/









































































































































































































Автор: Кац А.М.
Теги: физика сопротивление материалов упругость теория упругости издательство санкт-петербург
ISBN: 5-8114-0453-0
Год: 2002



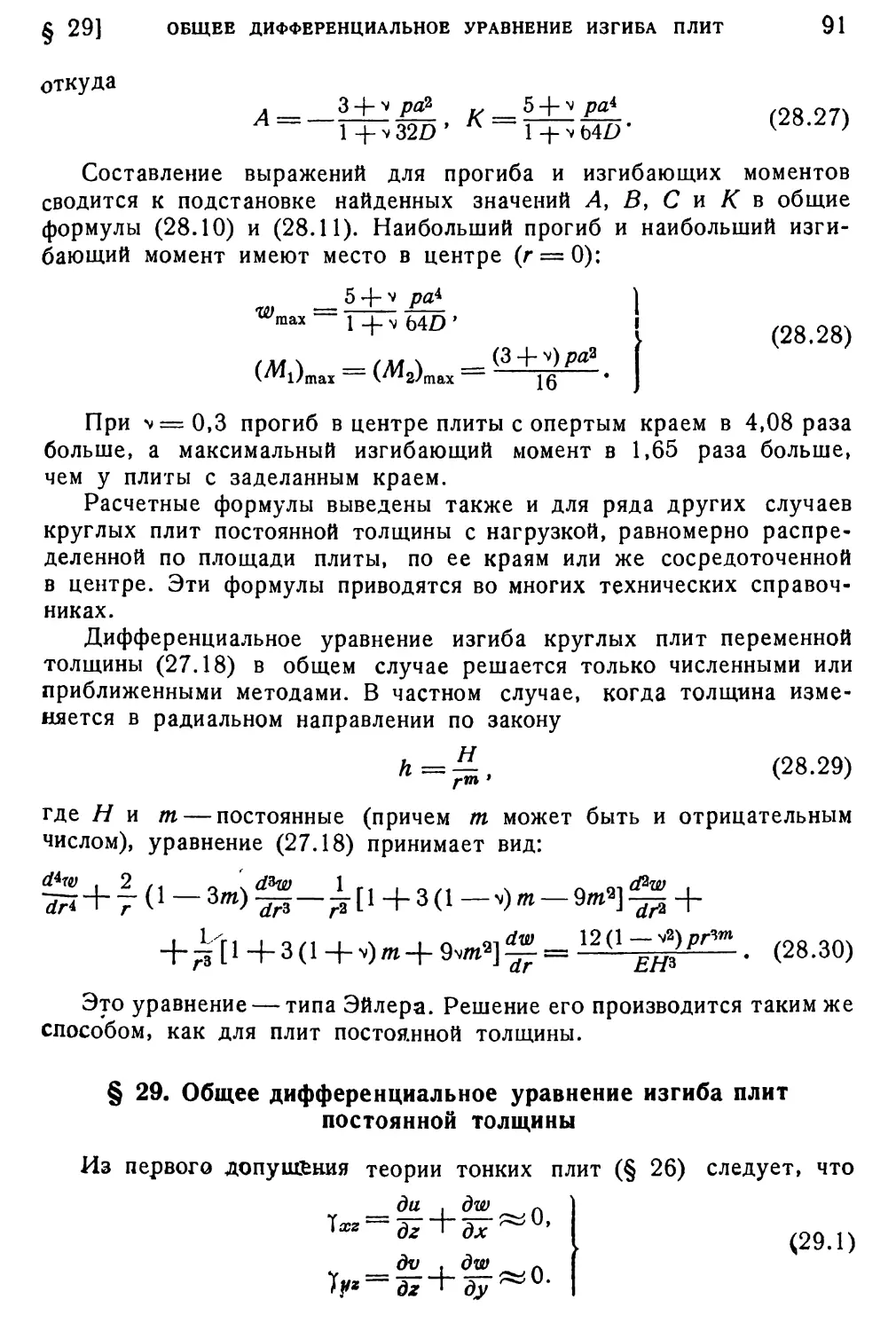
Текст
ЗОЛОТЫЕ ИМЕНА
ПРОФЕССОРОВ
САНКТ-ПЕТЕРБУРГСКОГО
ПОЛИТЕХНИЧЕСКОГО УНИВЕРСИТЕТА
А. М. КАЦ
ТЕОРИЯ
УПРУГОСТИ
Издание второе, стереотипное
Рекомендовано УМО по университетскому образованию
в качестве учебника для студентов высших учебных заведений
по направлению подготовки 553300 —
«Прикладная механика»,
и подготовки по специальности 071100 —
«Динамика и прочность машин»
ь
Санкт-Петербург 2002
ББК 22.3 /
К 12
Кац А. М.
К 12 Теория упругости. 2-е изд., стер. — СПб.: Издательство
«Лань», 2002.— 208 с. — (Учебники для вузов. Специальная
литература).
ISBN 5-8114-0453-0
Учебник представляет собой дополненное и переработанное изложение
курса лекций по теории упругости. В него включены необходимые
сведения об общих уравнениях и методах теории упругости, а также приемы
решения отдельных задач повышенной сложности.
Учебник предназначен для студентов-механиков и машиностроителей.
ББК 22.3
Редакционный совет серии:
Ю. С. Васильев — председатель
Б. Б. Глухое, М. П. Федоров,
А. Я. Башкарев, Ю. А. Сандулов
Оформление обложки
С. Л. ШАПИРО, А. Ю. ЛАПШИН
Охраняется законом РФ об авторском праве.
Воспроизведение всей книги или любой ее части
запрещается без письменного разрешения издателя.
Любые попытки нарушения закона
будут преследоваться в судебном порядке.
©Издательство «Лань», 2002 i
© А. М. Кац, 2002
©Издательство «Лань»,
художественное оформление, 2002
ОГЛАВЛЕНИЕ
Предисловие редактора 5
Предисловие автора 6
Введение 7
Глава I. Напряжения 9
§ 1. Основные понятия 9
§ 2. Зависимости между напряжениями, действующими на
различно направленных площадках в одной и той же точке . . 12
§ 3. Вычисление» составляющих тензора напряжения при повороте
координатных осей 14
§ 4. Главные напряжения 17
§ 5. Некоторые свойства главных напряжений 19
§ 6. Дифференциальные уравнения равновесия 23
§ 7. Дифференциальные уравнения равновесия в цилиндрических
координатах 24
Глава П. Деформации 27
§ 8. Основные понятия 27
§ 9. Вычисление составляющих тензора деформации при повороте
координатных осей 30
§ 10. Главные удлинения 31
§11. Условия сплошности 34
§ 12. Вычисление перемещений по деформациям 36
§ 13. Выражение деформаций в цилиндрических координатах ... 38
Глава III. Зависимости между напряжениями и деформациями . . 41
§ 14. Потенциальная энергия деформации 41
§ 15. Обобщенный закон Гука 44
§ 16. Закон Гука для изотропного тела 46
Глава IV. Общие уравнения теории упругости 50
§ 17. Полная система основных уравнений теории упругости.
Свойство единственности 50
§ 18. Решение задач теории упругости в перемещениях 52
§ 19. Решение задач теории упругости в напряжениях 54
§ 20. Некоторое замечания об общих уравнениях теории
упругости . . 58
Глава V. Постановка и методы решения задач теории упругости 59
§ 21. Постановка задач теории упругости 59
§ 22. Приближенные методы решения задач теории упругости . . 61
§ 23. Экспериментальные методы теории упругости 63
Глава VI. Простейшие осесимметричные задачи 71
§ 24. Толстостенная труба 71
§ 25. Вращающиеся диски, 75
I' лава VII. Изгиб тонких плит 81
§ 26. Постановка задачи 81
§ 27. Дифференциальные уравнения изгиба симметрично
нагруженных круглых плит 83
§ 28. Решение дифференциального уравнения изгиба симметрично
нагруженной круглой плиты 87
!'
4 ОГЛАВЛЕНИЕ /
§ 29. Общее дифференциальное уравнение изгиба плит постоянной
толщины 91
§ 30. Граничные условия для прямоугольных плит . . ... 95
§ 31. Некоторые случаи изгиба прямоугольных пинт . .... 99
§ 32. Потенциальная энергия изогнутой плиты 103
Глава VIII. Изгиб симметрично нагруженных цилиндрических
оболочек 105
§ 33. Постановка задачи 105
§ 34. Уравнение изгиба симметрично нагруженной цилиндрической
оболочки 107
§ 35. Полубесконечная оболочка с нагрузкой по краю 112
§ 36. Бесконечная оболочка, подкрепленная кольцами 116
§ 37. Деформация кольца равномерно распределенными крутящими
моментами 119
Глава IX. Кручение стержней 122
§ 38. Постановка задачи 122
§ 39. Некоторые свойства функции напряжений при кручении ... 127
§ 40. Мембранная аналогия 130
§ 41. Стержень эллиптического сечения 132
§ 42. Круглый стержень с полукруглой выточкой 134
§ 43. Стержень прямоугольного сечен 1Я 136
§ 44. Кручение тонкостенных стержней 141
§ 45. Понятие о более сложных случаях кручения ... .146
Глава X. Плоская задача 149
§ 46. Постановка задачи 149
§ 47. Общие уравнения плоского деформированного состояния ... 151
§ 48. Общие уравнения плоского напряженного состояния ... 154
§ 49. Некоторые свойства функции напряжений 158
§ 50. Уравнения плоской задачи в полярных координатах .... 162
§ 51. Изгиб консольной балки . . .' i 165
§ 52. Чистый изгиб кривого бруса 167
§ 53. Клин, нагруженный сосредоточенной силой, приложенной
к его вершине 169
§ 54. Растяжение пластины с малым круглым отверстием (задача
Кирша) | 172
Глава XI. Контактные задачи 178
§ 55. Постановка задач 173
§ 56 Упругая полуплоскость, нагруженная сосредоточенной силой,
перпендикулярной к границе (задача Фламана) 178
§ 57. Два соприкасающихся цилиндра с параллельными осями . . 181
§ 68. Упругое полупространство, нагруженное сосредоточенной
силой, перпендикулярной к границе (задача Бус^инеска) . . . 186
§ 59. Два соприкасающихся шара [ 190
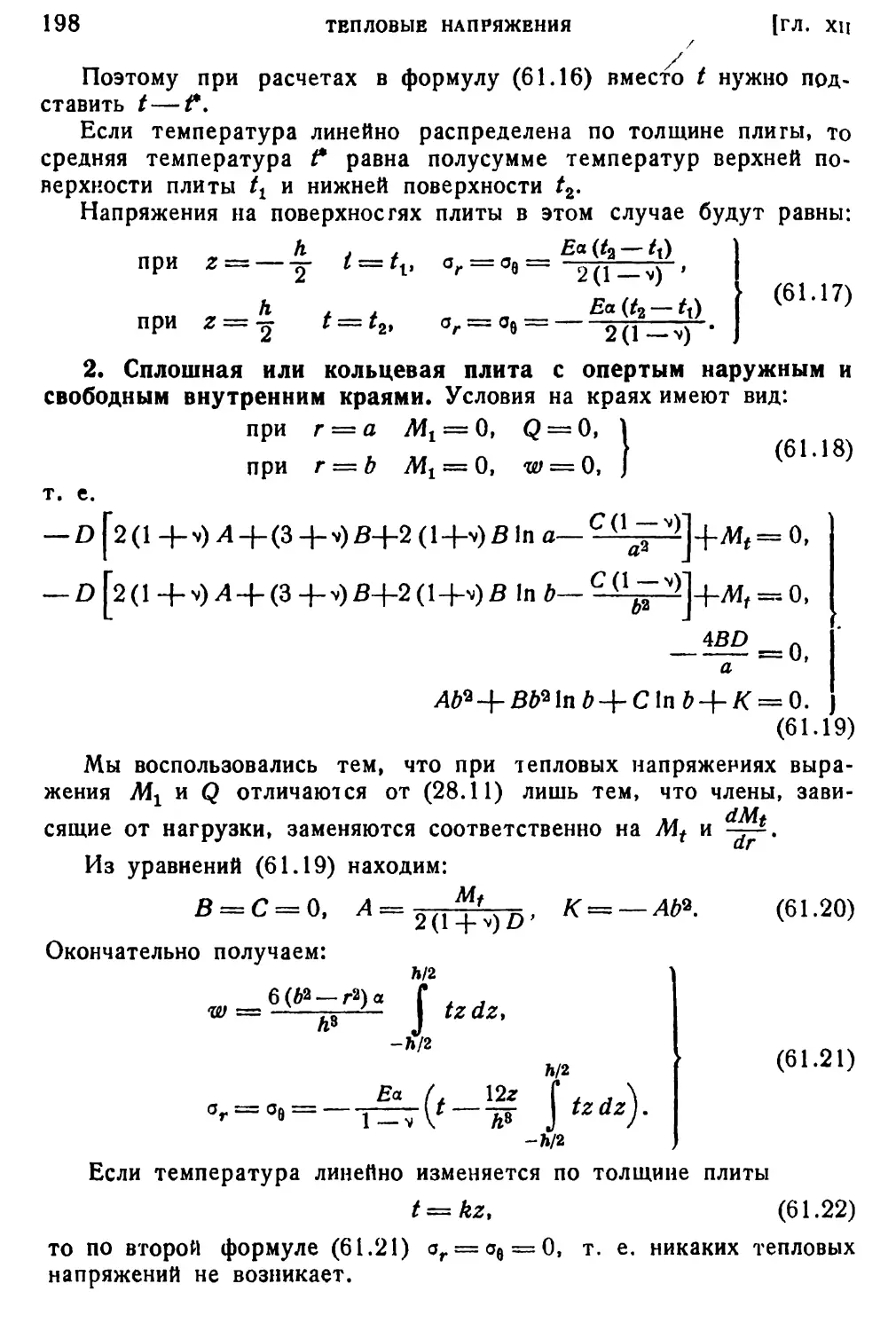
Глава XII. Тепловые напряжения 194
§ 60. Основные уравнения 194
§ 61. Круглая плита с осесимметричным распределением
температур 195
§ 62. Круглая плита с радиальным перепадом температур 199
§ 63. Толстостенная труба с радиальным перепадом температур . 201
§ 64. Тонкостенный цилиндр с радиальным и осевым перепадом
температур ... 203
Именной указатель .... 206
Предметный указатель 206
ПРЕДИСЛОВИЕ
РЕДАКТОРА ВТОРОГО ИЗДАНИЯ
Первое издание этой книги было издано почти полстолетия
назад. Книга эта предназначалась студентам и аспирантам
машиностроительных специальностей. В основу книги был положен курс
лекций, многократно читавшийся в Ленинградском
политехническом институте имени М. И. Калинина. Автор книги — доцент,
а затем и профессор названного института — был не просто
преподавателем Высшей школы, но и одновременно выдающимся
инженером. Преподавание в институте он совмещал с работой в
области двигателестроения на заводе «Русский дизель» и в
Центральном научно-исследовательском дизельном институте.
Арнольд Моисеевич Кац был выдающимся человеком, и
поэтому названные два направления его деятельности
благоприятно повлияли на его образ мыслей и на его собственную шкалу
ценностей. В результате книга приобрела два замечательных
качества — строгость изложения и яркую инженерную
направленность. Получилось так, что эта книга написана инженером
для инженеров. Это обстоятельство отразилось в книге двумя
аспектами: автор избегает громоздкости математического
аппарата, чем грешили и грешат книги по теории упругости,
написанные университетскими профессорами, а, во-вторых, он приводит в
книге большое количество примеров, имеющих прямое
техническое применение. В результате эта книга не потеряла своего
значения и сейчас, спустя полвека после первого издания. Она
чрезвычайно полезна при первоначальном изучении курса
теории упругости.
Полагаю, что новое издание будет тепло встречено новыми
потенциальными читателями.
Заслуженный деятель науки Российской Федерации,
доктор физико-математических наук, профессор
В. А. ПЛЛЬМОВ
ПРЕДИСЛОВИЕ АВТОРА
Эта книга представляет собой переработанное и несколько
дополненное изложение курса лекций по теории упругости, который
неоднократно читался автором на энергомашиностроительном и
механико-машиностроительном факультетах Ленинградского
политехнического института им. М. И. Калинина в 1947—1951 гг.
Книга рассчитана на читателей, имеющих общеинженерную
математическую подготовку. В нее включены необходимые сведения
об общих уравнениях и методах теории упругости (главы I—V)
и решения ряда частных задач (главы VII—XII), являющиеся
иллюстрациями к общей части и вместе с тем представляющие
практический интерес для машиностроителей.
Книга не содержит новых результатов, но выводы многих
формул переработаны по сравнению с встречающимися в литературе
с целью наибольшей простоты и ясности изложения.
Автор выражает благодарность коллективу кафедры динамики и
прочности машин и руководителю кафедры профессору А. И. Лурье
за ценные указания и помощь при выпуске этой книги.
ВВЕДЕНИЕ
Механика деформируемого твердого тела состоит из двух частей:
а) физической части, в которой экспериментально изучаются
механические свойства твердых тел: прочность, упругость,
пластичность, усталость и т. д.;
б) математической части, в которой на основании общих законов
механики и экспериментально установленных зависимостей между
напряжениями и деформациями математически исследуется
напряженное и деформированное состояние твердых тел различной формы,
находящихся под действием различных внешних нагрузок.
Основы физической части учения о деформируемом твердом теле
и наиболее часто встречающиеся в практике простые задачи,
решаемые элементарными методами, входят в курс сопротивления
материалов.
Математическая часть учения о деформируемом твердом теле
делится на теорию упругости и теорию пластичности.
В теории упругости рассматриваются идеально упругие тела,
т. е. такие, деформации которых являются однозначными функциями
от напряжений и исчезают после снятия внешних нагрузок. В теории
пластичности, напротив, рассматриваются тела, в которых под
действием достаточно больших напряжений возникают остаточные
деформации, не исчезающие после снятия нагрузок.
Теория упругости есть наука, целью которой является
определение внутренних усилий и относительных смещений частиц
в идеально упругом теле при действии на него внешних сил. В
действительности все тела в ббльшей или меньшей степени обладают
свойством пластичности, т. е. свойством сохранять некоторую часть
деформации после снятия нагрузок. Это свойство реальных тел
зависит от величины максимального напряжения, достигнутого при
нагружении, температуры и других условий работы материала.
Основные материалы, * применяемые в технике (металлы, сплавы
и др.) при обычных температурах и при напряжениях, не
превышающих предела упругости, можно считать с достаточной точностью
идеально упругими телами.
В курс теории упругости обычно включается исследование общих
свойств напряженного и деформированного состояния сплошных сред
8 ВВЕДЕНИЕ у
и частные задачи, требующие для своего решения более строгих
и сложных математических приемов, чем те, которые применяются
в курсе сопротивления материалов. Граница обоих курсов в
значительной мере условна: некоторые методы расчета элементов
конструкций, относимые обычно к теории упругости (теория изгиба
тонких плит, расчет напряжений во вращающихся дисках, теория
тонких стержней и др.) иногда включаются в курс сопротивления
материалов.
В 1638 г. задача об изгибе балок впервые рассматривалась
Галилеем. Однако твердую основу учение о сопротивлении
материалов получило только после установления Гуком закона о
пропорциональности деформаций упругого тела приложенным нагрузкам
(1660 г.). До начала XIX века развитие этого учения сводилось
к решению частных задач, преимущественно по изгибу стержней.
Общие уравнения теории упругости были выведены Навье и Коши
(1821 — 1822 г.). На основании этих уравнений Сен-Венан дал теорию
кручения призматических стержней (1855 г.) и уточненную теорию
изгиба. В дальнейшей разработке теории упругости приняли участие
многочисленные ученые различных стран.
ГЛАВА 1
НАПРЯЖЕНИЯ
§ 1. Основные понятия
Рассмотрим тело произвольной формы, находящееся в
равновесии под действием приложенных к нему внешних сил.
Внешние силы могут быть приложены к поверхности тела —
поверхностные силы (например, давление газов, жидкостей или
твердых тел, соприкасающихся с данным телом), или ко всем
элементам объема тела — объемные силы (силы веса, центробежные
силы).
Поверхностные силы характеризуются направлением и величиной
нагрузки на единицу площади приложения, а объемные силы —
направлением и величиной нагрузки на единицу объема.
Рассечем мысленно рассматриваемое тело какой-либо
поверхностью 5 на две части А и В (рис. 1). Воздействие одной части
тела на другую, например,
части А на часть В состоит
в том, что на поверхности S
действуют некоторые
силы, которые для тела в
целом являются внутренними
силами.
Под действием этих
внутренних сил и
приложенных внешних сил каждая из
частей находится в
равновесии.
Вообще говоря, внутренние силы неравномерно распределены по
площади сечения. Если н-а элементарную площадку dS действует
сила dP, то отношение
называется вектором напряжения на площадке dS. Индекс п
обозначает, что внешняя нормаль к площадке dS имеет направление д.
Рис. 1.
10
НАПРЯЖЕНИЯ
[гл. 1
/
Так, например, если длинный стержень с поперечным сечением
50 растягивается двумя силами Р, приложенными к его концам
(рис. 2), то на элементарной площадке, составляющей часть
плоского сечения, проведенного перпендикулярно к оси стержня и
расположенного на достаточном расстоянии от концов стержня, вектор
напряжения равен
*-■£-£• <'-2>
так как в этом случае сила равномерно распределяется по сечению.
Индекс у при р означает, что направление
нормали п к рассматриваемому сечению совпадает с
направлением положительной оси у.
Если в том же стержне провести
сечение под углом а к оси (рис. 3), то
площадь этого сечения будет равна
0 , и напряжение на любой элементар-
±
\?ъ
п
So
\-
ш
Л
\-р
Рис. 2.
sin а
ной площадке его будет равно
Psina
/>» =
So
(1.3)
На этом примере мы видим, что
напряжение, вообще говоря, зависит не
только от положения центра
элементарной площадки dS внутри тела, но
и от направления этой площадки.
Рис. 3. Вектор рп может быть
охарактеризован тремя проекциями на оси
координат х, yt z, которые обозначаются так: рпх> рпу* рпг (рис. 4).
Наиболее важное значение в теории упругости имеют
напряжения, Действующие на площадках, перпендикулярных к координатным
осям. Эти напряжения можно обозначить так (рис. 5):
Направление
внешней
нормали
X
У
г
Векгор
Рх
Ру
Pz
Проекции
на ось х
Рхх
Рух
Ргх
на ось у
Рху
Раи
Pzij
на ось z
Pxz
Руг
Pzz j
Здесь pxx, руу, pZ3 суть нормальные напряжения, так как они
перпендикулярны к соответствующим площадкам; в дальнейшем
будем их обозначать символами ож, ау и <зг. Остальные составляю-
§ 1]
ОСНОВНЫЕ понятия
11
щие лежат в плоскостях соответствующих площадок и суть
касательные напряжения, которые мы в дальнейшем будем обозначать
символами 1ху> zX2, iyx^ ?yz, ?zx> *zy
Заметим, что положительные нормальные напряжения ах, oyt az
означают растяжение, а отрицательные — сжатие. Знаки касательных
напряжений зависят от выбора направлений координатных осей.
i z
Рпг_
Л
S I
I "-
I
л
i
■*>&,
\Pxz
ггг*
А*
Рис. 4.
Рис. 5.
Рассмотрим произвольно ориентированную площадку с внешней
нормалью я, направленной в сторону части А тела (рис. 6);
напряжение/^ характеризует воздействие А на часть В,
передающееся через площадку dS. Воздействие
части В на часть А, передающееся через ту же
площадку, будет иметь ту же величину, но
противоположное направление. Поэтому
Р-п^—Рп (1-4)
Так, например, если внешняя нормаль к
рассматриваемой площадке направлена параллельно
отрицательной оси х> то вектор напряжения на
этой площадке
Р-х = — Рсо (1-5)
и проекции
равны —а„
этого вектора на оси координат
Р-п
Таким образом, положительные составляю- рис> §.
щие вектора напряжения на координатной
плоскости yOz соответствуют направлениям координатных осей, если
внешняя нормаль совпадает с направлением оси х\ аналогично
определяются составляющие вектора напряжения на координатных
плоскостях xOz и хОу.
Если же внешняя нормаль к площадке направлена
противоположно координатной оси, то положительным составляющим вектора
напряжения на этой площадке соответствуют направления,
противоположные координатным осям.
12 НАПРЯЖЕНИЯ [гл. I
/
§ 2. Зависимости между напряжениями, действующими
на различно направленных площадках
в одной и той же точке
Рассмотрим элементарный (бесконечно малый) тетраэдр (рис. 7),
три грани которого параллельны координатным плоскостям, а
нормаль п к четвертой грани составляет с координатными осями углы
Рис. 7.
(ti> х)у (п, у) и (riy z). Длины ребер тетраэдра, параллельных
координатным осям, обозначим через dx, dy, dz.
Напряжения, действующие на гранях тетраэдра, и площади этих
граней указаны в следующей таблице.
Наименование
грани
yOz
xOz
хОу
Наклонная
Направление
внешней
нормали
— X
— У
— г
п
Площадь
jdydz
— dzdx
jdxdy
dS
Проекции напряжения
на ось х
zyx
Рпх
на ось у
Pny
на ось z |
Paz
На грани тетраэдра действуют силы, равные произведениям
напряжений на соответствующие площади. Все эти силы — величины
§ 2)
ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ
13
второго порядка малости относительно dxt dy, dz, и их можно
считать приложенными в центрах тяжести соответствующих граней.
Кроме того, на тетраэдр действует объемная сила, проекции
которой равны KxdV, KydV, KzdV, где dV = -^dxdydz—объем
тетраэдра. Эта сила — величина третьего порядка малости
относительно dx, dy, dz, и поэтому ею можно пренебречь по сравнению
с предшествующими.
Составим уравнение равновесия приложенных к тетраэдру сил
в проекциях на ось х:
— <3x^^ydz — Tifx^dzdx — 'zZXYdxdy-{-pncodS = 0t (2.1)
Но по теореме о площади проекции плоской фигуры
±}-dydz= dS cos (п, х), 1
у dzdx = rfScos(n, y)t
2" dx dy = dS cos (n, z). J
(2.2)
Воспользовавшись этими равенствами, получим следующие три
формулы (вторая и третья выводятся из уравнений равновесия
проекций сил на оси у и z):
PnaJ = °aJCOS(/Z, *) + Tyj.COS(rt, У) ~\~ ~zxCOS(n, Z), \
Pny = *xy™s(*h x)-\-aycos(n, y) + zzycos(n, z), \ (2.3)
Pnz = ~xz cos (Л > 'х) + ~yz cos (Л» ^) + 3zC0S(rt, Z). J
Таким образом, составляющие вектора напряжения,
действующего на любой наклонной площадке, выражаются через
составляющие векторов напряжений, действующих на трех площадках,
перпендикулярных к координатным осям. Эти формулы вывел Коши.
Составим теперь остальные три уравнения равновесия
тетраэдра— уравнения моментов.
Наиболее удобно взять моменты относительно прямых,
проведенных параллельно координатным осям через центр тяжести наклонной
грани С. На чертеже (рис. 8) изображена одна из таких прямых,
а именно прямая zf, параллельная оси z. Расстояния точки С от
нертикальных и горизонтальной граней тетраэдра соответственно
равны -rrdx, -~dy и —йг. Следовательно, проекции точки С на
О *J о
указанные грани совпадают с центрами тяжести последних. Поэтому
из 12 составляющих сил., действующих на грани тетраэдра, все,
кроме двух, соответствующих напряжениям ixy и zyx, либо
параллельны оси zr, либо пересекают ее.
14
НАПРЯЖЕНИЯ
/
Уравнение моментов относительно прямой z' имеет вид:
"ху 2
dydz^ — ivx\dxdz^
dx
3
:0,
[гл. I
(2.4)
откуда получается первое из следующих трех равенств (остальные
два выводятся аналогично):
хух — *ху>
хгу — хуг*
(2.5)
= тг
Эти равенства выражают
закон взаимности
касательных напряжений.
Формулы (2.3) и (2.5)
показывают, что напряженное
состояние», в данной точке
сплошного тела вполне определяется
^у шестью величинами: ах, оу,
°г> хху> V И Хгх- Эти вели"
чины называются
составляющими (или компонентами)
тензора напряжения.
Рис. 8. Если наклонная грань
бесконечно малого тетраэдра
совпадает с элементом поверхности рассматриваемого сплошного тела,
го проекции вектора напряжения рпх, рпу, рП2 равны проекциям Fnx,
Fny, Fnz внешней нагрузки, отнесенной к единице поверхности.
Поэтому на поверхности тела имеют место следующие равенства:
a^cosfa, x)-f-Tr!,cos(/*, ^) + ^cos(n, z) = Fnx,
zxycos(nt x)-\-cy cos(я, y) + ivzco$(n, z) = Fvy,
xzxcos(n, x)-{-T:yzcos(n, у)-\г<з2 cos(n, z) = Fnz,
где n — внешняя нормаль к поверхности.
(2.6)
§ 3. Вычисление составляющих тензора напряжения
при повороте координатных осей
Пусть 7, 2, 3— оси системы прямоугольных декартовых
координат, проведенных в точке О нагруженного тела. Повернем систему
координат вокруг точки О таким образом, чтобы новые оси
соответственно заняли положение /', 2', Зг (ршс. 9).
Выразим составляющие тензора напряжения в новой системе
координат /', 2', 3\ через составляющие этого тензора в старой
системе координат /, 2, 3.
§ 3]
ВЫЧИСЛЕНИЕ СОСТАВЛЯЮЩИХ ТЕНЗОРА НАПРЯЖЕНИЯ
15
Косинусы углов между старыми и новыми осями выпишем в
следующей таблице, обозначив через a,-w = cos(/, тг) косинус угла
между старой осью I и новой осью т'.
1
2
3
V
ап
я21
а31
2'
«12
«22
а32
3'
а13 |
а23
а33
Рассмотрим бесконечно малую площадку, перпендикулярную
к новой оси т' (где т'—1', 2' или 3').
Проекции вектора напряжения рт», действующего на этой
площадке, на старые оси выражаются формулами
(2,3): г 3
Pm'l = Alaim+ftla2J»-f-ftia9ro (3.1)
и аналогично для рм>2 и р,П'3\ или в общем виде:
з
/W* = 2 Puflim- (3.2)
i = i
Проекция вектора рт* на какую-либо
новую ось п* равна сумме проекций на ту же
ось трех его составляющих, направленных по
старым осям /
Рт'п' = Рш'1<Х1п-\- рш>2<*2п~\- Рп'ЪаЪп —
— HjPm'k*kn- (3,3)
Рис. 9.
к=1
Подставляя (3.2) в (3.3), находим искомые формулы
преобразования составляющих тензора напряжения при переходе к новым осям
координат:
3 3
Рт'п' = S ^JPu&inP-kn' (3.4)
i = i к = 1
Вспоминая, что р1к = ~Нк и pu — ait напишем эти формулы в
развернутом виде:
ог = Pvv = aja?! + a2o& -f- a3aat + 2т12аиа21 + 2т23а21а31 + 2x3ia81au,
ivr = а1«11а12 + з2а21а22 + (заа31а12-)-т12(а11а22Н-а21а12)-|--
+ ~23 (a21«32 + «31^22) + *31 (а31а12 + ail«32) (3-5)
и аналогично для остальных четырех составляющих.
16
НАПРЯЖЕНИЯ
/
[гл. I
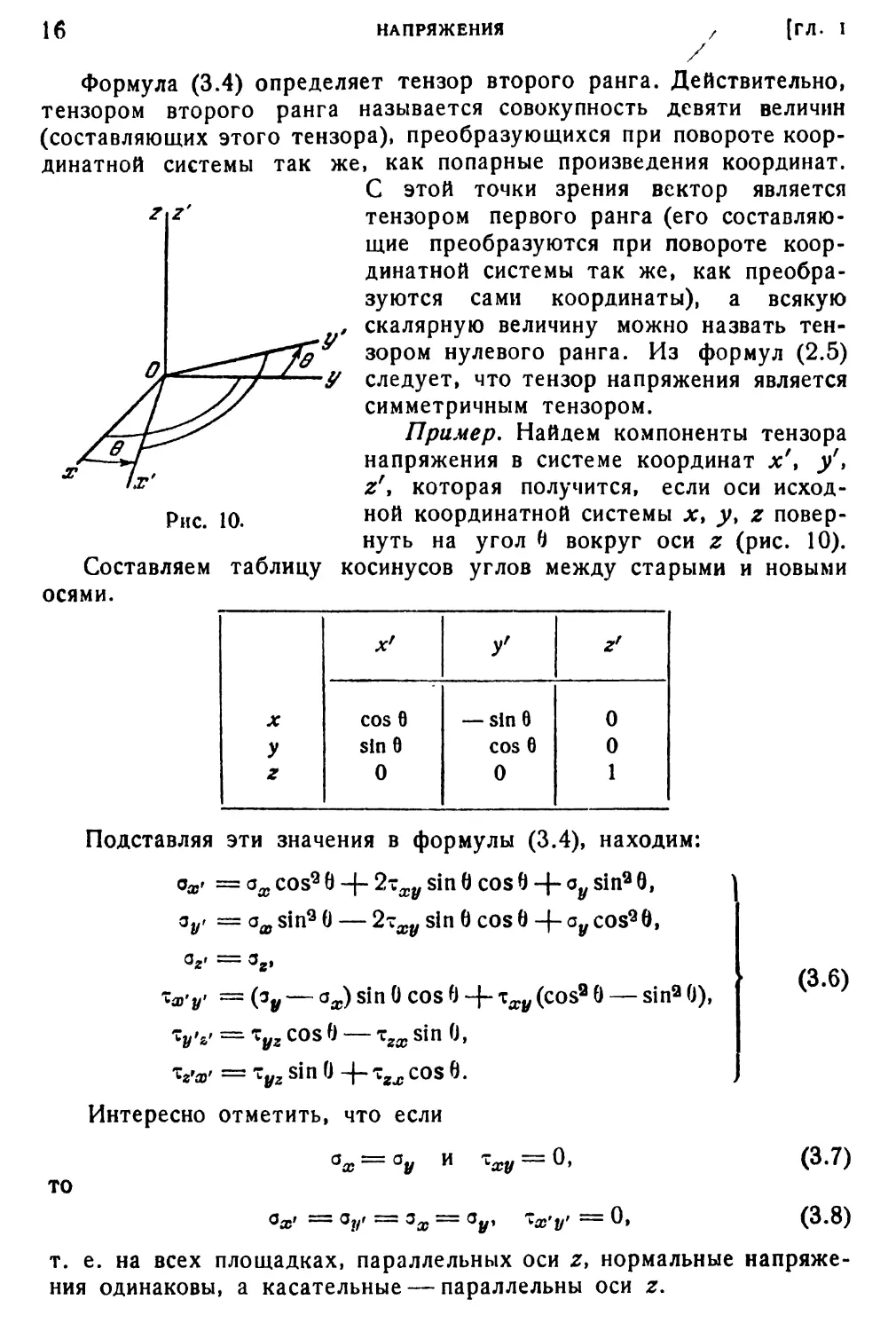
Формула (3.4) определяет тензор второго ранга. Действительно,
тензором второго ранга называется совокупность девяти величин
(составляющих этого тензора), преобразующихся при повороте
координатной системы так же, как попарные произведения координат.
С этой точки зрения вектор является
тензором первого ранга (его
составляющие преобразуются при повороте
координатной системы так же, как
преобразуются сами координаты), а всякую
, скалярную величину можно назвать тен-
^ зором нулевого ранга. Из формул (2.5)
следует, что тензор напряжения является
симметричным тензором.
Пример. Найдем компоненты тензора
напряжения в системе координат х\ у'\
z\ которая получится, если оси исход-
рис ю. ной координатной системы лг, у, z
повернуть на угол Ь вокруг оси z (рис. 10).
Составляем таблицу косинусов углов между старыми и новыми
осями.
X
У
Z
х'
cos 8
sin6
0
/
— sme
cos 6
0
zr
0
0
1
Подставляя эти значения в формулы (3.4), находим:
<V = ах cos9 Й + 2-ху sin Ь cos Ь -f- ау sin* 8,
зу< = аш sin9 0 — 2~ху sin 6 cos Ь-{-оу cos96,
<V = з2.
*х'yf = (iy — ох) sin 0 cos 6 + хху (cos9 0 — sin9 0),
V*' = VcosЙ — тгх sin О,
Va>' = ~yz s'n 0 4"~ ^zx C0S ^*
Интересно отметить, что если
(3.6)
°х = ау
ТО
~х'у' — "»
(3.7)
(3.8)
т. е. на всех площадках, параллельных оси z, нормальные
напряжения одинаковы, а касательные — параллельны оси z.
§ 4]
ГЛАВНЫВ НАПРЯЖЕНИЯ
17
§ 4. Главные напряжения
На произвольно направленной элементарной площадке,
проведенной через данную точку, действуют, вообще говоря, как нормальное,
так и касательное напряжения.
Попытаемся найти такую площадку, на
которой действует только нормальное
напряжение.
Направление нормали к искомой
площадке обозначим через п (рис. И),
а величину искомого нормального
напряжения на ней — через оя. Так как
направления п и рп совпадают, то
Pna> = °nCOS(/l, X), ]
Рпу =
= oncos(n, у), \
= ancos(/t, z). I
(4.1)
Рис. 11.
Подставляя эти выражения в равенства (2.3) и перенося все
члены в одну сторону, получаем:
(Рх — °n)cos(/i, x) + txycos(nt y) + ^ZJfcos(nt 2) = 0, ]
txycos(n> х)-\-(ау — з
n)cos(/t, j0 + iy3 cos (л, 20 = 0, [
[n, y) + (iz — on)cos(n, z) = 0. i
tgxCOS(n, *)-|-7j,zC0S(rt
Из этих уравнений совместно с известным соотношением
cos1 (п, jc)-|-cosQ(/i, .у)-!-cos9(л, z)=\
(4.2)
(4.3)
можно определить четыре неизвестных: cos (я, х)% cos (л, у), cos (л, z)
и оп. Так как на основании соотношения (4.3) cos(rt, х), cos(n, у)
и cos(n, z) не могут все одновременно равняться нулю, то
уравнения (4.2), рассматриваемые как система трех линейных однородных
•уравнений с неизвестными cos (n, х), cos (л, у), cos (л, z), должны
иметь ненулевые решения. Следовательно, их определитель должен
равняться нулю:
"х— wn»
^ху*
тга>»
^ху*
*уг>
*уг
= 0.
Развертывая определитель, получим:
(4.4)
(4.5)
18
НАПРЯЖЕНИЯ
[ГЛ. I
где
h = °х°у + °у°г + °гах '
*ху~
хуг-
Ъгх*
х *"Уг ~
°у *гх'
г*ху-
J
(4.6)
Кубическое уравнение (4.5) называется характеристическим
уравнением данного напряженного состояния; оно имеет три корня
ai> °2 и °з- Величины ор о2, о3 называются главными
напряжениями. Далее будет показано, что эти корни всегда вещественны.
Вообще говоря, они различны, хотя в частных случаях два из них
или даже все три могут быть равны между собой.
Если напряжения cv о2 и о3. различны, то для каждого из них
может быть определено направление площадки, на которой это
напряжение действует. Косинусы углов между нормалью к каждой
из этих трех площадок и осями координат найдутся из уравнений
(4.2) и (4.3), в которые вместо оп следует подставить значения оА,
а2 или Од.
Покажем, что указанные три площадки взаимно перпендикулярны.
Пусть для площадки /, на которой действует напряжение ov
направляющие косинусы cos (я, х)у cos (л, у) и cos (л, z) равны
соответственно аж1, ау1, аг1, а для площадки 2, на которой действует
напряжение о2, они равны ах2> ау2, <хг2. Подставим эти значения
в уравнения (4.2), умножим первые три уравнения соответственно
на ах2, «у2» аг2» a последние три на —axV —ayV
сложим:
(°х al) axl + WV """Ь Т*саг1 = °»
*хуах\ + (ау °l) ауL + ~yzazl = О,
т«Ай + Vam + (а* — al) аг1 = О»
(ая — аг) ая>2 "+- хшуа|/2 Н~ тгла22 = °»
тжуаа?2 + (Ру — аг) ау2 + туга*2 = °> I — <*<
T«Ae2 И" ^zay 2 Ч~ (°* °г) а*2 = 0 • | "el ;
После приведения подобных членов получим:
(а2 0l) (а»1ая>2 + а^1ау2 + azla*2> = 0.
Если а2Фа1$ то, сокращая равенство (4.8) на а2-
аа;1аж2 + а|Дау2 4" azla*2 = 0-
-ав1 и затем
лх2
Лу2
Лг2
*xl
VI
(4.7)
(4.8)
ov получим:
(4.9)
Это и есть условие взаимной перпендикулярности нормалей
к площадкам / и 2, т. е. перпендикулярности этих площадок между
собой.
С помощью равенства (4.9) нетрудно доказать также
вещественность корней av о2, о3. Действительно, если предположить, что
§ 5] НЕКОТОРЫЕ СВОЙСТВА ГЛАВНЫХ НАПРЯЖЕНИЙ 19
корень аг уравнения (4.5) комплексный, то уравнение (4.5) должно
иметь второй комплексный корень о2, сопряженный с ох. В так<3&
случае ах2> <ху2 и а22 были бы комплексными числами, соответственно
сопряженными с axV ayv аг1. Так как произведение двух
комплексных сопряженных чисел
(а + Ы)(а — Ы) = а?-\-№
всегда положительно, то все три слагаемых в левой части
равенства (4.9) должны быть положительны, что невозможно.
Следовательно, av о2, с3 не могут быть комплексными, а всегда вещественны.
Не приводя доказательства, укажем, что если два главных
напряжения равны между собой, например at = а2, то направление
площадки, на которой действует напряжение о3,
определяется так же, как в общем случае. На всех
элементарных площадках, перпендикулярных к указанной
(рис. 12), действуют только нормальные напряжения,
равные ах (=о2). Далее, если' ах = а2 = о3, то на всех
элементарных площадках, проходящих через данную
точку, действуют только нормальные напряжения
одной и той же величины. Иначе говоря, в
окрестности данной точки материал находится в состоянии
равномерного всестороннего растяжения или сжатия.
Из всего сказанного следует, что в каждой точке
напряженного тела можно провести три взаимно пер- Рис. 12.
пендикулярные площадки, на которых действуют только
нормальные напряжения. Эти площадки называются главными
площадками. Если напряжения av о2, о3 различны, то эти площадки
определены единственным образом; если же все три главные
напряжения равны между собой, то направления главных площадок могут
быть выбраны произвольно.
§ 5. Некоторые свойства главных напряжений
Направим оси координат по главным осям напряженного
состояния в данной точке, т. е. по нормалям к трем взаимно
перпендикулярным площадкам, на которых действуют напряжения av о2, о3.
Так как т12 = т23 = т31 = 0, то первая формула (3.5) для
нормального напряжения на произвольно наклоненной площадке с нормалью п
примет следующий, более простой вид:
°п — aiam+ o2a2n-f- о3а3л- (5.1)
На основании соотношения
Z | Z I 2 «
«in-Г &2п "Т" a3n = 1
(5.2)
20
Напряжения
[гл. I
равенство (5.1) можно переписать так:
зЛ = °i — (°i — аг)а2» — (°i — ?з) азл
2
/
либо так:
то
(5.3)
°n = (?i — °з)а1п + (^2 — °з)<*2Л+°8. (5-4)
Отсюда следует первое свойство главных напряжений, если
а1 ^>°2^ аз»
<3i>3n>°3' (5.5)
т. е. яз всех нормальных напряжений, действующих на
различных элементарных площадках, проходящих через данную точку,
наибольшим и наименьшим являются соответствующие главные
напряжения.
Формулы (2.3) дают в рассматриваемом случае
An — aiam» |
Рп2 = а2(Х2п> \ (5-6)
Рпъ z= °зазп- '
Следовательно,
^=^„хН-Р^ + ^пз = <'Мл-Ь-^„+0К- (5-7)
Второе свойство главных напряжений выводится на основании
п тех же соображений, которые привели
нас от формулы (5.1) к свойству (5.5).
Из соотношения (5.7) заключаем, что
если
К1Ж1Ж1.
то
Ы>|/>«1>Ы. (5.8)
т. е. из всех полных напряжений,
действующих на различных
элементарных площадках, проходящих через
данную точку, наибольшим и наименьшим
по абсолютной величине являются соответствующие главные
напряжения.
Величина касательного напряжения тп на площадке с нормалью п
может быть найдена из равенства (рис. 13):
Исключая из выражений (5.7) и (5.9) величину р* и добавляя
к полученному уравнению соотношения (5.1) и (5.2), получим систему
Рис. 13.
§ 5]
уравнений:
НЕКОТОРЫЕ СВОЙСТВА ГЛАВНЫХ НАПРЯЖЕНИЙ
<*<J«+<*4. + 3&,. = <* + t*.
о о? —I— о а2 —I— о а'
Зп
aL+aL + ^n =1,
21
(5.10)
решая которую, выразим направляющие косинусы aln, а2п и a3w
через oj, о2, о3, ол и тп:
х2 =
Tn + (gn-g2><gn-q8>
(*1—°2)(<Ч —*8>
а2 =
"2п
л8л"
xn + (gw-g3>(gtt-gi>
(а2~аз)(а2 —CTl)
T'+(gn^gl)^gn~g2)
(°8 — al) (а3 ~ а2>
(5.11)
Будем считать, что Oi> о2> аз- Так как левые части равенств
(5.11) положительны, то нормальные напряжения оп и касательные
напряжения тп на любых площадках должны удовлетворять
неравенствам
*п + (?п — °2)(?п—Зз)>°»
^+К—Зз)(ап —al)<°»
Ъг + iPn— °l)(an — °2>>°» )
которые могут быть переписаны в следующем виде
г . / *2 + *Л2 ^ Л*« —*Л8 \
(5.12)
■»-f(°n-
-а^]Г<(а?»у.
(5.12')
Эти неравенства имеют простой геометрический смысл, а именно
они показывают, что значения оп и тЛ на всех различных
элементарных площадках, проходящих через данную точку, лежат на
заштрихованной части плоскости оптя (рис. 14), ограниченной тремя
окружностями, имеющими центры на оси ап и проходящими через
точки (av 0), (о2, 0) и (о3, 0).
Отсюда следует, между прочим, третье важное свойство
главных напряжений; «
(Tn)ir
2 '
(5.13)
т. е. наибольшее касательное напряжение равно полуразности
наибольшего и наименьшего главных нормальных напряжений,
22
НАПРЯЖЕНИЯ
[ГЛ. I
/
Найдем, на какой площадке действует это наибольшее касательное
напряжение. Подставляя значения
„ _gi — g3
. ст1 + *8
в формулы (5.10), получим:
т. е. искомых площадок две, они проходят через ось 2 и составляют
углы в 45° с осями 1 и 3 (рис. 15).
Рис. 14.
откуда
Отметим связь между главными напряжениями и
коэффициентами характеристического уравнения Iv /2 и /3. По известному
свойству алгебраических уравнений с одним неизвестным
0з _ /i0e + /2в _ /з = (о _ 0i) (а _ аг) (0 _ 0з)§ (5.14)
Главные напряжения в данной точке суть физические величины,
не зависящие от выбора осей координат. Поэтому, хотя
коэффициенты /v /2, /3 выражаются формулами (4.6) через составляющие
тензора напряжения в некоторой системе координат, они не зависят
от выбора направлений осей этой системы.
Так, например, если имеются две системы координат xv ylt zx
и х2, yv z2, то
°а>, + аУх + °*i = А = °х> + °У% + а*а'
(5.16)
§ 6] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ РАВНОВЕСИЯ 23
Аналогичные равенства можно написать для /2 и /3. Поэтому Iv
/2, /3 называются соответственно первым, вторым и третьим
инвариантами напряженного состояния. Эти инварианты не зависят один
от другого, т. е. ни один из них не может быть выражен через
два других.
Как показывают общие формулы (3.4), шесть составляющих
тензора напряжения в одной системе координат выражаются через
шесть составляющих тензора напряжения в другой системе
координат и девять направляющих косинусов, характеризующих взаимное
положение обеих систем осей. Как известно, эти девять косинусов
связаны шестью соотношениями. Исключая из шести уравнений
преобразования и шести соотношений между косинусами все девять
косинусов, можно получить всего три независимых соотношения
между составляющими тензора напряжения в обеих системах
координат, не содержащих никаких других величин.
Мы уже знаем три соотношения типа (5.16), выражающие, что
инварианты Iv /2, /3 одинаковы для составляющих тензора
напряжения в обеих системах координат. Следовательно, других
независимых соотношений такого рода и других независимых инвариантов
быть не может,
§ 6. Дифференциальные уравнения равновесия
Рассмотрим, какие зависимости накладываются условиями статики
на изменение составляющих тензора напряжения при переходе от
данной точки сплошного тела
к соседним точкам. Для этого
мысленно выделим
элементарный объем в форме
параллелепипеда с ребрами dx, dy,
dz и напишем для него
условия равновесия.
На рис. 16 изображены
проекции на направление оси
х напряжений, действующих
на всех гранях
параллелепипеда, и объемной силы К ^
(отнесенной к единице объема).
Проекция К на ось х
обозначена через Кх.
Напряжения на гранях
параллелепипеда несколько
отличаются от напряжений ах% zxy . . . в центре его и потому
обозначения их снабжены значками ' для трех невидимых на рисунке
граней и " для трех видимых граней.
Рис. 16.
24 НАПРЯЖЕНИЯ [гл. I
/
Уравнение, выражающее, что сумма проекций на ось х всех сил,
действующих на выделенный объем, равна нулю, будет следующим:
-\-Kxdxdydz = 0. (6.1)
Бесконечно малые приращения напряжений могут быть выражены
через их частные производные по координатам:
f J **йх.% * J *£Ldy., x»-x'^^dz. (6.2)
OB X 0Х УХ УХ О У гх гх 02 V '
Подставляя (6.2) в уравнение (6.1) и сокращая на dxdydz,
получим дифференциальное уравнение равновесия для направления
оси X.
Уравнения для направлений у и z выводятся аналогично путем
рассмотрения проекций сил на направления осей\у и z; однако проще
получить их из первого уравнения путем круговой перестановки
индексов. В результате получим следующие дифференциальные
уравнения равновесия:
\ д*х д*ух . д^гх
дх » ду * дг
**у i д<5У , д1"/
дх "+" ду i дг ~т~'уУ
&*хг , д*уз , fae
Kx = 0t
АГ„=0,
-яг+^=0-
(6.3)
дх ' ду ~ дг "^ г \
Для равновесия элементарного параллелепипеда должны
удовлетворяться также три уравнения моментов. Эти уравнения, однако,
не дают каких-либо новых зависимостей, а приводят к ранее
выведенным равенствам; (2.5).
§ 7. Дифференциальные уравнения равновесия
в цилиндрических координатах
Рассмотрим элемент объема в цилиндрических координатах г, 0, z
и составим уравнения равновесия его.
На рис. 17 изображены напряжения, проекции которых на
направление радиуса-вектора, проведенного к центру элемента, не
равны нулю. Уравнение, выражающее, что сумма проекций на
указанное направление всех сил, действующих на элемент объема,
равна нулю, будет следующим:
(ay-ey)dbdr-(,'()+o;)^drdz-t-(z;-^)drdz+
■i-i^ — fyr dHdr -\-К/ dr db dz = Q. (7.1)
§ 7] ДИФФЕР. УР-НИЯ РАВНОВЕСИЯ В ЦИЛИНДРИЧЕСКИХ КООРДИНАТАХ 25
Выражаем бесконечно малые приращения через производные:
<г" - V - W ( V) dr - (г £ + ог) dr,
г0г"
Ч-^Л.
т —X
<Эх
дг
(7.2)
Подставляя значения (7.2) в уравнение (7.1), сокращая на rdrdb dz
и учитывая, что при стремлении
размеров элемента к нулю
значения с£ и oj' стремятся к oQ,
получим первое уравнение
равновесия:
д*
1 ах
г9 !
dz„
дг
+
г дб ■ дг
Кг=0. (7.3)
На рис. 18 изображены
напряжения, проекции которых на
перпендикуляр к радиусу век-
'^ -
Рис. 18.
тору, проведенному к центру элемента, не равны нулю. Уравнение
проекций имеет вид:
W — </>м dz + ('? - '{)dr dz + «л - <е>' <*' М +
+ «. + *{,) -f *" ^ + * а' <*'<"<** = 0. (7.4)
При этом
Ъ" ~ </' = i (W) *■ = (г ^ + xr9) dr. |
„» „' _ д5" Лй «•" -' ^rf j-
(7.5)
26
НАПРЯЖЕНИЯ
/
[ГЛ. 1
Подставляя (7.5) в (7.4), сокращая на rdrdhdz и учитывая, что
при стремлении размеров элемента к нулю значения т^. и т^
стремятся к хг8, получим второе уравнение равновесия:
1 даа дхЛ- 2х
дх
гЬ
Оз
гО
+-*• = (>.
(7.6)
дг » г дЬ ' дг « г
Наконец, составляя сумму проекций на направление оси z сил,
к*;
Рис. 19,
действующих на выделенный элемент (рис. 19), и приравнивая ее
нулю, получим уравнение
«/"-^')rfe^+(x;;-^)dr^+
+ (о* — op rdrdD-j- К/ drd<idz = 0. (7.7)
При этом
</"-</ = £(х„г)dr = (r^ + xn)dr, \
vfe-
^ дГаЬ>
г дг
(7.8)
Подставляя (7.8) в (7.7) и сокращая на rdrdbdz, получим третье
уравнение равновесия:
д* 1 дт. да -с
(7.9)
ГЛАВА II
ДЕФОРМАЦИИ
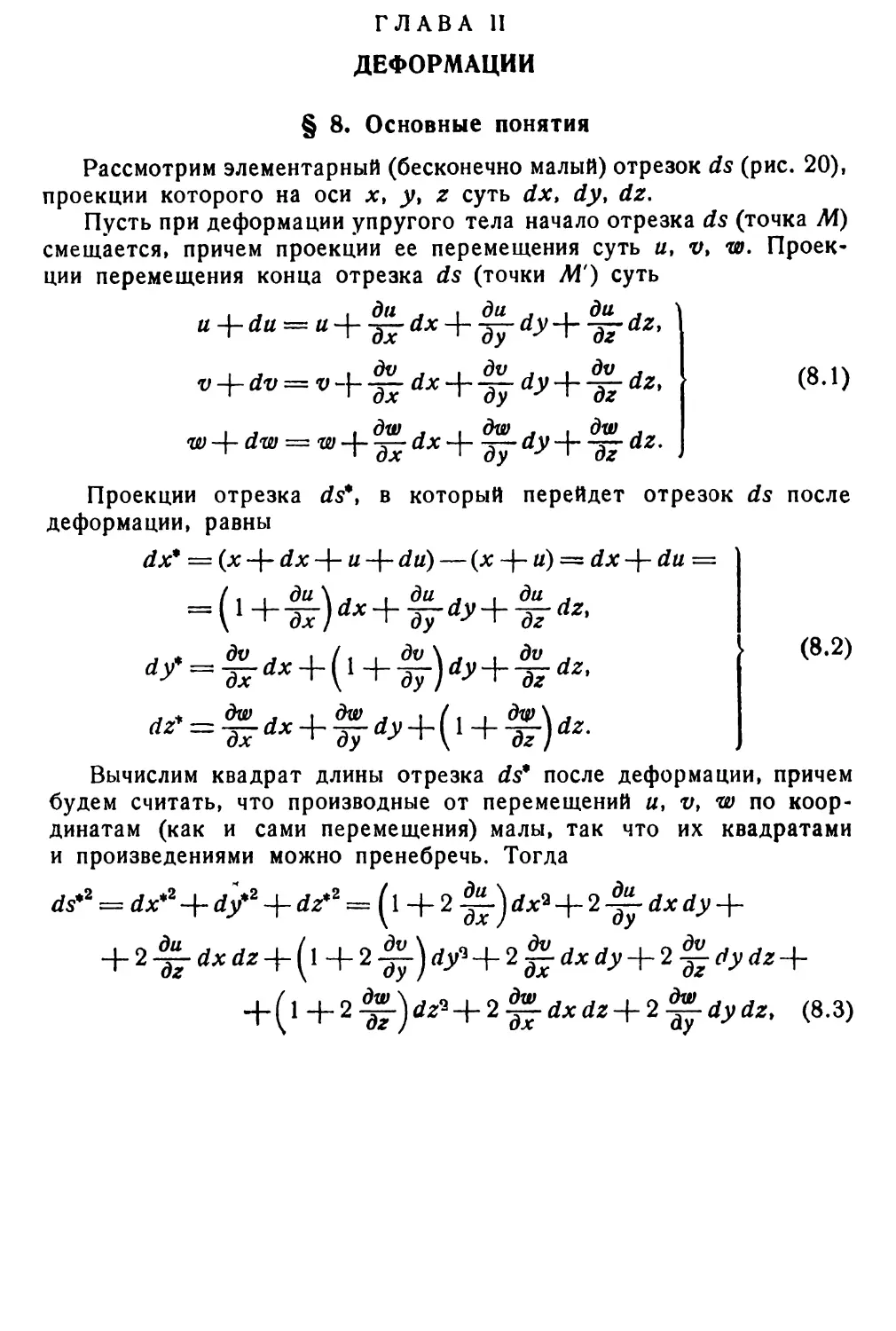
§ 8. Основные понятия
Рассмотрим элементарный (бесконечно малый) отрезок ds (рис. 20),
проекции которого на оси х, у, z суть dx> dy, dz.
Пусть при деформации упругого тела начало отрезка ds (точка М)
смещается, причем проекции ее перемещения суть a, v, w. Проек*
ции перемещения конца отрезка ds (точки М') суть
. du , , да , , ди .
дх
dv
ду
dv
dv
u-\-du
w-\-dw
dz,
+£*+£*+**■
dy
dz
(8.1)
Проекции отрезка ds*t в который перейдет отрезок ds после
деформации, равны
dx* = (л: + dx + и + du) — (л: -\- и) = dx + du =
(8.2)
Вычислим квадрат длины отрезка ds' после деформации, причем
будем считать, что производные от перемещений и, v, w по
координатам (как и сами перемещения) малы, так что их квадратами
и произведениями можно пренебречь. Тогда
ds« = dX« + dy« + dz* = (\ + 2£)dx* + 2^dxdy +
+ 2*Ldxdz + (l+2%.)dy*+2gdxdy + 2%dydz +
^+2^)^+2wdxdz+2i!yLdyd2' (8-3)
28
ДЕФОРМАЦИИ
/
откуда после приведения подобных членов получим
ds*2 — ds* = чхх dx* + т w W + Ъг d# + 2у^ <** *У +
+ 2-(yzdydz-lr2igxdzdx,
где
y -2 —
Чхх —' дх
су dv
dw
дг
ди . dv
Чху— ду ПГ -fa »
(fa I ддо
о dw
дн
*** — дд: + дг
[гл. и
(8.4)
(8.5)
Величины ухх, • • •» Tza? полностью характеризуют деформированное
состояние тела в окрестности данной точки и являются, как это
*г
Рис. 20.
Рис. 21.
будет показано в следующем параграфе, составляющими тензора
деформации.
Выясним физический смысл этих величин. Обозначим
относительное удлинение отрезка ds через
ds* — ds
ds
(8.6)
Так как рассматриваются лишь малые деформации, a ds* мало
отличается от ds, то
ds" — ds
ds*2 — ds* = (ds*-\-ds)-
ds
dstt2eads*.
(8.7)
Применяя эту формулу к отрезку, параллельному оси х, для
которого ds имеет проекции dx, 0, 0, получим
26^*2 = Т!са,<**а,
(8.8)
§ 8]
основные понятия
29
откуда
Т.™ = 2ея; (8.9)
аналогично получим
Tw = 2er Ъ, = 2е2, (8.90
т. е. величины ^хх, Tw» Чгг равны удвоенным относительным
удлинениям бесконечно малых отрезков, которые до деформации
были параллельны координатным осям.
Для выяснения физического смысла ^уг рассмотрим углы
поворота в плоскости yz отрезков dy и dz, до деформации
соответственно параллельных осям у и z. С точностью до малых второго
порядка эти углы равны -j- и ^— (рис. 21), если считать
положительным направление вращения от оси у к оси z. Прямой угол
между проекциями указанных отрезков уменьшается при деформации
dw , dv
на "57+ "5?* т' е' как раз на Ъм-
Так как угол между отрезками dy* и dz* после деформации
отличается от угла между их проекциями на плоскость yz на малую
величину второго порядка, то можно дать величине ^уг следующее
определение: чуг есть величина, на которую уменьшается при
деформации прямой угол между проведенными из данной точки
бесконечно малыми отрезками, которые до деформации были
соответственно параллельны осям у и z.
Дадим несколько более строгий вывод этого определения. С
точностью до малых второго порядка
cos (dy*, х) = -£- , cos {dz*, х) = -—■,
cos(rf/, у)=\, cos(dz*,y) = ^, \ (8.10)
din)
cos (dy*, z) = -j-, cos (rfz*, z) = 1;
~ — (dy*t dz*) = cos (dy*, dz*) = cos (dy*, x) cos (dfz*, x) -f-
-\-cos (dy*, y) cos (dz*, y)-\-cos(dy*, z) cos (dz*, z)==
du da , dv . dw /fl in
=="57"^r + "^" + "57 = T^ ( }
Величины fxyt -\yz и 4zx называются сдвигами.
Подставив в равенства (8.5) 2гх, 2гу и 2з2 вместо ^хх, -\уу и y22,
получаем окончательно формулы, связывающие относительные
so
ДЕФОРМАЦИИ
[гл. Ii
удлинения и сдвиги с производными перемещений
ди
~дх
dF ' Та*:
ди , dt/
dv_ dv \ dw
гУ — dv * ^yz ~ dz "^ dv '
dy
&£^ dtt^ , ди
dy
~dz
дх
dz '
1
(8.12)
^' A<?
§ 9. Вычисление составляющих тензора деформации
при повороте координатных осей
Пусть /, 2, 3 и /', 2', 3' — оси двух систем прямоугольных
декартовых координат (рис. 22). Координаты какой-либо точки по
отношению к этим системам осей обозначим соответственно через
xv хг* xs и xi* Х2* хъ'
Если, как и выше, в § 3,
обозначить через aim косинус угла
между старой осью / и новой осью
т'> то формулы преобразования
координат будут иметь вид:
и, следовательно,
з
~ ЛЛ dxi= 2 «iM<. (9.2)
Рис. 22. г „TTi гт т
Изменение квадрата длины элементарного отрезка ds следующим
образом выражается через его проекции dxv dx2, dxs и
составляющие fmn тензора деформации в старой системе координат /, 2, 3:
3 8
ds*2 —Ж?3 = 2 2 1ikd*idxk- (9.3)
Подставляя сюда dxi и dxk из формул типа (9.2), находим
ds*-ds* = у 2 т« 2 «4шл<. 2 «*„<*< =
3 8
м» = 1
п = 1
= 2 2 <Ч,<*<2 2 !««*««*».
(9.4)
Но приращение квадрата длины того же элементарного отрезка
можно выразить через составляющие fwv тензора деформации в
§ 101
ГЛАЙНЫЕ УДЛИНЕНИЯ
31
новой системе координат /', 2', 3':
3 3
rfSrt-ds«=S ^lm,,,dx'mdx'n. (9.5)
Выражения (9.4) и (9.5) должны быть тождественно равны при
любых значениях dx'm и dx'n\ следовательно,
з з
Tmw =22 luflinflk»- (9-6)
i = l А = 1
Сравнивая эту формулу с (3.4), видим, что составляющие
тензора деформации преобразуются при повороте координатных осей
то^чно так же, как составляющие тензора напряжения.
§ 10. Главные удлинения
В предыдущем параграфе было показано, что формулы
преобразования составляющих напряжения и составляющих деформации
при повороте координатных осей имеют совершенно одинаковый
вид, т. е. что обе совокупности составляющих образуют тензоры
второго ранга (тензор напряжения и тензор деформации). Эта
математическая аналогия позволяет легко выявить важные свойства
деформированного состояния.
Сопоставим деформированное состояние данного бесконечно
малого объема dVt сплошного тела, характеризующееся
деформациями Цхх* Чуу> 4zz> fxy> tyz> Ъх> и напряженное состояние некоторого
бесконечно малого объема dV2 другого сплошного тела,
характеризующееся напряжениями ох, оу, ог, *zxy, xyz, хгх.
Прикладывая ко второму телу соответствующие нагрузки, можно
создать в элементе объема dV2 любые напряжения, ограничиваемые
лишь условиями прочности. Придадим этим напряжениям значения,
пропорциональные деформациям элемента объема dVt:
°х == Я7хх> zxy :== k"fxy> |
°г == Щж& zzx == Щгх* '
где k — произвольно выбранный коэффициент пропорциональности.
В силу одинаковости вида формул (3.4) и (9.6) соотношения (10.1)
остаются верными при переходе от исходной системы
прямоугольных декартовых' координат к любой другой.
В теории напряжений мы показали, что если определить
направляющие косинусы новых осей координат по формулам (4.2) и (4.3),
то касательные напряжения на площадках, перпендикулярных к
новым осям, отсутствуют, а нормальные напряжения равны
соответствующим значениям входящей в уравнения (4.2) величины оп.
32 ДЕФОРМАЦИИ / [ГЛ. 1
/
Найдя такие оси /, 2, 3 для объема dV2 и написав для
составляющих тензоров напряжений в объеме dV2 и деформаций
в объеме dVv отнесенных к новым осям, соотношения, подобные (10.1),
получим:
ftTll = o1, ЛТ12 = т12 = 0, )
/гу22 = о2. *Т2з = т23 = 0, } (10.2)
^ТЗЗ == а8» ^Тз1 == Т31 == 0. )
Следовательно, в объеме dVx существуют три взаимно
перпендикулярных направления, сдвиги между которыми равны нулю.
В приведенном рассуждении бесконечно малый объем dVx
окружал любую заданную точку сплошного тела и при стремлении
к пределу стягивался в эту точку. Поэтому полученный результат
можно сформулировать следующим рбразом: в каждой точке
деформированного сплошного тела имеются три взаимно
перпендикулярных направления, сдвиги между которыми равны нулю.
Прямые, проведенные из данной точки по этим направлениям,
называются главными осями деформированного состояния в этой
точке.
Относительные удлинения по направлениям главных осей /, 2, 3
деформированного состояния называются главными удлинениями
•» = -jT~ («=1.2,3). (10.3)
Косинусы углов, составляемых главными осями деформированного
состояния с осями координат х, у, z, и главные удлинения могут
быть найдены из уравнений (4.2) и (4.3), в которых нужно заменить
введенные по ходу рассуждений напряжения в объеме dV2
деформациями в данной точке (в объеме dVx). Выполняя такую замену
с помощью соотношений (10.1) и первых трех соотношений (10.2),
представленных в форме
°п = *ТпЛ (л=1. 2, 3), (10.4)
приходим к следующей системе уравнений:
(Tee— Tnn)C0S(/t, *)-Иа*С08(Л, у) -}- Тга? COS (л, Z) = 0, ]
Та* cos (л, *) + (Tw —Tnn)cos(», y) + iV9cos{n, *) = 0, I
Tw,cos(/i, *)+?,, cos (л, .у) + (тм —TnJcosOi. z) = 0, I
COS9(Л, Jt)+COS9(fl, y)-\-COS*(n9 z)=l. J
Исключая из первых трех уравнений величины cos (я, х), cos (л, у)
и cos (л, z)t которые в силу четвертого уравнения не могут все
одновременно равняться нулю, получаем характеристическое урав-
§ 101
нение
ГЛАВНЫЕ УДЛИНЕНИЙ
33
Тага? Тпл Тл* Т*а?
Та* Туу~Тпп Туг 1 = 0. (Ю.б)
1гх Туг Т** Тпл
Разделив все элементы определителя на 2 и учитывая выражения (8.9)*
получим:
2 "***
J_ 1
2 Та* "J" Tf J?
_ I
* en 2 TV*
1
= 0.
(10.7)
2 »2^ 2 ^y- 8* 8n
Три корня кубического уравнения (10.7) дают три главных удли»
нения ех, е2, sa. Эти корни всегда вещественны (ср. § 4).
Развертывая определитель, получаем
где
*i = •* + а„ + г* = в! -f- Ч + 8з>
^ = г з
2 а? #
+ 33-4-33 г ("Г2 -4- Т2 -4- Y2 )
2 \ =
= ste2 + s223 + s:
ЗП»
(10.9)
Iv *2> h называются соответственно первым, вторым и третьим
инвариантами деформированного состояния в данной точке.
Первый инвариант /х имеет простой физический смысл.
Рассмотрим бесконечно малый параллелепипед с ребрами dх, dy>dz>
параллельными главным осям тензора деформации; его объем до
деформации
dV = dxdydzt (10.10)
и после деформации
dV = dx{l+;)dy{l+*Jdz(l+tJ&
^dxdydzQ+ti + zt + tt). (10.11)
Относительное изменение объема, которое принято называть
объемным расширением» равно
dV — dV . . .
*> = —jy— = г1-Ье2 + ез = /1-
(10.12)
Следовательно, первый инвариант деформированного состояния
есть не что иное, как относительное изменение объема.
:ч
ДЕФОРМАЦИИ
§11. Условия сплошности
/
|гл. ii
J
Представим себе, что рассматриваемое сплошное тело разрезано
на элементарные кубики (рис. 23, а), а затем каждый из этих кубиков
деформирован. Если сложить деформированные кубики, то в
общем случае между ними могут
остаться пустоты (рис. 23, б).
Для того чтобы
деформированные кубики могли быть
составными частями сплошного
тела (рис. 23, в), необходимо,
чтобы их деформации
удовлетворяли некоторым условиям —
так называемым условиям
сплошности.
Если тело остается сплошным, то его деформации являются
следствием определенных перемещений всех его точек. Эти
перемещения и, v, w должны находиться из шести равенств (8.12).
Перемещения и можно определить, если известны частные произ-
да да да
,ЮДНЬ1е-57- 3JT- U-
По первой формуле (8.12)
да
а)
в)
дх *х*
(11.1)
да
Производная -^- не может быть непосредственно найдена из
равенств (8.12), но из этих равенств нетрудно выразить вторые
производные следующим образом:
\ду)~ ду \дх)~~ ду '
_д
дх V ду t
ду \ду
д_
дг
дгу
дх~>
~\ду) ~ ~ду \Ja-if — дх) *"' ~ду~
fE!L\ — JLlJL( —$L\jl—( —W
\ду)~ 2[dzV*v дх)~^ dyVzx дх)}'
— 1 f^v д^х дЬЛ
" 2 V дг I" ду дх ) *
(11.2)
Совершенно аналогично могут быть найдены выражения для
. „ да dv dv dw dw
ЧаСТНЫХ ЛрОИЗВОДНЫХ ПО X, у, 2 ОТ фуНКЦИЙ -gp , j£ , -gj , -j£ И -g- .
Для того чтобы правые части равенств (11.2) могли быть частными
производными по х, у, z от одной и той же функции -^- , они
должны удовлетворять трем соотношениям, выражающим, что
результат дифференцирования по двум независимым переменным не зависит
^ Ti| НЫЧИСЛВНИЕ ПЕРЕМЕЩЕНИЙ ПО ДЕФОРМАЦИЯМ 35
от порядка дифференцирования:
L\JL(*!LS\ — A. ГА f^L\ I
~ду [дх [ду )\ ~ дх \ ду \ ду )\ '
dz
J_
дх
[ду\ду)\- ду[дг\ду)\
(11.3)
I
Подстановка значений -g—(j-j... из (11.2) приводит к первому,
четвертому и пятому из следующих равенств:
ау2 "^ Ах»
1о?у
Л*
1 д
Л,
#e.r
+
ддг2
д*а
дгдх
ду дг
дгдх
дх ду
2 дх
1 д
2
1 а
V а*
а*
ду V а*
*т*
ду
— 1 _ fllff. _L_
"" 2 а* V ду ■
а*
длг У'
ауУ'
дх
dz
(11.4)
п .. . .. ии UV UV OW OW
При определении каждой из функций -зг» ^т:' *Л7» Т7» "7ПГ
да dv dv dw dw
dz * дх ' dz * дх ' ~ду
мы приходим также к трем условиям. Однако из полученных 18
соотношений различными оказываются лишь шесть, выражающихся
равенствами (11.4). Эти шесть соотношений и суть искомые условия
сплошности (называемые также зависимостями Сен-Венана).
§ 12. Вычисление перемещений по деформациям
Если производные от функции -г- определены по формулам (11.2),
то эта функция найдется как интеграл
О (0, 0, 0)
изятый по какой-либо линии, соединяющей начало координат 0 с
точкой М(х, у, z). Через Сх обозначена постоянная интегрирования.
Как известно, при выполнении условий (11.3) или равносильных им
соотношений (11.4) интеграл (12.1) не зависит от пути
интегрирования при следующем ограничении: значение интеграла может изме*
няться на постоянную* величину, если при непрерывном изменении
пути интегрирования последний пересечет линию, на которой
функция -г- имеет особенность (т. е. обращается в бесконечность или
становится неопределенной). Внутри сплошного тела перемещения и,
3(5
Деформации
/
(i';l. il
v, w суть непрерывные функции координат, не имеющие
особенностей. Поэтому для односвязного сплошного тела (рис. 24, а)
указанное ограничение несущественно.
Более подробное рассмотрение многосвязного сплошного тела
(т. е. тела с отверстиями, рис. 24, б) приводит к выводу, что в этом
случае, кроме дифференциальных условий сплошности (11.4), должны
выполняться еще дополнительные интегральные условия сплошности,
на которых мы
останавливаться не будем.
Предположив, что все
условия сплошности выполнены, мы
можем найти перемещения по
заданным деформациям. Из
первых производных от и
ди
б)
Рис. 24.
только
дх
непосредственно
. п ди ди
выражается через деформацию гх. Для нахождения -г- и -р
приходится сначала определять соответствующие вторые производные от и
по координатам по формулам (11.2) и им подобным, а затем вычислять
интегралы типа (12.1). Тогда и находится по уже известным
значениям ^—, -г-, -г- с помощью подобного же интеграла.
Вычисление v и w производится аналогично, с некоторыми
упрощениями за счет использования ранее найденных первых производных
от и и V.
Расчет производится по следующей схеме.
1) Нахождение и:
ди
дх
щ
^_(ди\ I
ду\ду)
д (ди\ |
дг \ду) J
дх\дг)
ду\дг)
д /ди\
dz\dz)
ди_
ду
ди
~дг
(12.2)
Здесь и далее величины, поставленные справа от фигурных скобок,
должны быть определены путем составления интегралов типа (12.1).
§ 12) ВЫЧИСЛЕНИЕ ПЕРЕМЕЩЕНИЙ ПО ДЕФОРМАЦИЯМ 37
2) Нахождение v:
dv
du
ду
dv
д (dv\ \
dx\dz)
д fdv\
dy\dz)
d fdv\
dz\dz)
3) Нахождение w\
dw
дх
dv
1 "Э?"'
du y
V.
(12.3)
w.
(12.4)
dw dv
dy~~Ttf~—дг'
dw
Вторые производные от и, v, w находятся по формулам
типа (11.2).
В качестве простейшего примера применения выведенной
расчетной схемы рассмотрим следующую задачу: найти перемещения,
соответствующие отсутствию деформаций, т. е. при условии, что
гх = *у = *г = fxy = Ьш = Ъа = °- (12 • 5>
Получаем последовательно:
du
(12.6)
О,
d /&А d /du\ d (du\ Q du
dx\dy)~~ dy \dy)~~ dz\dy)~Vf dy ~
»Ct.
d /da\ a (du\ d (du\ n d/* r
dx \dz)~ dy\dz)— dzydz) — "' dz ~C2'
u = Ciy + C2z-{-uQ,
гле Clt C2 и н0— постоянные интегрирования.
Далее,
dv du r
dx —~Ту *~ — Cp
dy u'
►
±mldv\_ д (dv\_ dv _r
dx\dz)'-"dy\dz)'^y)i "37"~Сз'
(12.7)
38
и
dw
dx~~
dw
~5y~
dw
dz —
w =
ачения
: — ?t •
ДЕФОРМАЦИИ
du
dz ~
dv
dz ~
0,
— Czx-
c2 =
= -c2.
= ca,
-c^+
?r C3
/
<ш0. j
= —
[гл. и
(12.8)
Ci = —?,. C2 = ?lf> C3 = —<pe, (12.9)
то полученные выражения для и, v, w принимают вид:
« = ¥**—?*У +"о- )
v=-v2x —yxz-\-Vv 1 (12.10)
« = ?а^ — 9^4"W0. j
Как и следовало ожидать, эти формулы представляют
перемещения точек абсолютно твердого тела, причем и0, vQ1
w0—перемещения твердого тела, получающиеся вследствие его
поступательного движения, а остальные слагаемые — перемещения в результате
вращений вокруг осей х, у, z на малые углы срж, <ру, ср2.
Возвращаясь к общему случаю, отметим, что по заданным
деформациям (удовлетворяющим условиям сплошности) перемещения
определяются не единственным образом, так как по ходу
вычислений появляются постоянные интегрирования.
Пусть и, v, w и u'tv'iw' — две системы перемещений, которым
соответствуют одни и те же значения деформаций. Тогда из
формул (8.12) следует, что перемещениям
и* = и' — и, v* = v' — v9 w*=f=w'—w (12.11)
соответствуют нулевые деформации. Следовательно, и*, v*, w*
выражаются формулами (12.10).
Итак, различные системы перемещений, соответствующие
одинаковым деформациям, могут отличаться друг от друга только на
перемещения твердого тела, как целого.
§ 13. Выражение деформаций в цилиндрических координатах
Рассмотрим элементарный отрезок ds (рис. 25). Проекции ds
на три взаимно перпендикулярных направления — на радиус-вектор г,
касательную к окружности 6 и ось z — соответственно равны dr, rdO
\\ dz, так что
<fr9 = rfr9 +/*</»* +Л* (13.1)
§ 13] ВЫРАЖЕНИЕ ДЕФОРМАЦИЙ В ЦИЛИНДРИЧЕСКИХ КООРДИНАТАХ
39
Изменение квадрата длины этого отрезка после деформации на
основании выводов § 8 может быть выражено следующей формулой:
ds*2 — ds* = 2гг rfr9 + 2eftr9 db* + 2гг dz* + 2^rbr db dr -f-
+ 2wd9dz. + 2i„drdz, (13.2)
где er, e9, гг — относительные удлинения бесконечно малых отрезков,
имевших до деформации направления г, 0, z, а -\гЧ> Тог» Тг* —из*
менения прямых углов между этими отрезками.
Найдем зависимости между деформациями ег, ...,кг2 и
перемещениями точек упругого тела. Проекции перемещения точки
**'
N и^ац
•**г#
Рис. 25.
М — начала отрезка ds (рис. 26) —на направления г, 6, z обозначим
через и, v, w. Тогда
дг
"+■*>««+£*+£«+£**.
w + dw = w+£dr + %db+%rdz
(13.3)
dr "' ~ М" ~ dz
будут представлять собой проекции перемещения точки М! — конца
отрезка ds — на направления г', в', 2 в точке М'. Проекции
отрезка ds*, в который перейдет отрезок ds после деформации, на
первоначальные направления г, 6, г в точке М будут иметь вид;
(rfs*)r = dг + (и -+- A*) cos (dO) — (t> -f- du) sin (<W) — « =
= dr + tf я — vdb=z
(rf4-*)0 = г dO + («+A») cos (<Й) 4- (« + d«) sin (dO) — о =
= rdb-+-dv-t-udH =
(13.4)
40
ДЕФОРМАЦИИ
[ГЛ. II
/
Составим выражение для ds*2, пренебрегая квадратами и
произведениями перемещений и их производных по координатам,
и вычтем из него rfs9. Получим:
Сравнивая это равенство с (13.2), получаем
1_ да , dv v
Ч'6"'Т~Ш ~Т"~дг~7
да
~дгу
1 dv
, „• 7
е, =
<te
Т^ ■" дг "+" г <Э6 '
ди , dw
Т/г ЦуГ
дг *
(13.6)
Если сравнить полученные формулы с формулами (8.12) для
деформаций в декартовых координатах, то существенно отличными
оказываются только последние члены в
формулах для ей и ?гй. Поясним
физическое происхождение этих членов.
Представим £ебе
упругое тело (скажем,
в виде полого цилиндра,
рис. 27), которое
деформируется так, что все
точки его совершают
одинаковые радиальные
перемещения и. Тогда
окружность радиуса г
удлинится на 2rc(r-f-
-\-и) — 2irr = 2i:tf и
получит относительное удлинение ее = —.
Далее, представим себе другой вил деформации того же
упругого тела (рис. 28), при котором все его точки перемещаются
по направлению окружности на одинаковые расстояния v. Тогда
отрезок прямой, совпадавший до деформации с радиусом-вектором,
после деформации составит с радиусом-вектором угол —, а с
касательной
Рис. 27.
Рис. 28.
окружности — угол -~--] , т.
е. появится сдвиг
ГЛАВА III
ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ
И ДЕФОРМАЦИЯМИ
§ 14. Потенциальная энергия деформации
При деформировании твердого тела приложенные к нему
внешние силы совершают некоторую работу. В теории упругости
рассматриваются идеально упругие тела, которые при снятии внешних
сил вновь принимают первоначальную форму, причем полностью
отдают обратно работу
деформации. Многие материалы,
применяемые в технике (в частности,
конструкционные стали и легкие сплавы),
но своим упругим свойствам близки
к идеально упругим телам. В
дальнейшем изложении идеально
упругое тело мы будем просто называть
упругим.
Рассмотрим два бесконечно
близких деформированных состояния
какого-либо сплошного тела:
первое, характеризующееся
перемещениями и, v, w (из недеформирован-
ного состояния) и
соответствующими деформациями ев, ..., fzx, и второе, при котором
перемещения равны и-\~ои, t/-f-Si/, w-^bwy а деформации равны
•«-ЬЦз, ■••» 7гда4"<*Ткэ- Найдем работу, затрачиваемую на
деформирование бесконечно малого параллелепипеда с ребрами dx, dy,
dz (рис. 29) при переходе из первого состояния во второе. Если
значения перемещений и, t/, w и напряжений ах, . ..,тжл относятся
к центру параллелепипеда, координаты которого суть х, у, z> то
для центра передней грани эти величины будут иметь вид:
Рис. 29.
. да dx
~h
dv dx
A* T
. dw dx
, daxdx
42 ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ [ГЛ. III
/
/
а для центра задней грани:
да dx dv^ dx_ dw dx_ д<зх dx
а~~дх~2' V~~dx 2' W~dx 2' °*~dx~2''
Искомая работа сил, приложенных к передней и задней граням
параллелепипеда, будет равна
[(<.+&т)»(«+£т)-(*-&т)«(—£т)+
/ diX3l dx\<s/ dw dx\] . j
-('«—3f-r)4w-3FT)J^rfz =
= {^ou + d^bv^^w)(fXdydz +
+ l^(fe) + W(£)+^®]**^. 04.1)
причем работа сил, приложенных к задней грани, оказывается
отрицательной вследствие противоположного направления сил и
перемещений на этой грани; в процессе вычисления бесконечно малые
величины высших порядков отбрасываем.
Составляя аналогичные выражения для работ сил, действующих
на прочие грани параллелепипеда, а также выражение для работы
объемных сил (КхЪи +- Kyw -j- Kfiw) dx dy dz и складывая все эти
выражения, найдем искомую работу, затраченную на
деформирование параллелепипеда:
-[fe«-+T?*+$?«-+*(£) +*.•(£)+ -*.<)+
+3f »■+£»•+*••+*'(£)+*•(£)+ °-5(£)+
+ КхЪи +Kvbv +KJbw\dxdydz. (14.2)
Суммы слагаемых, стоящих в каждом из первых трех столбцов,
равны нулю в силу уравнений равновесия (6.3); следовательно,
Н-«.8s, + тг„ 5Т,„ + V 8т,. +- tw«т.х) <<* <Уrf*. (14.3)
Л 14] ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ДЕФОРМАЦИИ 43
Если рассматриваемое сплошное тело — упругое, то в каждом
деформированном состоянии оно обладает определенной
потенциальной энергией деформации.
Обозначим через а потенциальную энергию единицы объема
упругого тела. Тогда потенциальная энергия рассматриваемого
параллелепипеда есть а • dxdydz, а работа bW равна приращению
этой потенциальной энергии
bW = badxdydz> (14.4)
откуда
la =z ох Ьгл + °у 8ev + ог Ьгг + ~ху Ь^ху -f хуз 8^г + Ъ» 8 W (*4•5)
Но величина а зависит только от деформированного состояния
рассматриваемого малого объема тела, т. е. от е^, ..., izx\
следовательно,
^ да * , да * • да 5 , да * , да *> \ да *
(14.6)
д^и^_г^и-«'^^ивг^^,''^^^;'''«'г^^;
Сравнивая это равенство с предыдущим, видим, что
(14.7)
да да да
да да да
\ху ' "\уг "\гх
т. е. напряжения равны частным производным от потенциальной
энергии единицы объема по соответствующим деформациям.
Эти формулы были получены Грином.
и Ра
Если вычислить смешанную производную -^—^— из первого,
Otx Оёу
а затем из второго равенства (14.7) и приравнять найденные
выражения, то мы получим первое из следующих пятнадцати равенств:
дах
Ъгу
д*у
dzz
**х
дОу
дгх>
дзг
~~д^'
дзх
= *7'
дох
<>йу
д*х
д<зх
dlz.r
д*ху
~~ dzx '
~ д*х >
_ d^zx
~ дгх '
д°у
dixy
дау
д*у
dlzx
д*ху
~"д^'
дгу '
д*3х
~ д*у >
d'z
dixy
d°z
dhz
d'z
dbx
d*xy
d^zx
- дгя '
дх*у
dlyz
*уш
dlzx
д*зх
д1ху
fry*
dixy
д*зх
foxy
dlzx
(14.8)
Остальные равенства получаются аналогично.
Зависимости между напряжениями и деформациями для всякого
сплошного тела должны удовлетворять равенствам (14.8). Кроме
того, они должны быть такими, чтобы потенциальная энергия единицы
объема, вычисленная путем интегрирования равенства (14.6), была
положительной при любых значениях деформаций.
44 ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ [ГЛ. 111
Указанные ограничения, однако, далеко не определяют вида
зависимостей между напряжениями и деформациями. Для
установления этих зависимостей оказывается необходимым использовать
упругие свойства реальных тел.
§ 15. Обобщенный закон Гука
Для большей части реальных упругих тел при напряжениях,
меньших предела упругости, с достаточной точностью верно следующее
положение, называемое обобщенным законом Гука: составляющие
тензора деформации суть линейные функции от составляющих
тензора напряжения.
Все другие основные уравнения теории упругости: уравнения
равновесия (6.3), условия на поверхности тела (2.6) и зависимости между
перемещениями и деформациями (8.12) также линейны. Поэтому тела,
подчиняющиеся обобщенному закону Гука, обладают следующим
важным свойством: если пропорционально увеличивать все нагрузки,
то напряжения и деформации растут пропорционально нагрузкам.
Рассмотрим напряженное и деформированное состояние такого
тела, вызванное поверхностными и объемными силами Fnx, Fnyt Fnz,
Кху Ку> Кг и характеризующееся напряжениями аж, ..., zzx и
деформациями гх, .... угж. Силы kFnx, lFny, XFnz, ККХ, ХА^, X/(z,
где X — некоторый числовой множитель, вызовут напряжения
Ь°х> ...» Хт2а? и деформации Хеж, . . ., k^gx.
Пользуясь формулой (14.5), составим выражение для приращения
потенциальной энергии деформации при увеличении X на 8Х:
8л = [Xc^Xe^-f- . • • +Хт^8(ХТга?)] =
= (V*+ ..- +^Тга,)Х8Х. (15.1)
Интегрируя это равенство по X от 0 до 1, получим следующую,
так называемую билинейную формулу для потенциальной энергии
единицы объема:
а = 2* (аЛ?+ аЛ + а*е* + zxvlxy-\- VTtf» + *гхЪхУ (15.2)
Покажем, что для тел, подчиняющихся обобщенному закону
Тука, деформации равны частным производным от потенциальной
энергии единицы объема по соответствующим напряжениям.
Из формулы (15.2) следует, что при произвольных малых
приращениях напряжений и деформаций
28л = aw Ьгх -f ву Ъгу -f- ог Ьгг + хху ^ху + Тц 8Ту* + *zx 8Тм> +
+ *х 8аа> + гу Ьау + гг Ч + Tat/ '*ху + Луг 8 V + tzx 8тзаг
(15.3)
Вычитая из этого равенства равенство (14.5), получаем
5л = гх Ъох + гу Ьсу + гг Ъог + Т.гу Ку + Луг 8V + T*r 8V' С15-4)
$ l5t
ОБОБЩЕННЫЙ ЗАКОН ГУКА
45
Но величина а вполне определяется напряженным состоянием
рассматриваемого малого объема тела; поэтому
. да cs . да * , да
дъя
•от.
ху
+ aT-3V+
*,
*.
■8т,
"ху ' *""уг ' wy-zx
Сравнивая это равенство с предыдущим, видим, что
да да да
'*~'дол9 в* —*„' е<~^
"X
да
ху
"У
да
Чуз~ д\
УЗ
г
да
(15.5)
(15.6)
Указанные формулы называются формулами Кастильяно;
очевидно, что они взаимны с формулами Грина (14.7); однако формулы
Кастильяно справедливы лишь для тел, подчиняющихся обобщенному
закону Гука.
Если деформации суть линейные однородные функции от
напряжений, то, как видно из формулы (15.2), потенциальная энергия
единицы объема есть квадратичная однородная функция от
напряжений. Наиболее общий вид такой функции следующий:
\ , 2 | 2 | 2 j 2 j 2 [ 2 j
+ 2ci2°x*y + 2с13зЛ + Ъсиоххху -f 2cVooxiyz + 2г16оЛж +
+ 2^23V«+ 2^24 V*y ~Ь 2^2баЛг+ 2с26сус2ж +
+ 2с34а2т^Н- 2с3ба2ту5+ 2с36а2хгг+
I 2^4бха;утуг i *С4Ъ1хухгх ~Т~
+ 2^^), (15.7)
где сп, . . ., сбв—гкоэффициенты, которые для однородных упругих
тел постоянны по'всему объему тела, а для неоднородных являются
функциями от координат.
Подставляя выражение (15.7) в формулы (15.6), получим
следующие зависимости между деформациями и напряжениями:
*х = ^11^+ ^12°[/Ч- £l30s-f сихху+ C15V + С\&гх>
еу = с\2°х + с22*у + c2*°z + <^2^ху + с2&уг + с2&гх>
гг = С13°х + C2.i°y + ^З.Л + Сг^ху + ^ЗбТ|/г + ^36Т^'
То* = С14аш + С24ау + Cuat -f С^Тд.у 4" С^уг + ^G^*'
V = с1Ь°х + с2^+ с35аг + с45х^+ сббХуг+ Сб6Т*г'
Тг* = с16аа; + Ы°у + с36°* + ^a* + ^66Ty2+ <W4r-
Коэффициенты си, ..., сб6, числом 21, полностью
характеризующие упругие свойства однородного тела, называются упругими
постоянными.
(15.8)
4б ЗАВИСИМОСТИ МЕЖДУ НАПРЯЖЕНИЯМИ И ДЕФОРМАЦИЯМИ |ГЛ. Ill
§ 16. Закон Гука для изотропного тела
Упругое тело, для которого имеют место зависимости (15.8),
содержащие 21 упругую постоянную, вообще говоря, будет
обладать различными упругими свойствами в различных
направлениях. Так, например, при растяжении по направлению оси jc
(только Од. Ф 0) соответствующее удлинение ьх = сиох, тогда как
при растяжении по направлению оси у (только оу Ф 0)
соответствующее удлинение еу == с22зу. Такие упругие тела называются
анизотропными. К их числу относятся дерево и различные
кристаллы.
Большая часть применяемых в технике упругих тел обладает
одинаковыми упругими свойствами во всех направлениях либо
вследствие аморфности (стекло, пластмассы), либо вследствие
того, что эти тела состоят из мелких беспорядочно ориентированных
кристалликов (металлы). Тела, обладающие одинаковыми упругими
свойствами во всех направлениях, называются изотропными. Для
изотропных тел выполняется ряд соотношений между упругими
постоянными; так, совершенно очевидно, что должно иметь место
равенство: сп = с22 = сп. Иначе говоря, существует некоторое
подобие тензоров напряжения и деформации. Кроме того, в каждой
точке изотропного тела главные оси напряженного и
деформированного состояний совпадают, т. е. тензоры напряжения и деформации
ориентированы одинаковым образом.
Выражение для потенциальной энергии деформации единицы
объема изотропного упругого тела не должно изменяться при любом
повороте координатных осей, так как все направления в этом теле
равноправны. Следовательно, потенциальная энергия единицы объема
изотропного тела есть инвариант тензора напряжения (если она
выражена через напряжения) или тензора деформации (если она
выражена через деформации).
Как было показано в § 5, тензор напряжения имеет только
три независимых инварианта Iv /2 и /3 соответственно первой,
второй и третьей степени относительно напряжений. Следовательно,
потенциальная энергия деформации единицы объема должна
выражаться через эти инварианты, а так как она является однородной
функцией второй степени от напряжений, то эта функция должна
иметь вид:
а = Л/? + В/2 = Л(зш + оу+ог)* +
+ Я(аа>а*+ V*-f аА> — Хху — 1уг— Т*,,), (16.1)
где А и В — постоянные коэффициенты.
Таким образом, изотропное тело характеризуется всего двумя
упругими постоянными Л и В.
1С)
ЗАКОН ГУКА ДЛЯ ИЗОТРОПНОГО ТЕЛА
47
По формулам (15.6) получаем:
•» = 2Лош -f (2А + В) (а, + ".),
е„ = 2/Ь„ + (2Л 4 В) К 4 о«). Т». = ~ 2В V-
., =2А»,4-(2Л4-Я)(ав + в,).
Тжу — л°^»
Тга? = — 2fl*W
(16.2)
Заметим, что формулу (16.1) можно представить еще в
следующем виде:
в = (л4-5-в)('а;4^4^)2--§-В[(^-^)9+(^-0*)2+
+K-^)2+6(4+i+i)b (16.3)
Так как потенциальная энергия упругого тела положительна при
любых ненулевых значениях напряжений, то должно быть
Л4уЯ>0, Я< О,
(16.4)
откуда, между прочим, вытекает, что А > 0.
Опыт показывает, что у реальных упругих тел простое
растяжение (например, от > 0 при оу = ог = 0) вызывает сокращение
размеров тела в направлениях, перпендикулярных к оси растяжения
(т. е. в указанном примере еу = ег<0). Отсюда следует (см.
формулы (16.2)), что
2Л + В<0. (16.5)
Поэтому можно положить
— v, (16.6)
2Л = 1 —2В = 1
Е ' О
2А
причем
1
Е>0, G>0, ~>-v>0.
(16.7)
Верхняя граница для v получается из первого неравенства (16.4),
эквивалентного неравенству Л>—(2А-\-В).
Формулы (16.2) принимают следующий окончательный вид:
е.т = £ К — v (*у + °г)1 Та-|/ = 7J ~*Г
|av—v (0^4-^)1, Т
V»
G Т**'
e.= £laa — 4^ + ^)],
7з<В (J^i
(16.8)
£, О in суть технические упругие постоянные, а именно: £ —
модуль упругости (модуль Юнга), О—модуль сдвига, v —
коэффициент поперечного сжатия (коэффициент Пуассона).
48 ЗАВИСИМОСТИ МЕЖДУ напряжениями и деформациями (гл. lit
Если подставить в третье равенство (16.6) значения А и В из
первых двух равенств, то получим соотношение между Е, G и \,
которое легко приводится к следующему виду:
£ = 2G(l+v). (16.9)
Формулы (16.8) определяют зависимости деформаций от
напряжений. Найдем зависимости напряжений от деформаций.
Сложив первые три уравнения (16.8), получим:
««••+^ + «. = Ц^(<»ш + ^ + 0. (16.10)
где через 0, как и выше, в § 10, обозначено объемное
расширение.
Первое уравнение (16.8) можно преобразовать следующим
образом:
•* == £ Ь* (1 + *) — * (*х Ч- °* + *«)] =
в!*0^_ * о = •£_*». (16Л1)
Ь 1 - - 2v 2а 1 — 2v v 7
Отсюда находим искомую формулу для ах и аналогично —
формулы для су и ое. Формулы для т получаются непосредственно из
формул (16.8). Окончательно получим:
(16.12)
В некоторых руководствах и работах по теории упругости
применяют вместо технических упругих постоянных так называемые
постоянные Ламэ:
х=т=ъ> ^ = а (16ЛЗ)
Мы будем пользоваться только техническими упругими
постоянными.
Приведем выражение для потенциальной энергии единицы объема
изотропного упругого тела через напряжения и технические упругие
постоянные.
Подставив в формулу (16.1) выражения постоянных А и В через
Е и v и произведя некоторые преобразования, получим:
а = 2£ (4 + 4 + °* — 2v (°*a* + V* + VJ +
+ 2(i + *)(4,4-4.+4*)b (16.14)
ji 1б| ЗАКОН ГУКА ДЛЯ ИЗОТРОПНОГО ТЕЛА 49
Это выражение можно представить в следующем виде, получаемом
иЭ выражения (16.3):
я = До+Яф'
где
\ 2n
1 + v
аФ=£Й-^-ау)2 + (а,-аг)а4-(^-оа?)2 +
+6(x2y+4e+xL)].
(16Л6)
(16.16)
При равномерном всестороннем растяжении или сжатии (аш =
=*оу = оа, тжу = хуг = тга. = 0) аф = 0, а при деформации, не
сопровождающейся изменением объема (ft = 0,
следовательно, ох + оу + о3 = 0), а0 = 0.
Поэтому можно сказать, что часть
потенциальной энергии а0 вызывается изменением объема
упругого тела, а часть а$—изменением его
формы.
Все формулы этого параграфа остаются
верными при любом выборе направлений трех
взаимно перпендикулярных координатных осей
х, у% z. Эти направления могут быть взяты
одинаковыми или различными в различных
точках упругого тела. В частности, две оси можно
взять параллельными направлениям радиуса-
вектора г и оси z цилиндрической системы координат. Третья ось,
перпендикулярная к двум первым, пойдет в направлении отсчета О
(рис. 30). Это те же оси, которые были использованы в §§ 7 и 13.
Формулы, связывающие напряжения с деформациями в
цилиндрических координатах, а также соответствующие формулы для
объемного расширения и потенциальной энергии деформации,
получаются из выражений (16.8), (16.12), (16.10), (16,14) и (16.16)
заменой индексов х, yt z индексами г, bt z.
Рис. 30.
ГЛАВА IV
ОБЩИЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ
§ 17. Полная система основных уравнений
теории упругости. Свойство единственности
Из выведенных уравнений основными уравнениями теории
упругости являются следующие:
I. Уравнения равновесия (6.3), связывающие напряжения между
собой и объемными силами:
д°х . foxy , <Ь ZX
I 17Т
ду I dz
дх
дъху dzy дчуя
дх
дъгх . dzvz . дз.
ду i dz
уг
дх
ду
dz
%х
Ку
к,
= 0, |
= 0,
= 0.
(17.1)
II. Уравнения (16.8), выражающие зависимости деформаций от
напряжений:
__ ах ~ v (°у + аг) __хху
Тху q *
\
*У~
°г —
Е
-^(°*
Е
Ч**
+
+
Ъ)
°у)
V =21
Тгл
(17.2)
(где 0= оно. \) или обратные зависимости (16.12) напряжений
от деформаций:
0x=z20(ex-\-T-?-jjy :,(=0^, |
о„ = 2о(.|г + г^ в). v = GTi„ (17.3)
jj 17) ПОЛНАЯ СИСТЕМА ОСНОВНЫЕ УРАВНЕНИЙ ТЕОРИИ УПРУГОСТИ
51
ГДе
ди
ех fa >
dv
dw
е* — дг '
ди . dv \
dv | dw
» dw . ди
4zx~-~~dx\~dz* J
III. Уравнения (8.12), связывающие деформации с перемещениями:
(17.4)
Всего имеем 15 уравнений с 15 неизвестными:
ал> Tutf» ех* 1ху> и>
ау> xyz> гу> 1уг> v>
az> ~гх> ez' 4zx> w-
В каждой конкретной задаче в дополнение к этим уравнениям
должны быть заданы еще граничные условия на поверхности
упругого тела. В зависимости от характера этих условий различают
следующие основные виды задач теории упругости:
1) на всей поверхности тела заданы поверхностные силы:
2) на всей поверхности тела заданы перемещения ut v, w;
3) на части поверхности тела заданы поверхностные силы, а на
остальной части — перемещения (так называемые смешанные задачи).
Возможны и более сложные граничные условия, например, при
контакте нескольких упругих тел.
Граничные условия для случая, когда заданы поверхностные
силы, выражаются равенствами (2.6):
ох cos (л, х) + ixy cos (л, у) + z2x cos (л, z) = Fnx, |
XxyCOS(tl, *)-+- Oy cos (n, ^)+T^COS(/lf z) = Fny1 \
txxcos(n, x)-+-*zyzcos(n, y) + oscos(n, z) = Fn3. J
(17.5)
Для этого вида задач необходимо сделать физически очевидную
оговорку: система уравнений имеет решение лишь при условии, что
внешние силы, приложенные к телу, взаимно уравновешиваются, и
это решение является единственным только для напряжений и
деформаций, тогда как в выражения для перемещений входят шесть
произвольных постоянных интегрирования, характеризующих
поступательное перемещение л\ поворот тела как целого. Доказательство
Теоремы единственности принадлежит Кирхгофу.
Для перечисленных трех основных видов задач теории упругости
имеет место свойство единственности: система уравнений (I), (II)
и (HI) при заданных граничных условиях может иметь только одно
Решение.
52
ОБЩИЕ УРАЬНЕНИЯ ТЕОРИИ УПРУГОСТИ,
/
[гл. IV
Необходимо отметить, что теорема единственности не
распространяется на случаи, когда перемещения столь велики, что
приближенные уравнения (III), связывающие деформации с
перемещениями, должны быть заменены более точными нелинейными
зависимостями.
В этих случаях решение остается единственным лишь при
нагрузках, не превосходящих определенного предела. При больших
нагрузках оказываются возможными две или несколько форм упругого
равновесия, причем некоторые из них неустойчивы.
§ 18. Решение задач теории упругости в перемещениях
Из основных уравнений (17.1) — (17.4) нетрудно исключить
деформации и напряжения и получить дифференциальные уравнения для
перемещений и, v, w. Таким образом, число неизвестных, с
которыми нужно иметь дело при решении задачи, можно уменьшить
до трех.
Для этого в уравнениях (17.3) выразим деформации через
перемещения с помощью уравнений (17.4):
•. = 20(£+г^т,»). *.-«(£+£),
'.=ЧЙ+т^»). <--<>(£+£).
(18.1)
а затем подставим их в дифференциальные уравнения
равновесия (17.1). Первое из полученных уравнений имеет вид:
tiPw
д&1\ — 2ч дх
Замечая, что
и обозначая
дхдг,
&и
d*v
d*w
дх*
дхду
дхдг
дЬ_
дх
А __ д2и , д*и , fflu
дг*
:) + ^ш = 0.
(18.2)
(18.3)
(18.4)
(Дм называют лапласианом и), получим дифференциальные
уравнения для перемещений в следующем окончательном виде:
О *+OA« + #f.-0.
1 — 2v дх
G д»
1 — 2чду
+ ОДг»+К„=0.
Д* + од.+^,во. ]
(18.5)
18J РЕШЕНИЕ ЗАДАЧ ТЕОРИИ УПРУГОСТИ В ПЕРЕМЕЩЕНИЯХ 53
Если на поверхности тела заданы перемещения, то граничные
условия для этих уравнений выражаются весьма просто; если же
на границе тела заданы поверхностные силы, то граничные условия
получим, подставив в зависимости (17.5) напряжения, выраженные
по формулам (18.1).
Эти условия будут иметь довольно сложный вид:
o[(S+t)«-^*)+(S+S)«-(»'»+
Уравнения (18.5), выведенные еще Ламэ, долгое время не
использовались при решении конкретных задач теории упругости.
Г. Д. Гродским и П. Ф. Папковичем независимо друг от друга
было найдено и в 1932 г. опубликовано общее решение
дифференциальных уравнений (18.5) в следующем виде:
(18.6)
и = Ф1
V =Фо
4(1
1 д (Фо+хФ^уФг + гФг), \
(Фп + хФ^уФг + гФь),
4(1—v) дх
1 д
W-
) ду
Ф3~Т(1^^(Ф0+^Ф1+^Ф2+^Ф3)
(18.7)
гАе Ф0, Фх, Ф2, Ф3 — функции координат х% у, z,
удовлетворяющие одному и тому же дифференциальному уравнению
#5ф
АФ = -^2+^ + ^ = °-
(18.8)
Уравнение (18.8) называется гармоническим уравнением или
Уравнением Лапласа. Функции, ему удовлетворяющие, носят назва-
ние гармонических функций; они хорошо изучены в математике.
Формулы (18.7) несколько позже были вновь выведены Нейбером,
Который успешно использовал их для математического исследования
Устных напряжений вблизи отверстий и выточек в упругих телах.
Рассмотрим случай, когда объемные силы не зависят от
координат или отсутствуют. Дифференцируя первое уравнение (18.5)
54 ОБЩИЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ / [ГЛ. IV
по х, второе по у, третье по -г и складывая их, получим:
Т^^^+^ + ^+О^ + -д^ + -^-;==0, (18.9)
но
откуда следует, что
Д'1 = 0. (18.10)
Таким образом, в случае постоянных объемных сил
относительное объемное расширение Я будет гармонической функцией координат.
Дифференцируем далее левую часть первого уравнения (18.5)
дважды по х (при условии, что Кх постоянно), дважды по у и дважды
по z. Складывая все эти вторые производные, получим:
—9— Д _^ + ОДДм = 0. (18.11)
1 — 2v дх ■ v '
Но
ч дЬ _ дЬЪ ___ п
так как Я — гармоническая функция, и мы получаем из
уравнения (18.11) *):
ДДи = 0; ДДх/ = 0; ДД<о/ = 0. (18.12)
Второе и третье уравнения выведены аналогично.
Уравнение вида
^¥=Ы+^+^)\-ш + ^+-д^) = 0 (18ЛЗ)
называется бигармоническим, а функция 1Г, ему удовлетворяющая,—
бигармонической функцией. Как это следует из (18.12),
перемещения и, v, w упругого тела в случае постоянства объемных сил
будут бигармоническими функциями координат.
Зная гармонические функции, можно найти также и бигармониче-
ские функции; ..так, легко проверить непосредственным
дифференцированием, что выражение
4f = 4.o+^i-h^2+*W4-(*9+y,+«e)^. (18-14)
где «^0, tyv ф2, ^а, <^4— гармонические функции, удовлетворяет
уравнению (18.13).
§ 19. Решение задач теории упругости в напряжениях
При решении многих задач теории упругости, в которых заданы
поверхностные силы, удобнее пользоваться не уравнениями (18.5)
с граничными условиями (18.6), а более сложной системой уравнений,
* Следует заметить, что функции //, v и wt определяемые этими
уравнениями, не являются независимыми, так как они связаны между собой
уравнениями (18.5).
РЕШЕНИЕ ЗАДАЧ ТЕОРИИ УПРУГОСТИ В НАПРЯЖЕНИЯХ
55
§ 19]
которая получается, если из основных уравнений (17.1) — (17.4)
исключить перемещения и деформации, оставив в качестве
неизвестных шесть компонент напряжений zx, oyt о2, xxyt xyz, чгх.
Большая сложность системы дифференциальных уравнений искупается при
этом простотой граничных условий и тем, что окончательные
формулы для напряжений в большинстве конкретных практических
задач получаются гораздо более простыми, чем формулы для
перемещений, и поэтому их легче найти.
Напряжения должны удовлетворять дифференциальным уравнениям
равновесия (17.1). Для получения дополнительных уравнений нужно
прежде всего исключить из уравнений (17.4) перемещения я, v, w.
Такое исключение уже было произведено выше, в § 11, и
результатом его были условия сплошности для деформаций (11.4), которые
выпишем вновь:
д*гл 1 д fd-\zx . д-\ху djyz \
дх У
&х . Л,
ду* ' дх*
&hy д*гг
dz* 1 ду*
&h , &ех
*г,
а??/
дхду
ду dz
ду dz
дЧ
~ 2 dUc V д
у
дгдх
д%
1 д /дчХ{
2 ду\ дг
ду
ху
дг
dtyz
1 д ,дЪ
дх*
дг*
дгдх
дх
ду"" 2 дг \
Уг
дх
dbx
дх
ду
#1гх\
ду )>
д1ху\
-згу
(19.1)
Затем нужно подставить в (19.1) выражения деформаций через
напряжения; последние удобно взять в форме
•.—tl«
'(°y + 0*)l =
= 2QU + v) K!+v> °*-v(**+"гИД = ^(*, -^s),
О *W
где
(19.2)
(19.3)
* = °а> + а* + а*
представляет собой первый инвариант тензора напряжений.
Выполнив указанную подстановку, получим шесть уравнений
(выписываем только первое, третье и четвертое уравнения)
&*х
ду*
Shu
дх*
1+'
(d*S **\_ **** \
\ дх* "т" ду*)"' дх ду '
&hz_,dh^ v (d*S . ^\_Q
дх* "Г дг* ~"\+ч\дг* > дх*)""
д*а~ v д'-5
ду дг 1 -f v ду дг '
5J
(—4
дх.
j?y
дг
дгдх '
дл:
)•
(19.4)
56 ОБЩИЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ , [ГЛ. IV
/
Это и есть условия сплошности, выраженные в напряжениях.
Зависимости (19.4) можно привести к более удобному виду,
пользуясь тем, что входящие в них напряжения должны
удовлетворять уравнениям равновесия (17.1). Для этого нужно произвести
следующие преобразования.
Сложив первое и третье уравнения (19.4), получим равенство
д%х дЬх &(ау + ог) v / d*s &s &s
ду* т <fca -г ^2 1 +
/ 0*S O'S <r*s\
= HX
^LJU9 ^*9X — 9 JL ( dT'xy -L dz*x\ _
ду "Гl дгдх ~ l dx \ dy "+" dz )~
—2£(-fe+*-)« <19-5>
которое после простой перегруппировки слагаемых принимает вид:
Заменяя в (19.6) х на у и на г, соответственно получим:
(19.7)
1 &s ч дКу
И+г+^ w - iqr-vд* = - 2 "57" -
1 + v dz* 1 + v йг ' J
Складывая равенство (19.6) с двумя равенствами (19.7), будем
иметь
Подставляя As из (19.8) в (19.6), находим в окончательном виде
одно из первой группы искомых уравнений
ao*~T\+v dx* z дх \-Лдх ^ ду ^ u?j'^y'y;
Одно из второй группы искомых уравнений получим,
преобразовывая четвертое уравнение (19.4) следующим образом:
д*ох v d*s д /дтгх\ д /дтху\ d*z
dydz ду \ дх ) ""Г dz \ дх )'
\у*
dydz 1 + v ду dz ду\дх )~ dz \ dx ) dx*
04
dy \ dy ~г dz ""Г74*; д2 \ ду -Г д2 -ТКу)-
У
dx*
19] РЕШЕНИЕ ЗАДАЧ ТЕОРИИ УПРУГОСТИ В НАПРЯЖЕНИЯХ 57
чТо после простой перегруппировки слагаемых дает
, 1 Л дКу дКг
Окончательно преобразованные условия сплошности,
выраженные в напряжениях (называемые также зависимостями Бельтрами —
Митчела), имеют вид:
Д** +
Аа-4-
1
1 d*s
= — 2
дКх
дК,
Да*
At.
At,
At,
1 + v dya
1 d*s
1 d*s
1 -f-vdjfdy "
1 d*s
Vt^T^dydz'
1 дЧ
= — 2
a*
a*,,
= — 2
ду
JL (dKx
1 — v \ дх '~г ду ~^~ dz
Mx , дКу . а/Ц
^ дг)у
xy
dz
dKx
ду
дКу
1-
— v\ ал: ^ dy ' <te J'
у /а/Со, а/су атц
— v\ ^л: ' d>r ' dz J'
а*
а/с*
ду
дКх
(19.12)
1 + v дг дх дх dz '
Если объемные силы отсутствуют или не зависят от координат
(как, например, собственный вес), то правые части уравнений (19.12)
обращаются в нуль и эти уравнения принимают очень простой
вид. Как видно из (19.8), в этом случае первый инвариант тензора
напряжения s является гармонической функцией. Легко также
показать, что все составляющие тензора напряжения будут при этом
бигармоническими функциями координат; для этого достаточно
применить оператор Лапласа
л _ аа , ^ . д*
а~~ дх* ^ dy*^~ dz*
к уравнениям (19.12). Эти бигармонические функции не будут
независимыми, так как они связаны между собой уравнениями
равновесия (17.1).
Решение задач теории упругости в напряжениях сводится, таким
°бразом, к нахождению шести неизвестных функций ох, ayt <зг, хх^
хь*> тгж' удовлетворяющих девяти дифференциальным уравнениям (17.1)
и (19.12) и трем граничным условиям (17.5).
Здесь имеется та своеобразная математическая особенность, что
число дифференциальных уравнений (девять) больше, чем число
неизвестных функций (шесть), но зато число граничных условий (три)
Меньше, чем число неизвестных функций. Тем не менее, как оче-
видно из физического смысла задачи, этих дифференциальных
уравнений и граничных условий оказывается как раз достаточно для
°пределения неизвестных напряжений.
58 ОБЩИЕ УРАВНЕНИЯ ТЕОРИИ УПРУГОСТИ/ [ГЛ. IV
§ 20. Некоторые замечания об общих уравнениях
теории упругости
В предыдущих параграфах были выведены нижеперечисленные
общие уравнения теории упругости в декартовых координатах:
I. Дифференциальные уравнения равновесия (17.1).
II. Зависимости между напряжениями и деформациями:
прямые (17.2) и обратные (17.3).
III. Зависимости между перемещениями и деформациями (17.4).
IV. Граничные условия (17.5) на той части поверхности тела,
на которой заданы внешние силы.
V. Дифференциальные уравнения для перемещений (18.5).
VI. Выраженные в перемещениях граничные условия (18.6) на
той части поверхности тела, на которой заданы внешние силы.
VII. Условия сплошности (19.1), связывающие между собой
деформации.
VIII. Условия сплошности (19.2), выраженные в напряжениях.
При решении задач в цилиндрических координатах обычно
используются дифференциальные уравнения равновесия (7.3), (7.6) и (7.9)
(соответствующие системе уравнений I) и зависимости между
перемещениями и деформациями (13.6) (соответствующие системе III).
Зависимости между напряжениями и деформациями и граничные
условия в цилиндрических координатах получаются из
соответствующих зависимостей в декартовых координатах II и IV простой
заменой индексов х, yt z индексами г, 0, г.
Системы уравнений V—VIII в цилиндрических координатах не
приведены ввиду их сложности.
ГЛАВА V
ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ ЗАДАЧ
ТЕОРИИ УПРУГОСТИ
§ 21. Постановка задач теории упругости
При строгой постановке задач теории упругости должны быть
полностью заданы:
1) форма тела,
2) его упругие постоянные,
3) объемные силы,
4) три граничных условия на всей поверхности тела (см. § 17),
При этом решение задач, т. е. вычисление напряжений,
деформаций и перемещений, встречает значительные математические
трудности и может быть доведено до расчетных формул лишь
в ограниченном числе случаев, совершенно недостаточном для
технических приложений.
Часто удается значительно упростить задачу, отказавшись от
точного задания распределения внешних нагрузок по поверхности
тела. Такую возможность дает принцип упругой равнозначности
статически эквивалентных нагрузок (принцип Сен-Венана),
интуитивно применявшийся уже давно, но впервые точно сформулированный
Сен-Венаном в середине XIX века и до сих пор строго не
доказанный.
Этот принцип может быть изложен так: если систему сил,
действующих на небольшую часть поверхности или объема упругого
пела, заменить другой системой, действующей на ту же часть
поверхности или объема тела и имеющей те же главный вектор
11 главный момент, то напряженное состояние в точках тела
нс очень близких к местам приложения сил, почти не изменится.
Практически этот принцип используют следующим образом.
° задачах, в которых внешние нагрузки приложены к небольшой
Масти тела, ограничиваются заданием главного вектора и главного
Момента этих сил, не уточняя закона распределения их по
поверхности (или объему). При этом задача теряет определенность, т. е.
Может иметь место бесчисленное множество различных решений.
60 ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ [ГЛ. V
/
Этим пользуются, находя из всех возможных решений какое-либо
одно, наиболее простое. Нетрудно выяснить закон
распределения внешних нагрузок, при котором найденное решение будет
точным. При других законах распределения нагрузок полученное
решение, по принципу упругой равнозначности, достаточно хорошо
представит напряженное состояние во всех точках тела, не очень
близких к местам приложения сил.
Примером может служить известное из курса сопротивления
материалов элементарное решение задачи о кручении круглого
стержня (рис. 31 и 32), выражающееся формулами:
^ = °v = °2 = 'c^ = 0,
ху
Mzy
__ Мгх
(21.1)
где Мг — скручивающий момент, У —полярный момент инерции
поперечного сечения. Нетрудно убедиться в том, что это решение
Рис. 31.
Рис. 32.
удовлетворяет уравнениям равновесия (17.1), условиям
сплошности (19.12) и граничным условиям (17.5) на цилиндрической
боковой поверхности стержня. Однако это решение является точным
только в том случае, если
условия (17.5) на верхнем и
торце
Mzy
удовлетворяются также и граничные
нижнем торцах, а именно: на верхнем
F =■
' пх
F =
' пу
МгХ
F» = 0
(21.2)
и на нижнем торце
F =
1 пх —
М,у
Мях
пу •
Pnz = 0.
(21.3)
*
221
ПРИБЛИЖЕННЫЕ МЕТОДЫ РЕШЕЙИЯ ЗАДЧЧ ТЕОРИИ УПРУГОСТИ
Если силы, приложенные к концам стержня, статически
эквивалентны тем же скручивающим моментам Мг и —Мг, но
распределены иначе (см., например, рис. 33), то напряжения в концевых
частях стержня также будут совершенно иными. Напротив, в частях
стержня, достаточно удаленных от его концов, напряжения будут
близки к тем, которые даются формулами (21.1).
ш
-dp*
Рис. 33.
Принцип упругой равнозначности находит основное применение
в задачах о кручении и изгибе стержней и в некоторой мере
используется в теории тонких плит и оболочек.
§ 22. Приближенные методы решения задач теории упругости
Применение принципа упругой равнозначности значительно
расширяет круг задач,/ в которых интегрирование уравнений теории
упругости оказывается возможным. Однако большое число задач
остается недоступным для точного решения. В этих случаях
широкое применение находят различные приближенные приемы решения,
которые можно разбить на две группы.
Первая группа приемов характеризуется тем, что точные
дифференциальные уравнения задачи заменяются приближенными.
Важнейшим из этих приемов является следующий. Нередко на
основами физических соображений или известных решений для сходных
с^учаев можно разделить напряжения, встречающиеся в рассматри-
ваемой задаче, на основные и второстепенные.
Второстепенными считают напряжения, малые по сравнению
с основными и их не учитывают при вычислении деформаций. При-
МеРом может служить элементарная теория изгиба балок, в которой
Вь1числение прогибов производится без учета касательных напряжений.
К той же группе приемов приближенного решения относится введе-
Ие тех или иных гипотез о распределении напряжений или о характере
()2 ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ (Г Л. V
/
деформированного состояния (так называемых кинематических
гипотез). Например, при расчете вращающихся дисков считают,
что нормальные напряжения в радиальном и тангенциальном
направлениях равномерно распределены по толщине диска. В
элементарной теории изгиба балок принимают, что поперечные сечения балки
остаются плоскими и нормальными к изогнутой оси балки.
Нередко кинематические гипотезы оказываются равноценными
предположениям о малости некоторых напряжений. Так, в
элементарной теории изгиба балок гипотеза плоских сечений
эквивалентна допущению о том, что деформации определяются только
основными нормальными напряжениями. Однако не все
кинематические гипотезы могут быть истолкованы таким образом.
В задачах, решаемых с помощью первой группы приемов, иногда
оказывается возможным определение второстепенных напряжений
из уравнений равновесия. Условия сплошности (19.12) при этом,
конечно, не удовлетворяются. В других случаях от определения
второстепенных напряжений приходится отказываться. Практически
такое ограничение несущественно.
В дальнейшем встретится много примеров применения
изложенных приемов к технически важным задачам.
Прежде чем перейти ко второй группе методов, заметим, что
при решении дифференциальных уравнений теории упругости
(точных или приближенных) прежде всего стараются уменьшить число
неизвестных функций, подлежащих определению. Иногда удается
выразить все искомые неизвестные через производные от какой-либо
величины, имеющей непосредственное физическое значение (например,
в теории тонких плит — от прогиба). В других задачах вводят новые
неизвестные функции от координат, так называемые функции
напряжений, через частные производные которых по координатам
выражаются все искомые напряжения.
В ряде типов задач (в частности, в задачах о кручении стержней,
о плоской деформации и о плоском напряженном состоянии,
рассмотренных ниже) оказывается возможным выразить все
неизвестные через производные от одной функции напряжений, и решение
сводится к нахождению этой функции.
Отметим, что возможности точного нахождения функции
напряжений в указанных задачах были значительно расширены советскими
учеными Г. В. Колосовым и особенно Н. И. Мусхелишвили,
использовавшими для этой цели теорию функций комплексной переменной.
Вторая группа приемов приближенного решения задач теории
упругости заключается в том, что дифференциальные уравнения,
определяющие искомую неизвестную функцию, решаются
приближенно. В наиболее распространенных приемах этой группы
приближенное выражение искомой функции Ф ищется в следующей форме:
*eCo<Po + <VPi-f-«VPa + • • • +<VPn» <22Л)
§231
где <Ро» ?!•
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ТЕОРИИ УПРУГОСТИ
. . ., срл— некоторые функции от координат,
..., сп — постоянные коэффициенты.
63
Функции ср0, cplt ..., ип выбирают так, чтобы граничные условия
задачи были удовлетворены; при этом выбор функций ук в
значительной мере остается произвольным. Затем находят такие значения
коэффициентов с0> cit . .., civ при которых приближенное решение
(22.1) наиболее близко к точному. Два различных метода
определения этих коэффициентов были даны Ритцем (1908) и советским
ученым Б. Г. Галеркиным (1915). Метод последнего получил особенно
широкое распространение.
Изложение этих методов, равно как и других методов второй
группы, выходит за рамки этой книги.
§ 23. Экспериментальные методы теории упругости
Для решения задач теории упругости нередко применяют также
экспериментальные методы, которые делятся на две группы.
Первую группу составляют методы измерения деформаций
нагруженных деталей или их моделей. По деформациям могут быть затем
вычислены напряжения. В эту группу входят методы: тензометриче-
ские, лаковых покрытий, оптический *) и рентгенографический.
Вторую группу составляют методы решения дифференциальных
уравнений теории упругости с помощью экспериментального
исследования других физических явлений, описываемых
такими же уравнениями (так называемые
методы аналогии).
Тензометрическими называются методы
измерения удлинений небольших частей
поверхности упругих тел с помощью специальных
приборов — тензометров.
Механические тензометры (простейшая схема
которых изображена на рис. 34) имеют две
заостренные ножки, которые прижимаются
к поверхности исследуемого тела. Одна из ,
этих ножек жестко соединена с корпусом
прибора, другая связана с этим корпусом шар-
нирно и ее перемещения относительно корпуса
с помощью рычажной системы передаются
указателю (стрелке) в сильно увеличенном виде. При нагружении
исследуемого тела указатель показывает в определенном масштабе,
насколько изменяется" расстояние между ножками тензометра (база).
Изменение расстояния между ножками тензометра может также
измеряться и регистрироваться оптическим способом (с помощью
f=
/'"""../,,..,D,,
sfe
шяя
Рис. 34.
1) Точнее, при применении оптического метода измеряется двойное луче-
пРеломление, пропорциональное в упругой области деформациям.
I
База
J Т
■
/Г
ЛЛГ-^П
()4 ПОСТАНОВКА И MEtOAbl РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ {гЛ. V
/
подвижного зеркальца, отражающего узкий пучок света) или элек-
трическими способами (индукционным или емкостным).
Если напряженное состояние по длине изменяется незначительно,
то относительное удлинение в пределах базы можно считать
постоянным. Тогда его легко подсчитать, разделив изменение расстояния
между ножками на его первоначальную величину. Длина базы должна
выбираться в соответствии с неравномерностью напряженного
состояния (у различных тензометров она составляет от 0,5 до 200 мм).
В последние годы получили очень широкое применение так
называемые проволочные тензометры. Такой тензометр представляет
собой зигзагообразно изогнутую очень
тонкую проволоку (рис. 35), наклеенную
на кусочек бумаги. Для измерения
удлинения какого-либо участка поверхности
исследуемого тела в определенном
направлении тензометр Р (рабочий датчик)
наклеивается на эту поверхность так,
чтобы длинные участки проволоки были
параллельны направлению измерения.
Затем рабочий датчик включается в
мостовую схему, составляя одно из ее плеч.
Второе плечо образует другой такой же
тензометр К (контрольный датчик). Он
обычно наклеивается на специальную
балочку, в которой подвешиванием
грузов можно создавать определенные
напряжения. Остальные два плеча выполнены
в виде обычных проволочных сопротивлений Rx и /?2, одно из
которых имеет устройство для точной подрегулировки. В одну из
диагоналей моста включается батарея Z>, в другую — чувствительный
гальванометр Г.
Перед приложением нагрузки, регулируя величину
сопротивления У?2» добиваются того, чтобы ток в гальванометре отсутствовал.
При удлинении данного участка поверхности исследуемого тела,
вызванном действием нагрузки, проволока рабочего датчика также
удлиняется, а ее поперечное сечение уменьшается. Сопротивление
рабочего датчика увеличивается, и через гальванометр начинает итти
ток, практически пропорциональный измеряемому удлинению.
Масштаб измерения можно установить, создавая определенное
напряжение в балочке, на которой наклеен контрольный датчик.
Если измерение происходит при изменяющихся температурных
условиях, то контрольный датчик никуда не наклеивается и
помещается вблизи рабочего для компенсации влияния температуры.
В этом случае масштаб измерения устанавливается отдельным опытом.
При измерениях деформаций, вызываемых постоянными
(статическими) нагрузками, на исследуемое тело обычно наклеивают много
Рис. 35.
$ 231
ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ТЕОРИИ УПРУГОСТИ
65
оабочих датчиков, а затем в процессе измерения поочередно
включают их в измерительную схему.
Проволочные тензометры пригодны также и для измерения быстро
изменяющихся удлинений (при колебаниях, ударах и т. п.). Для
этого вместо гальванометра в схему включается ламповый усилитель,
выходной ток которого направляется в осциллограф. С помощью
последнего производится визуальное наблюдение или фотозапись
процесса.
Остановимся теперь на вопросе о том, как по результатам тензо-
метрических измерений определить напряжения.
Если измерения производятся на ненагруженной поверхности или
на поверхности, подвергаемой нормальному давлению (например,
давлению газа или жидкости), то одна из главных осей
напряженного состояния направлена по нормали к поверхности тела и
соответствующее главное напряжение равно внешнему давлению с
обратным знаком. Две остальные главные оси напряженного состояния
касательны к поверхности. Нередко их направления известны
(например, из соображений симметрии). Тогда достаточно в каждой
исследуемой точке произвести измерение удлинений по этим двум
взаимно перпендикулярным направлениям. Если напряженное
состояние— одноосное, т. е. только одно из главных напряжений
существенно, то можно ограничиться определением удлиьения в направлении
действия этого напряжения. В общем случае, когда направления
двух главных осей, касательных к поверхности, неизвестны, в каждой
исследуемой точке приходится измерять удлинения по трем
направлениям (под углом в 45 или 60°). По этим данным можно найти
направления осей деформированного и напряженного состояния,
а затем и главные напряжения.
Метод лаковых покрытий заключается в том, что поверхность
исследуемого упругого тела покрывают тонким слоем особого лака.
При постепенном нагружении на наиболее напряженных растянутых
участках поверхности в лаковом покрытии появляются трещины.
Направления этих трещин перпендикулярны к той главной оси
деформированного состояния, по которой имеется наибольшее
относительное удлинение.
Трещины возникают при определенной величине относительного
Удлинения; поэтому при дальнейшем увеличении шагрузки появляются
новые трещины, захватывающие все большую часть поверхности
тела.
Таким образом, если наибольшие главные напряжения на
поверхности тела—растягивающие, то метод лаковых покрытий позволяет:
0 найти наиболее напряженные участки поверхности, 2) выявить
^правления наибольших относительных удлинений в различных местах
п°верхности, 3) количественно определить эти наибольшие удлинения.
Количественные определения затрудняются, однако, тем, что
Снойства лака сильно зависят от условий его приготовления и сушки.
(Ai ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ |ГЛ. V
Кроме того, знание одного наибольшего удлинения в данной точке
еще не дает возможности подсчитать напряжения. Поэтому часто
метод лаковых покрытий применяют в сочетании с тензометрическим,
выбирая места и направления установки тензометров в соответствии
с расположением трещин лакового слоя.
Метод лаковых покрытий можно применить также и к
исследованию напряжений в сжатых телах, нанося лаковый слой на тело,
находящееся под нагрузкой, а затем постепенно снимая эту
нагрузку.
Весьма обширное применение получил оптический метод,
дающий возможность определения напряжений в моделях из прозрачных
материалов: стекла, целлулоида, искусственных смол (как, например,
бакелит, висхомлит) и т. п. Наиболее часто этот метод применяется
для исследования тонких плоских моделей, нагруженных силами,
параллельными срединной плоскости модели и приложенными
симметрично по отношению к этой плоскости. Такие модели находятся
в плоском напряженном состоянии (см. § 46), т. е. одна из
главных осей напряженного состояния направлена перпендикулярно
к плоскости модели и соответствующее главное напряжение
практически равно нулю. Остальные две главные оси параллельны
плоскости модели, причем
Э
М Л Л2
Л! П
Рис. 36.
соответствующие главные
напряжения можно считать
постоянными по толщине
модели.
Исследование
производится на оптических
поляризационных
установках, одна из схем
которых изображена на рис. 36. Установка состоит из источника
света //, линзы JIU дающей параллельный пучск лучей,
поляризатора П и анализатора А между которыми помещается модель М,
линзы Л2 и экрана Э. Последний может быть заменен
фотопластинкой.
Как известно, свет представляет собою электромагнитные
колебания, причем векторы электрической и магнитной напряженности,
перпендикулярны друг к другу и к направлению распространения
В дальнейшем колебания вектора магнитной напряженности будем
для краткости называть просто световыми колебаниями, а плоскость,
в которой происходят эти колебания, — плоскостью поляризации.
Пусть в луче света, прошедшем через поляризатор, световые
колебания происходят в вертикальной плоскости. На входной
поверхности модели изменения магнитной напряженности выражаются формулой
Я = Л sin 2™/, (23.1)
где А—амплитуда, v -частота световых колебаний, t — время.
ЭКСПКРИМКНТАЛЬНЫК МК10ДЫ ТЕОРИИ УПРУГОСТИ
ь'7
%\
(23.2)
"*\
//
п
% ^1
Из данных опыта следует, что, войдя в прозрачную
напряженную среду, луч света разлагается на два. В каждом из этих лучей
световые колебания происходят по направлению соответствующего
главного напряжения ах или о2, причем лучи распространяются с
разами скоростями (vx и v2). Световые колебания в этих лучах у входа
в модель представляются формулами
(см. рис. 37, а)
Цх = Я cos у = A cos ср sin 2тЫ\
/у2 = Н sin ср = A sin ср sin 2тс\£,
а на выходе из модели, имеющей
толщину а,
Н[ = Л cos ф sin 2nv u j ,
a)
-/7
Н'2 = A sin <p sin 2t:m (/ j.
(23.3)
1
\
\
\
\
4 /
d&.
#
fctf
6J
Рис. 37.
В этих формулах ср— угол между
главным напряжением ах и плоскостью
поляризации входящего луча.
Предположим для простоты, что
анализатор расположен непосредственно
за моделью (это предположение не влияет на конечный результат).
Анализатор пропускает только световые колебания, происходящие
в плоскости, перпендикулярной к плоскости колебаний, пропускаемых
поляризатором (например, горизонтальной). Эти колебания (согласно
рис. 37,5) выражаются формулой
На = НхА— Н2А = #i sin ср — Н'2 cos ср =
= A sin ъ cos ср I sin 2™ (/ — — J — sin 2n\ It — — П =s
= A sin 2ф sin
тс .g (vx — y2)
vtv2
cos2tcvu
['
2уху2
]•
(23.4)
Интенсивность света, прошедшего через анализатор
пропорциональна квадрату амплитуды световых колебаний, т. е. величине
J=A*sin*2<fsin*™iv*-v*\
(23.5)
Экспериментально установлено, что разность скоростей
распространения двух лучей, на которые разлагается входящий луч в
напряженной прозрачной среде, пропорциональна разности
соответствующих главных нормальных напряжений:
k (°i — °2)>
(23.6)
68 ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ [ГЛ. V
/
где к — постоянный коэффициент, несколько зависящий от частоты
световых колебаний к
Так как вместе с тем vl и v2 мало отличаются от скорости
света v в ненапряженном материале, то формулу (23.5) можно
представить в следующем окончательном виде
y=^sin3 2cpsin27^ К —о2). (23.7)
Из этой формулы видно, что интенсивность проходящего света
обращается в нуль в двух следующих случаях.
1) У=0 при
sin 2'f = 0, (23.8)
т. е. во всех точках, в которых направления главных нормальных
напряжений лежат в плоскостях колебаний, пропускаемых
поляризатором и анализатором. Так как условие (23.8) не содержит частоты
колебаний v, т. е. выполняется одновременно для световых лучей
любого цвета, то на изображении модели в этих местах получаются
черные полосы — изоклины (линии равных наклонов). При повороте
поляризатора совместно с анализатором или же модели вокруг оси
установки картина изоклин будет изменяться. Фотографируя ряд
этих картин, можно определить направления главных напряжений
во всех точках модели.
2) J= О также при
sin — ^-a^O, (23 9)
т. е. во всех точках, в которых разность главных напряжений ах — а2
равна или кратна некоторому значению, зависящему от свойств
прозрачного материала, толщины модели и частоты световых колебаний.
Если модель освещается монохроматическим светом, т. е. светом
определенной частоты v, то те точки, для которых выполняется
условие (23.9), образуют ряд черных полос, разделенных светлыми.
Если же модель освещается белым светом, состоящим из колебаний
весьма многих различных частот, то условие (23.9) может
выполняться только для некоторых из этих частот и вместо черных и
светлых полос получаются многочисленные цветные полосы
различной окраски. В обоих случаях эти полосы называются изохромами
(линиями равного цвета). По ним можно с достаточно большой
точностью определить величины разности главных напряжений at— a2
во всех точках модели.
На рис. 38 схематически изображены изохромы и изоклины при
чистом изгибе кривого бруса, ось которого имеет форму
полуокружности.
Величины главных напряжений в каждой точке такого бруса
зависят только от расстояния этой точки до центра кривизны
осевой линии. При этом одно из главных напряжений направлено по
радиусу, а другое — перпендикулярно к нему.
Л 23] ЭКСПЕРИМЕНТАЛЬНЫЕ МЕТОДЫ ТЕОРИИ УПРУГОСТИ 69
Изохромы в этом случае будут дугами окружностей,
концентрических с осью бруса, изоклины — отрезками двух перпендикулярных
прямых, проходящих через центр.
Изоклины, всегда несколько затемняющие изохромы, можно
устранить небольшим видоизменением поляризационной установки.
Оптический метод имеет то преимущество, что он дает
наглядную картину напряженного состояния во всей плоской модели. Однако
получаемые непосредственно по экспериментальным данным
величины ср и ах — а2 не характеризуют полностью напряженного
состояния (За исключением незагруженных точек контура, где одно из
V М
Рис. 38.
главных напряжений равно нулю). Для определения величин av о2
и ср во внутренних точках плошади модели обычно определяют еще
и сумму главных напряжений oi~^-a2.
Оказывается, что о1-\-а2 можно найти расчетом по тем же
экспериментальным данным. Существуют также различные
экспериментальные методы определения этой суммы, например, путем замеров
изменения толщины модели при ее нагружении (это изменение
пропорционально о1-(~а2),
В последние годы оптический метод стал успешно применяться
также и для исследования пространственных напряженных состояний
в моделях любой формы. Один из способов такого исследования
основан на свойстве «замораживания» картины полос, которым
обладают бакелит и другие искусственные смолы. Если нагруженную
модель нагреть до 110° С, затем медленно охладить до комнатной
температуры и только после этого снять нагрузку, то ненагружен-
ная модель в поляризационном свете дает ту же картину полос,
которую она имела под нагрузкой при 110° С. Приобретенные
моделью оптические свойства не нарушаются при разрезании ее
на части. Это дает возможность исследовать пространственные
напряженные состояния, «замораживая» модель, разрезая ее на тонкие
пластинки и изучая последние в отдельности.
70 ПОСТАНОВКА И МЕТОДЫ РЕШЕНИЯ ЗАДАЧ ТЕОРИИ УПРУГОСТИ [ГЛ. V
Существует также пока еще недостаточно разработанный способ
оптического исследования пространственных напряженных состояний
с помощью наблюдения неплоских моделей в рассеянном свете.
Рентгенографический метод основан на том, что диффракцион-
ная картина, получающаяся при» отражении рентгеновых лучей от
небольшого участка поверхности кристаллического (в частности,
металлического) тела, изменяется при деформировании этого тела.
Ввиду громоздкости необходимой аппаратуры и невысокой точности
этот метод применяется редко.
Методы аналогии, основанные на подобии математических
зависимостей, встречающихся в теории упругости, и таких же
зависимостей, описывающих другие физические явления, различны для
разных частных задач. Ограничимся приведением двух примеров.
Для случая кручения стержней произвольного постоянного
поперечного сечения имеет место мембранная аналогия: дифференциальное
уравнение и граничное условие для функции напряжений при кручении
подобны дифференциальному уравнению и граничному условию для
прогиба тонкой гибкой пленки (мембраны), равномерно натянутой
на жесткий контур, подобный контуру сечения скручиваемого стержня,
и подвергнутой одностороннему равномерному давлению. Изготовив
такую мембрану и замерив ее прогибы
. Л щ в различных точках, можно выяснить
-If- X— распределение напряжений по всему се-
<■ nJ 1 чению скручиваемого стержня (см. по-
' ' дробнее в § 40).
[**Л При кручении круглых валов пере-
I—I J П Ш\ менного диаметра имеет место электри-
i
ческая аналогия: если сделать электро-
L*~j ТлоА-А проводящую модель, контур которой
~*1Ф1 ' полобен контуру половины осевого сече-
р ,.Q ния вала, а толщина в любой точке
пропорциональна кубу расстояния от
прямолинейного края, соответствующего оси вала, и пропустить через
эту модель электрический ток, подведенный так, как показано на
рис. 39, то по распределению электрических потенциалов в модели
можно вычислить распределение напряжений в валу.
Приводимые в технической литературе коэффициенты
концентрации напряжений в местах перехода от участка вала одного диаметра
к участку другого диаметра получены этим методом.
В заключение следует отметить, что разнообразные установки
для измерения напряжений и решения задач теории упругости имеются
и широко используются в настоящее время во многих
научно-исследовательских институтах, высших учебных заведениях и заводских
лабораториях Советского Союза.
ГЛАВА VI
ПРОСТЕЙШИЕ ОСЕСИММЕТРИЧНЫЕ ЗАДАЧИ
§ 24. Толстостенная труба
Рассмотрим толстостенную трубу (рис. 40), находящуюся под
действием внутреннего давления рх и наружного давления р2.
Деформированное состояние такой трубы будет осесимметричным,
т. е. каждая точка трубы будет
перемещаться только в
направлении радиуса г (на величину и) и
параллельно оси трубы z (на
величину w)t причем и и w не
зависят от полярного угла 0.
Предположим, что все
сечения трубы, перпендикулярные
к ее оси, деформируются
одинаково и остаются плоскими, иначе
говоря, и зависит только от г,
a w — только от z.
Далее мы увидим, что для
трубы со свобоаными концами
эти предположения оказываются
строго верными. В других
случаях они приближенно верны для сечений, не очень близких к
концам трубы.
Деформации могут быть выражены по формулам (13.6), которые
дают:
Рис. 40.
du
dr
и
л = т
dw ш
0. (24.1)
Относительное объемное расширение определяется по
формуле (10.12):
(к I , du , и , dw
''-•' + •.-+-«^-SF + T + dF-
(24.2)
72 ПРОСТЕЙШИЕ ОСЕСИММЕТРИЧНЫЕ ЗАДАЧИ- [ГЛ. V|
Напряжения могут быть выражены через деформации по форму-
лам (17.3), в которых индексы лг, ^?, z заменены индексами г, 0, z\
on Л i '' <Л 20(1— v)/ а ч du . ч dw\
l<h — k,
(24.3)
Объемные силы в рассматриваемой задаче равны нулю.
Уравнения равновесия (7.3) и (7.9) принимают вид:
дзг
-0. \
f Г I (24.4)
а третье уравнение равновесия (7.6) удовлетворяется тождественно.
Подставляя ог из (24.3) в (24.4), получаем
|*-0. (24.5)
откуда
^- = ег = const. (24.6)
Подстановка зг из выражения (24.3) в (24.4) дает после
сокращения на постоянный множитель:
£^ + 1*£ ^о (247)
dr* ' г dr r2 и" ^-{)
Это — линейное однородное дифференциальное уравнение второго
порядка типа Эйлера. Как известно, его частные решения имеют
вид:
и = г». (24.8)
Подставляя выражение (24.8) в уравнение (24.7), получаем после
сокращения на гп~* характеристическое уравнение
/I9—1 =0. (24.9)
Корням этого уравнения пх = 1, пг = — 1 соответствуют частные
решения ли—. Общее решение найдем, умножив эти частные
с 24] ТОЛСТОСТЕННАЯ ТРУБА 73
решения на постоянные интегрирования Ct и С2 и затем сложив их:
и = Схг-\-^. (24.10)
Подставляя выражение (24.10) в формулы (24.3), находим:
__2G(Ct + *8a) 2GC2 _ 4 _А
_ 2G{Ct + *9) , 2GC3 _ . , В
—" 1-2/"" "1" ~7*~ - л -Г Та*'
4GvCt . 2G(! -\К
^г— j_„2v
+
:2^ +Ев,
(24. П)
Здесь мы ввели обозначения
1—2^
(24.12)
и воспользовались соотношением (16.9).
Постоянные А, В и ez подлежат определению из граничных
условий.
Заметим, что напряжение о2 всюду постоянно. Следовательно,
полученное решение строго верно в тех случаях, когда к торцам
трубы приложены равномерно распределенные растягивающие или
сжимающие внешние силы (в частном случае эти силы могут быть
равны нулю).
Рассмотрим два частных случая.
I. Труба со свободными концами (например, цилиндрическая
втулка, посаженная с натягом на вал).
Граничные условия имеют вид:
при г = а or = —pv \
при г = b ar = — pv
на свободных концах ог = 0.
(24.13)
Используя эти условия, найдем Л, В и гя и получим следующие
окончательные формулы:
_ р^ — рф* (Pi-p3)aW
г~~~ № — а* у* —а*) г* '
_ pitf—pp , (li—/?»)fl2fr2
1—у(р^ — р^г , l+v (li—Ря)
Я Ьъ — а* 'Я (АЗ —^
(24,14)
74
ПРОСТЕЙШИЕ ОСЕСИММЕТРИЧНЫЕ ЗАДАЧИ
(ГЛ. VI
При г == а
/
■== ~Pv
**•■
tf + cfl
£2 __ ач Р\
а ( № + а*
2^а
Ь'2 — а*
Рг>
(24.15)
а ( № + а* . \
2а№
Е(№ — а*)
а при г =Ь
30 =
2аЗ
£2-
&lh~ *я
2л26
Е(Ь*—а*)
Р
£'\ 62 — в2
/V
(24.16)
Если одно из давлений рр /?2 значительно больше, чем другое,
то наибольшим по абсолютной величине напряжением оказывается
напряжение о0 при г = а,
-77^/,;/////////, WW&XL-
%^Za —
~\^ZztzZZL
%А*
tzzizzzzzsS&i
в'З&Г Р*
т. е. у внутренней
поверхности трубы.
Для труб из вязких
материалов (например,
стальных) расчетным является
наибольшее, главное
касательное напряжение. Если
давления рх и р2 таковы, что з0 > 0, то главное касательное
напряжение
Рис. 41.
* — -% l*e —3rJ— (ji_e2)r* •
При г == а оно имеет максимальное значение
wmei № — с& '
(24.17)
(24.18)
Формулы (24.15), (24.16) и (24.18) применяются для расчета
горячих и прессовых посадок.
2. Tpyfa с закрытыми концами (толстостенный резервуар).
В этом случае (рис. 41) на каждое днище действует сила
Pz = *<J>ia*-p2V*).
(24.19)
В сечениях трубы, достаточно удаленных от ее концов, можно
считать напряжение cz постоянным и равным
- Р* р\а2 — рф*
ъ{№ — аЦ — ДО —*2 '•
(24.20)
§
25]
ВРАЩАЮЩИЕСЯ ДИСКИ
75
Формулы (24.14) — (24.18) для напряжений остаются верными
лля трубы с закрытыми концами, формулы же для перемещений и
должны быть заменены другими.
Так как при этом oz = о-(°* + ав)» то формулы (24.17) и (24.18),
в отличие от предыдущего случая, верны при любых соотношениях
давлений.
Рассмотренная задача была решена Ламэ (1852 г.). Развив это
решение, русский ученый А. В. Гадолин в 1858—1862 гг. впервые
вывел и практически применил формулы для расчета стволов орудий,
составленных из нескольких труб, насаженных друг на друга в горячем
состоянии.
§ 25. Вращающиеся диски
Рассмотрим напряженное состояние диска постоянной толщины
(рис. 42), вращающегося с постоянной угловой скоростью о>. Диск
находится под действием центробежных сил
инерции; кроме того, к наружной и
внутренней окружностям его могут быть
приложены равномерно распределенные
радиальные нагрузки. Деформированное состояние
диска является осесимметричным.
Воспользуемся цилиндрической системой
координат, направив ось z по оси диска.
Если толщина диска мала по сравнению
с его диаметром, то можно считать, что
радиальное перемещение и любой точки
диска зависит только от г, а напряжения
зг и тгг всюду пренебрежимо малы, ибо они обращаются в нуль
на торцах.
Деформации выражаем по формулам (13.6), в которых полагаем
т> = 0:
da
Заменяя в выражениях (17.2)
и полагая о2 = 0, получим:
Рис, 42.
гй =
и
(17.2)
Е '
Тг9 = т,г = 0. (25.1)
индексы х, у индексами г, 9
Trf = if. 7», = т?' (25-2)
Отсюда следует:
Е / i \ Е {du . и\
Е , . ч Е ( и , du\
т,. = 0.
(25.3)
76 ПРОСТЕЙШИЕ ОСЕСИММЕТРИЧНЫЕ ЗАДАЧИ- [ГЛ. V|
Первое дифференциальное уравнение равновесия (7.3) в данном
случае принимает вид:
17 + -VA + V = 0' (25-4)
где последний член представляет объемную силу — центробежную
силу массы единицы объема, причем f — удельный вес материала,
g—ускорение силы тяжести.
Второе уравнение равновесия (7.6) удовлетворяется тождественно.
Подставляя напряжения ог, <зв из (25.3) в уравнение (25.4), получаем
после сокращения на постоянный множитель:
dr* ' г dr г2 gE \ - )
Общее решение этого линейного неоднородного уравнения равно
сумме какого-либо частного решения его и общего решения
соответствующего однородного уравнения, которое совпадает с
уравнением (24.7) предыдущего параграфа. Частное решение
уравнения (25.5) можно взять в виде и = Сг* и путем подстановки в (25.5)
определить коэффициент С. Общее решение однородного уравнения
выражается формулой (24.10). Тогда общее решение уравнения (25.5)
имеет вид:
ТГ(1-*)«*/* , г ~ . с*
и = ■
•+Сгг + ^. (25.6)
SgE
Соответствующие напряжения находим по формулам (25.3):
_ ЕСХ ЕС2 у(3 + ^<о2/-2
°г~~ 1— у (l+v)/-2 8^
_ ЕС, . ЕС2 т(1+Зу)о)^
°Ь~ 1— v"~" (1 +ч)г2 * Sg
(25.7)
Вводя новые постоянные
ЕСХ Б==^2_ (258)
I — v ' ~ 1 + V '
можем представить напряжения в более простом виде:
а =А — — ^3 + v)(oV2
, = Л-
r* Sg
В f(l+3v)<»ara
г2 8^ • j
(25.9)
Постоянные Л и Б должны быть определены из граничных
условий.
Рассмотрим два частных случая.
* 26J
ВРАЩАЮЩИЕСЯ ДИСКИ
77
1. Сплошной диск со свободным краем. Напряжения в центре
диска остаются конечными и поэтому В должно быть равно нулю
(£ = 0). Вторая постоянная Л опре- >Q
деляется из условия:
при r = b а, =0. (25.10)
После несложного вычисления
получаем:
'<г
8iT
!(*2-
3 + v
(25.11)
J
Характер изменения напряжений
ог и ое вдоль радиуса показан на
рис. 43 сплошными линиями.
Наибольшие напряжения имеют место в центре (при г = 0), где
°г = а9 :
T(3-f-v)t»>2fr2
8^
(25.12)
2. Диск с отверстием со свободными краями. В этом случае
граничные условия имеют вид:
при г = а аг = 0, |
при г = b а;. = 0. J
(25.13)
Определив с помощью этих условий постоянные А и В, найдем
формулы для напряжений:
(25.14)
Характер изменения напряжений аг и о9 вдоль радиуса показан
на рис. 43 пунктирными линиями; аг достигает при r = Y&b
максимального значения
(°r)max —
I<8 + v)-.(4_e)Bt
»g
(25.15)
тогда как аь достигает наибольшего значения на краю отверстия
(при г = а):
ы.
Ii^(*4|^^)>(^, (25-16)
7h ПРОСТЕЙШИЕ ОСЕСИММШ РИЧНЫК 2\)]yiH (гл. V|
/
Если диаметр отверстия мал по сравнению с диаметром диска,
то вторым членом в скобках можно пренебречь, и тогда
Y(3-fv) «да
ы,
^
(25.17)
Ьвг?ч*0* %r(terr)drde
/?6„dr
Это напряжение вдвое больше, чем напряжение в центре диска
без отверстия, выражаемое формулой (25.12). Таким образом, наличие
в центре диска отверстия, хотя бы малого, существенно уменьшает
прочность диска вследствие концентрации напряжений у края
отверстия.
В современной технике вращающиеся диски постоянной толщины
применяются редко; гораздо большее применение находят диски
переменной толщины, убывающей от ступицы к ободу^ При расчете
такого диска его обычно разбивают на ряд концентрических
кольцеобразных дисков, причем толщину
каждого из этих дисков считают постоянной
и применяют формулы, вывод которых
приведен в этом параграфе. Для
упрощения вычислений многочисленных
постоянных интегрирования (по две на каждый
кольцеобразный диск) разработаны
различные технические приемы.
Если зависимость толщины диска от
радиуса может быть выражена несложной
формулой, то может оказаться
целесообразным решать задачу непосредственно
для диска переменной толщины.
Зависимости (25.1), (25.2) и (25.3) остаются в силе для такого диска.
Дифференциальное уравнение равновесия для средних по толщине
диска напряжений ог и ое легко вывести с помощью рис. 44, где
через h обозначена толщина диска.
Составляя сумму проекций всех приложенных к элементу сил
на направление среднего радиуса и приравнивая ее пулю, получаем
d (hirr) dr db — Aoe drdb -f 2^ йг rfr dO = 0 (25.18)
Рис. 44.
dr
или в окончательном виде
dv
— 4-
1 dh
Y<i>2r
0.
(25.19)
dr » r ' h dr '* ■ g
Подставляя сюда or и o0 из (25.3), получим дифференциальное
уравнение для перемещения а:
dr* ~l"(^ r "T h dr) dr \r~ h
dh\ и
dr)T
^(1 — v2)a>2r
It *
(25.20)
Решение этого уравнения легко может быть найдено в частном
случае дисков с так называемым гиперболическим профилем, у которых
$251
НРАШ\ЮШИЕСЯ ЛИСКИ
П
зависимость толщины от радиуса выражается формулой
Л =
ftll
(25.21)
Где Н и /и —постоянные. Для этого случая уравнение (25.20)
принимает вид:
(I +vm)« f(l — v2)o)2r
rf2tf , 1 — т du
dr
gE
(25.22)
Обшее решение этого уравнения типа Эйлера имеет вил:
7(1 _v2)o>2,-3
и —
4-с^ + с^ч
[8_(3 + v)/n]*£
где ях и я2 суть корни квадратного уравнения
/t-— та— (1 -{-w) = 0,
(25.23)
(25.24)
aCi и С2—постоянные интегрирования.
Все дальнейшие вычисления проводятся так же, как для диска
постоянной толщины.
Другим практически важным случаем дисков
переменной толщины является диск равной прочности.
Если исключить и из первых двух формул (25.3)
, du
(это можно сделать, выразив и и -г- через аг и о0
du\
и подставив затем выражение для и в -т-), то
получим условие совместности напряжений
rfcrft
da
-5Г-^=0 + ")
(25.25)
вид которого не зависит от формы диска. Это
условие, в частности, удовлетворяется, если положить,
что напряжения ог и оь имеют олно и то же
значение во всех точках диска
zr = a0 = const = a. (25.26)
Подставляя (25.26) в уравнение равновесия
(25.19), получаем
1 dh , t<oV
0.
(25.27)
Рис. 45.
h dr ' gs
Интегрирование этого дифференциального уравнения дает
■)<оа?я
h0e 20* .
(25.28)
Эта формула определяет профиль диска равной прочности (рис. 45),
причем h0—постоянная, равная толщине диска на его оси.
МО ПРОСТЕЙШИЕ ООЕСИММЕТРИЧНЫЕ ЗАДАЧИ , f ГЛ. VI
/
Радиальное перемещение любой точки такого диска
а(1 — v)r
(25.29)
Если в диске, профиль которого выражается формулой (25.28),
напряжения аг и ов повсюду равны о, то такую же величину должны
иметь радиальные нагрузки на единицу площади наружной
цилиндрической поверхности диска. Применяемые, например, в турбостроении
диски равной прочности снабжаются ободом прямоугольного сечения,
несущим лопатки. Указанное условие в месте сопряжения обода
с профилем равной прочности может быть выполнено за счет
подбора размеров обода.
ГЛАВА VII
ИЗГИБ ТОНКИХ плит
§ 26. Постановка задачи
Плитой, или пластинкой, постоянной толщины в теории
упругости называют тело, которое в ненагруженном состоянии
ограничено двумя параллельными плоскостями (мы будем называть их
торцовыми плоскостями) и цилиндрической или призматической
поверхностью, образующие которой перпендикулярны к торцовым
плоскостям (рис. 46). При этом рас-
стояние между торцовыми плоскостями, ^* ""^ч.
называемое толщиной плиты Л, меньше, f jk
чем размеры плиты в остальных направ- т~ч /I
лениях. h\ К /)
Плоскость, равноотстоящая от тор- •*—\Л^ ^^^^У
цовых плоскостей, называется срединной ^ч4^*-"^^—
плоскостью плиты. v*>«—-"^
В задаче об изгибе плит рассматри- Рис. 46.
ваются напряжения и деформации плит
под действием сил, перпендикулярных к срединной плоскости.
Мы рассмотрим теорию изгиба тонких плит, т. е. таких,
у которых:
а) толшина мала по сравнению с другими размерами (не более 1/6
от размеров в плане),
б) прогибы малы по сравнению с толщиной.
Для толстых плит, у которых толщина более 1/ъ размеров в плане,
нижеуказанные допущения, которые кладутся в основу теории тонких
плит, приводят к существенным погрешностям и поэтому в теории
толстых плит используются более строгие приемы решения, что
значительно ограничивает круг разрешимых задач. Даже для простейших
случаев эта теория сложна и редко используется в технической
практике.
При расчете весьма тонких плит, у которых прогибы сравнимы
с толщиной или превосходят ее, нельзя применять формулы теории
малых перемещений, вывод которых приведен в гл. II, а приходится
82
ИчЗГИБ тонких плит
[гл. VII
пользоваться более точными нелинейными зависимостями между
перемещениями и деформациями. Соответствующая теория весьма тонких
плит разработана для ряда случаев и находит применение в
судостроении и самолетостроении.
Кроме плит постоянной толщины, рассмотрим также плиты
переменной толщины, ограниченные не двумя плоскостями, а
двумя плавными поверхностями, зеркально симметричными
относительно срединной плоскости
плиты.
Теория тонких плит как
постоянной, так и переменной
толщины строится на основе
нескольких допущений.
Примем, что координатная
плоскость хОу до
деформирования плиты совпадает со
срединной плоскостью (рис. 47). Тогда
эти допущения можно
сформулировать так:
1) напряжения oz,
"•xz
и т,
уг
являются второстепенными, т. е.
они малы по сравнению с
основными напряжениями ах, оу, *гху и поэтому ими можно пренебречь
при вычислении деформаций,
2) проекция перемещения w(x, у, z) на ось z принимается
неизменной по толщине плиты, т. е. равной прогибу w(x, у, 0)
срединной плоскости
w (х, уt z)^w(x, у, 0).
(26.1)
Если все внешние силы, приложенные к плите, в том числе и
реакции опор, параллельны оси z, то можно показать, что
перемещения всех точек срединной поверхности также параллельны оси z
(срединная поверхность плиты не растягивается), т. е.
и (х, у, 0) = v (х, у, 0) = 0.
(26.2)
Для простоты изложения мы примем это положение без
доказательства.
Заметим еще, что допущение о малости ъхг и хуг, из которого
следует, что fxz = 0 и ^yz = 0f может быть заменено эквивалентной
ему гипотезой прямых нормалей: прямолинейные отрезки,
которые до деформирования были перпендикулярны к срединной
плоскости, при деформировании остаются прямолинейными и
нормальными к деформированной срединной поверхности.
Эта гипотеза сходна с гипотезой плоских сечений, лежащей
в основе технической теории изгиба балок.
§ 27] ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ИЗГИБА КРУГЛЫХ ПЛИТ 83
§ 27. Дифференциальные уравнения изгиба симметрично
нагруженных круглых плит
Рассмотрим симметрично нагруженную круглую сплошную или
кольцевую плиту постоянной или переменной толщины (рис. 48).
Воспользуемся цилиндрической системой координат г, 6, z. В силу
симметрии
Trt = 0, тв2 = 0, v = 09 (27.1)
а все остальные напряжения и прогиб не зависят от 6.
з:
На основании первого допущения, изложенного в предыдущем
параграфе,
хга = ОТг, = о(£ + ^)«0. (27.2)
На основании второго допущения w не зависит от z и поэтому
dw dw
вместо -г- можно написать — . Тогда из равенства (27.2) следует:
ди dw ^
Интегрируя по ^ и имея в виду, что и = О при 2 = 0, получаем:
• —*£• (37.4)
84
ИЗГИБ тонких плит
/
[гл. VII
Находим выражения для основных деформаций:
Из равенств
ди <Pw
*r~dr~~~~~Z dr* '
и z dw
8* ~ г ~~ г dr>
Tr6 = 0.
r~~ E
_°6-vcr
tt £ ' J
(27.5)
(27.6)
являющихся частным случаем формул (17.2) при ог = 0 (см. также
первые две формулы (25.2)), получаем:
Е , , ч Ez fd2w . v dw\
£ , , ч £* / 1 A» , ^юХ I
(27.7)
Рассмотрим элемент, вырезанный из плиты двумя плоскостями,
проходящими через ось z, и двумя цилиндрическими поверхностями
(рис. 49),
Напряжения ог, действующие на одной из граней этого элемента,
дают некоторый изгибающий момент. Обозначим этот момент,
отнесенный к единице ширины полоски, через Мг. Тогда
Л/2 ч
-Л/2 J
где
D =
Eh*
12(1—tf)
(27.8)
(27.9)
— так называемая цилиндрическая жесткость плиты. Заметим,
что D отличается от жесткости прямоугольной балки (высотой h и
шириной, равной единице) только множителем (1—№) в знаменателе.
Изгибающий момент от напряжений о6, действующих на другой
грани того же элемента, также отнесенный к единице ширины
полоски, равен
Л/2
Мг= г V„ = _D(! £+,£). (27л0)
-Л/2
§ 27]
ДИФФЕРЕНЦИАЛЬНЫЕ УРАВНЕНИЯ ИЗГИБА КРУГЛЫХ ПЛИТ
85
Напряжения тГ2, действующие на той же грани, что и ог, дают
перерезывающую силу, направленную параллельно оси z. Величину
этой силы, отнесенной к единице ширины полоски, обозначим через Q.
Рассмотрим условия
равновесия вырезанного элемента
(рис. 50).
Рис. 49,
Рис. 50,
В силу симметрии из шести уравнений равновесия твердого тела
достаточно составить всего два (остальные удовлетворены
тождественно).
Уравнение моментов относительно оси 0, проведенной
перпендикулярно к оси z через центр тяжести элемента, имеет вид:
м"г"(1Ъ~м1г db —М2 dr db_2^±fi!21 db dr = 0, (27.11)
Слагаемое M2drdb получилось в результате проектирования
обоих векторов M2dr на ось 0, с которой они составляют углы
2 ' 2 '
Замечая, что
urn
(27 Л 2)
и считая, что при г"— г'->0 вместо QV и Q'r" можно писать
просто Qr> получим после деления на dr dSi и перехода к пределу
Jr^r)—Aft —Qr = 0.
Уравнение проекций на ось z будет
Qf'r»db -^~ Q'r' db + prdbdr = 0.
При r" — r'-+0
Ит
—pnzrp—
dr
№
(27 Л 3)
(27.14)
(27 Л 5^
86 ИЗГИБ ТОНКИХ ПЛИТ , [ГЛ. VII
/
и, следовательно, после деления на drdb и перехода к пределу
получим
iL(Qr) + /w = 0. (27.16)
Подстановка выражений (27.8) и (27.10) для М{ и М2 в
уравнение (27.13) дает
п — п fdBw _i_ ] d%m 1 dw \ dD fd2w _l_ v dw \ m 11\
Для того чтобы найти уравнение, связывающее прогиб плиты w
с интенсивностью распределенной нагрузки р, остается подставить
выражение (27.17) в уравнение (27.16).
В общем случае плиты переменной толщины получается
следующее дифференциальное уравнение четвертого порядка:
d^w , о М , l_dD\^w /_1_ 2 + ^dD 1 d?D\d*w .
dr*"+" V г "+~ £> tfr J rfr3 Vr2 rD tfr D dr* ) dr* '
i /1 L*£_l J-*!£\**_ £- Гс7 \к\
■" \r* r2D rfr » rD dr*) dr — D * v * ;
Для плиты постоянной толщины уравнение имеет более
простой вид:
d*w . 2 <?%у 1 tf% . 1 tfw j7 ,<yj iQ4
Решение задачи об изгибе симметрично нагруженной круглой
(сплошной или кольцевой) плиты сводится к решению уравнения
(27.18) или (27.19) при заданной нагрузке р и заданных граничных
условиях на краях плиты.
После нахождения w как функции от г основные напряжения ог
и ое могут быть вычислены по формулам (27.7). При каждом
значении г наибольшие напряжения ог и о9 имеют место при z = ±-^-,
т. е. у верхней и нижней поверхностей плиты. Они выражаются
формулами:
( . _ Eh /d?w . v dw\__^6Ml \
(ar)gm±H- ~-+-2(1 —^2) Ur2"i г dr)~~— № ' I
, v _ Eh (\ dw к (fiw\ . 6Af2
(27.20)
Наибольшие касательные напряжения xrz имеют место у срединной
поверхности и могут быть вычислены по следующей формуле
(приводимой без доказательства):
§ 28] РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ИЗГИБА 87
§ 28. Решение дифференциального уравнения изгиба
симметрично нагруженной круглой плиты
Так как уравнение (27.19) — линейное неоднородное, то его общее
решение может быть представлено в виде суммы какого-либо
частного решения wl этого уравнения и общего решения
соответствующего однородного уравнения
й*щ , 2_d^Wo 1 rf%p ■ 1 dw0 2
dr* ' г dri г* dr* 1>з dr \*°-Ч
Уравнение (28.1) — типа Эйлера, поэтому, как известно, оно имеет
частные решения вида
w0 = rn. (28.2)
Подставляя выражение (28.2) в уравнение (28.1), получаем после
сокращения на rn~4 и приведения подобных членов
характеристическое уравнение
■яа(л —2)* = 0. (28.3)
Это уравнение имеет два двойных корня
ii,2 = 0, л8,4=2. (28.4)
Напомним следующее свойство дифференциальных уравнений типа
Эйлера: двойному корню п соответствуют два частных решения: гп
и гп\пг. Действительно, если характеристическое уравнение имеет
два близких друг к другу корня п\\п-\-ь, то частными решениями
будут гп, гч+б, а также и разность этих решений, деленная на Ь.
Полагая затем, что разность корней 8 стремится к нулю, получим
ГЛ+8 гп г5 1 И in г
5->0 Ь 8->0 6 6-»0 1
Итак, дифференциальное уравнение (28.1) имеет частные
решения 1; In г; г"2 и г*2 In г, а его общее решение имеет вид:
w0 = Ar* + Br* In г + С In г + К, (28.5)
где Лу В, С, К — постоянные интегрирования.
Частное решение неоднородного дифференциального уравнения
(27,19) в практически важных случаях находится весьма просто.
Если нагрузка р на единицу площади постоянна по всей плите
(равномерно распределена), то имеется частное решение вида
wt =--. ссг4, (28.6)
где а — постоянный коэффициент.
Подставляя выражение (28.6) в уравнение (27.19), находим а и
получаем окончательно
•i = fi£- <38.7)
88 ИЗГИБ тонких плит / [ГЛ. VII
/
Если закон распределения нагрузки выражается формулой
Р = РоГ°> (28.8)
где, р0 и s — какие-либо постоянные, то аналогично находится частное
решение
«1"(, + 4у£ + 2УВ- (28<9)
Рассмотрим подробнее плиту (сплошную или кольцевую) с
равномерно распределенной нагрузкой. У такой плиты прогиб выражается
следующей формулой:
w = TW04-Wi = ^«+Bra!nr-f С1пг + /С+^* (28.10)
Дифференцируя выражение (28.10) необходимое число раз и
подставляя его в формулы (27.8), (27.10) и (27.17), получаем:
М
IS'" '
Af, — — D [2(1+ n) Л+(1+Зч)В+2(1-И)Я lnr+H=5^J—
(l+3v)pr8
16
n _ WB EL
v~ "7 2 •
(28.11)
Постоянные А, В, С и К, входящие в формулы (28,10) и (28.11),
определяются из условий на краях плиты.
Наиболее часто встречаются следующие виды этих условий.
1. На жестко заделанном краю плиты прогиб и угол поворота
касательной плоскости к срединной поверхности равны нулю:
•ш = 0, ^ = 0. (28.12)
2. На опертом краю прогиб и момент, изгибающий плиту в
радиальном направлении, равны нулю:
w = 0, Ж, = 0. (28.13)
3. На свободном ненагруженном краю момент, изгибающий плиту
в радиальном направлении, и перерезывающая сила равны нулю:
■«,«01 Q = 0- «8.14)
§ 28] РЕШЕНИЕ ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ИЗГИБА 89
4. На свободном краю, нагруженном силами, равномерно
распределенными вдоль края ( на единицу длины края приходится
нагрузка q)\
а) если край наружный (рис. 51, а),
Af1 = 0> Q = q\
б) если край внутренний (рис. 51, б)>
М1==0, Q = — g.
(28.15)
(28.16)
Сплошная круглая плита имеет только один край, на котором
должны выполняться два условия. Остальные два условия,
необходимые для определения четырех постоянных
интегрирования, получаются следующим образом.
Прогиб в центре Плиты конечен, поэтому
С = 0. (28.17)
Если в центре плиты приложена сосредо^
точенная сила Р, то на окружности радиуса г
(рис» 52) перерезывающая сила равна
Q;
Р + кг*р
2кг
р
2 '
(28.18)
Сравнивая это выражение с последней
формулой (28.11), получаем:
В =
8nD'
(28.19)
Если сосредоточенной силы в центре нет, то В = 0.
Если две круглые плиты (сплошная и кольцевая или две
кольцевые) жестко связаны между собой (рис. 53), то на общем краю
Рис. 53.
вместо двух условий для каждой из плит получаются четыре общих
условия, а именно: прогиб w, угол наклона -т-, изгибающий
момент Мх и перерезывающая сила Q на наружном краю внутренней
плиты равны тем же величинам на внутреннем краю наружной пяиты/
90
ИЗГИБ тонких плит
/
[гл, VII
Приведем теперь два простых примера расчета круглых
равномерно нагруженных плит.
1. Сплошная плита с заделанным краем (рис. 54). Условия
в центре:
S = C = 0. (28.20)
Условия на краю, составленные с помощью формул (28.10) и
(28.11), имеют вид:
w
= №+К + Ёп = 0'
64£>
откуда
32D ' А ~~ 64D '
Следовательно, по формулам (28.10) и (28.11)
рд4
(28.21)
(28 22)
w
~" 64D
^i = & 10-И) *а—(3+ *)/■"].
(28.23)
iM2=.jJ[(l+v)aa — (l + 3v)r*J.
Наибольший прогиб имеет место в центре (г ~- 0)
<ш = ——
max 64DJ
(28 24)
тогда как наибольший изгибающий момент действует у края (г = а)
в радиальном направлении
it
Рис. 54.
v'Jl/max — з #
(28.25)
Рис, 55.
2. Сплошная плита с опертым краем (рис. 55) Условия в центре
(28.20) остаются такими же и в предыдущем случае. Условия на
краю имеют вид:
Ws=Aa*+K+&> = 0,
мх-—2В(14-*)л-(3+1;)ра'-о
16
С28.26)
§ 29] ОБЩЕЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ИЗГИБА ПЛИТ 91
откуда
А-— TT"-32D' K-TT~-bW' ( }
Составление выражений для прогиба и изгибающих моментов
сводится к подстановке найденных значений Л, В, С и К в общие
формулы (28.10) и (28.11). Наибольший прогиб и наибольший
изгибающий момент имеют место в центре (г = 0):
5 + v ра*
w = —■ ——
(МЛ =(Ш =(з + у)/^
v/Kil/max — vK12/max — \Q
(28.28)
При n=0,3 прогиб в центре плиты с опертым краем в 4,08 раза
больше, а максимальный изгибающий момент в 1,65 раза больше,
чем у плиты с заделанным краем.
Расчетные формулы выведены также и для ряда других случаев
круглых плит постоянной толщины с нагрузкой, равномерно
распределенной по площади плиты, по ее краям или же сосредоточенной
в центре. Эти формулы приводятся во многих технических
справочниках.
Дифференциальное уравнение изгиба круглых плит переменной
толщины (27.18) в общем случае решается только численными или
приближенными методами. В частном случае, когда толщина
изменяется в радиальном направлении по закону
Л=£. (28.29)
где Н и т — постоянные (причем т может быть и отрицательным
числом), уравнение (27.18) принимает вид:
S + 70-3»)S-in + 3(l-,)«-9»lS +
+^ + 3(l + v)i. + !b»']g-»(1^. (28.30)
Это уравнение — типа Эйлера. Решение его производится таким же
способом, как для плит постоянной толщины.
§ 29. Общее дифференциальное уравнение изгиба плит
постоянной толщины
Из первого допущения теории тонких плит (§ 26) следует, что
да . dw ^j а
т--*> + **- ' i (29л)
dv _.dw n
92
ИЗГИБ тонких плит
/
[гл. vu
Из второго допущения той же теории следует, что w не зависит
от z. Поэтому, интегрируя равенства (29.1) по z и имея в виду,
что и(х, у у 0)~v(x, у, 0) —0, получаем:
aw
дх '
dw
\
(29.2)
г> =
дущ )
Основные деформации ех, eyt ^ху выражаются через прогиб
следующим образом:
ди
d2w
дх~~
dv
*дх*'
dfiw
\
\
(29.3)
ди .dv 9 d2w
4xv—Ty^dl:-~~lZW&j* j
Так как при вычислении деформаций напряжением oz можно
пренебречь, то по формулам (17.2) получаем:
еж =
°х — ^у
—т~
*(xyz
Е •
(29.4)
откуда, согласно (29.3),
о,л
Ez /<Pw , d*w\ ]
1—v2 \d~jfl "'~V ду*)' I
Ez /d2w , d2w\ i
"У — — Г=^2 i,dy2"+"V 5^2 J' I
Ez d*w
(29.5)
g*Ptf *
1 -f- v дх dy'
J
Теперь второстепенные напряжения zxz, хуг> ог можно найти из
уравнений равновесия (производные этих напряжений, входящие
в уравнения равновесия, нельзя считать малыми, так как хотя сами
напряжения малы, они резко изменяются по толщине плиты).
Интегрируя по z равенства
fox,
dz
д\
, доя 62ft Ez (d3w I d*w \
~ дх ду ^ 1 — v2 [djfl i дх dy*)'
HI
faxy _^v_ Ez f №w , d*w\
дх ду^ Г— * \djfl ду ' Ну?) *
(29.6)
А 2d) ОБЩЕЕ ДИФФЕРЕНЦИАЛЬНОЕ УРАВНЕНИЕ ИЗГИБА ПЛИТ
получаем:
_ Ez* fd^w . d*w \ . f
тт2 — 2(l — v2) \дх* ' дхdy2)~T~fl (Xt У)'
__ Ez* / &>w . #%\ ■ . . v
V — 2 (1 — v2) \(?jc2 dy I" dy V "^ /2 ^' ^
На торцовых плоскостях плиты
при z = :
2 '
v=°-
93
(29.7)
(29.8)
Подставляя эти значения в (29,7), находим вошедшие при инте
грировании функции /х(л:, у) и /2(#, у), и получаем:
т^е— 2(1 — ^2)^4 Z Адх*^ дхдуУУ
-)(•
(29.9)
^* 2(1—v2)\4 " У \длг2(?у ~ ду* ) '
Из неиспользованного до сих пор третьего уравнения равновесия
следует
dia
dz
уя
dz
откуда
дх
ду ~ 2(1—^2)
( 2 V
d*w d*w \
дх*ду* ■ ду4 /
(29.10)
2(1
/ Л2£ Z*\{d*W , 0 д% . d*W\ , г, ч /on 114
^)(— -т)1^- + 2Ж^ + ^)+^(^3')- (29.11)
Будем считать, что нагрузка р приложена к верхней плоскости
плиты и действует вниз. Тогда на торцовых плоскостях плиты
при Z--
оа=0
при * = -—*• ог = —р.
(29.12)
Первое условие дает возможность определить вошедшую при
интегрировании функцию f3(x, у), после чего получаем:
Б ,,а г,,п i л оч /d*w i п д*х i d*w \
,(A8-3^+^)(S+2w+
(29.13)
z 24 (1 — v2) V" w „-j--** ,у dxi -j- - дх2ду2
Подставляя это выражение во второе условие (29.12), получаем
искомое дифференциальное уравнение для прогиба плиты w:
d4w
дх*
+ 2
d*w
d*w
где
D
djfldy* * ду*
Eh*
P
D
12(1 — n2)
(29.14)
(29.15)
— цилиндрическая жесткость плиты.
94
ИЗГИБ ТОНКИХ плит
/
/ [ГЛ. VII
Левая часть уравнения (29.14) представляет результат
двукратного применения к w оператора Лапласа:
)■
(29.16)
d4w
d*w
^19.
дх*^ дх^Оу*^ду*
дх* \ дх* *ду*)~* ду* \дх* "+" ду»
d2w \
ду'Ч
= ДАгг/.
Поэтому дифференциальное уравнение для прогиба плит можно
написать в следующей легко запоминаемой форме:
ДД^ = -—
(29.17)
Во многих случаях (в частности, при составлении граничных
условий) необходимо знать выражения для сил и моментов,
действующих на элементарные узкие площадки,
О -ъ~2> перпендикулярные к срединной плоскости
плиты и имеющие высоту, равную толщине
плиты. Рассмотрим такую площадку,
перпендикулярную к оси х (рис. 56).
Напряжения сх создают изгибающий
момент Мх dy. Интенсивность этого момента
на единицу ширины полоски
Л/2
-Л/2
zo„ dz =
Л/2
Рис. 56.
_,2^a-t-V др)) Z aZ~
-Л/2
—"(S+'$)- <2918>
Напряжения ixy создают скручивающий момент Hldyt
интенсивность которого
Л/2
-Л/2
Hi= J* zxxydz = — D(\—4)
Напряжения t^ создают перерезывающую силу Qxdy,
интенсивность которой
Л/2
*-К*--в(&+п&)--'>ж>* <»■«»
-Л/2
Аналогично на площадку, перпендикулярную к оси у, действует
изгибающий момент M2dx, скручивающий момент H2dx и пере-
§ 30] ГРАНИЧНЫЕ УСЛОВИЯ ДЛЯ ПРЯМОУГОЛЬНЫХ плит 95
резывающая сила Q2dx, причем
Н2= — D(l— n).
«»=-D(a
= HV
d2w
дх ду
(29.21)
ay и т^ имеют место на торцовых
\djfl ду
Наибольшие значения ох>
плоскостях плиты (при г = ±-ту\, тогда как xxz и zyz достигают
наибольших значений у срединной плоскости плиты (z = 0). При
этом
К) ь =—(pJ
(Ру) h = (О Л =
, ч • ч w^i 6//а
^Тя?^г=— ^ а?^г=_А Д2 /*2
6Aft
Л2 '
Л2 '
_ 6Яг _
\ (29.22)
Если толщина плиты переменная, но меняется плавно, то
формулы (29.5) для основных напряжений, а также формулы (29.18),
(29.19) и (29.21) для изгибающих и скручивающих моментов остаются
в силе (с точностью несколько меньшей, чем для плит постоянной
толщины, но практически достаточной).
Формулы для перерезывающих сил и дифференциальное уравнение
для прогиба плиты в этом случае принимают вид:
^ д /пл \ i /1 ./dD d^w dD d*w \ )
Qi = —g^(DA«» + (l-
дх ду*
dD d*w
\ldD
A(DAW)_(1_^_ __2 _^_ дх-
dD d*w
ду dxi
dD d*w
дх*
дЧо
дх дх ду
дЮ дЧ)
)•
(29.23)
t-S^)-'- ***
§ 30. Граничные условия для прямоугольных плит
Для простоты изложения ограничимся формулировкой граничных
условий только для прямоугольных плит, боковые стороны которых
параллельны осям хну (рис. 57).
а) На жестко заделанном крае прогиб плиты равен нулю и
касательная плоскость к деформированной срединной поверхности
совпадает со срединной плоскостью плиты до деформации.
Й6 изгиб тонких плит ^ [гл. VII
/
Для жестко заделанного края, параллельного оси у и отстоящего
от нее на расстоянии а> граничные условия будут иметь вид:
при х^=а *0 = О, 4^ = 0. (ЗОЛ)
дх
Если же край параллелен оси х, то
при у = Ь w = 0, ^=-0, (30.2)
где Ь — расстояние края от оси х.
б) На опертом крае прогиб плиты и изгибающий момент равны
нулю. Граничные условия имеют вид:
при * = а w = 0, ^ = 0, (30.3)
или соответственно
при )/ = ^ w = 0, Ж2 = 0. (30.4)
Условия (30.3) можно несколько упростить, если выразить
изгибающий момент AfjL по формуле (29.18) и учесть, что из условия
w = 0 при х = а (и любых ^у) следует, что при том же значении
х = а вторая производная -—- = ()• Поэтому условия (30,3)
эквивалентны следующим:
при х = а w = 0, -^- = 0. (30.5)
Аналогично условия (30.4) могут быть заменены следующими:
при у = Ь « = 0, -0- = О. (30.6)
Для обоих рассмотренных случаев формулировка граничных
условий не вызывает затруднений. Однако для случая опертого края
возникает трудность при определении
реакции опоры.
Скручивающий момент на опертом крае,
вообще говоря, не равен нулю, и,
следовательно, опора, кроме перерезывающей силы,
должна воспринимать и этот момент.
Вместе с тем физически опора может создавать
ty только силы реакции, перпендикулярные
к срединной плоскости плиты.
Рис. 57. Это противоречие, вызванное
неточностью приближенной теории, может быть
устранено с помощью дополнительного предположения о том, что
в узкой полосе плиты, примыкающей к краю, происходит
перераспределение касательных напряжений. Со стороны плиты на эту
полосу действует распределенная перерезывающая сила и распре-
О
\
L
-*— я—**
х
§ 301
ГРЧНИЧНЫЕ УСЛОВИЯ ДЛЯ ПРЯМОУГОЛЬНЫХ плит
97
деленный скручивающий момент, а со стороны опоры —
распределенная сила реакции и (как показывают теория и опыт)
сосредоточенные силы реакций по углам плиты.
Для определения распределенных и сосредоточенных реакций
воспользуемся началом возможных перемещений.
Дадим точкам контура плиты ABCD (рис. 58, а) возможное
перемещение— прогиб hw. Тогда работа распределенных реакций N
Рис. 58
и сосредоточенных в углах плиты реакций РА, РБ, PQ, PD будет
равна
ЗЛ'= fbwNdy-i- fbwNdx + f bwNdy~\- fbwNdx-\-
AB ВС CD DA
+ bWAPA + lWBPB + S V<7 + 8<W (30-7>
Работа перерезывающих сил Qt и скручивающих моментов Я,
приложенных к части АВ пограничной полосы (рис. 58, б), равна
ЬА"АВ = - J iwQl dy+j ^f Н dy. (30.8)
АВ
АВ
В этом выражении -^—(ow) есть угол поворота элемента
пограничной полосы, на котором совершает работу скручивающий момент Н.
Интегрируя второе слагаемое выражения (30.8) по частям,
преобразуем это уравнение к виду
ЬАлв = - J 3w(«i + Щ)йУ + Ъ*>в"в-**»аНа- <30-9)
АВ
98
ИЗГИБ тонких плит
/
[гл. VII
Выражения для работы перерезывающих сил и моментов,
приложенных к остальным частям пограничной полосы, имеют
следующий вид:
Hdy,
во
ЬА" = \bwQ.dy
ВС
d(5tti)
(30.10)
-CD- J "«"«".Г I ду
CD CD
bA"DjL= \lwQ2dx~- \d-^pHdx.
I)A DA
Преобразуя их подобно тому, как это сделано с выражением (30.8),
и складывая, получаем:
ЬА" = ЬА"АВ + ЬА"ВС + bA"0V + bA"DA =
= - j" bwfa + ^dy— j 8TO(Q2 + -^)dx +
AB ВС
4- j 3« fa + Ш) dy 4- J ow (Q.a + ^) rf* - 2bwAHA +
02) IM
-f 2bwBHB — 2bwcHG-{- 2bwDHD. (30.11)
Изменение потенциальной энергии деформации узкой пограничной
полосы при возможном перемещении bw следует считать
пренебрежимо малым и поэтому
8Л''4-8Л" = 0. (30.12)
Так как это равенство должно выполняться при произвольных
значениях bw, то
дН
на AB: N^Q,-^-^,
на ВС: W = Q34--^,
на CD: Л/ = -(<?1 + ^). |
на DA: Л7 = —(q2 + 4£)
(30.13)
РЛ = 2НЛ, />
: —2Я,
Ра=*Н<Г PD-
2HD. (30.14)
в) На свободном крае при строгой постановке задачи напряжения
должны были бы отсутствовать. При этом изгибающий и
скручивающий моменты и перерезывающая сила равнялись бы нулю.
л 311 НЕКОТОРЫЕ СЛУЧАИ ИЗГИБА ПРЯМОУГОЛЬНЫХ плит 99
Однако в излагаемой приближенной теории на свободном крае (как
и на заделанном или опертом) должны быть поставлены всего два
рраничных условия. Постановка трех условий: М = 0; Я = 0; Q = 0
сделала бы задачу математически неразрешимой.
Из предыдущих рассуждений (п. б) следует, что на свободном
крае должны равняться нулю изгибающий момент и реакция опоры,
так как перерезывающая сила и крутящий момент, не равные нулю,
при перераспределении напряжений в пограничной полосе плиты
могут уравновесить друг друга. Поэтому граничные условия на
свободном крае, параллельном оси у, будут иметь вид:
при х=^а Af1 = 0, (5^-^ = 0, (30.15)
а на крае, параллельном оси jc,
при у = Ь М2 = 0, Q2 + ^ = 0. (30.16)
Если два свободных края примыкают друг к другу, то
сосредоточенная реакция в общей угловой точке, определяемая по
соответствующей формуле (30.14), должна равняться нулю, например,
при х = а у = Ь, Я=0. (30.17)
Если же угол плиты имеет точечную опору, то условие Н = 0
заменяется условием <до = 0.
§ 31. Некоторые случаи изгиба прямоугольных плит
Решение задач об изгибе прямоугольных плит довольно сложно.
В инженерной практике, как правило, пользуются готовыми
результатами, найденными для ряда случаев
(см., например, книгу: Б. Г. Галеркин,
Упругие тонкие плиты, Госстройиздат,
1933).
Мы ограничимся рассмотрением
плит, у которых два противоположных
края оперты, так как в этих случаях
решение сравнительно просто. Два
Других края могут иметь любые
условия закрепления. Нагрузка на плиту
может быть распределена по любому заданному закону^
Граничные условия *на опертых краях у = 0 н у = Ь (рис. 59)
записываются так:
(31.1)
w = 0,
100
ИЗГИБ тонких плит у [гл. Vli
При любом фиксированном значении координаты х функцию
w(x, у) в интервале O^y^Lb, т. е. прогиб плиты, можно
представить тригонометрическим рядом по синусам
оо
w(x,y)=^Xksm^-, (31.2)
коэффициенты которого Хк суть функции координаты х,
подлежащие определению. При этом каждый член ряда удовлетворяет
граничным условиям (31.1) (этот метод решения был предложен в 1899 г.
М. Леви).
Мы предположим, что ряд (31.2), а также ряд для -j-j ,
получаемый из предыдущего двукратным дифференцированием,
равномерно сходятся. Тогда функция w(x, у), представляемая рядом (31.2),
также удовлетворяет условиям (31.1).
Нагрузку р(х, у) можно представить в виде ряда, подобного
ряду (31.2),
оо
Р(х>У)=%Рк*п-^, (31.3)
Л = 1
где
2
Pk=j
j ps{nM-dy (31.4)
легко вычисляемые функции от х.
Подставляя (31.2) и (31.3) в дифференциальное уравнение изгиба
(29.14) и приравнивая слагаемые левой и правой частей, имеющие
кку
одинаковые множители sin—^-, получим
d*Xh 2kW d*Xk , № у _Рк m.
Это — линейное неоднородное уравнение с постоянными
коэффициентами для неизвестной функции Хк.
Его общее решение может быть написано в следующем виде:
хк = х;+х?, (31.6)
где X* — какое-либо частное решение уравнения (31.5), а X** —
общее решение соответствующего однородного уравнения.
X* нетрудно найти, если зависимость рк от х несложная. Так,
если р(х, у) = const, то при нечетных к
а при четных к эти величины равны нулю.
§311
НЕКОТОРЫЕ СЛУЧАИ ИЗГИБА ПРЯМОУГОЛЬНЫХ ПЛИТ
101
Для определения X** найдем сначала частные решения
однородного уравнения, имеющие вид:
(31.8)
Х*к* = *Ч
Для X получаем характеристическое уравнение
Х4-
Шт& , ,
ь*
4-
#**
о,
имеющее два двойных корня
*1,2 =
Ь '
Ь*
A3, 4 = Г-.
Следовательно,
Атса?
ккао
К = (Ск1^Ск2х)еЬ +(Скз + Сых)е
(31.9)
(31.10)
(31.11)
Постоянные Cfcl, . . ., СА4 определяются из граничных условий
на краях плиты, параллельных оси у.
Дальнейшие вычисления проведем для
случая, когда все четыре края плиты оперты,
а нагрузка — равномерно распределенная.
Для того, чтобы воспользоваться симметрией j_
задачи, расположим ось у так (рис. 60),
чтобы условия на краях, параллельных
оси у, имели вид:
при х = ±± «г = 0. -^ = 0, (31.12)
и, следовательно, Хк должны удовлетворять условиям:
1
1
а
* I 1
О
а
\у
Рис
. 60.
при x = ±i-7r Хк = 0,
<РХк
dx*
0.
(31.13)
Определив из этих условий постоянные Ск1, ..., СА.4, получаем
окончательно
Хк =
Ыа Ai_ kna \ . knx
ch—т—
О+т'-тг)'
knx . knx
sh—г—
2b
ch
kna
(31.14)
при нечетных к (при четных к ^ = 0). Как видим, значения ЛГЛ
весьма быстро убывают с увеличением номера члена ряда к.
Прогиб плиты выражается рядом (31.2)
w(xty)= J] A^sin-^-.
(31.15)
*=1,3, б,...
102
ИЗГИБ тонких плит
./
[ГЛ. VII
Если ограничиться всего одним первым членом ряда (31.15), то для
прогиба в центре плиты [х = 0; у ■= у) получаем следующую
приближенную формулу:
•ю»# ■■
1 _1_ *а *и па
ch
па
lb
Для квадратной плиты (а = Ь)
*(0.£)= 0,0041 li£,
(31.16)
(31.17)
что отличается от точного значения 0,00406 -^- приблизительно
на 1%.
Изгибающие и скручивающие моменты выражаются следующими
рядами:
ft = l,3,5,...
v#*n3
&7Гу
62
#*2
rfjca
ft=l,3,5...
H=-.D(l—<)$ 2 *
63
dx
*»)-»-r
sin-
cos
foty
Л —1,3,5,.
(31.18)
При вычислении изгибающих и скручивающих моментов
сходимость рядов несколько хуже. Однако двух-трех членов оказывается
совершенно достаточно для вычисления результатов с практически
необходимой точностью.
Если у плиты нет двух противолежащих опертых краев, то
прогиб ее не может быть представлен рядом вида (31.2) и решение
приводит к более сложным вычислениям.
Приводим некоторые результаты вычислений для плит с
равномерно распределенной нагрузкой при v = 0,3:
а) все четыре края оперты:
1 ь
а
ра*
WmaX : ^g
Mmax : pa2
1
0,0443
0,0479
1,2
0,0616
0,0626
1,4
0,0770
0,0753
1,6
0,0906
0,0862
1.8
0,1017
0,0948
2
0,1106
0,1017
3
0,1336
0,1189
oo
0,1422
0,1250
32] ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ИЗОГНУТОЙ плиты 103
б) два противоположных края длиной Ь оперты, два других дли
н0Й а заделаны:
ь
а
ра*
МтйХ:ра2
1
0,0209
0,070
1,2
0,0340
0,087
1,4
0,0502
0,100
1,6
0.0658
0,109
1,8
0,0799
0,115
2
0,0987
0,119
3
0,1276
0,125
со
0,1422
0,125
а
Т
рЬ*
WmKX' Eh*
\ Mm&x:pbz
1
0,0209
0,070
1,2
0,0243
0,077
1,4
0,0262
0.081
2
0,0284
0,084
оо
0,0284
0,083
Для практически важного случая равномерно нагруженной
прямоугольной плиты с четырьмя заделанными краями такие вычисления
были впервые проделаны И. Г. Бубновым (1914 г.). Приводим
некоторые результаты (при \ = 0,3)
b
а
ра*
Wmal • ы&
1
0,0138
0,051 а
1,2
0,0188
0,0639
1,4
0,0226
0,0726
1,6
0,0251
0,0780
1,8
0,0267
0,0812
2
0,0277
0,0829
оо
0,0284
0,0833
§ 32. Потенциальная энергия изогнутой плиты
При решении многих статических и динамических задач (в частности,
при определении собственных частот колебаний плит) оказывается
необходимым вычислить потенциальную энергию изогнутой плиты.
При выводе формулы для потенциальной энергии учитываются
только основные напряжения ох% ау и чху.
Потенциальная энергия, отнесенная к единице объема,
выражается формулой (15.2),~в которую подставляются напряжения (29.5) и
Деформации (29.3),
а = у (*Л> + V* + хху То*) =
__ Ez* \( dPw , ffw\s on—J^^ (.&*> \all mn
— 2(1 —vajlVdJca "Г dy*J Z{i V[~dXZ dy* ~\д7ду) j}' &*А>
104 ИЗГИБ тонких плит / [ГЛ. Vli
Потенциальная энергия всей плиты
W = J* f f adxdydz. (32.2)
Интегрирование no z, которое должно производиться в пределах
h h
от z = — ~п до 2 = -7г, легко выполняется, и мы получаем
окончательную формулу для потенциальной энергии изогнутой плиты
»-TjH(S+-&M'-'>[S4M£tfl>,te*-
(32.3)
Интегрирование в этой формуле должно производиться по
площади плиты.
Эта формула пригодна для плит как постоянной, так и
переменной толщины; в первом случае можно вынести D за знаки
интегралов.
Выражение для потенциальной энергии можно написать в
цилиндрических координатах:
Эта формула находит применение при расчете собственных частот
колебаний дисков паровых турбин.
ГЛАВА VIII
ИЗГИБ СИММЕТРИЧНО НАГРУЖЕННЫХ
ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
§ 33. Постановка задачи
Оболочкой в теории упругости называют тело, форму которого
в ненагруженном состоянии можно охарактеризовать следующим
образом.
Дана криволинейная поверхность F (называемая срединной
поверхностью), ограниченная контуром К (рис. 61). Представим себе, что
во всех точках срединной поверхности проведены нормали к ней
и на этих нормалях по обе стороны от F отложены отрезки
длиной Y - Концы всех этих отрезков лежат на внешней и внутренней
поверхностях оболочки, а отрезки,
отложенные от точек контура К> образуют боковую
поверхность оболочки.
Оболочка называется тонкой, если ее
толщина h значительно меньше, чем прочие
размеры. Толщина оболочки может быть
постоянной или переменной.
Направления нагрузок, приложенных к
оболочке, могут быть какими угодно.
При расчетах на прочность тонких
оболочек пользуются двумя различными теориями.
Безмоментная теория строится на основе рис< 61.
Допущения, что оболочка не сопротивляется
Изгибу и в ней имеют место лишь напряжения, параллельные
касательной плоскости и постоянные по толщине.
При такой постановке задача о нахождении напряжений в
оболочке становится статически определимой и легко решается.
Общеизвестным примером применения безмоментной теории
является вывод котельной формулы, применяемой для расчета тонко-
ценных цилиндрических резервуаров, находящихся под внутренним
Явлением.
106 ИЗГИБ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК [ГЛ. Уц(
Для оболочек плавной формы безмоментная теория дает до.
статочно точные результаты. Она, однако, оказывается неудов,
летворительной при расчете напряжений в местах, где имеет
место нарушение плавности формы оболочки: у краев, в ме-
стах сопряжения частей различной кривизны и т. п. Для таких
расчетов нужно пользоваться более точной моментной теорией
тонких оболочек, которая строится на основе допущений, весь*
ма сходных с теми, которые принимаются в теории изгиба
тонких плит.
Сформулируем эти допущения применительно к следующей задаче,
подробно разбираемой ниже.
Дана тонкая цилиндрическая оболочка (тонкостенная труба),
осесимметрично нагруженная радиальной нагрузкой (например,
внутренним давлением) и усилиями, приложенными
к торцам.
Растягивающих или сжимающих сил,
приложенных по торцам, пока рассматривать не будем,
считая, что усилия, приложенные к торцу, сводятся
к изгибающим моментам М0 и радиальным
перерезывающим силам Q0, равномерно распределенным
вдоль окружности трубы (рис. 62).
Ось z цилиндрической системы координат на-
Рис. 62. правим вдоль оси оболочки. Вследствие симметрии
задачи все перемещения и напряжения не зависят
от координаты 6. Кроме того, отсутствуют перемещения вдоль
окружности и два касательных напряжения:
т> = 0, \
(38.1)
При рассмотрении задачи принимают следующие допущения.
1. Напряжения ог и о9 являются основными, а напряжеьия ог и
xrz — второстепенными, которыми можно пренебрегать при
вычислении деформаций.
2. Изменение толщины оболочки мало по сравнению с ее
прогибом в радиальном направлении и, так что
и (г, z)wu(R, z), (33.2)
где R — радиус срединной поверхности.
Допущение о второстепенности напряжения чгг, из которого
следует, что Чгг=== 0» может быть заменено эквивалентной ему
гипотезой прямых нормалей: прямолинейные отрезки, которые до
деформирования были нормальны к срединной поверхности, при
деформировании остаются прямолинейными и нормальными
к деформированной срединной поверхности.
S 34] УРАВНЕНИЕ ИЗГИБА ЦИЛИНДРИЧЕСКОЙ ОБОЛОЧКИ 107
§ 34. Уравнение изгиба симметрично нагруженной
цилиндрической оболочки
Рассмотрим некоторую точку Л (г, z) цилиндрической оболочки
(рис. 63), находившуюся до деформирования на расстоянии £ от
срединной поверхности; тогда
Д г = Л+6. (34.1)
Пусть опущенная из А нормаль к срединной поверхности
встречает последнюю в точке А0. Проекции перемещения точки А0 на
направления гиг обозначим через и0 и w0.
Как следует из чертежа, в соответствии с вышеуказанными
допущениями относительно характера деформации оболочки, проекции
перемещения рассматриваемой
точки А равны
W = Wb
duo
к dz
(34.2)
так как: 1) изменение длины
отрезка £ пренебрежимо мало по
сравнению с а0 и 2) можно
считать, что отрезок этот остается
нормальным к деформированной
срединной поверхности. Индекс 0
у а0 в дальнейшем изложении
отбрасываем.
Перемещения v вдоль
окружности равны нулю.
По формулам (13.6) и (34.2)
найдем выражения для основных
деформаций оболочки:
dw
дг ''
dwQ
' dz
.d*u
1 dz*'
eft = ~ £& -T-
(34.3)
В формулах, связывающих эти деформации с напряжениями,
1
er=£ ta2 — Ч°г+ае)Ь
1
(34.4)
пренебрегаем малыми напряжениями ar и получаем
Я л. I „ч— Е (dw0 tt±JL.VL\
** = Т=^ (•* + -е) - -у—72 \Tte~ld*^R)*
Е , ч__ Е (u , dWp 1&и\
(34.5)
108
ИЗГИБ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
[ГЛ. VIU
Так как оболочка не несет продольной нагрузки, то главный
вектор нормальных напряжений о2, действующих в сечении z = const,
должен равняться нулю.
Элемент поверхности этого сечения (рис. 64) 2irr dr tt 2kR d\ и
условие отсутствия продольной силы в оболочке напишется так:
Л/2
j sz2KRdt = 0t (34.6)
-Л/2
что после подстановки з2 из (34.5) и интегрирования дает:
Г ^0_j2^ ^У>/2 _h(dW, чи\
С помощью этого равенства исключаем из выражений (34.5)
велико ,
чину -3j и находим следующие формулы, выражающие основные
напряжения ог и о0 через радиальный прогиб оболочки и:
£5
v2 ^2 ' а0 — — "
сРи
1 — v2 dZ* ' "в ~~ R 1 — v2 » tf^ ' (347)
Рассмотрим равновесие элемента, вырезанного из оболочки двумя
dr*dt
Рис. 64.
Рис. 65.
плоскостями, проходящими через ось z, и двумя плоскостями,
перпендикулярными к этой оси (рис. 65).
Примем следующие обозначения:
Мг — изгибающий момент в продольном направлении;
М2 — изгибающий момент в поперечном направлении;
Q — перерезывающая сила;
Т—растягивающая сила (в поперечном направлении);
р — нагрузка.
34] УРАВНЕНИЕ ИЗГИБА ЦИЛИНДРИЧЕСКОЙ ОБОЛОЧКИ 109
Силы и моменты относим к единице длины контурной линии
цемента на срединной поверхности, а нагрузку — к единице
площади срединной поверхности. Ось г проведена через центр элемента
перпендикулярно к оси z.
При этом
л/2
Мг:
-ft/2
Л/2
М2= oegd£ = —vD
d*u
dz*'
-Л/2
Л/2
J °8
Л/2
dl =
Ehu
(34.8)
где (как и в § 27)
D =
Eh*
12(1—v2)
(34.9)
D называется цилиндрической жесткостью оболочки.
Из шести уравнений равновесия элемента четыре удовлетворяются
тождественно, а два остальных суть: уравнение моменюв
относительно оси sf перпендикулярной к г и z,
(jMt + ^jpdz) R db — MXR db —Qrdbdz = 0 (34.10)
и уравнение проекций на ось г
(Q + ^dz)Rdb — QRdb — Tdzdb~\-pRdbdz = Ot (34.11)
или в окончательном виде:
dz v — u,
dQ Т , Л
(34.12)
Подставляя (34.8) в уравнения (34.12), получаем выражение для
Перерезывающей силы и дифференциальное уравнение прогиба
симметричной цилиндрической оболочки переменной толщины:
Q
dz*
dz\ dz*)'
lr^d*u\ , Ehu
(34.13)
(34.14)
ПО изгиб цилиндрических оболочек/ [гл. vi^
/
Для оболочки постоянной толщины
Q=-Og, (34.15)
и дифференциальное уравнение прогиба имеет вил:
Ши . 12(1-у2)р
Это — линейное дифференциальное уравнение 4-го порядка с по*
стоянными коэффициентами.
Если обозначить
*-v-
?<1^-. (34.17,
то однородное уравнение, соответствующее уравнению (34.16), можно
написать в следующем виде:
g + 4p*« = 0. (34.18)
Полагая
и = еаг, (34.19)
находим для определения а характеристическое уравнение
а4 + 4Р4 = 0, (34.20)
корни которого суть:
*i = 0+OP> а2 = (1—0Р, а3 = (— 1+/)Р> а4 = (—1—/)р. (34.21)
Этим корням соответствуют следующие линейно независимые
решения уравнения (34.18):
e$zcos$z, e$zsm$z, e~^ecos^zt tf-^sinp^.
Следовательно, общее решение уравнения (34.16) имеет вид:
и = е$* (Сг cos pz + С2 sin $z) + *-Р* (С3cos р* + С4 sin pz)-f alf (34.22)
где ut — какое-нибудь частное решение того же уравнения.
Для случая равномерной нагрузки р = const
«t-g. (34.23)
Нетрудно показать, что формула (34.23) остается верной и в том
случае, если нагрузка задана в виде полинома от z не выше третьей
степени.
Если же нагрузка задана в виде полинома более высокой степени
от z, то надо взять выражение для ut в виде полинома той же
степени с неопределенными коэффициентами и определить последние
путем подстановки ut в уравнение (34.16).
34] УРАВНЕНИЕ ИЗГИБА ЦИЛИНДР! ЧЕСКОЙ ОБОЛОЧКИ 1 11
Четыре постоянные Cv С2, С3, С4 в формуле (34.22) должны
быть определены из четырех граничных условий на концах оболочки
(по два условия ча каждом конце).
Найдя окончательное выражение для и, можно затем определить
изгибающие моменты Mv М2 и растягивающую силу Т по
формулам (34.8). Основные напряжения о2 и а6 достигают наибольших
значений на внутренней и наружной поверхностях оболочки. Эти
значения выражаются следующими формулами, легко получаемыми
из (34.7) и (34.8):
"9/Ы±М2 ~ № '
v Ч-±л/2 h — №
(34.24)
В некоторых случаях на оболочку действуют продольные
растягивающие усилия. При расчете таких цилиндрических оболочек
условие (34.6) необходимо заменить условием
Л/2
j ozdt = S, (34.25)
—Л/2
которое после подстановки значения о2 из выражения (34.5)
приводит к соотношению
dw0 . и 1 — v2
ЧГ + "я=-ЕГЬ- <34'26>
Здесь S — продольная сила, отнесенная к единице длины
окружности среднего радиуса R оболочки.
Исключая при помощи (34.26) производную -^ из
выражений (34.5), получим формулы для напряжений ог и зб, с учетом
продольной растягивающей силы S:
S £с d*u )
z ~ h 1 — V2 d& '
_ S..EU _**_*« <34^
заменяющие в данном случае выражения (34.7).
Для изгибающих моментов Mv М2 и перерезывающей силы Q
остаются справедливыми выведенные ранее соотношения, но
последняя формула (34.8), представляющая поперечную силу 7\ должна
быть заменена следующей:
Л/2
f
а,</< = ^ + ^«. (34.28)
-fc/2
112
ИЗГИБ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
[ГЛ. VIII
/
Вследствие этого основное дифференциальное уравнение для
прогиба оболочки и примет вид:
Сравнивая (34.29) с (34.14), видим, что при наличии осевого
растяжения оболочки можно пользоваться выведенными ранее
результатами, если заменить распределенную нагрузку р величиной
5
Р =Р—щ*-1
(34.30)
Поэтому, например, в случае оболочки постоянной толщины
нужно решить уравнение
d*u , лпл рч
7& + ^» = Ъ>
(34.31)
где параметр р определяется выражением (34.17).
Первая формула (34.24), определяющая наибольшие значения
напряжения а2, должна быть заменена следующей:
h— № '
Ы
Ч=±Л/2
вторая формула (34.24) для о6 остается без изменений.
(34.32)
"о
N
N
Оа
§ 35. Полубесконечная оболочка с нагрузкой по краю
Если оболочка достаточно длинна, то прогибы и напряжения
вблизи одного из торцов ее весьма мало зависят от перерезывающих
сил и изгибающих моментов, приложенных к дру-
рг*^ тому торцу. Поэтому при решении задачи можно
принять, что второй торец находится бесконечно
далеко.
Рассмотрим действие перерезывающих сил Q0
и изгибающих моментов М0, приложенных к торцу
z == 0 такой полубесконечной оболочки (рис. 66).
Ввиду отсутствия распределенной нагрузки
будем иметь их = 0. Так как при z -► со
прогиб и должен оставаться ограниченным, то
в формуле (34.22) должно быть С1 = С2 = 0.
Следовательно,
Рис. 66.
Дифференцируя, находим
du
а = *-Р*(С8 cos $z -f-C4 sin p*). (35.1)
dz
= $e-V* [(C4 — C3) cos 3z — (C3 + C4) sin p*]
(35.2)
$ 35] полубесконвчная оболочка с нагрузкой по краю
н затем
щ = — D Ц = 2pDe-k (Ct cos $z — C3 sin pz),
Q = - D g = - 2pDe-* [(Cz+CJ cos?*+(C4—C,)sin fa.
Подставляя в (35.3) граничные условия
М = М0, Q = Q0 при z = О
113
(35.3)
(35.4)
найдем:
С*'
Мо
Cs =
(35.5)
(35.6)
2^D '
Если ввести обозначения
Vci + Cl = C> -^ = cos^. -^«sin^,
то формулы (35.1)—(35.3) можно представить в следующем виде:
и = Се-?г sin (pi + ф), (35.7)
g = рСв-1" [COS ф2 + ф) — Sin $2 + ОД =
== —V^Ce-^rsin^+^cos-J —cos(p2r + <j»)sin ij =
= — У 2$Се~9г sin (fl« + ф _ JJ.). (35.8)
Аналогично получаем:
М = — 2p9DC*-?* sm (p*-f * — J). j
Qa=2V2p»DCe-,*an(p«+^—^V I
Таким образом, графики зависимости и, -г-, М и Q от 2 (напри-
мер, изображенный на рис. 67 график и при ^ = ~| по форме сходны
с известным графиком затухающих свободных колебаний
(представляющим отклонения колеблющейся системы в зависимости от
времени).
Длина полуволны
* -УШ. (35.10)
(35.9)
/=?^
j/3(l— v8)
114
ИЗГИБ ЦИЛИНДРИЧЕСКИХ 0г0Л0ЧЕК
{гл. VIII
Если
/
то
> = 0,3,
1 = 2,45\/Ля.
(35.11)
Отношение прогибов в двух точках оболочки, отстоящих друг
от друга в осевом направлении на полволны, равно (см. рис. 67)
£2
«1
= *-Р*:
е~п =
23,4 '
а для точек, отстоящих на целую волну,
"г
1
530
(35.12)
(35.13)
Это значит, что за пределами полосы шириной 2/, примыкающей
к нагруженному краю, радиальные перемещения и напряжения,
вызванные перерезывающими силами и
а изгибающими моментами,
приложенными к краю оболочки,
пренебрежимо малы.
Если длина оболочки
L>2/,
(35.14)
то перерезывающие силы и
изгибающие моменты, приложенные
к одному из краев, столь мало
влияют на напряженное состояние
у другого края, что расчет можно
проводить по формулам для
полубесконечной оболочки.
Произведем, например, расчет
Рис. 67. длинного тонкостенного цилиндра,
нагруженного внутренним
давлением р0 и заделанного своими краями в массивные жесткие днища,
деформацией которых можно пренебречь.
Здесь следует различать два случая.
1. Случай, когда происходит осевое перемещение
днищ.
При этом
P=2i:RS = kR2Po
(35.15)
представляет собой равнодействующую сил давления, приложенных
к днищу; из выражений (35.15) и (34.30) вытекает, что
(35.16)
§ 35) ИОЛУВЕСкОНЕЧНАЙ ОЕОЛОЧКА 6 НАГРУЗкОЙ ПО КРАЮ 115
Условие (35.14) предполагаем выполненным. Тогда, используя
выражения (34.23) и (35.7), имеем вблизи края z = 0:
и = Се-** sin (Р* -f ф) + -^, (35.17)
е С
ным условиям:
Eh
где постоянные С и ф должны быть определены согласно Гранин
при* = 0 я = 0 и ^ = 0. (35.18)
Вычисления дают:
+=т- с—*%г- <3519>
Подставляя выражения (35.19) в первую формулу (35.9), получим
выражение для изгибающего момента:
м=р7йе~9г sin (?z - т) • <3520>
Наибольший изгибающий момент, как легко сообразить, имеет
место при z = 0; его абсолютное значение
|Мта,| = !^. (35.21)
Подставляя полученное значение в выражение (34.32) и
учитывая (35.16), получаем расчетную формулу
при v = 0,3
(е.).» = 2.04^. (35.23)
2. Случай, когда осевое перемещение днищ
отсутствует. Для определения продольной силы 5 интегрируем
уравнение (34.26); так как по условию
L
J 4gdz = w(L) — w(0) = Q, (35.24)
6
то
ь
~ J a dz = -Ц^ SI. (35.25)
о
Выражение для и, пригодное при любых z, имеет вид:
u^Ce-?*s\n$z + <l) + p^ + C'e-?*'sm$z' + ¥)t (35.26)
/
11() ИЗГИБ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК / 11 Л. VIII
/
где /
z' = L — z, (35.27)
так что первое слагаемое учитывает краевой эффект при г = О,
а второе слагаемое — при z = L. Ввиду того, что граничные условия
на обоих концах однотипны и имеют вид (35.18), для постоянных
будем иметь:
С = С'= —^|££; (35.28)
Т.
Ф = Ф =т- (зб-29>
После подстановки выражения (35.26) в уравнение (35.25) и
интегрирования крайние слагаемые согласно (35.27) и (35.29)
сокращаются, и мы получим:
V р*ф 1 — v2 ,« от
откуда, вспоминая (34.30), вычисляем
S = vp0R. (35.31)
/f = (l—v*)/>0. (35.32)
Наибольший изгибающий момент МтйХ вследствие сохранения
краевых условий (35.18) определяется формулой (35.21). Тогда из
выражений (35.21), (35.32) и (35.31), после подстановки в (34.32),
следует расчетная формула
<°.)т„ = Ь 4-/3(1 _v*)J *£; (35.33)
при \> = 0,3
("«)««= Ь95^. (35.34)
Сравнение формул (35.33) и (35.22) показывает, что
максимальные напряжения oz несколько меньше, чем в предыдущем случае.
§ 36. Бесконечная оболочка, подкрепленная кольцами
Рассмотрим бесконечно длинную цилиндрическую оболочку,
нагруженную равномерным внутренним давлением и подкрепленную
узкими кольцами (или кольцевыми ребрами), находящимися друг от
друга на расстоянии 2а (рис. 68).
Если а < /, то взаимное влияние подкрепляющих колец является
ощутимым и его необходимо учитывать.
С 36] БЕСКОНЕЧНАЯ ОБОЛОЧКА, ПОДКРЕПЛЕННАЯ КОЛЬЦАМИ 117
Обозначим площадь поперечного сечения кольца через F и
будем пренебрегать различием между средними радиусами кольца
и оболочки. Если радиальный прогиб
оболочки под кольцом равен и0,
то растягивающая сила в кольце
равна ~^, а сила давления оболочки
на единицу длины кольца (рис. 69)
равна
EFup
Я2
Ц£>. (36.1)
Рис. 68.
Перерезывающая сила на единицу длины, возникающая в оболочке
с каждой стороны кольца, равна -у.
Рассмотрим отрезок оболочки длиной а (рис. 70).
Рис. 69.
Рис. 70.
Постоянные Cv С2, С, и С4 в общем решении
и = е$г (Ct cos $z + С2 sin pz) +
/>*»
+ e-P* (C3 cos $z + C, sin p*) -f-%r,
^ = p {«fc I (Cx + C2) cos pz — (Cj — C2) sin pz] +•
4- в"рг [ (Ct— Cs)cos pz—(C3 -f C4) sin pz ]),
уИ = — 2p2D [e^ (C2 cos pz — Ct sin pz) —
— e-V* (C4 cos pz — C3 sin pz) ],
Q = — 2p»D {eP5 [ (C2 — C,) cos pz — (Ct + C2) sin pz] +
+ e~$* I (C8 + Q cos pz + (C4 — C3) sin pz])
должны быть найдены-из следующих граничных условий:
при z = 0 й=0, Q = 0,
du г. s-, EF
при Z = « rfi^0, 4 = — 2&и-
(36.2)
(36.3)
118 ИЗГИБ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧРЖ
Эти условия дают:
/
[гл. VIII
Ci+C. + C, —С, = 0,
Сг — Q+Cj+C^O,
е*а (cos pa — sin §а) С{ -\- е?а (cos pa + sin ра) С2 —
— *-P«(cos ра + sin ра)С3 -|-^"Pa(cos pa — sin ра)С4 = О,
2p8D (— е*° (cos pa -f sin pa) Cx -f- ^P« (cos pa — sin pa) C2 -+-
-4- e-t* (cos pa — sin pa) C3 -f- e~t" (cos pa + sin pa) С J =
= §щ [e*° (Ct cos pa + C2 sin pa) +
+ e-t"(C, cos pa +- C4 sin pa) + РЩ.
Решая полученную систему четырех уравнений, получаем:
(36.4)
сх = с3 = -
sh pa cos pa + ch pa sin pa
sh 2?a + sin 2pa +
8p*D/?a
EF
pR*
(ch 2pa — cos 2pa)
Eh
C2 C4
sh pa cos pa — ch pa sin pa
sh 2pa + sin 2pa + S^J^ (ch 28a
EF
■ cos 2pa)
pr* [<36-5>
Eh
Наибольший изгибающий
момент имеет место под кольцом
ЛГтах = 4p9D(Ct sh pa sin pa — C2 ch pa cos pa). (36.6)
Соответствующее максимальное изгибающее напряжение равно
л, \ _ Iш*
А*
sh 2pa — sin 2pa
sh 2Sa + sin 2pa + S^f^ (ch 2pa -
• cos 2pa)
(36.7)
Здесь ~г напряжение растяжения в неподкрепленной оболочке. Если
множитель при —■ в формуле (36.7) больше единицы (что может
случиться при больших значениях F и а), то кольца не усиливают,
а, напротив, ослабляют оболочку.
Так, например, если а>>/, то ра > тг, sh 2ра « ch 2ра ^
^-. е*Р»>26б, и членами sin2pa и cos2pa в формуле (36.7) можно
§ 37]
ДЕФОРМАЦИЯ КОЛЬЦА
119
пренебречь. Тогда формула (36.7) принимает вид:
v г/тах '
н
при v = 0,3
Если
(рХ
EF
1,82 pR
1 +
ЕР
^<0.82,
(36.8)
(36.9)
(36.10)
то «подкрепление» оболочки кольцами в действительности приводит
к увеличению напряжений в ней.
Поэтому при проектировании цилиндрических оболочек,
подкрепленных кольцами или ребрами, необходимо проверять
выбранные соотношения размеров по формуле (36.7). Такая проверка не
нужна лишь в тех случаях, когда расстояние между кольцами
в несколько раз меньше, чем определенная по формуле (35.11)
длина полуволны /.
§ 37. Деформация кольца равномерно
распределенными крутящими моментами
Края деталей, выполненных в виде цилиндрических оболочек,
часто снабжаются кольцевыми выступами (рис. 71). Расчет таких
выступов, как узких кольцевых плит (рис. 71, а) или коротких
цилиндрических оболочек (рис. 71, б), оказывается неудобным, так как
Ряс. 71.
Рис. 72.
в формулах появляются малые разности близких друг к другу
величин.
В таких случаях целесообразно воспользоваться простыми
результатами решения следующей задачи.
Рассмотрим кольцо прямоугольного сечения, равномерно
нагруженное скручивающими моментами (рис. 72),
120
ИЗГИБ ЦИЛИНДРИЧЕСКИХ ОБОЛОЧЕК
[ГЛ, VIII
/
Можно считать с достаточной точностью, что при деформации
такого кольца каждое поперечное сечение его, не изменяя своей
формы, поворачивается вокруг некоторой точки, лежащей в
срединной плоскости кольца на расстоянии г0 от оси (рис. 73).
Точки кольца, имевшие до деформации координаты г, zf после
деформации будут находиться от оси кольца на расстоянии г*,
выражаемом формулой
г* = г0 + (г —г0) cos ср+
-f- zsincp^r-|-2cp. (37.1)
Как видно из (37.1), г0 не
входит в окончательное вы-
Рис. 73.
Рис. 74.
ражение для г*, достаточно точное при малых ср. Для дальнейшего
величина г0 не имеет значения.
Относительное удлинение окружности, на которой лежат точки,
имеющие одинаковые значения гиг, будет равно
Г* — г
з0 = -
гср
(37.2)
Полагая далее, что напряжениями от и аг можно пренебречь,
получим:
зц = Егъ =
Ег<р
(37.3)
Равнодействующая нормальных сил, действующих на элементы
поперечного сечения кольца,
Л/2 ft Н2 ь
\aBdzdr = Ey zdz\y = Q (37.4)
-Л/2 а -Л/2 а
и, следовательно, эти силы статически эквивалентны моменту
Л/2 Ь Л/2 Ъ
Mr=-- J jo^zdzdr = E9 J sfldz J^ = ^2ln|.. (37.5)
-ft/3 ci
-ft/2
§ 371
ДЕФОРМАЦИЯ КОЛЬЦА
121
Пусть интенсивность приложенного крутящего момента на
единицу длины средней линии кольца, имеющей радиус R — а~^ ,
равна М0. Тогда уравнение моментов для элемента кольца (рис. 74)
будет иметь вид:
M0Rdb — 2Мгу = 0,
т. е.
Mr = M0R.
Следовательно, угол поворота кольца
\2MqR
Eh* in — '
а
а наибольшие напряжения (при г = а и z = ±-^\
6M<>R
(аб)тах = :
h4 In
Если кольцо узкое, то
In — -^ 1, a^,R,
а а
и формулы можно еще упростить, а именно:
12Af0#a
<Р =
(°б)тах = — wx
Е№ {Ь — ау
6M0R
h*(b — a)'
т. е.
? =
MpR*
EJ '
\°в/тах дог •
(37.6)
(37.7)
(37.8)
(37.9)
(37.10)
(37.11)
(37.12)
где J и W-— соответственно экваториальный момент инерции
и момент сопротивления сечения кольца относительно оси, лежащей
в срединной плоскости.
Можно показать, что формулы (37.12) остаются верными и для
узкого кольца произвольного поперечного сечения, если J и W брать
относительно оси, проведенной через центр тяжести сечения
перпендикулярно к оси кольца.
ГЛАВА IX
КРУЧЕНИЕ СТЕРЖНЕЙ
§ 38. Постановка задачи
Рассмотрим упругое тело (стержень), имеющее форму призмы
или цилиндра и нагруженное только по торцовым плоскостям,
причем силы, приложенные к каждому из торцов, статически
эквивалентны моменту, вектор которого направлен параллельно оси тела z
(рис. 75).
Граничные условия будут иметь вид:
на боковой поверхности
^ COS (Я, *)-Иа* COS (Я, ,У) = 0, \
-ziycos(n, x)-\-aycos(n, у) =
X,
о, J
(38.1)
vJa,COS(7t, X)
а на торцах (д; = 0 и х = /)
Я
я
я
я
я
Я<т<»
-|-Tj,.. COS (Я, J
Ю =
= 0
хга,й/? = 0, 1
r.ydF = 0,
«,«//•' = 0,
osjeufF = 0,
o^rfF^O
iX — t^dF-.
►
= Л1
(38.2)
(38.3)
Следуя Сен-Венану, решаем задачу «полуобратным методом»
задаваясь выражениями для части напряжений по аналогии с
известным элементарным решением задачи о кручении круглого стержня
§ 38] ПОСТАНОВКА ЗАДАЧИ 123
й находя затем остальные напряжения. Именно, полагаем
ae = ar = e,=:xe|f = 0. (38.4)
Дифференциальные уравнения равновесия (17.1) принимают вид:
dz ^U'
^ = 0
dz и'
dz*
дх
УЯ
ду
:0.
(38.5)
Из первых двух равенств следует, что tzx и ту, не зависят от zt
а из третьего — что выражение
— xyz dx + хгх dy = <*Ф (38.6)
есть полный дифференциал некоторой функции Ф(ле, у), которая
называется функцией напряжений
при кручении. При этом напряже- у^
ния чгх и xzy в поперечных
сечениях стержня (рис. 76) и соответ-
Рис. 75.
Рис. 76.
ственно равные им напряжения txn и туя в продольных сечениях
выражаются формулами:
дФ
хгх —= xxz фу «
"гу
"V*
дФ
дх9
(38.7)
Уравнения равновесия удовлетворяются при любом виде
функции Ф. Полученные также из статических соображений граничные
Условия (38.1)—(38.3) накладывают некоторые ограничения на
функцию напряжений, но совершенно недостаточны для ее
определена. Поэтому необходимо обратиться к рассмотрению деформаций,
124 КРУЧЕНИЕ СТЕРЖНЕЙ / [ГЛ. IX
которые должны удовлетворять условиям сплошности. Эти последние
возьмем в форме (19.12), где деформации уже выражены через
напряжения.
Вследствие равенства нулю напряжений ох, ау, а2 и хху первые
четыре уравнения (19.12) удовлетворяются тождественно, а два
последних принимают вид:
После подстановки %гх и хуг из формул (38.7) и изменения порядка
дифференцирования получим:
д (№ №\ _ п д (д*Ф , д*Ф ч ___ R Q
Следовательно, искомая функция Ф должна удовлетворять
дифференциальному уравнению
&*Ф . дЩ
J5+^econet- (38Л0)
Для выяснения физического смысла постоянной, стоящей в правой
части этого уравнения, вычислим перемещения, исходя из равенств
(17.4) и (17.2):
да п ди . dv п
dv_ п ди , dw_ J_ дФ
гУ ~~ ду ~~ U' Ь* ~"дг + дх ~~ О ду'
dw п dv_ , dw 1 дФ
*г~~ йг^"^ 1yz~~dz~f~'dy —~0 дх'
(38.11)
Из первого равенства следует, что и не зависит от хУ а из
ди
пятого с учетом третьего — что -д- не зависит от г.
Поэтому можно написать
g=/l(_y)> « = */i(y)+-/iO» (38.12)
и аналогично
% = М*)> v = zMx) + ft(x). (38.13)
Подставляя найденные выражения для и и v в четвертое
равенство (38.11), находим:
^[/(C) + /3WH-/jCy) + /;W = 0. (38.14)
§ 381
ПОСТАНОВКА ЗАДАЧИ
125
Это равенство должно удовлетворяться тождественно при любых
значениях х, у и z; следовательно,
/so*—/»—*. I (38Л5)
где а и сх— постоянные.
Интегрирование дает:
Л CV) = —-&У + с2, f2(y) = — сху +- «0>
/в (*) = а* — ся> /4 (л:) = г ^ -+- v0
i-c2z — сху + и^ \
c8* + *i*-Mo» J
и = - - ауг + c2z — с^ + ио>
v = corz — Со
(38.16)
(38.17)
г;0—новые постоянные.
Последние три члена каждой формулы представляют
перемещение стержня, как целого: ц0 и v0 — перемещения по направлениям
осей х и у, cv с2 и с3 — малые углы поворота соответственно вокруг
осей г, у и х. Отбрасывая эти члены, не влияющие на напряжения,
получаем окончательно:
и = — ayz, )
(38.18)
V = OLXZ. J
Эти формулы выражают то, что каждое сечение стержня
поворачивается вокруг его оси на угол az, причем проекция его на
плоскость ху не претерпевает искажений; а есть угол закручивания
на единицу длины стержня.
Из двух последних равенств (38.11) следует:
dw , 1 дФ
dw , 1 дФ
ду ' U дх
(38.19)
Дифференцируя первое из этих равенств по у, а второе по х и
d*w
исключая д д , получим:
S+S--*-»• <38-20>
Мы получили другим путем дифференциальное уравнение (38.10),
причем стоящая в его правой части постоянная оказалась
выраженной через модуль сдвига О и угол закручивания на единицу длины а.
1!2() кручвнир. стержней / (гл. \\
Кроме дифференциального уравнения (38.20), функция
напряжений должна удовлетворять граничному условию, которое получается
из третьего равенства (38.1), тогда как первые два удовлетворяются
тождественно.
Если х и у суть координаты точки контура поперечного сечения
стержня, a ds— элемент дуги контура (рис. 77), то
(38.21)
(38.22)
cos (п, *) = %>
/ \ dx
cos(n, У) = -Т$,
и третье равенство (38.1) принимает на контуре вид:
дФ£у_,^ФЛг йФ п
5у ds ' дх ~ds ds
Так как при добавлении к Ф любой постоянной величины
напряжения не изменяются, то для стержня со сплошным сечением
можно считать, что на контуре
Ф = 0. (38.23)
Если же стержень трубчатый, то Ф имеет постоянные значения
на всех контурах сечения; однако эти значения различны и лишь
на одном из контуров можно принять,
что соответствующее значение Ф равно
нулю.
Уравнения теории кручения
призматических стержней можно получить из
соответствующих кинематических гипотез
о характере перемещений скручиваемого
стержня. Элементарная теория кручения
(которая остается справедливой для
стержней круглого поперечного сечения)
предполагает, что деформация стержня
при кручении сводится к повороту
поперечных сечений вокруг оси на углы,
пропорциональные осевому расстоянию (отсюда следует (38.18)), причем
сами сечения при этом не искажаются.
В строгой теории приходится допустить наличие проекции
перемещения на ось стержня депланации w, однако она предполагается
не зависящей от осевой координаты, следовательно,
dw
~5Г
:0.
(38.24)
Легко показать, что функция w будет гармонической, но
граничное условие для нее оказывается сложным, вследствие чего
предпочтительнее пользоваться функцией напряжений Ф.
§ 39) НЕКОТОРЫЕ СВОЙСТВА ФУНКЦИИ НАПРЯЖЕНИЙ ПРИ КРУЧВНИИ 12?
§ 30. Некоторые свойства функции напряжений
при кручении
Проведем в сечении две произвольные взаимно
перпендикулярные оси координат хг и у' (рис. 78). Тогда
/ / 4 1 / / ч дФ ду > дФ дх
x^cos(*', *)4-т„со8(* , У) = ^г^г + т^^г
и аналогично
дФ
ду д/ ~т" дх ду' ду'
zzy' —'
дФ
дх'
(39.1)
(39.2)
Проведем в сечении линию Ф = const (рис. 79). Это будет
некоторая замкнутая кривая. Пусть s — направление касательной
V
4/
О
l
у^'
—Н¥"
1 1
1 1
1 1
1 '
-dx
■к-
sr'х'
л?
Рис. 78.
Рис, 79.
к ней в некоторой точке, а п — направление нормали в той же
точке.
Тогда из формул (39.1) и (39.2) следует:
дФ
т*8 ~~ дп '
*-» = 0.
(39.3)
Итак, касательное напряжение в любой точке сечения направлено
по касательной к линии Ф = const, проходящей через эту точку, и
пропорционально быстроте изменения Ф по нормали к этой линии.
Если на перпендикулярах к плоскости сечения отложить
значения Ф для соответствующих точек сечения, то полученный
пространственный график будет носить название «холма напряжений».
Можно сказать, что касательные напряжения направлены по
горизонталям холма напряжений и пропорциональны уклону его
поверхности.
Обратимся теперь к условиям (38.2) и (38.3) на торцах стержня.
Последние три условия (38.2) удовлетворяются тождественно.
Покажем, что удовлетворяются и первые два. Для этого разобьем все
Учения стержня линиями Ф = const на узкие кольца (рис. 80).
128
кРУЧЕНИЁ СТЕРЖНЕЙ / [ГЛ. IX
Проекция на ось х сил, действующих на кольцо, ограниченное
кривыми, на которых функция напряжений имеет постоянные
значения Ф и Ф-f # равна нулю:
ф tex dnds = ф zza cos (s, x) dnds = ф т28 dn dx =
= $ ж dndx = § аФ dx = аф § dx = °' (39'4)
так как при обходе замкнутой линии х возвращается к исходному
значению.
Следовательно, проекция на ось х равнодействующей всех сил,
приложенных к торцовому сечению, также равна нулю. То же
относится и к проекции этой
равнодействующей на ось v.
Рис. 80.
Рис. 81.
Рассмотрим теперь момент сил, приложенных к тому же узкому
кольцу. Складывая моменты сил z^dnds, действующих на элементы
этого кольца (рис. 81), получим:
dMt = | (тг8 dn ds)h = d<& J hds = 2F<> </Ф, (39.5)
так как ф -^hds = F& есть не что иное, как площадь,
ограниченная рассматриваемой кривой Ф = const.
Складывая далее крутящие моменты, отвечающие всем кольцам,
на которые разбито сечение, получим:
Мж = 2$ Р<ъйФ.
(39.6)
Входящий в эту формулу интеграл есть не что иное, как объем
холма напряжений. При этом если стержень трубчатый, то, как
ясно из вывода, в этот объем должны быть включены и те части
холма напряжений, которые расположены над отверстиями сечения,
§ 39]
НЕКОТОРЫЕ СВОЙСТВА ФУНКЦИИ НАПРЯЖЕНИЙ
129
причем эти части ограничены сверху плоскостями, параллельными
основанию (рис. 82).
Формулу (39.6), изменяя порядок суммирования элементов объема
холма напряжений, можно написать в следующем виде:
Ж:
-2//ф^.
(39.7)
где интеграл распространен на всю площадь сечения (включая и
отверстия в последнем).
В дальнейшем нам потребуется еще одно свойство
распределения касательных
напряжений по сечению скручиваемого
стержня.
Найдем интеграл Фтгв*/$,
взятый по замкнутой * линии
r*yf"
"& Tzs
щ
dx
Рис. 82.
Рис. 83.
Ф = const. Этот интеграл называется циркуляцией касательного
напряжения.
Мы имеем (рис. 83):
*zza = 'zzxcos(s> *)-H««cos(s, y) = t.
*гаУ
ds
+ '
г* ds
(39.8)
Подставив сюда полученные на основании формул (38.7) и (38.19)
выражения
дФ ~ . r> dw
(39.9)
дх
■Получим:
ду
Интегрируем это выражение по замкнутой линии Ф = const:
§*e8ds=aQ§(xdy — ydx) + Q§^ds. (39.11)
Первый интеграл в правой части этого равенства есть
удвоенная площадь Т^ф, ограниченная рассматриваемой кривой Ф = const.
130 КРУЧЕНИЕ СТЕРЖНЕЙ , [ГЛ. IX
/
Второй интеграл в правой части равен нулю, так как w есть
однозначная функция от х и у, после обхода замкнутой кривой
возвращающаяся к исходному значению. Итак, получаем окончательно:
§ tZ8ds = 2<xGFb. (39.12)
<D = oonst
Это равенство носит название теоремы о циркуляции
касательного напряжения; оно было выведено Бредтом в 1896 г.
§ 40. Мембранная аналогия
Мембраной называется тонкая равномерно натянутая пленка,
совершенно не сопротивляющаяся изгибу (например, пленка из
какой-либо жидкости, обладающей большим поверхностным
натяжением).
Рассмотрим мембрану, натянутую на плоский жесткий контур и
подвергнутую затем одностороннему нормальному давлению р. На-
Рис. 84.
тяжение мембраны q будем считать настолько большим, что
прогибы ее f(x, у) малы по сравнению с пролетом.
Составим уравнение равновесия элемента поверхности мембраны
(рис. 84), спроектировав на ось z все действующие на него силы,
После приведения подобных членов и сокращения получаем:
§40]
МЕМБРАННАЯ АНАЛОГИЯ
131
причем на контуре мембраны
/= 0. (40.3)
Если положить
/=*&-*• (40-4)
то дифференциальное уравнение (40.2) и граничное условие (40.3)
становятся тождественными с дифференциальным уравнением (38.20)
и граничным условием (38.23), определяющими функцию напряжений
при кручении сплошного стержня. Эта мембранная аналогия,
указанная Прандтлем формулируется следующим образом: значения функции
напряжений при кручении сплошного стержня пропорциональны
малым прогибам мембраны, натянутой на контур, подобный
контуру поперечного сечения стержня, и подвергнутой
равномерному одностороннему давлению.
Мембранную аналогию можно распространить и на трубчатые
стержни. На контуре отверстия Ф = const и на основании (39.3) и
теоремы о циркуляции (39.12)
£ 2L ds = (j) тгв ds = 2aOF0, (40.5)
где F0—площадь отверстия.
Следовательно, на соответствующем внутреннем контуре мембраны
должны выполняться условия:
/= const, §4^ds = PFo- (40.6)
Левая часть последнего равенства представляет взятую с
обратным знаком сумму вертикальных проекций сил натяжения мембраны,
действующих на внутренний контур; Правая часть того же
равенства представляет силу,
действующую на площадь F0 при загрузке
ее равномерным давлением р.
Поэтому для соблюдения
теоремы о циркуляции и граничного
Условия на внутреннем контуре
следует считать, что мембрана
связана с ограниченной этим контуром
Жесткой пластинкой, нагруженной
Тем же давлением р и могущей
Поступательно перемещаться так, что ее плоскость остается
параллельной плоскости наружного контура (рис. 85).
Мембранная аналогия имеет двоякое значение: 1) она позволяет
Экспериментально находить функцию напряжений при кручении
сТержней таких сечений, для которых аналитическое решение
невозможно; 2) она позволяет во многих случаях наглядно представить себе
132 КРУЧЕНИЕ СТЕРЖНЕЙ [ГЛ. IX
/
форму «холма напряжений», сделать некоторые заключения о
характере распределения касательных напряжений и даже вывести
для этих напряжений приближенные формулы.
§ 41. Стержень эллиптического сечения
Пусть
Я*. У) = 0 (41.1)
есть уравнение контура сечения скручиваемого стержня. На этом
контуре функция напряжений Ф должна равняться нулю. Иначе
говоря, функции Фи/ должны обращаться в нуль при одних и тех же
значениях хну.
В ряде простых случаев функцию Ф можно получить, умножая
левую часть уравнения контура / на подходящий множитель.
Рассмотрим стержень эллиптического сечения, уравнение контура
которого имеет вид:
Попробуем принять для функции напряжений следующее
выражение:
Ф = Л/ = л(^ + |—l), (41.3)
где А — пока неизвестный постоянный множитель.
Подставляя это выражение в дифференциальное уравнение (38.20),
получим:
ж+ж=-2а0' <41-4>
откуда
а0аЩ (41.6)
(41.6)
(41.7)
~a?+W
искомая функция напряжений
а aGaW Л х* у2\
Напряжения выражаются следующими формулами:
дФ 2aGa?y
*гх — fy — а2 _|_ £2 *
дФ 2aGb*x
*** ~~ дх ~ а* + Ь* * .
На концах малой оси эллипса (при у = ±Ь)
I | 2aGa4 . Л.
Ixza;lmai— а2 _1_ £2 » (41.0J
41]
СТЕРЖЕНЬ ЭЛЛИПТИЧЕСКОГО СЕЧЕНИЯ
133
а на концах большой оси (при х = ±а)
*zy I max QbJ^yi
(41.9)
Эпюры распределения напряжений вдоль осей хну показаны
на рис. 86.
Касательные напряжения на концах малой оси, выражаемые
формулой (41.8), являются наибольшими по сечению.
Для определения крутящего момента, передаваемого
стержнем, воспользуемся формулой (39.6). Равенство (41.6) можно
рассматривать как уравнение
линии напряжений Ф = const. Если
преобразовать его к
следующему виду:
■(•/■-3£«)'
+ {ф-Ш*1
= 1,
(41.10)
Рис. 86.
то становится ясным, что каждая линия напряжений есть эллипс,
площадь которого равна
Ф
^-"'O-^SS-H^1-£)• (41Л1)
причем
фтах а2 _|_ ^2
(41.12)
есть максимальное значение Ф, имеющее место при х = 0, у = 0.
Следовательно, по формуле (39.6)
М
■уил. чхал.
z = 2 J Fbd$ = 2*ab J ( 1 — ^—) d$ = паЬФ1
о о
Жесткость на кручение
^ Mz izGa4*
С "Т~"~~ аа + АЗ #
Исключая а из (41.8) и (41.13), находим:
Г ^ — 2Мг
_ naGaW
max а2_|-£2 *
(41.13)
(41.14)
(41.15)
134
КРУЧЕНИЕ СТЕРЖНЕЙ
[ГЛ. 1Х
Формулу (41.14) можно представить еще в следующем виде:
GF*
' 39,3/ •
(41.16)
где F — площадь сечения, a J—полярный момент инерции этой
площади относительно ее центра тяжести. Формула (41.16),
выведенная Сен-Венаном, приближенно верна для всех сплошных
сечений, близких к овалу или выпуклому многоугольнику, и может
служить для оценки их жесткости.
§ 42. Круглый стержень с полукруглой выточкой
Подобно рассмотренной задаче о кручении стержня
эллиптического сечения решаются задачи для некоторых других сечений,
в частности для равностороннего
треугольника, для сечения,
близкого к квадрату с закругленными
углами, для круглого сечения с
полукруглой выточкой.
В последнем случае (рис. 87)
удобно применить полярные
координаты г, 6 с полюсом в центре
полукруглого выреза. Тогда
уравнения контуров— круглого вала
радиуса Ъ и полукруглой выточки
(канавки) радиуса а — будут иметь вид:
/х(г, 6) = г — £cos6 = 0,
/2(г, 6) = г2 —а9 = 0.
Рис. 87.
(42.1)
Функцию напряжений Ф примем в виде:
ф — л /i/a -/-• -о «- * • Ьа*
[М- = А(г* — а* — йг cos 6 +-~-cos6).
(42.2)
Тогда, как это видно из (42.1), на контуре функция Ф
обращается в нуль. Постоянную А подберем так, чтобы удовлетворилось
уравнение (38.20). Для этого сначала перейдем в выражении (42.2)
к декартовым координатам. Так как
rcos6 = Ar, га = л;2-ЬУ>,
то
ф = л(л:а+у> — а2
Ьх-
jca-j-ya
■)•
(42.3)
§ 42) КРУГЛЫЙ СТЕРЖЕНЬ С ПОЛУКРУГЛОЙ выточкой 135
Вычислим первые и вторые производные функции Ф по х и у:
**> -л\2х h I аЧ У2-*2! )
f=4
а2£д:у
■]•
(*2 + У5)2.
(*2 + :у2)3
a26jc (лг2
(■*»+)";
]•
ЗуЗП [
V 1' \
(42.4)
(42.5)
Подстановка выражения (42.5) в уравнение (38.20) приводит
к следующему значению для постоянной А:
Л = -1аО.
(42.6)
Таким образом, функция Ф, являющаяся решением поставленной
задачи о кручении вала с полукруглой
выточкой, в полярных координатах yi
имеет вид:
+ Ьг cos 6
аЧ
cos 0
). (42.7)
Для вычисления касательных
напряжений х2Г и т29 рассмотрим
площадку, перпендикулярную к оси z
(рис. 88) и перейдем от проекций
вектора напряжения хг на оси х и у
к его проекциям на направление г и перпендикуляр к нему
(направление 6):
Рис. 88.
тзг = хгх cos G + **гу sin &»
'} -\-ъгу sin 6, |
I —T2a.sin6. J
Учитывая, однако, формулы (38.7), а также, что
получим:
x = rcos6,
v = r sin6,
дФ 1
x*r~- ду г
дФ
ил л ил
w = cosb> ж=—rsin
-~-=sin0, ~^- = rcos6,
ду дФ ( \ дх\ \ дФ
дъ дх \ г дь) ~ г ае
д* дФ ду дФ
дг ду ~дг ~dF *
(42.8)
(42.9)
(42.10)
136
КРУЧЕНИЕ СТЕРЖНЕЙ
/
[ГЛ. IX
Дифференцируя теперь согласно (42.10) функцию (42.7), получим:
sin U, |
(42.11)
Tte = aG[r —ft(l+^)cose].
Максимальное значение касательное напряжение принимает на
контуре в точке, находящейся на дне выточки:
I W I = Ы9==0; гвв = aG (2* — а).
(42.12)
Из формулы (42.12) следует, что если радиус а выточки
достаточно мал *по сравнению с радиусом Ь, то напряжения у дна
выточки вдвое больше, чем на контуре
такого же вала без выточки:
Задача эта была решена Вебером в 1921 г.
Заметим, что вообще всякие впадины
в контуре сечения вызывают появление
местных напряжений, или, как говорят,
концентрацию напряжений, тем ббльшую, чем они
острее. Напротив, на выступающих углах
сечения напряжения обращаются в нули.
Пусть, например, сечение имеет
выступающий прямой угол (рис. 89). Расположим
оси хну параллельно сторонам этого угла. При переходе от
угловой точки / к смежным с ней точкам контура /' или 1" Ф
сохраняет постоянное нулевое значение. Следовательно, в угловой точке
Рис. 89.
дФ
дх
и напряжения равны нулю.
= 0,
Ту'
= 0,
(42.13)
§ 43. Стержень прямоугольного сечения
Рассматривая кручение стержня прямоугольного сечения (рис. 90),
остановимся сначала на случае, когда прямоугольник узкий, т. е.
а
отношение -г велико.
о
В этом случае из мембранной аналогии (рис. 91) ясно, что на
значительной части длины сечения функция напряжений Ф почти
не зависит от х, так как на прогибе соответствующей части
мембраны почти не сказывается влияние коротких сторон контура.
Поэтому дифференциальное уравнение (38.20) можно
приближенно заменить следующим:
U=-2aO. (43.1)
§43]
СТЕРЖЕНЬ ПРЯМОУГОЛЬНОГО СЕЧЕНИЯ
137
с граничными условиями:
при у — rt -^ Ф ~ 0.
(43.2)
Интегрирование уравнения (43.1) при граничных условиях (43.2)
дает
Ф = аО(-5-у), (43.3)
откуда
■аОу, ^ = -^- = 0. (43.4>
дФ
Эти формулы приближенно верны для всего сечения, за
исключением частей, примыкающих
к коротким сторонам контура. ^&
Вблизи последних напряжения izx
Л
2L
а
2
а
?
-*-&
Рис. 90.
Сечение М Сечение 2-2
Рис. 91.
уменьшаются, доходя при x = ±:-(j до нуля, а напряжения тву
возрастают.
Наибольшие напряжения хгх по первой формуле (43.4) имеют
место у длинных сторон контура (при y^^z-^Л:
(^««==«0*- (43.5>
Наибольшее напряжения ггу, как показывает приведенное ниже
точное решение, несколько меньше.
Подставив (43.3) в (39.7), найдем зависимость между
скручивающим моментом и углом закручивания:
«/2 Ь/2
Мг = 2 j - ( Qdxdy^^bGab*,
откуда
а;=_о/2 #= - Ь/2
С = -&. = 4- Gab9
<х 3
(43.6>
(43.7)
138 КРУЧЕНИЕ СТЕРЖНЕЙ / [ГЛ. IX
И
(^)шах = ^- (43-8)
Перейдем к рассмотрению кручения стержня прямоугольного
сечения с произвольным отношением сторон. Функция напряжений Ф
должна удовлетворять дифференциальному уравнению (38.20) и гра-
ничным условиям:
при х = ±^ Ф = 0, при у = ±~ Ф = 0. (43.9)
Будем искать Ф в виде суммы ее приближенного значения,
даваемого формулой (43.3), и поправки F, являющейся функцией
от х и у:
Ф = «</(^ — У*) + Р. (43.10)
Подставляя значение Ф в уравнение (38.20) и используя
граничные условия (43.9), найдем, что функция F должна
удовлетворять дифференциальному уравнению
U+U-0 (43.П)
и граничным условиям:
при* = :±:| F = aG(^-~),
при у = ± о- F = 0.
(43.12)
Следуя методу Фурье, будем искать частные решения
уравнения (43.11) в виде
F = XYt (43.13)
где X—функция от х, а Y—функция от у.
Подставляя выражение (43.13) в уравнение (43.11), получаем:
^Y+Wx=0' , (43Л4)
откуда следует, что
<&Х d?Y
J^e_j£._X., (43.15)
где X9 — некоторая постоянная величина.
Действительно, X3 не зависит ни от л;, ни от у, так как
/ d-L\ ( &х \
л 43] СТЕРЖЕНЬ ПРЯМОУГОЛЬНОГО СЕЧЕНИЯ 139
Из выражений (43.15) получаем дифференциальные уравнения
для X н Y:
^L — k*X=0, J%L-±-\*Y=0. (43.17)
dx* dy* ' v '
Ввиду симметрии задачи X и Y должны быть четными функциями
соответственно от х и от у. Поэтому искомые частные решения
имеют вид:
ЛГ=сЬХдг, Y = cos\y, F = ch\xcos\y. (43.18)
Потребуем, чтобы эти частные решения удовлетворяли
граничным условиям при у=:±-^. Это дает значения
cos^ = 0, хк==1(2к + 1)* (k = 0, 1, 2, ...). (43.19)
Умножая частные решения (43.18), соответствующие различным
значениям к9 на постоянные Ак и складывая их, найдем следующее
достаточно общее решение дифференциального уравнения (43.11),
четное относительно х и у, и удовлетворяющее граничным
условиям (43.12) при у = ±-~:
F=f^fcch<2* + 1>**coS(2*+1),ty. (43.20)
ft=0
Остается удовлетворить граничные условия (43.12) при х = ±-^.
Подставляя в них (43.20), получим:
£^che^^co.S* + toee0(y.-4). (43.21)
Правую часть этого равенства в интервале —-х^У^С о" можно
разложить в тригонометрический ряд по косинусам
/(y) = ao(y-^) = |cfccos^* + to, (43.22)
в котором коэффициенты Ск определяются с помощью известных
формул теории тригонометрических рядов
Ь/2
-Ь/2
Ь/2
-Ь/2
140
КРУЧЕНИЕ СТЕРЖНЕЙ
/
Сравнивая (43.21) и (43.22), получаем:
лксьШ+р* = сл.
[ГЛ. I*
(43.24)
Находя отсюда Ак и подставляя его в (43.20), а затем в (43.10),
получаем окончательное выражение для функции напряжений
<5 = aG
4
со
Л = 0
(_1)fech(2^ + l)^cos(2^ + l).y
(2£ + iy*ch
(2k + 1)ш
2b
. (43.25)
Наибольшее напряжение xzx имеет место у средин длинных сторон
контура сечени-я (при х = 0, у = — if) •
(Т^)шах = «О*
--У
1
— (2^ + l)2ch
(2& + 1)тга
2£
(43.26)
Наибольшее напряжение -zzy имеет место у средин коротких
сторон контура (х = ±^-, y = 0j:
СО
zy/m&x '
(_1)feth(2M_^
Л-0
(2*+!)*
Вычисление Mz по формуле (39.7) дает:
AL = aGa£3
J_ _ 64 ^ у
3 ттБ a Jj
л=о
(2k+\)7za
n 2b
(2^+1)5
(43.27)
(43.28)
Бесконечные ряды в этих формулах при -т- ^> 1 весьма быстро
сходятся.
Из формул (43.26) — (43.28) вытекает, что выражения для
максимальных напряжений и для жесткости на кручение могут быть
представлены в следующем виде:
\xzy/max == Я2 (Тгж)тах'
a ™
(43.29)
где коэффициенты qlt q2, q% зависят только от отношения сторон -г-
Значения этих коэффициентов приведены в следующей таблице:
§44]
КРУЧЕНИЕ ТОНКОСТЕННЫХ СТЕРЖНЕЙ
141
а
Т
1
1,5
2
3
4
6
8
10
оо
Я1
0,208
0,230
0,246
0,267
0,282
0,298
0,307
0,312
0,333
Яъ
1
0,860
0,795
0,753
0,745
0,7425
0,7425
0,7425
0,7425
Чъ
0,140
0,196
0,229
0,263
0,281
0,298
0,307
0,312
0,333
При £> 3
01:
: qz « 1 — 0,63 —, q2 « 0,74.
(43.30)
Для очень длинных прямоугольников ql=qzz=-~, и тогда пер-
о
вая и третья формулы (43.29) переходят в формулы (43.8) и (43.7).
§ 44. Кручение тонкостенных стержней
В практике часто встречаются стержни с тонкостенными
профилями (сечениями), которые можно разбить на два класса:
(ti
Рис. 92.
1) стержни с открытыми профилями, имеющие односвязные
сечения, как пример: уголок, швеллер, тавр, двутавр и т. п. (рис. 92);
142 КРУЧЕНИЕ СТЕРЖНЕЙ / [ГЛ. IX
2) стержни с закрытыми профилями, имеющие многосвязное
Сечение, иначе говоря, трубчатые стержни.
1. Тонкостенные открытые профили. Сечения стержней с
открытым профилем в большинстве случаев состоят из узких полосок
постоянной ширины, причем эти полоски могут иметь вид
прямоугольников, но могут ,быть и криволинейными.
Представим себе мембрану, натянутую на контур такого сечения
и подверженную равномерному давлению с одной стороны (рис. 93).
Ясно, что вид этой мембраны над большей частью каждой
полоски (кроме концов ее) будет почти таким же, как у мембраны,
натянутой на замкнутый прямоугольный прямолинейный или
криволинейный контур с теми же размерами, что у рассматриваемой
полоски.
Обозначим через
ai — длину /-й полоски,
bi — ширину /-й полоски,
tj—касательное напряжение в срединах длинных сторон /-й
полоски,
Mi — крутящий момент, передаваемый /-й полоской.
Применим к каждой полоске формулы (43.8) и (43.7):
3Mt
•V»
,2 >
М4 _ Gafi]
(44.1)
Крутящий момент, передаваемый всем сечением, равен сумме
моментов, передаваемых всеми полосками:
А** = 2^. (44.2)
Из формул (44.1) и (44.2) следует:
а 6 ^ w w \
xi = aGbi =—*-?-„.
(44.3)
Эти формулы не являются точными, так как при выводе ие
рассматривались те участки «холма напряжений», которые лежат вблизи
стыков между примыкающими полосками.
Экспериментальные данные показывают, что для уточнения первой
формулы (44.3) в нее нужно вводить поправочный коэффициент ч\р
44] КРУЧЕНИЕ ТОНКОСТЕННЫХ СТЕРЖНЕЙ 143
так
что
y\G
¥2 «л.
(44.4)
Значения этого коэффициента (по Фепплю) лежат в следующих
пределах:
для уголков
для швеллеров
для тавров
для двутавров
т| = 0,86-
•4 = 0,98-
•4 = 0,92-
4=1,16-
-1,03,
-1,25,
-1,25,
-1,44.
Вторая формула (44.3) довольно правильно дает значения
напряжений на длинных сторонах полосок. Однако значительно большие
местные напряжения получаются
у мест сопряжения полосок.
Приведем формулу для
подсчета этих местных напряжений
^т
[J
<
{,
<У
Ркс. 93.
Рис. 94.
в месте сопряжения под прямым углом двух полосок одинаковой
толщины (рис. 94).
^шах:=Ь74т1]/ А,
(44.5)
где тА — напряжение, подсчитанное по второй формуле (44.3).
При соотношениях размеров, лежащих в пределах 1 < — < 2,
формула (44.5) хорошо сходится с экспериментальными данными.
2. Тонкостенные трубы. Рассмотрим кручение тонкостенной
Трубы с поперечным сечением любой формы (рис. 95), имеющей
Постоянную или переменную толщину стенки 8. Линию, проведенную
посредине между наружиьТм и внутренним контурами, будем
называть средней линией сечения.
Как указывалось в § 40, для сечения с отверстием мембранная
аналогия формулируется так: поверхность холма напряжений
совпадает с поверхностью кольцевой мембраны, внешний контур
144
КРУЧЕНИЕ СТЕРЖНЕЙ
[ГЛ. IX
/
которой (совпадающий с ^внешним контуром сечения) неподвижен,
а внутренний (совпадающий с внутренним контуром сечения) связан
с жесткой пластинкой, могущей свободно перемещаться в
направлении, перпендикулярном к ее плоскости, причем мембрана и пластинка
находятся под одинаковым односторонним, равномерно
распределенным давлением.
Ясно, что если сечение тонкостенное (рис. 96), то направление
наибольшего уклона в каждой точке мембраны приблизительно
совпадает с направлением нор-
0 мали л к средней линии сечения,
причем этот уклон почти
постоянен по толщине сечения.
Следовательно, напряжение
в каждой точке сечения
направлено по s, т. е.
перпендикулярно к соответствующему
направлению п (рис. 95), и
по величине равно
дф $1 ,лл а\
^s = —^ = -^,(44.6)
Рис. 96.
где Фх — постоянное значение функции напряжений на внутреннем
контуре сечения.
Если F—площадь, ограниченная средней линией сечения, то
объем «холма напряжений» равен F<Pt и по формуле (39.6)
MU = 2F$V
(44.7)
Исключая Фг из (44.6) и (44.7), получаем расчетную формулу
для напряжения
Ъ~3&- (44-8)
Отметим существенное различие между стержнями открытого и
закрытого профиля. У стержня с открытым профилем наибольшее
напряжение по второй формуле (44.3) получается в самых толстых
частях сечения, тогда как у трубчатого стержня по формуле (44.8)
оно получается в наиболее тонких местах.
§ 44] КРУЧЕНИЕ ТОНКОСТЕННЫХ СТЕРЖНЕЙ 145
Для определения жесткости трубчатого стержня при кручении
нужно применить теорему о циркуляции касательного напряжения
к средней линии сечения.
Формула (39.12) для рассматриваемого случая принимает вид:
§
т2Я ds = 2aOF,
(44.9)
где ds— элемент дуги средней линии сечения. Подставляя сюда т29
из (44.8), получим:
откуда •
М2 4GF*
С:
w
(44.10)
(44.11)
Если толщина стенки трубы 8 постоянна, то, обозначая длину
средней линии сечения через s, будем иметь:
С =
4GP*o
(44.12)
Формулы (44.11) и (44.12) для жесткости на кручение являются
достаточно точными для практических приложений, формула же (44.8)
2а
Htf-H
а)
' б)
Рис. 97.
Рис. 98.
пригодна для определения наибольшего напряжения лишь в тех
случаях, когда контур сечения плавный. В противном случае
в сопряжениях отдельных участков сечения могут возникать местные
напряжения, более высокие, чем дает формула (44.8).
Трубчатые стержни вообще значительно лучше сопротивляются
скручиванию, чем стержни с открытыми профилями. Покажем это
на примере, сравнив два профиля: открытый и закрытый, с
одинаковой площадью сечения, например швеллер и квадратную трубу,
изображенные на рис. 97.
У швеллера по формулам (44.3):
__ 3MZ
Ti 4ао2 >
(44.13)
146 кручение Стержней
а у трубчатого стержня по формулам (44.12) и (44.8):
С2 = ОаЧ, |
_ Мя )
Т2 — 2аЧ ' J
/
[ГЛ. IX
(44.14)
причем в обоих случаях мы не рассматриваем местных напряжений
в углах.
Сравнивая формулы (44.13) и (44.14),. находим:
Сг ~~ 4S2 > TjL — Зя '
(44.15)
Так как а значительно больше, чем о, то С2 значительно больше,
чем Cv а т2 при одном и том же Мг значительно меньше, чем xv
Мембранная аналогия успешно применяется также к расчету
на кручение труб с перегородками (см., например, рис. 98). Такие
трубы широко применяются в самолетостроении.
§ 46. Понятие о более сложных случаях кручения
а) Стесненное кручение. В изложенной теории кручения
предполагается, что сечения стержней могут свободно искривляться.
Это искривление особенно велико у стержней с тонкостенными
открытыми профилями.
В некоторых случаях, однако, свободное искривление сечений
невозможно. Сравним кручение швеллера со свободными концами
и швеллера, заделанного одним концом.
В первом случае (рис. 99, а) все сечения
свободно искривляются, так что полки
и стенка швеллера лишь скручиваются,
но не изгибаются. Во втором случае
(рис. 99, б) заделанное сечение не может
искривляться и, кроме кручения,
происходит также изгиб полок в их
плоскости, причем обе полки изгибаются в
противоположных направлениях. Такой вид
деформированного состояния называется
стесненным кручением.
Стесненное кручение двутавровых
балок было впервые теоретически
исследовано С. П. Тимошенко. Общая теория стесненного кручения
стержней с тонкостенными открытыми профилями была создана
проф. В. 3. Власовым. Эта теория находит обширное применение
при расчете строительных конструкций, рам железнодорожных
вагонов и т. п.
§ 45] ПОНЯТИЕ о БОЛЕЕ сложных СЛУЧАЯХ КРУЧЕНИЯ 147
б) Кручение круглых стержней переменного сечения. Задача
о кручении круглых стержней переменного сечения имеет большое
практическое значение. Если сечение стержня изменяется плавно,
то, как показывают точные решения, полученные для конического
стержня и некоторых других
случаев, без большой погрешности
можно пользоваться
элементарными формулами для
напряжений в круглом цилиндрическом
стержне.
2R
Ml
V
т
Рис. 101.
Если же сечение стержня резко изменяется по длине его, то
возникают значительные местные напряжения.
Для цилиндрического стержня с неглубокой выточкой имеется
теоретическое решение. Обозначим через а коэффициент концентра-
\
/
/.
\i-
\>
\/
'/
/>
S*
7.
Р
5
ис.
10
2.
ао2$\
ао5\
>
0.0/\
OJ5\
? >
Ции напряжений, т. е. отношение наибольшего местного напряжения
к наибольшему напряжению в гладком вале (без выточки).
Тогда для выточки с острыми выходящими углами (рис. 100, а)
— l+Zf
(45.1)
148 КРУЧЕНИЕ СТЕРЖНЕЙ [ГЛ. IX
/
а для выточки с сильно закругленными углами (рис. 100, б)
а = ]/"-£. (45.2)
Для практически еще более важного случая сопряжения двух
цилиндрических участков вала с переходной галтелью (рис. 101)
теоретического решения пока не найдено, но имеются
экспериментальные данные, изображенные на рис. 102.
Интересно отметить, что эти данные были получены не путем
измерения напряжений, а на основании математической аналогии
между задачей о кручении круглого стержня переменного сечения
и задачей о прохождении электрического тока по пластинке
переменной толщины определенной формы (см. § 23, рис. 39).
Значения напряжений в скручиваемом стержне были вычислены
по данным измерения электрического потенциала в ряде точек таких
пластинок.
ГЛАВА X
ПЛОСКАЯ ЗАДАЧА
I I I 1 I 1 I I О
§ 46. Постановка задачи
Под наименованием плоской задачи теории упругости объединяют
две физически различные задачи, приводящие к весьма сходным
математическим зависимостям: задачу о плоском деформированном
состоянии и задачу о плоском напряженном состоянии. В задаче о
плоском деформированном состоянии рассматривается упругое тело,
ограниченное цилиндрическими или призматическими поверхностями,
образующие которых параллельны некоторой оси z, и двумя
плоскостями, перпендикулярными
к этой оси (рис. 103).
Внешние силы,
действующие на указанное тело,
распределены равномерно
по длине его, т. е. по
направлению z,
перпендикулярны к оси z и взаимно
уравновешиваются.
Торцовые плоскости
предполагаются жестко закрепленными
в том смысле, что
перемещения w по направлению z
на них равны нулю, тогда
как на перемещения по перпендикулярным направлениям никаких
ограничений не накладывается.
При этих условиях поперечные сечения тела, перпендикулярные
к оси zy при деформации остаются плоскими и не смещаются по
направлению z. Перемещения точек тела и напряжения в нем
не зависят от координаты z, иначе говоря, одинаковы в
соответствующих точках всех поперечных сечений.
Заметим, что если длина тела велика по сравнению с размерами
его поперечного сечения, то от требования закрепления торцовых
сечений можно освободиться следующим образом. Пусть найдено
)с Т Т "Г т х т т -г
/ j. _1 _] —I _| _| —J —I _| _
урп П м u и
,//
<\\ \\ М \ \ ГТТТ
Рис. 103.
150 ПЛОСКАЯ ЗАДАЧА у/ [ГЛ. X
решение некоторой задачи о плоской деформации и вычислены
реакции, действующие на закрепленные торцы (рис. 104, а). Главным
вектором этих реакций на каждом торце является некоторая сила Я,
параллельная оси z, а главным моментом — момент М, вектор
которого лежит в плоскости торца (на рис. 104, а плоскость чертежа
перпендикулярна к вектору момента).
Наложим на полученное решение задачи о плоской деформации
известное из курса сопротивления материалов решение элементарной
задачи о равномерном растяжении стержня силами —Р и чистом
I <ИНН1ГТТТ|,
ИИ1)ИП1ПН]
а)
Jd
Т)
)
Рис. 104.
изгибе его моментами —М (рис. 104,(5). Тогда мы получим решение
задачи о деформациях и напряжениях в том же теле при тех же
нагрузках на боковой поверхности, но с такими нагрузками на
каждом торце, главный вектор и главный момент которых равны
нулю (рис. 104, в). Это решение по принципу Сен-Венана во всех
точках тела, удаленных от торцов, почти совпадает с решением
для того же тела со свободными торцами. Заметим, что при
наложении растяжения и чистого изгиба из компонент напряжений
изменяются только аг, тогда как перемещения изменяются все.
Примерами упругих тел, находящихся в плоском
деформированном состоянии, могут служить: прямая плотина, длинный ролик
подшипника качения, труба под внутренним или внешним давлением,
часть горного массива, окружающая прямолинейный туннель.
В задаче о плоском напряженном состоянии рассматривается
упругое тело в виде тонкой пластинки постоянной толщины,
нагруженной по контуру силами, параллельными плоскости пластинки и
равномерно (или по крайней мере симметрично) распределенными по ее
§ 47] УРАВНЕНИЯ плоского ДЕФОРМИРОВАННОГО состояния 151
толщине (рис. 105). Конечно, эти силы должны взаимно
уравновешиваться. Примеры плоского напряженного состояния в деталях
машин и сооружений весьма
многочисленны. Некоторые из них
приведены ниже в этой главе.
Систематическое изучение
плоской задачи, как особого
раздела теории упругости, началось
с 1862 г., когда английский
астроном Эри ввел метод решения ее
с помощью функции напряжений
(см. ниже §§ 47—49). В
настоящее время число частных случаев
плоской задачи, для которых
найдены решения различными
исследователями, весьма велико.
Новые методы решения
плоской задачи, основанные на
теории функций комплексного
переменного и значительно
увеличивающие число случаев, доступных для решения, были найдены и
разработаны советскими учеными Г. В. Колосовым и Н. И. Мусхелишвили.
§ 47. Общие уравнения плоского
деформированного состояния
Рассмотрим плоское деформированное состояние тела,
изображенного на рис. 103, пользуясь декартовыми прямоугольными
координатами х, у, z. Перемещения и, v по направлениям осей х> у не
зависят от 2, а перемещение w равно нулю:
и = и(х, у), v = v(x, у), w — Q. (47.1)
Деформации при этом будут иметь виц:
ди
dv
\ху '
да . dv
Туг
= t™ = o.
(47.2)
Деформации гх, гу и х,ьу не зависят от z.
Напряжения itjZ и хгх равны нулю. Остальные напряжения связаны
с деформациями соотношениями (17.2):
1
Ч°,+°-Л
1 ' *Фх-Ь°„)1 =
е„
Лху :
1
о,
(47.3)
^оказывающими, что напряжения также не зависят от z.
152
ПЛОСКАЯ ЗАДАЧА
[ГЛ. X
Из третьего равенства получаем:
». = Ч^-1-«»г)' <47-4)
т. е. если известны оа и ву, то аг определяется весьма просто.
Исключая о, из выражений (47.3) с помощью равенства (47.4), находим:
ea) = -L[(l— ч*)ох — n(1+n)o,1,
е* = 1Г1(1 — *>а9 — Ч0-И)°*]-
Вспоминая, что £" = 20 (1 —|— м) и вводя обозначение
.' *
(47.5)
(47.G)
^•-
wf/
TuTJ/ =
2a(l + V)
°ty — **'3х
20(1 |-v')
0"#
получим соотйошения между деформациями и напряжениями в
следующем окончательном виде:
(47.7;
При составлении дифференциальных уравнений равновесия будем
считать, что объемные силы отсутствуют. Тогда первые два
уравнения (17.1) примут вид:
даа
дт,
дх
ду
ху
ду
до.
дх
ду
=--0, |
Н0' I
(47.8)
а третье уравнение удовлетворится тождественно.
Напомним, что соотношение
др(х9 у) __ дд(х, у)
ду дх
является необходимым и достаточным условием того, чтобы
выражение
р(х, y)dx-\-q(x, y)dy
было полным дифференциалом некоторой функции от л: и у.
Следовательно, первое уравнение (47.8) показывает, что
выражение oxdy — ъхуйх есть полный дифференциал некоторой функции»
которую обозначим через А(х, у).
§ 47]. УРАВНЕНИЯ плоского ДЕФОРМИРОВАННОГО состояния
Тогда
дА
дА
дхщ%
153
(47.0)
Аналогично, выражение oydx— txydy есть полный
дифференциал некоторой функции В(х,у) и
*ху ■
дВ
ду
__ дВ
*У— дх
(47.10)
Сравнивая вторую формулу (47.9) с первой формулой (47.10),
находим, что
дА ^ дБ
дх ~ ду '
(47.11)
следовательно, Bdx-\- Ady есть полный дифференциал некоторой
функции у(х,у) и
(47.12)
дх ' ду *
Таким образом, все напряжения могут быть выражены через
одну функцию ср(лг, у), которая называется функцией напряжений
или функцией Эри,
__ дЦ
°х ~ ду* '
у ~ дх*
"ооу :
д*у
дхду ' )
I
(47.13)
Из предыдущего ясно, что напряжения, выражаемые формулами
(47.13), удовлетворяют уравнениям равновесия (47.8), иначе говоря,
условиям статики при любом виде функции ср. Для дальнейшего
решения задачи необходимо обратиться к рассмотрению
деформаций.
Выразим деформации через функцию напряжений, подставив
формулы (47.13) в соотношения (47.7):
_ 1 (Фу , д^\
*м~ 20(1 + -/) \ду* v дх*)'
1 ( д*у , Щ\ !
гУ~~ 2G(1+V) \дх* v ду*)' \
— .. 1 д*У
T*v — ' G дхду '
(47.14)
Эти деформации должны удовлетворять первому условию
сплошности (19.1):
ду-
d*2 djcdy '
154 ПЛОСКАЯ ЗАДАЧА / [ГЛ. X
/
Остальные пять условий сплошности (19.1) удовлетворяются
тождественно, так как все их члены обращаются в нули.
Подстановкой выражений (47.14) в (47.15) находим
дифференциальное уравнение, которому должна удовлетворять функция
напряжений:
Или, так как
то уравнение (47.16) может быть представлено в следующем виде:
ДДср = 0. (47.18)
Таким образом, решение задачи о плоской деформации сводится
к определению функции ср (лг, у), удовлетворяющей бигармоническому
дифференциальному уравнению (47.18) и определенным граничным
условиям.
В частности, если заданы внешние нагрузки Fnx, Fny на
поверхности тела, то на основании формул (17.5) и (47.13) граничные
условия будут иметь вид:
^J- cos (п, х) — ~^ cos (/г, у) = Fn
cos (п, x) + S-cos(/i, y) = Fn
(47.19)
дхду w*v*> ">-Гдуъ wV», j} — м пу.
§ 48. Общие уравнения плоского
напряженного состояния
Рассмотрим пластинку толщиной Л, находящуюся в плоском на»
пряженном состоянии (рис. 105).
Расположим оси х и у в срединной плоскости пластинки.
Граничные условия на поверхностях пластинки z = ± -^ будут
следующими:
при* = ±А oe = 0, *yz = 0, т#а, = 0. (48.1)
Так как это имеет место для любых х и у при ,г = :±:-^-| то
\Ш/ -± А^5 \~5v~/ - А === ^' Следовательно, из третьего уравнения
равновесия (в котором надо положить Kz = 0)
дх "Т" <ty "Г дг — ^
§ 48]
УРАВНЕНИЯ ПЛОСКОГО НАПРЯЖЕННОГО СОСТОЯНИЯ
155
вытекает, что при z = ±z-j
dz
:0.
(48.2)
Пользуясь разложением в ряд, мы можем выразить напряжение <зг
внутри пластинки через его значение (и значения производных)
на поверхностях z = — -j •
+т(&),.*ю(г*4),+ --- <48-з>
Принимая во внимание выражения (48.1) и (48.2), получим:
°^ = 4(&)г=±Л/2(г-т)а+--- (48-4)
Поэтому, если толщина пластинки мала по сравнению с прочими
ее размерами, то без большой погрешности можно считать во всех
ее точках напряжение аг равным нулю.
Это предположение является основным в теории плоского
напряженного состояния. Умножив первые два уравнения равновесия (17.1)
на -V-' и проинтегрировав в пределах от z =—-к до г = -|--о~
(при Кх = Ку = 0), получим:
Л/2 Л/2
х J-aF^+x J-3jr^+T J-arrf*e0'
-Л/2 ■' -Л/2 -Л/2
/А/2 Л/2 Л/2
х J^r^+x J-ЗзГ^+х J-srrf2?==0'
(48.5)
Последний интеграл в каждом уравнении обращается в нуль. В самом
Деле,
Л/2
С д±гх
) дг
-Л/2
^ = [*вл]
z=h/2
'*=-Л/2*
'О.
(48.6)
Остальные члены мо>йно преобразовать следующим образом:
Л/2 Л/2 .
_L Г ?±агвжЦ1_ f а^) = ^, (48.7)
h J дх dx\h ) х ) дх
-Л/2
-Л/2
156
причем
ПЛОСКАЯ ЗАДАЧА
Л/2
/ [гл. X
/
°У h
* -_L
а>2/ Л
-ft/2
ft/2
-ft/2
ft/2
(48.8)
-ft/2
су/я& средние no толщине пластинки значения напряжений.
Тогда уравнения равновесия (48.5) окончательно напишутся в
следующем виде:
да„
Ку
дх ~ ду
Ку<К
о,
0.
(48.9)
дх ' ду
Рассуждая так же, как в предыдущем параграфе, можем
выразить все напряжения через функцию напряжений <p*(jt, у):
ду*
d*t*
ху
у дх* '
(48.10)
Полагая в уравнениях (17.2), связывающих напряжения с
деформациями, ог = 0 и беря средние значения всех членов по толщине
пластинки, будем иметь:
'2G(l-И)'
ж 1/ о?
2G(l + v)'
*ху
ху
G
(48.11)
Эти формулы совпадают с формулами (47.7) для плоской
деформации, но вместо постоянной v' в них стоит постоянная v.
Средние по толщине пластинки значения деформаций е^, е* у*
связаны со средними значениями перемещений и*, v* следующими
§ 48] УРАВНЕНИЯ плоского НАПРЯЖЕННОГО состояния 157
равенствами, легко получаемыми из (17.4):
ди* * dv* * ди* , dv
~я ~дх~ ' еу ду ' lay "~~ ~~ду
•-=-• •;=■%-• ^"k+ж- <48л2>
Для того чтобы по трем деформациям е* е* ч* можно было
определить два перемещения и*, v*y нужно, чтобы эти деформации
удовлетворяли первому условию сплошности (19.1), которое для
средних по толщине значений деформаций напишется так:
N
Выражая деформации с помощью (48.11) и (48.10) через функцию
напряжений ср* и подставляя в (48.13), найдем дифференциальное
уравнение для функции ср*
совпадающее по виду с уравнением (47.16), выведенным для задачи
о плоской деформации.
Если на контуре пластинки заданы внешние нагрузки (средние по
толщине) F*nx> F* , то граничные условия для функции ср* будут на
основании (17.5) и (48.10) иметь вид:
—*— cos (я, х) — 7П^- cos (л, у) = F* ,
ду* v ' ' дхду
^COS(/t, *)+-^С08(Л^)=:^.
(48.15)
Сравнивая уравнения плоского напряженного состояния с
уравнениями плоской деформации, мы видим, что они имеют
совершенно одинаковую структуру и различаются лишь в следующем:
1) в то время, как в формулы для плоской деформации входят
обычные напряжения, деформации, перемещения и поверхностные
силы, в формулы для плоского напряженного состояния входят
средние по толщине значения этих величин;
2) коэффициенту Пуассона v в формулах для плоского
напряженного состояния соответствует несколько больший по численной
величине коэффициент v' = yzz— в формулах для плоской деформации;
3) решение задачи о плоской деформации является точным в том
смысле, что при изложенных в § 46 предположениях о граничных
условиях все уравнения теории упругости оказываются
удовлетворенными; напротив, в основе решения задачи о плоском
напряженном состоянии лежит неточное допущение, что ог = 0, поэтому если
вычислить при ^том предположении не только три деформации,
158 ПЛОСКАЯ ЗАДАЧА / [ГЛ. X
/
входящие в уравнение (48.13), а все шесть и подставить их в
условия сплошности (19.1), то некоторые из этих условий не будут
удовлетворяться.
Практически, однако, точность решения задачи о плоском
напряженном состоянии, неоднократно проверенная на опыте, оказывается
вполне достаточной.
Заметим, что ни в дифференциальные уравнения (47.16) и
(48.14) для функции напряжений, ни в граничные условия (47.19) и
(48.15) для случая, когда заданы поверхностные силы, не входят
постоянные G, n или v', характеризующие упругие свойства
материала.
Если рассматриваемое тело односвязно, то дифференциальное
уравнение и граничные условия вполне определяют функцию ср
(или ср*) и имеет место следующая теорема (Леви—Митчела): в
плоской задаче для односвязного тела, на поверхности которого
заданы внешние нагрузки; напряжения ох, ау и хху не зависят
от материала тела, а также оказываются одинаковыми при
плоской деформации и при плоском напряженном состоянии.
В случае многосвязного тела (с отверстиями) должны быть выполнены
дополнительные условия однозначности перемещений (ср. § 12),
в которые могут войти (но не во всех случаях входят) постоянные
v или </.
Доказано, что напряжения не зависят от v или V лишь в тех
случаях, когда равны нулю главные векторы нагрузок, приложенных
к каждому замкнутому контуру в отдельности. Упругие постоянные
обязательно входят в решение, если на всей поверхности или на
ее части заданы перемещения.
В следующих параграфах при рассмотрении примеров плоского
напряженного состояния мы будем опускать в обозначениях
звездочки, означающие усреднение по толщине.
§ 40. Некоторые свойства функции напряжений
Пусть найдена некоторая функциия срр удовлетворяющая
дифференциальному уравнению (47.16) и граничным условиям (47.19)
для какой-либо определенной задачи. Тогда функция
ср = ср! -f- ах -\- by -f- с (49.1)
при любых постоянных а, Ь, с также будет функцией напряжений
для той же задачи. Действительно, вторые производные функции
срх и ср, т. е. напряжения, одинаковы.
Выбором постоянных a, b и с всегда можно распорядиться так,
чтобы в некоторой заданной точке Л0(х0, у0) выполнялись условия:
§ 4$] НЕКОТОРЫЕ СВОЙСТВА ФУНКЦИИ НАПРЯЖЕНИЙ 159
Возьмем точку А0 на контуре рассматриваемого упругого тела
(рис. 106) и будем отсчитывать от нее длину дуги контура s.
Положительным направлением обхода контура будем считать такое, при
котором тело остается слева.
Замечая, что
cos (я, х) =
cos (/г, у) = -
dy
ds
dx
"ds9
(49.3)
мы можем представить граничные условия (47.19) в следующем
виде:
ду \ду ) ds** дх\ду) ds ~ ds\dy )~~ пх'
ду \дх J ds дх \дх J ds ~ ds \дх ) *~~ пУ
Интегрируя полученные равенства по 5 от 5 = 0 до 5 =
(49.4)
где
sx — длина дуги контура A0AV найдем значение производных от
функции напряжений в точке Ах:
о
\dx\-~
«1
* ПХ QS Г\ху
Fny ds — Ry,
(49.5)
где Rx и Ry — проекции на оси х и у главного вектора внешней
нагрузки, приложенной к участку контура А0А1ш
*о'Щ>.Ц>1
Рис. 106.
Производная от функции напряжений по дуге контура
Is
в 8
dcp dx . д<р dy dx Г „ . . dy Г ж? ^
= telF + TjdF = -W)Fnvds + lfc)Fnxds> (49.
6)
160
ПЛОСКАЯ ЗАДАЧА
[ГЛ. X
./..
Для тЪго чтобы найти значение функции напряжений в точке Av
интегрируем это равенство по s от s = 0 до 5 = sv причем
пользуемся приемом интегрирования по частям:
8Х К 8
<?>'= ,[[-£/ FnVds + £fJFnxcls]ds =
об о
=*[-*{ Fnv <*s+уj Fnx dsfQ- J (-xFny+yFnx)ds =
0 0 0
= -$l(xl — x)F„v-(yi—y)Fn:v]dS=Mi. (49.7)
0
Как ясно из чертежа (рис. 107), каждый элемент интеграла в
правой части полученного равенства, обозначенного через Mv есть не
x_j* что иное, как момент относи-
)+—\ тельно точки Лг нагрузки на
элемент дуги контура ds.
Следовательно,значение
функции напряжения в точке контура
равно взятому относительно этой
точки моменту нагрузки,
приложенной к дуге контура между
начальной точкой и данной.
Как следует из хода вывода,
формулы (49.5) и (49.7) верны в
том случае, если направление
обхода контура от точки Л0 к Ах
положительное, т. е. такое, что
упругое тело остается слева. При отрицательном направлении
обхода, когда упругое тело остается справа, знаки в правых частях
формул (49.5) и (49.7) должны быть изменены на противоположные.
Приведенные рассуждения можно применить также и для
выяснения физического значения функции напряжений в любой
внутренней точке В упругого тела (рис. 108). Для этого соединим точку В
произвольной линией с исходной точкой А0. На часть упругого тела,
лежащую слева от линии AqB, действуют внутренние упругие силы,
приложенные к линии AqB. Рассуждая подобно предыдущему, получим,
что значение функции напряжений в точке В равно взятому
относительно этой точки моменту внутренних сил, приложенных к
линии AqB.
Отсюда следует, что при определенной начальной точке А0
значение функции напряжений в любой точке В упругого тела не
зависит от выбора осей координат.
Рис. 107.
§ 49] НЕКОТОРЫЕ СВОЙСТВА ФУНКЦИИ НАПРЯЖЕНИЙ 161
Во многих случаях формулами (49.5) удобно пользоваться в
несколько измененной форме. Обозначим через п направление внешней
нормали к контуру, а через s — положительное направление
касательной к дуге контура, совпадающее с положительным
направлением обхода контура (рис. 109). Тогда можно применить формулы (49.5),
приняв п и s за направления осей вместо х и у.
Получим:
(&),-*„. (49.8)
'£),--«.•
(49.9)
где Rn и Ra — проекции на направления п и s главного вектора
внешней нагрузки, приложенной к участку контура A0AV
Если задана нагрузка на контуре упругого тела, то равенства
(49.7) и (49.9) дают два независимых граничных условия для функ-
У\
Рис. 108.
Рис. 109.
ции напряжений (значения самой функции ср и ее нормальной
производной -~- на границе).
Равенство (49.8) может быть получено дифференцированием
равенства (49.7) по s и поэтому самостоятельного значения не
имеет.
Если обойти весь замкнутый контур, то значения ср и —- в
конечной точке, совпадающей с начальной, будут равны
соответственно моменту относительно этой точки всей нагрузки, действующей
на контуре и взятой с минусом проекции главного вектора этой
нагрузки на направление касательной к контуру. Если
рассматриваемое тело односвязно, то главный вектор и главный момент
нагрузки, приложенной к его контуру, равны нулю. Следовательно,
<р и —- после обхода контура возвращаются к исходным нулевым
значениям — функция напряжений оказывается однозначной.
Если рассматривается многосвязное тело, ограниченное несколь-
замкнутыми контурами, то значения ff и?^
кими
после обхода
162
ПЛОСКАЯ 3\ДАЧ\
1гл. X
/
какого-либо из этих контуров оказываются совпадающими с
исходными только в том случае, если главный вектор и главный момеиг
нагрузки, приложенной к этому контуру, равны нулю. В противном
случае функция ср оказывается многозначной и при каждом обходе
контура получает определенное приращение. При этом вторые
производные ее, через которые выражаются напряжения, остаются
однозначными.
Многозначность функции напряжений для многосвязного тела не
имеет ничего общего с многозначностью перемещений, о которой
упоминалось в § 12 и 48. Многозначной функции напряжений могут
соответствовать однозначные, т. е. физически возможные
перемещения и, напротив, однозначность функции напряжений не обеспечивает
однозначности перемещений и
последняя (для многосвязных тел) должна
проверяться особо.
§ 50. Уравнения плоской задачи
в полярных координатах
Для многих случаев плоской задачи
решения легче находятся и получаются
в более простой форме, если применять
Рис. 110. вместо декартовых прямолинейных
прямоугольных координат надлежаще
выбранную систему криволинейных координат. В частности, ряд
практически важных задач удобно решается в полярных координатах.
Выведем, какой вид принимают в полярных координатах
дифференциальное уравнение для функции напряжения ср и формулы для
напряжений.
Формулы, связывающие декартовы координаты с
(рис. ПО), как известно, имеют вид:
Дифференцируя эти формулы по л: и по у, найдем:
полярными
(50.1)
дх
ду
У ^ _
х* + у2
х cos G
sin 6
jfl+y*
(50.2)
Yx* + y2
Первые производные от функции ср по х и по у выразятся так:
ду ду дг | ду дО
дх ~~ дг дх ^Wdx"
ду t ду_ д£_\ ду дО
ду дг ду ' дО ду
■ cos О
ду
дг
*•«& +
sin 6 ду
cos 0 ду
(50.3)
< 501
УРАВНЕНИЯ ПЛОСКОЙ ЗАДАЧИ В ПОЛЯРНЫХ КООРДИНАТАХ
\Ь6
Для вторых производных от той же функции получаются
следующие формулы:
•.-£-е(*)-»"т'-*
sin 8 д i ду_ \
-\дх)~
+*-««-»(^*-7аЯг)-
_j^_j)/d£\ . f] д / ду \ , cos О д / ду \ __
— ду* ~~ dy\dy)~-sin дг\ду J^ г дЬ \ду J ~~
-""3+»«(-тг+**)-
-'-•«•(^if-J-A)-
■(£>-
db
*ху '
дх ду
дх
. ,. ,4 / <?2у ду 1 #>y \
= sin 0 cos Ь -— ~ т -шг —
V дг3 г дг г* два J
-*-"-"«№4-7А)'
Следовательно,
f — дх* Т ду* ~~
&1 , I д* , 1 дЦ
дг* * г дг * г* два
(50.4)
(50.5)
Для того чтобы выразить ААср, нужно в формуле (50.5) заменить <р
на Аср. Дифференциальное уравнение ААср = 0 для функции
напряжений принимает вид:
(JL+L±
\дг*
, 1 а . 1 *\/д*р , 1 ^ , 1 азу\_ -nfi
+ 7dF + 72-^Jl^ + 7d7 + 72-WJ = 0- (50*6)
Для вычисления напряжений в полярных координатах
воспользуемся формулами (3.6). Так как направления координатных линий г
(по радиусу-вектору) и 6 (перпендикулярно к радиусу-вектору) со-
впадают с принятыми при выводе формул (3.6) направлениями х' и у,
будем иметь:
сг = ах cos* 6 4- Ъхху sin 0 cos 0 + оу sina 6, ]
о0 = вх sin9 6 — 2хху sin 6 cos 0 -f- °у cos9 в, \
хг0 = (оу — ах) sin 0 cos 0 -f- zxy (cos9 6 — sina Ь). J
(50.7)
164 ПЛОСКАЯ ЗАДАЧА / [ГЛ. \
Подставляя сюда выражения (50.4) для ах, ау и v^yf получим:
г ~ г дг^гъ два ' 1
_ |
— JL ^1 _ 1 <*2сР _ £_ / j_ дн> \ !
Тг8~~ /-а дв Нг^Г дг\г Ж)' >
-в = 5, } (50.8)
Приведем другой, более простой, но несколько искусственный
вывод формул (50.8) и уравнения (50.6).
Если путем поворота координатных осей совместить ось х с
радиусом-вектором г, то во всех точках этой оси напряжение ау будет
тождественным с об. Поэтому из формулы су = ^ непосредственно
следует вторая формула (50.8)
°9 = Ц. (50.9)
Уравнения равновесия (7.3) и (7.6) для плоской задачи, при
отсутствии объемных сил, т. е. при
тгг = 0, т9г = 0, Кг = 0, /Г, = 0 (50.10)
приводятся к виду:
в . . . *„
(50.11)
дг ' дЪ
Подставляя (50.9) во второе равенство (50.11), получим:
дг ~~ дг*дЪ
Интегрирование по г дает
-£«-'£)■ <»■»>
^ __ 1 ^ 1 ^2?
^• — та" Ж~ 7"57ао ' (£>ил5;
т. е. третью формулу (50.8). Постоянная интегрирования равна нулю,
так как при срзэО напряжение т,.0 также должно всюду исчезать.
Подставляя (50.13) в первое равенство (50.11), получим:
д ( .__ 1 дЦ | 1 дз<р i&V_
откуда следует первая формула (50.8)
§51]
ИЗГИБ КОНСОЛЬНОЙ БАЛКИ
165
В силу инвариантности суммы нормальных напряжений (§ 4)
дх* ~ ду*
1
г*—* ^
111
2
1
j
Л\ \ ill .
Э
lll.ll
А
^
ч .7'
1
С помощью этой формулы, как и выше, составляется
уравнение (50.6).
§ 51. Изгиб консольной балки
Рассмотрим консольную балку с сечением в виде узкого
прямоугольника, к концу которой приложены сила Р и момент М, а к
верхней грани — равномерно распределенная нагрузка q (рис. 111). Все
указанные нагрузки будем считать отнесенными к единице ширины
балки.
При строгой постановке задачи
следовало бы задать распределение
нормальных и касательных внешних сил
на левом торце, а на правом
заделанном торце потребовать равенства пере- м(°г\
мещений нулю. ч Р\
Решение такой задачи весьма
сложно. Поэтому мы потребуем
строгого выполнения граничных условий Рис. 111.
только на верхней и нижней гранях
балки, а на торцах зададим лишь главные векторы и главные моменты
приложенных внешних сил. При такой постановке задачи она имеет
не единственное решение, однако, по принципу Сен-Венана в точках
балки, достаточно удаленных от ее торцов, все эти решения будут
Давать практически одинаковые напряжения. Поэтому из возможных
решений целесообразно найти наиболее простое.
Составим граничные условия для функции напряжений ср на
верхней и нижней гранях.
Пусть в точке А0(о, —у] функция ср и ее производные по х
и по у равны нулю. В точке А верхней грани значение ср равно
взятому с обратным знаком моменту относительно точки А всех
внешних сил, приложенных к участку А0А контура, а производная
^у- равна взятой с обратным знаком проекции главного вектора
тех же внешних сил на ось х (перемена знаков вызвана тем, что
Но правилу, указанному в § 49, направление обхода А0А является
отрицательным).
166
ПЛОСКАЯ ЗАДАЧА
[ГЛ. X
Следовательно,
/
при^ = -| 9 = -.(м + Рх + ^д>*), -g=0,
при у = — -
о, i*=o.
ду
(51.1)
Естественно попытаться искать функцию ср в следующем виде;
Т^/оОО + АООя+т/аСУ)*9.
(51.2)
Тогда
при^== у /о = — М> fi = — p> /2='—Я>
tfy dy dy
при .у =
/o = /i=/2 = 0,
rfy tfy rfy
(51.3)
Функция ср должна удовлетворять бигармоническому уравнению
(47.16):
d4y . d4cp
"Т = Й + 2
<*2/2
= 2
ду* ~
d*f0
d*f, 1 d*f2
■^+o-^*e = 0. (51-4)
Уравнение (51.4) должно удовлетворяться при всех х; поэтому
И»Л , <*4/о
■О,
d*A
г = 0.
<*4Л
= 0.
(51.5)
rfya 1 ^У4 "• dy* ' dy*
Интегрируя эти выражения с учетом граничных условий (51.3),
находим сначала f{ и /2, а затем /0:
A—i^+H-*i)-m^-V- \
/, = -±Р(,-|-3|-4^), J (51.6)
л—-И'+4-«£) I
и, следовательно,
? = ■
1
Ж
+ лн4,*-)(1 + з£-Й)-
>*-¥У- <51-7>
521
ЧИСТЫЙ ИЗГИБ КРИВОГО БРУСА
167
(?2ср
Gv— дх*'
Напряжения в балке выразятся следующими формулами:
'.-S-*(*+"+W-^-S). I
Напряжение аж состоит из двух слагаемых. Первое слагаемое
не отличается от того выражения для ах, которое получается по
элементарным формулам курса сопротивления материалов. Второе
слагаемое невелико, составляя по абсолютной величине при у = ±-я
всего — q, тогда как при x^§>h первый член, как правило, значи-
о
тельно больше q.
Напряжение ау вообще не рассматривается в элементарной
теории. Его наибольшее значение равно q при у = -^.
Наконец, формула для ixy совпадает с выводимой в курсе
сопротивления материалов формулой Журавского.
Таким образом, в рассмотренном случае подтверждается
достаточная для практики точность обычно применяемых элементарных
формул расчета балок на изгиб.
§ 52. Чистый изгиб кривого бруса
Рассмотрим кривой брус, имеющий вид части кругового кольца
с сечением в виде узкого прямоугольника (рис. 112). Пусть верхняя
и нижняя поверхности его свободны от нагрузок, а на каждый торец
действуют внешние силы с главным
вектором, равным нулю, и главным
моментом М, направленным, как
показано на рисунке.
Положим, что в точке А0
функция напряжений ср и ее первые
производные по г и 0 равны нулю.
Значение со в любой точке
контура равно моменту относительно
э'гой точки всех внешних сил,
действующих на участок контура от
гочки Л0 до данной точки, т. е. ср = О для точек дуги г = а
и ср ^ уи для точек дуги г = Ь. Производная ~- равна взятой с
обратным знаком проекции главного вектора тех же внешних сил на
направление касательной к контуру, т. е. равна нулю для всех точек
Рис. 112.
16В ПЛОСКАЯ ЗАДАЧА |ГЛ. ^
дуг г = а и г *= Ь, Итак,
при г = а <р = 0, ~ = О, I
м * о I (521)
при г •— £ ср = Ж, -~ = О.
Наиболее простым решением задачи будет такое, при котором <р
не зависит от угла Ь не только на контуре бруса, но и повсюду.
Поэтому положим, что ср зависит только от г:
? = ?('). (52.2)
Бигармоническое уравнение (50,6) для функции напряжений при-
нимает в этом случае следующий вид:
т. е.
В § 28 мы уже встречались с таким уравнением и нашли- его
общее решение
ср = Ar*+ Bf> In г + С In г Н- /С (52.5)
Соответствующие напряжения будут иметь вид:
"•-■Ш = т = 2Л+'Н2Ыг+3'>—%• } <52-»>
*—!#*)->■
Заметим, что в частном случае В = 0 эти формулы дают
решение задачи о трубе под внутренним и внешним давлением,
рассмотренной в § 24. В нашем случае, пользуясь граничными условиями (52.1)»
находим:
Aa^ + Ba^\na + C\na-\-K-=Ot \
2Л + Я(2!па+1) + -^-0,
Ab*-\-Bb*\nb-\- Cln*-f К = М,
2Л + Я(21п*+1)Н--§ = 0,
(52.7)
откуда определяются А, В и С. Постоянная /С, которая также может
быть определена из этих уравнений, несущественна, так как не
входит в выражения для напряжений.
53] КЛИН, НАГРУЖЕННЫЙ СОСРЕДОТОЧЕННОЙ силой 169
Окончательно получаем следующие формулы для напряжений:
о, = — Ь*\п -г 4-а2 In г- In — ),
где
(52.8)
/V = (/>*-- я*)« — 4a9ft9(ln ~-Y. (52.9)
Это решение было впервые получено X, Ф. Головиным (1881 г.).
В курсе сопротивления материалов приводятся формулы для
напряжений, возникающих при изгибе кривого бруса, выведенные
на основании двух различных гипотез:
1) напряжения при изгибе кривого бруса распределены по высоте
сечения его так же, как и при изгибе прямого бруса, т. е. по закону
прямой линии;
2) при изгибе кривого бруса поперечные сечения его остаются
плоскими, что приводит к гиперболическому закону распределения
нормальных напряжений по высоте бруса.
В обоих случаях получаются формулы, которые отличаются как
друг от друга, так и от формул (52.8). Численные подсчеты, однако,
показывают, что значения основных напряжений по формулам (52.8)
и по формулам, выводимым из гипотезы плоских сечений, почти
точно совпадают. Напротив, гипотеза о прямолинейном законе
распределения напряжений дает другие числовые результаты, причем
максимальное напряжение сз0 получается меньшим, чем по точным
формулам (52.8). Ошибка составляет около 10% при —==1,3 и
быстро растет с увеличением этого отношения.
Если определить перемещения, соответствующие системе
напряжений (52.8), то оказывается, что поперечные сечения бруса
действительно остаются плоскими, а некоторая неточность формул
элементарной теории, основанной на гипотезе плоских сечений, вызвана
Неучетом радиальных напряжений ог.
§ 53. Клин, нагруженный сосредоточенной силой,
приложенной к его вершине
Рассмотрим неограниченный клин с углом 2а, к вершине которого
приложена сила Р, составляющая с осью клина угол f (рис. 113).
Решение этой задачи дал Митчел.
При решении удобно воспользоваться полярными координатами г
и 0, направив полярную ось Ох по оси клина.
170
ПЛОСКАЯ ЗАДАЧА
[ГЛ.
Положим, что в точке А0 верхней грани клина функция на.
пряжений ср и ее первые производные по г и 6 равны нулю.
Тогда, на основании выводов § 49,
в любой точке верхней грани клина
при 0 = а
■а В любой точке нижней грани (6 = — а)
значение ср равно моменту силы Р отно-
Рис. ИЗ.
сительно рассматриваемой точки, а
дп
(53.3)
равно взятой с обратным знаком проекции силы Р на направление
грани:
приО = —a cp = -Prsin(a+T). |J =7 |f=-Pcos(a+T). (53.2)
Переписываем граничные условия в следующем окончательном
виде:
при 0 = — а ср = —Pr sin(a-f--)f)> -^ = Prcos(a+T)»
при 0 = а ср = 0, -rg- = 0.
Таким образом, на контуре ср и -^ пропорциональны г.
Естественно предположить, что искомая функция ср имеет вид
? = г/(0). (53.4)
Для отыскания f(b) подставляем выражение (53.4) в бигармони-
ческое уравнение (50.6) для функции ср. Имеем:
*<Р = £ [гНЩ +1 А [лДО)] + ^ ^ [г/(в)1 =
= | 1/(0) + /" («)1. (53.5)
^«Р = ^(7^<0) + ^<в>,1 + 7^{7^<0> + ^<в)>) +
+ Ж Ж17 [/(f,)-h/"(f0J) = i l/IV(f0+ 2/"(в)+/(0)). (53
.(>)
Приравнивая нулю найденное выражение, получаем уравнение
/" (0) + 2/" (0)+/СО = 0. (53.7)
§53]
КЛИН, НАГРУЖЕННЫЙ СОСРЕДОТОЧЕННОЙ СИЛОЙ
171
Частные решения этого линейного дифференциального уравнения
с постоянными коэффициентами ищем по общему правилу в виде
т.*
дв) = г . Подстановка этого выражения в уравнение (53.7)
приводит к характеристическому уравнению
корни которого суть:
*1,а = -Н. *м = —'• (53.9)
Так как корни двойные, то четыре независимых частных
решения уравнения (53.7) суть: cos 0, sin 0, 6 cos 9, 6 sin 0 и, следовательно
<р = dr cos 0 -f-C2r sin 0 +C3r8 cos9 -f-C4r6 sin 9.
Соответствующие напряжения суть:
(53.10)
1 df , 1 дЦ
?о;
г дг
^=0
2Cq sin 6 , 2С4 cos 6
г2 д№
т _ д /1 *\_0
(53.11)
Первые два слагаемых в функции ср, равные соответственно С:л:
и С2у, не влияют, таким образом, на напряжения. Постоянные С3
и С4 определяем из граничных условий (53.3). Подстановка в них
выражения (53.10) дает:
Сх cos a-f- С2 sin a-f- C3a cos a-f- C4a sin a = 0,
(C2-f- C8) cos a—(Ct—C4) sin a-f-C4a cos a—C3a sin a = 0,
Cx cos a — C2 sin a — C3a cos a -(- C4a sin a =
=— P sin (a-f-Т)»
(C2-f-C8) cos a+(Ct—C4)sina—C4acosa—C3asina =
= Я cos (a-f-t)-
(53.12)
Попарное сложение и вычитание первого и третьего, а также
второго и четвертого уравнений дает:
2Ci cos a -f- 2C4a sin a = — P sin (a + Tf)»
2C2 sin a -f- 2C3a cos a = P sin (a -f- f ),
2 (C2 + C3) cos a -7 2C3a sin a = P cos (a -f- f),
— 2 (C, — C4) sin a + 2C4a cos a = — P cos (a + 7).
В первое и четвертое из уравнений (53.13) входят только С{
и С^, а во второе и третье — Сг и С,.
} (53.13)
172 ПЛОСКАЯ ЗАДАЧА / [гл. х
Определяя отсюда С3 и С4 и подставляя в (53.11), находим
окончательно:
2Р /" sin f sin 6 , cos y cos 0 '
(53.14)
___ 2P /
, 2a — sin 2a
2a + Sin 2a
И
При r = 0 напряжение or обращается в бесконечность —
естественное следствие предположения, что сила Р сосредоточена в одной
точке. В действительности эта сила всегда бывает распределена
по некоторой площадке вблизи вершины клина и решение (53.14)
пригодно только при таких г, которые значительно больше, чем
размеры упомянутой площадки.
Если угол 2а невелик, то напряжения ar, даваемые формулами
(53.14), мало отличаются от тех, которые получились бы при
расчете на сжатие и изгиб по формулам сопротивления материалов.
§ 64. Растяжение пластины с малым круглым отверстием
(задача Кирша)
Пусть некоторая сплошная пластина испытывает равномерное
растяжение по направлению оси х:
°х = Р> <^ = 0, ^ = 0. (54.1)
Рассмотрим, как изменится напряженное состояние полосы, если
сделать в ней круглое отверстие, диаметр которого 2а мал по
сравнению с шириной пластины (рис. 114).
Очевидно, что напряжения, вызванные наличием отверстия, имеют
характер местных напряжений,
а на достаточно большом
расстоянии от отверстия напряжения
останутся почти теми же, что в
сплошной пластине.
Напряжениям в сплошной
пластине (54.1) соответствует
функция напряжений
\_
2
/Н
Рис. 114.
<Ро:
±-ру\
(54.2)
которая в полярных координатах имеет вид
То
jpr^sirfib = j pr^—j pr^ cos 2Ь. (54.3)
Искомая функция напряжений ср для пластины с отверстием
должна давать при достаточно больших значениях г те же
напряжения, что и функция ср0.
С 54] РАСТЯЖЕНИЕ ПЛАСТИНЫ С МАЛЫМ КРУГЛЫМ ОТВЕРСТИЕМ 173
На контуре отверстия (считая, что в одной из его точек ср = О,
^1 = 0, ^-=0) мы должны иметь:
при r^a cp = 0, -д£ = 0. (54.4)
Будем искать функцию <р в следующем виде:
? = /i(r)+/a(r)cos26. (54.5)
Подставляя это выражение в дифференциальное уравнение (50.6),
получи^
\dr*^ г dr)\ dr* ~ г dr J~
Так как это уравнение должно удовлетворяться при всех
значениях 6, то оно распадается на два уравнения:
1. Дифференциальное уравнение для. fx
— линейное уравнение типа Эйлера. Отыскивая его частные решения
в виде /t = гп, получим:
^ + 7^-1я<л-1) + я1гП"а = ^^ (54'8)
(^ + ~)яЯгЯ"в==яЯКл —2)(я —3) + я-2]г«-* =
= я2 (я — 2)а г*~4 = 0. (54.9)
Характеристическое уравнение
я2 (я —2)3 = 0 (54.10)
имеет два двойных корня:
/4.2 = °' ^з,4 ^2;
следовательно, общее решение уравнения (54.7) имеет вид:
Л = Ci + Ca In r-f-С3г2 + С4/-2 1пг. (54.11)
Интересно отметить, что после выполнения дифференцирования
и перемножения уравнение (54.7) принимает вид, тождественный
с (28.1). Поэтому решение (54.11) отличается от (28.5) только
обозначениями постоянных интегрирования.
2. Дифференциальное уравнение для /2
(# , 1 d 4\/tf/a 1 df2 4/а\_ .
174 плоская задача / [гл. х
—также ешнейное уравнение типа Эйлера. Отыскивая его частные
решения в виле /2 = гп, получим:
= (пН-2)(п —2)г»-а, (54.13)
= (я + 2)(я — 2)[(/i — 2)(п — 3)+л — 2 — 4]г»-* =
= (л + 2)л(АГ—2)(я —4)гл'4=«0. (54.14)
Следовательно, /t может иметь четыре частных значения: пг = — 2,
/г2 = 0, /i3 = 2, я4 = 4, и общее решение дифференциального
уравнения (54.12) имеет вид:
л=т£+с«-+•<v*+с>к (54-'5)
Таким образом, мы получили:
<р = Ct +Са In г + С,г« + С4г« In г +
+ (^ + Cg + C7^+^4)cos20. (54.16)
Слагаемые C4rQ In г и C8r4 cos 2Ъ, как видно из формул (50.8),
дают напряжения, неограниченно возрастающие с ростом г. Поэтому
должно быть
С4 = С8 = 0. (54.17)
Для того чтобы при больших значениях г напряжения,
соответствующие функции <р, были теми же, что и напряжения,
соответствующие функции ср0, выражаемой формулой (54.3), нужно, чтобы
выполнялись условия:
С, = |р. С7 = -!/>. (54.18)
Остальные слагаемые в правой части формулы (54.16) при
возрастании г растут медленнее, чем г9, и поэтому соответствующие им
напряжения с ростом г стремятся к нулю.
Условия (54.4) дают:
С, + С2 In а +1 ра» + (%■ + С6 -1 ра*)со% 26 = 0,
(54.19)
$ 54) РАСТЯЖЕНИЕ ПЛАСТИНЫ С МАЛЫМ КРУГЛЫМ ОТВЕРСТИЕМ
№
Эти условия должны удовлетворяться при всех значениях 0,
следовательно,
C.-r-Calna-T-T/"*'
£ + С«
- ра*
= 0,
:0,
Ь+*ра = 0.
(54.20)
2СГ) 1
a1 2 ^
0,
откуда
С, =i pa*(in а — |),
Са=-1раЗ. С6 = —J-pa*. С^^рсР
(54.21)
Отбрасывая в выражении (54.16) постоянную Cv не влияющую
на напряжения, и учитывая выражения (54.17) и (54.21), получаем
окончательно:
<р=1р[г9 —2a*lnr--(r*--- 2a2 + -~)cos20]
Напряжения выражаются следующими формулами:
•,-И>-*-0~*+£)»Ч1
*,» = —-g^1 +Т2"- 7rJs,n2°-
(54.22)
(54.23)
Так как рассматриваемое упругое тело не односвязно, то нужно
еще проверить, соответствуют ли напряжениям (54,23) однозначные
перемещения. Не приводя этих вычислений, укажем, что они
подтверждают правильность полученного решения.
Наибольший интерес представляют напряжения у края отверстия
(г —а) и в ослабленном поперечном сечении пластины Го == ztz-^V
При г = д формулы (54.23) дают:
сг = 0, ^ = 0, зб = р(1 —2 cos 20).
(54.24)
Из графика (рис. 1 КЗ), изображающего зависимость о9 у края
отверстия от 6, видим, что
при 6 =
2
. = Зр, \
при 0 = 0 или - ae = —р. )
(54.25)
176
ПЛОСКАЯ ЗАДАЧА
/
1гл. х
Первое из этих значений является максимальным. При 0 = ± у
формулы (54.23) дают:
,г==0, т,8 = 0, oe = p(l+|^+U). (54.26)
Зависимость зе от г представлена графиком на рис. 116.
При — = 1, 2, 3, оо
оь^Зр, 1,22р, 1,07р, р.
Таким образом, существенное увеличение напряжений
(«концентрация напряжений») имеет место только вблизи отверстия.
Рис. 115.
Рис. 116.
Полученные формулы верны в случае, если ширина пластины d
велика по сравнению с диаметром отверстия 2а. Если же ширина d
не очень велика, но все же больше, чем 4а (рис. 117), то для опре-
J ,д
т>
р Н—М
и
~Р
Рис. 117.
Рис 118.
деления наибольшего растягивающего напряжения можно
пользоваться следующей приближенной формулой:
Ыи
ЪР
d — a '
(54.27)
§ 54] РАСТЯЖЕНИЕ ПЛАСТИНЫ С МАЛЫМ КРУГЛЫМ ОТВЕРСТИЕМ 177
Приведем еще формулу для наибольшего напряжения в
растягиваемой пластине большой ширины с эллиптическим отверстием
(рис. 118):
Если большая ось отверстия расположена перпендикулярно к
направлению растяжения (а > b)f то (зе)тах > Зр, если же большая ось
идет вдоль этого направления (а < Ь), то р < (ое)тах < Зр.
Задачам о концентрации напряжений в области выточек и
отверстий в плоских деталях посвящено большое число работ.
Глава xi
КОНТАКТНЫЕ ЗАДАЧИ
§ 55. Постановка задач
Если два упругих тела, которые при отсутствии взаимного
нажатия соприкасались между собой в точке или по линии, прижимаются
затем друг к другу какими-либо силами, то вследствие упругих
деформаций возникает общая для обоих тел площадка контакта,
на которой и вблизи которой действуют контактные напряжения. Эти
напряжения имеют местный характер, т. е. быстро убывают по мере
удаления от места контакта.
Размеры площадки контакта зависят от величины силы взаимного
нажатия тел, и напряжения не пропорциональны приложенным силам.
Знание контактных напряжений весьма важно для расчета
подшипников качения, кулачковых механизмов и т. п.
Решение задачи о напряжениях при контакте двух тел,
ограниченных плавными поверхностями, было найдено в общем виде Герцем
и подробно исследовано Н. М. Беляевым. Это решение довольно
сложно.
Ниже рассматриваются простейшие задачи о контактных
напряжениях при соприкосновении двух цилиндров с параллельными осями
и двух шаров. Предварительно рассматривается действие
сосредоточенной силы на упругую полуплоскость (задача Фламана) и на упру
гое полупространство (задача Буссинеска).
§ 66. Упругая полуплоскость, нагруженная
сосредоточенной силой, перпендикулярной
к границе (задача Фламана)
Задача Фламана является частным случаем задачи § 53, и реше-
ние ее получается из (53.14), если положить а =9-» f == ®> чт0 Дает;
2Pcos б А л /ttc .ч
В любой точке полуплоскости главные оси напряженного
состояния направлены по г и перпендикулярно к нему. Главное касатель^
§ 56] УПРУГАЯ ПОЛУПЛОСКОСТЬ* НАГРУЖЕННАЯ СОСРВДОТОЧ. силой 1?9
яое напряжение
t.„nv =
| <Jr — CJq | Pcos I
(56.2)
На окружности произвольного диаметра D, касающейся границы
в точке приложения силы (рис. 119),
r = Dcos6,]
~ -L. \
'■max — ъО * )
(56.3)
1 1 -&.>
Л
v LA '
Рис. 119.
т. е. главное касательное напряжение оди*
наково во всех точках этой окружности.
При исследовании плоского напряженного
состояния прозрачных моделей оптическим
методом вблизи точек приложения
сосредоточенных нагрузок наблюдаются характерные пучки таких
окружностей.
Найдем перемещения точек полуплоскости, соответствующие
системе напряжений (56.1) в случае плоской деформации
(перемещение и — по направлению г и перемещения v—перпендикулярно к г).
По формулам (13.6) и (47.5) получаем:
да 1— &{_ v _\ 2(1— v2)Pcos0
*г =
ц —
ТгО =
дг ~~
1 ди
г ае
Е
1 dv
г дЪ "
. dv
* дг '
К9'-
1 —
~ Е
V
г
"Г=^°в
v2 /
1 а0
1
т.Е . г '
2v(l+^)^cos6
пЕ г ]
:0.
(56.4)
Интегрируя первое уравнение (56.4) по г, находим
2(1—v2)P
я -й i—_z__ Cos 6 In г +/(G).
(56.5)
Подставляя это выражение во второе уравнение (56.4) и
интегрируя по 0, получаем:
x;=2v(1+v)PsinO + 2(1"V2)PsinQlnr — Ф(Ь) + Р(г)> (56.6)
гс£
где
Так что
Ф(0) = //(в)Л,
/(в) = Ф'(в).
(56.7)
(56.8)
Для нахождения неизвестных функций Ф(6)и F(t), появившихся
в процессе интегрирования, подставляем (56.5) и (56.6) в третье
Уравнение (56.4) и после приведения подобных членов получаем
1У(В) + 1Ф(6)Н-2(1+^-^ЯУ + ^(г)-^(г)-0.(66.9)
180
Контактные задачи
/
[гл. XI
Умножая все члены выражения (56.9) на г и перенося последние
два члена в правую часть, придадим этому равенству следующий
вид:
Ф" (0)+ Ф (6) + 2(1+^~2V)P sin 6 = — rF' (г) + F (г). (56.10)
Левая часть этого равенства зависит только от б, правая—только
от г, следовательно, обе эти части равны одной и той же
постоянной величине Cv т. е.
Ф*(б)+Ф(в) =—2(1+v^1~2v)Psine+c1,ч
— rF'(r) + F{r) = C1.
Общие решения этих уравнений имеют вид:
Ф (Ь) = ° + v)^~2v)Р Ь cos 9-|- Ct -f-Сгcos 6 -f С9 sin 6, \
F^^d + Qr,
и выражения для искомых перемещений получаются следующими:
2(1— v2)P (l+v)(l—2v)Pn . ft ,
и = —^— In г cos 0 — ^ ; v £- б sin 8 +
1
(56.11)
(56.12)
кЕ
пЕ
(56.13)
+ [c. + (1+^-2v)/>]co«6-Cadn9,
2(l-;i.)P,nrsine_(l+v)(l-2,)P9cos9_
пЕ ъЕ
— С2 cos 0 — Гсз — 2v(1+v)Pl sin 0 -f С/.
Предположим, что рассматриваемая полуплоскость не смещается
в горизонтальном направлении и не поворачивается, так что
при 0 = 0 v = 0 (56.14)
и, кроме того, точка, лежащая на линии действия силы Р на
расстоянии h от границы, закреплена так, что
Тогда
при г = h и 0 = 0
1£ = 0.
(56.15)
С-с-ь с,..ЦЦ^1.»-<'+*>«-•»>'' «56.,
и окончательные выражения для перемещений таковы:
2(1—у2)р|-^ г ^ t l_2v
6)
и = = ^J fin ~ cos О -f * 2\ 0 sin О] ,
L h ^2(l — v) J
7с£
2(1—у2)р
т:Е
[(,пХ + Т(Г^))81пв-
sin
1—2v
2(l-v)
OcosO
]•!
(56.17)
§ 57] ДВА СОПРИКАСАЮЩИХСЯ ЦИЛИНДРА С ПАРАЛЛЕЛЬНЫМИ осями 181
Перемещения точек границы полуплоскости будут иметь вид:
(l+v)(l-2v)P
2 2
W.-JL —Wi-i —
2£
2(l-^)Pjnr (l+v)P
*£
пВ
(56.18)
Выведенные выражения (56.18) для перемещений понадобятся
нам в* следующем параграфе,
§ 57. Два соприкасающихся цилиндра с параллельными осями
Рассмотрим задачу о плоской деформации двух соприкасающихся
цилиндров с параллельными осями, прижатых друг к другу силами,
равномерно распределенными по длине цилиндров. Интенсивность
этих сил на единицу длины обозначим через Р.
Рис. 120.
Пусть А1 и А2 (рис. 120) — точки на поверхностях цилиндров,
находящиеся на расстоянии £ от плоскости, проходящей через оси
Цилиндров.
Расстояние между этими точками до деформации равно
где
о Lj 1 _#t + fla
р 2RX ^~ 2/?а — 2RtRt *
(57.1)
(57.2)
Под действием сил Р цилиндры сплющатся, оси их сблизятся
На величину 8 и получится полоска контакта шириной 2а,
182 КОНТАКТНЫЕ ЗАДАЧИ / [ГЛ. XI
Пусть вертикальная проекция перемещения точки Ах по
отношению к осям xlOiy1 (с началом координат на оси первого цилиндра)
есть vv а вертикальная проекция перемещения точки А2 по
отношению к осям х209у2 (с началом координат на оси второго цилиндра)
есть г/2. Перемещение точки А2 по отношению к осям xlOly1 равно
8— vv а по отношению к точке Ах равно 8 — v2 — vv
Если $^а, то точки Аг и А2
совместятся и, следовательно,
8_V2_Vl==C1 + C2 = pp, (57.3)
т. е,
vx + v2 = b — ре2- (57.4)
Если ширина полоски контакта мала
Рис. 121. по сравнению с радиусами цилиндров, то
каждый из цилиндров можно приближенно
рассматривать как упругую полуплоскость и воспользоваться для
вычисления vx и v2 формулами § 56.
Пусть удельное давление на площадке контакта (переменное по
ширине ее) равно р(х). При этом
а
fp(x)dx = P. (57.5)
-а
Под действием нагрузки p(x)dx, действующей на полоску
шириной dx, точка /4t (рис. 121) получит вертикальное перемещение,
которое по второй формуле (56.18) равно
2(1-.?) |«-*| (1+Mt)
dVl = —-p(x)dx In—^ ^-p(x)dx =
2(1—nJ)
nEi [pMlnll-xl + ^jQ^-lnR^pix^dx. (57.
От давления на всю полоску контакта точка Ах получит верти
калыюе перемещение
6)
[ Jp(x)ln|E—^(^^(aoz^y-in^pJ.ceTJ)
2(1 —vj)
—a
Аналогично вертикальное перемещение точки А2 будет равно
о
^ = -2Л^[ J/'WinH-x|dx + (27Tir^-in/?2)p].(57.8)
—а
Упругие постоянные Ev vx первого цилиндра и Е2> v2 второго
цилиндра могут быть различными,
§ 57) ДВА СОПРИКАСАЮЩИХСЯ ЦИЛИНДРА С ПАРАЛЛЕЛЬНЫМИ осями 183
Подставляя выражения (57.7) и (57.8) в (57.4), получаем основное
уравнение рассматриваемой задачи
i(!^ + iZ^j §p(x)\n\l — x\dx = №-)-const9 (57.9)
-а
в котором через const обозначена сумма членов, не зависящих от £.
Чтобы избавиться от этих членов, дифференцируем (57.9) по £.
Так как подинтегральное выражение в левой части (57.9)
обращается в бесконечность при х = $, то было бы неправильно просто
воспользоваться формулой дифференцирования интеграла по параметру.
Поэтому сначала исключим из интервала интегрирования участок
£ —ех <л:<£4-82'
а затем перейдем к пределу, устремив ех и е2 к нулю.
Имеем
-|-[ j p(x)\n(l — x)dx+ J р(х)Щх — 6)Ак] =
-a i hta
= J 0jdx + p(S — ei)Inet+ j -§&■ dx—p{l+4)Ine2. (57.10)
-o En,
Если мы подчиним ex и s2 условию: при et -> 0 и ег ->■ 0
lim-^ = l, (57.11)
то
lim |/>($— е,) In ех —р(£ + ег^1п Н\ —
= Иш([р(5 — в1) — P« + e2)llnei+^«-(-e2)lni) =
дИшр«-;-у-^^.1...1]+р(|)11ш(|,^)д
= —// (с). 2 • 0 -f р (0 -0 = 0. (57.12)
Переходя в равенстве (57.10) к пределу, получим
а £-8, а
£[Jp(*)ln|5-*|*c]"~Hm[ J f^rf*+ Jf^H' (57ЛЗ)
-а -о E+e3
Условимся понимать интеграл в левой части
нижеследующего равенства, как предел правой части его, при соблюдении
184 КОНТАКТНЫЕ ЗАДАЧИ /' [ГЛ. XI
соотношения (57.11):
$-•.
при гх ■
р
0
(£l
— X
€i
dx +
-*1.
a
J
5+«.
djCl 1
(57.14)
т. е., как говорят, будем брать главное значение этого интеграла.
Тогда результат дифференцирования равенства (57.9) можно написать
в следующем виде:
-а
Задача сводится к нахождению функции р(х), удовлетворяющей
интегральному уравнению (57.15) при всех значениях (• в интервале
от — а до а и условию (57.5).
Как нашел Герц, удельные давления р(х) должны быть
пропорциональны ординатам полуокружности, построенной на диаметре 2а,
p(x) = £fiVa* — x*. (57.16)
При этом из равенства (57.5) получается, что
/W=g. (57.17)
Чтобы показать, что выражение (57.16) действительно
удовлетворяет уравнению (57.15) при некотором значении а, найдем
предварительно неопределенный интеграл
-л'*
J е--* Ч J (1-х) \fcP-x* * J fa*-x* J fa*—j
-=У а2— £21п — V — -Иarc sin У а—«* • *57.18)
Тогда определенный интеграл, входящий в уравнение (57.15),
можно вычислить следующим образом:^
-a t^0 -a e+t,
Первое слагаемое здесь согласно (57.18) будет иметь вид:
(У^=П?[1п 2 (a«— S2)— 1 — Jim In (гга)\ + б(£ + arc sin ±)J,
У1ПЯХ
а
§ 57] ДВА СОПРИКАСАЮЩИХСЯ ЦИЛИНДРА С ПАРАЛЛЕЛЬНЫМИ осями 185
а второе слагаемое оказывается таким:
^(/^=Т[Ит1п(2^)_ in 2(^~^)+П + «(у— arc sin 1)},
Объединяя оба слагаемых в одну формулу и вспоминая
определение главного значения интеграла, т. е. учитывая условие (57.11),
получим
а
•р(Х)<1х^гртлХ1 (5719)
\'
Подставляя найденное значение интеграла (57Л9) в
выражение (57.15), получаем после сокращения на £:
(^+^)^-»-^- <™>
Подставляя сюда ртах из выражения (57.17), находим половину
ширины полоски контакта
а затем из (57.17) определяем
/W - . / ГГ. Г* ,. • (57-22)
При Ех = Ег = £ и vt = v2 = 0,3 получаются следующие формулы,
часто употребляемые при инженерных расчетах:
л - l 62 iAIMI
(57.23)
Наибольшее сжимающее напряжение в материале цилиндров
имеет место в середине полоски контакта и равно ртлх*
Наибольшее главное, касательное напряжение, являющееся
расчетным по третьей теории прочности, имеет место, как показал
Н. М. Беляев, в точке, лежащей на нормали, восстановленной в
середине полоски контакта, на глубине ^ 0,78а, и равно
'm« = 0.304pm„. (57.24)
186
КОНТАКТНЫЕ ЗАДАЧИ
|ГЛ. XI
/
§ 68, Упругое полупространство, нагруженное сосредоточенной
силой, перпендикулярной к границе (задача Буссинеска)
Задача Буссинеска внешне похожа на задачу Фламана,
разобранную в § 56; однако ее решение оказывается значительно сложнее,
и мы изложим его с возможной краткостью, не производя подробно
всех выкладок, а лишь наметив их.
Воспользуемся цилиндрическими координатами г, 6, z, взяв начало
координат в точке приложения силы Р и направив ось z по
нормали к границе (внутрь упругого полупространства), т. е. вдоль
линии действия силы Р (рис. 122).
Рассматриваемая задача обладает осевой симметрией, так что
имеют место только радиальные и осевые перемещения точек
упругого полупространства и и w (v = 0),
причем они не зависят от полярного
угла 0. Из формул (13.6) и (16.12)
следует поэтому, что
ди , dv
Ж
T>G:
G
/1 ди . dv v\ л
Чг
J^-J- — ЁШЛ
°(£+4
дЪ )'
0.
(58.1)
Рис. 122.
Таким образом, определению
подлежат четыре неизвестных составляющих
тензора напряжения ог, ае, ог и тгг. Они
должны удовлетворять двум уравнениям
равновесия, получаемым из уравнений (7.3) и (7.9) путем
отбрасывания производных по 0 и проекций объемных сил (уравнение (7.6)
удовлетворяется тождественно):
д<*г i дгяг i
дг
-SQ
дг
= 0,
дъ»
до»
дг
дг
0.
(58.2)
Кроме того, при отыскании напряжений надо принять во
внимание условия сплошности (зависимости Бельтрами — Митчела); в
рассматриваемом случае осевой симметрии их будет четыре:
До.
Дое-
2 К — qp)
1
d*s
га
2 (<у — <*е)
1 + v дг*
1 1
= 0,
Г2
Да.
1+V
1
Дт,
г2
1 1+v
1 &S
1+v дгдг
г дг U'
*i = 0
= 0.
(58.3)
§ 58]
УПРУГОЕ ПОЛУПРОСТРАНСТВО, НАГРУЖЕННОЕ СИЛОЙ
187
Уравнения (58.3) получаются из (19.12) переходом к
цилиндрическим координатам.
Определение четырех неизвестных функций ог, ое, ог хгг по
уравнениям (58.2) и (58.3) представляет очень сложную задачу, которую
можно существенно упростить введением функции напряжения. Лявом
была указана функция ф, через третьи производные которой
выражаются все напряжения:
дг
и-йь
д ( А 1 1 W 1
дг*
)■
(58.4)
Непосредственной подстановкой легко проверить, что уравнения
равновесия (58.2) и зависимости Бельтрами—Митчела (58.3) буду г
удовлетворены, если функция ф бигармоническая, т. е.
Щ = 0.
Здесь, как и в выражениях (58.4),
v ~ дг** г дг ^ дг*'
(58.5)
(58.6)
Выражения для перемещений через функцию напряжений ф могу г
быть найдены интегрированием уравнений
да
dw
~дг
ди_\ dw
дг
(58.7)
в правые части которых надо подставить составляющие тензора
Деформации ег, ев> гг и *fzry вычисленные при помощи закона Гука
с учетом (58.4). После соответствующих выкладок получаем:
_ 1+* д*<\>
дгдг '
w =
1+v
{2(1-^-^).]
(58.8)
Решение задачи Буссинеска дается бигармонической функцией:
Ф = ■£■ {« + (!—2^) [г 1п (Л+ «) — /?]}.
(58.9)
188 КОНТАКТНЫЕ ЗАДАЧИ [ГЛ. XI
/
Здесь и далее для упрощения вида формул введено обозначение
Я = 1/7* +Л (58.10)
Дифференцируя выражение (58.9) согласно (58.4) и имея в виду,
что
дг
г
Т9
дг ~ R > к z~ R + z
получим:
А/? = ~, &[zln(R + z)—R] = 0,
— р Г(1 —2v)/g _ 3/*г]
P(l_2v)
(58.11)
ЗР 2«
7_? £Л
2к#а #з '
ЗР гга
(58.12)
гг 2*/?2 да •
Система напряжений (58.12) на плоскости 2 = 0 (граница
полупространства) соответствует отсутствию внешних сил во всех
точках, за исключением точки г = 0 (начала координат), где имеется
особенность: выражения (58.12) вблизи начала координат безгранично
возрастают. Покажем, что эта особенность порождена приложенной
в начале координат нормально к границе полупространства
сосредоточенной силой Р. Для этого вырежем из полупространства
полусферу радиуса R с центром в начале координат и вычислим главный
вектор усилий, приложенных по поверхности этой полусферы.
Вследствие осевой симметрии главный момент указанных сил
(относительно начала координат), а также проекция главного
вектора на направление радиуса г равны нулю.
Применяя третью формулу (17.5) к данному случаю получим:
x2rcos(tt, г)-f- azcos(п, z) = Fnz. (58.13)
Тогда проекция главного вектора сил на ось z будет иметь вид:
Z= Г Г [izr cos (/г, г) -\- az cos (я, z))dF% (58.14)
причем интегрирование ведется по поверхности полусферы. Замечая,
что
sinX = —4,
cos (л, г) = -
COS(fl, z) = -
-cosx = — -ft
(58.15)
§ 58] УПРУГОЕ ПОЛУПРОСТРАНСТВО, НАГРУЖЕННОЕ силой 189
(см. рис. 123, на котором изображено сечение этой полусферы
плоскостью rz)f а также, что элемент площади поверхности сферы dF
можно выразить через дифференциалы углов Ь и х(0^в^2тг;
0<Х<|)
dF = rdb • Rdx>
(58.16)
получим после подстановки значений (58.12), (58.15) и (58.16) в
выражение (58.14):
2л те/2
z== JdeJ(wdn*+i^C08x)r*dx=»
о о
к/2
*= ЪР J sinxcosQx^X — ^ (58.17)
о
Перемещения точек полупространства получим, подставляя
значения (58.9) в выражение (58.8):
Ж1+*)
2к£#а
гГ(1—2*)/? г] *
v = 0t
w ■•
Я(1+у)
2nER
[2o-^)+i].
(58.18)
Как и следовало предполагать, на любой прямой — =» const,
проходящей через точку приложения силы, напряжения обратно
пропорциональны /?2, перемещения же
оказываются обратно
пропорциональными R.
В отличие от задачи § 56 в
рассматриваемом случае при R,
стремящемся к бесконечности, все
перемещения стремятся к 0. Благодаря этому
оказывается возможным отсчитывать
перемещения по отношению к системе
координат, связанной с частью
упругого полупространства, весьма удаленной от точки приложения
силы. Такой способ отсчета и принят при выводе формул (68.18)»
щ
/А
"ЩЪ
*
Р
1
Z
Рис. 123.
190
KOHlAK'lHblE ЗАДАЧИ
[ГЛ. XI
Перемещения точек границы получаются из формул (58.18), если
положить в них z = 0:
и =
P(l+v)(l— 2v)
w
2nEr
Я(1-~ va)
-кЕг
(58.19)
§ 59. Два соприкасающихся шара
Рассмотрим задачу о деформациях и напряжениях вблизи места
соприкосновения двух шаров, прижатых друг к другу силами Р.
Расстояние между точками
поверхностей шаров Аг и А2 (рис. 124), oi-
стоящими от линии центров на
расстояние р, до деформации равно
Ci + C,=»
-_£?
2Rt
+
.PL —
2#,
РР9. (59.1)
где
Р =
1
2Ri 2/?2
J /?t+*a
2/?j/?2
(59.2)
Пусть сближение двух точек
первого и второго шаров, лежащих на
линии центров достаточно далеко от
места соприкосновения, равно S,
перемещение точек At и А2 по
отношению к системам координат,
связанным с удаленными от места
соприкосновения частями шаров, суть wx и w2>
и р^а, где а — радиус круга контакта. Тогда, рассуждая так же,
как в § 56, найдем
Wl-{-w2 = Z — ^ (59.3)
При помощи второй формулы (58.19), находим, считая шар
приближенно за упругое полупространство,
Рис. 124.
•*-П
1
Р(г)
т.Е\
dF,
(59.4)
где p(f) — удельное давление на расстоянии t от центра площадки
контакта, s — расстояние от точки Av где ищется прогиб, до точки В
бесконечно малой площадки dF, на которую действует нагрузка
p(r)dF (рис. 125).
При этом
(59.5)
ffp(r)dF = P.
§ 59] ДВА СОПРИКАСАЮЩИХСЯ ШАРА МИ
Двойные интегралы должны быть взяты по всей площади круга
контакта.
За величины, характеризующие положение площадки dFt могут
быть приняты расстояние s и угол ф между 5 и р (рис. 125).
Тогда
dF = sdsdty. (59.6)
Написав для w2 формулу, аналогичную (59.4), и подставляя wi и
<w2 в выражение (59.3), приходим к интегральному уравнению
1 /1 - J , 1 — ^ ч (• г* р (г) л Л
которое с помощью выражения (59.6) приводится к следующему виду:
-( -g-L -| ^-) J J /, (г) <fe d<J> = * — pp*. (59.8)
Как нашел Герц, удельные давления р(г) должны быть
пропорциональны ординатам полушара, диаметральным сечением которого
является круг контакта.
р (г) = £е& ya*_r*t (59.9)
Для проверки этого подставляем (59.9) в уравнение (59.8).
Предварительно вычисляем входящий в это уравнение двойной интеграл.
Рис. 125. Рис. 126.
Закон изменения удельного давления р(г) по длине хорды CD
(рис. 126) изображается полуокружностью, показанной на рисунке
пунктиром. Длина этой хорды равна
2 У a*— p2sin9<j,,
192 КОНТАКТНЫЕ ЗАДАЧИ 1ГЛ. XI
/
/
а удельное давление в ее середине равно
£2nnyraa_p2slI1-2^
Поэтому взятый по этой хорде интеграл
J* р (Г) ds = &В&. -£ (а2 — р9 sin* ф) (59.10)
и
J |р(г)*^ = J^|(a*-p*sit^)^ = «V^g^-P1) (59.11)
Подставляя (59.11) в уравнение (59.8), находим
откуда
Подставляя выражение (59.9) в уравнение (59.5), находим
далее из (59.14) следует:
'/ ЗРЯ,/?, ,\-<t 1-.$ч
в— К 4(*1 + яД £t "+■ Ь, )•
п = гГ bPj/tj + W
Рта 1/ l_v2 1—v^ чо •
При Е1=Ег = Е и vt = v2 = 0,3 получаются широко
применяемые в инженерной практике формулы:
s
(59.16)
JW-0.388 j/—-
(59.17)
§ 59] ПИЛ СОПРИКАСАЮЩИХСЯ ШАРА 193
В центре круга контакта, где действует наибольшее сжимающее
напряжение ртах, материал работает в условиях всестороннего
сжатия. Наибольшее главное касательное напряжение, как показал
А. Н. Динник, действует в точке, лежащей на линии центров на
глубине я^ 0,47а; оно равно
*«в8=0,31ршв. (59.18)
Наибольшее растягивающее напряжение имеет место на
окружности круга контакта и равно
(°*)m„ = 0,133/w (59.19)
ГЛАВА XII
ТЕПЛОВЫЕ НАПРЯЖЕНИЯ
§ 60. Основные уравнения
Если нагреть элемент объема упругого тела до температуры t
и при этом ничто не будет препятствовать его свободному
расширению, то этот элемент расширится во всех направлениях, причем
тепловые деформации его выразятся следующими формулами:
•i =в; =< =**,)
Т' =Т' =7' =0. <60Л>
*ху \уг *zx )
Если тело нагрето неравномерно или какие-либо участки его
поверхности связаны с другими телами, то элементы тела не могу г
свободно расширяться и в нем возникают тепловые напряжения.
Деформация каждого элемента тела складывается из тепловой
деформации и упругой деформации, вызванной тепловыми
напряжениями. Если эти напряжения обозначить, как обычно, через ох,
су* °г> *ху> хуг> тг<в» то на основании формул (17.2) и (60.1) получим:
1 1 ч
•х = ~£ 1°х — v (су + az)\ + <**> Чху = -Q *ху>
*z = £- \*г — * (Рх + °|/)] + at> Лгх = -Q *жх-
Из этих уравнений можно найти выражения напряжений через
деформации. Именно, складывая первые три уравнения, получим
» = ^ + ^+в2 = -^^(^-+-^+^) + ЗаЛ (60.3)
где 0 — относительное объемное расширение.
Первое уравнение (60.2) преобразуется затем так:
*х — -£ 1°х (1 + N) — v (°* + °у 4" з 2)] + at =
— а* v n+lJLl.tf. (60.4)
2о 1—2v » 1 — 2v
^ ()lj ПЛИТА С ОСЕСИММЕТРИЧНЫМ РАСПРЕДЕЛЕНИЕМ ТЕМПЕРАТУР 195
Отсюда определяем ах и аналогично находим ау и аг.
Окончательные формулы следующие:
1 + у
!=20(еа; +
г=-20(ег-т-г^
1— 2ч
1 —2v
Ъ
а
в
о
■№*)
1+v
^ху
= от
ху>
ьуг
1-
;*)
(/2'
(60.5)
Для тела, испытывающего тепловые напряжения, остаются в силе
зависимости (17.4) между перемещениями и деформациями и условия
сплошности (19.1). Тепловые напряжения должны удовлетворять
уравнениям равновесия (17.1) и граничным условиям (17.5).
Так как для нагретого тела уравнения (17.2) или (17.3)
заменяются уравнениями (60.2) или (60.5), то для него изменяются также
и уравнения (18.5), (18.6) и (19.12), а именно: в правые части этих
уравнений входят дополнительные члены, зависящие от
температуры.
§ 61. Круглая плита с осесимметричным
распределением температур
Рассмотрим круглую плиту (рис. 127) с произвольным
осесимметричным распределением температур
t = t(r, z).
Обозначим среднюю по толщине температуру плиты вдоль
радиуса г через /*(г)
Л/2
'*(Г)==1 j '(Л *)<**• (6М)
-Л/2
В силу линейности основных
уравнений теории тепловых
напряжений можно вычислять отдельно
напряжения, вызванные радиальным
перепадом температур, т. е.
температурным полем t*(r), и напряжения, вызванные температурным
полем
р(г, *) = /(г, z) — f (г), (61.2)
обладающим тем свойством, что средняя по толщине температура
плиты всюду равна нулю:
Л/2
f /** (г, z)dz = 0. (6 КЗ)
--Л/2
196
ТЕПЛОВЫЕ НАПРЯЖЕНИЯ
./
[гл. XII
Первая задача рассмотрена в § 62, а здесь мы займемся второй
задачей. Вместо ***■ в дальнейшем будем писать просто t.
Пользуясь теми же допущениями, которые приняты в теории
изгиба тонких плит (§ 26 и 27), получаем формулы (27.5):
d*w
.=— z
dr*
z dw
(61.4)
Деформации выражаются через основные напряжения ог, о0 и
температуру t следующим образом:
в аг — vcr0
• а/,
. ©fj — V<7.
"£+orf,
откуда
°е
Ez fdPw , v dw\ Eat
~ l—^\dr**~rdr) 1—v'
_ Ez f 1 dw | (Pw\ Eat
~ l — tf\r dr~^S' dr*) 1-v
В силу равенства (61.3)
Л/2 Л/2
\ ordz=z Г obdz = 0.
(61.5)
(61.6)
(61.7)
-Л/2
-Л/2
Поэтому напряжения ' сг или а0, действующие на какую-либо из
граней элементарного объема, изображенного на рис. 49, как и
в задаче об изгибе плит, статически эквивалентны некоторому
изгибающему моменту.
Изгибающие моменты, действующие в радиальном и в
тангенциальном направлениях, выражаются формулами:
Л/2 }
-Л/2
Л/2
,_ /„Л —!>(!* + ,*) + *,
-Л/2
где через Mt обозначена следующая величина, являющаяся функцией
от г и зависящая только от заданного распределения температур:
Л/2
Л«* = — j~ f tzdz. (61.9)
-Л 2
М*
(61.8)
§ 61] ПЛИТА С ОСЕСИММЕТРИЧНЫМ РАСПРЕДЕЛЕНИЕМ ТЕМПЕРАТУР 197
Уравнения равновесия элементарного объема (27.13) и (27.16), в
которых следует положить нагрузку р равной нулю, остаются в силе:
UMxr)-M2 — Qr = 0,
dr
£«М-о.
(61.10)
Подставляя в эти уравнения выражения Af, и М2 из
формул (61.8), получаем
"т г dr* г* dr^ г* dr ~ Ddr\ dr Г \0iAZ)
d4w
~dr*
Левая часть дифференциального уравнения (61.12) точно такая же,
как у дифференциального уравнения изгиба осесимметрично
нагруженной круглой плиты и поэтому общее решение его имеет тот же вид,
а именно: ^ = Л/.9 + £г21пг +-C\nr+ K+wv (61.13)
где A, Bt С, К—постоянные интегрирования, a wt — какое-либо
частное решение.
Можно показать, что одно из частных решений уравнения (61.12)
выражается формулой
г ря
«t==i j" [J ^(pompi]^ (6Ы4)
a a
где px и p2 — вспомогательные переменные, по которым производится
интегрирование.
Нередко можно найти wt и более простыми приемами.
; Рассмотрим два простых примера, в которых закон
распределения температур по толщине одинаков при всех значениях г, так
что t — t{z), Mt = const. При этом частным решением
уравнения (61.13) является 1^ = 0.
1. Плита без отверстия с заделанными краями. Из условий
непрерывности плиты и отсутствия сосредоточенной силы в центре
следует, как было показано в § 28, что £ = С = 0, а условия
закрепления наружного края
приг = * w = 0, ^-=0 (61.15)
дают А = /С = 0.
Следовательно, по всей плите w = 0, т. е. плита остается
плоской. По формулам {61.6)
зг = а0 = — у^-. (61.16)
Напомним теперь, что мы отсчитывали температуру t от
среднего значения температуры по толщине плиты f.
198
ТЕПЛОВЫЕ НАПРЯЖЕНИЯ
[ГЛ. XII
/
Поэтому при расчетах в формулу (61.16) вместо / нужно
подставить t—f.
Если температура линейно распределена по толщине плигы, то
средняя температура f равна полусумме температур верхней
поверхности плиты tx и нижней поверхности t2.
Напряжения на поверхностях плиты в этом случае будут равны:
h j . Ea(t2 — М
при z = — -j t = tv ог = оь= 2(1—v]| '
h
2
(61.17)
при z = -% t = t2t or = ob = 2(1—?)
2. Сплошная или кольцевая плита с опертым наружным и
свободным внутренним краями. Условия на краях имеют вид:
при г = а Ж! = 0, Q = 0, \
t ./ л л Г (61.18)
при r = b Мг — О, <w = 0, j v
т. е.
_D[2(14-v)^ + (3 4-v)B+2(l+v)Blna-^^]+Mf=^
_d[2(1+vM + (3+v)B+2(1+^
4BD
= 0,
Л^ + B^lnft-f Clnfr + ZC^O. J
(61.19)
Мы воспользовались тем, что при тепловых напряжениях
выражения Мх и Q отличаются от (28.11) лишь тем, что члены,
зависящие от нагрузки, заменяются соответственно на Mt и -^г.
Из уравнений (61.19) находим:
Mf
dr
Окончательно получаем:
6<*3-rV J tzdz>
2(l + v)D'
Л/2
/C = —Л*з.
w =
A3
-Л/2
Л/2
(61.20)
(61.21)
-Л/2
Если температура линейно изменяется по толщине плиты
t = kz, (61.22)
то по второй формуле (61.21) ог = ое = 0, т. е. никаких тепловых
напряжений не возникает.
§ 62] КРУГЛАЯ ПЛИТА С РАДИАЛЬНЫМ ПЕРЕПАДОМ ТЕМПЕРАТУР
199
В заключение рассмотрим случай плиты с произвольными
условиями на краях, температурное поле которой обладает тем
свойством, что
Л/2
J te<te = 0. (61.23)
-h/2
Это будет иметь место, когда температура представляет четную
функцию расстояния z от срединной плоскости, в частности, при
равномерном распределении температур.
Тогда Mf = 0, ?0 = О, а напряжения выражаются формулами
Eat
каковы бы ни были размеры и условия закрепления плиты.
(61.24)
§ 62. Круглая плита с радиальным перепадом температур
Рассмотрим тонкую круглую плиту (рис. 127) с радиальным
перепадом температур
t = t{r). (62.1)
Если плита тонкая, то напряженное состояние в ней можно
считать плоским и в формулах для деформаций полагать ог = 0.
Из симметрии задачи следует, что радиальные перемещения и
зависят только от радиуса г, а перемещения v в направлении Ь
равны нулю. Тогда основные деформации имеют вид:
du 1 ,
ег = ;т7 = р(*г-
dr
и
Е
1
откуда
?1 = 7* == ]f (°> ~~ ^ + atl
(62.2)
(62.3)
Подставляя ог и об в первое уравнение равновесия (7.3),
принимающее в данном случае вид
far
*г — Ч
о,
(62.4)
dr ' г
находим дифференциальное уравнение для радиального перемещении
Jf*\ г dr г*
/ii \ dt
(l+v)a7r.
(«2.0)
200
ТЕПЛОВЫЕ НАПРЯЖЕНИЯ
[ГЛ. ХЦ
/
Для интегрирования этого уравнения его удобно представить
в следующем виде:
dr
Первое интегрирование дает
d
d П d i ч! /114^
а второе
~(ra) = (l+v)a/r + Ctr,
(62.6)
(62.7)
(62.8)
где переменная интегрирования обозначена через р.
Подставляя (62.8) в выражения (62.3), находим формулы для
напряжений:
г
Ел ./ ч , . ЕС л ЕСо
a
(62.9)
1гь = 0.
Постоянные Ск и С2 должны быть определены из условий на
краях плиты.
Пример. Найдем тепловые напряжения в сплошной круглой
плите со свободным краем, температура которой падает от центра
к краю по квадратичному закону
t = t0-(tQ — tx)y2,
(62.10)
так что при г = 0 t = t0, а при г = b t = tx.
В центре плиты перемещение и = 0, откуда следует, что
С2 = 0.
На краю плиты r = ft, <зг = 0, что дает
ь
~J *(p)pdp-
2(1 -v)
:0.
(62.11)
(62.12)
Подставляя сюда t из (62.10) и вычисляя интеграл, находим
-ё£±— = — (t, a- LY (62.13)
2(1—v) ~" Т ^°"+~ ^*
63) ТОЛСТОСТЕННАЯ ТРУБА
Окончательные формулы для напряжений следующие:
°г- з—I1- т)>
О,:
E*{tQ-tx)(, Зг*\
4 V &У
Наибольшим оказывается напряжение oQ при г = Ъ
Ea{t0-h)
iaeW — 2 '
201
(62.14)
(62.15)
§ 63. Толстостенная труба с радиальным перепадом температур
Рассмотрим длинную толстостенную трубу (рис. 128) с
радиальным перепадом температур
t = t(r). (63.1)
Пренебрегая влиянием торцов, можно
считать, что сечения трубы, перпендикулярные
к ее оси, остаются плоскими и работают
в одинаковых условиях, так что радиальные
перемещения и зависят только от г,
перемещения v в направлении 8 отсутствуют, а
деформации выражаются формулами (24.1),
причем относительное удлинение по направлению
оси z
s2 = const (63.2)
есть пока неизвестная постоянная величина
(см. § 24).
В этом случае по формулам (60.5) получаем:
-»[т+Т^к(1+7+ьНЙ-].
Рис. 128.
Подставляя эти выражения в первое уравнение равновесия
(63.3)
dar
■Н
= 0,
dr ■ г
Получаем дифференциальное уравнение для и:
dPu . l_du и _ (1+ч)« dt
dr** г dr г* ~ 1 — v dr'
(63.4)
(63.5)
Это уравнение отличается от уравнения (62.5) предыдущего
Параграфа только величиной коэффициента в правой части.
Поэтому решение его может быть сразу написано по аналогии с
202
ТЕПЛОВЫЕ НАПРЯЖЕНИЯ
\ГЛ. XII
выражением (62.8): /
г
а
Напряжения аг и о0 найдутся по формулам (63,3), а
напряжение az—из равенства
s* = ^K-v(ar+o9)]-fa'. (63.7)
Все сдвиги, а следовательно, и касательные напряжения равны
нулю.
Формулы для нормальных напряжений имеют вид:
г
Еа
(1-v)
■pg f ttopdf + A—jL,
Г
qe = (i_v)r2 J ^(P)P^P—Т=7 + Л + 7^'
£a<
где
, £(Сг + 2уеа)
2(l + v)(l—2v)'
(63.8)
В;
£C9
(63.9)
1 + v-
Постоянные А, В к ег определяются из условий на внутренней
и наружной поверхностях и из дополнительного условия, что труба
не несет осевой нагрузки и, следовательно,
б
J* ог2*г dr = 0, (63.10)
т. е.
^ J f(p)pdP + l(2v^ + Eei)(^ —а^) = 0. (63.11)
Если внутренняя и наружная поверхности трубы свободны, то
при г —а и г = й аг = 0. Производя вычисления, получаем:
Л-(1_^2_аа),[ '(P)PrfP-
а
(63.12)
Из формул (63.8) и (63.12) следует, что в любой точке трубы
°г + * = «, = -тЁг + 2А (63.13)
§ 64]
ТОНКОСТЕННЫЙ ЦИЛИНДР
203
Приведем расчетные формулы для важного случая, когда на
внутренней и наружной поверхностях трубы поддерживаются
постоянные температуры tx и £2. При этом в стенках трубы имеет
место установившийся поток тепла и распределение температур по
толщине стенки выражается формулой
/ =
(63.14)
Тогда на внутренней и на наружной поверхностях
(°»Уг=а — (*Л=а jT=T- [&-Ф — 7ГТ\ '
21п —
а
2 In —
(63.15)
Если труба тонкостенная, так что отношение — близко к
единице, то эти формулы приближенно переходят в следующие:
(л\ (п \ _ £<* (*2 — к)
\?Vr=a — \°г)г=а — 2 (1 — v) '
(п \ /rt \ £а (/2 — tj) j
KPVr^b — Уаг)г=Ь — 2(1—») * J
(63.16)
Интересно отметить, что эти формулы дают те же величины
напряжений, что и формулы (61,17) для плиты с заделанными краями.
§ 64. Тонкостенный цилиндр с радиальным и осевым перепадом
температур
Рассмотрим тонкостенный цилиндр (цилиндрическую оболочку),
причем используем' те же допущения и применим те же
обозначения, что и в §§ 33 и 34. Предполагаем, что температурное поле
симметрично относительно оси цилиндра, причем температура
изменяется линейно по толщине стенки и по произвольному закону — по
направлению оси цилиндра, так что
(64.1)
t=;F(z) + fJ£l
где F(z)—средняя по Чолщине стенки температура, а /(г) —
радиальный перепад температур между наружной и внутренней
поверхностями.
Выражения (34.3) для основных деформаций оболочки остаются в
силе для рассматриваемого случая. Деформации связаны с напряжениями
204
ТЕПЛОВЫЕ НАПРЯЖЕНИЯ
[ГЛ. XII
/
уравнениями (60.5):
** = 7?К — *(«Г-Ив)1 + <А «о = ^К — v(or + cr2)J-f erf. (64.2)
Пренебрегая малыми напряжениями ог, находим:
£ , , ч Eat
°z = Г=^а (8*+ vee)~ JZT7 =
Е , , ч £а*
ач — т=^(е9 + v8*) — т=^7
Условие отсутствия продольной силы в оболочке
ft/2
J аг2ти/?^ = 0
(64.3)
(64.4)
-ft/2
дает
= T^[^° + f-(l+^] = 0. (64.5)
Исключая из формул (64.3) величину -j^,
находим:
Ег <Ри
Eat f
l — #d& l-v/i'
<v
Ей
£v? *Ptf
1 — v2 <fc2
-fa/7
E<* f
1—v Л
(64.6)
Изгибающие моменты в продольном и поперечном направлениях
и растягивающая сила выражаются следующим образом;
-ft/2
Л/2
f2== Г a0^ = -D[vg + a(l+v)n
-ft/2
ft/2
7= J 0{ldi = Eh(^~aP).
(64.7)
§ И|
ТОНКОСТЕННЫЙ цилиндр
205
Вывод уравнений равновесия (34.12) остается в силе для
рассматриваемого случая и потому
а дифференциальное уравнение для прогиба приобретает
следующий вид:
d? (гл<&и\ г £Аы /114^ /АЛ , EahF
Для оболочки постоянной толщины
Q:
dz* к l ' h dzf
Фи . 12(l-~v2) _ g(l+v) <Р/ I ,£**/»
(64.9)
(64.10)
(64.11)
Последнее уравнение отличается от уравнения (34.16) только правой
частью и легко решается, как указано в § 34, если F{z) и f(z)
заданы в виде полиномов от z.
Нетрудно показать, что в случае произвольного осесимметрич-
ного распределения температур в тонкостенной цилиндрической
оболочке формулы (64.7)—(64.11) остаются верными, если положить
в них:
F(z)
чг \
-1 J tdb
-Л/2
Л/2
/<*) = § J Ml
(64.12)
-Л/2
а формулы (64.6) для напряжений заменяются следующими:
Ek <Ри Eol
1 _ va d& 1 — N
(t — F),
0,=
Ей
£v* d*u
R 1 — v* d&
Ea
1 — <
■(/—nF).
(64.13)
ИМЕННОЙ УКАЗАТЕЛЬ
Беляев Н. М. 178. 185
Бредт 130
Бубнов И. Г. 103
Буссинеск 186
Вебер 136
Власов В. 3. 147
Га до лин А В. 75
Галеркин Б. Г. 63, 99
Галилей 8
Герц 178, 184, 191
Головин X. Ф. 169
Грин 43
Гродский Г. Д. 53
Гук 8, 44
Динник А. Н. 193
Кастильяно 45
Колосов Г. В. 62, 151
ПРЕДМЕТНЫЙ
Анализатор 66
Аналогия мембранная 70» 131
— электрическая 70
Балка консольная 165
Бельтрами —Митчела зависимость 57
Брус кривой 167
Буссинеска задача 186 и д.
Вычисление перемещений по деформациям 35
Гипотеза прямых нормалей 82, 106
Гипотезы кинематические 62
Грина формулы 43
Гука обобщенный закон 45
Деформация 27 и д.
— тепловая 194
Диск вращающийся 75 и д.
Единственность решения задач теории
упругости 51
Жесткость цилиндрическая оболочки ЮЭ
плиты 84
Журавского формула 167
Коши 8, 13
Ламэ 75
Леви М. 101
Митчел 169
Мусхелишвили Н. И. 62, 151
Навье 8
Нейбер 52
Папкович П. Ф. 53
Прандтль 131
Ритц 63
Сен-Венан 8, 59, 122, 134
Тимошенко С. П. 146
Фламан 178
УКАЗАТЕЛЬ
Зависимости Бельтрами —Митчела 57
— Сен-Вена на 35
Задача Буссинеска 186 и д.
— Кирша 182
— контактная 178
— осесимметричная 71 и д.
— плоская 148 и д.
в полярных координатах 162
— смешанная 51
— Фламана 178 и д.
Закон взаимности касательных напряжений 14
— Гука обобщенный 45
Изгиб консольной балки 165
— кривого бруса 167
— тонких плит 81 и д.
Изоклины 68
Изохромы 68
Инварианты деформированного состояния 33
— напряженного состояния 23
Кастильяно формула 45
Кирша задача 172
Клин, нагруженный сосредоточенной силой,
приложенной к его вершине 169
ШЧ-ДМиТНЫЙ УКАЗАТЕЛЬ
20?
|<ольцо прямоугольного сечении, равномерно
нагруженное скручивающими моментами 119
Компоненты тензора деформации 30
^ — напряжения 14
Концом i рация напряжений 176
Коэффициент поперечного сжатия
(коэффициент Пуассона) 47
Кручение стержней 122 и д.
.. — стесненное 146
Ламэ постоянные 48
Лапласа уравнение 53
Лапласиан 62
Леви — Митчела теорема 158
Мембрана 70
Метод аналогий 63, 70
— лаковых покрытий 65
— оптический об
— полуобратный 122
— рентгенографический 70
.- тензометрический 63
Многозначность функции напряжений 162
Модуль сдиига 47
— упругости (модуль Юнга) 47
Напряжение 9
— главное 18, 19
— касательное 11
— нормальное 10
Напряжения тепловые 194 и д.
Оболочка 105
— тонкая 105
— цилиндрическая 106 и д.
бесконечная, подкрепленная кольцами 116
полубесконечная с нагрузкой по краю
112 и д.
симметрично нагруженная 106 и д.
— —- тонкостенная с радиальным и осевым
перепадом температур 203
Оси главные деформированного состояния 32
напряженного состояния 19
Плита (пластинка) 81
— круглая 81
с осесимметричным распределением
температур 195
с радиальным перепадом температур 199
— прямоугольная 95 ид., 99 и д.
— с малым круглым отверстием 172
— толстая 81
— тонкая 81
Плоскость плиты срединная 81
— поляризации 66
г- торцовая 81
Площадка главная 19
Г* контакта 178
Поверхность оболочки бокопая 10G
ZT срединная 105
Покрытие лаковое 65
Полуплоскость упругая, нагруженная
сосредоточенной силой, перпендикулярной к гра-
нице 178 и д.
Полупространство упругое, нагруженное
сосредоточенной силой, перпендикулярной
пк границе 186 и д.
Поляризатор 66
Постановка задач теомш wipyrocTii 58
Постоянные упругие 46
— — Ламе 48
ZT — технические 47
Пуассона коэффициент 47
!|РИнцип Сен-Веншш М>
Профиль тонкостенный закрытый 141
открытый 141
Растяжение пластины с малым круглым
отверстием 172
Расширение объемное 33
Резервуар толстостенный 74
Решение задач теории упругости в
напряжениях 55
в перемещениях 52
приближенное 61
Сдвиг 29
Сен-Венана зависимости 35
— принцип 59
Силы объемные 9
— поверхностные 9
Сопротивление материалов 7
Составляющие тензора деформации 30
напряжения 14
Состояние плоское деформированное 149, 151
напряженное 66, 149, 154
Стержень круглый переменного сечения 117
с полукруглой выточкой 134
— прямоугольного сечения 136
— тонкостенный 141
с закрытым профилем 141
— — с открытым профилем 141
— эллиптического сечения 132
Тело анизотропное 46
идеально упругое 41
— изотропное 46
Тензометр механический 63
— проволочный 64
Тензор деформации 28, 30
— напряжения 14
Теорема Леви — Митчела 158
— о циркуляции касательного напряжения 130
Теория безмоментная 105
— моментная 106
— пластичности 7
— упругости 7
Толщина плиты 81
Труба толстостенная 71 и д.
с радиальным перепадом температур 201
— тонкостенная 143
Удлинение главное 32
Уравнение гармоническое (уравнение
Лапласа) 53
— общее изгиба плит постоянной толщины 91
— характеристическое 18
Уравнения общие теории упругости 50 и д.
Условия сплошности 35, 56, 57
Фламана задача 178 и д.
Формула Журовсксго 167
— кастильяно 45
— котельная 105
Формулы Грина 43
Функция гармоническая 63
— напряжений (функция Эри) 62, 153
при кручении 123, 127
Холм напряжений 127
Цилиндр тонкостенный с радиальным и
осевым перепадом температур 203
Цилиндры соприкасающиеся с параллельными
осями 181
Циркуляция касательного напряжения 129
Шары соприкасающиеся 190
Эри функция 62, 153
Арнольд Моисеевич Кац
ТЕОРИЯ УПРУГОСТИ
Издание второе, стереотипное
Генеральный директор А Л. Кноп
Директор издательства О. В. Смирнова
Главный редактор Ю. А. Сандулов
Художественный редактор С. Л. Шапиро
Подготовка к переизданию С. В. Краснова
Выпускающий Н. К. Белякова
ЛР № 065466 от 21.10.97 г.
Гигиенический сертификат 78.01.07.953.П.001666.03.02
от 18.03.02, выдан ЦГСЭН в СПб
Издательство «ЛАНЬ»
lan@lpbl.spb.ru www.lanpbl.spb.ru
193012, Санкт-Петербург, пр. Обуховской обороны, 277,
издательство: тел./факс: (812)262-24-95, тел.: (812)262-11-78;
pbl@lpbl.spb.ru, print@lpbl.spb.ru
торговый отдел: 193029, ул. Крупской, 13, тел./факс: (812)567-64-93,
тел.: (812)667-86-78, (812)667-14-45, 667-86-82, 567-86-91; trade@lanpbl.spb.ru;
Филиал в Москве:
109263, Москва, 7-я ул. Текстильщиков, б,
тел.: (095) 919-96-00, 787-59-47, 787-59-48; lanmsk@gpress.ru
Филиал в Краснодаре:
350072, Краснодар, ул. Зиповская, 7, тел.: (8612)62-97-73.
Подписано в печать 10.01.02.
Бумага типографская. Формат 60x88Vie.
Гарнитура Школьная. Печать офсетная.
Усл. п. л. 10,08. Тираж 3000 экз. Заказ № /J, Jf.
Отпечатано с готовых диапозитивов
в ООО «Северо-Западный Печатный двор»
188350, Ленинградская обл., г. Гатчина, ул. Солодухина, д. 2