач, различные способы переключения передач и различные наборы
шестерен, обеспечивающие необходимые передаточные числа. Это
позволяет провести оптимальный подбор коробки передач и других
агрегатов трансмиссии в зависимости от условий эксплуатации.
Производство широкого набора коробок передач и других агре-
гатов трансмиссии при минимальных затратах на проектирование
и изготовление достигается применением модульного принципа их
проектирования.
Модульный принцип проектирования агрегата трансмиссии -
это создание набора отдельных деталей либо их совокупности (уз-
лов) и возможность их различного сочетания в агрегате. Составные
части этого набора называют модулями.
В качестве модулей агрегатов трансмиссии могут выступать от-
дельные корпусные детали, либо наборы шестерен с валами и под-
шипниками. Совокупность всех модулей одной размерности называ-
ется рядом. Параметрами ряда являются: межцентровое расстояние
агрегата; размеры посадочных мест под подшипники; осевые и мон-
тажные размеры базовой детали - картера агрегата; типоразмеры
синхронизатора.
103
2.3. Нагрузочные режимы
Эксплуатационные нагрузочные режимы
При конструировании и расчете машин стремятся к созданию
такой конструкции, которая имела бы максимальный КПД, мини-
мальную массу и оптимальную комфортабельность в заданных усло-
виях эксплуатации. В этом случае необходимо решить проблему
оптимизации системы, которая для КМ является многопараметриче-
ской с различными видами ограничений. Из-за сложности расчетов
данную задачу делят на отдельные составляющие.
Получение максимального КПД при проектировании КМ воз-
можно в основном благодаря созданию рациональной конструкции,
совершенствованию технологических процессов изготовления, при-
менению новых материалов (в том числе и смазочных) и т.д.
Минимизацию массы и оптимизацию комфортабельности осу-
ществляют конструктивными и технологическими мероприятиями с
одновременным совершенствованием методов расчетов.
Известно, что любой расчет связан с созданием эквивалент-
ной схемы рассматриваемого элемента или агрегата конструкции,
с оценкой и заданием нагрузок, действующих на них. Под нагруз-
кой в данном случае следует понимать не только силовые факторы
и их производные, но и другие оценочные величины, такие как ви-
броускорение (виброскорость), звуковое давление, которые являются
функциями времени. Изменение во времени оценочных величин при
движении КМ в реальных условиях определяет эксплуатационный
нагрузочный режим.
При эксплуатации КМ действующие нагрузки имеют различ-
ный характер изменения, который зависит как от внешних факторов
(дорожные и климатические условия, движение в потоке), так и от
конструктивных особенностей самой машины.
Наглядное представление об эксплуатационном нагрузочном ре-
жиме можно получить по его временной реализации, которую опреде-
ляют различными способами измерений, записи и воспроизведения.
Рассмотрим характерные режимы нагружения элементов КМ.
На рис. 2.7 представлены нагрузочные режимы элементов трансмис-
сии КМ (бхб) при трогании с места путем быстрого включения сцеп-
ления (а), переезде единичной неровности синусоидальной формы (6)
и в процессах плавного трогания и разгона с переключением пере-
дач (в). Характерным для таких видов нагружения является нали-
чие экстремальных значений оценочных величин, изменение кото-
рых во времени представляет собой переходный процесс. При тро-
гании с места происходит аналогичное нагружение рессор и реак-
тивных штанг. При этом реактивные штанги могут воспринимать
104
Рис. 2.7. Крутящие моменты на полуосях переднего (I),
среднего (2) и заднего (3) мостов соответственно; (/ - IV -
номер передачи; tn - время переключения передач)
нагрузки, в 2-3 раза превышающие статические усилия, рассчитан-
ные по максимальному моменту двигателя.
Для рассмотренных процессов нагружения трансмиссии харак-
терным является влияние различных параметров исследуемой си-
стемы и входного возмущения на динамические нагрузки. На
рис. 2.8 представлены характеристики динамического нагружения
трансмиссии по максимальным суммарным моментам на переднем
и промежуточном мостах. Анализ приведенных данных показывает,
что максимальные суммарные моменты могут значительно превы-
шать максимальный момент двигателя ТДВтах и статический мо-
мент сцепления Тси.ст (соответственно в 4 и 2 раза). Поэтому эле-
менты трансмиссии могут нагружаться крутящими моментами, в 4
раза превышающими крутящие моменты, рассчитанные по макси-
мальному моменту двигателя.
Взаимодействие колес многоприводной КМ даже с единичной не-
ровностью является сложным динамическим процессом, вызываю-
щим интенсивные колебания и динамические нагрузки в трансмис-
сии. Кроме скорости переезда единичной неровности (рис. 2.9, а) на
105
Рис. 2.S. Зависимости максимального суммарного кру-
тящего момента Тс на карданных валах от передаточно-
го числа трансмиссии итр:
а - неприведенный к двигателю привод переднего .моста; б -
приведенный к двигателю привод среднего моста; 1 — V111 -
номер передачи
динамические нагрузки в трансмиссии в этом случае оказывает вли-
яние тип привода (заблокирован или разблокирован межосевой диф-
ференциал в раздаточной коробке). При дифференциальном приводе
крутящие моменты на всех полуосях практически линейно умень-
шаются с увеличением скорости. Иной характер распределения по
мостам КМ имеют крутящие моменты при блокированном приво-
де, хотя общий вид зависимостей их от скорости движения остается
прежний. Это указывает на необходимость учета типа привода при
опенке нагруженности элементов трансмиссии КМ.
На рис. 2.9, б показаны зависимости крутящих моментов Гп на
полуосях от различных значений внутреннего давления воздуха в
шинах при переезде единичного препятствия. Из их анализа следу-
ет, что при снижении внутреннего давления воздуха в шинах на всех
мостах максимальные крутящие моменты имеют близкие значения
106
Гп.хН’М
О 100 ZOO JOO р^кПа
б
Рис. 2.9. Зависимости максимальных крутя-
щих моментов на полуосях КМ (6x6) при пе-
реезде единичной неровности от скорости дви-
жения (а) и внутреннего давления воздуха в
шинах (б):
1, 4, 0 ~ соответственно передняя, средняя и задняя
полуоси, блокированный привод; 2, 3, 5 - то же, диф-
ференциальный привод
как при блокированном, так и при дифференциальном приводе. В то
же время увеличение давления приводит к неравномерной нагружен-
ности полуосей, что особенно заметно при блокированном приводе.
Оценка влияния изменения внутреннего давления воздуха в шинах
на нагруженность элементов и узлов трансмиссии особенно необхо-
дима при оснащении рассматриваемых КМ шинами с регулируемым
давлением воздуха. Изменение давления воздуха осуществляется в
зависимости от массы машины, рельефа местности, покрытия до-
рожного полотна, его состояния и т.д. При введении в трансмиссию
107
гидротрансформатора или гидромуфты нарушается жесткая связь
значительных инерционных масс двигателя, колес и поступательно
движущейся массы машины; снижаются динамические нагрузки в
трансмиссии в 2.. .2,5 раза.
Практика эксплуатации КМ показала, что максимальные на-
грузки могут также возникать при резонансных явлениях в транс-
миссии (источником возмущения является ДВС), подвеске (источник
возмущения - неровности дороги), рулевом управлении (источник
возмущения - автоколебания управляемых колес).
Наряду с максимальными (при переходных процессах) и резо-
нансными нагрузками, которые составляют незначительный про-
цент времени действия по отношению ко всему времени эксплуата-
ции, на элементы КМ действуют основные эксплуатационные на-
грузки, временное развитие которых носит случайный и цикличе-
ский закон изменения значений оценочных величин.
Дорожные условия определяют случайное изменение оценочных
величин во времени. Так как движение КМ осуществляется в нео-
динаковых дорожных условиях, то, следовательно, и нагрузочные
режимы будут различаться (рис. 2.10). Такому нагружению подвер-
жены все элементы КМ. На рис. 2.10, б показана связь между ко-
лебаниями трансмиссии и подвески. Так, максимальные значения
крутящих моментов совпадают с максимальными значениями. отно-
сительных перемещений рамы и заднего моста (прогиб рессоры ..
На рис. 2.11 приведены нормированные спектральные плс тности
нагружения рычага трапеции рулевого привода и вертикальных ви-
броускорений пола кабины и сиденья водителя. Анализ полученных
нагрузочных характеристик показывает, что по частотному составу
представленные спектральные плотности имеют существенные раз-
личия, которые определяются не только формой входного сигнала. но
и динамическими свойствами рассматриваемой системы. Та:*., наи-
большая нагруженность рычагов трапеции соответствует значениям
спектральной плотности при частотах /], /г и /з собственны е коле-
баний кузова, моста и колес вокруг шкворней соответственны На
графике спектральной плотности виброускорений сиденья водителя
практически вся мощность сигнала находится в частотной области,
соответствующей частоте собственных колебаний подрессоренных
масс.
Циклическому нагружению подвержены элементы агрегатов и
узлов КМ, которые совершают вращательные движения К таким
элементам относятся зубчатые колеса, валы коробок передач и раз-
даточных коробок, труба карданного вала, колесо. При этом циклич-
ность нагрузок может быть различной (рис. 2.12). Если для вала,
108
tfixH-"}. ЛЛ*'^ЛМиА*'Л/\ЛЛЛ;>ЛЛ\Л/\\^
Рис. 2.10. Нагрузочные режимы элементов трансмиссии и
подвески КМ (4x2):
а - движение по булыжной дороге; 6-движение по грунтовой дороге: 1,
3 - прогиб рессоры в центре и конце коренного листа соответственно;
2 - крутящий момент на задней полуоси
Рис. 2.11. Нормированные спектральные плотности нагружения
рычага рулевой трапеции (а) и вертикальных виброускорений (б):
а - КМ (4x2), булыжное шоссе, 1 - v = 30 км/ч, 2 - v = 45 км/ч,
3 - v = 60 км/ч; б - КМ (6x4), динамометрическая дорога, v = 30 км/ч,
1 - на полу кабины, 2 - на сиденье водителя
109
Рис. 2.12. Схемы элементов конструкций и их нагрузочных ре*
жимов:
а - вал, вращающийся с угловой скоростью и», под вертикальной нагр\ з-
кой б - зубчатое колесо промежуточного вала при угловой скорости
вращения W2; в - диск колеса при движении КМ со скоростью i = и
статической нагрузкой РС1; 1-3- зубчатые колеса; - диск колеса. 1-111
- точки начала отсчета; <т», (Т2, (Тд - напряжения изгиба вала, зубчатого
колеса и диска; Ла,» - амплитуды импульсов; т - длительность импульса:
<та - амплитуда напряжения; Тв,2,« - периоды процессов нагружения: г, -
радиус качения колеса; - угловая скорость качения колеса
110
работающего на изгиб, цикл нагружения симметричный и соответ-
ствует его угловой скорости, то для зуба зубчатого колеса нагруже-
ние представляет собой последовательность импульсов с частотой
повторения, равной угловой скорости или кратной ей, если в зацеп-
лении находится более двух зубчатых колес.
В рассмотренных примерах сборочные единицы КМ испытыва-
ют различные виды нагрузок: регулярные и нерегулярные, детер-
минированные и случайные, стационарные и нестационарные. Учет
тех или иных видов нагружений при расчете и конструировании ма-
шины зависит от поставленной задачи.
Классификация нагрузочных режимов
Производя расчет на прочность, целесообразно классифициро-
вать нагрузки по повреждающему воздействию. Проанализиру-
ем условную диаграмму конструкционного пластичного материала
при статическом нагружении и переменных нагрузках (рис. 2.13).
На оси ординат нанесены временное сопротивление или предел проч-
ности ств, предел текучести <7Т и предел выносливости ст_1, на оси аб-
сцисс - число циклов N в логарифмическом масштабе. На диаграмме
выделены три области, в пределах которых разрушение материалов
подчиняется общим закономерностям:
Область I - статического и повторно-статического разрушения,
характеризуемая тем. что у образцов из пластических материалов
разрушение происходит по шейке, образующейся при приложении от
одного до нескольких десятков циклов нагрузки. Следует отметить,
что ств, стт и ст-1 являются случайными величинами и подчиняются
определенным законам распределения (рис. 2.14).
Ш
Рис. 2.14. Гистограмма и кривые выравнивающих частот
распределения механических характеристик для листов из
стали марки СтЗ (р - частота события)
Область 11 (см. рис. 2.13) - малоцикловой усталости - располо-
жена в диапазоне 102 ... 105 циклов. При N < 103 циклов нагружения
проявляются особенности статического разрушения, а при Л’ > Ю5
- усталостного разрушения.
Область III - усталостного разрушения - наблюдается при чи-
сле циклов N > 104...105. С уменьшением напряжений число ци-
клов до разрушения растет, при этом результаты испытаний при
фиксированных значениях амплитуды напряжений аа подвержены
значительному разбросу и описываются асимметричными законами
распределения (логарифмически нормальным, Вейбулла).
На рис. 2.13 линия AMi - левая ветвь кривой усталости, со-
ответствует средним значениям N. В точке с координатами (а-ц
IgMj) Для образцов из углеродистых сталей наблюдается перелом
кривой, усталости. Напряжение - предел выносливости при ис-
пытании образцов с симметричным циклом нагружения - характери-
зуется тем, что при <га < ст-1 усталостное разрушение невозможно.
Для высоколегированных сталей с <тв > 1500 МПа, а также лег-
ких сплавов кривые усталости не имеют горизонтального участка
и продолжают снижаться (см. рис. 2.13, линия AiA'2). Такое явле-
ние наблюдается и у материалов, имеющих горизонтальный участок
кривой, но работающих в условиях коррозии и повышенной темпе-
ратуры.
Сопоставим диаграмму зависимости lgo*(lg.V) с нагрузками,
возникающими при эксплуатации. При этом возможны три класса
112
задач (рис. 2.15). К первому классу относятся задачи по определе-
нию хотя бы однократного превышения нерегулярной нагрузкой зна-
чения, (тв, т.е., согласно диаграмме, рассматривается область ста-
тического нагружения. В КМ такая нагрузка может возникнуть в
элементах трансмиссии и подвески при преодолении единичного пре-
пятствия или форсированном разгоне, в деталях рулевого управле-
ния при ударе управляемыми колесами о вертикальное препятствие
и т.д.
Рис. 2.15. Осциллограммы напряжений, характер-
ные для задач по расчетам конструкций на статиче-
скую прочность (а), малоцикловую усталость (б) н
усталостное разрушение (в)
113
Второй класс составляют задачи о накоплении остаточных де-
формаций в конструкциях при действии стационарных или квазиста-
ционарных случайных нагрузок в области малоцикловой усталости.
К третьему классу принадлежат задачи о накоплении усталостных
повреждений при воздействии стационарных и квазистационарных
случайных силовых факторов. При этом предполагается, что пере-
грузки не достигают значений и <7Т, т.е. являются маловероят-
ными, и конструкция выходит из строя в результате постепенного
развития усталостной трещины.
Из анализа нагрузочных режимов следует, что для КМ наиболее
типичными являются задачи, относящиеся к первому и третьему
классам.
Решение задач третьего класса направлено на определение ха-
рактеристик сопротивления усталости образцов или деталей, выпол-
ненных из конкретного конструкционного материала. Для оценки
данных характеристик используют кривые усталости (рис. 2.16). по-
лученные в лабораторных условиях для идеализированных циклов
нагружения (рис. 2.17). На основании многочисленных эксперимен-
тальных данных кривые усталости аппроксимируют различными
способами. Наиболее часто используют следующие выражения:
— a™No — С при 7 > 7Г;
N — СХ> при 7 < <7Г,
(2-1)
где 7 - текущее значение напряжения; т - угловой коэффициент кри-
вой усталости; 7Г - предел выносливости при асимметричном цикле
нагружения; г - коэффициен г асимметрии цикла; No - число циклов,
соответствующее точке перегиба кривой усталости; С - константа.
б-г
Рис. 2.16. Кривая усталости а(Л')
114
б
Рис. 2.17. Графики изменения напряже-
ний во времени:
I - симметричный никл; II - отнулевой цикл;
III - асимметричный цикл
Согласно уравнению (2.1), получают кривую, имеющую точку
перегиба при с = <тг и не имеющую асимптоты, характерной для
опытных данных.
Сопротивление усталости при переменных напряжениях зави-
сит от напряженного состояния и характера изменения напряжений
во времени. При этом следует прежде всего учитывать возможное
сочетание статических и переменных напряжений, т.е. изменение
напряжений по асимметричному циклу (см. рис. 2.17, 777).
Зависимость <т(£) предполагается периодической (близкой к гар-
монической) с периодом Т. При этом циклом напряжений называют
совокупность последовательных значений переменных напряжений
за один период их изменения.
Цикл напряжений характеризуется следующими значениями на-
пряжений: максимальным vmax - наибольшее по алгебраическому
значению напряжение цикла; минимальным amjn - наименьшее по
алгебраическому значению напряжение цикла; средним ат, вычи-
сляемым по формуле ат ~ 0,5(<ттах Ч- amjn); а также амплитудой
напряжений о~а цикла, определяемой по выражению
& а — 0, ,5(<7max — crmin).
Коэффициентом г асимметрии цикла называется отношение
минимального напряжения цикла к максимальному (напряжение
принимают с Соответствующим алгебраическим знаком):
Т = *7min / ^"max •
115
Когда т — —1, напряжения amjn и сттах равны по величине,
но противоположны по знаку, такой цикл называется симметрич-
ным (см. рис. 2.17,/). Напряжениям, относящимся к симметрич-
ному циклу, присваивают индекс “ — 1”. В этом случае <тт = 0 и
= ^тах ~ ^min-
ПрИ отнулевом цикле минимальное напряжение равно нулю (см.
рис. 2.17, II). Напряжения, относящиеся к такому циклу, имеют ин-
декс “0”. При этом ат — <7а = 0,5^тах.
В общем случае асимметричного цикла, т.е. при сттах = ffm+ffai
^min - °т - с?а (см. рис. 2.17, III), напряжения, относящиеся к та-
кому циклу, имеют индекс “г”.
Для характеристики сопротивления металла (образца, детали)
действию переменных напряжений с различной асимметрией строят
так называемую диаграмму предельных напряжений при асимме-
тричных циклах. Пример такой диаграммы для полуосей КМ при
испытаних на кручение и для образцов, изготовленных из материала
полуосей, показан на рис. 2.18.
Рис. 2.18. Диаграмма предельных напряжений при кру-
чении для полуоси КМ (1) и стандартного образца (2)
116
При построении диаграммы по оси ординат откладывают мак-
симальные ттах напряжения цикла, а по оси абсцисс - средние тт
напряжения цикла. Прежде всего на диаграмму наносят точку, соот-
ветствующую пределу выносливости т_] при симметричном цикле
(тт = 0), а затем точку, ордината которой соответствует пределу
выносливости то при отнулевом цикле (тт = 0,5ттах). В большин-
стве случаев точки, соответствующие асимметричным циклам, рас-
положены близко к прямой, проведенной через эти две точки. Мак-
симальные напряжения цикла не должны превышать предела теку-
чести материала гт. Индекс ид” в характеристиках сопротивления
усталости относится к детали. Верхняя точка диаграммы соответ-
ствует пределу прочности т6 детали.
Любой цикл напряжений полуоси КМ на диаграмме отмечает-
ся двумя точками, расположенными на одной ординате. Линия ОЕ,
расположенная под углом 45° к оси абсцисс, делит расстояние между
двумя точками диаграммы пополам. Симметричный цикл определя-
ется точками 41 и А2; отнулевой положительный - точками Cj, Ст,
асимметричный знакопеременный - точками 5i, В2; асимметричный
знакопостоянный - точками Dj, D%-
Верхняя линия диаграммы предельных напряже-
ний полуоси КМ соответствует пределу выносливости для заданно-
го пикла. Циклы, изображаемые точками, расположенными внутри
диаграммы, являются безопасными в отношении усталостного раз-
рушения.
Схематизация нагрузочных режимов
В общем случае нагрузочные режимы деталей КМ являются не-
стационарными случайными процессами по математическому ожи-
данию, дисперсии и частоте.
Так, все три параметра будут меняться при изменении крутяще-
го момента на картанном валу при длительной эксплуатации маши-
ны в зависимости от включенной передачи коробки передач, режима
движения (разгон, движение с постоянной скоростью и т.д.), микро-
профиля дороги и других факторов. Для подвески колес и балки мо-
ста в зависимости от режима движения нестационарность будет про-
являться в основном по дисперсии. Если КМ движется с постоянной
скоростью по дороге с однородным покрытием , т.е. микропрофиль
описывается стационарной случайной функцией, то нагрузочные ре-
жимы большинства деталей могут быть отнесены к стационарным
случайным процессам.
117
Так как характеристики усталостной прочности определяют
при регулярном нагружении, а при случайном нагружении понятия
цикла, среднего значения и амплитуды напряжения носят условный
характер, то возникает проблема схематизации. Схематизация -
это такой вид обработки случайного процесса нагружения, когда
исходный процесс заменяют эквивалентным ему по степени повре-
ждающего воздействия упорядоченным неслучайным процессом, по
которому могут быть определены характеристики цикла: среднее
значение, амплитуда и период цикла напряжений.
В настоящее время в инженерной практике применяют более де-
сяти видов схематизации, которые в основном можно разделить на
две группы по методам получения необходимых данных:
непосредственная схематизация процессов изменения оценочной
величины (по экстремумам, максимумам, размахам, укрупненным
размахам, полным циклам и т.д.);
схематизация, основанная на применении теории случайных
функций.
Методы первой группы при наличии специальных приборов по-
зволяют быстро получить результаты экспериментов в цифровой
форме, удобной для последующих расчетов и анализа. Однако при
схематизации одних и тех же процессов различными методами рас-
четная долговечность (при одинаковых правилах расчета) может
значительно отличаться.
Методы второй группы дают возможность получать необходи-
мые параметры процессов нагружения по известным статистиче-
ским свойствам входных процессов и динамическим свойствам изу-
чаемых объектов.
Рассмотрим некоторые виды схематизации (рис. 2.19).
Метод максимумов. По методу максимумов (рис. 2.19,1) определя-
ют число максимумов кривой процесса нагружения. За амплитуды
цикла принимают все максимальные значения, за расчетную часто-
ту - среднее число максимумов в единицу времени. Среднее значение
напряжений цикла принимают равным нулю. При этом возникает
трудность, связанная с необходимостью учета отрицательных мак-
симумов в качестве амплитуд, которая может быть устранена, если
принять за амплитуды только положительные максимумы, а за рас-
четную частоту - среднее число положительных максимумов в еди-
ницу времени. Схематизация процесса в этом случае заключается в
переносе положительных минимумов и отрицательных максимумов
и минимумов на нулевую линию.
118
w о1---------------------------------*
t
Рис. 2.19. Осциллограммы напряжений при схематизации слу-
чайных процессов нагружения:
А, В - исходные случайные процессы; 1 - 14 - экстремальные значения
напряжений
Метод учета одного экстремума между двумя соседними
пересечениями среднего уровня (см. рис.2.19, 77). В данном слу-
чае между двумя соседними пересечениями кривой процесса с линией
среднего уровня учитывают только один наибольший экстремум. За
амплитуд}' принимают отклонение учитываемого экстремума от ли-
нии среднего уровня, среднее значение напряжений цикла считают
равным нулю, а за расчетную частоту принимают число экстрему-
мов в единицу времени.
Метод размахов (см. рис. 2.19, 777). Расчетную амплитуду
определяют как половину приращения случайного процесса, соответ-
ствующего двум соседним экстремумам, а расчетную частоту - как
среднее число одноименных экстремумов в единицу времени. Сред-
нее значение цикла принимают равным нулю.
Метод размахов с учетом среднего значения цикла (см.
рис. 2.19, 7V). Этот метод является обобщением метода размахов,
когда вместе с амплитудами учитывают среднее значение цикла.
Метод полных циклов (см. рис. 2.19, V — VIII). За ампли-
туды принимают половины приращений процесса между соседними
119
экстремумами при постепенном исключении из заданного процесса
промежуточных циклов с возрастающими амплитудами. Схемати-
зацию ведут в несколько этапов. Вначале выделяют промежуточные
циклы с амплитудой, меньшей некоторой заданной aoj, и определяют
их число. Затем операцию повторяют и определяют число амплитуд,
которые меньше ^аз и т.д. Таким образом, удается учесть все
циклы процесса нагружения.
Метод превышений (выбросов). Число амплитуд в некотором
малом интервале подсчитывают как прирашение числа превышений
за уровни, определяющие заданный интервал. Среднее значение ци-
кла нагружения принимают равным нулю.
Метод корреляционного счета. Метод корреляционного счета
заключется в том, что при анализе нагрузочных режимов каждую
пару экстремальных значений (минимум и последующий максимум
или наоборот) заносят в корреляционную таблицу в соответствии
с принятыми уровнями нагрузки (рис. 2.20;. Число в клетке корре-
ляционной таблицы характеризует определенный размах, соответ-
ствующий выбранному максимуму и минимуму. Для этого таблицу
разбивают по горизонтали на принятое число уровней максимумов,
а по вертикали - на принятое число уровней минимумов. При обра-
ботке записей каждое значение размаха заносят в соответствующую
клетку и их количество суммируют. Корреляционная таблица мо-
жет иметь численное содержание только справа от диагонали, так
как следующий за минимумом максимум на обследуемой кривой не
может попасть в разряд, лежащий ниже зафиксированного миниму-
ма. Из корреляционной таблицы могут быть получены гистограм-
мы одномерных распределений максимумов, минимумов, размахов,
амплитуд и двумерных распределений максимумов, минимумов или
амплитуд, средних значений.
Методы второго направления, основанные на использовании
характеристик случайных процессов, в настоящее время широко
внедряются в связи с применением ЭВМ. Решение многих задач
основано на предположении, что случайные процессы 'нагрузочные
режимы) являются эргодическими с гауссовским распределением.
При этом наряду с приведенными в § 1.2 определяют следующие
характеристики процессов:
среднее число пересечений в единицу времени нулевого уровня
П1 = (2тг)-1 vm2/nio;
среднее число максимумов в единицу времени
П2 = (2тг)“1-Ут4/т2;
120
540
J60
180
О
-180
-360 h
t,C
Корреляционная таблица соседних максимумов
и минимумов
Интервалы
изменения
7, Нм
(минимумы)
Интервалы изменения
Т,Н-м (максимумы)
-$50...-450
-360 ...-ПО
-270...-180
-до...-9о
~ 90... О
О ... 90
90 - 180
180... ПО
270... 360
350... 450
№... 540
nimin
Рис. 2.20. Осциллограмма крутящего момента:
1 - V - циклы нагружения; n^mjni nfm*x - число соответ-
ственно минимумов и максимумов на t-м интервале
критерий ширины спектральной плотности
Ес = - (»1/п2)2,
где т^ - моменты спектральной плотности £-го порядка (k = 0; 2; 4),
=
ОО
(Zw;
о
- круговая частота; G(yj) - односторонняя спектральная плот-
ность, причем то, та, являются соответственно дисперсиями
самого процесса, его скорости и ускорения.
121
При этом критерий ширины спектральных плотностей различ-
ных типов меняется в пределах 0 < £с < 1. Спектральные плотно-
сти, которые имеют малые значения ес, считают узкополосными. У
широкополосных спектральных плотностей £с приближается к еди-
нице. Случайный процесс с непрерывной спектральной плотностью
называется узкополосным, если график спектральной плотности рас-
полагается в узкой полосе частот вблизи частоты если же ука-
занное условие не выполняется, то случайный процесс называется
широкополосным (рис. 2.21). При исследовании степени широкопо-
лосности процесса выявлено определенное соотношение между чи-
слом пересечений нулевого уровня [или среднего уровня N?) и
числом экстремумов а следовательно, и определенная интенсив-
ность процесса усталостного повреждения Таким образом, £с ха-
рактеризует сложность структуры процесса, т.е. учитывается ча-
стотный спектр процесса нагружения. Чем выше значение €с, тем
сложнее структура процесса.
Рис. 2.21. Спектральная плотность уз-
кополосного (/) и широкополосного (2)
случайных процессов
Следует отметить, что для некоторых способов схематизации
нагрузочный режим может быть представлен в виде одномерных
f(a) и двумерных плотностей распределений J\&i. <72 ) Схематиза-
ция в виде двумерных распределений является более трудоемкой, но
из нее легче определить одномерные распределения.
Например, для нормальных стационарных процессов двумерная
плотность распределения максимумов -- минимумов имеет вид
г/ ч “ а2
45/2тг€гЗ(1 - е2)ес
122
а плотность распределения амплитуд и средних значений -
f(aa,om) =
%/2тгсг^(1 -
хехр-гА [г^ +
I 2сг£ И — £~
(2.3)
где ст] и сг2 - соответственно максимальное и минимальное значения
г-го цикла нагрузочного режима; а и аа - соответственно среднее и
среднее квадратическое значения случайного процесса нагружения;
оа и огп ~ амплитуда и среднее значение г-го цикла нагрузочного
режима.
Из выражения (2.2) получаем формулу Райса для плотности рас-
пределения максимумов:
°вп
Ж) =
ст I — а
а из (2.3) - формулу Рэлея для плотности распределения амплитуд:
где п = y/l - ; (Тип - (од - aJn/^Sc).
Для методов первого направления вводят лишь число циклов
на единицу пути (в единицу времени), учитывающее при схематиза-
ции число экстремальных точек на заданном отрезке пути (времени).
Для обоих направлений схематизации общим является определение
законов распределения параметров процесса нагружения, по кото-
рым следует проводить схематизацию.
Схематизированные нагрузочные режимы используют непосред-
ственно в расчетах и при определении обобщенного нагрузочного ре-
жима.
Определение параметров нагрузочных режимов
Выше был проведен анализ параметров эксплуатационных на-
грузочных режимов, используемых при расчете узлов и агрегатов
КМ. При проектировании новых конструкций приходится решать
задачу определения параметров нагрузочных режимов при отсут-
ствии экспериментальной информации об их нагруженности. Эта
123
задача может быть решена двумя способами: корреляционными ме-
тодами и моделированием систем.
При использовании корреляционных методов предполагается,
что результаты ранее проведенных экспериментальных исследова-
ний нагрузочных режимов аналогичных конструкций статистически
обработаны в виде множественных регрессионных уравнений, отра-
жающих связь между параметрами нагрузочного режима, основны-
ми конструктивными характеристиками и условиями эксплуатации.
Нагрузочный режим может быть определен по данным испыта-
ний аналогичных конструкций. Например, среднее значение Т и
среднее квадратическое отклонение а? крутящего момента полуоси
заднего моста КМ при движении по дорогам различных типов опре-
делены в виде регрессионных зависимостей:
Т - aiUyp + a2UTpv + ^3V2 + а^р + asv + Де;
ат ~ 6iu2p + + b4UTp + 65ц + be.
где итр - передаточное число трансмиссии; v - скорость движения
машины, км/ч; д,, bj - коэффициенты регрессии, 1 < i < 6.
Если ввести удельные показатели по максимальному крутяще-
му моменту двигателя К?е = Т(Те тах или по номинальной массе
машины Л"тм = Т/тпи и иметь достаточный статистический мате-
риал по машинам данного класса, то для расчетов аналогичных кон-
струкций можно использовать корреляционные зависимости, подста-
вив соответствующие значения максимального крутящего момента
Те max Двигателя или номинальной массы машины.
Экспериментальные способы определения нагрузочных режимов
являются универсальными и позволяют оценить нагрузочный режим
практически в любых условиях эксплуатации.
Полученные экспериментальные данные о нагрузочных режи-
мах по результатам длительной эксплуатации на различных дорогах
с переменной осевой нагрузкой цосле соответствующей схематиза-
ции могут быть представлены как обобщенный нагрузочный режим.
Под обобщенным нагрузочным режимом понимают режим, который
отражает заданные условия эксплуатации КМ в виде удельных пока-
зателей, плотности распределения силового f(Q) и скоростного /(и)
режимов, числа циклов на единицу пути и т.д.
Обобщенный нагрузочный режим включает характерные или
элементарные нагрузочные режимы: трогание и разгон с переключе-
нием передач, установившееся движение, накат, торможение и т.п.
Каждый из характерных нагрузочных режимов может быть описан с
124
помощью дифференциальных уравнений, при этом в отличие от об-
щего случая движения машины расчетные зависимости могут быть
существенно упрощены.
При таком подходе обобщенный нагрузочный режим может быть
представлен в виде линейной комбинации или суперпозиции харак-
терных нагрузочных режимов, при этом коэффициенты суперпози-
ции определяют по результатам эксплуатационных испытаний:
п I
= У? “д> У?
1=1 fc=l
где </(а) - плотность распределения обобщенного нагрузочного ре-
жима; Q!ai - доли дорог различных типов в общем пробеге машины,
п
£2 О!д: = 1; 0iK ~ Доля пробега на k-й передаче и по дороге г-го типа,
i=i
I
£ 0iK = 1; fiK(a) ~ плотность распределения нагрузочного режима
fc=i
на к-й передаче и дороге з-го типа, определенная с учетом установив-
шихся и неустановившихся режимов, а также случайных скоростных
и массовых составляющих.
При моделировании рассматриваемую систему представляют в
виде математической модели (в общем случае нестационарной и не-
линейной) с наложенными голономными и неголономными связями,
на входы которой подают возмущающие воздействия, на выходе по-
лучают реализацию нагрузочного режима. Такой расчет обычно вы-
полняют с помощью вычислительных мащин и комплексов. Если
оператор системы линейный, то нахождение параметров нагрузоч-
ного режима упрощается, и они могут быть определены с использо-
ванием основных положений статистической динамики. Так, если
входными возмущениями линейной системы с постоянными параме-
трами являются стационарные случайные процессы (рис. 2.22), то
спектральная плотность Gy(w) выходного сигнала может быть вы-
числена по следующему выражению:
п п
Gy (“) = Е Е Я*
1=1 }=i
где Я?(с*>) - частотная характеристика системы, комплексно-со-
пряженная с Zfj(w); Hj(w) - частотная характеристика системы;
Gij(u>) - односторонняя взаимная спектральная плотность входных
сигналов.
125
Рис. 2.22. Структурная схема системы
с несколькими входами и одним выходом
В случае взаимно некоррелированных входных воздействий фор-
мула принимает вид
п
~ У",
1=1
где - спектральная плотность г-го входного сигнала.
Данные соотношения дают возможность оценить нагрузочные
режимы отдельных элементов по их частотным характеристикам.
Обобщая полученные результаты, можно представить укруп-
ненный алгоритм задания параметров нагрузочного режима следу-
ющим образом:
определение нагрузочного режима (экспериментально или тео-
ретически);
схематизация нагрузочного режима (непосредственно по записи
процесса или по характеристикам случайного процесса);
определение законов распределения параметров нагрузочного ре-
жима (одномерное или двумерное распределение).
При оценке функции комфортабельности (вибронагруженности
рабочего места оператора, уровня шума в рабочих отсеках и т.д.)
выполняют только первое действие с последующим непосредствен-
ным вычислением необходимых характеристик.
2.4. Моделирование рабочих процессов
Общие положения
Интенсивное развитие и совершенствование техники за послед-
ние десятилетия обусловили резкое усложнение разрабатываемых
систем и комплексов, в том числе и КМ, что привело к расширению
круга предварительных исследований и особенно объемов и сроков
126
натурных испытаний. Затягивание сроков испытаний приводит к
моральному старению исследуемой системы к моменту ее создания.
Поэтому сокращение сроков проведения НИР и ОКР, освоение раз-
работок новых конструкций и модернизация существующих в насто-
ящее время особенно актуально.
Решение данной проблемы возможно при широком внедрении
моделирования в технологический процесс разработки и создания
образцов КМ. Как показывает практика, качество и сроки проекти-
рования в значительной степени зависят от полноты функциональ-
ного анализа и правильного выбора подсистем разрабатываемой си-
стемы уже на этапе предпроектных исследований. На этом этапе
желательно иметь возможно более полную информацию не только о
статических, но и о динамических характеристиках разрабатывае-
мой системы, условиях ее эксплуатации. Однако провести полные
аналитические исследования часто не представляется возможным.
Эта задача с успехом может быть решена с использованием модели-
рования.
В процессе моделирования решаются следующие задачи:
обоснование ТЗ на разработку систем и комплексов;
сравнительная оценка эффективности существующих и разра-
батываемых систем и комплексов;
исследования по определению соответствия характеристик раз-
рабатываемых систем и комплексов заданному ТЗ;
разработка рекомендаций по вариантам применения систем и
комплексов, подлежащих проверке в процессе моделирования;
оценка качества функционирования систем при участии чело-
века-оператора;
разработка ТЗ на тренажеры и проведение тренировок.
Физическое моделирование
При анализе работы колесного движителя; напряженно-дефор-
мированного состояния рам, кузовов, кабин, корпусов; устойчивости
и управляемости КМ и автопоездов широко используют физическое
моделирование. Физические модели представляют одну из подгрупп
материально-физических моделей, у которых физическая природа
изучаемых явлений сохраняется полностью или частично, как и в
натурном образце. Физическое моделирование базируется на теории
подобия. В то время как теория подобия изучает свойства заведомо
подобных систем, учение о моделировании решает прикладную за-
дачу - устанавливает требования, которым должна удовлетворять
127
модель, чтобы процессы, происходящие в ней, были подобны процес-
сам, протекающим в натурном образце (оригинале).
Физическое моделирование заключается в исследовании модели-
руемой системы на сформированной модели, которая подобна ориги-
налу. Оно содержит следующие основные этапы: создание модели,
изучение процессов на модели, перенос полученной информации на
моделируемую систему (натуру).
Теория подобия дает возможность установить наличие подобия
и способы его получения. Взаимно однозначное соответствие между
Двумя подобными системами определяется известными функциями
перехода от параметров, характеризующих одну из систем, к соот-
ветствующим параметрам другой, а математические описания этих
систем могут быть преобразованы в тождественные.
Подобными являются такие физические системы, у которых по-
добны все характеризующие их параметры ( все векторные вели-
чины геометрически подобны, а все скалярные величины пропор-
циональны в соответствующих точках пространства и в соответ-
ствующие моменты времени ). Подобные явления характеризуются
пропорциональностью всех величин, определяющих качественную и
количественную стороны изучаемых процессов. Физическое подобие
рассматривают как совокупность подобия частных характеристик
объекта: геометрических, кинематических, динамических, темпера-
турных.
Например, геометрическое подобие выражается пропорциональ-
ностью всех линейных размеров L и равенством всех соответствую-
щих углов;
Т]нат ^2нат ^пнат TjHaT г/
-- = - = - = ---= KL = const,
Ь]мОД-----------------------Ь2мод-Ьдмод-^1мод
где 2>пнат ~ линейные размеры натуры (оригинала) п — 1, ..., г;
£пмод _ линейные размеры модели.
Безразмерный коэффициент К называют масштабом линейных
размеров, или константой подобия линейных размеров. Другие фи-
зические параметры системы имеют свои масштабы (масштаб на-
грузки, деформаций, напряжений и т. д.).
Теория подобия базируется на трех основных теоремах, содер-
жание которых заключается в следующем.
1. Для подобных между собой явлений уравнения, описывающие
эти явления для натуры и модели, должны иметь одинаковый вид.
2. Все уравнения, описывающие подобные явления, могут быть
преобразованы в уравнения, выражающие однозначную связь между
128
критериями подобия . Сходственные параметры в подобных явлени-
ях пропорциональны.
3. Краевые условия в подобных явлениях одинаковы.
Вывод условий подобия двух процессов возможен на основании
аналитического описания этих процессов или, если оно отсутствует,
путем анализа размерностей. Второй метод менее точен, так как
не позволяет определить, какие переменные и параметры являются
существенными для изучаемого процесса, а это может привести к
серьезным ошибкам.
Для возможности конкретного моделирования устанавливают
закон подобия, который выражает зависимость между основными ве-
личинами, определяющими ход процесса в натурном объекте. Для
установления закона подобия выражения, характеризующие собой
исследуемое физическое явление, приводят к безразмерному виду пу-
тем введения масштабных преобразований для всех входящих в них
величин. Выбирают условие, при котором справедливы данные мас-
штабные преобразования, т.е. ограничивают свободу выбора мас-
штабов с тем, чтобы рассматриваемые выражения стали безразмер-
ными.
В ряде случаев совмещение двух геометрических систем может
быть осуществлено только неравномерной, т.е. неодинаковой для
всех направлений, деформацией. Такие системы называют афинны-
ми. Примером афинно-масштабных преобразований является случай
моделирования напряженно-деформированного состояния тонкостен-
ных конструкций несущих систем (рам, кузовов, корпусов), где мас-
штабы линейных размеров и толщины тонкостенной конструкции не
равны между собой.
При физическом моделировании важным является выбор кон-
стант подобия, которые влияют на точность полученных результа-
тов, экономичность моделирования. Так, при исследовании на моде-
лях прочности, надежности, устойчивости движения КМ основны-
ми являются масштабы геометрического и силового подобия. Чем
больше линейный масштаб, тем выше точность полученных резуль-
татов. Однако большой масштаб экономически невыгоден. Мас-
штаб геометрического подобия выбирают с учетом следующих фак-
торов: цели исследований; точности, продолжительности и средств,
требуемых для исследований; нагрузки, действующей на модель;
сложности конфигурации исследуемого объекта и его размеров; воз-
можностей стендового оборудования и измерительной аппарату-
ры.
5 — 692
129
Моделирование с помощью вычислительных машин в зависимо-
сти от конструкций элементов и методов решения уравнений под-
разделяется на моделирование с помощью электронных аналоговых
(АВМ) и цифровых машин (ЭВМ). АВМ построены на электрон-
ных блоках-интеграторах на базе решающих усилителей, инвенто-
рах, сумматорах, делителях, блоках дифференцирования и специаль-
ных блоках нелинейных функций. Аналоговые модели формируют в
виде материальных объектов, но из элементов иной физической при-
роды, чем оригинал, так как для систем различной физической при-
роды имеет место аналогия между их компонентами и переменными,
характеризующими состояние системы.
Процессу решения задач с помощью АВМ предшествует рабо-
та по программированию - определению необходимых операционных
блоков и способов их соединения по данным математическим зави-
симостям, эквивалентным задачам Коши. При программировании
на АВМ используют следующие уровни: укрупненных блок-схем,
структурных схем, коммутационных и электрических схем. Мас-
штабирование выполняют в виде масштабных таблиц, содержащих
перечень математических переменных, соответствующих им мас-
штабных переменных и числовых значений масштабов. Масштаби-
рование заключается в установлении соотношений между перемен-
ными процесса и электрическими напряжениями на входах и выхо-
дах решающих блоков. Масштабы имеют размерность вольты на
единицу измерения переменной. Масштаб может быть постоянной
величиной или функцией независимой переменной по времени I.
В качестве примера на рис. 2.23, а приведена динамическая схе-
ма взаимодействующих агрегатов КМ при трогании с места, а на
рис. 2.23, б - ее структурная схема для исследования динамических
процессов с учетом буксования ведущих колес.
Аналоговое моделирование позволяет изучить в количественном
и качественном отношении влияние изменения параметров на устой-
чивость системы; получить запись неустановившихся процессов на
выходе системы при различных воздействиях на нее и провести ана-
лиз качества; исследовать чувствительность системы к малым из-
менениям параметров; исследовать поведение системы в различных
условиях эксплуатации, в частности в аварийных условиях; решить
задачу выбора оптимальных параметров системы в соответствии с
тем или иным критерием оптимальности; выполнить контроль и от-
ладку реальных элементов системы, подключаемых к АВМ вместо
их моделей (частичное испытание системы). Кроме того, АВМ часто
используют для имитации внешней среды (различные тренажеры и
130
Рис. 2.23. Моделирование на АВМ нагрузок в трансмиссии КМ:
а - динамическая схема взаимодействующих агрегатов; б - структурная
схема динамической системы; Л, Jt, J&, Js,t - соответственно момент
инерции вращающихся деталей двигателя, ведомого диска сцепления, дви-
гателя на элементах подрессоривания,ведущих колес; J3, Jt, Je,9 - соот-
ветственно суммарный момент инерции деталей трансмиссии, ведущего
моста, поступательно движущейся массы заднего моста и КМ; ei-e - по-
датливости упругих участков системы; Тлв - момент двигателя; БН - блок
нелинейности
динамические стенды), что позволяет провести первые испытания
создаваемой динамической системы в реальных условиях, исключив
возможность человеческих жертв и потери дорогостоящего оборудо-
вания.
Математическое моделирование
В настоящее время перед автомобильной промышленностью на-
ряду с требованими совершенствования конструкций выпускаемых и
вновь проектируемых машин, повышения их эффективности стоит
задача резкого сокращения сроков проектирования, доводки и вне-
дрения в производство. Современная полноприводная КМ - слож-
131
пая динамическая система, интенсивно взаимодействующая с внеш-
ней средой и водителем. Поэтому очевидно, что без оценки этого
взаимодействия на стадии проектирования новой машины решить
упомянутую выше задачу невозможно. Получить данную оценку в
полном объеме можно при использовании математического модели-
рования, которое не только отражает сложную взаимосвязь рабочих
процессов в подсистемах машины, но и учитывает реальное возму-
щающее воздействие со стороны водителя и внешней среды, а также
позволяет наряду с задачами “внешней” динамики (тяговой, тормоз-
ной, топливной экономичности, устойчивости, управляемости) ре-
шать широкий круг проблем динамики “внутренней”, связанной в
первую очередь с динамической нагруженностью подсистем, прогно-
зированием нагрузочных режимов и вероятностной долговечностью
деталей проектируемой КМ.
Математической моделью (ММ) называют совокупность мате-
матических объектов (чисел, символов, множеств и т.д.) и связей
между ними, отражающих важнейшие для проектирования свойства
проектируемого технического объекта. К ММ предъявляют требо-
вания универсальности, адекватности, точности и экономичности.
Степень универсальности ММ характеризует полноту отобра-
жения в модели свойств реального объекта. ММ отражает лишь
некоторые свойства объекта.
Точность ММ определяется степенью совпадения значений па-
раметров реального (натурного) объекта и значений тех же параме-
тров, рассчитанных с помощью предполагаемой ММ. Пусть отража-
емые в ММ свойства оцениваются вектором выходных параметров
Y = (Уь Y2, ..., Ут)- Тогда, обозначив истинное и рассчитанное с
помощью ММ значения j-ro выходного параметра через YjHCT и У)расч
соответственно, Можно определить относительную погрешность £?:
V- — V-
27расч 2_?ист
£i ~ у- ’
1 JHCT
которая является векторной оценкой, т.е. £ = (ej, еч, ..., £т).
При необходимости сведения этой оценки к скалярной использу-
ют норму вектора ||"ё*||, например:
Срасч = ||"ё*|| = maxej, j € [1 : ш].
132
Адекватность ММ - способность отображать заданные свой-
ства объекта с погрешностью, не выше заданной. Поскольку выход-
ные параметры являются функциями векторов внешних Q и вну-
тренних X параметров, погрешность зависит от значений Q и
X. Обычно значения внутренних параметров ММ определяют не из
условия минимизации погрешности £мм в некоторой точке Q ком про-
странства внешних переменных, а используют ММ с рассчитанным
вектором X при различных значениях Q. При этом, как правило,
адекватность ММ имеет место лишь в ограниченной области изме-
нения внешних переменных:
оЯ = {^кмм<«},
где о! - область адекватности ММ; <5 > 0 - заданная константа,
равная предельно допустимой погрешности ММ.
Экономичность ММ характеризуется затратами вычислитель-
ных ресурсов (машинного времени и памяти) на ее реализацию, а
также средним числом операций, выполняемых при одном обраще-
нии к ММ, размерностью систем уравнений, числом используемых
в ММ внутренних параметров и т.д.
Требования высокой точности, степени универсальности, широ-
кой области адекватности, с одной стороны, и высокой экономично-
сти, с другой, противоречивы.
Структурные ММ отображают структурные свойства объекта.
Различают структурные ММ топологические и геометрические.
В топологических ММ отображаются состав и взаимосвязи эле-
ментов объекта. Их чаще всего применяют для описания объектов,
состоящих из большого числа элементов, при решении задач привяз-
ки конструктивных элементов к определенным пространственным
позициям (например, задачи компоновки КМ, размещения деталей и
т.п.) или к относительным моментам времени (например, при раз-
работке технологических процессов). Топологические модели могут
иметь форму графов, таблиц (матриц), списков и т.п.
В геометрических ММ отображаются геометрические свойства
объектов, в них дополнительно к сведениям о взаимном расположе-
нии элементов содержатся сведения о форме деталей. Геометриче-
ские ММ могут выражаться совокупностью уравнений линий и по-
верхностей, графами, списками. Геометрические ММ применяют
133
при решении задач конструирования в машиностроении, для оформ-
ления конструкторской документации. Существует несколько типов
геометрических ММ (аналитические, алгебрологические, каркасные,
кинематические).
Функциональные ММ предназначены для отображения физиче-
ских или информационных процессов, протекающих в объекте при
его функционировании или изготовлении. Как правило, это системы
уравнений, связывающие фазовые переменные, внутренние, внешние
и выходные параметры.
В зависимости от уровня описания различают ММ, относящиеся
к микро-, макро- и метауровням.
Особенностью ММ на микроуровне является отражение физиче-
ских процессов, протекающих непрерывно в пространстве и во вре-
мени. Типичные ММ этого уровня - дифференциальные уравнения в
частных производных. В них независимыми переменными являются
пространственные координаты и время.
В ММ на макроуровне используют укрупненную дискретизацию
пространства по функциональному признаку, что приводит к пред-
ставлению таких моделей в виде обычных дифференциальных урав-
нений. В этих уравнениях независимой переменной является вре-
мя, а вектор зависимых переменных содержит фазовые переменные,
характеризующие состояние укрупненных элементов дискретизиро-
ванного пространства. Такими переменными являются силы и ско-
рости в механических системах, напряжения и силы тока в электри-
ческих системах. Системы обычных дифференциальных уравнений
являются универсальными моделями на макроуровне, пригодными
для анализа как динамических, так и установившихся состояний
объектов. Для установившихся режимов модель может выглядеть в
виде систем алгебраических уравнений. Порядок системы уравнений
зависит от числа выделенных элементов объекта. Если порядок си-
стемы приближается к 103, то оперировать моделью затруднительно
и переходят к ММ на метауровне.
На метауровне в качестве элементов ММ принимают достаточ-
но сложные совокупности деталей. Метауровень характеризуется
большим разнообразием типов используемых ММ. Для многих объ-
ектов ММ на метауровне по-прежнему представляются системами
обычных дифференциальных уравнений. Важный класс ММ на ме-
тауровне составляют модели массового обслуживания, применяемые
для описания процессов функционирования информационных и вы-
числительных систем, производственных участков, линий и цехов.
134
По степени детализации описания в пределах каждого иерархи-
ческого уровня выделяют полные ММ и макромодели.
Полная ММ - это модель, в которой фигурируют фазовые пере-
менные, характеризующие состояние всех имеющихся межэлемент-
ных связей.
Макромодель - это ММ, в которой фазовые переменные отобра-
жают состояния значительно меньшего числа межэлементных свя-
зей, что соответствует описанию объекта при укрупненном выделе-
нии элементов.
По способу представления свойств объекта функциональные ММ
делят на аналитические и алгоритмические.
Аналитические ММ представляют собой явные выражения вы-
ходных параметров как функций входных и внутренних параметров,
т.е.
Т = F(X,(J).
Алгоритмические ММ выражают связи выходных параметров с
внутренними и внешними параметрами в форме алгоритма. Типич-
ной алгоритмической ММ является система уравнений
LV(~Z) = ^(Z),
где L - некоторый оператор; Z - вектор независимых переменных, в
общем случае включающий время и пространственные координаты;
Z) - заданная функция независимых переменных, дополненная
алгоритмом выбранного численного метода решения и алгоритмом
вычисления вектора выходных параметров как функционалов реше-
ния системы уравнений V( Z ).
Имитационная ММ - алгоритмическая модель, отражающая по-
ведение исследуемого объекта во времени при задании внешних воз-
действий на объект.
Математическое моделирование процесса движения КМ требу-
ет разработки расчетной динамической схемы для математического
описания системы, выбора метода реализации на ЭВМ, разработ-
ки алгоритмов и программ расчетов, аналитического исследования
ЭВМ.
Математическое моделирование динамических процессов в си-
стеме двигатель - трансмиссия - движитель машины с колес-
ной формулой 4x4 (рис. 2.24) позволяет определить взаимосвя-
занность крутильных колебаний в трансмиссии с вертикальными
135
продольно-угловыми колебаниями подрессоренной массы на упру-
гих элементах подвески и шинах; типы привода ведущих мостов
(дифференциальный или блокированный) и шин (радиальные или
диагональные); продольные жесткости рессор и шин; возмущающее
воздействие ДВС (в данном примере - дизеля с двухрежимным ре-
гулятором); нелинейные характеристики трансмиссии и подвески;
возмущающее воздействие дороги, макро- и микропрофиль которой
описывается детерминированной и случайной функциями. Система
содержит два уравнения первого порядка и 19 дифференциальных
уравнений второго порядка.
Исследования многомассовой динамической системы целесооб-
разно проводить в несколько этапов, начиная с расчета свободных и
вынужденных колебаний линейных моделей. При этом определение
частот и форм свободных колебаний позволяет выявить структуру,
связи и основные закономерности исследуемой системы, проанализи-
ровать влияние конструктивных параметров на частоты собствен-
ных колебаний и тем самым, получив частотный диапазон возму-
щающих воздействий на машину со стороны двигателя и микро-
профиля дороги, найти пути устранения резонансных зон. Анализ
вынужденных колебаний дает возможность изучить влияние жест-
костных и демпфирующих характеристик динамической системы на
ее амплитудно- и фазово-частотные характеристики при гармониче-
ских колебаниях.
Рис. 2.24. Моделирование процесса движения КМ:
Jat, Л.п, Л1.2, Jm и JDp - момент инерции вращающихся частей соответ-
ственно двигателя, коробки передач, колеса, подрессоренной массы КМ и
прицепа; J*n, 7^1,2 ~ момент инерции соответственно картера коробки пе-
редач и ведущих мостов; ти, mMi,2, niop и тар1,2 - соответственно подре-
соренная и неподресоренная масса КМ и прицепа; ск.в, cK.n, c«.»i,2, сООЛ1,г
и сШ1,2 ~ крутильная жесткость соответственно карданного вала приво-
да коробки передач, элементов коробки передач, карданных валов при-
вода ведущих мостов, полуосей и шин; с*и - суммарная жесткость опор
крепления коробки передач при угловых колебаниях; Ср]_4, Ср),2, Сш]_4,
cmi,2 и сси - жесткость соответственно рессоры и шины в вертикальном
и горизонтальном направлениях, сцепного устройства; - высоты не-
ровностей микропрофиля; ik].4 - углы наклона микропрофиля в точках
контакта; и hap - высота центра масс соответственно машины и при-
цепа; Zu, Лк, znp, тар н <рпр - обобщенные координаты подрессоренной
массы соответственно машины и прицепа; D, Di, Dt - дифференциал со-
ответственно коробки передач и ведущих мостов; Lc», £са, Lap, вор и 6Пр -
геометрические параметры соответственно машины и прицепа; и«,п и uq
- передаточное число соответственно коробки передач и главной передачи
137
Имитационнонное моделирование
Одним из наиболее мощных средств математического модели-
рования, применяемых при анализе функционирования и синтезе
структур сложных систем, является имитационное моделирование.
Имитационное моделирование в широком смысле включает процесс
создания логико-математической модели исследуемой системы, опи-
сывающей структуру и поведение системы, принимающей обычно
форму машинной программы, и проведение экспериментов с моделью
на ЭВМ с целью получения данных о функционировании системы в
течение определенных интервалов времени.
В процессе имитационного моделирования исследователь имеет
дело с тремя основными системами: реальной системой, имитацион-
ной моделью и ЭВМ (рис. 2.25).
Рис. 2.25. Основные системы, используемые при имита-
ционном моделировании
В процессе имитационного моделирования он не только изучает
реальную систему, разрабатывает имитационную модель и исполь-
зует ЭВМ, но и устанавливает и реализует определенные взаимосвя-
зи между ними.
Реальная система описывается множеством характеристик Хт>
изменяющихся в процессе функционирования и являющихся в про-
стейшем случае функцией времени. Имитационная модель включает
выбор инструкций по изменению значений множества характеристик
Хт. выполнение которых позволяет воссоздать с некоторым прибли-
жением процесс функционирования реальной системы. Проведение
экспериментов с моделью на ЭВМ, т.е. имитация функцинирования
реальной системы, заключается в проведении машинных прогонов с
целью сбора, накопления и последующей обработки статистики из-
менений значений характеристик Хт(1).
138
В зависимости от наличия только дискретных, непрерывных
или тех и других переменных различают дискретные, непрерывные
и комбинированные модели. В дискретных имитационных моделях
переменные изменяются дискретно в определенные моменты имита-
ционного времени. Переменная времени может быть либо непрерыв-
ной, либо дискретной в зависимости от того, могут ли дискретные
изменения переменных происходить в любой момент имитационно-
го времени или только в определенные моменты. В непрерывных
имитационных моделях переменные изменяются непрерывно, а пе-
ременная времени может быть как непрерывной, так и дискретной
в зависимости от того, являются переменные доступными в любой
момент имитационного времени или только в определенные момен-
ты. В комбинированных имитационных моделях переменные могут
изменяться дискретно, непрерывно или непрерывно с дискретно на-
ложенными скачками. Переменная времени может быть либо дис-
кретной, либо непрерывной.
Вне зависимости эт типа модели, имитационное моделирование
включает в себя ряд основных этапов, последовательность выполне-
ния которых приведена ниже.
1. Формулировка проблемы, стоящей перед исследователем, и
принятие решения о целесообразности применения метода имитаци-
онного моделирования. Определение целей, которые должны быть
достигнуты в результате имитации (от формулировки целей в зна-
чительной мере зависит выбор типа имитационной модели).
2. Выбор релевантных элементов и аспектов функционирования
модулируемой системы, т.е. наиболее существенных в смысле сфор-
мулированной проблемы элементов системы и взаимодействия меж-
ду ними, а также релевантных воздействий окружающей среды.
3. Формализация описания имитационной модели: определение
компонентов модели, характеристик компонентов и соответствую-
щих им переменных и параметров; разработка моделирующего алго-
ритма модели, отображающего взаимодействия компонентов между
собой и с окружающей средой. На данном этапе можно использовать
различный математический аппарат теорий массового обслужива-
ния, графов, множеств и т.д.
4. Программирование имитационной модели на одном из универ-
сальных алгоритмических или специальных имитационных языков.
Оформление моделирующего алгоритма в виде подпрограмм: опи-
сание массива характеристик компонентов и состава записей, сбор
данных о наблюдаемых переменных.
139
5. Планирование эксперимента с целью уменьшения машинного
времени, затрачиваемого на получение необходимых данных о пове-
дении имитационной модели. Оно включает обоснование числа ими-
тационных прогонов и их продолжительности, числа наблюдаемых
переменных; последовательность изменения параметров имитацион-
ной модели и т.д.
6. Определение начального состояния имитационной модели,
влияющего на достижение моделью равновесия. Это позволяет по-
высить адекватность функционирования имитационной модели и ис-
следуемой системы.
7. Подготовка данных о начальных значениях переменных и па-
раметров имитационной модели.
8. Прогоны модели на ЭВМ в соответствии с планом имитаци-
онного эксперимента.
9. Интерпретация и анализ статистических данных о поведении
модели.
Зачастую сложно сразу определить, является ли элемент систе-
мы релевантным и какие аспекты ее функционирования существен-
ны в рамках исследуемой проблемы, какие данные можно подгото-
вить, а какие окажутся недопустимыми и т.д. Поэтому на практике
некоторые рассмотренные этапы многократно повторяются. В ре-
зультате имитационная модель становится более адекватной иссле-
дуемой системе.
При осуществлении экспериментов с имитационной моделью в
режиме диалога итеративно повторяются этапы 7-9. Описание
имитационной модели в процессе ее разработки осуществляется на
нескольких уровнях: неформализованном, формализованном и про-
граммном (соответственно этапы 2, 3 и 4). Каждый уровень от-
личается степенью детализации моделируемой системы, способами
описания ее структуры и процесса ее функционирования. При этом
уровень абстрагирования возрастает. Неформализованное описа-
ние разрабатываемой имитационной модели содержит определения и
характеристики основных элементов моделируемой системы, после-
довательность их взаимодействия на собственном языке. Неформа-
лизованное описание модели необходимо как самим разработчикам
(при проверке адекватности модели, ее модификации и т.д.), так
и специалистам других профилей. На основе неформализованного
описания разрабатывают более точное и подробное формализован-
ное описание.
140
Численные методы дают возможность существенно расширить
рамки традиционных оценок эффективности КМ на основе исследо-
вания построенных по иерархическому принципу сложных имитаци-
онных моделей, изучение которых аналитическими методами оказы-
вается практически невозможным. В полной мере это относится к
моделям, в которых движение КМ описывается системой нелиней-
ных дифференциальных уравнений, содержащих переменные состо-
яния и управления, а также детерминированные и (или) случайные
возмущения. В зависимости от выбранного базиса переменных и
принятых методов формализации, определяемых системой алгорит-
мов и программным обеспечением, машина может быть представле-
на той или иной математической моделью, структура которой, а так-
же степень детализации элементов и связей между ними диктуются
задачами предпринимаемого исследования.
Общая модель движения КМ, включающая в себя в качестве
подсистем управляющую часть (водителя, органы и приводы упра-
вления), силовую цепь (двигатель, трансмиссия, движитель), систе-
му подрессоривания несущей системы (упругие элементы, аморти-
заторы) и внешнюю среду (грунт во взаимодействии с движителем,
профиль пути и его конфигурацию в плане), позволяет изучать ха-
рактеристики машины в целом или характеристики подсистемы лю-
бого порядка подчиненности, определяемого иерархической структу-
рой общей модели. При этом как временные функции управления,
вырабатываемые водителем с помощью программного устройства
или автоматической системой, так и начальные условия в логически
обоснованных пределах могут быть произвольными.
С помощью того или иного варианта общей модели из анализа
реакций на управление при неизменных фиксированных параметрах
внешней среды выявляют кинематические и силовые характеристи-
ки отдельных видов движения КМ. Эти характеристики формируют
представление о действующих на машину максимальных нагрузках
и предельных кинематических режимах элементов, о ее управляе-
мости. Имитация таких характерных режимов, как разгон, тормо-
жение, поворот, движение по синусоидальной в плане траектории,
позволяет сформулировать требования к управляющей части дина-
мической системы дорога - машина - водитель.
Оценка таких характеристик подвижности, как скорости маши-
ны и топливная экономичность, должна базироваться на имитации
функционирования КМ, соответствующего реальным условиям экс-
плуатации. При имитационном моделировании формируются отве-
чающие этим условиям внешние возмущения и целенаправленные
141
управляющие воздействия. Прогнозирование нагруженности и дол-
говечности деталей силовой цепи и ходовой части требует, кроме
того, создания весьма расчлененной модели, способной каждым эле-
ментом и соединением реагировать как на случайные возмущения от
управления и внешней среды, так при необходимости и на регуляр-
ные внутренние возмущения. Таким образом, для решения упомяну-
тых выше задач тяговой динамики можно использовать универсаль-
ную математическую модель КМ как сложной управляемой системы,
представленную обычными дифференциальными уравнения в форме
Коши:
7 = 7(7, М, U(t), 7(0));
л? = M(st, м, 7(0));
7 = 7,
где Q , 0 - векторы кинематических переменных состояния (угло-
вых и линейных скоростей); Л? - вектор силовых переменных состо-
яния; U (t), F (0) - вектор-функции управления и возмущения; t -
время.
С целью ускорения процесса проектирования технологию моде-
лирования постоянно изменяют. В настоящее время основными на-
правлениями ее совершенствования являются:
создание гибких автоматизированных комплексов моделирова-
ния модульного типа;
роботизация моделирования;
обеспечение адекватности моделирования;
планирование и управление натурными испытаниями и обес-
печение информационной взаимосвязи моделирования с эксперимен-
том.
Описанные в литературе методы моделирования опираются, как
правило, на построение некоторой модели, имитирующей действие
исходной системы. Если рассматривать полунатурное моделирова-
ние, то имитационный подход к нему не всегда дает успешный ре-
зультат. Это объясняется тем, что полунатурная модель системы,
содержащая достаточное количество дополнительной аппаратуры,
бывает сложнее и малонадежнее исходной системы. Более того, ими-
тация требует организации оперативного управления вычислитель-
ным процессом в реальном времени, что осуществить достаточно
сложно.
142
Решение проблемы моделирования представляется возможным
при перестройке технологического процесса разработки и создания
образцов техники на единых принципах модульности.
В связи с этим необходима реорганизация как структур самих
баз моделирования, так и их взаимодействия. Разработка баз моде-
лирования должна осуществляться на единых принципах методоло-
гии, организационных и информационно-технических требованиях.
Модульное моделирование
В основе модульного моделирования лежит переход от исход-
ной сложной системы к исследованиям таких более простых систем,
по совокупным свойствам которых можно восстановить точно или
приближенно свойство исходной системы. Тогда разрабатываемая
система представляет собой совокупность модулей, оценка качества
которых и системы в целом проводится на основе использования ма-
тематических моделей, идентифицированных по результатам полу-
натурного моделирования в лабораторных условиях или натурных
испытаний.
Модульное моделирование включает следующие этапы.
1. Ориентация и декомпозиция исходной системы на фактически
замкнутые подсистемы (реальные модули). Расчлененная система
представляется набором независимых опытных образцов, выделен-
ных в реальные модели, и программной частью системы, не воспро-
изводимой реально.
2. Идентификация реальных модулей на всех этапах разработки
системы путем подачи тестирующего сигнала от имитаторов воздей-
ствий среды. В реальных модулях исследуется влияние окружающей
среды на поведение объекта с целью определения его адекватной ма-
тематической модели (программного модуля).
3. Оценка свойств системы путем сборки программных мо-
дулей в систему. Программный модуль представляет собой пакет
прикладных программ моделирования подсистем. В этих модулях
осуществляется доработка моделей реальных модулей до получения
адекватной модели системы и проводятся исследования на этой моде-
ли. Отладка параметров системы осуществляется путем подстройки
программной части системы либо моделей подсистем.
Таким образом, модульный метод позволяет для получения оце-
нок параметров системы провести необходимое число циклов модели-
рования путем многократного просчета на ЭВМ, используя только
математические модели. Кроме того, поскольку отладка системы
143
осуществляется путем сопряжения математических моделей подси-
стем, т.е. реальные процессы заменяются математическими, снижа-
ются требования к обеспечению вычислительного пропесса в реаль-
ном времени.
В соответствии с принципами модульности моделирующую ба-
зу строят по иерархическому принципу. Так, комплексы моде-
лирования предприятий-разработчиков объединяют каналами свя-
зи в единую отраслевую базу (банк) моделирования. Информаци-
онный обмен в автоматизированном режиме позволяет моделиро-
вать взаимодействие нескольких задач. Структура самих комплек-
сов также должна быть модульной, т.е, технические и программно-
математические средства должны представлять собой набор реаль-
ных и программных модулей.
Получаемые программные модули образуют банк отдельных
подсистем, а в процессе сопряжения модулей организуется банк мо-
делей системы и среды ее функционирования, а также самих этапов
разработки. Полученный банк моделей можно использовать как при
создании новых, так и при модернизации образцов техники.
Гибкие автоматизированные комплексы моделирования модуль-
ного типа характеризуются гибкостью и возможностью перестра-
ивания структуры под решение конкретной задачи; модульностью
построения, которая обеспечивает автоматизированную сборку ком-
плекса, дальнейшую его модификацию и наращивание мощности; на-
личием интеллектуального интерфейса и экспертной системы, обес-
печивающей автоматизированный набор методов и средств решения
данной задачи; интерактивностью режима работы; коллективным
пользованием в режиме теледоступа и разделения времени; наличием
автоматизированной системы управления обеспечивающими сред-
ствами.
2.5. Расчет динамических нагрузок
колесных машин
Нагруженность узлов и деталей КМ практически не бывает ста-
тической, так как режимы работы ее связаны с перемещениями по
различным дорогам и, как правило, с переменными режимами, Это и
предопределяет динамическую нагруженность деталей и узлов КМ,
которая проявляется в виде крутильных и изгибных колебаний в
трансмиссии, колебаний подрессоренных и неподрессоренных масс
машины, а также при воздействии реактивных силовых факторов
упругозакрепленных агрегатов.
144
Источниками возмущающего воздействия этих колебаний явля-
ются: неравномерность работы ДВС, работа карданных передач,
наличие бокового зазора и ошибки по шагу в зубчатых передачах,
воздействия на КМ со стороны дорожного полотна при преодолении
неровностей. Для определения возникающих динамических нагрузок
строят схемы динамических систем КМ, эквивалентные реальным,
с распределенными параметрами или состоящие из сосредоточенных
масс, соединенных между собой упругими связями. Кинетическая и
потенциальная энергии эквивалентных систем соответственно рав-
ны кинетической и потенциальной энергиям реальных систем. На-
грузки, возникающие в деталях КМ от колебаний, а следователь-
но, и напряжения могут достигать критических значений. Так, для
КМ высокой проходимости периодические динамические крутящие
моменты в трансмиссии могут превосходить средний крутящий мо-
мент в два и более раз. Максимальных значений нагруженность
достигает при резонансных режимах процессов колебаний. Продол-
жительность такого режима может повлиять на долговечность де-
талей КМ.
Остановимся подробнее на этапах расчета динамических нагру-
зок КМ.
Определение параметров исходной системы
Моменты инерции масс и коэффициенты жесткости (или по-
датливости) соединений между ними определяют по известным фор-
мулам для эквивалентных систем. Геометрические размеры деталей
КМ известны, так как динамический расчет целесообразно прово-
дить на стадии проектирования, чтобы прогнозировать динамиче-
скую нагруженность КМ. Если детали имеются в наличии, предпо-
чтение отдается экспериментальным методам определения моментов
инерции и коэффициентов жесткости.
Коэффициент демпфирования характеризует рассеяние энергии
в процессе колебаний. Рассчитывают его по-разному для отдельных
узлов КМ. Так, для ДВС момент сопротивления ТСОЛр пропорциона-
лен угловой скорости уз:
Тсопр = ^-дУ3?
где ka - коэффициент демпфирования в двигателе, характеризующий
изменение момента сопротивления при изменении частоты вращения
коленчатого вала в процессе колебаний.
145
Различные методы определения коэффициента демпфиро-
вания двигателя содержат разные эмпирические зависимости. Так,
Г.С. Маслов рекомендует следующую формулу для вычисления ка:
Лд =
где д = PjJFnVm - удельный коэффициент демпфирования; Рд -
полная сила демпфирования; Fn - площадь поршня; иш - линейная
скорость шатунной шейки вала; Як - радиус кривошипа; гц - число
цилиндров, приходящихся на одно колено.
Для V-образных дизелей д = (10... 15) • 103 Н-с/м3 при двухуз-
ловой форме колебаний и д = (20 ... 70) • 103 Н-с/м3 при трехузловой
форме колебаний.
В деталях трансмиссии рассеяние энергии происходит в основ-
ном из-за потерь в стыках деталей (шпоночные и шлицевые соедине-
ния, опоры валов) и зубчатых передачах, работы внутреннего трения
в материале деталей, а также из-за демпфирующих устройств, спе-
циально введенных в систему для уменьшения амплитуд колебаний.
Учитывая, что рассеяние энергии в материале на порядок меньше,
чем в соединениях, им можно пренебречь.
Рассеяние энергии на участке i, i + 1 трансмиссии может быть
определено по формуле
^г, 14-1 = — Дп,'+1)^>
где си - круговая частота; Ащ, Дп,+! _ амплитудные значения пере-
мещений г-й и i + 1-й масс системы. Коэффициент демпфирования
на участке г, i + 1 равен
= 4n,.,+!/2%wei,i+1),
где ч/’п,',+i _ коэффициент рассеяния энергии на участке 2, г + 1;
ei i+1 _ коэффициент податливости на участке г, г + 1.
Коэффициент рассеяния энергии определяют по формуле
’/’n.-.i+l = lAotti.i+l,
где V’o - относительный коэффициент рассеяния энергии, т.е. отно-
шение энергии, рассеянной за цикл, к максимальной энергии при
колебаниях (V’o — 1,2...2,4); - относительный коэффици-
ент податливости шпоночных, шлицевых и зубчатых соединений,
146
a; ,_j = li t+i - коэффициент податливости шпоноч-
ных. шлицевых и зубчатых соединений на участке г, г 4- 1 .
Коэффициенты демпфирования в шинах и элементах подвески
определяют из экспериментальных исследований реальных или ана-
логичных им конструкций, а также на моделях объектов.
Определение источников внешнего и внутреннего
воздействий на динамическую систему КМ
Одним из наиболее сильных источников возмушения в КМ явля-
ется две.
Колебания от двигателя обусловлены неравномерностью кру-
тящего момента, которая вызвана переменным давлением газов в
цилиндрах двигателя и инерционными силами. Крутящий момент
двигателя изменяется по сложному периодическому закону. При раз-
ложении в ряд Фурье момент может быть представлен в виде суммы
гармонически изменяющихся моментов. Гармонический анализ кру-
тящего момента Т. действующего на одну шатунную шейку колен-
чатого вала двигателя, проводят на основании теоремы Фурье, со-
гласно которой всякую периодическую функцию можно представить
в виде сходящегося бесконечного ряда гармонических составляющих:
Т — То + Т-[ sinfeji 4- al) + Тг sin(2u?i 4- sin(3u?i 4-аз) + •
оо
. .. 4- 7} sinffcwi 4- оц) = То 4- Tk syn(kwt 4- а^),
где То - средний крутящий момент, действующий на рассматрива-
емую шатунную шейку вала; Ti, Тз, 7з, ... Т, - амплитудные со-
ставляющие гармонически изменяющихся моментов; t - время ; k -
порядок гармонически изменяющегося момента. Например, для че-
тырехтактного двигателя k = п/2 принимает следующие значения:
0,5; 1,0; 1,5; 2,0 и т.д., где п - ряд натуральных чисел.
Каждая из гармоник вызывает колебания системы с соответ-
ствующей частотой. При совпадении частоты колебаний, вызван-
ных гармоническим моментом, с частотой собственных колебаний
динамической системы КМ могут возникнуть значительные ампли-
туды колебаний.
147
Суммарная работа всех цилиндров двигателя выражается зави-
симостью
k
Ад = тг Ti~ai,
i=i
где Ti - амплитуда крутящего момента на г-ой шатунной шейке ко-
ленчатого вала двигателя; - вектор амплитуды угловых переме-
щений г-ой шатунной шейки.
Круговые частоты и динамических воздействий на транс-
миссию КМ при работе зубчатого зацепления и карданной передачи
пропорциональны частоте вращения валов пт:
ш3 = 2шпт; о>к = 2пт,
где зш - число зубьев ведущего зубчатого колеса.
Основные агрегаты КМ имеют упругое закрепление, которое
под воздействием входных, выходных и возникающих при этом реак-
тивных моментов обуславливает угловые перемещения валов и кар-
теров и тем самым оказывает воздействие на происходящие процес-
сы колебаний. Неучет реактивных связей в расчетной динамической
схеме приводит к ошибкам в получении расчетных значений (частот,
амплитуд перемещений, динамических моментов и др.).
Для КМ высокой проходимости существенное значение имеют
динамические возмущения, появляющиеся в результате взаимодей-
ствия колесного движителя с неровностями дороги. Профиль доро-
ги может быть выражен функцией пути или времени. Такая за-
висимость называется возмущающим воздействием. При взаимо-
действии колесного движителя с микропрофилем дороги последний
оказывает существенное влияние на колебания КМ. Макропрофиль
с длительными подъемами и спусками влияет на режим движения
КМ, но, в отличие от микропрофиля, существенно не сказывается на
ее колебаниях. Возмущение КМ от взаимодействия колесного дви-
жителя с неровностями микропрофиля можно с большой долей досто-
верности считать стационарным случайным процессом. Неровности
микропрофиля ограничены по высоте. Математически микропро-
филь можно описать или в виде непрерывной случайной функции,
или в виде отдельных детерминированных функций. Представляя
микропрофиль в виде отдельных неровностей, можно математиче-
ски выразить возмущения со стороны дороги и рассчитать реакцию
системы на эти возмущения с помощью детерминированной функ-
ции.
148
Аналогичный подход можно использовать и при расчете динами-
ческих нагрузок, возникающих при движении КМ по периодическим
неровностям. В этом случае задача значительно упрощается, если
вместо реальной неровности взять эквивалентную ей неровность, та-
кую. чтобы точка контакта колеса с грунтом (точечный контакт) и
центр колеса лежали бы на одной вертикали. В случае реальной не-
ровности этого нет, так как касание колесом неровности происходит
раньше, чем проекция на опорную поверхность центра колеса будет
над началом неровности. Длина £э эквивалентной неровности будет
больше длины £н реальной неровности на величину 21:
L3 = L„ + 21,
где 21 - длина площадки контакта колеса с опорной поверхностью.
На рис. 2.26 показаны реальная и с учетом сглаживающей спо-
собности шины эквивалентная неровности соответственно с высота-
ми гн и z3.
Рис. 2.26. Реальная (2) и эквива-
лентная (2) единичные неровности
Если входное воздействие на линейную динамическую систему
будет иметь спектральную плотность 5Вх(^')> то на выходе спек-
тральная плотность Sbux(^) определяется как произведение 5вх(и>)
на квадрат модуля передаточной функции |^(jw)|2 системы, и за-
дача сведется к нахождению передаточной функции. Для получе-
ния передаточной функции динамической системы КМ к дифферен-
циальным уравнениям, описывающим данную систему, применяют
преобразование Лапласа. Так как эти уравнения являются нелиней-
ными, то для этого их необходимо линеаризовать. Возникающие
дополнительные динамические нагрузки можно рассматривать как
функции неровностей дороги.
149
Выбор способа моделирования
При определении динамической нагруженности КМ можно ис-
пользовать методы физического и математического моделирования.
Методы физического моделирования применяют при стендовых
испытаниях. Стендовые испытания позволяют сократить время экс-
перимента по сравнению с полигонными, дают сопоставимые с ними
результаты испытаний, их можно проводить непрерывно в течение
любого промежутка времени, осуществляя запись происходящих в
КМ процессов и обрабатывая получаемые при этом данные. Экс-
периментальные исследования модели объекта, разработанной с ис-
пользованием математического аппарата теории подобия, позволяют
определить значения параметров реального объекта путем измере-
ния значений соответствующих параметров на модели. При этом
моделируется не только сама динамическая система КМ , но и на-
грузочные режимы, эквивалентные режимам при реальной эксплуа-
тации.
На рис. 2.27 показан один из вариантов стенда, на котором мож-
но исследовать рядные, разветвленные и кольцевые динамические
системы. Для этого на стенде имеются два тормозных двигателя,
один из которых работает при рядной системе, а другой - при раз-
ветвленной или кольцевой. Разветвление потока мощности проис-
ходит на редукторе, далее крутящий момент передается на модель
колеса и благодаря силам сцепления колеса с имитатором дороги -
на барабаны имитатора и тормозной двигатель. Крутящий момент
задается основным двигателем, управляемым, как и тормозной дви-
гатель, тиристорной системой, позволяющей смоделировать нагру-
зочные режимы и силы сопротивления, возникающие при движении
КМ. Переменную составляющую момента моделирует инерционный
вибратор, представляющий собой планетарный редуктор с неурав-
новешенными сателлитами.
На стенде можно моделировать различные КМ, благодаря смен-
ным валам и инерционным массам, исследовать переходные .процес-
сы при переключении передач (для этого имеется коробка передач и
сцепление). Тележка спроектирована так, что можно менять осевую
нагрузку иа колесо и демпфирование в подвеске.
Математическое моделирование предусматривает создание ма-
тематической модели происходящих в КМ динамических процессов
и реализацию ее на АВМ или ЭВМ. При моделировании на АВМ
динамические процессы, возникающие при колебаниях КМ, опера-
тивно регистрируются, воспроизводятся на экране осциллографа и
150
Рис. 2.27. Стенд для исследования динамической нагружеино-
сти КМ:
1 - вибратор; 2 - сцепление; 3 - направляющие тележки; - тележка,
имитирующая массу КМ; 5 - модель колеса; 6 - имитатор дороги; 7 -
инерционные массы; 8 - редуктор; 9 - опорная плита; 10 - вспомогатель-
ный электродвигатель; 11 - основной электродвигатель; 12- карданные
валы; 13 - сменные валы; 14 - коробки передач; 15 - тормозные электро-
двигатели
151
дают возможность установить связь между физической сущностью
явления и его математическим описанием. При моделировании на
ЭВМ получается высокоточный, результат.
Определеяке параметров модели
Выбор расчетной схемы динамической системы КМ и создание
ее математической модели - важный этап динамического расчета.
Динамические системы КМ имеют большое число степеней свобо-
ды. На рис. 2.28 показана кинематическая схема трансмиссии КМ
(8 х 8) с раздачей крутящего момента по бортам, а также схема ди-
намической системы этой машины.
При моделировании такие системы обычно упрощают. Эффек-
тивным способом упрощения динамических систем является метод
парциальных частот. Суть его заключается в том, что всю систему
разбивают на парциальные системы двух типов (рис. 2.29) и опреде-
ляют их круговые собственные частоты
«о = х/(ел + еп)/ел^еп; + Jn)/J4eJn,
где е, J - соответственно коэффициент податливости и момент инер-
ции вала; индексы “л” и “п” - соответственно для левой и правой
части вала.
Парциальную систему с наибольшей частотой преобразуют в
эквивалентную систему. Для одномассовой системы (см. рис. 2.29, о)
эквивалентной является двухмассовая система (см. рис. 2.29, б) и на-
оборот. Преобразование одномассовой парциальной системы выпол-
няют так, чтобы узел колебаний эквивалентной системы располагал-
ся на месте массы исходной системы. Для этого необходимо, чтобы
параметры эквивалентной системы описывались выражениями
Л = [еп/(ел + en)]J;
Л = [ел/(ел + en)]J;
е = ел + еп.
При замене исходной двухмассовой системы эквивалентной од-
номассовой ставится аналогичное условие, для выполнения которого
параметры эквивалентной системы следует определять так:
ел = [Л/(Л + *Zn)]e;
еп == [•7Л/(>7Л 4- Л)]е;
«7 = «7Л +
152
8
Рис. 2.28. Кинематическая схема трансмиссии КМ (8x8) с разда-
чей крутящего момента по бортам (а) и эквивалентная ей схема
динамической системы (б):
1 - двигатель; 2 - коробка передач; 3 - раздаточная коробка; 4 - бортовая пе-
редача; 5и 7-колесные редукторы; б-карданный вал с зубчатыми муфтами;
8- ведущие колеса; 9- масса КМ, приведенная к ведущим колесам; Л,... , Лв
- моменты инердии, приведенные к ведущим колесам; £1,2,..., Еы - коэф-
фициенты податливости, приведенные к ведущим колесам
153
л
6
Рис. 2.29. Одномассовая (а) и двухмассовая (б) схе-
мы динамических парциальных систем
Преобразованные парциальные системы заменяют в динамиче-
ской системе исходные, и, таким образом, полученная новая динами-
ческая система имеет на одну степень свободы меньше. Преобразо-
вание продолжают до получения системы с требуемым числом сте-
пеней свободы.
Детали трансмиссии КМ вращаются с различными угловыми
скоростями. Для удобства расчета их целесообразно привести к од-
ной частоте вращения при равенстве кинетической и потенциальной
энергий приведенной и действительной систем. Для выполнения это-
го условия необходимо моменты инерции и коэффициенты жесткости
умножить или разделить на квадрат передаточного числа в зависи-
мости от направления приведения (к коленчатом)7 валу двигателя
или к валу ведущего колеса).
Определение выходных характеристик КМ
Для определения параметров, характеризующих динамическую
нагруженность КМ. необходимо иметь расчетную схему упрошенной
динамической системы и ее математическую модель.
При угловых колебаниях эта модель представляет собой систему
дифференциальных уравнений второго порядка:
ТдвУ’дв Н" ^дв^дв фб) “I" Сдв(^дв — ч^б) = -Gib-
4
JsVS + fen(<^5 - У’дв) + 5? - Vi) + Сдв^б ~
1=1
4
+ zL Ci^s ~ = °;
1=1
J&i + - ¥?m) = Cifai - + Cr-Jcpi - = Tci-
4 4
- y’i) + 53ст?(^м ~ </?*) = Ton,
i=l i=l
154
Рис. 2.30. Упрощенная расчетная схема динамиче-
ской системы трансмиссии КМ
где 7ДВ, J5, и 7мР - соответственно моменты инерции масс дви-
гателя, трансмиссии, колес и массы всей машины, приведенной к
ведущим колесам; с/?Д8, </>i и <рм - соответственно угловые пе-
ремещения при колебаниях масс двигателя, трансмиссии, колес и
массы машины, приведенной к крутильной схеме колебаний; кав, к(
и kTt - соответственно коэффициенты демпфирования в двигателе,
трансмиссии и шинах при их тангенциальной деформации; сдв, q и
сГ| - соответственно коэффициенты жесткости деталей двигателя,
трансмиссии и колес при их тангенциальной деформации; Тдв - воз-
мущающий момент со стороны двигателя; Тс1- - моменты сопроти-
вления движению, приложенные к колесам; Топ - опрокидывающий
момент, действующий на массу КМ.
На рис. 2.30 показана упрощенная расчетная схема динамиче-
ской системы трансмиссии, эквивалентная реальной трансмиссии,
приведенной на рис. 2.28.
На рис. 2.31 показана схема динамической системы подрессо-
ривания КМ. Математическая модель колебаний этой системы пред-
ставляет собой также систему дифференциальных уравнений:
4. 4
тмгм + kpt (^м -|- i-i) 4” Ср, -|- 1црм — = 0;
г=1 г=1
4
тихм - У Qj = 0;
S—1
155
Рис. 2.31. Схема динамической системы подрессоривания КМ
4 4
хмфм + + ЦФм ~ 2t) + Ср,lj(zM + 1црм — 2,) =
1=1 1=1
4
= ~ 2М — Цфм + 3К|-) — Qi',
»=1
miZi + — Цфм) 4" cp,(2i “ ZM Цфм) + кш^ ~ 2Kl) +
+ сШ|-(.г, — 2Ki) — 0;
xi ~ *^m 4" (^t rK{ 4" ZM 4" Цфы}
где mM - подрессоренная масса KM; гм, хм и tpM - соответственно пе-
ремещения подрессоренной массы в вертикальном, горизонтальном
и угловом направлениях; kPi, кШ{ - коэффициенты демпфирования
соответственно в подвеске и шинах при их радиальной деформа-
ции; Ц - расстояния от центра масс до соответствующих осей; Zi
и Xi - перемещения осей колес соответственно в вертикальном и го-
ризонтальном направлениях; cPt и сШх- - соответственно жесткости
подвески и шин при их радиальной деформации; Qi - горизонталь-
ные силы, возникающие в точке контакта колеса с дорогой; JM - мо-
мент инерции подрессоренной массы относительно поперечной оси;
156
h{ - расстояния от центра масс до точки контакту, колес с дорогой;
- вертикальные смешения точек приложения нормальных реак-
ций к колесам; - масса колеса; - радиусы качения колес.
В обшей динамической системе КМ трансмиссия связана с систе-
мой подрессоривания, и нагрузки через систему подрессоривания пе-
редаются на трансмиссию. Поэтому целесообразно рассмотреть об-
щую взаимосвязанную динамическую систему КМ, которая одновре-
менно учитывала бы колебания в трансмиссии и системе подрессо-
ривания. Это позволит рассчитывать нагруженность трансмиссии
от динамических воздействий, приходящихся на колесный движи-
тель при его движении по неровностям, а также от воздействий со
стороны двигателя и других источников. На рис. 2.32 представлена
Рис. 2.32. Общая взаимосвязанная схема динамической
системы КМ (8 х 8)
157
взаимосвязанная схема динамической системы КМ. Ее математиче-
ская модель имеет вид
4 4
mM'iM + У" *р,(«м + Цфм - г>) + У" cp.(zM + liVlt - Zi) = 0;
i=l i=l
4
— 52 Qi — 0;
1=1
4 4
+ 5 kptli(zM — Цфм + 2[) + Ср,lj(zM + 1црм — гф) =
i=l i=i
4
= 52(^4 + 2м — Цфм ~ 2K{)Qii
1=1
4- кр-— zM ^фм) *1* (гг ^i^M) 4* kuix (zi ~ ^к,)+
4* Сцц(2{ - 2К.) = 0;
^ДВ^ДВ + £дв(Фдв ~’ Ф$) + Сдв((£дв — С/?5) = Тдб;
4
^5ф5 + ^дв^э — ^дв) + 52 “ ¥4’) + ~ ^дв) +
i=l
+ 52 ~ ~ О’
1=1
ЛУ1» + “ У’б) + кТ;(ф{ — фм) + Cj((/?j — с^э) — СГД^;- — ^м; ~ Тг:
xi = 4* (^i гк, ~ zi 4* гм + ^»9-,м)9-’м5
Qi = kxt(iKi - Xi) + сж.(хК(. - Ii)~
- [Ti - к1\(ф{ - фм) - CTi(Vi ~ ^m)]/ck,,
где Qi - горизонтальная сила, приложенная в пятне контакта г-го
колеса; kXi -коэффициенты демпфирования в шинах при их радиаль-
ной деформации; хк,- _ горизонтальное смещение точек приложения
нормальных реакций к колесам.
Эта система уравнений отображает связь всех видов колебаний
в КМ. Ее решение дает возможность определить спектр собствен-
158
ных частот и формы колебаний динамической системы, выявить ре-
зонансные режимы работы. Данная система уравнений позволяет
решить задачу как при детерминированном, так и при случайном
динамическом воздействии. В последнем случае при линеаризации
уравнений закон распределения параметра на выходе соответствует
закону его распределения на входе. Если принять закон распределе-
ния дорожных неровностей нормальным, то амплитуды колебаний
масс системы и их линейные комбинации тоже будут распределены
по нормальному закону. По полученным дисперсиям крутящих мо-
ментов, нагружающих детали трансмиссии, можно определить закон
распределения напряжений, так как переменный момент и напряже-
ние связаны постоянным множителем, равным моменту сопротивле-
ния при кручении.
Полученные функции распределения угловых отклонений кру-
тящих моментов, а также дисперсии моментов и скоростей их из-
менения являются необходимыми исходными данными для опреде-
ления долговечности деталей КМ при использовании определенной
гипотезы суммирования усталостных повреждений. После решения
этой системы уравнений и получения расчетных данных оценивают
динамическую натруженность КМ. В случае, если она неудовлетво-
рительна, вносят необходимые изменения в конструкцию и заново
проводят расчет.
Пути уменьшения динамической нагруженности КМ
Наиболее распространенным мероприятием, способствующим
снижению динамической нагруженности КМ, является изменение
параметров системы, что позволяет вывести нежелательные резо-
нансные режимы из зоны рабочих частот вращения. К таким же
результатам приводит установка в трансмиссии упругих муфт или
демпфирующих устройств, которые, кроме того, снижают амплиту-
ду колебаний вследствие рассеяния энергии. Если перечисленные
меры не дают желаемого результата, то необходимо принципиаль-
ное изменение конструкции трансмиссии или подвески.
Все перечисленные выше методы расчета, а также конструктив-
ные изменения предусмотрены на стадии проектирования КМ, что
лает возможность в более короткие сроки внедрить новейшие виды
колесной техники в производство.
159
2.6. Детерминированные и вероятностные
методы расчета
В зависимости от вида исходных данных методы расчета на
прочность могут быть детерминированными и вероятностными.
Детерминированиые расчеты
При детерминированном расчете константы и функции, входя-
щие в уравнение прочности, носят неслучайный характер, т.е. оце-
ниваются одним значением или функцией.
Расчеты на статическую прочность. Условие статической
прочности можно определить одним из следующих способов:
по допускаемому напряжению
°тах < [*^]»
где <7щах - наибольшее напряжение в детали; [а] - допускаемое на-
пряжение;
по запасу прочности
п = <7В1 т/<7тах > [и ], (2-4)
где <тв,т ~ временное сопротивление или предел текучести; [nz] - до-
пускаемый запас прочности;
по предельному состоянию
п
1=1
где п - число состояний; ст, - нормативные напряжения; п* - коэффи-
циент перегрузки; kp - коэффициент, учитывающий условия работы;
k{ - коэффициент однородности материала.
Условия прочности по допускаемому напряжению и запасу проч-
ности связаны соотношением
М = а^т/п'.
Размеры деталей должны определяться не только внутренними
напряжениями и внешней контактной напряженностью, но и требо-
ваниями, предъявляемыми к данной детали как к звену машины.
Следовательно, при проектировании необходимо выполнять не один
160
расчет, а несколько с учетом условий и особенностей работы дета-
лей, а также возможных износов и поломок. Комплекс таких рас-
четов одной и той же детали называют расчетами по предельному
состоянию.
Расчеты по предельному состоянию можно разделить на четыре
группы:
1) по основным внутренним напряжениям (несущей способно-
сти); при этом максимальные напряжения, действующие ограничен-
ное число раз, не должны превышать временное сопротивление или
предел текучести;
2) по контактным напряжениям; при этом максимальные напря-
жения, действующие ограниченное число раз, не должны превышать
предельного контактного напряжения;
3) по вибростойкости; при этом определяют деформацию (проги-
бы, углы закручивания), частоты собственных колебаний, возмуща-
ющие и демпфирующие силы и максимально возможную вибрацию;
4) по экстремальным нагрузкам.
Расчеты по предельному состоянию отражают всю совокупность
нагрузок, характеристик материала, условий эксплуатации элемен-
тов конструкции и, будучи детерминированными, тесно связаны с
вероятностными расчетами.
Если при расчете на внутреннюю напряженность деталь испы-
тывает одновременное действие нормальных а и касательных т на-
пряжений (изгиб и кручение), то более правильно оценку прочности
детали выполнять, в соответствии с одной из теорий прочности, в
зависимости от свойств материала. При этом допускаемое напря-
жение [ст] сравнивают с эквивалентным сгЭкв> которое определяют по
одновременно действующим на деталь нормальным и касательным
напряжениям.
При сложном напряженном состоянии эквивалентное напряже-
ние для пластичных материалов рекомендуется подсчитывать по
формуле энергетической теории прочности
<4, = Уст2 + Зт2 < [ст].
Иногда эквивалентное напряжение для пластичных материалов
вычисляют, пользуясь теорией наибольших касательных напряже-
ний: ________
ст^в = Уст2 + 4т2 < [ст].
Как показывают исследования, данные, полученные с примене-
нием энергетической теории прочности, лучше согласуются с резуль-
татами экспериментов.
6 — 692
161
Для хрупких материалов применяют формулу теории прочности
Мора
’-.И ~ 0,5(1 - а„)о + 0,5(1 + а„)л/а2 + 4т2 < [ст],
где ам - коэффициент, характеризующий свойства хрупкого мате-
риала при растяжении и сжатии , ам = сгв/опч; сгв и сгпч - временное
сопротивление или предел прочности соответственно при растяже-
нии и сжатии.
При проектировании КМ из-за простоты и возможности экспе-
риментального подтверждения широко используют расчет на проч-
ность по коэффициентам запаса.
Расчеты иа сопротивление усталости. При оценке сопроти-
вления усталости, так же как и при расчетах на статическую проч-
ность, можно использовать запас прочности при регулярном и нере-
гулярном нагружениях.
Условие сопротивления усталости оценивают по линейной зави-
симости, полученной по диаграмме предельных напряжений:
О-х - Оа + (2.5)
где фа - коэффициент влияния постоянных нормальных напряжений.
При введении понятия эквивалентного переменного напряжения
°экв ~ + 'Фа-О'гп
зависимость (2.5 ) преобразуется: сг-i =
Концентрации напряжений, масштабный и поверхностный фак-
торы, как показали экспериментальные исследования, влияют толь-
ко на переменную составляющую цикла. Поэтому
и
°3kb “ —Ъ Ь
ИЛИ
°3kb = аа + Фаа^т,
а условие сопротивления усталости для детали имеет вид
fi
азкв — а-1д>
где kg- - эффективный коэффициент концентраций напряжений;
Еа - масштабный коэффициент; /За - коэффициент, зависящий от
162
состояния поверхности; fa - коэффициент влияния постоянных нор-
мальных напряжений на деталь, = V?o'(£o'^a/fco-); сг_1Д - предел
выносливости для детали, ст—i д = a-i &&/ка}
При действии касательных напряжений условие сопротивления
усталости для деталей
или
Т-1 д = Та + faATm,
где напряжения та, тт, т-i и коэффициенты с индексом т имеют тот
же смысл, что и аналогичные параметры при действии нормальных
напряжений.
Условие сопротивления усталости при сложном напряженном
состоянии для симметричного цикла переменных напряжений изгиба
и кручения можно записать так:
V-1 = -/о-а + Зт^.
Отсюда соотношение между пределами выносливости при кру-
чении и изгибе принимает вид
(7—1 = х/ЗТ-1.
Это подтверждается экспериментально для пластичных мате-
риалов.
В общем случае, когда данное соотношение не выполняется,
можно ввести корректированное условие сопротивления усталости
для детали:
О--1Д = y°‘a+(^i) ’’а- (2.6)
Обозначим левую часть выражения (2.6) через а"кв. Тогда для
детали при одновременном действии переменных и постоянных на-
пряжений получим
О’экв = + (----—) (то + ^г„тм)2.
у 4 Т— 1 Д /
6*
163
При определении запаса сопротивления усталости необходимо
учитывать возможные изменения постоянных и переменных напря-
жений. Если предельные постоянное и переменное напряжения (со-
ответствующие началу усталостного разрушения) связаны с ана-
логичными действующими напряжениями линейной зависимостью
(через коэффициент пропорциональности), то запас сопротивления
усталости для однокомпонентного напряженного состояния можно
записать в следующей форме:
= ст-1д/сГэкв; п" = сг-1д/(сга + V4iCTm); (2-7)
пт = т-1 д/тэкв; пт = Т— 1 д](та + фтдТтп)- (2.8)
Запас сопротивления усталости при сложном напряженном со-
стоянии (изгиб и кручение) находят по формулам
ii _ _ / н
п — ^-l Д/^экв)
- для симметричного цикла нагружения и
г/ / ч
п — а-1д./аэк1»
= / (210)
V (ст„ + ^дСТт)2 + (ст-1 д/т-1 д)2(та + фт^Тт)2
- для асимметричного цикла нагружения.
Преобразовав формулы (2.9) и (2.10), получим более удобный
вид представления:
УМ)2 + (п?)2’
где п% и п" - частные коэффициенты запаса сопротивления устало-
сти по нормальным и касательным напряжениям. Для симметрич-
ного цикла nJ = о--1д/ста, п” = r-ia/ra. При совместном действии
переменных и постоянных напряжений nJ и п" вычисляют по фор-
мулам (2.7) и (2.8).
При расчете элементов КМ на усталостную долговечность для
нерегулярного процесса нагружения используют гипотезу линейного
накопления (суммирования) относительных усталостных поврежде-
ний Пальмгрена - Майнера. Сопоставляя кривую усталости А^(<т),
164
построенную при стендовых испытаниях, с кривой накопленных ча-
стот Ф(сг), полученной при эксплуатации, оценивают срок службы
деталей в соответствующих условиях эксплуатации (рис. 2.33).
Рис. 2.33. Графики линейного суммирования повреждений при дис-
кретном (а) и непрерывном (б) представлении нагрузочного режима
Проведем анализ гипотезы линейного суммирования. Рассмо-
трим одновременно кривую усталости /У(сг) и эксплуатационный на-
грузочный режим, который представлен дискретно в виде числа ци-
клов Hi с напряжениями crj. Очевидно, при напряжении crj срок
службы составляет щ/Ni. При П] = произошло бы разрушение
детали. Но так как П] < то деталь будет иметь запас уста-
лостной долговечности. При сгз срок службы составляет при
сгз... aj - соответственно ns/Ns* .. • > Чтобы деталь не раз-
рушилась, необходимо соблюдать условие
fc
= а,
>=1
где а - степень повреждаемости материала (в первом приближении
можно принять а = 1). Значение а зависит от материала детали и
условий ее нагружения.
Данная гипотеза основана на предположении, что повреждение,
вызванное данным циклом напряжений, не зависит от состояния де-
тали в рассматриваемый момент и от предыдущих циклов нагруже-
ния, а просто суммируется с повреждениями, вызванными предыду-
щими циклами, т.е. не зависит от процесса нагружения.
165
Для определения эквивалентного напряжения и запаса сопроти-
вления усталости при нерегулярном режиме нагружения воспользу-
емся степенным уравнением кривой усталости amN = const и усло-
вием линейного суммирования повреждений
k
= а-
j=i
Умножив числитель и знаменатель выражения на а™ и учиты-
вая уравнение кривой усталости, получаем
у' niaT _ у' п>аТ _
h NiaT " “ °’
откуда определяем условие эквивалентности
1 к
j=l
где Nq - число циклов, при котором аа = сг-ь К этому числу ци-
клов приводят значение амплитуды эквивалентного регулярного ре-
жима. При определении запаса сопротивления усталости эту экви-
валентную амплитуду сопоставляют с пределом выносливости. Та-
ким образом, выражения для эквивалентного напряжения и запаса
сопротивления усталости имеют соответственно следующий вид:
При непрерывном изменении амплитуд напряжений (см.
рис. 2.33, б) условие линейного суммирования относительных повре-
166
ждений записывают в форме
где пк - верхний предел интегрирования, соответствующий конеч-
ному напряжению сгк, которое учитывают при повреждении.
Обозначив общее число циклов изменения всех перегрузочных
напряжений при работе детали через пе и зная функцию распреде-
ления амплитуд напряжений, определим число циклов п при условии
а1 < а (а1 текущее значение напряжения) и величину dn. входящую
в условие суммирования:
п = nzF(a)\ dn = пе/(сг)(/сг,
где F(<r)- функция распределения напряжений; /(сг) - плотность рас-
пределения напряжений, /(сг) = dF(a)/da.
Эти выражения справедливы, так как отношение п/п^ может
быть представлено как вероятность события а' < а.
Текущее значение N определим из уравнения кривой усталости,
представленного той или иной аналитической формой. Принимая
уравнение кривой в виде amN = a™laNo, получим следующие -выра-
жения для эквивалентного напряжения и запаса сопротивления уста-
лости:
(2.П)
(2-12)
Если в формулах (2.11) и (2.12) принять а — 1, а нижний пре-
дел интегрирования оставить д (гипотеза линейного суммирова-
ния повреждений), то не учитываются циклы с амплитудой, мень-
шей предела выносливости, также влияющие на накопление уста-
лостного повреждения при наличии в нагрузочном режиме циклов
со значениями амплитуд, превышающими предел выносливости. В
167
этом случае нижний предел интегрирования принимают равным
^min — k(7—i д [к = 0,4 ... 0,7).
По формулам (2.10) и (2.12) также можно проводить расчеты
при tTjnin = но в этом случае степень повреждаемости материа-
ла а нужно определять по формулам, предложенным В.П. Когаевым.
Так, для дискретного спектра нагрузок
0 = pnaxC_ Л Л.
\ СТ-1Д / \а-1д /
С ~ 2 Piai' < ^maxj
а для непрерывного
O’max O’max
f affv) da — ka-i а f f(a)da
kcr-ia kff_ia
a = -------------------’
(<^max “ к(7— }д) J* f(a)da
kff-m
O’max
C = —<**.
Gmax J
k<r-ia
Здесь сттах - максимальное напряжение в нагрузочном режиме; ( -
коэффициент корректировки; Pi - относительное число циклов дей-
ствия с напряжением
I
Pi = ni/ 52
»=1
Если при расчетах получают а < 0,1, то принимают а = 0,1.
Использование плотности распределения напряжения при рас-
чете равноценно по смыслу замене действительного нерегулярного
режима эквивалентным упорядоченным режимом.
Для определения запаса сопротивления усталости были исполь-
зованы характеристики кривой усталости при симметричном цикле
нагружения детали, что предполагает равной нулю постоянную со-
ставляющую циклов нагрузочного режима. Если во время эксплуа-
тации процесс нагружения оценивается двумя параметрами: ампли-
168
тудой сга и средним значением ат процесса, то возможны следующие
варианты расчета показателя сопротивления усталости:
при постоянном значении ат в процессе изменения нагрузок
сг-1 д заменяют на аТ д в выражениях для п" (схематизация по методу
максимумов);
при нагрузочном режиме с переменным значением среднего на-
пряжения циклов ат переходят от одномерной плотности распреде-
ления амплитуд /(сга) к двумерной плотности распределения ампли-
туд и средних значений циклов /(ста, ат) (схематизация по методу
размахов с учетом среднего).
Указанные в скобках методы схематизации процессов относятся
к нагрузочным режимам с неявно выраженными циклами нагрузок,
т.е. к случайным процессам.
Иногда в процессе расчета сопротивления усталости вычисля-
ют запас усталостной долговечности — №о/№экв при приведении
напряжения эквивалентного числа циклов нагружения к пределу вы-
носливости.
Для оценки усталостной долговечности деталей КМ наряду с
рассмотренными показателями широко используют такие характе-
ристики, как срок службы Ls (в км) и (в ч ) детали, которые
связаны между собой соотношением
— LfaV,
где v - средняя скорость движения машины в заданных условиях
эксплуатации, км/ч.
Исходной формулой при определении срока службы детали явля-
ется условие гипотезы суммирования усталостных повреждений.
Для непрерывного изменения напряжений, соответствующего экс-
плуатационному режиму нагружения, имеем
О’ max
[ npf(a)da
а~ J N(a) '
Outrun
тогда срок службы детали
О'max
Ls = ^«(^ [ (2.13)
\ J 2V(oj /
Ornin
169
где Пр - общее число циклов нагружения до разрушения детали;
и7ц - среднее число циклов нагружения на 1 км.
Усталостное повреждение зависит от нагрузок, возникающих
чаще чем 103 раз в течении полного срока службы детали, поэто-
му максимальное напряжение <ттах при расчетах на усталостную
долговечность нужно определять по уравнению
О’ max
1- У f(a)da= lO’^Wu)-1.
—оо
Решение данного уравнения может быть получено только мето-
дом последовательных приближений, поскольку <ттах входит в рас-
четную формулу для Ь8. Нахождение <ттах упрощается, если при-
нять правую часть уравнения равной 10-4 ... 10~б, что соответству-
ет 107 ... 109 циклам нагружения при эксплуатации. Если в эксплу-
атационном нагрузочном режиме имеются нагрузки, большие <ттах,
то их следует учитывать в расчетах на статическую прочность.
Приведенные оценки сопротивления усталости и усталостной
долговечности в полной мере справедливы и для процесса нагру-
жения в общем случае (нерегулярного нестационарного случайного
пропесса) с тем лишь различием, что оценки будут выборочными, со
своими законами распределения. При этом плотности распределений
напряжений можно определить после преобразования нагрузочного
режима с помощью одного из методов схематизации.
Вероятностные расчеты
При вероятностном подходе к решению задач по определению
прочности элементов конструкций характеристики материалов и на-
грузочных режимов задают как случайные величины (рис. 2.34).
Расчеты иа статическую прочность. Если нагрузка (напри-
мер, момент) представляет собой единичное случайное по величине
воздействие (рис. 2.35), а механические характеристики материала
также являются случайными величинами, то вероятность того, что
разрушение наступит, будет Рразр = Р(бгв,т < <т). Для нахожде-
ния вероятности разрушения Рразр воспользуемся формулой полной
вероятности в интегральном виде:
оо
Рразр = У /(<7в,т)Р(о7<Тв,т)<^в,т,
—оо
170
шк.
0 Q Я Q,R
Рис. 2.34. Плотности распределении
нагрузки f(Q) и прочности /(Я)
Рис. 2.35. Гистограммы и кривые плотности /(Гт&х) распреде-
ления максимального крутящего момента Ттлх на полуоси КМ
при трогании с места на первой (а) и второй передаче (б)
где /(ав,т) _ плотность распределения опасных напряжений в мате-
риале конструкции; Р(а/аВ]Т) - условная вероятность события а.
Условную вероятность Р(<т/ав>т) события а можно определить
по функции распределения ^’<твт(а) или плотности распределения
/(а), если событие аВ]Т произошло:
сю
/’(ст/а-в,т) = ^<гв,т(сг) = У f(a)da.
Тогда вероятность того, что действующие напряжения превы-
сят предельные значения, можно определить по формуле
сю сю
Рр.зр = У /(ств,т)^ У da^T
— СЮ <Тв,т
171
Вероятность безотказной работы конструкции Р, когда теку-
щие значения напряжений не превышают предельных, получим из
равенства суммы вероятностей данных событий единице:
Р — 1 — Рразр-
В табл. 2.1 приведены формулы для расчета вероятности безот-
казной работы при различных сочетаниях наиболее типичных зако-
нов распределения напряжений а от действующей нагрузки и напря-
жений ав,т, характеризующих прочность материала детали.
В тех случаях, когда не представляется возможным найти закон
распределения совокупного показателя нагрузки и (или) совокупного
показателя прочности, для определения вероятности безотказной ра-
боты используют метод статистических испытаний (метод Монте-
Карло).
Расчеты на сопротивление усталости. Выше было отмечено,
что процесс нагружения деталей КМ можно представить как случай-
ный стационарный процесс, обладающий эргодическим свойством.
Тогда функция входящая в выражение (2.13) для определения
срока службы детали, является функцией случайной величины - дей-
ствующего напряжения. Следовательно, срок службы - тоже функ-
ция случайной величины, определяемой числовыми характеристи-
ками: математическим ожиданием (среднее значение) и дисперсией
(среднее квадратическое значение). Среднее значение срока службы
будет определяться математическим ожиданием величины [.V(cr)]_1,
которым является интеграл:
O’max
У [•/v(<7)] /(o’)da-
О min
Дисперсию срока службы можно получить по дисперсии
pV(cr)j , которая выражена следующей формулой:
O’max
= у pV(a)j f(cr)da - m2N,
O’min
172
Таблица 2.1. Формулы для расчета вероятности безотказной
работы при статическом нагружении
Закон и плотность распределения
для нагрузки для прочности
Нормальный, /(<г) = х хех₽1’ 2^ ] Нормальный, /(л) = х Г (Я-Я)’] ХеХ₽Г ]
Формула для расчета
Экспоненциальный,
/(7?) = Адехр(-АкЯ)
Вейбула,
ло
Закон и плотность распределения
для нагрузки для прочности
Экспоненциальный, Нормальный,
ДО) = Agexp(—AgQ) /(Я)=^Х Г (Я-Я)2] ХеХ₽1 2^ ]
Экспоненциальный, /(Я) = Аяехр(-АкЯ) Вейбула, ДК) = тд' х Г ( R - Яс'."1»] х"хрН“яН ] Гамма, /□«я /(/>!)-Явя’1х 1 (о/г) х схр(-^дЯ)
Продолжение табл. 2.1
Формула для расчета
р = 1 - Ф(-ЯЛк) - ех₽(^—2—
-<-т
р = 1
Ая
А<э + Ад
p = l-^ Jm-RcF"-'*
Яе
Г (R-Rc\mK х D] ,D
х exp I — I—-—I — AqR \ dR.
[ \ no / J
P = i_ [ R<,a-,x
Г(ая) J
x exp[- (Aq H <IH
Окончание табл. 2.1
Закон и плотность распределения Формула для расчета
для нагрузки для прочности
О • е <? Хэ £ Ф" 1 О- о Q. 1 Ю* “о. гв S | ?> II “ Ю С? tt g s s ffl х Логарифмически нормальный, W = A1L-Jil' х ехр{-[1п(Я — lie)- -1п(Я- Яс)]2/ /2<Т1п(Я-Яь)} Р=1 1— 0,1п(Я-Яс)у2тг^ Г [1п(Я - Ле) - 1п(Я - Яе))2 ХеХ₽1 2-?„(Я-В.) fR-QAma\iiR — 1 —z: 1 < u rt \ Qo J j
Вейбула, “о хех± ЬйН ] и I 2 i" «О 1 । al1® IS?"- "s° k * , 2 I? । & "С Л S; 3 " 7 X
Примечание. В таблице приняты следующие обозначения: Q = о; R = <тВ1Г; <?q, Aq,
Ая, ms, R, Rc, Ro, mq, Q, Qc, Qo, 0r, or, ffin(R-flo) - параметры законов распределения; Ф(х) -
'dt-, Г(г) - гамма-функция, T(z) = J1
интеграл вероятное^,'., Ф(х) =
е ‘di.
Используя приведенные зависимости, вычисляют соответству-
ющие среднее значение срока службы и его дисперсию При
этом окончательные уравнения для определения среднего значения
срока службы и его дисперсии Dbh будут зависеть от метода
схематизации исходного нагрузочного режима.
При схематизации случайного эргодического процесса с нор-
мальным распределением по методу превышений заданного уровня
плотность распределения амплитуд напряжений описывается зако-
ном распределения Рэлея:
/Ы = ^ехр[-^],
где аа - текущее значение амплитуды напряжений схематизирован-
ного процесса; - среднее квадратическое значение напряжений
процесса нагружения. Далее, рассматривая случай, когда а = 1,
<ттах = оо, ^min = а-1д и кривая усталости задана уравнением
1Ч0(а-1л/а)т при сг>сг_1Д;
оо при а < <7-1 д;
получим следующие выражения для искомых величин:
г______________Т^0(а-1л/а)т____________.
h 2m/2r[(m + 2)/2] р[(<7-1д/<7)2, т + 2] ’
Dlk = aTeLh =
r(m+l)p д/о.)2_ 2т+ 2] ,
— J __________L---------------J___|____2
1г![(т + 2)/2]р![(»-1д/1г)> + 2] *
(2-14)
(2-15)
где Тв - эффективный период изменения нагрузки, Те = 2тг(<70-/а(у);
ад - среднее квадратическое значение скорости изменения напряже-
ния нагрузочного режима; Г(пг) * гамма-функция, пр - некоторая
положительная величина, Р(х2, пг) _ табулированная функция х2'
распределения Пирсона,
176
сю
Р(х2, пг) = [2<"-2)/2Г(пг/2)] I z"-1 ехр(-^) dr,
X
х =
а - коэффициент, учитывающий корреляцию между повреждениями
(можно принять а = 1 + 2р, где р - коэффициент корреляции между
повреждениями, 0 < р < 1).
При корреляции между повреждениями, равной нулю, т.е. для
гипотезы линейного накопления относительных усталостных повре-
ждений, коэффициент а в формуле (2.15) равен единице.
Значения и рассчитанные по соотношениям (2.14) и
(2.15), определяют при постоянной частоте нагружения wo = 2тг/Те,
т.е. для узкополосного случайного процесса (ес = 0). При учете
влияния частотного состава нагрузочного режима расчетные зна-
чения данных величин могут значительно изменяться. Так, для
среднего значения срока службы корректировочный коэффициент
0 = (1 — Сс)-0,0. а уточненный средний срок службы определяют
как L^g = Lfr 3. Отсюда следует, что даже для процессов со срав-
нительно небольшой шириной полосы (ес = 0,6) срок службы зани-
жается в 1.2 раза, а для более широкополосного процесса, например
процесса нагружения балки моста КМ, - приблизительно в 1,4 раза,
т.е. необходимость учета реальной широкополосности нагрузочного
режима совершенно очевидна.
При расчетах усталостной долговечности до сих пор предполага-
лось, что прочностные характеристики материалов (a—i, m, ip и т.д.)
а также характеристики случайных процессов нагружения (wu, сс,
а), входящие в расчетные формулы, являются детерминирован-
ными. Однако в действительности по ряду причин все они обладают
различным рассеянием, т.е. являются случайными величинами со
своими статистическими характеристиками. Так, на разброс пара-
метров прочности материалов значительное влияние оказывают спо-
собы и технология их производства. Основными факторами, опреде-
ляющими рассеяние характеристик нагрузочного режима, являются
условия эксплуатации КМ. Например, дороги одной категории в
различных регионах имеют неодинаковые состояния поверхностей.
В связи с этим усталостная долговечность есть функция несколь-
ких случайных аргументов и обладает некоторым статистическим
рассеянием расчетных значений.
177
В общем случае срок службы детали является нелинейной функ-
цией средних значений независимых переменных, н для определения
плотности распределения, по которой оценивают вероятностное рас-
сеяние расчетных значений, используют несколько методов. Одним
из них является метод линеаризации.
По этому методу получены следующие расчетные формулы для
математического ожидания и дисперсии срока службы детали:
Ls = Ls(a-i, (а), аа, ыи, фа, т, =
<7 max
= а|ши У [/((ff), ёс, tr)/Af('f-1’ т, (а), cr^j da} ;
t^min
— Е@>
(dLs\
+2ЕЕУ,у(гт. 1<J> (2-1б>
i=] >! 1 J
где черта над параметром означает ею среднее значение (например,
<7—1, (ст) - среднее значение соотвегственно <7_। и а); 6, - г-й случай-
(дТв\
ныи параметр процесса нагружения или кривой усталости; (
\ дЬ{ / о
частная производная по 6$, определяемая в точке О, соответствую-
щей его математическому ожиданию; ст^ - среднее квадратическое
значение параметра - коэффициент корреляции между пара-
метрами и bj.
Более простой вид принимает формула (2.16), когда величины
bj некоррелированы, т.е. ггу ~ 0 при i / j. В этом случае
Dl.
Учитывая предыдущее допущение, можно записать формулу для
третьего центрального момента срока службы Ls в виде
178
№L3
/ $bs\3
где V3b “ третий центральный момент параметра b{.
На основании Ls, Dls, рзь3, исходя из теоретических предпо-
сылок и результатов статистической обработки аналогичных эле-
ментов КМ. выбирают закон распределения и рассчитывают его па-
раметры; при этом jz3£a используют для нахождения коэффициента
асимметрии распределения.
Анализ многочисленных экспериментальных исследований пока-
зывает, что распределение усталостной долговечности чаще всего
подчиняется логарифмически нормальному закону. Поэтому распре-
деление логарифма срока службы описывается нормальным законом,
а вероятность разрушения за пробег, меньший вычисляют по
формуле
/ ^p[-(lg^lgL~] (2.17)
' v2tt J L J
rnelgZ5 - среднее значение логарифма срока службы; <rigLa - среднее
квадратическое отклонение логарифма срока службы.
Если ввести новую переменную
«Р = (1g - lgiS)/ffl6Za,
то выражение (2.17) примет вид
Дб1,, = ф(ир) =
—сю
где Ф(ир) - интеграл вероятностей.
Тогда срок службы Lsp, соответствующий заданной вероятно-
сти разрушения Р, определив предварительно соответствующее зна-
чение квантили up, можно вычислить по формуле
lg Lsp = 1g Ls 4- upaig La.
179
Рис. 2.36. Плотности распределения на-
грузки Q на картер ведущего моста при
движении КМ по асфальтобетонной (2).
булыжной (2), грунтовой (5) дорогам
и снежной целине (4)
Среднее квадратическое значение логарифма срока службы де-
тали, определяющее его рассеяние, связано с дисперсиями характе-
ристик рассчитываемого элемента конструкции и процесса нагруже-
ния соотношением
^ё^ - \/CTl2gLeH+CTl2gL5H!
где ^lg Lsa и ^g l3H - среднее квадратическое значение логарифма сро-
ка службы, связанного соответственно с разбросом характеристик
детали и нагрузочного режима.
Значения trig и ^igLSH определяют по результатам обработки
большого объема лабораторных и дорожных испытаний.
При эксплуатации КМ в различных условиях кривые плотно-
сти f(Q) распределения нагрузок Q на детали могут значительно
отличаться одна от другой (рис. 2.36).
Срок службы элемента конструкции в таких случаях оценива-
ют по предельному сроку службы в конкретных условиях и сред-
ней продолжительности работы машины в этих условиях, выражен-
ной в долях а- общего срока службы Ls% до капитального ремонта.
Общий срок службы распределяется по условиям эксплуатации
1, 2, 3, ..., п следующим образом:
180
Lsz = + a2^sY. 4- азЬ&£ 4-... 4- anLS£',
n
ai + «2 4- «3 + • • 4- «n = «i = 1-
i=l
Вероятность Рразр разрушения детали при пробеге в режимах
эксплуатации 1, 2, 3, п определяют как отношение пробега в
данных условиях к пробегу, при котором в этих условиях происходит
разрушение детали Ь8{:
^разр! = Ррлзр2 = a2^Js'L / ^s2?
^разрЗ = Ррлзрп = anLsY.I i-'sni
при этом Рразр1- = 1.
:=1
Если допустить, что отдельные режимы эксплуатации неза-
висимо влияют на усталостную долговечность элементов КМ, то
разрушение наступит при условии
ajLsz _ J
i=l ^si
Отсюда срок службы детали в смешанных условиях движения ма-
шины можно определить через частные сроки службы в каждом кон-
кретном случае эксплуатации:
При определении срока службы детали с заданной гарантированной
вероятностью неразрушения Рг, т.е. гарантированным сроком служ-
бы детали до разрушения, выражение (2.18) принимает вид
Такую оценку срока службы элементов конструкции можно ис-
пользовать при различных сочетаниях условий эксплуатации колес-
ной машины.
181
2.7. Надежность
Основные термины и определения
Под надежностью понимается свойство объекта (машины, агре-
гата, узла, детали) сохранять во времени в установленных преде-
лах значения всех параметров, характеризующих способность вы-
полнять требуемые функции в заданных режимах и условиях при-
менения, технического обслуживания, ремонтов, хранения и транс-
портирования.
Надежность в зависимости от назначения КМ и условий ее экс-
плуатации включает: безотказность, долговечность, ремонтопри-
годность и сохраняемость.
Безотказность - свойство объекта непрерывно сохранять ра-
ботоспособное состояние в течение некоторого времени или некото-
рой наработки. В работоспособном состоянии машина должна на-
ходиться как в период ее эксплуатации, так и в периоды хранения
и транспортирования. При нарушении работоспособности КМ необ-
ходимо проведение работ в объеме текущего ремонта, в то же время
техническое обслуживание не является признаком нарушения ее ра-
ботоспособности.
Долговечность - это свойство объекта сохранять работоспособ-
ное состояние до наступления предельного состояния при устано-
вленной системе технического обслуживания и ремонта. Долговеч-
ность элементов, являющихся составными частями более сложных
объектов, может характеризовать безотказность последних. Напри-
мер, от долговечности ремня привода вентилятора зависит безотказ-
ность двигателя.
Ремонтопригодность - свойство объекта, заключающееся в
приспособленности к предупреждению и обнаружению причин воз-
никновения отказов, повреждений и поддержанию и восстановлению
работоспособного состояния путем проведения технического обслу-
живания и ремонтов. Значения показателей ремонтопригодности
должны быть заданы в технической документации для регламенти-
рованных условий технического обслуживания и ремонта.
Сохраняемость - это свойство объекта сохранять значения по-
казателей безотказности, долговечности и ремонтопригодности в те-
чение и после хранения и (или) транспортирования.
Машина, находящаяся в эксплуатации, при исправном состоя-
нии должна соответствовать всем требованиям нормативно-техни-
ческой и конструкторской документации. Это понятие шире поня-
182
тия “работоспособное состояние”. Работоспособная машина в отли-
чие от исправной удовлетворяет лишь тем требованиям норматив-
ной документации, которые обеспечивают ее нормальное функцио-
нирование при выполнении заданных функций, т. е. осуществлении
перевозок. При этом она может не удовлетворять, например, требо-
ваниям, относящимся к ее внешнему виду (нарушение декоративного
покрытия, вмятины на деталях кузова и др.).
Объект с точки зрения надежности может находиться в одном из
следующих состояний: исправном, неисправном, работоспособном,
неработоспособном, предельном.
Исправное состояние - состояние объекта, при котором он со-
ответствует всем требованиям нормативно-технической и (или) кон-
структорской (проектной) документации.
Неисправное состояние - состояние объекта, при котором он не
удолетворяет хотя бы одному из требований нормативно-техни-
ческой и (или) конструкторской (проектной) документации.
Работоспособное состояние - состояние объекта, при кото-
ром значения всех параметров, характеризующих способность объ-
екта выполнять заданные функции, соответствуют требованиям
нормативно-технической и (или) конструкторской (проектной) до-
кументации.
Неработоспособное состояние - состояние, при котором значе-
ние хотя бы одного параметра, характеризующего способность объ-
екта выполнять заданные функции, не соответствует требованиям
нормативно-технической и (или) конструкторской документации.
Следует различать два вида неработоспособности; устранимую
и неустранимую. Работоспособность объекта может быть восста-
новлена при выполнении ремонтных работ. Неработоспособность
неустранима, когда восстановление объекта технически невозможно
(предельное состояние) или экономически невыгодно, в связи с чем
дальнейшее его применение по назначению недопустимо или нецеле-
сообразно.
Таким образом, наступление предельного состояния определя-
ется моментом, когда дальнейшая эксплуатация машины невозмож-
на или нецелесообразна по одной или нескольким причинам: стано-
вится невозможным поддержание безопасности, безотказности или
эффективности объекта на допустимом уровне во время эксплуата-
ции; в результате изнашивания и (или) старения объект пришел в
такое состояние, при котором ремонт требует больших затрат и не
обеспечивает необходимый уровень восстановления работоспособно-
сти.
183
КМ относится к таким изделиям, которые не сохраняют рабо-
тоспособное состояние до наступления предельного , т.е. его безот-
казность меньше наработки, соответствующей долговечности.
Переход объекта из работоспособного в неработоспособное со-
стояние происходит при наступлении события, называемого отка-
зом.
Отказ - событие, заключающееся в нарушении работоспособ-
ного состояния объекта. Следует различать отказ и повреждение.
Последнее заключается в нарушении исправного состояния объекта
при сохранении работоспособного.
Переход объекта из одного состояния в другое обычно происхо-
дит вследствие повреждения или отказа.
При проведении анализа отказов необходимо учитывать все фак-
торы, приводящие к нарушению работоспособности машины. Пре-
жде всего следует определить место отказа или неисправности (агре-
гат, узел, деталь), для указания которого пользуются нумерацией и
наименованиями, принятыми в системе обозначений автомобильного
подвижного состава.
К частичным отказам, снижающим эксплуатационные качества
машины, относятся отказы, увеличивающие время подготовки к дви-
жению из-за необходимости проведения незапланированных крепеж-
ных или регулировочных работ (устранение течи топлива или сма-
зочного материала), снижающие среднюю скорость движения и гру-
зоподъемность машины до значений, допускающих ее использование
в течение некоторого времени.
К полным отказам, лишаюшим машину подвижности, относят-
ся отказы, без устранения которых движение машины невозможно
(например, поломка карданного вала) или недопустимо (например,
разрушение питающей магистрали пневмопривода тормозов).
Для количественной характеристики каждого из свойств надеж-
ности машины служат такие единичные показатели, как наработка,
наработка на отказ, наработка между отказами, ресурс, срок служ-
бы, срок сохраняемости, время восстановления. Значения этих по-
казателей получают по данным испытаний или эксплуатации.
Наработка - продолжительность или объем работы объекта.
Ресурс - суммарная наработка объекта от начала его эксплу-
атации или возобновления после ремонта до перехода в предельное
состояние.
Срок службы - календарная продолжительность эксплуатации
объекта или ее возобновление после ремонта от начала использова-
ния до наступления предельного состояния.
184
Срок сохраняемости - календарная продолжительность хране-
ния и (или) транспортирования объекта в заданных условиях, в те-
чение и после которых сохраняются исправность, а также значе-
ния показателей безотказности, долговечности и ремонтопригодно-
сти в пределах, установленных нормативно-технической документа-
цией на данный объект.
Время восстановления - календарная продолжительность опе-
раций по восстановлению работоспособного состояния объекта или
продолжительность операций по его техническому обслуживанию.
Для качественной характеристики надежности используют по-
казатели надежности.
Показатели надежности
Надежность КМ зависит от множества факторов, характеризу-
ющих качество ее проектирования, изготовления, организацию тех-
нической эксплуатации, а также условия эксплуатации. Поэтому
надежность машин даже одной и той же модели различна.
Величины, характеризующие надежность КМ, их агрегатов, уз-
лов и деталей, имеют случайный характер. Поэтому ее можно ха-
рактеризовать только путем обработки большого числа данных, по-
лученных при эксплуатации или испытаниях машин, используя по-
нятия теории вероятностей и математической статистики.
Показатели безотказности. Одним из важнейших показателей
безотказности является вероятность безотказной работы, т.е. ве-
роятность того, что в пределах заданной наработки отказ объекта
(машины, агрегата, узла, детали) не возникнет.
Статистическую оценку вероятности безотказной работы за вре-
мя t определяют из соотношения
где Лгр - число работоспособных объектов к концу времени t испыта-
ний или эксплуатации; N - число объектов, поставленных на испы-
тания или эксплуатацию; п(£) - число объектов, отказавших к концу
времени t испытаний или эксплуатации.
Так как безотказная работа и отказ - взаимно противоположные
события, то оценку вероятности отказа определяют по формуле
Q(i) = 1 - P(t) = n(t)/N.
185
Распределение отказов во времени характеризуется плотностью
распределения /(/) наработки до отказа. Статистическая оценка
плотности распределения имеет вид
/(<) =
Дп(/)
Wat
где Дп(/) - приращение числа отказавших объектов за время ДЛ
В смысле теории вероятностей, плотность распределения нара-
ботки до отказа
Тогда вероятности отказов и безотказной работы через плот-
ность распределения выразятся зависимостями
<?(<) = J f(i)di;
P(i) = 1 - Q(t) = 1 - у f(i)di = У /(/) dt.
Интенсивность отказов в статистической трактовке определяет-
ся по формуле
а в теории вероятностей зависимостью
X(t} - ж
рцу
Отсюда вероятность безотказной работы после преобразова-
ний примет вид
I
Р(4) = ехр[-уА(«)й].
О
Это соотношение является одним из основных уравнений теории
надежности.
186
В рассматриваемых способах опенки вероятности безотказной
работы до первого отказа отказы не различают по тяжести их по-
следствий. В большинстве случаев при проектировании необходи-
мо установить критерий отказа объекта: по экономическим послед-
ствиям восстановления его работоспособности, вследствие исчерпа-
ния ресурса и по другим характеристикам.
Критерием отказа называют признак или совокупность при-
знаков неработоспособного состояния объекта, установленных в
нормативно-технической или конструкторской документации.
Средняя наработка на отказ - это отношение наработки вос-
станавливаемого объекта к математическому ожиданию числа его
отказов в течение этой наработки.
Статистическую оценку среднего значения наработки на отказ
вычисляют как отношение суммарной наработки за рассматривае-
мый период испытаний или эксплуатиции объектов к суммарному
числу отказов этих объектов за тот же период:
1=1 :=1
Средняя наработка до отказа - это математическое ожидание
наработки объекта до первого отказа. Для непрерывной функции
ее определяют по формуле
оо
Т = У P(t)dt,
t
а для дискретной функции P(i)
k
i=l
где P(ti) = Npi/N\ Npi - число работоспособных объектов на интер-
вале наработки Д/j = i— if, N - общее число объектов, поставлен-
ных на испытание или в эксплуатацию; k - общее число рассматри-
ваемых интервалов наработки в эмпирической функции надежности.
Средняя наработка между отказами - это математическое
ожидание наработки объекта от окончания восстановления его рабо-
тоспособного состояния после отказа до возникновения следующего
отказа.
187
Статистическую оценку среднего значения наработки между от-
казами вычисляют как отношение суммарной наработки объекта
между отказами за рассматриваемый период испытаний или эксплу-
атации к числу отказов этого объекта за тот же период:
т
Т = ^/т-
1=1
Перечисленные показатели безотказности в зависимости от це-
лей исследования определяют на различных стадиях работы объек-
та. Так наработку на отказ в период приработки объекта определя-
ют для выявления ранних отказов с целью принятия необходимых
мер по совершенствованию конструкции и технологии изготовления,
исключающих причины появления подобных отказов при серийном
производстве этих объектов.
На стадии серийного изготовления показатели безотказности
вычисляют с целью контроля их нормируемых значений через опре-
деленные промежутки календарного времени.
Показатели долговечности. Средний ресурс - математическое
ожидание ресурса. Статистическая оценка среднего ресурса
Гр = £тр./Л',
1=1
где Tpi - ресурс г-го объекта; N - число объектов, поставленных на
испытания или в эксплуатацию.
Гамма-процентный ресурс представляет собой наработку, в те-
чение которой объект не достигает предельного состояния с заданной
вероятностью 7, выраженной в процентах.
Гамма-процентный ресурс определяют с помощью кривых рас-
пределения ресурсов (рис. 2.37).
Вероятность обеспечения ресурса, соответствующую значению
7/IOO, определяют по формуле
оо
J P(Tp)dTp = ^,
Тру
где Тру - наработка до предельного состояния (ресурса).
188
Рис. 2.37. Кривые убыли (а) и распределения (б) гамма-
процентного ресурса
Гамма-процентный ресурс является основным расчетным пока-
зателем для подшипников и других элементов. Существенное досто-
инство этого показателя - возможность его определения до заверше-
ния испытаний всех образцов. В большинстве случаев для различ-
ных элементов используют 90 %-ный ресурс.
Назначенный ресурс - суммарная наработка, при достижении
которой применение объекта по назначению должно быть прекра-
щено независимо от его технического состояния.
Под установленным ресурсом понимается технически обосно-
ванный или заданный ресурс, обеспечиваемый конструкцией, тех-
нологией и эксплуатацией, в пределах которого объект не должен
достигать предельного состояния.
Средний срок службы - математическое ожидание срока службы
объекта. Статистическую оценку среднего срока службы определя-
ют по формуле
N
TC, = Y.T^/N’
i=l
где Тсл1 - срок службы г-го объекта.
Гамма-процентный срок службы представляет собой календар-
ную продолжительность эксплуатации, в течение которой объект не
достигает предельного состояния с вероятностью 7, выраженной в
процентах. Для его расчета используют соотношение
оо
^сл-у
189
Назначенный срок службы - суммарная календарная продолжи-
тельность эксплуатации, при достижении которой применение объ-
екта по назначению должно быть прекращено независимо от его тех-
нического состояния.
Под установленным сроком службы понимают технико-эконо-
мически обоснованный или заданный срок службы, обеспечиваемый
конструкцией, технологией и эксплуатацией, в пределах которого
объект не должен достигать предельного состояния.
Показатели ремонтопригодности. Чаще всего используют два
показателя ремонтопригодности - среднее время восстановления и
вероятность восстановления.
Среднее время восстановления - математическое ожидание вре-
мени восстановления объекта. Статистическую оценку этого пара-
метра определяют по формуле
т
Т» = Л T»klm>
k=\
где Т3}. - время восстановления k-ro отказа объекта; т - число от-
казов объекта за заданный срок испытаний или эксплуатации.
Вероятность восстановления работоспособного состояния -
это вероятность того, что объект будет восстановлен в заданное
время /в. Для большинства изделий машиностроения вероятность
восстановления подчиняется экспоненциальному закону распределе-
ния:
Л>(г) = e~xt,
где А - интенсивность отказов (принимается постоянной).
Показатели сохраняемости. Средний срок сохраняемости -
математическое ожидание срока сохраняемости объекта. В стати-
стической трактовке этот показатель определеляют по формуле
тс = £тс1/лг,
1=1
где Tci - срок сохраняемости г-го объекта.
Гамма-процентный срок сохраняемости - календарная продол-
жительность хранения и (или) транспортирования объекта, в тече-
ние и после которой показатели безотказности, долговечности и ре-
монтопригодности объекта не выйдут за установленные пределы с
вероятностью 7, выраженной в процентах.
190
Как и гамма-процентный ресурс, значение гамма-процентного
срока сохраняемости определяют, используя выражение
оо
Р(ТС7)= J P(Tc)dTc = ^..
Тс-,
Назначенный срок хранения - календарная продолжительность
хранения в заданных условиях, по истечении которой применение
объекта по назначению не допускается независимо от его техниче-
ского состояния.
Под установленным сроком сохраняемости понимают технико-
экономически обоснованный (или заданный) срок хранения, обеспе-
чиваемый конструкцией и эксплуатацией, в пределах которого пока-
затели безотказности, долговечности и ремонтопригодности объекта
сохраняются теми же, какими они были у объекта до начала его хра-
нения и (или) транспортирования.
Комплексные показатели. К комплексным показателям отно-
сятся коэффициенты готовности, технического использования и опе-
ративной готовности.
Коэффициент готовности (Л"г) - вероятность того, что объект
окажется работоспособным в произвольный момент времени, кро-
ме планируемых периодов, в течение которых применение объекта
по назначению не предусматривается. По значению Кг судят о на-
дежности объекта на определенном интервале эксплуатации, поэто-
му при нормировании этого показателя необходимо в нормативно-
технической документации указывать интервал эксплуатации объ-
екта, на котором следует оценивать Кг. Среднее статистическое
значение К? определяют по формуле
где N - число наблюдаемых объектов в заданном интервале эксплу-
атации; Ц - суммарная наработка i-го объекта в заданном интервале
эксплуатации; т, - суммарное время восстановления г-го объекта за
тот же период эксплуатации.
191
Если на заданном интервале эксплуатации определены среднее
значение наработки на отказ и среднее время восстановления объек-
та после отказа, то
к т°
г То + т,
Коэффициент технического использования - отношение мате-
матического ожидания наработки объекта на отказ за некоторый
период эксплуатации к сумме математических ожиданий наработки
на отказ, продолжительности технических обслуживаний гт.о, пла-
новых ремонтов тр и неплановых восстановлений тв за тот же период
эксплуатации. Рассчитывают /Ст.и по формуле
ЛТ.И — гт, . . , •
*о + Ту.о -f- Тр 4- тв
Коэффициент оперативной готовности - вероятность того,
что объект окажется работоспособным в произвольный момент вре-
мени, кроме планируемых периодов, в течение которых применение
объекта по назначению не предусматривается, и, начиная с этого
момента, объект будет работать безотказно в течение заданного ин-
тервала времени.
Численное значение коэффициента оперативной готовности
определяют из выражения
Ko.r = KTP(tQ, Zi), (2.19)
где P(to, ti) - вероятность безотказной работы объекта в интерва-
ле (io, ii); io * момент времени, с которого возникает необходимость
применения объекта по назначению; ii - момент времени, когда при-
менение объекта по назначению прекращается.
Коэффициент КГ в формуле (2.19) определяют для периода ожи-
дания работы, непосредственно предшествующего моменту io, когда
возникает необходимость в применении объекта.
Рассмотренные выше количественные показатели надежности
непосредственно связаны с отказами изделия. В зависимости от при-
чин возникновения отказов последние подразделяют на случайные и
систематические.
В соответствии с этими причинами, а также по характеру раз-
вития и проявления отказы подразделяют на внезапные (поломки) и
постепенные (износ, старение). Внезапные отказы являются более
опасными, чем постепенные.
192
По причинам возникновения различают конструкционные (вы-
званы недостатком конструкции), технологические (производствен-
ные, вызваны несовершенством или нарушением технологии) и экс-
плуатационные (вызваны неправильной эксплуатацией) отказы.
По своей физической природе отказы бывают связаны с разруше-
нием самой детали и ее поверхностей (поломки, выкрашивание, из-
нос, коррозия, старение) или не связаны с этими разрушениями (за-
сорение каналов подачи топлива, смазки или подачи рабочей жидко-
сти в гидроприводах, ослабление соединений, загрязнение или осла-
бление электроконтактов). В результате отказы могут быть устра-
нены заменой деталей, их регулированием или очисткой их поверх-
ностей.
По времени возникновения отказы делят на приработочные (воз-
никают в первый период эксплуатации), внезапные (возникают в пе-
риод нормальной эксплуатации - назначенный ресурс) и износовые
(вызваны износом и старением деталей).
По сложности устранения различают отказы, устраняемые в
порядке технического обслуживания и при среднем или капиталь-
ном ремонте. В зависимости от места устранения различают отка-
зы, не устраняемые в эксплуатационных условиях и устраняемые в
стационарных условиях.
Поскольку все нормативы для КМ установлены на 1 км пробе-
га, показатели их надежности целесообразно рассматривать не как
функцию времени t, а как функцию пробега I.
Числовые значения показателей надежности КМ определяют по
результатам наблюдений в условиях эксплуатации или испытаний.
Показателям надежности, связанным с конкретными причина-
ми отказов некоторых групп изделий, присущи определенные за-
кономерности, описываемые математическими моделями - закона-
ми распределения. В табл. 2.2 приведены формулы для определения
вероятности безотказной работы объектов автомобилестроения при
наиболее распространенных законах распределения отказов.
Нормальный закон распределения отказов наблюдается в случа-
ях, когда отказ обусловлен большим числом факторов, мало зави-
сящих между собой, причем ни один из них не является превали-
рующим, а доля внезапных отказов весьма мала. Это, например,
отказы, связанные с явлениями изнашивания.
Логарифмически нормальному закону распределения соответ-
ствуют отказы, обусловленные усталостными разрушениями эле-
ментов агрегатов и систем КМ.
7 — 692
193
Таблица 2.2. Формулы для определения вероятности безотказной работы
Закон и плотность распределения Расчетная формула
Нормальный, Ж = ,72?ХЧ~( ]’ где 0 < 1 < оо, а > 0 = 1 - -А= х <Т\/27Г ' Г (/ - m)21 XiM 2а’ Г
Логарифмически нормальный, ДО , д-х ех₽ 9„г Ь /o’lnivS^r L 2<Т|И ( J где 0</<оо;сг>0 Р(')=1 /Г‘х O'ln IV J 0 Г (In 1 - m,n ()21 Х"Х'*[- 2a?n, Г
Экспоненциальный, /(/) = Аоехр(-Ао/), где 0 < / < оо, Ао > 0 < хр(-Ао/)
Вейбула, /('>=К0 хехр[_0]’ где 0 < / < оо, а > 0, b > 0 Р(/)=ехр[-(0 ]
Примечание. Здесь т и сг - математическое ожидание и среднее квадратическое значение
наработки до первого отказа; Ао, а и b - параметры соответствующих законов распределения.
Экспоненциальный закон распределения отказов справедлив для
машин, их узлов и агрегатов, т.е. сложных систем, состоящих из
большого числа деталей, отказы которых, включая внезапные, явля-
ются следствием различных причин, в том числе тяжелых условий
эксплуатации.
Закон распределения Вейбулла описывает явления, связанные с
нарушением работоспособности конструктивных элементов машин
вследствие сочетания износа и усталостных повреждений.
Согласно исследованиям, у 60 % деталей машины распределение
отказов подчиняется закону Вейбулла с параметром b = 1,1... 3,18;
у 35 % - нормальному закону, у 3 % - экспоненциальному и у 2 % -
логарифмически нормальному.
Законы распределения ресурсов изделий зависят от их нагру-
женности и методов испытаний (стендовых, полигонных, эксплуата-
ционных). Поэтому для оценки показателей надежности рекоменду-
ется пользоваться экспериментальными методами определения зако-
на и параметров распределения с периодической их проверкой, со-
поставлением результатов испытаний, выполнением сравнительных
расчетов по нескольким вариантам распределений, особенно для нор-
мирования показателей надежности. Одновременно следует учиты-
вать конкретную ситуацию, например условия эксплуатации, экспе-
римента и степень достоверности информации.
Знание законов распределения наработок на отказ имеет боль-
шое практическое значение и позволяет глубже познать природу от-
казов, их физическую сущность; обобщить отказы с общими зако-
номерностями распределения наработок и выработать стратегию их
предупреждения; более точно проводить расчеты по надежности и
объему ремонтных работ; моделировать и прогнозировать отказы;
совершенствовать систему технического обслуживания и ремонта.
Структурный и функциональный анализ надежности
Функциональная структура'любой системы, в том числе и КМ,
определяет закон взаимодействия технических характеристик эле-
ментов, согласно которому они функционируют определенным обра-
зом и в определенной последовательности. Систему, для успешного
функционирования которой потребуется исправная работа всех эле-
ментов, называют последовательной.
Структурная и функциональная избыточности являются одним
из основных способов обеспечения надежности.
7*
195
При проектировании на основании расчетов выбирают мини-
мально необходимую структуру системы, обеспечивающую требу-
емые уровни технических характеристик для выполнения системой
ее функций. Затем, благодаря введению резервирования, структу-
ру доводят до соответствующего уровня сложности, который обес-
печивает выполнение заданных функций с требуемой надежностью.
Окончательно структуру сложной системы доводят в процессе от-
работки с использованием результатов испытаний. На этом этапе
проверяют правильность заложенных технических решений и вы-
являют истинные запасы структурной и функциональной избыточ-
ностей, обеспечивающих требуемую надежность.
Структурная схема надежности для последовательной системы
приведена на рис. 2.38.
р,т — рги)--------------------p„(t)
Рис. 2.38. Структурная схема надежности
для последовательной системы
Вероятность безотказной работы такой системы в течение за-
данной наработки (0, t) равна
п
рщ = п w = ехр
:=1
где - вероятность безотказной работы г-го элемента; -
интенсивность отказов г-го элемента; п - число элементов в системе.
При постоянной интенсивности отказов
Pj(t) = ехр[—Ajt].
Интенсивность отказов системы
а = £а(.
1=1
Чем больше последовательно соединенных элементов входит в
систему, тем надежность системы ниже. Поэтому при последова-
тельном соединении элементов для получения высокой надежности
196
системы нужно или уменьшить до минимума число элементов, или
увеличить надежность каждого из них.
Параллельной называется система, состоящая из п элементов и
построенная таким образом, что ее отказ происходит лишь в случае
отказа всех элементов, т. е. система исправна, если исправен хотя
бы один ее элемент. Такое соединение часто называют резервиро-
ванием. В большинстве случаев резервирование оправдывает себя,
несмотря на увеличение стоимости. При конструировании техниче-
ских систем в зависимости от выполняемой системой задачи при-
меняют “горячее” или “холодное”, а также общее или раздельное
(поканальное и поэлементное) резервирование.
“Горячее” резервирование используют тогда, когда не допуска-
ется перерыва времени на переключение отказавшего элемента на
резервный с целью выполнения задачи в установленное время.
“Холодное” резервирование применяют тогда, когда требуется
увеличение ресурса работы элемента и допускается время на пере-
ключение отказавшего элемента на резервный.
|—p/znffl р
—| P2i(t) J---J Р2т (У |—
-ръю [-
]-
а
—j /д/ (I) |—•••—| Pnm(t)
б
Pnr(t) |—
в
Рис. 2.39. Структурная схема надежности системы при общем (а),
поканальном (б) и поэлементном (в) резервировании
Структурная схема надежности при общем резервировании
представлена на рис. 2.39, а.
При общем резервировании вероятность безотказной работы
п
ри = 1-П[1-лт],
г=1
где Pj(t) - вероятность безотказной работы г-го элемента в течение
заданной наработки (0,2); п - число параллельно соединенных эле-
ментов.
197
Для экспоненциального закона распределения наработки до от-
каза при общем резервировании
п
=1 - ГЦ1 ~ ехр(-Л’()]’ (2-2°)
г=1
где - интенсивность отказов г-го элемента.
Для высоконадежных систем, когда 1 , выражение (2.20)
можно записать в виде
п
1=1
При поканальном резервировании (рис. 2.39, б) вероятность бе-
зотказной работы системы
п т
p(t) = 1 - П О _ П ехр( ~л а1)]
г=1 j = i
В этом случае для высоконадежных систем 1) имеем
гг т
г=1 “ j=1
При поэлементном резервировании (рис. 2.39, в) вероятность бе-
зотказной работы системы
т п
P(i) = П^-Ш1 -ехР(-А.?)]}- (2.21)
}=1 г=1
Для высоконадежных систем (X^i 1) выражение (2.21) при-
нимает вид
т п т п
гм^П{1-П(м}г1-ЕПч<
j=l 1=1 j=l1=1
Необходимо отметить, что многие технические системы имеют
такую структуру соединения элементов, которая не может быть све-
дена к параллельно-последовательным схемам, представленным на
рис. 2.39, б, в.
198
В теории надежности часто рассматривают системы с частич-
ным резервированием, когда работоспособность системы определя-
ется при ^-исправных элементах из п.
Расчетная формула при этом выглядит так:
PM =
где Pjfc(i) - вероятность исправной работы k элементов; =
= (n!)/[fc!(n — &)!]; Pi(t) - вероятность исправной работы одного эле-
мента; Qi(t) - вероятность отказа одного элемента.
Таким образом, безотказная работа системы эквивалентна со-
бытию, состоящему в том, что исправны, по крайней мере, j эле-
ментов. При j = 1 система будет полностью, а в остальных случаях
- частично параллельной. Тогда вероятность безотказной работы
системы можно определить по формуле
k=j
Методика проектного расчета надежности
технического объекта
Целью расчета является теоретическое определение количе-
ственных показателей надежности, заданных в техническом задании
в виде вероятности безотказной работы P(t), коэффициента готов-
ности Кг, средней наработки на отказ То, среднего времени восста-
новления Тъ и др. Технический объек т должен выполнять возложен-
ные на него функции при заданных режимах и условиях применения,
техническом обслуживании, ремонте, хранении и транспортирова-
нии на требуемом уровне за заданный промежуток времени, уста-
новленный в техническом задании или определенный техническими
требованиями.
Проектный расчет надежности технического объекта проводят
по материалам эскизного проектирования либо по материалам тех-
нического и рабочего проектов. На те элементы, узлы и механизмы,
которые имеют статистические данные изделий-аналогов, получен-
ные в условиях эксплуатации или по результатам испытаний, в рас-
чете надежности используют такие показатели, как средняя нара-
ботка на отказ или интенсивность отказов, среднее время восстано-
вления и др.
199
Рис. 2.40. Структурная схема надежности технической системы:
ПС - последовательное соединение; ПкР - поканальное резервирование;
ПэР - поэлементное резервирование
На основе анализа работы технического объекта, его функци-
ональной схемы и назначения составляют структурную схему на-
дежности (рис. 2.40). представляющую собой последовательно или
параллельно соединенные прямоугольники, каждый из которых обо-
значает законченный узел, механизм, агрегат и т.п.
В зависимости от ответственности выполняемой объектом за-
дачи структурные схемы имеют последовательное, параллельное и
смешанное соединение агрегатов, механизмов, узлов. В свою оче-
редь, каждый агрегат, механизм, узел состоит из большого числа
элементов.
Расчет надежности объекта основан на использовании интен-
сивности отказов и принятом допущении о ее постоянстве в течение
гарантийного срока эксплуатации. Такое допущение позволяет при-
менять при расчете экспоненциальный закон распределения. При
этом формула для вероятности безотказной работы имеет вид
п
Р(«) = ехр(-У2А<г)-
г=1
При проектном расчете надежности сложного технического объ-
екта принимают следующие предпосылки и допущения.
1. Структурную схему надежности составляют, исходя из функ-
ционального назначения определенной группы узлов, механизмов и
агрегатов, выполняющих поставленную задачу в соответствии с ци-
клограммой работы.
2. В связи с тем, что каждое предприятие имеет свои индивиду-
альные особенности в технологии изготовления, культуре производ-
ства, квалификации кадров, методах контроля и т. п., в проектных
расчетах надежности следует использовать интенсивность отказов
200
только по элементам-аналогам данного предприятия. Это связано с
тем, что каждое предприятие имеет большую преемственность в ис-
пользовании существующей оснастки, стендового оборудования, спе-
циальной оснастки для изготовления аналогичных деталей, узлов,
механизмов, агрегатов.
3. Если в процессе испытаний или эксплуатации отказов по эле-
ментам структурной схемы надежности не наблюдалось, то в первом
приближении вероятность безотказной работы этих элементов мож-
но принять равной единице.
Для определения вероятности безотказной работы любой дета-
ли, узла, механизма внутри элемента структурной схемы надежно-
сти следует использовать только интенсивность отказов отказавших
деталей, узлов, механизмов; неотказавшие детали, узлы, механизмы
при расчете вероятности безотказной работы не учитывают.
4. Проектный расчет надежности технического объекта целесо-
образно проводить в два этапа:
1) по результатам статистических данных наработок на отказ,
полученных в процессе всех видов испытаний образцов-аналогов;
2) по результатам статистических данных наработок на отказ,
полученных в процессе эксплуатации образцов-аналогов.
Следует иметь в виду, что проектный расчет значений показа-
телей надежности является дополнительным материалом для объек-
тивной оценки надежности объекта на стадии разработки. Опреде-
ляющую роль в обеспечении надежности объекта закладывает кон-
структор, используя интуицию, существующие методы конструиро-
вания и богатый опыт конструкторских разработок.
Проектный расчет надежности изделий следует рассматривать
как необходимый дополнительный материал для проведения сравни-
тельного анализа разработчиком и выработки им совместно со служ-
бой надежности рекомендаций по повышению надежности.
Рассмотрим более подробно методику проектного расчета следу-
ющих количественных показателей надежности: Р(£) и (сред-
нее квадратическое отклонение вероятности безотказной работы),
Кг и сткг (среднее квадратическое отклонение коэффициента готов-
ности), То, Тв.
В случае отсутствия статистических данных по результатам
испытаний или эксплуатации для расчета вероятности безотказной
работы используют справочные данные по интенсивностям отказов.
201
Расчетная формула выглядит следующим образом:
/ п \
P(t) = exp I - ^2 «М j =
\ г=1 /
(п \
— ^ixp^ixp Н" -^гтр^тр^ J ? (2.22)
г=1 /
гДе , AjXp, AjTp - интенсивность отказов г-го элемента во время ра-
боты, хранения и транспортирования; ^хр и tjTp - время работы,
хранения и транспортирования г-го элемента; п - число элементов,
входящих в структурную схему надежности.
Интенсивность отказов работающих в нормальных условиях де-
тали, узла, механизма выбирают из справочной литературы. Для
случая работы элемента в утяжеленных условиях используют фор-
мулу пересчета вида
Аф = Ajo<ii,
где А|о - интенсивность отказов в нормальных условиях эксплуата-
ции (температура окружающей среды 20 ... 25° С, влажность 60 %,
нормальная нагрузка — 1,0); а, - коэффициент, учитывающий
нагрузку элемента и его температурный режим в соответствии с
техническим заданием, например, температура окружающей среды
±50° С, влажность воздуха 90 % Для механических элементов ко-
эффициент нагрузки принимают равным единице; А;о выбирают по
справочным данным; а <ц - по справочным данным, расчетным пу-
тем или по графикам.
При отсутствии данных о надежности элементов для перио-
дов работы в фактических условиях хранения и транспортирова-
ния принимают следующие соотношения интенсивностей отказов:
Ахр = Ю ; Ахр.тр = 1,5Ахр; Ар.?р = 1,5Ар.
Как правило, формулу (2.22) используют для определения ве-
роятности безотказной работы элемента структурной схемы надеж-
ности объекта. Вероятность безотказной работы сложного техниче-
ского объекта, состоящего из нескольких элементов, вычисляют как
произведение вероятностей по формуле
Nt
1=1
202
где Pi(t) - вероятность безотказной работы за время t г-го элемента
структурной схемы надежности; Nj - число элементов структурной
схемы надежности, участвующих в выполнении работы.
При наличии статистических данных по результатам испыта-
ний или эксплуатации аналогичных элементов вероятность безот-
казной работы
w=1 - 5
где тг - число отказов г-го элемента, п* - число циклов испытаний
г-го элемента.
При числе отказов тщ — 0 и п,- < 100
Pitf) = 1 - ? г
2 \пг + 2)
В случае п, > 100 в первом приближении принимаем = 1) 0-
Среднее квадратическое отклонение показателя P(t) для систе-
мы в целом равно
Р
= \1 22 стр)
При числе отказов т, 0
у/лсо [i-ед]
В случае отсутствия отказов (тп$ = 0)
_ 1 /5п, + 7
2(п, + 2) у Щ + 3
При отсутствии статистических данных среднее квадрати-
ческое отклонение принимают равным интенсивности отказов:
CTPt(t) =
Коэффициент готовности рассчитывают по выражению
Кг = 1 — Крем “ Крегл)
/^2
где Крем - коэффициент ремонта; Крем = £ KpeMj; KpeMj - коэф-
г=1
фициент ремонта г-го элемента; N? - число элементов, входящих в
203
структурную схему надежности и влияющих на коэффициент готов-
ности; А'регл - коэффициент регламента, #регл = Трегл/^эксп; Грегл ~
время регламента (технического обслуживания); Тэксп _ время экс-
плуатации до проведения регламента.
Коэффициент ремонта можно вычислить по формуле
^рем* = 7рем:/7эксл»
где ТреМ1 - суммарное время непланового ремонта г-го элемента за
период эксплуатации Тэксп-
Можно также использовать выражение вида
zx . — Т»1
лрем: гр , гр i
JBt + J-oi
где Tbi - среднее время восстановления одного отказа г-го элемента;
Tot “ средняя наработка на отказ г-го элемента.
Коэффициент готовности объекта можно определять также по
формуле
Среднее квадратическое отклонение коэффициента готовности в
первом приближении принимают равным среднему квадратическому
отклонению коэффициента ремонта:
= ^А-р-
Для проведения расчета необходимы следующие исходные дан-
ные: время эксплуатации Джсл, продолжительность работы объекта
t для определения вероятности безотказной работы, продолжитель-
ность проведения регламента Трегл, периодичность проведения ре-
гламента, требуемые значения количественных показателей надеж-
ности: Kr, To.
Направления повышения надежности. Надежность КМ при
эксплуатации зависит от ряда факторов, которые можно разделить
условно на субъективные (индивидуальные особенности конструкто-
ра, изготовителя, эксплуатационника) и объективные (эксплуатаци-
онный фон, воздействие внешней среды). По характеру возникнове-
ния факторы можно разделить на конструктивные, технологические
и эксплуатационные, которые определяют комплекс мероприятий по
существенному повышению надежности КМ.
204
К конструктивным мероприятиям относят:
1. Упрощение конструктивной схемы машины, уменьшение чи-
сла составляющих элементов путем ее рационализации.
2. Замену элементов, определяющих надежность машины, более
надежными.
3. Выбор долговечных материалов деталей и рациональных их
сочетаний в сопряжениях.
4. Обеспечение функциональной избыточности элементов маши-
ны повышением прочностных характеристик деталей (этот путь
ограничивается требованиями к снижению материалоемкости, энер-
гоемкости и стоимости).
5. Защиту элементов машины от разрушающих действий окру-
жающей среды.
6. Установку различных датчиков и контрольно-измерительных
устройств, сигнализирующих об изменении технического состояния
и о возникновении отказов основных элементов машины.
7. Повышение уровня ремонтопригодности машины более раци-
ональной компоновкой ее элементов, обеспечивающей свободный до-
ступ к наименее надежным сборочным единицам; обеспечение про-
стоты регулирования и замены быстроизнашивающихся деталей.
8. Обеспечение благоприятных условий работы деталей и сма-
зывания трущихся поверхностей. Создание оптимальных темпера-
турных режимов работы сопряжений.
9. Создание эффективных устройств для очистки воздуха, топ-
лива и смазочного материала.
10. Проведение испытаний КМ и их элементов.
Технологическими являются следующие мероприятия.
1. Тщательный подбор материалов деталей в соответствии с тре-
бованиями технической документации и контроль их качества для
своевременного обнаружения скрытых дефектов или несоответствия
физико-механических свойств требуемым.
2. Упрочнение деталей и их рабочих поверхностей термической,
химико-термической обработками и поверхностным пластическим
деформированием.
3. Повышение износостойкости и коррозионной стойкости дета-
лей нанесением покрытий.
4. Строгое соблюдение и совершенствование технологии произ-
водства.
5. Повышение требований к точности основных размеров дета-
лей и качеству их поверхности.
205
6. Применение автоматизированных станков с программным уп-
равлением, обеспечивающих высокую точность и стабильность ха-
рактеристик изделий, для изготовления деталей КМ.
7. Текущий контроль качества изготовления деталей, введение
системы бездефектного проектирования и изготовления продукции.
8. Введение автоматизированной системы управления производ-
ством. Значительное повышение надежности КМ может быть до-
стигнуто повышением прочностных характеристик материалов ме-
ханической, термической или химико-термической обработками де-
талей. Для улучшения прочностных характеристик стальных де-
талей необходимо произвести цементацию, цианирование, нитро-
цементацию, азотирование. Проведение термической и химико-
термической обработок деталей имеет исключительно важное зна-
чение для повышения их долговечности.
Эксплуатационными мероприятиями являются:
1. Повышение квалификации обслуживающего персонала.
2. Строгое соблюдение рекомендаций инструкции по эксплуата-
ции КМ.
3. Обеспечение нормальных режимов работы КМ.
4. Соблюдение правил транспортирования и хранения КМ.
5. Оптимизация режимов и периодичности технического обслу-
живания.
6. Совершенствование организации технического обслуживания
и ремонтов КМ.
7. Проведение диагностики.
8. Совершенствование систем сбора, обработки и анализа ин-
формации о надежности КМ; разработка рекомендаций по повыше-
нию надежности машины и ее элементов.
Прогнозирование надежности
Оценки надежности, полученные по результатам испытаний и
наблюдений в эксплуатации, носят, как правило, характер конста-
тации фактического состояния машины в целом или ее отдельных
элементов. В ряде случаев такие оценки приобретают прогнозиру-
ющий характер. Это происходит, если, например, на основании ре-
зультатов выборочных испытаний делается прогноз о надежности
партии изделий.
Таким образом, количественная оценка надежности может быть
различной направленности: констатацией фактического уровня на-
дежности и прогнозированием изменения уровня надежности за бу-
дущий период эксплуатации изделия.
206
Основой прогнозирования технического состояния КМ являет-
ся изучение поведения одних систем (прогнозируемых) в зависимо-
сти от изменения параметров других (прогнозирующих), чтобы в
вероятностном плане предвидеть, что будет происходить с системой-
функцией, если известно поведение системы-аргумента в настоящее
время и в определенной ситуации. Прогнозирование выполняют для
оценки технического состояния объекта (машины, сборочной едини-
цы) и определения закономерности его изменения в процессе работ’
для управления надежностью.
Различают три этапа прогнозирования: ретроспекцию, диагно-
стику и прогноз. Первый этап заключается в исследовании динами
ки состояния машины в прошлом, выявлении и уточнении характе-
ристик изменения параметров состояния ее элементов. В результа-
те исследований разрабатывают динамическую модель техническо-
го состояния машины. На втором этапе устанавливают допустимые
пределы изменения параметров состояния элементов, разрабатыва-
ют или выбирают методы и средства измерений, определяют пара-
метры технического состояния, выбирают методы прогнозирования,
а также способы оценки достоверности прогноза. На третьем этапе
прогнозируют изменения различных параметров состояния элемен-
тов, синтезируют прогнозы, обобщая их и делая вывод о техническом
состоянии (уровне надежности) всей машины.
Таким образом, ретроспекция анализирует прошлое, диагности-
ка - настоящее, прогноз - будущее, причем прогноз воздействует на
диагностику. Появляется возможность использования прогнозиро-
вания для управления надежностью машин, и в частности на ста-
дии проектирования в процессе разработки технического задания на
изготовление элементов КМ.
Основные задачи прогнозирования надежности КМ можно сфор-
мулировать следующим образом:
1) предсказание закономерного изменения надежности некоторо-
го класса изделий в связи с перспективами развития производства,
внедрением новых материалов, повышением прочности деталей тех-
нологическими и конструктивными мероприятиями (новыми видами
обработки деталей, более рациональными конструктивными схема-
ми и др.);
2) оценка надежности проектируемого изделия до того, как оно
будет изготовлено;
3) прогноз надежности конкретного изделия на основании ре-
зультатов измерения его параметров;
207
4) прогноз надежности некоторой совокупности изделий по ре-
зультатам исследований ограниченного числа опытных образцов;
5) прогноз надежности машины в необычных условиях эксплуа-
тации.
Очевидно, что для эффективного управления надежностью КМ
необходимо на различных этапах их разработки и производства ре-
шать все перечисленные задачи.
Методы прогнозирования надежности можно разделить на три
основные группы:
1) экспертных опенок;
2) моделирования, включающие физические, математические и
информационные модели;
3) статистические, основанные на интерполяции или экстрапо-
ляции данных, полученных в результате предварительных исследо-
ваний.
Метод выбирают с учетом задач прогнозирования, количества
и качества исходной информации, характера реального процесса из-
менения показателя надежности (прогнозируемого параметра).
Прогноз осуществляют на основе информации, полученной в ре-
зультате исследований надежности КМ.
Для прогнозирования надежности КМ и их элементов можно
использовать совокупность показателей: погрешность прогнозиро-
вания, отношение длительности прогнозируемого периода к глуби-
не ретроспективного анализа, полноту прогнозирования, экономи-
ческие показатели, показатель эффективности прогнозирования, а
также область, в которой с заданной вероятностью будет находить-
ся значение показателя.
Погрешность прогнозирования £п определяют по формуле
еп = |я - х\/х,
где х - истинное значение прогнозируемого параметра; х - значение
прогнозируемого параметра, полученное в результате исследований.
При оценке достоверности прогнозирования принимают еп < ео,
где Ео _ некоторое заранее заданное положительное число, устана-
вливаемое из практических соображений на основе результатов ра-
нее проведенных аналогичных исследований с учетом необходимой
точности решения поставленной задачи.
Полную погрешность прогнозирования определяют как сумму
погрешностей исходных данных еи, погрешности метода ем, погреш-
ности вычислений ев и случайной погрешности есл:
Еп = + £в 4" Сел-
208
Полная погрешность не одинаково зависит от своих составляю-
щих, поэтому последнее выражение можно переписать следующим
образом:
£п = О]Еи + 4" + ^ЦЕсл}
4
где о, - весовые коэффициенты, а, = 1.
i=l
Допустимые пределы погрешностей устанавливают, исходя из
требуемой точности решения задачи.
Важным показателем, определяющим прогнозирование, являет-
ся отношение длительности прогнозируемого периода Т2 к продол-
жительности периода 71] ретроспективного анализа:
КЪ = Т2/Т!.
Для обеспечения достаточной достоверности результатов про-
гнозирования рекомендуется придерживаться значений коэффициен-
та Кв < 0,3...О,5.
Полноту прогнозирования оценивают показателем, который
представляет собой отношение числа пп прогнозируемых параме-
тров к общему числу Nn параметров, характеризующих работоспо-
собность изделия:
— пп/Nn
Для экономической оценки прогнозирования используют пока-
затель, представляющий собой отношение затрат материальных
средств на проведение необходимых исследований к периоду прогно-
зирования:
К.= (ц + Зр)/Т2,
где Ц - стоимость контрольно-измерительных приборов и диагно-
стического оборудования, р.; Зр - заработная плата рабочих и
инженерно-технического персонала, проводящего необходимые ис-
следования, р.
Этот показатель может быть использован для сравнительной
оценки различных методов прогнозирования по критерию удельных
приведенных затрат на проведение процедуры прогнозирования.
Показатель эффективности прогнозирования КЭф позволяет оце-
нить, насколько улучшились эксплуатационные характеристики ис-
следуемого изделия после проведения соответствующих мероприя-
тий.
209
Показателем эффективности прогнозирования надежности КМ
и их элементов может служить изменение показателей надежности.
В частном случае это может быть относительное изменение коэффи-
циента готовности:
А'эф = (#r2 -tfrl)/#rl,
где А"г1,2 = Toi.j/^Tol.J + 7в1,г).
Время восстановления Тв может быть существенно сокращено на
основании результатов прогнозирования, что приведет к увеличению
/<г.
Размеры области, в которой с заданной вероятностью будет на-
ходиться значение показателя, также характеризуют прогнозирова-
ние надежности.
При определении интервала, в котором с заданной вероятностью
будет заключено значение прогнозируемого параметра, необходимо
установить закон распределения погрешностей прогнозируемого па-
раметра и его основные статистические характеристики (например,
для нормального закона - математическое ожидание и дисперсию).
Глава 3
ТРАНСМИССИИ КОЛЕСНЫХ МАШИН
3.1. Общие вопросы проектирования
Современные ЛВС не обладают достаточным диапазоном крутя-
щих моментов и угловых скоростей. В то же время для движения КМ
в различных эксплуатационных'условиях необходимо, чтобы усилие
на ведущих колесах и частоты их вращения изменялись в значитель-
ных пределах. Эту задачу выполняют агрегаты трансмиссии.
В настоящее время на полноприводных КМ применяются ме-
ханические. гидромеханические, гидрообъемные н электромеханиче-
ские трансмиссии. При увеличении грузоподъемности, полной мас-
сы, числа осей и мощности двигателя наблюдается 'тенденция пере-
хода от механической к гидромеханической, далее к гидрообъемной
и электромеханической трансмиссии. При мощности двигателя до
250 кВт чаше используют механическую трансмиссию, реже -- ги-
дромеханическую и гидрообъемную, и еще реже - электромехани-
ческую. При мощности двигателя от 250 до 750 кВт чаще приме-
няют гидромеханическую и гидрообъемную трансмиссии, иногда -
электромеханическую и совсем редко механическую. При мощности
двигателя свыше 750 кВт основной трансмиссией является электро-
механическая. а механическую не используют вовсе.
Наиболее простой по конструкции, дешевой в изготовлении и в
эксплуатации является механическая трансмиссия. Поэтому ее наи-
более широко применяют в машинах с колесной формулой 4 X 4, 6 х 6
и 8 х 8. Наряду с этим в таких машинах используют гидромехани-
ческую, гидрообъемную и даже электромеханическую трансмиссии,
позволяющие облегчить управление (снизить число передач, вплоть
до перехода к бесступенчатой трансмиссии), уменьшить динами-
ческие нагрузки и повысить проходимость КМ. Однако при этом
возрастает стоимость трансмиссии и расход топлива.
211
При дальнейшем увеличении числа активных осей существенно
усложняется компоновка трансмиссии в механическом и гидромеха-
ническом вариантах и увеличивается ее масса, поэтому для таких
КМ используют в основном гидрообъемную и электромеханическую
трансмиссии.
В зависимости от назначения КМ, к ней предъявляют различ-
ные требования, которые формируют в техническом задании, явля-
ющемся одним из этапов проектирования как всей машины, так и
элементов трансмиссии. Для работы трансмиссии наиболее важны-
ми являются производственные (технологичность, стандартизация,
унификация, агрегатирование, эксплуатационные показатели, топ-
ливная экономичность, проходимость, надежность, технологичность
обслуживания и ремонта) и потребительские (малая стоимость изго-
товления и эксплуатации, легкость управления, безопасность) тре-
бования. Они должны быть удовлетворены на этапе проектирова-
ния, выполняемом в кратчайшие сроки и с высоким качеством, что
должно обеспечиваться применением САПР трансмиссии. Некото-
рые из них регламентированы государственными или отраслевыми
стандартами и другими документами.
Интегральной оценкой удовлетворения большинства из перечи-
сленных требований может служить технический уровень трансмис-
сии, который определяется прежде всего ее КПД, удельной материа-
лоемкостью и надежностью.
Конструкция трансмиссии должна обеспечивать движение КМ
в условиях эксплуатации, для которых она предназначена, и иметь
высокий технический уровень. Чтобы удовлетворять своему функ-
циональному назначению, трансмиссия должна обладать определен-
ными параметрами: максимальным и минимальным передаточными
числами, набором передаточных чисел различных агрегатов. Исход-
ные данные для расчета этих параметров задает техническое зада-
ние на проектируемую КМ. Прежде всего необходимо знать мак-
симальную vmax и минимальную vmin скорости движения, а также
полную массу тпм машины.
Если задана масса перевозимого груза, то полная масса в первом
приближении может быть опенена по коэффициенту грузоподъемно-
сти
АГр = mrp/mM,
где тгр - масса груза.
212
Кроме того, необходимо определить требуемую максимальную
(номинальную) мощность двигателя Ее можно найти, за-
давшись удельной мощностью Nya = /тм. сопоставляя ха-
рактеристики разрабатываемой КМ с существующими аналогами
(табл. 3.1).
Таблица 3.1. Значения предельных скоростей движения,
коэффициента грузоподъемности и удельной
мощности для полноприводных КМ
Полноприводные КМ Чтах, КМ/Ч Vmin, КМ/ч Л'гр Худ, кВт/ч
Легковые 80 - 155 4-5 0,21 - 0,49 18-38
Грузовые с колесной
формулой:
4 х 4 и б х б 75 - 95 3-5 0,35 - 0,54 9-14
8x8 60 - 90 2-3 0,46-0,49 7,5 - 11
Более точно определить требуемую максимальную мощность
можно, исходя из энергетического обеспечения максимальной
скорости (по балансу мощности):
JVjfJ6 = (Р^ + PwJVmax/f^Tp^cJj
где - сила сопротивления дороги; Pw - сила сопротивления воз-
духа; vmax - максимальная скорость, м/с; т/тр - КПД трансмиссии
на режиме движения с максимальной скоростью; Кс - коэффициент,
учитывающий потери мощности в воздухоочистителе, глушителе,
радиаторе, компрессоре и вспомогательных агрегатах.
Для различных двигателей коэффициент Кс изменяется в пре-
делах 0,75 ... 0,95. Значение т/тр на режиме движения с максималь-
ной скоростью может быть оценено для механической трансмиссии
в пределах 0,88... 0,95 для неполноприводных КМ и в пределах
0,80 ... 0,90 для полноприводных КМ (уменьшение связано с наличи-
ем дополнительных агрегатов трансмиссии, таких как раздаточная
коробка, колесные редукторы и др.).
Для гидромеханической трансмиссии можно принимать такие
же значения т/тр благодаря тому, что максимальная скорость движе-
ния достигается при блокируемом гидротрансформаторе. Для ги-
дрообъемной и электромеханической трансмиссий КПД на режиме
213
максимальной мощности 7/тр = 0,65 ... 0,75 и дтр = 0,63 ... О, 73 со-
ответственно (хотя максимальные значения КПД этих трансмиссий
достигают 0,85 и 0,81 соответственно).
В свою очередь, силы сопротивления дороги и воздуха равны:
Pw = CxFqv,
где Сх - коэффициент обтекаемости; F - площадь лобового сечения,
F = КЛ^ВН-. Клоб - коэффициент заполнения площади лобового
сечения, В - колея машины, Н - габаритная высота машины; qv -
скоростной напор, qv = pBv^ax/2, рв - плотность воздуха.
Для нормальных атмосферных условий рв = 1,25 кг/м3, д —
— 9,81м/с2. Для полноприводных КМ v = 0,02... 0,03. Значения
коэффициентов обтекаемости Сх и заполнения площади К-юб приве-
дены ниже:
Легковые КМ.................. О,25.-.0,45 0,78...0,80
Грузовые КМ.................. 0,80.-.1,30 0,75...0,95
Автобусы .................... 0,60... 0,75 0,80... 0,95
Ориентировочные значения произведения ширины колеи В на
высоту И машины приведены в табл. 3.2.
Таблица 3-2. Размеры площади лобового сечения
Легковые КМ Грузовые КМ
Рабочий объем двигателя, л В х Н, м2 Г рузо- подъемность, т В х Н, м2
<1,2 1,4 - 1,9 0,5 - 2,0 4,2 - 5,7
1,2 - 1,8 1,6 - 2,1 2,0 - 5,0 5,2 - 7,5
1,8 - 3,5 1,9 - 2,3 5,0 - 15,0 6,9 - 9,0
> 3,5 2,2 - 2,6 > 15,0 9,0 - 15,0
В зависимости от требуемой максимальной мощности А’щ^еб вы-
бирают нужный двигатель. В результате конструктору становят-
ся известными следующие параметры устанавливаемого на машину
двигателя: максимальная мощность двигателя Ате, частота враще-
ния (угловая скорость) двигателя при максимальной мощности пдв^
(Шдвдг); максимальный крутящий момент двигателя 7те и частота
214
вращения (угловая скорость) двигателя при максимальном крутя-
щем моменте пдв т (^дв т) •
Неправильный выбор мощности двигателя чреват существенны-
ми издержками. Выбор Nme < Л^еб нежелателен, так как стано-
вится невозможным достижение необходимой по техническому зада-
нию максимальной скорости vmix, кроме того, снижаются динамиче-
ские качества и средняя скорость КМ. При Nme > Nrne & вырастает
средняя скорость, улучшаются динамические качества КМ, a vmax
может быть обеспечена при некоторых углах подъема профиля доро-
ги. Однако при этом увеличиваются масса и стоимость двигателя,
расход топлива.
При подборе нужного двигателя следует учитывать, что методи-
ки испытаний двигателей на стендах, принятые в различных стра-
нах, отличаются по комплектности двигателя, параметрам нормаль-
ных атмосферных условий и т.д. В связи с этим паспортная (мак-
симальная; мощность одного и того же двигателя, рассчитанная по
различным методикам, будет неодинакова. Для сравнительной оцен-
ки значений мощности двигателя, определенных по различным ме-
тодикам. можно использовать следующие соотношения, полученные
в результате статистической обработки данных по большому числу
дизелей: Лтс = .VrocT — Nsae — 1,WNjis — 1,06Лв$ — l,08JVp/yv,
где подстрочечные индексы означают стандарты различных стран
на методики испытаний двигателей: ГОСТ - России; SAE - США;
JIS - Японии: BS - Великобритании; DIN - Германии.
После подбора двигателя следующим шагом является выбор ши-
ны, исходя из номинальной нагрузки на колесо GK и определение ра-
диуса качения колеса гк. Для полноприводной КМ с односкатной
ошиновкой, считая распределение массы машины по всем колесам
равномерным, GK в первом приближении можно оценить так:
GK = mM5/(2no),
где по - число осей КМ.
Радиус качения выбранного колеса определяют эксперименталь-
но либо вычисляют по формуле Зимелева:
__ Згст
1 4-2гст/гсв ’
где гст - статический радиус колеса; гсв - свободный радиус колеса.
215
Если неизвестен статический радиус колеса, то можно использовать
более простую формулу:
гк = 0,97гсв.
После этого переходят к определению минимального umin и мак-
симального итах передаточных чисел трансмиссии.
Расчет минимального передаточного числа трансмиссии umjn ве-
дут, исходя из кинематического обеспечения максимальной скорости
^тах:
umin = 7Угк/^тах = Я'ГСдв NT*!(ЗО^тах),
где тздв/у в об/мин; vmax в м/с.
В настоящее время стремятся несколько уменьшить umin по
сравнению со значением, полученным по приведенному выше вы-
ражению. Тем самым как бы кинематически увеличивают vmax.
Энергетически увеличение максимальной скорости может быть реа-
лизовано при уменьшении суммарного коэффициента сопротивления
движению V’ по сравнению с его расчетным значением (например,
при движении под гору) или при снижении полной массы тм КМ
(например, при движении в недогруженном или порожнем состоя-
нии). Это обеспечивает увеличение производительности КМ из-за
движения с большей скоростью либо, при движении с прежней скоро-
стью, экономию топлива и уменьшение износа двигателя вследствие
уменьшения частоты вращения коленчатого вала двигателя и при-
ближения значения этой частоты к зоне с минимальным удельным
расходом топлива.
Максимальное передаточное число umax трансмиссии выбирают
на основании сравнения трех величин:
1) максимального передаточного числа umaxyJ, обеспечивающего
реализацию максимально возможной силы тяги по условию сцепле-
ния колес с дорогой:
^те^тр^тах^/Гк =
откуда
Umaxj — ~ ,
* те ?7тр
где - коэффициент сцепления колеса с дорогой (как правило,
ip = 0,7... 0,8); Ссц - сцепной вес, или составляющая веса при-
ходящаяся на ведущие колеса, для полноприводной машины Ссц =
= mucosa; а - угол подъема продольного профиля дороги (обычно
а = 34... 38°);
216
2) максимального передаточного числа umax^, обеспечивающего
преодоление КМ заданного максимального дорожного сопротивления
V’max при равномерном движении и пренебрежении сопротивлением
воздуха (ввиду малой скорости движения)
^шс^трита.х v;/Z'K “ тм9'Фmax,
откуда
'п^м9‘Фта.хгк
umax tb m ’
1 те^тр
где ^max = о. 58 ... 0,64;
3) максимального передаточного числа umaxv, обеспечивающего
устойчивое движение КМ с требуемой минимальной скоростью vmjn:
7Г^'двТ7’к
umin — 77 ,
oUUmax v
откуда
________________________________
umaxv — "77 ,
30fmin
где Пдвт в об/мин; vmjn в м/с.
Исходя из удобства маневрирования и для выполнения эвакуа-
ционных и специальных транспортных работ с осторожностью, це-
лесообразно принимать vmin = 0,56... 1,39 м/с (2 ... 5 км/ч).
Сначала сравнивают значения umaxyJ и umax^.
Для неполноприводных КМ неравенство umax^ > umaxyJ сви-
детельствует о том, что преодоление заданного дорожного сопро-
тивления невозможно без увеличения сцепного веса (т.е. увеличе-
ния числа ведущих осей). В этом случае необходимо отвергнуть
umaxt/j и Принять Umax = umaxy?- ПрИ Umax^ < umaxy? МОЖНО
принять umax = umax^, чтобы уменьшить диапазон трансмиссии
D — Umax/Umin и тем самым снизить размеры и массу ее агрегатов.
Однако обычно даже в этом случае стремятся полностью использо-
вать сцепной вес и принимают umax = umaxyJ.
Для полноприводной КМ всегда стремятся обеспечить реа-
лизацию максимально возможной силы тяги по сцеплению колес
217
с дорогой, поэтому значение umax^ отвергают и принимают umax =
= Umax^- Максимальный коэффициент сопротивления V’max, реали-
зуемый при этом, может быть найден из равенства umaxy? = umax^:
^м9 COS _ 'п^м9'Фтлхгк
ТтеЦтр ТтеЦгр
Отсюда
0max = 93 COS Qfmax
или с учетом V’max = f cos amax 4- sinamax
tg C^max ~ ~ f 1
где f - коэффициент сопротивления качению колеса по дороге.
Из анализа данных, приведенных в табл. 3.3, следует, что даже
на асфальтобетонной дороге с высоким коэффициентом сцепления
((/? = 0, 70... 0,80) максимальный преодолеваемый полноприводной
КМ подъем Отах = 34 . . . 38°, При ЭТОМ V’max = 0,58 ... 0,64.
Ввиду того, что режим работы трансмиссии при максимальной
силе тяги отличается от режима работы при максимальной мощно-
сти, значения КПД трансмиссии для этих режимов будут различны-
ми.
При подсчете итаХ¥? и umax^ принимают 7?тр = 0,8...0,85
для механической трансмиссии; 0,56... 0,60 для гидромеханиче-
ской трансмиссии, если гидротрансформатор используется в широ-
ком диапазоне движения на пониженной передаче в трансмиссии, и
0,8 ... 0,85, если он используется только для трогания с места, а за-
тем блокируется. Для гидрообъемной трансмиссии 7?тр = 0. 7 ... 0, 8.
а для электромеханической 7]тр = 0,4 ... 0,6.
Итак, в результате сравнения umaxyJ и umax^ обычно выбирают
uma.xy?- Далее сравнивают значения umaxyJ и umaxv и максималь-
ное принимают за umax. При этом, если umaxyJ > игпаху, то, при-
нимая Umax = umaxyJ, полностью используется сцепной вес, а ми-
нимальная скорость будет даже меньше требуемой. Если umaxv >
> Umax^?, то, считая umax = umaxt., обеспечивается требуемая мини-
мальная скорость движения, но максимальная сила тяги в контакте
колеса с дорогой будет больше, чем можно обеспечить по сцеплению.
Знание минимального umin и максимального umax передаточных
чисел трансмиссии дает возможность определить и общий ее диапа-
зон D = Umax/Umin.
218
Таблица 3-3- Предельный угол подъема продольного профиля дороги
frmax и суммарный коэффициент сопротивления дороги
V’max,преодолеваемые полноприводной КМ при средних
значениях коэффициентов сцепления <р и сопротивления
качению /
Тип дороги f атах > Град ’/'max
Асфал ь то-бетон ная: 0,75 0,016 36,3 0,60
I категории 0,77 0,035 36,3 0,62
II и III категории 0,75 0, 020 36,1 0,60
0,77 0,035 36,3 0,62
Булыжная: 0,65 0,025 32,0 0,55
ровная 0,70 0,040 33,4 6758
0,65 0,040 31,4 0,55
разбитая 0,70 0,050 33,0 б?58
Грунтовая: 0, 55 0,027 27,6 0,49
профилированная сухая О?6О 0,045 29,0 0,52
разбитая 0,45. 0, 070 20,8 0,42
0,50 0,067 23?4 0^6
0,30 0,200 5,8 0,30
в распутицу 0,35 0,115 13,2 0,34
Песчаная сухая 0,25 0,250 0 0
0,32 0,125 11,5 0,32
Снежная: 0,35 0,030 17,7 0,33
укатанная — — —
0,42 0,052 20,4 0,40
0,20 0,300
целина —
0,30 0,215 4,9 0,30
Примечание. В числителе приведены значения при нормальном давлении
воздуха в шине, а в знаменателе - при сниженном.
219
3.2. Механические трансмиссии
При проектировании механической трансмиссии необходимо оп-
ределить ее кинематическую схему, т.е. пути и способы подвода
мощности от двигателя до колес. Различают бортовые и мостовые
схемы, причем и те, и другие могут быть с блокированным, диф-
ференциальным или смешанным приводом. Кроме того, выпускают
КМ, имеющие не один, а два двигателя, каждый из которых приво-
дит во вращение свою группу мостов либо один из бортов.
Мостовая схема трансмиссии используется значительно чаше,
чем бортовая. Это связано с тем, что большинство полноприводных
КМ разработано на базе неполноприводных, имеющих мостовой при-
вод. Особенно это относится к машинам с колесной формулой 4x4
и 6 х 6, хотя и среди них встречаются конструкции с бортовым при-
водом.
На рис. 3.1 3.4 приведены наиболее распространенные схемы
трансмиссий полноприводных КМ. На этих схемах: 1 - двигатель;
2 - сцепление; 3 - коробка передач; 4 ~ раздаточная коробка; 5 -
главная передача и дифференциал; 6 - дополнительная раздаточная
коробка; 7- бортовая раздаточная коробка; 8 - бортовой редуктор.
Рис. 3.1. Схемы трансмиссий полноприводных КМ с
мостовым приводом
На рис. 3.1 приведены схемы трансмиссий с мостовым приводом
для машин с колесными формулами 4 х 4 (а) , 6 х 6 (б) и 8 х 8 (б).
Средний мост на схеме б является в данном случае проходным, т.е.
через него крутящий момент передается на задний мост. Бортовой
привод обычно применяется на КМ с несущим корпусом (например,
220
плавающих) и позволяет иметь свободный объем в средней части
корпуса для размещения груза или специального оборудования.
Применение бортового привода требует разработки оригиналь-
ных агрегатов трансмиссии: раздаточной коробки, распределяющей
крутящий момент по бортам; бортовых редукторов, изменяющих на
90° направление крутящего момента и являющихся аналогами кони-
ческих главных передач в мостах; элементов привода от бортового
редуктора к колесу. Требуется также независимая подвеска колес.
На рис. 3.2 приведен вариант бортового привода для машины с ко-
лесной формулой 8x8.
Рис. 3.2. Схема трансмиссии КМ 8x8
с бортовым приводом
Раздаточная коробка обычно является обязательным агрегатом
и в трансмиссии полноприводной колесной машины с мостовым при-
водом, за исключением случая, когда функцию раздаточной коробки
удается передать коробке передач. Реально это можно выполнить
только у легковых машин с колесной формулой 4x4 при несоосных
ведущем и ведомом валах коробки передач. Схема такой трансмис-
сии дана на рис. 3.1, г.
Несмотря на усложнение и удорожание трансмиссии бортовой
привод по сравнению с мостовым позволяет уменьшить неподрессо-
ренные массы КМ путем устранения балок ведущих мостов и уста-
новки бортовых редукторов в корпусе (на раме) КМ, что способству-
ет улучшению плавности хода.
Аналогичного результата можно добиться и при мостовом при-
воде. если устранить балку ведущего моста, закрепить корпус ре-
дуктора этого моста на раме КМ и произвести соответствующие
221
изменения в приводе и подвеске колес. При этом, однако, можно
говорить лишь о частичной унификации данной конструкции и ве-
дущего моста неполноприводного аналога КМ.
Бортовой привод позволяет достаточно легко обеспечить бло-
кировку колес одного борта и всей трансмиссии, что существенно
повышает проходимость КМ. Поэтому такой привод часто приме-
няется для специальных КМ, существенная доля пробега которых
приходится на условия плохих дорог и бездорожья, в частности для
КМ, предназначенных для эксплуатации в заболоченных и снежных
районах, для поисково-спасательных работ в условиях пересеченной
местности и труднодоступных территорий.
При бортовом приводе также существенно легче осуществить
бортовой поворот машины, который нередко применяется на легких
малогабаритных автомобилях-транспортерах. Иногда на этих ма-
шинах используется сочетания мостового и бортового привода. На
рис. 3.3 приведена схема такой трансмиссии, используемой в транс-
портерах с колесной формулой б X б на пневмокатках. Здесь крутя-
щий момент от двигателя передается на борта через мост, а затем
распределяется между колесами борта с помощью цепной передачи.
Рис. 3.3. Схема трансмиссии КМ
6 х 6 со смешанным (мостовым и
бортовым) приводом
Для повышения проходимости КМ, трансмиссия которой име-
ет мостовой привод, необходимо предусмотреть возможность прину-
дительной блокировки дифференциалов во всех мостах, а также в
раздаточных коробках, если там имеются дифференциалы. Вместо
принудительной блокировки можно использовать самоблокирующи-
еся дифференциалы, дифференциалы с повышенным трением или с
переменным коэффициентом блокировки. Однако это приводит к пе-
рерасходу топлива и сокращению сроков службы дифференциалов.
222
Основным недостатком трансмиссии с блокированным приводом
является нагружение валов и других ее деталей, связанных блоки-
рованным приводом, дополнительными крутящими моментами, воз-
никающими из-за технологической и эксплуатационной разницы ра-
диусов качения колес. Это также приводит к перерасходу топлива,
уменьшению долговечности деталей трансмиссии и ускоренному из-
носу шин.
В некоторых случаях, например при отсутствии двигателя не-
обходимой мощности, возможна установка на машину двух одина-
ковых двигателей. На рис. 3.4 приведены схемы трансмиссий пол-
ноприводных четырехосных КМ с двумя двигателями. На первой
схеме каждый из двигателей осуществляет привод одного переднего
и одного заднего мостов, на второй схеме - одного борта.
Рис. 3.4. Схемы трансмиссий полноприводных че-
тырехосных КМ с двумя двигателями и с мостовым
(а) и бортовым (б) приводами
223
Для равномерной загрузки обоих двигателей необходимо, чтобы
при прямолинейном движении КМ их соответствующие выходные
характеристики (крутящие моменты и угловые скорости вращения
коленвалов) в любой момент времени были одинаковыми.
При движении по криволинейной траектории равномерной за-
грузки обоих двигателей добиться практически невозможно, особен-
но для КМ с бортовым приводом. Так как по кинематике колеса раз-
ных бортов в этом случае должны двигаться с различными угловыми
скоростями, то при одинаковой подаче топлива это обуславливает
различия в крутящих моментах обоих двигателей (согласно внеш-
ней характеристики двигателя),- причем больший крутящий момент
будет у двигателя, связанного с колесами, двигающимися по мень-
шему радиусу. Это затрудняет поворот и приводит к увеличенному
расходу топлива.
Выбор той или иной схемы трансмиссии при проектировании
полноприводной КМ зависит от назначения машины и предъявля-
емых к ней требований. Если машина в основном предназначена
для эксплуатации в тяжелых дорожных условиях, где проходимость
является доминирующим фактором, то лучше использовать борто-
вую блокированную схему трансмиссии.
Если же полноприводная КМ большую часть времени будет экс-
плуатироваться на хороших дорогах и будет выполняться требова-
ние о снижении эксплуатационных расходов, го целесообразнее при-
менять мостовую дифференциальную схему и предусмотреть прину-
дительную блокировку дифференциалов.
Важную роль при формировании схемы трансмиссии играет
требование унификации проектируемой полноприводной КМ с вы-
пускаемыми полноприводными и неполноприводными аналогами.
Необходимо стремиться к удешевлению разрабатываемой конструк-
ции и максимальному использованию хорошо зарекомендовавших се-
бя в эксплуатации агрегатов. По этой причине большая часть выпус-
каемых полноприводных КМ имеет мостовую схему трансмиссии.
После выбора схемы, а зачастую и параллельно с этим, опре-
деляют передаточные числа различных агрегатов трансмиссии при
условии обеспечения найденных выше максимального umax и мини-
мального Urnin передаточных чисел всей трансмиссии. Это требует
введения определенного числа передач в некоторых агрегатах.
224
Необходимо стремиться обеспечить наибольшее передаточное
число в агрегатах трансмиссии, расположенных ближе к колесам,
что позволяет уменьшить крутящий момент, передаваемый большей
частью валов и деталей трансмиссии, и снизить их массу. Наиболее
эффективно это может быть сделано благодаря введению колесных
редукторов с достаточно большим (до икр = 5...б) передаточным
числом. Такое решение возможно как при мостовой, так и при бор-
товой схеме трансмиссии.
Передаваемый крутящий момент и массу трансмиссии можно
уменьшить и установкой в начале силового потока ускоряющего ре-
дуктора. Это особенно эффективно при использовании низкообо-
ротных дизелей. Необходимо лишь следить, чтобы максимальные
частоты вращения валов не превышали критических значений по
устойчивости.
Вместо установки ускоряющего редуктора крутящий момент
можно уменьшить сдвигом всех передаточных чисел коробки пере-
дач в сторону меньших передаточных чисел. При этом в коробке
появляется несколько ускоряющих передач.
Однако во многих выполненных конструкциях полноприводных
КМ высшие, наиболее часто используемые передачи в коробке пе-
редач и в раздаточной коробке являются прямыми (и = 1,0), что
позволяет уменьшить потери в трансмиссии при движении машины
на этих передачах.
Итак, задавшись, исходя из изложенных выше соображений, ми-
нимальным передаточным числом в коробке передач икп.в (обычно
меньшим или равным единице) и в раздаточной коробке ирк>в (обыч-
но близким к единице), можно определить передаточное число глав-
ной передачи
umin
^ГП — 5
^кп.в^рк.в
или, что то же самое, произведение передаточных чисел последова-
тельно расположенных (согласно принятой схеме трансмиссии) ре-
дукторов, составляющих разнесенную главную передачу. Если в ве-
дущем мосту предполагаются две передачи, то полученное значение
игп будет соответствовать высшей передаче.
Следующим шагом является определение суммарного числа пе-
редач в коробке передач и раздаточных коробках. Это число зависит
от диапазона трансмиссии D. Чем он больше, тем больше должно
быть передач.
8 — 692
225
Если исходить из целесообразности работы двигателя в опреде-
ленном диапазоне частот вращения независимо от включенных пере-
дач и отсутствия при этом перекрытия передач, то общие передаточ-
ные числа трансмиссии должны подчиняться закону геометрической
прогрессии, т.е.
Unix =
где q - знаменатель геометрической прогрессии; =
— ^хп ^рх ^дрх ... ; ^хл> ^дрк • •. ~ число передач в коробке пере-
дачу раздаточной коробке, в дополнительной раздаточной коробке
и в других агрегатах трансмиссии соответственно. Тогда, так как
D = Umax/Umin, получаем D = gnE-1. Откуда
nE = 1 + logg£> = 1 + lg £>/lg q = 1 + In D/In q.
Таким образом, нужное суммарное число передач в трансмис-
сии будет зависеть от знаменателя геометрической прогрессии
д, определяющимся при данном подходе значениями частот враще-
ния коленчатого вала двигателя, для которых скорости движения
КМ на двух смежных передачах равны. На рис. 3.5 в качестве
Рис. 3.5. Зависимость скорости движения КМ от
номера включенной передачи при выборе переда-
точных чисел по закону геометрической прогрессии
226
таких частот выбраны частоты вращения коленчатого вала при мак-
симальной мощности и максимальном крутящем моменте пдвт
двигателя:
V1N V2T Щ V2N V3T Щ ПдвК
q = —- = ----= — =--------- ---- — - ...---------- qTN,
V1T V1T U2 V2T V2T ^3 Пдвт
где щ - общее i-e передаточное число трансмиссии из ряда umjn, ...,
..., Umax! i = 1,2, ..., пе? - скорость КМ при щ. Чем больше д,
тем меньше необходимо передач в трансмиссии, т.е. меньше пе, и
наоборот. Выбор максимального теоретически возможного значения
q — tfmax = ^дв^Мдв min недопустим, так как из-за потерь скорости
КМ при переключениях передач это приведет к остановке двигателя
и невозможности движения с переключениями передач.
Уменьшение q и соответствующее увеличение числа передач пе
дает возможность при различных дорожных условиях и нагрузке в
кузове выбрать нужную передачу, которая обеспечивает работу дви-
гателя в зоне минимального удельного расхода топлива де при усло-
вии движения КМ с максимально возможной скоростью. Это по-
зволяет снизить расход топлива на единицу пути, пройденного КМ,
однако усложняет управление трансмиссией.
Чтобы обеспечить выбранное таким образом число передач не
трансмиссии есть два пути: реализовать все пе передач в одном
агрегате трансмиссии либо распределить передачи по различным
агрегатам.
Первый путь используют в основном при создании трансмиссий
для неполноприводных КМ, сосредоточивая все передачи в коробке
передач. При уменьшении q это приводит к появлению многоступен-
чатых коробок передач с числом передач 10, 14, 16 и 20, что харак-
терно для большегрузных магистральных автопоездов. Тем самым
в зоне минимума де добиваются уменьшения до 200 мин-1 разницы
в частотах вращения коленчатого вала двигателя при движении с
одной и той же скоростью на смежных передачах. Это ориентиро-
вочно соответствует значению q = (пдвт + 200)/пдвт = 1,13... 1,15
(при пдвт = 1500... 1300 мин-1 для дизелей, устанавливаемых на
магистральных автопоездах). Следует заметить, что такие много-
ступенчатые коробки передач лишь условно можно считать одним
агрегатом трансмиссии, так как для уменьшения массы их обычно
выполняют в виде последовательно соединенных между собой или
объединенных одним картером двух или трех коробок передач.
Второй путь обычно используют в полноприводных КМ при на-
личии раздаточных коробок, а также дополнительных и бортовых
8*
227
раздаточных коробок. Существуют трансмиссии машин с колесной
формулой 4 х 2, в которых наряду с передачами в коробке пере-
дач имеются две передачи в заднем мосту. Однако известны так-
же трансмиссии полноприводных машин, в которых раздаточная ко-
робка является лишь редуктором с неизменяемым передаточным чи-
слом при шести или пяти передачах в коробке передач: это машины
ХМ-453Е2 и ХМ-656 фирмы “Форд” с колесной формулой 8x8, ан-
глийские машины “Элвис Стэлварт”, “ Саладин”, “Сарацин”, “Са-
ламандер” и “Столвэт”с колесной формулой 6x6, а также российская
машина БАЗ-135МБ с колесной формулой 8x8 при восьмиступен-
чатой коробке передач.
В большинстве случаев число передач в других агрегатах транс-
миссии, кроме базовой (основной) коробки передач, принимают рав-
ным единице илн двум. Это связано как со сложностью управления
трансмиссией, в которой несколько агрегатов имеют число передач
более двух, так и с трудностью согласования передаточных чисел
в этих агрегатах. Несмотря на это, встречаются дополнительные
(следующие за базовой) коробки передач, где имеются и три, и че-
тыре передачи.
Обычно не более трех агрегатов трансмиссии имеют число пере-
дач, не равное единице. Пусть это будут коробка передач, раздаточ-
ная коробка и дополнительная раздаточная коробка. Тогда, приняв
соответствующие значения для пр>{ и пдрк , можно найти требуемое
число передач в коробке передач:
^КП —
Л’ркЛ’ДрК
Для многоступенчатой коробки передач, состоящей из базовой и
дополнительных передней и задней коробок, число передач в базовой
коробке
^КП — 5
Л’ЛКпП’ЗКП
где Ппкп, Изкп - число передач в передней и задней дополнительных
коробках соответственно. В последнем случае подразумевается, что
в других агрегатах трансмиссии число передач равно единице.
После установления числа передач в агрегатах трансмиссии не-
обходимо выбрать и согласовать передаточные числа в них. Чтобы
обеспечить распределение общих передаточных чисел трансмиссии
по закону геометрической прогрессии с выбранным знаменателем
= timing”2'1)) также возможны два пути.
228
В первом случае в базовой коробке передач выбирают переда-
точные числа, подчиняющиеся закону геометрической прогрессии со
знаменателем д, а в другом агрегате отношение передаточных чисел
двух смежных передач должно перекрывать весь диапазон переда-
точных чисел базовой коробки.
Во втором случае в базовой коробке передач выбирают переда-
точные числа, подчиняющиеся закону геометрической прогрессии с
увеличенным по сравнению с q знаменателем, а в других агрегатах
трансмиссии устанавливают такие значения передаточных чисел на
различных передачах, которые приводили бы к уплотнению ряда
общих передаточных чисел трансмиссии до нужного значения зна-
менателя q.
Использую! и комбинации этих путей. Так, в многоступенча-
той коробке передач, состоящей из базовой и двух дополнительных
коробок, передаточные числа передней коробки выбирают обычно
как во втором случае, а задней - как в первом. Встречаются кон-
струкции, когда в задней дополнительной коробке передач одна пара
передаточных чисел выбрана как во втором случае, а другие - как
в первом.
При отступлении от данного правила возможны совпадения или
близость общих передаточных чисел трансмиссии при различных
комбинациях передач в агрегатах.
Проиллюстрируем оба указанных подхода на примере трансмис-
сии, у которой кроме четырехступенчатой базовой коробки передач
имеется дополнительная задняя трехступенчатая коробка, а осталь-
ные агрегаты имеют неизменные передаточные числа (рис. З.б). Для
большей наглядности по горизонтали рядом с номерами передач от-
ложены не произведения передаточных чисел агрегатов трансмис-
сии, а десятичные логарифмы этих произведений. Вместо десятич-
ных могут быть использованы логарифмы при любом основании.
Индексы “кп”, “зкп” и “мкп” означают базовую, заднюю и многосту-
пенчатую (общую) коробку передач, а “в”, “н” - высшую и низшую
передачи соответственно; г, j - номера передач в базовой и задней
коробках передач соответственно; гмкп - номер передачи в многосту-
пенчатой коробке передач.
Диапазон многоступенчатой коробки передач
J-. иКП.НиЗКП.НиГП ^КП.Н иЗКП.Н _ J-. J-.
Ь'мкп — — _ 1>кп1>зкп,
икп.визкп.вигп ^КП.В изкп.в
где DKn, D3Kn - диапазоны базовой и задней коробок передач соот-
ветственно.
229
lg(Uxn.nUf»)
Рис. З.б. Диаграммы, иллюстрирующие выбор пе-
редаточных чисел задней дополнительной коробки
передач при условии существенного увеличения диа-
пазона всей многоступенчатой коробки передач по
сравнению с диапазоном базовой коробки (а) и уплот-
нения ряда передаточных чисел базовой коробки (б)
В первом случае (см. рис. З.б, а)
икп» “ ^кп.в? кп *;
^кп ~ ^кп.н/'Икп.в = дПхп
230
Знаменатель ряда передаточных чисел дополнительной коробки
передач
изкп> п п пка
Чзкп — — J-^кпЧ — Я
U3KIl(j + l)
При этом
II — II „Пзкп-З — ». пЛкп(пзкп j) •
U3Knj ~ “ЗКП.ВУзкП ~ “ЗКП.В у )
Г) — лпзкп— 1 _ /пПкп\ПЗКП“1 _ пЛкп(Пз1СП — 1).
Ь'зкп — Узкп — \Ч ) ~ Я >
Г) _____ П Г) __ Ппкп—1 Ппкп(пэкп 1) — пПХП^ЗКВ~ 1
^>МКП — •^'кпЬ'зкп — Я Ч ~ Ч
Для Пкп = 4 и пзкп = 3 имеем £>кп = g3; D3Kn = g8; DMKn = q11.
Аналогично во втором случае (см. рис. 3.6, б)
„ __ ЛЛЗКП. г-) __ ПЛКП—1 __ /-ПзкпАПкп-1 — ПЛЗКП(П1£П—1).
укп — Ч 1 ^кп — Укп — \Ч ) ~ Ч »
«кп. = икп.в g"nKn-i = ижл.вд"3^^11"0;
изкп; — изкп.в 9зкпП = изкп.в дПзхп J;
Г) — оЛзкд-1 _ Пзкп-1.
^зкп — Уэкп — Я >
Г) ____ Г) Г) __ Лпзкп(пкп —1) ЛПЗКП—1 — Ппкппзкп —1
Ь'мкп — Ь'кпЬ'зкп — Ч Я ~ Я
Для пкп = 4 и пзкп — 3 получили £>кп = g9; D3Kn = ч2\
=qli-
При данном q и общем числе передач = пкппэкп — 4 • 3 = 12,
кроме отмеченных двух, возможны еще по крайней мере шесть ва-
риантов разбивки передаточных чисел в основной и дополнительной
коробках передач: два при пкп = 3 и пзкп = 4, два при пкп = 6 и
пзкп = 2, два при пкп = 2 и пзкп = 6.
Однозначного ответа на вопрос: какой из восьми вариантов
предпочесть, дать нельзя. Решение зависит от множества факто-
ров, среди которых следует принять во внимание совокупную мас-
су всех агрегатов трансмиссии для различных вариантов, удобство
управления, ограничения по значению знаменателя ряда передаточ-
ных чисел в одном агрегате из-за тяжелой работы синхронизаторов
и трудностей переключения соответствующих передач. Главным же
фактором, который должен быть учтен, является фактор унифика-
ции, т.е. использования существующих, хорошо зарекомендовавших
себя агрегатов с учетом ограничений по допустимым входным кру-
тящим моментам.
231
С этих позиций варианту, представленному на рис. 3.6, а, мож-
но отдать предпочтение с точки зрения удобства управления, так
как при включении определенной передачи в задней коробке водите-
лю придется манипулировать лишь рычагом управления базовой ко-
робкой передач. Это преимущество становится особенно очевидным
при увеличении пкп, например, до 6 и уменьшении пзкп до 2. Од-
нако ограничение значения знаменателя ряда передаточных чисел в
задней коробке дзкп = дПкп < 4 вынуждает уменьшать шаг q переда-
точных чисел в базовой коробке передач (особенно при пкп > 5), что
ограничивает самостоятельное использование базовой коробки из-за
уменьшения ее диапазона: DKn = qn*n~l. Кроме того, больший диа-
пазон задней коробки передач (£)ЗКГ1 = дп*п^Пзкп-1)) предопределяет
большие ее размеры и массу.
Преимущест вами варианта, представленного на рис. 3.6, бу явля-
ются небольшие значения знаменателей q и qKa = дПэкп, что созда-
ст хорошие условия для работы синхронизаторов. Кроме того, это
позволяет самостоятельно использовать базовую коробку передач в
других КМ, особенно при пзкп = 2. Однако управление коробками
передач в данном варианте затруднено.
Вместо задней дополнительной коробки передач на рис. 3.6 мог
бы фигурировать другой агрегат трансмиссии, например раздаточ-
ная коробка нли дополнительная раздаточная коробка и т.д. Пред-
ставленные выше формулы изменились бы только в части индексов.
Один из возможных вариантов распределения передаточных чи-
сел между тремя агрегатами трансмиссии представлен на рис. 3.7, а.
Здесь индекс “пкп" означает переднюю коробку передач, 1Пкп+кп _
номер передачи в комбинации двух агрегатов: передней и базовой
коробок передач; t - номер передачи в передней коробке.
В данном примере передняя двухступенчатая дополнительная
коробка передач уплотняет ряд передаточных чисел базовой че-
тырехступенчатой коробки, а задняя двухступенчатая существенно
расширяет весь диапазон. При этом
— п лПпкп-*. Г) — Пппкп~ 1.
“ПКП1 — “ПКП.В У 1 ^пкп — У ,
. _ ,, лпкп~* ___ I, (Г) п\ЛКп—* — -а лппкп(Лкп —0•
“КП1 — “КП.ВУкп — “,кп.в I, ^пкп У) — “’КП.ВУ ,
= 9"пкп(Пкп-1).
“экп> = U3Kn.B93"3nKn“J = П>хп.в(О„кг,Ок„9)"',‘П“; =
= u3Kn.B(gn“n-1gn“n(n,‘I,_1)g)n3l‘,,_J = иЗКп.в9п‘“пПкп(Пз“'_^;
232
Рис. 3.7. Диаграммы, иллюстрирующие возможные рациональ-
ные варианты выбора передаточных чисел в трех агрегатах
трансмиссии при наличии в каждом из них более одной пере-
дачи:
а - с использованием всех передач; б - с перекрытием передач
233
Л ______ „^ЭКП-1 _ л^ПКП^КпС^ЗКП—1).
^зкл — Узкп — Я ,
_______ Г) Г) Г} ________ лПпкп—1лппкп(пкп— 1)лПпкпПкп(ПЗКП —
мкп — Ь'лкп^кп^'зкп — Я Я Я
_ дППХП^КППЗКП““1
ДлЯ Ппкп — 2, Пкп — 4 И 71зкп — 2
Divku — g; DKn = q ; D3Kn — Я ; -^мкп =
Безусловно, в этом случае, также как при комбинациях двух
агрегатов трансмиссии (см. рис. 3.6), необходимо принять во вни-
мание несколько упомянутых выше факторов. Причем благодаря
увеличению общего числа передач на выходе базовой коробки усили-
вается влияние ограничения на выбор знаменателя ряда передаточ-
ных чисел в задней дополнительной коробке передач. В результате
уменьшения этого знаменателя появляется перекрытие некоторых
передач. При этом можно либо блокировать использование близ-
ких по общим передаточным числам комбинаций передач, либо ра-
ботать в двух диапазонах, когда высшая передача в задней коробке
используется при движении в легких и средних дорожных условиях,
а низшая передача - при движении в средних и трудных дорожных
условиях.
На рис. 3.7, # показан такой вариант трансмиссии, когда при
включении высшей передачи в задней коробке передач первая пере-
дача в базовой коробке блокируется, в результате чего общее число
передач уменьшается с 16 до 14. При этом выражения для пере-
даточных чисел и диапазонов передней и базовой коробок передач
остаются прежними, а
. _ ,, -Пзкп—J — (Г) Л п~ Цпзкп~У —
“зкп? ~~ “ЗКП.ВУзкП ~ “ЗКП.В^ПКП^КП? ) —
— it Лппкапкп—2)(пзкп—j).
— изкп.ву ,
Л _____ л(ппкп^кп — 2)(п3кп— 1).
л-'зкп — Ч 1
______ Л Л Л _________ лПпкппкппзкп —2пзкп+1
мкп — ^пкп^кп^зкп — Ч
Для тгпкп = 2, пкп = 4 и пзкп = 2 получаем
&ПКП ~ Я> Dan. ~ Я > ^зкп = Я > ^мкп = Я
Принцип работы трансмиссии в двух диапазонах широко приме-
няется не только при использовании задней дополнительной коробки
234
передач, но и практически всегда при наличии двух передач в раз-
даточной коробке или заднем мосту. При этом предусматривается
переключение передач в указанных агрегатах только при остано-
вленной КМ, что позволяет отказаться от синхронизаторов в них.
Основными причинами такого подхода к выбору передаточных
чисел в раздаточных коробках являются упрощение управлением
трансмиссией (выбрав передачу в раздаточной коробке, соответству-
ющую условиям движения, водитель в дальнейшем переключает пе-
редачи только в коробке передач) и желание использовать коробку
передач с неполноприводного аналога КМ (обычно такие коробки
имеют диапазон DKn = 7... 10). Такое решение целесообразно, не-
смотря на увеличение общего числа передач по сравнению с возмож-
ным “идеальным” случаем трансмиссии без перекрытия передач.
На рис. 3.8 дана диаграмма, иллюстрирующая на примере пяти-
ступенчатой коробки передач и двухступенчатой раздаточной короб-
ки выбор передаточных чисел, обеспечивающий работу трансмиссии
в двух диапазонах. Здесь гкп+рк ~ номер передачи в коробке передач
при включенной высшей (в) или низшей (н) передаче в раздаточной
Рис. 3.8. Диаграмма, иллюстрирующая вы-
бор передаточных чисел в раздаточной ко-
робке для обеспечения работы трансмиссии
в двух диапазонах
Обычно передаточное число низшей передачи в раздаточной ко-
робке Орк.я выбирают, исходя из полного использования максимально
возможной силы тяги по сцеплению при полном приводе на все ко-
леса. В этом случае при наличии механизма отключения переднего
235
моста нецелесообразно устанавливать диапазон раздаточной короб-
ки DpK = UpK.H/upK.B > 2 для машин с колесной формулой 4 х 4 и
DpK >1,5 для машин с формулой 6x6. Иначе при включенной выс-
шей передаче в раздаточной коробке и отключенном переднем мосте
не будет обеспечено использование максимально возможной на этом
режиме силы тяги, т.е. будут ограничены тяговые возможности КМ
на этом режиме.
Для уверенного движения КМ в легких и средних условиях
эксплуатации на высшей передаче в раздаточной коробке с по-
стоянно включенным передним мостом нецелесообразно принимать
Прк >2,5.
Таким образом, обычный диапазон раздаточной коробки DpK =
= 1,65 ... 2,5. Еше раз отметим, что работа трансмиссии в двух диа-
пазонах при различных передаточных числах в раздаточной коробке
требует наличия коробки передач с достаточно большим диапазоном
(£)кп = 7... 10 и более для грузовых полноприводных машин).
Чтобы уменьшить общее число передач в трансмиссии, можно
несколько увеличить среднее значение знаменателя общего ряда пе-
редаточных чисел по сравнению с выбранным значением q. При этом
за счет увеличения шага между передаточными числами низших пе-
редач можно добиться нужного значения q для высших передач и тем
самым обеспечить выгодные условия работы двигателя при движе-
нии КМ на наиболее часто используемых передачах. Ряд передаточ-
ных чисел в этом случае будет смещен в сторону так называемого
гармонического ряда. Такой подход используют в большинстве пол-
ноприводных и неполноприводных КМ.
Связь между диапазоном коробки передач (в том числе и много-
ступенчатой) DKn и числом передач пКп в ней, а также средние значе-
ния знаменателя ряда передаточных чисел в коробке, вычисленные
по формуле
q — V Т*кп >
приведены ниже:
Окп . . . 5,7-8,5
Пкп ••• 5
q........ 1,55-1,71
7,9 - 9,4 8,0 - 10,0 9,2 - 18,5 13,0 - 19,4 17,0 - 24,7
6 8 10 16 20
1,51 - 1,56 1,35 - 1,39 1,28 - 1,38 1,19 - 1,22 1,16 - 1,18
Данные получены на основании обработки параметров большого
числа коробок передач отечественных и зарубежных грузовых КМ.
236
В табл. 3.4-3.6 даны технические характеристики для полно-
приводных КМ с кинематическими схемами трансмиссии, предста-
вленными на рис. 3.1, 3.2 и 3.4, а также для ЗИЛ-157, привод всех
мостов которого осуществляется отдельными валами, идущими от
раздаточной коробки.
Дополнительно приведены условные минимально возможные
значения знаменателя геометрической прогрессии
? =
при заданных D и “оптимальном” распределении передаточных
чисел в агрегатах трансмиссии (когда нет перекрытия передач), а
также значения максимально и минимально возможных по кинема-
тике скоростей КМ, вычисленные по формулам
Umax к = 3, б7ГПдВлгГк/(30ит,п);
Umin к ~ 3, 6тГ7^двт1П / (ЗОДтах )•
В последних пя7 i строках таблиц представлены теоретически
необходимые значения максимального umax и минимального umjn
передаточных чисел, рассчитанные исходя из условий полного ис-
пользования спепного веса КМ и достижения максимальной скорости
движения, а также соответствующий им диапазон D трансмиссии и
числа передач и n^min при разбивке всего диапазона передаточ-
ных чисел по закону геометрической прогрессии со знаменателями
Qtn и gmax. Для расчета использовали следующие формулы:
Umax = Umax^ = тм9 COS C*max ' ^^/(Тще^/тр);
Umin = 3, бтгтгдвДгГкДЗОитах)?
D = Umax/urnjn;
= 1 + lg D/lgg™;
ПЕтт = I + Ig^/lgQmax,
где Отах = 36°; уз = 0,75; т/тр = 0,82; vmax в км/ч.
Анализ табл. 3.4 - 3.6 позволяет сделать следующие выводы.
1. В представленных конструкциях КМ фактическое значение
максимального передаточного числа трансмиссии umax близко к рас-
четному (отличие не более 30 %), за исключением двух шасси МАЗ,
для которых фактическое значение Umax больше расчетного в 1,75
раза.
2. Фактическое значение минимального передаточного числа
трансмиссии umjn меньше или равно расчетному (отличие не более
16% ).
237
Таблица 3.J. Технические характеристики КМ с колесной формулой 4x4
Характеристика ВАЗ-2121 УАЗ-469Б УАЗ-469 УАЗ-452В УАЗ-452 УАЗ-45271 11Л 3-3201 ГАЗ-66-02
тм, т 1,55 2,29 2,45 2,69 2,670 2,620 7,155 5,97
тгр, т 0,4 0,74 0,74 0,72 0,8 0,8 2,295 2,0
Wmax, км/ч 132 100 100 95 95 95 80 90
Размер шины 6,95-16 8,4-15 8,4-15 8,4-15 8,40 15 8,40 -15 8,25-20 12,0-18
гк, м 0,338 0,386 0,386 0,386 0,386 0,386 0,480 0,529
Схема
трансмиссии Рис. 3.1 ,а Рис. 3.1,а Рис. 3.1 ,а Рис. 3.1,а Рис. 3.1,а Рис. 3.1,а Рис. 3.1 ,а Рис. 3.1,а
две-1 ВАЗ-2106 УАЗ-451 М УЛЗ-451МИ УАЗ-451М УАЗ-451 М УАЗ-451 М ЗМЗ-672 ЗМЗ-66
(К, Р4) (К, Р4) (К, Р4) (К, Р4) (К, Р4) (К, 1>4) (К, V8) (К, V8)
Nmi, кВт 58,8 55,2 55,2 55,2 55,2 55,2 84,6 84,6
Тте, Н-м 121,6 166,7 166,7 166,7 166,7 166,7 284,4 284,4
Пдв/у, мин-1 5400 4000 4000 4000 4000 4000 3200 3200
паат, мин-1 3000 2000 2000 2000 2000 2000 2000 2000
Пдв min, МИН 600 600 600 600 600 600 600 600
QTN 1.8 2,0 2,0 2,0 2,0 2,0 1,60 1,60
4тах 9,0 6,67 6,67 6,67 6,67 6,67 5,33 5,33
Пкп 4 4 4 4 4 4 4 4
«КП» 3,242 4,12 4,12 4,12 4,12 4,12 6,55 6,55
1,989 2,64 2,64 2,64 2,64 ‘2,64 3,09 3,09
1,289 1,58 1,58 1,58 1,58 1,58 1,71 1,71
1,000 1,000 1,000 1,000 1,00 1,00 1,00 1,00
1,63 1,56 1,56 1,56 1,56 1,56 2,12 2,12
= UKlu/’*Xll(t+1 ) 1,54 1,67 1,67 1,67 1,67 1,67 1,81 1,81
1,289 1,58 1,58 1,58 1,58 1,58 1,71 1,71
/)K|| — Ufcn.H / UKFI В 3,242 4,12 4,12 4,1'2 4,12 4,12 6,55 6,55
1,48 1,60 1,60 1,60 1,60 1,60 1,87 1,87
Прк 2 2 2 2 2 2 2 2
UpKJ 2,123 1,94 1,94 1,94 1,94 1,94 1,963 1,982
1,200 1,00 1,00 1,00 1,00 1,00 1,000 1,000
PpK =^рк.н/Ирк в 1,77 1,94 1,94 1,94 1,94 1,94 1,963 1,982
Urn 4,3 5,125 2,77xl,94,2 = 5,125 5,125 5,125 6,83 6,83
= 5,38
Umax =
— Uku nUpx.HUrn 29,60 40,96 43,00 40,96 40,96 40,96 87,82 88,67
Окончание табл. 3.^
Характеристика ВАЗ-2121 УАЗ-469Б УАЗ-469 УАЗ-452В УАЗ-452 УАЗ-452Д ПАЗ-3201 ГАЗ-66-02
umin =
— ^кп в^рк в^гп 5,16 5,125 5,38 5,125 5,125 5,125 6,83 6,83
D = 5,74 7,99 7,99 7,99 7,99 7,99 12,98 12,86
ПЕ = пкппрк 8 8 8 8 8 8 8 8
д = ’^D 1,28 1,35 1,35 1,35 1,35 1,35 1,44 1,44
I'max к - Км/ч 133,3 113,6 108,2 113,6 113,6 113,6 84,8 93,4
Vmin к, км/ч 2,58 2,13 2,03 2,13 2,13 2,13 2,58 1,35
Расчетные значения
“max 31,27 38,49 41,18 45,21 44,88 44,04 87,7 80,61
Umin 5,21 5,82 5,82 6,13 6,13 6,13 7,24 7,09
D 6,00 6,61 7,08 7,38 7,32 7,18 12,11 11,37
7lc 4,05 3,72 3,82 3,88 3,87 3,84 6,31 6,17
Л’Е min 1,82 2,00 2,03 2,05 2,05 2,04 2,49 2,45
’’ К карбюраторный; Р4 - 4-цилиндровый рядный; V8 - 8-цилиндровый V-образный.
2 Передаючное число в колесном редукторе.
Таблица 3.5. Технические характеристики КМ с колесной формулой 6x6
Характеристика ЗИЛ-157КД ЗИЛ-131 Урал-375Д Урал-375Н Урал-4320 КамАЗ-4310 КрАЗ-255Ы КрАЗ-260
пгм, т 8,69 11,685 13,025 14,925 13,245 14,940 19,415 22,0
пггр, т 5,0 5,0 5,0 7,0 5,0 6,0 7,5 9,0
®тах> КМ/Ч 60 80 75 75 85 85 71 80
Размер шины 12,00- 18 12,00- 20 14,00-20 НООх 400 14,00 20 1200 x 400 ' 1300 х 530 1300 х 530
-533 -533 -533 -533
Гк, М 0,529 0,557 0,614 0.525 0,614 0,582 0,621 0,621
Схема
трансмиссии - Рис. 3.1/ Рис. 3.1/ Рис. 3.1/ Рис. 3.1/ Рис. 3.1/ Рис. 31/ Рис. 3.1/
ЛВС*1 ЗИЛ-157КД ЗИЛ-131 ЗИЛ-375 ЗИЛ-375Я4 КамАЗ-740.14 КамАЗ-740 ЯМЗ-238 ЯМ 3-238Л
(К, Р6) (К, V8) (К, V8) (К, V8) (Л, V8) (Л. V8) (Л, V8) (11, V8)
Лте , кВт 80,9 110,3 132,4 132,4 154,4 154,4 176,5 220,6
1 те, Н-М 343,2 402,0 465,8 465,8 637,4 637,4 882,6 1078,7
Пдвд/, мин-1 2800 3200 3200 3200 2600 2600 2100 2100
пЛвТ, мин-1 1100 1800 1800 1800 1400 1400 1500 1500
^дв min , МИН 1 600 600 600 600 700 700 700 700
QTN 2,55 1,78 1,78 1,78 1,86 1,86 1,40 1/1
«Углах 4,67 5,33 5,33 5,33 3,71 3,71 3,0 3,0
Пкп 5 5 5 5 5 5 5 8
Окончание табл. 3.5
Характеристика ЗИЛ-157КД ЗИЛ-131 Урал-375Д Урал-375Н Урал-4320 КамАЗ-4310 КрАЗ-255Б1 КрАЗ-260
«КП» 7,44 7,44 6,17 6,17 5,61 7,82 5,26 7,73; 5.52
4,10 4,10 3,4 3,4 2,89 4,03 2,90 3,94
2,29 2,29 1,79 1,79 1,64 2,50 1,52 2,80
1,47 1,47 1,00 1,00 1,00 1,53 1,00 1,96; 1,39
1,00 1,00 0,78 0,78 0,723 1,00 0,66 1,00; 0,71
?«,< + ! = 1,81 1,81 1,81 1,81 1,94 1,94 1,81 1,40
= UKni/UKn(i+l ) 1,79 1,79 1,90 1,90 1,76 1,61 1,91 1,40; 1,41
1,56 1,56 1,79 1,79 1,64 1,63 1,52 1,43; 1,41
1,47 1,47 1,28 1,28 1,38 1,53 1,52 1,39; 1.41
~ «ХП.Н/«КП в 7,44 7,44 7,91 7,91 7,76 7,82 7,97 10,89
?= 1,65 1,65 1,68 1,68 1,67 1,67 1,68 1,41
«рк 2 2 2 2 2 2 2 2
«рк; 2,27 2,08 2,15 2,15 2,15 1,692 2,28 1.31
1,16 1,00 1,3 1,3 1,3 0,917 1,23 1,013
DpK = «рк н /«рк.в 1,96 2,08 1,65 1,65 1,65 1,845 1,85 1,29
«гп 6,67 7,339 8,9 8,05 7,32 7,22 8,21 8,173
“max =
— «кп.н«рк.н«гп 112,65 113,57 118,06 106,79 88,29 95,53 98,46 82,76
Umin — — UKIl.BUpK BUrn 7,74 7,339 9,02 8,16 6,88 6,62 6,66 5,88
D = D„,DP, 14,56 15,48 13,08 13,08 12,83 14,43 14,78 14,07
— пкппрк 10 10 10 10 10 10 10 16
? = 1,35 1,36 1,33 1,33 1,33 1,35 1,35 1,19
Umax x, КМ/Ч 72,1 91,6 82,1 77,6 87,5 84,8 73,8 83,6
к , Км/ч 1,06 1,11 1,18 1,11 1,84 1,58 1,66 1,98
Расчетные значения
Umax 97,23 117,53 124,63 122,11 92,62 97,43 99,16 91,94
Umin 9,31 8,40 9,88 8,44 7,08 6,61 6,92 6,15
D 10,44 13,99 12,61 14,47 13,08 14,74 14,33 14,95
nE 3,51 5,58 5,40 5,63 5,14 5,34 8,91 9,04
Ucmin 2,52 2,58 2,52 2,60 2,96 3,05 3,42 3,46
К - карбюраторный; Д - дизельный; Р6 - б-цилиндровый рядный; V8 - 8-цилиндровый V-образный.
244
Таблица 3.6. Технические характеристики КМ с колесной формулой 8x8
Характеристика БТР-60ПБ БТР-70 ММЗ-560 БАЗ-69501 БАЗ-135МБ МАЗ-79091 МАЗ-79092
шм, т 10,3 И,5 21,5 31,5 25,05 43,5 44.15
тг, т - - 14 12 24,0 22,0
Утах, км/ч 80 80 75 70 65 75 75
Размер шины 13,00 18 13,00 - 18 1200x500- - 508 1300x530 -533 16,00 20 1500x600 - 635 1500x600 - 635
ГК) м Схема 0,552 0,552 0,571 0,621 0,671 0,720 0,720
трансмиссии Рис. 3.4,а Рис. 3.4,а Рис. 3-2 Рис. 3.4,£ Рис. 3.2 Рис. 3.1,в Рис. 3.1,в
две1 ГАЗ-49Б ЗМЗ-4905 ЯМЗ-240 КамАЗ-740 ЯМЗ-238В ЯМЗ 8424.10 ЯМЗ- 8424.10
(2 шт. К, Р6) (2 ш-1. К, V8) (Д, V12) (2 шт. Д, V8) (Л, V8) (Д, V8) (Л, V8)
'Чпе, кВт 66,2x2 84,6x2 265 154,4x2 220,6 346 346
Тте. Н-М 220,7x2 284,4x2 1370 637,4x2 1078,7 1970 1970
Пдв/V, МИН’ 1 3400 3200 2100 2600 2100 2100 2100
плвт, мин-' 2000 2000 1300 1400 1500 1300 1300
лдвтш , МИН 600 600 700 700 700 700 700
QTN 1,7 1,6 1,62 1,86 1,4 1,62 1,62
Qmax 5,67 5,33 3.0 3,71 з.о з.о 3,0
Пкп 4 4
UK)11 6,55 6,55
3,09 3,09
1,70 1,70
1,00 1,00
- -
- -
- -
- -
91,4-1 = 2.12 2,12
= U|<rii/UKn(i+l) 1,82 1,82
1,70 1,70
- -
- -
- -
245
5 3,909 7,82 4x2-8 9,95/2,90 !) 10,8 9 10,8
2,110 4,03 5,23/1,52 6,13 6,13
1,138 2,50 3,44/1,00 4,51 4,51
0,714 1,53 2,44/0,71 3,50 3,50
0,512 1,00 - 2,78 2.78
1,75 1,75
-- 1,29 1,29
- 1,00 1,00
- - 0,795 0,795
1,85 1,94 1,91/1,91 1,76 1,76
1,85 1,61 1,52/1,52 1,36 1,36
1,59 1,63 1,41/1.41 1.29 1,29
1,39 1,53 1,26 1,26
- 1,59 1,59
- - - 1,36 1,36
- - - 1,29 1,29
- - 1,26 1,26
Таблица 4-15. Значения некоторых величин,
и прочность конической пары зубчатых
Режим движения Т, Н-м Ft, Н п, мин-1 «э, м/с К Ну Fj0. МПа кй Kral Кга2
Без прицепа: 1536 27156 233 1.4 1,026 1,365 123 0 1.0 1,00
при ирк в 792 14003 451 2,7 1,032 1,373 64 0,2 1,1 1,08
492 8699 728 4,3 1,040 1,383 40 0,2 1,1 1,08
328 5799 1189 7,0 1,053 1,400 26 0,2 1,1 1,08
222 3924 1819 10,8 1,072 1,426 18 0,2 1,1 1,08
при «рК.н 2520 44554 126 0,7 1,022 1,359 203 0 1,0 1,00
1461 25830 245 1.5 1,026 1,365 117 0,2 1,1 1,08
906 16018 395 2,3 1,030 1,370 73 0,2 1,1 1,08
С прицепом: 1536 27156 200 1,2 1,025 1,363 123 0 1,0 1,00
цри «рК В 792 14003 388 2,3 1,030 1,370 64 0,2 1,1 1,08
492 8699 626 3,7 1,037 1,379 40 0,2 1,1 1,08
328 5799 1021 6,0 1,048 1,394 26 0,2 1,1 1,08
222 3924 1564 9,3 1,065 1,416 18 0.2 1,1 1,08
при UpK.H 2520 44554 108 0,6 1,022 1,359 203 0 1,0 1,00
1461 25830 210 1.2 1,025 1,363 117 0,2 1,1 1,08
906 16018 338 2,0 1,029 1,369 73 0,2 1,1 1,08
Л<-2 - 0, 5*2 а
Wlnm = Wlte2-------Б------ cos Рт2 =
Ле2
= 8,775
131,695 -0,5-37
131,695
cos 38° = 5,943
мм;
dwmi = mnmzi/ cos /Зт1 = 5,943 -15/ cos 38° = 113,127 мм;
и = z2/21 = 26/15 = 1,733;
Ft = 2T - 103/(<Uninc) = 2T - 103/l 13,127.
Значение T берем из табл. 4.3 для карданного вала, соединяю-
щего средний и задний мосты. Результаты вычислений Ft записы-
ваем в табл. 4.15.
346
Расчетные значения
Umax 93,50 81,01 65,05 111,39 113,11 115,41 117,13
Umin 8,84 8,32 6,03 8,70 8,17 7,60 7,60
D 10,58 9,74 10,79 12,80 13,84 15,18 15,41
5,45 5,84 5,93 5,11 8,81 6,64 6,67
Яц min 2,36 2,36 3,17 2,94 3,39 3,48 3,49
Примечание. Для БАЗ-135МБ в числителе приведены значения иК||, и « +1 для первого диапазона коробки передач,
а в знаменателе - для второго.
11 К - карбюраторный; П - дизельный; Р6 - 6-цилиндровый рядный; V8 и V12 - 8- и 12-цилиндровые V-образные.
'2 Значение параметра на одном диапазоне коробки передач.
‘3 Передаточное число в дополнительном раздаточном редукторе.
14 Передаточное число в колесном редукторе.
15 Передаточное число в бортовом коническом редукторе.
3. Для большинства представленных КМ фактическое значение
диапазона трансмиссии D близко к расчетному (отличие не более
20%). Однако у ЗИЛ-157КД и большинства КМ с колесной форму-
лой 8x8 фактическое значение D больше расчетного на 30 ... 70 %.
4. Среднее значение шага передаточных чисел в коробке пере-
дач q = 1,48... 1,87 - для машин, оборудованных карбюраторны-
ми двигателями, и q — 1,39... 1,68 - для машин с дизелями, что
близко к отношению частот вращения коленчатого вала двигате-
ля при максимальной мощности и максимальном крутящем моменте
qTN = б ... 2, 55 и qTN = 1, 4 ... 1,86 у карбюраторного двигателя
и дизеля соответственно.
5. В представленных конструкциях минимальное значение шага
передаточных чисел (между высшими ступенями) в коробке пере-
дач qj 1+1 = 1,26 ... 1, 71 приближается к теоретически возможному
значению q = 1,19 ... 1,46 (при выполненном диапазоне D и числе
передач в трансмиссии ns).
6. В представленных конструкциях КМ раздаточные коробки
имеют по две передачи и диапазон передаточных чисел DpK =
— 1,29... 2,14. Исключение составляет шасси БАЗ-135МБ, имею-
щее одну передачу в сочетании с двухдиапазонной восьмиступенча-
той коробкой передач.
7. При принятии в качестве шага передаточных чисел всей
трансмиссии числа qr.N общее расчетное число передач должно из-
меняться в пределах П£ = 4 ... 10- Фактически общее число передач
ns = 8... 18 при близком (в большинстве случаев меньшем) к qr.N
значении шага передаточных чисел. Это обеспечивает работу транс-
миссий полноприводных КМ в двух диапазонах с пересекающимися
рядами передаточных чисел при разных передачах в раздаточной
коробке.
8. Минимально устойчивая (кинематическая) скорость движе-
ния у представленных КМ составляет vmjn к = 0,96 ... 2, 58 км/ч.
3.3. Гидромеханические трансмиссии
Основными элементами гидромеханической трансмиссии явля-
ется гидромеханическая передача, состоящая из бесступенчатого ги-
дравлического элемента и механической коробки передач со ступен-
чатым регулированием передаточных чисел, а также другие агрега-
ты механической трансмиссии. В качестве гидравлического элемен-
та используется так называемая гидродинамическая передача (ги-
дротрансформатор или гидромуфта), обладающая внутренней авто-
матичностью и использующая кинетическую энергию движущейся
248
жидкости. Коробка передач имеет автоматическое или командное
управление.
Основные преимущества гидромеханической трансмиссии в
сравнении с механической:
значительное увеличение срока службы силовой установки и
трансмиссии КМ;
повышение проходимости машины при движении по грунтам с
низкой несущей способностью;
плавное изменение силы тяги на ведущих колесах;
улучшение комфортабельности и снижение вибрации несущей
системы машины.
Факторами, сдерживающими распространение гидромеханиче-
ских передач, являются: сложность их конструкций, большая удель-
ная масса и, следовательно, более высокая стоимость по сравнению с
чисто механическими передачами. Кроме того, в случае замены ме-
ханической передачи на гидромеханическую без увеличения мощно-
сти двигателя наблюдается ухудшение характеристик разгона КМ.
Одновременно снижается и ее топливная экономичность.
Гидромуфтой называется устройство врашательного движения,
состоящее из двух лопастных колес, рабочая полость которых за-
полнена жидкостью, и бесступенчато изменяющее кинематическое
передаточное число. Гидротрансформатор в отличие от гидромуф-
ты имеет не менее трех лопастных колес, заполненных жидкостью,
и бесступенчато изменяет кинематическое и силовое передаточные
числа.
Кинематические схемы комплексных одноступенчатых (с одним
турбинным колесом) гидротрансформаторов показаны на рис. 3.9.
Комплексными они называются потому, что могут работать и как
гидротрансформатор, и как гидромуфта. В первом случае муфты
ззободного хода М (или 1М и 2М) соединяют реакторы Р (или 1Ри
jP' с корпусом 3 гидродинамической передачи, вследствие чего они
.-.сходятся в неподвижном состоянии. Во втором случае реакторы
вращаются свободно, т.е. не имеют жесткой связи с корпусом 3.
На рис. 3.9 видно, что гидротрансформатор связан с тремя
внешними звеньями: входным валом 7, выходным валом 2 и корпус-
ом 3. Звено 1 соединено с насосным колесом Я, а звено 2- с турбин-
ным колесом Т. Корпус 3 связан с реактором Р посредством муфты
свободного хода М. У гидромуфты имеются только два внешних
звена - насос и турбина.
249
Рис. 3.9. Кинематические схемы комплексных трехколес-
ного (о) и четырехколесного (б) одноступенчатых гидро-
трансформаторов
Силовые и кинематические параметры гидродинамической пе-
редачи связаны между собой через КПД:
^гт = №•/№ = Ттпт/(Тнпк) = /frTurT,
где NT - мощность, снимаемая с турбинного колеса; NH - мощность,
подведенная к насосному колесу; Тт и Тн - крутящие моменты соот-
ветственно турбинного и насосного колеса; пт и пн - частоты враще-
ния соответственно турбинного и насосного колеса; Кгт = Тх/Тн -
коэффициент трансформации; иГт = пт/пн - передаточное отноше-
ние.
Для установившегося режима работы гидродинамической пере-
дачи условие равновесия может быть выражено с помощью уравне-
ния моментов:
Тк + Тт + Тр = О
- в случае гидротрансфоматора и
Тн + Тт = О
- в случае гидромуфты, где Тр - крутящий момент колеса реактора.
Из последнего уравнения имеем Тт = — Тн. Следовательно, у
гидромуфты К'гт = 1 (без учета знака). Ввиду отсутствия реакто-
ра гидромуфта не способна изменять силовой параметр - крутящий
момент. Главное назначение гидромуфты состоит в автоматическом
регулировании передаточного отношения в зависимости от нагрузки
на выходном валу.
250
Принцип действия гидродинамической передачи основан на ис-
пользовании сил инерции, действующих на лопасти колес со стороны
циркулирующей жидкости. На рис. 3.10 показаны планы скоростей
и инерционных сил в точке А межлопастного канала центробежного
колеса гидродинамической передачи на неустановившемся режиме.
В этой точке рабочая жидкость имеет абсолютную скорость С, ко-
торая слагается из геометрической суммы переносной (окружной) U
и относительной Ж скоростей:
7? = 77 +
Векторы скоростей и и W направлены по касательным в точке
A: U - к окружности радиусом ОА в сторону вращения; W - к
линиям тока 1А2 рабочей жидкости во внешнюю сторону.
Рис. 3.10. Планы скоростей жидкости (а), а также инерцион-
ных сил в плоскости вращения (б) и радиальной плоскости (а)
колеса гидродинамической передачи
д
На каждую частицу рабочей жидкости, проходящую через точку
.4. действуют следующие элементарные силы инерции: dPc, dPa,
dPw и dPx. Сила dPc является центробежной. Она возникает
вследствие переносного движения и ее модуль может быть найден из
уравнения
dPc — dmpc^y
251
где dm - масса элементарной частицы рабочей жидкости, находя-
щейся в точке Л; pc = ОА - радиус; си - угловая скорость пере-
носного движения.
Сила d Poi представляет собой первую составляющую центро-
бежной силы инерции d Pq относительного движения. Его появление
обусловлено криволинейностью лопастей колес. Уравнение для опре-
деления модуля этого вектора имеет вид
dPoi = dmW2/р\.
Здесь р\ - радиус кривизны в точке А развертки линии тока на
плоскость, перпендикулярную оси вращения лопастного колеса.
Вторая составляющая dPo2 силы dP^ показанная на рис. 3.10, в,
действует в меридиональной плоскости. Она возникает вследствие
кривизны наружного и внутреннего торов и ее модуль определяется
из уравнения
dPo2 = dmC'in! р2,
где Ст ~ меридиональная скорость; р2 - радиус кривизны в точке А
проекции линии тока на меридиональную плоскость.
Вектор dPo2 направлен по нормали к проекции линии тока на
меридиональную плоскость в сторону внешнего тора. Результирую-
щая сила d Ро равна геометрической сумме:
d PQ = d Pq\ + d Ро2-
Возникновение силы d Рщ вызвано неравномерностью относи-
тельной скорости W. План инерционных сил, построенный на
рис. 3.10, б', соответствует случаю ускоренного движения рабочей
жидкости вдоль линии тока. В гидротрансформаторах КМ такой
случай возможен при замедлении вращения турбинного колеса, что
приводит к возрастанию расхода циркулирующей жидкости и, сле-
довательно, относительной скорости W.
Для установления связи силы Pw с вариацией относительной
скорости W может быть использовано уравнение
d Pw = dmdW/dt.
252
Вектор dPy. представляет собой силу Кориолиса, появляющу-
юся в результате наложений относительного и переносного (враща-
тельного) движения. Ее модуль определяется из уравнения
dP^ = 2dmWa;sm(V?, о?).
Направление сил инерции показано на рис. 3.10, б, в. Вектор
d?c направлен по радиусу ОА. Линиями действия векторов d~F?0 и
d Pw служат соответственно нормаль и касательная к линии тока
в точке А. Вектор dPo направлен по нормали от центра кривизны.
Направления векторов d Pw и совпадают при замедлении и проти-
воположны при ускорении относительного движения жидкости. Для
определения направления силы d /’к надлежит спроектировать век-
тор W на плоскость, перпендикулярную главной оси гидродинами-
ческой передачи, и затем повернуть полученную проекцию на угол
90° против направления переносного вращения.
Градиент давлений вдоль линии тока, обусловленный действием
указанных сил инерции, вызывает циркуляцию жидкости в рабочей
полости. Проекции сил инерции dP&, dPo и d~Pw на направления,
перпендикулярные меридиональным плоскостям, вызывают возник-
новение крутящих моментов на колесах. Центробежные же силы
инерции dPc влияют на крутящие моменты косвенным образом. От
соотношения сил d~Pc в соседних колесах во многом зависит расход
в рабочей полости: чем больше расход, тем значительнее силы dPy.
и dP0 и, следовательно, больше крутящие моменты.
Составляющая dP$2 силы d Pq оказывает большое влияние на
рабочий процесс гидромуфты. От ее величины в гидромуфте зави-
сит форма круга циркуляции жидкости в рабочей полости. На ра-
бочий процесс гидротрансформатора вектор d Р$2 почти не влияет.
Модули и направления этих векторов определяют осевые нагрузки в
гидротрансформаторе.
В случае ударного входа потока в лопастную систему колеса
кроме перечисленных элементарных сил инерции возникает допол-
нительная составляющая dP&c- На рис. 3.11 показан для данного
случая план скоростей жидкости в точке /, расположенной на вхо-
де в г-е колесо гидродинамической передачи. Пусть жидкость при
253
2
d~
Рис. 3.11. Планы скоростей жидкости в случае
ударного входа потока в лопастную систему колеса
подходе к г-му колесу имеет скорость В точке 1 начинает-
ся перестраивание плана скоростей вследствие стремления потока
жидкости принять форму межлопастного канала. В результате это-
го вектор абсолютной скорости изменит свое направление и модуль.
Тогда в точке 1
= c\i-i)2 +
Изменение скорости потока на величину Д С?повлечет за собой
и изменение энергии потока. Указанное обстоятельство вызывает
появление на входных участках лопастей ударных сил dP что
обуславливает возникновение крутящего момента. В случае умень-
шения абсолютной скорости в точке /, как это показано на рис. 3.11,
происходит передача энергии от циркулирующей жидкости к лопаст-
ной системе г-го колеса. При увеличении абсолютной скорости в точ-
ке 1 наблюдается обратный процесс, т.е. часть энергии передается
от колеса к потоку жидкости. Переданная таким образом энергия
затрачивается на торможение или разгон потока жидкости, что вы-
зывает ее нагревание. В первом случае крутящий момент, обусло-
вленный действием ударных сил dP дс, будет направлен в сторону
вращения колеса, а во втором - в противоположную сторону.
Суммарный крутящий момент на г-ом лопастном колесе, создан-
ный элементарными силами инерции dPx, dPo, dPw и dP^c, можно
определить, используя закон моментов количества движения. Со-
гласно данному закону, производная по времени t момента количе-
ства движения системы Li относительно некоторого неподвижного
254
центра О равна результирующему моменту Т; всех внешних сил:
dLi „
—* = Ti.
dt 1
Следовательно, изменение момента количества движения жид-
кости, проходящей через каналы г-го колеса за одиу секунду:
= IT -
происходит благодаря действию внешнего момента Т, (как активно-
го, так и реактивного).
Расход массы жидкости в рабочей полости на установившемся
режиме
dm
ТГ = ^’
где Q - объемный расход жидкости в секунду.
На рис. 3.12 показаны разложения векторов абсолютных скоро-
стей "^-1)2 и на выходе из (г — 1)-го и г-го лопастных колес
на две составляющие скорости: окружные "^(«-1)2» Сщ2 и меридио-
нальные C^ni- При равноскоростном потоке для всех колес
меридиональные скорости одинаковы, т.е. Cmi = Ст- Выполнение
этого условия позволяет исключить из баланса энергии диффузор-
ные потери.
Объединение последних трех уравнений приводит к первой фор-
муле Эйлера для турбомашины:
Ti = Qp (C’ui2ri2 - <?<»(»—1)2) •
Объемный расход жидкости можно выразить посредством меридио-
нальной скорости Ст и суммарной площади проходных сечений F
каналов колес:
Q - CmF.
После расшифровки Q становится очевидным, что формула Эйлера
включает обе составляющие абсолютной скорости С жидкости на
выходе из колес.
Эта формула применима для всех колес - как вращающихся (на-
сос и турбина), так и неподвижных (реакторы). При использовании
255
Рис. 3.12. Планы скоростей жидкости на выходе из
лопастных систем колес гидродинамической передачи
формулы Эйлера следует учитывать знак крутящего момента Т,, ко-
торый определяет направление его действия: знак “+” означает, что
Tj направлен в сторону вращения, а ” - против вращения колеса.
На КМ получили распространение главным образом комплекс-
ные гидротрансформаторы, обладающие по сравнению с простыми
более высокими энергетическими показателями.
При уменьшении нагрузки на гидротрансформатор осуществля-
ется переход с режима работы трансформатора на режим работы
муфты, а при ее увеличении, наоборот, - с режима муфты на режим
трансформатора. В первом случае реактор начинает вращаться сво-
бодно, а во втором - останавливается, соединяясь при этом через
муфту свободного хода с корпусом.
3.4. Гидрообъемные трансмиссии
Основными элементами гидрообъемной трансмиссии являют-
ся гидрообъемная передача и необходимые агрегаты механической
трансмиссии. В отличии от гидромеханической передачи гидрообъ-
емная (гидростатическая) передача использует не кинетическую, а
потенциальную энергию жидкости.
На КМ гидрообъемные трансмиссии находят пока ограниченное
применение. Связано это со сложностью и ненадежностью уплотне-
ний гидросистемы, повышенных требований к точности и чистоте
256
рабочих поверхностей гидромашин, а также к качеству рабочих жид-
костей (масел) и их очистке, невысоким общим КПД (г) < 0,9).
Наряду с этим гидрообъемные трансмиссии по сравнению с ме-
ханическими имеют некоторые преимущества:
1) возможность бесступенчатого изменения передаточных чисел
в широком диапазоне, плавность подвода крутящего момента к ве-
дущим колесам машины;
2) удобство компоновки ее отдельных агрегатов на машине;
3) возможность торможения машины с помощью трансмиссии;
4) реверсивность трансмиссии без применения специальных
устройств;
5) легкость осуществления разветвления мощностного потока по
потребителям через дистанционный гидропривод.
В состав гидрообъемной передачи входят несколько гидрома-
шин, выполняющих роль насоса и гидромотора, трубопроводы высо-
кого и низкого давления, баки для рабочей жидкости, механизмы для
регулировки режима работы силовой установки, распределительные
устройства и приборы.
Возможны несколько вариантов компоновок гидрообъемных пе-
редач на КМ. Рассмотрим основные из них. Наиболее простым явля-
ется вариант, в котором насос и гидромотор установлены в механи-
ческой трансмиссии вместо коробки передач. Кинематическая связь
гидроагрегатов с механической частью трансмиссии может осуще-
ствляться как по полнопоточной, так и по многопоточным (диффе-
ренциальным) схемам. Последний способ связи применяется, когда
необходимо повысить КПД передачи.
Еще один вариант компоновки гидрообъемной передачи: насос
непосредственно связан с приводным двигателем, а гидромоторы
максимально приближены к ведущим колесам машины. Высокомо-
ментные гидромоторы встраивают в ведущие колеса машины, а вы-
сокоскоростные соединяют с ними посредством редукторов. Связь
насоса с гидромоторами в большинстве случаев параллельная. Для
ступенчатого регулирования скорости движения машины применя-
ют комбинированное соединение гидромашин. Переключение с па-
раллельного на последовательное соединение позволяет почти в два
раза уменьшить передаточное число передачи и тем самым значи-
тельно увеличить скорость движения машины.
По типу гидромашины подразделяют на шестеренчатые, ло-
пастные и поршневые. В гидрообъемных передачах КМ распро-
странение получили поршневые гидромашины. В зависимости от
9 - 692
257
расположения поршней последние разделяют на радиальные и акси-
альные.
Радиально-поршневые гидромашины используют в качестве ги-
дромоторов в некоторых гидрообъемных передачах, выполненных по
второму варианту компоновки. Аксиально-поршневые гидромоторы
применяют как в первом, так и во втором вариантах компоновки.
Эти гидромашины могут иметь различное конструктивное оформ-
ление. Их делят на две группы: с шатунным и бесшатунным при-
водом. Гидромашины первой группы в свою очередь разделяют на
карданные и бескарданные. В зависимости от нагрузки карданные
передачи гидромашин могут быть силовыми и несиловыми. Гидро-
машины с бесшатунным приводом имеют точечный контакт сфери-
ческих торцев поршней с наклонной шайбой. В более совершенных
конструкциях гидромашин применяют кольцевые гидростатические
опоры.
Все аксиально-поршневые гидромашины, используемые в гидро-
объемных передачах, имеют торцевое распределение рабочей жид-
кости. Они могут выполнять роль и насоса, и гидромотора, т.е.
являются взаимозаменяемыми. Аксильно-поршневые гидромашины
имеют следующие показатели: удельные массы регулируемых и не-
регулируемых гидромашин с ручным управлением находятся в пре-
делах 2,7... 9,8 и 0,95... 4,2 кг/кВт соответственно; давление рабо-
чей жидкости достигает 35 МПа, а расход 0,15 м3/с; максимальная
частота вращения гидромашин 3000 мин-1; объемный КПД отдель-
ной гидромашины равен 0,93... 0,99; эффективный КПД гидропе-
редачи насос-гидромотор 0,81 ...0,86; диапазон рабочего регулиро-
вания насосов от 1 до 8, гидромоторов от 1 до 2,5.
Рассмотрим рабочий процесс простейшей полнопоточной гидро-
объемной передачи, в основу схемы которой положен первый вариант
компоновки, а в качестве насоса и гидромотора используют две оди-
наковые аксиально-поршневые гидромашины с шатунным приводом.
Анализируя кинематическую схему таких гидромашин (рис. 3.13),
найдем уравнения, характеризующие рабочий процесс.
Перемещение поршней
х = Л sin 7(1 — cos а),
где R - радиус расположения головок шатунов на опорной шайбе;
7 - угол наклонаблока цилиндров; а - угол поворота опорной шайбы.
При а = 180° получим полное перемещение, называемое ходом
поршией:
s = 2Язш7.
258
Рис. 3.13. Расчетная схема аксиально-поршне-
вой гидромашины с шатунным приводом
Скорость поршней (относительная)
п.’о — —- = Rld sin 7 sin а,
dt
где cu = da/dt - угловая скорость опорной шайбы. Относительное
ускорение поршней
jo = dvjo/dt — Rw2 sin 7 cos а,
переносное (центростремительное)
jn ~ Rua) ,
где Ru - радиус расположения осей цилиндров. Благодаря парал-
лельности относительных перемещений поршней и оси вращения
блока цилиндров кориолисово ускорение в анализируемых гидрома-
шинах равно нулю.
Силы инерции, вызванные относительным и переносным движе-
нием поршней, соответственно равны
Pjo = -~mnj0 = ~mnRu>2 sin 7 cos а;
Pjn = -mnjn = -тпЛкш2,
где тп - масса поршня.
9*
259
Сила инерции Pjo направлена вдоль оси цилиндра. Она стре-
мится либо прижать, либо оторвать поршень от шатуна. Изменение
направления действия силы Pjo происходит при а, равном 90 и 270°.
При изменении угла а от 90 до 180° и далее до 270° она направлена
от опорной шайбы, а от 270 до 0° и далее до 90° - в сторону опорной
шайбы.
Сила Pjn направлена от оси вращения ротора. Линия ее дей-
ствия проходит через центр тяжести поршня перпендикулярно оси
цилиндра. Эта сила прижимает поршень к внешней стенке цилин-
дра.
Теоретическая объемная мгновенная производительность гидро-
машины (объемный расход)
Q — Q1 + Q2 + + Qm,
где Qi, Q2, • • •, Qm - мгновенные производительности качающих уз-
лов (поршень - цилиндр);
Ql = FnRw sin 7 sin a,
Q2 = Fn-Rusin 7 sin(a + 9?),
Qm = Fn7?u?sin7sin^Q + (m - l)y?j;
Fn - площадь поперечного сечения поршня, Fn = 7г</2/4; d - диаметр
поршня; т - число качающих узлов, находящихся в полости нагне-
тания, причем при четном z т = (г — 2)/2 ... г/?., а при нечетном
т = (г — 1)/2... (z + 1)/2; (т — 1) - число промежутков между ци-
линдрами, находящимися в полости нагнетания; z - число поршней
в гндромашине.
Средняя теоретическая объемная производительность
Q-reop — 9^/(2^),
где q - объемная постоянная (рабочий объем) гидромашины,
q ~ Fnsz.
График суммарной производительности гидромашины показан
на рис. 3.14. На рисунке видно, что при угле пульсации ап суммар-
ная производительность становится максимальной Qmax- Для опре-
деления ап продифференцируем по а представленные выше выраже-
ния для Q и Qi:
-у- = Fn-Rusin 7/ cos а + cos(a + ¥>) + •.. + cos[a + (m — l)y>]|.
260
Рис. 3.14. Изменение суммарного
расхода жидкости в гидромашине
В полученном выражении а примет значение ап при dQ/da —
— 0. После выполнения данной операции и некоторых преобразова-
ний найдем
1 + cos (/? + ... + cosfm —
= arctg :----------——------------.
sin 9? 4-... 4- sin(m — 1 )</?
Пульсация потока характеризуется коэффициентом неравномер-
ности подачи гидромашины
& ~ (Qmax фпип)/фтеор,
который при числе поршней от 4 до 12 соответственно составляет,
45,5; 6,2; 22,9; 3,1; 7,8; 1,9; 5; 1,2 и 3,5%. Видно, что для нечетного
числа поршней указанный коэффициент имеет значительно меньшее
значение, чем для четного. Этим объясняется наличие у гидрома-
шин, как правило, нечетного числа поршней.
Коэффициент пульсации гидромашины
Ф ~ Qт&х./Qreap •
Сила Р от давления р рабочей жидкости на поршень равна
Р — рРп,
а ее нормальная и тангенциальная составляющие
Рп = Р cos 7,
РТ — PsYb.'i,
261
Нормальная составляющая Рп прижимает головку шатуна к
опорной шайбе гидромашины, а тангенциальная сила Рт создает на
опорной шайбе и связанном с ней валу гидромашины крутящий мо-
мент, равный для одного цилиндра
Т\ = Prftsina = P#sin7sina.
Для находящихся в данное время в одной зоне высокого или низкого
давлений цилиндров
Т = Т1+Т24-... + Тт,
где
71 = PRsin 7 sin а;
Т2 = PRsin 7sin(a + у>);
Tm == Pftsin7sin[a + (m — !)(/>].
Результирующий крутящий момент
Тр ~ Тпг ~ Твс-
Здесь Тнг, Твс - крутящий момент, создаваемый в зоне нагнетания
гидромашины и возникающий в зоне ее всасывания соответственно.
Зависимость крутящего момента Т от давления р рабочей жид-
кости, объемной производительности Q и угловой скорости ш выра-
жается уравнением
Т = pQ/u.
Выразим Q через рабочий объем q. Тогда
т = рч/(2т).
Крутящие моменты на валах насоса и гидромотора соответственно
равны
Тн = Дрн7н/(2тгт/8 н),
Ты — Дрм^м^в.м/^Л'),
где Дрн и Дрм - перепад давления соответственно в насосе и гидро-
моторе; т?в.н и *?в.м - внутренние (гидравлические и механические)
КПД насоса и гидромотора соответственно.
Коэффициент трансформации гидрообъемной передачи
rz Тм A.pMq»
Лпэп — гп ~~ л J/b.hTJb.M-
Гн Дрн9н
262
Для гидрообъемных передач, в основу компоновки которых положен
первый вариант, можно принять Дрн Дрм, и, следовательно,
КГОп = (<7м/<7н)^В.н7?В.М-
Мощность, потребляемая насосом,
TVh — ТкШп — — Дрн?н<*;н/(27ГТ|в.н).
Мощность, отдаваемая гидромотором,
~ Тмшм = Дрм9м^мт/а.м/(27г).
Таким образом, КПД передач
Угол ~ Ли/(““Ан) ~ ТмШм/(—ТяШн) — А^гоп/^гоп»
а передаточное число
<7м 1
игоп — “ >
<7н т?о.нТ?о.м
где т/о.н и т/о.м - объемные КПД насоса и гидромотора.
Эффективный КПД гидрообъемной передачи насос - гидромо-
тор
7?гоп,э = ^в.н^в.м^о.н^/о.м-
'Кгоп.Угм
Рис. 3.15. Безразмерные характе-
ристики гидрообъемной передачи
На рис. 3.15 изображены зависимости КГоп и ^Гоп от передаточ-
ного отношения UrOn = шм/шн = l/uron.
263
3.5. Электромеханические трансмиссии
Общие положения
Из всех видов прогрессивных передач на полноприводных КМ
наиболее широкое применение получили гидромеханические переда-
чи, а на машинах большой грузоподъемности и высокой проходимо-
сти - электрические передачи. Электрическая передача состоит из
автономного источника электроэнергии, исполнительного механизма
и системы регулирования.
В настоящее время на КМ большой грузоподъемности, высокой
проходимости, многозвенных автопоездах и автобусах большой вме-
стимости находит применение теплоэлектрический привод (ТЭП)
с электромотор-колесами (ЭМК). ТЭП называют систему приво-
да всех ведущих колес КМ с помощью электродвигателей, получаю-
щих питание от генератора, который приводится во вращение тепло-
вым двигателем (поршневым, газотурбинным). Основные элементы
ТЭП КМ: 1) автономный источник энергии (двигатель-генераторная
установка ограниченной мощности); 2) исполнительный механизм
(чаще всего ЭМК), состоящий из тягового электродвигателя (ТЭД),
редуктора, тормозного устройства, механизма управления, колесно-
го движителя и других вспомогательных механизмов; 3) раздельная
или совместная система автоматического регулирования двигатель-
генераторной установкой и ТЭД.
Использование ТЭП решает ряд важных задач, среди которых
необходимо отметить следующие: рациональное деление и переда-
ча мощности от автономного источника энергии к ведущим колесам
практически при любой колесной формуле, расширение возможно-
стей поиска оптимальных решений компоновочных и конструктив-
ных схем КМ. ТЭП отличается гибкой системой регулирования, что
позволяет расширить ее функции для улучшения эксплуатационных
характеристик КМ.
Экономичность машин с ТЭП определяется более низкой (на
10 - 30 %) себестоимостью перевозок в сравнении с себестоимостью
перевозок обычным автотранспортом в условиях бездорожья вслед-
ствие их большой грузоподъемности и высокой проходимости. Повы-
шение первоначальной стоимости агрегатов электропривода по срав-
нению с механическим приводом (примерно в 2-3 раза) окупается
увеличением их срока службы (в 6-7 раз) и снижением расходов
по ремонту н содержанию, простоев транспортных машин, а также
меньшим износом резины и деталей тормозов.
264
Системы ТЭП могут быть выполнены на постоянном и пере-
менном токе. Возможны также смешанные системы на переменно-
постоянном токе. Свойства ТЭП в значительной степени определя-
ются видом тока, в зависимости от которого применяют то или иное
электрическое оборудование и систему регулирования.
Структурные схемы электромеханических трансмиссий КМ по-
казаны на рис. 3.16.
Рис. 3.16. Структурные схемы электромеханических транс-
миссий с одним тяговым электродвигателем (а), с ЭМК (б)
и с несколькими электродвигателями и редукторами, устано-
вленными на несущей системе (а):
АИЭ - автономный источник энергии; ТЭД - тяговый электродвига-
тель; Р - редуктор; КД - колесный движитель; ГП - главная передача;
ЭМК - электромотор-колесо
265
В настоящее время на КМ используют автономные системы
ТЭП постоянного тока с ТЭД последовательного возбуждения; рас-
ширяется применение аналогичных систем ТЭП, но с ТЭД незави-
симого возбуждения, обеспечивающими более гибкое регулирование
ТЭП, в частности моментов и реализуемой на ЭМК мощности.
Системы ТЭП переменного тока с асинхронными ТЭД находят
пока еще ограниченное применение на КМ главным образом из-за
относительной сложности преобразователя частоты, чаще всего вы-
полненного по непосредственной схеме с использованием тиристоров.
Делаются попытки применения на КМ электропривода с тяговыми
вентильными двигателями и непосредственными преобразователя-
ми частоты. Механическая характеристика такого привода (зави-
симость момента на валу ТЭД от частоты вращения) аналогична
характеристике ТЭП постоянного тока.
Разновидности привода ведущих колес показаны на рис. 3.17.
Все приводы ведущих колес включают ТЭД постоянного или пе-
ременного тока и механическую передачу, связывающую ТЭД с ко-
лесным движителем. Приводы выполняют либо индивидуальными
(ЭМК), либо групповыми (ТЭД - ось); они имеют механическую
передачу с постоянным или переменным передаточным числом.
Рис. 3.17. Разновидности привода ведущих колес
266
В системах ТЭП постоянного тока в качестве первичного дви-
гателя применяют поршневые, а также одновальные ГТД, которые
работают в режиме постоянной мощности с неизменной частотой
вращения. В случае применения поршневых ДВС вал генератора
обычно соединен непосредственно с валом первичного двигателя (без
редуктора), а при использовании ГТД обязательно наличие понижа-
ющего редуктора с большим передаточным числом.
В ТЭП переменно-постоянного тока целесообразно использовать
одновальные ГТД, работающие с постоянной мощностью, и быстро-
ходные синхронные генераторы, имеющие непосредственное соеди-
нение с двигателями; известны случаи применения дизелей. Регули-
рование частоты в таких системах осуществляется вне двигателя-
генератора. Возможно также использование двухвальных ГТД, ко-
торые обеспечивают достаточно простое регулирование всего ТЭП.
Они работают с изменяющейся мощностью и переменной частотой
вращения.
Максимальное напряжение генератора, как известно, определя-
ется технико-экономическими факторами и соображениями техники
безопасности. Его нельзя превысить из-за насыщения магнитной це-
пи, а также потому, что существуют ограничения на нагревание об-
мотки возбуждения, по электрической прочности изоляции, по допус-
каемому напряжению между коллекторными пластинами. Для гене-
ратора постоянного тока максимальное напряжение t/r.max < 900 В.
Физиологическое воздействие переменного тока на человеческий ор-
ганизм в 5 раз сильнее, чем постоянного, поэтому для привода пере-
менного тока 6 г.max < 380 В.
В отечественном и зарубежном автомобилестроении грузоподъ-
емность и проходимость повышают увеличением числа ведущих осей
КМ, нагрузки на ось, а также созданием двухзвенных и многозвен-
ных автопоездов. Серьезной технической проблемой, которую прихо-
дится решать при создании таких мащин, является выбор силового
привода ведущих колес. Во многих случаях предпочтение отдают
электрическому приводу, применение которого относительно просто
решает проблему рационального разделения и передачи мощности от
силовой установки к ведущим колесам при любой колесной формуле.
Использование ЭМК открывает большие технические возможности в
создании КМ новых конструкций, для которых трансмиссия в виде
индивидуального электропривода ведущих колес является возмож-
ной и целесообразной.
Основными критериями, определяющими целесообразность при-
менения на полноприводных машинах привода с ЭМК по сравнению
267
с механическими и гидромеханическими приводами, являются: мас-
са агрегатов и узлов; эксплуатационные свойства (надежность в ра-
боте, объем и периодичность обслуживания, простота обслуживания
и т.п.); КПД системы привода; срок службы агрегатов; стоимость
агрегатов и узлов привода, а также эксплуатационные расходы за
установленный техническим заданием срок службы.
Основные параметры ЭМК определяются техническими и экс-
плуатационными характеристиками проектируемой КМ. Вместе с
тем возможно создание транспортных машин на базе существую-
щих ЭМК с применением соответствующей двигатель-генераторной
установки, обеспечивающей питание электроэнергией определенно-
го числа двигателей ЭМК данной конструкции. Здесь для ряда КМ
различного класса и назначения проявляется возможность унифика-
ции такого сложного и дорогостоящего узла, как мотор-колесо.
Использование привода с ЭМК на КМ большой грузоподъемно-
сти и высокой проходимости дает следующие преимущества:
1) свободный выбор колесной формулы;
2) возможность создания КМ практически с любым числом ве-
дущих осей, что недопустимо при других видах привода;
3) компоновку шасси, позволяющую получить большую сте-
пень соответствия конструкции шасси характеристикам перевози-
мого груза;
4) повышение надежности привода, достигаемое существенным
упрощением для КМ с колесной формулой 8 х 8 и более механиче-
ской части электропривода по сравнению с механическими и гидро-
механическими приводами, уменьшение числа подверженных износу
деталей привода;
5) уменьшение массы агрегатов привода по сравнению с массой
агрегатов гидромеханического привода при относительно большой
мощности теплового двигателя (500... 700 кВт и более);
6) повышение проходимости благодаря плавному нарастанию
силы тяги на колесах, отсутствие дифференциального эффекта меж-
ду осями и колесами, возможность введения в схему электропривода
специального противобуксовочного устройства для каждого мотор-
колеса;
7) повышение общего КПД на многоосных полноприводных КМ
в результате снижения потерь в шинах по сравнению с вариантом,
где мощность реализуется при меньшем числе ведущих колес;
8) обеспечение заданного диапазона силы тяги при бесступенча-
том или двухступенчатом регулировании.
268
Недостатком привода с ЭМК является сравнительно высокая на-
чальная стоимость его агрегатов.
В системах ТЭП происходит двойное преобразование энергии,
что отрицательно сказывается на его общем КПД. Номинальные
значения КПД электрических машин несколько ниже номинальных
значений КПД гидротрансформаторов, но снижение КПД при откло-
нении режима работы от номинальных параметров в электрических
машинах проявляется значительно слабее, чем в гидротрансформа-
торах. Кроме того, гидротрансформатор работает только при разго-
не и движении в условиях реализации максимальной тяги, а осталь-
ное время находится в заблокированном состоянии, т.е. не влияет на
КПД системы привода.
Недостаток конструкций электрических трансмиссий с ЭМК -
относительно большие неподрессоренные массы, что повышает на-
грузки на подвеску и несущую систему.
Основные требования, предъявляемые к электрическим транс-
миссиям при их проектировании.
1. Обеспечение заданных тяговых Рк(ум) и тормозных Рт(им)
характеристик, трогания с места, разгона, выбега и реверсирования
движения КМ. Отметим, что в режиме трогания на тяжелых грун-
тах можно развивать пусковой момент тяговых электродвигателей
Тп = (2.. .3)ТНОМ, где Тном “ номинальный момент электродвигате-
ля, соответствующий номинальному тяговому усилию Ркном.
2. Реализация тяговым электродвигателем полной свободной
мощности источника энергии в рабочем диапазоне скоростей дви-
жения автомобиля. Поэтому отбор мощности от источника энер-
гии производится в соответствии с предельными характеристика-
ми, устанавливающими зависимость между энергетическими пара-
метрами электрооборудования и источника энергии. Ограничение
предельной мощности должно происходить автоматически. Условие
равенства мощностей источника и потребителей выражается соот-
ношением
k m р
'У \ ^евг ~ \ 7Уэт/,
i=l } = \ /=1
где к, т, р - число источников энергии, тяговых электродвигателей
и вспомогательных агрегатов соответственно; NCBi - свободная мощ-
ность г-го источника энергии; Naaj - мощность j-ro тягового элек-
тродвигателя; N3Tf - потери в /-м агрегате электрической транс-
миссии.
269
3. Обеспечение работы тяговых электродвигателей при исполь-
зовании части свободной мощности источника энергии.
4. Обеспечение заданного диапазона регулирования скорости
движения КМ и создание необходимых тяговых усилий при мини-
мальных массе и размерах силового электрооборудования (главным
образом тяговых электрических машин). В свою очередь, указанное
обстоятельство предъявляет повышенные требования к выбору ра-
циональной схемы трансмиссии, электромагнитным параметрам тя-
говых электрических машин, конструктивному исполнению силово-
го электрооборудования, строгому анализу и учету времени работы
трансмиссии в каждом из возможных режимов. Минимизация массы
и размеров - одно из основных и трудновыполнимых требований при
разработке тягового электрооборудования КМ с электропередачами.
5. Надежная работа при температурах от 40 до —50° С и влажно-
сти до 98 %, при вибрации с ускорением до 50 м/с2 в спектре частот
1 ... 80 Гц и до 150 м/с2 при одиночных ударных нагрузках.
6. Максимальная степень унифицикации электрооборудования с
целью наиболее полного его применения в КМ различного класса и
назначения. В этом случае значительно снижаются стоимость раз-
работки и сроки внедрения в серийное производство как собственно
электрооборудования, так и КМ в целом. Унификация позволяет
уменьшить время и трудоемкость ремонтов при эксплуатации, об-
легчает задачу обеспечения запасными частями и т.д.
При выборе источника энергии для КМ необходимо также пре-
дусмотреть мероприятия по технике безопасности экипажа и охране
окружающей среды.
Перечисленные требования являются общими для электриче-
ских трансмиссий любого типа. При разработке КМ каждого класса
и определенного назначения их конкретизируют с учетом особенно-
стей эксплуатации и других условий, оговоренных в техническом
задании на проектирование. Исходя из рассмотренных выше тре-
бований, выбирают способы регулирования частоты вращения тя-
говых электродвигателей, выявляют наиболее рациональные схемы
силовой цепи преобразования и передачи энергии, определяют пара-
метры и характеристики агрегатов силовой цепи.
По характеру работы ТЭП подразделяют на электроприводы по-
стоянного и периодического действия. ТЭП постоянного действия
является основным и единственным видом тягового привода непол-
ноприводных и полноприводных КМ, имеющих единую несущую си-
стему, на которой размещены все агрегаты. КМ с ТЭП периоди-
270
ческого действия обычно состоят из двух или более звеньев. Коле-
са одного из них имеют постоянный механический или гидравличе-
ский привод (основной), а колеса другого - электропривод, который
включается периодически при ухудшении дорожных условий. Такие
КМ работают как неполноприводные при выключении электропри-
вода, а с включенным электроприводом представляют собой маши-
ны со смешанным приводом. КМ с электроприводом периодического
действия - это двухзвенные поезда (одноосный тягач и прицеп), реже
- двухосные или многоосные тягачи и многоосные прицепы. Причем
электропривод имеют колеса прицепного звена, что позволяет при-
менять электрические машины меньшей мощности, а следовательно
снизить массу.
К числу машин с электроприводом постоянного действия отно-
сятся неполноприводные КМ (электробусы, самосвалы с колесной
формулой 4 х 2), полноприводные КМ 4x4, 6x6, 8 х8 и т.д. (тя-
гачи, автомобили высокой проходимости), а также полноприводные
двухзвенные и многозвенные автопоезда.
Работы исследовательских организаций показали, что мини-
мальные сроки внедрения электропривода имеют большегрузные
автомобили-самосвалы грузоподъемностью 50 ... 300 т с колесной
формулой 4 х 2 и 4 х 4, полноприводные КМ высокой проходимо-
сти с колесной формулой 8 х 8 и более, а также автобусы большой
вместимости с единой несущей системой, либо сочлененные с колес-
ной формулой 6x4.
Расчет основных характеристик ТЭП постоянного тока
Для определения тягово-скоростных свойств автомобиля с элек-
тропередачей исходными данными являются внешняя характери-
стика теплового двигателя, характеристики тяговых генератора и
электродвигателя, полная масса КМ, радиус качения колеса, ха-
рактеристика намагничивания электродвигателя для привода посто-
янного тока, передаточное число редуктора ЭМК. Расчет тягово-
скоростных свойств КМ ведут в следующей последовательности.
1. Определяют мощность дизельного двигателя на маховике
Ne = Ne тах^вс,
где Л'е max - максимальная мощность двигателя, кВт; т]вс ~ коэффи-
циент, учитывающий потребление мощности на привод вспомога-
тельных агрегатов.
271
Эта мощность соответствует входной мощности тягового гене-
ратора.
2. Рассчитывают максимальную мощность на выходе тягового
генератора
М- max — А^еТ/г,
где т/г - КПД генератора.
Чтобы найти реальную внешнюю характеристику генератора,
необходимо построить характеристику совместной работы дизеля и
генератора.
При получении нагрузочных характеристик генератора строят
его частичные характеристики, при этом предельные напряжения
определяют из выражения
Up = Ur max(n'r/nr max)2,
где U'j. - предельное напряжение при заданной частоте вращения ва-
ла генератора; Ur max ~ максимальное напряжение; п'г - частота вра-
щения вала генератора; пг max _ максимальная частота вращения
вала генератора.
Значение п'г находят по частичным характеристикам генератора
при постоянном значении тока.
Входная мощность генератора при постоянном токе
где 1Г - сила тока генератора, 1Г = const.
Аналогично определяют мощности при других значениях 1Г. Ха-
рактеристику совместной работы двигателя и генератора строят при
наложении кривых N'e = /(пдв)‘ и АГг.Вх = /(пг). Если двигатель и
генератор соединены муфтой, то пав — пг. По точкам пересечения
этих кривых можно построить реальную внешнюю характеристи-
ку генератора, т.е. по значениям N*.вх (точки пересечения) найти
соответствующие значения Ur:
Ur = вхт/г//г.
3. Определяют характеристику намагничивания ТЭД. Намаг-
ничивающую силу ТЭД с последовательным возбуждением рассчи-
тывают по формуле
272
FrB — ^пДв?
где bn - число витков последовательной обмотки возбуждения; /дв -
ток в якорной цепи.
При ослаблении возбуждения путем шунтирования обмотки
Лав ~
где /3 - коэффициент регулирования возбуждения.
По характеристике намагничивания ТЭД строят графики зави-
симости Е/плъ — /(Лв) (где Е - электродвижущая сила, пдв - ча-
стота вращения якоря электродвигателя) для полного и частичного
ослабления возбуждения обмоток электродвигателя.
4. Находят электромеханические характеристики ТЭД. Для за-
данного значения токовой нагрузки ТЭД 1ав определяют токовую
нагрузку тягового генератора. При параллельном соединении ТЭД
/г = 2/дв (для двух ведущих колес). По внешней характеристике
генератора находят напряжение генератора Ur, которое равно на-
пряжению ТЭД. Электродвижущая сила
£^ДВ ~ £4 — Д£(цВ)
где Д{7дв - падение напряжения в якорной цепи ТЭД,
ДЦдВ = /дВ^ДВ 4"
Rrb - сопротивление якорной цепи ТЭД; Д{7Ш - потери напряжения
в контакте щеток с коллектором, Д£7Щ = 2,5 В.
Частота вращения якоря ТЭД
Е
— ~Е~! ’
Ь/п^ъ
а крутящий момент на валу
ТдВ = 9,55(Е/пдв)/дв-
Значения Е/пав определяют по графикам /(/дв) (см. п. 3). Ана-
логично находят частоту вращения якоря и крутящие моменты на
валу ТЭД при частичном возбуждении. Строят электромеханиче-
ские характеристики ТЭД.
273
5. Определяют внешнюю характеристику ТЭД Тдв = /(пдв), ко-
торую используют для нахождения тягово-скоростных характери-
стик КМ.
6. Вычисляют КПД ТЭД
^ДВ “ М[В/./Удв.ВХ,
где NaB - мощность на валу ТЭД, Вт; NaB.BK - мощность, подводимая
к ТЭД, Вт.
Получаемая на валу полезная мощность NM = 1,03Тдвпдв. Тог-
да тудв можно определить из выражения
т/дв — 03Тдвпдв/({7дв/дв).
Строят зависимость т/дв = /(пдв).
7. Рассчитывают передаточное число и? редуктора ЭМК, исходя
из условия обеспечения движения КМ в наиболее тяжелых дорожных
условиях эксплуатации:
__ ‘Фгла.хтмгк9
где V’max - максимальный коэффициент суммарного дорожного со-
противления; тм - полная масса КМ, кг; гх - радиус качения колеса
без скольжения, м; Тдв тах - максимальный крутящий момент, раз-
виваемый ТЭД при максимальном токе (устанавливают на заводе-
изготовителе), Н-м; т/ред - КПД редуктора; kaB - число ТЭД.
От передаточного числа редуктора ЭМК зависят режимы рабо-
ты ТЭД и его теплонагруженность.
На практике существуют два приближенных метода проверки
возможности работы ТЭД без перегрева.
1. Определение номинального динамического фактора Р*ом, ко-
торый соответствует режиму работы ТЭД при номинальном токе:
р* _ 2Тдв>номир7/реД
'-'ном _ 5
Тктм9
где ТДВ.ном - номинальный крутящий момент на валу ТЭД.
Если рассчитанный динамический фактор Z)J0M не превышает
действительный РНом, то обеспечивается нормальная работа ТЭД.
274
2. Определение среднего квадратического значения тока в ТЭД
за цикл работы КМ:
где ta - длительность одного цикла движения КМ; IaBi - сила тока
ТЭД на i-м участке трассы; ti - время движения на i-м участке
трассы; z - число участков трассы.
Для определения /дв, и ti трассу движения КМ разбивают на
z характерных участков. Для каждого участка находят крутящий
момент на валу ТЭД и соответствующую ему силу тока 1ав. С ис-
пользованием рассчитанных ранее электромеханических характери-
стик определяют ток в ТЭД и частоту вращения его вала, по кото-
рой вычисляют среднюю скорость движения автомобиля и время его
движения на данном участке.
Полученное среднее квадратическое значение тока 1ав не должно
превышать номинальный ток в ТЭД, т.е. 1ав < /дв.ном-
Применение ЭМК вызывает необходимость рассмотрения про-
песса работы ТЭД при повороте КМ. Наличие в силовой це-
пи более двух ТЭД позволяет использовать различные виды их
подсоединения: последовательное, параллельное и последовательно-
параллельное. Так, при последовательном соединении ТЭД с после-
довательным возбуждением обеспечивается дифференциальная связь
ведущих колес правого и левого бортов КМ при повороте, так как
сила тока в обмотках возбуждения ТЭД одинакова, а напряжения
в них пропорциональны частоте вращения якорей. Однако при по-
следовательном соединении ТЭД возможно буксование колес одного
из бортов и полная остановка других, что вызывает недопустимое
повышение напряжения на буксующем колесе. Поэтому в этом слу-
чае в ТЭД устанавливают дополнительную независимую обмотку
возбуждения, предназначенную для ограничения частоты вращения
якорей ТЭД буксующих колес.
При параллельном включении в силовую цепь ТЭД во время
поворота КМ в их обмотках возбуждения сохраняется одинаковое
напряжение при перераспределении силы тока, которое вызывает
соответствующие изменения крутящих моментов на якорях ТЭД.
Численные значения крутящих моментов определяются по внешней
характеристике ТЭД Тдв = /(пдв). Так, при минимальном радиусе
275
поворота КМ и высоких значениях силы сопротивления движению
отношение крутящих моментов на валах внутреннего и наружного
ТЭД КМ большой грузоподъемности может достигать 1,25... 1,35.
Это различие Тдв приводит к соответствующему изменению окруж-
ных сил на внутренних и наружних колесах КМ. Увеличение или
уменьшение окружных сил на ведущих колесах КМ от их среднего
значения, соответствующего прямолинейному движению, составля-
ет 12... 17%.
Проектирование ЭМК
ЭМК является исполнительным механизмом системы ТЭП.
ЭМК представляет собой агрегат, в котором конструктивно объеди-
нены все элементы исполнительного механизма: ТЭД ; механиче-
ская передача, состоящая из редуктора, механизма соединения вала
ТЭД с ведущим звеном редуктора, механизма переключения пере-
дач и его привода (для двухскоростных ЭМК), механизма сцепле-
ния и его привода (для привода периодического действия); элемен-
ты системы охлаждения ТЭД ; колесо, состоящее из шины, обода и
ступицы; опорные подшипники колеса; механический тормоз и его
привод; элементы уплотнения; элементы крепления подвески ЭМК
к несущей системе КМ; элементы механизма подкачки шин (в КМ
высокой проходимости).
В зависимости от режима работы системы ТЭП с ЭМК по-
следние делят на ЭМК постоянного действия с ограниченным (од-
носкоростные) и с расширенным (двухскоростные) диапазоном ре-
гулирования.
При проектировании ЭМК необходимо учитывать следующее:
компоновку ЭМК, удобство компоновки механического тормоза, со-
здание в ЭМК воздуховода с минимальным аэродинамическим со-
противлением при воздушном охлаждении ЭМК или трубопровода с
минимальным сопротивлением при жидкостном охлаждении ЭМК,
подведение электропроводки к ТЭД достаточно простым способом,
несложное подведение воздуха к шинам с централизованной подкач-
кой для машин высокой проходимости.
Анализ кинематических схем выполненных образцов односко-
ростных ЭМК показывает, что наибольшее распространение полу-
чили схемы, образованные двумя трехзвенными планетарными ме-
ханизмами (табл. 3.7).
276
Таблица 3.7. Техническая характеристика односкоростных ЭМК
ет. что они в основном состоят из однорядных трехзвенных плане-
тарных механизмов с внешним и внутренним зацеплением шестерен
(табл. 3.8).
Алгоритм разработки кинематической схемы рассмотрим на
примере создания редуктора двухскоростного ЭМК для автопоезда
высокой проходимости с нагрузкой на колесо (7К = 25 кН при его
движении со скоростью vmax = 70 км/ч. Требования к редуктору
ЭМК следующие: 1) обеспечить (из тягово-скоросного расчета) пе-
редаточные числа uj = 59,2 и иц — 19,8; 2) разместить редуктор
277
Таблица 3.8. Техническая характеристика двухскоростных ЭМК
с ТЭД внутри обода колеса диаметром DK = 400 мм (осевой размер
редуктора должен быть минимальным); 3) получить максимальный
кпд.
Выполнить успешно эти требования можно только в случае при-
менения планетарной передачи, составленной из трехзвенных плане-
тарных механизмов. В связи с жестким ограничением по диаметру
колеса необходимо наложить ограничение на внутреннее передаточ-
ное отношение планетарного ряда и = ЗкорЛсол, где zKOp, гСОЛ - числа
зубьев коронной и солнечной шестерен планетарного ряда.
В выполненных конструкциях планетарных редукторов ЭМК
внутреннее передаточное отношение планетарного ряда лежит в пре-
делах и1 — 1,5 ... 5 0. Чем больше и', тем меньше солнечная шестер-
ня, а чем меньше и , тем меньше сателлит и труднее разместить под-
шипники сателлитов. Наименьший по габаритным размерам трех-
звенный планетарный механизм может быть получен при и1 = 3,
т.е. гСол = ^сат- Уравнение кинематической связи между звеньями
механизма (рис. 3.18) имеет вид
О + + и"аЬшЬ-
278
Рис. 3.18. Однорядный трехзвенный пла-
нетарный механизм:
а, Ь, к, д, - соответственно солнечная шестерня,
коронная шестерня, водило и сателлит
В зависимости от того, какое звено планетарного ряда затормо-
жено, можно получить следующие передаточные отношения:
^ = ^ = -«' = -1,5...-5;
ШЬ
Ь Ша 1 I I О к а
иан = — = 1 + и =2,5...о;
а ШЬ 1 т 7 ] 9
иЬн = — = ~Т~ = 1,7.-.1,2.
Шц и
При составлении редуктора из простых однорядных трехзвен-
ных планетарных механизмов с внешним и внутренним зацеплением
шестерен можно получить более простой и с минимальными разме-
рами по оси составной планетарный механизм (см. рис. 3.18). Три
планетарных ряда могут обеспечить передаточное число д/ = 59,2.
Для получения двухскоростного редуктора с двумя степенями сво-
боды необходимы два планетарных ряда, а следовательно, третий
планетарный ряд на выходе должен быть без элементов управле-
ния. Целесообразно, чтобы планетарный ряд на выходе значительно
повышал передаточное число, поэтому его лучше выполнить с оста-
новленной коронной шестерней или водилом. Так как при остано-
вленном водиле КПД в трехзвенном планетарном механизме меньше,
чем при остановленной коронной шестерне, то этот случай предпо-
чтительнее. При затормаживании водила КПД передачи составляет
7}0 = Т/внТ/внеш = 0,99 - 0,98 = 0,97,
где т/вн, 7внеш - КПД внутреннего и внешнего зацепления шестерен
соответственно.
279
В связи с тем, что все современные КМ высокой проходимости
имеют для регулирования внутреннего давления в шинах нейтрали-
зованную систему подкачки шин, необходимо предусмотреть в кон-
струкции ЭМК устройство, обеспечивающее возможность подведе-
ния воздуха от ресивера к шине. Обычно это устройство состоит из
одного или двух осевых уплотнений, между которыми воздух пода-
ется в отверстие по вращающемуся валу и далее в шину.
Для обеспечения большей долговечности ЭМК необходимо стре-
миться к уменьшению окружной скорости валов. Все это приводит
к усложнению планетарного ряда на выходе.
На рис. 3.19, а видно, что при этом не только усложняется кон-
струкция планетарного ряда, но и увеличивается осевой размер ре-
дуктора. Если выполнить планетарный ряд на выходе с остановлен-
ным водилом, то можно сократить осевой размер редуктора и умень-
шить число уплотнений (рис. 3.19, б), но при этом понизится КПД.
Если уменьшение осевого размера ЭМК имеет большее значение, то
принимают второй вариант конструкции редуктора.
Рис. 3.19. Установка уплотнений
в редукторе ЭМК:
а - двойное уплотнение; б - одинарное
а
На выходе нужно обеспечить |д| = 1,5... 5. Тогда два остав-
шихся планетарных ряда должны обеспечить две скорости с пере-
даточным отношением uj = д//|д| = 39,5...11,8; ui — иц/\и\ —
13,2... 3,96. Максимальное внутреннее передаточное отношение
должно удовлетворять равенству (1 + и1')2 = 36.
Редуктор ЭМК состоит минимум из двух планетарных рядов.
Учитывая жесткие ограничения по радиусу, приходится использо-
вать в схеме еще один ряд с остановленным звеном. В кинематиче-
ской схеме двухскоростного планетарного редуктора с двумя степе-
нями свободы должны быть использованы ведущее звено d. ведомое
280
х и два тормозных звена, которые для удобства записи планетарных
рядов обозначили 1 и 2.
Кинематические схемы планетарного редуктора ЭМК, обеспе-
чивающие заданные передаточные числа, можно выбрать из анали-
за планов угловых скоростей основных звеньев редуктора. Построим
в координатах (и; и>х) изменение угловых скоростей тормозных зве-
ньев 1 и 2 в масштабе = 1. Прямая w = (рис. 3.20) характери-
зует изменение угловой скорости ведомого звена. Прямая, проведен-
ная через масштабную точку е и точку на оси абсцисс шх = 1/ui, ха-
рактеризует изменение угловой скорости тормозного звена 1, а пря-
мая, проведенная через точку е плана и точку = 1/^2, - изменение
угловой скорости звена 2. Для полученных интервалов значений tq
и U2 обратные их отношения составляют l/uj = 0,027. •. 0,085 и
1/^2 = 0,081... 0, 253.
Рис. 3.20. Графическое изображение связи
угловых скоростей звеньев редуктора
Лучи тормозных звеньев могут проходить как справа, так и сле-
ва от оси и = потому что ЭМК должно обеспечить движение
КМ и вперед, и назад (рис. 3.21). Но для анализа кинематических
схем нужно взять случай, когда движение на двух передачах про-
исходит либо вперед, либо назад, так как реверсирование движения
281
Рис. 3.21. План угловых скоростей редуктора
осуществляется не переключением передач в редукторе, а изменени-
ем направления вращения вала ТЭД- Чтобы направление вращения
выходного звена х на первой и второй передачах было одно и то
же, необходимо составить кинематические схемы либо из верхних
лучей cui и сиг, либо из нижних. Верхние лучи cui и сиг дают от-
рицательные передаточные числа. Возможные планетарные ряды:
d21, d2x, dlx, 21х. При заданных ограничениях на абсолютное зна-
чение передаточного числа конструктивно выполнимы трехзвенные
планетарные механизмы d21, d2x, dlx, из которых можно составить
схемы 1-3 (рис. 3.22) со следующими сочетаниями механизмов со-
ответственно: d21 и d2x, d21 и dlx, d2x и dlx. Нижние лучи cuj и cup
образуют трехзвенные планетарные механизмы dxl и dx2, dl2n 21х.
При выполнении основного ограничения конструктивно выполнимы
механизмы dx2, dl2 и 21х, из которых можно составить схемы 4-6
(см. рис. 3-22): dx2 и dl2, dx2 и 21х, dl2n 21х.
Критерии выбора схемы: возможность ее конструктивного ис-
полнения, простота и высокий уровень КПД. Возможность кон-
структивного исполнения проверяют при наличии большого числа
трехзвенных планетарных механизмов, составляющих кинематиче-
скую схему. Условия исполнения схемы: ведущее, ведомое и упра-
вляемые звенья должны иметь выход наружу и одноименные зве-
нья не должны пересекаться. В нашем случае при наличии двух
282
трехзвенных планетарных механизмов в каждой схеме все сочета-
ния могут быть конструктивно выполнены. Нет необходимости и в
построении эскизных схем из-за относительной простоты самого ре-
дуктора. Анализ всех шести возможных кинематических схем (см.
рис. 3.22) позволяет по сложности расположить их в следующий ряд:
4, 1, 2, 5, 3, 6.
Схема 2
Рис. 3.22. Варианты кинематических схем редуктора (d, х, 1,2-
основные звенья)
Далее необходимо для каждой схемы определить КПД на пер-
вой и второй передачах. В качестве примера рассмотрим схему 4.
Для нее уравнения кинематической связи между основными звенья-
ми имеют вид
(1 -I- uj)a>i = щ 4- и\^2] (3.1)
(1 4- U2) от® = Wrf + (3«2)
где и\ и и'2 - внутренние передаточные отношения механизмов dl2
и dx2 соответственно.
Первая передача осуществляется включением тормоза 1, т.е.
uji = 0. Тогда из уравнений (3.1), (3.2) получаем
(1 4- u'2)w® = Щ - U2^d/U'iy
283
и выражение для передаточного отношения принимает вид
1+и2
, III'
1 — У-2/и1
Обозначив передаточное отношение неуправляемого планетарного
механизма и = — и3, найдем передаточное число на первой передаче:
щ = щи = —59,2. (3-3)
Так как механизм дает положительное передаточное число, а выход-
ной планетарный ряд - отрицательное, то на выходе будем иметь
отрицательное передаточное число. На второй передаче и>2 = 0 и
и2 = = 1 + и2‘, иц = и2и = 19,8. Примем наибольшее пере-
даточное число и'3 = 4, тогда и2 = 4. Из выражения (3.3) находим
щ = 6.
Определим КПД на первой передаче по формуле
Vi = ViVo = (3.4)
где tti - силовое передаточное число; ui = п - показатель
степени, равный ±1.
Знак показателя степени оценим из выражения
щ = sign (— ) —(3.5)
\щ/du*
При включении первой и второй передач соответственно имеем
• и1
П1 = sign— =
U1
П2 = Sign-- =
U2
-(1 + Ц)(Ц/(Ц2) = ,
[1 - (и!,/Ц)]2
[1 — (u2/(u;)] — (14- ц2)(~Уц1)
[1 - (Ц/Ц)]2
Значения КПД на первой и второй передачах:
Vi =
1 4- u^Vq1
u2’?o'1/(ui’?o ‘)]ul
= 0,85;
ч„=1±^„о=0,95.
U2
284
Проведя аналогичный расчет для каждой схемы, получим, что
наиболее приемлемыми кинематическими схемами по КПД являют-
ся схемы 5, 3, 2, 6. Сравнивая кинематические схемы по сложности и
значениям КПД, выберем для проведения дальнейших силовых рас-
четов схему 5.
Из уравнений кинематической связи основных звеньев имеем
(1 + и^х = Щ + ^1^25 (3.6)
(1 4* U2 = С^2 -+ ^2^1, (3'7)
где и" - внутреннее передаточное отношение механизма 21х, уточ-
ним внутренние передаточные отношения механизмов, составляю-
щих схему. Принимая |ug| — 4, из выражений (3.6) и (3.7) находим
Ц = 3,95, tij = 2,46 и, используя методику, приведенную в работе
Крейнеса, определяем rji = 0, 92, = 0,95. Принято, что момент на
входе 7^ = 1. Моменты, действующие на звенья на первой и второй
передачах, с учетом внутренних передаточных отношений планетар-
ных механизмов, показаны на рис. 3.23.
Рис. 3.23. Нагруженность звеньев редуктора на первой (а)
и второй (б) передачах
Все результаты анализа кинематических схем являются основа-
нием для дальнейших расчетов элементов редуктора ЭМК.
Анализ и синтез составных планетарных механизмов с двумя
степенями свободы можно провести на ЭВМ в следующей последо-
вательности:
1) расчет скоростей звеньев, отбраковка трехзвенных планетар-
ных механизмов по абсолютным значениям внутренних передаточ-
ных отношений |и| и предельному значению относительной угловой
скорости сателлитов;
2) формирование трехзвенных планетарных механизмов и соста-
вление их кодов;
3) расчет нагрузок, мощностей; отбраковка кинематических
схем по КПД.
285
Основной недостаток ТЭП - двойное преобразование энергии, а
следовательно, пониженный КПД по сравнению с механической пе-
редачей. Это вынуждает применять электрические машины с двой-
ной суммарной установленной мощностью, что повышает их массу
и габаритные размеры. Этот недостаток главным образом объясня-
ет ограниченность использования ТЭП на транспортных машинах
средней и малой грузоподъемности.
Возможен прямой метод уменьшения габаритных размеров и
массы ТЭП путем повышения степени использования активных и
конструкционных материалов в машинах, т.е. увеличением в мате-
риале удельных электромагнитных, тепловых и механических на-
грузок. Однако посредством этого нельзя достигнуть решающих
результатов, тем более, что удельные нагрузки в электрических ма-
шинах существующих трансмиссий и так достаточно высоки. Кроме
того, по мере увеличения удельных нагрузок в материале снижается
КПД передачи.
Глава 4
РАСЧЕТ ЭЛЕМЕНТОВ МЕХАНИЧЕСКИХ
ПЕРЕДАЧ ТРАНСМИССИЙ
4.1. Нагрузочные режимы
Для определения характеристик нагрузочных режимов дета-
лей трансмиссий КМ используют три способа: экспериментально-
статистический, расчетный и экспериментальный.
Экспериментально-статистический способ основан на использо-
вании результатов анализа экспериментальных исследований нагру-
зочных режимов в деталях трансмиссии КМ в различных услови-
ях эксплуатации и нахождении общих закономерностей, присущих
определенным классам КМ.
В основе расчетного способа лежит моделирование процессов на-
гружения трансмиссии в условиях эксплуатации при различных ре-
жимах движения КМ и различных воздействиях на трансмиссию.
Наконец, экспериментальный способ основан на схематизации
кривых нагружения деталей трансмиссии, полученных при испыта-
тельных пробегах КМ в характерных условиях эксплуатации.
Первые два метода могут быть использованы на стадии проек-
тирования КМ.
Рассмотрим экспериментально-статистический способ определе-
ния характеристик нагрузочных режимов.
Движение КМ происходит по дорогам различного профиля с раз-
личной нагрузкой. При этом характер нагружения деталей транс-
миссии крутящими моментами носит случайный характер и может
быть описан кривыми распределения этих моментов по времени (или
по пробегу). Таких кривых распределения может быть несколько в
зависимости от числа режимов движения КМ и принятых методов
их схематизации.
287
Установим следующую последовательность определения харак-
теристик нагрузочных режимов.
1. Определение числа режимов работы в зависимости от числа
передач в коробке передач и в раздаточной коробке, массы груза в
кузове, наличия прицепа и типа дорожных условий.
2. Установление относительных пробегов КМ (продолжитель-
ности действия) на каждом режиме.
3. Определение параметров кривой распределения удельных сил
тяги (крутящих моментов) для каждого режима.
4. Суммирование усталостных повреждений и определение ко-
эффициентов пробега.
5. Установление параметров нагрузочного режима для рассма-
триваемой детали трансмиссии.
6. Определение максимальных динамических нагрузок в дета-
лях трансмиссии.
Остановимся подробнее на каждом из этих шести пунктов.
Определение числа режимов работы
Будем считать, что нагрузочный режим в трансмиссии опреде-
ляется прежде всего включенными передачами в коробке передач и в
раздаточной коробке и мало зависит от типа дорожного покрытия. В
этом случае число режимов работы будет равно произведению чисел
передач в этих агрегатах трансмиссии. Если КМ может эксплуа-
тироваться с прицепом и без него, то число режимов должно быть
удвоено. То же относится и к автомобилям-самосвалам, которые по-
ловину пробега двигаются в груженном состоянии, а половину - в
порожнем.
Возможен и другой подход, когда определяющими считаются до-
рожные условия, а не включенные передачи. В этом случае число
режимов будет зависеть от числа дорожных условий, которые встре-
чаются во время эксплуатации КМ. Такой подход будет описан при
расчете валов на усталость при кручении (см. § 4.4).
В действительности нагрузочный режим в трансмиссии зависит
как от дорожных условий, так и от включенной передачи. Одна-
ко, реализация такого подхода требует большого объема предвари-
тельных экспериментальных исследований для каждого класса КМ.
Имеющиеся данные по распределению пробегов для грузовых авто-
мобилей с колесной формулой 4 х 2 с четырех- и пятиступенчатыми
коробками передач при движении по дорогам шести типов использо-
вать для других классов КМ и другого типа дорог затруднительно.
288
Установление относительных пробегов
Примем следующий порядок расчета.
А. На основании экспериментальных исследований было устано-
влено, что изменение скорости движения КМ для дорожных условий
нашей страны приближенно может быть описано нормальным зако-
ном распределения (рис. 4.1):
Рис. 4.1. Кривая распределения ско-
ростей движения КМ
Для проектируемой КМ считаем
и = 0,6vmax;
av — v/3.
Кривая /(и) является усеченной как по минимальному v = О,
так и по максимальному vmax значениям скоростей.
Б. Находим средние скорости движения КМ на высшей и г-й
передачах в коробке передач при включенных высших передачах в
раздаточной коробке и других агрегатах трансмиссии с числом пе-
редач, не равным единице:
Vb = 0,65vmax; Щ = ив'Мкп.в/'Икп i-
В. Определяем квантили нормального распределения х* = —
—v)/^v, характеризующие разности и — и, в долях среднего квадра-
тического отклонения uv.
10 — 692
289
Г. По таблицам функции нормального распределения для каждо-
го Х{ находим площадь под той частью кривой нормального распре-
деления, которая расположена левее координаты щ:
хг
4>(zi) = —
Д. Считаем, что разность F} двух смежных значений Ф(х1) и
пропорциональна относительному пробегу на г-й передаче в
коробке передач (кроме высшей). Для i = 1 Ф^.^) = 0.
Е. Находим удельную силу тяги на колесах при включенных
высших передачах во всех агрегатах трансмиссии
Рк.в = 71те'итр.в^тр.в/(^м5'гк)>
где иТр.в = umjn, т/тр.в = т/тр ПРИ включенных высших передачах во
всех агрегатах трансмиссии на режиме максимального крутящего
момента двигателя.
Ж. Определяем коэффициент тяги Ку, учитывающий влияние
тяговых качеств проектируемой КМ на характер кривой распреде-
ления скоростей и относительные пробеги на передачах:
Кт = 0,711 + 0,032/рк.в.
3. Находим относительные пробеги на различных (кроме выс-
шей) передачах
7г = FtKT.
На высшей передаче
Лкп—1
7в = 1 - 52
i=!
Значение 7, есть отношение пути проходимого КМ на г-й
передаче в коробке передач, к обшему пути Lq, проходимому КМ за
все время эксплуатации, т.е. 7, = Li/Lq.
Здесь же рассмотрим особенности определения относительных
пробегов 7, для трех частных случаев: КМ с двумя передачами в
раздаточной коробке, КМ с прицепом и КМ с гидромеханической
трансмиссией.
В первом случае весь пробег Lq целесообразно разделить на два
участка: пробег на высшей ступени в раздаточной коробке Zqb =
= 0,95£о и пробег на низшей ступени Zqh = 0,05£q.
290
Для каждого участка нужно определить свои значения итах, и,
crv, Vi и т.д., согласно приведенной выше методике, принимая во вни-
мание, ЧТО соответствующие значения Vmax в и Umax н ДЛЯ £Ов И £Он
будут обратно пропорциональны передаточным числам раздаточной
коробки:
Umax н/^max в — ^рК.в/^рк.н-
Соответствующие значения рк.в и рк.в,н удельной силы тяги на
высшей передаче в коробке передач при включении высшей и низшей
передач в раздаточной коробке связаны соотношением
Рк.в,н/Рк.в = ирк.н/ирк.в-
Относительные пробеги при включении высшей и низшей пере-
дач в раздаточной коробке соответственно равны
ПКП—1
7i = 0,95FiAT; 7в = 0,95 - У 7i;
г=]
Пкп~ 1
= 0,05£'tA’T: ?в = 0, 05 - 7;.
г=1
Так как при включении низшей передачи в раздаточной коробке
обычно не используется высшая и ближайшая к ней передачи в ко-
робке передач, то относительные пробеги нужно вычислять без уче-
та этих передач.
Во втором случае необходимо задать долю пробега с прицепом
£qP из общего пробега Lq. Пусть £qP = 0,1£о- Соответственно доля
пробега без прицепа равна 0, 9£q.
Для расчета 7, при работе с прицепом необходимо определить
максимальную скорость vSJkx КМ при работе с прицепом . Это может
быть сделано, исходя из обеспечения баланса мощности (см. § 3.1) с
учетом ДВС, установленного на данную машину.
Далее процесс решения повторяет рассмотренную выше схему
вплоть до определения удельной силы тяги. Для удельных сил тяги
Рк.в и рк.в КМ с прицепом и без него справедливо следующее соот-
ношение:
где тПр - масса прицепа.
10’ 291
Относительные пробеги при движении с прицепом н без него
будут соответственно равны
пКП~ 1
'yi = 0,lFiKT- 7в = 0,1- 76
t=l
Якп“1
7i = 0,9FjtfT; 7в = 0,9- У2 7i-
i=i
На основании обработки экспериментальных данных по относи-
тельным пробегам на различных передачах при движении самосва-
лов с грузом и без него в первом приближении было установлено,
что при увеличении (уменьшении) полной массы автопоезда в Hq
раз, например при буксировании прицепа или движении самосвала
в порожнем состоянии, относительный пробег на средней передаче
в коробке передач увеличивается (уменьшается) тоже в Лкп.ср — h-G
раз. Увеличение (уменьшение) относительного пробега на низшей
Лкп.н и высшей /1кп.в передачах в коробке передач можно подсчитать
по следующим формулам;
Лкп.н = 2,86Ло-1,86;
^кп.в = 1,35 — 0, 35/ig-
Если число передач в коробке более трех, то для промежуточных
передач значения h находят линейной интерполяцией. Например,
для передачи промежуточной между низшей и средней передачами
^кп.п ~ (^кп.н Н" ^КП.Ср)/2.
Таким образом, значения 7г- должны быть подкорректированы
умножением на соответствующий коэффициент h для всех передач,
кроме высшей, для которой значение 7в определяют по приведенным
выше формулам.
В третьем случае в связи с отсутствием жесткой связи меж-
ду двигателем и колесами для определения V{ вместо uKnt необхо-
димо использовать расчетное значение передаточного числа ирасч£
совокупного агрегата - гидротрансформатора с коробкой передач:
ирасч£ = ^кш/^гт, где "Нгт _ передаточное отношение гидротрансфор-
матора, дгт = пт/пн; пт и пн - частоты вращения турбинного и
наносного колес гидротрансформатора соответственно.
292
Рис. 4.2. Безразмерные характеристики
гидротрансформатора
Рис. 4.3. Характеристики совместной ра-
боты двигателя и гидротрансформатора
Значение игт находят по безразмерной характеристике т}1Т
(рис. 4.2) для выбранных значении КПД гидротрансформатора. Для
всех передач в коробке, кроме высшей, т/гт = 0, 7, для высшей пере-
дачи ?/гт = 0,85. При этом
^нев-Кгт.в^тр.в^тр.в
Рк.в —
^мР^к
Здесь ТНев _ крутящий момент, в точке пересечения кривой эф-
фективного крутящего момента Те ДВС с параболой Тн.в (рис. 4.3),
являющейся характеристикой насосного колеса гидротрансформато-
ра при т/гт = 0,85:
Гн.в = ^Н.вРгТ^дв^Н,
Ан.в _ коэффициент, определяемый по безразмерной характеристике
293
насосного колеса гидротрансформатора при т/п- = 0,85; ргт - плот-
ность жидкости в гидротрансформаторе; DH - внешний активный
диаметр круга циркуляции насосного колеса; Ктт.в - коэффициент
трансформации гидротрансформатора (силовое передаточное число)
при 7/гт = 0,85.
Пример 1. Определить относительные пробеги т, для автомоби-
ля КамАЗ-4310 с колесной формулой 6x6.
Примем следующие исходные данные: тм = 14940 кг; тпр =
= 7000 кг, vmax — 85 км/ч; ЛВС - дизель КамАЗ-740; Nme — 155 кВт
при Пдвдг = 2600 мин-1; Тте = 650 Н м при павт = 1600 мин-1;
^кп.н = ^кп] = 7,82; иКп2 = 4,03; иХпЗ = 2,50; икп^ = 1,53; икп.в ~
—— Дкп5 = 1,00; Ирн.н — 1,692; Ирк.в = 0,917; Urn ~ 7,22; размер шин
1200x400-533; гсв = 0,6м;гк = 0,97- гсв = 0,582м.
Определяя число режимов, будем различать движение КМ на
различных ступенях в коробке передач и в раздаточной коробке, а
также с прицепом и без него. Таким образом, имеем 5x2x2 =
= 20 режимов.
Согласно изложенному выше, разобьем весь пробег Lq на следу-
ющие участки: пробег на высшей передаче в раздаточной коробке с
прицепом = 0,08£q и без него Lqb = 0,87£q; пробег на низшей
передаче в раздаточной коробке с прицепом = 0, О2£о и без него
£он = 0, 03£q .
Вычисляя относительные пробеги, будем исходить из баланса
мощности. Найдем максимальную скорость движения при работе с
пр
Прицепом Vmax:
Nme ~ + 7Jw)lJmfax/(7?TpA'c) =
_ [(тпм + тпр)д^ + СхКло5ВН • 0,5рв(Дх)2]Утах
7/тр-^С
Примем = 0,02; Сх = 1,05; Клоб = 0,85; В х Н = 7 м2;
рв = 1,25 кг/м3; 7/тр = 0,88; Кс — 0,88; д = 9,81 м/с2.
Так как Мпе = 155000 Вт, тм + тпр = 21940 кг, то име-
ем 155000 = 1,291(4305 + 3, 9047(vmax)2]vmaxnp. Откуда г?тРах =
= 20, 3 м/с = 73 км/ч.
Максимальные скорости при движении на низшей передаче в
раздаточной коробке КМ без прицепа и с прицепом соответственно
равны
Umax н = ^тах ^рк.в/Црк.н = 85 • 0,917/1,692 = 46, 1 Км/ч;
<ах Н = 73 0,917/1,692 = 39,6 км/ч.
294
Значения удельной силы тяги на колесах при включении высшей
передачи в коробке передач составляют:
Рк.в = ^гпе^тр.вРтр.в/(™МрГк) = ^Ггпеикп.вирк.вигпРтр.в/(^мР'7'к) =
= 650 1,0 0,917 7,22 0,88/(14940 9,81 0,582) = 0,0444
- при движении без прицепа и включении высшей передачи в разда-
точной коробке;
Рк.в,н = Pk.bWPk.h/wPk.b = 0,0444 1,692/0,917 = 0,0819
- при движении без прицепа и включении низшей передачи в разда-
точной коробке;
rfPB = Рк.втм/(тм + тпр) = 0,0444 14940/21940 = 0,0302
- при движении с прицепом и включении высшей передачи в разда-
точной коробке и
Ркрв,н =Рк.в,нтм/(тм + тпр) = 0,0819- 14940/21940 = 0,0558
- при движении с прицепом и включении низшей передачи в разда-
точной коробке.
Результаты расчета заносим в табл. 4.1.
Так как масса КМ с прицепом больше полной массы машины в
h<j = 21900/14900 = 1,47 раза, то необходимо подкорректировать 7,
у режимов движения с прицепом.
Для третьей передачи в коробке передач Лкпз = he — 1,47. Для
других передач
Лкп1 = 2,86Ag - 1,86 = 2,86 -1,47 - 1,86 = 2,34;
^кп2 = (Лкп1 + ^кпз)/2 = (2, 34 + 1,47J/2 = 1,91;
Акпб = 1,35 - 0,35/zg = 1,35 - 0,35 1,47 = 0,836;
Акп4 = (Акпз + Акпб)/2 = (1,47 + 0,836)/2 = 1,153.
Полученные значения hKn{, кроме /гкп5 умножаем на соответ-
ствующие исходное значения 7, при движении машины с прицепом
и получаем скорректированные значения 7,.
Окончательные значения относительных пробегов 7», подкоррек-
тированные в связи с редким использованием двух высших передач
295
Таблица Расчет относительных пробегов 7, на
Режим движения Формулы для расчета км/ч и, км/ч av, км/ч км/ч «рк «кп.-
Без прицепа 7t =0,87/;^ 7в = 0,87-Е7< 85 51 17 55,25 0,917 7,82 4,03 2,50 1,53 1,00
7, = 0,03F,KT 7в = о, оз - 46,1 27,66 9,22 30,0 1,692 7,82 4,03 2,50 1,53 1,00
С прицепом 7, = 0, 08FjFT 7в = 0,О8-Е7.' 73 43,8 14,6 47,5 0,917 7,82 4,03 2,50 1,53 1,00
7, = 0,02FtFT 7в = 0,02-527. 39,6 23,76 7,92 25,7 1,692 7,82 4,03 2,50 1,53 1,00
в коробке передач при включении низшей передачи в раздаточной
коробке, приведены в табл. 4.1. При корректировке весь пробег при
наличии (или отсутствии) прицепа разбивали между тремя низши-
ми передачами согласно их исходным относительным пробегам. В
результате число режимов сократилось с 20 до 16.
Несмотря на определенную условность приведенной методики,
она позволяет проводить сравнительную оценку КМ различных за-
водов и фирм.
Существуют также рекомендации по выбору значений 7,, выра-
ботанные различными фирмами.
296
различных передачах для автомобиля КамАЗ-4310
к», км/ч ФО,-) Fi Рк.в КТ Значения ц
исходные скорректи- рованные оконча- тельные
7,07 *2,58 0,0050 0,0050 0,0444 1,43 0,0062 - 0,0062
13,71 -2,19 0,0143 0,0093 0,0116 - 0,0116
22,1 -1,70 0,0446 0,0303 0,0377 - 0,0377
36,1 -0,876 0,1905 0,1459 0,1815 - 0,1815
55,25 - - - 0,6330 - 0,6330
3,84 -2,58 0,0050 0,0050 0,0819 1,10 0,00017 - 0,00345
7,44 -2,19 0,0143 0,0093 0,00031 - 0,00628
12,0 -1,70 0,0446 0,0303 0,00100 - 0,02027
19,6 -0,876 0,1905 0,1459 0,00481 - -
30,0 - - - 0,02371 - -
6,07 -2,58 0,0050 0,0050 0,0302 1,77 0,00071 0,00166 0,00166
11,8 -2,19 0,0143 0,0093 0,00132 0,00252 0,00252
19,0 -1,70 0,0446 0,0303 0,00429 0,00631 0,00631
31,0 -0,876 0,1905 0,1459 0,02066 0,02382 0,02382
47,5 - - - 0,05302 0,04569 0,04569
3,29 -2,58 0,0050 0,0050 0,0558 1,28 0,00013 0,000304 0,00318
6,38 -2,19 0,0143 0,0093 0,00024 0,000458 0,00482
10,28 -1,70 0,0446 0,0303 0,00078 0,001147 0,01200
16,80 -0,876 0,1905 0,1459 0,00374 0,004312 -
25,70 - - - 0,01511 0,013779 -
Определение параметров кривой распределения
удельных сил тяги
В результате обработки большого количества эксперименталь-
ных данных установлено, что кривые распределения удельных сил
тяги на колесах КМ на каждой передаче за все время ее эксплуа-
тации описываются логарифмически нормальным законом. Причем
эти кривые являются усеченными по максимальным значениям, так
как ограничены возможностями двигателя и сцеплением колес с до-
рогой.
Умножив удельные силы тяги на массу КМ и радиус качения ко-
леса и разделив полученные значения на передаточное число транс-
297
миссии от рассматриваемой детали до колеса и на характеристи-
ку сечения этой детали, получим распределение напряжений в этой
детали. При данном подходе мы оперируем только средними нагруз-
ками, а все динамические процессы, происходящие в трансмиссии,
учитываются коэффициентами динамических нагрузок.
Примем следующий порядок определения параметров кривых
распределения удельных сил тяги.
А. Находим предельную удельную силу тяги, обусловленную
сцеплением ведущих колес с дорогой, при движении КМ без прицепа
и с прицепом соответственно:
Pv = G^l(m„gy,
p'Sp = + mnpff).
Для полноприводной КМ (прн неактивном прицепе) имеем соот-
ветственно
Pip = m.,,gp/im..,gj = ip;
р^ = m^gipKm^g + mnpg) = + mnp).
Здесь коэффициент сцепления = 0,7 при движении на высшей
ступени в раздаточной коробке и = 0,5... 0,6 при движении на
низшей ступени.
Б. Определяем предельные удельные силы тяги, обусловленные
возможностями двигателя, на каждой г-й передаче в коробке передач
и определенной передаче в раздаточной коробке при движении КМ
без прицепа и с прицепом соответственно:
Рав i = ^1пгеЦтрг7?трг/(гк^м5')>'
Рдв.- = + тПр)] ,
где uTpi и т)тр{ - соответственно суммарное передаточное число и
КПД трансмиссии при включении г-й передачи.
Для гидромеханической трансмиссии вместо Тте в этих выра-
жениях необходимо использовать произведение T„ei KrTi (см.рис. 4.2
и 4.3), где THei - крутящий момент в точке пересечения кривой Те
с параболой ТН1 = Ан»Ргт^дВ^н- Значения Ктт{ и Ан^ безразмерных
характеристик гидротрансформатора взяты при т/гт = 0,7.
В. Находим расчетные (предельные) удельные силы тяги:
Ркг = min(p^, рдв,).
298
Г. Задаемся средним значением удельной силы тяги, обусловлен-
ной сопротивлением дороги:
0,018 0,025 . 0,040. .030 .0,052 — для легковых автомобилей; — для грузовых автомобилей; — для самосвалов и полноприводных
Pv = Ф = КМ на низших передачах в
коробке передач;
0, 025. . 0,030 — то же на высших передачах
в коробке передач.
П1мр
р11^ ==
Г WI
Д. Определяем средние значения удельных сил тяги, обусловлен-
ных сопротивлением воздуха, для движения без прицепа и с прице-
пом соответственно:
_ _ _ CxFqvi = СхКхобВНр„у]-0,5
™мд тмд
СхКло5ВНРзу2г 0,5
(тм + тпр)р
Е. Вычисляем средние значения удельных сил тяги, затрачива-
емых на разгон КМ:
Pai = Ka(Pxi ~ Р-ф ~~ Pwi}->
где Ка - коэффициент, равный 0,2 для легковых автомобилей, само-
свалов и полноприводных КМ и 0,3 для грузовых автомобилей.
Ж. Находим средние значения суммарных удельных сил тяги:
Pni = Рф + Pwi "Ь Pai-
3. Оцениваем средние квадратические отклонения кривых рас-
пределения удельных сил тяги.
Принимаем следующие значения средних квадратических от-
клонений логарифмов удельных сил тяги: crigp = 0,15 ... 0, 20 - для
легковых автомобилей и <7\gp = 0,20 ... 0,30 - для грузовых автомо-
билей, самосвалов и полноприводных КМ.
Если на некоторых передачах р-й/рм < 1,0, то среднюю удель-
ную силу тяги pKi для этой передачи следует принимать на основа-
нии опытных данных.
299
Суммирование усталостных повреждений и определение
коэффициентов пробега
Суммирование усталостных повреждений при нестационар-
ном ступенчатом нагружении. Пусть в детали трансмиссии дей-
ствует изгибающее напряжение с амплитудой ctj в течение Nj сим-
метричных циклов. Число циклов с амплитудой <7j, после кото-
рого деталь разрушится, обозначим через Npj (рис. 4.4.). Точка
(<7j, Npj) лежит на кривой усталости детали. Уравнение этой кри-
вой v™Npj = С = const, где тп - показатель степени, зависящий от
марки материала и характера нагружения детали. Тогда степень по-
вреждения детали может быть оценена величиной Nj/Npj. Согласно
линейной гипотезе суммирования повреждений, деталь разрушится,
если
где k - число ступеней нагружения детали.
Рис. 4.4. Суммирование уста-
лостных повреждений при сту-
пенчатом нагружении
Разделив и умножив каждое слагаемое указанной суммы на ст™,
получим с учетом уравнения кривой усталости
* Nj у
N„i С
j=i PJ 1 j=i
300
откуда
к
^TNi = c-
;=i
к
Таким образом, £2 характеризует накопленную в матери-
>1
але усталость, и равенство этой суммы величине С соответствует
разрушению детали. Возможны три пути учета полученной суммы.
к
1. Непосредственное использование суммы £2 для расчета
j=i
долговечности детали.
2. Определение эквивалентного числа циклов N3KB, которое при
действии некоторого расчетного напряжения <7раСч обеспечивает та-
кое же повреждение детали, как и при эксплуатации:
к
N — <тт N
а3 "3 ~ <7расч2Уэкв-
J=1
Тогда
к
М>кв =
j=i
3. Определение эквивалентного напряжения <7ЭКв> которое, дей-
ствуй в течение действительного эксплуатационного числа циклов
к
N = ^Nj,
3=1
обеспечивает то же повреждение детали, что и при эксплуатации,
к
>1
Отсюда
^экв —
301
Рис. 4.5. Суммирование усталостных
повреждений при непрерывном измене-
нии напряжений
Суммирование усталостных повреждений при непрерывном
изменении напряжений. Пусть вместо к ступеней имеется кривая
распределения /(ст) амплитуд напряжений (рис. 4.5). Тогда, так как
вся заштрихованная площадь на этом рисунке соответствует общему
числу циклов N, испытываемых деталью за все время эксплуатации
с напряжением от сгт;п до сттах, произведение f(a)da N даст нам
общее число циклов с амплитудой напряжения а за время эксплуа-
тации, т.е. Nf(v)da = Nj при ступенчатом изменении напряжения.
Следовательно, общее повреждение детали при разрушении можно
записать так:
67 min
N f(a)da
o’max
Г Nf(a~)da ст’
J ~NP
rm _ L
Откуда
O’min
Последний интеграл характеризует накопленную в материале
детали усталость.
Далее, как и прежде, имеются три пути расчета.
302
1. Непосредственное использование полученного интеграла для
расчета долговечности детали.
2. Определение эквивалентного числа циклов
^max
У amNf(a)da = a™C4N3
откуда
^max
Л'эхв = / amf(a)da.
^расч J
^min
3. Определение эквивалентного напряжения аэкв:
^тах
У a™Nf(a)da = a™BN,
откуда
с^экв —
Определение коэффициента пробега при ступенчатом
k
изменении напряжения. Умножим и разделим сумму £2
J=i 3
выражающую накопленную в материале усталость, на произведение
^N-.
k
N k
расч7 _ m V
m N страсч^ 2-
расч
mNj
~N
k
,m м A"
расч ‘ * -*1 п з
где Страсч _ напряжение, соответствующее расчетному значению
k
удельной силы тяги; fy = aj/страсч; (*j = Nj/N; Кп — ^2
303
Величину Ап называют коэффициентом пробега, т.е. коэффи-
циентом приведения режима переменных циклических напряжений
к режиму циклического напряжения, соответствующего расчетному
значению удельной силы тяги.
С учетом полученного выше выражения
коэффициент пробега можно представить в виде
Таким образом, коэффициент пробега КП - это отношение экви-
валентного числа циклов к действительному.
Определение коэффициента пробега при непрерывном из-
менении напряжения. Используя последнее равенство и выражение
для ЛЭкв при непрерывном изменении напряжения, запишем
Ап
^Уэкв
~7Г
<Tmax
и расч •/
^min
Так как определенному уровню напряжений в деталях транс-
миссии может быть с определенной степенью точности поставлен в
соответствие уровень крутящего момента в трансмиссии, далее по
цепочке - уровень крутящего момента и силы тяги на ведущих ко-
лесах и, наконец, уровень удельной силы тяги на ведущих колесах,
то последнее равенство может быть приближенно записано в виде
Ртах
/ pmf(p)dp-
грасч J
Pmin
Поскольку кривая распределения удельных сил тяги /(р) зада-
ется по пробегу КМ, следовательно, Ап _ это отношение эквивалент-
ного пробега к действительному.
304
Эквивалентным называется пробег с расчетной для данной пе-
редачи удельной силой тяги, при котором усталостные явления, про-
исходящие в деталях, на их поверхностях или в сечениях, те же, что
и при действительном пробеге с удельными силами тяги, соответ-
ствующими заданной кривой распределения.
Использование коэффициента пробега позволяет значительно со-
кратить число операций при расчете; при этом отпадает необходи-
мость вычислять напряжения на каждом интервале нагрузки и опре-
делять прозведения достаточно лишь знать напряжение арасч,
полное число циклов N и коэффициент пробега Кп.
На рис. 4.6 приведены графики, построенные путем математи-
ческой обработки кривых распределения удельных сил тяги. Здесь
Кпн и Knf - коэффициенты пробега при расчете активных поверх-
ностей зубьев по контактным напряжениям и зубьев по напряжениям
изгиба соответственно. Значения показателя степени т при вычи-
слении Кан и Кпр принимали равными 3 и 9 соответственно.
Рис. 4.6. Зависимость коэффициента пробега КпН (а) и
A'nF (б) от отношения удельных сил тяги при <rigр, равном
0,3 (2), 0,25 (2) и 0,20 (5)
305
Для деталей, которые работают под нагрузкой на всех переда-
чах, коэффициенты общего пробега Кпно и KnFo можно определять
по формулам
kt
КпНо — ^'п//17г(?кг/Рк.расч) !
г=1
kt
^пГо = У? -^'п^П1(Рк1/Рк.расч)Э,
i=l
где - число режимов работы.
При этом все режимы заменяются режимом работы с максималь-
ной расчетной удельной силой тяги рк.расч-
Однако последними двумя формулами можно пользоваться толь-
ко для тех деталей трансмиссии, которые имеют одинаковые пере-
даточные числа от этой детали до колеса, т.е. расположены после
последнего агрегата трансмиссии с изменяемыми передаточными чи-
слами. К ним обычно не относятся детали трансмиссии, располо-
женные между двигателем и раздаточной коробкой, включая детали
коробки передач и раздаточной коробки. При этом подразумевается,
что в раздаточной коробке имеются две передачи.
Кроме того, указанными формулами нельзя пользоваться, если
удельные силы тяги вычислены при разных нагрузках на КМ, на-
пример при движении с грузом и без груза, с прицепом и без прицепа.
Во всех этих случаях необходимо при расчете долговечности сумми-
ровать повреждения, получаемые отдельно на каждой передаче.
В некоторых расчетах вместо коэффициента пробега Ка исполь-
зуют коэффициенты нагрузки Кп. Связь между этими величинами
можно выявить следующим образом:
k
X^Nj = ^,NKn=a^N,
j=l
откуда
Пример 2. Определить коэффициент пробега автомобиля
КамАЗ-4310. Для расчета использовать исходные данные и резуль-
таты расчета, полученные в примере 1.
Предельные удельные силы тяги по сцеплению при движении
без прилепа и с прицепом соответственно равны
306
[ 0,70 при ирк.в;
= ср = < л _
[ 0, ОО при Црк.н!
пр
Рр = V
14940
°’70 ' 21940 = °’477 ПрИ “рк'в’
"₽ I °’55 ' = °1375 ПрИ UpK H'
Примем 7}тр; = 0,85 для иКПг и 7/тр.в — 0,88. Определим предель-
ные удельные силы тяги по двигателю:
Tme ^кп1ирк.вигп^?трг
Рлв1 = ----------------------- =
650икп,-• 0, 917 7, 22 0,85 _
0,582-14940-9,81 ’ и,1п‘
- при движении без прицепа при дрк.в;
Ряв. = 0,04288uKni = 0,07912uKnl-
- при движении без прицепа при ирк.н;
14940
рпр. = 0,04288икпг- ---= 0,02920икп1-
гЛв1 > кш 21940 кп‘
- при движении с прицепом при ирк.в и
Р™, = 0,02920«Kni = 0,05388uKnj
- при движении с прицепом при ирк.н.
Средние значения удельных сил тяги, обусловленные сопроти-
влением воздуха, при движении без прицепа и с прицепом соответ-
ственно равны
Сх к лоб в Н p„v? - 0, 5
Pu>i = ------------------------ =
тмд 3,62
_ 1,05 0,85 7 - 1,25 - и? 0,5
14940-9,81 • 3,62
= 2,06 10~6vJ;
307
р”’. = 2,06 • 10"6v?-—-----= 2,06 IO"6—— v? = 1,40 10“6Й
wt ‘ m„ + m„p 21940 1
(здесь щ в км/ч). При определении коэффициентов пробега прини-
маем <T]gp = 0, 25. Все результаты вычислений заносим в табл. 4.2.
Ввиду того, что удельные силы тяги в данном примере вычи-
слены при разных нагрузках (движение с прицепом и без него), ко-
эффициенты общего пробега не определяем.
Установление параметров нагрузочного режима для
рассматриваемой детали трансмиссии
Как было отмечено выше, с использованием коэффициента про-
бега уровень накопленного повреждения на г-й передаче определя-
ется произведением a^C4i^i^ni- Уровень циклического напряжения
^расч» зависит от расчетного крутящего момента 71,, на рассматри-
ваемом валу трансмиссии, а число циклов Ni изменения напряжений
на г-й передаче - от расчетной частоты вращения этого вала тц. Ко-
эффициенты пробега K^Hi и ^лГг являются общими показателями
для всех деталей, нагруженных на данной передаче, и были опреде-
лены выше.
Приведем последовательность нахождения расчетного крутяще-
го момента на рассматриваемом валу трансмиссии. Расчетным кру-
тящим моментом Тг называется момент определенный исходя из рас-
четной удельной силы тяги pKi на ведущих колесах машины на дан-
ной передаче. Для движения без прицепа
„ V О
Ti = ApKimMgrK-------,
а для движения с прицепом
Т"Р - + map)ffrK-------,
из,кг^з,кг
где А - доля крутящего момента двигателя, которая передается дан-
ным валом; О - коэффициент, учитывающий увеличение крутящего
момента вследствие возможной циркуляции паразитной мощности
при блокированном приводе; u3 Kj - передаточное число от вала рас-
сматриваемой (заданной) детали до вала колеса при включенной г-й
передаче; r}3 Kj - КПД этого участка трансмиссии.
Для валов трансмиссии, передающих полную мощность, А = 1.
308
Таблица J.2. Расчет коэффициентов пробега для автомобиля КамАЗ-4310
Режим движения и,-, км/ч Р^ Рдв> Рю Рч- Pwi Pai Рю Рк./Р,; К„г,
Без прицепа: 7,07 0,7 0,3353 0,3353 0,046 0,0001 0,0579 0,1040 3,22 0,070 0,018
при ирк в 13,71 0,7 0,1728 0,1728 0,046 0,0004 0,0253 0,0717 2,41 0,135 0,042
22,1 0,7 0,1072 0,1072 0,046 0,0010 0,0120 0,0590 1,82 0,210 0,070
36,1 0,7 0,0656 0,0656 0,0275 0,0027 0,0071 0,0373 1,76 0,230 0,075
55,25 0,7 0,0444 0,0444 0,0275 0,0063 0,0021 0,0359 1,24 0,300 0,110
ПРИ Прх.н 3,84 0,55 0,6187 0,55 0,046 0,00003 0,1008 0,1468 3,75 0,060 0,008
7,44 0,55 0,3189 0,3189 0,046 0,0001 0,0546 0,1007 3,17 0,075 0,022
12,0 0,55 0,1978 0,1978 0,046 0,0003 0,0303 0,0766 2,58 0,125 0,040
С прицепом: 6,07 0,477 0,2283 0,2283 0,046 0,00005 0,0365 0,0826 2,76 0,110 0,035
ПРИ UpK.B 11,8 0,477 0,1177 0,1177 0,046 0,0002 0,0143 0,0605 1,95 0,190 0,060
19,0 0,477 0,0730 0,0730 0,046 0,0005 0,0053 0,0518 1,41 0,240 0,089
31,0 0,477 0,0447 0,0447 0,0275 0,0013 0,0032 0,0320 1,40 0,245 0,090
47,5 0,477 0,0302 0,0302 0,0250 0,0032 - 0,0282 1,07 0,325 0,120
При Прк.н 3,29 0,375 0,4213 0,375 0,046 0,00002 0,0658 0,1118 3,35 0,064 0,014
6,38 0,375 0,2171 0,2171 0,046 0,00006 0,0342 0,0803 2,70 0,113 0,037
10,28 0,375 0,1347 0,1347 0,046 0,00015 0,0177 0,0639 2,11 0,175 0,055
309
В первом приближении при блокированном приводе распределе-
ние крутящего момента между валами можно оценить с помощью
следующей формулы:
где G<p - вес, приходящийся на те ведущие колеса, к которым мощ-
ность передается через рассматриваемый вал.
Симметричный дифференциал распределяет крутящий момент
между выходными валами поровну (без учета трения в дифферен-
циале), поэтому для него показатель А = 0,5. Для несимметричного
дифференциала обычно обеспечивают Ai = 0,33 и Аг = 0,67.
Если же в приводе расположено несколько дифференциалов, то
показатель А следует определять как произведение его частных по-
казателей для каждого дифференциала.
При расчетах принимают: 0 = 1,0 — при дифференциальном
приводе; 0=1,1- при блокированном приводе для низших передач;
0 = 1,2 - то же для высших передач; 7?ц,вш = 0,98... 0,985 - для
цилиндрического зубчатого зацепления внешнего; 7}ц.вн = 0, 99 - то
же для внутреннего; т?кон = 0, 97... 0,98 - для конической передачи
с круговым зубом; т/Гип = 0,96... 0,97 - для конической гипоидной
передачи; г/ч = 0,90...0,92 - для червячной передачи; т/п.п = 0,995
- для пары подшипников качения.
В гидромеханической трансмиссии расчетный крутящий момент
на участке от двигателя до гидротрансформатора вычисляют, исхо-
дя из максимального крутящего момента двигателя: Т = ТтеЦдв,з,
где иДв,з - передаточное число от коленчатого вала двигателя до
заданного вала. На остальных участках, расчетный момент опреде-
ляют так же, как и для механической трансмиссии.
Расчетную частоту вращения nj вычисляют по формуле
60t7jU3 Kj
* 2тг - 3,6rK ’
где П{ в мин-1, ajJjB км/ч.
В гидромеханической трансмиссии на участке от гидротранс-
форматора до колеса расчетную частоту вращения подсчитывают
по этой же формуле, а для участка от двигателя до гидротрансфор-
матора
п = пдвТ/иав,з-
При затруднениях в определении средних скоростей движения щ
последнюю формулу можно использовать и для механической транс-
миссии.
310
Пример 3. Определить расчетные моменты и частоты вращения
для пяти участков трансмиссии автомобиля КамАЗ-4310.
Примем следующие значения КПД: коробки передач на высшей
(прямой) передаче т}кп.в = т?п.п = 0,995; коробки передач на всех
передачах, кроме высшей, = 9ц.вш 9п.п = 0,9852 • 0,9952 —
= 0.961; раздаточной коробки т?рк = = 0>9852 • 0,9955 =
= 0,946; главной передачи ^гп = 9кон9и.вш9п.п = 0,975-0,985 0, 9954 =
= 0,941 и колесного узла т/ку = т?п.п = 0,995.
Тогда для полуоси т?зк|- = цку = 0, 995; для карданных валов меж-
ду коробкой и средним мостом и между средним и задним мостами
9з.к? = 9ку9гп = 0,995 • 0,941 = 0,936; для вторичного вала коробки
передач т/3 = т/Ку9гп9рк = 0,995-0,941-0,946 = 0,885; для первично-
го вала коробки передач на прямой передаче 7?3>Ki = т?Ку9гп9рк9кп.в =
= 0,995 0,941 0.946 0,995 = 0,88, на других передачах (кроме
прямой) Tj3_Kt = ^ку^гп^рк^кпг — 0,995 0,941 0,946 0,961 = 0,8.
Так как в раздаточной коробке расположен несимметричный
дифференциал, распределяющий крутящий момент в соотношении
1:2, то 0 = 1,0 за исключением участка трансмиссии, включающе-
го средний и задний мосты, имеющие между собой блокированную
связь.
Все результаты вычислений приведены в табл. 4.3.
Определение максимальных динамических нагрузок
в деталях трансмиссии
Рассчитанные выше величины используют при опенке долговеч-
ности деталей трансмиссии. Для вычисления прочности этих дета-
лей необходимо знать максимальные динамические нагрузки, воз-
никающие в трансмиссии при наиболее неблагоприятных условиях
эксплуатапии.
Экспериментально установлено, что наибольшие моменты в
трансмиссии возникают при трогании КМ с места быстрым включе-
нием сцепления и при движении в условиях бездорожья, что харак-
терно для машин высокой проходимости. Для количественной оцен-
ки этих режимов движения вводят коэффициент динамичности А'д,
который показывает, во сколько раз максимальный крутящий мо-
мент Tmax i на том или ином участке трансмиссии при движении на
г-й передаче больше соответствующего расчетного момента Tf.
^max i — К a Ti-
311
co
M
Таблица 4-3. Значения расчетных моментов и расчетных частот вращения
для пяти (1 - 5) участков трансмиссии автомобиля КамАЗ-4310
Режим vi> И* *,Ж1 0Ч Т, Нм п,, мин 1
движения км/ч 1 2 1 4 5 1 2 3 4 5 1 2 3 4 5
Без прииепа: 7,07 51,77 6,621 0,85 1,1 1,1 650 4881 2835 1536 5280 1670 214 233 233 32
при ирж в 13,71 26,68 6,621 0,85 1,1 1,1 650 2515 1461 792 2722 1670 415 451 451 63
22,1 16,55 6,621 0,85 1.1 1,1 650 1560 907 492 1688 1670 668 728 728 101
36,1 10,13 6,621 0,85 1,2 1,2 650 955 555 328 1128 1670 1090 1189 1189 165
55,25 6,621 6,621 0,88 1,2 1,2 650 643 375 222 762 1670 1668 1819 1819 252
ПрИ Upit.y 3,84 95,53 12,22 0,85 1,1 1,1 578 4341 4654 2520 8667 1670 214 126 126 18
7,44 49,23 12,22 0,85 1,1 1,1 650 2515 2697 1461 5021 1670 415 245 245 34
12,0 30,54 12,22 0,85 1,1 1,1 650 1560 1673 906 3115 1670 668 395 395 55
С прицепом: 6,07 51,77 6,621 0,85 1 1 1,1 650 4881 2835 1536 5280 1430 183 200 200 28
При UpK.a 11,8 26,68 6,621 0,85 1,1 1,1 650 2515 1461 792 2722 1430 356 388 388 54
19,0 16,55 6,621 0,85 1,1 1,1 650 1560 907 492 1688 1430 574 626 626 87
31,0 10,13 6,621 0,85 1,2 1,2 650 955 555 328 1128 1430 936 1021 1021 141
47,5 6,621 6,621 0,88 1,2 1,2 650 643 375 222 762 1430 1434 1564 1564 217
при UpK.B 3,29 95,53 12,22 0,85 1,1 1,1 578 4341 4654 2520 8667 1430 183 108 108 15
6,38 49,23 12,22 0,85 1,1 1,1 650 2515 2697 1461 5021 1430 356 210 210 29
10,28 30,54 12,22 0,85 1,1 1,1 650 1560 1673 906 3115 1430 574 338 338 47
Примечания: 1. Цифрами 1 — 5 в таблице обозначены следующие участки: 1 - первичный вал коробки передач;
2 - вторичный вал коробки передач; 3 - вал между раздаточной коробкой и средним мостом; 4 - вал между средним и задним
мостами; 5 полуось. 2. Для участков 1 и 2 А = 1,0, для участка 3 А = 0,67, для участка 4 А = 0,33, для участка 5
А = 0,167.
*' Для участков 3 и 4 и, К| = 7,22, для участка 5 иэ.к, = 1,0.
*2 Для участков 2 — 5, jj, > соответственно равны 0,885; 0,936; 0,936 и 0,995.
*3 Для участков 1 — 30 = 1,0.
На основании обработки большого числа экспериментальных
данных рекомендуются следующие значения коэффициента дина-
мичности: 1,5 ... 2,0 - для легковых автомобилей; 2,0... 2,5 - для
грузовых автомобилей; 2,5 ... 3,0 - для КМ высокой проходимости.
В гидромеханической трансмиссии на участке от двигателя до
гидротрансформатора можно принимать Кл = 1,0. На других
участках, где предусмотрен дифференциальный привод,
-Кд = Атто/ ^-гтг,
где Кгто - коэффициент трансформации гидротрансформатора на
режиме “стоп” (см. рис. 4.2).
В гидромеханических трансмиссиях с блокированным приводом
эту формулу для участка после гидротрансформатора нужно при-
менять только для валов, передающих всю мошность двигателя. Во
всех других случаях необходимо использовать приведенные выше
значения Кл для механических трансмиссий.
4.2. Зубчатые колеса
Рассмотрим поверочный расчет зубчатых колес на сопротивле-
ние усталости и прочность. В основу предлагаемой методики рас-
чета положен ГОСТ 21354-87 “Передачи зубчатые цилиндрические
эвольвентные. Расчет на прочность” и работы, проведенные груп-
пой ученых под руководством И.С.Цитовича.
Основные отличия предлагаемой методики от ГОСТа следую-
щие.
1. Для оценки сопротивления усталости зубчатых колес исполь-
зуют время их работы и пробег КМ, а не допускаемое напряжение.
Это позволяет более наглядно перейти от детерминированного рас-
чета к вероятностному.
2. Расчетные формулы распространяются на все виды зубчатых
колес, которые применяются в трансмиссиях КМ (цилиндрические
и конические).
3. Формулы в расчетах на сопротивление усталости по контакт-
ным и изгибным напряжениям идентичны.
313
Детерминированные расчеты
Приведем укрупненный алгоритм расчета зубчатых колес на
сопротивление усталости по контактным напряжениям:
1) определение расчетного контактного напряжения П// на по-
верхности зуба, обусловленного расчетным крутящим моментом Тг-;
2) определение предельного для данного зубчатого колеса кон-
тактного напряжения П#р0 при базовом числе циклов Njj0 и веро-
ятности неразрушения Р = 0,9;
3) сравнение П# и П#ро: если П# < О,9Пяро, то расчет закан-
чивают (неограниченная долговечность по контактным напряжени-
ям), если П# > 0,9П#Р0) расчет продолжают;
4) определение ресурса расходуемого за 1 км пробега КМ,
с использованием относительных пробегов и коэффициентов про-
бега KnHi-
5) вычисление общего ресурса 7?я1шн которым располагает зуб-
чатое колесо;
6) определение пробега до появления прогрессирующего выкра-
шивания активных поверхностей зубьев Ljj = RjJhm/RiH'i
7) сравнение полученного пробега Ljj с планируемым сроком
службы Lq (должно быть Lff >Lq).
Укрупненный алгоритм расчета зубчатых колес на сопротивле-
ние усталости при изгибе имеет следующий вид:
1) определение расчетного напряжения изгиба зуба ар, обусло-
вленного расчетным крутящим моментом 7$;
2) вычисление предельного для данного зубчатого колеса напря-
жения изгиба арр0 при базовом числе циклов Np0 и вероятности
неразрушения Р = 0,9;
3) сравнение ар и арр0‘. если ар < О,9а^ро, расчет заканчи-
вают (неограниченная долговечность по напряжениям изгиба), если
ар > 0, Эо’/’Ро» т0 расчет продолжают;
4) определение ресурса R^p, расходуемого за 1 км пробега КМ,
с использованием относительных пробегов 7^ и коэффициентов про-
бега Клрр,
5) вычисление общего ресурса Rp lim, которым располагает зуб-
чатое колесо;
6) определение пробега до появления усталостной поломки зуба
Lp — Rp ит/Rip,
7) сравнение полученного пробега Lp с планируемым сроком
службы Lq (должно быть Lp > £0).
314
Расчет зубчатых колес на сопротивление усталости
Будем параллельно описывать оба расчета: по контактным и
по изгибным напряжениям, опуская, где это возможно, индекс “г” у
величин 7;, Ti, K„Hi, K„Fi.
Предварительно сделаем одно замечание. Чтобы обеспечить
идентичность формул для напряжений изгиба и контакта вместо
контактного напряжения по Герцу ад воспользуемся параметром
контактного напряжения П# (далее будем называть просто контакт-
ным напряжением), имеющим одинаковую с ад единицу измерения
и связанным с ним соотношением
где ZM - коэффициент, учитывающий механические свойства мате-
риалов сопряженных зубчатых колес,
I I 2£1£2
У тг(1 - El + E2'
у - коэффициент Пуассона; Ei. £2 - модули упругости материалов
шестерни и колеса соответственно. Здесь и далее индекс “1” соот-
ветствует шестерни (меньшему зубчатому колесу), а индекс “2 ” -
колесу (большему зубчатому колесу).
Если ад} П#, Е\ и £2 измерять в мегапаскалях, то для стальных
зубчатых колес ZM = 275 -УМПа.
Итак, имеем следующие выражения для расчетных контакт-
ных П# и изгнбных ар напряжений:
Ft
Пн = 7—J----ZHZeKHoKHpKHvKH>lKHx-,
OwUwml
Ft
Of = ------¥р¥еКраКррКръКрцКрх>
^f^nm
где Ft - расчетная окружная сила в зубчатом зацеплении, Н; bw, bf
- рабочая ширина зуба при расчете контактных и изгибных напря-
жений соответственно, мм; тпгп - средний нормальный модуль (для
цилиндрической передачи равен нормальному модулюmn), мм;
- средний начальный диаметр шестерни (для цилиндрической ше-
стерни равен начальному диаметру мм.
Коэффициенты Z#, Ур в этих выражениях учитывают форму
сопряженных поверхностей зубьев; Z£, Уе - перекрытие зубьев; Кда,
315
К Fa - распределение нагрузки между зубьями в зависимости от сте-
пени точности передачи; Крр - распределение нагрузки по
ширине венца; Kffv, Kfv ~ динамическую нагрузку, возникающую
в зацеплении; ~ влияние трения и смазки; Я/р®, ^Fx ~
влияние размеров зубчатого колеса и модуля зубьев.
Расчетную окружную силу можно определить, исходя из расчет-
ного момента Т (см. § 4.1), действующего на валу зубчатого колеса,
среднего начального его диаметра dwm и числа сателлитов пс, нахо-
дящихся в зацеплении с рассматриваемым центральным зубчатым
колесом:
„ 2 103Т
Ft = 1-----•
где Т в Н-м, dwm в мм, Ft в Н. Для непланетарной передачи пс = 1.
Для гипоидной передачи значения Ft подсчитывают отдельно
для шестерни Fti и для колеса Fa, причем в формулу для вычи-
сления контактных напряжений необходимо наряду со средним
начальным диаметром шестерни dwm[ подставлять окружную силу
для колеса Ft = Ft2- Для остальных передач значения Ft у шестерни
и у колеса одинаковы.
Рабочую ширину венца bw или Ьц, ^f2 определяют согласно
рис. 4.7. При этом расчетная ширина бу зуба на изгиб может пре-
вышать ширину bw не более чем на значение окружного модуля mt
с каждой стороны:
mt — mnj cos 3,
где mn - нормальный модуль; ,3 - угол наклона зуба.
Рис. 4.7. Рабочая ширина зубчатого венца при
расчете на контактные и изгибные напряжения
316
Для конических и гипоидных передач при задании внешнего
окружного модуля колеса т^е2 средний нормальный модуль
Re2-0,5b2
тпт — mte2 Д COS рт2,
где Ле2 - внешнее конусное расстояние колеса; 62 - ширина венца
колеса; (Зт2 - средний угол наклона зуба колеса.
Начальные диаметры цилиндрической шестерни и цилиндриче-
ского колеса вычисляют по формулам
dwl = 2aw/(и ± 1);
dm2 rfwl и,
где aw - межцентровое расстояние; и = 22/21 - передаточное число;
2i, Z2 - числа зубьев шестерни и колеса соответственно; здесь и далее
в формулах верхний знак (“+” или - для внешнего зацепления,
нижний - для внутреннего.
Для конических и гипоидных передач средний начальный диа-
метр шестерни и колеса соответственно равны
dwml — 'rnnmz\l COS /Зтп\!
d>wm2 = mnmz2/ /дтЯ,
причем для гипоидной передачи 3ml > /dm2-
Единичное контактное напряжение (коэффициент кон-
тактного напряжения) для различных видов передач определяют по
следующим формулам:
Ztf = </wlawtg Фш/(2рт1Ри2)
- для цилиндрической прямозубой передачи,
Zfj = 2(u ±1) cos2 0/(usin 2апш)
- для цилиндрической косозубой передачи,
ZH = 2\/u2 + 1 cos2 pml(usin 2ап)
317
- для конической обкатной передачи с межосевым углом Е = 90°,
Z// = 2u cos2 ртЦ \/u2 + 1 sin 2an)
- для конической полуобкатной передачи с Е = 90°,
Ztf = 2 sin 6j(u2 + 2ucos E 4- 1) cos2 Pm/(u sin 2an)
- для конической передачи с Е / 90°,
Zh = 2 sin ^(ctg <5i/Кт + A'rCtg^Jcos2 £cp/(usin 2an)
- для гипоидной обкатной передачи,
Zff = 2 sin ^ctg <5j cos2 pcP!(Kvu sin 2an)
- для гипоидной полуобкатной передачи. Здесь aw = atw, anw -
углы зацепления в торцевом и нормальном сечениях соответственно;
Рт1 и рИ2 - радиусы кривизны профиля зуба в точках пересопряжения
шестерни и колеса соответственно (при отсутствии данных по pTi
и рИ2 значение Zff для цилиндрической прямозубой передачи можно
вычислять по формуле для цилиндрической косозубой передачи при
/3 = 0); ап - угол профиля зуба в нормальном среднем сечении; 6}
и - углы делительного конуса шестерни и колеса соответствен-
но; Кт — cos ртг/cos pmi - коэффициент гипоидности (коэффициент
увеличения размеров шестерни); /Зср = 0,5(^mi + Ртз)-
Выражения для вычисления углов зацепления имеют вид
= arctg (tg aw cos ,3);
mt<Z2 ± г и cos at
aw = atw = arccos —5,
где at - угол профиля в торцевом сечении, at = arctg (tg ап/cos Pm)-
Углы делительных конусов находят из следующих равенств:
sin Е
dj = arctg— ----; С>2 = Е - dj.
и + cos L
Полуобкатной метод нарезания конических зубчатых колес
обеспечивает более высокую степень точности, чем обкатной.
318
Рнс. 4.8. Номограмма для определения коэффициента
Y? при расчете зубчатых колес внешнего зацепления
Единичное напряжение изгиба (коэффициент напряжения изги-
ба)
YF = YFKuKaKpKr,
где Yp - номинальное значение коэффициента Yp\ Ка, Кр, Кт -
коэффициенты, учитывающие влияние параметров парного зубчато-
го колеса, угла профиля, радиуса переходной кривой профиля зуба
и преднамеренного перераспределения толщины зубьев шестерни и
колеса соответственно.
Значение Yp находят по номограмме (рис. 4.8) для зубчатых ко-
лес внешнего зацепления и по табл. 4.4 для колес внутреннего зацеп-
ления в зависимости от коэффициента смещения х соответствующе-
го колеса и эквивалентного числа зубьев zv:
zl;] = Z]/(cOs61 COS3 ,9ml);
zv2 = Z2/(cOS& COS3^m2)-
Для колеса полуобкатной конической или гипоидной передачи
принимается Yp = 2,25.
319
Значение коэффициента Y°F для зубчатых
колес внутреннего зацепления при х2 = г1
Таблица J,.J,.
X zb2
40 50 | 60 80 100
z^=13
2,52 2,46 2,40 2,35 2,35
о
2,72 2,73 2,74 2,73 2,72
2,50 2,46 2,40 2,35 2,35
0 3
2,43 2,52 2,58 2,66 2,70
2,48 2,44 2,38 2,35 2,35
0,6
2,23 2,33 2,41 2,54 2,63
2,48 2,44 2,38 2,35 2,35
1,0
2,00 2,12 2,23 2,41 2,50
2,50 2,44 2,38 2,32 2,30
о
2,72 2,73 2,74 2,73 2,72
2,48 2,44 2,38 2,32 2,30
0,3
2,43 2,52 2,58 2,66 2,70
2,46 2,42 2,36 2,30 2,30
0,6
2,23 2,33 2,41 2,54 2,63
2,46 2,42 2,36 2,30 2,30
1,0
2,06 2,12 2,23 2,41 2,50
2C1-J7
2,48 2,40 2,35 2,30 2,20
2,62 2,63 2,64 2,63 2,62
2 46 2 40 2; 35 2’30 2 20
0,3
2,36 2,43 2,49 2,56 2,60
2,44 2,38 2,32 2,25 2,20
0,6
2,15 2,24 2,32 2,46 2,53
2,44 2,38 2,32 2,25 2,20
1,0
2,00 2,05 2,15 2,32 2,41
zvi=19
2,45 2,38 2,32 2,28 2,10
о
2,62 2,63 2,64 2,63 2,62
2,43 2,36 2,32 2,26 2,10
0,3 -
2,36 2,43 2,49 2,56 2,60
2,42 2,35 2,30 2,24 2,10
0,6
2,15 2,24 2,32 2,46 2,53
320
Окончание табл.
X ZV2
40 50 60 80 100
2,42 2,35 2,30 2,20 2,10
1 0
2,00 2,05 2,15 2,32 2,41
=25
2,30 2,20 2,12 2,02
0
2,55 2,56 2,55 2,54
л д 2,28 2,20 2,10 2,02
и,о 2,36 2,42 2,50 2,53
Л Й 2,26 2,18 2,08 2,02
и,О 2,18 2,26 2,39 2,46
1,0 2,26 2,18 2,06 2,02
2,00 2,09 2,26 2,34
zvi =33
2,08 2,04 2,00
0
2,56 2,55 2,54
2,08 2,04 2,00
0,3
2,42 2,50 2,53
2,06 2,02 2,00
0,6
2,26 2,39 2,46
2,06 2,02 2,00
1,0
2,09 2,26 2,34
Примечание- В числителе дано значение Yp для шестерни, в знаменателе -
для колеса.
Зубья колеса нарезают долбяком, имеющим число зубьев zq =
= 20.В противном случае принимают Yp — Ypa/KpQ, где Ypa опре-
деляют по номограммам, представленным на рис. 4.9.
Для шестерни цилиндрической передачи внешнего зацепления
Л"и1 = 1+0,125(гф1/ги2 + - 1),
для колеса такой же передачи
А'иг = 1+0,125(гф2/2Г1 + - 1),
11-692
321
для шестерни и колеса цилиндрической передачи внутреннего зацеп-
ления
А'и! = КИ2 = 1 + 0,125(>2 “ 5С1),
а для конических и гипоидных передач
А'и! = Л"и2 = 1,
где 2ф - число зубьев условного парного колеса передачи, причем,
при х > —0,3 2ф1 = 14 4 20а?1, 2ф2 = 14 4- 20ге2> а при х < —0,3 2ф1 =
= 2 — 20а?1, 2ф2 = 2 — 20ггг; х% - коэффициент суммарного смещения
шестерни (a?i) и колеса (хг)-
Рис. 4.9. Номограммы для определения коэффициента Ура при
расчете колес внутреннего зацепления
zo = Z0
322
При стандартных значениях угла профиля а = 20° и радиуса
переходной кривой профиля у ножки зуба pj = р^тп-п — 0,коэф-
фициенты KQ = К/, = 1,0. При нестандартных а и р*^ коэффициенты
Ка и Кр имеют следующие значения:
............................... 15° 17°30' 20° 22°30' 25°
Ка............................ 1,14 1,07 1,0 0,935 0,88
р}............................ 0 0,1 0,2 0,3 0,4
Кр............................ 1,22 1,12 1,07 1,03 1,0
Коэффициент, учитывающий влияние преднамеренного перерас-
пределения толщины зубьев шестерни и колеса, для конических и
гипоидных передач вычисляют по формуле
Кт = 1,57/(1,57 +jr),
для цилиндрических передач Кт = 1. Здесь хт - коэффициент изме-
нения толщины зуба (коэффициент тангенциальной коррекции).
Для прямозубых передач коэффициенты Z£ = Yz — 1,0. Для пе-
редач с непрямыми зубьями значение Ze определяют по номограм-
мам, представленным на рис. 4.10, в зависимости от значения ко-
эффициентов осевого и торцевого перекрытия. Для цилин-
дрических и конических косозубых передач Ye = Ze\ для гипоидной
шестерни
cos ftp/cos
для гипоидного колеса
Уе2 = cos /Зср/ cos 0m2.
Коэффициенты осевого и торцевого перекрытия для ци-
линдрических передач вычисляют по формулам
Ед = bw sin /?/(?rmn);
Са = (Pal “ Ppi)/(япц cos at).
где Pal = °>5V + Ppi — iflwsinafu) + Po2\ Pa2 —
= 0, byjd2a2 - <f|2; dbi = zimt cos otf, db2 = z2mtcosaf, dai, da2 - диа-
метры вершин зубьев шестерни и колеса соответственно; для кони-
ческих передач эти выражения принимают следующий вид:
sin/?т/(тгтпт);
И’
323
Рис. 4.10. Номограммы для определения коэффициен-
та Z* при расчете цилиндрических косозубых (а), а так-
же конических с криволинейным зубом и гипоидных
передач (б)
Са = -----[д/( — , + h* + Я] cos
тт cos at L V \2cos di
+ y(.2^ + h° + X2mS0m) '
\2 /21 COS tty
/ \ 2 cos 6i
Z2 COS Oa2
2 cos 62 /
- sin Oit ( 9 Z--7 + -T~Z2 c 11 ,
\ 2 cos 0i 2 cos 02/J
где Лд ~ коэффициент высоты головки зуба; наконец, для гипоидных
передач используют соотношение
£3 = (ЗЙ^ - /С^)Ле2/(37Г772£е2)э
324
bw[Re2 — 0,56w)tg/?ср
где /ц = ------——------г—т---а приближенные значения вы-
Не2(Ке2- Ow)
бирают в зависимости от числа зубьев шестерни z\:
... 6 7 8 9 10 12 14 16 18 20
. . 0,87 0,95 1,02 1,07 1,11 1,19 1,21 1,23 1,25 1,26
Коэффициент
КНа = Кц^Кц.,,
где Kffy - коэффициенты, учитывающие непостоянство ин-
тенсивности нагрузки на наклонных контактных линиях и влияние
точности изготовления на распределение нагрузки между зубьями
соответственно.
Для прямозубых передач
^Иф = «Ну = 1-
Для передач с криволинейными зубьями
„ _ Р + £Р3 при -в -1>°;
Я14 [1,33 при£/?>1,0,
а значения находят по рис. 4.11 в зависимости от степени точно-
сти передачи (5 — 9), нормы плавности работы и расчетной окружной
скорости в зацеплении
v3 = ?г(/шглп/(60 103),
где dwm в мм; ti - расчетная частота вращения зубчатого колеса,
мин-1 (для планетарной передачи п - частота вращения при отно-
сительном движении).
Коэффициент
KFa = l+(K°Fa-l)Kb,
где Кра - коэффициент, учитывающий влияние числа зубьев zv и
величины смещения х на распределение нагрузки между зубьями;
К& - коэффициент, учитывающий влияние точности изготовления
и удельной нагрузки F)o = Fj/(6wmnm) на распределение нагрузки
между зубьями.
Для внешнего зацепления определяют по табл. 4.5.
325
Рис. 4.11. Зависимости для определения
коэффициента Кн-i при расчете передач с
криволинейными зубьями (5 - 9 - степени
точности по нормам плавности работы)
Таблица 4-5- Коэффициенты K°Fa для зубчатых колес со
стандартным исходным контуром
Zy X
0,8 0,6 0,4 0,2 0 -0,2 -0,4 -0,6 -0,8
10 1,35 1,40 1,40 1,35 - - - -
12 1,36 1,42 1,42 1,36 1,32 - - - -
16 1,40 1,46 1,46 1,40 1,34 1,30 - - -
20 1,46 1,50 1,48 1,45 1,39 1,34 1,30 - -
25 1,48 1,52 1,50 1,48 1,41 1,36 1,30 - -
30 1,52 1,55 1,52 1,48 1,42 1,38 1,32 1,28 -
40 1,58 1,56 1,54 1,48 1,43 1,38 1,32 1,28 1,26
60 1,63 1,56 1,54 1,49 1,45 1,40 1,36 1,30 1,26
80 1,65 1,58 1,54 1,50 1,46 1,42 1,38 1,34 1,26
100 1,66 1,58 1,54 1,51 1,47 1,44 1,40 1,36 1,28
200 1,68 1,62 1,56 1,52 1,48 1,45 1,43 1,40 1,34
Значения для внутреннего зацепления приведены ниже:
2V1........................ 12-16 17-22 >23
K°Fa.............................. 1,3 1,35 1,38
326
Значения коэффициента Ад’выбирают в зависимости от степени
точности передачи и значения Fto'.
Степень
точности .... 5 6 7 8 9 10
' В числителе - при Fto > 120 МПа, в знаменателе - при Fto <
< 120 МПа.
Для передач с неразветвленным потоком мощности
кнз = 1 +
KF/3 = 1 + - i)KFw,
а для передач с разветвленным потоком мощности
Кщз = 1 + (ЧпКр - l)KBw;
KF/3 = 1 + (7n^j - l)KFw
Здесь коэффициент К& учитывает распределение нагрузки по ши-
рине венца в начальный период работы передачи, Kffw и Kpw -
приработку зубьев в процессе эксплуатации, уп - неравномерность
распределения нагрузки между разветвлениями (в частности, сател-
литами) в начальный период работы передачи.
Для нахождения коэффициента К@ можно использовать зависи-
мости, приведенные на рис. 4.12 и 4.13 для различных условий за-
креплений и типов передач (здесь V’fed = bw/dwmi). Значения ко-
эффициентов Khw и Kpw берут из табл. 4.6, а значение -;п - из
табл. 4.7.
Рис. 4.12. Зависимости для определения коэффициента Кр при
расчете цилиндрических зубчатых колес с твердостью ак-
тивных поверхностей зубъев НВ> 350
327
Рис. 4.13. Зависимости для определения коэффициента при
расчете главных передач КМ (верхний ряд передач) и нерегули-
руемых конических передач (нижиий ряд передач) с твердостью
активных поверхностей зубьев НВ> 350 (/; - для шестерни; 1? -
для колеса)
Таблица j.6. Значения коэффициентов Khw (числитель) и Kfw
(знаменатель), учитывающих приработку зубьев
Твердость активных v3, м/с
поверхностей
зубьев HRC3 1 2 4 6
0,62 0, 65 0,70 0,80
47
0,9 0,96 1 1
0,72 0,76 0,85 0,96
50 । — —
0,95 1 1 1
0,80 0,85 0,96 1
60 1 1 1 1
Примечание. При и, > 8 м/с Кни = Kfw = 1-
328
Таблица j.7. Значения коэффициента 7П, учитывающего неравно-
мерное распределение нагрузки в передачах с раз-
ветвлением потока мощности
Вид механизма Самоустанаэли вающееся звено Число разветвлений
2 3 4 5 6
Одно- рядный:
Отсутствует - 1,25 1,30 1,35 1,40
it Водило или два центра- льных зубчатых колеса (одно центральное в простой несо- осной передаче) 1,10 1,10 1,15 1,20 1,25
Одно из центральных колес - 1,15 1,20 1,25 1,30
Дэу? Отсутствует - 1,30 1,35 1,40 1,45
рядный Водило или два центральных зубчатых колеса - 1,15 1,20 1,25 1,30
-Я- Одно из центральных колес - 1,20 1,25 1,30 1,35
Последовательность вычисления коэффициентов Kffv и Kpv сле-
дующая:
1) определяют расчетную производственную погрешность До
зубчатых колес согласно табл. 4.8;
2) вычисляют внутреннюю динамическую нагрузку (в Н) при
окружной скорости v3 = 1 м/с:
-fjAl — + 1)До/у,
где Na - коэффициент, учитывающий тип передачи и равный 0,18
для цилиндрической прямозубой передачи; 0,10 для косозубой пере-
дачи; 0,20 для конической прямозубой передачи; 0,14 для передачи с
криволинейным зубом и 0,08 для гипоидной передачи; 6ср = 0,5(6р +
4-6^2)? мм; в мм;
3) определяют внутреннюю динамическую нагрузку (в Н) при
расчетном значении окружной скорости:
FjA = Р]ЫУз',
329
Таблица 4-8. Расчетная погрешность изготовления зубчатых
колес До, мкм
Степень точности по нормам плавности m(mn, mnm), мм
1-2,5 2,5-4 4-6 6-8 8-10 > Ю
6 10 12 14 16 18 22
7 18 20 22 25 28 34
8 28 32 36 42 48 56
4) рассчитывают предельное значение динамической нагрузки
(в Н) для цилиндрической передачи по формуле
Fjm — cos 3,
для конической и гипоидной передач с помощью выражения
Fjm — 1,2Ao^cp^iE cos ^ср5
где - суммарная удельная жесткость сопряженных зубьев; для
прямозубых передач Gt^, = 14 Н/(мм-мкм), для передач с непрямыми
зубьями значения GtY, приведены ниже:
Угол наклона
линии зуба /?ср, град.......
GJE, Н/(мм- мкм), для передачи:
цилиндрической..............
конической ..............
* Для удобства проведения р:
даны не в МПа, а в Н/(мм- мкм).
12 16 20 24 28 32 36 40
20 19 18 17 16 14 13 11
23 22 21 20 19 17 16 14
чета значения удельной жесткости G(£
5) сопоставляют значения Fj& и Fjm и меньшее из них при-
нимают в качестве расчетного значения внутренней динамической
нагрузки Fj]
6) определяют расчетное значение коэффициента внутренней ди-
намической нагрузки:
/Суд = 1 + Fj/Ft\
330
7) вычисляют искомые значения коэффициентов Kpv и
Kpv = KV^KV€-, KHv = у/ Kpv,
где Kve - коэффициент, учитывающий влияние внешних динамиче-
ских нагрузок; определяется типом КМ, видом трансмиссии и демп-
фирующим влиянием подвески агрегатов трансмиссии (рис. 4.14).
Рис. 4.14. Зависимости для определения коэф-
фициента Kvet
1 - 4 ~ яля механической трансмиссии гусенично-
го трактора, колесного трактора, грузовой и легко-
вой КМ соответственно; 5 - для гидромеханической
трансмиссии (штриховые линии - для неподрессорен-
ных агрегатов; сплошные - для подрессоренных)
При использовании смазочных материалов, рекомендуемых для
агрегатов трансмиссии КМ, Кяд — 1- Для ведущего зубчатого ко-
леса внешнего зацепления Кр^ = 1,05, а для ведомого 0,95. Для
ведущего и ведомого колес внутреннего зацепления Кр^ = 1.
Для зубчатых колес, имеющих (средний) начальный диаметр
< 700 мм, Ktfx = 1; для зубчатых колес, имеющих dw > 700 мм,
КНх = 1/(1,07 - 10-4dw).
Коэффициент Крх находят по табл. 4.9.
Предельные напряжения при расчете на сопротивление устало-
сти определяют по формулам
ПЯро = П^Кт/л;
О’РРО = О’яПтХй-Л'яс,
331
где П^ц и - пределы выносливости (при контактных на-
пряжениях и симметричном изгибе зубьев соответственно), устано-
вленные при стендовых испытаниях колес с заданными конкретными
размерами, термообработкой и чистотой поверхности зубьев, соот-
ветствующие вероятности неразрушения Р = 0,9 и базовым числам
циклов N/fQ и -/Уро? и Кй ~ коэффициенты, учитывающие особен-
ности обработки зубьев; Крс - коэффициент, учитывающий отличие
характера нагружения зубчатого колеса от знакопеременного симме-
тричного цикла.
Таблица /.9. Значения коэффициента К?г
, (^u'm)i мм т, (тп, тппт), мм
2 3 4 5 6 7 8 9 10 11 12
До 300 0,96 1,00 1,02 1,04 1,07 1,10 1,13 1,16 1Д9 1,22 1,25
300- 400 0,98 1,02 1,04 1,06 1,09 1,12 1,15 1,18 1,21 1,24 1,27
400-500 1,00 1,04 1,06 1,08 '1,12 1,16 1,19 1,22 1,25 1,27 1,30
500-600 1,03 1,07 1,09 1,11 1,15 1,18 1,22 1,26 1,29 1,32 1,35
600- 700 1,06 1,10 1,12 1,14 1,18 1,21 1,26 1,30 1,33 1,37 1,40
700 - 800 1,10 1,13 1,16 1,19 1,22 1.26 1,30 1,34 1,38 1,42 1,46
Значения и ^Fo Для зубчатых колес, изгото-
вленных из различных материалов, приведены в табл. 4.10. Значе-
ние коэффициента /д, общее для шестерни и колеса, принимают по
табл. 4.11, исходя из шероховатости активной поверхности зуба бо-
лее грубого зубчатого колеса в зацеплении.
Коэффициент Уд = 1 принимают для цементированных, циани-
рованных, закаленных токами высокой частоты (ТВЧ) по контуру,
нормализованных и улучшенных зубчатых колес, имеющих нешли-
фованную переходную поверхность без грубых следов обработки (не
подвергавшихся упрочняющей обработке дробью). Значение Y# / 1
можно принимать при наличии достаточно достоверных эксперимен-
тальных данных.
Коэффициент Крс = 1,0 при явно выраженном знакопеременном
цикле нагружения (промежуточные зубчатые колеса в реверсных од-
норядных передачах, сателлиты с внешним и внутренним зацепле-
332
ниями в планетарных передачах или периодического реверсирования
при одинаковой продолжительности работы в обоих направлениях).
При одностороннем отнулевом или достаточно близком к нему
цикле (зубчатые колеса низших передач и заднего хода в коробках
передач) Крс = 1,30.
При периодическом изменении направления нагрузки, когда от-
ношение чисел циклов может достигать ^Урев/АпрЯМ = 0,3...0,4
(зубчатые колеса, расположенные за узлом реверсирования: зубча-
тые колеса раздаточных коробок, ведущих мостов и т.д.), Kj?c =
= 1,20; при -VpeB/ArnpHM = 0,65...0,75 (зубчатые колеса выс-
ших передач в коробках передач, испытывающие реверсирование
нагрузки при движении накатом, а также вследствие колебатель-
ных процессов в трансмиссии) Кус — 1,08; при Npee/MipiM =
= 0,45 ... О, 60 (зубчатые колеса промежуточных передач в коробке
передач) KpQ = 1,14.
Ресурсы и зубчатого колеса по контактным напряже-
ниям и при изгибе, расходуемые за 1 км пробега КМ, определяют по
формулам
А,
ПЯ1- 7»из,к1Л’пЯп
i=l
R}p = ans У
i=l
где a - фактор цикличности, т.е. число вхождений в зацепление
одного зуба одной и той же стороной за 1 оборот вала зубчатого
колеса; ns - число оборотов, совершаемых ведущим колесом КМ за
1 км пробега.
ns = 1000/(2тггк).
Следует принимать а = 1 для зубчатых колес, имеющих одно за-
цепление, а также для паразитных зубчатых колес непланетарных
передач и сателлитов планетарных передач; а = пс для зубчатых
колес, имеющих пс зацеплений (например, центральных колес пла-
нетарных передач).
Значения mH и mF приведены в табл. 4.10.
333
Таблица 4-Ю. Характеристики выносливости и прочности зубьев
Марка стали Вид термо- обработки HRC3 МПа И Я limJM МПа
на поверхности зуба в сердцевине зуба
12Х2Н4А Цементация 56-63 33-41 1900 190
12ХНЗА )> 56-63 25-33 1850 190
15ХГН2ТА 56-63 30-42 1750 190
18ХГТ >) 56-63 28-35 1600 190
18Х2Н4ВА » 58-63 35-40 1950 190
20Х2Н4А )) 56-63 36-41 1950 190
20ХНЗА » 56-63 31 -41 1900 190
20ХГНТА 56-63 30-42 1750 190
20ХНМ )> 58-63 28-35 1700 190
20ХГНР )> 56-63 28-35 1650 190
20ХГР 0 56-63 28-35 1500 190
25ХГТ » 56-63 28-35 1700 190
ЗОХГТ Л 56-63 29-42 1700 190
35Х Цианирование 56-63 35-45 1750 190
38ХА 56-63 35-45 1800 190
40ХА » 56-63 35-45 1800 190
40ХН Объемная закалка 45-55 45-55 1600 100
40ХН Улучшение 25-30 25-30 700 40
45 Закалка ТВЧ по
контуру 53-58 28-35 1500 160
55ПП То же 56-62 29-32 1600 190
334
зубчатых колес, изготовленных из различных материалов
^Fiur.' МПа °F lim МПа •'Vfo х хЮ"6, циклы mF п° МПа Пянт, МПа Л'нох х10“8, циклы mH Vh
430 467 4 9 0,062 19 22,1 1,2 3 0,11
380 422 4 9 0,078 18,5 21,5 1,2 3 0,11
420 486 4 9 0,106 19 22,1 1,2 3 0,11
370 430 4 9 0,110 18 21,3 1,2 3 0,12
430 466 4 9 0,060 21 24,8 1,2 3 0,12
460 505 4 9 0,070 21 24,4 1,2 3 0,11
400 444 4 9 0,076 19 22,1 1,2 3 0,11
420 486 4 9 0,106 19 22,1 1,2 3 0,11
420 465 4 9 0,076 20 23,3 1,2 3 0,11
410 465 4 9 0,092 18 21,0 1,2 3 0,11
380 430 4 9 0,092 19 22,5 1,2 3 0,12
400 462 4 9 0,104 19 22,5 1,2 3 0,12
410 475 4 9 0,106 19 22,5 1,2 3 0,12
410 460 2 9 0,082 18 21,3 1,2 3 0,12
420 470 2 9 0,082 18 21,3 1,2 3 0,12
420 470 2 9 0,082 18 21,3 1,2 3 0,12
300 350 2 6 0,112 11 13,0 0,6 3 0,12
240 280 1 6 0,090 5 5,7 0,16 3 0,09
280 320 2 7 0,098 13 15,4 1,0 3 0,12
420 480 2 7 0,098 16 18,6 1,0 3 0,11
335
Таблица 4-11- Значения коэффициента Zr
Класс шероховатости поверхности по ГОСТ 2789-73 яо, мкм Rt, мкм ZR
4 - 40-20 0,82
5 - 20- 10 0,88
6 2,5- 1,25 - 0,94
7 1,25 -0,63 - 1,00
Передаточное число и3]К от вала зубчатого колеса до ведущих
колес КМ определяют по кинематической схеме трансмиссии. Для
планетарных передач с вращающимся водилом в формулы для вы-
числения ресурсов, расходуемых за 1 км пробега, вместо изк следует
подставлять соответствующее выражение для и° к (передаточное чи-
сло с учетом относительного вращения звеньев) (табл. 4.12). Схемы
механизмов с обозначением звеньев приведены на рис. 4.15.
При расчете деталей, работающих под нагрузкой на всех пере-
дачах и имеющих независимо от включенной передачи одинаковые
передаточные числа от этой детали до колеса и3 к, = u3K, ресур-
сы Я]// и Ryf можно определять с использованием коэффициентов
общего пробега по следующим формулам:
^1Я — Пя^счап«из,к ^пЯо!
R1F =
При этом все режимы заменяются режимом работы с максимальной
расчетной удельной силой тяги рк.расч, которой в данном случае бу-
дут соответствовать и максимальные расчетные напряжения П#расч
и о/7расч- Последние выражения нельзя применять при учете раз-
личных весовых нагрузок на КМ (движение с грузом и без груза,
движение с прицепом и без него).
Общие ресурсы R/f iim и Л/r цга вычисляют по формулам
Значения базовых чисел циклов Л"яо и ^Fo приведены в
табл. 4.10.
336
Рис. 4.15.
Схемы планетарных механизмов
Таблица 4 12 Формулы для вычисления передаточного числа и®к
от рассчитываемой детали (зубчатого колеса) до
ведущих колес КМ для планетарных механизмов
трансмиссии
Вариант использования звеньев планетарного механизма Рассчитываемое зубчатое колесо
а ь д’ е 3“, f
Ведущее а. ведомое h, неподвижное Ь -Р«в,к ив,к ч вв,к ZS Zb “«в,к 2е Zb — «в,к 2/
Ведущее Ь. ведомое h, неподвижное а «в,к 1 «в,к -р Ив,к z9 Za — Ив,к ze Za — Ив,к Z3
Ведущее h. ведомое а (или Ь'). неподвижное b (или а) -р«в,к Ив,к '_pZoUBK -Р*вИВ1К -pzauBK
1 -р С1 - р) гз (1 ~p)2s (1 ~p)2s
Примечания: 1. Параметр механизма р = —zt,lza для схемы А,
-ZbZg/(zaZf) для схемы В, z/,z9/(zazj) для схемы С и z^jza для схемы D. 2. ив к -
передаточное число от ведомого звеиа механизма до ведущих колес КМ.
* Для схем А и D (см. рис. 4.15). ’’Для схем В и С (см. рис. 4.15).
При оценке долговечности ‘ зубчатых колес по сроку службы
определяют пробеги Ьц и Lp до появления прогрессирующего вы-
крашивания активных поверхностей зубьев и усталостной поломки
зуба:
337
Lh = RhutJRih;
LF = R/.,:r„/R}i.',
которые затем сравнивают с планируемым сроком службы Lq (долж-
но быть Lff > Lq и Lp > Lq).
Параллельно оценке по сроку службы в километрах пробега воз-
можны также оценки по допускаемому и эквивалентным напряжени-
ям.
Требования к оценке сопротивления усталости зубчатых колес
по допускаемым напряжениям предусмотрены ГОСТ 21354-87. По-
следовательность расчета следующая.
1. Определяют эквивалентные числа пиклов изменения напряже-
ний:
NH„„ = R1HL0/Tl™H-,
= RyfLo/a^.
При оценке зубчатых колес, работающих на нескольких сту-
пенях регулирования с различными значениями напряжений, в эти
формулы следует подставлять наибольшие значения Пя и ар.
2. Находят коэффициенты долговечности;
KhL = т1иКно/КНэх1,
Kfl = ’t'/nfo/Nf3w
3. Определяют допускаемые напряжения:
ПЯР = Пяро^Я£;
а FP = aFPo^FL-
Если получают ПЯР > 0,6ПЯlimм, то ПЯР = 0,6ПЯИтМ.
При арр > 0,5стрнтд/ принимают арр = 0,5а/7нтд/, но арр <
900 МПа. Здесь ПЯутд/ - предельное контактное напряжение, при
котором возможно повреждение активной поверхности зуба (смятие,
растрескивание упрочненного слоя) от однократного действия дина-
мической нагрузки; ар^тм - предельное напряжение изгиба зуба,
при котором возможны появление остаточной деформации зуба или
его хрупкий излом от однократного действия динамической нагруз-
ки.
Значения ПЯ1|тд/ и приведены в табл. 4.10.
338
Условия достаточного сопротивления усталости зубчатого коле-
са
Пя < ПЯр; оя < ояр.
При оценке по эквивалентным напряжениям определяют
пяэкв =
= mF^ R^fLo/Nfo-
Если П//экв > П# то П#экв = П#, при арЕ > aF принимают
^Еэаъ ~ &F '
Условия достаточного сопротивления усталости:
ПЯэкв Пяро; <трэкв < aFPU.
Все три способа оценки сопротивления усталости зубчатых ко-
лес дают однозначные результаты. Однако оценка по сроку службы
является наиболее удобной и наглядной при переходе от детермини-
рованных расчетов к вероятностным.
Расчет зубчатых колес на прочность
Задачей этого расчета является определение максимально воз-
можных в эксплуатации контактных напряжений П#тах на актив-
ных поверхностях зубьев и напряжений изгиба артлх зубьев и сопо-
ставление полученных значений с предельными П^КтЛ/ и
(см. табл. 4.10).
Напряжения П/^тах и ^Ттах возникают при действии макси-
мально возможного динамического крутящего момента Ттах на валу
зубчатого колеса, который, согласно § 4.1, равен
Ттах = Ад Т1
где Т - наибольший расчетный крутящий момент на рассчитывае-
мом участке трансмиссии.
Максимальные напряжения вычисляют по формулам
ПЯтах = Кл-Г—Г-ЗнгеКнаКнрКнх - ]
Ow“wmi ЛЯчЛЯд
^тах = Kai-^—YFYeKFaK FpKF „KFx =
OfTTinm K-Fv
339
где все величины, кроме Кд, имеют те же значенния, что и при рас-
чете на сопротивление усталости, а в качестве Ft, П# и <гр следует
использовать значения, соответствующие наибольшему расчетному
крутящему моменту Т.
Условия достаточной прочности зубьев имеют вид
Пя max — О, 9ПяПт М’
°F так < ОЗоЯКтМ-
Анализ результатов расчетов зубчатых колес на
сопротивление усталости и прочность
Если в результате проведенных расчетов срок службы КМ по-
лучился заниженным (L < Lq) следует уточнить параметры нагру-
зочного режима и другие исходные данные и повторить расчеты.
Наибольшее влияние на срок службы оказывает расчетный кру-
тящий момент Т, особенно на режиме работы на низшей ступени
в трансмиссии. Поэтому, если эта ступень предназначена только
для маневрирования и движения с малой скоростью, то для нее в
качестве расчетного момента на входном валу трансмиссии следует
принять не максимальный крутящий момент двигателя Тще, а лишь
(О, 7 ... 0,8) Тте, приняв во внимание ограничение по сцеплению ве-
дущих колес.
Если корректировка параметров нагрузочного режима не дает
существенных результатов, необходимо изменить размеры зубчато-
го колеса (особенно, если получен недостаточный предел выносливо-
сти по всем видам напряженного состояния).
Во всех случаях должен быть обеспечен достаточный запас проч-
ности.
При получении очень большого срока службы (например, L >
> (З...5)£о) следует сначала убедиться в достаточной динамиче-
ской прочности зубчатого колеса. Если по прочности также имеется
запас, то необходима корректировка его размеров.
Однако и в этом случае может оказаться оправданным сохране-
ние выбранных ранее размеров зубчатого колеса при необходимости
выполнения ряда условий: если получены умеренные сроки службы
при расчете по другим напряженным состояниям; в связи с требова-
ниями унификации; из-за необходимости размещения зубчатой муф-
ты определенных размеров на ступице колеса; из-за необходимости
установки зубчатого колеса на валу, диаметр которого выбран по
340
условиям жесткости конструкции, или установки достаточно долго-
вечного подшипника.
В практике проектирования сохранился метод ориентировочной
оценки работоспособности конструкции по номинальным напряже-
ниям. используемый при предварительном выборе размеров деталей.
Номинальные напряжения рассчитывают по формулам
Ft
nH = ~—ZHZe-:
Ow^wml
bfTnnm
Затем полученные значения сравнивают со значениями номиналь-
ных напряжений в соответствующих деталях, надежно работающих
на машинах-аналогах.
Вероятностные расчеты
Исходные зависимости для вероятностного расчета зубчатых
колес на сопротивление усталости
В рассмотренных выше детерминированных расчетах использо-
вались значения величин, которые являются случайными и подчи-
няются определенным статистическим законам распределения. Это
касается напряжений, чисел циклов до разрушения, сроков службы
и т.п Исходной зависимостью для вероятностной оценки зубчатого
колеса на сопротивление усталости может служить выражение для
определения его срока службы L = Япт/Я1-
Задачей вероятностного расчета является нахожделение стати-
стических характеристик случайной величины L. Исходными дан-
ными для решения этой задачи служат статистические характери-
стики случайных величин и Я}.
Обобщение результатов исследований усталостных характери-
стик материалов зубчатых колес и нагрузочных режимов трансмис-
сий КМ позволяет принять в первом приближении для случайных
величин Япт и Я] логарифмически нормальный закон распределе-
ния. Исходная зависимость вероятностной оценки зубчатого колеса
на сопротивление усталости при этом принимает вид
1g I = 1g #lim -1g Fl-
341
Основные характеристики случайных величин 1g Яцт и lg R^ при
нормальном законе их распределения - это средние значения 1g Яцт и
lg Ri и средние квадратические отклонения <7]g и alg . Если они
известны, то соответствующие характеристики случайной величины
L можно вычислить по формулам
lg L = Igfliim -Igfli;
0-lgL - Va|2gfiUm + algfir
Определение статистических характеристик
распределения ресурсов 1g Яцт и lg R\
Средние значения логарифмов общих ресурсов по контактным
напряжениям и напряжениям изгиба определяются выражениями
lg RH lim m/flg (П и + lg NH0;
lg ^Flim = тПе(’/чт1№с) + lgA>0-
Значения Пянт и ^iim (см- та^л- 4.10) определенным образом свя-
заны с соответствующими значениями П^цт и , используемы-
ми в детерминированном расчете.
Средние квадратические отклонения логарифмов общих ресур-
сов находят по формулам
<71еЯи1.т = 0'43тЯ^;
= °’43mfV>-
Значения Vjj и Vy также приведены в табл. 4.10.
Выражения для вычисления средних значений логарифмов ре-
сурсов, расходуемых за 1 км пробега КМ, имеют вид
lg Rih = ^(XrhRih);
Ig^lF = Igf^flF^xF).
Коэффициенты Ад/уи Хуу, а также средние квадратические
отклонения логарифмов ресурсов, расходуемых за 1 км пробега
и CTlg Rif 5 приведены в табл. 4.13. Значения Яц/ и R1F берут
из детерминированного расчета.
342
Таблица 4.13. Значения Xr и Tigfl,
Грузоподъемность КМ Xrh Хнр
Малая 0,84 0,075 0,70 0,150
Средняя 0,80 0,100 0,63 0,200
Большая 0,75 0,125 0,56 0,250
Определение статистических характеристик распределения
сроков службы зубчатых колес
Средние значения логарифмов сроков службы зубчатых колес, а
также их средние квадратические отклонения вычисляют по форму-
лам _____ __________ _________
lg LH = Igfttflim-lgftl#;
IgLf = lg /i/.’lim - lg UlF',
alsLH = VCTlg/i„iin, +<7lg/i1Hl
— V^lgRg-lim -l"<7|gRiF'
Определение сроков службы и вероятности безотказной
работы зубчатых колес
По полученным значениям lg L и можно найти сроки служ-
бы зубчатого колеса, соответствующие заданной вероятности безот-
казной работы, или решить обратную задачу - определить вероят-
ность безотказной работы в течение заданного срока службы.
Наибольший интерес представляют следующие показатели:
а) вероятность P(Lo) безотказной работы детали на протяжении
планируемого пробега Lo КМ до капитального ремонта;
б) минимальный срок службы Lmjn детали в километрах пробега
КМ;
в) гамма-процентный срок службы Ly% (гамма-процентный ре-
сурс) детали в километрах пробега (срок службы в километрах про-
бега, который имеют или превышают в среднем 7% деталей).
Вероятности Р(£о)я и P(Lo)f безотказной работы в течение
планируемого пробега, обусловленные контактными напряжениями
343
Таблица Ц. Вероятность безотказной работы в зависимости от
квантиля нормального распределения х
X Р 7, % X Р 7, %
- 3,090 0,999 99,9 0,000 0,50 50
- 2,748 0,997 99,7 0,075 0,47 47
- 2,512 0,994 99,4 0,151 0,44 44
- 2,326 0,99 99 0,228 0,41 41
- 1,881 0,97 97 0,305 0,38 38
- 1,555 0,94 94 0,385 0,35 35
- 1,405 0,92 92 0,468 0,32 32
- 1,282 0,90 90 0,563 0,28 28
- 1,126 0,87 87 0,674 0,25 25
- 0,984 0,84 84 0,772 0,22 22
- 0,878 0,81 81 0,878 0,19 19
- 0,772 0,78 78 0,994 0,16 16
- 0,674 0,75 75 1,126 0,13 13
- 0,563 0,72 72 1,282 0,10 10
- 0,468 0,68 68 1,645 0,05 5
- 0,385 0,65 65 1,960 0,025 2,5
- 0,305 0,62 62 2,366 0,009 0,9
- 0,228 0,59 59 2,576 0,005 0,5
- 0,151 0,56 56 2,807 0,0025 0,25
- 0,075 0,53 53 3,090 0,0010 0,10
и напряжениями при изгибе, могут быть найдены после вычисления
соответствующих квантилей нормального распределения:
ХН = (lg Д> ~
xF = (lg Lo - lgbF)MgIP-
С помощью табл. 4.14 по значениям хц и хр находят соответ-
ственно P(Lq)h и P(Lo)f- При этом необходимо, чтобы P(Lq)h >
> Р(Д0) и P(L0)F > P(L0)-
Значение P(Lq) назначают с учетом заданной вероятности бе-
зотказной работы деталей, входящих в состав сборочной единицы.
Для повышения надежности сборочной единицы значение Р(Ло) у
отдельных деталей должно быть достаточно высоким (Р(£о) > 0,9).
344
По мере повышения значимости детали вероятность безотказной ра-
боты должна возрастать вплоть до Р(£о) = 0,99 и выше.
Минимальные сроки службы Lfjmjn и зубчатого колеса
в километрах пробега КМ, обусловленные сопротивлением устало-
сти при контактных и изгибных напряжениях соответственно, могут
быть определены из следующих выражений:
lg min
lg ^Fmin = lg ^F
По значениям логарифмов находят искомые Ьц mjn и Lpmin.
Каждый из этих минимальных пробегов должен быть не ниже уста-
новленного гарантийного пробега Lr.
Гамма-процентный срок службы находят после определения
квантиля Ху нормального распределения, соответствующего задан-
ной вероятности ? безотказной работы, с помошью следующих
формул: _____
1g = Ig^H + хуа1ъ1н\
lg Fy “ lg ^F + x'ya\gLf
Значения Ху подставляют с тем знаком, который приведен
в табл. 4.14. По значениям lg L//-7 и lg Lpy определяют гамма-
процентные сроки службы Lfjy и Lр^ зубчатого колеса в километрах
пробега, обусловленные контактными напряжениями и напряжения-
ми изгиба.
Пример 4- Рассчитать на прочность и сопротивление устало-
сти коническую пару зубчатых колес главной передачи автомобиля
КамАЗ-4310 (технические параметры автомобиля и характеристики
нагрузочных режимов трансмиссии взять из примеров 1 — 3).
Исходные данные зубчатой пары: z\ — 15; z2 ~ 26; rnte —
= 8,775 мм; R&2 — 131,695 мм; = b2 = 37 мм; — /Зт2 = /Зт —
= 38°; ап = 22°30/; Л* = 0,85; с* = 0,188; Xi = 0,329; х2 = -0,329;
xTi = 0,1; Х-Г2 = -0,1; пс — 1; S = 90°; материал - цементированная
сталь 25ХГТ; HRC356 ... 63; класс шероховатости активных поверх-
ностей зубьев 6; степень точности по нормам плавности 7; передача
полуобкатная, регулируемая.
Недостающие значения геометрических параметров будем вычи-
слять по мере выполнения расчета на сопротивление усталости.
Определим значения величин, входящих в выражения для П# и
bw — bji = bj2 — b\ = b2 — bCp = 37 mm;
345
Таблица 4.15. Значения некоторых величин,
и прочность конической пары зубчатых
Режим движения т, Нм Л, Н п, мин~] v3> м/с КНу Кна Ло, МПа Кд Кга1 Кра2
Без прицепа: 1536 27156 233 1.4 1,026 1,365 123 0 1,о 1,00
При Ирк,в 792 14003 451 2,7 1,032 1,373 64 0.2 1,1 1,08
492 8699 728 4,3 1,040 1,383 40 0,2 1,1 1,08
328 5799 1189 7,0 1,053 1,400 26 0,2 1,1 1,08
222 3924 1819 10,8 1,072 1,426 18 0,2 1,1 1,08
при «рк.н 2520 44554 126 0,7 1,022 1,359 203 0 1.0 1,00
1461 25830 245 1.5 1,026 1,365 117 0,2 1.1 1,08
906 16018 395 2,3 1,030 1,370 73 0,2 1,1 1,08
С прицепом: 1536 27156 200 1.2 1,025 1,363 123 0 1,0 1,00
при Црк в 792 14003 388 2,3 1,030 1,370 64 0,2 1,1 1,08
492 8699 626 3.7 1,037 1,379 40 0,2 1.1 1,08
328 5799 1021 6,0 1,048 1,394 26 0,2 1.1 1,08
222 3924 1564 9,3 1,065 1,416 18 0,2 1.1 1,08
при Црк.н 2520 44554 108 0,6 1,022 1,359 203 0 1.0 1,00
1461 25830 210 1.2 1,025 1,363 117 0,2 1,1 1,08
906 16018 338 2,0 1,029 1,369 73 0.2 1,1 1,08
Ле2-0,5б2
^пт — ТГЧе2-----п------ coS ^m2 “
Яе2
„ ... 131,695-0,5 -37
8’П5-----М5--------
cos 38° =5,943
мм;
dwmi = mnmZi/cos = 5, 943 • 15/ cos 38° = 113,127 мм;
и = z2/zi = 26/15 = 1,733;
Ft = 2Т 103/(<2Wminc) - 2Т • 103/113,127.
Значение Т берем из табл. 4.3 для карданного аала, соединяю-
щего средний и задний мосты. Результаты вычислений Ft записы-
ваем в табл. 4.15.
346
полученные при расчете на сопротивление усталости
колес главной передачи автомобиля КамАЗ-4310
КНв Н К„д Kve Kjjv Пя, МПа МПа ОТ2, МПа
0,82 1,020 455 1,017 1,063 1,081 1,040 13,92 303 325
0,89 1,021 878 1,063 1,122 1,193 1,092 7,54 190 200
0,96 1,023 1398 1,161 1,190 1,382 1,175 5,06 137 144
1,00 1,024 2275 1,392 1,265 1,761 1,327 3,81 116 122
1,00 1,024 3510 1,894 1,300 2,462 1,569 3,05 109 115
0,80 1,019 228 1,005 1,032 1,037 1,018 22,34 477 512
0,82 1,020 488 1,019 1,068 1,088 1,043 13,28 320 336
0,87 1,021 748 1,047 1,104‘ 1,156 1,075 8,49 210 222
0,81 1,019 390 1,014 1,054 1,069 1,034 13,82 299 321
0,87 1,021 748 1,053 1,104 1,163 1,078 7,45 185 195
0,94 1,023 1203 1,138 1,166 1,327 1,152 4,96 131 138
1,00 1,024 1950 1,336 1,250 1,670 1,292 3,71 109 116
1,00 1,024 3023 1,770 1,290 2,283 1,511 2,94 102 107
0,80 1,019 195 1,004 1,027 1,031 1,015 22,27 474 508
0,81 1,019 390 1,015 1,054 1,070 1,034 13,16 314 330
0,85 1,020 650 1,041 1,090 1,135 1,065 8,41 206 218
Определим теперь коэффициенты Ztf, Yfj и Ze, Ye, учитываю-
щие форму сопряженных поверхностей зубьев и их перекрытие:
Zff = 2ucos2 + 1 • sin2an) =
= 2 1,733cos2 38°/(\/l, 7332 + 1 sin45° = 1,521;
61 — arctg 'pH S/(u + Cos S)j —
= arctg [sin90o/(l,733 + cos90°)] = 30°;
S2 = S - 6, = 90° - 30° = 60°;
zvi — 21/(cos 6i cos3 = 15/(cos 30° cos3 38°) — 35;
?v2 = Z2/(cos 62 cos3 /3m2) = 26/(cos 60° cos3 38°) — 106;
Y^ = 2,16; ^2 = 2,25; #и1 = Кк2 = 1,0; Ka = 0,935;
347
Кр = 1,04;
КТ1 = 1, 57/(1, 57 + хТ1) = 1,57/(1,57 + 0,1) = 0,94;
Кт2 = 1, 57/(1,57 + хг2) = 1,57/(1,57 - 0,1) = 1,07;
YF1 = YF1KuiKaKpKri = 2,16 -1,0 - 0,935 -1,04 - 0,94- = 1,974;
YF2 = YF2K„2KaKpKT2 = 2,25 -1,0 - 0,935 • 1,04 • 1,07 = 2,34;
ер ~ bw sin = 37 sin 38/(тг 5, 943) = 1, 22;
at = arctg (tgan/cos/3m) = arctg(tg22°30,/cos38°) = 27°45z;
7Г COS Qf L V \2cosdl / \2cosdl/
( Z1 . Z2 \
sin at ( T--j- 4- -----p
\2cosdi 2 COS 02 /
7Г cos 27°45z
15
-------4-0,854-0,329 cos 38'
2 cos 30° ’ ’
15cos27°45z\* 2
2 cos 30° /
26 rt \2 /26cos27°45'\2
--------4-0,85-0,329cos38° I -(— ------——)-
2 cos 60° / \ 2 cos 60° /
15 26
2 cos 30° 2 cos 60°/J
— sin
ye = Ze = l,0; =
v3 — тг(/шт1п/(60 103) = 7Г 113,127n/(60 103).
Значение n для шестерни берем из примера 3. Полученные зна-
чения и3 и Kfty заносим 8 табл. 4.15.
Найдем остальные коэффициенты, входящие в выражения для
П# и сг^, и запишем значения некоторых из них в табл. 4.15:
Кна = Кн^Кн-t =
K°Fal = Y$Y K°Fa2 = \,&,
Fi0 = Ft/(bwmnm) = Ft/(37 5,943);
KM
348
KFal = 1 + (K°Fai - 1)Ад = 1 +(1,51 - 1)Ад;
KFa2 = 1 + (^ - W = 1 + (1,42 - 1)Кд;
= bw/dwmi = 37/113,127 = 0,33;
Kp = 1,024 (см. рис. 4.13 для = 0,33 при передаче V типа);
K>w=l>0; KHw-
KHfj = \+ (K°p - l)KBw = 1 + (1,024 - l)KHw-
KF/) = 1 + - l)KFw = 1 + (1,024 - 1) • 1 = 1,024;
Ao = 22 мкм; = 0,14;
l/j'Al — fecp (u + l)Ao/u =
= 0,14- 37v'l 13,127 (1,733 + 1) 22/1, 733 = 325 H (м/с)"1;
F;d = Fj&iv3 = 325v3;
17; v = 15 H/(mm мкм);
FjM = l,2AoMfo c°s2 0cp = 1,2 22- 37 15cos2 38° = 9098 H;
Fj = min(FjA, FjM) = Fj&;
= 1 + Fj/F;; Аре (см. рис. 4.14); KFv = A/,,,;
KH<. = V Kfv-
KHll = 1,0; KF)11 = 1,05; KFfl2 = 0,95; KHx = 1; KFx = 1,07.
Определим теперь расчетные напряжения и также запишем их
в табл. 4.15:
Пя =
F;
37 113,127
Yн'Z^Kн„Кп:3КНьКнftKНх =
Owdwra\
1,521 1,0 \,HKHf)KHv - 1,0- 1,0 = FtK^l,V\
2(Jo9
Fi
°F1 = т YFlYeKFalKF/3KFvKFttlKFx =
= - f-- 1,974 1,0К>о1 1,024Ар„ 1,05 • 1,07 =
37-5,943 ? ’ 96,82
Ft
aF2 = -b~mri УР2УеКРа2КРрКРуКР)12КРх =
= ^7-^T—2,34 1,0ЯГа2 1,024Л>„ 0,95 1,07 =
37-5,943 ’ ?а2 rv 90,28
349
Вычислим предельные напряжения при базовом числе циклов:
Лгро = 1,2* 108 и Лгро = 4 • 10б соответственно:
Пяро = П?,ЦтХя = 19.0,94 = 17,86 МПа;
&FPto = aFUm^P^Fc ~ 400 1 1,2 — 480 МПа.
Так как максимальные значения расчетных напряжений (см. по-
следние три столбца в табл. 4.15) удовлетворяют неравенствам
(Пя)тах > 0,9Пяро (22,34 МПа >16,07 МПа);
(°Т1)тах > 0, Эстрро (477 МПа > 432 МПа);
(^Pajmax > 0,9<t^po (512 МПа > 432 МПа),
то расчет продолжаем.
Определим ресурсы, расходуемые за 1 км пробега:
16
7?1Р1 = апа =
i=l
16
== 1 273,5 £ П3Яг-7£ 7, 22ЛГП/Л = 4,3 • 104;
г=1
16
R1F1 - ane^aFfi'iiU3KiKnFi =
:=1
16
= 1 - 273,5 ' 7,22ЛГпяг -= 2, 07 1023;
г=1
16
Я1Г2 = ans^2af^iu3KiKnFi =
:=1
16
= 1 -273,5 7,22KnFi = 3,81 • 1023,
t=i
где a — 1; ns — 1000/(2тггк) = 1000/(2тг0,582) = 273,5; значения ц
взяты из примера 1, K„ffj и KnFi -- из примера 2, а Пя»> &FH и aF2i
- из табл. 4.15.
350
Вычислим общие ресурсы сопротивления усталости зубчатых
колес:
RHllm = ^НР^но = 17,863 • 1,2 - 108 = 6,84 • 1011;
«f li„. = °FP<^F<> = 4809 - 4 106 = 5, 41 • IO30.
Оценим сопротивление усталости зубчатых колес по сроку служ-
бы:
LH1 = = 6,84 - 1013/(4, 3 • 104) = 1,59 107 км;
LF1 = RfuJRiFi = 5,41 • 1Озо/(2,07 - 1023) = 2,61 • 107 км;
LF2 = RFiln,/RlF2 = 5,41 1Озо/(3,81 1023) = 1,42- 107 км.
Если принять срок службы КМ до капитального ремонта Lq =
= 5 • 105 км, то полученные сроки службы превышают Lq более, чем
на порядок.
Оценим сопротивление усталости по допускаемым напряжени-
ям:
Л1я,х.1 = Л1Я1£о/(Пя)™" = 4,3 104 • 5 • 105/22,343 = 1,93 • 106;
Л>экв1 = R1FiRo/^fXL = 2,07 1023 5 105/4779 = 8,10 104;
NF,„2 = RiF2Ro/(°F2)™£ = 3,81 1023 5 105/512э = 7,90 104;
KHL1 = mHVNHo/NH^ = 0,2-108/(1,93-106) = 3,96;
KFL1 = ”V1VFO/XF3KB1 = 0-106/(8,10-10“) = 1,54;
KFL2 = m^NFtl/NF,m2 = 0-106/(7,9-10“) = 1,55;
ПЯР1 = nHPoKHLi = 17,86-3,96 = 70,7 МПа;
CTFP1 = aFP0^FLl — 480 1,54 — 739 МПа;
CTFP2 = ctFPo-^FL2 = 480 1,55 = 744 МПа;
пЯНл1М = 19° мпа; CTfiimM = 1700 МПа.
Так как
ПяР1 < 0, бПяПтЛ/ (70,7 МПа <114 МПа;)
351
<JFP\ < OjSo’f’iimM (739 МПа < 850 МПа);
арр? < ^^'7FlirnA/ (744 МПа < 850 МПа),
го принимаем
П#р1 = 70,7 МПа; (?fPi = 739 МПа; <трР2 = 744 МПа.
Условия достаточного сопротивления усталости по допускае-
мым напряжениям:
(П#)тах < П#р1 (22,34 МПа < 70,7 МПа);
(fFi)max < °ТР1 (477 МПа < 739 МПа);
(^Рз)тах < &FP2 (512 МПа < 744 МПа).
Оценка по эквивалентному напряжению дает следующие значе-
ния:
П//ЭКВ1 = ”’V^lHlio/ArHO =
= ^/4,3 104 • 5 • 105/(1,2 108) = 5,64 МПа;
ctFbxb1 — x/^lFl^o/^FO ”
= ^/2, 07 1023 -5- 105/(4 106) = 309 МПа;
ctFbkb2 = mV^lF2io/ArFO =
= ^3, 81 1023 - 5 - 105/(4 - 106) = 331 МПа.
Условия достаточного сопротивления усталости по эквивалент-
ным напряжениям:
Прэкв1 < Прр0 (5,64 МПа < 17,86 МПа);
^FskbI < CTFP0 (309 МПа < 480 МПа);
(Трэкв2 < CTFP0 (331 МПа < 480 МПа).
Выполним теперь расчет на прочность. Примем, согласно при-
веденным в § 4.1 рекомендациям, для КМ высокой проходимости
Кд = (2,5 + 3,0)/2 = 2, 75. Тогда
п — -^д(^я)тах
max “yr/
2, 75-22,34
1,018 1,0
= 60, 3 МПа;
352
_ -^д(°Т1)тах
& F max 1 — rs
&Fv
max
CTFmax2 — 77
KFv
2 75 • 477
“Уозт~" = 1264 МПа;
2’75'512 = 1359 МПа.
1,037
Условия достаточной прочности зубьев:
Пнтах < 0,9ПнктМ (60,3 МПа < 171 МПа);
CTFmaxi < О^Эст^ПтМ (1264 МПа < 1530 МПа);
°Ттах2 < 0,9CTFlim М (1359 МПа < 1530 МПа).
Проведем теперь вероятностную оценку сопротивления усталости:
= ra-tflgtntflimZfl) + lg NHo =
= 3 lg (22,5 0,94) + lg (1,2 108) = 12,06;
1g#F1im = mMg(a^limyflA'Fc) + lgJVFo =
= 91g (462 1,0 1,2) + lg(4 106) = 31,3;
CTl6flHlim = 0,43mHVH = 0,43 -3 0,12 = 0,1548;
= 0,43mFVF = 0,43 - 9 0,104 = 0,4025;
Ig^iHi = lg (XrhRiHi) = lg (0, 75 4,3 104) = 4, 51;
|gfl1F1 = lg (ХдГЯ1Г1) = lg (0,56 • 2,07 1023) = 23,06,•
IgtfiF2 = lg (*flF^iF2) = lg (0, 56 - 3,81 - 1023) = 23,33;
algRiH = °.125; CTl6fl1F = 0,25;
lg£tfl =2g^Hlim-_lg«iHi = 12,06 - 4,51 = 7,55;
Ig^Fi = Ig^Flim - lg K1F1 = 31,3 - 23,06 = 8,24;
IgTF2 = lgT?Flim - lg«iF2 = 31,3 - 23,33 = 7,97;
+ = x/0115482 + 0, 1252 = 0,199;
algLFi = a\t,LF2 = \la\f,RF&m + CTl26fl1F =
= ^0,40252 4- 0,252 = 0,474.
12 - 692
353
Вычисляем квантили:
xHl = (lgLo - = [lg (5 105) - 7,55]/0,199 = -9,28;
XF1 = (Igio -STF1)/al6Lfl = [lg (5 - 105) - 8,24] /0,474 = -5,36;
XF2 = (lg £0 - IgTF2)/CT16Lf2 = [lg (5 - IO5) - 7,97] /0,474 = -4, 79.
Из табл. 4.14 по вычисленным квантилям определяем вероятно-
сти безотказной работы в течение планируемого срока службы Lq:
P(L0)Hi > 0,999; P(£0)F1 > 0,999; P(To)F2 > 0,999.
Минимальные сроки службы деталей составляют:
lg LHlmin = lg I'M - 3<Tig = 7,55 — 3 0,199 = 6,95;
lg LF1 mi„ = liiFi - 3a)8 Lf, = 8,24 - 3 0,474 = 6,82;
Ig^FZmin = lg£F2 - 3ct1b7f2 = 7,97 — 3 - 0,474 = 6,55,
откуда
ttfimin = 8,9 106 km; Lflmin = 6,6 106 km;
^FZmin = 3,5 106 KM.
Значению 7 = 90 % соответствуют вероятность неразрушения
детали Р = 0,9 и квантиль х-у = —1,282. Тогда
1g ^Н1(9о %) = Igitfl + xralgLfiI = 7,55 - 1,282-0,199 = 7,29;
lg 7>f'i(90 %) — lg ^F1 + xtalgLFl = 8, 24 — 1, 282 0,474 = 7,63;
lg 7 F2(90 %) = Pn + LF2 = 7,97 - 1,282 0,474 = 7, 36.
Отсюда 90 %-ный срок служи деталей (90 %-ный ресурс)
^Я1(90 %) = 1,95 107 км; £fi(9o %) = 4,29 10' км;
7-F2(M %) = 2, 29 107 км.
354
Несмотря на полученные очень большие сроки службы по срав-
нению с £о, нет оснований для уменьшения размеров рассчитыва-
емой зубчатой пары, так как при расчете на прочность напряже-
ние при изгибе зубьев колеса <7ртаХ2 = 1359 МПа близко к до-
пустимому 0,9(7p|imy^ = 1530 МПа, а при принятии Кл = 3,0
CTFmax2 = 1483 МПа.
Если сравнить различные способы оценки сопротивления уста-
лости, то, несмотря на существенные различия значений показате-
лей сопротивления усталости, все они дают принципиально одина-
ковые результаты.
Чтобы убедиться в этом подсчитаем коэффициенты запаса:
nLHi = Lhi/Lo = 1,59 107 : (5 10s) = 31,8;
niF1 = LFy/La = 2,61 107 : (5- 10s) = 52,2;
niF2 = LF2/La = 1,42 107 : (5 105) = 28,4;
плН\ - ИЯР1/(^я)тих = 70, 7 : 22, 34 = 3,16;
ЛД?1 = CTFPi/(CTFi)max = 739 : 477 = 1,55;
naF2 = CTFP2/(CTF2)max = 744 : 512 = 1,45;
пэквЯ1 = Пяро/Пяэкв1 = 17, 86 : 5,64 — 3,17;
"bkbFI = ^FPo/^FbxbI = 480 : 309 = 1,55;
пэхвГ2 = ^FPo/ctF3kb2 = 480 : 331 = 1,45;
где n£, пд, пЭкв _ коэффициенты запаса по сроку службы, допускае-
мым и эквивалентным напряжениям соответственно.
Имеют место следующие соотношения, которые легко могут
быть получены в общем виде:
— mH _ „тН . „ _ mF _ „mF
nLHl ~ паН1 ~ пзмН1' nLFl ~ пдП - пэквУ1’
_ _ mF _ „mF
nLF2 ~ ~ пэквГ2-
Эти выражения показывают связь между оценками сопротивле-
ния усталости различными способами. Действительно, подставив в
них рассчитанные выше значения коэффициента запаса, получим
31,8 » 3,163 = 3,173;
52,2 = 1,55э « 1,55э;
28,4 ® 1,459 ® 1,459.
12*
355
4.3. Подшипники
Расчет подшипников при статическом нагружении
К статическим условиям нагружения подшипника относят усло-
вия, при которых он воспринимает внешнюю нагрузку без относи-
тельного вращения колец или при вращении с частотой не более
1 об/мин. В условиях статического нагружения работают, напри-
мер, подшипники ступиц зубчатых колес постоянного зацепления
вторичного вала коробок передач КМ. При работе под нагрузкой
тела качения этих подшипников не вращаются, так как зубчатые
колеса блокируются с валом зубчатой муфты. Подшипники враща-
ются только при работе зубчатых колес вхолостую, не восприни-
мая нагрузки. Оценку работоспособности подшипника при статиче-
ском нагружении проводят по статической грузоподъемности Со, а
при динамическом - по динамической грузоподъемности С, которые
являются основными характеристиками подшипника *).
Статическая грузоподьемность представляет собой статическую
нагрузку (радиальную для радиальных и радиально-упорных и осе-
вую для упорных и упорно-радиальных подшипников), вызывающую
в наиболее нагруженной зоне контакта общую остаточную деформа-
цию тела качения и колец, равную 0,0001 диаметра тела качения.
Для стандартных подшипников значения Со приведены в справоч-
никах, а для нестандартных подшипнков их можно определить по
следующим выражениям:
Шариковые подшипники:
радиальные и радиально-упорные........... l2,26izD? cos a
сферические........................... 3,33izD^ cosa
упорные и упорно-радиальные........... 49zZ?3 sin а
Роликовые подшипники:
радиальные, сферические и радиально-
упорные ................................. 2l,57izDwiLwi cosa
упорные и упорно-радиальные........... 98,liLw/Z?wj sin a
Здесь i - число рядов тел качения в подшипнике; z - число тел
качения в одном ряду; Dw, Dw{ -диаметр шарика и ролика (средний
Термины статическая и динамическая грузоподъемность подшипников
являются общепринятыми при оценке работы подшипников (ГОСТ 18854-82 и
ГОСТ 18855-82)
356
диаметр для конического ролика и наибольший для бочкообразно-
го), мм: а - номинальный угол контакта, равный углу между ли-
нией действия результирующей нагрузки на тело качения и плоско-
стью. перпендикулярной оси подшипника; Lwi - фактическая длина
контакта ролика с кольцом, имеющим наименьшую протяженность
контакта, мм.
Работоспособность подшипника при статическом нагружении
обеспечивается, если выполняется условие
Со > Р()ХбО-КМО;
где Pq - эквивалентная статическая нагрузка; Kqq - коэффициент
безопасности при статическом нагружении; Kmq - коэффициент ма-
териала.
Для радиальных шариковых и радиально-упорных шариковых и
роликовых подшипников в качестве Pq принимают наибольшее зна-
чение из рассчитанных по формулам
Р() = Xf}FrO + Y0FaQ И Pq = PrQ'i
для радиальных роликовых подшипников
Pq = /'го;
для упорных и упорно-радиальных шариковых и роликовых под-
шипников
Ро = 2,3Crotg а + Р'аО
где FfQ и Fqq - соответственно радиальная и осевая статические на-
грузки; Хо- Н _ соответственно коэффициенты радиальной и осевой
статических нагрузок.
Коэффициент Хо — 0, 5 для однорядных подшипников и Xq = 1
для двухрядных (кроме шариковых радиальных, для которых Xq =
= 0,6; Yq = 0,5). Для шариковых сферических Yq = 0,22ctga, а для
двухрядных Yq — 0,44ctga. Ниже приведены значения Yq для ша-
риковых радиально-упорных однорядных (числитель) и двухрядных
(знаменатель) подшипников при различных углах контакта:
а. град .. 12 18 - 19 20 25 26 30 35 36 40
у 0,47 0,43 0,42 0,38 0,37 0,33 0,29 0,28 0,26
° 0,94 0, 86 0,84 0,76 0,74 0,66 0,58 0,56 0^52
357
Рис. 4.16. Зависимость коэффи-
циентов материала от его твердо-
сти при расчете подшипника иа
долговечность и статическую
нагрузку Кио
Коэффициент #60 зависит от требований к плавности хода и
моменту трения подшипника (легкости вращения): при высоких
требованиях принимают #60 = 1,2...2,5; при нормальных #бо =
= 0,8... 1,2; при пониженных #60 = 0,5... 0,8.
Коэффициент материала Кмо при расчете подшипников без од-
ного или двух колец определяют по рис. 4.16 в зависимости от твер-
дости поверхности детали, выполняющей роль беговой дорожки. Для
подшипников с кольцами следует принимать Кио = 1.
Расчет подшипников качения на усталостную долговечность
Основным показателем, определяющим усталостную долговеч-
ность подшипников качения, является динамическая грузоподъем-
ность С - расчетная нагрузка (радиальная для радиальных и
радиально-упорных подшипников н осевая для упорных и упорно-
радиальных), которую подшипники могут выдержать в течении рас-
четного срока службы, равного 106 оборотов внутреннего кольца.
Под расчетным сроком службы понимается число оборотов, при ко-
тором признаки усталости металла не появляются не менее чем у
90 % подшипников из данной группы в одинаковых условиях.
Усталостная долговечность подшипника зависит от внешних
факторов (величины и характера нагрузки, частоты вращения, рабо-
чей температуры и т.д.), а также от динамической грузоподъемости.
358
Срок службы подшипников в миллионах оборотов
£ = (С/РПРГ,
где С - динамическая грузоподъемность, Н; Рпр - приведенная на-
грузка, Н; m - показатель степени, равный 3 для шариковых и 3,33
для роликовых подшипников.
Приведенная нагрузка представляет собой постоянную нагруз-
ку, при приложении которой к подшипнику он будет иметь такой же
срок службы, что и при действительных условиях работы в подшип-
никовом узле. Приведенная нагрузка
Рпр = РКбКтКи,
где Р - эквивалентная динамическая нагрузка, Н; Ag _ коэффициент
безопасности; Кт - температурный коэффициент; Км - коэффициент
материала.
Срок службы подшипников агрегатов КМ выражают в киломе-
трах пробега:
Ls =
где П] - число оборотов подшипника за 1 км пробега КМ, п\ =
= 500ип,к/(7ггк)> wn,K ~ передаточное число участка трансмиссии от
рассчитываемого подшипника до ведущих колес.
Для подшипника, у которого при работе вращаются оба коль-
ца (например, подшипник передней опоры вторичного вала коробки
передач, расположенный в торцевой выточке первичного вала), при
определении ип к следует использовать относительную частоту вра-
щения его внутреннего и наружного колец: потн = пв ± пн, причем
знак принимать при вращении колец в разные стороны, а -
в одну.
Срок службы подшипника при переменных режимах работы
можно определять на основе гипотезы линейного суммирования по-
вреждений по формуле
Л,-
^6Lsi/Lsi = l, (4.1)
1=1
где &Lsi и Lsj - соответственно наработка и полный срок службы
подшипника на г-м режиме; - число режимов работы подшипника.
Наработка 6Lsi подшипника на г-м режиме связана со сроком
службы Ls при работе на всех режимах зависимостью
&Lsi —
359
где 7/ - относительная длительность работы подшипника на г-м ре-
жиме, определяемая как отношение пробега КМ на г-м режиме к ее
общему пробегу (см. § 4.1).
Полный срок службы подшипника, при работе только на г-м ре-
жиме,
Lsi = 106С"7(Рп™ пн),
где Pnpi = PiKeiKTKM приведенная нагрузка на г-м режиме; nii =
— 500ип к^/тггк - число оборотов подшипника за 1 км пробега на г-м
режиме.
Подставляя полученные выражения для £Lsi и Lsj в формулу
(4.1), после преобразований получаем
106Ст
Ls~ т;
г=1
Долговечность подшипника обеспечивается, если
Ls > Lo,
где Lq - нормативный пробег КМ до капитального ремонта (пла-
нируемый срок службы).
Формулу (4.2) используют для вычисления срока службы под-
шипника при проверочных расчетах. Из нее же получено выражение
для определения требуемой динамической грузоподьемости подшип-
ника:
4.2
А,
1=1
(4.3)
которое используют для выбора подшипников при проектировочных
расчетах. По формуле (4.2) можно найти Срок службы подшипника
выраженный в часах. Для этого вместо П]2 следует использовать
nlhi ~ 60npi-,
где - число оборотов подшипника за 1 ч на г-м режиме; пр2 -
расчетное (среднестатистическое) число оборотов подшипников за
1 мин на г-м режиме, а вместо 7$ - относительную длительность
работы подшипника на г-м режиме по времени. Тогда
106Ст
L>1 ~ к;
360
Если срок службы подшипника задан в часах, то требуемую
динамическую грузоподъемность С при проектировочных расчетах
определяют по формуле
с =
1=]
Значения динамической грузоподъемности для стандартных
подшипников приведены в справочниках. Для нестандартных под-
шипников динамическую грузоподъемность рассчитывают по фор-
мулам, данным в табл. 4.16. Необходимые для расчета значения
коэффициента /с берут из табл. 4.17. Динамическую грузоподъем-
ность С подшипникового узла, состоящего из двух радиальных или
радиально-упорных подшипников, определяют так: С = l,62Ci -
для шариковых и С = 1,72 Ci - для роликовых подшипников, где Ci
- динамическая грузоподъемность одного подшипника.
Таблица J). 16. Выражения для расчета динамической грузо-
подъемности С, Н
Тип подшипника T>w(T>wi), мм Формула для расчета
Шариковый:
радиальный, радиально- упорный < 25,4 fc(i cos о)0’7 z2,3D^’&
> 25,4 3,647^(1 cos а)°'7г2/3Д^4
упорный <25,4
> 25,4 3,647
Роликовый:
радиальный с короткими цилиндрическими роликами, радиально-упорный Любой ^(^(Cosa)7/9^/4!»79/27
упорный )>
с длинными пилиндрическими
роликами без колец )> 24,5z2/3Dwi£w,
Игольчатый:
с сепаратором » 59z2/3D„,£wl
без сепаратора » 39г2/3Д„,£ш,
361
Таблица 4-17. Числовые значения коэффициента /с
DT cos а dQ Тип подшипника
шариковый роликовый
радиальный однорядный, радиально- упорный радиал ьный двухрядный сферический упорный радиальный и радиально- упорный упорный
0,01 - - - 36,72 45,74 99,20
0,02 - - 45,21 53,46 108,85
0,03 - - - 51,06 58,42 118,49
0,04 - - - 55,66 62,28 128,14
0,05 46,69 44,23 17,30 59,51 65,03 137,78
0,06 49,08 46,49 18,63 62,86 67,79 143,29
0,07 51,10 48,41 19,89 65,83 69,44 148,80
0,08 52,82 50,04 21,09 68,52 71,65 154,32
0,09 54,29 51,43 22,25 70,99 72,75 159,83
0,10 55,54 52,62 23,38 73,27 73,85 165,34
0,12 57,49 54,46 25,57 77,39 76,06 170,85
0,14 58,80 55,71 27,67 81,05 77,16 176,36
0,16 59,59 56,46 29,70 84,36 77,71 181,88
0,18 59,95 56,79 31,65 87,40 78,26 187,39
0,20 59,92 56,77 33,51 90,20 78,26 192,90
0,22 59,59 56,45 35,24 92,82 77,71 196,21
0,24 58,99 55,88 36,82 95,28 77,16 199,51
0,26 58,16 55,10 38,21 97,59 77,06 202,82
0,28 57,13 54,13 39,38 99,79 74,95 206,12
0,30 55,95 53,01 40,29 101,87 73,85 209,43
0,32 54,63 51,76 40,91 103,82 - -
0,34 53,20 50,40 41,24 105,77 - -
0,36 51,66 48,94 41,26 - - -
0,38 50,05 47,42 40,98 - - -
0,40 48,37 45,82 40,43 - - -
П р ям ечан ие. Здесь Рт - диаметр тела качения (Pw, Dwt)-, do - диаметр окружности,
проходящей через центры тел качения.
Для подшипникового узла, состоящего из двух или более оди-
наковых радиально-упорных однорядных подшипников, установлен-
ных последовательно и смонтированных так, что нагрузка на под-
шипники распределяется равномерно, динамическая грузоподъем-
ность
С = г°’7С1 и С = i7/9Ci
для шариковых и для роликовых подшипников соответственно, где
i - число подшипников.
Эквивалентную динамическую нагрузку Р для различных под-
шипников определяют по следующим формулам:
Шариковые радиальные и радиально-
упорные, роликовые радиально-упорные..... XV FT + YFa
Роликовые радиальные..................... V FT
Шариковые и роликовые радиальные
сферические, упорно-радиальные .......... XFr+YFa
Шариковые и роликовые упорные............ Fa
Примечание. Здесь X и Y - коэффициенты радиальной и
осевой нагрузок; V - коэффициент вращения, равный 1 и 1,2 при вну-
треннем кольце, вращающемся и неподвижном по отношению к нагрузке
соответственно ; Fr - радиальная нагрузка; Fa - осевая нагрузка.
Коэффициенты радиальной X и осевой Y нагрузок находят по
табл. 4.18 в зависимости от отношения Fa/(VFr) и коэффициента е,
который характеризует особенности нагружения подшипника при
действии комбинированной (радиальной и осевой) нагрузки. Коэф-
фициент е для радиальных и радиально-упорных шарикоподшипни-
ков с углом контакта о < 15° зависит от отношения Fa/Ca и зна-
чения а, а для остальных типов подшипников - только от значения
о
Радиальные и осевые нагрузки на подшипники узлов трансмис-
сии КМ обусловлены усилиями в зубчатых зацеплениях
(табл. 4.19.). Подшипники осей сателлитов планетарных коробок пе-
редач дополнительно нагружены центробежной силой сателлитов.
Для шестерни в формулах для определения радиального FT и
осевого Fx усилий гипоидных и конических зубчатых колес с непря-
мыми зубьями (см. табл. 4.19) нижний знак следует принимать то-
гда, когда направление вращения шестерни (если смотреть со сторо-
ны ее основания на вершину) совпадает с направлением наклона зу-
бьев шестерни, а верхний знак - в противном случае. Для колеса
правило знаков противоположное.
364
Таблица J.18. Коэффициенты радиальной Д’ носовой Y динамических нагрузок
Тип подшипника .V при 1 при с
> < ''«/(» /!)>
Шариковый:
радиальный 0 0,014 1/1 0,56/0,56 0/0 2,30/2,30 0,19
0,028 1/1 0,56/0,56 0/0 1,99/1,99 0,22
0,056 1/1 0,56/0,56 0/0 1,71/1,71 0,26
0,084 1/1 0,56/0,56 0/0 1,55/1,55 0,28
0,11 1/1 0,56/0,56 0/0 1,45/1,45 0,30
0,17 1/1 0,56/0,56 0/0 1,31/1,31 0,34
0,28 1/1 0,56/0,56 0/0 1,15/1,15 0,38
0,42 1/1 0,56/0,56 0/0 1,04/1,04 0,42
0,56 1/1 0,56/0,56 0/0 1,00/1,00 0,44
радиально- 12 0,014 1/1 0,74/0,46 2,08/0 2,94/1,81 0,30
упорный 0,029 1/1 0,74/0,46 1,84/0 2,63/1,62 0,34
0,057 1/1 0,74/0,46 1,69/0 2,37/1,46 0,37
0,086 1/1 0,74/0,46 1,52/0 2,18/1,34 0,41
0,11 1/1 0,74/0,46 1,39/0 1,98/1,22 0,45
0,17 1/1 0.74/0,46 1,30/0 1,84/1,13 0,48
0,29 1/1 0,74/0,46 1,20/0 1,69/1,04 0,52
0,43 1/1 0,74/0,46 1,16/0 1,64/1,01 0,54
0,57 1/1 0,74/0,46 1,16/0 1,62/1,00 0,54
Окончание табл. 1,. 18
Тип подшипника а° F./G, X при У при е
F./(VFr) < е Fa/tVF,.-) > е Fa/(VFr-) < е Fa/(yfr') > е
радиально- 15 0,015 1/1 0,72/0,44 1,65/0 2,39/1,47 0,38
упорный 0,058 1/1 0,72/0,44 1,46/0 2,11/1,30 0,43
0,087 1/1 0,72/0,44 1,38/0 2,00/1,23 0,46
0,17 1/1 0,72/0,44 1,26/0 1,82/1,12 0,50
0,29 1/1 0,72/0,44 1,14/0 1,66/1,02 0,55
0,58 1/1 0,72/0,44 1,12/0 1,63/1,00 0,56
18-20 - 1/1 0,70/0,43 1,09/0 1,63/1,00 0,57
24-26 - 1/1 0,67/0,41 0,92/0 1,44/0,87 0,68
30 - 1/1 0,63/0,39 0,78/0 1,24/0,76 0,80
35,36 - 1/1 0,60/0,37 0,66/0 1,07/0,66 0,95
40 - 1/1 0,57/0,35 0,55/0 0,93/0,57 1,14
упорно- 45 - 1,18/- 0,66/0,66 0,59/- 1/1 1,25
радиальный 60 - 1,90/“ 0,92/0,92 0,54/- 1/1 2,17
75 - 3,89/“ 1,66/1,66 0,52/- 1/1 4,67
Роликовый сферический и радиально- упорный - - 1/1 0,67/ 0,4 0,45ctga/0 0, 67ctga/0,4ctga l,5tga
Примечания: 1. В числителе приведены значения X и Y для двухрядных подшипников, а в знаменателе
для однорядных. 2. Для упорно-радиальных подшипников V = I.
Таблица 4-19. Формулы для расчета усилий в зацеплении
зубчатых колес
Усилие
с прямыми зубьями
Зубчатые колеса
с косыми зубьями
Цилиндрические
Окружное Fx = 2T/dw Fx = 2T/dw
Радиальное Fr = Fttg(aw + p) Fr = Fttg(cxwn + p)/ cos 0
Осевое 0 Fx = Ftlg0
Конические
Окружное Л 2T/dwm Ft = 2T/dwm
Радиальное Fr = /r,tg(a + p)cos6 Fr = — tg(an + p)cos6q=sin/?msin6 COS 0m 1 J
Осевое Fx = Fttg (a + p) sin 6 Ft Г Fx — —- 1 tg (an + p) sin 6 ± sin 0m cos 6 COS 0m t
Гипоидные
Окружное
Радиальное
Осевое
Ft2 — 'XT'l! /'ll — Ft2 cos 8m\ / COS^m2
COS^m [tS^‘
+ p) cos <5 sin 0m sin 6
p = ----L_ tg(an + p)sin 6 ±sin0m cos
COS 0m I -
Примечание. Здесь T - расчетный крушший момент на зубчатом колесе;
du - начальных диаметр; aw - угол зацепления; р - угол трения (р г: 3... 5°); awn
- угол зацепления в нормальном сечении; 0 - угол наклона зуба; а - угол профиля
исходного контура; dwm - средний начальный диаметр; ап - угол профиля среднего
нормального исходного контура (для гипоидных зубчатых колес - нормальный угол
зацепления) * - угол делительного конуса; 0т - средний угол наклона зуба; индекс “1”
относится к шестерне, индекс “2” - к колесу.
Направление действия радиального Fr и осевого Fx усилий опре-
деляется их знаком (“+” или При положительных значениях Fr
и Fx первое направлено по радиусу к оси вращения зубчатого колеса,
а второе - от вершины к основанию делительного конуса параллель-
но оси вращения: при отрицательных значениях - соответственно в
противоположные стороны.
Будем считать, что радиальная нагрузка, действующая на
радиально-упорные шариковые и роликовые подшипники, приложе-
на в точке 0 пересечения нормали, проведенной к середине контакт-
ной площади наружного кольца подшипника, с осью подшипника
(рис. 4.17). Расстояние а от точки приложения радиальной нагрузки
до торца наружного кольца однорядного радиально-упорного шари-
кового и роликового подшипников может быть рассчитано соответ-
367
Рис. 4.17. Расчетная схема дейст-
вия радиальной нагрузки FT на вал
при установке радиально-упорных
шариковых (а) и роликовых (б)
подшипников
ственно по следующим формулам:
а = 0,5 В + 0,5(d + D)tg aj:
а = 0, 5 Нм + 0,5(d + Z))tg aj.
На рис. 4.18 показаны два варианта установки радиально-упор-
ных подшипников. Расстояние I между радиальными нагрузками
в обоих случаях существенно различно, что важно при приложе-
нии к валу момента. При установке подшипников по схеме, дан-
ной на рис. 4.18, а, плечо I будет больше, а радиальная нагрузка на
подшипники меньше, чем при установке по схеме, изображенной на
рис. 4.18, б.
При приложении радиальной нагрузки Fr к однорядному ра-
диально-упорному подшипнику появляется осевая составляющая S.
Для радиально-упорных шариковых и роликовых подшипников со-
ответственно
S = eFf,
S = 0,83eFr,
где е - коэффициент. Для шариковых подшипников с углом контак-
та а — 12° коэффициент е для вычисления осевой составляющей S
находят из уравнения
lg е= [lg(Fr/C0) - 1,144]/4,729,
368
Рис. 4.18. Расчетная схема дейст-
вия реакций опор при V-образной (а)
и X-образной (б) схемах установки
раднально-упорных подшипников
для шариковых подшипников с углом контакта а ~ 15° - по формуле
lg е = [lg(/’r/C’o) - 1, 76б]/7,363,
а для шариковых подшипников с углом контакта а = 18... 40° - по
табл. 4.18. Учитывая, что для радиально-упорных роликовых под-
шипников е = l.otga, выражение для S можно записать в следую-
щем виде:
S = 1,245Frtga.
Осевую нагрузку Fa на радиально-упорные однорядные подшип-
ники при их парной установке на валу определяют исходя из внеш-
ней осевой нагрузки обусловленной осевыми усилиями в зубча-
тых колесах, и осевых сил Sj и Syy, возникающих в опорах I и II
369
от действия радиальных нагрузок Frj и Frjj (см. рис. 4.18). Фор-
мулы для расчета осевых нагрузок Faj и Fajj в опорах приведены
в табл. 4.20. При их использовании следует обращать внимание на
нумерацию опор вала: номер I имеет та опора, для которой напра-
вление действия осевой силы S совпадает с направлением внешней
осевой нагрузки Fx, а номер II - опора, для которой направления
действия указанных сил не совпадают.
Таблица ^.20. Формулы для определения осевой нагрузки,
приходящейся на радиально-упорные одно-
рядные подшипники
Условия нагружения Опора I Опора 11
St > Sir, Ar > 0 Fai = S, Fall = Si + Fx
Sr < Sa; Fx > Sii - Si Fai = Si F„,t =Sl+F,
S, < Sn; F, < Srl - S, Fal = sn - Fx Fall = Sn
Последовательность определения радиальных и осевых нагру-
зок на подшипники такая: рассчитывают усилия в зубчатых коле-
сах и составляют расчетную схему; находят радиальные Аг/, Frjj
и внешнюю осевую Fx нагрузки на подшипники; вычисляют осевые
составляющие радиальных нагрузкок Sj, Sjj и осевую нагрузку Fa-
Коэффициент безопасности A’g учитывает влияние динамиче-
ских нагрузок на срок службы подшипника:
Кь = АдвнАдвнеш,
где А£н, ^неш - соответственно коэффициенты внутренних и внеш-
них динамических нагрузок.
Коэффициент А'®’1 учитывает динамическую нагрузку Fa в за-
цеплении зубчатых колес, которой возникает из-за ошибок в окруж-
ном шаге зубьев. Если на валу расположено одно зубчатое колесо,
то
= 1 + (Ъ/Fi'j,
а если два одновременно работающих зубчатых колеса, то
= l + 0,5[(F;/Ft') + (F"/Ft")],
где Ад, Ад - динамическая нагрузка, а А/ и А/' - окружное усилие в
зацеплении соответственно первого и второго зубчатых колес.
370
Динамическая нагрузка
Fa = А'вАмбсрГзУг/ш^и + 1)Д/и, (4.4)
где Кв - коэффициент, зависящий от вида зубчатой передачи;
Ам - коэффициент, учитывающий вращающиеся массы, жестко свя-
занные с шестерней; 6ср - средняя осевая ширина ободьев сопря-
женных зубчатых колес, мм; v3 - окружная скорость в зацеплении,
м/с; dwi - начальный диаметр шестерни (для конической - сред-
ний начальный диаметр dwmi), мм; Д - наибольшая вероятность
погрешности шага зацепления, мкм.
Ниже приведены значения коэффициента Кв для различных пе-
редач:
Цилиндрическая с зубьями:
прямыми..................................0,18
косыми.................................0,10
Коническая с зубьями:
прямыми..................................0,20
круговыми..............................0,14
Если шестерня не связана жестко с деталью, масса которой со-
измерима с массой шестерни, то коэффициент Ам = 1. При наличии
такой детали (например, в блоке зубчатых колес коробок передачи)
коэффициент Ам определяют по формуле
Ам = (QM + 1)(ц2 + 1 )/(Qm + u2 + 1),
гдв QM - отношение момента инерции масс, жестко связанных с ше-
стерней, к моменту инерции шестерни.
Средняя осевая ширина ободьев сопряженных зубчатых колес
6ср = 0,5(6] 4- 62), где 61, 62 - осевая ширина обода соответственно
шестерни и колеса. Окружная скорость в зацеплении при частоте
вращения щ шестерни для цилиндрических и конических зубчатых
колес соответственно равна
v3 = tt^wi rcj /60;
v3 = 7rdwrnin]/60.
Наибольшая погрешность окружного шага зацепления
Д = fpel +/рв2’
371
где /pBi и /рв2 - предельные отклонения окружного шага зацепления
соответственно шестерни и колеса.
Максимальная динамическая нагрузка в зацеплении для цилин-
дрических зубчатых колес
Л max — bcpA(j7£; COS /?,
для конических -
max 1,2ЬсрДС?(£ cos2/3cp,
где Gtz - суммарная удельная жесткость сопряженных зубьев (см.
§ 4.1). Если вычисленное по формуле (4.4) значение Fa > FamiX, то
следует принимать Fa = Fam^.
Коэффициент внешних динамических нагрузок КдНеш учитыва-
ет динамические нагрузки в агрегатах трансмиссии, возникающие
вследствие колебаний, возбуждаемых двигателем и внешними сила-
ми - воздействием дороги при движении КМ. Подшипники выход-
ных валов, расположенные рядом с фланцем крепления карданного
вала, а также подшипники дифференциала дополнительно нагружа-
ются динамической нагрузкой, обусловленной колебаниями кардан-
ного вала и дифференциала.
Коэффициент Кдвнеш определяют при расчете динамической си-
стемы трансмиссии на крутильные колебания или на основании экс-
периментальных данных. Можно принимать следующие значения:
/('внеш _ - для подшипников, расположенных рядом с фланцем
крепления карданного вала; /С“еш = 1,5 - для подшипников диф-
ференциала; K™eui = 1... 1,2 - для прочих подшипников агрегатов
трансмиссии.
Температурный коэффициент Кг учитывает влияние теплового
режима работы подшипника на его срок службы. Ниже приведены
значения Кт для расчетных рабочих температур подшипника:
t°C .... 100 125 150 175 200 225 250
Кт . . . . 1,00 1,05 1,10 1,15 1,25 1,35 1,40
В агрегатах трансмиссии автомобилей температура масла, как
правило, не превышает 100°, поэтому для них следует принимать
Кт = 1.
Коэффициент материала учитывает влияние поверхностной
твердости деталей, выполняющих роль беговых дорожек, на срок
372
службы подшипников без одного или двух колец. Для таких под-
шипников коэффициент Кы определяют по приведенному на рис. 4.16
графику в зависимости от твердости поверхностей деталей, выпол-
няющих роль беговых дорожек.
Основы вероятностного расчета
Срок службы подшипников качения Ls агрегатов трансмиссии
в условиях эксплуатации носит вероятностный характер. В общем
случае его рассчитывают по формуле
Ls — R/R-rpi,
где R и 7?тр1 - полный и расходуемый за 1 км пробега КМ ресурс
подшипника соответственно.
Ресурс подшипника зависит от параметров последнего (разме-
ров, материала, точности и др.). Его определяют по результатам
испытаний подшипников согласно формуле
R = Ртп, (4.5)
где Р - эквивалентная нагрузка, действующая на подшипник при
испытаниях: п - число оборотов подшипника до выхода его из строя.
Расходуемый за 1 км пробега ресурс подшипника
fc,
Лтр1 = ^ПргпН-
Значения и определяют, исходя из нагрузочного режи-
ма трансмиссии и условий работы подшипника. Для установления
закона распределения срока службы подшипника необходимо знать
законы распределения и числовые характеристики случайных вели-
чин R и 7?тр1
Распределение случайных величин R и RyP\ в первом прибли-
жении можно описать логарифмически нормальным законом.
Прологарифмировав выражение Ls = R/Rrpit получим
lg Ls = lg R - lg -RTpi. (4.6)
Так как распределения случайных величин lg R и lg 7?Tpi описы-
ваются нормальным законом, то распределение случайной величины
lg Ls также будет подчиняться нормальному закону. Для построения
373
кривой распределения срока службы подшипника требуется знать
числовые характеристики распределения случайной величины lgL8\
ее среднее значение lg L8 и среднее квадратическое отклонение cr^g La •
С учетом формулы (4.6) выражения для определения числовых ха-
рактеристик можно записать в следующем виде:
lg Ls = lg R - lg -RTpi;
— Я + % ft-rpl ’
где lg R и lg Ятр] - средние значения случайных величин 1g Я и
lg 7?Tpi; P’ig.ft и trig - их средние квадратические отклонения.
Числовые характеристики lg R и случайной величины lg R
устанавливают при стендовых испытаниях подшипников, а число-
вые характеристики lg RTpi и crjg ягр1 случайной величины lg ArPj -
исходя из законов распределения параметров нагрузочного режима
трансмиссии и факторов, определяющих условия работы подшипни-
ков в узле.
Рис. 4.19. Нормальное распреде-
ление случайной величины lg R
Среднее квадратическое отклонение случайной величины
lg R, распределенной по нормальному закону (рис. 4.19), может быть
в первом приближении рассчитано по формуле
CTlg Я — (lg -Rmax lg-^min)/6,
где lg 7?max и lg 7?min - максимальное и минимальное значения, полу-
ченные при ограниченном числе опытов. С учетом равенства (4.5)
последнее выражение можно записать в виде
1, Птах , .
'7ig^=6lg7~’ (4-7)
U П(П1П
где Птах и ^min ~ соответственно максимальное и минимальное числа
оборотов подшипника до выхода его из строя.
374
Отношение nmax/^min характеризует рассеяние срока службы
подшипников одного типоразмера при стендовых испытаниях при
действии постоянной эквивалентной динамической нагрузки Р. Со-
гласно результатам испытаний, отношение nmax/nmin лля шарико-
вых подшипников равно 160, а для роликовых 80.
Подставив указанные значения nmax/^min в формулу (4.7), по-
лучим для шариковых и роликовых подшипников соответственно
<71gfi! = (l/6)Igl60 = 0,38;
01вЯ = (l/6)Ig80 = 0,32.
Эти значения следует принимать для подшипников прн диаме-
тре тел качения DT < 25,4 мм; при DT > 25,4 мм среднее квадрати-
ческое отклонение <7]g r увеличивают на 15 %.
Среднее значение lg R случайной величины lg R, распределенной
по нормальному закону (см. рис. 4.19), вычисляют по формуле
iD? = lgtfHOM + l,282(7lgfl, (4.8)
где 7?ном - номинальный ресурс подшипника, соответствующий
вероятности неразрушения Р = 0,9, ЯНОм = 106Ст; числовой ко-
эффициент 1.282 здесь равен значению квантили (с обратным зна-
ком) при Р = 0, 9. Площадь под кривой нормального распределения,
лежащая левее абсциссы 1g Ян, равна интегральной плотности рас-
пределения Г (1g Я) = 0,1.
Среднее значение lgRTpi случайной величины lg KTpi определя-
ют на основании статистической обработки данных о нагружениости
подшипника в различных эксплуатационных условиях. Для прибли-
женных расчетов можно принимать
/<7-йтр1 — 1g (^/гпЯтр1),
где Х%п - коэффициент, используемый для перехода от значения
ЯтР1, полученного при детерминированном расчете, к среднему зна-
чению. При расчетах можно принимать Xru = Xrr, a <7ig/?Tpl =
= (см' табл. 4.13).
4.4. Валы
Валы трансмиссий рассчитывают на статическую прочность,
жесткость, сопротивление усталости, крутильные и изгибные коле-
бания.
375
Иногда проводят не все виды расчетов, а только те, которые
определяют работоспособность вала и агрегата трансмиссии в це-
лом, что зависит от конструктивных особенностей вала и агрегата,
а также от характера нагружения.
Перед проведением того или иного расчета вала необходимо
определить действующие на него силовые факторы: крутящий мо-
мент (см. § 4.1), усилия в зацеплениях зубчатых колес (см. § 4.3),
реакции в опорах.
Расчет валов на статическую прочность
Расчет на статическую прочность проводят для всех валов
трансмиссии по максимальному динамическому моменту Ттах, дей-
ствующему на вал (см. § 4.1).
В наиболее общем случае валы трансмиссий КМ работают на
изгиб, сжатие (растяжение) и кручение и лишь в некоторых случаях
только на кручение (например, разгруженные полуоси). Поэтому
порядок расчета следующий.
1. По заранее определенным силовым факторам, действующим
на вал, строим эпюры изгибающих моментов в двух взаимно пер-
пендикулярных плоскостях - в плоскости осей валов и в перпенди-
кулярной к ней плоскости.
2. По этим эпюрам находим изгибающие моменты Миу в плоско-
сти валов и Мкг в перпендикулярной плоскости для опасного сечения
вала (или для нескольких опасных сечений).
3. Определяем суммарный изгибающий момент в опасном сече-
нии вала:
4. Находим напряжения изгиба и кручения в опасном сечении:
_ Ра _ ?тах
где Рд и Ттах _ максимальное осевое усилие и динамический мо-
мент, действующие в опасном сечении; №и, И4р, S - моменты со-
противления изгибу и кручению и площадь опасного сечения вала
соответственно.
376
Рис. 4.20. Коэффициенты, учи-
тывающие влияние абсолютных
размеров сечения вала на предел
прочности и предел текучести:
1 - марганцовистая сталь; 2 - прочая
легированная сталь
5. Определяем запасы прочности по пределам текучести:
"«тт = Л'Е.г<тт/<т; пТт = Ке^тт/т,
где К£т - коэффициент, учитывающий влияние абсолютных разме-
ров сечения вала на предел текучести (рис. 4.20); <тт, тт - пределы
текучести при изгибе и кручении (табл. 4.21).
Таблица 4-21. Механические характеристики стандартных
образцов из материалов, применяемых
для валов КМ, МПа
Сталь НВ не менее О’в <Тт т* Ту О’-i т-i р*_
45 240 800 550 450 300 350 210 0,08
40Х 270 900 750 680 450 410 240 0,08
40ХН 270 920 750 700 450 420 250 0,07
40ХН2МА 390 1400 1150 1000 800 650 330 0,07
12ХНЗА 260 950 700 650 490 420 210 0,07
12Х2Н4А 300 1100 850 800 590 500 250 0,07
18ХГТ 330 1150 950 900 665 520 280 0,10
зохгт 320 1150 950 900 665 520 310 0,10
* Коэффициент вариации предела выносливости (безразмерная величина).
377
6. Определяем запасы прочности по пределам прочности:
Па, = КСъаг1а\ пт, = Ке,тв/т,
где К£в - коэффициент, учитывающий влияние абсолютных разме-
ров сечения вала на предел прочности (см.рис. 4.20); сгв, тв - пределы
прочности при изгибе и кручении (см. табл. 4.21).
7. Находим общие коэффициенты запаса прочности по пределу
текучести и по пределу прочности:
Пт = n„Tn-J ^п1т + п\- п„ = п„ъпТв I y/n\+n\.
Условие достаточной прочности вала
пт > 1,2...1,5; пв > 1,5...1,8.
Оценку статической прочности вала проводят по пределу теку-
чести, если <7т/<тв < 0, 7, и по пределу прочности, если ат/аъ > 0, 7.
Расчет валов на жесткость
Расчет на жесткость проводят для валов агрегатов трансмис-
сии, имеющих большую длину, при действии на вал расчетного кру-
тящего момента Т (см. § 4.1). Значительные деформации этих ва-
лов нарушают правильность зацепления зубчатых колес и контакт
тел качения с кольцами подшипников, что может привести к повы-
шенной вибрации и шуму при работе, к увеличению износа зубьев и
подшипников.
Целью расчета валов на жесткость является определение их сум-
марных прогибов в местах установки зубчатых колес и суммарных
углов поворота сечений валов в тех же местах и на опорах валов с
последующим сравнением полученных значений с допустимыми.
Поворот сечений на опорах валов приводит к искажению контак-
та тел качения подшипников (особенно роликовых), что вызывает
неравномерность нагружения последних, их износ и сопровождается
шумом.
Прогибы валов в плоскости осей в местах установки зубчатых
колес приводят к изменению межцентрового расстояния, что вызы-
вает дополнительное скольжение и износ зубчатых пар. Повороты
сечений валов в этих же местах создают перекосы зубчатых колес
и способствуют неравномерному распределению нагрузки по длине
зуба.
378
Расчет на жесткость вала постоянного сечения. Прогиб у и
угол поворота 0 любого сечения вала могут быть определены из
универсальных уравнений упругой линии вала и углов поворота се-
чений вала
EJy = EJyo + EJQqx + Мя(х - a)2/2 + Р(х — 6)3/6; (4.9)
EJ@ = EJQo + M„(x - a) + P(x - b)2/2, (4.10)
где E - модуль упругости первого рода; J - момент инерции сечения
вала относительно главной центральной оси, перпендикулярной к
плоскости изгибающего момента; у о, 0g - прогиб и угол поворота
сечения вала, расположенного в начале координат (при х = 0); х -
текущая координата сечения вала, для которого определяют прогиб
и угол поворота (рис. 4.21); Мк, Р - внешние изгибающий момент и
сосредоточенная поперечная сила, действующая на вал.
женного положительными сосре-
доточенной силой Р и изгибаю-
щим моментом М
Для сплошного вала диаметром d
J = тг</4/64.
Как можно видеть, уравнение (4.10) получается из (4.9) диффе-
ренцированием по х.
Показанные на рис. 4.21 направления действия силы Р и момен-
та Л/и считаются положительными.
В выражениях (4.9), (4.10) под силой Р и моментом Ми следует
понимать все действующие на вал силы и моменты, включая реак-
ции опор. При расчете на жесткость вала постоянного сечения пред-
варительно необходимо определить расчетный крутящий момент Т
379
см. § 4.1), действующий на вал, а также нагрузки от зубчатых
колес и в опорах (см. § 4.3).
Порядок дальнейшего расчета следующий.
1. Рассчитываем прогибы у и углы поворота Qy сечений вала в
плоскости осей валов.
2. Определяем прогибы z и углы поворота сечений вала в
плоскости, перпендикулярной плоскости осей валов.
3. Вычисляем суммарные углы поворота ©£ сечений вала:
еЕ = ^ + ©1.
Условия достаточной жесткости вала в местах установки зубчатых
колес:
у < 0,1 мм; z < 0,15 мм;
Оу < 0,002 рад; 02 < 0,002 рад;
па опорах при установке шарикового радиального или радиально-
упорного подшипника:
61: < 0, 002 рад,
при установке роликового или игольчатого подшипника:
Ое < 0,0005 рад.
Рассмотрим методику расчета прогибов и углов поворота сече-
ний вала на примере промежуточного вала коробки передач, пока-
занного на рис. 4.22, где МИ1 = Fxidwi/2; Л/И2 = FX2^w2/2.
Запишем универсальные уравнения упругой линии вала и углов
поворота сечений вала для расчетной схемы, показанной на
рис. 4.22, б:
। / £_/1V
EJy = EJyQ + EJQyox + Ryn — |+Миi ""
EJQy — EJQyo + Еул *2* | (x — /i)—
380
Рис. 4.22. Схема сил и изгибающих моментов, действую-
щих на вал в пространственной системе координат (а), в
плоскости осей валов (б) и в плоскости, перпендикулярной
плоскости осей валов (в)
Для определения прогибов и углов поворота сечений вала на
участке 0 < х < /j следует пользоваться членами уравнений, распо-
ложенными слева от вертикальной черты с индексом для участ-
ка < х < I? - слагаемыми до черты с индексом “II”, а для участка
/2 < z < - полными уравнениями.
Определим произвольные постоянные уо и 0о- Условия на опо-
рах вала:
уо = 0 при х = 0; yi = 0 при х = /.
Тогда из первого уравнения при х = I имеем
1 г /3
= 6 +Ми1
С'-6)2
2
-Л/и2
(/ - /2)2 F (I -
~ ,г'2 ег
381
Зная уо и 0уо, находим прогибы и углы поворота сечений в нуж-
ных точках вала:
при х =
ц
У1 - QyoG + Нул
I2
0yi - ®уо + ЯуЛ 2£J’
При X = I?
„ 0 I + 1 Гл? 'Lm ('2~'1)2 р
У2 — ^уО‘2 + £j ,-^ул — + Ми1 2 ^rl fl ] ’
0р2 = 0ро + -F7 К 7 + м^‘2 “ ~ Frl ^-7^1;
£/J L I I J
при X = I
Qyl — 0yo 4- [йул ~ 4- MdG “ h) — Л-i - ——
-Mx2(l-l2)-Fr2 ^4^]-
Аналогично определяем прогибы z и углы поворота Qz в плос-
кости xOz (см.рис. 4.22, в).
Углы Qy и 02 считаются положительными, если сечение вала
повернуто против часовой стрелки при ориентации систем коорди-
нат как показано на рис. 4.22.
Расчет на жесткость ступенчатого вала. Наиболее простой
метод такого расчета основан на преобразовании ступенчатого вала
в эквивалентный вал постоянного сечения и в применении к послед-
нему описанной выше методики.
Разрешим универсальные уравнения упругой линии вала и углов
поворота сечений вала относительно прогиба у и угла поворота 0:
(х — а)2 (х — 6)3
У = И + + + (4.11)
0 = ео + м„^^-4 + Р^^. (4.12)
Чтобы при изменении диаметра вала нс изменились прогибы у и
углы поворота 0, необходимо оставить неизменными коэффициенты
при двучленах в уравнениях (4.11), (4.12).
382
a - в - соответственно ступенчатый вал и эпюры его поперечных
сил и изгибающих моментов; г, д- нагрузки, действующие на части
разрезанных ступенчатого и эквивалентного валов соответственно;
е - эквивалентный вал
Таким образом, основным принципом преобразования ступенча-
того вала в эквивалентный вал постоянного сечения является изме-
нение всех нагрузок и реакций, действующих на определенный уча-
сток вала, в К раз при изменении момента инерции сечения этого
участка тоже в К раз.
Рассмотрим последовательность преобразования ступенчатого
вала в эквивалентный постоянного сечения на примере вала, изо-
браженного на рис. 4.23. Пусть моменты инерции соответствующих
сечений вала равны Ji, J2, J3.
383
1. Определяем внешние силы и моменты, действующие на вал,
а также реакции в опорах.
2. Строим эпюры поперечных сил и изгибающих моментов. В
местах изменения поперечного сечения (точки А и В) определяем
поперечные силы Qa- Qb и изгибающие моменты Мкд и Мкв-
3. Условно разбиваем вал на три участка, прикладывая для рав-
новесия внутренние силы и моменты на границах участков.
4. Переходим на каждом участке от сечения с характеристикой
Ji к сечению с характеристикой Jo, умножая все силовые факторы
на Ki = Jq/Ji при i — 1, 2, 3. Обычно за Jo принимают один из Ji.
5. Объединяем все три участка вала в один вал, прикладывая в
сечениях А и В дополнительные внешние силовые факторы
= QA(Kt - к2у, лмкА = МяА(К, - к2);
AQb = Qb(K2 - #з); ДЛ/„в = М„в(.К2 - К3).
Прогибы и углы поворота у полученного эквивалентного вала с
моментом инерции сечения Jo будут одинаковыми с соответствую-
щими величинами у ступенчатого вала при исходной схеме нагру-
жения.
Расчет валов на сопротивление усталости при кручении
Расчет на сопротивление усталости выполняют в основном для
полуосей ведущих мостов КМ. Валы других агрегатов трансмис-
сии, диаметры которых выбирают из условия обеспечения достаточ-
ной жесткости или по размерам подшипников, имеют повышенные
запасы статической прочности, что, как правило, исключает необ-
ходимость проведения для них расчета на сопротивление усталости.
При этом расчете используют длительно действующие нагрузки с
учетом числа и характера циклов нагружения.
В отличие от экспериментально-статистического способа опре-
деления характеристик нагрузочных режимов в трансмиссии, опи-
санного в § 4.1, будем считать, что определяющими для нагрузочно-
го режима в трансмиссии являются дорожные условия.
Исходя из этого, принимаем следующий порядок расчета.
1. Определяем номинальное напряжение кручения в j-x дорож-
ных условиях:
= ТуЖр,
где Tj - расчетный крутящий момент на валу в j-x дорожных усло-
виях; WKp - момент сопротивления сечения вала при кручении,
И"'кр = 0, 2с/3 для вала диаметром d.
384
Значение Tj принимаем равным максимальному расчетному
крутящему моменту на валу на всех передачах в коробке передач
и в раздаточной коробке, которые используются при движении в j-x
дорожных условиях (см. § 4.1).
2. Находим число циклов изменения напряжений при кручении
на рассчитываемом валу за 1 км пробега КМ в j-x дорожных усло-
виях:
N\j = /(2тггк),
где nQj - число циклов изменения напряжения кручения на валу ко-
леса за один оборот этого колеса при пробеге КМ в j-x дорожных
условиях (табл. 4.22); - передаточное число от данного вала до
колеса при действии расчетного крутящего момента Tj.
Таблица 4-22. Ориентировочные значения параметров нагрузоч-
ного режима для расчета валов трансмиссии КМ
на сопротивление усталости при кручении
Дорожные условия "0; г. к„ „ ю2
Асфальтированные улины городов 0,8-1,2 0,3 -0,4 0,16-0,20 0,5-0,7
Асфальтированное шоссе в
местности:
равнинной 0,4-0,6 0,5 -0,7 0,18-0,22 0,7- 0,9
холмистой 0,5-0,9 0,4 -0,6 0,22-0,26 0,6- 0,8
горной 0,9-1,3 0,3 -0,5 0,28-0,32 0,4-0,6
Булыжное шоссе:
в удовлетворительном состоянии 1,6-2,0 0,2 -0,3 0,26-0,30 0,6- 0,8
разбитое 2,3-3,7 -0,3...-0,4 0,36-0,42 0,3- 0,5
Грунтовые и гравийные дороги:
в равнинной местности 0,5 -0,9 0,3 -0,5 0,20-0,24 0,6-0,8
в холмистой местности 0,9-1,3 0,2 -0,4 0,24-0,28 0,5-0,7
разбитые 1,8-2,4 -0,15...-0,20 0,30- 0,34 0,4-0,6
Бездорожье 2,4-3,0 -0,10...-0,15 0,36-0,40 0,3-0,5
Примечание. Значения n?o, Fj, Ка.»} и аР] являются ориентировочными и
должны уточняться на основании экспериментальных данных либо расчетным путем.
»/2 В —692
385
3. Определяем ресурс вала по напряжениям кручения, расходу-
емый за 1 км пробега КМ в j-x дорожных условиях:
brj —
где m = 4; Кп Bj - коэффициент приведения реального режима на-
гружения к расчетному для движения КМ в j-x дорожных условиях
- аналог коэффициента пробега (см. табл. 4.22).
4. Находим предел выносливости стандартного образца из ма-
териала вала при кручении с симметричным циклом (г = — 1) при
вероятности неразрушения Р = 0,95, считая закон распределения
этого предела выносливости нормальным по аналогии с выражени-
ем (4.8):
7_] — 7-1(1 — 1,65vT_i),
где 7-1 - среднее значение предела выносливости при вероятности
неразрушения Р = 0, 5; vr_i - коэффициент вариации предела вынос-
ливости,
«г-, =огт_1/т-1;
гДе Vr-i - среднее квадратическое отклонение предела выносливо-
сти. Значения т-i и vr-1 приведены в табл. 4.21.
5. Определяем обший коэффициент концентрации напряжений:
_ Кт + Кпг ~ 1
гд К?ТКСТ ’
где Кг - эффективный коэффициент концентрации напряжений при
кручении (табл. 4.23); Кпт - коэффициент, учитывающий влия-
ние состоянии поверхности на предел выносливости при кручении
(табл. 4.24); Крг - коэффициент, учитывающий влияние упроч-
няющей обработки вала на предел выносливости при кручении
(табл. 4.25); Ksr - коэффициент, учитывающий влияние абсолют-
ных размеров сечения вала на предел выносливости при кручении
(рис. 4.24).
6. Находим коэффициент, характеризующий качество материа-
ла вала:
Крт = 7 — 1 / 7— 1.
7. Определяем предел выносливости вала при кручении с реаль-
ным асимметричным циклом при вероятности неразрушения Р =
= 0,95 и движении КМ в j-x дорожных условиях:
___________2т_ 1________
Кто. + (^ТД — K<pr)rj
где rj - коэффициент асимметрии цикла при движении КМ в j-x
дорожных условиях (см. табл, 4.22).
386
Таблица 4-23. Значения эффективного коэффициента Кг концент-
рации напряжений при кручении
Вал r/d <тв, МПа
400 | 600 | 800 | 1000 | 1200
D/d = 2
С гантельными 0,01 1,90 2,00 2,10 2,20 2,30
переходами 0,03 1,63 1,66 1,70 1,75 1,80
0,05 1,50 1,53 1,56 1,59 1,62
0,10 1,26 1,28 1,31 1,34 1,37
Г Г”К— 0,20 1,10 1,12 1,14 1,17 1,20
D/d = 1,/
0,01 1,80 1,87 1,94 2,02 2,10
0,03 1,55 1,58 1,62 1,66 1,70
0,05 1.45 1,47 1,49 1,52 1,55
0,10 1,20 1,23 1,27 1,31 1,35
0,20 1,10 1,12 1,14 1,17 1,20
D/d = 1, /
0,01 1,65 1,71 1,77 1,85 1,95
0,03 1,52 1,57 1,61 1,66 1,71
0,05 1,42 1,44 1,47 1,51 1,54
0,10 1,20 1,22 1,24 1,27 1,30
0,20 1,05 1,07 1,09 1,12 1,15
Со шлицами:
прямобочными - 2,10 2,36 2,55 2,70 2,80
эвольвентными 1,40 1,46 1,52 1,58 1,60
387
Таблица 4-24- Значения коэффициента Кпт, учитывающего
влияние состояния поверхности вала на
предел выносливости при кручении
Вид обработки Класс шеро- ховатости поверхности по ГОСТ 2789-73 мкм А-пт при <та, МПа
400~ 800 1200
Шлифование 9, 10 0,32 -0,08 1,00 1,00 1,00
Обточка:
тонкая 6 -8 2,5 -0,32 1,05 1,10 1,25
грубая 3 -5 (80 - 10) 1,20 1,25 1,50
Н еобр аботан н ая
поверхность - - 1,30 1,50 2,20
Таблица 4-25. Значения коэффициента Квт, учитывающего
влияние упрочняющей обработки вала на
предел выносливости при кручении
Вид поверхностной обработки Вал
гладкий с концентратором напряжений
Закалка ТВЧ 1.20 - 1,50 1,5 -2,5
Азотирование 1,10 - 1,15 1,3 -2,0
Цементация 1,10 - 1,50 1,2 -2,0
Обкатка роликами 1,10 - 1,25 1,3 - 1,8
Обработка дробью 1,10 - 1,20 1Д -1,5
8. Находим общий ресурс вала по напряжениям кручения при
движении КМ в J-x дорожных условиях:
~ TrajNori
где Nqt - базовое число циклов изменения напряжений при кручении
вала, Nor — б • 106 циклов.
388
Рис. 4.24. Зависимость коэффициента влияния абсолют-
ных размеров сечения вала на предел выносливости при
кручении от наружного диаметра:
1 - углеродистая сталь; 2 - легированная сталь
9. Определяем расчетный срок службы вала в километрах про-
бега при эксплуатации КМ в j-x дорожных условиях:
= j I
где dpj - коэффициент учета нестационарности режима нагружения
(см. табл. 4.22).
10. Находим расчетный срок службы вала в километрах пробега
при эксплуатации КМ в смешанных дорожных условиях:
к1
j=l
где Qj - относительный пробег КМ в j-x дорожных условиях (зада-
ется заказчиком); kj - общее число дорожных условий, в которых
эксплуатируется КМ. В данном случае принято kj = 10 (см. та-
бл. 4.22). Условием достаточного сопротивления усталости вала по
напряжениям кручения является неравенство
> Lq.
Расчеты валов на крутильные и изгибные колебания
Расчеты на крутильные и изгибные колебания проводят, чтобы
избежать опасных резонансных колебаний в зоне эксплуатационных
частот вращения того или иного вала. Они особенно актуальны
для длинных карданных валов, у которых возможен резонанс попе-
речных изгибных колебаний при движении на высших передачах в
коробке передач.
В- 692 3 89
Расчет на крутильные колебания валов связан с составлением
динамической системы всей трансмиссии КМ, определением частот
колебаний этой системы и опасных резонансных режимов, поэтому
этот вопрос подробно рассмотрен в § 2.5.
Что касается расчета валов на изгибные колебания, то он будет
проведен при рассмотрении карданных передач. При этом будут
определены критические частоты вращения карданных валов и вли-
яние на эти частоты конструкций опор валов.
4.5. Шлицевые и шпоночные соединения
Общие положения
Шлицевые соединения, применяемые в КМ, различаются по фор-
ме зуба, поверхности центрирования, степени подвижности и харак-
теру нагружения.
По степени подвижности бывают шлицевые соединения подвиж-
ные (которые при передаче нагрузки имеют осевые перемещения, на-
пример: скользящее соединение двух частей карданного вала), непо-
движные (соединения с осевым натягом входных или выходных ва-
лов агрегатов трансмиссии с фланцами) и условно-неподвижные, у
которых относительные осевые перемещения при передаче нагрузки
возникают из-за перекосов, деформаций и зазоров (например, соеди-
нение полуосевая шестерня - дифференциал, венцы зубчатых муфт).
По характеру нагружения соединения можно разделить на че-
тыре Группы:
группа Т: соединения, которые передают только крутящий
момент (шлицы карданных валов, полуосей, солнечных шестерен,
рис. 4.25);
Рис. 4.25. Соединения, передающие только крутящий момент
(группа Т)
390
Рис. 4.26. Зубчатые муфты
(группа ЗМ)
Рис. 4.27. Соединения, передающие и
крутящий момент и окружное усилие
(группа ТР)
группа ЗМ: зубчатые муфты, соединяющие вал со свободно си-
дящим на нем зубчатым колесом и используемые для переключения
передач в коробках передач (рис. 4.26);
группа ТР: соединения, которые передают и крутящий момент,
и окружное усилие (например, соединение вала с шестерней, имею-
щей зацепление только с одним зубчатым колесом, рис. 4.27);
группа РР: соединения, нагруженные двумя окружными уси-
лиями (например, соединение промежуточного зубчатого колеса с
валом, рис. 4.28).
По поверхности центрирования шлицевые соединения различа-
ются на центрируемые по наружному диаметру D, по внутреннему
диаметру d и по боковым поверхностям.
По форме зуба щлицевые соединения бывают прямобочные,
эвольвентные и треугольные.
Наиболее высокая точность центрирования - по внутреннему
диаметру d. Это достигается шлифованием и вала, и отверстия,
даже если втулка имеет твердость HRC3 > 40. Меньшая точность
13*
391
Рис. 4.28. Соединения, нагружен-
ные двумя окружными усилиями
(группа РР)
достигается при центрировании по наружному диаметру, так как
вал в этом случае может быть отшлифован, а отверстие - нет. По-
этому последней технологической операцией с отверстием являет-
ся протягивание, и твердость поверхности отверстия должна быть
HRC3 < 40.
Наименьшей точностью обладает центрирование по боковым по-
верхностям, которое применяют, когда необходимо обеспечить проч-
ность соединения, а точность менее существенна (например, у пря-
мобочного шлицевого соединения двух частей карданного вала). Бо-
ковые грани зубьев у вала при этом шлифуют, а отверстие протя-
гивают, поэтому твердость последнего HRC3 < 40.
Наиболее распространенные прямобочные шлицевые соединения
выполняют со всеми видами центрирования; они имеют три серии,
отличающиеся высотой шлиц:
легкую, используемую для неподвижных и слабонагруженных
узлов;
среднюю, применяемую для средненагруженных неподвижных
или условно-неподвижных соединений;
тяжелую, используемую для подвижных соединений и всех
остальных соединений, передающих большой крутящий момент.
Широко распространенные эвольвентные шлицевые соединения
центрируют по боковым поверхностям или наружному диаметру D.
Они имеют следующие преимущества по сравнению с прямобочны-
ми:
1) повышенную нагрузочную способность благодаря постоянно-
му утолшению зубьев к основанию, уменьшению концентрации на-
пряжений и вероятности возникновения трещин у основания зубьев
при термообработке;
392
2) способность втулок с эвольвентным профилем самоустана-
вливаться на валу под нагрузкой (при центрировании по боковым
поверхностям), что улучшает равномерность приложения нагрузки
и увеличивает сопротивление смятию и износу;
3) возможность применения стандартного зуборежущего обору-
дования для их изготовления.
Однако трудоемкость шлифования эвольвентных шлиц больше,
чем прямобочных, и эвольвентные протяжки более дорогие.
Применяют эвольвентные шлицевые соединения для передачи
больших крутящих моментов.
Треугольные шлицевые соединения используют значительно ре-
же и в основном для неподвижного соединения деталей, передающих
относительно малый крутящий момент, в частности для соедине-
ния вала с тонкостенными втулками. Центрирование осуществляют
только по боковым поверхностям.
Расчеты шлицевых соединений
Проводят два вида расчета: на смятие и на износ.
Расчет на смятие ведут из условия передачи соединением макси-
мального динамического крутяшего момента Ттах (см. § 4.1). Это
основной расчет для неподвижных соединений, хотя иногда для них
выполняют также “условный” расчет на износ, учитывая возмож-
ность ослабления или даже исчезновения натяга.
Расчет на износ проводят исходя из условия передачи соединени-
ем расчетного крутящего момента Т (см. § 4.1). Для подвижных и
условно-неподвижных соединений выполняют оба расчета - на смя-
тие и на износ.
Последовательность расчета шлицевого соединения на смятие
следующая.
1. Определяем средний диаметр шлицевого соединения:
<р = (£) + d)/2,
где D - наружний диаметр вала; d - внутренний диаметр втулки
(ступицы).
2. Находим рабочую высоту шлипев:
h = (D - d)/2 - fB - А,
гДе /в3 /с ~ высота фаски на шлицах вала и ступицы соответственно.
393
3. Вычисляем среднее и максимальное напряжения смятия:
&смср ~ hzuijty'i
О’см max — ^смср^з^пр-к^н.П}
где гшл - число шлицев на валу; / - рабочая длина соединения;
К3 - коэффициент наравномерности распределения нагрузки меж-
ду зубьями; /Спр.к _ коэффициент продольной (по длине соединения)
концентрации нагрузки; Кн.п _ коэффициент концентрации нагруз-
ки от погрешности изготовления. Значения этих коэффициентов для
групп соединений, приведенных на рис. 4.25 - 4.28, даны в табл. 4.26.
Определяем коэффициент запаса прочности:
п = а-г/о-
см шах,
где <гт - предел текучести материала зубьев, имеющего наименьшую
твердость (табл. 4.27). Достаточная прочность соединения обеспечи-
вается, если п > 1,25 для незакаленных соединений и п > 1,4 для
закаленных.
Приведем теперь последовательность расчета шлицевого соеди-
нения на износ.
1. Определяем номинальное напряжение смятия на г-й передаче
в коробке передач:
<7смг = 27г/(</ср
где Ti - расчетный крутящий момент на валу соединения (см. § 4.1).
2. Находим расчетные напряжение смятия
^см.расчг ^пр.к К3.
3. Принимаем число циклов аг изменения напряжения на боковой
поверхности щлица соединения за один оборот вала на г-й передаче,
равным 1 - для соединений групп Т, ЗМ, ТР и 2 - для соединений
группы РР.
4. Определяем число оборотов ведущего колеса КМ, совершае-
мых за 1 км пробега:
ns — 1000/(2тггк).
394
Таблица J. 26. Коэффициенты, используемые при расчете шлицев на смятие
Коэф- фици- ент Дополнительные условия Группа соединений
Т (см. рис. 4.25) зм (см. рис. 4.26) ТР* (см. рис. 4.27) рр (см. рис. 4.28)
К, - 1 1 + ^ Яв 1+^Е <*в (З^ср^ШЛ X х cos 0,57р)/ - 2)]
Км В период приработки при высокой точности изготовления То же при низкой точ- ности изготовления После приработки 1,1-1,2 1,3- 1,6 1 1,1 - 1,2 1,3- 1,6 1 1,1 - 1,2 1,3- 1,6 1 1,1-1,2 1,3-1,6 1
Кпр.к - Л'.р К.р Кч, + К, - 1 Кс
тах(ККр, К«)
Кцр 1/D < 0,5 1 1 1 1
^>°,5 HRC3 < 40 1 + 0,004-1+ /2 +0.05^ - 1 + 0,004-1 + +0.05^ 1
HRCa > 40 1 + 2(0,004-1+ + 0,0511) - 1 + 2(0,004-1+ +0,0511) 1
Окончание табл. J.26
Коэф- фици- ент Дополнительные условия Группа соединений
Т (см. рис. 4.25) ЗМ (см. рис. 4.26) ТР" (см. рис. 4.27) РР (см. рис. 4.28)
К, - - - 1 + е. + 5г2//£>
К', - 1 0,8+3-^ 0.6+5^ (3<^<-р2шл X х cosO, 57ур)/
Примечание. dB - диаметр основной окружности зубчатого колеса, связанного с валом шлицевым
соединением (см. § 4.2);7р - угол между направлениями действия сил (см. рис. 4.28); коэффициент
концентрации нагрузки от закручивания вала; Ке - коэффициент концентрации нагрузки в зависимости
от смешения поперечного усилия от середины длины ступицы на величину е; е = е/1 - для прямозубых
цилиндрических зубчатых колес со шлицами, е = е/l ± 0,5(Рх/Pr)dB/l и е = с/l ± tg 0 cos(0,5yp)dB/l - для
косозубых зубчатых колес групп ТР и РР соответственно; (знак - если моменты от радиальной РТ и
осевой Рх сил действуют в одном направлении относительно точки оси вала, лежащей па середине длины
ступицы, - если в разных направлениях; К'3 - коэффициент, учитывающий влияние неравномерного
нагружения зубьев и скольжения рабочих поверхностей при вращении вала.
" Для коэффициента КПр.к в числителе приведено выражение для схемы нагружения, показанной
на рис. 4.27, а, а в знаменателе - для схемы на рис. 4.27, б.
Таблица 27. Свойства сталей, применяемых в шлицевых
соединениях
Марка Вид термообработки НВ HRC3 <7Т, МПа
35 Улучшение 300 30 490
Закалка 500 40 670
45 Улучшение 250 23 500
Закалка 400 42 740
50 Г Улучшение 250 24 430
Закалка 400 42 790
40Х Улучшение 250 23 690
Закалка 400 43 ИЗО
Закалка ТВЧ 300 50 740
40ХН Улучшение 250 24 590
Закалка 400 48 1280
Закалка ТВЧ 320 50 790
40ХГР Улучшение 300 31 840
Закалка ТВЧ 300 50 840
20Х Улучшение 240 22 490
Цементация 290 60 790
12ХНЗА Улучшение 280 28 580
Цементация 330 50 790
18ХНЗА Улучшение 380 40 840
Цементация 400 62 1030
12Х2Н4А )) )> 330 60 840
20Х2Н4А )> » 350 62 1050
25ХГНТ )> » 330 62 1230
ЗОХГТ » )> 330 60 890
18ХГТ » )) 330 60 930
Примечание. Твердость НВ указана для сердцевины образца, a HRCS - для
поверхности.
397
5, Находим число циклов изменения напряжения на боковой по-
верхности шлица соединения на г-й передаче, приходящееся на 1 км
пробега:
JVji = ainsu3Km
(способы определения 7$ и u3Kj см. в § 4.1).
6. Вычисляем ресурс износостойкости соединения в условных
единицах, расходуемый за 1 км пробега КМ;
&1к ~ Уу всм.расч^Н-^пий
где т = 3; Knni - коэффициент приведения (аналогичный коэффици-
енту пробега Кп (см. § 4.1)) режима реальных напряжений на рабо-
чих поверхностях соединения к режиму напряжения при расчетном
Рис. 4.29. Зависимость коэффициента приведения Кпи от
расчетной удельной силы тяги р,;
1 - КМ высокой проходимости, самосвалы; 2 - грузовые автомобили,
автобусы; 3 - легковые автомобили
7. Задаемся допускаемым напряжением смятия [<тСм] при базовом
числе циклов Л'о = 108 и постоянном режиме работы. Значения [асм]
в зависимости от твердости поверхности приведены ниже:
HRC3 ............. 20 28
[<тсм], МПа .... 95-1 ПО’2
40 45 52 60
135*3 170*3 185’3 205’4
Без термообработки.
*2 После улучшения.
’3 После закалки.
’4 После цементации или азотирования.
398
При работе с частым реверсированием приведенные выше зна-
чения [<тсм] рекомендуется снижать на 20.. .25 %.
8. Определяем предельное напряжение смятия по условию из-
носостойкости при базовом числе циклов Nq = 108 и постоянном
режиме работы:
О’иКт = Км]/(КсКос),
где Kz - коэффициент, учитывающий условия смазки соединения и
равный 0,7 при наличии обильной смазки без загрязнения, 1,0 при
средней смазке и для неподвижных соединений, 1,4 при бедной смазке
с загрязнениями и 2,0 без смазки (например, соединение ведущего
вала коробки передач со ступицей ведомого диска сцепления); КОс -
коэффициент, учитывающий условия осевого закрепления ступицы
на валу и ее перемещение под нагрузкой, равный 1 при жестком
закреплении, 1,25 при закреплении, допускающем небольшие осевые
перемещения (например, соединения группы ЗМ), и 3,0 при осевых
перемещениях под нагрузкой.
9. Находим общий ресурс износостойкости соединения в услов-
ных единицах:
^иНт = °и11т-^0’
10. Определяем пробег КМ до достижения соединением предель-
ной износостойкости:
= Нт/
Условие достаточной износостойкости шлицевого соединения:
-^н > Ьо,
где Lq - планируемый пробег КМ до замены узла, включающего
рассчитываемое соединение.
Возможна также оценка износостойкости шлицевого соединения
не по сроку службы £и в километрах пробега, а по допускаемому
напряжению. В этом случае после п.8 последовательность действий
будет такая.
9. Находим эквивалентное число циклов, необходимое для выра-
ботки соединением планируемого срока службы Lq, при наибольшем
399
из всех crCM pac4f расчетном напряжении смятия сгсм,расчЛ1:
•Мокв = -^Йи^'О/^см.расч.н'
10. Определяем коэффициент износостойкости:
Л'иГ = х/^о/^и ЭКВ.
И. Находим допускаемое напряжение смятия по условию изно-
состойкости:
Условие достаточной износостойкости шлицевого соединения
^см.расч.н < [^cmIk-
Обе оценки (по сроку службы и по допускаемому напряжению)
дают аналогичные результаты.
Расчет шпоночных соединений
Шпоночные соединения используют в трансмиссиях КМ значи-
тельно реже, чем шлицевые. Основное применение имеют призма-
тические и сегментные шпонки, для которых проводят условный
расчет на смятие в предположении равномерного распределения да-
вления на поверхности контакта боковых граней шпонки с валом и
ступицей.
Условие прочности шпонки на смятие имеет вид
стсм = 2Tmax/(o^c) < [^см],
где d - диаметр вала; I - длина шпонки; hc - высота выступающей
над валом части шпонки; [<тсм] - допускаемое напряжение смятия,
МПа, [<тСм] = o't/Kq-, Кб - коэффициент безопасности, равный 1,5.. .2
при нереверсивной нагрузке и 2,25... 3 при реверсивной.
Целесообразно, чтобы материал шпонки был менее прочным,
чем материалы вала и ступицы.
400
4.6. Картерные детали агрегатов
Общие сведения
Картерные (корпусные ) детали обычно имеют сложную геоме-
трию и воспринимают основную часть силовой нагрузки, возника-
ющей при работе трансмиссии КМ. Как правило, внешняя форма
этих деталей имеет конкретный вид независимо от типа машины,
так как определяется вполне устоявшимися конструктивной схемой
и компоновкой размешенных внутри картера механизмов. Так, кар-
тер сцепления имеет либо сферическую поверхность, заключенную
между двумя параллельными плоскостями, либо форму усеченного
конуса (рис. 4.30). При этом их обычно стремятся сделать монолит-
ными (как наиболее жесткие), а если это невозможно (как правило,
технологически), то картеры делают разъемными. Для соединения
их используют винты и болты.
Рис. 4.30. Конструктивная схема типовых
картеров сцепления КМ ЗИЛ-131 (а),
ВАЗ-2121 (б) и Урал-375 (в)
Картерные детали обычно представляют собой оболочечную
конструкцию, в которой обязательно присутствуют две параллель-
ные плоские стенки с отверстиями под подшипники и крышка, пред-
ставляющая собой одну из стенок.
Серийно выпускаемые картеры КМ являются литыми деталя-
ми, имеющими в качестве подкрепляющих стенки и отверстия такие
элементы, как бобышки, ребра жесткости и технологические при-
ливы. Геометрия и место расположения этих элементов на карте-
рах могут быть весьма разнообразными. Относительные размеры
ребер жесткости и бобышек существенно влияют на напряженно-
деформированное состояние тех стенок, на которых они расположе-
ны. Анализ конструкций картеров большинства КМ показывает,
401
что в среднем отношение высоты ребра жесткости к толщине стен-
ки для ребер жесткости и цилиндрических бобышек находится в
пределах H/h — 1,5... 2,5. При этом наружный D и внутренний
d диаметры бобышек могут иметь весьма широкий диапазон зна-
чений, определяемый диаметрами имеющихся в картере отверстий.
Приливы под резьбу и технологические приливы при сравнительно
небольших размерах поперечного сечения могут иметь значитель-
ную высоту по отношению к толщине стенки (до H/h = 3... 3,5).
Кроме того, в литых конструкциях встречаются бобышки с отвер-
стиями, оси которых перпендикулярны к поверхности стенки.
Картеры относительно сильно нагруженных конструкций обыч-
но выполняют литыми из чугуна, а для менее нагруженных - из
алюминиевых и магниевых сплавов.
Виды нагрузок, действующих на картерные детали
В процессе эксплуатации на картерные детали КМ действует
совокупность нагрузок, которые по характеру воздействия можно
разделить на случайные и детерминированные. Когда картер не
является частью несущей системы КМ (хребтовой рамы), то он вос-
принимает нагрузки в виде реакций в подшипниковых опорах транс-
миссии, находящейся внутри картера. Если же картер является еще
и частью несущей системы, то он воспринимает также и долю внеш-
них нагрузок.
Детерминированные нагрузки делятся на динамические и ста-
тические. К статическим прежде всего следует отнести массу агре-
гатов, а также усилия, возникаюшие в результате предварительного
сжатия пружин (например, нажимного диска сцепления). Источни-
ками динамических нагрузок могут быть воздействия от агрегата
на упругой подвеске, связанных с ним смежных агрегатов и узлов
(рамы или кузова, карданной передачи и мостов машины). Причем
уровень максимальных амплитуд нагрузок от силового агрегата от-
носительно невелик, а динамические нагрузки от карданной пере-
дачи существенно влияют на напряженно-деформированное состоя-
ние картеров сцепления и коробки передач. Уровень динамических
напряжений в картере сцепления, соединенного с высокооборотным
двигателем, вследствие дисбаланса карданной передачи может до-
стигать 100 МПа при определенных скоростях движения. К тому же
осевое усилие, возникающее в карданной передаче ввиду блокиров-
ки шлицев и нагружающее главным образом подшипники и заднюю
стенку коробки передач, может достигать 40 ... 50 кН.
402
Нагрузки, действующие на картеры сцепления и коробки пере-
дач в реальных условиях работы, обусловлены компоновкой транс-
миссии и схемой подвески силового агрегата КМ. В случае соеди-
нения двигателя, сцепления и коробки передач последовательно, а
вторичного вала коробки с главной передачей посредством кардан-
ного вала можно выделить две наиболее распространенные схемы
картера коробки передач (рис. 4.31).
Рис. 4.31. Конструктивная схема типовых
картеров коробки передач КМ ЗИЛ-131 (а)
и ВАЗ-2121 (5)
При работе зубчатых зацеплений на опорах валов возникают ре-
акции, нагружающие картеры. При переходных режимах работы
двигателя в трансмиссии имеют место пиковые значения крутящего
момента, превышающие максимальный момент на установившемся
режиме в 1,5 ... 2,5 раза.
Подобные пиковые нагрузки являются эпизодическими, но в то
же время они могут стать причиной разрушения картерных дета-
лей и особенно картера коробки передач. Разрушение в этом слу-
чае происходит по причине недостаточной прочности картера, т. е.
наблюдается превышение предельно допустимых напряжений в от-
дельных частях конструкции. Прочность деталей коробок передач
на практике обычно оценивают по результатам экспериментального
определения разрушаюших нагрузок и коэффициента запаса прочно-
сти по максимальному моменту двигателя на разных передачах.
Для предварительного определения размеров и формы деталей
трансмиссии наибольшее распространение получил метод расчета
при квазистатических нагрузочных режимах при условии обеспече-
ния статической прочности и жесткости. Наряду с критерием допу-
стимых напряжений используют критерий предельных напряжений.
Для дальнейшего уточнения параметров деталей проводят динами-
ческий расчет по динамическим моделям.
403
В последние годы широкое распространение для расчетов прак-
тически во всех областях техники получил метод конечных элемен-
тов (МКЭ). Благодаря своим преимуществам, хорошо освещенным
в литературе, МКЭ позволяет идеализировать любую конструкцию
с помощью набора конечных элементов разнообразных типов и форм.
Матричная формулировка МКЭ явилась хорошей предпосылкой его
алгоритмизации для ЭВМ.
Однако современные методы расчетов на прочность при дина-
мическом нагружении картерных деталей пока не отличаются удо-
влетворительной точностью. Динамические модели картерных де-
талей на основе МКЭ позволяют проводить качественный и количе-
ственный анализ собственных частот и форм изгибных колебаний
этих деталей. Основные проблемы решения динамических задач
МКЭ связаны с большими (примерно на порядок) затратами времени
на решение по сравнению со статическими задачами (для конечно-
элементных моделей одного уровня), а следовательно, трудностями
определения высокоточных значений напряжений при вынужденных
колебаниях при различном характере возмущающего воздействия.
Таким образом, статические расчеты пока преобладают над дина-
мическими при проектировании картерных деталей.
Для опенки статической прочности следует проводить анализ
напряженно-деформированного состояния при нагружении макси-
мальным динамическим моментом на входе в коробку передач. При-
чем коэффициент динамичности можно определять эксперименталь-
но или расчетом резонансных крутильных колебаний. Поскольку
силовой агрегат КМ установлен на упругих опорах, при расчете
следует учитывать податливость опор. При статических расчетах
предложение о жесткости опор обеспечивает дополнительный запас
прочности.
Рассмотрим основы теории МКЭ и особенности его применения
к моделированию и расчету картерных конструкций, в том числе
элементов трансмиссии (нагружающих картер и деформирующихся
вместе с ним) и групповых резьбовых соединений.
Основные сведения о методе конечных элементов
МКЭ является обобщением классических вариационных мето-
дов Галеркина- Ритца, выгодно отличаясь от них способом выбора
координатных (базисных) функций и формированием функционала
потенциальной энергии. В МКЭ исследуемую область разбивают на
совокупность подобластей - конечных элементов, в пределах границ
404
которых строят координатные функции, однозначно определяющие
перемещения внутри элемента через перемещения узловых точек.
Построение этих функций можно проводить независимо для каждого
отдельного элемента, а необходимые при аппроксимации всей обла-
сти условия гладкости и непрерывности функций задавать в узлах,
связывающих элементы между собой. Это наиболее распространен-
ный в мировой практике подход, основанный на методе перемещений.
Сходимость решения к точному при этом определяют выбором по-
лей перемещений, т.е. в первую очередь выбором формы элемента и
функций перемещений. Перемещения любой точки внутри элемента
задают в форме
{f) = [N]{«}, (4.13)
где N - матрица коэффициентов базисной функции (или функции
формы); 6 - вектор перемещений узловых точек элемента. Матрица
N должна быть выбрана таким образом, чтобы при подстановке в
(4.13) координат узлов получались соответствующие узловые пере-
мещения.
По известным перемещениям точек элемента могут быть найде-
ны деформации
{е} = [В]{«} (4.14)
и напряжения
{<z} = [D]({e} - {е0}) + {<т0}, (4.15)
где В - матрица градиентов, содержащая производные функции фор-
мы по координатам; D - матрица упругих констант материала; ео и
<То - начальные деформации и напряжения соответственно.
Сосредоточенные в узлах силы, которые статически эквивалент-
ны граничным напряжениям и действующим на элемент распреде-
ленным нагрузкам, при деформации элемента совершают работу.
Для внешних сил
dA = (d{«})T{P},
где Т - знак транспонирования.
Работа внутренних обобщенных сил (напряжений)
dW = d{e}T{<r}
или, с учетом (4.14) и (4.15),
dw = (ед)т[в]т{<7}.
405
Приравнивая работу внешних и внутренних сил, получаем
(d{«})T{P} = (d{6})T /[B]T{a}dV.
V
Отсюда, подставляя (4.14) и (4.15), имеем
{Р} = (/[B]T[D][B]dV){6} - У[B]T[D]{eo}dv+
V V
+ У [В]т{<70 }dV. (4.16)
V
Выражение J[b]T[d][b]^V называется матрицей жесткости эле-
V
мента и является одной из основных характеристик любого конечно-
го элемента. Обозначим ее К. Остальные члены в уравнении (4.16)
выражают силы, соответственно обусловленные начальной дефор-
мацией, начальными напряжениями и распределенными нагрузками.
Для идеализации всей области (или конструкции) с помощью сово-
купности конечных элементов записываем условия равновесия всех
сил в узловых точках. При этом суммируем компоненты сил от всех
элементов, соединяющихся в общем узле, и получаем результирую-
щую систему уравнений
ИЧ - {Р}; (4.17)
{Р} = {р}р + {р}9 + {Pk + {PU;
м
К = £>],-, i =
i=l
где {Р} - вектор внешних сил; {Р}Р, {Р}9, {Р}е0, {Р}<т0 ~ векторы
сосредоточенных сил и сил от распределенных нагрузок, начальных
деформаций и напряжений; [к] - матрица жесткости конструкции,
которая состоит из суммы матриц жесткостей отдельных г-х элемен-
тов; М - число конечных элементов в конструкции.
Сходимость решения системы уравнений (4.17) к точному опре-
деляется прежде всего правильностью выбора функций формы N.
406
Кроме того, факторами, влияющими на сходимость решения, явля-
ются погрешности дискретизации реальной конструкции и погреш-
ности округления при решении системы уравнений большого поряд-
ка. Погрешности дискретизации равны /(Р+1-т), где I - характер-
ный относительный размер конечного элемента; р - степень полного
интерполяционного полинома в выражении для вычисления коэффи-
циентов матрицы N, т - порядок старшей производной в функци-
онале энергии. При уменьшении I уменьшаются погрешности дис-
кретизации, но возрастают погрешности округления, так как они
пропорциональны величине с/-2т, где с - число, зависящее от сте-
пени интерполирующих функций.
Следовательно, при выборе функций формы элементов и степе-
ни интерполяционных полиномов необходим анализ, исходящий из
желаемой точности решения и числа элементов, требуемых для ап-
проксимации сложных геометрических форм. Поскольку разработа-
на большая группа различных типов конечных элементов для рас-
чета как плоского, так и объемного напряженно-деформированного
состояния конструкций, то важно правильно их выбрать при модели-
ровании объектов. В качестве основных критериев оценки конечно-
элементной модели объекта следует брать получаемую точность ре-
зультатов. а также затраты труда и времени на подготовку и про-
ведение расчета.
Расчет корпусных деталей
Определение расчетных нагрузок является одним из основных
этапов подготовки исходных данных при расчете картерных дета-
лей КМ на основе МКЭ. Статические составляющие нагрузок, дей-
ствующие на картер вследствие работы зубчатых зацеплений, обыч-
но находят по известным формулам для расчета реакций на опорах
валов. Возможность создания конечно-элементной модели валов и
зубчатых зацеплений при применении МКЭ позволяет развить еди-
ный подход в расчете картеров, автоматизировать расчет нагрузок
и рассмотреть совместную деформацию картера и валов на одной
обшей модели.
Уровень идеализации валов, зубчатых зацеплений, подшипников
и других деталей трансмиссии зависит от задач расчета.
Моделирование осуществляют типовыми звеньями, соответ-
ствующими определенным элементам кинематической схемы ко-
робки передач. Сочетание этих звеньев позволяет реализовать
в конечно-элементной модели практически любую кинематическую
схему.
407
Рис. 4.32. Конечно-элементная модель валов и зубчатых зацеп-
лений коробки передач
Рассмотрим принципы составления моделей из типовых звеньев
на простом примере распространенной трехвальной коробки пере-
дач, имеющей прямозубые и косозубые шестерни. Схема разрабо-
танной модели содержит 23 узла и 23 элемента (рис. 4.32). Номера
стержневых элементов на рисунке выделены квадратами, а узлы -
точками. Предлагаемую модель используют только для определения
опорных реакций без исследования деформаций валов и напряжений
в них. Поэтому удобно каждый вал разбить на 4 — 6 элементов, за-
давая одно общее поперечное сечение на конечном элементе с осред-
ненными по его длине характеристиками.
В трансмиссиях КМ чаще всего используются прямые валы в
форме тел вращения, устанавливаемые в подшипниковых опорах.
Валы бывают ступенчатые и гладкие. Более распространены сту-
пенчатые валы, близкие по форме к балкам, равнопрочным при из-
гибе. Передача крутящего момента на насаживаемые детали осу-
ществляется посредством шлицев или шпонок, из-за которых форма
вала в местах их наличия не гладкая. Зубчатые колеса насаживают
на валы трансмиссий КМ часто без натяга. В опорах устанавливают
обычно подшипники качения, иногда подшипники скольжения.
Валы трансмиссий КМ в процессе эксплуатации испытывают
сложное нагружение в виде крутящего момента, изгибающих мо-
ментов и перерезывающих сил (от зубчатого, шлицевого зацеплений
и др.), которые в общем случае имеют переменный характер. Про-
408
дольные размеры площадки приложения этих нагрузок обычно в не-
сколько раз меньше, чем длина вала, что позволяет в большинстве
случаев рассматривать нх зону действия как точку. Часто отноше-
ние наибольшего диаметра вала к его длине D/1 < 1/5. Это позво-
ляет подходить к расчету напряженно-деформированного состояния
валов с позиций теории балок.
Исходя из этого, при определении только деформаций валов и
расчетных нагрузок, т.е. вычислении опорных реакций, моделирова-
ние целесобразно проводить с помощью стержневого конечного эле-
мента, имеющего 12 степенен свободы. Это позволяет получить удо-
влетворительную точность при малом числе элементов в модели,
образуя рациональные конечно-элементные модели с наименьшим
числом степеней свободы и параметров описаний, обеспечивающие
получение приемлемой точности решения.
Разбивку валов трансмиссий на конечные элементы рекоменду-
ется проводить в соответствии с их геометрической формой: узлы
размещать в зонах резких изменений жесткостей (обычно более, чем
на 10 %), а также в местах расположения опор и приложения нагру-
зок. Моделирование опор валов осуществляют на основе граничных
условий в соответствующих узлах. Для рассматриваемого примера
(см. рис. 4.32) эти условия приведены ниже:
Номер узла...................
Перемещение по оси:
Ох.........................
Оу.........................
Oz..................... . .
Вращение вокруг оси:
Ох.......................
Оу.........................
Oz.........................
1 4 10 15 21
10 110
0 0 0 0 0
0 0 0 0 0
110 11
11111
11111
Примечание. Здесь цифра 1
степени свободы, а 0 - ее отсутствие.
означает наличие в узле данной
Узел сочленения первичного и вторичного валов моделируют
введением в него граничных условий, моделирующих шарнир. В
рассматриваемой модели подобный шарнир образован в узле 5 прн
следующих граничных условиях для стержня 5:
Ти — MKV — MKW — о,
где Ти - крутящий момент относительно оси О'и (локальной оси,
направленной вдоль стержня, рис. 4.33 ); MKV и Mww - изгибающие
моменты относительно осей O'v и O'w соответственно.
409
Рис. 4.33. Плоская (а) и пространственная (б) модели зубчатого
зацепления
Зубчатые зацепления моделируют с помощью фиктивных эле-
ментов (стержней), характеристики которых принимают близкими
к абсолютно жестким. Стержни вводят для идеализапии частей ре-
альной конструкции и выделения их определенных свойств, напри-
мер для моделирования передачи силового потока по шестерням в
зацеплениях. В косозубом зацеплении стержень 11, моделирующий
шестерню (ведущее звено), расположен параллельно плоскости yOz
и перпендикулярно к линии зацепления (см. рис. 4.33, а). Стержень
13 (см. рис. 4.32) передает усилия с ведущего звена на ведомое, обра-
зуя в пространстве угол а зацепления с учетом угла трения и угол /3
наклона зубьев, который лежит в плоскости треугольника LPN (см.
рис. 4.33, а). Стержень 12 (см. рис. 4.32) введен в модель для со-
хранения положения стержня Ц в плоскости косозубого зацепления,
параллельной плоскости yOz (рис. 4.33, б). Узел Ц (см. рис. 4.32)
лежит в точке, совпадающей с полюсом зубчатого зацепления.
Для устранения обусловленного моделированием изгибающего
момента MHw на стержне 11 относительно оси O'w в локальной си-
стеме координат O'uvw (см. рис. 4.33, б) в узле 12 (см. рис. 4.32)
задается граничное условие = 0. Следует отметить, что при
выборе локальной системы координат для каждого стержня ось О'и
направлена по оси стержня, а ось О v - параллельно плоскости хОу
глобальной системы координат.
При моделировании прямозубого зацепления угол /3 = 0, следо-
вательно, стержень 12 отсутствует. Фиктивные стержни 13 и 22
принимают работающими лишь на растяжение - сжатие, поэтому
410
для них задается только площадь поперечного сечения. Для стерж-
ней 11, 12, Ц, 21, 23, работающих на растяжение - сжатие и изгиб
одновременно, задают моменты инерции поперечного сечения отно-
сительно осей O'v и O'w, а моменты кручения относительно про-
дольной оси О 'и этих стержней принимают равными нулю. Как по-
казывают проведенные исследования, площади н моменты инерции
поперечных сечений фиктивных стержней должны быть достаточ-
но большими, например соизмеримыми с аналогичными характери-
стиками валов, чтобы не нарушать кинематической схемы системы
вследствие больших перемещений в результате деформации.
Широкое распространение конических зубчатых передач в ав-
тотракторном машиностроении требует наличия соответствующих
конечно-элементных моделей.
На рис.4.34 в качестве примера представлены стержневая мо-
дель зацепления и схема сил, действующих на коническое колесо с
криволинейным зубом в локальной и глобальной системах коорди-
нат.
Рис. 4.34. Стержневая модель зацепления и схема сил,
действующих на коническое колесо с криволинейным зу-
бом в локальной н глобальной системах координат
411
В коническом зацеплении узел 1 элемента /, лежащего парал-
лельно плоскости хОу, расположен на расстоянии Н от узла 3 и
находится на линии, параллельной оси Ov. Стержень 2 передает
усилия с ведущего звена на ведомое, образуя в пространстве углы
а, (3^ 8 (см. рис. 4.34), где а - угол зацепления с учетом угла трения,
0 - угол спирали шестерни и колеса, 8 - половина угла при вершине
начального конуса.
Узел 3 стержня находится в точке, совпадающей с полюсом
зацепления. При жестком соединении стержней 3 и 4 в точке 3 воз-
никают изгибающие моменты МКь и относительно осей O'v
и O'w соответственно, уравновешивание которых в представленной
конечно-элементной модели не составляет труда.
Для стержня 2, работающего на растяжение - сжатие, задается
только площадь поперечного сечения, а для стержней 1 и рабо-
тающих еще и на изгиб, дополнительно задаются моменты инерций
относительной осей O'v и O'w соответственно.
Координаты узлов находят геометрически по схеме модели. В
случае когда плоскость валов параллельна одной из плоскостей гло-
бальной системы координат (см. рис. 4.34), координаты узла 2 вы-
числяют по отклонениям Az и Az от полюса зацепления, которые
определяют по формулам
Az = Н/ cos /?(tg a sin 8 sin /J cos 5);
Az = H/ cos /?(tga cos 8 ± sin 3 sin 8), '
где H - смещение вершины делительного конуса (узел /) относи-
тельно полюса зацепления.
Стержень 3 расположен в плоскости xOz, и поэтому Ду = 0.
На рис. 4.34 представлено коническое колесо правого вращения
с левой спиралью (разноименные направления вращения и направле-
ния спирали). При одноименных направлении вращения и направле-
нии спирали знаки перед вторым слагаемым в скобках в формулах
(4.18) меняются на противопоположиые.
По результатам расчета на ЭВМ построены кривые погрешно-
стей моделирования передачи усилий в конической паре в зависимо-
сти от значения Н при различных радиусах шестерни г (рис. 4.35).
Это позволяет при заданной точности А и известному радиусу ше-
стерни выбирать значения Н, тем самым обеспечивая высокую точ-
ность вычислений.
412
Рис. 4.35. Кривые погрешности моделирования
передачи усилий в конической паре при различ-
ных значениях радиуса г шестерни
При решении любой краевой задачи теории упругости большую
роль играет точность задания нагрузок, в рассматриваемом слу-
чае реакций от зацепления зубчатых колес на опорные поверхно-
сти картера через наиболее распространенные упорный и радиально-
упорный подшипники.
Для расчетов картерных деталей трансмиссии МКЭ при едином
подходе, когда картер, валы и зубчатые зацепления представляют в
виде системы конечных элементов, целесообразно моделировать пе-
редачу нагрузки на картер также с помощью конечных элементов,
например стержневых.
Рассмотрим особенности моделирования передачи реакций от
зацепления на картер коробки передач через радиально-упорный
подшипник качения двумя способами: представлением конструкции
подшипника (колец и тел качения) системой конечных элементов и
воспроизведением действия непосредственно распределенной нагруз-
ки на картер совокупностью конечных элементов.
Для обеспечения удовлетворительной точности расчета первым
способом необходимо большое число конечных элементов, что свя-
зано с увеличением затрат времени на вычисления и большими по-
грешностями округления при решении систем уравнений высокого
порядка.
413
Рис. 4.36. Конечно-элементная
модель стенки картера и под-
шипника
Второй способ является более простым и удобным при расчете
конструкций картера в целом. Расчетная схема стенки картера с
отверстием под подшипник составлена из трех- и четырехугольных
двумерных элементов изопараметрического типа (рис. 4.36). С помо-
щью стержней 1-5 моделируется передача радиальной силы R, при-
ложенной в центре подшипника, по заданному закону. Чтобы стерж-
ни работали только на сжатие (подобно телам качения подшипни-
ка), стержневая система должна быть размещена в зоне сжатия - в
полукруге, отсекаемом перпендикуляром АВ к линии действия ради-
альной силы R, и для стержней должна быть задана лишь площадь
поперечного сечения F. Заданный закон распределения радиальной
силы R можно получить только в случае описания площади F попе-
речного сечения стержней тоже по определенному закону.
Закон изменения площади стержней Fj — Fo cos1/217 позволя-
ет полностью воспроизвести распределение усилий по стержням в
соответствии с известным законом распределения радиальной силы,
причем погрешность расчета этих усилий не превышает 3 % для
наиболее чувствительных к изменению передаваемой силы стерж-
ней, расположенных под большими углами к линии действия ради-
альной силы (стержни 1 и 5).
При моделировании распределения осевых сил, действующих на
гнезда подшипников, для упрощения задания исходных данных це-
лесообразно приводить эти силы к узлам, считая их распределение
414
между узлами, лежащими на контуре отверстия, равномерным. В
этом случае узловая сила
Pi = Fa/N,
где Fa - осевая сила; N - число узлов на контуре отверстия.
Для опенки возможностей звена, моделирующего подшипник ка-
чения, были проведены специальные исследования передачи через
него радиальной нагрузки. Заданное распределение радиальной си-
лы обеспечивается также при определенной закономерности измене-
ния жесткости стержней, моделирующих тела качения подшипника.
Так, при равной для всех стержней площади поперечного сечения
распределение передачи радиальной силы существенно изменяется;
соответствует заданному закону оно лишь в случае изменения пло-
щади стержней: Fj = Fq cos3/2 17. Погрешность определения распре-
деления усилий по стержням в этом случае не превышает 4 %.
Передача осевого усилия в упорном подшипнике осуществляется
при помощи системы “фиктивных” стержней и “фиктивных” плос-
ких элементов (характеристики принимают близкими к абсолютно
жестким), связывающих эти стержни. Эта схема, составляемая ис-
ходя из ожидаемой точности решения задачи, требует равномерной
разбивки контура отверстия. Число стержней в расчетной схеме
должно быть согласовано со схемой разбивки картера на конечные
элементы в зоне отверстия.
Предлагаемые модели передачи усилий для основных типов под-
шипников приведены в табл. 4.28.
Решение тестовых задач показало, что уже при числе стержней,
моделирующих передачу сил через тела качения (шарики и ролики),
более восьми, погрешность вычислений составляет менее 2 %.
Радиально-упорный подшипник, расчетная схема модели кото-
рого представлена на рис. 4.37, воспринимает как радиальную R, так
и осевую Р нагрузки. Схема составлена из треугольных двумерных
элементов 8. 9 и моделирующих передачу усилий стержней 1-7.
Стержни 3, 5, 6 располагаются под углом а1 (угол контакта под-
шипника) к оси Oz, а стержни 1, 4 и 2, 7 - вдоль составляющих Р и
R соответственно. Стержни 1, Сработают на растяжение - сжатие.
Передачу нагрузки моделируют введением граничных условий
в соответствующих узлах, которые для данного случая сведены в
табл. 4.29.
415
Таблица 4-28. Модели передачи усилий для основных типов подшипников
Радиально-
упорный
п Но cos3/2 гу
Hi —--------;—;
COS Ct'
Pi = Fa/(N sin o')
Для роликовых подшипников к = 4,08, для шариковых к = 4,37
7'
Рис. 4.37. Расчетная схема модели передачи нагрузок через
радиально-упорный подшипник
Таблица 4-29. Степени свободы в узлах расчетной модели
радиально-упорного подшипника
Номер узла на рис. 4.37 Перемещение по оси Вращение вокруг оси
Ох Оу Oz Ох Оу Oz
3 0 1 1 1 1 1
4 1 1 1 0 0 0
5 0 0 0 1 1 1
6 1 1 . 1 1 1 1
7 1 1 1 1 1 1
8 0 0 0 1 1 1
9 0 1 1 1 1 1
Прим е ч а н и е. Здесь цифра 1 свидетельствует о наличии в узле данной
степени свободы, а 0 - о ее отсуствии
418
Задание нагрузок осуществляют с помощью граничного усло-
вия вида Ти — Трасч (Трасч - расчетный крутящий момент на входе
в коробку передач). Это условие характерно для стержня, модели-
рующего участок первичного вала, несущий на себе ведомый диск
сцепления (стержень /, см. рис. 4.32). Координаты узлов, принадле-
жащих элементам, моделирующим зацепление, в общем случае на-
ходят по формулам аналитической геометрии.
В частном случае, когда плоскость валов параллельна одной из
плоскостей глобальной системы координат (см. рис. 4.33, а), коорди-
наты узла Р можно найти по отклонениям от полюса зацепления 1г.
Ах — A sin a cos /3/(1 + г);
Ay — A sin a tg /3/(1 + г);
Az — Asin2 а/(1 + г),
где А - межцентровое расстояние зубчатой лары; i = гг/тч - пере-
даточное число зубчатой пары.
Конечно-элементная модель валов и зубчатых зацеплений ко-
робки передач применима для любой вычислительной программы,
реализующей МКЭ и имеющей в библиотеке конечных элементов
стержневые элементы с 12 степенями свободы.
Число стержней в расчетной схеме картера определяется схемой
его разбивки на конечные элементы в зоне отверстия. В свою оче-
редь схему разбивки составляют, исходя из ожидаемой точности ре-
шения задачи. Последнее обстоятельство требует равномерной раз-
бивки контура отверстия при составлении расчетной схемы картера,
а следовательно, постоянного угла 7.
Проиллюстрируем особенности моделирования и точность рас-
чета радиального подшипника. Расчеты были проведены для пя-
тистержневой системы. Радиальную силу принимали равной R =
= 18511,4 Н. Свойства материала стержней: модуль упругости пер-
вого рода Е — 206 ГПа, коэффициент Пуассона у = 0,3.
При моделировании подшипника с помощью конечных элементов
очень важно правильно задать площадь Fq центрального стержня.
Следует отметить, что как недостаточная, так и чрезмерная жест-
кость стержней по сравнению с жесткостью остальных элементов
могут привести к плохой обусловленности матрицы жесткости всей
конструкции и, следовательно, к снижению точности расчета. Учи-
тывая что нижний предел измеряемых деформаций картеров зубча-
тых передач составляет обычно несколько микрометров, рекомен-
дуется задавать значение Fq таким, чтобы абсолютная деформация
419
стержня получалась бы в пределах Д/ = (1 ... 5) 10-6 м. Исходя из
этого, площадь центрального стержня была принята равной 10“3 м2.
Погрешность расчета деформаций и усилий по данной модели соста-
вила менее 1 %.
Для достижения высокой точности расчетов важное значение
имеет правильное расположение стержней при моделировании ра-
диальной нагрузки относительно направления действия радиальной
силы. При постоянном угле 7 даже малое угловое смещение Д7
центрального стержня от направления действия радиальной силы
приводит к значительному перераспределению усилий по стержням,
а следовательно, к изменению закона распределения. Отклонение
Д7 = 3° (при 7 = 30°) приводит к погрешности по передаче усилий
стержнем 4 (см. рис. 4.36), равной 4,5 %, а стержнями 3 и 5 - уже
13,7%.
Моделирование стенок корпусных деталей
Наиболее приемлемым для описания поверхности картерных де-
талей КМ является плоский тип конечных элементов. Причем це-
лесообразно использовать плоские элементы в виде тонкой пласти-
ны (мембранное и изгибное напряженно-деформированные состояния
независимы) и пластины средней толщины (учитываются эффекты
поперечного сдвига). Применение объемных элементов в данном слу-
чае нецелесообразно ввиду больших затрат времени на подготовку
и решение задачи при соизмеримой точности решения и одинако-
вом числе конечных элементов. Их рекомендуется использовать при
расчете местного утолщения.
Для сплошной стенки, нагруженной усилиями, параллельными
плоскости стенки, изменение деформированного состояния происхо-
дит по закону, близкому к линейному. При этом для моделирова-
ния требуется минимальное число элементов, определяемое потреб-
ностью воспроизведения геометрии. При наличии вырезов в стенке с
относительным размером a/А = 1/8 ... 1/10 (где а, А - характерный
размер соответственно выреза и стенки) сетка конечных элементов
должна быть более мелкой. Точность расчетов в основном зависит
от адекватности воспроизведения элементами отверстия.
Для моделирования изгиба стенки (от нагрузок, действующих
перпендикулярно к стенке) требуется большее число конечных эле-
ментов, чем для мембранного состояния. Исследования показали,
что оптимальным является моделирование при а1 /А = 0,1 ... 0,12
(ах - характерный размер конечного элемента).
420
Для обеспечения заданной точности при моделировании стенок
конечные элементы выбирают близкими к равносторонним: Ь{В =
= 0,2 ... 1 (где b и В - соответственно наименьшая и наибольшая
стороны конечного элемента), а отношения характерных размеров
смежных элементов - близкими к 1 и не меньше 1/5. При нали-
чии ребер жесткости сетка конечных элементов должна быть такой,
чтобы имелись границы, параллельные ребрам жесткости.
Моделирование ребер жесткости и приливов
Моделирование ребер жесткости и приливов можно осуще-
ствлять объемными, плоскими и стержневыми конечными элемен-
тами. Следует отметить, что моделирование плоскими элемента-
ми отличается слишком большой погрешностью результатов (до
35 ... 40 % по сравнению с экспериментальными данными).
При использовании объемных элементов можно достаточно точ-
но воспроизвести геометрию прилива или бобышки, что уменьшает
погрешность дискретизации. Однако для обеспечения высокой точ-
ности результатов, особенно в зоне отверстий, необходимо вводить
большое число объемных элементов и узлов, что требует больших
затрат на подготовку данных и решение задачи МКЭ. Кроме то-
го, точность решения задачи изгиба толстых и средних по толщи-
не пластин при моделировании их объемными элементами невысо-
кая. Например, при расчете квадратной свободно опертой по конту-
ру пластины (толшина h = 0,01 м, распределенная по поверхности
нагрузка q — 10 МПа, длина стороны а = 0,1м) при одинаковой сет-
ке для объемных элементов получены худшие результаты, чем для
плоских элементов (табл. 4.30).
Таблица j.30. Параметры расчета прямоугольной квадратной
пластины с использованием двух типов конечных
элементов (24 степени свободы)
Тип элемента Параметры расчетной схемы Относительное время счета Прогиб в центре пла- стины, мм
число элементов число узлов
Оболочечный 24 степени свободы) 64 81 1,0 710
Объемный 24 степени свободы) 64 162 2,1 23
Примечание. При точном решении прогиб в центре пластины был равен
714 мм.
421
1
Рис. 4.38. Моделирование ребер жесткости (а), бо-
бышек и приливов (б) с помощью стержневых (в),
плоских (г) и объемных конечных элементов (д)
В теории упругости при приближенном расчете пластин и обо-
лочек с оребрением моменты инерции ребер жесткости 1 чаще всего
приводят к осям симметрии поперечных сечений пластины 2 или
оболочки (рис. 4.38). Такой подход легко может быть реализован в
МКЭ путем представления ребер жесткости 1 в виде стержневых
элементов 3, лежащих на границе плоских конечных элементов и
между узлами (см. рис. 4.38, в).
Момент инерции поперечного сечения относительно оси (^'мож-
но привести к срединной плоскости Оух оболочечного конечного эле-
мента (“простой перенос”) согласно выражению
Jy = Jy + ^Ре ’
где Jy - момент инерции относительно центральной оси О'у' ребра;
Fp - площадь сечения ребра; е - расстояние от оси О'у1 до срединной
поверхности пластины.
Без приведения моментов инерции (Jy = Jy) погрешность опре-
деления отношения прогиба в точке приложения силы в пластине
с ребрами к соответствующему прогибу /о в пластине без ребер
может стать значительной (табл. 4.31, 4.32). При этом полностью
обеспечивается совместность деформаций, но решение получается
неточным ввиду того, что не учитывается эксцентриситет продоль-
ной оси стержня по отношению к линии его соединения с пласти-
ной. Большая точность достигается приведением матрицы жест-
кости стержня к срединной поверхности оболочечных элементов (по
422
Таблица 4-31. Результаты расчета изгиба пластины с ребрами от
сосредоточенной нагрузки Р= 4905 Н при а = 0,1 м,
D = 0,15 м, h = 0,067 м
Способ моделирования H/h = 1,5 H/h = 2,0 H/h = 4,b
f, мкм //Л Погреш- ность, % f, мкм //Л Погреш- ность, % f, мкм ///о Погреш- ность, %
“Простой перенос” 220,5 0,74 11,3 147,8 0,5 21,9 141,7 0,46 33,0
То же при “неполной работе ребра” “Перенос” с использова- нием теории Власова: 226,7 0,74 11,9 150,2 0,5 21,9 101,8 0,34 6,0
с учетом “неполной работы ребра” без учета “неполной 255,5 0,86 2,4 230,8 0,77 20,3 206,4 0,69 92,0
работы ребра” 253,2 0,85 1,2 222,7 0,75 17,2 193,9 0,65 81,0
Без учета эксцентри- ситета (е = 0) Экспериментальные 281,0 0,98 15,3 269,3 0,94 49,2 261,3 0,88 101,0
значения 0,84 - - 70,4 0,38 -
Примечание, /о — 298 мкм.
423
Таблица 4-32. Результаты расчета изгиба пластины с ребра-
ми с подкрепленным отверстием в центре под
действием распределенной нагрузки Q = 4905 Н
при а — 0,1 м, D — 0,15 м, h — 0,067 м
Способ H/h = 2,56 H/h = 1,85
моделирования f, f/h Погреш- f, //Л Погреш-
мкм ность, мкм ность,
% %
При d = 50 Л4КЛ fo = 799 мкм
Простой перенос То же при “неполной 370 0,463 1,1 413 0,517 0,8
работе ребра” 470,2 0,588 27,8 438,2 0,548 6,0
Перенос с использова- нием теории Власова 440,3 0,551 19,0 558 0,698 34,0
Без учета эксцентри- ситета (е = 0) Экспериментальные 487,0 0,610 33,0 682 0,854 63,0
значения - 0,46 - - 0,52 -
При d = 40 мкм /о = 339 мкм
Простой перенос То же при “неполной 151,6 0,447 1,6 166 0,49 4,7
работе ребра” 180,4 0,532 20,4 203 0,599 17,6
Перенос с использова- нием теории Власова 175 0,516 17,0 220,4 0,657 27,0
Без учета эксцентри- ситета (е = 0) Экспериментальные 189,1 0,558 27,0 268,4 0,792 55,0
значения - 0,46 - - 0,51 -
При d = 25 мкм /о = 145 мкм
Простой перенос То же при “неполной 64,3 0,443 0,7 68,3 0,471 7,0
работе ребра” 71,2 0,491 11,4 81,1 0,559 7,8
Перенос с использова- нием теории Власова 75,8 0,523 19,0 87,7 0,605 19,0
Без учета эксцентри- ситета (е — 0) Экспериментальные 75,0 0,517 18,0 106,3 0,733 43,0
значения - 0,44 - - 0,51 -
424
соотношениям, полученными с использованием теории В.З. Власо-
ва). В обоих случаях важно правильно найти расстояние е. При
этом следует учесть рекомендации по определению “активной” вы-
соты ребра (т.е. оценить “неполную работу ребра”).
Для количественной оценки погрешности при моделировании ре-
бер и бобышек обычными оболочечными и стержневыми элементами
рассматривали задачу изгиба сплошной прямоугольной пластины с
отверстием и бобышкой (см. рис. 4.28, б), для которой имеются экс-
периментальные данные. Размеры и нагрузки задавали в соответ-
ствии с реальной конструкцией и условиями нагружения картерных
деталей КМ.
Применительно к расчету деталей картера МКЭ по результа-
там исследования больших и средних (по числу узлов и элементов)
конечно-элементных схем можно сделать следующие выводы.
1. Моделирование бобышек, ребер жесткости и приливов целе-
сообразно осуществлять стержневыми конечными элементами.
2. В процессе расчета сплошных пластин с ребрами необходи-
мо учитывать эксцентриситет продольной оси стержня (ребра) по
отношению к стенке картера: при H/h < 2 (см. рис. 4.38, а,б), - кор-
рекцией матрицы жесткости с использованием теории В.З. Власова,
а при H/h > 2 - коррекцией соответствующего момента инерции.
Моделирование групповых резьбовых соединении
Различные элементы корпусных деталей КМ соединяют группо-
выми резьбовыми соединениями. Примерами соединений картерных
деталей и их элементов являются крепления стаканов с подшипни-
ковыми опорами валов, крепление картера сцепления к двигателю
и др. Нередко эти соединения испытывают сложное воздействие
со стороны деталей. От надежности работы резьбовых соединений
может зависеть надежность работы агрегатов в целом. Например,
если разные половины разъемного картера соединены нежестко, то
возможно нарушение кинематики зубчатых зацеплений, появление
чрезмерных перекосов в валах и подшипниках, нарушение герме-
тичности стыков и т.д. Это может привести к преждевременному
выходу узла из строя.
Корпусные детали, как правило, представляют собой сложные
пространственные конструкции, для моделирования которых требу-
ется большое число конечных элементов, поэтому модель резьбового
соединения должна быть простой и обеспечивать высокую точность
расчетов.
14 — 692
425
Особенностями большинства корпусных деталей КМ являются:
относительно большие размеры и высокая жесткость деталей кар-
ьера в поперечной плоскости, практическое отсутствие изгиба в со-
единяющих их болтах и смещений в плоскости стыка. С учетом
этих особенностей фланцы можно моделировать оболочечными ко-
нечными элементами, имеющими шесть степеней свободы в узле, а
резьбовые соединения -- двумя типами моделей в зависимости от на-
правления действия внешних сил (перпендикулярно или параллель-
но стыку).
В первом случае резьбовое соединение предлагается моделиро-
вать фиктивными стержнями, работающими на растяжение - сжа-
тие и имеющими жесткость, равную жесткости соединения. Во вто-
ром случае в зависимости от конструкции фланцевого соединения
можно использовать несколько типов моделей.
В наиболее распространенном случае (болты установлены с
зазором), когда внешние силы уравновешиваются силами трения,
связь соединяемых деталей считается жесткой, а стык - спаянным.
Если внешние силы воспринимаются, например, поясками фланцев,
то жесткая связь устанавливается между узлами элементов, распо-
ложенными вдоль линии контакта, а не по всей поверхности флан-
ца. Если внешние силы воспринимаются болтами, установленными
без зазора, шпонками, втулками или другими аналогичными элемен-
тами, то в соответствующий конечный элемент (фиктивный стер-
жень), вводят дополнительную жесткость, равную жесткости этих
деталей на срез.
Решение задачи МКЭ, как известно, сводится к решению урав-
нения (4.17).
Матрицу жесткости конструкции получают в результате сум-
мирования матриц жесткости отдельных ее элементов К ,. в том
числе моделирующих фланцы, резьбовые соединения, картер.
Для стержневого элемента, моделирующего резьбовое соедине-
ние (растяжение - сжатие), жесткость
Е - F*E*/l} (4.19)
где F* - приведенная площадь поперечного сечения; Е* - приведен-
ный модуль упругости первого рода; I - расстояние между узлами,
лежащими на оси резьбового соединения, и срединными поверхно-
стями фланцев стыка.
Чтобы использовать обычную для МКЭ процедуру вычисления
матрицы жесткости стержневого элемента, величины Е*, Е* и I
426
должны быть введены в программу как исходные. В данном случае
сначала необходимо определить К, а затем из зависимости (4.19)
найти F* и Е*.
Жесткость соединения, в котором раскрытие стыка отсутству-
ет, определяется жесткостями элементов крепежных и стягиваемых
деталей, а также их контактной податливостью.
Удлинение болта при действии внешнего усилия Р
Ы = К~'Р, (4.20)
ИЛИ
д' = гтгр> <4-21)
Ад т
где К - жесткость соединения; Ад - податливости стягиваемых дета-
лей (при отсутствии раскрытия стыка этот коэффициент учитывает
контактную податливость в местах контакта стягиваемых деталей
и податливость прокладки); Аб _ податливости болта,
Ag = Аб — Ар б ч- Аг с ~ Ак.
л
где Ag = ~ податливость участка болта от голов-
i=i
ки до резьбы: 1&. Е§г. Е^ - длина, модуль упругости первого ро-
да и площадь поперечного сечения г-го участка болта; п - количе-
ство участков болта; Ар.б, Аг.б - податливость резьбы на участке
непосредственного контакта и головки болта соответственно; Ак -
податливость в местах взаимодействия (контакта) головки болта и
стягиваемых деталей.
Значения Ар.б и Аг.б можно определить по зависимостям, извест-
ным из курса "Детали машин”.
Основная трудность расчета коэффициента податливости стя-
гиваемых деталей Ад состоит в определении площади фланца, по ко-
торой напряжения распределяются от усилия, приложенного к резь-
бовому соединению. Характер распределения этих напряжений и их
значения в обшем случае неизвестны.
Для обоснованного выбора более предпочтительного метода рас-
чета Ад соединений можно использовать зависимость, представлен-
ную на рис. 4.39. Однако более точной и универсальной является за-
висимость, основанная на предположении о конусах давления. При-
мем, что для рассматриваемых фланцев зоны контакта определяют-
ся основаниями конусов давления резьбового соединения (при дей-
ствии как растягивающих, так и сжимающих внешних сил).
427
Рис. 4.39. Экспериментальная зависи-
мость Ад от внешнего диаметра D стя-
гиваемых деталей (а = 20 мм; I = 50 мм;
d = 12 мм)
Контактное перемещение
\ = с(Р/К)т,
где сит- коэффициенты, зависящие от геометрии контактирую-
щих поверхностей и свойств материала; FK - площадь контакта,
В общем случае при неизвестной внешней нагрузке процедура
определения должна быть итерационной. Однако при давлении q =
= Р/> 2 ... 3 МПа зависимость приближается к линейной:
6К = XKq,
где Кк - коэффициент контактной податливости.
Тогда
Лк = КкРи
где Р3 - усилие предварительной затяжки болта.
Окончательно коэффициенты матрицы жесткости соединения
рассчитывают по выражениям (4.20) и (4.21),
Проиллюстрируем особенности и виды расчетных схем, а также
погрешности теоретических результатов на примере расчета МКЭ
картера коробки передач автомобиля ЗИЛ-131.
Коробка передач ЗИЛ-131 имеет характерное правостороннее
(по ходу автомобиля) размещение блока шестерен заднего хода, ко-
торое существенно сказывается на нагруженности картера при дви-
жении автомобиля в режиме заднего хода.
428
На обеих боковых стенках картера коробки находятся два лю-
ка: для установки вала отбора мощности и для облегчения процес-
сов сборки и ремонта. Оба люка имеют сильно развитые фланцы
для сохранения жесткости стенок и закрыты тонкими (около 3 мм)
стальными пластинками. Для повышения жесткости на поверхно-
сти картера имеются ребра и местные утолщения. Средняя толщина
различных стенок картера приведена ниже, мм:
Боковая стенка ..................... 6
Торцевая стенка..................... 13
Крышка.............................. 5
В рассматриваемой коробке передач передняя опора промежу-
точного вала имеет роликовый цилиндрический подшипник, а все
остальные - шариковые. Посредством четырех болтов картер ко-
робки консольно прикреплен передней торцевой стенкой к картеру
сцепления, который шестью болтами крепится к картеру блока дви-
гателя. На задней торцевой стенке картера коробки соосно с вторич-
ным валом установлен корпус трансмиссионного тормоза, который
является одновременно крышкой подшипника. Картер отлит из чу-
гуна марки СЧ18, крышка - из чугуна СЧ15.
В качестве расчетных нагрузок приняты реакции, возникающие
на опорах валов при нагружении трансмиссии максимальным крутя-
щим моментом двигателя, а также при максимальном динамическом
изменении этого момента. Для двигателя Тдв = 402,2 Н-м. Опыт
работы в области исследований динамической нагруженности транс-
миссий позволяет принять коэффициент динамичности для данной
КМ Кд = 2 на первой передаче.
Осевая сила, действующая иа коробку со стороны карданной пе-
редачи.
4Тк.вд
Чк.в — п ,
'-'шл T" “шл
где Тк.в - крутящий момент на карданном валу; р. - коэффициент
трения в шлицах: £)шл, 4м _ диаметр шлицев соответственно по
выступам и впадинам.
Даже в случае хорошего смазывания (/х = 0,06) шлицевого
соединения сила фк.в = 6520 Н при движении на первой переда-
че с максимальной нагрузкой (Тк.в = 2992 Н-м; £)шл = 0,06 мм;
^шл = 0,05 м). При тех же нагрузках, но недостаточном смазывании
(ц — 0,142 ... 0,15), что весьма характерно для обычных условий
эксплуатации, эта сила возрастает до QK.B == 15, 2 кН.
429
Поскольку, как правило, конструкции картеров коробки передач
и сцепления несимметричны относительно продольной вертикальной
плоскости машины и выбранные режимы нагружения не обеспечи-
вают симметрии точек приложения нагрузок, составим расчетные
конечно-элементные модели для нх конструкций в целом.
Основным элементом конечно-элементных моделей выберем
плоский четырехугольный элемент изопараметрического типа с 24
степенями свободы. На участке криволинейной поверхности для
соблюдения требований плоскостности четырехугольных элементов
наряду с ними выберем треугольный элемент того же типа. Относи-
тельный размер элементов на различных участках расчетных схем
моделей, предназначенных для точного решения, установим на осно-
ве опытных данных. Контур отверстий в стенке под подшипники
валов разобьем равномерной сеткой для правильного моделирования
нагрузок. Для задней стенки коробки выберем более мелкую сетку,
так как оиа больше ослаблена отверстиями и нагружена, чем другие.
Для зоны размещения блока шестерен заднего хода примем более
мелкую сетку по сравнению с сеткой всей задней стенки, поскольку
в этой зоне возможна концентрация напряжений в режиме заднего
хода. Ребра жесткости и фланцевые утолщения разъемов будем мо-
делировать с помощью стержневых элементов. Скачкообразное из-
менение толщин стенок картера учитываем при нанесении конечно-
элементной сетки путем совмещения границ элементов с границами
перехода толщины и задания переменной толщины элементов. Ли-
тьевые радиусы в схеме не рассматриваем в связи с неприемлемым
измельчением сетки.
Характеристика расчетных схем конечно-элементных моделей
дана в табл. 4.33.
Примеры конечио-элемеитных моделей картеров коробки пере-
дач и сцепления представлены на рис. 4.40.
Ниже приведены расчетные(числитель) и экспериментальные
(знаменатель) значения перемещений при нагружении первичного
вала коробки передач максимальным моментом двигателя в режи-
мах первой передачи и заднего хода:
Первая передача
6 • 105, м 3,9/4,2 9,8/8,1 1,4/1,8 -4,5/-6,0
Погрешность,% . . . . .... 7,7 Задний ход 27 22,2 25
610s, м -4,3/-3,8 -5,9/-4,9 1,6/1,3 7,8/6,6
Погрешность,% . . . . . . . . 13,1 20,4 23 18,2
430
Таблица J.33. Характеристика расчетных схем коиечно-
элементных моделей
Номер схемы Модели- руемый объект Тип ко- нечного элемента Число элементов, включая стержни Число узлов Число степеней свободы Ширина матрицы жесткости
средняя максима- мальная
1 Картер Оболочеч- 184 463 1120 76 157
2 коробки ный изопа- 503 1230 2940 196 401
3 передач раметри- ческий 1128 2845 6880 342 488
4 Картер Оболочеч- 175 448 1085 82 141
5 сцепле- ный не- 496 1198 3004 215 380
6 НИЯ согласо- ванный 773 400 2100 57 182
6 О
Рис. 4.40. Конечно-элементные модели
картеров коробки передач (а) и сцепле-
ния (б)
431
Перемещения точек картера коробки передач в результате упру-
гой деформации достигают наибольших значений на его задней стен-
ке при обоих режимах нагружения, причем максимальные значения
имеют место в верхних углах стенки в направлении оси Оу. Следую-
щим наиболее податливым местом является средний участок правой
боковой стенки с опорой оси блока шестерен заднего хода. Переме-
щение при изгибе стенки под действием поперечной силы (реакции
на опоре оси блока шестерен) бу = 38, 7 • 10-5 м. Правда, это ха-
рактерно только для режима заднего хода. Перемещение от изгиба
задней стенки под действием поперечной нагрузки, передающееся
через подшипник промежуточного вала, является также значитель-
ным = —8, 7 • 10”5 м) в области, расположенной между тремя
отверстиями.
Перемещения точек картера сцепления максимальны в месте
стыка сцепления с коробкой передач. Место стыка с прилегающей
к нему зоной шириной 0,03... 0,05 м является наиболее податливой
частью конструкции картера сцепления: уровень максимальных пе-
ремещений на первой передаче 8Х = 8,1 • 10”5 м, на заднем ходу
8Х = —10,5 • 10"^м. В остальной части конструкция обладает до-
статочно высокой жесткостью с перемещениями не более 2 • 10-5 м.
Указанные значения перемещений соответствуют расчету кар-
теров сцепления и коробки передач по расчетным схемам 2 и 5 (см.
табл. 4.33).
Сравнительный анализ показывает, что расчетная схема 2 (см.
табл. 4.33) дает относительную погрешность расчета перемещений
не более 25 %. Поскольку средняя погрешность вычислений по более
точным конечно-элементным моделям (схема 3) составляет ~ 20 %,
можно считать расчетную схему 2 приемлемой для анализа жест-
кости картера коробки передач. Кроме того, расчет МКЭ весьма
информативен, так как позволяет получать поля деформаций и на-
пряжений. Однако точность вычисления напряжений определяется
главным образом степенью совершенства расчетной схемы.
Расчетные зоны концентрации напряжений на поверхности кар-
тера коробки передач в основном совпадают с зонами наибольших
перемещений. Для количественной оценки уровня напряжений це-
лесообразно рассматривать результаты расчета по эквивалентным
напряженям.
При оценке напряжений в зонах их концентрации особое внима-
ние следует обратить на конечные элементы, непосредственно на-
груженные в узловых точках сосредоточенными силами или момен-
тами. В областях, близких к месту приложения сосредоточенных
нагрузок, распределение напряжений получается отличным от ре-
ального. В расчете это выражается резким увеличением напряжений
432
в элементах, к узлам которых приложены сосредоточенные силы.
Осреднение напряжений по элементу, предложенное О. Зенкевичем,
или “сгущение’’ сетки позволяет без снижения точности расчета луч-
ше представить действительное распределение напряжений.
Экспериментальные данные полностью подтвердили наличие
зон концентрации напряжений на поверхности картера коробки пере-
дач в режиме заднего хода при наибольшем уровне эквивалентных
напряжений на задней и правой боковой его стенках, несущих на себе
опоры блока шестерен заднего хода.
Напряжения, полученные при расчете по схеме 2 картера ко-
робки передач, свидетельствуют о недостаточной точности расче-
та (табл. 4.34, рис 4.41). Расчетные и экспериментальные данные
сравнивали для наиболее нагруженного состояния картера в режиме
заднего хода. Относительная погрешность расчета эквивалентных
напряжений по схеме 2 достигает 1,89, что может быть приемле-
мо лишь при качественном анализе распределения напряжений. Не-
достатки моделирования по схеме 2 связаны с достаточно грубой
разбивкой структуры на конечные элементы без учета жесткости
крышек подшипниковых опор и боковых люков.
Применение схемы 3, отличающейся более мелкой разбивкой
на элементы особенно в зонах концентрации напряжений, заметно
повысило точность расчетов (см. табл. 4.34). В расчетной схеме 3
Таблица 4-34. Значения напряжений в некоторых точках картера
коробки передач
Зона поверхности картера - номера датчиков на рис 4.41 Эквивалентное напряжение, МПа Относительная погрешность
расчетное эксперимен- тальное
26, 27 31,92 / 30,84 22,57 0,41 /0,366
32, 33 64,39 / 62,5 68,65 0,27 /0,295
34, 35 80,72 / 68,83 46,39 0,74 /0,484
36, 37 72,31 / 43,32 34,82 0,107/0,244
36, 37 35,13 / 20,67 12,13 0,189/0,70
Примечание. В числителе даны значения для схемы 2, в знаменателе -
для схемы 3.
433
Рис. 4.41. Расположение датчиков на карте-
рах сцепления (а) и коробки передач (б)
учтены все крышки подшипников, часть корпуса трансмиссионного
тормоза и более точно воспроизведена геометрия картера в зонах
концентрации напряжений.
Вместе с тем сравнительный анализ распределения напряжений
на торцевых и боковых стенках свидетельствует о том, что степень
разбивки стенок на элементы заметно влияет на точность расчета
напряжений изгиба (наибольшие напряжения возникают на боковых
стенках коробки передач). На боковых стенках следует выполнять
более мелкую сетку, соизмеримую с сеткой на торцах картеров. При-
чем желательно придерживаться более равномерной сетки по всей
стенке, сгущая ее только в ярко выраженных зонах концентрации
напряжений.
43-1
Глава 5
КОЛЕСНЫЕ МАШИНЫ ПОИСКОВЫХ КОНСТРУКЦИЙ
5.1. Колесно-гусеничные машины и машины
с переменным числом колес
В мировой практике цри создании машин высокой проходимости
идут двумя путями: 1) разрабатывают конструкции на базе выпус-
каемых серийно легковых и грузовых автомобилей, что позволяет
при сравнительно небольших затратах организовать на действую-
щих заводах производство машин со значительно улучшенными экс-
плуатационными характеристиками (главным образом повышенной
проходимости); 2) создают принципиально новые машины, макси-
мально приспособленные для работы в особо тяжелых условиях. К
числу последних относятся автопоезда со всеми ведущими колеса-
ми, шагаюшие машины, машины с частичной разгрузкой колес с
помощью воздушной подушки и др. Удельный вес машин этого ти-
па сравнительно невелик, однако многие конструктивные решения,
используемые в них, представляют большой интерес.
В этой главе будут представлены лишь те машины, в которых
используется колесо, его модификации или сочетания с другими ти-
пами движителей.
Интерес к машинам, сочетающим в себе преимущества колес-
ной и гусеничной машины, вполне закономерен. Впервые колесно-
гусеничные машины были созданы в нашей стране. Еще зимой
1909 г. на легковой автомобиль “Мерседес” вместо задних ведущих
колес были установлены барабаны с натянутыми на них резиновы-
ми лентами - гусеницами (движитель “Кегресс”). Машина на гусе-
ницах имела удовлетворительную проходимость по снегу. Позднее
лента была значительно расширена, и дополнительно укреплена ме-
таллическими грунтозацепами.
435
В 1916 г. на Путиловском заводе был изготовлен на шасси стан-
дартного грузовика “Остин” колесно-гусеничный вездеход, способ-
ный преодолевать подъем под углом 30° и развивать на местности
скорость до 40 км/ч. Были построены также несколько тяжелых
колесно-гусеничных машин на шасси американских тягачей “Аллис-
Чалмерс”. Создание машин с комбинированным движителем шло в
трех направлениях: с последовательным размещением колесного и
гусеничного движителя, с параллельным размещением колесного и
гусеничного движителя и с использованием трансформируемого дви-
жителя (превращение колесного в гусеничный и обратно).
Машины с последовательным расположением движителей (спе-
реди - колесный, сзади - гусеничный) строили на базе обычных
двух- или трехосных автомобилей. Машины с параллельным распо-
ложением движителей имели более сложную конструкцию ходовой
части и представляли собой оригинальные разработки. При всей
заманчивости первой схемы оказалось, что проходимость машины
повышается незначительно, но при этом сушественно падает ее ско-
рость на дорогах с твердым покрытием. Быстрый износ гусениц
приводил к резкому снижению общего ресурса машины.
В 20-40-е годы с колесно-гусеничным движителем (последова-
тельным) выпускали главным образом военные машины, в том чи-
сле: “Триангель” (Дания): “Бурфорд-Кегресс” (Англия): “Пежо”,
“Кегресс-Хинстин”, “Ситроен-Кегресс”, “Панар-Кегресс-Хинстин”
(Франция); ZGKW (Германия): М-9А, “Форд 1,5 т”, “Линн” (США);
ГАЗ-60, ЗИС-22. ЗИС-42 (СССР). Так, легкий колесно-гусеничный
тягач “Краусс-Маффей” грузоподъемностью 1 т и силой тяги до
27 кН способен был преодолевать подъемы до 20°. Особенностью
ходовой части являлись: гусеницы с игольчатыми шарнирами и на-
ружными резиновыми подушками; шахматное расположение опор-
ных катков; передняя ось с управляемыми, но не ведущими колеса-
ми.
Все машины этого семейства обладали более высокой проходи-
мостью по сравнению с существующими тогда КМ, но уступали гу-
сеничным машинам, особенно при движении по вязкому грунту. Для
них характерна также неудовлетворительная маневренность (пово-
рачиваемость) при наличии глубокой колеи.
Машины с параллельным расположением движителей предста-
вляли собой либо гусеничную машину с опускающимися и поднима-
ющимися колесами, либо КМ с опускающимися и поднимающимися
гусеницами. Они обладали высокой проходимостью по местности
и высокой скоростью движения на дорогах, однако достигалось это
436
за счет резкого увеличения массы движителя, снижения надежности
машины и увеличения ее стоимости. И тем не менее такие маши-
ны, как “Сен-Шамон”, “Рено”, “Шнайдер-Лоран” (Франция); “Ланд-
сверк” (Швепия); “Виккерс-Волслей”, “Виккерс-Конвертибль” (Ан-
глия): “Шкода”' (Чехословакия), выпускали серийно.
Они отличались очень большой шириной или длиной. И в том,
и в другом случае при поднятых колесах резко ухудшался обзор из
машины. На некоторых образцах переход с одного движителя на
другой осуществлялся во время движения.
К колесно-гусеничным относятся и машины, у которых переход
с гусеничного хода на колесный и обратно осуществляется путем
снятия и надевания гусениц. Этот принпип применялся на машинах
“Кристи1, (США), однако не получил большого распространения по
причине длительности и трудоемкости снятия и надевания гусениц,
а также необходимости предусматривать места для хранения гусе-
нип. И тем не менее в последующие годы к этому принципу возвра-
щались. Так, сочленный вездеход “Куад-Трак” с колесной форму-
лой 8x8 имеет сдвоенные пневматические шины, на которые могут
быть надеты 4 гусеницы. Усилие от колес на гусеницы передается
за счет сцепления между ними. Поворот машины осуществляется
вследствии изменения угла между осями передней и задней секции.
В настоящее время на финской фирме “Валмет” выпускают вез-
деход “Экотрэк” с колесной формулой 8 х 8, на сдвоенные пневма-
тические шипы которого надеты ленточные гусеницы с грунтозаце-
пами (рис. 5.1). Вездеход уверенно движется вне дорог и при этом
почти не нарушает травяного покрова.
Рис. 5.1. Движитель вездехода “Экотрек’*:
1 - ведущее колесо; 2 - резиновая гусеница
Бесшарнирные резинометаллические гусеницы большой шири-
ны с пневматическими катками имеют и вездеходы “Тюмень” (гру-
зоподъемность 36 т) и “Ямал” (грузоподъемность 70 т). Последний
является совместной советско-канадской разработкой и предназначен
437
для освоения районов Западной Сибири и Крайнего Севера. Маши-
на способна преодолевать брод до 2,5 м. При ширине гусениц 1,85 м
она создает давление на грунт не более 0,04 МПа.
‘Ямал” снабжен дизельным двигателем мощностью 514 кВт и
при обшей массе 105 т может развивать скорость до 14 км/ч. Ма-
шина достаточно маневрена, при длине 20 м ее радиус поворота не
превышает 22 м. Кабина “Ямала” просторна, рассчитана на трех
человек, имеет спальное место, система микроклимата обеспечива-
ет в ней нормальные условия даже при температуре окружающего
воздуха до —50° С.
Более целесообразна комбинация [усеничного и колесного дви-
жнгелей, когда один из них является вспомогательным, временно
используемым, упрощенного и облегченного типа. Такие схемы на-
поминают КМ с переменным числом работающих колес, однако на-
личие вспомогательною гусеничного движителя более эффективно
для движения на грунтах с малой несущей способностью.
Параметры вспомогательного гусеничного движителя можно по-
добрать так, что во многих случаях проходимость машины будет
лучше, чем гусеничной. Например, у обычных гусеничных машин
нельзя применять гусеницы с высокими и острыми грунтозацепами,
гак как они не пригодны для движения по дорогам, а у машин с
комбинированным движителем можно.
Весьма перспективно в качестве вспомогательного гусеничного
движителя использовать так называемую пневмогусеницу, облада-
ющую высокими тягово-спепными качествами, или бесшарнирную
резинометаллическую гусеницу. Последняя нашла применение на
снегоболотоходе, созданном на Уральском автомобильном заводе со-
вместно с НАМИ. Он представляет собой четырехгусеничный вез-
деход, в котором широко используются автомобильные узлы и агре-
гаты. Особенностью этой машины является наличие двух привод-
ных гусеничных тележек, шарнирно соединенных с рамой вездехода.
Опорные катки тележек снабжены пневматическими шипами, на ко-
торые надеты ленточные бесшарнирные резинометаллические гусе-
ницы большой ширины, обеспечивающие при полной массе машины
12 т среднее удельное давление на грунт 0,024 МПа. Тележки могут
поворачиваться вокруг вертикальных стоек в разные стороны, что
обеспечивает изменение направления движения машины.
Не меньший интерес, чем к колесно-гусеничным машинам, про-
являют к машинам с переменным числом колес. Так, во Франции
много лет шпускалй военные машины фирмы “Панар” с колесной
формулой 8 х 8 - 4 х 4. Особенностью этих машин является наличие
438
четырех ведущих осей, причем две средние оси, снабженные метал-
лическими колесами с крупными грунтозацепами, при движении по
дорогам с твердым покрытием поднимаются. Это позволяет машине
двигаться по шоссе со скоростью до 100 км/ч.
При движении вне дорог и при преодолении препятствий сред-
ние колеса с помощью гидропневма гических рессор опускаются и
проходимость машины резко увеличивается. По сравнению с обыч-
ной четырехосной КМ этот вариант имеет то преимущество, что
средние колеса с большими грунтозацепами оказываются более эф-
фективными. чем колеса с пневматическими шипами.
Управление машиной осуществляется поворотом только перед-
них колес при движении в режиме 4x4 или передних и задних колес
(в разные стороны) при движении в режиме 8x8. Имеются два
равноценных поста управления, расположенные в передней и задней
частях корпуса, поэтому машина с одинаковыми возможностями мо-
жет двигаться и вперед, и назад. Лишат ель - горизонтальный, 12-
цилиндровый с воздушным охлаждением, высотой 216 мм - располо-
жен в средней части корпуса. Машина имеет так называехмую бор-
товую схему трансмиссии, что позволило значительно уменьшить ее
высоту за счет освобождения центральной части корпуса для разме-
щения людей и агрегатов.
Иначе решена идея переменного числа колес в английской плава-
ющей машине “Террапин”, имеющей колесную формулу 8 х 8 - 6 х 6
(рис. 5.2.). Все 8 колес этой машины жестко (без подрессоривания)
Рис, 5,2. Плавающая машина “Террапин”
в режиме 6x6 (а) и в режиме 8x8 (б)
439
закреплены на корпусе, причем колеса передней оси располагают-
ся выше остальных и при максимальном давлении воздуха в шинах
колес второй, третьей и четвертой осей не касаются поверхности
дороги. Это сделано для облегчения поворота машины, осуществля-
емого путем изменения скорости вращения колес левого и правого
бортов.
При движении вне дорог давление воздуха в шинах колес второй,
третьей и четвертой осей уменьшается, колеса первой оси опираются
на грунт (режим 8x8), что и обеспечивает повышение проходимости
КМ.
Такое конструктивное решение ходовой части позволило умень-
шить объемы, необходимые для размещения колес движителя, т.е.
увеличить объем корпуса между колесами, и тем самым обеспечить
уменьшение длины и осадки машины при движении на воде.
5.2. Машины с разгрузкой колес
при помощи воздушной подушки
В последнее время все больше внимания уделяется проблеме дви-
жения на воздушной подушке. Интерес к ней обусловлен перспекти-
вами создания принципиального нового типа транспортных средств.
Воздушная подушка - слой сжатого воздуха под днищем транспорт-
ного средства, с помощью которого оно приподнимается на некото-
рую высоту над опорной поверхностью (земля, вода, болото). Это
обеспечивает существенное снижение сопротивления движению. Та-
кие транспортные средства не летают, а передвигаются вблизи с
опорной поверхностью. Главная особенность аппаратов на воздуш-
ной подушке - их вездеходность - обусловлена сравнительно низким
давлением, которое они оказывают на опорную поверхность.
Еще в 30-е годы сотрудником Новочеркасского политехническо-
го института В. Левковым были построены и испытаны одни из пер-
вых в мире вездеходов на воздушной подушке. За рубежом подобные
работы начались лишь в 50-е годы. К настоящему времени в мире
накоплен большой опыт создания и эксплуатапии различных типов
транспортных средств, использующих воздушную подушку. Толщи-
на воздушной подушки в них может составлять от нескольких долей
миллиметра до 50 ... 80 см.
440
Рис. 5.3. Схемы способов образования воздушной подушки
По схеме образования воздушной подушки и принципу поддер-
жания над опорной поверхностью вездеходы на воздушной подушке
делят на пять групп (рис. 5.3): с воздушной камерой под днищем
(а), с кольцевым реактивным кольцом (5), с лабиринтным уплотне-
нием воздушной подушки (е), на воздушной пленке (г) и типа крыло-
таран (<?).
Машины с воздушной камерой под днищем наиболее простые.
Камера, имеющая форму купола, ограничена ее днищем и опорной
поверхностью. При этом потери энергии на трение воздуха невели-
ки. Однако машины камерного типа эффективны только при движе-
нии на небольшой высоте. Чем шире щель между кромкой камеры и
поверхностью, гем больше воздуха надо нагнетать в подкупольное
пространство и больше должна быть мощность вентилятора. Эта
схема приемлема только для машин, движущихся на небольшой вы-
соте над спокойной поверхностью воды или над гладкой поверхно-
стью дороги.
В машинах с кольцевым реактивным кольцом воздух, нагнетае-
мый вентилятором, через щели (сопла) вытекает под днище, образуя
воздушную завесу и пополняя подушку. Подъемную силу при этом
создает как избыточное давление в подушке, так и реактивное дей-
ствие самих струй. В конструктивном отношении кольцевое сопло
может быть одно- или двухконтурным.
Разновидностью машин такого типа являются конструкции с
экраном из водяных струй (при движении над водой), твердых сте-
нок - скегов или эластичных стенок -- “юбок”. Гибкие “юбки” по-
зволяют увеличить высоту парения машины и повысить ее проходи-
мость.
441
Лабиринтное уплотнение машин следующего типа обеспечивает
повышение давления в воздушной подушке и снижение расхода воз-
духа. Однако в конструктивном отношении эта схема очень сложна
и приводит к увеличению габаритов машины.
Аппараты на воздушной пленке могут работать только над
гладкой опорной поверхностью, поэтому их возможности весьма
ограничены.
В машинах типа крыло-таран вначале создается воздушная по-
душка, а затем, при достижении определенной горизонтальной ско-
рости, имеющееся на нем крыло начинает создавать подъемную силу
по принципу работы крыла вблизи экрана.
Преимущество машин камерного и кольцевого (соплового) ти-
пов состоит в том. что при таких схемах образования воздушной
подушки имеется возможность производить отбор мощности двига-
теля для обеспечения поступательного движения машины. В других
случаях требуется установка двух автономных двигателей.
У машин камерного типа подъемную силу создает избыточное
давление воздуха в подушке под основанием корпуса. По мере нагне-
тания воздуха вентилятором давление в камере повышается пока не
станет равным GM(S, где GM - вес машины, S - плошадь подушки.
При дальнейшем повышении давления воздуха подъемная сила ста-
новится больше силы тяжести машины и поднимает ее над опорной
поверхностью на высоту h. Но так как через щель воздух истекает со
скоростью и, давление в камере падает и становится равным GM/S.
Чтобы аппарат сохранял заданную высоту подъема h, скоростной
напор воздуха q = 0,5pv (где р - плотность воздуха), истекающего
по периметру основания, должен быть равен избыточному давлению
р в камере. Таким образом, подъемная сила воздушной подушки
для машин с нагнетательной камерой равна ¥ = pS, а изменение
количества воздуха, истекающего через щель, составляет
Q — pvlhk,
где / - параметр щели; к - коэффициент сжатия струи.
Вследствие близости опорной поверхности подъемная сила уве-
личивается. Коэффициент А' влияния близости опорной поверхно-
сти определяют из выражения
А1 Y/Q - S/^lkh).
При сопловой схеме образования воздушной подушки статиче-
ская подъемная сила определяется двумя составляющими: силой ста-
тического давления воздуха на днище аппарата и реактивной силой
442
сгруй завесы. Для простейшего случая, когда применена однокон-
турная завеса и струя завесы тонкая (/ < h). подъемная сила
}’ = pv2t [б’ (1 + cos Q)/h + /sin О
где 0 - угол наклона струи воздуха к горизонтальной плоскости.
Под коэффициентом А' в этом случае понимается отношение
полной подъемной силы, развиваемой соплом вблизи опорной поверх-
ности. к хлору эквивалентного сопла без учета влияния опорной по-
верхности-
= Yjpv2tl = sin 0 + (1 + cos О) S/(Jh). (5.1)
Из приведенных зависимостей видно, что влияние опорной по-
верхности на аэродинамические характеристики машины определя-
ется отношением высоты подъема к линейному размеру (например,
длине машины
Коэффициент влияния близости опорной поверхности растет с
уменьшением высоты подъема до определенного предела, а не стре-
мится к бесконечности, как это следует из формулы (5.1). Физически
это объясняется снижением эффективности работы вентилятора при
достижении некоторого значения давления р воздуха под днищем.
Высоту подъема h обычно выбирают с таким расчетом, чтобы
машина могла преодолевать неровности опорной поверхности или
волнение на воде. При данной высоте h благоприятное влияние опор-
ной поверхности на подъемную силу обеспечивается при больших
значениях отношения S//, что достигается при круглой форме осно-
вания корп} са.
На подъемную силу аппарата соплового типа влияет также угол
наклона 0 кольцевых струй завесы относительно горизонтальной
плоскости. Эксперименты подтвердили преимущество сходящихся
струй. Так. для машин с h/D = 0,1 (где D - диаметр основания)
об увеличении подъемной силы, обусловленном эффектом близости
опорной поверхности, можно судить по следующим данным: при
0 = 45° А1 = 5,9, а при 0 = 90° (вертикальная струя) А1 = 3,8.
Общая мощность энергетической установки может быть пред-
ставлена в виде суммы
jV = Nu + Л^д,
где .Vn - мощность, затрачиваемая на создание воздушной подушки
(мощность подъема); Na - мощность, затрачиваемая на обеспечение
поступательного движения (мощность движения).
443
Для приблизительной оценки этих мощностей воспользуемся
следующими зависимостями. Мощность подъема
N„ = (1/7/)Л>п.„„р, (5.2)
где Лп.теор - теоретическая мощность, не учитывающая влияние
опорной поверхности и потерь на трение; т/ = 7/в7/в.т7/мех - общий
КПД системы; т/в - КПД вентиляционной установки; т/в.т - КПД,
учитывающий потери в воздушных трактах; т/мех - КПД, учитыва-
ющий механические потери в установке. В свою очередь
Формула (5.3) справедлива для любого аппарата независимо от спо-
соба создания воздушной подушки.
Действительная мощность подъема машины камерного типа
.Ч, = 2,83аА1^У^=1лЧ (5.4)
S/l т} 2^ V S 7? и '
h
где а - коэффициент расхода воздуха; - параметр высоты подъ-
, h
ема; А1 = 2,
Мощность подъема можно существенно уменьшить, снизив ко-
эффициент а путем рационального проектирования боковых стенок
аппарата, отработки формы щелей и применения различных уплот-
нений.
Для корпусов, имеющих в плане прямоугольную форму, мощ-
ность подъема (в кВт)
Л'п = 0, 25-(5.5)
V V A S
где А = L/B - отношение длины корпуса к ширине.
В частном случае при А — 2,5, а = 0, б, г] = 0, 7 получаем
М, - 0,47ЛРч/ёГ. (5.6)
444
По известной мощности Nn и принятому давлению воздушной
подушки определяют производительность вентилятора (расход воз-
духа):
Q = 102—т/. (5.7)
Р
Для корпусов прямоугольной формы с соотношением сторон А =
= 2.5 и одноконтурным сопловым устройством мощность подъема
:V„ = 0:33/1р/б'м. (5.8)
Расчет энергетических характеристик машин камерного и соп-
лового типов на основе зависимостей (5.3) и (5.8) показывает, что
при неизменной массе, одной и той же высоте подьема и различ-
ных давлениях воздуха мощность подьема с увеличением габарит-
ных размеров корпуса уменьшается. Кроме того, мощность подьема
при заданных массе, высоте подъема и площади днища уменьшается
с уменьшением его периметра. Поэтому оптимальным с этой точки
зрения является днище круглой или близкой к ней формы в плане.
Анализ приведенных зависимостей показывает также, что за-
траты энергии на создание воздушной подушки у аппаратов с ре-
активным кольцевым соплом меньше, чем у аппаратов камерного
типа. Выигрыш в мощности подъема у машин, имеющих одну и
ту же массу, при одинаковых высоте подъема и давлении воздуха
составляет около 30 ... 40 %.
Что же касается мощности Д^д, затрачиваемой на обеспечение
поступательного движения машины, то для вездеходов, использую-
щих для поступательного движения колесный движитель, ее опре-
деляют обычным образом.
Опыт эксплуатации машин на воздушной подушке показывает,
что корпус должен быть максимально удален от опорной поверхно-
сти. Поэтому для уменьшения расхода воздуха используют эластич-
ные "юбки". Они позволяют значительно повысить проходимость
машины по пересеченной местности. Ниже приведена сравнитель-
ная характеристика машин на воздушной подушке без “юбки” (чи-
слитель) и с эластичной “юбкой” высотой 0,9 м (знаменатель):
Общая мощность, % ................................... 100/45
Мощность, затрачиваемая на подъем, %.............. 70/10
Мощность, затрачиваемая на поступательное
движение, % .................................... 30/35
445
Зазор между нижней кромкой сопла ( или “юбкой”)
и опорной поверхностью, м......................... 0,46/0,10
Относительная полезная нагрузка, % ............... 10,4/28,6
Эксплуатационные расходы на одного
человека на 1 км, %............................... 100/24
Примечание. Они имеют одинаковые массы, скорость и запас
хода. г
Видно, что использование эластичной “юбки” уменьшает мощ-
ность подъема, увеличивает полезную нагрузку и сокращает эксплу-
атационные расходы.
В настоящее время освоено производство эластичных “юбок” из
прорезиненной ткани высотой более 1 м. Испытания, например, вез-
дехода на воздушной подушке модели SR-N1Mk5 (Англия) показали,
что при наличии “юбки’’ высотой 1,2 м он может преодолевать такие
препятствия, как кирпичная стена высотой 1 м или волны высотой
1,8 м (при этом чистый зазор между нижней кромкой “юбки” и по-
верхностью воды составляет лишь 230 мм).
Все чаше применяют надувные эластичные “юбки”, обладаю-
щие малой массой, высокой прочностью, способностью к большим
деформациям, малой изнашиваемостью. Считают, что со временем
все аппараты на воздушной подушке будут иметь эластичную “юб-
ку’’ .
При эксплуатации аппаратов на воздушной подушке возника-
ют некоторые трудности, связанные с образованием брызг, летящих
комьев грунта, пыли и травы. Эго зависит главным образом от
давления воздуха на выходе из подушки (начиная с 0,7 МПа). При-
меняемые в ряде случаев огражагали не дают большого эффекта,
особенно при малых скоростях движения.
В качестве нагнетателей для машин на воздушной подушке ис-
пользуют компрессоры, воздуходувки и вентиляторы (осевые и цен-
тробежные). Эти нагнетатели должны иметь малую массу и га-
баритные размеры, высокий КПД, работать в широком диапазоне
нагрузок, иметь высокую надежность и т.д. Указанным требовани-
ям отвечают осевые вентиляторы, которые и получили наибольшее
распространение.
Тип вентилятора и его характеристики определяются параме-
трами воздушной подушки (давлением и расходом воздуха). Давле-
ние воздуха, в свою очередь, связано с массой машины и ее габарит-
ными размерами.
446
Расход воздуха, необходимый для образования и удержания воз-
душной подушки под днищем, зависит от схемы образования воз-
душной подушки, высоты подъема корпуса, давления в подушке и
параметра истечения воздуха.
Для аппаратов камерного типа расход воздуха может быть опре-
делен следующим образом:
Q =
Расчеты показывают, что для подъема машины даже на неболь-
шую высоту необходим сравнительно большой расход воздуха (осо-
бенно для аппаратов с нагнетательной камерой). Поэтому прихо-
дится применять вентиляторы высокой производительности, кото-
рые отличаются большим диаметром, что затрудняет их размеще-
ние на машинах. Стремление к уменьшению размеров вентиляторов
приводит, в свою очередь, к увеличению частоты их вращения и
возрастанию уровня шума. Вентиляторы малого диаметра устана-
вливают по периметру машины на воздушной подушке, освобождая
место в ее центральной части для людей и грузов.
Снизить расход воздуха можно, уменьшая потери в системе
образования воздушной подушки путем применения рациональных
воздухозаборников и воздушных трактов. Воздухопроводы должны
быть короткими, гладкими, без поворотов.
Система нагнетания воздуха с большим числом вентиляторов
применена на экспериментальном американском вездеходе
FMC/ACV-1 (рис. 5.4). Воздух под днище на нем нагнетают 14
вентиляторов, расположенных по бортам и приводимых в движение
двумя двигателями мощностью по 228 кВт каждый, Область по-
вышенного давления под аппаратом ограждена эластичной “юбкой’''
высотой 0,9 м. изготовленной из полимерного материала.
Рис. 5.4. Аппарат FMC/ACV-1 на воздушной
подушке
447
В Англии на базе серийной машины “Лэнд-Ровер” с колесной
формулой 4x4 выпущен вездеход, снабженный устройством для со-
здания воздушной подушки, уменьшающей давление колес на грунт.
Дополнительный двигатель, установленный на машине, вращает
центробежные вентиляторы, установленные по бокам и нагнетаю-
щие воздух под кузов, снабженный по периметру гибким огражде-
нием. Под кузовом создается давление до 24 МПа.
Колеса используются для создания тяги и изменения направле-
ния движения вездехода, что выгодно отличает его от обычных ап-
паратов на воздушной подушке.
Во Франции построен более тяжелый вездеход ВС.б, полная мас-
са которого 2,63 т, а грузоподьемность 1,2 т. Особенность его кон-
струкции состоит в том, что под днищем расположено восемь камер с
гибким ограждением. Воздух в каждую камеру нагнетается отдель-
ным вентилятором. Переднее управляемое и заднее ведущее колеса
расположены вдоль продольной оси машины. Колесо и вентиляторы
приводятся в движение от разных двигателей воздушного охлажде-
ния мощностью 47 и 66 кВт. На дорогах машина развивает скорость
до 70 км/ч.
Вездеход ВС.7 имеет четыре колеса. Передние и задние колеса
у него являются управляемыми, а два задних - ведущими. Колеса
можно поднимать и тем самым изменять нагрузку на них от 0 до
0,8 т при полной массе вездехода 4 т. В отличие от обычных аппа-
ратов на воздушной подушке использование частично разгруженных
колес решает проблему управления и стабилизации при движении
против ветра и на подъемах.
Необычный аппарат на воздушной подушке построен и на Горь-
ковском автомобильном заводе на базе автомобиля “Чайка”. При
необходимости колеса убираются в крылья, двигатель переключает-
ся на привод двух вентиляторов, и машина свободно скользит над
водной поверхностью или мягким грунтом на высоте 25 см со скоро-
стью 30 км/ч.
По мнению зарубежных специалистов сочетание принципа воз-
душной подушки с колесным или гусеничным движителем позволит
создать бронированную боевую машину, обладающую необычайно
высокой проходимостью и маневренностью. На ней могут быть уста-
новлены самые различные виды вооружения; при полном отрыве от
грунта колесного или гусеничного движителя такие машины смогут
свободно преодолевать минные поля (давление, на грунт не превы-
шает 0,002 МПа).
448
5.3. Колесно-шагающие машины
Необходимость создания движителя транспортного средства для
движения в сложных условиях на Земле и других планетах привела
к мысли о движителе, сочетающем положительные качества коле-
са и шагающего механизма. Мысль о сочетании в одном движите-
ле качения и шагания не нова. Попытки решить подобную задачу
предпринимались неоднократно и привели к созданию ряда машин
с колесно-шагающим движителем.
Так, фирмой “Вагнер” (США) был создан опытный образец вез-
дехода ’То-Девиль” с колесной формулой 4x4, отличающийся тем,
что все продольные рычаги подвески, на которых установлены коле-
са. могли поворачиваться в продольном направлении относительно
корпуса машины на 360°. Он имел раздельный привод к колесам
и рычагам. При использовании привода к колесам осуществлялся
обычный колесный принцип движения, а при вращении рычагов под-
вески происходило шагание. Машина была выполнена сочлененной,
что и обеспечивало ее поворот с радиусом 5,5 м. Недостатком вез-
дехода "Го-Девиль” явилось неравномерное и медленное движение в
режиме шагания. При повороте всех рычагов вверх машина могла
быть опущена днищем на грунт, а при повороте рычагов одного бор-
та вверх, а другого вниз - способна двигаться по косогору с углом
наклона до 40°. На плаву колеса поднимались вверх, выступали из
воды и служили дополнительным движителем.
При вращении рычагов возможность движителя резко возраста-
ла. Если грунт обладал достаточной несущей способностью, корпус
машины при этом поднимался и опускался.
Схема взаимодействия движителя с грунтом приведена на
''’равнения равенства проекций сил на оси Ох и Oz, а также
у равнения моментов относительно точки О имеют вид
Я1 + Я2 = mMj cos а;
R1 + /?2 = GM + mMj sin а;
R?L = Gua 4- mMj (hg cos a 4- a sin a),
где - касательная сила, действующая между колесом и грунтом;
j - линейное ускорение.
Заменим а = Z/2 4- / sin а и найдем выражение для силы R2"
Л L • , • 2 '
4- тпы] I hg cos а 4- — sin а 4-1 sin а
449
Рис. 5.5. Схема взаимодействия колесно-
шагающего движителя с грунтом
При а = 90°
^2 — ^max — {Gm 4" 5 -}- —J
Hi ~ Rmin — (GM -|- triMj) (o, 5 — ;
^max _ 05 0-^ 4" I
^min 0, 5L — Г
Максимальная вертикальная нагрузка действует на колеса, сме-
щенные к середине корпуса при горизонтальном положении рычагов-
балансиров. Увеличение их длины приводит к перераспределению
нагрузки по колесам; в предельном случае, когда I = L/2, Лтах =
— GM, Rm'm — 0- Условие возможности движения: h < hK (где h -
глубина погружения колеса в грунт с малой несущей способностью;
hK - дорожный просвет).
Затрачиваемая на передвижение вездехода работа А — GMl(l —
— cos оо), где оо - начальный угол наклона рычагов-балансиров, а
путь перемещения корпуса за один их оборот 5 = 2/ sin Oq-
Таким образом, рассмотренный способ передвижения очень не-
экономичен, но он дает возможность двигаться на грунтах с низ-
кой несущей способностью. Движение при этом будет прерывистым,
450
если работают все рычаги-балансиры одновременно (колеса не вра-
щаются вокруг своих осей). Возможны и промежуточные варианты
движения.
К колесно-шагающим можно отнести и вездеход “Террастар”
(США) с движителем типа “Пади-вагон”, состоящим из четырех
трехкатковых колес. Он имеет раздельный привод колес и катков.
При заторможенных колесах вездеход перемещается благодаря вра-
щению катков и ничем не отличается от обычной КМ (4x4 или
8 х 8). а при заторможенных катках и вращающихся колесах маши-
на перемещается в режиме шагания.
Как и у вездехода “Го-Девиль”, при работе в режиме шагания
корпус машины приподнимается, но в меньшей степени. При ис-
пользовании п катков на одном колесе обеспечивается непрерывное
движение почти без поднятия корпуса при ао = ir/n.
Таким образом, при увеличении числа катков уменьшаются угол
о. и соответственно вертикальное перемещение корпуса, а также
энергия, затрачиваемая на это перемещение. В предельном случае
многокатковое колесо превращается в обычное.
Испытания показали, что вездеход “Террастар” при высокой
проходимости имеет лучшую плавность хода, большую скорость ша-
гания и меньшне затраты энергии, чем вездеход “Го-Девиль”. Од-
нако движитель его более сложный и громоздкий.
Общим недостатком КМ с колесно-шагаюшим движителем яв-
ляется трудность обеспечения поворота. Одним из возможных вари-
антов является поворот за счет изменения скорости вращения колес-
катков одного борта относительно другого, что и осуществлено на
вездеходе “Террастар”.
В Институте автомобильной промышленности в Праге создано
транспортное средство “Ротопед”, использующее принцип отталкн-
ваюшихся колес. Вместо обычной шины на ободе колеса находятся
несколько камер, в которые поочередно поступает из распредели-
теля сжатый воздух. Распределитель расположен так, что он по-
дает больше воздуха в камеры, находящиеся немного сзади опоры
(рис. 5.6). При этом возникает врашаюший колесо момент
Г = Ra,
где R - результирующее усилие, равное сумме реакций T?i,...,/?4
под опирающимися на грунт камерами; а - смещение результирую-
щего усилия.
Горизонтальное тяговое усилие Н = Riga, причем tga = a/h.
451
Рис. 5.6. Схема взаимодействия камер
Ki, Ki движителя с опорной поверх-
ностью
Отдельные камеры работают подобно человеческой ноге, опира-
ющейся на землю за вертикалью, проходящей через центр тяжести
тела. Разница, однако, состоит в том, что опоры перемещаются не
поступательным движением, а вращением по окружности. Поэтому
отпадает необходимость в уравновешивании сил от ускорения дви-
жущихся масс.
С ростом смещения результирующей силы крутящий момент на
колесе не растет. Смещение зависит от отношения радиуса обода
г об к радиусу колеса гк, которое должно быть максимальным.
Для плавного перемещения колеса число камер должно быть
также максимальным. Двухрядное расположение камер позволяет
увеличить их число.
Одним из условий эффективной работы привода является до-
статочно быстрое наполнение и опорожнение камер с минимальны-
ми потерями давления в трубопроводах, которые должны быть как
можно большего диаметра.
Каждое из колес “Ротопеда” с элементами подрессоривания мо-
жет повоорачиваться вокруг вертикальной оси на 180°. Это обес-
печивает ему высокую маневренность. Вездеход снабжен двигате-
лем воздушного охлаждения мощностью 20 кВт, являющимся при-
452
Рис. 5.7. Принципиальная схема пневма-
тической системы вездехода “Ротопед”:
1 - нагнетатель; 2 - колесо с камерами;
3 - вспомогательный компрессор
водом нагнетателя типа Руте. Рабочее давление воздуха в систе-
ме 0,05... 0,06 МПа, давление в камерах 0,02 МПа, диаметр колес
500 мм, диаметр камер 160 мм, колея 1000 мм, дорожный просвет
350 мм, полная масса вездехода 420 кг, максимальная скорость дви-
жения 20 км/ч.
Пневматическая система (рис 5.7) работает по замкнутому ци-
клу. Воздух, выходящий из камер, возвращается в нагнетатель.
Вспомогательный поршневой компрессор служит для начального на-
полнения системы воздухом и для компенсации потерь, вызванных
его утечкой.
Исследования показывают, .что более выгодной является систе-
ма. включающая газовую турбину и центробежный нагнетатель воз-
духа. Еще более благоприятные эксплуатационные показатели мо-
453
гут быть получены с помошью системы с теплообменником и замкну-
тым циклом. Последний дает возможность эксплуатации вездехода
в условиях отсутствия атмосферы.
Опытный вездеход “Ротопед” благодаря большой деформации
камер оказывает низкое удельное давление на грунт, что в сочетании
с развитыми грунтозацепами (камерами) обеспечивает ему высокую
проходимость вне дорог. Однажо была установлена ограниченная
возможность вездехода по преодолению подъемов на пересеченной
местности и невозможность движения по дорогам с большими ско-
ростями.
В одном из макетных образдов вездехода с колесно-шагающим
движителем (США) имеются две шарнирно сочлененные секции, со-
единяемые механизмом с двумя степенями свободы. Каждое из че-
тырех колес снабжено гидрообъемным приводом и механизмом ша-
гания (система шарнирных рычагов подвески и гидроцилиндров).
Движение в режиме шагания осуществляется за счет поочередного
переноса колес вперед относительно корпуса, а затем переноса кор-
пуса относительно неподвижных колес.
Известен колесно-шагающий движитель, в котором колеса с ин-
дивидуальным приводом укреплены на раме на качаюшихся рыча-
гах, снабженных гидроцилиндрами (один выполняет роль упругого
элемента подвески, другой создает продольное перемещение колеса).
Перемещение в шагающем режиме осуществляется следующим обра-
зом: в первый период колеса одного борта передвигаются в ведущем
режиме на длину шага, затем они блокируются, а корпус машины
при помощи гидроцилиндров перемещается вперед на эту же дли-
ну. Колеса обоих бортов передвигаются попеременно: если колеса
одного борта движутся в ведущем режиме, то колеса другого борта
в это время блокированы и, упираясь в грунт, создают упоры для
перемещения корпуса машины вперед. При застопоренных гидро-
цилиндрах перемещения корпуса и включенных приводах вращения
колес машина движется как обычная колесная.
В общем случае колесно-шагающий движитель можно предста-
вить как обычный шагающий, у которого опоры механизмов шага-
ния выполнены в виде колес, связанных с приводами вращения. В
процессе передвижения в шагающем режиме механизмы шагания с
помошью привода шагания обеспечивают возвратно-поступательное
перемещение осей колес, при котором они то перемешаются относи-
тельно корпуса машины против движения, то выносятся вперед по
определенной траектории, причем в зависимости от характера пере-
носа можно получить различные виды колесного шагаиия. Перенос
454
колес может осуществляться с разгрузкой переносимого колеса от
массы машины и без разгрузки.
Второй способ несколько лучше первого, так как при этом ре-
шается часть проблем, а именно:
требуется прямолинейное или почти прямолинейное перемеще-
ние осей колес, а такой характер траектории позволяет применять
простейшие по кинематике механизмы;
колесо может достаточно хорошо исполнять роль адаптируемого
элемента;
при переносе колеса форма и приложение многоугольника опор
меняются незначительно, что позволяет обеспечить устойчивое ша-
гание малоопорных машин (начиная с трехопорных);
переход на колесный режим может происходить в любых поло-
жениях механизма шагания.
Таким образом, наибольший интерес представляет колесно-ша-
гающий движитель, у которого колеса в режиме шагания перемеща-
ются по опорной поверхности безотрывно.
В колесно-шагающем движителе, как и в шагающем, наличие
определенного количества колесно-шагающих механизмов позволя-
ет использовать различные способы шагания или “походки”, выбор
которых зависит в общем случае от характера поверхности или це-
ли передвижения. Эти “походки” различаются последовательностью
перемещения колес по поверхности и их взаимным положением во
времени и пространстве. В зависимости от характера перемещения
корпуса следует различать два принципиально разных по методам
реализации способа передвижения: непрерывное перемещение кор-
пуса транспортного средства (непрерывная “походка”) и прерывное
перемещение (прерывная “походка”).
На рис. 5.8 изображена схема передвижения транспортного сред-
ства в режиме непрерывной “походки”, при которой колеса соверша-
ют возвратно-поступательное перемещение относительно корпуса,
оказываясь то на этапе переноса, то на этапе отталкивания, при-
чем чередование этапов происходит непрерывно, что обеспечивает
непрерывное передвижение корпуса транспортного средства.
Что касается последовательности перемещения колес движите-
ля, то, как и для шагающего движителя, можно отметить два край-
них состояния. Если все колеса движителя перемещаются так, что
фиксируют одноименные положения на своих траекториях через оди-
наковые интервалы времени, то это будет равномерная непрерыв-
ная “походка”. Если все колеса движителя разделены на группы,
455
Рис. 5.8. Схема передвижения в ре-
жиме непрерывной “походки":
а - исходное положение; б - перенос пер-
вого колеса; в - перенос второго колеса;
г - перенос третьего колеса; я - шаг
перемещающиеся в противофазе, то это будет фазная “походка”. Все
остальные возможные последовательности перемещений колес мож-
но представить как комбинации вышеуказанных.
Применительно к равномерным “походкам” независимо от спо-
соба переноса колес основные параметры шагания в колесно-шага-
ющем режиме имеют тот же физический смысл и определяются по
тем же зависимостям, что и для чисто шагающего движителя с уче-
том того, что отсутствует отрыв опор механизмов шагания от опор-
ной поверхности во всех фазах перемещения.
В чисто шагающем движителе передвижение осуществляется
при наличии лишь одного вида перемещения - шагания, а в колесно-
шагающем существует еще и вращение колес. Наличие этих двух
видов перемещения накладывает некоторые дополнительные огра-
ничения на параметры движителя для эффективного передвижения.
Так, при осуществлении непрерывного колесно-шагающего пе-
редвижения колеса будут перекатываться по опорной поверхности с
456
различными угловыми скоростями в соответствии с этапами переме-
щения. Очевидно, что для реализации эффективного передвижения
в качестве первого условия необходимо, чтобы колеса перемещались
по опорной поверхности без юза и буксования.
Если скорость шагания определяется из выражения
(5.9)
где и I - угловая скорость и длина условного звена механизма
шагания, то скорость передвижения можно записать так:
+ Чпг^
Если это условие соблюдается для всех колес, находящихся на
разных этапах перемещения, то скорость корпуса на этапе отталки-
вания будет
икорп — voi + (1 — <$ю) + шкгг-, (5.10)
где voj - скорость шагания на этапе отталкивания; - со-
ответственно угловые скорости условного звена колеса и механизма
шагания на этапе отталкивания,- - коэффициент юза.
Скорость корпуса на этапе переноса:
иКорп = — vni == MKir ~ (5’11)
Таким образом, так как скорость шагания за цикл меняется как
по абсолютной величине, так и по знаку, то для обеспечения усло-
вий (5.10) и (5.11) необходимо, чтобы угловая скорость колеса соот-
ветственно изменялась от значения на этапе отталкивания оА, до
значения на этапе переноса иЛ. Обеспечение этих условий является
основной задачей при проектировании колесно-шагающих движите-
лей с кинематикой непрерывного движения.
Эффективное передвижение в конкретных условиях определяет-
ся соответствующим выбором значений параметров шагания и дви-
жителя. Так, в некоторых случаях наиболее рациональным оказыва-
ется использование режима колесно - шагающего движения с макси-
мальной производительностью шагания, которая достигается тогда,
когда в любой момент времени переносится только одно колесо, т.е.
zo = п0 — 1. Тогда коэффициент производительности шагания
7 = *о/[(га°(1 - *п) - *о],
И_®2
457
где zo - число опор, контактирующих с поверхностью; по ~ общее
число механизмов шагания; kn - коэффициент перекрытия, харак-
теризующий нормальные условия перехода с одного многоугольника
опор на другой.
При kn = 0 имеем
“Утах ~ по 1 •
Таким образом, скорость шагания на этапе переноса в (no - 1)
раз больше, чем на этапе отталкивания. В большинстве случаев, и
особенно для многоопорных транспортных средств, это условие явля-
ется серьезным ограничением при синтезе оптимальных механизмов
шагания н привода.
Эти ограничения отсутствуют при использовании способа пе-
редвижения в режиме прерывной “походки”. На рис. 5.9 представле-
на схема передвижения транспортного средства в режиме прерывной
Рис. 5.9. Схема передвижения в режиме прерывной
“походки”:
а - исходное положение; б - перенос первого колеса; в - пе-
ренос второго колеса; г - перенос третьего колеса; <? - оттал-
кивание всех колес, или перенос корпуса; s ~ шаг
458
“походки”. В этом случае сначала все колеса движителя в опреде-
ленной последовательности перемешаются вперед по опорной поверх-
ности на длину шага (этап переноса колеса), а затем относительно
неподвижных колес перемешается с помощью механизмов шагания
корпус машины на это же расстояние (этап отталкивания колес, или
переноса корпуса). Далее цикл передвижения повторяется. При этом
корпус машины перемешается прерывно на длину шага за каждый
цикл передвижения.
Для прерывного способа передвижения, как и для непрерывного,
особое значение имеют две последовательности перемещения колес.
Так, если перенос колес осуществляется последовательно по одному
колесу, то это равномерная прерывная “походка”. Если все коле-
са движителя разделены на две равные группы, перемещающиеся
попеременно, то это фазная прерывная “походка”.
Кинематические параметры для прерывных “походок” опреде-
ляются, как и для непрерывных “походок”, согласно выражениям
(5.9) — (5.11). Тогда, в соответствии с уравнениями (5.11) и (5.10)
для этапа переноса, учитывая, что vKOpn = 0, имеем:
^=“ш? = ^(1-55), (5.12)
а для этапа отталкивания при = О
икорп — voi ~ — (5.13)
Здесь 5б _ коэффициент буксования.
Среднюю скорость передвижения машины в режиме прерывной
•‘походки” можно определить по формуле
/ in io \
^корп “ I vndt + j vodt I ,
\ 0 о /
где tu - время одного цикла перемещения; tn - время этапа переноса;
t0 - время этапа отталкивания.
Обеспечение кинематики движения в соответствии с выражени-
ями (5.12) и (5.13) является основной задачей при синтезе механизмов
колесно-шагающего движителя. Этому вопросу посвящены работы
А.Л. Кемурджиана с соавторами.
Рассмотрим некоторые конструктивные особенности колесно-
шагающих машин, связанные главным образом с возможностью их
15*
459
использования как транспортных средств в условиях других планет.
Это прежде всего касается колесного движителя.
Как известно, колеса с резинокордными пневматическими шина-
ми по ряду причин не удовлетворяют требованиям, предъявляемым
к движителям планетоходов. Поэтому их развитие идет в основном
по пути создания различных металлических конструкций.
Например, колесо “Лунохода” представляет собой достаточно
жесткую конструкцию. Его обод образован тремя титановыми об-
ручами, соединенными между собой с помощью грунтозацепов, из-
готовленных также из титанового сплава. Крайние обручи имеют
несколько меньший диаметр, чем средний. Таким образом, на твер-
дой поверхности обод колеса имеет практически точечный контакт.
Однако на мягких грунтах в формировании колеи участвуют и пе-
риферийные части обода благодаря деформации грунта под средним
обручем. Каждый обод соединен стальными спицами со ступицей,
выполненной из алюминиевого сплава. Наружная поверхность об-
ручей обшита стальной сеткой. Диаметр колеса по грунтозацепам
составляет 0,51 м, ширина 0,2 м.
Такая конструкция колеса соответствует требованиям, предъ-
являемым к движителю для случаев прямолинейного движения и
бортового поворота, когда колеса проскальзывают в направлении
своей оси (в поперечном направлении). Благодаря отсутствию дис-
ка, соединяющего обод и ступицу колеса, обеспечивается свободное
перемещение грунта по внутренней поверхности обручей и сетки. Не
создают больших сопротивлений сдвигу грунта в поперечном напра-
влении и тонкие грунтозацепы, закрепленные на обручах под неболь-
шим (< 20°) углом к средней плоскости колеса. Наличие свободного
пространства во внутренней полости колеса способствует быстрому
очищению его от грунта даже при буксовании, когда глубина колеи
увеличивается.
При минимальной массе и ажурности конструкции колесо вы-
держивает удар в случае наезда на препятствие, при котором ра-
диальное усилие достигает 4000 Н. Однако при большой скорости
движения энергоемкость колес с жестким ободом оказывается недо-
статочной для поглощения энергии удара. Возможными вариантами
решения задачи поглощения энерии удара является применение ме-
ханизмов внутреннего подрессоривания жесткого обода либо упругой
шины, выполненной, например, из стальной сетки.
Так, шина колеса вездехода LRV изготовлена из проволоки диа-
метром 0,84 мм и в свободном состоянии имеет диаметр около 0,8 м.
При статической нагрузке на колесо до 28 Н она прогибается на
460
75 мм, а при динамическом нагружении она может прогнуться до
внутреннего кольцевого упора, связанного с диском колеса ленточ-
ными пружинами из титана. Кольцевые пружины установлены в
радиальном направлении поперек продольной плоскости колеса. На
боковой поверхности шины расположены титановые грунтозацепы,
шарнирно связанные между собой. Они установлены елочкой и за-
нимают более 50 % поверхности (обеспечивают защиту сетки от ис-
тирания). Такое колесо остается работоспособным при выходе из
строя до 10 % проволок.
Главным требованием к конструкции колеса планетохода с вну-
тренним подрессориванием является минимальная масса элементов
подрессоривания при обеспечении заданной энергоемкости. Они
должны быть надежны в работе и не требовать технического обслу-
живания при эксплуатации. Для повышения показателей плавности
хода характеристика упругого элемента должна быть нелинейной: с
увеличением прогиба жесткость должна возрастать.
Перечисленным требованиям в некоторой степени удовлетворя-
ет известный механизм подрессоривания, содержащий ряд спиц, вы-
полненных в виде цилиндрических пружин растяжения, расположен-
ных между ступипей и ободом колеса. Однако в такой конструкции
одновременно работают не более 50 % пружин, что снижает ее эф-
фективность.
В большей степени удовлетворяет перечисленным требовани-
ям колесо с механизмом подрессоривания, состоящим из нескольких
пар пилиндрических винтовых пружин растяжения, расположенных
вдоль оси колеса. Пружины связывают фланцы ступицы и проме-
жуточное кольцо, которое жестко соединено спицами (или диском)
с жестким ободом, образуя единый узел, подвижный относительно
ступицы. Концы пружин во фланцах ступицы и промежуточном
кольце заделаны шарнирно.
При перемещении обода под действием радиальной силы, при-
ложенной в любой точке, работают все пружины. Упругую харак-
теристику можно регулировать изменением жесткости пружин (их
заменой), их количеством и усилием растяжения. Наличие дополни-
тельного элемента (пружины, промежуточного кольца), не участву-
ющего в организации беговой дорожки, приводит к заметному уве-
личению массы колеса.
Очевидно, что минимальная масса может быть получена в том
случае, когда пружины будут являться элементами обода колеса.
461
Практически в этом случае получается упругая металлическая ши-
на. Параметры упругой характеристики такой шины можно варьи-
ровать изменением толщины проволочной сетки и размеров ее ячей-
ки. Однако сетчатая шина не имеет на наружной поверхности до-
статочно развитых грунтозацепов.
Другим недостатком сетчатой шины является сравнительно не-
высокая жесткость ее в осевом (боковом) направлении, что в случае
бортового поворота приводит к большим уводам колес.
Металлоупругое колесо с арочными ленточными пружинами
в значительной степени позволяет решить проблему увода колес.
Упругая часть колеса собрана из ленточных пружин, соединенных
упругими обручами, и имеет в поперечном сечении форму арки. Пру-
жины обтянуты упругой металлической сеткой, и к ним прикрепле-
ны грунтозацепы. Жесткая часть колеса состоит из двух внутрен-
них ободов, соединенных со ступицей набором спиц.
Применение упругой металлической сетки предоставляет воз-
можности для формирования заданного профиля беговой дорожки
колеса. В частности, возможна организация металлической шины,
имитирующей сдвоенное автомобильное колесо. Причем в централь-
ной впадине могут быть установлены грунтозацепы.
Что же касается улучшения тягово-сцепных качеств колес, то
наиболее простыми приемами считают увеличение ширины и эф-
фективного радиуса колеса. Среди колес с увеличенным эффектив-
ным радиусом можно отметить колесо фирмы “Бендикс” (рис. 5.10),
внешняя опорная поверхность которого выполнена из упругой метал-
лической сетки, связанной с внутренним диском набором упругих
металлических колец, установленных в шахматном порядке. Недо-
статком такого колеса является возможность заклинивания колец
грунтом и их поломка.
462
Рис. 5.11. Колесо с увеличенным эф-
фективным радиусом:
а - с рычажно-кулачковым механизмом и од-
носторонним кулачком; б - с рычажно-кулач-
ковым механизмом и двухсторонним кулач-
ком; в - с гидрообъемными элементами
Известны колеса, эффективный радиус которых может быть уве-
личен из-за деформации упругого обода посредством различного ро-
да механизмов (рис. 5.11). Колесо, показанное на рис. 5.11, а, состо-
ит из упругого металлического обода и жесткой ступицы, связанных
между собой двухзвенными рычагами. Одно из звеньев представля-
463
ет собой двухплечий рычаг с роликом на свободном конце, опира-
ющийся на кулак, профиль которого задает форму колеса. Видно,
что нижняя часть колеса, контактирующая с опорной поверхностью,
имеет большой радиус, чем свободный радиус упругого обода. Не-
достатком конструкции является ее сложность и необходимость гер-
метизации кинематических пар.
Колеса, изображенные на рис. 5.11, а и б, в свободном состоянии
(без нагрузки) имеют круглую форму, а под действием нагрузки на
ось колеса обод деформируется. Колесо принимает форму, близкую
к эллиптической. Такие колеса могут выполнять роль упругого эле-
мента подвески.
По сравнению с колесом с односторонним кулачком ролики на
концах рычагов колес с двухсторонним кулачком вставлены в про-
филированный паз, лишающий рычажные механизмы одной степе-
ни свободы. В результате независимо от действующей на колесо
нагрузки концы рычагов движутся по строго определенной траекто-
рии.
Одной из главных причин сложности создания рассмотренных
конструкций является то, что в настоящее время пока еще отсут-
ствуют методики предварительного расчета их основных характе-
ристик. Даже прочностные расчеты металлических колес с про-
странственными связями несущих элементов могут быть выполне-
ны при значительных допущениях. Что же касается упругих ха-
рактеристик колес, в частности с упругой металлической шиной, то
с необходимой точностью они могут быть определены только экс-
периментальным путем. Весьма затруднительна также расчетная
оценка характеристик взаимодействия колес с грунтом, даже если
физико-механические свойства последнего хорошо изучены.
Существенным отличием конструкций колесно-шагающих ма-
шин является также организация передачи энергии от силовой уста-
новки к движителю. Эта передача осуществляется главным образом
с помощью электромеханической трансмиссии, в состав которой вхо-
дят системы и узлы, участвующие в распределении, преобразовании
и передаче энергии от источника к движителю. Это силовая ка-
бельная сеть и коммутаторы, тяговые электродвигатели (с системой
регулирования), редукторы и другие узлы.
Основные требования, предъявленные к таким трансмиссиям:
1) аварийный выход из строя отдельных узлов не должен ли-
шать машину возможности двигаться (при использовании колес это-
му требованию удовлетворяет индивидуальный привод каждого из
них);
464
2) силы тяги и скорости движения вперед и назад должны быть
одинаковы;
3) конструкция привода должна гармонично сочетаться с кон-
струкцией движителя.
Индивидуальный электромеханический привод позволяет при-
близить тяговые электродвигатели и преобразователи механической
энергии к движителю (ЭМК). Как и для наземных машин, ЭМК
планетохода является не только составной частью трансмиссии,
но и единым в конструктивном отношении агрегатом, выполняю-
щим функции, выходящие за рамки задач, решаемых трансмиссией.
ЭМК может включать: ТЭД, механический редуктор, колесо, тор-
моз, узлы подвески и другие элементы.
Индивидуальный привод позволяет реализовать практически
любые алгоритмы поведения (движения) планетохода. Однако он
имеет и свои недостатки; сложность реализации установочной мощ-
ности двигателей всех колес при движении по пересеченной мест-
ности (это приводит к снижению КПД); установочную мощность
двигателей и геометрию механизмов колес следует выбирать из рас-
чета эксплуатации одного, самого нагруженного колеса в наиболее
неблагоприятных условиях (это приводит к увеличению массы кон-
струкции).
Конструкция колесно-шагающего движителя с индивидуальным
приводом показана на рис. 5.12. Все узлы и механизмы привода
размещены во внутренней полости шарнирно сочлененных рычагов,
первый из которых шарнирно установлен на стакане двигателя, а
второй несет на себе ступицу колеса.
Одним из наиболее сложных элементов этого привода являет-
ся узел сочленения рычагов, включающих опоры как вала самого
сочленения, так и зубчатых передач колесного и суммирующего ре-
дукторов. Причем опоры сочленения, так же как и опоры ступицы,
первого рычага и балансира, нагружаются от внешних сил, действу-
ющих на колесо при взаимодействии с грунтом, и, кроме того, от сил,
возникащих в зацеплениях суммирующего редуктора. Передаточное
отношение в относительном движении от малого к большому колесу
суммирующего редуктора равно двум.
Не вдаваясь в подробности расчета привода колесно-шагающего
движителя данного типа, отметим, что такие сложные кинематиче-
ские схемы отличаются наличием в них контуров циркуляции. В
рассматриваемой конструкции контур циркуляции включает часть
опор и зацеплений, встроенных в рычагах колесного редуктора, сами
рычаги механизма шагания и суммирующий редуктор.
465
Рис. 5.12. Схема индивидуального привода колесно-шагающего
движителя:
1 - корпус; 2- тяговый двигатель; 3- первый рычаг механизма шагания;
4 - стакан; 5 - тормоз в режиме шагания; 6 - планетарный ряд блоки-
рующего механизма; 7 - редуктор привода шагания; 8 - редуктор приво-
да вращения колеса; 9 - второй рычаг механизма шагания; 10 - колесо;
11 - суммирующий редуктор вращения рычагов механизма шагания
С некоторой степенью условности к колесно-шагающим можно
отнести и созданный в Швейцарии двухсекционный вездеход “Ме-
трак” с колесной формулой 6x6 (рис. 5.13). Основой шасси этой
машины служит жесткая средняя ось, к которой шарнирно прикреп-
лены четыре балансира несущих колеса. В передней секции смон-
тированы двигатель, коробка передач и кабина, в задней - устано-
влен грузовой кузов. С помощью двух вертикальных гидроцилин-
дров подрамник передней секции опирается на балансиры передних
колес, а задняя секция с кузовом при помощи таких же гидроцилин-
дров - на балансиры задних колес. Для осуществления относитель-
ного поворота секций в вертикальной плоскости имеются два про-
дольных горизонтальных гидроцилиндра двухстороннего действия.
Все шесть гидроцилиндров соединены с одним шестеренчатым насо-
сом. По усмотрению водителя имеется возможность поднимать одно
из колес, поворачивать секции в вертикальной плоскости на угол до
30° в двух направлениях как на ходу, так и во время стоянки.
466
3 2 1
Рис. 5.13. Двухсекционный везде-
ход “Метрах”:
1 - главная передача; 2 - балансир с при-
водом задних колес; 5 - балансир с при-
водом передних колес
Благодаря такой конструкции машина может двигаться на ко-
согорах, сохраняя горизонтальное положение кузова, поворачиваться
почти на месте за счет притормаживания одного из колес средней оси
и при поднятых передних или задних колесах, двигаться на трех ко-
лесах (два с одного борта, одно с другого), двигаться на двух осях,
“перешагивать” через препятствия.
На машине установлен только один дифференциал в средней оси
(с принудительной блокировкой). Привод передних и задних колес
осуществляется от средней оси при помощи цепей, расположенных
внутри каждого балансира.
5.4. Машины на пневмокатках и пневмогусеницах
Для повышения проходимости транспортных машин в услови-
ях движения по грунтам с низкой несущей способностью и по снегу
разработаны специальные шины сверхнизкого давления - пневмо-
катки, представляющие собой эластичную резинокордную оболочку
бочкообразной формы с малым числом слоев корда (2 — 4 слоя) и
работающую при давлении воздуха 0,02 ... 0,1 МПа. Характерной
особенностью такой шины является большая ширина профиля и ма-
лый посадочный диаметр. Благодаря этому они имеют значительно
467
большую, чем у обычных шин, площадь контакта с опорной поверх-
ностью, а следовательно, и значительно меньшее давление на грунт
(0,02... 0,07 МПа). Это и обеспечивает существенное повышение
проходимости. Обладая высокой эластичностью, пневмокатки при
движении “обтекают” неровности дороги, обеспечивая тем самым
достаточно хорошую плавность хода. В таблице 5.1 представлены
некоторые показатели пневмокатков трех типов отечественного про-
изводства.
Передача крутящего момента и вертикальной нагрузки к каткам
может осуществляться при помощи обрезиненных валков (до 8 шт.)
или через ось. В последнем случае выше КПД и меньше износ.
Фирмой FWD (США) создан оригинальный транспортер “Тера-
крузер” с колесной формулой 8 х 8 на пневмокатках размером 42 х
х50 х 10, обьединенных в две тележки. Он может развивать ско-
рость на шоссе до 64 км/ч, преодолевать подъемы до 60 %, уверенно
двигаться по песку, практически не оставляя на нем следа.
Крутящий момент к каткам подводится через ось от гитары ше-
стерен, расположенных в балансирах. С помощью централизованной
подачи воздуха давление в них изменяется от 0,035 до 0,09 МПа.
Маневрирование транспортера осуществляется поворотом пе-
редней тележки вокруг центрального шкворня с помощью гидроуси-
лителя. Тормоза - дисковые, авиационного типа с гидроприводом.
Универсальный транспортер М8-327-4 (США) также имеет ба-
лансирные тележки, причем передняя поворотная соединяется с ра-
мой машины с помощью шарикового поворотного круга, а задняя -
жестко крепится к раме. В качестве движителя используются во-
семь пневмокатков с наружным диаметром 1067 мм. Благодаря ба-
лансирным тележкам обеспечивается необходимая плавность хода и
хорошая приспособляемость движителя к неровностям пути. Это по-
зволило исключить из конструкции транспортера упругие элементы
подвески, т.е. упростить и облегчить его.
Направление движения транспортера изменяется поворотом пе-
редней тележки при помощи гидропилиндров. Радиус поворота 9 м.
На транспортере установлен шестицилиндровый дизель с гори-
зонтальным расположением цилиндров мощностью 183 кВт и пяти-
ступенчатая коробка передач. Двигатель и коробка обьединены в
один агрегат. Крутящий момент от двигателя через коробку пере-
дач передается карданным валом к раздаточной коробке с дифферен-
циальным приводом, а затем главным передачам переднего и задне-
го ведущих мостов. При необходимости дифференциал раздаточной
468
Таблица 5.1. Характеристика пневмокатков отечественного производства
Показатель Размеры пневмокатка
24 х 36 х 6*1 1000 х 1000 х 250-2 1200 х 1200 х 500-3
Число слоев корда 4 4 4
Наружний диаметр, мм 609 1000 1200
Посадочный диаметр, мм 152 250 500
Ширина профиля, мм 913 100 1200
Высота профиля, мм 228 375 350
Отношение высоты профиля к ширине 0,25 0,37 0,29
Отношение ширины профиля к диаметру 1,5 1 1
Отношение посадочного диаметра к наружнему 0,25 0,25 0,42
Нагрузка на каток при его относительной деформации 20 % и давлении воздуха 0,05 МПа, Н 5000-3 20000 20000
Масса катка, кг 29 63 -
Радиальная жесткость, Н/мм 130 100 325
Глубина рисунка протектора, мм 10 15 15
ф1В дюймах. '2В милиметрах. *3При давлении воздуха 0,035 МПа.
коробки может быть заблокирован кулачковой муфтой с пневмопри-
водом.
Главные передачи и дифференциалы мостов конические; диффе-
ренциалы могут блокироваться кулачковой муфтой. Далее крутя-
щий момент попадает на бортовые передачи, а от них с помощью
гитары шестерен - к ступицам пневмокатков. На наружных концах
полуосей дифференциалов главных передач установлены дисковые
тормоза с пневматическим приводом.
Транспортер оборудован устройством, позволяющим водителю
изменять давление воздуха в пневмокатках на ходу. Давление на
грунт при полезной нагрузке 8 т меняется в зависимости от давле-
ния воздуха в шинах от 0,03 до 0,1 МПа, что и обеспечивает суще-
ственное повышение проходимости.
В таблице 5.2 представлена краткая характеристика ряда зару-
бежных машин на пневмокатках.
Аналогичный вездеход марки ЭТ-8 был разработан в НАМИ. Он
имел так называемые квадратные пневмокатки модели И-245 раз-
мером 1200 х 1200 х 500, один межтележечный и два межбортовых
дифференциала в приводе к каткам. Полная масса машины около
12,5 т, наименьший радиус поворота 15,5 м.
В настоящее время выпускают различные типы вездеходов на
пневмокатках. Одним из таких вездеходов является Catco R.D-85 с
колесной формулой 8x8. Это сочлененная машина, имеющая отно-
сительно небольшую высоту (по сравнению, например, с “Теракру-
зером”) и простую конструкцию привода пневмокатков.
Нагрузка на пневмокатки передается через обрезиненные роли-
ки. Вездеход обладает хорошей проходимостью по снегу и высокой
маневренностью (радиус поворота машины 14 м). Он снабжен ком-
фортабельной многоместной кабиной, выполненной из стеклопласти-
ка. Полная масса вездехода около 20 т.
На рис. 5.14 показан опытный американский вездеход с дви-
жителем “Аэрол”. Пневмокатки здесь используются как подвиж-
ные звенья, закрепленные своими осями на крупнозвенчатых цепях
(рис. 5.15, а). Они могут свободно вращаться на своих осях. Эта
своеобразная гусеница приводится в движение ведущей звездочкой.
Пневмокатки при этом обкатываются по периметру копира, распо-
ложенного внутри гусеницы.
При движении машины по твердому грунту корпус с закреплен-
ными на нем копирами перемещается по пневмокаткам как по роли-
кам (рис. 5.15, б). Если вездеход попадает в болото, то катки ста-
новятся как бы развитыми грунтозацепами гусеницы. Скорость ма-
шины в этом случае равна скорости перематывания гусеницы. Вра-
щение пневмокатков при этом вокруг своих осей не имеет никакого
470
Таблица 5.2. Характеристика зарубежных машин
иа пневмокатках
Показатель ХМ-357 Catco RD-85 М8-327-4 ХМ-401 8-369-ТН-С
Грузоподъем- ность, кг 9000 10200 7700 4200 6300
Масса снаря- женой маши- ны, кг 9000 9600 6000 5800 9980
Габаритные размеры, мм: длина 7620 10070 8230 9145 9800
ширина 3660 - 2740 2740 2740
высота 3460 - 2620 - 3000
Максимальная скорость дви- жения по шоссе, км/ч 40 32 43 72 43
Мощность дви- гателя. кВт 257 270 183 183 183
Размер пневмо- катков* 42 х 60 54 х 68 42 х 40 х 10 42 х 40 х 10 42 х 40 х 10
Масса катка, кг - - 97 80 97
‘ В дюймах.
Рис. 5.14. Схема вездехода с движителем “Аэрол”
471
Рис. 5.15. Схемы движения “Аэрола”:
а - общая схема; б - качение катков по твердому
грунту; е - качение корпуса по каткам, перекаты-
вающимся по грунту; г - скольжение корпуса по
каткам (катки вращаются)
значения. Таким образом, движитель автоматически приспосабли-
вается к условиям движения на различных грунтах.
Внешними силами, действующими на движитель, являются со-
ставляющие веса машины CMcosa и Gm sin а; сила сопротивления
т т
воздуха Wu; сила инерции GM)lg и движущие силы и Я»-
г=1 г=1
Возможность движения, ограничиваемая сцеплением пневмокат-
ков, определяется неравенством
m
GM(sina + j/g) + Wu = ^7 Hi < GM^cosa,
где <p - коэффициент сцепления колес с грунтом, не отличающимся
от неравенства для обычного колесного движителя.
Схема сил, действующих в случае качения корпуса по пневмо-
каткам, перекатывающимся по грунту, приведена на рис. 5.15, в:
РЦ = Я + ЯК; (Нк-Н)гк = R(ai+a2),
472
где Рц - сила тяги цепей; И - касательная сила, действующая меж-
ду пневмокатком и грунтом; Як - касательная сила, действующая
между пневмокатком и корпусом (копиром); R - нормальные силы,
действующие на пневмокаток со стороны грунта и корпуса; Д], дг -
смещения нормальних реакций, вызываемые потерями на качение
колеса по грунту и корпусу (копиру) соответственно.
Учитывая, что а.\[тк = f и Дг/гк = /к, получаем
Нк = Н + R (f + А); Рц = 2Я + R (f + А),
где /, /к - коэффициенты сопротивления качению пневмокатка по
грунту и корпусу (копиру) соответственно.
Касательная сила Нк, передаваемая от корпуса на пневмокаток,
равна сумме силы тяги И и силы сопротивления качению пневмо-
катка по грунту и корпусу. Движущей силой является сила тяги И.
Сила тяги цепей Ри более чем в 2 раза превосходит силу тяги Н, что
согласуется с кинематикой движения.
Максимальное значение силы Н* ограничивается силой трения:
Н* < Rfiy. Максимально возможная сила тяги, создаваемая одним
катком при условии его качения, определяется неравенством
Я(дк - / - /к) > Н < R^,
где /zK - коэффициент трения пневмокатков по корпусу (копиру).
Характер работы катково-гусеничного движителя на режиме ка-
чения пневмокатков аналогичен многоколесному движителю. Поэто-
му результаты исследования влияния параметров шин и числа осей
на эксплуатационные показатели приемлемы для рассматриваемого
режима.
Схема сил. действующих на каток в случае скольжения корпуса
(копира) по каткам, приведена на рис. 5.15, г:
= И + RfiK\ (Н - RfiK)rK = Ray.
Учитывая, что Д1/гк = Ji, получаем
Я = R(fix + /1),
где Rfi - сопротивление грунта, препятствующее качению катка
(каток еще не катится).
При И > R + /) происходит скольжение катка по корпусу и
качение по грунту назад , корпус остается на месте, т.е. движение
невоможно.
473
Учитывая это, максимальное возможное значение силы тяги, со-
здаваемой одним катком при условии скольжения корпуса по каткам,
определяется неравенством
R + /) > И < Rip.
Сравнивая работу этого движителя с гусеничным, можно от-
метить, что максимальная сила тяги, обусловленная сцеплением с
грунтом, в данном случае должна быть больше, так как большая
масса грунта подвергается сдвигу (между катками), и почти вся си-
ла сцепления движителя с грунтом может быть реализована как сила
тяги (Ятах = Rip}. Вместе с тем потери энергии внутри движите-
ля будут больше, чем у колесного и гусеничного движителей, из-за
значительных потерь на трение корпуса относительно катков.
Испытания машин на катково-гусеничном движителе показали,
что они хорошо работают на снегу и в болоте, способны двигать-
ся по твердым грунтам. Однако они не эффективны на скользких,
твердых и неровных поверхностях, при преодолении подъемов, а при
движении по неровным дорогам отличаются низкой плавностью хода
(введение подрессоривания резко усложняют конструкцию машины).
Другой, весьма своеобразной комбинапей колесного и гусенично-
го движителей является пневмогусеничный движитель. В нем пнев-
могусеницей служит резинокордная оболочка, имеющая избыточное
внутреннее давление воздуха, смонтированная на катках.
Первый патент на конструкцию эластичного движителя такого
типа был предложен еще в 1918 г. Однако изготовление опытных
образцов стало возможным лишь в конце 50-х - начале 60-х годов. В
настоящее время пневмогусенипы делят на одно- и многополостные.
Однополостные представляют собой торообразную оболочку с
круглым поперечным сечением. Такие пневмогусеницы удержива-
ются на катках обычно их ребордами или гребнями, выполняемы-
ми на поверхности пневмогусеницы. Сила тяги с ведущего катка
на пневмогусеницу может быть передана за счет трения. Однако
из-за попадания между катками и гусенипей грунта реализуемая си-
ла тяги нестабильна. Поэтому вводят принудительное зацепление
пневмогусеницы с ведущим катком.
Серия конструкций однополостных пневмогусенип была созда-
на известным итальянским авиаконструктором Дж.Бонмартини и
с успехом применялась на легких самолетах итальянского, немец-
кого, английского и американского производства. Однополостная
пневмогусеница подобно пневматической шине состоит из оболоч-
ки с несколькими слоями корда, охватывающими два продольных
474
троса, препятствующих продольному растяжению оболочки и спа-
данию ее с катков. В свободном состоянии она представляет собой
шину большого диаметра, и лишь при надевании на катки дефор-
мируется (сжимается или растягивается) и становится похожей на
гусеницу. Давление воздуха в ней - около 0,25 МПа.
Весьма перспективным способом снижения потерь на перематы-
вание пневмогусеницы считается замена деформаций растяжения-
сжатия стенок оболочки их изгибом, что можно получить гофриро-
ванием оболочки.
Следует иметь в виду, что пневмогусеницы круглого профиля
имеют неблагоприятную эпюру давлений на грунт по ширине от-
печатка. На грунтах с малой несущей способностью и на снегу это
вызывает увеличение глубины колеи. Поэтому предпринимались по-
пытки создания пневмогусении с плоской формой беговой дорожки,
в частности при использовании облочек, разделенных несколькими
параллельными камерами. Однако они оказались сложными в изго-
товлении и эксплуатации.
Многополостные пневмогусеницы представляют собой совокуп-
ность резинокордных оболочек (пневмотраков), выполняющих функ-
ции элементов гусеничных цепей. В зависимости от способа креп-
ления пневмотраков к несущим элементам различают гусеницы с
неподвижными и подвижными пневмотраками. Первые представля-
ют собой гусеничную цепь, траками которой являются пневматиче-
ские элементы. Вследствие независимости деформаций отдельных
пневмо траков имеет место значительное скольжение гусеницы от-
носительно опорной поверхности при входе и выходе из контакта с
грунтом. Поэтому решающим фактором при определении долговеч-
ности подобных гусениц будет износ пневмотраков. Вместе с тем
такие гусеницы отличаются простотой монтажа, легкостью замены
вышедших из строя пневмотраков, малыми потерями на перематы-
вание, эластичностью контакта-с опорной поверхностью, бесшумно-
стью движения. Однако при этом возникают недостатки, свойствен-
ные металлическим звенчатым гусеницам.
На пневмотраковых гусеницах создано несколько типов везде-
ходов. Один из них фирмы “Генс-Воут” (США) представляет со-
бой плавающую машину на гусеницах, состоящих из отдельных, за-
крепленных на гибкой ленте пневматических элементов размером
800 х 500 х 500 мм с низким давлением воздуха (0,007... 0,01 МПа).
Каждый трак имеет индивидуальное устройство изменения давле-
ния воздуха.
475
В СССР коллективом Белорусского института механизации
сельского хозяйства совместно с ХТЗ и заводом “Красный резин-
щик” (г. Киев) был создан экспериментальный трактор “Эврика”
на пневмотраковых гусеницах.
Интересные исследования по созданию пневмогусеничного дви-
жителя проведены в Белорусском политехническом институте с це-
лью повышения проходимости универсально-пропашного трактора
МТЗ-80. Испытания пневмоэлементов показали, что коэффициент
удельной нормальной жесткости (рис. 5.16, а)
Cz =
где pw - давление воздуха в пневмоэлементе; Fn - площадь проекции
пневмоэлемента на горизонтальную плоскость.
Рис. 5.16. Зависимость коэффициента удельной нор-
мальной жесткости (а) и коэффициента неравномерно-
сти распределения давлений пневмоэлементов (б) от
давления воздуха в них
Коэффициент неравномерности распределения давлений пневмо-
элементов на деформируемой поверхности существенно зависит от
давления воздуха в них (рис. 5.16, 5) и аппроксимируется уравнени-
ем регрессии:
Л"нп = 1,1 - 0,39 10~2рш + 1,05 • Ю-4р^.
Распределение давлений по длине опорной поверхности пневмо-
гусеницы зависит от взаимного расположения пневмоэлементов и
476
опорных катков. Давление достигает своего максимума под опорны-
ми катками в момент нахождения их над серединой пневмоэлемента.
И.И. Жданович предлагает определять максимальное давление под
катком по формуле
'Утах» —
KmKtRi
2-------------
Дг-1 Ai
Ы
где Kt = t/l - плотность расположения пневмоэлементов; t -
шаг пневмогусеницы; / - длина пневмоэлемента; - нагрузка
на г-й каток; b - ширина пневмогусеницы; Рг - ее натяжение;
Кир = СгК/(Сг 4- К) - приведенный коэффициент жесткости; К -
коэффициент объемного сжатия почвы; Aj-i = е ? у , А, =
ГК^Ь
= е 2 у/ р ; а{- расстояния между катками.
Максимальное давление, создаваемое трактором, имеющим ко-
лесно-пневмогусеничную ходовую часть с пневмоэлементами разме-
ром 400 х 176 х 130 мм при давлении воздуха в них 60... 80 кПа
и шины размером 9-20 на передних колесах с жесткостью 160...
...167 кН/м, при крюковых нагрузках от 0 до 16 кН не превы-
шает 80 кПа. Следовательно, такой трактор, в соответстнии с
ГОСТ 26955-86, можно использовать без ограничений на ранневе-
сенних работах при любой влажности почвы.
Следует отметить, что экспериментальный трактор МТЗ-80 с
колесно-пневмогусеничным движителем может работать в трех со-
стояниях: полугусеничном (с опорной поверхностью взаимодейству-
ют управляемые колеса и пневмогусеницы); колесном (натяжное ко-
лесо и опорная тележка пневмогусеничного движителя подняты, а с
опорной поверхностью взаимодействуют управляемые колеса и часть
пневмогусеницы, находящаяся под ведущим колесом); гусеничном
(управляемые колеса вывешены, с опорной поверхностью взаимодей-
ствует только пневмогусеничный движитель, а поворот осуществля-
ется вследствие подтормаживания внутренней гусеницы).
Испытания трактора с колесно-пневмогусеничным движителем
показали, что на вспаханном поле он развивает тяговое усилие на
20 % большее по сравнению с обычным днижителем при буксовании.
КПД колесно-пневмогусеничной ходовой части на асфальте пример-
но на 12 % ниже, чем у колесной, и составляет 0,77, а на вспаханном
поле, наоборот, выше и составляет 0,67 (против 0,64 у колесной).
477
Рис. 5.17. Схема колесно-пневмогусеничного
вездехода НАМИ-С-ЗМ
Работы по созданию колесно-пневмогусеничных движителей
для вездеходов у нас в стране были начаты в МВТУ им. Н.Э. Баума-
на, НАМИ и на Ленинградском заводе еще в начале 60-х годов. Один
из таких вездеходов показан на рис. 5.17. Пневмогусеничный движи-
тель его представляет собой две балансирные полутележки (рама с
укрепленными на ней тремя катками). Средний каток жестко соеди-
нен с полуосью ведущего моста, а крайние со средними соединены
цепной передачей. Все катки имеют реборды (до 20 мм) для удер-
жания гусениц. Сила тяги от ведущего катка на пневмогусеницы
передается трением. Краткая характеристика вездехода НАМИ-С-
ЗМ представлена ниже:
Количество пассажиров, чел..................... 4
Грузоподъемность, кг........................... 200
Масса в снаряженном состоянии, кг.............. 1450
Колея, мм ..................................... 1245
Максимальная скорость на асфальте, км/ч........ 60
Размер шин..................................... 6,70-15
Размеры пневмогусеницы, мм:
внутренний диаметр в свободном состоянии .... 1150
ширина....................................... 180
высота профиля............................... 90
Давление воздуха, МПа:
в шинах ..................................... 0,17
в гусеницах.................................. 0,02...0,06
При движении вездехода по снегу вместо передних колес устана-
вливали лыжи, выполненные из стеклопластика. Машина уверенно
двигалась по снегу глубиной до 1,2 м.
478
Испытания машины на пневмогусеницах показали их высокую
плавность хода и бесшумность движения, высокую проходимость на
многих грунтах и удовлетворительную силу тяги (даже на гусени-
цах без грунтозацепов). Были отмечены также и недостатки этого
движителя: колебания машины при высоких скоростях движения во-
круг вертикальной оси, вызванные высокой боковой эластичностью
гусеницы; нагрев гусеницы в местах контакта с ребордами катков
до 50°C; довольно частые спадания гусениц с катков.
На одном из вариантов вездехода, разработанного в НАМИ, бы-
ли установлены пневмотраковые гусеницы, пневмоэлементы кото-
рых изготавливали в небольших прессформах, что позволяло изме-
нять рисунок протекторной части.
Пневмогусеничный движитель обладает рядом особенностей,
выгодно отличающих его от металлических и резиноленточных гусе-
ничных движителей: пневмогусеница благодаря высокой своей эла-
стичности является одновременно демпфирующим элементом, гася-
щим вибрации ходовой части; при движении по неровностям, пере-
крываемым пневмогусеницей, улучшается плавность хода машины;
пневмогусеница обеспечивает более равномерное распределение да-
вления на грунт и более высокие тягово-сцепные качества машины,
меньшее разрушение грунтов и растительного покрова при движе-
нии вне дорог,
Вместе с тем пневмогусеничный движитель имеет более высо-
кие потери мощности при движении по твердой поверхности, мень-
ший срок службы, склонность к спаданию пневмогусениц с катков,
большую чувствительность к температурам окружающей среды и
меньшую работоспособность по сравнению с эластичным колесом.
5.5. Другие типы машин
Известно, что скорость движения плавающих КМ на воде обычно
невелика. Это объясняется большим сопротивлением движению корпуса,
имеющего нерациональные обводы, колес и других выступающих элемен-
тов. Поэтому вполне естественной можно считать попытку создателей
амфибий увеличить скорость движения на воде за счет вывода машин из
воды с помошью подъемой силы специальных подводных крыльев.
Идея использования подводных крыльев для увеличения скорости
движения на воде появилась давно и принадлежит нашему соотечествен-
нику Ламберту, получившему в 1891 г, патент на лодку с подводными
крыльями. Вскоре он построил ее и продемонстрировал успешно работу
на воде. Затем эти работы были продолжены в Италии, США, Англии,
Германии.
479
Ло середины 30-х годов суда на подводных крыльях строили без до-
статочно обоснованных теоретических расчетов. Впервые теория дви-
жения таких судов была разработана в 1935 г. советскими учеными
М.В. Келдышем н М.А. Лаврентьевым и в дальнейшем развита в трудах
Н.Е. Когина и А.И. Владимирова. Эти работы имели очень большое зна-
чение для дальнейшего совершенствования судов на подводных крыльях.
С середины 50-х годов у нас в стране началось серийное производство
судов на подводных крыльях: “Ракета”, “Метеор”, “Спутник”, “Мир”,
“Комета” и др.
Чтобы транспортное средство уверенно шло в крыльевом режиме, не
касаясь корпусом воды, его масса должна целиком восприниматься кры-
льями, что возможно только во время его движения благодаря созданию
на крыльях подъемной силы. Способность создавать такую силу, перпен-
дикулярную направлению движения, является основным свойством кры-
ла. Возникновение подъемной силы неизбежно сопровождается появлени-
ем силы сопротивления, противоположной направлению движения. Обе
эти силы зависят от формы и размеров крыла, скорости движения, плот-
ности среды, окружащей крыло, а также от положения крыла относи-
тельно набегающего потока.
Подводные крылья представляют собой несущие поверхности, на ко-
торых при движении машины в воде создается подъемная сила, способная
поднять и стабильно удерживать ее в надводном положении. Возникно-
вение подъемной силы на крыле связано с характером его обтекания во-
дой, с распределением скоростей и давлении в обтекающем потоке около
крыла. Форму подводного крыла определяют следующие геометрические
характеристики: размах (по ширине машины), ширина (по сечению кры-
ла), углы килеватости (при плоском днище угол килеватости равен нулю)
и стреловидности (по передней кромке), профиль. Важнейшее значение
имеет профиль крыла, определяемый максимальной его толщиной, углом
атаки, изогнутостью и т.д.
Установлено, что подъемная сила, создаваемая крылом, может быть
определена как
^ = 1^5,
где Су - безразмерный коэффициент подъемной силы, зависящий от фор-
мы крыла, угла атаки, размаха, относительной глубины погружения и
режимов движения машины; р - плотность воды; и - скорость набегаю-
щего на крыло потока воды; S - площадь крыла.
На рис. 5.18 качественно показано изменение безразмерного коэффи-
циента подъемной силы и коэффициента гидродинамического качества
(отношение подъемной силы крыла к силе сопротивления). Видно, что с
увеличением угла атаки Су возрастает, достигает своего максимума (при
а ~ 10°) и далее начинает уменьшаться в связи с началом срыва потока.
Коэффициент гидродинамического качества максимален при малых
углах атаки (1.. .3°), которые и считаются оптимальными.
480
Рис. 5.18. Влияние угла атаки на гид-
родинамический коэффициент К и ко-
эффициент подъемной силы Су
Если углы атаки по размеру крыла постоянны, крыло называется
гидродинамически плоским, если изменяются - гидродинамически закру-
ченным.
Для устойчивого движения на подводных крыльях необходимо, что-
бы при любой установившейся скорости движения после выхода на кры-
льевой режим подъемная сила на крыльях равнялась весу судна. В за-
висимости от способа поддержания постоянства подъемной силы на кры-
льях различают конструкции с крыльями, неподвижно закрепленными
относительно корпуса, и конструкции с управляемыми крыльями.
В первом случае поддержание постоянства подъемной силы обеспе-
чивается илн соответствующим типом крыльев, или их расположением
(крылья полупогруженные, малопогруженные, глиссирующие), во вто-
ром - путем принудительного изменения положения или формы крыла
с помощью системы управления. Наиболее распространенным способом
управления является поворот крыла на шарнирах вокруг оси, располо-
женной перпендикулярно направлению движения (рис. 5.19). Иногда у
в i
Рис. 5.19. Схемы управляемых крыльев:
а - поворот крыла на оси; б - поворот закрылка;
в - поворот предкрылка; г - изменение глубины
погружения
481
Рис. 5.20. Управляемые консольные передние (а) н
заднее (б) крылья амфибии PUKW
крыльев делают управляемые закрылки или подкрылки. Возможна так-
же перестановка крыла по глубине погружения с целью частичного или
полного вывода его из воды. Управляемые крылья являются глубокопо-
груженными.
В качестве примера амфибии с управляемыми крыльями приведем
американскую машину с колесной формулой 4x4 фирмы “Лайкоминг”
марки LVHX-1, снабженную ГТД мощностью 735 кВт. При движении
на воде ее колеса с помошью гидросистемы убираются внутрь кузова,
а крылья (переднее в виде рамкн, заднее - одностоечное с приводом на
винт) переводятся в рабочее положение. При общей массе машины около
20 т она развивает на воде скорость до 65 км/ч иа крыльях и 22 км/ч в
водоизмещающем режиме. Система автоматического управления глуби-
ной погружения крыльев позволяет машине двигаться при значительном
волнении.
Форма глубокопогруженных крыльев может быть различной. В
США, например, получили распространение консольные стреловидные
крылья, подобные крыльям самолета (рис. 5.20). Стреловидность способ-
ствует увеличению устойчивости на курсе. Глубокопогруженные упра-
вляемые крылья наиболее перспективны для морских амфибий.
Важным для амфибий на подводных крыльях является уменьшение
осадки в воде при малых скоростях движения (особенно при входе и выхо-
де из воды), чтобы не цепляться крыльями за дно водоема. С этой делью
крылья делают убирающимися. На рис. 5.21 представлены различные
схемы убирающихся крыльев. Желательно, чтобы схема обеспечивала
уменьшение осадки на ходу (без остановки машины). Для осуществле-
ния подъема или складывания крыльев используют механические, элек-
трические нли гидравлические приводы. Из всех представленных схем
первая отличается наибольшей простотой и надежностью. Такая схема
была применена на амфибии DUKW.
Трудность задачи уменьшения осадки крылатых аппаратов в водо-
нзмещающем режиме заключается еще и в том, что требуется поднимать
482
б в
Рис. 5.21. Схемы убирающихся крыльев:
а - е - передние и задние крылья; ж - задние крылья
не только подводные крылья, но и гребной винт, который работает либо
на одном уровне с крыльями, либо ниже их. У амфибии DUKW эта задача
решена совмещением виита и заднего крыла. Как показывает практика
в этом случае для обеспечения хода при поднятых крыльях необходимо
иметь дополнительный движитель (например, водомет).
Вообще к движителю крылатого аппарата предьявляются следую-
щие специфические требования:
а) высокая эффективность работы при большой скорости движения;
б) способность создавать большую величину упора при малой ско-
рости движения для преодоления наибольшего сопротивления во время
разгона;
в) простота привода от силовой установки.
Наибольшее применение получили винтовые движители с постоянно
фиксированным шагом благодаря высокому КПД на большой скорости,
надежности, простоте привода и всей конструкции. Их недостатком явля-
ется низкий пропульсивный (общий) КПД на малой скорости, поскольку
параметры движителя выбирали для максимальной скорости движения.
Этот недостаток не является существенным, так как время плавания на
малых скоростях (в водоизмешающем режиме) невелико, однако затруд-
няет переход аппарата на крыльевой режим.
Значительно облегчить переход на крыльевой режим можно путем
применения винта регулируемого шага. Это позволяет на 10...20 %
сэкономить топливо, увеличить моторесурс двигателя, снизить мощность
двигателя, однако значительно усложняет привод винта.
В случае установки на амфибию ГТД возникает необходимость ис-
пользования специальных некавитирующих винтов (в том числе с одной
лопастью). Однако они мало пригодны для малоскоростных режимов.
Делались попытки установки на суда с подводными крыльями и та-
ких движителей, как воздушные и воздушно-реактивные винты, но они
483
Рис. 5.22. Схемы привода поднимающегося винтового
движителя:
1 - силовая установка; 5- корпус амфибии; 3 - заднее крыло
оказались малоэффективными при низких скоростях движения и поэтому
могут быть использованы лишь в сочетании с винтовым движителем.
На рис. 5.22 показан вариант привода поднимающегося винтового
движителя амфибии иа подводных крыльях. Вообще приводы судов на
подводных крыльях отличаются большим разнообразием. Валопровод к
гребному винту может быть выполнен прямым, ломаным (с карданны-
ми или угловыми передачами) и вертикальным с угловыми передачами.
Первый вариант самый простой, но он приводит к тому, что при работе
винта в косом потоке снижается его КПД (иа 10 % при угле 12°). Вто-
рой и третий варианты, хотя и более сложные, но дают возможность
улучшить компоновку судов, обеспечить нормальные условия для работы
винта, уменьшить обтекаемость привода.
Способность амфибий двигаться на подводных крыльях обязательно
нужно учитывать при проектировании их корпуса, ходовой части, кры-
льев и особенно при выборе мощности двигателя и характеристик водного
движителя. Способность амфибий выходить иа крыльевой режим харак-
теризуется скоростью в момент отрыва корпуса от воды, максимальным
сопротивлением движению во время разгона, путем и временем разгона (с
начала разгона до момента отрыва корпуса от воды), устойчивостью во
время разгона и максимальной высотой волны, при которой этот выход
возможен.
484
СПИСОК ЛИТЕРАТУРЫ
1. Грузовые автомобили / М.С. Высопкий, Ю.Ю. Беленький, Л.Х.Гилелес и
др. М.: Машиностроение, 1979. 384 с.
2. Конструирование и расчет колесных машин высокой проходимости: Общие
вопросы конструирования / Под реп. Н.Ф. Бочарова и Л.Ф. Жеглова. М.г
Машиностроение, 1992. 352 с.
3. Конструирование и расчет колесных машин высокой проходимости: Расчет
агрегатов и систем / Под ред. Н.Ф. Бочарова и Л.Ф. Жеглова. М.: Маши-
ностроение, 1994. 404 с.
4. Лукинский В.С., Зайцев Е.И. Прогнозирование надежности автомобилей.
Л.: Политехника, 1991. 224 с.
5. Платонов В.Ф. Полноприводные автомобили. М.г Машиностроение, 1989.
312 с.
6. Проектирование трансмиссий автомобилей: Справочник / Под ред.
А.И. Гришкевича. М.: Машиностроение, 1984. 272 с.
7. Смирнов Г.А. Теория движения колесных машин. М.: Машиностроение,
1990. 352 с.
8. Цитович И.С., Каноник И.В., Вавуло В.А. Трансмиссии автомобилей.
Минск.: Наука и техника, 1979- 256 с.
ОГЛАВЛЕНИЕ
Предисловие.................................................... 3
Введение ...................................................... 4
Глава 1. Основы технологии проектирования колесных машин . . И
1.1. Процесс проектирования................................... 11
1.2. Условия эксплуатации..................................... 25
1.3. Требования, предъявляемые к колесным машинам ............ 41
1.4. Классификация колесных машин............................. 44
1.5. Компоновка колесных машин................................ 50
1.6. Эксплуатационные характеристики.......................... 56
1.7. Колесные машины и защита окружающей среды................ 65
1.8. Силовые установки........................................ 74
Глава 2. Общие вопросы проектирования полноприводных
колесных машин................................................. 82
2.1. Принципы системного подхода.............................. 82
2.2. Принцип модульного проектирования....................... 96
2.3. Нагрузочные режимы...................................... 104
2.4, Моделирование рабочих процессов......................... 126
2.5. Расчет динамических нагрузок колесных машин............. 144
2.6. Детерминированные и вероятностные методы расчета........ 160
2.7, Надежность.............................................. 182
Глава 3. Трансмиссии колесных машин.......................... 211
3.1. Общие вопросы проектирования............................ 211
3.2. Механические трансмиссии................................ 220
3.3. Гидромеханические трансмиссии........................... 248
3.4. Гидрообъемные трансмиссии............................... 256
З.б. Электромеханические трансмиссии......................... 264
486
Глава j. Расчет элементов механических передач трансмиссий. , 287
4.1. Нагрузочные режимы...................................... 287
4.2. Зубчатые колеса......................................... 313
4.3. Подшипники.............................................. 356
4.4. Валы.................................................... 375
4.5. Шлицевые и шпоночные соединения......................... 390
4.6. Картерные детали агрегатов.............................. 401
Глава 5. Колесные машины поисковых конструкций............... 435
5.1. Колесно-гусеничные машины и машины с переменным числом колес 435
5.2. Машины с разгрузкой колес при помощи воздушной подушки . . . 440
5-3. Колесно-шагающие машины................................. 449
5.4. Машины на пневмокатках и пневмогусеницах................ 467
5.5. Другие типы машин....................................... 479
Список литературы............................................ 485