/



















































Автор: Федоров В.А. Алексаков Г.Н. Гаврилин В.В.
Теги: компьютерные технологии вычислительная техника микропроцессоры персональный компьютер
ISBN: 5-283-01460-6
Год: 1992
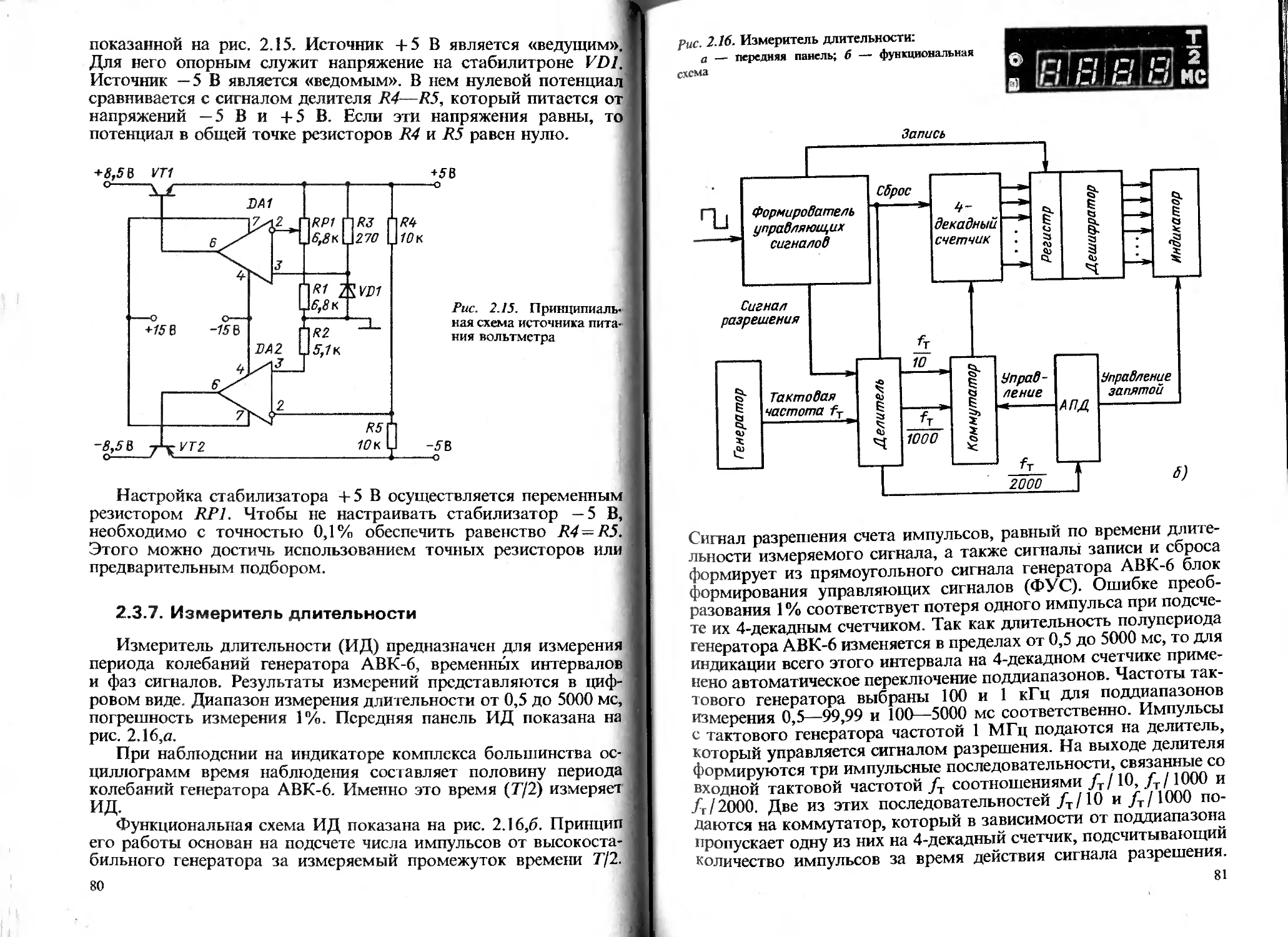
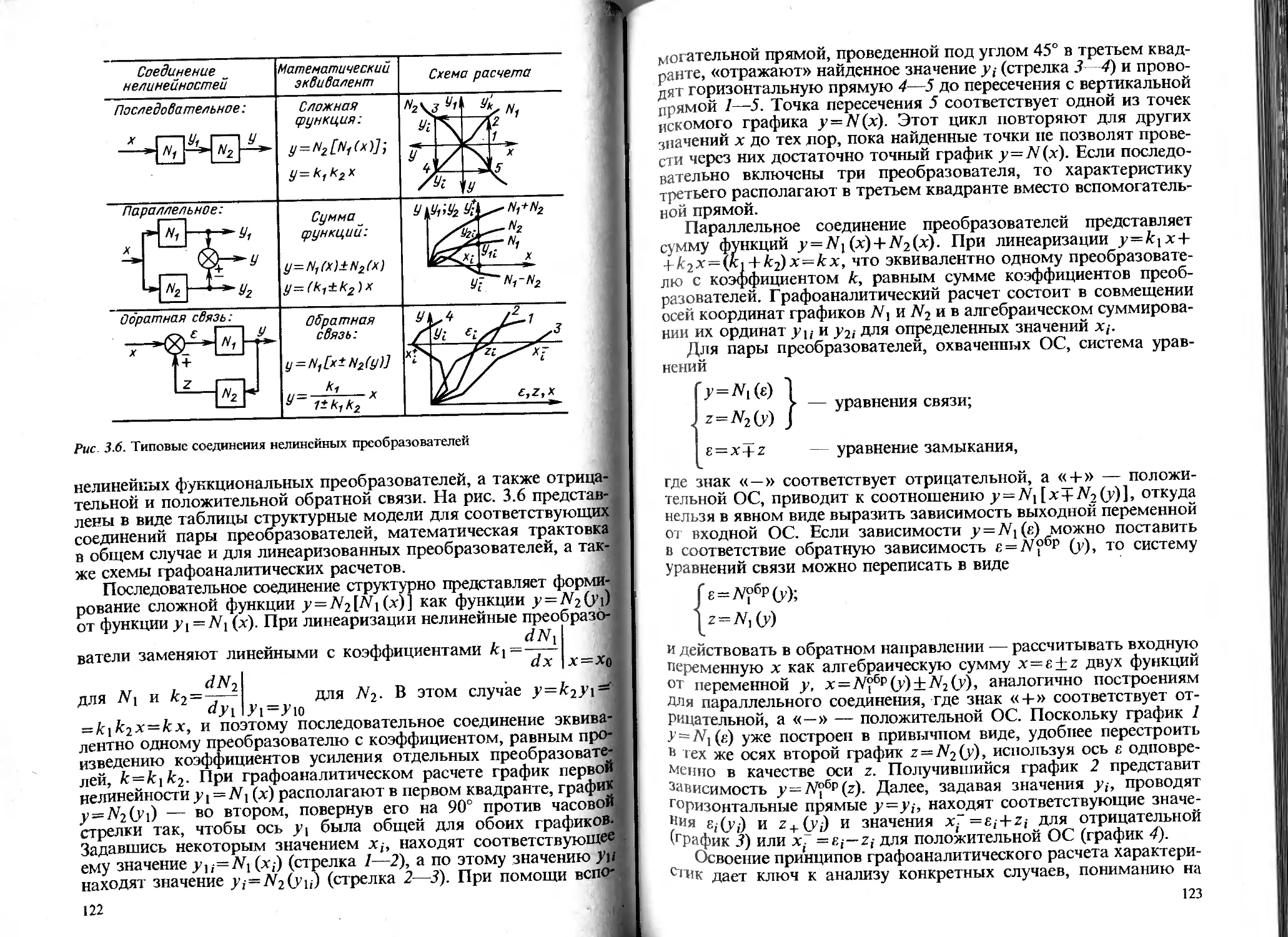
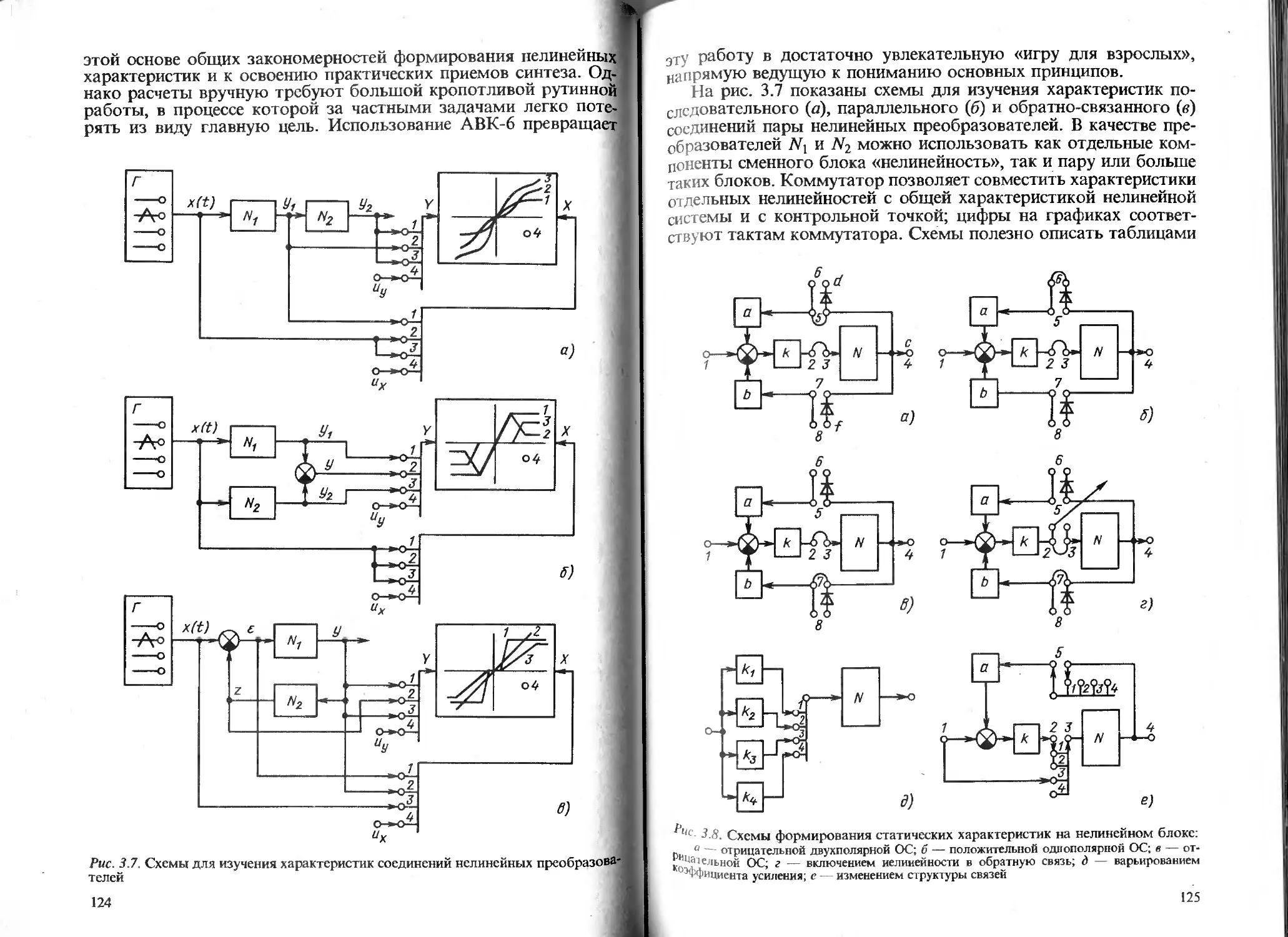
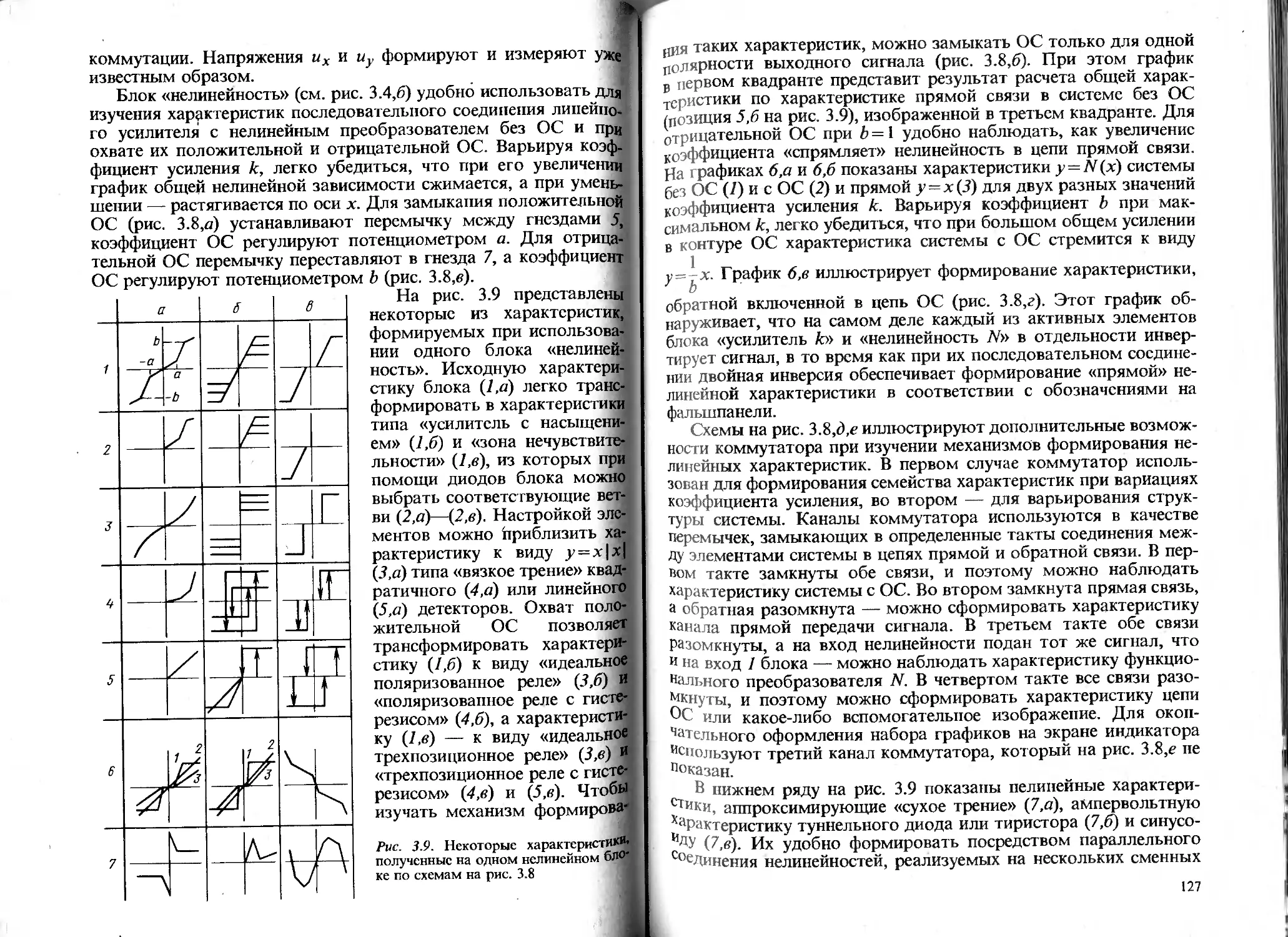
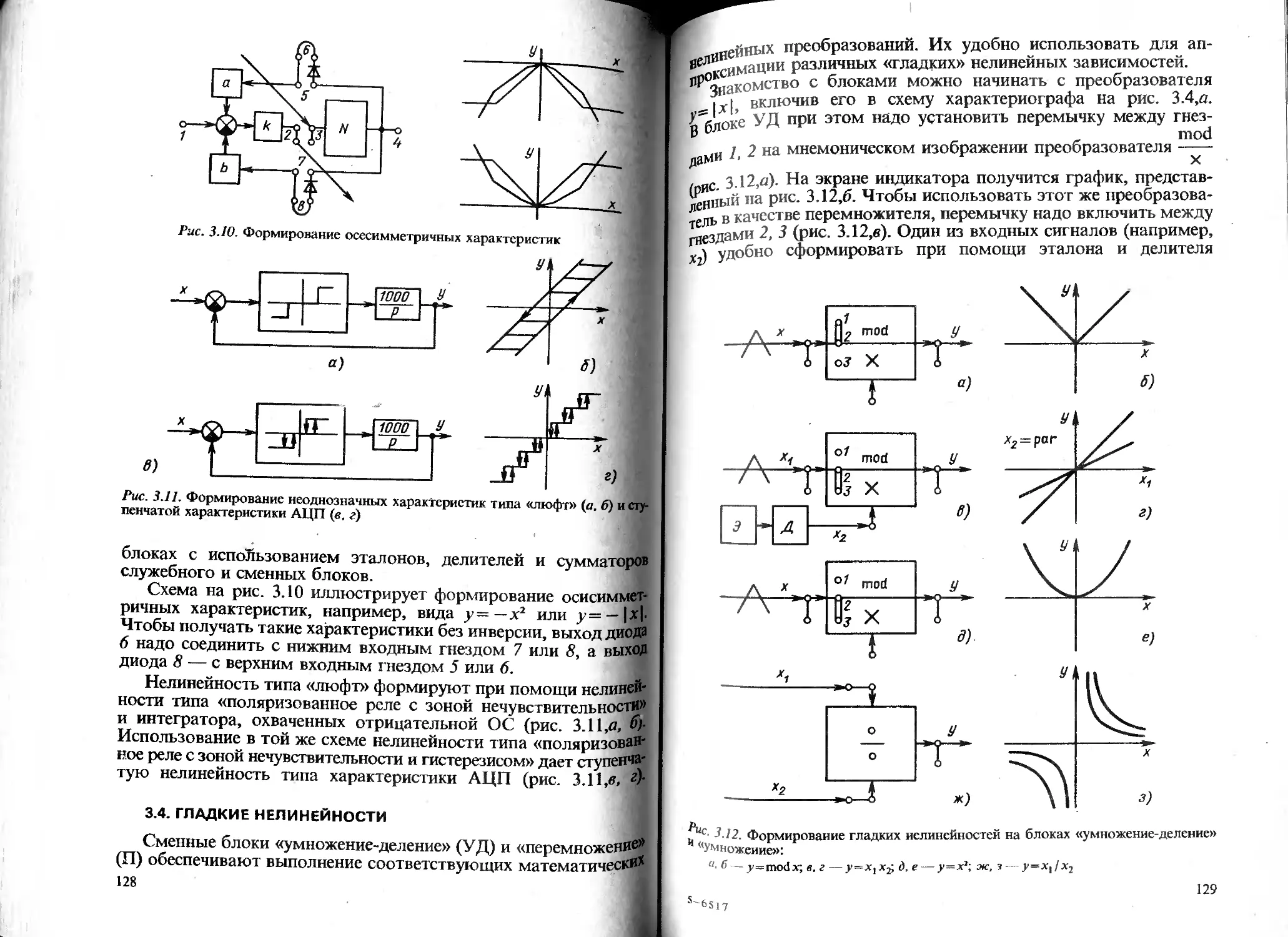
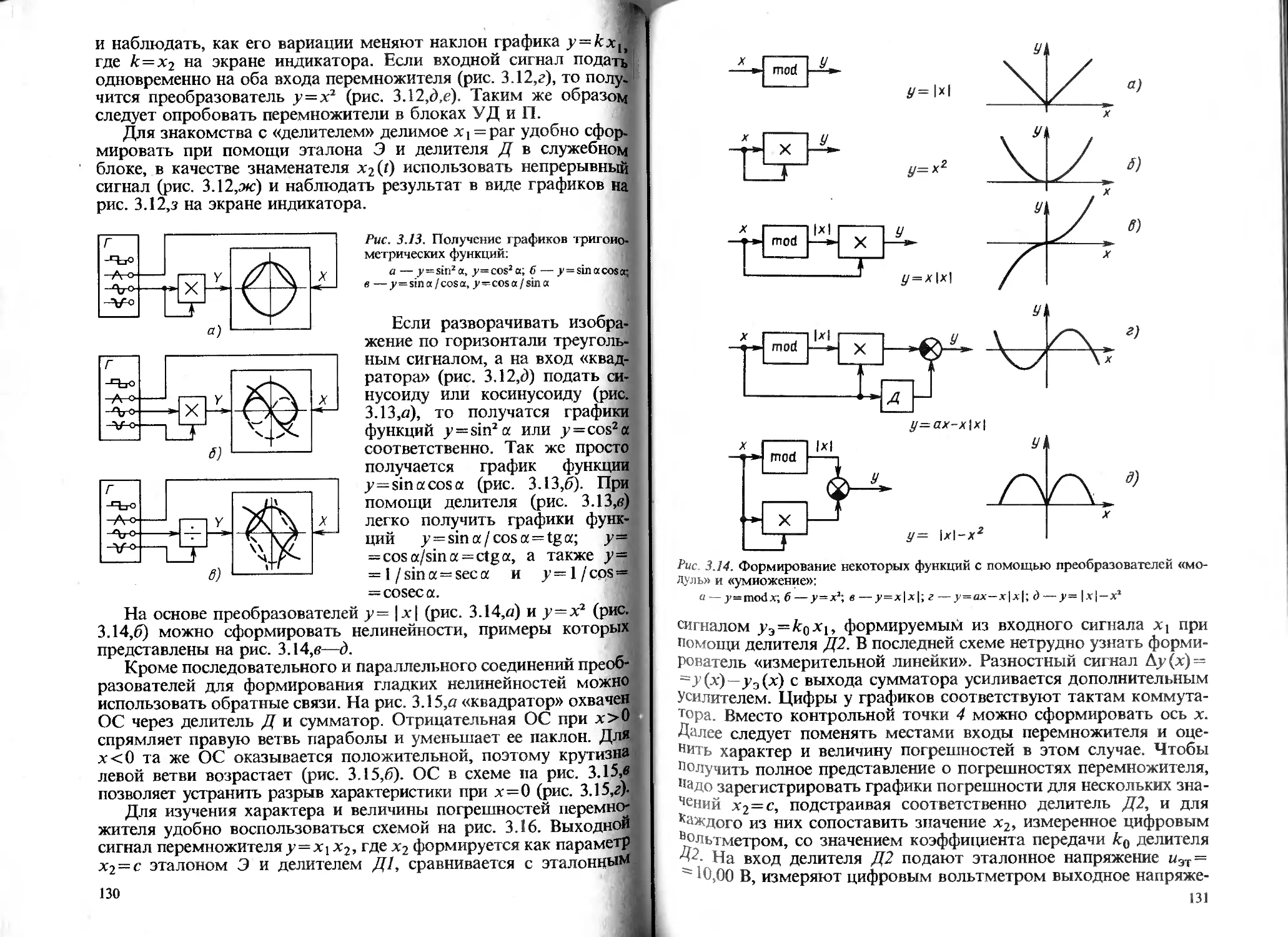
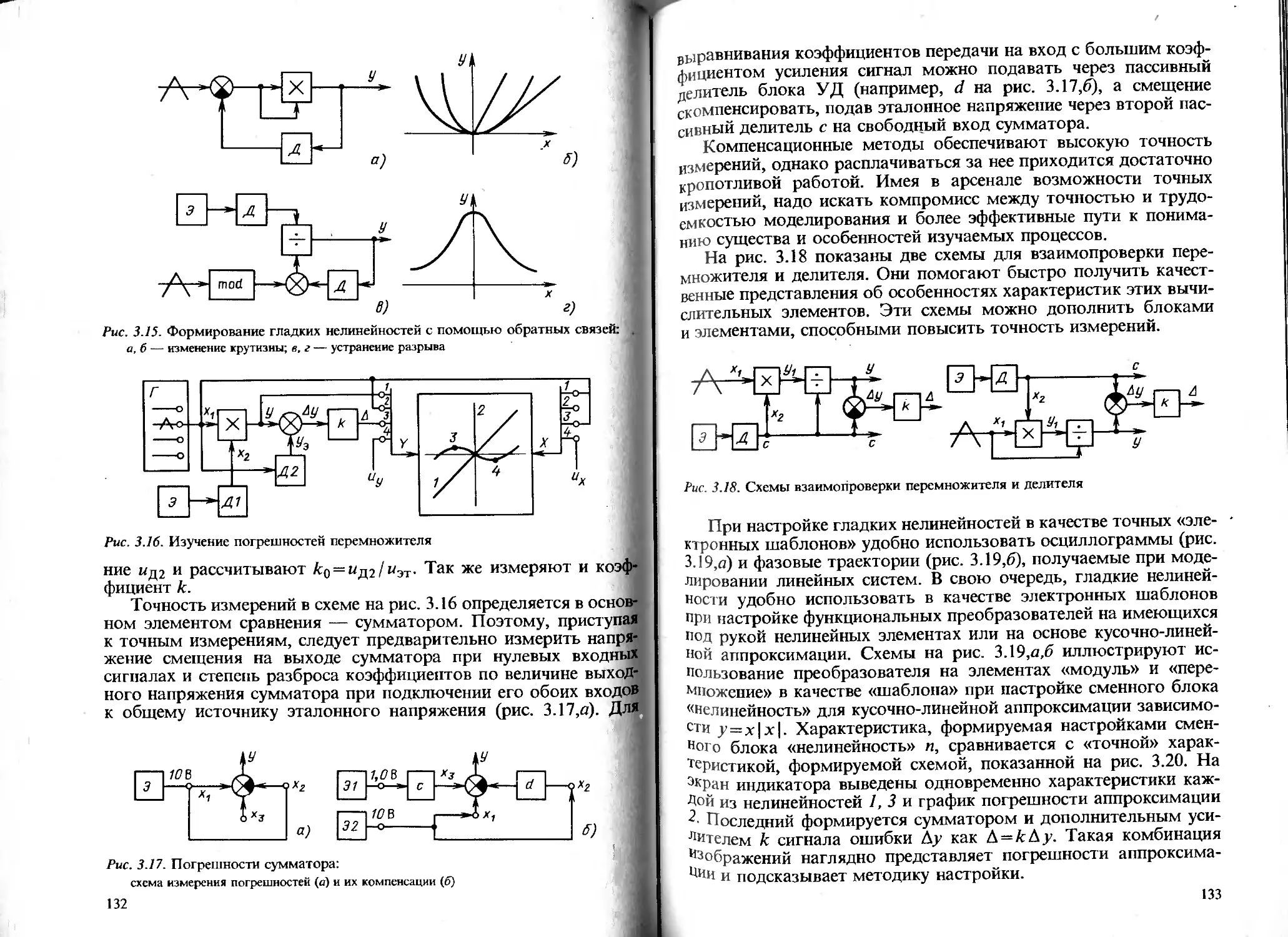
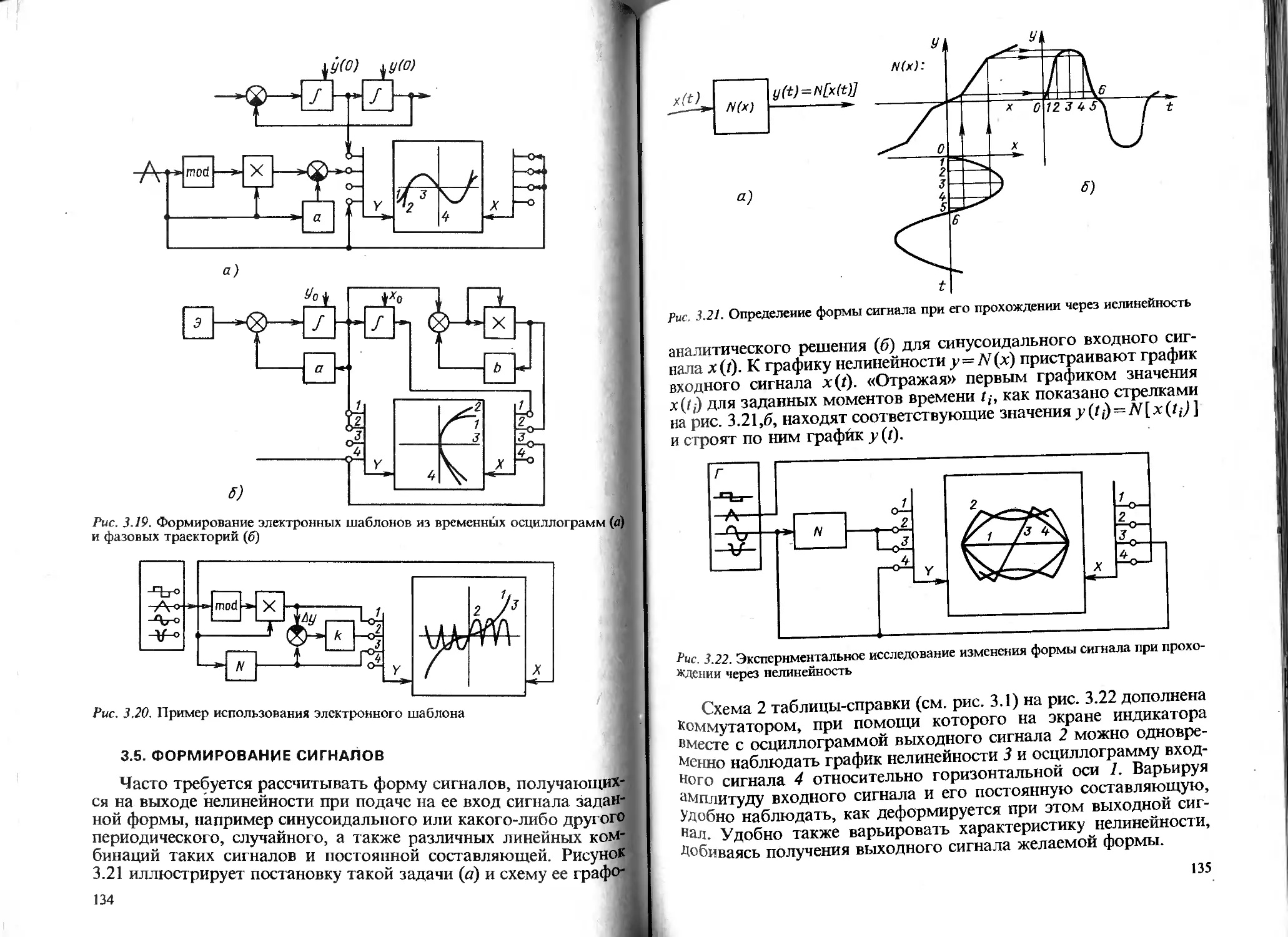
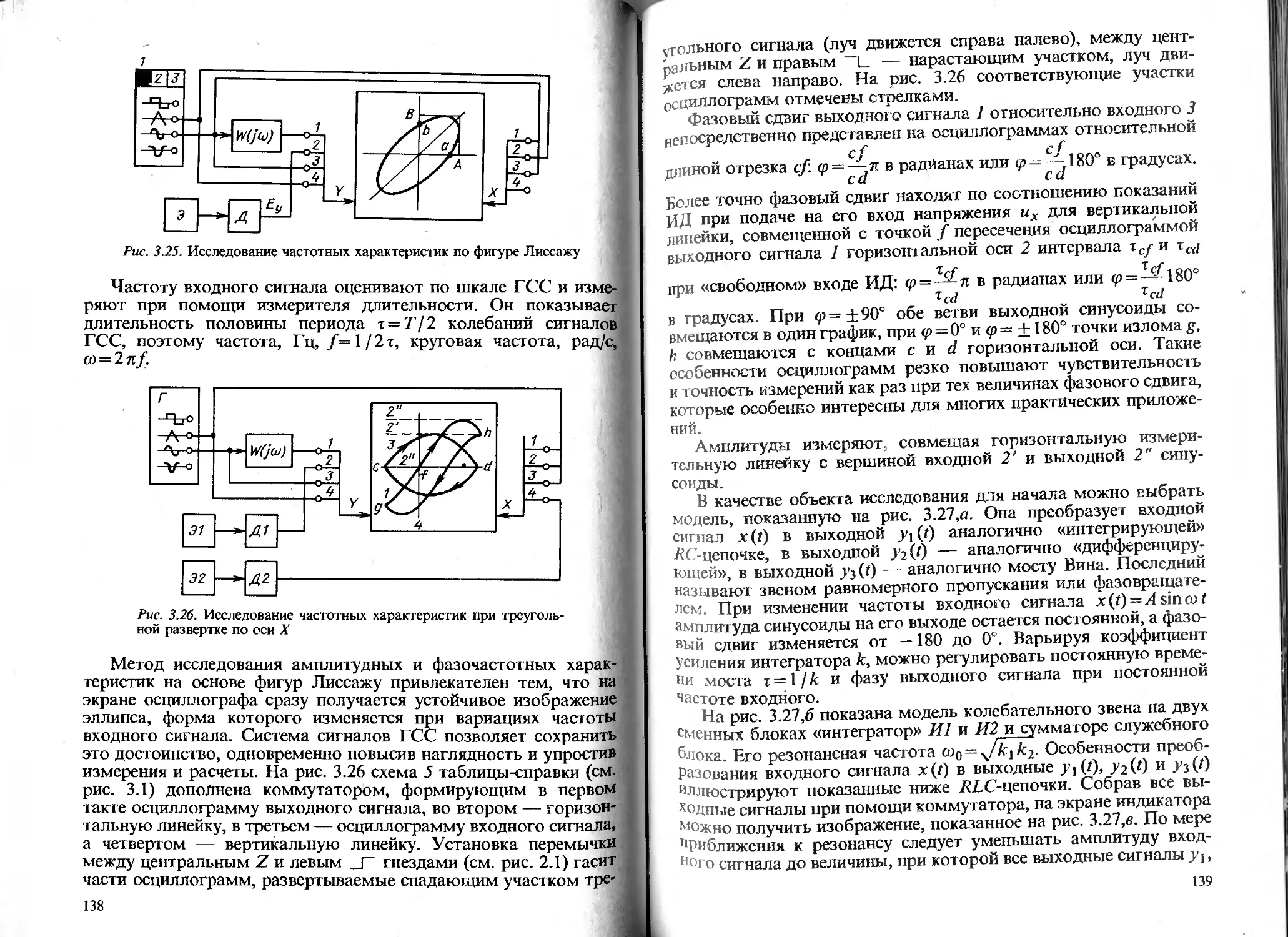
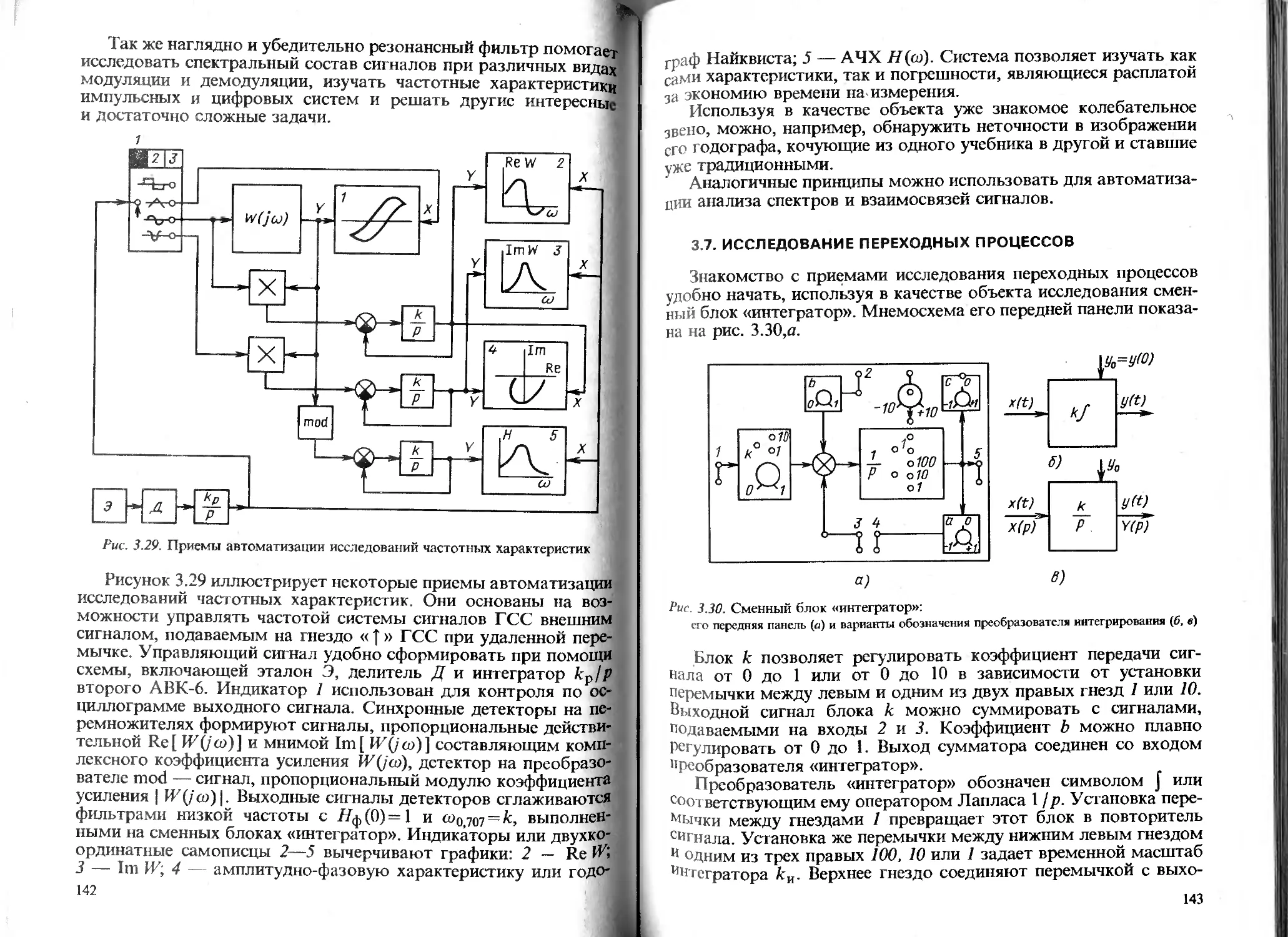
Текст
ЕН. АЛЕНСАНОВ
вв. гаврилин
В.А. ФЕДОРОВ
МРСОИАЛЫМ
днддеговыи
КОМПЬЮТЕР
ГН.АЛЕНСАКОВ
ВВ. ГАВРИЛИН
В.А.ФЕДОРОВ
аналоговый
е е КОМПЬЮТЕР
МОСКВА
ЭНЕРГОАТОМИЗДАТ
1992
ББК 32.97
А46
УДК 681.332/.333.OO1.3
Рецензент д-р техн, наук проф. В. Н. Афанасьев
Алексаков Г. Н. и др.
А46 Персональный аналоговый компьютер /
Г. Н. Алексаков, В. В. Гаврилин, В. А. Федо-
ров.— М.: Энергоатомиздат, 1992. — 256 с.: ил.
ISBN 5-283-01460-6
Всесторонне описан разработанный авторами анало-
говый вычислительный комплекс АВК-6 — персональный
аналоговый компьютер для изучения динамических про-
цессов различной физической природы на языке структур-
ных математических моделей. Показаны возможности его
использования для автоматизации инженерных и научных
исследований.
Для инженеров, занимающихся автоматизацией изме-
рений, обработки информации и управления. Полезна сту-
дентам и преподавателям вузов и техникумов.
2404000000-069
А-----------------224-91
051(01)-92
ББК 32.97
ISBN 5-283-01460-6
© Авторы, 1992
Предисловие
Цель работы — познакомить читателя с одним из путей
повышения профессиональной грамотности через совершенство-
вание математической в обход компьютерной.
В поисках такого пути авторы обратились к анализу нссиело-
вательской деятельности человека, рассматривая ее как объект
автоматизации средствами вычислительной техники. Обращение
к такому сложному и деликатному объекту автоматизации по-
требовало изучения и осмысления психолого-педагогических
и инженерно-психологических концепций. Использование психо-
логами и педагогами общих положений и конкретных представ-
лений теории управления для изучения и описания психологичес-
ких механизмов вдохновило авторов данной работы попытаться
сформировать и изложить свой взгляд на вполне определенную
область человеческой деятельности, связанную с изучением дина-
мических процессов в различных объектах.
Практической целью при этом была разработка таких средств
компьютеризации, которые бы естественным образом органично
вписывались в человеческую деятельность. Результатом явилось
создание в 1979 г. аналогового вычислительного комплекса
АВК-4.
Практическая апробация АВК-4 в вузах и ФМШ вылилась
в достаточно широкий эксперимент по экспертной оценке специ-
алистами общей концепции автоматизации исследований и адек-
ватности ей предложенного технического решения. Успех этого
эксперимента вдохновил на создание более совершенного прибо-
ра АВК-6, который в 1985 г. был отмечен медалью Лейпцигской
ярмарки.
Многие учебные заведения оснастили свои лаборатории та-
кими приборами. Интерес к АВК-6 растущего круга пользова-
телей призвана удовлетворить данная работа —- первая попытка
связно изложить весь комплекс методических и технических ас-
пектов этого направления компьютеризации исследований и обу-
чения.
3
Глава 1 содержит примеры математической формализации
различных предметных задач. Эти примеры иллюстрируют ме-
тод технологического построения математической модели, а обо-
бщение конкретных результатов используется при уточнении тре-
бований к персональному компьютеру, предназначенному для
исследований динамических процессов.
Глава 2 — это краткое описание аналогового персонального
компьютера АВК-6 в объеме, позволяющем воспроизвести и на-
ст -.лить отдельные блоки и приоор v целом. Тем, кто стремится
использовать АВК-6 только как готовое средство для компьюте-
ризации исследований и обучения, можно опустить эту главу
и сразу приступить к практическому знакомству с АВК-6.
Глава 3 знакомит с практическими приемами работы с анало-
говым персональным компьютером АВК-6.
В гл. 4 представлены некоторые результаты моделирования
па АВК-6 процессов, рассмотренных в гл. 1, и их обсуждение
с точки зрения особенностей изучаемых процессов. В § 4.12 описа-
но построение структурной модели экстремальной системы
и приведены некоторые результаты моделирования одномерных
и двумерных экстремальных задач.
В гл. 5 последовательно описывается построение структурной
математической модели нейтронно-физических процессов в ядер-
ном реакторе и результаты их моделирования на АВК-6.
В гл. 6 тот же аппарат структурных моделей использован для
анализа структуры деятельности человека — исследователя дина-
мических процессов. Эта глава итожит весь предыдущий матери-
ал и одновременно излагает общий принцип действий для всех
конкретных задач, рассматриваемых в предыдущих главах. По-
этому с этой главой имеет смысл ознакомиться предварительно,
до изучения конкретных задач, и периодически возвращаться
к ней по мере их освоения.
Рассмотренные примеры преследуют цель заинтересовать ши-
рокий круг читателей — от любознательных школьников и их
учителей, студентов и преподавателей вузов и техникумов до
инженеров и научных работников.
Авторы благодарят своих коллег, которые, будучи студен-
тами МИФИ и сотрудничая в СКИБ-А, внесли свой вклад в со-
здание АВК-4 и АВК-6: В. Тарасову, А. Анпилова, Е. Бичева,
А. Денисова, С. Гаврилюка, Т. Покровскую, Е. Овчинникову,
А. Шкуренкова, В. Алферова, И. Мазаева, Ю. Миронова,
С. Налетова, С. Руднева, В. Преснова, В. Известного.
Авторы выражают признательность И. В. Мазаеву, при уча-
стии которого был разработан ряд блоков АВК-6 и техническая
документация на них, подготовлены иллюстрации к гл. 2 и напи-
саны §§2.3.7, 2.5.9, 2.5.10, а также Т. В. Покровской и
Ю. И. Свиридову за помощь в оформлении рукописи.
Авторы
4
Глава 1
СТРУКТУРНЫЕ МОДЕЛИ ДИНАМИЧЕСКИХ
ПРОЦЕССОВ
1.1. ЗАДАЧИ ПРО БАКИ И БАССЕЙНЫ
Здесь и далее в гл. 1 мы преследуем двуединую цель:
во-первых, на конкретном материале присмотреться к умствен-
ной деятельности человека, изучающего динамические процессы,
а во-вторых, ввести и проиллюстрировать определенную систему
понятий, терминов и обозначений. Итоги анализа структуры
действий при исследовании динамических процессов обобщены
в гл. 6 и представлены там в виде структурных моделей на рис.
6.1 и 6.2. С этими моделями полезно предварительно познако-
миться и соотносить с ними практические действия, детально
представленные далее для первых задач и более обобщенно —
для последующих.
Итак, в бак ведут две трубы (рис. 1.1,д). По одной трубе в бак
втекает q\(t), а по другой — вытекает qi(t) литров жидкости
в секунду. Эго — расчетная схема объекта исследования. На
рисунке наглядно представлены те черты реального объекта,
которые должна отразить его математическая модель.
Для начала надо уточнить цель исследования — указать,
какие внешние физические переменные рассматриваются в каче-
стве причин изменения состояния объекта в развитии изучаемого
динамического процесса и какая физическая переменная является
следствием — непосредственно наблюдаемым результатом. Пе-
ременные-причины кратко называют «входами», переменную-
следствие — «выходом». Граф 1 на рис. 1.1 показывает, что
входы — это расходы q\(t) и q^ (/) — две причины изменения
Уровня воды в баке h(t). Уровень можно непосредственно изме-
рить рейкой с делениями, по шкале мензурки, водомерной труб-
кой или уровнемером, и поэтому именно уровень Л(/) имеет
смысл рассматривать в качестве выхода.
Далее надо указать, какие промежуточные переменные полез-
но рассматривать при изучении преобразования первопри-
чин-входов в конечное следствие-выход и от каких параметров
5
6
4,(1) Aq(t); Q(t); Q(t);
Рис. 1.1. Структурные модели наполнения баков
зависят эти преобразования. Над стрелкой графа 2 на рис. 1.1
приведен список переменных, а под ней указан единственный
параметр — площадь днища S для бака или бассейна с вер-
тикальными стенками.
Следующий шаг — анализ причинно-следственных связей
между переменными. Граф 3 на рис. 1.1 представляет его резуль-
тат. Он отражает, что разность расходов kq(t) = q\(t) — #2(0
определяет скорость изменения Q(t) количества жидкости (2(0,
а от ее количества зависит уровень h (t).
Следующий шаг — анализ конкретных зависимостей перемен-
ных-следствий от переменных-причин. В разрывы стрелок графа
3 включают блоки для описания соответствующих зависимо-
стей — получается структурная схема 4. Преобразователь 7 от-
ражает зависимость небаланса расходов &q(t) от входов q\(t)
и #2 (О- Стрелки, представляющие переменные-причины, входят
в кружочек-сумматор, переменная-следствие выходит из пего.
Зачерненный сектор отмечает переменную, входящую в алгебра-
ическую сумму со знаком минус. Преобразователь 2 представля-
ет зависимость количества жидкости Q (t) от скорости его измене-
ния Q(t) = Aq(t), преобразователь 3 — зависимость уровня жид-
кости h (t) от ее количества Q (t).
В структурной математической модели 5.1 блоки заполнены
математическими описаниями соответствующих преобразований
переменных. Количество жидкости Q (/) в каждый момент време-
ни t > 0 определяется его начальным значением <2о = Q (0) и накоп-
t
лением за время г>0 как Q (J) = Qo + \ & q (т) dt. Это преобразова-
ние в структурной модели 5.1 отмечено символом f в блоке 2
с входящими в него стрелочками A.q(t) — dQ I d t слева и Qo
сверху. Выходная стрелка блока 2 Q (г) входит в блок 3, описыва-
ющий зависимость уровня h(t) от объема Q(t) как h (г) = Q(t).
Это означает, что для расчета h (0 величину Q (t) надо умножить
на постоянный коэффициент к^- Х IS.
Аналитическую модель процесса заполнения или опорожне-
ния бака обычно стремятся записать в виде дифференциального
уравнения (t)— #2(0] с начальным условием А (0) = ко-
операции, которые при этом надо выполнить, иллюстрируют
соотношения 6 на рис. 1.1. Уравнение баланса расходов (1)
и зависимости уровня от объема (3) в .виде А(0=^(2(0 надо
дополнить уравнением (2). Последнее описывает реальный физи-
ческий процесс накопления жидкости — интегрирование по вре-
мени (блок 2 структурной модели 5.1) обратным ему дифферен-
циальным соотношением dQ/dt=Aq(t), определяющим причину
процесса Д#(г) через наблюдаемый результат — изменение объ-
7
ема Q(t). Исключив из этой системы «лишние» переменные А</(г)
и Q(t), записывают относительно следствия h(t) дифференциаль-
ное уравнение с правой частью, определяемой причинами q\ (/)
и ^2(0-
Такое детальное описание действий на первый взгляд может
показаться излишним, а использование символики графов и стру-
ктурных схем — загромождающим содержание простой физичес-
кой задачи. Однако эта детальная и последовательно развернутая
картина действий позволяет еще раз взглянуть на весь процесс
перехода от расчетной схемы к дифференциальному уравнению
в целом, чтобы, рассуждая от противного, решить, можно ли,
исключив какую-либо из операций, считать, что уравнение запи-
сано действительно осмысленно, а не формально.
Усложним задачу. Пусть бак имеет форму воронки, тет раэдра
или опрокинутой призмы (рис. 1.1,6), цилиндра (цистерны) или
шара (рис. 1.1,в). В этом случае зависимость уровня Л(/) от
объема воды Q (г) будет уже не прямо пропорциональной, а нели-
нейной h — Nf,(Q). Она представлена на рис. 1.1 блоком Nh,
которым надо заменить блок 3 в структурной модели 5.1. Ско-
рость прироста уровня определяется площадью зеркала S(h),
которая сама зависит от h, что отмечено штриховой обратной
связью у блока h = Nh(Q). Переменные h, Q, S по-прежнему
являются функциями времени, но для упрощения формул этого
в явном виде часто не указывают. Записать окончательное диф-
ференциальное уравнение в одно действие для такой задачи
труднее, чем для бака на рис. 1.1,а. Детальная структура действий
помогает точно указать, какой элемент и на каком этапе требует
дополнительных уточнений. В рассматриваемых задачах это опи-
сание зависимости уровня от объема жидкости в конкретном
баке Л=Л^(0. Для баков, показанных па рис. 1.1,д- -в, они
представлены соответствующими графиками ниже структурной
модели 5.1.
Такие графики называют градуировочной характеристикой,
если речь идет только об измерении уровня, или регулировочной,
если проектируют систему управления уровнем. Эти характери-
стики называют статическими, поскольку их строят как зависи-
мость установившегося уровня h от количества жидкости Q.
Соответствующие им функциональные преобразователи считают
безынерционными, поскольку они «мгновенно» преобразуют из-
менения входной переменной Q(t) в изменения выходной /?(/)•
Пусть теперь жидкость свободно вытекает через отверстие
с проходным сечением ст в днище бака. В этом случае скорость
истечения жидкости v=Nv(h) зависит от ее уровня Л, а расход
Q2 = (tv пропорционален проходному сечению ст отверстия (блоки
4 и 5 модели 5.2 на рис. 1.1). Модель 5.2 наглядно представляет
внутреннюю «обратную связь»: расход qiit) теперь не является
8
независимой переменной, а определяется уровнем жидкости h(t)
над отверстием. Одновременно модель 5.2 обнаруживает, что
в цепочке преобразователей 1—5 физические зависимости
Г = 7У„(Л) (блок 4) и 92=42(0; ») (блок 5) являются «новыми»,
и потому требуют отдельных исследований, которые должны
быть завершены математическим описанием соответствующих
преобразований физических переменных.
Зависимость скорости истечения идеальной жидкости v из
отверстия от высоты ее открытой поверхности h над отверстием
описывает формула Торричелли [1]. Это соотношение
и соответствующий ему график можно принять в качестве перво-
го приближения — статической градуировочной характеристики
v = 7Vt,(/i) нелинейного безынерционного преобразователя 4 в мо-
дели 5.2 на рис. 1.1.
Для постоянного проходного сечения а = const параметр <т —
просто коэффициент, на который надо умножать переменную
v(t), чтобы рассчитать переменную ?2(0=°’г(0- Если же а —
проходное сечение вентиля или клапана, которым регулируют
расход вытекающей жидкости, то a (t) — переменный параметр,
являющийся функцией времени t, и для расчета расхода
92(0 = сг(0” (0 потребуется преобразователь, отражающий в
структурной модели операцию х — «перемножение»* (блок 5 на
рис. 1.1).
Скорость реальной жидкости зависит от ее вязкости и харак-
тера течения, от «воронки», образующейся над отверстием. Кро-
ме того, установление скорости при изменении уровня Л (г) проис-
ходит не мгновенно. Поэтому, приняв в качестве первого прибли-
жения для преобразователей 4 и 5 структурной модели 5.2 зависи-
мости «блок 4» и «блок 5» на рис. 1.1, полезно проверить
экспериментом, насколько они справедливы для конкретного слу-
чая. Модель 5.2 подсказывает постановку такого эксперимента.
Для его «чистоты» исследуемое преобразование Л-»#2 надо вы-
членить из всей совокупности взаимосвязанных преобразований.
Этого можно достичь, задавая последовательность значений
h=ci и стабилизируя каким-либо образом уровень в течение
времени, необходимого для измерения расхода q2 с наперед
заданной точностью. В любом случае структурная математичес-
кая модель с полной определенностью говорит о том, какие
именно зависимости учитывает теоретическое исследование.
Для перехода к аналитической форме математической модели
соотношения (1) и (2) системы уравнений 6 (рис. 1.1) надо допол-
нить соотношениями, описывающими зависимость уровня от
объема жидкости для конкретного бака (3), скорости истечения
* Термин «перемножение» отличает блок и операцию умножения двух неза-
В1,’счим.ых переменных x(t) и у(/) друг на друга z(t)-=x(t)y(t) от «умножения»
y(t)=kx{t) переменной x(t) на коэффициент к.
9
от уровня жидкости (4), расхода от скорости и проходного сече-
ния (5). Далее, исключая «лишние» переменные, стремятся в за-
мкнутом виде записать дифференциальное уравнение относитель-
но выходной переменной h(t) и собрать в его правой части
независимые входные переменные q}(f) и <r(t). Когда это не
удается, аналитическую модель представляют в виде двух соот-
ношений:
—<71 (0 — ?2[сг(0; <2(01 — уравнение состояния,
h (t) = Nf, [ Q (t) ] — уравнение выхода.
Первое описывает преобразование входов ql(t) и rr(/) в состоя-
ние — скрытую переменную Q(t), а второе — преобразование
состояния Q(t) в измеряемый выход h(t).
Соединение преобразователей типа 1—2—3 в схемах 4 и 5.1 на
рис. 1.1, а также 2—3—4—5 в схеме 5.2 на рис. 1.1 называют
последовательным. Цепочку преобразований, развертывающую-
ся в направлении от первопричины — входа к конечному следст-
вию — выходу, например 2—3 в схеме 5.2, называют каналом,
цепью прямой передачи сигнала или прямой связи, либо просто
прямой связью, а развертывающуюся в противоположном на-
правлении, например 4—5, — каналом обратной связи, цепью
обратной связи или просто обратной связью (ОС). Сумматор
1 замыкает «петлю» или «контур» обратной связи. Поэтому
соотношение (1) системы уравнений 6 называют уравнением за-
мыкания, а остальные (2)—(5) — уравнениями связи.
Преобразователи 4 и 5 модели 5.2 в явном виде представляют
скрытую ОС, свойственную самому процессу. Такую ОС называ-
ют внутренней. Можно поручить кому-нибудь управлять при
помощи вентиля расходом qx (t) таким образом, чтобы поддер-
живать уровень h (t) на заданной отметке, несмотря на изменения
расхода q2(t) вытекающей жидкости. Такой оператор реализует
внешнюю ОС. Входные переменные, нарушающие равновесие,
называют возмущениями; переменную, используемую для до-
стижения цели управления, называют управлением. Оператора
несложно заменить автоматическим устройством. Например, по-
плавок автомобильного карбюратора, поднимаясь вместе с уров-
нем топлива, перемещает иглу, которая перекрывает поступление
топлива в камеру и поэтому уровень в ней Л (г) остается
постоянным при изменениях расхода q2 (t) вместе с изменениями
скорости двигателя. Это — один из многочисленных примеров
реализации внешней или главной ОС при помощи соответст-
вующего автоматического устройства.
Преобразователь «интегратор» описывает не только накопле-
ние жидкости. Присмотревшись к толпе перед эскалатором мет-
ро, нетрудно заметить аналогию переменной q{ (?) — числу пас-
10
сажиров в единицу времени, выходящих из прибывающих поез-
дов, переменной <?2(0 — числу пассажиров, «пробивающихся»
в единицу времени на эскалатор через его проходное сечение ст;
в преобразователе — зависимость длины очереди Л(/) от
количества Q(t) пассажиров в «накопителе» и, наконец, в преоб-
разователе Nv — зависимость скорости прохода на эскалатор от
напирающего сзади «хвоста» очереди h(f). Разумеется, в этом
случае конкретные характеристики нелинейностей определяются
не столько физическими, сколько «человеческими» факторами.
Интегрирование описывает процесс накопления денег на счету
в банке, рост популяций и народонаселения, накопление вредных
и лечебных факторов в организме, падение уровня Аральского
моря и нарастание экологических нарушений в глобальном мас-
штабе. Однако для успешного применения математического мо-
делирования в широких и жизненно важных областях имеет
смысл сначала более детально присмотреться к его использова-
нию для изучения динамических процессов в более доступных
и менее опасных объектах.
1.2. ТЕРМОДИНАМИЧЕСКИЕ ПРОЦЕССЫ
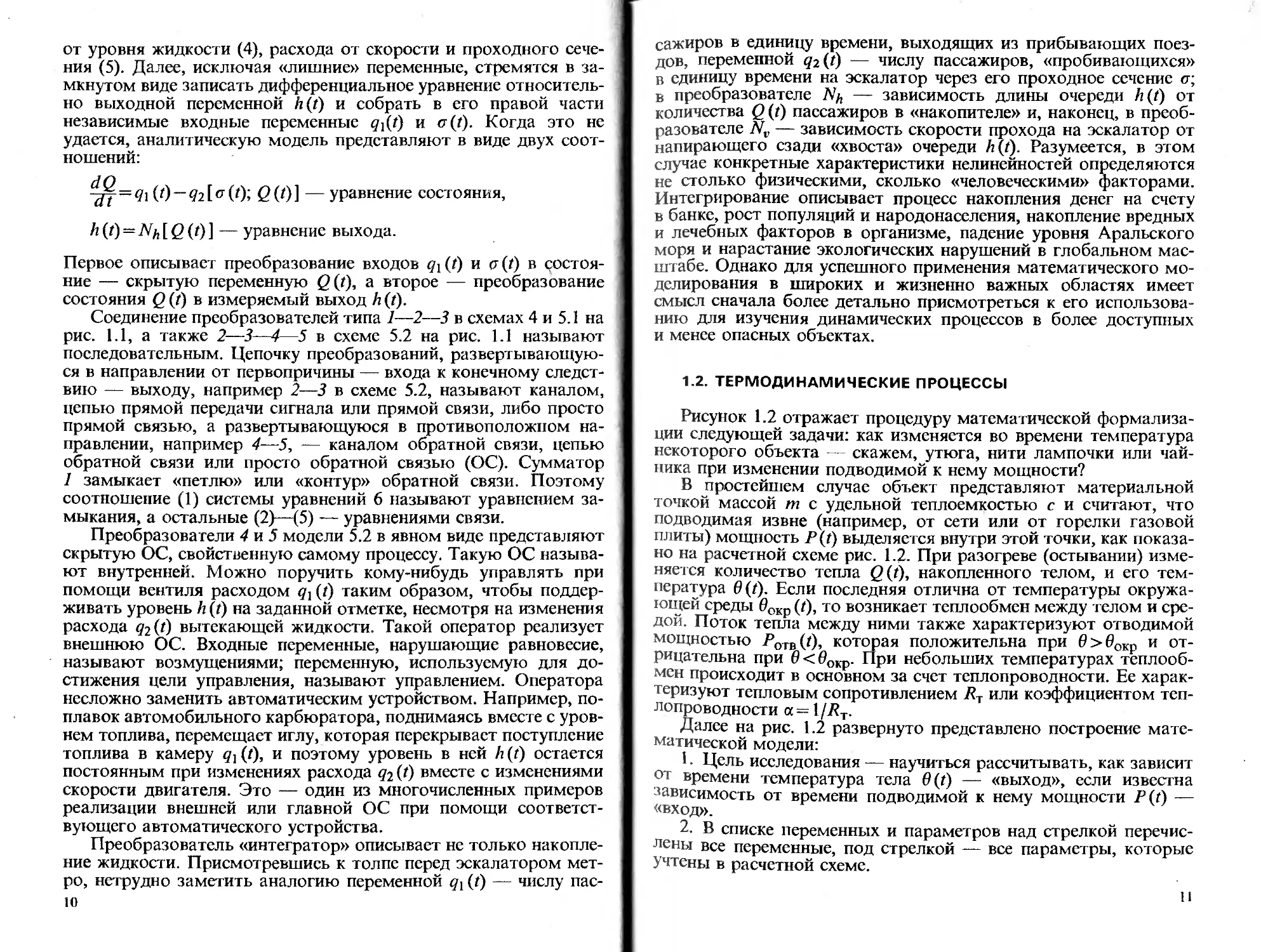
Рисунок 1.2 отражает процедуру математической формализа-
ции следующей задачи: как изменяется во времени температура
некоторого объекта — скажем, утюга, нити лампочки или чай-
ника при изменении подводимой к нему мощности?
В простейшем случае объект представляют материальной
точкой массой т с удельной теплоемкостью с и считают, что
подводимая извне (например, от сети или от горелки газовой
плиты) мощность P(t) выделяется внутри этой точки, как показа-
но на расчетной схеме рис. 1.2. При разогреве (остывании) изме-
няется количество тепла Q(f), накопленного телом, и его тем-
пература 0(f). Если последняя отлична от температуры окружа-
ющей среды 0окр (/), то возникает теплообмен между телом и сре-
дой. Поток тепла между ними также характеризуют отводимой
мощностью РОтв(0, которая положительна при 6>0Окр и от-
рицательна при 0<0Окр- При небольших температурах теплооб-
мен происходит в основном за счет теплопроводности. Ее харак-
теризуют тепловым сопротивлением /?т или коэффициентом теп-
лопроводности а = 1//?т.
Далее на рис. 1.2 развернуто представлено построение мате-
матической модели:
1 • Цель исследования — научиться рассчитывать, как зависит
от времени температура тела 0(f) — «выход», если известна
зависимость от времени подводимой к нему мощности P(f) —
«вход».
2 . В списке переменных и параметров над стрелкой перечис-
лены все переменные, под стрелкой — все параметры, которые
учтены в расчетной схеме.
н
p<tL иГ\ e(t> #окр (ty
a * p0Tg (t)
1.
P(t) —*- B(t)
ротв(*)> Q(t)', Po*p (t)
2. P(t) ---------------—---------------*- 6(t)
' /77, c, a
3. P(t) Pp(t) —*~Q(t)
РотвС^) ABCt) &окр(*)
*- 2
Porn(t)
Рис. 1.2. Структурные модели тепловых процессов
1) Pp(t)=P(t)~P0TB(t)
2) pp(t)=dQ/at
3) =
<9 36ft)=0(t)-6OKp(t)
5) P0Te(t)=aM(t)
Лампочка Чайник
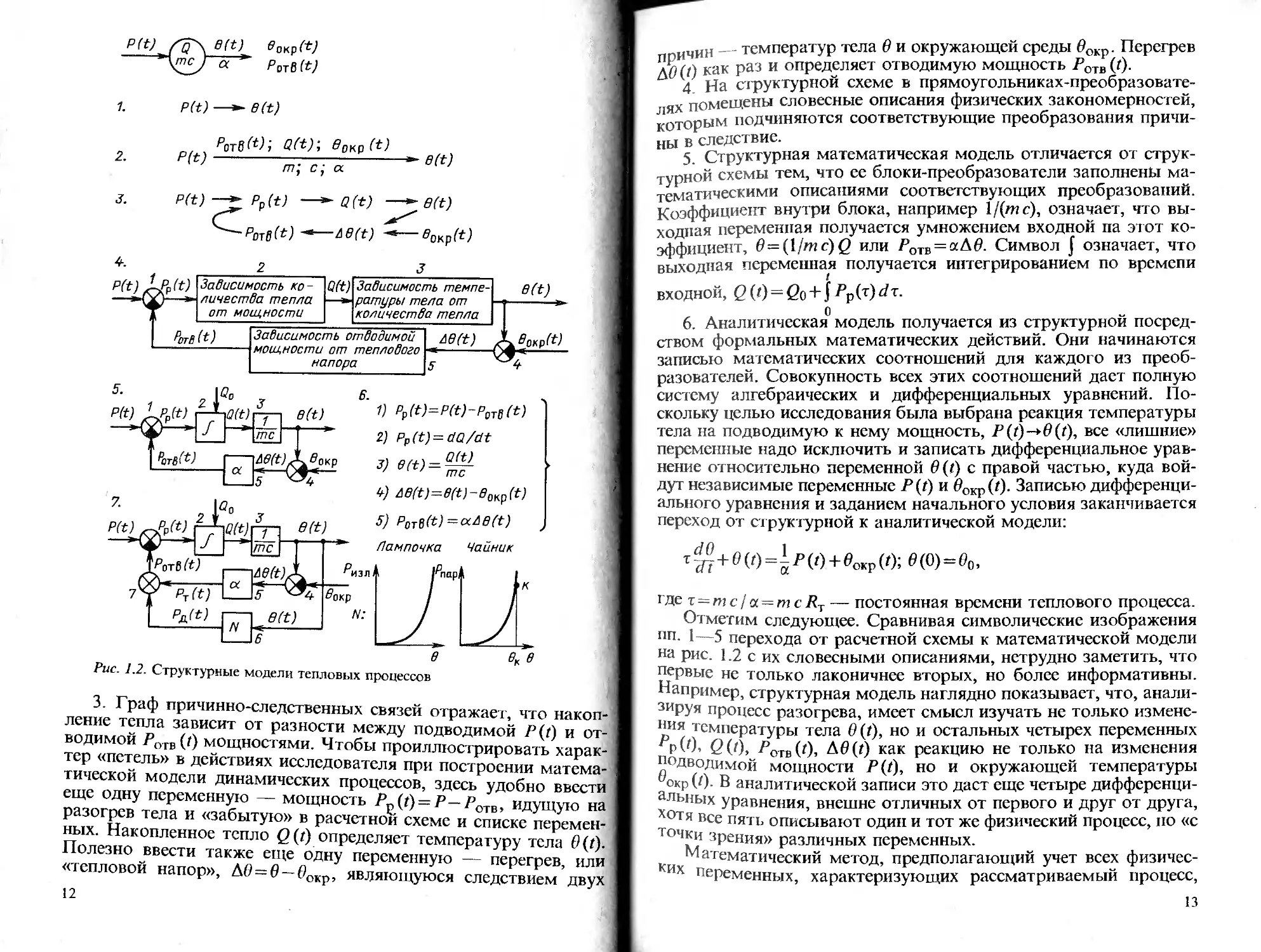
3. Граф причинно-следственных связей отражает, что накоп
ление тепла зависит от разности между подводимой Г (г) и от
водимой Роп (/) мощностями. Чтобы проиллюстрировать харак
тер «петель» в действиях исследователя при построении матема
тичсской модели динамических процессов, здесь удобно ввести
еще одну переменную — мощность P„(t) = Р-Роп, идущую на
разогрев тела и «забытую» в расчетной схеме и списке перемен
ных. Накопленное тепло Q(t) определяет температуру тела 0(f)
Полезно ввести также еще одну переменную — перегрев, или
«тепловой напор», Д(? — в — 0окр, являющуюся следствием двух
12
пичин —- температур тела 6 и окружающей среды 0окр. Перегрев
дД (/) как раз и определяет отводимую мощность Ротв (г).
а 4 На структурной схеме в прямоугольниках-преобразовате-
помещены словесные описания физических закономерностей,
которым подчиняются соответствующие преобразования причи-
ны в следствие.
5. Структурная математическая модель отличается от струк-
турной схемы тем, что ее блоки-преобразователи заполнены ма-
тематическими описаниями соответствующих преобразований.
Коэффициент внутри блока, например 1/(ж), означает, что вы-
ходная переменная получается умножением входной па этот ко-
эффициент, 0—(l/mc)Q или Ротв = аД0. Символ f означает, что
выходная переменная получается интегрированием по времени
входной, б (?) = <2о + f рр(тМт-
о
6. Аналитическая модель получается из структурной посред-
ством формальных математических действий. Они начинаются
записью математических соотношений для каждого из преоб-
разователей. Совокупность всех этих соотношений дает полную
систему алгебраических и дифференциальных уравнений. По-
скольку целью исследования была выбрана реакция температуры
тела на подводимую к нему мощность, Р (?)->#(?), все «лишние»
переменные надо исключить и записать дифференциальное урав-
нение относительно переменной f)(t) с правой частью, куда вой-
дут независимые переменные Р (?) и 0окр (t). Записью дифференци-
ального уравнения и заданием начального условия заканчивается
переход от структурной к аналитической модели:
^+0(0=Ь(О+0окР(О; О(Р)=ео,
где т = тс I a = nic RT — постоянная времени теплового процесса.
Отметим следующее. Сравнивая символические изображения
пн. 1—5 перехода от расчетной схемы к математической модели
на рис. 1.2 с их словесными описаниями, нетрудно заметить, что
первые не только лаконичнее вторых, но более информативны.
Например, структурная модель наглядно показывает, что, анали-
зируя процесс разогрева, имеет смысл изучать не только измене-
ния температуры тела в (?), но и остальных четырех переменных
"pv), Q(t), Ротв(0, как реакцию не только на изменения
подводимой мощности P(t), но и окружающей температуры
окр (?). В аналитической записи это даст еще четыре дифференци-
альных уравнения, внешне отличных от первого и друг от друга,
отя все пять описывают один и тот же физический процесс, но «с
ТОЧм 3Рения>> различных переменных.
Математический метод, предполагающий учет всех физичес-
их ПеРеменных, характеризующих рассматриваемый процесс,
13
называют методом пространства состояний или фазового про-
странства, а переменные — переменными состояния или фазовы-
ми координатами. Структурная модель представляет этот метод
в развернутом виде.
Рассматривая температуру тела 0(f) в качестве выходной —
«внешней» переменной, например, потому, что ее можно изме-
рить термометром и зарегистрировать самописцем, остальные
переменные придется признать «внутренними», «скрытыми» от
непосредственного наблюдения. Отметим, что алгоритмический
путь построения математической модели ведет к этим достаточ-
но абстрактным понятиям теории управления напрямую, не вы-
ходя за рамки школьных курсов математики и физики.
Вернемся к исследуемым тепловым объектам. Чем отличают-
ся процессы разогрева утюга, чайника и лампочки? Утюг не
разогревается докрасна и нс кипит — никакие другие механизмы
теплообмена, кроме теплопроводности, можно не учитывать,
и поэтому построение его математической модели можно счи-
тать законченным. Для лампочки с ростом температуры нити
начинает преобладать теплоотвод излучением — лампочка как
раз и служит для преобразования электрической энергии в свето-
вое излучение, а о «скрытой» температуре нити надо помнить,
заботясь о спектре излучения, КПД и надежности лампочки.
При разогреве чайника растет роль теплоотвода из-за испаре-
ния (парообразования), которое при кипении становится опреде-
ляющим. Поэтому структурные модели лампочки и чайника
придется дополнить блоком N, отражающим зависимость допол-
нительного теплоотвода Рд(г) в модели 7 на рис. 1.2.
Необходимость учесть дополнительный теплоотвод вынужда-
ет временно прервать цикл проводимого исследования с тем,
чтобы пройти аналогичный цикл (см. рис. 6.1 и 6.2) для изучения
особенностей теплоотвода. Для лампочки объектом исследова-
ния оказывается теплообмен излучением, для чайника — тепло-
обмен испарением. В принципе, для каждого из этих объектов
надо пройти весь цикл исследования, чтобы получить оконча-
тельный результат — зависимость отводимой мощности от тем-
пературы тела.
Для лампочки можно принять в качестве «готового» резуль-
тата закон Стефана — Больцмана ej=(?04, где ej — интегральная
излучательная способность абсолютно черного тела, 0 — аб-
солютная температура и а — универсальная постоянная Стефана.
Представив эту зависимость в виде нелинейного функциональ-
ного преобразователя Ризл — N (0), его надо включить в структур-
ную модель лампочки параллельно блоку, описывающему тепло-
обмен нити с окружающей средой за счет теплопроводности. Эта
дополнительная цепочка — вторая «внутренняя ОС», отлича-
ющая процесс разогрева лампочки от разогрева утюга.
14
Для чайника прямого ответа на интересующий нас вопрос,
как зависит мощность, отводимая испарением (парообразовани-
ем), от температуры Рпар — ^(6), в справочнике нет. Можно
продолжить поиск в специальной литературе или поставить конк-
ретную задачу физикам. Структурная модель подсказывает путь
инженерного решения проблемы: вооружившись электрическим
чайником или кипятильником, автотрансформатором, ваттмет-
ром и термометром, снять интересующий график, пока закипает
чайник. Она же наглядно показывает возможные источники по-
грешностей такого исследования и помогает предложить прак-
тические меры, позволяющие разделить слагаемые теплоотвода
и повысить точность измерений. Вид графика PnaP = N(fi) показан
на рис. 1.2, буквой к на нем отмечена точка кипения.
Эти простые примеры, разумеется, не исчерпывают возмож-
ности метода структурных моделей в исследованиях термодина-
мических процессов. Иллюстрируя действия исследователя, свя-
занные с учетом тех или иных конкретных особенностей тепло-
вых процессов и завершающихся последовательным наращива-
нием структурной модели, они помогают еще раз как бы со
стороны взглянуть на структуру и динамику любого инженер-
ного исследования.
1.3. ДВИЖЕНИЕ МАТЕРИАЛЬНОЙ ТОЧКИ
С расчетной модели в виде материальной точки массой т, на
которую действует сила f начинают изучение механического
движения любых объектов.
Пусть для начала таким объектом является космический ко-
рабль, который должен причалить к космической станции КС
(рис. 1.3,а).
Космонавт или автомат может включать двигатели корабля:
левый — чтобы разогнать его силой/+ для сближения со станци-
ей, правый — чтобы затормозить его силой/_ при подходе к ней.
Чтобы благополучно причалить, надо детально изучить, как
сила тяги /(г) преобразуется в перемещение корабля относитель-
но станции x(t) (граф 1).
Перемещение зависит от скорости корабля v(t), а послед-
няя — от его ускорения a(t). Преобразование силы тяги в ускоре-
ние определяется параметром т — массой корабля, которая
в общем случае тоже является функцией времени m(t). Список
переменных приведен над стрелкой графа 2, параметров — под
ней.
Граф связей между переменными 3 не требует дополнитель-
ных пояснений.
Блоки-преобразователи структурной схемы 4 заполнены сло-
весными описаниями зависимостей, подлежащих изучению и ма-
тематическому описанию. Первая из них — это закон Ньютона,
15
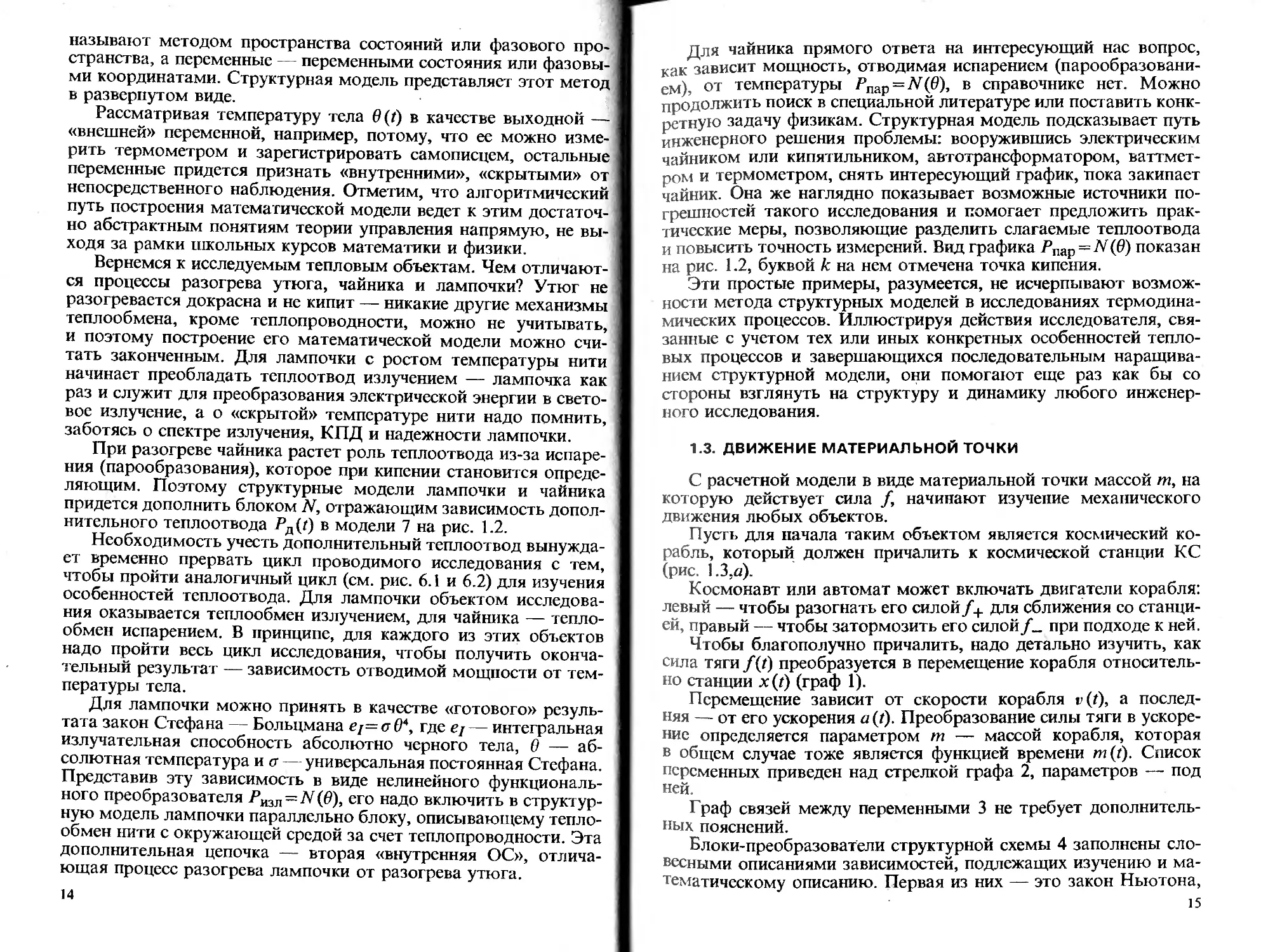
f(t) m v(t); x(t)
1. f(t) -------- x(t)
alt); v(t)
2. fit) -x(t)
J. f(t)-*-altJ—*-v(t) ——x(t)
Рис. 1.3. Одномерное движение материальной точки
устанавливающий физическую зависимость ускорения а (г) от
силы /(/) и массы т, а второй и третий — математические
зависимости скорости от ускорения и перемещения от скорости.
В структурной модели 5,а блоки заполнены математическими
описаниями преобразований:
а(0=^/(0 - закон Ньютона;
16
t>(O = t’o+j a(r)dr — накопление скорости;
о
t
x(O = *o + f — накопление перемещения
о
Аналитическая модель 6 представляет собой известное диф-
ференциальное уравнение второго порядка, которым описывают
движение материальной точки массой т под действием силы f(t)
с начальными условиями при /=0; v(O)=vo; х(О) = хо.
Пусть теперь точка массой т представляет автомобиль (рис.
1.3,6) или корабль (рис. 1.3,в). Предоставив проделать промежу-
точные действия 1-4 самому читателю, перейдем сразу к струк-
турной модели 5,б,в. В ней отражено, что в этих случаях при
движении тела возникает сила сопротивления движению
зависящая от скорости v(z), а ускоряющая сила fy(t) равна раз-
ности сил тяги f(t) и сопротивления /с (/). В общем случае зависи-
мость силы сопротивления от скорости нелинейна, что представ-
лено блоком/с = А(т). Нелинейность Ng для автомобиля соответ-
ствует «сухому» трению, a NB для корабля — гидравлическому
сопротивлению, пропорциональному квадрату скорости.
Аналитическая модель 6,6,в представляет все эти зависимости
в виде формулы.
Цель моделирования — изучение алгоритмов выбора управ-
ляющей силы в зависимости от координаты и скорости движуще-
гося объекта, обеспечивающих достижение цели за минимальное
время при разумных затратах энергии или других дополнитель-
ных условиях.
1.4. ВЕРТИКАЛЬНОЕ ДВИЖЕНИЕ ТЕЛА
В ГРАВИТАЦИОННОМ ПОЛЕ
В столбце 1 (рис. 1.4) представлены три варианта такой зада-
чи: человек собирается спрыгнуть на землю без парашюта (I),
с парашютом (II) и ныряет в воду с вышки (III).
Все операции по переходу от физической к структурной моде-
ли «свернуты» в одно действие, результаты которого — струк-
турные модели трех изучаемых процессов — представлены в
столбце 2.
Причиной движения во всех трех случаях является сила грави-
тации p—mg, которая для тела массой т (это — параметр)
является функцией переменной g — земного, марсианского или
лунного ускорения свободного падения. Для выбранного направ-
ления оси х она отрицательна, что отмечено зачерченным сек-
тором сумматоров на входе уже знакомой модели второго зако-
на Ньютона.
В первом варианте задачи сопротивление движению не учиты-
вают.
17
Рис. 1.4. Одномерное движение в поле тяжести
Пытаясь зонтиком смоделировать парашют или пользуясь
настоящим парашютом (вариант II), надо учесть силу аэродина-
мического сопротивления /c = at'2- Ее формирование как функции
скорости v отражает блок Nc. Парашютист может управлять
моментом «включения» силы fc, дергая за кольцо парашюта на
той или иной высоте от поверхности земли.
Структурная модель ныряльщика (III) отражает его переход
из воздуха в воду. При х(/)>хк, где хк — уровень воды, спортс-
мен движется в воздухе, сопротивлением которого можно прене-
бречь. При х(г) = хк (это сравнение отражает сумматор 2:
Ах = хк —х(/)) спортсмен касается воды. При Ах = хк —х(г) = +Л,
где h — рост спортсмена, он полностью погружается в воду.
Нелинейность Nx описывает этот переход. Для упрощенной мо-
дели тела спортсмена в виде цилиндра длиной Лр и объемом Ио
при 0 < Ах < /;р погруженная часть v=V/V0 пропорциональна Ах,
18
v=Ax/hp; при Лл<0 v = O и при Ax>/ip v=l. График этой нели-
нейности показан около блока Nx на структурной модели.
По мере погружения спортсмена «включаются» две силы —
Архимеда и гидродинамического сопротивления. Первая сила
Z = р Го v, где р — плотность воды и Го — объем тела, пропорци-
ональна погруженной части тела v. Ее формирование отражает
блок р Го, она направлена вверх, и поэтому поступает на неинвер-
тирующий вход сумматора. Чтобы «включить» силу гидродина-
мического сопротивления fc, можно принять, что опа также
пропорциональна погруженной части тела, fc=fcv> где
уо=ос v | v | — сила при полностью погруженном теле. Формирова-
ние этой силы в зависимости от скорости отражает блок Nc, а ее
«включение» моделирует блок х. Эта сила противоположна
скорости и поэтому поступает на инвертирующий вход суммато-
ра 7.
О динамических объектах типа парашютиста и ныряльщика
говорят, что они описываются дифференциальными уравнениями
с переменной структурой. Парашютист изменяет структуру диф-
ференциального уравнения, дергая за кольцо. Структура диф-
ференциального уравнения ныряльщика изменяется при его входе
в воду.
Спрыгивая с забора, имеет смысл подумать, при какой на-
чальной скорости окажется наименьшей скорость встречи с по-
верхностью земли.
Выбирая момент раскрытия парашюта так, чтобы сократить
время снижения, надо не опоздать, поскольку открывшись, пара-
шют гасит скорость не сразу. Полезно также оценить перегрузку
в момент раскрытия парашюта в зависимости от времени за-
держки.
Собираясь нырнуть, не лишне оценить перегрузку в момент
входа в воду в зависимости от способа входа в нее («солдати-
ком», «рыбкой» или плашмя) и от высоты вышки, а также
глубину — хватит ли ее, чтобы погасить скорость до встречи
с дном реки или бассейна.
1.5. ДВИЖЕНИЕ ШАРИКА ДЛЯ ПИНГ-ПОНГА
Если отпустить шарик для пинг-понга, то он падает. Достиг-
нув поверхности стола, он отскакивает, затем снова падает и сно-
ва отскакивает. Так повторяется много раз, пока колебания не
затухнут.
Такой натурный эксперимент нетрудно воспроизвести. Напи-
сать сразу, «в одно действие» дифференциальное уравнение дви-
жения несколько труднее.
На рис. 1.5 представлено развернутое решение этой задачи.
На шарик действует сила гравитации f—mg, под действием кото-
рой он падает. Его движению противодействует сила аэродина-
19
'f=mg
hft)
♦fr
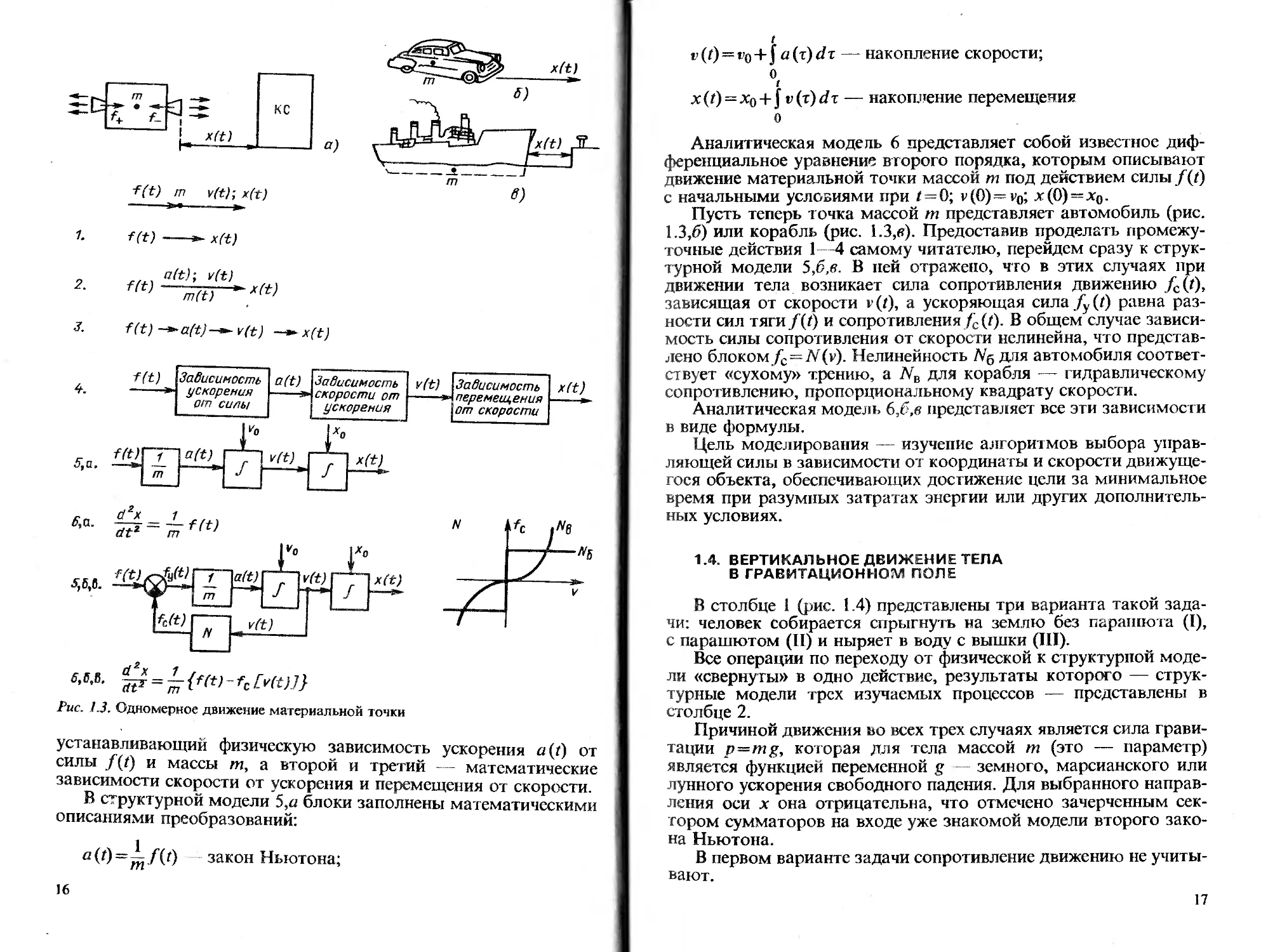
1. g(t)—^h(t)
^(t)
2.
ac ; Kr; m
g(t) a(t)iV(t); fc(t)^fr(t)^h(tj
Рис. 1.5. Вертикальное движение шарика для пинг-понга
мического сопротивления — трения о воздух /с. При соприкос-
новении с горизонтальной поверхностью шарик деформируется,
и возникает сила упругости fT (сила Гука), которая добавляется
к силам f и fc. Под действием этой силы шарик отскакивает от
поверхности стола или пола. Как будет прыгать шарик на Земле,
на Луне, на Марсе, в ускоряющемся лифте? Как повлияет на его
поведение плотность атмосферы?
Причиной движения шарика является сила гравитации, кото-
рая по условиям задачи может меняться. В качестве выходной
переменной имеет смысл рассматривать зависимость высоты
шарика от времени, как это показано графом 1.
Список переменных учитывает ускорение шарика a(t), его
скорость v (t), силы сопротивления /с (/) и упругости /г (f), а список
параметров — массу шарика т, коэффициент сопротивления ас
20
и коэффициент упругости кг (граф 2). Граф связей 3 отражает
зависимость ускоряющей силы fy от сил f fc и fT. Блоки струк-
турной схемы 4 заполнены словесными описаниями зависимо-
стей, знание которых необходимо для анализа движения шарика.
Блоки структурной модели 5 заполнены математическими
описаниями зависимостей переменных-следствий от перемен-
ных-причин. Модель содержит элементы моделей парашютиста
и ныряльщика (см. §1.4). Блок Nc представляет уже знакомую
зависимость силы аэродинамического сопротивления fc от скоро-
сти v,fc = Nc(v).
Нелинейность Nr описывает зависимость силы упругости от
деформации шарика. При h>hc, где hc — высота стола, шарик не
касается его поверхности, и для отрицательных значений А (г)
сила упругости равна нулю. При h—hc шарик входит в контакт
с поверхностью стола, при h<hc он деформируется. В этом
случае сила упругости определяется законом Гука, fr(i)=kr А (/),
где кт — коэффициент упругости, а А (г) > 0 — деформация шари-
ка. Эти условия представлены нелинейностью Nr.
Шарик можно просто отпускать на различной высоте /г0 с ну-
левой начальной скоростью = 0 или бросать его вверх или вниз,
задавая г0> 0 или ио<0 соответственно
Результат натурного эксперимента нс оставляет сомнений
в том, что в системе имеют место затухающие колебания и что
одновременно с изменением амплитуды меняется частота колеба -
ний. Таким образом, в результате теоретического анализа движе-
ния шарика построена структурная модель нелинейной колеба-
тельной динамической системы. Аналитическое исследование
движения такой системы наталкивается на определенные трудно-
сти, успешно преодолевать которые должно помочь математи-
ческое моделирование.
1.6. МОДЕЛИ МАЯТНИКОВ
Изучение колебаний обычно начинают с механических систем,
движение которых хорошо описывается линейными дифференци-
альными уравнениями с постоянными параметрами.
На рис. 1.6 сопоставлены физические и структурные модели
трех типов маятников.
Маятник I — это акселерометр, прибор для измерения ускоре-
ния. Рама 1 связана с объектом, ускорение которого надо изме-
рять. Через пружины 2 с рамой связан груз 3 массой т, который
скользит по направляющей 4 и перемещает движок потенциомет-
ра 5.
В покое груз занимает среднее положение. Если рама движет-
ся с ускорением а (на схеме — вправо), груз отстает от нее,
Деформируя пружины. Смещение груза Ах от середины рамы.
21
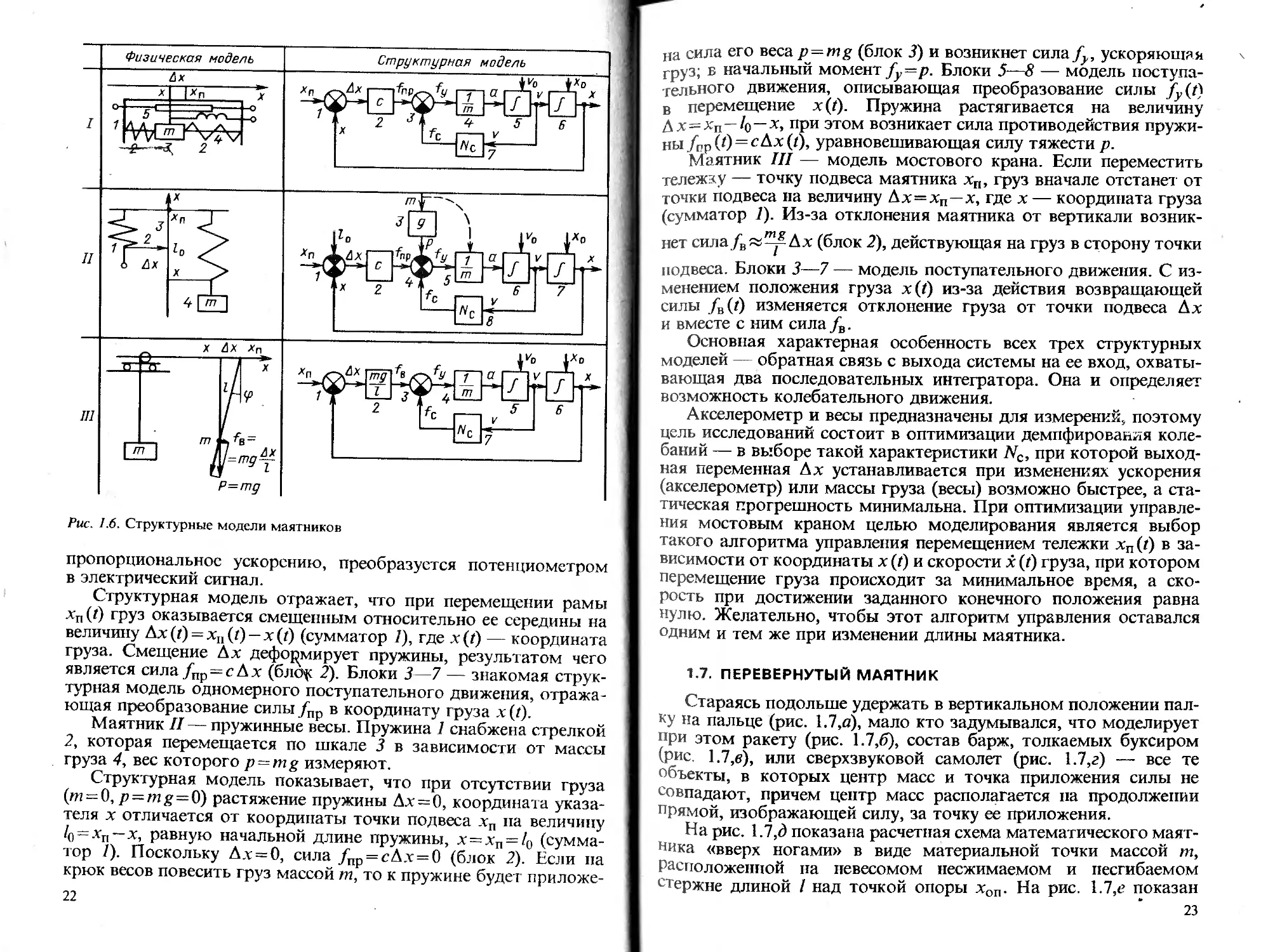
Рис. 1.6. Структурные модели маятников
пропорциональное ускорению, преобразуется потенциометром
в электрический сигнал.
Структурная модель отражает, что при перемещении рамы
хп (О ГРУ3 оказывается смещенным относительно ее середины на
величину Ax(r) = x„(r) — x(t) (сумматор 7), где x(t) — координата
груза. Смещение Ах деформирует пружины, результатом чего
является сила /Пр —с Ах (бло^с 2). Блоки 3—7 — знакомая струк-
турная модель одномерного поступательного движения, отража-
ющая преобразование силы /пр в координату груза х (/).
Маятник II — пружинные весы. Пружина 1 снабжена стрелкой
2, которая перемещается по шкале 3 в зависимости от массы
груза 4, вес которого p — mg измеряют.
Структурная модель показывает, что при отсутствии груза
(/л? — 0, p — mg=0) растяжение пружины Ах = 0, координата указа-
теля х отличается от координаты точки подвеса хп па величину
4>=-vn—равную начальной длине пружины, х=хп = /0 (сумма-
тор 7). Поскольку Ах = 0, сила /пр = сАх = 0 (блок 2). Если па
крюк весов повесить груз массой т, то к пружине будет приложе-
22
На сила его веса p = tng (блок 3) и возникнет сила fy, ускоряющая
груз; в начальный момент fy~p. Блоки 5—8 — модель поступа-
тельного движения, описывающая преобразование силы fy(t)
в перемещение x(t). Пружина растягивается на величину
Дх=хп-/о-г, при этом возникает сила противодействия пружи-
ны/пр(0 = сАх(0> уравновешивающая силу тяжести р.
Маятник III — модель мостового крана. Если переместить
тележку — точку подвеса маятника хп, груз вначале отстанет от
точки подвеса на величину Ах=хп—х, где х — координата груза
(сумматор 7). Из-за отклонения маятника от вертикали возник-
нет силаАх (блок 2), действующая на груз в сторону точки
подвеса. Блоки 3—7 — модель поступательного движения. С из-
менением положения груза х(0 из-за действия возвращающей
силы /в (0 изменяется отклонение груза от точки подвеса Ах
и вместе с ним сила /в.
Основная характерная особенность всех трех структурных
моделей — обратная связь с выхода системы на ее вход, охваты-
вающая два последовательных интегратора. Она и определяет
возможность колебательного движения.
Акселерометр и весы предназначены для измерений, поэтому
цель исследований состоит в оптимизации демпфирования коле-
баний — в выборе такой характеристики Лгс, при которой выход-
ная переменная Ах устанавливается при изменениях ускорения
(акселерометр) или массы груза (весы) возможно быстрее, а ста-
тическая прогрешность минимальна. При оптимизации управле-
ния мостовым краном целью моделирования является выбор
такого алгоритма управления перемещением тележки xn(z) в за-
висимости от координаты х (/) и скорости х (г) груза, при котором
перемещение груза происходит за минимальное время, а ско-
рость при достижении заданного конечного положения равна
нулю. Желательно, чтобы этот алгоритм управления оставался
одним и тем же при изменении длины маятника.
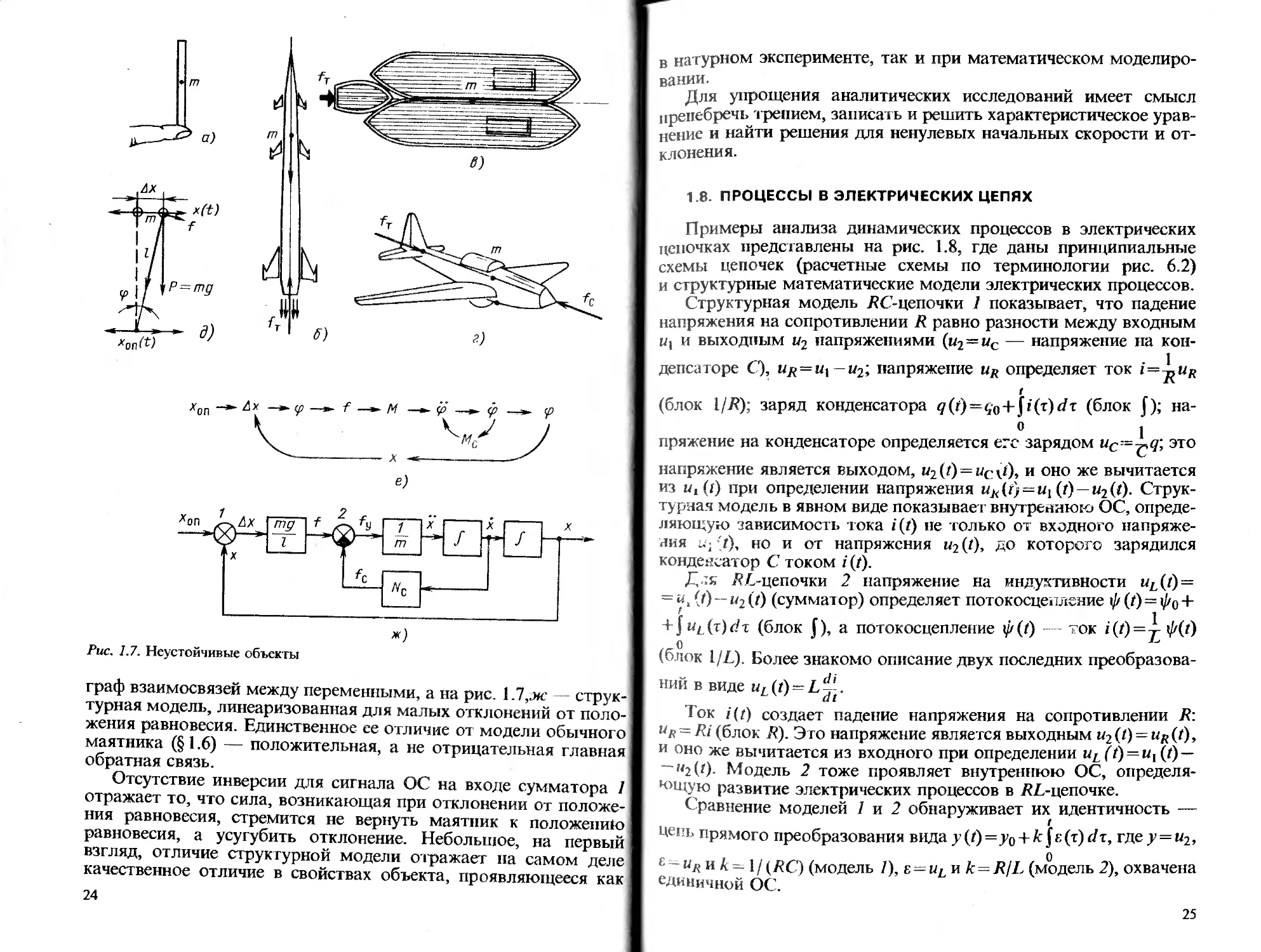
1.7. ПЕРЕВЕРНУТЫЙ МАЯТНИК
Стараясь подольше удержать в вертикальном положении пал-
ку на пальце (рис. 1.7,а), мало кто задумывался, что моделирует
при этом ракету (рис. 1.7,6), состав барж, толкаемых буксиром
(рис. 1.7,в), или сверхзвуковой самолет (рис. 1.7,г) — все те
объекты, в которых центр масс и точка приложения силы не
совпадают, причем центр масс располагается па продолжении
прямой, изображающей силу, за точку ее приложения.
На рис. 1.7,6 показана расчетная схема математического маят-
ника «вверх ногами» в виде материальной точки массой т,
расположенной на невесомом несжимаемом и несгибаемом
стержне длиной / над точкой опоры хоп. На рис. 1.7,е показан
23
Рис. 1.7. Неустойчивые объекты
граф взаимосвязей между переменными, а на рис. 1.7,ж — струк-
турная модель, линеаризованная для малых отклонений от поло-
жения равновесия. Единственное ее отличие от модели обычного
маятника (§ 1.6) — положительная, а не отрицательная главная
обратная связь.
Отсутствие инверсии для сигнала ОС на входе сумматора i
отражает то, что сила, возникающая при отклонении от положе-
ния равновесия, стремится не вернуть маятник к положению
равновесия, а усугубить отклонение. Небольшое, на первый
взгляд, отличие структурной модели отражает на самом деле
качественное отличие в свойствах объекта, проявляющееся как
24
в натурном эксперименте, так и при математическом моделиро-
вании.
Для упрощения аналитических исследований имеет смысл
пренебречь т-репием, записать и решить характеристическое урав-
нение и найти решения для ненулевых начальных скорости и от-
клонения.
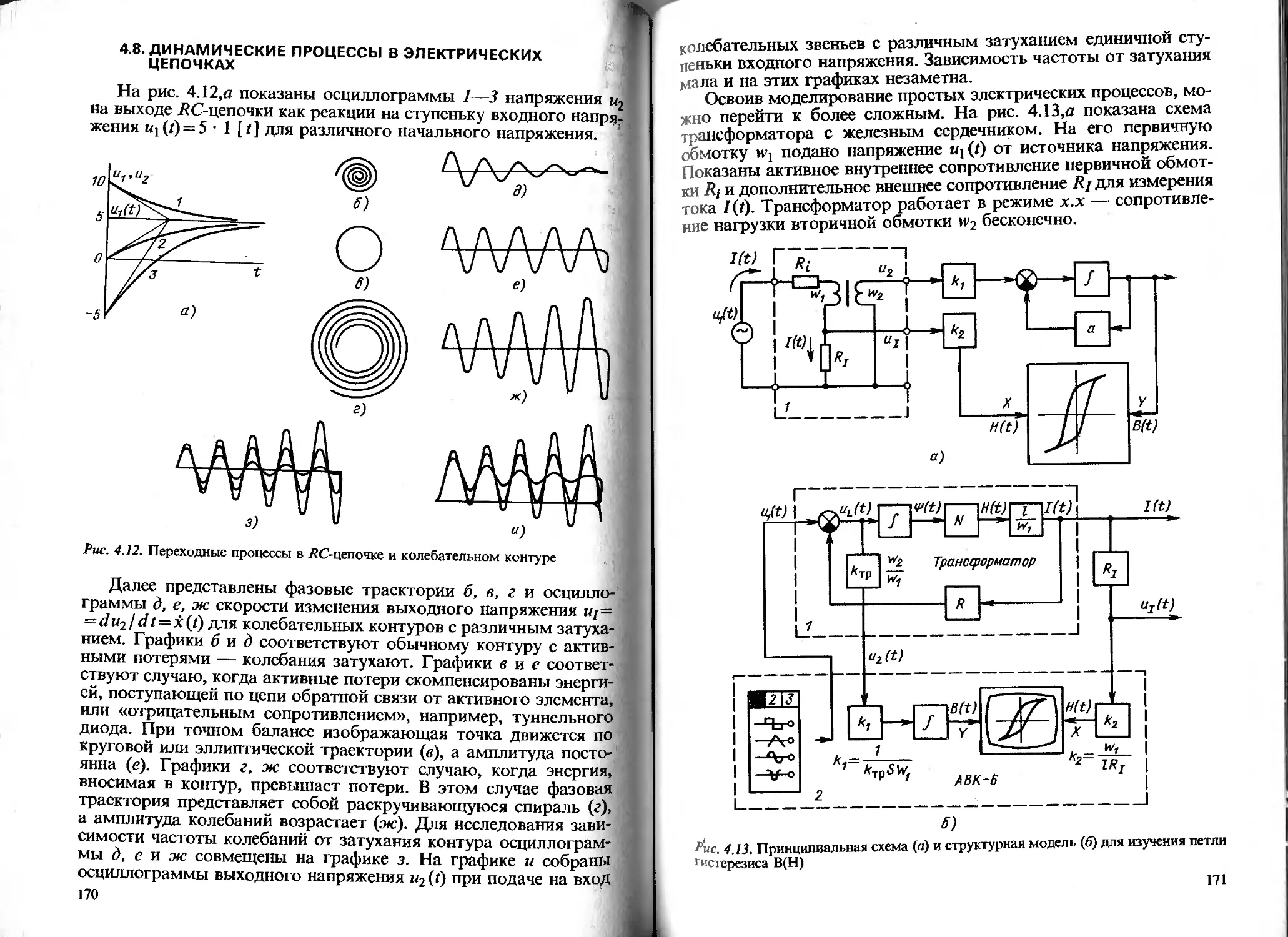
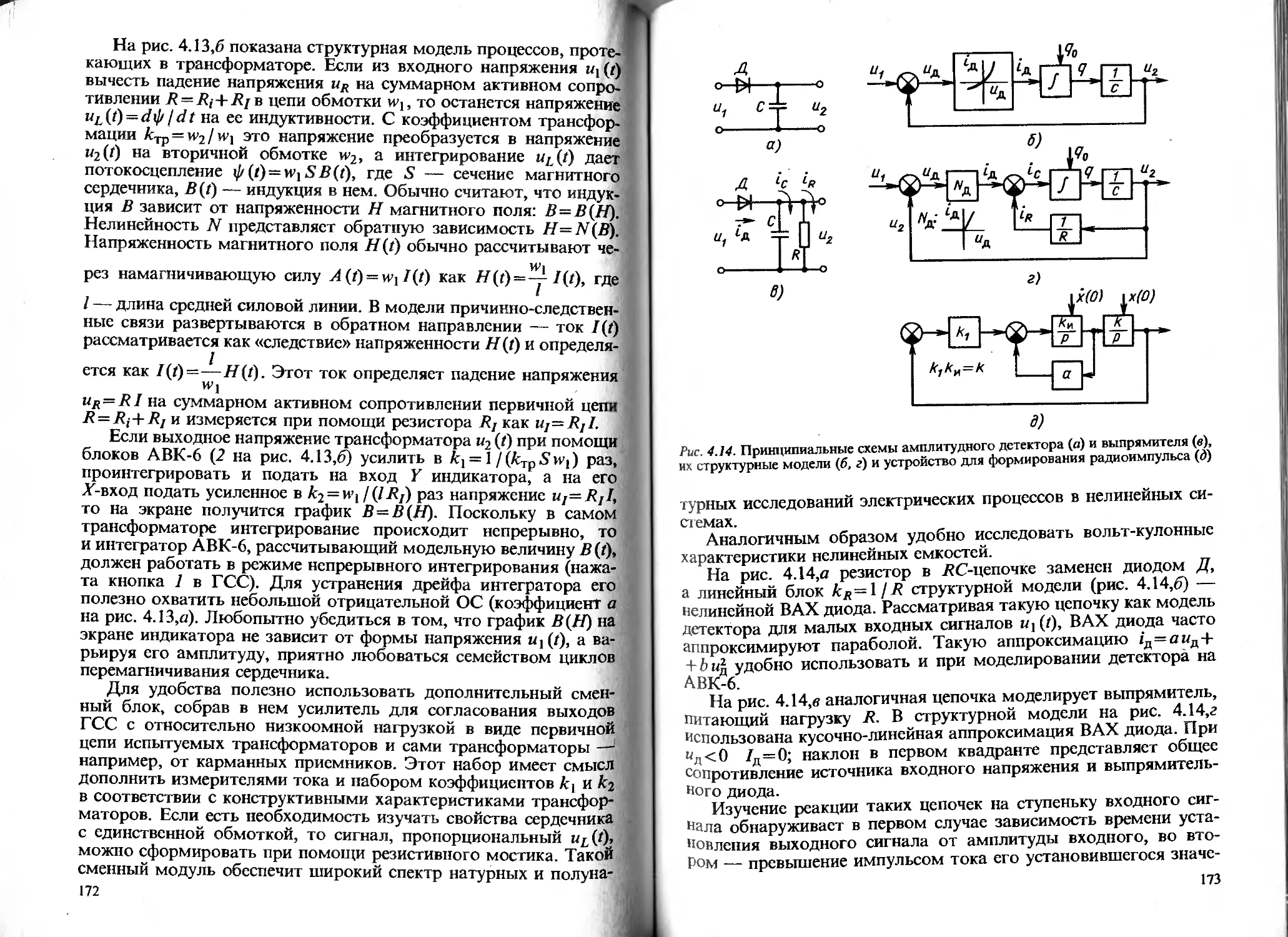
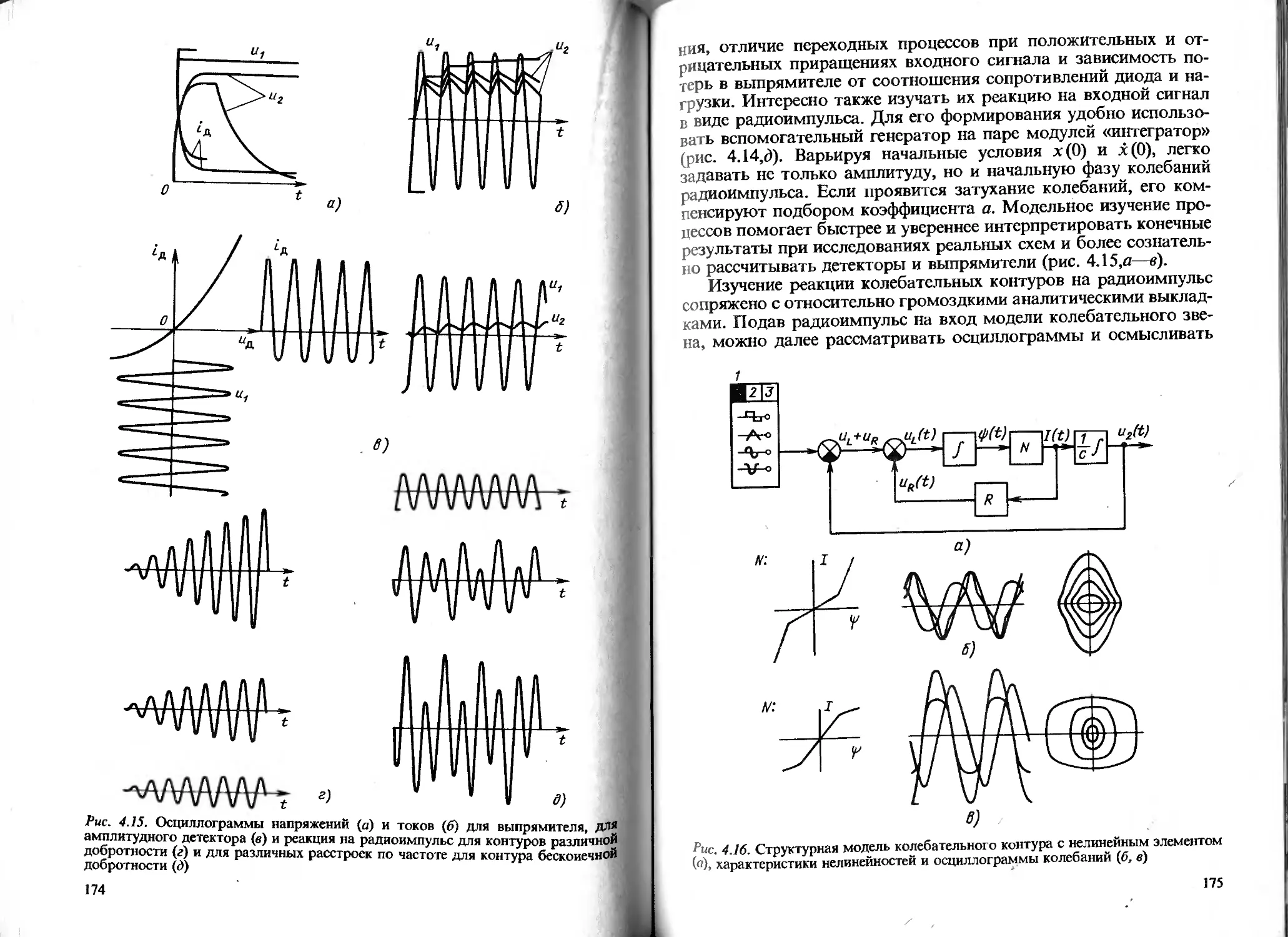
1.8. ПРОЦЕССЫ В ЭЛЕКТРИЧЕСКИХ ЦЕПЯХ
Примеры анализа динамических процессов в электрических
цепочках представлены на рис. 1.8, где даны принципиальные
схемы цепочек (расчетные схемы по терминологии рис. 6.2)
и структурные математические модели электрических процессов.
Структурная модель /?С-цепочки 1 показывает, что падение
напряжения на сопротивлении R равно разности между входным
и выходным п2 напряжениями (u2=uc — напряжение па кон-
денсаторе Q, w^ = t/i-w2; напряжение uR определяет ток i=pUR
t
(блок I//?); заряд конденсатора q(t)—qo+р’(т) dx (блок f); на-
0 1
пряжение на конденсаторе определяется егс зарядом uc---^q; это
напряжение является выходом, u2 (z) = uc vO» и оно же вычитается
из u, (z) при определении напряжения пл(г} — Щ (z) — u2(t). Струк-
турная модель в явном виде показывает внутреннюю ОС, опреде-
ляющую зависимость тока z(z) не только от входного напряже-
ния 7), но и от напряжения и2 (Z), до которого зарядился
конденсатор С током z (z).
Д.щ RL-цепочки 2 напряжение на индуктивности п£(/) =
= (z) — и2 (z) (суммат op) определяет потокосцепление (Z) — i//0 +
+ Jwz.(t)^t (блок J), а потокосцепление — ток i (Z)=\
о
(блок 1/£). Более знакомо описание двух последних преобразова-
ний в виде wz(z)~£^'.
Ток z(z) создает падение напряжения на сопротивлении R:
Ujt = Ri (блок R). Э го напряжение является выходным u2(z) = uR(z),
и оно же вычитается из входного при определении uL (t) = ux (t) —
Модель 2 тоже проявляет внутреннюю ОС, определя-
ющую развитие электрических процессов в /?£-цепочке.
Сравнение моделей / и 2 обнаруживает их идентичность —
Цепь прямого преобразования вида у (Z)=у0 + к jz; (т) dт, где у = и2,
£~urh к — l/(RC) (модель /), е — ul и k—RjL (модель 2), охвачена
единичной ОС.
25
Рис. 1.8. Динамические процессы в электрических цепочках
Для анализа процессов в дифференцирующих цепочках 3 и 4
нет необходимости начинать все исследования с самого начала.
Достаточно заметить, что структурные модели 1 и 2 полностью
описывают процессы накопления в соответствующих цепочках.
Отличия же состоят в тем, что выходным сигналом дифферен-
цирующей ЯС-цепочки является напряжение на резисторе и2 = мЛ,
а не ис\ для Я£-цепочки — напряжение на индуктивности uL—и2,
а не uR.
Для колебательного контура 5 разность входного щ и выход-
ного и2 напряжений определяет суммарное падение напряжений
на индуктивности и сопротивлении uLR—uL+uR (сумматор У).
Если из этого суммарного напряжения вычесть падение напряже-
ния uR на сопротивлении R, то останется напряжение на индук-
тивности uL (сумматор 2). В результате интегрирования и ум-
ножения на 1/£ напряжение uL преобразуется в ток /. Поскольку
этот ток одинаков для всех последовательно включенных элемен-
тов цепи, он определяет падение напряжения на активном со-
противлении uR (блок R и ОС на вход сумматора 2), а интег-
рирование тока позволяет рассчитать заряд конденсатора q и да-
лее — напряжение на конденсаторе u2 = (\/C)q. Нетрудно заме-
тить, что структурная модель 5 включает знакомые элементы
моделей 7 и 2.
Структурные модели для конфигураций £С7£цепочки вида
6 и 7 отличаются от модели 5 только точками съема выходного
сигнала.
Схема 8 — модель резонансного усилителя с колебательным
контуром в цепи анода лампы, коллектора биполярного или
стока полевого транзисторов. Ток активного элемента i(f) рас-
пределяется между конденсатором С и цепочкой из сопротивле-
ния R и индуктивности £. Чтобы найти ток i\, надо вычесть ток i2
(сумматор 7, Ц — i—i2). Интегрирование тока ij дает заряд q,
а умножение последнего на 1/С — напряжение на конденсаторе
wc=^=w2. Но это же напряжение приложено и к последователь-
ной 7?£-цепочке. Сумматор 2 и блоки 3—4—5 моделируют те же
процессы, что и для цепочки 4, но выходом этих преобразований
является ток z2, который вычитается из i сумматором £
Структурные модели электрических цепочек позволяют непо-
средственно приступить к моделированию процессов на АВК-6,
а также после несложных математических действий записать
операторные соотношения или дифференциальные уравнения для
дальнейших аналитических исследований или моделирования
с помощью традиционных ЭВМ.
Нетрудно обнаружить сходство структурных моделей для
электрических колебательных контуров 5 и 8 на рис. 1.8 с моделя-
ми маятников на рис. 1.6 — механических колебательных объек-
тов. Их характерная особенность — последовательное соедине-
27
ние двух интеграторов-накопителей, охваченных общей отрица-
тельной ОС.
1.9. СТРУКТУРНЫЕ МОДЕЛИ ЭЛЕКТРИЧЕСКИХ МАШИН
Действие электрических машин основано на явлениях электро-
магнитной индукции и магнитоэлектрического взаимодействия
(рис. 1.9).
Закон электромагнитной индукции Фарадея описывает зави-
симость электродвижущей силы (ЭДС) Е(Г) в контуре от скоро-
сти изменения d<b / d^потока Ф (Г) через поверхность, ограничен-
ную этим контуром, Е(0= — d<b/dt. Знак минус отражает прави-
ло Ленца: индукционный ток в контуре стремится уменьшить
изменение потока, т. е. противодействует своей причине.
Рис. 1.9. Модели электрических машин постоянного тока
28
На отрезке проводника длиной I, перемещаемом со скоростью
v(/)ll, в поле В±1 наводится ЭДС E=—vBl. Ее направление
определяют по правилу правой руки (рис. 1.9,а): если вектор
В входит в ладонь, а отставленный большой палец направлен по
направлению скорости v, то четыре пальца показывают направ-
ление ЭДС Е. Преобразование причин — скорости v и индукции В
в ЭДС Е можно представить блоком перемножения (рис. 1.9,6).
Явление магнитоэлектрического взаимодействия проявляется
в виде силы, действующей на проводник с током в магнитном
поле. Закон Ампера определяет силу dF, действующую на эле-
мент проводника с током die магнитном поле В, соотношением
dF = [dI BJ.
Если элемент di перпендикулярен направлению магнитного
поля В, то направление силы dF находят по правилу левой руки
(рис. 1.9,в): если вектор В входит в ладонь, а четыре пальца
направлены по вектору d I, то отставленный большой палец
указывает направление силы dF. На прямой проводник длиной
/ с током I в однородном магнитном поле В действует сила
f=lBI. Преобразование тока I и индукции В в силу f в этом
случае можно представить в виде блока перемножения (рис
1.9,г).
Законы Фарадея и Ампера, как, впрочем, и все классические
законы, представляют в чистом виде отдельные явления сложных
реальных процессов. Например, чтобы измерить ЭДС E=lBv,
наводимую на проводнике в соответствии с законом Фарадея,
к этому проводнику надо подключить измерительный прибор.
Цепь замкнется, и по ней в соответствии с законом Ома потечет
ток I=EI R, где R — общее сопротивление замкнутого контура,
включающего измерительный прибор. В приборе этот ток вызы-
вет отклонение стрелки, а протекая по проводнику, он будет
взаимодействовать с магнитным полем В. По закону Ампера на
проводник будет действовать сила f=lBI, направленная в соот-
ветствии с правилом Ленца противоположно скорости v (ср. рис.
1.9,а и 1.9,в). Эта сила будет стремиться остановить движение
проводника. Если мы по-прежнему хотим измерить нашим ре-
альным прибором ЭДС Е, наводимую на проводнике в соответ-
ствии с идеальным законом Фарадея, придется скомпенсировать
силу Ампера внешней механической силой /мсх =f, чтобы обес-
печить постоянство скорости v = const. Для этого потребуется
совершать работу A~fMexv, которая должна компенсировать
мощность Рэл = EI^E1 / R=RP, обеспечивающую измерение
идеальной ЭДС Е реальным прибором.
Отметим интересный семантический момент в приведенном
выше описании. Для описания последовательности взаимосвя-
занных явлений в нем использовано будущее время. Тенденция
использовать будущее время при теоретических рассуждениях
29
непосредственно выражает структуру исследовательских дейст-
вий: теоретический прогноз — это обсуждение того, что будет
происходить в натурном эксперименте. Однако с этой тенденци-
ей, особенно характерной для молодых авторов, активно борют-
ся редакторы не только научных изданий, но и учебников, фор-
мируя традицию представлять окружающий нас мир в «совер-
шенной» форме в настоящем или прошедшем времени.
Разобраться во взаимосвязи различных идеальных физических
явлений в составе реальных процессов помогают структурные
математические модели.
Генератор (рис. 1.9,Э) преобразует механическую энергию
в электрическую, двигатель (рис. 1.9,е) — электрическую в меха-
ническую.
На схемах внутри окружностей, изображающих коллектор
машин, показана эквивалентная электрическая схема якорной
цепи.
Структурная модель генератора (рис. 1.9,ж) отражает преоб-
разование напряжения возбуждения (7B(t) в ток возбуждения ZB(t)
(см. §1.8). Ток возбуждения ZB далее преобразуется в поток
возбуждения Фв. Зависимость ФВ=АГВ(/В) определяется числом
витков обмотки возбуждения ivB и характеристиками магнито-
провода, состоящего из статора и якоря машины. В результате
вращения якоря со скоростью со на его обмотке наводится ЭДС
£=с£йФв, где коэффициент сЕ определяется числом витков об-
мотки и конструкцией якоря. Эта ЭДС через коллектор и щетки
подается на выходные зажимы якорной цепи машины. При под-
ключении к ним нагрузки Лн течет ток ZH. Эквивалентная элект-
рическая схема якорной цепи позволяет рассчитать выходное
напряжение (7Н как ии=-О^-Е=кнЕ. Рассматривая ток нагруз-
ки как независимую переменную, выходное напряжение также
нетрудно рассчитать как UH = E~ где R, —- внутреннее со-
противление якорной цепи. Последнее соотношение представлено
в структурной модели генератора блоком и сумматором.
Зависимость выходного напряжения UH от тока нагрузки ZH
называют внешней или нагрузочной характеристикой генератора.
При использовании генератора в качестве измерителя скоро-
сти вращения (тахогенератора) входной переменной является
угловая скорость со, а нестабильность магнитного потока ведет
к погрешностям. Иногда тахогенератор используют для пере-
множения двух переменных, преобразованных в угловую ско-
рость и магнитный поток машины. При использовании машины
в качестве электромашинного усилителя входным сигналом явля-
ется напряжение возбуждения, а скорость аж const. В управля-
емом генераторе напряжение возбуждения позволяет «париро-
вать» отклонения выходного напряжения от заданного значения
в широком диапазоне изменения скорости со. Регулировочной или
30
градуировочной характеристикой называют зависимость выход-
ного напряжения от переменной, рассматриваемой в качестве
входной.
На рис. 1.9,з показана структурная модель двигателя постоян-
ного тока (ДПТ). Если двигатель неподвижен, то входное напря-
жение ия приложено к сопротивлению якоря и в цепи якоря
течет ток 1Я—^ ия. Взаимодействуя с магнитным потоком воз-
буждения Фв, этот ток создает вращающий момент М—смФя1я.
Если этот момент превышает сумму моментов нагрузки Мк
и трения Л/тр, то ускоряющий момент Му — М—Л/н — Мтр раз-
гоняет якорь с ускорением а движение с ускорени-
ем изменяет скорость &>(/). От скорости &>(/) зависит момент
трения Л/тр=Л^Тр((о) и противоЭДС Е—сеФясо, возникающая
в результате вращения якоря в магнитном поле. По правилу
Ленца она противоположна напряжению ия, что показано на
эквивалентной электрической схеме внутри якоря двигателя на
рис. 1.9,е и отмечено зачерненным сектором сумматора 1 на рис.
19.1,з. Поток возбуждения ДПТ Фв формируется из напряжения
возбуждения б/в точно так же, как в генераторе (рис. 1.9,ж).
В структурной модели ДПТ эти преобразования представляет
блок НДМ (нелинейная динамическая модель).
Структурные модели генератора и двигателя позволяют легко
записать все аналитические соотношения, используемые при ана-
лизе электрических машин [2], или приступить к математичес-
кому моделированию протекающих в них процессов.
Методически эти модели интересны тем, что они в унифици-
рованном виде представляют взаимосвязи в едином процессе
различных по своей физической природе явлений — электричес-
ких, механических и электромеханических. Эти модели нетрудно
дополнить блоками и связями, представляющими баланс энергии
и другие процессы — например, разогрев машины и его влияние
на характеристики и т. д.
1.10. СТРУКТУРНЫЕ МОДЕЛИ В ТЕОРИИ
ЛИНЕЙНЫХ СИСТЕМ
Объектом исследования в данном параграфе являются анали-
тические формы представления динамических процессов, а
целью — материализация некоторых математических понятий
и аналитических приемов в виде структурных математических
моделей.
Модели линейных систем представляют аналитически в виде
Дифференциального уравнения л-го порядка, системы п дифферен-
циальных уравнений первого порядка в развернутой или мат-
31
ричной форме, в виде передаточной функции, которую записыва-
ют в общем виде или как описание соединений типовых пере-
даточных функций элементарных звеньев.
Линейное дифференциальное уравнение записывают в виде
Е У (О = Е bjPJ и (О, (1 1)
i=O у=О
где о, и bj — постоянные коэффициенты; р — символ дифферен-
цирования; _>’(/) — выходная, u(t) — входная переменные; для
реальных систем т^п. Решение этого уравнения ищут для на-
чальных условий
р‘у(О)=у№, PJu(t) = uj0. (1.2)
Отношение преобразований Лапласа выходной переменной
к входной при нулевых начальных условиях называют передаточ-
ной функцией:
у
V .
L aiP
i-0
(1.3)
где р — оператор Лапласа.
При йу = О для всех j/О и передаточная функция имеет
вид
Z
(1.4)
а дифференциальное уравнение записывается как
Е aipiy(t)^bou{t\ (1.5)
i-0
где р — символ дифференцирования.
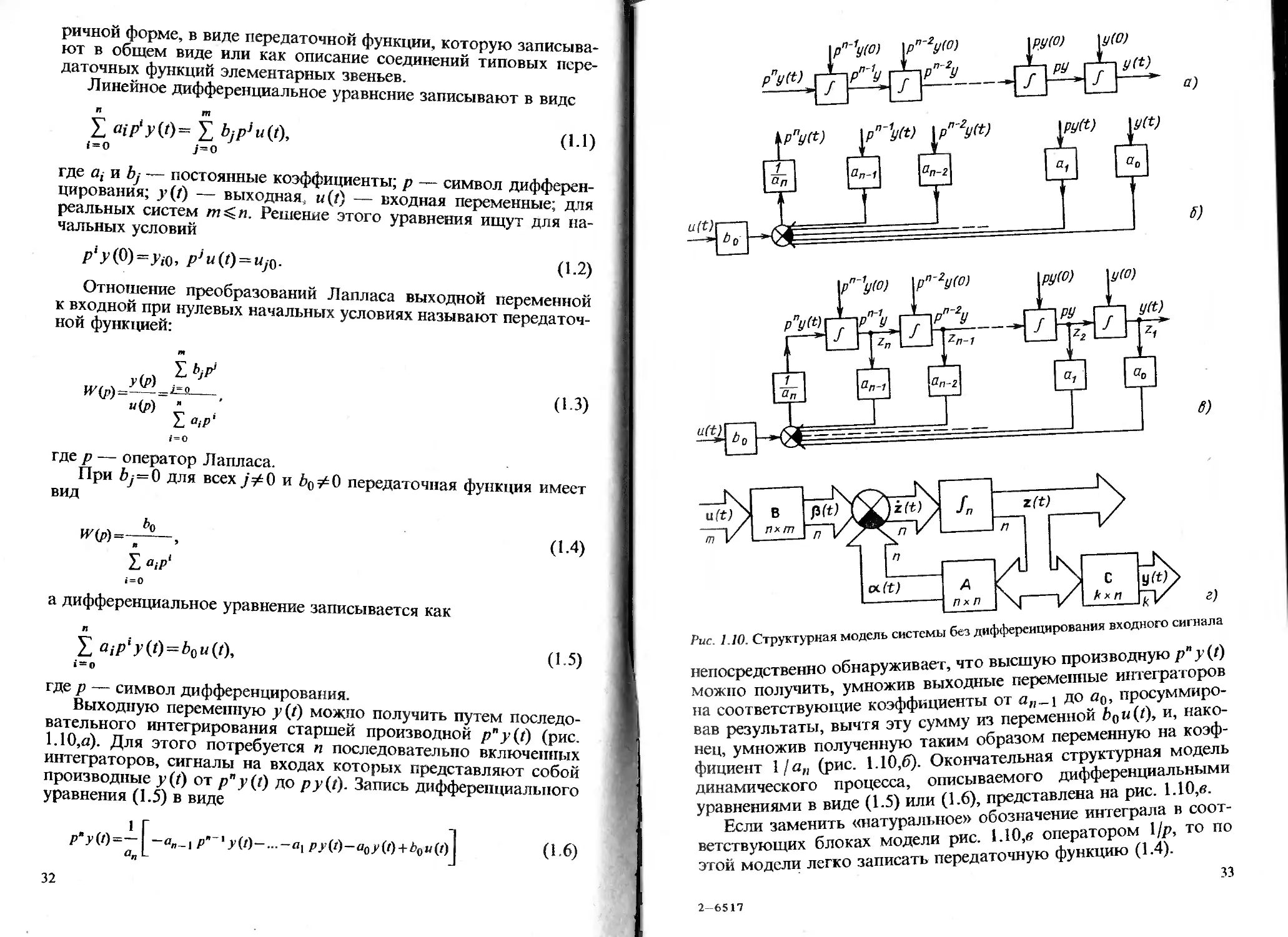
Выходную переменную y(j) можно получить путем последо-
вательного интегрирования старшей производной pny(f) (рис.
1.10,а). Для этого потребуется п последовательно включенных
интеграторов, сигналы на входах которых представляют собой
производные y(t) от pny(f) до py(t). Запись дифференциального
уравнения (1.5) в виде
Р',Т(О = —Г-a„_( р"',у(/)-...-в1 рт(/)-ао/(') + М(ОI 0-6)
o„L J
32
Рис. 1.10. Структурная модель системы без дифференцирования входного сигнала
непосредственно обнаруживает, что высшую производную pny(j)
можно получить, умножив выходные переменные интеграторов
на соответствующие коэффициенты от до о0, просуммиро-
вав результаты, вычтя эту сумму из переменной bou(t), и, нако-
нец, умножив полученную таким образом переменную на коэф-
фициент 1/ап (рис. 1.10,6). Окончательная структурная модель
динамического процесса, описываемого дифференциальными
уравнениями в виде (1.5) или (1.6), представлена на рис. 1.10,в.
Если заменить «натуральное» обозначение интеграла в соот-
ветствующих блоках модели рис. 1.10,д оператором l/р, то по
этой модели легко записать передаточную функцию (1.4).
2-6517
33
Обозначив y(r)=z1(/); py(.t)=z2(t) и т. д. до jf 1y(t)=zn(t),
можно записать дифференциальное уравнение n-то порядка (1.5)
в виде системы п дифференциальных уравнений первого порядка
zi (t)=z2(t\
z2(0=z3(0;
(1-7)
zn-i(0=^n(0;
zn (0 = - Е aiZi(t)+fin и (/) .
i=o
с начальными условиями г,(0)=у,о, гДе и рп=Ь0/ап. Эта
аналитическая запись представляет в ином виде тот же самый
динамический процесс, структура которого показана на рис.
1.10,е.
В матричной форме систему уравнений (1.7) в развернутом
виде записывают как
*1 (0 ^2 (О — 0 0 1 0 0 .. 1 .. 0 0 *1(0 *г(0 + 'о' 0 п(/)(1.8)
г„-1 (0 0 0 0 .. 1 *«-1(0 0
*Я(0 -Оо -«1 -а2 .. -ап-1 *и(0 А
или, сокращенно,
z(/)=Az(z) + Pw(f), (1.9)
где z(/) = [z1(<), z2(f), ..., zn(0]T — л-мерный вектор состояния;
А — квадратная матрица размером п х п и ₽ =[0, 0, ..., О, ]т —
матрица-столбец управления. Разумеется, и эти аналитические
соотношения описывают тот же динамический процесс, который
представлен структурной математической моделью на рис. 1.10,в.
Таким образом, структурная математическая модель динами-
ческого процесса, показанная на рис. 1.10,в, не только не уступает
остальным формам математической модели в виде аналитиче-
ских выражений (1.4) —(1.9), но и обладает определенными пре-
имуществами перед ними. Во-первых, она дает ясное и наглядное
объяснение понятия «состояние системы» как совокупности сиг-
налов на выходах интеграторов и, во-вторых, в явном виде
представляет структуру связей между переменными в виде систе-
мы с обратной связью, которая и определяет развитие процессов.
На рис. 1.10,г приведена структурная модель, соответству-
ющая представлению динамической системы в обобщенном мат-
34
ричиом виде. Последовательное и-кратное интегрирование пред-
ставлено в ней и-мерным интегратором J„, преобразующим
и-мерный вектор i(t) в состояние системы z(f). Векторный сигнал
z(f) формируется и-мерным сумматором из двух компонен-
тов — вектора управлений ₽ (/) и вектора обратной связи по
состоянию а (/)• Матрица обратной связи А формирует сигнал
а (0 из вектора состояния z(t). Матрица управления В преоб-
разует /и-мерный вектор входных воздействий u(f) в и-мерный
вектор управлений ₽ (О, а матрица С преобразует и-мерный
вектор состояния z(f) в fc-мерный выход:
y(/)=Cz(r). (1-10)
Для случая, представленного развернутой структурной моделью
рис. 1.10,в, управление u(t) — скалярная переменная, т= 1, и мат-
рица В вырождается в вектор-столбец с единственным ненулевым
коэффициентом рп. Матрица С преобразует и-мерный вектор
состояния z(t) в одномерный скалярный выход y(t)=z{ (i).
Передаточную функцию (1.4) часто представляют в виде про-
изведения элементарных сомножителей
b0 1 1
ич/>)=- —- —-
ал р—A-i р — ^2
1
—=- п —.
р-к, l-1 p-*i
где Л,- — корни характеристического уравнения
(1.И)
(1-12)
1 = 0
которые могут быть действительными или комплексно-сопря-
женными числами.
Передаточная функция системы, показанной на рис. 1.11,о,
запишется как
^(р)
1
р + Оо'
(1-13)
Характеристическое уравнение р4-Оо=0 имеет действитель-
ный корень Л= — а0. Он численно равен коэффициенту ад, но
противоположен ему по знаку. Для системы с положительной ОС
(рис. 1.11,6) коэффициент в цепи ОС — корень характеристичес-
кого уравнения, и поэтому эта структурная модель непосредст-
венно реализует сомножитель вида 1/(р—Л). Соответствующее
ему типовое звено называют апериодическим, или инерционным.
Передаточную функцию часто приводят к виду, когда свободный
член в знаменателе равен единице:
к
^а(р)=^—7, (1-14)
* аР' *
35
Рис. 1.11. Структурные модели элементарных апериодического (о, б) и колеба-
тельного (в) звеньев и системы »ьго порядка в виде последовательного соединения
элементарных звеньев (г) х
где постоянная времени Та=\/ао и коэффициент усиления
к=1/а0=Та.
Для структурной модели рис. 1.11 ,в легко записать передаточ-
ную функцию колебательного звена
^к(р)=^Т---—.
(115)
При «J = 0 она принимает вид
И/к(р)=
1
Р2 + «о
(1-16)
Характеристическое уравнение р2 + ао = О имеет чисто мнимые
сопряженные корни
Р\, 2=±j^=±j^>0,
(1-17)
а реакция звена (1.16) на ступеньку на входе представляет собой
незатухающие гармонические колебания с частотой со0. Итак,
коэффициент а0 имеет ясный и простой смысл — он равен
квадрату резонансной частоты колебательного звена.
При о,/О характеристическое уравнение имеет корни
Pl, 2 = ^1,
(118)
При а1/2<<л0 они становятся комплексно-сопряженными, и для
них удобнее записать выражение
36
2
I называют собственной. Она
Частоту cO[=&j0
проявляет себя в виде частоты колебаний на выходе звена при
ненулевых начальных условиях или при подаче на вход звена
единичной ступеньки:
Л(/)=к 1- e-pt
COSCO, t-\--sin со, t
"1
(1-20)
Параметр £ = д1 /2ct>0 называют степенью затухания, а Р — ^соо —
коэффициентом затухания.
Таким образом, коэффициент модели а1 = 2са0^ = 2/3 равен
удвоенному коэффициенту затухания fl.
Передаточную функцию колебательного звена
1
р2 + 2£а>0р+со20
(1-21)
часто приводят к виду со свободным членом в знаменателе,
равным 1:
<122)
Т2р2+2с, Тр+\
где 7= 1 /со0 — постоянная времени колебательного звена, в на-
шем случае к— Т1 = 1 / а0.
Структурная модель, показанная на рис. 1.11,в, реализует
11
пару сомножителей вида ------ ---—-, соответствующих паре
р—Л р—л*
комплексно-сопряженных корней
А, А* = — P+jco\.
Таким образом, запись передаточной функции в виде произ-
ведения дробей (1.11) можно рассматривать как еще одно анали-
тическое представление системы, показанной на рис. 1.10,в, но
в виде последовательно соединенных элементарных звеньев рис.
1.11,г типа рис. 1.11,6,в, соответствующих корням характеристи-
ческого уравнения (1.12) этой системы.
Передаточную функцию (1.11) в случае действительных раз-
личных корней можно преобразовать к виду
ж(р)=^ п -Ц-=- Z (1-23)
ani=\p-2i ап^р-2-,
соответствующему параллельнОхму соединению элементарных
звеньев вида 11(р—А,) (рис. 1.12,о). Коэффициенты г, находят как
вычеты функции комплексного переменного W(p) в полюсах или
37
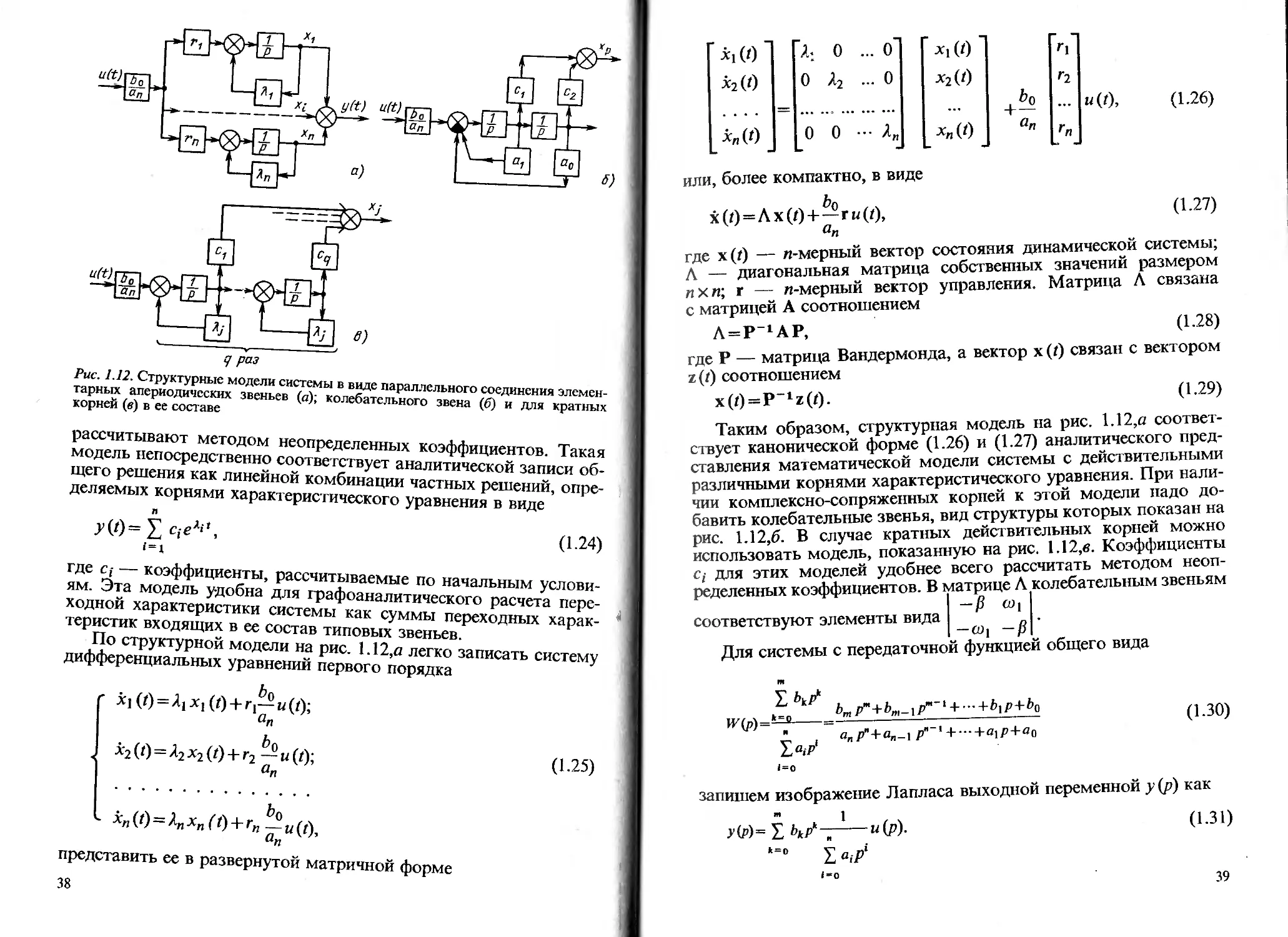
Рис. 1.12. Структурные модели системы в виде параллельного соединения элемен-
тарных апериодических звеньев (а); колебательного звена (б) и для кратных
корней (в) в ее составе
рассчитывают методом неопределенных коэффициентов. Такая
модель непосредственно соответствует аналитической записи об-
щего решения как линейной комбинации частных решений, опре-
деляемых корнями характеристического уравнения в виде
7(0= (1.24)
<=i
где с(- — коэффициенты, рассчитываемые по начальным услови-
ям. Эта модель удобна для графоаналитического расчета пере-
ходной характеристики системы как суммы переходных харак-
теристик входящих в ее состав типовых звеньев.
По структурной модели на рис. 1.12,а легко записать систему
дифференциальных уравнений первого порядка
Г X](0 = 2Ix1(Z) + r1—«(/);
«л
x2(z) = A2x2(/) + r2—u(r);
«л
(1-25)
^n(0~^nxn(0~^rn —-u(t),
ап
представить ее в развернутой матричной форме
38
*i (0 *2 (0 0 0 Л2 ... 0 ... 0 (0 *2(0 *2 «(0, (1-26)
xn(f) 0 0 ••• хп (0 ап гп
или, более компактно, в виде
x(r)=Ax(/) +—rw(/), (1-27)
«и
где х(г) — n-мерный вектор состояния динамической системы;
Л — диагональная матрица собственных значений размером
и хи; г — n-мерный вектор управления. Матрица Л связана
с матрицей А соотношением
Л = Р1АР, (1.28)
где Р — матрица Вандермонда, а вектор x(z) связан с вектором
z (z) соотношением
x(Z) = P-1z(z). (1.29)
Таким образом, структурная модель на рис. 1.12,а соответ-
ствует канонической форме (1.26) и (1.27) аналитического пред-
ставления математической модели системы с действительными
различными корнями характеристического уравнения. При нали-
чии комплексно-сопряженных корней к этой модели надо до-
бавить колебательные звенья, вид структуры которых показан на
рис. 1.12,6. В случае кратных действительных корней можно
использовать модель, показанную на рис. 1.12,в. Коэффициенты
Ci для этих моделей удобнее всего рассчитать методом неоп-
ределенных коэффициентов. В матрице Л колебательным звеньям
соответствуют элементы вида
-0 со,
— С01 -р
Для системы с передаточной функцией общего вида
____bmp’"+bm_itf'-t+-+bxp+b0
Д , аяР”+«я-1 jf~,+-+a1p+a0
LaiP
(1-30)
запишем изображение Лапласа выходной переменной у (р) как
У(р)= L ЬкРк~~-ц(р)- (1-31)
‘=0 I
‘-О
39
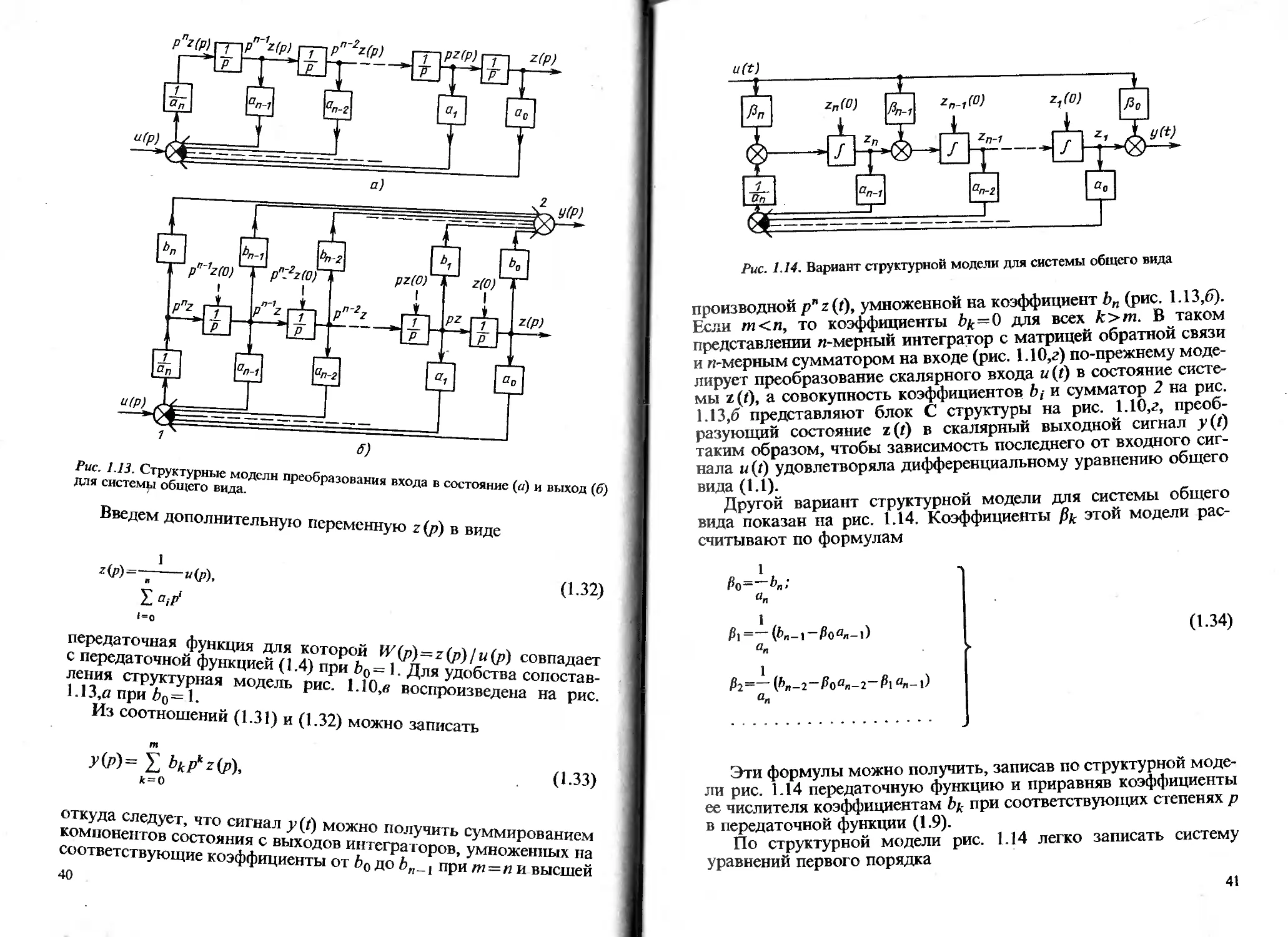
Рис. 1.13. Структурные модели преобразования входа в состояние (а) и выход (б)
для системы общего вида.
Введем дополнительную переменную z(p) в виде
z(p)=~---0-32)
£ aiPl
1 = 0
передаточная функция для которой W(p)=z(p)/u(p) совпадает
с передаточной функцией (1.4) при b0— 1. Для удобства сопостав-
ления структурная модель рис. 1.10,в воспроизведена на рис.
1.13,о при b0= 1.
Из соотношений (1.31) и (1.32) можно записать
У(р)~ Е ькР^(р),
к = 0
(1.33)
откуда следует, что сигнал у (?) можно получить суммированием
компонентов состояния с выходов ин теграторов, умноженных на
соответствующие коэффициенты от Ьо до Ьп_{ при т=п и высшей
40
u(t)
Рис. 1.14. Вариант структурной модели для системы общего вида
производной умноженной на коэффициент Ьп (рис. 1.13,6).
Если т<п, то коэффициенты Ь^—0 для всех к>т. В таком
представлении и-мерный интегратор с матрицей обратной связи
и и-мерным сумматором на входе (рис. 1.10,г) по-прежнему моде-
лирует преобразование скалярного входа и (t) в состояние систе-
мы z (/), а совокупность коэффициентов 6, и сумматор 2 на рис.
1.13,6 представляют блок С структуры на рис. 1.10,г, преоб-
разующий состояние z(r) в скалярный выходной сигнал у(0
таким образом, чтобы зависимость последнего от входного сиг-
нала и (/) удовлетворяла дифференциальному уравнению общего
вида (1.1).
Другой вариант структурной модели для системы общего
вида показан на рис. 1.14. Коэффициенты fik этой модели рас-
считывают по формулам
0о=-*я;
1
01 = — (^л-1— 0Ойл-1)
а„
(1-34)
02~— (Ьп-2~ 0Оал-2~ 01 ал-1)
Эти формулы можно получить, записав по структурной моде-
ли рис. 1.14 передаточную функцию и приравняв коэффициенты
ее числителя коэффициентам Ьк при соответствующих степенях р
в передаточной функции (1.9).
По структурной модели рис. 1.14 легко записать систему
уравнений первого порядка
41
*1(0=*г(0 + А1«(0;
z2 (f) = z3 (0 + A? u (0>
(1.35)
1 "
zn (0 =-----S ai zi (0 + Pn U (0>
_ i = о
представить ее в развернутой матричной форме
*1(0 'о 1 0 ... 0 *1(0 А1
- *?(0 0 0 1 ... 0 *2(0 Аг
.... = ... ... ... + ... «(0>
*л-1(0 0 0 0 ... 1 *л-1(0 Ал-i (1.36)
*л(0 -«о -Я! — а2 ... -а„-1 *л(0 Ап _
где cti—ail ап, и записать векторное уравнение
z(/)=Az(Z)+ р u(t). (1.37)
Уравнения (1.36) и (1.37) отличаются от (1.8) и (1.9) только
вектором р. Структурная модель на рис. 1.14 иллюстрирует, что
и в этом случае состояние системы z(f) есть совокупность сиг-
налов на выходах интеграторов (рис. 1.10,г), но их входные
сигналы формируются как линейные комбинации компонентов
состояния z; (/) и управлений, «раздаваемых» вектором входных
коэффициентов В (блок В и сумматор на рис. 1.10,г). Скалярный
выход у (/) формируется из состояния г (/) и управления и (t) как
j(O=*i(O+Aow(O-
Передаточную функцию общего вида (1.30) также можно
разложить на элементарные сомножители, найдя не только ее
полюсы (1.12), но и нули как корни уравнения
bmf'+bm-xl?'' 1+ ... + fcip+ho = O, (1.38)
которое получают, приравняв нулю числитель передаточной фун-
кции. Передаточную функцию в виде произведения элементарных
сомножителей
П (p~vk)
W(p)=^------, (1.39)
П (р-^
1=0
где Л, — полюсы и — нули передаточной функции, рассматри-
вают как последовательное соединение типовых звеньев вида
42
P~vi
^(p)=—г
p~M
— инерционно-дифференцирующего звена;
p-vr
=---------—
P2+^irm0rP + ^20r
—- колебательного звена с дифференцированием;
. P2+2^w05p+a>gs
w3 (p)=---------------
/>2 + 2£д<а0д/> + <»2
(1-40)
(1.41)
(1.42)
— колебательного звена с двойным дифференцированием. Их
структурные модели получаются как частные случаи общих мо-
делей на рис. 1.13,6 и рис. 1.14 при и=1 и п = 2.
Если собственные значения А,, Л2, ..., А„ матрицы А систе-
мы — действительные различные числа, то, используя преоб-
разование
х(;) = Р 1z(r),
(1.43)
где Р — матрица Вандермонда, систему (1.37) можно преобразо-
вать к виду
х(0 = Лх(0 + Р~1Ьн(0, (1.44)
здесь Л — диагональная матрица собственных значений. Преоб-
разование изменяет вектор управления
v=P-1b. (1.45)
Используя последнее соотношение, можно записать
x(r) = Ax(z) + vu(r). (1-46)
Система (1.46) отличается от (1.27) только вектором управле-
ния, компоненты которого по-прежнему равны вычетам переда-
точной функции системы в полюсах и могут быть рассчитаны
методом неопределенных коэффициентов. Структура математи-
ческой модели для уравнений (1.45) и (1.46), показанная на рис.
1.15, отличается от структуры па рис. 1.12,а дополнительным
43
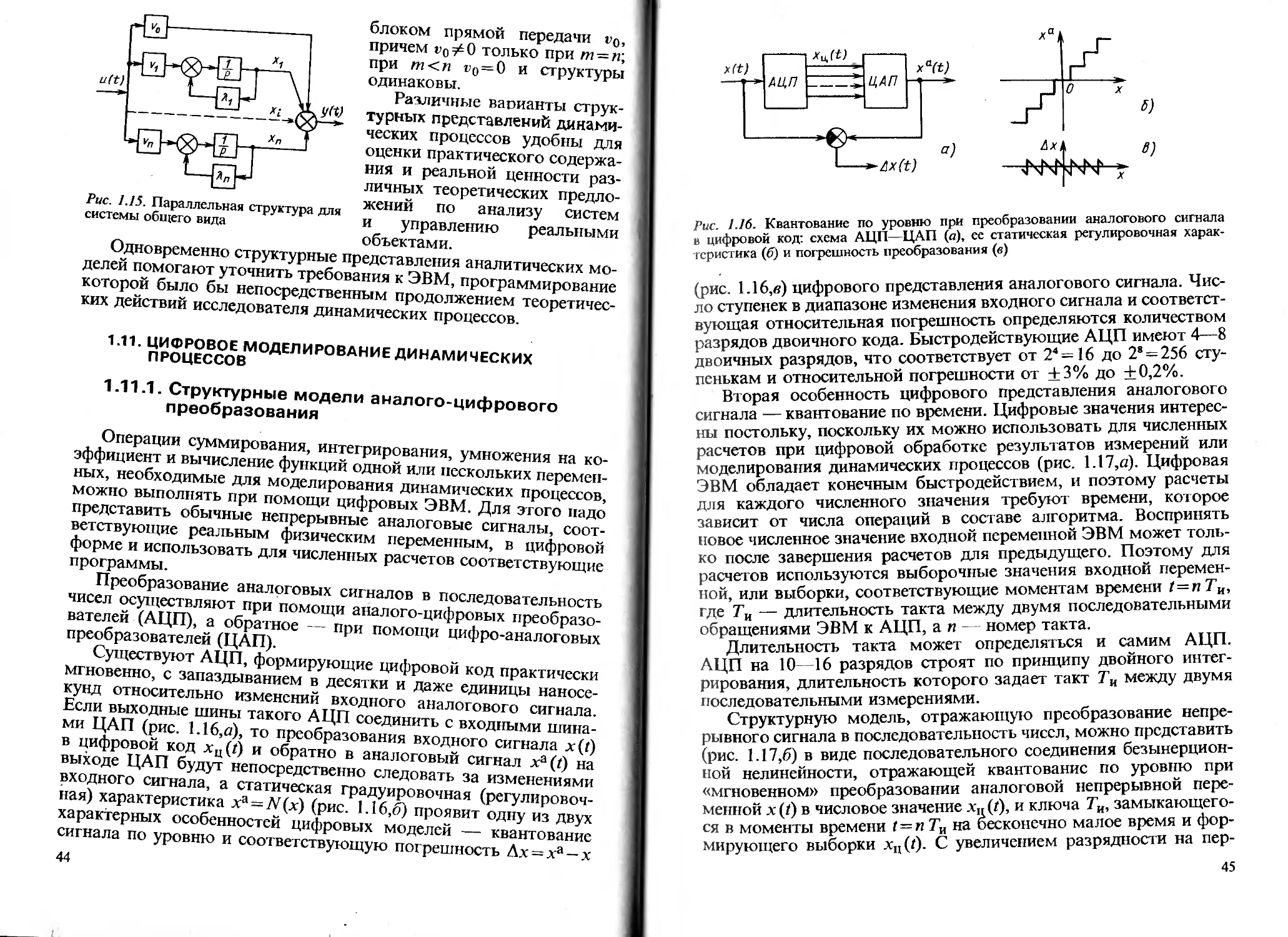
Рис. 1.15. Параллельная структура для
системы общего вида
блоком прямой передачи v0,
причем v0 #0 только при т=п;
при т<п го=О и структуры
одинаковы.
Различные варианты струк-
турных представлений динами-
ческих процессов удобны для
оценки практического содержа-
ния и реальной ценности раз-
личных теоретических предло-
жений по анализу систем
и управлению реальными
объектами.
Одновременно структурные представления аналитических мо-
делей помогают уточнить требования к ЭВМ, программирование
которой было бы непосредственным продолжением теоретичес-
ких действий исследователя динамических процессов.
1.11. ЦИФРОВОЕ МОДЕЛИРОВАНИЕ ДИНАМИЧЕСКИХ
ПРОЦЕССОВ
1.11.1. Структурные модели аналого-цифрового
преобразования
Операции суммирования, интегрирования, умножения на ко-
эффициент и вычисление функций одной или нескольких перемен-
ных, необходимые для моделирования динамических процессов,
можно выполнять при помощи цифровых ЭВМ. Для этого надо
представить обычные непрерывные аналоговые сигналы, соот-
ветствующие реальным физическим переменным, в цифровой
форме и использовать для численных расчетов соответствующие
программы.
Преобразование аналоговых сигналов в последовательность
чисел осуществляют при помощи аналого-цифровых преобразо-
вателей (АЦП), а обратное — при помощи цифро-аналоговых
преобразователей (ЦАП).
Существуют АЦП, формирующие цифровой код практически
мгновенно, с запаздыванием в десятки и даже единицы наносе-
кунд относительно изменений входного аналогового сигнала.
Если выходные шины такого АЦП соединить с входными шина-
ми ЦАП (рис. 1.16,а), то преобразования входного сигнала x(t)
в цифровой код хц(0 и обратно в аналоговый сигнал ха(г) на
выходе ЦАП будут непосредственно следовать за изменениями
входного сигнала, а статическая градуировочная (регулировоч-
ная) характеристика xa — N(x) (рис. 1.16,6) проявит одну из двух
характерных особенностей цифровых моделей — квантование
сигнала по уровню и соответствующую погрешность Ах = ха — х
44
Рис. 1.16. Квантование по уровню при преобразовании аналогового сигнала
в цифровой код: схема АЦП—ЦАП (а), ее статическая регулировочная харак-
теристика (6) и погрешность преобразования (в)
(рис. 1.16,в) цифрового представления аналогового сигнала. Чис-
ло ступенек в диапазоне изменения входного сигнала и соответст-
вующая относительная погрешность определяются количеством
разрядов двоичного кода. Быстродействующие АЦП имеют 4—8
двоичных разрядов, что соответствует от 24 — 16 до 28 = 256 сту-
пенькам и относительной погрешности от ±3% до +0,2%.
Вторая особенность цифрового представления аналогового
сигнала — квантование по времени. Цифровые значения интерес-
ны постольку, поскольку их можно использовать для численных
расчетов при цифровой обработке результатов измерений или
моделирования динамических процессов (рис. 1.17,о). Цифровая
ЭВМ обладает конечным быстродействием, и поэтому расчеты
для каждого численного значения требуют времени, которое
зависит от числа операций в составе алгоритма. Воспринять
новое численное значение входной переменной ЭВМ может толь-
ко после завершения расчетов для предыдущего. Поэтому для
расчетов используются выборочные значения входной перемен-
ной, или выборки, соответствующие моментам времени t=n Тн,
где Ти — длительность такта между двумя последовательными
обращениями ЭВМ к АЦП, ан — номер такта.
Длительность такта может определяться и самим АЦП.
АЦП на 10—16 разрядов строят по принципу двойного интег-
рирования, длительность которого задает такт Ти между двумя
последовательными измерениями.
Структурную модель, отражающую преобразование непре-
рывного сигнала в последовательность чисел, можно представить
(рис. 1.17,6) в виде последовательного соединения безынерцион-
ной нелинейности, отражающей квантование по уровню при
«мгновенном» преобразовании аналоговой непрерывной пере-
менной x(Z) в числовое значение х„(/), и ключа Ти, замыкающего-
ся в моменты времени t=n Тк на бесконечно малое время и фор-
мирующего выборки Хц(г). С увеличением разрядности на пер-
45
Рис. 1.17. Преобразование аналог-цифра в численном моделировании динамиче-
ских процессов: схема системы для цифрового моделирования (а); структурная
модель преобразования аналог-цифра с учетом квантования по уровню и по
времени (б), обозначение (в) и структурная модель (г) импульсного модулятора
вый план выступает квантование по времени, а квантование по
уровню становится менее заметным и «маскируется» шумами
реальных сигналов. При анализе квантования по времени кван-
тованием по уровню часто пренебрегают и считают, что ключ Ги
преобразует в выборки х* (?) непосредственно значения сигнала
x(t) при t=nTK. Процесс такого преобразования называют им-
пульсной модуляцией, а ключ ТИ — импульсным модулятором
и обозначают его иногда так, как показано на рис. 1.17,я.
Для удобства математических выкладок числа х* (I) = х (п ТИ)
рассматривают как 5-функции — бесконечно узкие импульсы
с конечной площадью, равной значению х(/) при /=пГи, и опи-
сывают последовательность выборок соотношением
x*(0=f х(05(г-пТи).
— со
Структурным аналогом импульсного модулятора при этом явля-
ется блок перемножения (рис. 1.17,г) аналогового сигнала х(г) на
СО
«решетчатую функцию» А(0 = £ — периодическую по-
- сю
следовательность импульсов типа 5-функции с единичной площа-
дью, следующих с периодом Ти и, соответственно, частотой
/и = 1 / Ти = о)и / 2 л. Импульсный сигнал А (?) является «несущим»,
46
сигнал x(t) — «модулирующим», а результат модуляции пред-
ставлен последовательностью выборок л* (f).
1.11.2. Структурные модели цифрового
дифференцирования и экстраполятора
Численное дифференцирование выполняют посредством
арифметических операций, состав и последовательность которых
• / \ Х„ — I ^'41
представлены соотношением x(f)x-------—----=——, где х„=
-* и т и
— х(пТк) — выборка в текущем такте вычислений для 1=пТи;
xn-i=x[(n— 1) Ги] — выборка в предыдущем такте t—(n — 1) Ти;
Тн —- интервал времени между выборками и Л.х„ — приращение
«текущего» значения относительно «предыдущего». Таким об-
разом, для численного дифференцирования необходимо запоми-
нать очередную выборку на время такта Ги, вычитать ее из
следующей выборки и делить рассчитанное приращение на Тк
(или умножать его на 1 / Ти). После этого надо заменить в памя-
ти «старую» выборку на «новую» и подготовиться чем самым
к следующему такту вычислений.
е~рТ"
=K(t-Tu)
x(t)
J_____t
5)
h
1
о
Puc. 1.18. Звено чистого запаздывания (а), его переходная (б), амплитудно-
и фазочастотная характеристики (в), годограф Найквиста (г)
Запоминание импульса на время Ги и воспроизведение его по
прошествии этого интервала времени можно реализовать при
помощи линии задержки, идеальной математической моделью
которой является звено чистого запаздывания (рис. 1.18,п). При
подаче на его вход единичной ступеньки при t = 0 она появится на
его выходе при t~TH (рис. 1.18,6). Амплитудно-частотная харак-
теристика Я(<у)=1, фазочастотная (со) = — Тп со (рис. 1.18,в),
а годограф Найквиста IV (/со) — окружность единичного радиуса
с центром в начале координат комплексной плоскости (рис. 1.18,г).
Структурная модель численного дифференцирования показа-
на на рис. 1.19,а. Сигнал х(г) при помощи импульсного модуля-
тора, представленного ключом Ти, преобразуется в последовате-
льность выборок х*(с). Они поступают одновременно на вход
47
звена чистого запаздывания е-рГ" и на прямой вход сумматора.
Инверсный вход сумматора соединен с выходом звена запаз-
дывания. На выходе сумматора в текущем такте при г = «Ти
получается импульс Ах„=хп—хи_(, соответствующий прираще-
нию сигнала x(t) за время Ти. Умножение этого приращения на
коэффициент 1 / Тн дает импульс, соответствующий приближен-
ному численному значению производной на интервале Тн. Про-
цесс приближенного численного дифференцирования иллюстри-
руют графики входного сигнала х(0 (непрерывная линия) и им-
пульсной последовательности у*(t)xdx/dt (стрелочки) на рис.
1.19,6.
Рис. 1.19. Структурные модели численного дифференцирования (а) и экстра-
полятора (в) и графики, отражающие преобразование сигналов (б. г)
В модели экстраполятора нулевого порядка (ЭПО) на рис.
1.19,» численное, а точнее, импульсное дифференцирование «га-
сится» аналоговым интегратором 1 /р. Его реакцией на каждый
очередной импульс Ах„ является ступенька, величина которой
Ау„ равна Дх„. Поэтому для моментов времени t=n ТИ, соответ-
ствующих выборкам, имеет место равенство y(Z) = x(n Tv), а да-
лее величина y(t) остается неизменной до следующей выборки.
Работу ЭПО иллюстрируют графики х(/) — плавная кривая
и у (г) — ступенчатый, кусочно-постоянный график на рис. 1.19,г.
Эта пара графиков наглядно иллюстрирует запаздывание выход-
ного сигнала y(f) системы импульсный модулятор — ЭПО
(АЦП—ЦАП) относительно входного x{t).
1.11.3. Структурная модель цифрового интегратора
Структурная модель цифрового интегратора (ЦП) показана
на рис. 1.20,а. Входной сигнал х(г) подвергается импульсной
модуляции (ключ Ти) и умножается на коэффициент ТИ. Импульс
Ти х* (0 = хп = ТИх(п Ти) поступает на вход сумматора 1, выход
которого соединен со входом звена задержки е~рТ". Задержанные
на Аг=Ти импульсы поступают на второй вход сумматора 1.
48
Рис. 1.20. Структурная модель цифрового интегратора и особенности алгоритмов
численного интегрирования
В качестве выходных сигналов можно рассматривать сигналы
) *(/) на входе звена задержки и >*(/ —Ти) на его выходе. В пер-
вом случае
/*(0=У(«Ги)=/я=>'л_1 + Тихи,
где индекс п соответствует текущей, а п — 1 — предыдущей выбор-
кам. Во втором
Уп+1~ Уп + ТИх„,
где yn+i — «будущее» значение у*(/), рассчитанное по текущим
значениям уп и х„. Последнее соотношение можно переписать
в виде уп—уп— ] 4- Тк хп_ ].
Чтобы удобнее было наблюдать сигналы на выходах ЦИ,
можно воспользоваться ЭПО (рис. 1.20,6).
На графиках рис. 1.20,в—д сопоставлены реакция на входную
ступеньку jc(t)=1[z] идеального интегратора y(t) (наклонная
прямая) с диаграммами сигнала ya(t) на выходе ЭПО, вход
которого соединен с выходами ЦИ у* (/) (в), у* (г) (г) и у% (/) (6).
В первом случае график уа (t) для у„ (?) идет «в среднем» выше
переходной характеристики идеального интегратора, а в послед-
нем, для у J (/), — ниже ее. Поэтому первый алгоритм численного
интегрирования иногда называют интегрированием по Эйлеру
с избытком, а последний — с недостатком. Средняя диаграмма
построена для сигнала у?(0, полученного суммированием сиг-
налов у* (г) и у* (t— ТИ) и умножением суммы на коэффициент 1/2.
В этом случае
49
Я.-1+ Ги*л+.Ъ)-| + 7>Я-1 *» + *«-!
л.п=_—=-----------_--------+ ти------------,
т. е. приращение на интервале п рассчитывается как полусумма
значений входного сигнала хи„1 в начале и хп в конце такта —
среднее значение x(t) в данном такте. Этот алгоритм называют
интегрированием по трапециям. В этом случае среднее значение
результата численного интегрирования совпадает с переходной
характеристикой идеального интегратора.
Рис. 1.21. Организация исследований цифровых интеграторов
Для наглядной демонстрации особенностей алгоритмов чис-
ленного интегрирования целесообразно подать один и тот же
сигнал на входы аналогового J и цифрового ЦИ интеграторов
и наблюдать сами сигналы и их разность на экране электронного
осциллографа (рис. 1.21).
1.11.4. Цифровые модели динамических процессов
Построив модель цифрового интегратора (ЦИ), ее можно
использовать далее для изучения особенностей цифрового моде-
лирования реальных динамических процессов. При этом имеет
смысл опереться на те процессы, которые уже хорошо знакомы
по результатам аналитических исследований, подтвержденных
натурным экспериментом.
На рис. 1.22,а представлена знакомая структурная модель
7? С-цепочки (см. § 1.8), где к= 1 / RC. На рис. 1.22,6 в этой модели
аналоговый интегратор J заменен цифровым ЦИ. Цель исследо-
вания — изучить отличия сигнала y(t) на выходе цифровой
модели (рис. 1.22,6) от его аналога на выходе аналоговой (рис.
1.22,а) в зависимости от того, какой из алгоритмов интегрирова-
ния использован в ЦИ и от соотношения постоянной времени Т
АС-цепочки и такта ТК.
На рис. 1.22,в показана знакомая структурная модель гар-
монического осциллятора — маятника (см. § 1.6) или колебатель-
ного контура (см. § 1.8) без затухания. В этом случае реакцией на
входную ступеньку являются незатухающие синусоидальные ко-
лебания. В целях исследования характера и величины погреш-
ностей при цифровом моделировании целесообразно для начала
50
заменить один из аналоговых интеграторов цифровым (рис.
1.22,г) и посмотреть, как повлияют на осциллограммы алгоритм
интегрирования и соотношение между собственной частотой а>0
осциллятора и тактом интегрирования Ти.
Рис. 1.22. Цифровые модели динамических процессов: аналоговая (а) и цифровая
(6) модели АС-цепочки; модели гармонического осциллятора на двух аналоговых
(в) и иа аналоговом и цифровом интеграторах (г)
Для организации экспериментальных исследований цифрово-
го моделирования систем первого (рис. 1.22,а,б) и второго (рис.
1.22,в,г) порядка целесообразно воспользоваться методикой, ко-
торую иллюстрирует рис. 1.21.
1.12. ТРЕБОВАНИЯ К ПЕРСОНАЛЬНОМУ КОМПЬЮТЕРУ
ДЛЯ ИССЛЕДОВАНИЯ ДИНАМИЧЕСКИХ ПРОЦЕССОВ
1.12.1. Математическая формализация предметных
задач и программирование ЭВМ
Рассмотренные примеры математической формализации
предметных задач (см. §1.1—1.9) иллюстрируют эффективность
технологического пути построения математической модели и по-
казывают, что этот путь на определенном этапе естественным
образом приводит к структурной математической модели. По
ней легко записать аналитические соотношения и продолжить
теоретическое исследование традиционными методами. Однако
материал §1.10 и §1.11 показывает, что и в тех случаях, когда
предметом исследования становятся аналитические модели и чис-
ленные алгоритмы, перевод их на язык структурных моделей
Дает дополнительную точку зрения на внутреннее содержание
математических действий и одновременно развернутую схему
программ для моделирования. Поэтому имеет смысл добивать-
ся, чтобы язык теоретической структурной модели был непосред-
51
ственно «понятен» ЭВМ, был языком обращения к ней, языком ее
программирования.
Для этого ЭВМ должна предлагать пользователю набор мо-
дулей-микропрограмм, реализующих вычислительными средст-
вами математические преобразования входных переменных в вы-
ходные, тождественные тому содержанию, которое скрыто за
символическими обозначениями «бумажной» структурной моде-
ли. Эти модули должны быть «словами», из которых пользова-
тель конструирует «высказывания», воспроизводя тем или иным
способом связи между «словами», тождественные связям, пред-
ставленным стрелками «бумажной» структурной математической
модели.
Приняв идею использования структурных моделей как ос-
новы языка обращения к ЭВМ, целесообразно минимизировать
состав его «слов», ограничившись лишь теми преобразователя-
ми, которые естественным образом оказываются элементарными
при технологическом построении моделей предметных объектов,
в том числе и математических. Рассмотренные в § 1.1—1.10 при-
меры дают основание выделить в качестве элементарных преоб-
разователи, представленные в обобщенном виде на рис. 1.23.
Усилитель к представляет линейное преобразование причины
х(Г) в следствие у (f) = kx(f), математически описывающее линей-
ные физические зависимости типа преобразования силы в ускоре-
ние, тока через резистор в падение напряжения па нем, теплового
напора в мощность, отводимую за счет теплопроводности, и т. д.
Нелинейность y=N(x) представляет в общем виде конкретные
Рис. 1.23. Элементарные преобразователи структурных математических моделей
52
нелинейные физические зависимости переменной-следствия y(t)
от одной переменной-причины x(t). Примерами могут служить
зависимость силы сопротивления от скорости, тока через р — «-пе-
реход от напряжения на нем, магнитного потока от намагничива-
ющей силы и т. д. Блок перемножения у — х(х2 представляет
структурно физические зависимости одной переменной-следствия
от произведения двух переменных-причин — типа законов Фара-
дея и Ампера. Существуют физические зависимости, для матема-
тического представления которых требуется преобразователь ти-
па «деление» (у=х1/х2) одной из переменных-причин Х](/) на
И
вторую x2(t). Сумматор у(/) = *t(f) отражает принцип супер-
i=l
позиции — случай, когда переменная-следствие у (/) равна алгеб-
раической сумме одинаковых с ней по физической природе пере-
менных-причин Xi{t).
Все эти преобразователи безынерционны, т. е. они мгновенно
преобразуют входные переменные-причины в выходную-следст-
вие.
Развитие процессов во времени определяется происходящим
в объектах накоплением скорости и перемещения, массы, заряда,
тепла и т. п. Математически элементарный процесс накопления
представляет интегратор — преобразователь, зависимость вы-
ходной переменной которого y(t) от входной x(t) описывается
t
соотношением y(z)=y0 + J x(r)dr, где >o=j(O) — начальное зна-
о
ченис переменной у (t) при t = 0.
На рис. 1.24,а показана структура типового соединения элеме-
нтарных преобразователей в модуле для моделирования линей-
ных систем. Считая каждый преобразователь «словом», эту
структуру можно рассматривать как некое «словосочетание»,
Рис. 1.24. Структура типового соединения элементарных преобразователей в мо-
дуле для моделирования:
о — линейных систем; б — нелинейных зависимостей
53
позволяющее конструировать любые «высказывания», представ-
ленные структурными моделями реальных процессов (см.
§1.1—1.9) и математических уравнений (§1.10), при помощи небо-
льшого числа коммутационных проводников, и сохранять визу-
альное подобие монтажной схемы конфигурации «бумажной»
структурной модели. Не менее существенно и то, что эти соедине-
ния столь же естественны и с точки зрения аналоговой вычис-
лительной техники. Такое объединение уменьшает избыточность,
улучшает использование операционных усилителей, повышает
точность и устойчивость моделей в широком диапазоне измене-
ния их параметров.
В моделях нелинейных систем функциональные нелинейные
преобразователи также сочетаются с усилителями и сумматора-
ми. Типовая конфигурация их соединения, позволяющая вклю-
чать нужные связи небольшим числом внешних соединений, по-
казана на рис. 1.24,6.
1.12.2. Методическое единство математического
и натурного экспериментов
Отправной точкой в постановке математических задач явно
или интуитивно является конечная цель исследования в виде
натурного эксперимента. Поэтому математическая постановка
задачи отражает условия натурного эксперимента, а его техника
и форма представления результатов служат ориентирами для
математических методов.
Натурный эксперимент состоит в изучении статических и ди-
намических свойств объекта, представляемых соответствующими
характеристиками. Статические характеристики отображают за-
висимость установившегося значения выходной переменной от
входных, динамические — процессы перехода из одного устано-
вившегося состояния в другое или реакцию выходной переменной
на изменение входных. Входную переменную, используемую для
достижения цели управления, называют управляющей или, крат-
ко, управлением. Независимые переменные, препятствующие до-
стижению цели управления, называют возмущающими или, крат-
ко, возмущениями.
Зависимость выходной переменной от управления в устано-
вившемся режиме называют регулировочной или градуировоч-
ной характеристикой, а от возмущения — нагрузочной, внешней
или статической характеристикой по возмущению.
Статические характеристики снимают, задавая ряд последова-
тельных значений одной из переменных и поддерживая оста-
льные неизменными, а по полученным точкам строят график
у—у(х). Для более полного наглядного представления свойств
объекта используют семейства графиков, получаемых в резуль-
54
Синхронизация развертки
Рис. 1.25. Исследование характеристик объекта:
статических (о) и динамических (б—д)
тате серии последовательных измерений при варьировании как
параметров самого объекта, так и остальных входных перемен-
ных.
Статические характеристики исследуют при помощи харак-
териографов (рис. 1.25,а). Для этого формируют сигнал, позволя-
ющий изменять входную переменную объекта х(/) в заданном
диапазоне, сигнал с выхода объекта у(/) подают на вход вер-
тикального отклонения У осциллографа или самописца и развер-
тывают изображение по оси X входным сигналом х(0. В случае
малоинерционных объектов (полупроводниковые приборы
и микросхемы, электровакуумные приборы, ферриты и т. д.) на
экране осциллографа сразу получается устойчивый график
у = ЛДх). Варьируя вручную входную переменную wy, рассмат-
риваемую как параметр, удобно наблюдать и изучать дефор-
мацию характеристик, вызываемую изменениями параметра,
а программируя автоматически величину последнего в виде ряда
значений, можно получить осциллографическое изображение все-
го семейства.
Идея характериографа позволяет заменить кропотливые
и медленные рутинные ручные действия при снятии отдельной
характеристики быстрыми автоматическими и оставить в качест-
ве ручных только те операции, которые связаны с осмыслением
влияния того или иного параметра на характеристику в целом.
Стремление слишком быстро получать графики статических
характеристик для инерционных объектов ведет к погрешностям,
связанным с отклонениями условий натурного эксперимента от
математического определения статической характеристики.
В случае непрерывного треугольного или синусоидального вход-
ного сигнала х(г) выходная переменная у(/) объекта из-за его
инерционности отстает от значения, которое бы установилось
при Г->оо для «остановленного» значения х(/). Это вносит допол-
нительную динамическую погрешность в измерения статической
характеристики. Эту погрешность надо уметь узнавать и выбо-
ром частоты генератора Г добиваться уменьшения се до вели-
чины, меньшей наперед заданной, стремясь одновременно обес-
печить максимальное быстродействие. Такая задача оптимиза-
ции типична для многих натурных экспериментов.
Динамические свойства объектов во временной области пред-
ставляют переходной и импульсной переходной (весовой) харак-
теристиками. Математически их определяют как реакцию выход-
ной переменной у (/) при нулевых начальных условиях на воздей-
ствие типа единичной ступеньки в первом и типа единичной
<5-функции во втором случае. Эти определения исходят из стрем-
ления упростить расчеты, приблизив одновременно математиче-
скую постановку задачи к условиям натурного эксперимента.
56
В натурном эксперименте стремятся приблизить состояние
объекта к стационарному, соответствующему началу отсчетов,
приложить ко входу объекта то или иное воздействие и зарегист-
рировать реакцию объекта. Например, исследуя динамику само-
лета с автопилотом, возмущение типа 6-функции можно реализо-
вать взрывом пиропатрона, а изучая динамику электропечи, сту-
пенчато изменить напряжение нагревателя. Для электронных
схем, электромеханических элементов, систем автоматики на их
основе и т. п. более удобно воспользоваться генератором Г пря-
моугольного периодического сигнала х(0 и изучать реакцию
объекта исследования y(t) на такой сигнал при помощи элект-
ронного осциллографа ЭЮ (рис. 1.25,6). Автоматизировав таким
образом рутинные ручные действия по периодическому воспроиз-
ведению условий эксперимента, надо, однако, сохранить для
выполнения вручную те операции, которые связаны с осмыслени-
ем результата.
Использование генератора системы синхронных прямоуголь-
ного и треугольного сигналов (рис. 1.25,в) сразу обеспечивает
получение устойчивого изображения выходного сигнала на эк-
ране электронного индикатора с расплатой за это изменением
начальных условий. Это может осложнить трактовку результа-
тов для систем выше первого порядка, особенно нелинейных.
Для наблюдения фазовых траекторий (рис. 1.25,г) сигнал с вы-
хода объекта y(t) подают на вход X индикатора, а на вход
Y подают сигнал, пропорциональный скорости изменения выход-
ного сигнала у (0. Этот сигнал тем или иным способом снимают
непосредственно с объекта или получают дифференцированием
выходного сигнала. Для получения периодически развертываю-
щейся на экране фазовой траектории состояние объекта надо
периодически «возмущать», для чего можно использовать вход-
ной сигнал х(0.
При исследовании частотных характеристик (рис. 1.25,6) изу-
чают зависимость амплитуды av и фазы <ру установившихся
синусоидальных колебаний у (t) = ау sin (ш t+сру) на выходе
объекта от частоты синусоидального входного сигнала х (0 =
=ах sin cat. Математическое понятие «установившиеся колебания»
отражает практическую ситуацию, когда подача входного сигна-
ла или изменения его частоты или (и) амплитуды были произве-
дены задолго до начала измерений и вызванные этими изменения-
ми переходные процессы успели закончиться. Для получения
фигуры Лиссажу на вход X индикатора подают входной сигнал
*(0=flYsin<y/, а на вход Y— выходной у (t) = ay sin (cd 14- (py). По
получающемуся на экране эллипсу рассчитывают амплитуд-
но-частотную И (а))—ау(с^ j ах и фазочастотную <ру(а>) характе-
ристики и строят их графики. Схема соединений на рис. 1.25,6
57
Рис. 1.26. Организация сравнения результатов теоретиче-
ского прогноза и натурного эксперимента
тождественна схеме на рис. 1.25,67, а процедура измерений для
ряда последовательных значений частоты аналогична процеду-
ре снятия вручную статических характеристик.
Для автоматизации измерений частотных характеристик ши-
роко используют
характериографы. В них низкочастотный
сиг
нал программирует частоту высокочастотного генератора сину-
соидального сигнала, который подан на вход объекта. Сигнал
с его выхода детектируют и используют для отклонения луча
индикатора по вертикали, развертывая изображение низкоча-
стотным сигналом. Расплатой за автоматизацию и в этом случае
может оказаться динамическая погрешность из-за инерционности
установления амплитуды и фазы выходного сигнала при измене-
ниях частоты входного сигнала.
При формировании общих требований к персональному ком-
пьютеру для автоматизации исследований динамических процес-
сов в основу языка его ответа целесообразно положить традици-
онные формы представления свойств реального объекта в виде
его статических и динамических характеристик. Состав и ор-
ганизация такого компьютера должны обеспечивать завершение
расчетов и моделирования представлением конечных результатов
непосредственно в виде графиков.
Ставя целью компьютеризацию исследования как целого и за-
ботясь об удобствах широкого круга пользователей, целесооб-
разно стремиться к тому, чтобы материализовать и самую после-
днюю, ключевую операцию — сравнение результатов теоретичес-
кого прогноза и натурного эксперимента. Признав натурный
эксперимент первичным и рассматривая математический экспе-
римент как его модель, имеет смысл реализовать сравнение их
результатов в виде, представленном схемой на рис. 1.26. Она
отображает двойной эксперимент, проводимый одновременно
над самим объектом и параллельно над его математической
моделью при одинаковых условиях, по единой методике, с ис-
пользованием одних и тех же контрольно-измерительных
58
устройств, в идеале — предлагаемых компьютером в готовом
виде.
«Натурным объектом» может быть и результат аналитиче-
ского решения или графоаналитических расчетов (§1.10). В этом
случае моделирование также должно воспроизводить все условия
«натурного» эксперимента, реализуя форму функции в правой
части дифференциального уравнения и начальные условия, а ре-
зультат должен быть представлен удобным для наблюдения
графиком. Целесообразно обеспечить как возможность развер-
тывания решения в реальном масштабе времени, так и трансфор-
мацию временного масштаба в широких пределах.
Принципиальная возможность завершить теоретическое ис-
следование прямым сравнением результатов математического
и натурного эксперимента представляется авторам исключитель-
но важной методической целью, определяющей подход к выбору
средств для ее достижения. К их числу относятся состав и ор-
ганизация контрольно-измерительной системы, способной реали-
зовать методическое единство математического и натурного экс-
периментов, и выбор вычислительных средств, способных наибо-
лее просто обеспечить такое единство при математическом моде-
лировании.
1.12.3. Компьютер аналоговый или цифровой?
С точки зрения пользователя безразлично, какие вычисли-
тельные средства, скрытые за фальшпанелью, реализуют матема-
тические преобразования, представленные мнемосхемой на
фалыппанели.
Поставленная цель компьютеризации, а также ограничен-
ность времени и средств направили авторов к поиску пути к ней
через использование аналоговой вычислительной техники. Обес-
печивая точность, не уступающую точности реальных объектов
и систем, аналоговая техника снимает само обсуждение вопроса
о погрешностях, связанных с квантованием по уровню и времени
при цифровом моделировании (§1.11). Приемы исследования ана-
логовых моделей достаточно просто приблизить к условиям
натурного эксперимента. Выбор аналоговой техники освобожда-
ет и от огромной работы по созданию матобеспечения цифровых
ЭВМ, способного искусственно уподобить машинный математи-
ческий эксперимент натурному.
В тех случаях, когда цифровая техника позволяет реализовать
законченные математические преобразования лучше, чем анало-
говая, имеет смысл «прятать» за фальшпанелями цифровые
устройства. Такие блоки есть в составе аналогового персональ-
ного компьютера АВК-6.
59
Гпава 2
АНАЛОГОВЫЙ ПЕРСОНАЛЬНЫЙ КОМПЬЮТЕР
АВК-6
2.1. ОБЩАЯ ОРГАНИЗАЦИЯ АВК-6
Общий вид персонального аналогового компьютера АВК-6
показан на рис. 2.1. Он выполнен в виде настольного прибора,
объединяющего в одном корпусе мини-ABM, МЭМ-6, инди-
кационно-измерительную систему и источник питания. Слева
расположены блоки индикационно-измерительной системы
(ИИС) — электронно-лучевой индикатор 7, генератор системы
синхронных сигналов и электронный коммутатор 2, служебный
модуль 3. Центральная часть АВК-6 — сборочная панель 4,
рассчитанная на установку шести сменных решающих модулей,
из которых по структурной математической модели формируется
аналоговый процессор — мини-ABM. Справа расположен блок
питания 5.
Главной особенностью АВК-6 является возможность про-
граммирования непосредственно по структурной математической
модели динамического процесса. Такая возможность обеспечена
выполнением коммутационных панелей блоков АВК-6 в виде
развернутых мнемосхем с обозначениями элементов структурных
моделей и связей между ними в символике, принятой в учебной
и научно-технической литературе по теории динамических про-
цессов [ 3 ]. Соответствие преобразований электрических сигналов
(напряжений) между гнездами, совмещенными с элементами мне-
монической схемы, обозначениям последней обеспечено жестким
предварительным объединением элементарных аналоговых вы-
числительных операций в микропрограммы решающих блоков.
Сменные решающие блоки АВК-6 выполнены в едином конст-
руктиве, что позволяет устанавливать их на любую позицию
монтажного поля 4 в зависимости от вида структурной модели.
Функциональная организация АВК-6 подсказывает пользовате-
лю оптимальный способ коммутации преобразователей при на-
боре модели.
Состав и характеристики элементов ИИС обеспечивают полу-
чение результатов моделирования в традиционных для инженер-
ной практики графических формах: в виде семейств переходных
процессов, фазовых траекторий, статических характеристик, ча-
стотных характеристик и годографов. Цифровые измеритель дли-
тельности и вольтметр, расположенные в служебном модуле,
обеспечивают возможность измерения параметров модели, ма-
шинных переменных, временных интервалов и фаз сигналов в
цифровом виде.
Мнемоника блоков ИИС дает пользователю исчерпывающую
информацию об их функциональных возможностях. Расположе-
60
Рис. 2.1. Персональный аналоговый компьютер (аналоговый интегрирующий калькулятор) АВК-6:
1 — индикатор; 2 — генератор и коммутатор; 3 — служебный модуль; 4 — сборочная панель; 5 — блок питания
ние блоков ИИС слева от АВМ обеспечивает разделение зон
оперативной работы с моделью и средствами ее исследования,
а также дает возможность подавать внешние воздействия на
модель слева, т. е. в соответствии с принятой в научно-техниче-
ской литературе традицией.
Блоки компьютера снабжены ручками и шкалами для опера-
тивной настройки параметров, а линейные преобразователи —
световыми индикаторами выхода из линейного режима работы.
Индикаторы расположены рядом с мнемоническими изображе-
ниями преобразователей. Размеры передних панелей решающих
блоков обеспечивают свободное прочтение мнемосхем и удобст-
во работы с ручками настройки и коммутационными гнездами
блоков при наборе, настройке и исследовании моделей.
Шарнирное крепление электронно-лучевого индикатора
АВК-6 к корпусу позволяет установить экран в удобное положе-
ние.
Габаритные размеры АВК-6 — 660x240x80 мм, масса —
9 кг, мощность, потребляемая от сети 220 В, 50 Гц до 40 В • А.
2.2. ИНДИКАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА АВК-6
2.2.1. Электронно-лучевой индикатор
Электронно-лучевой индикатор 7 (рис. 2.1) предназначен для
наблюдения и измерения электрических сигналов — напряжений
до 10 В в частотном диапазоне от 0 до 100 кГц. Конструктивно он
представляет собой законченный узел, состоящий из кожуха
с электронно-лучевой трубкой внутри и электронного блока,
оформленного в виде подставки. Кожух и подставка связаны
шарниром, который позволяет приподнять экран индикатора
и зафиксировать его в удобном для работы положении. Такая
конструкция одновременно обеспечивает защиту электронных
элементов от высокой температуры цоколя трубки при мини-
мальном расстоянии между ними и трубкой.
Индикатор имеет два независимых канала вертикального Y
и горизонтального X отклонения луча и канал управления ярко-
стью луча Z. Входные гнезда X, Y и Z расположены на мнемо-
схеме в верхней части служебного модуля 3. Размеры рабочей
части экрана 30 х 30 мм.
Принципиальная схема индикатора показана на рис. 2.2.
Усилители отклонения преобразуют входные сигналы, изме-
няющиеся в диапазоне + 5 В, в пары противофазных напряжений,
изменяющихся относительно постоянного уровня +50 В на
±40 В.
Усилители отклонения выполнены по схеме дифференциаль-
ного каскада на высоковольтных транзисторах VT4, VT5 (канал
Y) и VT6, VT7 (канал X) типа КТ605Б. Транзисторы VT4 и VT6
62
-500 В ;rVB 6Л01И
Рис. 2.2. Принципиальная схема электронно-лучевого индикатора
охвачены отрицательной ОС. Она расширяет полосу пропускания
и стабилизирует коэффициент усиления и рабочую точку усили-
теля. Подстроечные резисторы R21 и R31 позволяют смещать
луч по вертикали и горизонтали и вывести его в центр экрана при
отсутствии входных сигналов.
Питание усилителей отклонения осуществляется от двух ста-
билизированных источников напряжения 100 Ви—15 В. Общий
ток, потребляемый усилителями отклонения от каждого из ис-
точников, — 10 мА.
Модулятор яркости содержит симметричный дифференциаль-
ный каскад на транзисторах VT1 и VT2 типа КТ203А и эмиттер-
ный повторитель на транзисторе VT3 (КТ315В). С формирова-
теля на базу VT3 (вход Z) подаются прямоугольные импульсы
амплитудой + 15 В, управляющие яркостью луча. Уровень —
15 В на входе Z создает на коллекторе VT2 напряжение, до-
статочное для запирания трубки и полного гашения луча на
экране ЭЛТ. Уровень +15 В на входе Z отпирает луч ЭЛТ. Диод
VD1 ограничивает максимальную яркость луча на уровне, опре-
деляемом напряжением на движке потенциометра R5 («яркость»).
Схема питания ЭЛТ служит для обеспечения необходимого
режима работы ЭЛТ и регулировок яркости и фокусировки луча.
К схеме питания подводятся от блока питания напряжения
+100 В, — 500 В, ~6,3 В. Резисторы R5 и R14 выведены под шлиц
и позволяют регулировать яркость и фокусировку луча.
В случае необходимости резистор R16 подбирают по наимень-
шим искажениям формы луча по всему экрану ЭЛТ.
Питание трубки и усилителей отклонения стабилизирован-
ными напряжениями устраняет необходимость в оперативной
регулировке яркости, фокусировки и центровки луча.
Настройка индикатора заключается в центровке луча при
отсутствии входных сигналов с помощью потенциометров R21
и R31 и в подстройке чувствительности по X- и У-входам с помо-
щью резисторов R18 и R27. При использовании предварительно
отобранных или точных резисторов, отвечающих соотношениям
R7=R8, R3 = R11, R4 = R12 с точностью 1%, модулятор яркости
луча настройки не требует.
2.2.2. Генератор системы синхронных сигналов
На рис. 2.3 представлена общая фальшпансль электронного
коммутатора (ЭК) 1 и генератора системы синхронных сигналов
(ГСС) 2.
Генератор ГСС является источником системы синхронных
сигналов прямоугольной, треугольной, синусоидальной и косину-
соидальной форм. Эти сигналы используются для формирования
воздействий на объект или модель и одновременно для фор-
64
Рис. 2.3. Фальшпанель электронного ком-
мутатора и генератора АВК-6:
/ — электронный коммутатор; 2 — генера-
тор; 3 — переключатель режимов исследования;
4 — перемычка режимов управления частотой
генератора; 5 — переключатель поддиапазонов
частоты генератора; 6 — ручка управления ча-
стотой генератора
мирования изображений на экра-
не электронно-лучевого индика-
тора, чем достигается устойчи-
вость изображений. Выбор режи-
мов исследования моделей осуще-
ствляется при помощи переклю-
чателя 3: клавиша 1 — непрерыв-
ное интегрирование, 2 — перио-
дическое интегрирование, 3 —
ввод начальных условий.
В режиме периодического ин-
тегрирования ГСС управляет ра-
ботой интеграторов.
Амплитуду каждого из четы-
рех синхронных сигналов можно
регулировать независимо от оста-
льных в пределах 0—10 В. Диапа-
зон частот от 0,1 до 1100 Гц при
регулировании вручную (пере-
мычка 4) разбит на четыре под-
диапазона: 0,1—1,1 Гц, 1,0—
11 Гц, 10—110 Гц и 100—1100 Гц.
Последний получается при от-
ключенном состоянии всех кла-
виш переключателя диапазонов 5.
В каждом из поддиапазонов ча-
стоту колебаний можно регулиро-
вать плавно вручную ручкой 6
в отношении 1:11.
Для управления частотой от
внешнего сигнала перемычку 4
надо удалить и подать на вход Uy
напряжение, изменяющееся в пределах 0,1—10 В. Это обеспечит
безынерционное управление частотой всей системы синхронных
сигналов в пределах двух декад на любом из четырех подди-
апазонов 0,01—1,0 Гц, 0,1—10 Гц, 1,0—100 Гц и 10—1000 Гц.
Структурная схема генератора показана на рис. 2.4. Релак-
сационный генератор, образованный нелинейным преобразова-
телем 1, усилителем 2 и интегратором 3, формирует прямоуголь-
ные n(t) и треугольные Д(/) импульсы с частотой f=kUml45,
65
3-6517
Рис. 2.4. Структурная схема генератора:
1,4 — нелинейные преобразователи; 2, 5 — усилители; 3, 6 — интеграторы
где Um — амплитуда прямоугольных импульсов на выходе нели-
нейности с гистерезисной характеристикой 1; ё — полуширина
петли гистерезиса и k = kikKi — общий коэффициент дополни-
тельного усилителя 2 и первого интегратора 3. Нелинейность 4
формирует из треугольного сигнала сигнал косинусоидальной
формы K(t). На выходе интегратора 6 из косинусоидального
сигнала формируется синусоидальный сигнал C(t). Для поддер-
жания пулевого среднего значения последнего введена вторая
обратная связь с выхода интегратора 6 на второй инвертиру-
ющий вход сумматора 7[4].
Амплитуда треугольного сигнала А (О определяется полуши-’
риной петли гистерезиса д. Поэтому при изменении коэффициен-
та усиления к{ изменяется частота, а амплитуда треугольного
сигнала остается постоянной. Для того чтобы при изменении
частоты оставалась неизменной и амплитуда синусоиды C(f),
коэффициент к2 необходимо изменять синхронно с коэффициен-
том /q. Синхронное плавное управление коэффициентами к{ и к2
вручную проще всего реализовать при помощи сдвоенного потен-
циометра. Используя в качестве к\ и к2 аналоговые псрсмножи-
тели, ручное управление частотой генератора легко дополнить
автоматическим. Коэффициенты усиления интеграторов А'и1 и ки2
удобно использовать для дискретного переключения диапазонов.
Принципиальная электрическая схема генератора ГСС приве-
дена на рис. 2.5.
Реле с гистерезисной характеристикой реализовано на
ОУ DA1, интеграторы — на ОУ DA3 и DA5, переменные коэф-
фициенты, управляемые напряжением, — на аналоговых пере-
множителях сигналов DA2 и DA4. Нелинейный функциональный
66
й Si- е si+ fl SL~ ££/ +
Рис. 2.5. Принципиальная схема генератора
67
преобразователь с синусоидальной статической характеристикой
реализован на транзисторах VT1 и VT2. Обратные связи заведе-
ны через резисторы R1 и R2.
Использование в качестве DA1 быстродействующего ОУ типа
КР544УД2, имеющего скорость нарастания выходного сигнала
20 В/мкс, обеспечивает крутые фронты прямоугольного сигнала.
Для симметрирования характеристики реле на выходе DA1 по-
ставлен двуханодный стабилитрон VD1 типа КС 191 А, имеющий
малый разброс положительного и отрицательного напряжений
стабилизации.
В качестве аналоговых перемножитслей DA2, DA4 исполь-
зованы перемножители типа КР525ПС2А. Управляющие входы
перемножителей соединены, гнездо XS2 служит для управления
частотой генератора от внешнего источника напряжения. Для
ручного управления частотой необходимо установить перемычку
между гнездами XS2 и XS3, которые выведены на переднюю
панель генератора. Тогда управление частотой производят с по-
мощью потенциометра RP5. Интеграторы выполнены на ОУ
DA3 и DA5 типа КР140УД6 стандартным образом.
Нелинейный функциональный преобразователь с синусои-
дальной статической характеристикой реализован на полевых
трапзисгорах VT1 и VT2 типа КП103М и КП303Г. Статические
характеристики «ток стока — напряжение сток-исток» транзисто-
ров близки к у = sinx при напряжении сток-исток до 3 В. Потенци-
ометр RP6 служит для ограничения входного сигнала преоб-
разователя, а потенциометры RP7 и RP8 — для симметрирова-
ния результирующей нелинейной характеристики.
На рис. 2.5 принципиальная схема генератора показана для
одного поддиапазона, когда плавное изменение частоты осущест-
вляют при помощи управляющего напряжения, которое подают
на гнездо XS2.
Переход от одного поддиапазона к другому осуществляется
синхронным включением в обратную связь DA3 и DA5 конден-
саторов С] и С2 соответствующей емкости (табл. 2.1) с помощью
переключателя типа П2К.
Схема на рис. 2.5 обеспечивает
Таблица 2.1 генерацию системы синхронных сиг-
Диапазон Емкость С, налов с постоянными амплитудами.
Номер | Частота, Гц и С2, мкФ Для независимой плавной регули-
] 0,1—1 1 1 0 ровки амплитуды каждого из сигпа-
2 1,0—11 1,0-10'* лов в генераторе использованы че-
3 10—110 1,0 10-’ тыре усилителя, принципиальные
4 110—1100 1,0-10-’ схемы которых показаны на рис. 2.6. Кроме регулировки амплитуды они
позволяют сформировать систему сигналов с желаемыми взаим-
ными фазами. Поэтому для усилителя прямоугольного и косину-
68
R9 51 к
Рис. 2.6. Принципиальные схемы усилителей генератора
К1 О 10 О к
соидального сигналов применено неинвертирующее включе-
ние ОУ, а для треугольного и синусоидального сигналов — ин-
вертирующее включение. Регулировка амплитуд сигналов осуще-
ствляется потенциометрами RP1—RP4. Усилитель прямоуголь-
ных импульсов реализован на быстродействующем ОУ типа
КР544УД2, остальные — на ОУ типа КР140УД6.
Настройка генератора имеет целью обеспечить соответствие
параметров системы синхронных сигналов значениям, указанным
на передней панели генератора, с погрешностью не хуже 1%.
Сначала настраивают схему формирования сигналов (рис.
2.5), затем — усилители (рис. 2.6).
Для симметрирования прямоугольных сигналов генератора
измеряют напряжения стабилизации двуханодных стабилитро-
нов КС191А при токе стабилизации 7ст = 0,5 мА и отбирают для
установки те из них, в которых | С/ст| = | — (7СТ| с точностью 1%.
Далее удаляют перемычки П1 и П2 (рис. 2.5) и настраивают
аналоговые перемножители DA2 и DA4. Цель настройки — мини-
мизировать смещения нулей и пролезания по входам перемножи-
телей, а также обеспечить идентичность чувствительности по
входам, используемым для управления частотой генератора. На-
стройка осуществляется стандартным образом с помощью поте-
нциометров RP1—RP4 для перемножителя DA2 и потенциомет-
ров RP9—RP12 для перемножителя DA4.
Затем настраивают ведущий генератор. Он состоит из соеди-
ненных в контур реле с гистерезисом на DA1, управляемого
коэффициента передачи на DA2 и интегратора на DA3 (рис. 2.5).
69
Перед его настройкой необходимо вывод резистора R1 отсо-
единить от выхода микросхемы DA5 и подключить его к общей
точке («земле»); установить перемычку Ш; установить коммута-
ционную перемычку между гнездами XS2 и XS5. После выполне-
ния этих операций на выходе DA1 возникают прямоугольные
колебания напряжения, а на выходе DA3 — треугольные.
Настройку верхней частоты диапазона 1100 Гц проводят,
когда ручка резистора RP5 повернута по часовой стрелке до
упора. Частоту измеряют цифровым частотомером соответст-
вующего класса точности (например, 43-57). Если она выше
желаемой, то сопротивление резистора R8 увеличивают, если
ниже, то уменьшают. Настройку нижней частоты диапазона
100 Гц проводят, когда ручка резистора RP5 повернута против
часовой стрелки до упора. Если частота выше заданной, то
уменьшают сопротивление резистора R7, если ниже — увеличи-
вают.
Затем приступают к настройке всей системы сигналов генера-
тора на верхнем поддиапазоне. Перед настройкой соединяют
перемычкой П2 вывод 7 микросхемы DA4 с истоком транзистора
VT2. С помощью потенциометра RP6 устанавливают амплитуду
напряжения, поступающего на преобразователь, равной 1,5—
1,8 В и, подстраивая напряжения на затворах транзисторов VT1
и VT2 с помощью потенциометров RP7 и RP8, добиваются на
выходе преобразователя (исток VT2) симметричной осцилло-
граммы косинусоидального сигнала. Если в вершинах наблюда-
ется излом осциллограммы, то следует уменьшить амплитуду
входного сигнала с помощью RP6 и провести повторную на-
стройку симметрии. Амплитуда входного сигнала не должна
быть менее 1,3 В.
После настройки нелинейного преобразователя замыкают об-
щую обратную связь в генераторе. Для этого резистор R1 отсо-
единяют от общей точки и подключают к выходу DA5 (вывод б).
На осциллографе наблюдают осциллограммы прямоугольного
(стабилитрон VDP), треугольного (вывод 6 микросхемы DA3),
косинусоидального (вывод 7 микросхемы DA4) и синусоидаль-
ного (вывод 6 микросхемы DA5) сигналов генератора. При изме-
нении частоты колебаний потенциометром RP5 амплитуда сиг-
налов должна сохраняться постоянной.
Если конденсаторы Cj и С2 подобраны с десятикратным
соотношением их емкостей с точностью 1%, то настройка генера-
тора на других частотных поддиапазонах не требуется.
Максимальные значения амплитуд всех четырех сигналов ге-
нератора устанавливают равными 10 В путем подбора резисто-
ров, отмеченных на схеме (см. рис. 2.6) звездочкой, при выверну-
тых по часовой стрелке до упора ручках потенциометров
RP1—RP4.
70
Рис. 2.7. Организация коммутатора ЭК:
а - функциональная схема; б — временные диаграммы работы
2.2.3. Электронный коммутатор сигналов
Электронный коммутатор (ЭК) предназначен для наблюдения
на экране электронно-лучевого индикатора одновременно не-
скольких электрических сигналов — напряжений амплитудой до
Ю В. Функционально коммутатор аналогичен переключателю на
четыре положения и три направления, что отражает мнемосхема
его передней панели (рис. 2.3). Коммутатор состоит из трех
каналов, имеет три выхода — по одному на каждый канал
71
Рис. 2.8. Принципиальная схема коммутатора ЭК
и двенадцать входов — по четыре входа на каждый канал.
Коммутатор работает на четыре такта, синхронно подключая за
каждый такт три входа к трем выходам. Коммутация осуществ-
ляется или с фиксированной частотой 10 кГц от внутреннего
генератора ЭК, или с частотой генератора системы синхронных
сигналов ГСС комплекса. Возможность выбора частоты ком-
мутации для регистрации результатов исследований позволяет
использовать как электронно-лучевые индикаторы, так и элект-
ромеханические самописцы, не меняя при переходе от одного
регистрирующего прибора к другому схему формирования ис-
следуемых изображений.
Принцип работы коммутатора поясняет схема, показанная на
рис. 2.7,о, и временные диаграммы работы на рис. 2.7,6.
Прямоугольные импульсы с генератора (ГИ) поступают на
распределитель импульсов (РИ), состоящий из счетчика и дешиф-
ратора. На четырех выходах РИ образуются импульсы, сдвину-
тые по времени относительно друг друга. Каждый из четырех
выходов РИ связан с цепями управления трех ключей в каналах
коммутатора. При поступлении импульса происходит синхрон-
ное отпирание этих ключей, и соответствующие входные сигналы
поступают на входы буферных повторителей. С выходов повго-
72
рителей сигналы подаются на индикаторы или схему моделиро-
вания.
Принципиальная схема коммутатора показана на рис. 2.8.
Внутренний генератор прямоугольных импульсов построен
стандартным образом на микросхеме DD2 типа К176ЛА7. Им-
пульсы с этого генератора или с генератора ГСС поступают па
пересчетную схему распределителя импульсов. Он собран на двух
£)-триггерах DD1.1 и DD12, находящихся в корпусе микросхемы
типа К176ТМ1. Конденсатор С1 обеспечивает надежную работу
схемы на низких частотах.
Сигналы с выхода пересчетной схемы поступают на дешиф-
ратор, реализованный па DD3.1—DD3.4 (микросхема типа
K176JIA7). Поочередно на каждом выходе дешифратора возника-
ет импульс управления ключами коммутатора. В качестве клю-
чей в каждом канале коммутатора использована микросхема
КР590КН2, которая представляет собой 4-канальный ключ на
МОП-транзисторах со схемой управления, на соответствующие
входы которой поданы управляющие импульсы с дешифратора.
Исследуемые сигналы подают на аналоговые входы (выводы
2,5, 11,14) микросхемы КР590КН2, аналоговые выходы которой
(выводы 1, 6,10,15) объединены и подключены ко входу соответ-
ствующего буферного повторителя (ОУ DA1—DA2).
2.3. СЛУЖЕБНЫЙ БЛОК
2.3.1. Назначение и состав
Служебный блок предназначен для объединения частей струк-
турных моделей, реализованных на сменных блоках МЭМ-6,
в общую структуру; для выполнения вспомогательных вычис-
лительных операций при моделировании; для настройки и изме-
рений коэффициентов модели, управления индикатором АВК-6
и внешними регистрирующими приборами (например, двухкоор-
динатным самописцем).
Передняя панель блока показана на рис. 2.9. В состав служеб-
ного блока входят два многовходовых сумматора 1, размножи-
тель сигналов 2, два делителя 3 и источники эталонных напряже-
ний + 1 В (4) и +10 В (5). Эти устройства могут использоваться
при реализации модели, настройке коэффициентов и нелинейных
преобразователей, а также при измерениях переменных средст-
вами ИИС АВК-6.
В блок вынесены также пульт управления индикатором и ком-
мутатором 6, цифровые вольтметр 7 и измеритель длительно-
сти 8.
Соответствие действительных значений параметров элемен-
тов служебного блока значениям, указанным на его передней
панели, в пределах 1%.
73
Рис. 2.9. Передняя панель служебного блока
Конструктивно служебный блок
представляет законченный модуль из
двух печатных плат, расположенных
одна над другой и закрытых сверху
общей передней панелью с мнемони-
ческими изображениями входящих
в него элементов. Измеритель длитель-
ности расположен на нижней печатной
плате, остальные элементы блока — на
верхней.
2.3.2. Сумматоры
Многовходовые сумматоры (2 шт.)
предназначены для суммирования сиг-
налов при моделировании и для выпо-
лнения вспомогательных операций при
измерениях. Каждый сумматор имеет
восемь инвертирующих и два неинвер-
тирующих входа (рис. 2.10,0). Принци-
пиальная схема одного сумматора по-
казана на рис. 2.10,6. Сумматор реали-
зован па операционном усилителе (ОУ)
DA1 типа КР544УД2 стандартным об-
разом.
Коэффициенты усиления по всем
инвертирующим входам равны 1. По
неинвертирующему входу коэффици-
ент усиления равен 1 при отключенных
от источников сигналов инвертирую-
щих входах. При подаче сигналов на
инвертирующие входы (или их «зазем-
лении») коэффициент усиления к+ по
неинвертирующему входу увеличиваст-
, , ^7
ся по соотношению к. —1 + п-----,
+ R1 + R2
где п — число инвертирующих входов, подключенных к источ-
никам сигналов или к «земле». Для значений сопротивлений
резисторов схемы на рис. 2.10,6
к+ = 7 + 0,02и.
Сумматор снабжен индикацией выхода из линейного режима
работы на светодиодах VD1 и VD2. Уровни индикации определя-
74
рис. 2.10. Многовходовый сумматор:
а — мнемосхема; б — принципиальная схема
>отся делителями на резисторах R15—R18, выбранных таким
образом, чтобы светодиоды загорались при превышении напря-
жения +10 В.
Чтобы коэффициенты передачи сумматора были единичными,
необходимо выполнение соотношений R2=R=... — R11 = R13 6
11 R1 = R12. При использовании точных резисторов, например
типа С2-29В, погрешност ь в реализации единичных коэффициен-
тов не будет превышать 1%. При использовании резисторов
с допусками 1% и выше необходим предварительный подбор
Резисторов по указанным соотношениям с точностью 0,5%.
75
51
620
о*® । ое
Рис. 2.11. Источники эталонных напряжений:
а — мнемосхема источников; б — принципиальна
схема источника « + 1 В»; в — принципиальная схем
источника «-+ 10 В»
ffV TOOK
vm 2 £
53
51 к
+ 15 В
57
530
551
ЮК
ДА1.1
55 Юк
УДгЦ
B)
-15 8
XS1
+ 1B
52
6Z0
+15B
58
530
552
Юк
UA1.Z
56 100 К
B)
-15 В
Балансировка нуля ОУ DA1 проводится стандартным обра-
зом переменным резистором RP1 с точностью до 1 мВ при
отсутствии входных сигналов.
2.3.3. Источники эталонных напряжений
Мнемосхема источников эталонных напряжений показана на
рис. 2.11,о. Принципиальные схемы источников «4-1 В» и
«4-10 В» приведены на рис. 2.11,6 и в соответственно. В них
использованы микросхемы типа КР1408УД2, содержащие два
ОУ в одном корпусе.
Источник «4-1 В» реализован на операционном усилителе
DA1.1, а источник «4-10 В» — на операционном усилителе DA1.2
стандартным образом. Эталонные напряжения —1 Ви —10 В
формируются из этих напряжений с помощью инверторов на
двух операционных усилителях, объединенных в одном корпусе
микросхемы КР1408УД2.
Настройка эталонных источников заключается в установке
точного значения эталонного напряжения 4-1 В и точного значе-
ния эталонного напряжения 4-10 В. Установка точных значений
производится с помощью переменных резисторов RP1 и RP2
соответственно. Значения эталонных напряжений — « — 1 В»
и «—10 В» должны находиться в пределах (—1,00 + 0,01) В и
(—10,00±0,01) В.
2.3.4. Делители
Делители (2 шт.), мнемосхема которых показана на рис.
2.12, а, воспроизводят входной сигнал с коэффициентом переда-
чи, регулируемым в пределах от 0 до 1. Делители используются
76
XS2
+ 10 В
Рис. 2.12. Делители:
а — мнемосхема делителей; б — принципиальная схема делителя
при настройке коэффициентов модели, при измерениях нелиней-
ных искажений, при формировании регулируемых напряжений из
постоянных эталонных напряжений, для компенсации постоян-
ной составляющей при точных измерениях и т. д.
Оба делителя выполнены по схеме неинвертирующего повто-
рителя, как это показано на схеме рис. 2.12,6. Для этого исполь-
зованы два ОУ, находящихся в одном корпусе микросхемы
КР14084УД2. Делители настройки не требуют.
2.3.5. Пульт управления индикатором
Пульт предназначен для управления индикатором АВК-6
и внешними регистрирующими приборами.
Рис 2.13. Пульт управления индикатором:
а — мнемосхема пульта; б — принципиальная схема усилителя-нормализатора
На переднюю панель пульта (рис. 2.13,а), которая является
частью передней панели служебного блока, выведены входы уси-
лителей-нормализаторов каналов X и Y индикатора, вход Z,
предназначенный для управления яркостью луча ЭЛТ и записью
регистратора, а также кнопка выбора режима индикации (регист-
рации) исследуемых сш палов.
77
Выходы усилителеи-нормализаторов подключены ко входам
X и У усилителей отклонения луча индикатора комплекса, а вход
Z — к схеме гашения луча (см. п. 2.2.1).
Изменение напряжения на входе Z от + 15В до — 15В
приводит к изменению яркости луча от максимальной до полно-
го гашения луча, включению и выключению самописца.
На гнезда справа и слева от входа Z подаются противофазные
прямоугольные импульсы амплитудой 15 В, синхронные с прямо-
угольными импульсами генератора АВК-6. Установка перемыч-
ки между входом Z и одним из этих гнезд гасит луч в один из
полупериодов прямоугольных импульсов ГСС. Подача напряже-
ния на вход Z от других источников позволяет модулировать
яркость луча.
Усилители-нормализаторы выполнены на быстродействую-
щих ОУ типа 544УД2А для получения широкой полосы пропу-
скания (до
100
кГц) и передачи сигналов с выхода
электронного
коммутатора на вход усилителей отклонения луча ЭЛТ без ис-
кажений.
Схема усилителя-нормализатора показана на рис. 2.13,6. Она
одинакова для каналов X и Y. Каждый усилитель имеет три
входа с различной чувствительностью. Она выбрана такой, что-
бы при подаче 10 В на вход XS1 (см. рис. 2.13,6), 5 В на вход XS2
или 1 В на вход XS3, выходное напряжение равнялось 5 В.
Нормализаторы выполнены по схеме суммирующего усилителя,
поэтому возможно суммирование сигналов с соответствующими
масштабными коэффициентами. Это расширяет возможности из-
мерения средствами ИИС АВК-6.
Использование точных резисторов или предварительный под-
бор по соотношениям R1 = R4 = 2R2 = 10R3 и R5 = R6 с точностью
0,5% устраняют необходимость настройки усилителей-нормали-
заторов.
2.3.6. Вольтметр
Вольтметр предназначен для измерений постоянных напряже-
ний в диапазоне от —19,99 В до 19,99 В с погрешностью не более
0,1 % и индикации результата измерения в цифровом виде. Перед-
няя панель вольтметра показана па рис. 2.14,о.
При подключении двух внешних резисторов R4 и R5, четырех
конденсаторов Cl, С2, СЗ, С4 и кварцевого резонатора ZQ1
(4=100 кГц) микросхема DD1 выполняет функцию АЦП, рабо-
тающего по принципу двойного интегрирования с автоматичес-
кой коррекцией нуля, автоматическим определением полярности
входного сигнала и цифровой индикацией результата на 3,5-де-
кадном индикаторе (HG1—HG4 на рис. 2.14,6). В связи с тем, что
диапазон входного сигнала для К572ПВ2А равен + 1,999 В, на
78
рис. 2.14. Вольтметр:
а — передняя панель; б — принпипиальная схема
входе микросхемы предусмотрено 10-кратное деление входного
сигнала. Для обеспечения требуемой точности измерения необ-
ходимо выполнить соотношение R1 = 9R2 с погрешностью не
более 0,05%.
Настройки вольтметр не требует. Проверка его работы осу-
ществляется путем сравнения показаний вольтметра АВК-6 с по-
казаниями вольтметра соответствующего класса точности. Для
проверки работы сегментов цифровых индикаторов на вход
вольтметра подают напряжение -1-18,88 В и смотрят, все ли
сегменты индикаторов светятся.
Питание микросхемы К572ПВ2А должно осуществляться от
Двух стабилизированных напряжений +5 В+ 0,01 В и —5 В +
±0,01 В. Эти напряжения формируются из нестабилизированных
напряжений +8,5 В и —8,5 В источника питания АВК-6 по схеме,
79
показанной на рис. 2.15. Источник +5 В является «ведущим».
Для него опорным служит напряжение на стабилитроне VD1.
Источник —5 В является «ведомым». В нем нулевой потенциал
сравнивается с сигналом делителя R4—R5, который питается от
напряжений —5 В и +5 В. Если эти напряжения равны, то
потенциал в общей точке резисторов R4 и R5 равен нулю.
Настройка стабилизатора +5 В осуществляется переменным
резистором RP1. Чтобы не настраивать стабилизатор —5 В,
необходимо с точностью 0,1% обеспечить равенство R4 — R5.
Этого можно достичь использованием точных резисторов или
предварительным подбором.
2.3.7. Измеритель длительности
Измеритель длительности (ИД) предназначен для измерения
периода колебаний генератора АВК-6, временных интервалов
и фаз сигналов. Результаты измерений представляются в циф-
ровом виде. Диапазон измерения длительности от 0,5 до 5000 мс,
погрешность измерения 1%. Передняя панель ИД показана на
рис. 2.16,а.
При наблюдении на индикаторе комплекса большинства ос-
циллограмм время наблюдения составляет половину периода
колебаний генератора АВК-6. Именно это время (772) измеряет
ИД.
Функциональная схема ИД показана на рис. 2.16,6. Принцип
его работы основан на подсчете числа импульсов от высокоста-
бильного генератора за измеряемый промежуток времени Т/2.
80
Рис. 2.16. Измеритель длительности:
а — передняя панель; б — функциональная
схема
Запись
Сигнал разрешения счета импульсов, равный по времени длите-
льности измеряемого сигнала, а также сигналы записи и сброса
формирует из прямоугольного сигнала генератора АВК-6 блок
формирования управляющих сигналов (ФУС). Ошибке преоб-
разования 1 % соответствует потеря одного импульса при подсче-
те их 4-декадным счетчиком. Так как длительность полупериода
генератора АВК-6 изменяется в пределах от 0,5 до 5000 мс, то для
индикации всего этого интервала на 4-декадном счетчике приме-
нено автоматическое переключение поддиапазонов. Частоты так-
тового генератора выбраны 100 и 1 кГц для поддиапазонов
измерения 0,5—99,99 и 100—5000 мс соответственно. Импульсы
с тактового генератора частотой 1 МГц подаются на делитель,
который управляется сигналом разрешения. На выходе делителя
формируются три импульсные последовательности, связанные со
входной тактовой частотой fr соотношениями /т/10,/т/1000 и
А/2000. Две из этих последовательностей /,/10 и /т/ 1000 по-
даются на коммутатор, который в зависимости от поддиапазона
пропускает одну из них на 4-декадный счетчик, подсчитывающий
количество импульсов за время действия сигнала разрешения.
81
Управляющий сигнал для коммутатора вырабатывает авто-
мат переключения диапазонов (АПД). Для обеспечения работы
схемы во всем диапазоне 0,5—5000 мс на АПД подаются импуль-
сы частотой /т/2000. АПД определяет границу диапазонов, пере-
ключая коммутатор и позицию запятой на индикаторах резуль-
тата измерения.
По окончании импульса разрешения число, накопленное
в счетчике, переписывается по стробирующему импульсу в ре-
гистр дешифратора, который хранит его до окончания следующе-
го цикла преобразования. После дешифрирования число высвечи-
вается на индикаторах. Перед началом следующего цикла преоб-
разования счетчики обнуляются сигналом «Сброс», который вы-
рабатывает ФУС. В это время на индикаторе высвечивается
результат предыдущего измерения, который хранится в регистре
дешифратора. После окончания очередного измерения происхо-
дит смена информации в регистре дешифратора.
Принципиальная схема ИД показана на рис. 2.17. Для обес-
печения минимальной потребляемой мощности в схеме ИД ис-
пользованы в основном микросхемы серии К176. Формирователь
управляющих сигналов собран на элементах DD1.4, DD2 микро-
схем серии К176ЛА7. На элементах DD1.1—DD1.3 реализован
тактовый генератор. Делитель и 4-декадный счетчик (DD3—DD9)
реализованы на микросхемах типа К176ИЕ2. Регистр и дешиф-
ратор совмещены в одном корпусе (микросхемы DD10—DD13
серии 514ПР1) К выходам микросхем DD10—DD13 непосредст-
венно подключены входы индикаторов HG1—HG4 типа
АЛС324Б. Автомат переключения диапазонов состоит из двоич-
ных счетчиков DD15—DD16 (К176ИЕ1), цифро-аналогового пре-
образователя DA1 и DA2, собранного на микросхемах К572ПА2
и К140УД6, и компаратора DA3 (К140УД6), выход которого
подключен к коммутатору. Коммутатор собран на элементах
DD1.1—DD1.4 микросхемы К176ЛА7.
Настройка ИД заключается в регулировке автомата переклю-
чения поддиапазонов. Для настройки необходим промышленный
частотомер, например, 43-57. На вход Б частотомера необходи-
мо подать прямоугольные импульсы с генератора АВК-6. При
этом нажата кнопка «длит. Б» в 43-57. Вращая ручку изменения
частоты генератора АВК-6, устанавливают на индикаторах 43-57
показания 100,1 мс. Затем, вращая движок сопротивления RP1,
добиваются, чтобы индикатор ИД показал число 100. На этом
настройка закончена.
Измеритель длительности размещен на нижней печатной пла-
те служебного блока. Индикаторы ИД расположены на одной
плате с индикаторами вольтметра и соединены с платой ИД
плоским жгутом.
82
R5-R32 470
Рис. 2.17. Принципиальная схема измерителя длительности
2.4. БЛОК ПИТАНИЯ
Блок питания установлен в правом отсеке корпуса АВК-6
(5 на рис. 2.1). Он обеспечивает все блоки АВК-6 необходимыми
напряжениями. Конструктивно он выполнен в виде законченного
модуля, закрытого передней панелью, на которую выведены
кнопка и световой индикатор включения, а также гнезда ком-
мутации режимов «ведомая—ведущая» мини-ABM МЭМ-6. На
84
передней панели модуля приведена краткая таблица — справка
об основных приемах работы с компьютером.
Питание (рис. 2.18) осуществляется от сети переменного тока
напряжением 220+ 10 В, частотой 50—60 Гц. Значения выходных
напряжений блока питания и их параметры приведены в табл. 2.2.
Таблица 2.2.
Обозиа- ченне выхода на рис. 2.18 Напряжение Максималь- ный ток нагрузки, мА Ампли- туда пуль- саций, мВ
Вид Значение, В
+ 15 В Постоянное ста- билизированное +15 ±0,01, амплитудное 500 5
-15В » » -15 ±0,01 » 500 5
-500 В » » — 500±10 » 2 1000
+ 100 » » + 100±3 » 10 100
+ 8,5 В Постоянное не- стабилизирован- + 8,5 ±0,2 » 400 —
ное
-8,5 В » » -8,5 ±0,2 » 400 —
6,3 В Переменное 6,31 “*, действующее 600 —
Принципиальная схема стабилизаторов +15 В показана на
рис. 2.19. В стабилизаторе —15 В опорным является напряжение
на стабилитроне VD5. В стабилизаторе +15 В в качестве опор-
ного используется выходное напряжение стабилизатора —15 В (де-
ли гель R12—RP2—R15). Таким образом, стабилизатор —15 В явля-
ется «ведущим», а стабилизатор +15 В — «ведомым». Это
обеспечивает симметричность выходных напряжений относитель-
но общей точки, что улучшает работу питаемых от стабилизато-
ров + 15 В блоков АВК-6. Операционные усилители DA1 и DA2
обеспечивают высокое качество стабилизации. Питание ОУ осу-
ществляется от двух параметрических стабилизаторов на R1,
VD1 и R2, VD2. Стабилитроны VD3 и VD4 осуществляют посто-
янный сдвиг уровней напряжения от выходов ОУ ко входам
регулирующих элементов стабилизаторов на транзисторах VT1,
VT2 и VT3, VT4.
Принципиальная схема стабилизатора +100 В показана на
рис. 2.20,а. Стабилизатор выполнен по стандартной компенсаци-
онной схеме на транзисторах VT1, VT2 и стабилитроне VD1.
В источнике —500 В (рис. 2.20,6) использована схема актив-
ного фильтра на транзисторе. Напряжение — 550 В через резистор
Р2* поступает на коллектор транзистора VT3. Опорное напряже-
ние на базе этого транзистора получается при помощи фильтра
R3C1, сглаживающего пульсации выпрямленного напряжения.
Резистор R2* и тиратрон МТХ-90 обеспечивают защиту тран-
зистора VT3 от перегрузки по напряжению коллектор—база при
включении источника питания.
85
Рис. 2.19. Принципиальная схема стабилизатора + 15 В
+ о
Рис. 2.20. Принципиальные схемы высоковольтных стабилизаторов:
а — схема стабилизатора +100 В; б — схема стабилизатора —500 В
При настройке стабилизаторов — 15Ви+15Вна холостом
ходу сначала с помощью потенциометра RP] устанавливают на
выходе источника —15 В напряжение —15 В + 0,005 В, затем
потенциометром RP2 устанавливают на выходе источника + 15 В
напряжение + 15 + 0,005 В. Далее к выходам стабилизаторов
подключают резисторы по 30 Ом и проверяют значения напряже-
ний и пульсаций па выходах стабилизаторов.
Настройку стабилизатора + 100 В на холостом ходу осущест-
вляют подбором сопротивления R6*. Если напряжение больше
86
номинального, сопротивление R6* увеличивают, если меньше —
уменьшают. Далее подключают нагрузку 10 кОм и проверяю!
выходное напряжение и его пульсации по табл. 2.2.
Для настройки стабилизатора —500 В необходимо предвари-
тельно подключить нагрузку 240 кОм. Если напряжение на на-
грузке больше номинального, то сопротивление резистора R2*
увеличивают, если меньше — уменьшают.
2.5. СМЕННЫЕ БЛОКИ АВК-6
2.5.1. Назначение и состав
Сменные блоки служат для реализации структурных моделей
исследуемых динамических процессов. В основной комплект
сменных блоков входят следующие блоки:
линейный — 6 шт.
нелинейный — 2 шт.
умножения-деления — 2 шт.
умножения — 1 шт.
Функциональный состав этих блоков позволяет проводить на
АВК-6 исследование широкого круга динамических процессов
и алгорит мов обработки информации.
В число дополнительных входят импульсный блок для моде-
лирования импульсных и цифровых систем и изучения динамики
алгоритмов численного моделирования динамических процессов
и блок управляемой задержки (чист ого запаздывания).
Блоки преобразования координат (проектор) и спектрального
анализа соединяют в себе в закопченном виде определенные
алгоритмы обработки сигналов. Блок генераторов случайных
и детерминированных сигналов обеспечивает модельное изучение
теории вероятностей и случайных процессов.
Все блоки выполнены в едином конструктиве, каждый из них
Может быть установлен в любую из шести позиций монтажного
поля в соответствии с конфигурацией конкретной структурной
модели исследуемого процесса, что делает схему, набора подоб-
ной структурной модели процесса, изображенной на листе бумаги.
Модульный принцип организации АВК-6 позволяет расши-
рять состав сменных решающих блоков, это обеспечивает нара-
щивание возможностей аналогового компьютера.
2.5.2. Линейный блок
Общий вид линейного блока показан на рис. 2.21. Он предназ-
начен для интегрирования во времени входных сигналов — на-
пряжений амплитудой до 10 В. На фалыппанели блока воспроиз-
веден структурный инвариант линейных моделей, знакомый по
Рис. 1.22,а.
87
Рис. 2.21. Общий вид линейного блока
Предусмотрены три режима работы блока — ввод начальных
условий, непрерывное интегрирование и периодическое интегри-
рование с установкой начальных условий. Диапазон измерения
начальных условий — от —10 до + 10 В, диапазон времени
интегрирования — от 10"’ до 100 с. Коэффициент передачи
интегратора (величина, обратная постоянной интегрирования)
может быть выбран равным 1, 10 или 100 с-1 в зависимости от
положения соответствующей перемычки. Диапазон изменения
коэффициентов а и с — от —1 до 4-1, коэффициента к —<
от 0 до 1 или от 0 до 10. Интегрирование не сопровождается
паразитной инверсией выходного сигнала интегратора.
Соответствие действительных значений коэффициентов деле-
ниям шкал на передней панели в крайних положениях ручек
настройки — в пределах погрешности 1%. Точная настройка
коэффициентов осуществляется при помощи ИИС АВК-6. После
настройки отклонения коэффициентов от установленных значе-
ний не превышают 0,5% при нормальных условиях эксплуатации.
Блок снабжен световыми индикаторами выхода преобразова-
телей из линейного диапазона работы.
Соответствие преобразований электрических сигналов (напря-
жений) обозначениям на фальшпанели (см. рис. 1.22,а и 2.21)
достигнуто жестким микропрограммированием таких элементар-
ных для аналоговой техники операций, как интегрирование сум-
мы с инверсией, инвертирование, умножение сигнала на регули-*
руемый коэффициент.
Общая схема аналоговой микропрограммы блока показана на
рис. 2.22. Интегрирование суммы грех сигналов реализовано на
88
Рис. 2.22. Схема аналоговой
микропрограммы линейного
блока
ОУ1. Чтобы исключить паразитную инверсию выходного сиг-
нала интегрирующего преобразователя, к выходу ОУ1 подклю-
чен инвертор на ОУ2.
Включение потенциометров RP4 и RP5 между выходами ОУ1
и ОУ2 обеспечивает плавную регулировку коэффициентов а и с
в диапазоне от — 1 до +1. Выходной сигнал преобразователей а
и с получают с движков этих потенциометров.
ИИС комплекса АВК-6 позволяет проводить измерение пара-
метров процессов в исследуемой модели без их прерывания, что
очень удобно при моделировании. Возможность проведения не-
разрушающего контроля модели средствами ИИС АВК-6 позво-
ляет из четырех традиционных режимов работы блоков интег-
рирования — ввод начальных условий, интегрирование, останов
и разрыв связей — отказаться от двух последних, предназначен-
ных для настроек и измерений при использовании традиционных
мини-ABM и средств измерения. Сокращение числа режимов
работы интегратора позволяет использовать простейшую апе-
риодическую схему задания начальных условий с минимальным
числом ключевых элементов (ключи К1 и К2 на рис. 2.22). Это
уменьшает погрешности интегрирования, вызванные неидеаль-
ностью ключей. Синхронизация времен интегрирования и уста-
новки начальных условий в интеграторах при периодическом
режиме работы от генератора системы синхронных сигналов
ИИС гарантирует точность заданий начальных условий и получе-
ние устойчивых графиков переходных процессов и других изо-
бражений на экране индикатора.
Полная принципиальная электрическая схема блока показана
на рис. 2.23. Для интегрирования суммы входных сигналов ис-
пользован операционный усилитель DA] типа К140УД14А. Это
прецизионный операционный усилитель с малыми входными то-
ками, напряжением смещения нуля и потребляемой мощностью.
В качестве интегрирующих конденсаторов С2—С4, включаемых
89
в обратную связь DA1, использованы конденсаторы типа К73П-3
с малыми токами утечки и остаточными напряжениями. Для
балансировки DА1 служит подстроечный резистор RP4.
Режим работы интегратора определяется состоянием ключей
на полевых транзисторах VT1 и VT2. Когда транзистор VT1
закрыт, a VT2 открыт, происходит интегрирование суммы вход-
ных сигналов; когда транзистор VT1 открыт, a VT2 закрыт —
установка начальных условий. Управляют ключами VT1 и VT2
напряжения с распределительной платы МЭМ-6, поступающие
по адресам А1 и А2.
Инвертор реализован на ОУ DA2 типа К544УД1А стандарт-
ным образом.
Выход сигналов DA1 из диапазона линейной работы +10 В
индицируют светодиоды VD3 и VD4, включенные в коллекторы
транзисторов VT3 и VT4 соответственно. Напряжение отпирания
транзисторов определяют делители R16, R17 и R15, R18.
Соответствие параметров блока значениям, указанным на его
передней панели с точностью 1%, обеспечивает выбор элементов
схемы по соотношениям R4C4=\ с; R4 = R6=R12=R14= 10R5',
R21 = R22 и C4= 10C3 = 100C2 с точностью 0,5%. Это достигается
применением точных резисторов и предварительным подбором
конденсаторов.
После балансировки интегратора при помощи переменного
резистора RP4 дрейф не должен превышать 0,5 мВ/с при единич-
ной постоянной времени интегратора.
90
2.5.3. Нелинейный блок
Общий вид нелинейного блока показан на рис. 2.24. Блок
предназначен для моделирования нелинейных функций одной
переменной — однозначных монотонных и немонотонных, мно-
гозначных и петлевых. В состав блока входят трехвходовый
сумматор с регулируемыми коэффициентами передачи а и в по
двум входам, усилитель к, нелинейный преобразователь (НП)
и два диода, подключенных к его выходу.
Входной сумматор (рис. 2.25) выполнен по стандартной схеме
на DA1. Коэффициенты передачи айв регулируются от 0 до 1
потенциометрами RP1 и RP2, общий коэффициент передачи
Рис. 2.24. Общий вид
Рис- 2.25. Принципиальная схема нелинейного блока
91
к — от 1 до 5 потенциометром RP3. В качестве операционных |
усилителей DA1 и DA2 использованы ОУ типа КР544УД2А
и К544УД1А соответственно. Коррекция усилителя DA1 (конден-
сатор С1 и резистор R6) выбрана таким образом, чтобы обес-
печить устойчивость работы преобразователей блока при охвате
их общей отрицательной обратной связью.
Рис. 2.26. Статическая ха-
рактеристика универсаль-
ного нелинейного преоб-
разователя
Нелинейный преобразователь обеспечивает формирование
симметричной нелинейной характеристики, показанной на рис.
2.26. Он построен на основе нелинейного элемента (НЭ), схема
которого показана на рис. 2.27,а, и состоит из параллельного
соединения двух эмиттерных повторителей на комплиментарных
транзисторах, на базы которых подается регулируемое запира-
ющее напряжение смещения. При R1 = R2, R3=R5 и |+Ек|—'
= | — Ек| транзистор VT1 (или VT2) отпирается напряжением
р R1
' + ^ЭБ >
А, + 2(ЛЗ|| RI) R3
Рис. 2.27. Нелинейный элемент типа «плавная зона нечувствительности»:
а — принципиальная схема; б — статическая характеристика
92
где р — сопротивление введенной части резистора R4; (7эб —
напряжение отпирания транзистора VT1 или VT2.
При дальнейшем увеличении входного напряжения схема НЭ
работает как эмиттерный повторитель с делителем R3 / (R1 + R3)
на входе. Низкий уровень порога отпирания при р = 0 достигается
использованием германиевых транзисторов, работающих на от-
носительно большое эмиттерное сопротивление R6.
НП реализован на операционном усилителе DA2. Транзисто-
ры VT1 и VT2 совместно с делителем на резисторах R10—R13
реализуют первый НЭ во входной цепи DA2 (см. рис. 2.25).
Переменным резистором RP4 регулируют ширину зоны нечу-
вствительности CD (рис. 2.26). Коэффициент передачи кх на
участке CD регулируют потенциометром RP5. Коэффициент уси-
ления на симметричных участках DE и СВ регулируют с помо-
щью потенциометра RP6. Транзисторы VT3 и VT4 и делитель на
резисторах R20—R28 реализуют второй НЭ. Он включен в цепь
ОС усилителя DA2. Реостатом на RP9 регулируют величину зоны
нечувствительности этого НЭ (ординаты точек В и Е на рис.
2.26). С помощью потенциометра RP8 па участках характеристи-
ки EF и В А коэффициент передачи можно менять от 0 до со,
поскольку DA2 охвачен как положительной (резисторы R16
и R19), так и отрицательной (резистор RP8) обратными связями.
Симметрию статической характеристики НП и соответствие
параметров блока значениям, указанным на шкалах, обеспечива-
ет выбор элементов R] 1 — R12 = 2R10 — 2R13, R21 — R22=2R20 =
= 2R23 и R2 — R3 — R4—R7 с точностью 0,5%.
Для этого используют точные резисторы или производят их
предварительный отбор.
Настройка блока состоит в минимизации смещения пуля ОУ
DA2 с помощью потенциометра RP7.
2.5.4. Блок умножения-деления
Общий вид блока умножения-деления показан на рис. 2.28.
Блок целесообразно использовать при моделировании на АВК-6
систем с переменными параметрами, оптимальных систем, пове-
рхностей в трехмерном пространстве, алгоритмов обработки
сигналов.
Функциональный состав блока представлен на его передней
панели. В блоке объединены четыре пассивных делителя сигналов
. , mod
а- Ь, с, а; преобразователь «умножение-модуль» , позволя-
ющий выполнить либо перемножение двух входных сигналов,
либо формирование модуля одного входного сигнала; два сум-
матора, каждый из которых имеет два неинвертирующих входа
и один инвертирующий; преобразователь «деление» , обеспечи-
вающий деление одного аналогового сигнала на другой во всех
иегырех квадрантах и преобразователь «умножение» х, обес-
93
Рис. 2.28. Общий вид блока умножения-деления
печивающий перемножение двух аналоговых сигналов. Диапазон
изменения коэффициентов делителей а, Ь, с и d — от 0 до 1.
Масштабный коэффициент преобразователя «умножение» равен
0,1, а преобразователя «деление» — 10.
Организация блока, взаимное расположение функциональных
преобразователей, их входных и выходных гнезд на передней
панели обеспечивает удобный набор нелинейных функциональ-
ных зависимостей, наиболее часто встречающихся в структурных
моделях нелинейных динамических процессов и систем автомати-
ческого управления.
Преобразователь «умножение» реализован на микросхеме
DA1 типа 525ПС2А (рис. 2.29), представляющей собой интеграль-
ный перемножитель двух аналоговых сигналов и включенной
стандартным способом в режиме перемножения. Гнезда XS1
и XS2 — входы преобразователя, а гнездо XS3 — его выход.
Переменные резисторы RP1—RP4 служат для минимизации по-
грешностей преобразователя. Индикация выхода из нормального
режима реализована на транзисторах VT1, VT2 и светодиодах
VDI, VD2 стандартным для АВК-6 образом.
Для преобразователя «деление» предложено оригинальное
схемотехническое решение [ 5 ], обеспечивающее выполнение опе-
рации деления во всех четырех квадрантах (рис. 2.30). Общая
точка резисторов R1 и R2 соединена со входом коммутатора 1,
один выход которого соединен с инвертирующим, а второй —,
с неинвертирующим входами операционного усилителя 2. Выход
последнего соединен с одним из входов умножителя 3. На второй
94
рис, 2-29. Принципиаль-
ная схема преобразовате-
ля «умножение»
вход умножителя и на управляющий вход коммутатора подано
на> [ряжение-знаменатель.
Если напряжение-знаменатель положительно, то коммутатор
I подключает общую точку резисторов R1 и R2 к инвертирующе-
му входу усилителя 2, если отрицательно — к пеинвертирующе-
му. Поэтому схема работает как «инвертирующий умножитель»
при любом знаке знаменателя.
Рис. 2.30. Упрощенная схема преобразователя «де-
ление»
Принципиальная схема преобразова-
теля «деление» показана на рис. 2.31. Он
реализован на микросхемах DA1—DA4.
Входами преобразователя являются гнез-
да XS1 и XS2, на которые подают напря-
жения числителя и знаменателя. Выход преобразователя — гнез-
до XS3. В обратную связь ОУ DA2 включен аналоговый умножи-
тель DA4. Общая точка входного резистора R1 и резистора
обратной связи R10 через противофазно работающие ключи на
^Т1 и VT2 подключаются к инвертирующему или неипвертиру-
Ющсму входу ОУ DA2. Состоянием ключей управляют ком-
Даратор DA1 и инвертор его выходного сигнала на VT1. Обрат-
нДя связь DA2 остается отрицательной при любом знаке знамена-
теля, и операция деления выполняется схемой во всех четырех
Квадрантах.
95
Схемотехническое решение, использованное для преобразова-
теля «умножение-модуль», поясняет рис. 2.32. Чтобы обеспечить
реализацию одной из двух функций: j = modx или y — xt х2,
использованы аналоговый неремпожитель сигналов и компара-
тор. Если их соединить, как показано на рис. 2.32,а, то
мвых = ит мвх s*8n wbx = ит mod wbx Если связь между выходом ком-
паратора и У-входом перемножителя разорвать и подавать на X-.
и У-входы перемножителя напряжения их и и2, как это показано I
на рис. 2.32,6, то лпых = л1л2.
Рис. 2.32. Функциональна!
организация преобразовать
ля «умножение-модуль»:
а — реализация операцш
«модуль»; б — реализация опера
ции «умножение»
Преобразователь «умножение-модуль» реализован на микроб
схеме DA1 — аналоговом перемпожителе сигналов типа
525ПС2А и микросхеме DA2 — операционном усилителя
К140УД6 (рис. 2.33). Микросхема DA1 включена в режиме пере-
множения аналоговых сигналов стандартным образом. Операци-.
онпый усилитель DA2 включен в режиме компаратора.
96
рис. 233. Принципиальная схема пре-
образователя «умножение-модуль»
Если между гнездами XS2
и XS3 коммутационная пере-
мычка отсутствует, то преоб-
разователь работает в режиме
перемножения аналоговых сиг-
налов, подаваемых на входы
XS1, XS2; если между гнездами
XS2 и XS3 установлена пере-
мычка, то преобразователь
реализует функцию wBblx =
=modwBX.
В состав блока «умноже-
ние-деление» входят два сум-
матора, каждый из которых
имеет один инвертирующий
и два неинвертирующих входа.
Сумматоры реализованы на
ОУ типа К140УД6 по схеме,
аналогичной схеме многовхо-
довых сумматоров служебного
блока. Пассивные делители
сигналов в составе блока реализованы на переменных резисторах
в потенциометрическом включении.
Настройка блока сводится к минимизации погрешностей вы-
полнения операции перемножения микросхемами типа К525ПС2
стандартным образом и к установке точных или предварительно
отобранных резисторов. Для схемы преобразователя «деление»
(см. рис. 2.31) соотношения R13 = R16, Rl = R10 и R8 = R9 должны
выполняться с точностью не хуже 0,5%.
2 5.5. Блок умножения
Общий вид блока показан на рис. 2.34. Его целесообразно
использовать при моделировании нелинейных динамических про-
цессов и исследованиях оптимальных и экстремальных САУ.
В состав блока входят преобразователь «модуль», двухвходо-
вые сумматоры с регулируемыми от 0 до 1 коэффициентами
передачи а и b по одному из входов, преобразователь «умноже-
ние» (х ), а также генератор трех синхронных сигналов прямо-
угольной, треугольной и синусоидальной формы амплитудой до
1 о В; диапазоны изменения частоты от 1 до 10 Гц и от 100 Гц до
1,0 кГц.
Соответствие действительных значений параметров блока де-
лениям шкал на передней панели — в пределах погрешности
97
4—6517
+ 5%. Точная настройка коэффициентов осуществляется средст-
вами ИИС АВК-6.
Рис. 2.34. Общий вид блока умножения
Схемотехнические решения, использованные при построении
сумматоров, преобразователей «модуль» и «умножение», такие
же, что и в блоке «умножение-деление».
Принципиальная схема генератора показана на рис. 2.35.
Рис. 2.35. Принципиальная схема генератора трех синхронных сигналов
98
Реле с гистерезисом реализовано на ОУ DA1 типа К553УД1А,
а интегратор на ОУ DA2 типа К553УД2А. С помощью резистора
Я2 формируется гистерезисная характеристика реле, через рези-
стор R3* заведена отрицательная ОС с выхода интегратора на
вход реле.
Прямоугольные импульсы, прежде чем поступить на выход-
ное гнездо XS4, инвертируются с помощью стандартной схемы
на ОУ DA4. Инверсия применена для того, чтобы временные
диаграммы сигналов соответствовали показанным на фальшпа-
нели модуля.
Треугольный сигнал с выхода ОУ DA2 поступает на вход
нелинейного преобразователя, реализованного на двуханодном
стабилитроне VD3 и диодах VD4 и VD5. Выходной сигнал нели-
нейного преобразователя поступает на неинвертирующий усили-
тель-нормализатор, реализованный на ОУ DA3, на выходе кото-
рого формируется синусоидальный сигнал амплитудой 10 В.
Для соответствия параметров генератора значениям, указан-
ным на его мнемосхеме с погрешностью не более 5%, необ-
ходимо выполнение соотношений RP1- 10R4\ С1 — 100С2
и R2j R3 = 1,4 с погрешностью не более 1,5%.
Настройка генератора заключается в подборе резисторов R9*
и R17* с тем, чтобы амплитуды выходных сигналов прямоуголь-
ной и синусоидальной формы равнялись 10 В с погрешностью не
более 5%.
2.5.6. Импульсный блок
Импульсный блок (рис. 2.36) предназначен для аналогового
моделирования процессов в импульсных и цифровых системах.
Он позволяет моделировать импульсные и цифровые системы
1-го порядка. Для моделирования систем 2-го порядка и выше
предусмотрена синхронная работа нескольких (до шести) им-
пульсных блоков, а также совместная работа этих блоков с дру-
гими решающими блоками АВК-6. Реализация цифровых и им-
пульсных систем и вычислительных алгоритмов производится по
их структурным моделям путем внешней коммутации преобразо-
вателей блока при помощи перемычек и проводов и установкой
необходимых коэффициентов.
Функциональный состав блока отражает его передняя панель.
В блок входят: квантователи Т, усилители кна, сумматор, звено
1—е“рГ
импульсной задержки е рТ, экстраполятор ----- и генератор
р
тактовых импульсов (ГТИ).
Диапазон изменения коэффициента А: от 0 до 1, коэффициента
а от —3 до +3, диапазоны изменения периода тактовых импуль-
сов от 0,5 до 5,5 мс и от 5 до 55 мс. Соответствие действительных
99
значений делениям шкал на передней панели — в пределах 5%
Точная настройка коэффициентов осуществляется с помощък
ИИС АВК-6. После настройки отклонения коэффициентов от
установленных значений не превышают 1%.
Рис. 2.36. Общий вид импульсного блока
Блок работает в режимах, аналогичных режимам линейного
блока. Это задание начального значения выходного сигнала зве-
на импульсной задержки е~рТ (нажата клавиша 3 генератора
АВК-6), режим непрерывной работы, когда звено осуществляет
Рис. 2.37. Принципиальная схема генератора тактовых импульсов
100
импульсную задержку входного сигнала на один такт ГТИ (нажа-
та клавиша 1) и режим периодической работы (нажата клавиша
2), в котором при отрицательном полупериоде прямоугольных
импульсов генератора АВК-6 осуществляется ввод начального
значения выходного сигнала звена, а при положительном —
задержка входного сигнала на один такт ГТИ.
Работой всех преобразователей блока управляет генератор
тактовых импульсов ГТИ (рис. 2.37). На ОУ DA1 реализовано
реле с гистерезисом, которое охвачено отрицательной обратной
связью через зарядную ЛС-цепочку. Частота генераций определя-
ется шириной петли гистерезиса реле и постоянной времени
PC-цепочки. Ток в зарядную емкость при положительном выход-
ном напряжении ОУ DA1 поступает через диод VD3 и определя-
ется резистором R3, при отрицательном —- через диод VD2
и определяется резистором R2. При соотношении сопротивлений
R2=9R3 скважность генерируемых импульсов равна 10. Для
дискретного переключения диапазонов предусмотрено подключе-
ние одного из двух конденсаторов С1 и С2. Ширина петли
гистерезиса определяется резисторами R4, R5 и RP1, Rl, R10.
С помощью переменного резистора RP1 ширина петли меняется,
что использовано для плавной регулировки частоты. Через диод
VD1 и емкость СЗ осуществляется, в случае необходимости,
синхронизация от генератора АВК-6. Инверсия выходных им-
пульсов DA1 производится транзистором УТ/.
Для совместной работы нескольких блоков импульсы с гене-
ратора «ведущего» блока подают на гнезда XS5 «ведомых» гене-
раторов, убрав перемычки между их гнездами XS5 и XS4 или
XS3. В этом случае «ведомые» генераторы повторяют импульсы
«ведущего» генератора.
Для синхронизации работы импульсного блока от генератора
ГСС устанавливают перемычку между гнездами XS1 и XS2.
Принципиальная схема звена импульсной задержки показана
на рис. 2.38. Ключи на транзисторах VT1 и VT2 управляются
сигналами от переключателя режимов в ГСС АВК-6. Когда ключ
ГТ7 открыт, a VT2 закрыт, происходит ввод начального значения
выходного сигнала задержки, когда закрыт VT1 и открыт V-J2,
включается режим импульсной задержки входного сигнала.
Ключ на транзисторе УТЗ предназначен для вывода входного
сигнала звена импульсной задержки на переднюю панель блока
(гнездо XS6). Звено задержки работает под действием управля-
ющих последовательностей мг1 и пг2 (рис. 2.39) с выхода генера-
тора блока. Последовательность wrl подается на затворы тран-
зисторов УТЗ, VT4 и VT&, а последовательность пг2 — на затвор
транзистора VT5.
Положительный импульс последовательности пг1 открывает
ключ VT4. При этом емкость С1 через сопротивления двух
101
~15 В +75 В
Рис. 2.38. Принципиальная схема звена импульсной задержки
насыщенных транзисторов И72
и VT4 заряжается до уровня
входного сигнала звена, проис-
ходит запись на конденсаторе
С1 выборки входного сигнала.
Затем отрицательный импульс
последовательности ии пере-
водит VT4 в состояние отсечки,
и в течение времени отрица-
тельного импульса на конден-
саторе С1 сохраняется уровень
записанной выборки входного
сигнала. Этот уровень воспро-
изводится повторителем на
DA1. В это время положитель-
ный импульс последовательно-
сти wr2 открывает ключ на
транзисторе VT5. Напряжение,
«записанное» на емкости С1,
через повторитель DA1 «пере-
писывается» в емкость С2 и по-
является на выходе буферного
повторителя на DA2. С прихо-
Рис. 2.39. Временные диаграммы рабо-
ты звена импульсной задержки
102
Рис. 2.40. Принципиальная схема экстраполятора нулевого порядка
Рис. 2.41. Принципиальная ;хема усилителя с регулируемым коэффициентом
передачи
дом следующего тактового импульса последовательности wrl
выборка входного сигнала, задержанная на период Т тактового
генератора, появляется на выходе ключа VT6, а в емкость С1
записывается новое значение входного напряжения. Изменяя пе-
риод (частоту) сигнала генератора блока, меняют время задерж-
ки сигнала звеном импульсной задержки. Звено снабжено свето-
вой индикацией выхода сигнала из рабочего диапазона.
Экстраполятор нулевого порядка построен по обычной схеме
выборки-хранения (рис. 2.40). Выборка производится в течение
положительного импульса последовательности иг1 с помощью
ключа на транзисторе VT1. Во время отрицательного импульса
последовательности wri ключ VT1 запирается, а емкость С1
хранит уровень напряжения до прихода следующего положитель-
ного импульса.
Возможность регулировки коэффициента а блока от —3 до
+ 3 обеспечивает схема, показанная на рис. 2.41.
Сумматор, входящий в состав блока, реализован на ОУ стан-
дартным образом, поэтому его схему мы не приводим.
2.5.7. Блок преобразования координат
Блок преобразования координат предназначен для наблюде-
ния проекций трехмерных изображений на экране индикатора
АВК-6 и их регистрации при помощи дополнительных регист-
рирующих приборов. Общий вид блока показан на рис. 2.42.
В него входят электронный проектор трехмерного изображения
на плоскость индикатора Уи, Уи, позволяющий вращать изо-
бражение вокруг оси абсцисс (угол 0) и оси ординат Уи (угол tf)
системы координат плоскости индикатора независимо друг от
Друга в пределах от 0 до л/2; генератор лестничной функции
с изменением выходного напряжения от —10 до 4-10 В ступень-
103
Рис. 2.42. Общий вид блока преобразования координат
ками величиной 1 В; два делителя а и Ь, сумматор с двумя
неинвертирующими и одним инвертирующим входом; источники
эталонных напряжений +10 и —10 В и контактная группа (один
контакт — нормально замкнутый, второй — нормально разо-
мкнутый).
Функциональный состав блока позволяет наблюдать трехмер-
ные изображения в виде проекции на плоскости экрана индикато-
ра и регистрировать их на двухкоординатном самописце.
Проектор осуществляет преобразование координат X, Y, Z-*
->УИ Уи в соответствии с формулами
Уи=Z cos г]—Xsin rj;
. Yw= YcosO—sin0{A"costj + Zsintj}.
Выходные напряжения схем, показанных на рис. 2.43,а,б, зави-
сят от углов поворота движков а, и а2 потенциометров следую-
щим образом:
Л) 2Ч,
,(вых1 ~ ивх1 0С|),
ивых2 = ывх2^^(1 — аг)-
ZJrv
Первая зависимость аппроксимирует функцию «i=usinai,
а вторая -— функцию u2=ucosa2 с достаточной для целей ин-
104
пикации точностью при а] и я2, меняющихся в пределах от 0 до
я/2.
Рис. 2.43. Схемная реализация тригонометрических функций:
а — синуса; б — косинуса
Принципиальная схема проектора координат показана на рис.
2.44. Электронный проектор реализован на операционных усили-
телях DA1—DA3. Напряжения, соответствующие координатам
X, Y, Z, подают на входы XS1, XS2 и XS3. Резисторы R1—R5
задают ток в синус-косинусные преобразователи на резисторах
R6—Rll, RP1—RP6. Сигналы с выходов последних суммируют-
ся ОУ DA1—DA3 в соответствии с формулами для Хк, Уи.
Коэффициенты выбраны таким образом, чтобы обеспечить еди-
ничные масштабы преобразования по всем трем координатам.
Принципиальная схема генератора лестничной функции пока-
зана на рис. 2.45. Генератор построен на цифро-аналоговом
преобразователе, реализованном на микросхемах DD1—DD3
и DAI, DA2. Резистором RP1 устанавливают величину «ступень-
ки лестницы», а резистором RP2 симметрируют выходной сигнал
генератора относительно нуля. Входной код поступает на ЦАП
DD3, DA1 с выхода пересчетной схемы на DD1.1, DD2 и DD1.3
с числом пересчета 21. DD2 — двоичный счетчик, на DD1.1 DD1.3
реализована обратная связь, обеспечивающая нужное число пере-
счета схемы. Входные прямоугольные импульсы от ГСС АВК-6
подают на пересчетную схему в гнездо XS1. Реле КА1, контакты
которого выведены па переднюю панель блока для управления
записью внешних регистрирующих приборов, управляется
Устройством выдержки па транзисторе VT1. Устройство выдерж-
ки обеспечивает время выдержки реле гв = 6 + 1 с после прихода
105
Рис. 2.44. Принципиальная схема проектора координат
импульса управления длительностью более 7 с. Ручное управле-
ние генератором и устройством выдержки осуществляется с по-
мощью выключателя SA1.
Источники эталонных напряжений и сумматор выполнены по
стандартным для АВК-6 схемам на ОУ.
2.5.8. Блок спектрального анализа
Блок спектрального анализа (рис. 2.46) предназначен для ис-
следования спектрального состава сигналов и частотных характе-
106
i
Рис. 2.45. Принципиальная схема генератора лестничной функции
ристик систем, а также для изучения алгоритмов спектрального
анализа. Он объединяет ступенчатый аттенюатор Г, фильтр ниж-
них частот ФНЧ 2 с регулируемым вручную коэффициентом
усиления к и сопрягающей частотой fc, плавно перестраиваемой
напряжением от встроенного источника 7 или от внешнего гене-
ратора в пределах диапазонов, устанавливаемых переключателем 3;
резонансный фильтр 4, перестраиваемый в пределах 10-2—104 Гц
Рис. 2.46. Общий вид блока спектрального анализа
107
плавно — напряжением и ступенчато — переключателем диапа-1
зонов 5; детектор 6 с квадратичной или модульной характери-1
стикой.
Управление частотой
Рис. 2.47. Функциональные схе-
мы фильтров:
а — резонансный фильтр; б —
фильтр нижних частот
Резонансный фильтр
построен по структуре,,
показанной на рис. 2.47,я.
Его передаточная функ-
ция имеет вид Г/(р) =
Тр j
Т2р2+2^Тр+Г ГД1
Добротность такого'
фильтра Q равна коэффи-
циенту усиления ктах на
частоте резонанса сор =
= 1/Т, причем Q=kmax=
1 1 lk2 u «
. Чтобы ме-
ге aVfcj П
нять частоту резонанса, сохраняя при этом добротность неизмен-
ной, необходимо синхронно менять коэффициенты к1 и ^2-
Интеграторы фильтра построены на ОУ типа К140УД6 стан-
дартным образом. Дискретное переключение поддиапазонов осу-
ществляется переключателем 5 (см. рис. 2.46), плавное управле-
ние резонансной частотой фильтра — с помощью синхронного
изменения коэффициентов передачи на аналоговых перемножи-
телях типа 525ПС2А. Сигнал управления резонансной частотой
фильтра подается на гнезда, выведенные на переднюю панель
блока. Для ручного управления резонансной частотой фильтра
предусмотрен регулируемый источник постоянного напряжения.
ФНЧ построен по структуре, показанной на рис. 2.47,6. Его
1 1
передаточная функция имеет вид W(p)=-— —-------------где Т=—^-
К « 1 р “г 1 /С» К
Из этих соотношений видно, что для управления сопрягающей
частотой фильтра а>с—1/Т следует изменять коэффициент к.
Коэффициент передачи на нижних частотах fc0 —/&+ ПРИ этом
изменяться не будет
Сумматор и интегратор ФНЧ реализованы на ОУ типа
К140УД6 стандартным образом. Дискретное управление гранич-
ной частотой ФНЧ осуществляется установкой перемычки между
108
гнездами 3 на передней панели блока (см. рис. 2.46), плавное
изменение — схемой на аналоговом перемножителе типа
525ПС2А. Сигнал управления при этом тот же, что и для управ-
ления резонансной частотой фильтра 4.
Детектор 6 осуществляет над входным сигналом одну из двух
операций: у = mod л или у=х2. Он реализован на ОУ типа
К140УД6 и перемножителе 525ПС2 по схемотехническому реше-
нию, описанному в п. 2.5.4.
2.5.9. Блок управляемой задержки
Передняя панель блока показана на рис. 2.48. Функционально
блок объединяет управляемую линию задержки 1, перемножи-
тель аналоговых сигналов 2 и регулируемый источник 3 опорных
напряжений +1 В и + 10 В. Амплитуда входных сигналов управ-
ляемой линии задержки — от 0 до + 10 В, частота — от 0 до
100 Гц. Диапазон управляемой задержки от 0 до 40 с разбит на
три поддиапазона: 0—0,4; ft—4; 0—40 с. Погрешность преоб-
разования входного сигнала в выходной задержанный u(t — т) нс
более 3%.
Рис. 2.48. Передняя панель блока
управляемой задержки
Плавная регулировка за-
держки сигнала в каждом под-
диапазоне осуществляется с по-
мощью напряжения от 0 до
10 В. Дискретность времени за-
держки для диапазона 0—0,4 с
составляет 100 мкс, для диапа-
зона 0—4 с — 1 мс и для диапа-
зона 0—40 с — 10 мс.
Принцип действия линии
задержки (рис. 2.49,о) основан
на аналого-цифровом преобра-
зовании исходного сигнала, бесконечной кольцевой записи выбо-
рок в память с последующим их считыванием по адресу, форми-
руемому из адреса записи и адреса уставки, определяемого необ-
ходимой задержкой сигнала, и формировании выходного сигнала
Цифро-аналоговым преобразователем.
Входной аналоговый сигнал преобразуется АЦП в 8-разряд-
ный параллельный код. После записи данных в ячейку с адресом
Ап происходит возврат к ячейке с адресом Ао. Вслед за записью
осуществляется считывание из памяти по адресу, отличающемуся
от адреса записи на К номеров. Величина К определяется по
значению необходимой задержки входного сигнала. Считанный
КОД записывается в регистр и преобразуется ЦАП в аналоговый
сигнал.
109
Входные Выходные
Рис. 2.49. Принцип работы линии задержки:
° — упрощенная схема; б — полная схема липни задержки
Полная функциональная схема линии задержки показана на
рис. 2.49,6. АЦП1 работает в стартстоппом режиме, преобразуя
входной сигнал в параллельный цифровой код. После каждого
цикла преобразования АЦШ выдает импульс ГД в блок управлен-
ие
ння, который формирует сигналы, синхронизирующие работу
памяти и адресной части схемы. По сигналу «Такт» происходит
прибавление единицы к содержимому счетчика адреса записи.
Сигналом «Переключение адреса зп/чт» буфер адреса зп/чт под-
ключает к адресным входам памяти выходы счетчика адреса
записи. Сигналами «зп/чт» и «выб. мс» происходит запись кода
с шины данных АЦП1 в выбранную ячейку памяти. Для задания
адреса считывания в схему введены АЦП2 и сумматор адреса
считывания. Адрес считывания формируется на выходах сум-
матора из кода адреса записи и кода времени задержки, сфор-
мированного АЦП2 из напряжения управления задержкой иг.
Цикл чтения происходит после цикла записи. Буфер адреса
«зп/чт» подключает к адресным входам памяти выходы сум-
матора адреса считывания, и осуществляется выборка из памяти.
Считанные данные записываются в регистр ЦАП, который хра-
нит их до следующего чтения из памяти. ЦАП преобразует
данные, записанные в регистре, в аналоговую величину.
Данный способ построения линии задержки аналогового сиг-
нала позволяет плавно изменять время задержки внешним управ-
ляющим сигналом ит, сохраняя постоянную ошибку преобразо-
вания «(/) в u(i—v).
В блоке использованы АЦП типа К1113ПВ1, ЦАП типа
К591ПА1, требуемый объем памяти 4 Кбайт реализован на двух
микросхемах КР537РУ10.
2.5.10. Блок случайных сигналов
Блок предназначен для изучения теории вероятностей и слу-
чайных процессов, а также для исследования реальных систем
и их моделей при случайных воздействиях. Передняя панель
блока показана на рис. 2.50. В состав блока входят два независи-
мых генератора случайных сигналов 1, генератор периодических
детерминированных сигналов 2, устройство выборки-хранения 3,
нелинейные преобразователи 4 и 5, каждый из которых снабжен
входным сумматором 6, а также фильтр нижних частот
7 и фильтр верхних частот 8.
Каждый из двух генераторов 1 является источником случай-
ного сигнала с равномерной в диапазоне от 10 Гц до 10 кГц
спектральной плотностью и близкой к нормальной плотностью
распределения вероятностей амплитуды сигнала. Интенсивность
сигнала каждого генератора может плавно регулироваться
пользователем.
Генератор детерминированных сигналов 2 формирует систему
трех синхронных периодических сигналов прямоугольной, тре-
угольной и синусоидальной форм. Амплитуда каждого сигна-
ла — 10 В. Частотный диапазон генератора от 0,01 до 1100 Гц
111
Рис: 2.50. Передняя панель блока случайных сигналов:
1 — генераторы случайных сигналов; 2 — генератор детерминированных периодических
сигналов; 3 — устройство выборки-хранения; 4, 5 — нелинейные преобразователи; 6 — вход-
ные сумматоры; 7 — фильтр нижних частот; 8 — фильтр верхних частот
разбит на 5 поддиапазонов: 0,01—0,11; 0,1—1,1; 1,0—11; 10—ПО
и 100—1100 Гц.
Устройство выборки-хранения 3 обеспечивает выборку значе-
ния входного сигнала и его хранение на выходных клеммах
преобразователя в диапазоне времени от 0,1 мс до 1 с. Для
управления работой преобразователя на его синхровход следует
подать внешний сигнал, по каждой перемене знака которого
с минуса на плюс будет происходить операция выборки значения
входного сигнала и его хранение до следующей перемены знака.
При временах хранения от 0,1 до 10 мс следует пользоваться
диапазоном «мс» (миллисекунды), а при временах от 0,01 до
1,0 с — с диапазоном «с» (секунды). Выбор диапазона осуществ-
ляется установкой в преобразователе коммутационной перемыч-
ки в одну из двух позиций.
Нелинейный преобразователь 4 имеет релейную характери-
стику типа «включено—выключено», а преобразователь 5 реа-
лизует «функцию окна», ширину которого можно плавно регули-
ровать в диапазоне от 0,1 до 1 В. Сумматоры на входах этих
преобразователей создают удобства при их использовании для
112
экспериментального получения функций распределения и плот-
ности распределения вероятностей. Фильтр нижних частот 7 име-
ет передаточную функцию WK=(p) = kI(Тр+ I); возможна плав-
ная регулировка коэффициента к в диапазоне от 1 до 10; постоян-
ная времени фильтра Т может быть выбрана в диапазоне от 0,01
до И с; он разбит на поддиапазоны 0,01—0,11; 0,1—1,1; 1,0—11 с
с возможностью плавной регулировки внутри каждого подди-
апазона. Фильтр верхних частот 8 имеет передаточную функцию
JfB(p)=fc Тр/(Тр +1); к плавно регулируется в диапазоне от. 1 до
10; постоянная времени Т фильтра может быть выбрана в диапа-
зоне от 0,001 до 1,1 с, который разбит на поддиапазоны
0,001—0,011; 0,01—0,11; 0,1—1,1 с. Внутри поддиапазонов предус-
мотрена плавная регулировка постоянной времени. Фильтры
предназначены для формирования сигналов с нужной спектраль-
ной плотностью, а фильтр нижних частот — и для усреднения
сигналов.
Гпава 3
ПРИЕМЫ РАБОТЫ С АВК-6
3.1. ЗНАКОМСТВО С АВК-6
Знакомство с персональным аналоговым компьютером
АВК-6 (см. рис. 3.1) начинают с его осмотра. Надо найти сам
электронно-лучевой индикатор и блок «индикатор» в верхней
части служебного модуля с гнездами для сигналов отклонения по
X и Y и гашения луча Z, генератор системы сигналов с ком-
мутатором, монтажное поле со сменными блоками, рассмотреть
таблицу-справку («шпаргалку») на крышке блока питания (рис.
3.1). Если мнемоника знакома, можно сразу начинать экспериме-
нтировать с компьютером. Он защищен от таких ошибок пользо-
вателя, как замыкание выходов на «землю» и друг на друга,
подача внешних сигналов на «внутренние» гнезда преобразова-
телей в блоках и других неправильных соединений.
С самых первых шагов полезно предварять действия с АВК-6
схемами экспериментов и прогнозами их результатов в виде
графиков. Привычка методично планировать эксперимент и вы-
делять наиболее существенные результаты поможет действовать
Уверенно, быстро и точно в дальнейших исследованиях сложных
процессов и систем [6].
Если мнемоника непривычна, то надо освоиться с обозначени-
ями, перерисовав их с фальшпапслей и таблицы-справки, разо-
браться в стрелках, обозначающих входы и выходы элементов
и блоков, и в соответствующих им гнездах. Полезно также
сопоставить схемы 1—6 таблицы-справки с обзором эксперимен-
тальной методики в п. 1.12.2 и структурные модели линейных
систем 7—10 с теоретическим материалом § 1.10.
ИЗ
Для подготовки АВК-6 к работе надо включить вилку пита,
ния в розетку сети 220 В, 50—60 Гц, приподнять в удобное
положение индикатор и нажать кнопку включения, расположен-!
ную вверху таблицы-справки на крышке блока питания. Индика-1
тор рядом с кнопкой сигнализирует, что прибор включен. После
прогрева накала ЭЛТ в центре экрана появляется светящаяся
точка — прибор готов к работе. Чтобы уберечь ЭЛТ от выгора-
ния люминофора в центре экрана, на вход X, 10 (см. рис. 2.9)
следует подать от ГСС непрерывный сигнал, например треуголь-
ный, луч начнет двигаться по горизонтали*. Перемычка «руч-
ное регулирование» в ГСС должна быть включена.
Далее следует рассмотреть и зафиксировать в рабочем жур-
нале систему синхронных сигналов. Настроив самую низкую
частоту, можно убедиться, что треугольный сигнал заставляет
луч двигаться по экрану влево и вправо с одинаковой постоянной
скоростью. После этого на вход индикатора Y, 10 надо поочеред-
но подавать сигналы с других выходов генератора и, регулируя
ПРИЕМЫ РАБОТЫ С КОМПЛЕКСОМ
1 Включите прибор в сеть 22obtidZ 50гц. После прогревр
индикпторр комплекс готов к роботе
2 Моле ль нябиррйте поблочно, контролируя кяжаый блок и
их СОЕДИНЕНИЯ.
з Выбором коэффициентов удерживяйте выхооные ндпря-
ЖЕНИЯ БЛОКОВ В ДИЯПЯЗОНЕ 1-1DB.
vПревышение уровня -ив контролируйте по световым
.ИМДИКЯТОРЯМ.
Рис. 3.1. Таблица-справка па передней панели блока питания
* На рис. 3.1 и далее ГСС для краткости обозначен Г (генератор), а начинай!
с рис. 3.2 — специальным символом, мнемонически отражающим систему син*
хронных сигналов (см. §2.2).
114
амплитуду, рассмотреть движение_луча по экрану. Соединив
перемычкой гнездо Z с гнездами _1— и ИL , разберитесь с гаше-
нием луча. Увеличив частоту генератора, получите устойчивые
неподвижные осциллограммы и уточните форму сигналов ГСС.
МОДЕЛИ ДИФФЕРЕНЦИЯЛЬНЫХ УРДВИЕИИЙ
д. Н. И- ГО ПОРЯДК R:_
Й S * - *а,ЭТ*а°^‘ u(t’ Wp = = 7ч ай-ТрД
СИСТЕМА П Д Ы. 1-ГО ПОРЯОКД_
- аиягаияльияя матрица собствеццых чиячеиий
М)
u(l)
Собственные значения и последовательное соединение типовых
ait) 3BEUbBB.
W)=n^
НЫЛИ ПЕРЕДЯТОНМОИ ФЫНКЦИИ ТТ а^рП pH Q * р°
3^*ап->арт‘"“а>др‘асУ(*)=Ьг„ари *bm.T^pfpi*"-*b,d“ *boui.t)
При молелировяиии па ырявнеиию x(t)=Ax(t)»ru(t) мыли считыва-
ются ВЫБОРОМ КОЭФФИЦИЕНТОВ Г;. И То .
ис- 31. (продолжение)
115
7
Рис. 3.2. Использование коммутатора:
а, б — наблюдение нескольких процессов; в. г — измерение амплитуды сигналов; д, е
формирование координатных осей
Коммутатор (рис. 3.2,а) позволяет одновременно наблюдать
на экране индикатора четыре осциллограммы (рис. 3.2,6). Для
этого вход Y индикатора соединяют с выходом одного из кана-
лов коммутатора, а исследуемые сигналы подают на входы 1—-4
этого канала. При отжатой кнопке в блоке «индикатор» ком-
мутатор работает с частотой 5 кГц от встроенного генератора,
а при нажатой — переключается положительными перепадами
прямоугольных импульсов ГСС. Особенности получающихся
при этом изображений можно рассмотреть, варьируя частоту
ГСС. Верхнему диапазону частот от 100 до 1100 Гц соответствует
верхнее (выключенное) положение всех клавиш переключателя
диапазонов. Варьируя частоту ГСС, следует обратить внимание
на показания измерителя длительности (ИД) в служебном блоке.
116
Он измеряет длительность «прямого хода» треугольного сигнала
(луч движется слева направо). Полезно сопоставить показания
ИД с ориентировочной оценкой частоты по шкале ГСС.
На рис. 3.2,в такт 4 коммутатора использован для формирова-
ния измерительной линейки 4 (рис. 3.2,г). Выход эталонного
источника Э подключен к входу делителя Д, с помощью которо-
го можно смещать по вертикали горизонтальный отрезок 4,
например, до совмещения его с верхушкой а синусоиды 3. Если
выставленное таким образом постоянное напряжение делителя иу
подать одновременно на вход цифрового вольтметра (ЦВ), то
будет измерена амплитуда а синусоиды. Точно так же, совместив
контрольный отрезок 4 с вершиной прямоугольного импульса 1,
можно измерить амплитуду прямоугольного (или любого друго-
го) сигнала.
Два канала коммутатора (рис. 3.2,6) позволяют сформиро-
вать на экране изображения осей х(7) и у (2), синусоиды 3 или
другого графика и контрольной точки (КТ) 4. Последнюю можно
перемещать по полю экрана делителями Д1 по вертикали и Д2 по
горизонтали до совмещения с заинтересовавшей Вас точкой гра-
фика 3. Измерение при помощи ЦВ напряжений иу и их с выходов
делителей дает координаты КТ. Если же напряжение их подать на
вход измерителя длительности ИД, то последний покажет дли-
тельность временного интервала cf от начала движения луча из
точки с до точки f — проекции КТ на ось времени х. Напомним,
что если вход ИД свободен (никуда не подключен), то ИД
измеряет длительность интервала с d.
На рис. 3.3,а показана схема для формирования изображений
(рис. 3.3,6) осей координат х(7) и у (2) и наклонных отрезков
У=кх (3) и у=кх + Ь (4). Полезно, однако, начать с более про-
стой схемы без коммутатора на рис. 3.3,в. Получите изображение
отрезка у = кх с наклоном к, регулируемым при помощи дели-
теля Д1; познакомьтесь с работой сумматора — соедините его
выход со входом Y индикатора и подайте сигнал у = кх поочеред-
но на прямой и инвертирующий входы, наконец, сместите полу-
ченный график по вертикали при помощи эталона Э и делителя
Д2 (рис. 3.3,г) и только после этого украсьте полученный график
осями координат при помощи коммутатора (рис. 3.3,6).
Прямолинейный отрезок с регулируемыми наклоном и сме-
щением пригодится в качестве «электронной линейки». Возврат
Же от сложных схем к более простым с последовательной их
проверкой и наращиванием (п. 2 инструкции в таблице-справ-
ке) — прием, который ведет к конечной цели быстрее, чем
Попытки сразу получить окончательный результат.
В развитие знакомства с ИИС АВК-6 следует опробовать
Вх°Лы индикатора с различной чувствительностью и суммирова-
ние сигналов на его входах, использовать для формирования
117
изображений различные сигналы ГСС и их комбинации. Ориен-
тирами в этих упражнениях удобно выбрать уравнения аналити-
ческой геометрии на плоскости.
у = кх+Ь
Рис. 3.3. Формирование изображений отрезков:
а, б — с помощью коммутатора; в, г — без коммутатора
Для оценки итогов первого знакомства с АВК-6 можно попы-
таться сформировать на экране индикатора изображения цифр
и букв латинского и русского алфавита.
3.2. ИССЛЕДОВАНИЕ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК
Схема 1 таблицы-справки (см. рис. 3.1) для наблюдения на
экране индикатора статической характеристики (п. 2.11.3, рис.
2.20,а) воспроизведена на рис. 3.4,а. Непрерывный сигнал ГСС
x(t), например треугольный, подают одновременно на входы X
индикатора и исследуемого нелинейного преобразователя, а вы-
ход последнего у (z) = /V[x(z)] — на вход У индикатора. В качестве
нелинейного преобразователя удобно использовать сменный
блок «нелинейность» (рис. 3.4,6). Его динамические характеристик
ки в диапазоне частот ГСС приближены к «безынерционной
нелинейности», и поэтому выбором частоты ГСС на экране
118
индикатора можно получить стационарный график статической
характеристики без динамических погрешностей. Сигнал x(i)
подают на вход 1, перемычкой соединяют выход 2 усилителя к со
входом 3 нелинейности N, сигнал j (z) = ./V[x (?)] снимают с выхо-
да 4. Перемычки между парами гнезд 5—8 для начала следует
выключить (удалить). Собрав схему рис. 3.4,а и получив график
нелинейности (рис. 3.4,в), следует еще раз разобраться по мнемо-
схеме блока в назначении ручек и, наблюдая характеристику на
экране индикатора, изучить, как влияет каждая из них на форму
графика. Предскажите, как изменят форму графика диоды Д1
и Д2 и проверьте этот прогноз.
График нелинейности полезно дополнить осями координат
и контрольной точкой. Схема, обеспечивающая такую комбина-
Входы (такты) коммутатора Выходы
1 2 3 4
ла) A(t) — ^х X
y(t) — A(t) Y
N(x) ось X ось у КТ Экран
д)
3.4. Исследование статических характеристик:
° — схема исследования; б — коммутация преобразователей нелинейного блока; в — вид
Рак герметики; г — характеристика в координатных осях; д — таблица коммутации
119
цию изображений, показана на рис. 3.4,г. Ее поясняет располо-
женная ниже таблица коммутации (рис. 3.4,3). В ней каждому
каналу коммутации отведена своя строка. В первых четырех
столбцах, соответствующих входам каналов и одновременно так-
там коммутатора, записываю!, какие сигналы подают на эти
входы. В пятом столбце указывают, куда подключены выходы
каналов, а в нижней строке описываю! изображение, формиру-
емое в данном такте на экране индикатора. Таблицу, представ-1
ленную на рис. 3.4,3, можно прочитать следующим образом:
1. Первый такт\ на вход X индикатора подан сигнал Л (г), на
вход Y — сигнал >,(0=Лг[х(0] с выхода нелинейности — на
экране формируется график у — N(x).
2. Второй такпг. на У-вход индикатора подан сигнал разверт-1
ки Д(/), на У-входе внешний сигнал отсутствует, У (0 = 0 — на
экране формируется горизонтальная ось х.
3. Третий такт: на У-входе внешний сигнал отсутствует,
х(/) = 0, на У-вход подан сигнал развертки Л (г) — на экране
формируется вертикальная ось у.
4. Четвертый такт: на У-вход индикатора подано постоян-
ное напряжение Ех, на У-вход — постоянное напряжение Еу, па
экран выводится изображение контрольной точки с координата-
ми Ех, Еу.
Программирование коммутатора позволяет вырьировать со-
держание информации, выводимой на экран индикатора в соот-
ветствии с целями конкретного исследования. Так, вместо коор-
динатных осей на экран можно вывести еще две измерительные
точки, что позволит, например, «запоминать» на экране коор-
динаты характерных точек графика и настраивать нелинейность,
«проводя» ее характеристику через определенные точки.
Измерительная линейка — простейший электронный шаблон,
который может оказаться удобным инструментом при измерени-
ях. Схемы формирования измерительных линеек сведены в таб-
лицу на рис. 3.5. Для вывода каждой из них па экран индикатора
совместно с другими изображениями надо затратить один такт
коммутатора.
В первой строке таблицы приведена схема формирования
вертикальной линейки. На У-вход индикатора подан треуголь-
ный сигнал А (г) ГСС, на У-вход — регулируемое постоянное
напряжение Ех, изменяя которое можно смещать линейку впра-
во—влево. Вертикальную линейку удобно применять для опреде:
ления абсцисс характерных точек. Во второй строке приведена
уже знакомая схема формирования горизонтальной линейкН,
а в третьей — наклонной, проходящей через начало координат,
причем ее угол наклона регулируется изменением коэффициента
к. Если угол наклона а между осью абсцисс и линейкой недоста-
точен, можно поменять местами сигналы, поступающие на А|
120
Рис 3.5. Схемы формирования измерительных линеек:
вертикальной (1), горизонтальной (2), наклонной (3, 4), со смещением но оси Y (5), по
оси Л' (6)
и i’-входы индикатора (четвертая строка). Тогда tga= 1 / к, и при
малых к линейка направлена круто вверх. Использование сум-
матора, эталона и делителя позволяет смещать линейку
вверх—вниз (пятая строка) или вправо—влево (шестая строка).
Применение этих схем помогает измерять на графиках коор-
динаты характерных точек, строить асимптоты, касательные,
хорды и медианы, проверять симметричность графиков относи-
тельно заданных точек или прямых, определять расстояние меж-
ДУ точками в заданном направлении и т. д.
З.з. ФОРМИРОВАНИЕ НЕЛИНЕЙНЫХ ХАРАКТЕРИСТИК
Вооружившись приемами формирования изображений и изме-
рений, можно перейти к более детальному изучению формирова-
ния нелинейных характеристик. Эти приемы опираются на ис-
пользование последовательного и параллельного соединений
121
Соединение
нелинейностей
Последовательное:
Математический
эквивалент
Сложная
функция:
y-N2[N1(x)];
y=k1k2x
Сумма
функций:
y=N1(x)±N2(x)
y=(k1±k2)x
Обратная
связь:
y=N1[x±N2(y)]
ki
и=----—х
у 1±k1k2
Схема расчета
Рис. 3.6. Типовые соединения нелинейных преобразователей
нелинейных функциональных преобразователей, а также отрица-
тельной и положительной обратной связи. На рис. 3.6 представ-,
лены в виде таблицы структурные модели для соответствующих
соединений пары преобразователей, математическая трактовка
в общем случае и для линеаризованных преобразователей, а так-
же схемы графоаналитических расчетов.
Последовательное соединение структурно представляет форми-
рование сложной функции y = A'’2[Azi(х)] как функции y=N2(yi)
от функции j’i (х). При линеаризации нелинейные преобразо-
, dN<
ватели заменяют линейными с коэффициентами к1=——
ах x=Xq
, для N2. В этом случае y=fc2yi —
dyi У1— Ую
dN2
ДЛЯ N[ И «2 = 7“
= к\ к2х=кх, и поэтому последовательное соединение эквива-
лентно одному преобразователю с коэффициентом, равным про-
изведению коэффициентов усиления отдельных преобразовате-
лей, к=к\к2. При графоаналитическом расчете график первой
нелинейности yi — N\ (х) располагают в первом квадранте, график
y=N2(yi) — во втором, повернув его на 90° против часовой
стрелки так, чтобы ось yt была общей для обоих графиков.
Задавшись некоторым значением xz, находят соответствующее
ему значение yn=N\ (х,) (стрелка 1—2), а по этому значению уи
находят значение yj=N2(yij) (стрелка 2—3). При помощи вспо-
122
могательной прямой, проведенной под углом 45° в третьем квад-
ранте, «отражают» найденное значение у, (стрелка 3—4) и прово-
дят горизонтальную прямую 4—5 до пересечения с вертикальной
прямой 1—5. Точка пересечения 5 соответствует одной из точек
искомого графика y=N(x). Этот цикл повторяют для других
значений х jyo тех лор, пока найденные точки не позволят прове-
сти через них достаточно точный график y=N(x). Если последо-
вательно включены три преобразователя, то характеристику
третьего располагают в третьем квадранте вместо вспомогатель-
ной прямой.
Параллельное соединение преобразователей представляет
сумму функций y=N\ (х)+ N2(x). При линеаризации у=кхх +
+k2x = (ki3-k2)x=kx, что эквивалентно одному преобразовате-
лю с коэффициентом к, равным сумме коэффициентов преоб-
разователей. Графоаналитический расчет состоит в совмещении
осей координат графиков N\ и N2 и в алгебраическом суммирова-
нии их ординат у1(- и y2i для определенных значений х/.
Для пары преобразователей, охваченных ОС, система урав-
нений
'y=iVj(c)
^=л^20)
► — уравнения связи;
e = x+z — уравнение замыкания,
где знак « —» соответствует отрицательной, а « + » — положи-
тельной ОС, приводит к соотношению y=7Vi [х+-У2(у)]> откуда
нельзя в явном виде выразить зависимость выходной переменной
от входной ОС. Если зависимости у = N\(e) можно поставить
в соответствие обратную зависимость к = (у), то систему
уравнений связи можно переписать в виде
£=х//ОбР(у);
’ z=N,(y)
ь.
И действовать в обратном направлении — рассчитывать входную
переменную х как алгебраическую сумму x—e + z двух функций
от переменной у, x = 7V?6p(y) + N2(y), аналогично построениям
Для параллельного соединения, где знак «+» соответствует от-
рицательной, а «—» — положительной ОС. Поскольку график I
>' = (е) уже построен в привычном виде, удобнее перестроить
в тех же осях второй график z=N2(y), используя ось е одновре-
менно в качестве оси z. Получившийся график 2 представит
зависимость у=Л^бр(г). Далее, задавая значения у,-, проводят
торизонтальные прямые у=у/, находят соответствующие значе-
ния s,(y2) и z+(yi) и значения хГ =£,+£, для отрицательной
(трафик 3) или х7 —Ei—Zi для положительной ОС (график 4).
Освоение принципов графоаналитического расчета характери-
стик дает ключ к анализу конкретных случаев, пониманию на
123
этой основе общих закономерностей формирования нелинейных
характеристик и к освоению практических приемов синтеза. Од-
нако расчеты вручную требуют большой кропотливой рутинной
работы, в процессе которой за частными задачами легко поте-
рять из виду главную цель. Использование АВК-6 превращает
Рис. 3.7. Схемы для изучения характеристик соединений нелинейных преобразо!
телей
124
эТу работу в достаточно увлекательную «игру для взрослых»,
напрямую ведущую к пониманию основных принципов.
На рис. 3.7 показаны схемы для изучения характеристик по-
следовательного (а), параллельного (б) и обратно-связанного (в)
соединений пары нелинейных преобразователей. В качестве пре-
образователей N\ и W2 можно использовать как от дельные ком-
поненты сменного блока «нелинейность», так и пару или больше
таких блоков. Коммутатор позволяет совместить характеристики
отдельных нелинейностей с общей характеристикой нелинейной
системы и с контрольной точкой; цифры на графиках соответ-
ствуют тактам коммутатора. Схемы полезно описать таблицами
Рицац
«ОЗфф
“с- 3.8. Схемы формирования статических характеристик на нелинейном блоке:
— отрицательной двухполярной ОС; б — положительной однополярной ОС; в — от-
ельной ОС; г — включением нелинейности в обратную связь; д — варьированием
ициента усиления; е — изменением структуры связей
125
коммутации. Напряжения их и иу формируют и измеряют уже
известным образом.
Блок «нелинейность» (см. рис. 3.4,6) удобно использовать ддя
изучения характеристик последовательного соединения линейно*
го усилителя с нелинейным преобразователем без ОС и при
охвате их положительной и отрицательной ОС. Варьируя коэф-
фициент усиления к, легко убедиться, что при его увеличении
график общей нелинейной зависимости сжимается, а при умень-
шении — растягивается по оси х. Для замыкания положительной
ОС (рис. 3.8,а) устанавливают перемычку между гнездами К
коэффициент ОС регулируют потенциометром а. Для отрица-
тельной ОС перемычку переставляю! в гнезда 7, а коэффициент
ОС регулируют потенциометром Ь (рис. 3.8,в).
На рис. 3.9 представлены’
некоторые из характеристик,
формируемых при использоваЗ
нии одного блока «нелинейЗ
ность». Исходную характери-
стику блока (1,а) легко транс-1
формировать в характеристики
типа «усилитель с насыщени-1
ем» (1,6) и «зона нечувствите-
льности» (1,в), из которых при
помощи диодов блока можно
выбрать соответствующие вет-
ви (2,а)—(2,в). Настройкой эле-
ментов можно приблизить ха-
рактеристику к виду j^ = x|x|
(3,а) типа «вязкое т рение» квад-
ратичного (4,а) или линейного
(5,а) детекторов. Охват поло-
жительной ОС позволяет
трансформировать характери-
стику (1,6) к виду «идеальное
поляризованное реле» (3,6) и
«поляризованное реле с гисте-
резисом» (4,6), а характеристи-
ку (1,в) — к виду «идеальное
трехпозиционное реле» (3,в) и
«трехпозиционное реле с гисте-
резисом» (4,в) и (5,в). Чтобы
изучать механизм формировав
Рис. 3.9. Некоторые характеристик
полученные на одном нелинейном бЛ'
ке по схемам на рис. 3.8
ния таких характеристик, можно замыкать ОС только для одной
полярности выходного сигнала (рис. 3.8,0. При этом график
в первом квадранте представит результат расчета общей харак-
теристики по характеристике прямой связи в системе без ОС
(позиция 5,6 на рис. 3.9), изображенной в третьем квадранте. Для
отрицательной ОС при b = 1 удобно наблюдать, как увеличение
коэффициента «спрямляет» нелинейность в цепи прямой связи.
На графиках 6,а и 6,6 показаны характеристики y=N(x) системы
без ОС (7) и с ОС (2) и прямой у=х(3) для двух разных значений
коэффициента усиления к. Варьируя коэффициент b при мак-
симальном к, легко убедиться, что при большом общем усилении
в контуре ОС характеристика системы с ОС стремится к виду
у=-х. График 6,в иллюстрирует формирование характеристики,
7 Ь
обратной включенной в цепь ОС (рис. 3.8,г). Этот график об-
наруживает, что на самом деле каждый из активных элементов
блока «усилитель к» и «нелинейность N» в отдельности инвер-
тирует сигнал, в то время как при их последовательном соедине-
нии двойная инверсия обеспечивает формирование «прямой» не-
линейной характеристики в соответствии с обозначениями на
фальшпанели.
Схемы на рис. 3.8Де иллюстрируют дополнительные возмож-
ности коммутатора при изучении механизмов формирования не-
линейных характеристик. В первом случае коммутатор исполь-
зован для формирования семейства характеристик при вариациях
коэффициента усиления, во втором — для варьирования струк-
туры системы. Каналы коммутатора используются в качестве
перемычек, замыкающих в определенные такты соединения меж-
ду элементами системы в цепях прямой и обратной связи. В пер-
вом такте замкнуты обе связи, и поэтому можно наблюдать
характеристику системы с ОС. Во втором замкнута прямая связь,
а обратная разомкнута — можно сформировать характеристику
канала прямой передачи сигнала. В третьем такте обе связи
Разомкнуты, а на вход нелинейности подан тот же сигнал, что
и на вход 7 блока — можно наблюдать характеристику функцио-
нального преобразователя N. В четвертом такте все связи разо-
мкнуты, и поэтому можно сформировать характеристику цепи
ОС или какое-либо вспомогательное изображение. Для окон-
чательного оформления набора графиков на экране индикатора
Иснользуют третий канал коммутатора, который на рис. 3.8,е не
и°казан.
В нижнем ряду на рис. 3.9 показаны нелинейные характери-
стики, аппроксимирующие «сухое трение» (7,а), ампервольтную
Характеристику туннельного диода или тиристора (7,6) и синусо-
иду (7,в). Их удобно формировать посредством параллельного
°еДинения нелинейностей, реализуемых на нескольких сменных
127
Рис. 3.10. Формирование осесимметричных характеристик
Рис. 3.11. Формирование неоднозначных характеристик типа «люфт» (а, 6) негу
пенчатой характеристики АЦП (в. г)
блоках с использованием эталонов, делителей и сумматоров
служебного и сменных блоков.
Схема на рис. 3.10 иллюстрирует формирование осисиммет-
ричных характеристик, например, вида у~—х2 или у= —1*1-
Чтобы получать такие ха5рактеристики без инверсии, выход диода
6 надо соединить с нижним входным гнездом 7 или 8, а выход
диода 8 — с верхним входным гнездом 5 или 6.
Нелинейность типа «люфт» формируют при помощи нелиней-
ности типа «поляризованное реле с зоной нечувствительности»
и интегратора, охваченных отрицательной ОС (рис. 3.11,о, &)
Использование в той же схеме нелинейности типа «поляризоваИ-
ное реле с зоной нечувствительности и гистерезисом» дает ступенча-
тую нелинейность типа характеристики АЦП (рис. 3.11,в, гУ
3.4. ГЛАДКИЕ НЕЛИНЕЙНОСТИ
Сменные блоки «умножение-деление» (УД) и «перемножение»
(П) обеспечивают выполнение соответствующих математически*
128
I
яейных преобразований. Их удобно использовать для ап-
'НеЛЙсИ1лации различных «гладких» нелинейных зависимостей,
г^чнакомство с блоками можно начинать с преобразователя
1Х1 включив его в схему характериографа на рис. 3.4,а.
/^1оКе УД при этом надо установить перемычку между гнез-
В р mod
ами 1> 2 на мнемоническом изображении преобразователя ——
3.12,а). На экране индикатора получится график, представ-
еяный на рис. 3.12,6. Чтобы использовать этот же преобразова-
ЛеЛЬ в качестве перемножителя, перемычку надо включить между
гнездами •?> $ (Рис- 3.12,в). Один из входных сигналов (например,
) удобно сформировать при помощи эталона и делителя
Лис 3.12. Формирование гладких нелинейностей на блоках «умножение-деление»
«Умножение»:
а, б — y=tnodx-, в. г — y=xtx2, д. е — у=х2; ж, ч — y=xtlx2
129
S~6S17
и наблюдать, как его вариации меняют наклон графика у = кх1г
где к=х2 на экране индикатора. Если входной сигнал подать
одновременно на оба входа перемножителя (рис. 3.12,г), то полу,
чится преобразователь у=х2 (рис. 3.12Де). Таким же образом
следует опробовать перемножители в блоках УД и П.
Для знакомства с «делителем» делимое %] = раг удобно сфор-
мировать при помощи эталона Э и делителя Д в служебном
блоке, в качестве знаменателя x2(t) использовать непрерывный
сигнал (рис. 3.12,ж) и наблюдать результат в виде графиков на
рис. 3.12,з на экране индикатора.
Рис. 3.13. Получение графиков тригоио-1
метрических функций:
а —у=sin2 a, у=cos2 а; б — y=sinacosa;
в —y=sina/cosa, у=cos a/sin a
Если разворачивать изобра-
жение по горизонтали треуголь-
ным сигналом, а на вход «квад-
ратора» (рис. 3.12,6) подать си-
нусоиду или косинусоиду (рис.
3.13,а), то получатся графики
функций у = sin2 а или j=cos2a
соответственно. Так же просто
получается график функции
j=sinacosa (рис. 3.13,6). При
помощи делителя (рис. 3.13,<?)
легко получить графики функ-
ций y = sina/cosa = tga; у—
= cosa/sina = ctga, а также у=
= l/sina = seca и y=l/cos=
= cosec a.
На основе преобразователей у= |х| (рис. 3.14,а) и у—х2 (рис.
3.14,6) можно сформировать нелинейности, примеры которых
представлены на рис. 3.14,в—д.
Кроме последовательного и параллельного соединений преоб-
разователей для формирования гладких нелинейностей можно
использовать образные связи. На рис. 3.15,а «квадратор» охвачен
ОС через делитель Д и сумматор. Отрицательная ОС при х>0
спрямляет правую ветвь параболы и уменьшает ее наклон. Для
л<0 та же ОС оказывается положительной, поэтому крутизна
левой ветви возрастает (рис. 3.15,6). ОС в схеме па рис. 3.15,в
позволяет устранить разрыв характеристики при х=0 (рис. 3.15,г)-
Для изучения характера и величины погрешностей перемнсн
жителя удобно воспользоваться схемой на рис. 3.16. Выходной
сигнал перемножителя у=х\ х2, где х2 формируется как параметр
х2=с эталоном Э и делителем Д1, сравнивается с эталонным
130
Рис. 3.14. Формирование некоторых функций с помощью преобразователей «мо-
дуль» и «умножение»:
о — y=modx; б — у—х1; в — у=л|х|; г — у=ах—х|х|; <) — у— |.х| —х1
сигналом Уэ=к$Х\, формируемым из входного сигнала х{ при
помощи делителя Д2. В последней схеме нетрудно узнать форми-
рователь «измерительной линейки». Разностный сигнал Ду(х) —
=Хх)—Уэ(х) с выхода сумматора усиливается дополнительным
Усилителем. Цифры у графиков соответствуют тактам коммута-
тора. Вместо контрольной точки 4 можно сформировать ось х.
Далее следует поменять местами входы перемножителя и оце-
нить характер и величину погрешностей в этом случае. Чтобы
Получить полное представление о погрешностях перемножителя,
Надо зарегистрировать графики погрешности для нескольких зна-
чений х2=с, подстраивая соответственно делитель Д2, и для
Каждого из них сопоставить значение х2, измеренное цифровым
Вольтметром, со значением коэффициента передачи к0 делителя
Д2. На вход делителя Д2 подают эталонное напряжение пэт=
= Ю,00 В, измеряют цифровым вольтметром выходное напряже-
131
Рис. 3.16. Изучение погрешностей перемножителя
ние ндг и рассчитывают А?0 = 1/д2/пэт. Так же измеряют и коэф-
фициент к.
Точность измерений в схеме на рис. 3.16 определяется в основ-
ном элементом сравнения — сумматором. Поэтому, приступая
к точным измерениям, следует предварительно измерить напря-
жение смещения на выходе сумматора при нулевых входных
сигналах и степень разброса коэффициентов по величине выход-
ного напряжения сумматора при подключении его обоих входов
к общему источнику эталонного напряжения (рис. 3.17,я). Для!
Рис. 3.17. Погрешности сумматора:
схема измерения погрешностей (а) и их компенсации (б)
132
выравнивания коэффициентов передачи на вход с большим коэф-
фициентом усиления сигнал можно подавать через пассивный
делитель блока УД (например, d на рис. 3.17,6), а смещение
скомпенсировать, подав эталонное напряжение через второй пас-
сивный делитель с на свободный вход сумматора.
Компенсационные методы обеспечивают высокую точность
измерений, однако расплачиваться за нее приходится достаточно
кропотливой работой. Имея в арсенале возможности точных
измерений, надо искать компромисс между точностью и трудо-
емкостью моделирования и более эффективные пути к понима-
нию существа и особенностей изучаемых процессов.
На рис. 3.18 показаны две схемы для взаимопроверки пере-
множителя и делителя. Они помогаю! быстро получить качест-
венные представления об особенностях характеристик этих вычи-
слительных элементов. Эти схемы можно дополнить блоками
и элементами, способными повысить точность измерений.
Рис. 3.18. Схемы взаимопроверки перемножителя и делителя
При настройке гладких нелинейностей в качестве точных «эле-
ктронных шаблонов» удобно использовать осциллограммы (рис.
3.19,о) и фазовые траектории (рис. 3.19,6), получаемые при моде-
лировании линейных систем. В свою очередь, гладкие нелиней-
ное™ удобно использовать в качестве электронных шаблонов
при настройке функциональных преобразователей на имеющихся
под рукой нелинейных элементах или на основе кусочно-линей-
ной аппроксимации. Схемы на рис. 3.19,с,6 иллюстрируют ис-
пользование преобразователя на элементах «модуль» и «пере-
множение» в качестве «шаблона» при настройке сменного блока
«нелинейность» для кусочно-линейной аппроксимации зависимо-
сти у = Л-|х|. Характеристика, формируемая настройками смен-
ного блока «нелинейность» п, сравнивается с «точной» харак-
теристикой, формируемой схемой, показанной на рис. 3.20. На
экран индикатора выведены одновременно характеристики каж-
дой из нелинейностей I, 3 и график погрешности аппроксимации
Последний формируется сумматором и дополнительным уси-
лителем к сигнала ошибки Ду как Д — к к у. Такая комбинация
Изображений наглядно представляет погрешности аппроксима-
ции и подсказывает методику настройки.
133
Рис. 3.19. Формирование электронных шаблонов из временных осциллограмм
и фазовых траекторий (б)
Рис. 3.20. Пример использования электронного шаблона
3.5. ФОРМИРОВАНИЕ СИГНАЛОВ
Часто требуется рассчитывать форму сигналов, получающих-
ся на выходе нелинейности при подаче на ее вход сигнала задан-
ной формы, например синусоидального или какого-либо другого
периодического, случайного, а также различных линейных ком-
бинаций таких сигналов и постоянной составляющей. Рисунок
3.21 иллюстрирует постановку такой задачи (а) и схему ее графо-
134
Рис. 3.21. Определение формы сигнала при его прохождении через нелинейность
аналитического решения (б) для синусоидального входного сиг-
нала x(t). К графику нелинейности y=N(x) пристраивают график
входного сигнала х(1). «Отражая» первым графиком значения
x(Ji) для заданных моментов времени t,, как показано стрелками
на рис. 3.21,б, находят соответствующие значения у (ti) — N[x(t,) ]
и строят по ним график у (t).
Рис. 3.22. Экспериментальное исследование изменения формы сигнала при прохо-
ждении через нелинейность
Схема 2 таблицы-справки (см. рис. 3.1) на рис. 3.22 дополнена
Коммутатором, при помощи которого на экране индикатора
вместе с осциллограммой выходного сигнала 2 можно одновре-
менно наблюдать график нелинейности 3 и осциллограмму вход-
ного сигнала 4 относительно горизонтальной оси 1. Варьируя
амплитуду входного сигнала и его постоянную составляющую,
Удобно наблюдать, как деформируется при этом выходной сиг-
нал. Удобно также варьировать характеристику нелинейности,
Добиваясь получения выходного сигнала желаемой формы.
135
Рис. 3.23. Исследование формы сигнала при прохождении через квадратичную'
нелинейность
На рис. 3.23 показана схема для изучения формы сигнала на
выходе квадратичной нелинейности в зависимости от амплитуды
и смещения входного сигнала. Разделение переменной у~ (z) и по-
стоянной (О составляющих выходного сигнала y(f) осуществ-
ляется фильтром на основе блока «интегратор». Для изучения
характера и величины искажений синусоидального сигнала ис-
пользован компенсационный метод измерений, реализованный
при помощи делителя Д2 и сумматора 3. Графики иллюстрируют
формирование выходного сигнала и вид соответствующих осцил-
лограмм на экране индикатора.
На рис. 3.24 показана схема широтно-импульсного модулято-
ра. Нелинейность типа «поляризованное реле» формирует из
треугольного сигнала A(z) импульсы, относительная длитель-
ность которых определяется величиной модулирующего сигнала
x(z), смещающего порог реле. Сигнал x(t) можно сформировать
при помощи делителя Д из эталонного напряжения Еэт. Варьи-
руя сигнал х, наблюдают на индикаторе изменение относитель-
ной длительности выходных импульсов. Ниже показана осцилло-
грамма выходного сигнала в обычном виде.
136
Рис. 3.24. Схема широтно-импульсиого модулятора
Понимание механизма формирования нелинейностью выход-
ного сигнала позволяет перейти от задачи анализа к задаче
синтеза сигналов. Для получения заданной формы выходного
сигнала требуется сочетание формы и амплитуды входного сиг-
нала с характеристикой нелинейности. Например, проектируя
умножитель частоты, разумно подобрать такую нелинейность,
которая способна подчеркнуть нужную и минимизировать неже-
лательные гармоники в спектре сигнала на выходе нелинейности.
Другой пример — формирование символов для осциллографи-
ческого дисплея или графопостроителя. Решению этих и других
задач синтеза сигналов помогают описанные выше приемы ис-
пользования АВК-6 для исследования статических характеристик
систем.
3.6. ИССЛЕДОВАНИЕ ЧАСТОТНЫХ ХАРАКТЕРИСТИК
Схема 3 таблицы-справки (см. рис. 3.1) для исследования
частотных характеристик по фигуре Лиссажу дополнена на рис.
3.25 коммутатором. Частотные характеристики исследуют в ре-
жиме непрерывного интегрирования (нажата кнопка 1 генерато-
ра). Синусоидальный сигнал генератора подают на вход модели
*У(/со) и на У-вход индикатора. На У-вход индикатора подают
выходной сигнал у (t) модели. В первом такте на экран выводится
эллипс, во втором — горизонтальная измерительная линейка,
в третьем — отрезок у—х, в четвертом — ось ординат. Переме-
тая по вертикали измерительную линейку, измеряют величины
Д b и А. Последнюю измеряют, совместив линейку с концом
вспомогательного отрезка у=х, сформированного сигналом
J'=a-=A sin со t. По найденным значениям рассчитывают для дан-
ной частоты коэффициент передачи Н(со) = В / А и фазовый сдвиг
выходного сигнала у (Г) = В sin [ со 7+<р (со)] относительно входно-
го х (г) = A sin со t по соотношению <р (со) = a resin -.
137
Рис. 3.25. Исследование частотных характеристик по фигуре Лиссажу
Частоту входного сигнала оценивают по шкале ГСС и изме-
ряют при помощи измерителя длительности. Он показывает
длительность половины периода т = 7'/2 колебаний сигналов
ГСС, поэтому частота, Гц,/=1/2т, круговая частота, рад/с,
a>=2nf.
Рис. 3.26. Исследование частотных характеристик при треуголь-
ной развертке по оси X
Метод исследования амплитудных и фазочастотных харак-
теристик на основе фигур Лиссажу привлекателен тем, что на
экране осциллографа сразу получается устойчивое изображение
эллипса, форма которого изменяется при вариациях частоты
входного сигнала. Система сигналов ГСС позволяет сохранить
это достоинство, одновременно повысив наглядность и упростив
измерения и расчеты. На рис. 3.26 схема 5 таблицы-справки (см-
рис. 3.1) дополнена коммутатором, формирующим в первом
такте осциллограмму выходного сигнала, во втором — горизон-
тальную линейку, в третьем — осциллограмму входного сигнала,
а четвертом — вертикальную линейку. Установка перемычки
между центральным Z и левым _Г гнездами (см. рис. 2.1) гасит
части осциллограмм, развертываемые спадающим участком тре-
138
угольного сигнала (луч движется справа налево), между цент-
ральным Z и правым —L — нарастающим участком, луч дви-
жется слева направо. На рис. 3.26 соответствующие участки
осциллограмм отмечены стрелками.
Фазовый сдвиг выходного сигнала 1 относительно входного 3
непосредственно представлен на осциллограммах относительной
сf cf
длиной отрезка cf. (р ——-п в радианах или ^=—180 в градусах.
cd cd
Более точно фазовый сдвиг находят по соотношению показаний
ИД при подаче на его вход напряжения их для вертикальной
линейки, совмещенной с точкой f пересечения осциллограммой
выходного сигнала 1 горизонтальной оси 2 интервала гсу и icti
при «свободном» входе ИД: в радианах или <р = —180°
^cd Tcd
в градусах. При <р=+90° обе ветви выходной синусоиды со-
вмещаются в один график, при <р = 0° и (р— +180° точки излома g,
h совмещаются с концами с и d горизонтальной оси. Такие
особенности осциллограмм резко повышают чувствительность
и точность измерений как раз при тех величинах фазового сдвига,
которые особенно интересны для многих практических приложе-
ний.
Амплитуды измеряют, совмещая горизонтальную измери-
тельную линейку с вершиной входной 2' и выходной 2" сину-
соиды.
В качестве объекта исследования для начала можно выбрать
модель, показанную на рис. 3.27,а. Она преобразует входной
сигнал x(t) в выходной у ft) аналогично «интегрирующей»
АС-цепочке, в выходной y2(f) — аналогично «дифференциру-
ющей», в выходной y3(f) — аналогично мосту Вина. Последний
называют звеном равномерного пропускания или фазовращате-
лем. При изменении частоты входного сигнала х (Z) = .4 sin сП
амплитуда синусоиды на его выходе остается постоянной, а фазо-
вый сдвиг изменяется от —180 до 0°. Варьируя коэффициент
Усиления интегратора к, можно регулировать постоянную време-
ни моста т — 1/к и фазу выходного сигнала при постоянной
частоте входного.
На рис. 3.27,6 показана модель колебательного звена на двух
сменных блоках «интегратор» И1 и И2 и сумматоре служебного
блока. Его резонансная частота а>0 = у/к1к2. Особенности преоб-
разования входного сигнала х(у) в выходные у ft), уг(0 и j3(z)
Иллюстрируют показанные ниже ALC-цепочки. Собрав все вы-
ходные сигналы при помощи коммутатора, на экране индикатора
Можно получить изображение, показанное на рис. 3.27,в. По мере
приближения к резонансу следует уменьшать амплитуду вход-
ного сигнала до величины, при которой все выходные сигналы yt,
139
Рис. 3.27. Модели линейных объектов:
а — первого порядка; б — второго порядка; в, г — настройка резонатора; д.е — выделе-
ние резонатором из прямоугольного сигнала высших гармоник
У2 и Уз не превышают +10 В (светодиоды входного сумматора
и интеграторов не горят). Чтобы их амплитуды были примерно
одинаковы, при настройке резонансной частоты а>о = \А1^2 иаД0
поддерживать кл^к2.
Фазовый сдвиг выходного сигнала y2(t) относительно вход-
ного при резонансе равен нулю. Изломы на осциллограммах
входного и выходного сигналов при этом совпадают, а фигура
Лиссажу превращается в отрезок у = к х, наклон которого опреде-
ляется коэффициентом усиления при резонансе кй = Н((О(^. Вели-
чина Я(<д0) и острота резонанса зависят от потерь в колебатель-
ном звене, представленных в модели коэффициентом а. При
Я((Уо)-> оо.
140
Входной сигнал вместо левого сумматора удобно подавать на
одно из входных гнезд коэффициента b в блоке И1 (стрелка Хф на
рис. 3.27,6). Это позволит «тонко» регулировать общий коэф-
фициент усиления, не нарушая настроек резонансной частоты
и затухания звена. Собрав коммутатором на экране индикатора
осциллограммы входного %ф(0 и выходного у2(0 сигналов, мож-
но добиться резонанса и уравнять их амплитуды путем настрой-
ки коэффициента Ь (У2=х$ на рис. 3.27,в). В результате получится
резонансный фильтр с коэффициентом передачи на резонансной
частоте, равным единице.
Такой фильтр полезен для многих тонких исследований. Для
начала на вход Хф фильтра вместо синусоиды можно подать
прямоугольники и убедиться в том, что, во-первых, и в этом
случае имеет место резонанс, во-вторых, амплитуда синусоиды
на выходе фильтра в 4/л раз превышает амплитуду прямоуголь-
ников и, в-третьих, что фазовый сдвиг этой первой гармоники
равен нулю (рис. 3.27,г). Далее, уменьшая частоту прямоуголь-
ников, можно попытаться выделить фильтром высшие гармо-
ники и убедиться в наличии только нечетных гармоник, амп-
литуда которых убывает обратно пропорционально их номеру
(рис. 3.27 Де).
Рис. 3.28. Схема исследования спектра ШИМ-сигнала
Далее интересно исследовать спектр ШИМ-сигнала (рис. 3.28).
При х=0 коэффициент заполнения прямоугольных импульсов
У=/и/ Т= 1/2, и поэтому картина на экране индикатора будет
отличаться от предыдущего случая только фазовым сдвигом.
^Меньшая частоту входного сигнала, имеет смысл повторить
исследование спектра, обратив внимание на фазовые сдвиги гар-
моник. После этих подготовительных операций следует выделить
тРстью гармонику и попробовать изменить сигналом х коэф-
фициент заполнения у. При у = 1/3 амплитуда третьей гармоники
Убывает до нуля, а при у < 1/3 ее фаза меняется на противополож-
ную. Настроив поточнее у =1/3, следует исследовать спектр та-
кого сигнала. Такие исследования интересно повторить, задавая
Последовательно у =1/4; 1/5; 1/6 и т. д., и проверить эксперимен-
тальные результаты аналитически.
141
Так же наглядно и убедительно резонансный фильтр помогает
исследовать спектральный состав сигналов при различных видах
модуляции и демодуляции, изучать частотные характеристики
импульсных и цифровых систем и решать другие интересные
и достаточно сложные задачи.
Рис. 3.29. Приемы автоматизации исследований частотных характеристик
Рисунок 3.29 иллюстрирует некоторые приемы автоматизации
исследований частотных характеристик. Они основаны на воз-
можности управлять частотой системы сигналов ГСС внешним
сигналом, подаваемым на гнездо « f » ГСС при удаленной пере-
мычке. Управляющий сигнал удобно сформировать при помощи
схемы, включающей эталон Э, делитель Д и интегратор кр/р
второго АВК-6. Индикатор / использован для контроля по ос-
циллограмме выходного сигнала. Синхронные детекторы на пе-
ремножителях формируют сигналы, пропорциональные действи-
тельной Rc[ И7 (/to)] и мнимой Im[ IV (/со)] составляющим комп-
лексного коэффициента усиления W(jco), детектор на преобразо-
вателе mod — сигнал, пропорциональный модулю коэффициента
усиления | Bz(/to)|. Выходные сигналы детекторов сглаживаются
фильтрами низкой частоты с Нф (0) — 1 и (о^/=к, выполнен-
ными на сменных блоках «интегратор». Индикаторы или двухко-
ординатные самописцы 2—5 вычерчивают графики: 2 — Re И7;
3 — Im W; 4 — амплитудно-фазовую характеристику или годо-
142
граф Найквиста; 5 — АЧХ Н(а>). Система позволяет изучать как
сами характеристики, так и погрешности, являющиеся расплатой
за экономию времени на измерения.
Используя в качестве объекта уже знакомое колебательное
звено, можно, например, обнаружить неточности в изображении
его годографа, кочующие из одного учебника в другой и ставшие
уже традиционными.
Аналогичные принципы можно использовать для автоматиза-
ции анализа спектров и взаимосвязей сигналов.
3.7. ИССЛЕДОВАНИЕ ПЕРЕХОДНЫХ ПРОЦЕССОВ
Знакомство с приемами исследования переходных процессов
удобно начать, используя в качестве объекта исследования смен-
ный блок «интегратор». Мнемосхема его передней панели показа-
на на рис. 3.30,о.
Рис. 3.30. Сменный блок «интегратор»:
его передняя панель (а) и варианты обозначения преобразователя интегрирования (6, в)
Блок к позволяет регулировать коэффициент передачи сиг-
нала от 0 до 1 или от 0 до 10 в зависимости от установки
перемычки между левым и одним из двух правых гнезд 1 или 10.
Выходной сигнал блока к можно суммировать с сигналами,
подаваемыми на входы 2 и 3. Коэффициент b можно плавно
Регулировать от 0 до I. Выход сумматора соединен со входом
преобразователя «интегратор».
Преобразователь «интегратор» обозначен символом J или
соответствующим ему оператором Лапласа 11р. Установка пере-
мычки между гнездами 1 превращает этот блок в повторитель
сигнала. Установка же перемычки между нижним левым гнездом
и одним из трех правых 100, 10 или 1 задает временной масштаб
Интегратора ки. Верхнее гнездо соединяют перемычкой с выхо-
143
дом задатчика начального условия. Выход интегратора соединен,
с гнездами 5 и входами коэффициентов ап с, каждый из которых
можно плавно регулировать от —1 до +1. Выходные гнезда
4 коэффициента а расположены так, чтобы их удобно было
соединять стандартной перемычкой с входными гнездами 3 сум-
матора.
Расстояния между гнездами не позволяют соединять их не-
правильно стандартными перемычками, не деформируя послед-
ние «грубой силой».
Варианты упрощенного обозначения преобразователей одно-
го входного сигнала x(t) в один выходной y(t), реализуемых на
сменном блоке «интегратор», показаны на рис. 3.30,б,в. Если
надо показать суммирование двух входных сигналов, ОС, замы-
каемую перемычкой 3—4, или «ветвление» с применением коэф-
фициентов а и с для масштабирования или инвертирования сиг-
налов, используют более подробные схемы.
Схема 4 таблицы-справки (см. рис. 3.1) для исследования
переходных характеристик дополнена на рис. 3.31,о коммутато-
ром; объектом исследования является сменный блок «интегра-
тор». На его вход поданы прямоугольные импульсы, развертка
по горизонтали осуществляется треугольным сигналом. В пер-
вом такте на экрагге представлен выходной сигнал интегратора 1,
во втором — горизонтальная линейка 2, в третьем — сигнал 3 на
входе интегратора. В четвертом такте чуть позже можно сфор-
мировать измерительную линейку у = х (4).
Рис. 3.31. Исследование блока «интегратор»:
а — режимы интегрирования; б — вырьирование к и Т; в — изменение входного сигнала;
г — изменение коэффициентов а и с; д - - варьирование начальных условий
144
Переходные характеристики исследуют в режиме периодичес-
кого интегрирования — нажата клавиша 2 переключателя режи-
мов в ГСС. При этом в течение положительной полуволны
прямоугольных импульсов происходит интегрирование, а во вре-
мя второго полупериода — ввод начальных условий. Если гнездо
для ввода начального условия в блоке 1 / р свободно, то вводится
р0—0. Штриховой линией на графиках рис. 3.31,а показаны участ-
ки осциллограмм для второго полупериода — отрицательный
полупериод прямоугольников 3 и процесс установки начального
условия Г. Их гасят установкой перемычки между левым _Г“
и центральным Z гнездами блока «индикатор» в служебном
модуле.
Интегратор преобразует входной сигнал x(t) в выходной y(t)
I
в соответствии с соотношением y(/)=J’o + f Если x(t) =
t °
=£wml[Z], то y(t)=y0 + $kurndi=y(l+kumt и на экране появит-
ся наклонный отрезок. При уо=О он начинается из начала коор-
динат (Z—0, 7=0). Наклон зависит от амплитуды входной сту-
пеньки ит, коэффициента к и скорости развертки по горизонтали.
В конце такта интегрирования при Z=tK = 7y2, где Т— период
колебаний ГСС, y(tK)—kum Т/2. Рисунок 3.31,6 иллюстрирует
деформации графика при um —const и вариациях к и Т. Скорость
интегрирования имеет смысл выбрать максимальной, установив
в блоке l/р масштаб Аи= Г00. Тогда для «ступеньки» на входе
х,„=10 В (1 отн. ед.) в конце такта интегрирования y(tx)=10 В
(1 отн. ед.) при tK= 1/100 с, что соответствует частоте ГСС
/=1/Г=50 Гц, поскольку T=2tK. При такой частоте изображе-
ние на экране не мелькает и, варьируя коэффициент к, удобно
наблюдать, как зависит от к (левый блок на рис. 3.30,а) наклон
переходной характеристики h(t) интегратора (рис. 3.31,6). Со-
вместив правый конец отрезка y(tK) с концом графика + uw
и варьируя величину ит, удобно наблюдать деформацию графи-
ка у (г) в зависимости от ит (рис. 3.31,в). Выставив максимальные
значения к и ит, следует познакомиться с возможностями коэф-
фициентов а и с (рис. 3.31,г). Горизонтальные участки графиков
ya(t)=ay(t) и yc(t)=cy(t) соответствует насыщению ОУ интег-
ратора, о чем можно судить также по свечению светодиодов.
Перемычка между выходным гнездом задатчика начального
Условия и верхним гнездом в блоке 1/р позволит варьировать
начальное условие Уо-У(^) (рис. 3.31,6). Сформировав в четвер-
том такте график у—х, можно использовать его для измерения
коэффициента к. При помощи начального условия начало осцил-
лограммы у (z) совмещают с левым концом отрезка у—х, а затем
совмещают оба эти отрезка, варьируя частоту ГСС. Если амп-
145
литуды треугольников и входной ступеньки составляют 10 В, то
k= \/tK, где tK=T/2 — показания измерителя длительности, мс.
Освоившись с интегрированием ступеньки, интересно проин-
тегрировать синусоиду, косинусоиду и треугольники, проверяя
в каждом случае экспериментальный график аналитическим рас-
четом. Вернувшись к ступеньке на входе, полезно изучить, как
деформируют переходную характеристику интегратора с ОС ва-
риации коэффициента а, и убедиться аналитически, что вращение
этой ручки перемещает корень характеристического уравнения
2 + а — 0 или полюс передаточной функции И7(р) = 1 + а) по
отрезку (—1; +1) действительной оси комплексной плоскости
(<т,ую).
Механическим аналогом может быть одномерное движение
материальной точки массы т=\)к под действием сил тяги
= и трения/Тр (t) = д г (г), причем трение может быть как
«обычным» (— так и «отрицательным» (0<«<1).
Рис. 3.32. Исследование системы второго порядка:
а — схема исследования; б — измерение амплитуды первого выброса; в — измерение
времени; г — измерение затуханий; д — «растяжка» осциллограммы
Далее к выходу первого интегратора надо подключить второй
и подготовиться к одновременному наблюдению осциллограмм
их выходных сигналов (рис. 3.32,о). В первом такте на экране
индикатора представлена сила w(z), действующая на точку мас-
сой т и создающая ускорение w (/) = к и (f)=-—u(t), во втором —'
t т
положение точки у(0~Уо + fв четвертом — ее скорость
о
146
v(t)=y(О=Уо + f и'(т)с/т. Третий такт использован для формиро-
о
вания оси x=t или горизонтальной измерительной линейки
у = Еу. Осциллограммы соответствуют равноускоренному движе-
нию точки (я=0и/)=0) при отрицательной начальной скорости
г(0)=у(0)<0 и начальному положению .у(О)=у(О) = О. Варьируя
а при 6 = 0 и наблюдая деформации осциллограмм, полезно
сопоставлять их с понятными особенностями движения при нали-
чии трения.
Если два интегратора охватить общей ОС то получит-
ся модель маятника (см. рис. 3.27,6). При отрицательной ОС
модель представляет обычный маятник, при положительной —
перевернутый. Эти наглядные аналоги удобно использовать для
интерпретации осциллограмм, наблюдаемых на экране индика-
тора.
Для измерения амплитуды колебаний используют горизон-
тальную линейку (рис. 3.32,6). Чтобы измерить поточнее время
максимума tm, осциллограмму полезно «растянуть» изменением
частоты ГСС, как показано на рис. 3.32,в. Более точно можно
измерить затухание и период колебаний, пользуясь осциллограм-
мой скорости (рис. 3.32,г). Выбором частоты ГСС эту осцилло-
грамму можно растягивать, как показано на рис. 3.32,6. Для
осциллограммы 1 измеритель длительности покажет время tm,
для осциллограммы 2 — период колебаний Тк. Точность измере-
ний позволяет обнаружить отличие собственной частоты колеба-
ний в переходном процессе Ю1 = со0х/1 — Е2 от частоты сом =
= й)Ох/Т— 2£2 максимума амплитудно-частотной характеристи-
t п I п 1 1 ^1 а
ки, где £ = /?/«0, In
Режим 2 периодического интегрирования с заданием началь-
ных условий обеспечивает тождественность модельного матема-
тического эксперимента аналитическому расчету. Вместо прямо-
угольных импульсов можно использовать в качестве входного
сигнала постоянное напряжение или любые другие сигналы, сфо-
рмировав их средствами АВК-6.
В режиме непрерывного интегрирования (нажата кнопка
1 ГСС) на экране индикатора видна реакция модели на последо-
вательность прямоугольных импульсов. При движении луча ин-
дикатора слева направо развертывается реакция на положитель-
ный перепад входного сигнала, при движении луча справа нале-
во — на отрицательный. Пример изображения на экране ин-
дикатора показан на рис. 3.33,а. Если представляет интерес лишь
°дна из половин осциллограммы, то вторую часть можно пога-
сить, установив перемычку между Z-входом индикатора и одним
Из гнезд _Г или ~1_ (рис. 3.33,б,в).
147
Рис. 3.33. Управление яркостью луча:
а — гашение отсутствует; б — погашен обратный ход луча; в — погашен прямой ход луча
Режим 1 моделирует ситуацию, возникающую при исследова-
нии средствами ИИС АВК-6 реальных объектов и систем. Они
«сами» «описывают себя» дифференциальными уравнениями
и «сами» их «решают» в режиме «непрерывного интегрирова-
ния». Поэтому, используя АВК-6 для уподобления реальному
объекту его теоретической модели, последнюю надо ставить в те
же условия, которые свойственны самому объекту.
3.8. ИССЛЕДОВАНИЕ ФАЗОВЫХ ТРАЕКТОРИЙ
Чтобы получить на экране индикатора фазовую траекторию,
выходной сигнал объекта или модели надо подать на вход X ин-
дикатора, а его производную — на вход Y (схема 6 таблицы-
справки на рис. 3.1). На рис. 3.34,а показана схема для изучения
метода фазовой плоскости применительно к анализу движения
материальной точки (§3.7). Выходная переменная у (Z) — положе-
ние. 3.34. Исследование фазовых траекторий:
схема исследования (о), примеры фазовых траскторий для о<0 (б) и а>0 (в)
148
ние точки; у (z)=?(«) — ее скорость. Чтобы иметь возможность
задавать произвольные начальные условия j(O)=jo и у(О)=ро,
используют режим периодического интегрирования — нажата
кнопка 2 ГСС. При отсутствии трения <7 = 0. Коэффициент к—\1т
представляет закон Ньютона, описывающий преобразование си-
лы u(t) в ускорение точки y(t)=—u(t).
т
Изучение фазовых траекторий удобно начать с полезных пра-
ктических случаев, когда сила может принимать только значения
u(t)=+um; u(t)=—unt и u(Z) = 0. Значение +ит можно задавать
прямоугольными импульсами ГСС, как показано на рис. 3.33.
Удобно также просто поочередно подавать на вход модели соот-
ветствующие сигналы от эталонов.
Для и (z) — + ит ускорение у (Z) = к ит, скорость у0 (Z) =
Г
=j’o + fr(T)^T=J'o + ^wni/, перемещение (положение) ^(0—Го +
’ ° z*
+iy(j)dT=y0+y()t+kurn~.
Соотношения для y(t) и у (Z) задают на плоскости (у; у),
кривую y=f(y) — параметрически, через параметр Z. Для этого
случая легко исключить параметр z и получить аналитическое
выражение для фазовой траектории. Это полезно делать, рас-
сматривая осциллограммы фазовых координат j(Z) и y(z) при
помощи схемы на рис. 3.32,а и «сворачивая» их в фазовые траек-
тории при помощи схемы на рис. 3.34,а. Для получения устой-
чивых изображений используют ускоренный временной масштаб
(А'и=100). Чтобы при этом наблюдать, как развертывается фазо-
вая траектория во времени, варьируют частоту периодизации,
задаваемую ГСС. На графиках в обозначении индикатора на рис.
3.34,п направления движения изображающей точки по фазовой
траектории показаны стрелками.
Варьируя коэффициент а, интересно наблюдать, как изменя-
ются фазовые траектории в зависимости от характера трения
(«нормального» или «отрицательного») и от коэффициента тре-
ния. Траектории для t/(Z)= + ит при а<0 показаны на рис. 3.34,6,
при о>0 — на рис. 3.34,в.
В схеме на рис. 3.35 коммутатор использован для совмещения
изображений фазовой траектории 1 с осциллограммой одной из
фазовых координат 2 и осями координат 3 и 4, которые при
подаче напряжений Ех и Еу на соответствующие входы можно
Использовать в качестве вертикальной и горизонтальной измери-
тельных линеек. Объектом исследования является модель систе-
мы второго порядка в общем случае. Варьируя коэффициенты
° и Ь и начальные условия, можно полюбоваться фазовыми
траекториями для всех типов особых точек для свободного
149
Рис. 3.35. Использование коммутатора для совмещения изображений фазовых
и временных траекторий
(и (/) = 0) и вынужденного движения. Особенно интересно наблю-
дать переходы фазовых траекторий одного типа в другой при
плавном изменении знака коэффициентов а и Ь.
Рис. 3.36. Исследование особой точки типа «устойчивый фокус»:
о — фазовая траектория; б — измерение координат точки А; в — измерение времени
На рис. 3.36,а показан вид фазовой траектории для особой
точки типа «устойчивый фокус». Рисунок 3.36,6 иллюстрирует
измерения координат точки А (хА, уА) этой фазовой траектории.
Чтобы измерить еще и время tA от начала движения до точки А,
нужно, не меняя настроек Ех и Еу, уменьшать время решения
(увеличивать частоту ГСС) до тех пор, пока фазовая траектория
не будет оканчиваться точно в точке А (рис. 3.36,в). В этом случае
измеритель длительности покажет время tA.
3.9. ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК СЛУЧАЙНЫХ ПРОЦЕССОВ
К основным характеристикам случайных процессов относятся
функции распределения и плотности распределения вероятностей,
математическое ожидание и дисперсия, корреляционная и авто-
корреляционная функции, спектральная плотность. В математи-
ческих определениях этих характеристик используется усреднение
на бесконечном интервале изменения соответствующей пере-
менной.
150
2
р -
“с. 3.37. Исследование алгоритмов обработки случайных процессов:
о — математического ожидания и дисперсии; б — функций распределения и плотности
Распределения вероятностей, корреляционной функции и спектральной плотности
151
На практике приходится довольствоваться конечным набо-
ром реализаций и ограниченным временем регистрации сиг нала,
что заставляет пользоваться оценками характеристик случайных
процессов, полученными при усреднении по ограничсннсму числу
реализаций или конечному времени регистрации процесса.
На рис. 3.37 приведены примеры структурных моделей некоч
то'рых алгоритмов обработки случайных процессов и исследова-
ния на АВК-6 их возможностей и ограничений при практическ»
применениях.
Рисунок 3.37,а посвящен исследованию на АВК-6 алгоритмов
получения оценок математического ожидания тх и дисперсии Dx
процесса х (?) в случае, когда для усреднения используют простей-
шие фильтры первого порядка. Рисунок 3.37,6 иллюстрирует
приемы исследования на АВК-6 алгоритмов получения функций
распределения Fx(X) и плотности распределения fx(X) гмплиту
ды сигнала, графики функций выведены на индикатор И2. Резуль-
таты моделирования алгоритмов получения оценок автокорреля-
ционной функции 7?х(т) и спектральной плотности Sx(<o) ппед-
ставлены в графической форме на экране индикатора 773. Для
развертки по осям X индикаторов удобно использовать треуголь-
ный сигнал генератора ГСС АВК-6 (рис. 3.37,а); если необходима]
очень медленная развертка, используют генератор Г блока слу-
чайных сигналов (рис. 3.37,6).
Глава 4
ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ
4.1. Моделирование задач о баках
На рис. 4.1 представлен отчет о моделировании процессов
заполнения и опорожнения баков одинаковой емкости, но раз-|
личной формы. Результаты упорядочены в виде таблицы — «мат-
рицы», имеющей три вертикальных столбца и шесть горизон-1
тальных рядов-строк.
В верхнем ряду 1 представлены эскизы баков — вертикаль-
ного цилиндра 1.1, воронки 1.2 и цистерны 1.3. Рядом с эскизами
баков показаны их градуировочные характеристики — графики
зависимости уровня жидкости h от ее количества в баке Q.
В ряду 2 показаны структурные модели для формирования
средствами АВК-6 необходимых нелинейных зависимостей — за-
висимости v = Nv(h) скорости истечения v от уровня жидкости h,
описываемой формулой Торричелли v — ,j2gh (2.1), и регулироН
вечных характеристик h = Nh (Q) для воронки (2.2) и для цистерны
(2.3). Для воронки эту зависимость несложно описать аналити-
чески соотношением h = ^fQ, а для цистерны использована прй-
152
Рис. 4.1. Исследования процессов заполнения и опорожнения баков
153
Сниженная кусочно-линейная аппроксимация при помощи блока
«нелинейность».
В ряду 3 представлены результаты моделирования соответст-
вующих нелинейностей.
Осциллограммы ряда 4 представляют процессы заполнения
соответствующих баков с открытым сливным отверстием для
четырех значений расхода поступающей жидкости ^! = 0,25; 0,5;
0,75; 1,00. Графики 1—4 — зависимость от времени объема
жидкости Q, h\ — h4 — уровня h. Для бака 1 уровень пропор-
ционален объему жидкости, и для принятых масштабов перемен-
ных графики h (t) совпадают с соответствующими им графиками
Q(t). Там же показаны графики заполнения этого бака при
закрытом сливном отверстии Г—4' и графики небаланса рас-
ходов А#(<). Эти дополнительные графики полезны для проверки
правильности масштабирования и наглядной оценки особенно-
стей изучаемых процессов. В частности, сравнение графиков
A<?(z) обнаруживает, что время установления уровня увеличива-
ется с ростом расхода </i = par и соответствующего ему устано-
вившегося уровня h (оо). Ту же общую закономерность обнаружи-
вают и осциллограммы 4.2 для воронки и 4.3 для цистерны.
Сравнение графиков 4.1—4.3 показывает, что при одинаковом
расходе q\ во всех баках устанавливается одинаковый уровень
й(оо) = <7*, но соответствующие *ему объемы жидкости в различ-
ных баках не одинаковы, кроме значения = для которого
<2(оо)=1,0 и й(оо)=1,0. Графики 4.1—4.3 выявляют также ин-
тересные особенности динамики заполнения баков различной
формы.
Прежде чем переходить к следующим двум рядам осцилло-
грамм, стоит поразмыслить над следующей задачей: при /=0
в баках запасено одинаковое количество жидкости, при />0
жидкость свободно вытекает через одинаковые сливные отвер-
стия в днищах баков. Какой из них опорожнится первым, а ка-
кой — последним?
Осциллограммы в рядах 5 и б дают и объясняют ответ на этот
вопрос. Они зафиксированы для одинакового ряда начальных
значений объема жидкости (7(0) = 0,25; 0,5; 0,75; 1,0.
В ряду 5 показаны осциллограммы, отражающие изменение
количества жидкости Q и уровня h в зависимости от времени t.
Для бака 1 (осциллограммы 5.1) при принятых масштабах пере-
менных, как и на графиках 4.1, Q(t)=h(t). Осциллограммы для
скорости истечения жидкости «(г) на графиках 5.1 обнаружи-
вают неочевидную на первый взгляд линейную зависимость ско-
рости v от времени t. Из воронки 2 (графики 5.2) больший объем
жидкости успевает вытечь при большем уровне и, соответствен-
но, при большей скорости истечения жидкости. Графики 5.3 ДЛЯ
цистерны 3 предоставим читателю осмыслить самостоятельно.
154
Рис. 4.2. Термодинамические процессы в электрической лампочке накаливания
155
В ряду 6 совмещены осциллограммы g(0 (6J), Л (г) (6.2), v (t)
(6.3) для различных баков. Цифрами на них отмечены осцилло-
граммы для бака 1, воронки 2 и цистерны 3 соответственно. Из
графиков 6.1—6.3 видно, что воронка опорожнится первой, а вер-
тикальный бак 1 — последним. Одновременно осциллограммы
для цистерны обнаруживают невысокое качество кусочно-линей-
ной аппроксимации ее регулировочной характеристики.
Имея перед глазами результаты моделирования, стоит прове-
рить их аналитически и затем убедиться в правильности теории
путем несложных натурных экспериментов с реальными ворон-
ками и баками.
4.2. ТЕРМОДИНАМИКА ЭЛЕКТРИЧЕСКОЙ ЛАМПОЧКИ
На рис. 4.2 воспроизведены схема натурного эксперимента по
исследованию термодинамических процессов в электрической
лампочке (а) и структурная математическая модель (6) из § 1.2.
Схема для проверки и настройки нелинейности />изл=<т04 на
рис. 4.2,в, где Г — генератор треугольного сигнала; х — два
блока перемножения; К — электронный коммутатор и И —- элек-
тронный индикатор или самописец, позволяет наблюдать или
записать графики (рис. 4.2,г): у\ = х, Уг=х2, Уз=х3 и у4 = х4. Гра-
фик у3=х3 получается при замкнутых перемычкой гнездах 1—2,
а график у4 — х4 в положении перемычки 2—3. Это переключение
можно осуществить автоматически, при помощи двух свободных
полей коммутатора. Такой набор графиков на экране индикатора
позволяет проверить точность моделирования нелинейностей.
Точка пересечения графика нелинейности с графиком прямой
y'i=x соответствует относительным значениям входной х и вы-
ходной у переменных, которые разумно принять за 1 или 100%.
Для АВК-6 за 100% удобно принять 10,000 В. Схему на рис. 4.2,в
следует использовать для контроля и, при необходимости, кор-
рекции нелинейной характеристики при помощи коэффициентов
усиления, которые на этой схеме не показаны.
Далее оси х и у графика у=у4(х) размечают непосредственно
в единицах физических переменных — точно так же, как это
делают при построении аналогичного графика вручную. Пере-
менная х представляет температуру нити лампочки 6, и поэтому
отметке 1 па оси х имеет смысл поставить в соответствие круглое
значение температуры, близкое к температуре плавления вольф-
рама (3380° С), например 3000 К. В этом случае приращению
машинной переменной в 1 В соответствует приращение темпера-
туры 300° С, а начало отсчета совпадает с абсолютным нулем.
Отметке 1 на оси у надо поставить в соответствие мощность,
отводимую излучением при 0=3000 К. Соотношение <гл = Ризл/^
определяет числовое значение коэффициента дл = S а для конкрет-
156
ной лампочки через постоянную Стефана—Больцмана
<7=5,67 • 10-’ Вт • м~2 • К-4 и излучающую поверхность нити S,
а также выбор масштаба по оси у.
Настроив нелинейный функциональный преобразователь
Ризл = Далее следует подобрать коэффициент а модели,
представляющий отвод тепла от нити вследствие теплопровод-
ности. Это удобно сделать по температуре, для которой мощ-
ности, отводимые вследствие теплопроводности и излучения,
одинаковы, и контролировать результат по точке пересечения
графиков Рюл — А'изл(0) и Рг = ад.
Коэффициент к=1 /(тс) можно рассчитать по известной мас-
се т и теплоемкости с нити. Можно поступить и по-другому —
выбрать для начала какое-нибудь удобное для моделирования
и наблюдения осциллограмм значение этого коэффициента, на-
пример к= 100, получить временные графики и уточнить значение
к по их соответствию физическому изменению светового потока
при включении и выключении лампочки.
На рис. 4.2,д приведены такие графики для включения лам-
почки при /=0 и выключения ее при t = to, на рис. 4.2,е показана
статическая характеристика, представляющая зависимость уста-
новившейся температуры нити в от рассеиваемой в ней элект-
рической мощности P=UI. Характеристика обратна зависимо-
сти суммарной мощности, отводимой от нити излучением и теп-
лопроводностью Ротв = Ризл + Рг = <тл в4 4- а в. Семейство осцилло-
грамм на рис. 4.2,д показывает, что с увеличением подводимой
мощности температура устанавливается быстрее из-за быстрого
увеличения теплоотвода излучением.
На рис. 4.2,ж показано семейство осциллограмм, представля-
ющих зависимость излучаемой мощности от времени при вклю-
чении лампочки при t—0 и выключении при t=tQ. С уменьшени-
ем подводимой мощности излучение быстро уменьшается, а пе-
реходный процесс затягивается — при пониженном напряжении
лампочки медленно «разгораются» при включении, а постепен-
ное потухание нити становится более заметным. Для осцилло-
граммы температуры 5 (рис. 4.2,Э) мощность излучения меньше
порога, при котором оно становится видимым (см. график на
рис. 4.2,г), и поэтому соответствующая ему осциллограмма на
рис. 4.2,ж отсутствует (совпадает с осью t). Суммарная отводи-
мая мощность Ротв, естественно, в точности равна рассеиваемой
в нити электрической мощности Р (рис. 4.2,з).
4.3. ТОРМОЖЕНИЕ
На рис. 4.3 приведены графики изменения скорости v (t) = x(t)
(о), перемещения x(t) (б) и фазовые траектории v — v(x) (в) при
замедлении движения объекта, представленного моделью в виде
157
Рис. 4.3. Моделирование торможения для «сухого трения» (а), линейного (б)
и квадратичного (в) сопротивления движению
материальной точки массой т (см. § 1.3). Если это автомобиль, то
его начальную скорость гп = х(0) можно погасить, начав при z=0
давить на педаль тормоза с постоянной силой, в результате чего
возникнет тормозящая сила/т = const. В процессе равнозамедлен-
ного движения скорость v (t) убывает по линейному закону (гра-
фик 1 на рис. 4.3,а), а пройденный путь возрастает по параболе
(график 1 на рис. 4.3,6). Фазовая траектория также представляет
собой параболу 1 (рис. 4.3,в). При t = tK скорость v(zK) = 0 —
автомобиль остановится, пройдя за время торможения ZK путь хк
(рис. 4.3,б,в).
Графики 2 соответствуют случаю, когда сила сопротивления
линейно зависит от скорости, т. е. убывает пропорционально
уменьшающейся скорости. Такой режим торможения можно осу-
ществить, постепенно отпуская педаль тормоза; он возникает
естественным образом при торможении троллейбуса или поезда
метро переключением их двигателей в режим торможения. Ско-
рость убывает по экспоненте v(z)—voe~‘/T, а пройденный путь
нарастает, приближаясь асимптотически при z-»co к величине хэ.
Поскольку обе переменные v (z) и x(z) изменяются экспоненциаль-
но, фазовая траектория представляет собой прямую, которая при
Z—>со заканчивается в точке (v = 0, х—хэ).
Графики 3 представляют замедление корабля после выключе-
ния двигателя при z = 0, двигавшегося в этот момент с начальной
скоростью г(())=г’0 = л'0. Скорость убывает медленнее, чем при
экспоненциальном торможении, а пройденное расстояние при
Z—»со неограниченно возрастает, что наглядно показывает вид
фазовой траектории 3 на рис. 4.3,в. Разумеется, это не оправдыва-
ет капитанов, слишком поздно отдающих команду «стоп-маши-
158
ра» и позволяющих своим кораблям врезаться в причалы или
л другие корабли.
Для удобства сравнения начальная скорость и начальное зна-
чение сил сопротивления при моделировании были выбраны
сдянаковыми.
Фазовая траектория 1 представляет интуитивный закон управ-
ления, в соответствии с которым в зависимости от скорости
движения определяют расстояние до линии «стоп», на котором
еще имеет смысл тормозить при переключении светофора на
красный свет.
4.4. ДВИЖЕНИЕ ПАРАШЮТИСТА И НЫРЯЛЬЩИКА
На рис. 4.4,а,б приведены результаты моделирования движе-
ния парашютиста. Цифрой 1 отмечены высота x(t) и скорость
v (0 для случая свободного падения, 2 — аналогичные графики
прыжка с уже раскрытым парашютом. На рис. 4.4,6 горизонталь-
ные. 4.4. Моделирование движения парашютиста (а, 6) и ныряльщика (в, г, д)
159
ные линии 7—5 отмечают высоту, на которой раскрывается’
парашют. Теми же цифрами отмечены соответствующие графики
зависимости высоты х и скорости v от времени t. Представлены
также осциллограммы силы fc, прикладываемой к парашютисту
лямками парашюта. Из графиков видно, как с увеличением вр<.
мени свободного падения возрастает импульс силы, встряхива-
ющий парашютиста при раскрывании парашюта. Графики позво-
ляют оценить запас высоты, требующийся для гашения скорости
спуска до безопасной величины.
Графики на рис. 4.4,в—д представляют движение ныр илыци-
ка. На осциллограммах рис. 4.4,в ясно различаются участки,
соответствующие свободному падению, входу в воду, сопровож-
дающемуся резким ростом силы гидродинамического сопротив-
ления fc и общей силы которая вызывает быстрое уменьшение!
скорости v, и, наконец, последний интервал соответствует пассив-
ному всплытию под действием силы Архимеда =fA—Р. Осцил-
лограммы позволяют оценить перегрузку, испытываемую^
спортсменом при входе в воду и запас глубины, обеспечивающий
его безопасность.
На рис. 4.4,г скорость развертки по оси времени уменьшена
примерно втрое, и поэтому видно, как спортсмен всплывает
и показывается над поверхностью воды. Выталкивающая сила
при этом убывает, а сила притяжения сообщает ему отрицатель-
ную скорость. Спортсмен вновь погружается, выталкивающая
сила опять возрастает, постепенно гасит отрицательную скорость
и сообщает ему положительную скорость, в результате чего часть
тела спортсмена вновь оказывается на некоторое время над
поверхностью воды.
На рис. 4.4,д скорость развертки уменьшена еще втрое. Видно,
как медленно затухают колебания. Такое движение, правда, ско-
рее свойственно пассивному поплавку, чем активному спорт-
смену.
4.5. МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ШАРИКА ДЛЯ
ПИНГ-ПОНГА
На рис. 4.5 воспроизведены расчетная схема (а), структурная
. модель динамических процессов (в), зависимость силы упругости
от высоты шарика над поверхностью стола fr = NT(&y) представ!
лёна графиком нелинейности (б) и приведены результаты модели!
рования его движения (графики г, д, е, ж).
На графике г совмещены осциллограммы всех переменный
которые ниже представлены отдельными осциллограммами: си-
лы f(t) (<Э), скорости v (Г) (ё) и высоты над поверхностью стола у (О
(ж). Импульс силы имеет вид полупериода синусоиды. Он быст-
ро гасит накопленную шариком при падении отрицательную
скорость и сообщает ему такую же положительную скорость
160
Рис. 4.5. Моделирование движения шарика для пинг-понга:
расчетная схема (о), график нелинейности (6), структурная модель (в) и осциллограммы
движения (г—ж)
поскольку в модели принято, что потери при ударе отсутствуют.
Из осциллограмм видно, что шарик прыгает в безвоздушном
пространстве, поскольку нет потерь и при его движении над
поверхностью стола амплитуда импульса силы, максимальная
скорость и высота отскока остаются постоянными.
Наблюдая осциллограммы движения шарика для пинг-понга,
можно усмотреть в нем аналогию движения «попрыгунчика»-ро-
бота по поверхности Фобоса — спутника Марса. Для аналогич-
ного устройства на поверхности Марса, Земли или Венеры надо
Учесть сопротивление движению со стороны атмосферы, смоде-
лировав соответствующую зависимость силы сопротивления fc
ОТ скорости vy нелинейностью fc = Nc(vy)-
Нелинейность fc=avlv] превращает математическую модель
Движения шарика для пинг-понга в модель воланчика для бад-
минтона. Чтобы смоделировать движение мячика, потерю энер-
гии при ударе можно учесть дополнительной ОС с выхода нели-
нейности Nr на вход второго интегратора.
161
6517
В дизельном копре для забивки свай потерю энергии при
ударе компенсирует энергия взрыва в цилиндре. Силу взрыва
можно промоделировать еще одной нелинейностью NB, включив
се между выходом преобразователя NT и прямым входом левого
сумматора.
4.6. МЕХАНИЧЕСКИЕ МАЯТНИКИ
На рис. 4.6 приведены осциллограммы скорости (а—в) и фазо-
вые траектории (г—ё) маятников, отличающихся друг от друга
зависимостью fc = Nc(v) силы сопротивления движению fc от
скорости V. Графики а и г соответствуют квадратичной зависимо-
сти силы от скорости — маятник погружен в жидкое масло или
Рис. 4.6. Движение механических маятников для квадратичного (а, г) и линейного
(6, д) сопротивления движению и для «сухого трения» (в, е)
спирто-глицериновую смесь, а графики б и д — «линейному»
маслу.
В маятнике, движение которого представлено осциллограм-
мой в и фазовой траекторией е, имеет место «сухое трение».
162
yf(O=/Los*gn{t’(O}- Начальное значение силы сопротивления
/•(0)—Л(г(0)] Для всех трех случаев принято одинаковым. Ос-
циллограммы рис. 4.6,а—в интересно сравнить с осциллограм-
мами торможения материальной точки на рис. 4.3 и объяснить
результаты такого сопротивления. Это мы предоставляем сде-
лать читателю самостоятельно.
Освоив моделирование на простых примерах и проверив ана-
литически правильность получаемых результатов, можно услож-
нять задачи.
Рис. 4.1. Расчетная схема (а) и структурная модель (б) маятника, вращающегося
в вертикальной плоскости
На рис. 4.7,о показана «кинограмма» движения маятника
в виде материальной точки массой т, закрепленной на невесомом
несгибаемом стержне длиной 7, который может свободно вра-
щаться в вертикальной плоскости вокруг точки 0. Для различных
Углов отклонения маятника (р показано формирование силы
f-mgsinep, стремящейся вернуть его к положению равновесия.
Правее показана структурная модель (б), в цепь ОС которой
включен соответствующий функциональный преобразователь.
Удобно воспользоваться блоком «умножение-деление» или «ум-
ножение» и аппроксимировать синусоиду функцией у~х—х|х|
Ча интервале — (рис. 4.8,а). Варьируя начальные условия
% и <р0 при fx=0, по осциллограммам a>(t) и <p(t) и по фазовой
Траектории <д = <»(<р) интересно наблюдать, как изменяется дви-
жение маятника (рис. 4.8).
163
1.Э-
На рис. 4.9 показано использование маятника в качестве
задатчика и измерителя момента нагрузки, прикладываемого
к валу двигателя при исследовании его механической характери-
стики <Уд=с«д(Л/н). Шкивы на валу двигателя 7 и на оси качания
маятника 2 охвачены пассиком. Натяжение пассика определяет
момент трения, который приложен к валу двигателя и измеряется
по углу отклонения маятника. На структурной модели (рис. 4.9,6)
показано, что момент трения Л/тр является нелинейной функцией
от разности скоростей Д а> маятника <о и двигателя а>д. График
AfTp = 7VC0(Aa>) отражает, что момент трения покоя превышает
момент трения при скольжении Мс=аТ, где а — коэффициент
трения и Т — натяжение пассика. Для начала можно принять
у = jVjp (<р) = sin и обойтись без нелинейности Nv. Варьируя
скорость (Уд, интересно наблюдать возникновение незатухающих
колебаний и зависимость их параметров от скорости сод и особен-
ностей характеристики
Некоторые результаты показаны на рис. 4.9,в. Для нижнего
графика сод = 0, колебания быстро затухают. С увеличением сод
амплитуда увеличивается. На фазовых портретах хорошо виден
устойчивый предельный цикл. На четвертом снизу фазовом пор-
трете можно рассмотреть траектории, близкие к неустойчивому
предельному циклу. Верхние графики соответствуют границе ш*,
за которой колебания затухают. Предельный цикл называют
полуустойчивым. Фазовая траектория внутри него обнаруживает,
что «сухое» трение при солху* как бы исчезает — затухание
колебаний определяется только затуханием самого маятника.
Интересно изучить преобразование постоянной энергии в виде
вращения вала двигателя со скоростью <уд под нагрузкой Мтр
в переменную энергию колебаний маятника. При определенных
соотношениях параметров эта модель начинает представлять
скрип пера по стеклу или колебания скрипичной струны при
движении по ней смычка. В графике зависимости Мтр =
можно усмотреть аналогию с ВАХ туннельного диода или друго-
го активного элемента с «отрицательным сопротивлением»,
а в маятнике — аналогию с колебательным контуром. Таким
образом, структурная модель рис. 4.9 позволяет дать наглядное
Толкование и промоделировать на АВК-6 целую серию нетриви-
альных процессов возбуждения колебаний.
Расчетная схема на рис. 4.10 представляет хорошо знакомые
качели. Это тоже маятник, амплитуду колебаний которого мож-
но изменять при помощи внешней силы или ее момента M(f)
либо научиться самому вовремя приседать и распрямляться,
варьируя тем самым параметр I — длину математического маят-
ника. Структурная модель качелей — объект левее и ниже штрих-
пунктирной линии — отличается от предыдущих блоком х —
«перемножение», который формирует возвращающий момент
как A/B(z) = 7(t)/(0, где l(t) = l0 + Д7(Г) — длина маятника;
165
Рис. 4.9. Маятниковый измеритель момента (а), его структурная модель (б)
и результаты моделирования (в):
фазовые траектории, ochmjluoi раммы скорости а> (/) и участок нелинейной характеристи-
ки ^.=jV<u(A<o), участвующий в возбуждении колебаний для различных <од=раг
166
Рис. 4.10. Качели (я) и структурные модели (б и в), описывающие параметрическое
управление колебаниями.
При определенном фазовом сдвиге переменной &l(t)=a, sin (2а>0 (+</>) («сигнал накачки»)
амплитуда колебаний маятника возрастает (г, д), для противоположной фазы — затухает (е).
«Восьмерка» (ж) — траектория о(Д/). .v(/)=azsin2a>0r, у (() = «>(() = Л sin <uoz для системы,
в которой «накачка» &l(t) компенсирует потери в осцилляторе
fit)=mg sin ip(t) — знакомая по предыдущим примерам возвра-
щающая сила. Управление представляет в виде блока ЗУ (закон
Управления) набор правил, в соответствии с которыми принима-
ют решения о подталкивании качелей внешним моментом М (/)
и о приседании Д/(() в зависимости от состояния объекта — угла
отклонения <р (Г) и скорости со (О качелей.
Модель качелей позволяет поставить на АВК-6 целый цикл
интересных, нетривиальных и вполне практических исследований.
167
При /(/) = /0=const можно изучать резонансные явления для раз-
личных случаев внешнего воздействия M(f) в зависимости от
формы, частоты и фазы синусоидальных и импульсных воздейст-
вий. Далее интересно перейти к изучению параметрических спосо-
бов управления колебаниями. Формируя вариации параметра
Д2(/) как функцию от <p(f) и со(/) при помощи нелинейных функ-
циональных преобразователей, удобно изучать явления парамет-
рического усиления и возбуждения колебаний. Для изучения энер-
гетики параметрических систем модель несложно дополнить бло-
ками для расчета подводимой и рассеиваемой мощности. Вместо
псремножителя можно использовать делитель, как показано на
рис. 4.10,в. Если же целью исследований является изучение «тон-
ких» отличий параметрической системы от «обычной» с постоян-
ными параметрами, псремножитсль имеет смысл включить па-
раллельно блоку к. Усилитель к при этом будет определять
свойства системы соответственно постоянной составляющей па-
раметра 10, а перемножитель — учитывать только его вариации
Дф).
4.7. ПЕРЕВЕРНУТЫЙ МАЯТНИК
Решив стать человеком, обезьяна встала на задние ноги
и освободила руки для палки и математического моделирования.
Тем самым она «подкинула» человеку задачку о стабилизации
стоящего на двух ногах неустойчивого маятника, и человеку
пришлось научиться ее успешно решать. Анализируя сигналы
встроенных датчиков отклонения от вертикали, его внутренний
персональный процессор рассчитывает сигналы управления ис-
полнительными органами, обеспечивая устойчивость системы.
Работу ее, как, впрочем, и всех других автоматических систем,
мы не замечаем до тех пор, пока они исправны.
Артисты цирка нарочно усложняют эту задачку -— ходят по
канату, лазят по свободно стоящим лестницам, катаются на
одном колесе или балансируют па нескольких скрещенных ци-
линдрах. Любуясь искусством артистов цирка, один из которых
удерживае г па голове шест, а второй стоит па голове на верхнем
конце шеста, имеет смысл поразмыслить над математической
формализацией объекта в виде двух неустойчивых двумерных
маятников, один из которых опирается на второй, и прикинуть,
в чем состоит математический алгоритм их стабилизации, успеш-
ную реализацию которого наглядно демонстрируют эти артисты.
Выбрав объект и цель исследования, имеет смысл начать
с одномерного (плоского) неустойчивого маятника. Можно сразу
приступить к натурному эксперименту — откинуться вместе со
стулом назад и попытаться сидеть, опираясь на две задние ножки
стула. Найдя положение равновесия, можно пойти дальше —
168
I
учиться попадать в него из любого начального отклонения, задав
необходимую скорость. Неудача натурного эксперимента может
побудить исследователя бросить эту деятельность или обратить-
ся к теоретическому исследованию.
Рис. 4.11. Движение неустойчивого маятника:
семейство фазовых траекторий (о) и осциллограммы (б)
Построение линеаризованной модели неустойчивого маятни-
ка было рассмотрено нс в §1.7, а на рис. 4.11 его движение
представлено фазовыми траекториями (а) и осциллограммами
(б), которые соответствуют фазовым траекториям.
Точка неустойчивого равновесия типа «седло» располагается
в начале координат фазовой плоскости (х]=х; x2~x=v). В пер-
вом и третьем квадрантах зарегистрированы траектории, кото-
рые почти прямолинейны и исходят почти из начала координат.
Во втором и четвертом квадрантах почти прямолинейные траек-
тории приходят почти в начало координат. Через начало коор-
динат проводят теоретические прямолинейные фазовые траек-
I ории, но «поймать» их в экспериментах как с самим маятником,
так и с его моделью вряд ли удастся. Эти прямые разделяют
фазовую плоскость на области, в которых располагаются качест-
венно отличные семейства фазовых траекторий. В левой области
изображающая точка движется сверху вниз. Это соответствует
случаю, когда, отклонившись влево от положения равновесия
(х0<0), вы отталкиваетесь с недостаточной скоростью. В резуль-
тате маятник подходит к положению равновесия, но, не достиг-
нув его, начинает падать влево. В правой области фазовые траек-
тории представляют аналогичные эксперименты для начального
отклонения от положения равновесия вправо (х0>0). Траектории
в верхней и нижней областях соответствуют избыточной для
Данного начального отклонения скоросги — маятник переходит
через положение равновесия и падает в направлении, противопо-
ложном начальному отклонению.
Для маятника, который может вращаться вокруг точки О
(§4.6), особые точки типа «седло» для неустойчивого положения
равновесия чередуются с особыми точками типа «центр» для
Устойчивого. Их легко узнать на фазовом портрете рис. 4 8.
169
4.8. ДИНАМИЧЕСКИЕ ПРОЦЕССЫ ЭЛЕКТРИЧЕСКИХ
ЦЕПОЧКАХ
На рис. 4.12,а показаны осциллограммы 1—3 напряжения и2
на выходе ЯС-цепочки как реакции на ступеньку входного напря-
жения щ(1) = 5 • 1 [/] для различного начального напряжения.
Рис. 4.12. Переходные процессы в ЛС-цепочке и колебательном контуре
Далее представлены фазовые траектории б, в, г к осцилло-
граммы д, е, ж скорости изменения выходного напряжения
— duildt=x(t) для колебательных контуров с различным затуха-
нием. Графики б и д соответствуют обычному контуру с актив-
ными потерями — колебания затухают. Графики в и е соответ-
ствуют случаю, когда активные потери скомпенсированы энерги-
ей, поступающей по цепи обратной связи от активного элемента,
или «отрицательным сопротивлением», например, туннельного
диода. При точном балансе изображающая точка движется по
круговой или эллиптической траектории (в), а амплитуда посто-
янна (е). Графики г, ж соответствуют случаю, когда энергия,
вносимая в контур, превышает потери. В этом случае фазовая
траектория представляет собой раскручивающуюся спираль (г),
а амплитуда колебаний возрастает (ж). Для исследования зави-
симости частоты колебаний от затухания контура осциллограм-
мы д, е и ж совмещены на графике з. На графике и собраны
осциллограммы выходного напряжения и2 (t) при подаче на вход
170
колебательных звеньев с различным затуханием единичной сту-
пеньки входного напряжения. Зависимость частоты от затухания
мала и на этих графиках незаметна.
Освоив моделирование простых электрических процессов, мо-
жно перейти к более сложным. На рис. 4.13,а показана схема
трансформатора с железным сердечником. На его первичную
обмотку и’] подано напряжение щ (/) от источника напряжения.
Показаны активное внутреннее сопротивление первичной обмот-
ки Ri и дополнительное внешнее сопротивление Rj для измерения
тока /(<)• Трансформатор работает в режиме х.х — сопротивле-
ние нагрузки вторичной обмотки w2 бесконечно.
б)
Р'ис. 4.13. Принципиальная схема (а) и структурная модель (б) для изучения петли
гистерезиса В(Н)
171
На рис. 4.13,6 показана структурная модель процессов, проте-
кающих в трансформаторе. Если из входного напряжения ut(r)
вычесть падение напряжения uR на суммарном активном сопро-
тивлении R — Rj+R[B цепи обмотки то останется напряжение
uL(f) = dipI1 d t на ее индуктивности. С коэффициентом трансфор-
мации &тр = w2 / wi это напряжение преобразуется в напряжение
w2(0 на вторичной обмотке w2, а интегрирование uL(f) дает
потокосцепление $ (t) = wxS B(t), где 5 — сечение магнитного
сердечника, В (t) — индукция в нем. Обычно считают, что индук-
ция В зависит от напряженности Н магнитного поля: В=В(Н).
Нелинейность N представляет обратную зависимость H=N(B).
Напряженность магнитного поля H(t) обычно рассчитывают че-
W1
рез намагничивающую силу A(f) = wxI(f) как H(f)=— I(t), где
I — длина средней силовой линии. В модели причинно-следствен-
ные связи развертываются в обратном направлении — ток 1(f)
рассматривается как «следствие» напряженности H(t) и определя-
ется как /(/)=—H(t)- Этот ток определяет падение напряжения
и>!
ur = RI на суммарном активном сопротивлении первичной цепи
R=Rj+Rj и измеряется при помощи резистора R{ как Uj—RjI.
Если выходное напряжение трансформатора и2 (О при помощи
блоков АВК-6 (2 на рис. 4.13,6) усилить в кх = 1 / (ктр S Wj) раз,
проинтегрировать и подать на вход У индикатора, а на его
У-вход подать усиленное в k2 = wx / (I Rj) раз напряжение uI=RII,
то на экране получится график В=В(Н). Поскольку в самом
трансформаторе интегрирование происходит непрерывно, то
и интегратор АВК-6, рассчитывающий модельную величину В (/),
должен работать в режиме непрерывного интегрирования (нажа-
та кнопка 1 в ГСС). Для устранения дрейфа интегратора его
полезно охватить небольшой отрицательной ОС (коэффициент а
на рис. 4.13,а). Любопытно убедиться в том, что график В (И) на
экране индикатора не зависит от формы напряжения и । (/), а ва-
рьируя его амплитуду, приятно любоваться семейством циклов
перемагничивания сердечника.
Для удобства полезно использовать дополнительный смен-
ный блок, собрав в нем усилитель для согласования выходов
ГСС с относительно низкоомной нагрузкой в виде первичной
цепи испытуемых трансформаторов и сами трансформаторы —
например, от карманных приемников. Этот набор имеет смысл
дополнить измерителями тока и набором коэффициентов кх и к2
в соответствии с конструктивными характеристиками трансфор-
маторов. Если есть необходимость изучать свойства сердечника
с единственной обмоткой, то сигнал, пропорциональный Н£,(0»
можно сформировать при помощи резистивного мостика. Такой
сменный модуль обеспечит широкий спектр натурных и полуна-
172
Рис. 4.14. Принципиальные схемы амплитудного детектора (о) и выпрямителя (в),
их структурные модели (б, г) и устройство для формирования радиоимпульса (д)
турных исследований электрических процессов в нелинейных си-
стемах.
Аналогичным образом удобно исследовать вольт-кулонные
характеристики нелинейных емкостей.
На рис. 4.14,а резистор в АС-цепочке заменен диодом Д,
а линейный блок Ал=1/А структурной модели (рис. 4.14,6) —
нелинейной ВАХ диода. Рассматривая такую цепочку как модель
детектора для малых входных сигналов ut (/), ВАХ диода часто
аппроксимируют параболой. Такую аппроксимацию /д=опд+
+ bul удобно использовать и при моделировании детектора на
АВК-6.
На рис. 4.14,в аналогичная цепочка моделирует выпрямитель,
питающий нагрузку А. В структурной модели на рис. 4.14,г
использована кусочно-линейная аппроксимация ВАХ диода. При
«д<0 /д=0; наклон в первом квадранте представляет общее
сопротивление источника входного напряжения и выпрямитель-
ного диода.
Изучение реакции таких цепочек на ступеньку входного сиг-
нала обнаруживает в первом случае зависимость времени уста-
новления выходного сигнала от амплитуды входного, во вто-
ром — превышение импульсом тока его установившегося значе-
173
Рис. 4.15. Осциллограммы напряжений (а) и токов (6) для выпрямителя, ДЛ*
амплитудного детектора (в) и реакция на радиоимпульс для контуров различной
добротности (г) и для различных расстроек по частоте для контура бесконечной
добротности (д)
174
ния, отличие переходных процессов при положительных и от-
рицательных приращениях входного сигнала и зависимость по-
терь в выпрямителе от соотношения сопротивлений диода и на-
грузки. Интересно также изучать их реакцию на входной сигнал
в виде радиоимпульса. Для его формирования удобно использо-
вать вспомогательный генератор на парс модулей «интегратор»
(рис. 4.14у)). Варьируя начальные условия х(0) и х(0), легко
задавать не только амплитуду, но и начальную фазу колебаний
радиоимпульса. Если проявится затухание колебаний, его ком-
пенсируют подбором коэффициента а. Модельное изучение про-
цессов помогает быстрее и увереннее интерпретировать конечные
результаты при исследованиях реальных схем и более сознатель-
но рассчитывать детекторы и выпрямители (рис. 4.15,а—в).
Изучение реакции колебательных контуров на радиоимпульс
сопряжено с относительно громоздкими аналитическими выклад-
ками. Подав радиоимпульс на вход модели колебательного зве-
на, можно далее рассматривать осциллограммы и осмысливать
Рис. 4.16. Структурная модель колебательного контура с нелинейным элементом
(°), характеристики нелинейностей и осциллограммы колебаний (б, в)
175
влияние соотношения частот, начальной фазы радиоимпульса
и добротности контура на протекающие в нем процессы.
Подключив к модели контура модель активного элемента —
транзистора, лампы, туннельного диода или элемента интеграль-
ной схемы, можно изучать не только установившиеся режимы
колебаний, по и процессы их установления (рис. 4.15,г,Э). Полез-
ные идеи дают аналогии с механическими колебаниями из §4.6.
Хорошо моделируются режимы регенератора и сверхрегенерато-
ра. Удобно, просто и наглядно можно изучать процессы в коле-
бательных контурах с нелинейными элементами (рис. 4.16). Ис-
пользование же полунатурного моделирования позволяет полу-
чать нс только качественные, но и количественные данные о про-
цессах, которые не поддаются ни точному аналитическому ис-
следованию, ни цифровому моделированию.
4.9. МОДЕЛИРОВАНИЕ ГЕНЕРАТОРА
И ДВИГАТЕЛЯ ПОСТОЯННОГО ТОКА
Некоторые результаты моделирования ДПТ представлены на
рис. 4.17. Коммутация производилась непосредственно по ст рук-
Рис. 4.17. Моделирование ДПТ:
а — регулировочные характеристики для якорного, 6 — полюсного управления; в, г —
динамические процессы при автоматизации исследований статических характеристик; д,
ж — динамические характеристики ДПТ
176
турной модели ДПТ (рис. 1.9). На рис. 4.17,а приведены две
регулировочные характеристики для ДПТ с якорным управлени-
ем. \ Характеристика 1 соответствует потоку возбуждения
фв1^=ФНом» характеристика 2 — потоку Фв2=0,5ФВ1. Наклон
линейных участков характеристики 2 вдвое больше, чем харак-
теристики 1. Для того чтобы противо-ЭДС Е=сЕФва>, фор-
мирование которой представлено в структурной модели ДПТ
преобразователем хсЕ в цепи ОС, смогла уравновесить то же
caMOQ входное напряжение и„ при уменьшении потока Фв вдвое,
должна вдвое возрасти скорость со. Одновременно вдвое увеличи-
вается напряжение трогания. Двигатель трогается, когда враща-
ющий момент А^=с’Л/Фв /, формирование которого представлено
блоком Хс’дт в цепи прямой передачи, достигнет и чуть-чуть
превзойдет момент сухого трения Мтр. При уменьшении потока
вдвое для получения того же самого вращающего момента
М”Л/тр потребуется вдвое больший ток трогания /тр, а следова-
тельно, и вдвое большее напряжение гстр = /?я /тр, при котором
придет во вращение якорь двигателя.
На рис. 4.17,6 представлена регулировочная характеристика
ДПТ с полюсным управлением <у=со(Фв) при пя = const. Рабочи-
ми считают гиперболические участки характеристики. При малых
потоках (Фв«0) ДПТ останавливается, ток в цепи якоря при этом
определяется только сопротивлением якоря. Петлевые участки
при малых потоках проявили увеличение инерционности ДПТ
при Фв-*0.
На рис. 4.17,в еще раз показаны та же регулировочная харак-
теристика 1 для якорного управления, что и на рис. 4.17,а, и вид
графика Г, который получается при увеличении частоты тре-
угольного сигнала, используемого в характериографе. На графи-
ках рис. 4.17,г зарегистрирована зависимость тока якоря от вход-
ного напряжения /я~^я(ыя) при очень малой частоте треуголь-
ного сигнала 1 и при такой частоте, когда проявляются динами-
ческие свойства ДПТ Г. Стрелки показывают направления, в ко-
торых движется точка (w8, /я) по диаграмме. В пределах зоны
нечувствительности двигателя — птр<»я<итр якорь неподвижен,
ток пропорционален напряжению, подводимому к якорю 7Я =
При |мя|> wTp якорь вращается, и в статическом режиме
тек /я = Л/тр/(сА/Фв) создаст вращающий момент М=смФв1я,
Уравновешивающий момент трения М—Мтр. При увеличении
частоты треугольного сигнала становятся заметными следующие
явления. Для линейного во времени изменения скорости якоря,
обладающего моментом инерции J, требуется ускоряющий мо-
м<нт My=Jd(o/dt, и поэтому вращающий момент М при раз-
г°не должен быть равен сумме Л/уск = Л/тр + Л/у, а при торможе-
нии — разности Л/Торм = Л/тр — Му моментов трения Мтр и уско-
ряющего Му. Поэтому при разгоне ток якоря /длИ должен быть
177
/>
больше, а при торможении — меньше, чем в статическом реж!ше
на величину А7Я (рис. 4.17,г). Но для этого противо-ЭДС должна'
отличаться от входного напряжения на соответствующую вели-]
чину Аия = 7?гА7я, а это возможно, когда скорость при разгоне
несколько меньше, а при торможении — несколько больше,, чем
при том же входном напряжении в статическом режиме,' что
хорошо видно на рис. 4.17,в. Чтобы динамическая погрешность
характериографа (§1.12) была достаточно малой, следует уменЛ
шать частоту треугольного сигнала до тех пор, пока шйрина
«динамической петли» не станет соизмерима с толщиной/ луча
электронного индикатора или шириной графика самописца, как
на характеристиках 7, показанных на рис. 4.17,о,в.
На рис. 4.173 сопоставлены переходные характеристики ДПТ
для одинаковой ступеньки входного напряжения и для того же
соотношения между потоками возбуждения ФВ2=6,5ФВ1, что
и статические регулировочные характеристики на рис. 4.17,о. Обе
переходные характеристики экспоненциальны, но вторая стре-
мится к вдвое большему установившемуся значению, а ее посто-
янная времени Т2=4Т1, поскольку постоянная времени Т=
= 7?(/(/сЛ1Фв<.'£Фв) обратна произведению коэффициентов уси-
ления во всем контуре обратной связи.
Соответствующие друг другу осциллограммы тока /(/) (рис.
4.17,е) и скорости &>(/) (рис. 4.17,ж), отмеченные цифрами 7—4,
зарегистрированы для режима динамического торможения дви-
гателя при различном сопротивлении в цепи якоря. Возрастание
номера соответствует увеличению сопротивления якоря, причем
для каждой последовательной пары номеров сопротивление воз-
растает вдвое. Осциллограмма скорости 5 соответствует 7?я = оо,
и поэтому соответствующая ей осциллограмма тока совпадает
с осью времени, а скорость убывает по линейному закону.
4.10. МОДЕЛИРОВАНИЕ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ЗВЕНЬЕВ
На рис. 4.18,а представлены осциллограммы выходной пере-
менной j’(0 звена первого порядка, на вход которого при нуле-
вом начальном условии >’(0) = 0 подана единичная ступенька.
Наклонная прямая 1 соответствует «чистому» интегратору
(а=А—О), устойчивая экспонента 2 — значению а=2= —1, не-
устойчивая 3 — случаю а=2 = +1. Таким образом, при вращения
ручки а линейного модуля просто перемещается действительный
корень А по отрезку действительной оси от — 1 до +1.
На рис. 4.18,6 представлены графики движения при нулевом
входном сигнале из ненулевого начального состояния у (0). Циф-
ры 1—3 соответствуют тем же значениям 2, что и на предыдущем
графике.
178
Рис. 4.18. Динамические процессы в звеньях первого (а, 6) и второго (в) порядка
На рис. 4.18,в представлена реакция 1 колебательного звена на
ступеньку на входе при нулевых начальных условиях у(0)=0,
у (0) = 0. Экспонента 2 зарегистрирована на выходе первого инте-
гратора модели колебательного звена при оборванной «главной»
ОС ао=О, al=2= — 1, а экспонента 3 — для вдвое меньшего
значения ат= — 0,5. Эти графики наглядно демонстрируют смысл
соотношения /2 (§1.19). Для синусоидального сигнала сред-
нее значение затухания вдвое меньше, чем для знакопостоянного.
4.11. ДИНАМИКА ЦИФРОВЫХ МОДЕЛЕЙ
Изучение динамики алгоритмов численного моделирования
реальных систем и САУ с ЭВМ (см. рис. 1.17,а) удобно начать
с модели ЛС-цепочки включив между выходом сумматора и вхо-
дом интегратора квантователь с ЭПО (см. рис. 1.19,в). Получится
модель цифро-аналогового комплекса, в котором алгебраическое
суммирование реализует цифровая, а интегрирование — аналого-
вая ЭВМ.
На первый взгляд, ничего не должно измениться, поскольку
коэффициент передачи пары квантователь — ЭПО равен единице,
а квантования по уровню нет.
На рис. 4.19,а показана осциллограмма сигнала на выходе
ЭПО, на которой заметны ступеньки, длительность которых
равна такту квантования ТИ. Соответствующий ей сигнал на
выходе интегратора представляют плавные осциллограммы 1 на
графиках б и в. С увеличением коэффициента усиления инте-
гратора k=l / (RC) = 1 / Т становится заметной кусочно-линейная
аппроксимация экспоненты (осциллограмма 2 на рис. 4.19), а при
£ Тв= 1 переходный процесс заканчивается за один такт (осцилло-
грамма 3). Осциллограммы, представленные на рис. 4.19,в—д,
наглядно демонстрируют, как по мере увеличения коэффи-
циента к переходный процесс из апериодического становится
колебательным, далее затухание уменьшается, при к Тв=2 имеют
^есто незатухающие колебания, а при кТИ>2 они расходятся.
179
Рис. 4.19. Цифровое и цифро-аналоговое моделирование непре-
рывных динамических процессов для систем первого (о—к) и вто-
рого (л—у) порядка
Серия осциллограмм е—к иллюстрирует сказанное при меньшей
скорости развертки по оси времени.
Эти осциллограммы наглядно демонстрируют причины, ме-
ханизм и внешнее проявление вычислительного абсурда, возника-
ющего при небрежном отношении к выбору такта при цифровом
моделировании непрерывных процессов.
На рис. 4.19,л,л/ приведены результаты моделирования гар-
монического осциллятора — маятника без затухания, в модели
которого один из аналоговых интеграторов заменен цифровым
«по Эйлеру с недостатком». Вместо незатухающих получаются
расходящиеся колебания, а зависимость скорости, с которой
увеличивается амплитуда, от такта Тк можно разглядеть непо-
средственно при сравнении совмещенной пары графиков. Они
показаны в отдельности на рис. 4.19,н,р вместе с соответству-
ющими фазовыми траекториями (рис. 4.19,л,с).
Последние осциллограмма и фазовая траектория получены
при интегрировании в ЦИ «по Эйлеру с избытком» — колебания
затухают.
Модель гармонического осциллятора часто применяют в ка-
честве теста для выявления погрешностей моделирования.
АВК-6 позволяет детально изучать влияние квантования по
времени на точность как численного моделирования реальных
объектов, так и цифровых систем управления ими.
4.12. ПОИСК ЭКСТРЕМУМА
Читатель не раз решал задачу оптимизации, настраивая при-
емник на заинтересовавшую его радиостанцию. Именуя его далее
«оператором», а приемник — «объектом с экстремальной харак-
теристикой», присмотримся к алгоритму таких действий.
На рис. 4 20,а выше штрихпунктирной линии показана струк-
турная модель объекта, а ниже — структура действий оператора
по настройке приемника. Нелинейность No — зависимость амп-
литуды выходного сигнала (громкости) у от настройки х. Послед-
няя зависит от среднего положения ручки настройки и, малых
Пробных вариаций ее положения в ходе настройки Ах и от
неконтролируемых изменений, представленных возмущением v.
Найдя станцию, оператор пробует осторожно вращать ручку
настройки то в одну, то в другую сторону и прислушивается
к тому, как изменяется громкость у (рис. 4.20,6).
При точной настройке на резонанс х0=хр (график 6) вариации
в любом направлении (в) ведут к одинаковому результату
(г) —- величина выходного сигнала у уменьшается. Слева от
Резонанса (xo=xi) пробное вращение ручки настройки Ах вправо
&едет к увеличению сигнала у (кривая 1 на графике 6), справа
'*о = х2) — к уменьшению у (кривая 2 там же). Иначе говоря,
Рис. 4.20. Структурная модель экстремального регулятора (а) и графики, пояс'
няющие се работу (б—ж)
182
рариации выходного сигнала А у для средней настройки
xo=xi<xp синфазны с вариациями входного Ах, а для
х0 = х2 > хр — противофазны.
Разумеется, структура и диаграммы идеализируют действия.
Вряд ли удастся вручную сделать пробное воздействие Ах сину-
соидальным — конечно же, оно будет случайным. И формируют
его ае независимо, а одновременно с выбором коррекции и основ-
ной настройки х0. Однако такая идеализация подготовила тех-
ническую реализацию системы автоподстройки. Для этого потре-
буются генератор пробного сигнала П и устройство, преобразу-
ющее его сигнал в вариации настройки (например, на основе
варикапа), а также устройства, технически реализующие анализ
качества настройки (блок Д') и коррекцию основной настройки
(блок Н).
Синхронный детектор строят на основе блока перемноже-
ния X. Перемножение синфазных опорного (пробного) Ахи ва-
риаций выходного А у сигналов дает сигнал z (графики ж) с поло-
жительной постоянной составляющей 1, противофазных — с от-
рицательной 2. Фильтр Ф выделяет постоянную (медленно меня-
ющуюся) составляющую x(t)=z0(t) сигнала z(t)=z0(t)+Az(t),
пропорциональную наклону характеристики y=N0(x) в точке х0
I ®— л
у ах
х=х0
В экстремальном регуляторе так же, как и в обычном, резуль-
тат измерения выходной переменной следует сравнить с задан-
ным значением aeg, что представлено сумматором в блоке Н. При
настройке на экстремум $g=0, и поэтому «уставку» обычно
опускают. Наличие уставки и элемента сравнения Аге=
= 32g—аг (/) делает структуру экстремального регулятора анало-
гичной общей структуре системы с ОС, что позволит далее
получить много полезных сведений о свойствах экстремальных
Регуляторов в готовом виде из общей теории регулирования.
Отклонение Аж(/) = аг^ —аг(/) поступает на вход регулятора Р,
выходной сигнал которого u(t) управляет основной настройкой,
поддерживая равенство ti(t)+v(t)=x0(t)=Xp(t). В качестве
Устройства, преобразующего электрический сигнал в настройку
колебательного контура, используют двигатель, вращающий ко-
нденсатор переменной емкости, подключенный к настраиваемо-
му контуру. В современных системах, например, при настройке
Резонатора лазера на максимум излучаемой мощности, функции
Основной настройки и ее вариаций совмещают в одном элементе
'Пьезокристалле), перемещающем подвижное зеркало резонато-
Ва> а их разделение осуществляют электронными средствами.
** качестве закона регулирования целесообразно использовать
H i'Тральный закон, поскольку в установившемся состоянии он
183
обеспечивает точную компенсацию возмущения v (/) угпавлением
u(t)=v(t). Поскольку интегратор сам фильтрует высокочастот-
ные составляющие, уменьшая их амплитуду обратно прав эрца-
овально частоте, можно совместить в нем реализацию закона
управления и фильтрацию, а отдельный фильтр низкой частоты
Ф исключить.
Высокочастотные вариации входного сигнала Дх(0 непрерыв-
но как бы «ощупывают» наклон участка нелинейности 'бъекта
y=N0(x), на котором располагается точка x0(f), отнеси гельнЯ
медленно перемещающаяся по оси х, а синхронный детектор ня
блоке перемножения непрерывно преобразует величину i аклона
в постоянную (медленно меняющуюся) составляющую сигнала
zo(0=as(0. Рассматривая медленно меняющийся сигнал хо(0 как
входной, а медленно меняющийся сигнал аг(0 как выходной
блоки М (модулятор) и Д (демодулятор) структурной модели на
рис. 4.20,а можно объединить в один преобразователь аг=аг(х0)
(штриховой блок на рис. 4.21,о), представляющий зависимость
dN0
измеренной крутизны аг—
, нелинейности у=Дп(х) от
ах х=х0
положения точки x0(t) на оси х. Зависимость аг=ае(х0) можно
представить в виде обычной статической регулировочной хг рак-
теристики.
На рис. 4.21 график б представляет зависимость y—No(x)
нелинейности типа резонансной характеристики, а график в —
статическую зависимость крутизны аг от положения точки х0.
Ниже показан нелинейный функциональный преобразователь Nx
с характеристикой аг=Лгж(х0), представленной графиком в. Этим
преобразователем следует заменить штриховой прямоу1 >льник
М—Д на рис. 4.21,о с тем, чтобы анализировать свойства экст-
ремального регулятора как обычного регулятора с ОС.
Нелинейную функцию y=N0(x) вблизи точки экстремума ча-
сто аппроксимируют параболой. На рис. 4.21,г показана парабо-
ла у— — х2/2. Соответствующая ей регулировочная хауактери-
dy л
стика на рис. 4.21,д аг=Дж(хо)=— = — х0 линейна. В ос-
ах х=х0
щем случае следует записать аг= — кх0 и использовать показав-
шей ниже линейный преобразователь вместо блока МД в < тру*'
туре на рис. 4.21,о. Для обеспечения устойчивости системы "чвер*
сию — кв объекте надо скомпенсировать инверсией в регулВ'
торе Р.
Экстремальная система может отыскивать как максимум, так
и минимум на характеристике объекта y—N0(x). На рис. 4.21/
представлена парабола у=х2/2, имеющая минимум при
Регулировочная характеристика (рис. 4.21,ж) аг=аг(х0) представ*
ляет собой прямую аг=х0. Какой из экстремумов — минимУИ
или максимум ищет экстремальная система, определяет знак 0<Я
184
— — х0 линейна. В об-
Рис. 4 21. Структурная модель для анализа устойчивости и качества экстремаль-
ных регуляторов (в), графики экстремальных характеристик объекта (б, г, е)
11 эквивалентные регулировочные статические характеристики объекта (в, д, ж)
Если регулятор Р — просто интегратор, то из начального
состояния хо(О)=Лхр система с параболической нелинейностью
будет стремиться к положению равновесия в точке экстремума
Л<) (/—>оо)=хр при экспоненциальном (по времени) изменении
^Правления. Такое движение наглядно иллюстрирует динамику
Метода наискорейшего спуска, для которого скорость движения
к экстремуму пропорциональна крутизне. Если же регулятор
Обладает дополнительной инерционностью или используют
Фильтр, то движение может приобрести колебательный характер
185
и даже стать неустойчивым. Анализ движения такой системы
и синтез регулятора для нее можно выполнить методами обы«£
ной теории регулирования.
Для моделирования на АВК-6 интересно подобрать такую
нелинейную характеристику, которая позволяла бы легко перей-
ти от отыскания минимума к отысканию максимума, иллюст-
рировать механизм градиентных методов и их локальный харак-'
тер. Последовательность шагов по формированию одной из мно-
гочисленных нелинейностей, удовлетворяющих высказанным вы-
ше пожеланиям, представлена на рис. 4.22 в виде структурной
модели (о), аналитических соотношений (б) и последовательности
графиков (в).
Сформировав параболу j(=x2 и сместив ее У2=У1~а, полу-
ченную переменную у2 можно подать на вход преобразовател*
>3—l-Fzl- Подав далее у3 на инвертирующий вход сумматора,
получают переменную у4 = — у3. Просуммировав с у4 постоянно!
напряжение Ь, график у3—у4 + Ь приподнимают настолько, чтобы
вершина параболы оказалась чуть выше оси х. Добавка ком-
поненты ах, пропорциональной входной переменной х, перека-
шивает график j6=Js + ax тем сильней, чем больше а. Наконец,
последний преобразователь с характеристикой типа однополупе-
риодного выпрямителя превращает отрицательные «хвосты» гра-
фика у6 (х) в горизонтальные отрезки и оставляет без изменений
вид кривой при >'б>0 в составе окончательного графика у=у (х).
Результаты моделирования экстремальной системы с такой
нелинейной характеристикой в качестве модели объекта приве-
S) У^*2 У2=Уга Уз=\У2\ У^ = -Уз ys=yeb Уе=У5+ах
Рис. 4.22. Структурная модель формирования экстремальной характеристики
аналитические соотношения (б) и графики (в) для последовательных шагэг
формирования
186
рис. 4.23. Результаты моделирования
экстремальной системы:
грлфлх нелинейности у—N(x) (а), осцил-
jxh раммы при поиске миВимума (б) и мак-
симумов (в) и эквимлеитпая статическая ха-
рактеристика (г)
дены на рис. 4.23, где показаны
график нелинейности (а) и ос-
циллограммы управления u(t)
при отыскании минимума (б)
и максимумов (в).
При отыскании минимума
(б) для начальных состояний
х2<х0<х4 х0 (0) = и (0)= и0
(принято v=0) осциллограммы
u(t) при /—»оо асимптотичес-
ки приближаются к точке экст-
ремума и=хз, их изменение
носит экспоненциальный ха-
рактер. Для хо<хх система
быстро движется влево, а при
х0>*4— вправо, но, «добе-
жав» до горизонтального
участка, останавливается, по-
скольку наклон характеристики
на участках x<xi их>х4равен
нулю и никакой информации
о том, куда следует двигаться
дальше, нет.
При поиске максимумов си-
стема уверенно движется к бли-
жайшему из них, ускоряясь по
мере приближения к цели и бы-
стро останавливаясь при ее до-
стижении. Осциллограммы и (О
имеют вид расходящихся (неустойчивых) экспонент. Начиная
Двигаться из исходных состояний, близких к точке минимума х3,
система долго «думает» и осторожно движется, а по мере того,
как она «убеждается» в правильности избранного направления,
Движение все более ускоряется.
Для объяснения особенностей движения систем обратимся
к рис. 4.23,г, где показана эквивалентная статическая регулиро-
вочная характеристика аг=аг(х0). При отыскании минимума на
ио сервале х2<ыо<х4 система представляет собой интегратор,
охваченный отрицательной ОС, замыкающейся через регулиро-
вочную характеристику s.=k.£{u—х3). В целом она представляет
собой устойчивое апериодическое звено. Точка и=х3 является
187
точкой устойчивого равновесия, и поэтому осциллограммы (м
управления u(t) для начальных значений в указанном интервале
имеют вид затухающих экспонент.
При отыскании максимумов знак ОС изменяется, поэтому цц
том же интервале система представляет собой интегратор, охва-
ченный положительной ОС. Система превращается в неустой-
чивое апериодическое звено, а точка х3 оказывается точкой не-
устойчивого равновесия такой системы. Система «убегает» от
положения неустойчивого равновесия тем быстрее, чем дальше
от него находится, и осциллограммы управления и (t) имеют вид
расходящихся (неустойчивых) экспонент. Двигаясь таким обра-
зом по оси х, точка u(t) достигает одного из двух максимумов
и (t) —х2 или и (/)=х4. В них интегратор оказывается охваченным
отрицательной ОС, замыкающейся через вертикальные участки
2 и 4 с характеристикой типа идеального поляризованного реле
с бесконечным коэффициентом усиления. Поэтому, достигнув
максимума, система резко останавливается и очень «цепко» за
него «держится».
На внешних склонах характеристики при хх<и<х2 и х4>
>и>х5 система, отыскивающая минимум, как бы «обращает-
ся» — знак ОС переключается, и интегратор оказывается охва-
ченным положительной ОС (пунктирное продолжение характери-
стики ае=ае(х0) на участке 2-—4). Система оказывается неустой-
чивым апериодическим звеном, причем в исходном состоянии,
достаточно далеком от точки неустойчивого равновесия х3. По-
этому графики движения u(t) из состояний на внешних склонах
(6) представляют собой участки расходящихся экспонент. Достиг-
нув горизонтальных участков, система останавливается. Систе-
ма, отыскивающая максимум, напротив, на внешних участках
оказывается устойчивым апериодическим звеном, но в началь-
ном состоянии, далеком от точки устойчивого равновесия х3.
Поэтому графики и (/) представляют собой крутые отрезки устой-
чивых экспонент (в).
На рис. 4.24,а показана структурная модель для формирова-
ния поверхности z=z(x, у) типа «лунный кратер», а на рис.
4.24,6 — схема для получения объемных изображений. Проектор
координат ПК преобразует тройку координат х, у, z, представля-
ющих поверхность z(x, у), в пару координат X, Y — проекции
пространственной фигуры на плоскость экрана электронного ин-
дикатора (ЭИ) или двухкоординатного самописца (ДС). ПК по-
зволяет поворачивать фигуру вокруг вертикальной оси и накло-
нять изображение на наблюдателя, как бы поворачивая его за
верхний конец оси z относительно горизонтальной оси, проходя-
щей через начало координат в плоскости экрана.
Для прочерчивания семейств сечений используют генератор
ступенек ГС блока ПК. Система для поиска экстремумов на
поверхности содержит два одинаковых контура, показанных на
188
Рис. 4.24. Структурная модель для формирования поверхности типа «лунный
кратер» (а) и схема для наблюдения объемных изображений на плоском экране (б)
рис. 4.20, для каждой из координат х и у. Чтобы отличать
вариации по каждой из координат, используют ортогональные
или разночастотные пробные сигналы. При моделировании ис-
пользовались ортогональные сигналы a sin cot и a cos со/ гене-
ратора АВК-6.
На рис. 4.25,о показаны траектории движения для различных
исходных состояний при отыскании минимума и максимума.
Более нагляден рис. 4.25,6, где поверхность прочерчена траек-
ториями, близкими к эквипотенциалям. Направление движения
По траекториям при отыскании экстремумов показано стрелка-
ми. Эти траектории пересекают эквипотенциали под прямым
Углом. Наглядно проявляется локальный характер градиентного
Метода — траектории, начинающиеся чуть левее минимума ж,
сНачала направлены влево — противоположно направлению на
глобальный максимум М. Достигнув гребня недалеко от точки
189
Рис. 4.25. Поверхность типа «лунный кратер» с траекториями движения к мини-
муму и максимуму (а); аналогичные траектории на поверхности, прочевченной
траекториями, близкими к эквипотенциалям (б)
минимума гребня т М, они далее разворачиваются вдоль гребня
и идут по нему «кружным путем» к глобальному магсимуму.
Остальные траектории также сначала быстро выходят на гре-
бень, а затем идут по нему к максимуму М.
Рис. 4.26. Гладкая поверхность с траекториями движения к минимуму и М3**
симуму (а); аналогичные траектории относительно линий, близких к эквипотеЧ
циалям (б); траектории движения (в)
190
Для формирования поверхности z=(x2+y2 — b)2 + a х (рис.
4.26,а) в структурной модели на рис. 4.24,о преобразователь mod
заменен вычислителем квадрата входной переменной. Гребень
сгладился, а характерные особенности метода наискорейшего
спуска проявились более наглядно.
Разумеется, эти задачи значительно сложнее предыдущих
и более трудоемки. Однако усилия вполне окупаются результа-
том — перевод экстремальных задач на язык структурных моде-
лей помогает детально разобраться в математических методах
оптимизации и апробировать их моделированием.
Гпава 5
СТРУКТУРНЫЕ МОДЕЛИ ФИЗИЧЕСКИХ
ПРОЦЕССОВ В ЯДЕРНЫХ РЕАКТОРАХ
И ИХ ИССЛЕДОВАНИЕ НА АВК-6
5.1. МОДЕЛИ НЕЙТРОННОЙ КИНЕТИКИ
Ядерный реактор (ЯР) — устройство, в котором происходит
управляемая цепная реакция деления ядер горючего. Деление
ядер сопровождается выделением тепла, используемого на АЭС
для получения электрической энергии. Простейшая структурная
модель нейтронной кинетики, отражающая механизм цепной ре-
акции деления ядер горючего, показана на рис. 5.1,о.
Рис 5.1. Элементарные модели нейтронной кинетики
Нейтроны плотностью потока Ф(/) взаимодействуют с яд-
рами горючего, замедлителя, теплоносителя и других матери-
алов активной зоны реактора. В результате взаимодействия про-
исходит поглощение нейтронов, а скорость их убыли равна
”п(0 = /?в(0 = Ф(0^а, где Л» (0 — скорость взаимодействий, со-
провождаемых поглощением нейтронов, см-3 • с-1; — сум-
марное макроскопическое сечение поглощения, см-1. Часть ней-
лонов, поглощаемых ядрами горючего, вызывает деление ядер
191
со скорей ;ью 7?у(0=Ф(/)2у. Макроскопическое сечение деления
Еу составляет большую долю от сечения поглощения нейтронов
в горючем: Еу=Ед—Е^, где е£ — сечение непроизводительного
(радиационного) захвата нейтронов ядрами горючего. В каждое
акте деления образуются осколки, испускающие v нейтронов
следующего поколения (v>2), и выделяется (в среднем) энергия
Ef. Удельная мощность (энерговыделение) в(/) с коэффициен-
том Ef пропорциональна скорости делений Разность скоро-
сти генерации нейтронов деления йд(/) = т.«у(г) и скорости их
поглощения лп(/) определяет скорость изменения плотности ней-
тронов в реакторе п (/), а накопление нейтронов плотностью п (/)
связано с п (/) через интеграл:
л (/)=л (0) + f п (т) т/г. (5.1)
О
Нейтроны движутся со средней скоростью «, образуя плот-
ность потока нейтронов Ф(/), который в свою очередь является
причиной генерации и поглощения нейтронов.
Таким образом, как видно из рис. 5.1, ЯР можно представить
интегратором, охваченным положительной и отрицательной об-
ратными связями, глубину которых определяют параметры vEy
и Еа. Изменяя эти параметры, например, посредством перемеще-
ния поглотителей или топливных элементов, осуществляют упра-
вление плотностью потока нейтронов и энерговыделением в ак-
тивной зоне реактора.
Если vEy>Eo, ЯР надкритичен и Ф(/) экспоненциально воз-
растает. При vEy< Еа поглощение нейтронов превалирует над их
образованием в результате делений ядер горючего, и поток Ф(0
уменьшается, стремясь в пределе к нулю. Равновесие (критичес-
кое состояние) достигается при vEy--Ea. В этом случае Ф(/) и и’(0
неизменны.
Для «запуска» цепной реакции в ЯР вводят источник, генери-
рующий нейтроны со скоростью s. Его влияние отражено в струк-
турной модели в виде дополнительной переменной на входе
сумматора.
Плотность потока нейтронов в реакторе зависит не только от
времени, но и от пространственных координат и скорости (энер:
гии) нейтронов — Ф(г, v, Z), так же как и макроскопические,
сечения взаимодействия — Е/ (г, v, /) = <т((г, v) Nj(r, f), где
Nj(r, t) — концентрация ядер /-го нуклида, см~3; <т{(г, v) — мик-
роскопическое сечение реакции z-го вида при взаимодействии
нейтронов с J-м нуклидом.
Здесь и далее будем рассматривать так называемую точечную
модель ЯР, применимость которой ограничивается определен'
ними допущениями в отношении свойств активной зоны [ 7 ]. Н®
рис. 5.1,6 показана структурная модель нейтронной кинетики.
192
Рис. 5.2. Структурная модель генерации нейтронов
в которой упрощенно учтены пространственно-энергетические
эффекты в ЯР. Блок с коэффициентом ф отражает преобразова-
ние скорости генерации быстрых нейтронов «б (О, получаемых
при делении ядер горючего, в скорость генерации тепловых ней-
тронов лт(/), имеющих скорость v. Утечку части тепловых ней-
тронов из активной зоны реактора со скоростью лут (/) = Еут Ф (/)
представляет дополнительная отрицательная ОС интегратора.
Деление ядер горючего со скоростью Rf(t) является причиной
генерации мгновенных нейтронов и ядер-предшественников запа-
здывающих нейтронов, Доля которых в общем нейтронном пото-
ке равна fi. Процесс генерации мгновенных и запаздывающих
нейтронов представлен структурной моделью на рис. 5.2. Ско-
рость генерации мгновенных нейтронов лм(/) = (1 — (S)vRf(f),
а скорость генерации ядер-предшественников запаздывающих
нейтронов cr(t)=fivRf(t). Ядра-предшественники распадаются
со скоростью cp(z), которая пропорциональна концентрации с(/)
и интенсивности (постоянной) распада А. Скорость генерации
запаздывающих нейтронов п3 (?) = ср (/) = Л. с (/). Общая скорость
генерации быстрых нейтронов Лб (/) равна сумме скоростей гене-
рации мгновенных и запаздывающих нейтронов.
Ядра-предшественники запаздывающих нейтронов разного
сорта имеют различные постоянные распада Л и их делят на
группы, характеризуемые усредненными значениями Л, и /?,.
Структурная модель нейтронной кинетики с учетом шести групп
ядер-предшественников показана на рис. 5.3,а.
При описании кинетики нейтронов в ЯР используют также
понятие эффективного коэффициента размножения, определяемо-
го как отношение установившейся скорости генерации тепловых
нейтронов к скорости их убывания — /c^(z) = ^v£y(z)/[So(r) +
+ LyT(Z)J. Методами преобразования структурных схем модель
на рис. 5.3,а приводится к виду, представленному на рис. 5.3,6,
Имеющему в качестве независимой управляющей переменной
величину &эф(г). Параметр Z0 = [v(Se-|-Eyi)]_1 представляет со-
бой среднее время жизни нейтронов.
Степень отклонения значения от 1 (£эф=1 соответствует
критическому состоянию ЯР) характеризуют реактивностью:
Р(0 = [£эф(0 — 1]/^эф(0- После несложных преобразований
Рис. 5.3. Структурные модели нейтронной кинетики с шестью группами запаз*
дывающйх нейтронов
модель на рис. 5.3,6 можно представить в виде, показанном на
рис. 5.3,в. Здесь параметр /=/0/ к^ есть среднее время генерации
нейтронов. Величина n(t)fl имеет физический смысл скорости
генерации нейтронов деления. Скорость генерации мгновенных
нейтронов определяется разностью скорости прироста плотности
нейтронов за счет нейтронов, появившихся в результате делении
(в том числе вышедших из осколков) пд (г) = р (t) л (?) / /, и суммар*
ной скорости генерации ядер-предшественников запаздывающих
194
6
нейтронов Y, Fin(t) I / ! Скорость генерации запаздыва-
„ i=> . ,.
ющих нейтронов и3(/) отражает на структурной модели выход
блока Жгз. Текущая скорость изменения плотности нейтронов
будет результатом суммы: n(f) = nM(j) + n3(f)+s(t). Данная мо-
дель, хотя и не имеет такого ясного физического смысла, как
модель на рис. 5.3,а, наиболее часто используется при описании
нейтронной кинетики. Это объясняется тем, что чисто математи-
ческое понятие реактивности является достаточно удобной харак-
теристикой состояния реактора.
Моделирование нейтронной кинетики на АВК-6. Исследуем
реакцию плотности нейтронов и(<) на ступенчатые и линейно
изменяющиеся возмущения реактивности посредством модели-
рования на АВК-6. В качестве математического описания ней-
тронной кинетики используем структурную модель, показанную
на рис. 5.3,в. Значения реактивности принято задавать в долях /?,
поэтому преобразуем данную модель к виду на рис. 5.4, на
котором входной переменной модели является величина р' = р/р.
J3
1—
^п(О)
p'(t)
^,(0)
Л
n(t)
s(t)
Рис. 5.4. Структурная модель
нейтронной кинетики с реактив-
ностью в долях j? в качестве
Управляющей переменной
Структурная схема набора на мини-ABM комплекса АВК-6
модели нейтронной кинетики приведена па рис. 5.5. Схема имеет
ту же организацию, что и структурная модель на рис. 5.4, отлича-
ясь от нее лишь коэффициентами в блоках-преобразователях
Переменных. Для определения машинных коэффициентов необ-
ходимо ввести масштабы, связывающие реальные физические
переменные с соответствующими им напряжениями схемы набо-
ра модели на АВМ. Масштабы рассчитывают по формуле
тх~ ^1хтах' (5-2)
ППе Хтах — максимальное значение физической переменной х (/);
— верхний предел рабочего диапазона напряжений АВК-6
195
Рис. 5.5. Схема набора модели нейтронной кинетики на АВК-6
в вольтах. Исследование на АВК-6 динамических процессов, про-
текающих за время менее 1 мс или более 100 с, требует задания
временного масштаба
(5.3)
где /м — машинное время; t — реальное время.
После того как определены значения масштабов по соотноше-
ниям в табл. 5.1, можно найти начальные условия интеграторов
и коэффициенты для каждого элементарного функционального
преобразователя или их простейших соединений. Для перемно-
жителей и делителей задание масштабов входных переменных
сразу определяет масштаб выходной (строки 5 и 6 табл. 5.1).
Процедура масштабирования не всегда является тривиальной,
прежде всего потому, что максимальные значения некоторых
переменных не известны заранее. Их приходится оценивать, пред-
варительно решая простые «масштабные» задачи или действуя
методом проб и ошибок. Другой путь нахождения коэффициен-
тов состоит в записи по структурной модели и по схеме набора
системы интегральных (или дифференциальных) уравнений от-
носительно переменных состояния, последующей замене пере-
менных схемы набора их выражениями через масштабы и в срав'
нении коэффициентов полученных уравнений с коэффициентами
модели. В образуемой таким образом системе расчетных соот-
ношений масштабы промежуточных переменных часто можн°
исключить или определить их, задавая удобные значения соб-
ственно искомых коэффициентов схемы набора. Найдем соот-
ношения для расчета машинных коэффициентов модели нейтрон-
ной кинетики последним способом.
196
Таблица 5.1
Введем масштабы: тп, тр, тс, ms. В нормальном режиме
Работы динамику ЯР определяют главным образом запаздыва-
ющие нейтроны, у которых самая долгоживущая группа ядер-
предшественников имеет постоянную времени распада 80 с. Что-
бы обеспечить возможность наблюдать результаты моделирова-
ния на электронно-лучевом индикаторе комплекса и проводить
оперативную регистрацию результатов на двухкоординатном са-
мописце (ДС), следует ввести масштаб по времени mt. Согласно
структурной модели на рис. 5.4
' Р 6 1 .4
п(0 = л(0) + / --------я(т)у + £ 2,с,(г) + $(т) dr, (5.4)
197
c,(O = G(O)+f
J у И(г)-2,с,(т) dr.
(5.5)
По схеме набора модели на рис. 5.5 можно записать:
"л(О = МО)+ко f
О
б
0,1 dod{ up.(-t)un(r)-doun(P) + £ о,и,(т) + мДт)
i- 1
dr, (5.6)
u,(t)=ui(0)+ki J 6,мл(г)-о,и,(т) Jt, i=1, 2, .... 6. (5.7)
0
Подставляя в эти уравнения вместо машинных переменных их
выражения связи с физическими переменными через масштабы,
получаем
n(z) = n(O) + kowJ
о
6 тС1
0,1 dod{ т р'— don(i)+ V а.—г,(т) +
ms
Ч---s(i) Idt;
т„ J
(5.8)
ci (0=ci (0)+fc, m, J
о
bimn
L mCi
dt.
(5.9)
Сравнивая (5.8), (5.9) c (5.4), (5.5), находим соотношения
O,lkododlmp'mt = ^ 11; (5.10)
kodomt=Pll-, (5.11)
komtms/m„=\; (5.12)
aikomtmCj/m„ = 2.i; (5.13)
bikimtmn I mCi=pill-, (5.14)
aikimt^=k[. (5.15)
Объединяя (5.10) и (5.11), (5.13) и (5.14), имеем
0,lzZ,n2p.= l; (5.16)
Ь,т(к0 = ^/1. (5.17)
Считаем, что р'тах — 1 и итйЛ-=105 нейтр/см3. Тогда мас-
штабы переменных: №,/=10 В; т„=10~4 Б ем3. Положим мас-
штаб времени ли , = 0,1, сократив тем самым время регистраций
процессов в 10 раз. Масштабы ms и mCi можно не задавать»
поскольку они определяются из соотношений (5.12) и (5.13)-
198
(5.18)
Далее, выбрав значение любого из коэффициентов схемы набора,
например Jo= 1, по соотношениям (5.10)—(5.17) последовательно
определяем остальные коэффициенты:
Ло=1ОД//; ktai=\0^ р;
d{ = 1; ms= 10-4//Р; тс.= 10~3 к,!/р.
В табл. 5.2 и 5.3 приведены значения ядерно-физических констант,
характерных для ЯР на тепловых нейтронах с 13SU в качестве
горючего, и результаты расчета коэффициентов в схеме набора
структурной модели на АВК-6. Там же указаны значения коэф-
фициентов пересчета задаваемого начального условия ип (0) в на-
чальные условия w/(0). Коэффициенты определяют по формуле,
получаемой из соотношений (5.13)—(5.17):
g/=u,(0)/«n(0)=fri7a». Таблица 5.2 (5.19)
Параметр Р 1. с ^0 т,, В-с-см’
Значение 6,5-10"’ IO'1 6,5 65 1 1,54-10“’
Таблица 5.3
Номер группы PitP Л,-, с— ь, к. ai mr., В-см3 В/
1 0,033 0,0124 0,033 1 0,124 1,54-10- 0,266
2 0,219 0,0305 0,219 1 0,305 1,54- 10- 0,718
3 0,196 0,111 0,196 10 0,111 1,54-10- 1,766
4 0,395 0,301 0,395 10 0,301 1,54-10-’ 1,312
5 0,115 1,13 0,115 100 0,113 1,54-10-’ 1,018
6 0,042 3,00 0,042 100 0,3 1,54-10-’ 0,14
Для реализации структуры на рис. 5.5 нужно семь блоков
линейных, в состав которых входят интегрирующие преобразова-
тели, и один блок перемножения. Так как в одном АВК-6 могут
быть одновременно использованы шесть сменных блоков, то
Удобно на одном комплексе (2) моделировать динамику шести
гРупп запаздывающих нейтронов, а на другом (/) — мгновенных.
После установки решающих модулей на монтажном поле
^ини-АВМ последовательно выставляют значения коэффициен-
тов и начальных условий и производят коммутацию преобразо-
вателей каждого блока в отдельности. При этом, используя
Индикационно-измерительные средства комплекса, полезно конт-
ролировать правильность выполнения заданной микропрограм-
199
Рис. 5.6. Переходные процессы в модели ядерного реактора, критичного в началь-
ный момент времени:
а — положительные скачки реактивности: 1 — р'=0,4; 2 — р'=0,3; 3 — р'=0,25; 4 —
р'=0,2; 5 — р'=0,15; 6 — р'=0,1;
б — отрицательные скачки реактивности: 1 — р'= —0,1; 2— р'— — 0,2; 3 — р'= —0,4; 4—
р'— -0,6; 5 — р'= —0,8; 6 — р‘ — — 1;
в — реактивность линейно возрастает со скоростью р', с*1: 1 — р'=0,04; 2 — р'=0,03;
3 —. р'=0,02; 4 — р'=0,015; 5 — /5'=0,01; W
г — реактивность линейно убывает: 1 — р'=—0,01; 2 — р'=—0,015; 3 — р'=—0,02;
4 — р'= -0,03; 5 — р'= -0,04
мы блока. Далее, сформировав в соответствии со структурной
моделью связи между сменными модулями, приступают к ис-
следованию модели.
Для организации периодического режима один из АВК следу*
ет сделать ведущим, другой — ведомым. Этот режим обеспечива-
ется подачей управляющих импульсов генератора ведущего
комплекса на АВМ ведомого. В периодическом режиме при
минимальной частоте генератора 0,1 Гц длительность развертки
составляет 5 с (соответствует реальному времени 50 с). Для ре*
гистрации более длительных процессов необходимо установить
200
Рис. 5.7. Переходные процессы в модели реактора, подкритичного в начальный
момент времени:
а — положительные скачки реактивности Др' относительно уровня подкритичности
— Др'= 1,1; 2 — Др'= 1; 3 — Др'=0,8; 4 — Др'=0,6; 5 — Др' =0,4; 6 — Др'=0,2;
6 — отрицательные скачки реактивности Др' относительно уровня подкритичности
/> = -0,15: 1 — Др'=—0,05; 2 — Лр'=-0,25; 3 Др'=-0,45; 4 — Др'=-0.65;
5 - Др'= —0,85;
в — реактивность линейно возрастает с уровня р'=—1 со скоростью р', с"1: 1 — р'=0,06;
2~ /5'=0,05; 3 — р'=0,04; 4 — р' = 0,03; 5 — р'=0,02;
г — реактивность линейно убывает с уровня р'= —0,15: 1 — р’= —0,005; 2 — р' = —0,01;
3 — р'= -0,02; 4 — р'= -0,04; 5 — р'= -0,05
частоту генератора с помощью отдельного источника напряже-
ния менее +1 В или использовать режим непрерывного интег-
рирования с организацией линейной развертки ДС на допол-
нительном интеграторе АВК, как показано в строке 1 табл. 5.4
(предельно достижимая длительность развертки в этих случаях
Равна 300 с). В качестве ступенчатых сигналов реактивности
Можно использовать прямоугольный сигнал ведущего генерато-
ра, а в качестве линейных — смещенный треугольный сигнал
(строка 2 табл. 5.4) генератора ведомого АВК. В режимах перио-
201
дического и однократного непрерывного интегрирования данные
воздействия проще формировать, задавая на вход модели носз о-
янное напряжение нужного знака и амплитуды и линейно-изменя-,
ющийся сигнал с выхода интегратора (табл. 5.4, строка 1, w2=0).
Таблица 5.4
На рис. 5.6 и 5.7 приведены результаты моделирования, пред-1
ставленные в виде семейств графиков переходных процессов,
полученных при различных по величине и знаку возмущения»
реактивности. Рисунок 5.6 относится к модели ЯР, находившему-)
ся в начальный момент времени в критическом состоянии, а рис.
5.7 — к подкритическому ЯР с источником нейтронов.
5.2. СМЕННЫЙ МОДУЛЬ Р
Специализированный сменный модуль Р (реактор) обеспечи-
вает моделирование широкого круга задач по изучению нейтрон
но-физнческих процессов в ядерном реакторе, исследованию его
динамических характеристик, проектированию систем контроля
и управления ЯР. Возможно использование модуля Р в составе
тренажеров, в системах комбинированного и полунатурного мо-
делирования элементов АЭС.
На рис. 5.8 показан общий вид модуля, передняя панель!
которого отражает структурную модель нейтронной кинетики,
полученную посредством преобразования структурной модели на
рис. 5.4. Преобразование состоит в следующем:
две цепи ОС интегратора объединяют в одну общую, выход-
ной переменной которой является сумма скоростей накопления]
ядер-предшественников запаздывающих нейтронов:
Е q(0=~n(0- Е я* с, (0;
202
Рис. 5.8. Общий вид сменного модуля Р
переносят преобразователь с коэффициентом Р/1 в прямую
связь интегратора.
Такое представление структурной модели нейтронной кинети-
ки дает возможность повысить точность ее реализации элект-
ронным образом путем выполнения модели динамики запазды-
вающих нейтронов в виде параллельно соединенных пассивных
ЛС-цепей.
Разбиение структурной модели нейтронной кинетики на ком-
мутируемые перемычками элементы или отдельные преобразова-
тели, а также организация самих преобразователей позволяют:
наблюдать и регистрировать в реальном времени напряже-
б
ния, соответствующие p(Z), s(t), n(t), n(f), £ c((Z);
i = l
изменять количество учитываемых групп ядер-предшествен-
ников запаздывающих нейтронов (модели дополнительных групп
Реализуют па стандартных модулях АВК-6);
измерять и независимо регулировать относительные доли
запаздывающих нейтронов f-й группы /?///? и постоянную fi/l;
устанавливать начальные условия для плотности нейтронов
/)(0) с автоматическим вводом начальных условий для концент-
раций ядер-предшественников с(- (0), соответствующих стационар-
ному реактору с уровнем п (0);
исследовать упрощенные модели нейтронной кинетики (мгно-
6енного скачка, постоянного источника и др.).
В состав модуля дополнительно введены: сумматор 1, кнопоч-
^Н’й переключатель 2, задатчики напряжения 3, 4 и многофунк-
203
циональный преобразователь 5 (рис. 5.8). Установкой перемычки
в этом преобразователе коэффициент к, регулируемый от 0 до 1
умножается на 1, со или 0,1 /р, чем обеспечивается выполнение
соответствующих преобразований — усиления с коэффициентами
к и «бесконечность» и интегрирования. При использовании пре-
образования 0,1 kip данным блоком моделируется динамика при-
вода регулирующего стержня (PC), перемещаемого с помощью
двигателя постоянного тока (ДПТ). Передаточная функция
0,1 к/p в свернутом виде приближенно представляет цепочку пре-
образований н(/)-»<р(0-»Лр.с(/)-»р'(Г), где u(t) — напряжение
управления, подводимое к ДПТ; <p(t) — угол поворота вала
двигателя; hp c(t) — глубина погружения регулирующего стерж-
ня; p'(t) — реактивность в долях /?. Если в решаемой задаче
нужно учесть, например, инерционность ДПТ или нелинейность
в градуировочной характеристике стержня, то для этого исполь-
зуют стандартные модули АВК —- соответственно линейный
и нелинейный, включаемые последовательно с преобразователем
0,1 к/р модуля Р. Кнопочный переключатель 2 имитирует ключ
управления стержнем ручного регулирования. Кнопками «|»
и «|» формируются релейные сигналы напряжения амплитудой
+ 10 В и —10 В, моделирующие включение привода на подъем
и опускание PC.
Если перемычка в преобразователе 5 установлена в положение
1, то входные сигналы сумматора соответствуют реактивности^
При этом инвертирующий вход сумматора используют для пода-
чи сигнала реактивности, являющейся, например, результатом
тепловых процессов в ЯР.
Задатчик 3 напряжения в диапазоне 0-н +-10 В служит для
моделирования источника нейтронов s, а задатчик 4 (0-.— 10 В) —
для установки начального условия н(0).
На основе модуля Р легко реализуются различные варианты
организации вычислителей реактивности (реактиметров), пред-
ставляющих собой обратную модель нейтронной кинетики и по-
зволяющих по сигналу, соответствующему плотности нейтронов,
вычислить входную переменную ЯР — реактивность.
Как известно, структуры реактиметров могут быть получены
двумя способами [8]. Во-первых, включением модели нейтрон-
ной кинетики в отрицательную ОС усилителя с большим коэф-
фициентом усиления (рис. 5.9,а), во-вторых, обратным преоб-
разованием этой модели (рис. 5.9,6). Первый способ реализуется
в модуле Р установкой перемычки блока 5 в положение со и пере-
мычки, замыкающей выход модели нейтронной кинетики с ин-
вертирующим входом сумматора. При организации второго не-
обходимо использовать дополнительно модуль умножения-деле-
ния и линейный модуль, на котором приближенно реализуется
операция дифференцирования.
204
Рис. 5.9. Структурные модели вычислителей реактивности:
а — реактиметр на основе прямой модели нейтронной кинетики; 6 — реактиметр на
основе инверсной модели нейтронной кинетики
Принципиальная схема модуля Р приведена на рис. 5.10. На
операционных усилителях (ОУ) DA 1 и DA2 выполнены многофу-
нкциональный преобразователь и входной сумматор. Операция
умножения в модели нейтронной кинетики реализована на анало-
говом перемножителе 525ПС2 (DA3) в стандартном включении.
Цепи подстройки характеристики DA3, а также резисторы балан-
сировки нулей ОУ на схеме не показаны. Модель динамики
запаздывающих нейтронов построена на ОУ DA4, включенном
как суммирующий усилитель токов пассивных PC-цепочек, кото-
рые моделируют группы ядер-предшественников. Выходное на-
I 6
пряжение DA4 соответствует величине - £ <?,(/). В электронную
р 1=1
модель нейтронной кинетики входят также сумматор на ОУ DA5
и интегратор на DA6. Напряжение начального условия для интег-
ратора подается на гнездо XS1 от регулируемого источника
напряжения па резистивном делителе R37, RP10. Ввод началь-
ного условия производится с помощью ключей на МДП-тран-
зисторах VT7, VT8, управляемых разнополярными напряжени-
ями с выхода формирователя АВК-6. Ключи VT1—VT6 работа-
ют синхронно с VT7, обеспечивая установку нулевых начальных
условий с ДО), которым соответствуют начальные условия с( (0) =
= л(0)^(7(А|/). Вместо МДП-транзисторов VT1—VT8 могут
быть использованы интегральные аналоговые ключи КР590КН5.
Диод VD1 служит для ограничения выходного напряжения DA6
областью положительных значений. Светодиоды VD2, VD3 сиг-
нализируют о превышении напряжения на выходе интегратора
Уровня +10 В и его уменьшении ниже нуля. Транзисторы VT9,
УТ10 обеспечивают нормальный ток через светодиоды, а рези-
сторами R31—R34 заданы пороги +10 В и 0 В. Переменными
резисторами RP4—RP9 устанавливают требуемые значения Д,/Д,
а резистором RP3 — постоянную /? / /.
Выбор параметров электронной модели основан на подобии
Уравнений, связывающих токи и напряжения в электрической
схеме, уравнениям нейтронной кинетики, которые в соответствии
205
Рис. 5.10. Принципиальная схема модуля Р
со структурной моделью на передней панели модуля Р имеют вид
n(t) = n(0)+j j
О
6
P'(t)h(t)+s'(t)- Y с-(т)
i-1
(5.20)
(5.21)
где =
Р
Для электронной модели можно записать:
“ R18
_ 1\14
"и(0 = «„(0)+—
о
R18 R18 « 1
+иу(т)--------У и(т) dr;
R13 R15 J
R16
К2К
(5.22)
(5.23)
1 («4 (г)
uM=aku„(t)-— — dz, (5.24)
СА J AzA
0
6
где u„ (t) — напряжение на выходе DA6; £ и, (г) — напряжение на
i= 1
выходе DA4', u^ff) — напряжение в точке соединения резистора
R2K и конденсатора СК (К =4,5, 9); а к — коэффициент пере-
дачи делителя на RPK\ KR=(RP3 + R19) / (R19+у RP3); у — поло-
жение движка резистора RP3 (у = 0-?1). Вводя масштабы
un(i) = mnn{t)\ up'(f)=mp'p'(ty, u^(t) = ms-s' (/); hi(z) = /mic-(0
и подставляя эти выражения в уравнения (5.22)—(5.24), получаем
п(г)-«(0)+——
C3R22 J
О
r0,lwfl.^7S R18ms'
---------p'W"(t)+-------J'(0-
_ R14 R13mn
(5.25)
Л/S ‘ т, 1
ттгЕ—ад
R15 J
Р
207
J c[(t)dz.
,,IX <*kR16mn 1
c, (0=--------л(г) --------
R2Kmi CKR2K
(5.26)
0
Сравнивая (5.25), (5.26) c (5.20), (5.21), находим уравнения, связы-
вающие масштабы, физические и электрические параметры, из
которых легко выразить расчетные соотношения в виде
Р,
Р
1
-----------=Л,-:
CKR2K
10R14
R15 р
R18 Кл Р
R15 R22C3 I
R13 т,
R15 т
RI6=R2K;
i=K-3.
(5.27)
В интеграторе многофункционального преобразователя со-
множитель 0,1 выбран следующим образом. Считая, что мак-
симальная скорость введения реактивности p'nwv=0,l с*1, на-
ходим масштаб mp'—Up‘ /p%,.;x= 100 В-с. Значение сомножи-
теля определяет постоянная времени интегратора (R3- С2)~‘ (см.
рис. 5.10). Так как
p'(O=f p'^dT- (5.28)
О
г
ир' =[ v(т) <5-29)
1 КЗ С2 J '
о
то, подставив в (5.29) соотношения Mp'(0=Wp'P'(0; мр'(0 =
=тр p'(t) и сравнив полученное выражение с (5.28), получим
l/(R3-C2)=mp'/m^. (5.30)
Припу=10В (R3 С2)~* = 0,1 с~‘.
Выбрав номиналы элементов схемы электрической модели,
подбором или установкой прецизионных компонентов необходи-
мо обеспечить требуемую точность выполнения соотношений
(5.27) и (5.30). Настройка собранного модуля заключается в ба-
лансировке нулей ОУ и перемножителя, а также в регулировке
коэффициента передачи последнего. В процессе решения конкрет-
ных задач нужные значения /?( / /3 и /? /1 устанавливают с помощью
эталонного источника напряжения +10 В и цифрового вольтмет-
ра АВК-6, подключаемых к входным и выходным гнездам соот-
ветствующих преобразователей.
208
5.3. ДИНАМИКА НУКЛИДНОГО СОСТАВА АКТИВНОЙ ЗОНЫ
В результате взаимодействия нейтронов с ядрами нуклидов
и процессов радиоактивного распада постоянно изменяется ядер-
ный состав активной зоны. Следствием изменения концентрации
ядер Nj является изменение макроскопических сечений и реактив-
ности реактора.
Обобщенная структурная модель динамики концентрации от-
дельного нуклида приведена на рис. 5.11. Генерация /-го нуклида
происходит за счет процессов:
деления ядер ьго нуклида горючего, в результате которого
с вероятностью Pj появляется j-й нуклид;
радиационного захвата нейтронов ядрами предыдущего
(/—1)-го нуклида, имеющего сечение захвата Е/1;
радиоактивного а- и ^-распада ядер к-го нуклида со скоро-
стью Убыль количества ядер j-ro нуклида определяют
процессы поглощения ими нейтронов и радиоактивного распада
с постоянной kj. Модель носит обобщенный характер в том
смысле, что для любого конкретного нуклида некоторые из
коэффициентов преобразователей равны нулю (отсутствуют со-
ответствующие связи). Например, для осколков деления с мас-
совыми числами менее 72 и более 145 все Р}=0, а если j-й нуклид
не подвержен радиоактивному распаду, то Ау=О.
Полное описание динамики нуклидного состава ЯР будет
представлять совокупность моделей вида на рис. 5.11, связи
между которыми отражают реальный механизм ядерных превра-
щений. Естественно, что учет всех нуклидов, имеющихся в актив-
ной зоне ЯР (а их известно более 2000), делает модель очень
сложной и непригодной для расчета современными средствами
Рис. 5.11. Обобщенная структурная модель изме-
нения концентрации и макроскопического сече-
ния j-ro нуклида
209
вычислительной техники. Поэтому в ЯР группируют или выделя-
ют только те нуклиды и процессы, которые оказывают сущест-
венное влияние на нейтронно-физические характеристики актив-
ной зоны. Это процессы выгорания и воспроизводства ядерного
горючего, отравления и шлакования ЯР продуктами деления.
Отравление ЯР. Под отравлением реактора понимают про-
цессы накопления ядер ксенона |35Хе и самария “,9Sm, которые
обладают огромными по сравнению с другими нуклидами сече-
ниями поглощения тепловых нейтронов. Изменение концентра-
ции ядер этих изотопов заметно влияет на реактивность ЯР.
Ксенон образуется в результате как деления ядер горючего,
так и распада осколка деления ,35Те в следующей цепочке превра-
щений:
РТе /3 /3 /3
235U-t-n -> ,35Те -► 1351 -> 135 Хе -> 135 Cs.
Период /3-распада теллура мал по сравнению с периодами
/3-распада йода и ксенона, поэтому полагают, что йод получается
непосредственно в результате деления. На рис. 5.12 приведена
структурная модель изменения концентрации ксенона с учетом
того, что сечение поглощения йода -»0, а топливом является
235 U, сечение деления Еу- которого принято постоянным (это
оправдано, поскольку длительность ксеноновых процессов значи-
тельно меньше времени выгорания топлива). Причина процес-
сов — поток тепловых нейтронов плотностью Ф(/), взаимодейст-
вие которого с ядрами горючего вызывает деление ядер со скоро-
стью 7?}(г) = Е^Ф(/). Скорость генерации йода R}(t) определяется
7?}(z) и вероятностью Р] выхода йода при делении 235U. Ско-
рость накопления ядер ,35I (z) равна разности скоростей гене-
рации R'(t) = Р^Е^ФЦ) и распада /?p(Z) = где — посто-
янная /3-распада йода. Накопление 1351 отражает на структурной
модели интегратор, преобразующий N{(t) в Распад ,351
является одной из причин генерации 135Хе. Вторая — непосредст-
венный выход изотопа 135Хе при делении 23SU с вероятностью
РХе- Скорость 7VXe(z) накопления ксенона равна разности скоро-
стей его генерации R *е (z) = Р Хе X/ Ф (z) + Аj (z) и убыли R *' (Z) =
= 7?*с(z)+ R*e(Z), где /?pC(Z) = AXe/<Xe(Z) — скорость радиоактив-
ного распада 135Хе, a R „е (Z) = а *' NXc (z) Ф (Z) — скорость его
выгорания в результате поглощения нейтронов. Концентрация
ксенона NXe (t) определяется интегрированием NXe (z) с начальным
условием 2VXe(0), что представлено на рис. 5.12 вторым интег-
ратором.
210
Рис. 5.12. Структурная модель прочее- Рис. 5.13. Схема набора модели
са отравления реактора ксеноном отравления ксеноном на АВК-6
Исследуем путем моделирования на АВК-6 временное поведе-
ние макроскопического сечения поглощения ксенона L*e(z) (или
концентрации АХс(0) при резком изменении плотности потока
нейтронов в реакторе относительно некоторого стационарного
уровня Фо. Структурная схема набора на мини-ABM комплекса
АВК-6 модели отравления ксеноном показана на рис. 5.13. Для
вычисления коэффициентов схемы набора проведем масштабиро-
вание, пользуясь табл. 511. Свяжем масштабами входные и вы-
ходные переменные: пгф=Пф(/)/Ф(г), mN=uN(t)/N(t). Поскольку
переходные процессы изменения концентраций 135Хе и ,351 длятся
десятки часов, введем также масштаб времени /я,. Структурной
модели на рис. 5.12 и схеме ее набора на АВК на рис. 5.13
соответствуют строки 4 и 7 табл. 5.1. В результате сравнения
моделей можно сразу записать систему расчетных соотношений
для машинных коэффициентов:
к1к2=Г^&', к3к4^Р^
тфт, тфт,
, 71 7 у*
Qi кг = — j я2 кг ~
mt т,
аХе Л
к4а3=——-—; atk4=—.
0,1лпфШ, т,
Значения ядерно-физических констант, входящих в структурную
Модель на рис. 5.12, приведены в табл. 5.5.
211
Таблица 5.5
Параметр р1 Хе 1рС 1 а*с, IO’" см2 ар 10 24 см2
Значение 0,06 0,003 2,8-10“’ 2,1 • IO’’ 2,65 10е 583,5
(532)
Макроскопическое сечение деления Е/ найдем из следующих
соображений. Положим, что в ЯР горючим служит диоксид
урана UO2 плотностью рио = 10,5 г/см3 с 2%-ным обогащением
235U (характерно для теплсвыделяющих элементов энергетичес-
ких реакторов). Тогда ядерная плотность горючего
кг — ^аРно,
UO1~ AAj+2AZ0’
где Аа = 6,022-1023 моль-1 — число Авогадро; и Л/о — атом-
ные массы соответственно урана и кислорода, а. е. м. Концент-
рация 235U равна Ns = NVO1 г, где г = 0,02 — обогащение. В резуль-
тате вычислений получим Ns — 0,0468 • 1022 ядер/см3 и
= 0,27 см-1. Будем считать, что максимальная плотность по-
тока нейтронов в исследуемом ЯР составляет Фтах=
= 1014 нейтр/(см2 • с). Данной плотности потока соответствует
максимальная равновесная концентрация ядер йода =
1
=рР15Е/Фтох = 5,8-1016 ядер/см3. Тогда масштабы для плотно-
сти потока нейтронов и концентраций йода и ксенона:
щф=10-13 В-см2-с; шЛг=1,73-10-16 В-см3.
Полагая к2 — к4 = 1 и выбирая а3 = 1, находим масштаб по време-
ни mt= 10ст=2,65-10-4. Далее по формулам (5.31) опреде-
ляются все значения коэффициентов: а, = 0,106; а2 = 0,08;
ki =0,106; к3 — 0,0053. Если Ф(0)=1014 нейтр/(см2 • с), то началь-
ные условия для интеграторов в схеме набора модели на АВК:
р5 у5 Ф /(в
Ц (0) = 17 = 1/ф (0) = 10 В;
-*1
^(0)=^^^= 1.03 в. (5.34)
(5.33)
АХе + <'Ф(О) ЯХе + <'Ф(О)
Если Ф(0)=1013 нейтр/(см2 с), то Ц(0)=1 В, {7Хе(0) = 0,62 В.
Для моделирования на АВК-6 используют блок перемноже-
ния и два линейных блока. Регистрацию графиков на ДС осуще-
ствляют в периодическом режиме интегрирования. Если в обоих
интеграторах модели установить вместо множителя 1 множитель
100 (сделав таким образом £2 = Р4 = 100 с-1), то произойдет
212
Рис. 5.14. Отравление ксеноном:
а — при снижении потока нейтронов с уровня Ф(0)= 10” нейтр/(см! с) до Ф=0,1ЛФ(0)
(1— к=б; 2—к—4; 3—к = 2; 4—к=1)- б — при увеличении потока нейтронов с уровня Ф(0)=
= 10” нейтр/(см’ с) до Ф=(1 +к) Ф(0) (1-к= 1; 2-к = 5; 3-к=9)
100-кратное сокращение модельного времени и процессы будет
удобно наблюдать на экране осциллографического индикатора
комплекса.
На рис. 5.14 приведены графики изменения сечения поглоще-
ния ксенона Е*'(7) как результат ступенчатого изменения плот-
ности потока нейтронов ЯР. Как видно из рис. 5.14, а, в первые
часы после быстрого снижения мощности реактора значи-
тельно возрастает. Соответственно увеличивается непроизводи-
тельное поглощение нейтронов в 135Хе и уменьшается реактив-
ность ЯР. Возникает так называемая йодная яма — провал
реактивности, который необходимо компенсировать путем из-
влечения PC (уменьшения для того, чтобы удержать мощ-
ность реактора на новом уровне. Увеличение мощности приводит
к противоположному эффекту (рис. 5.14, б). Вначале наблюдается
уменьшение Е*е (всплеск реактивности), а затем его рост до
равновесного значения.
Отравление реактора самарием представляет структурная мо-
дель на рис. 5.15. Ядра 14,Sm непосредственно при делении не
возникают, а образуются в цепочке радиоактивного распада:
23su + h 149Nd --> 149Pm -^>149Sm.
213
Рис. 5.15. Структурная модель процес-
са отравления реактора самарием
Рис. 5.16. Схема набора модели
отравления самарием на АВК-6
Поскольку период полураспада неодима (1,7 ч) невелик по
сравнению с периодом полураспада прометия (48 ч), в структур-
ной модели ,4’Рт считается непосредственным продуктом деле-
ния. Скорость накопления ядер прометия равна разности скоро-
стей его генерации в результате делений j'?rm(/)=P|m е;ф(о
и распада /^(O^Fm^VpmW- Одновременно скорость /2-распада
прометия есть причина генерации ядер I49Sm, убыль которых
в результате поглощения ими тепловых нейтронов происходит со
скоростью R (г) = a NSm (г) Ф (г). Интеграторы в модели на
рис. 5.15 отражают накопление ядер прометия и самария концен-
трациями WPm(0 и ^т(0-
В табл. 5.6 приведены значения соответствующих констант,
а на рис. 5.16 показана схема набора модели отравления сама-
рием. Сотношения из расчета машинных коэффициентов нахо-
дим тем же способом, как и в рассмотренной выше модели
процесса отравления ,3SXe:
ГПфШ,
o-Sm
кз а2—------°----;
0,1 rn^mt
1 Pm
<11Л2 =—
а,к3=^.
(5.35)
Таблица 5.6
Параметр р5 •* Pm С * <т;Г, 10’24 см1 10 14 см2 Е), см 1
Значение 0,014 3,6-10’* 4,1-10“ 583,5 0,27
214
Рис. 5.17. Отравление самарием:
а — при снижении потока нейтронов с уровня Ф(0)= 10“ нейтрДсм1 • с) до Ф=0,1 /сФ (0)
(7—к=1; 2—к=2-, 3—к=4; 4—к = 6; 5—к = 8)-, б—при увеличении потока нейтронов с уровня
Ф(0)=10‘3 нейтр/(см2• с) до Ф=(1+/с)Ф(0) (2-к= 1; 2-к=3; 3-к = 5; 4-к=Т, 5-к=9)
Получим графики изменения макроскопического сечения по-
глощения (концентрации) 149Sm при ступенчатых возмущениях
потока Ф(2) — уменьшении с уровня Ф(0)=1014 нейтр/(см2-с)
и увеличении с уровня Ф(0)=1013 нейтр/(см2 • с). Задав а2 = 1
и Шф= КГ13 В-см2 с, находим mt = 4,1 • 10~6 и at =0,88. Равновес-
ная концентрация 149Sm не зависит от потока и равна
Arsm(0) = E/J>Pm/<7«n’ = 9,2-1016 ядер/см3. Считая, что данному зна-
чению соответствует напряжение wSm(0) = 5 В, найдем масштаб
mN=5,43-10"17 В-см3 и далее /с, =0,5. Начальное условие
“рт(0) = шуФ(0)Е^Р^п,/Лрт при Ф(0) = 10*4 нейтр/(см2-с)
и Ф(0)= 10*3 нейтр/(см2 - с) равно соответственно 5,69 В и 0,569 В.
Графики изменения (/) показаны на рис. 5.17. Реакция
самария на возмущения мощности аналогична реакций ксенона.
Однако переходные процессы отравления 149Sm длятся десятки
суток, а его концентрация независимо от возмущения стремится
к одному и тому же уровню.
Динамика топливного состава ЯР. Изменение изотопного со-
става ядерного горючего, образованного смесью 235U и 238U,
определяют ядерные реакции:
235U+n-> 236U
* Осколки деления
238и+п ->• 239u A 239Np A 239Pu+п -> 240Ри+п ->
Осколки
-♦ 241Ри + п -+ 242Ри.
* Осколки
215
Рис. 5.18. Структурная модель динамики топливного состава реактора
Если пренебречь изотопами 23S>U и ”’Np, имеющими малое
время жизни, а также 236U и 242Ри, обладающими небольшим
сечением поглощения нейтронов, то структурную модель, описы-
вающую процессы выгорания и накопления ядер горючего, пред-
ставляет ограниченный пунктиром прямоугольник \Vr на
рис. 5.18. Для каждого из изотопов — 235U, 238U, 239Pu, 240Pu,
241Pu с концентрациями Ns (z), Ne (z), N9 (/), N0(t), (t) — модель
отражает процессы убыли ядер со скоростью 7?L(Z) = 6(Z)a^M (О
в результате радиационного захвата нейтронов и деления
216
для делящихся ядер, а'а=сг'с для ядер, не подвержен-
ных делению тепловыми нейтронами) и их генерации со скоро-
стью при радиационном захвате нейтрона
ядром-предшественником. Интегратор представляет преобразо-
вание скорости накопления ядер в их количество (концентрацию):
М (/) = Nt (0) + f N, (T)dx. (5.36)
о
Скорость деления /?}(Г) = Ф(г)<т}-/У,(Г) (i=5; 9; 1) преобразуется
в скорость генерации нейтронов n‘r(t) с коэффициентом v(, рав-
ным среднему количеству нейтронов, возникающих при делении
ядра i-ro нуклида. В данном преобразовании опущена модель
генерации нейтронов Wrti (см. рис. 5.3, а), поскольку время
выхода запаздывающих нейтронов несущественно по сравнению
с длительностью процессов изменения концентрации ядер горю-
чего. Общая скорость генерации нейтронов равна сумме
йг(0=«?(0+”?(0 + «г(0-
Нейтроны деления имеют среднюю энергию около 2 МэВ и их
называют быстрыми. Быстрые нейтроны могут вызвать деление
238U, а их превращение в тепловые (с энергией примерно 0,025 эВ)
является результатом замедления, при котором возможно резо-
нансное поглощение нейтронов ядрами 238U с образованием
23’Ри. Эти процессы упрощенно учтены на рис. 5.18 моделью
ИбТ, в которой д — коэффициент размножения па быстрых
нейтронах; <р —- вероятность избежать резонансного поглощения.
Удельная мощность и; (/), получаемая при делении ядер i-ro
нуклида, определяется скоростью деления /?}(/), которая преоб-
разуется в тг, (г), с коэффициентом Е}, равным тепловой энергии,
генерируемой в одном акте деления. Полная тепловая мощность
ЯР
Р(/) = [w5 (0 + ж» (/) + и-, (/)] V, (5.37)
где V — объем активной зоны.
Отношение скорости накопления нового горючего 239Ри
и 24‘Ри к скорости выгорания исходного 235U называют коэф-
фициентом воспроизводства [7]:
(5.38)
^(0
Для моделирования Kt стуктурную модель на рис. 5.18 нужно
дополнить сумматором и делителем.
Получим графики изменения макроскопических сечений изо-
топов, энерговыделения и энерговыработки при постоянной
плотности потока нейтронов в ЯР Ф(7)=Фо = 1014 нейтр/(см2 • с)
217
и начальной загрузке UO2 с обогащением 235U 2%. Поскольку по
условию задачи Ф (f) = const, структурную модель на рис. 5.18
мржно упростить, заменив перемножающие преобразователи иа
линейные с коэффициентом преобразования Фо. Схема набора
такой модели приведена на рис. 5.19. Будем считать, что выход-
ные напряжения интеграторов соответствуют макроскопическим
сечениям поглощения u,,(t)=Е ‘а (t), где i = 5; 8; 9; 0; 1, а масш-
таб mL= 10/E„mav. Начальные значения макроскопических сечений
изотопов: Е®(0) = 0,062 см"'; Е^(0) = 0,318 см"'; Е’(0) = Е«(0)®
=Ei(0)=0, Тогда тпх= 10/Ея(0) = 31,45 Всм.
218
Согласно структурной модели для ьго изотопа в общем виде
можно записать:
N, (t) = Nf (0) - |{<7’Ф(Л( (т)-а'-'Ф0^_, (т) + Фо ц (1 - ср) х
X [v5 О’) Ns (т) + Уд б} Ng (т) + Vj о} Л\ (т)]| dr, (5.39)
или, умножив на о „:
х[т^а*£*(т) + У^^Е’(т) + т^а^(т)]} Jt, (5.40)
где v^ = v,- Ду/o-j,.
По схеме набора модели
u, (t) = w, (0) - J|a, и, (т) - kj Uj_ । (т) + bj [c5 м5(г) +
4-c9m9(t)4-c1Ui(t)]} Jt. (5.41)
В результате сравнения (5.40) и (5.41), с учетом масштаба по
времени т„ находим соотношения
а,/п(=о-5,Ф0; />/с5пг/ = о-'(,Ф()д(1-<?>)т^);
а.ф ст<-1 Ь, с9/и, = о-^Ф0д(1-<p)v^;
к> т< = ° h~ ’
/>,С|П2, = СГ^ФОД(1-^)Т^,
(5.42)
которые можно представить в виде
c5=p(l-<p)v^; ki=ai б‘~'/б‘~'; с9=д(1-<р)г^; bj^at; = (5.43)
Таблица 5.7
Константа MSU 238U 239pu 240Pu 2«ipu
аа, 10“24 см1 680,9 2,7 1011,2 289,5 1378
<Т//«Га 0,857 0 0,736 0 0,737
0,143 1 0,264 1 0,263
V 2,416 0 2,862 0 2,924
о. 0,494 0,002 0,734 0,21 1
kt 0 0 0,734 0,055 1
bi 0 0,002 0,734 0 0
Ci 0,275 0 0,279 0 0,286
219
Рис. 5.20. Изменение макроскопических сече-
ний нуклидов горючего и шлакон в процессе
кампании реактора:
1 - !’(/); 2 - !’«); 3 - Е*(/); 4 - Е“(,У
5 — 2?(0; 6 — (О
В табл. 5.7 приведены входящие
в структурную модель константы
взаимодействия тепловых нейтро-
нов с изотопами урана и плутония
[7], а также коэффициенты схемы на-
бора модели. Масштаб ш,=
= 13,78 • 10“8 выбран, исходя из того,
что в сменном модуле И комплекса
АВК-6 коэффициент а,- имеет диапа-
зон изменения 0 — 1, а максималь-
ным микроскопическим сечением поглощения обладает 24|Рц.
Начальные условия интеграторов определяют по формуле
Mi(0) = mzE'(0).
Наблюдение и регистрацию графиков Е 'а (I) удобно проводить
в периодическом режиме интегрирования АВК-6. Они показаны
на рис. 5.20. В процессе кампании реактора сечение Е? практичес-
ки не изменяется, а Е’ экспоненциально убывает. Одновременно
происходит накопление нового горючего — ядер плутония и рост
сечений Е’ и Е^, причем вклад последнего в суммарное сечение
поглощения нейтронов в топливе невелик.
Напряжение на выходе сумматора сигналов преобразователей
di=Gflu,a с масштабными коэффициентами mR и тк соответ-
ствует суммарному сечению деления топлива Е/(0, скорости
делений Rj(t) и удельной мощности и(0 (принято Е\ = Е;=
= E9f=Ef). Один масштаб известен, другие равны
ГЛ?
mR =—; .
Фо *>Ф0
Таким образом, пгл=31,45-10“14 В см’ с, ши,=9,83-10-’
В-см’/Вт (£z = 3,2-Ю-'1 Втс).
Задав масштаб mq, можно определить коэффициент kq инте-
гратора, преобразующего удельную мощность w(0 в удельную
энерговыработку q (0:
kq = mq/(m, mv).
Графики w(t) и q(i) показаны на рис. 5.21. Там же приведен
график Ф(0, определяющий требуемую программу изменения
плотности потока нейтронов для поддержания постоянного энер-
говыделения в ЯР.
220
Рис. 5.21. Графики измене-
ния удельной мощности
и удельной энерговыработ-
ки в процессе работы реак-
юра при постоянной плот-
ности потока нейтронов
и программа изменения
Ф (г) для поддержания
и, (г)=const
Графики на рис. 5.22 отражают процессы изменения суммар-
ного макроскопического сечения поглощения изотопов E„(Z), ве-
личины v Ez(z) = vs E}(z) + v, E’(z) 4- v, L}(z) и коэффициента раз-
множения kx(t)=pupvL f (z)/Eo (z).
Шлакование ЯР. Шлакование — процессы образования ста-
бильных и долгоживущих ядер, накопление которых приводит
к непроизводительному поглощению нейтронов. Шлаки обычно
объединяют в одну группу, характеризуемую усредненными зна-
чениями концентрации Nwn и микроскопического сечения погло-
щения а ^л. Структурная модель шлакования представлена на
рис. 5.23. Она дополняет модель динамики топливного состава
( Шт с) и построена с учетом того, что шлаки образуются в резуль-
Рис. 5.22. Графики изменения сум-
марных сечений и эффективного ко-
эффициента размножения в процессе
работы реактора при постоянной
плотности потока нейтронов
Рис. 5.23. Структурная
модель процесса шлако-
вания реактора
тате делений, а также при радиационном захвате нейтронов
ядрами 231U. Входными переменными модели здесь являются
нейтронный поток Ф(/), суммарная скорость делений Rf(t) =
= Rf(t) + R}(t) + Rf(f) и скорость поглощения нейтронов в 235U,
а выходом — макроскопическое сечение Z “л (?) или концентрация
^(0-
Схема набора на АВК модели шлакования, отражающая про-
цесс изменения Е (?) при постоянной плотности потока нейтро-
нов Фо, показана на рис. 5.24. Выражения для определения ма-
шинных коэффициентов имеют вид
mRmi mRml
График Е™(?) приведен на рис. 5.20.
На рис. 5.25 показана структурная модель нейтронной кинети-
ки с учетом динамики нуклидного состава. Модель представляет
совокупность нейтронно-физических процессов в тепловыделяю-
щих сборках (ТВС), теплоносителе, замедлителе и регулирующих
стержнях, которые составляют активную зону реактора и уча-
ствуют в формировании плотности потока тепловых нейтронов
Ф(?). Структурные модели процессов в ТВС, содержащих горю-
чее и продукты деления, рассмотрены выше. Структурные моде-
ли генерации нейтронов W'T н для нуклидов горючего имеют вид
рис. 5.3, а и отличаются только значениями /?, и Я,.
Рис. 5.24. Схема набора модели шлакова-
ния на АВК-6
222
hpc
Рис. 5.25. Структурная модель нейтронной кинетики с учетом процессов измене-
ния нуклидного состава
223
5.4. ТЕПЛОВЫЕ ПРОЦЕССЫ В ЯДЕРНОМ РЕАКТОРЕ
И ТЕМПЕРАТУРНЫЕ ЭФФЕКТЫ РЕАКТИВНОСТИ
Тепловыделение в ЯР обусловлено мощностью P(f), которая
выделяется большей частью в ядерном горючем. Следствием
изменения мощности Р(г) является изменение температуры ак-
тивной зоны. В первом приближении преобразование Р(/) в тем-
пературу 6(t) можно описать структурной моделью, показанной
в штриховом прямоугольнике на рис. 5.26. Эта модель совпадает
со структурной моделью, которая подробно рассмотрена в § 1.2
и отражает процесс разогрева утюга, представляемого точечным
телом массой т и теплоемкостью с. Процессы разогрева утюга
и активной зоны ЯР отличаются только тем, что в утюге тепло-
передача происходит с его поверхности в окружающую среду,
а в ЯР выделяемая мощность отводится теплоносителем, цир-
кулирующим через активную зону. Поэтому в модели на рис.
5.26 «тепловой напор» является следствием средних температур
активной зоны и теплоносителя ДО (г) = в (г) — 0Г (г), а параметры t],
Г, та с обозначают коэффициент теплопередачи, площадь тепло-
отдачи, усредненные массу и удельную теплоемкость элементов
активной зоны.
Изменение температуры в ЯР приводит к изменению микро-
скопических сечений <т] взаимодействия нейтронов с ядрами сре-
ды и концентраций ядер Nj. В результате изменяются макроско-
пические сечения и реактивность ЯР. Влияние температуры на
реактивность существенно зависит от размеров, состава и ком-
поновки активной зоны. Поэтому в реакторах различных типов
и даже в различных диапазонах изменения температуры одного
и того же ЯР рост температуры может сопровождаться измене-
нием реактивности как в положительную, так и отрицательную
сторону. Преобразование температуры в реактивность представ-
лено в структурной модели рис. 5.26 нелинейным блоком N[0 (г)]-
Обычно нелинейную зависимость линеаризуют и характеризуют
ЯР температурным коэффициентом реактивности ав=Ар/А0.
Реактивность ЯР p(t), определяющая формирование плотно-
сти потока нейтронов (процесс отражен блоком г, представля-
емым структурной моделью на рис. 5.4), является результатом
алгебраического суммирования реактивности рв, порождаемой
Рис. 5.26. Структурная модель ядерного реактора с учетом тепловых процессов
224
Рис. 5.27. Изменение мощности реактора с отрицательным температурным коэф-
фициентом реактивности:
а — положи тельные скачки реактивности ДРрс: 1—Лр' с—0,5; 2—А//с=0,7; 3—&р'рс—
=0,8; 4—Др' =0,9,6 — отрицательные скачки реактивности:/—Др' = —1,4;2—Др' = —1;
3—Др' = -&,5;4-Др' =-0,2
Р С г р.с
действием температурного эффекта, и реактивности рр„ вноси-
мой органами регулирования. Таким образом, учет температур-
ного эффекта приводит к появлению в структурной модели ЯР
дополнительной ОС, характеристики которой в значительной
степени определяют динамику реактора, его устойчивость и без-
опасность. Несмотря на упрощенное представление теплофизи-
ческих процессов, структурная модель на рис. 5,26 полезна для
качественного анализа нормальных и аварийных режимов ЯР
в энергетическом диапазоне, для оценки эффективности проек-
тируемых систем управления и защиты.
При наборе на АВК-6 структурной модели на рис. 5.26 до-
статочно двух сменных блоков — интегратора и модуля Р.
Опуская процедуры масштабирования и выбора параметров схе-
мы набора, подробно изложенные в предыдущих примерах, при-
ведем графики изменения мощности P(t) при ступенчатом изме-
нении реактивности ррс в реакторе, имеющем отрицательный
температурный коэффициент реактивности ае=3-10“5 (°C)“S.
Графики на рис. 5.27, а, б отражают реакцию P(J) на положитель-
ные и отрицательные скачки реактивности Дррс относительно
значения ррс(0) — — рв(0), соответствующему критическому со-
стоянию ЯР. Температура 0Т принята неизменной, а постоянная
времени теплового процесса Tatneft] равна 5 с. На рис. 5.28
показаны реакции P(z) на ступеньку Др рс=0,7 при различных
постоянных времени Те. Данные графики иллюстрируют свойст-
во саморегулирования ЯР, одновременно подчеркивая опасность
значительного превышения мощности относительно установив-
225
8-6517
Рис. 5.28. Реакция мощности реактора
на ступеньку реактивности Др' с=0,7
при различных постоянных времени
процесса разогрева активной зоны:
7 — 7=1 с; 2—7=2,5 с; 3—7=5 с; 4—7=
=7,5 с; 5-7= 10 с
шегося уровня при увеличении
постоянной Тв или амплитуды
возмущения p[,c.
В наиболее распространенных гетерогенных реакторах ком-
поненты активной зоны -— горючее, теплоноситель, замедлитель
и др. — разделены в пространстве и несут различную тепловую
нагрузку. Компоненты отличаются по теплофизическим харак-
теристикам, а их температуры неоднородно изменяются при
изменении мощности и оказывают различное влияние на реак-
тивность ЯР. Учет этих особенностей требует уточнения и допол-
нения структурной модели рис. 5.26.
Структурная модель динамики тепловых процессов в актив-
ной зоне водо-водяного некипящего ЯР приведена на рис. 5.29, а.
Она включает взаимосвязанные модели тепловых процессов в го-
рючем и теплоносителе, который одновременно является замед-
лителем нейтронов. Если пренебречь мощностью, выделяемой
в теплоносителе-замедлителе, и считать, что вся мощность P(J)
выделяется в горючем, то коэффициент кг = 1. Структурная мо-
дель разогрева горючего отличается от модели па рис. 5.26
только значениями параметров т, с, t] и F. Мощность
Ргт = Ег/;г(0г—0Т), отводимая с поверхности тепловыделяющих
элементов, в которых содержится горючее, передается теплоно-
сителю и является на рис. 5.29 входной переменной модели
нагрева теплоносителя. На нагрев теплоносителя затрачивается
мощность ДРт(0, равная разности PlT(f) и мощности Рт(0>
уносимой из активной зоны реактора и поступающей в теплооб-
менник. Последнюю определяет расход С и разность энтальпий
(теплосодержаний) А/ теплоносителя на входе и выходе активной
зоны. Если гидравлическое сопротивление технологических кана-
лов активной зоны невелико (мал перепад давления), то удель-
ную теплоемкость с теплоносителя можно считать постоянной по
высоте зоны. В этом случае Ai = cTA0T, где Л0т — разность
температур на входе и выходе реактора, которая определяется
226
Рис. 5.29. Структурные модели тепловых процессов в компонентах активной зоны
гетерогенного реактора:
а — горючее и теплоноситель; б — замедлитель
через среднюю 0T(t) и входную 0ВХ(0 температуры. Влияние
температур горючего и теплоносителя на реактивность отража-
ют в структурной модели блоки с коэффициентами аг и ат,
называемыми температурными коэффициентами реактивности
по топливу и теплоносителю.
Для реакторов, в которых замедлитель является отдельной
компонентой активной зоны, структурную модель рис. 5.29, а
следует дополнить моделью тепловых процессов в замедлителе.
Ее вид аналогичен структурной модели разогрева горючего
и показан на рис. 5.29, 6. Мощность Рэ(0, выделяемая в замедли-
теле в результате замедления нейтронов и поглощения у-квантов,
хотя и составляет небольшую долю общей мощности (к3 ~0,1),
может вызывать существенный рост температуры 03(t). Так, на-
пример, в реакторах типа РБМК [9], имеющих графитовый за-
медлитель, который находится в тепловом контакте с теплоноси-
телем, 03(f) в стационарном режиме отличается от температуры
горючего только вдвое. Это связано с тем, что площадь теплопе-
редающей поверхности F3 значительно меньше Fr.
Объединение моделей на рис. 5.29, а и б в одну общую
структурную модель теплофизических процессов отражают свя-
зи, отмеченные пунктиром. Температура замедлителя 03(t) с ко-
эффициентом реактивности по замедлителю а3 преобразуется
в реактивность р3(г), которая, суммируясь с pr(t) и р3(1), вносит
свой вклад в реактивность pe(t).
227
5.5. МОДЕЛИРОВАНИЕ СИСТЕМ УПРАВЛЕНИЯ
И ЗАЩИТЫ ЯДЕРНЫХ РЕАКТОРОВ
Система управления и защиты (СУЗ) — важнейшая система,
обеспечивающая безопасную работу реактора в нормальных
и аварийных режимах. Она включает комплекс технических
средств для контроля, управления и аварийного гашения цепной
реакции деления в активной зоне ЯР.
Основной контролируемой переменной ядерного реактора яв-
ляется плотность нейтронного потока Ф(/), которая определяет
удельную мощность w (г), а та в свою очередь — ряд лимитиру-
ющих параметров, характеризующих теплотехническую надеж-
ность активной зоны. Поток Ф(г) контролируют с помощью
нейтронных детекторов, в качестве которых используют иониза-
ционные камеры (ИК), детекторы прямого заряда (ДПЗ) и др. [9].
В СУЗ применяют ИК, представляющие собой безынерционные
преобразователи Ф (t) в ток. В процессе вывода ЯР из подкрити-
ческого состояния на энергетический уровень мощности плот-
ность потока нейтронов и соответственно токи детекторов изме-
няются в диапазоне десяти и более декад. Поэтому измеритель-
ные усилители-преобразователи токов ИК в напряжения строят
на основе логарифмических усилителей или линейных усилителей
с переключаемыми диапазонами усиления.
В переходных режимах работы существенным для безопас-
ности реактора является контроль приведенной скорости измене-
ния плотности потока нейтронов а(/) = Ф(/)/Ф(/), называемой
обратным периодом. Обратный период
а(0= ~[1п Ф(Г)].
dt
при экспоненциальном изменении Ф (/) постоянен и обратно про-
порционален периоду реактора Т=а~1.
Обычно измеритель обратного периода выполняют в виде
реального дифференцирующего звена, подключаемого к выходу
логарифмического усилителя.
В состав СУЗ входят также электронные устройства, реализу-
ющие требуемые алгоритмы автоматического регулирования
и защиты, регулирующие стержни и электромеханические элемен-
ты — реле, двигатели, электромагнитные муфты, управляющие
движением PC. По сигналам Ф(г) и с (г) автоматический регуля-
тор в соответствии с заданным законом или программой измене-
ния мощности формирует управляющие воздействия на серво-
приводы стержней автоматического регулирования (АР). Эти же
сигналы, получаемые чаще всего от независимых измерительных
каналов, используют в устройствах защиты, обеспечивающих
ввод в активную зону реактора стержней аварийной защиты (АЗ)
при превышении Ф (/) или а (г) допустимых значений.
228
Рис. 5.30. Общий вид
сменного модуля Л
Для моделирования на АВК-6 составных частей СУЗ, напри-
мер системы автоматического регулирования плотности потока
нейтронов Ф (/), необходимо построить структурную модель кон-
тура регулирования, включив в нее те элементы и связи, влияние
которых следует учитывать при решении конкретной поставлен-
ной задачи. Если исследуется система автопуска реактора с кана-
лом измерения обратного периода, то моделирование на АВК-6
преобразователя, который с достаточной точностью посред-
ством кусочко-линейной аппроксимации воспроизводит логариф-
мическую зависимость выходного сигнала от входного, требует
использования нескольких нелинейных сменных модулей АВК-6,
а для построения измерителя обратного периода нужно несколь-
ко линейных блоков. В конечном итоге для моделирования от-
носительно несложной системы автоматического пуска и регули-
рования потребуется не один комплекс АВК-6. Данный путь
малоэффективен, поэтому в комплект сменных блоков АВК-6
включен дополнительный модуль Л.
Сменный модуль Л. Модуль Л (логарифмический) предназ-
начен для моделирования элементов систем контроля и регули-
рования ЯР. В состав модуля, общий вид которого показан на
рис. 5.30, входят антилогарифматор, два логарифматора напря-
жения с сумматорами на выходе, два дифференцирующих и ли-
нейный суммирующий усилители, два регулируемых источника
напряжения. Этот набор преобразователей достаточно универса-
лен и может использоваться для решения ряда других задач.
Принципиальная схема элементов модуля Л приведена на
рис. 5.31. Логарифмический преобразователь выполнен на ОУ DA2
229
Рис. 5.3J. Принципиальная схема элементов модуля Л
и DA5. Для логарифмирования использована естественная нели-
нейность вольт-амперной характеристики перехода база — эмит-
тер транзистора DA1.1 микросхемы DAI (КР198НТ1А). Тран-
зистор включен в обратную связь ОУ DA2, выходной сигнал
которого усиливается инвертирующим усилителем на DA5. Вы-
ходное напряжение ил логарифматора связано со входным
иъх следующим выражением:
/ и
ия = у <pTlnl01gl—~
L \М10
R20 R20
------а u0 —-
R14 R15 J
где <pT — температурный потенциал; 10 — тепловой ток
р-п-перехода; и0 — напряжение стабилизации VDP, а и у — поло-
жение движков переменных резисторов RP3 и RP4. Выбором
номиналов резисторов и регулировкой а и у обеспечивается пре-
образование
ия = к 1g ип,
где коэффициент к=2,5; 5; 10 устанавливается с помощью пере-
мычки между средним выводом RP4 и резисторами R20, R21,
R22. На ОУ DA7 реализован неинвертирующий сумматор, под-
ключенный к выходу логарифматора.
Антилогарифматор, построенный па ОУ DA3, DA6 и тран-
зисторе DA1.2 (рис. 5.31), выполняет преобразование, обратное
логарифмированию
нал= 100,,*и“,
где fc=4; 2; 1 устанавливается с помощью перемычки между
гнездом входа и резисторами R2, R3, R4. Выходное напряжение
Пая антилогарифматора
пал = R23I0 exp Г — ( )1 - R23I0,
L <рг \ R2 мо J J
где а и у —- положение движков потенциометров RP2 и RP1,
которыми осуществляется точная настройка функциональной ха-
рактеристики. .
Параметры <рт и 10 являются функциями температуры. Ис-
ключение температурного дрейфа характеристик антилогариф-
мического и обоих логарифмических преобразователей обеспече-
но термостатированием транзисторов DA1.1, DA1.2 и DA1.5 (на
рис. 5.31 не показан). В схеме стабилизации температуры исполь-
зованы транзисторы DA1.3 и DA1.4, которые находятся на общем
с транзисторами DA1.1, DA1.2 и DA1.5 кристалле микросхемы
DA1. Датчиком температуры служит транзистор DA1.3 в диод-
ном включении. При постоянном токе, который задается от
стабилитрона VD1 через резистор R7, напряжение база — эмит-
тер DA1.3 практически линейно уменьшается с ростом темпера-
231
туры с коэффициентом 2 мВ/°С. Это напряжение сравнивается
с напряжением уставки, которое формируется делителем на рези-
сторах R8 и R9, а небаланс усиливается ОУ DA4. Выходной
сигнал DA4 управляет регулирующим каскадом нагревателя на
транзисторе DA1.4. После включения регулятор обеспечивает
быстрый разогрев кристалла до заданной температуры (пример-
но 45° С) и ее стабилизацию с погрешностью не более 0,1%.
Дифференцирующий усилитель состоит из последовательно
включенных реального дифференциатора на ОУ DA8 и усилителя
на ОУ DA11 с коэффициентом к, регулируемым в диапазоне
1—10. Передаточная функция дифференцирующего преобразова-
теля, который моделирует измеритель обратного периода, имеет
вид
иг..,(р)=
kC3R35p
(C3R34p+l)a’
где а — положение движка переменного резистора RP5 (О^а^ 1).
Ключ на транзисторе VT1 служит для установки нуля на выходе
преобразователя в режиме задания начальных условий. Он позво-
ляет устранить «заброс» дифференциатора, возникающий при его
насыщении вследствие значительной скорости изменения вход-
ного сигнала. Второй дифференцирующий усилитель выполнен
по идентичной схеме, но его инерционность отличается на поря-
док (см. рис. 5.30).
Суммирующий усилитель с коэффициентом, изменяемым от
1 до 100, и регулируемый источник напряжения построены по ОУ
DA9 и DA10 соответственно.
Рис. 5.32. Настройка функциональных преобразователей с помощью АВК-6:
а — логарифматора; <5 —антилогарифма тора
232
Методика настройки функциональных преобразователей ил-
люстрируется на рис. 5.32 . На вход логарифматора, имеющего
коэффициент к=5 B/дек., подают экспоненциально нарастающий
сигнал щ (t), формируемый в периодическом режиме с помощью
модели неустойчивого апериодического звена (рис. 5.32, а). Изме-
няя частоту генератора АВК-6, устанавливают диапазон измене-
ния сигнала (/) от 0,01 до 10 В. На выходе интегратора к2)р
получают эталонный линейный сигнал и2 (t) в диапазоне
(—10-т- +5) В. Усиленный разностный сигнал Лн(/) наблюдают
на экране индикатора и регулировкой переменных резисторов
RP3 и RP4 добиваются максимального приближения графика
Дн(/) к линии нулевого уровня. Антилогарифматор настраивает-
ся аналогичным образом с помощью резисторов RP1 и RP2 по
схеме, приведенной на рис. 5.32, б.
В дифференцирующем преобразователе настраивают коэффи-
циент передачи kB—kC3R35la = \Gk с. При этом на его вход
подают сигнал, линейно нарастающий от уровня нуля со скоро-
стью 0,1 В/с, а к выходу подключают цифровой вольтметр.
Резистором RP5 устанавливают выходное напряжение дифферен-
циатора ив — к В.
Используя модули Л и Р, а также стандартные сменные блоки
АВК-6, можно исследовать различные алгоритмы управления
реактором.
На рис. 5.33 показана схема типичной системы автоматичес-
кого пуска и регулирования ядерного реактора. Токовый сигнал
ионизационной камеры 2 преобразуется логарифмическим усили-
телем 3 в напряжение, пропорциональное логарифму тока ПК.
Формирователь управлений 5 в зависимости от напряжения лога-
рифма мощности па выходе 3 и напряжения обратного периода,
получаемого па выходе измерителя обратного периода 4, выра-
батывает сигнал управления, который усиливается по мощности
и поступает на сервопривод 7 стержня автоматического регули-
рования 8. Перемещение стержня автоматического регулирова-
ния в активной зоне реактора / вызывает изменение реактив-
ности и, как следствие, — нейтронного потока и мощности ЯР,
характер изменения которых определяется формирователем управ-
лений.
Рис. 5.33. Схема типичной системы автоматического пуска и регулирования
реактора:
1 — ядерный реактор; 2 — ионизационная камера; 3 — логарифматор тока; 4 — измери-
тель обратного периода; 5 — формирователь управления; 6 — усилитель мощности; 7 — сер-
вопривод стержня АР; 8 — стержень АР
233
Рис. 5.34. Структурные модели формирователя управлений:
а — формирователь иеошимального регулятора; 6 — формирователь оптимального
регулятора
Данная система регулирования обеспечивает автоматический
перевод реактора на заданный уровень мощности и ее стабилиза-
цию на этом уровне. Обычно изменение мощности в переходных
режимах осуществляется с постоянным заданным периодом. На
рис. 5.34, а приведена структурная модель довольно часто ис-
пользуемого релейного формирователя управлений [9], обеспечи-
вающего регулирование мощности и приведенной скорости ее
изменения (обратного периода). Модель формирователя вклю-
чает релейный элемент с зоной нечувствительности и ограниче-
нием, источник опорного напряжения и0, сумматоры и линейные
преобразователи с регулируемыми коэффициентами усиления к2
и к2. Последние выполняют функцию задатчиков соответственно
обратного периода и логарифма мощности. Сигнал на входе
релейного элемента имеет вид
u£ = w0 - кх иц „ - к2 ил.м, (5.44)
откуда выражаются заданный логарифм мощности ипз и задан-
ный обратный период ипз:
Мл.з = Ио/^2; Мп.э = ИоД1- (5.45)
Недостатком системы с таким формирователем является за-
тягивание переходных процессов, поскольку обратный период,
определяемый (5.45), поддерживается лишь при нл м, близком
к нулю и с ростом пл м начинает уменьшаться. Для того чтобы
увеличить диапазон изменения мощности, проходимый с посто-
янным заданным периодом в преобразователь к2, вводят в зону
нечувствительности в пределах до 90% заданной мощности. Это
позволяет сократить длительность переходных процессов, одна-
ко усложняется схема формирователя и возникают трудности
с регулировкой ил з.
Применение теории оптимального управления к анализу и син-
тезу системы управления реактором позволило выявить предель-
ные возможности самого регулятора как объекта управления
и сформулировать технические требования к аппаратуре, обес-
печивающей достаточно хорошее приближение реальной системы
234
Рис. 5.35. Изменение физических пере-
менных в системе регулирования реак-
тора в процессе перехода с одного уров-
ня мощности на другой:
-------------оптимальный регулятор;
---------неоптимальиыи регулятор
t
к оптимальной. В [10] получен оптимальный по быстродействию
закон управления, который реализует формирователь, показан-
ный на рис. 5.34, б. Система регулирования на его основе обес-
печивает практически мгновенное достижение и стабилизацию
заданного обратного периода, а также практически мгновенную
стабилизацию мощности при достижении заданного уровня.
На рис. 5.35 приведены результаты моделирования на АВК-6
рассмотренных систем управления реактором. Графики измене-
ния переменных в процессе подъема мощности реактора нагляд-
но представляют достоинства оптимальной системы.
Гпава 6
МОДЕЛЬ ЧЕЛОВЕЧЕСКОЙ ДЕЯТЕЛЬНОСТИ
В КОМПЬЮТЕРИЗАЦИИ ИССЛЕДОВАНИЙ
И ОБУЧЕНИЯ
6.1. МОДЕЛЬ ИССЛЕДОВАНИЯ
На рис. 6.1. деятельность исследователя представлена струк-
турной моделью, похожей на модели материальных объектов.
Она «оставляет за кадром» мотивацию и физиологические меха-
низмы, отражая только алгоритмическую сторону действий по
преобразованию информации об объекте исследования [11].
Действия начинаются выбором объекта. Конечная цель со-
стоит в достижении материального результата посредством
практического действия над объектом — «натурного эксперимен-
та» (правый путь на рис. 6.1). Но ему обязательно предшествует
прогнозирование результата — левый путь «теория».
235
Рис. 6.1. Структурная модель исследования
Теоретические действия состоят в последовательном преоб-
разовании информации об изучаемом объекте.
Первое преобразование — переход от реального объекта к его
упрощенной расчетной схеме, адекватной планируемому экспери-
менту.
Второе — переход от расчетной схемы к математической
модели для мысленных экспериментов.
Третье преобразование — это сам мысленный эксперимент.
Это переход от модели к прогнозу, непосредственно сопостави-
мому с результатом планируемого натурного эксперимента.
Только теперь, имея прогноз, можно начинать эксперимент.
Несовпадение результата с прогнозом вернет исследователя к ре-
визии его теоретических действий (левая ОС па рис. 6.1). Под-
черкнем, что результат натурного эксперимента — объективная
реальность, и причиной несовпадения могут быть только ошибки
в теории — в том, как сознание исследователя эту материю
отражает.
Если результаты экспериментов совпадают с прогнозом, то
теория верна, и можно перейти к другому объекту (правая ОС на
рис. 6.1).
Присмотримся к действиям котенка, который ловит мышку.
Это активный исследователь, выбравший объект и цель действий.
236
Перед прыжком он должен узнать мышку, рассчитать траек-
торию с учетом движения мышки, рассчитать и запрограммиро-
вать реакции в своих опорах. Все это должно предшествовать
прыжку — иначе он не состоится или не будет успешным. При-
дется признать, что и здесь «эксперименту» предшествует «тео-
рия», а успех исследования — умение ловить мышей достигается
совершенствованием теории методом проб и ошибок.
Отличие котенка от инженера в том, что первый не осознает
структуры своих действий. Заметим, однако, что и второй этого
обычно тоже не делает. Анализ внутренней структуры собствен-
ных сознательных действий не входит в число его целей, она
находится вне его поля зрения, и поэтому остается неосознанной.
Психологи изучают скрытые внутренние умственные действия
по их внешним видимым «материальным» или «материализован-
ным» результатам [12]. Рис. 6.1 представляет теоретические, т. е.
умственные действия в виде трех отдельных последовательных
преобразований — блоков, разделенных и одновременно соеди-
ненных стрелками — промежуточными «материализованными»
результатами. Их объективность и определенность формы как
раз и позволяет разделить деятельность инженера на отдельные
действия и попять их взаимосвязи в едином процессе исследова-
ния. Как и при анализе динамических процессов в технике, раз-
делять процесс человеческого исследования на отдельные бло-
ки-преобразователи можно только таким образом, чтобы выход
предыдущего преобразования непосредственно был входом по-
следующего.
Природный «биокомпьютер» исследователя в каждый момент
времени выполняет единственную операцию. Последователь-
ность операций на некотором интервале времени образует един-
ственное действие в отношении единственного объекта. Психоло-
ги считают, что нельзя думать одновременно о двух объектах
сразу.
Рис. 6.1 представляет один цикл исследования. В целом оно
развивается как бы по восходящей спирали. Каждый ее виток —
цикл в отношении того или иного объекта, которые исследова-
тель последовательно выбирает по мере развития исследования.
Поэтому имеет смысл более подробно изучить действия, обра-
зующие этот «элементарный» цикл.
6.2. РАЗВЕРНУТАЯ СТРУКТУРА ИНЖЕНЕРНОГО ИССЛЕДОВАНИЯ
На рис. 6.2 представлена развернутая структура цикла дейст-
вий при исследованиях динамических процессов [11]. На пей
237
стрелками обозначены скрытые умственные действия-преобразо-
вания, а в прямоугольниках выписаны объективные формы пред-
ставления информации.
Переход от реального объекта к расчетной схеме здесь тоже
детально не раскрыт. Вопросы построения образных моделей
очень важны, но они сознательно исключены с целью ограни-
читься обсуждением математических действий.
Блок II на рис. 6.1 представляет переход от расчетной схемы
к математической модели как одно действие. В его составе
можно выявить определенную последовательность операций,
представленных на рис. 6.2 стрелками 1 —6. Эти операции знако-
мы по примерам гл. 1, 4 и 5.
Первая операция — формулировка цели исследования. Ее
результатом был граф, показывающий, какие переменные счи-
тают причиной — «входом», а какие — результатом — «выхо-
дом» всего изучаемого процесса в целом.
Вторая — выявление промежуточных переменных, участву-
ющих в преобразовании входа в выход и параметров, определя-
ющих эти преобразования. Ее результат был представлен спис-
ками переменных над стрелкой графа и параметров — под ней.
Третья — анализ структуры взаимосвязей между перемен-
ными. Ее результат представлял граф связей.
Четвертая — выявление законов, определяющих связи между
переменными.
Пятая — математическое описание каждой из зависимостей
переменных-следствий от переменных-причин. Ее результат —
развернутая структурная математическая модель.
И, наконец, шестая операция — запись математической моде-
ли в аналитической форме, в виде дифференцированного уравне-
ния или системы уравнений.
Весь переход от реального объекта к его математической
модели называют математической формализацией предметной
задачи.
Аналитическая модель — выход математической формализа-
ции и одновременно вход следующего преобразования — перехо-
да от модели к прогнозу результата натурного эксперимента.
Последнее преобразование называют математическим или вычи-
слительным экспериментом.
Блок III на рис. 6.1 представляет математический эксперимент
как одно действие. На самом деле, как показано на рис. 6.2, здесь
есть четыре прямых параллельных пути, на каждом из кото-
рых можно выявить соответствующую последовательность опе-
раций.
238
Эксперимент
Рис. 6.2. Развернутая структура исследования
Прежде всего этот путь аналитического решения дифференци-
ального уравнения классическим или операторным методом [13].
Конечной целью здесь часто считают запись формулы. Подчерк-
нем, что результат натурного эксперимента обычно представлен
графиком — осциллограммой, траекторией частицы или самоле-
та. Даже дискретные измерения температуры больного для на-
глядности выстраивают в виде временного графика. Ни разу не
прорисовав вручную графиков синусоиды или экспоненты, их
просто не удастся узнать даже в совершенно правильной осцил-
239
лограмме. Поэтому теоретическое исследование должен завер-
шить график-прогноз.
Прикладные методы ведут в обход аналитических затрудне-
ний при изучении нелинейных систем и систем высокого порядка.
Они начинаются переходом от аналитической к структурной
модели. Это другая модель, ориентированная на эффективное
использование наличных вычислительных средств.
Еще недавно инженер располагал только «персональными
компьютерами» в виде логарифмической линейки и арифмомет-
ра. Такая техника нацеливала на развитие графоаналитических
методов (второй путь на рис. 6.2). Структурные модели для них
строили из типовых звеньев, а несложные манипуляции с их
статическими и динамическими характеристиками вели к по-
строению графиков, представляющих свойства всей системы в це-
лом, т. е. к пониманию общих закономерностей и особенностей
движения динамических систем [14].
Развитие ЭВМ преследовало цели автоматизации математи-
ческого эксперимента.
Для ЦВМ (третий путь на рис. 6.2) структурную схему ориен-
тируют на эффективное использование машины для цифрового
моделирования. Далее надо вручную написать программу, ввести
ее и отладить [15]. Составляя структурную схему для АВМ,
стремятся уменьшить объем оборудования и погрешности моде-
лирования. Далее надо вручную составить схему набора задачи,
набрать и настроить модель [16]. Поскольку именно человек
понимает, с одной стороны, содержание задачи, а с другой — воз-
можности и специфику вычислительных средств, он и должен
проделать «вручную» всю эту умственную нетривиальную рабо-
ту в отношении ЭВМ как самостоятельного объекта в надежде
передать ей рутинные математические действия и вернуться к соб-
ственному объекту.
Имея прогноз, можно приступить к натурному эксперименту.
Для этого надо сформировать совокупность реальных начальных
условий и внешних воздействий на объект, подготовиться к на-
блюдению и регистрации процессов и нажать кнопку «пуск».
Несовпадение результата эксперимента с прогнозом вернет
к ревизии теории, а совпадение «запустит» новый цикл для
нового объекта.
Структурные схемы на рис. 6.1 и 6.2 — еще одна попытка
представить в обозримом системном виде человеческую интел-
лектуальную деятельность. Претендуя па определенную новизну,
эта модель исследования вызывает вопросы относительно своей
правильности и полезности.
240
6.3. СТРУКТУРА ИССЛЕДОВАНИЯ В ИНЖЕНЕРНОЙ ПРАКТИКЕ
Структура цикла исследования, представленная на рис. 6.2,
явно проступает в планах НИР и ОКР и в структуре центров,
организующих усилия «команды» исследователей при подготов-
ке крупномасштабных экспериментов [17]. Особенно близки к ней
исследования объектов, процессами в которых нельзя оперативно
управлять потому, что их масштаб несовместим с возможностя-
ми человека-исследователя. Таковы, например, исследования
ядерных реакций или посылки сигналов «братьям по разуму».
Сюда же относятся эксперименты с необратимыми последстви-
ями — типа Чернобыля, Арала и Кара-Богаза, а также экономи-
ческие и политические эксперименты. Невозможность дважды
войти в одну и ту же реку выделяет из непрерывной спирали
исследования единственный цикл для выбранного объекта и фак-
тически размыкает левую ОС на рис. 6.1 и 6.2. Ошибки в прогно-
зах, разумеется, и здесь используют для коррекции теории, но
уже в других экспериментах над другими объектами, часто —
другие исследователи.
Разрыв непрерывности действий соответствует методическо-
му приему, апробированному для математических объектов. Его
суть — вычленение отдельных преобразований путем искусствен-
ного обрыва прямых и обратных связей. Здесь это сделать труд-
нее, чем отпаять резистор или застабилизировать уровень жид-
кости. Однако инженерная практика сама предлагает весь спектр
от «разовых» до «перманентных» исследований.
В деятельности инженера, занятого, например, разработкой
приборов и систем автоматики, циклы исследований непрерывно
сменяют друг друга и перемежаются решением организацион-
ных, снабженческих и других задач. Структуру иженерного ис-
следования в деятельности инженера можно проявить анализом
планов и рабочих записей, экспериментов и отчетов. Взгляд на
собственные инженерные действия как бы со стороны, с точки
зрения наблюдателя-психолога, помогает подтвердить или опро-
вергнуть обсуждаемую структуру самонаблюдением.
Управление автомобилем, самолетом, реактором или энерго-
системой не оставляет времени ни для развертывания теории, ни
для самоанализа, ни для искусственного разрыва непрерывности
действий. Тем не менее и здесь можно проявить ту же структуру,
попросив оператора комментировать вслух свои наблюдения,
решения и действия. Психологи называют это «материализацией
внутренних умственных действий во внешнеречевой форме» [12].
Рассматривая обучение как поэтапное формирование умственных
241
действий, они считают «проговаривание вслух» необходимым
промежуточным этапом перевода внешних развернутых матери-
альных «ручных» действий в начале обучения в скрытые сверну-
тые автоматические «умственные» — в конце. Возврат к давно
пройденному требует от оператора определенных усилий, но зато
такое сотрудничество позволяет проследить за всей «спира-
лью» — за автоматическим движением по циклу и быстрыми
переходами от одного объекта к другому сообразно изменениям
обстановки. Оно дает и научно-технические плоды в виде эр-
гатичной автоматизации, понятной и привлекательной для опе-
раторов [18].
Обучение призвано сформировать алгоритм индивидуальных
умственных действий, отвечающий сложившемуся профессио-
нальному стереотипу — структуре, наполненной предметным
содержанием. Учебные планы «размыкают» прямые связи струк-
туры (рис. 6.2) с тем, чтобы вычленить отдельный предмет и,
превратив его на время в самостоятельный объект изучения
в виде курса «Общая физика», «Матанализ», «ТФКП», «ТАУ»,
«Моделирование» или «САПР САУ», вернуть его затем на его
место в общей структуре инженерной подготовки и апробировать
результаты курсовым и дипломным проектированием.
Сравнение «теоретического прогноза» — структурных схем,
представляющих в явном «материализованном» виде скрытую
умственную деятельность, с практикой, как результатом «натур-
ного эксперимента», позволяет уточнять теоретическую модель
человеческой деятельности как объекта автоматизации и остано-
виться тогда, когда модель отразит изучаемый предмет с точ-
ностью, достаточной для правильного прогнозирования послед-
ствий его автоматизации.
6.4. ОШИБКИ И АВТОМАТИЗАЦИЯ ИССЛЕДОВАНИЙ
В структуре человеческой деятельности левая ОС на рис. 6.2
аналогична контуру самонастройки в адаптивных САУ с моде-
лью, где небаланс выходов объекта и модели используют для
настройки модели. Несовпадение результата эксперимента с про-
гнозом возвращает исследователя к уточнению теории, модели-
рующей эксперимент.
Каждый виток по петле левой ОС вынуждает снова осмыс-
лить как самостоятельный объект каждое из преобразований
в «прямой» цепочке от «объекта» до «прогноза», поскольку зара-
нее неизвестно, ошибка в каком из них проявила себя неверным
прогнозом. Коррекцию заканчивают, когда теория обеспечивает
242
точность прогноза, достаточную для практических целей конк-
ретного исследования.
С «полезностью» ошибок для совершенствования теории
вступает в противоречие «вредное» замедление продвижения
к конечному результату из-за блужданий по циклам исследова-
ния. Это противоречие призвана разрешить автоматизация.
Автоматизация исследования состоит в свертывании некото-
рого набора действий в одну безошибочную операцию, которую
исследователь либо сам выполняет в уме в одно действие, как
говорят — «интуитивно», либо передает внешним средствам,
например, ЭВМ. Это создает дополнительный прямой путь, па-
раллельный человеческим действиям.
Моделирование начинается формализацией предметных задач
и заканчивается математическим экспериментом. Занимаясь ма-
тематической формализацией, возвраты для коррекции ошибок
в соответствующих действиях придется считать «полезными».
Ошибки же в математическом эксперименте отвлекают от основ-
ного объекта , и поэтому их разумно устранить автоматизацией.
При отработке математического эксперимента роли ошибок ме-
няются на противоположные. Уменьшения «вредных» ошибок
добиваются выбором для тестов упрощенных предметных задач
с известным ответом.
Наличие параллельных путей математического эксперимента
позволяет выявлять математические ошибки сравнением прогно-
зов, даваемых различными математическими методами, и ис-
ключить на время натурный эксперимент и все связанные с ним
проблемы. «На время» часто становится «навсегда»: эксперимен-
таторы уходят в теоретики и программисты, но редко возвраща-
ются обратно.
Удержаться от переквалификации обещает пятый обходной
путь математического эксперимента, показанный на рис. 6.2. Он
начинается от «структурной модели» и через программирование
по ней ЭВМ ведет к «прогнозу» в обход аналитической модели
и традиционных математических методов. По нему и пошли
авторы при разработке АВК-4 в 1977 — 78 годах. Понятие «пер-
сональный компьютер» тогда только складывалось, но «пятый
путь» уже был представлен первыми зарубежными и отечествен-
ными пакетами программ типа MASS и MASLIN [19]. Они
разрабатывались как САПР САУ. Их входным языком были
структурные схемы из типовых звеньев ТАУ, а расчеты в режиме
«off-line» заканчивались распечаткой графиков.
Сейчас автоматизация математического эксперимента от ана-
литической или структурной модели до графика реализована во
243
многих пакетах программ для персональных ЭВМ [20]. Лучшие
из них (professional MATLAB, CTRL-C, ACSL, SIMMON и др.)
предлагают широчайший спектр возможностей и взаимодействие
на языке, близком к естественному. Однако цена лицензирования
и требования к мощности ЭВМ делают из малодоступными даже
для хорошо обеспеченных зарубежных вузов. Это побуждает
преподавателей к разработке более простых и дешевых программ
для приемлемых ЭВМ. Требования к предварительной подготов-
ке для использования таких пакетов в качестве средства изучения
ТАУ включает основательное владение ЭВМ и изучение самих
пакетов как отдельного объекта с опорой на хорошее знание ТАУ
[21]. Это противоречие обнаруживает, что существует определен-
ная «ниша» в компьютеризации, которую призван был занять
й занял персональный аналоговый компьютер АВК-6.
Продолжая человеческое исследование (рис. 6.2) от структур-
ной модели и завершая математический эксперимент в реальном
времени графиком, АВК-6 оставляет исследователю только со-
держательные действия по осмыслению процессов и коррекции
математической модели на основе сравнения результатов мате-
матического и натурного эксперимента. Возможность поддер-
жать изучение динамических процессов «с нуля», практически без
предварительной подготовки, превращает АВК-6 в удобный и по-
лезный инструмент, развивающий аккуратный математический
подход и готовящий к осмысленному использованию более мощ-
ных и дорогих компьютерных средств.
6.5. ТЕХНОЛОГИЧНОЕ ОБУЧЕНИЕ:
КОНЦЕПЦИЯ, ИНСТРУМЕНТ, МЕТОДИКА
Модель исследования снимает остроту споров о том, является
ли студент сосудом, который надо наполнить знаниями, или
факелом, который надо зажечь жаждой действия. Опа представ-
ляет цель обучения как наработку алгоритма действий, наполнен-
ного профессиональным содержанием.
Ученик должен быть активным исследователем. Надо не про-
сто выучить, а открыть для себя лично законы Архимеда, Ньюто-
на, Ома, Ампера и многие другие точно так же, как это сделали
когда-то сами первопроходцы. Но в отличие от них он вправе
рассчитывать на помощью учителей, цель которых — сформиро-
вать у учеников научное мышление.
Преобладающим способом формирования культуры мышле-
ния является изучение итогов научной и технической деятель-
ности как системы курсов — «подсистем» накопленного знания.
244
Вместе с усвоением фактического знания ученик самостоятельно
осваивает метод научного мышления и закрепляет его в виде ин-
туитивных навыков. Лаконизм научных публикаций и учебников
создает иллюзию единовременности действий при математичес-
кой формализации и оставляет ее технологию интуиции ученика.
Объектом контроля при таком обучении является не столько
степень овладения методом, сколько точность воспроизведения
предложенных образцов рассуждений.
Учебный процесс можно строить как модель будущих «взрос-
лых» исследований. Прежде всего ученика надо превратить из
пассивного «обучаемого» в активного исследователя. Актив-
ность — одна из аксиом модели исследования. Решив проблему
активности ученика, можно двигаться далее в двух направлениях.
Понимая роль ошибок в самоорганизации исследования, их
потенциальные источники в виде задач и заданий, упражнений,
контрольных вопросов и т. д. можно рассчетливо расставить как
«подводные камни», возвращающие на основной фарватер,
и убрать все лишнее. Сначала возвраты по левой ОС на рис. 6.2
организуют так, чтобы они вели к единственному отрабатыва-
емому действию. Отработав его до операции, ее присоединяют
к смежному, предыдущему или последующему действию. Далее
наращивают последовательную цепочку действия, соединяя их
в одну емкую законченную интуитивную операцию. Последова-
тельность изучаемых объектов выстраивают таким образом, что-
бы теория для только что изученного объекта сразу же входила
операцией в состав действий для следующего объекта. Это делает
учебный процесс более эффективным и интересным, а ученики
при этом могут даже не подозревать о скрытых за привычными
формами педагогических секретах.
Другая возможность — предметное изучение структуры чело-
веческой исследовательской деятельности. Аналогом является
предметное изучение методов математической индукции и до-
казательства от противного. Исследователю в развернутой
форме предлагается способ организации действий, освоение ко-
торого как самостоятельного объекта служит в дальнейшем ос-
новой успешной технологии умственных действий в отношении
других, самых разных объектов. Предметное изучение техноло-
гии математической формализации предметных задач поддержи-
вает интуицию обозримой технологией теоретических действий
для любых объектов.
Персональный аналоговый компьютер АВК-6 автоматизи-
рует математический эксперимент от структурной математичес-
кой модели до графика-прогноза. Хорошая совместимость с че-
245
ловеческими действиями существенно ускоряет движение по цик-
лу. Это позволяет в течение одного занятия многократно прохо-
дить по всему циклу и отрабатывать методику исследования как
единое целое, фокусируя внимание вначале на технологии мате-
матической формализации, затем — на «ручных» математичес-
ких методах, и далее — на общих свойствах и особенностях
материальных объектов.
АВК-6 был разработан как инструмент для изучения ТАУ.
В этом качестве он заинтересовал многие вузы. Затем им заин-
тересовались преподаватели электротехники, электроники, при-
вода, робототехники, физики и других дисциплин. Попал он
и в поле зрения учителей физико-математических школ, где заре-
комендовал себя удобным и полезным средством для изучения
школьной физики и начал высшей математики.
АВК-6 используют как многоцелевое ТСО. Он вынуждает
преподавателя развернуть перед учениками алгоритм собствен-
ных исследовательских действий, скрытых при других способах
изложения материала, помогает нарабатывать такой же алго-
ритм действий у учеников и контролировать степень овладения
методом по конечному результату. Это предъявляет высокие
требования к профессиональной и методической подготовке, что
устраивает не всех преподавателей.
Класс АВК-6 легко развернуть в любой аудитории. Один
прибор Обеспечивает два рабочих места. Одному преподавателю
удобно работать с 3 — 4 бригадами. Дополнительный АВК-6 сто-
ит разместить на стене рядом с доской, чтобы демонстрировать
рациональные приемы действий одновременно всем ученикам
«фронтальным» методом. Стоимость 10 приборов для оборудо-
вания класса не превосходит стоимости одного компьютера типа
IBM PC.
ЗАКЛЮЧЕНИЕ
Пока эта книга готовилась к печати, произошло много собы-
тий. Киевский радиозавод в порядке конверсии освоил производ-
ство АВК-6, более 150 учебных заведений оснастили свои лабора-
тории его продукцией. Фрунзенский завод ЭВМ разработал кра-
сивый современный образец АВК-6. Разработан и подготовлен
к производству на ПО КРЗ демонстрационный настенный вари-
ант АВК-6Д с увеличенными размерами передних панелей и цвет-
ным индикатором, а также сменные модули «Импульсный»,
«Управляемая линия задержки», «Анализатор спектра», «Случай-
ные сигналы». Разработаны модули «Типовые звенья ТАУ»,
246
«Типовые законы регулирования», «Модель теплопроводности»,
«Термодинамика точечного объекта», «Электромеханические ре-
ле», «RLC-цепи», «Операционный усилитель». Заканчивается раз-
работка и подготовка к производству блока связи с IBM PC,
который перекинет мост к изучению современных методов об-
работки информации и прямого цифрового управления в реаль-
ном времени.
Перестройка отделила разработчиков от ПО КРЗ и ФЗ ЭВМ
границами независимых государств. Неопределенность с финан-
сированием вынуждает учебные заведения отказываться от зака-
занного учебного оборудования, а сокращение спроса чревато-
остановкой налаженного на ПО КРЗ производства.
Тем не менее, авторы не теряют надежды, что персональный
аналоговый компьютер сыграет свою роль в поддержке исследо-
ваний и обучения. Они заранее признательны всем, кто выскажет
критические замечания и конструктивные предложения.
Приложение
НОВЫЕ СМЕННЫЕ БЛОКИ АВК-6
За время подготовки книги к печати новые поколения сту-
дентов МИФИ разработали под руководством авторов новые
сменные блоки АВК-6. В их числе - натурные физические моде-
ли, блоки для изучения схемотехники и измерительных преоб-
разователей, для изучения управления движением, для зна-
комства с принципами измерения радиоактивных излучений и
др. Наиболее удачные из законченных блоков кратко представ-
лены в данном Приложении.
1. ТЕРМОДИНАМИКА ТОЧЕЧНОГО ОБЪЕКТА ТТО
Предназначен для изучения термодинамических процессов
в натурном объекте, который хорошо описывается точечной ма-
тематической моделью (см. § 1.2 и §4.2). Удобен для апробации
методов исследования и идентификации нелинейных динами-
ческих объектов, изучения принципов и особенностей линеари-
зации математических моделей, принципов построения и рабо-
ты различных регуляторов, их использования для автоматиза-
ции физического эксперимента.
В качестве натурного точечного объекта в блоке использо-
вана миниатюрная лампа накаливания СМН. Блок содержит
247
источники питания нити с характеристиками генераторов на-
пряжения и тока и измерители тока, светового потока и темпе-
ратуры нити по ее сопротивлению. Этот набор электрических
сигналов, представляющих все существенные физические пе-
ременные реального объекта, открывает широкий простор для
постановки различных исследований, приближенных к реаль-
ным практическим задачам.
2. ИЗМЕРЕНИЕ И РЕГУЛИРОВАНИЕ ТЕМПЕРАТУРЬ! ИРТ
Предназначен для практического изучения управления теп-
лофизическими объектами, а также принципов построения из-
мерительных преобразователей сигналов первичных датчиков
температуры — термопар, терморезисторов, транзисторов и т. п.
Может использоваться для поверки и градуировки термодатчи-
ков, для исследования температурных характеристик электрон-
ных элементов и схем.
Содержит термокамеру объемом 12 см3 (2x2x3 см) с нагре-
вателем и датчиком температуры, регулятор температуры,
включающий измеритель и задатчик температуры с нормализо-
ванными выходными сигналами, и устройство управления.
Имеются регулируемые источники напряжения, дифференци-
альный усилитель с К=200 и операционный усилитель с набором
постоянных и переменных резисторов для моделирования раз-
личных схем нормирующих преобразователей для датчиков
температуры.
Встроенный автоматический регулятор блока ИРТ обеспечи-
вает программирование температуры в диапазоне 25-100 °C и
ее стабилизацию с погрешностью менее 0,1 °C. Предусмотрена
возможность отключения регулятора для изучения при помощи
стандартных блоков АВК-6 различных регуляторов темпера-
туры.
3. ЭЛЕКТРОМАГНИТНЫЕ РЕЛЕ ЭМР
Блок предназначен для изучения работы электромагнитных
реле и простых релейно-контактных схем. Может использовать-
ся как блок сопряжения через ’’сухие” контакты с внешними
устройствами - двигателями, нагревателями, более мощными
реле и контакторами и т. п. при полунатурном моделировании
систем регулирования и управления с использованием АВК-6
в качестве модели управляющего устройства.
248
Блок содержит два реле типа РЭС-9 и одно герконовое реле
типа РЭС-47, два повторителя напряжения для сопряжения
выходных сигналов основных блоков АВК-6 с нагрузкой в виде
обмотки реле, а также резисторы, конденсаторы и диоды для
сборки различных вариантов схем. Последовательно с обмотка-
ми реле включены резисторы, позволяющие наблюдать осцил-
лограммы токов. Совмещение этих осциллограмм при помощи
коммутатора АВК-6 с осциллограммами напряжений на контак-
тах реле дает возможность удобно, просто и наглядно изучать
статику и динамику самих реле и простых релейных схем.
Реальные реле модуля удобно совмещать с моделями объ-
ектов и управляющих устройств для изучения принципов и
особенностей реализации в скользящем режиме линейных за-
конов регулирования в релейных регуляторах, а также движе-
ния оптимальных, экстремальных и других автоматических
систем с реальными реле.
4. ОПЕРАЦИОННЫЙ УСИЛИТЕЛЬ ОУ
Блок содержит панель для установки ОУ и набор пассивных
линейных и нелинейных элементов - резисторов, делителей
напряжения, конденсаторов, диодов. Выводы ОУ и пассивных
элементов соединены с гнездами, позволяющими собирать
схемы на ОУ при помощи коммутационных перемычек и про-
водников.
Для изучения свойств ОУ и схем на его основе используют-
ся контрольно-измерительная система АВК-6 и ее возможности
в автоматизации наблюдений и измерений статических и дина-
мических характеристик.
Методическая разработка помогает последовательно знако-
миться с характеристиками самого ОУ, основами теории обрат-
ной связи, а также с формированием при помощи ОС статичес-
ких и динамических характеристик преобразователей сигналов
на основе ОУ с ОС.
5. АНАЛОГОВАЯ СХЕМОТЕХНИКА АС
Блок предназначен для изучения базовых схем на операци-
онных усилителях и способов реализации типовых корректиру-
ющих звеньев систем автоматического управления.
249
В состав блока входят два операционных усилителя, входы и
выходы которых укомплектованы наборами резисторов (посто-
янных и переменных), конденсаторов и коммутационных гнезд.
Комплектность и топология расположения элементов блока
позволяет оперативно набирать на нем и исследовать с по-
мощью индикационно-измерительной системы АВК-6 широкий
набор линейных схем на ОУ: повторители и усилители напря-
жения и тока, инверторы, сумматоры и разностные усилители,
интеграторы и дифференциаторы, фильтры верхних и нижних
частот, полосовые и резонансные фильтры и т. д.
На элементах блока могут быть реализованы типовые ли-
нейные законы регулирования: пропорциональный, пропорцио-
нально-интегральный и пропорционально-интегро-дифферен-
циальный (П, ПИ, и ПИД-законы), а также типовые звенья ТАУ
первого и второго порядков.
В составе АВК-6 блок целесообразно использовать при изу-
чении курсов ТАУ, ’’Информационная техника”, ’’Основы элект-
роники”, ’’Схемотехника ОУ”.
6. УСИЛИТЕЛЬ МОЩНОСТИ ЗВУКОВЫХ ЧАСТОТУМЗЧ
Предназначен для изучения теории регулирования приме-
нительно к задачам проектирования электроакустических сис-
тем. Может использоваться вместе с блоком ЭДГ для создания
звуковых эффектов при моделировании различных динамичес-
ких систем.
Содержит оконечный каскад на паре взаимодополнитель-
ных транзисторов и операционный усилитель, а также набор
пассивных элементов для формирования требуемых характерис-
тик.
Позволяет наглядно иллюстрировать возможности ОС в ли-
неаризации статической регулировочной характеристики, а так-
же в формировании частотных характеристик как самого УМЗЧ,
так и всей системы УМЗЧ-ЭДГ с использованием тахометричес-
кой ОС. Видимые изменения характеристик иллюстрирует из-
менение звучания системы.
7. ЭЛЕКТРОДИНАМИЧЕСКИИЙ ГРОМКОГОВОРИТЕЛЬ ЭДГ
Предназначен для изучения электромеханических и элект-
роакустических систем, методов исследования их характерис-
тик и способов их коррекции. Может использоваться при моде-
250
лировании связных устройств, в качестве звукоизлучателя для
создания звуковых эффектов при моделировании различных
систем, в качестве акусто-электрического преобразователя.
Блок содержит электродинамический громкоговоритель
в герметичном ящике с отверстием, перекрываемым пробкой.
Имеется тахометрический мост, преобразующий скорость
движения катушки громкоговорителя в напряжении.
Блок позволяет иллюстрировать звучанием изменения в
частотных и переходных характеристик электроакустических
систем, формируемых электрическими и механическими сред-
ствами.
8. ИЗМЕРЕНИЕ РАДИОАКТИВНОСТИ РА
Предназначен для изучения принципов измерения радио-
активных излучений. Может использоваться в качестве измери-
теля частоты следования импульсов от разнообразных источни-
ков импульсных сигналов.
Блок содержит маломощный р-активный источник излуче-
ния; сцинтиляционный (Nal) и газоразрядный (СБМ-20) смен-
ные детекторы радиоактивности; преобразователи сигналов де-
текторов; источники постоянного напряжения 1500 В и 400 В
для питания детекторов и преобразователей; дискриминатор
импульсов с регулируемым напряжением порога; генератор
эталонных временных интервалов; двоично-десятичный счет-
чик с дешифратором и 4-разрядным семисегментным индика-
тором.
На основе входящих в блок РА элементов можно построить
автоматический измеритель мощности дозы радиоактивного излуче-
ния; измеритель коэффициента поглощения различных матери-
алов; измеритель энергетического спектра излучения. Кроме
того, блок позволяет промоделировать измерители паросодер-
жания, влажности и других физических величин, сформировать
сигнал типа ’’белый шум”, полезный при изучении динамики
систем при случайных воздействиях.
9. ПРОСТРАНСТВЕННОЕ ДВИЖЕНИЕ ПД
Блок предназначен для моделирования на АВК-6 прост-
ранственного движения в декартовых координатах центра масс
твердого тела.
251
В состав блока входят шесть интегрирующих преобразовате-
лей, в которых предусмотрена регулировка коэффициентов пе-
редачи и начальных условий. Режимы работы интеграторов
соответствуют режимам интеграторов линейных блоков АВК-6.
Блок удобен при исследовании на АВК-6 задач управления
движением, наведения, баллистики. В этом случае он заменяет
шесть блоков линейных АВК-6.
В составе АВК-6 блок целесообразно использовать при изу-
чении курсов ТАУ и специальных курсов, посвященных указан-
ным выше задачам.
10. РУЧНОЕ УПРАВЛЕНИЕ РУ
Предназначен для ручного управления реальными объекта-
ми и их моделями на АВК-6.
В состав блока входят аналоговый электромеханический
джойстик и два нелинейных преобразователя. Ручкой аналого-
вого джойстика можно формировать двумерный вектор управления
и = { их;иу] величиной до 10 В в люб'ом направлении на плос-
кости XOY. Нелинейные функциональные преобразователи
позволяют сформировать требуемую статическую характеристи-
ку по каждому каналу управления: линейную, с зоной нечувст-
вительности, с ограничением и др.
Блок полезен при исследовании эргатических систем управ-
ления, при ситуационном моделировании игровых задач. При
использовании в составе АВК-6 в учебном процессе дает воз-
можность учащемуся лично поуправлять реальными объекта-
ми или их моделями, что убеждает его в сложности большинст-
ва практических задач управления и актуальности изучения
теории автоматического управления.
Список литературы
1. Яворский Б. М., Детлаф А. А. Справочник по физике. М.: Наука, 1964.
2. Волков Н. И., Миловзоров В. П. Электрические устройства автоматики. М.:
Высшая школа, 1986
3. Свидетельство на промышленный образец № 15272 СССР. Аналоговый
интегрирующий калькулятор / Г. Н. Алексинов, В. В. Гаврилин, В. А. Федоров //
Промышленные образцы. Товарные знаки. 1984. № 2.
4. А.с. № 1116523 СССР, МКИ НОЗ В 27/00. Многофункциональный генера-
тор / В. В. Гаврилин, В. В. Светозаров, И. В. Мазаев // Открытия. Изобретения.
1984. № 36.
5. А.с. № 1153331 СССР, МКИ G 06g7/16. Аналоговое делительное устрой-
ство / В. В. Гаврилин, А. Ю. Миронов, И. В. Мазаев // Открытия. Изобретения.
1985. № 16.
6. Алексаков Г. Н., Гаврилин В. В. Практические методы анализа и проек-
тирования САУ. М.: Изд-во МИФИ, 1979.
7. Бать Г. А. Основы теории и методы расчета ядерных энергетических
реакторов. М.: Энергоиздат, 1982.
8. Сидорова И. И. Аналоговое моделирование в ядсрнон энергетике. М.:
Атомиздат, 1969.
9. Емельянов И. Я., Ефанов А. И., Константинов Л. В. Научно-технические
основы управления ядерными реакторами. М.: Энергоиздат, 1981.
10. Алексаков Г. Н. Оптимальное (по быстродействию) управление нейтрон-
ным потоком ядерного реактора. Автоматизация управления технологическими
процессами. Вып. 2. М.: Атомиздат, 1972. С. 17—30.
11. Алексаков Г. Н., Гаврилин В. В. Аналоговый интегрирующий калькулятор
для инженерных исследований и проектирования САУ // Автоматизация измере-
ний и обработки информации. М., 1982.
12. Талызина Н. Ф. Управление процессом усвоения знаний. М.: Изд-во
МГУ, 1975.
13. Понтрягин Л. С. Обыкновенные дифференциальные уравнения. М.: Наука,
1982.
14. Солодовников В. В. Техническая кибернетика. Кн. 1, 2, 3. М.: Машино-
строение, 1969.
15. Джермейн К. Программирование на IBM/360: Пер. с англ. М.: Мир, 1979.
16. Тетельбаум И. М., Шнейдер Ю. Р. Практика аналогового моделирования
динамических систем. М.: Энергоатомиздат, 1987.
17. Информатика и научно-технический прогресс. М.: Паука, 1987.
18. The optimal processes theory in the design of ergonomic control systems for
nuclear reactors. ENC-90 Transactions. Vol. 3. P. 1793—1798.
19. Чхартишвили Г. С., Чхартишвили Л. П. Цифровое моделирование динами-
ческих систем. М.: Изд-во МЭИ, 1978.
20. Schaufelberger W. Educating future control engineer. IFAC-91 Transactions,
Tallinn. P. 82-93.
21. Катало!' программных средств учебного назначения. НИИ ВО ГКНО
СССР. Вып. 6, 1990. Вып. 7, 1991.
ОГЛАВЛЕНИЕ
Предисловие ...................................................... 2
Глава 1. Структурные модели динамических процессов ............... 5
1.1. Задачи про баки и бассейны ............................... б
1.2. Термодинамические процессы .............................. 11
1.3. Движение материальной точки ............................. 15
1.4. Вертикальное движение тела в гравитационном поле ........ 17
1.5. Движение шарика для пинг-понга .......................... 19
1.6. Модели маятников ........................................ 21
1.7. Перевернутый маятник .................................... 23
1.8. Процессы в электрических цепях .......................... 25
1.9. Структурные модели электрических машин .................. 28
1.10. Структурные модели в теории линейных систем ............ 31
1.11. Цифровое моделирование динамичеких процессов ........... 44
1.11.1. Структурные модели аналого-цифрового преобразования .... 44
1.11.2. Структурные модели цифрового дифференцирования и экс-
траполятора ............................................... 47
1.11.3. Структурная модель цифрового интегратора .......... 48
1.11.4. Цифровые модели динамических процессов ............ 50
1.12. Требования к персональному компьютеру для исследования ди-
намичеких процессов ......................................... 51
1.12.1. Математическая формализация предметных задач и про-
граммирование ЭВМ ...................................... 51
1.12.2. Методическое единство математического и натурного экс-
периментов ................................................ 54
1.12.3. Компьютер аналоговый или цифровой? <............... 59
Глава 2. Аналоговый персональный компьютер АВК-6 ................ 60
2.1. Общая организация АВК-6 ................................. 60
2.2. Индикационно-измерительная система АВК-6 ................ 62
2.2.1. Электронно-лучевой индикатор ....................... 62
2.2.2. Генератор системы синхронных сигналов .............. 64
2.2.3. Электронный коммутатор сигналов ............'....... 71
2.3. Служебный блок ........................................ 73
2.3.1. Назначение и состав ................................ 73
2.3.2. Сумматоры .......................................... 74
2.3.3. Источники эталонных напряжений ..................... 76
2.3.4. Делители ........................................... 76
2.3.5. Пульт управления индикатором ....................... 77
2.3.6. Вольтметр .......................................... 78
2.3.7. Измеритель длительности ............................ 80
2.4. Блок питания ............................................ 84
2.5. Сменные блоки АВК-6 ..................................... 87
2.5.1. Назначение и состав ................................ 87
2.5.2. Линейный блок ...................................... 87
2.5.3. Нелинейный блок .................................. 91
2.5,4. Блок умножения-деления ............................. 93
2.5.5. Блок умножения .....................................
2.5.6. Импульсный блок ...................................
2.5.7. Блок преобразования координат ......................
2.5.8. Блок спектрального анализа .........................
2.5.9. Блок управляемой задержки ..........................
2.5.10. Блок случайных сигналов ...........................
Глава 3. Приемы работы с АВК-6 ..................................
3.1. Знакомство с АВК-6 ......................................
3.2. Исследование статических характеристик ..................
3.3. Формирование нелинейных характеристик ...................
3.4. Гладкие нелинейности ....................................
3.5. Формирование сигналов ...................................
3 6. Исследование частотных характеристик ..................
3.7. Исследование переходных процессов .......................
3.8. Исследование фазовых траекторий .........................
3.9. Исследование характеристик случайных процессов ..........
Глава 4. Исследование динамических процессов ....................
4.1. Моделирование задач о баках .............................
4.2. Термодинамика электрической лампочки ....................
4.3. Торможение ..............................................
4.4. Движение парашютиста и ныряльщика .......................
4.5. Моделирование движения шарика для пинг-понга ............
4.6. Механические маятники ...................................
4.7. Перевернутый маятник ....................................
4.8. Динамические процессы в электрических цепочках ..........
4.9. Моделирование генератора и двигателя постоянного тока ...
4.10. Моделирование линейных динамических звеньев ............
4.11. Динамика цифровых моделей ..............................
4.12. Поиск экстремума .......................................
Глава 5. Структурные модели физических процессов в ядерных реакторах
и их исследование иа АВК-6 ......................................
5.1. Модели нейтронной кинетики ..............................
5.2. Сменный модуль Р ........................................
5.3. Динамика нуклидного состава активной зоны ...............
5.4. Тепловые процессы в ядерном реакторе и температурные эффек-
ты реактивности ..............................................
5.5. Моделирование систем управления и защиты ядерных реакторов
Глава 6. Модель человеческой деятельности в компьютеризации исследова-
ний и обучения ..................................................
6.1. Модель исследования .....................................
6.2. Развернутая структура инженерного исследования...........
6.3. Структура исследования в инженерной практике.............
6.4. Ошибки и автоматизация исследований......................
6.5. Технологичное обучение: Концепция, инструмент, методика..
Заключение ......................................................
Приложение.......................................................
Список литературы ...............................................
97
99
103
106
109
U1
113
113
119
121
128
134
137
143
148
150
152
152
156
157
159
160
162
168
170
176
178
179
181
191
191
202
209
224
228
235
235
237
241
242
244
246
247
253
Производственно-практическое издание
Алексаков Габриэль Николаевич
Гаврилин Владимир Викторович
Федоров Владимир Алексеевич
ПЕРСОНАЛЬНЫЙ АНАЛОГОВЫЙ КОМПЬЮТЕР
Редактор издательства 3. И. Михеева
Художник обложки В. Ф. Громов
Художественный редактор Т. А. Дворецкова
Технический редактор Г. И. Л.чдухииа
Корректор Л. С. Тимохова
ИБ № 2934
Набор выполнен в Прейскурантиздазе Подписано в печать с оригннала-макета 20.01.92.
Формат 60 x 88'/,,. Бумага офсетная № 2. Гарнитура Таймс. Печать офсетная.
Усл.неч.л. 15,68. Усл.кр.-отт. 16,04. Уч.-изд.л. 16,55. Тираж 12 000 зкз. Заказ 6517. С069.
Энер1 оатомнздат, 113114, Москва, М-114, Шлюзовая наб., 10.
Отпечатано в ордена Октябрьской Революции и ордена Трудового Красного Знамени
МПО «Первая Образцовая типография» Министерства печати и информации Российской
Федерации. 113054, Москва, Валовая ул., 28.