/















































































































































































































































































































































Автор: Торопчин А.Я. Романенко І.О. Даник Ю.Г. Руснак І.С. Жуков С.А.
Теги: зброя військова справа
ISBN: 966-601-057-7
Год: 2003



Текст
4
4
МІНІСТЕРСТВО ОБОРОНИ УКРАЇНИ
ДОВІДНИК
з ПРОТИПОВІТРЯНОЇ
ОБОРОНИ
І
і
МІНІСТЕРСТВО ОБОРОНИ УКРАЇНИ
ДОВІДНИК
З ПРОТИПОВІТРЯНОЇ ОБОРОНИ
КИЇВ
2003
ББК 68.64 (4 УКР)
Д64
УДК623 (03)
Рецензенти:
начальник Воєнно-наукового управління - заступник начальника Генерального штабу
Збройних Сил України з науки заслужений діяч науки і техніки України доктор військових наук
професор генерал-лейтенант І.С. Руснак;
начальник Військового інституту Київського Національного університету імені Тараса Шевченка
доктор технічних наук професор генерал-майор С.А. Жуков.
Довідник з протиповітряної оборони І А.Я. Торопчин, І.О. Романенко, Ю.Г. Даник,
Д64 Р.Е. Пащенко та ін. - К.: МО України, X: ХВУ, 2003. - 368 с.:іл.
В Довіднику проведено узагальнюючий огляд і аналіз засобів повітряного нападу та засобів і методів боротьби з
ними. Основну увагу приділено основам побудови засобів озброєння та бойового застосування військ (сил)
протиповітряної оборони.
Для широкого кола військових і цивільних фахівців, які працюють у галузях, пов’язаних з протиповітряною
обороною. Може бути корисним науковим робітникам, викладачам, слухачам, курсантам та студентам вищих
навчальних закладів.
Ю. Г Даник (розділи 1,2.3, 4. 5, 6, 7. 8, 9, 10), Р. Е. Пащенко (розділи 1, 2, 3, 4, 5, 6, 7, 8, 9, 10), І.О. Романенко (розділи 1,2, 3, 5, 7,
8, 10), А.Я. Торопчин (розділи 1, 2, 3, 4, 6, 7, 8, 9), О.О. Стеценко (підр. 1.2, 2.5, 9.2, 10.1 - 10.7), В.Б. Толубко (підр. 2.1,2.6, 2.7,
7.1, 7.2, 9.1.1), В.В. Кенійський ( підр. 7.3, 7.5, 7.6, 8.1), В.І. Ткаченко (підр. 1.2, 3.2, 3.3, 3.9, 5.1, 5.7, 5.8, 6.4), С.М. Нечхаєв
(підр. 1.2. 7.5, 7.7, 7.8, 7.10), В.В. Новосьолов (підр. 5.5, 5.6), М.Г. Батурін (підр. 3.3, 3.4, 10.9), М.О. Єрмошин (підр. 5.7, 5.8),
Карпенко В.І. (підр. 2.4, 3.1,3.2, 3.8), С.П. Лєщенко (підр. 3.4), Г.В. Пєвцов (підр. 3.4, 3.11,3.12), М.А. Шершнєв (підр. 5.1-5.4).
ББК 68.64 (4 УКР)
І8В\ 966-601-057-7
© Даник Ю. Г., Пащенко Р. Е, Романенко І.О., Торопчин А.Я., 2003
ЗМІСТ
ЗМІСТ
Передмова.............................................................................................. 5
1. Протиповітряна оборона. Етапи розвитку.............................................................. 6
1.1. Протиповітряна оборона країни (6). 1.2. Етапи розвитку протиповітряної оборони (6).
2. Засоби повітряно-космічного нападу............................................................... 12
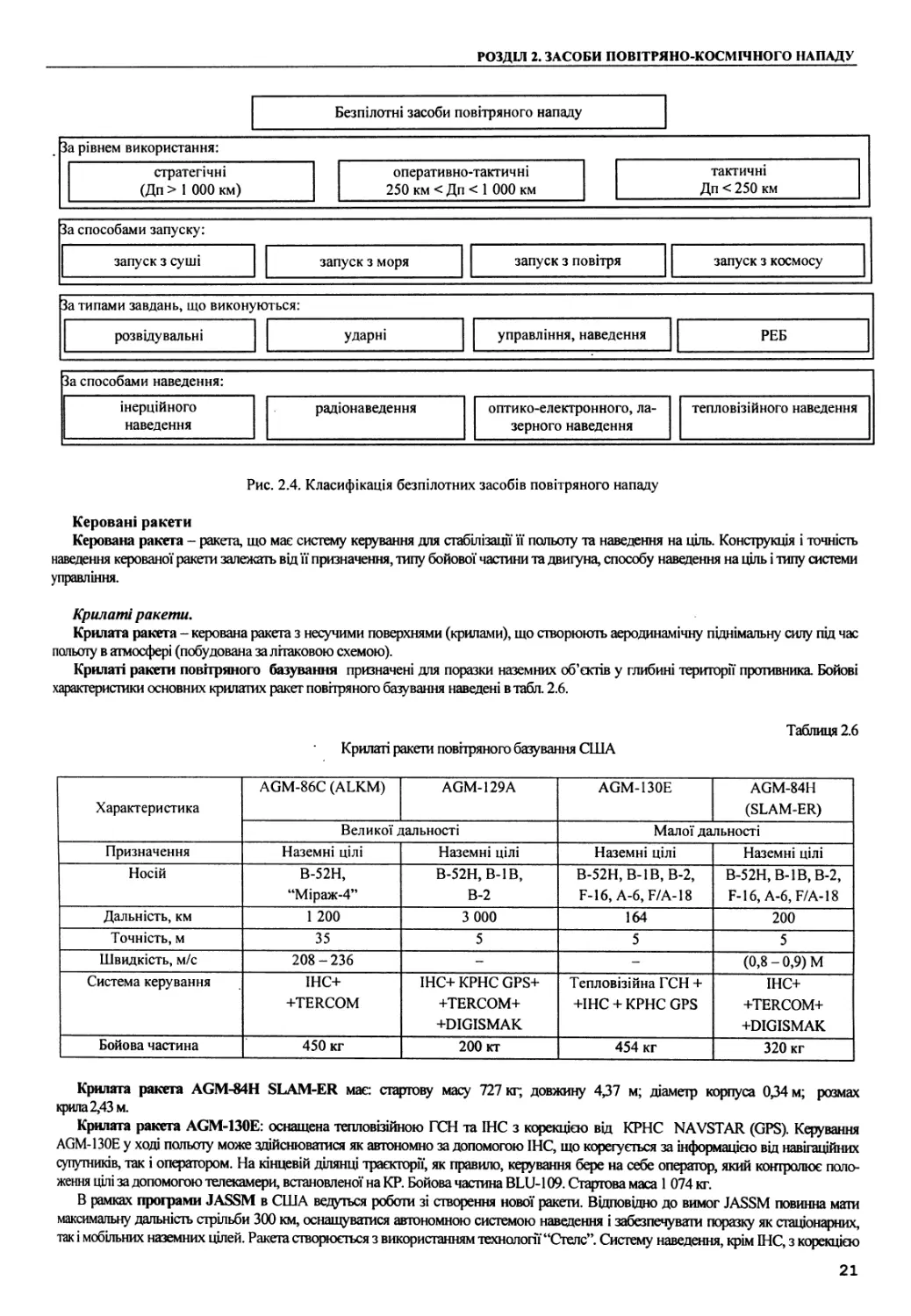
2.1. Балістичні ракети (12). 2.2. Пілотовані засоби повітряного нападу (13). 2.3. Безпілотні засоби повітряного нападу
(20). 2.4. Розвідувально-ударні комплекси (28). 2.5. Системи дальнього радіолокаційного виявлення і управління
(29). 2.6. Тевденцїї розвитку форм та способів збройної боротьби у воєнних конфліктах майбутнього (ЗО). 2.7. Космічні
системи забезпечення бойових дій (31). 2.8. Зброя на нових фізичних принципах (37).
4С
3. Основи теорії побудови систем озброєння ППО........................................................
3.1. Характеристика повітряного простору як середовища поширення радіохвиль і його вплив на радіолокаційні
спостереження (40). 3.2. Принципи побудови систем виявлення засобів повітряного нападу (50). 3.3. Методи огляду
простору та вимірювання траєкторних і сигнальних параметрів повітряних об’єктів (69). 3.4. Методи розпізнавання і
селекції повітряних об’єктів (76). 3.5. Загальні принципи побудови РЛС (88). 3.6. Такгико-технічні характеристики РЛС
ППО (93). 3.7. Основні пристрої радіолокаційних систем (98). 3.8. Цифрова обробка радіолокаційної інформації’(111).
3.9. Етапи процесу обробки радіолокаційної інформації (116). 3.10. Оптична локація (118). 3.11. Теоретичні основи радіо- і
радіотехнічної розвідки (128). 3.11.1. Засоби радіо- і радіотехнічної розвідки (128). 3.11.2. Принципи функціонування
системи пошуку радіовипромінювань за частотою (129). 3.11.3. Визначення напрямку на джерела
радіовипромінювань (133). 3.11.4. Визначення місцеположення джерел радіовипромінювань (135). 3.11.5. Проріджування
потоку сигналів у системі селекції засобу РРТР (137). 3.12. Теоретичні основи радіоелектронної боротьби (139).
3.12.1. Класифікація радіозавад, що застосовуються у засобах радіоелектронного подавлення (139). 3.12.2. Основні вади
активних радіозавад (141). 3.123. Засоби радіоелектронної боротьби (145). 3.12.4. Способи ведення РЕП та їх
ефективність (153). 3.12.5. Радіоелектронний захист радіоелектронних систем і засобів (159). 3.12.6. Електромагнітна
сумісність радіоелектронних систем і засобів (159).
4. Радіотехнічні війська ППО..........................................................................
4.1. Системи і засоби озброєння РТВ ППО (169). 4.1.1. Засоби радіолокаційної розвідки (169). 4.1.2. Система державного
радіолокаційного розпізнавання (171). 4.1.3. Комплекси засобів автоматизації (172). 4.1.4. Системи передачі радіолокаційної
інформації (174). 4.2. Такгико-технічні характеристики РЛС РТВ (175). 4.2.1. Експлуатаційно-технічні показники РЛС та
КЗА (186). 4.2.2. Характеристики основних зразків радіоелектронної техніки РТВ (187). 4.3. Тактика радіотехнічних військ
ППО (189). 4.3.1. Основи бойового застосування радіотехнічних військ ППО (189). 4.3.2. Бойові можливості радіотехнічних
військ (191). 4.3.3. Вибір бойової позиції (193).
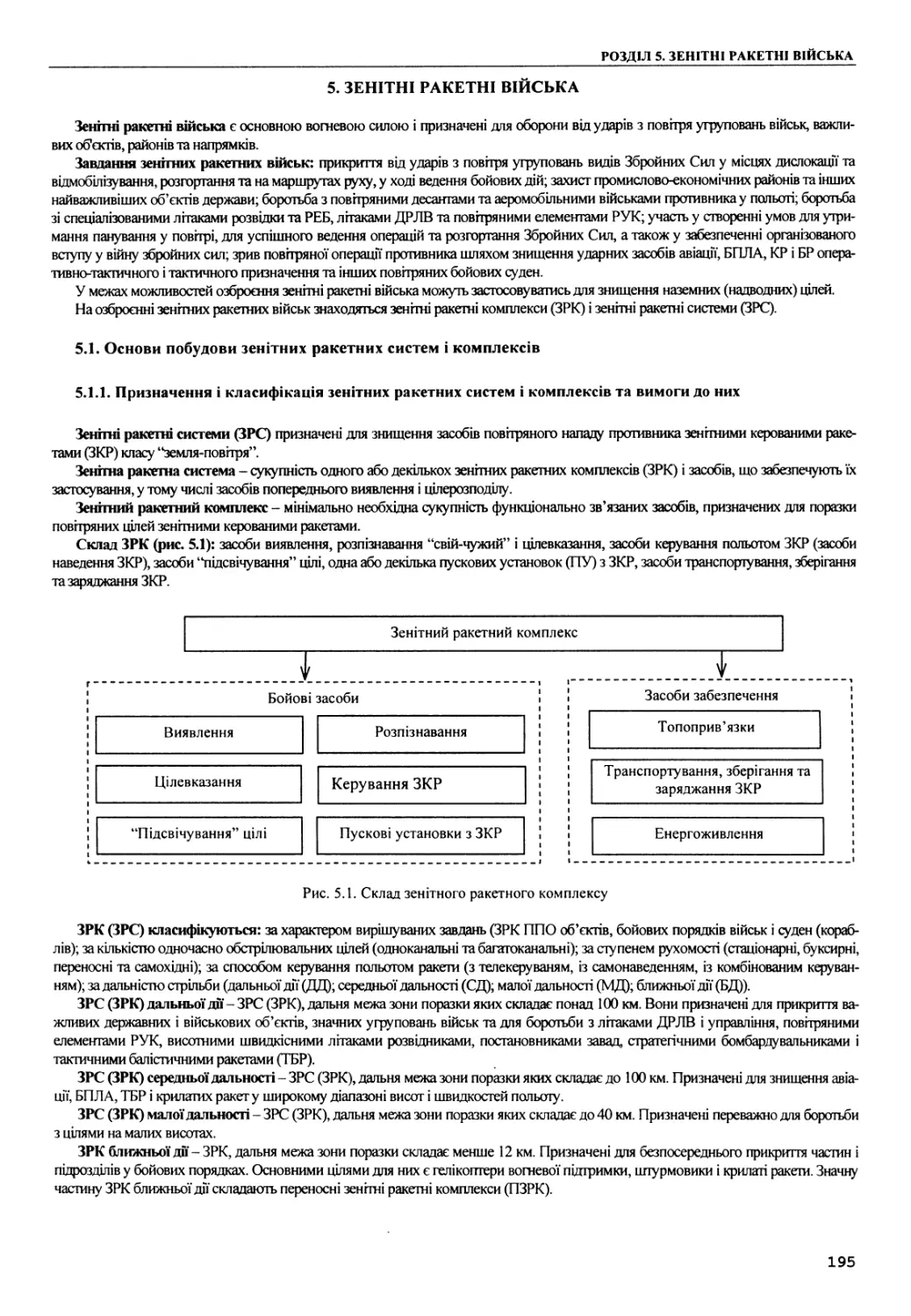
5. Зенітні ракетні війська............................................................................
5.1. Основи побудови зенітних ракетних систем і комплексів (195). 5.1.1. Призначення і класифікація зенітних ракетних
систем і комплексів та вимоги до них (195). 5.1.2 Характеристики складових частин зенітних ракетних комплексів і систем
керування зенітними ракетами (197). 5.2 Наведення ракети на ціль (209). 5.2.1. Помилки наведення ЗКР (209). 5.2.2 Методи
наведення ракет (215). 5.3. Імовірнісні показники знищення цілей зенітними керованими ракетами (222). 5.4. Такгико-
технічні характеристики зенітних ракетних комплексів (226). 5.5 Переносні зенітні ракетні комплекси (ПЗРК) (227).
5.6. Зенітні гарматні ракетні комплекси (228). 5.6.1. Стрільба зенітної артилерії (230). 5.7. Основи стрільби зенітними
керованими ракетами і управління вогнем підрозділів (234). 5.7.1. Сутність стрільби зенітними керованими ракетами
(234). 5.7.2. Зони поразки і пуску, можливості ЗРК з послідовного обстрілу цілей (235). 5.7.3. Основи управління вогнем
підрозділів (239). 5.8. Основи ведення бойових дій зенітними підрозділами (частинами) (244). 5.9. Бойові можливості засобів
ППО щодо боротьби з крилатими ракетами (252). 5.10. Бойові можливості засобів ППО щодо боротьби з балістичними
ракетами (254).
25
6. Авіація ППО........................................................................................
6.1. Призначення та завдання авіації ППО (257). 6.2. Основи бойового застосування авіації ППО (258). 6.2.1. Форми та
способи бойових дій авіації ППО (258). 6.2.2. Основи тактики одиночного та групового повітряних боїв (258). 6.3. Бойові
можливості авіації ППО (260). 6.3.1. Просторові показники бойових можливостей авіації ППО (261). 6.3.2. Часові показники
бойових можливостей авіації ППО (263). 6.3.3. Імовірнісні показники бойових можливостей авіації ППО (264). 6.4.
Планування повітряного бою (265). 6.5. Ведення повітряного бою сучасних винищувачів із малопомітними літаками (268).
27
7. Основи управління та підготовки бойових дій (бойового застосування)................................
7.1. Основи управління (271). 7.1.1. Принципи управління силами та засобами (271). 7.1.2. Зміст та суть управління (272).
7.2. Система управління (274). 7.2.1. Загальна характеристика системи управління (274). 7.2.2. Структура системи
управління (277). 7.3. Організація зв’язку і АСУ ППО (278). 7.3.1. Організація зв’язку (278). 732. Автоматизована система
ЗМІСТ
управління ППО (278). 7.3.2.1. Призначення, завдання та принципи побудови АСУ ППО (278). 7.З.2.2. Види забезпечення
АСУ ППО (280). 7.З.2.З. Показники ефективності роботи АСУ (284). 7.4. Перспективи розвитку АСУ (285). 7.5. Робота
командира та штабу при організації управління з'єднаннями (частинами) (285). 7.6. Основи підготовки бойових дій
(бойового застосування) (286). 7.6.1. Суть підготовки бойових дій (бойового застосування) (286). 7.6.2. Зміст рішення на
бойові дії (бойове застосування) (287). 7.6.3. Методика прийняття рішення на бойові дії’ (бойове застосування) (287).
7.6.4. Методика оцінки противника (288). 7.6.5. Оцінка своїх військ (289). 7.6.6. Методика оцінки бойових
можливостей (289). 7.7. Основи планування бойових дій (бойового застосування) (290). 7.8. Доведення бойових завдань до
підлеглих (291). 7.9. Основи інформаційної боротьби (291). 7.9.1. Мета, зміст та основні характеристики інформаційної
боротьби (291). 7.9.2. Основні принципи і форми інформаційної боротьби (293). 7.10. Повітряна операція (293).
8. Основи організації взаємодії.......................................................................... 295
8.1. Завдання взаємодії (295). 8.2. Організація взаємодії (296). 8.2.1. Організація взаємодії з’єднань та частин ЗРВ з
частинами ВА (296). 8.2.2. Організація взаємодії між з’єднаннями (частинами) ЗРВ (298). 8.2.3. Організація взаємодії між
частинами винищувальної авіації (298). 8.2.4. Організація взаємодії між з’єднаннями (частинами) РТВ (298).
8.2.5. Організація взаємодії з’єднань (частин) РТВ з частинами інших родів військ та РЕБ (299). 8.2.6. Організація
взаємодії частин (підрозділів) РЕБ зі з’єднаннями та частинами ЗРВ, В А, РТВ (299). 8.3. Робота командира і штабу під час
організації взаємодії (299).
9. Забезпечення бойових дій (бойового застосування) та повсякденної діяльності........................... 301
9.1. Бойове (оперативне) забезпечення (301). 9.1.1. Розвідка (301). 9.1.2. Радіоелектронна боротьба (303).
9.1.3. Оперативне маскування (304). 9.1.4. Інженерне забезпечення (305). 9.1.5. Забезпечення радіаційного, хімічного і
біологічного захисту (307). 9.1.6. Захист від зброї масового ураження (307). 9.1.7. Топогеодезичне забезпечення (308).
9.1.8. Метеорологічне забезпечення (312). 9.1.9. Штурманське забезпечення (312). 9.1.10. Радіотехнічне забезпечення (312).
9.1.11. Пошуково-рятувальне забезпечення (313). 9.1.12. Безпосереднє прикриття та наземна оборона (313). 9.2. Технічне
забезпечення бойових дій (бойового застосування) (315). 9.2.1. Ракетно-технічне забезпечення (316). 9.2.2. Інженерно-
ракетне забезпечення (316). 9.2.3. Інженерно-радіоелектронне забезпечення (317). 9.2.4. Інженерно-артилерійське
забезпечення (317). 9.2.5. Інженерно-технічне забезпечення (317). 9.2.6. Автотехнічне забезпечення (317).
9.2.7. Танкотехнічне забезпечення (317). 9.2.8. Технічне забезпечення радіаційного, хімічного і біологічного захисту (318).
9.2.9. Технічне забезпечення зв’язку і АСУ (318). 9.2.10. Технічне забезпечення по службах тилу (318). 9.2.11. Метрологічне
забезпечення (318). 9.3. Тилове забезпечення бойових дій (бойового застосування) (319). 9.3.1. Матеріальне
забезпечення (319). 9.3.2. Торговельно-побутове, квартирно-експлуатаційне та фінансове забезпечення (319). 9.4. Морально-
психологічне забезпечення (320). 9.4.1. Інформаційно-пропагандистське забезпечення (320). 9.4.2. Психологічне
забезпечення (320). 9.4.3. Військово-соціальна та правова робота (321). 9.4.4. Культурно-виховна робота (321). 9.5. Медичне
забезпечення (321).
10. Основи забезпечення безпеки під час бойової підготовки..............................................
10.1. Система заходів безпеки, яких необхідно дотримуватися у ході бойової підготовки (323). 10.2. Обов’язки
посадових осіб з організації заходів безпеки (323). 10.3. Діяльність командирів (начальників) щодо забезпечення заходів
безпеки при проведенні навчань, стрільб, пусків ракет та інших заходів бойової підготовки (325). 10.4. Організаторська
діяльність командирів, штабів щодо розробки заходів безпеки для бойової підготовки (327). 10.5. Відповідальність та
організація контролю під час проведення навчань (328). 10.6. Заходи безпеки при діях особового складу за сигналами
оповіщення та під час приведення у вищі ступені бойової готовності (329). 10.7. Заходи безпеки під час технічного
обслуговування та перевірки готовності озброєння, військової техніки, ракет і боєприпасів до бойового застосування (330).
10.8. Заходи безпеки при прямуванні в призначені райони (331). 10.9. Заходи безпеки при стрільбах по повітряних
цілях (332). 10.10. Заходи безпеки при стрільбі (пусках) засобів ППО безпосереднього прикриття (334). 10.11. Заходи
безпеки при експлуатації ракет та боєприпасів (335). 10.12. Заходи безпеки при роботі з джерелами надвисокої
частоти (335). 10.13. Заходи безпеки при обслуговуванні електрообладнання (336). 10.14. Заходи безпеки при
обслуговуванні електроагрегатів (336). 10.15. Заходи безпеки при перевезенні особового складу на машинах (337).
10.16. Заходи безпеки при перевезенні залізничним транспортом (338). 10.17. Заходи пожежної безпеки (338). 10.18. Заходи
безпеки під час гасіння пожежі (339). 10.19. Проведення інструктажу з техніки і засобів безпеки (340). 10.20 Забезпечення
екологічної безпеки повсякденної діяльності військ (341). 10.21. Надання першої допомоги постраждалим (342).
344
Післямова...............................................................................................
345
Література..............................................................................................
ТІ 353
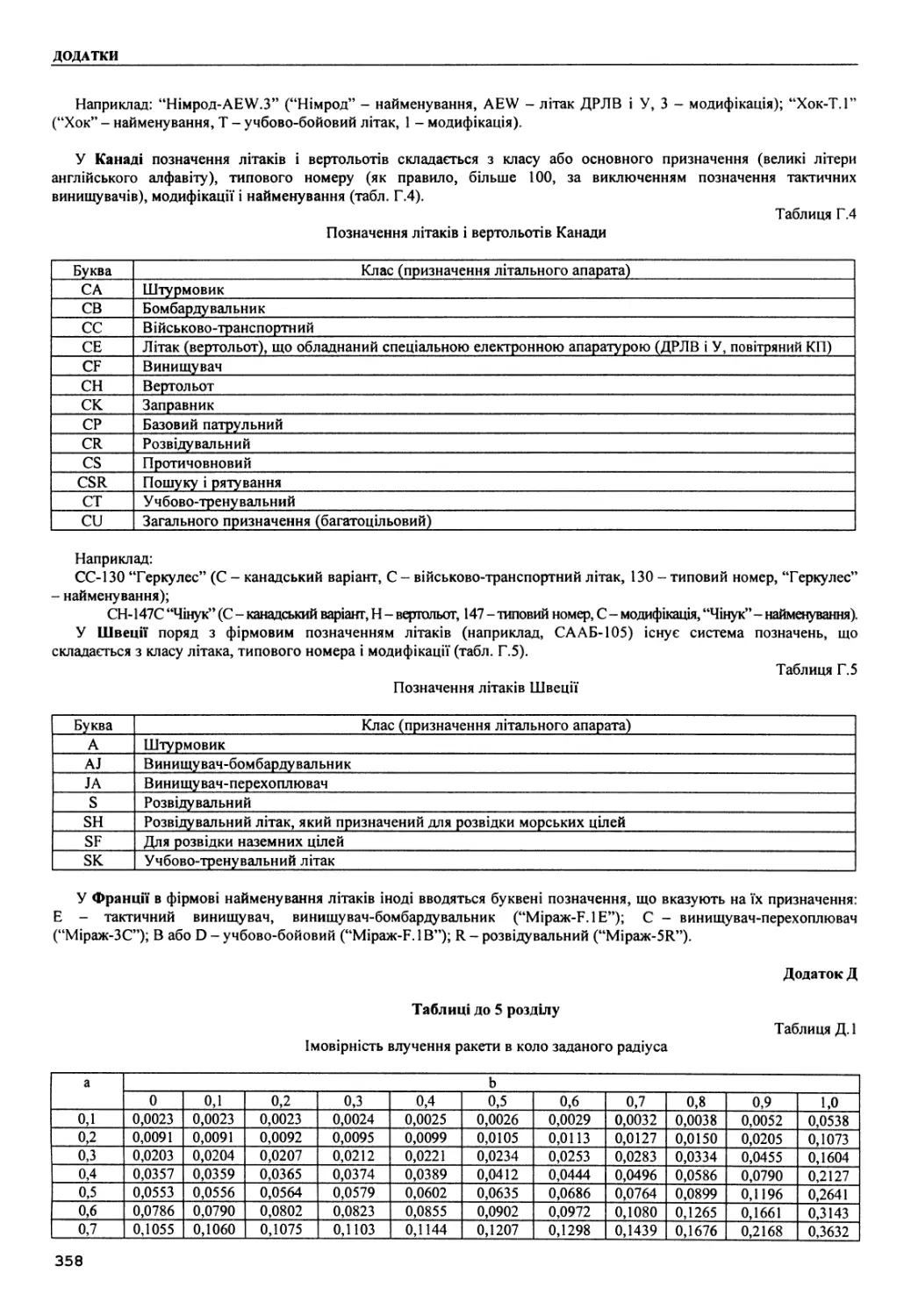
Додаток А. Відповідність довжини хвиль частотам коливань радіохвиль (353). Додаток Б. Перевід відношення
потужностей (Р2/Р1) і напруг (Л2/^і) з децибел у безрозмірні одиниці (353). Додаток В. Умовні позначення у закордонній
радіоелектронній апаратурі (354). Додаток Г. Позначення закордонної військової авіаційної техніки (356). Додаток Д.
Таблиці до 5 розділу (358).
4
ПЕРЕДМОВА
ПЕРЕДМОВА
Перенесення основних зусиль збройної боротьби в повітряно-космічну сферу, пряма залежність результатів воєнного
конфлікту від того, хто буде панувати в ній, призводить до суттєвого підвищення ролі протиповітряної оборони, якість якої багато у
чому визначається рівнем підготовки особового складу, який, в свою чергу, суттєво залежить від наявності та розвитку навчально-
методичної бази. З метою подальшого підвищення професійних знань та навичок фахівців протиповітряної оборони був створений
цей Довідник.
Довідник охоплює всі основні напрямки побудови, оснащення та забезпечення протиповітряної оборони.
В ньому у системному вигляді представлені:
основні завдання протиповітряної оборони, військ, які її здійснюють, основи управління та підготовки бойових дій;
викладені основні, найбільш важливі відомості, щодо побудови систем і засобів озброєння РТВ ППО, ЗРВ ППО, авіації ППО їх
такгико-технічних характеристик та бойових можливостей, основ і особливостей їх бойового застосування, ведення бойових дій,
видів забезпечення;
надана інформація про засоби повітряного нападу (і системи, які забезпечують їх застосування) найбільш розвинутих країн
світу з урахуванням досвіду їх використання у війнах і військових конфліктах, особливо минулого десятиріччя, та перспектив їх
подальшого розвитку;
розглянуті основні елементи теоретичних основ радіолокації і побудови сучасних та перспективних зразків озброєння ППО, а
також їх складових.
Значної уваги приділено:
основам виявлення малопомітних засобів повітряного нападу та таких, що діють на малих і гранично малих висотах,;
теоретичним основам радіо- і радіотехнічної розвідки та радіоелектронної боротьби;
автоматизованим системам управління ППО;
основам організації взаємодії*;
питанням забезпечення безпеки під час бойової підготовки у військах ППО.
При підготовці Довідника використані видані за останні роки публікації, перелік яких наведений у списку літератури. Для
Довідника обрані найбільш поширені термінологія та умовні позначення.
Довідник підготували і здійснили редакцію: Головнокомандувач Військ Протиповітряної оборони Збройних Сил України гене-
рал-лейтенант А.Я. Торопчин (розділи 1,2,3,4,6,7,8,9), заступник Головнокомандувача Військ Протиповітряної оборони з бойо-
вої підготовки військ та військових навчальних закладів - начальник бойової підготовки генерал-майор І.О. Романенко (розділи 1,2,
3,5,7,8,10), доктор технічних наук професор полковник Ю. Г. Даник (розділи 1,2,3,4,5,6,7, 8,9,10), кандидат технічних наук
доцент підполковник Р. Е. Пащенко (розділи 1,2,3,4,5,6,7,8,9,10).
До раду підрозділів включені матеріали підготовлені:
начальником Озброєння Збройних Сил України кандидатом воєнних наук доцентом генерал-полковником О.О. Сгеценко
(підр. 1.2,2.5,9.2,10.1 -10.7), начальником Національної Академії оборони України доктором технічних наук професором гене-
рал-полковником ВБ. Голубко (підр. 2.1,2.6,2.7,7.1,7.2,9.1.1), начальником Головного штабу - першим заступником Головноко-
мандувача Військ Протиповітряної оборони Збройних Сил України генерал-лейтенантом В.В. Камінським (підр. 7.3,7.5,7.6,8.1),
начальником Харківського військового університету кандидатом воєнних наук професором генерал-лейтенантом В.І. Тка-
ченко (підр. 1.2,3.2,3.3,3.9,5.1,5.7,5.8,6.4), першим заступником Головнокомандувача Військ Протиповітряної оборони Збройних
Сил Украйни кандидатом військових наук доцентом генерал-майором С.М. Нечхаєвим (підр. 1.2, 7.5, 7.7, 7.8, 7.10), начальником
військ протиповітряної оборони Сухопутних військ Збройних Сил України генерал-майором В.В. Новосьоловим (підр. 5.5, 5.6),
начальником наукового центру Військ Протиповітряної оборони кандидатом технічних наук доцентом полковником М.Г. Ба-
туріним (підр. 3.3,3.4,10.9), начальником кафедри Харківського військового університету кандидатом воєнних наук доцентом пол-
ковником М.О. Єрмошикнм (підр. 5.7, 5.8), заступником начальника Харківського військового університету з наукової роботи
доктором технічних наук професором полковником Карпенко В.І. (підр. 2.4,3.1,32,3.8), начальником відділу наукового центру
Військ Протиповітряної оборони кандидатом технічних наук полковником С.П. Лєщенко (підр. 3.4), заступником начальника
наукового центру Військ Протиповітряної оборони з наукової роботи доктором технічних наук полковником Г.В. Пєвцовим
(підр. 3.4, 3.11, 3.12), професором кафедри Харківського військового університету кандидатом технічних наук доцентом М.А.
Шершневим (підр. 5.1-5.4).
Довідник призначений для широкого кола військових і цивільних фахівців, які працюють у галузях, пов’язаних з проти-
повітряною обороною.
Довідник є: необхідним для отримання, поповнення і поновлення знань щодо вищезазначених галузей, підготовки для вступу
до вищих військових навчальних закладів оперативно-тактичного та оперативно-стратегічного рівнів, а також для самоосвіти;
інтегрованим джерелом інформації для тих, хто навчаються в системі командирської (професійної) підготовки в Збройних Силах
України.
Може бути корисним науковим робітникам, викладачам, слухачам, курсантам та студентам вищих навчальних закладів.
Довідник такого характеру видається в Україні вперше, тому автори будуть вдячні всім, хто вважає за потрібне повідомиш свої
зауваження та пропозиції щодо покращення Довідника
5
РОЗДІЛ 1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
1.1. Протиповітряна оборона країни
Протиповітряна оборона (ППО) країни представляє собою сукупність загальнодержавних заходів і бойових дій військ, узго-
джених та взаємопов’язаних єдиним замислом і планом за метою, завданнями, місцем та часом, які проводяться під єдиним керів-
ництвом для відбиття повітряного нападу противника, зниження ефективності його ударів, завдання йому поразки. ППО країни є
стратегічним фактором, який здійснює істотний вплив на хід та результати війни.
Завдання ППО:
охорона за мирного часу державного кордону у повітряному просторі та контроль за дотриманням встановленого порядку його
використання;
надання черговими силами допомоги повітряним суднам у разі форс-мажорних обставин;
попередження та припинення порушень державного кордону літальними апаратами інших держав, а при необхідності -
знищення бойових літальних апаратів-порушників державного кордону;
безперервне ведення розвідки, збір та узагальнення інформації що до повітряної обстановки, виявлення засобів повітряного
нападу у польоті, оповіщення військ (сил), органів управління Збройних Сил, Державної служби охорони державного кордону, і
Міністерства з питань надзвичайних ситуацій та у справах захисту населення від наслідків Чорнобильської катастрофи, видача
інформації на командні пункти зенітних ракетних військ (ЗРВ) та винищувальної авіації (ВА);
установлення початку повітряного нападу противника та попередження про нього органів управління держави і Збройних Сил;
знищення ударних засобів авіації, безпілотних літальних апаратів (БПЛА), крилатих ракет (КР) і балістичних ракет (БР) опера-
тивно-тактичного і тактичного призначення, засобів повітряної розвідки, літаків дальнього радіолокаційного виявлення (ДРЛВ),
повітряних постановників завад і повітряних елементів розвідувальних ударних комплексів (РУК), аеромобільних військ та десан-
тів у польоті;
захист від ударів з повітря угруповань Збройних Сил, важливих військових та державних об’єктів, прикриття адміністративно-
політичних та промислово-економічних центрів, інших важливих об’єктів країни, у разі потреби - участь у знищенні наземних та
надводних цілей противника.
Протиповітряна оборона країни включає системи: розвідки повітряного противника та оповіщення про нього; зенітного
ракетно-артилерійського прикриття; винищувального авіаційного прикриття; управління військами.
1.2. Етапи розвитку протиповітряної оборони
Виникнення протиповітряної оборони.
Застосування літаків у воєнних цілях призвело до створення засобів боротьби з ними і організації ППО держави і військ.
Готуючись до першої світової війни, провідні держави світу швидко розвивали новий засіб боротьби - авіацію, розширювали та
вдосконалювали її бойові можливості, розробляли способи її використання у воєнних цілях.
На початку війни авіація широко застосовувалась як засіб розвідки, але з появою нових літаків значно розширився перелік зав-
дань, що покладалися на авіацію. Швидкісні літаки почали використовуватись для знищення літаків у польоті (винищувачі), важкі
літаки наносили удари з повітря не тільки по військах, але й по населених пунктах, залізничних вузлах та інших об’єктах (бомбар-
дувальники).
У ході війни безперервно збільшувалась чисельність авіації і поліпшувались її льотно-технічні дані. Так, якщо до серпня 1914 р.
чотири воюючі держави (Німеччина, Франція, Англія і Росія) мали трохи більше ніж 900 літаків, то вже у листопаді 1918 р. їх чисе-
льність зросла до 8 500. Разом з авіацією під час війни отримали розвиток дирижаблі (здебільшого, у Німеччині).
З усією очевидністю виявилася необхідність негайної та надійної організації протиповітряної оборони не тільки військ і
об’єктів, поблизу лінії фронту, але й розташованих у глибокому тилу.
У першу світову війну для ведення боротьби з повітряним противником були створені й почали широко застосовуватись такі
засоби ППО, як зенітна артилерія (ЗА), винищувальна авіація, зенітні кулемети, зенітні прожектори, аеростати загородження. Була
організована система повітряного спостереження і оповіщення, а також почала створюватися система управління силами і засобами
протиповітряної оборони. Особливо широкого розвитку, як засіб боротьби з повітряним противником, отримала зенітна артилерія.
Спочатку стрільбу по літаках і дирижаблях вели із звичайних польових, а також морських гармат, пристосованих для цієї мети. Ці
гармати встановлювалися на спеціальних станках, які забезпечували стрільбу під великими кутами місця. Але гармати мали значні
недоліки: обмежені швидкості наведення і малу швидкострільність. Одночасно проводились роботи щодо створення спеціальних
зенітних гармат. До початку першої світової війни в Росії, Німеччині та Франції вже було створено спеціальні гармати для стрільби
по повітряних цілях. Найкращі на той час такгико-технічні дані мала російська тридюймова зенітна гармата зразка 1914 року. По-
чаткова швидкість її снаряда становила 588 м/с, досяжність по висоті - 5 000 м і швидкострільність - до 12 пострілів за хвилину.
Розвиток і широке використання авіації в ході війни призвело до суттєвого збільшення кількості зенітної артилерії. Так, на прикрит-
ті Парижа наприкінці війни знаходилось 270, а на прикритті Лондонського району 249 зенітних гармат. У ході війни змінювались і
якісні показники зенітної артилерії. Початкова швидкість снаряда зросла до 760 м/с, досяжність по висоті - до 7 900 м. У ряді дер-
жав були сконструйовані або пристосовані для стрільби по повітряних цілях гармати великого і малого калібрів.
Одночасно з розвитком і вдосконаленням зенітних гармат створювалися і удосконалювались способи стрільби. У 1915-1916 рр.
для підвищення точності стрільби зенітної артилерії були створені й надійшли на озброєння прилади для визначення координат цілі
- курсоміри, дальноміри та ін. Були розроблені спеціальні таблиці для ведення вогню. У 1916 році у війська стали надходити зенітні
6
РОЗДІЛ 1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
прожектори, призначені для забезпечення стрільби зенітної артилерії і бойових дій винищувальної авіації’ вночі. Все це значною
мірою підвищило ефективність вогню зенітної артилерії. Однак точність стрільби залишалась відносно невеликою.
1915 рік також став роком народження служби повітряного спостереження, сповіщення та зв’язку (ПССЗ), яка вирішувала
завдання виявлення авіації противника, спостереження за її діями й сповіщення сил та засобів ППО і населення міст про повітряну
небезпеку.
У зв’язку зі зростанням чисельності авіації і розширенням масштабів її застосування ЗА не могла вирішити всіх завдань проти-
повітряної оборони. Виникла необхідність використання й інших засобів. Таким засобом став літак, оснащений спеціальним озбро-
єнням, яке забезпечувало йому можливість ведення повітряного бою. У 1915 р. на Російсько-Балтійському вагонному заводі був
створений перший спеціалізований винищувач РБВЗ-С-16. Він мав досить високі на той час льотно-тактичні характеристики -
швидкість 150 км/год, високу маневреність і був озброєний спеціальним синхронним кулеметом, що стріляв через гвинт. Пізніше
літаки-винищувачі були створені і в інших воюючих державах.
Винищувальна авіація у ході війни швидко розвивалась, а її питома вага у складі військово-повітряних сил зростала. Внаслідок
цього до кінця війни її частка становила більш ніж 40% від складу всієї воєнної авіації і стала найбільш ефективним засобом боро-
тьби з повітряним противником, перетворившись на один з основних засобів протиповітряної оборони військ і об’єктів.
Відповідно до цього з’явилась і нова тактика дій авіації’ - були розроблені способи перехоплення повітряного противника з по-
ложення патрулювання і з положення “чергування на аеродромі”, розроблені способи наведення винищувачів на ціль. Наведення
здійснювалось за допомогою білих стріл, які викладались на землі та вказували винищувачам напрям на противника. Для наведен-
ня винищувачів також застосовувалась і зенітна артилерія, яка показувала розривами снарядів у повітрі місцезнаходження цілі.
Наприкінці війни на винищувачах стали встановлювати радіотелефони, що дозволяло здійснювали управління літаками, які знахо-
дились у повітрі. Все це сприяло посиленню протиповітряної оборони і підвищенню ефективності бойових дій ВА.
Зустрівши протидію зенітної артилерії і винищувальної авіації на великих і середніх висотах, засоби повітряного нападу в 1917
році стали здійснювали нальоти на малих висотах. Для боротьби з літаками, діючими на малих висотах, почали застосовували
аеростати повітряного загородження, кулемети і навіть стрілецьку зброю.
У роки першої світової війни були розроблені й впроваджені на практиці основні принципи ППО об’єктів країни та військ,
прийоми та способи боротьби з повітряним противником. Одним із яскравих прикладів з точки зору ефективної організації ППО
тилових об’єктів став Одеський військовий округ (м. Одеса, Миколаїв, Херсон та ін.). У 1916 р. в Одесі створюється штаб та підроз-
діли протиповітряної оборони. В їх складі на початок 1917 р. було 18 протилітакових батарей, 4 авіазагони, 2 роли спостерігачів,
4 прожекторних команди і телефонно-телеграфна команда.
Становлення протиповітряної оборони.
У роки Громадянської війни на основі досвіду першої світової війни зазнала розвитку тактика військ ППО, були розроблені
принципи побудови протиповітряної оборони великих населених пунктів, почався розвиток оперативного мистецтва військ ППО.
На початку весни 1918 р. у Червоній Армії було близько 200 зенітних артилерійських батарей і 12 винищувальних авіазагонів. Для
прикриття Петрограду створювалась система ППО, що складалась з 16 зенітних артилерійських батарей і 19 літаків-винищувачів.
Прикриття від повітряних ударів інших об’єктів здійснювалось лише під час безпосередньої загрози повітряного нападу. У 1919
році в м. Нижній Новгород створюється перший навчальний заклад, у якому готують фахівців для ППО - Школа стрільби по
повітряному флоту (нині Житомирській військовий орденів Жовтневої Революції і Червоного прапора інститут радіоелектроніки
імені С.П. Корольова).
У 20-х роках протиповітряна оборона базувалась на пунктах ППО, що входили у сектори ППО прикордонних військових
округів. Командувачі округів несли відповідальність за ППО у межах округу. У цей же період створюється мережа постів ПССЗ у
прикордонній смузі та навколо найбільших центрів країни.
1924 р. - з окремих дивізіонів створюється перший полк зенітної артилерії (ЗА) Робітничо-селянської Червоної Армії (РСЧА).
Під час воєнної реформи 1924-1925 рр. почалось удосконалення засобів і систем ППО. Були побудовані та випробувані перші
літаки-винищувачі И-1, які поступили на озброєння військ у 1927 р.
1927 р. - створений 6-й відділ штабу РСЧА як орган управління підрозділами ППО. На нього покладались завдання розробки і
створення озброєння організації ППО військ і об’єктів, підготовки кадрів. Створюється перша зенітна артилерійська бригада.
15 лютого 1929 р. у відповідності з директивою штабу Українського військового округу створюється ППО м. Києва.
У 30-х - на початку 40-х років війська ППО зазнають принципових змін.
Вони оснащуються новою бойовою технікою. На озброєння військ надходять: 1931 р. - 76,2-мм зенітна гармата; 1935 р. -
пристрій управління артилерійським зенітним вогнем ПУАЗВ-2; 1938 р. - нова 76,2-мм зенітна гармата; 1939 р. - 85-мм зенітна
гармата і 37-мм автоматична зенітна гармата; пристрій управління артилерійським зенітним вогнем ПУАЗВ-З; служба ПССЗ отри-
мує перші радіолокаційні станції виявлення РУС-1, РУС-2. На озброєння винищувальної авіації надходять літаки-винищувачі И-15,
И-16, И-153, Як-1, Як-3, МиГ-3, ЛаГГ-3, Ла-5, Ла-7. Широкого розповсюдження зазнають прожектори, звукоуловлювачі та аеро-
стати повітряного загородження. Особливо значним досягненням стала поява радіолокаторів. Створення радіолокаційних
станцій гарматного наведення і оснащення ними зенітних батарей набагато збільшило бойові можливості останніх. Зенітна артиле-
рія отримала здатність вести бій за будь-яких умов, вдень і вночі. У той же час розгортаються нові частини та з’єднання ППО, удо-
сконалюється їх організаційна структура та принципи бойового використання.
1930 р. - у штабі РСЧА створюється Управління ППО (з 1932 р. воно стає Управлінням ППО РСЧА і підпорядковується безпо-
середньо наркому з військових та морських справ). Управління ППО РСЧА здійснювало загальне керівництво протиповітряною
обороною всієї території країни, а також об’єднувало діяльність всіх громадських відомств та установ з питань ППО. У військових
округах створюються управління ППО, які очолюють начальники ППО військових округів, що безпосередньо підпорядковуються
командувачам військами округів, а у спеціальному відношенні - начальнику ППО РСЧА.
1932 р. - створюється перша зенітна артилерійська дивізія.
7
РОЗДІЛ 1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
1937 р. - для ППО важливих промислових і адміністративних центрів країни (м. Москва, Ленінград, Баку) створюються корпу-
си ППО, для оборони інших важливих міст і районів (м. Київ, Мінськ, Одеса, Батумі, Хабаровськ та ін.) створюються дивізії і окре-
мі бригади ППО. До їх складу входили всі роди військ ППО, окрім винищувальної авіації, яка продовжувала залишатися у підпо-
рядкуванні командувачів ВПС військових округів. Але вона базувалась у відповідності з завданнями ППО. З початком війни перед-
бачалось оперативне її підпорядкування командирам з’єднань ППО.
Грудень 1940 р. - Управління ППО РСЧА перетворюється на Головне управління ППО Червоної Армії, яке здійснювало
планування оперативного застосування військ ППО, облік озброєння і керівництво бойовою підготовкою.
Лютий 1941 р. - уся прикордонна територія країни розподілена на зони ППО (за кількістю військових округів), які очолювали
помічники командувачів військами округів з ППО - командувачі зон ППО. На території України було розгорнуто три зони ППО:
Київська, Південна і Харківська. До складу Київської зони ППО входила 3-я дивізія ППО, що прикривала Київ, 4-а дивізія ППО, що
обороняла Львів, 1-а бригада ППО, що охороняла Дрогобич та бригадні райони ППО: Сганіславський, Рівненський, Вінницький і
Житомирський. До Південної зони ППО входили бригадні райони ППО: Кишинівський, Первомайський і Запорізький.
Аналіз побудови протиповітряної оборони Радянського Союзу у передвоєнний (до 1941 року) період показує, що вона була
підпорядкована ідеї застосування військ ППО в межах тактики. Це було зумовлено, з одного боку, поглядами на застосування авіа-
ції противника при діях по об’єктах тилу країни (вважалося, що авіація буде здійснювати нальоти незначними групами), а з іншою
боку - станом і можливостями засобів протиповітряної оборони того часу. Так, винищувальна авіація діяла у радіусі 150 - 200 км, а
зенітна артилерія могла знищувати літаки противника тільки на безпосередніх підступах до об’єктів оборони. Внаслідок цього про-
типовітряна оборона організовувалась і здійснювалась за принципом оборони окремих пунктів (об’єктів), розташованих у зоні до-
сяжності авіації противника. Для оборони кожного пункту виділялась певна кількість сил і засобів ППО, які вирішували свої
завдання самостійно, поза зв’язком із силами і засобами, що обороняли інші пункти.
Єдиного оперативного органу, здатного здійснювати централізоване управління силами і засобами ППО, призначеними для
протиповітряної оборони країни, не було. Головне управління протиповітряної оборони, що існувало в той період оперативними
функціями не володіло. Відповідальність за протиповітряну оборону об’єктів країни покладалась на командувачів військами війсь-
кових округів, які здійснювали керівництво через командувачів зонами ППО, які були їх заступниками, а під час війни - на коман-
дувачів військами фронтів і військових округів.
Вищою організаційною одиницею сил і засобів ППО було тактичне з’єднання. До того ж з’єднання винищувальної авіації були
підпорядковані командувачу військово-повітряних сил військового округу (фронту), а з’єднання наземних військ ППО - команду-
ванню зони протиповітряної оборони військового округу (фронту), при цьому взаємодія між ними не була налагоджена.
Протиповітряна оборона у роки другої світової війни.
Напередодні другої світової війни всі розвинені країни світу приділяли значну увагу організації протиповітряної оборони.
В Англії на початку другої світової війни загальне керівництво всією протиповітряною обороною країни вже здійснювалось
винищувальним командуванням військово-повітряних сил, якому безпосередньо підпорядковувалась винищувальна авіація, аеро-
стати загородження й служба повітряного спостереження, оповіщення та зв’язку, а в оперативному відношенні була підпорядкова-
на зенітна артилерія й зенітні прожектори. Вся територія Англії до кінця 1940 року була розбита на шість районів протиповітряної
оборони, які, в свою чергу, ділилися на сектори протиповітряної оборони. Залежно від важливості районів протиповітряної оборони
на прикриття їх виділялось від однієї до чотирьох зенітних артилерійських дивізій і одна винищувальна авіаційна група різного
складу. Крім цього, використовувались прожекторні частини, аеростати загородження, було організовано єдину службу спостере-
ження, оповіщення і зв’язку. Загальне керівництво всіма засобами протиповітряної оборони здійснював оперативний центр.
У цілому протиповітряна оборона Англії відрізнялась високою ефективністю, хоч її завдання і полегшувалися тим, що у її про-
тивника - військово-повітряних сил Німеччини не було стратегічної авіації, а бомбардувальна авіація не мала достатнього озброєн-
ня і необхідних сил прикриття для ведення широкого повітряного наступу.
Досвід перших місяців війни виявив досить високу ефективність вогню зенітної артилерії, що примусило англійське команду-
вання приділити велику увагу її розвитку. Для боротьби з літаками, які діяли на малих висотах, вже тоді були сконструйовані
57- і 76,2-мм реактивні установки, з яких були сформовані зенітні ракетні батареї. Але надалі у ході війни ці установки у зв’язку з
їх малою ефективністю були зняті з озброєння і замінені зенітними гарматами.
В ніч на 13 червня 1944 р. німці вперше здійснили обстріл м. Лондона літаками-снарядами типу ФАУ-1. Однак застосування
цих засобів для англійського командування не було несподіванкою. Маючи дані про наявність літаків-снарядів у противника, воно
заздалегідь вжило заходів щодо посилення протиповітряної оборони. Створення ракет ФАУ-2 висунуло нову проблему - проблему
протиракетної оборони.
У свою чергу, збройні сили Німеччини протягом тривалого часу вдосконалювали способи боротьби зі стратегічними бомбар-
дувальниками союзників. Під час відбиття їх масованих нальотів застосовувались одночасні атаки великої кількості винищувачів у
поєднанні з посиленою протиповітряною обороною промислових об’єктів і адміністративних центрів країни. Причому дії винищу-
вальної авіації військово-повітряних сил Німеччини в ряді випадків носили характер протиповітряної операції, що проводилась за
єдиним замислом і в значній зоні повітряного простору. Однак засобів для створення досить міцної протиповітряної оборони у
Німеччини не вистачало, оскільки основні зусилля військово-повітряних сил були зосеред жені на Східному фронті.
Водночас, в Англії війська протиповітряної оборони були перетворені на самостійний вид збройних сил з єдиним командуван-
ням і централізованим управлінням. У ході війни ущільнялося угруповання зенітних засобів на підступах до найважливіших
об’єктів, створювалися нові винищувачі з потужним озброєнням, підвищувалася ефективність взаємодії всіх сил і засобів протипо-
вітряної оборони. Над всією територією Англії було створено суцільне поле радіолокаційного спостереження, в тому числі і в
150 км смузі від узбережжя.
8
РОЗДІЛ 1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
Велику Вітчизняну війну війська ППО Радянського Союзу зустріли у період їх переозброєння. Сучасних літаків-винищувачів
Як-1, МиГ-3 у військах було недостатньо, в ЗА мало було нових 37-мм автоматичних і 85-мм зенітних гармат. Всього війська ППО
мали 3 659 гармат, з них З 1 ЗО малого калібру.
На початку Великої Вітчизняної війни обставини вимагали єдності керівництва всіма силами і засобами ППО Радянського
Союзу, призначеними для протиповітряної оборони країни. Внаслідок проведеної реорганізації війська ППО країни одержали опе-
ративну та організаційну самостійність, що відповідало умовам їх діяльності і значно підвищило ефективність бойових дій. Це був
якісний стрибок у розвитку протиповітряної оборони, який забезпечував централізоване оперативне керівництво військами ППО і
можливість швидкого маневру силами і засобами ППО на загрозливому напрямку.
В липні 1941 р. проводяться заходи з підсилення захисту м. Москви, Ленінграда, й Донбасівського, Московського, Ярославсь-
кого і Горьківського промислових районів (22 липня 1941 р. Державним комітетом оборони (ДКО) прийнято постанову “Про орга-
нізацію протиповітряної оборони найважливіших промислових і економічних об’єктів і пунктів Союзу РСР”), а також інших стра-
тегічних об’єктів (2 вересня 1941 р. ДКО прийнято постанову “Про заходи протиповітряної оборони залізничних вузлів, мостів і
транспорту”). Для цього прискорено формувалися частини ВА, ЗА, зенітні кулеметні та прожекторні частини.
Захист м. Москви здійснювався 1-м корпусом ППО і оперативно підпорядкованим йому 6-м винищувальним авіаційним кор-
пусом ППО. До складу цих сил входили понад 600 винищувачів, близько 100 зенітних гармат середнього і малого калібру, близько
350 зенітних кулеметів, понад 600 зенітних прожекторів, 124 пости аеростатів повітряного загородження і 612 постів ПССЗ.
Захист м. Ленінграда здійснювався 2-м корпусом ППО і оперативно підпорядкованим йому 7-м винищувальним авіаційним
корпусом ППО.
Відбиття масованих нальотів на м. Москву і Ленінград у 1941 р. здійснювалось за єдиним, заздалегідь розробленим планом, а
дії сил і засобів ППО характеризувалися виконанням оперативних завдань.
9 листопада 1941 р. було прийнято Постанову Державного комітету Оборони № 874 “Про підсилення і зміцнення Протиповіт-
ряної оборони території Союзу”. Цією постановою визначалось, що з метою підсилення і зміцнення Протиповітряної оборони
території Союзу Війська Протиповітряної оборони підпорядковуються Народному Комісару Оборони. Для безпосереднього
управління Військами вводилась посада Заступника Народного Комісара з Протиповітряної оборони - командувача Військ Проти-
повітряної оборони території країни. Перший командувач Військ ППО - генерал-майор М.С. Громадин.
Січень 1942 р. - командуванню ППО підпорядковується винищувальна авіація, тобто забезпечене централізоване управління
військами в оперативних і тактичних ланках.
Квітень 1942 р. - створений Московський фронт ППО, в Ленінграді і Баку - армії ППО. З’явились перші оперативні об’єднання
військ ППО.
Червень 1943 р. - Управління командувача Військами ППО території країни було розформовано і замість нього створено два
фронти ППО: Західний і Східний. Війська ППО, які захищали Москву, були реорганізовані в Особливу Московську армію ППО.
Березень-квітень 1944 р.- Західний і Східний фронт, а також Закавказька зона ППО були реорганізовані у Північний,
Південний і Закавказький фронти ППО.
Грудень 1944 р. - з’єднання, що здійснювали оборону об’єктів в тилу країни, були об’єднані в Центральний фронт ППО, а
Північний і Південний були перетворені на Західний і Південно-Західний фронти ППО.
Березень 1945 р. - на базі Далекосхідної і Забайкальської зон ППО створені три армії ППО: Приморська, Приамурська і
Забайкальська.
У ході війни організаційно сформувалися, як роди військ ППО, зенітна артилерія і винищувальна авіація. Великих змін зазнала
служба ПССЗ, прожекторні частини і частини аеростатів повітряного загородження. Були створені оперативні об’єднання, опера-
тивно-тактичні і тактичні з’єднання ППО, з’єднання і частини родів військ, частин спеціальних військ.
Орган управління Військами ППО території країни у роки війни мав такий склад:
1. Військова рада ППО території країни.
2. Штаб ППО території країни, до якого входили відділи: оперативний, розвідувальний, формування і комплектування, вивчен-
ня і використання досвіду війни, шифрувальний, топографічний, загальний та вузол зв’язку.
3. Управління винищувальної авіації.
4. Головне Управління ППО території країни, до якого входили: управління бойової підготовки, управління кадрів, управління
військово-навчальних закладів та запасних частин, управління озброєння, управління матеріально-технічного забезпечення,
управління повітряного спостереження, оповіщення та зв’язку, інженерний відділ, відділ перевезень, господарчий відділ та гараж,
фінансовий відділ, науково-дослідний відділ, загальний відділ та комендатура
За роки Великої Вітчизняної війни Військами ППО знищено більше 7 300 літаків, понад 1 000 танків і бронемашин, близько
1800 гармат і мінометів, а також багато іншої бойової техніки та живої сили ворога
Героїчними сторінками в історію військ ППО увійшли - оборона м. Києва, Одеси, Севастополя, форсування Дніпра і прорив
‘Східного валу”.
У складі 8-ї Червонопрапорної окремої армії ППО, яка з часом склала основу Військ ППО України, було 11 орденоносних
частин, 5 гвардійських, 8 мали почесні найменування, а 7 військовослужбовців навічно зараховано до списків військових частин за
здійсненні бойові подвиги.
Досвід другої світової війни показав, що добре організована протиповітряна оборона є серйозною перешкодою для авіації про-
тивника, хоча і не може повністю заборонити її дії*. Здатність військ протиповітряної оборони вести ефективні бойові дії ставить
противника перед загрозою великих втрат, змушує його діяти в невигідних умовах і навіть відмовлятися від нальотів. Відомо
чимало випадків, коли дії військово-повітряних сил противника зривались або не досягали мети і авіація несла значні втрати
внаслідок сильної протидії засобів протиповітряної оборони.
9
РОЗДІЛ 1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
Розвиток протиповітряної оборони у повоєнний період.
У післявоєнний час форми і способи застосування Військ ППО країни та їх організаційна структура у зв’язку із застосуванням
нової техніки і озброєння одержали подальший розвиток. Він здійснювався на підставі всебічного урахування досвіду другої
світової війни, досягнень і перспектив розвитку сучасної воєнної науки і техніки.
Лютий 1946 р. - створена посада командувача Військ ППО, який безпосередньо підпорядковувався командувачу артилерією.
Командувач Військ ППО - генерал-полковник М.С. Громадин.
1948 р. - вжито заходів, спрямованих на розвиток і значне зміцнення протиповітряної оборони країни. Було ухвалено рішення
про створення протиповітряної оборони на всій території країни, виділення Військ ППО країни у вид Збройних Сил, розподіл від-
повідальності за протиповітряну оборону країни між Військами ППО країни, військовими округами і флотами. Війська ППО виве-
дені з підпорядкування командувача артилерією Збройних Сил. Командувач Військ ППО - Маршал Радянського Союзу
Л.О. Говоров. Вся територія країни була умовно розділена на внутрішню територію і прикордонну смугу. Відповідальність за про-
типовітряну оборону покладалася: на внутрішній території - на Війська ППО країни; у прикордонній смузі - на військові округи;
військово-морських баз і портів - на флоти. Все керівництво протиповітряною обороною країни покладалося на командувача
Військ ППО країни.
До кінця 1949 року була розроблена нова теорія організації і проведення протиповітряної оборони оперативними об’єднаннями
ППО. Аналіз її основних положень показував, що бойові дії об’єднань ППО набули характеру і форми особливої операції. Ця
операція з початку одержала назву повітряної оборонної, а з 1953 року почала називатись протиповітряною операцією.
Нова форма організації та ведення протиповітряної оборони викликала зміни і в організаційній структурі Військ ППО країни.
Створені під час війни об’єднання ППО були дуже громіздкими. Розміри району розташування з’єднань і частин цих об’єднань
ППО становили 1 500 - 3 000 км по фронту і в глибину. Частини з’єднання знаходились на значному віддаленні один від одного,
що при можливостях засобів зв’язку того часу ускладнювало управління ними. Тому об’єднання ППО, що існували, були розфор-
мовані, а на їх базі створені райони ППО першої, другої і третьої категорії Всі райони ППО стали оперативними об’єднаннями
Військ ППО країни. Кордони районів ППО встановлювались таким чином, щоб, з одного боку, не був обмежений маневр винищу-
вальної авіації, а з іншого, забезпечувалось централізоване управління всією ВА району ППО при зосередженні зусиль на тому або
іншому повітряному напрямку. До бойового складу району ППО входили з’єднання і частини родів Військ ППО: винищувальної
авіації, зенітної артилерії, радіотехнічних і спеціальних військ. З прийняттям на озброєння засобів постановки радіозавад стали
створюватися частини спеціальних військ з завданням здійснювати подавлення (заглушення) бортових радіоелектронних засобів
авіації противника Зенітні прожектори та аеростати загородження були зняті з озброєння як такі, що втратили своє значення.
До кінця 1952 р. на озброєння авіації військ ППО надходять реактивні винищувачі МиГ-15, МиГ-17, надзвукові винищувачі
МиГ-19 з бортовими радіолокаційними прицілами. Зенітна артилерія отримує нові зенітні артилерійські комплекси, які складалися
з 57-, 100- і 130-мм зенітних гармат, радіолокаційних станцій наведення гармат і пристроїв управління артилерійським зенітним
вогнем. Війська ПССЗ отримують радіолокаційні станції П-3 і П-За. Командувач Військ ППО - генерал-полковник М.Н. Нагорний.
З 1952 р. до Військ ППО почала надходити принципово нова зброя - зенітні ракетні комплекси і системи, що дозволило до 1960
р. зенітну' артилерію перетворити в новий рід військ - зенітні ракетні війська ППО. Винищувальна авіація ППО почала отриму-
вати надзвукові винищувачі з ракетним озброєнням класу “повітря-повітря”. Частини і підрозділи ПССЗ почали отримувати нові
радіолокаційні станції виявлення і наведення ВА. Широко впроваджуються у військах автоматизовані системи управління (АСУ).
Створюються частини і підрозділи радіорозвідки та постановки завад радіоелектронним засобам повітряного противника
1954 р. - війська ПССЗ переформовані на радіотехнічні війська ППО.
З 1954 р. для оборони найбільш важливих стратегічних напрямків і об’єктів формуються армії ППО, в тому числі Київська, яка
з березня 1960 р. стає 8-ою окремою армією ППО і виконує бойові завдання на території України.
Травень 1954 р. - створена посада головнокомандувача Військ ППО. Перший головнокомандувач Військ ППО - Маршал Ра-
дянського Союзу Л.О. Говоров. Далі головнокомандувачами Військ ППО були: 1955 р. - Маршал Радянського Союзу С.С. Бірю-
зов; 1962 р. - маршал авіації В.О. Судець; 1966 р. - Маршал Радянського Союзу П.Ф. Батіцький; 1978 р. - головний маршал авіації
О.І. Колдунов; 1987 р. - генерал армії І.М. Третяк.
З 60-х років, у зв’язку з надходженням на озброєння армій закордонних держав стратегічних ракет і космічних систем різнома-
нітного призначення, приймаються заходи по захисту держави та її Збройних Сил від раптового ракетного нападу. У складі Військ
ППО створюються війська ракетно-космічної оборони, які виконують функції по: попередженню про ракетний напад, протикосмі-
чній обороні, протиракетній обороні, контролю космічного простору.
Загальною характерною тенденцією в розвитку принципів організації протиповітряної оборони країн стало створення коаліцій-
них систем протиповітряної оборони.
У 1957 р. Сполучені Штати Америки і Канада утворили об’єднане (коаліційне) командування ППО Північноамериканського
континенту (‘;НОРАД”) з єдиним штабом і центром управління.
У 1961 р. було створено коаліційну систему протиповітряної оборони країн НАТО.
Важливим у побудові єдиної системи протиповітряної оборони було прагнення забезпечити раннє радіолокаційне виявлення
засобів повітряного нападу. З цією метою, наприклад, командування ППО США ще в 1957 р. розгорнуло дальній рубіж виявлення,
який створювали радіолокаційні пости лінії “Дью”, розміщені від Аляски до Гренландії. Починаючи з вісімдесятих років, окремі
країни розгорнули загоризонтні радіолокаційні станції з дальністю дії понад 3 000 км і літакову систему дальнього радіолокаційного
виявлення та управління “АВАКС”.
За лінією оповіщення було встановлено взаємодію з об’єднаною системою ППО НАТО. Ці заходи дозволили створити перший
рубіж перехоплення повітряних цілей на дальніх підступах до Північноамериканського континенту, в тому числі й на малих
висотах.
Одним з основних способів досягнення надійності протиповітряної оборони стає її автоматизація. Зростання ролі автоматизо-
ваних систем управління підтвердив досвід війни у В’єтнамі. За оцінкою американських військових фахівців, при використанні
10
РОЗДІЛ 1. ПРОТИПОВІТРЯНА ОБОРОНА. ЕТАПИ РОЗВИТКУ
автоматизованих систем управління час планування бойових дій в окремих випадках скорочувався з 10 годин до 10 хвилин, а цикл
планування польотів авіації (1 200 літако-вильотів за день) зменшився з 14 до 4 годин. Ще більш вражаючими ці показники стали у
локальних війнах останнього десятиліття.
У шістдесяті роки вперше в реальних бойових умовах були використані зенітні ракетні комплекси. їх застосування примусило
американських військових під час війни у В’єтнамі переглянути тактику дій авіації по наземних об’єктах. Модернізація зенітних
ракетних комплексів збільшила їх вогневі можливості, завадозахищеність, мобільність. Разом з тим у міру поліпшення авіаційної
техніки і засобів радіоелектронної боротьби деякі засоби протиповітряної оборони, зокрема зенітна артилерія, стали малоефектив-
ними. Тому вдосконалення системи протиповітряної оборони пішло шляхом створення змішаних угруповань сил і засобів (ЗРК,
РЯС, літаки-винишувачі), проведення значного обсягу робіт з інженерного обладнання позицій зенітних ракетних комплексів і
місць базування винищувальної авіації, використання нових прийомів дій.
Поява зенітних ракетних комплексів вимагала вдосконалення авіаційного озброєння, створення засобів радіоелектронної боро-
тьби і оснащення ними літаків, вироблення нових тактичних способів дій авіації, таких як зближення з ціллю за різними маршрута-
ми, польоти на малих і гранично малих висотах. У бойових порядках стали створюватись ударні та забезпечувальні (розвідувальна,
демонстративна, прикриваюча, відволікаюча) групи, причому питома вага останніх весь час збільшувалась.
Створення протиповітряної оборони України.
Після проголошення акту незалежності України починається літопис протиповітряної оборони України.
6 грудня 1991 р. - прийнято Закон України “Про Збройні Сили України”.
Січень 1992 р. - командування, особовий склад 8-ої Червонопрапорної окремої армії ППО прийняли присягу на вірність народу
України.
23 березня 1992 р. - генерал-лейтенант Лопатін М.О. призначений Командувачем 8-ою ОА ППО у складі Збройних Сил
України.
З травня 1993 р. - створюється командування Військ ППО України. Командувач - генерал-лейтенант Лопатін М.О.
У серпні 1993 року для підготовки висококваліфікованих фахівців д ля Військ ППО, ППО Сухопутних військ, ракетних військ і
артилерії, хімічних військ на базі всесвітньо відомих навчальних закладів: Військової інженерної радіотехнічної орденів Жовтневої
Революції і Вітчизняної війни академії протиповітряної оборони імені Маршала Радянського Союзу Говорова Л.О. та Харківського
вищого військового командно-інженерного училища ракетних військ імені Маршала Радянського Союзу Крилова М.І. створено
провідний вищий військово-навчальний заклад - Харківський військовий університет.
22 лютого 1994 р. - створено Сили ППО у складі Військ Повітряної оборони України. Командувач Сил ППО - генерал-
лейтенант Лопатін М.О.
20 червня 1996 р. створено Сили ППО України, як окремий вид Збройних Сил. Генерал-лейтенант Стеценко О.О. призначений
заступником Міністра оборони України - Командувачем Сил ППО України.
З липня 1996 р. - на території України проведені перші експериментальні стрільби зенітних ракетних військ ППО на полігоні
Чауда (півострів Крим).
14-25 жовтня 1996 р. - початок планових бойових стрільб ЗРК на полігоні Чауда.
В 1997 році розроблена та затверджена Міністром оборони України Програма будівництва та розвитку Військ Протиповітряної
оборони України, змістом якої є система поглядів на їх призначення, завдання, основні шляхи, етапи та перспективи розвитку.
Головною її метою є створення єдиної системи протиповітряної оборони держави та Збройних Сил з урахуванням сучасної воєнно-
політичної обстановки, шляхів і темпів будівництва та розвитку Збройних Сил, фінансово-економічної спроможності України та
сучасних вимог до оборони держави.
2 липня 1997 р. - Указом Президента України № 602/97 в державі встановлено професійне свято - День Військ ППО України
(перша неділя липня).
2 липня 1997 р. - Наказом Міністра оборони України № 227 засновано нагрудний знак “Війська ППО України”.
28 липня -1 серпня 1997 р. - участь частин ЗРВ корпусів ППО в бойових стрільбах під час СКШН “Чисте небо”.
10-28 жовтня 1998 р. - бойові стрільби 10-и частин Військ ППО на полігоні Чауда під час КС КШН “Осінь-98”.
11 січня 1999 р. - Наказом заступника Міністра оборони - Командувача Військ ППО України № 8 засновані нагрудні знаки
“Відмінник Військ ППО”, “За бойове чергування”, “Класність”.
31 липня 2000 р - призначено заступником Міністра оборони України - Командувачем Військ ППО України генерал-
лейтенанта Ткачова В.В.
5 жовтня 2000 року Верховною Радою України прийнято Закон України “Про Збройні Сили України”, в якому Військам
Протиповітряної оборони надано статусу виду Збройних Сил України.
20 серпня 2001 р. - підписано Указ Президента України “Про заснування посад Головнокомандувачів видами Збройних Сил
України”. Указами Президента України призначено Головнокомандувачів видів Збройних Сил України. Головнокомандувачем
Військ ППО Збройних Сил України призначено генерал-полковника Ткачова В.В.
26 грудня 2001 р. - призначено Головнокомандувачем Військ ППО Збройних Сил України генерал-лейтенанта Торопчина А.Я.
Система протиповітряної оборони України створювалась і удосконалюється з урахуванням усього попереднього досвіду, вихо-
дячи з геополітичного положення України, спрямованості її Воєнної доктрини, наявних сил та засобів ППО, а також відповідно де
технічних та економічних можливостей держави.
11
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Засоби повітряно-космічного нападу пройшли складний процес еволюційного розвитку і вдосконалення зразків озброєння: від
аеростатів і дирижаблів до сучасних винищувачів та бомбардувальників, які розроблені за технологією зниження їх помітності
(наприклад, “Стеле”); від ракет "У-Г (“ФАУ-1”) та “У-2” (“ФАУ-2”) до балістичних ракет (БР) та крилатих ракет повітряного і
морського базування (КРПБ, КРМБ). Класифікація засобів повітряно-космічного нападу наведена на рис. 2.1.
Рис. 2.1. Класифікація засобів повітряно-космічного нападу
2.1. Балістичні ракети
Балістична ракета - це ракета, політ якої, за виключенням відносно невеликої активної ділянки, здійснюється по балістичній
траєкторії (траєкторії вільно кинутого тіла).
Балістичні ракети не мають несучих поверхонь для створення аеродинамічної підйомної сили під час польоту в атмосфері.
Аеродинамічна стійкість польоту деяких БР забезпечується стабілізаторами. Класифікація БР наведена на рис. 2.2.
Балістичні ракети
За призначенням:
стратегічні оперативно-тактичні тактичні
За дальністю польоту:
міжконтинентальні середньої дальності малої дальності ближньої дії
За типом двигуна:
рідинні твердопаливні комбіновані
За конструкцією:
одноступеневі двохступеневі трьохступеневі
За способом базування:
наземного базування морського базування (на підводних човнах)
І
стаціонарні мобільні
Рис. 2.2. Класифікація балістичних ракет
Міжконтинентальні балістичні ракети (МБР) призначені для ураження великих адміністративних та промислових об‘єктів,
стартових позицій ракет та інших цілей. Вони мають дальність польоту більше 5 000 км, швидкість - до 7,5 км/с і висоту - 1 000 км і
більше. МБР можуть наносити удари у будьгякий час доби та пори року, незалежно від погодних умов. До МБР відносяться:
"ДунФен-5” (Китай); РС-18 “Стилет’’, РС-20 "Сатана”, РС-22 "Скальпель”, РС-12М “Серп”, "Тополь-М” (Росія); "МХ”,
"Мінітмен-3”, "Мінітмен-ЗА” (США).
Балістичні ракети морського базування (балістичні ракети підводних човнів - БРПЧ) призначені для ураження
різноманітних військових та військово-промислових об‘єктів. Пуск здійснюється з атомних підводних човнів. З шахтної пускової
установки ракета виштовхується стислим повітрям і на висоті 20 - 30 м над поверхнею води вмикається двигун першого ступеня.
До БРПЧ відносяться: "Трайдент-2” базується на підводних човнах атомних ракетних базах (ПЧАРБ) типу “Вейнгард” (Велико-
британія); Л.-1 на ПЧАРБ типу "Ся” (Китай); РСМ-50 "Скат”, РСМ-52 “Осетр”, РСМ-54 “Скіф” на ПЧАРБ типів "Дельфін” та
"Тайфун” (Росія); "Трайдент-1 ”, "Трайдент-2” на ПЧАРБ типу "Огайо” (США); М4С, М45 на ПЧАРБ типу "Тріумфан” (Франція).
12
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Балістичні ракети середньої, малої дальності та ближньої дії призначені для ураження різноманітних об’єктів на дальностях
до 5 000, до 1 000 і до 150 км відповідно. Пуск ракет здійснюється з наземних мобільних пускових установок.
До БР середньої дальності відносяться: “Шавіт”, “Ієріхон-2” (Ізраїль); “Агні-2” (Індія); “Аль Аббас” (Ірак); “Шехаб-3”,
“Шехаб-4” (Іран); “ДунФен-21”, “ДунФен-3”, “ДунФен-4” (Китай); “Горі-2”, “Горі-3” (Пакистан); ‘ТепхоДонг-1”, ‘ТепхоДонг-2”,
“НоДонг-1” (Північна Корея), “ДунФен-3” (Саудівська Аравія).
До БР малої дальності відносяться: “Ієріхон-1” (Ізраїль); “Прітхві-1”, “Прітхві-2” (Індія); “Аль Хусейн”, “Скад В” (Ірак);
“ЗелЗал-2” (Іран); “ДунФен-11”, “ДунФен-15” (Китай); “Хатф-2”, “Хагф-3” (Пакистан); “N№-1”, “Скад С” (Північна Корея);
ОТР-23 “Паук”, Р17 “Скад В” (Росія).
Балістичні ракети ближньої дії спроможні поражати об’єкти на відстані до 150 км. Пуск ракет призволиться з наземних
рухомих пускових установок, що дозволяє маневрувати ними на місцевості.
До БР ближньої дії відносяться: “Лане” (Ізраїль); “Мушак-120” (Іран); “Хагф-1” (Пакистан); “Точка” (Росія); “Атак МС”
(США); “Грін Бі” (Тайвань).
Балістичні ракети можуть бути оснащені як звичайними, так і ядерними бойовими частинами.
Для підвищення імовірності прориву системи протиракетної оборони (ПРО) на БР можуть розміщуватися активні і пасивні
засоби подолання системи ПРО.
До активних засобів подолання відносяться станції активних завад.
До пасивних засобів подолання відносяться: легкі оманні (несправжні) цілі (надувні, сітчасті, інфрачервоні); важкі оманні цілі,
що являють собою зменшену у масштабі модель реальної боєголовки; піротехнічні оманні цілі, що створюють плазмові утворю-
вання; д ипольні відбивачі, а також аерозольні та іонізовані утворювання.
Основні характеристики МБР та БРПЧ, які вирішують стратегічні завдання, наведені у табл. 2.1.
Основні характеристики стратегічних балістичних ракет
Таблиця 2.1
Найменування БР Дальність польоту, км Потужність боєголовки, кг Кількість боєголовок
“ДунФен-5” (Китай); 12 000 - -
РС-18 “СгилеГ’ (Росія) 10000 550 6
РС-20 “Сатана” (Росія) 11000 550/750 10
РС-22 “Скальпель”(Росія) 10000 550 10
РС-12М “Серп” (Росія) 10500 550 1
“Тополь-М” (Росія) 10000 550 1
“МХ”(США) 11000 500 10-14
“Мінітмен-3” (США) 10000 330 3
“Мінітмен-ЗА” (США) 9 500 500 3
РСМ-50 “Скат” (Росія) 8000 500 3
РСМ-52 “Осетр” (Росія) 8 300 200 10
РСМ-54 “Скіф” (Росія) 8 300 100 4
“Трайдент-Г’(США) 7400 100 8
“Трайдент-2” (США) 12 000 100 10-14
М-4С (Франція) 4000 150 6
М45 (Франція) 6000 150 6
2.2. Пілотовані засоби повітряного нападу
До пілотованих засобів повітряного нападу відносяться літальні апарати, що здійснюють політ з екіпажем в порівняно щіль-
них шарах атмосфери відповідно до законів аеродинаміки (літаки та вертольоти (вертольоти) різноманітного призначення).
Основні показники бойових можливостей ЗПН: швидкість; діапазон висот бойового застосування; швидкість підйому;
дальність (радіус) польоту; маневреність; озброєння, бомбове та інше (спеціальне) навантаження.
Швидкість польоту. Висока швидкість польоту літаків сприяє досягненню тактичної раптовості, скорочує час перебування
літаків над територією противника, знижує уразливість від вогню повітряного і наземного противника, забезпечує перевагу в повіт-
ряному бою. У різноманітних умовах бойової обстановки виникає необхідність розвивати різноманітну швидкість польоту, що
досягається різноманітними режимами роботи рухової установки літака. При одній і тій же тязі рухової установки літака значення
його швидкості зростає зі збільшенням висоти польоту.
Максимальна швидкість - швидкість рівномірного прямолінійного горизонтального польоту літака при роботі двигунів з
найбільшою тягою, що дозволяється (форсаж).
Крейсерська швидкість - швидкість горизонтального польоту, при якій досягається мінімальна витрата палива на кілометр
шляху і, отже, найбільша дальність польоту. Для дозвукових літаків: Укр=(0,7... О^У^
Крейсерська швидкість застосовується при виконанні маршрутних польотів до входу в зону дГї вогневих засобів системи ППО
противника.
13
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Економічна (найвигідніша) швидкість - швидкість, при якій забезпечуються мінімальні витрати палива за одиницю часу і
досягнення максимальної тривалості польоту. Ця швидкість значно менше крейсерської і досягається при мінімальній тязі двигунів,
що потрібна для горизонтального польоту (на висотах 8 ... 10 км вона складає порядку 500 ... 800 км/год). Економічна швидкість
використовується бойовими літаками, що здійснюють чергування в повітрі, літаками РЕБ у зонах баражування, повітряними
КП і т.ін.
Мінімальні швидкості польоту літаків істотно залежать від висоти. Найменші значення вони мають при польотах літаків на
малих і середніх висотах, найбільші — на великих висотах. На висоті 1 км мінімальна швидкість польоту тактичних винищувачів
складає 400 ... 600 км/год а на висоті 20 км - 1 500 ... 1 800 км/год.
Градація діапазонів швидкостей польоту літаків і вертольотів (вертольотів): V < 100 м/с - низькошвидкісні; У=100 ...
300 м/с - дозвукові; V = 300... 640 м/с - швидкісні; V > 640 м/с - високошвидкісні.
Швидкість підйому літака визначається максимальною швидкістю набору висоти за одиницю часу або часом набору заданої
висоти.
Діапазон висот бойового застосування характеризується мінімальною і максимальною висотами, у межах яких ЗПН може здій-
снювати політ і виконувати бойові завдання. Чим більше діапазон висот бойового застосування ЗПН, тим менше засобів ППО може
впливати на його дії.
Мінімальна безпечна висота польоту ЗПН залежить від рельєфу місцевості на маршруті польоту, типу засобу нападу, наявно-
сті на його борту системи забезпечення польоту на малих висотах, а також від підготовки льотного складу.
Максимальною висотою бойового застосування ЗПН є практична стеля, що визначається як найбільша висота польоту, на
якій вертикальна швидкість набору висоти складає 5 м/с і зберігається керованість.
Бойова стеля - висота польоту літака, на якій він спроможний виконувати горизонтальний маневр (розворот) із креном до
15 ... 20° без втрати висоти і швидкості. На цій стелі можна успішно вести повітряний бій. Бойова стеля нижче практичної для оди-
ночних літаків-винишувачів на 5 ... 10%, бомбардувальників - на 10... 15%.
Динамічна стеля - висота польоту, у момент виходу на яку літак має мінімальну швидкість, необхідну для зберігання керо-
ваності.
Градація висот польотів: Н < 200 м - гранично малі висоти; Н = 200... 1 000 м - малі висоти; Н = 1 000... 4 000 м - середні
висоти; Н = 4 000... 12 000 м - великі висоти; Н= 12000... 40000 м-стратосферні висоти.
Дальність польоту літака - шлях, що проходить літак до витрата палива, що є у нього. Дальність польоту відносно аеродрому
вильоту прийнято характеризувати перегоночною дальністю польоту, тактичною, а також бойовим радіусом дії.
Дальність польоту перегоночна - максимальна відстань, що пролітаєгься літаком без бомбового навантаження і ракет із
максимальною заправкою паливом.
Дальність польоту тактична - максимальна відстань, що пролітаєгься літаком з однією заправкою палива зі штатним
озброєнням і нормальним бомбовим навантаженням Дт = (0,7... 0,8) Д^.
Максимальна дальність польоту може бути досягнута на крейсерській швидкості і найвигіднішій висоті польоту.
Бойовий радіус дії - найбільша відстань, яку може пролетіти літак для виконання бойового завдання зі штатним озброєнням і
нормальним бомбовим навантаженням і повернутися без проміжної посадки та додаткового заправлення на аеродром вильоту,
Кед = О,ЗДТ - для груп літаків і Кед = 0,4Дт - для одиночних літаків на великих висотах.
Бойовий радіус дії на малих висотах зменшується приблизно в 2... 2,5 рази через збільшену витрату палива
Бойові радіуси дій тактичної авіації й авіації з авіаносців у залежності від типів літаків і висот їх польоту складають
600...2100 км.
Маневреність - спроможність літака змінювати з визначеною швидкістю параметри польоту: швидкість, висоту, напрямок.
Маневреність характеризується перевантаженнями, що складають для бомбардувальників 2 ... З одиниці, для винищувачів - до
10 одиниць.
Горизонтальна маневреність характеризується величиною діапазону швидкостей польоту, радіусом і часом розвороту на
360°, часом розгону літака.
Вертикальна маневреність характеризується для бомбардувальників швидкістю підйому і граничною швидкістю зниження, а
для винищувачів, крім того, часом виконання бойового розвороту під час набору висота, а також розміром втрата висоти при
перевороті.
Висока маневреність дозволяє сучасним літакам успішно долати і переборювати систему ППО.
Озброєння і бомбове навантаження літака визначає можливості даного типу літака з нанесення ударів і ураження різномані-
тних об’єктів противника
Озброєння літака містить засоби ураження і системи, що забезпечують їх бойове застосування.
У залежності від принципів дії розрізняють такі види авіаційного озброєння: стрілецько-гарматне; ракетне; бомбардува-
льне; мінно-торпедне; спеціальне (ядерне, хімічне, запальне).
Авіаційні засоби ураження: авіаційні кулемета і гармата з боєприпасами; керовані і некеровані ракети; звичайні або ядерні
бомби різноманітних типів; керовані авіаційні бомби; бомбові касети; торпеди і міни; баки з напалмом і т.ін.
Системи, що забезпечують застосування засобів ураження: прилади і пристрої для розміщення засобів ураження; прилади і
пристрої для виявлення цілей, прицілювання і управління стрільбою (скиданням, пуском).
Бомбове навантаження - маса бомбардувальних засобів ураження, що підвішуються на літак. При підготовці до бойових дій
літак може бути споряджений максимальним і нормальним бомбовим навантаженням.
Максимальне бомбове навантаження - найбільше бомбове навантаження, що обмежене конструкцією даного типу літака,
його вантажопідйомністю, міцністю бомботримачів і вузлів їх кріплення. Воно може складати до 25% максимальної злітної
маси літака.
14
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Нормальне бомбове навантаження - бомбове навантаження, при якому досягається розрахункова дальність польоту літака
для заданих висот і швидкості.
Важливе значення для оцінки бойових можливостей ЗПН має їх спроможність з постановки завад і дій уночі та у складних
метеорологічних умовах.
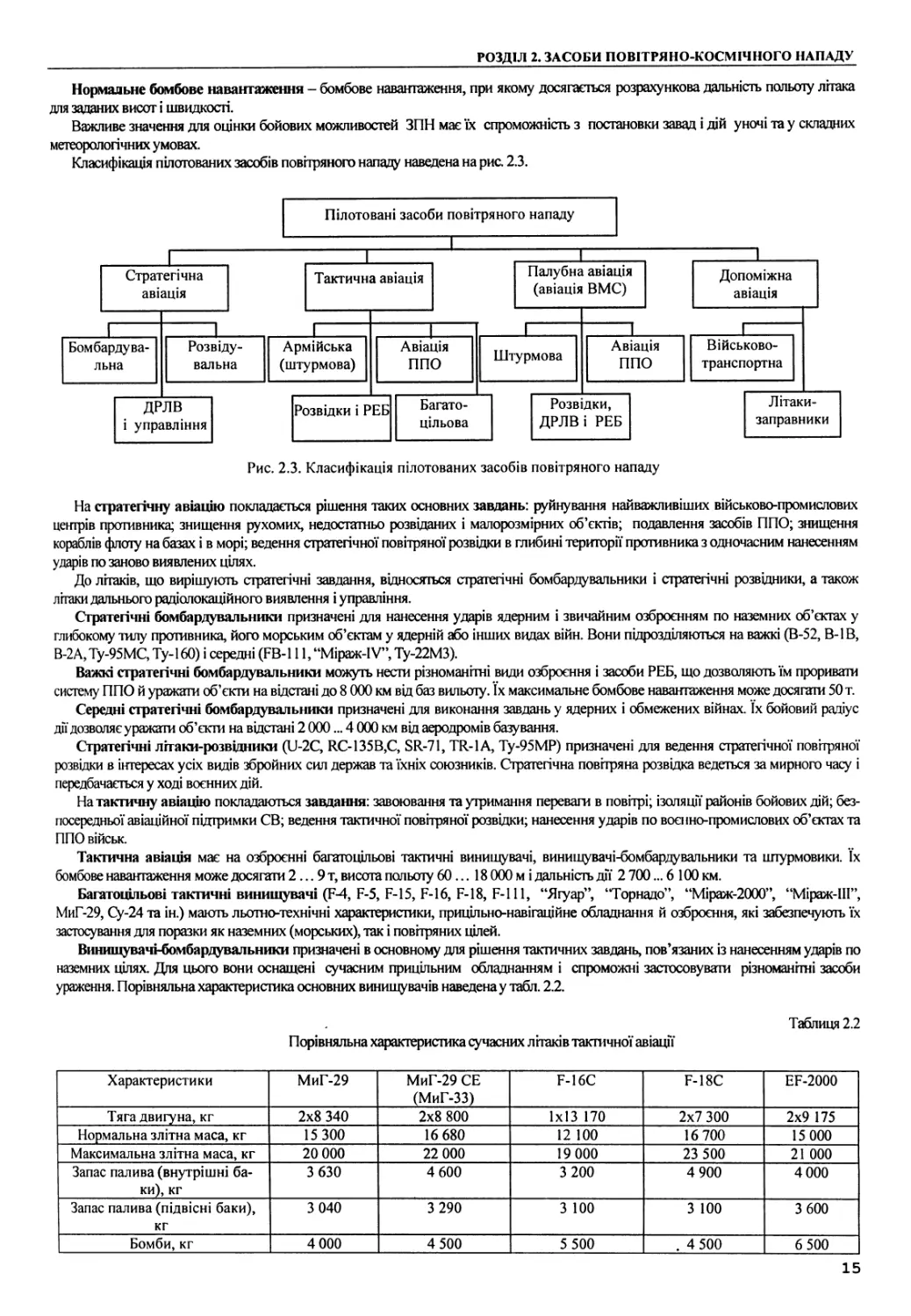
Класифікація пілотованих засобів повітряного нападу наведена на рис. 2.3.
Рис. 2.3. Класифікація пілотованих засобів повітряного нападу
На стратегічну авіацію покладається рішення таких основних завдань: руйнування найважливіших військово-промислових
центрів противника; знищення рухомих, недостатньо розвіданих і мапорозмірних об’єктів; подавлення засобів ППО; знищення
кораблів флоту на базах і в морі; ведення стратегічної повітряної розвідки в глибині території противника з одночасним нанесенням
ударів по заново виявлених цілях.
До літаків, що вирішують стратегічні завдання, відносяться стратегічні бомбардувальники і стратегічні розвідники, а також
літаки дальнього радіолокаційного виявлення і управління.
Стратегічні бомбардувальники призначені для нанесення ударів ядерним і звичайним озброєнням по наземних об’єктах у
глибокому тилу противника, його морським об’єктам у ядерній або інших видах війн. Вони підрозділяються на важкі (В-52, В-1В,
В-2А,Ту-95МС,Ту-160) і середні (РВ-111,“Міраж-ІУ”,Ту-22МЗ).
Важкі стратегічні бомбардувальники можуть нести різноманітні види озброєння і засоби РЕБ, що дозволяють їм проривати
систему ППО й уражати об’єкти на відстані до 8 000 км від баз вильоту. їх максимальне бомбове навантаження може досягати 50 т.
Середні стратегічні бомбардувальники призначені для виконання завдань у ядерних і обмежених війнах. їх бойовий радіус
дії дозволяє уражати об’єкти на відстані 2 000... 4 000 км від аеродромів базування.
Стратегічні літаки-розвідники (П-2С, КС-135В,С, 8К-71, ТК-1А, Ту-95МР) призначені для ведення стратегічної повітряної
розвідки в інтересах усіх видів збройних сил держав та їхніх союзників. Стратегічна повітряна розвідка ведеться за мирного часу і
передбачається у ході воєнних дій.
На тактичну авіацію покладаються завдання: завоювання та утримання переваги в повітрі; ізоляції районів бойових дій; без-
посередньої авіаційної підтримки СВ; ведення тактичної повітряної розвідки; нанесення ударів по воєнно-промислових об’єктах та
ППО військ.
Тактична авіація має на озброєнні багатоцільові тактичні винищувачі, винишувачі-бомбардувальники та штурмовики. їх
бомбове навантаження може досягати 2... 9 т, висота польоту 60... 18 000 м і дальність дії 2 700... 6 100 км.
Багатоцільові тактичні винищувачі (Е-4, Е-5, Е-15, Р-16, Е-18, Е-111, “Ягуар”, ‘Торнадо”, “Міраж-2000”, “Міраж-Ш”,
МиГ-29, Су-24 та ін.) мають льотно-технічні характеристики, прицільно-навігаційне обладнання й озброєння, які забезпечують їх
застосування для поразки як наземних (морських), так і повітряних цілей.
Винищувачі-бомбардувальники призначені в основному для рішення тактичних завдань, пов’язаних із нанесенням ударів по
наземних цілях. Для цього вони оснащені сучасним прицільним обладнанням і спроможні застосовувати різноманітні засоби
ураження. Порівняльна характеристика основних винищувачів наведена у табл. 2.2.
Таблиця 2.2
Порівняльна характеристика сучасних літаків тактичної авіації
Характеристики МиГ-29 МиГ-29 СЕ (МиГ-33) Е-16С Е-18С ЕЕ-2000
Тяга двигуна, кг 2x8 340 2x8 800 1x13 170 2x7 300 2x9 175
Нормальна злітна маса, кг 15 300 16 680 12 100 16 700 15 000
Максимальна злітна маса, кг 20 000 22 000 19 000 23 500 21 000
Запас палива (внутрішні ба- ки), кг 3 630 4 600 3 200 4 900 4 000
Запас палива (підвісні баки), кг 3 040 3 290 3 100 3 100 3 600
Бомби, кг 4 000 4 500 5 500 . 4 500 6 500
15
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Закінчення табл.. 2.2
Характеристики МиГ-29 МиГ-29 СЕ (МиГ-33) Б-16С Б-18С ЕБ-2000
Максимальна швидкість, км/год 2 450 2 500 2 170 1 900 2 300
Дальність польоту без підвіс- них баків, км 1 500 2 200 2 000 2 200 1 800-2 200
Дальність польоту з підвіс- ними баками, км 2 900 3 200 3 200 3 200 3 000-4 000
Швидкопідйомність біля зем- лі, м/с 330 320 265 256 300
Штурмовики (А-7Д А-10, “Альфа-Джет”, “Хоук”, А-6Е, Б/А-18, АУ-8, Су-25) призначені в основному для безпосередньої
авіаційної підтримки сухопутних військ. Вони мають невисокі швидкісні і маневрені характеристики, оснащені прицільним устат-
куванням і озброєнням, що оптимізовані для поразки наземних малорозмірних броньованих цілей удень при візуальній видимості
цілі. Штурмовики спроможні вести оборонні повітряні бої з використанням КР із інфрачервоною головкою самонаведення і гармат.
Нові типи штурмовиків спроможні базуватися на аеродромах із грунтовими злітно-посадними смугами обмежених розмірів.
Авіація ВМС призначена для ураження сил флолу противника та його морських транспортних засобів, прикриття кораблів у
морі, ведення повітряної розвідки на морських та океанських ТВД. У залежності від призначення і характеру (місця) базування вона
підрозділяється на: авіанесучу (палубну), базову і авіацію морської піхоти. Бомбове навантаження літаків ВМС може досягати 7 т,
висота польоту 60 ... 14 000 м і дальність дії до 5 000 км.
Авіанесуча (палубна) авіація складається з літаків (винищувачі, штурмовики, протичовнові, розвідники, дальнього радіолока-
ційного виявлення, РЕБ) та вертольотів (гелікоптерів) різноманітного призначення, що базуються на кораблях, які мають злітно-
посадкові палуби.
Базова авіація призначена для пошуку і поразки підводних човнів, ведення радіотехнічної і візуальної розвідки, а також
постановки мін (патрульні літаки Р-ЗС “Оріон”, літаки радіотехнічної розвідки ЕР-ЗЕ та ін.).
Авіація морської піхоти вирішує завдання авіаційної підтримки морської піхоти у ході висадки десанту, а також безпосеред-
ньої підтримки її на березі. У залежності від завдань, що вирішуються, авіація морської піхоти підрозділяється на штурмову, вини-
щувально-штурмову, розвідувальну, транспортну.
Авіація ППО призначена для рішення завдань ППО на сухопутних і морських ТВД. Може застосовуватися також для
прикриття ударних груп своєї авіації від винищувачів противника. Винищувальна авіація ППО - це один з основних активних
засобів ППО (Е-15, Р-16А, “Фантом”, ‘Торнадо БЗ ”, Б-14А, МиГ-25П, МиГ-29, МиГ-31, Су-27).
Тактико-технічні характеристики пілотованих засобів повітряного нападу наведені у табл. 2.3 - 2.4.
Таблиця 2.3
Тактико-технічні характеристики літаків
Тип літака Максим, швидкість польоту, км/год Практична стеля, м Дальність польоту, км Бойовий радіус дії, км Озброєння
Стрілецько- гарматне Ракетно-бомбове (навантаження, кг)
СТРАТЕГІЧНА АВІАЦІЯ
В-52 1 050 15 000 20 000 8 000 4 х 20 м.м КРПБ 8КАМ, АЬСМ (34 000)
БВ-111 2 330 20 000 6 600 3 700 - КРПБ 8КАМ (16 000)
В-1В 2 330 15 000 15 000 7 500 - ЯБВ-61 або В-83, КРПБ 8КАМ, АЬСМ (55 000)
В-2А 950-1 010 15 240 18 530 7 400 - КРПБ АСМ-129-АСМ, ЯБ В- 61 або В-83 (16 900)
Ту-160 2 200 15 000 12 300 6 000 - КРПБ Х-55СМ, Х-15 (45 000)
Ту-95 МС6 910 9 000 11 000 5 500 - КРПБХ-55, Х-22 (12 000)
Ту-22 - МЗ 2 300 14 000 7 000 3 500 - КРПБ Х-15, Х22МА (24 000)
“Міраж- IV” 2 300 20 000 3 500 1 100 1 х 20 мм АБ, КР А8МР, А8-37 (6 400)
ТАКТИЧНА АВІАЦІЯ
“Торнадо” 2 100 17 700 1 950 800 1 х 27 мм АБ, КР “Шрайк”, “Матра”, “Сайдвіндер”, “Спарроу”, А8- 37, “Кормаран”, (5 000)
Б-4 2 350 19 000 2 800 750 1 х 20 мм “Вулкан” АБ, КР “Шрайк”, ”Булпап” “Мейверік”, “Сайдвіндер”, “Спарроу”, “Стандарт АКМ” (6 500)
16
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Закінчення табл. 2.3
Тин літака Максим, швидкість польоту, км/год Практична стеля, м Дальність польоту, км Ройовий радіус дії, км Озброєння
Стрілецько- гарматне Ракетно-бомбове (навантаження, кг)
Р-5А І 050 15 800 2 750 890 1 х 20 мм АБ, ПАР, КР “Мейверік” ”Сайдвіндер”, (3 200)
Р-14О 2 500 17 000- 21 000 3 300 — 1 х 20мм КР “Фенікс”, АІМ-120, “Спарроу”, “Сайдвіпдер”, (4 000)
р-16 2 100 16 000 3 890 600 1 х 20 мм АБ, КР “Сайдвіпдер”, “Мейверік” (5 000)
Р-І17А 1 040 13 600 3 500 1 100 1 х 20 мм АБ “Псйв Уей-2” з лазерною гсп,сви-ю,сви-і5, ВкП-109, КР АІМ-130, КР “Мейверік” (2 200)
Р/А-18 1 900 15 200 2 000 700 1 х 20 мм АБ, КР “Спарроу”, ПАЯМ, “Сайдвіпдер”, АІМ-120, “Мейверік”, “Гарпун” (1 000)
Р-22 А 1,7М на 11=10 км 15 240 5 700 - 1- х 20 мм КР “Сайдвіпдер”, АМКААМ
АУ-8В 1 050 15 000 4 500 - І х 25 мм КР “Мейверік”, “Мажік”, “Сайдвіпдер” (4 000)
“Міраж- 2000С” 2 350 19 000 3 500 — 2 х 30 мм КР “Матра”, “Мажік”, АБ -ЗОБ, АМ-39 “Екзосет”, “А8МР” (3 000)
“Альфа- Джст” 1 000 14 600 2 700 - 1 х 27 мм КР "Мейверік”, “Мажік”, НАР 114 х 70мм (2 250)
“Ягуар” 1 700 14 000 3 650 — 2 х 30мм КР “Мартель”, “Мажік”, “Сайдвіпдер”, АБ - 37, НАР 80x68 мм (4 500)
МиГ- 23МЛ 2 500 18 500 - 650 1 х 30 мм АБ, ПАР, КР (2 000)
МиГ-29 М 2 450 18 000 3 200 620 1 х 30 мм АБ, ПАР, КР Р-279, Р-27, -73, -77, Х-29Г, Х-25МП (4 500)
Су-25 1 000 7 000 1 950 480 2 х 30 мм АБ, ПАР, КР Р-60, Х-25МЛ, Х-29Л (4 340)
Су-37 2 500 18 000 6 500 — 1x30 мм КР Р-37, КС172, Р-77, Р-27, Р-73, Х-29ТЛ, ПРР Х-31П, КАБ, АБ (8 000)
Як-141 1 800 15 000 2 100 — 1 х 30 мм КР Р-77, Р-27, Р-73, Р-60, Х-26, Х-31А, Х-35, Х-25, ПРР Х-31П (2 600)
А-ІОА 830 13 500 1 200 270-600 1 х 30 мм АБ, 11КР, КР “Мейверік” (7 200)
А-7О 1 100 10 000 3 100 600 1 х 20 мм “Вулкан” 11 КР, КР “Булнан”, “Шрайк”, “Сайдвіпдер”
А-6Б 1 050 13 600 3 100 600 2 х 20 мм ПКР, КР “Булнан” “Шрайк”, “Сайдвіпдер”
АВІАЦІЯ ППО
Р-15 2 650 19 000 1 100 980 1 х 20 мм КР “Спарроу”
Р-4Р 2 350 19 000 2 800 1 050 1 х 20 мм “Вулкан” КР “Спарроу”
Су-27 2 430 19 000 4 000 1 800 1 х 30 мм ПКР, КР Х-9ІП, Х-29ТЛ, Р-77, Р-73, ФАБ-І00, ФАБ-250, ФАБ-500, М54 (6 000)
МиГ-25 П 3 000 20 700 1 800 — — КР Р-40, Р-60 М
МиГ-31 3 000 20 600 3 300 - І х 23мм КР Р-33, -40, -60 (Р-60М); МиГ-31М: КР Р-37, -77 (3 000)
17
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Закінчення табл. 2.3
Тип літака Максим, швидкість польоту, км/год Практична стеля, м Дальність польоту, км Бойовий радіус дії, км Озброєння
Стрілецько- гарматне Ракетно-бомбове (навантаження, кг)
ЛІТАКИ РОЗВІДКІ ТА РЕБ
КС-135В, С 1 000 15 000 1 000- 12 000, патрулювання до 12 год. Станція РТР АМ/Н8П-7. Радіопеленгатор АІЧ/АЬА-6. Розвідувальний приймач АМ/АРК-17. Аерофотоапарат КС-6А.
КЕ-4Е 2 240 18 500 3 800 До п’яти АФА. РЛС бокового огляду, станція ІЧ- розвідки
ЕЕ-111А 2 350 1 6500 4 200 Станція радіоелектронного подавлення АМ/АЬ(2-99Е (передавачів завад, що керуються ПЕОМ); станція РЕБ індивідуального захисту АІЧ/АЬР-137; станція попередження про опромі- нювання АК/АЬК-62
ЕА-6В 940 11 360 3 100 Розвідувальні приймачі АІЧ/АЬК - 42, - 45; стан- ції РЕБ АМ/АЬ(2-92, -99, -100; обладнання вики- дання протирадіолокаційних відбивачів і ІЧ пас- ток А1Ч/АЬЕ-29А
Таблиця 2.4
Радіоелектронне обладнання сучасних літаків
Тип літака, країна, рік прийняття на озброєння Радіоелектронне обладнання
В-52Н США, 1955 РЛС переднього огляду; ІНС А1ЧХА8М-13; засоби управління, контролю та індикації; станція актив- них завад АМ/А8()-131; тепловізійна камера АМ/АУ(}-22; інфрачервона станція переднього огляду АИ/ААр-6; система НАВСТАР
В-1В США, 1985 Багатофункціональна РЛС АРЦ-164; ІНС 8К1Ч-2440; доплерівський вимірювач швидкості АК/АІШ- 218; блоки управління електрообладнанням фірми ІВМ; модифікована астроінерційна навігаційна система ИА8-26; апаратура відображення даних наступальної системи; електронні блоки відобра- ження даних на ЕЛТ; блок передачі даних для збору та зберігання бойового завдання; оборонне обла- днання для протидії РЛС противника АИ/АЬР-161
В-2А США, 1989 Багатофункціональна РЛС А1Ч/АР()-18; лазерний дальномір-цілепокажчик; ІНС; приймачі ТАКАН, ЛОРАН, НАВСТАР; засоби супутникового зв’язку АФСАТКОМ; система ”ДЖИТИДС”
ТУ-160 Росія, 1987 Комплексна прицільна навігаційна система; ІНС; астронавігаційна система; РЛС; система зв’язку; оптико-електронний бомбовий приціл; комплексний РІП.
ТУ-95 МС6 Росія, 1956 Панорамна РЛС “Рубідій-ММ” сполука з оптичним бомбовим прицілом ОПБ-5; бортовий радіоелек- тронний оборонний комплекс “МЕТЕОР-НМ”
ТУ-22 - МЗ Росія, 1981 Пілотажно-навігаційний комплекс РЛС; оптико-телевізійний бомбардувальний приціл ОПБ-15; авто- матична бортова система управління та система управління ракетною зброєю; активна та пасивна система РЕБ
Р-4Е США, 1975, Р-4А, 1960 Імпульсно-доплерівська РЛС АМ/А8(}-26; навігаційно-бомбардувальна підсистема АМ/А8(}-91, сис- тема САУ А1Ч/А8А-32; засоби РЕБ: приймачі виявлення РЛ випромінювань АМ/АРК-36/37 передава- чі завад АЬІ/АЬР-71/72/87; пілотажно-навігаційна система; ІНС А1Ч/А8М-63; лічильно-вирішуючий пристрій А1Ч/А8М-46; радіовисотомір малих висот АN/АРN -155; комплексна система радіонавігації та розпізнавання А1Ч/А8(}-19 з системою ТАСА
Р-15С(Е) США, 1972 Прицільна навігаційна система ЛАНТІРІ; РЛС А1Ч/АРС-70; А1Ч/А8М-109; ЕОМ; електронна оптична система; комплекс управління зброєю; радіовисотомір
Р-16С США, 1975 Прицільна навігаційна система; імпульсно-доплерівська РЛС; ІНС; спецобчислювач; радіовисотомір; ЕОМ; КРНС НАВСТАР; приймач ”ДЖИТИДС”; інфрачервона система; лазерне цілевказання; авто- мат ІЧ пасток та пасивних завад АЬЕ-40; система попередження, опромінювання та наведення
Р-117А США, 1990 Прицільна навігаційна система включає: датчик тепловізійної системи ГЬІК; лазерний цілепокажчик; високоточна інерційна система; 14 датчики переднього та нижнього огляду; ІНС; засоби зв’язку, КРНС НАВСТАР
А-10А США, 1980 Прицільна навігаційна система; ІНС; теплопеленгатор; апаратура управління та наведення (з лазер- ною системою виявлення та супроводження цілей “Пейв Пенні”; запитувач ТАКАН, СРЗО; радіови- сотомір, оптичний приціл; ЦОМ; апаратура зв’язку та передачі ТКІ; станція РЕБ; БРЛС із забезпе- ченням польоту на Н = 180 м; система ЛАНТІРІ; РЛС відслідковування рельєфу, ІЧ станція і лазер- ний дальномір- цілепокажчик; апаратура ІЧ пасток та пасивних завад АЬЕ-40; радіостанція
18
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Закінчення табл. 2.4
Тип літака, країна, рік прийняття на озброєння Радіоелектронне обладнання
Торнадо-Р2108 Великобританія, ФРН, Італія, 1979 ЕОМ; система обробки даних; система відображення тактичної обстановки; багатофункціональна доплерівська РЛС; ІНС; система ТАКАН; радіовисотомір; система польоту з огинанням рельєфу; лазерний дальномір; приймач виявлення
Р-22А США Високонадійний процесор; комплексна система зв’язку навігації та впізнання ІС1ЧІР; комплексна система РЕБ ІХЕУ/8
Р-14П США Система керування зброєю АМ/А\¥6-9; імпульсно-доплерівська РЛС СРЗО; інфрачервона станція; ЕОМ (550 тис. опер./с), апаратура передачі ТКІ; навігаційний комплекс ІНС; ТАКАН; радіовисото- мір; станція посадки на авіаносець; станція АК/АЬР-165; апаратура тактичної системи розподілення інформації ”ДЖИТИДС”; пристрій АК/АЬЕ
Р/А-18 США, 1983 Прицільна навігаційна система: імпульсно-доплерівська РЛС АТ4/АР6-65; телепеленгатор; лазерний дальномір-цілепокажчик із системою управління лазерною ГСН А1Ч/А89-173; ЦОМ; радіовисотомір; ІНС; елементи ”ДЖИТИДС”; станція посадки на авіаносець; система ТАКАН, ЛОРАН, НАВСТАР; станція завад АМ/АЬр-126, -165; пристрій АМ/АЬЕ
АУ-8В США, Великобританія, 1984 РЛС не має ІНС А1Ч/А8М-130А; апаратура всепогодної системи посадки; система керування зброєю А1Ч/А8В-19; центральна ЕОМ А1Ч/АУК-14; система пілотування АМ/А8\¥-46; контейнерна станція завад АК/АЬР-164
МиГ-25 П Росія, 1972 Радіотехнічне обладнання: радіолокаційний приціл РП-25 ”Смерч-25”; запитувальна апаратура; апа- ратура системи наведення; станція попередження про опромінювання СРО; пілотажно-навігаційне обладнання; автоматична система управління САУ-155 склад: автоматичний радіокомпас АРК-10; радіовисотомір РВ-4; приймач РНС ближньої навігації РСБН-6С; обладнання радіозв’язку
МиГ-29М Росія, 1986 Імпульсно-доплерівська РЛС “Жук” (Д < 100 км) удосконалена оптико-локаційна система; телекаме- ри для упізнавання цілей; лазерний дальномір збільшеної дальності; полегшений нашоломний при- ціл; ІНС; удосконалений індикатор на лобовому склі; захищена система передачі даних; система РІП
МиГ-31 Росія, 1978 РЛС з ФАР та квазібезперервного випромінювання; ЗБУ-16 “Заслін” (Д = 90 - 320 км); ІЧ система пошуку та визначення цілей; телепеленгатор 8ТП (Д = 50 км); цифровий автоматичний завадозахис- ний комплекс; навігаційна система “Тропік”, “Маршрут”
Су-25 Росія, 1981 Лазерна станція підсвічування “Клен-ПС”; стрілецько-бомбардувальний приціл АСП-17БЦ-8; станція попередження про опромінювання СПО-15; пристрій відстрілу дипольних відбивачів та ІЧ патронів; навігаційно-пілотажне обладнання включає: навігаційний комплекс КН-23-1 у складі: інерційної кур- сової вертикалі ІКВ-1, доплерівського вимірювача шляху і кута; приймач РНС ближньої навігації РСБН-6С
Су-27 Росія, 1982 Когерентно-імпульсно-доплерівський РЛ приціл; РЛПК-27 (Д = 80 - 100 км); оптико-електронний приціл; теплопеленгатор; лазерний дальномір (Д = 40 км); нашоломна система цілевказування НСЦ-27; система управління по лінії “Бірюза”; пілотажно-навігаційний комплекс; автоматичний ра- діокомпас АРК-19(20); радіовисотомір А-38; РСБН; комплекс РЕБ; комплекс зв’язку
Су-37 Росія, Цифрова електродистанційна система управління (ЕДСУ); БРЕО з штучним інтелектом; БРЛС з ФАР та БРЛС заднього огляду; удосконалена оптико-електронна система (тепловізор з лазерним дальномі- ром-цілепокажчиком) об’єднана з БРЛС та з удосконаленим нашоломним прицілом; апаратура обмі- ну даними з іншими винищувачами; комплекс оборони, РЕБ, обладнання зв’язку
Як-141 Росія Прицільний комплекс (бортова ЕОМ з імпульсно-доплерівською РЛС; система управління вогнем; нашоломна система цілевказання та лазерно-телевізійна система наведення); прицільно-пілотажна інформація на лобовому склі та багатофункціональному екрані-індикаторі на дошці приладів; апара- тура РЕП; пілотажно-навігаційний комплекс (ІНС, радіовисотомір, автоматичний радіокомпас, авто- номний навігаційний обчислювач; апаратура супутникової навігаційної системи)
Армійська (військова) авіація призначена для дії безпосередньо в інтересах загальновійськових формувань, їх авіаційної
підтримки, ведення тактичної повітряної розвідки, висадки тактичних повітряних десантів і вогневої підтримки їх дій, радіоелект-
ронної боротьби, перевезення військ та вантажів, евакуації поранених з поля бою.
Армійська авіація складається з частин і підрозділів армійських літаків і вертольотів.
Літаки армійської авіації (0-1 “БердДог”, 0-2А, О-2В, ОУ-1 “Мохоук”, ОУ-ІО “Бронко”, 0-1 “Остер”, 0-6 “Вівер”, 0-8
“Семіноул”, 0-21 “Юте”, К0-21Н, КС-120, КС-12Н, Г)О-28О-2,8М-1019) призначені для ведення повітряної розвідки, забезпечен-
ня зв’язку, перевезення особового складу і легких вантажів, а також для знищення наземних об’єктів у тактичній глибині.
Основним бойовим засобом армійської авіації є вертольоти (табл. 2.5) наступного призначення:
вогневої підтримки (АН-64А “Апач”, АН-1 “Хью Кобра”, АН-18“КобраТоу”, ВО-Ю5Р, \У6-13 “Лінкс”, 8А-342 “Газель”,
\У-30 “Саламандра”, А-129 “Мангуста”, Ми-24, Ми-28, К-50);
загального призначення або багатоцільові (ОН-1 “Ірокез” різноманітних модифікацій, ОН-60А “Блек Хоук”, 8А-341 та його
модифікації, 8А.365М “Пантера”, Н-76 “Голок”, Ми-4, Ми-8, Ми-17);
19
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
транспортно-десантні (СНЛ7Д “Чинук”, СН-53С, 8А-330В “Пума”, НАК-3 “Сі Кінгі’, А8-332В “Супер Пума”, Ми-8, Ми-6,
Ми-10, Ми-26М, Ка-32Т, Ка-62, “Сокіл”);
розвідки і радіоелектронної боротьби (ОН-6А “Каюс”, ОН-58 “Кайова”, ЕН-1Н, ЕН-60А, Ми-8ППА, Ми-17П);
спеціальні (зв’язку, пошуково-рятувальні та ін.).
Вертольоти вогневої підтримки виконують бойові завдання знищення броньованих цілей, забезпечення бойових дій
тактичних десантів, супроводу танкових колон і транспортно-десантних вертольотів у повітрі, прикриття флангів військ, що
наступають, подавлення наземних засобів ППО та несення патрульної служби.
Багатоцільові вертольоти виконують завдання з установки мін і розмінування, забезпечення управління і зв’язку, коригуван-
ня вогню артилерії та ударів тактичної авіації, перевезення військ і вантажів, ведення розвідки, постановки димових завіс, проклад-
ки проводних ліній зв’язку і т.ін. При установці на них систем зброї вони можуть виконувати всі завдання, покладені на вертольоти
вогневої підтримки.
Транспортно-десантні вертольоти вирішують завдання десантування тактичних повітряних десантів, перекидання військ,
бойової техніки і матеріальних засобів, евакуації з поля бою поранених і ушкод женої техніки. Можуть здійснювати транспортуван-
ня вантажів, як усередині вантажних кабін, так і на зовнішній підвісці.
Такгико-технічні характеристики основних вертольотів армійської авіації
Таблиця 2.5
Назва вертольота Екі- паж, чол. Злітна вага норм, макс, кг Максим, швидкість, км/год Прак- тична стеля, м Бойовий радіус дії, км Основні варіанти озброєння
Стрілецько-гарматне (кількість х калібр) Кількість ПТКР х найменування: кількість х калібр, мм
АН-64А “Апач” 2 6 270 8 000 320 6 250 240 1 х 30мм 16 х “Хелфайр” чи 20 НКР чи 76 х 70
АН-1\¥ 4710 390 - - - -
А-342М “Газель” 2 1 700 1 900 310 6 000 300 - 6 х “Хот” чи 7 х 70, чи 14x68
“Лінкс” 2-3 4 300 4 760 340 5 000 310 2 х 7,62 мм, 2 х 20 мм, 36 х 70 НАР
ВО-Ю5Р 2 2 000 2 300 270 5 180 230 - -
“Тигр” 2 3 300 6 000 280 2 000 - - -
А8-332В “Супер Пу- ма” 2-3 9 000 280 4 800 - 2 х 7,62 мм 1 х 20 мм -
Ми-24 2 11 500 310 5*750 400 1 х 23 мм 470 сн ПТКР “Штурм”, або “Атака”, 4 НКР 80 і 130 мМ
Ми-28 2 10 400 300 4 000 460 1 х 30 мм 16 ПТКР “Вихрь”, КР Р-60, -73
Ка-50 1 10 800 350 4 000 460 1 х 30 мм 500 сн 16 ПТКР “Вихрь”, КР Р-60, -73
Ка-52 2 10 800 310 4 000 460 1 х 30 мм 500 сн 16 ПТКР ”Вихрь”, КР Р-60, -73
Вертольоти розвідки і радіоелектронної боротьби призначені для ведення розвідки, наведення на розвідані об’єкти верто-
льотів вогневої підтримки, коригування вогню артилерії, перевезення особового складу і легких вантажів. Вертольоти РЕБ вирі-
шують завдання радіорозвідки, пеленгування і радіоелектронного подавлення наземних радіоелектронних засобів.
2.3. Безпілотні засоби повітряного нападу
Досвід воєнних конфліктів останнього десятиріччя (Ірак, Югославія, Афганістан) демонструє зміщення центру збройної
боротьби у повітряний простір, де фактично забезпечується досягнення мети воєнних дій, у тому числі з інтенсивним використан-
ням безпілотних засобів повітряного нападу (БЗПН). Так, у війні проти Югославії в перші 20 діб частина високоточної зброї в за-
гальній кількості бомб і ракет, які застосовувались, наближалась до 90 - 100%, за підсумком двох перших місяців війни - до 70%.
Особлива роль при веденні наступальних дій у початковому періоді війни належала масованому застосуванню крилатих ракет
повітряного та морського базування по об’єктах та військах сторони, що обороняється.
Класифікація безпілотних засобів повітряного нападу наведена на рис. 2.4.
20
РОЗДІЛ 2, ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Безпілотні засоби повітряного нападу
За рівнем використання:
стратегічні оперативно-тактичні тактичні (Дп > І 000 км) 250 км < Дп < 1 000 км Дп < 250 км
За способами запуску:
запуск з суші запуск з моря запуск з повітря запуск з космосу
За типами завдань, що виконуються:
розвідувальні ударні управління, наведення РЕБ
За способами наведення:
інерційного наведення радіонаведення оптико-електронного, ла- зерного наведення тепловізійного наведення
Рис. 2.4. Класифікація безпілотних засобів повітряного нападу
Керовані ракети
Керована ракета - ракета, що має систему керування для стабілізації її польоту та наведення на ціль. Конструкція і точність
наведення керованої ракети залежать від її призначення, типу бойової частини та двигуна, способу наведення на ціль і типу системи
управління.
Крилаті ракети.
Крилата ракета - керована ракета з несучими поверхнями (крилами), що створюють аеродинамічну піднімальну силу під час
польоту в атмосфері (побудована за літаковою схемою).
Крилаті ракети повітряного базування призначені для поразки наземних об’єктів у глибині території противника. Бойові
характеристики основних крилатих ракет повітряного базування наведені втабл. 2.6.
Таблиця 2.6
Крилаті ракети повітряного базування США
Характеристика А6М-86С (АЬКМ) А6М-129А АСМ-130Е А6М-84Н (8ЕАМ-ЕК)
Великої дальності Малої дальності
Призначення Наземні цілі Наземні цілі Наземні цілі Наземні цілі
Носій В-52Н, “Міраж-4” В-52Н, В-1В, В-2 В-52Н, В-1В, В-2, Р-16, А-6, Р/А-18 В-52Н, В-1В, В-2, Р-16, А-6, Р/А-18
Дальність, км 1 200 3 000 164 200
Точність, м 35 5 5 5
Швидкість, м/с 208-236 - - (0,8-0,9) М
Система керування ІНС+ +ТЕКСОМ ІНС+ КРНС 6Р8+ +ТЕКСОМ+ +Ш6І8МАК Тепловізійна ГСН + +ІНС + КРНС ОР8 ІНС+ +ТЕКСОМ+ +ОІ6І8МАК
Бойова частина 450 кг 200 кт 454 кг 320 кг
Крилата ракета АСМ-84Н 8ЬАМ-ЕЯ має: стартову масу 727 кг; довжину 4,37 м; діаметр корпуса 0,34 м; розмах
крила 2,43 м.
Крилата ракета АСМ-130Е: оснащена тепловізійною ГСН та ІНС з корекцією від КРНС КАУ8ТАК (6Р8). Керування
АСМ-130Е у ході польоту може здійснюватися як автономно за допомогою ІНС, що корегується за інформацією від навігаційних
супутників, так і оператором. На кінцевій ділянці траєкторії, як правило, керування бере на себе оператор, який контролює поло-
ження цілі за допомогою телекамери, встановленої на КР. Бойова частина ВШ-109. Стартова маса 1 074 кг.
В рамках програми ЛА88М в США ведуться роботи зі створення нової ракети. Відповідно до вимог ДА88М повинна маги
максимальну дальність стрільби 300 км, оснащуватися автономною системою наведення і забезпечувати поразку як стаціонарних,
так і мобільних наземних цілей. Ракета створюється з використанням технології “Стеле”. Систему наведення, крім ІНС, з корекцією
21
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
за даними КРНС КАУ8ТАК і тепловізійної ГСН, планується оснастити програмно-апаратними засобами автономного
розпізнавання цілей. Точність наведення ракети буде складати близько 2,5 м.
Крилата ракета АСМ-158 розроблена у межах програми ДА88М. Стартова маса 1 050 кг, дальність стрільби 350 км, точність
наведення 3 м, маса БЧ 450 кг. Довжина 4,26 м, висота 0,45 м, ширина 0,55 м, розмах крила 2,7 м.
Крилата ракета “Апаш” (АРАСНЕ) (Франція, розробляється та проходить випробування). Основним призначенням “Апаш”
є поразка бронетанкової техніки і живої сили в місцях зосередження, аеродромів і літаків на них, слабко захищених командних
пунктів, залізничних вузлів, позицій ЗРК, складів та інших об’єктів противника. КР “Апаш”: стартова маса 1 200 - 1 230 кг, маса
бойової частини до 520 кг, максимальна дальність стрільби 140 км; швидкість польоту 0,9М. Геометричні розміри: довжина 5,1 м;
ширина корпуса 0,63 м; висота корпуса 0,48 м; розмах крила 2,85 м.
Крилата ракета 8САЬР створена на базі КР “Апаш”, має подібні компонування і геометричні розміри. Особливостями даної
ракети є застосування технології “Стеле” і більш потужного двигуна з меншою питомою витратою палива і підвищеною тягою.
Максимальна дальність стрільби КР більш 250 км. ЇЇ основним призначенням буде поразка високозахищених малорозмірних цілей
типу командних пунктів і вузлів зв’язку.
Крилаті ракети морського базування призначені д ля поразки наземних об’єктів у глибині противника та надводних кораблів.
Крилаті ракети морського базування “Томахок” знаходяться на озброєнні багатоцільових атомних підводних човнів і деяких
типів надводних кораблів США. Ці ракети можуть нести ядерний або звичайний боєзаряд вагою 450 кг. Існують модифікації з
моноблоковою (ВСМ-109С) і касетною (ВСМ-109О) бойовою частиною. Бойові характеристики крилатих ракет морського
базування ‘Томахок” наведені у табл. 2.7.
Таблиця 2.7
Крилаті ракети морського базування ‘Томахок” США
Характеристика ВСМ-109А В6М-109В ВСМ-109С В1оск2 ВСМ-109С ВІоскЗ ВСМ-Ю9О
Призначення Наземні цілі Проти- корабельна Наземні захищені цілі Наземні захищені цілі Наземні площадні цілі
Прийняття на озброєння 1984 р. 1984 р. 1985 р. 1993 р. 1988 р.
Носій АПЧ, НК АПЧ, НК АПЧ, НК АПЧ, НК АПЧ, НК
Дальність, км 2500 550 1300 1850 1500
Точність, м 35 5 10 8 10
Швидкість, м/с 240 240 246 246 246
Висота польоту, м 10-250 5-10 10-250 10-250 10-250
ЕПР, м2 0,1 -0,2 0,1 -0,2 0,1 -0,2 0,1 -0,2 0,1 -0,2
Система керування ІНС+ ТЕКСОМ ІНС з актив- ною ГСН ІНС+ ТЕКСОМ+ ПІ6І8МАС ІНС+ КРНС 6Р8 + ШСІ8МАС+ кон- троль часу підльоту ІНС+ ТЕКСОМ+ ПІСІ8МАС
Бойова частина Ядерна, 200 кт Проникаюча 450 кг Фугасна, 450 кг Фугасна, 450 кг Касетна, 450 кг
Протирадіолокаційні ракети
Авіаційні протирадіолокаційні ракети розглядаються закордонними військовими спеціалістами як один із основних засобів
поразки радіолокаційних станцій наземного і корабельного базування. Вони знаходяться на озброєнні літаків тактичної авіації та
авіації ВМС практично всіх розвинених держав світу.
Основний спосіб бойового застосування ПРР. За даними літакового приймача виявлення визначається наявність джерел
радіовипромінювання в заданому районі, напрямок на них, їх тип і режим роботи. Ці дані відображаються на дисплеях у кабіні
екіпажа і вводяться в систему наведення ПРР. Пуск ракети може бути здійснений практично одночасно з виявленням об’єкта, що
випромінює, або в будь-який інший момент, навіть якщо джерело випромінювання вийде за межі поля огляду ГСН ПРР.
Другий спосіб застосовується при поразці віддалених цілей. У цьому випадку здійснюється попередній запис параметрів
цілі, що радіовипромінює, у систему наведення ПРР, та її пуск по балістичній траєкторії на максимальну дальність у напрямку
передбаченого перебування цілі. Якщо ракета в процесі польоту виявляє випромінювання цілі, то вона наводиться на неї, у против-
ному випадку відбувається самоліквідація ПРР.
Третій спосіб передбачає застосування ГСН ракети як засобу виявлення об’єктів, що радіовипромінюють. Ці дані передаються
на дисплеї екіпажа і можуть використовуватися для ідентифікації цілей і визначення їх пріоритетності.
Керовані ракети “повітря-повітря”.
Керовані ракети “повітря-повітря” призначені для поразки повітряних цілей в умовах повітряного маневрового бою.
22
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Такгико-технічні характеристики основних КР “повітря-повітря”:
Керована ракета АІМ-9Х “Сайдвіпдер”: стартова маса 85 кг, максимальна дальність стрільби до 20 км; маса бойової частини
9,4 кг. Геометричні розміри: довжина 2,9 м; діаметр 0,127 м; розмах крила 0,355 м; розмах рулів 0,445 м.
Керована ракета 1Ш8-Т: стартова маса 90 кг, маса бойової частини 10 кг, максимальна дальність стрільби до 25 км; робочий
діапазон довжин хвиль ГСН 3-5 мкм. Геометричні розміри: довжина 3,0 м; діаметр 0,127 м; розмах крила 036 м.
Керована ракета РЕгІІ: маса: стартова 220 кг, бойової частини 30 кг, максимальна дальність стрільби 22 км; мінімальна
дальність стрільби 0,5 км; діапазон висот цілей 0,03 - 21 км; перевантаження до 20 одиниць; максимальна швидкість польоту 2,4М;
максимальний промах 8 м. Геометричні розміри: довжина 3,7 м; діаметр 0,203 м.
Керована ракета “А-Дартер”: стартова маса 89 кг, максимальна дальність стрільби до 20 км; силова установка—однорежим-
ний РДДТ; тип рульових приводів електричний. Геометричні розміри: довжина 3,0 м; діаметр 0,166 м; розмах оперення 0,488 м.
Керована ракета ХААМ-5: стартова маса 100 кг, максимальна дальність стрільби до 20 км; середня швидкість польоту 4М.
Геометричні розміри: довжина 3,0 м; діаметр 0,15 м.
Нова КР ВУКААМ великої дальності призначена для поразки повітряних цілей, що знаходяться за межами візуальної
видимості. Відповідно до вимог вона повинна бути всеракурсною, мати стартову масу 160-185 кг, максимальну дальність стрільби
близько 150 км, характеризуватися високою середньою швидкістю польоту, підвищеною маневреністю і завадозахищеністю
системи наведення, маги можливість наведення на джерело завад.
Нова КР “Метеор” (розрахункові дані): максимальна дальність стрільби 150 км; маса: стартова 165 кг, бойової частини близько
25 кг, швидкість: польоту 4,5М; необхідна для пуску РПД 1,8М; припустимий діапазон перевантажень цілі до 11 одиниць.
Геометричні розміри: довжина 3,65 м; діаметр корпуса 0,18 м; розмах крила 0,4 м; розмах оперення 0,63 м.
На основі КР АІМ-120С-8 ЕКААМ передбачається побудувати дослідний зразок ракети ГМКААМ. Планер намічено
виконати за безкрилою аеродинамічною схемою й оснастити хвостовим оперенням, призначеним для керування і стабілізації КР у
польоті. У складі силової установки буде використовувались ППРД на рідкому паливі, застосування якого має ряд переваг, зокрема
можливість більш простої технічної реалізації автоматичного регулювання двигуна в гпежності від параметрів польоту ракети і
невисокої помітності продуктів горіння в оптичному діапазоні довжин хвиль. Заявлені такгико-технічні характеристики КР
ЕМКААМ практично збігаються з ТГХ КР “Метеор”.
Керовані ракети “повітря - корабель".
Керовані ракети “повітря - корабель” призначені для поразки надводних цілей.
Такгико-технічні характеристики основних протирадіолокаційних ракет, керованих ракет “повітря -повітря” і керованих ракет
‘тіовітря - корабель” наведені в табл. 2.8.
ТТХ керованих ракет
Таблиця 2.8
Найменування Стартова маса, кг Максимальна дальність стрільби, км Тип бойової частини Система наве- дення Літаки-носії
Пі ютирадіолокаційні КР
АОМ-45 “Шрайк” 177 50 ОФ Пасивна РЛ Г-4, А-6Е, А-7И, “Торнадо”, Г-16
АОМ-78 “Стандарт” 630 80 ОФ Пасивна РЛ Г-4, А-6Е, А-7О, Р-16
АОМ-88 НАКМ 354 80 ОФ Пасивна РЛ Г-117А, Г-4, А-7О, ЕА-6В
А8-37 “Мартель” 530 60 Осколочна Пасивна РЛ “Міраж”
КР класу “повітря - повітря”
АІМ-9 “Сайдвіндер” 75-86 11-18 ОФ або стри- жнева Напівактивна РЛ або ІЧ Г-4, Г-5А, Р-16, Г-22, Г/А-18, “Торнадо”, “Міраж”, “Харіер”, А- 6Е, А-7И, АУ-8В
АІМ-4 “Фалкон” 56-70 близько 10 ОФ Напівактивна РЛ або ІЧ Г-4
АІМ-7 “Спарроу” 205- 230 25-40 Стрижнева Напівактивна РЛ Г-4, Г-16, Г/А-18, “Торнадо”, “Міраж”, “Харіер”,АУ-8В
АІМ-120 149 100 ОФ Комбінована Г-22, Г-15, Г-16, Г/А-18
“Матра” К..530 230 36 ОФ Напівактивна РЛ “Міраж”
“Мажик” К.550 88 8 ОФ ІЧ “Міраж”
Протикорабельні КР класу “повітря — корабель”
А8-34 “Корморан” 600 37 Кумулятивна Комбінована “Торнадо”
АОМ-84 “Гарпун” 520 120 Фугасна Комбінована А-6Е, А-7И, Г/А-18
23
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Системи наведення керованих ракет.
Можливість застосування КР по цілях різного характеру і типу обумовлено перш за все різноманіттям систем наведення (СН),
до яких відносяться командні, телевізійні, лазерні, радіолокаційні, інерційні, комбіновані та інші СН.
Командна СН. Наведення КР здійснюється на лінії візирування “літальний апарат - ціль” за допомогою різноманітних засобів:
оптичних, радіолокаційних, лазерних та інших. Льотчик повинен виявити ціль і після виконання умов стрільби провести пуск
ракети, а потім утримувати її на лінії* візирування.
Телевізійна СН. Льотчик спочатку виявляє ціль, за допомогою телевізійної камери ГСН, зображення з якої передається на
індикатор, що розміщений у кабіні літака-носія. Після вибору та впевненого захоплення цілі і переходу ГСН на режим її супровод-
ження льотчик проводить пуск ракети, далі вона наводиться на ціль автоматично.
Лазерна СН. Система, як правило, працює в інфрачервоному (ІЧ) спектрі (довжина хвилі 1,06 мкм). Підсвічування цілі
лазерним променем може проводитися з літака-носія, іншого літального апарату або передовим авіаційним навідником з землі.
Після входу літака у район цілі та її виявлення льотчик-операгор вмикає лазерний цілепокажчик і при виконанні умов стрільби
проводить пуск ракети. Літак проводить протиракетне маневрування, а лазерний промінь продовжує безперервно супровод-
жувати і опромінювати ціль. ГСН приймає відбите лазерне випромінювання і визначає напрям на ціль, при цьому вимірюється
помилка між лінією прицілювання і напрямком польоту КР, пропорційно якій виробляються сигнали управління.
Радіолокаційна СН. Використовується у ракетах, призначених для знищення радіолокаційно контрастних цілей. Активна
радіолокаційна ГСН складається з антени з механічним пристроєм сканування, приймача і блоку обробки сигналів.
Інерційна СН. Головним елементом ІСН є блок вимірювання, за допомогою якого визначаються поточні значення прискорен-
ня КР за осями координат та кути повороту ракети відносно інерційної системи координат. Ця інформація надходить на обчислю-
вач, де визначаються поточні значення швидкості польоту, координати КР, кути крену, а також виробляються сигнали керування
траєкторією польоту у відповідності з програмою, що закладена Інерційні СН в силу своєї невисокої точності застосовуються для
забезпечення виведення ракет або бомб у район цілі, а далі починають працювати інші СН.
Телевізійно-командна СН. Для наведення КР використовується двохканальна апаратура зв’язку і наведення, що має
відеоканал, по якому з борту ракети передається телевізійне зображення цілі, і командний канал, що забезпечує передачу команд
наведення на кінцевій ділянці траєкторії*. Точність наведення складає біля 10 м.
Лазерно-командна СН. Містить підвісну лазерну станцію наведення і керування. У процесї наведення лазерний промінь
станції’, що швидко сканує, дозволяє визначити поточне положення цілі, а також передавати на КР кодованікОмаццикорегу вання її
траєкторії* польоту, які відпрацьовуються імпульсними ракетними двигунами.
Радіолокаційна командна СН. Використовується бортовий радіовисотомір, який дозволяє утримувати визначену висоту
польоту ракети, а РЛС, за допомогою якої проводиться пошук та супроводження цілі, забезпечує наведення КР по азимуту.
Автономна СН. Проводить автоматичний пошук, виявлення, розпізнавання цілі і наведення на неї ракети. У блок пам’яті КР
вносяться еталонні радіолокаційні зображення (сигнатури) типових цілей (танків, БТР і т.ін.) на типових для різних ТВД рельєфах
місцевості у різноманітних природно-кліматичних умовах. Після пуску ракети поточне зображення району місцевості з розташова-
ними на ньому цілями, яке отримується за допомогою радіолокаційної ГСН, порівнюється (корелюється) мікропроцесором з
еталонними сигнатурами типових цілей. У результаті цього проводиться розпізнавання і вибір цілі для поразки, а також вироблення
команд керування д ля автоматичного наведення ракети.
Протирадіолокаційна СН. Протирадіолокаційна ГСН представляє собою приймач випромінювання від РЛС. Це забезпечує
виявлення джерел радіовипромінювання у типових діапазонах хвиль.
Тепловізійна СН. Працює за принципом пасивної радіолокації, тобто приймання притаманного цілі теплового випроміню-
вання в ІЧ діапазоні.
Кореляційна СН. Базується на порівнянні зображення цілі або району, яке отримано заздалегідь, з поточним зображенням, що
фіксується бортовою апаратурою наведення зброї. Порівнюються або два зображення цілком, або тільки характерні ознаки цілі.
В результаті виявляється сигнал помилки (розбігу), що усувається шляхом корегування траєкторії польоту КР до моменту збігу
обох зображень.
Електронно-оптична кореляційна СН. Використовує еталонні зображення районів, що розташовані поблизу об’єкта. В
момент корегування на еталрнне зображення накладається оптичне зображення районів корегування або об’єкта. Команди для
корегування траєкторії* виробляються таким чином, щоб обидва зображення повністю збіглися. Отримані зображення можуть
попередньо перетворюватися у цифрову форму.
Система наведення з коригуванням за даними космічної радіонавігаційної системи. Наведення здійснюється методом
порівняння записаних у бортову апаратуру КР координат цілі з поточними координатами КР. Останні розраховуються безперервно
шляхом обробки сигналів, що випромінюють передавачі радіонавігаційної системи.
Комбінована СН. На різних етапах польоту КР до цілі використовується одна із перелічених вище систем наведення.
Бойові частини крилатих ракет.
Як бойові частини (БЧ) крилатих ракет можуть використовуватися:
осколочно-фугасні бомби - для поразки відкритих, неброньованих або слабко броньованих цілей як осколками, так і фугасною
дією (радіолокаційні станції та зенітні ракетні комплекси);
касетні осколочні бомби - для нанесення ударів по відкритих неброньованих або слабко броньованих цілях (жива сила, ракети
на відкритих позиціях, літаки поза сховищ, автотранспорт);
касетні напівбронебійні бомби - для поразки броньованих цілей або об‘єктів, що мають міцний бетонний або залізобетонний
захист (літаки у сховищах);
24
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
касетні бетонобійні (проникаючі) бомби для виводу з ладу укріплених (заглиблених) пунктів управління та шахтних пускових
установок балістичних ракет;
касетні бомби - для поразки живої сили та техніки.
Існуючі і перспективні проникаючі бойові частини КРПБ і КРМБ США наведені у табл. 2.9.
Таблиця 2.9
Бойові частини КРПБ і КРМБ США
Тип БЧ Маса, кг Пробивність бетону Принцип дії Засіб доставки Статус
АЬР-З(М) 900 понад 4 м Кінетичний КРПБ САЬСМ Віоск 2 на озброєнні
ВК.ОАСН 450 3 м Кумулятивний тандем ного типу КРПБ САЬСМ Віоск 2, КРМБ Тактичний Томахок 2003 р. 2003 р.
№ОИ-36В 318 0,7 - 1 м (оцінки) Кумулятивний КРПБ САЬСМ Віоск 2, КРМБ Тактичний Томахок на озброєнні 2003 р.
Керовані авіаційні бомби
Керовані авіаційні бомби призначені для поразки укріплених заглиблених об’єктів. Рубежі можливих прицільних скидань КАБ
з великих висот при характерному для них режимі планерування складають 60 - 70 км. Найбільшу точність мають КАБ з лазерним
наведенням, а також КАБ з корекцією на кінцевій ділянці траєкторії (до 3 м). Але, в міру удосконалювання головок самонаведення і
застосування більш продуктивної обчислювальної техніки в системах цілевказання, у перспективі можливо досягнення ще більшої
точності. Очевидно, для цього буде потрібно виконувати корекцію боєголовки на кінцевій ділянці траєкторії.
Основні такгико-технічні характеристики КАБ США наведені в табл. 2.10.
Таблиця 2.10
Керовані авіаційні бомби США
Тип Маса бойової частини, кг Дальність, км Точність, м
Керовані авіаційні бомби
СВІТ 10 900 (Мк-84, ВЬП-109) 15 3
СВЬІ-12 230 (Мк-82) 15 3
СВП-24/27 900 (Мк-84, ВЬП-109) понад 20 3
СВП-28 2 300 понад 9 3
ЛЗАМ 900,450 (Мк-84, Мк-83, ВЬП-109) 15 1-3
ЛЗАМ-РІР 900 15 3
САМ 2 300 понад 9 1-3
ХУСМЛ 900 (СВЬІ-87, СВИ-89, СВЬІ-97) 13 зо
КАБ, що планерують
СВП-15 900 (Мк-84, ВЬП-109) до 50 3
ХУаІІеуе 190,430 до 65 5
А6М-142 350 до 80 до 4
І8О5У (А6М-154) 450 до 75 3
ВазеІіпе/ВЬЬІ-108 450 до 75 до 5
Існуючі і перспективні проникаючі боєприпаси КАБ США наведені у табл. 2.11.
Таблиця 2.11
Проникаючі боєприпаси КАБ США
Тип боєприпасів Маса, КГ Пробивність бетону Принцип дії Засіб доставки Статус
ВЬП-109 900 1,5 м (оцінки) Кінетичний + фугасний КАБ СВП-10, СВП-15, СВП-24/27, ЛЗАМ На озброєнні
БЧ СВУ-37 2 000 понад 6 м Кумулятивний КАБ СВП-28/37, САМ На озброєнні
25
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Закінчення табл.. 2.11
Тип боєприпасів Маса, кг Пробивність бетону Принцип дії Засіб доставки Статус
ВІЛМ16В (АУР) 750 більше у 2 рази ВИ}-109 Кумулятивний, кіне- тичний КАБСЕЮ-10, ОВІІ-15, ОВІІ-24/27, ЮАМ На озброєнні
ВКОАСН 450 — Кумулятивний КАБ 7207/ 2003 р.
Безпілотні літальні апарати
Одним з перспективних напрямків в області створення засобів інформаційного забезпечення для досягнення інформаційної
переваги над противником, а також гарантованої високоточної поразки найбільш важливих елементів його оборони є концепція
створення і використання безпілотних літальних апаратів.
Класифікація безпілотних літальних апаратів наведена на рис. 2.5.
Безпілотні літальні апарати
За
тактичні операти вно-такти ч н і оперативно-стратегічні
1 —1 1 -1
ближньої дії (до 80 км)
малої дальності (до 300 км)
середньої дії (до 700 км)
великої тривалості польоту
(до 700 км у режимі бара-
жування)
За органами управління, в інтересах яких використовуються:
батальйон,
бригада
дивізія,
армійський корпус
оперативне управління СВ
на ТВД
оперативне управління
збройних сил на ТВД
З а характером завдань, що виконують:
розвідники
РЕБ
бойові (ударні)
За вагою:
малорозмірні
мікро міні
до 5 кг 200 - 1 000 кг
середньорозмірні
1 000 - 2 000 кг
великорозмірні
понад 2 000 кг
За тривалістю польоту:
малої тривалості
1 < 6 годин
середньої тривалості
6 < 1 < 12 годин
великої тривалості
1 > 12 годин
За висотою польоту:
маловисотні
Н < 1 км
середньовисотні
висотні 4 < Н < 12 км стратосферні Н> 12 км
За типом літального апарата:
за літаковою аеродинамічною схемою
за гелікоптерною аеродинамічною схемою
вільно літаючі прив’язні
За базуванням:
наземного базування
морського базування
За кратністю застосування:
одноразові
багаторазові
Рис. 2.5. Класифікація БПЛА
26
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
На теперішній час БПЛА одержали широке застосування в арміях багатьох держав і використовуються для рішення
найрізноманітніших завдань. Вони вважаються ефективними засобами розвідки, радіоелектронної боротьби, вогневого подавлення
і т.ін., а також забезпечують безпосередню доставку корисного вантажу на відстані до 5 000 км. При цьому, вони можуть тривалий
час (до 40 годин, а за прогностичними оцінками - до кількох місяців) знаходитись в повітрі з управлінням їх діями в реальному
масштабі часу.
Під БПЛА розуміється літальний апарат, виконаний за літаковою або вертолітною аеродинамічною схемою, призначений для
рішення розвідувальних, развіду вально-ударних та інших завдань, керований дистанційно або виконуючий політ за програмою.
Малі габарити, сучасний рівень технології виробництва (застосування в конструкціях пластмас, скловолокна, пінопласту,
картону та ін.) дозволяє досягти значення ЕПР 0,005 - 0,1 м2. Застосування малопотужних економічних двигунів робить їх політ
практично безшумним. А головне, вони набагато дешевші у порівнянні з пілотованою авіацією.
Поряд з перевагами БПЛА мають і ряд істотних недоліків: нездатність ухилятися від вогню наземних засобів ППО і винишу-
вачів-перехоплювачів; висока чутливість до помилок інерційних навігаційних систем; складність здійснення повернення і посадки.
Для пошуку наземних цілей бойові БПЛА планується оснастити РЛС із синтезуванням апертури антени, що буде використо-
вуватись також для визначення місця розташування наземних радіолокаційних засобів ППО. Застосування таких РЛС, на думку
експертів, забезпечить їм високу ефективність при поразці зенітних ракетних систем незалежно від режиму роботи їх станцій.
В якості силової установки бойового БПЛА передбачається використовувати двигун легкого пасажирського літака. За роз-
рахунками спеціалістів такий БПЛА буде мати масу близько 4 тонн і зможе нести, як мінімум, вісім 100 кг керованих авіаційних
бомб, що корегуються за допомогою космічної радіонавігаційної системи КАУБТАК. Очікується, що при його розробці будуть
широко використовуватися композитні матеріали. Довжина розроблювального БПЛА близько 8 м, розмах крила- 10,3 м, висота -
2 м. Відповідно до розрахунків, радіус дії бойових БПЛА буде складати 1 000 - 2 000 км при корисному навантаженні 500 - 1 500
кг. При цьому обидва ці показники будуть залежати від часу його перебування в зоні чергування, який може скласти від однієї до
кількох годин.
Відповідно до існуючих проектів бойовий БПЛА буде мати два відсіки озброєння ліворуч і праворуч від силової установки.
Передбачається також застосовувати КАБ з корегуванням від КРНС КАУБТАК, оснащених осколочно-фугасною бойовою части-
ною, заряд якої буде спроможний вивести з ладу антенну систему наземної РЛС, пункт управління або мобільну пускову установку
зенітних керованих ракет.
Крім того, фахівці не виключають можливість оснащення бойових БПЛА керованими ракетами великої дальності, а також
гіперзвуковими керованими ракетами. В даний час фахівці мають намір включити до складу озброєння цих літальних апаратів
тільки протирадіолокаційні ракети АСМ-88 НАКМ.
Для підвищення тривалості польоту БПЛА ведуться розробки економічних двигунів з великою питомою потужністю (тягою) і
використанням нових видів палива з більш високою енергоємністю. У США досліджуються питання з використання на БПЛА в
якості силової установки електричних двигунів з живленням від бортових акумуляторів і сонячних батарей. До 2005 року можливе
прийняття на озброєння практично безшумних апаратів з тривалістю польоту до декількох місяців, за рахунок використання
сонячних батарей.
Характеристики основних БПЛА іноземних держав наведені у табл. 2.12.
Таблиця 2.12
Безпілотні літальні апарати
Найменування БПЛА, країна Мзл, КГ Мкн, кг V, км/год Н,м Т 1 пол, год Додаткові дані
“Пчела-ІТ”, Росія 140 1 ТВ. Тактичний радіус 50 км. Входить до складу комплексу “Стрела-П”. Комплекс складається: одна пускова установка на базі гусеничного само- хода, одна технологічна машина КАМАЗ, одна машина ГАЗ-66. Гарантійний термін експлуатації 7,5 років
“Марвел”, Франція-США 146 23 280 4 500 3-4 Розроблений США і Францією для ВМС на базі БПЛА ”8СОКРІОМ“. Зліт - з рейкових направля- ючих на колісному шасі, посадка - на колісне шасі
Х-45А, США 7 000 1 350 1 000 12 000 3,5 РЛС з ФАР, активний ЛД, ІЧ, РЕР. Радіус дії 1 850 км. Бойовий, багаторазового використання
БЬ-327 “Сентинел”, Канада 350 100 160 5 500 4 ТВ, ІЧ, ЛД, АПД, РлСА, РЛР. Тактичного при- значення, радіус дії 200 км, вертикального зльоту і посадки, розроблений за програмою УЬАК. Входить у систему ШТАБ. Довжина фюзеляжу 6,4 м. Розмах крила 2,8 м
“Фенікс”, Великобританія 160- 175 45- 56 130-170 12 750 5-6 ІЧ. БПЛА тактичного рівня. На озброєнні - на зміну “БЬ-89”. Зліт - за допомогою катапульти, посадка - парашут. Довжина фюзеляжу 3,4 м. Розмах крила 4,2 м
К4Е-50 “Скай Ай”, США ЗЦ) 100 220 6 000 10 Довжина фюзеляжу 3,6 м. Розмах крила 6,0 м
27
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Закінчення табл.. 2.12
Найменування БПЛА, країна Мзл, кг Мк„, кг V, км/год Н,м ї*пол, ГОД Додаткові дані
“Хантер”, США 91 — 240 5 180 3-7 Розробляється як варіант маневреного єдиного тактичного БПЛА. Запуск - за допомогою катапуль- ти, посадка - на парашутне крило
“Дак Стар”, США 3 900 454 556 15 240 < 12 РЛР, ОЕ, ІЧ. Висотний, малопомітний для розвідки особливо важливих цілей у будь-яких умовах і будь-який час доби. Радіус дії до 1 000 км, виготов- лений з графітового композиційного матеріалу для зменшення ваги. Малопомітність за рахунок по- криття і конструкції за технологією “Стеле” з ма- лою ЕПР. Веде розвідку на території площею 48 000 км кв
“Фокс” АТ-1, АТ-2, Т8, ТХ, Франція 115 90 140 120 25 25 25 25 180 180 180 ПО 4 250 4 000 4 000 3 500 3- 5 1 - 4 4- 5 5 ТВ, ІЧ, РЕБ. Використовувався в 1993-1994 р.р. Керування АТ-1 - програмне, АТ-2 - дистанційне. Запуск за допомогою катапульти, посадка - пара- шут або посадкові лижі. Т8 і ТХ надходять на озброєння з 1995 р. БПЛА типу “Гох” продано в інші країни біля 400 одиниць
“Предатор”, США Варіант: “Предатор ХР” Варіант: “Предатор В” 1 020 3 000 200 400 220 400 4 500- 10 000 16 000 16 зо Середньовисотний БПЛА для детальної розвідки невеличких ділянок місцевості. Висота бойового використання 1 500 - 4 500 м. Система складається: 3 БПЛА, системи керування та апаратури зв’язку. Для транспортування системи повітрям необхідно 5 С-130 або 2 С-141. Для приведення в готовність необхідно 6 годин після доставки на місце операти- вного призначення. Бойовий радіус дії 6 000 км
Кр-4 «Глоубал Хоук», США 9 000 11 000 900 1 000 648 21 300 24-42 ТВ, РЛР, ОЕ, РТР, ІЧ, РЕБ. Висотний БПЛА. Бойо- вий радіус дії до 8 000 км. На борту має 3-4 хибні цілі. Веде розвідку району площею 140 000 км2
2.4. Розвідувально-ударні комплекси
Розвідувально-ударний комплекс - організаційне і технічне об’єднання засобів розвідки, цілевказання, наведення і ураження,
що дозволяють комплексно вирішувати завдання вибору і оперативного ураження цілей.
Розвідувально-ударні комплекси (РУК) призначені для нанесення масованих ударів (з одночасним ураженням великої кількості
цілей) в глибині розташування військ противника в інтересах з’єднання, об’єднання та командування на ТВД без введення на його
територію військ або проникнення пілотованих літаків в його повітряний простір.
Елементи РУК: засоби розвідки (радіолокаційні, радіо- і радіотехнічні, лазерні, телевізійні, оптико-електронні та ін.); засоби
обробки інформації і управління (ЕОМ, апаратура передачі даних, засоби відображення і зв’язку); засоби навігації; засоби ураження
(керована зброя та зброя і боєприпаси, що наводяться самі).
Комплексна система розвідки наземних цілей і управління зброєю на ТВД ПЛСС призначена для розвідки і вогневого
ураження засобів противника, що випромінюють, в масштабі ТВД.
РУК ПЛСС забезпечує розвідку РЕЗ і наведення на них зброї на території противника по фронту і на глибину до 500 км.
Система ПЛСС вирішує дві групи завдань. Перша пов’язана з веденням радіо- і радіотехнічної розвідки працюючих РЕЗ і призна-
чена для виявлення, розпізнавання, класифікації, визначення місцезнаходження комплексів ППО, вузлів зв’язку та інших наземних
об’єктів противника на площі 200 ... 300 тис. км2. Друга група пов’язана з управління зброєю і здійснює автоматичне радіокоманд-
не наведення на виявлені цілі літаків тактичної авіації і керованої зброї класів “поверхня-поверхня” і “повітря -поверхня”.
До складу РУК ПЛСС можуть входити: 10 літаків розвідки і ретрансляції; наземний пункт обробки даних і управління; наземна
навігаційна мережа; 100 комплектів бортового обладнання для ударних літаків і 500 комплектів - для керованої зброї; 10 підвісних
контейнерів ретрансляції команд наведення.
Під час бойового застосування РУК ПЛСС на чергуванні у повітрі на великій висоті знаходяться одночасно три літаки розвідки
і ретрансляції. Кожному з них визначається зона патрулювання протяжністю по фронту 150... 250 км. Ці літаки здійснюють пере-
хоплення випромінювання РЕЗ противника і передають отриману інформацію на наземний центр. Наземний центр на підставі цієї
інформації здійснює розпізнавання типів РЕЗ противника і розраховує їх місцезнаходження. Визначення місцезнаходження РЕЗ
базується на різнично-дальномірному методі розрахунку координат джерел, що випромінюють. У якості опорних пунктів, по
відношенню до яких визначається різниця часу приймання випромінювання, використовуються три чергових літаки розвідки,
координати яких при цьому точно фіксуються за допомогою прив’язки до опорної наземної радіонавігаційної мережі або за
допомогою космічної радіонавігаційної системи ^УБТАК Ураження виявлених об’єктів здійснюється тактичною авіацією або за
допомогою керованої зброї (КР, КАБ).
28
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Оперативно-тактичний розвідувально-ударний комплекс “Джисак” призначений для нанесення ударів по броньованих
об’єктах, по резервах танкових і механізованих частин і з’єднань в оперативно-тактичній глибині, а також може використовуватися
для ураження позицій ракетних військ і засобів ППО, комунікацій, центрів управління й інших об’єктів, що виявлені різноманітни-
ми засобами розвідки.
До складу комплексу входять: літак розвідки і ретрансляції з багатофункціональною РЛС виявлення; центр збору та обробки
тактичної розвідувальної інформації; система розподілу тактичної інформації; тактична ракетна система.
Під час бойового застосування РУК “Джисак” літак розвідки з РЛС на борту патрулює за замкненим маршрутом протяжністю
до 150 км в 50... 90 км від зони бойових дій і здійснює оперативний огляд місцевості площиною 150 х 110 км2 для розвідки стаціо-
нарних об’єктів, а також селекцію рухомих цілей на площині близько 85 000 км2. Результати розвідки виводяться на індикатори
операторів літака, за допомогою яких здійснюється супроводження цілей, що вибрані, з визначенням їх курсу руху, швидкості,
азимуту і географічних координат, а також напівавтоматичне наведення на ціль тактичних винищувачів і автоматичне - керованих
ракет. Після пуску ракети за допомогою РЛС літака здійснюється корегування траєкторії польоту ракети і при виході ракети у
район цілі подається команда на визначений варіант розведення її бойової частини.
2.5. Системи дальнього радіолокаційного виявлення і управління
Завдання системи дальнього радіолокаційного виявлення і у правління: контроль повітряної обстановки над заданою
територією на значній відстані від району бойових дій; виявлення і супроводження великої кількості літаків, які діють на малій
висоті і прикриті завадами; визначення державної належності цивільних і військових літаків, які оснащені системами розпізнавання;
передача у реальному масштабі часу даних про повітряну обстановку на наземні центри управління активними засобами ППО;
управління ударними літаками і винишувачами-перехоплювачами, що виконують завдання ППО, на дальності, яка значно
перевищує дальність дії наземних систем управління.
Система ДРЛВ і У АВАКС призначена для розвідки повітряного противника і оповіщення про нього системи ППО, для
управління силами і засобами ППО і тактичною авіацією на ТВД.
Основою системи АВАКС є літаки Е-ЗА “Сентрі”. В процесі бойового застосування літаки Е-3 А патрулюють над своєю тери-
торією за замкненим маршрутом протяжністю (по фронту) 200 ... 250 км з інтервалами між ними (по фронту) до 650 ... 800 км.
Тривалість патрулювання на відстані 1 100 км від бази - 8 годин (без додаткової заправки) і 24 години (з додатковою заправкою у
повітрі). Відстань зони патрулювання від району ведення бойових дій у залежності від можливостей системи ППО і засобів РЕП
противника складає 60... 200 км.
РЛС літака Е-ЗА “Сентрі” забезпечує виявлення стратегічних бомбардувальників на дальності до 650 км, винищувачів - 400 км.
Центральна ЕОМ літака керує РЛС і дозволяє одночасно супроводжувати до 300... 400 цілей і автоматично наводити до 50
винищувачів.
Система ДРЛВ і У АТО8 призначена для розвідки повітряного противника і оповіщення про нього з’єднань ВМС, для управ-
ління засобами ППО авіанесучих кораблів і палубною авіацією при нанесенні ударів по кораблях, важливих берегових об’єктах і
авіаційної підтримки при висадці десантів.
Основу системи АТО8 складають літаки Е-2С “Хокай”. Апаратура, що встановлена на літаку, забезпечує виявлення цілей на
дальностях до 450 км (патрулювання на великих і середніх висотах) і до 370 км (на малих). Крилаті ракети можуть виявлятися на
дальності до 100 км, а кораблі - до 360 км. У зоні патрулювання (протяжністю 200 ... 400 км) літак Е-2С “Хокай” спроможний
діяти без додаткової заправки у повітрі до 6 годин. Кількість винищувачів, що одночасно наводяться на цілі, до 30.
Система ДРЛВ і У НИМВАКС призначена для раннього виявлення в умовах завад від земної та водної поверхонь літаків,
крилатих ракет і надводних кораблів, передачі даних про них на наземні пункти управління і наведення та для управління діями
винищувачів.
Основу системи НИМВАКС складають літаки “Німрод” АЕ\У Мк.З. Апаратура, що встановлена на літаку, забезпечує вияв-
лення бомбардувальників на дальності до 600 км, винищувачів до 320 км. Крилаті ракети та кораблі можуть виявлятися на дальнос-
ті до 100 км. У зоні патрулювання (протяжністю 200 ... 400 км) літак “Німрод” АЕ\¥ Мк.З спроможний діяти без додаткової
заправки у повітрі до 10 годин. Кількість винищувачів, що одночасно наводяться на цілі, до 30.
Об’єднана система радіолокаційного спостереження і цціевказання Джистарс (Лоіїй 8ТАК5) (система СВ і ВПС) призна-
чена для забезпечення інформацією про наземну обстановку за лінією фронту у режимі реального часу, для цілевказання і управ-
ління ударними засобами, а також для інформаційної підтримки при прийнятті рішення на бойові дії (операцію).
Склад системи: літак ВПС Е8 (модифікований пасажирський “Боінг 707”); наземні модулі, що використовуються команду-
ванням СВ; система обміну даними.
Основні режими роботи: оглядовий; секторний селекції рухомих цілей; відображення стаціонарних цілей (РЛС бокового
огляду з синтезованою апертурою); розпізнавання цілей.
Літак Е8, який знаходиться над розташуванням своїх військ, (тривалість бойового чергування 10 годин, з додатковою заправ-
кою-20 годин) може здійснювати огляд території противника на оперативну глибину, виявляти і супроводжувати рухомі і стаціо-
нарні наземні цілі, а також формувати близьку до фотографічної карту місцевості на глибину близько 150 - 200 км від переднього
краю. Закритими лініями зв’язку, у тому числі й супутниковими, інформація про наземну обстановку на території противника пере-
дається на наземні командні модулі СВ на ТВД пункти управління ВПС, або центри воєнного аналізу, що знаходяться на відстані
тисячі кілометрів від місця конфлікту.
На борту літака Е8 обладнано 18 автоматизованих робочих місць. Одне - навігації і управління борговим комплексом і
17-уніфіковані. З них проводиться: планування маршруту; контроль формування і відображення картографічного і гіпсографічно-
го зображення району розвідки; управління радаром; виявлення і аналіз загрози; цілерозподіл; розрахунки з наведення ударних
засобів, обчислення координат передавачів завад та ін.
29
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Для ведення цілодобового спостереження з однієї зони чергування в повітрі необхідно чотири літаки.
Існують два варіанти наземних модулів: середній на базі двох стандартних 5-ти тонних вантажівок і легкий на базі двох багато-
цільових автомобілів.
Основні недоліки системи на цей час: не розрахована для роботи у гірській місцевості і ведення розвідки бронетанкової техніки
у населених пунктах та у лісі; відсутні відпрацьовані алгоритми взаємодії з іншими розвідувальними системами.
Основні тактико-технічні характеристики літаків ДРЛВ і У наведені у табл. 2.13.
Літаки дальнього радіолокаційного виявлення і управління
Таблиця 2.13
Тип літака Швидкість у зоні патрулювання, км/год Висота у зоні патрулювання, м Дальність польоту, км Тривалість патрулювання, год Обладнання
Е-ЗА ”Сентрі” 600 - 800 8 000 - 9 000 8 400- 10 000 до 8 РЛС А1Ч/АРУ-2, ЕОМ, комплект АМ/АКС-192 з 14 УКХ радіостанцій, об- ладнання відображення, апаратура А1Ч/ІЖР-33(У) системи зв’язку “Джитидс”
Е-2С “Хокай” 350-450 5 000 - 6 000 2 660- 3 100 до 6 РЛС дальнього виявлення А1Ч/АР8-125; антени АМ/АРА-171 і АМ/АРА-172 - гру- па обладнання відображення; станція радіотехнічної розвідки АІЧ/АЬК-59, дві ЕОМ, пристрої зв’язку
“Німрод” АЕ\¥ Мк.З 600 8 000 7 400- 8 000 до 10 РЛС “Магсопі”, ЕОМ із розподільною обробкою даних, апаратура радіотехніч- ної розвідки, підсистема обробки і відо- браження інформації, пристрої зв’язку
2.6. Тенденції розвитку форм та способів збройної боротьби у воєнних конфліктах майбутнього
Виходячи із сучасного досвіду воєнних дій, досягнень науки, розвитку озброєння і військової техніки, можна очікувати зміни
сучасної воєнної стратегії провідних країн світу від орієнтації на масштабні загальновійськові операції на повітряно-космічну
операцію.
Основним змістом повітряно-космічної операції стануть узгоджені за цілями, завданнями, місцем і часом, масовані удари висо-
коточних неядерних засобів стратегічного, оперативного і тактичного рівня, а також застосування зброї, основаної на нових фізич-
них принципах. Операція буде проводитися рішучо з різноманітністю виконуваних завдань і з високою напругою для їх вирішення.
Стратегічна повітряно-космічна наступальна операція достатньо імовірно буде проводитися в два етапи. На першому етапі -
тривалість до 10 - 15 діб будуть завдаватися масовані удари для завоювання переваги у повітрі, знищення у противника засобів
удару у відповідь, найважливіших військових, військово-економічних об’єктів, органів управління державою і збройними силами,
засобів ППО і ПРО та захоплення ініціативи у війні.
На другому етапі - тривалістю 50 - 70 і більше діб масованими ударами високоточними засобами космічного, повітряного і
морського базування, зброєю, основаною на нових фізичних принципах, завершиться розгромом економічного потенціалу против-
ника, його системи управління державою і збройними силами, чим будуть практично досягнуті як воєнні цілі, так і політичні. На
цьому війна може закінчуватися цілком.
При нанесенні ударів високоточні засоби нападу будуть застосовуватися на широкому фронті без зосередження основних
зусиль на якомусь одному напрямку і на всю глибину території країни, яка піддається нападу. Ці дії носитимуть характер одночас-
них масованих ударів великої щільності з усіх напрямків в умовах винятково складної радіоелектронної обстановки, яку буде
утворювати сторона, яка нападає.
Для збільшення щільності ударів сторона, яка нападає, може піти на одночасне застосування великої кількості (тисячі одиниць)
дешевих безпілотних літальних апаратів різноманітного призначення, а також застосування ударних засобів космічного базування.
Тривалість операції буде значною мірою залежати від заздалегідь підготовленої кількості непілотованих високоточних засобів
поразки і зброї, основаної на нових фізичних принципах. Загальне число таких засобів у найбільш економічно розвинутих країнах
на рубежі 2010 р. може досягти від ЗО до 50 тисяч одиниць.
Це будуть головним чином високоточні крилаті ракети повітряного і морського базування, ударні бойові системи космічного
базування, зброя, основана на нових фізичних принципах різноманітного базування, безпілотні літальні апарати та ін. Тільки для
нанесення першого масованого удару може бути залучено до 10 - 20 тисяч одиниць такої зброї.
Поступово новим у воєнному мистецтві стане те, що в збройній боротьбі сторона, яка нападає, для ДІЇ над територією против-
ника буде широко застосовувати безпілотні засоби різноманітного призначення. Роль пілотованої авіації буде зводитися, головним
чином, до доставки до рубежів пуску високоточних засобів поразки та безпілотних засобів. Істотне збільшення кількості пілотова-
ної авіації в майбутньому не відбудеться, але вся вона стане всепогодною і її використання не залежатиме від часу доби. Вона буде
оснащена широким набором засобів РЕБ та вироблятиметься з використанням технологій малопомітності.
Таким чином, аналіз тенденцій розвитку форм та способів збройної боротьби у воєнних конфліктах майбутнього вказує на такі
перспективи у розвитку засобів повітряного нападу: активізація робіт щодо створення ударних та розвідувальних безпілотних
ЗО
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
апаратів; підвищення можливостей бойової авіації за рахунок застосування високоточної керованої зброї нового покоління
(наприклад, керованих авіаційних ракет з гіперзвуковою швидкістю, малорозмірних ударних БПЛА тощо); підвищення точності
навігаційного забезпечення польотів та застосування зброї; створення системи розвідки глобального масштабу з застосуванням
космічних систем розвідки і зв’язку, засобів розвідки на безпілотних літальних апаратах з використанням космічних засобів зв’язку;
застосування БПЛА для постановки завад засобам зв’язку та РЛС; застосування одноразових постановників завад розширення
діапазонів подавленення радіоелектронних засобів противника
2.7. Космічні системи забезпечення бойових дій
Космічні системи розвідки.
Завдання космічних систем розвідки: виявлення даних про збройні сили противника; виявлення об’єктів військово-
економічного потенціалу, державного та воєнного управління і визначення їх координат і характеристик; спостереження за станом
та функціонуванням стратегічних об’єктів; визначення складу, основних ГГХ та районів дислокації РЕЗ противника в інтересах
організації РЕБ; здійснення постійного контролю за режимами функціонування РЕЗ ППО, а також за змінами загальної радіоелект-
ронної обстановки на ТВД; здійснення фотографування території з метою отримання документальної інформації і картографування
в інтересах видів збройних сил; оперативний контроль за результатами дій своїх сил з метою найбільш ефективного наступного
нанесення ударів; виявлення перевезень військ та вантажів; виявлення скупчення військ та резервів.
До космічних систем розвідки відносять супутники оптико-електронної, радіотехнічної, радіолокаційної і метеорологічної роз-
відки.
Супутники оптико-електронної розвідки використовують оптико-електронну апаратуру для реєстрації зображень об’єктів
місцевості та передачі цих даних на Землю по лініях радіозв’язку.
Зображення, сформоване оптичною системою, перетворюється на електричні сигнали за допомогою матриць або лінійок
напівпровідникових фотоприймачів. Електронно-променеві трубки, що використовували раніше для цих цілей (телевізійні зніма-
льні системи) у даний час застосовуються дуже обмежено через порівняно низьке оптичне розрізнення і надійність. Об’єктиви бі-
льшості знімальних камер на ШСЗ виконуються з дзеркальних компонентів, тому що в порівнянні з лінзовими вони мають значно
меншу масу. Націлювання бортової апаратури, призначеної для спостереження, на об’єкти зйомки уздовж траси польоту супутни-
ків здійснюється шляхом їх кутового орієнтування за допомогою бортової апаратури, що сканує, а також, за необхідності, реактив-
них двигунів малої тяги. Отримані відеозображення передаються в цифровій формі по радіоканалу на наземні станції прийому
інформації.
Супутники оптико-електронної розвідки КХ-11 забезпечують можливість регулярного та оперативного спостереження за
територією і стратегічними об’єктами іноземних держав, ведення розвідки морських комунікацій, будівництва і функціонування
важливих державних об’єктів, виявлення пересування військ і передислокації військової техніки, складання карт масштабу
1:25000та 1:30000.
У системі використовується 2 ШСЗ “КХ-11” на сонячно-синхронних орбітах з параметрами: нахил 96,9°, висота перигею
250... 280 км, апогею 500 ... 570 км, період обертання 92 хвилини. Площини їх орбіт рознесені приблизно на 48°, а різниця у часі
перетинання екватора складає близько половини періоду обертання ШСЗ. Таке орбітальне розташування супутників забезпечує
послідовне перекриття смуг огляду двох ШСЗ, що дозволяє здійснити безперервний перегляд усієї територій Євразії протягом
однієї доби. Окремі райони (об’єкти) можуть спостерігатися два рази на добу з різницею в часі близько 3 годин.
Супутники “КХ-11” ведуть оглядову (безперервну) і детальну (кадр за кадром) розвідку. При оглядовій розвідці здійснюється
перегляд заданого району, а при детальній - спостереження за конкретним об’єктом у межах смуги огляду супутника. За одну добу
ШСЗ може спостерігати 30 районів розміром 90 х 120 км2 або 400 об’єктів. Результати спостережень передаються по радіоканалах
(системах супутникового зв’язку) у масштабі часу, близькому до реального.
Ці апарати дають змогу отримувати цифрове зображення наземних об’єктів з максимальною роздільною здатністю під час
оглядової розвідки 0,6 ... 1,5 м, під час детальної - 0,15 ... 0,3 м. Точність визначення координат об’єктів близько 50 м. Основу
боргового обладнання КА такого типу складає довгофокусна оптична система, широкоформатна картографічна камера, а також
апаратура інфрачервоної зйомки. Вона дозволяє отримати зображення та визначити координати наземних об’єктів з високим
ступенем точності. Оперативне отримання зображень споживачами для обробки забезпечується бортовою радіоапаратурою, яка
працює у сантиметровому діапазоні в реальному масштабі часу. Вага ШСЗ на орбіті 13 тонн.
Супутники дистанційного зондування Землі серії 8РОТ оснащені двома фотоапаратами із роздільною здатністю 10 м у
видимому і 20 м в інфрачервоному діапазонах. Така роздільна здатність спецапаралури дозволяє розрізняти багато об’єктів: дороги,
будинки і т. ін., але отримані знімки відповідно до рішення уряду Франції не вважаються розвідувальними. З’явилася можливість
придбання і використання урядами, організаціями і засобами масової інформації фотографій різноманітних ділянок поверхні Землі,
у тому числі секретних військових об’єктів, районів ведення бойових дій і розгортання зброї.
Очікується, що просторове розрізнення у нового супутника 8РОТ-5 досягне 2,5 м. Далі Франція планує запускати КА за
програмою 38, що дозволить підвищити оперативність одержання інформації з космосу і знизити вартість цифрових
знімків місцевості.
Крім того, у Франції є два розвідувальних супутники “Геліос-1 А”, вони були створені на основі технічних рішень, апробованих
на супутниках 8ЮТ. ШСЗ ‘Теліос-1 А” спроможні вести нічне спостереження за військовими об’єктами в ІЧ діапазоні,
що знижує можливості противника по дезінформації і маскуванню.
Для рішення завдань стратегічної розвідки у Франції планується розробити супутник “Геліос-2” - удосконалену версію
Теліос-1 А”. У роботі бере участь Німеччина. Перший супутник цієї серії передбачається вивести на орбіту в 2004 р., а
усього запланований запуск двох таких ШСЗ, що дозволить достатньо оперативно одержувати і передавати на Землю до 70 тис.
знімків на рік.
31
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Франція і Німеччина активно співробітничають також у розробці ШСЗ радіолокаційної розвідки за програмою 8АК-Еире.
Планується створити угруповання з чотирьох таких супутників (масою по 650 кг), німецька сторона пропонує в рамках
цієї програми розробити і запустити шість подібних ШСЗ (по 500 кг). Для одночасного їх запуску передбачається викори-
стати російсько-українську ракету “Дніпро”.
Супутники ІЧ розвідки. Роботи з одержання зображень місцевості в ІЧ діапазоні оптичного випромінювання ведуться вже
понад 40 років. Американські супутники “Мідас”, оснащені датчиками ІЧ випромінювання для виявлення факелу при запуску
ракети, дозволяли визначати її траєкторію і кінцеву ціль.
Друге покоління ШСЗ ІЧ розвідки складали геостаціонарні супутники, створені за програмою О8Р, на яких був установлений
великий ІЧ-телескоп. Такі ШСЗ призначені для спостереження за запусками балістичних ракет і ядерними вибухами. Інформація,
передана з них, оброблялася разом із даними, одержаними за допомогою апаратури реєстрації нейтронів, рентгенівського і гамма-
випромінення із супутників, що знаходяться на орбітах, і даними від системи фіксування ядерних вибухів.
Останнє покоління супутників з інфрачервоною апаратурою створюється відповідно до концепції космічної системи спостере-
ження в ІЧ-діапазоні 8ВІК8. В систему повинні входити п’ять високоорбітальних стаціонарних супутників, сім блоків приймачів
ІЧ-випромінювання, установлюваних на супутники інших систем, і низьковисотні ШСЗ спостереження за польотом балістичних
ракет. Термін виведення супутників на геостаціонарні орбіти - 2004 р.
Підвищити надійність виявлення об’єктів розвідки дозволяє апаратура, що працює не тільки в інфрачервоному або панхрома-
тичному, але й в інших діапазонах спектра. На раніше розроблених супутниках для дистанційного зондування Землі кількість спек-
тральних каналів не перевищувала десяти. Але з ростом можливостей електроніки кількість використовуваних вузькосмугових
каналів зросла до кількох сотень. Така зйомка одержала найменування гіперспекгральної.
Супутники гіперспекгральної зйомки. Дані, отримані при гіперспектральній зйомці, дозволяють виявляти болота по розбіж-
ностях спектральних відбитків від мокрої і сухої трави. Вони також можуть використовуватися для визначення місцеположення
військової техніки противника.
Гіперспекгральна апаратура ЕТН8І, що має масу близько 10 кг, була розроблена для дослідного супутника Уі^ЬіуЗаі II, (умовне
найменування Зігкігу). ШСЗ, виведений на орбіту висотою 547 км, дозволяє здійснювати зйомку територій площею 20 х 13 км2 в
області спектру від 470 до 1 050 нм із періодичністю 3 доби. Супутник має вузько смуговий канал передачі даних, у зв’язку з чим
потребує значних обчислювальних потужностей і спеціально розробленого процесора для обробки сигналів. Шляхом порівняння
отриманих гіперспектральних зображень із наявними в банку даних супутника цей процесор дозволяє виділяти необхідну інфор-
мацію і передавати її на Землю.
За програмою 8ТР був здійснений запуск супутника масою 600 кг, обладнаного мультиспектральним тепловізором МТІ, із 15
каналами реєстрації зображень ділянок місцевості розміром 12x12 км2. Одне таке зображення одержують при вертикальному
положенні візирної осі МТІ, а інше - при її нахилі на 45 - 55°.
Супутники радіотехнічної розвідки “Феррет-Д” вирішують завдання з визначення характеристик РЛС, розвідки об’єктів та
їх оборони заданими радіотехнічної розвідки, а також викриття системи ППО.
У системі функціонують 2 ... З ШСЗ. Супутник запускається на кругову орбіту висотою 500 км з нахилом 96,5°. Маса
ШСЗ - 80 кг. Діапазон частот, що розвідуються, 50... 18 000 МГц. Частота огляду одним КА району на середніх широтах-до
4 разів на добу. Смуга огляду ШСЗ - 3 000 км для приймання випромінювань і 500 ... 600 км для уточнення координат РЕЗ.
Точність визначення координат РЕЗ 10... 20 км.
Супутники радіолокаційної розвідки дозволяють одержувати інформацію про місцевість і противника вдень і вночі, хоча за
якістю зображень вони дещо поступаються ШСЗ, оснащеним оптичною знімальною апаратурою. Супутники радіолокаційної
розвідки “Радарсат-1” (розрізнення 7 м) має Канада. США має два супутники радіолокаційної розвідки “Лакросс” серії УЕСА,
спроможних розрізняти об’єкти розміром 15 - 60 м. Європейське космічне агентство має у своєму розпорядженні супутник Епуізаі
масою 8 200 кг із радіолокатором, що забезпечує розрізнення на місцевості порядку 30 м.
Супутники радіолокаційної розвідки “Лакросс” з бортовою РЛС сантиметрового діапазону та великогабаритною параболі-
чною антеною знаходяться на низьких навколоземних орбітах (висота 680 км). Маса ШСЗ на орбіті 15 тонн. Максимальна розділь-
на здатність бортової апаратури супутників дає змогу оцінювати результати повітряних ударів, нанесених вночі або в непогоду.
Отримана таким чином інформація може використовуватись для цілевказання при нанесенні бомбових ударів літаками або
крилатими ракетами по різних об’єктах.
Тактико-технічні характеристики основних ШСЗ розвідки наведені в табл. 2.14.
Штучні супутники Землі, які використовуються дтя розвідки
Таблиця 2.14
ТипКА Вид роз- відки Кількість КА Державна належність Нахил ор- біти, град Висота, км Смуга розвідки, км
апогею перигею
Феррет-Д РТР 4 США 85 822 804 5 600
ССУ 2 РТР 3 США 63 1 273 955 7 000
Лакросс РЛР 2 США 57 701 681 4 100
8РОТ ОЕР 3 Франція 98 857 841 970
КХ-11 ОЕР, ІЧР 2 США 97 999 315 3 600
32
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
У США створюється перспективна система космічної розвідки в радіочастотному діапазоні за програмою “Дискавер-2”.
Метою програми є створення менш дорогих космічних апаратів, спроможних одержувати тривимірні радіолокаційні зображення
земної поверхні з розрізненням 0,3 м і робити селекцію цілей, що рухаються. Точність цілевказання повинна бути близько 1,8 м. На
супутниках планується встановити РЛС із синтезуванням апертури антени й електронним скануванням діаграми спрямованості.
Передбачається, що якість оброблюваних на борту зображень буде достатньою для передачі цілевказань безпосередньо на
ударні літаки і крилаті ракети в польоті. Особливістю ШСЗ серії “Дискавер-2” стане спроможність виявляти підземні споруди і
замасковані об’єкти.
Згідно з прогнозами перший серійний супутник повинен бути запущеним наприкінці 2007 р., а до 2010 р. США мають намір
вивести у космос 24 таких ШСЗ, що повинні будуть пролітати над будь-якою точкою Землі кожні 15 хвилин.
Хоча радіолокаційна розвідка є всепогодною, але її якість залежить від стану атмосфери. Наприклад, дощові краплі при-
зводять до розсіювання радіолокаційних сигналів, що погіршує якість зображення. Уточнювати погодні умови в районах прове-
дення супутникової розвідки дозволяють метеорологічні ШСЗ.
Супутники метеорологічної розвідки. Відомості про погодні умови необхідні не тільки для вибору параметрів зйомок
із космосу, але і для всіх систем управління військами. Знімальна апаратура ШСЗ метеорологічної розвідки працює як в
оптичному, так і в радіочастотному діапазоні електромагнітного випромінювання.
Такі супутники звичайно працюють на геостаціонарних орбітах, крім ШСЗ “Тайрос” національного управління з дослідження
океанів і атмосфери, що знаходяться на полярних орбітах. Космічні апарати, оснащені ІЧ і радіолокаційною апаратурою, дозволя-
ють оперативно одержувати дані про хмарний покрив і зміни температури на землі, морі та в атмосфері з метою проведення війсь-
кової метеорологічної розвідки. Така розвідка виконується, зокрема, за програмою ОМ8Р. Одним із перших завдань для вій-
ськових метеосупутників ОМ8Р було визначення товщини хмарного покриву над можливими цілями для КА, що проводили
фоторозвідку. Надалі (із 2010 р.) інформацію передбачається одержувати з трьох ШСЗ, що будуть працювати на полярних орбітах
у складі національної системи супутників оперативного спостереження за навколишнім середовищем.
Німеччина приступила до створення власних супутників видової розвідки. Під час війни на Балканах німецьке космічне
агентство надавало військовим дані про місцевість у краї’ Косово з розрізненням 6 м, одержані із супутника ТПВ8АТ.
У Великобританії створюються малорозмірні КА видової розвідки масою від 600 до 1 400 кг, що запускаються
російськими й американськими ракетами. У Великобританії виготовляються супутники 880/Т, “Церіс” і “Клементайн” для
компанії С1ЧЕ8, що працює в області прикладного використання результатів зйомок із космосу, ШСЗ Еа5аі-А і -В для Чилі. КііЗаЬІ
для Республіки Корея, Ро8аі-1 для Португалії, Тйаі-Рпії для Таїланду і ряд супутників 1)о8аі із розрізненням порядку 10 м.
Наносупутники типу 8КАР-1 (оснащені чотирма мікромініатюрними відеокамерами, кожна з яких створена на одному
кристалі, а також маневровою установкою з двигунами розміром до 10 см), розглядаються як дослідні КА систем протису-
путникової зброї.
Китай неодноразово робив запуски ШСЗ фоторозвідки Е8\У КУ масою до 2,5 т і створив перші зразки КА оптико-електронної
розвідки. Разом з Бразилією Китай намітив запуск супутника СВЕК8-3 із розрізненням 1 м, який буде передавати видову інформа-
цію в масштабі часу, близькому до реального.
Тайвань у найближчі роки розраховує вивести на орбіту супутник видової розвідки К.ОС8АТ-2 із розрізненням
4-5 м.
Ізраїль здійснив запуск супутника оптико-електронної розвідки серії “Офек” (Обрій). Він також має КА серії ЕКО8-А, що
забезпечують зйомку з розрізненням 1,8 м, а спеціальна обробка зображень дозволяє довести його до 1 м. Супутники серії ЕКО8-В
спільної розробки Ізраїлю і США будуть мати розрізнення 0,82 м. Усього намічено запустити шість таких КА.
Ізраїль співробітничає в цій області також із Німеччиною. Супутник “Давид” спільної розробки має розрізнення порядку 5 м.
Ці країни вивчають можливість запуску супутника “Діамант”, оснащеного системою мультиспектральної зйомки М8К8, що
працює в 12 піддіапазонах видимого і теплового випромінювання. Апаратура М8К8 (60 х 58 х 58 см3) дозволить щодня одержу-
вати 140 зображень районів розміром 26 х 40 км2 у стереоскопічному режимі.
Крім того, Ізраїль у рамках співробітництва із Сінгапуром розробляє розвідувальні супутники нового покоління, на які плану-
ється поставити камеру з розрізненням 1 м у чорно-білому режимі і 4 м - у кольоровому.
Напрямки розвитку ШСЗ видової розвідки. Апаратура, установлена на супутниках, поки ще має розрізнення не краще
50 см, за винятком ШСЗ, створених у США за програмою КХ (в останніх розрізнення порядку кількох сантиметрів). Таке розріз-
нення дозволяє визначати не тільки тип озброєнь, але і його характеристики. Але навіть ця країна має тільки два таких КА, що
обумовлено їх високою вартістю.
Тому найбільша увага приділяється розгортанню угруповання порівняно дешевих малих і надмалих супутників видової роз-
відки. Нарощування чисельності мікро- і наносупутників видової розвідки дозволяє довести оперативність одержання даних про
противника практично до реального часу. Ці супутники одержують зображення не тільки в оптичному, але й у радіочастот-
ному діапазоні спектра електромагнітного випромінювання.
Спільній обробці супутникової інформації, отриманої у вузьких оптичних і радіочастотних діапазонах, велика увага приділя-
ється в країнах НАТО. Така обробка дозволяє виявляти не тільки важливі наземні, але й підземні споруди.
Альтернативним напрямком є створення багатофункціональних космічних систем розвідки. США вже мають у своєму розпо-
рядженні багатотонний ШСЗ, на якому розміщена радіолокаційна й оптико-електронна апаратура видової розвідки, що дозволяє в
перспективі створити космічні платформи для одночасного виконання функцій контролю, управління, зв’язку, обробки даних,
одержання зображень, картографування і розвідки.
Космічні радіонавігаційні системи.
Космічна навігаційна система повинна забезпечувати визначення координат і швидкості руху з високою точністю, маги
достатній рівень універсальності у відношенні сфери бойового застосування, видавати навігаційну інформацію в масштабі часу,
33
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
близькому до реального. Перше положення є обов’язковою вимогою до навігаційних систем військового призначення. Друге озна-
чає пристосованість їх до застосування різноманітними видами збройних сил. Третє припускає можливість безперервного одер-
жання навігаційної інформації у будь-який момент часу (незалежно від взаємного положення супутника та об’єкта), а також високу
швидкість визначення координат та інших параметрів руху.
На теперішній час у світі працюють дві глобальні космічні радіонавігаційні системи: російська ГЛОНАСС (ГЛОбальна
НАвігаційна Супутникова Система) і американська NАV8ТАК. (СР8) (НАУі^аІіоп Заіеііііе Тітіп§ Алеї Кап£Іп§ (СІоЬаІ Ро8ІІіопіп§
Зузіет)). 17 березня 2002 року був затверджений європейський проект глобальної космічної радіонавігаційної системи Талілео”.
Космічна радіонавігаційна система ГЛОНАСС.
Призначення КРНС ГЛОНАСС - глобальна оперативна навігація рухомих об’єктів (сухопутних, морських, повітряних) і
низькоорбітальних космічних. Термін “глобальна оперативна навігація” означає, що рухомий об’єкт, оснащений навігаційною апа-
ратурою користувачів (НАК) може у будь-якому місці приземного простору в будь-який момент часу визначити (уточнити) пара-
метри свого руху (три координати і три складові вектора швидкості).
Склад космічної радіонавігаційної системи ГЛОНАСС: космічний сегмент з орбітальним угрупованням навігаційних
космічних апаратів (НКА); сегмент управління - наземний комплекс управління орбітальним угрупованням НКА; сегмент
навігаційної апаратури користувачів (НАК) - апаратура користувачів.
В КРНС ГЛОНАСС застосовуються НКА на кругових геоцентричних орбітах з висотою 20 000 км над поверхнею Землі.
Завдяки використанню в бортових еталонах часу і частоти НКА атомних стандартів частоти в системі забезпечується взаємна
синхронізація навігаційних радіосигналів. На рухомому об’єкті в сеансі навігації приймаються радіосигнали не менше ніж від
чотирьох радіовидимих НКА і використовуються для виміру не менше чотирьох відповідних псевдодальностей і радіальних псев-
дошвидкостей. Результати вимірів і ефемеридна інформація (ефемериди - дані про справність супутника та параметри його
орбіти - коефіцієнти, за допомогою яких приймачі обчислюють поточне та наступне положення супутника, крім того, ці
повідомлення утримують коефіцієнти поправки до супутникового годинника і затримки розповсюдження сигналів в іоносфері),
прийнята від одного НКА, дозволяють визначити (уточнити) три координати і три складові вектора швидкості рухомого об’єкта, а
також визначити зсув шкали часу (ШЧ) об’єкта щодо шкали часу системи. В КРНС кількість користувачів не обмежується,
оскільки НАК не передає радіосигнали на НКА, а тільки приймає їх від НКА (пасивна навігація).
Космічна радіонавігаційна система 1УА У8ТАК (ЄР8).
Глобальна супутникова система NАV8ТАК (СР8) призначена для високоточного визначення трьох координат місця, що
складають вектори швидкості і часу різноманітних рухомих об’єктів.
Склад системи СР8: космічна частина; наземна частина; обладнання користувачів.
Космічна частина - 24 супутники, які рухаються по 6 орбітах на висоті 20 180 км з періодом обертання 12 годин. Потужність
супутникового передавача складає 50 Вт. Супутники СР8 здатні заповнювати порожнини в системі, якщо один з них вийшов з
ладу. Важливими елементами супутника є найточніші атомні годинники (рубінові і цезієві), що розташовані по чотири на кожному.
Наземна частина складається з чотирьох станцій спостереження, які розташовані на тропічних островах. Наземні станції
забезпечують роботу системи в цілому. Вони відслідковують супутники, які спостерігаються і передають дані на Головну станцію
управління та контролю на авіабазі Колорадо-Спрінгс. Наземні станції приймають навігаційну інформацію від супутників. Місце
розташування наземних станцій визначено з високою точністю, а обладнання аналогічне апаратурі об’єктів, що обслуговуються.
Навігаційна інформація, отримана від супутників, передається потім на Головну станцію управління, де вона піддається попередній
обробці з метою визначення для кожного супутника, що працює в системі, даних про параметри його орбіти. Результати попере-
дньої обробки щодоби передаються в основний обчислювальний центр, де на їх основі прогнозується орбіта кожного супутника.
Дані про параметри прогнозованої орбіти за допомогою станції передачі даних щодоби надходять на супутник для збереження в
бортовому пристрої пам’яті і наступної ретрансляції їх об’єктам, що обслуговуються, разом з іншою навігаційною інформацією. На
основі інформації’, переданої з супутників, об’єкти, що обслуговуються, за допомогою приймально-обчислювальної апаратури
визначають свої координати та швидкість руху.
Структурна схема системи СР8 наведена на рис. 2.6.
Супутник передає сигнали СР8 на частотах ІД = 1 575,42 МГц і Ь2 = 1 227,6 МГц. Сигнали мають два види інформації:
“навігаційну складову” і “псевдовипадковий код”. Код представляє собою послідовність одиниць і нулів, на перший погляд випад-
кову, але яка змінюється за складним законом і в собі має номер супутника.
Існують два види кодів. Цивільні СР8 використовують С/А (Соагее А^^иізіііоп) - код, який передається тільки на частоті ІД.
Військові 6Р8 високої точності використовують Р-код (Ргесізе), який передається на обох частотах, ІД і Е2.
Повний цикл навігаційних повідомлень включає ефемеридні дані і дані альманаху, дані про час в системі СР8 і коефіцієнти для
його перерахунку на всесвітній час, ключові слова до Р-коду і спеціальні повідомлення. Альманах - дані про ефемериди і стан
решти супутників в системі (зберігаються у пам’яті приймача). Завдяки цим даним приймач завжди “знає” де знаходяться всі
супутники системи, навіть коли їх не бачить, та які супутники краще використовувати для визначення координат.
Система СР8 використовує спосіб визначення дальності до орієнтирів-супутників за допомогою псевдовипадкового коду. Для
цього приймач генерує свій внутрішній дублюючий код у відповідь на код, який посланий супутником. Після порівняння кодів, за
відомими часом затримки та швидкістю розповсюдження радіохвиль, приймач визначає відстань до супутника і за двома відстаня-
ми може визначити своє точне місцезнаходження.
Годинник супутника дуже точний (на рівні наносекуцд) і коректується за сигналами з Землі. Годинник приймача менш точний,
крім того, затримка розповсюдження сигналу в іоносфері, тропосфері та ін. створюють сумарну помилку. Для її виправлення СР8
використовує вимір відстані від третього супутника.
34
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
ШСЗ 1 ШСЗ 2 ШСЗ З
Рис. 2.6. Структурна схема системи СР8
Приймач СР8 вирішує задачу пошуку місця розташування алгебраїчно. Ці обчислення дають рішення трьох рівнянь для трьох
змінних: довготи, широти і помилки годинника. Ось для чого для визначення двомірних координат необхідні як мінімум три
супутники, для трьохвимірних (довгота, широта, висота) - чотири.
Звичайні цивільні приймачі 6Р8 забезпечують точність від 10 до 50 м у залежності від діючого на даний момент КА, кількості
супутників, які одночасно задіяні та їх геометрії. Більш складні і дорогі прилади, які коштують декілька тисяч доларів, можуть
забезпечити точність до декількох сантиметрів, використовуючи не одну, а декілька радіочастот. Однак точність майже звичайних
цивільних 6Р8-приймачів може бути збільшена до 4 м та більше (інколи до 1 м) за допомогою так званої диференціальної СР8
(ОСР8), яка використовує додатковий, зафіксований в одній точці СР8-приймач, для визначення корекції супутникових сигналів.
Системи супутникового зв’язку.
У існуючих у теперішній час системах зв’язку особливе місце займає супутниковий зв’язок. Основна відмінність систем супут-
никового зв’язку (ССЗ) від інших систем зв’язку полягає у використанні у їх складі космічних апаратів, які виконують роль ретранс-
ляторів. Супутниковий зв’язок, який має рад унікальних властивостей, таких, наприклад, як глобальність, потаємність, високий
рівень надійності та достовірності за короткий строк одержав широкий розвиток та різнобічне застосування. Коли йдеться про
глобальні системи рухомого зв’язку, зв’язку з абонентами у складнодоступних районах - супутниковий зв’язок поза конкуренцією.
Всі військові конфлікти, які відбувалися за останній час, продемонстрували, що не дивлячись на великі витрати на створення та
експлуатацію систем супутникового зв’язку, вони є практично єдиним реальним засобом зв’язку, що оперативно забезпечує розгор-
тання військ на необладнаних театрах воєнних дій.
У провідних країнах світу створені національні, інтернаціональні та глобальні комерційні і воєнні системи супутникового
зв’язку. Серед існуючих комерційних систем найбільший інтерес представляють «Інтелсат», яка належить 1Т8О (Міжнародній
організації далекого зв’язку), «Інмарсат» (Міжнародному консорціуму «Інмарсат»), «Сатком» (США), «Євтелсат» (ЄС), які мають
найбільші можливості за обсягами інформації, що передається. Розвиток нових технологій практично стер чітку розбіжність між
військовими та цивільними супутниковими системами зв’язку. Під час бойових дій у зоні Перської затоки та у ряді інших локаль-
них конфліктів (колишня Югославія, Афганістан) був наочно продемонстрований військовий потенціал комерційних систем зв’яз-
ку. Під час підготовки до проведення операції «Буря в пустелі», вперше, понад 50 % інформаційного обміну здійснювалось через
комерційні КА зв'язку. Більш того, на думку експертів, комерційні системи у ряді випадків виявились більш працездатними та ефе-
ктивними. У теперішній час у Збройних силах США все активніше використовуються послуги комерційних систем СЗ, а у Велико-
британії простежується повний перехід до їх використання у військових цілях. Це робиться, з одного боку, для створення альтерна-
тивних шляхів передачі інформації на випадок виникнення несправностей у військових системах, а з іншого боку, для надання
підрозділам нових типів інформаційних послуг, не властивих військовим системам.
Більшість супутників у ССЗ, розгорнених з кінця 60-х до середини 90-х років, розмішувалися на стаціонарних орбітах. Основна
перевага такого розміщення полягає у тому, що супутники ніби постійно висять над однією і тією ж точкою земної поверхні. Це дає
можливість постійного стійкого зв'язку з окремих регіонів Землі через один і той же супутник та не вимагає від наземних станцій
безперервного відстежування його переміщення. Окрім того, це у значному ступені підвищує живучість систем на випадок ведення
35
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
бойових дій у космосі з точки зору труднощів їх досяжності, хоча і створює проблеми при необхідності відновлення орбітального
угруповання. У зв’язку з тим, що дальність космічних апаратів, розташованих на геостаціонарних орбітах складає близько 40 000
км, потрібно забезпечувати великі потужності передавачів, чутливості приймачів наземних користувацьких терміналів, виникає
необхідність застосування досить великогабаритних гостроспрямованих антен. Це призводить до зростання складності, а, у ряді
випадків, і повністю виключає можливість застосування подібних систем зв’язку мобільними користувачами. Окрім того, у тепері-
шній час, значно зросли інтенсивність та об’єм інформації, що передається по лініях зв'язку (телекс, відеотекст, віддалені бази даних,
електронна пошта та електронні дошки оголошень, Інтернет та ін.), розширилась мережа її споживачів, підвищилися вимоги до
якості передачі інформації.
Роботи з удосконалення систем супутникового зв'язку, на цей час, ведуться за двома основними напрямками. З одного боку,
створюються геостаціонарні супутники з підвищеною потужністю ретрансляторів та високою стабільністю положення, що реалі-
зують режим багатостанційного доступу. Це дає можливість реалізації технології У8АТ (Уегу 8та11 АреПигс Теттіпаї) - викорис-
тання наземних супутникових терміналів з невеликими антенами (у У8АТ використовуються дзеркальні параболічні антени діаме-
тром від 1,2 м і більше). Мережа У8АТ реалізує принцип розподілу декількох супутникових каналів між багатьма користувачами.
Мережа У8АТ об'єднує географічно віддалених користувачів у єдину цифрову мережу зв'язку з інтеграцією послуг (І8ОІЧ). Іншим
напрямком при створенні перспективних систем супутникового зв'язку став перехід до низькоорбітальних систем зв'язку. З початку
90-х років ряд всесвітньо відомих фірм практично одночасно виступили з проектами та оголосили про свій намір приступити до
створення низькоорбітальних систем зв’язку. У системах, що пропонуються, супутники, як правило, розмішуються на орбітах з
висотою від 650 до 1 500 км та можуть забезпечити зв'язок з абонентами у радіусі від 2 700 до 4 000 км від підсупутникової точки.
Але для цього необхідно розгорнути та підгримувати у робочому стані угруповання з декількох десятків супутників у кожній із
систем. У цьому випадку може бути вирішена задача безперервного, цілодобового обслуговування абонентів, за рахунок того, що
на зміну кожному з супутників, які виходять із зони радіовидимості, приходять інші, що входять до неї, положення яких узгоджено
по простору та за часом з попередніми. Кожний з супутників може підгримувати деяку, достатньо велику, кількість незалежних
каналів зв'язку, у тому числі і між супутниками.
Найбільш цікавими з проектів, у яких використовується розміщення космічного сегмента системи на низьких і
середньовисотних орбітах, є Ігісііит, ОІоЬакіаг, ОКВСОММ, Агіез, Обуззеу, ЕПірзо, ІСО. Здійснення цих проектів надає можливість
користувачам отримати такі види послуг: зв’язок рухомих абонентів, які мають персональні термінали між собою; зв’язок рухомих
абонентів, які мають персональні термінали, з абонентами національної мережі телефонного зв’язку та навпаки; визначення
місцеположення.
У цілому системи супутникового зв’язку складаються з космічного сегмента (угрупування супутників зв’язку), ракетно-
космічного комплексу, центру управління, мережі командно-вимірювальних комплексів, мережі наземних станцій, які приймають і
передають та терміналів користувачів.
Угруповання супутників зв’язку призначене для ретрансляції інформації, що передається.
Ракетно-космічний комплекс призначений для створення угруповання супутників та підтримання його у потрібному складі.
З центру управління здійснюється технічне керівництво експлуатацією всієї системи, у тому числі управління роботою
наземних приймально-передаючих станцій та супутникових ретрансляторів, контроль їх стану, управління орбітальним рухом су-
путників, що входять у систему, а також приймання та обробку замовлень на лінії та канали зв’язку, аналіз статистичних даних про
роботу системи, планування запусків КА для забезпечення нормального функціонування системи.
Командно-вимірювальні комплекси забезпечують одержання траєкторних вимірювань, телеметричної інформації з КА, що
знаходиться у зоні їх дії та видачу їм команд управління.
Наземні станції, які приймають і передають, призначені для обміну різною інформацією (телеграфною, телефонною тощо),
яка циркулює у мережі між космічними апаратами, що почергово входять у зону їх дії та місцевими телефонними мережами зага-
льного користування. Термінал кожного користувача реєструється у національній приймально-передаючій станції, тим самим
визначається його початкове територіальне розміщення.
Інформаційний обмін у мережах супутниковому зв’язку визначається їх топологією, прийнятими протоколами обміну інфор-
мацією, можливостями підтримки або перетворення різноманітних протоколів передачі даних, організацією обміну інформацією
між наземними станціями і супутниками орбітального угруповання, способом організації керування та адміністрування.
Одним із шляхів підвищення ефективності використання комерційних систем супутникового зв’язку у військових цілях є
створення спеціальних портативних наземних станцій, які приймають і передають, які легко транспортуються, і забезпечують
можливість сполучення з потрібними військовими та комерційними ССЗ. Є відомості про наявність понад 20 типів наземних
станцій здатних функціонувати у декількох частотних діапазонах (як комерційних, так і військових), що дозволяє реалізувати
гнучкий підхід до організації каналів зв'язку у різних умовах функціонування видів збройних сил.
На сьогоднішній день у світі розгорнуто понад 20 систем супутникового зв’язку військового призначення. Серед них найбільш
відомі наступні.
Система стратегічного зв’язку “ДСЦС” призначена для забезпечення надійного і безперебійного зв’язку військово-
політичного керівництва США зі штабами військ, що розташовані по всьому світу.
Система складається з ШСЗ, наземних і корабельних станцій та центру управління. ШСЗ “ДСЦС’ виводяться парами на стаці-
онарні, близькі до екваторіальних орбіти (нахил 3 град) висотою 35 800 км, а потім на орбіті розводяться у райони оперативного
використання. ШСЗ забезпечують одночасний зв’язок по 3 900 радіотелефонних каналах в сантиметровому (7 ... 8 ГТц) і децимет-
ровому (224... 400 МГ ц) діапазонах.
Система збору і передачі даних “СДС” призначена для забезпечення зв’язку літаків ВПС, приймання інформації із супут-
ників військового призначення, що знаходяться поза зонами видимості наземних станцій збору інформації та передачі на них, а
також ретрансляції інформації зі станцій спостереження за ШСЗ, дислокованих поза територією США.
36
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
До складу системи входять З ШСЗ на високоеліптичних орбітах. Супутники виводяться на нахильні орбіти (нахил 63,4°) з
висотою перигею 450 км і апогею 39 300 км. Період обертання ШСЗ близько 12 годин.
Система тактичного зв’язку ВМС “Флггсатком” призначена для забезпечення глобального зв’язку надводних кораблів,
підводних човнів та літаків.
Система складається з 4 ШСЗ, що виводяться на кругові стаціонарні орбіти, і мережі наземних, корабельних і літакових станцій.
Забезпечує зв’язок по 23 радіотелефонних і радіотелеграфних каналах (10- ВМС, 12 - ВПС, 1 - управління національної безпеки).
Система зв’язку ВПС “Афсатком” призначена для забезпечення глобальним зв’язком літаків стратегічної авіації. Спеціальні
супутники не запускаються, а використовуються канали зв’язку ШСЗ систем “СДС” і “Флітсатком”, а також ретрансляторів, що
встановлені на борту військових супутників різного призначення.
Система зв’язку НАТО “Сатком” призначена для забезпечення зв’язку штаб-квартири НАТО зі столицями країн блоку і зі
штабами об’єднаних сухопутних військ, ВПС і ВМС.
До складу системи входять З ШСЗ і 13 наземних станцій. ШСЗ виводяться на стаціонарну орбіту на висоту порядку 35 800 км.
Апаратура ШСЗ забезпечує зв’язок в діапазоні 7*250... 8 400 МГц і має 950 односторонніх телефонних каналів.
2.8. Зброя на нових фізичних принципах
З нових видів зброї найбільшу реальну небезпеку у найближчому майбутньому можуть складати променева, радіочастотна,
інфразвукова, радіологічна, геофізична і протиенергопостачальна зброя.
Променева зброя
Променева зброя - сукупність пристроїв (генераторів), дія яких заснована на формуванні гостроспрямованих променів
електромагнітної енергії або концентрованого пучка елементарних частинок, розігнаних до великих швидкостей.
Одні із видів променевої зброї засновані на використанні лазерів, інші представляють собою пучкову (прискорювальну) зброю.
Принцип роботи лазера заснований на взаємодії електромагнітного поля з електронами атомів і молекул робочої речовини, що
міститься в ньому. Випромінювання лазерів, на відміну від світла звичайних оптичних джерел, когерентно (має постійну різницю
фаз між коливаннями), монохроматично, поширюється в просторі у вигляді вузькоспрямованого променя і характеризується
високою концентрацією енергії.
У залежності від типу робочої речовини розрізняють лазери: твердотільні, рідинні, газові і напівпровідникові.
У твердотільних лазерах використовуються кристалічні (наприклад, рубін) або аморфні речовини (скло з домішкою
рідкоземельних елементів і діелектрики).
У рідинних лазерах застосовують розчини органічних барвників або неорганічних солей рідкісних металів.
У тазових лазерах застосовують неон, аргон, вуглекислий газ та інші гази або пари (наприклад, пар кадмія).
Напівпровідниковий лазер містить у якості робочого тіла, найчастіше, арсенид галію (ОаАз), що має властивості
напівпровідника.
Основними елементами пристрою лазерів, крім робочої речовини, є джерело накачування й оптичний резонатор. Джерело
накачування служить для накопичення в робочій речовині лазера збуджених атомів. Для різних видів робочої речовини
використовуються різноманітні типи джерел накачування. Так, наприклад, для твердотільних і рідинних лазерів застосовують
оптичні джерела накачування (потужні лампи-спалахи).
Під впливом зовнішнього джерела випромінювання - джерела накачування в робочому тілі лазера виникає так звана інверсія
населеності рівнів (перевищення числа атомів із визначеною енергією на верхньому рівні стосовно їх числа на нижньому рівні). Це
явище й обумовлює початок генерування світлового променя.
Необхідна когерентність випромінювання досягається в результаті повернення частини випроміненої енергії до активного
середовища робочої речовини. Цей процес здійснюється за допомогою оптичного резонатора, що у найпростішому вигляді
представляє собою два соосно розташованих дзеркала, од не з яких напівпрозоре.
Уражаюча дія лазерного променя досягається в результаті нагрівання до високих температур матеріалів об’єкта, що викликає їх
розплавлення і навіть випар, ушкодження надчутливих елементів, осліплення органів зору і нанесення людині термічних опіків
шкіри.
Дія лазерного променя відрізняється прихованістю (відсутністю зовнішніх ознак у вигляді вогню, диму, звуку), високою
точністю, прямолінійністю поширення, практично миттєвою дією.
У тумані, при випаданні дощу і снігу, а також в умовах димової і пилової атмосфери вражаюча дія лазерного променя істотно
знижується.
Передбачається створення лазерних бойових комплексів різноманітного призначення: наземного, морського і повітряного
базування з різноманітною потужністю, дальністю дії, швцдкострільністю і різною кількістю “пострілів” (боєзапасом). Об’єктами
поразки таких комплексів також можуть бути оптичні засоби спостереження і розвідки, жива сила противника (спостерігачі,
розвідники, водії, навідники, пілоти), літальні апарати різноманітних типів, крилаті, протикорабельні, зенітні й інші типи ракет.
Прискорювальна зброя є різновидом променевої зброї, вражаючим чинником якої служить високоточний
госіроспрямований пучок насичених енергією заряджених або нейтральних частин (електронів, протонів, нейтральних атомів
водню), розігнаних до великих швидкостей. Прискорювальна зброя також називається пучковою зброєю.
У прискорювальній зброї головну роль відіграють дві основні системи, що визначають її структуру і дію: система, що створює
прискорювальні електромагнітні й електричні поля та забезпечує електромагнітне фокусування пучка і система, що комутує, яка
забезпечує наведення і утримання пучка на цілі.
Потужний потік енергії створює на цілі механічні ударні навантаження, інтенсивний тепловий вплив і викликає (ініціює)
короткохвильове електромагнітне (рентгенівське) випромінювання. Застосування прискорювальної зброї не потребує урахування
37
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
законів балістики, відзначається миттєвістю і раптовістю дії, всепогодністю, миттєвістю процесів руйнації (ушкодження) і
виведення з ладу об’єктів, що уражаються.
Об’єктами ураження можуть бути насамперед штучні супутники Землі, балістичні і крилаті ракети різноманітних типів, а також
різноманітні види наземного озброєння і військової техніки. Дуже уразливим елементом перерахованих об’єктів є електронне
обладнання. Не виключається можливість застосування прискорювальної зброї по живій силі противника.
Бойові комплекси прискорювальної зброї можуть створюватися у варіантах наземного, морського і космічного базування.
Радіочастотна зброя
Радіочастотна зброя - засоби, дія яких заснована на використанні електромагнітних випромінювань надвисокої або
надзвичайно низької частоти. Діапазон надвисоких частот знаходиться в межах від 300 МГц до ЗО ГГц, до надзвичайно низьких
відносять частоти менше 100 Гц.
Об’єктом поразки радіочастотної зброї є жива сила. При цьому мається на увазі відома здатність радіовипромінювань
надвисокої і надзвичайно низької частоти викликати ушкодження (порушення функцій) життєвоважливих органів і систем
людини, таких, як мозок, серце, центральна нервова система, ендокринна система і система кровообігу.
Радіочастотне випромінювання спроможне також впливати на психіку людини, порушувати сприйняття і використання
інформації про навколишню дійсність, викликати слухові галюцинації, синтезувати мовні повідомлення, які вводяться
безпосередньо у свідомість людини для дезорієнтування.
Бойові комплекси радіочастотної зброї можуть бути створені у варіантах наземного (мобільні наземні генератори), повітряного і
космічного базування.
Інфразвукова зброя
Інфразвукова зброя - засоби, дія яких заснована на використанні спрямованого випромінювання потужних інфразвукових
коливань із частотою нижче 16 Гц.
Такі коливання можуть впливати на центральну нервову систему і органи травлення людини, викликають головну біль, болючі
відчуття у внутрішніх органах, порушують ритм дихання. При більш високих рівнях потужності випромінювання і дуже малих
частотах з’являються такі симптоми, як запаморочення, нудота і втрата свідомості. Інфразвукове випромінювання спричиняє також
психотропну дію на людину, викликає втрату контролю над собою, почуття страху і паніки.
Для генерування інфразвуку передбачається використання реактивних двигунів, обладнаних резонаторами з відбивачами звуку.
Можливо також використання двох акустичних генераторів інфразвукових частот із дуже малою різницевою частотою, що
сприймається людиною як інфразвук.
Радіологічна зброя
Радіологічна зброя - зброя, дія якої заснована на використанні бойових радіоактивних речовин. Під бойовими радіоактивними
речовинами розуміють спеціально одержані і виготовлені у вигляді порошків або розчинів речовини, які містять у своєму складі
радіоактивні ізотопи хімічних елементів, що створюють іонізуюче випромінювання.
Іонізуюче випромінювання впливає на живі тканини організму, призводить до їх руйнації, викликає у людини променеву
хворобу або локальну поразку окремих органів - око, шкіра та ін., ракові захворювання внаслідок накопичення в організмі канцеро-
генних речовин. Основним джерелом одержання бойових радіоактивних речовин є відходи, що утворюються при роботі ядерних
реакторів. Вони можуть бути також отримані шляхом опромінення заздалегідь підготовлених речовин у ядерних реакторах.
Застосування бойових радіоактивних речовин може здійснюватися за допомогою авіаційних бомб, авіаційних приладів
розпилювання, безпілотних літаків, крилатих ракет та інших боєприпасів і бойових приладів.
Використання боєприпасів із серцевиною із збідненого урану в 30-мм снарядах, які входять до боєкомплекту штурмовиків
А-10А ВПС США та до крилатих ракет “Томахок” призвели до значного підвищення рівня радіоактивності на території Серби,
Македонії, Чорногорії та особливо Косово.
Бронебійна серцевина снаряду виготовлена із сплавів збідненого урану-238 (фактично - з відходів ядерного пального). Рівень
радіоактивності однієї серцевини складає близько 3,4 міллікюрі. З його поверхні випромінюється близько 1 тис. альфа-частинок та
36 тис. бета-частинок за секунду. Маса 1 снаряду 400 г, а маса радіоактивної серцевини 300 г.
В головних частинах крилатих ракет ‘Томахок” використовується близько 3 кг збідненого урану, 80% якого при влученні в ціль
перетворюється на аерозольну хмару, що може розповсюджуватися на відстань до 50 км від ураженого об’єкта.
Заданими закордонних джерел, в ході операції “Союзницька сила” на територію Югославії було випущено: 820 крилатих ракет
‘Томахок”, до складу яких розрахунково входило 2 тонни 460 кг збідненого урану.
Геофізична зброя
Геофізична зброя - сукупність різноманітних засобів, що дозволяють використовувати у військових цілях руйнівні сили
неживої природи шляхом штучно викликаних змін фізичних властивостей і процесів, що протікають в атмосфері, гідросфері та
літосфері Землі.
Можливі способи активного впливу на геофізичні процеси передбачають створення в сейсмонебезпечних районах штучних
землетрусів, потужних приливних хвиль типу цунамі на узбережжя морів і океанів, ураганів, вогненних бурь, гірських обвалів,
сніжних лавин, оповзнів,селевих потоків і т.ін.
Здійснючи вплив на процеси в нижніх прошарках атмосфери, домагаються великих опадів (злив, граду, туману). Створюючи
затори на ріках і каналах, можна викликати повені, затоплення, порушувати судноплавство, вивести з ладу іригаційні та інші
гідроспоруди.
38
РОЗДІЛ 2. ЗАСОБИ ПОВІТРЯНО-КОСМІЧНОГО НАПАДУ
Розглядається також можливість впливу на іоносферу, для виклику штучних магнітних бурь і полярного сяйва, що порушують
радіозв’язок і заваджають радіолокаційним спостереженням в значних просторових межах. Вивчається можливість
великомасштабної зміни температурного режиму шляхом розпилення речовин, що поглинають сонячну радіацію, зменшення
кількості опадів, розрахованого на несприятливі для противника зміни погоди (наприклад, засуху). Руйнація прошарку озону в
атмосфері може надати можливість направити в райони, зайняті противником, згубну дію космічних променів і ультрафіолетового
випромінювання Сонця.
Для впливу на природні процеси можуть бути використані різноманітні засоби, у тому числі хімічні речовини (йодисте срібло,
тверда вуглекислота, карбамід, вугільний пил, з’єднання брому, фтору й інші), можливе також використання потужних генераторів
електромагнітних випромінювань, теплових генераторів та інших технічних пристроїв.
Протиенергопостачальна зброя
Протиенергопостачальна зброя призначена для виведення з ладу ліній електропостачання, трансформаторних підстанцій та
інших елементів системи енергопостачання об’єктів противника.
Існуючі боєприпаси такого типу мають розміри 200 х 70 мм і містять: котушки з нитками, що проводять електричний струм, які
самостійно розгортаються. Вони виготовлені із композиційного матеріалу на основі вуглецю; заряд, що викидає котушки; парашут,
що гальмує.
Під час бойового застосування авіаційних касет, оснащених протиенергопостачальними боєприпасами, здійснюється їх розкид
над комутаційно-розподільними об’єктами систем енергозабезпечення противника. Після спрацювання зарядів із корпусів боєпри-
пасів викидаються котушки, із яких розмотуються нитки, що проводять електричний струм. їх численні фрагменти при влученні на
елементи об’єктів енергозабезпечення, що проводять електричний струм, викликають численні короткі замикання мережі. У випа-
дку, якщо такими об’єктами є високовольтні пристрої, замикання можуть призвести до утворення електричної дуги, що викликає
значні ушкодження обладнання і пожежі.
В 1999 р. авіаційні касети, споряджені протиенергопостачальними боєприпасами, були скинуті одночасно в районах семи
найбільш значних міст Югославії. У результаті авіації НАТО вдалося паралізувати частину системи енергозабезпечення цієї’ країни.
В якості міри захисту від цього типу боєприпасів може використовуватися тимчасове відключення джерел електричного
струму від системи енергозабезпечення на термін, протягом якого зберігається загроза застосування такої зброї.
39
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
3.1. Характеристика повітряного простору як середовища поширення радіохвиль і його вплив на
радіолокаційні спостереження
Атмосфера Землі - газоподібна оболонка Землі. Земна атмосфера за щільністю і складом газів, температурним режимом,
електричними та іншими фізичними властивостями підрозділяється на такі основні шари: тропосферу, стратосферу, іоносферу і
сферу розсіяння (екзосферу).
Тропосфера - нижній шар атмосфери над поверхнею Землі, у межах якого температура зменшується з висотою у середньому
на 6 ... 6,5 град на один кілометр. Верхня межа висоти тропосфери збільшується від полюса до екватора і складає від 7 до 18 км.
Стратосфера - частина атмосфери понад тропосферою до висот 50 ... 60 км. Склад газів в ній такий, як і в тропосфері, за
виключенням озону (максимальна кількість озону на висоті 20 ... 25 км). Озон сильно поглинає сонячну радіацію, в результаті
температура на цих висотах підвищується.
Іоносфера - частина атмосфери, що розташована понад стратосферою до висот приблизно 1 000 км. На висотах більше 60 км
атоми газів розрідженого повітря під впливом сонячної радіації і потоку корпускул, що випромінює Сонце, частково або повністю
іонізуються: з’являються вільні електрони і позитивно заряджені іони - в результаті чого і створюється іоносфера. Максимум
іонізації зосереджений на висоті 250 ... 350 км.
Екзосфера (сфера розсіювання) - область простору понад іоносферою, що поступово переходить у навколоземний космічний
простір.
Теоретична межа атмосфери 28 000 км над полюсами і 42 000 км над екватором.
Траси поширення радіолокаційних сигналів більшості РЛС ППО знаходяться у тропосфері.
Приземний (приводний) шар - нижня частина тропосфери, що примикає до підстилаючої поверхні землі або води і має
товщину декілька десятків метрів. Товщина цього шару залежить від швидкості вітру, шорсткості поверхні та стійкості атмосфери.
Радіофізичні властивості тропосфери характеризуються коефіцієнтом заломлення п, що пов’язаний з відносною
діелектричною проникністю тропосфери співвідношенням п = л/є . У зв’язку з тим, що п, як правило, не суттєво відрізняється від
одиниці, то користуються індексом заломлення N = (п - 1) 10”6. Індекс заломлення N можна обчислити за формулою Дебая:
N = 77(р + 4810ц/Т)/Т , (3.1)
де Т - температура, °К; р - атмосферний тиск, мбар (1 мбар = 0,76 мм рт. ст.); ц - тиск водяного пару (вологість), мбар.
Зі збільшенням температури і зменшенням тиску та вологості індекс заломлення зменшується. З висотою індекс заломлення
зменшується для стандартної тропосфери за законом
М(Н) = 289 ехр( - 0,136 Н), (3.2)
де Н - поточна висота, км.
Стосовно поширення радіолокаційного сигналу представляє інтерес залежність від висоти градієнта (швидкості зміни) індексу
заломлення §н=дП\І/с1Н. Для стандартної тропосфери
= - 0,04 ехр( - 0,136 Н). (3.3)
На рис. 3.1 наведені залежності індексу (а) і градієнта індексу заломлення (б) для стандартної тропосфери.
Рис. 3.1. Залежність індексу заломлення (а) і градієнта індексу заломлення (б) від висоти
б)
Атмосферний тиск - тиск, що чинить повітря на тіло, яке знаходиться у заданій точці простору. Для спрощених розрахунків
атмосферний тиск може бути розрахований за наступним співвідношенням:
__Н_
р = РОе Н° , (3.4)
40
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
де Ро- тиск над рівнем моря для стандартних умов, бар (Ро » 1 бар або 760 мм рт. ст.); Н - поточне значення висоти, м (км);
Но=8 ОООТ/То - умовна висота “однорідної’ атмосфери, м (км); Т = і° + 273,15° - температура повітря, °К; То = 273,15° К - нульова
точка за шкалою Цельсія (точка затвердіння води).
Щільність повітря - маса повітря, що міститься в одиниці об’єму:
н
р~ = рое Но . (3-5)
К1
де К=287 Дж/(кг К) - універсальна газова константа; ро = Р(/РТ = 1Д7 кг/м3 - щільність сухого повітря.
Атмосферний тиск і щільність повітря зменшуються зі збільшенням висоти і на висоті більше 40 км дорівнюють нулю.
Температура повітря - ступінь його нагріву, що виміряється у градусах за термодинамічною шкалою Кельвіна (°К) або
стоградусною шкалою Цельсія (°С). Типова залежність середньої температури повітря від висоти для північної півкулі Землі
наведена на рис. 3.2.
Рис. 3.2. Залежність температури повітря від висоти
Відносна вологість повітря - відношення пружності водяного пару ео у даній точці до пружності пару Еф, що насичують
простір при заданій температурі І °С над плоскою поверхнею чистої води:
Ко = (е0/Ео)1ОО%, (3.6)
7,6Г
де Ео = 6,1 • 10273+г. (3.7)
Абсолютна вологість повітря - кількість грамів водяного пару на 1 м3 повітря:
а0 = 216,7(е/Т). (3.8)
Основними явищами, що визначають сутність фізичних процесів в тропосфері, є стратифікація і турбулентність.
Стратифікація тропосфери - розподіл температури повітря по вертикалі, що визначає умови рівноваги у тропосфері. Тобто
стратифікація характеризує спроможність частинок повітря зберігати первинне положення під час будь-якого вертикального зсуву.
Турбулентність тропосфери - рух газу у тропосфері, при якому здійснюється інтенсивне перемішування частин (дуже малих
об’ємів газу), останні рухаються не у вигляді окремих прошарків, а за безпорядними траєкторіями.
Під час слабкого вітру переважає стійка стратифікація, турбулентність розвинута слабко. Дрібномасштабні вихори розташо-
вуються біля поверхні Землі і загасають на висоті. У потоці повітря присутні нерегулярні вкраплення, що мають протяжність за
напрямком вітру.
Шд час помірного і сильного вітру розміри дрібномасштабних вихорів майже не змінюються з висотою, протяжність великих
вихорів з висотою зростає.
Під час буревіїв існують потоки, що пересуваються вверх і вниз, на які накладені дрібномасштабні вихори, що слабішають з
висотою. Якщо існує турбулентний рух, потік повітря в цілому можна уявити у вигляді деякого середнього руху, на який накладені
флуктуаційні елементи турбулентності.
Неоднорідність тропосфери призводить до викривлення напрямку поширення радіохвиль (до рефракції). Наявність у тропо-
сфері газів і водяного пару призводить до поглинання енергії радіохвиль сантиметрового і міліметрового діапазонів, до розсіяння і
як наслідок до ослаблення їх під час поширення.
Рефракція радіохвиль. Дальність прямої видимості.
Тропосферна рефракція - викривлення траєкторії електромагнітних коливань під час їх поширення у середовищі зі змінним
коефіцієнтом заломлення. Зміна коефіцієнта заломлення Дп (або ДМ) з висотою призводить до зміни фазової швидкості на фронті
хвилі ДУф = с/Дп, що викликає викривлення траєкторії.
У залежності від значення градієнта індексу заломлення тропосферну рефракцію підрозділяють на негативну та позитивну, а
позитивну у свою чергу - на нормальну, критичну і понддрефракцію. На рис. 3.3 для кожного виду рефракції наведені відповідні
профілі індексу заломлення і схеми трас поширення радіохвиль над поверхнею Землі.
41
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
б)
в)
Рис. 3.3. Профілі індексу заломлення і схеми трас поширення радіохвиль під час тропосферної
рефракції: негативна рефракція (а); нормальна рефракція (б); - критична рефракція (в);
понадрефракція (г)
Негативна рефракція - спостерігається, коли індекс заломлення збільшується з висотою (сіІМ/сіН > 0; рис. 3.3, а). При цьому
траєкторія радіохвилі (променя) повернена опуклістю униз (радіус кривизни рк < 0). Негативна рефракція призводить до зменшення
прямої видимості об’єкта
Позитивна рефракція - (сІІЧ/сІН < 0) має місце, коли індекс заломлення зменшується з висотою, при цьому траєкторія променя
повернена опуклістю вверх (рк > 0). Позитивна рефракція сприяє збільшенню прямої видимості об’єкта.
Нормальна рефракція - (рис. 3.3, б) має місце під час поширення радіохвиль у стандартній тропосфері, при цьому градієнт
індексу заломлення є постійним за висотою і дорівнює градієнту індексу заломлення стандартної тропосфери - 0,04 1/м. Радіус
кривизни променя складає рк ~ 25 000 км.
У випадку критичної рефракції (рис. 3.3, в) радіус кривизни променя дорівнює радіусу земної кулі рк = 6 371 км, тобто
радіохвиля поширюються паралельно земній поверхні. Це трапляється, якщо = — 0,1571 /м.
У випадку понадрефракції (^ < - 0,157 1/м, рис. 3.3, г) радіус кривизни променя менше радіусу земної кулі (рк < 6 371 км), що
є умовою виникнення хвилеводного характеру поширення радіохвиль. Характер поширення радіохвиль у приводному (приземно-
му) хвилеводі можна трактувати як послідовне заломлення променів у верхній частині хвилеводу з відбиттям їх від водної (зем-
но!) поверхні у нижній частині внаслідок більшої діелектричної проникності води (землі) у порівнянні з тропосферою.
Рефракція радіохвиль призводить до зміни дальності прямої видимості Ио.
Без урахування рефракції
К0[км] = Т2Й;(7н;+Їн7) = 3>57(Їн7 + 7н7), (3.9)
де Из = 6 371 км; Н], Нг- висоти (м) антени РЛС і польоту літального апарата відповідно.
42
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
З урахуванням рефракції
КОр=72ІМл/ЙГ + 7н?)’ (31°)
де Ке-еквівалентний радіус Землі, що визначається з співвідношення
Ке=К3рк/(рк-К3). (3.11)
У випад ку нормальної тропосферної рефракції
Яорк[Км] = 4,12(7нГ + 7н;). (3.12)
Дальність прямої видимості для різних значень висоти польоту літального апарата і висоти розміщення фазового центру
антени, що дорівнює 5 м, наведені у табл. 3.1.
Таблиця 3.1
Залежність дальності прямої видимості від висоти польоту цілі
Висота цілі, м Дальність прямої видимості, км
Без урахування рефракції 3 урахуванням рефракції
100 44 50
300 70 81
500 88 101
1 000 121 139
2 000 168 193
5 000 260 301
10 000 365 421
20 000 510 590
Дальність прямої видимості може значно обмежувати дальність виявлення цілей РЛС на малих і гранично малих висотах,
особливо у разі наявності кутів закриття антен станції. У цьому випадку
Ко = д/(Кс8ІпєзаКр) + 2КсН2 -Кс8ІпєзаКр, (3.13)
де Ке-еквівалентний радіус Землі, що дорівнює 8 500 км (з урахуванням нормальної рефракції).
Дальності прямої видимості на малих і гранично малих висотах наведені у табл. 3.2.
Таблиця 3.2
Вплив кутів закриття на дальність прямої видимості
Кут закриття, град Дальність прямої видимості, км, при (Н2 - Н|), м
20 50 100 300 500 1 000
0 16 28 40 71 92 130
0,25 3,3 9,2 18 43 62 98
0,5 - 3,8 10 28 44 75
1,0 - - 5,3 16 26 49
2,0 - - - 8,3 14 27
Помилки тропосферної рефракції. Рефракція електромагнітних коливань, що супроводжується викривленням шляху, викли-
кає додаткове часове затримання, що призводить до виникнення помилок по дальності ДО і збільшення значень кута місця цілі,
тобто до виникнення помилок Дє. Значення помилок ДО і Дє у залежності від дальності і кута місця наведені на рис. 3.4 і 3.5
відповідно.
Поглинання і ослаблення електромагнітних хвиль.
Поглинання і ослаблення електромагнітних хвиль трапляється у кисні і у водяній парі тропосфери, а також за рахунок розсіяння
від гідрометеоутворень.
Дальність дії локаційних засобів з урахуванням факторів поглинання і ослаблення може бути розрахована, км:
О = О010-0’5а', (3.14)
де О0 - дальність дії РЛС у вільному просторі, км; а - коефіцієнт поглинання і ослаблення електромагнітних коливань у тропо-
сфері, дБ/км; С - довжина шляху електромагнітних хвиль у середовищі, що поглинає, км.
Коефіцієнт поглинання в іоносфері можна розрахувати за формулою:
а = 1,16-10-6Мєу/£2, (3.15)
де Мс - концентрація вільних електронів, елекгронів/м3; Г- частота електромагнітних хвиль, Гц; V - частота співударяння елек-
тронів з нейтральними атомами, Гц.
Значення коефіцієнта а у залежності від довжини хвилі для кисню (суцільна крива) і води (точкова) наведені на рис. 3.6.
43
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.6. Залежність коефіцієнта поглинання від довжини хвилі
Основні властивості гідрометеоутворень, що впливають на радіолокаційне спостереження.
Характеристика гідрометеоутворень.
Класифікація гідрометеоутворень (гідрометеорів) базується на розмірах і фізичних властивостях частинок, що їх утворюють, з
урахуванням гіпотези про сферичність частинок (рис. 3.7).
Туман - сукупність зважених у повітрі крапель води або кристалів льоду, що знижують видимість до 1 км і менше. У залеж-
ності від дальності видимості розрізняють наступні види туманів: сильний туман - видимість менше 50 м, помірний - 50 ... 500 м,
слабкий - 500 ... 1 000 м.
Хмара - видиме скопичення продуктів концентрації або сублімації (процес переходу водяної пари у тверду фазу, обминаючи
рідинну) водяної пари на деякій висоті.
У залежності від умов утворення хмари розподіляють натри класи:
купчастотвірні - сильно розвинуті за вертикаллю, але мають порівняно невелику горизонтальну протяжність;
хвилястого ірні - мають велику горизонтальну протяжність у вигляді “барашків”, валів та паєм;
44
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
шаруватотвірні - мають вигляд безперервної пелени, горизонтальна протяжність яких у сотні разів більша їх вертикальних
розмірів.
Рис. 3.7. Класифікація гідрометеоутворень
У залежності від зовнішнього вигляду розподіляються на десять форм (родів): перисті (Сг); перисто-купчасті (Сс); перисто-
шаруваті (Су); висококупчасті (Ас); високошаруваті (Ах); шарувато-дощові (8п); шарувато-купчасті (5с); шаруваті (5/); купчасті (Си);
купчасто-дощові (Сгі).
За складом хмари розподіляються натри групи:
водяні (рідинно-крапельні) - складаються з крапель води, а при негативних температурах - з переохолоджених крапель;
льодяні (кристалічні) - складаються з льодяних кристалів;
змішані - складаються із суміші переохолоджених водяних крапель і льодяних кристалів.
У залежності від висоти розташування хмари розподіляються на:
верхнього ярусу (більше 6 км) - перисті, перисто-купчасті, перисто-шаруваті - складаються із льодяних кристалів;
середнього ярусу (від 2 до 6 км) - висококупчасті, високошаруваті - складаються із дрібних крапель і кристалів льоду;
нижнього ярусу (нижче 2 км) - шарувато-дощові, шарувато-купчасті, шаруваті - складаються в основному із крапель;
хмари вертикального розвитку (починаються на висоті хмар нижнього ярусу, а закінчуються на висоті хмар середнього або
верхнього ярусів) - усі форми купчастих хмар, утворення яких пов’язано із конвекцією атмосфери.
Тип опадів, що випадають з хмар, безпосередньо пов’язаний з вертикальною потужністю або товщиною хмари. Так, мряка ви-
падає під час середньої потужності хмар 850 м; дощ з мрякою -1400 м; дощ - 2 150 м; сніг- 2 300 м; сніг з дощем - 2 600 м.
У загальному випадку вертикальна протяжність хмар може досягати 10 км, горизонтальна протяжність шаруватих хмар -до
1000 км, а купчастих -до 10 км.
Мряка - однорідні опади, що складаються з великої кількості крапель радіусом менше 0^25 мм. Інтенсивність опадів під час
мряки не перевищує Ід=25 мм/год.
Дощ - водяні опади, що складаються із крапель радіусом більше 0,25 мм.
За інтенсивністю дощі розподіляються на:
слабкі (0,25 мм/год < Ід < 5 мм/год) - мають значну горизонтальну протяжність 400... 500 км і більше;
середньої інтенсивності (до 25 ... 35 мм/год) - протяжність близько 1 ... 20 км;
сильні 0д > 40 мм/год) - середня протяжність 7 ... 8 км.
Град утворюється у потужних конвекгивних хмарах в основному влітку. Частинки граду, як правило, мають форму льодяних
кульок. Щільність дрібного граду і крупи приблизно 0,3 г/см3.
Сніг - опади, що складаються із сніжинок різноманітних форм і розмірів. Найбільш часто сніжинки мають наступні форми:
голки, плоскі дендрити (зірки) (розміром не більше 4 ... 5 мм), просторові дендрити (розміром 8 ... 10 мм), кристали із краплями,
що не замерзли.
Водність \¥д (г/м3) - кількість крапляно-рідинної води в одиниці об’єму.
Основні характеристики купчастих хмар наведені у табл. 3.3.
Таблиця 3.3
Середня водність і концентрація крапель у купчастих хмарах
Висота над початком хмари, м Середня водність хмари, г/м3 Середня кількість крапель в 1 см3
25 0,08 300
100 0,18 460
225 0,27 200
400 0,41 140
600 0,45 90
800 0,72 70
1 000 0,97 70
45
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Ослаблення радіолокаційних сигналів в гідрометеоутвореннях.
Ослабляюча дія гідрометеоутворень. Для довжин хвиль X = 0,5 ... 10 см коефіцієнт ослаблення у у дощі та інших метеоутво-
реннях можна розрахувати за емпіричною формулою
у [дБ/км] = 0,438 \Уд//? . (3.16)
У табл. 3.4 наведені значення коефіцієнта ослаблення радіохвиль (у, дБ/км) у хмарах при концентрації води 1 г/м3.
Таблиця 3.4
Обумовлене хмарами ослаблення радіохвиль, що поширюються в одному напрямку, дБ/км
Хмара Температура, °С Довжина хвилі X, см
0,9 1,24 1,8 3,2
Водяна 20 0,647 0,311 0,128 0,0483
10 0,681 0,406 0,179 0,0630
0 0,99 0,532 0,267 0,0858
-8 1,25 0,684 0,34 0,112
Льодова 0 8,74 10'3 6,35 10’3 4,36 10’3 2,46 10’3
-10 2,93 10'3 2,11 10’3 1,46 10’3 8,19 10-4
-20 2,0 10'3 1,45 10’3 1,0 10’3 5,63 10-4
У табл. 3.5 наведені значення коефіцієнта ослаблення (у, дБ/км) радіохвиль в дощі, отримані в результаті їх обчислення з вико-
ристанням закону розподілу розмірів крапель, що запропоновано Лоусом-Парсоном.
Таблиця 3.5
Ослаблення радіохвиль в дощі різної інтенсивності при температурі повітря 18 °С, дБ/км
Інтенсивність опадів, мм/год Довжина хвилі X, см
0,3 0,4 0,5 0,6 1,0 3,0 3,2 10,0
0,25 0,305 0,230 0,160 0,106 0,037 0,0022 0,0019 9,97 10'5
1,25 1,15 0,929 0,720 0,549 0,228 0,0161 0,0117 4,16 10'4
2,5 1,98 1,66 1,34 1,08 0,492 0,0388 0,0317 7,85 10’4
12,5 6,72 6,04 5,36 4,72 2,73 0,285 0,238 3,64 10’3
25 и,з 10,4 9,49 8,59 5,47 0,651 0,555 7,28 10’3
50 19,2 17,9 16,6 15,3 10,7 1,46 1,26 0,01498
100 33,3 31,1 29 27 20,0 3,24 2,80 0,0311
150 46 43,7 40,5 37,9 28,8 4,97 4,39 0,0481
Ослаблення радіолокаційного сигналу на трасі поширення. Коефіцієнт ослаблення уа(Н) у чистій атмосфері на протязі всієї
траси є постійним. Якщо висоти розташування антени РЛС (НО і об’єкта виявлення (Н2) однакові (Н = Н, = Н2), то показник зату-
хання радіолокаційного сигналу після проходження ним траси в одному напрямку на відстань / визначається виразом:
Па = Уа(Н) І . (3.17)
Якщо Н] * Н2, коефіцієнт ослаблення змінюється вздовж траси, тому показник затухання визначається:
Па = Г1 Л +У2І2 > (3.18)
де /| і /2 - відстані, що проходять електромагнітні хвилі, а у! і у2 - коефіцієнти ослаблення радіохвиль, відповідно у сухій атмосфе-
рі і водяній парі.
У табл. 3.6 наведені значення г|а для випадку проходження радіохвилі через усю товщину тропосфери і стратосфери при темпе-
ратурі 20 °С.
Таблиця 3.6
Показник затухання Ца, дБ, при різних значеннях зенітного кута
X, см Ф = 0° Ф = 30° Ф = 45° Ф = 90°
15,0 0,034 0,039 0,047 1,7
7,5 0,038 0,041 0,051 0,9
5,0 0,041 0,048 0,059 2,2
2,5 0,061 0,071 0,086 4,0
1,0 0,24 0,27 0,33 15,0
Розсіяння радіохвиль гідрометеоутвореннями.
Розсіяння радіолокаційних сигналів пдрометеоутвореннями можна розглядати як результат накладення парційних сигна-
лів, що розсіюються частинками, які взаємно не впливають на процеси відбиття ними радіохвиль.
Для оцінки характеристик розсіювання використовують питому ефективну площу розсіювання оготг - площу радіолокаційно-
го розрізу одиниці об’єму при некогерентному розсіюванні.
46
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Розсіяння радіохвиль дощем
На рис. 3.8. наведені залежності аГІИГ дощу від його інтенсивності.
Рис. 3.8. Питома ЕПР дощу
Для розрахунку питомої ЕПР можна використовувати апроксимовану формулу
апит=С,і, (3.19)
де С=60 X2 ехр(- 540 X)+9,2 10"8; а = 1,09 +0,4 ЛСЮ4 X- 80).
Вираз справедливий при Ід = 1... ІООмм/год, Х=0,1 ...Зсм і і=0...40°С.
Основні властивості підстилаючих поверхонь, що впливають на радіолокаційне спостереження
Характеристика підстилаючих поверхонь.
Класифікація підстилаючих поверхонь проведена відповідно до ступеню впливу на форму поверхні турбулентності атмос-
фери, відбиваючих властивостей і параметрів, що характеризують її нерівності (рис. 3.9).
Поверхні, що не схильні до короткочасної дії турбулентної атмосфери
Сніжний наст, льод (гладкий) Бетон, асфальт, гравій Кам’яні розсипи
Поверхні, що слабко схильні до короткочасної дії турбулентної атмосфери
Рілля Пустеля з барханами Поверхні зі сніжно-льодово- водяною сумішшю
Поверхні, що сильно схильні до короткочасної дії турбулентної атмосфери
Трав’яне покриття висотою менше 20 см Луг з травостоєм висотою менше 1 м Кущі, ліс висотою більше 1 м Водна поверхня
Рис. 3.9. Класифікація підстилаючих поверхонь
Крім того, поверхню землі можна умовно розподілити на чотири типи: А - гладка (поверхня з піску, водна поверхня, поверхня з
асфальтом); В - змішана пагорбкувата місцевість з окремими ділянками лісу, з невеликою кількістю споруд; С - нерегулярна гори-
ста та лісова місцевість; О - міська місцевість.
Вплив на відбивну здатність підстилаючої поверхні робочої частоти передавача.
Для будь-якої хвилі А, що випромінюється, місцевість може бути розподілена на гладку і нерівну. До гладкої відноситься місце-
вість, у якої середнє значення нерівностей менше А/( 16 зіп(ф)), де ф - кут ковзання, у протилежному випадку місцевість - нерівна.
При всіх характерних хвилях радіолокаційного діапазону (23,10,5 і 3 см) практично будь-яка місцевість відноситься до нерівних.
В табл. 3.7 наведені значення відбивної здатності для різних типів підстильних поверхонь. Значення, отримані при кутах ков-
зання від 5° до 10° при різних тривалостях сигналів, що випромінюються (від 5 до 0,5 мкс), розмірах променя в азимутальній пло-
щині (менше 0,8°) та горизонтальній і вертикальній поляризаціях.
Значення відбивної зд атності 8 зменшується з підвищенням робочої частоти ї.
47
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Таблиця 3.7
Залежність відбивної здатності підстилаючої поверхні від робочої частоти передавача (довжини хвилі)
Довжина хвилі, см Відбивна здатність різних типів поверхонь, дБ
А В С □
23 -32 -зо -29 -19
10 -29 -27 -25 -15
5 -27 -24 -21 -13
3 -25 -22 -19 -12
Вплив на відбивну здатність підстилаючої поверхні кута ковзання
Для значень кута ковзання від 10 до 60° величина 8 практично не залежить від ф.
На рис. 3.10 наведена залежність відбивної здатності від кута ковзання д ля різних типів підстильних поверхонь.
Рис. 3.10. Залежність відбивної здатності різних типів поверхонь від кута ковзання
Для малих кутів ковзання відбивна здатність може бути розрахована за допомогою емпіричних формул, які для різних типів
підстильних поверхонь мають вигляд (0,3 см < А < 3 см, 0° < ф < 45°):
8 = - СІ + С21§(ф/ф0) - С31§(Х/Хо), (3.20)
де Сі, Сь Сз, Фо, Ао - постійні величини, значення яких для різних типів підстильних поверхонь наведені у табл. 3.8.
Таблиця 3.8
Значення постійних величини Сь С2, С3, фо, Ао
Тип підстилаючої поверхні Сь дБ С2, дБ С3, дБ Фо, град А#, см
Дерева 11,5 26 8 35 1,0
Посіви 16,3 26 8 35 1,0
Трава 20 26 10 35 1,5
Рілля 31 18 15 25 1,5
Злаки 28 18 15 25 1,5
Сніг 25 25 15 зо 1,5
Тверде покриття 39,1 32 20 35 2,2
Міські споруди 6 3 3 зо 1,о
Формула для в ідбивної здатності поверхні землі, що покрита сухими деревами, і поля, що покрите травою, має вигляд
(03см<А<Зсм, 0°<ф<45°)
8 = - 20 + 10 1§(ф/25) - 15 1§А. (3.21)
Вплив на відбивну здатність підстилаючої поверхні поляризації радіохвиль
Поляризація сигналу, що випромінюється, при зондуванні при великих кутах місця практично не впливає на величину відбив-
ної здатності більшості типів місцевості. В той же час дослідження показали, що при зондуванні на малих кутах місця поляриза-
ційні характеристики відбитка від підстилаючої поверхні є дуже інформативними. Для більшості типів підстилаючих поверхонь
характерно, що рівень зворотного відбитка від підстилаючої поверхні на вертикальній поляризації до 5 дБ вище, ніж на горизонта-
льній, відбитки на кросових поляризаціях менше на 5 ... 7 дБ. Крім того, характеристики відбитків залежать від умов вимірів і пори
року. Зокрема, різниця потужності відбитка в літній і зимовий періоди може досягати величини 15 ... 20 дБ. За рахунок спільної
доплерівської, кореляційної і поляризаційної обробки сигналів, відбитих від цілей і пасивних перешкод зокрема, від підстилаючої
поверхні можна підвищити завадодозахищеність радіолокаційних засобів. Використання лінійних поляризацій на прийом і переда-
чу може дати виграш у відношенні сигнал/завада до 10 ... 15 дБ у порівнянні з круговими поляризаціями. Застосування повного
поляризаційного прийому, тобто випромінювання на одній поляризації, а прийом на погодженій і кросовій складовій поляризації
може дати виграш у відношенні сигнал/завада 3 дБ. Останнім часом ведуться роботи з вивчення можливостей методів поляриза-
ційної обробки при виявленні цілей на фоні підстилаючої поверхні. Попередня оцінка показала, що адаптація поляризаційного ба-
зису антени на прийом і передачу, а також використання методу повного поляризаційного зондування простору, що заснований на
48
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
випромінюванні двох ортогональних поляризаціях і вимірі поляризаційної матриці розсіювання, можуть дати виграш у відно-
шенні сигнал/завада до 20 дБ і більше, при відсутності доплерівських різниць сигналів, відбитих від цілей і підстилаючої поверхні.
Вплив на відбивну здатність підстилаючої поверхні кліматичних умов
Для плоскої місцевості плівка води, яка виникає під час дощу, збільшує гладкість поверхні, що значно підвищує величину її від-
бивної здатності.
Вплив дощу на відбивну здатність нерівної поверхні залежить від кількості рослинності. В табл. 3.9 наведені значення відбивної
здатності 8 для місцевості з пагорбами. Вимірювання проводились за допомогою РЛС 3-см діапазону, тривалість імпульсу 0,2 мкс,
азимутальна ширина променя 1,4 град.
Таблиця 3.9
Залежність відбивної здатності пагорбкуватої підстилаючої поверхні від місяця року
Ф,град Відбивна здатність (відносно 1 м /м‘)
Квітень Травень Серпень Листопад
5 -30,2 -26,3 -23 -26,3
2,5 -39,2 -38,2 -зо -32,5
1,25 -48 -46,5 -38,5 -41
Відбивна здатність снігу залежить від кількості води, що міститься в ньому. Сніг викликає зменшення відбивної здатності на
9-10дБ.
Морська поверхня.
Відбиття радіолокаційного сигналу від морської поверхні визначаються станом поверхні моря, який залежить від різноманітних
факторів, найбільш важливим з яких є вітер.
Взаємозв’язок між швидкістю вітру і станом поверхні моря оцінюється, як правило, за шкалою Бофорта, у якій у залежності від
швидкості вітру представлені 13 становищ морської поверхні (від штилю до урагану).
В основному морські хвилі характеризуються такими параметрами: довжиною (відстанню між двома гребенями), висотою (ве-
ртикальною відстанню від гребеня до впадини), періодом, швидкістю руху фронту хвилі.
На внутрішніх морях в умовах шторму параметри хвилі, як правило, не перебільшують 9 м за висотою, 150 м за довжиною і
10 с за періодом.
Висота морських хвиль оцінюється діючою висотою (одна третя частина середньої висоти хвилі, Н^).
2
Параметр Ніз в залежності вщ дисперсії висоти хвилі (пн ) або швидкість вітру (ов (км/год)) визначається:
Н(/3 =4,06^0^, (3.22)
Н1/3 =3,926 Ю-4»)’. (3.23)
На характеристику відбитого сигналу також впливає кут ковзання ф. На рис. 3.11 показана залежність відбивної здатності 8 від
кугаф.
Зона між фг і <р = 90 град - область дзеркального відбиття радіохвиль, яка визначається елементами хвиль, розміри яких пере-
вищують довжину радіохвиль РЛС.
В області між фі і фг відбиття здійснюється в основному від капілярних хвиль, довжина яких близька до довжини радіохвиль
РЛС.
У зоні між ф = 0 град і фі за рахунок інтерференції між радіохвилями, що випромінюються і відбиваються, спостерігається різке
зменшення 8 при зменшенні кута ф.
Для малих кутів ковзання ф характер зміни відбивної здатності 8 показаний на рис. 3.12.
Існує критичний кут ковзання, при якому нахил кривої різко змінюється за рахунок інтерференції між радіохвилями, що ви-
промінюються і відбиваються. Крива 1 відповідає спокійному морю (хвилі висотою від 0,3 до 1 м), крива 2 - помірному хвилюван-
ню на морі (хвилі висотою від 1 до 1,5 м). Критичний кут з посиленням хвилювання моря зменшується.
49
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.12. Залежність відбивної здатності морської поверхні від кута ковзання
У табл. 3.10 наведені експериментальні значення відбивної здатності морської поверхні при різних кутах ковзання, поляризації
радіохвиль, стану моря та несучої частоти сигналів, для збурення моря за шкалою Бофота Кв = 4 і Кв = 5.
Таблиця 3.10
Відбивна здатність поверхні моря
Ф, град Відбивна здатність, дБ при частоті, ГГц
3,0 5,6 9,3 35
Кв=4 Кв=5 Кв=4 Кв=5 Кв=4 Кв=5 Кв=4 Кв=5
1 42/42 38/42 39/39 35/35 37/36 33/33 32/- 31/-
3 38/41 35/37 36/38 33/34 35/35 31/32 31/34 -
10 31/- 28/38 32/36 28/- 31/34 26/31 29/29 26/27
зо 27/37 - 25/35 - 24/33 20/24 22/- 20/20
Число у чисельнику характеризує величину 8 при вертикальній поляризації радіохвиль, а в знаменнику - при горизонтальній.
Зв’язок між 8 і робочою частотою Г враховується співвідношенням вигляду
8~Г , (3.24)
де т змінюється від 0 до 4.
Для кутів ф > 60° поляризація радіохвиль практично не впливає на відбивну здатність морської поверхні. При малих кутах ф го-
ризонтальна поляризація дає менші величини у порівнянні з вертикальною. Ця різниця зменшується зі зростанням ф і Кв.
На підставі дослід жень встановлена емпірична залежність відбивної здатності морської поверхні від кута ковзання ф, довжини
електромагнітної хвилі X і показника стану моря за шкалою Бофорта Кв (5, 8Іп(ф) і X представлені у децибелах) справедлива для
вертикальної поляризації радіохвиль для кутів ф < 45°:
8 = 50 + 8іп(ф) - X + 2 Кв . (3.25)
3.2. Принципи побудови систем виявлення засобів повітряного нападу
Системи координат, що застосовують для рішення задачі виявлення та визначення місцеположення засо-
бів повітряного нападу.
Положення повітряних об’єктів (ПО) у просторі може бути визначено відносно будь-яких інших тіл (точок), які називають
тілами відліку (точками відліку). Тілами відліку можуть бути: Сонце, центр Землі, визначена точка на поверхні Землі, центр мас
Землі тощо. З тілом відліку пов’язується визначена система координат.
Для рішення задач визначення місцеположення ПО, їх наведення і поразки можуть застосовуватись земні (нерухомі відносно
Землі), зв’язані і швидкісні (рухомі відносно Землі) системи координат.
Земні системи координат.
Геоцентрична прямокутна (Х,¥Д і сферична (г, ф, X) системи. За початок координат О береться центр мас Землі, а ось
О¥ прямокутної системи спрямовується по осі обертання Землі, осі ОХ і 02 таким чином, щоб створити праву систему координат.
У сферичній системі положення ПО визначається радіус-вектором г , геоцентричною широтою ф і довготою X (рис. 3.13, а).
Зв’язок між геоцентричними прямокутними і сферичними координатами:
X = ГСО8ф8ІП X,
<У = Г8Іпф, (3.26)
2 = гсозфСозХ.
50
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.13. Геоцентрична (а) і поверхнева (б) системи координат
Поверхнева прямокутна (X, V, 2) і сферична (О, Р, є) системи. За початок системи координат О береться визначена точка
земної поверхні, ось О¥ прямокутної системи спрямовується вертикально у вверх, ось ОХ пов’язується з напрямком на північ (або
на місцевий орієнтир), а ось 02 таким чином, щоб створити праву систему координат.
У сферичній системі положення ПО визначається нахильною дальністю О та д вома кутами Р, є, що визначають напрямок век-
тора нахильної дальності О.
Кут є між вектором О і його проекцією на горизонтальну площину називають кутом місця; кут Р, що визначає в горизонталь-
ній площині напрямок проекції О відносно початку відліку (осі ОХ), називають азимутом (рис. 3.13, б).
Зв’язок між поверхневими прямокутними і сферичними координатами:
О = 7х2 +¥2 + 22,
2
Р = агсі£ —
(3.27)
є = агсі§
¥
7х2 + 22
Рухомі (відносно Землі) системи координат.
Зв’язана система координат (хь уь г^. За початок системи координат о береться центр мас ПО, ось ОХ] спрямована вздовж
повздовжньої осі ПО, ось оу! у площині вертикального, а ось 02] у площині горизонтального перерізу ПО, таким чином, щоб ство-
рити праву систему координат (рис. 3.14, а).
Кут між повздовжньою віссю ПО і її проекцією на горизонтальну площину називають кутом тангажу о;
Кут між проекцією подовжньої осі ПО на горизонтальну площину і оссю ох називають кутом курсу (рискання)
Кут між вертикальною площиною, що проходить скрізь вісь 0Х| і зв’язаною віссю оу І5 називають кутом крену у.
На рис. 3.14, а зображена схема взаємного розташування зв’язаної і земної системи координат при суміщенні їх центру.
Кута ц/, о, у створюються шляхом послідовних поворотів: 1 - навколо осі у на кут ц/; 2 - навколо осі г’ на кут о; 3 - навколо вісі
X] на куту.
Рис. 3.14. Зв’язана (а) і швидкісна (б) системи координат
51
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Швидкісна система координат (х^ уст 4). За початок системи координат о береться центр мас, ось співпадає з вектором =
швидкості, осі оус і о^ лежать відповідно у вертикальній і горизонтальній площинах симетрії ПО (рис. 3.14, б).
Положення швидкісної системи координат відносно зв’язаної визначається кутами атаки і ковзання.
Кут атаки а - кут між проекцією вектора швидкості V на вертикальну площину симетрії’ ПО і оссю ОХ].
Кут ковзання Р - кут між вектором швидкості і вертикальною площиною симетрії’ ПО.
Вибір кожної конкретної системи координат визначається простотою виконання розрахунків та іншими факторами.
У загальному вигляді перехід від однієї системи прямокутних координат до іншої здійснюється за формулами аналітичної гео-
метрії та таблицями спрямовуючих косинусів.
Значення спрямовуючих косинусів між зв’язаною і земною системами координат наведені в табл. 3.11, а між зв’язаною і швид-
кісною системами координат - в табл. 3.12.
Таблиця 3.11
Спрямовуючі косинуси між зв’язаною і земною системами координат
Координати ОХ । оуі 071
ох СОБ О СОБ 1|/ СОБ Ц/ БІП О СОБ у + БІП Ц/ БІП у СОБ ф БІП О БІП у + БІП ф СОБ у
оу БІП О СОБ О СОБ у - СОБ О БІП у
07 - БІП Ц/ СОБ О СОБ к|/ БІП у + БІП ф БІП О СОБ у СОБ Ц/ СОБ у - БІП 1|/ БІП О БІП у
Таблиця 3.12
Спрямовуючі косинуси між зв’язаною і швидкісною системами координат
Координати ОХ] оуі 07]
охг СОБ а СОБ р - СОБ р БІП а БІП р
ок БІп а соб а 0
О2С - СОБ а БІП р БІП а БІП р СОБ Р
Для розв’язання окремих специфічних задач можуть застосовуватися різноманітні модифікації систем координат.
Фізичні принципи, що покладені в основу отримання інформації про ПО.
Виявлення ПО у польоті може бути забезпечено шляхом прийому електромагнітних хвиль, що відбиваються від поверхні ПО,
або електромагнітних хвиль, що випромінюються самим ПО. Також виявлення можливо за рахунок фіксації’ змінювання парамет-
рів навколишнього середовища, що виникають під час руху ПО в цьому середовищі.
Відповідно, фізичні явища на яких грунтується виявлення ПО, можуть бути розподілені натри групи.
Відбиття або розсіяння електромагнітних хвиль - фізичне явище, що забезпечує виявлення за рахунок різноманітних влас-
тивостей ПО, що перевипромінюють, і середовища, що його оточує.
Активне виявлення ПО можливе, якщо його опромінювати електромагнітними, звуковими хвилями або потоком частинок, що
рухаються з великою швидкістю, а потім приймати розсіяні сигнали. При цьому можливе використання відбиття від ПО енергії
Сонця або інших космічних джерел.
Випромінювання хвиль різної фізичної природи - фізичне явище, що забезпечує виявлення за рахунок різного роду випро-
мінювання самого ПО у польоті (випромінювання бортових джерел, випромінювання тепла під час нагріву корпусу ПО, випромі-
нювання факела реактивного двигуна, звукове випромінювання).
Ці явища забезпечують створення систем пасивного виявлення ПО у польоті в радіо-, оптичному і звуковому діапазонах хвиль.
Збудження середовища - фізичні явища, що супроводжуються змінами параметрів навколишнього середовища під час польоту
ПО (виникнення специфічної турбулентності, зміна хімічного складу, іонізація поля земного тяжіння, земного магнетизму та ін.).
Ці явища потенційно можуть бути використані для рішення задач виявлення ПО, якщо є можливість їх фіксації.
Класифікація фізичних явищ, які потенційно можуть бути використані для рішення задач виявлення, зображені на рис. 3.15.
З усіх розглянутих явищ для виявлення ПО у повітрі на теперішній час найбільш широко використовують явище відбиття
хвиль, що лежить в основі активної і напівактивної локації, а також явище випромінювання, що складає основу пасивної локації’.
Виявлення ПО радіолокаційними засобами
Радіолокація - область науки і техніки, предметом якої є спостереження різноманітних об’єктів (визначення їх місцеположен-
ня) за рахунок прийому та аналізу відбитих, перевипромінюваних або випромінюваних ними радіохвиль.
Радіолокаційні цілі (цілі) - об’єкти спостереження (в радіолокації - фізичні тіла), інформація про які викликає практичний ін-
терес. Для ППО цілями є повітряні (аеродинамічні) об’єкти (літаки, крилаті ракети та ін.) і космічні об’єкти (балістичні ракети, шту-
чні супутники Землі та ін.). Цілями природного походження можуть бути іонізовані утворення і сліди, хмари, скопичення гідроме-
теоутворень та ін.
Радіолокаційна інформація - сукупність даних про цілі, що одержана засобами радіолокації.
Радіолокаційна інформація умовно ділиться на:
траєкторну - сукупність даних про поступальне переміщення радіолокаційної цілі в просторі, які дозволяють визначити пара-
метри її прямування і побудувати траєкторію польоту;
52
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
сигнальну - сукупність даних про фізичні (розмір, форма та ін.) і електродинамічні (відбивні) властивості ці-
лі,» орієнтацію у просторі, а також фізичні явища, що супроводжують її прямування.
Фізичні явища, на яких грунтується виявлення ПО у польоті
Відбиття (розсіювання) електромагнітних хвиль
Радіохвиль Світла Звуку Інших видів
Випромінювання хвиль різної фізичної природи
ІЧ діапазону Радіохвиль Світла Звуку
Збудження середовища
Виникнення Зміна хімічного Зміна поля земного Зміна земного
турбулентності складу тяжіння магнетизму
Рис. 3.15. Класифікація фізичних явищ, які потенційно можуть бути покладені в основу виявлення ПО
Радіолокаційні станції (РЛС) або радіолокатори (у англійській і американській літературі використовується термін радар
(гадаг—гасііо беіесйоп апд гап&іп£) -технічні засоби отримання радіолокаційної інформації.
Сучасні РЛС представляють собою складні комплекси, у які, крім радіотехнічних пристроїв, входять системи автоматики і об-
числювальні засоби.
Джерелом інформації про ціль для РЛС є випромінені ціллю радіохвилі. Розрізняють три види випромінювань: вторинне (роз-
сіяння) (рис. 3.16, а, б), перевипромінювання (ретрансляція) (рис. 3.16, в) і власне випромінювання (рис. 3.16, г). У першому і
другому випадках РЛС випромінює в напрямку на ціль зондуючий сигнал; у третьому випадку опромінення цілі не потрібно, тому
що вона сама є д жерелом радіохвиль.
а) б) в) г)
Рис. 3.16. Види випромінювання радіохвиль: активна радіолокація з пасивною відповіддю (а), (б);
активна радіолокація з активною відповіддю (в); пасивна радіолокація (г)
Активна радіолокація - використовує вторинне випромінювання і перевипромінювання цілі (рис. 3.16, а, б, в).
Активна радіолокація з пасивною відповіддю (рис. 3.16, а, б) - радіолокація, що використовує ефект вторинного випроміню-
вання радіохвиль, при цьому прийнятий сигнал називається відбитим (розсіяним) або ехо-сигналом.
Радіолокація з активною відповіддю (рис. 3.16, в) - активна рад іолокація з перевипромінюванням. Вона знаходить широке
застосування при локації і впізнанні своїх об’єктів спостереження (літаків, ракет, ШСЗ), причому на об’єкті в даному випадку вста-
новлюється прийомопередавач (відповідач), що забезпечує достатньо велику потужність перевипромінюваного сигналу.
Пасивна радіолокація - використовує власне випромінювання цілі (рис. 3.16, г).
Прийнятий РЛС сигнал представляє собою електромагнітні коливання у визначеному діапазоні радіохвиль. Параметри сиг-
налу пов’язані з електричними, механічними, кінематичними та іншими властивостями радіолокаційної цілі.
Параметрами радіолокаційної цілі є дані про місце розташування, електрод инамічні властивості та інші її характеристики,
що визначаються з прийнятого сигналу.
До траєкторних параметрів від носять дальність, кутові координати, доплерівську швидкість.
До сигнальних - ефективну площу розсіювання цілі (ЕПР) та ін.
Траєкторні і сигнальні параметри називаються радіолокаційними характеристиками цілі.
Діаграма вторинного випромінювання - характеристика, що показує зміну ефективної площі розсіювання цілі в залежності
від напрямку її опромінення щодо РЛС. Діаграми вторинного випромінювання реальних цілей мають багатопелюстковий характер
(рис. 3.17).
53
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.17. Діаграма вторинного випромінювання стратегічного бомбардувальника В-52
для довжини хвилі X = 10 см
Ефективна площа розсіювання цілі - площа такого еквівалентного випромінювача, що розсіює падаючі на нього електрома-
гнітні хвилі рівномірно і створює в точці прийому ту ж щільність потоку потужності, що і реальна ціль (табл. 3.13).
Таблиця 3.13
Основні радіолокаційні цілі ППО мають такі ЕПР м2
Тип засобу повітряного нападу Діапазон хвиль, що випромінюються РЛС, см
5-10 10-100 100-200
Стратегічний бомбардувальник 6-10 10- 15 15-20
Середній бомбардувальник 5 10 15
Тактичний винищувач 2-3 3 5
Палубний штурмовик 3 5 7
Гелікоптер 0,5-1 1 - 1,5 2-3
Крилата ракета 0,1 -0,4 0,5 - 0,8 1-2
Безпілотний літальний апарат 0,01-0,1 0,1 -0,3 0,3 - 0,5
Процес одержання радіолокаційної інформації у загальному випадку єдиний. При теоретичному аналізі його зручно розділити
на наступні етапи: виявлення цілей, вимірювання траєкторних і сигнальних параметрів, розрізнення і розпізнавання цілей.
Виявлення цілей - процес прийняття рішення про наявність або відсутність цілі у ділянці простору шляхом прийому і статис-
тичної обробки сумарного значення радіолокаційних сигналів 80) і шуму (завад) п(1), тобто
у(0 = 8(і) + п(і). (3.28)
У результаті процесу виявлення повинно бути видане рішення А1 * про наявність цілі або А0* про її відсутність на ділянці про-
стору, що переглядається радіолокатором. За рахунок наявності перешкод і флуктуацій прийнятого сигналу кожне з цих рішень
може бути прийняте при двох умовах, що взаємно виключаються: А1 - “ціль є”; А0 - “цілі немає”, які при прийнятті рішення неві-
домі.
Таким чином, при виявленні цілі можливі чотири ситуації суміщення випадкових подій “рішення” і “умови”: А1*А1 - прави-
льне виявлення; А0* А1 - пропускання цілі; А1 * А0 - хибна тривога; А0*А0 - правильне невиявлення.
Можливості виникнення цих подій характеризуються наступними ймовірностями: Р(А1*А1) - імовірністю правильного вияв-
лення; Р(А0*А1) - імовірністю пропускання цілі; Р(А1*А0) - імовірністю хибної тривоги; Р(А0*А0) - імовірністю правильного
невиявлення.
Сума цих ймовірностей дорівнює одиниці, тобто
Р(А1*А1) + Р(Ао*А1) + Р(А1*Ао) + Р(Ао‘Ао)=1. (3.29)
Кожну імовірність суміщення ПОДІЙ можна уявити у ВИГЛЯДІ добутку Імовірності умови Р(А|і) на умовну імовірність рішення
Р(Аі7Ак),дек=0Д;і=0Д;
Р(Аі*Ак) = Р(Ак) Р(Аі7Ак). (3.30)
Імовірності наявності або відсутності цілі Р(А]) і Р(Ао) називаються додослідними (апріорними) і вони звичайно заздалегідь
невідомі. Умовні імовірності для кожного радіолокатора є цілком визначеними і можуть бути оцінені експериментально або розра-
54
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
хунковим шляхом. Тому при проектуванні та випробуваннях РЛС переходять до умовних ймовірностей прийняття рішень, що
служать якісними показниками виявлення.
За умови наявності цілі якісними показниками виявлення є:
умовна імовірність правильного виявлення
О = РСАГ/АО = РСА/АО/РСА,); (3.31)
умовна імовірність пропускання цілі
О* = РСАо’/АО = Р(А0*А1)/Р(А1). (3.32)
Оскільки відповідні одній умові А! рішення А/ і Ао* взаємовиключні, то О+О* = 1.
За умови відсутності цілі якісними показниками виявлення є
умовна імовірність хибної тривоги
Р = Р(А17а0) = Р(А/Ао)/Р(Ао); (3.33)
умовна імовірність правильного невиявлення
Р* = Р(Ао7Ао) = Р (Ао*Ао)/Р(Ао), (3.34)
причому Р + Р*= 1.
Основними якісними показниками радіолокаційного виявлення є умовні імовірності правильного виявлення О і хибної
тривоги Г.
Статистичний характер виявлення сигналів визначається значеннями щільності розподілу завади Рп та суміші сигналу і завади
Рот які мають вигляд:
1 —
Рп(у) = -А-е2’!, (3.35)
72іГСТ
(У-5)2
Рсп(у) = ~4=-е 2-2 , (3.36)
де $ - математичне сподівання; о - середнє квадратичне відхилення.
Рис. 3.18. Графічне представлення імовірностей правильного виявлення і хибної тривоги
Якщо відома величина порогу приймального пристрою - у©:
о=?рсп(у)ау, (3.37)
Уо
Р=°[Рп(у)ау. (3.38)
Уо
Графічно значення В і Р зображені на рис. 3.18 (заштриховані ділянки).
Величина порогу у0 визначається у залежності від критерію оптимальності і завдання, що виконує виявлювач.
Критерії оптимальності виявлення - закономірні правила, на основі яких приймається рішення про наявність або відсутність
цілі в умовах дії завад
В теорії виявлення використовуються критерії: мінімуму середнього ризику, максимуму відношення правдоподібності, ідеаль-
ного спостерігача, Неймана-Пірсона, послідовного спостерігача та ін.
Критерії, що використовуються під час виявлення цілі, грунтуються на порівнянні з деяким порогом у© відношення правдоподі-
бності /(у). Якщо /(у) > у о, приймається рішення про наявність цілі, якщо /(у) < у о, то констатується відсутність цілі.
Найбільш узагальненим критерієм оптимальності системи виявлення є критерій мінімуму середнього ризику (критерій
Байєса), який може бути зведений до так званого вагового критерію
О - /0 Р = птах, (3.39)
де 4 - ваговий множник, що визначає величину порога виявлювача, при якому забезпечується максимальне значення співвід-
ношення /(у).
З критерію мінімуму середнього ризику випливає критерій максимуму відношення правдоподібності
р / Ч (82~2У8)
/(У) = -^7Т = е 2°2 • (3.40)
Р3(У)
55
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Залежність відношення правдоподібності від величини сигналу у показана на рис. 3.19, де значення /(у) > /о, що еквівалентно
значенню у >у0.
Рис. 3.19. Залежність відношення правдоподібності від величини сумарного сигналу
Якщо необхідно величину порога вибирати безпосередньо за заданим рівнем Р, то використовують критерій Неймана-
Пірсона, який максимізує імовірність правильного виявлення □ при заданій імовірності хибної тривоги Р.
Згідно з критерієм ідеального спостерігача пороговий рівень встановлюється таким чином, щоб імовірність загальної помил-
ки була мінімальною, або, інакше, імовірність правильного рішення максимальною. Цей критерій в основному використовується у
радіозв’язку.
У критерії послідовного спостерігача (критерії Вальда) проводиться безперервний аналіз відношення правдоподібності і
’ 1 - О . •• О „ . .
зрівняння його з двома порогами у0 =------ і у о = —• Якщо відношення правдоподібності менше у0, то приймається рі-
1-Е Р
шення про наявність тільки шуму. Якщо ж відношення правдоподібності більше у о , то приймається рішення про наявність сигна-
лу. У тому випадку, коли відношення правдоподібності знаходиться між нижнім рівнем у о і верхнім рівнем у0 , то даних для
прийняття рішення не достатньо, і випробування продовжується. Така процедура повторюється до тих пір, поки не буде прийняте
остаточне рішення.
Параметр виявлення д (відношення сигнал/шум) - безрозмірне відношення енергії* Е корисного сигналу до спектральної
щільності N0 шуму (завад):
Виявлення детермінованого сигналу (сигналу з повністю відомими параметрами).
Алгоритм оптимального виявлення має вигляд:
т \
г=[у(і)8(і)ді у0 , (3.42)
0
де у(і) - прийнятий сигнал; 8(1) - сигнал, що очікується.
Права частина формули називається кореляційним інтегралом. Рішення кореляційного інтеграла забезпечується побудовою
Рис. 3.20. Структурні схеми кореляційного (а) і фільтрового (б) оптимальних виявлювачів
детермінованого сигналу
Кореляційний інтеграл також може бути сформованим за допомогою лінійного фільтра (рис. 3.20, б). Дійсно, якщо Ь(1) - імпу-
льсна характеристика (відклик фільтра на дію короткого імпульсу - дельта-функції) фільтра, на вхід якого надходить процес у(і), то
результат х (Т) на виході фільтра визначається інтегралом згортки:
х (Т) = У у(і)Ь(Т - і) ді . (3.43)
0
Якщо Ь(Т -1) = 8(1), то величина г(Т) співпадає з кореляційним інтегралом г. З цього випливає, що імпульсна характеристика
фільтра, на виході якого формується значення кореляційного інтеграла, у момент закінчення спостереження Т має вигляд:
ЬуФ(0 = 8(Т - і). (3.44)
Такий фільтр називається узгодженим, тому що його імпульсна характеристика узгоджена з сигналом, що виявляється. Імпу-
льсна характеристика узгодженого фільтра є “дзеркальним відображенням” форми сигналу. Оскільки узгоджений фільтр (УФ) є
складовою частиною оптимального виявлювача (рис. 3.20, б) і мінімізує відношення сигнал/шум на виході, його також називають
оптимальним, якщо обробка корисного сигналу здійснюється на фоні білого шуму.
56
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Фізична суть оптимальної операції* виявлення є в тому, що перемноження величини сигналу, який приймається, у(і) на величи-
ну сигнал, який очікується, з(і) забезпечує придушення перешкод що не співпадають з сигналом, який очікується, за часом і
частотою.
Виявлення радіосигналу з випадковою початковою фазою. Кореляційний інтеграл має вигляд
т
X = (у(і)8(ф,0(ІІ = X! СО8ф +г2 8ІПф = г0 СО8(ф-V) , (3.45)
о
Т Т Г~2-----2
де Ф - випадкова початкова фаза; = [у(і)8і(і)с1і і х2 = (уСО^СО^ - його квадратурні складові; х0 =\2і +х2 ;
0 0
С08 V=х/ад 8ІП V=х/2о; 8і(і) = А(і) со8[а\)1+ф(і)]; 8г(1) = А(1) 8Іп[(ОоІ+ф(0]; А(і) - амплітудна модуляція сигналу; ф(і) - фазова моду-
ляція сигналу; ©о - частота сигналу.
Алгоритм оптимального виявлення вигляду х0 у 0 може бути реалізований у вигляді кореляційної схеми з двома квадралу-
Рис. 3.21. Структурні схеми кореляційного (а) і фільтрового (б) оптимальних виявлювачів
сигналів з випадковою початковою фазою
Наявність двох каналів обумовлено незнанням фази сигналу. Якщо корисний сигнал має зсув фази відносно опорного коливан-
ня в одному із каналів на 90 град то приросту напруги на виході інтегратора у цьому каналі не буде. Але в іншому каналі відповід-
ний приріст буде максимальним.
Схема оптимального виявлювача може бути представлена також у фільтровому варіанті (рис. 3.21, б). Дійсно, величина хо, яку
повинен сформувати виявлювач, є огинаюча коливання Хо соз (ф - V). Огинаюча х</0 коливання х(1) на виході узгодженого фільтра
(з імпульсною характеристикою И(і) = з(ф, Т - і)) виділяється амплітудним детектором (АД), при цьому результат детектування на
момент часу і=Т повинен подавалися на пороговий пристрій.
Виявлення радіосигналу з випадковою початковою фазою і амплітудою.
Структурні схеми оптимального виявлювача сигналу з випадковою початковою фазою і амплітудою співпадають зі схемами
оптимального виявлювача сигналу з випадковою початковою фазою (рис. 3.21).
Показники якості виявлення розглянутих виявлювачів можна визначити за допомогою кривих виявлення (рис. 3.22).
Рис. 3.22. Криві виявлення для детермінованого сигналу - суцільні, для сигналу з випадковою початковою
фазою - штрихові та для сигналу з випадковою амплітудою і початковою фазою - точкові
57
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Виявлення радіолокаційних сигналів з постійним рівнем хибної тривоги.
Зміна інтенсивності і функції розподілення імовірності вхідної суміші сигналу з завадою (робота в умовах наявності відбитків
від місцевих предметів) суттєво зменшує ефективність виявлення класичних пристроїв виявлення (зміна інтенсивності завади на
2 дБ призводить до зміни імовірності хибної тривоги в системах з фіксованим порогом на два порядки). Тому отримали розпов-
сюдження спеціальні алгоритми стабілізації імовірності хибної тривоги (пристрої СІХТ). В пристроях СІХТ для формування рівня
порогу використовують метод “ковзного вікна”. Одномірні “вікна” формують в частотній або часовій областях, або за циклами
огляду. Двомірні вікна формуються у площинах дальність-швидкість, дальність-азимут.
Формування порогу виявлення (Сп) в пристроях СІХТ заключаєгься в оцінці потужності завади (2) і помноженні її на порого-
вий коефіцієнт (порогову константу) Т, що залежить від імовірності хибної тривоги та довжини “вікна”
Сп=Т-2, (3.46)
Способи формування вирішуючих правил (3.46) визначаються апріорною інформацією про заваду.
Отримали розповсюдження наступні моделі завад у межах “вікна”: модель 1 - однорідна і стаціонарна завада у межах “вікна”;
модель 2 - неоднорідна за потужністю завада у межах “вікна” (зміна потужності завади стрибком); модель 3 - однорідна завада з
цілями, що заважають, у межах “вікна”.
У залежності від використання моделі розглядають 4 класи пристроїв СІХТ: з усередненням потужності по елементах
“вікна”; з використанням різної логіки на елементах “вікна”; на основі порядкових статистик; адаптивні до параметрів нере-
леєвських розподілень амплітуд завад.
Пристрої з усередненням потужності по елементах “вікна” розраховані на використання моделі 1 завади, де невідомими
вважають параметри апріорно заданого, як правило, гаусівського розподілення завади. Стабілізація рівня хибної тривоги зводиться
до визначення оцінки потужності завади і встановлення відповідного порога виявлення. До складу структурної схеми такого при-
строю СІХТ (рис. 3.23) входять: лінійний або квадратичний детектор (Д) на вході пристрою; лінія затримки (ЛЗ); суматор, на виході
Рис. 3.23. Структурна схема пристрою СІХТ з усередненням потужності по елементах “вікна”
Пристрої СІХТ з усередненням потужності по елементах “вікна” використовують оцінку потужності завади у вигляді
1 N
/ = (3.47)
N і=і
Однак модель 1 завади, для якої розроблені пристрої першого класу, часто неадекватні реальній пасивній заваді. При цьому
вибірка завади у межах “вікна” стає не тільки нестаціонарною відносно параметрів розподілення, але і неоднорідною, коли різні
елементи вибірки можуть належати до різних розподілень. При роботі з такими завадами пристрої з усередненням потужності по
елементах “вікна” мають неприпустимо великі втрати і не забезпечують постійного рівня хибних тривог. Використання моделі 2 у
вигляді стрибка потужності завади призводить до різких змін рівня хибної тривоги та імовірності правильного виявлення. Модель З
завади призводить в пристроях з усередненням потужності по елементах “вікна” до ефекту маскування цілі в елементі “вікна”, який
аналізується, ціллю, що заважає.
Серед пристроїв СІХТ з використанням різної логіки на елементах “вікна” виділяють: пристрої СІХТ з вибором “більшого
із”; пристрої СІХТ з вибором “меншого із”; пристрої СІХТ на змішаних логіках.
Пристрої СІХТ з вибором максимальної амплітуди у “вікні” використовують оцінку потужності завади у вигляді
Х = тах{Х1,... ,Хп}, (3.48)
де {X,} - завадова вибірка у “вікні”, і = 1,..., п.
Пристрої СІХТ з вибором максимальної амплітуди у ‘"вікні” мають втрати по відношенню сигнал/завада на 2,2 дБ більше, ніж
пристрої з усередненням потужності по елементах “вікна” при використанні моделі завади 1. Крім того, в пристрої СІХТ з вибором
максимальної амплітуди у “вікні” спостерігається ефект маскування виявленої цілі крайкою завади (модель 2) і цілями, що заважа-
ють (модель 3).
Пристрій СІХТ з вибором “більшого із” (рис. 3.24) використовує оцінку потужності завади у вигляді:
[( 1 А М < і А N 1
2 = тахЛ— £Хі, — £Хі к N = 214. (3.49)
<М;і=м+і
Такий пристрій поступається пристрою з усередненням потужності по елементах “вікна” по втратах 0,1 ... 0,3 дБ при викори-
станні моделі 1 завади, але стабілізує заданий рівень хибної тривоги при використанні моделей 2 і 3 завади. Ефект маскування цілі,
яка виявляється, крайкою завади і цілями, що заважають, пристрій СІХТ з вибором “більшого із” не усуває.
Пристрій СІХТ з вибором “меншого із” (рис. 3.25) використовує оцінку потужності завади у вигляді:
[( 1 А М ( і А N 1
7 = тіп< — ЕХ,, — ЕХД N = 214. (3.50)
іаМ;і=і ІМ;і=м+і ]
58
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.24. Структурна схема пристрою СІХТ з вибором “більшого із”
Такий пристрій виключає ефект маскування цілі для моделей 2,3, коли цілі, що заважають, зібрані в одному з “напіввікон” Це
пов’язано з логікою “меншого із”, яка усуває заважаючи цілі і крайку завади, як аномальні викиди. Однак якщо цілі, що заважають,
з’являються одночасно в обох “напіввікнах”, то ефект маскування не усувається. Коли стрибок потужності завади займає більшу
частину “вікна”, спостерігається завищення рівня хибної тривоги.
Рис. 3.25. Структурна схема пристрою СІХТ з вибором “меншого із”
Рис. 3.26. Структурна схема пристрою СІХТ на змішаних логіках
Пристрій СІХТ, що використовує порядкові статистики для формування рівня порога (рис. 3.27) використовує значення
(вибірку амплітуди сигналу) К-ої порядкової статистики Х^ (процентіль) у якості дисперсії фону завади, по якій виставляється
необхідне значення порога.
Критерій виявлення пристрою СІХТ на порядкових статистиках має вигляд
¥>Т-Х(К)=ип> (3.51)
де ¥ - аналізоване значення, що піддається порівнянню з порогом; Т - порогова константа, що залежить від імовірності хибної
тривоги; Х(ю - значення К-ої порядкової статистики, причому К = 0,5И +1, N для забезпечення ефективного функціонування в
умовах впливу нестаціонарних завад; N - розмір “ковзного вікна”.
Рис. 3.27. Структурна схема пристрою СІХТ на порядкових статистиках
Ранг К вибирають з компромісу між можливістю забезпечення заданого рівня хибних тривог, втратами у відношенні сиг-
нал/завада і ефектом маскування цілі у елементі, що аналізується, крайкою завади і цілями, що заважають. Наприклад, при К > N/2
59
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
пристрій СІХТ на порядкових статистиках стабілізує рівень хибних тривог в моделі 1 завади, однак спостерігається маскування цілі
крайкою завади в моделі 2. Останнє пов’язане з встановленням в пристрої завищеного значення порога при влученні крайки завади
на елемент ‘^вікна”, який відповідає процентілю.
Пристрої СІХТ на порядкових статистиках стабілізують рівень хибних тривог для всіх моделей 1,2,3 завади і мають малі втра-
ти у відношенні сигнал/завада. Слабка чутливість таких пристроїв до нестаціонарних завад у “вікні” дозволяє збільшити довжину
“вікна” 14, що, в свою чергу, призводить до подальшого зменшення втрату відношенні сигнал/завада.
При побудові пристроїв адаптивних до параметрів нерелеєвських розподілень амплітуд завад приймають заваду
стаціонарною у “вікні”, з невідомою потужністю, якщо приймається модель 1, але при цьому враховується, що розподіл амплітуд
цієї завади являється нерелеєвським. Найчастіше застосовуються моделі вейбулівського і логарифмічного нормального роз-
поділення амплітуд завад. Модель вейбулівського розподілення завад у “вікні” описує широкий клас розподілень від експо-
ненціального до релеєвського. Оскільки апріорне розподілення амплітуд завад у “вікні” невизначено, то пристрої СІХТ можуть
бути побудовані на непараметричній статистиці. Однак використання непараметричних алгоритмів в пристроях СІХТ при невели-
ких “вікнах” (14 < 15) призводить до значних втрат у відношенні сигнал/завада. Структурна схема вейбулівського пристрою СІХТ
представлена на рис. 3.28. Вейбулівські пристрої СІХТ будуть стабілізувати імовірність хибної тривоги і для завад з логарифмічно
нормальним розподілом, але порогова константа Т при цьому повинна бути іншою.
Рис. 3.28. Структурна схема вейбулівського пристрою СІХТ
Методи виявлення малопомітних повітряних цілей.
Для більшості прикладних локаційних завдань актуального значення набуває задача виявлення малопомітних (малоконтраст-
них, малорозмірних, та виконаних з використанням спеціальних технологій, які забезпечують зниження помітності) цілей. Першо-
чергова увага при цьому акцентується на проблемі підвищення дальності виявлення таких цілей.
Методи збільшення енергетичного потенціалу РЛС базуються на підвищення потужності передавача і коефіцієнта спрямо-
ваної дй’ антени. Але це неминуче призводить до збільшення енергетичних витрат і до проблем маскування і маневреності РЛС.
Методи підвищення якості роботи приймальних пристроїв РЛС базуються насамперед на аналізі тонкої структури сигна-
лів з використанням нових методів цифрової обробки на ЕОМ, таких, наприклад, як, понадшвидкісні великі інтегральні схеми. Для
виконання окремих операцій з обробки сигналів створені пристрої з зарядовим зв’язком, а також з використанням поверхневих
акустичних хвиль. Але підвищення якості роботи приймальних пристроїв РЛС потребує великих часових і обчислювальних витрат,
ускладнюються схемні рішення та системи обробки сигналів.
Метод інверсного синтезування апертури використовується для збільшення часу когерентного накопичення ехо-сигналів, за
рахунок чого підвищується дальність виявлення. В ньому застосовуються алгоритми, протилежні тим, що використовуються в
режимах синтезування апертури РЛС і дозволяють отримувати детальні зображення наземних об’єктів на базі аналізу доплерівсь-
ких зсувів частоти сигналу. Відмінною ознакою цього методу є те, що накопичення сигналу проводиться за рахунок руху цілі, а не
антени РЛС, як при звичайному синтезуванні апертури. Недоліком даного методу вважається необхідність наявності попередніх
даних про дальність до цілі та швидкість її руху. Помилки у визначенні цих параметрів призводять до погіршення характеристик
точності РЛС у режимі роботи з використанням методу інверсного синтезування апертури.
Метод, що базується на виборі оптимального діапазону робочих частот РЛС. В основу цього методу покладена залежність
ЕПР літального апарата від частоти сигналу, що опромінює ціль. Розрахунки показують, що дальність виявлення малопомітного
літального апарата в діапазоні 1-2ІТцв 1,75 разів більше, ніжу діапазоні 2-4 ГТц, та в 2,2 разів більше, ніжу діапазоні 4-8 ГГц.
Якщо у системах ППО використовувати РЛС різноманітних діапазонів, то створити ефективне радіопоглинаюче покриття для
літального апарата буде практично неможливо, тому що існуючі (здебільшого феритові) радіопоглинаючі матеріали відносно вузь-
космугові, розраховані на невеликий діапазон частот.
Загоризонтний метод виявлення базується на ефекті послідовного багатократного відбиття від іоносфери і поверхні Землі
коротких (приблизно 10 - 100 м - декаметровий діапазон хвиль) радіохвиль від цілей, що знаходяться на шляху їх поширення або
збурень, що вони викликають. Відстань від точки випромінювання хвилі до району її відбиття від поверхні Землі (однострибкова
РЛС) або між двома сусідніми відбиттями від поверхні Землі (двохстрибкова РЛС) називають дальністю стрибка. У залежності від
значення кута, під яким випромінюється хвиля, та її довжини ця дальність змінюється у межах 800 - 4 000 км. Приймальний при-
60
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
сірій загоризонтних РЛС може знаходитись у районі розташування передавача (РЛС нахильно-зворотнього зондування) або на
трасі поширення зондуючого сигналу за декілька тисяч кілометрів від передавача (РЛС прямого зондування).
До недоліків загоризонтних РЛС відносять: впливовість на них природничих та штучних завад, неможливість виявлення цілей,
що знаходяться ближче 800 км, тому, що існує “мертва” зона; низьку розрізнювальну здатність; залежність їх характеристик від
стану іоносфери.
Формування та обробки нових складних радіолокаційних сигналів. Застосування зондуючих сигналів, що узгоджені за
формою цілі, дозволяє значно підсилити ехо-сигнали. Цей метод відповідає методу узгодженого фільтрування, що використовуєть-
ся у сучасних РЛС. Формування зондуючих сигналів здійснюється на підставі імпульсної характеристики цілі, що залежить від її
конфігурації, просторового положення та динаміки руху. На практиці для узгодження сигналів з ціллю потрібні імпульси наносе-
кундної довжини. До таких імпульсів можна віднести несинусоїдальні сигнали, важливою властивістю яких є надщирокосмуго-
вість. Розрахунки показують, що феромагнітні матеріали слабко поглинають енергію радіолокаційних несинусоїдальних сигналів.
Метод використання багаточасготних сигналів. Ціль у цьому випадку опромінюється одночасно декількома безперервними
сигналами на різних частотах. Приймання та обробка ехо-сигналів здійснюється за допомогою багатоканального приймального
пристрою, в кожному з каналів якого формуються пари сигналів на близьких частотах, а потім здійснюється їх перемноження та
інтегрування для доплерівського фільтрування. Перевагою багаточастотної радіолокації є можливість вибору набору частот, що
забезпечують максимальну дальність виявлення. Як і в попередньому методі, визначальним параметром є конфігурація цілі.
Методи, що базуються на ефекті “нелінійної радіолокації”. Цей ефект полягає в тому, що об'єкти техніки при опроміненні
не тільки відбивають падаючі хвилі, але і генерують зворотне випромінювання на гармоніках. Але цей ефект можна спостерігали на
гранично малих дальностях. Тому він отримав розповсюдження лише при вирішенні завдань пошуку підслуховуючих пристроїв.
Розглянуті методи приводять до підвищення складності як засобів генерації, так і обробки сигналів. Крім того, збільшується час
на обробку таких сигналів.
Багатопозиційна радіолокаційна система (БІТРЛС) - це система, що включає до свого складу декілька рознесених у
просторі позицій, що передають, приймають або приймають-передають, на яких проводиться спільна обробка одержуваної
інформації про радіолокаційні цілі (рис. 329).
Рис. 3.29. Принцип дії активних багатопозиційних РЛС
Дальність до цілі відносно приймальної позиції визначається за формулою
т2с2 + 4Бст 8Іп2 — + 4Б2 8Іп2 —
Об.п =-------------------------------. (3.52)
2тс + 4Б8Іп2 —
2
де т - час затримки сигналів від цілі відносно приймальної позиції; с - швидкість світла; Б - база між позиціями, на яких
знаходяться передавач і приймач; у - просторовий кут пеленгу на ціль відносно позиції, на якій знаходиться перед авач.
Методи визначення дальності у пасивних багатопозиційних РЛС
1. Тріангуляційний метод - метод пеленгування цілей з д вох і більше рознесених приймальних пунктів (рис. 3.30), один з яких
розташований у точці О, а інші у точках А і В.
Рис. 3.30. Тріангуляційний метод визначення дальності
61
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Дальність до цілі визначається за формулою
СО8 Є (СО8 Р - 8ІП Р СІ£ 0і ) ’
де Б - база між точками О і А, м; є, р, Рі - кут місця і азимути цілі, що вимірюються відносно точок О і А.
X Кутомірно-різницево-дальномірний метод - метод, що базується на вимірюванні кутових напрямків на ціль і різниці
дальностей між ціллю і точкою О, ціллю і точкою А (див. рис. 3.30).
Дальність до цілі визначається за формулою
2(Бсо5 РСО8 є-ДОа) ’
де ДГ)а- різниця у визначенні дальностей до цілі між точками О і А, м.
3. Різницево-далмюмірний метод - метод, що базується на вимірюванні різниці дальностей між ціллю і точками О і А (рис.
Рис. 3.31. Різницево-дальномірний метод визначення дальності
Дальність до цілі визначається за формулою
р 2Б2-ДРа~ДРв
2(ДРа+ДРв) ’
(3.55)
де Б - база між точками О і А, м; ДЛа, ДОВ - різниця дальностей до цілі між пунктами, що розташовані в точках О і А, м.
Для методів 2 і 3 визначення різниці дальностей ДОа і ДОВ здійснюється за допомогою розміщення на пункті О спеціального
корелятора, що враховує час затримки т* під час розрахунку значення бази (Б) між пунктами, тобто ДО = т3с - Б.
Основними перевагами БПРЛС у порівнянні з однопозиційними є можливість високоточного визначення просторового
положення цілей і збільшення обсягу сигнальної інформації' про цілі (за рахунок можливості одночасного спостереження цілей із
різноманітних напрямків), а також підвищена завадозахищеність і живучість таких систем (за рахунок складності постановки
ефективних завад відразу декільком РЛС, рознесеним у просторі).
До недоліків БПРЛС відноситься трудність спільного керування рознесеними позиціями, складність передачі великої кількості
даних по лініях зв’язку в пункт (або декілька пунктів) спільної обробки, складність синхронізації сигналів, підвищені вимоги до
співюстування позицій і можливостей апаратури обробки сигналів, а також високі вимоги до продуктивності обчислювальних
засобів.
Також зроблена спроба використовувати для збільшення дальності виявлення специфічні для малопомітних (малорозмірних)
цілей ознаки.
Методи виявлення малопомітних цілей. Характерною ознакою цих методів є зміна об’єкта локації. Таким об’єктом вважа-
ється не сам фізичний об’єкт, а ті збурення, які виникають у навколишньому середовищі при його проходженні через це середови-
ще. До них можливо віднести: збудження геомагнітного поля Землі, тепловий контраст, інтенсивні конвекційні потоки, суттєві
зміни структури та хімічного складу навколишнього середовища. Виявлення та ідентифікація цих ознак дозволяють значно підви-
щити імовірність виявлення малопомітних цілей.
Для забезпечення пошуку і виявлення таких цілей можуть використовуватися, як активні, так і пасивні засоби.
Як показала практика, використання вимірювань збудження геомагнітного поля Землі для вирішення задачі виявлення мало-
помітних об’єктів є дуже малоефективним у зв’язку з надзвичайно високим рівнем хибних тривог та рядом інших недоліків.
Найбільш інформативними ознаками виявлення і розпізнавання об’єктів є аномалії щільності повітря у вигляді суттєвої зміни
концентрації і складу компонент сліду.
Аналіз результатів зондування супутнього сліду повітряної цілі, утвореного елементами відпрацьованого палива, дозволяє з ви-
сокою достовірністю установити факт прольоту досліджуваної області простору літальним апаратом. Розміри сліду залежать від
типу аеродинамічного об’єкта і особливостей конструкції його двигуна Крім того, слід кожного об’єкта має специфічну просторо-
ву структуру і хімічний склад, який утворюється з продуктів горіння авіаційних або ракетних палив, а також характеризується на-
явністю інтенсивних турбулентних та повітряних потоків. Таким чином, в залежності від типу двигуна, висоти і режиму його поль-
оту у визначених межах будуть змінюватися склад компонентів сліду, концентрація частинок та їх просторовий розподіл, що, у
свою чергу, може служити додатковою інформаційною ознакою селекції і розпізнавання цілей. Фіксація змін цих параметрів у
зондуємому об’ємі простору відносно звичайного повітря буде свідчити про наявність там повітряної цілі.
Оптико-електронні методи використовують для отримання і передачі інформації оптичний діапазон спектра електромагніт-
них коливань, а для перетворення інформації - різноманітні електронні пристрої.
Основні оптико-електронні методи - лазерний, інфрачервоний 04), телевізійний (ТВ).
62
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
А
Лазерний метод (метод активної локації) використовує результати лазерних вимірювань оптично-атмосферних характеристик
сліду аеродинамічної цілі, склад параметри і стан якого суттєво відрізняються від характеристик навколишнього середовища.
Найбільш інформативними ознаками виявлення і розпізнавання цілей є аномалії щільності повітря у вигляді суттєвої зміни концен-
трації і складу компонент сліду, а також наявність інтенсивних турбулентних потоків, обумовлених рухом об’єкта у щільних шарах
атмосфери.
Аналіз параметрів сліду, як об’єкта локації, показує, що він представляє собою протяжну ціль, деяким чином орієнтовану у про-
сторі відносно напрямку польоту.
Фіксація змін цих параметрів в об’ємі простору, що зондується лазерним локатором, відносно звичайного повітря буде свідчити
про наявність там повітряної цілі. Значним недоліком методу є те, що при його реалізації’ важко забезпечити потрібні пошукові
можливості засобів виявлення.
Гранична дальність дії активних оптико-електронних систем:
Рвип^пр^ц^пер^пр^ср
* ^3. О у
4лДо)Рпор
де Рвт - потужність, що випромінюється, Вт, 8пр - еквівалентна (ефективна) площа апертури антени, що приймає, м2; оц - ефек-
тивна площа розсіювання цілі, м2; Асо - кут розходження зондуючого сигналу, ср; Рпор- гранична чутливість приймального при-
строю; іпф, ірр, іф - коефіцієнти пропускання передавального, приймального тракту і атмосфери відповідно.
Інфрачервоний метод базується на фіксації теплового випромінювання ПО у польоті в ІЧ діапазоні. Теплове випромінювання
виникає внаслідок аеродинамічного нагріву конструкції, роботи реактивного двигуна і дії’ сонячної радіації’.
Розподіл інтенсивності випромінювання (Вт/см3) для абсолютно чорного тіла визначається за законом Планка
^•т = ’ (3’57)
е*т -1
де С] = 3,74 10’12 Вт/см2, Сг = 1,4 см К - константи; X - довжина хвилі; Т - абсолютна температура нагрітого тіла, К.
Інтенсивність випромінювання реальних тіл
(3.58)
де є - спектральний коефіцієнт випромінювання (є ~ 0,7 для сплаву з нікелю в області максимального випромінювання).
Залежність 1 від довжини хвилі показана на рис. 3.32, а.
Індикатриса випромінювання - геометричне місце точок у просторі, що характеризує рівні випромінювання однакової
інтенсивності.
Вертикальний переріз індикатриси теплового випромінювання ПО з реактивним двигуном показаний на рис. 3.32, б.
Рис. 3.32. Інтенсивність (а) та індикатриси (б) теплового випромінювання цілей
ВідстаньЖ
Дальність виявлення пасивними ІЧ системами
Е)ІЧ= Р^е8Ц5"РТ"РТ^) (359)
V 4яРпор
де 8ц - площа проекції’ цілі; 8^, т^, іф, 5чт, є - визначені у формулах (3.56), (3.57), (3.58).
Телевізійний метод включає перетворення оптичного зображення в електричний сигнал; передачу електричного сигналу по
каналах зв’язку; прийом, обробку електричного сигналу і перетворення його на оптичне зображення або реєстрацію будь-яким
іншим методом.
Дальність виявлення телевізійними системами
О < /Вх8цГи8,,РЛ^ТпРТсР /36Л\
™ 4"Р„р ’ (3'60)
63
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
де Вх - спектральна щільність випромінювання поверхні цілі за рахунок освітлення її сонцем, (Вх= 10’2 Вт/(см2мкм ср));
гц - коефіцієнт відбиття цілі, Гц=ОД т 0,8; ДХ - смуга пропускання оптичного фільтра (мкм).
Контурно-текстурні методи виявлення об’єктів на зображенні зводяться до розподілу зображення на текстурні області,
оточені контурами, так, щоб ці контури, по можливості, відповідали контурам об’єктів на зображенні. Контурна і текстурна інфор-
мації* потім обробляються окремо.
Текстура описує просторові властивості ділянок зображень земної поверхні з локально-однорідними статистичними характери-
стиками. Області, підлягаючі виділенню, повинні характеризуватися на першому кроці деякою характерною ознакою. Для зобра-
жень характерними є ознаки, які можуть бути виявлені на основі виділення просторових частот і визначення статистичних характе-
ристик рівнів інтенсивності.
Дисперсійний метод виявлення об’єктів на текстурних оптичних і радіолокаційних зображеннях (метод Г-статистики)
полягає у наступному.
2 2
Розглядаються дві множини {Сп} і {СЦ, що складаються з N і М випадкових чисел, і с ] , ~ вибіркові дисперсії, де
2 — 1 — 2 2 —
= (М -1) Е (Сп - С) , аналогічно визначається а2 • Тут С - вибіркове середнє. Якщо ці множини мають однакову дис-
п=1
персію, то відношення їх вибіркових дисперсій
о»?
г0=4- <3-61)
наближається до одиниці. Критерій, заснований на дисперсійному відношенні, зветься Г-критерій.
Наявність об’єкта на зображенні визначається таким способом. Нехай на зображенні є тільки фон або знаходиться накладений
на фон об’єкт, що необхідно виявити. Зображення ділиться на ділянки з кінцевим числом елементів розрізнення. Потім визначаємо
відношення вибіркової дисперсії сигналу на ділянці, що перевіряється, до дисперсії ділянки з явно відсутнім зображенням об’єкта.
За рахунок того, що сигнал від об’єкта додається до фону, збільшується загальна дисперсія флуктуацій зображення. Визначаючи Г-
статистику згідно з виразом (3.61) на всіх ділянках, можна виділити деталі об’єкта. Коли значення Г-статистики наближається до
одиниці, то вважається, що на даній ділянці є присутнім тільки фон. Таким способом перевіряються всі ділянки вихідного зобра-
ження.
Аналіз проведених випробувань такого методу показує, що чим більшу площу займає об’єкт на ділянці, що обробляється, тим
більше його Г-статисіика і тем легше його виявити. Але як тільки розміри об’єкта починають наближатися до розмірів ділянки, Г-
статистика наближається до одиниці.
Методи фракгального виявлення малопомітних об’єктів базуються на принципі використання фрактальних властивостей
поверхонь та (або) середовищ, на фоні яких або у яких спостерігають об’єкт. Відомо, що незалежно від природи чи методу побудо-
ви у всіх фракталів є декілька важливих загальних властивостей: ступінь складності їх структури може бути описаний деяким ха-
рактеристичним числом - фракгальною (дробною) розмірністю О6 а частини фрактальних структур, у деякому визначеному змісті
подібні всій структурі в цілому. Методи фракгального виявлення відрізняються тим, що в них використовується ця, до цього часу
не затіяна (що у значній мірі зменшувало інформативність існуючих моделей фонів) інформація про властивості деякої структурної
подібності (у ряді випадків самоподібності) природних середовищ. При цьому, мова йде про виявлення об’єктів, зображення яких
має відмінні риси у вигляді їх нефрактальності або відмінних за їх фракгальними властивостями, в оброблюваних оптичних або
радіолокаційних зображеннях, одержуваних у результаті радіолокаційного, лазерного зондування, а також під час оптико-
електронних, радіометричних та інших спостережень чи отриманих будь-яким іншим шляхом. Зміна фракгальної розмірності є
достатньою умовою для ухвалення рішення про наявність об’єкта іншої природи відносно фону.
Застосування, у якості критерію виявлення, факту зміни фракгальної розмірності потребує наявності інформації* про фракгальну
розмірність вихідного зображення, отриманого для випадку відсутності об’єкта. Якщо ця умова виконується, то для виявлення
об’єкта достатньо виміряти фракгальну розмірність отриманого зображення і порівняти з відомою. При відмінності цих розмірнос-
тей можна прийняти рішення про наявність у структурі нового об’єкта, що має інші фрактальні характеристики.
Проте на практиці, як правило, необхідно виявляти об’єкти у зображеннях, для яких фрактальна розмірність апріорі не відома.
Для рішення такого типу задач, виходячи з властивостей фракталів, використовують декілька підходів.
Більшість зображень природних ландшафтів є фракгальними в різноманітних діапазонах просторових масштабів. При зміні ма-
сштабу зображення аналізованої ділянки підстильної поверхні його фрактальна розмірність при відсутності нефрактальних об’єктів
повинна зберігатися. При їхній наявності лінійні розміри звичайного геометричного об’єкта будуть змінювались пропорційно зміні
масштабу, тобто заповнювання простору в зображенні також буде змінюватися. Тому поява на контрольованому зображенні деяко-
го штучного об’єкта змінить розмір фракгальної розмірності в цілому. Таким чином, маючи зображення підстилаючої поверхні і
проводячи аналіз шляхом порівняння у загальному випадку його окремих частин (їх фрактальних розмірностей) між собою і з зо-
браженням у цілому, або, зокрема, однієї і тієї ж частини зображення в різноманітних масштабах, можна розпізнати тип поверхні і
виявити нефракгальні об’єкти або об’єкти, з іншими, стосовно фонових, фракгальними характеристиками на ньому (або в ньому).
Проте, при виявленні об’єктів не завжди є зображення структури, що спостерігається, в різноманітних масштабах, і для аналізу
частіше усього доступне одне зображення. Для одержання інших зображень необхідно генерувати їх із даного зображення, напри-
клад, шляхом зміни масштабу вихідного зображення. Кожній точці нового зображення присвоюється деяке значення, що представ-
ляє собою порівнювану з визначеним порогом лінійну комбінацію значень сусідніх точок вихідного зображення. Масштабуючи
таким чином зображення, одержують ряд зображень, для яких обчислюють розмірності. При відсутності об’єкта фрактальна розмі-
рність всіх отриманих зображень буде незмінною. При наявності об’єкта фрактальна розмірність буде змінюватися від зображення
до зображення, що дозволяє зробити висновок про його наявність.
64
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Виходячи з того, що частини фрактальних структур у визначеному змісті подібні всій структурі в цілому, можна використову-
вати інший метод фракгального виявлення без генерації допоміжних зображень. Його сутність полягає в наступному. Виходячи із
зазначеної властивості фрактальних структур, фракгальна розмірність усього зображення і будь-якої його ділянки (за умови, що
масштабування не проводиться і лінійні розміри об’єкта більше розрізнювальної здатності апаратури, що реєструє) повинні бути
однаковими з точністю до деякого є . Виявлення здійснюється шляхом порівняння частин із цілим.
Для природних фрактальних поверхонь припущення про властивість самоподібності буде справедливе тільки при ряді обме-
жень. Наведемо деякі з них.
По-перше, для фрактальних природних структур розмірність усього зображення і його ділянки буде змінюватися випадковим
чином. Виходячи з того, що помилки вимірів вносяться різноманітними незалежними чинниками, можна припустити, що розкид
значень фрактальної розмірності розподіляється за нормальним законом. На рис. 3.33 наведена гістограма розподілу значень фрак-
тальної розмірності. Дані для побудови гістограми отримані шляхом вимірювання фрактальної розмірності різноманітних ділянок
п'ятдесяти зображень морської поверхні з фракгального розмірністю « 1,3 ± є . Перевірка даної гіпотези (про нормальний
2 2
закон розподілу значень фрактальної розмірності) за критерієм % склала значення 0,5 - 0,6 / Пред , що дозволяє зробити висно-
вок про те, що висунута гіпотеза є правдоподібною.
По-друге, при роботі з реальними зображеннями при виборі розміру ділянки необхідно враховували той факт, що зменшували
розмір ділянки зображення до безконечності недоцільно. Принцип самоподібності для природних поверхонь дотримується тільки в
тому випадку, якщо площа ділянки більше деякої критичної площі 8 (розміру самоподібності). Для різноманітних природних
структур розмір самоподібності різний (наприклад для морської поверхні він складає 8 ~ 100 м2). Дана умова визначає нижню
межу розмірів ділянки.
Рис. 3.33. Гістограма розподілу значень фрактальної розмірності
По-третє, при роботі з реальними зображеннями необхідно враховували характеристики апаратури спостереження, тому що
при виборі зображення невеликих розмірів можлива ситуація, коли воно займе тільки один елемент розрізнення. У цьому випадку
інформація про самоподібність буде загублена.
Правило вибору розміру ділянки зображення. Вибір опорного (“загравного”) елемента. Залежність розміру фрактальної
розмірності ділянки морської поверхні від її площі 80 (у відсотках від площі вихідного зображення) показана на рис. 3.34.
Рис. 3.34. Залежність розміру фрактальної розмірності ділянки морської поверхні від її площі
З рис. 3.34 випливає, що значення фрактальної розмірності збільшується при зменшенні площі ділянки 80 до 3 % від вихідного
зображення. Ріст значень фрактальної розмірності обумовлений обмеженими можливостями апаратного розрізнення засобів спо-
стереження, що призводить до втрати інформації про самоподібність.
65
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Розмір опорного (“загравного”) елемента варто вибирати так, щоб його площа 8 о У залежності від площі вихідного зображен-
ня 8 складала:
[(о, 01-0,05)8 якщо0,018>5;
8о = к „ (3.62)
0 |8 якщо 0,018 <8.
Для виявлення об'єктів на фоні підстилаючої (морської) поверхні вхідне зображення р(х, у) розбивається на N областей, що
не перетинаються, і в кожній області вибирається опорний елемент з площею, що визначається за формулою (3.62). Після цього,
для кожного опорного елемента визначаються N значень фрактальної розмірності , ..., . Фракгальна розмірність під-
стилаючої поверхні для випадку відсутності об’єкта визначається згідно виразу:
(3.63)
N і
Потім визначається фракгальна розмірність усього зображення в цілому і знаходиться величина зміни фрактальної роз-
мірності у вигляді:
АО = |ОГоЬ-Ог|, (3.64)
що порівнюється з порогом. При перевищенні порога приймається рішення про наявність об’єкта, а в противному разі - про йо-
го відсутність.
Структурна схема фракгального виявлювача показанана рис. 3.35.
Розмір порога прийняття рішення залежить від необхідних показників якості виявлення, (імовірності правильного виявлення
О (з) та імовірності хибної тривоги Р).
Показники якості при фракгальному виявленні об’єктів на фоні підстилаючої (морської) поверхні
Прийняття рішення по одному зображенню носить випадковий характер через неминучу наявність завад і випадкового харак-
теру параметрів оброблюваного зображення.
Генеральна сукупність усіх можливих значень фрактальної розмірності описується відповідними щільностями імовірності.
Нехай на зображенні знаходиться тільки підстилаюча (наприклад, морська) поверхня з деякою розмірністю. У результаті обро-
бки зображення проводиться вимір його фрактальної розмірності (вираз (3.63)) .
Як було показано вище, розподіл значення фрактальної розмірності “загравних” елементів підпорядковується нормальному за-
кону розподілу з рівними математичними сподіваннями Ш] = т2 = ... = т і рівними дисперсіями су і = су2 = ... = су .
Ні
Рис. 3.35. Фракгальний виявлювач з використанням опорних (“затравних”) елементів
Розподіл результуючої фрактальної розмірності підстилаючої (морської) поверхні для випадку відсутності об’єкта також буде
підпорядкований нормальному закону розподілу з параметрами
1 ? 1 7
о2= — Ін,2. (3.65)
N і М2 і
З виразів (3.65) видно, що математичне сподівання результуючої фрактальної розмірності не змінюється, а дисперсія зменшу-
ється в N разів. Щільність імовірності р(О(-) буде мати вигляд:
р(Ог) = -г=_ ехР
(Рг-Р|і)2>
2п2 .
(3.66)
Поява у просторі спостережень нового об’єкта, нефракгального або з іншими фракгальними характеристиками, призводить до
зміни фрактальної розмірності.
Проведемо аналіз зміни розміру фрактальної розмірності в залежності від розміру об’єкта, що з’явився.
Нехай є зображення підстилаючої (морської) поверхні з геометричними розмірами р на р точок і фракгальною роз-
мірністю .
66
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Припустимо, що на зображенні є присутньою тільки підстилаюча (наприклад, морська) поверхня. Для визначення фрактальної
розмірності, зображення підстилаючої поверхні покривається клітинками різних розмірів Є] і є2 (метод покриття). Вирішуючи
систему рівнянь вигляду
Ь8К(є1)=Ь8С-Ог Ьвб!
Ь8К(є2) = Ь8С-Ог Ь8є2 ’
де К(Є1),Н(є2) - кількість клітинок покриття, що містять нерівності підстилаючої поверхні (зони хвиль морської поверхні,
що падають); С -деяка константа, визначають фракгальну розмірність:
Ь8^(еі)/к(Є2)]
°г" 4к/є.1 ' <3 ’
Величина фрактальної розмірності зміниться, якщо на зображенні підстилаючої (морської) поверхні з’являться об’єкт, що має
нефракіальні властивості і геометричну площу §оь. Вводиться безрозмірна величина з
8 _ $оЬ
(3.69)
де = р • р = р2 - площа зображення підстильної (морської) поверхні
У цьому випадку при обчисленні фрактальної розмірності кількість клітинок покриття, що містять нерівності підстилаючої по-
верхні (зони хвиль морської поверхні, що падають), зміниться на величину
к2« —
Є2
(3.70)
^ГоЬ =
(3.71)
ДЛЯ розмірів КЛІТИН покриття Єї І Є2 відповідно.
Шляхом підстановки (3.70) у (3.68) визначається фракгальна розмірність при наявності об’єкта
н(єі)+и;
н(є2)+14,2
Ьвієг/Єі]
У результаті появи на зображенні підстилаючої (морської) поверхні нефрактального об’єкта розмір фрактальної розмірності
зміниться на величину ДО (3.64). В результаті підстановки у вираз (3.64) значення (3.71) і (3.68) визначається зміна фрактальної
розмірності для випадку появи на зображенні нефрактального об’єкта
ар.сі^Н—
&К'2К(єі)+К
У виразі (3.72) константи С і К розраховують за формулами
С = 1/Ье[є2 /є,], К = к(є2)н(є1). (3.72)
Таким чином, узагальнений математичний вираз для величини фрактальної розмірності при появі на зображенні нефракгально-
го об’єкта можна представити у вигляді:
(3.72)
°£оь(8) = О? + кЬе(1 + пз).
(3.74)
У цьому виразі величина $ описується формулою (3.69) і змінюється на інтервалі [0; 1], величина В {• - фракгальна розмірність
при відсутності об’єкта. Коефіцієнт к визначається як різниця топологічної розмірності нефрактального об’єкта Оу (простір, в
якому існує фрактал) і фрактальної розмірності підстилаючої (морської) поверхні В^ (к = Вт -В^). Коефіцієнт п враховує
швидкість зміни фрактальної розмірності у залежності від стану підстилаючої (морської) поверхні (нерівність поверхні, хвилюван-
ня моря). Наприклад, для спокійної морської поверхні коефіцієнт п « 9.
На рис. 3.36 показаний графік зміни величини фрактальної розмірності (В^оЬ ) від площі нефрактального об’єкта (8оЬ). Крива
1 отримана при аналізі зображень спокійної морської поверхні з бінарним (чорно-білим) квантуванням. Фракгальна розмірність
змінюється від початкового значення В^ «1,3 до розмірності нефрактального об’єкта, що збігається з топологічною розмірністю
простору Вт = 2, в якому існує фрактал. Поки розмір нефрактального об’єкта не перевищить розміру клітини покриття
(80ь < 81)’ фракгальна розмірність не зміниться, при подальшому рості площі нефрактального об’єкта розмірність стрибком пе-
рейде до нового значення, і деякий час буде залишатися незмінною. Тому графік зміни фрактальної розмірності представляє собою
східчасту функцію, що має деякий тренд до зміни. Розмір сходинки визначається дискретністю заповнення фракгального зобра-
ження нефрактальним об’єктом. Криві 2 і 3 на рис. 3.36 розраховані за формулою (3.74) при появі на зображенні нефрактального і
фракгального об’єкта з розмірністю В^ =1,75 відповідно.
Умовна щільність імовірності для випадку появи на зображенні підстилаючої (морської) поверхні нефрактального об’єкта за-
лежить від його (нефрактального об’єкта) площі. Тому площу об’єкта, як правило, вважають довільною, але з фіксованим розміром.
У зв’язку з тим, що площа об’єкта є величиною детермінованою, то фракгальна розмірність для випадку присутності об’єкта
пов’язана лінійною залежністю з фракгальною розмірністю для випадку відсутності об’єкта.
67
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.36. Залежність величини фракгальної розмірності від площі нефрактального об’єкта
З теорії імовірності відомо, що якщо величина X підпорядкована нормальному закону розподілу, то величина ¥ = аХ + Ь та-
кож підпорядкована нормальному закону розподілу з параметрами
ту =атх +Ь, Су = |а|сх » (3.75)
де т і о - математичне сподівання і середнє квадратичне відхилення нормального закону розподілу.
Тоді, виходячи з (3.75), умовна щільність імовірності фракгальної розмірності для випадку присутності на зображенні нефрак-
тального об’єкта розподілена за нормальним законом
р(°г І8) = -/=--- ехР
у2тісоЬ
(рг-ргоь)2>
2соЬ2 ,
(3-76)
з параметрами
°ҐОЬ = Ог + Щ(1 + П8), стоЬ = О.
Це відповідає зсуву кривої щільності імовірності на величину кЬ§(1 + пз). Графіки щільності імовірності для випадку відсут-
ності (суцільна лінія) і наявності (пунктирна лінія) об’єкта при В » 1,3 ; к = 0,7; п = 9; 8 = 0,2 наведені на рис. 3.37.
Рис. 3.37. Щільності імовірності фракгальної розмірності для випадку відсутності і наявності об’єкта
Для кількісної оцінки показників якості використовують дві умовні імовірності: хибної тривоги ї7 і правильного виявлення
р(5).
Умовна імовірність хибної тривоги визначається виразом
г= ”р(рг)арг,
о»
де Вф - поріг виявлення.
Після підстановки виразу (3.66) в (3.77), визначається умовна імовірність хибноїтривоги
р = 1_фҐ2ог2г\
а
(3.77)
(3.78)
68
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
де Ф(х) - інтеграл імовірностей, що визначається формулою
ф(х)=-у^= [ ехр
у/2ті -оо
11'
2
7
Задаючись умовною імовірністю хибної тривоги Р і визначаючи поріг В о із (3.77) знаходять умовну імовірність правильного
виявлення 0(з)
О(з)= “р(Ог|8)(Юг. (3.79)
Оо
Після підстановки (3.76) в (3.79) отримуємо
р(5)=1-фґР»-Р^М*“Г|. (3.80)
За допомогою виразу 3.80 побудовано сімейство кривих виявлення для випадку появи нефрактального об’єкта (рис. 3.38, а) і
фракгального об’єкта (рис. 3.38, б).
З наведених графіків видно, що для досягнення імовірності правильного виявлення В (з) = 0,9 необхідно, щоб площа нефрак-
тального об’єкта складала 0,16 - 0,38 від площі вихідного зображення при різних значеннях умовної імовірності хибної тривоги.
Якщо на зображенні підстилаючої (морської) поверхні з’являється фракгальний об’єкт з фракгальною розмірністю
^ГоЬ = 1,75, ті ж показники якості досягаються, якщо його площа складає 0,26 - 0,73 від площі вихідного зображення.
Таким чином, зміна фрактальної розмірності є достатньою умовою для прийняття рішення про наявність об’єкта іншої,
відносно фону, природи.
а) б)
Рис. 3.38. Криві виявлення для випадку появи нефрактального (а) і фракгального (б) об’єкта
3.3. Методи огляду простору та вимірювання траєкторних і сигнальних параметрів повітряних
об’єктів
Методи огляду простору
Огляд повітряного простору здійснюється з метою виявлення ПО і може проводитися за напрямком (кутовими координатами),
дальністю і швидкістю.
Огляд простору за напрямком дозволяє виявити і визначити кутові координати ПО. Для огляду можуть застосовуватися радіо-
локаційні і оптичні засоби.
Метод кругового огляду забезпечує огляд верхньої напівсфери повітряного простору. Для цього використовують радіолока-
тор, антена якого переміщується за азимутом на 360° (рис. 3.39, а).
Частота обертання антени повинна бути такою, щоб була можливість отримання заданої кількості відбитих від ПО імпульсів
або накопичення необхідного для виявлення рівня енергії сигналу у кінцевому пристрою виявлення.
Час огляду визначається за формулою
Тогл.кр= —. (3.81)
де соА - кутова частота оберту антени.
69
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.39. Можливі методи огляду простору: круговий (а); рядковий (б); лінійний пилкоподібний (в);
спіральний (гвинтовий) (г)
Для одночасного визначення азимута і кута місця ПО може застосовуватися віялоподібний промінь. Роздільна здатність і точ-
ність визначення кутових координат ПО залежать від ширини діаграми спрямованості антени у вертикальній і горизонтальній
площинах. В радіолокаторах з ФАР переміщення променя антени здійснюється електронним способом за рахунок перестроювання
фазообертачів.
До методів огляду простору у вузькому секторі відносять рядковий, лінійний пилкоподібного сканування і спіральний.
При застосуванні рядкового методу огляд простору здійснюється вузькою (голкоподібною) діаграмою спрямованості, що
здійснює зворотньо-поступальний рух у двох взаємно перпендикулярних площинах у заданому секторі (рис. 3.39, б). Діаграму
спрямованості перемішують хитанням (обертанням) антени радіолокатора або електронним способом за жорсткою програмою,
коли кожна ділянка простору переглядається на протязі незмінного відрізку часу незалежно від результату виявлення.
Час огляду визначається за формулою
в°Бв°в
<3 82)
де 0°, - ширина сектора у вертикальній і горизонтальній площинах відповідно; Од - ширина діаграми спрямованості ан-
тени; (о п - кутова швидкість діаграми спрямованості.
Рядковий метод з використанням ФАР забезпечує огляд простору як за жорстко визначеною, так і за гнучкою програмою.
Під час реалізації рядкового огляду простору з використанням ФАР час огляду визначається за формулою
0°є0°в
ТСТр=4г-(Тс.п+Тперестр), (3.83)
де Тсп - час стояння діаграми спрямованості (час локації одного напрямку); - час перестроювання фазообертачів.
Під час застосування лінійного пилкоподібного сканування огляд простору у заданому секторі здійснюється однією або дво-
ма взаємно перпендикулярними діаграмами спрямованості ножеподібної форми (рис. 3.39, в). Цей метод дозволяє визначити відно-
сні координати всіх ПО, що знаходяться у секторі сканування.
Під час застосування спірального методу огляду діаграма спрямованості антени здійснює рух за спіраллю. Метод використо-
вується для пошуку і наведення діаграми спрямованості антени для супроводження ПО за напрямком (рис. 3.33, г).
Огляд простору в вузькому секторі може виконуватися за допомогою оптичних засобів.
Огляд простору за дальністю виконується з метою виявлення і визначення дальності до ПО в радіолокаторі з безперервним
випромінюванням фазокодоманіпульованих сигналів. Огляд простору, наприклад, можна забезпечити за рахунок послідовної зміни
часової затримки опорного кодованого сигналу. Якщо ПО знаходиться на деякій дальності, опорний і відбитий сигнали, що співпа-
дають за структурою і моментом часу, створюють сигнал виявлення. Час огляду по дальності залежить від структури і тривалості
фазокодоманіпульованого сигналу, швидкості зміни затримки опорного сигналу, заданого рівня сигналу виявлення.
Огляд простору за швидкістю забезпечує розрізнення ПО, що летять з різними швидкостями.
70
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
До основи огляду по швидкості покладений ефект Доплера, що проявляється у прирощенні (зменшенні) частот сигналів, відби-
тих від ПО, що рухаються, при їх наближенні (віддаленні). При цьому величина прирощення (зменшення) частоти Доплера визна-
чається за формулою
2У
рд = , (3.84)
А
де X-довжина хвилі передавача РЛС; Уг-радіальна складова швидкості ПО.
До основи побудови великої кількості систем пошуку за швидкістю (частотою) покладений спектральний метод При цьому
може застосовуватися послідовний, паралельний або комбінований метод огляду за частотою.
Під час застосування послідовного методу пошуку приймальний пристрій радіолокатора одночасно пропускає тільки невели-
кий спектр частот Допплера, що визначається смугою пропускання фільтру.
Пошук по частоті може виконуватися шляхом послідовного вимірювання резонансної частоти вузькосмугового фільтра (рис.
3.40, а) і перестроювання частоти гетеродина у діапазоні доплерівських частот (рис. 3.40, б). Пристрій реєстрації сигналів буде по-
слідовно відображали сигнали, що відбиті від 1,2,3,..., п-го ПО.
б)
Рис. 3.40. Послідовний пошук по швидкості: з перестроюванням фільтра (а); з перестроюванням
гетеродина (б)
Час огляду при послідовному пошуці визначається за формулою
т _ 2Рдмакс т
1ПОСЛ “ * г 1 спост >
(3.85)
де АГф - смуга пропускання вузькосмугового фільтра; - максимальне значення частоти Доплера, яке можливе у випадку,
що розглядається; Т^ост- час спостереження, тобто інтервал часу на протязі якого спектр сигналу повинен існували на вході вузько-
смугового фільтра.
Метод паралельного пошуку. Визначення частот Доплера у відбитому сигналі здійснюється набором вузькосмугових фільт-
рів, кожний з яких настроєний на перетворювальний по частоті спектр сигналу визначеного ПО, і увесь набір перекриває діапазон
частот Допплера, який розглядається.
При паралельному методі кількість фільтрів, що забезпечують огляд, визначається з виразу
2Рдмакс
Пф=_х?г
(3.86)
Позитивним у цьому методі є малий час огляду і більш повне використання енергії спектрів сигналів; недоліком - необхідність
використання значної кількості вузькосмугових фільтрів.
Зменшення кількості фільтрів і отримання визначеного часу огляду досягається при реалізації комбінованого методу огляду.
Час пошуку при реалізації* комбінованого методу
Ткомб = т^спост» (3.87)
де т - число переключень частоти гетеродина.
Число вузькосмугових фільтрів зменшується в т разів у порівнянні з паралельним методом пошуку.
Методи вимірювання траєкторних і сигнальних параметрів повітряних об’єктів.
Основними траєкторними параметрами в радіолокації є дальність до цілі К, азимут Р, кут місця е і радіальна швидкість цілі
Уп (швидкість по лінії візування РЛС - ціль).
В основу вимірювання координат радіолокаційними методами покладена постійність швидкості і прямолінійність поширення
радіохвиль в однорідному середовищі (швидкість поширення радіохвиль у вільному просторі с=3*108м/с).
71
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Методи вимірювання дальності до повітряних об’єктів радіолокаційними засобами.
Якщо приймальна і передавальна антени рознесені в просторі (рознесена радіолокаційна система), то час запізнювання відби-
того сигналу щодо зондуючого визначається співвідношенням
де В.|, К-2 - відповідно відстані від ПО до пунктів радіолокаційної системи, з якого передають і у якому приймають.
Якщо антени приймача і передавача суміщені (суміщена радіолокаційна система, тобто К.| = К2 = К), то час запізнювання відби-
того сигналу щодо зондуючого Ц і дальність до ПО (Кпо) визначається із формул:
2КПО Цс
ц=—— ; Кпо = -Т-- (3.89)
с 2
Час Із може бути виміряний за запізненням відбитого від ПО імпульсу, величиною зміни частоти передавача, величиною зміни
фази радіолокаційного сигналу. У зв’язку з цим розрізняють три методи вимірювання дальності: імпульсний (часовий), частотний і
фазовий.
Імпульсний (часовий) метод виміру дальності заснований на фіксації часу запізнювання між випроміненим і прийшлим сиг-
налом і визначенні дальності за формулою (3.89) (рис. 3.41, а).
Рис. 3.41. Методи вимірювання дальності: часовий (імпульсний) (а); частотний (б); фазовий (в)
При імпульсному методі роздільна здатність РЛС по дальності:
ст*
ДК = , (3.90)
де т- - тривалість імпульсу передавача.
Діапазон однозначного визначення дальності:
КПОодн.=~> (3.91)
де Тп - період повторення імпульсів передавача.
Мінімальна дальність до ПО, що вимірюється імпульсною РЛС:
„ С(Т:+ІВ)
КпОміи = 2 > <3-92)
де і, - час відновлення чутливості приймача.
Позитивним такого методу є можливість вимірювання дальності і розрізнення по дальності багатьох ПО, порівняна простота
реалізації, недоліками - неможливість вимірювання малих дальностей, необхідність великої імпульсної потужності випромінюван-
ня.
Частотний метод вимірювання дальності заснований на використанні безперервних коливань, частота яких певним чином
змінюється у часі. Передавач випромінює електромагнітні хвилі з частотою, яка змінюється за лінійним законом (рис. 3.41, б). За
час проходження електромагнітних хвиль до ПО і назад до приймача РЛС частота передавача зміниться на величину
2К п0
=Пп-----— > (3.93)
с
де Цп - швидкість зміни частоти електромагнітних коливань, що випромінюються.
Прийняті сигнали від ПО і високочастотні коливання передавача поступають на змішувач приймача, де утворюється різницева
(Рр) частота (частота биття)
Нр=Г„ (3.94)
С1 м
де ДРМ - девіація частоти високочастотних коливань, що випромінюються; Тм - період повторення модулюючої частоти пере-
давача.
Дальність до ПО
72
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Роздільна здатність по дальності
ДЯ>
ДРфТм
4ДРМ
де ДРф - ширина смуги пропускання фільтра приймача.
Діапазон однозначного вимірювання дальності
В-ПОодн •
Мінімальна дальність до ПО, що визначається РЛС:
о . > 1 С
ПОм,н 4 АРМ
(3.96)
(3.97)
(3.98)
Позитивним такого методу є можливість вимірювання малих дальностей, мала імпульсна потужність випромінювання; недолі-
ком -складність одночасного вимірювання дальності багатьох ПО.
Фазовий метод вимірювання дальності базується на визначенні величини зміни фази модулюючого коливання прийнятого
ехо-сигналу щодо сигналу, що випромінюється (рис. 3.41, в). За час запізнювання сигналу фаза цих коливань зміниться на величину
Дф = 2 л Рм із, (3.99)
де Рм - частота модуляції високочастотних коливань.
Дальність до ПО визначається за формулою
Кпо=т-^Дф- (3100)
4лРм
Діапазон од нозначного вимірювання дальності
кпо™=^ (3101)
Позитивним такого методу є висока точність вимірювання дальності; недоліками - неоднозначність вимірювання дальності,
відсутність розрізнювальної спроможності.
Вимірювання дальності до повітряних об’єктів оптичними засобами.
Вимірювання дальності до ПО в оптичному діапазоні хвиль здійснюється оптичними вимірювачами дальності. Дальність ви-
значається за часом затримки відбитого від ПО сигналу, що випромінюється генератором вимірювача дальності. Для цього коли-
вання, що випромінюються генератором, модулюються за амплітудою або фазою. У відповідності з цим розрізнюють три методи
вимірювання дальності: імпульсний, фазовий, фазово-імпульсний.
При застосування імпульсного методу ПО опромінюється імпульсами малої тривалості. Узагальнений гіпотетичний лазерний
дальномір складається з випромінювача (лазера), формуючої оптичної системи (ФОС), приймальної оптичної системи (ПОС), фо-
топриймального пристрою (ФПП), вимірювача часових інтервалів (ВЧІ), пристрою реєстрації (ПР) (рис. 3.42). Наведення дально-
міра на об’єкт може виконуватися за зовнішнім цілевказанням або за допомогою системи наведення (візирного пристрою), який
може входити до складу лазерного дальноміра.
Рис. 3.42. Структурна схема імпульсного лазерного дальноміра
У визначені моменти часу випромінювач генерує короткочасні імпульси, основна частка енергії яких надходить до ФОС і
спрямовується до ПО. Мала частка енергії імпульсу відводиться до блока вимірювання часових інтервалів, фіксуючи момент ви-
промінювання зондуючого імпульсу. Відбитий від ПО сигнал проходить приймальну оптичну систему і надходить у ФПП. Після
чого прийнятий сигнал надходить до блока вимірювання часу запізнювання, фіксуючи момент свого надходження. Прямий і відби-
тий сигнали можуть бути подані на пристрій реєстрації, який має шкалу відліку дальності.
Під час застосування фазового методу випромінювач генерує безперервний сигнал, що промодульваний за амплітудою за си-
нусоїдальним законом. Прямий і відбитий сигнали подаються на блок вимірювання різності фаз Дф, промодульованих таким чином
коливань.
Під час застосування фазово-імпульсного методу коливання, що випромінюються дальноміром, модулюються за амплітудою
і фазою, що дозволяє вимірювати дальність і швидкість ПО:
КП0 = аДф, (3.102)
де а- коефіцієнт пропорційності.
73
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Методи вимірювання кутових координат.
Вимірювання кутових координат цілей (азимута і кута місця) грунтується на здатності антенних систем РЛС концентрувати ви-
промінювання в якомусь одному напрямку і забезпечувати спрямоване приймання відбитих від цілі сигналів. Визначення напрямку
на ціль називається пеленгуванням цілі.
Розрізнюють наступні методи визначення кутових координат (рис. 3.43): максимуму, рівносигнальних зон (інтегральної і мит-
тєвої рівносигнальної зони).
Метод максимуму - метод, при якому напрямок на ПО визначається за напрямком максимуму діаграми спрямованості анте-
ни, що відповідає моменту приймання максимального сигналу від ПО (рис. 3.43, а).
Метод рівносигнальних зон (РСЗ) - метод, при якому напрямок на ПО визначається по рівності амплітуд (фаз) відбитих від
ПО сигналів, що приймаються антеною, яка формує дві (чотири) діаграми спрямованості, що перехрещуються. Розрізнюють мето-
ди з амплітудною сумарно-різницевою обробкою сигналів і фазовий метод. Метод з амплітудною обробкою сигналів може бути з
миттєвою (рис. 3.43, б) і інтегральною (рис. 3.43, в) РСЗ.
Метод інтегральної РСЗ - метод, при якому рівносигнальна зона створюється шляхом переключення або обертання (розгор-
тання) діаграми спрямованості антени (рис. 3.43, в). У пристроях з переключенням діаграми спрямованості сигнали від ПО при-
ймаються при положеннях І і II діаграми спрямованості. Якщо ПО не знаходиться на рівносигнальному напрямку (РСН), то сигна-
ли будуть мати різні амплітуди.
Оператор або система супроводження повертає антену так, щоб амплітуди сигналів иі і и2 були рівні. Час переключення діаграм
спрямованостей повинен бути таким, при якому ПО не виходить із зони виявлення РЛС.
Метод миттєвої РСЗ з амплітудною сумарно-різницевою обробкою сигналів. При цьому методі напрямок на ПО визнача-
ється за рівністю сигналів, що приймаються антеною, яка формує чотири (по дві у кожній площині) діаграми спрямованості, що
перехрещуються (рис. 3.44, а).
Порівняння амплітуд сигналів здійснюється на один і той же момент часу, у зв’язку з цим метод має назву миттєвих РСЗ. У ви-
падку відхилення ПО від РСН на кут Д0 виникає різниця амплітуд сигналів (Ди), що приймаються
Ди = її! - и2 = 2 Ц) К(<р0) Км Д0 зіп со01, (3.103)
де Ц) - амплітуда сигналу при находженні ПО на РСН; Щфо) - коефіцієнт підсилення антени; К*. - крутизна пеленгаційної ха-
рактеристики антени; циклічна частота сигналу.
Різниця амплітуд сигналів (Ди), що приймаються, використовується для формування сигналів управління у системі управління
положенням антени. Антена повертається у напрямку зменшення величини ДО, у результаті чого ПО знаходиться на РСН.
Рис. 3.43. Методи визначення кутових координат ПО: максимуму (а); миттєвої рівносигнальної зони
(б); інтегральної рівносигнальної зони (при конічному скануванні променем антени) (в)
Рис. 3.44. Методи миттєвих рівносигнальних зон: з амплітудною сумарно-різницевою обробкою
сигналів (а); з фазовою обробкою сигналів (б)
74
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Сумарний сигнал Щ + и2 не несе інформації про відхилення ПО від РСН і використовується у пристроях для вимірювання
дальності і швидкості ПО.
Метод миттєвих РСЗ з фазовою обробкою сигналів - метод, при якому напрямок на ПО визначається по рівності фаз
сигналів, що приймаються двома антенами, які розміщені на деякій базі б (рис. 3.44, б). При відхиленні ПО від РСН різниця фаз
сигналів иь и2:
2тт(1 . л 2тссі
Дф =-----8іп ДО «-----ДО, (3.104)
X X
де X - робоча довжина хвилі РЛС.
Для вимірювання різниці фаз застосовуються хвилевідні кільцеві мости, фазові детектори та ін. Напруга, про-
порційна величині ДО, використовується для управління положенням антен при автоматичному супроводженні ПО
за напрямком.
Позитивним методу є висока точність вимірювання; недоліки - неоднозначність визначення величини ДО, за-
лежність точності вимірювання від стану хвилевідного тракту РЛС.
Методи вимірювання радіальної складової швидкості повітряних об’єктів.
Вимірювання радіальної швидкості грунтується на ефекті Доплера, сутність якого основується на тому, що у випадку взаємно-
го переміщення джерела і приймача електромагнітних коливань частоти цих коливань відрізняються на величину, пропорційну
швидкості взаємного переміщення джерела і приймача випромінювання. При цьому частота випромінених і прийнятих електрома-
гнітних коливань пов’язана з радіальною швидкістю цілі таким співвідношенням:
Гпр=£0——> (3105)
"Р °і + уг/с
де Ср - частота електромагнітних коливань (у точці прийому), від битих від рухомої цілі; - частота сигналу, що випромінюєть-
ся; У/с- відношення радіальної швидкості цілі до швидкості світла.
Вираз (3.105) можна записали у вигляді
Гпр = Го-Рд, (3.106)
де Рд - доплерівська поправка частоти (частота Доплера);
( 1-У /с^
(ЗІО7)
При Уг« с дріб у формулі (3.107) можна розкласти в ряд. Якщо обмежитись першими членами цього ряду, отримаємо
2У 2У
Р = 0.108)
с Хо
X)-довжина хвилі сигналу, що випромінюється.
Ця формула справедлива для активної радіолокації, коли доплерівська поправка частоти визначається ефектом подвійного пе-
ретворення: при опроміненні (ПО розглядається як приймач електромагнітних коливань, що рухається) і при випромінюванні (ПО
розглядається як д жерело електромагнітних коливань, що рухаємся). При пасивній радіолокації, коли перетворення частоти відбу-
вається тільки при випромінюванні, формула (3.107) набуває вигляду
Рд=^. (3.109)
Таким чином, вимірювання радіальної швидкості полягає у вимірюванні частоти Доплера, після чого вона може бути об-
числена для активної радіолокації за формулою
РпХ0
(3.110)
а для пасивної радіолокації за формулою
^=ГДХО. (3.111)
Знак доплерівського зсуву частоти вказує напрямок прямування цілі: при наближенні цілі частота прийнятого сигналу зростає
(Рд < 0), а при віддаленні цілі - частота зменшується (Рд > 0) (див. вираз 3.106). При імпульсній роботі РЛС розглянута вище зміна
частоти (яка може також трактувались як зміна масштабу часу) в однаковій мірі відноситься до тривалості і періоду проходження
імпульсів (тобто ефект Доплера спостерігається і для частоти проходження імпульсів).
Метод вимірювання висоти повітряних об’єктів.
З урахуванням сферичної форми Землі висота ПО над її поверхнею у залежності від д альності Кцо визначається за формулою
К.
Н « К.8ІПЄ + —, (3.112)
2Ке
де є-кут місця цілі; Ке~ 8 500 км-ефективний радіус Землі.
75
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
3.4. Методи розпізнавання і селекції повітряних об’єктів
Методи розпізнавання повітряних об’єктів
Розпізнавання об’єктів- визначення типу і державної належності повітряно-космічних об’єктів. Здійснюється шляхом аналізу
даних про параметри руху і поведінки у польоті, характер випромінювань, місце і час пуску та інших даних (конфігурація, розмір і
т.ін.), отриманих від РЛС різного призначення й інших засобів контролю повітряно-космічного простору.
Система державного радіолокаційного розпізнавання (ДРЛР) базується на принципах радіолокації з активним запитом та
відповіддю.
Радіолокаційне розпізнавання - одержання радіолокаційних характеристик різноманітних ПО, вибір інформативних і стійких
ознак та ухвалення рішення про приналежність цих ПО до того або іншого класу (типу) (віднесення радіолокаційної цілі, що спо-
стерігається, до одного із заздалегідь визначених класів або типів цілей).
Класи ПО утворюються в результаті об’єднання ПО різних типів за будь-якою ознакою.
До ознак при радіолокаційному розпізнаванні, зокрема координатних ознак (висота, швидкість, траєкторія польоту), відносять
так звані радіолокаційні сигнатури. Вони містять просторову, часову, спектральну і поляризаційну структури відбитих сигналів,
тобто будь-які характеристики відбитих сигналів, що не пов’язані безпосередньо з координатами об’єктів локації'. Особливу групу
складають вторинні ознаки (параметри руху об’єкта відносно центра мас, розміри цілі, конфігурація, характер поверхні, що відби-
ває, характеристики реактивного двигуна, вид випромінювання бортових систем та ін).
Первинні ознаки (сигнатури) використовують в основному при рішенні задач ідентифікації об’єкта відомого типу шляхом
порівняння з еталонами.
Вторинні ознаки використовують в основному при визначенні призначення (класу) ПО. Кінцеве рішення про склад робочого
словника ознак системи радіолокаційного розпізнавання не може бути прийнято без класифікації об’єктів, тобто розподілу їх на
класи (алфавіт класів).
Рішення задачі розпізнавання містить наступні етапи:
1. Аналіз шляхів використання інформації розпізнавання і вибір алфавіту класів ПО і ситуацій, що необхідно розрізнити.
2. Виділення ознак розпізнавання (словника ознак) і при необхідності уточнення алфавіту класів з урахуванням реальних мож-
ливостей РЛС з отримання інформації про цілі.
3. Вибір алгоритмів прийняття рішень, що забезпечують максимальну достовірність розпізнавання в умовах обмежень часу
розпізнавання і інформаційних можливостей РЛС.
Інформація, необхідна для розпізнавання, міститься в параметрах прийнятого від об’єкта радіосигналу. Системи, що розпізна-
ють, приймають рішення про клас (тип) об’єкта на підставі виділення з прийнятих радіосигналів деяких ознак і порівняння їх з
еталонними значеннями, що отримуються в процесі навчання. Кожна система, що розпізнає, використовує обмежений набір ознак,
який називається робочим словником ознак. Уся сукупність ознак може бути розділена на траєкторні (координатні) і сигнальні.
Сукупність розпізнаваних класів ПО називається алфавітом розпізнаваних класів. Вибір алфавіту розпізнаваних класів і ви-
бір робочого словника ознак є взаємозалежними задачами. Розширення алфавіту розпізнаваних класів, як правило, призводить до
розширення робочого словника ознак. Рішення задачі вибору алфавіту розпізнаваних класів і робочого словника ознак тому здійс-
нюється на основі критерію “ефективність-вартість’’.
Траєкторні ознаки враховують параметри руху ПО: швидкість, висоту, різні прискорення, особливості виконання маневру, осо-
бливості побудови строїв групових ПО. Для балістичних об’єктів можуть обчислюватися координати точок старту і падіння. З
усього набору перерахованих параметрів в оглядових трикоординатних РЛС можливе вимірювання тільки висоти і швидкості цілі.
На рис. 3.45 наведені приклади дозволених значень висоти і швидкості деяких типів ПО.
Використання траєкторних ознак звичайно не вимагає великих апаратурних і обчислювальних витрат, однак вимагає порівняно
тривалого контакту з об’єктом. На підставі аналізу траєкторної інформації сукупність ПО може бути розділена, наприклад, на чоти-
ри класи: аеродинамічні об’єкти, що включають літаки, БПЛА, деякі типи авіаційних ракет; балістичні об’єкти; малошвидкісні
маловисотні об’єкти (гелікоптери); малошвидкісні висотні об’єкти (малорозмірні кулі, автоматичні дрейфуючі аероста-
ти).Сигнальні ознаки розрізняють для активної радіолокації і пасивної радіолокації (первинної і вторинної).
Сигнальні ознаки для пасивної однопозиційної локації містяться в параметрах випромінюваних об’єктом сигналів. Розпі-
знавання за цими ознаками є різновидом радіотехнічної розвідки. Використання таких ознак дозволяє приймати рішення з висо-
ким ступенем вірогідності. Алфавіт розпізнаваних класів ПО складається з груп ПО, що несуть однакове радіоелектронне облад-
нання. Ефективність сигнальних ознак пасивної локації різко знижується при дотриманні противником заходів для приховання
випромінювань бортових РЕЗ. Крім того, виникають труднощі з ототожненням інформації радіотехнічної розвідки з координатною
інформацією активної радіолокації.
Сигнальні ознаки при пасивній (вторинній) локації містяться у відповідних сигналах, випромінюваних аеродинамічними
цілями у відповідь на запитальні сигнали з наземних радіолокаційних запитувачів в системах управління повітряним рухом і радіо-
локаційного розпізнавання. У міжнародній системі управління повітряним рухом КВ8 у відповідних сигналах міститься інформація
про номер виконуваного рейса для комерційних літаків. У деяких випадках є можливість визначення типу повітряних суден війсь-
кового призначення. У вітчизняній системі управління повітряним рухом міститься інформація про бортовий номер літака. Це до-
зволяє однозначно визначати тип комерційних повітряних суден. Однак під час ведення бойових дій бортові відповідачі системи
управління повітряним рухом можуть бути вимкнуті, що відразу зводить нанівець усі достоїнства вторинної локації для розпізна-
вання. Крім того, не всі аеродинамічні об’єкти обладнані такими відповідачами. Деякі типи аеродинамічних ПО принципово не
можуть бути обладнані відповідачами (різні ракети, БПЛА і т.ін.).
76
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.45. Дозволені значення висоти і швидкості деяких типів повітряних ПО
Сигнальна інформація для розпізнавання при активній (первинній) локації міститься в параметрах відбитого ехо-сигналу. Та-
кими параметрами є амплітуда, фаза, частота, час запізнювання і поляризація. Значення цих параметрів визначаються геометрич-
ними характеристиками ПО, матеріалом, з якого вони виготовлені, законом руху, параметрами приймально-передавальної апарату-
ри й умовами поширення радіохвиль. Вплив на параметри ехо-сигналів приймально-передавальної апаратури, умов поширення
радіохвиль і руху ПО може бути оцінено і якимось чином усунуто до проведення радіолокаційного розпізнавання. У цьому випадку
параметри відбитих сигналів цілком визначаються формою і матеріалом виготовлення ПО, що створює передумови їх
розпізнавання. Розрізняють сигнальні ознаки розпізнавання при вузькосмуговому і широкосмуговому зондуванні.
Сигнальні ознаки вузькосмугового зондування: ефективна поверхня розсіювання об’єкта (ЕПР); поляризаційні ознаки; спектр
роторної (турбінної або пропелерної) модуляції; потужність відбитого сигналу.
Ефективна поверхня розсіювання об’єкта складним чином залежить від форми і матеріалу об’єкта, його ракурсу, довжини
хвилі та поляризації зондуючого сигналу. Це призводить до того, що при вузькосмуговому зондуванні ЕПР може змінювалися в
дуже широких межах (у сантиметровому діапазоні до ЗО дБ при зміні орієнтації цілі на кут менше одного градуса).
Значення ЄПР у д ецибелах можуть бути оцінені з рівняння дальності радіолокації за формулою
( 2Л
о[дБ] = 10і8 2- +4018(Яц[м])-1018(и[м2])+А,
(3.113)
де —оцінка усередненого енергетичного відношення сигнал/шум; Яц[м] - оцінка дальності; Д -виправлення на поточ-
2і Е6(є,р){А(є,Р)[м2]} . „„„
ні умови; ІІ[м ] =--Ї-—_ потенціал РЛС.
(4л)2 N0
Тут: Е - енергія зондуючого сигналу (з урахуванням втрат у середовищі і системі обробки); N 0 - спектральна щільність по-
тужності шуму; С(є,Р) і А(є,Р) [м2] - коефіцієнт підсилення передавальної й ефективна площа приймальної антен (у м2), які
залежать від кутів відхилення діаграми спрямованості щодо нормалі до апертури.
Чинники, що ускладнюють використання ЕПР, як ознаки розпізнавання: залежність усереднених ЄПР від вибору сек-
тора тілесних або ракурсних кутів усереднення; відмінність вимірюваних значень ЕПР від усереднених при малому часі усереднен-
ня; залежність результатів вимірювань ЕПР від нестабільності потенціалу РЛС; залежність результатів вимірювань ЕПР від впливу
землі на результуючу діаграму спрямованості антени; можливості протилокаційної імітації і маскування ЕПР.
Залежність усереднених параметрів ЕПР від ракурсу може бути зменшена шляхом оцінювання цих параметрів у відносно
великих тілесних кутах. Оцінка ракурсу цілі може бути отримана на підставі траєкторних даних. Для зменшення залежності вимі-
рювань ЕПР від потенціалу РЛС необхідно забезпечувати його фактичний контроль. Перераховані факти роблять практично мож-
ливими тільки приблизні оцінки ЕПР. Вважається, що для реальних РЛС (нелабораторних і полігонних) помилки вимірювання
ЕПР складають величину не менш 2,5 - 3 дБ.
Поляризаційні ознаки
Електромагнітні хвилі різних поляризацій по-різному розсіюються об’єктами. Поляризаційні властивості ПО виражаються по-
ляризаційною матрицею розсіювання (ПМР).
77
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Елементи ПМР ау = ^о~е](Рі-і - ефективна площа цілі (а) і зміна фази сигналу (ф) при розсіянні для і-ої поляризації прийма-
льної антени та рої поляризації перед авальної (і, ] = 1,2).
Вимірювання всіх елементів ПМР припускає як зондування, так і прийом на двох ортогональних поляризаціях. При однопо-
зиційному прийомі ПМР характеризується п’ятьма незалежними параметрами:
д/а11 ’ >/а22 » 7а12 =7а21 > ДФ1 = Ф22 “Ф11> ДФ2 = Ф12 “Ф11 •
Поляризаційна матриця, яка визначена в одному поляризаційному базисі, може бути перерахована в інший поляризаційний
базис шляхом лінійного перетворення. Поляризаційний базис, у якому елементи аІ2 = а2і = 0, називається власним поляризацій-
ним базисом. Діагональні елементи ПМР у власному поляризаційному базисі називаються власними значеннями а। = Хі,
а 22 = ^2 • Власний поляризаційний базис визначає дві ортогональні поляризації (власні поляризації об’єкта) хвилі, при яких пере-
хресний компонент у відбитій хвилі відсутній. Важливою властивістю власних значень матриці розсіювання є їх інваріантність до
обертання поляризаційного базису. Якщо = ^2 , то об’єкт за своїми властивостями відноситься до поляризаційно-ізотропних
об’єктів. Якщо ^2 = 0, то об’єкт називається виродженим об’єктом. Прикладом поляризаційно-ізотропного об’єкта є провідна
сфера. ПМР сфери незалежно від обраного поляризаційного базису має вигляд
(3.114)
Прикладом поляризаційно-виродженого об’єкта є напівхвильовий вібратор, ПМР якого у власному поляризаційному базисі має
вигляд
(З.П5)
При однопозиційній локації поляризаційно-ізотропні об’єкти розсіюють хвилі, не змінюючи їх поляризації. Поляризаційно-
вироджені об’єкти змінюють поляризацію відбитих ними хвиль. Таким чином, аналіз елементів ПМР ПО дозволяє судити про їх
геометричні характеристики і вирішувати завдання радіолокаційного розпізнавання.
Для одночасного вимірювання ПМР необхідні в загальному випадку двоканальні передавальні й приймальні пристрої. Елемен-
ти поляризаційної матриці розсіювання можуть бути вимірювані послідовно в часі при зміні поляризації випромінюваних і прийня-
тих сигналів. Час вимірювання повинен бути досить малим, тому що радіолокаційні характеристики об’єкта змінюються в часі за
рахунок зміни його орієнтації, розвороту повітряних гвинтів і т.ін. На точності вимірювання параметрів поляризаційної матриці
розсіювання може позначитися погана розв’язка приймальних трактів, що обробляють ортогонально-поляризовані компоненти
ехо-сигналів, вплив відбитків від землі та ін.
Спектр роторної (турбінної або пропелерної) модуляції.
Обертання лопаток повітряних гвинтів вертольотів і гвинтових літаків, а також лопаток компресорів (турбін) турбореактивних
літаків призводить до характерної роторної модуляції відбитого сигналу. До модуляції такого виду приводять і вібрації корпусу
літального апарата, обумовлені роботою двигунів. Роторна модуляція часто називається “пропелерною” або “турбінною”. Спектр
роторної модуляції складається з складових на частотах кМЕ, к = ± 1,2,..., де N - кількість лопаток, Е - швидкість обертання
ротора двигуна. Таким чином, чим менше лопаток і швидкість обертання, тим більш щільний спектр. Роторна модуляція ехо-
сигналу є однією із сигнальних ознак, що дозволяє вирішувати задачу радіолокаційного розпізнавання класів ПО.
Особливості використання ознаки роторної модуляції: спостереження роторної модуляції від більшості турбореактивних
ПО можливо в локаторах з довжиною хвилі, що не перевищує 10 - 15 см. Спостереження роторної модуляції* від гвинтових ПО
можливо в будь-яких РЛС, аж до метрових. Спостереження роторної модуляції від турбореактивних двигунів крилатих ракет мож-
ливо в локаторах з довжиною хвилі не більше 1 - 2 см; рівень складових роторної модуляції в середньому на 15 дБ менше
“планерної” складової; при ракурсах спостереження, що близькі до бортових, роторна модуляція від турбореактивних ПО не спо-
стерігається через затінення лопаток компресора (турбіни) корпусом двигунів; швидкість обертання роторів турбореактивних дви-
гунів (на відміну від турбогвинтових) може змінюватися в широких межах; роторна модуляція від турбореактивних ПО створюєть-
ся декількома ступенями компресора (турбіни), що призводить до появи комбінаційних складових у спектрі відбитого сигналу.
Зазначені особливості ускладнюють рішення задачі розпізнавання повітряних ПО за ознакою роторної модуляції. Найбільш
зручне використання ознаки роторної модуляції в доплерівських РЛС із тривалим контактом з об’єктом. В імпульсних оглядових
РЛС, як правило, частота повторення недостатня для однозначного представлення спектра роторної модуляції. На рис. 3.46 наведе-
ні приклади спектрів роторної модуляції, отримані методом математичного моделювання від турбореактивного літака Ту-16
(рис. 3.46, а), турбогвинтового літака Ан-26 (рис. 3.46, б) і вертольота АН-64 (рис. 3.46, в).
Однією з найбільш інформативних ознак розпізнавання є радіолокаційний дальнісний портрет (у зарубіжній літературі гап§е
ртоШе). Дальнісний портрет представляє огинаючу відбитого ехо-сигналу, якщо роздільна здатність по дальності менше геомет-
ричного розміру цілі. Для цього необхідні зондуючі сигнали із шириною спектра більше 40 МГц. Реалізація таких сигналів можли-
ва за рахунок використання внутрішньоімпульсної модуляції* (ЛЧМ, ФМ сигналів), або при використанні багаточастотних сигналів
(коли здійснюється перестроювання несучої частоти окремих вузькосмугових сигналів від імпульсу до імпульсу).
На рис. 3.47 наведені приклади дапьнісних портретів ПО різних типів, отримані методом моделювання для ЛЧМ сигналу із
шириною спектра 100 МГц (розділювальна здатність 1,5 м), рис. 3.47, а - бомбардувальника, рис. 3.47, б - винищувача і рис. 3.47, в
- крилатої ракети.
78
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
в)
Рис. 3.46. Спектри роторної модуляції: від турбореактивного літака Ту-16 (а); від турбогвинтового літака
Ан-26 (б); від гелікоптера АН-64 (в)
Рішення про належність цілі, що спостерігається, до одного з класів здійснюється шляхом порівняння визначеної ознаки
розпізнавання з еталонними, що зберігаються в пам’яті системи розпізнавання. Еталонні значення ознак формуються при навчанні
системи розпізнавання. Навчання може проводитися шляхом обльоту РЛС із системою розпізнавання літаками заздалегідь уста-
новлених типів або шляхом моделювання (фізичного і математичного). Структурна схема радіолокаційної системи розпізнавання
наведена на рис. 3.48.
Імовірність розпізнавання Р^ Якщо необхідно вирішити завдання розпізнавання двох виявлених ПО за К ознаками, кожна
з яких вимірюється п разів, то імовірність розпізнавання
Р = —
грозп 2
2(7]
(3.116)
де ті, т2 - математичне сподівання величини ознаки першої і другої цілі відповідно; О) - середня квадратична помилка в оцінці
ознаки; п - число вимірювань ознаки; К - число ознак; Ф(») - інтеграл імовірностей.
Залежність імовірності розпізнавання об’єкта від кількості ознак показана на рис. 3.49. Існує оптимальна кількість конкретних
ознак, що забезпечує максимальне значення імовірності розпізнавання.
Методи розпізнавання радіовипромінювань та їх джерел
Одним з найважливіших етапів обробки сигналів та інформації засобами (на постах) радіо- і радіотехнічної розвідки (РРТР) є
розпізнавання радіосигналів, їх джерел і об’єктів, функціонування яких вони забезпечують.
Розпізнавання образів - процес прийняття рішень про найбільш істотні властивості деякого об’єкта на підставі непрямих да-
них, тобто на підставі спостереження інших властивостей, які називають ознаками. У РРТР розпізнавання образів представляє со-
бою віднесення об’єкта, що спостерігається, до одного з взаємовиключних класів.
79
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
О 2 4 6 в 10 1 2 1 4 1 6 18 20 22 24 26 28 ЗО 32 34 36 38 40 42 44 46
а)
в)
Рис. 3.47. Дальнісні портрети ПО різних типів: бомбардувальника (а); винищувача (б); крилатої ракети (в)
80
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.48. Структурна схема радіолокаційної системи розпізнавання
Ознаками звичайно бувають фізичні, логічні й інші властивості об’єктів, які можна формалізувати або значення яких можна
виміряти.
У радіотехнічній розвідці у якості ознак розпізнавання застосовуються несуча частота, тривалість і період проходження
імпульсів, тривалість і ширина спектра сигналів, тривалість і період проходження пачок імпульсів, поляризація сигналів, особли-
вості структури огинаючої (тонкої структури) сигналу, напрямок (пеленг) на джерело розвідувальних відомостей (ДРВ),
місцеположення ДРВ, періодичність роботи, тип ДРВ, щільність розміщення ДРВ на місцевості, віддалення ДРВ від лінії зіткнення
військ (ЛЗВ) та інші технічні й оперативно-тактичні параметри радіовипромінювань, їх джерел і об’єктів, яким вони належать.
У радіорозвідці ознаками розпізнавання є несуча частота, ширина спектра сигналу, вид модуляції, глибина модуляції, вид
передачі (рід роботи), швидкість передачі, середня тривалість елементарної посилки, середня тривалість паузи, тривалість і період
проходження елементів сигналів з адаптивного (АПРЧ) або програмного (ППРЧ) перетворювача робочої частоти, тривалість
повідомлення, особливості тонкої структури сигналу, суть переданих повідомлень, інтенсивність радіообміну, тип ДРВ, напрямок
на ДРВ, координати ДРВ, віддалення ДРВ від лінії зіткнення військ, віддалення головної радіостанції від ЛЗВ, віддалення підлеглих
радіостанцій від ЛЗВ, віддалення вузла зв’язку (ВЗ) від ЛЗВ, віддалення ВЗ від об'єктів, з якими встановлений зв’язок, середня дис-
танція зв’язку в радіомережі, площа радіомережі, кількість кореспондентів у радіомережі, кількість радіомереж (радіонапрямків) на
ВЗ, тип головної радіостанції у радіомережі (радіонапрямку), типи підлеглих радіостанцій у радіомережі (радіонапрямку), напрямок
зв’язку від головної радіостанції й інші властивості радіовипромінювань і їх джерел.
Образ - множина об’єктів (предметів, явищ), об’єднаних деякими загальними властивостями в загальний клас (рис. 3.50).
Об’єкт розпізнавання є представником свого класу. Наприклад, класом може бути множина передач частотної телеграфії
(ЧТ), а об’єктом - одна з них (із заданим розносом частот і швидкістю передачі) або реалізація сигналу ЧТ. При розпізнаванні видів
передач класами можуть бути передачі амплітудної телеграфії (АТ), ЧТ, відносної фазової телеграфії (ВФТ) та ін.
Об’єкт, що
розпізнається 8чт
Об’єкт, що
розпізнається 8ІП
Образ 8,
Образ
Рис. 3.50. Образи, що розпізнаються, які задані в просторі ознак 8
81
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Сукупність визначених значень ознак, що утворюють клас, дає його опис, названий еталонним описом образу. Під еталоном
потрібно розуміти типового представника класу або зразок з усередненими значеннями параметрів.
Прийняття рішення проводиться шляхом порівняння вибірок ознак (параметрів) з еталонами образів. Вибірка представляє со-
бою множину незалежних реалізацій (спостережень) ознак.
Якщо еталонний опис образів є невідомим, то виникає необхідність навчання системи розпізнавання. Навчання може проводи-
тися “з вчителем” (власно навчання) або “без вчителя” (самонавчання). Вихідними даними для навчання служать навчальні вибір-
ки. При навчанні навчальна вибірка представляє собою кінцеву множину реалізацій ознак, для кожної з яких зазначене правильне
рішення. При самонавчанні навчальна вибірка не містить вказівок на правильні рішення. Система, що навчається, самостійно ви-
значає кількісний, якісний склад образів і виробляє еталонні описи образів. Окремим випадком самонавчання є кластерний аналіз,
який представляє собою розбивку вибірки на підмножини близьких за своїми властивостями об’єктів. Можливі також комбіновані
методи навчання, при яких частина процесу навчання протікає “без вчителя”, а інша частина - “з вчителем”. Наприклад, “без вчи-
теля” виявляються об’єкти розпізнавання, що спостерігаються, і формуються їх еталонні описи, а потім “вчитель” (оператор поста)
групує об’єкти в образи.
У залежності від ступеня автоматизації засобу РРТР розпізнавання може здійснюватися оператором, або системою розпізна-
вання (СР) в автоматизованому (за участю оператора) або автоматичному (без участі оператора) режимах. Узагальнена структурна
схема СР показана на рис. 3.51.
Вхід
Вихід
Рис. 3.51. Структурна схема системи розпізнавання
При розпізнаванні радіовипромінювань та їх джерел спочатку підсистемою виділення ознак (ПВО) виділяються (виміряються)
ознаки. Вибірки ознак порівнюються в підсистемі прийняття рішення (ППР) з еталонними значеннями ознак, що надходять з
підсистеми навчання й еталонів (ПНЕ). У ППР реалізується задана вирішальна функція (правило прийняття рішення), що розби-
ває вибірковий простір на непересічні області, які відповідають образам, що розпізнаються (рис. 3.52). При надходженні вибірки в
ППР формується однозначне рішення щодо того, який з образів спостерігається. Підсистема ПНЕ призначена для реалізації ре-
жимів навчання, самонавчання і збереження еталонних описів. Реєстрація і відображення прийнятого рішення виробляється в блоці
індикації (БІ).
Рис. 3.52. Образи, що розпізнаються, які задані в просторі вибірок X
Розроблена велика кількість різноманітних вирішальних функцій, які базуються на різних критеріях ефективності - геометрич-
них, логічних, структурних (лінгвістичних), статистичних та ін. Стосовно до розпізнавання радіовипромінювань у засобах РРТР
найбільш науково обґрунтовані на даний час статистичні методи розпізнавання образів. Це пояснюється тим, що прийом і обробка
сигналів у засобах РРТР здійснюється в умовах завад. Виміряні значення ознак є випадковими величинами, що підпорядковуються
певним законам розподілу ймовірностей. Тому процес розпізнавання образів у засобі РРТР має характер, спільний із процесами
виявлення радіосигналів та вимірювання їх параметрів і на нього природно поширюються добре апробовані методи перевірки ста-
тистичних гіпотез. Випадковість вибіркових значень ознак призводить до їх розсіювання навколо об’єктів розпізнавання (рис. 3.52).
При реалізації статистичних методів розпізнавання радіовипромінювань звичайно застосовуються критерії Байєса (Б) (мінімуму
середнього ризику), максимуму апостеріорної імовірності (МАІ) і максимальної правдоподібності (МП). Синтезовані відповідно до
них вирішальні функції засновані на обчисленні відношень функцій правдоподібності (відношень правдоподібності) вибірок х,
що спостерігаються, і порівняння їх з порогом. Під функцією правдоподібності вибірки розуміється умовна щільність ймовірності
№(х|Ц) вибіркових значень х за умови, що спостерігається образ Ц, Ц = {Цп}, і є {1,2,..., Ь}, п є {1,2,..., V,}, де Ь - кількість об-
разів, що розпізнаються; V,- кількість об’єктів розпізнавання, що входять до складу і-го образу.
82
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
У найпростішому випадку образи представляють собою окремі об’єкти розпізнавання иІ5 кожен з яких задається в метриці кож-
ної ознаки хр] є {1,2,..., 3}, одним еталонним значенням 8^. При розпізнаванні двох таких образів Ц і Ц відношення правдопо-
дібності /(х) має вигляд
/(х) = ^(хІи^/^хІЦі) = 5У(х|8<|)/5¥(х|8і) . (3.117)
Для різних критеріїв оптимальності правила ухвалення рішення реалізують методи перевірки простих статистичних гіпотез
ГЧ
8: /(х) > с, (3.118)
Гі
де Уф- рішення на користь гіпотез Нч і Ні про спостереження образів Ц і иі? відповідно, що відрізняються тільки значеннями
порога с:
сБ = • Рі , сМА1=РЬ, СМП=1, (3.119)
пчі-пчч рч рч
де Піч > П,і > 0, Пці > Пцц > 0 - елементи матриці втрат, перший індекс відповідає висунутим гіпотезам, другий індекс -
прийнятим рішенням; рч і р, - апріорні ймовірності спостереження відповідних образів, рч + р = 1.
Якість прийнятих рішень прогнозується умовними ймовірностями помилок першого роду
а = Р(уч|Ні)=р{хєХА|иі}= [^(х|8і)<іх (3.120)
хч
і другого роду
Р = Р(уі|нч)=р(хєХі|ич}= ( 3¥(х|8ч)дх , (3.121)
Хі
де Хі, Хц - області прийняття відповідних рішень вибіркового простору.
Якщо розпізнається більше двох образів (багатоальтернативне розпізнавання), то відношення правдоподібності визначаєгь-
сяу вигляді (х) = XV(х 18, )/\¥(х 18|) , і є {1,2,..., Ц. Байєсовське правило прийняття рішення має вигляд:
Ь Рі
§Б : І(Пи -Піц)-Н17і(х) > П1ч -Пп , (3.122)
і=2 Рі
ь
1 = 1, 2, ..., Ь, 1#ч, 4 = 2, 3, ..., Ь , Х| =Х- І) Хч ,
4=2
де Щ > 0 - елементи матриці втрат П розміром Ь х Ь; уч - рішення прийняти гіпотези Нч; р - апріорні імовірності спостережен-
ій
ня образів Ц; £ Рі = 1.
і=1
До області Хф цє {2,3,..., 3}, відносяться точки вибіркового простору X, що задовольняють системі нерівностей (3.122). Об-
Ь
ласгь X! визначається з умови Х| = X - СІ Хц .
4=2
При застосуванні критерію максимуму апостеріорної імовірності приймається рішення уч, ц=2,3,..., Ь, якщо
Уч
Змаі-Рч /ч(х)= тах Рі/і(х), (р^Мх)>\ , і = 2, 3,... ,Ь, (3.123)
2<і^Ь
і рішення уі, якщо (р/рі)/і(х) < 1, V і є {2,3,..., Ц.
Правило прийняття максимально правдоподібного рішення має аналогічний вигляд:
Уч Гі
Змп :^(х)= тах 4(х)> /іі(х)> 1, і = 2, 3, ... ,Ь, /і(х)<1, V і є {2, 3,..., Ц. (3.124)
2<і<Ь
На практиці РРТР наведені випадки зустрічаються порівняно рідко. Частіше, як було показано вище, образ складається з декі-
лькох об’єктів розпізнавання. Кожному об’єкту в метриці кожної ознаки може відповідати один або декілька інтервалів еталонних
значень і (або) одне або декілька дискретних еталонних значень ознаки. Для рішення такого класу задач застосовуються методи
перевірки складних статистичних гіпотез. Вводиться “складний еталонний опис” образів у вигляді 3-мірних спільних апріорних
умовних щільностей імовірності змішаного типу еталонних векторів § незалежних ознак 8,, ] є {1,2,..., 3}, для кожного з Ь образів
Ц, іє {1,2,... ,Ц:
З Ку
ХУі (8) = У^(5|и і ) = П X ІцГРі]г\¥цГ (8, 8*цГ , 8’’
)=1[_г=1
уг ) + <2^ УСІ Р усі І 8 усі ) ’
(3.125)
83
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
ЕРііг+ ІРуа = 1> 2ІугРі]г+ ІїудРуд = Ь V і є {1,2, ... ,Ь}, V) є {1,2, ... ,3},
Г=1 <1=1 Г=1 <1=1
де з’др з"^) - визначені при навчанні алгоритму апріорні щільності розподілу ознаки з, на кожному з Ку еталонних інтерва-
лів [з’^ з,,дГ], г є {1,2,..., Ку}; 5 (зрЗу^) - функції Дірака, як щільності імовірності математичних очікувань зуа кожного з Оу можли-
вих дискретних еталонних значень ознаки ^,(1 є {1,2,..., Оу}; руг і р^- апріорні умовні ймовірності спостереження г-го інтервалу
або (1-го значення при спостереженні образа ІЗ, у метриці ознаки 2^; є [0,1] - коефіцієнти, що характеризують відносний ступінь
інформативності (або важливості) г-го інтервалу або 6-го значення ознаки з, при розпізнаванні образа Ц.
Для прикладу на рис. 3.53 наведені геометричні моделі двох образів ІЗ, і заданих у метриці однієї ознаки з,. Образ з, заданий
одним еталонним інтервалом і трьома дискретними еталонними значеннями ознаки (рис. 3.53, а). Образ зч заданий трьома інтерва-
лами й одним дискретним еталонним значенням (рис. 3.53, б). У межах інтервалів ознаки розподілені за рівномірним законом. На
рис. 3.53, в показана результуюча сукупність еталонних описів образів, на рис. 3.53, г - апостеріорні щільності імовірності ознаки
при спостереженні образів (з гауссівським розподілом оцінок ознаки).
Статистичні алгоритми прийняття рішень при складних еталонних описах образів також грунтуються на статистиках
відношень правдоподібності. При використанні критеріїв Байєса і максимуму апостеріорної імовірності відношення правдо-
подібності мають вигляд:
[ \У(х|з)\у, (з)(І8
Лі(х) = -^-------і----------, (3.126)
[ \¥(х|8)\¥](8)(І8
5|
де 8, - області простору ознак, що відповідають образам 11;.
Об’єкти, що розпізнаються, які входять до образу V,
Р...б(ч,-Ч.)
=\У(8.|и.)
Рис. 3.53. Еталонні описи образа Ц (а), образа 1)ч (б), апріорний розподіл ознаки З] (в) та апостеріорні щільності
імовірності ознаки з, при спостереженні об’єктів образів, що розпізнаються (г)
84
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Правила прийняття рішень виходять з (3.122), (3.123) заміною Цх) на Л/х). При застосуванні критерію максимальної правдопо-
дібності перевіряються статистики відношень правдоподібності
тах \¥(х | з)
.. , . зє8і
Е:(х) =----1-------,
тах \¥(х |з)
$є8]
З (кй
8і = іі
]=1 ^г=1 6=1
і = 2, 3, ... ,Ь, (3.127)
6=1
де 817 - г-і інтервали еталонних значень і-го образа в метриці ознаки 8^ - 6-і еталонні значення і-го образа в метриці ]-ої озна-
ки. Рішення приймаються відповідно до (3.124).
Якість прийнятих рішень прогнозується оцінюванням повних умовних імовірностей прийняття помилкових рішень уч при спо-
стереженні образа Ц
р{уч|иі}=р{хєхч|8є8і}= [ V/ і (з) [\У(х І з є 8, )СІХ<І8 , (3.128)
Хч
і повної імовірності помилки правила ухвалення рішення
Ь Е Е
Рпом = ЇРпом.і =ХХРі(^і(8)[\У(х|8є8і)(1хсІ8, (3.129)
і=1 і=1ч=1 8, Хч
Ч#і
де Рпош - апріорна імовірність помилки розпізнавання і-го образа
Якщо, наприклад, розпізнаються два образи Ц і кожний з яких у метриці єдиної ознаки 8 заданий одним інтервалом еталон-
них значень з апріорними розподілами XV, ч (з, 8*, 8*ч ), то правило прийняття рішення, оптимальне за критерієм
максимальної правдоподібності, має вигляд:
&МАІ
РЧ |^(х І з) XV ч (з, 8^ ,8'^ )(І8 Гч
Рі [\У(х | в) XV і (в, 8*і ,8"і )дз <
«і Гі
(3.130)
У більшості практично важливих випадків ознаку 8 на інтервалах [з'^, 8"^ можна вважати розподіленою рівномірно, а функції
правдоподібності \У(х|з) можна моделювати гауссівськими розподілами (типу шума) із середніми квадратичними відхиленнями
0,(8) при 8 Є Ц І Оч(8) при 8 є Ц. У цьому випадку
8”ч 1 РЧ(8"і 8’і)і МЄХр- . . 4 *•, <М8) Я • А ( V і = —— —— (х-з)2 2оч2(з) •(із гч > 1
ОМАІ* ^Х^Ху — и [ (х-з)И [ 2Оі2(8)] 1 , (ІЗ Гі
(3.131)
8”і>8,і, 8”ч > 8’ч .
Якщо дисперсія ознаки не залежить від його поточного значення 8, то [(^(з)]2 = а^2, V 8 є [з'цр У цьому випадку алгоритм
спрощується:
$МАЬ Л(х) =
?Ч
> 1,
(3.132)
Ті
„ 1 г-‘-
де р(г) = -у - (е 2 61 - функція Лапласа.
72л _оо
Якість алгоритмів (3.131), (3.132) оцінюється повними імовірностями помилок першого а і другого Р роду:
8п_т_8\<
1 8 4
аз, Р = І
8 Ч 8 Ч 5’ч
1
а = і-—।
8"і-8’і 8’і
(3.133)
де 8п=аі£[Л(х)=1] - поріг, що розділяє образи в метриці ознаки 8.
Методи селекції цілей
Селекція повітряно-космічних цілей - виділення космічних і авіаційно-космічних апаратів, головних частин балістичних ра-
кет, крилатих ракет, літаків і т.ін. у повітряному і космічному просторі на фоні хибних цілей, штучних або природничих завад. Для
селекції застосовуються радіолокаційні, радіотехнічні, оптичні, оптико-електронні, акустичні, теплолокаційні та інші спеціальні
засоби.
85
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Захист від пасивних завад грунтується на різниці швидкостей цілей і відбивачів, що заважають, швидкість яких не перевищує
швидкості вітру. Тому захист від пасивних завад називається швидкісною селекцією або селекцією рухомих цілей (СРЦ). Суть
швидкісної селекції особливо наочна при використанні монохроматичного зондуючого сигналу.
На рис. 3.54 наведені сумарний спектр сигналу, відбитого від пасивної завади, і шуму приймача N(0, а також зміщений на час-
тоту Доплера Ед спектр сигналу, відбитого від цілі 8((). З рисунку випливає, що знайти навіть слабкий сигнал цілі на фоні потужної
пасивної завади можна за рахунок частотної режекцїї останньої за допомогою фільтрів, що придушують коливання в діапазоні час-
тот завади.
Рис. 3.54. Сумарний спектр сигналу, відбитого від пасивної завади, і шуму приймача N(0
та спектр сигналу, відбитого від цілі 8(Г)
В імпульсних РЛС спектр відбитих сигналів має гребінкову структуру (рис. 3.55).
Гребені спектрів відстоять один від одного на частоту повторення зондуючих імпульсів Гп. У цьому випадку потрібен фільтр
придушення завади з гребінковою структурою АЧХ. Найпростішим фільтром з такою АЧХ є схема черезперіодного віднімання
(ЧПВ). Амплітудно-частотна характеристика схеми ЧПВ визначається виразом
Така АЧХ має провали з періодом Еп. Схема ЧПВ і її амплітудно-частотна характеристика наведені на рис. 3.56, а і б відповідно.
Ширина гребенів придушення може бути збільшена при послідовному включенні схем ЧПВ.
Рис. 3.56. Схема ЧПВ (а) та її амплітудно-частотна характеристика (б)
При аналоговій обробці сигналів необхідна для роботи ЧПВ затримка на період зондування Т може забезпечуватися за допомо-
гою потенціалоскопів або ультразвукових ліній затримки. При цифровій обробці, крім схем ЧПВ, можуть реалізовуватися і більш
складні режекторні фільтри.
86
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Характерною рисою СРЦ в імпульсних РЛС є наявність так званих сліпих швидкостей цілі. Сліпі швидкості відповідають час-
тотам Доплера відбитих сигналів, кратним частоті повторення зондуючих імпульсів і визначаються виразом
Уг=кХРА (3.135)
де к = 1,2,...; X-довжина хвилі РЛС.
Спектр сигналу, відбитого від цілі, що летить на сліпій швидкості, не має відмінностей від спектра пасивної завади. У результаті
сигнал цілі буде придушуватися системою СРЦ. Для скорочення кількості сліпих швидкостей застосовують вобуляцію (зміну)
періоду повторення зондуючих імпульсів у межах пачки відбитих сигналів.
Найпростіші схеми ЧПВ забезпечують придушення завад від місцевих предметів, що не мають доплерівського зсуву частоти.
Коливання завад, що відбиваються від хмар дипольних відбивачів, зміщені на частоту Доплера, обумовлену швидкістю вітру. Ви-
користання в цьому випадку схем ЧПВ малоефективно. Для захисту від таких завад використовують адаптивні кореляційні ав-
токомпенсатори пасивних завад. Такі пристрої забезпечують автоматичне настроювання смуги режекщї на частоту завади. Осно-
вним недоліком автокомпенсаторів є погане придушення крайок протяжної завади, пов’язане з часом адаптації. Тому на практиці
часто використовують комбіновані системи СРЦ, що використовують як^схеми ЧПВ, так і автокомпенсатори пасивних завад
Порад з міжперіодною обробкою сигналів, для захисту від пасивних завад також застосовують міжогладову обробку. Міжог-
лядова обробка дозволяє виділяти і придушувати малорухомі об’єкти типу “ангелів”.
Необхідною умовою роботи систем СРЦ є когерентність оброблюваних сигналів. Розрізняють РЛС із дійсною когерентністю,
еквівалентною внутрішньою когерентністю та еквівалентною зовнішньою когерентністю. Дійсна когерентність досягається при
використанні для формування і обробки сигналів високостабільних пристроїв. При еквівалентній внутрішній когерентності,
випадкова фаза випромінюваного сигналу запам’ятовується за допомогою когерентного гетеродина і враховується при подальшій
обробці. При еквівалентній зовнішній когерентності запам’ятовування випадкових початкових фаз зондуючих сигналів здійс-
нюється за коливаннями, прийнятими від протяжної пасивної завади.
Методи селекції рухомих цілей (СРЦ): когерентний метод безперервного випромінювання (використовується в РЛС із безпе-
рервними зондуючими сигналами); когерентно-імпульсний метод малої шпаруватості (9 < 10) (використовується в імпульсних
РЛС); когерентно-імпульсний метод великої шпаруватості ((? > 10) (використовується в імпульсних РЛС).
Шпаруватість р- відношення періоду повторення імпульсів Ті до тривалості імпульсу т-.
Когерентно-імпульсний метод використовує ефект Доплера. Головний недолік - наявність так званих “сліпих швидкостей”,
при яких дана схема не може відрізнити рухому ціль від нерухомої.
Фрактальна селекція рухомих цілей (ФСРЦ).
Пошук нетрадиційних шляхів вирішення задачі селекції рухомих цілей привів до використання фракгальної теорії стосовно до
рішення задач СРЦ.
Під час переміщення над фрактальною поверхнею або у фрактальному середовищі об’єкт (літак, корабель і т.ін.) ви-
кликає зміни в атмосфері (інверсійний слід, турбулентні завихрення і т.ін.). Ці збурення при фрактальному аналізі резуль-
татів спостереження виявляються у вигляді змін фракгальної розмірності середовища, у якому проводиться спостережен-
ня. Необхідно зауважити, що самий об’єкт може бути непомітним у жодному з діапазонів електромагнітних хвиль, його
розміри можуть бути малі для виявлення, але збурення, внесені ними, достатніми для досягнення цієї мети при застосу-
ванні фрактальних методів.
Стосовно до проблем СРЦ може бути застосований такий алгоритм. Отримане зображення розбивається на ділянки, розміри
яких залежать від лінійних розмірів об’єкта, що необхідно виявити, і точності виявлення. У кожній ділянці визначається фрактальна
розмірність (наприклад методом покриття). В результаті такої обробки одержується розподіл значень фракгальної розмірності в
межах усього зображення.
Кожній парі координат (х, у), відповідній центрам таких ділянок вихідного зображення, ставиться у відповідність
фрактальна розмірність О|(х,у). Аналізований розподіл фрактальних розмірностей представляє собою скалярне поле.
Відомо, що градієнтом скалярного поля II(г) називають вектор (що позначається £гас! О ), який визначається для
кожної точки поля співвідношенням (для двомірного випадку):
Вгади = 7і~’ + '|і~Ь (3.136)
дх ду
З властивостей скалярного поля відомо, що визначення градієнту (£га<і II) не залежить від вибору системи координат. На-
прямок вектора градієнта вказує на найбільший ріст скалярного розміру (у випадку, що розглядається, фракгальної розмірності), а
його модуль (§гасі О ) показує темп росту. У точках, для яких £гасЮ = 0, фрактальна розмірність має максимум (або мінімум).
Таким чином, визначаючи градієнт у будь-якій точці поля (за формулою (3.136)), можна одержати напрямок зростання фракга-
льних розмірностей, і, відповідно, зростання збурень, що спричинили за собою зміни фракгальної розмірності. При цьому модуль
градієнта показує швидкість росту збурень. Знаходячи координати зображень, для яких ^тасЮ = 0 , одержуємо координати облас-
ті з найбільшими збуреннями (за умови, що градієнт у сусідніх точках вказує на цей напрямок). Очевидно, що координати найбіль-
шого збурення є координатами об’єкта, що вносить ці збурення.
Якщо подібну обробку проводити від кадру до кадру і знаходити нові координати центру збурень, то можна оціниш швидкість
і напрямок переміщення об’єкта, а також вирішити задачу розпізнавання об’єкта.
87
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
3.5. Загальні принципи побудови РЛС
За здатністю визначати координати виявлених цілей РЛС підрозділяються на двохкоординатні, трьохкоординатні і РЛС визна-
чення висоти польоту повітряних цілей (радіолокаційні висотовимірювачі).
Двохкоординатна РЛС - виявляє і визначає дальність і азимут цілі.
Трьохкоординатна РЛС - виявляє і визначає дальність, азимут і кут місця (висоту).
Радіолокаційні висотовимірювачі - визначають висоту цілей і працюють разом із двохкоординатними РЛС у складі радіоло-
каційних постів (центрів) управління і оповіщення ППО.
За типом випромінювання РЛС розділяються на: РЛС з імпульсним випромінюванням (імпульсні РЛС) і РЛС з безперервним
випромінюванням.
Імпульсна РЛС - випромінює в напрямку на ціль зондуючі сигнали у вигляді послідовності високочастотних радіоімпульсів
тривалістю Ті з періодом повторення (слідування) Тп (частотою повторення £п = 1/ТП).
РЛС з безперервним випромінюванням - випромінює безперервне коливання.
Радіолокаційні сигнали.
Всі основні характеристики РЛС, що пов’язані зі структурою сигналів, що випромінюються, узагальнюються функцією неви-
значеності цих сигналів, яка характеризує можливості РЛС з розрізнення ПО, точність і однозначність вимірювання їх координат.
Функція невизначеності (ФН) сигналів, що випромінюються - двомірна автокореляційна функція р((, і) сигналів, що одно-
часно представляє їх структуру як у часовій, так і в частотній області (рис. 3.57):
Е
[8(І)8(І - Т)е-’2ЛП(ІІ
(3.137)
Чим вужчий (гостріший) рельєф функції невизначеності у відповідному напрямку, тим вища точність і роздільна здатність за
дальністю або швидкістю. Розріз ФН по осі частот є спектр одиночного імпульсу, а розріз по осі часу - його кореляційна функція.
Рис. 3.57. Двомірна автокореляційна
функція радіолокаційного сигналу
Рис. 3.58. Простий (гладкий) сигнал: структура (а);
розріз двомірної автокореляційної функції (б), (в)
Як правило в РЛС ППО використовуються два типи радіоімпульсів: без внутрішньоімпульсної модуляції (гладкі) і з внутріш-
ньоімпульсною модуляцією.
В гладких радіоімпульсах частота високочастотного заповнення (несуча частота Го) постійна в межах одного імпульсу
(рис. 3.58, а). Розріз двомірної автокореляційної функції прямокутного імпульсного сигналу у вигляді еліпсу показаний на рис. 3.58,
б) і в). Умовно можна прийняти, що розділення за дальністю і за швидкістю двох або більше ПО не може бути виконане, якщо від-
биті від них сигнали потрапляють у середину еліпсу.
Ширина спектра такого радіоімпульсу ЛГ обернено пропорційна його тривалості Ті і добуток ширини спектра на тривалість ім-
пульсу (база сигналу) дорівнює одиниці, тобто Літ, = 1 (рис. 3.58, б, в). Такі сигнали називаються простими (або вузькосмугови-
ми) і використовуються в основному для виявлення цілей.
Недоліком таких сигналів є те, що збільшення дальності дії РЛС вимагає збільшення (для підвищення енергії), а це погіршує
розділювальну здатність за дальністю. Крім того, такі сигнали не забезпечують (без прийняття спеціальних заходів) розрізнення ПО
за швидкістю.
Принцип невизначеності в радіолокації (справедливий для простих сигналів) - полягає у тому, що має місце деяка невизна-
ченість в одночасному визначенні дальності і швидкості, тобто виграш у розділювальній здатності і точності за дальністю досяга-
ється за рахунок погіршення цих характеристик за швидкістю і навпаки. Якщо змінювати параметри сигналу, можна лише пере-
розподілити цю невизначеність, тобто змінити форму еліпсу, не змінивши його площину.
Складні сигнали - сигнали, що випромінюються РЛС, добуток тривалості імпульсу на ширину спектра яких значно більше
одиниці, тобто Літ,» 1. Це досягається за рахунок введення внутрішньоімпульсної модуляції частоти (частотно-модульовані сиг-
нали) або фази (фазомодульовані сигнали).
88
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Позитивним цих сигналів є те, що при великій тривалості і;, яка вибрана для забезпечення великої д альності виявлення, можна
забезпечити необхідну розділювальну здатність за дальністю шляхом “стиску” сигналу на виході виявлювача на величину, що ви-
значається коефіцієнтом стиску Кет
Складні сигнали широко використовують в сучасних РЛС ППО для високоточного вимірювання траєкторних і сигнальних па-
раметрів цілей.
Лінійно-частотно-модульовані (ЛЧМ) сигнали - сигнали, частота яких у межах тривалості імпульсу змінюється за лінійним
законом від Гйн до Сеє (рис. 3.59, а, б), тобто
£(О = £о+Д^—, (3.138)
де - початкова частота; А£ = - девіація частоти, що визначає ширину спектра ЛЧМ сигналу.
Аналітичний вираз сигналу
, . . ( лАЕ 2
8(І) = 8О81П 0)0І +---І
I ТІ
Коефіцієнт стиску сигналу
Кст = тіА£. (3.140)
Відповідно, енергія сигналу, що випромінюється, (Дж) з імпульсною потужністю Рі
Е = РіТі. (3.141)
Тривалість сигналу на виході оптимального приймача
На рис. 3.59, в наведений переріз функції ЛЧМ сигналу (горизонтальною площиною), межа якої на осі часу визначає величину
сигналу “стиску” т^.
(3.139)
Рис. 3.59. ЛЧМ сигнал: структура (а); закон змінювання частоти (б); переріз двомірної автокореляційної функ-
ції (функція (діаграма) невизначеності) (в)
Фазоюдоманіпул ьовані (ФКМ) сигнали-сигнали, фаза яких усередині імпульсу дискретно змінюється на 180 град, у визна-
ченій послідовності (за визначеним кодом) (рис. 3.60, а, б).
ФКМ сигнал складається з N прямокутних дискретів тривалістю тда які об’єднані в один сигнал з тривалістю ті, і має аналпич-
ний вираз
N-1 „
8(0= Е (-1)КС08 0)І, (3.143)
К=0
де числа К= 1,2,... ,N-1 створюють послідовність нулів і одиниць, яка визначає порядок зміни фази; о-несуча частота сиг-
налу.
Переріз функції невизначеності ФКМ сигналу зображений на рис. 3.60, в. При цьому для ФКМ сигналу справедливі рівності
Ті = Ьїтд; тд=1/А£; тіА£=К = Кст, (3.144)
де АГ-ширина спектра сигнала.
В результаті оптимальної обробки на виході фільтра створюється вихідний сигнал, тривалістю =тд (рис. 3.60, в).
Фаза ФКМ сигналу може змінюватися стрибком або ф = 0 (код 0), або ф = п (код 1). Але максимальне значення
2Е
Чмакс = — досягається, якщо застосовується максимальний код і фаза змінюється від нуля до фо
N
/N-0
Фо = я-атссоя —— . (3.145)
І N + 1 /
89
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
І
а)
б)
в)
Рис. 3.60. ФКМ сигнал: структура (а); закон зміни частоти (б); перетин двомірної автокореляційної функції (в)
Послідовність (пачка) імпульсів - основний вид зондування простору в імпульсній радіолокації. Періодична модуляція імпу-
льсів частотою посилок Рп змінює структуру спектра і вид кореляційної функції (рис. 3.61, де т- - тривалість окремого імпульсу;
Тто - тривалість пачки імпульсів; Тп - період посилки імпульсів, Тп = 1/РП).
Достоїнством цих сигналів є незалежність точності вимірювання часу і частоти один від одного. Помилка вимірювання часу за-
тримки визначається, як і у простих сигналів, тривалістю імпульсу, а точність вимірювання частоти залежить від загальної тривало-
Рис. 3.61. Послідовність імпульсів: структура (а); часове представлення (б); спектральне представлення (в)
Імпульсні РЛС.
Узагальнена структурна схема імпульсної РЛС, що працює на одну антену, яка приймає і передає, показана на рис. 3.62.
Передавальна система (передавач) генерує потужні радіоімпульси, які надходять на антенну систему через антенний пере-
микач.
Антенний перемикач підключає до антени передавач у режимі передачі і приймач - в режимі приймання. Він же здійснює за-
хист приймача від потужності передавача.
Відбитий від об’єкта сигнал приймається антеною, що у ряді випадків помішується під радіопрозоре укриття (РПУ). Радіопро-
зоре укриття представляє собою конструкцію з матеріалу з малим поглинанням сигналів, що не завдджає поширенню радіохвиль,
але захищає антену РЛС від впливу атмосферних явищ (снігу, дошу, вітру та ін.).
Приймальна система (приймач) посилює, перетворює за частотою і здійснює детектування вхідного сигналу. У багатьох су-
часних імпульсних РЛС ППО вже в кінцевих каскадах приймача аналоговий сигнал перетворюється на цифрову форму і його по-
дальша обробка здійснюється в цифровому вигляді.
Пристрій первинної обробки сигналів проводить первинний витяг інформації про траєкторні і сигнальні параметри об’єктів
із відбитих імпульсів.
Центральна ЕОМ служить для завершальної обробки радіолокаційної інформації та автоматизації процесу роботи РЛС.
Пристрій первинної обробки та ЕОМ у сукупності утворюють систему обробки інформації (СОІ). Обчислювальні засоби
РЛС можуть здійснювати як первинну, так і вторинну обробку радіолокаційної інформації.
90
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.62. Структурна схема імпульсної РЛС
Первинна обробка - виявлення ехо-сигналу і витяг із нього координатної і сигнальної інформації в одиничному вимірі (при
одному зондуванні).
Вторинна обробка - визначення параметрів прямування об’єкта в результаті аналізу ехо-сигналів, отриманих за декілька тактів
зондування. У процесі вторинної обробки виконуються операції' згладжування значень параметрів ехо-сигналів, отриманих в оди-
ничних вимірах, їх екстраполяції у наступних тактах зондування і т.ін. Це дає можливість здійснювати побудову траєкторій пряму-
вання цілей.
Розподілена схема обробки даних - раціональний розподіл функцій між локальними і центральною ЕОМ (задачі з первинної
обробки інформації покладаються на різноманітні спеціальні обчислювачі (локальні ЕОМ), що представляють собою міні- і мікро-
ЕОМ (спецобчислювачі), на центральну ЕОМ в основному покладається задача з вторинної обробки радіолокаційної інформації).
Пристрій управління РЛС розподіляє інформацію управління по окремих пристроях станції у вигляді відповідних команд. За
цими командами відбувається вибір відповідного режиму роботи, типу зондуючого сигналу, із набору наявних у РЛС, частоти про-
ходження імпульсів і т.ін.
Система управління антеною забезпечує або вибір положення поверхні антени, що фокусує, для дзеркальних систем, або
електронне сканування діаграми спрямованості у фазованих антенних решітках, або те і інше разом в антенних решітках, що меха-
нічно переміщуються за буд ь-якою коорд инатою, наприклад за азимутом.
Синхронізатор генерує високостабільну послідовність опорних (тактових) імпульсів, до яких прив’язується у часі робота всіх
інших пристроїв РЛС.
Отримана РЛС інформація передається в цифровому вигляді безпосередньо з ЕОМ по каналах зв’язку (наприклад, для цілевка-
зання засобам поразки повітряних або космічних цілей) або передається на систему відображення і реєстрації радіолокаційної інфо-
рмації.
Система відображення і реєстрації радіолокаційної інформації може містити візуальні індикаторні пристрої (наприклад на
основі електронно-променевих трубок, електролюмінісцентних приладів, рідких кристалів та ін.) і пристрої реєстрації інформації на
спеціальних стрічках, магнітних дисках та ін. Останнім часом у РЛС ППО усе ширше використовуються найсучасні методи реєст-
рації' і відображення інформації, у тому числі з використанням дисплеїв і відеомагнітофонів.
Імпульсні РЛС можна розподілити на два основних типи: некогерентно-імпульсні (які частіше називають просто імпульсними)
і когерентно-імпульсні (які частіше називають імпульсно-допплерівськими).
Некогерентно-імпульсні РЛС. Поняття точної когерентності застосовується до гармонійних синусоподібних коливань
вигляду
и(і) = ио 8Іп(оЯ + ф). (3.146)
Два або більше гармонійних коливань називаються когерентними на інтервалі Ть якщо різниця фаз між ними на всьому цьому
інтервалі залишається постійною (Дф = фі - фг=сопзі).
Недоліком некогеренгно-імпульсних РЛС є те, що вони не дозволяють визначати доплерівську швидкість цілі.
Когерентно-імпульсні РЛС. Основною відмінністю є те, що одночасно з випромінюванням передавачем зондуючого сигналу
у приймачі виробляється когерентний (опорний) сигнал місцевого гетеродина. При цьому під когерентністю розуміється зберігання
фази зондуючого сигналу в опорному. Когерентний зв’язок передавача і місцевого гетеродина приймача забезпечується за допомо-
гою загального високочастотного генератора незатухаючих коливань. В приймачі є комплект фільтрів доплерівських частот, за
допомогою яких проводиться вимірювання швидкості цілі.
РЛС з безперервним випромінюванням
Структурна схема найпростішої РЛС з безперервним випромінюванням із частотною модуляцією показана на рис. 3.63. РЛС із
безперервним випромінюванням містить практично ті ж системи і пристрої, що й імпульсна станція. Основною відмінністю є те,
що частина приймальної станції має самостійну антену, встановлену так, щоб виключити можливість потраплення на неї прямого
випромінювання передавальної антени. У той же час, антени, які працюють на передачу і прийом, пов’язані спеціальним фідером
(лінією передачі електромагнітних коливань), по якому на вхід приймальної системи надходить частина енергії сигналу, що випро-
мінюється. ’
91
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Сигнал передавача на частоті Гге промодульований частотним модулятором, випромінюється через передавальну антенну сис-
тему у напрямку на об’єкт. Відбитий від об’єкта сигнал на частоті через приймальну антенну систему надходить на вхід прийма-
ча Одночасно сюди надходить частина енергії зондуючого сигналу на частоті ГГ1. У змішувачі приймача відбувається порівняння
частот випроміненого і відбитого сигналів і на пристрій первинної обробки видається перетворений сигнал. Його частота дорівнює
різниці цих частот Гк = |ГП - Ц Якщо частота передавача змінюється за лінійним законом (рис. 3.64), зміна частоти відбитого сигналу
До користувачів радіолокаційної інформації
Рис. 3.63. Структурна схема РЛС з безперервним випромінюванням
Рис. 3.64. Пояснення принципу вимірювання дальності в РЛС з безперервним ЛЧМ сигналом
Якщо крутість прямої АС позначити уи = то з трикутника АВС отримаємо:
= Ік 18 <Рк = Ік Ук = 2укК/с, (3.147)
ЗВІДКІЛЯ
К = (с/£к)/(2їк). (3.148)
Різниця частот випроміненого і відбитого сигналів, а також швидкість зміни частоти зондуючого сигналу однозначно визнача-
ють дальність до цілі.
Достоїнством РЛС з безперервним випромінюванням є: мала імпульсна потужність випромінювання; можливість однозначно-
го вимірювання швидкості; можливість вимірювати дуже малі дальності. Недоліки: необхідність мати дві рознесені антени; склад-
ність і громіздкість частотних аналізаторів спектра; високі вимоги до лінійності зміни частоти для забезпечення однозначності від-
ліку. Ці недоліки визначили значно більш широке застосування в РЛС ППО імпульсного методу радіолокації в порівнянні з безпе-
рервним.
Багатофункціональні РЛС
Багатофункціональні РЛС (БФРЛС) - радіолокаційні станції з електричним скануванням діаграми спрямованості (ДС), що
забезпечують виконання функцій пошуку і супроводження цілі так, якби ці функції’ виконувалися двома РЛС, одна з яких оптимі-
зована на вирішення завдань виявлення (пошуку) цілей, а інша - на вирішення завдань їх супроводження. Можливість практично
миттєво спрямовувати одну або декілька діаграм спрямованості в будь-яку точку контрольованого простору дозволяє водночас
здійснювати пошук і супроводження декількох цілей, передачу даних, наведення ракет і виконувати інші операції’. Обов’язковою
складовою таких РЛС є підсистема (блок) управління, у якості якого може використовуватися ЕОМ, яка виконує функції управлін-
ня скануванням ДС, часом опромінення цілі і випромінюваною потужністю сигналу. Управління здійснюється адаптивно з ураху-
ванням обстановки, призначення РЛС і потреб системи, що обслуговується.
Характерною особливістю БФРЛС є виконання декількох функцій, таких як пошук цілі в зоні відповідальності, активне (інди-
відуальне) супроводження важливих з точки зору системи цілей, передача даних, наведення активних засобів (винищувачів, ракет).
Особливістю роботи БФРЛС є також те, що під час перекидання ДС з одного напрямку на інший електромагнітна енергія не
випромінюється, що підвищує скритність в роботі і більш раціональне використання енергетики РЛС.
Основні функціональні режими БФРЛС: режим пошуку (виявлення) цілі в зоні огляду; режим активного супроводження
декількох повітряних цілей.
92
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Класичним типом БФРЛС є система з нерухомою антенною решіткою (АР), що дозволяє здійснювати електричне сканування
діаграмою спрямованості антени по двох координатах: азимуту - Р і куту місця - є. Для огляду всієї напівсфери (360° по Р)
об’єднуються декілька (4 - 5) плоских АР. При цьому повністю усуваються обмеження, пов’язані з обертанням антени, і
з’являються необмежені можливості по темпах огляду простору і супроводження цілі в складній завадо-цільовій обстановці. Однак
розміри, складність і вартість таких систем над звичайно високі.
Можливості цифрової обчислювальної техніки і систем оптимального управління дозволяють сьогодні створювати змішані за
принципами побудови БФРЛС, що сумішують режим обертання антени й електричного сканування ДС. Така РЛС отримала назву
обертальна радіолокаційна станція (система) з електронним скануванням або просто обертальна БФРЛС. В ній використовується
єдина плоска АР, що забезпечує електронне сканування ДС по азимуту і куту місця при одночасному обертанні АР по азимуту за
допомогою механічного приводу. В такій “змішаній” радіолокаційній системі можуть бути застосовані всі засоби багато-
функціональної роботи з розподілом ресурсів, що і в БФРЛС з нерухомою АР.
Застосування цифрових засобів формування ДС АР на прийом дозволяє істотно поширити арсенал способів і алгоритмів об-
робки інформації та управління і забезпечиш таким чином підвищення ефективності БФРЛС в цілому. Однак, при оцифровуванні
сигналів, що приймаються, на виході кожного рецептора (випромінювача) АР для формування ДС і обробки сигналів (особливо
просторової обробки) погрібні будуть обчислювальні засоби надзвичайно високої швидкодії. Тому при цифровому формуванні
діаграми спрямованості АР на прийом часто вдаються до об’єднання приймальних елементів решітки в підрешітки (модулі), всере-
дині яких об’єднання сигналів, що приймаються, (формування ДС модулів) здійснюється аналоговими приладами, після чого
вихідні сигнали підрешіток перетворюються на цифрову форму і вся подальша обробка сигналів виконується в цифровому вигляді.
Кількість випромінювачів, що об’єднуються в підрешітки, встановлюється при конкретному проектуванні та у відповідності з на-
явними обчислювальними ресурсами. Відзначимо, що чим крупніші модулі цифрової приймальної решітки, тим складнішим є
управління її функціонуванням і тим більшими є втрати в ефективності управління у порівнянні з АР з оцифровкою вихідних сиг-
налів кожного випромінювача.
Структурна схема багатофункціональної РЛС з модульною АР і цифровим формуванням діаграми спрямованості на прийом
може бути представлена у вигляді, зображеному на рис. 3.65.
До складу схеми входять наступні основні підсистеми:
1. Підсистема формування і управління однопелюстковою діаграмою спрямованості АР на передачу. До складу цієї підсистеми
входять блоки формування і розподілу зондуючих сигналів, процесор управління головною пелюсткою діаграми спрямованості
антени, вузли управління підрешіток і система керованих фазообертачів на вході кожного випромінювача.
2. Підсистема формування підрешіток, підсилення, гетероданування і цифрового перетворення анналів на виході модулів АР.
До складу підсистеми входять суматори, приймальні модулі, що включають підсилення на НВЧ, перетворення частоти, підсилення
на проміжній частоті, фазове детектування і цифрове перетворення квадратурних складових сигналів підрешіток, що приймаються.
3. Підсистема цифрового формування і управління діаграми спрямованості АР на прийом, виконана у вигляді окремого цифро-
вого блока. Ця підсистема пов’язана безпосередньо і по каналу зворотного зв’язку з блоком адаптивної просторової обробки сиг-
налів, що включається при впливі активних шумових завад.
4. Підсистема цифрової обробки радіолокаційних сигналів, що приймаються, і даних, включаючи адаптивне управління як сис-
темою обробки, так і видаванням інформації споживачам. Ця підсистема реалізується за допомогою ряду потужних
спеціалізованих і універсальних цифрових обчислювальних систем (процесорів).
3.6. Тактико-технічні характеристики РЛС ППО
Тактичні характеристики РЛС ППО: сектор відповідальності РЛС (зона огляду); роздільна здатність за дальністю, кутами,
швидкістю; точність визначення дальності, кутових координат, швидкості і т.ін.; пропускна здатність; завадостійкість; надійність;
мобільність.
Сектор відповідальності (зона огляду) РЛС, у межах якого станція здатна вирішувати покладені на неї задачі, обмежена в про-
сторі максимальними і мінімальними дальностями дії, азимутами і кутами місця.
Максимальна дальність дії при фіксованій ЕПР цілі визначається енергетичними можливостями радіолокатора, мінімальна
- розмірами “мертвої зони”, у межах якої неможливо виявлення і визначення координат цілей. Для імпульсних РЛС, що пра-
цюють на одну приймально-передавальну антену, основними причинами виникнення “мертвої зони” є неможливість прийому
відбитих сигналів під час випромінювання сигналу передавачем. Сектор відповідальності по кутах визначається можливостями
антенної системи РЛС з огляду простору.
Роздільна здатність РЛС характеризує можливість роздільного радіолокаційного спостереження близько розташованих цілей
і роздільного вимірювання параметрів кожної цілі при відсутності взаємних завад.
Роздільна здатність по координатах характеризується елементарним об’ємом. Розміри останнього по дальності Ж і кутових ко-
ординатах 5р, 5є (рис. 3.66) встановлюються так, що наявність цілі в сусідньому елементарному об’ємі практично не погіршує пока-
зників якості виявлення і вимірювання координат цілі, що розташована в центрі виділеного об’єму. Виділений таким способом
елементарний об’єм називають роздільним об’ємом, а при імпульсному опроміненні цілі - імпульсним об’ємом
У = К25К5р5є. (3.149)
Роздільна здатність РЛС за дальністю
8К = ^>, (3.150)
93
Рис. 3.65. Структурна схема багатофункціональної РЛС з модульною АР і цифровим формуванням ДС на прийом
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
де с - швидкість розповсюдження електромагнітних коливань; т,, Дт - тривалість і величина розширення від-
битого сигналу відповідно; Ке, — коефіцієнт стиску сигналу на виході оптимального приймача (для імпульсних сиг-
налів без внутрішньоімпульсної модуляції Кст = 1).
(3.151)
Роздільна здатність РЛС по кутових коорд инатах (азимуту і куту місця)
50 = 0Р; 5є = 0Б,
де 0р, 0Е- ширина діаграми спрямованості в азимутальній і кутомісцевій площині відповідно.
Роздільна здатність РЛС по висоті - мінімальна різниця висот двох цілей, які знаходяться на однаковій дальності і на одному
азимуті:
зн=-^5-
СО8Є
(3.152)
для ТВ систем
(3.153)
(3.154)
(3.155)
(3.156)
де є-поточне значення кута місця.
Роздільна здатність оптико-електронних засобів (ОЕЗ) за дальністю (тільки для активних систем). Значення роздільної
здатності за дальністю визначається величиною тривалості сигналу який враховується під час оцінки
Рф ^сер Ь V Ті,
де Пар - серед ня кількість фотонів у сигналі; И=6,62 10'34 Дж с - постійна Планка; V - частота випромінювання.
Роздільна здатність оптико-електронних засобів по кутових координатах 50:
для активних систем 50А=Опері
для пасивних ІЧ систем 50н =
О
а®ТВ =Т"^П’
О
де ©пф-кут розбіжності променя генератора; О-кут поля зору передавальної трубки; Ь-ширина мішені передавальної трубки;
(іц-діаметр променя, що розгортається (плями).
Роздільна здатність телевізійних оптико-електронних засобів визначається як кількість переходів від чорного до білого або
обернено, що можуть бути передані (відображені) телевізійними ОЕЗ. Одиниця вимірювання розрізнення в цьому випадку назива-
ється ТВ-лінією. Розрізнення за вертикаллю у всіх телевізійних ОЕЗ однакове тому що обмежено телевізійним стандартом (здебі-
льшого 625 рядків телевізійної розгортки). На розрізнення по горизонталі насамперед впливає кількість елементів ПЗЗ-матриці.
Точність визначення дальності К, азимуту 0, куту місця є, доплерівської швидкості Уг звичайно характеризується серед-
ньою квадратичною помилкою о, яка визначається як корінь із дисперсії помилки вимірювання цього параметра О. Потенційна
(мінімально можлива) СКП визначення д аного параметра о™ може бути представлена у вигляді
К
амін — /~Г
7?
де К -деякий коефіцієнт, що залежить від параметрів зондуючого сигналу і самої станції; ц2 - відношення сигнал/шум за поту-
жністю.
При вимірюванні дальності, кутових координат і радіальної швидкості цілі коефіцієнт Кю Кр, К* КУг визначаються за форму-
лами:
(3.157)
(3.158)
V _ С V _ V — 1 _ ^0
2Иеф еф 2теф
де ГЦ - ефективна ширина спектра радіолокаційного сигналу; €еф - ефективна довжина апертури (розкриву) антени, нормована
до довжини хвилі; т^ф-ефективна тривалість сигналу.
Точність вимірювання дальності при заданому відношенні сигнал/шум тим вище, чим ширше спектр радіолокаційного сигна-
лу; точність вимірювання кутової координати - чим більше апертура антени (при фіксованій довжині хвилі); точність вимірювання
швидкості - чим більше тривалість радіолокаційного сигналу.
Конкретні значення параметрів Пф т^ф залежать від виду зондуючого сигналу, а - від параметрів антени.
При фіксованих параметрах РЛС потенційна точність вимірювання параметрів цілі тим вище, чим більше відношення сиг-
нал/шум на вході приймача станції.
95
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Пропускна здатність РЛС - інтенсивність потоку цілей, що обслуговуються (кількість цілей, що обслуговуються за одиницю
часу) з показниками якості, не нижче заданих. При цьому під обслуговуванням розуміється повний комплекс операцій, що викону-
ється РЛС відповідно до її функціонального призначення (виявлення, супроводження, розпізнавання).
Завадостійкість - здатність радіолокаційної станції виконувати свої функції під час впливу зовнішніх завад. За джерелом ви-
никнення завади можна розділити на природні і штучні (організовані).
Природні завади у всьому НВЧ-діапазоні обумовлені наявністю шумів атмосфери, Сонця, Галактики, а в сантиметровому і,
особливо, міліметровому діапазонах додатково істотну роль відіграють метеоутворення - хмари, град, краплі дощу, сніжинки.
Штучні завади ставляться супротивною стороною з метою ускладнити або зробити цілком неможливою роботу РЛС ППО.
Вони поділяються на активні і пасивні.
Активні завади створюються за допомогою спеціальних генераторів сигналів. Ці сигнали представляють собою радіовипромі-
нювання різноманітної структури, що перекривають робочу смугу частот РЛС.
Пасивні завади створюються за допомогою спеціальних (частіше усього дипольних) відбивачів.
Надійність РЛС - здатність виконувати свої тактичні функції і зберігати значення параметрів при заданих умовах експлуатації
Кількісно надійність частіше усього оцінюється або середнім часом безвідмовної роботи РЛС, або імовірністю безвідмовної роботи
протягом визначеного часу.
Мобільність - здатність РЛС змінювати свою дислокацію на місцевості. Звичайно мобільність характеризується часом розгор-
тання і згортання на позиції.
Технічні характеристики: потенціал РЛС; робоча довжина хвилі або несуча частота сигналу; потужність випромінювання
(імпульсна і середня); чутливість і смуга пропускання приймача; ширина ДС антени і рівень бічних пелюстків; коефіцієнт спрямо-
ваної дії антени.
Потенціал - характеризує енергетичні можливості станції. Потенціал РЛС пов’язаний з максимальною дальністю дії Клд. РЛС.
Щільність потоку потужності випромінених РЛС електромагнітних коливань рц у місці розташування об’єкта дорівнює
РрЛС _ РвипрСп
4лЯ2 4лК2
(3.159)
де Ррлс - потужність електромагнітних коливань, що випромінюються РЛС у напрямку цілі; К. - дальність до об’єкта; Р^ - по-
тужність, що випромінюється; Сп - коефіцієнт підсилення передавальної антени.
Щільність потоку потужності, відбитої об’єктом і такої, що утворюється в місці розташування РЛС ррлс дорівнює
Рц _ Рцац
4лК2 4лК2
(3.160)
де рц - потужність електромагнітних хвиль, які відбиваються ціллю в напрямку РЛС; оц - ефективна площа розсіювання.
Потужність відбитого сигналу, що надходить на вхід приймача РЛС Рф визначається за формулою
Рпр = Ррлс^еф.пр» (3.161)
де - ефективна площа приймальної антени.
Основне рівняння радіолокації:
п _ Рвипр^п^еф.пр^ц
пр= (^к4
Відношення сигнал/шум:
2 _ Рпр _ Рвипр^п^еф.пр^цЛ
4 ~ рш " (4л)2РшК4
(3.162)
(3.163)
де Рш-потужність шуму; 0 < г| < 1 - множник втрат, що враховує енергетичні втрати сигналів при поширенні через середовище
поширення, неідеальності трактів обробки сигналів та ін.
Потенціал РЛС:
п=РВипр Оп5ефпрП
Рш (4л)2
Якщо в РЛС одна приймально-передавальна антена, тобто 6П = = С, 8^ = 8^ = 8^ , то з урахуванням того, що
4л8еф
11 =-----
п=Рвшф^фП = Рвип16^А1
Рш 4лХ Рш (4л)
Максимальна дальність дії при заданих параметрах ц2 і оц пропорційна кореню четвертого ступеня з потенціалу РЛС:
І По..
Кмакс=4-^-, (3.166)
ї Ч
тобто щоб збільшити максимальну дальність дії РЛС при роботі з об’єктом із однією і тією ж ЕПР, наприклад, у два
рази, необхідно збільшити її потенціал у шістнадцять разів.
96
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Робоча довжина хвилі (несуча частота сигналу). Довжина хвилі Л, що поширюється у вільному просторі, і його частота £
пов’язані за формулою
Х = р (3.167)
де с = З 108 м/с - швидкість світла у вакуумі.
Миттєва активна потужність Р(і) - усереднене за період То поточне значення потужності (Вт) коливань, що випромінюють-
ся, р(і) = и(1) і(0 (и(0 та і(і) - миттєві значення напруги і струму, які усереднені за період високої частоти То):
1 То
Р(0 = — (3.168)
!0 0
Найбільше значення миттєвої потужності називається піковим, тобто Р^С) = РГ1К-
Імпульсна потужність - потужність, що усереднюється за час тривалості імпульсу тї:
р, =—?Р(оаі<рпік. (з.іб9)
ті о
Для імпульсів прямокутної форми значення імпульсної і пікової потужностей співпадають, тобто Р, = Рак.
Середня потужність - потужність, що усереднюється за період слідування імпульсів Тп:
Е Р
р“-=^=о’ (3|7<,)
де 9=ТУт- - шпаруватість імпульсів.
Енергія імпульсу Е^Дж:
Еі= . (3.171)
0
Чутливість приймача (Рі^^щ) - мінімальне значення середньої потужності (Вт) сигналу на вході приймача, при якому забез-
печується відношення потужності сигналу до потужності шуму, що дорівнює 1:
Рп,мін = КШТ0ДГпр, (3.172)
де К = 1,38 10’23 Дж/К - постійна Больцмана; Ш - коефіцієнт шуму приймача; То - температура; Д£ф - смуга пропускання при-
ймального пристрою, Гц.
На практиці використовують поняття порогової (граничної) чутливості, тобто чутливості, при якій забезпечується приймання
та виявлення відбитих сигналів із заданою імовірністю:
Рпор “ Рпр.мін Я, (3.173)
де ц - погрібне для виявлення відношення сигнал/шум.
Ширина діаграми спрямованості антени і рівень бічних пелюстків.
Діаграма спрямованості антени має багатопелюстковий характер. Центральний і найбільший пелюсток називається головним
пелюстком ДС антени, інші - бічними пелюстками. Бічні пелюстки - заважають, вони знижують властивості спрямованості
антени, ведуть до енергетичних втрат, створюють можливість помилкового пеленгування.
Ширина ДС - ширина головного пелюстка на деякому обумовленому рівні (частіше усього рівні половинної потужності).
Ширина ДС дзеркальних антен у площинах азимуту Ор і куту місця рад:
Єр = к-^, ЄЕ=К.-^~, (3.174)
де К - коефіцієнт пропорційності (К ~ 0,88); Ц, Ц - розміри антени у площинах азимуту і купгу місця.
Ширина ДС фазованої антенної решітки у відповідній площині:
0 = К—-—, (3.175)
Ьсоаа
де а - кут між нормаллю до площини решітки і положенням ДС на даний момент часу.
Коефіцієнт спрямованої дй* антени - відношення інтенсивності випромінювання в напрямку головного максимуму випромі-
нювання до середнього значення інтенсивності випромінювання в усіх напрямках Р£
О(Р>є) = Імак£._ (3.176)
РХ
Він показує виграш за потужністю, що утворюється в напрямку головного максимуму випромінювання в порівнянні з іншими
напрямками. Виграш досягається за рахунок концентрації електромагнітної енергії в даному напрямку і ослаблення випромінюван-
ня в інших напрямках.
Коефіцієнт підсилення Со враховує втрати в реальній антені.
4л8Є(Ь
С() “ "2 ’ §еФ = Кп^геом » (3.177)
А,2
ДО $геом - ефективна і геометрична площини антени від повідно; К„ - коефіцієнт використання площі антени (для різних ти-
пів антен Кп=0,5 0,7).
97
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Зв’язок коефіцієнта підсилення з діаграмою спрямованості
4л 40000 25000
ереЕ * " е°ро; ” е;е; ’
(3.178)
де Ор, 0Е - ширина діаграми спрямованості за половинною потужністю, рад; 0Р°, 0Е° - ширина діаграми спрямованості за поло-
винною потужністю, град; Кп = 0,6.
3.7. Основні пристрої радіолокаційних систем
Антенні пристрої
Радіолокаційні антени призначені для випромінювання в напрямку на ціль і прийому відбитих (випромінених) електромагні-
тних коливань.
Важлива функція антен полягає у формуванні випромінювання з визначеними характеристиками, головним чином із заданою
діаграмою спрямованості. Діаграма спрямованості антени (ДСА) - залежність від напрямку напруженості поля або потужності,
випромінюваної передавальною антеною, чи електрорушійною силою, або струмів, які індукуються у приймальній антені в процесі
поглинання падаючих на неї електромагнітних хвиль. Таким чином, ДСА характеризується кутовим розподілом амплітуди поля
випромінювання чи кутовим розподілом щільності потоку потужності випромінювання антени в дальній зоні (діаграма спрямова-
ності за потужністю). Обидві ці діаграми спрямованості в складних антенах мають пелюсткову структуру, обумовлену інтерферен-
цією хвиль, які випромінюються і розсіюються різними елементами антени. Якщо синфазно складаються поля всіх елементів, то
відповідний їм максимум називають головним. Діаграму спрямованості зображують у вигляді об’ємної, рельєфної картини, конту-
рної карти з лініями однакових рівнів або за допомогою окремих плоских перерізів, частіше двох ортогональних перерізів, що про-
ходять через напрямок головного максимуму і вектори Е та Н (вектори напруженості електричного і магнітного полів). Внаслідок
того основна частина потужності, яка випромінюється чи приймається антеною, локалізується в головній пелюстці, спрямованість
випромінювання антени характеризують шириною головної пелюстки на рівні половинної потужності Д0ОЗ чи нульовому рівні
Д0О~ 2Д0о,5 . Величина Д0О^ визначає кутову розрізнювальну спроможність антени і може бути приблизно оцінена за формулою (у
радіанах): Д0ОЗ ~ Х/Ь, (X - довжина хвилі, Ь - лінійний розмір антени). Це співвідношення збігається з критерієм Релея, який вико-
ристовують в оптиці для оцінки розрізнювальної спроможності оптичних систем.
Класифікація антен: за характером розташування випромінювачів - антени з безперервно розподіленими випромінювачами і
антенні решітки; за діапазоном, що використовується - антени довгих, середніх, коротких хвиль, антени УКХ і антени оптичного
діапазону.
Антени з безперервно розподіленими випромінювачами і антенні решітки можна розподілити на лінійні, поверхневі та
об’ємні у відповідності до того, як розташовані безперервні або дискретні випромінювачі: вздовж лінії, на ділянці поверхні або у
деякому об’ємі. До поверхневих безперервно розподілених випромінювачів відносять апертурні антени (рупори, дзеркала, лінзи), у
яких випромінювання електромагнітних хвиль здійснюється через деякий отвір, що називається апертурою або розкривом антени.
Антени довгих, середніх і коротких хвиль представляють собою системи тонких проводів, які перетворюють струми високої
частоти на енергію електромагнітних хвиль і формують діаграму спрямованості. Відношення лінійного розміру антени Ь до дов-
жини хвилі X менше або дорівнює одиниці (для антен довгих та середніх хвиль — « 1, для антен коротких хвиль — ~ 1).
X X
Антени УКХ (діапазон довжини хвиль X = 1 мм ... 10 м) мають такі особливості: їх розмір значно більше довжини хвилі X, тоб-
Ь
то — » 1, це дозволяє забезпечити високу спрямованість антени; замість лінійних струмів, що протікають по тонких проводах,
X
широко використовуються поверхневі струми, що протікають по металевій поверхні; перетворення струмів високої частоти на
радіохвилі і формування діаграми спрямованості виконується різними елементами. Класифікація антен УКХ наведена на рис. 3.67.
Антени УКХ
1 1 і “і
Дротові Акустичного типу Оптичного типу і і Щілинні Поверхневих хвиль
Спіральні Хвилеводні Дзеркальні
*- Вібраторні Рупорні Лінзові
1
Решітки поперечного випромінювання Решітки осьового випромінювання
Рис. 3.67. Класифікація антен УКХ
98
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Дротові антени.
Спіральні антени можуть бути циліндричною спіраллю з рефлектором, конічними зі змінним кутом намотування, плоскі і т.ін.
Якщо довжина витка спіралі приблизно дорівнює довжині хвилі, то максимум випромінювання спрямований вздовж осі. Спіральні
антени збуджують у напрямку осі спіралі поле кругової поляризації.
У вібраторних антен основним елементом найбільш часто є симетричний вібратор довжиною близько Х/2 (рис. 3.68, а).
Рис. 3.68. Вібраторні антени: симетричний вібратор (а); вібраторна решітка з поперечним
випромінюванням (б); вібраторна решітка з осьовим випромінюванням (в)
Рад вібраторів, які однаково орієнтовані і розміщені на деякій відстані один від одного, створюють вібраторні решітки.
В решітках поперечного випромінювання (рис. 3.68, б-антена типу “синфазне полотно”) максимум випромінювання спря-
мований по нормалі до площини решітки або відхилений від нормалі на деякий кут. Для того, щоб випромінювання було зосере-
джено в один бік, у таких антенах використовують рефлектор (металевий лист або сітка), який встановлюють на відстані приблизно
чверті довжини хвилі від решітки.
В решітках з осьовим випромінюванням (рис. 3.68, в - директорка антена) вібратори збуджуються хвилею, що біжить. Мак-
симум випромінювання спрямований вздовж лінії розташування вібраторів. У цій системі збуджується тільки один “активний віб-
ратор”, поле якого збуджує інші “пасивні” вібратори. Необхідні фази струмів у вібраторах забезпечуються вибором довжини вібра-
торів і відстані між ними.
Достоїнством решітки з осьовим випромінюванням є простота конструкції та формування вузької діаграми спрямованості од-
ночасно в двох взаємно перпендикулярних площинах шляхом збільшення тільки одного лінійного розміру - довжини антени, в
решітках з поперечним випромінюванням для цього необхідно збільшувати обидва розміри полотна. Недоліком решітки з осьовим
випромінюванням (у порівнянні з решітками з поперечним випромінюванням) - великий рівень бічних пелюсток.
Антени акустичного типу
Простим хвилеводним випромінювачем є відкритий кінець прямокутного або круглого хвилеводу (рис. 3.69, а, б). Спрямова-
ність випромінювання такої антени невелика. Крім того, вона погано узгоджена з вільним простором.
а) б) в) г)
Рис. 3.69. Антени акустичного та щілинного типу: прямокутний хвилевід (а); круглий хвилевід (б);
пірамідальний рупор (в); щілинна (дифракційна) антена (г)
Для підвищення спрямованості і покращання узгодження на відкритому кінці хвилеводу розміщують рупор (рис. 3.69, в). Ру-
порні антени прості і широкосмугові. Такі антени широко використовуються як самостійні антени та у якості елементів більш скла-
дних антен. Але в рупорних антенах важко отримати вузьку діаграму спрямованості.
Щілинні антени (рис. 3.69, г) представляють собою систему щілин (як правило напівхвильових), що прорізані на поверхні
хвилеводу, коаксіального кабелю або об’ємного резонатора. За спрямованими властивостями щілинні антени багато у чому анало-
гічні вібраторним антенам.
Достоїнством щілинних антен є простота і відсутність частин, що виступають за межі поверхні, на якій прорізані щілини. Недо-
ліком щілинних антен є їх вузькосмуговість.
Антени оптичного типу.
Дзеркальними антенами називаються антени, що формують ДС шляхом розсіювання електромагнітних хвиль, що падають
на металеве дзеркало (рефлектор) визначеної конфігурації. Джерелом електромагнітної енергії хвиль служить будь-яка слабкосп-
рямована антена, яка називається опромінювачем. За кількістю дзеркал вони можуть бути одно- і багатодзеркальними. За конфі-
гурацією розрізняють параболічні, сферичні, конічні, циліндричні та інші антени.
Параболічна дзеркальна антена. Дзеркало такої антени представляє собою параболоїд обертання, у фокусі якого розміщений
опромінювач (рис. 3.70).
99
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Сферична хвиля, що виходить із фокуса Е і потрапляє на дзеркало, перетвориться після відбиття на плоску хвилю, що поширю-
ється в напрямку осі параболоїда Спрямовані властивості параболічної антени залежать від відношення радіуса розкриву дзеркала
ро до параметра, що утворює дзеркало параболи р = 2іф (Гф - фокусна відстань). Для параболоїдів обертання частіше усього викорис-
товуються вібраторні, хвилеводно-рупорні і спіральні опромінювані.
Рис. 3.70. Формування поля у параболічній
дзеркальній антені
Рис. 3.71. Формування поля
у дводзеркальній антені
Дводзеркальні антени в порівнянні з однодзеркальними мають великі можливості у формуванні діаграм спрямованості з не-
обхідними характеристиками. Дводзеркальна антена (рис. 3.71) складається з опромінювана, що опромінює поверхню малого дзер-
кала, названого контррефлекгором, від поверхні якого хвиля відбивається і спрямовується на поверхню великого (основного) дзер-
кала або рефлектора У дводзеркальних антенах можна максимально зменшити довжину хвилеводного тракту, шляхом встанов-
лення опромінювана поблизу вершини великого дзеркала
У РЛС ППО більш широке поширення одержали антени Кассегрена з опуклими малими дзеркалами (див. рис. 3.71). У таких
антенах велике дзеркало має параболічну, а мале - гіперболічну форму і звернено опуклою стороною до великого дзеркала Фазо-
вий центр опромінювана розташований у фокусі Р| гіперболічного відбивача; фокус Р2 контррефлекгора сполучений із фокусом
параболічного дзеркала Сферична хвиля опромінювана перетвориться малим дзеркалом на сферичну ж хвилю, але з центром у Р2,
що у свою чергу перетвориться великим дзеркалом на плоску хвилю, яка створює в розкриві антени синфазне поле.
Достоїнством дзеркальних антен є достатньо великий коефіцієнт підсилення, простота конструкції та експлуатації’, відносно не-
висока вартість. Головний недолік - дзеркальні антени можуть здійснювати огляд повітряного простору тільки за рахунок механіч-
ного повороту дзеркальної системи (механічне сканування) або переміщення якогось елемента антени, наприклад опромінювала
(електромеханічне сканування).
Лінзові антени (рис. 3.72) можуть бути виконані з діелектриків з малими втратами. Але діелектричні лінзи великих розмірів
мають велику масу та високу вартість. Тому замість реальних діелектриків застосовують штучні діелектрики, що представляють
собою решітки з металевих частинок, які запресовані в діелектрик з коефіцієнтом заломлення, близьким до одиниці. Лінзи з штуч-
ного діелектрика дешевші і мають меншу масу.
Рис. 3.72. Лінзова антена
Рис. 3.73. Лінза, що прискорює
На відміну від оптики у радіодіапазоні використовуються не тільки сповільнюючі лінзи з коефіцієнтом заломлення більше оди-
ниці, але і прискорюючі лінзи, наприклад, металевопластичні (рис. 3.73). Якщо вектор Е паралельний пластинам, то фазова швид-
кість в лінзі більше швидкості світла, що відповідає коефіцієнту заломлення, який менше одиниці.
Достоїнством лінзових антен у порівнянні з дзеркальними є: відсутність елементів, які закривають розкрив, що випромінює;
зниження рівня бічного випромінювання; широкі можливості формування потрібної діаграми спрямованості шляхом зміни профі-
лю двох поверхонь, величини коефіцієнта заломлення і закону його розподілу у середині лінзи; можливість створення антен для
коливання променя у широкому секторі. Загальним недоліком усіх типів лінзових антен, що використовуються у радіодіапазоні, є
велика маса і складність конструкції.
100
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Антени поверхневих хвиль (рис. 3.74). Основним елементом в цих антенах є сповільнююча структура, яка формує поверхне-
ву хвилю. Хвиля, що випромінюється рупором, поступово трансформується у поверхневу. Це сприяє збільшенню спрямованості
системи у порівнянні зі спрямованістю рупору.
Металевий стрижень
Діелектричний шар
Періодична структура
Діелектричний шар
Металеві диски
Металева пластина
Рис. 3.74. Сповільнюючі структури антен поверхневих хвиль: гладка (а), (в); періодична (б), (г)
Можливі різні варіанти конструктивної реалізації антен поверхневих хвиль, які розрізняються типом сповільнюючої структури
(гладка- рис. 3.74, а), в), періодична- рис. 3.74, б), г) та її геометрією (плоска- рис. 3.74, в), г), стержнева- рис. 3.74, а), б).
Достоїнством антен поверхневих хвиль є широкосмуговість (антени з гладкими сповільнюючими структурами), малі розміри
по висоті (плоскі антени), можливості створення різних діаграм спрямованості шляхом змінювання параметрів сповільнюючої
структури. Недоліки антен поверхневих хвиль є суттєві втрати та обмеження з потужності, особливо антени з періодичними
сповільнюючими структурами.
Фазовані антенні решітки (ФАР) представляють собою антенні решітки (сукупність найпростіших слабкоспрямованих ви-
промінювачів, розташованих певним чином відносно один одного), кожний випромінювач яких збуджується роздільно сигналами з
керованою амплітудою і фазою.
Роздільне електричне керування кожним випромінювачем ФАР дає можливість практично миттєво змінювали просторове по-
ложення діаграми спрямованості антени, тобто здійснювати електричне (або, частіше говорять, електронне) сканування.
Принцип формування ДС лінійної решітки, що складається з N випромінювачів, розташованих уздовж осі 02 з однаковим кро-
ком сі, пояснюється на рис. 3.75.
Рис. 3.75. Формування ДС лінійної антенної решітки
Діаграма спрямованості лінійної антенної решітки формується в залежності від амплітудно-фазового розподілу (АФР) сигналів,
що живлять А(Хп), параметрів самої решітки (кроку д і кількості елементів М) і напрямку випромінювання 6. Множник такої решіт-
ки можна записати у вигляді
'с»ст'в>- 1 А(г„, (3.179)
п — О
де А(тп) - амплітуда сигналу живлення; \|/(Хп) - фаза сигналу живлення; сі - крок решітки; 0в - кут між напрямком випроміню-
вання і нормаллю до решітки; к = 2лА-хвильове число; п - кількість випромінювачів (п = 0, N -1).
Електричне сканування в антенних решітках. Напрямок максимуму випромінювання радіохвиль:
0
м
= агсвіп
(3.180)
де ^-різниця фаз сигналів живлення між двома сусідніми випромінювачами; т = 0,1,2,....
Управління напрямком максимуму ДС антенної решітки в просторі можна здійснити шляхом змінювання частоти сигналу (до-
вжини хвилі X) або різницею фаз сигналів живлення в елементах решітки.
Діаграма спрямованості антенної решітки має не один, а декілька головних максимумів (пелюстків). Тому при проектуванні ан-
тенних решіток застосовують спеціальні заходи щодо подавлення побічних (дифракційних) максимумів: зменшення відстані між
сусідніми випромінювачами; використання спрямованих властивостей окремого випромінювача; використання нееквідісгантних
решіток.
Класифікація ФАР: за способом сканування; за способом живлення випромінювачів; за розташуванням елементів у просторі;
за розташуванням елементів у самій решітці.
101
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Частотний спосіб сканування - сигнали живлення на випромінювачі антенної решітки подаються від генератора змінної час-
тоти або від генератора постійної частоти через систему сповільнюючих структур. Основною характеристикою частотного способу
сканування є куточастотна чутливість, що показує, як змінюється положення максимуму ДС при заданому перестроюванні частоти.
Фазовий спосіб - сканування, яке грунтується на створенні керованих фазових зсувів сигналів живлення між випромінювача-
ми антенної решітки. Фазові зсуви створюються за допомогою фазообертачів, ліній затримки й інших елементів, які зсувають фазу.
У якості основних керуючих елементів при формуванні необхідного фазового розподілу у ФАР застосовуються феритові і на-
півпровідникові фазообертачі. У феритових фазообертачах використовується ефект змінювання фази сигналу, який проходить че-
рез ферит, в залежності від магнітної проникності фериту, що змінюється під дією керуючого магнітного поля. У напівпровіднико-
вих фазообертачах, основними з яких є фазообертачі на р-і-п-діодах, для керування фазою сигналу використовується ефект зміню-
вання параметрів напівпровідникового елемента під дією прикладеної напруги.
Безперервний спосіб керування фазою сигналів - розмір внесеного фазообертачем фазового зсуву пропорційний розміру
керуючого струму. Цей спосіб дозволяє здійснити плавне керування ДС антенної решітки, проте відрізняється низькою стабільніс-
тю (під час роботи розмір керуючого струму і відповідно розмір фазового зсуву можуть змінюватися під впливом різноманітних
чинників, наприклад температури) і неекономічністю (у керуючому ланцюзі увесь час протікає електричний струм). Для реалізації
цього способу керування необхідно мати складний пристрій, що виробляє керуючі сигнали.
Дискретний спосіб - керуючий сигнал змінюється стрибкоподібно. При цьому для керування фазовим зсувом використову-
ється ряд дискретних точок безперервної характеристики фазообертача. При цьому спрощується пристрій, що виробляє керуючі
сигнали, проте залишаються такі недоліки, як неекономічність і нестабільність характеристик фазообертачів.
Комутаційний спосіб - для його реалізації використовуються комутаційні фазообертачі, фаза електромагнітних коливань на
виходах яких приймає визначені фіксовані значення. Комутаційний спосіб забезпечує високу стабільність характеристик, тому що
фазообертачі працюють у режимі, при якому використовуються тільки дві крайні області їхніх характеристик, що відповідають
режиму вмикання і вимикання фазообертачів. Він відрізняється високою економічністю, тому що споживання енергії відбувається
тільки в момент переключення фазообертачів.
Дискретні і комутаційні фазообертачі характеризуються розрядом р. Кількість фіксованих значень фази N пов’язана з розрядні-
стю фазообертача р співвідношенням N = 2Р, при цьому фаза сигналу живлення змінюється стрибком на величину
Д\|/ = 2л/2р. (3.181)
Наприклад, чотирьохрозрядний фазообертач забезпечує одержання 16-ти фіксованих значень фази з дискретністю Д\|/ = я/8.
Послідовна схема вмикання фазообертачів при керуванні фазовим зсувом (рис. 3.76, а) - кожний фазообертач змінює фазу
на одну і ту ж величину від 0 до 360° (наприклад на 1°, як показано на рис. 3.76, а). Достоїнством у схемі є простота керування.
Проте в цієї схеми є істотні недоліки: низька надійність (вихід із ладу одного фазообертача призводить до відключення усіх фазоо-
бертачів, що стоять за ним), мала потужність, що пропускається (уся потужність проходить через перший фазообертач), накопи-
чення фазових помилок (помилки, внесені кожним фазообертачем, підсумовуються).
а) б)
Рис. 3.76. Схеми включення фазообертачів: послідовна (а); паралельна (б)
Паралельна схема - фазообертачі включаються у відрізки фідерів, що підводять живлення до кожного випромінювача окремо
(рис. 3.76, б). Для забезпечення лінійного закону зміни фази уздовж антенної решітки необхідно, щоб кожний фазообертач управ-
лявся за своїм законом. Це істотно ускладнює схему керування фазообертачами, тому в сучасних РЛС із ФАР для керування фазоо-
бертачами використовуються ЕОМ.
Антенні решітки з фідерним живленням - електромагнітні коливання підводяться до кожного випромінювача за допомогою
фідера, що живить. Якщо в каналі живлення такої решітки є генератор або підсилювач, то така ФАР називається активною. Струк-
турна схема типового модуля активної приймально-передавальної решітки зображена на рис. 3.77.
Антенні решітки з просторовим (оптичним) живленням (рис. 3.78).
Прохідні (рефракційні) ФАР - випромінювачі мають приймально-передавальні елементи, між якими розташовані фазообертачі
(рис. 3.78, а). Опромінювач, що знаходиться позаду полотнини антенної решітки, випромінює сигнали, що передаються на прийма-
льні елементи випромінювачів не по фідерах, а через вільний простір. Фазові зсуви в прийняті сигнали вводяться за допомогою
керованих електронно-обчислювальними машинами фазообертачів. Після цього отримані сигнали випромінюються в напрямку на
об’єкт, за допомогою передавальних елементів.
Відбивні (рефлекторні) ФАР - опромінювач знаходиться попереду полотнини антенної решітки (рис. 3.78, б). Така конструкція
більш компактна і зручна в експлуатації у порівнянні з прохідною ФАР, проте розміщення опромінювана в полі відбитої від полот-
нини антени хвилі призводить до так названого “затінення” розкриву антени, що зменшує коефіцієнт її підсилення і створює інші
небажані ефекти.
102
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.77. Структурна схема приймально-передавального модуля суміщеної антенної решітки
Фронт
хвилі
Рис. 3.78. ФАР з оптичним живлення: прохідна (а); відбивна (б)
Фазовані антенні решітки не дають можливість формувати одночасно декілька незалежних діаграм спрямованості на одному
загальному розкриві антени за рахунок використання визначених законів збудження випромінювачів. Цей принцип формування
ДС реалізується в багатопроменевих ФАР, що складаються з власне антенної решітки і так названої схеми діаграмостворення.
Основними видами схем діаграмостворення є послідовна і паралельна (матрична).
Одномірні ФАР - випромінювачі у просторі розташовуються прямолінійно, дугою або кільцем.
Двомірні ФАР - плоскі, циліндричні, сферичні або конічні.
Тривимірні ФАР - об’ємні.
У антенних системах РЛС ППО використовують плоскі антенні решітки, у яких керування напрямком максимуму ДС здійсню-
ється в двох площинах - азимутальній і кутомісцевій.
Еквідистантні ФАР - з постійним кроком решітки сі у межах всієї апертури антени.
Нееквідисгантні ФАР - параметр сі змінний, причому він звичайно збільшується при віддаленні випромінювачів від центра
решітки (розрідження решітки до країв).
Передавальні пристрої
Передавальні пристрої -однокаскадні або багатокаскадні пристрої, що забезпечують генерування і формування високочасто-
тних сигналів із заданими значеннями форми і вихідної потужності.
Основні характеристики передавальних пристроїв: потужність, стабільність частоти, діапазон робочих частот, коефіцієнт
корисної дії, габарити, маса, механічна міцність, вібростійкість та ін.
Спрощена структурна схем однокаскадного і багатокаскадного передавального пристрою показана на рис. 3.79.
Генератор надвисокочастотних електромагнітних коливань (НВЧ-генератор) генерує коливання, що надходять на форму-
ючий пристрій, де формуються сигнали необхідної структури. Отримані сигнали посилюються спочатку попередніми підсилюва-
чами потужності, а потім кінцевим підсилювачем потужності, за рахунок чого забезпечується необхідне значення імпульсної поту-
жності сигналу.
Основу передавальних пристроїв РЛС ППО складають генераторні і підсилювальні НВЧ-пристрої двох типів: електровакуумні
і напівпровідникові.
Електровакуумні НВЧ-пристрої розділені на пристроїтипів О і М.
103
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.79. Структурна схема передавального пристрою (однокаскадний має один попередній підсилювач по-
тужності, багатокаскадний - декілька)
Пристроїтипу О - перетворення кінетичної енергії’ електронів на енергію електромагнітного поля відбувається в результаті га-
льмування електронів цим полем. Магнітне поле або не використовується зовсім, або застосовується тільки для фокусування елект-
ронного потоку і принципового значення для процесу енергообміну не має. До пристроїв типу О відносять клістрони і лампи біжу-
чої хвилі (ЛБХ).
Пристрої типу М - пристрої, у яких відбувається перетворення потенційної енергії електронів на енергію електромагнітного
поля. Постійне магнітне поле у таких пристроях перпендикулярно до постійного електричного поля, що прискорює електрони. До
пристроїв типу М відносять магнетрони, магнетронні підсилювачі та амплітрони.
Магнетрон - двоелектродний електровакуумний прилад з електромагнітним керуванням, що є генератором електромагнітних
коливань у діапазоні від метрових до міліметрових хвиль.
Принцип роботи магнетрона. Початкові електромагнітні коливання в резонаторах магнетрона виникають у результаті флук-
туацій електронного потоку. Коливання підтримуються за рахунок енергії джерела постійної напруги анод - катод, що за допомо-
гою електронного потоку передається полю хвилі. Таку спрямовану передачу енергії’ можна здійснити, якщо електронний потік
взаємодіє зі змінним електричним полем визначеної фази. Для цього електронний потік повинен бути згрупований у згустки, час
проходження котрих поблизу щілини резонатора збігався б з часом існування там поля в потрібній фазі.
Прямування електронів від катода до анода в магнетроні відбувається не у всіх азимутальних напрямках рівномірно. Потоки
електронів створюються лише в деяких областях простору взаємодії, відзначених пунктиром на рис. 3.80, створюючи при цьому
так названі електронні спиці. Електрони в спицях переміщуються до анода по складних петлеподібних траєкторіях, тому що харак-
тер їх прямування визначається сумарним впливом постійного магнітного поля і постійного і змінного електричних полів. При
цьому спиці обертаються в просторі взаємодії зі швидкістю, що забезпечує збіг моментів проходження електронами області прос-
тору взаємодії поблизу щілин резонаторів й існування в цій області потрібної фази поля. Інакше кажучи, обертання спиць синхроні-
зується зі зміною фази високочастотних коливань. При такому складному характері прямування в спиці на шляху від катода до
анода електрони на кожному витку втрачають частину своєї потенційної енергії’, що передається електромагнітному полю, забезпе-
чуючи підтримку його коливань. Електрони, що віддали свою енергію електромагнітному полю, ідуть на анод, а спиці поповню-
ються новими електронами, емітованими катодом.
Для генерування НВЧ-коливань також застосовуються удосконалені багаторезонаторні магнетрони: коаксіальні і обернені
коаксіальні. Такі магнетрони дозволяють збільшити потужність електромагнітних коливань, що генеруються, і підвищити стабі-
льність частоти.
Для посилення електромагнітних коливань у попередніх і кінцевих каскадах посилення використовуються, як правило, кліст-
рони і лампи біжучої хвилі. Ці ж прилади в принципі можуть працювати й у режимі генерування НВЧ-коливань.
Рис. 3.80. Розташування електронних спиць у багаторезонаторному магнетроні
104
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Клістрони - електронні НВЧ-припади, що містять один або декілька об’ємних резонаторів, робота яких грунтується на зміню-
ванні швидкості (швидкісної модуляції) електронного потоку. Клістрони застосовуються для підсилення, генерування і множення
частоти НВЧ-коливань. Коливальні системи клістронів вузькосмугові і перебудова клістронних підсилювачів та генераторів у не-
обхідному діапазоні частот проводиться, як правило, механічно (зміною геометричних розмірів об’ємних резонаторів).
Пристрій дворезонаторного підсилювального клістрона показаний на рис. 3.81.
Принцип роботи дворезонаторного підсилювального клістрона. Електрони, що випускаються катодом, рухаються під дією
поля прискорювального електрода, на який подається позитивна напруга ІЗо- Далі електронний потік рухається через сітки вхідного
і вихідного резонаторів до колектора (анода), на який подана висока позитивна напруга. Якщо у вхідний резонатор подаються НВЧ-
коливання, то між його сітками виникає змінне електричне поле, що діє на електронний потік і змінює (модулює) його швидкість.
Промодульований за швидкістю електронний потік проходить через вихідний резонатор і створює в ньому посилені електромагні-
тні коливання. Підсилення досягається за рахунок енергії’ джерела постійної напруги П*, яке створює прискорююче поле. Електро-
нний потік одержує в цьому полі велику енергію і завдяки тому, що у вхідному резонаторі відбувається модуляція за швидкістю і
сформовані згустки електронів потрапляють у вихідний резонатор, коли електричне поле в ньому гальмуюче, вони віддають части-
ну своєї’ енергії’ вихідному резонатору.
Рис. 3.81. Дворезонаторний клістрон
Лампа біжучої хвилі - НВЧ-пристрій, у якому використовується тривала взаємодія електронного потоку з полем електро-
магнітної біжучоїхвилі. Пристрій підсилювача на ЛБХ показаний нарис. 3.82.
Управляючий
електрод
Катод
Вхідна Вхід
коаксіальна
лінія
Перший
анод
Жти
Другий Діелектричний
Другий Діелектричний
анод стержень
Вихід
Металевий Фокусуюча
котушка
олектор
Пристрої узгодження
лампи зі входом та
іоглинаючий
пристрій
Діелектричний
стержень
Спіраль
Вихідна
коаксиальна
лінія
виходом
Скляна
колба
-- V
Рис. 3.82. Підсилювач на ЛБХ типу О
Принцип дії лампи біжучої хвилі Електромагнітні коливання, що підлягають підсиленню, надходять на вхід лампи і далі по-
ширюються уздовж сповільнюючої системи. Швидкість поширення електромагнітної хвилі уздовж згорнутого в спіраль проводу
дорівнює швидкості світла. Ця швидкість називається груповою. Швидкість поширення електромагнітної хвилі уздовж осі спіралі
називається фазовою. Ця швидкість менше групової швидкості в лЦ/Д разів, де Д —діаметр і крок спіралі відповідно. Парамет-
ри спіралі Ос і Д вибирають такими, щоб забезпечити потрібне сповільнення і тим самим збільшити час взаємодії електронного
потоку й електромагнітної хвилі. Для одержання ефективної взаємодії пучка електронів із хвилею погрібно забезпечити рівність
фазової швидкості хвилі і швидкості електронів. Електрони при вході в спіраль у залежності від фази НВЧ електромагнітного поля
105
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
гальмуються або прискорюються цим полем. У результаті різниці швидкостей електронів вони групуються в згустки. При прави-
льно обраних швидкостях прямування електронів і хвилі, згустки створюються в тій частині біжучої хвилі, де електрони гальму-
ються і передають свою кінетичну енергію хвилі. Амплітуда хвилі при цьому збільшується. Таким чином, у результаті взаємодії
згустків електронів із гальмуючим полем електромагнітної біжучої хвилі досягається ефект її посилення.
Підсилювач на ЛБХ типу М (магнетронний підсилювач) - електронний НВЧ-пристрій, у якому підсилення електромагніт-
ної хвилі здійснюється за рахунок її тривалої взаємодії з електронним потоком, що рухається у схрещених електричному і магніт-
ному полях. Побудова магнетронного підсилювача показана на рис. 3.83.
Принцип дії магнетронного підсилювача
Високочастотний сигнал підводиться на вхід сповільнюючої системи. У магнетронних підсилювачах звичайно використову-
ються сповільнюючі системи у вигляді гребінки або сходового типу. Прямування електромагнітної хвилі уздовж сповільнюючої
системи супроводжується утворенням поблизу її поверхні неоднорідного електричного поля. Електричне поле створюється за ра-
хунок різниці потенціалів між сповільнюючою системою, на яку подається позитивна щодо катода напруга Ид, і холодним катодом
(негативним електродом). Постійне магнітне поле створюється зовнішньою магнітною системою. Вектор В магнітної індукції пер-
пендикулярний вектору Е електричного поля. Під впливом поперечної складової цього поля електрони в потоці формуються в згу-
стки, а вплив вздовжньої складової призводить до поступового зсуву електронів у процесі прямування від негативного електрода до
сповільнюючої системи. У результаті такого прямування електрони втрачають потенційну енергію, віддаючи її полю хвилі. За ра-
хунок цього досягається ефект посилення електромагнітних коливань.
Додатковий
анод
Система,
Вхід що заземлює
Поглинаючий
пристрій Вихід Колектор
Електрони
Пое
Катод
Холодний
катод
Рис. 3.83. Підсилювач на ЛХБ типу М (магнетронний підсилювач) з плоскими катодами
6 +
У реальних приладах система електродів магнетронного підсилювача має кільцеподібну форму (рис. 3.84). Це дозволяє змен-
шити габаритні розміри приладу і спрощує вимоги до конструкції магнітної системи. Як видно з рис. 3.84, у магнетронному підси-
лювачі сповільнююча система і електронний потік не замкнуті.
Амплітрон - підсилювач типу М, що відрізняється сполученням незамкнутої сповільнюючої системи із замкнутим у кільце
електронним потоком. У порівнянні з магнетронним підсилювачем амплітрон має більшу широкосмуговість.
Рис. 3.84. Підсилювач на ЛБХ типу М з кільцеподібними електродами
Електровакуумні НВЧ-пристрої- магнетрони, клістрони, ЛБХ та ін. дозволяють реалізувати в сантиметровому і дециметрово-
му діапазонах дуже великі імпульсні потужності (до декількох десятків мегаватів). Основними недоліками електровакуумних НВЧ-
пристроїв є громіздкість, складність в експлуатації і недостатня надійність.
106
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Напівпровідникові НВЧ-присгрої-транзистори, лавино-прольотні діоди (ЛПД) і діоди Ганна Напівпровідникові генератори
відносяться до генераторів з електричним керуванням електронним потоком. Напівпровідниковий прилад у таких генераторах ви-
конує роль ключового елемента, що підключає у визначений момент часу коливальну систему до джерела живлення, у результаті
чого відбувається поповнення енергії коливальної системи.
Основним недоліком транзисторних генераторів є сильна залежність основних характеристик від частоти, тобто їх погіршен-
ня при переході до НВЧ-діапазону. Область застосування обмежується частотою приблизно 20 ГГц.
У генераторах на ЛПД - для генерування електромагнітних коливань використовується ефект, сутність якого складається в
тому, що при лавинній іонізації в напівпровідниках виникає плазма твердого тіла, що є ефективним джерелом коливань сантимет-
рового і міліметрового діапазонів хвиль. У динамічному режимі ЛПД має негативний опір, аналогічний негативному опору тунель-
ного діода, обумовленому специфічним видом його вольт-амперної характеристики (рис. 3.85).
Як видно з рис. 3.85, характеристика має АБ ділянку, що знижується, для якої характерний негативний опір змінному струму.
За допомогою негативного опору можна позбутися від втрат в контурі і одержати генерування незатухаючих коливань.
Генератори на діодах Ганна використовують ефект, який полягає в тому, що якщо до бруска, наприклад, арсениду галія
(рис. 3.86) прикласти достатньо сильне постійне електричне поле, то в ньому виникають періодичні коливання струму. Виникнення
коливань також пов’язано з появою негативного опору.
Рис. 3.86. Схема отримання коливань струму з використанням ефекту Ганна
Частотні і енергетичні можливості основних НВЧ-пристроїв наведені в табл. 3.14.
Основні характеристики генераторних НВЧ-пристроїв
Таблиця 3.14
Найменування пристрою Режим роботи Діапазон частот, ГГц Коефіцієнт кори- сної дії, % Максимальна по- тужність, кВт
Багаторезонаторні магнет- рони Імпульсний безперервний 0,3 - 90 30-70 104 102
Клістрони Імпульсний безперервний 5-300 5-15 10 1
Транзистори Імпульсний безперервний 0,3-20 25-80 ІО'1 10’2
ЛПД Імпульсний безперервний 4-100 3-18 10'1 5 10’3
Діоди Ганна Імпульсний безперервний 2-60 2-12 5 10’3 0,3 10’3
107
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Приймальні пристрої
Приймальні пристрої призначені для прийому відбитих (випромінених) сигналів, їх підсилення, перетворення за частотою і
представлення у вигляді, зручному для подальшої обробки.
Основні електричні характеристики приймальних пристроїв:
чутливість - здатність приймача забезпечувати нормальний прийом слабких сигналів. Чутливість оцінюється мінімальною ве-
личиною сигналу (напруги ІІ0 або потужності Ро) на вході приймача, що необхідна для одержання нормальної вихідної потужності
приймальної системи при заданому перевищенні сигналу над власними шумами або зовнішніми завадами;
вибірність - здатність виділяти корисний сигнал із сукупності коливань із різноманітними несучими частотами, що тісно пов'я-
зана зі смугою пропускання приймальної системи;
діапазон робочих частот - інтервали частот, у межах яких повинен забезпечуватися нормальний прийом сигналів;
динамічний діапазон - відношення максимального вхідного сигналу (напруги 15м або потужності Рм), прийом якого відбува-
ється ще з припустимими спотвореннями, до чутливості приймача, виражене в децибелах:
15 Р
До = 2018—*- = Ю1£—; (3.182)
ио
завадостійкість - здатність забезпечувати достовірний прийом корисної інформації при впливі різноманітних завад, у тому чи-
слі й організованих.
Структурна схема приймального пристрою показана на рис. 3.87.
Рис. 3.87. Структурна схема приймального пристрою супергетеродинного типу
Основними елементами приймального пристрою є підсилювач радіочастоти (ПРЧ), змішувач (ЗМ), оптимальний фільтр (ОФ),
підсилювач проміжної частоти (ППЧ), детектор (Д), аналого-цифровий перетворювач (АЦП), гетеродин (Г), система автоматично-
го підстроювання частоти (АПЧ) і система автоматичного регулювання посилення (АРП).
Підсилювачі радіочастоти - каскади приймального пристрою, у яких посилення сигналу відбувається на його несучій частоті.
Підсилювач радіочастоти виконує три основні функції: знижує коефіцієнт шуму приймальної системи для підвищення її чутли-
вості, підсилює корисний прийнятий сигнал і забезпечує частотну вибірність.
Основними типами підсилювачів радіочастоти, що використовуються в РЛС ППО, є підсилювачі на ЛБХ, параметричні
напівпровідникові підсилювачі, підсилювачі на тунельних діодах і квантові парамагнітні підсилювачі.
Підсилювачі радіочастоти на ЛБХ. Принцип їх дії практично не відрізняється від підсилювачів потужності на ЛБХ, які вико-
ристовуються у передавачах. Основні недоліки: громіздкість, складність в експлуатації, недостатня надійність. Крім того, ко-
ефіцієнт шуму ЛБХ досить швидко зростає зі збільшенням робочої частоти вхідного сигналу.
Параметричний напівпровідниковий підсилювач - пристрій, у якого посилення сигналу відбувається за рахунок енергії'
джерела високочастотних електромагнітних коливань, що вводяться до коливальної системи шляхом примусової періодичної зміни
одного або декількох параметрів реактивних елементів цієї системи. Звичайно реактивним елементом є нелінійна ємність. На прак-
тиці використовують ємність напівпровідникового діода, до якого прикладена напруга, що замикає.
Підсилювач на тунельних діодах - ефект посилення досягається за рахунок внесення в коливальний контур негативної
провідності (див. рис. 3.85).
Квантовий парамагнітний підсилювач (КПП) - квантовий підсилювач, принцип дії якого грунтується на збільшенні енергії
електромагнітних коливань за рахунок індукованого випромінювання, яка виникає при парамагнітному резонансі речовини, що
знаходиться в активному стані.
Принцип дії квантового парамагнітного підсилювача базується на властивості парамагнетизму деяких матеріалів (наприклад,
парамагнітних солей з іонами хрому, нікелю, заліза і гадолинія), що і є активною речовиною. Взаємодія індукованого ви-
промінювання активної речовини з електромагнітною біжучою хвилею дозволяє домогтися її посилення, при цьому підсилені ко-
ливання зберігають частоту, поляризацію і напрямок поширення коливань на вході. Основним недоліком КПП є складність систе-
ми охолодження, для якої необхідно мати криогенні установки, що споживають велику потужність і мають великі габаритні
розміри. Шумові і підсилювальні характеристики основних типів підсилювачів радіочастоти наведені в табл. 3.15.
Перетворювач частоти складається зі змішувача (нелінійного елемента або лінійного елемента з деяким змінним параметром)
і гетеродина (малопотужного генератора). За допомогою перетворювача спектр прийнятого сигналу змішується в область більш
низької проміжної частоти. Це дає можливість одержувати достатнє посилення сигналу і необхідну форму частотної характеристи-
ки приймача.
108
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Характеристики основних типів ПРЧ
Таблиця 3.15
Тип підсилювача Коефіцієнт шуму, дБ Коефіцієнт підсилення за потужністю, дБ
Підсилювач на ЛХБ Більше 2 10-60
Підсилювач на тунельних діодах 2-5 15-17
Параметричний напівпровідниковий підсилювач 1,2-2 15-20
Квантовий парамагнітний підсилювач 1,03- 1,04 15-25
У якості змішувачів використовуються напівпровідникові змішувальні діоди. Конструктивно змішувач на базі напівпровідни-
кового діода складається зі змішувальної камери у вигляді відрізка хвилеводу, до якого підводяться коливання сигналів від підси-
лювача радіочастоти і гетеродина, і змішувального діода, який розміщується в цій камері.
Як гетеродини застосовуються генератори безперервних НВЧ-коливань, що мають у своєму складі відбивні клістрони або на-
півпровідникові генератори на транзисторах, лавино-пролітних діодах і діодах Ганна
Оптимальний фільтр. Фільтри служать основним засобом, за допомогою якого в радіолокаційних приймачах здійснюється
розподіл корисних сигналів і завад.
Зміна форми сигналів після проходження ОФ при обробці широкосмугових сигналів призводить до ефекту їх стиску. На
рис. 3.88 зображені ЛЧМ-сигнал і його спектр на вході ОФ і обгинаюча стиснутого радіоімпульсу на виході.
Як вцдно з рис. 3.88, тривалість стиснутого ЛЧМ-сигналу тст обернено пропорційна ширині його спектра Ц, тобто чим більша
смуга сигналу, тим сильніше він стискується по тривалості після оптимальної фільтрації. Ефект стиску складних сигналів дозволяє
істотно покращити розрізнювальну спроможність по дальності без зменшення тривалості зондуючого сигналу, тобто без погіршен-
ня енергетичних можливостей РЛС при огляді простору. Якщо два зміщених широкосмугових радіоімпульси, що перекриваються,
впливають на ОФ (рис. 3.89), то кожний із них відповідно до принципу суперпозиції в лінійних системах стискується незалежно
один від одного і нерозрізненні до оптимальної фільтрації сигнали після неї можуть бути легко розділені за дальністю.
Обгинаюча стиснутого радіоімпульсу
ЛЧМ-сигнал
тст=1/Пі
Рис. 3.88. Стиск складних сигналів після оптимальної фільтрації
Рис. 3.89. Розділення складних сигналів після оптимальної фільтрації
Ді
—>
Обгинаючі стиснутих
радіоімпульсів
Підсилювач проміжної частоти призначений для посилення перетвореного сигналу до величини, що забезпечує нормальну
роботу кінцевих каскадів приймача, і в першу чергу детектора У підсилювачах проміжної частоти РЛС ППО застосовуються під-
силювальні каскади на транзисторах і інтегральних схемах (ІС).
Детектори - пристрої, вихідна напруга яких змінюється за законом модуляції сигналу, що підводиться.
Амплітудний детектор перетворює радіоімпульси у відеоімпульси, що повторюють по своїй формі обгинаючу сигналів, що
детекіуються. Отримані після перетворення відеоімпульси несуть інформацію про дальність до цілі і щодо деяких сигнальних па-
раметрів (наприклад, ЕПР цілі).
Фазовий детектор формує сигнали, що характеризують відхилення положення цілі від РСН, тобто несуть інформацію про ку-
тові координати цілі.
109
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Аналого-цифровий перетворювач перетворює аналогові сигнали в цифровий код шляхом квантування їх за часом і за рівнем.
Типовий АЦП включає до свого складу: імпульсний елемент, що здійснює квантування вхідної величини за часом; пристрій
квантування за рівнем; кодуючий пристрій, який формує цифровий код даного сигналу.
Принцип процесу квантування аналогового сигналу за часом і рівнем пояснюється на рис. 3.90.
Рис. 3.90. Процес квантування аналогового сигналу: 1 - аналоговий сигнал; 2 - вихідний сигнал
Відліки аналогового сигналу и(і) проводяться в дискретні моменти часу, при цьому на інтервалі дискретизації Т вихідний сиг-
нал приймає фіксоване значення. Крок квантування за часом (період дискретності Т) залежить від частотних характеристик сигна-
лу. Для вибору Т користуються теоремою Котельникова, що зв’язує повноту представлення сигналу и(і) у часовій області з його
представленням у частотній області (спектром сигналу 8(со)). Відповідно до теореми Котельникова функція и(і) із максимальною
частотою спектра цілком визначається послідовністю значень, що відстоять за часом на Т = л/со^. Крок квантування за рівнем А
визначається кількістю розрядів пристрою квантування за рівнем і дорівнює ціні одиниці молодшого розряду. Максимальне зна-
чення систематичної помилки ідеального пристрою, що квантує, дорівнює А/2, середнє значення - нулю, а середнє квадратичне -
А і >/12 . Реальні пристрої, що квантують, вносять додаткові помилки, обумовлені недостатньо відпрацьованими електричними і
механічними параметрами окремих елементів.
Для забезпечення нормальної роботи приймальних систем РЛС у них використовуються автоматичне підстроювання частоти й
автоматичне регулювання підсилення. Підстроювання частоти можливе як за рахунок зміни частоти передавача, так і за рахунок
зміни частоти гетеродина, проте за конструктивними і експлуатаційними розуміннями у сучасних РЛС ППО частоту звичайно
підстроюють шляхом впливу на гетеродин. Автоматичне регулювання посилення запобігає перевантаженню приймача потужними
сигналами і завадами.
Для виділення сигналів, відбитих від об’єктів, що рухаються, із усієї сукупності сигналів, що надходять у приймальну систему,
у сучасних РЛС ППО використовуються пристрої селекції рухомих цілей (СРЦ). Ці пристрої дозволяють виділяти корисні ехо-
сигнали від реальних цілей, характерною рисою яких є велика швидкість прямування відносно джерел пасивних завад (як природ-
них, наприклад місцевих предметів, так і організованих, наприклад, дипольних відбивачів). Місцеві предмети нерухомі, а хмари
дипольних відбивачів, що перемішуються повітряними потоками, мають меншу швидкість прямування відносно корисних цілей.
Обчислювальні системи
Обчислювальні системи РЛС ППО будуються на базі цифрових електронно-обчислювальних машин (ЕОМ). Структурна схема
ЕОМ показана на рис. 3.91.
Процесор-основна частина ЕОМ, що здійснює перетворення й обробку інформації відповідно до програмно-реалізованих ал-
горитмів.
Багатопроцесорні обчислювальні системи - виконують декілька незалежних програм або декілька незалежних гілок однієї’
програми.
Рис. 3.91. Структурна схема ЕОМ
110
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
3.8. Цифрова обробка радіолокаційної інформації
Нові обчислювальні засоби сприяли розробці нових способів і алгоритмів обробки радіолокаційної інформації, в тому числі й
спеціально орієнтованих для реалізації на цифровій обчислювальній техніці. Намітився поступовий перехід до РЛС з цифровими
антенними решітками (ЦАР) - цифрових РЛС, в яких отримані сигнали оцифровуються безпосередньо на виході кожного
антенного елемента. Спрощену структурну схему приймальної частини такої РЛС представлено на рис. 3.92.
Управління
Рис. 3.92. Структурна схема приймальної частини цифрової РЛС
В такій РЛС сукупність 2п + 1 антенних елементів а^..., ао,..., а„ з діаграмами спрямованості утворюють систему аналогових
рецепторів, що перетворюють електромагнітне поле на вході антенної решітки (АР) на радіосигнали на несучій частоті настройки
приймальних модулів (ПМ). Приймальні модулі вирішують задачі підсилення, перетворення частоти і фільтрування радіосигналів
незалежно в кожному елементарному каналі прийому. Відносно інформаційних параметрів сигналів (амплітуда, частота, фаза)
канал ПМ є лінійною ланкою. Вихідні сигнали ПМ перетворюються на цифрову форму безпосеред ньо (на проміжній частоті) або в
квадратурних каналах з використанням фазового детектування. Оцифровані сигнали паралельно надходять на вхід
спеціалізованого процесора (спеціалізованої ЕОМ), що вирішує всі задачі обробки інформації, отриманої за допомогою системи
рецепторів, об’єднаних в антенну решітку.
Переваги цифрових РЛС: відсутні втрати, що вносяться фазообертачами; з’являються необмежені можливості застосування
спеціальних цифрових методів обробки сигналів, що приймаються, і радіолокаційних даних; з’являється можливість формування
множини незалежно керованих діаграм спрямованості антени.
В загальному випадку цифрові РЛС представляють собою обчислювальну систему реального часу, що включає сукупність
спеціалізованих обчислювальних засобів і спеціалізованого програмного забезпечення, об’єднаних операційною системою реаль-
ного часу, і призначену для реалізації комплексного алгоритму функціонування системи. Комплексний алгоритм системи включає
вирішення задач дискретизації та квантування сигналів, що приймаються, просторового фільтрування сигналів, режекції пасивних
завад, когерентного і некогерентного накопичування сигналів, виявлення, оцінки координат, розпізнання і супровод ження об’єктів
радіолокації, а також ряд інших операцій.
Адаптивна антенна решітка
В умовах різноманітної і випадковим чином змінюваної зовнішньої обстановки, обумовленої дією активних завад, для забезпе-
чення необхідної ефективності цифрових РЛС з виявлення і супроводження повітряних об’єктів все більш широке застосування
отримують адаптивні антенні решітки.
Адаптивними називаються АР, в яких максимальна за заданим критерієм ефективність функціонування при змінюваних
зовнішніх умовах забезпечується безперервним (в реальному масштабі часу) регулюванням форми її діаграми спрямованості на
основі аналізу зовнішнього середовища і умов функціонування РЛС.
Необхідні апостеріорні дані про стан зовнішнього середовища (завадової обстановки) одержуються в цьому випадку на основі
спеціальної навчальної вибірки вхідних сигналів на інтервалі [0, (о] навчання. Якщо в процесі навчання спостерігається тільки
вибірка сигналів завад, на придушення яких розраховується система, то така вибірка називається кваліфікованою. У противному
разі, коли навчальна вибірка містить окрім завад і корисні сигнали, вона називається некваліфікованою. В обох випадках
оцінювання невідомих параметрів завад здійснюється методом максимальної правдоподібності. Звичайно, в другому випадку, че-
рез “засміченість” навчальної вибірки, ці оцінки будуть менш точними, що відіб’ється на збільшенні часу протікання процесу адап-
тації системи.
111
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМОЗБРОЄННЯППО
Структурна схема лінійної адаптивної антенної решітки, в якій формування ДС здійснюється в цифровому вигляді, зображена
на рис. 3.93. Основним її елементом є цифровий адаптивний фільтр, призначений для формування коефіцієнтів \МЬ ..., \УМ, з якими
зважуються сигнали АР, заздалегідь перетворені в цифрову форму в аналого-цифрових приймальних модулях (АЦМ).
В цьому фільтрі принципове значення для адаптації АР має відомий опорний сигнал Хо(і), з яким порівнюється вихідний сигнал
решітки ЦД). Утворюваний при цьому сигнал помилки є(і) = Хд(і) - 0^(1) використовується в адаптивному фільтрі для об-
числень і підстроювання комплексних вагових коефіцієнтів \Мт (т = 1,2,..., М) у відповідності з прийнятим критерієм огггималь-
ності. При цьому будь-який прийнятий сигнал, не представлений в Хц(О, сприймається як сигнал завади, і система зворотного
зв’язку регулює вагові коефіцієнти так, щоб усунути його з вихідного сигналу. В результаті, в напрямку приходу цього сигналу
встановлюється нуль діаграми спрямованості АР. Якщо ж сигнал, що приймається, представлений в Х^І), система зворотного
зв’язку зберігає його у вихідному сигналі з такою ж амплітудою і фазою, як і у Хо(1). Отже, за допомогою опорного сигналу Хо(()
можна розрізняти корисний і завадовий сигнали і забезпечити формування ДС з АР з провалами в напрямках джерел завад.
Рис. 3.93. Структурна схема лінійної адаптивної цифрової антенної решітки
Реалізація такого варіанті побудови адаптивної цифрової АР проблематична, по-перше, через відсутність регулярного засобу
формування опорного сигналу Хо((), а по-друге, через надзвичайну складність обчислень.
На практиці використовується підхід до розробки адаптивної ЦАР, в якому для адаптації використовується тільки частина еле-
ментів АР (при безмодульній або навіть модульній побудові решітки). Такі решітки отримали назву частково адаптивних. Спроще-
на структурна схема лінійної ЦАР з виділеним основним каналом і використанням для адаптації М з N елементів антенної решітки
наведена на рис. 3.94.
1 2 3 4 М
Рис. 3.94. Схема лінійної частково адаптивної АР з виділеним основним каналом
В цій схемі діаграма спрямованості антени основного каналу має високий коефіцієнт спрямованої дії (КСД) і призначена для
прийому корисних сигналів. Діаграми спрямованості допоміжних (компенсаційних) каналів перекриваються і мають малі КСД
112
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
відповідні наближено середньому рівню бокових пелюсток основної антени. На виході сигнали компенсаційних каналів з ураху-
ванням вагових коефіцієнтів підсумовують з сигналами основного каналу, що відповідає формуванню результуючої ДС з провала-
ми в напрямках на джерела завад.
Цифрові погоджені фільтри (ЦПФ) для згортки сигналів в часовій області
Через те, що радіолокаційні сигнали, що приймаються, перед дискретизацією перетворюються на дві квадратурні складові, ре-
алізація ЦПФ повинна здійснюватися в двох квадратурних каналах. Комплексна обгинаюча вхідного сигналу має вигляд
О[к] = ис[к]-]ц5[к]. (3.183)
де Цс[к] і иДс] - квадратурні складові вхідного сигналу в дискретні моменти часу к^.
Комплексна обгинаюча спряженої імпульсної характеристики ЦПФ має вигляд
Н*[к] = Ьс[к] + іМк]. (3.184)
Сигнал на виході ЦПФ з точністю до постійного множника визначається за формулою
Х[к] = дс[к] + К5[к] = "х^сЕк -1]- )и5[к - 1]Хьс[пх -1] + ]Ь5[п5 -1]). (3.185)
1=1
Після заміни (пх - 1) = і:
ВД = Е(ЬС[І] + )Мі]Хис[к-(пх -і)]-Х[к(пх -і)]). (3.186)
І = 1
Квадратурні складові вихідного сигналу ЦПФ:
<5с[к1= ЇЬс[і]ис[к-(пх -і)] + ЇЬс[і]и5[к - (пх - і)] = дсс[к] + <;55[к] > (3-187)
і=1 і=І
д5[к]= ХЬ5[і]ис[к-(пх -і)]-ЕЬс[і]и8[к-(пх -і)] = ?К[Ц-(;в[к]. (3.188)
і=1 і=1
Подальша конкретизація алгоритмів ЦПФ визначається виглядом сигналів, що згортаються.
Структурна схема цифрового погодженого фільтра наведена на рис. 3.95.
Рис. 3.95. Структурна схема цифрового погодженого фільтра
Цифровий погоджений фільтр для згортки сигналів в частотній області
У відповідності з теорією дискретного представлення безперервних функцій, обмежених за часом або частотою, функція и(1),
яка представлена послідовністю відліків {ц(і)} (і= 0, 1,2,..., п - 1), може бути відображена в частотну область за допомогою дис-
кретного перетворення Фур’є (ДПФ), яке для кожного к=0,1,2,..., п -1 має вигляд
Ри[к] = Е*и[і]е"]2лік 1 п = е' и[і]^*к , де \УП = е’-|'2л 1 п, (3.189)
і=0 і=0
і, навпаки, будь-яка функція, що представлена обмеженим дискретним спектром {Ри[к]} (к = 0, 1, 2, ... , п - 1), може бути
відновлена в часовій області за допомогою зворотного ДПФ (ЗДПФ) за формулою
1 п-1 -і / 1 п-1 ..
и[і] = - Е Ги[к]е-)2лік/п = - Е ГЛкЖ • (3.190)
п к=0 Пі=о
Згортка послідовностей в частотній області зводиться до множення результатів їх ДПФ. Для цього необхідно заздалегідь
здійснити два прямих перетворення Фур’є - для послідовності, що згортається, і послідовності відліків імпульсної характеристики
згортаючого фільтра Якщо після згортки необхідно знову перейти в часову область, потрібно буде здійснити ЗДПФ послідовності
складових згортки.
Для комплексних функцій (сигналів) алгоритм операції “ДПФ - згортка - ЗДПФ”:
113
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
п-1 ..
1. Р|1[к]= І Ь[і]\У’к , к = 0,1,2,... ,п-1, (3.191)
і = 0
де Ь[і] - послідовність відліків комплексної імпульсної характеристики згортаючого фільтра.
2. РиМ=і:'и[іЖк , (3.192)
і=0
де и[і] - послідовність комплексних вибірок вхідної (згортуваної) функції.
3. Р2[к] = Рь[к]-Ри[к], к = 0,1,..., Ь + п-1. (3.193)
і Ь+п-1
4. 2[і] = ---- . і=0,1,...,Е + п-1. (3.194)
Ь + п к=0
Принциповою особливістю алгоритму, який розглядається, є режим групової обробки, коли аналізу підлягає масив вхідних да-
них довжиною Ь > п. Результат згортки має довжину Ь + п - 1.
При вирішенні задачі погодженого фільтрування радіосигналів імпульсна характеристика ПФ незмінна (принаймні для зон-
дуючих сигналів одного типу). Тому її ДПФ здійснюється заздалегідь і записується в ЗП відповідного обчислювача. В процесі
згортки необхідно здійснювати одне пряме і одне зворотнє ДПФ.
Істотно зменшити кількість операцій при згортці в частотній області можна, застосувавши спеціальні алгоритми ДПФ, що от-
римали назву алгоритмів швидкого перетворення Фур’є (III ПФ).
Принцип побудови алгоритму ШПФ з проріджуванням у часі.
Нехай послідовність {^[і]}, що підлягає ШПФ, має довжину М, що відповідає цілому степені числа 2, тобто М = 2ІП. Ця вхідна
послідовність може бути розкладена на дві частини за правилом
и Е [і] = и[2і],и0 [і] = и[2і + 1], і = 0,1, 2,..., М/2 .
Послідовність иЕ[і] містить елементи вхідної послідовності з парними номерами, а послідовність цД] - з непарними. Довжина
кожної послідовності М/2. Отримані в результаті розкладу послідовності знову розкладаються на дві частини до тих пір, доки не
буде отримане М/2 двоточкових послідовностей. Число кроків розкладу т = 1о§2М.
(2уть алгоритму ШПФ з проріджуванням в часі полягає в тому, що ДПФ послідовності довжиною 1 > 2 обчислюється шляхом
комбінації результатів ДПФ двох послідовностей довжиною 1/2. У відповідності з цим в процесі реалізації алгоритму ШПФ М-
точкової послідовності спочатку здійснюється М/2 ДПФ двоточкових послідовностей, після цього отримані перетворення
об'єднуються з метою отримання М/4 чотирьохточкових, після цього М/8 восьмиточкових і далі до тих пір, доки після т кроків не
буде отримане перетворення довжиною М. Обчислення перетворень здійснюється за формулами
Е[к] = ЕЕ[к]+\У^Е0[к], к = 0,1, ....М/2-1,
Е[к + М/2]= ЕЕ[к]-^Г0[к],
М/2-1 .. М/2-1 .,
деРЕ[к]= £ иЕ[і]^м/2 ; Г0[к] = Е иоН^М/2 -ДПФ парної і непарної послідовності.
і = 0 і=0
Для графічного представлення алгоритму ШПФ використовуються направлені графи, в яких застосовують наступні позначен-
ня: крапка (кружок) означає операцію додавання-віднімання, причому сума з'являється в верхній вихідній гілці, а різниця - в нижній
вихідній гілці, стрілка на гілці - операцію множення на константу, записану над стрілкою (за відсутності стрілки константа
дорівнює одиниці). Спрямований граф для восьмигочкового ШПФ з проріджуванням в часі по основі 2 представлений на рис. 3.96.
Рис. 3.96. Спрямований граф 8-точкового ШПФ
Порядок задавання вхідних даних на цьому графі отриманий за допомогою процедури подвійної інверсії чисел
0, 1,..., 7. Це спрощує зображення графа і дозволяє отримати вхідну послідовність в природному порядку (Ро, Рі, Р?>
Р3 - в верхніх вихідних гілках, Р4, Р5, Р6, Р7 - в нижніх вихідних гілках). Як видно з рисунку, восьмиточкове ШПФ
здійснюється за три етапи.
114
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
На 1-му здійснюється 4 двоточкових ДПФ, причому при обчисленні враховується, що \¥2 = - 1- Тому операції множення
відсутні та у відповідності з (3.177)
Г[0] = Ре[0] + Ро[0] , Р[1] = Ре[0]-Ро[0].
На 2-му етапі дві пари двоточкових ШПФ об’єднуються в 2 чотирьохточкових за формулами (3.195), а на 3-му етапі за цими же
формулами отримані 2 чотирьохточкових - у восьмиточкове. В загальному випадку кількість етапів т = Іо&М. На кожному етапі,
окрім 1-го, виконується М/2 комплексних множень і М комплексних додавань. Тому для обчислення М-точкового ШПФ потрібно
М/2І0&М комплексних множень і МІо&М комплексних додавань.
Структурна схема відповідного обчислювального пристрою реалізації погодженого фільтрування радіосигналів в частотній об-
ласті з урахуванням застосування алгоритму ШПФ представлена на рис. 3.97. Необхідно зазначити, що на вхід процесора прямого
ШПФ одночасно надходять дві квадратурні складові, що разом утворюють комплексний сигнал, що підлягає перетворенню ШПФ
- комплексне множення - ЗШПФ. Тому вхідний ПЗ, вихідний ПЗ і всі проміжні регістри повинні мали подвійну довжину розрядної
сітки.
Рис. 3.97. Структурна схема погодженого фільтра в частотній області
Для погодженого фільтрування сигналів в частотній області з застосуванням ШПФ необхідно виконати одне пряме ШПФ, одне
зворотнє ШПФ і перемноження двох М-точкових комплексних чисел.
Швидкість згортки можна значно збільшити, застосувавши поточну структуру алгоритму ШПФ. В цьому випадку процесор
ШПФ містить (М/2)ІО£2М арифметичних пристроїв, які працюють паралельно. Кожен арифметичний пристрій виконує операції
перетворення на одному з етапів ШПФ. При цьому гранично може бути отримане скорочення часу обчислень в ІО&М/2 разів. Для
поточної організації ШПФ буде потрібна додаткова пам’ять у вигляді міжкаскадних регістрів затримки.
Для скорочення часу згортки окрім ШПФ можуть бути також застосовані інші швидкі способи ортогональних перетворень,
зокрема перетворення Уолша-Адамарататеоретико-числові перетворення.
Реалізація багатоканальної фільтрової схеми в часовій області складна. Тому представляє інтерес реалізація багатоканальної
схеми накопичувана в частотній області на основі дискретного перетворення Фур’є. Особливістю ДПФ є наявність специфічних
викривлень спектральних характеристик, зумовлених обмеженістю об’єму вибірки вхідного сигналу N. В результаті кожному ко-
ефіцієнту ДПФ може бути поставлений у відповідність смуговий фільтр з центральною частотою Рк = к/МТ, (к = 0,1,2,..., N - 1).
Смуга пропускання кожного фільтра порядку ЇМ Ескіз головних пелюсток АЧХ аналізатора спектра на основі ДПФ при N = 8
показаний на рис. 3.98.
Рис. 3.98. Ескіз головних пелюсток АЧХ 8-канального ДПФ
Розглянуті властивості ДПФ дозволяють використати відповідні багатоканальні фільтри для накопичування когерентних сиг-
налів роздільно в кожному з п створених частотних каналів. В цьому випадку виявлення і оцінка доплерівської частоти сигналу
виконується за номером каналу ДПФ, в якому накопичений сигнал перевищив поріг виявлення. Якщо цей поріг перевищений в
декількох частотних каналах, виконується усереднення або вагове об’єднання відповідних частот.
При великих N для обчислення коефіцієнтів ДПФ застосовуються алгоритми швидкого перетворення Фур’є, що в багатьох
випадках дозволяє вирішувати поставлену задачу в реальному масштабі часу.
АЧХ елементарних фільтрів ДПФ мають високий рівень бокових пелюсток (РБП) (рівень потужності першого бокового пелю-
стка порядку - 13 дБ) і перекриваються. Наявність бокових пелюсток призводить до погіршення селективності фільтрової схеми.
Для послаблення впливу бокових пелюсток використовуються вагові фу нкції (вікна), на які треба помножити послідовність вибірок
сигналів на вході фільтра ДПФ (ШПФ), або, що еквівалентно, згладжували спектральні відліки на виході фільтра ДПФ. Операції
ДПФ і згладжування даних за допомогою вагових функцій можна виконувати в довільному порядку, що визначається
міркуваннями зручності реалізації.
При зважуванні на вході д искретне перетворення Фур’є має вигляд
115
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
N-1
РиЛк]= І^[і]и[і]ехрН2лік/^, (3.196)
І = 1
де XV [і] = XV [іТ], (і=0,1,- 1) - коефіцієнти вагової функції.
В табл. 3.16 наводяться математичні вирази і основні характеристики декількох різновидів вагових функцій, що знайшли засто-
сування при вирішенні задач цифрової обробки сигналів.
Застосування вікон зі спадаючими до країв вагами призводить до істотного зниження бокових пелюсток елементарних фільтрів
ДПФ у порівнянні з ДПФ без зважування (з прямокутною ваговою функцією), але водночас відбувається розширення основного
пелюстка АЧХ, що, з одного боку, поширює смугу режекції завад в області нуля доплерівської частоти, але, з іншого боку, призво-
дить до погіршення роздільної здатності фільтра за доплерівською частотою.
Таблиця 3.16
Характеристики основних вагових функцій
Назва функції Математичний вираз Макс. РБП (ДБ) Відносна ши- рина головної пелюстки Максимальні втрати пере- творення (дБ)
Хеннінга \У[І] = 0,5[1 -СО8(2ЛІ /14)], і = 0,1,N -1 -32 1,44 3,18
Хемінга \У[і] = 0,54 -0,46со8(2лі /14), і = 0,1,..., N -1 -43 1,30 3,10
Блекмана \У[і] = 0,42 - 0,5 со8(2лі /14) + 0,08 соз(4лі /14), і = 0,1,...,14-і -58 1,68 3,47
Блекмана- Харріса (чотирьох- членна) \У[і] = 0,35875 - 0,48829 со8(2лі /14) + + 0,14128 со8(4лі /14) - 0,01168 со8(6лі /14), і =0,1,...,N-1 -92 1,90 3,85
Кайзера-Бесселя \У[І] = 1О ла-^1-(2і/14-1)2 , 0<|і|<14/2,а = 2,5 10[-]- модифікована функція Бесселя 1-го роду нульово- го порядку -69 1,74 3,56
Іншим джерелом втрат при накопичуванні фільтром ДПФ зі зважуванням є паразитна амплітудна модуляція спектра при обро-
бці пачок сигналів, доплерівська частота яких не співпадає з базовими тонами, кратними частоті 1/МТ. Втрати через паразитну амп-
літудну модуляцію складають 1... 2 дБ для вікон з плавно спадаючими до країв ваговими коефіцієнтами.
3.9. Етапи процесу обробки радіолокаційної інформації
Первинна обробка радіолокаційної інформації
Під первинною обробкою розуміється перетворення радіолокаційних сигналів, що надходять з виходу приймального при-
строю РЛС за один огляд простору. В процесі первинної обробки вирішуються задачі виявлення цілі та вимірювання її координат.
Виявлення об’єкта. Оптимальний метод виявлення корисних сигналів на фоні завад (шумів) складний у реалізації, тому на
практиці частіше використовуються спрощені методи. Один із найбільш простих методів, що застосується в імпульсних РЛС, грун-
тується на аналізі щільності прийнятих імпульсних сигналів. Виявлення об’єкта здійснюється шляхом отримання і виявлення пачки
ехо-сигналів, відбитих від нього. Початок пачки визначається за критерієм 1 із т, а кінець - при фіксації* к пропускань (логіка вияв-
лення “1/т- к”). Більш докладно основні методи виявлення повітряних об’єктів (цілей) розглянуті вище.
Вимірювання координат об’єкта.
Вимірювання дальності базується на визначенні інтервалу часу від моменту посилки зондуючого сигналу до моменту прийому
відбитого сигналу приймачем РЛС.
Вимірювання азимута об’єкта в імпульсних РЛС зводиться до розрахунку азимута середини пачки відбитих сигналів, одержу-
ваних при огляді простору в горизонтальній площині (аналогічно здійснюється вимірювання і кута місця об’єкта). Більш докладно
основні методи виміру координат об’єктів розглянуті вище.
Вторинна обробка радіолокаційної інформації
В РЛС в режимі пошуку і супроводження з періодичним оглядом зони відповідальності в підсистему обробки радіолокаційних
даних з виходу підсистеми сигнальної обробки (первинної обробки) видаються у вигляді числових кодів координати миттєвого
положення виявлених істинних і “хибних” (зумовлених завадами) відміток. Координати відмітки приблизно представляють коор-
динати об’єкта в момент його локації. Однак, за одиночною відміткою ще не можна прийняти рішення про його виявлення, тим
більш не можна за нею визначати параметри траєкторії його руху (напрямок руху, швидкість та ін.). Для цього необхідно проаналі-
зувати і зв’язати дані, отримані за декілька зондувань об’єкта, рознесених в часі. Таким чином, рішення задач вторинної обробки
116
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
базується на принципі пооглядового зв’язку оцінок, отриманих по кожному об’єкту. Так, при прямолінійному і рівномірному пря-
муванні траєкторія об’єкта буде прямою. Тому в черговому циклі огляду простору об’єкт (і відповідно відмітка від нього на екрані
індикатора РЛС) з’явиться не в довільній точці, а в деякій області, віддаленій за напрямком прямування об’єкта на відстань, обумо-
влену періодом огляду радіолокаційної станції і швидкістю прямування об’єкта.
Основні операції алгоритму вторинної обробки: стробування; розрахунок параметрів прямування об’єкта;
екстраполяція координат об’єкта; звіряння.
Процес вторинної обробки інформації від кожного об’єкта звичайно реалізується в два етапи: виявлення
траєкторії і періодичне поновлення параметрів траєкторії виявленого об’єкта, що називається супроводженням
траєкторії об’єкта, або для стислості, супроводженням об’єкта.
Реалізація цього процесу за даними двокоординатної РЛС з рівномірним оглядом в прямокутній системі координат
ілюструється на рис. 3.99.
Стробування. Нехай в деякій точці зони огляду зафіксовано одиночну відмітку Оо, не придатну для підтвердження жодної з
вже існуючих (супроводжуваних) траєкторій. Ця відмітка приймається за початкову точку траєкторії нового об’єкта Якщо апріорі
відомі (задані) складові по осях X, ¥ мінімальної і максимальної У^^ швидкості руху підлягаючих супроводженню
об’єктів, то область 8Ь в якій слід шукати відмітку, що належить цьому об’єкту (цілі) в наступному огляді, можна представити у
вигляді простору між двома прямокутниками, розміри сторін яких дорівнюють: внутрішнього - 2УХ ^НТО і 2Уу а зовнішнього -
2УХШМТО і 2УумжсТо, де То - період огляду зони пошуку. Операція формування області 8| називається стробуванням, а сама ця об-
ласть називається стробом первинного захоплення. Форма стробу може бути різноманітною. Оптимальною формою стробу при
роботі в прямокутній системі координат є еліпсоїд.
Строб первинного захоплення формується після одержання кожної оцінки (можливо і помилкової), що не ставиться до вже су-
проводжуваних об’єктів. Його розмір розраховується з умови прямування об’єкта з максимальною гаданою швидкістю в довільно-
му напрямку. Розмір наступних стробів при автозахопленні і всіх стробів при автосупроводженні розраховується відповідно для
кожної гаданої і для кожної виявленої траєкторії з урахуванням обмірюваних у попередніх огляд ах координат і розрахованих по
них параметрів прямування об’єкта
В строб первинного захоплення може потрапити не одна, а декілька відміток. Кожну з них потрібно вважати як одне з можли-
вих продовжень можливої траєкторії. По двох відмітках вже можна обчислити швидкість і напрямок руху об’єкта за кожною з
можливих “зав’язаних” траєкторій, а після цього розрахувати можливе положення відмітки на наступний (третій) огляд (рис. 3.99).
Операції розрахунку початкових значень параметрів (швидкості, напрямку руху) і екстраполяції положення відмітки на наступний
огляд реалізуються спеціальними алгоритмами фільтрування і екстраполяції.
Розрахунок параметрів прямування об’єкта. Параметри визначаються на підставі інформації про координати об’єкта за п
оглядів радіолокаційної станції. Оскільки вимірювання координат здійснюється з помилками, то для підвищення якості інформації
виникає необхідність у згладжуванні (інтерполяції) параметрів прямування, що може здійснюватися методом найменших квадра-
тів, методом середньозважених або експоненційним методом.
Екстраполяція координат об’єкта. У загальному випадку під екстраполяцією прийнято розуміти поширення результатів од-
ній’ частини явища, отриманих із спостереження, на іншу його частину. При екстраполяції координат установлюється (визначаєть-
ся) закон руху об’єкта в інтервалі часу за п оглядів простору, що поширюється за межі інтервалу спостереження, наприклад на п + т
оглядів. Звичайно приймається гіпотеза про прямолінійне і рівномірне прямування об’єкта. Для зменшення помилок екстрапольо-
вані координати розраховують методом згладжування.
Навколо екстрапольованих відміток, які на рис. 3.99 позначені трикутниками, утворюються строби, розміри яких визначаються
тепер можливими помилками екстраполяції і вимірювання координат відміток. Якщо в будь-який строб 82 в третьому огляді по-
трапила нова відмітка, то вважається, що вона належить траєкторії, що виявляється. З урахуванням значень координат цієї відмітки
уточнюються параметри траєкторії, що виявляється, і будуються нові строби. Після реалізації встановленого критерію за кількістю
відміток т, які потрапили в п послідовно створених стробів, приймається рішення про виявлення траєкторії^ і вона передається
на супроводження. На рис. 3.99 рішення про виявлення траєкторії приймається за трьома відмітками, що слідують одна за одною
(критерій “3 з 3-х”).
Супроводження траєкторії об’єкта полягає в послідовній від вимірювання до вимірювання “прив’язці” до неї нових відміток і
уточненні їх параметрів. При автоматичному супроводженні траєкторії, що називається автосупроводженням, виконуються
117
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
наступні операції: уточнення параметрів траєкторії після прив’язки до неї нової відмітки; екстраполяція параметрів на час наступно-
го сеансу вимірювання; стробування зони можливого положення нової відмітки для продовження траєкторії; відбір нових відміток
в строб супроводжуваної траєкторії.
Звіряння. При потраплянні в строб супроводження декількох відміток вирішується задача відбору для продовження траєкторії
однієї' з них, або за кожною відміткою, що потрапила в строб, будується своє продовження, як це показане на рис. 3.99. Якщо в
строб супроводжуваної траєкторії’ не відібрано жодної відмітки, для її продовження може бути використана екстрапольована
“точка”. При повторенні пропусків відміток, наприклад к разів поспіль, автосупроводження траєкторії припиняється, тобто траєк-
торія знімається з супроводження. Щільність імовірності появи оцінки від супроводжуваної цілі збільшується з наближенням до
екстрапольованої точки (центра стробу). Селекція цілей здійснюється з використанням методів мінімальних еліптичних і мінімаль-
них лінійних відхилень.
Третинна обробка радіолокаційної інформації
До основних операцій третинної обробки відносяться: приведення інформації до єдиного початку відліку, ототожнення повід-
омлень, формування узагальнених повідомлень.
Приведення інформації’до єдиного початку відліку в просторі здійснюється виконанням операції’ перетворення координат, а до
єдиного початку відліку в часі - виконанням операції’ екстраполяції координат на момент часу обробки. Найбільш простими є фор-
мули перетворення для прямокутної системи координат. Для екстраполяції' координат застосовуються ті ж методи, що і при вто-
ринній обробці.
Ототожнення повідомлень. У процесі ототожнення вирішується задача добору повідомлень, що ставляться до одного об’єкта,
але надійшли від різних джерел радіолокаційної інформації’. Цей процес звичайно включає грубе і точне ототожнення.
Грубе ототожнення зводиться до оцінки різниці однойменних координат і параметрів прямування об’єктів, зазначених у по-
відомленнях. Два повідомлення відносяться до одного об’єкта, якщо різниці всіх зазначених у них координат і параметрів не пере-
вищують відповідних припустимих значень. У результаті грубого ототожнення утворяться групи попередньо ототожнених повід-
омлень по кожному об’єкту.
Точне ототожнення здійснюється на підставі аналізу додаткових ознак, що характеризують індивідуальність кожного об’єкта.
При точному ототожненні можуть застосовуватися логічні правила: 1 - 4.
Правило 1. Якщо в групу попередньо ототожнених повідомлень увійшли повідомлення від різних джерел, то ці повідомлення
відносяться до різних об’єктів і їх ототожнити не можна (група сформована помилково).
Правило 2. Якщо в групу ввійшло по одному повідомленню від кожного джерела, то ці повідомлення відносяться до одного
об’єкта (група ототожнених повідомлень сформована правильно).
Правило 3. Якщо в групі утримується однакова кількість повідомлень від кожного джерела радіолокаційної інформації’, то за-
гальне число об’єктів у групі дорівнює кількості повідомлень будь-якого з джерел.
Правило 4. Якщо в групу ввійшла неоднакова кількість повідомлень від різних джерел, то в групі стільки об’єктів, скільки по-
відомлень надійшло від джерела, що видало найбільшу їх кількість.
У випадках застосування правила 3 або 4 здійснюється наступний аналіз повідомлень із використанням методу максимальної
правдоподібності, методу найменших квадратів та ін.
Формування узагальнених повідомлень зводиться до осереднення значень координат і параметрів кожного об’єкта, отрима-
них у повідомленнях від різноманітних джерел. Осереднення може здійснюватися з використанням методів середньозважених
значень, кращого відбору по достовірності джерел і кращого відбору за часом надходження інформації.
3.10. Оптична локація
Оптична локація - сукупність методів виявлення і вимірювання координат віддалених об’єктів, а також розпізнавання їх фор-
ми за допомогою електромагнітних хвиль оптичного діапазону - від ультрафіолетового (УФ) до далекого інфрачервоного (ІЧ).
В оптичній локації’ використовуються ті ж принципи визначення координат, що й у радіолокації: вимірювання відстаней з
декількох опорних точок чи вимірювання відстаней і пеленга (азимута) з однієї точки.
Сукупність даних про об’єкти, що отримується шляхом прийому та аналізу електромагнітних хвиль оптичного діапазону, нази-
вають оптичною інформацією. Оптичну інформацію можна розділити на координатну і некоординатну. Під координатною інфо-
рмацією розуміють відомості про місце розташування об’єкта в будь-який момент часу спостереження і про характер зміни місця
розташування (дальність, кутові координати, похідні координат, траєкторні параметри і т.ін.). Під некоординатною інформацією
розуміють сукупність відомостей про відбивні характеристики об’єкта (що залежать від матеріалу його поверхні, розмірів, форми й
інших параметрів), його зображення, параметри обертального руху навколо центра мас та ін. Ці параметри досить повно характери-
зують індивідуальні особливості об’єкта. Координатна інформація може представлятися в різних системах координат. Початок
координат може бути прив’язаний до точки стояння оптичного локаційного засобу, до центра Землі чи до інших точок. При аналізі
некоординатної інформації’ звичайно не цікавляться абсолютними координатами об’єкта і для зручності вводять систему коорди-
нат, прив’язану до об’єкта.
Одержання локаційної інформації’ здійснюється в процесі прийому й обробки оптичних локаційних сигналів, що формуються в
результаті вторинного чи власного випромінювання об’єктів і є носіями інформації. У залежності від характеру випромінювання
об’єктів розрізняють активну, напівакгивну і пасивну оптичну локацію.
Активна оптична локація грунтується на використанні ефекту вторинного випромінювання (відбиття, розсіювання) оптич-
них хвиль. Вона може проводитися з використанням джерел некогерентних (наприклад, прожектори, які випромінюють у видимо-
му і інфрачервоному (ІЧ) діапазонах хвиль) і когерентних (лазерних) оптичних сигналів.
118
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Напівактивна оптична локація - використовує явище вторинного випромінювання (відбиття) цілями оптичних хвиль від
природного джерела інтенсивного первинного випромінювання. Найчастіше таким д жерелом є Сонце. Засоби напівакгивної оп-
тичної локації з використанням перевідбитого ціллю випромінювання від сторонніх, тобто таких, які не входять до складу оптично-
го локатора джерел, називають оптико-електронними засобами.
Часто, зневажаючи ефектом вторинного випромінювання цілей при сонячному ггідсвітленні, оптико-електронні засоби відно-
сять до засобів пасивної оптичної локації. На цей час оптико-електронні засоби (ОЕЗ), розглядаються у більш широкому розумінні,
як засоби, що використовують для одержання інформації оптичний діапазон спектра електромагнітних хвиль (ЕМХ), а для пере-
творення інформації - різноманітні електронні пристрої.
Пасивна оптична локація передбачає використання власного оптичного випромінювання нагрітих ділянок поверхні цілі чи
іонізованих утворень навколо неї. Засоби пасивної оптичної локації зазвичай працюють у ближньому ІЧ-діапазоні. До подібних
засобів відносяться ІЧ-пеленгатори, тепловізори, теплові головки самонаведення, пасивні прилади нічного бачення та ін.
Виходячи з того, що в оптичній локації часто розрізняються окремі елементи об’єктів, то для урахування просторового розподі-
лу енергії розсіяного випромінювання їх поділяють на три групи: такі, що спостерігаються як “точкові”; об’єкти кінцевих розмірів,
менших поля зору оптичного локаційного засобу; протяжні об’єкти.
Розсіювання об’єктами оптичних хвиль має ряд особливостей у порівнянні з розсіюванням радіохвиль. В оптичному діапазоні
розміри об’єктів локації, як правило, значно перевищують довжину хвилі. При цьому розміри мікронерівностей поверхні об’єкта
сумірні з довжиною хвилі, тобто значно менше розмірів поверхні, що опромінюється. Мікронерівності на поверхні об’єкта
з’являються в результаті технологічної обробки матеріалу покриття, у процесі якої на нього діють різні випадкові чинники, тому,
навіть при незмінній технології обробки поверхонь об’єкти мають лише тотожну форму, а картина мікронерівностей у кожному
конкретному випадку своя. У зв’язку з цим характер вторинного випромінювання сильно залежить не тільки від властивостей ма-
теріалу поверхні, але й від її обробки.
Для опису характеру вторинного випромінювання можна використовувати поняття дзеркального, дифузійного і змішаного
(дзеркально-дифузійного) відбиття. Без урахування властивостей матеріалу поверхні, що розсіює і за умови, що на межі поверхні
відбиття світла відбувається за законами геометричної оптики, дзеркальне відбиття має місце, якщо поверхня, що відбиває, має
мікронерівності, розміри яких значно менше довжини хвилі падаючого випромінювання, а дифузійне відбиття - якщо розміри мік-
ронерівностей більше довжини хвилі. В інших випадках говорять про змішане відбиття. Відповідно до цього вводиться поняття
дзеркального і дифузійного коефіцієнтів відбиття, рівних відношенню відбитої потужності до потужності, що падає на поверхню.
Дзеркально і дифузійно відбиті компоненти поля відрізняються по ширині діаграми вторинного випромінювання, тому вони порів-
няно просто розділяються. Це дозволяє експериментально визначати коефіцієнти відбиття для різних матеріалів. У залежності від
об’єкта локації оптична хвиля може поширюватися у середовищі, із якого він складається, з малими поглинанням і розсіюванням (у
прозорому оптичному середовищі), розсіюватися при невеликому питомому поглинанні на неоднорідностях матеріалу (частках
домішок) чи сильно поглинатися. На межі поділу двох середовищ з різними показниками заломлення завжди відбувається часткове
відбиття оптичних хвиль. Отже, розсіяне об’єктом випромінювання є, як правило, двоскладовим. Воно складається із частин, які
виникають як за рахунок внутрішнього (об’ємного) розсіювання в матеріалі поверхні, так і за рахунок відбиття від геометричної
поверхні об’єкта. Для прозорого оптичного середовища характерна перевага поверхневої складової розсіяного випромінювання.
Взагалі коефіцієнт відбиття об’єкта залежить від показників заломлення та поглинання, від поляризації падаючої хвилі і куга падін-
ня. Якщо локаційна задача розглядається в скалярній постановці, при якій не враховується поляризація падаючої і відбитої хвиль, то
поняття дзеркального і дифузійного характеру відбиття дозволяють досить адекватно представляти умови локації.
Урахування поляризації необхідно перш за все при вирішенні задач розпізнавання об’єктів, селекції об’єктів на фоні хибних ці-
лей, підвищення надійності роботи оптико-електронних засобів при наявності завад і ін. Вид поляризації’ є основною характеристи-
кою, що визначає поляризаційну структуру хвилі. Можна виділити три основних види поляризації: проста, складна, випадкова До
простого виду поляризації відносяться еліптична і її окремі випадки кругова і лінійна Складний вид поляризації включає поляриза-
цію, що змінюється в часі за довільним, але цілком визначеним законом. Складний вид поляризації може бути отриманий шляхом
модуляції по поляризації простого виду. Випадкова поляризація (неполяризоване випромінювання) відноситься до того виду, при
якому вектор Е описує в просторі фігуру невизначеної випадкової форми, що змінюється в часі. Експериментальні результати пока-
зують, що хаотично поляризований компонент при дифузійному поверхневому відбитті не перевищує 5 -10 % за потужністю ком-
понента з регулярною поляризацією (лінійною, круговою). Поляризаційні характеристики світла при дифузійному відбитті шорст-
куватою поверхнею металів і прозорих оптичних середовищ залежать від їх статистичних властивостей і визначаються дифракцій-
ними явищами на мікроплощадках поверхні. Визначений внесок у деполяризацію вносять також відбиття від неплавких її жорст-
костей (відколи, подряпини) і багаторазові відбиття від мікронерівностей.
Таким чином, характер відбиття світла визначається не тільки характером мікронерівностей геометричної поверхні, але і влас-
тивостями матеріалу. Поляризація і спектральний склад відбитого випромінювання в основному також визначаються властивостя-
ми матеріалу об’єкта
Для визначення енергетичних параметрів оптико-електронних систем потрібна кількісна характеристика енергії відбитого
об’єктом сигналу. Електромагнітне випромінювання оптичного спектра характеризують світлотехнічними та енергетичними ха-
рактеристиками. Найбільш часто застосовують наступні характеристики.
Сила світла - характеризує світіння джерела оптичного випромінювання в деякому напрямку. Дорівнює відношенню
світлового потоку, який поширюється від джерела всередині елементарного тілесного кута у даному напрямку, до цього тілесного
кута: 1 = 6Ф / сЮ , [кд=лм • ср-1].
Сила випромінювання (енергетична сила світла) - просторово-кутова щільність потоку випромінювання у даному напрямку.
Дорівнює відношенню щільності потоку випромінювання, який поширюється від джерела всередині тілесного кута у даному на-
прямку, до величини цього тілесного кута: ІЕ =дФт /сЮ , [Втср-1].
119
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Світловий потік - світлова величина, яка оцінює потік випромінювання, тобто - потужність оптичного випромінювання по
світловому сприйняттю, яке ним викликається (точніше, за його дією на селективний приймач світла, спектральна чутливість якого
визначається функцією відносної спектральної світлової ефективності випромінювання): Ф = сіXV / 6і , [лм = кдср].
Потужність випромінювання - кількість світлової енергії, яка випромінюється заодиницю часу: Ф Е = 6\УЕ / сії, [Вт].
Світлова енергія (кількість світла) - енергія, яка переноситься світлом протягом інтервалу часу Ді = (2 -11:
12
XV = [Ф6і,[лмс].
Ч
Енергія випромінювання (промениста енергія) - енергія, яка переноситься випромінюванням протягом інтервалу часу
Ді = і2-іі
\УЕ = [ФЕ6і,[Дж].
1!
Освітленість в точці поверхні, відношення світлового потоку, який падає на елемент поверхні, до площі цього елементу:
Е = 6Ф / (18 [лк]. Освітленість зв’язана з силою світла І точкового джерела, віддаленого від заданої точки на відстань К
співвідношенням Е = І сов 0/К2, де 0 - кут падіння світла
Енергетична освітленість (щільність опромінення поверхні) - відношення потоку випромінювання, що падає на елемент по-
верхні, на якому знаходиться точка, що розглядається, до площі цього елементу:
Ее = 6Фе /68,[Втм‘2].
Світність (щільність освітлення поверхні) - світловий потік, що випромінюється або відбивається одиницею поверхні:
М =6Ф/68,[лк= кдсрм“2=лмм“2].
Енергетична світність в точці поверхні (щільність випромінювання поверхні) - відношення потоку випромінювання, який
випускає у напівсферу елемент поверхні до площі цього елементу (променистий потік, який випромінюється або відбивається оди-
ницею поверхні у всіх напрямках М Е = 6Ф Е / 68, [Втм'2].
Яскравість (Ь), поверхнево-просторова щільність світлового потоку, що виходить від поверхні, дорівнює відношенню світло-
вого потоку 6Ф до геометричного фактора 60 68 созО: Ь = 6Ф/6О 68 созО, де 60 - заповнений випромінюванням тілесний кут,
68 — площа ділянки, що випускає чи приймає випромінювання, 0 - кут між перпендикуляром до цієї ділянки і напрямком випро-
мінювання.
З загального визначення яскравості випливають двіапрактично найбільш цікаві наступні визначення:
1) яскравість - відношення сили світла 61 елемента поверхні до площі його проекції, перпендикулярної розглянутому напрямку:
Ь = 61/68 созО.
2) яскравість - відношення освітленості 6Е у точці площини, перпендикулярної напрямку на джерело, до елементарного тілес-
ного кута, у якому укладений потік, що створює цю освітленість: Ь = 6Е/6О созО, [кдм'2].
З усіх світлових величин яскравість найбільше безпосередньо зв’язана з зоровими відчуттями, тому що освітленості зображень
цих предметів на сітківці ока пропорційні яскравості цих предметів. У системі енергетичних величин аналогічна яскравості величи-
на називається енергетичною яскравістю.
Енергетична яскравість - випромінювання променистої енергії у визначеному напрямку з одиниці поверхні за одиницю часу,
перпендикулярної напрямку поширення в одиничному тілесному куті:
Ь Е = 61Е / 68 сов <р, [Втср*, м‘2].
Коефіцієнт поглинання (поминальна здатність) а - відношення променевого потоку, що поглинається, до променевого потоку,
що падає.
Коефіцієнт пропускання т - відношення променевого потоку, що пропущений, до променевого потоку, що падає.
Механічний еквівалент світла - мінімальна потужність у ватах, необхідна для створення світлового потоку в один люмен при
довжині хвилі, що відповідає максимальній здатності бачення людського ока:
Мсв =0,00146 Вт лм-1.
Таким чином, енергія відбитого сигналу на вході оптико-електронної системи залежить від цілого ряду чинників і перш за все
від їх освітленості і властивостей об’єктів, що відбивають (рис. 3.17).
Таблиця 3.17
Значення коефіцієнта відбиття для різних об’єктів
Об’єкт Коефіцієнт відбиття, %
Сніг 90
Біла фарба 75-90
Скло 70
Стоянка для автомобілів з автомобілями 40
Цеглина 35
Бетон 25-30
Трава, дерева 20
Людина 15-25
120
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Орієнтована освітленість об’єктів у залежності від погоди і часу доби наведена в табл. 3.18.
Орієнтована освітленість об’єктів (лк) на вулиці (широта Києва)
Таблиця 3.18
Безхмарний сонячний день (кут Сонця 55°) 100 000
Сонячний день із легкими хмарами 70 000
Похмурий день 20 000
Темрява 4
Ясна ніч, повний Місяць 0,2
Ясна ніч, неповний Місяць 0,02
Ніч, Місяць у хмарах 0,007
Ясна безмісячна ніч 0,001
Безмісячна ніч із легкими хмарами 0,0007
Темна хмарна ніч 0,00005
Особливості виявлення об’єктів оптико-електронними засобами. Статистична теорія оптимального виявлення оптичних
сигналів і вимірювання їх параметрів у строгій постановці повинна містити квантово-механічний опис оптичних полів. Однак у
цьому випадку рішення задачі статистичного синтезу виявляється надзвичайно складним. В інженерній практиці широке розпо-
всюдження одержав напівкласичний підхід до рішення задачі оптимального виявлення оптичних сигналів, при якому в залежності
від задачі, яка розглядається, враховують або тільки хвильові, або тільки квантові властивості оптичного сигналу. У процесі таких
оптичних сигналів виявляється квантова природа електромагнітних хвиль. При прийомі слабких оптичних сигналів енергія надхо-
дить ‘"порціями” у випадкові моменти часу. Це призводить, зокрема, до появи квантових шумів сигналу, що у ряді випадків значно
перевищують внутрішні шуми фотоприймача. Квантові шуми сигналу обмежують чутливість ідеального оптичного приймача під
час відсутності завад на рівні енергії хоча б одного фотону для видимого діапазону. При урахуванні квантових властивостей оптич-
ний сигнал представляють у вигляді потоку фотонів. При урахуванні тільки хвильових властивостей оптичний сигнал представля-
ють у вигляді просторово-часового розподілу електромагнітного поля. Часто поряд з розподілом оптичного поля розглядають роз-
поділ інтенсивності оптичного поля (інакше розподіл інтенсивності світла, розподіл інтенсивності оптичного сигналу й ін.). При
цьому також припускається, що обробка оптичних полів до фотоприймача й електричних сигналів після нього оптимізуєгься розді-
льно. Рішення про наявність чи відсутність сигналу приймають за вихідним струмом фотоприймача. Вихідний струм фотоприйма-
ча є наслідком квантових переходів (вильоти фотоелектронів у приймачах із зовнішнім фотоефектом чи утворення носія заряду в
приймачах із внутрішнім фотоефектом), що відбуваються під дією квантів світла, а також у результаті внутрішніх взаємодій при
теплових коливаннях атомів чи молекул речовини (темновий струм).
Передавачі і приймачі оптичного випромінювання (оптичних сигналів)
Створення оптичних локаторів з великою дальністю дії, високими точністю і розділювальною здатністю, для активної локації
стало можливим після появи могутніх джерел когерентного оптичного випромінювання - лазерів. Принципи роботи лазерів базу-
ються на явищі змушеного випромінювання і пов’язані з оптичними властивостями інверсного середовища, що полягають у здат-
ності елементарних частинок змінювати свій енергетичний стан - переходити з одного енергетичного рівня на інший. При переході
з низького рівня на більш високий відбувається поглинання порції ЕМ-енергії - кванта світла або одного фотона. При зворотному
переході - випромінюється один фотон. Частота випроміненого або поглиненого кванта світла визначається різницею енергій (XV)
початкового і кінцевого стану частки:
де Ь - постійна Планка
У залежності від природи активного середовища лазери можуть бути твердотільними, газовими, рідинними, напівпровіднико-
вими. Випромінювання лазера (незалежно від типу і конкретних технічних даних) є в тій або іншій мірі монохроматичним, когере-
нтним, спрямованим, інтенсивним і поляризованим. Мала довжина хвилі електромагнітного випромінювання лазерів дозволяє
одержувати вузькі діаграми спрямованості (від одиниць до десятків кутових секунд) навіть при невеликих розмірах випромінюва-
чів (десятки сантиметрів). При розбіжності випромінювання, рівній одній кутовій секунді (І" = ЗЧО^рад), поперечний розмір облас-
ті, що опромінюється, на дальності 200 км складає 1 м, що дозволяє роздільно зондувати окремі елементи цілі. Часова і просторова
когерентність випромінювання лазерів забезпечує стабільність частоти при високій спектральній щільності їхньої потужності, а
гостра спрямованість лазерного випромінювання обумовлює високу завадозахищеність лазерних локаційних засобів від впливу
природних джерел випромінювання. Висока частота коливань забезпечує великі доплерівські зсуви частоти при взаємних перемі-
щеннях цілі і локатора, і, таким чином - високу точність вимірювання радіальної швидкості елементів цілі, але при цьому вимагає
розширення смуги приймальних пристроїв. Часова модуляція зондуючих сигналів здійснюється на етапі генерації, випромінюван-
ня коливань і в процесі їх проходження через формуючу оптичну систему (ФОС) (див. рис. 3.42) передавального пристрою. Оптич-
ні сигнали, що генеруються, виявляються просторово-часовими вже на виході лазера. Основним видом часової модуляції на етапі
генерації* є імпульсна з коефіцієнтом широкосмуговості (базою) 1 ... 104, але найчастіше, з випадковою фазовою структурою.
Принцип стиску, тобто компенсації випадкової фазової модуляції зондуючого сигналу, реалізується в лазерах із синхронізацією
мод, що випромінюють послідовність простих імпульсів із тривалістю до 1011... ЗІ О13 с, не досяжною в радіодіапазоні. Найбільш
складну просторово-часову модуляцію лазерних сигналів забезпечують генератори на основі обернення хвильового фронту. Пода-
льша просторова модуляція оптичних сигналів здійснюється в процесі проходження їх через ФОС, де забезпечується необхідний
121
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
миттєвий розподіл потоку зондувального лазерного випромінювання в просторі. До неї може входити система некерованих дзер-
кал, лінз, керованих дефлекторів, просторово-часових модуляторів та інших оптичних елементів. Дефлектори забезпечують пере-
міщення променя в просторі. Керовані просторово-часові модулятори світла (п’єзоелектричні, акустичні і т.ін.) здійснюють моду-
ляцію амплітуди і фази сигналу відповідно до керуючих впливів.
Прийом відбитих від цілей лазерних сигналів здійснюється оптико-електронним приймальним пристроєм, основними елемен-
тами якого є приймальна оптична система (ПОС) і ФПП (див. рис. 3.42). На відміну від об’єднання передавальної і приймальної
антен у радіолокації подібне об’єднання ФОС і ПОС у єдину оптичну систему в лазерних локаторах використовується рідко через
перевантаження блоків фотоприймачів і зростання рівня завад. В даний час як передавальна, так і приймальна оптичні системи
перспективних лазерних локаторів виконуються в адаптивному варіанті для компенсації спотворень хвильових фронтів сигналів у
середовищах лазерних генераторів і в атмосфері.
У блоці фсгтоприймача основним елементом, що перетворює оптичний сигнал на електричний, є фотоприймач. Одноелемент-
ний фотоприймач (фотодіод, фоторезистор, фотоелектронний помножувач (ФЕП) і ін.) забезпечує одноканальний прийом оптич-
них сигналів. Багатоелементний фотоприймач (матричний чи телевізійний) дозволяє здійснювати рівномірний прийом з області
простору, що називається полем зору фотоприймального пристрою.
При відсутності матричного, фотоприймачі, що забезпечують необхідне поле зору оптико-електронного прийомного пристрою,
іноді здійснюють його перегляд переміщенням одноелементного фотоприймача чи однорядкової матриці фотоприймачів у площи-
ні зображення ПОС.
На відміну від РЛС, у блоках фотоприймачів лазерного локатора практично не використовують підсилення сигналів на несучій
частоті, тому що при цьому ускладнюються конструкція і огляд простору. Використовується лише підсилення відеосигналів і ра-
діосигналів проміжної частоти (при гетеродинному прийомі). Відеочастотне підсилення використовується переважно у видимому і
УФ діапазоні, де є малошумливі приймачі з зовнішнім фотоефектом (тобто з вибиванням електронів квантами оптичного випромі-
нювання з фотокатода).
Відбитий від об’єкта потік електромагнітних хвиль оптичного діапазону захоплюється дзеркалом, фокусується і спрямовується
на матрицю фотоприймача для визначення кутових координат, а в активній локації одночасно і на ФЕП для визначення дальності
до об’єкта. Кожний елемент багатоелементного фотоприймача характеризується його геометричним місцем і освітленістю. Процес
перетворення по черзі (елемент за елементом) яскравості зображення на задану послідовність електричних сигналів (відеосигнал)
називається розгорткою зображення. Звичайно в телебаченні використовується лінійно-рядкова розгортка, при якій сигнали від
розташованих уздовж рядка елементів передаються послідовно один за одним із постійною швидкістю. Послідовний лінійний зсув
рядків у перпендикулярному їм напрямку називається кадровою розгорткою.
Сукупність всіх елементів зображення, переданого за один цикл розгортки, називається телевізійним кадром. На відміну від
нього телевізійний растр, представляє собою геометричне місце цієї сукупності елементів у телевізійному кадрі, що має 2 рядків.
Число рядків і кадрів, переданих за одиницю часу, одержало назву відповідно рядкової і кадрової Гк. частоти, а обернені до
них величини - періоду рядка Тр і періоду кадру Тк. Геометрична координатна відповідність деталей зображення, проектованого
на світлочутливу поверхню багатоелементного фотоприймача із деталями зображення, відтвореного на екрані відео-контрольного
пристрою, забезпечується синхронізацією рядкової і кадрової розгорток. Вона здійснюється спеціальними синхроімпульсами, пе-
реданими разом із відеосигналом. Інформацію про передане зображення несе чинна частина рядка, яка обмежується рядковим ім-
пульсом, що гасить (рядковим бланком). Тривалість чинної частини рядка дорівнює різниці між періодом рядкової розгортки Тр, і
тривалістю рядкового бланка Трб. Час передачі одного елемента зображення Г, звичайно дорівнює часу його перетворення на елект-
ричний сигнал (часу комутації елемента) і визначається виразом
іе = (Тр - Тр б)/пр, (3.198)
де Пр - число елементів на рядку.
Час передачі кадру дорівнює різниці періоду кадрової розгортки Тк і кадрового імпульсу, що гасить, (бланка) Ткб.
Розмір матриці багатоелементних фотоприймачів досить часто описується параметром, який називається "формат”. Формат -
діагональний розмір відікона, еквівалентного даній матриці. Він вимірюється в дюймах і приймає значення: Г (9,52 х 12,7 мм),
2/3 ’ (6,6 х 8,8 мм), 1/2’ (4,8 х 6,4 мм), 1/3’ (3,6 х 4,8 мм).
Структурні схеми й особливості побудови напівактивного і пасивного оптичних локаторів багато в чому збігаються зі структу-
рною схемою й особливостями побудови оптико-електронного приймального пристрою лазерного локатора.
В практиці використовують дві основні структури виявлювачів оптичних сигналів: з некогерентним (прямим) фотодетектуван-
ням та з гетеродинним (когерентним) фотодетекіуванням.
Обидва виявлювачі включають оптичний фільтр зі смугою частот 10... 104 ГТц, фотоприймач і пристрій обробки. Характерни-
ми їх елементами є: у першому випадку відеопідсилювач; у другому - лазерний гетеродин, напівпрозоре дзеркало, підсилювач
проміжної частоти, детектор. Відповідно до цих структур розрізняють і два основних методи прийому оптичних сигналів: метод
прямого фотодетекіування і гетеродинний метод прийому.
У приймачі прямого фотодетекіування корисний сигнал і фонове випромінювання проходять через оптичний фільтр, що має
деяку ефективну смугу пропускання і надходять на вхід фотоприймача. Фотоприймач перетворює оптичне випромінювання на
електричний сигнал. При цьому вихідний струм формується із сигнальної складової, фонової складової і темпового струму фото-
приймача. Після підсилення електричний сигнал надходить на вхід пристрою обробки, що забезпечує виявлення оптичного сигна-
лу чи вимірювання його параметрів.
Відзначимо деякі особливості приймача прямого фотодетекіування. Він забезпечує одержання інформації, закладеної в часовій
зміні потужності прийнятого випромінювання. Інформація, закладена в частоті і фазі прийнятих коливань, втрачається при прямо-
му фотодетекіуванні. При використанні вузькосмугового корисного сигналу можна зменшити завадову складову на виході при-
ймального пристрою за рахунок вузькосмугового оптичного фільтра, що послабляє фонове засвітлення. При цьому доплерівські
122
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
зсуви частоти сигналу не будуть помітно впливати на характеристики приймача прямого фотодетектування тому, що навіть вузько-
смугові оптичні фільтри мають смуги пропускання 10... 104 ГТц.
Основними джерелами завад в оптичній локації є: власні шуми фотоприймача; зовнішній фон, обумовлений випромінюванням
неба, випромінюванням дискретних джерел (Сонце, Місяць, планети, зірки), і завад зворотного розсіювання зондуючого сигналу.
Власні шуми фотоприймача залежать від його типу. Для фотоелектронних помножувачів (ФЕП) і фотодіодів (ФД) основним дже-
релом шумів є темновий струм.
Особливості гетеродинного прийому. До складу блока фотоприймача вводять лазерний гетеродин і змішувач у вигляді напів-
прозорого дзеркала чи призми, що поділяє світло. У випадку взаємної когерентності випромінювань лазерного гетеродина і переда-
вального пристрою можлива когерентна обробка прийнятого сигналу. Тому гетеродинний прийом використовується не тільки для
придушення внутрішніх шумів у ІЧ діапазоні, але й для витягу інформації з фазової структури прийнятого поля у видимому й УФ
діапазонах. Виходячи з того, що спектральна щільність випромінювання фону звичайно невелика, рівень завади при гетеродинному
прийомі залежить, насамперед, від потужності гетеродина і темпового струму фотоприймача. Підвищення потужності гетеродина
забезпечує збільшення як корисної, так і завадової частини складових вихідного струму. Але при цьому можна домогтися, що влас-
ні шуми фотоприймача не будуть впливати на рівень завади, і вона буде визначатися тільки шротовим шумом випромінювання
гетеродина. Ця властивість гетеродинного приймача надзвичайно корисна, особливо при використанні фотоприймачів з великим
рівнем власних шумів. Відзначена особливість дозволяє зробити висновок про те, що в гетеродинному приймачі застосування оп-
тичного фільтра для ослаблення фона необов’язкове. Перевагою гетеродинного методу прийому є ще те, що він дозволяє одержу-
вати інформацію, що міститься в частоті і фазі оптичного сигналу. Недоліком гетеродинного приймача є складність компенсації
великих доплерівських зсувів частоти відбитого сигналу, тому що підсилювачі проміжної частоти звичайно бувають вузькосмуго-
вими.
Враховуючи те, що всі існуючі фотоприймачі реагують тільки на інтенсивність падаючого випромінювання для реєстрації про-
сторової кореляційної функції поля чи вимірювання її параметрів, використовуються спеціальні методи прийому оптичних сигна-
лів. Одним з таких методів є інтерферометричний. При його реалізації на вході блока фотоприймача підсумовують поля від двох чи
декількох просторово-рознесених точок (областей). За результатами інтерференції полів визначають їх взаємну когерентність і фа-
зові співвідношення. Після набору вимірювань при різному розносі точок прийому стає можливим відновлення просторового роз-
поділу амплітуди і фази прийнятого поля. Інтерферометричний прийом використовується при відсутності гетеродина для витягу
інформації з фазової структури прийнятого поля, а також для збільшення кутового розділення і синтезування апертури.
Типи і характеристики оптичних систем
Оптичні системи забезпечують концентрацію оптичного випромінювання від об’єкта на фотоприймачі. Вони є вхідним еле-
ментом практично всіх оптичних і оптико-електронних пристроїв для одержання інформації про об’єкти, які спостерігають. Оптич-
ні системи можуть істотно розрізнятися за конструктивними ознаками, але виконувати однакові функції, і навпаки, при ідентично-
му конструктивному виконанні мати різне функціональне призначення. Функціональне призначення оптичної системи визначаєть-
ся методом прийому й обробки оптичних сигналів, реалізованих у кожному конкретному пристрої. Функція одержання оптичного
зображення припускає таке перетворення прийнятого світлового потоку, у результаті якого в площині за оптичною системою ство-
рюється розподіл поля чи інтенсивності поля, який є аналогічним розподілу в картинній площині об’єкта (у безпосередній близько-
сті від об’єкта вводять картинну площину, у місці прийому оптичних сигналів вводять апертурну площину, вони є паралельними, їх
взаємне положення може визначатись відстанню між ними).
Оптичні системи, що здійснюють перетворення прийнятого світлового потоку, не зв’язані з формуванням зображення, за
своїми функціями часто аналогічні спрямованим антенам радіодіапазону. Вони звичайно застосовуються при використанні фото-
приймачів, які не реєструють просторовий розподіл світлового потоку (фотодіоди, ФЕП та ін.) у дальномірах, фотометрах та інших
пристроях. Такі оптичні системи служать для концентрації світлового потоку із вузької області.
Звичайно оптичні системи, що формують зображення, використовуються разом з фотоприймачами, що реєструють просторо-
вий розподіл сигналу. Це забезпечують, наприклад, телевізійні системи.
Оптичні системи, які призначені для спостереження віддалених предметів називаються телескопічними. їх характерною оптич-
ною властивістю є те, що промені в систему надходять у вигляді паралельних пучків і виходять із системи також у вигляді пара-
лельних пучків. Розрізняють дзеркальні, лінзові і дзеркально-лінзові оптичні системи. Існує декілька основних типів телескопічних
оптичних систем. На рис. 3.100 показана оптична система Кеплера й оптична система Галілея.
Рис. 3.100. Типи телескопічних оптичних систем: телескоп Кеплера (а); телескоп Галілея (б)
123
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Достоїнством лінзових систем є: можливість гарної абераційної корекції, можливість суміщення функцій захисного скла і пер-
шого компонента, відносно прості складання і юстування та ін. У той же час лінзовим системам властиві такі недоліки: велике се-
лективне поглинання в ряді ділянок спектра, важке огтгико-механічного сканування, порівняно великі хроматичні аберації.
Поряд із лінзовими оптичними системами використовуються системи з відбивними дзеркалами. На рис. 3.101 зображені схеми
телескопів Ньютона і Касегрена. Всі недоліки, що властиві лінзовим системам, практично відсутні в дзеркальних, достоїнством
яких є: можливість роботи в широкому спектральному діапазоні, відсутність хроматизму, менші повздовжні габарити, менші маса і
Рис. 3.101. Дзеркальні оптичні системи: телескоп Ньютона (а); телескоп Касегрена (б)
Основними характеристиками оптичної системи є: фокусна відстань; видиме збільшення Г; кут поля зору (кут огляду); діаметр
вихідної зіниці ЕУ; роздільна здатність.
Розрізнювальною спроможністю або розрізнювальною силою називають здатність оптичної системи зображувати
роздільно дві точки. При відсутності аберації в оптичній системі і за умови її точної центрованості межу розділення системи вста-
новлює дифракція ЕМХ:
Ч/ = 1.22-^, (3.199)
де к - довжина хвилі падаючого випромінювання в мкм; □ - діаметр лінзи або дзеркала.
Видимим збільшенням оптичної системи називається відношення діаметра вхідної зіниці О до діаметра вихідної зіниці
Г = □/□'. (3.200)
Діаметр вхідної зіниці О визначається з умови розрізнювальної спроможності, а діаметр вихідної зіниці □' з умови видимого
збільшення.
Ширина поля зору 0 оптико-електронного приймального пристрою з фотоприймачем, у якого лінійний розмір чутливого еле-
мента - Ь, і фокусною відстанню ПОС - Р:
0 = 2 агсіе(Ь/2Р) ~Ь/Р. (3.201)
Ширина поля зору може бути від десятків кутових секунд до десятків градусів (стандартний кут огляду людського ока складає
60 - 70 °). Ширококутні оптичні системи як правило вносять істотні спотворення зображення.
Важливою характеристикою оптичної системи є світлосила - величина, яка дозволяє порівняти освітленості в площинах зоб-
ражень різних оптичних систем. Розглядають світлосилу геометричну (без урахування втрат світлової енергії на поглинання та
відбиття в оптичній системі (дорівнює квадрату відносного отвору - (В/Г)2)), та фізичну (або ефективну) - вона характеризує частку
світлової енергії, що пропускається оптичною системою, і обчислюється, як добуток квадрата відносного отвору і коефіцієнта про-
пускання.
Для опису процесів формування і обробки зображень використовують методи частотного аналізу і теорії лінійних систем.
Основні параметри і характеристики приймачів оптичного випромінювання
Приймачі оптичного випромінювання (фотоприймачі) - прилади, зміна стану яких під дією потоку оптичного ви-
промінювання служить для виявлення цього випромінювання. Вони перетворюють енергію оптичного випромінювання на інші
види енергії для забезпечення зручності їх безпосереднього виміру (перетворюють інформацію, яку переносять ЕМХ оптичного
діапазону в електричні або оптичні сигнали).
Різноманіття типів приймачів оптичного випромінювання (ЛОВ) визначається великою кількістю способів перетворення
енергії електромагнітної хвилі, а також великою шириною оптичного діапазону спектра Принцип дії усіх фотоприймачів базується
на взаємодії поля електромагнітної хвилі з речовиною чутливого елемента. Природа цієї’ взаємодії відрізняється великим роз-
маїттям, але його результатом є реакція (відгук) на інтенсивність випромінювання, тобто потужність випромінювання, усереднену
за багатьма періодами коливання поля. Ця властивість обумовлена тим, що характеристичний час відгуку фотоприймача визна-
чається процесами переносу і релаксації, що відбуваються значно повільніше, ніж коливання поля. Тому фотоприймач, як правило,
є квадратичним детектором.
124
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
При поглинанні енергії електромагнітної хвилі змінюється стан речовини чутливого елемента фотоприймача У найпростішому
випадку відбувається підвищення температури, що впливає на параметри речовини (тиск газу, електропровідність твердого тіла,
електричну поляризацію діелектрика та ін.). Фотоприймачі, що працюють за цим принципом, називаються тепловими. До них
відносяться болометри, термоелементи, оптикоакустичні, пневматичні та піроелектричні приймачі. Більш складні процеси мають
місце у фотонних приймачах, які базуються на безпосередньому впливі поглинених квантів поля ЕМХ на електронну підсистему
твердого тіла Наприклад, при опроміненні напівпровідника виникають нерівноважні носії заряду, що можуть або вийти за межі
кристала у вакуум, або змінити його електропровідність і викликати низку більш складних ефектів. У першому випадку говорять
про зовнішній фотоефект чи фотоелектронну емісію і відповідні фотоприймачі відносять до емісійного типу. Найбільш важливими
з них є фотоелементи, фотоелектронні помножувачі й електронно-оптичні перетворювачі, а також передавальні телевізійні трубки.
В другому випадку має місце внутрішній фотоефект. По суті справи, це велика група ефектів, в основі яких лежить виникнення
нерівноважних носіїв заряду. До фотоприймачів на основі внутрішнього фотоефекта відносяться фоторезистори, фотодіоди, різні
фоточутливі мікросхеми й ін. Усі вони поєднуються в клас фотоелектричних напівпровідникових приймачів. На цей час найбільше
розповсюдження отримали багатоелементні напівпровідникові фотоприймачі. Знімання інформації і первинна обробка сигналу в
них забезпечується за рахунок приладів із зарядовим зв’язком (ПЗЗ), приладів із зарядовою інжекцією (ПЗІ) (первинна обробка
електричного сигналу фоточутливих елементів матриці в ПЗІ - структурах здійснюється із зарядовими пакетами шляхом інжекції
зарядів в єдину підложку). Багатоелементні приймачі можуть створюватися в монолітному чи гібридному виконанні. У монолітних
структурах матриця фоточутливих елементів і ПЗЗ (ПЗІ) - пристрій виготовляються з одного напівпровідникового матеріалу. У
гібридних структурах фоточутлива матриця і ПЗЗ-пристрій виготовляються з різних матеріалів.
Приймачі випромінювання характеризують низкою параметрів і характеристик. При цьому під параметром розуміють таку
величину, єдине значення якої характеризує визначену властивість приймача (при обговорених умовах виміру). Параметр може
бути виміряним безпосередньо чи обчисленим заданими вимірювань інших величин.
Під характеристикою розуміють ту чи іншу властивість приймача, яка може бути описана тільки сукупністю значень будь-яких
величин.
Параметри фотоприймачів можуть бути розбиті на наступні групи: геометричні; конструктивні й експлуатаційні; параметри
перетворення оптичного сигналу, електричні та фотоелектричні.
Найважливішими геометричними параметрами є форма й ефективна площа чутливого елемента, а для багатоелементних фото-
приймачів також кількість і розташування чутливих елементів. Конструкція й особливості експлуатації приймачів значною мірою
визначаються робочою температурою чутливого елемента. До основних параметрів перетворення оптичного сигналу приймачами
випромінювання відносять: інтегральну чутливість, граничну чутливість, виявлювальну здатність (здатність до виявлення), рівень
шумів, опір(темновий) і постійну часу.
Крім них, часто використовують такі характеристики фотоприймачів: спектральну, частотну, енергетичну, вольтові характе-
ристики, а також коефіцієнт використання приймача, спектр потужності шумів та ін.
Чутливість - відношення зміни вимірюваної електричної величини, викликаної падаючим на фотоприймач випромінюванням,
до кількісної характеристики цього випромінювання в заданих умовах експлуатації.
Найчастіше вихідний сигнал фотоприймача визначається ефективним значенням напруги чи струму фотосигналу. У цих
випадках використовують поняття вольтової 8у (8у=ЦІ/Р^п) чи струмової 8і (8і=І/Рщп) чутливості.
В залежності від спектрального складу випромінювання, що реєструється, виділяють інтегральну і монохроматичну
чутливості.
Інтегральна чутливість - чутливість ПОВ до немонохроматичного випромінювання заданого спектрального складу.
Монохроматична чутливість - чутливість ПОВ до монохроматичного випромінювання.
Важливим параметром ПОВ є спектральна характеристика чутливості - залежність монохроматичної чутливості від довжини
хвилі випромінювання, що реєструється.
Темповий опір (Яр) фотоприймача - опір ПОВ під час відсутності падаючого на нього випромінювання в діапазоні його
спектральної чутливості.
Темповий струм фотоприймача (Іт) - струм, що протікає через ПОВ при зазначеній напрузі на ньому під час відсутності па-
даючого на ПОВ випромінювання в діапазоні його спектральної чутливості.
Частіше всього під чутливістю розуміють мінімальну освітленість на об’єкті, при якій ще можна розрізнити перехід від чорного
до білого, але іноді розуміють і мінімальну освітленість на приймачі (матриці), яку ще можна зареєструвати. Формула, що зв’язує
освітленість на об’єкті і на матриці, наведена нижче:
ЕКР
1п=-^’ (3202)
11 4
де ІоіІп- світленісль об’єкта і матриці відповідно; Р - світлосила оптичної системи; К- коефіцієнт відбиття об’єкта (див.
табл. 3.17).
Під граничною чутливістю розуміють мінімальну енергію (потужність) сигналу на вході фотоприймача, при якій забезпе-
чується його виявлення із заданими характеристиками (умовними ймовірностями правильного виявлення і хибної тривоги.
Шум приймача - сигнал із випадковою амплітудою і частотою. Джерела шуму можуть бути як внутрішні, так і зовнішні. У
раціонально сконструйованому ОЕЗ чутливість до малих вхідних сигналів визначається тільки рівнем внутрішніх шумів. Розподіл
потужності шуму по спектру визначається спектральною потужністю шуму по спектру - дисперсією, що припадає на одиницю
смуги частот.
Наведемо найважливіші види шумів приймачів випромінювання.
Тепловий шум виникає внаслідок хаотичного теплового руху вільних електронів, у результаті чого кількість електронів, що
рухаються уздовж провідника в одному напрямку, не дорівнює кількості електронів, що рухаються в протилежному напрямку (у
будь-який момент часу).
125
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Дисперсія теплового шуму в смузі частот Д £ визначається за формулою:
и|=4КТКД£, (3.203)
де К = 1,38 1О'23 Дж/К - постійна Больцмана; Т - температура приймача; К- опір приймача
Генераційно-рекомбінаційний шум обумовлений випадковим характером генерації електронів за рахунок теплового пору-
шення кристалічних ґрат напівпровідника, а також випадковим характером рекомбінації цих електронів, тобто флуктуацією числа і
часу життя носіїв.
Сгрумовий шум обумовлений випадковими змінами опору напівпровідника внаслідок різних контактних і поверхневих явищ.
Шум мерехтіння обумовлений випадковими змінами емісії фотокатода.
Дробовий шум виникає унаслідок флуктуації в часі потоку дискретних частинок, що утворюють електричний струм. Протіка-
ючи по опору навантаження К„, цей флуктуючий струм створює напругу, дисперсія якої визначається з формули:
Ьідр = 2еІ0К„Д£ , (3.204)
де е - заряд електрона; Іо - середнє значення струму.
Радіаційний (фотонний) шум визначається флуктуаціями сигналу, що потрапляє на приймач, тобто флуктуаціями кількості
фотонів, що приходять за визначений проміжок часу на чутливий шар приймача, як від елементів самого приймача, так і від
зовнішніх випромінювачів (об’єкт, фон).
Температурний шум визначається випадковими коливаннями температури приймача щодо деякого середнього значення че-
рез мінливість процесу теплообміну між чутливою площадкою і навколишнім середовищем.
Для теплових приймачів флуктуації потужності випромінювання, що надходить від фону (чорного тіла з температурою Тф) на
приймач площею А, описуються співвідношенням:
ДФВ =8ЕткТфСТАД£, (3.205)
де є - випромінювальна здатність чутливого шару приймача; а - постійна Сгефана-Больцмана
Оскільки приймач є у свою чергу випромінювачем із температурою Т^, то флуктуації потоку, “що іде” від нього, описуються
виразом:
ДФ„В = 8єткТпВоАД£. (3.206)
Загальна флуктуація, що визначає дисперсію радіаційного шуму, дорівнює:
Дф2 = Дф2 + дф2в = &;якаЛдГ(Т5 + Т5в ) (3.207)
Оскільки цей шум у значній мірі залежить від параметрів джерела випромінювання й умов роботи приймача, то він визначає
межу чутливості приймача випромінювання.
Якщо окремі види шумів некорельовані, то випадкові флуктуації викликають шум, дисперсія якого:
V2 =8ц£ДФ2 + £и2 • (3.208)
Граничним потоком приймача (граничною чутливістю) називається середньоквадратичне значення діючого на приймач сину-
соїдально модульованого потоку випромінювання із заданим спектральним розподілом, при якому середньоквадратичне значення
напруги (струму) сигналу дорівнює напрузі (струму) шуму в заданій смузі частот (іноді називають еквівалентною потужністю
шумів).
д/щ” уір~
Фп=^=“- [Вт]. (3.209)
Він визначає максимальну дальність дії ОЕЗ.
Для більш зручного порівняння різноманітних приймачів вводять поняття граничного потоку приймача в одиничній смузі час-
тот:
Ф
Фп1 [Вт/Гц1/2]. (3.210)
П1 уІМ
Використовують також таке визначення граничної чутливості. Гранична чутливість - мінімальне значення променистого по-
току, що викликає на виході приймача сигнал, який дорівнює напрузі шумів (середньому квадратичному значенню) чи перевищує
його в задане т число разів: Ф* = тФ п . Значення коефіцієнта т залежить від того, до чого відносять граничну чутливість. Якщо
його розглядати окремо для приймачів у стандартизованих умовах, то звичайно приймають т = 1. Якщо ж він відноситься до при-
ймачів, включених у визначену схему, що служить для виділення сигналу на фоні шумів, то коефіцієнт т приймають рівним 3 ... 5,
а для деяких спеціальних схем навіть меншим чи рівним 1.
Внаслідок того, що напруга шумів приймача залежить від площі його чутливої площадки і смуги частот підсилювача сигналу,
для порівняння різних приймачів використовують величину граничної чутливості, віднесену до смуги пропущення і площі фото-
приймача: Ф*с = гпФп / л/аД£ [Вт/см-Гц1'2].
Величина, обернена до граничного потоку в одиничній смузі частот, називається виявлювальною здатністю приймача:
°°ф~ (3.211)
126
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Для різноманітних конструкцій приймачів того самого типу цей параметр дуже неоднозначний, тому що для різноманітних
площ чутливого шару параметри % і иш непостійні. Тому більш зручно користуватися питомою випалювальною здатністю
приймального пристрою:
* $ил/АД£
О =-У—---------, [Вт' см Гци]. (3.212)
тЦш
Під постійною часу т ПОВ розуміють відрізок часу від початку опромінення приймача до моменту, коли його вихідна величина
досягає заданої частини сталого значення при тривалому опроміненні. У більшості приймачів вихідний сигнал наростає за експо-
ненціальним законом, тому т досить часто фіксується до моменту досягнення сигналом 0,63 сталого значення. Постійна часу прий-
мача визначає максимально можливу частоту модуляції світлового потоку.
Частотна характеристика виражає залежність чутливості приймача 8(со) від частоти модуляції со падаючого на нього
світлового потоку при його незмінній потужності. Частотна характеристика визначає динамічні властивості і пов’язана з постійною
часу і видом модуляції. Для приймачів, які мають експоненціальну залежність вихідного сигналу від часу (при синусоїдальній
формі імпульсів падаючого світлового потоку), цей зв’язок має вигляд
8(®)=-7=Ж=, (3.213)
71 + (<от)2
де 8(0) - чутливість приймача при частоті модуляції, близької до нуля.
Світлова (енергетична) характеристика виражає залежність вихідної напруги в ланцюзі приймача 1)^ від величини
світлового потоку (потужності випромінювання) Ф, що падає на його чутливу площадку (при постійній напрузі живлення ланцюга
приймача). За енергетичною характеристикою може бути визначена інтегральна (вольтова) чутливість приймача, що є крутизною
залежності ІІцих = ^(Ф).
Вольтові характеристики. Вони виражають залежності інтегральної, вольтової і граничної чутливості, а також рівня шумів від
величини напруги, що живить приймач випромінювання. Зі збільшенням напруги живлення вольтова чутливість приймача
збільшується, але одночасно збільшується і напруга шумів, тому вольтові характеристики використовують для оптимізації
відношення сигнал/шум.
Вольт-амперна характеристика виражає залежність фотоструму від напруги, прикладеної до приймача (електродів) при
незмінній потужності світлового потоку.
Спектр потужності шуму. Крива, що описує розподіл дисперсії шуму по частотах, називається спектром потужності шуму. На
підставі цієї характеристики вибирають частоту модуляції сигналу і смуту пропущення схеми посилення так, щоб відношення сиг-
нал/шум було найбільшим.
При рішенні задачі розпізнавання об’єктів за їх зображеннями, створюваними оптико-електронними телевізійними системами
часто виходять із принципів, що були запропоновані Д Джонсоном ще в середині 50-х років. При такому підході здатність спосте-
рігача виявляти чи розпізнавати об’єкт за його зображенням зв’язується з можливістю спостереження цією апаратурою визначеної
кількості (пар) ліній (щілин) в еквівалентній мірі (тест-об’єкти).
За аналогією з процесом перетворення спектра часових частот електричного сигналу електронним фільтром одержання зобра-
ження в оптико-електронних телевізійних системах розглядається як процес перетворення спектра просторових частот випроміню-
вання об’єкта лінійними фільтрами, що представляють собою різні елементи приймальної системи.
Здатність приймальної системи і складових її компонентів відтворювати просторові частоти зображення описується оптичною
передатною функцією (ОПФ) системи чи її компонент. Модуль ОПФ називають модуляційною передатною функцією (МПФ) чи
частотно-контрастною характеристикою (ЧКХ).
Загальні особливості оптичної локації визначаються використовуваним діапазоном частот. Оптичний діапазон у порівнянні з
радіодіапазоном має ряд істотних переваг.
В оптичному діапазоні полегшується одержання некоординатної інформації про об’єкт завдяки високому просторовому розпо-
ділу оптичних локаційних засобів. Об’єкти спостереження виглядають як сукупність безлічі “блискучих” точок, випадковим чином
розташованих на поверхні і досить повно відображають образ об’єкта. У радіодіапазоні об’єкти складаються з обмеженого числа
“блискучих” точок, що визначають радіолокаційний “портрет” об’єкта, що не відповідає видимому. Для вимірювання поперечних
характеристик об’єктів в оптичному діапазоні потрібні лінійні апертури на 4 - 5 порядків менше апертур радіолокаційних засобів. У
той же час висока спрямованість зондувального випромінювання і вузькі поля зору прийомних пристроїв істотно обмежують мож-
ливості оптичних локаційних засобів по огляду простору.
Однак, як показали військові конфлікти останніх десятиліть, при бойових діях у XXI столітті нанесення повітряних ударів буде
виконуватися із застосуванням перш за все високоточної зброї, яка сама наводиться на джерела випромінювання розвідувальних і
бойових систем ППО. При цьому для прикриття будуть використовуватись високоефективні електронні активні шумові завади. У
цих умовах різко знижується бойова ефективність угруповань ППО, що використовують активні радіолокаційні засоби, і зростає
значення інформаційних систем пасивної локації та лазерних систем, які дозволяють рано виявляти цілі, супровод жувати і знищу-
вати їх при вході в зону поразки без демаскування самих себе. Розвиток і застосування ОЕЗ військового призначення забезпечує:
виявлення, розпізнавання селекцію і супроводження малопомітних у радіодіапазоні цілей, групових цілей, прикритих рядітя дядя-
ми, а також цілей на малих і гранично малих висотах для рішення задач інформаційного забезпечення систем і комплексів ППО,
одержання різноманітної інформації щодо цілей в інтересах рішення задач контролю ступеня їх поразки для бойових систем і ком-
плексів з високим ступенем автоматизації, наведення керованих засобів поразки.
127
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
3.11. Теоретичні основи радіо- і радіотехнічної розвідки
3.11.1. Засоби радіо- і радіотехнічної розвідки
За допомогою засобів радіо- і радіотехнічної розвідки (РРТР) здійснюються пошук і виявлення радіовипромінювань,
вимірювання їх параметрів, демодуляція і декодування, пеленгування і визначення місцеположення джерел радіовипромінювань
(ДРВ), вирішуються інші задачі РРТР. Виявлення радіотехнічних засобів противника полягає у встановленні фактів їх роботи на
даний момент часу. Пошук працюючих радіоелектронних засобів ведеться за частотою і за напрямком. До засобів РРТР
відносяться радіоприймальні пристрої з комплектами демодулюючої апаратури, декодуючих і реєструючих пристроїв,
радіопеленгатори, станції і комплекси пасивної радіолокації, спеціально розроблені станції' і комплекси. Узагальнена структурна
схема типового засобу радіо- і радіотехнічної розвідки показана на рис. 3.102.
Рис. 3.102. Структурна схема засобу РРТР
Звичайний засіб РРТР містить у собі наступні технічні системи: антенну (АС); пошуку радіовипромінювань за частотою (і ча-
сом) (СПЧ); селекції (СС); пеленгування (СП) або визначення місцеположення (СВМП); аналізу, розпізнавання радіовипроміню-
вань і їхніх джерел (САР); реєстрації і документування (СРД); управління (СУ).
Антенна система призначена для прийому сигналів. За спрямованістю вона може бути неспрямованою, слабкоспрямованою і
спрямованою. Слабкоспрямовані і спрямовані АС можуть застосовуватися для селекції сигналів за напрямком і пеленгування (ви-
значення місцеположення). Спрямовані антени застосовуються також для здійснення пошуку радіовипромінювань за напрямком. У
найпростішому випадку застосовується штиреві антени або антени типу “похилий промінь”. У більш складних системах можуть
застосовуватися комплекти різнорідних антенних систем і фазовані антенні решітки (ФАР).
Система пошуку радіовипромінювань за частотою призначена для реалізації частотно-часового пошуку радіовипроміню-
вань у широкому діапазоні частот. У найпростішому випадку пошук здійснюється оператором в ручному режимі шляхом пере-
строювання гетеродина супергетеродинного розвідувального приймача. У більш складних системах СПЧ реалізує різні за техноло-
гією пошукові і безпошукові способи визначення несучої частоти.
Система селекції призначена для проріджування потоку сигналів, що виявляються шляхом їх селекції або режекції за частот-
ними, часовими та іншими параметрами. У найпростішому випадку - це підсилювач проміжної частоти (ППЧ) із керованою ши-
риною смуги пропускання або пристрої регулювання (вибору) розділювальної здатності за частотою аналізатора спектра сигналів.
У більш складному - комплекти спеціальних програмно керованих автоматизованих алгоритмів і пристроїв, що реалізують метод
розпізнавання образів за просторовими, частотними, часовими, поляризаційними та іншими ознаками прийнятих радіови-
промінювань.
Системи пеленгування або визначення місцеположення - призначені для пошуку джерел радіовипромінювань за напрям-
ком, визначення напрямку на ДРВ (у СП) або координат ДРВ (у СВМП). Якщо під “засобом РРТР” розуміється станція РРТР, то
цю систему звичайно називають системою пеленгування. Якщо мова йде про комплекс РРТР, то це - система визначення
місцеположення. В якості цих систем використовуються радіопеленгатори або пошукові скануючі за напрямком антенні системи з
датчиками кута.
Система аналізу, розпізнавання радіовипромінювань і їх джерел призначена для вимірювання й аналізу часових, частотних
та інших параметрів радіовипромінювань, розпізнавання видів і параметрів прийнятих сигналів (у тому числі - видів модуляції,
видів передачі тощо), демодуляції сигналів, декодування повідомлень, розпізнавання типів джерел радіовипромінювань та
виділення інформації, що є в сигналах. У найпростішому випадку САР - це оператори постів радіоперехоплення і пеленгування
(або оператор станції РТР), а також апаратура виділення каналів, часового і спектрального аналізу радіовипромінювань, демоду-
ляції сигналів і декодування повідомлень, яку вони використовують. Сучасні САР представляють собою складні обчислювальні
алгоритми і машини (ПЕОМ або конструкції із сигнальних процесорів), що реалізують методи штучного інтелекту.
Система реєстрації і документування призначена для реалізації візуального інтерфейсу оператора, ведення звітної докумен-
тації В елементарному випадку - це індикатори, пристрої реєстрації на фото- і кіноплівку, магнітні носії, електрохімічний і звичай-
ний папір і т.д, бланки постів РРТР. У сучасних засобах РРТР система реєстрації і документування реалізована звичайно на основі
комп’ютерної техніки та оргтехніки.
Система управління засобу РРТР призначена для здійснення управління всіма технічними пристроями і системами засобу
РРТР, реалізації їх взаємодії в процесі функціонування, зв’язку з іншими аналогічними засобами і вищими органами управління.
Необхідно відзначити, що кожна з технічних систем, показаних на рис. 3.102, через систему управління може при не-
обхідності взаємодіяти одна з одною. Наприклад, при реалізації проріджування потоку сигналів за просторовими ознаками, система
селекції може керувати антенною системою. Система аналізу і розпізнавання радіовипромінювань може одержувати дані від
128
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
СП (СВМП) і АС. Система пеленгування, у свою чергу, може керувати СПЧ для настроювання на задані частоти або підстрою-
вання робочої частоти і т.ін.
Максимальна дальність радіоелектронної розвідки визначається формулою радіозв’язку, наприклад, у вигляді:
X І РсОсСр
Грозв~4пУР К ’
| 1 р.мін1квтр
(3.214)
де X - довжина хвилі; Рс - потужність прийнятих сигналів; Ос, 6Р - коефіцієнти підсилення передавальної і приймальні антен,
відповідно; Рр.мн - гранична чутливість приймального пристрою засобу РРТР; - коефіцієнт, що враховує втрати через
відхилення характеристик розвідувального приймача від оптимального (щодо прийнятого сигналу), розбіжності поляризації РЕС і
засобу РРТР, втрати при поширенні радіохвиль тощо.
Гранична дальність РРТР фожіран звичайно обмежується дальністю прямої видимості Кп.в, км:
Грозв.гран ї *п.в = 4,12^ + (3.215)
де Ь] - висота антени передавача РЕС-джерела розвідувальних відомостей, м; Ь2 - висота антени засобу РРТР, м.
3.112. Принципи функціонування системи пошуку радіовипромінювань за частотою
У радіо- і радіотехнічній розвідці застосовуються безпошукові і пошукові способи виявлення радіовипромінювань і визначення
їх несучої частоти.
Безпошукові способи дають можливість виявляти і вимірювати несучу частоту майже миттєво у всьому діапазоні частот, що
розвідуються. Скорочення часу обробки сигналів на основі безпошукових способів дається ціною або погіршення точності і розріз-
нювальної спроможності вимірювання, або збільшення кількості апаратури.
Пошукові способи базуються на перестроюванні приймача за частотою. Вони дозволяють з більшою точністю (розрізнюваль-
ною спроможністю за частотою) вимірювати несучу частоту ціною збільшення часу обробки сигналів.
Безпошукові способи виявлення сигналів з невідомою несучою частотою
На цей час розроблено дуже багато принципів побудови безпошукових розвідувальних приймальних пристроїв, наприклад: од-
ноканальні широкосмугові приймачі прямого підсилення, багатоканальні Фур’є-процесори, інтерференційні частотні розрізнювані.
Часто до безпошукових розвідприймачів відносять акустооптичні, дисперсійні Фур’є-процесори, цифрові пристрої, що реалізують
дискретне або швидке перетворення Фур’є, інші види ортогональних розкладань сигналів у широкій смузі частот.
Засоби РРТР традиційного парку побудовані на основі одноканальних широкосмугових приймачів прямого посилення і бага-
токанальних Фур’є-процесорів (панорамних приймачів).
Найпростіший одноканальний широкосмуговий приймач прямого підсилення (аперіодичний приймач) складається з ан-
тени, кристалічного детектора, відеопідсилювача й індикатора. Перевагою цього приймача є можливість цілком відтворювати ін-
формацію, яка є в прийнятому сигналі. Однак чутливість його досить мала. Точність вимірювання частоти низька, вона визначаєть-
ся приблизно половиною ширини смуги пропускання антени або вхідного фільтра.
Багатоканальні приймачі забезпечують високу точність визначення частоти. Це пов’язано з тим, що весь діапазон частот, що
розвідуються, розділяється системою фільтрів на ряд піддіапазонів. Смуги прозорості фільтрів примикають одна до іншої. Ширина
смуги пропускання кожного фільтра і кількість фільтрів т вибираються з умови одержання заданої точності 6Г визначення час-
тоти (розрізнювальної спроможності) т = А£р/25£ . У багатоканальних приймачах для підвищення чутливості і вибірності за-
стосовують фільтри з залізо-ітрійового граната. Подібні фільтри забезпечують лінійність перестроювання і високу добротність ре-
зонансних підсилювачів у широкому діапазоні частот.
Пошук (виявлення) за частотою сигналів з невідомою несучою частотою
Пошукові способи виявлення сигналів за частотою реалізуються звичайно панорамними розвідувальними приймачами. У най-
простішому випадку вони представляють собою супергетеродинні приймачі, що перебудовуються автоматично або в ручному
режимі в смузі частот, що розвідуються. Однією з найважливіших характеристик панорамного приймача є час пошуку радіосигна-
лу. Звичайно перегляд усього робочого частотного діапазону здійснюється за пилкоподібним законом періодично з періодом Тп.
Тому максимальний час пошуку (виявлення) безперервного сигналу не перевищує Тп. Більш складним є визначення несучої часто-
ти переривчастих короткочасно діючих сигналів (імпульсних, з АПРЧ, ППРЧ та іншими складними видами модуляції, далі -
“імпульсних сигналів”). У загальному випадку процес виявлення і виміру частоти імпульсного (переривчастого) сигналу носить
імовірнісний характер.
У залежності від співвідношення періоду перестроювання і тривалості сигналу РЕС, що розвідується, розрізняють: повільний
гарантований пошук, швидкий гарантований пошук, імовірнісний пошук (із середньою швидкістю).
При повільному гарантованому пошуку імпульсних сигналів (рис. 3.103, частотно-часова діаграма пошуку сигналів) час пе-
рестроювання приймача АТ на ширину його смуги пропускання більше періоду Ті повторювання імпульсів, АТ> Т,. Серйозними
недоліками повільного пошуку є великий час виявлення, низька пропускна здатність і, відповідно, мала імовірність розвідки корот-
кочасно діючих ДРВ. Причиною цього є мала швидкість ц перебудови приймача: ц < ДГ^/Гі, де Д£ф- смуга пропускання прийма-
льного пристрою.
129
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.103. Повільний гарантований пошук за частотою імпульсних сигналів
Щоб зменшити час розвідки при заданих діапазоні і швидкості перестроювання, необхідно розширювати смугу пропускання
приймача Тому панорамні приймачі з повільним пошуком, як правило, є широкосмуговими.
Точність визначення несучої частоти за допомогою таких приймачів невелика Вона складає приблизно 0,5АГф. Чутливість
приймальних пристроїв з повільним пошуком внаслідок значної смуги пропускання також невисока Часто ці приймачі викону-
ються за схемою прямого підсилення з вхідними ланцюгами, що перестроюються.
Час (г гарантованого виявлення при повільному пошуку визначається періодом перестроювання, тобто V=Тп.
При швидкому гарантованому пошуку одиночних імпульсних сигналів (рис. 3.104) час перестроювання приймача у всьому
діапазоні робочих частот АР = Г2 - І'і менше тривалості прийнятого сигналу, тобто Тп < тг Швидкості перестроювання частоти в цьо-
му випадку надзвичайно великі (сотні і тисячі мегагерц за мікросекунду) і забезпечуються тільки електронними пристроями.
Зі збільшенням швидкості перестроювання ц знижується чутливість, точність і роздільна здатність визначення несучої частоти.
Це обумовлено інерційністю резонансних ланцюгів приймача. У панорамних приймачів зі швидким перестроюванням існує опти-
мальна смуга АГрро для кожного значення ц. Смуга пропускання АГф радіоприймача і тривалість імпульсу тівих, що утворюється на
його виході в результаті швидкого перестроювання, зв’язані наближеним співвідношенням АГ^ ~ 1/^.ик- При заданих швидкості
перестроювання ц і смузі пропускання АГФ тривалість імпульсу = АГ^ц, тобто АГ^ ~ д/н • При більш точному визначенні цієї
залежності необхідно враховувати вид і параметри амплітудно-частотної характеристики приймача
Скорочення часу пошуку призводить до погіршення точності визначення частоти і, навпаки, підвищення точності вимірювання
частоти вимагає збільшувати час пошуку. Якщо, наприклад, АГФ = 10 МГц, то максимально допускається швидкість перестрою-
вання = 314 МГц/с.
Одночасне забезпечення значної швидкості перестроювання і високої розрізнювальної спроможності за частотою успішно мо-
же бути досягнуте в приймачі на основі дисперсійних та акустооптичних Фур’є-процесорів. Тому їх іноді відносять до безпошуко-
вих приймачів.
Усе викладене вище в однаковій мірі відноситься до пошуку груп (пачок) імпульсних сигналів.
При повільному гарантованому пошуку груп імпульсів (рис. 3.105) необхідною умовою є АТ >Тф, де Тф- період прохо-
дження групи імпульсів. Якщо це співвідношення виразити через швидкість перестроювання, то одержимо р, < АГ^/Тф. Ця швид-
кість дуже мала. Але велика частота проходження груп у ряді випадків зустрічається, і повільний пошук груп імпульсів знаходить
практичне застосування.
Рис. 3.104. Швидкий гарантований пошук за частотою імпульсних сигналів
130
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.105. Повільний гарантований пошук за частотою груп (пачок) імпульсних сигналів
Умовами швидкого гарантованого пошуку груп імпульсів (рис. 3.106) є: ДТ > кТі та тф > де - тривалість групи (пач-
ки) імпульсів, ціле число к вибирається з умов забезпечення роботи наступних пристроїв, що аналізують і вимірюють, наприклад,
частоту проходження та тривалість імпульсів.
Проміжне положення між повільним і швидким займає імовірнісний пошук (пошук із середньою швидкістю) за частотою.
Цей вид пошуку за частотою виникає внаслідок відсутності апріорних відомостей про РЕС, що спостерігаються. Час ДТ пере-
будови розвідувального приймача в межах його смуги пропускання при імовірнісному пошуку визначається співвідношенням
кТі > ДТ > Ті, де Т - період проходження імпульсів; Ті - тривалість імпульсів РЕС, що розвідується; к = 1,2,3 - ціле число. Характе-
рною рисою пошуку із середньою швидкістю є відсутність гарантованого виявлення роботи імпульсного РЕС протягом одного
періоду перебудови розвідувального приймача.
Рис. 3.106. Швидкий гарантований пошук за частотою груп (пачок) імпульсних сигналів
Імовірність Р| виявлення одного імпульсу при пошуку за частотою (неенергетичного) без урахування тривалості імпульсу мож-
на орієнтовно оцінити за формулою
Р, »ДТ/ТП = Д£пр/ДР. (3.216)
Імовірність виявлення ОДИНОЧНОЇ групи Імпульсів Рі.гр можна визначити як
Рі.гр«(*гр+ДТ-2кТі)/Тп . (3.217)
Імовірність виявлення за частотою не є єдиним показником ефективності виявлення сигналів засобом РРТР. Якість пошуку ра-
діовипромінювань прийнято оцінювати комплексним показником кп, похідним від імовірності правильного енергетичного вияв-
лення Рю імовірностей виявлення за напрямком Р^ (див. нижче) і за частотою Рач:
кпв = РвРан-Рач. (3.218)
Компоненти (3.218) залежать від основних частотних і часових параметрів ФП і сигналів, що обробляються.
На вхід системи пошуку радіовипромінювань за частотою засобів РРТР надходить велика кількість сигналів, що істотно відріз-
няються один від іншого за структурою і параметрами. У силу короткочасності і дискретного характеру сигналів багатьох типів
РЕС до швидкодії СПЧ звичайно пред’являються високі вимоги. Тому СПЧ звичайно будують за принципом паралельно-
послідовної обробки ділянок діапазону частот, що аналізується. Для обробки ділянок діапазонів застосовуються автоматизовані
Фур’є-процесори (ФП) - аналогові або цифрові пристрої визначення спектра сигналів. Фур’є-процесори є базовими елементами
систем пошуку радіовипромінювань за частотою сучасних засобів РРТР. У залежності від співвідношення між розрізнювальною
спроможністю 5Г ФП за частотою і шириною спектра ДГаі сигналів, які обробляються, Фур’є-процесор реалізує функції пристрою
пошуку за частотою (5Г > Д^) або аналізатора спектра прийнятих сигналів (5Г « Д^).
У своєму складі така система може мали елементи, функціонування яких грунтується на різних фізичних принципах одержання
перетворення Фур’є від вхідної реалізації. Це можуть бути фільтрові (аналогові або цифрові) ФП послідовного і паралельного типу,
дисперсійні, акустооптичні та інші Фур’є-процесори, цифрові пристрої дискретного і швидкого перетворення Фур’є та ін. Особливо
131
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
високі вимоги пред'являються до швидкодії СПЧ засобів радіотехнічної розвідки і радіорозвідки РЕС зі складними видами модуля-
ції (АПРЧ, ППРЧ, ШСС).
Можливості вимірювання на виході СПЧ ознак радіовипромінювань залежать від основних параметрів ФП: роздільної здат-
ності за частотою і часом, динамічним діапазоном, граничною чутливістю та ін.
Роздільна здатність ФП за часом визначається періодом проходження спектрограм (результатів однократної обробки Фур’є-
процесором вхідної реалізації в смузі частот аналізу).
Роздільною здатністю за частотою визначається точність виміру частотних параметрів на виході Фур’є-процесора. Кількіс-
ною мірою роздільної здатності за частотою Фур’є-процесора є найменший частотний інтервал 5Г між двома гармонійними сигна-
лами, що дозволяє розділити їх Фур’є-образи. Для його визначення (експериментально або аналітично) використовують два гармо-
нійних сигнали
М^М+Фи) (3.219)
з амплітудами несучими частотами £] 2 = 1,2/(2л) і початковими фазами ср1і2. Розглядають сигнал (спектрограму) на
виході ФП. Фіксується обгинаюча |з((о)| спектрограми в точці со = о>о “провалу” між відгуками ФП на перевірочні сигнали та у точці
з меншою амплітудою: со = сої (або со = СО2). Змінюючи рознос ДГ= Дсо/(2л) несучих частот сигналів домагаються, щоб амплітуда
огинаючої у точці со = соо була в ц разів менше, ніж у точці со = со ।
5со = аг^^Дсо, со = со! )| = т] |з(Дсо, со = со0)|, т] > 1, іі| < и2}, (3.220)
Дсо
де (з точністю до загального амплітудного множника)
8(Дш,со =<00 =7и12Е\У2(о)+и22Р^2(д<о)+2и1и2Е\У(о)Е\У(д<й)со8(Дф + х); (3.221)
8(Дсо, со = соо) =-^и12Е,Л'2(ш0 -со,)+и22Е\У2(соо -со2)+2и,и2Г\У((оо -со^ЕАУ^о-со2)со8(Дср + х); (3.222)
Дср = |фі - ф2І- різниця початкових фаз перевірочних сигналів; додатковий фазовий зсув, обумовлений особливостями по-
будови деяких типів ФП; Е\¥(со) - дійсна, симетрична відносно со = 0 спектральна вагова функція (СВФ) Фур’є-процесора.
Спектральна вагова функція визначає вид і параметри нормованої амплітудно-частотної характеристики еквівалентного
каналу частотного розділення (ЕКЧР) Фур’є-процесора. ЕКЧР є аналогом амплітудно-частотної характеристики вузькосмугово-
го тракту. Під ЕКЧР розуміється результат перетворення на ФП гармонійного сигналу. Він може, наприклад мати вигляд функції
$іп(х)/х.
При рівності амплітуд сигналів, Ц| = ц2 = ио, частота соо = 0,5 (сої +СО2), тому останній вираз спрощується:
|з(Дсо, со = со0 )| = и0|р\У2 (0,5Дсо)|72 [1 + со$(Дср + %)]. (3.223)
Коефіцієнті! вибирається з практичних розумінь, звичайно рівним 0,5; 0,707.
Під динамічним діапазоном О радіоприймальних пристроїв звичайно розуміється відношення максимального рівня сигналу
Декс, при якому негативні наслідки нелінійних явищ у лінійному приймальному тракті ще не перебільшують припустимих, до гра-
ничного рівня:
= и макс /и г > (3.224)
де значення ц звичайно відповідає граничній чутливості радіоприймального пристрою.
Для неспотвореного прийому сигналів ДРВ повинна виконуватися умова
□ >0о (3.225)
де Ос-динамічний діапазон радіосигналів на вході СПЧ.
Під динамічним діапазоном радіосигналів звичайно розуміють інтервал інтенсивності радіосигналів, що діють у даній радіо-
електронній обстановці.
При оцінюванні динамічного діапазону СПЧ поряд з визначенням (3.224) застосовують поняття динамічного діапазону за рів-
нем бічних пелюстків СВФ Фур’є-процесора. При цьому динамічний діапазон характеризується відношенням максимального
значення відгуку на гармонійний сигнал до його величини на частоті сигналу, що відокремлюється. Цей параметр характеризує
можливість спостереження сигналів з малою амплітудою на фоні бічних пелюстків відгуків ФП на сигнали з великою амплітудою.
Динамічний діапазон Пп за рівнем бічних пелюстків СВФ визначається експериментально або обчислюється шляхом порі-
вняння рівнів сигналів на виході ФП: відгуку ФП на сигнал з більшою амплітудою, наприклад Ц|((), на частоті со = сої + Ас» (при
со। < со?) або на частоті со = (0| - Дсо (при сої > СО2); відгуку ФП на сигнал и2(() з меншою амплітудою и2 < Ц| на його несучій частоті
СО = СО?.
При цьому рознос несучих частот Дсо = 2л ДГвибирається таким чином, щоб максимум відгуку ФП на сигнал з меншою амплі-
тудою збігався з найбільшим бічним пелюстком відгуку ФП на сигнал з більшою амплітудою. Фіксується амплітуда сигналу и^і),
при якій він ще спостерігається на фоні сигналу Ц|(і). Динамічний діапазон визначається за правилом:
(\ -1
аг§|82(со = со2)|-|81(со = со| + Дсо)|< Аі}) , (3.226)
«2 /
де Д - абсолютна інструментальна погрішність вимірювання різниці амплітуд сигналів на виході ФП;
|з2(со = со21 = 8о^и^ЕХУ^Дсо)* и22 + 2и1и2Е\У(Дсо)со8 Дер ; (3.227)
8|(со = СО| + Дсо) = 80д/и12Е\У2(Дсо)+и22Е\У2(2Дсо)+2и1и2Е\У(Дсо)Е^(2Дсо)со8Дф ; (3.228)
$о - амплітудний множник, величина якого визначається конструкцією Фур’є-процесора.
132
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Під чутливістю приймального пристрою розуміється мінімальний рівень вхідного сигналу, при якому на виході пристрою за-
безпечується бажаний ефект. У силу того, що на вхід ФП надходять сигнали зі складними видами модуляції з різною невідомою
спектрально-часовою структурою, погодити еквівалентні канали частотного розділення ФП з кожним із сигналів, що обробляють-
ся, не вдається. Тому спостерігаються енергетичні втрати, обумовлені невідповідністю форми і характеристик вагових функцій
ЕКЧР і спектрів радіосигналів, а також випадковим положенням сигналів на осі частот щодо середніх частот ЕКЧР. Експеримента-
льно встановлено, що для забезпечення однакової якості енергетичного виявлення сигналу з фіксованою енергією чутливість СПЧ
повинна бути в 10... 100 разів вище за чутливість трактів, погоджених із сигналами.
3.113. Визначення напрямку на джерела радіовипромінювань
Для виявлення (пошуку) за напрямком і пеленгування джерел радіовипромінювань у РРТР також використовуються безпошу-
кові і пошукові методи. Безпошукові системи пеленгування (СП) засобів РРТР визначають напрямок на ДРВ миттєво при будь-
якому його розташуванні стосовно антени пеленгатора. Пошукові СП фіксують напрямок на джерело випромінювання шляхом
послідовного огляду простору. При цьому вимірювання пеленга вимагає значно більшого часу, ніж при безпошуковому визначенні
напрямку на ДРВ. В обох випадках можуть використовуватися усі види пеленгації: амплітудна, фазова, частотна та комбінована.
Як приклади амплітудних методів пеленгації можна привести методи максимуму, мінімуму і порівняння (рівносигнальний).
Метод максимуму базується на визначенні напрямку на максимум сигналу на виході розвідувального приймача, що відповідає
напрямку антенної системи на джерело випромінювання. Цей метод звичайно використовується в діапазонах сантиметрових і де-
циметрових хвиль із застосуванням гостроспрямованих антен. Точність Д0п визначення пеленга звичайно складає
ДО п = (0,1... 0,25)0 р , де 0р - ширина діаграми спрямованості антени пеленгатора в горизонтальній площині.
Метод мінімуму дозволяє визначити напрямок на ДРВ за мінімумом сигналу на виході приймача. При цьому діаграма спрямо-
ваності антени має два пелюстки, рознесені на визначений кут. Такий метод застосовують для пеленгування потужних джерел ви-
промінювання у всіх діапазонах радіохвиль. Він забезпечує високу точність пеленга, однак дальність дії пеленгатора при цьому
менше, ніж при методі максимуму.
Метод порівняння (рівносигнальний) забезпечує визначення напрямку на джерело випромінювання за рівністю амплітуд
сигналів, прийнятих різними антенами. Антени формують два променя, що перекриваються. Напрямки максимумів променів роз-
носяться на заданий кут. Поворотом результуючої діаграми спрямованості визначається рівносигнальний напрямок, який є напрям-
ком на ДРВ. Метод дозволяє визначати напрямок на ДРВ з високою точністю при порівняно великій дальності дії пеленгатора
При фазовому методі визначення напрямку на джерело випромінювання здійснюється за рівністю фаз сигналів на виході
приймача При цьому використовуються дві антени, розташовані на визначеній відстані одна від одної (базі), що формують два
променя. Напрямки максимумів променів паралельні рівносигнальному напрямку. Метод забезпечує високу точність пеленга
У найпростішому випадку безпошукове визначення напрямку на ДРВ здійснюється просторово багатоканальним виборчим
пристроєм. У такому пеленгаторі прийом ведеться одночасно декількома гостроспрямованими антенами в заданому секторі про-
стору. Точність визначення напрямку і роздільна здатність за напрямком при цьому обмежуються шириною діаграми спрямова-
ності антени. Висока точність пеленгування досягається застосуванням великої кількості антен і, отже, приймальних каналів.
У пеленгаторах пошукового типу кутові координати джерела випромінювань вимірюються за допомогою гостроспрямованої
антени, що сканує за напрямком. Її кутове положення, при якому сигнал РЕС на виході пеленгатора досягає максимального значен-
ня, відповідає пеленгу на ДРВ.
Способи пошуку при пеленгуванні можуть бути круговий і секторний.
При круговому пошуку діаграма спрямованості антени приймача обертається по кругу з частотою
ї"а — Фр^п/кі.мін » (3.229)
де - ширина діаграми спрямованості антени засобу РРТР, град; Еп - частота повторення імпульсів ДРВ; - мінімальна
кількість імпульсів, необхідна для аналізу сигналів, які приймаються.
При роботі ДРВ в безперервному режимі випромінювання
Ра^Єр/‘с> (3-230)
де - необхідний час спостереження сигналу.
Імовірність виявлення сигналу за п обертів антени дорівнює
Рп=1-е-пР>, (3.231)
де Рі - імовірність виявлення сигналу при одному оберті антени.
При секторному пошуку діаграма спрямованості антенної системи засобу РРТР із заданою швидкістю переміщається у ви-
значеному секторі. При цьому її кутова швидкість не повинна перевищувати величину, обумовлену (3.229), (3.231).
Так само, як і при пошуку за частотою, розрізняють повільний, швидкий гарантований і імовірнісний пошуки імпульсних (пе-
реривчастих) сигналів за напрямком.
Повільний гарантований пошук за напрямком груп (пачок) імпульсів. Азимутально-часова діаграма цього виду пошуку
показана на рис. 3.107.
Гарантованість пошуку забезпечується при ДТ > Т^ , де ДТ, у даному випадку, - час повороту діаграми спрямованості АС
засобу РРТР на величину 0р своєї’ ширини (величини розділювальної здатності з а напрямком); Тф- період проходження груп
133
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
імпульсів. Якщо, наприклад, групи імпульсів створюються РЛС кругового огляду, то Тф= Тйрлс, де Т^рлс - період обертання антени
РЛС.Звичайно ДТ/Та = 0р/(2л),звідкіля ДТ = Та0р/2л ,деТа=1/Ра.
Повільний пошук доцільно проводити тільки у РЛС зі швидким обертанням антени, наприклад літакових панорамних РЛС
кругового огляду. У противному разі буде потрібно настільки збільшити період сканування Та, що час виявлення виявиться непри-
пустимо великим.
Рис. 3.107. Повільний гарантований пошук груп (пачок) імпульсних сигналів за напрямком на ДРВ
При швидкому гарантованому пошуку за напрямком груп імпульсів умовами пошуку є: Та <тгр; ДТ>кТі? де
Тф-тривалість групи (пачки) імпульсів, що відповідає ширині діаграми спрямованості РЕС. Азимутально-часова діаграма швидко-
го пошуку груп імпульсів показана на рис. 3.108.
Рис. 3.108. Швидкий гарантований пошук за напрямком груп (пачок) імпульсних сигналів
Звичайно тгр = 0С То РЕС/2л, де 0С- ширина діаграми спрямованості РЕС, що створює групи за рахунок обертання;
Торес - період обертання антени РЕС.
При відсутності апріорних даних про структуру сигналів РЕС, що спостерігаються, ведеться імовірнісний пошук за напрям-
ком. Для оцінювання імовірності виявлення (за напрямком) необхідно знали імовірність виявлення деякого елемента сигналу, на-
приклад імовірність Р1>ф виявлення одиночної групи імпульсів. Ця імовірність визначається (3.217), де замість періоду Тп перебудо-
ви приймача за частотою підставляється період Та обертання пошукової антенної системи. Імовірність виявлення сигналу, що скла-
дається з і груп, оцінюється за формулою Р = 1 - (1 - Р| ^)’.
Точність систем пеленгування джерел радіовипромінювань засобів РРТР звичайно оцінюють систематичними і випадковими
помилками пеленгування.
Систематичні помилки Дсист можуть бути постійними або змінюватися за певним законом. Період їхньої зміни значно бі-
льше часу, що відводиться на пеленгування ДРВ, тому ці помилки принципово можуть бути істотно ослаблені. Систематичні по-
милки як правило представляють собою інструментальні помилки - установочні, топогеодезичні тощо. Вони залежать від азимута,
несучої частоти та інших параметрів і факторів. При великій кількості вимірювань пеленгів на те саме джерело випромінювання
мінімальна помилка пеленгування приблизно дорівнює результуючій систематичній помилці.
Випадкові помилки Двип обумовлені випадковими причинами. Звичайно їх велика кількість, впливи для кожному випадку
різні й заздалегідь невідомі.
У реальних умовах звичайно складно розділити систематичні і випадкові помилки, визначити кореляційні зв’язки між складо-
вими загальної помилки. Систематична помилка змінюється в значних межах під впливом багатьох факторів. При цьому чим мен-
ша кількість вимірювань пеленгів, тим більше проявляється випадковий характер помилки. Тому приблизну результуючу серед-
ньоквадратичну помилку А можна оцінювати за формулою
134
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Дрез»7Дсисг+Д2вип,- (3-232)
Безліч незалежних і випадкових причин, що призводять до випадкових помилок виміру кутів приходу хвилі, дозволяють ввести
модель гауссівського (нормального) закону розподілу імовірностей помилок вимірювання пеленга. Для оцінки точності пеленгу-
вання можуть використовуватися помилки: середня арифметична Д^ середня квадратична Д^ серединна або імовірнісна Ді„.
При достатній кількості вимірювань і А» визначаються за формулами
Дек = -р)2 /(т-1) ; (3.233)
дса = - ?|Рі - Р| • (3-234)
т і=г 1
де р - середнє арифметичне значення пеленга при т вимірюваннях.
Імовірнісна або серединна помилка характеризується тим, що імовірність помилки, що не перевішує її за абсолютною величи-
ною, дорівнює 0,5, тобто половина всіх помилок менше Дм.
Кожному із зазначених видів помилок відповідає інтегральна імовірність: Р = 0,68 для Д^ Р = 0,58 для Д^ Р = 0,5 для
В даний час для оцінки інструментальної й експлуатаційної точності пеленгаторів звичайно користуються середньоквадратич-
ною помилкою. При цьому близько 70 % одиничних помилок вимірювань Дм за абсолютною величиною не перевищують
3.11.4. Визначення місцеположення д жерел радіовипромінювань
Для визначення місцеположення джерел розвідувальних відомостей у частинах РРТР і РЕБ військ (сил) ППО, як і при визна-
ченні координат завадоносїїв у системах пасивної радіолокації, застосовують три основних методи: тріангуляційний (кутомірний);
різницево-дальномірний (гіперболічний); комбінований (кутомірно-різницево-дальномірний).
Для їх реалізації дві або більше станцій РРТР поєднують у систему визначення місцеположення - пеленгаторну мережу. Міс-
цеположення ДРВ знаходиться як точка перетинання (“зарубка”) двох або більше ліній положення.
Основним якісним показником системи визначення місцеположення (СВМП) засобу РРТР є лінійна точність. Кількісно вона
виражається “помилкою місця”, що визначається відстанню між істинним положенням випромінювача і точкою імовірного місце-
положення, установленою системою місцевизначення. Відхилення умов поширення радіохвиль від ідеальних та неминучі помилки
при вимірюванні параметрів прийнятих радіовипромінювань призводять до того, що лінії положення визначаються з помилками,
що мають переважно випадковий характер. Закон розподілу імовірностей просторових параметрів, що виміряються, звичайно вва-
жається близьким до гауссівського.
Наявність помилок визначення ліній положення призводить до необхідності оцінювати район імовірного розташування
об’єкта, а не точку. Для двох ліній розташування цей район звичайно моделюється у вигляді паралелограма помилок. При цьому
границі району (сторони паралелограма) можна вважати відрізками паралельних прямих при будь-якій конфігурації ліній розташу-
вання (прямих, окружностей, гіпербол), тобто при будь-якому способі місцевизначення.
Лінійна помилка місця ДІ визначається як велика напівдіагональ паралелограма помилок:
Д/ = -4— ^(Дг,)2 +(ДГ|)2 +2(ДГ|)(Дг2)со8у, (3.235)
де у- кут “зарубки” (перетинання ліній розташування); Дгц- помилки відповідних двох ліній розташування; Дг«г, т- від-
стань від точки “зарубки” до найближчої станції системи місцевизначення.
У більшості випадків помилки ліній розташування, що визначаються кожною станцією системи, можна вважали некорельова-
ними. При цьому двомірна щільність розподілу випадкових помилок Дгі і Дг2 визначається виразом
^(^,^2) = -—І----------ехр^-ОЛ^Аг,/а )2 +(Дг2/о )2]} (3.236)
27ТСТГ СТГ х
де Огід-середні квадратичні значення випадкових лінійних помилок Дгі і Дг2.
З (3.236) випливає рівняння кривої рівної щільності розподілу імовірностей:
(Дг,)2 (Дг2)2 _ 2
; і----------х— — л.
2а Г| 2а г2
(3237)
Це рівняння еліпса в косокутній системі координат, осі якої збігаються з напрямками помилок ліній розташування. Скорочено
його називають еліпсом помилок місця Еліпс помилок описує лінію постійної щільності спільного розподілу помилок місця.
Розміри півосей еліпса і кут нахилу (<ре) при двох пеленгаторах у мережі визначаються формулами:
д/ст2г( +а2г2 Т7(0% +Ст2г2)2 -4с2г,ст2г2 8Іп2у
(3.238)
Фе = 0,5 агсі£
2 ~2
сг Г| — а г2
а Г| +а г2
їв У
(3.239)
де знак мінус у знаменнику відповідає більшій півосі а е знак плюс - меншій Ь..
135
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Коефіцієнт К = у/ - 21п(1 - Ре) залежить від імовірності Ре перебування ДРВ усередині еліпса і визначає розміри еліпса.
Для оцінювання параметрів еліпсів помилок необхідне проведення складних і громіздких обчислень. Особливо складні обчис-
лення у випадку, якщо в пеленгаторній мережі більше двох радіопеленгаторів. Тому в практичній роботі частин РРТР і РЕБ більш
широко застосовуються оцінки кругових середньоквадратичних лінійних помилок місця. При цьому реальне еліптичне розсіюван-
ня помилок заміняється моделлю кругового розсіювання. Якщо, однак, задана імовірність правильного місцевизначення Р^ пере-
вищує величину 0,6, то функції розподілу помилок місця при еліптичному і круговому розсіюванні порівняно мало розрізняються.
При використанні кругової середньоквадратичної помилки лінійна точність місцевизначення оцінюється не розмірами півосей
еліпса, а середньоквадратичною круговою помилкою місця
Кск=—7стп +ст?2 • <3-24°)
81П у ’ 1 2
Найбільш просто оцінюються помилки триангуляційної системи місцевизначення з незалежними кутовими помилками
пеленгаторів, що входять до неї. Якщо в систему входять два рівноточних пеленгатори, то
Кск =— Л,2+г22 , (3.241)
81П у *
де Г] і г2 - відстані від точки виміру помилки до кожного з пеленгаторів; - середні квадратичні кутові помилки
радіопеленгаторів.
Якщо кількість N радіопеленгаторів у системі більше двох і пеленгатори нерівноточні (Д^ Д^, Х/Ц є {1,2,..., ЇМ},і Ф Д то
визначається виразом:
= 0,017453К
(3.242)
де у, - кут “зарубки” між і-м і ]-м пеленгами; Д^, Д^ - середні квадратичні кутові помилки радіопеленгаторів, виміряються в
градусах; гь г- - відстані від точки виміру помилки до кожного з пеленгаторів, виміряються в км;
К = 7-1п(1-Рмв) . (3.243)
Таблиця 3.19
Приклади значень коефіцієнта К для різних імовірностей Рмв
р» 0,05 0,2 0,5 0,633 0,8 0,95 0,99 1
к 0,227 0,472 0,832 1 1,268 1,73 2,147 00
Точність місцевизначення різницево-дальномірними системами залежить від великої кількості параметрів, серед яких осно-
вними можна вважати базу і взаємне розміщення пунктів прийому, точність вимірювання часових затримок сигналів, точність
прив’язки приймальних пунктів та ін. Приблизно точність визначення місцеположення трьохпозиційними різницево-
дальномірними системами можна оцінюватися за формулою
СОдт л/8ІП2 (ф! /2) + 8ІП2 (ф2 /2)
Кск =-----> (3 244)
2 8Іп(ф 1 /2) 8Іп(ф2 /2) 8ІП —-^--2
де с- швидкість поширення радіохвиль; оДт- середньоквадратична помилка вимірювання різниці ходу сигналів; ф|2 - кути пе-
ретинання ліній, що проходять через точки перебування джерела випромінювання і місцеположення приймальних пунктів.
Розрахунок лінійних помилок систем визначення місцеположення дозволяє оцінити точність визначення місцеположення ДРВ
в конкретній точці смуги розвідки. Обчислення лінійних помилок для кожної “зарубки” множини точок смуги РРТР представляє
собою трудомістку задачу. З метою її спрощення для систем місцевизначення попередньо складаються поля помилок або буду-
ються зони помилок.
Поле помилок представляє собою сукупність нанесених на карту чисел - величин помилок визначення місця для дискретного
ряду точок смуги розвідки (рис. 3.109).
Іноді поля еліптичних помилок будуються у вигляді полів еліпсів помилок (рис. 3.110). Поля еліптичних помилок найбільше
повно характеризують точність системи місцевизначення. Однак через складність їхнього розрахунку звичайно визначаються поля
кругових середньоквадратичних лінійних помилок.
Якщо з’єднати плавною лінією точки, у яких кругові середньоквадратичні помилки дорівнюють заданій величині, то вийде ізо-
лінія рівної точності. З однієї сторони ізолінії помилки місця будуть менше цієї величини, з іншої - більше. Відповідно до необхід-
ної точності можна визначити зону, у межах якої лінійна помилка буде не більше припустимої (Кск < Клрип). Зона, у межах якої
лінійна помилка із заданою імовірністю не перевищує припустиму величину, називається зоною помилок або робочою зоною. Ро-
боча зона кутомірної системи місцевизначення зветься зоною пеленгування.
136
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
0
5
96 87 78 69 63 58 53 48 44 40 36 33 зо 5с
93 84 75 66 60 54 49 45 40 37 33 зо 27 Д
92 82 73 65 37 52 47 42 39 35 32 29 26 1
91 81 72 64 56 52 45 42 38 34 31 28 25 с
93 83 74 65 57 51 46 42 38 35 31 28 25 |
95 85 76 67 59 53 48 44 40 36 33 зо 27 Є
92 89 79 70 62 57 51 47 42 38 35 32 29 V
Рис. 3.109. Поле помилок (приклад)
й й о о о 0 0 0
о о о о о о о О
Рис. 3.110. Поле еліпсів помилок (приклад)
Звичайно смугу розвідки розбивають на кілька робочих зон шляхом побудови сімейства ізоліній, у межах яких помилки місця
не перевищують заданих значень. Робочі зони будують на спеціальних планшетах-картах, які використовуються при обробці
результатів місцевизначення. Нарис. 3.111 показаний приклад зон пеленгування для систем місцевизначення з трьох радіопе-
ленгаторів.
Попередня побудова робочих зон має велике практичне значення. Вона дозволяє прогнозувати і попередньо оцінювати лінійну
помилку місця безпосередньо після визначення місцеположення джерела радіовипромінювання без проведення розрахунків. Це
значно скорочує час на обробку результатів місцевизначення. Крім того, робочі зони мають велике значення для ухвалення рішення
щодо побудови бойового порядку частин РРТР і для оцінки ефективності обраного варіанта пеленгаторної мережі за критерієм
точності місцевизначення об’єктів і джерел розвідки.
3.11.5. Проріджування потоку сигналів у системі селекції засобу РРТР
Функціонування засобу РРТР відбувається в умовах складної радіоелектронної обстановки. Висока завантаженість діапазонів
частот, у яких ведеться розвідка, обумовлює підвищені вимоги до пропускної здатності засобів РРТР.
При первинній обробці вхідного потоку сигналів у системі пошуку радіовипромінювань за частотою кожний сигнал представ-
ляє собою “вимогу” на обслуговування. Інтенсивність потоку вимог на обслуговування в СПЧ визначається, як кількість сигналів,
що спостерігаються, за одиницю часу. Інтенсивність потоку вимог на обслуговування в системі аналізу і розпізнавання радіовипро-
мінювань і їх джерел багаторазово зростає. Це обумовлено дискретизацією за частотою і часом кожного із сигналів при їхній пер-
винній обробці в системах СПЧ, СП (СВМП), а іноді - у САР. При цьому “вимогою” є кожний елемент дискретизованого сигналу.
Як правило один засіб РРТР (або один оператор поста РРТР) не може справитися з усім потоком прийнятих сигналів. Для зни-
ження інтенсивності потоку сигналів застосовуються організаційні і технічні заходи.
До числа організаційних заходів відносяться, наприклад, розподіл об’єктів розвідки між частинами РРТР, окремими засобами і
постами РРТР шляхом призначення зон, секторів розвідки, поділу діапазону частот розвідки на окремі ділянки, призначення окре-
мим постам переліків контрольованих частот, веденням періодичного і контрольного спостереження за окремими об’єктами тощо.
Технічні заходи реалізуються шляхом застосування спрямованих антенних систем, оснащенням засобів РРТР спеціальними
пристроями - селекторами сигналів. Застосування цих заходів веде до втрати частини сигналів. Допустимість таких втрат обумов-
лена тим, що на практиці звичайно відсутня необхідність одночасної обробки всього потоку сигналів. У загальному потоці радіови-
промінювань присутня велика кількість сигналів своїх РЕС, можуть також прийматися різного роду завадові радіовипромінювання.
Більшість з них має ті або інші властивості, що дозволяють віднести їх до класу сигналів не об’єктів розвідки (фонових радіовипро-
мінювань).
137
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.111. Приклад зон пеленгування для системи місцевизначення, яка складається з трьох радіопеленгаторів
При створенні засобів РРТР автоматизовані системи обробки сигналів звичайно розраховуються на інтенсивність потоку, оці-
нену для умов типових бойових ситуацій (епізодів). При цьому потік вважається стаціонарним. Однак у реальних умовах потік
вимог не завжди відповідає стаціонарної моделі. В окремих бойових епізодах, наприклад при подоланні авіацією противника сис-
теми ППО, можливі зростання і різкі перепади інтенсивності потоку сигналів. При цьому зростають вимоги розпізнавання об’єктів
РРТР. Ці втрати можуть носити або випадковий характер, або бути логічно упорядковані відповідно до рішення оператора засобу
РРТР. В останньому випадку радіовипромінювання, що спостерігаються, попередньо розділяються на два великих класи: сигнали,
що підлягають автоматичному розпізнаванню в САР, і сигнали, що можуть не оброблятися в САР. Наприклад сигнали радіостан-
цій можуть бути розділені на сигнали з ППРЧ та АПРЧ, що обробляються автоматично у САР, і сигнали з незмінною несучою
частотою, що розпізнаються оператором. Частина сигналів малоінформативних ДРВ взагалі може бути втраченою. Такий розподіл
реалізується методами селекції, які називаються також методами проріджування потоку сигналів.
Для реалізації функцій проріджування потоку сигналів до складу засобів РРТР звичайно входить система алгоритмів і при-
строїв, що реалізують функції селекції і режекції сигналів (система селекції, СС). Селекцією сигналів називають виділення корис-
них (обраних) сигналів з апріорно заданими параметрами на фоні інших радіовипромінювань. Під режекцією розуміють операцію,
дуальну до селекції - компенсацію (виключення з подальшої обробки) обраних (фонових) сигналів. Функції селекції і режекції
відрізняються тільки кінцевими операціями. При селекції обраний сигнал передається для подальшої обробки, при режекції - не
передається.
Автоматизована СС може містити також вимірювачі інтенсивності вхідного потоку вимог. Вони представляють собою лічиль-
ники імпульсів, що оцінюють на вході САР, СП або СВМП кількість вимог на аналіз і розпізнавання радіовипромінювань та їх
джерел за одиницю часу. При необхідності зниження інтенсивності потоку вимог за рішенням оператора або автоматично включа-
ються пристрої проріджування потоку. Пристрої можуть включатися в режимах селекції або режекції сигналів за обраними пара-
метрами (ознаками). При автоматичному включенні система селекції вимірює інтенсивність потоку вимог і обчислює заванта-
ження р системи аналізу і розпізнавання. Якщо завантаження перевищує гранично припустиме рп = 1, то підключаються пристрої
проріджування. Після включення кожного з пристроїв оцінюється завантаження р. При досягненні р < рп підключення нових при-
строїв припиняється.
Завантаження САР, як і будь-якої іншої системи обробки сигналів і інформації, визначається добутком
р = АІ (3.245)
інтенсивності потоку вимог А і середнього часу І обслуговування вимоги (обробки сигналу або його відліку).
Інтенсивність потоку сигналів на вході пристроїв обробки
2пЕ0Н у
X _ ‘— 0— £ у ДГ
Ед8ГГфп у=і у у
(3.246)
залежить від: реалізованої надмірності дискретизації п = 1, 2,... (у порівнянні з дискретизацією за Котельниковим); діапазону
Ед робочих частот засобу РРТР; смуги Ео < Ед робочих частот; розрізнювальної спроможності за частотою Фур’є-процесора,
періоду Тфп проходження спектрограм на його виході; проведеного проріджування потоку сигналів (враховується коефіцієн-
том Е є [0,1]); кількості ¥ груп по %у сигналів з однаковою шириною спектра та шириною спектра сигналів АГУ.
138
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Середній час обслуговування вимоги визначається принципами побудови системи обробки сигналів, її швидкодією, встанов-
леними пріоритетами, порядком обробки та іншими факторами. Сучасні системи обробки сигналів мають багатопроцесорну архі-
тектуру, тому для визначення часу обслуговування застосовуються структурно-логічні методи дослідження складних систем. У
найпростішому випадку час обслуговування можна визначиш у вигляді
ї = к/(Кє), (3.247)
де к - кількість операцій у алгоритмі, що реалізується N - кількість процесорів у системі обробки сигналів; є - швидкодія ко-
жного з процесорів, оперУс.
Головна особливість рішення задачі селекції в РРТР у порівнянні із селекцією в радіолокації полягає в тому, що апріорі невідо-
мо, чи спостерігається об’єкт, що селектується, у складі конкретної вибірки. Задача селекції формулюється таким способом: при
відомих відмінностях між розподілами значень ознак об’єктів різних класів і невідомому складі конкретної вибірки об’єктів, що
спостерігаються, необхідно за результатом вимірювання ознак (параметрів) всіх об’єктів прийнята рішення про те, який з об’єктів
відноситься до класу, що цікавить оператора, якщо цей сигнал є у вибірці, яка обробляється.
Розроблена велика кількість типів аналогових і цифрових пристроїв проріджування сигналів за просторовими, частотними, ча-
совими та іншими параметрами радіовипромінювань і їх д жерел. Усі вони, як правило, побудовані за принципом смугової (при
селекції) або загороджувальної (при режекції) фільтрації сигналів за заданим параметром. Основною вимогою до таких пристроїв є
можливість функціонування в реальному часі.
Сучасні успіхи в створенні спеціалізованих обчислювальних пристроїв типу сигнальних процесорів обумовили розвиток алго-
ритмічних методів проріджування потоку сигналів на основі перевірки статистичних гіпотез. При цьому алгоритм селекції радіови-
промінювань розглядається як алгоритм розпізнавання заданого типу сигналів на фоні найближчих (за шкалою однієї або декількох
ознак) із усіх принципово можливих радіовипромінювань. Часто “найближчі сигнали” насправді не існують, а вводиться деяка
невелика захисна область навколо сигналу, що селектується або режекіується.
3.12. Теоретичні основи радіоелектронної боротьби
3.12.1. Класифікація радіозавад, що застосовуються у засобах радіоелектронного подавлення
Сучасні радіоелектронні системи і засоби функціонують в умовах масового впливу завад
За походженням розрізняють природні і штучні радіоелектронні завади.
Природними є завади природного походження: атмосферні, що утворені електричними процесами в атмосфері; космічні (від
Сонця, зірок та інших космічних об’єктів і процесів); спорадичні - електромагнітні випромінювання, які викликані потоками заря-
джених частинок в іоносфері і магнітосфері; радіовипромінювання полярних сяйв і радіаційних поясів Землі; відбиття від метеоро-
логічних утворень, земної і водної поверхні та інші.
Штучні завади радіоелектронним засобам створюються спеціальними пристроями (передавачами, станціями завад, комплек-
сами РЕБ), які випромінюють електромагнітні коливання, або відбивачами різного типу, що розсіюють енергію електромагнітних
хвиль.
У сучасних засобах радіоелектронного подавлення (РЕП) застосовується велика кількість видів радіозавад, що класифікують за
різними ознаками.
У залежності від джерела утворення завади поділяються на ненавмисні і навмисні.
Навмисні завади за способом створення є завадами штучного походження і поділяються на активні, які генеруються спеціа-
льними засобами завад, і пасивні, утворені за рахунок розсіювання (відбиття) різними об'єктами електромагнітних хвиль, випромі-
нюваних радіоелектронними засобами і системами (РЕС).
За характером впливу на РЕС розрізняють маскуючі та імітуючі завади.
Маскуючі завади - заважаючі випромінювання на фоні яких виділення сигналів ускладнене або цілком виключене.
Імітуючі завади - випромінювання, що вносять помилкову інформацію в засоби, які подавляються. Імітуючі завади підрозді-
ляються на дезінформуючі завади - які призводять до витягу помилкової інформації, і дезорганізуючі - завади, що призводять до
зміни (спотворення) алгоритмів обробки сигналів і інформації.
Як електромагнітні поля завади класифікуються за структурними, часовими, частотними ознаками, за спрямованістю випромі-
нювань, за розташуванням станцій завад у просторі.
За видом використаних випромінювань розділяють електромагнітні й акустичні завади.
За структурними характеристиками розрізняють шумові завади; копії сигналів - завади, однакові за спектрально-часовою
структурою із сигналами РЕС, які подавляються; завади, що відрізняються від сигналів РЛС, які подавляються.
За часовими характеристиками завади підрозділяються на прицільні за часом і безперервні в часі.
За шириною спектра і способом наведення за частотою розрізняють прицільні, загороджувальні та прицільно-загороджувальні
(комбіновані) і ковзаючі.
У прицільних за частотою завад ширина спектра завади АГП сумірна зі смугою пропускання приймального пристрою ДГФ РЕС,
що подавляється, ДГП ® (1... 10) АГф. Для створення цього виду завад потрібна складна апаратура радіо- і радіотехнічної розвідки.
Загороджувальною за частототою називається завада, спектр якої перекриває діапазон робочих частот РЕС, що подавляються,
АГП > АЕд = Гмакс - Гмін . У залежності від величини діапазону робочих частот РЕС і можливостей передавачів засобів РЕП
загороджувальна завада може створюватися одним або декількома передавачами. При використанні декількох передавачів кожний
139
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
з них настроюється на свою частоту з таким розрахунком, щоб спектри сформованих завад частково перекривалися. Для створення
загороджувальних завад звичайно не потрібно складної апаратури розвідки і управління.
Ковзаючою завадою називається завада з вузьким спектром (ДГП = АГф), що “хитається” в межах встановленої ділянки діапазо-
ну частот. Ковзна завада може застосовуватися для подавлення РЕС, які перестроюються за частотою.
За спрямованістю випромінювання бувають спрямовані і неспрямовані завади. Ступінь спрямованості кількісно визначається
коефіцієнтом підсилення антени (6П). Приблизно максимальне значення Сп для гостроспрямованих антен може бути знайдене зі
співвідношення
де 0Р, 0£—ширина діаграми спрямованості антени (ДСА) у горизонтальній і вертикальній площинах відповідно, в градусах.
Завади, які випромінюються антенами з Сп > 100, називаються спрямованими або прицільними за напрямком, з 6П < 5 - не-
спрямованими або загороджувальними за напрямком. Слабкоспрямовані антени мають Сп = ЗО... 50.
За розташуванням станцій завад у просторі - випромінювані з однієї або декількох точок простору.
За методом формування розрізняють: ретрансльовані завади - перевипромінені сигнали радіостанції, яка подавляється, підси-
лені і додатково промодульовані; завади, сформовані станцією завад.
За видом модуляції - прямошумові завади; завади модульовані (маніпульовані) за амплітудою, частотою, фазою або за суку-
пністю параметрів; завади, модульовані шумом за амплітудою, частотою, фазою або декількома параметрами.
Найбільша кількість видів активних завад розроблена для подавлення радіолокаційних засобів (РЛС). Нижче наведений корот-
кий класифікаційний перелік основних видів активних завад РЛС (за даними відкритих джерел).
1. Активні маскуючі завади.
1.1. Маскуючі завади радіолокаційним станціям, що
працюють у режимі виявлення.
1.1.1. Безперервні шумові завади.
1.1.1.1. Прямоту мова завада.
1.1.1.2. Амплітудно-модульована шумова завада.
1.1.13. Амплітудно-модульована шумова завада з
обмеженням модулюючих шумів.
1.1.1.4. Частотно-модульована шумова завада.
1.1.1.5. Модульована за фазою шумова завада.
1.1.1.6. Шумові завади з комбінованою модуляцією.
1.1.1.7. Прицільно-загороджувальні шумові завади РЛС з
перестроюванням частоти.
1.1.1.8. Безперервні шумові завади, що перестроюються за
частотою.
1.1.2. Незатухаюча немодульована завада.
1.13. Імпульсні маскуючі завади.
1.13.1. Хаотична імпульсна завада.
1.13.2. Послідовності (пачки) радіоімпульсів, промодульовані
за одним або декількома параметрами флуктуаційним шумом.
1.13.2.1. За амплітудою.
1.13.2.2. За тривалістю.
1.13.23. За інтервалом між імпульсами.
1.13.2.4 . Комбіновані.
1.1.3.3. Імпульсні шумові сигнали для створення кільцевих
засвіток індикатора кругового огляду (ІКО).
1.1.3.4. Переривчаста завада системам АРР.
1.1.3.5. Короткоімпульсна загороджувальна завада.
1.1.4. Імпульсні маскуючі завади у відповідь.
1.1.4.1. Немодульовані пачки радіоімпульсів у відповідь.
1.1.4.2. Інверсні завади.
1.1.4.2.1. Інверсна модуляція перевипромінюваної пачки
радіоімпульсів.
1.1.4.2.2. Поімпульсна інверсна завада.
1.1.4.3. Пачки радіоімпульсів у відповідь, модульовані за
амплітудою гармонікою частоти сканування РЛС.
1.1.4.4. Імпульсні шумові завади, що заповнюють інтервали
між імпульсами РЛС.
1.1.5. Створення на екрані ІКО смуг шумового засвітлення на
основі сканування діаграми спрямованості АС станції завад.
1.2. Завади системам автоматичного супроводження за
напрямком (АСН).
1.5. Завади кореляційним системам.
1.5.1. Шумові завади.
1.5.2. Шумові завади, які створюються декількома
передавачами, установленими на одному носії.
1.5.3. Циклічно повторювані шуми, що випромінюються
декількома спрямованими антенами.
1.5.4. Крос-поляризаційні завади.
1.5.5. Імпульсні завади, що накривають.
1.5.6. Інверсні завади.
1.6. Завади РЛС зі стиском імпульсів.
1.6.1. Імпульсна завада, яка накриває.
1.6.2. Імпульсна завада, яка накриває, з тривалістю, що
змінюється.
1.6.3. Імпульсна завада, яка накриває, з хибною
доплерівською частотою.
1.6.4. Завада імпульсним РЛС з ФКМ, що використовує
хибну ФКМ.
1.6.5. Широкосмугові загороджувальні завади з постійною
спектральною щільністю.
2. Активні імітуючі завади.
2.1. Імітуючі завади імпульсним РЛС, що працюють в
режимі виявлення.
2.1.1. Одноразова імпульсна завада у відповідь.
2.1.2. Багаторазові імпульсні завади у відповідь.
2.1.2.1. Синхронні багаторазові імпульсні завади у
відповідь.
2.1.2.1.1. Синхронні пачки радіоімпульсів.
2.1.2.1.2. Завадні радіоімпульси, які випромінюються
тільки в бічні пелюстки ДСА РЛС.
2.1.2.1.3. Завадні радіоімпульси, які випромінюються в
момент зсуву ДСА РЛС на фіксований кут щодо станції’ РЕП.
2.1.2.1.4. Програмні багаторазові імпульсні завади у
відповідь, які порушують логіку функціонування РЛС.
2.1.2.2. Несинхронна багаторазова імпульсна завада у
відповідь.
2.2. Імітуючі завади системам АСН.
2.2.1. Завади системам АСН з послідовним порівнянням
сигналів.
2.2.1.1. Прицільна за частотою сканування завада
2.2.1.2. Завада РЛС з конічним скануванням тільки
приймальної антени з перестроюванням за частотою
сканування.
140
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
1.2.1. Завади системам АСН з послідовним порівнянням
сигналів (конічним скануванням).
1.2.1.1. Загород жувальні за частотою сканування завади.
1.2.1.1.1. Шумова загороджувальна за частотою сканування
завада
1.2.1.1.2. Ковзна за частотою сканування завада.
1.2.1.1.3. Завада з подвійною амплітудною модуляцією.
1.2.1.2. Інверсні завади.
1.2.1.2.1. Інверсне конічне сканування.
1.2.1.2.2. Інверсна завада з подвоєною частотою сканування.
1.2.1.2.3. Інверсна завада, сформована шляхом сканування
діаграми спрямованості антени станції РЕП.
1.2.2. Завади системам АСН з одночасним порівнянням
сигналів (моноімпульсним системам АСН).
1.2.2.1. Періодична завада.
1.2.2.2. Крос-поляризаційні шумові прицільні за частотою
завади.
1.2.2.3. Переривчаста завада системам АСН.
1.2.2.4. Шумові завади системам АСН.
1.3. Завади системам автоматичного супроводження за
дальністю (АСД).
1.3.1. Прямошумові завади системам АСД.
1.3.2. Модульовані шумові завади системам АСД.
1.3.2.1. Амплпудно-модульована завада.
1.3.2.2. Частотно-модульована завада.
1.3.2.3. Фазо-модульована завада.
1.3.2.4. Шумові завади з комбінованою модуляцією.
1.3.3. Хаотичні імпульсні завади.
1.3.4. Імпульсні завади, що накривають.
1.3.5. Імпульсні шумові завади, які маскують визначені
ділянки дальності.
1.3.6. Інверсні завади.
1.4. Завади системам автоматичного супроводу за швидкістю
(АСШ).
1.4.1. Прямошумові завади системам АСШ.
1.4.2. Модульовані шумові завади.
1.4.3. Хаотичні імпульсні завади системам АСШ.
1.4.4. Двохчастотна завада.
1.4.5. "Доплерівські шуми”.
1.4.6. Маскуючі завади за швидкістю радіолокаторам зі СДЦ.
1.4.7. Свіппіруюча за доплерівською частотою завада.
1.4.8. Завада на нульовій доплерівській частоті.
1.4.9. Імпульсні завади, що накривають.
2.2.1.3. Завада, що відводить з напрямку.
2.2.2. Завади системам АСН з одночасним порівнянням
сигналів.
2.2.2.1. Некогерентні завади.
22.2.2. Когерентні завади.
2.2.2.З. Завади на дзеркальній частоті прийому РЛС з АСН
на основі фазових методів пеленгації.
2.2.2.4. Розстроєні за частотою завади.
2.2.2.5. Мерехтливі завади (швидкі, повільні, синхронні,
несинхронні мерехтіння).
2.2.2.5.1. З перевипромінюванням прийнятих сигналів.
22.2.5.2. З випромінюванням своїх сигналів.
2.2.2.6. Завади, що перенацілюють.
2.2.2.6.1. На основі перевідбиття завадних сигналів від
природних відбивачів.
2.2.2. 62. Шляхом використання антен станції завад з
особливою формою ДСА.
2.22.7 . Двохчастотні завади.
22.2.8 . Крос-поляризаційні ретрансляційні завади.
2.3. Імітуючі завади системам АСД.
2.3.1. Імпульсні завади, що відводять.
2.3.2. Завади, що відводять за дальністю, РЛС з
безперервними сигналами.
2.4. Імітуючі завади системам АСШ.
2.4.1. Завади, що відводять за швидкістю.
2.4.2. Оманні за швидкістю цілі на основі фазової
модуляції перевипромінюваного сигналу за псевдовипадковим
законом.
2.4.3. Мерехтливі оманні доплерівські цілі.
2.5. Імітуючі завади кореляційним системам.
2.5.1. Повторювані шуми.
2.5.2. Високочастотні коливання, модульовані
повторюваними вибірками відеошумів.
2.5.3. Записаний та періодично ретрансльований сигнал
РЛС, яка подавляється.
2.6. Імітуючі завади РЛС зі стиском імпульсів.
2.6.1. Імпульсні завади РЛС зі стиском імпульсів у
відповідь.
2.6.2. Імпульсна завада у відповідь з додатковою
внутрішньоімпульсною амплітудною модуляцією для РЛС із
ЛЧМ сигналами.
2.6.3. Комбінована завада РЛС з ЛЧМ сигналами на
основі додаткової внутрішньоімпульсної амплітуд ної модуляції
прийнятих сигналів і шумової завади. .
2.6.4. Багаточастогні імпульсні завади РЛС з
стрибкоподібним перестроюванням частоти.
2.6.5. Сигнали РЛС, ретрансльовані з реверберацією.
3. Комбіновані завади, що дезорієнтують.
3.122. Основні вида активних радюзавад
Маскуючі завади РЛС виявлення
Радіолокаційним засобам, що працюють у режимі огляду, створюються безперервні шумові й імпульсні завади. Результатом дії
безперервних шумових завад є маскування корисних сигналів у деякому тілесному куті і визначеному інтервалі дальностей. Вна-
слідок цього погіршуються характеристики виявлення РЛС, їх роздільна здатність і точність визначення координат і параметрів
руху цілей. Найбільше шумові завади впливають на можливості вимірювання дальності і швидкості.
У загальному випадку шумовий завадовий сигнал записується у вигляді
ип(0 = 1Лі(0<М“п* + Фп(0], (3.249)
Де ЩО - обгинаюча; соп - несуча частота; ЩО - повна фаза, ЩО = ц/п(0 + ЧАь ЩО - функція кутової модуляції; 4/0 - початкова
фаза сигналу.
141
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Сигнал вважається завадовим у тому випадку, якщо Щі) чи \уп(1) або одночасно ЩО і \рп (і) змінюються під дією модулюючого
завадового сигналу ^(1). У залежності від того, якими параметрами 1^(0 керує сигнал £0), розрізняють завадові сигнали з амплітуд-
ною, кутовою, амплітудно-частотною й амплітудно-фазовою модуляціями.
Сигнал 1^(1) нагадує гармонійний, випадково модульований за амплітудою і фазою. Він представляє собою квазігармонійний
шум, що утворюється на виході вузькосмугової резонансної системи при дії на неї широкосмугового випадкового сигналу (білого
шуму). Отримані таким способом флуктуації и^і) називаються прямошумовою завадою. Ця завада відрізняється високою якістю
шуму і рівномірністю спектра в заданому діапазоні частот. Ширина її спектра Д£п « Гп = соп / 2л. Однак прямоту мові завади
не одержали широкого застосування через труднощі збереження високих ентропійних властивостей при проходженні через каска-
ди кінцевих підсилювачів.
Амплітудно-модульовані шумові завади (АМШ) формуються шляхом модуляції несучого гармонійного коливання смуго-
вим шумом:
Щ(і) = Щ , (3.250)
де О0 і ДО - середнє значення і максимальне збільшення обгинаючої Оп(1).
При модуляції повинна виконуватися умова ^(і) ДО/О о > -1. Спектральні характеристики АМШ-завади визначаються спе-
ктром модулюючого шуму £(і). Якщо £(0 - гауссівський шум з рівномірною спектральною щільністю в діапазоні частот 0 - Емод, то
АЩгР^.
Особливістю високочастотного спектра цієї завади є присутність у ньому дискретної складової на несучій частоті. Потужність
Рп генератора завад розподіляється між несучою Рп і бічними Рб складовими за законом
Рп = Рн + Рб = Рн + кн б^н > (3.251)
де Киб = Рб^н< 1 ~ коефіцієнт, що враховує відносний розподіл потужності завади між несучою і бічними складовими спектра.
Присутність несучої в спектрі амплітудно-модульованих завад погіршує їх маскуючі властивості, тому, що сама несуча маску-
ючих властивостей, не має, а відбирає на себе велику частину випромінюваної потужності.
Якщо модулюючі шуми не обмежені, то завада має невелику середню глибину модуляції. При цьому її потужність на несучій
частоті значно перевищує потужність бічних складових. Для збільшення потужності бічних складових за рахунок потужності несу-
чої звичайно модулюючі шуми обмежують зверху і знизу двостороннім обмежником з порогами обмеження ± СЩ Однак обме-
ження, як і будь-яке нелінійне перетворення, погіршує маскуючі властивості шуму, що модулює (обгинаючої).
Кутова модуляція підрозділяється на взаємозалежні фазову і частотну модуляції. При фазовій модуляції (ФМШ)
ц/п(О = А^(О, (3.252)
де Ац/ - девіація фази.
Якщо Д\р « 1, то форма спектра ФМШ завади збігається з формою спектра АМШ завади при малому середньому коефіцієнті
гпам модуляції тим же сигналом ВД. Ширина спектра ФМШ завади АЕф м ~ 2ГМ0Д « Гп . При Дц/>> 1 несуча не виявляється,
спектр розмивається і його форма залежить тільки від Д\р:
Аїф.м = Ац/Емакс , (3.253)
Де Рмакс - максимальна частота спектра сигналу, що модулює.
При частотній модуляції (ЧМШ) несуча частота завади змінюється за законом
(О(1) = (0п+Д<о£(1), (3.254)
де Дсо - девіація частоти (Дщ « а>п).
Форма спектра ЧМ шумів визначається індексом частотної модуляції т чм = Дсо еф / £2 макс , де Доц- ефективне значення
девіації кутової частоти; СЩ = 2лРмакс- максимальне значення кутової частоти сигналу, що модулює. При тчм« 1 ширина спект-
ра не залежить від девіації частоти і дорівнює ДГ1{М = 2АЩ, де ДГ^ - ширина спектра шумів, що модулюють. При іпм » 1 форма
спектра ЧМШ завади визначається не формою спектра, а щільністю розподілу р(£) сигналу, що модулює, £((). Ширина спектра
завади в цьому випадку дорівнює ДГ^ ~ 2ДГеф = Доц 12л.
Серед імпульсних маскуючих завад широко застосовується хаотична імпульсна завада (XIП). Вона представляє собою послідо-
вність радіоімпульсів, основні параметри яких (період проходження, тривалість, амплітуда) змінюються за випадковим законом.
Хаотичні імпульсні завади за своїми властивостями подібні завадам, що з’являються у результаті амплітудної модуляції несучим
обмеженим шумом.
Імітуючі завади імпульсним РЛС виявлення
Основними видами активних імітуючих завад є однократні і багатократні імпульсні завади у відповідь.
Однократна імпульсна завада у відповідь предствляє собою радіоімпульс, що випромінюється з визначеною затримкою у
відповідь на прийнятий сигнал РЛС. Час затримки звичайно змінюється таким чином, щоб створити на екрані РЛС імітацію реаль-
ної цілі, що рухається. Швидкість зміни затримки відповідає швидкості руху імітуємо!’ цілі. При великій потужності передавача
завад за рахунок впливу через бічні пелюстки діаграм спрямованості антени на екрані РЛС створюється декілька оманних відміток.
Це ускладнює роботу оператора й обчислювальної підсистеми РЛС виявлення.
Багатократна імпульсна завада у відповідь - пачка радіоімпульсів, що випромінюється у відповідь на прийнятий сигнал
РЛС. Багатократні імпульсні завади створюються для ускладнення повітряної обстановки. При цьому у відповідь на кожний ім-
142
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
пульс РЛС станція завад формує відповідний сигнал у вигляді пачки імпульсів, подібних до відбитого сигналу. У результаті цього
на екрані РЛС спостерігається безліч оманних цілей, що утрудняють операторові вибір справжньої цілі.
Радіоімпульси завади і корисного відбитого сигналу за формою, тривалістю і потужністю звичайно ідентичні. Розрізняють син-
хронні і несинхронні (відносно частоти повторення зондувальних імпульсів РЛС) багатократні імпульсні завади у відповідь.
Несинхронні багатократні імпульсні завади у відповідь створюються випромінюванням пачок радіоімпульсів за довільні
моменти часу. Несинхронні імпульсні завади звичайно створюються для ускладнення загальної радіоелектронної обстановки. Від-
мінність несинхронних імпульсних завад і імпульсного корисного сигналу за частотою повторення використовується при створенні
пристроїв завадозахисту РЛС.
Синхронні імпульсні завади предвляють собою пачки радіоімпульсів, час випромінювання яких певним чином зв’язаний з
часом прийому сигналу РЛС, яка подавляється. На екранах РЛС багатократні імпульсні завади у відповідь породжують серії відмі-
ток, що імітують неіснуючі цілі. Такі відмітки можуть бути створені перед або позад відміток реальної цілі.
Маскуючі завади системам автоматичного супроводження
Радіолокаційним станціям, що працюють у режимі автоматичного супроводження, створюються маскуючі та імітуючі завади.
Вони можуть бути активними і пасивними. Маскуючі завади призначені для зриву роботи систем селекції цілі за кутовими коор-
динатами, дальністю і швидкістю. Імітуючі завади вносять хибну інформацію в системи автоматичного супроводження цілі за
кутовими координатами (напрямками), дальністю і швидкістю.
Системам автоматичного супроводження за напрямком (АСН), дальністю (АСД) і швидкістю (АСШ) можуть створюватися рі-
зні види шумових маскуючіх завад: прямошумові, АМШ, ЧМШ, ФМШ, хаотичні імпульсні завади. Шумові завади в залежності
від їхньої інтенсивності викликають різні ефекти.
Шумові маскуючі завади викликають випадкові кутові помилки системи АСН, зрив супроводження або утруднення захоплен-
ня цілі на автосупроводження. Завади малого рівня багато в чому еквівалентні за своїм впливом внутрішнім шумам. Найбільш не-
безпечні завади великого рівня, коли постановник завад і ціль рознесені в просторі (завада з винесеної точки). Для боротьби із шу-
мовою маскуючою завадою РЛС може використовувати режим пасивного супроводження постановника завад (супроводження по
заваді).
У системах АСД і АСШ при малому7 відношенні завада/сигнал збільшуються флуктуаційні помилки спостереження за дальніс-
тю і швидкістю. З ростом інтенсивності завади в дискримінаційних пристроях систем АСД і АСШ виникають нелінійні явища.
Коефіцієнт передачі систем падає, відбувається зрив супроводження. Якщо в РЛС не передбачено режим пасивного супроводжен-
ня джерела завади за кутовими координатами, то порушення роботи систем АСД і АСШ призводить до повного зриву автосупро-
водження цілі.
При створенні шумових завад каналам АСШ ширина спектра завадового сигналу вибирається з умови перекриття доплерівсь-
ких частот усіх корисних сигналів, відбитих від групи цілей.
Імітуючі завади системам автоматичного супроводження
Система автоматичного супроводження за напрямком (АСН) РЛС здійснює кутову селекцію, вимірювання кутових коор-
динат цілей та похідних від цих параметрів. У більшості випадків втрата інформації про кутові координати цілі призводить до неви-
конання задачі, що розв’язуються РЛС. Способи створення завад системі АСН визначаються кількістю незалежних каналів прийо-
му. Робота одноканальної системи АСН (зі скануванням діаграми спрямованості антени), може бути порушена при створенні зава-
ди з однієї точки (завади за частотою сканування). Для подавлення моноімпульсних двохканальних систем АСН застосовуються
завади, що створюються з двох і більш точок простору. Існує принцип “старшинства” завади: завада, створювана з двох і більш
точок простору, є ефективною як для двохканальної (моноімпульсної) системи АСН, так і для одноканальної системи (з конічним
скануванням).
Отже, системам АСН можуть бути створені завади з однієї*, двох і більше точок простору. До одноточкових завад відносяться:
прицільні за частотою сканування, загороджувальні за частотою сканування, переривчасті, крос-поляризаційні завади. З двох і
більше точок можуть створюватися некогерентні, когерентні і мерехтливі завади. Ці завади викликають кутові помилки систем
АСН, тому вони відносяться до імітуючих (оманні напрямки на ціль) завад.
Прицільна за частотою сканування завада представляє собою амплітудно-модульоване коливання, частота завадової моду-
ляції рп якого приблизно збігається з частотою сканування антени С^. Завада, прицільна за частотою сканування, може бути ство-
рена тільки РЛС, частота сканування яких або точно відома, або може бути визначена в ході радіотехнічної розвідки. При впливі
цієї’ завади антена РЛС змішується від справжнього напрямку на ціль доти, поки завадова модуляція не буде скомпенсована моду-
ляцією, що викликана скануванням антени РЛС.
Загороджувальні за частотою сканування завади застосовуються у випадках, коли частота сканування антени РЛС невідо-
ма. Розрізняють шумові і ковзаючі загороджувальні за частотою сканування завади. Завада першого виду представляє собою гар-
монійний сигнал несучої частоти, модульований за амплітудою низькочастотною шумовою напругою з рівномірним спектром, що
перекриває діапазон можливих частот сканування. Ковзаюча загороджувальна завада формується шляхом модуляції несучої за
амплітудою синусоїдальною напругою, частота якої періодично змінюється у визначеному діапазоні. Кутова помилка системи
АСН при впливі завад цього класу визначається відношенням смуги пропущення системи АСН до смуги перебудови завади.
Некогерентні багатоточечні завади створюються декількома рознесеними в просторі передавачами. Якщо кутова відстань
між цілями Х| і х2 (рис. 3.112), що несуть передавачі завад, менше ширини основного пелюстка ДСА РЛС, що подавлюєгься, то
рівносигнальний напрямок (РСН) орієнтується на ефективний центр парної цілі с^. Положення центру залежить від відношення
потужностей Ці2 = Рі / Рг завадових сигналів.
143
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.112. Пеленгаційна характеристика системи АСН
Кутове відхилення [З системи АСН, що подавляється, щодо лінії, яка з’єднує РЛС і середину відрізка [хь х2], при кутових від-
станях між джерелами Ар = (О,1...О,2)Ро,5 визначається виразом:
р = ^Чі2 2І (3.255)
2 Чі2 +1
Якщо Ц|2 = 1, то Р = 0 і помилки супроводження цілей за модулем однакові і складають О,5Ар. Збільшення потужності одного з
джерел призводить до зсуву рівносигнального напрямку убік джерела з більшою потужністю. При ці2 = 4...5 помилка супрово-
дження джерела з більшою потужністю стає незначною.
Мерехтливі завади створюються за допомогою двох і більше передавачів завад їх почерговим включенням і вимиканням. Роз-
різняють повільні і швидкі мерехтіння. У першому випадку частота мерехтіння лежить у межах смуги пропускання системи АС:
Ом < АОасн. При цьому антена РЛС, що подавлюється, по черзі відпрацьовує напрямки на цілі Хі і х2. При куті між джерелами ви-
промінювань АР > АРо, де Аро - ширина головного пелюстка пеленгаційної характеристики системи АСН (рис. 3.112), джерела, що
мерехтять, розрізнюються. Тобто кут розрізнювання АРр для мерехтливих завад при малій частоті Ом дорівнює ДРр = ДРо- При шви-
дких мерехтіннях частота Ом лежить поза смугою пропускання системи АСН: Ом > ДОАСН. Система АСН сприймає парну мерехт-
ливу ціль як одиночну і стежить за положенням центра О джерел Х| і х2.
Переривчаста завада є окремим випадком мерехтливих завад. Вона представляє собою періодичну послідовність потужних
радіоімпульсів, випромінюваних одним передавачем завад. Дія переривчастих завад базується на використанні особливостей пере-
хідних процесів у системі автоматичного регулювання підсилення (АРП). Внаслідок інерційності системи АРП коефіцієнт підси-
лення приймального тракту не може змінюватися стрибкоподібно. Переривчаста завада призводить до перевантаження приймача і
викликає перерви надходження інформації в кутомірний канал. Її ефективність залежить від інтенсивності завадового сигналу, три-
валості завадових імпульсів, періоду їхнього проходження і параметрів системи АРР.
У більшості сучасних антен поряд з випромінюванням на власній поляризації існує паразитне випромінювання на ортогональ-
ній поляризації Це випромінювання одержало назву крос-поляризаційного. Особливо яскраво виявляється крос-поляризаційне
випромінювання в дзеркальних антенах, що містять відбивачі з подвійною кривизною. Крос-поляризаційні завади базуються на
спотворенні результуючої діаграми спрямованості антени РЛС шляхом опромінення її полем з ортогональною поляризацією. Діаг-
рама спрямованості антен на ортогональній поляризації’ істотно відрізняється від основної діаграми. Вплив крос-поляризаційних
завад призводить до зменшення крутизни і деформацій пеленгаційної характеристики системи АСН і, отже - до помилок автома-
тичного супроводження цілі.
Системам автоматичного супроводження за дальністю (АСД) створюються імітуючі імпульсні завади. Вони являють со-
бою послідовність імпульсів у відповідь, затриманих щодо сигналу на величину т3. У момент включення засобу РЕП т3=0. На вхід
системи АСД надходять одночасно два сполучених за часом імпульси - сигнал, відбитий від цілі і завада. Якщо амплітуда завади
більше амплітуди сигналу, то строб дальності “захоплює” завадовий сигнал. Збільшення т3 призводить до відповідного переміщен-
ня стробуючого імпульсу системи АСД РЛС. При значенні т3, що перевищує апертуру характеристики часового розділювача (при-
близно рівному тривалості зондувального імпульсу), система АСД “втрачає” ціль і переходить на спостереження за завадою. Од-
нак, незважаючи на зрив супроводження за дальністю, РЛС продовжує одержувати інформацію про кутове положення справжньої
цілі. Щоб внести завадові збурення в систему АСН, після закінчення серії’ завадових імпульсів, що уводять, засіб РЕП звичайно
виключається. Система АСД РЛС переходить у режим пошуку. Під час пошуку на вхід системи АСН сигнал не надходить і інфор-
мація про кутові координати цілі губиться. Після захоплення цілі системою АСД засіб РЕП починає новий цикл відведення.
Імітуючі завади, що відводять, системам автоматичного супроводження за швидкістю (АСШ) змінюють частоту гетероди-
на системи АСШ і викликають припинення автосупроводження за доплерівською частотою сигналу, відбитого від цілі. При спіль-
ному надходженні на частотний детектор слабкого корисного сигналу (відбитого від цілі) і сильного завадового випромінювання
центр дискримінаційної характеристики частотного детектора зміщається за частотою більш потужнього випромінювання. Несуча
частота завади плавно змінюється і гетеродин перестроюється слідом за частотою завади. Система АСШ переходить на автосупро-
водження завади. Поки триває цикл відведення, система АСШ видає помилкову інформацію про швидкість і прискорення цілі.
Після припинення циклу відведення сигнал у стробі швидкості зникає і система АСШ переходить у режим пошуку. Під час пошуку
РЛС втрачає ціль.
144
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Завади командним радіолініям управління і зв’язку
Для радіоподавлення командних радіоліній управління і радіоліній зв’язку можуть застосовуватися спеціальні комплекси, стан-
ції та інші засоби РЕП, а також засоби зв’язку, дообладнані пристроями формування завад.
Основними видами завад командним радіолініям управління (КРЛУ) є загороджувальні і прицільні за кодом завади.
Загороджувальні за кодом завади являють собою безперервні шумові коливання або хаотичні імпульсні завади (ХІП). Вони
можуть викликати повне або часткове подавлення переданих команд, зміну параметрів модуляції коливань. Завади малого рівня
несуттєво змінюють параметри модуляції піднесучих коливань і призводять до малих помилок наведення. Завади великого рівня
спотворюють команди на виході КРЛУ й істотно погіршують характеристики КРЛУ (наприклад, зменшують коефіцієнт передачі).
При подавленні КРЛУ з фазово-імпульсною модуляцією виникають помилки в опорних і виконавчих кодах, а також утворення
оманних опорних і виконавчих кодів. Недоліком загороджувальних за кодом завад є необхідність застосування високопотенційних
станцій завад.
Прицільні за кодом завади мають структуру, подібну до сигналів, що передаються у КРЛУ. Звичайно вони створюються
шляхом ретрансляції' сигналів КРЛУ. При створенні цього виду завад період передачі завадових імпульсів синхронізується з пері-
одом передачі команд. У результаті дії завад відбуваються помилкові спрацьовування дешифратора КРЛУ, що призводить до спо-
творення переданих команд. Створенню прицільних за кодом завад передує розвідка кодів, їх параметрів, порядку і періоду прохо-
дження, формування подібних кодів завад - копій сигналів.
Лініям телефонного радіозв’язку можуть створюватися АМШ, ЧМШ, ХІП, прямошумова та інші види завад.
Ефективність завади визначається її видом, параметрами, спектральними характеристиками розладнання завади щодо резонан-
сної частоти приймального пристрою, що подавляється, видом модуляції’, застосованої в радіолінії зв’язку. В умовах завад погіршу-
ється розбірливість мови і при деякому граничному відношенні потужності завади до потужності сигналу на вході приймального
пристрою в межах його смуги пропускання настає порушення радіозв’язку. Оператор на приймальній стороні перестає розуміти
зміст переданого повідомлення. Це відношення називається коефіцієнтом подавлення радіолінії зв’язку. Розбірливість мови в умо-
вах завад звичайно визначається експериментальним шляхом за допомогою артикуляційних таблиць. Велика частина енергії мови
укладена в смузі частот 0,3 ... 3,4 кГц. Однак найбільш важливими для розбірливості мови є складові мовного спектра, що знахо-
дяться в смузі частот 400... 800 Гц. Ширина спектра завади не повинна бути менше ширини формантного спектра мови.
3.123. Засоби радіоелектронної боротьби
До засобів радіоелектронної боротьби відносяться: засоби радіоелектронної (радіо- і радіотехнічної, радіотеплової, теплової, ла-
зерної та ін.) розвідки, засоби контролю радіовипромінювань, засоби активних і пасивних завад, оманні цілі, уловлювачі, протира-
діолокаційні ракети та інші засоби. Основні принципи побудови засобів радіоелектронної розвідки розглянуті вище. Аналогічну
структуру мають станції’ контролю радіовипромінювань, застосовані д ля рішення задач РЕЗ і протидії’ технічним засобам розвідки
(ПДТЗР). На відміну від них, засоби активних завад мають у своєму складі пристрої і технічні системи, що дозволяють формувати і
випромінювати завадові сигнали.
Основними типами засобів активних завад є засоби завад не “у відповідь”, засоби завад у відповідь, комбіновані засоби РЕП і
малогабаритна техніка загороджувального подавлення.
Засоби завад не кау відповідь”
Як правило комплекси, станції й апаратура завад не “у відповідь” забезпечують груповий захист повітряних, наземних, надвод-
них та інших об’єктів, а також застосовуються для дезорганізації’ управління військами (силами). Прикладами закордонних засобів
завад не “у відповідь” є: АМ/АЬО-99, А^АЬО-130, АЬІ/АЬО-143, АЬІ/АЬО-149, АМАЬО-150, АМ/АЬО-151, АМ/АЬО-176, РАІК5,
АК/бЬО-3 А, АК/МЬО-22, АТЧ/АЬТ-28, АТЧ/АЬТ-31, АМ/АЬТ-32 та інші.
На рис. 3.113 показана узагальнена структурна схема типового засобу завад не “у відповідь” (далі - засобу РЕП).
Рис. 3.113. Структурна схема засобу РЕП
Звичайно засіб РЕП містить у собі антенну систему (АС), технічні системи: радіо- (радіотехнічної) розвідки (РРТР), постановки
завад (СПП) і управління (СУ). Система РРТР, у свою чергу, звичайно складається з підсистем нижчого рівня (рис. 3.114): пошуку
радіовипромінювань за частотою (СПЧ), пеленгування (СП) або визначення місцеположення джерел радіовипромінювань (СВМР),
селекції’ сигналів (СС), аналізу і розпізнавання (СР) сигналів і їхніх джерел.
145
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.114. Структурна схема системи РРЗР засобу РЕП
Система постановки завад засобу РЕП (рис. 3.115) звичайно складається з пристроїв вибору виду завади, наведення СПП за ча-
стотою і напрямком на об’єкт подавлення і декількох передавачів завад. Кожний з передавачів завад включає модулятор, генератор
НВЧ і вихідний підсилювач.
Рис. 3.115. Структурна схема системи постановки завад засобу РЕП
До основних характеристик СПП відносяться: діапазон робочих частот (Г^ - Емн), вихідна потужність (Р^), ширина спектра
завади (ДГП), повний час перестроювання за частотою. Повний час перестроювання СПП за частотою на даний час є одним з голо-
вних показників, що обмежують можливості засобу РЕП щодо швидкодії.
Для випромінювання завади служать передавальні антени антенної системи засобу РЕП. Застосування спрямованих антен до-
зволяє значно підвищити еквівалентну потужність СПП (Рпе = РП6П), яку також називають енергетичним потенціалом засобу
РЕП. Одним з найважливіших узагальнених енергетичних показників засобу РЕП є створювана ними щільність потужності шумо-
вих завад р [Вт/МГ ц]:
Р 6
Р= '7П. (3.256)
ДГП
Як підсилювальні прилади в передавачах завад застосовуються радіоелектронні лампи, магнетрони, лампи біжучої хвилі,
(ЛБХ), лампи зворотної хвилі (ЛЗХ), твердотільні прилади. Генераторні або підсилювальні лампи повинні забезпечувати роботу в
широкому діапазоні хвиль без істотної зміни потужності і коефіцієнта корисної дії (ККД) у діапазоні, швидку перебудову за часто-
тою в діапазоні робочих частот засобу РЕП, високі енергетичні показники. Досить широкий діапазон робочих частот мають ЛБХ і
ЛЗХ, але у них низький ККД. Більший ККД мають магнетрони. Найвищий ККД у різновиду магнетрона - барратрона. Ця лампа
створена спеціально в якості потужного і широкосмугового генератора шуму. Твердотільні прилади почали застосовуватися недав-
но та за своїми характеристиками вже наблизилися до електронно-вакуумних приладів. Для генерації коливань у НВЧ діапазоні
придатні транзистори, варакгорні діоди, лавинопрольотні діоди, діоди Ганна та ін. Недоліками твердотільних приладів є обмежена
потужність і невеликий ККД.
Модулятор передавача містить у собі джерело шумової напруги і підсилювально-обмежувальні пристрої. Як джерело шумів
звичайно використовується тиратрон у магнітному полі або шумовий діод прямого розжарення (насичений діод). Тиратрон має
найбільш високий рівень шумів, але порівняно малу ширину їх спектра (декілька мегагерц). За допомогою шумового діода напруга
виходить з досить широким і рівномірним спектром (десятки і навіть сотні мегагерц), але порівняно малої інтенсивності. Це ускла-
днює безпосередню модуляцію передавача сигналом з виходу шумового діода. Тому застосовують широкосмугові підсилювачі з
великим коефіцієнтом підсилення первинної шумової напруги. Шуми далі обмежуються, завдяки чому забезпечується велика по-
тужність випромінювання на бічних складових спектра передавача завад (за рахунок збільшення ефективної глибини модуляції
146
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
передавача бічними складовими спектра модулюючого шуму). Застосовуються амплітудна, фазова і частотна модуляції. Іноді за-
стосовується також амплітудно-частотна й амплітудно-фазова модуляції.
Авіаційні станції імпульсних завад у відповідь
Станції імпульсних завад у відповідь призначені для індивідуального захисту літальних апаратів від вогневих засобів ППО. Во-
ни здійснюють зрив роботи систем автоматичного супроводження за дальністю (АСД), швидкістю (АСШ), напрямком (АСН) (ку-
товими координатами (Р, є)). Для зриву роботи систем автоматичного супроводження створюються однократні і багатократні імпу-
льсні завади у відповідь. Крім того, деякі з цих станцій завад, наприклад у літака РЕБ ЕГ-111, використовуються для ускладнення
повітряної обстановки. Прикладами закордонних станцій завад у відповідь є АМ/АЬО-126, АМ/АЬО-129, АМ/АЬО-136,
АМАЬО-137 та інші.
Існує два основних типи станцій завад у відповідь: відповідачі-ретранслятори і відповідачі-генератори. У відповідачах-
ретрансляторах відбувається підсилення і перевипромінювання прийнятого сигналу, а у відповідачах-генераторах прийнятий сиг-
нал використовується для формування власних сигналів у відповідь. Перші звичайно використовуються для створення завад типу
однократних, другі - багатократних завад у відповідь.
Узагальнена струкіурна схема типової станції завад у відповідь наведена на рис. 3.116.
запуску
Рис. 3.116. Струкіурна схема станції імпульсних завад у відповідь
Пристрій запам’ятовування (відтворення) частоти станції фіксує значення несучої частоти виявленого сигналу і забезпечує ви-
промінювання завади на цій частоті. Формуючий пристрій призначений для формування завадових сигналів.
Авіаційні станції комбінованих завад
Станції комбінованих завад поєднують у собі можливості постановки завад у відповідь і не “у відповідь”. Це станції типу
АМ/АЕО-87, АМ/АЬО-119, АЬІ/АЬО-131, АІЧ/АЬО-135, АЬІ/АЬО-161 та інші. Станція АЬІ/АЬО-131, наприклад, має широкий діа-
пазон робочих частот (2 - 20 ГГц) і дозволяє здійснювати обробку виявлених сигналів, визначати пріоритет погрози, напрямок на
РЕС і розподіляти потужність, що випромінюється, з вибором оптимального виду завади. Складається із системи РРТР і 1 - 5 пере-
давачів завад. Може випромінювати до 40 видів завад. Станцією оснащуються літаки типу Г-4, Р-16, ЕГ-111, РВ-111, А-7, А-10,
АУ-8В та інші. С у ВПС США, Єгипту, Іспанії, Нідерландів, Норвегії, Пакистану, Японії та інших країн.
Малогабаритна техніка загороджувального подавлення (МТЗП)
Під малогабаритною технікою загороджувального подавлення звичайно розуміють передавачі завад, що носяться (ППН) і
що закидаються (ППЗ). Часто до МТЗП відносять також надмалі дистанційно пілотовані апарати- постановники завад
(мікро-ДПЛА-ПП).
Передавачі завад, що носяться, доставляються розвідувально-диверсійними групами і служать для подавлення РЕС безпосе-
редньо в бойових порядках. Вони можуть бути замасковані під місцеві предмети або предмети побуту, що прийшли в непридат-
ність. У порівнянні із ППЗ ці передавачі мають більший час дії, тому що оснащуються потужними джерелами живлення, і можуть
бути багаторазового використання.
Передавачі завад, що закидаються, одноразового використання. Вони доставляються в райони позицій РЕС за допомогою
пілотованих і безпілотних літальних засобів, ракет, пострілів з артилерійських знарядь. Можливо також залучення для цього розві-
дувально-диверсійних груп. ППЗ із літальних апаратів скидаються спеціальними автоматами типу АМ/АЬЕ-24, АШХЬЕ-28,
АІЧ/АЬЕ-39 та ін., які, крім того, можуть застосовуватися для скидання пачок протирадіолокаційних відбивачів і ІЧ уловлювачів.
Передавачі завад, що носяться і що закидаються, виготовляються на базі твердотільних НВЧ-прилддів і модульних схем. Вони
мають невеликі розміри і масу порядку десятків - сотень грам без джерела живлення. Протягом короткого часу порядку десятків
хвилин - декількох годин ППЗ можуть випромінювати потужність кілька десятків ват і створювати щільність потужності завади до
сотень міліватів на мегагерц. МТЗП можуть застосовуватися в діапазоні частот ЗО - 20 000 МГц.
147
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Наданий час у закордонних державах інтенсивно ведуться роботи зі створення мікро-ДПЛА-ПП, призначених для масованого
застосування в районах зосередження радіоелектронної техніки. Вони будуть мати злітну масу 10 - 100 г, довжину 6-20 мм, масу
корисного навантаження 5 - 20 г, час польоту 20 - 60 хв, крейсерську швидкість 30 - 65 км/год. Мікро-ДПЛА-ПП будуть дозволяти
вести виявлення і РЕП засобів радіолокації, радіонавігації і радіозв’язку на дальності до 10 км.
Засоби функціональної поразки радіоелектронних систем і засобів (РЕС)
Під функціональною поразкою (подавленням) РЕС, розуміється порушення їх функціонування під впливом потужного корот-
кого імпульсного НВЧ випромінювання. Засоби функціональної поразки (ЗФП) часто називають НВЧ-зброєю функціональної
поразки. Вони забезпечують виведення з ладу автоматизованих систем управління, систем зв’язку, контролю, розвідки, радіоелект-
ронних систем підриву боєприпасів та інших РЕС. Ефект функціональної поразки залежить від ступеня захищеності елементної
бази РЕС від впливу потужного НВЧ випромінювання.
За наслідками застосування, ЗФП розділяють на два класи. Засоби, застосування яких призводить до невідновлюваних, необо-
ротних відмовлень, називають зброєю функціональної поразки (ЗбФПр). Інший клас ЗФП призначений для нанесення збитку у
вигляді відновлюваних (тимчасових) відмовлень або функціональних порушень РЕС (помилкових спрацьовувань виконавчих
схем, спотворень вихідних сигналів тощо). Такі ЗФП називають засобами функціонального подавлення (ЗФПо). Відновлювані
відмовлення можуть бути як зі збереженням, так і з погіршенням параметрів РЕС після відновлення їхньої працездатності. Інтервал
тимчасового виходу з ладу еіементів РЕС може змінюватися в широких межах - від одиниць мілісекунд до десятків хвилин.
Найбільш вразливими при впливі потужного НВЧ випромінювання є чуттєві елементи вхідних трактів приймальних пристроїв
РЕС, побудованих на основі твердотільних напівпровідникових структур. Потужне НВЧ випромінювання проникає як через аніо-
ну, так і, минаючи її, через технологічні щілини, люки обслуговування і вентиляційні люки, ланцюги живлення, кабелі.
Звичайно причиною невідновлюваних відмовлень є тепловий пробій напівпровідникових структур. Як робочу характеристику
ЗбФПр при цьому використовують кррперіальний рівень поразки Р„. Він представляє собою граничне значення потужності, що
руйнує структуру в результаті тепловиділення. Для довжини вражаючих імпульсів більш 100 не він оцінюється за допомогою фор-
мули Вунша-Белла:
Рп =А/т, +В/7ЇЇ + С, (3.257)
де т, - тривалість потужного НВЧ імпульсу; А, В і С - коефіцієнти, що залежать від площі зони переходу напівпровідникових
матеріалів, їх теплоємності, теплопровідності, температури нагрівання і умов теплознімання.
Для імпульсів, тривалістю 0,1-1 мке найбільший внесок у (3.257) вносить перший доданок, пропорційний 1/т { , при тривалос-
тях 1 - 10 мке-другий доданок, пропорційний 1/, для т, > 10 мке-третій доданок.
Процеси, що виникають у напівпровідникових структурах при тривалостях імпульсів НВЧ випромінювання порядку одиниць і
десятків наносекунд, вивчені недостатньо. Експериментально встановлено, що вплив подібних імпульсів призводить найчастіше до
виникнення тимчасових відмов.
Алгоритмічні впливи на обчислювальні підсистеми радіоелектронних систем і засобів
На теперішній час у теорії і практиці РЕБ виник новий напрямок, обумовлений бурхливим розвитком обчислювальної техніки і
зв’язаною з ним широкою автоматизацією процесів обробки сигналів і інформації у військовій сфері. При цьому у якості об’єктів
РЕБ розглядаються алгоритми функціонування обчислювальних підсистем та ЕОМ радіоелектронних систем і засобів. Навмисні
впливи різної фізичної природи, які використовуються для зниження ефективності функціонування цих алгоритмів, одержали на-
зву алгоритмічних. До таких впливів відносяться: несанкціонований доступ до інформації, що зберігається в пам’яті ЕОМ, введення
в програмне забезпечення “логічних бомб”, “вірусів”, спотворення алгоритмів обробки інформації, порушення логіки їх застосу-
вання тощо. Найбільш ефективними вважаються “вірусні” впливи, переносниками яких будуть електромагнітні хвилі
(“радіовіруси”). У закордонних державах на даний час активно проводяться роботи зі створення таких “вірусів”.
Можливість створення й ефективність алгоритмічних впливів засновані на використанні загальних закономірностей роботи
ЕОМ різного призначення і алгоритмів обробки інформації і сигналів, що ними реалізуються. Дистанційний несанкціонований
доступ до обчислювальних ресурсів РЕС можливий у силу того, що як первинне джерело інформації в них використовуються ра-
діосигнали.
Можна виділити дві групи алгоритмічних впливів. Перша призначена для спотворення власних алгоритмів роботи ЕОМ щодо
організації конкретних обчислювальних процедур і часового графіка їх використання. Друга - призведе до порушення або неадек-
ватного використання алгоритмів обробки сигналів і інформації, реалізованих в ЕОМ.
Засоби пасивних штучних маскуючих радіозавад
Пасивні завади - заважаючі сигнали, що виникають у результаті відбиття або розсіювання електромагнітних або акустичних
хвиль від природних і штучних об’єктів та середовищ, що відбивають. Для створення штучних пасивних завад застосовуються
дипольні, кутові, лінзові відбивачі, антенні решітки, що перевипромінюють, та ін. Інтенсивні пасивні завади можуть виникати та-
кож за рахунок іонізації локальних областей простору при розпиленні і спалюванні в атмосфері елементів, що легко іонізуються,
(цезію, натрію). За рухомим об’єктом, з якого викидається речовина, що легко іонізується, утворюється слід із продуктів реакції з
високою концентрацією вільних електронів. Час їхнього життя в сліді залежить від інтенсивності рекомбінації електронів, парамет-
рів навколишнього середовища, початкової концентрації електронів та інших факторів.
148
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Пасивні завади поділяються на маскуючі та імітуючі.
Пасивні маскуючі завади представляють собою сигнали РЛС, відбиті від хмар пасивних завад. Вони створюють фон на інди-
каторах, що маскує позначки цілей.
Імітуючі завади представляють собою сигнали, відбиті від штучно створених об’єктів, які сприймаються апаратурою й опера-
торами РЛС як позначки від цілей. Засоби протидії інфрачервоним пристроям (пасивним борговим координаторам ракет) також
можуть бути розділені на засоби маскування і оманні теплові цілі. Для створення пасивних імітуючих завад застосовуються розгля-
нуті нижче оманні цілі і уловлювачі.
Найбільш масовим засобом постановки пасивних маскуючих завад є дипольний відбивач. Він виготовляється з металевої фоль-
ги або паперу, скловолокна, капрону, на які наноситься провідний шар. Довжина і товщина диполів вибираються так, щоб забезпе-
чувалося ефективне розсіювання радіохвиль у широкому діапазоні частот. Звичайно довжина диполя приблизно дорівнює половині
довжини хвилі РЛС, що подавлюється. Товщина металевого покриття дипольного відбивача залежить від глибини проникнення
електромагнітного поля в провідний шар, що у свою чергу, залежить від частоти електромагнітних коливань. У сантиметровому
діапазоні глибина проникнення може бути близько 1 мкм. Це дозволяє виконувати диполі у вигляді дуже тонких металізованих
смужок або волокон діаметром у кілька десятків мікронів.
Дипольні відбивачі комплектуються в пачки. Хмара, що виходить після розкриття пачки, скинутої з літака, спостерігається на
екрані індикатора кругового огляду РЛС у вигляді яскравої плями або засвічених смуг.
Пачка в залежності від діапазону може містити десятки тисяч і мільйони диполів. У силу некогерентності полів, що розсіюють-
ся окремими диполями, ефективна площа розсіювання (ЕПР) оп хмари відбивачів однакової довжини в середньому дорівнює:
пн = КдМп!, (3.258)
де Кд - коефіцієнт діючої кількості диполів (враховуючий якість виготовлення і розліт диполів); N - кількість диполів у пачці;
СУ І -середня ЕПР одного диполя.
В ідеальному випадку Кд = 1. Ефективна площа розсіювання О| одного напівхвильового диполя залежить від його орієнтації
щодо електричного вектора падаючої хвилі. При виготовленні диполів прагнуть забезпечити довільну рівноімовірну орієнтацію
диполів після їх викиду. Для цього центр ваги кожного відбивача випадковим чином змішується від його геометричної середини.
2 2
Установлено, що СУ| =0,17А. , тому ап =0,17Х Мпе,де 1Чпе = КДМ - кількість ефективно діючих диполів у пачці.
Для створення відбитого сигналу, близького за потужністю сигналу цілі, необхідно мати кількість диполів
N =§еф, (3.259)
Кд°І
де 8еф - ефективна площа цілі, що відбиває.
Темп скидання пачок диполів з літака І™ при якому завада маскує позначку цілі на екрані імпульсної РЛС, може бути розрахо-
ваний відповідно до виразу:
де - тривалість імпульсу РЛС; Ул - швидкість літаків, що летять під прикриттям завад; Кп - коефіцієнт подавлення;
$еф - ефективна площа цілі, що відбиває.
Для викидання засобів пасивних завад, що маскують, розроблена і застосовується велика кількість пристроїв і систем, напри-
клад, автомати типу АМ/АЬЕ-32, АК/АЕЕ-38, АК/АЕЕ-40 (У)Х, АІЧ/АЬЕ-43, АМ/АЬЕ-43, АМ/АЬЕ^И, пускові установки “Дагай”,
ЕУ/8-90СА, “Магай”, “Протіан”, “Сібіл” і безліч інших.
Оманні цілі і радіолокаційні уловлювачі
Оманні цілі застосовуються в основному для протидії' РЛС виявлення і цілерозподілення. Оманні цілі створюють на екранах
індикаторів РЛС відмітки, подібні до відміток від існуючих цілей. У якості повітряних оманних цілей застосовуються спеціальні
ракети (літаки-снаряди), оснащені стартовими або маршовими двигунами. Вони можуть здійснювати автономний керований або
некерований політ протягом тривалого часу (до декількох десятків хвилин). Бомбардувальник В-1, наприклад, може нести 25 - ЗО
оманних цілей. Оманні теплові цілі (інфрачервоні уловлювачі) представляють собою піротехнічні пристрої, що створюють інтенси-
вне теплове випромінювання в діапазоні ІЧ хвиль.
Основними задачами застосування оманних цілей у контурах цілерозподілення є: дезорієнтація операторів РЛС, перевантажен-
ня обчислювальних пристроїв контуру (систем обробки інформації), збільшення часу на впізнання цілі, відволікання засобів ППО
на поразку оманних цілей. Ефективність застосування оманних цілей залежить від тактики їхнього застосування, співвідношення
загальної чисельності п цілей (істинних і оманних) та кількості засобів поразки ППО. Ефективність застосування оманних цілей
може бути оцінена зниженням імовірності поразки літаків, що прикриваються. У випадку масового застосування оманних цілей
імовірність рт(п) поразки літака, прикритого групою оманних цілей, при рівноімовірному виборі цілі спрощено визначається вира-
зом:
( їт
Рт(п)=1-Н-Р1 . т<п, (3.261)
\ п )
де т- кількість випущених ракет; рі - імовірність поразки літака (або хибної цілі) однією ракетою (по кожній цілі здійснюється
один пуск ракети).
149
РОЗДІЛ з. ОСНОВИ ТЕОРІЇ ПОБУ ДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Радіолокаційні уловлювачі призначені для зриву автоматичного супроводження цілі радіолокаційною станцією або головкою
самонаведення. Вони забезпечують переключення контуру автоматичного супроводження з істинної цілі на уловлювач. При цьому
відбувається відведення уловлювачем за собою об’єкта, що атакує.
За способом застосування радіолокаційні уловлювачі поділяються на керовані, буксируємі та такі, що скидаються.
Керовані уловлювачі, як і оманні цілі, застосовуються в контурах цілерозподілення і представляють собою ракети з пасивни-
ми або активними перевипромінювачами електромагнітної енергії. На уловлювачах можуть установлюватися як стартові, так і
маршові двигуни, що забезпечують керований політ (за сигналами управління або за програмою) від декількох секунд до декількох
хвилин.
Для успішного застосування уловлювача літак, що прикривається, одночасно з його запуском здійснює маневр за швидкістю і
напрямком. Початкова швидкість ракети-уловлювача визначається динамічними характеристиками систем, що стежать, контуру
наведення (самонаведення). Орієнтовно вона вибирається із умови нерозділення об’єкта, що прикривається, і уловлювача за кутом,
дальністю і швидкістю. Після скидання уловлювача швидкість його віддалення від літака-носія повинна забезпечити відведення на
себе всіх стробів систем, що стежать. У противному разі застосування уловлювача буде безрезультатним. Ціль, що прикривається, і
уловлювач можуть бути розділені за прискореннями (перевантаженнями).
Першими буксируємими уловлювачми (часів другої світової війни) були металеві сітки, буксируємі літаками на довгих тро-
сах. Сучасні буксируємі уловлювачі бувають пасивного й активного типу.
Ефективність пасивного уловлювача залежить від його ефективної площі розсіювання і віддалення від об’єкта, що прикрива-
ється. Для збільшення ЕПР уловлювачів застосовуються спеціальні методи і пристрої, наведені нижче.
Активні буксируємі уловлювачі з’явилися порівняно недавно - у 80-х роках минулого століття. Активні уловлювачі першого
покоління практично цілком автономні. Вони представляють собою малогабаритні когерентні повторювані радіолокаційних сигна-
лів, що опромінюють. Можуть застосовуватися усіма видами літаків і безпілотних літальних апаратів.
У бойовому вильоті кожний літак повинен нести декілька активних уловлювачів, що випускаються за борт на буксируючих
тросах-кабелях (БТК) при підході до зони дії систем ППО противника. На високошвидкісних маневрених літальних апаратах улов-
лювачі представляють собою витратні засоби. Вони відділяються від пускового пристрою після відбиття атаки або при поверненні
на базу'. При захисті транспортних літаків та інших середньошвидкісних літальних апаратів застосовуються уловлювачі багаторазо-
вої дії, що втягуються зворотно на борт після бойового застосування. Ударному літаку досить мати три - чотири уловлювачі.
Прикладами автономних активних буксируємих уловлювачів можуть служити уловлювач “Ариель” (розроблений фірмою
6ЕС-МАКС0МІ, Великобританія) і АМ/АЕЕ-50 (відділенням Е-Бузіетз, фірми КАТІОМ, США). “Ариель” має довжину БТК до
200 м, максимальний час його розгортання 2 хв, швидкість носія при розгортанні 340 - 450 км/год маса уловлювача 5 кг, троса-
кабелю - 4 кг, внутріфюзеляжного устаткування - 9,5 кг. Уловлювачами “Ариель” оснащуються літаки “Нимрод”, “Торнадо”,
“Харриер”, “Ягуар” Великобританії, Е-16, С-130 США та інші.
А№АЕЕ-50 має діаметр 6,1 см, довжину 40 см, масу 2,85 кг. Призначений для захисту літаків типу Р/А-18, Е-15, Е-16, А-6, В-1 В,
рЕА, рЕ-100, рЕ-106, Р-3, ЕІ-2 та ін. Ефективність активних буксируємих уловлювачів залежить від величини ЕПР літального апа-
рата, що захищається. Для захисту тактичних винищувачів досить потужності завади, випромінюваної одним АМ/АЕЕ-50, для бо-
мбардувальників типу В-1 В - необхідно не менше двох уловлювачів.
Багаторежимні буксируємі уловлювачі другого покоління мають оптоволоконний зв’язок з літальним апаратом, що захищаєть-
ся. Це дозволяє в залежності від обстановки формувати різні види завад, уводити різну кількість оманних цілей, для кожної з оман-
них цілей імітувати свої координати, швидкість, вводити в контури автоматичного супроводження іншу дезінформацію. При цьому
завади формуються у внутріфюзеляжній системі РЕП і передаються в уловлювач. Випромінюються завади як правило синхронно з
борту літака, що прикривається, і уловлювачем. У результаті величина промаху радіолокаційного наведення може виявитися насті-
льки великою, що ціль виявиться поза кутом захоплення можливої дублюючої оптико-електронної системи ГСН ракети.
Одним з уловлювачів другого покоління є АМ/АЕЕ-55. Він функціонує разом з бортовими внутріфюзеляжними системами
РЕП типу АК7АЕО-214, АМ/АЕ()-211. Ці системи встановлюються на літаки Е/А-18 Е,Е, В-1В, ЕІ-2 та ін., укомплектовані декілько-
ма уловлювачами АМ/АЕЕ-55.
Уловлювачі, що скидаються, служать дтя захисту об’єктів від ракети, що атакує. Вони не мають двигунів і представляють
собою активні або пасивні перевипромінювачі, що мають більшу ЕПР, ніж літак, що прикривається.
Тривалість впливу сигналів від уловлювачів на систему самонаведення для імпульсних РЛС визначається часом перебування
уловлювачів в імпульсному' об’ємі, а для РЛС безперервної дії - динамічними характеристиками каналу АСШ і часом перебування
уловлювачів в межах діаграми спрямованості РЛС.
Час перебування уловлювачів і цілі в тому самому' імпульсному об’ємі визначається розрахунком траєкторії падіння уловлюва-
ча за допомогою формул балістики. Цей час збільшується з ростом маси уловлювача і зі зменшенням його розмірів.
Засоби збільшення ефективної площі розсіювання оманних цілей і радіолокаційних уловлювачів
Для збільшення ЕПР оманних цілей і уловлювачів застосовуються активні і пасивні перевипромінювачі сигналів. Крім того, для
імітації цілей перевипромінювачі можуть самостійно скидатися з літаків - постановників завад, і підвішуватися на парашутах у
повітряному просторі (тобто використовуватися як скидаємі уловлювачі).
На рис. 3.117 наведена структурна схема активного підсилювача-ретранслятора сигналів. Радіосигнали РЛС, що подавля-
ється. приймаються приймальною антеною Аь підсилюються в попередньому підсилювачі ПУ, надходять на вхід кінцевого підси-
лювача потужності КУМ і випромінюються передавальною антеною А2. Для імітації флуктуації ЗПР цілі в КУМ звичайно сигнали
модулюються за амплітудою шумовою напругою, сформованою модулятором М.
До пасивних перевипромінювачів пред’являються великі вимоги щодо вагових характеристик і габаритів. Цим вимогам від-
повідають кутові відбивачі різних типів: перевипромінювачі у вигляді лінз Люнеберга і відповідачі Ван-Атта
150
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Кутовий відбивач представляє собою конструкцію із взаємно перпендикулярних граней, електрично з’єднаних між собою. У
залежності від форми граней розрізняють трикутні, прямокутні і круглі кутові відбивачі. їх максимальні ЕПР о відповідно рівні:
4 а4 12л 4 „ а4
Од - я ; Од - а ; о„-2л ,
з К А А
(3.262)
де а - довжина ребра відбивача.
Рис. 3.117. Структурна схема активного підсилювача-ретранслягора
При довжині хвилі X = 3 см і а = 50 см ЕПР о = 25 000 м2. Ширина діаграми перевипромінювання кутових відбивачів на рівні
половинної потужності складає приблизно 40 - 50°. Щоб збільшити сектор перевипромінювання, застосовують декілька кутових
відбивачів, по-різному орієнтованих у просторі. Максимальна ЕПР кутових відбивачів істотно залежить від кутів між гранями від-
бивача. Якщо кут між гранями відрізняється від розрахункового усього на Г, то максимальне значення ЕПР кутового відбивача
зменшується в 2 - 5 разів.
Для РЛС із круговою поляризацією кутові відбивачі бувають неефективні. Це пояснюється тим, що від провідних граней куто-
вого відбивача хвиля відбиває непарне число разів, внаслідок чого напрямок обертання вектора електричного поля відбитого сигна-
лу змінюється на зворотний. Явище обертання поляризації відбитих хвиль, що виникає в кутових відбивачах, можна виключити,
якщо одну з його граней покрити шаром діелектрика.
Основним недоліком кутових відбивачів є мала ширина діаграми перевипромінювання. Більш широку діаграму перевипромі-
нювання має лінза Люнеберга, що представляє собою діелектричну кулю. Коефіцієнт переломлення діелектрика в ідеальній лінзі
Люнеберга ппр = ^2 -(Кт/Кн)2 залежить тільки від відношення поточного і зовнішнього Кн радіусів лінзи. Максимальна
ЕПР лінзи Люнеберга складає
о 4
стл = 4л Н . (3.263)
X
Відповідач Ван-Атта є антенною решіткою, виконаною з диполів або спіралей. На рис. 3.118 наведений шестиелементний від-
повідач. Диполі знаходяться на рівному віддаленні від осі симетрії відповідача і попарно з’єднані коаксіальними кабелями однако-
вої довжини. Електромагнітна хвиля, прийнята диполем 1, перевипромінюється диполем 6. У свою чергу, диполь 1 перевипромінює
хвилю, прийняту диполем 6. Електричні довжини антенно-фідерної системи 1 - 6, так само як і інших попарно з’єднаних диполів,
однакові. Сигнали, прийняті і перевипромінюванні диполями, проходять однаковий шлях. Тому напрямок максимуму діаграми
перевипромінювання збігається з напрямком приходу падаючої хвилі.
Ефективна площа розсіювання відповідача, утвореного пІІД напівхвильовими диполями, розташованими на відстані А/2 один від
одного і А/4 від екрана, що відбиває, визначається виразом:
о » 0,25лп2 ДА2 . (3.264)
Перевипромінюваний сигнал може бути промодульований за амплітудою. Для цього у фідерні лінії, що з’єднують вібратори,
включають фазообертачі. Зміною зсуву фаз можна домогтися необхідного закону амплітудної модуляції перевипромінюваного
сигналу. Відповідач Ван-Атга може бути виконаний і в активному вигляді. Основні труднощі при цьому складаються в розв’язці
прийомних і передавальних трактів і узгодженні елементів.
151
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Засоби і методи оптико-електронного подавлення
Засоби оптико-електронного подавлення (ОЕП) призначені для ведення радіоелектронної боротьби в оптичному діапазоні час-
тот. Об’єктами ОЕП є оптико-електронні засоби (ОЕЗ) забезпечення бойових дій, що здійснюють пошук і виявлення особового
складу, озброєння і військової техніки, розпізнавання і виділення цілей, наведення на них зброї. Крім того, засоби ОЕП застосову-
ються для ураження зору особового складу і для маскування об’єктів у відповідних діапазонах частот.
Засоби ОЕП впливають на чутливі елементи (ЧЕ) оптико-електронних приладів. Ступінь заподіюваного збитку залежить від рі-
зних факторів: механізму поразки (розплавлювання матеріалу, електричний пробій ЧЕ тощо); часу впливу; довжини хвилі випро-
мінювання; параметрів оптичних приладів (коефіцієнтів пропускання, відбиття тощо); фізичних властивостей матеріалів, застосо-
вуваних у конструкціях приладів (наприклад, теплопровідності); наявності й конструкції пристроїв охолодження ЧЕ та ін.
З погляду можливості використання як систем оптико-електронного подавлення лазерних засобів, їх можна розділити на насту-
пні основні категорії.
1. Прилади, що не є безпосередньо засобом ОЕП, але потенційно можуть вирішувати задачі ОЕП. Це лазерні дальноміри, цілев-
казівники (у тому числі портативні), а також тренажери й імітатори стрілецької та іншої зброї.
2. Лазерні системи і засоби, призначені для виявлення (за відбитим випромінюванням) оптико-електронних приладів противни-
ка і їх ОЕП або функціональної поразки. Крім того, такі засоби можуть застосовуватись для ураження органів зору особового скла-
ду. Основу таких систем і засобів будуть складати оптико-електронні прилади, що працюють у видимому та ІЧ діапазонах елект-
ромагнітного спектра.
3. Високоенергетичні системи, призначені для силової поразки оптичних елементів, приймальних трактів РЕС, а також носіїв
цих приладів. Системи такої зброї можуть мати значні масогабаритні характеристики. Вони створюються на основі лазерів і потуж-
них генераторних приладів (виркаторів, гиротронів та ін.).
4. Джерела інтенсивного некогерентного випромінювання оптичного діапазон} спектра До них відносяться прожектори, поту-
жні лампи-спалахи тощо. Такі пристрої можуть мати малі габарити і масу (менш 10 кг), працювати в імпульсному і безперервному
режимах генерації некогерентного випромінювання. При впливі на органи зору людини вони викликають втрату орієнтації в прос-
торі. Крім того, можуть застосовуватися одноразові засоби (оптичні боєприпаси), що генерують потужні імпульси квазікогерентно-
го випромінювання.
На даний час за рубежем інтенсивно розробляються бортові авіаційні системи ОЕП, що дозволяють виводити з ладу оптико-
електронні прилади шляхом їх подавлення або функціональної поразки лазерним випромінюванням. Оптико-електронне подав-
лення представляє собою комплексний вплив на оптико-електронну систему, у результаті якого вона втрачає здатність виконувати
цільову задачу протягом необхідного інтервалу часу. Функціональна ОЕ поразка - вплив на оптико-електронну систему, у ре-
зультаті якого відбуваються необоротні зміни її елементів і вона цілком втрачає здатність виконувати цільову задачу.
Засобами оптико-електронної протидії системам наведення зброї вирішуються задачі: зменшення інформації про об’єкт на ос-
нові зниження рівня енергії його випромінювання в оптичному діапазоні частот і погіршення відбиваючих властивостей; зсуву
точки націлювання ракети від об’єкта наведення на основі використання додаткових джерел випромінювання - ІЧ уловлювачів і
оманних цілей; поразки основних елементів оптико-електронних систем (ОЕС) за допомогою штатних або спеціальних лазерних
засобів.
Як уловлювачи і оманні цілі застосовуються світлові бомби малого калібру, що скидаються, на парашутах, факел яких утво-
рює довгострокове і потужне джерело ІЧ випромінювання і уводить ракету від цілі.
Для подавлення лазерних систем самонаведення ракет, снарядів і авіаційних бомб розроблений спосіб лазерного підсвічування
хибної цілі з об’єкта, що атакується. При виявленні лазерного опромінення об’єкт, що атакується, направляє свій більш потужний
лазерний промінь на іншу ціль і такий спосіб дезорієнтує оптичну голівку самонаведення (ОГСН). Однак цей спосіб є малоефекти-
вним, якщо лазерне випромінювання підсвічування кодується імпульсами визначеної послідовності, а в ОГСН реалізований алго-
ритм амплітудно-часової селекції цілей.
У найближчій перспективі оманні цілі будуть створюватися голографічним методом. Для цього передбачається використовува-
ти голограму реальної цілі, лазерне джерело підсвічування та екран, на який проектується зображення. У якості екрану можуть
використовуватися хмари або димові завіси.
Засоби ОЕП можуть застосовуватися для впливу на зір людини. Оптична система ока людини беззавадно пропускає і фокусує
на сітківці випромінювання видимі (довжина хвилі від 0,39 до 0,78 мкм) і ближньої області ІЧ діапазону спектра (до 1,4 мкм). Око
людини представляє собою оптичну систему, що фокусується, з коефіцієнтом підсилення близько 200. Випромінювання ІЧ і види-
мого діапазонів електромагнітного спектра, що потрапляє на сітківку ока, можуть викликати короткочасне осліплення, кровотечу і
термічні опіки, що призводять до втрати зору. Погроза ураження сітківки істотно зростає при проход женні випромінювання через
різні оптичні прилади (приціли, біноклі тощо).
Наявність на озброєнні лазерних систем буде вчиняти психологічний вплив на противника, що полягає в постійному чеканні
можливого ураження органів зору. Ступінь ураження органів зору лазерним випромінюванням можна розподілити на три основні
категорії: тимчасове осліплення, що супроводжується втратою здатності ока сприймати яскравість, контрастність і колір об’єктів;
фізичне руйнування (“випалювання”) сітківки при фокусуванні на неї випромінювання, що перевищує максимально припустимий
рівень. Найбільшу небезпеку для сітківки ока представляє випромінювання з довжиною хвилі від 0,39 до 1,4 мкм; “випалювання”
роговиці і склоподібного тіла ока, що призводить до втрати їхньої прозорості або деформації поверхні. Воно викликається випромі-
нюванням з довжиною хвилі більш 1,5 мкм, що у принципі вважається менш небезпечним, тому що для ураження ока потрібні
рівні щільності енергії (потужності) випромінювання на кілька порядків більше, ніж для діапазонів довжин хвиль 0,39 - 1,4 мкм.
На ступінь ураження ока лазерним випромінюванням впливають багато факторів, зокрема довжина хвилі випромінювання,
тривалість імпульсів, загальний час і режим (імпульсний, частотний або безперервний) впливу й ін. Навіть при бічному (не за опти-
чної осі) влученні в око лазерного випромінювання і точковому “випалюванні” сітківки ураження може поширюватися на перифе-
152
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
рійні області за рахунок великих крововиливів, викликаних надмірним тепловим нагріванням або фотохімічними процесами. Для
нанесення такого ураження органам зору досить випромінювання потужністю кілька міліватів у безперервному режимі або кілька
мікроджоулів енергії в імпульсі тривалістю декілька наносекунд.
Маскування в оптичному діапазоні спектра. Власне випромінювання об’єкта в більшості випадків носить тепловий харак-
тер. Для зменшення теплового випромінювання застосовуються спеціальні маскувальні екрани, що закривають найбільш нагріті
деталі, присадки в паливо, що знижують температуру вихлопних газів і газових струменів, теплоізолюючі матеріали. Як пасивні
засоби протидії оптичним, лазерним, телевізійним і 14 системам наведення зброї можуть також використовуватися аерозолі з ви-
значеними фізико-хімічними властивостями (маскуючі, високотемпературні, світлорозсіюючі, поглинаючі та інші). Ефективність
аерозолю характеризується площею поверхні, що може бути схована за допомогою 1 кг аерозольного засобу.
Для зменшення відбиваючих характеристик і контрастності об’єктів застосовується спеціальне фарбування й ек-
рани, що переломлюють напрямок поширення хвиль оптичного діапазону. На теперішній час активно розробляють-
ся методи створення спотвореного візуального сприйняття об’єкта, які базуються на так названому “ефекті хамеле-
она”. Цей ефект полягає в зміні кольору і насиченості фарбування об’єктів у залежності від часу доби, колірної гам-
ми фону і температури навколишнього середовища. Його застосування планується для маскування одягу,
військових об’єктів, зброї, транспортних засобів тощо. Крім того, цей ефект може досягатися активним способом,
шляхом накладення на поверхню об’єкта зображення фону, яке динамічно змінюється. Це досягається використан-
ням датчиків, що реєструють колір і освітленість місцевості, на фоні якої рухається об’єкт, що маскують, і наступ-
ним відтворенням цих параметрів на поверхні об’єкта за допомогою спеціальних решіток активних елементів.
3.12.4. Способи ведення РЕП та їх ефективність
Основні критерії оцінки ефективності засобів і способів РЕП
Ефективність засобів і способів РЕП оцінюють за чотирма основними критеріями: інформаційному, енергетичному, тактично-
му і економічному.
Інформаційний критерій використовується для порівняльної оцінки якості завад. Він дозволяє визначити ефективність завади
і її стійкість до мір завадозахисту.
Ефективність маскуючіх завад за цим критерієм звичайно оцінюється в порівнянні з білим шумом. Найбільш повно маскуючі
властивості завадового сигналу х(1) описуються багатомірною ентропією
Нп(х) = -?••• Трп(х1>--->хп)1о§2Рп(хі>•••,ХП)СІХ|...дхп , (3.265)
-ОО -00
дерп(х|,...,хп) -багатомірнащільність імовірності.
Ефективність маскуючої завади оцінюється співвідношенням
Ке^ = , (3.266)
де Нпбш = 2ТД£макс 1о&2 72^еРб.ш ~ 2ТД£максНбш ~ багатомірна, Нб.ш - одномірна ентропії; Рб.ш- потужність квазібі-
лого шуму тривалістю Т і обмеженою шириною спектра Д£макс •
Іноді маскуючі властивості завади характеризують відношенням ентропійної потужності Ре реального шуму до його середньої
потужності Рп, тобто К^^Р/Рп. Ентропійною потужністю Ре реального шуму називається потужність білого шуму, ентропія якого
дорівнює ентропії реального шуму Н|(х). Ентропійна потужність визначається виразом
1
Рб.ш=Ре=^е ’ (3.267)
де Н| - одномірна ентропія реального шуму, що у даному випадку прирівнюється до ентропії білого шуму.
Властивості маскуючої завади залежать також від ступеня рівномірності її спектра, що може бути оцінена спектральним коефі-
цієнтом якості
8П(Д£П)
Кякс= - п , (3.268)
^п.макс
де 8П (ДГП) - значення спектральної щільності завади при £ = ДГП; Д£п - еквівалентна ширина спектра завади,
00
ДГП = [ 8П (Г)сіГ / 8П макс ; 8амакс - максимальне значення спектральної щільності.
О
При оцінці імітуючих властивостей завади застосовується різниця умовних ентропії випадкових параметрів, що імітуються,
корисного сигналу і відповідних параметрів завадового сигналу. Найкраща імітація досягається при рівності нулю цієї різниці.
Енергетичний критерій застосовується для порівняння енергетичних можливостей завадових сигналів щодо подавлення за-
даного РЕС. Для порівняння вводиться коефіцієнт подавлення Кп = (Рп вх / Рс вх )мін , що визначає мінімальне відношення
потужностей Рп і Рс завади і сигналу на вході приймача, що подавляється, у межах його смуги пропускання, при якому настає зада-
153
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
ний ступінь подавлення РЕС. Кількісно ступінь подавлення характеризується зниженням імовірності виконання своїх функцій РЕС,
що подавляється. Значення Кп залежить від виду завади, способу обробки сигналів у РЕС та інших факторів. Енергетичний крите-
рій відрізняється від інформаційного тим, що він вимагає знання конкретних характеристик РЕС, що подавлюється, і засобів РЕП.
Тактичний критерій призначений для оцінки повноти виконання задачі засобом РЕП і радіоелектронною системою (засо-
бом), що подавляється, та дозволяє реалізувати порівняння різних засобів і способів РЕП. Найбільш повною кількісною характерис-
тикою тактичного критерію є імовірність виконання конкретної задачі. Іншими показниками тактичної ефективності засобів РЕП
можуть бути: збільшення помилок визначення місцеположення цілей, збільшення часу виявлення об’єкта на фоні завад та інші.
Економічний критерій служить для оцінки засобів РЕП за відношенням їх вартості до ефективності. Він використовується
при створенні і застосуванні засобів РЕП. Оптимізація засобів РЕП за економічним критерієм полягає у визначенні оптимальних
параметрів завадових сигналів, потужності передавача завад, діаграми спрямованості та інших характеристик апаратури РЕП при
наявності ряду обмежень за масою, об’ємом і вартістю.
При застосуванні засобів РЕП за допомогою економічного критерію оцінюється відносна доцільність застосування засобів РЕП
і вогневої поразки для рішення однієї і тієї ж задачі.
Коефіцієнт подавлення і рівняння РЕП для радіолокаційних засобів
При оцінці ефективності засобів і заходів РЕП за енергетичним критерієм ступінь подавлення оглядових РЛС шумовими зава-
дами оцінюється через імовірності рпв і рхт правильного виявлення і хибної тривоги при виявленні РЛС корисних сигналів. Для
цього використовуються криві виявлення. Виходячи з необхідного ступеня подавлення РЛС, на кривих виявлення визначаються
критичні значення Рив і Ркт На їхній основі знаходиться коефіцієнт подавлення, як відношення однобічної спектральної щільності
8П завади до енергії Ес корисного сигналу:
КП = 8П/ЕС. (3.269)
Для випадку подавлення імпульсної РЛС із когерентною оптимальною обробкою N імпульсів з невідомими амплітудою і поча-
тковою фазою прямошумовою завадою коефіцієнт подавлення можна визначити за наближеною формулою:
ґ Р N
к П « N « т----------с . (3.270)
к Нс.вх 7МІН >8Рх т _ |
\І£Рп.в 7
Для урахування якості завадового сигналу, наявності схем завадозахисту і втрат в РЛС, звичайно вводиться мультиплікативний
поправочний коефіцієнт виду
Х=*вт, (3.271)
^ЯК
де Кет- коефіцієнт втрат у РЛС при обробці сигналу (1^ < 1); К^.- коефіцієнт якості маскуючої завади, що враховує її власти-
вості за інформаційним критерієм і ступінь стійкості стосовно схем завадозахисту.
Підвищення Кж досягається раціональним вибором ширини спектра, рівня обмеження, коефіцієнта й індексу модуляції та ін-
ших параметрів завади.
Якщо є макет або модель РЛС, коефіцієнт подавлення, види і параметри завад можуть визначатися дослідним шляхом. Для
цього на вхід приймального пристрою РЛС подається корисний сигнал і фіксується його потужність Рсвх. Потім туди ж уводиться
завада, потужність якої збільшується доти, поки на екрані РЛС позначка цілі не сховається на фоні шуму. Граничне значення поту-
жності завад РПГр заміряється. Зміною параметрів завади домагаються мінімального значення відношення Ригр / Рсвх = Кп.
Найбільша відстань між РЛС, що подавляється, і станцією завад, на якій система РРТР засобу РЕП виявляє і розпізнає РЛС із
заданою якістю, називається максимальною дальністю гіимжс дії засобу РЕП (дальністю РРТР). Для передавачів загороджуваль-
них завад, що не мають власних систем РРТР, під максимальною дальністю дії розуміється така відстань між РЛС і передавачем
завад, на якій потужність завади на вході приймача РЛС, що подавляється, досягає значення його реальної чутливості.
Мінімальною дальністю дії (дальністю подавлення) засобу РЕП називається відстань до РЛС, на якій ступінь її подав-
лення досягає заданого значення. Дальність гпми визначає границі зони подавлення, тобто тієї області, у межах якої організовані
завади ефективні. Для знаходження гИІЛН використовується рівняння РЕП, що зв’язує параметри РЕС, що подавляється, і засобу
РЕП.
Рис. 3.119. Схема створення завад РЛС
154
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
(3.272)
На рис. 3.119 наведена схема створення завад для випадку подавлення РЛС, коли станція завад (СП) і ціль (Ц), що прикриваєть-
ся, рознесені в просторі. При цьому якщо знехтувати загасанням радіохвиль в атмосфері і природними шумами, відношення поту-
жності завади до потужності сигналу на вході приймача РЛС у межах його смуги пропускання можна визначити виразом:
Р ґі
к= ппц-47гГ2(Р,є)упКг,
Рс^СГПаЦ
де Рп і Рс—потужності передавачів станції завад і РЛС; 6П - коефіцієнт підсилення передавальної антени засобу РЕП у напрямку
на РЛС, що подавляється; Сс - коефіцієнт підсилення антени передавача РЛС у напрямку на ціль; ац - ефективна площа розсіюван-
ня цілі; гп і гц - дальності від РЛС до станції завад і цілі, що прикривається; Е(Р,є) - функція, що описує нормовану діаграму спрямо-
ваності антени РЛС, що подавляється, за полем; р і є - кути, що характеризують кутовий зсув станції завад щодо напрямку на ціль
(тобто відносно максимуму діаграми спрямованості РЛС) у горизонтальній і вертикальній площинах відповідно;
* 2
[КОсо);\((о)асо
Кг
(3273)
[8п(со)(ісо
- коефіцієнт, що враховує зниження потужності завади за рахунок різниці спектра завади і корисного сигналу; К(]со) - пере-
давальна функція фільтра, погодженого з корисним сигналом; 8п(со) - спектральна щільність завади.
При прямокутній амплітудній частотній характеристиці фільтра зі смугою пропускання Арр, рівномірному спектрі завади сму-
гою АГП і АГф<АГп, коефіцієнт Кг дорівнює Кг=АГф/АГп. Поляризаційний коефіцієнт уп визначається кутом Фе між векторами
Е п і Е с електричного поля завади та корисного сигналу. Якщо завада має випадкову поляризацію з рівномірною щільністю роз-
поділу кута Фе, то уп = 0,5.
При заданому енергетичному потенціалі Рп х Оп засобу РЕП і постійній відстані гп до постановника завад, відношення К змен-
шується зі скороченням відстані гц до цілі, що прикривається. Якщо ціль Ц и станція завад СП сполучені, то в міру наближення
передавача завад до РЛС ефективність завад падає (зменшується відношення завада/сигнал). Це відбувається внаслідок того, що
при наближенні станції завад до РЛС на вході приймача РЛС потужність корисного сигналу зростає швидше, ніж потужність зава-
ди (потужність завади оберненопропорціональна- г2 , а потужність сигналу - Гц ).
Завада наносить заданий інформаційний збиток у випадку, якщо К > Кп. Границя ефективності завади визначається рівністю
Р ґї
" П2Ц 4лЕ2(р,Є)їпКг = Кп ,
^с^сгпац
яке називається рівнянням РЕП (рівнянням протирадіопокації). З рівняння РЕП знаходяться границі зон подавлення і визнача-
ється наряд сил і засобів РЕП.
Якщо ціль Ц і станція завад СП сполучені (реалізується самоприкригтя), то гп = Гц, Р2(р,є) = 1. Рівняння РЕП спрощується:
_ 4лРпОпупК(- 2
Кп" РГ " П ’
З (3275) можна визначити дальність подавлення (мінімальну дальність г^н):
(3274)
(3275)
(3276)
= т1
Гпмін =ГЦ2 4ЛРпС"У"КгЕ(р,Є).
II.Міг! Ц ‘•і тг '
Границя зони подавлення в горизонтальній площині представляє собою коло радіуса г^н, у центрі якого розташована РЛС,
що подавляється.
Вирішуючи (3.274) відносно Гц, можна знайти границю (радіус) відкритої зони:
— и/ Гп^п^с^с^ц
Г“'^4яРп6пупКгЕ2(Р,Є) ’
Під відкритою зоною розуміється простір навколо РЛС, у межах якого цілі на фоні завад спостерігаються.
Рівняння РЕП дозволяє також визначити величину ефективного сектора подавлення РЛС, тобто сектора, у межах якого цілі
2
на фоні завад не спостерігаються. Для цього рівняння РЕП вирішується відносно Е (Р, є) в горизонтальній площині:
(3.277)
? КпРсСсо„г2
Р2(Р)= п с с ц п
(3278)
При відомій діаграмі спрямованості РЛС знаходять корінь трансцендентного рівняння Г2(р) - Н = 0. Внаслідок парності функції
Р(р) ефективний сектор подавлення 0п дорівнює 0п=2р. Приклад графічного рішення цієї’ задачі для Е=10‘2 показаний на
рис. 3.120.
Для наближеного рішення цієї задачі в межах головного пелюстка можна скористались апроксимацією діаграми спрямованості
антени РЛС функцією:
155
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМІ ОЗБРОЄННЯ ППО
Е2(Р) = ехр
(3.279)
де 9о>5 - ширина діаграми спрямованості антени РЛС на рівні половинної потужності.
При цьому
(3.280)
За допомогою рівняння РЕП можна визначити необхідний енергетичний потенціал РП6П засобу РЕП. Для цього з тактичних
міркувань задаються значеннями гп, гф 9П, які підставляються в рівняння
р 0 КЛСЛгп
” П 4тгГцР2(0,5Єп )ЇпКг
Знаючи, наприклад, залежність енергетичного потенціалу засобу РЕП від гц, можна для різних способів бойового застосування
засобів РЕП оцінювати радіуси відкритих зон конфронтуючих РЛС.
(3.281)
Рівняння РЕП для командних радіоліній управління і радіоліній зв’язку
Особливістю визначення коефіцієнта подавлення в цьому випадку є те, що передавач радіосигналу (РП) і його приймач (РПр)
рознесені в просторі (рис. 3.121) на відстань г^. Засіб РЕП (СП) приймає сигнали передавача (на дальності г^), а завади створює
приймачу на дальності гп.
Рис. 3.121. Схема побудови завад КРЛУ та лініям радіозв’язку
156
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Під коефіцієнтом подавлення Кп командних радіоліній управління (КРЛУ) і радіоліній зв’язку шумовими завадами розуміється
мінімально необхідне відношення (Ргькк І Розмін, при якому із заданою імовірністю виключається можливість прийому інформації
приймачем радіолінії, що подавляється.
Рівняння РЕП у цьому випадку (рівняння протирадіозв’язку) має вигляд:
Р С г2
(3282)
*с с Гп
де Ер(Р,є) - діаграма спрямованості антени радіоприймача за полем; РС6С - енергетичний потенціал передавача КРЛУ або лінії
радіозв’язку.
Інші позначення відповідають введеним вище.
За допомогою (3.282) можна оцінити, наприклад, енергетичний потенціал засобу РЕП, необхідний для подавлення командної
радіолінії управління ракетою. Припустимо, що траєкторія ракети коректується командами радіолінії на початковому етапі польоту
та за сигналами бортової РЛС у районі зустрічі з ціллю. Припустимо також, що К„ = 1, уп = 1 і створюється завада, прицільна за
несучою частотою, ДГГІР = Д£ге тобто Кг= 1.
Для порушення процесу наведення ракети треба розімкнути контур командного радіоуправління ракетою до того, як здійснить-
ся виявлення і захоплення цілі її РЛС. При цьому мінімальна дальність подавлення т^ повинна бути принаймні рівною максима-
льній дальності Грлс Дії РЛС ракети, тобто гп м;н = гРдС • При цьому якщо покласти (Зс = Оп = 1, Е(Р,є) = 1, то з рівняння протираді-
озв’язку випливає
Рп - Рс (гРЛс/грп •
Необхідний енергетичний потенціал засобу РЕП визначається виразом:
(3.283)
(3.284)
' Гп V РС6С
< ГРП > Рр (р»є)
При подавленні КРЛУ з вузькими діаграмами спрямованості приймальних антен завади діють за бічними пелюстками, внаслі-
док чого потрібний енергетичний потенціал РПСП зростає на декілька порядків.
Способи ведення РЕБ
За характером впливу на об’єкти РЕП розрізняють три основні способи ведення РЕБ: вибіркове подавлення; групове подав-
лення; вибірково-групове подавлення.
Перший з них застосовується при наявності достатньої кількості апріорної інформації й ефективної радіо- і радіотехнічної роз-
відки як при плануванні, підготовці, так і при веденні радіоелектронної боротьби. Другий - при малій кількості апріорної інформації
про супротивну сторону і наявності великої кількості сил і засобів РЕБ. Третій спосіб припускає сполучення перших двох.
За характером захисту своїх об’єктів розрізняють наступні способи, показані на рис. 3.122 на прикладі застосування літакових
засобів РЕП: самоприкрипя (рис. 3.122, а), завади здійснюється з борту об’єкта, що захищається (літака); групове прикриття
(рис. 3.122, б), завади здійснюється з борту спеціального літака, який летить у складі групи; прикриття напрямків прориву з зони
баражування (рис. 3.122, в), завади здійснюється з борту літака, що знаходиться поза групою, що захищається.
Одним із основних завдань, що розв’язуються засобами активних завад, є зниження зони дії РЕС: для РЛС - це зменшення да-
льності виявлення цілей, для засобів радіоуправління зброєю і військами - зменшення зони наведення і управління.
Рис. 3.122. Способи бойового застосування засобів активних завад
Можливості засобів активних завад щодо зменшення дальності виявлення РЛС при кожному способі їх застосування будуть рі-
зні і можуть оцінюватися розмірами відкритої зони, вирази для оцінки радіуса якої наведені вище. На рис. 3.123 наведений приклад
визначення радіуса відкритої зони за заздалегідь побудованими графіками для кожного із способів прикриття.
За такими графіками можна визначити щільність потужності завади р = РпСгп /Д£п , необхідну для заданого скорочення раді-
уса відкритої зони.
157
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рис. 3.123. Приклад визначення радіуса відкритої зони графічним методом
При виборі способів ведення РЕБ важливу роль відіграють визначення ефективного сектора подавлення і прогнозування куто-
вих розмірів цілей. Методика визначення ефективного сектора подавлення наведена вище (базується на застосуванні рівняння про-
тирадіолокації). Визначення кутових розмірів цілі особливо важливе при плануванні групового прикриття. Вважається, що групова
ціль прикривається, якщо ефективний сектор подавлення 0п> аа1квво де максимальний кутовий розмір цілі. Кутові розміри
цілі ссц залежать від лінійних розмірів / і відстані гц від РЛС до цілі:
„ /
ац = 2агсі§
2ГЦ
(3.285)
На рис. 3.124 показані графіки, що ілюструють процес визначення відстані К, з якої може бути прикрита завадами групова ціль
при прикритті з бойових порядків (Кц) і з зон баражування (Кщ) при гп = 75 км.
Рис. 3.124. Приклад визначення відстані прикриття цілі
Супротивна сторона для подавлення РЛС вогневих комплексів ППО може використовувати перший спосіб (спосіб індивідуа-
льного захисту), для приховання складу груп ударних літаків - другий, для приховання напрямку удару і складу груп ударних літа-
ків при їх перебуванні в дальній зоні РЛС - третій.
При подавленні ліній радіоуправління і радіозв’язку також можуть реалізовувалися індивідуальний або груповий вплив (з бойо-
вих порядків або з зон). Для прогнозування їх ефективності використовується рівняння протирадіозв’язку. При цьому будуються
так звані зони радіозв’язку, наведення авіації, радіоуправління тощо в умовах завад. Чим менше ця зона, тим ефективніше спосіб
застосування засобів завад.
Способи застосування засобів пасивних завад (ЗПП). При подоланні системи ППО у ВПС закордонних держав передбача-
ються три способи застосування ЗПП: безперервне викидання, хаотичне викидання, разове викидання (стріляння) значної кількості
пачок ЗПП.
При безперервному викиданні ЗПП на маршруті польоту реалізується безперервний викид пачок з темпом, що забезпечує
одержання необхідної кількості пачок ЗПП на 100 м шляху. При цьому створюється смуга, у межах якої маскуються всі літаки, що
158
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
знаходяться в ній. Цей спосіб застосування призначений для приховання складу, бойового порядку і маршрутів польоту ударних
груп літаків.
При хаотичному викиданні пачки ЗПП викидаються з хаотичною періодичністю всіма літаками, що знаходяться в зоні дії
РЛС ППО. При цьому застосовуються пачки з різним часом розкриття. У результаті на екранах індикаторів РЛС формується вели-
ка кількість помилкових відміток, що ускладнюють розпізнавання цілей.
При разовому викиданні пачок ЗПП із літака за короткий проміжок часу викидається значна кількість пачок ЗПП із мінімаль-
ним часом розкриття (звичайно супроводжується маневром літака). Цей спосіб застосовується при подоланні зони поразки ЗРК і
захисту літака під час атаки винищувачами противника. При цьому досягається зрив супроводження літака радіолокаційною стан-
цією управління ракетами “земля-повітря” або “повітря-повітря” у результаті перенацілювання на хмару ЗПП.
3.125. Радіоелектронний захист радіоелектронних систем і засобів
Захист радіоелектронних систем і засобів (РЕС) управління військами (силами) ППО і зброєю від навмисних, ненавмисних ра-
діоелектронних завад та інших випромінювань, від зброї, яка сама наводиться на випромінювання, досягається застосуванням орга-
нізаційних і технічних заходів забезпечення завадозахищеності.
Завадозахищеність (33) характеризує здатність РЕС виконувати задачі з необхідною якістю при впливі завад. Завадозахище-
ність РЕС визначається їх прихованістю щодо розвідки і завадостійкістю.
Під прихованістю розуміють здатність РЕС виконувати покладені на них задачі, залишаючись при цьому невиявленими сис-
темами радіоелектронної розвідки (РЕР)супротивної сторони. Звичайно розрізняють енергетичну, структурну й інформаційну при-
хованість РЕС.
Енергетична прихованість характеризує здатність РЕС протистояти мірам, спрямованим на виявлення сигналів розвідуваль-
ними приймальними пристроями. Кількісною мірою енергетичної прихованості звичайно є умовні імовірності помилок виявлення
сигналів РЕС апаратурою розвідки.
Структурна прихованість характеризує здатність РЕС протистояти мірам РЕР, спрямованим на розкриття структури сигналів
(розпізнавання форми, визначення видів і параметрів модуляції, способів кодування сигналів, застосовуваних видів передачі).
Інформаційна прихованість характеризує здатність РЕС протистояти мірам, спрямованим на розкриття змісту інформації, пе-
реданої за допомогою сигналів.
Завадостійкість (ЗС) характеризує здатність РЕС виконувати покладені на них задачі при впливі ненавмисних і навмисних (ор-
ганізованих) завад. Для підвищення завадозахищеності застосовуються організаційні та технічні заходи.
До організаційних заходів радіоелектронного захисту (РЕЗ) відносяться: підготовка розрахунків до роботи в умовах завад;
застосування спеціальних способів ведення бою в умовах завад; оптимальне розміщення РЕС на місцевості й в угрупованнях; роз-
поділ робочих і запасних частот, комплексне використання різних РЕС для виконання бойових завдань; організація збору й оброб-
ки інформації від різних джерел тощо.
Технічні заходи, способи і засоби підвищення 33 реалізуються в принципах побудови радіоелектронних засобів і систем, у
способах передачі, прийому й обробки сигналів, а також у принципах і схемах захисту від завад. їх реалізація заснована на викорис-
танні відмінностей корисних сигналів РЕС від радіозавад за формою сигналів, їх часовими, частотними, поляризаційними, просто-
ровими параметрами, за характером змін цих параметрів та іншими технічними ознаками.
Основними технічними заходами, способами і засобами захисту від завад є: одержання необхідного відношення сиг-
нал/завада в приймачах РЕС; застосування широкосмугових сигналів та їх накопичення в радіоприймальних пристроях; запобіган-
ня перевантаження приймальних пристроїв; селекція (виділення) і фільтрація сигналів; застосування різних видів і параметрів мо-
дуляції, способів кодування сигналів, видів передачі; завадостійке кодування; використання випромінювань засобів завад для одер-
жання інформації про цілі та ін.
Одним з найважливіших заходів радіоелектронного захисту є забезпечення електромагнітної сумісності РЕС.
3.12.6. Електромагнітна сумісність радіоелектронних систем і засобів
Проблема електромагнітної сумісності (ЕМС) обумовлена, з одного боку, збільшенням кількості і номенклатури радіоелект-
ронних систем та засобів (РЕС), з іншого боку - обмеженими можливостями використання діапазонів радіочастот.
Під електромагнітною сумісністю розуміють такий стан функціонування сукупності РЕС, при якому ці системи та засоби і
пристрої, які входять до їх складу, можуть функціонувати з припустимим погіршенням їхніх робочих характеристик. Електромагні-
тна сумісність забезпечується вибором відповідних характеристик РЕС, а також організаційними заходами щодо їх просторового,
частотного і часового розносів.
На даний час широко ведуться дослідження, спрямовані на розробку критеріїв електромагнітної сумісності РЕС різного при-
значення і методів оцінювання результатів одночасного впливу на РЕС різних видів випромінювань, що заважають.
Основні принципи і порядок використання радіоспекгра
Основні особливості радіоспекгра як природного ресурсу:
радіоспектр використовується, але не витрачається. Це дає можливість виділяти ділянки радіоспекгра для нових об’єктів науки і
техніки за рахунок перерозподілу смуг частот, раніше закріплених за різними службами;
радіоспектр використовується на основі урахування взаємозалежних просторових, часових і частотних факторів. На одній і тій
же ділянці радіоспекгра можуть працювати одночасно РЕС у декількох географічних зонах. Для кожної географічної зони радіови-
промінювання регламентуються за часом і частотою;
159
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
радіоспектр є міжнародним ресурсом. Розподіл частот будь-якою державою підпорядковуються загальному порядку, обумов-
леному міжнародними угодами.
Вважається, що радіоспектр використовується нераціонально, якщо за його допомогою вирішуються задачі, які можна було б
реалізувати іншими засобами. При використанні радіоспекгра виходять з передумови, що будь-які рішення щодо розподілу спектра
радіочастот повинні враховувати можливості їх подальших змін. Основною причиною змін можуть бути або створення нових тех-
нічних засобів, що дозволяють більш ефективно використовувати радіоспектр для рішення визначених завдань, або соціально-
економічні фактори, що призводять до появи нових або розширення наявних потреб у радіочастотах.
Основні принципи використання радіоспекгра:
за правильністю використання радіочастот існуючими службами здійснюється безперервний контроль. При зміні умов або по-
яві нових технічних рішень окремі служби перемішуються на інші, менш насичені ділянки радіоспекгра. Перевага у використанні
радіоспекгра віддається тим службам, що не можуть бути забезпечені іншими засобами. Службам, що забезпечують державну або
суспільну безпеку, радіочастоти виділяються в першу чергу. Служби, для яких використання радіоспекгра не є єдино можливим
засобом, але економічно доцільним, задовольняються радіочастотами в останню чергу;
нові служби розглядаються з погляду їх потенційної значимості, радіочастоти їм виділяються в технічно придатних частинах
спектра, в окремих випадках - за рахунок переміщення менш важливих служб. До питання про виділення широких ділянок діапа-
зону в недостатньо освоєних областях спектра підходять з урахуванням того, що в майбутньому можуть бути відкриті нові, більш
ефективні методи використання цих областей частот;
при проектуванні РЕС характеристики передавачів, приймачів, антен та інших технічних елементів вибираються з урахуванням
особливостей використання робочих частот. Вони вибираються таким чином, щоб радіоспектр використовувався найбільше ефек-
тивно. При цьому проводяться попередні узгодження щодо реалізації частот замовниками і розроблювачами РЕС з відповідними
офіційними адміністративними частотними органами.
Основою розподілу частот є загальна доцільність, що базується, насамперед на урахуванні технічних міркувань, доповнених
доводами нетехнічних фахівців. При рішенні питань розподілу частот враховуються взаємні завади, до яких відносяться складні
комбінаційні складові пристроїв модуляції, побічні випромінювання генераторів електромагнітних коливань, випромінювання в
напрямку бічних і задніх пелюстків діаграм спрямованості антен, випадкові випромінювання електричних пристроїв.
Оскільки електромагнітні коливання поширюються за межами території окремих держав і торкаються інтересів багатьох країн,
використання радіоспекгра грунтується на міжнародних угодах. Найбільш значимими міжнародними організаціями, пов’язаними з
розподілом і використанням радіочастот, є Міжнародний союз електрозв’язку, Міжнародний спеціальний комітет з радіозавад,
Міжнародний комітет з морських радіозв’язків, Міжнародна наукова радіоспілка, Міжнародна організація цивільної авіації, Євро-
пейський союз радіомовлення. Питання розподілу радіочастот вирішує Міжнародний союз електрозв’язку. Він є органом ООН зі
штаб-квартирою в Женеві і містить у собі наступні основні органи: Генеральний секретаріат, Повноважну конференцію (верховний
орган союзу), Адміністративну радіоконференцію, Адміністративну конференцію з телеграфії і телефонії, Міжнародний комітет
реєстрації частот (МКРЧ), Міжнародний консультативний комітет з радіо (МККР), Міжнародний консультативний комітет з теле-
графії і телефонії (МККТТ).
Основним міжнародним документом з питань розподілу радіочастот служить “Регламент радіозв’язку”, прийнятий Адміністра-
тивною конференцією радіозв’язку в Женеві в 1959 році і частково переглянутий пізніше на міжнародних конференціях радіо-
зв’язку. Цей регламент містить положення щодо використання радіочастот і роботи радіослужб, розподілу частот і порядку їхнього
застосування, норм на радіовипромінювання, заходів боротьби проти радіозавад, правил роботи окремих радіослужб та ін. Основне
місце в “Регламенті радіозв’язку” займає ‘Таблиця розподілу частот між 10 кГц і 275 ГТц”.
Згідно з “Регламентом радіозв’язку” для розподілу частот земна куля розділена на три райони: у район 1 входять усі країни
Європи й Африки, а також Монголія, азіатська частина території колишнього СРСР і частина території Туреччини. Район 2 вклю-
чає Північну і Південну Америку та Гренландію. Район 3 охоплює Австралію, Океанію і країни Азії, за винятком азіатської частини
території колишнього СРСР, Монголії і частини території Туреччини.
У “Регламенті радіозв’язку” розрізняються три поняття: розподіл, присвоєння і виділення частот або смуг частот. Поняття
“розподіл” відноситься до служб, поняття “виділення” - до зон або країн, поняття “присвоєння” - до станцій.
Якщо та сама смуга частот присвоюється декільком службам, то в таблиці спочатку вказуються “первинні”, потім “дозволені” і,
нарешті, “вторинні” служби. При складанні планів розподілу частот первинні служби мають переважне право вибору частот перед
дозволеними. Засоби дозволених служб не повинні створювати завади РЕС первинних служб, але користуються перевагою стосов-
но станцій вторинних служб. Станції вторинних служб не повинні створювати завад станціям первинної і дозволеної служб, не
мають права висувати претензії до завад від станцій первинної або дозволеної служб, однак можуть висувати такі претензії до ін-
ших станцій вторинної служби.
Класифікація і коротка характеристика діапазонів радіочастот і радіохвиль
Спектр електромагнітних коливань охоплює частоти приблизно від 10'3 до ІО^Гц. Електромагнітні коливання від 3 Гц до
З 000 ГТц відносяться до радіочастот. Спектр радіочастот звичайно розбивається на 12 діапазонів. У табл. 3.20 наведена класифі-
кація, що відповідає “Регламенту радіозв’язку”. Кожен із діапазонів включає частоти від 0,3' Ю14 до 3- 10і4 Гц, де N = 1,2,..., 12-
номер діапазону.
В окремих випадках під діапазоном радіочастот розуміється область частот з іншими частотними границями, обумовленими
організаційними або технічними міркуваннями. Часто вводиться поняття смуги радіочастот, тобто області радіочастот, що є час-
тиною одного діапазону або частиною суміжних діапазонів радіочастот.
160
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Таблиця 3.20
Класифікація діапазонів радіочастот і радіохвиль
№ діапаз. Найменування діапазону Границі діапазону
за частотою за довжиною хвилі за частотою за довжиною хвилі
повне скорочене
1 Край низькі частоти КНЧ Декамегаметрові хвилі З-ЗОГц 100000-10000 км
2 Наднизькі частоти ННЧ Мегаметрові хвилі ЗО-ЗООГц 10000-1000 км
3 Інфранизькі частоти ІНЧ Гектокілометрові хвилі ЗОО-ЗОООГц 1000-100 км
4 Дуже низькі частоти днч Міріаметрові хвилі 3-30 кГц 100- 10 км
5 Низькі частоти НЧ Кілометрові хвилі ЗО-ЗООкГц 10- 1 км
6 Середні частоти СЧ Гектометрові хвилі 300-3 000 кГц 1 000- 100м
7 Високі частоти ВЧ Декаметрові хвилі 3-30 МГц 100-10м
8 Дуже високі частоти двч Метрові хвилі 30-300 МГц 10-1 м
9 Ультрависокі частоти УВЧ Дециметрові хвилі ЗОО-ЗООО МГц 100-10см
10 Надвисокі частоти нвч Сантиметрові хвилі 3-30 ГГц 10-1 см
11 Край високі частоти квч Міліметрові хвилі ЗО-ЗООГГц 10- 1 мм
12 Гіпервисокі частоти гвч Дециміліметрові хвилі ЗОО-ЗООО ГГц 1 -0,1 мм
На даний час активно освоюються електромагнітні коливання не охоплювані радіочастотними діапазонами. До них насамперед
відносяться інфрачервоні, видимі оптичні, ультрафіолетові, рентгенівські і у-промені.
В міру укорочення хвилі стає усе більш істотним квантовий характер електромагнітних коливань і в меншій мірі виявляються їх
хвильові властивості. Тому електромагнітні коливання оптичного діапазону називають променями і поділяють їх на піддіапазони,
наведені в табл. 3.21.
Таблиця 321
Піддіапазони оптичного діапазону
№ піддіапазону Найменування піддіапазону Границі піддіапазону
за частотою за довжиною хвилі
1 Інфрачервоні промені далекого піддіапазону 3- ЗОТГц 104-1(Г5м
2 Інфрачервоні промені ближнього піддіапазону 30- 400 ТГц 1(Г5-0,76-10* м
3 Видимі промені 400 - 750 ТГц (0,76-0,4)10* м
4 Ультрафіолетові промені ближнього піддіапазону 750-3 000 ТГц 0,4-10*- 10’7м
5 Ультрафіолетові промені далекого піддіапазону 3 000- ЗООООТГц КУ7-10*м
Відповідно до міжнародної системи одиниць СІ для частот і довжин хвиль введені наступні одиниці виміру:
для частот:
1 кГц (кілогерц) = КРГц;
1 МГц (мегагерц) = 106 Гц;
1 ГГ ц (гігагерц) = 109 Гц;
1 ТГц(терагерц) = 10,2Гц;
для довжин хвиль:
1 мкм (мікрометр) = ІО^м;
1 нм (наномегр) = 10‘9 м;
1А (ангстрем) = Ю’10 м;
1 пм (пікаметр) = 10'12 м.
Електромагнітні коливання характеризуються наступними основними параметрами: довжиною хвилі X (м); частотою коливань
Г (Гц); періодом коливань Т (с); фазою ер; круговою частотою ш (Гц); швидкістю поширення світла с (м/с). Між ними існують на-
ступні залежності:
Х = сТ; Г = 1Т; со = 2тгГ; ср = аЯ; (с = 3-108м/с) . (3.286)
Різні ділянки спектра радіочастот мають різні властивості. Ці відмінності обумовлюють різниці в апаратурі, що функціонує в рі-
зних діапазонах:
Смуга частот від 10 до 200 кГц може забезпечити глобальне, безперервне географічне покриття опроміненням і відрізняється
порівняно високою завадостійкістю стосовно іоносферних збурювань. Ці частоти придатні для зв’язку з підводними об’єктами. За
рахунок високих потужностей на частотах 10 - ЗО кГц можуть бути реалізовані великі дальності зв’язку. Сигналами з частотами від
30 до 200 кГц забезпечується зв’язок на відстань порядку 1 600 - 3 300 км. Однак цій смузі частот властивий високий рівень атмос-
ферних та індустріальних завад і на ній може бути реалізована порівняно мала пропускна здатність. Для зв’язку в цій смузі потрібні
громіздкі антенні системи (висотою порядку 300 м) і великі потужності передавачів.
У смузі частот 10 - 200 кГц розміщаються служби радіонавігації, радіолокації, радіомовлення, фіксована, морська рухома і
служба стандартних частот. Передбачається також передача сигналів часу шляхом накладення їх на сигнали РЕС на смузі частот
14 - 30 кГц. Ця ділянка спектра радіочастот добре пристосована для зазначених служб через велику дальність передачі і високу
досяжну точність. Морські рухливі служби використовують частотний діапазон 10 - 200 кГц головним чином для зв’язку берего-
вих станцій з корабельними.
161
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
В смузі частот 200 - 3 000 кГц зв’язок ведеться за допомогою поверхневих радіохвиль. Однак у нічний час існує також іоно-
сферне поширення, особливо в області високих частот. Внаслідок цього зростає дальність поширення сигналів і одночасно утво-
рюються завади для радіоліній, що використовують поверхневі хвилі.
Ця смуга частот приділяється службам радіонавігації, радіомовлення (525 - 1 605 і 2 300 - 2 498 кГц), фіксованій, морській ру-
хомій (415 - 490 і 510 - 525 кГц), стандартних частот, повітряної радіонавігації (255 - 415 кГц), морської радіонавігації (285 - 315 і
405 - 415 кГц). Ділянка частот 490 - 510 кГц виділена для передачі сигналів небезпеки і виклику рухомої служби. У більшості ра-
йонів ділянки частот 525 - 1 605 кГц і 2 300-2 498 кГц настільки насичені, що вночі, коли переважають завади, що поширюються
просторовою хвилею, вільний від завад прийом ряду станцій стає практично неможливим. У багатьох країнах починаються кроки
щодо переведення повітряної рухливої служби в діапазон декаметрових хвиль.
Діапазон частот 3-30 МГц розподілений між 12-ма службами, в основному радіозв’язку. Це пояснюється тим, що РЕС, які
працюють у цьому діапазоні, виходять технічно простими і мають відносно малу вартість. Можливість відбиття радіохвиль від
іоносфери забезпечує зв’язок як на великих, так і на малих відстанях. При цьому необхідні значно менші рівні полужності переда-
вачів і більш прості антени, ніж на раніше розглянутих смугах частот. Однак цьому діапазону властиві й деякі недоліки. Один з них
пов’язаний зі зміною параметрів іоносфери в залежності від часу доби, сезону і фази 11-річного циклу сонячної активності. Ліни
радіозв’язку в цьому діапазоні піддаються впливу атмосферних завад і впливу селективних завмирань, що виникають через багато-
разові відбиття від іоносфери і багатопроменеве поширення радіохвиль. Іоносферні збурювання призводять також до перерв
зв’язку. Щоб забезпечувався безперервний зв’язок при змінах параметрів іоносфери, необхідно працювати на декількох частотах.
Найбільша частина діапазону 3-30 МГц виділена фіксованій службі. Крім того, у цьому діапазоні функціонують повітряна і
морська рухлива служби, для яких складені погоджені в міжнародному масштабі частотні плани. Для служби радіомовлення в ра-
йоні 1 виділено одинадцять дискретних частотних смут. П’я гь ділянок частот віддано радіоаматорам. Служба стандартних частот
користується також п’ятьма ділянками, що можуть застосовуватися і для передачі сигналів єдиного часу.
Смуга частот 30-1 000 МГц характеризується зменшенням ефекту іоносферного поширення і перевагою механізму' поши-
рення усередині тропосфери і проникнення крізь іоносферу. Ефективність поверхневих хвиль різко знижується. Виявляється диф-
ракція як навколо поверхні Землі, так і навколо клиноподібних завад. На низькочастотній частині цієї смуги частот можуть форму-
ватися поля завад через відбиття від іоносфери. На частотах до 60 МГц помітну роль відіграє іоносферне розсіювання. Усі види
поширення, за винятком (частково) тропосферного розсіювання, забезпечують передачу сигналів із шириною смуги частот у декі-
лька мегагерц. Тропосферне розсіювання забезпечує надійну' передачу' інформації на відстань до 800 км, а при наявності одного і
більше ретрансляторів - до декількох тисяч кілометрів. Іоносферне розсіювання обмежується вищою частотою порядку' 25 - 60
МГц при мінімальній дальності близько 1 300 км, досить високій надійності і порівнянних з діапазоном 3-30 МГц швидкостях
передачі інформації.
В цій смузі частот функціонують засоби радіонавігації, радіолокації, радіометеорології, радіоастрономії, сигналів стандартних
частот і часу. Цей діапазон використовують також служба ЧМ радіомовлення, рухлива служба, космічна служба, служби радіонаві-
гації і радіометеорології за допомогою штучних супутників Землі, фіксована служба. Служба радіомовлення, у тому числі й телеба-
чення, наданий час займає до 50 % спектрального простору зазначеної смуги частот.
Смуга частот 1 - 10 ГГц є основною для багатьох РЕС. Радіохвилі цієї смуги частот поширюються практично в межах прямої
видимості, піддані поглинанню в атмосфері, відбиваються від опадів, землі та води.
Приблизно 18 % частот цієї смуги виділено службам радіонавігації на первинній основі або спільному використанні, близько
30% частот надано радіолокаційній службі, ділянка близько 4 500 МГц відведена фіксованій і рухливій службам. Крім того, ця
смуга частот використовується службами радіометеорології, радіоастрономії, радіонавігації за допомогою ШСЗ і рядом інших
служб. Розробка тропосферних ліній зв’язку сприяє розвитку техніки фіксованих служб за межами прямої видимості на відстані до
800 км. У цьому діапазоні забезпечується ефективне функціонування широкосмугових ліній зв’язку і телебачення.
Серед частот понад 10 ГГц найбільш вивченою на даний час є смуга від 10 до 40 ІТц. Фізичні властивості поширення радіо-
хвиль в цій смузі обмежують дальність радіозв’язку межами прямої видимості. На втрати поширення хвиль істотно впливає кіль-
кість опадів.
В смузі частот 10 - 40 ГТц функціонують різні сучасні і перспективні РЕС, у тому числі радіорелейні, радіолокаційні, радіонаві-
гаційні, радіоастрономічні, космічні, аматорські служби, апаратура наукового і медичного призначення.
Фізичні властивості спектра в діапазоні 40 - 300 ГГц наданий час активно вивчаються. Можна припускати, що подальший роз-
виток радіослужб буде зв’язаний значною мірою із використанням вільного поки діапазону частот вище 10 ГГц.
Взаємні завади РЕС
Взаємними завадами називаються завади, обумовлені взаємним впливом випромінювань різних радіоелектронних засобів і
систем. Взаємний вплив РЕС може бути безпосереднім або через проміжні ланки. Взаємні завади поділяються на пасивні та актив-
ні. Пасивні взаємні завади створюються в результаті перевідбиття (наприклад, у горах) електромагнітних коливань, випромінюва-
них іншими РЕС. Активні завади є результатом безпосереднього впливу випромінювань даного РЕС на інші РЕС. За характером
впливу взаємні завади поділяються на маскуючі та імітуючі.
Іноді до групи взаємних відносять індустріальні (промислові) завади, що створюються колекторними електричними машинами,
двигунами і трансформаторами, електромеханічними комутаційними пристроями і реле, електрозварювальними апаратами, місь-
ким і залізничним електротранспортом, системами запалювання автомобільного і мотоциклетного транспорту і т.ін.
При оцінці можливого впливу взаємних завал на ефективність функціонування РЕЗ насамперед приймаються до уваги рівні і
спектри основних і неосновних випромінювань радіопередавачів, а також випромінювання гетеродинів приймачів. Не менш важ-
ливе значення має урахування чутливості і смуг пропускання приймачів по основних і неосновних каналах.
До основних випромінювань передавачів відносяться випромінювання, що знаходяться в межах смуги частот, необхідної для
передачі даного виду повідомлень або сигналів. Необхідною смугою випромінювання називається мінімальна ширина смуги
162
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
частот при заданому виді випромінювань, що забезпечує передачу сигналів зі швидкістю і якістю, обумовленими умовами функці-
онування даного радіоелектронного засобу або системи.
Неосновні випромінювання передавачів - випромінювання поза межами необхідної смуги випромінювання. Вони підрозді-
ляються на побічні та позасмугові.
Побічні випромінювання передавачів - широкий клас випромінювань, рівні і спектр яких визначаються нелінійними проце-
сами або іншими високочастотними процесами випадкового характеру в цих пристроях. Як правило, виникнення побічних випро-
мінювань не пов’язано з керуванням коливаннями. Однак при випромінюванні з подавленням несучої в ході модуляції можуть
виникати побічні випромінювання. Характерними побічними випромінюваннями передавачів є випромінювання на гармоніках і
субгармоніках, а також комбінаційні, паразитні й інтермодуляційні випромінювання. Рівні побічних випромінювань виміряються у
вихідних трактах або в полі випромінювання передавачів.
Випромінювання на гармоніках - побічні випромінювання на частотах, кратних частотам основного випромінювання. Дже-
релами гармонік у передавачах є їхні високочастотні каскади.
Амплітуда п-ої гармоніки імпульсного сигналу обчислюється через амплітуду імпульсу А:
Ап=Аа , (3.287)
де Зп- коефіцієнт розкладання періодичної функції (сигналу) у ряд Фур’є. Для періодичної послідовності прямокутних імпуль-
сів з періодом Т і тривалістю і; значення коефіцієнтів визначаються
~ д Т; 8Іп(7ГпТі/Т)
а п = 2 А — —у п 7 < . (3.288)
т лпТі/Т
Зменшення рівня випромінювання гармонік досягається їх фільтрацією проміжним і антенним контурами. Коефіцієнт фільтра-
ції для сучасних схем може складати від декількох сотень до декількох тисяч. Використовуються також фільтри нижніх частот, що
включаються, як правило, між проміжним контуром і антеною. Для боротьби з випромінюваннями на парних гармоніках у каска-
дах передавачів застосовуються двотактні схеми. На високих частотах ослаблення випромінювання на гармоніках здійснюється
хвилеводами і коаксіальними фільтрами.
Випромінювання на субгармоніках характеризуються смугами частот, меншими в ціле число раз щодо частот смуги основ-
ного випромінювання. Субгармоніки виникають у передавачах з помножувачами частоти. Для боротьби із субгармоніками поліп-
шують вибірковість помножувальних каскадів і оптимізують режими їхньої роботи. Крім того, субгармоніки фільтруються промі-
жним і антенним контурами. Для ослаблення випромінювання на субгармоніках застосовуються фільтри верхніх частот, що вклю-
чаються між проміжним контуром і антеною передавача.
Комбінаційні випромінювання - побічні випромінювання, що виникають при формуванні коливань основного випроміню-
вання шляхом нелінійних перетворень допоміжних коливань. Комбінаційні випромінювання утворяться в діапазонних передава-
чах, збудники яких формують сигнали заданої довжини хвилі із сітки дискретних частот, що створюється системою кварцевої ста-
білізації частоти. Наприклад, при змішанні двох коливань з частотами і Г2 виникає комбінація сум і різниць гармонік цих частот,
що можуть потрапляти в смугу пропускання приймача:
± т£] ± п£2 = Го ± 0,5Д£п р, (3.289)
де т, п - цілі числа; Го- несуча частота; А^ - смуга пропускання приймача.
Паразитні випромінювання не пов’язані з формуванням основних коливань. їх виникнення звичайно випадкове і обумовлене
ненавмисним самозбудженням елементів РЕС. Розповсюдженими способами усунення паразитних випромінювань є або зміна
параметрів ланцюга, що впливає на умови самозбудження, або введення у відповідний ланцюг додаткового загасання.
Інтермодуляційні випромінювання виникають у передавачах при впливі на них випромінювань інших передавачів, функціо-
нально або конструктивно з ними пов’язаних, наприклад, при одночасній роботі на одну антену або на антени, розташовані в безпо-
середній близькості одна від одної. У таких умовах електромагнітні коливання одного передавача впливають на вихідний каскад
іншого. У результаті взаємодії з’являються інтермодуляційні коливання з комбінаційними частотами. Для зменшення рівня інтер-
модуляційних випромінювань застосовують спеціальні пристрої узгодження, розв’язки і фільтрації.
Позасмугові випромінювання передавачів - неосновні випромінювання навколо смуги випромінювання передавача. Вони
виникають у ході модуляційних процесів у передавачі. Модуляція може бути як процесом, необхідним для передачі даного виду
повідомлень або сигналів, так і процесом, обумовленим паразитною дією фону, флуктуаційного шуму і т.ін.
При оцінюванні рівня і спектра позасмугових випромінювань враховується ширина смуги випромінювання (ШСВ), займана
даним передавачем. Ширина смуги випромінювання - ширина смуги частот, за нижньою і верхньою межами якої середні поту-
жності, що випромінюються, складають кожна по 0,5 % середньої потужності випромінювання даного передавача Якщо основне
випромінювання в межах необхідної смуги частот містить 99 %, а позасмугові випромінювання - 1 % середньої потужності випро-
мінювання передавача, то такий розподіл характеризує так зване досконале випромінювання. У більшості випадків передавачі ма-
ють недосконале випромінювання, при якому займана смуга випромінювання більше необхідної. Іноді через зниження якості пере-
даного сигналу займана ШСВ буває менше необхідної смуги випромінювання.
Для зменшення позасмугових випромінювань передавачів РЕС систем радіозв’язку звичайно прагнуть: застосовувати найбільш
ефективні види модуляції, що забезпечують мінімально необхідну смугу частот; знижувати девіацію частоти для ЧМ випроміню-
вань; максимально використовувати режим однієї бічної смуги; забезпечувати оптимальні види фронтів телеграфних сигналів при
роботі в режимах амплітудної і частотної телеграфії. Для звуження спектра сигналів імпульсних РЛС підбирають імпульси такої
форми, при якій забезпечується компроміс між значенням ШСВ й ефективністю РЛС.
До позасмугових відносяться також шумові випромінювання передавача, що створюються паразитною модуляцією напруги
внутрішнього шуму. Рівень шумових випромінювань збільшується при зростанні коефіцієнта множення частоти. Зменшення рівня
163
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
шуму передавачів систем зв’язку досягається вибором оптимальних кутів відсічення помножувачів, зниженням їх загальної кілько-
сті і застосуванням фільтрів у всіх каскадах передавача.
Індустріальні завади - завади, обумовлені високочастотними випромінюваннями пристроїв промислового, наукового, медич-
ного застосування, і завади, створювані транспортом, що рухається, лініями електропередачі, а також побутовими приладами. Від-
повідно до санітарних норм гранично припустимі рівні напруженості електричного поля від промислових високочастотних устано-
вок складають 20 В/м в смузі частот 105 — З-107 Гц і 5 В/м в смузі частот 3-Ю7-3-Ю9 Напруженість магнітного поля повинна бути
не більш 5 А/м в смузі частот 105 - З -109 Гц.
На електромагнітну сумісність РЕС значно впливають характеристики основного і неосновного каналів прийому.
Основний канал прийому представляє собою смугу радіочастот, що забезпечує прийом основного випромінювання і співпа-
даючу за параметрами зі смугою пропускання приймача. Внаслідок ряду технічних причин, наприклад, недостатньої вибірковості
приймачів, смуга пропускання основного каналу може бути ширше необхідної смуги випромінювання.
Неосновні канали прийому - канали, що знаходяться за межами необхідних смуг випромінювання. Наявність неосновних ка-
налів обумовлюється недостатньою вибірковістю приймачів, нелінійними властивостями змішувачів і підсилювачів, що виявля-
ються в процесі взаємодії прийнятого сигналу і сигналів, що заважають. Неосновні канали прийому підрозділяються на побічні та
позасмугові.
Побічний канал прийому - смуга радіочастот за межами основного каналу прийому, на якій ослаблення завад менше задано-
го для даного пристрою. Побічні канали прийому утворюються в змішувачах внаслідок недостатньої вибірковості трактів, що пере-
дують змішувачам, і нелінійних процесів взаємодії напруги сигналів, що заважають, з напругами гетеродинів. Побічні канали мо-
жуть бути комбінаційними та інтермодуляційними.
Комбінаційні побічні канали виникають у результаті взаємодії напруги сигналів, що заважають, та їх гармонік з напругами
коливань гетеродинів та їх гармонік. На виході змішувача при впливі на нього коливань частоти Г і коливань гетеродина частоти Гг
утворюються коливання комбінаційних частот пГ± 1Г„ де п і 1 - цілі числа. Якщо будь-яка з комбінаційних частот збігається з про-
міжною Гпр, на яку набудовані наступні каскади приймача, сигнал цієї частоти підсилюється й утворюється побічний канал прийо-
му. При Г(» Гпр побічні канали прийому виходять на частотах вхідних коливань
Г|п = ‘к+^пр) (3-290)
п
Дзеркальний канал прийому - побічний канал прийому, середня частота якого відстоїть від частоти настроювання прийма-
льного пристрою на інтервал, рівний подвоєній проміжній частоті, причому частота гетеродина знаходиться посередині цього ін-
тервалу.
Зі збільшенням кількості перетворень частоти в приймачах зростає кількість комбінаційних побічних каналів. Зменшення
сприйнятливості приймачів на комбінаційних побічних каналах досягається підвищенням вибірковості преселекторів, вибором
оптимальних значень проміжних частот, використанням у змішувачах активних елементів, нелінійність яких забезпечує ефективне
перетворення, але недостатня для виникнення комбінаційних каналів високих порядків, та ін.
Інтермодуляційні побічні канали утворюються в результаті взаємодії напруги декількох сигналів, що заважають, та їх гармо-
нік з напругами коливань гетеродинів та їх гармонік. Інтермодуляційні побічні канали з’являються в тому випадку, коли на вході
змішувача є два або більше сигналів, що заважають, з рівнями, достатніми для прояву нелінійних властивостей тракту.
Ослаблення сприйнятливості приймачів до сигналів, що заважають, на частотах інтермодуляційних каналів досягається підви-
щенням вибірковості преселекторів і трактів високої частоти, зниженням нелінійності характеристик змішувачів, зменшенням по-
силення в тракті високої частоти до можливого мінімуму тощо.
Позасмугові канали прийому діють на сусідніх з основним каналом частотах і є причиною перехресних завад і блокування
корисного сигналу. Вони утворюються в підсилювачах високої і проміжної частот у результаті недостатньої вибірковості попере-
дніх трактів, а також нелінійності процесів взаємодії сигналів, що приймаються і що заважають. Перехресні завади виявляються в
модуляції корисного сигналу напругою сигналу, що заважає, несуча частота якого перебуває за межами смуги пропускання при-
ймача. Причинами перехресних завад є нелінійні явища в елементах підсилювальних трактів і в нелінійних резонансних системах.
Блокування корисного сигналу виявляється у зменшенні його рівня або повному подавленні в підсилювальному тракті при дії
сигналу, що заважає, частота якого лежить за межами смуги пропускання приймача.
При роботі в одному районі декількох радіоелектронних систем (засобів) звичайно виникає складна електромагнітна обстанов-
ка. Передавачі декількох РЕС одночасно створюють основні, позасмугові й побічні випромінювання, а приймальні пристрої цих
систем поряд з основними мають неосновні канали прийому.
Електромагнітна обстановка - сукупність електромагнітних випромінювань, що впливають на радіоелектронні системи і за-
соби. Розрізняють зовнішню і внутрішню електромагнітну обстановку стосовно даного РЕС.
Зовнішня електромагнітна обстановка створюється випромінюваннями радіоелектронних пристроїв, засобів і систем, що не
входять до складу даного засобу або системи.
Внутрішня електромагнітна обстановка створюється випромінюваннями пристроїв і засобів, що входять до складу даної
РЕС.
При аналізі електромагнітної обстановки (ЕМО) дція РЕС, що розробляються або встановлені на місцевості, виконуються на-
ступні дії: проводиться аналіз (шляхом статистичної обробки даних) навколишньої ЕМО; оцінюється рівень ненавмисних завад, що
впливають на радіоприймачі, і знаходяться джерела та причини виникнення завад; перевіряється відповідність характеристик РЕС
нормам; вибирається найкращий частотний діапазон і визначаються вимоги частотно-теріггоріального розносу даного РЕС та бли-
зько розташованих засобів; розподіляються частоти для спільної експлуатації РЕС і оцінюється їхня очікувана ефективність у про-
цесі експлуатації. При цьому враховуються: рівні та спектри основних і неосновних випромінювань передавачів даної системи, а
також інших передавачів, які можуть впливати і на приймачі даної системи; випромінювання гетеродинів приймачів; чутливість
приймачів за основним і неосновним канапами прийому; припустимі значення співвідношення сигнал/завада на входах приймачів,
164
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
при яких забезпечується задана якість функціонування пристрою або системи; перевантажувальні характеристики приймачів; кое-
фіцієнти зв’язку між антенами пристрою та інші характеристики.
Принципи захисту РЕС від взаємних завад
ч.
Найважливішими параметрами, що впливають на ЕМС, є ширина смуги частот випромінювань, стабільність частоти радіопе-
редавачів, потужності побічних випромінювань радіопередавачів, рівні внесених індустріальних завад та ін. На ці параметри введе-
ні норми, що є обов’язковими для всіх міністерств і відомств, що розробляють, виробляють і експлуатують радіоелектронні при-
строї, засоби і системи. Дотримання норм та інших обмежень в інтересах ЕМС контролюється спеціальними службами.
Для забезпечення ЕМС радіоелектронних засобів різного призначення застосовуються технічні й організаційні заходи. До них
відносяться: усунення або максимальне ослаблення неосновних випромінювань, застосування випромінювань різної поляризації,
оптимальна фільтрація сигналів, просторовий і частотний рознос РЕС, узгодження роботи РЕС за часом та ін.
Просторовий рознос РЕС - розміщення РЕС на віддаленні одна від одної, що забезпечує нормальну роботу за рахунок ослаб-
лення електромагнітної енергії на відстані. При цьому можливі два варіанти: перший - просторовий рознос РЕС, що мають однако-
ві несучі частоти; другий - просторовий рознос РЕС, що мають різні несучі частоти.
Частотний рознос РЕС припускає поряд із застосуванням різних робочих частот - наявність розв’язуючих частотних при-
строїв, оптимальних фільтрів, а також застосування різних поляризацій. Величина частотної розв’язки характеризується коефіцієн-
том частотного розносу Кч. При Кч—> оо рознесені за частотою РЕС можуть розташовувались в безпосередній близькості одна від
одної.
Часовий рознос РЕС. У тих випадках, коли усунути взаємний вплив заважаючих завад між РЕС за рахунок просторово-
частотного розносу виявляється неможливим, вводиться узгодження їх роботи за часом. Воно досягається: введенням часового
графіка робіт для різних РЕС, виключенням одночасної роботи РЕС на напрямках одна на іншу, введенням заборони на роботу
окремих РЕС на визначені періоди часу, забезпеченням взаємної синхронізації РЕС, що входять у єдине угруповання тощо.
Принципи розрахунку електромагнітної сумісності РЕС
На рис. 3.125 наведена схема виникнення взаємних радіозавад між радіоелектронними станціями декількох радіоелектронних
систем.
Рис. 3.125. Модель виникнення взаємних завад
Для оцінювання радіоелектронної обстановки, визначення умов функціонування РЕС у заданому угрупованні здійснюється кі-
лькісна оцінка електромагнітної сумісності РЕС.
Основні задачі розрахунку ЕМС поділяються на прямі, зворотні та визначення частотного розносу.
При рішенні прямих задач визначається відношення потужності корисного сигналу до потужності завади на вході приймача
РЕС, яке забезпечує функціонування робочої РЕС із заданою якістю при фіксованому просторовому розносі станцій, що заважа-
ють, а також при збігу і розбіжності несучих частот робочої РЕС та станцій (засобів), що заважають.
Зворотні задачі складаються у визначенні просторового розносу між робочою РЕС і станціями заважаючої РЕС, при якому за-
безпечується функціонування робочої РЕС із заданою якістю у випадках збігу і розбіжності несучих частот робочої РЕС і заважаю-
чих станцій.
Задача визначення частотного розносу полягає у визначенні частотного розносу між взаємодіючими РЕС з відомим просто-
ровим розносом, що забезпечує їх функціонування із заданою якістю.
Основною енергетичною характеристикою завадостійкості при рішенні основних задач ЕМС є коефіцієнт завадостійкості К^р,
під яким розуміється мінімально необхідне відношення середньої потужності Рсвх корисного сигналу до середньої потужності Р[ик
завадового сигналу на вході приймача РЕС в смузі пропускання його лінійної частини, при якому забезпечується задана якість фун-
кціонування радіоелектронного засобу або системи:
165
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
КПер “ ( Рс.вх /Рп.вх )мін ’ (3.291)
Кількісні значення Кікр можуть бути визначені тільки при конкретизації типу і характеристик РЕС, виду і параметрів завадових
сигналів.
Взаємні завади не порушують функціонування РЕС за умови
р
Чм= с вх > Кпер , (3.292)
*п.вх
де цм - відношення потужності Р^ корисного сигналу до потужності Рп кч завади на вході приймача.
Тому при рішенні задач ЕМС насамперед необхідно встановити залежність Кікр від параметрів робочої РЕС і пристрою, що
створює йому взаємні завади.
Параметри, що характеризують робочу РЕС: Р^- потужність передавача з урахуванням ККД фідера; 6^- коефіцієнт
підсилення антени передавача; Ьг1Єр^(Рпр,Єпр) - функція, що описує нормовану діаграму спрямованості антени передавача за полем;
коефіцієнт підсилення антени приймача; Ь^ДРІ1Єр,ггкр) - функція, що описує нормовану діаграму спрямованості антени при-
ймача за полем; Аегрлр = - ефективна площа приймальної антени; АГпр.р- ширина смуги пропускання лінійної частини
приймача; Кгкр- коефіцієнт завадостійкості при заданому сигналі, що заважає; г^- відстань між передавачем і приймачем робочої
РЕС; Гроб, Рг^ Єпр- полярні координати приймача робочої РЕС щодо його передавача, кути Р[ір, відраховуються на відповідних
площинах від максимуму спрямованості антени передавача робочої РЕС; г^ Рое^е^- полярні координати передавача робочої
РЕС щодо його приймача, кути Р^ відраховуються на відповідних площинах від максимуму спрямованості антени приймача
робочого радіоелектронного пристрою.
Параметри, що характеризують заважаючі РЕС: Ргср.п - потужність передавача з урахуванням ККД фідера; Сгкрл - коефіці-
єнт підсилення антени передавача; АЕ^- ефективна ширина спектра завадового сигналу; уп- коефіцієнт, що враховує розходжен-
ня поляризації антен передавача заважаючої РЕС і приймача робочої РЕС; коефіцієнт, що враховує зміни заважаючої дії зава-
ди через нерівномірність розподілу у спектрі потужності сигналу і завади, яка створена заважаючою РЕС; Усп - коефіцієнт, що вра-
ховує ослаблення дії взаємної заважаючої завади, через розбіжність несучих частот взаємодіючих пристроїв, а також розходження
між АГ^р і АЕпц,^; ггои відстань між заважаючою РЕС і приймачем робочої РЕС; г^, (3^, є^- полярні координати приймача ро-
бочої РЕС щодо передавача заважаючої РЕС, кути відраховуються на відповідних площинах від максимуму спрямованос-
ті антени передавача заважаючої РЕС; ггюм, р^,,, - полярні координати заважаючої РЕС щодо приймача робочої РЕС, кути
Рперл, єпер.п відраховуються на відповідних площинах від максимуму спрямованості антени приймача робочої РЕС.
При рішенні прямої задачі визначається відношення потужностей корисного сигналу і завади на вході приймача при збігу не-
сучих частот робочої РЕС і заважаючої РЕС
пер.р^пер.р^пер.р(Рпр.р’ єпр.р) гпом^пр.р(Рпер’ єпер)х
1 ХІ0 0’1а(Гроб Гпом
1 пр.п
Х [рпер.п^ пер.п^пер.п (рпр.п ’ Єпр.п ) Гроб^пр.р (рпер.р ’ Єпер.р )/ пУнерУ сп
де а - коефіцієнт, що враховує загасання в атмосфері, дБ/км, при проходженні сигналу від передавача до приймача.
Часто розглянута задача вирішується в децибелах. При цьому вираз (3.293) має вигляд:
Чом “ Ропер.р + ^0пер.р + 2Е()пер.р\Рпр.р>єпр.р/+2г0пом +
+ 2Р()пр.р (Рпер > ^пер ) — а(грОб ~ Гпом )—Ропер п “^Опер.п —
“ ^0 пер.п(рпр.ппр.п)- 2г0роб “ 2Еопр.р(рпер.п>єпер.п)- УОп “УОнер “УОсп »
(3.293)
(3.294)
де індекс “0” символізує те, що розрахунки ведуться в децибелах.
Наведені вирази дозволяють розрахувати відношення цм потужності корисного сигналу до потужності завади на вході приймача
в залежності від параметрів і взаємного розташування робочої і заважаючої РЕС. Порівняння дм і К^ дозволяє встановити наявність
або відсутність електромагнітної сумісності РЕС.
При рішенні зворотної задачі знаходиться просторовий рознос між робочою і заважаючою РЕС, який забезпечує їх ЕМС. При
збігу несучих частот зони електромагнітної сумісності визначаються виразом:
^пер.п (р пр.п » ^пр.п )^пр.п (р пер.п » Б пер.п ) Р пер.п пер.п У п У нерУ СП _ _ _
Гпом Гро6 -------------Г з пер Р ' С---------- • (3-95)
Г'пер.р Хгпр.р > ^пр.р /‘пр.р \Рпер ’ Б пер / V пер.пер.р
Границя зони ЕМС визначається формулою (3.295) при рівності її лівої і правої частин.
Аналогічний розрахунок виконується також д ія випадку, коли РЕС, яка спочатку прийнята за робочу, вважається такою, що заважає,
а та, що заважала - робочою. З двох отриманих значень найбільше приймається за мінімально необхідний просторовий
рознос. Якщо розрахована величина ггюм перевищує відстань прямої видимості Кпрям км=4,12( Ь| + Ь2 ), де Ь| - висота антени
передавача пристрою, що заважає, м, а Ь2 - висота антени приймача робочого пристрою, м, то взаємодіючі РЕС можуть розміщуватись
довільно.
166
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
У тих випадках, коли розрахований мінімально необхідний просторовий рознос перевищує 100 км, при визначенні а повинен врахо-
вуватися вплив тропосферного розсіювання радіохвиль. Для цього вводиться множник ослаблення який обумовлений тропосферним
розсіюванням.
Площа, що опромінюється за рахунок тропосферного розсіювання заважаючої РЕС, у районі розташування робочої РЕС зале-
жить від висоти Н тропосферних неоднорідностей, від яких відбувається відбиття електромагнітних хвиль і кута місця є діаграми
спрямованості заважаючої РЕС:
*Н2ЄрЄе
. 2
81П Є
(3.296)
де 0р, 0є - ширина діаграми спрямованості заважаючої РЕС на площинах р і є, відповідно.
При рішенні прямої і зворотної задач при розбіжності несучих частот робочої і заважаючої РЕС враховується додаткове осла-
блення дії завади. Для цього вводяться додаткові коефіцієнти ослаблення завади у високочастотному тракті увч і в приймачі Ці
коефіцієнти перемножуються з коефіцієнтами уп, Унср, і Усп у виразах (3.293), (3.295) або віднімаються з результату (3.294).
При визначенні частотного розносу, який потрібен, необхідно за виразом (3.293) знайти відношення потужності корисно-
го сигналу до потужності завади на вході приймача при фіксованому просторовому розносі робочої і заважаючої станцій. Після
цього визначається необхідне додаткове ослаблення завади ІС, = яке здійснюється шляхом частотного розносу. За отрима-
ним значенням К.,, за допомогою кривої вибірковості робочого приймача, визначається необхідний частотний рознос між взаємо-
діючими станціями. При повній частотній розв’язці коефіцієнт прагне до нескінченності, а при збігу частот дорівнює 1, тобто
1<Кч<оо.
Розрахунок ЕМС радіолокаційних станцій і систем
При створенні радіолокаційних систем із заданою просторовою структурою інформаційних полів часто виникає задача забез-
печення ЕМС однотипних або різнотипних РЛС, що утворюють такі системи і працюють на загальній смузі частот. При рішенні
цих задач, як і вище, визначається залежність коефіцієнта завадостійкості від параметрів робочої РЛС і станцій, що створюють
їй взаємні завади. Однак задачі такого роду мають свою особливість - розрахунки проводяться щодо відбитого сигналу.
На рис. 3.126 показана модель розташування взаємодіючих радіолокаційних станцій і повітряної цілі Ц.
Рис. 3.126. Схема побудови взаємних завад РЛС
Параметрами робочої РЛС і повітряної цілі є: Р^- потужність передавача робочої РЛС з урахуванням ККД фідера; Ср-
коефіцієнт підсилення антени робочої РЛС; АГГЮ- ширина смуги пропускання лінійної частини приймача робочої РЛС; Е^Рс єс)-
функція, що описує нормовану діаграму спрямованості антени робочої РЛС за полем; К^- коефіцієнт завадостійкості робочої
РЛС для даного сигналу, що заважає; Ар- ефективна площа антени робочої РЛС; ос- ефективна площа розсіювання повітряної
цілі; ґц, Рс Єс - полярні координати повітряної цілі, кути рс і Єс відраховуються на відповідних площинах від максимуму діаграми
спрямованості антени робочої РЛС.
До параметрів заважаючої РЛС відносяться: Р[)срп - потужність передавача заважаючої РЛС; 6П- максимальний коефіцієнт
спрямованої дії* антени заважаючої РЛС; ДГП - ефективна ширина спектра заважаючого сигналу; уп - коефіцієнт, що враховує розхо-
дження поляризації антен робочої і заважаючої РЛС; ЕП(РП, єп)- функція, що описує нормовану діаграму спрямованості антени за-
важаючої РЛС за полем; гп, рп, єп - полярні координати, що заважає РЛС, кути рп і єп відраховуються на відповідних площинах від
максимуму діаграми спрямованості антени робочої РЛС; гп, Рп^ єас- полярні координати робочої РЛС щодо заважаючої РЛС.
Відношення потужностей корисного сигналу і завади на вході приймача робочої РЛС (пряма задача) визначається виразом:
167
РОЗДІЛ 3. ОСНОВИ ТЕОРІЇ ПОБУДОВИ СИСТЕМ ОЗБРОЄННЯ ППО
Рпер.р^рацгп рс (Рс,£с)х 10-О,1а(2гн-гп)
4^ц4рпер.нСпРс2(Рп^П)Рп(Рп.с,£п.с)Упол ^прЖ
(3.297)
де а - коефіцієнт, що враховує загасання в атмосфері (дБ/км) при проходженні сигналу в одному напрямку.
Як і вище, порівняння величин цм і Кпер дає можливість установити наявність або відсутність умов ЕМС робочої і заважаючої
РЛС для конкретного варіанта їхнього взаємного розташування. При заданому енергетичному потенціалі заважаючої РЛС Р^Д. і
постійній відстані гп відношення сигнал/завада на вході приймача робочої РЛС збільшується зі зменшенням гц. Значення Гц, при яких
Чм(г) = Клер, визначають границю області, у межах якої дотримуються умови ЕМС.
Просторовий рознос між робочою і заважаючою РЛС, що забезпечує їх ЕМС на загальній смузі частот (зворотна задача), мо-
жна знайти, нехтуючи поглинанням електромагнітних хвиль в атмосфері (а = 0), з (3.297) і поклавши цм = К^:
_ 2 Рс (Рп>£п)Рп (Рп.с>£п.с) |їг 471Рпер.пЄ пУ п
Рс(Рс,Єс) ї Рпе,РСраЛ
(3.298)
Потім аналогічний розрахунок проводиться при заміні заважаючої РЛС на робочу, а робочої - на заважаючу. З двох отриманих
значень розносу вибирається найбільше.
Необхідно відзначити, що розрахунок впливу ненавмисних радіоелектронних завад можливий тільки'при наявності повних да-
них про джерела завад і робочі РЕС.
168
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Радіотехнічні війська є основним джерелом інформації про повітряну обстановку і призначені для ведення радіолокаційної
розвідки повітряних об’єктів та оповіщення військ.
Завдання радіотехнічних військ: ведення безперервної радіолокаційної розвідки і видача інформації про початок повітряного
нападу; видача розвідувальної радіолокаційної інформації на КП об’єднань (з’єднань) ППО, з’єднань і частин ЗРВ, ВА і РЕБ для
бойового управління; видача бойової радіолокаційної інформації на КП з’єднань, частин і підрозділів ЗРВ, ВА і РЕБ для безпосере-
днього ведення протиповітряних і повітряних боїв та радіоелектронного подавлення (РЕП) радіоелектронних засобів (РЕЗ) против-
ника; видача інформації попередження про повітряного противника органам управління видів Збройних Сил; контроль за польота-
ми (перельотами) своєї авіації; контроль за дотриманням правил використання повітряного простору країни повітряними суднами
усіх відомств та іноземних держав; спостереження за наземною (морською), радіаційною, хімічною та біологічною обстановкою в
районах дислокації радіотехнічних з’єднань (частин).
4.1. Системи і засоби озброєння РТВ ППО
Добування, обробка і видача споживачам радіолокаційної інформації про повітряну обстановку в РТВ ППО досягається
сумісним використанням радіоелектронних систем і засобів різного призначення: засобів радіолокаційної розвідки (радіолокаційні
комплекси і станції, радіолокаційні висотоміри), засобів державної системи радіолокаційного розпізнавання, комплексів засобів
автоматизації (комплекси апаратури автоматизації збору, обробки і відображення інформації на КП з’єднань, частин і підрозділів
РТВ), систем передачі радіолокаційної інформації.
4.1.1. Засоби радіолокаційної розвідки
Засоби радіолокаційної розвідки - основне д жерело інформації про повітряну обстановку.
Засоби радіолокаційної розвідки забезпечують огляд повітряного простору, виявлення повітряних об’єктів (ПО), вимір їх пото-
чних координат та інших характеристик, державне розпізнавання ПО.
На озброєнні радіотехнічних військ перебуває велика кількість різнотипних РЛС, які можна класифікували за такгико-
технічними ознаками, основними з яких є: цільове призначення РЛС (чергового режиму, бойового режиму, виявлення маловисот-
них цілей, спеціального призначення); кількість координат, що вимірюються (однокоординатні (висотоміри), двокоординатні
(дальноміри), трикоординатні (РЛ комплекси); маневреність (стаціонарні, рухомі, мобільні); діапазон хвиль (сантиметровий, деци-
метровий, метровий).
Трикоординатні РЛС визначають повні просторові координати цілей (дальність, висоту і азимут) у сферичній або прямокут-
ній системах координат.
Двокоординатні РЛС визначають похилу дальність до цілі і азимут цілі. Двокоординатні РЛС називаються також радіолока-
ційними дальномірами (РЛД).
Під од нокоординатними РЛС розуміють радіолокаційні висотоміри (рухомі радіовисотоміри - РРВ) і для них класифікаційна
ознака кількості вимірюваних координат не зовсім вдала. У дійсності радіолокаційні висотоміри є трикоординатними РЛС, але
використовуються здебільшого у комплексі з дальномірами, працюють за цілевказанням від них і видають лише інформацію про
висоту цілі. За необхідності радіолокаційні висотоміри можуть використовувались і як самостійні трикоординатні РЛС.
За ознакою маневреності радіолокаційні засоби РТВ поділяються на: стаціонарні, рухомі й мобільні.
Стаціонарні РЛС монтуються у капітальних опалюваних спорудах, де умови експлуатації апаратури значно сприятливіші і за-
вдяки цьому термін експлуатації таких РЛС набагато більший, ніж тих, які розгорнуті на відкритих позиціях. У стаціонарному варі-
анті виконуються, як правило, РЛС чергового режиму і розгортаються вони на тих напрямках, де необхідне постійне чергування.
Рухомими називаються такі РЛС, апаратура яких змонтована в закритих колісних причепах або напівпричепах. Своєї тяги такі
РЛС не мають і для їх передислокації’ необхідні сідельні або дишлові тягачі. Цим значно обмежується їх маневреність. Важливим
показником для таких РЛС є кількість транспортних одиниць. Більшість РЛС чергового і бойового режиму є рухомими.
Мобільні РЛС встановлюються на автомобільних або гусеничних шасі і є найбільш маневреними. Завдяки цьому мобільні
РЛС часто використовуються як засіб оперативного нарощування та відновлення радіолокаційного поля. У мобільному варіанті
випускається здебільш РЛС виявлення маловисотних цілей.
Для виявлення і супроводження повітряних об’єктів, що не є постановниками активних завад, в РТВ застосовуються імпульсні
радіолокаційні засоби. Вимір дальності до повітряного об’єкта засновано на методі вимірювання затримки відбитого від цілі
імпульсу відносно сигналу, що зондує, вимір азимуту - на методі виявлення максимуму пачки ехо-сигналів. Аналіз і обробка по-
точних координат повітряних об’єктів дозволяють одержали похилу дальність, швидкість об’єкту, курс, виявити початок маневру.
Аналіз структури ехо-сигналу може дали відомості про бойовий склад групової цілі.
Для виявлення і супроводження постановників активних завад (ПАЗ) використовуються методи пасивної радіолокації*
(тріангуляційні або базові-кореляційні).
Державне радіолокаційне розпізнавання засноване на сполученні принципів двостороннього автоматичного радіозв’язку і
радіолокації*.
Радіолокаційні засоби забезпечення вогневих комплексів відрізняються від радіолокаційних засобів розвідки більш високою
точністю виміру поточних коорд инат і кращою розрізнювальною спроможністю.
169
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Радіолокаційні засоби розвідки повітряних об’єктів у певних умовах можуть використовуватись для радіолокаційного забез-
печення вогневих комплексів і навпаки, радіолокаційні засоби забезпечення вогневих комплексів - проводити радіолокаційну
розвідку. Радіолокаційні висотоміри можуть за певних обмежень виконувати функції трикоординатних РЛС.
Двокоординатні РЛС (радіолокаційні дальноміри) забезпечують виявлення повітряних об’єктів і визначення їх координат
(азимуту і дальності). Структурна схема імпульсного радіолокаційного дальноміра наведена на рис. 4.1.
Зондування повітряного простору імпульсами електромагнітної енергії забезпечується передавальним пристроєм та антенно-
фідерною системою дальноміра, прийом відбитих сигналів - антенно-фідерною системою і приймальним пристроєм. Прийняті
сигнали відображаються на індикаторних пристроях дальноміра.
Передавальний пристрій формує зондуючі сигнали (гладкі (прості), лінійно-частотно-модульовані, фазокодо-модульовані (ши-
рокосмугові) та ін.). За допомогою фідерного тракту НВЧ енергія зондуючих імпульсів через антенний комутатор підводиться до
антени і випромінюється в простір.
Рис. 4.1. Структурна схема імпульсного радіолокаційного дальноміра
Ширина діаграми спрямованості антени дальноміра в горизонтальній площині складає одиниці або частки градусів. Основний
метод огляду простору в горизонтальній площині - рівномірний круговий огляд, що забезпечується обертанням антени. Огляд про-
стору у вертикальній площині забезпечується використанням декількох антен (антенних каналів) або коливанням антени у вертика-
льній площині.
Швидкість обертання антени вибирається виходячи з необхідної дискретності зняття інформації та одержання достатньої для
нормальної обробки інформації кількості імпульсів у пачці ехо-сигналів:
де Па - швидкість обертання антени, об/хв; Ор - ширина діаграми спрямованості в азимутальній площині, град; Рп - частота по-
вторення імпульсів, Гц; - мінімальна кількість імпульсів у ехо-пачці, яка необхідна для нормального свічення екрана трубки.
Основні параметри передавального пристрою та антенно-фідерної системи: імпульсна потужність генератора НВЧ (Р,);
середня потужність генератора НВЧ (Рф); тривалість зондуючого імпульсу (ті); вид модуляції зондуючого імпульсу; частотний діа-
пазон роботи генератора НВЧ; коефіцієнт підсилення антени (О0); рівень бокових пелюсток; ширина діаграми спрямованості в
горизонтальній і вертикальній площинах на рівні половинної потужності.
Відбиті сигнали приймаються антеною і через перемикач антени подаються на вхід приймача, де здійснюється їх частотна се-
лекція і посилення. Наступна обробка цих сигналів (придушення завад, стиск імпульсів і т.ін.) відбувається в спеціальних пристроях
обробки, із яких вони потім надходять на індикаторні або інші вихідні пристрої та пристрої спряження з КЗА.
Основні параметри приймально-індикаторного тракту: чутливість приймачів; коефіцієнт підзавадової видимості; коефіці-
єнт стиснення імпульсів; динамічний діапазон; пропускна здатність вихідних пристроїв.
Синхронізатор виробляє імпульси запуску, що узгоджують у часі (синхронізують) початок випромінювання зондуючих імпу-
льсів передавача із початком розгортки індикаторів, а також роботу інших систем РЛС. В імпульсних РЛС значення частоти повто-
рення обмежується вимогою виявлення цілей на заданих дальностях.
Максимальна частота повторення імпульсів, що зондують, не може бути більше
с
Рп макс - ТТГ > (4.2)
^^макс^з
де с - швидкість поширення радіохвиль; - необхідна максимальна дальність виявлення РЛС (РЛК); К3 - коефіцієнт запасу
(при розрахунках береться 1,15-1,25).
170
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Для виявлення цілей із заданою імовірністю необхідно прийняти від них і обробити необхідну кількість імпульсів за ОГЛЯД Кмн.
Ця умова визначає нижню межу частоти повторення:
для висотоміра
N мін ДРАє
гпмін — гр а а
1 оглур°є
(4.3)
і для дальноміра
(4.4)
6па с
де Др - сектор огляду за азимутом; Дє - сектор огляду за кутом місця; 0р, 0є - ширина діаграми спрямованості за рівнем поло-
винної потужності на азимутальній і кутомісній площинах відповідно; - період огляду; па - швидкість обертання антени, об/хв.
Радіолокаційні висотоміри призначені для визначення висоти повітряних об’єктів над поверхнею землі і моря. Частіше усього
використовуються автономні висотоміри, що мають апаратуру сполучення з дальномірами, каналами зв’язку і КЗА. В окремих
випадках висотоміри виконуються в неавтономному варіанті і є складовою частиною радіолокаційного комплексу.
Принцип визначення висоти польоту ПО зводиться до виміру нахильної д альності О до нього, кута місця є і рішення рівняння
висоти. У висотомірах підвищеної точності вирішується рівняння з поправкою на рефракцію:
Н-О8ІПЄ + 4-ДН^фр+Ьц ,
(4.5)
де К3 - радіус Землі, км; Ьа - висота електричного центру антени висотоміра, км; ДН^ - поправка висоти на рефракцію
радіохвиль, км;
ДНрефр=41О-7Го,8-|1О-2Те.п 1(Н-50)О2
(4.6)
де Тел - еквівалентна приведена температура, обумовлена тиском, вологістю і температурою середовища на трасі РЛС - ПО; Н,
О - висота ПО і д альність до нього.
Однозначна прив’язка інформації про висоту повітряних об’єктів, що супроводжуються дальноміром, забезпечується видачею
на висотомір сигналів цілевказання (за дальністю та азимутом) від дальноміра, що для даного висотоміра є головним, для чого у
висотомірах передбачається система виміру (індикації) азимуту і дальності цілі. Це дозволяє в окремих випадках при супроводі
малої кількості цілей у круговому огляді або при роботі у вузькому секторі за азимутом використовувати висотомір для виміру
трьох координат.
Трикоординатні РЛС вимірюють три поточні координати повітряного об’єкта. Для них характерна автоматична прив’язка ін-
формації про висоту до площинних координат ПО, що підвищує інформаційні можливості комплексу з одночасного супроводу
великої кількості ПО.
4.1.2. Система державного радіолокаційного розпізнавання
Система державного радіолокаційного розпізнавання (ДРЛР) базується на принципах радіолокації з активним запитом та
відповіддю.
Структурну схему радіолінії показано на рис. 4.2.3 надходженням імпульсу запуску від РЛС (або власного запуску) передавач
запитувача формує сигнал запиту (СЗ), що випромінюється антеною у напрямку відповідача. Сигнал запиту несе у собі ознаку
інформації, що запитується. Повідомлення, що передаються, кодуються в шифраторі.
Сигнал запиту, який прийнятий антеною відповідача, підсилюється у приймальному пристрої. Дешифратор сигналів запиту ви-
діляє ознаку інформації, що запитується і передає її на шифратор сигналів відповіді, який кодує повідомлення відповіді.
Сигнал відповіді (СВ), що сформований передавальним пристроєм відповідача і випромінюваний його антеною, приймається
антеною запитувача і після підсилення у приймальному пристрої надходить на дешифратор сигналів відповіді. Для правильної
обробки сигналів відповіді на дешифратор одночасно з формуванням коду запиту надходить від шифратора ознака інформації*, що
запитується (режиму запиту) або ознака коду відповіді, що очікується. В результаті дешифрацїї з сигналу відповіді витягається за-
питана інформація та формується імпульсний сигнал, що називається в різних системах координатним сигналом (КС) або сигналом
загального розпізнавання, який використовується для визначення координат - азимуту і дальності.
Завдання системи ДРЛР: загальне імітостійке розпізнавання повітряних, надводних об’єктів; загальне неімітостійке розпізна-
вання повітряних, наземних, берегових, надводних об’єктів; індивідуальне розпізнавання повітряних, наземних, берегових об’єктів
за принципом “Де ти?”; індивідуальне розпізнавання повітряних, надводних об’єктів за принципом “Хто ти?”, а надводних - за
принципом “Хто надводний?”; передача з повітряних об’єктів польотної інформації (висота, запас палива, бойовий запас); визна-
чення місцезнаходження повітряних, надводних об’єктів, які зазнають лиха; виявлення та супроводження своїх об’єктів, які не спо-
стерігаються іншими засобами радіолокації.
Елементи системи ДРЛР: літакові радіолокаційні відповідачі (ЛРВ), запитувачі - відповідачі (ЛРЗВ); корабельні радіолокацій-
ні відповідачі (КРВ), запитувачі-відповідачі (КРЗВ); наземні радіолокаційні запитувачі (НРЗ); наземні радіолокаційні відповідачі
(НРВ).
Система умовно поділяється на підсистеми розпізнавання наземних, надводних та повітряних об’єктів.
171
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
За місцерозташуванням об’єктів, що розпізнають, та об’єктів, що розпізнаються, в системі виділяються радіолінн: “земля-літак”,
“земля-корабель”, “корабель-корабель”, “корабель-вертоліт ВМС”, “літак-земля” та інші.
Рис. 4.2. Структурна схема радіолінії
Наземний радіолокаційний запитувач (НРЗ) - наземна частина апаратури ДРЛР, може спрягатися з РЛС по мережах син-
хронізації, обертання антени й індикації (відображення) сигналу відповіді.
Основні показники ефективності системи радіолокаційного розпізнавання:
1. Надійність розпізнавання - здатність системи розпізнавання правильно розпізнавати свої об’єкти із заданою імовірністю в
різних тактичних ситуаціях з урахуванням експлуатаційної надійності засобів, що працюють на радіолініях розпізнавання.
Надійність розпізнавання характеризується імовірністю прийняття рішення “свій” за умови, що об’єкт, який розпізнається, є
свій.
Розпізнавання - процес двохетапний: отримання мітки розпізнавання, прив’язка до відмітки цілі.
2. Імітостійкість - здатність системи розпізнавання забезпечувати правильне розпізнавання “чужих” об’єктів з імовірністю, не
гірше заданої, в умовах імітації ними сигналів системи. Характеризується імовірністю імітації за тактично обґрунтований відрізок
часу.
3. Перепускна здатність - гранична кількість запитувачів і відповідачів, які здатні одночасно працювати в спільній зоні їхньої
дії і забезпечують задану надійність розпізнавання.
4. Прихованість - здатність системи розпізнавання протидіяти спробам противника одержати інформацію про систему або про
об’єкти, які оснащені елементами системи.
Розрізняють енергетичну, структурну та інформаційну прихованісгь.
Енергетична прихованість - здатність системи протидіяти виявленню сигналів.
Структурна прихованість - здатність протидіяти розкриттю параметрів сигналів (частоти, коди, параметри імпульсів та ін.).
Інформаційна прихованість - здатність протидіяти вилученню (одержанню) інформації із сигналів.
4.1.3. Комплекси засобів автоматизації
Комплекси засобів автоматизації (КЗА) радіотехнічних військ ППО призначені для забезпечення оперативності, прихова-
ності та надійності управління підрозділами, підвищення якості радіолокаційної інформації, скорочення термінів її обробки і
доведення до споживачів, прийому від взаємодіючих частин і підрозділів інформації про повітряну обстановку.
КЗА оснащуються командні пункти радіотехнічних з’єднань, частин та підрозділів.
КЗА забезпечують: управління підпорядкованими підрозділами; збір, обробку і видачу радіолокаційної інформації про повіт-
ряну обстановку; збір, передачу та обробку даних про стан бойової готовності підрозділів; видачу радіолокаційної інформації на
командний пункт з’єднання (об’єднання) ППО, командні пункти з’єднань, частин, підрозділів ЗРВ, ВА і РЕБ, прийом і відображен-
ня інформації, що надходить від сусідів, командного пункту з’єднання (об’єднання) ППО і взаємодіючих командних пунктів; доку-
ментування інформації; тренування бойових обслуг.
Комплекс засобів автоматизації КП РТВ будь-якого рівня представляє собою складну систему (рис. 4.3), основними елемента-
ми якої є: керуючий обчислювальний комплекс; апаратура відображення; автоматизовані робочі місця (АРМ); апаратура прийому-
передачі даних (АПД); апаратура документування (АД); апаратура імітації і тренажу (АІТ); апаратура функціонального контролю
(АФК); апаратура (пристрої) спряження з РЛС (ПСС); системи життєзабезпечення.
Основним елементом КЗА, що забезпечує автоматизацію процесів збору, обробки інформації і управління її джерелами, є
керуючий обчислювальний комплекс (КОК). Характеристика і склад КОК визначаються обсягом і складністю вирішуваних
командним пунктом завдань. У залежності від рівня КП до складу КОК може входити від одного-двох спецобчислювачів до
декількох високопродуктивних ЕОМ разом із великою кількістю спецобчислювачів. До складу КОК входять також спеціальні
пристрої для зв’язку (ПЗ) із зовнішніми абонентами (пристрої обміну, канали вводу-виводу) і міжмашинного обміну інформацією,
пристрої зовнішньої пам’яті на магнітних стрічках, барабанах і дисках.
Зовнішні абоненти можуть підключатися до каналів вводу-виводу, безпосередньо або через спеціальні пристрої спряження.
Останні визначають послідовність обміїїу інформацією з зовнішніми абонентами одного конкретного типу, а також можуть
виконувати функції накопичення і найпростішого перетворення вхідної та вихідної інформації.
172
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Апаратура відображення призначена для наочного уявлення процесу обробки радіолокаційної інформації, результатів
обробки, а також прийнятих рішень, команд і розпоряджень. До складу апаратури відображення входять засоби відображення
колективного (великі екрани, табло) і індивідуального (сполучаються з АРМ) користування.
Рис. 4.3. Склад комплексу засобів автоматизації командного пункту РТВ
Апаратура автоматизованих робочих місць є однією з найважливіших складових частин КЗА, саме з них здійснюється бойо-
ва діяльність людини-оператора. Склад і конструкція АРМ залежать від його функціонального призначення і характеру оператор-
ської діяльності людини.
Елементи АРМ: засоби відображення інформації індивідуального користування; органи керування (пульти з клавіатурою, пе-
ремикачами та ін.); кінцеві засоби зв’язку (телефонні, телеграфні апарати та ін.); засоби реєстрації і друкування інформації; засоби
сигналізації*.
Для інформаційного обміну з підпорядкованими, взаємодіючими і старшим КП передбачена апаратура прийому-передачі
даних. Кількість приймачів і передавачів у її складі залежить від кількості джерел і споживачів інформації Інформація з (на) апара-
тури прийому-передачі даних вводиться (виводиться) в (з) КОК безпосередньо або через спеціальний пристрій спряження. Інфор-
мація, що видається споживачам, із передавачів апаратури прийому-передачі даних надходить у канали зв’язку. У якості основних і
резервних каналів зв’язку в КЗА РТВ використовуються провідні, радіо- і радіорелейні.
Апаратура документування зв’язана з каналами передачі даних, КОК, пультами команд і зв’язку АРМ. Вона забезпечує
реєстрацію даних про повітряну обстановку, бойову готовність і бойові дії підпорядкованих військ, а також підсумкових даних, що
представляються у вигляді, зручному для наступного розбору і вивчення.
Апаратура для тренажу і навчання бойової обслуги КП забезпечує можливість тренувань посадових осіб бойових обслуг в
умовах, наближених до бойових, без використання зовнішньої інформації.
Апаратура функціонального контролю зв’язана з усіма основними елементами устаткування КП і призначена для перевірки
справності пристроїв, локалізації відмов, включення резервних засобів.
Апаратура спряження з РЛС входить тільки до складу КЗА КП радіотехнічних підрозділів. У перспективі апаратура
спряження з РЛС із складу КЗА може бути виключена внаслідок перерозподілу функцій між КЗА і РЛС та зміни принципів їх
спряження.
Спільність розв’язуваних автоматизованими КП задач визначає спільність їх тактико-технічних характеристик і єдність
принципів побудови КЗА.
Основні тактико-технічні характеристики КЗА можна звести в декілька груп, що характеризують можливості КП щодо рішення
окремих завд ань.
Можливості з управління підпорядкованими військами характеризуються кількістю керованих командних пунктів,
кількістю взаємодіючих КП, із якими можливий одночасний обмін інформацією, кількістю забезпечуваних КП, а також
можливостями перепідпорядкування та спряження з РЛС (кількість, типи РЛС, способи спряження).
Можливості з обробки радіолокаційної інформації характеризуються пропускною спроможністю (продуктивністю),
складом (повнотою) інформації, що видається, робітним часом КП (часом реакції). Пропускна здатність характеризує максимальну
кількість одночасно супроводжуваних повітряних об’єктів із установленим темпом відновлення по них інформації. Склад
173
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
інформації, що видається, визначає повноту характеристик повітряного об’єкта, що містяться в повідомленнях. Точність
радіолокаційної інформації характеризується середньоквадратичними помилками оцінки координат, швидкості, курсу повітряних
об’єктів. Робітний час характеризує середній час із моменту виявлення повітряного об’єкта або першого повідомлення, що
надійшло про нього, до видачі по ньому першого повідомлення споживачу.
Коефіцієнт проведення повітряних об’єктів
т п т
Кпр=ЇЇД‘мсупр/ЕЛ‘ідіюЧ - (4-7)
І=1 і = 1 І=1
де Дїусупр - інтервал часу стійкого супроводження кожної з т діючих трас у зоні інформаційного забезпечення КЗА;
Діуиюч- інтервал часу наявності кожного з) = 1,..., т повітряних об’єктів.
Коефіцієнт хибних і дублюючих трас
Єї (2 т
К-х.тр “ ( кіх.тр + Аік2дубл.тр ) / А^діюч ’ (4-8)
кІ=І к2=1 т=І
де Дкіхлр~ інтервал часу стійкого супроводження хибних трас, що зав’язуються (СІ - кількість таких трас);
Ді^даоч - інтервал часу дублюючого супровод ження С2 трас (С2 є т).
Середній час існування хибних трас
----- 1
Тх.тр ~~ Е ДЦіх.тр (4.9)
к1=1
Мобільність і готовність КЗА характеризується часом розгортання і згортання апаратури на позиції, часом включення
апаратури і переходом із чергового у бойовий режим, кількістю транспортних одиниць, швидкістю руху. Крім того, готовність КЗА
визначається також його надійністю, що характеризується відповідними показниками (напрацювання на відмову, середній час
відновлення, коефіцієнт готовності та ін.).
Техніко-економічні показники характеризують вартість КЗА в цілому, вартість однієї години роботи, енергоспоживання та ін.
До ергономічних характеристик, що визначають умови роботи осіб бойової обслуги, відносяться насамперед рівень шуму на
робочих місцях, температура, наявність і способи вентиляції тощо.
4.1.4. Системи передачі радіолокаційної інформації
Система передачі даних (СПД) про повітряну обстановку представляє собою сукупність кінцевих пунктів, що з’єднані
каналами зв’язку. Кінцеві пункти СПД входять до складу апаратури КЗА командних пунктів і називаються апаратурою пере-
дачі даних.
Канали зв’язку представляють собою сукупність підсилювальних, комутаційних та інших технічних засобів, що забезпечують
незалежну передачу сигналів по лініях зв’язку між кінцевими пристроями.
Під лінією зв’язку розуміють фізичне середовище (пари проводів, хвилевід світловід та ін.), у якому поширюються сигнали, що
несуть інформацію, і забезпечується зв’язок по одному або декількох каналах.
Класифікація систем передачі даних:
за структурою побудови - лінійна, радіальна, радіально-вузлова, багатозв’язна і кільцева СПД. У РТВ переважне застосування
знаходять радіальні та радіально-вузлові структури;
за типом використовуваних ліній зв’язку - провідні, радіо- і радіорелейні СПД. У КЗА РТВ у якості основних використовують-
ся, як правило, провідні лінії зв’язку, а радіо- і радіорелейні лінії використовуються як резервні;
за швидкістю передачі даних - низькошвидкісні (В < 200 біт/с), середньошвидкісні (200 біт/с < В < 9 600 біт/с) і високошвид-
кісні (В > 9 600 біт/с) СПД. У РТВ переважне застосування знаходять середньошвидкісні системи;
за способом встановлення з’єднання між взаємодіючими командними пунктами - СПД з некомутованими каналами, з комута-
цією каналів і з комутацією повідомлень. У КЗА РТВ використовуються переважно некомутовані канали;
за способом реалізації алгоритму інформаційного обміну - СПД з апаратурним, програмним і змішаним обміном. Спосіб обмі-
ну залежить від можливостей керуючого обчислювального комплексу, типу АПД, кількості джерел і споживачів інформації, а та-
кож від характеру прийнятої і переданої інформації. У сучасних КЗА використовуються переважно програмний і змішаний способи
обміну;
за способом підвищення достовірності передачі інформації - СПД із зворотним зв’язком і СПД без зворотного зв’язку. У нових
і перспективних КЗА перевага віддається більш ефективним системам із зворотним зв’язком.
Якість функціонування систем передачі радіолокаційної інформації прийнято характеризувати наступними показниками: про-
пускною спроможністю, достовірністю передачі повідомлень, надійністю, сумісністю СПД при взаємодії’ різних КЗА.
Під пропускною здатністю каналу зв’язку розуміють ту максимально можливу кількість інформації, що може бути передана
за одиницю часу при необхідному ступені точності передачі. Пропускна здатність при передачі бінарних повідомлень може оціню-
ватися кількістю елементарних імпульсів, що передані за одну секунду.
Достовірність передачі повідомлень характеризує ступінь відповідності прийнятих повідомлень переданим. Кількісно вона
може бути оцінена імовірністю правильного прийому або імовірністю помилкового прийому інформації.
Надійність функціонування СПД визначається коефіцієнтом бойової готовності й імовірністю безвідмовної роботи.
174
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Сумісність СПД багато в чому визначає можливості по взаємодії різних КЗА. Сумісність залежить від ступеня уніфікації АПД,
способів реалізації* алгоритмів інформаційного обміну і т.ін. Найбільші можливості за сумісністю мають СПД із програмним обмі-
ном, які і знаходять із цієї причини усе більше застосування в сучасних і перспективних КЗА і АСУ.
4.2. Тактико-технічні характеристики РЛС РТВ
Тактико-технічні характеристики РЛС РТВ - сукупність кількісних і якісних показників, які характеризують можливості
РЛС щодо розвідки повітряного простору за конкретних умов обстановки і за встановлений час.
Можливості РЛС РТВ залежать від її технічних характеристик, боєздатності, обраних режимів роботи, а також від рельєфу по-
зиції, на якій вона розгорнута, ефективної поверхні цілей, що відбиває, електронної обстановки, складу і рівня підготовки бойової
обслуги, метеорологічних умов та інших чинників. Зміна умов обстановки призводить до зміни можливостей РЛС РТВ. Оцінка
можливостей проводиться стосовно до конкретних бойових завдань і умов їх виконання.
Основні тактико-технічні характеристики РЛС РТВ: зона виявлення; точність вимірювання координат цілей; роздільна
здатність; завадозахищеність; можливості з обробки інформації; характеристики мобільності та готовності до бойового
застосування.
Зона виявлення РЛС
Зона виявлення РЛС - область простору, у межах якої забезпечується виявлення повітряних об’єктів із заданою ефективною
поверхнею, що відбиває, з показниками якості, не гірше заданих.
Параметри зони виявлення РЛС є просторовими показниками можливостей радіолокаційного засобу по виявленню повітряних
об’єктів.
Параметри зони виявлення (ЗВ) для РЛС РТВ: межа ЗВ для повітряного об’єкта з ефективною поверхнею, що відбиває,
(ЕВП) 1 м2 при умовній імовірності правильного виявлення Р,. = 0,5 і умовній імовірності хибної тривоги на елемент розділення
Рхг= Ю"6; мінімальна висота безпровальної проводки повітряного об’єкта; мінімальний є^н і максимальний кути місця ЗВ та ін.
Зона виявлення представляє собою об’ємне тіло складної форми, наочне представлення якого утруднено. Тому на практиці ЗВ
звичайно представляють набором перетинів цього тіла різними площинами.
У РТВ найбільше поширення одержало представлення ЗВ РЛС набором його вертикальних або горизонтальних перетинів: або
ізовисотних, або ізорельєфних.
Ізовисотним називається перетин зони виявлення поверхнею, що проходить на визначеній висоті щодо рівня моря.
Ізорельєфним називається такий перетин, у якого всі його точки розташовані на постійній висоті щодо розміщеної під ними
земної поверхні.
Ізорельєфні перетини використовують при відображенні зон виявлення РЛС для повітряних об’єктів, що летять на малих і гра-
нично малих висотах (як правило, при Нц < 1 200 м). На таких висотах повітряні об’єкти, як правило, летять з огинанням рельєфу
місцевості.
Застосовують і перетини ЗВ вертикальною площиною, що проходить через точку стояння РЛС. Вертикальний перетин ЗВ РЛС
представляє собою плоску фігуру, межі якої показують залежність дальності виявлення повітряного об’єкта заданого типу від кута
місця його візування на визначеному азимутальному напрямку. Приклад перетину ЗВ у вертикальній площині наведений на
рис. 4.4.
Рис. 4.4. Перетин зони виявлення РЛС у вертикальній площині
Параметри зон виявлення РЛС залежать від багатьох внутрішніх і зовнішніх факторів. До основних з них можна віднести: па-
раметри (стан) тропосфери і підстилаючої поверхні, над якою поширюються електромагнітні хвилі; технічні характеристики РЛС, у
175
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
тому числі і форма діаграми спрямованості антени (ДСА) у вільному просторі; тип і параметри руху повітряного об’єкта; наявність і
параметри завад.
Вплив підстилаючої поверхні на параметри і форму ЗВ здійснюється шляхом затінення частини простору елементами
рельєфу (наявністю кутів закриття), а також перерозподілу випромінюваної енергії в просторі, викликаного інтерференцією прямих
і перевідбитих земною поверхнею електромагнітних хвиль. При цьому межі перетинів зони виявлення мають порізаний вигляд.
Найбільший вплив підстилаючої поверхні спостерігається на малих висотах. Зі збільшенням висоти вплив рельєфу на параметри
ЗВ послабляється. Так, наприклад, у районах із середньопересіченою місцевістю на висотах більш 2 км ізовисотні перетини ЗВ
набувають правильної округлої форми.
Вплив тропосфери полягає у скривленні трас поширення електромагнітних хвиль (рефракція) і ослабленні цих хвиль
гідрометеорами і газами за рахунок поглинання і розсіювання енергії. При позитивній рефракції дальність межі ЗВ на малих висо-
тах збільшується, при негативній - зменшується. Поглинання радіохвиль у тропосфері призводить до зменшення дальності вияв-
лення повітряних об’єктів, що найбільш характерно для РЛС сантиметрового діапазону хвиль. У метровому і дециметровому
діапазоні поглинання радіохвиль незначне.
Вплив завад призводить до погіршення відношень “корисний сигнал/завада + шум” і як наслідок - до стиснення ЗВ РЛС.
При відсутності завад і розміщенні РЛС на рівній однорідній поверхні межа горизонтального перетину ЗВ має вид окружності.
У цьому випадку зона виявлення може бути подана у вигляді таблиці значень дальності виявлення (О) повітряного об’єкта із зада-
ною ЕВП на різноманітних висотах його польоту (Н) над поверхнею Землі. Такий спосіб завдання ЗВ використовується у форму-
лярах радіолокаційних станцій та іншій технічній літературі для опису просторових можливостей РЛС з виявлення повітряних
об’єктів.
При табличному зображенні зони виявлення приводяться також значення мінімального є^н і максимального кутів місця,
мінімальної висоти безпровальної проводки цілі і радіуса мертвої воронки (Н^) на максимальній висоті проводки (рис. 4.4).
Зона виявлення РЛС метрового або дециметрового діапазонів хвиль формується за участю земної поверхні. Для формування
ЗВ відповідно до паспортних даних необхідна рівна горизонтальна ділянка навколо РЛС. Розміри цієї ділянки визначаються зонами
Френеля (як правило, розміром першої зони Френеля). У межах даної ділянки відбивається основна частина випромінюваної
енергії, що падає на землю, тому нерівності в межах цієї ділянки призводять до викривлення діаграми спрямованості антени (ДСА)
РЛС, утворення додаткових провалів. Радіус ділянки залежить від висоти електричного центру антени РЛС К, довжини хвилі X і
висоти польоту повітряного об’єкта Нпо щодо точки стояння РЛС. За умови, коли Ьа / Нпо « 0,25 , розміри ділянки можна
визначити за формулою
ь2
К діл [м]« 23,3 (4.10)
А,
При невиконанні цієї умови радіус ділянки визначається, як
Яділ[м] = 4,12727Х2/3 +Ьа -21д/х . (4.11)
Припустимий розмір нерівностей Ин на ділянці не повинен перевищувати:
Ьн < X/(168Іп(0)), (4.12)
де 0 - кут візування нерівностей з електричного центру антени.
Вимоги до розмірів і нерівностей ділянок навколо точки стояння РЛС приводяться в технічній документації до станцій.
РЛС сантиметрового діапазону хвиль не пред’являють жорстких вимог до розмірів і нерівностей позиції (ділянки). Для
зменшення кутів закриття РЛС розміщають, як правило, на пануючих висотах, естакадах, вежах.
Потенційні можливості РЛС за дальністю виявлення повітряного об’єкта на малих висотах при нормальній атмосферній
рефракції радіохвиль і рівній місцевості визначаються за формулою:
Оп[км] = 4,12к(7н; + 7ь;), (4.13)
де К - коефіцієнт використання радіообрію; Нц, Ьа - висоти польоту цілі та підйому електричного центру антени відносно пове-
рхні точки стояння РЛС, [м].
При виборі позиції РЛС для забезпечення максимальної дальності виявлення повітряних об’єктів необхідно забезпечити міні-
мальні кути закриття, що визначаються, як правило, місцевими предметами і рельєфом у ближній зоні.
Гранична дальність виявлення цілей на малих висотах, що може бути реалізована при різноманітних значеннях кута закриття у,
показана на графіку рис. 4.5.
Для збільшення дальності виявлення цілей на малих висотах піднімається електричний центр антени з одночасним нахилом її
фокальної осі на деякий негативний кут місця.
Залежність потенційної дальності виявлення РЛС від висоти польоту цілі і висоти підйому електричного центру антени при
К = 1 показана на рис. 4.6.
Кути закриття для РЛС створюють тіньовий ефект на малих висотах і при розрахунку зони виявлення повинні враховуватися.
Додатковими вимогами до позицій РЛС можуть бути: припустимий нахил (підйом) позиції, мінімальний радіус ділянки навколо
РЛС, висота нерівностей позиції, що не повинна перевищувати значень 1^. Бажано, щоб позиція у відповідальному секторі мала
явно виражений нахил. Якщо нерівності земної поверхні на такому нахилі малі, то нижня межа ДСА РЛС притискається до землі,
що збільшує дальність виявлення повітряних об’єктів на малих висотах.
176
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Реальні зони виявлення РЛС, розгорнутих на позиціях, розраховуються з урахуванням впливу рельєфу місцевості і пе-
ревіряються обльотом. У процесі експлуатації РЛС на даній позиції накопичується статистика у виявленні повітряних об’єктів з
різноманітними ЕВП і при різноманітних висотах їх польоту. На підставі такої статистики зона виявлення повинна уточнюватися.
Рис. 4.5. Залежність максимально можливих дальностей виявлення повітряних
об’єктів на малих висотах від кутів закриття
Рис. 4.6. Залежність потенційних можливостей РЛС з виявлення повітряних об’єктів на малих висотах від висоти
підйому електричного центру антени і висоти польоту літака
Методи розрахунку параметрів зон виявлення РЛС
Розрахунок параметрів зон виявлення РЛС (особливо на малих висотах) з врахуванням рельєфу місцевості є дуже складною і
трудомісткою задачею, яка потребує багато часу, вміння і досвіду.
До кінця 90-х років двадцятого століття, коли ПЕОМ ще не набули широкого застосування у військах, зони виявлення РЛС
розраховували ручними методами, які дуже грубо ураховували вплив рельєфу місцевості та інших факторів на параметри цих зон.
Тому результати розрахунку ЗВ РЛС (особливо над пересіченою, горбкуватою та гірською місцевостями) могли суттєво
відрізнятися від реальних..
177
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Розроблені та реалізовані у військах у вигляді програм методи автоматизованого розрахунку ЗВ РЛС, які з різним ступенем де-
талізації можуть врахувати більшість факторів, що впливають на параметри зон виявлення, значно підвищують достовірність ре-
зультатів і скорочують час розрахунків.
При відсутності у військах обчислювальних засобів використовуються ручні методи розрахунку параметрів ЗВ РЛС. Тому ни-
жче коротко розглянемо ці методи. Ними можна приблизно оцінити параметри ЗВ РЛС у випадку неможливості використання
методів автоматизованого розрахунку. Далі будуть розглянуті принципи автоматизованого розрахунку параметрів ЗВ РЛС.
Розрахунково-експериментальний спосіб визначення параметрів зони виявлення РЛС
Розрахунку зони виявлення передує топографічна обробка позиції, що передбачає побудову профілів рельєфу позиції на різно-
манітних азимутах, визначення кутів закриття і середніх кутів нахилу позиції для тих же азимутів.
Потім за формулою (4.13) для заданої висоти перетину визначається потенційна дальність виявлення РЛС.
З урахуванням потенційної дальності виявлення і кутів закриття за побудованими профілями позиції визначається фактична
дальність виявлення повітряних об’єктів для кожного заданого азимутального напрямку. Для чого на профілі рельєфу позиції’ про-
водяться лінія візування і профіль польоту повітряного об’єкта (з огинанням рельєфу місцевості - для висот польоту нижче 1 200м,
без огинання - для висот вище 1 200 м). Потім знаходяться ділянки, на яких повітряний об’єкт на даній висоті не спостерігається
(коли кут їх візування знаходиться нижче кута закриття). Початок і кінець ділянки позначаються відповідно і К^.
Далі визначається максимальна дальність виявлення повітряних об’єктів О0 на заданій висоті. Якщо О0 > Оп, то приймається
□о = Оп. Таким же чином визначається О0 для інших значень висоти польоту повітряного об’єкта. Отримавши значення О0 і
розміри ділянок, що не оглядаються, на різних висотах, будується вертикальний перетин зони виявлення наданому азимуті.
Подібним чином проводиться побудова вертикальних перетинів розрахункової зони виявлення для інших азимутів. При побу-
дові перетинів зони виявлення РЛС метрового і дециметрового діапазонів враховується поправка на розмір нахилу позиції шля-
хом переносу всіх точок зони виявлення на кут нахилу уц, на цьому азимуті.
Горизонтальні перетини зони виявлення для заданих значень висоти польоту повітряних об’єктів будуються на карті чи блан-
кову, при цьому використовується азимутальне коло, на якому задаються точки, що відповідають уточненим значенням дальності
виявлення на кожному з азимутів. Поєднавши ці точки плавною кривою, одержують зовнішню межу зони виявлення РЛС наданій
висоті. Аналогічним чином знаходяться ділянки всередині ЗВ, утворювані тіньовим ефектом, де не відбувається виявлення
повітряних об’єктів.
Розрахункові значення Оо, потрібно уточнювати обльотом, який проводиться на різних висотах для одного або
декількох азимутальних напрямків у залежності від пересіченості рельєфу в районі дислокації РЛС. Обліт дозволяє уточнювати
фактичну дальність виявлення повітряного об’єкта, значення коефіцієнта використання радіообрію даної РЛС, а також вплив нахи-
лу позиції на параметри зони виявлення.
Для підвищення достовірності експериментальних результатів обліт за заданими маршрутами треба проводити кілька разів,
після чого усереднити отримані результати і перерахувати отриману реальну дальність виявлення повітряного об’єкта для
стандартної ЕВП 1 м2 (порядок перерахування описано нижче).
Розмір відхилення розрахункової дальності виявлення від обльотної
ДО = 0^-00 (4.14)
вводитися на азимуті обльоту і на інших азимутах, де кути закриття та нахилу позиції дорівнюють або близькі кутам закриття та
нахилу на азимуті обльоту.
Параметри зони виявлення РЛС уточнюють за накопиченими даними аналізу супроводу повітряних об’єктів у журналі-
накопичувачі, який повинен вестися на кожній РЛС.
У журнал заносяться тільки ті повітряні об’єкти, тип яких відомий (наприклад, рейсові літаки чи літаки, що летять за заявкою).
У процесі проводки повітряних об’єктів по індикатору кругового огляду фіксуються координати точок початку і закінчення спосте-
реження літака локатором. При цьому з використанням висотоміра чи запитувача системи розпізнавання визначається висота
повітряного об’єкта, а також його ЕВП у залежності від типу і ракурсу. Потім, як і у випадку з обльотом, у міру накопичення даних
проводиться перерахування дальності виявлення повітряних об’єктів для стандартної ЕВП, усереднення отриманих результатів і
корегування розрахункової дальності виявлення на відповідній висоті. Достоїнством даного методу є можливість накопичення
достатньої статистики для одержання достовірних експериментальних даних про параметри ЗВ РЛС.
Для уточнення зони виявлення РЛС на висотах, що перевищують практичну стелю польоту літаків, застосовується метод
зниження потенціалу.
У цьому випадку обліт виконується на доступних висотах, а потенціал комплексу штучно зменшується. Зниження потенціалу
рівноцінно рівномірному стиснення зони виявлення уздовж ліній постійних кутів місця.
Ступінь зниження потенціалу вибирається з таким розрахунком, щоб висота польоту повітряного об’єкта, що виконує обліт,
перевищувала висоту безпровального супроводу його в “стиснутій зоні”.
Спочатку за результатами обльоту, користуючись викладеним вище методом, будують “стиснуту зону” виявлення РЛК
(рис. 4.7), а потім реальну зону виявлення, що відповідає нормальному потенціалу РЛК.
Для перерахунку точок а, Ь, с, сі “стисненої зони” на відповідні їм точки А, В, С, О реальної зони використовується
співвідношення
N
Од=Ообл Ю40 > (4.15)
де Ообл і Од-дальності виявлення при зниженій і нормальній потужності передавача РЛС відповідно;
N - ступінь зниження потужності передавача РЛС, дБ.
Лінія, що з’єднує точки А, В, С, О, є межею зони виявлення.
178
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Перерахунок зони виявлення для іншого значення ЕВП щодо даного
На практиці виникає необхідність за відомою зоною виявлення, розрахованою для одного значення ЕВП оь одержати зону
виявлення цілей з іншою ЕВП о2-
Для перерахунку на середніх і великих висотах використовують формулу
02=0141 — , ЯКЩО Є = С0П8І . (4.16)
V
Для перерахунку на малих висотах обчислюється зміна дальності виявлення ДО (у км), обумовлена зміною ЕВП:
ДО = т б , (4.17)
де т = -101&— , дБ; б = , км/дБ; £ - несуча частота РЛС, МГц.
п2 >/£
Отримане значення ДО у залежності від знака додають до О або віднімають. При збільшенні дальності треба пам’ятали, що во-
на не може бути більше дальності до завади, яка затіняє, або радіообрію. Знову отримані точки з’єднують плавною кривою, що є
зовнішньою межею зони виявлення при новому значенні ЕВП.
На закінчення роблять стикування двох частин зони виявлення, побудованих для діапазонів малих і середніх висот.
Рис. 4.7. Зона виявлення РЛС із зниженим і номінальним потенціалами
Перерахунок зони виявлення РЛС для заданого значення імовірності виявлення цілі. Зовнішня межа зони виявлення
РЛС будується для значень Ро = 0,5. При цій умові для перерахунку зони виявлення для заданого значення імовірності виявлення
цілі Р можна використати формулу
0 = 1,350о,54/-І8Р • (4.18)
Тут також треба зважати, що дальність □ не може бути більшою ніж дальність до завади, що затіняє.
Методика автоматизованого визначення параметрів зон виявлення РЛС. Особливість методики автоматизованого визначення
параметрів зон виявлення РЛС полягає в розрахунку енергетичної насиченості області простору в межах відповідальності РЛС і
виявлення на основі аналізу цієї насиченості параметрів зони виявлення. Такий підхід забезпечує одержання більш достовірних
результатів про параметри ЗВ РЛС за рахунок можливості коректного обліку впливу властивостей місцевості, що відбиває, завад (у
тому числі й комбінованих), технічних характеристик РЛС.
Вихідні дані для розрахунку параметрів ЗВ РЛС: цифрові карти місцевості (ЦКМ) для району дислокації РЛС; географічні
координати точки стояння (прив’язки) РЛС; такгико-технічні характеристики РЛС; ЕВП повітряного об’єкта, по якій будуть про-
водитись розрахунки, і висоти горизонтальних перетинів ЗВ РЛС; параметри тропосфери (середовища поширення електромагніт-
них хвиль); очікувані напрямки постановки і параметри завад (у випадку розрахунку параметрів ЗВ РЛС у обстановці завад).
При розрахунку перетинів ЗВ спочатку на кожному заданому азимутальному напрямку визначається множина точок перетину,
у якій забезпечується їхня пряма раді о видимість з електричного центру антени РЛС. Таким способом забезпечується урахування
затінюючих властивостей рельєфу місцевості.
Радіовидимість оцінюється з використанням цифрових карт місцевості. Для уточнення впливу на ЗВ об’єктів, розташованих на
позиції, передбачена можливість використання таблиці завад, що складається на основі плану позиції. У таблицю завад заносяться
координати (азимут і відстань до точки стояння РЛС) і висоти об’єктів, що заважають, які знаходяться на позиції та у прилягаючих
до неї околицях і не знайшли відображення в цифрових каргах (кабіни і антенні системи РЛС, насипні гірки, казарми, складські
приміщення та інші штучні завади). Навколо точки стояння РЛС із заданим кроком по азимуту Ар (як правило, др=Г) з викорис-
танням ЦКМ формуються радіальні перетини рельєфу (рис. 4.8), визначаються кути візування і відстані до вершин рельєфу з елект-
ричного центру антени. Потім з обліком даних таблиці завад перевіряються умови радіовидимості кожної відповідної точки
179
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
горизонтального (ізорельєфного) перегину ЗВ. Вважається, що точку видно, якщо її кут спостереження перевищує кут закриття на
даному азимутальному напрямку.
Після перевірки умови радіовидимості визначається для “видимих” точок перетину очікувана потужність сигналу Р^, відбито-
го від повітряного об’єкта з ЕВП су^ що летить на заданій висоті на відстані т( від РЛС.
р _ Рімп^макс АМакс^ (еі)стпо
гпрі ”
(4тггі2)2п
(4.19)
де: Р1МП - ефективна імпульсна потужність зондувального сигналу; 6ЧОКС - максимальне підсилення антени на випромінювання;
- максимальна ефективна площа антени в режимі прийому; Е(є.) - значення нормованої діаграми спрямованості РЛС у верти-
кальній площині, що сформована з урахуванням впливу Землі, в напрямку і-ої точки перетину ЗВ (у технічних описах звичайно
наводять діаграми спрямованості антен з урахуванням впливу поверхні, що задовольняє вимогам до позицій РЛС); г| - коефіцієнт
втрат.
точка о»<«
стояння РЛС_______
Рис. 4.8. Приклад профілю рельєфу місцевості, знятого з ЦКМ
Надалі розрахована потужність порівнюється з пороговою Р^ і якщо Р^ > Рп^ то вважається, що виконується виявлення.
Відомості про Рпор при заданих умовних імовірностях О і Р™ містяться в паспорті РЛС у вигляді дальності виявлення повітряно-
го об’єкта з заданою (відомою) су^ що летить на заданій висоті. На основі таблиці паспортних дальностей виявлення на фіксованих
висотах шляхом інтерполяції розраховується (для середніх і великих висот) дальність виявлення на заданій висоті перетину ЗВ.
При визначенні параметрів ЗВ на малих висотах розраховується максимальна дальність виявлення повітряного об’єкта за фор-
мулою прямої радіовидимості з використанням паспортного значення коефіцієнта використання радіогоризонту, а також висоти
фазового центру антени РЛС, висоти горизонтального (ізорельєфного) перетину ЗВ і характеристики стану тропосфери. Останнє
враховується за допомогою введення в розгляд еквівалентного радіуса Землі Язе. Тим самим враховується скривлення траєкторії
поширення електромагнітних коливань у тропосфері. Зокрема, для “стандартної’ тропосфери еквівалентний радіус Землі -
Язе=4/3Яз = 8 500 км. Дальність прямої радіовидимості при цих умовах визначається за формулою (4.13).
З використанням паспортної максимальної дальності виявлення визначається поріг виявлення у вигляді розрахованої потужно-
сті сигналу для цієї дальності за умови, що дана дальність не перевищує дальності прямої радіовидимості.
Результати порівняння Р[ір з отриманою граничною потужністю запам’ятовуються. Така процедура повторюється на кож-
ному заданому азимутальному напрямку.
При урахуванні впливу на РЛС активних шумових завад розраховується відносна потужність прийнятих завад від кожного
джерела на вході виявлювача. Вважається, що залишки завад підвищують поріг виявлення аналогічно внутрішньому шуму при-
ймача, тому їхня потужність додається до потужності шумів при визначенні порога виявлення. Якщо на РЛС діє кілька джерел
завад, то їх потужності від кожного джерела при розрахунках зважено підсумовуються. Вага визначається посиленням антени РЛС
у напрямку на джерело завад, канальністю і якістю апаратури придушення завад.
По закінченню визначення енергетичної насиченості точок перетину ЗВ РЛС, виконується її графічна побудова. При цьому
передбачається два способи візуального представлення результатів розрахунку: відображення всієї площини перетину ЗВ РЛС
шляхом засвітлення ділянок екрана монітора в навколо точок з координатами відносно РЛС т, і р„ у яких енергетичний рівень ехо-
сигналів перевищує сумарний рівень порога і завад (рис. 4.9), або відображення тільки границь перетину (рис. 4.10).
180
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Рис. 4.9. Приклад відображення площини перетину Рис. 4.10. Приклад відображення границі перетину
зони виявлення на висоті 300 м РЛК 5Н87 зони виявлення на висоті 300 м РЛК 5Н87
(масштаб 100 км) (масштаб 100 км)
Точність вимірювання координат цілей
Точність вимірювання координат є одним із найважливіших показників РЛС, оскільки вона суттєво впливає на вирішення бага-
тьох завдань ППО. Чим точніше вимірюються координати цілей, тим точніше цілевказання ЗРК, тим вище імовірність перехоплен-
ня цілі винищувачем і тим з вищою якістю вирішується задача цілерозподілу на КП частин та з’єднань.
Точність вимірювання координат цілей визначається помилками вимірювання, які представляють собою різницю між істинним
і виміряним значеннями координат. В понятійному розумінні точність є величиною обернено-пропорційною величині помилок,
тобто чим менше помилки, тим вище точність.
Помилки вимірювання координат цілей за закономірністю їх виникнення поділяються на грубі, систематичні та випадкові.
Грубі помилки або промахи, які виникають внаслідок некваліфікованих дій, легко усуваються. На практиці добре підготовлена
обслуга таких помилок не допускає. Випадкові і систематичні помилки вимірювання координат цілі радіолокаційними станціями за
причинами їх виникнення діляться на потенційні, зовнішні, динамічні та інструментальні.
Потенційні помилки - помилки вимірювання, які виникають під впливом теплових шумів. Величина цих помилок залежить
тільки від параметрів просторово-часової модуляції зондуючого сигналу, ехо-сигналів та відношення “сигнал/шум”. Інакше кажу-
чи, потенційні помилки - це помилки ідеального радіолокатора. Потенційні помилки за характером виключно випадкові.
Зовнішні помилки зумовлюються станом зовнішнього середовища, тобто середовища поширення радіохвиль, і виникають під
впливом рефракції радіохвиль, відбиття їх від рельєфу місцевості, спотворення форми сигналу через дисперсійні властивості сере-
довища. Зовнішні помилки за природою можна вважали стосовно задач радіолокаційної розвідки переважно систематичними, оскі-
льки параметри середовища поширення радіохвиль хоча і змінюються, але протягом часу, який значно перевищує час виконання
бойового завдання. Тому такі помилки можна враховували при веденні радіолокаційної розвідки. Наприклад , стандартна рефракція
радіохвиль у тропосфері враховується в усіх РЛС без винятку, а в деяких радіолокаційних висотомірах враховується навіть поточна
рефракція.
Динамічні помилки вимірювання визначаються тим, що повітряна обстановка постійно змінюється, а виявлення цілей та ви-
мірювання їхніх координат здійснюється дискретно і з деяким запізненням. Динамічні помилки залежать від характеру переміщен-
ня цілі, а також від способу зйому інформації’. Для рівномірного і прямолінійного руху цілі, динамічні помилки вимірювання коор-
динат визначаються так:
Бхдин — Ух (із — іл) , (4.20)
де Ух - швидкість зміни відповідної координати; ід - час локації цілі; і, - час зйому інформації з даної координати.
При візуальному зйомі інформації динамічні помилки досить суттєві й фактично є випадковими, оскільки оператор при супро-
водженні 6... 10 цілей фізично не в змозі враховували час запізнювання при зйомі інформації. При автоматизованому та автоматич-
ному способах зйому інформації динамічні помилки можна вважали систематичними, оскільки величини і, і іл фіксуються, і динамі-
чні помилки при траєкторній обробці інформації компенсуються.
Інструментальні помилки - помилки, які дає радіолокатор, як інструмент вимірювання. Вони виникають через нестабільність
параметрів приймальних пристроїв, нестабільність імпульсів запуску, неточність формування електричного масштабу, помилки
інтерполяції позначки від цілі щодо ліній електричного масштабу при візуальному зйомі інформації, неточність суміщення маркера
181
РОЗДІЛ 4, РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
з позначкою при автоматизованому зйомі інформації, дискретизацію сигналів при цифровій автоматичній обробці сигналів і зйомі
інформації’, помилки топоприв’язки станції’ та з ряду інших причин. Інструментальні помилки за природою можуть бути як систе-
матичними, так і випадковими.
Систематичні складові всіх перерахованих груп помилок можуть бути визначені, а потім обчислені й компенсовані. Тому точ-
ність виміру координат цілей в основному залежить від випадкових помилок. Оскільки випадкові помилки вимірювання коорди-
нат повітряних об’єктів формуються під впливом багатьох чинників різної природи, то на підставі центральної граничної теореми
закон розподілу імовірності цих помилок є нормальним.
Показники точності вимірювання координат, якими найчастіше користуються а практиці: середнє квадратичне значення
помилки о; серединна помилка; помилка у 80 % вимірів; максимальна помилка.
Середня квадратична помилка за відсутності систематичних помилок може бути визначена так:
/ 1 п о
<у = .-х82 , (4.21)
V п і=і
де 8і = а, - X - випадкова помилка і-го виміру; аі-результат і-го виміру; X-реальне значення координати, що вимірюється;
п - кількість незалежних вимірів.
Якщо відомі середні квадратичні помилки аь о2, •.а„, що викликані різноманітними незалежними джерелами, то загальна
середня квадратична помилка
+ с22+--- + а2 . (4.22)
Імовірність того, що помилка не перевищить значення середньої квадратичної помилки для нормального закону розподілу імо-
вірності становить Р(]б| < су) = 0,683.
Імовірною 5.И або серединною помилкою називають таке її значення, імовірність перевищення котрого становить
Р(|б| > б,м) = 0,5. Для нормального закону розподілу імовірностей
2
5ім=-а. (4.23)
Помилкою у 80% вимірів називають таке її значення бо^, яке не буде перевищене у 80 % вимірів. Для нормального закону
розподілу імовірностей
бо,8= 1,3а . (4.24)
Максимальна помилка - помилка б^, імовірність перевищення якої становить менше, ніж 0,3%, тобто Р(|б| < б^) = 0,997.
Зв’язок між максимальною помилкою і середньоквадратичним значенням помилок для нормального закону визначається співвід-
ношенням:
Змакс^За . (4.25)
Точність вимірювання координат цілей.
Загальна середня квадратична помилка вимірювання дальності
= + + (4.26)
у *Ают Мм>вн інегр *^дин
Потенційна точність вимірювання дальності, яка характеризується величиною стОпот, залежить тільки від параметрів зондую-
чого сигналу та відношення “сигнал/шум” і характеризує можливості ідеального радіолокатора при відсутності рефракції’:
де с - швидкість поширення світла; ц = д/2Е/М0 - відношення сигнал/шум (на зовнішній межі зони виявлення ц « 10 дБ);
ПЕ - ефективна ширина спектра зондуючого сигналу (ПЕ « 1 ,7/т; - для прямокутних немодульованих зондуючих сигналів триваліс-
тю Ті; Пе ® 1,8Д£- для ЛЧМ сигналів з девіацією АГ; ПЕ ~ 1,7/тд - для ФКМ сигналів з тривалістю дискрети Тд).
Зовніїїіні помилки Оозовн не перевищують декількох метрів і у більшості випадків їх можна не враховувати.
Інструментальна помилка аИнсф визначається головним чином неточністю формування електричного масштабу дальності
помилками візуального визначення центра позначки ооц, помилками інтерполяції аИнгерп, помилками суміщення маркера з
позначкою Оом^ж, помилками дискретизації’ сигналів а0даоф. Середні квадратичні значення зазначених помилок ощнюються:
ОДГ
=-г-; (4.28)
^масшт '
•?1оп
СТО,
СТ, □
—+ т0^п
зо ’
^ммін
” 10...20 ’
^інтерн
(4.29)
(4.30)
„ _ тоап
сто».р« —;
(4.31)
182
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
О
до
^дискр
(4.32)
де □ - дальність до цілі; АГ / £оп - відносна нестабільність частоти опорного генератора формувача міток дальності або імпуль-
сів дискретизації; т; - тривалість обробленого ехо-сигналу; т0 - масштаб розгортки дальності, км/мм; сіп - діаметр сфокусованої на
екрані трубки плями, мм; Ом мін - відстань між масштабними мітками мінімальної градації’ в одиницях дальності; ДО - інтервал
дискретизації за дальністю.
Кінцева величина інструментальної помилки визначається за формулою
сгр =-/ХсУ[)і , (4.33)
^інстр у
і залежить від способу з’йому інформації'. При візуальному зйомі інформації необхідно враховувати складові (4.28), (4.29), (4.30),
при автоматизованому зйомі інформації- складові (4.28), (4.31), (4.32), а при автоматичному - складові (4.28), (4.32).
Динамічна помилка при рівномірному, прямолінійному русі цілей і при нормальному розподілі курсів цілей щодо РЛС визна-
чається формулою
столив =Уц(13-Іл)/3, (4.34)
де Уц- швидкість цілі; іл, - час локації та зйому інформації відповід но.
При візуальному способі зйому інформації динамічна помилка при складній повітряній обстановці перевищує інструменталь-
ну. При автоматизованому і автоматичному способах зйому інформації визначальною є інструментальна помилка, а динамічна
помилка майже компенсується при траєкторній обробці інформації після визначення швидкості руху цілі.
Точність вимірювання азимуту цілей залежить від ширини ДСА у горизонтальній площині (потенціальні помилки), від гори-
зонтальної рефракції радіохвиль, скривлення траєкторії розподілу під впливом нерівностей рельєфу місцевості (зовнішні помилки),
помилки орієнтування, помилок передачі азимуту променя антени на індикатор, формування масштабу азимута, суміщення марке-
ра (інструментальні помилки), а також помилок від переміщення цілі по азимуту за час формування і зйому інформації (динамічні
помилки).
Загальна середня квадратична помилка вимірювання азимуту
аР=л/стР +СТР +СТР .+ аР • (4.35)
Р у Нпот Рзов Рінстр» Рдин
Потенційна точність вимірювання азимуту, яка характеризується величиною ор^ залежить від ширини ДСА в азиму-
тальній площині та відношення “сигнал/шум”:
0р
°0пот=—(4.36)
Чл/я
де 0р - ширина ДСА у горизонтальній площині на рівні половинної потужності;
Величина зовнішніх помилок вр^вн на точність вимірювання азимуту цілей суттєво не впливає, оскільки градієнт показника
заломлення у горизонтальній площині дуже малий і рефракцією хвиль в азимутальній площині для РЛС виявлення повітряних
об’єктів можна знехтувати.
Інструментальна помилка Ор^ визначається головним чином неточністю орієнтування РЛС Орфснп помилками системи пе-
редачі азимуту арспА, помилками формування електричного масштабу азимуту помилками візуального визначення центра
позначки арц, помилками інтерполяції Прінгерп? помилками суміщення маркера з позначкою аР1кЧЖ, помилками дискретизації сигналів
Ордисхр. Середні квадратичні значення зазначених помилок оцінюються:
строріЄнТ “ (3—5)' (4.37)
(0,5... 1)° - для одноканальних аналогових СПА;
стРсііл =" (7.-9)' - для двоканальних аналогових СПА;
(2...3)' - для цифрових СПА;
^Рмасшт (3...4)
_0р+трдп
Стрц= й ;
_ Рммін
СТрінтерп "Їо72О;
„ тРап
°0марк ~ »
о(3диС1ф=(0,7...0)9)^рЛ
Іогл
(4.38)
(4.39)
(4.40)
(4.41)
(4.42)
(4.43)
де Ор - ширина ДСА по азимуту на рівні половинної потужності; пір - масштаб розгортки по азимуту, град/мм; - діаметр
сфокусованої на екрані трубки плями, мм; рмч<н - відстань між масштабними мітками азимуту мінімальної градації в градусах;
Тп- період посилок зондуючих сигналів; - період огляду простору.
183
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Величина інструментальної помилки вимірювання азимуту, в цілому, визначається за формулою
(4.44)
_ п 2
^Рінстр “ л/Л^Р» ’
і залежить від способу зйому інформації. При візуальному зйомі інформації необхідно враховувати складові (4.37), (4.38), (4.39),
(4.40), (4.41), при автоматизованому - складові (4.37), (4.38), (4.39), (4.40), (4.42), а при автоматичному - складові (4.37), (4.38), (4.40),
(4.43).
Динамічна помилка вимірювання азимуту при рівномірному, прямолінійному русі цілей і при нормальному розподілі кур-
сів цілей щодо РЛС визначається формулою
_ Уц(і3-іл)57,7
^Р-ДИН
(4.45)
де и із - час локації та зйому інформації відповідно.
Точність вимірювання висоти цілей залежить від точності вимірювання дальності до цілі, точності вимірювання кута місця
цілі, від точності врахування рефракції радіохвиль, від інструментальних та динамічних помилок:
(4.46)
І 2 2 її 2 2 2 2
стн = (Осозє) Оє+(8ІПЄ + ——) с0+он +стНянп >
V їх. інстр дин
де є - кут місця цілі; Язе - еквівалентний радіус Землі (для стандартної рефракції радіохвиль в атмосфері).
Причини появи помилок вимірювання кута місця оЕ цілей такі ж, як і при вимірі азимуту цілей, тому оцінка їх проводиться
аналогічно
(4.47)
_ /_2 , _2 , 2 , 2
СУР — . + СУ _ + СУ + СУр
ь у ьпот гори ЮСТ °рефр
Потенціальна точність вимірювання кута місця суепот визначається шириною ДСА у вертикальній площині та відношенням
‘сигнал / шум”:
^пот
ЄЕ
(4.48)
Середньоквадратичні значення помилок горизонтування сгГТ)рп та юстування антенної системи становлять 2'... З'.
Значного внеску до складу помилок вимірювання кута місця цілей завдають неточності урахування рефракції радіохвиль в
атмосфері:
(4.49)
_ аап/ан
СУр =-----------
ьг*фр 20
де сулйм - середньоквадратичне значення відхилення висотного градієнта коефіцієнта заломлення радіохвиль в атмосфері сіп/сІН
від стандартного значення.
Інструментальні помилки вимірювання висоти сгН1нстр пов’язані зі способом зйому інформації про висоту цілі. При викорис-
танні індикатора висоти, тобто при візуальному та автоматизованому способах зйому інформації вони визначаються так:
стн =л/стн +стн +стн +ан +ан • (4.50)
“мнстр у *1настр 1,масшт В1ц “інтерп В1марк
Середньоквадратичні помилки вимірювання висоти цілей за рахунок неточності настроювання індикатора висоти суЬІнагтр
навіть при якісному настроюванні індикатора можуть становити декілька десятків метрів. Помилки за рахунок нестабільностей
масштабних міток висоти суНкааігт при формуванні міток висоти із міток дальності малі і ними можна знехтувати. Природа помилок
за рахунок неточного візуального визначення центру позначки від цілі сіни, помилок інтерполяції онінгерп, і помилок за рахунок нето-
чностей суміщення маркеру із позначкою від цілі суНм^к аналогічна помилкам при вимірюванні дальності та азимуту і визначаються
так:
стн,
Озіп0Е + тндп
ЗО
ТІ
11 м мін
(4.51)
(4.52)
пн — ’
,кт‘рл 10...20
„ тнап
пн =-----------,
пмарк З
де 0Е - ширина ДСА у вертикальній площині; пін - масштаб розгортай по висоті, м/мм; - діаметр сфокусованої на екрані тру-
бки плями, мм; Нмйн - відстань між масштабними мітками висоти мінімальної градації.
При візуальному зйомі інформації з індикатора висоти необхідно враховувати перші чотири складові виразу (4.50), а при авто-
матизованому - першу, третю і п’яту. При автоматичному зйомі інформації про висоту цілі складова помилок (4.50) взагалі відсут-
ня, оскільки висота цілі обчислюється програмними засобами заданими вимірювань кута місця цілі, дальності до неї та відповідних
поправок на рефракцію радіохвиль в атмосфері.
(4.53)
Можливості з роздільного спостереження цілей
Можливості по визначенню складу групової цілі, моменту її поділу характеризуються роздільною здатністю РЛС. Під розділь-
ною здатністю РЛС за будь-якою координатою розуміють таку мінімальну відстань за даною координатою між двома цілями, інші
184
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
координати яких співпадають, при якій обидві цілі спостерігаються роздільно. При візуальному та автоматизованому зйомі інфор-
мації роздільні здатності РЛС за дальністю ДО, за азимутом Ар і за висотою ДН визначаються таким чином:
АО = ^- + 1-Зто(іп; (4.54)
2кст
Др = 6р+1,3трап; (4.55)
ДН=^- + 1,Зтндп, (4.56)
СО8Є
де с - швидкість світла; т, - тривалість зондуючого сигналу; кд. - коефіцієнт стиснення імпульсів при обробці (для простих зон-
дуючих сигналів 1^=1); т0 - масштаб розгортки за дальністю, км/мм; ф, - діаметр сфокусованої на екрані трубки плями, мм; Ор, 0є -
ширина ДСА в азимутальній та вертикальній площинах; тр - масштаб розгортки за азимутом, град/мм; О, є - дальність і кут місця
до цілі; пін - масштаб розгортки за висотою, км/мм.
При автоматичному з’йомі інформації розділювальні здатності РЛС визначаються тільки першими складовими у виразах
(4.54 ...4.56).
Завадозахищеність
Завадозахищеність - здатність РЛС виконувати свої функції з припустимим зниженням якості в умовах завад.
Можливості із захисту від активних шумових завад характеризуються величиною коефіцієнта стиснення зони виявлення:
Кст(0,є) =
Рр(Р.е)
^пер(Р’Є)
(4.57)
де ЩР,є) - дальність виявлення цілей із заданою ЕВП за відсутності активних шумових завад;
ЦкрСР^) - дальність виявлення цілей із заданою ЕВП в завадах.
При дії п постановників активних шумових завад з різних напрямків
К (В є) = д/1 І £ ^папіУі^2(Р~РпАПі>Є~ЄПАПі)
V 47іпетркТШкпрАП >=і О^і
(4.58)
де Аеф - ефективна площа приймальної антени; - втрати сигналів в приймальному тракті РЛС; к = 1,38- 10 а Дж/град - по-
стійна Больцмана; Т = 300°- шумова температура антени; Ш - коефіцієнт шуму приймального тракту; к^дп - коефіцієнт подавлен-
ня активних завад системою захисту; Кпдп - спектральна щільність потужності активних шумових завад, які випромінюються і-им
постановником у напрямку на РЛС; % - ефективність завад і-го постановника (коефіцієнт наближення їх до теплових шумів);
Г(Р,є) - нормована діаграма спрямованості приймальної антени; Рпдп , Єпдп - кутові координати і-го постановника завад; Опал -
дальність до і-го постановника завад.
У формулярах на РЛС, як правило, наводяться значення коефіцієнта стиснення Кст зони виявлення для двох випадків: при дії за-
вад від еквівалентного джерела завад по бокових пелюстках ДСА і по головному променю ДСА. Для тих РЛС, які не мають захисту
від завад, що діють по головному променю, наводиться значення сектора ефективного подавлення РЛС. Під еквівалентним джере-
лом активних шумових завад розуміють постановника активних завад, який знаходиться на дальності 200 км, висоті 10 км і випро-
мінює в напрямку на РЛС шумові завади зі спектральною щільністю потужності 10 Вт/МГц.
Можливості РЛС із захисту від пасивних завад характеризуються такими величинами: коефіцієнтом придушення пасивних
завад кп, коефіцієнтом підзавадової видимості к^ і допустимою щільністю дипольних завад, за якої ще можливе виявлення цілей із
заданими параметрами. Кожний із показників має свої переваги і недоліки.
Показник кп визначає у скільки разів ослаблюється пасивна завада по відношенню до власних шумів при проходженні через
систему захисту, тобто
к _ (Рпз /Рщ)вх
(Рпз /Рш)вих
(4.59)
при цьому поза увагою залишається сигнал. Цим показником користуються для характеристики можливостей РЛС з придушення
віддзеркалень від місцевих предметів.
Показник кпв визначає у скільки разів підвищується відношення “сигнал /(пасивна завада + шум)” при проходженні через сис-
тему захисту, тобто
к _ (Рс /(Рпз + Рщ ))вих
пв (РС/(РПЗ+РШ))ВХ
(4.60)
і враховує, таким чином, вплив системи захисту на сигнал. Але при цьому необхідно завжди обумовлювали різницю радіальних
швидкостей цілі і пасивної завади. У формулярах на РЛС наводяться значення к^ переважно для оптимальної різниці швидкостей.
За цих умов часто показник к^ виглядає переконливіше, ніж к„, в багатьох випадках к^ > кп.
Допустима щільність дипольних завад, за якої ще можливе виявлення цілей із заданими параметрами, характеризується кількіс-
тю стандартних пачок дипольних завад пп на 100 м шляху постановника. Показником пп характеризуються можливості РЛС із за-
хисту від організованих пасивних завад. Стандартна пачка диполів залежно від типу має ефективну відбиваючу поверхню від 50 до
150 м2.
Характеристика захищеності РЛС від імпульсних завад чітко визначених показників не має, оскільки існує безліч часткових
показників залежно від конкретного типу імпульсних завад. Тому захищеність РЛС від імпульсних завад характеризується наявніс-
тю або відсутністю апаратури придушення імпульсних завад певного типу. Більшість РЛС РТВ мають захист від несинхронних
185
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
періодичних і хаотичних імпульсних завад (НПЗ, ХІЗ) та від синхронних імпульсних завад, які діють по бокових пелюстках ДСА
(імпульсні завади у відповідь - ІЗВ). Ті РЛС, у яких використовуються складні зондуючі сигнали (ФКМ або ЧМ), мають ефектив-
ний захист від будь-яких імпульсних завад, якщо закон внутрішньоімпульсної модуляції їх не співпадає із законом модуляції зон-
дуючих сигналів.
Інформаційні можливості РЛС
Інформаційні можливості РЛС характеризуються максимальною кількістю цілей, по яких РЛС може видавали інформацію за-
даної якості з установленою періодичністю оновлення.
Потенційні інформаційні можливості РЛС визначаються кількістю наявних одночасно цілей, які вона здатна виявити роздільно
і виміряти їх координати:
Нп =((Омакс-Омін)ДВДЕ)/(ДОДр.Дє), (4.61)
де Пмаю Пмн - межі роботи РЛС за дальністю; ДВ, ДЕ - сектори огляду РЛС за азимутом і кутом місця відповідно;
ДО, др, Дє - роздільні здатності РЛС за координатами.
Практична реалізація цих можливостей обмежується продуктивністю пристроїв зйому інформації. У зв’язку з цим інформацій-
ні можливості РЛК залежать від способу зйому, кількості паралельних пристроїв зйому інформації, способів реалізації цілевказан-
ня, а також швидкості огляду простору.
При візуальному та автоматизованому способах зйому інформації інформаційна можливість з видачі відповідної координати
визначається так:
N і = К п т і і оновл і / і зн і > (4.62)
де Кп - коефіцієнт, який враховує зниження інформаційної можливості за рахунок перекриття секторів зйому, перерозподілу
цих секторів та ін. (Кп <1); ті - кількість пристроїв зйому і-ої складової інформації (кількість індикаторів); - період оновлення
(дискретність з’йому) і-ої складової інформації; - час, що витрачається на зйом інформації і реалізацію цілевказання.
При цьому треба мати на увазі, що період оновлення інформації не може бути більшим, ніж період огляду простору, тобто зав-
жди Іоноалі > Того - період ОГЛЯДУ ПрОСТОру.
При автоматичному способі зйому інформації інформаційні можливості РЛС визначаються можливостями обчислювальних
засобів.
4.2.1. Експлуатаційно-технічні показники РЛС та КЗА
Відновлення боєздатності підрозділів і частин проводиться за рахунок вводу тактичних і технічних резервів та відновлювально-
го ремонту техніки.
Показники безвідмовності перемонтованих виробів
Імовірність безвідмовної роботи р(1) - імовірність того, що в межах заданого напрацювання і відмова виробу не виникне.
Імовірність відмови ч(1) - імовірність того, що в межах заданого напрацювання і виникне відмова виробу.
Щільність розподілу часу безвідмовної роботи 1(1) - безумовна імовірність виникнення відмови на нескінченно малому відрі-
зку (І, і + Ді) віднесена до значення цього відрізка.
Інтенсивність відмов Аф - умовна щільність імовірності виникнення відмови невідновлювального виробу, яка визначається
для моменту часу, який розглядається за умови, що до цього моменту відмова не виникне.
Середнє напрацювання до відмови - математичне сподівання напрацювання виробу до першої відмови.
Гамма-відсотковий наробіток на відмову - напрацювання, протягом якого відмова виробу не виникає з імовірністю, вира-
женою у відсотках.
Показники безвідмовності ремонтованих виробів.
Середнє напрацювання до відмови - відношення напрацювання відновлюваного виробу до математичного сподівання
кількості його відмов протягом цього напрацювання.
Параметр потоку відмов уу(() - відношення середньої кількості відмов відновлювального виробу за довільно мале його напра-
цювання до значення цього напрацювання.
Показники ремонтопридатності
Імовірність відновлення працездатного стану в межах заданого часу У(т) - імовірність того, що час відновлення працезда-
тного стану не перевищить заданого.
Імовірність невідновлення працездатного стану в межах заданого часу У(т) - імовірність того, що час відновлення праце-
здатного стану перевищить заданий.
Щільність розподілу часу відновлення у(т) - безумовна імовірність відновлення виробу на нескінченно малому відрізку
(т, т + Ат) віднесена до значення цього відрізка.
Інтенсивність відновлення цф - умовна щільність імовірності відновлення виробу в момент т за умови, що до моменту т
виріб не був відновлений.
Середній час відновлення працездатного стану Тв - математичне сподівання часу відновлення працездатного стану.
Показники довговічності
Усі показники довговічності розподіляються на показники, які основані на напрацюванні, і показники, які основані на строку
служби, або календарі, і показники, які основані на напрацюванні та характеризуються поняттям ресурс.
До основних показників, які основані на напрацюванні, відносяться середній ресурс і гамма-відсотковий ресурс.
186
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Середній ресурс В - математичне сподівання ресурсу. Різновиди показника: середній ресурс до середнього (капітального) ре-
монту Ксрі (Ккрі); середній ресурс між середніми (капітальними) ремонтами (Кфі); середній ресурс до списання призначений
ресурс Крес - сумарне напрацювання виробу, при досягненні якого застосування за призначенням повинно бути припиненим.
Гамма-відсотковий ресурс - напрацювання, протягом якого виріб не досягає граничного стану із заданою імовірністю, ви-
раженою у відсотках.
До основних календарних показників довговічності відносяться середній термін служби та гамма-відсотковий термін служби.
Середній термін служби - математичне сподівання строку служби. Різновиди показника: середній термін служби до серед-
нього (капітального) ремонту Ц,] (Ц^); середній термін служби між середніми (капітальними) ремонтами (Ця); середній термін
служби до списання призначений термін служби - календарна тривалість експлуатації виробу, при досягненні якої викори-
стання за призначенням повинно бути припиненим.
Гамма-відсотковий термін служби - календарна тривалість від початку експлуатації виробу, протягом якої він не досягає
граничного стану із заданою імовірністю, вираженою у відсотках.
Показники збереження
Середній термін збереження - математичне сподівання строку збереження.
Гамма-відсотковий термін збереження - термін збереження, який досягається виробом із заданою імовірністю, вираже-
ною у відсотках.
Для кількісної оцінки готовності виробів до використання за призначенням можуть бути використані комплексні показники на-
дійності: коефіцієнт готовності, коефіцієнт оперативної готовності, коефіцієнт технічного використання і коефіцієнт запланованого
застосування, коефіцієнт збереження ефективності.
Коефіцієнт готовності Кг - імовірність того, що виріб опиниться у працездатному стані на довільний момент часу, крім запла-
нованих періодів, протягом яких застосування виробу за призначенням не передбачається.
Коефіцієнт оперативної готовності К^ - імовірність того, що виріб опиниться у працездатному стані на довільний момент ча-
су, крім запланованих періодів, протягом яких застосування за призначенням не передбачається, і, починаючи з цього моменту,
буде працювати безвідмовно протягом заданого інтервалу часу.
Коефіцієнт технічного використання К„ - відношення математичного сподівання інтервалів часу перебування виробу в пра-
цездатному стані за деякий період експлуатації’ до суми математичних сподівань інтервалів часу перебування виробу в працездат-
ному стані, простоїв, обумовлених технічним обслуговуванням і ремонтів за той же період експлуатації.
Коефіцієнт запланованого застосування Кж - частка періоду експлуатації, протягом якої виріб не повинен знаходитись на
плановому технічному обслуговування і ремонті.
Коефіцієнт збереження ефективності Кеф - відношення фактичного значення показника ефективності до значення того ж по-
казника, визначеного при умові, що відмови об’єкта не виникають.
Експлуатаційна технологічність кількісно може бути оцінена показниками системи контролю технічного стану, технічного об-
слуговування і ремонту, до яких відносять: час проведення технічного обслуговування, час введення у бойову готовність з техніч-
ного обслуговування та ін.
Живучість може бути оцінена показниками стійкості техніки до уражаючих факторів ядерної і звичайної зброї. Для оцінки жи-
вучості використовують показники: надлишковий тиск та швидкість натиснення фронту ударної хвилі, потужність у випроміню-
вання, величина нейтронного потоку, радіус поразки боєприпасів зі звичайним зарядом.
Маневреність характеризується показниками рухомості та мобільності. Рухомість та мобільність техніки можна оцінити часом
згортання, розгортання, включення, кількістю транспортних одиниць, масою причепів, кабін і т.ін.
Економічність як властивість виробів можна оцінити узагальненими витратами матеріальних і грошових коштів на стадії екс-
плуатації, які містять: вартість технічного обслуговування і ремонту, вартість використання за призначенням, вартість зберігання,
вартість матеріально-технічного майна, витраченого при експлуатації та ремонті, адміністративні витрати.
4.2.2. Характеристики основних зразків радіоелектронної техніки РТВ
РЛС дальнього виявлення і попередження 5Н84 А
Діапазон хвиль - метровий.
Спрягається з об’єктами: РЛС П-18, ПРВ-13, ПРВ-17, КЗА РТВ.
Склад: напівпричіп А і П-1 (основна антена); напівпричіп А і П-2 (допоміжна антена); напівпричіп АП-1 (приймальна апарату-
ра, апаратура захисту від завад); напівпричіп АП-2 (передавальний пристрій); напівпричіп АП-3 (виносні ПСО, апаратура спряжен-
ня); дизельна електростанція 5Е96; кабіна РПК 5Е88; причіп 73Е6.
Дальність виявлення цілей на різних висотах;
Ндім) 100 500 1 000 10 000 20 000
Дц (км) 33 80 105 300 400
Масштаби ПСО: 200,400,600,1 200 км.
187
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
РЛС П-18
Діапазон хвиль - метровий.
Спрягається з об’єктами: РЛС П-19, П-37,5Н84А, РЛК 5Н87, ПРВ-13, ПРВ-16, ПРВ-17, КЗА РТВ.
Склад: апаратна машина (приймальна і передавальна апаратура, індикатори, апаратура розпізнавання); машина антенно-
щоглового пристрою (АЩП); силові причепи П-1 та П-2 (АД-10Т, ЗІП); машина НРЗ 1Л22.
Дальність виявлення цілей на різних висотах:
Н„(м) 100 500 1 000 10 000 20 000
Ди (км) НА = 6,365 м 28 50 65 175 230
НА= 10,35 м зо 60 80 250 270
Масштаби ІКО: 90, 180, 360 км.
РЛК 5Н87
Діапазон хвиль - дециметровий.
Спрягається з об’єктами: РЛС П-35, П-37, ПРВ-13, ПРВ-17, КЗА РТВ.
Склад: дві ППК дальноміра; два модуляторних причепи; технічний пост; індикаторний причіп; причіп ЗІП; п’ять причепів еле-
ктростанцій (2 шт. - АД-200, 3 шт. - АД-100); причіп ППС (5 шт. - ПСЧ-10); причіп ЦРП; два причепи НРЗ 73Е6; 2-4 ПРВ-13;
причіп 5Г75 (імітатор).
Дальність виявлення цілей на різних висотах:
Нц(м) 100 500 4 000 6 000 10 000 20 000
Ди (КМ) 40 85 185 240 300 330
Масштаби ІКО: в основному запуску - 100,200,300,370 км; в рідкому запуску - 100,200,300,400,600 км.
РЛС П-37 Р (П-37 М)
Діапазон хвиль - сантиметровий.
Спрягається з об’єктами: РЛС П-18, ПРВ-13, ПРВ-17, КЗА РТВ.
Склад: машина №1 (111ІК); машина №2 (індикаторна); машини №№3,4 (АД-60-Т230 1Р); машина №5 (тягач АТС-668С);
машина №6 (ВПЛ-ЗОД); машина №7 (ТАПЗ-755, АД-10); машина №11 (НРЗ 1 Л22).
Помилки визначення координат: за дальністю - ± 500 м, за азимутом - ± 0,5°;
Роздільна здатність:
за дальністю - 500 м, за азимутом - 1 ° (якщо кут місця - 0° - 7°); -1,5° (якщо кут місця більше 7°).
Дальність виявлення цілей на різних висотах: __________________________________________________________________
Нц(м) 100 200 300 500 3 000 6 000 8 000 12 000
Ди (км) 26 35 40 50 120 150 170 180
Масштаби ІКО: в рідкому запуску - 100,200,350 км; в частому запуску - 100,170 км.
Швидкість обертання антен - 3 або 6 об/хв.
Час згортання (розгортання) РЛС повною обслугою - 8 год.
Рухома РЛС виявлення цілей на малих висотах П-15
Діапазон хвиль - дециметровий.
Спрягається з об’єктами: ПРВ-16, КЗА РТВ.
Склад: машина на базі 31Л-157 (апаратна станція, агрегат живлення АБ-8М); одновісний причіп АП-1,5 (агрегат живлення
АБ-8М).
Дальність виявлення цілей на різних висотах:
Нц(м) 100 500 1 000 4 000
Ди (КМ) зо 65 90 150
Масштаби ІКО: 100,200,300 км.
РЛС виявлення цілей на малих висотах 19Ж6
Діапазон хвиль - сантиметровий.
Спрягається з об’єктами: КЗА РТВ.
Склад: напівпричіп 6УФ (апаратна кабіна та антенна система); причіп (електростанція 99X6).
Помилки визначення координат (на відстані до 70 км):
за дальністю - 250 м; за азимутом - 20х; за висотою - 400 м (при Нц до 6 000 м).
Роздільна здатність (по цілі типу МиГ-21 на відстані до 70 км):
за дальністю - 300 м; за азимутом - 4°; за кутом місця - 3°.
Дальність виявлення цілей на різних висотах:_____________________________________
Нц (м) 50 100 1 000 8 000 20 000
Ди (КМ) зо 45 120 145 100
Масштаби ІКО: 75,150 км.
Швидкість обертання антени - 12 або 6 об/хв.
Коефіцієнт придушення пасивної (віддзеркалень від місцевих предметів) завади - 50 дБ.
Коефіцієнт придушення активної завади - близько 23 дБ.
Час розгортання РЛС обслугою з 5 чоловік - 1 год.
188
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Автономний рухомий радіовисотомір ПРВ-13 (ПРВ-13М, ПРВ-13МР)
Діапазон хвиль - сантиметровий.
Спрягається з об’єктами: РЛС П-37, П-18,5Н84А, РЛК 5Н87, КЗА РТВ.
Склад: причіп В-1 (і ПІК); причіп В-2 (імітатор, АД-ЗОТ); причіп В-3 (АД-ЗОТ, ВПЛ-ЗОМД, ЗІП); може комплектуватися
НРЗ-4П (1 Л22) в автономному варіанті.
Дальність виявлення цілей на різних висотах:
Нц(м) 50 100 500 4 000 6 000 і більше
Ди (КМ) 32 46 90 200 310
Масштаби ІКО: 100,200,300,400 км.
Масштаб індикатора висоти: 8,5; 17; 34; 85 км.
Рухомий радіовисотомір РРВ-16
Діапазон хвиль - сантиметровий.
Спрягається з об’єктами: РЛС П-15, П-18, П-19, КЗА РТВ.
Склад: причіп №1 (апаратура висотоміра); причіп №2 (електростанція 1Е9).
Дальність виявлення цілей на різних висотах;________________г___
Нц(м) 100 500 1 000 3 000
Ди (КМ) 35 85 110 170
Масштаб індикатора висоти: за висотою -15,30,45 км; за дальністю -130,200,300 км.
4.3. Тактика радіотехнічних військ ППО
4.3.1. Основи бойового застосування радіотехнічних військ ППО
Бойове застосування РТВ - організовані сумісні дії радіотехнічних з’єднань, частин, підрозділів по здобуванню радіолокацій-
ної інформації та видачі її на КП об’єднань ППО, з’єднань, частин зенітних ракетних військ та винищувальної авіації при веденні
ними бойових дій.
Основні принципи бойового застосування РТВ: постійна бойова готовність; висока активність і рішучість дій при виконанні
бойових завдань; узгоджене спільне застосування всіх видів розвідки повітряного противника; зосередження основних зусиль на
напрямках дій головних сил повітряного противника; безперервність радіолокаційної розвідки і видачі інформації про повітряного
противника; маневр силами і засобами, вміле використання і своєчасне відновлення резервів; раптовість та прихованість дій; всебі-
чне урахування та повне використання морального і психологічного чинників в інтересах виконання поставлених завдань; всебічне
забезпечення бойового застосування РТВ; тверде і безперервне управління.
Постійна бойова готовність РТВ - стан військ, що забезпечує спроможність радіотехнічних з’єднань, частин і підрозділів ор-
ганізовано необхідним складом сил і засобів у встановлені терміни розпочати рішення завдань і успішно виконували їх в будь-яких
умовах обстановки.
Висока активність та рішучість дій при виконанні бойових завдань - постійне прагнення і готовність військ в будь-яких
умовах обстановки успішно виконували поставлені бойові завдання з високою ефективністю.
Активність проявляється в енергійному проведенні розвідки повітряного противника радіолокаційними засобами, в пошуку
нових засобів добування відомостей про повітряного противника та видачі радіолокаційної інформації про нього.
Рішучість - уміння командирів і штабів діяти сміливо і енергійно, спроможність іти на розумний ризик, з граничною наполег-
ливістю і завзяттям домагалися безумовного виконання поставленого бойового завдання.
Узгоджене сумісне застосування всіх видів розвідки повітряного противника передбачає організацію і підтримку безпере-
рвної чіткої взаємодії між ними. Взаємодія передбачає скоординовані за завданнями, місцем, часом і засобами дії різних сил і засо-
бів розвідки повітряного противника для досягнення загальної мети бойових дій.
Зосередження основних зусиль на напрямках дій головних сил повітряного противника знаходиться в прямій залежності
від напрямків зосередження основних зусиль ВА і ЗРВ. Зосередження основних зусиль вимагає чималого підвищення мобільності
радіотехнічних підрозділів з метою швидкої концентрації зусиль РТВ на головних напрямках.
Безперервність радіолокаційної розвідки і видачі інформації про повітряного противника - розвідка повинна вестися по-
стійно в мирний час, напередодні і в ході війни, в будь-яких умовах обстановки всіма силами та засобами, а відомості, що добува-
ються, повинні негайно представлятися командуванню і дозволяти йому робити висновки про дії та наміру противника.
Маневр силами і засобами - організоване пересування підрозділів, частин і з’єднань в загрожувальний період чи у ході бойо-
вих дій на нові напрямки (рубежі, райони) з метою зайняття вигідного положення і утворення необхідного угруповання сил і засо-
бів, виводу військ з-під удару противника і ефективного використання їх при виконанні раніше поставлених або знов виникаючих
завдань.
Раптовість - несподівані для повітряного противника дії РТВ за часом, місцем, масштабами, радіолокаційними засобами, що
застосовуються, та тактичними прийомами.
Всебічне забезпечення РТВ - комплекс заходів, що проводять з метою створення сприятливих умов для успішного ведення
радіолокаційної розвідки і видачі розвідувальної та бойової інформації, збереження боєздатності підрозділів, частин і з’єднань РТВ,
зниження ефективності вогневої дії противника та радіоелектронного придушення РЕЗ.
189
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Тверде і безперервне управління дозволяє найбільш ефективно використовувати бойові можливості РТВ по рішенню завдань
радіолокаційної розвідки, видачі розвідувальної і бойової інформації.
Радіотехнічні війська складаються з радіотехнічних бригад, полків, радіотехнічних батальйонів, радіолокаційних рот, окремих
радіолокаційних взводів.
Радіотехнічна бригада (ргбр) - тактичне з’єднання РТВ, що складається з радіотехнічних батальйонів, командного пункту,
підрозділів управління і забезпечення.
Радіотехнічний полк (ртп) - тактична частина РТВ, що складається з радіотехнічних батальйонів (радіолокаційних рот), ко-
мандного пункту, підрозділів управління і забезпечення.
Радіотехнічний батальйон (ртб) - основний тактичний підрозділ РТВ. Він складається з радіолокаційних рот, радіолокаційно-
го підрозділу при управлінні батальйону, окремих радіолокаційних взводів, підрозділів управління і забезпечення.
Радіолокаційна рота (рлр) - тактичний підрозділ, що складається з радіолокаційних взводів (обслуг РЛС), взводів управління і
зв’язку, відділення (взводу) матеріального забезпечення.
Окремий радіолокаційний взвод складається з обслуг РЛС та засобів зв’язку і призначений для нарощування або посилення
радіолокаційного поля на найбільш імовірних напрямках польоту ЗПН противника і відновлення порушеного радіолокаційного
поля.
Для виконання бойових завдань з’єднання (частини) радіотехнічних військ розгортаються по всій території країни в бойові по-
рядки, які включають: бойові порядки радіотехнічних підрозділів, командні пункти і резерви.
Радіотехнічні підрозділи ведуть радіолокаційну розвідку, виконуючи бойове завдання не тільки в межах свого позиційного ра-
йону, але і за його межами на повну дальність виявлення радіолокаційних засобів.
Командні пункти радіотехнічних з’єднань, частин і підрозділів є основними елементами системи управління і забезпечують
збір, обробку, відображення інформації про повітряну обстановку, стан бойової готовності військ, своєчасну передачу всього необ-
хідного об’єму інформації на старші, забезпечувані, взаємодіючі і підпорядковані командні пункти, своєчасне доведення до підлег-
лих бойових завдань, наказів, розпоряджень і контроль за їх виконанням.
Радіотехнічні підрозділи РТВ є головним джерелом інформації про повітряну обстановку. Основним способом добування ін-
формації про повітряну обстановку є радіолокаційна розвідка, яка полягає в безперервному огляді повітряного простору радіоло-
каційними станціями, виявленні, радіолокаційному розпізнаванні і супроводженні повітряних об’єктів, визначенні напрямків їх
польоту, складу, висоти, швидкості і характеру маневру.
Зміст радіолокаційної розвідки: постійне радіолокаційне спостереження за простором; збір, обробка і передача радіолокацій-
ної інформації на КП об’єднань (з’єднань) ППО, з’єднань, частин і підрозділів ЗРВ, ВА і РЕБ; аналіз одержаної радіолокаційної
інформації
Організація постійного радіолокаційного спостереження за повітряним простором передбачає розгортання радіолокаційних за-
собів таким чином, щоб забезпечити спостереження в певному повітряному просторі і використання цих засобів для безперервного
огляду, виявлення, розпізнавання, визначення держналежності і супроводження повітряних цілей. Безперервний огляд заданої
області повітряного простору полягає в постійному зондуванні її засобами активної локації або в прийомі сигналів, що випроміню-
ються засобами повітряного нападу противника, системами пасивної (вторинної) локації.
Всі виявлені радіолокаційними засобами об’єкти іменуються локаційними об’єктами і підрозділяються на повітряні (надвод-
ні) цілі, “свої” повітряні (надводні) об’єкти і нерозпізнані об’єкти.
До повітряних (надводних) цілей відносяться: повітряні (морські) судна противника; повітряні судна невстановленої держа-
вної належності; повітряні судна та інші літальні апарати, що порушують державний кордон і порядок використання повітряного
простору країни.
Повітряні об’єкти (повітряні судна, метеоутворення, зграї* птахів і т.ін.), що не розпізнані, до моменту їх розпізнавання вважа-
ються повітряними цілями.
Відомості щодо повітряних цілей, своїх повітряних об’єктів, завадової обстановки, які добуті в ході радіолокаційної розвідки,
складають радіолокаційну інформацію. Радіолокаційна інформація є складовою частиною інформації про повітряну обстановку,
доповнюється даними інших видів розвідки. Радіолокаційна інформація передається споживачам у вигляді формалізованих
повідомлень.
У залежності від призначення радіолокаційна інформація поділяється на розвідувальну і бойову.
Розвідувальна інформація - радіолокаційна інформація, яка видається на командні пункти об’єднань, з’єднань і частин ППО,
призначена для оцінки повітряної обстановки, оповіщення про неї військ і об’єктів і прийняття рішень командирами з виконання
поставлених бойових завдань. Складовою частиною розвідувальної інформації є інформація попередження - радіолокаційна ін-
формація про початок нападу (дій) повітряного противника, що видається на КП видів ЗС та інших відомств.
Бойова інформація - радіолокаційна інформація з більш високими точносними характеристиками, мінімальними дискретніс-
тю і часом проходження, що видається зенітним ракетним з’єднанням, частинам і підрозділам для цілевказання зенітним ракетним
комплексам; частинам (підрозділам) авіації ППО і на пункти наведення для цілерозподілу між винищувачами, що знаходяться в
повітрі, і наведення їх на повітряні цілі; частинам (підрозділам) РЕБ для цілерозподілу і цілевказання станціям завад.
Рубежі видачі радіотехнічними військами розвідувальної і бойової інформації, її точність і дискретність повинні забезпечувати
своєчасне приведення сил і засобів ППО в необхідний ступінь бойової готовності і виконання ними своїх завдань на заданих
рубежах.
Способами виконання бойового завдання радіотехнічними з’єднаннями, частинами і підрозділами є варіанти використання
сил і засобів стосовно умов обстановки, що дозволяють із максимальною ефективністю виконати поставлені бойові завдання: при
веденні радіолокаційної розвідки; обробці радіолокаційної інформації*; видачі розвідувальної і бойової інформації
Способи ведення радіолокаційної розвідки: круговий пошук; пошук у призначеній зоні (секторі); пошук у зазначеному діа-
пазоні висот; пошук і супроводження призначених повітряних об’єктів.
190
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Круговий пошук застосовується у всіх випадках, коли відсутня будь-яка інформація про ДІЇ повітряного противника і коли кі-
лькість локаційних об’єктів не перевищує інформаційні можливості командних пунктів.
Пошук у призначених зоні (секторі) і діапазоні висот застосовується для підвищення ефективності радіолокаційної розвідки
у тих випадках, коли замисел дій противника розкритий, виявлені його головні сили і коли кількість локаційних об’єктів перевищує
інформаційні можливості командних пунктів.
Пошук і супроводження призначених повітряних об’єктів застосовуються при виявленні і супроводженні особливо важли-
вих локаційних об’єктів.
Способи обробки радіолокаційної інформації: автоматизований; неавтоматизований.
Способи видачі бойової і розвідувальної інформації: централізований; децентралізований.
Централізований спосіб видачі інформації передбачає її видачу з КП об’єднання (з’єднання) ППО на командні пункти
з’єднань і частин ЗРВ, ВА і РЕБ для рішення задач цілерозподілу, цілевказання і наведення.
Децентралізований спосіб передбачає видачу бойової інформації безпосередньо з КП радіотехнічних підрозділів на близько
розташовані командні пункти частин ЗРВ, ВА, РЕБ.
Матеріальною основою виконання бойових завдань, що стоять перед РТВ ППО, є радіолокаційне поле.
Радіолокаційне поле - область повітряного простору, в межах якого радіолокаційними засобами підрозділів радіотехнічної ча-
стини забезпечується виявлення, супроводження і визначення тактичних характеристик повітряних цілей і своїх літаків з імовірніс-
тю, не менше заданої.
Просторова протяжність і загальна конфігурація, висотний діапазон та внутрішня структура радіолокаційного поля залежить
від кількості підрозділів, які створюють радіолокаційне поле, від бойового складу і технічних характеристик радіолокаційних засо-
бів підрозділів.
Радіолокаційному полю притаманні багатофункціональність, багаточастотність та багатоярусність.
Багатофункцюнальнкть радіолокаційного поля полягає в формуванні та суміщенні в просторі одночасно декількох полів:
поля активної локації, поля пасивної локації поля визначення держприналежності.
Поле активної локації, яке формується РЛС, РЛК і висотомірами, складає основу радіолокаційного поля.
Поле пасивної локації становить область повітряного простору, в межах якого засобами пасивної локації (тріангуляції) забезпе-
чується визначення координат літаків-постановників завад.
Поле визначення держприналежності створюється за допомогою апаратури радіолокаційного розпізнавання, яка сполучена з
РЛС (РЛК) активної локації.
Багаточастотність забезпечується формуванням поля за допомогою РЛС і систем розпізнавання, які працюють в різноманіт-
них частотних діапазонах. Це підвищує стійкість радіолокаційного поля при застосуванні противником радіозавад.
Багатоярусність поля створюється за рахунок взаємного перекриття зон виявлення сусідніх радіолокаційних станцій на
певних висотах.
Первинною чарункою радіолокаційного поля є зона виявлення РЛС, що створює працююча РЛС. Радіолокаційні роти створю-
ють зони інформації, сукупність яких складає радіолокаційне поле (батальйону (полку, бригади)).
Для забезпечення безперервного супроводу локаційних об’єктів необхідно утворення суцільного радіолокаційного поля. Під
безперервним супроводом слід розуміти спостереження за повітряним об’єктом, що дозволяє визначити його поточні координати,
державну приналежність та інші характеристики в будь-який момент часу на всьому маршруті польоту.
При наявності в складі угруповання РТВ РЛС різних типів, діапазонів і призначення радіолокаційне поле формується неоднорі-
дним. Маловисотні РЛС створюють нижній ярус поля (маловисотие поле), як правило, обмежений зверху межею виявлення цих
РЛС. Верхній ярус радіолокаційного поля створюється РЛС із великою межею висоти виявлення. Мертві воронки в зонах виявлен-
ня, як правило, перекриваються сусідніми РЛС. Через кривизну земної поверхні на малих і гранично малих висотах утворюються
непроглядні зони і ділянки, що ускладнює розвідку повітряних об’єктів, які здійснюють політ на цих висотах з огинанням рельєфу
місцевості. Нижня і верхня результуючі обвідних зон виявлення РЛС характеризують межі існування радіолокаційного поля по
висоті.
4.3.2. Бойові можливості радіотехнічних військ
Під бойовими можливостями радіотехнічних військ розуміють сукупність кількісних і якісних показників, що характеризу-
ють їх спроможність виконати поставлені бойові завдання в конкретних умовах обстановки у встановлений час.
Бойові можливості РТВ включають: можливості з ведення радіолокаційної розвідки; можливості з видачі бойової і розвіду-
вальної радіолокаційної інформації; можливості з приведення КП з’єднань і частин РТВ, радіотехнічних підрозділів до вищих сту-
пенів бойової готовності; завадостійкость угруповань РТВ; можливості радіотехнічних з’єднань, частин і підрозділів зі здійснення
маневру.
Можливості з ведення радіолокаційної розвідки характеризуються, насамперед, просторовими показниками - розмірами
області повітряного простору, у межах якої можливо виявлення за допомогою РЛС повітряних (наземних, морських) об’єктів з
імовірністю, не менше заданої, визначення їхніх координат і характеристик. Ці показники збігаються з параметрами радіолокацій-
ного поля, яке створене засобами радіолокаційної розвідки угруповань РТВ.
Параметри радіолокаційного поля: висота нижньої межі; висота верхньої межі; рубежі виявлення повітряних об’єктів у
межах поля (зовнішня межа суцільного радіолокаційного поля) для заданої висоли польоту (перетин поля для заданої висоли); кое-
фіцієнт перекриття поля в даній точці простору.
Висота нижньої межі суцільного радіолокаційного поля - мінімальна висота, відрахована від рельєфу місцевості, при
польоті на якій повітряних об’єктів забезпечується їх безперервне супроводження засобами радіолокації.
191
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Висота верхньої межі суцільного радіолокаційного поля - максимальна висота, відрахована від рівня моря, при польоті на
якій забезпечується безперервність супроводження повітряних об’єктів засобами радіолокації.
Рубежі виявлення повітряних об’єктів у межах поля (зовнішня межа суцільного радіолокаційного поля) на заданій висоті ста-
новить замкнуту лінію при перетинанні поля уявною поверхнею, рівновіддаленою від поверхні землі (моря).
Коефіцієнт перекриття в даній точці простору характеризується кількістю радіотехнічних підрозділів, які здатні одночасно
спостерігати локаційний об’єкт в даній точці простору.
Для поля пасивної локації і поля розпізнавання використовуються аналогічні показники.
Таким чином, розрахунок просторових показників бойових можливостей з ведення радіолокаційної розвідки зводиться до ви-
значення лінійних розмірів об’єму повітряного простору за шириною, глибиною та висотою, в межах якого існує суцільне радіоло-
каційне поле.
На значення просторових показників (параметрів радіолокаційного поля) великий вплив чинитимуть активні та пасивні завади,
що створюються з метою придушення РЛС. Особливо це характерно для активних завад. При дії активних завад по основному і
бічних пелюстках діаграми спрямованості антени РЛС дальність виявлення повітряних об’єктів різко знижується, тобто їх зони
виявлення неначе “стискуються”, зменшуються у розмірах. При цьому стискується і радіолокаційне поле, що призводить до погір-
шення його параметрів: збільшується висота нижньої межі, зменшується висота верхньої межі, скорочуються межі виявлення пові-
тряних об’єктів.
Можливості з видачі бойової і розвідувальної радіолокаційної інформації на старші, забезпечувані й взаємодіючі командні
пункти (пункти наведення авіації) оцінюються інформаційними показниками.
Інформаційні показники характеризують можливості радіотехнічних підрозділів, частин і з’єднань за кількістю одночасно
супроводжуваних локаційних об’єктів і спроможністю видавати інформацію про них на старші, забезпечувані і взаємодіючі коман-
дні пункти із заданою якістю.
Основні інформаційні показники: кількість локаційних об’єктів, що одночасно оброблюються і видаються на старший КП;
кількість локаційних об’єктів, що одночасно оброблюються і видаються на КП ЗРВ; кількість локаційних об’єктів, що одночасно
оброблюються і видаються на КП авіації ППО; кількість постановників активних завад, що одночасно оброблюються і видаються.
Значення цих показників залежать від способу збору, обробки і видачі радіолокаційної інформації, кількості каналів видачі
інформації і їхньої пропускної спроможності, дискретності видачі інформації.
Кількість локаційних об’єктів, що одночасно оброблюються і видаються на старший КП, може бути визначена з виразів:
ЬІЛО = тіп{ £ Млоджі, МкплоКЗА} , (4.63)
і=1
Р
МЛОджі= І КуідуПу/60, (4.64)
Ї=1
де ЇЧюджі - кількість локаційних об’єктів, що одночасно оброблюються і видаються і-м джерелом інформації; - інфор-
маційні можливості КЗА (КП) і-го джерела інформації; - кількість робочих місць і-го джерела інформації при видачі радіолока-
ційної інформації; Ц - дискретність передачі донесень (зйому координат) з і-го джерела інформації]-го робочого місця; пу - продук-
тивність оператора і-го джерела інформації ]-го робочого місця; т - кількість д жерел інформації; р - кількість робочих місць і-го
джерела інформації.
Кількість локаційних об’єктів, що одночасно оброблюються і видаються на КП ЗРВ, визначається як
к
Мло зрв = Е І^лоі зрбр(зрп) 9 (4.65)
і=1
Кцу
ї^ло зрбр(зрп) — ШІП { Е Іі дискр» ^ло кзд} > (4.66)
І = 1
Де ^.тозр^зрп) - кількість локаційних об’єктів, що одночасно оброблюються і видаються для цілевказання зрбр (зрп); к - кількість
зрбр (зрп) угруповання ЗРВ; X, - пропускна спроможність каналів видачі даних цілевказання; і - дискретність оновлювання
даних цілевказання; Кцу- кількість каналів видачі даних цілевказання; - інформаційні можливості КЗА КП зрбр (зрп).
Кількість локаційних об’єктів, що одночасно оброблюються і видаються на КП авіації ППО визначається як
к
Млоаппо= Е МЛОІКп(пн) 9 (4.67)
і=1
Кн
^Локп(пн) - тіп { % X. Іі дискр, №локза} 9 (4.68)
І = 1
Де ЇЧющпн) - кількість локаційних об’єктів, що одночасно оброблюються і видаються для наведення на КП (ПН) авіації ППО;
к - кількість КП (ПН) авіації* ППО; X, - пропускна спроможність каналів видачі даних наведення; і - дискретність оновлювання
даних наведення; Кн- кількість каналів видачі даних наведення; - інформаційні можливості КЗА КП (ПН).
Кількість пеленгів на постановники активних завад і кількість постановників активних завад, що одночасно оброблюються і ви-
даються, може бути визначена з виразів:
К = (Е ПіНнкза) , (4.69)
і=1
к
МпАП = Е Н ПАП КЗА 9 (4.70)
І = 1
192
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
де 1ЧП - кількість пеленгів на постановники активних завад, що одночасно оброблюються і видаються; Пі - кількість пеленгів на
постановники активних завад, що видаються і-м підрозділом; Н п кза - можливості КЗА КП і-го підрозділу по видачі пеленгів на
постановники активних завад; Мпдп- кількість постановників активних завад, що одночасно оброблюються і видаються; Нпапкза -
можливості КЗА КП і-го підрозділу супроводженню постановників активних завад; п - кількість підрозділів, що беруть участь у
видачі пеленгів на постановники активних завад; к- кількість КЗА КП, що супроводжують постановники активних завад.
Важливим показником бойових можливостей РТВ є завадостійкість. Для кількісної оцінки завадостійкості угруповання РТВ
використовуються показники його можливостей з виявлення і супроводження повітряних об’єктів у заданому районі в умовах ін-
тенсивного застосування активних і пасивних завад засобам радіолокації. Завадостійкість угруповання залежить від завадозахище-
ності РЛС, які залучені для радіолокаційної розвідки і застосованих методів пасивної локації.
При оцінці завадостійкості визначаються можливості підрозділів, частин, з’єднань і угруповання РТВ по виявленню і супрово-
дженню повітряних об’єктів, що прикриваються завадами, і самих постановників завад.
Показниками завадостійкості є сектори ефективного придушення РЛС, коефіцієнти стиснення зон виявлення РЛС і зміни па-
раметрів радіолокаційного поля угруповання.
Завадостійкість угруповання РТВ завжди вище завадозахищеності окремих РЛС.
Для характеристики можливостей з приведення КП з’єднань і частин РТВ, радіотехнічних підрозділів до вищих ступенів
бойової готовності і здійсненню маневру застосовуються часові показники.
Час приведення у вищі ступені бойової готовності визначається мінімальними витратами часу на підготовку до виконання бо-
йових завдань встановленим складом сил і засобів. Він визначається, виходячи з підльотного часу засобів повітряного нападу; часу
приведення в бойову готовність з’єднань і частин ЗРВ, авіації ППО, РЕБ, що забезпечуються радіолокаційною інформацією; техні-
чних можливостей озброєння, фізіологічних можливостей особового складу, віддалення від бойової позиції (КП) місць проживання
командного складу.
Під маневром РТВ розуміють організоване пересування радіотехнічних підрозділів, частин і з’єднань у новий район (напрямок)
із метою посилення угруповання військ на найбільш важливих напрямках для нарощування радіолокаційного поля, створення ра-
діолокаційних смуг попередження, виводу з-під удару сил і засобів РТВ, відновлення порушених радіолокаційного поля і бойової
готовності, для рішення інших раптово виникаючих завдань.
Час маневру включає виграти часу: на згортання і приведення в похідне положення РЛС, підрозділу, частини; на здійснення
маршу чи пересування залізничним, водним, повітряним транспортом в заданий район; на розгортання в бойовий порядок і приве-
дення в готовність до виконання бойових завдань у новому районі. Найбільш характерним і припустимим для сил та засобів радіо-
локаційної розвідки є маневр своїм ходом - марш.
Сумарний час для здійснення маршу радіотехнічними підрозділами визначається
+ , (4.71)
де Ом - протяжність маршруту, км; Ук - швидкість пересування колони на маршруті, км/год; - час згортання і шикування у
похідний порядок, год; 1& - час розгортання в новому районі в бойовий порядок, включення техніки і проведення контролю функ-
ціонування, год
Основним критерієм, що визначає доцільність і можливість маневру, як при підготовці, так і в ході бойового застосування, є час,
який є у розпорядженні командира, тобто маневр доцільний у тому випадку, коли час, якій є у розпорядженні, більше часу, що по-
трібний на маневр.
4.3.3. Вибір бойової позиції
Для виконання бойового завдання радіотехнічний підрозділ розгортається на місцевості в бойовий порядок. Ділянка місцевості,
на якому підрозділ розгортається в бойовий порядок, називається бойовою позицією. Розміри позиції залежать від озброєння під-
розділу і рельєфу місцевості.
Бойовий порядок підрозділу повинен забезпечувати: повну реалізацію бойових можливостей РЛК (РЛС), КЗА і засобів зв’язку;
можливість одночасної роботи всіх РЛК (РЛС) і засобів зв’язку без взаємних завад; можливість візуального спостереження за пові-
тряним простором і наземною обстановкою в районі позиції підрозділу на всіх напрямках; високу бойову готовність і живучість
підрозділу від вогневого впливу повітряного і наземного противника; виняток шкідливого впливу високочастотного випроміню-
вання РЛК (РЛС) на особовий склад.
Виконання цих вимог забезпечується правильним вибором позиції підрозділу і розміщенням елементів бойового порядку.
Якість позиції’ підрозділу визначається рельєфом місцевості, тому що зони виявлення РЛК (РЛС) метрового і дециметрового ді-
апазонів хвиль формуються з урахуванням впливу земної поверхні. На умови виявлення цілей впливають також висота електрич-
ного центру антени РЛС над підстилаючою поверхнею і кути закриття.
Крім того, при виборі позиції враховують наявність підї’зних шляхів, гірських обвалів, оповзів, що маскують і захисні властиво-
сті місцевості, близькість джерел води й електропостачання, засобів зв’язку, умови життя і побуту особового складу, сейсмічні умо-
ви і геологічні перспективи району, перспективи розвитку населених пунктів, організацій і підприємств промисловості.
Шляхом раціонального вибору позиції можна збільшити дальність виявлення радіолокаційними станціями маловисотних цілей
на деяких азимутальних напрямках (секторах відповідальності підрозділів). Для цього в даних секторах не повинно бути великих
кутів закриття, а рельєф місцевості повинен забезпечувати більш сильне притиснення до Землі нижнього пелюстка ДСА РЛС.
Дальність виявлення маловисотних цілей можна збільшити такими способами: бажано, щоб позиція в секторі відповідальності
мала явно виражений нахил, убік цілі; позицію РЛС бажано вибирали на узвишшях (гірських вершинах, високих обривах, штучних
насипах і спорудах); якщо на позиції зі складним рельєфом місцевості є протяжна ділянка з ухилом убік цілі, то висоту підйому
антени треба вибирали так, щоб ділянка, яка істотно впливає на відбиток радіохвиль під малими кутами місця, розташовувалася в
основному на цій ділянці.
193
РОЗДІЛ 4. РАДІОТЕХНІЧНІ ВІЙСЬКА ППО
Збільшення дальності виявлення РЛС під малими кутами місця також можна досягти шляхом раціонального вибору кута нахи-
лу антени і поляризації зондуючого сигналу. При горизонтальній поляризації можна одержати велику дальність дії РЛС під малими
кутами місця для деяких азимутальних напрямків.
На приморських напрямках найбільш повно задовольняють вимогам позиції, розташовані на островах, мисах, висотах, що
панують над водяною поверхнею.
Для забезпечення живучості підрозділу позиції вибирають на безпечній відстані від можливих зон затоплення і пожеж. Не вар-
то розташовувати позиції в безпосередній близькості від споруд, що екранують електромагнітну енергію.
Для безпосереднього вибору позиції підрозділу призначається рекогносцирувальна група під керівництвом командира частини
або його заступника. До складу рекогносцирувальної групи призначаються офіцери управління і служб частини, а також командир
підрозділу і начальник основної РЛС того радіотехнічного підрозділу, для якого вибирається позиція.
Робота рекогносцирувальної групи здійснюється в такій послідовності: попередній вибір декількох позицій по карті в штабі ча-
стини; рекогносцировка на місцевості обраних позицій і визначення найбільше придатних з них; топогеодезичні роботи на обраних
позиціях; упорядкування звітних документів, що характеризують обрані позиції, з висновками про їх придатність і пропозиціями
рекогносцирувальної групи.
При виборі позиції рекогносцирувальна група керується бойовим завданням підрозділу, можливостями противника з подолан-
ня системи ППО і вимогами до позиції для типів РЛК (РЛС), що знаходяться на озброєнні в даному підрозділі.
Вибір позиції може проводитись як вручну з використанням топографічних карт місцевості масштабу 1:50 000 або 1:100 000,
так і автоматизовано з використанням цифрових карт місцевості. На карті в зазначеному районі намічаються 3 - 4 позиції для попе-
редньої їх оцінки. Обрана ділянка місцевості радіусом 1,5 - 2 км вважається попередньо придатною для позиції при виконанні та-
ких умов: поверхня ділянки повинна бути рівною на відстані 1,5 - 2 км від її центру; на ділянці немає лісового масиву; ділянка роз-
ташована не ближче 3 - 5 км від околиці населеного пункту; у секторі відповідальності підрозділу немає підйому рельєфу і сильної
його порізаності, відсутні кути закриття; площа гідрографії не перевищує половини площі позиції, за винятком прибережних місць,
де площадку необхідно вибирати на острові, косі, мису; обрана площадка по можливості повинна розташовуватися поблизу
шосейної дороги, ліній зв’язку й електропередач.
На теперішній час розроблені методи, що дозволяють проводити автоматизований вибір позиції радіотехнічних підрозділів.
При цьому здійснюється автоматизований аналіз особливостей рельєфу місцевості, а також існуючих обмежень задачі вибору
позиції з використанням цифрових карт місцевості. Використання засобів автоматизації дозволяє істотно підвищити оперативність
попередньої оцінки місцевості та виробітки кількісно обгрунтованих рекомендацій командиру при ухваленні рішення на вибір
позиції.
194
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Зенітні ракетні війська є основною вогневою силою і призначені для оборони від ударів з повітря угруповань військ, важли-
вих об'єктів, районів та напрямків.
Завдання зенітних ракетних військ: прикриття від ударів з повітря угруповань видів Збройних Сил у місцях дислокації та
відмобілізування, розгортання та на маршрутах руху, у ході ведення бойових дій; захист промислово-економічних районів та інших
найважливіших об’єктів держави; боротьба з повітряними десантами та аеромобільними військами противника у польоті; боротьба
зі спеціалізованими літаками розвідки та РЕБ, літаками ДРЛВ та повітряними елементами РУК; участь у створенні умов для утри-
мання панування у повітрі, для успішного ведення операцій та розгортання Збройних Сил, а також у забезпеченні організованого
вступу у війну збройних сил; зрив повітряної операції противника шляхом знищення ударних засобів авіації, БПЛА, КР і БР опера-
тивно-тактичного і тактичного призначення та інших повітряних бойових суден.
У межах можливостей озброєння зенітні ракетні війська можуть застосовуватись для знищення наземних (надводних) цілей.
На озброєнні зенітних ракетних військ знаходяться зенітні ракетні комплекси (ЗРК) і зенітні ракетні системи (ЗРС).
5.1. Основи побудови зенітних ракетних систем і комплексів
5.1.1. Призначення і класифікація зенітних ракетних систем і комплексів та вимоги до них
Зенітні ракетні системи (ЗРС) призначені для знищення засобів повітряного нападу противника зенітними керованими раке-
тами (ЗКР) класу “земля-повітря”.
Зенітна ракетна система - сукупність одного або декількох зенітних ракетних комплексів (ЗРК) і засобів, що забезпечують їх
застосування, у тому числі засобів попереднього виявлення і цілерозподілу.
Зенітний ракетний комплекс - мінімально необхідна сукупність функціонально зв’язаних засобів, призначених для поразки
повітряних цілей зенітними керованими ракетами.
Склад ЗРК (рис. 5.1): засоби виявлення, розпізнавання “свій-чужий” і цілевказання, засоби керування польотом ЗКР (засоби
наведення ЗКР), засоби “підсвічування” цілі, одна або декілька пускових установок (ПУ) з ЗКР, засоби транспортування, зберігання
та заряджання ЗКР.
Зенітний ракетний комплекс
Бойові засоби
Засоби забезпечення
Топоприв’язки
Транспортування, зберігання та
заряджання ЗКР
Енергоживлення
Рис. 5.1. Склад зенітного ракетного комплексу
ЗРК (ЗРС) класифікуються: за характером вирішуваних завдань (ЗРК ППО об’єктів, бойових порядків військ і суден (кораб-
лів); за кількістю одночасно обстрілювальних цілей (одноканальні та багатоканальні); за ступенем рухомості (стаціонарні, буксирні,
переносні та самохідні); за способом керування польотом ракети (з телекеруваням, із самонаведенням, із комбінованим керуван-
ням); за дальністю стрільби (дальньої дії (ДЦ); середньої дальності (СД); малої дальності (МД); ближньої дії (БД)).
ЗРС (ЗРК) дальньої дії - ЗРС (ЗРК), дальня межа зони поразки яких складає понад 100 км. Вони призначені для прикриття ва-
жливих державних і військових об’єктів, значних угруповань військ та для боротьби з літаками ДРЛВ і управління, повітряними
елементами РУК, висотними швидкісними літаками розвідниками, постановниками завад, стратегічними бомбардувальниками і
тактичними балістичними ракетами (ТБР).
ЗРС (ЗРК) середньої дальності - ЗРС (ЗРК), дальня межа зони поразки яких складає до 100 км. Призначені для знищення авіа-
ції, БПЛА, ТБР і крилатих ракету широкому діапазоні висот і швидкостей польоту.
ЗРС (ЗРК) малої дальності - ЗРС (ЗРК), дальня межа зони поразки яких складає до 40 км. Призначені переважно для боротьби
з цілями на малих висотах.
ЗРК ближньої дії - ЗРК, дальня межа зони поразки складає менше 12 км. Призначені для безпосереднього прикриття частин і
підрозділів у бойових порядках. Основними цілями для них є гелікоптери вогневої підтримки, штурмовики і крилаті ракети. Значну
частину ЗРК ближньої дії складають переносні зенітні ракетні комплекси (ПЗРК).
195
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Основні вимоги до сучасних ЗРС і ЗРК
Всепогодність - спроможність ЗРК забезпечити знищення повітряних цілей у будь-яких метеоумовах. Всепогодність досяга-
ється комплексуванням радіоелектронних і оптичних засобів локації та виявлення цілей.
Завадозахищеність - властивість, що забезпечує спроможність ЗРК знищувати повітряні цілі в умовах завад, природного по-
ходження або штучно створюваних противником для подавлення радіолокаційних, електронних (оптичних) засобів виявлення
повітряних цілей та наведення ЗКР, а також управління і зв’язку.
Мобільність - спроможність ЗРК швидко пересуватися до початку і в ході бойових дій у різноманітних умовах, а також розго-
ртатися в бойовий порядок. Характеризується транспортабельністю ЗРК, швидкістю пересування та часом їх переведення з похід-
ного стану в бойовий і з бойового в похідний. Є одним із чинників, від яких залежить можливість маневру.
Відносним показником мобільності може служилі сумарний час, необхідний для зміни стартової позиції в заданих умовах.
Найбільш мобільним вважається комплекс, що має більшу транспортабельність і вимагає меншого часу на здійснення маневру.
Мобільні комплекси можуть бути самохідними, перевізними і переносними. Немобільні ЗРК називають стаціонарними.
Універсальність - властивість, що характеризує технічні можливості ЗРК знищувати усі типи аеродинамічних цілей, крилатих
ракет і тактичних балістичних ракет.
Автоматнзованість - ступінь участі бойової обслуги в передачі функцій управління ЗРК технічним засобам в процесі вико-
нання бойової роботи. За ступенем автоматизації розрізняють зенітні ракетні комплекси автоматичні, напівавтоматичні і неавтома-
лічні. В автоматичних ЗРК всі операції, починаючи з виявлення і супроводу цілей до наведення ракет на них викону ються автома-
тами без участі людини. В напівавтоматичних і неавтоматичних ЗРК у вирішенні ряду задач приймає участь людина.
Багатоканальність - спроможність ЗРС (ЗРК) одночасно супроводжувати декілька цілей і наводити на кожну' з них декілька
ЗКР. Зенітні ракетні комплекси розрізнюють за кількістю цільових і ракетних каналів. Комплекси, що забезпечують одночасне
супроводження і обстріл однієї цілі, називаються одноканальними, а декількох цілей - багатоканальними по цілі, аналогічно - по
ракеті.
Надійність - спроможність ЗРК виконувати свої функції в заданих умовах експлуатації на протязі фіксованого відрізку часу.
Надійність бойової роботи зенітного ракетного комплексу
Надійністю технічного пристрою є властивість, обумовлена його безвідмовністю, довговічністю та ремонтопридатністю, що
забезпечує нормальне виконання пристроєм заданих функцій. Ця властивість характеризується імовірнісними процесами, що про-
тікають у часі.
Подія, що складається в повній чи частковій втраті працездатності пристроєм, називається відмовленням.
За своїм характером відмовлення поділяються на поступові й раптові. Поступові відмовлення виникають у результаті розвитку
процесів зносу і старіння елементів. їх можна прогнозувати і вчасно вживати заходів по недопущенню зниження боєздатності ЗРК.
Раптові відмовлення носять випадковий характер. їхніми основними причинами є приховані виробничі дефекти і помилки експлуа-
тації. Відмовлення на період їхнього виявлення й усунення виводять комплекс із ладу.
Надійність технічного пристрою (комплексу) оцінюється за допомогою кількісних показників, які можна розділити на три гру-
пи: показники безвідмовності, відновлюваності та бойової готовності.
Показники безвідмовності дозволяють оцінити технічний пристрій з погляду його безвідмовної роботи протягом деякого часу.
Найбільш простими показниками цієї групи є середній час безвідмовної роботи Ц, та імовірність безвідмовної роботи протягом
визначеного інтервалу часу Р(і).
При оцінці ефективності стрільби ЗКР по повітряній цілі враховується імовірність нормального функціонування комплексу при
виконанні ним бойової задачі (при стрільбі), що прийнято називати коефіцієнтом надійності бойової роботи ЗРК К^.
Властивість відновлюваності (відновлення втраченої в результаті відмовлення працездатності) кількісно оцінюється середнім
часом відновлення іц, (тривалістю інтервалу випадкового часу простою, витраченого на ремонт технічного пристрою після відмов-
лення).
Коефіцієнт готовності технічного пристрою визначається як імовірність того, що він в момент часу і буде знаходитись в стані
справності. Отже, коефіцієнт боєздатності ЗРК Кб^., - це є імовірність готовності комплексу до бойової роботи (стрільби) у будь-
який момент часу. Коефіцієнт боєздатності комплексу враховується при оцінці математичного чекання кількості стрільб.
Коефіцієнт надійності бойової роботи комплексу може бути визначений досвідним шляхом, тобто на основі стрільб, чи розра-
хований на основі статистичних матеріалів, накопичених у процесі експлуатації техніки.
Коефіцієнт надійності бойової роботи К^., визначений досвідним шляхом, приймається рівним відношенню кількості стрільб, у
яких комплекс чи розглянутий його елемент працював безвідмовно, до загальної кількості стрільб. Недолік цього методу — велика
вартість іспитів. Обмеженість досвідного матеріалу не дає достатнього наближення частоти до імовірності безвідмовної роботи
комплексу (його елемента) при стрільбі.
Для підтримання боєготовності та надійності роботи комплексу на техніці періодично проводяться різні види технічного обслу-
говування (ТО), а також контроль його функціонування (КФ).
Розрахункова формула для Кб.р елемента комплексу визначається, виходячи з наступного. Несправності за своїм характером
можуть бути різними. Припускається, що частина відмовлень виявлена після включення апаратури, інша частина - у процесі прове-
дення контролю функціонування, а деякі несправності виявлені тільки в результаті виконання технічного обслуговування. За ре-
зультатами контролю функціонування комплекс визнаний боєготовим. У цьому випадку зрив бойової роботи комплексу (його
елемента) може бути наслідком двох випадкових подій. Виникнення несправності (відмовлення) в апаратурі в процесі бойової ро-
боти (при стрільбі) та невиявлення перед початком бойової роботи несправності, що є в апаратурі. Імовірність безвідмовної роботи
елемента, що має постійну небезпеку відмовлень, убуває в часі за експонентним законом:
196
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Р(і) = е °*р* ; (5.1)
де - загальна кількість відмовлень, що мали місце за час - кількість годин, протягом яких розглянутий елемент ком-
плексу функціонував (напрацював під струмом) за календарний час; іб.р. - тривалість роботи елемента при стрільбі.
Імовірність виявлення відмовлення перед стрільбою стосовно до розглянутої вище схеми експлуатації і контролю комплексу
визначається частотою виникнення несправностей Хі і середнім часом гі наробітки апаратури під струмом за час між технічними
обслуговуваннями і-ої періодичності. Виходячи з того, що включення комплексу (його елемента) у будь-який момент часу на
інтервалі гі рівноймовірне, то імовірність другої події визначається за формулою
Пт° — X. • і •
Рневиявл. =ПтгО-е 11); (5-2)
І = 1 * *
де Пго - кількість видів технічних обслуговувань (включаючи контроль функціонування) за періодичністю їхнього виконання.
Отже, коефіцієнт надійності бойової роботи елемента комплексу
^б.р. = РОРневиявл. • (53)
При стрільбі в найбільш складних умовах працює бортова апаратура ракети. На неї діють такі специфічні навантаження, як віб-
рація, прискорення, зміна тиску з висотою та ін.
До моменту бойового використання ракета знаходиться на збереженні. У процесі збереження її боргова апаратура може пері-
одично перевірятись. Можлива перевірка боргової апаратури ракети і безпосередньо перед стрільбою. Обробка статистичного ма-
теріалу, отриманого в результаті цих перевірок, дозволяє визначити коефіцієнт готовності ракети до бойового застосування в будь-
який момент часу. Оцінка ж коефіцієнта надійності роботи бортової апаратури при стрільбі можлива лише на основі аналізу реаль-
них пусків ЗКР. Це пояснюється тим, що умови роботи боргової апаратури при наземних перевірках і при стрільбі різні.
Знаючи коефіцієнти надійності окремих елементів і структурну схему комплексу, можна обчислиш надійність його бойової
робота при пусках заданої кількості ракет.
5.1.2. Характеристики складових частин зенітних ракетних комплексів і систем керування
зенітними ракетами
У відповідності із завданнями, що вирішуються ЗРК, до його складу можуть повністю або частково входити розглянуті вище
(п. 5.1.1) бойові засоби. При використанні в складі ЗРК багатофункціональних РЛС (багатофункціональних радіолокаторів підсві-
чування та наведення - РПН) вони виконують завдання всіх наземних рддіозасобів (виявлення, розпізнавання, супроводження цілей
(ПО) і ракет, що наводяться на них, пристроїв передачі команд керування, а також станцій підсвічування цілі для забезпечення ро-
бота бортових радіопеленгаторів).
Засоби виявлення. В ЗРК у якості засобів виявлення цілі можуть використовуватися активні, напівактивні й пасивні радіо та
оптичні локаційні станції й пеленгатори, особливості робота яких розглянуті в розділі 3 Довідника. Пасивний режим робота
засобів виявлення знижує можливість виявлення ЗРК противником і виключає можливість застосування ним
протирадіолокаційних ракет. Об’єктами радіопеленгації* можуть бути радіолокаційні бомбові приціли, станції* переднього огляду та
інші випромінюючі засоби ПО.
Засоби розпізнавання ПО дозволяють визначиш державну належність виявленого ПО і віднести його до категорії “свій-
чужий”. У сучасних ЗРК вони, як правило, сполучені з передавальними (приймальними) пристроями РЛС (більш докладно розгля-
нуті у розділі 4 Довідника).
Засоби цілевказання призначені для прийому, обробки й аналізу інформації про повітряну обстановку і визначення
послідовності обстрілу виявлених цілей, а також передачі даних про них на інші бойові засоби.
Інформація про виявлені та розпізнані ПО, як правило, надходить від РЛС. У залежності від вигляду кінцевої побудови засобів
цілевказання аналіз інформації* про ПО здійснюється автоматично (при використанні ЕОМ) або вручну (оператором при викорис-
танні екранів електронно-променевих трубок). Результати обчислень ЕОМ (або лічильно-вирішуючого приладу (ЛВП)) можуть
відображатися на спеціальних пультах, індикаторах у вигляді сигналів для прийняття оператором рішення про їх подальше викори-
стання, або передаються на інші бойові засоби ЗРК автоматично. Якщо як кінцевий пристрій використовується екран, то відмітки
від виявлених ПО відображаються світловими знаками. Дані цілевказання (рішення на обстріл цілі) можуть передавалися як по
кабельних лініях, так і по радіолініях зв’язку. Засоби цілевказання і виявлення можуть обслуговувати як один, так і декілька підроз-
ділів ЗРВ.
Зближення зенітної керованої ракети з повітряною ціллю, яка безупинно переміщається в просторі, забезпечується системою
керування ракетою, яка являє собою сукупність елементів (засобів і пристроїв), розташованих на пункті керування (наведення) та в
ракеті й забезпечують підготовку до пуску, пуск, наведення ракети на ціль та підрив її бойової частини. Системи керування сучас-
них багатоканальних ЗРК замкнуті й повністю автоматичні.
Потрібна траєкторія зближення ракета з ціллю задається рівняннями зв’язку, що визначають рух ракета в залежності від коор-
динат і параметрів руху цілі. Характер цих зв’язків обумовлюється вибором методу наведення. Отже, для зближення ракета з ціллю
система керування в кожен момент часу повинна не тільки мата інформацію про координата і параметри руху цілі і ракета, але і
задавати характер зв’язку між ними, визначати міру порушення цих зв’язків і на підставі цього виробляти і віддавати команди керу-
вання, що забезпечують рух ракета за необхідною траєкторією.
Частиною системи керування є система наведення, що керує польотом ракета. Система наведення ЗКР є замкнутою системою
автоматичного керування. Вона вирішує дві основні задачі: на основі інформації про координата і параметри руху цілі визначає
траєкторію руху центра мас ракети і забезпечує її політ за цією траєкторією шляхом зміни величини нормальних керуючих сил.
197
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
У контур цієї системи (у контур керування) у якості однієї з ланок входить система стабілізації, призначена для збереження необ-
хідного кутового положення чи сталого кутового руху ракети. Об’єктом керування системи стабілізації і системи наведення в ціло-
му є ракета. Контур керування замикається через так звану кінематичну ланку, що встановлює зв’язок між рухом ракети і рухом
цілі. Струкіурна схема кінематичної ланки визначається обраним методом наведення і параметром неузгодженості. Структурна
схема і параметри контуру керування повинні забезпечувати задану точність наведення ракети на ціль за умови, коли вхідні сигна-
ли, крім регулярних впливів, обумовлених рухом цілі, а також подовжнім рухом ракети, мають у своєму складі відносно високий
рівень випадкових збурень.
Для наведення зенітних керованих ракет на ціль використовують неавтономні системи керування: телекерування (командні си-
стеми телекерування (1 і 2 типу)), теленаведення (системи наведення за променем (одно- та двохпроменеві)), самонаведення (акти-
вні, напівактивні, пасивні)) і комбіновані системи керування (послідовні, паралельні, змішані). Для рішення окремих задач знахо-
дять застосування й автономні системи керування.
Командними системами телекерування називають такі, у яких керування польотом ракети здійснюється за допомогою команд,
сформованих на пункті управління і переданих на ракету по радіолінії керування. До складу системи входять пристрої виміру коор-
динат цілі і ракети, пристрій формування команд керування (ПФК), командна радіолінія керування (КРК), пускові пристрої (пускові
установки) з ЗКР. Розрізняють командні системи телекерування 1 і 2 типу (ТК-1, ТК-2).
Командна система ТК-1 (рис. 5.2, а). Засоби пункту керування за даними цілевказання або самостійно виявляють цілі. У процесі
автоматичного або ручного супроводження виміряються координати цілі (частіше в сферичній системі координат). Значення коор-
динат надходять в ПФК, де формуються команди керування, і далі через КРК передаються на борг ракети. Дальність дії КРК зале-
жить від технічних параметрів апаратури передавального і приймального трактів:
і 2
п - РпКРКС1°2^КРК
°КРК - -І ; 2 П----------- истр.макс »
| (4л) РПр.мінКРК
(5.4)
де Рпкрк ~ потужність випромінювання передавача КРК; С ] С 2 - коефіцієнти спрямованої дії антен передавача і приймача
КРК відповідно; А.КРК - довжина робочої хвилі КРК; Рпр<мінКРК “ чутливість бортового приймача лінії; ВСтр.макс -максима-
а) б)
Рис. 5.2. Схеми командних систем керування І типу (а) і II типу (б);
1 - пристрій супроводження цілі; 2 - пристрій супроводження ракети; 3 - ПФК; 4 - КРК; 5 - пускові пристрої
Після дешифрування в бортовій апаратурі команди керування надходять в автопілот і на рулі ракети, керуючи їх положенням.
Командна система ТК-2 (рис. 5.2, б) відрізняється від ТК-1 тим, що пристрій одержання інформації про параметри руху цілі
(координатор) розміщений на борту ракети. Дані про ціль після попереднього перетворення й обробки бортовою апаратурою по
радіолінії передаються на пункт керування і вводяться в ПФК. Сюди ж надходять і координати ракети, які виміряються візирами
пункту керування. Подальший процес аналогічний керуванню в системі ТК-1.
Система ТК-1 забезпечує:
досить високу точність наведення ракети при обстрілі цілей на невеликих дальностях, але при збільшенні дальності, у зв’язку із
зростанням помилок визначення місцеположення цілі, точність погіршується, крім того при недостатній розділювальній здатності
пристроїв супроводження цілі ефективність обстрілу групових і маловисотних цілей також є низькою (від цього вільна система
ТК-2);
можливість адаптивної зміни параметрів контуру керування з урахуванням умов стрільби, а також перенацілювання ракет
(забезпечується і в системі ТК-2);
відносну простоту боргової апаратури, але досить великий об’єм апаратури пункту керування; можливість використання у
складних завадових умовах режиму ручного супроводження цілі (завадостійкість системи ТК-2, порівняно з системою ТК-1,
є меншою).
198
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Системи теленаведення (системи наведення за променем) - системи керування ракетами, у яких команди керування польотом
формуються на борту ракети. Напрямок руху ракети в них задається за допомогою спрямованого випромінювання електромагніт-
них хвиль (радіохвиль, лазерного випромінювання й ін.). Промінь модулюється таким чином, щоб при відхиленні ракети від зада-
ного напрямку її бортові пристрої автоматично визначали сигнали неузгодженості і виробляли відповідні команди керування раке-
тою. їхня величина пропорційна відхиленню ракети від рівносигнального напрямку (РСН), що створюється локаційними візирами
пункту керування (рис. 5.3). Такі системи бувають одно- і двохпроменевими.
а) б)
Рис. 5.3. Схеми систем теленаведення: однопроменева (а); двохпроменева (б);
1 - пристрій супроводження цілі й наведення ракети; 2 - пускові пристрої з ЗКР; 3 - пристрої наведення ракети
Системи самонаведення - системи, у яких керування польотом ракет здійснюється командами керування, що формуються на
борту ракет.
До складу контуру самонаведення ЗКР входять головка самонаведення, зенітна керована ракета із системою стабілізації і кіне-
матична ланка. Система самонаведення крім контуру, що замикається через кінематичну ланку, має ряд внутрішніх контурів авто-
матичного керування.
Для реалізації методів самонаведення необхідна інформація про кутову швидкість лінії візування цілі (методи пропорційного і
паралельного зближення) чи поточне значення кута упередження (методи погоні). Формування команд керування, як правило,
здійснюється з урахуванням різного роду компенсаційних виправлень. У цьому випадку виникає необхідність в одержанні інфор-
мації як про кутові швидкості лінії ракета-ціль, так і про величину кутів упередження (пеленга) цілі.
Рішення задачі автоматичного спостереження за ціллю головкою самонаведення, розміщеної на боргу ракети, здійснюється ко-
ординатором за допомогою різних приводів, що стежать. У системах самонаведення ракет найбільше застосування знайшли так
звані рухливі координатори. Вони забезпечують переміщення рівносигнального напрямку щодо корпуса ракети незалежно від його
руху. Поворот рівносигнальної лінії може вироблятись механічно (поворотом антени), або електрично (при використанні ФАР та
ін.). Помилки супроводу цілі повинні бути мінімальними, навіть при невеликих дальностях ракета-ціль, коли швидкість супроводу
велика
За видом енергії’, яка використовується для інформації про параметри руху цілі, розрізняють системи самонаведення активні,
напівакгивні, пасивні.
Активними називаються системи самонаведення, у яких джерело опромінювання цілі встановлено на борту ракети. Відбиті
від цілі сигнали приймаються бортовим координатором і служать для виміру параметрів руху цілі (параметра неузгодженості),
рис. 5.4, а
У напівактивних системах самонаведення джерело опромінювання цілі розміщене на пункті управління (рис. 5.4, б). Відбиті від
цілі сигнали використовуються бортовим координатором для виміру параметра неузгодженості.
Пасивними називають такі системи самонаведення, у яких для виміру параметрів руху цілі використовується енергія, що ви-
промінюється ціллю. Це може бути теплова (промениста), світлова, радіотеплова енергія (рис. 5.4, в).
До складу системи самонаведення входять пристрої, що вимірюють параметр неузгодженості, ЛВП, автопілот і кермовий
тракт. Контроль якості наведення може бути візуальним, або за допомогою радіолокаційних і телевізійно-оптичних засобів, устано-
влених на пункті управління.
Автономні системи - системи, у яких сигнали керування польотом виробляються на борту ракети відповідно до попередньої
(до старту) заданої програми. При польоті ракети автономна система керування не одержує будь-якої інформації від цілі та пункту
керування. Така система в ряді випадків використовується на початковій ділянці траєкторії польоту ракети для виведення її в задану
область простору.
Комбіновані системи наведення - системи, у яких наведення ракети на ціль здійснюється декількома способами (послідовно,
паралельно, послідовно-паралельно). При послідовному керуванні вони застосовуються по черзі. Це може бути комбінація команд-
ної системи телекерування на початковій ділянці траєкторії польоту ракети і самонаведення на кінцевому або наведення за радіо-
променем на початковій ділянці і самонаведення на кінцевій.
199
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
а) б) в)
Рис. 5.4. Схеми систем самонаведення: активної (а); напівактивної (б); пасивної (в);
1 - бортовий координатор; 2 - ЛВП; 3 - автопілот; 4 - станція підсвічування цілі; 5 - пусковий пристрій
При паралельному комбінуванні ТК-1 і ТК-2, після початку функціонування бортового координатора, використовуються одно-
часно. Такий спосіб одержав назву бінарного. При його реалізації важливим є раціональне комплексування сигналів <д2н, ^(ко-
манд керування польотом ракети), які формуються за даними про параметри руху цілі отриманими від двох джерел (наземного та
бортового). Це забезпечується шляхом введення та використання вагового коефіцієнта Чзр1=<ґн/(о2н+ о2б), який встановлює у вихід-
ній команді керування польотом ракети ох (ох=(1-уОр()а)н4- у^о^) пайову участь систем ТК-1 і ТК-2, з урахуванням дисперсій сиг-
налів керування (о\, о2б) сформованих відповідно до даних, одержаних від наземних пристроїв виміру координат цілі та бортового
координатора.
Прикладом послідовно-паралельного (змішаного) способу керування польотом ракети може бути керування за схемою: авто-
номне керування —>телекерування ТК-1—^бінарне керування.
Завдяки застосуванню в комбінованих системах наведення на кінцевій частині траєкторії телекерування ТК-2 забезпечується
зниження залежності точності наведення ракети від дальності стрільби, а також можливість ефективного обстрілу групових і мало-
висотних цілей та адаптивної зміни параметрів і структури контуру керування ракетою завдяки застосуванню на пункті керування
пристрою виробки команд з великими обчислювальними можливостями. Можливі також перенацілювання ракет і стрільба раке-
тами, які знаходяться в транспортно-пускових контейнерах. Однак, при цьому використовується велика кількість радіоканалів, які
можуть піддаватися впливу завад з боку противника.
Засоби керування польотом ЗКР. В загальному випадку будь-яка система керування ракетою повинна включати: вимірювачі
поточних координат ракети і цілі; ЛВП або ЕОМ (визначають параметр неузгодженості і формують команди керування); пристрій
передачі команд (ППК); автопілот (АП); ракету (її рульовий тракт - об'єкт регулювання).
Величина параметру неузгодженості (міри порушення зв’язків, що зумовлюються характером руху цілі й методом наведення
на неї ЗКР) вимірюється засобами супроводження ЗКР (станцію спостереження за ціллю і ракетою чи координатором цілі, устано-
влюваним на борту ракети (головка самонаведення)). ЕОМ (ЛВП) визначає параметр неузгодженості Д(() і забезпечує формування
електричних сигналів, величина і знак яких відповідають величині та знаку від хилення ракети від кінематичної траєкторії. На основі
А(0 формується відповідний електричний сигнал у вигляді напруги або струму, що називається сигналом неузгодженості иД . Си-
гнал неузгодженості є основною складовою при формуванні команди керування. Для підвищення точності наведення ракети на
ціль до складу команди керування можуть вводитись сигнали корекції.
Окрім вирішення задач, пов'язаних з формуванням команд керування, ЕОМ (ЛВП) може виконувати й інші задачі: визначати
момент пуску ракет, формувати разові команди, керувати режимами роботи боргової апаратури тощо. На відміну від систем ко-
мандного керування в системах самонаведення пристрій формування команд керування розташовується на боргу ракети.
Пристрої передачі команд (командні лінії керування (КЛК)). В системах телекерування передача команд керування з пунк-
ту наведення на бортові прилади ЗКР здійснюється шляхом апаратури, що утворює КЛК (здебільшого командні радіолінії керуван-
ня (КРК)). Ці лінії забезпечують передачу команд керування польотом ракети, разових команд, що змінюють режими роботи бор-
тової апаратури.
КРК є багатоканальною лінією зв'язку, кількість каналів якої відповідає кількості команд, що передаються, при одночасному
керування декількома ракетами.
Радіоканал - сукупність приладів, що забезпечують передачу команди на борт ракети. До складу радіоканалу входять тракт
передачі, середовище розповсюдження хвиль, приймальний тракт. Перетворення повільно змінюваної напруги команди и (і) на
радіосигнали, придатні для передачі на борт ракети, здійснює апаратура тракту передачі, який розташовується на пункті наведення.
На борту ракет встановлюється апаратура приймального тракту, що забезпечує прийом радіосигналів команд і перетворення їх у
форму, придатну для управління виконавчими органами.
Перетворення команд на радіосигнали в тракті передачі виконується, як правило, таким чином: спочатку напруги команд пере-
творюються на напруги піднесучих частот за прийнятим методом (наприклад, можуть бути застосовані методи з імпульсними і
200
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
гармонійними піднесучими), далі формується ознака належності команди (кожній команді придається своя ознака належності,
кодом можуть бути гармонійні коливання або імпульсні комбінації), апаратурно ці перетворення реалізуються в перетворювачі і
кодуючому пристрої шифратора. Сигнали (і) з виходу кодуючих пристроїв всіх радіоканалів надходять в підсумовуючий при-
стрій (модулятор передавача), на виході якого формуються сигнали з(і), які надходять в генератор радіочастоти для модуляції
несучих коливань за одним з їх параметрів - амплітудою, частотою або фазою. Перетворені на високочастотні коливання команди
через антену випромінюються в простір.
На борту ракети встановлена апаратура приймального тракту, що містить антену, приймач, селектор і демодулятор. Приймач
селектує прийняті сигнали команд за несучою частотою і посилює радіосигнали. Розподіл сумарного сигналу на сигнали команд і
фільтрування завад здійснює декодуючий пристрій, що є набором селекторів, кожний з яких виділяє з сигналу $(і) сигнал певної
команди. Відмінною ознакою служить ознака належності команди. На вихід декодуючого пристрою пройдуть сигнали тих команд,
що відповідають вигляду операторів перетворення селекторів, що є зворотним оператору кодування.
З виходу селекторів сигнали надходять в демодулятори відповідних радіоканалів, які перетворюють сигнали команд на напруги
(як правило, на повільно змінювані напруги (струми)), що характеризують величину і знак команди. Оператори перетворення де-
модуляторів є зворотними операторам перетворювача тракту передачі. Напруги команд з виходів демодуляторів надход ять до ви-
конуючих пристроїв апаратури ракети і використовуються для управління її роботою.
Методи з імпульсними піднесучими. Амплітудно-імпульсний метод (ДІМ) полягає у тому, що напруга команди и (і) пере-
творюється в імпульси напруги, амплітуда яких змінюється у відповідності зі зміною напруги команди. Частотно-імпульсний метод
(ЧІМ) полягає в тому, що напруга команди перетворюється на імпульси напруги, частота повторення яких змінюється за законом
ик(і). Часо-імпульсний (ЧсІМ) або фазоімпульсний (ФІМ) метод полягає у тому, що напруга команди перетворюється на
імпульси напруги, часове положення яких по відношенню до опорних імпульсів змінюється у відповідності зі зміною величини і
знаку и (і) . Широтно-імпульсний метод (НИМ) полягає у тому, що напруга команди перетворюється на імпульси, ширина (три-
валість) яких змінюється у відповідності з законом зміни напруги и (і) . Кодово-імпульсний метод (КІМ) полягає у тому, що
напруга и к (і) перетворюється на імпульси напруги, які представляють собою цифровий (частіше двійковий) код
Методи з гармонійними піднесучими. Амплітудно-частотний метод (АЧМ) полягає у тому, що напруга команди перетво-
рюється на гармонійні коливання, фаза яких змінюється у відповідності з напругою и к (і). Фазочастотний метод (ФЧМ) полягає
у тому, що напруга команди перетворюється на гармонійні коливання, фаза яких змінюється у відповідності з напругою и к (і).
Пускові установки (ГТУ), пускові пристрої - спеціальні пристрої, призначені для розміщення, прицілювання, передстаргової
підготовки і пуску ракети. ПУ складається з пускового столу або напрямних, механізмів наводки, засобів горизонтування, пе-
ревірочно-пускової апаратури, джерел електроживлення тощо.
ПУ розрізнюють: за типом старту ракет (з вертикальним і нахильним стартом); за рухомістю (стаціонарні, напівстаціонарні
(розбірні), рухомі).
Стаціонарні ПУ у вигляді пускових столів монтуються на спеціальних бетонованих майданчиках і переміщенню не
підлягають.
Напівстаціонарні ПУ при необхідності можуть розбиратися і після транспортування встановлювалися на іншій позиції.
Рухомі ПУ розташовуються на спеціальних транспортних засобах. Застосовуються в мобільних ЗРК і виконуються у самохід-
ному, возимому, носимому (переносному) варіантах. Самохідні ПУ розташовуються на гусеничних або колісних шасі, забезпечую-
чи швидкий перехід з похідного стану до бойового і навпаки. Возимі ПУ встановлюються на гусеничних або колісних несамохід-
них шасі, перевозяться тягачами.
Переносні пускові пристрої виконуються у вигляді пускових труб, в які встановлюється ракета. Пускова труба може мали при-
цільний пристрій для поперед нього націлювання і пусковий механізм.
За кількістю ракет, що знаходяться на пусковій установці, розрізнюють одинарні ПУ, спарені тощо.
Зенітна керована ракета - безпілотний літальний апарат з реактивним двигуном, призначений для доставки бойового заряду
(бойової частини) до району знаходження цілі.
Класифікація ЗКР. Зенітні керовані ракети класифікуються за: типом системи наведення (телекеровані, теленавідні, самонаві-
дні, з комбінованою системою); дальністю дії (ДД СД МД БД); способом створення керуючих сил (з аеродинамічною, газодина-
мічною чи аерогазодинамічною схемою); кількістю ступенів (як правило, одно- і двоступінчаті); розташуванням стартових двигунів
(тандемне, радіальне); способом старту (нахильний (з постійним чи змінним кутом нахилу), вертикальний); аеродинамічною схе-
мою (“утка”, поворотне крило, нормальна, безхвістка, безкрилка, комбінована, несучий конус (рис. 5.5)), типом бойового заряду
(звичайні зі спеціальним зарядом (наприклад, ядерним)), типом ракетного двигуна (з РРД РДТП).
Ракета в своєму складі має планер, ракетний двигун та бортове обладнання (рис. 5.6). Планер є несучою конструкцією ракети і
складається з корпуса, нерухомих і рухомих аеродинамічних поверхонь. Корпус планера, як правило, циліндричної форми з коніч-
ною (сферичною, оживальною) головною частиною. Аеродинамічні поверхні планера служать для створення піднімальної і керу-
ючих сил. До них відносяться крила, стабілізатори (нерухомі поверхні), дестабілізатори, рулі.
Ракетні двигуни (РД). Ракетним називається двигун, що використовує паливо, яке цілком знаходиться на бо-
рту ракети. Тяга РД створюється за рахунок витікання робочого тіла або його продуктів: газу, продуктів розкладан-
ня чи згоряння. За видом палива ракетні двигуни розділяються на ракетні двигуни твердого палива (РДТП) і рідинні
ракетні двигуни (РРД).
РРД - РД що працює на рідкому ракетному паливі. Перетворення палива на реактивний газовий струмінь, що створює тягу,
відбувається в камері. У сучасних РРД використовуються як двокомпонентні ракетні палива, які складаються з окислювача і паль-
ного, що зберігаються в окремих баках, так і однокомпонентні ракетні палива, що є рідинами, здатними до каталітичного розкла-
201
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
дання. За родом використовуваного окислювача РРД бувають азотнокисло™, азоттетроксидні (окислювач — чотирьохокис азоту),
кисневі, перекисводневі, фторні та ін. РРД характеризуються значенням тяги, питомим імпульсом тяги, режимом роботи, габари-
тами, питомою масою, тиском у камері згоряння, конструкцією загальною і основних агрегатів. За системами подачі палива РРД
поділяються на двигуни з витискуваними (з повітряним, пороховим чи рідинним акумулятором тиску) чи з насосними системами (з
газогенератором на унітарному паливі чи елементах основного палива).
1 2
3 4 5 6 7
Рис. 5.5. Аеродинамічні схеми керованих ракет: 1 - “утка”; 2 - поворотне крило; 3 - нормальна;
4 - безхвістка; 5 - безкрилка; 6 - комбінована; 7 - несучий конус
1 2 3 4 5 6 7 8 9 10 11 12
13 14 15 10 16 17 12 11
б)
Рис. 5.6. Варіанти схем можливого агрегатного компонування ЗКР з РДТП (а) та з РРД (б):
1 - стабілізатори; 2 - стартовий прискорювач; 3 - підпалювач стартового двигуна; 4 - двигуни управління рулями; 5 - ру-
лі; 6 - підпалювач маршового двигуна; 7 - паливо маршового двигуна; 8 - приймальна антена ; 9 - крила; 10 - джерела
бортового електроживлення; 11 - апаратура управління польотом; 12 - бойова частина та радіопідривач; 13 - РРД; 14 -
ТНА; 15, 17 - баки для компонентів палива (бак “окислювач”, бак “паливо”); 16 - балон зі стиснутим повітрям.
а)
РДТП складається з корпуса, паливного заряду, реактивного сопла, запалювана та ін. елементів. Корпус РДТП служить каме-
рою згоряння й основним силовим елементом РДТІ1. Корпус представляє собою, як правило, судину циліндричної форми, вигото-
влену з металу (сталь, титанові чи алюмінієві сплави). Як паливо в РДТП використовуються ракетні порохи і сумішні тверді пали-
ва, що запресовуються безпосередньо в камеру згоряння двигуна Паливний заряд, виготовлений способом заливання, є власне
кажучи частиною конструкції РДТП. Він повинен бути досить міцним і одночасно еластичним, щоб сприймати навантаження в
процесі виготовлення, транспортування і збереження РДТІ 1 і, нарешті, під час польоту. Важливою умовою надійної роботи РДТІ 1,
як і досягнення розрахункових характеристик, є однорідність і суцільність маси виготовленого заряду (у т.ч. відсутність тріщин і
пор), а також цілісність з'єднання заряду з теплоізоляційним шаром. При експлуатації ракет з РДТП необхідно враховувати, що
тверді палива, а також бронюючі, теплоізоляційні, адгезіонні й інші полімерні матеріали змінюють механічні властивості в залеж-
ності від температури і характеру прикладання навантаження, схильні до “акумулювання” структурних порушень (у результаті
чого можлива поява тріщин і відшарування), а також піддані старінню (тобто необоротній зміні властивостей внаслідок хімічних і
фізичних процесів, що відбуваються).
Розрахунок робочих характеристик РДТІ 1 виконується методами внутрішньої балістики. У тому випадку, коли фізичні умови у
всіх точках палаючої поверхні заряду однакові і паливо однорідне, заряд згоряє рівномірно, паралельними шарами, тобто фронт
горіння переміщається від поверхневих шарів у глиб заряду з однаковою швидкістю у всіх точках. Тиск у камері згоряння і тяга
РДТП при незмінній площі горловини сопла пропорційні розмірам палаючої поверхні та швидкості горіння палива Сталість тяги
чи необхідна зміна її в часі досягається вибором конфігурації заряду і застосуванням палив з різними швидкостями горіння.
РДТП поділяють: за типом палива (порохові і сумішні); за формою заряду (броньовані, неброньовані); за способом споряджен-
ня (зі скріпленим зарядом, із нескріпленим зарядом).
Бортова апаратура керування польотом ракети (складова частина системи керування) в залежності від системи керування,
що реалізована в комплексі керування зенітними ракетами, може включати до свого складу:
202
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
в системах командного телекерування пристрої, що складають прийомний тракт командної радіолінії керування - антена і при-
ймач радіосигналів команд керування, селектор команд, демодулятор, координатор (у системах ТК-2), що вимірює параметри руху
цілі, і передавач для передачі їх у відповідному коді на зовнішній пункт керування;
в системах теленаведення і самонаведення - координатор цілі (радіолокаційний або оптичний (видимого чи інфрачервоного ді-
апазону)) і ЛВП. Команди керування формуються в ЛВП відповідно до параметрів неузгодженості вимірюваних координатором з
виходу якого до ЛВП надходять напруги неузгодженості відповідної величини і знаку. З виходу ЛВП команди керування, до скла-
ду яких входять складові компенсації помилок наведення, надходять на автопілот для керування рулями ракети.
Радіолокаційний координатор, як правило, складається із антени, передавача (у координаторах активного типу), приймача,
автоселектора, кінцевого пристрою, пристрою відпрацювання неузгодженостей, приймача і антени каналу сигналів синхронізації
Пристрої відпрацювання неузгодженостей координаторів є виконавчими пристроями слідкуючої системи. Вони виконуються у
вигляді гіропривода, що забезпечує стабілізацію антени і управління її положенням.
Супроводження цілі за напрямком може здійснюватися за методом інтегральних і миттєвих рівносигнальних зон. Останній
вважається найкращим, тому що забезпечує більш високу точність супроводження. При методі миттєвих рівносигнальних зон мо-
же виконувались як амплітудна сумарно-різницева, так і фазова обробка радіолокаційних сигналів.
Оптичні координатори встановлюються на ракетах малої дальності стрільби. Вони більш компактні й мають малу масу. До
складу такого координатора входять оптична система, встановлена під світлопрозорим обтічником, аналізатор поля зображень цілі,
приймач променистої енергії’, підсилювач фотоструму, кінцевий пристрій і пристрій відпрацювання неузгодженості. За принципом
вимірювання координат цілі оптичні координатори поділяються на частотні, амплітудні, часово-імпульсні та ін.
Автопілот (АП) забезпечує стабілізацію ракети і керування її польотом, безпосередньо впливаючи на органи керування ракети
відповід но до величини і знаку команд керування. Виходячи з того, що орієнтація ракети в просторі визначається трьома кутами (а,
у, о), автопілот повинен включати три канали стабілізації та керування: канал курсу, канал крену і канал тангажу. Для стабілізації
ракети і поліпшення динамічних властивостей системи керування з ракети на АП звичайно видається ряд додаткових сигналів ке-
рування, що знімаються з чутливих елементів АП. Ці сигнали характеризують величини і швидкості зміни кутів нишпорення, тан-
гажа і крену, лінійне прискорення центра мас ракети і т.ін.
Чутливі елементи АП вимірюють кутові від хилення ракети а, у, в, її швидкість V і швидкісний напір рУ2/2. Так, при впливі зов-
нішніх чинників (вітру, зміні щільності повітря, асиметрії ракети і т.п.) відбувається поворот ракети на деякі кути ос, у, в навколо її
осей. З появою цих кутів чутливі елементи каналів стабілізації ракети за курсом, креном і тангажем вимірюють їх величини і вида-
ють пропорційні за величиною сигнали. Після посилення і перетворення ці сигнали надходить на органи керування, що повернуть
елерони на визначений кут. У результаті обертання ракети за цими кутами припиняється. Після цього елерони займають нейтраль-
не положення.
У системах стабілізації ракет у якості чутливих елементів використовуються гіроскопічні вимірники, датчики лінійних приско-
рень (акселерометри), датчики швидкісного напору та ін.
Перепзорювально-посилювальні пристрої АП - електронні перетворювачі струмів і напруг, що мають високу стабільність робо-
ти та надійність в умовах вібрацій і перевантажень ракети.
Виконавчі пристрої АП (рульові машини) служать для переміщення рулів ракети відповідно до команд керування. Вони мо-
жуть бути пневматичними, гідравлічними і електромоторними.
Задавальні пристрої - пристрої керування польотом ракети на автономній ділянці траєкторії, які забезпечують зміну режиму
роботи бортової апаратури відповідно до заздалегідь заданої програми.
Бойове спорядження зенітних ракет включає бойову частину (БЧ), запобіжно-виконавчий механізм (ЗВМ), контактний або
неконтактний підривач (НП).
Запобіжно-виконавчий механізм (ЗВМ) є проміжним пристроєм між неконтактним підривачем і бойовою частиною. Він пере-
дає імпульс підриву від підривана до бойової частини і забезпечує безпеку поводження з ракетою на всіх етапах експлуатації до її
пуску. До ЗВМ вводяться ступені запобігання, які знімаються після виходу на режим маршового двигуна, а також досягнення раке-
тою граничного значення поздовжнього прискорення.
Поразка цілі досягається підривом БЧ зенітної керованої ракети після її зближення з ціллю. За способом впливу на ціль бойові
частини ЗКР поділяються на осколково-фугасні, стрижневі, кумулятивні. Найбільше застосування знайшли осколково-фугасні
бойові частини. При підриві БЧ мета утворення осколків визначеної маси і розмірів звичайно досягається двома шляхами: розташу-
ванням на зовнішній поверхні бойового заряду готових вражаючих елементів (здебільшого кулькової чи кубічної форми); дроблен-
ням зовнішньої оболонки при вибуху вибухової речовини (ВР) (зовнішня оболонка має нарізи відповідно заданим масовим і геоме-
тричним параметрам осколків). При заданій масі БЧ необхідно забезпечити найбільшу її поражаючу дію з урахуванням припусти-
мого значення величини промаху. Осколкові БЧ можуть бути ненаправленої і спрямованої дії. БЧ ненаправленої дії розраховані на
однакову поразку цілі у всіх напрямках від точки вибуху. Щільність осколків при підриві такої БЧ розподілена рівномірно по пове-
рхні сфери і змінюється назад пропорційно квадрату відстані від центра вибуху. Для підриву БЧ не потрібно будь-якої додаткової
інформації, крім моменту проход ження ракетою найближчої до цілі точки.
БЧ спрямованої дії забезпечують в одних напрямках від точки вибуху більшу поражаючу дію по цілі і меншу в інших напрям-
ках. Фронт розльоту поражаючих елементів не утворює повної поверхні сфери, а обмежується областю розльоту осколків.
Область розльоту може бути симетрична щодо подовжньої осі ракети і характеризуватися лише величиною кута розльоту
осколків Ост (рис. 5.7, а). У цьому випадку область можливої поразки цілі представляє собою об’єм, обмежений двома конічними
поверхнями з вершиною в точці підриву бойової частини і з осями, що співпадають з вектором відносної швидкості ракети. В да-
ному об’ємі розподіляються відносні траєкторії осколків. Така форма області можливої поразки цілі дозволяє не враховувати при
виборі моменту підриву БЧ напрямок промаху ракети.
203
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.7. Статична область розльоту осколків бойової частини ЗКР: симетрична (а); несиметрична (б)
Область розльоту може бути і несиметричною щодо подовжньої осі ракети і характеризуватись не тільки кутом але і кутом
розльоту осколків у радіальній площині уст (рис 5.7, б). При управлінні вибухом БЧ у цьому випадку враховуються не тільки вели-
чина і напрямок вектора швидкості ракети і цілі, але й напрямок промаху ЗКР. Перед підривом бойового заряду ракета повертається
відносно подовжньої осі відповідно напрямку промаху.
За енергетичними розуміннями застосування БЧ спрямованої дії більш доцільно, тому що при тій самій масі бойової частини і
кількості осколків їхня щільність розподілу в заданих напрямках збільшується пропорційно відношенню поверхні сфери до площі
фронту розльоту осколків спрямованої БЧ.
Основними характеристиками осколкової БЧ, що у кінцевому рахунку визначають ефективність її поражаючої дії, є: кількість
поражаючих елементів; маса одного поражаючого елемента 0%^ форма і розміри поражаючих елементів; щільність розподілу по-
ражаючих елементів; початкова швидкість поражаючого елемента і характер зміни швидкості в залежності від умов підриву
бойової частини; статична область розльоту осколків. Щільність розльоту осколків убуває зворотно пропорційно квадрату їхньої
відстані до цілі. Радіус зони поразки залежить від швидкості поражаючих елементів, їхньої маси і форми. Для поразки цілі осколок
повинен мати визначену кінетичну енергію в момент зустрічі з перешкодою. Так, наприклад, осколок може пробити перепону тов-
щиною Ь, якщо його кінетична енергія в момент удару більше потрібної для витиснення матеріалу перепони, тобто якщо викону-
ється умова
ЕуЗпрЬ^т^У^/г; (5.5)
де 8ц, — площа пробоїни; Еу - питома енергія витиснення одиниця об’єму матеріалу перешкоди.
Якщо зробити підрив БЧ ракети в нерухомому стані (у статиці), то під дією газів розривного заряду основна маса осколків роз-
летиться в деякій області, названій статичною областю розльоту осколків. Величина статичного кута розльоту осколків в основно-
му залежить від відношення довжини БЧ до її діаметра і від форми оболонки. Чим менше довжина БЧ при тому ж діаметрі, тим
більше розсіювання енергії* вибуху в осьовому напрямку, тому величина статичного кута розльоту осколків зростає. Зі збільшенням
довжини БЧ при незмінному діаметрі статичний кут розльоту осколків зменшується.
Нахил бісектриси статичного кута розльоту осколків при заданій формі БЧ залежить від розташування точок ініціювання бойо-
вого заряду.
При розташуванні точки ініціювання ВР із задньої сторони бойової частини бісектриса кута розльоту осколків нахиляється впе-
ред. При ініціюванні розривного заряду з боку головної частини ракети область розльоту осколків відхиляється назад. Якщо точка
ініціювання знаходиться в центрі бойової частини (кілька точок ініціювання симетричні щодо цього центра), то бісектриса кута
розльоту осколків перпендикулярна подовжній осі ракети. Таким чином, при наявності в БЧ декількох точок ініціювання розривно-
го заряду вибором положення точки ініціювання ВР можна змінювати нахил статичної області розльоту осколків до подовжньої осі
ракети.
При стрільбі по повітряній цілі підрив БЧ відбувається в процесі польоту ракети. Вектор швидкості ракети спрямований по до-
тичній до траєкторії. Осколки БЧ мають поступальну швидкість, рівну швидкості ракети. При підриві БЧ відбудеться геометричне
підсумовування поступальної швидкості з власною швидкістю, одержуваною осколком за рахунок енергії* бойового заряду.
Динамічна область розльоту осколків характеризується динамічним кутом розльоту і кутом нахилу бісектриси у заданій пло-
щині, що проходить через подовжню вісь ракети. Динамічний кут розльоту осколків завжди менше статичного кута Чим більше
швидкість ракети, тим менша, при тому самому значенні статичного, величина динамічного кута При великих швидкостях цілі
зменшення кута розльоту осколків може бути в два рази і більше.
Нахил області розльоту осколків у напрямку польоту ракети також залежить від величини швидкості ракети. У просторі дина-
мічну область розльоту осколків можна представити як частину порожнього конуса, зверненого основою за напрямком польоту
ракети. Необхідною умовою поразки цілі є її накриття осколками бойової частини. Ця умова визначає момент підриву бойової час-
тини.
Підрив БЧ ракети в районі точки зустрічі може виконуватися двома способами. Видачею команди на підрив бойової частини з
наземного пункту наведення в момент, коли ракета наблизиться до цілі на визначену відстань, та за допомогою підривника, авто-
номно здійснюючого підрив бойової частини ЗКР поблизу цілі.
204
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Перший спосіб при виборі моменту підриву БЧ не дозволяє повното мірою врахувати умови зустрічі ракети з ціллю. Його за-
стосування можливе при використанні на ракеті ненаправлених осколково-фугасних БЧ, а також у деяких окремих випадках стрі-
льби.
Підривники ракет можуть бути неконтактними і контактними. Контактні підривник! можуть бути електричними і ударними.
Вони знаходять застосування в ракетах малої дальності при високій точності стрільби, що забезпечує підрив бойової частини при
прямому влученні ракети.
Неконтактні підривники поділяються: у залежності від місця розташування джерела енергії, яка використовується для спрацьо-
вування підривника, на активні, напівактивні і пасивні; за характером енергії - на електростатичні, оптичні, теплові, акустичні, елек-
тромагнітні (радіопідривачі). Частіше застосовуються радіо- і оптичні підривники, які для підвищення надійності підриву БЧ в умо-
вах електронного подавлення можуть працювати одночасно. За побудовою і принципом дії радіопідривники поділяються на імпу-
льсні та доплерівські. Принцип дії імпульсного радіопідривника аналогічний принципу дії найпростішої імпульсної радіолокаційної
станції. В ньому виробляються високочастотні імпульси малої тривалості (т,), які випромінюються антеною в напрямку цілі. Про-
мінь антени погоджений у просторі з областю розльоту осколків бойової частини. Положення цілі щодо ракети в момент спрацьо-
вування радіопідривника визначається характеристиками його діаграми спрямованості, величиною затримки і тривалістю строб-
імпульсів, виданих на каскад збігу. Підрив БЧ ракети відбувається при входженні цілі в область діаграми спрямованості радіопідри-
вника і збігу в часі імпульсів, відбитих від цілі, зі строб-імпульсами. Величина затримки цих імпульсів визначає дальність. Трива-
лість строб-імпульсів обумовлює діапазон можливих дальностей спрацьовування підривника. Мінімальна дальність спрацьовуван-
ня
^рвмін = сті / 2 , (5.6)
де с - швидкість світла
Основний недолік імпульсного підривника - наявність мертвої зони за мінімальною дальністю, що залежить від тривалості зон-
дувального імпульсу.
Доплерівські радіопідривники працюють, як правило, у режимі безупинного випромінювання високочастотних коливань. Час-
тоти випромінюваних коливань 5) і прийнятих Гзв’язані співвідношенням
£ = £0(1-2Уг/с),
де Уп- радіальна швидкість зближення ракети з ціллю.
Сигнали, відбиті від цілі і прийняті антеною, надходять до приймача, де виділяються коливання частоти Доплера
Гд=2Уг/Х, (5.7)
де X - робоча довжина хвилі радіопідривника.
які після посилення надходять на вирішуючий пристрій. При визначених параметрах цих коливань з нього видається сигнал на
підрив бойової частини ракети. Логіка роботи вирішуючого пристрою може бути різною.
У найпростішому випадку команда на підрив БЧ ракети може видаватися за рівнем відбитого від цілі сигналу, тобто вирішую-
чий пристрій представляє собою граничний пристрій порівняння амплітуди відбитих сигналів з деяким заздалегідь установленим
рівнем. Положення цілі щодо ракети в момент спрацьовування радіопідривника в даному випадку визначається орієнтацією його
діаграми спрямованості і величиною встановлюваного рівня граничного пристрою. Основні недоліки такого радіопідривника -
залежність дальності спрацьовування від ефективної відбиваючої поверхні цілі та низька завадозахищеність.
Для підвищення ефективності радіопідривника в логіку роботи вирішуючого пристрою може вводитись початкова інформація
про параметри зближення ракети з ціллю ззовні, наприклад, з виходу головки самонаведення.
Більш складними пристроями в порівнянні з доплерівськими підривниками є радіопідривники з частотною модуляцією непе-
рервного сигналу. Як закон частотної модуляції може бути прийнятий пилкоподібний і синусоїдальний. Внаслідок запізнювання
відбитого від цілі сигналу його частота не буде збігатися з частотою випроміненого сигналу. Миттєва різниця цих частот характе-
ризує дальність до цілі. Принцип дії радіопідривника такого типу заснований на порівнянні обмірюваних миттєвих значень різни-
цевої частоти чи її середнього значення із заздалегідь заданою частотою, що характеризує дальність спрацьовування радіопідрив-
ника.
При підриві БЧ ЗКР поразка цілі може бути досягнута: руйнуванням її конструкції, виведенням з ладу жипєвоважливих
відсіків, займанням палива на борту тощо.
Радіус ефективної фугасної дії БЧ ЗКР залежить у першу чергу від маси ВР і висоти цілі.
Необхідною умовою поразки цілі є накриття її осколками БЧ. Ця умова при заданих значеннях швидкостей ракети та цілі, кута
між ними, кута і швидкості розльоту поражаючих елементів визначає необхідний момент підриву БЧ ЗКР. Поражаючий елемент
зустрічається з ціллю у випадку, якщо в момент підриву БЧ ціль знаходиться на лінії, що співпадає з відносною швидкістю цього
елементу (рис 5.8).
Область можливої поразки цілі - область простору навколо ракети, при знаходженні цілі в якій в момент підриву бойової ча-
стини її вразливі відсіки накриваються потоком осколків, що розлітаються. Положення цієї області при стрільбі не залишається
постійним. Швидкість повітряних цілей змінюється в широких межах, швидкість ракети на траєкторії також не постійна, кут зу-
стрічі ракети з ціллю (кут між напрямками векторів швидкості цілі й ракети) залежить від коорд инат і параметрів руху цілі та поча-
ткових умов пуску ЗКР. Отже, вибір моменту підриву бойової частини повинен здійснюватись з урахуванням конкретних умов
зустрічі ракети з ціллю.
Під областю спрацювання радіопідривника розуміється просторова область біля ракети, що визначається геометричним місцем
умовних центрів цілі в момент спрацювання радіопідривника, тобто підриву бойової частини ракети. Імовірнісним описом цієї
області є закон спрацювання радіопідривника ш(х, у, г).
205
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.8. Відносна швидкість поражаючого елементу
Він характеризує розподіл координат підриву бойової частини в районі точки зустрічі:
X
У, 2
®(Х,У,2) = Г1
Г2(У>2) »
(5.8)
- щільність розподілу координата х спрацювання підривника при заданій помилці наведення у, г;
(У’2) ~ імовірність спрацювання радіопідривника по цілі в залежності від помилок наведення у, х.
Область спрацювання радіопідривника повинна співпадати з областю можливої поразки цілі. Якщо ці області співпадають
(рис. 5.30, а), то говорять, що радіопідривник погоджений з бойовою частиною. При неспівпаданні цих областей (рис. 5.30, б) спо-
стерігається та або інша міра неузгодженості радіопідривника з бойовою частиною і зниження імовірності поразки цілі при заданій
величині промаху.
Рис. 5.9. До визначення погодження радіопідривника і бойової частини ЗКР
Д ля підвищення імовірності поразки цілі використовуються різні способи узгодження радіопідривника і бойової частини раке-
ти, тобто одержання максимальної ефективності бойового спорядження при стрільбі. При хорошому узгодженні область розльоту
осколків, як правило, збігається в просторі з областю перебування цілі.
Перший спосіб — узгодження області спрацьовування радіопідривника й області можливої поразки цілі шляхом вибору кута
нахилу діаграми спрямованості до подовжньої осі ракети охь
Діаграма спрямованості має форму просторової зони можливої поразки цілі, тобто в площині, що проходить через подовжню
вісь ракети - форму двох пелюстків, а в перпендикулярній площині — форму кільця. Положення діаграми спрямованості визначає
область спрацьовування радіопідривника з точністю, що відповідає часовій затримці підриву бойової частини ракети щодо моменту
надходження на вхід приймача сигналу від цілі.
Для одержання максимальної ефективності бойового спорядження в різних умовах стрільби кут нахилу діаграми спрямованості
радіопідривника повинен бути функцією величини і напрямку вектора відносної швидкості ракета, тобто швидкості цілі, швидкості
ракети і кута зустрічі ракети з ціллю.
Якщо кут нахилу діаграми спрямованості щодо подовжньої осі ракета обраний постійним, то узгод ження радіопідривника і бо-
йової частини може бути лише для деяких середніх умов зустрічі ракети з ціллю. При відхиленні умов стрільби від розрахункових
(розрахункової швидкості цілі, дальності до точки зустрічі, висоти і курсового параметра) ефективність бойового спорядження ра-
кети, а отже, і імовірність поразки цілі знижуються.
206
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Швидкості польоту сучасних повітряних цілей змінюються в широких межах. Для узгодження радіопідривника і БЧ ракети у
всьому діапазоні зміни швидкостей необхідно мати не одне, а хоча б кілька фіксованих значень кутів нахилу діаграми спрямованос-
ті радіопідривника. Вибір тієї чи іншої діаграми спрямованості повинний виконуватися з урахуванням умов зустрічі ракети з ціллю.
Другий спосіб - забезпечення необхідної ефективності бойового спорядження ракети шляхом зміни кута нахилу статичної об-
ласті розльоту осколків у залежності від швидкості цілі й умов стрільби. БЧ ракети має кілька точок ініціювання, розташованих на
осі симетрії. Таке розташування точок ініціювання забезпечує симетричну характеристику розльоту осколків у площині, перпенди-
кулярній подовжній осі ракети. У площині, що проходить через подовжню вісь ракети, сполучення області можливої поразки цілі з
заданою областю спрацьовування (діаграмою спрямованості) радіопідривника здійснюється вибором точок ініціювання бойового
заряду. Кількість можливих комбінацій цих точок визначає можливу кількість фіксованих кутів нахилу статичної області розльоту
осколків.
Третій спосіб — вибір моменту спрацьовування радіопідривника за допомогою доплерівських вимірників швидкості. Допле-
рівська частота Ед сигналу на вході приймача радіопідривника змінюється прямопропорційно радіальній складовій відносної швид-
кості зближення ракети з ціллю:
рд = <0 (2УвіднС08ф) / с, (5.9)
де £—несуща частота радіопідривника; — відносна швидкість зближення ракети з ціллю; ф - кут між вектором відносної
швидкості та лінією ракета- ціль.
У районі точки зустрічі з достатньою для практики точністю можна вважати, що Увдн=соп8І Отже, значення доплерівської час-
тоти сигналу, що надходить на вхід радіопідривника, залежить тільки від величини кута ф. Кут ф збільшується в міру зближення
ракети з ціллю, досягаючи в момент зустрічі 9(Г. Доплерівська частота сигналу відповідно зменшується до нуля. Здійснюючи спра-
цьовування радіопідривника напругою, пропорційною частоті Гд сигналу, можна одержали залежність моменту спрацьовування від
величини кута між вектором відносної швидкості та лінією ракета—ціль.
Проміжним пристроєм між радіопідривником і бойовою частиною є запобіжно-виконавчий механізм (ЗВМ). Він призначений
для забезпечення безпеки звертання з боєголовок) ракетою до її пуску, запобігання передчасного спрацьовування БЧ під дією завад
противника (до виходу ракети в район зустрічі з ціллю, де здійснюється замикання детонаційного ланцюга ЗВМ), самоліквідації БЧ
у випадку прольоту ракетою цілі.
Координатний закон поразки цілі.
Поразка цілі, а також спричинені їй збитки при підриві бойової частини ЗКР, залежать від наступної випадкової сукупності
чинників: значень координат точки підриву ЗКР відносно цілі; міри накриття цілі потоком поражаючих елементів бойової частини;
ефективності поражаючого впливу бойової частини (маси і форми поражаючих елементів, їх швидкості в момент удару по цілі та їх
щільності, ефективності фугасної дії бойового заряду тощо); уразливості повітряної цілі; умов зустрічі ракети з ціллю (висоти точки
зустрічі, величини і напрямку вектора швидкості ракети і цілі тощо).
При заданих бойовому спорядженні ЗКР і характеристиках цілі імовірність її поразки в основному залежить від координат точ-
ки підриву ракети і умов зустрічі ракети з ціллю.
Інтегральна функція С(х, у, х), що визначає величину імовірності поразки цілі в залежності від координат точки підриву раке-
ти відносно цілі, називається координатним законом поразки цілі.
Функцію 6 о (у, 2),що визначає ймовірність поразки цілі в залежності від помилок наведення ЗКР на ціль, прийнято називати
умовним координатним законом поразки:
°о(у>2) =
^лмакс , \ І X
[ б(х,у,г)Г1|------- сіх ,
“ хмакс
У»2
(5.10)
де величини -х макс ,+х макс визначають можливий інтервал розсіювання точок підриву бойової частини ракет вздовж траєк-
тоР'Фмакс^ЗеГх.
Графічно умовний координатний закон поразки цілі може бути представлений сімейством замкнених кривих рівної імовірності
(рис. 5.10), які дозволяють визначити імовірність поразки цілі для будь-яких заданих значень у і х . У загальному випадку ці за-
мкнені криві не є колами, тобто імовірність поразки цілі залежить не тільки від величини, але й від напрямку промаху ракети.
При заданих характеристиках бойового спорядження ЗКР параметри умовного координатного закону поразки залежать від
уразливості цілі та умов зустрічі ракети з ціллю.
Під уразливістю повітряної цілі розуміється ступінь її чутливості до поразки при підриві бойової частини ракети в заданих умо-
вах зустрічі з ціллю.
Оцінка уразливості імовірних цілей здійснюється посередньо шляхом загального аналізу їх конструкції та порівняння з уразли-
вістю типових відсіків літаків-мішеней.
Уразливість цілі залежить від умов її зустрічі з ЗКР (висоти, швидкості та орієнтації’ цілі відносно точки вибуху тощо).
Безпосередньо до літака примикає і обмежує частину простору навколо нього зона безумовної поразки цілі. При підриві ЗКР в
цій зоні з практичною вірогідністю літак знищується внаслідок загальних руйнувань конструкції, що спричиняються фугасною
дією бойової частини в поєднанні з осколковою дією щільного потоку вражаючих елементів.
При підриві бойової частини за межами зони безумовної поразки ціль поражається в результаті осколочної або запальної дії
окремих поражаючих елементів по уразливих відсіках літака Уразливість цілі в цьому випадку визначається кількістю уразливих
відсіків першої і другої груп та їх площею в проекції на площину, перпендикулярну вектору відносної швидкості осколків.
207
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.10. Графічне зображення умовного координатного закону поразки цілі
До відсіків першої групи прийнято відносити елементи повітряної цілі, виведення з ладу будь-якого з яких спричиняє її поразку
(кабіна льотчика, двигун одномоторного літака, бомбовий відсік тощо), до відсіків другої групи - елементи, виведення з ладу певної
кількості яких в деякій сукупності (уражуваній комбінації’ відсіків) призводить до поразки повітряної цілі.
Аналітично умовний закон поразки цілі може бути представлений функцією, що залежить від двох аргументів: величини про-
маху г і напрямку промаху ф . При заданих характеристиках бойового спорядження щільність осколків X визначається величи-
ною промаху г , а наведена уразлива площа літака 8ураз - напрямком промаху ф і величиною промаху г :
О0(г,(р)=1-е"Х^ур“^Ф\ (5.11)
При експериментальному визначенні умовного закону поразки цілі залежність (5.65) представляють у вигляді
8д(ф)
О0(г,<р)=1-е г2 , (5.12)
де 5о(ф) - параметр умовного закону поразки цілі, що залежить при заданому бойовому спорядженні ракети від типу цілі,
умов стрільби і напрямку промаху.
При приблизному оцінюванні ефективності стрільби зенітними керованими ракетами двовимірний умовний закон поразки цілі
замінюється круговим умовним законом. Апроксимація закону здійснюється шляхом усереднення параметра 50(ф)•
1 2л
6 = — (^(ф^Ф • (513)
2л 0
Тоді
_«о
С0(г)=1-е '2 . (5.14)
Параметр умовного закону поразки цілі 50 чисельно дорівнює величині промаху т , при якій умовна імовірність поразки цілі
складає 0,632 (рис. 5.11), оскільки С0(г = $о) = 1= 0,632 .
Рис. 5.11. Характер залежності 60(г)
Можливі й інші апроксимації умовного закону поразки цілі, наприклад:
208
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
О0(г)=е 2К» , (5.15)
де К о - параметр умовного закону поразки, він чисельно дорівнює величині промаху, при якій умовна імовірність поразки цілі
складає 0,606 (60(г = К0) = е~0,5 = 0,606).
5.2 Наведення ракети на ціль
5.2.1. Помилки наведення ЗКР
Міру порушення зв’язків в кожній площині наведення, що накладаються методом наведення на закон руху ракети, прийнято
називати параметром неузгодженості (параметром керування). Цей параметр є пропорційним відхиленню регульованої вели-
чини від необхідного значення, тобто є помилкою системи керування. Відповідно до даного визначення параметр неузгодженості
д(і)=а(і)-В(і) , (5.16)
де А((), В(() - заданий і фактичний закони руху ракети відповідно.
Сигнал неузгодженості - електрична напруга (струм), величина і знак якого відповідають величині і знаку параметра неузго-
дженості
иД(і)=КВ(і) , (5.17)
де К - коефіцієнт пропорційності.
Система керування, змінюючи напрямок польоту ракети, повинна усувати цю помилку і тримати її в таких межах, при яких за-
безпечується задана точність зближення ракети з ціллю. Реальна траєкторія буде відрізнятися від необхідної. За ознакою наведення
вона може бути поділена на три ділянки: початкова ділянка, ділянка виведення і ділянка наведення.
Початкова ділянка - це ділянка траєкторії неконтрольованого польоту ракети після старту. Наявність цієї ділянки зумовлю-
ється низкою обставин: керування ракетою стає достатньо ефективним після досягнення нею певної швидкості польоту, його доці-
льно здійснювати після скидання прискорювачів тощо.
Наприкінці неконтрольованого польоту положення ракети може не відповідати вибраному методу наведення і положенню цілі.
Виведення ракети на необхідну траєкторію вважається закінченим, якщо її відхилення не перевищує заданої величини, визначеної
ефективністю ди по цілі бойового спорядження ЗКР. Ділянка траєкторії, проміжна між початковою ділянкою і ділянкою наведення,
називається ділянкою виведення ракети на необхідну траєкторію. При розгляді мінімально можливої дальності стрільби ЗРК
під ділянкою виведення часто розуміють ділянку траєкторії від точки старту до закінчення виведення ракети на необхідну
траєкторію.
Ділянка наведення - ділянка траєкторії, на якій наведення ракети на ціль здійснюється згідно із заданим методом наведення.
Точність наведення ракети оцінюється числовими характеристиками закону розподілу помилок наведення в картинній або
будь-якій іншій характерній площині біля цілі.
Картинною називається площина, перпендикулярна лінії візирування цілі (рис. 5.12, а).
При теоретичному аналізі ефективності стрільби за площину оцінки помилок наведення ракети, як правило, приймається пло-
щина, перпендикулярна вектору відносної швидкості (рис. 5.12, б).
б)
Рис. 5.12. Площини оцінки помилок наведення
209
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Помилки наведення ракети на ціль за своїм характером можуть бути систематичними і випадковими, а за причинами виник-
нення їх прийнято поділяти на динамічні, флуктуаційні та інструментальні.
Систематичні помилки - помилки, які при стрільбі залишаються постійними або змінюються за цілком певним законом. Сис-
тематична помилка може бути виявлена і усунена шляхом введення відповідних поправок. Якщо величина систематичної помилки
залежить від параметрів руху цілі, що змінюються при стрільбі в широких межах, то точна компенсація такої помилки в ряді випад-
ків ускладнена
Величини систематичних помилок у0 і хд визначають положення центру розсіювання точок перетину дійсних траєкторій
відносно цілі в картинній площині (рис. 5.12, а).
Випадкові помилки - помилки, які при кожному пуску ракети можуть приймати різні значення величини і знаку, причому не-
відомо заздалегідь, які саме. Ці помилки спричиняють випадкові відхилення точок перетину дійсних траєкторій з картинною пло-
щиною відносно центру розсіювання.
Можна вважати, що випадкові помилки наведення ракети підпорядковуються нормальному закону розподілу, тобто описують-
ся щільністю імовірності вигляду
ґ(у,г) =
1
2тга у а2
(У-Уо)2 | (г-г0)2
2о2 2а2
(5.18)
де у,г - величини відхилень ЗКР від цілі у відповідній площині наведення; ау,а2 - середньоквадратичні помилки
відхилень.
Середньоквадратична помилка - характеристика розсіювання випадкової величини навколо її математичного сподівання.
Квадрат середньої квадратичної помилки називається дисперсією:
82[Х] = М[(Х-тх)2], (5.19)
де X - випадкова величина; тх - математичне сподівання випадкової величини; М[(Х - тх)] - математичне сподівання
відхилення випадкової величини від її середнього значення.
Статистична дисперсія випадкової величини обчислюється за формулою
2^ (хі ~~ х тп )
асТ[Х] = —--------------, (5.20)
п-1
де х, - спостережувані значення випадкової величини; х тп - статистичне середнє випадкової величини.
При оцінці розсіювання випадкових величин, що підпорядковуються нормальному закону, часто замість середньоквадратичної
помилки використовують числову характеристику, що називається серединною помилкою або серединним відхиленням.
Серединним відхиленням називається половина довжини ділянки, симетричної відносно центру розсіювання, імовірність по-
трапляння в яку дорівнює 0,5. Серединне відхилення Е пов’язане з середньою квадратичною помилкою співвідношенням
Е = 0,675а.
Розсіювання випадкової величини практично вкладається на ділянці ±3а або ±4Е .
Динамічна помилка наведення ЗКР на ціль - відхилення ракети від цілі, що виникає в результаті відпрацювання системою
керування зовнішніх впливів, зумовлених рухом цілі, а також подовжнім рухом ракети. При цьому вважається, що вхідний вплив
не має випадкових завад та інструментальних помилок.
Динаміка процесу наведення в значній мірі визначається коефіцієнтом підсилення і швидкодією контуру керування.
Основними складовими динамічної помилки і причинами їх виникнення можуть бути: помилки, зумовлені обмеженими мож-
ливостями ракети по перевантаженню; помилки, викликані похибками введення в команди керування компенсаційних поправок на
систематичну складову динамічної помилки; помилки перехідних процесів.
Помилки, зумовлені обмеженими можливостями ракети по перевантаженню. Наявні перевантаження ракети (п^) визна-
чають мінімально можливий радіус кривини траєкторії ракети
Рмін=Ур/п„8 . (5.21)
Кривина необхідної траєкторії ракети визначається методом її наведення, параметрами руху цілі й самої ракети. Якщо в заданих
умовах польоту ракети до цілі її наявні перевантаження стануть меншими за необхідні, то ракета зійде з необхідної траєкторії та
буде рухатися по дузі кола радіусу рм{н . Виникнення динамічної помилки зумовлено обмеженою маневреністю ракети (рис. 5.13).
Помилки такого роду можуть мати місце при втраті ракетою швидкості (на пасивній ділянці траєкторії), при
обстрілі висотних і швидкісних цілей (за межами можливостей ЗРК за швидкістю або висотою).
Помилки, викликані похибками введення в команди керування компенсаційних поправок. Найбільш
характерними складовими такого роду помилок є: динамічна помилка методу наведення (в системах телекеруван-
ня); помилка компенсації маси (ваги) ракети; поправка на подовжнє прискорення ракети (в системах самонаведен-
ня).
Динамічна помилка методу наведення - помилка, що характеризує потрібну величину параметра неузго-
дженості для реалізації необхідного руху ЗКР (рис. 5.14).
210
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.13. Виникнення помилки при обмежених можливостях ракети по перевантаженню
Рис. 5.14. Динамічна помилка методу наведення: 1 - кінематична траєкторія; 2 - динамічна траєкторія.
Кінематична (необхідна) траєкторія, за якою повинна рухатись ракета при її зближенні з ціллю, у загальному випадку криволі-
нійна. До ракелі на кожний момент часу повинна бути докладена нормальна сила, здатна в необхідній мірі скривити траєкторію. Ті
величина пропорційна куту відхилення рулів, а отже, й команді керування.
Таким чином, ракета може рухатися за криволінійною траєкторією тільки за наявності на кожен момент часу її помилки відно-
сно необхідного положення. Чим більше кривизна траєкторії при заданому коефіцієнті підсилення розімкнутого контуру керуван-
ня, тим більше значення цієї помилки. Необхідно компенсувати цю помилку, тобто введенням компенсаційної поправки в команду
керування сумістити динамічну траєкторію з кінематичною.
При обстрілі неманевруючої цілі
Ь<і=^кп/К0, (5.22)
де \¥кп - нормальне прискорення ракети, що рухається за необхідною траєкторією; Ко - коефіцієнт підсилення розімкнуто-
го контуру керування.
Нормальні кінематичні прискорення ракети в районі точки зустрічі з ціллю у загальному випадку залежать від координат цілі, їх
перших і других похідних, параметрів руху ракети (зокрема, від знаку прискорення ЗКР) і коефіцієнта методу наведення. Коефіці-
єнт підсилення розімкнутого контуру керування також не залишається стабільним для різних умов зустрічі ракети з ціллю.
Отже, формування компенсаційної поправки є достатньо складним. Прагнення здійснити більш точну компенсацію динамічної
помилки методу наведення, як правило, призводить до зростання випадкової складової помилки наведення ЗКР. Очевидно, опти-
мальним буде рішення, що забезпечує найменшу величину сумарної помилки. Компенсаційна поправка представляється у вигляді:
ЬдЕ =Х1(і)є,; Ьар =Х2(1)Р, 8ІПЄ, , (5.23)
де Хі (і), Х2 (і) - часові функції; є (, Р { - перші похідні кута місця і азимута або кутові швидкості лінії’ Р-Ц.
Сила ваги є однією з зовнішніх сил, докладених до ракети при її польоті. Вона безупинно створює збурювальний вплив на кон-
тур. Якщо в команді керування не мати компенсаційної поправки, то дія сили ваги викличе появу систематичної помилки наведен-
ня ракети у вертикальній площині (кут повороту рулів, необхідний для компенсації сили ваги аеродинамічною підйомною силою,
може бути отриманий тільки за наявності відповідного параметра неузгодженості).
Прискорення сили ваги може бути розкладене на дві складові: нормальну і дотичну до траєкторії (рис. 5.15).
211
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.15. До визначення поправки на масу (вагу) ракети
Компенсаційна поправка на нормальну складову
=(£С080)/К0, (5.24)
вводиться в один або обидва канали керування у залежності від орієнтування крил в польоті та принципу стабілізації ракети за
креном.
Дія дотичної складової до траєкторії в системах самонаведення ЗКР, що використовують засоби пропорційного або паралель-
ного зближення, аналогічна впливу подовжнього прискорення ракет и. Вона в раховуєгься відповідними компенсаційними
поправками.
Подовжнє прискорення самонавідної ракети призводить до безперервного переміщення положення миттєвої точки зустрічі, а
отже, до появи додаткової складової кутової швидкості лінії’ візирування цілі
Ф^ »(8Пх1фг)/(2О), (5.25)
де пх| - подовжнє перевантаження ракети; В - швидкість зміни дальності Р-Ц; фг - кутупередження.
Для розвантаження контуру керування і зменшення динамічної помилки, зумовленої його інерційністю, до складу команд ке-
рування вводиться компенсаційна поправка на подовжнє прискорення. Подовжнє перевантаження порівняно просто вимірюється
датчиками, розташованими на борту ракети.
Помилки перехідних процесів викликані маневром цілі, зміною методу наведення в процесі польоту ракети, а також різкими
збуреннями контуру наведення. Маневр цілі напрямком або швидкістю призводить до різкої зміни параметрів необхідної траєкторії
ЗКР, до зростання сигналу неузгодженості на вході системи керування. Динамічна помилка наведення ракети на маневруючу ціль в
районі точки зустрічі залежить від співвідношення перевантажень, що розвиваються ціллю і ракетою, інерційності контуру керу-
вання і часу початку маневру цілі відносно моменту зустрічі. Маневр цілі не призводить до різкого зростання помилки наведення,
якщо співвідношення досягнутих перевантажень перевищує 1,5-2. Найбільш ефективним є маневр цілі, який здійснюється за де-
кілька секунд до зустрічі.
Вимушена зміна засобу наведення при польоті ракети до цілі призводить до появи значної величини параметра неузгодженості.
Ракету необхідно перевести на нову кінематичну траєкторію. Якщо зустріч ракети з ціллю відбудеться до закінчення цього переве-
дення, то супутні перехідному процесу зростаючі помилки знизять імовірність поразки цілі. Отже, зміна методу наведення при
польоті ЗКР є доцільною лише при певному значенні інтервалу часу до зустрічі з ціллю, який є достатнім для затухання перехідного
процесу.
Перехід ракети з активної ділянки траєкторії на пасивну, особливо при різкому спаді тяги двигуна, в тій або іншій мірі супрово-
джується зростанням помилок наведення.
Зустріч ракети з ціллю на цій ділянці траєкторії, як правило, небажана з точки зору забезпечення максимуму імовірності пораз-
ки цілі.
Флуктуаційна помилка - відхилення ракети від цілі, що виникає внаслідок випадкових збурень в контурі керування. Причи-
нами появи випадкових збурень можуть бути: коливання амплітуди і ефективного центру відбитого від цілі сигналу; внутрішні
шуми радіоелектронної апаратури; природні перешкоди (місцевість, гідрометеорологічні чинники тощо); завади, створювані про-
тивником, тощо.
Флуктуації прийнятого сигналу призводять до появи помилок виміру координат цілі. З достатнім ступенем точності можна
вважати, що флуктуаційні помилки наведення телекерованої ракети пропорційні флуктуаційним помилкам супроводження цілі,
передусім за кутовими координатами:
~ К-ф^супр.ф • (5.26)
Флуктуаційні помилки супроводження групової цілі (групи ЗПН, що спостерігаються у вигляді однієї відмітки), як правило, бі-
льше флуктуаційних помилок супроводження одиночної цілі. Завадовий вплив землі і місцевих предметів на роботу РЛС при об-
стрілі цілей, що летять на малих та гранично малих висотах, може призводити до зростання помилок супроводження цілі, а отже, й
помилок наведення ракети на ціль.
Організовані радіоелектронні завади можуть призвести не тільки до зростання помилок супроводження цілі, але й до зміни пе-
ретворювальних властивостей елементів системи керування через перевантаження її шумами.
212
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Наявність флуктуаційної складової помилки в координатах цілі неминуче призводить до появи таких же складових помилки в
похідних координат. При багаторазовому диференціюванні координат величина помилки може виявитися порівнянною з отрима-
ним результатом. Отже, простота обчислення параметра неузгодженості безпосередньо пов’язана зі зменшенням флуктуаційної
помилки методу наведення. З цієї точки зору метод трьох точок кращий за методи спрямлення траєкторій.
Системи самонаведення, що використовують пеленгаційні прилади з миттєвим рівносигнальним направленням, теоретично
нечутливі до амплітудних флуктуацій відбитого від цілі сигналу. Кутові флуктуації цього сигналу' впливають на точність визначен-
ня параметра неузгодженості, і є основним джерелом флуктуаційних помилок самонаведення ракети. Флуктуаційні помилки, які є
по своїй суті випадковими, викликають розсіювання траєкторії ЗКР відносно цілі.
Інструментальна помилка - відхилення ракети від цілі, що виникає внаслідок конструктивних і виробничих помилок параме-
трів апаратури, їх нестабільності, відхилення від номінальних значень тощо. Вона включає інструментальні помилки приладів ви-
мірювання координат цілі та ракети, вироблення і передачі команд керування, автопілота ЗКР та інших елементів контуру керуван-
ня.
Сукупність чинників, що спричиняють появу інструментальних помилок, умовно можна поділити натри великі групи.
Перша група- допущення прийнятих методів вимірювання координат і параметрів руху цілі й ракети та вироблення команд
керування.
Прикладами інстру ментальних помилок такого роду є помилки компенсації скручування систем координат при просторовому7
керу ванні ракетою, вплив обтічника головки самонаведення на зміну' кутової швидкості повороту' антени при супроводі цілі, поми-
лки вимірювання різниці координат цілі та ракелі при використанні засобів сканування діаграми спрямування і активної відповіді
ЗКР тощо.
При рішенні задач керування ракетою варто розрізнялі вимірювальну, командну і виконавчу7 системи координат. Вимірюваль-
ною системою координат є система, у якій визначається помилка в положенні ракети (параметр неузгодженості). У командних
системах телекерування вона зв'язана з площинами повороту антен радіолокатора і виміру кутових координат, використовуваних
для формування параметра неузгодженості, у системах самонаведення — з осями рамок гіроплатформи, щодо яких виробляється
вимір кутів чи кутових швидкостей повороту антени головки самонаведення.
Командною системою координат прийнято називати систему, у якій здійснюється формування команди керування. Як правило,
вважають, що вимірювальна і командна системи координат збігаються.
Виконавчою системою координат є система, пов’язана з ракетою, у якій здійснюється відпрацьовування команд керування,
тобто створюються нормальні сили, що змінюють напрямок польоту ракелі. З точністю до кутів атаки і ковзання осі цієї’системи
збігаються з осями зв'язаної системи координат ракети.
Щоб система керування правильно відпрацьовувала помилку в положенні ракети, необхідно забезпечити паралельність осей
розглянуліх вище систем координат. Різний же характер їхнього руху в процесі наведення ракети може призвести до порушення
паралельності осей вимірювальної й виконавчої систем координат, тобто до так званого явища скручування координат.
Явище скручування координат погіршує якість наведення ракети. Малі кути скручування призводять до затягування перехід-
них процесів у системі керування, тобто до зниження точнісних характеристик комплексу. При великих кутах скручування контур
наведення стає нестійким. Припустиме значення кутів скручування залежить від запасу стійкості системи керування за фазою. При
грубих оцінках прийнято вважати, що кут скручування систем координат не повинен перевищувати 10°.
Таким чином, при наведенні ракети на ціль необхідно не допускали скручування виконавчої системи осей координат щодо ви-
мірювальної чи безупинно визначати величину кута скручування і враховувати його при формуванні команд керування. Допущен-
ня при вирішенні цієї задачі призводять до виникнення інструментальної помилки.
Друга група - виробничі допуски і регулювальні помилки виставки номінальних параметрів апаратури ЗРК, і в першу чергу
елементів контуру наведення ЗКР. Інструментальні помилки такого роду залежать від стану техніки, термінів і умов її експлуатації,
якості профілактичних робіт на ній.
Третя група - має місце тоді, коли у вирішенні задачі наведення ракети (при телекеруванні) якась операція виконується люди-
ною, то вона теж буде вносити інструментальну помилку наведення. При цьому необхідно враховувати також вплив ергономічних
факторів.
Для кожного ЗРК інструментальна помилка наведення ракети характеризується математичним сподіванням і середньоквадра-
тичною помилкою. Від комплексу до комплексу значення цієї помилки є в значній мірі випадковим.
Миттєвий промах ракети. Наявність мертвої зони самонаведення, зумовленої зривом автоматичного супроводження цілі за
кутовими координатами через їх насичення або “осліпленням” координатора при малих дальностях Р-Ц, призводить до появи так
званого миттєвого промаху ракети.
Після припинення функціонування системи самонаведення ракета здійснює неконтрольований політ з нормальним переванта-
женням, відповідним моменту зриву АС ГСН. Величина мертвої зони відносно невелика (від 50 - 70 до 300 - 500 м). Тому в пер-
шому наближенні можна вважати, що в її межах траєкторія ракети мало відрізняється від прямолінійної, а швидкість практично
залишається постійною.
Точку простору, в якій відбулася б зустріч ракети з ціллю, якщо, починаючи з даного моменту часу, ракета і ціль рухались би
прямолінійно і рівномірно, прийнято називати миттєвою точкою зустрічі. Якщо в момент зриву самонаведення вектор швидкості
ракети направлений в миттєву точку зустрічі (вектор відносної швидкості ракети співпадає з лінією Р-Ц), то буде влучення ракети в
ціль. Помилка в положенні вектору швидкості відносно миттєвої точки зустрічі призводить до промаху ЗКР. Величина цього про-
маху7 г (рис. 5.16)
г = О’2ф/Уотн =-В’2ф/6 , (5.27)
213
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
* V зіп р
де О - відстань Р-Ц в момент зриву самонаведення ЗКР; ф = —--------кутова швидкість повороту лінії Р-Ц;
О
V = А/у2 +V2-2У V соз VлV
у отн у у р у ц у р у Ц у р У Ц •
Рис. 5.16. Миттєвий промах ракети
Імовірність влучення в коло заданого радіусу
При відомому математичному очікуванні (у0 ,20 ) і середньоквдцратичній помилці (сгу, с>2) розсіювання траєкторій ракет
біля цілі і нормальному законі помилок наведення ЗКР імовірність Р влучення ракети в коло заданого радіусу К обчислюється на-
ступним чином.
Перший випадок. Систематичні помилки наведення відсутні (уо = 2 о = 0), помилки наведення підпорядковуються круго-
вому закону (ау = а2 = а ):
Р(г < К) = 1 -е"п , (5.28)
деп = К2 /2а2 .
Формула (5.28) дозволяє вирішувати і зворотні задачі, тобто визначати середньоквадратичну помилку а за заданою імовірнос-
те влучення в коло заданого радіусу.
Другий випадок. Наведення ракети на ціль супроводжується систематичними помилками (у о 0 і 20 0). Випадкові по-
милки підпорядковуються круговому закону (0Гу = а2 = а ).
Вирішення задач, пов’язаних з імовірністю влучення в коло заданого радіусу, здійснюється з використанням сімейства кривих
рівної імовірності в координатах а / К і г0 / К , показаних на рис. 5.17.
Вони дозволяють:
І~2 2 •
за відомими значеннями систематичної помилки наведення на ціль іо=^уо+2о і середньоквадратичної помилки о визна-
чити імовірність влучення ракети в коло заданого радіусу К Для цього необхідно обчислити значення сг / В і г0 / К та по кривих
зняти значення імовірності;
за відомими значеннями систематичної помилки г0 , середньоквадратичної помилки а та імовірності Р визначити величину
радіусу кола, в яке влучає ракета. Для цього обчислюється відношення Гд / В і кут а = агсі& г0 і сг . З початку координат під ку-
том а до осі абсцис проводиться промінь. Точка перетину цього променя з кривою заданої імовірності визначає координати
о / В і г0 / К . За відношенням а / К або Гд / К обчислюється радіус кола К , в яке влучає ракета із заданою імовірністю;
за відомими значеннями імовірності влучення ракети в коло радіусу В. і значеннями середньоквадратичної помилки о або
систематичної помилки г0 знайти відповідно г0 або а .
Третій випадок. Систематичні помилки наведення відсутні (уд = 20 = 0), а випадкові помилки наведення підпорядковують-
ся еліптичному закону (ау а2 ).
Імовірність влучення ракети в коло заданого радіусу визначається за табл. Д.1. Входами в таблицю є величини а і Ь, що обчис-
люються наступним чином:
I І 2~
1)а <а2 : а = — ;Ь= 1------------2)а > а2: а = —; Ь = 1-^Ц- . (5.29)
а2 а2 V о2
214
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Четвертий випадок. Наведення ракети на ціль супроводжується систематичними помилками (уо /д 0). Випадкові по-
милки підпорядковуються еліптичному закону на площині (ау а2 0).
Імовірність влучення в коло заданого радіусу, зважаючи на складність аналітичних розрахунків, може бути визначена графічно
із використанням сітки кругового розсіювання.
Рис. 5.17. Сімейство кривих рівної імовірності
5.2.2 Методи наведення ракет
Метод наведення - умова або закон зближення ракети з ціллю, які у залежності від координат і параметрів руху цілі визнача-
ють необхідний рух ракети, що забезпечує проходження кінематичної траєкторії через точку зустрічі з ціллю.
Кінематичною чи необхідною траєкторією прийнято називати теоретичну траєкторію ракети, за якою повинна рухатись ракета
при реалізації методу наведення. Характер цієї траєкторії встановлюється на основі кінематичного дослідження наведення ракети
на ціль, рух якої задано. При кінематичному дослідженні ракета приймається за точку, що рухається під дією визначених сил. Реа-
льна траєкторія буде відрізнятися від кінематичної через вплив на систему різних зовнішніх збурень, інерційності ракети й інших
елементів системи керування, наявності інструментальних помилок та ін. Однак ця відмінність повинна бути в межах заданої точ-
ності наведення ракети на ціль. Положення ракети (Р) щодо цілі (Ц) однозначно визначається відстанню між ракетою і ціллю та
напрямком у просторі лінії ракета-ціль (Р-Ц). Якщо рух цілі заданий, то зміна цих координат у часі однозначно визначає траєкторію
польоту ракети. Таким чином, метод наведення накладає певні вимоги на характер руху ракети, або, іншими словами, встановлює
зв’язок між законом руху цілі й ракети. Завдання методу наведення зводиться до визначення положення лінії (Р-Ц) щодо вектора
швидкості чи подовжньої осі ракети. Кут між вектором швидкості ракети і лінією Р-Ц прийнято називати кутом упередження, а
між подовжньою віссю ракети і напрямком на ціль - кутом пеленга. Кут упередження (пеленга) може бути заданий постійним чи
змінним, що змінюється в часі за цілком визначеним законом. Зміна кута упередження в часі може залежати від кінематичних па-
раметрів руху.
Метод наведення визначає вимоги до маневреності ракети, а при заданій маневреності - діапазон висот і параметрів руху цілі,
при якому можлива зустріч ракети з ціллю. Прийнятий метод наведення і параметр неузгодженості визначають структуру системи
наведення.
Основними вимогами до методу наведення є такі:
забезпечення невеликої кривизни кінематичної траєкторії на всіх ділянках траєкторії польоту ракети і особливо поблизу точки
зустрічі з ціллю, тому, що будь-яка ракета має цілком визначені спроможні перевантаження, які характеризують її маневрові мож-
ливості. Необхідно, щоб потрібні перевантаження, які залежать від кривини кінематичної траєкторії, не перевищували спроможні;
забезпечення потрібної точності наведення ракету заданому діапазоні швидкостей, висот і напрямів польоту цілей, у тому числі
під час стрільби як назустріч, так і навздогін. Величина промаху не повинна перевищувати радіус пораження цілі БЧ.
стійкість до дії різних завад (особливо це стосується методів, у яких використовують координату дальності до цілі);
можливість використання для реалізації якомога менше інформації про параметри руху цілі;
простота приладової реалізації.
У залежності від способу реалізації методи наведення ЗКР можна розділити на дві основні групи: триточкові і двоточкові. Най-
більш відомими методами першої групи є: метод трьох точок і методи упередження (спрямлення траєкторії). До другої групи мето-
дів наведення можна віднести: методи погоні і прямого наведення (та їх похідні з постійним або змінним кутом упередження), ме-
тоди паралельного і пропорційного зближення. У сучасних ЗРК досить часто вдаються до комбінування методів наведення.
Розглянемо існуючі двоточкові методи наведення, на прикладі плоского руху ракети затангажем.
215
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Метод прямого наведення - метод при якому в процесі руху ракети до цілі виконується умова: подовжня вісь ракети постій-
но спрямована на ціль. Ця умова вимагає рівності кута 3 тангажу ракети куту нахилу є лінії Р-Ц:
3=є . (5.30)
З формули (5.30) і рис. 5.18 випливає, що параметр неузгодженості при цьому методі дорівнює
Да=є-3 . (5.31)
У процесі наведення ракети потрібно безперервне вимірювання величини Д $ , тобто кута між напрямком осі ох і ракети і лі-
нією Р-Ц. Для цього може бути використаний бортовий вимірювач (координатор), що видає сигнал неузгодженості
Цд=КдДа , (5.32)
де Кд - коефіцієнт пропорційності.
Рис. 5.18. Виникнення параметра неузгодженості при методі прямого наведення
Для наведення за цим методом на борту ракети встановлюють координатор, що стежить (бортовий пеленгатор або пеленгатор,
антена якого жорстко скріплена з корпусом ракети і орієнтована по її повздовжній осі). Вісь його ох орієнтується по лінії Р-Ц. З
появою помилки спостереження ДЗ в системі координатора виробляється напруга, що надходить до пристрою управління поло-
женням чутливого (вимірювального) елемента (антени або оптичної системи координатора), викликаючи сполучення осі ох^з
лінією Р-Ц Тим самим визначається напрямок на ціль відносно осі ох, ракети. Методу відповідає достатньо велика кривина кіне-
матичної траєкторії при стрільбі назустріч, яка збільшується з приближенням ракети до цілі. Метод може бути реалізований тільки
при наведенні ракет на нерухомі, малорухомі або неманевруючі цілі.
Метод прямого наведення з постійним кутом упередження. Це метод, при якому протягом всього часу польоту ракети до
точки зустрічі з ціллю кут (кут упередження) між вектором швидкості ракети (подовжньою віссю ох,) та лінією Р-Ц залишається
постійним (рис. 5.19). Цю умову можна записати як
Ч = Чо > (5 33)
де ц - поточне значення кута між подовжньою віссю ракети ох, і лінією Р-Ц; ц 0 - заданий кут упередження.
Рис. 5.19. Параметр неузгодженості при методі прямого наведення з постійним кутом упередження
216
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
При порушенні рівності (5.33) виникає параметр неузгод женості Ац (кут між осями ох । і ох!)
Дч=Чо-Ч • (5-34)
Його значення може бути виміряне за допомогою таких саме засобів, що і для методу прямого наведення з нульовим кутом ви-
передження. Як видно з формули (5.34), напруга неузгодженості
ид (0=Кд|чо-ч(і)] • (5.35)
ч
Отримана відповідно до формули (5.35) напруга може бути подана в ЛВП для вироблення команд керування. Під їх дією рулі
ракети відхиляться на визначені кути, у результаті чого ракета розвиває нормальні прискорення і виходить на кінематичну траєкто-
рію. При цьому установиться рівність ц(і) = Цд . У ЗРК метод знаходить застосування тільки як допоміжний у сполученні з інши-
ми методами, які забезпечують меншу кривизну кінематичної траєкторії поблизу точки зустрічі ракети з ціллю.
Метод погоні (чистого переслідування) - метод наведення ракети на ціль, при якому в процесі польоту ракети, на кожен мо-
мент часу, вектор її швидкості спрямований на ціль (рис. 5.20)
0 = 8. (5.36)
З цього випливає, що кутове відхилення вектора швидкості ракети V від напрямку на ціль (0 - кут нахилу вектора швидкості
ракети) є параметром неузгодженості
Чп=0-є. (5.37)
Рис. 5.20. Параметр неузгодженості при методі погоні
Таким чином (рис. 5.20), для наведення ракети за цим методом потрібно вимірювати поточне значення кута цп . Для цього не-
обхідно знати напрямок вектора V, який може бути визначеним силовим флюгерним пристроєм, що орієнтує вісь ох^ координа-
тора за потоком повітря, що набігає (за вектором повітряної швидкості ракети). У випадку установки радіолокаційного координато-
ра він утворить рівносигнальну зону, напрямок рівних сигналів якої і є віссю ох координатора.
Взаємозв’язок дальності (О) ракета-ціль та напрямку лінії ракета-ціль (є) при заданих відношенні швидкості ракети до швид-
кості цілі (Ку=У{/Уц) і початкових умовах самонаведення (ро, Єо) описується рівнянням:
п= О,Л-и,(із8)
(8ІП є)Ку+ (1 + СО8 єо )Ку
При методі погоні ракета незалежно від початкових умов самонаведення підходить у районі точки зустрічі до цілі з задньої пів-
сфери. Траєкторія ракети буде прямолінійною тільки в двох окремих випадках — при пуску ракети точно навздогін цілі чи точно
назустріч цілі (нестійка траєкторія). Всі інші траєкторії є криволінійними і сходяться до точки «ціль» тільки при є=л і тільки в тому
випадку, якщо Ку>1. Добуток швидкостей ракети і цілі необхідно зменшувати, щоб відсунути за часом момент сходу ракети з
траєкторії, тобто зменшити величину промаху. Тому чистий метод погоні дає прийнятні за точністю наведення результати лише
при обстрілі малорухомих і нерухомих цілей чи при стрілянині навздогін (атаках швидкісних цілей із задньої півсфери).
Метод погоні з постійним кутом упередження вимагає такого руху ракети, при якому за весь час її польоту до точки зустрічі
з ціллю кут між вектором швидкості ракети та лінією Р-Ц (кутупередження цП() ) залишається постійним (тобто вектор швидкості
ракети упереджає лінію Р-Ц на заданий постійний кут):
Яп0 =є-0=соп8і. (5.39)
Для реалізації цього методу, як і методу погоні, потрібно визначати положення вектора швидкості ракети. При наведенні за цим
методом ракета розвиває менші нормальні прискорення, що підвищує динамічну точність наведення.
В той же час, метод має обмеження за швидкістю цілі знизу і не забезпечує зустріч ракети з повітряною ціллю у всьому можли-
вому діапазоні зміни її швидкості в реальних умовах стрільби.
При малих кутах упередження зустріч ракети з ціллю може виявитися можливою у всьому діапазоні швидкостей цілі. Однак
параметри траєкторії ракети при цьому будуть близькі до параметрів методу погоні.
Отже, метод наведення з постійним кутом упередження поліпшує властивості методу погоні тільки при стрільбі в задню пів-
сферу. При атаках у передню півсферу потрібні перевантаження ракети продовжують залишатися значними і практично виключа-
ють можливість подібної стрільби.
217
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Методом паралельного зближення називають такий метод наведення, при якому протягом усього часу польоту ракети до то-
чки зустрічі з ціллю лінія Р-Ц перемішується поступально і паралельно початковому положенню тобто залишається паралельною
заданому напрямку. Іншими словами, метод вимагає такого руху ракети, при якому кутова швидкість обертання лінії Р-Ц повинна
бути рівною нулю, тобто
8 = 0 або фр = 0 . (5.40)
Вираз (5.40) є рівнянням ідеального зв’язку. З рис. 5.21 видно, що даний метод є методом упередження. У процесі руху ракети
до цілі її вектор швидкості випереджає лінію Р-Ц на кут ц ц (кут між вектором швидкості цілі і лінією Р-Ц)
' V
Чр =агс8Іп -^-зіпОц
т.з
Рис. 5.21 Параметр неузгодженості при методі паралельного зближення
Параметром неузгодженості може бути:
Ае = є;
Д = Е-Ер„;
ДЧ = Чр-агс8Іп —у-8Іпдц
(5.41)
(5.42)
Для реалізації методу паралельного зближення вектор відносної швидкості ракети на кожен момент часу повинен збігатися з
лінією ракета—ціль, тобто вектор швидкості ракети повинен бути спрямований у миттєву точку зустрічі. Відповідно до цієї ознаки
метод паралельного зближення називають методом наведення в миттєву точку зустрічі. Зміна швидкості ракети і маневр цілі при-
зводять до безупинного переміщення положення миттєвої точки зустрічі в просторі. Задача системи керування при методі пара-
лельного зближення полягає в тому, щоб змінювати в часі напрямок вектора швидкості ракети відповідно переміщенню миттєвої
точки зустрічі.
Найбільш простим для приладової реалізації може бути варіант, при якому параметр неузгодженості представляється кутовою
швидкістю обертання лінії Р-Ц. Для виміру величини є на борту ракети встановлюють слідкуючий координатор, що безупинно
суміщає свою вісь з напрямком на ціль. З появою кутової швидкості обертання лінії Р-Ц координатор виробляє напругу неузго-
дженості
Ие=К^є , (5.43)
де Кд - коефіцієнт пропорційності.
Напруга и надходить у ЛВП для формування команд керування.
У системах телекерування при наведенні ракети за методом паралельного зближення параметр неузгодженості виміряється
апаратурою пункту наведення. Його величина, наприклад, у вертикальній площині дорівнює (рис. 5.22)
Дє = єр -Єц = агсзіп
——-8Іп(єн -є) ,
Ор у ц
(5.44)
де Ор- відстань між пунктом керування та ракетою.
При наведенні ракети за даним методом величина кута місця лінії Р-Ц повинна залишатися постійною протягом усього часу
польоту ракети до цілі, тобто є = Єд . Під час руху ракети за кінематичною траєкторією повинна виконуватися умова
Ер
= єц +агс8Іп
-----8Іп(є.. - є
Ор
(5.45)
“ єк
218
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Якщо за параметр неузгодженості прийняти лінійне відхилення ракети від кінематичної траєкторії, то його величина визна-
читься з виразу
Ьє- Вр< єц Єр
+ агсзіп
— 8Іп(єц -Є0)
(5.46)
Для приладової реалізації методу відповідно до виразу (5.46) необхідно мати наземний (борговий) радіолокаційний або оптич-
ний візир, що визначає координати цілі і ракети, пристрій запам’ятовування кута нахилу лінії Р-Ц на момент початку радіоуправ-
ління.
Рис. 5.22. До визначення параметра неузгодженості при наведенні телекерованої ракети за методом
паралельного зближення
Зміна швидкості польоту ракети навіть за умови рівномірного і прямолінійного руху цілі приводить до скривлення кінематич-
ної траєкторії. Цю зміну швидкості, тобто поздовжнє прискорення, досить просто заміряти відповідними датчиками, встановлени-
ми на боргу ракети. Для зменшення динамічних помилок самонаведення ракет до складу команди при використанні методу пара-
лельного зближення доцільно вводити компенсаційне виправлення на поздовжнє прискорення. Метод паралельного зближення в
порівнянні з раніше розглянутими методами висуває найменші вимоги до маневреності ЗКР.
Метод пропорційного зближення (пропорційної навігації) - метод, при наведенні за яким кутова швидкість обертання век-
тора швидкості ракети 0 пропорційна (К — коефіцієнт пропорційності (навігаційна постійна)) кутовій швидкості є обертання лінії
Р-Ц:
0 = Кє. (5.47)
Невиконання умови (5.47) призводить до виникнення параметра неузгодженості
Дд=Кє-0. (5.48)
Реалізація методу (рис. 5.23) вимагає виміру величин є і 0 . Перша з них може бути виміряна бортовим координатором ракети,
який у процесі спостереження за ціллю виробляє напругу = ає (а - коефіцієнт пропорційності). Вимір величини 0 безпосере-
дньо викликає необхідність встановлення на борту флюгерного пристрою, що призводить до великих помилок виміру кутової
швидкості обертання вектора швидкості ракети. Тому величину 0 одержують непрямим шляхом, а саме на основі вимірювання
величини нормального прискорення ракети XV и . При відомому значенні швидкості ракети Ур
Є = \Ун/Ур. (5.49)
Це, в свою чергу, дає можливість одержати напругу и , яка пропорційна 0 (х - коефіцієнт пропорційності)
и£=2\Ун/ур. (5.50)
Величина \УН може бути виміряна датчиком лінійних прискорень (ДЛП). Напруга неузгодженості
иД0 = КиЕ - и0 • (5.51)
Ця напруга входить у команду керування, відхиляючи рулі ракети так, що з появою кутової швидкості обертання лінії Р-Ц раке-
та змінює напрямок руху, при якому вектор швидкості обертається зі швидкістю 0 = К.£ .
При наведенні ракети за даним методом мають місце помилки-наведення, обумовлені впливом маси ракети, обтічника, поздов-
жніх прискорень. Для їхньої компенсації до складу напруги іц вводяться відповідні складові. Нормальні потрібні перевантаження
ракети
пн®КУрє/8. (5.52)
Коефіцієнт пропорційності К приймається рівним декільком одиницям. Його величина змінюється в залежності від напрямку
атаки. При атаці точно назустріч цілі вона найбільша, при атаці в задню напівсферу - найменша
219
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.23. Параметр неузгодженості при методі пропорційного зближення
З виразу (5.46) випливає, що при К = 1 метод пропорційного зближення відповідає методу погоні, при К —> оо - методу пара-
лельного зближення.
Під час реалізації методу пропорційного зближення в системах телекерування формування сигналу неузгодженості може
здійснюватись за аналогією з методом паралельного зближення.
Метод пропорційного зближення є достатньо простим з погляду реалізації та забезпечує досить високу точність наведення ра-
кети й можливість обстрілу цілі назустріч і навздогін. Причому з погляду кривини траєкторії й одержання кінематично точної
зустрічі умови стрільби навздогін більш сприятливі, чим назустріч.
Тригочкові методи наведення - методи, при наведенні за якими визначається взаємне положення в просторі трьох точок -
пункту наведення (ПН) (пункту керування ракетою), ракети (Р) і цілі (Ц). До них відносять метод трьох точок і методи упередження
(спрямлення траєкторії).
Метод трьох точок (метод суміщення, метод накриття цілі) вимагає такого руху ракети, при якому ракета в будь-який момент
часу повинна знаходиться на лінії ПН-Ц (на лінії візування цілі). З визначення методу випливає, що координати точок кінематичної
траєкторії єц, Рц (потрібні кут місця й азимут ракети) для будь-якого моменту часу повинні бути:
ДЄ Єц,Рц - кут місця й азимут цілі відповідно.
При відхиленні ракети від лінії ПН - Ц виникає параметр неузгодженості:
Де=єц-єр, Др = рц-рр. (5.54)
Для визначення параметра неузгодженості необхідно вимірювати поточні значення кутових координат цілі і ракети. Задача ви-
рішується пристроями супроводу цілі і ракети за кутом місця й азимутом. Для цього використовуються радіолокаційні станції й
оптичні візири (у тому числі й телевізійно-оптичні).
Вимірювані значення координат єц,Єр,Рц,Рр можуть бути подані на пристрій, що віднімає, з виходу якого знімаються на-
пруги неузгодженості:
Цде идр *"КрДр • (5.55)
Під дією напруг и у, и др відбувається відхилення рулів тангажу і курсу, у результаті ракета виходить на лінію ПН-Ц. Однак
це не забезпечує рівної точності наведення зенітної керованої ракети при різних відстанях стрільби. Зі збільшенням дальності раке-
ти при одній і тій же величині Дє(др) значення лінійного відхилення ракети від лінії ПН-Ц збільшується, тобто точність наведення
погіршується.
Для одержання рівної точності стрільби, незалежно від дальності, параметр неузгодженості представляють лінійним відхилен-
ням ракети від лінії ПН - Ц:
=°р5ІпДє, Ьдр=Ор8ІпДр. (5.56)
Оскільки Дє,Др дуже малі, вираз (5.56) можна записати таким чином:
«ОрДє, Ьдр «ОрДр. (5.57)
Відповідно до формули (5.57) виробляються напруги неузгодженості, що складають основу команд керування польотом ЗКР.
Метод трьох точок досить простий у приладовій реалізації і забезпечує необхідні точності наведення ракети на ціль в умовах
стрільби, при якій кривина кінематичної траєкторії ЗКР незначна. Такі умови характерні: при стрільбі по цілях, що мають невелику
швидкість; при знищенні цілей, що пікірують на ЗРК, та ін. Застосування методу трьох точок доцільно при зриві супроводу цілі за
дальністю і при теленаведенні за променем, тобто в умовах, коли реалізація інших методів наведення викликає труднощі або немо-
жлива. Зростання нормальних кінематичних прискорень ракети по мірі зближення ракети з ціллю та їх велика залежність від куто-
вих прискорень цілі — істотний недолік методу трьох точок
Методи упередження - методи, при наведенні за якими поточна точка кінематичної траєкторії випереджає лінію ПН - Ц на де-
який кут. Величина упередження пропорційна швидкості зміни кутових координат цілі. При керуванні польотом ракети в двох
взаємно перпендикулярних площинах кути упередження (у полярній системі координат):
Бупр “ £цЦбл » Рупр “(Рц СО$Бц)Цбл ’ (5.58)
де І Збл - час зближення ракети з ціллю.
220
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Приймаючи до уваги, що, і збл = (В ц - В ) / ДВ = ДВ / ДВ (ДВ - швидкість зміни дальності Р-Ц), можна записати:
єупр=єкДО/ДЕ), рупр =(РцДОсо8Єц)/Дб. (5.59)
У лінійній мірі величина упередження:
=єкОпДО/ДЕ)( Ьв =(Р„ОпДОсо88„)/ДЕ>. (5.60)
ьмір к Р Рмір ц Р ц
З виразу (5.60) випливає, що величина упередження пропорційна дальності Р - Ц і при ДВ = 0 стає рівною нулю. Таким чи-
ном, кінематична траєкторія при методі упередження проходить через точку знаходження цілі.
Множники єц / ДВ = сс та ((Зц соз єц) / ДВ = Ср у виразі (5.60) називають коефіцієнтами упередження. Розрізняють ме-
тоди упередження зі змінними і постійними коефіцієнтами. Реалізація методів упередження здійснюється за допомогою наземних
радіолокаційних і оптичних кутомірних пристроїв (візирів), як і при методі трьох точок. Значення єц, Рц, ДВ можуть бути отри-
мані шляхом диференціювання відповідних величин.
Метод спрямлення може бути заданий системою рівнянь
єк=єи+СєДЕ>’ Рк=Рц+СВД0’ (561)
їх ІД о їх ІД М
де Се і Ср - параметри методу наведення у відповідній площині керування (для методу спрямлення є постійними протягом усьо-
го часу польоту ракети до точки зустрічі, але не дорівнюють нулю: СЕ=тсЕ; Ср=тср); ДВ - різниця похилих дальносгей до цілі і
ракети (ДВ =ВЦ-ВР).
Продиференціювавши ці рівняння за часом, можна отримати:
є =Єц+с£дЬ, Рк=Рп+СВДЬ- (5 62)
їх ІД С їх ІД
При зближенні ракети з ціллю значення дб завжди негативне. Отже, для зменшення значень ек і рк у порівнянні з кутовими
швидкостями цілі знаки коефіцієнтів СЕ і Ср, повинні збігатись зі знаками величин ец і рц .
Це означає, що упередження ракети задаються за напрямком руху цілі.
При завданні параметра методу наведення постійним не можна зменшити величину нормального прискорення ракети для всіх
можливих параметрів руху цілі та координат точки зустрічі.
При обстрілі швидкісної цілі кривина кінематичної траєкторії методу спрямлення менше кривини траєкторії методу трьох то-
чок. Крім того, при методі спрямлення зустріч ракети з ціллю відбудеться раніш, тому що польотний час до точки зустрічі буде
менше. Істотним недоліком методу спрямлення, так само як і методу трьох точок, є значна залежність нормального прискорення, а
отже, і точності наведення ракети від кутових прискорень цілі.
При наведенні ракети на ціль за методом спрямлення для формування команд керування необхідно знати похилі дальності та
відносні кутові координати цілі й ракети.
Методи повного і половинного спрямлення траєкторії. При обстрілі цілей найбільший інтерес представляють нормальні
прискорення і динамічні помилки наведення безпосередньо в районі зустрічі ракети з ціллю. Вибором параметрів методу СЕ і Ср
можна звести до нуля кутову швидкість радіуса-вектора поточної точки кінематичної траєкторії* в районі зустрічі, не пред'являючи
особливих вимог до її величини на інших ділянках кінематичної траєкторії. Це означає, що в районі точки зустрічі ракети з ціллю
кінематична траєкторія буде дотичною до лінії візування цілі.
При даних параметрах методу наведення рівняння методів будуть мати вигляд:
є =є -те ДО/ДГ), Р =Р -трДО/ДЕ). (5.63)
їх Ц ц к ц ц
Для методу повного спрямлення траєкторії в районі точки зустрічі т=1. Метод упередження при т=1/2 прийнято називати ме-
тодом половинного спрямлення траєкторії в районі точки зустрічі.
Виходячи з того, що дб <0, то за абсолютною величиною єк,Рк завжди більше відповідно ец,Рц . Це означає, що упере-
дження вводиться за напрямком польоту цілі.
Недоліком методу повного спрямлення є те, що потрібні нормальні прискорення ракети в значному ступені залежать від нор-
мальних прискорень цілі. Це утрудняє точну компенсацію систематичної складової динамічної помилки, що призведе до зниження
точності стрільби, особливо по цілях, що маневрують.
Виключення вибором параметра методу наведення складових нормальних кінематичних прискорень ракети в районі точки зу-
стрічі, що залежать від кутових прискорень цілі, дозволяє більш точно здійснити компенсацію динамічної помилки наведення. Ве-
личина цієї помилки приблизно в два рази менше, ніж при наведенні ракети за методом трьох точок. Кривизна кінематичної траєк-
торії методу половинного спрямлення при обстрілі швидкісних цілей істотно менше кривизни траєкторії методу трьох точок. Ви-
бором інших значень коефіцієнта С чи параметрів методу наведення Се і Ср у цілому можна задати й інші форми кінематичних
траєкторій, домогтися рішення різних часткових задач (здійснити підйом траєкторії ракети при знищенні цілей на гранично малих
висотах та ін.).
Таким чином, при наведенні ракет методами упередження кривизна траєкторії’ зменшується, що збільшує дальність і точність
стрільби.
Можливим є також і послідовне комбінування методів наведення у ЗРК (паралельне і послідовно-паралельне не може бути реа-
лізоване тому, що кожному методу наведення відповідають свої кінематичні траєкторії, які за своєю формою для різних методів
можуть суттєво відрізнятися). Головною вимогою при комбінуванні методів наведення є забезпечення згасання збурень (закінчення
перехідних процесів) у контурі керування до моменту зустрічі ракети з ціллю.
221
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
5.3. Імовірнісні показники знищення цілей зенітними керованими ракетами
Імовірність знищення одиночної цілі однією ракетою
Знищення цілі ЗКР можна представити у вигляді складної випадкової події, що складається з двох інших випадкових подій, які
відбуваються послідовно в часі (рис. 5.24).
Рис. 5.24. До визначення імовірності поразки цілі
Перша випадкова подія полягає в тому, що підрив бойової частини ракети відбувся саме в даній точці простору з координатами
х, у, х відносно цілі. Імовірність цієї події визначається законом помилок р(х, у, 2), супроводжуючих стрільбу.
Друга випадкова подія полягає в тому, що вражаючі елементи бойової частини ракети, яка розірвалась саме в даній точці з ко-
ординатами х, у, 2, поразять ціль. Імовірність цієї події’ визначається координатним законом поразки цілі б(х, у, 2).
Отже, імовірність знищення цілі однією ракетою
+оо 4-00 4-00
Р1 = [ / /£(х,у,г)о(х,у,2)с1хсІусІ2 . (5.64)
—оо -оо —оо
Функція ї(х, у, 2) відмінна від нуля лише в деякому (небезкінечному) об’ємі поблизу цілі. В цьому об’ємі й виконується інтег-
рування.
Залежність (5.64) може бути представлена у вигляді
4-00 4-00
рі=І ІГ(у,хХ2(у,г:)С50(у,х)ііу<І2 ,
(5.65)
де £(у, 2) - закон помилок наведення ракети на ціль; (у,2) - залежність імовірності спрацювання неконтактного підривни-
ка від помилок наведення; 6 0 (у >2) ~ умовний координатний закон знищення цілі.
Порядок обчислення інтеграла за формулою (5.64) залежить від вигляду підінтегральних функцій.
У якості приклада розглянемо найбільш розповсюджений випадок, коли помилки наведення ракети підпорядковані круговому
закону (а = (а + а ) / 2 або а = /а а ), центр розсіювання не співпадає з ціллю (у#0 і 2#0), тобто щільність ймовірності
у 2 у У 2
розподілу промахів
ґ(г) = 4е’ 2’2 Іо
сг
/ 2 2
ДЄ г0 =^у0+20 .
Закон знищення цілі описується функцією
С(г) = е 2К« .
Радіус спрацювання неконтактного підривника необмежений (перевищує максимально можливий промах ракети), тоді
2
р = &0 2аЦ К^+а2^
' К^+а2
(5.66)
(5.67)
222
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Якщо при стрільбі по цілі умова гвзр > т0 + За може порушуватись, то при розрахунку імовірності знищення цілі необхідно
додатково враховувати залежність спрацювання неконтактного підривника від помилок наведення Г2 (у,2) • Найбільш просто це
зробити, коли функція Г2(у, з) представлена у вигляді
Му.гМЛгЦ'' ГІГ"“;
• Г > Гнане •
При такому законі спрацювання підривника для визначення імовірності знищення цілі необхідно значення імовірностей, отри-
маних за формулами (5.36) і (5.38), помножити на імовірність влучання в коло радіусом гчикс. У цьому випадку значення імовірності
влучання в коло розраховуються при характеристиках помилок а і г0 , рівних:
а = аКд /^Кд +а2 ; Тд = ТдКд /(Кд + а2). (5.68)
Імовірність знищення одиночної цілі п ракетами
При обчисленні імовірності знищення цілі п ракетами враховується характер цілі з точки зору можливості накопичення збитків
при її послідовному обстрілі зенітними керованими ракетами.
Якщо накопичення збитків немає та імовірності знищення цілі кожною ракетою однакові, то імовірність знищення цілі п раке-
тами
Рп =1-(1-Р,)П (5.69)
Якщо за цією формулою розрахувати величину Рп при різних значеннях Рі та п, то у випадку стрільби по неманевруючих цілях
можна побачити, що, наприклад, при Рі = 0,7 пуск другої ракети підвищує імовірність знищення цілі на 0,21, третьої ракети-
на 0,063, а четвертої ракети - всього лише на 0,019.
Число ракет, що забезпечує задану ймовірність знищення цілі Рп розраховується за формулою
п = 18(1-Рп)/18(1-РІ). (5.70)
При накопиченні збитків
Р1,п > РІ.п-1 > ••• > Р1.2 > Р1,1 •
(друга цифра в індексі ?! означає черговість пуску ракети). Тоді
Рп =1-(1-Р|.іХ1-Р1,2)..(і-Р1,п)- (5-71)
Визначити з достатньою точністю значення імовірностей Р| 2 ...?і п для заданих типів цілей і умов стрільби дуже складно. При
розрахунку імовірності знищення цілі п ракетами, як правило, користуються формулою (5.69), а накопичення збитків враховують
поправочними коефіцієнтами.
Імовірність нормального функціонування елементів ЗРК при виконанні ним однієї стрільби по цілі п ракетами можна характе-
ризувати коефіцієнтом надійності бойової роботи (Кар). З урахуванням цього коефіцієнта
Рп ~ ^б.р.узагЕ^ — 0 — К-б.р.б.к.Рі ]» (5-72)
де Кб р узаг і Кб р б,к. - коефіцієнти надійності бойової роботи одного цільового і одного ракетного каналів комплексу від-
повідно.
Кількість ракет, необхідна для досягнення заданої імовірності знищення цілі при стрільбі, з урахуванням надійності бойової ро-
боти комплексу:
п = 1§(1 - Рп / Кб р узаг)/ 1£(1 - Кб рбж ?!) . (5.73)
Математичне сподівання кількості знищених цілей
При стрільбі по групі одиночних цілей математичне сподівання кількості знищених ЗПН дорівнює сумі ймовірностей поразки
обстріляних одиночних цілей:
Кц
Мс = ЕР, . (5.74)
і=1
Якщо імовірності знищення Рі= Р однакові і на кожну ціль виділено по одному каналу, то
МС=МЦР .
Оцінка імовірності знищення не менше т або точно т з Ц одиночних цілей зводиться до обчислення:
при однакових імовірностях знищення цілей - відповідних членів біноміального розкладання
Р() = т) = С™ Рт(1 — Р)^и'т ; (5.75)
Р()>т) = і С™ Рт(1-Р)Ь)«-т або Р0>т)=1-П£С™ Рт(1-Р)Г','‘’т ;
]=т ц 3=0 ц
223
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
при різних імовірностях знищення цілі - коефіцієнтів робочої функції вигляду
Чц , N і
П[(1-Рі)+РіХ]= ІР/Л (5.76)
і-1 )=0
При стрільбі п ракетами по груповій цілі із N літаків, що спостерігаються на індикаторі РЛС у вигляді однієї відмітки, за умови,
що захват радіолокатором супроводження або ГСН того або іншого літака групи рівноімовірний і при підриві ЗКР по даному літаку
поразка інших літаків групи виключена, математичне сподівання
Мс = М(1-(1-Р1/М)п) . (5.77)
При стрільбі багатоканальними ЗРК по групі розділювальних цілей, але при відсутності цілерозподілу, коли кожний канал із
К вибирає ціль випадково, математичне сподівання кількості знищених цілей обчислюється за формулою
Мс =К(1-(1-РП/М)к) . (5.78)
Показник ефективності у цьому випадку буде нижче, ніж при повністю організованому цілерозподілі. При N = К
N • ( Р
дм = м°рг-м“е0Рг = N Е С* —5-
С С С . = 2 Ч
(5.79)
Економічність стрільби
Під економічністю стрільби розуміють математичне сподівання відношення кількості знищених цілей на одну витрачену
ракету
П = Цп/Ир- (5-80)
де ц п , ц р - математичні сподівання кількості знищених цілей та кількості витрачених ракет відповідно.
Показник, зворотний описаному вище, є середньою витратою ракет на одну знищену ціль.
Існують три види стрільби по повітряних цілях: одиночними ракетами (коли пуск кожної наступної ракети проводиться тільки
після оцінки результатів стрільби попередньої і при неураженні нею цілі), чергою ракет (коли пуск ракет проводиться послідовно із
встановленими інтервалами, меншими, ніж польотний час ракети) і змішаний, коли пуск частини призначених ракет здійснюється
чергою, а інших - поодиночно). Під час будь-якого виду стрільби по одиночній цілі математичне сподівання кількості знищених
цілей дорівнює ймовірності поразки цілі призначеними ракетами:
Мп=Рп=1-(1-Р1)П- <581>
Математичне сподівання кількості витрачених ракет залежить від виду стрільби і розраховується за відомою формулою
п
Мр = І ІРр (5.82)
Р,.......................... . .
де і - випадкова кількість витрачених ракет, а 1 - відповідна до цієї кількості ймовірність.
М =РП/Р. М =п
Під час стрільби одиночними ракетами р , чергою ракет - р , а під час стрільби змішаним способом
Мр=Р,+п(1-РІ) = п-Р1(п-1) .
н (якщо спочатку ведеться стрільба одиночною ракетою, а потім чергою) чи
М„ =(п-1)Рп . +П(1-рп ,) = П-Рп . =п-|1-(1-Р.)п’11
р •* (якщо спочатку стрільба ведеться чергою ракет).
Пчеог =РП /п = 1-(1-Р.)п /п
Економічність стрільби одиночними ракетами складає г|од = Р|, чергою ракет и , а
змішаним способом - у відповідності до загальної формули (5.80) і обраним порядком пуску ракет.
Стрільба одиночними ракетами є самою економічною, а чергою ракет-самою короткочасною.
Оцінка ефективності стрільби при протидії повітряної ЦІЛІ
Ефективність стрільби при протидії повітряної цілі (радіоелектронні завади, маневр) може знижуватись внаслідок:
зростання помилок наведення і зниження ефективності бойового спорядження ЗКР:
р’ = 77г’(у>2)Г2(у>2Хіо(у-2)с1Усі2 > (5.83)
-00 -00
(зірочкою позначені відповідні закони в умовах протидії цілі);
порушення нормального функціонування елементів комплексу (припинення надходження в контур наведення інформації' про
координати і параметри руху цілі, розрив контуру наведення ЗКР, хибне спрацювання радіопідривника тощо); імовірність Рф нор-
мального функціонування системи
Рф=1-п(РорГРпрРпоТ) . (5.84)
і = 1 і
224
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
де к - кількість каналів, що підпадають під дію радіоелектронних завад при наведенні та підриві ЗКР біля цілі; - імовірність
того, що завада буде організована; Рпр - імовірність попадання завади в приймальний пристрій каналу ЗРК, що подавлюєгься; Р^ -
імовірність того, що потужність завади буде достатня для порушення нормального функціонування контуру наведення;
виходу цілі з зони поразки на час зустрічі з ракетою.
Оцінка імовірності поразки цілі п ракетами здійснюється з урахуванням всіх зазначених вище чинників.
Узагальнений показник ефективності
Зі збільшенням наряду ракет п показник бойової ефективності (імовірність знищення цілі) Р п = 1 - (1 - Р । )п збільшується, а
показник економічності £, знижується. Показник, що враховує обидві тенденції обчислюється, як добуток обох показників і є уза-
гальненим показником ефективності стрільби. Він враховує у рівному ступені і бойову ефективність, і економічність
^ = Т1РП- (5.85)
Функція £ має максимум при п орї Рор1) 11£(1 - Рі) (де Рор1 = 0,715 інтерпретується, як імовірність оптимально до-
сягнута при даному вигляді узагальненого показника).
Якщо взяти узагальнений показник ефективності, наприклад, у вигляді £, = Г|а Вп2 а , то змінюючи коефіцієнт а , можна нада-
вати більшу вагу або бойовій ефективності (при а < 1), або економічності (при а > 1) стрільбі.
Розрахунок наряду засобів і розподіл вогневих засобів.
Задача розрахунку засобів відноситься до класу зворотних задач оцінки ефективності, коли заданий показник ефективності, а
вимагається визначити кількість засобів, необхідних для його досягнення.
Під час обстрілу одиночної цілі задають ймовірність знищення цілі за стрільбу Рзад і знаходять необхідну кількість ракет п, як
ціле число з округленням до більшої величини: П = 1 + ЄПІ(18(1-Рзад)/18(1-Р,)).
Якщо задане математичне сподівання кількості знищених цілей чи середня ймовірність знищення будь-якої цілі з групи в N
цілей ц зад = М п / N,30 отримаємо кількість ракет, призначених на кожну ціль: п = 1 + епі (І£( 1 - ц зад) /1§(1 - Р|)) і загальну
кількість витрачених ракет п у = N п .
Якщо задана ймовірність знищення усіх N цілей, які приймають участь в нальоті Рзад > Р , то
п = 1 + епі(1§(1-^Р^7)/!§(!-?!)), ПЕ =ЬІ-п.
Завдання раціонального розподілу засобів (цільових і ракетних каналів) полягає у знаходженні цілочислового набору значень
(кількості каналів із загального їх числа т , призначених на кожну ] ціль із загального числа цілей N ) за умовою, що
N
І п і < т , де ) = 1,2,..., N. У якості показника ефективності цілерозподілу частіш за все використовують математичне споді-
і=і
вання відвернутої шкоди
МЗШ = ІСІ[1-(1-РІ^], (5.86)
де С — відносна важливість цілей; Р| - імовірність знищення ) - ої цілі однією ракетою.
Якщо важливість усіх цілей і ймовірність їх знищення однакові (= 1, Р| = Р|), то математичне сподівання відвернутої шко-
ди буде дорівнювати математичному сподіванню кількості знищених цілей
N Г 1 N
Мзш =МП =І1-(1-Р,р ]= N - ^(1-Р, )п\ (5.87)
І=І Н
Найбільше значення обраного показника М п у цьому випадку буде досягнуто під час рівномірного розподілу засобів, коли
спочатку призначають на кожну ціль п = епІ(т / К) засобів, а ті, що залишились т* = т - N п , розподіляють довільно на будь-
які т* з N цілей. Математичне сподівання кількості знищених цілей складає
Мп =и1’[1-(1-Р1)п+,]+(к-т’)[1-(1-Рп)п]. (5.88)
Розподіл засобів при різних значеннях Р^ і здійснюється з використанням теорії’ нелінійного цілочислового програмуван-
ня, зокрема, методом послідовного розподілу для адитивних функцій типу (5.86). Зауважимо, що метод шаблонного перебору ви-
магає аналізу Nт варіантів, у той час як метод послідовного (ітераційного) розподілу - усього N т варіантів. Сутність останньо-
го методу полягає в тому, що на кожному К - т кроці розподілу, починаючи з першого, для кожної цілі розраховується приріст
показника ефективності
ДМ^С^І-Р^-1’, (5.89)
225
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
де п (к — 1) - кількість засобів, призначених на ] -у ціль на попередньому кроці розподілу.
Потім засіб (канал, ракета) призначається на ту ціль, де приріст показника буде максимальним. На наступному кроці знову роз-
раховується приріст для всіх цілей. Процес зупиняється, коли будуть розподілені всі т засобів чи коли приріст показника ефек-
тивності буде менше деякої заданої величини. Цей метод забезпечує найвище значення показника ефективності на будь-якому кро-
ці розподілу.
5.4 Тактико-технічні характеристики зенітних ракетних комплексів
Бойові можливості ЗРК залежать у першу чергу від їх такгико-технічних характеристик, до яких відносяться: призначення
ЗРК; дальність і висота поразки повітряних цілей; можливості знищення цілей, що летять з різними швидкостями; імовірності пора-
зки повітряних цілей за відсутності та при наявності завад, при стрільбі по цілях, що маневрують; кількість цільових і ракетних ка-
налів; завадозахищеність ЗРК; робітний час ЗРК (час реакції); час переведення ЗРК з похідного стану до бойового і навпаки (час
розгортання і згортання ЗРК на стартовій позиції); швидкість пересування; боєкомплект ракет; запас ходу; масові й габаритні харак-
теристики.
ТТХ задаються в тактико-технічному завданні на створення нового зразка ЗРК і уточнюються в процесі полігонних випробу-
вань. Значення показників ТТХ зумовлені конструктивними особливостями елементів ЗРК, принципами їх роботи.
Призначення ЗРК - узагальнена характеристика, що вказує на бойові завдання, що вирішуються за допомогою даного
типу ЗРК.
Дальність поразки - дальність, на якій цілі поражаються з імовірністю, не нижче заданої. Розрізнюють мінімальну і
максимальну дальності.
Висота поразки - висота, на якій цілі поражаються з імовірністю, не нижче заданої. Розрізнюють мінімальну і максимальну
висоти.
Можливість знищення цілей, що летять з різними швидкостями - характеристика, що вказує на гранично допустиме зна-
чення швидкостей польоту цілей, що знищуються в заданих діапазонах дальностей і висот їх польоту.
Величина швидкості польоту цілі зумовлює значення потрібних перевантажень ракети, динамічних помилок наведення та ймо-
вірність поразки цілі однією ракетою. При більших швидкостях цілі зростають необхідні перевантаження ракети, динамічні помил-
ки наведення, зменшується імовірність поразки. В результаті зменшуються значення максимальної дальності й висоти знищення
цілі.
Імовірність поразки цілі - імовірність появи події, що полягає в нанесенні цілі збитків при стрільбі ЗКР, в результаті чого ціль
не в змозі виконати бойове завдання.
Ціль може бути уражена при стрільбі однією або декількома ракетами, тому розглядають відповідні імовірності поразки
р, ІРП.
Цільовий канал - сукупність елементів ЗРК, що забезпечують одночасне супроводження і обстріл однієї цілі. Розрізнюють
ЗРК одно- і багатоканальні по цілі. М-канальний по цілі комплекс дозволяє водночас обстрілювати N цілей.
Склад цільового каналу: візир, пристрій визначення координат цілі.
Ракетний канал - сукупність елементів ЗРК, щ о забезпечують водночас підготовку до старту, старт і наведення однієї ЗКР
на ціль.
Склад ракетного каналу: пусковий пристрій (пускова установка), пристрій підготовки до старту і старту ЗКР, візир і пристрій
визначення координат ракети; елементи пристрою формування і передачі команд управління ракетою. Складником ракетного
каналу є ЗКР.
Одноканальними по ракеті є переносні комплекси. Вони дозволяють водночас наводити на ціль тільки одну ракету.
Багатоканальні по ракеті ЗРК забезпечують одночасний обстріл однієї або декількох ідей декількома ракетами. Такі ЗРК
мають більші можливості з послідовного обстрілу цілей. В них під цільовим каналом розуміють частину робочого циклу, який
приділяється на операції з однією ціллю і ЗКР, які наводяться на неї.
Для отримання заданого значення імовірності знищення цілі ЗРК має 2-3 ракетних канали на один цільовий канал.
Як показник завадозахищеності використовуються: коефіцієнт завадозахищеності (К ю ), допустима щільність потужності за-
вади на дальній (ближній) межі зони поразки (р д(б)) і в районі постановника, при якій забезпечується вчасне виявлення (викриття)
і знищення (поразка) цілі. Дальність відкритої зони (В вз) - дальність, починаючи з якої ціль виявляється (викривається) на фоні
завад при встановленні постановником завади, щільність потужності якої р . К еф - відношення показника ефективності ЗРК в
умовах завад (К п) до його значення без завад (Кд).
Кеф=Кп/К0 . (5.90)
За умови, що довжина хвилі передавача завад і радіоелектронного засобу (РЕЗ), що придушується, однакова, показник р д(б)
при постановці активних шумових завад визначається як
КпрРп<31<*цРпп
47ІД£пУпР(Р,Є)Оц.ПОТр.д(б)
(5.91)
226
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
де Кпр - коефіцієнт подавлення; Рп - потужність передавача, що подавлює РЕЗ; - коефіцієнт підсилення передавальної
антени; ац - ефективна відбиваюча поверхня цілі; Впп - дальність до постановника завад Д£п - смуга пропускання приймаль-
ного пристрою, що подавлює РЕЗ; у п - коефіцієнт незбіжності поляризації завадового і корисного сигналів; Р(Р,є) - значення
нормованої діаграми спрямованості приймальної антени; Р, є - кути відхилення напрямку прийому сигналу завади від напрямку
максимуму основної пелюстки діаграми спрямованості приймальної антени РЕЗ в азимутальній і кутомісцевій площинах
відповідно.
Значення Оц потр.д(б) визначається як
^ц.потр.д(б) = ^І^д(б) +^ц(ірд(б) +іраб)] + ц + Рц ’ (5-92)
де сі д(б) - горизонтальна складова дальньої (ближньої) межі зони поразки; Уц, Н ц, Рц - швидкість, висота і курсовий пара-
метр цілі, що обстрілюється; І р д<б) - час польоту ракети до дальньої (ближньої) межі зони поразки.
При встановленні завад на самоприкриїтя (індивідуальний спосіб захисту) Е(Р,є) = 1; Оц = Впп •
Дальність відкритої зони визначається як
0 = 1КпрРп°Іац£^Г
у 4лДГпупЕ(Р,є)р
Робітний час ЗРК (час реакції) - інтервал часу від початку виявлення цілі до готовності ЗРК до пуску першої ракети. Він ви-
значається часом, що витрачається на пошук і захоплення цілі та на підготовку вихідних даних для стрільби. Робітний час ЗРК за-
лежить від конструктивних особливостей і характеристик ЗРК, від рівня підготовки бойової обслуги. Для сучасних ЗРК його вели-
чина знаходиться в межах від одиниць до десятків секунд.
Час переведення ЗРК з похідного стану до бойового - час з моменту подачі команди на переведення комплексу до бойового
стану до готовності комплексу до відкриття вогню. Для ПЗРК цей час мінімальний і складає декілька секунд.
Час переведення ЗРК до бойового стану визначається вихідним станом його елементів, режимом переведення і типом джерела
електроживлення.
За умови, що комплекс розгорнутий на позиції, час переведення його в готовність до бойового застосування визначається як
Тгот =^взеп + *кф > (5-94)
де і взеп - час включення засобів електропостачання; і кф - час проведення контролю функціонування ЗРК.
Час переведення ЗРК з похідного стану до бойового
^бойове “ І ПОЗ + їрозг “^топ "^взеп "^"^пер ’ (5.95)
де іпоз - час зайняття позиції; - час розгортання техніки ЗРК на позиції; ітоп -частопоприв’язки; Іпер - час проведен-
ня перевірок параметрів і контролю функціонування ЗРК.
Час переведення ЗРК з бойового стану до похідного - час з моменту подачі команди на переведення ЗРК до похідного стану
до закінчення шикування елементів ЗРК у похідну колону:
ТПОх = І зг + І шик > (5.96)
де і зг - час згортання техніки ЗРК; і шик - час шикування похідної колони.
Можливості з переміщення ЗРК характеризуються швидкістю його переміщення по шосе, грунтових дорогах, воді, а також
можливістю транспортувати його залізничним, водним і повітряним транспортом.
Бойовий комплект - кількість ракет, встановлених на один ЗРК. Він є розрахунково-постачальницькою одиницею при обчис-
ленні забезпеченості та потреби в ракетах для виконання бойових завдань. Для іноземних ЗРК він складає одиниці - десятки ракет.
Запас ходу - гранична відстань, що може подолати автотранспортний засіб ЗРК, витративши одну заправку палива. Запас ходу
враховується при розрахунку маршів і т. п.
Масові характеристики - граничні масові характеристики елементів (кабін) ЗРК і ЗКР.
Габаритні характеристики - граничні зовнішні окреслення елементів (кабін) ЗРК і ЗКР, що визначаються їх найбільшою ши-
риною, довжиною і висотою.
Масові і габаритні характеристики елементів ЗРК враховуються при організації маршів і перевезенні зенітних ракетних
комплексів.
Основні технічні характеристики деяких ракет, зенітних ракетних комплексів та систем, які знаходяться на озброєнні, наведені в
табл. Д.2-Д.6.
5.5 Переносні зенітні ракетні комплекси (ПЗРК)
ПЗРК призначені для боротьби з цілями, що летять на малій та гранично малій висоті. Для наведення ПЗРК можуть використо-
вуватись: пасивні системи самонаведення (“Ред Ай”, “Стріла” (табл. Д.7), “Ігла”(табл. Д.8), “Стінгер”(табл. Д.9)), радіокомандні
(“Блоупайп”) та наведення за лазерним променем (КВ8-70).
Склад ПЗРК з пасивною системою самонаведення: пускова установка (пусковий контейнер), пусковий механізм, апаратура
розпізнавання, зенітна керована ракета.
227
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Пускова установка є трубою зі склопластику, в якій зберігається ЗКР. Труба герцілічна Ззовні труби розташовуються прицільні
пристрої для підготовки пуску ракет і пусковий механізм.
Пусковий механізм містить електричну батарею живлення апаратури як самого механізму, так і головки самонаведення (до
пуску ракети); балон з хладогентом для охолоджування приймача теплового випромінювання ГСН під час підготовки ракети до
пуску; комутуючий пристрій, що забезпечує необхідну послідовність проходження команд і сигналів; індикаторний пристрій.
Апаратура розпізнавання містить антену розпізнавання і електронний блок, до складу якого входять приймально-
передавальний пристрій, логічні схеми, обчислювальний пристрій, джерело живлення.
Ракета твердопаливна з головкою самонаведення, що може працювати в ІЧ- і ультрафіолетовому діапазонах. Приймач ви-
промінювання охолоджується. Суміщення осі оптичної системи ГСН з напрямком на ціль в процесі її супроводження здійснюється
за допомогою гіроскопічного приводу. Пуск ракети з контейнера виконується за допомогою стартового прискорювача Маршовий
двигун включається, коли ракета віддалиться на відстань, що виключає ураження стрілка-зенітника струменем працюючого двигу-
на
Склад рддіокомаидних ПЗРК: транспортно-пусковий контейнер, блок наведення з апаратурою розпізнавання і зенітна керо-
вана ракета Спряження контейнера з розташованою в ньому ракетою і блоком наведення здійснюється в процесі підготовки ПЗРК
до бойового застосування.
На контейнері розміщені дві антени: одна - пристрою передачі команд, інша - апаратури розпізнавання; всередині контейнера
знаходиться сама ракета
Блок наведення містить монокулярний оптичний приціл, що забезпечує захоплення і супровід цілі; ІЧ- пристрій вимірювання
відхилення ракети від лінії візирування цілі; пристрій вироблення і передачі команд наведення; програмний пристрій підготовки і
здійснення пуску; запитувач апаратури розпізнавання “свій-чужий”. На корпусі блока є контролер, який застосовується при наве-
денні ракети на ціль.
Після пуску ЗКР оператор супроводжує її за випромінюванням хвостового ІЧ-трасера за допомогою оптичного прицілу. Виве-
дення ракети налінію візирування здійснюється вручну або автоматично.
В автоматичному режимі відхилення ракети від лінії візирування, виміряне ІЧ-пристроєм, перетворюється на команди наведен-
ня, які передаються на борт ЗКР. Відключення ІЧ-пристрою здійснюється через 1,5-2 секунди польоту, після чого ракета наво-
диться в точку зустрічі вручну за умови, що оператор досягає суміщення зображення цілі й ЗКР в полі зору прицілу, змінюючи
положення вимикача контролю.
Команди управління, пропорційні положенню вимикача відносно нейтралі, передаються на борт ЗКР, забезпечуючи її політ за
необхідною траєкторією.
У комплексах, що забезпечують наведення ЗКР за лазерним променем, для наведення ракети на ціль у хвостовому відсіку ЗКР
розташовуються приймачі лазерного випромінювання, які виробляють сигнали, що керують польотом ракети. До складу блока
наведення входять оптичний приціл, пристрій формування лазерного променя із фокусуванням, яке змінюється у залежності від
віддалення ЗКР.
Бойова робота ПЗРК “Сгріла-2” (“Сгріла-2М”, “Сгріла-3”) полягає у наступному. При візуальному виявленні цілі стрілок-
зенітник включає джерело живлення. Після виходу головки самонаведення у робочий режим і розкручування ротора гіроскопа (при-
близно 5 секунд) він прицілюється і при одержанні звукової та світлової інформації’ про захоплення цілі тепловою ГСН початковим
натисканням спускового гачка робить розарретирування гіроскопа, у результаті чого головка починає відслідковувати ціль. По-
дальшим натисканням спускового гачка оператор здійснює пуск ракети. При цьому спрацьовує двигун, що викидає ракету зі
швидкістю до ЗО м/с і придає їй необхідного обертання. Після вильоту з труби на ракеті розкриваються рулі й стабілізатори. Потім
виробляється сигнал для вмикання підривного пристрою в робочий режим, запалюється пірозапобіжник і знімається перший
ступінь запобігання підривника. Через 0,3 секунди після викиду ракети вмикається маршовий двигун. Потім знімається другий
ступінь запобігання підривника, після чого він знаходиться в цілком зведеному стані. Ракета в польоті обертається з кутовою
швидкістю 15-20 об/с, підтримуваною за рахунок відповідного нахилу площини установки стабілізаторів. У випадку промаху по
закінченню 11-14 секунд польоту спрацьовує самоліквідатор ракети.
Комплекси “Сгріла-2”, “Сгріла-2М”, “Сгріла-3”, “Ігла-1” нормально працюють тільки в умовах перебування цілі на фоні
суцільної (шаруватої), легкої (пір'ястої) і купчастої хмарності менше 3-х балів. При купчастій хмарності більше 3-х балів, особливо у
весняно-літній період зона дії’ комплексу значно обмежується. Мінімальний кут на сонце повинен складати 22 - 43 °. Лінія горизон-
ту в сонячний день обмежує зону поразки комплексу кутом місця більшим 20°. Комплекси не захищені від помилкових теплових
завад (пасток). При відстрілі цілями одиночних пасток з інтервалом 0,3 с і залпами до 6 штук дані ПЗРК практично не працездатні.
Найбільш доцільне їх застосування проти БПЛА і крилатих ракет.
Бойова робота ПЗРК “Ігла” аналогічна розглянутій. При керуванні бойовою роботою використовується переносний електро-
нний планшет, інформація на який надходить із ВКП, відстань до якого не повинна перевищувати 15 км.
5.6. Зенітні гарматні ракетні комплекси
Зенітний гарматний ракетний комплекс є сукупністю функціонально зв’язаних декількох зенітних гармат, зенітних керованих
ракет і різноманітних технічних засобів, що забезпечують виявлення і супроводження вибраної для обстрілу цілі, підготовку і ве-
дення вогню по ній. Зенітні гарматні ракетні комплекси (ЗГРК), як правило, встановлюються на базі самохідних шасі.
Основні принципи побудови сучасних ЗГРК:
розміщення на одній бойовій машині комбінованого ракетно-гарматного озброєння з системою керування цим озброєнням. Та-
ке розміщення забезпечує суцільну зону поразки шляхом як послідовного обстрілу цілей ракетним і гарматним озброєнням (почи-
наючи з максимальних дальностей і закінчуючи ближньою межею гарматного озброєння - 200 м), так і автономного застосування -
або тільки ракетного, або тільки гарматного;
228
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
використання багагорежимної радіолокаційно-оптичної системи виявлення і супроводження цілей (РОСВСЦ). Система базу-
ється на використанні інтегрованих інформаційних засобів, що працюють у дм, см, мм та інфрачервоному діапазонах довжини
хвиль. Керування озброєнням здійснюється за допомогою високопродуктивної мультирежимної боргової центральної обчислюва-
льної системи на основі інформації від РОСВСЦ. Така побудова системи забезпечує високу завадозахищеність і надійність роботи,
одночасне використання радіолокаційного і оптичного каналів під час стрільби по одній цілі, а також паралельне (автономне) їх
використання під час одночасного обстрілу двох цілей (одна ціль супровод жується і обстрілюється з використанням радіолокацій-
ного каналу, що працює в дм, см і мм діапазонах, а друга ціль з використанням оптичних каналів, що працюють в інфрачервоному
(8-14 мкм) і видимому діапазонах;
використання простого теленаведення ЗКР - методу “трьох точок”, для якого достатньо тільки інформації про кутові координа-
ти цілі, що супровод жується;
реалізація модульного принципу побудови бойової машини, що дозволяє створювати різні модифікації, які відрізняються скла-
дом озброєння та інформаційними засобами керування озброєнням.
Структурна схема гіпотетичного зенітного гарматного ракетного комплексу та функціональних зв’язків його основних еле-
ментів показана на рис. 5.25.
Рис. 5.25. Структурна схема зенітного гарматного ракетного комплексу
Основні елементи ЗГРК: радіоприладний комплекс (РПК), до складу якого входять станція виявлення цілей і цілевказання
(СВЦ) та станція супроводження цілей (ССЦ) з антенними системами, які працюють в одному або декількох діапазонах довжини
хвиль, наземний радіолокаційний запитувач (НРЗ) (система розпізнавання), система вимірювання кутів хитавиці, боргова цен-
тральна обчислювальна система (БЦОС); оптико-електронний комплекс (ОЕК), до складу якого входять оптико-електронний
(ОЕЗ), тепловізійний засоби та лазерний канал; оптичний приціл з системою наведення; навігаційна система; система стабілізації;
система наведення гармати і ракет; система керування; система автоматики; зенітні керовані ракети та зенітні гармати; засоби за-
безпечення (система електроживлення, система вентиляції та забезпечення мікроклімату, апаратура внутрішнього та зовнішнього
зв’язку, засоби протиатомного, протихімічного, протибактеріального захисту, протипожежне обладнання, засоби спостереження);
шасі.
Тактико-технічні характеристики деяких ЗГРК наведені у табл. Д10.
Сучасні самохідні зенітні установки мають в своєму складі автоматизовані малокаліберні зенітні гармати. Вони забезпечують
ведення ефективного вогню з місця і під час руху у будь-яких погодних умовах.
Боєприпаси для стрільби - називаються гарматним пострілом, включають: снаряд з підривником; пороховий заряд в гільзі;
засіб запалення заряду і допоміжні елементи (флегматизатори, гасителі полум’я тощо).
Для стрільби по повітряних цілях застосовуються снаряди ударної дії, осколочні й осколочно-фугасні з контактними та дистан-
ційними або неконтактними підривниками. Поразка цілі може досягатися цілим снарядом (ударна дія) або влученням осколків
снаряда. Для підвищення ефективності пораження цілі ведуться розробки боєприпасів деструктивної дії і для малокаліберних зені-
тних гармат. Особливістю цих боєприпасів є використання у них активних поражаючих елементів (АПЕ), які знижують міцнісні
властивості літального апарата. Ці елементи можливо розділити за конструкцією на дві групи: капсульовані АПЕ (що мають неве-
ликі міцнісні характеристики, але хороші коефіцієнти наповнення снаряду та просту конструкцію) і високоміцні АПЕ. До деструк-
тивного складу АПЕ здебільшого включають галій, індій, олово і цинк.
Дистанційні підривники працюють за принципом відліку часу від моменту пострілу до моменту розриву снаряду на траєкторії.
Цей час призначається з таким розрахунком, щоб отримати розрив снаряду безпосередньо біля цілі. Відомі на цей час дистанційні
229
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
підривники за своєю побудовою поділяються на порохові й механічні. Дія порохового дистанційного підривника базується на го-
рінні порохової суміші, запресованої в дистанційних кільцях. З підривників механічної дп найбільше розповсюдження отримали
підривники годинникового типу. Механічні дистанційні підривники мають більшу точність відліку часу.
До неконтактних підривників відносяться підривники, для спрацювання яких прямого влучання (контакту) не вимагається, а
достатньо, щоб снаряд пролетів на деякій відстані від цілі.
Підривники ударної дп в залежності від проміжку часу (від моменту зустрічі снаряду з перешкодою до моменту його розриву)
поділяються на підривники миттєвої, звичайної і уповільненої дії.
Засоби запалення заряду за способом приведення в дію поділяються на уд арні й електричні (капсульні втулки і електрокапсулі
(найчастіше застосовуються в швидкострільних автоматичних артилерійських установках)).
5.6.1. Стрільба зенітної артилерії
Сутність стрільби по повітряних цілях зводиться до вирішення задачі зустрічі снаряда з ціллю, що швидко рухається, в пев-
ній точці простору, на певний момент часу і полягає у здійсненні пострілів (черг) з розрахунком на влучання і поразку цілі.
Гармата наводиться не в точку Ао (рис. 5.26), де знаходиться ціль на початковий момент, тобто в момент останнього визначення
її координат, які використовуються для виконання даного пострілу (черги), і не в точку Ав, де знаходиться ціль на момент виконан-
ня пострілу, а в упереджену точку Ау, в якій за розрахунками снаряд повинен зустрітися з ціллю.
Рис. 5.26. Сутність вирішення задачі зустрічі снаряду з ціллю
За вхідне положення приймається положення на момент останнього визначення координат цілі, що використовуються для роз-
рахунку даних пострілу (черги).
Проміжок часу між початковим моментом і моментом виконання пострілу називається робітним часом т^. Він включає прила-
дний час - проміжок між початковим моментом і моментом закінчення передачі даних з приладу на гармату та відпрацювання
даних гарматою. Для сучасних зенітних гарматних комплексів (ЗГК), оснащених радіо- і оптиколокаційними засобами та електро-
нно-обчислювальними системами обробки інформації з синхронною передачею даних на гармату робітний час практично дорів-
нює нулю.
Проміжок часу між вхідним моментом і моментом зустрічі снаряда з ціллю називається упереджувальним часом (у. Оскільки
робітний час дорівнює нулю, то{у=тХ¥+т = т (т - польотний час снаряда). Лінійне упередження - Ав Ау, а трикутник ОАуАв -
упереджу вальний.
Визначення місцеположення точки зустрічі в просторі (координат упередженої точки) і установок гармати та підривника на
момент пострілу прийнято називати вирішенням задачі зустрічі. Для вирішення задачі зустрічі необхідно знати: поточні координати
цілі, величину і напрямок вектора швидкості цілі, характер руху цілі за час польоту снаряда до упередженої точки (задатися гіпоте-
зою про її рух за цей час), відхилення умов стрільби від табличних, систему гармати, снаряд, детонатор.
Процес підготовки першого і наступних пострілів (черг) включає: визначення координат поточного положення цілі та її
параметрів і положення на момент пострілу (якщо робітний час не рівний нулю); рішення задачі зустрічі; зарядження, наводка гар-
мат (установок) і виконання пострілів.
Поточні координати цілі визначаються в результаті стеження за нею радіолокаційною станцією або оптичними (оптико-
електронними) приладами.
Параметрами руху цілі називаються величини, що однозначно визначають вектор її швидкості (величину і напрямок). Вектор
швидкості визначається поєднанням трьох незалежних параметрів. Вони обчислюються за зміною координат цілі, як правило
БЦОС.
Вирішення задачі зустрічі зводиться до погодження в часі шляхів руху снаряду і цілі при різних законах їхнього руху з задачею
забезпечення зустрічі снаряду і цілі в певній точці простору на певний момент. При цьому, як загальна приймається гіпотеза: за
упереджувальний час ціль перемішується також, як вона перемішувалась до моменту пострілу. Як часткові гіпотези можуть при-
йматися: за упереджу вальний час ціль рухається прямолінійно і рівномірно в будь-якій площині; за упереджувальний час ціль
230
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
рухається у нахильній площині з постійним прискоренням; за упереджу вальний час ціль рухається прямолінійно, рівномірно і гори-
зонтально. Можливі й інші часткові гіпотези. Вибір і реалізація гіпотез виконується в БЦОС відповідно до дій повітряної цілі. Закон
руху снарядів вивчається зовнішньою балістикою, що дозволяє точно знати залежність їх траєкторій і часу польоту від установок
гармат і умов стрільби. Як початкові використовуються табличні балістичні і метеорологічні умови.
Табличні балістичні умови: дуло середньої спрацьованості, що забезпечує отримання табличної початкової швидкості; тем-
пература заряду = 15 °С; маса снаряда нормальна; форма і розміри снаряда відповідають встановленому рисунку; заряд нормаль-
ний, що забезпечує отримання штатної початкової швидкості при стрільбі з нового дула; деривація (бокове відхилення снаряда від
площини кидання, що спричиняється обертальним рухом снаряда) відсутня.
Табличні метеорологічні умови: атмосферний тиск в точці стояння гармати Ьо = 100 000 Па = 750 мм рт.ст.; температура пові-
тря 15 °С; щільність повітря По = 1,206 кг/м3; вітер на всіх висотах відсутній (XV = 0); розподіл метеорологічних умов за висотою
відповідає закону, прийнятому в артилерії.
Стрільба, як правило, протікає в умовах, відмінних від табличних. Необхідні врахування цієї невідповідності і введення попра-
вок при вирішенні задачі зустрічі. Всі метеорологічні умови стрільби змінюються з висотою, і їх врахування в такому вигляді
ускладнене. Тому вводиться поняття балістичних середніх, тобто постійних розрахункових в межах висоти траєкторії відхилень
метеорологічних чинників (температури, щільності, вітру) від табличних, що спричиняють такі ж за величиною і напрямком відхи-
лення снаряда, як і дійсне змінне за висотою відхилення даного метеорологічного чинника. Так, наприклад, балістичним вітром
називають такий середній, постійний за величиною й напрямком в межах висоти траєкторії вітер, який спричиняє таке ж відхилен-
ня снаряда, як і дійсний змінний за висотою вітер. Дійсні значення метеорологічних чинників визначаються артилерійськими ме-
теорологічними станціями.
Чинники, що впливають на політ снаряда, враховуються визначенням координат так званої фіктивної точки, тобто тієї точки, в
яку необхідно направити снаряд, щоб з урахуванням реальних умов стрільби його зустріч з ціллю відбулася в упередженій точці Ау.
Вирішення задачі зустрічі в різних типах БЦОС має свої особливості, однак в усіх випадках воно зводиться до безперервного
вирішення ряду залежностей між елементами упереджувального трикутника з використанням табличної функції’ часу польоту сна-
ряда від дальності до точки зустрічі і умов стрільби. За відомими значеннями поточних координат і параметрів руху цілі виробля-
ються кутові упередження др і Дє та упереджена нахильна дальність з урахуванням поправок на зміну початкової швидкості снаря-
да, щільності повітря, температури заряду, балістичного вітру, бази, деривації тощо. В результаті складання кутових упереджень з
поточними координатами цілі виробляються упереджений азимут ру і упереджений кут місця Єу. За виробленим значенням упере-
дженої дальності Оу і кутом місця Єу визначається спочатку кут прицілювання а, а після цього й кут підвищення гармати ф.
Кутом прицілювання а називається куту вертикальній площині між лінією цілі і лінією пострілу, а кутом підвищення ф - кут,
складений площиною горизонту гармати і лінією пострілу:
ф = єу+а. (5.97)
Зенітна стрільба з прицілом (пряма наводка). Прямою наводкою називається така наводка, при якій гармата (зенітна уста-
новка) наводиться за допомогою прицільних пристроїв безпосереднім візируванням на ціль. Найбільше розповсюдження отримали
автоматичні зенітні та ракурсні приціли.
З допомогою прицілів вирішується задача зустрічі, як правило, з використанням гіпотези - за час польоту снаряду до упередже-
ноїточки ціль рухається рівномірно і прямолінійно в будь-якій площині.
Щоб снаряд влучив в упереджену точку Ау (рис. 5.27), необхідно дуло гармати направити по лінії ОС, положення якої відносно
лінії ОА визначається кутами упередження др, Дє і кутом прицілювання а. Ці кути в автоматичному прицілі одержуються шляхом
побудови (в прийнятому масштабі) трикутників аОау і ауОс, подібних упереджувальному АОАу і балістичному АУОС трикутникам.
В автоматичному прицілі сторона аау називається курсовою лінійкою, Ос - гарматною лінійкою, а^с - лінійкою кутів прицілю-
вання, Оау- прицільною лінійкою.
Всі побудови виконуються механізмами прицілу після введення в нього нахильної дальності до цілі і параметрів її руху (швид-
кості, курсу цілі і куту пікірування або кабрирування). При наводці перехресть коліматорів в ціль і введенні у приціл вхідних даних
вісь каналу дула спрямовується по лінії ОС, тобто враховується не тільки положення упередженої точки відносно точки пострілу,
але і пониження снаряду в польоті під дією сили ваги.
Рис. 5.27. Вирішення задачі зустрічі снаряда з ціллю зенітним прицілом
231
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Принцип вирішення задачі зустрічі в ракурсному прицілі показаний на рис. 5.28.
Площина кільцевого візира ракурсного прицілу встановлюється перпендикулярно до осі каналу дула, тобто з деяким допущен-
ням (з точністю кута прицілювання) її можна вважати перпендикулярною лінії Оау. При рівномірному і прямолінійному русі цілі в
будь-якій площині точка Ау є упередженою точкою положень цілі, що лежить на момент пострілу на поверхні сфери радіуса
8 = У( т (т— польотний час до точки зустрічі), при різних напрямках її руху.
Рис. 5.28. До визначення принципу побудови ракурсного прицілу
При стрільбі ціль може знаходитися в будь-якій точці поверхні сфери, наприклад в точках А] і А2 - в картинній площині, а в то-
чці А3 - поза картинною площиною. В першому випадку для влучання снарядів в ціль прицілювання необхідно виконувати через
точки аі і а2 візирного кільця таким чином, щоб напрямок руху проходив через центр кільця. В другому випадку для прицілювання
необхідно вибрати точку а3, що лежить між кільцем і його центром (А/-точка перетину лінії’ прицілювання з картинною пло-
щиною). Віддалення точки а3 від центру візира (якщо радіус візирного кільця дорівнює - а просторовий курсовий кут (ра-
курс цілі) - яь)
г3=Кв8Іпчь. (5.98)
При стрільбі ракурс цілі оцінюється (рис. 5.28, б) як відношення видимої довжини фюзеляжу до його повної довжини
(8Іп Ць = К1 / К) і враховується значеннями, кратними 1/4.
Підготовка стрільби і ведення вогню по повітряних цілях
Під стрільбою ЗА розуміють процес ведення артилерійського вогню по цілі із завданням її поразки.
ЗА може успішно вести боротьбу з повітряними, наземними і надводними цілями. Головним завданням стрільби ЗА є знищен-
ня повітряних цілей, тобто літаків, вертольотів, аеростатів, плануючих авіаційних бомб, а також цілей, що скидаються на парашу-
тах. До стрільби по наземних і надводних цілях ЗА залучається у випадку, коли боротьба з повітряними цілями стає менш важли-
вою, ніж з наземними і надводними цілями, як правило, при безпосередній загрозі з боку танків і піхоти противника.
Зони зенітних гармат. Для гармати при будь-якому куті місця існує гранична дальність стрільби Кожна гармата не може
стріляти точно в зеніт, має максимальний кут підвищення, внаслідок чого утворюється необстрілювана внутрішня зона, що
називається мертвою воронкою.
Зона досяжності гармати - простір, в межі якого ця гармата може закинути снаряд. Вона обмежена кривою досяжності, мерт-
вою воронкою і горизонтом гармати. Крива досяжності - це геометричне місце точок, що відповідають максимальним нахильним
дальностям при різних кутах місця.
Практично при стрільбі використовується не вся зона досяжності, а лише та її частина, де стрільба по повітряних цілях най-
більш ефективна.
Зоною обстрілу називається частина зони досяжності, в межах якої можливі пораження цілі снарядами.
Плоска зона обстрілу - кільцева зона, одержана в результаті перетину зони обстрілу горизонтальною площиною на заданій ви-
соті (рис. 5.29). Розміри плоскої зони обстрілу характеризуються радіусом , що зі збільшенням висоти зменшується, і радіусом г
мертвої воронки, що зі збільшенням висоти збільшується.
Для відкриття вогню на дальній межі зони обстрілу потрібна дальність виявлення цілі
= ^пл.з. + + ТП ) ’ (5-99)
де и - сумарний робітний час підготовки до відкриття вогню; тп- час польоту снаряда до дальньої межі зони обстрілу.
Підготовка стрільби
Підготовка стрільби поділяється на попередню і безпосередню. Попередня підготовка стрільби з БЦОС проводиться до
отримання цілевказання або до виявлення цілі і включає визначення відхилень умов стрільби від табличних, розрахунок сумарних
поправок і врахування на БЦОС тих поправок (відхилень), введення яких не залежить від умов польоту цілі. Попередня підготовка
232
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
установки вважається закінченою, якщо в БЦОС враховані: сумарне відхилення початкового швидкості снарядів від табличної
ДУвідх СуМ; сумарне балістичне відхилення щільності повітря від табличного ДАсум ; азимут Р\у і швидкість XV балістичного
вітру; база (величина В і азимут Рв ) і різниця висот між приладом, що визначає поточні координати цілі, і центром вогневої пози-
ції; систематичні помилки, властиві БЦОС даного типу, а також систематичні відхилення снарядів, що повторюються для ряду
стрільб даної батареї, здійснюваних в подібних умовах. Визначення сумарного відхилення початкової швидкості снарядів від таб-
личної здійснюється за формулою
А^відх.сум = А^відх.темп + А^відх.сер + А^відх.бал +А^відх.гр> (5.100)
де: ДУВІ лх _мп , ДУВІЛХ сеп , ДУВІ лх бал, ДУВІЛХ гп - приведені відхилення початкової швидкості від табличних відповідно:
оІДЛ.І^МіІ 7 оїДл.ССр ’ ВІДЛ.ООЛ 7 оІДЛ.І р *
внаслідок відхилення температури зарядів від табличної; внаслідок спрацювання каналів дул (середнє для дул); внаслідок відхилен-
ня початкової швидкості снарядів від табличної; що відповідає балістичному відхиленню щільності повітря (ДОа ); що відповідає
особливостям форми снаряда.
Рис. 5.29. Зони зенітних гармат
Сумарне балістичне відхилення щільності повітря від табличного визначається з виразу
АОсум = ДОВИС + АОтемп + АОП + АОокр + АО^ , (5.101)
де АОВС - балістичне відхилення щільності повітря від табличного для висоти метеорологічної станції; АО^ - приведене
балістичне відхилення щільності повітря, відповідне зміні при відхиленні його температури від табличної; ДОП - балістичне відхи-
лення щільності повітря, відповідне різниці висот розташування вогневої позиції батареї й метеорологічної станції; АО^ - приве-
дене балістичне відхилення щільності повітря, відповідне залишку при округленні АУВІДХ сум ; ДОФ - приведене балістичне відхи-
лення щільності повітря, відповідне особливостям форми снаряда
Щільність повітря залежить головним чином від температури і тиску, що змінюються в часі і з висотою.
Балістичне відхилення щільності повітря - умовне, постійне для всієї* траєкторії відхилення щільності повітря від нормаль-
ної (табличної), що спричиняє таке ж відхилення снаряда (траєкторії) від розрахункової точки, як і дійсне змінне з висотою відхи-
лення щільності. Воно розраховується за дійсним середнім відхиленям щільності повітря від табличного у даному шарі атмосфери.
При стрільбі гармат батареї на установках, вироблених без врахування бази, траси будуть відхилятися від цілі на величину бази
і за напрямком азимуту бази. Тому для підвищення точності стрільби координати цілі, що визначаються приладом, необхідно пере-
творювати на координати відносно центру вогневої позиції батареї (взводу). Таке перетворення виконується в РПК автоматично
при введенні в нього вхідних установок.
Безпосередня підготовка проводиться після отримання цілевказання або після виявлення цілі на батареї і включає: пошук, вияв-
лення і розпізнавання цілі; вибір засобу визначення даних для стрільби з РПК; визначення і призначення висоти цілі; установку на
РПК спостережного часу; призначення виду вогню і вибір моменту відкриття вогню.
Способи стрільби, види і режими вогню.
В залежності від обстановки, особливостей цілі, умов її спостереження і можливостей зенітних гарматних комплексів (устано-
вок) застосовуються наступні способи стрільби: з РПК, з прицілом, по трасах, загород жувальним вогнем.
Стрільба з РПК є основним способом стрільби, забезпечує найбільшу її дійсність і застосовується як по видимих, так і неви-
димих повітряних цілях.
233
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Стрільба з прицілом ведеться по візуально спостережуваних повітряних цілях. Застосовується при неможливості вести стрі-
льбу з РПК, а також при раптовій появі цілі на малих висотах. При стрільбі з прицілом гармати наводяться в упереджену точку на-
півавтоматично або вручну.
Стрільба по трасах ведеться шляхом суміщення трас з ціллю навідниками гармат. Цей спосіб застосовується при стрільбі по
цілях, виявлених зненацька на невеликих дальностях.
Загороджувальний вогонь застосовується тільки по візуально неспостережуваних повітряних цілях, коли неможливо вести
стрільбу з РПК або з прицілом, і полягає в постановці нерухомої вогневої завіси над розрахунковою точкою на шляху руху цілі.
Азимут і кут підвищення для розрахункової точки призначаються на підставі даних про ціль, що визначаються БЦОС або іншим
способом.
У залежності від способу стрільби, особливостей вибраної для обстрілу цілі, дальності стрільби, можливостей і стану матеріа-
льної частини гармат і наявності боєприпасів застосовуються наступні види вогню: одиночні постріли, залповий вогонь, рухомий
вогонь, короткі черги, довгі черги, безперервний вогонь.
Вогонь одиночними пострілами - вид вогню, коли кожний постріл виконується за окремою командою. Він застосовується
при стрільбі з прицілом (прямою наводкою) по цілях, що скидаються на парашутах, і по наземних цілях малих розмірів.
Залповий вогонь з встановленим темпом є основним видом вогню і застосовується при стрільбі з РПК по повітряних цілях.
Рухомий вогонь - вид вогню, коли кожна установка веде стрільбу самостійно по мірі готовності. Він застосовується при стрі-
льбі прямою наводкою по повітряних і наземних (надводних) цілях.
З тривалістю черги звичайно зв’язується класифікація видів автоматичного вогню малокаліберної зенітної артилерії. Чим довші
черги вогню і чим менше перерви між ними, тим інтенсивніша стрільба і (якщо при цьому не знижується точність наводки гармат),
тим більша імовірність поразиш ціль.
Вогонь короткими чергами застосовується при стрільбі по малошвидкісних повітряних цілях на великих дальностях, а також
по наземних і надводних цілях; при отриманні цілевказань, що обмежують витрати боєприпасів; при необхідності обмежувати
інтенсивність вогню для запобігання перевищення граничного режиму вогню; при неможливості вести вогонь довгими чергами
внаслідок задимлення поля зору коліматорів прицілу.
Вогонь довгими чергами є основним видом вогню зенітних батарей малого калібру і зенітних установок при знищенні повіт-
ряних цілей.
Безперервний вогонь ведеться при стрільбі по пікіруючих цілях і тих, що з’являються зненацька.
Граничні режими ведення вогню встановлюються, виходячи з гранично допустимої температури нагріву дул гармат. Вони при
певних умовах будуть обмежувати довжину черг і мінімальні інтервали між ними.
5.7. Основи стрільби зенітними керованими ракетами і управління вогнем підрозділів
5.7.1. Сутність стрільби зенітними керованими ракетами
Стрільба - процес бойової роботи зенітного ракетного підрозділу, спрямований на знищення повітряної цілі.
Процес бойової роботи зенітних ракетних підрозділів прийнято розподіляти на декілька етапів.
Перший етап називають попередньою підготовкою стрільби, він розпочинається з моменту надходження команди на приве-
дення підрозділу до вищого ступеня готовності і закінчується надходженням цілевказання (при веденні самостійних бойових дій -
прийняттям рішення на обстріл автономно виявлених цілей). Основним завданням етапу є найшвидше приведення у готовність
до стрільби особового складу озброєння і військової техніки.
Змістом попередньої підготовки стрільби є: ввімкнення і проведення передстрільбових перевірок (контролю функціонуван-
ня) усіх засобів підрозділу; попередня підготовка ракет до стрільби, у тому числі, якщо необхідно, заряджання пускових установок
(пристроїв), вивчення і оцінка повітряної обстановки (розпочинаються з одержанням перших відомостей про противника і прово-
дяться безперервно на протязі всього нальоту) з використанням усіх видів інформації, оцінка готовності підрозділу до бою; пошук
цілей автономними засобами розвідки.
Другий етап процесу бойової роботи - безпосередня підготовка стрільби (підготовка обстрілу). Основне завдання етапу -
забезпечення найбільш повного використання бойових можливостей підрозділу. Змістом етапу є: виявлення, захват на супрово-
дження і розпізнавання державної належності цілей; визначення складу групи, типу і важливості цілей; вибір видів, способів об-
стрілу і послідовності обстрілу цілей; вибір режимів роботи апаратури, способів захисту від завад і протирадіолокаційних засобів;
вибір виду ЗКР, що використовуються і призначення їх наряду; визначення і оцінка вихідних даних для обстрілу цілей (параметрів
руху цілі, характеристик зон поразки і пуску). Етап розпочинається з постановки завдань для підрозділу (наприклад, через видачу
цілевказання) і закінчується оцінкою готовності до пуску чи пуском ракет.
Третій етап - обстріл цілі, який розпочинається пуском ракет і закінчується зустріччю з ціллю останньої із ракет, що по ній ви-
пущені. Основним змістом етапу є контроль пуску ракет, захват ними цілі на супроводження у ЗРК із самонаведенням (захват ра-
кет, що стартували, у ЗРК з командним керуванням), контроль супроводження цілі й наведення ракет, прийняття оперативних захо-
дів для парирування протидії’ противника стрільбі ЗКР.
Четвертий етап - спостереження і оцінка результатів обстрілу. Завданням етапу є достовірне визначення факту ураження чи
неураження цілі, на підставі чого приймається обґрунтоване рішення на перенесення вогню, повторний обстріл цілі, вимкнення
засобів підрозділу тощо. Ураження цілі оцінюється за сукупністю ознак, визначених радіолокаційними, оптичними, акустичними
методами, за зміною параметрів руху цілі, функціонуванням бортової апаратури тощо. Етап закінчується звільненням цільового
каналу чи доповіддю про результат бойових дій.
234
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
5.7.2. Зони поразки і пуску, можливості ЗРК з послідовного обстрілу цілей
Зона поразки ЗРК - область простору, яка обмежена граничними значеннями реалізованої дальності, висоти та курсового па-
раметра зустрічі ЗКР з ціллю, у межах якої забезпечується знищення цілі з заданою імовірністю поразки.
Зони поразки і пуску прийнято розділяти на розрахункові та реалізовані. Під розрахунковою зоною поразки розуміють область
простору, у якій можливе знищення цілі з визначеною ефективністю при заданих параметрах руху цілі Уц, Н ц, Рц . Розрахун-
кові зони поразки характеризують граничні можливості комплексів щодо знищення повітряних цілей у найбільш простих умовах.
Межі чи опорні точки розрахункових зон поразки закладені в алгоритмах обчислювальних засобів ЗРК (автоматизованих приладів
пуску) і відображаються разом з точкою зустрічі на індикаторах загального призначення (огляду, наведення) чи спеціальних.
Реалізована зона поразки - частина зони поразки, у межах якої реалізуються можливості ЗРК з урахуванням обмежень в кон-
кретних умовах стрільби. Це є узагальнена характеристика можливостей ЗРК, що визначена з урахуванням ефективності стрільби,
його досяжності за дальністю, висотою і курсовим параметром.
Зона обстрілу - простір навколо ЗРК, у якому забезпечується наведення ракети на ціль.
Зона поразки відображається в параметричній системі координат і характеризується положенням дальньої, ближньої, верхньої і
нижньої межі зони. Основні її характеристики: горизонтальна (похила) дальність до дальньої і ближньої межі <3Д і мінімальна і
максимальна висоти Н^н і Н^, граничний курсовий кут і максимальний кут місця є^. Горизонтальна дальність до дальньої
межі зони поразки і граничний курсовий кут визначають граничний параметр зони поразки Р^, тобто максимальний параметр цілі,
при якому забезпечується її поразка з імовірністю, не нижче заданої. Для багатоканальних по цілі ЗРК характерною величиною
також є параметр зони поразки Р^о, до якого можлива кількість стрільб не менш, ніж при нульовому параметрі руху цілі. Типовий
перетин зони поразки вертикальною і горизонтальною площинами показаний на рис. 5.30.
Рис. 5.30. Зона поразки ЗРК
Положення межі зони поразки визначається великою кількістю факторів, що зв’язані з технічними характеристиками окремих
елементів ЗРК і контуру управління в цілому; умовами стрільби; характеристиками і параметрами руху повітряної цілі.
Положення дальньої межі зони поразки визначає потрібну дальність дії СНР (СВУ, РПН)
^потр.СНР = + (* роб +^р)’ (5.102)
де сід - горизонтальна дальність до дальньої межі зони поразки; (р^ - робітний час бойової обслуги ЗРК (тривалість з початку
пошуку цілі до моменту пуску ракети); (р - польотний час ракети до дальньої межі зони поразки.
235
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Якщо при яких-небудь значеннях ЕПР, швидкості і висоти цілі реалізована дальність дії СНР виявляється менше потрібної
(<кнр < склрснр),то Це призведе до скорочення розрахункової зони поразки ЗРК, тобто до зменшення граничної дальності стрільби.
Положення реалізованої далекої і нижньої межі зони поразки ЗРК може також залежати і від рельєфу місцевості.
Зона пуску ЗКР - область простору, при перебуванні цілі в якій у момент пуску ракет забезпечує їх зустріч у зоні поразки ЗРК.
Для визначення межі зони пуску необхідно з кожної точки зони поразки відкласти у бік, зворотний курсу цілі, відрізок, що дорів-
нює добутку швидкості цілі Уц на польотний час ракети до даної точки (на рис. 5.31, точки а, в, с, сі, е).
При супроводженні цілі СНР поточні координати точки зустрічі обчислюються автоматично і відображуються на екранах ін-
дикаторів. Пуск ракети здійснюється при перебуванні точки зустрічі в межах зони поразки.
Рис. 5.31. Зона пуску
Гарантована зона пуску - область простору, при перебуванні цілі в якій у момент пуску ракет забезпечує їх зустріч з ціллю в
зоні поразки незалежно від наявності і виду протиракетного маневру. Межі цієї зони визначаються умовою, що польотний час ЗКР
до точки зустрічі (І,) дорівнює часу, який потрібний цілі для виходу за межі зони поразки шляхом різкого маневру (Сгхлр)-
Для кожної точки гарантованої зони пуску < С^р-
Реалізовані зони виявлення і поразки ЗРК на малих висотах
Розрахунок зон здійснюється з використанням ПЕОМ чи вручну.
Для розрахунку зон виявлення радіолокаційних засобів необхідно замірити кути закриття із точок, що відповідають електрич-
ним центрам антен СНР (СРЦ, СОУ, БСНР, РПЦ, ГСН) через кожні 10 градусів за азимутом. При наявності ділянок з різко
мінливими кутами закриття замір їх проводиться через 1 - 2 градуси в межах відповідних десятиградусних секторів. Зняти профілі
місцевості з карти масштабу 1 : 100 000 (1 : 50 000) і побудувати їх за тими ж напрямками, за якими був зроблений замір кутів за-
криття. Профіль місцевості будувати до дальностей для ЗРК: ДД - 90 км, СД - 50 км і МД - 30 км (рис. 5.32).
Зниження точок рельєфу місцевості за рахунок кривини Землі (Нп>м) щодо обрію визначається за формулою
НП=Д2 /16900, (5.103)
де Д - дальність до цієї точки по осі абсцис, км.
Рис. 5.32. Побудова профілю місцевості
При побудові профілю місцевості масштаб осі абсцис береться відповідним масштабу карти, а осі ординат - зручний для побу-
дови у залежності від максимальних висот над рівнем моря.
Побудову профілю місцевості доцільно робити на міліметровому папері для кожного напрямку окремо: нанести на карту
профільну лінію з азимуту заміряного кута закриття; визначити і підписати висоти рельєфу місцевості; з’єднати отримані точки
прямими лініями.
Провести на кожному профілі лінію прямої видимості з висоти електричного центра антени через вершину найближчої найви-
щої перешкоди 2 і лінію 1, паралельну осі абсцис (рис. 5.32).
236
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Визначити розрахунковий кут закриття (£ роз) можна за формулою
^роз = агс18(Ь / сі) , (5.104)
де сі - відстань, що відкладається на лінії, паралельній осі абсцис, м; Ь - перевищення лінії* прямої видимості на відстані сі
відносно лінії, яка паралельна осі абсцис, м.
Розрахункові кути закриття порівняти з заміряними на відповідних напрямках. Якщо ці кути не відповідають розрахунковим, то
необхідно на цих напрямках ще раз замірити кути закриття і перевірити побудову профілю місцевості, звернувши увагу на нові
будівлі чи інші перешкоди, яких немає на карті. Крім порівняння заміряних і розрахункових кутів закриття результати пе-
ревіряються шляхом порівняння їх з видом місцевих предметів на екранах індикаторів.
На кожному' профілі наноситься траєкторія польоту цілі на висоті 300, 50 м відповідно для ЗРК ДД СД і МД з врахуванням
огинання нею рельєфу місцевості.
Точка перетинання траєкторії польоту цілі з лінією прямої видимості визначає розрахункову дальність виявлення Д^ у даному
напрямку’ відповідного РЕЗ (рис. 5.32).
На карті від точки стояння СНР за обраними напрямками відкладаються розрахункові дальності виявлення цілей. Отримані
точки з’єднують плавною кривою, що і є розрахунковою зоною виявлення РЕЗ на малих висотах, яка уточнюється обльотами
РЕЗ ЗРВ, а також шляхом накопичення даних про польоти літаків, висота яких відома.
Для розрахунку і побудови реалізованих зон поразки усі необхідні дані для даного типу ЗРК зводяться в таблицю, де в гра-
фах за рядками записуються: межі зони поразки через кожен кілометр від найближчої до дальньої межі на малій висоті (б); час
польоту ракети до межі зони поразки з обліком часу старту (ір + (ст); загальний час, рівний сумі часу польоту ракети до заданої межі
зони поразки, часу старту і робітного часу ЗРК
Чаг = + Чт + ЧрК » (5.105)
відстань, на яку пролетіла ціль за час (8ц); потрібна дальність виявлення цілі СНР (РПЦ, ГСН, СОУ, БСНР) для визначення
реалізованої д альньої межі зони поразки
Дв.вим.ЦВ = ^др + • (їздг + Іцв ) і (5.106)
потрібна дальність виявлення цілі засобами цілевказання при робітному часу засобів цілевказання.
Реалізована межа зони поразки на даному напрямку визначається з відповідної дальності виявлення цілі. Отримані точки
з’єднуються плавною кривою, що і є реалізованою межею зони поразки ЗРК (рис. 5.33). Для побудови зони вогню частини не-
обхідно від центра об’єкта провести з визначеним кроком азимутальні напрямки і відзначити на цих напрямках перетинання ре-
алізованих зон поразки ЗРК. З’єднання цих точок, що характеризують максимальні та мінімальні можливі віддалення зони вогню
від об’єкта, і визначають її розміри (рис. 5.33).
Рис. 5.33. Зона виявлення і поразки ЗРК на малих висотах
Визначення дальності стрільби по цілі, що летить з огинанням рельєфу місцевості на малих висотах, можна виконати після ви-
ходу її з області радіотіні. Дальність до цілі в цій точці залежить від профілю рельєфу місцевості в районі пануючого закриття, кута
закриття і висоти польоту цілі щодо земної поверхні.
Можливості ЗРК з послідовного обстрілу цілей, що входять у зону пуску, визначаються його канальністю по цілі, тривалістю
циклу стрільби, часом перезарядження пускових установок і підготовки ракет до старту.
Цикл стрільби - сукупність часу бойової роботи зенітного ракетного комплексу і дій бойової обслуги підрозділу, що викону-
ються при обстрілі однієї цілі. Цикл стрільби характеризується часом зайнятості цільового каналу комплексу при виконанні однієї
стрільби по цілі п ракетами. Цей час включає робітний час бойової обслуги ЗРК і час, необхідний на обстріл цілі
Тц — І роб + Чт + ^’(п — 1)+Ір + 10ц ,
де т - часовий інтервал між пусками п ракету черзі; 1^- час на старт ракети і час оцінки результатів стрільби відповідно.
237
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Час заряджання і підготовки ракет до старту впливає на можливості цільового каналу з послідовного обстрілу цілі, якщо
Тіар ~ ^рТц / П ,
де \р - кількість ракет на пусковій установці для даного цільового каналу.
Можливість цільового каналу ЗРК з повторного обстрілу однієї і тієї ж цілі п ракетами визначається умовою (рис. 5.34)
^об + т • (п — 1) < Т3 пуСКу ,
де Тігіуску - час перебування цілі в зоні пуску.
Рис. 5.34. До виявлення можливості однократного переносу вогню
Час є функцією висоти польоту цілі Нц, курсового параметра Рц і швидкості її польоту Уц. Він перевершує час перебуван-
ня цілі в зоні поразки на різницю польотного часу ракети до дальньої і ближньої межі зони поразки:
впуску = Т3.пор + (їд — ) •
Перенос вогню цільового каналу ЗРК на другу ціль можливий, якщо часовий інтервал між обстрілюваними цілями
А*1,2 — (*об1 +Іроб2 +Ч2) •
Вогнева продуктивність комплексу - кількість стрільб за одиницю часу. Визначає можливу щільність зенітного ракетного
вогню підрозділу при відбитті удару повітряного противника.
Для стрільби зенітними керованими ракетами використовують наступну класифікацію цілей за ознакою спостереження їх
на екранах РЛС і видів вогню.
Одиночна ціль - літак чи інший ЗПН, що спостерігається на екранах індикаторів РЛС у вигляді однієї відмітки.
Групова ціль - кілька літаків чи інших ЗПН, що спостерігаються хоча б на одному з індикаторів РЛС у вигляді накладених
одна на одну відміток.
Можливість розподілу цілей на одиночні і групові багато в чому залежить від розділювальної здатності РЛС, здібностей опера-
торів і їх натренованості. Для групових цілей характерні підвищена флуктуація і збільшені розміри відмітки, своєрідний характер
флуктуації відмітки, але, одночасно і підвищена дальність виявлення та ін.
Група цілей-кілька літаків або інших ЗПН, що спостерігаються одночасно на екранах індикаторів РЛС у вигляді окремих
цілей.
Ціль, що маневрує - літальний апарат, що змінює хоча б один з параметрів (швидкість, висота, курсовий параметр) руху в
процесі підготовки і ведення стрільби.
Протиракетний (протизенітний) маневр цілі за часом і місцем виконання прийнято поділяти на маневр проти управління і
маневр проти стрільби.
Маневр проти управління - маневр, що здійснюється одиночною ціллю чи групою літаків, дії яких погоджені за часом і міс-
цем до дальньої межі зони пуску ЗРК. Маневр виконується з метою ускладнити управління вогнем і безпосередню підготовку стрі-
льби, тим самим знизити кількість стрільб та їх ефективність, чи відвернути дії зенітних засобів.
Маневр проти стрільби - маневр, що здійснюється ціллю після пуску по ній ракети з метою уникнути зустрічі з ракетою чи
знизити ефективність стрільби.
Ціль, що баражує - літальний апарат, що здійснює політ за характерними замкнутими траєкторіями у визначеному районі.
Ціль-посгановник завад - намічений для поразки літак або інший ЗПН, що створює активні завади станціям розвідки чи будь-
яким елементам ЗРК (супроводу цілі і ракети, радіолініям та ін.).
Ціль під прикриттям завад - намічений для поразки літак чи інший ЗПН, який летить під прикриттям активних завад, що
створені передавачами завад на інших літаках, на наземних установках, кораблях.
Під впливом активних завад може відбуватися перекручування, маскування чи втрата корисного сигналу.
Під рубежем виконання завдання повітряним противником слід розуміти рубіж, при досягненні якого ЗПН противника
здатні застосовувати по об’єкту і військам, що прикриваються, засоби ураження (рис. 5.35).
Знищити ЗПН противника потрібно на дальностях, не менших відстані від об’єкта до рубежу виконання ним завдання, тобто
Пзнищ Г^-Крвз-
238
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Відстань рубежу виконання завдання повітряним противником від об’єкта (з урахуванням - радіуса об’єкта та К у - радіуса
його ураження) визначається за формулою:
КРВЗл = гоб + К.у + Уц • 1п - Д - для літаків; К.РВЗкр = Е^у - для крилатих ракет,
де: Уц - швидкість польоту цілі; Іп - час падіння бомби; А - запізнення бомби.
Тип цілі, її склад, координати і параметри руху, способи протидії та їх ефективність визначають вибір режиму бойової роботи
ЗРК, способи супроводження цілі, методи наведення, види вогню, виграти ракет, вибір моменту пуску ЗКР.
Рис. 5.35. До визначення рубежу виконання завдання повітряним противником
Вид вогню, порядок пуску ракет при обстрілі цілі Застосовують вогонь одиночними ракетами і вогонь чергою ракет.
Вогонь одиночними ракетами - вид вогню, при якому пуск наступної ракети по цілі здійснюється після оцінки результатів
стрільби по ній попередньою ракетою. Застосовується при тривалому перебуванні цілі в зоні пуску і відсутності переносу вогню на
іншу ціль.
Вогонь чергою ракет - вид вогню, при якому ціль обстрілюється призначеною кількістю ракет із встановленими інтервалами
між їх пусками. Темп пуску ракет виключає можливість попередньої оцінки результатів стрільби кожною ракетою. Час перебуван-
ня повітряної цілі в зоні поразки ЗРК дуже обмежений. Тому перша черга ракет повинна забезпечувати надійне знищення цілі.
Порядок підготовки і ведення стрільби по повітряних цілях у різних умовах обстановки визначається правилами стрільби.
Вони містять рекомендації: з оцінки повітряного противника, своїх засобів; з вибору цілей для знищення, режимів бойової роботи,
методів наведення; з підготовки вихідних даних для стрільби; з призначення виграти ракет і видів вогню; з вибору моментів пуску
ЗКР; з оцінки результатів стрільби та ін. Застосування цих правил повинне забезпечити найбільшу ефективність і економічність
стрільби.
5.7.3. Основи управління вогнем підрозділів
Сутність управління вогнем зенітних ракетних підрозділів як найважливішої складової частини управління боєм полягає в:
усвідомленні завдання на знищення ЗПН, оцінці обстановки, ухваленні рішення на відбиття удару повітряного противника, поста-
новці завдань підрозділам на знищення повітряних цілей, контролі за виконанням поставлених завдань і оцінці результатів ведення
бою (рис. 5.36).
Протиповітряний бій винятково швидкоплинний і динамічний. Тому управління вогнем здійснюється в умовах надзвичайно
обмеженого часу і будується на розумному сполученні централізації і самостійного ведення вогню підрозділами.
Під з’ясуванням завдання на знищення ЗПН розуміється з’ясування мети бою, замислу старшого командира з відбиття уда-
ру повітряного противника і своєї ролі щодо знищення цілей.
У результаті усвідомлення завдання встановлюється, які повітряні цілі необхідно знищити самостійно і які у взаємодії з іншими
силами ППО.
Оцінка обстановки включає оцінку повітряної обстановки (повітряного противника і дій своїх літаків) та наземної (морської)
обстановки, стану і можливостей своїх підрозділів, взаємодіючих сил і засобів, об’єктів і військ, що прикриваються, умов ведення
вогню, радіоелектронної обстановки.
Оцінка повітряного противника включає: визначення загального характеру і замислу удару ЗПН, складу сил і засобів, основних
напрямків і можливої тривалості і щільності удару, завдань, які буде намагатись вирішити противник, і відносної важливості цілей;
оцінку кожного ЗПН як цілі для зенітних ракетних підрозділів (її склад, швидкість і висота польоту, курсовий параметр, підлітній
час, способи протидії управлінню і стрільбі).
Визначення відносної важливості цілі безпосередньо зв’язано з оцінкою її тактичної значимості в даному нальоті, значимості
факту знищення для вирішення бойового завдання підрозділом.
239
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.36. Алгоритм управління вогнем підрозділів
Найбільш важливими цілями є літаки ударних груп і радіоелектронної боротьби, а також літаки, що здійснюють вогневе подав-
лення зенітного ракетного підрозділу. У складі ударної групи найбільш важливими є цілі - можливі носії найбільшого потенціалу
засобів пораження об’єкта.
Оцінка способів протидії' управлінню і стрільбі повітряним противником виробляється на основі аналізу їх характерних ознак,
що спостерігаються на індикаторах РЛС, а також оцінки характеру зміни параметрів руху цілей.
Оцінка стану і можливостей своїх підрозділів виробляється шляхом аналізу інформації*, яка безупинно надходить від них (допо-
відей і повідомлень), про стан і бойову діяльність - на основі глибокого знання командиром бойових властивостей і характеристик
озброєння та рівня підготовки бойових обслуг.
У результаті оцінки своїх підрозділів командир визначає, що він може на кожен момент бою протиставити повітряному проти-
внику, які дії він повинен розпочати, щоб виконати бойове завдання.
Оцінка взаємодіючих сил і засобів виробляється шляхом аналізу інформації, що надходить з вищого КП, від сусідніх підрозді-
лів, своїх засобів розвідки. У результаті цього аналізу командир визначає, у якій мірі бойові дії’ сусідів сприяють виконанню завдан-
ня, як забезпечити безпеку своїх літаків, уточнює способи взаємодії*.
Оцінка об’єктів і військ (сил), що прикриваються, здійснюється згідно з бойовим завданням та динамікою змін їх важливості у
ході бою.
Оцінка радіоелектронної обстановки здійснюється шляхом аналізу інформації про наявність завад і ступінь їх впливу, яка над-
ходить від станції* розвідки до ЗРК, а також шляхом прогнозування можливості постановки завад противником.
У результаті оцінки радіоелектронної обстановки робляться висновки про її вплив на ведення розвідки повітряного противника,
управління вогнем і стрільбу, визначаються найбільш доцільні режими і способи бойової роботи по цілях.
Умови ведення вогню (пора року і час доби, метеорологічні умови, природні й штучні перешкоди (завади) та ін.) оцінюються з
погляду їх впливу на режими бойової роботи ЗРК, способи обстрілу цілей, положення реалізованих меж зони поразки, тривалості
циклу стрільби, ефективності стрільби та ін.
Рішення на відбиття удару повітряного противника приймається командиром на основі усвідомлення бойового завдання що-
до знищення ЗПН противника та оцінки обстановки. Воно включає: замисел бою, основу якого складає зосередження зусиль на
прикритті об’єктів і військ, розподіл вогню по повітряних цілях (які цілі, якими підрозділами та у якій послідовності знищувати);
240
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
рубежі і порядок постановки завдань на знищення повітряних цілей; уточнення способів взаємодії з іншими силами і засобами
ППО, порядок управління і забезпечення бою.
В основі замислу бою з повітряним противником, що наносить удар по об’єкту прикриття, лежить визначення найбільш важли-
вих цілей і порядку їх знищення, розподіл вогню підрозділів по повітряних цілях.
Рішення командира доводиться до підрозділів при постановці завдань на знищення повітряних цілей. Завдання включає: ціле-
вказання (визначення місця розташування цілі в просторі), команду на знищення цілі і вказівку про порядок ведення вогню. Скоро-
чення часу постановки завдання підрозділам досягається застосуванням сигналів, коротких розпоряджень, максимальним викорис-
танням засобів автоматизації.
При контролі за виконанням поставлених завдань необхідно переконатись в правильності захоплення ЗРК цілей, які призна-
чені для знищення. Це досягається порівнянням на КП координат цілевказання і координат виявленої і супроводжуваної комплек-
сом цілі.
Усвідомлення завдання, оцінка обстановки, прийняття рішення, постановка завдання підрозділам при відбитті удару ЗПН про-
тивника здійснюються безупинно і одночасно з урахуванням особливостей ведення бою на той чи інший момент часу.
Основними вимогами до управління вогнем підрозділів є ефективність, стійкість, безперервність, оперативність і
прихованість.
Ефективність управління визначає ступінь впливу процесу управління вогнем на досягнення мети бою та характеризується
досягнутим результатом відносно раціонального використання бойових можливостей підрозділу.
Для забезпечення ефективного управління вогнем підрозділів потрібні високий рівень підготовки командирів і бойових обслуг;
глибоке розуміння ними характеру і способів ведення сучасного протиповітряного бою; тверде знання бойових можливостей і ос-
нов застосування зенітної ракетної зброї і сил противника; уміння правильно оцінювати обстановку; глибоке передбачення розвит-
ку подій і передбачливість; висока оперативність у роботі при прийнятті рішення, постановці завдань підлеглим, дисципліна, прояв
розумної ініціативи; уміле використання засобів зв’язку і автоматизації.
Ефективність централізованого управління вогнем визначається: раціональністю розподілу вогню по повітряних цілях, точніс-
тю видачі цілевказання, своєчасністю постановки завдань підрозділам на знищення повітряних цілей (оперативністю управління).
Раціональним варіантом розподілу вогню (цілевказання) є такий варіант, що максимізує кількість знищених ЗПН з урахуванням
їх важливості або іншого показника і критерію, який забезпечує найбільшу ефективність виконання бойового завдання.
Точність видачі цілевказання визначає імовірність безпошукового виявлення цілі, призначеної для знищення даним ЗРК.
Якщо значення цієї імовірності близьке до одиниці, то за даними цілевказання ціль виявляється без пошуку і робітний час підрозді-
лу визначається часом, потрібним для підготовки стрільби ЗКР. При цьому також виключається можливість переплутування цілей
підрозділами.
Розрахунок імовірності видачі бойової інформації на КП частини для ЦР і ЦВ ЗРК здійснюється за формулою
1 З
Рцв=т+П
2 і=і
.іЧ-мЛ
ф —! і-
I аі >.
(5.107)
де Ф(...) - приведена функція Лапласа; - об’єм, в якому веде пошук СНР (РПН, РПЦ, СОУ, БСНР) за: і = 1 - дальністю, і = 2 -
азимутом, і = 3 - кутом місця; М, - математичне очікування запізнення інформації’ при супроводі повітряного судна за дальністю,
азимутом, кутом місця; о, - середньоквадратичне відхилення за дальністю, азимутом, кутом місця.
Ціль вважається розподіленою правильно, якщо вона обстріляна зенітним ракетним комплексом у зоні поразки з врахуванням
важливості цілі та можливостей підрозділу, що призначений для її знищення.
Стійкість управління вогнем підрозділів характеризується ступенем збереження ефективності управління вогнем в різних
умовах вогневого і радіоелектронного впливу противника
Стійкість управління визначається живучістю, завадостійкістю та технічною надійністю засобів зв’язку і автоматизації
управління вогнем.
Живучість характеризується можливостями системи управління вогнем зберігати або швидко відновляти свою боєздатність в
умовах використання противником різних засобів ураження.
Завадостійкість характеризується здатністю системи управління вогнем виконати свої функції з погрібною ефективністю в
умовах завад.
Висока технічна надійність засобів управління вогнем характеризується малою імовірністю відмов функціонування її елемен-
тів та здатністю до їх швидкого усунення.
Безперервність управління характеризується здатністю системи управління вогнем забезпечити командира і бойову обслугу
підрозділів можливістю постійного впливу на хід підготовки і ведення бою.
Прихованість управління вогнем підрозділів полягає в здатності зберігати в таємниці від противника заходи щодо підготов-
ки і ведення бою.
Оперативність управління полягає в здатності командира і бойової обслуги вирішувати завдання управління в режимі часу,
який забезпечує випередження противника в діях, швидке реагування на зміну обстановки і своєчасний вплив на хід бою. Вимога
оперативності управління вогнем визначає положення рубежів управління (цілевказівки) підрозділам та кількісно оцінюється у
відносних значеннях
Р = 1-ехр(-Тпід1/Тпотр) , (5.108)
де Тгідт, Тпоф - підлітний та потрібний час підрозділу.
Підлітний час - час польоту цілі від моменту виявлення її засобами розвідки до дальньої межі зони поразки (рис. 5.37). Він
розраховується
Т • =(О ±1 -О )/У , (5.109)
П1ДЛ вияв поз д7 ц
241
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
де Овияв - максимальна відстань виявлення цілей засобами розвідки; Іга - відстань від позиції ЗРК засобів розвідки; Уц - швид-
кість цілі; Од - відстань до дальньої межі зони поразки.
Рис. 5.37. До визначення підльотного часу повітряного противника
І - зона поразки; II - зона пуску;
1 - зона виявлення цілі РЛС передових підрозділів; 2 - потрібний рубіж видачі інформації з урахуванням приведення ЗРК у го-
товність і прийняття рішення на обстріл цілі; 3 - рубіж оголошення готовності № 1; 4 - рубіж постановки бойового завдання на
знищення цілі; 5 - рубіж пуску ЗКР; 6 - точка зустрічі ЗКР з ціллю.
Потрібний час визначається як виграти часу
Тпотр = Т3бір +Тріш +Тзатв +ТПЄр +ТВИК , (5.110)
Де - час збору й обробки інформації; Трщ - час, затрачуваний на оцінку обстановки та ухвалення рішення з урахуванням
оперативно-тактичної ситуації; - час доведення даних обстановки й ухвалення рішення; - час формування і постановки
бойових завдань; - час, затрачуваний на виконання бойового завдання.
Сприятливий баланс часу забезпечується лише в тому випадку, якщо потрібний час не перевищує підлітного.
Потрібна дальність радіолокаційної розвідки цілей (якщо сів^тпатр > Р^ де - курсовий параметр руху цілі)
^вияв.потр ” ^ЦВ + ^цОкП + Цап)’ (5.111)
де (кп - робітний час КП, що здійснює управління вогнем підрозділів; - час запізнювання інформації про цілі (час з моменту
виявлення цілей станцією розвідки і цілевказання до моменту відображення інформації на КП).
Розрахунок відстані рубежів управління від позицій підрозділів здійснюється відповідно до очікуваних висот, швидкостей
польоту повітряного противника та нормативів бойової роботи.
Рубіж оголошення ГОТОВНОСТІ № 1 підрозділу, (Ц км
^ог = + ^ц(Цот 4* Іроб + Цд)’ (5-1 12)
де сід - горизонтальна дальність до дальньої межі зони поразки; иг - термін переходу з готовності № 2 у № 1; - робітний час
ЗРК; (рд - польотний час ракети до дальньої межі зони поразки;
Рубіж постановки бойового завдання км:
приРц = 0, Нц>1 000 м:
Дрпз = ^Нц +(СІд + Уи(1цв +1зах + Іп + Іст +1рд))2 ’ (5.113)
де - час від моменту видачі цілевказівки з КП до відпрацювання слідкуючими системами; - час від відпрацювання ЦВ
слідкуючими системами до моменту захоплення цілі операторами; Іп - час входження в режим роботи приладу пуску; Нц - висота
цілі;
при Рц# 0, Нц>1000 м:
Іг ГГ- Й2
Дцвд(б) = у у\^д(б) “Рц/ +^ц(1роб +1рд(б)) + РЦ+НЦ. (5.114)
Потрібний рубіж централізованого управління сірцу, км (при Рц=0)
^рцу “ ^д + ^ц(іртП + ^КПзрч + ^роб 4* Цд ), (5.115)
де ірт - робітний час радіотехнічного підрозділу; - робітний час КП частини; (р^ - робітний час ЗРК; - час польоту раке-
ти до дальньої межі зони поразки ЗРК.
Рубежі централізованого управління розраховуються як для дальньої, так і окремо для ближньої межі зони поразки
ЗРК (ЗРС).
242
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Оперативність управління вогнем досягається: створенням потрібної глибини радіолокаційної розвідки; правильною організа-
цією, злагодженою і чіткою роботою бойових обслуг КП, при якій на цикл управління витрачається мінімум часу; скороченням
робітного часу ЗРК за рахунок підвищення точності цілевказівки та виучки особового складу.
Вимога оперативності управління не означає доцільності передчасної постановки завдання підрозділам на знищення повітря-
них цілей. Завчасна постановка завдання підрозділам підвищує ефективність протидії ЗПН противника управлінню і стрільбі.
Розподіл вогню підрозділів по повітряних цілях складає основу рішення командира на їх знищення та повинен відповідати
ступеню важливості повітряних цілей.
При розподілі вогню використовуються розрахункові способи оцінки обстановки і вирішення завдання цілерозподілу, заздале-
гідь вироблені принципи і чіткі правила управління вогнем, інтуїція, логічне мислення і досвід командира Значний ефект у вирі-
шенні завдання розподілу вогню дає використання ЕОМ для вироблення рекомендацій командиру.
Зміст цілерозподілу у всіх випадках включає оцінку можливостей входження цілі в зону поразки ЗРК та обстрілу і-ої цілі фм
ЗРК, якщо
Р<Р і н
гці — ггран] 1 171 мін] — пці — 11 макс] •
Виконання цих умов визначається порівнянням висоти і курсового параметра руху цілі з граничними значеннями зон поразки
ЗРК чи переглядом того, плоскі зони поразки яких ЗРК наданій висоті перетинає упереджена траса цілі.
Можливості обстрілу цілі з врахуванням її швидкісних характеристик. Ефективний обстріл цілі даним ЗРК можливий, якщо
V < V
’ ці — ’ макс] »
де - граничні можливості ЗРК за швидкістю польоту цілей.
Можливості обстрілу цілі даним підрозділом за балансом часу. Обстріл можливий, якщо
Тпідл.у — ЇЦВу + їроб] + ^б) ’
де Тпідяд - підліший час і-ої цілі до ближньої межі зони поразки і-го ЗРК; (цзу - час на постановку вогневого завдання з і-ої цілі
фму ЗРК.
Щоб боєздатний і-й підрозділ залучити до знищення ]-ої цілі з переносом вогню, потрібно можливість такої бойової роботи пе-
ревірити за балансом часу.
Маючи інформацію, у зони поразки яких підрозділів, здатних знищувати дані цілі, може ввійти кожна з них і в якій послідовно-
сті, необхідно знайти варіант розподілу вогню підрозділів. При виборі цього варіанта варто враховувати наявність ракет, стан під-
розділів і підготовленість бойових обслуг.
Загальними правилами розподілу вогню є:
Знищення цілей з урахуванням їх важливості. При розподілі вогню необхідно оцінювати повітряні цілі за ступенем їх важ-
ливості (тактичної значимості), забезпечуючи надійний обстріл найбільш важливих з них.
При знищенні цілі найбільша відповідність основного призначення ЗРК, її характеристикам і параметрам руху забезпечує
найбільшу ефективність стрільб.
Знищення цілей на граничних відстанях стрільби, а тих, що маневрують - з урахуванням гарантованих зон пуску. При
цьому максимізується кількість стрільб, забезпечується знищення повітряних цілей на можливо великих відстанях від об’єкта
(військ), що прикриваються, підвищується ефективність обстрілу цілей, що маневрують.
Зосередження вогню по цілях у всіх випадках, коли це можливо.
Призначення кожному підрозділу такої кількості цілей, скільки стрільб він може провести в даних умовах обстановки.
Врахування пропозицій нижчого КП при наявності в нього у даній обстановці більш повної інформації'. Рішення, що не відпо-
відає реальній обстановці, не є оптимальним. Тому від наявності та якості інформації про цілі у тій чи іншій командній інстанції
залежить ступінь централізації* управління вогнем і характер прийнятих рішень.
Постановка завдання підрозділам на знищення повітряних цілей включає цілевказівку, наказ знищити ціль і, при необхід-
ності, вказівку про порядок ведення вогню. При використанні КЗА видача сигналу ЦВ приймається рівнозначною постановці за-
вдання.
Можливі способи цілевказання:
при автоматизованому управлінні - автоматичне наведення променя на ціль, яка призначена для знищення. Спосіб забез-
печує видачу цілевказівки без втрати часу і з високою точністю. Точність видачі ЦВ визначається помилками виміру координат цілі
станціями розвідки, помилками їх зйому і введення в КЗА системи управління;
прив’язка повітряній цілі єдиного номера чи видача на індикатор приймаючого ЦВ умовного знака. Спосіб застосовується
при наявності відповідних технічних засобів відображення і передачі даних;
при неавтоматизованому управлінні - цілевказання здійснюється передачею номера квадрата сітки ППО, у якому знахо-
диться проекція цілі на даний момент. Сітка наноситься на планшети та індикатори, що видають і приймають цілевказання. Квад-
рати сітки певним чином нумеруються. Точність видачі ЦВ по індикаторах обмежується ціною малого квадрата, а по планшетах,
крім того, залежить і від часу запізнення, і від точності відображення на них даних повітряної обстановки;
передачею азимута, дальності і висоти цілі;
за орієнтирними напрямками (сторонами світу як: 1 - північ, 2 - схід, 3 - південь, 4 - захід, 12 і 14 - північний схід і північний
захід; 32 і 34 - південний схід і південний захід);
за взаємним положенням цілей на екранах індикаторів. Переплутування цілей вірогідно виключається лише при відносно
малих відстанях передавального і приймаючого ЦВ, чи врахування цієї відстані при відображенні повітряної обстановки.
При всіх способах ЦВ той, що дає і приймає цілевказання, повинен переконатись в правильності виявлення і захоплення цілі
ЗРК. Це досягається порівнянням координат виявленої і взятої на супроводження цілі (квадрата сітки, взаємного положення), щодо
якої ставиться завдання на знищення.
243
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
5.8. Основи ведення бойових дій зенітними ракетними підрозділами (частинами)
Основи бойового застосування зенітних ракетних підрозділів (частин)
Бойовим застосуванням зенітних ракетних військ є організоване використання зенітних ракетних частин (підрозділів) в бою, як
самостійно, так і у взаємодії з іншими військовими формуваннями з метою виконання бойових завдань.
Зенітні ракетні війська здійснюють зенітне ракетне прикриття важливих об’єктів і угруповань військ, районів і напрямків.
Бойове завдання зенітні ракетні частини (підрозділи) виконують шляхом ведення протиповітряних боїв з метою знищення по-
вітряного противника до рубежу виконання ним завдань. Крім того, вони ведуть боротьбу із засобами повітряної розвідки та РЕБ і
можуть залучатися для знищення аеромобільних військ та повітряних десантів противника у польоті, а також наземних (надводних)
цілей.
Бойовий склад та організаційно-штатна структура зенітних ракетних частин не є постійними та визначаються поставленим
бойовим завданням, особливостями району бойових дій, об’єктів та військ, що прикриваються, їх важливістю, типом систем озбро-
єння та автоматизованого управління.
До складу зенітної ракетної частини входить командний пункт, декілька вогневих підрозділів, підрозділи технічний, забезпе-
чення та обслуговування.
Основні принципи бойового застосування зенітних ракетних частин (підрозділів):
постійна готовність військ до виконання поставлених бойових завдань з раціональним використанням бойових можливостей і
знищення повітряного противника на підступах до об’єктів та військ, що прикриваються;
зосередження основних зусиль на прикритті найважливіших об’єктів та угруповань військ, на найбільш імовірних напрямках та
висотах дій повітряного противника;
тісна взаємодія підрозділів (частин) з іншими силами ППО, з військами та об’єктами, що прикриваються, узгоджене застосу-
вання ЗРК (ЗРС) різного типу;
раптовість, безперервність, активність та рішучість дій, стійкість та здатність до ведення тривалих та напружених бойових дій в
умовах застосування противником високоточної зброї, сильного вогневого впливу та радіоелектронного подавлення;
рішучий маневр силами та засобами;
безперервність управління та наполегливість у виконанні поставлених завдань, поєднання при відбитті ударів повітряного про-
тивника централізованого управління з самостійним веденням бою;
всебічне забезпечення бойових дій, завчасне створення, уміле використання, своєчасне відновлення резервів, підтримка та своє-
часне відновлення боєздатності.
Система зенітного ракетного прикриття - сукупність взаємозв’язаних систем вогню, управління та розвідки зенітних ракет-
них підрозділів (частин), які розгорнуті у бойовий порядок для виконання бойового завдання.
Головними вимогами до системи зенітного ракетного прикриття є його ефективність та стійкість.
Ефективність системи зенітного ракетного прикриття характеризує ступінь її відповідності завданням, що вирішуються
при різних варіантах дій повітряного противника. Вона визначається можливостями створених систем вогню, розвідки та управлін-
ня, мобільністю прикриття, мистецьким використанням сил та засобів, рівнем бойової виучки особового складу.
Стійкість системи зенітного ракетного прикриття - її здатність зберігати свою ефективність у бойовій обстановці. Вона до-
сягається живучістю сил та засобів, завадостійкістю систем вогню, розвідки та управління, мобільністю прикриття, надійністю
озброєння, високою морально-психологічною підготовкою особового складу.
Система зенітного ракетного прикриття повинна бути круговою, з зосередженням зусиль на найбільш імовірних напрямках дій
повітряного противника та в діапазонах висот його бойового застосування (гранично малі висоти - менше 200 м, малі - від 200 до
1 000 м, середні - від 1 000 до 4 000 м, великі-від 4 000 до 12 000 м, стратосферні-більше 12000 м).
У залежності від бойового завдання, розташування та характеру об’єктів прикриття, особливостей району бойових дій, угрупо-
вання ЗРВ можуть бути: об’єкговими (для безпосереднього прикриття окремого об’єкта чи близько розташованих кількох об’єктів);
об’єктово-зональними (об’єктово-рубіжними) (безпосереднє прикриття окремих об’єктів сполучається з прикриттям районів і пові-
тряних напрямків); зональними (рубіжними) (можуть бути створені на ракетонебезпечних напрямках).
Мобільне угруповання ЗРВ створюється за рахунок підрозділів, які оснащені самохідними ЗРК (ЗРС) з високою рухливістю і
прохідністю.
Система зенітного ракетного вогню - організоване та узгоджене за метою, завданням, простором і часом сполучення зон во-
гню зенітних ракетних підрозділів (частин), які розгорнуті у бойовий порядок д ія виконання бойового завдання.
Зона зенітного ракетного вогню підрозділу - сукупність реалізованих зон поразки ЗРК (зона поразки ЗРК), які (яку) розгор-
нуто на позиції для виконання бойового завдання.
Основні показники системи вогню: розміри зони зенітного ракетного вогню; кратність перекриття зон поразки, що реалізу-
ються (кратність прикриття об’єктів і військ); щільність вогню на заданих рубежах; кількість стрільб до заданих рубежів; середня
ефективність стрільб.
Деякі з цих показників взаємозалежні. Однак кожен з них визначає особливості й можливості системи вогню. Для аналізу сис-
теми вогню можуть вводитись інші показники, що характеризують її завадостійкість і можливості щодо знищення різних
типів ЗПН.
Розміри зони вогню залежать від кількості підрозділів та типів ЗРК (ЗРС), які знаходяться на їх озброєнні, взаємного розташу-
вання підрозділів на місцевості та розмірів зон поразки, що реалізуються.
244
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Кратність перекриття реалізованих зон поразки характеризує можливості щодо зосередження вогню зенітних ракетних під-
розділів (частин) по цілях у зоні вогню. Кратність прикриття об’єкта (військ) характеризує можливості з послідовного й одночасно-
го зосередження вогню на тих чи інших напрямках при відбитті удару противника і оцінюється кількістю ЗРК (цільових каналів),
що беруть участь при відбитті ударів.
Області перекриття зон вогню і її кратність визначається для заданих напрямків і параметрів руху цілі графічно чи розрахову-
ються з використанням ЕОМ. Результати розрахунків представляються у вигляді графіка в координатах азимут - дальність або
рисунка
Кількість стрільб одного зенітного ракетного комплексу:
за задану тривалість удару (О:
для одноканального зенітного ракетного комплексу:
^тр = 1 + епі
сн Ф1пр
тц.сер ,
для багатоканального зенітного ракетного комплексу:
кт і /1н + *ПР ” Т
^^стр = 1 + епЧ----------
\ *пз
; при кі пз > Т ц сер і
N СТр = 1 + епї
*н + *пр “т ’
Тц.сер
• к ; при кіпз <Тцсер ,
(5.116)
(5.Н7)
(5.118)
де Ц, - час перебування цілі у зоні пуску; Т,|/>т - середня тривалість циклу стрільби ЗРК; - час пошуку та захоплення цілі на
супроводження для багатоканального ЗРК; т - інтервал між пусками ракет у черзі; к - кількість цільових каналів.
за запасом ракет:
N , (5.119)
н п
де Р - кількість ракет у боєкомплекті; п - витрата ракет на одну стрільбу.
Кількість стрільб до заданих рубежів оцінюється за напрямками і висотами:
К
уч
N = У N
стр ~ стрі ’
(5.120)
де - кількість стрільб, що проведені до заданого рубежу і-м підрозділом; де Куч - кількість ЗРК, які приймали участь у
відбитті удару.
Щільність вогню - кількість пострілів за хвилину, що можуть провести зенітні ракетні підрозділи (частини) при відбитті удару
повітряного противника. Вона визначається вогневою продуктивністю ЗРК (П^) і їх участю (К^) у відбитті удару.
Щільність вогню для одноканального ЗРК:
П вог “ т
1 ц.сер
Щільність вогню д ля багатоканальних ЗРК:
Пвог ~
- , при кіпз>ТЦСЄр;
гпз
к * т: , ПРИ к * 1пз < Тц.сер,
1 сц.стр.
(5.121)
(5.122)
де - час пошуку та захоплення цілі на супроводження; к - кількість цільових каналів; ТадСТр - середній цикл стрільби ЗРК.
Щільність вогню Пет частини розраховується за формулою:
Куч
Пвог = І ,(Пвогі) • <51И>
Ефективність стрільби характеризується середньою імовірністю поразки цілей за стрільбу в різних умовах обстановки. Її
значення визначаються імовірністю поразки даного типу цілі однією ракетою в розглянутих умовах стрільби і витратою ракет за
стрільбу (5.77).
Створення системи зенітного ракетного вогню організується і планується за напрямками, висотами і рубежами сполучення
зон вогню зенітних ракетних підрозділів (частин) для знищення повітряного противника при прикритті об’єктів і військ.
Основний сектор стрільби підрозділу призначається відносно центра об’єкта і визначає черговість знищення цілей і порядок
взаємодії’ із сусідніми підрозділами на середніх і великих висотах. При самостійному веденні вогню у першу чергу знищуються цілі
в основному секторі стрільби, а найбільш важливі - на ділянках перекриття із секторами взаємодіючих підрозділів.
Відповідальний сектор на малих висотах призначається відносно позиції підрозділу і вказує на те, що в цьому секторі підрозділ
повинен зосередити основні зусилля при відбитті ударів повітряного противника.
245
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Призначення підрозділам меж основних секторів стрільби і відповідальних секторів на малих висотах повинне забезпечувати
кругове прикриття об’єктів^військ) та зосередження основних зусиль на головних напрямках дій ЗПН.
Таким чином, система вогню повинна бути узгоджена за рубежами, висотами і часом в інтересах виконання бойового завдання.
Тому одночасно з показниками системи вогню оцінюються і характеристики систем розвідки та управління, реалізовані дальності
виявлення цілей і рубежі централізованого управління.
Система розвідки - організоване та узгоджене за метою, завданням, простором і часом поєднання зон виявлення радіолока-
ційних та інших засобів розвідки зенітних ракетних підрозділів (частин), які розгорнуті у бойовий порядок, та забезпечуючих під-
розділів радіотехнічних військ.
Система розвідки зенітних ракетних підрозділів (частин) є складовою частиною системи зенітного ракетного прикриття
об’єктів і угруповань військ, створення якої здійснюється після побудови бойового порядку підрозділів (частин) при підготовці і
ході ведення бойових дій.
Система розвідки повинна забезпечувати виявлення повітряних цілей на всіх висотах із зосередженням зусиль на найбільш імо-
вірних напрямках дій повітряного противника. Вона входить у єдину систему радіолокаційної розвідки і представляє собою спла-
новане і організоване розміщення на місцевості радіолокаційних засобів зенітних ракетних підрозділів (частин) та радіотехнічних
підрозділів РТВ, що створюють радіолокаційне поле для ведення радіолокаційної розвідки повітряного противника і видачі інфор-
мації.
Розвідувальна інформація - радіолокаційна інформація щодо повітряної обстановки, яка видається на командні пункти зеніт-
них ракетних підрозділів (частин) для оцінки повітряної та завадової обстановки, для викриття замислу дій повітряного противника,
оповіщення про нього військ (об’єктів) та прийняття рішення на приведення підрозділів у готовність до виконання бойового за-
вдання.
Бойова інформація - радіолокаційна інформація щодо повітряної обстановки, яка видається зенітним ракетним підрозділам
(частинам) для цілерозподілу (ЦР) і цілевказання (ЦВ) ЗРК на знищення цілей.
Система розвідки включає засоби розвідки КП частини та підрозділів ЗРВ і РТВ, що забезпечують бойові дії, пости візуального
і хімічного спостереження. Для ведення розвідки у складних умовах обстановки можуть залучатись станції наведення ракет (СНР)
(радіолокатори підсвічення та наведення (РПН), радіолокатори підсвічення цілей (РПЦ), станції виявлення та управління (СВУ),
багатоканальні станції наведення ракет (БСНР)) ЗРК.
Вимоги до системи розвідки випливають із загальних вимог до зенітного ракетного прикриття об’єктів і військ, при цьому го-
ловним з них є забезпечення реалізації максимальних вогневих можливостей підрозділів (частин), особливо в складних умовах
повітряної обстановки.
Побудова системи розвідки з урахуванням пропонованих вимог до системи розвідки зенітних ракетних підрозділів (частин) до-
сягається: всебічним аналізом очікуваного характеру дій повітряного противника, особливо при застосуванні різних способів про-
тидії (вогневого, застосування засобів РЕБ, малих висот, крилатих ракет та ін.); вибором і ретельною підготовкою позицій для засо-
бів розвідки; розміщенням засобів розвідки з урахуванням частотних діапазонів і можливістю їх зміни у встановлених межах; ство-
ренням суцільного радіолокаційного поля на нижній межі досяжності і особливо у відповідальних секторах ЗРК на малих висотах;
нарощуванням радіолокаційного поля за рахунок взаємодіючих сил; врахуванням електромагнітної сумісності всіх радіоелектрон-
них засобів зенітних ракетних підрозділів (частин) і підрозділів РТВ; створенням декількох варіантів одержання бойової інформації
на командних пунктах підрозділів (частин) від різних джерел; топогеодезичною прив’язкою засобів розвідки і взаємним їх орієнту-
ванням, а також юстировкою елементів АСУ; створенням багатоканального радіо- і провідного зв’язку між засобами розвідки і КП
усіх рівнів відповідно до бойового завдання; управлінням засобами розвідки.
Бойові порядки зенітних ракетних підрозділів (частин) у залежності від умов обстановки і розв’язуваних завдань можуть
бути: похідними, передбойовими і бойовими.
Похідний порядок - шикування підрозділів для здійснення маршу (пересування в колонах). Він повинен забезпечувати високу
швидкість руху, швидке розгортання в передбойовий і бойовий порядки, найменшу уразливість від ударів з повітря, надійність і
стійкість управління.
Для організованого проведення маршу і регулювання швидкості руху підрозділу вказується вихідний пункт і час його прохо-
дження, призначаються пункти регулювання, місця і час відпочинку. На привалах побудова колон зберігається. У машинах зали-
шаються радисти, бойова обслуга чергових зенітних засобів, спостерігачі за сигналами.
Для безпосереднього забезпечення маршу створюються загони забезпечення руху, що пересуваються за похідною охороною.
ДІЇ загонів включать інженерну розвідку шляхів, розчищення проходів у руїнах і завалах, пропуск колон через важкопрохідні
ділянки, відновлення і ремонт дорожньо-мостових споруд та ін.
Передбойовий порядок - шикування підрозділів у колонах, які пересуваються у похідних порядках військ, що прикриваються,
розосереджені по фронту і в глибину з урахуванням передбаченого розгортання їх у бойові порядки. Він повинен відповідати усім
вимогам похідного порядку і забезпечувати можливість ефективного ведення вогню з коротких зупинок і з ходу.
Бойовий порядок - розташування зенітних ракетних підрозділів (частин) на місцевості, а також у колонах військ, що прикри-
ваються, для ведення бою.
Позиції зенітних ракетних підрозділів розподіляються відповідно до їх призначення при вирішенні завдань прикриття об’єктів
(військ) від ударів з повітря на бойові, чергові, навчальні, удавані та засадні.
На бойових позиціях підрозділи розгортаються для ведення протиповітряних боїв із максимальним використання бойових
можливостей. За ступенем їх відповідності умовам виконання бойового завдання та інженерного обладнання вони можуть розподі-
лятися на основні й запасні. При веденні бойових дій вони стають рівнозначними.
Засадні позиції підрозділи займають перед виходом на запасні позиції. Вони обираються на місцевості, яка має природні
укриття: лісові масиви, гаї", видолинки, насадження, які дозволяють забезпечити приховане розташування окремих дивізіонів.
246
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Чергові позиції призначаються для розгортання зенітних ракетних підрозділів при несенні бойового чергування за
мирного часу.
Навчальні позиції призначені для проведення повсякденної бойової підготовки підрозділів.
Оманні позиції створюються у загрозливий період для введення противника в оману відносно характеру бойового порядку та
складу частини. Кількість оманних позицій, які створюються у позиційному районі, визначається, виходячи з тактичної доцільності.
Позиція кожного зенітного ракетного підрозділу повинна забезпечувати: повне використання технічних можливостей і бойових
властивостей озброєння при відбитті ударів повітряного противника у всьому можливому діапазоні висот його польоту, з будь-
якого напрямку; найкраще використання місцевості, прихованість розташування, інженерне обладнання і маскування позицій; мо-
жливість маневру і переходу на запасні позиції.
Бойові порядки зенітних ракетних підрозділів складають основу бойового порядку частини, основними параметрами якого є:
при прикритті об’єкта - віддалення позицій підрозділів від об’єкта (Неп і $сп від центра й від межі об’єкта відповідно) та інтервали
між ними (І); при прикритті військ - взаємні віддалення між позиціями і позиційними районами підрозділів, їх віддалення від перед-
нього краю (лінії бойового зіткнення).
При зенітному ракетному прикритті об’єкта знищення повітряного противника на підступах до об’єкта до рубежу виконання їм
завдань досягається таким розміщенням підрозділів від межі об’єкта, при якому забезпечується винос зони поразки за даний рубіж.
Для максимізації кількості стрільб при діях противника з різних напрямків необхідно забезпечити найбільший ступінь участі під-
розділів у відбитті удару і гарантоване проведення стрільб кожним з них до РВЗ противника.
Очевидно, позиції ЗРК необхідно розташувати на такому віддаленні від об’єкта прикриття, при якому максимізуєгься величина
^=ф0КдНстрНо/360, (5.124)
де Кд - кількість ЗРК, що здійснюють зенітне ракетне прикриття; N^^1 - кількість стрільб одного ЗРК при виносі за РВЗ зони
поразки глибиною Ь = Ьо (рис. 5.38).
Рис. 5.38. До визначення кількості стрільб одного ЗРК при виносі за РВЗ зони поразки глибиною Ь = Ьо
Інтервали між позиціями підрозділів вибираються з урахуванням створення заданої кратності перекриття зон вогню, забезпе-
чення взаємного вогневого прикриття підрозділів та інших вимог до бойового порядку.
Інтервали між багатоканальними ЗРК визначаються
«І - (Рпо + РгмпУ^п • (5.125)
Для одноканальних ЗРК інтервали визначаються
•І —2Ргмп/кп, (5.126)
де Рдо - параметр багатоканального ЗРК; - кратність прикриття об’єкта; Ргмп - гранична межа параметра ЗРК.
При прикритті військ бойовий порядок зенітних ракетних підрозділів (частин) будується так, щоб забезпечити надійне при-
криття основних угруповань сил і засобів, пунктів управління, найважливіших об’єктів тилу, комунікацій та ін. Віддалення позицій
першої лінії ЗРК від переднього краю вибирається за умови максимального виносу зон поразки за нього та забезпечення найбільшої
живучості підрозділів.
Під бойовими можливостями зенітних ракетних підрозділів (частин) розуміються можливості цих підрозділів (частин) вико-
нувати бойове завдання щодо прикриття об’єктів і військ від ударів з повітря в різних умовах обстановки. Бойові можливості під-
розділів (частин) ЗРВ складаються з вогневих, розвідувальних, маневрених можливостей та можливостей з прикриття, з переходу у
готовність до виконання бойового завдання, з накопичення ракет.
Бойові можливості зенітних ракетних підрозділів (частин) залежать від їхнього складу й укомплектованості, рівня бойової під-
готовки і морально-психологічного стану особового складу, тактико-технічних характеристик і бойових властивостей зброї і війсь-
кової техніки, забезпеченості підрозділу (частини), а також умов бою. Характеризуються сукупністю кількісних і якісних
показників.
247
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Вогневі можливості - здатність розгорнутого в бойовий порядок і підготовленого до бою зенітного ракетного підрозділу
(частини) знищувати повітряного противника в різних умовах обстановки. Вони характеризуються математичним сподіванням
кількості знищених засобів повітряного нападу за масований удар заданої тривалості чи при витраті встановленого запасу ракет
(узагальнений показник), а також кількістю стрільб і їх ефективністю (часткові показники).
Розрахунок вогневих можливостей підрозділів (частин) здійснюється за формулою
т
мх = ІМпідр.і , (5.127)
І = 1
де т - кількість типів ЗРК;
^підрі = КціКбгіКуПрікМіКМВі^стріРхі ’ (5.128)
де Кц - кількість ЗРК даного типу; К^ - коефіцієнт боєготовності підрозділів; Ку^ - коефіцієнт ефективності системи управ-
ління; 14^ - кількість стрільб підрозділу; Км - коефіцієнт впливу маневру цілей; К^ - коефіцієнт впливу польоту цілей на малих
висотах; Рм - імовірність знищення цілі за одну стрільбу.
Кількість стрільб, що проводяться підрозділами частини, визначається сумою кількості стрільб ЗРК усіх типів, які приймали
участь у відбитті удару повітряного противника:
^стр.5рч = кЯіЬїстр.1 +- + ЦіМир.і = ікЧіКир.і . (5.129)
Кількість стрільб розраховується для великих і середніх та малих висот
Nстр.зрч = ^стр.ВСВ^ВСВ + ^стр.МВ^МВ ’ (5.130)
ДО ї^всв, ^мв, Ч^рвсв, N^8 - імовірнісний розподіл ЗПН за висотами та кількість стрільб по цілях на ВСВ та МВ відповідно.
Ефективність бойових дій частини розраховується за формулою:
Е = М/ТМЦ, (5.131)
де М - математичне сподівання кількості знищених цілей; Мц- кількість цілей в ударі по яким організується вплив.
Розрахунок показника математичного сподівання кількості знищених цілей здійснюються з використанням різних методик.
Так математичне сподівання кількості знищених цілей розраховується з використанням біноміального розкладення
К ттіп{пк,Мк} / \хг
М= ІикІ £ Ч С’ (1-РдГ’к чР,чк. (5.132)
к=1 ]=1 ц=1 •'
де К - кількість визначених напрямків удару; - імовірність нанесення удару з напрямку к; т - кількість ЗРК; 1^ - кількість
стрільб, що може виконати фй ЗРК при нанесенні удару по об’єкту на напрямку к; - кількість ЗПН, які обстрілює фй ЗРК у
напрямку к; Р^ - імовірність поразки цілі за одну стрільбу фм ЗРК в к-му напрямку.
Одержаний показник є чутливим до розподілу цілей за напрямками удару, імовірності поразки цілей, кількості стрільб, що реа-
лізується у кожному напрямку. Тому він в принципі може бути використаний для обгрунтування бойового порядку частини, визна-
чення варіантів бойових дій і кількості знищених цілей, що усереднені за напрямками удару.
Методиками розрахунку загального показника вогневих можливостей як математичного сподівання кількості знищених цілей
є: використання інформаційно-розрахункових систем при урахуванні рельєфу місцевості і розрахунку ступеня ризику підрозділів у
ході протиповітряного бою; з використанням штабних математичних аналітико-стохастичних та імітаційних моделей; графоаналі-
тична методика розрахунку показників вручну.
Розвідувальні можливості підрозділів (частин) - сукупність показників, що визначають можливості штатних засобів розвід-
ки з виявлення, розпізнання і супроводження цілей, видачі даних на ЗРК для ведення вогню, на КП підрозділів (частин) для рішення
задач управління вогнем. Розміри реалізованих зон виявлення не можуть в усіх випадках забезпечити реалізацію дальньої межі
зони поразки, особливо, коли мова йде про розвідувальну інформацію.
Розвідувальні можливості характеризуються показниками з можливостей ведення радіолокаційної розвідки і видачі розвідува-
льної та бойової інформації.
Можливості ведення радіолокаційної розвідки оцінюються: просторовими показниками (параметри радіолокаційного поля)
- дальність виявлення на заданій висоті, висота верхньої і нижньої межі, коефіцієнт перекриття зон виявлення; інформаційними
показниками - кількість цілей, що одночасно супроводжуються і видаються на КП підрозділів (частин), кількість джерел та
споживачів інформації; часовими показниками - час приведення у готовність до бойового використання сил, час маневру, запас
ресурсу ОВТ.
Включена РЛС утворює зону виявлення. Дві і більше включених РЛС утворюють зону інформації, у межах якої здійснюєть-
ся радіолокаційна розвідка, виявлення, супроводження повітряних об’єктів, визначення їх координат, державної приналежності,
характеристик з метою викриття замислу дій повітряного противника у зоні вогню підрозділу (частини) та прийняття рішення на
бій зенітних ракетних підрозділів.
Радіолокаційне поле - область повітряного простору, що об’єднує зони інформації засобів КП частин, зенітних ракетних та
радіотехнічних підрозділів, у межах якого радіолокаційними засобами розвідки забезпечується виявлення, супроводження і визна-
чення даних повітряних цілей і своїх літаків з імовірністю, не менше заданої.
Кратність перекриття зон виявлення засобів розвідки в даної точці радіолокаційного поля оцінена імовірністю виявлення
цілей у даній точці, яка визначається за формулою
Рв =1-П(і-Рві), (5.133)
І = 1
де Ри - імовірність виявлення (фактична чи прийнята для розрахунків) у даній точці поля і-м засобом розвідки; Кп - коефіцієнт
перекриття в даній точці поля.
248
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Можливості видачі розвідувальної й бойової інформації оцінюються:
просторовими показниками - потрібними рубежами видачі розвідувальної інформації, бойової інформації (для централізовано-
го і децентралізованого способів управління);
інформаційними показниками - кількість повітряних суден, що одночасно видаються для ЦР і ЦВ зенітним ракетним підрозді-
лам, кількість повітряних суден, що одночасно видаються для підтримки взаємодії, якість інформації;
імовірнісними показниками - середньоквадратичні помилки вимірювання координат повітряних суден, імовірність видачі бо-
йової інформації ЗРВ.
Потрібний рубіж видачі розвідувальної інформації км:
сірі =ад + Уц(1КП +1бг +1роб +1рд + 1зат)> (5.134)
де: сід -горизонтальна дальність до дальньої межі зони поразки; Уц - швидкість цілі; - робітний час КП; - встановлений
строк переходу у готовність №1; 1^- робітний час ЗРК; їрД- польотний час ракети до дальньої межі зони поразки; - час затримки
інформації.
Потрібний рубіж видачі бойової інформації сі^ км:
абі =ад+уц(1кп+Іроб +1рд +Ізат)- (5.135)
Для підвищення точності одержуваних результатів розрахунків з висот більш 1 000 м враховується значення висоти.
Маневрені можливості підрозділів (частин, з'єднань ЗРВ) - це їх спроможність зробити маневр на транспортних засобах,
бойових машинах, з використанням залізничного, водного і повітряного транспорту на визначену відстань у конкретних умовах
обстановки за встановлені терміни. Характеризуються часом переведення ОВТ із бойового положення в похідне і з похідного в
бойове; прохідністю, маневреністю, вантажопідйомністю транспортних і бойових машин, інших транспортних засобів; наявністю
та можливостями вантажопідйомних засобів; маршовими можливостями підрозділів (частин, з'єднань); загальним часом здійснення
маневру на визначену відстань у конкретних умовах обстановки й ін. показниками.
Маневрені можливості характеризуються часом переведення підрозділів (частин) з бойового положення в похідне здійс-
ненням маршу на визначену відстань розгортанням у бойовий порядок і підготовкою до бойових дій у новому районі 1^. Манев-
рені можливості підрозділів (частин) залежать від характеристик озброєння, вантажопідйомних і транспортних засобів, підготовки
особового складу, географічних, кліматичних умов району бойових дій, пори року і доби. Маневрені можливості розраховуються за
формулою
Іман = Ізгор + Ім + *зан + Іроз ’ (5.136)
де ізан - час на заняття позиції.
Маневр - організоване пересування військ (сил) до початку та у ході бойових дій на новий напрямок (рубіж, у новий район) з
метою зайняття вигідного положення по відношенню до противника та створення необхідного угруповання сил і засобів; виводу
військ із-під ударів противника і ефективного використання їх для виконання поставлених завдань, або завдань, які знов виникають;
перенесення вогню для масованого впливу по найбільш важливих об’єктах (цілях) противника, або для пораження нових цілей
(маневр вогнем, маневр силами); переміщення (передача) матеріальних засобів для найбільш повного технічного та тилового забез-
печення угруповань військ (сил), що діють на головному напрямку.
Марш - організоване пересування військ у колонах на транспортних засобах, бойових машинах або в пішому порядку дорога-
ми і колонними шляхами з метою прибуття за встановлений термін у призначений район (на вказаний рубіж) у готовності до вико-
нання бойового завдання.
Марш здійснюється у похідному порядку з урахуванням одержаного завдання та умов обстановки. Похідні порядки склада-
ються з похідних колон підрозділів.
Марш проводиться приховано, як правило, вночі або в умовах обмеженої видимості з додержанням заходів маскування та захи-
сту від зброї масового ураження з максимально допустимою швидкістю.
Можливості підрозділів зі згортання та розгортання бойової техніки оцінюють за встановленими нормативами. При переве-
денні техніки у бойове положення вночі або в складних метеорологічних умовах (дощ, сильний вітер, емпература повітря нижче
-10 °С або вище + ЗО °С) нормативний час збільшується на 10 %. При роботі у складних метеорологічних умовах вночі або в інди-
відуальних засобах захисту нормативний час збільшується на 20 % від початкового. Усього норматив зростає не більш, ніж на 25 %.
Маневрені можливості залежать від ступеня мобільності ЗРК (ЗРС). Цілком закономірно, що найкращі такі можливості мають
самохідні ЗРК (ЗРС), здатні згортатися за час до 15 хв, пересуватися відповідними дорогами зі швидкістю до 40 км/год.
Можливості з накопичення ракет - здатність підрозділів (частин) з накопичення заданого запасу ракет на позиціях зенітних
ракетних підрозділів. Вони характеризуються часом накопичення заданого запасу ракет на позиціях у встановлених режимах гото-
вності та визначаються ешелонуванням і режимами утримування ракет у підрозділах (частинах); термінами переходу в готовність
до бойової роботи технічних підрозділів і позицій технічного обслуговування ракет, їх продуктивністю; часом підготовки перших
ракет і часом доставки ракет на позиції
Бойовий комплект - кількість ракет, що встановлені на одиницю озброєння. Боєкомплект служить розрахунково-
постачальницькою одиницею при обчисленні забезпеченості ракетами і потреби в них для виконання бойових завдань. Розміри
боєкомплекту встановлюються наказами. Основним режимом утримування ракет установлено режим проміжної готовності на
позиціях підрозділів.
Можливості з накопичення ракет прийнято характеризували графіком, на якому на осі абсцис показаний час, а на осі орд инат-
кількість боєздатних ракет. При підготовці ракет на ПТОР час їх накопичення відраховується з моменту оголошення зенітному
ракетному підрозділу готовності №1 з одночасною постановкою завдання на підготовку ракет.
249
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
При оцінці можливостей накопичення заданої кількості ракет на стартових позиціях технічними підрозділами враховується час
переведення в готовність №1 і виходу першої ракети, продуктивність технологічного потоку і час доставки підготовлених ракет у
зенітні ракетні підрозділи, що залежить від довжини і стану маршруту підвозу ракет.
Можливості з прикриття - здатність підрозділу (частини) створити при розгортанні в бойовий порядок суцільну зону зенітно-
го ракетного вогню з тією чи іншою кратністю перекриття зон поразки.
Як показник можливостей з прикриття приймається: при прикритті об’єкта - максимальне значення сектора прикриття до зада-
ного рубежу (рубежу виконання завдання (РВЗ)) - ф, при прикритті районів і напрямків - протяжність рубежу суцільного прикрит-
тя -Ц,.
Тактичний смисл кута прикриття одного ЗРК полягає у тому, що знаходячись на даній позиції, підрозділ у змозі обстріляти ціль,
що атакує об’єкт оборони, до РВЗ у секторі 2ф. Якщо д ля гарантованого обстрілу цілі необхідна визначена глибина зони поразки до
РВЗ, наприклад И, то цейд<ут скоротиться до значення 2фь. У загальному випадку величина 2ф може бути обчислена за теоремою
косинусів
р 2 р 2 _ я 2
КСП+КРВЗ аД
2-К.сп КРВЗ
ф = агссоз
(5.137)
Відповідно
КСП +(КРВЗ +Ь)2 _(1Д ,, ,1ЙА
Фь = агссо8 —-----------------V— . (5.138)
2 Ксп Акрвз + “)
Величина кута ф залежить не тільки від дальності (сід) стрільби ЗРК, але і від відстані його позиції від об’єкта, що прикривається.
Максимально можливе значення кута прикриття позначимо 2фмакс. Тоді показник можливостей підрозділу (частини) з прикриття
при однократному перекритті зон поразки
^=%2Фмакс? (5.139)
де Кцд - кількість ЗРК )-го типу в складі підрозділу (частини).
Значенню кута 2^^ відповідає цілком визначена відстань позиції ЗРК від центра об’єкта (К*сп)-
Розрахунок кута 2фмакс можна зробити, використавши наступні залежності.
1. Горизонтальна дальність до дальньої межі зони поразки більше радіуса рубежу виконання завдання: сід > Ерщ + (г^ - раді-
ус об’єкта). Тоді ЗРК, розташований у межі об’єкта, здатний обстрілювати повітряні цілі до заданого рубежу при ударах противни-
ка по об’єкту з будь-якого напрямку, тобто 2фмакс = 360° (рис. 5.39).
Рис. 5.39. Визначення 2фмакс при <1Д > КРВЗ
2. Горизонтальна дальність <1д менше радіуса Крвз, але більше деякого значення, рівного Кр^д -со8Цмакс , тобто
Крвз с°8Чмакс - <1д КРВЗ •
Тоді максимальна величина сектора прикриття досягається при розташуванні ЗРК на середині хорди довжиною 2бд кола радіу-
са Крвз (рис. 5.40). Отже,
сід
2(Рмакс = 2агс8іп —---- . (5.140)
КРВЗ
При цьому Ксп = ^КрВЗ -бд .
250
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Рис. 5.40. Визначення 2(рмакс при КРВЗ сов цмакс < сід < КРВЗ
3. Горизонтальна дальність д д < К р^з • сов ц макс • Тоді для напрямку нальоту (рис. 5.41) є геометричні співвідношення
Фмакс
= агссі&
КРВЗ ,
- : сІбЧмакс
Од • 8іп Чмакс
ксп
дд -8Іп Чмакс
Фмакс
(5.141)
(5.142)
Рис. 5.41. Визначення 2(рмакс при <1Д < КРВЗ сов дмакс
Порядок оцінки максимального кута прикриття не зміниться, якщо накласти визначену умову на мінімальну величину виносу
зони поразки за рубіж виконання завдання. У цьому випадку в розрахункових формулах величину радіуса Крв3 необхідно збільши-
ти на відповідну величину.
Протяжність рубежу суцільного прикриття
Епга=і?А2'М' (5І43)
Рівноміцність цього рубежу за кількістю стрільб забезпечується при
* _ РЬІ0і + Ргр)
ТІ 2
(5.144)
де Риоі - граничне значення параметра зони поразки, при якому забезпечується проведення по цілі такої ж кількості стрільб, як і
при нульовому параметрі.
251
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Можливості з переходу в готовність до бою - здатність підрозділів, розгорнутих у бойовий порядок, до переходу з даного
стану бойової готовності в готовність до пуску ракет (ведення вогню), характеризується часом цього переходу (часом “реакції’) - V
Підлітний час повітряного противника (тобто час польоту повітряної цілі з моменту її виявлення передовими радіолокаційними
станціями до дальньої межі зони поразки ЗРК) політ з урахуванням часу запізнення передачі даних визначає час підрозділу, який
він має у розпорядженні для підготовки до бою
Троз =1ПІДЛ-Ізап • (5.145)
Потрібний час для обстрілу цілі на дальній межі зони поразки
Тпотр=*г+*д » (5.146)
де Ід - польотний час ракети до дальньої межі зони поразки.
Для своєчасного обстрілу цілі необхідно забезпечити умову
Тпотр-Троз • (5.147)
Завадостійкість угруповання ЗРВ - це його здатність виконувати бойові завдання в умовах радіоелектронного подавлення
противником. Вона характеризується відносним зниженням математичного сподівання кількості знищених цілей при відбитті зада-
ного удару повітряного супротивника:
Д2=1-(2:2/2:1); (5.148)
де 2; і 2^— математичні сподівання кількості знищених цілей при відсутності та в умовах радіоелектронного подавлення про-
тивником відповідно.
5.9. Бойові можливості засобів ППО щодо боротьби з крилатими ракетами
Бойові можливості засобів ППО щодо боротьби з КР характеризуються сукупністю показників, що визначають: спроможність
засобів розвідки з виявлення і розпізнавання КР; спроможність своєчасного переведення ЗРК і ЗГРК у готовність до стрільби; час їх
реакції і ефективність стрільби по КР з місця та під час руху.
Можливості засобів розвідки з виявлення і вогневих засобів зі знищення КР залежать від повітряної, наземної та електромагніт-
ної обстановки, рельєфу місцевості, умов видимості і часу доби. Для більш повного використання технічних можливостей засобів
розвідки позиції для РЛС на імовірних напрямках дій КР повинні вибиратися з близькими до нульових або з негативними кутами
закриття. Засоби радіолокаційної розвідки повинні розташовуватись на місцевості з урахуванням максимального виносу зон вияв-
лення убік нападу, а також виконання вимог електромагнітної сумісності. Наявність у військах ППО різноманітних типів засобів
розвідки дозволяє здійснювати виявлення КР радіолокаційним і візуальним засобами. Проте через малі геометричні розміри КР
(малу ЕПР) дальність їх виявлення суттєво обмежена. Середні значення дальності виявлення КР радіолокаційними засобами розві-
дки ЗРК у залежності від висоти польоту при відсутності навмисних завад, отримані розрахунковим і досвідним шляхами, наведені
в табл. ДІЇ.
Дальність візуального виявлення при швидкостях польоту КР від 200 до 400 м/с на гранично малих висотах в секторі 30°... 60°
складає 2... З км.
Зенітні комплекси, що знаходяться на озброєнні з’єднань, частин і підрозділів ППО, мають наступні можливості зі знищення
КР: ЗРК С-300 ПТ (ПС) спроможний знищувати всі типи КР на дальностях 5 .. .75 км; ЗРК С-125 спроможний знищувати всі типи
КР на дальностях 3,5 ... 25 км; ЗРК “Бук-М1” спроможний знищувати всі типи КР на дальностях 3,5 ... 26 км; ЗРК “Тор-М1” спро-
можний знищувати всі типи КР на дальностях 1,5 ... 10 (12) км; ЗРК “Стріла-1 ОМ” (“Стріла-ЇМ”) спроможний знищувати КР в
основному на вздогін і при швидкості їхнього польоту, що не перевищує 310 м/с; ЗРК “Сгріла-2М” може застосовуватись для зни-
щення КР на дальності до 4 км при їх польоті на висоті більше 50 м із швидкістю до 260 м/с (обстріл КР можливий тільки навздогін
як із місця і короткої зупинки, так і під час руху); ЗРК “Оса” усіх модифікацій спроможний знищувати всі типи малошвидкісних
(швидкість до 300 м/с) КР на дальностях 2 ... 10 км у всьому діапазоні висот зони поразки. Середній час реакції комплексу “Оса”
складає 30 с, а при стрільбі з короткої зупинки - 47 с за умови, що бойова машина знаходиться в готовності № 1, ССЦ веде пошук
КР у секторі 60° і ракети поставлені на підготовку. В усіх випадках необхідно використовувати можливості ЗРК “Оса” з обстрілу КР
навздогін.
Зенітні гарматні ракетні комплекси (ЗГРК) спроможні знищувати КР: при своєчасному їх виявленні за допомогою РЛС із даль-
ності 2,5 км установками ЗСУ 2С6 ‘Тунгуска”, ЗСУ-23-4 “Шилка”; при своєчасному візуальному виявленні з дальності 2,5 ... З км
2С6 ‘Тунгуска”, ЗСУ-23-4 “Шилка”.
Ведення протиповітряної оборони при відбитті нальоту КР
Боротьба з КР включає: своєчасне виявлення КР противника та оповіщення про них військ; знищення КР до виконання ними
бойової задачі або атаки військ (об’єктів).
При організації бойових дій усі начальники на підставі оцінки імовірних напрямків ударів і характеру дій КР установлюють
межі відповідальних секторів засобам ПВО і зенітним ракетним підрозділам (частинам) (напрямок, сектори, висоти, час), порядок
дій при відбитті нальотів КР і визначають джерело інформації для безпосереднього оповіщення вогневих засобів про КР.
У ході відбиття нальоту повітряного противника командири самостійно приймають рішення на знищення КР із наступною до-
повіддю по команді.
Успішне рішення задач боротьби з КР досягається ретельною організацією розвідки повітряного противника, раціональною по-
будовою системи вогню насамперед для відбиття нальотів ЗПН на малих і гранично малих висотах, максимальним використанням
бойових можливостей ЗРК і ЗГРК, інженерним обладнанням їх стартових і вогневих позицій, надійним прикриттям військ і об'єктів
на найбільше імовірних маршрутах прольоту крилатих ракет.
252
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Для забезпечення своєчасного виявлення КР і видачі даних про них на КП ППО і КП зенітних ракетних (артилерійських) час-
тин необхідно: визначити можливі напрямки і час нальоту; створити систему розвідки з урахуванням рельєфу місцевості та імовір-
них напрямків дій КР; установити режими роботи радіолокаційних станцій, що мають кращі технічні можливості з виявлення ма-
лорозмірних цілей на гранично малих висотах, а також призначити їм відповідальні сектори, розміри яких не повинні перевищува-
ти 60 °; уточнити порядок видачі даних на КП ППО і КП з метою забезпечення безперервного оповіщення вогневих засобів про КР
найближчими радіолокаційними постами.
Для забезпечення своєчасного виявлення, безперервного супроводу КР необхідно передбачити комплексне використання
радіолокаційних засобів.
Варто враховувати, що для ЗГРК і ЗРК ближньої дії одним із основних засобів розвідки КР, що діють на гранично малих висо-
тах, є візуальна розвідка. Візуальна розвідка КР ведеться постами візуального спостереження (ПВС), що розгортаються на всіх КП,
стартових, вогневих і технічних позиціях. ПВС повинні оснащатись засобами зв’язку, приладами спостереження, по можливості
радіопеленгаторами, апаратурою розпізнання й іншими необхідними для розвідки засобами. ПВС ведуть розвідку в призначених
для них секторах, звертається особлива увага на природні укриття й орієнтири, що можуть бути використані для прихованого подо-
лання системи ППО і раптового нанесення удару.
Своєчасне виявлення і безперервне супроводження КР забезпечується високою злагодженістю в роботі бойових обслуг РЛС і
КП, скороченням часу на обробку і доведення даних до вогневих засобів ППО, їх безпосереднього оповіщення від найближчих
радіолокаційних постів і ПВС.
Оператори РЛС повинні знати схему сигналів, відбитих від місцевих предметів, оптимальні режими роботи радіолокаційних
засобів і види відміток від КР на індикаторах станцій.
Характерними ознаками позначок КР на екранах РЛС є менші розміри і яскравість їх світіння, ніж від пілотованих літаків, а для
КРтипу А8АЕМ - більша, ніж від пілотованого винищувача, швидкість її переміщення. Для отримання інформації про КР, а також
уточнення типу цілі можуть застосовуватися оптичні та оптико-електронні засоби.
При організації системи ППО в інтересах боротьби з КР необхідно враховувати: можливі маршрути польотів КР, що пови-
нні визначатись при оцінці повітряного противника для кожного напрямку до початку бойових дій, з обов’язковим розподілом їх по
завданнях, рубежах, напрямках і висотах; рельєф місцевості, фонові умови, сонячну засвітку і вплив завад при веденні вогню, особ-
ливо на гранично малих висотах; перекриття гранично малих висот і напрямків імовірних дій КР противника насамперед вогнем
ЗГРК із максимально можливою дальністю стрільби і ЗРК ближньої дії.
Підготовка до бойової роботи КП. На КП “Байкал-ЇМ”, “Сенеж”, “Ранжир” для цілерозподілу КР повинен бути наданий відпо-
відний пріоритет. На КП ЗРС С-300 для централізованих цілевказань у ЗРК залучаються не всі цільові канали, частина їх залиша-
ється для цілевказання від НВВ. При отриманні від КП інформації про КР даному типу цілі повинен присвоюватись відповідний
пріоритет при цілерозподілі.
На КП ППО повинні бути відомі робочі частоти (номери ТЛК), по яких можлива передача даних про повітряну обстановку.
Вибір РЛС для передачі даних здійснюється на КП частини начальником розвідки, а на КП ППО - помічником начальника ППО.
У ЗРК “Оса” для розвідки КР організується груповий пошук СН, ССЦ і РПК-2 у призначених секторах пошуку з перекриттям
їх не менше, ніж на одну третину.
Дані про виявлені КР передаються в зенітні ракетні підрозділи позачергово по лініях телекодового зв’язку та у радіомережі
управління командира частини із використанням сітки цілевказання (координат “азимут-дальність”).
Підготовка вогневих комплексів, управління вогнем і стрільба
Стрільба ЗРС С-300 по КР ведеться в основному по цілевказаннях від НВВ або РЛС 19Ж6 (35Д6), що його заміняють. Для ко-
жного ЗРК призначається відповідальний сектор.
У ЗРК “Тор-МІ” стрільба по КР ведеться, як правило, в автоматичному режимі.
У ЗРК “Бук-МІ” зона і можливість поразки КР визначаються дальністю їх виявлення і захоплення на автоматичне супрово-
дження станцією 9С35М1 (9С35) і РГС ракети. ЕПР КР складає 0,1 - 0,3 м2, що знижує можливості СВУ і РГС ракет з виявлення і
захоплення на автоматичне супроводження таких повітряних цілей у 1,74 рази.
Тому зона поразки КР при швидкостях їх польоту близько 250 м/с та імовірності поразки 0,5 - 0,6, що менше в порівнянні з
пілотованими повітряними цілями, і характеризується наступними значеннями:
за висотою - від 25 до 6 000 м (визначається льотно-технічними характеристиками крилатої ракети);
за дальністю - від 5 км (зона безпеки) до 18 км (в залежності від висоти польоту цілі).
Основним режимом роботи СВУ по крилатих ракетах є режим ЛЧМ.
При заважаючому впливі метеоумов і відбитків від місцевих предметів використовується режим КНІ, а при достатній оптичній
видимості -ТОВ (телевізійний оптичний візир).
Через слабкий відбитий сигнал від КР основним способом супроводження є змішане. При достатньо потужному відбитому си-
гналі доцільно переходити на автоматичне супроводження, а при наявності контрастного зображення КР на екрані ТОВ - на напів-
автоматичне по ТОВ. Через низьку можливість поразки повітряної цілі однією ракетою (0,5 - 0,6) доцільно призначати на стрільбу
2-3 ракети, вогонь вести з мінімальними інтервалами в черзі або залпом.
Стрільба ЗСУ-23-4 по КР на висотах більше 50 м ведеться в першому і другому режимах. На висотах менше 50 м, при немож-
ливості виділити позначку від цілі на фоні місцевих предметів, стрільба ведеться з використанням ракурсних сіток прицілу-дублера.
Обслуги бойових машин “Оса” під час руху пошук здійснюють за допомогою СВЦ у першому промені огляду простору. При
роботі на місці пошук КР здійснюється одночасно СВЦ, ССЦ і ТОВ.
Пошук за кутом місця для переходу на АС здійснюється вручну в секторі 0° ... 30° із виставленням стробу да-
льності на 13 ... 15 км і наступним відстеженням позначки від цілі.
253
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
При обстрілі КР доцільно зосереджувати вогонь не менше двох бойових машин, стрільбу по КР вести при ав-
томатичному (змішаному) супроводі чергою з 3 - 4 ракет із темпом 4 ... 5 с.
Бойові обслуги зенітних ракетних комплексів “Стріла-1 ОМ” (“Стріла-ЇМ”) обстріл КР ведуть автономно. Піс-
ля розпізнання і визначення типу цілі оператор вибирає канал роботи ГСН з урахуванням фонових умов. Якщо апа-
ратура оцінки зони (АОЗ) не включена або не вийшла на режим, перебування цілі в зоні пуску визначається візуаль-
но, а блокування пуску від АОЗ відключається.
Стрільба ПЗРК “Стріла-2М” (“Ігла”) по КР ведеться, як правило, стрілком-зенітником самостійно. Пуск ракети
здійснюється негайно після появи звукового сигналу про захоплення цілі ГСН і введення відповідного упередження.
5.10. Бойові можливості засобів ППО щодо боротьби з балістичними ракетами
Бойові можливості засобів ППО щодо боротьби з БР характеризуються сукупністю показників, що визначають спромож-
ність засобів розвідки з виявлення і розпізнавання БР, своєчасного переведення відповідних ЗРК (ЗРС) у готовність до стрільби, час
їх реакції і потенційну ефективність їх стрільби по БР. Значною мірою вони залежать від параметрів траєкторій польоту БР.
Особливості балістичних ракет, як цілей для ЗРК (ЗРС)
До бойових балістичних ракет (БР) відносяться некеровані або керовані (самонавідні) ракети, що оснащені бойовими части-
нами (БЧ) ядерного або звичайного спорядження, політ яких проходить за балістичними траєкторіями.
БЧ ТБР здебільшого не відокремлюються в польоті та представляють собою єдине ціле з корпусом ракети.
Траєкторія польоту ракети - крива, що представляє собою геометричне місце точок центру мас ракети за час її польоту від
моменту старту до зустрічі з ціллю.
У загальному випадку траєкторія польоту БР складається з активної ділянки, балістичної ділянки та кінцевої ділянки польоту у
щільних шарах атмосфери.
Для заданого значення швидкості Уо при визначеному куті О0огю що називається оптимальним кутом кидання, може бути забез-
печена найбільша (максимальна) дальність польоту БР. У якості заданого значення Уо при цьому може бути прийнято максимальне
значення швидкості Ум»» яке досягається наприкінці активної ділянки польоту при запасі палива двигунів, що є на ракеті. Така
траєкторія називається оптимальною. Всі траєкторії БР, що знаходяться вище оптимальної, називаються навісними, а нижче -
настильними. У першому випадку кути кидання більше оптимального, а у другому - менше.
Найбільш позитивним при запуску БР за оптимальними траєкторіями є найбільші досяжність і точність поразки об’єктів при
мінімальних витратах палива Недолік - великий час перебування у зоні поразки ЗРК. Запуск БР за настильною траєкторією дозво-
ляє противнику створювати найбільш важкі умови для ведення бойових дій ЗРК, тому що знижується дальність виявлення боєго-
ловок БР і як наслідок час на поразку зменшується у два рази і більше. Скорочується також і загальний час польоту ракети. Недолі-
ками стрільби за настильними траєкторіями є менша дальність і значне погіршення (не менше, ніж у 1,5 рази) точності стрільби.
Запуск БР за навісними траєкторіями може призвести до більш пізнього їх виявлення і навіть до їх пропуску засобами виявлен-
ня ЗРК. Для своєчасного виявлення і поразки БР, що запущені за навісною траєкторією, необхідно збільшувати кути огляду і об-
стрілу у вертикальній площині, що призводить до збільшення потрібної кількості ЗРК. Недоліками стрільби за навісними траєкторі-
ями є зменшення досяжності за дальністю та значне збільшення загального часу польоту і витрат пального, у порівнянні із стріль-
бою на дальність, що відповідає оптимальній. Крім того, знижується точність поразки об’єктів.
До основних факторів, що суттєво впливають на параметри траєкторій польоту бойових БР при їх застосуванні відносяться:
такгико-технічні характеристики і бойові можливості БР; розташування позиційних районів пуску БР та координати пускових
установок; склад і розташування можливих об’єктів удару; імовірні варіанти дій БР, їх кількість за типами та бойовий порядок в
ударі; склад засобів ППО, які можуть використовуватись у якості засобів ПРО у сторін, по яких наноситься удар БР; можливі прос-
торові параметри ударів; тактичні прийоми та способи протидії засобам ПРО, які можуть застосовуватись.
При порівняній оцінці бойових властивостей БР найбільш часто використовуються такі параметри: час польоту на максималь-
ну дальність; максимальна початкова швидкість; максимальна висота польоту; діапазон можливих кутів кидання при стрільбі по
різних об‘єктах; кількість і маса бойових блоків (боєголовок); маса корисного навантаження БР; потужність бойового заряду; розмі-
ри зони розведення бойових блоків при максимальній відстані стрільби; кругове імовірне відхилення від точки прицілювання при
оптимальному куті кидання.
Основними характеристиками БР, як цілей для ЗРК (ЗРС), крім типу траєкторії є параметри польоту (повна дальність, швид-
кість, максимальна висота і час польоту), а також ЕПР (табл. Д. 12)
Повна дальність польоту БР - довжина дуги великого кола земної сфери від точки старту до точки падіння. Повна дальність
польоту БР може бути розрахована за формулою
Ь = К3<р = КзаГССО8[8Іп(фст)8Іп(фп) -СО8(фст)С08(фп)8Іп(Хст -Хп)], (5.149)
де Кд = 6371 км - радіус Землі; ф - геоцентричний кут між точками старту та падіння БР; фп, - географічні координати
(широта і довгота) точок старту і падіння відповідно.
При оцінці можливостей нанесення ударів БР по конкретних об’єктах визначається дальність досяжності у залежності від їх
максимальної швидкості V та кута нахилу траєкторії БР 0^ (ЗО °- 60 °) для кожного типу ракет
Ь(9БР) = (V 2 зіп(2ЄБр)) /9,81. (5.150)
254
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
Ефективна поверхня розсіювання БР може змінюватися в межах 0,02 - 0,2 м2 у залежності від кута локації, що призводить до
зменшення дальності виявлення БР на 20 - 40 відсотків у порівнянні з літаками.
Час польоту оперативно-тактичних і тактичних (ОТ і Т) БР до об’єкта удару складає 1-10 хвилин. Готовність ракетних систем
до бойового застосування (тривалість підготовки до пуску) складає 1 - 3 хвилини.
Особливості стрільби ЗРК (ЗРС) по балістичних ракетах
Велика швидкість польоту і мала ЕПР БР накладають жорсткі часові обмеження при роботі за даним типом цілей. Можливості
станції наведення ракет (СНР) з виявлення БР при автономній роботі обмежені сектором огляду простору за кутом місця (е^єкс)-
Через обмежені можливості СНР по виявленню БР при автономному пошуку і жорстких обмеженнях за часом, стрільба за даним
типом цілей здійснюється тільки у режимі цілевказання (ЦВ).
На СНР, яка знаходиться в режимі ЦВ з одержанням ЦВ з ознакою БЦ (балістична ціль), як правило ряд операцій бойового ал-
горитму роботи здійснюється паралельно (або одночасно), що дозволяє значно скоротити робітний час ЗРК по даному типу цілі.
Так, постановка ракет на підготовку і призначення пускової установки (ПУ) для обстрілу цілі здійснюється автоматично при одер-
жанні ЦВ. Операції по захопленню цілі на супроводження і підготовка ракет до пуску здійснюються одночасно. При цьому для
скорочення робітного часу СНР і забезпечення максимальних потенційних можливостей захоплення цілі на супроводження здійс-
нюється, як правило, в автоматичному режимі. Здійснення цих заходів дозволяє на 35 - 40 відсотків, скоротити робітний час ЗРК у
порівнянні з режимом роботи, при якому ЗКР включається на підготовку після захоплення цілі на автосупроводження.
Автоматичне призначення ПУ для обстрілу цілі та підготовка ракет за даними ЦВ з ознакою БЦ здійснюється тільки при пере-
буванні хоча б однієї з ПУ в режимі “Бойова робота”. Тривалість перебування ПУ в режимі “Бойова робота", як правило, обмежена
(наприклад, для С-300В складає близько 10 хвилин, з обов’язковою наступною перервою до 20 хвилин). Тому для перебування
батареї в постійній готовності до відбиття удару ТБР необхідно організувати послідовне чергування ПУ, що знаходяться в режимі
“Бойова робота”. Для забезпечення такого чергування необхідно мати не менше трьох ПУ.
БР має ряд характерних ознак, які відображаються на екранах індикаторів та інформаційних табло СНР.
Цілевказання, що видаються на СНР по БР, мають у формулярі цілі ознаку БЦ, вироблену у результаті розпізнавання класів
цілей.
Параметри руху цілі, відображувані на табло в період відпрацювання ЦВ, мають великі значення за висотою і швидкістю
польоту. Після відпрацювання на СНР ЦВ по БР здійснюється перевірка належності переведеної на автоматичне супроводження
цілі до класу балістичних. Відмітка від БР спостерігається на індикаторах (після захоплення цілі) у вигляді окремої відмітки без
додаткових “турбінних” складових ехо-сигналу в процесі всього польоту цілі.
При спостереженні позначки від БР на індикаторах СНР, як правило, відсутні активні завади на всій траєкторії польоту. Це по-
яснюється тим, що на БР відсутня апаратура постановки завад. Але можлива постановка активних завад зовнішнього прикриття
іншими ЗПН у діапазоні частот СНР.
Мала уразливість даного типу цілей від дії осколково-фугасної БЧ призводить до зниження умовної імовірності їхньої поразки
у порівнянні з літаками на 20 - 30 відсотків. Тому для забезпечення надійної поразки ТБР доцільно їхній обстріл вести одночасно
кількома ракетами.
Забезпечити високу імовірність ураження БР можна прямим влученням. Для цього використовують спеціалізовану ЗКР, яка на-
водиться на ціль за допомогою інфрачервоної головки самонаведення на кінцевому етапі її польоту. Ефект також може бути досяг-
нутий, якщо використовується спеціальна БЧ ЗКР, що забезпечує детонацію БЧ БР. Знищення цілей даного типу необхідно, по
можливості, здійснювати на максимальній дальності та висоті.
Основні характеристики зенітних ракетних систем і комплексів, які спроможні боротися з балістичними ракетами, наведені у
табл. Д. 12, Д. 13.
Особливості організації тактичної протиракетної оборони з використанням ЗРК (ЗРС)
Найважливішою умовою боротьби засобів ЗРВ з ОТ і Т БР є використання повної і достовірної інформації. При організації про-
тиракетної оборони об’єктів і військ необхідно оцінювати можливість застосування противником БР та імовірні варіанти їх засто-
сування з проведенням попередньої оцінки кількісних та якісних показників за даними варіантами ударів БР.
При оцінці можливостей застосування БР визначаються: воєнно-політична обстановка та мета можливих бойових дій, типи та
склад можливих об’єктів удару, знищення яких БР дозволить противнику досягти мети бойових дій; наявність на озброєнні або
можливості придбання БР, кількісний склад та якісний стан і бойові можливості БР, що є на озброєнні, з урахуванням можливого
підсилення; рівень підготовки складу бойової обслуги; базування та відстані місць дислокації ракетних підрозділів від кордонів
держави (лінії бойового зіткнення), від об’єктів удару та від місць розташування засобів боротьби з БР; загальне шикування ракет-
них угруповань; підльотний час БР; схильність противника до застосування БР. Ця інформація повинна збиратись, аналізуватись та
поновлюватись постійно.
Далі визначаються: склад ракетного угруповання противника на поточний час; можливий розподіл БР за завданнями, напрям-
ками удару та по об’єктах; можливі траєкторії їх польоту до об’єктів удару і підльотний час; можливі тактика бойового застосуван-
ня і тактика дій при подоланні системи ПРО; можливі дії угруповань військ та сил противника, які перешкоджатимуть боротьбі з
БР, їх кількісний та якісний склад і можливості щодо завчасної постановки завад засобам розвідки та управління і вогневим засо-
бам, здатним вести боротьбу з БР.
Основними показниками, які характеризують можливості ЗРК (ЗРС) з прикриття об’єктів і військ від ударів ОТ і Т БР, є показ-
ники зони оборони. Розрахунок і оцінка цих показників необхідна для обґрунтованого визначення замислу та прийняття рішення на
255
РОЗДІЛ 5. ЗЕНІТНІ РАКЕТНІ ВІЙСЬКА
відбиття удару БР. Розміри зони оборони ЗРС залежать від розмірів зон оборони ЗРК, які входять до складу ЗРС і вибраних для
них основних напрямків стрільби. При організації оборони об’єктів і військ від ударів БР необхідно основні напрямки стрільби ЗРК
вибирати таким чином, щоб забезпечувався обстріл всіх БР, траєкторії яких відповідають можливому сектору удару. Зона оборони
ЗРС, в якій забезпечується прикриття об’єктів і військ від ударів БР кількома ЗРК, є перетином зон оборони цих ЗРК (їх загальною
частиною). Відстань між стартовими позиціями ЗРК і їх взаємне розташування вибирається таким чином, щоб об’єкти і війська, які
прикриваються, розташовувались в середині зони оборони ЗРС.
Під площею, яку обороняють від ударів БР, розуміється геометричне місце точок падіння БР, траєкторії яких перехоплюються
ЗРК в межах зони поразки з імовірністю, не нижче заданої.
Кожному типу траєкторії БР відповідає своя площина, яку обороняють (залежно від кутів падіння БР).
ЗРК розташовується в середині площі, яку обороняють. Основними параметрами, які характеризують зону оборони, є горизон-
тальні дальності до передньої межі зони оборони Г), до тильної межі зони оборони г2 та азимутальний сектор перехоплення
БР-а.
Значення Г| та г2 можна розрахувати, скориставшись такими формулами:
'і = -<НП -нмі„>'«=„)-нмі„/«ебр>; '2/«=„);
де сіп - дальність перехоплення БР; Нп - висота перехоплення БР; Єп - кут місця перехоплення БР; - мінімальна висота
перехоплення БР.
Для оцінки можливостей із видачі бойової інформації щодо балістичних цілей конкретних типів необхідно розрахувати потріб-
ну дальність цілевказання для ЗРС. Вона може бути розрахована за формулою
Дпотр.БІ = Дд + УБР^ЦВ +Іроб +‘рд)’ (5152)
де Дд - дальня межа зони перехоплення; Убр - швидкість польоту БР; іеів - час, який витрачається на прийом цілевказання; -
робітний час ЗРК; час польоту ЗКР до дальньої межі перехоплення БР.
Дальність видачі інформації на ЗРК від РЛВ КПчастини повинна бути не менше потрібної дальності виявлення балістичної цілі -
Дпотр аияаа (тобто Д> Д ЖЛІХИИЯВЛ), яка може бути розрахована за формулою
Дпотр.виявл. “ ^потр.БІ + ^БР^вкл + *КП + Чатр) ’ (5.153)
де: івкл - час, який витрачається на включення радіолокаційних засобів КП і приведення підрозділу в бойову готовність (дорів-
нює нулю, якщо всі засоби завчасно включені); Ікп - робітний час КП підрозділу; - час, витрачений на передачу даних з КП
частини до підрозділу.
Ефективність ПРО можна оцінити за формулою
N -Мг
ІВг(1-(1-Рг) г г
г
К
де Я - кількість об’єктів оборони (г=1.. .Я); Вг - коефіцієнт важливості г-го об’єкта; Рг- ймовірність пораження г-го об’єкта;
1ЧГ - наряд БР, що призначається на г-й об’єкт; Мг - математичне сподівання числа уражених БР, які приймають участь в ударі по
г-у об’єкту.
В цілому командир частини при визначенні варіантів ПРО об’єктів і військ повинен провести: оцінку об’єктів оборони, як мож-
ливих цілей для ОТ і Т БР та можливих втрат в об’єктах оборони при їх застосуванні противником; визначення тактичних можли-
востей по нанесенню противником ударів ОТ і Т БР по зоні бойових дій частини (з’єднання), типів ОТ і Т БР їх ТТХ та наряду по
об’єктах оборони, побудови удару і можливих параметрів траєкторій польоту БР від існуючого та імовірних угрупувань ракетних
підрозділів противника (Д^, 0^), секторів можливих ударів; оцінку підльотного часу БР, можливої радіоелектронної обстановки в
ході удару ОТ і Т БР та її впливу на роботу РЕЗ, метеорологічних, фізично-географічних та кліматичних умов; оцінку вогневих
можливостей ЗРС (ЗРК), своїх підрозділів та взаємодіючих сил і засобів щодо побудови тактичної системи ПРО, можливостей по
переходу до бою (баланс часу) та маневрових можливостей; розрахунок параметрів зони оборони; визначення необхідної для обо-
рони об’єктів від ОТ і Т БР кількості ЗРК, можливостей по прикриттю об’єктів оборони (вибір побудови бойових порядків) і ефек-
тивності ПРО.
256
РОЗДІЛ 6. АВІАЦІЯ ППО
6. АВІАЦІЯ ППО
6.1. Призначення та завдання авіації ППО
Авіація ППО призначена для знищення літаків, вертольотів та безпілотних засобів противника у повітрі.
Завдання авіації ППО: знищення авіації противника у повітряних боях з метою недопущення її переваги у повітрі; прикриття
військ та об’єктів, районів та напрямків від ударів авіації та безпілотних засобів противника; прикриття кораблів, морських десантів
та конвоїв на бойовий радіус дій винищувачів; знищення повітряних десантів противника у польоті та зрив його повітряних переве-
зень; знищення літаків ДРЛВ та У, РЕБ.
У першу чергу винищувачі ППО застосовуються для ураження повітряних цілей на далеких підступах до об’єктів оборони (в
районах, смугах, зонах, де противник через велику відстань ще не має можливості застосувати свої засоби для ураження військ та
інших об’єктів).
В окремих випадках авіація ППО може залучатися для ведення повітряної розвідки, знищення наземних (морських) об’єктів,
забезпечення вертольотів, що виконують пошук та порятунок екіпажів, які потрапили у біду.
За мирного часу авіація ППО частиною сил спільно з іншими силами та засобами ППО несе бойове чергування в єдиній систе-
мі протиповітряної оборони країни.
Винищувач - бойовий літальний апарат, важчий ніж повітря, що має силовий пристрій для створення тяги та крило, яке під час
руху в атмосфері створює підйомну силу, і призначений для знищення пілотованих та безпілотних засобів противника в повітрі. Як
правило має надзвукову швидкість, добру маневреність, велику практичну стелю польоту та потужне ракетно-гарматне озброєння.
Винищувач - складова частина авіаційного ракетного комплексу перехоплення (АРКП), який є сукупністю повітряних та
наземних засобів для знищення літальних апаратів у повітрі. АРКП складається з пускової установки на всепогодному пілотовано-
му винишувачі-перехоплювачі, ракет класу “повітря-повітря”, бортових та наземних засобів для пошуку та знищення повітряної
цілі, прицілювання та управління зброєю.
Сучасні винищувачі ППО спроможні виконувати бойові завдання вдень і вночі, в простих і складних метеорологічних умовах,
при наявності або відсутності візуальної видимості, окремим екіпажем або групою (підрозділом, частиною), самостійно або при
наведенні з КП (ПН В А).
Винищувачі виконують бойові завдання шляхом здійснення бойового польоту (рис. 6.1). Він включає: зліт, шикування бойово-
го порядку, політ за маршрутом до цілі, виконання бойового завдання, політ від цілі, повернення на аеродром, розпуск групи та
посадку. На етапі його підготовки та у процесі самого польоту широко застосовуються засоби автоматизації (обробка радіолокацій-
ної інформації, визначення часу підйому винищувачів у повітря, формування траєкторії польоту в точку перехоплення, прицілю-
вання та пуск ракети і т.ін.).
Рис.6.1. Етапи бойового польоту екіпажів та підрозділів винищувачів
Високі льотно-технічні характеристики сучасних винищувачів, зокрема, значна дальність польоту та великі інформаційні мож-
ливості бортових РЛС, дозволяють їм виконувати бойові завдання і за межами радіолокаційного поля, без наведення з КП (ПН ВА),
так звані напівавтономні та автономні дії.
257
РОЗДІЛ 6. АВІАЦІЯ ППО
6.2. Основи бойового застосування авіації ППО
Авіація ППО здійснює винищувальне авіаційне прикриття військ та об’єктів, вирішуючи при цьому одне з основних бойових
завдань з метою не допустити нанесення ударів засобами повітряного нападу противника по частинах та з’єднаннях військ, сил
флоту, важливих військових об’єктах, адміністративно-політичних та промислово-економічних центрах.
6.2.1. Форми та способи бойових дій авіації ППО
Форми бойових дій авіації ППО:
повітряний бій (основна форма бойового застосування) - озброєне протиборство частин, підрозділів, груп, екіпажів авіації
ППО у повітрі з метою знищення противника, відбиття його атак. Повітряний бій ведеться з рішучими цілями - знищити повітря-
ного противника або завдати йому такого ураження, щоб змусити відмовитися від виконання свого бойового завдання;
авіаційний удар - дії авіації ППО по наземних (морських) об’єктах засобами ураження з метою їх знищення;
спеціальний бойовий політ - дії авіації ППО у повітрі при виконанні бойового завдання, яке не потребує, як правило, застосу-
вання засобів ураження.
Способи бойових дій авіації ППО:
одночасне введення в бій основних сил частин (підрозділів) з положення чергування на землі або у повітрі. Застосовується при
відбитті масованих ударів повітряного противника для створення необхідного співвідношення сил на головних напрямках та вста-
новлених рубежах. Групи (ескадрильї) розпочинають повітряний бій одночасно, або через проміжки часу, що дорівнюють часу дії
групи (ескадрильї);
послідовне введення в бій підрозділів (екіпажів) з положення чергування на землі або у повітрі передбачає дію на противника
через проміжки часу, які значно перевищують тривалість бою підрозділів (екіпажів). Застосовується при ешелонованих діях повіт-
ряного противника невеликими групами, окремими літаками та ракетами;
напівавтономний пошук та знищення повітряного противника у заданому районі (напівавтономні дії). При цьому винищу-
вачі виводяться в райони пошуку за інформацією з пунктів управління про район польоту повітряного противника, виявляють його
за допомогою бортових засобів або візуально та знищують. Спосіб застосовується коли наведення з пунктів управління неможливе
через відсутність суцільного радіолокаційного поля або недостатню ємність системи управління;
самостійний пошук та знищення повітряного противника у заданому районі (вільне полювання). При цьому винищувачі ви-
водяться у заданий район без інформації про противника у ньому. Самостійно, за допомогою бортової апаратури або візуально
відшукують противника, виявляють його та знищують. Райони пошуку визначаються на найбільш вірогідних напрямках польоту
засобів повітряного нападу, в розривах радіолокаційного поля, або за його межами. Об’єктами атак “мисливців” є дрібні групи,
окремі літаки (вертольоти), які летять у напрямку об’єктів або повертаються із завдання, літаки зв’язку, коректувальники вогню
артилерії, постановники завад у зонах. Полювання, як правило, ведеться у світлий час доби у складі пар або ланок. Особлива увага
при цьому приділяється визначенню сприятливих умов, часу полювання, вибору району, забезпеченню прихованості.
Дії з положення чергування на аеродромі полягають у тому, що винищувачі знаходяться на майданчику чергових сил у вста-
новленому ступені бойової готовності. Виліт здійснюється після виявлення повітряного противника засобами розвідки. Застосову-
ється, коли інформація забезпечує своєчасний виліт та знищення противника на встановлених рубежах. Забезпечується висока еко-
номічність у витраті сил та засобів. Командир має можливість виділити для вирішення поставленого завдання необхідну кількість
винищувачів. Недоліком є запізніле, порівняно з іншим положенням, знищення повітряної цілі, що може призвести до несвоєчасно-
го виконання поставленого завдання.
Дії з положення чергування у повітрі полягають у тому, що винищувачі піднімаються у повітря завчасно, виводяться у при-
значені зони чергування, при виявленні противника наводяться на нього для знищення. При цьому необхідні великі витрати сил та
засобів. Крім того, винищувачі можуть бути виявлені засобами розвідки противника, якщо зони чергування знаходяться в межах їх
радіолокаційного поля. Застосовуються при недостатній глибині радіолокаційної інформації.
У ході прикриття військ та об’єктів авіація ППО знищує засоби повітряного нападу противника у взаємодії з сусідами,
з’єднаннями та частинами ППО. При цьому розгортаються пункти управління, призначаються зони чергування у повітрі, райони
самостійного пошуку, визначаються рубежі знищення, передачі управління і т.ін.
6.2.2. Основи тактики одиночного та групового повітряних боїв
Сучасний повітряний бій характеризується наступними рисами: великий просторовий розмах; широкий діапазон висот та
швидкості польоту; великий склад сил; складність повітряної обстановки; швидкість розгортання подій; застосування груп літаків
різного тактичного призначення.
Основні умови досягнення винищувачами перемоги у повітряному бою: наступальний характер дій протягом усього бою;
стрімкість зближення і раптовість атак; вміле застосування маневру у бою; спроможність знищити противника з першої атаки;
застосування тактичних прийомів з урахуванням сильних і слабких сторін свого винищувача і літака противника; узгоджені,
передбачені планом дії одиночних винищувачів і груп різного тактичного призначення.
Класифікація повітряних боїв: за характером дій підрозділів, екіпажів - наступальні і оборонні бої; за кількістю винищувачів,
що беруть участь у бою - одиночні і групові бої; за наявністю візуального контакту і типу застосовуваної зброї - маневрені ближні і
дальні ракетні бої; за висотами - повітряні бої на гранично малих, малих, середніх, великих висотах і в стратосфері; за часом доби -
денні і нічні бої, а також повітряні бої у сутінках (темряві); за типом цілей, із якими проводяться повітряні бої - бої з винищувачами,
258
РОЗДІЛ 6. АВІАЦІЯ ППО
бомбардувальниками, транспортними літаками і вертольотами, а також із безпілотними ЗПН противника (автоматичними
дрейфуючими аеростатами, крилатими ракетами, БПЛА та ін.).
Одиночний повітряний бій - бій одиночного винищувача з одним або з групою літаків противника
Одиночні повітряні бої можуть бути ближніми маневреними або дальніми ракетними.
Ближній маневрений повітряний бій ведеться із застосуванням маневру, що дозволяє зайняти вигідну вихідну позицію для
повітряної атаки або відхилитися від атаки противника Характерний для винищувачів, що мають високі показники
перевантаження і тягоозброєності, приціли, гармати і ракети ближнього бою.
Дальній ракетний повітряний бій ведеться на великих дистанціях із використанням авіаційних ракет “повітря-повітря”
середньої та великої дальності. При зближенні з противником дальній ракетний повітряний бій може перерости в ближній
маневрений бій.
Груповий повітряний бій - бій групи винищувачів з одним літаком або з групою літаків противника. Під час групового
повітряного бою екіпажі, підрозділи і групи тактичного призначення узгоджено діють за єдиним замислом для виконання бойового
завдання. Груповий повітряний бій - це процес двосторонньої збройної боротьби, при якому дп винищувачів ППО спрямовані на
знищення конкретної групи повітряного противника або на недопущення виконання противником поставленого бойового
завдання.
В основі групового повітряного бою лежать закономірності одиночного повітряного бою. Досягнення ж переваги над против-
ником здійснюється за рахунок вміння командира вдало маневрувати винищувачами та групами їх у бою.
Головна ідея бою - забезпечити введення в бій ударної групи при самих сприятливих для неї умовах, щоб тим самим нанести
противнику рішучого ураження.
Основні принципи групового повітряного бою: доцільна побудова бойових порядків винищувачів; грамотне бойове манев-
рування винищувачів при вогневій та тактичній взаємодії; організований вихід з бою.
Під час повітряного бою управління підрозділами (екіпажами) здійснюється із наземних, повітряних, корабельних пунктів
управління (наведення), а також командирами підрозділів (ведучими груп) з бойових порядків. Командири підрозділів (ведучі груп)
у повітрі управляють винищувачами під час бою по радіо, еволюціями літаків, особистим прикладом, а також за допомогою теле-
кодового зв’язку.
Повітряному бою передує пошук противника, який здійснюється за допомогою бортових технічних засобів або візуально, або
тим та іншим способом одночасно. Сектори пошуку повітряного противника визначає командир у залежності від бойового завдан-
ня та умов його виконання.
Кожен літак, виявлений у повітрі, вважається літаком противника до моменту його впевненого розпізнавання за допомогою бо-
ртової системи радіолокаційного розпізнавання або візуально.
При виявленні повітряного противника та зближенні з ним командир (ведучий) оцінює обстановку за допомогою індикатора
тактичної обстановки (індикатора прямого бачення) і діє за одним з варіантів плану повітряного бою, розподіляє між групами (екі-
пажами) літаки (групи) противника, вказує напрямок, черговість, спосіб атаки та порядок взаємодії.
Для ведення групового повітряного бою винищувачі шикуються у бойові порядки, що визначаються дистанціями, інтервалами,
перевищеннями (приниженнями) між літаками (парами, ланками).
Види бойових порядків під час ведення бою:
зімкнений - екіпажі виконують політ на скорочених інтервалах і дистанціях, які забезпечують виконання одночасних атак з
одного напрямку з індивідуальним прицілюванням кожним льотчиком. Застосовуються у ближньому повітряному бою при візуа-
льній видимості цілі;
розімкнений - екіпажі й підрозділи виконують політ у межах візуальної або радіолокаційної видимості на дистанціях та інтер-
валах, які забезпечують вогневу взаємодію у повітряному бою. Застосовуються парою, ланкою, групами тактичного призначення у
ближньому і дальньому повітряних боях;
розосереджений - екіпажі (підрозділи, групи) виконують політ на інтервалах і дистанціях, які забезпечують тактичну взаємо-
дію у повітряному бою. Підтримання їх взаємного розташування здійснюється за допомогою бортових, наземних радіотехнічних
засобів або візуально.
У залежності від взаємного розташування літаків (пар, ланок) форми бойових порядків можуть бути: пари - пеленг, фронт,
колона літаків; ланки - пеленг літаків (пар), фронт літаків (пар), колона пар.
Етапи повітряного бою (рис. 6.2).
1. Зближення з виявленим противником - бойовий маневр, що виконується винищувачами (групами) від моменту виявлен-
ня цілі до зайняття вихідного положення для атаки. Зближення повинно бути стрімким та прихованим, що забезпечує раптовість
атаки та знищення противника.
Способи зближення: по кривій погоні (поздовжня вісь винищувача постійно спрямована на ціль); на паралельних курсах - на-
вздогін цілі (ракурс безперервно збільшується і на початку атаки досягає потрібного значення); з кутом випередження (поздовжня
вісь винищувача спрямована попереду цілі і з лінією напрямку на ціль складає кут випередження); з приниженням (цілі на великих
та середніх висотах); з перевищенням (цілі на гранично малих та малих висотах) та ін.
2. Атака (одна або декілька) - вирішальний етап повітряного бою, який поєднує маневр та прицілювання з пуском ракет (ве-
денням гарматного вогню) з метою знищення противника. За напрямком відносно цілі, атаки можуть бути з передньої, задньої на-
півсфери та під великими ракурсами.
У груповому повітряному бою винищувачі застосовують способи атак: одночасні (кожному екіпажу призначається окрема
ціль, яка атакується одночасно з іншими екіпажами по своїх цілях); послідовні (літаки або групи послідовно пускають ракети після
того, як попередній літак або група починає вихід з атаки і не заважають пуску ракет); почергові (окремі літаки або групи діють за
правилом: один атакує, інший прикриває).
259
РОЗДІЛ 6. АВІАЦІЯ ППО
Атака, прицілювання та пуск ракет
“повітря-повітря”
та ведення гарматного вогню
Зближення для входу в зону
дозволених пусків ракет
(гарматного вогню)
Рис. 6.2. Етапи повітряного бою
Зона дозволених пусків ракет
Пошук та виявлення повітряного
противника за допомогою БРЛС
або візуально
3. Бойове маневрування - полягає у переміщенні винищувачів (груп) у повітряному просторі з метою зайняття тактично вигі-
дного положення для повітряної атаки або збереження винищувачами бойового порядку, а між собою - вогневої та тактичної взає-
модії; завади противнику вийти з-під удару; створення сприятливих умов для дій ударної групи; реалізації тактичних прийомів та
замислу повітряного бою.
4. Вихід з бою полягає в організованому відриві винищувачів від повітряного противника та їх відході з його поля зору (спосте-
реження) після атаки або у будь-який інший момент бою за командою (сигналом) командира (ПУ), а також вимушено, у разі ура-
ження (відмови) авіатехніки або пораненні льотчика, які виключають можливість продовження бою. Для виходу з бою використо-
вується хмарність, маскуюча дія Сонця, рельєф та фон місцевості, вогонь своїх наземних засобів. Вихід забезпечується взаємним
прикриттям винищувачів.
Несправність бортового озброєння або повна витрата боєкомплекту не є основою (підставою) для виходу з групового бою.
Льотчик повинен продовжувати атакувати противника у складі підрозділу.
Під час знищення особливо важливих цілей або за командою з ПУ льотчик повинен продовжувати бій до повної витрати паль-
ного з наступним катапультуванням.
Пара винищувачів, діючи самостійно або у складі ланки, веде повітряний бій, як правило, не розчленовуючи свого бойового
порядку, атакуючи противника одночасно або послідовно. Із бою пара виходить теж одночасно, або послідовно, по одному, забез-
печуючи взаємне прикриття.
Ланка та ескадрилья ведуть повітряний бій самостійно або у складі ескадрильї, як одна з груп тактичного призначення.
Винищувальне крило самостійно веде повітряний бій. Його бойовий порядок може складатись з розвідувально-ударної групи,
ударної групи та групи прикриття.
6.3. Бойові можливості авіації ППО
Бойові можливості авіації ППО - комплекс кількісних та якісних показників, які характеризують можливості екіпажів, під-
розділі та частин виконувати поставлені бойові завдання за установлений термін в конкретних умова обстановки.
Основу розуміння “бойові можливості” складає очікуваний результат бойових дій винищувачів зі знищення противника в рі-
зних умовах обстановки, який характеризується імовірнісними показниками. Але один очікуваний результат бойових дій не дає
повного опису бойових можливостей, тому що не відповідає на питання про те, у якому просторі та за який проміжок часу цей ре-
зультат може бути реалізованим. Повний опис бойових можливостей винищувачів дає сукупність їх імовірнісних, просторових та
часових показників.
Знання бойових можливостей дозволяє відповідним командирам приймати обгрунтовані рішення та ставити підрозділам та ча-
стинам реальні бойові завдання, з максимальною ефективністю використовувати винищувачі у ході бойових дій.
Зміст роботи з визначення та оцінки бойових можливостей залежить від того, на якому етапі виробляється рішення - у процесі
підготовки або у ході бойових дій.
В процесі підготовки проводиться основна робота з визначення та оцінки бойових можливостей. Вона є складовою частиною
оцінки обстановки, на підставі якої командир приймає рішення на бойові дії.
У ході бойових дій оцінка бойових можливостей базується на раніш проведених оцінках і зводиться головним чином до враху-
вання змін, що сталися під час бойових дій (внаслідок втрат льотного складу та авіаційної техніки, витрати боєприпасів, пального,
змін умов бойових дій і т.ін.).
Незалежно від етапу, на якому проводиться оцінка бойових можливостей, вона повинна виконуватись з максимальною старан-
ністю та об’єктивністю.
Показники бойових можливостей взаємно пов’язані між собою та впливають один на одного. Так, наприклад, просторові пока-
зники залежать від часових, а часові - від імовірнісних. Не дивлячись на це, розмежування показників виявляється доцільним для
більш точного визначення та оцінки бойових можливостей.
260
РОЗДІЛ 6. АВІАЦІЯ ППО
6.3.1. Просторові показники бойових можливостей авіації ППО
Просторові показники бойових можливостей характеризують простір, у якому авіація ППО може виконувати бойові за-
вдання. Значення цих показників безпосередньо випливає з основних вимог до бойового застосування винищувачів - своєчасного
знищення повітряного противника, у відповідності з яким противник повинен бути знищеним до рубежу виконання ним свого бо-
йового завдання.
Просторові показники бойових можливостей залежать від: льотно-тактичних характеристик; складу груп винищувачів та
ступеня їх бойової готовності; способу бойових дій; глибини радіолокаційної інформації про повітряного противника; висоти та
швидкості польоту літаків противника.
Основні просторові показники бойових можливостей авіації ППО: область бойової дії; область знищення повітряного про-
тивника; рубежі знищення повітряних цілей; рубежі вводу в бій; смуга знищення повітряного противника; рубежі підйому винищу-
вачів; рубежі приведення їх у бойову готовність.
Область бойової дії - повітряний простір навколо аеродрому постійного базування, розосередження та маневру, у будь-якій
точці якого винищувачі можуть виконати бойове завдання з врахуванням запасу пального, що є у розпорядженні екіпажу. Ця об-
ласть у горизонтальній площині обмежується еліпсом, фокусами якого є аеродроми вильоту та посадки, фокальною відстанню -
відстань між аеродромами, а велика напіввісь представляє собою дальність польоту винищувачів. Якщо посадка здійснюється на
аеродром вильоту, область бойової дії обмежується колом, радіусом якого є бойовий радіус дії винищувачів.
В залежності від поставленого бойового завдання в межах області бойової дії можуть бути призначені рубежі знищення повіт-
ряних цілей, рубежі початку та кінця супроводження літаків інших видів авіації, зони чергування винищувачів, райони самостійно-
го пошуку, райони знищення наземних (надводних) цілей.
Розмір області бойової дії визначається льотно-технічними характеристиками винищувачів на заданій висоті, складом груп, у
яких будуть виконуватись бойові завдання та аеродромною мережею.
Розрахункова формула для визначення радіус-вектора області бойової дії має вигляд:
(6.1)
де Дг = КХДр- Ув(бз); Дт - тактична дальність польоту винищувача; - коефіцієнт складу групи (пара-Кг=1,
ланка - Кг = 0,96, ескадрилья - Кг = 0,87, крило - К^-=0,67); Д р - практична дальність польоту винищувача; Ув - середня швидкість
винищувача; - час виконання бойового завдання (близько 5 хв); Д, - відстань між аеродромами зльоту та посадки; а - кутова
координата еліпса
Результати розрахунків використовуються для графічної побудови області бойової дії на карті. Приймаючи відповідний аеро-
дром за вихідну точку, послідовно відкладають (у полярній системі координат) кутову координату та відрізок, який дорівнює раді-
ус-вектору. Після з’єднання одержаних точок плавною кривою знаходять шукану (у вигляді еліпса) область бойової дії для дій ви-
нищувачів даного типу на д аній висоті.
Область знищення повітряного противника при наведенні винищувачів з КП (ПН) - частина області бойової дії, обмежена
дальністю розрахованих рубежів знищення повітряних цілей, що виконують політ на визначеній висоті та швидкості, за вибраною
програмою польоту винищувачів. Область знищення складається з двох полів: кінематичного та поля наведення.
Кінематичне поле - частина повітряного простору, у будь-якій точці якого можливе знищення повітряного противника вини-
щувачами згідно з радіолокаційною інформацією, що є у наявності. Обвідна кінематичного поля визначається за формулами:
Дрз “ДрзО при ДрзО > ^сум ’ (6 2)
г п + сов а
Дрз ДрзО при ДрзО < ^сум ’ (6.3)
соз а к 7
уц
п = -^, (6.4)
*в
де Дрзо - дальність рубежу знищення при польоті цілі у напрямку на аеродром (зону чергування у повітрі); а - кут між лінією
шляху цілі, що прямує на аеродром та напрямком польоту винищувача у точку знищення цілі; Уц - швидкість цілі; Ув - швидкість
винищувача; 4-ум - сумарний шлях винищувача (залежить від програми польоту, береться з довідника).
Поле наведення - частина повітряного простору, у будь-якій точці якого можливе наведення винищувачів на ціль. Утворюєть-
ся за результатами накладання одне на одного радіолокаційних полів (що створюються джерелами радіолокаційної інформації для
наведення винищувача) та поля команд, яке визначається можливостями засобів зв’язку щодо передачі команд управління на борг
винищувача Розміри радіолокаційного поля та поля команд визначаються за методикою, прийнятою для відповідних типів джерел
радіолокаційної інформації про повітряну обстановку та засобів зв’язку (передачі команд).
Рубіж знищення повітряних цілей - рубіж, до якого винищувально-авіаційне крило повинно виконати поставлене бойове за-
вдання. Рубіж знищення може бути заданим або розрахованим.
261
РОЗДІЛ 6. АВІАЦІЯ ППО
Задані рубежі знищення повітряних цілей для винищувально-авіаційного крила призначаються командиром з’єднання
(об’єднання), виходячи з тактичних міркувань щодо оборони визначених об’єктів (районів), а розрахункові визначаються у залеж-
ності від наявної радіолокаційної інформації та запасу палива винищувачів. Відстань заданого рубежу знищення можна визначити,
якщо знати дальність пуску противником крилатих ракет класу “повітря-поверхня” або польоту його керованих авіаційних бомб і
величину радіуса зони ураження ними.
Розрахунковий рубіж знищення повітряних цілей характеризує максимально можливу відстань від аеродрому, на якій може
бути знищений повітряний противник з врахуванням наявної глибини радіолокаційної інформації та установленого способу бойо-
вих дій винищувачів.
Розрахунок рубежів знищення виконується за однією з формул у залежності від умов застосування винищувачів:
Дрз =-------Ц , якщо Д-Уц1псум <дсум (зустрічно-пересічні курси);
Дрз = Д-УціІ1сум, якщо |Д- Уиіпсум| < дсум (на параметрі, в зоні чергування);
гт Д- уц1п.сум + псїсум ПА/ \
Дрз =---------, якщо Уціп сум - Д > асум (попутно - пересічні курси);
Іп.сум — ^пас + ^наб + Ірозг + ^бою + ^ман»
(6.5)
(6-6)
(6.7)
(6.8)
(6.9)
Де іпсум ~ сумарний час польоту. Залежить від програми польоту та ступеня бойової готовності (береться з довідника); - паси-
вний час (прийняття рішення, робітний час КП і т.ін.); - час набору висоти; - час розгону винищувача від крейсерської швид-
кості до швидкості початку маневру при вводі в бій; - час повітряного бою, що включає і час польоту ракети до цілі; - час
маневру; сЦ, - сумарний шлях винищувача (залежить від програми польоту, береться з довідника); сі^ = + сі^ + сі^ +
де сі - відповідно шляхи за час прийняття рішення, робітний час КП, набору висоти та швидкості, розгону від крейсерської швид-
кості до швидкості початку маневру при вводі в бій, повітряного бою, включаючи і час польоту ракети, маневру.
Отже, розрахункові рубежі знищення, як видно з формул, залежать від багатьох чинників (характеристик цілі та параметрів її
руху, ступенів готовності екіпажів перехоплювачів, положення чергування на аеродромі або у повітрі і т.ін.) і для кожного конкрет-
ного випадку будуть мати відповідні значення. Розрахункові рубежі знищення визначають ту частину повітряного простору, у якій
перехоплювачі можуть знищити повітряного противника за певних конкретних умов, і кількість цих рубежів буде відповідати кіль-
кості заданих варіантів умов виконання бойового завдання.
Що стосується призначених рубежів знищення, то вони визначаються, виходячи з міркувань збереження об’єктів оборони, і
вказують, де саме потрібно знищити противника, щоб не дати йому можливості виконати своє завдання. Саме цим слід керуватися
при прийнятті рішення на ведення бойових дій.
Тому у подальшому є сенс виходити з того, що рубежі знищення призначаються старшим командиром, а не розраховуються
для безлічі випадків, які можуть скластися у процесі бою.
Рубіж вводу в бій - рубіж, на якому знаходиться повітряний противник на початку повітряного бою (у момент виявлення його
винищувачем).
Він визначається з врахуванням забезпечення безперервної дії по противнику та виконання бойового завдання до рубежу зни-
щення повітряної цілі. Рубіж вводу в бій від рубежу знищення знаходиться на відстані, яку проходить ціль за час повітряного бою
всіх груп винищувачів, що приймають участь у бою.
Рубежі вводу в бій визначаються за формулою:
Друб = Дрз — Уц[2*бою + *г(2-1)]> (6.10)
де Дд-відстань до рубежу знищення; /-кількість винищувачів, що вводяться в бій; - час повітряного бою винищувача;
V- часовий інтервал вводу в бій винищувачів; Уц- швидкість цілі.
Знак “+” ставиться при наведенні винищувачів на зустрічно-пересічних курсах від аеродрому або зони чергування у повітрі.
Знак “ - ” ставиться при наведенні винищувачів на пересічних курсах від аеродрому або зони чергування у повітрі.
Смуга знищення повітряного противника - частина повітряного простору, розташована між рубежами вводу в бій та зни-
щення повітряного противника.
Глибина смуги знищення повинна забезпечити необхідні для бою усіх введених груп винищувачів простір та час. Відстань за-
даних рубежів знищення повітряного противника визначає для винищувально-авіаційного крила спосіб бойових дій при виконанні
бойового завдання.
Смуга знищення повітряного противника визначається за формулою:
Сз = Уц(2Ібою+*г(2-1)] (611)
Рубіж підйому винищувачів - рубіж, на якому знаходиться повітряний противник на момент подачі команди винищувачам на
запуск двигуна Рубежі підйому винищувачів визначаються за формулою:
Д рпв = Друб + ^цОвиЛ + Чів + гп) (612)
де івил - час вильоту з готовності №1; („в - час набору потрібної висоти; і™ - час польоту винищувача на горизонтальній ділянці.
Рубіж приведення у готовність (зайняття готовності) - рубіж, на якому знаходиться повітряний противник на момент подачі
команди на переведення винищувачів в установлену готовність. Визначається за формулою:
262
РОЗДІЛ 6. АВІАЦІЯ ППО
Дрзг “ Дрпв +^ц1бг
де (б,. - час зайняття винищувачами встановленої готовності.
Потрібна дальність видачі на КП радіолокаційної інформації (розвідувальної та бойової) визначається за формулами:
ДК'"Ф =Дрзг+УцІкП
де (кп - робітний час КП (об’єднання ППО та частини ВА - сумарний);
ттбойов.інф. _ гт V ґ
Дпотр -Дрпв+уц1КП
де і’кп - робітний час КП частини ВА.
Потрібна дальність виявлення цілі підрозділами РТВ визначається за формулою
гтВИЯВЛ. _ Пров.інф. ж,
Дпотр “Дпотр +уц*КПРТВ
де (^-робітний час КП РТВ.
Визначення просторових показників бойових можливостей пояснюється на рис. 6.3.
(6.13)
(6.14)
(6.15)
(6.16)
Рубіж
о
Рис. 6.3. До визначення деяких просторових показників бойових можливостей
Повітряний
противник
Відстань зони чергування у повітрі від аеродрому базування визначається за формулою:
Дзч “ ^ц^нпр — (Дп 4* ^збл ~~ §в) (6 17)
де («р - час польоту винищувача з моменіу подачі першої команди на наведення до пуску ракет, Д, - середня дальність пуску
ракет, $збл = Ув (ял - шлях винищувача від виходу на пряму зближення до пуску ракет, - час польоту винищувача від виходу на
пряму зближення до пуску ракет; 8В = Ув іп - шлях винищувача від зони чергування до точки початку розвороту; (п - час польоту
винищувача від зони чергування до точки початку розвороту.
Для розрахунків відстані зони використовуються спеціальні таблиці та номограми.
6.3.2. Часові показники бойових можливостей авіації ППО
Часові показники бойових можливостей характеризують динаміку бойових дій та організацію управління винищувачами.
Основні часові показники бойових можливостей авіації ППО: час приведення підрозділів (частин) у вищі ступені бойової
готовності; час вильоту винищувачів з різних ступенів бойової готовності; час зльоту групи винищувачів; час перехоплення повіт-
ряної цілі; час польоту до виходу в район виконання бойового завдання; тривалість повітряного бою; тривалість чергування у повіт-
рі; час підготовки літаків до повторного вильоту; бойова напруженість.
Більшість зазначених часових показників мають нормативний характер. Вони встановлюються у залежності від типу винищу-
вачів, умов базування та забезпечення, бойової виучки особового складу. Значення цих показників на підставі досвіду бойової робо-
ти регламентуються відповідними документами.
Час приведення частин (підрозділів, екіпажів) у вищі ступені бойової готовності та вильоту винищувачів з різних ступенів бо-
йової готовності визначається дослідним шляхом та встановлюється наказами та директивами.
Час зльоту групи винищувачів визначається за формулою:
^Ф = клі + (п-1)&, (6.18)
де („і - час зльоту першого літака (пари); п - кількість літаків (пар), що злітають; Л - інтервал зльоту.
Час перехоплення повітряної цілі - час, який витрачається винищувачем на набір висоти, горизонтальний політ, розгін літака
(Ірозг), маневр для виходу у вихідне положення для атаки (і^,);
Іпер “ Інв 4" (щ + (розг 4- Іман , (6.19)
Д рз - Ь сум
де ГП Ув ’ = ^наб + ~ сумарна відстань. Складається з окремих ділянок шляху. Залежить тільки
від вибраної програми польоту винищувачів і для заданої висоти та кінцевої швидкості винищувачів є величиною постійною.
263
РОЗДІЛ 6. АВІАЦІЯ ППО
Вона характеризує той необхідний шлях, який повинні пройти винищувачі для набору заданих висоти та швидкості. Величина
Ьсум визначається за профілем польоту винищувачів, що приведені в інструкціях щодо бойового застосування авіаційних комплек-
сів перехоплення, або згідно з інструкцією щодо розрахунку дальності та тривалості польоту винищувача; Ув - швидкість винищу-
вача на ділянці горизонтального польоту.
Час польоту до виходу в район виконання бойового завдання розраховується відповідно з вибраною програмою польоту
винищувачів на знищення повітряних цілей з моменту закінчення зльоту групи (збору групи) до моменту виходу винищувачів на
рубіж вводу в бій (рубіж знищення повітряного противника):
Ірз = Інв + Ігп + їрсвг + ^ман “^^руб, (6.20)
де сіїруб - час польоту до рубежу знищення повітряного противника.
Тривалість повітряного бою при атаці неманевруючої цілі:
Інмц _ ~
пб УВ±УЦ Ур±Уц, (6.21)
де - дальність виводу винищувачів у вихідне положення для атаки; сіт1 - дальність пуску ракет; Уц - швидкість цілі; Ур - абсо-
лютна швидкість ракети. Знак ставиться при атаці у передню півсферу, знак “ - “ - в задню півсферу.
Тривалість чергування винищувачів у повітрі розраховується згідно з інструкцією щодо розрахунку дальності та тривалості
польоту літака з врахуванням часу, необхідного для польоту на повітряний бій із зони чергування. Результати розрахунків подають-
ся у вигляді графіків та таблиць. Цей показник використовується для визначення можливості частин щодо безперервного чергуван-
ня у повітрі за один виліт або за виділений льотний ресурс, а також при складанні графіка бойового чергування.
Час безперервного чергування за один виліт в значній мірі залежить від висоти чергування та складу груп.
Час підготовки до повторного вильоту дозволяє визначити цикл бойового застосування винищувачів і впливає на організа-
цію сумісного застосування сил та засобів військ ППО. Час підготовки залежить від типу винищувача, варіанта озброєння, кількості
та характеристик засобів забезпечення та умов роботи. Внаслідок того, що підготовка літаків до повітряного вильоту здійснюється у
всіх підрозділах частини паралельно, загальний час підготовки буде визначатись часом підготовки підрозділів. Термін підготовки
літаків до повторного вильоту, як правило, лімітується підготовкою озброєння і зміна його варіанта може значно зменшити цей час.
Бойова напруженість характеризується кількістю бойових вильотів на екіпаж, підрозділ, частину на визначений період часу
(день, ніч, доба, місяць, період виконання бойового завдання). Бойова напруга встановлюється старшим начальником у залежності
від характеру бойового завдання та умов його виконання, рівня підготовки та фізичних можливостей льотного складу, кількості
бойових літаків, умов базування, забезпечення бойових дій та можливостей підготовки авіаційної техніки до бойових польотів.
Виходячи з фізичних можливостей льотчика та збереження боєздатності екіпажів, а також у залежності від типу літака макси-
мальне навантаження на льотчика протягом доби може плануватись на 3 - 5 вильотів, на перші 10 днів - 2 - 4 вильоти, на протязі ЗО
днів - 2 - 3 вильоти. При польотах вночі допустимим навантаженням є, як правило, 2-3 вильоти, кількість вильотів протягом міся-
ця повинна плануватись з врахуванням характеру дій противника та можливостей частини щодо кількості літако-вильотів на добу.
Враховуючи можливі втрати противника і своїх винищувачів прийнято вважати, що середня бойова напруга крила у перші дні
бойових дій буде складати до трьох вильотів крила на добу, у наступні дні місяця вона складе приблизно один виліт крила на добу.
Таким чином, середня бойова напруга крила на місяць складе 15-20 вильотів крила початкового складу.
6.3.3. Імовірнісні показники бойових можливостей авіації ППО
Основні імовірнісні показники бойових можливостей авіації ППО: повна імовірність ураження (знищення) цілі; математичне
сподівання кількості знищених цілей; потрібний наряд винищувачів; кількість одночасних наведень; математичне сподівання кіль-
кості своїх літаків, ураження яких можливе засобами ЗРВ.
Повна імовірність ураження (знищення) цілі. При наведенні винищувачів на повітряні цілі з КП (ПН) процес знищення цілі
можна уявити як такий, що складається з ряду подій, кожна з яких має імовірнісний характер. Такими подіями є наявність вільного
каналу наведення та вільного винищувача (групи) при виході цілі на рубіж підйому винищувачів, успішне наведення винищувача
(групи) на повітряну ціль, поразка цілі всіма призначеними на неї винищувачами.
Повна імовірність ураження (знищення) цілі може бути визначена, як добуток імовірностей цих подій
Руц-РоболРнавРц. (6.22)
Імовірність обслуговування цілі (Робсл) залежить від кількості бойових каналів та щільності потоку повітряних цілей. Кількість
бойових каналів обмежена кількістю винищувачів або кількістю каналів наведення. Імовірність обслуговування цілі може бути
визначена за допомогою формули Ерланга.
Імовірність наведення винищувача на повітряну ціль (Р^) залежить у значній мірі від величини помилок наведення за курсом
та висотою і визначається за допомогою інтеграла Лапласа.
Імовірність ураження цілі групою винищувачів визначається за формулою:
Рц=1-(1-Р1)2, (6.23)
де Рі - імовірність ураження цілі одним винищувачем; 2 - кількість винищувачів у групі.
Розрахунки повної імовірності ураження цілі проводяться з використанням відповідних довідників під час проведення попере-
дніх штурманських розрахунків.
Математичне сподівання кількості знищених цілей згідно з існуючою методикою підрахунків знаходиться як сума добутків кі-
лькості літаків - винищувачів різного типу (ТЧВ), помноженої на загальний коефіцієнт знищення повітряної цілі винищувачем цього
типу(Квд):
М = \В| Квді +... + N30 Кв». (6.24)
264
РОЗДІЛ 6. АВІАЦІЯ ППО
Загальний коефіцієнт знищення повітряної цілі враховує зниження бойових можливостей за рахунок різних чинників та умов,
за яких будуть вестись бойові дії і визначається за формулою:
КВА = КучКбгКеунКмпРІюрК^ (6.25)
де К.. - коефіцієнти відповідно участі літаків-винишувачів, їх боєготовності, ефективності управління і наведення, впливу ма-
невру цілі на ефективність виконання атаки літаком-винишувачем, впливу малих висот на знищення повітряної цілі; п - кількість
дій літака-винищувача по повітряній цілі; РІ10р - імовірність ураження цілі борговою зброєю винищувача.
Позитивним у цій методиці є простота виконання розрахунків, а також спільнйть підходу до оцінки бойових можливостей як
авіації ППО, так і зенітних ракетних військ. Недоліком є те, що не враховуються типи літаків противника, потенційні можливосгі
літаків-винищувачів визначаються без врахування тактики, умов обстановки, кількості засобів повітряного нападу противника у
нальоті. Розрахункові дані одержуються дещо завищеними.
Разом з тим необхідно визначити близькість методик авіації ВПС і авіації ППО щодо розрахунку бойових можливостей зі зни-
щення повітряних цілей.
Математичне сподівання кількості знищених цілей за один виліт крила може бути визначено:
МЦ=Р3-
(6.26)
де Р3 - повна імовірність знищення цілі групою винищувачів (з врахуванням протидії противника); N - кількість боєготових ви-
нищувачів у крилі; х - кількість літаків в групі на одну ціль.
Математичне сподівання кількості знищених цілей на протязі заданого періоду бойових дій (при послідовному вводі в бій)
визначаються за формулою:
Мц(і) — Р3 Аад Ізпбд, (6.27)
А№ - кількість винищувачів у повітрі.
Потрібний наряд винищувачів для гарантованого знищення повітряної цілі визначається за формулою:
де Рг- гарантована імовірність ураження цілей (цілі); Р] - імовірність ураження цілі одним винищувачем.
Наведена формула може бути відображена у вигляді номограм, побудованих для конкретних умов бойових дій. Застосування
таких номограм не потребує значних витрат часу, ними зручно користуватись у ході бойових дій.
Кількісні показники можливостей з наведення авіації ППО розраховуються, виходячи зі створеної системи управління вій-
ськами та зброєю з врахуванням оснащення пунктів управління авіації ППО відповідними засобами автоматизації:
т п
1Чн=ХЇКн].
І = 1 ] = 1
т п
і=Н=і
(6.29)
(6.30)
де 1ЧН - загальна кількість наведень авіації ППО; 1ЧЦ - загальна кількість цілей, на які наводяться винищувачі; К^ - кількість на-
ведень системою управління ]-го типу; Кч - кількість цілій, на які наводяться винищувачі системою управління та наведення ]-го
типу; п - кількість систем управління)-го типу в угрупованні; т - кількість типів систем управління.
Джерела та споживачі радіолокаційної інформації визначаються у відповідності до існуючого угруповання своїх та взаємодію-
чих військ і сил, а також прийнятою схемою проходження бойової та розвідувальної інформації.
Ефективність управління наведенням винищувачів на цілі
К = N /И
х^упр.н ^нсер' нмакс (631)
Де Купрн - коефіцієнт, який характеризує відносну кількість можливих наведень при даній системі управління; Пнсер - середня кі-
лькість наведень, які реалізуються з КП (ПН); 1Чнмакс- максимально можлива кількість наведень в ідеальному випадку (умовах).
Математичне сподівання кількості своїх лпаків, ураження яких можливе ЗРВ у разі порушення умов безпеки при діях в
одній зоні визначається за формулою:
^ = Мв(1-(1-Рпте(1-Рт)КсАК“, (6.32)
ІЧП - математичне сподівання кількості уражених своїх літаків; Пв - кількість своїх винищувачів, виконуючих бойові завдання у
зонах ураження ЗРК; Рпзрк - імовірність ураження ЗРК; Р^ - імовірність правильного розпізнавання цілі; Кс - ступінь централізації*
управління або якості взаємодії (при автономних діях винищувача (Кс = 1); К3 - кількість ЗРК, через зони яких проходить винищу-
вач; Кбв- кількість бойових вильотів.
6.4. Планування повітряного бою
Сучасний повітряний бій характеризується високою швидкоплинністю, швидкою зміною обстановки, складністю одержання й
обробки інформації про противника і положення своїх винищувачів (груп) у повітрі. Все це визначає необхідність завчасного
планування повітряного бою.
Планування повітряного бою - детальна розробка змісту і послідовності виконання виділеними силами бойових завдань в
умовах, що прогнозуються, розподіл зусиль, організація взаємодії’, всебічне забезпечення й управління. Планування повітряного
бою може виконуватись до отримання бойового завдання і уточнюватись після його отримання.
265
РОЗДІЛ 6. АВІАЦІЯ ППО
До отримання бойового завдання повітряні бої плануються для виконання можливих основних бойових завдань, які вирішу-
ються винищувачами в ході бойових дій. Таке планування дозволяє командиру та льотному складу підготуватися до виконання
конкретного вильоту за мінімальний час або виконати його без додаткової підготовки.
Після отримання бойового завдання, при наявності часу на підготовку для його виконання, проводиться уточнення раніше роз-
робленого плану, його конкретизація з доведенням змін до льотчиків на землі.
План повітряного бою повинен передбачати декілька варіантів дій противника і для кожного варіанта - найбільше доцільні дії
своїх винищувачів. Тому планування повітряно» бою в сучасних умовах базується на математичному моделюванні.
Моделювання повітряного бою. Моделювання, як метод дослідження, сприяє проникненню в суть повітряного бою, вияв-
лення кількісних оцінок його ефективності. Для моделювання повітряного бою використовуються фізичний (натурний), уявний
(знаковий) і комбінований методи моделювання.
Суть фізичного (натурного) моделювання полягає в тому, що воно відтворює бій зі зберіганням (або імітацією) основних
сторін його фізичної природи (місцевість, погода, час доби, літаки, озброєння), а також з імітацією застосування озброєння. Прикла-
дом натурного моделювання є дослідницькі польоти на повітряний бій.
Суть уявного моделювання полягає в умовно видному дослідженні моделі повітряного бою, яка представляється у вигляді
словесного логічного, графічного, графоаналітичного або математичного опису без реального відтворювання притаманних їм фізи-
чних сторін. У цих моделях прогнозуються дії противника, можливі дії своїх сил, надаються оцінки можливого ходу і результатів
повітряного бою за різними варіантами.
Комбіноване моделювання є сполученням фізичного і уявного, при якому натурно перевіряються лише окремі елементи
явища, процесу.
Різновидністю уявних моделей є математична модель, під якою розуміється система математичних залежностей і логічних
правил, що дозволяє з достатньою повнотою і в певному взаємозв’язку описати фізичні та інформаційні процеси, які властиві пові-
тряному бою, і визначити необхідні вихідні величини за відомими вхідними даними.
Математичні моделі повітряного бою розподіляються: за кількістю літаків - на моделі одиночних і групових боїв; за при-
значенням - на дослідницькі і навчальні; за способом побудови - на оціночні, імітаційні та оптимізаційні; за застосованим матема-
тичним апаратом - на аналітичні, статистичні та змішані.
Основні етапи моделювання повітряного бою: постановка завдання, формулювання замислу і визначення варіантів бою, які
слід моделювати; вибір і підготовка вихідних даних та матеріалів для моделювання; побудова моделі бою графічно або за допомо-
гою макетів траєкторій руху цілі та винищувачів (розробка алгоритму, ввід даних в ПЕОМ), здобуття припустимих значень параме-
трів виконання тактичних прийомів; аналіз і оцінка здобутих результатів; вибір оптимального тактичного прийому для проведення
повітряного бою; формування тактичних висновків і вибір варіанта повітряного бою.
Зміст моделювання: побудова траєкторій руху літаків (груп) відповідно з відпрацьованим замислом бою; визначення просто-
рово-часових характеристик усіх груп, що беруть участь у бою; оптимізацію варіантів бойового завантаження літаків, складу груп
тактичного призначення, розподілу льотчиків за групами з урахуванням рівня підготовки; порядок використання засобів ураження і
РЕБ; визначення результатів бою.
Математичне моделювання на ЕОМ дозволяє врахувати значну кількість факторів, що впливають на повітряний бій та дає
можливість швидко розглянути значну кількість варіантів обстановки та рішень на ведення повітряного бою з метою визначення
ефективного варіанта.
Вихідні дані для моделювання
Постійні дані: типи своїх літаків і противника, типові бойові порядки і тактичні прийоми ведення повітряного бою; варіанти
бойового завантаження; льотно-тактичні характеристики (діапазон висот і швидкостей польоту, розгінні характеристики, граничні
перевантаження, радіуси усталених віражів, крива погоні і прицілювання, циклоїди - траєкторії відносного руху); рубежі знищення;
час ведення повітряного бою на різних відстанях від аеродромів; характеристики оглядово-прицільних систем (ОПС); озброєння
(зони огляду і супроводження ОПС, області стрільби, імовірності ураження); можливості сторін щодо РЕБ; можливості пунктів
управління; можливості льотного складу щодо ведення повітряного бою (рівень підготовки).
Змінні дані: характер бойових дій противника; бойове завдання своїх сил; спосіб, умови бойових дій і ведення бою; район бою.
Графоаналітичне моделювання полягає у відтворенні процесу повітряного бою за допомогою траєкторій маневру літаків, зон
огляду оптичних засобів прицілювання і візуально, областей стрільби з наступною оцінкою візуального положення цілі і винищу-
вача, можливостей спостерігання за противником і ведення вогню на різних ділянках траєкторії
При моделюванні маневреного повітряного ближнього бою необхідно: послідовно (крок за кроком) будували траєкторії
супротивних винищувачів; наприкінці кожного кроку визначати можливість застосування зброї і, якщо є така можливість,
результат її застосування (може бути збитий чи ні, а також зіб’є або не зіб’є супротивний винищувач); якщо застосувати зброю не
представилось можливим або в результаті застосування зброї супротивний винищувач не був збитий, то процес моделювання
продовжували, тобто далі будували траєкторії винищувачів і визначали можливість застосування зброї і т.ін.
В основі побудови траєкторій винищувачів лежить замисел на ведення бою. Він формулюється у залежності від дій противника
і своїх можливостей. Оскільки дії противника при плануванні маневреного повітряного бою прогнозували достатньо складно, то
побудову траєкторій доцільно робити з огляду на можливо більшу кількість варіантів маневрування супротивних винищувачів.
Для систематизації перебору можливих варіантів може використовувались дерево рішень. Після вибору можливих варіантів
маневрування винищувачів будуються траєкторії польоту. Для побудови траєкторій польоту винищувачів час виконання маневру
розбивається на інтервали часу Ді, причому приймається, що за кожен такий інтервал швидкість Ув і перевантаження пх і Пу є
постійними. Тоді радіуси кривизни траєкторії в горизонтальній і вертикальній площинах розраховуються за формулами:
V2
г2 =-----—; (6.33)
£Пу 8іпу
266
РОЗДІЛ 6. АВІАЦІЯ ППО
V2
ув
(6.34)
ГЬ ’
£(ї1у -СО8 0)
де у - кут крену; 0 - кут тангажу; § = 9,81 (м/с2) - прискорення вільного падіння.
Зміна швидкості ДУвза час Аі визначається за формулою
АУв = § (пх - созб) Ді . (6.35)
Визначивши радіуси кривизни траєкторії в обох площинах і збільшення швидкості за час Аі, графічно будують траєкторії,
визначають швидкості та наприкінці кожного кроку оцінюють можливість застосування зброї одним або обома винищувачами.
Після побудови траєкторій і оцінки доцільності рішень у кожному “вузлі” виділяють “гілки”, реалізація яких найбільш імовірна.
Саме ці варіанти записуються в план повітряного бою.
Моделювання дальнього ракетного бою складається з визначення точки, у якій очікується перехоплення, і результатів
вогневого впливу.
Перехоплення - процес, етап бойового польоту для зустрічі з повітряним противником. Виконується за командами з ПУ від
вильоту до виявлення противника борговими засобами або візуально.
Точка, у якій очікується перехоплення, графічно визначається в такій послідовності.
З аеродрому винищувачів проводиться дуга радіусом Сь а з точки О, у якій виявлена ціль, у напрямку її польоту відкладається
відрізок, рівний УціЕ. Якщо ціль (точка Ц) після цього виявиться усередині кола радіусом Сь то це і є точка, у якій очікується
перехоплення (рис. 6.4).
Рис. 6.4. До визначення точок перехоплення
Якщо ціль (точка Ц1) виявилась поза колом радіусом Су, то проводиться збільшення часу А( і визначаються нові положення цілі
та винищувача Для цього відрізок 0і - Ц1 збільшується на розмір УцДі, а радіус - на добуток швидкості винищувача Ув у
горизонтальному польоті на Ді Якщо ціль знову не ввійшла в коло радіусом + УвДі, то вся побудова повторюється до того
моменту, поки ціль не виявиться усередині деякого кола радіусом Су + тУВА1 (т - кількість ітерацій).
Для визначення вогневого впливу будуються графи розподілу зусиль винищувачів, що атакують. Графи можуть бути
простими, якщо кількість атакованих літаків більше атакуючих (рис. 6.5, а).
4" “С "С "С
а)
В)
Рис. 6.5. Типи графів
У цьому випадку імовірність знищення кожного атакованого винищувача буде
Р. = Ро,
(6.36)
267
РОЗДІЛ 6. АВІАЦІЯ ППО
а втрати атакованої групи
Ва = Р0Ма, (6.37)
де N3 - кількість атакованих літаків.
Якщо кількість винищувачів, що атакують, більше кількості атакованих літаків, то граф стає складним (рис. 6.5, б). Тоді
імовірність знищення кожного атакованого літака розраховується за формулою
Ра= 1-(1-Ро)\ (6.38)
де 2 - кількість винищувачів, що зосереджують вогонь на одному атакованому літаку.
Втрати атакованої групи також визначаються за формулою (6.38).
Нарешті, може бути випадок, коли для однієї частини атакованої групи граф стає складним, для іншої - простим (рис. 6.5, в). У
цьому випадку імовірності втрат визначаються для кожної підгрупи окремо, а потім втрати підсумовуються.
Якщо за логікою ведення бою атакована група після нанесення по ній удару може завдати удар у відповідь, то моделювання
повітряного бою проводиться в два етапи. На І етапі визначаються втрати першої групи, що підпала під удар, а на II етапі групи
міняються місцями. При цьому склад першої групи, що підпала під удар, зменшується на розмір втрат Па.
З описаною методикою може бути проведене моделювання повітряного бою зі складною груповою ціллю, що складається з
декількох груп різного тактичного призначення. У цьому випадку спочатку розробляється замисел ведення бою, а потім крок за
кроком моделюється весь бій. Причому втрати супротивних винищувачів визначаються з урахуванням замислу ведення бою.
Наприклад, по групі прикриття завдає удару група винищувачів, що сковує, але група прикриття, не ув’язуючись з нею у бій, завдає
удару по винищувачах, що ринуться атакувати ударну групу, яка нею прикривається (рис. 6.6).
Група винищу-
вачів, що
сковує
Рис. 6.6. Схема замислу повітряного бою
У ході такого моделювання рекомендується оцінити реальність і ефективність варіантів замислу, визначити найвигідніші
варіанти розподілу зусиль груп різного тактичного призначення.
Варіанти повітряного бою, що призводять за результатами моделювання до найбільшої ефективності, вносяться в план
повітряного бою.
6.5. Ведення повітряного бою сучасних винищувачів із малопомітними літаками
Парк військової авіації у світовому масштабі поки ще не має у своєму розпорядженні великої кількості малопомітних літаків
(МПЛ). Вони є тільки у ВПС США - близько 60 тактичних ударних літаків Е-117А і 15 стратегічних бомбардувальників В-2А.
Недоліки малопомітних літаків: залишаються помітними в деяких діапазонах електромагнітного спектра; не можуть бути
прихованими від візуального спостереження; поступаються звичайним винищувачам за швидкістю польоту, маневреностними та
іншими тактико-технічними характеристиками.
Напрямки боротьби з малопомітними цілями: розробка тактичних прийомів пошуку і ураження малопомітних літаків су-
часними винищувачами; підвищення рівня підготовки льотного складу; поліпшення інформаційного забезпечення і управління
винищувачами.
Тактичні прийоми пошуку малопомітних літаків сучасними винищувачами.
Найбільш результативним вважається пошук за допомогою бортових РЛС. Хоча ефективна площа розсіювання (ЕПР) таких лі-
таків складає десяті і навіть соті частки квадратного метра, але саме ці станції мають найкращі характеристики у порівнянні з інши-
ми засобами пошуку. При цьому враховується, що МПЛ можуть входили в зони огляду бортових РЛС (БРЛС) винищувачів на
різних висотах і проходити через них під різними курсовими кутами, причому їх ЕПР, а отже, і дальність виявлення будуть залежа-
ти від різниці висот і курсів між ними (рис. 6.7).
Важливим чинником є вибір оптимальних напрямків і висоти польоту винищувачів щодо гаданого місцезнаходження против-
ника, на яких ЕПР його літаків буде максимальною. Такі значення можуть бути отримані при пошуку МПЛ під курсовими кутами
45° - 70° у передній півсфері, 155° - 180° у задній півсфері і різниці висот 2 000 - 3 000 м. При спостереженні під іншими курсо-
268
РОЗДІЛ 6. АВІАЦІЯ ППО
вими кутами і на одній висоті радіолокаційна помітність зменшується в декілька разів. Звичайно, отримані значення не такі вже й
великі, але у разі заміни БРЛС іншими джерелами інформації - ще менші. Так, при використанні ІЧ прицілів навіть при пошуку
винищувачами цілей із задньої півсфери, де їх теплове випромінювання досягає максимуму, дальність виявлення залишається в
1,3 рази менше, ніж у випадку застосування БРЛС. Щодо можливостей візуального виявлення літаків супротивних сторін, то вони
порівняні, і обидві сторони неспроможні поки що перешкодити цьому.
При груповому пошуку в заданому районі ширина його смуги (Ьп) залежить від кількості винищувачів, що за-
лучаються, і розмірів зон огляду їх БРЛС. Основними вимогами при цьому є, з одного боку, перегляд максимально
можливого повітряного простору протягом одиниці часу, а з іншого боку - недопущення пропуску цілей.
Обом вимогам відповідають бойові порядки пар винищувачів, розтягнені по фронту та ешелоновані в глиби-
ну. Водночас, чим ширше буде смуга пошуку (Ьп), тим більше повинні бути інтервали між винищувачами (]), а ви-
ходить, і менше шансів не пропустити противника непоміченим.
Рис. 6.7. Можливі дальності виявлення малопомітних літаків винищувачами
Узагальнюючи досвід бойового застосування малопомітних літаків можна відзначити, що вони не тільки мали низький рівень
помітності, але і діяли переважно в темний час доби поодинці або парами. Польоти до об’єктів ударів літаки здійснювали без входу
в зони ураження ЗРК малої дальності та ближньої дії, оснащених оптичними системами прицілювання, на висотах не нижче
6 300 м, за маршрутами із важко прогнозованими змінами курсу. При цьому удари завдавались з малих висот, а польоти виконува-
лись в спеціально відведених коридорах, щоб уникнути сутички з іншими літальними апаратами.
Тактичні прийоми ураження сучасними винищувачами малопомітних літаків у повітряних боях розробляються з урахуванням
двох основних чинників. По-перше, при меншій дальності виявлення таких літаків сучасними винищувачами тільки екіпажі мало-
помітних літаків одержують можливість вести дальні повітряні бої. Визначені обмеження призводять до зменшення дальності за-
стосування по МПЛ ракет із радіолокаційними ГСН і те, що ракети, оснащені ІЧ головками, можуть уражати цілі тільки з задньої
півсфери. У таких умовах винищувачам після відхилення від атак у дальньому повітряному бою варто було б продовжувати збли-
ження з МПЛ до дальності візуальної видимості, де шанси супротивних сторін зрівнюються, і спробувати вступити в ближній пові-
тряний бій. Але МПЛ діють, як правило, вночі, тому в такому бою при відсутності візуального зв’язку відмітки цілей на екранах
прицілів винищувачів будуть то зникати, то з’являтися в несподіваному місці. Візуально ж цілі можна частково виявляти на фоні
Місяця, при наявності значних пожеж на землі або в умовах штучного освітлення з використанням освітлювальних ракет, бомб.
По-друге, на хід боїв впливає тактика екіпажів МПЛ. Виявивши винищувачі першими, вони можуть змінювати курс, висоту
польоту і виходити на такі ракурси, при яких ЕПР їх літаків буде мінімальною, розмикати бойові порядки в групах, щоб знизити і
без того малу сумарну ЕПР і виконувати маневр для відхилення від бою або вступати в бій. При виявленні винищувачів на зустріч-
них курсах і курсах, що зустрічно перехрещуються, екіпажі будуть швидко розвертатися в їх сторону і запобігати ураження своїх
літаків шляхом постановки активних завад. Якщо ж винищувачі атакують із задньої півсфери, то для виходу з області можливих
атак проводиться відстріл ІЧ трасерів, пасток, дипольних відбивачів. Для ведення повітряних боїв передбачається встановлювати на
МПЛ ракети класу ‘"повітря-повітря”.
Один із можливих варіантів використання тактичних прийомів винищувачами показаний на рис. 6.8.
Замисел командира полягає в тому, щоб, ввівши в оману противника щодо своїх намірів оманними діями нечисленної демон-
стративної групи (груп), перешкодити йому завчасно виявити ударну групу. Остання ж після виходу на дальність упевненої види-
мості цілі розмикається на окремі пари, що атакують МПЛ одночасно з різних напрямків. Літаки прикриття забезпечують захист
ударної групи від атак винищувачів противника, а у випадку їх відсутності також беруть участь у діях цієї групи.
269
РОЗДІЛ 6. АВІАЦІЯ ППО
Рис. 6.8. Тактичні прийоми, що використовують звичайні винищувачі
Таким чином, екіпажі МПЛ будуть позбавлені найважливішої переваги - прихованості дій, ініціатива залишиться у винищува-
чів, і тому перша атака може виконуватись із застосуванням добре відомих тактичних прийомів. Якщо ж вона виявиться невдалою,
то винищувачі будуть вести бій з урахуванням взаємного положення літаків обох сторін, обираючи маневри і напрямки зближення
так, щоб ЕПР цілей була якнайбільшою, розвертатися на них раніш, чим ті вийдуть на дальність застосування своєї зброї, і уражати
противника ракетним вогнем. При цьому, незважаючи на дещо слабку маневреність МПЛ, винищувачі повинні маневрувати енер-
гійно, із великими перевантаженнями, щоб випереджати противника в ході всього бою.
Підвищення рівня підготовки льотного складу з точки зору дій у складних тактичних ситуаціях, якими будуть повітряні бої
з МПЛ, а також відпрацьовування тактичних прийомів і перевірку їх ефективності доцільно проводити в умовах, близьких до реа-
льних. Такі умови можуть бути створені на спеціальних полігонах, де буде моделювались відповідна обстановка, в якій звичайно
діють малопомітні літаки або їх аналоги.
Значна увага приділяється питанням морально-психологічної під готовки льотного складу, елементи якої не можуть повною мі-
рою моделюватися за мирного часу, але відіграють дуже важливу роль у боях із МПЛ. Справа в тому, що невидимий ворог завжди
більш страшний, а тому і більш сильний. Діючи в районах, контрольованих малопомітними літаками, льотчики перебувають під
загрозою раптової атаки і можуть бути збиті раніш, ніж виявлять противника. Вони відчувають постійну нервово-психологічну
напругу ще до початку реального бою, втрачають спроможність тверезо оцінювати навколишнє оточення. Безсилля перед против-
ником, гіпноз незримої небезпеки породжують страх, розгубленість, деморалізують волю до перемоги. Льотчики постійно опиня-
ються у стресових ситуаціях, багатократний вплив яких призводить до розладу психічної діяльності та втрати боєздатності.
Для впевнених дій у таких умовах необхідно якомога повно інформувати льотчиків про повітряну обстановку, тому що у випа-
дку непевності вони змушені будуть приймати за ворожі всі літаки, що знаходяться поблизу. Для кращого сприйняття інформації з
урахуванням психофізіологічних вимог вважається доцільним подавати її в прицільно-інформаційних системах у вигляді графічних
символів, побудованих на основі зорової уяви польоту, сформованого у свідомості. Знизити негативні впливи на психіку льотчиків
спеціалісти намагаються і шляхом створення багаторівневої системи психологічної допомоги, розвитку навичок адаптації, емоцій-
ного самоконтролю, а також інших відомих заходів психологічної реабілітації.
Поліпшення інформаційного забезпечення винищувачів йде шляхом обладнання пунктів управління більш досконалими
технічними засобами для виявлення малопомітних літальних апаратів. Основними джерелами інформації, незважаючи на їх обме-
жені можливості, залишаються наземні РЛС. Досвід бойових дій показує, що дальність дії РЛС сантиметрового діапазону по МПЛ
скорочувалась більш ніж удвічі, що не дозволяло мати суцільне радіолокаційне поле, і тому проводка МПЛ була нестійкою. Ця
обставина позбавляла пункти управління можливості безперервно стежити за їх польотами. Але без регулярної інформації не може
бути і мови про завчасне оповіщення винищувачів про небезпеки, що погрожують, і тим більше про наведення їх на МПЛ.
Випробовувалися й інші технічні засоби спостереження за МПЛ. Мало що дали в цьому відношенні експерименти з виявлення
МПЛ загоризонтними РЛС, а також спроби використовувати засоби радіотехнічної розвідки для виявлення таких літаків за випро-
мінюванням бортової радіоелектронної апаратури через незначне її вмикання екіпажами. Більш перспективними вважаються бага-
топозиційні РЛС із рознесеними передавачем і приймачами та літаки ДРЛВ, що опромінюють МПЛ не з передньої півсфери, а
зверху, де їх ЕПР більша
Ще одним шляхом поліпшення інформаційного забезпечення і управління є підвищення фахових навичок особового складу.
Головною фігурою на пункті управління стає висококваліфікований командир-оператор із бездоганним оперативно-тактичним
мисленням, спроможний постійно аналізувати поточну інформацію й організувати роботу всіх осіб, які беруть участь в управлінні.
270
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
7.1. Основи управління
Управління військами - цілеспрямована діяльність командирів, штабів та інших органів управління щодо підготовки військ
до виконання бойових завдань (підготовки бойових дій (бойового застосування)), підтримання постійної бойової готовності військ,
та організації виконання військами поставлених перед ними завдань в ході бойових дій (бойового застосування).
Головним завданням управління є забезпечення найбільш ефективного використання сил та засобів для досягнення постав-
леної мети при найменших затратах матеріальних засобів та людських ресурсів.
Основні вимоги до управління: оперативність, стійкість, безперервність, прихованість.
Оперативність у роботі командира та органів управління - спроможність усі свої функції виконувати швидко, з випере-
дженням противника, і разом з тим повно та якісно.
Для досягнення високої оперативності управління без втрати його якості першочергове значення надається високому професій-
ному рівню підготовки командирів та офіцерів органів управління, їх організаторським здібностям та вмілому використанню ними
АСУ спеціального призначення.
Стійкість та безперервність управління - спроможність забезпечити безперебійний зв’язок з підлеглими, постійне знання
командиром та штабом обстановки і можливість з їх боку впливати на хід бойових дій (бойового застосування) сил та засобів.
Виконання цього принципу може бути досягнуто: своєчасною та повною укомплектованістю органів управління висококвалі-
фікованими кадрами; правильною науковою організацією роботи штабів; всебічним технічним оснащенням штабів інформаційно-
розрахунковими системами; ефективним використанням АСУ спеціального призначення; забезпеченням високої живучості систе-
ми зв’язку та її завадостійкості; чіткою організацією бойового чергування; натренованістю органів управління з виконання функці-
ональних обов’язків у складних умовах; швидким відновленням порушеної взаємодії.
Прихованість управління полягає у збереженні в таємниці усіх заходів, що проводяться під час організації та здійснення
управління.
Щоб забезпечити прихованість управління необхідні: висока пильність усього особового складу; точний режим та чіткий поря-
док використання засобів зв’язку; обмеження кола осіб, які приймають участь у розробці бойових документів, дбайливе їх зберіган-
ня та дотримання заходів маскування.
7.1.1. Принципи управління силами та засобами
Основна мета управління силами та засобами з боку командира і штабу є постійна підтримка на високому рівні їх бойової
готовності. Друга мета управління - всебічна підготовка та забезпечення бойових дій (бойового застосування) для успішного вико-
нання бойового завдання.
Принципи управління силами та засобами: єдиноначальність; централізація управління з наданням ініціативи у визначенні
способів та шляхів виконання поставлених завдань; твердість і наполегливість в проведенні прийнятих рішень в життя; гнучкість;
всебічне застосування новітніх інформаційних технологій; особиста відповідальність командира за рішення, яке приймає, застосу-
вання підпорядкованих військ та результати виконання поставлених їм завдань.
Єдиноначальність полягає в тому, що командир націляється всією повнотою розпоряджувальної влади по відношенню до
підлеглих і несе повну відповідальність за всі сторони життя та діяльності військ. Командир керує під леглими на основі прав, нада-
них законами держави; положень військових статутів; настанов, наказів та директив старших начальників.
Централізація управління з наданням ініціативи у визначенні способів та шляхів виконання поставлених завдань реалізується
через способи управління.
Складні умови ведення сучасних операцій (бойових дій), різкі зміни обстановки, велика руйнівна сила сучасної зброї, а також
високий динамізм розвитку бойових дій вимагають швидкого, часом миттєвого, впливу на хід бойових дій шляхом прийняття під-
леглими самостійних рішень. Тому підлеглим повинна бути надана можливість прояву ініціативи і творчості при вирішенні постав-
лених їм завдань. Отже, в сучасних умовах в управлінні військами повинні розумно поєднуватись централізація і децентраліза-
ція. Характер такого поєднання може залежати від призначення органів управління, завдань, що вирішуються військами, та умов
обстановки.
При централізованому управлінні мета бойових дій, способи та шляхи її досягнення визначаються командиром.
При децентралізованому управлінні мету бойових дій визначає командир, а способи та шляхи її досягнення визначаються
командирами підпорядкованих з’єднань (частин).
Децентралізоване управління може застосовуватись при раптовому нападі повітряного противника, порушенні зв’язку з підпо-
рядкованими з’єднаннями (частинами), а також при відсутності своєчасної інформації, необхідної для вирішення завдань управлін-
ня централізованим способом.
Твердість та наполегливість управління - спроможність усіх без винятку офіцерів та командирів усіх рівнів прийняти сміли-
ве рішення, наполегливо провести його у життя, утримати у своїх руках керівництво підлеглими, зберегти організованість та домог-
тися виконання бойового завдання у будь-яких умовах обстановки.
Але при цьому, зважаючи нате, що бойові дії (бойове застосування) сил та засобів характеризуються частими, швидкими та рі-
зкими змінами обстановки, не слід допускати впертого дотримання раніше прийнятого рішення, коли це суперечить логіці та
271
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
здоровому' глузду. У таких умовах командиру необхідно вносити корективи та уточнення у раніше прийняті рішення та плани, а
також своєчасно доводити їх до підлеглих. Тому управління повинно бути не тільки твердим, але і гнучким.
Гнучкість управління - спроможність командира своєчасно уточнити раніше прийняте рішення, а якщо обстановка різко змі-
нилась, відмовитися від нього і прийняти нове рішення та перебудувати систему управління й методи своєї роботи відповідно до
нових умов обстановки.
Гнучкість управління стосується не тільки особисто командира, але і всієї системи управління. Для цього командир та органи
управління повинні мати надійний зв’язок з підлеглими, постійно знати обстановку, вчасно реагувати на її зміни, випереджувати їх
та запобігати можливим ускладненням.
Всебічне застосування новітніх інформаційних технологій спрямоване на покращання управління силами та засобами.
Інформаційна технологія - цілеспрямована організована сукупність інформаційних процесів з використанням засобів обчис-
лювальної техніки, що забезпечують необхідні: швидкість пошуку інформації і обробки даних, розосередження даних, доступ до
джерел інформації, незалежно від місця їх розташування.
Засоби інформатизації - електронні обчислювальні машини, програмне, математичне, лінгвістичне та інше забезпечення, ін-
формаційні системи або їх окремі елементи, інформаційні мережі та мережі зв’язку, що використовуються для реалізації інформа-
ційних технологій.
Особиста відповідальність командира за прийняті рішення, застосування підпорядкованих військ та результати виконання по-
ставлених завдань має важливе значення в управлінні військами. Поєднуючи в своїх руках всю повноту влади, командир несе осо-
бисту відповідальність за постійну бойову та мобілізаційну готовність підпорядкованих йому військ, успішне виконання ними бо-
йових завдань.
7.1.2. Зміст та суть управління
Зміст управління - комплекс функцій, які виконують командири та органи управління, як під час підготовки, так і у ході бойо-
вих дій (бойового застосування) з метою виконання бойового завдання.
Процес управління - безперервний послідовний організаційно-технічний процес, здійснюваний із широким використанням
різноманітних методів і технічних засобів формування керуючих впливів для досягнення заданої мети і відповідно до програми
системи управління.
Функції управління - поняття більш самостійне, загальне й укрупнене, ніж окремо взятий будь-який захід Воно включає де-
яку групу (сукупність) однорідних і взаємозалежних актів діяльності, що призводять до рішення визначеного завдання.
Основні функції управління: підтримання високої мобілізаційної та бойової готовності військ; безперервне і наполегливе до-
бування, збір, вивчення, відображення та аналіз даних про обстановку; прийняття командиром рішення; планування бойових дій
(бойового застосування); доведення бойових завдань до сил та засобів; організація та підтримка безперервної взаємодії; всебічне
забезпечення бойових дій (бойового застосування); організація системи управління; безпосереднє керівництво підготовкою військ
до виконання бойових завдань та їх бойовими діями; організація та здійснення контролю за готовністю сил та засобів до бойових
дій (бойового застосування), надання необхідної допомоги тим, кому вона потрібна.
Безперервне і наполегливе добування, збір, вивчення, відображення та аналіз даних про обстановку.
Командири та офіцери нижчих ланок управління самі можуть добувати дані про наземного, морського, повітряного противни-
ка, зараження місцевості та інше шляхом особистого спостереження за обстановкою, виконуючи у цьому випадку розвідувальні
функції. Усі інші органи управління збирають (одержують) дані з різноманітних джерел.
Для успішного управління підлеглими будь-якому командиру та органу управління потрібні такі дані, які прийнято називали
елементами обстановки: противник; свої війська; сусіди; умови виконання бойового завдання (місцевість, радіаційна обстановка,
гідрометеорологічні умови, час, пора року та доби, економічний стан району бойових дій (бойового застосування), соціально-
політичний склад населення).
Прийняття рішення командиром
Рішення командира є основою управління, а його прийняття - найважливішою творчою функцією та особистою діяльністю
комаццирачдиноначальника.
Рішення - обґрунтований на закономірностях та принципах воєнного мистецтва, правильному з’ясуванні одержаного бойово-
го завдання та оцінці обстановки результат творчого мислення та волі командира
Вимоги до рішення: відповідність динаміці розвитку подій, на які воно впливає; наукова обґрунтованість, тобто відповідність
очікуваної обстановки одержаному бойовому завданню, замислу старшого начальника, закономірностям та принципам бойового
застосування сил та засобів, закріплених у настановах та статутах; своєчасність прийняття, що дозволяє підлеглим ретельно підго-
туватись до його виконання та випередити противника у діях.
Умови для прийняття ефективного рішення: правильне усвідомлення поставленого завдання; відкинута надлишкова інфо-
рмація; враховано часткові упередження; вжиті заходи щодо прихованості прийняття рішення; погляди на вирішення найважливі-
ших проблем визначені та їм без обмеження можна слідувати; існують запасні варіанти ведення бойових дій; існує можливість змін
і зміни розглядаються, як можливий варіант розвитку подій (ведення бойових дій); послідовність та наполегливість виконання рі-
шення (бойових розпоряджень, завдань); рішення достатньо обмірковане.
Процес прийняття рішення у сучасних умовах повинен базуватися на точній інформації, бути ефективним та вільним від
емоцій та упереджень.
272
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Планування бойових дій (бойового застосування)
Прийняття командиром рішення нерозривно пов’язане з таким поняттям, як планування бойових дій (бойового застосуван-
ня). Це є з логічної та технічної точок зору єдиний і нерозривний процес. Після прийняття рішення процес планування не почина-
ється, а триває та завершується. Різкої межі між прийняттям рішення та плануванням бойових дій (бойового застосування) немає і
бути не може. Різниця буває лише у мірі деталізації тих або інших питань. У рішенні вони звичайно відображаються у більш зага-
льному вигляді у порівнянні з подальшим плануванням. Суть планування полягає у визначенні послідовності способів та термінів
виконання одержаного завдання.
Доведення бойових завдань до підлеглих та організація їх взаємодії’. Обидві ці функції за своєю суттю також нерозривно
пов’язані між собою. Командир, коли віддає бойовий наказ або бойове розпорядження підлеглим, зазначає, як вони повинні діяти
під час виконання своїх завдань та узгоджує їх зусилля відповідно до мети, часу та меж, тим самим доводить суть організації взає-
модії Тому ці обидві функції тісно пов’язані не тільки за своїм змістом, але і за часом виконання.
Всебічне забезпечення бойових дій (бойового застосування).
Мета цієї функції полягає у тому, щоб створити підрозділам необхідні умови для успішного виконання ними своїх бойових за-
вдань. Об’єктом управління при її здійсненні є підрозділи озброєння, тилу та спеціальних військ.
Організація управління.
Організація управління містить дві групи заходів: організаційно-тактичні та технічні.
Організаційно-тактичні заходи: розгортання КП та ЗКП, пунктів наведення ВА, обладнання їх технічними засобами управ-
ління, інженерне обладнання та маскування; розподіл (уточнення) завдань та функцій управління між органами управління різних
командних інстанцій та між посадовими особами, групами і напрямками; організація розвідки та визначення способів збору, пере-
дачі, обробки та відображення інформації; організація взаємодії з’єднань, частин родів військ з сусідами; розробка варіантів управ-
ління; визначення та розробка заходів, які забезпечують ефективне управління з’єднаннями, частинами в різних умовах обстанов-
ки; оцінка ефективності створеної системи управління за варіантами бойових дій та визначення раціональних способів управління;
організація бойового чергування на КП, ПН ВА і контроль за його несенням.
Технічні заходи: топогеодезичне забезпечення розгортання пунктів управління; наладка алгоритмів управління; розробка та
впровадження на КП і ПН ВА засобів автоматизації управління; спряження елементів АСУ з’єднань (частин) з АСУ сусідніх
з’єднань (частин); прийняття заходів щодо забезпечення захисту від завад РЕЗ та їх електромагнітної сумісності; створення на КП
та ПН ВА необхідних запасів матеріальних засобів д ля безперебійної роботи особового складу і апаратури.
Безпосереднє керівництво підготовкою військ до виконання бойових завдань та їх бойовими діями.
Робота командира, штабу, начальників відділів та служб з підготовки військ до бойових дій починається з моменту отримання
(уточнення) бойового завдання та всіх необхідних вказівок (розпоряджень) старшого штабу.
Ця робота містить у собі проведення всіх заходів, які складають зміст організації управління. При цьому об’єм, черговість захо-
дів, що проводяться і ступінь участі в них посадових осіб органів управління визначаються обстановкою, характером поставлених
завдань, встановленими строками готовності військ до їх виконання та виділеними матеріальними засобами.
Незалежно від обстановки при організації управління в першу чергу проводяться заходи, пов’язані з розгортанням КП і ПН ВА,
організацією бойового чергування на них та підтриманням їх у високій бойовій готовності.
Організація та здійснення контролю за готовністю сил та засобів до бойових дій (бойового застосування), надання необхідної
допомоги.
Головна його мета полягає у тому, щоб кожний об’єкт (суб’єкт) управління (солдат, офіцер) точно знав своє завдання і був в
усіх відношеннях готовим до його успішного виконання як особисто, так і шляхом застосування дорученої йому техніки та особо-
вого складу. Контроль за готовністю сил та засобів до бойових дій (бойового застосування) містить: вивчення фактичного стану
справ у підпорядкованих підрозділах; прийняття на основі такого вивчення рішення на усунення виявлених недоліків; доведення до
підлеглих відповідних розпоряджень (завдань).
Цикл управління - проміжок часу Т^, протягом якого здійснюється послідовне рішення завдань управління до повного їх ви-
конання в масштабі даної системи управління.
У загальному випадку він може бути розрахований за формулою:
Тцу — Іусв.завд + ^обр + ^оц.обст. + Іцр.ріш. + ^пост.зад ІцБЗ ^оц > (7• 1 )
де ^свзавд, ~ час, протягом якого здійснюється одержання бойового завдання від вищого командира і його усвідомлення органом
управління системи;
(обр - час, протягом якого проводиться добування даних про противника, обробка й узагальнення інформації про обстановку в
цілому;
^оцобст. - час, необхідний командиру (бойовій обслузі, штабу) для оцінки обстановки і підготовки даних для прийняття рішення;
іпрріш - час, що затрачується командиром на прийняття рішення (плану дій) із формулюванням конкретних бойових завдань вій-
ськам (частинам, підрозділам), що входять у дану систему управління;
^постзад. ~ час, необхідний командиру (штабу) на постановку завдань підпорядкованим підрозділам;
(цбз - тривалість циклу впливу бойових засобів підпорядкованих військ при виконанні ними бойових завдань;
<оц - час, протягом якого в органі управління системи здійснюється аналіз, узагальнення даних про результати бойових дій
військ і доповідь (бойові донесення) про виконання поставлених бойових завдань.
Здійснення самого процесу управління можливе при наявності в системі необхідної інформації. Інформація є одним із ключо-
вих найважливіших вхідних атрибутів щодо процесу прийняття рішення.
Інформація - сукупність визначених відомостей, необхідних для виконання властивій даній системі функцій відповідно до цілі
та програми цієї системи управління.
273
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Інформація, що використовується в будь-яких системах управління, повинна задовольняти двом основним вимогам: забезпечу-
вати за своїм змістом рішення визначеного кола завдань, характерних для системи даного типу, і мати єдину систему кодування, що
відповідає даній системі управління й іншим пов’язаним із нею системам. В ланках частина-з’єднання використовується оператив-
но-тактична інформація.
Класифікація оперативно-тактичної інформації: за призначенням - розвідувальна, бойова, звітна, довідкова та ін.; за дже-
релами отримання - радіолокаційна, радіотехнічна, видова та ін.; за представленням на засобах відображення - індивідуального
користування, колективного користування, вихідних пристроїв засобів зв‘язку; за характером обробки - первинна, вторинна, тре-
тинна та ін.; за складом - про угруповання противника, свої війська взагалі або дані по кожному повітряному об’єкту (координати,
характеристики та ін.); за якістю - точна, дискретна, достовірна та ін.; за цінністю - про раптовий удар, про напрямок головного
удару та ін.; за ступенем терміновості - особливої важливості, позачергова, поточна та ін.; за станом об’єктів управління - про
боєготовність, боєздатність, дислокацію, повсякденну діяльність та ін.; за характером використання - бойової діяльності, бойо-
вого чергування, бойової підготовки, повсякденної діяльності; за динамікою отримання - постійна (стаціонарна) та змінна
(динамічна).
Інформація також може бути цільовою, контекстуальною та мотиваційною.
Основні вимоги до інформації: своєчасність і безперервність надходження; достатня точність і дискретність, що забезпечує
рішення задач на даному рівні; простота кодування, що забезпечує негайне її використання в АСУ; достатній ступінь укрупнення
складу інформації, що відповідає визначеному рівню системи.
7.2. Система управління
7.2.1. Загальна характеристика системи управління
Організаційно-технічну основу управління військами складає система управління, яка створюється на базі стаціонарних і рухо-
мих командних пунктів.
Система управління - є упорядкована сукупність взаємозалежних і взаємодіючих елементів, підсистем, що утворюють єдине
ціле з метою досягнення в процесі функціонування визначеного (заданого) результату.
Будь-яка система управління складається з елементів (підсистем), що можуть виконувати в системі різноманітні функції.
Елемент системи - частина системи управління, що виконує в ній строго визначену функцію самостійно або в сукупності з
іншими однорідними або неоднорідними елементами.
До однорідних елементів, тобто якісно-тотожних, відносяться такі елементи, у яких загальні властивості переважають, хоча по
другорядних, несуттєвих ознаках вони можуть і відрізнятися.
До неоднорідних елементів відносяться такі елементи, що відрізняються один від одного за основними суттєвими ознаками,
тобто вони є за своїми функціями принципово різними елементами.
Підсистема - виділена за визначеними ознаками (властивостями, якостями, функціями і т.ін.) частина системи управління, що
виконує одну або декілька функцій, властивих даній системі управління.
У військовій справі для рішення завдань управління військами і зброєю створюються системи управління військового призна-
чення, що в усіх випадках відображають організаційно-штатну структуру військ (структуру систем озброєння) у будь-якому масш-
табі і на всіх рівнях.
Класифікація систем управління: за характером об’єкта управління - системи управління військами (СУВ) і системи управ-
ління бойовими засобами (СУБЗ); за масштабами і характером виконуваних задач - одноцільові та багатоцільові системи управлін-
ня; за областю бойового застосування - системи управління військами тактичного, оперативного і стратегічного масштабу; за скла-
дністю організаційної структури - однотипні, що складаються з однорідних елементів, і різнотипні (багатофункціональні); за особ-
ливостями протікання процесів управління в системах - імовірнісні та детерміновані; за ступенем автоматизації процесу управлін-
ня - неавтоматизовані (НСУ), автоматизовані (АСУ) і автоматичні системи управління; за характером переробки і використання
інформації на виході системи - інформаційні, що управляють, і комбіновані; за мобільністю - стаціонарні та рухомі системи управ-
ління.
Система управління військами (СУВ) - сукупність функціонально й ієрархічно пов’язаних органів управління, пунктів
управління та засобів управління (засобів зв’язку, засобів автоматизації управління військами, а також спеціальних засобів, що за-
безпечують збір, обробку і передачу інформації).
Система управління бойовими засобами (СУБЗ) - система, що забезпечує збір, обробку й аналіз інформації, необхідної для
оптимізації управління бойовими засобами з метою найбільш ефективного їх застосування.
Система управління повинна представляти собою сукупність функціонально зв’язаних між собою органів та пунктів управлін-
ня, забезпечених засобами автоматизації та зв’язку. Вона повинна бути автоматизованою і включати в себе три взаємозв’язаних між
собою підсистеми:
командно-сигнальну підсистему, яка забезпечує приведення та підтримання військ у потрібних ступенях бойової готовності;
автоматизовану підсистему бойового управління, яка забезпечує управління військами безпосередньо в процесі виконання бо-
йових завдань;
інформаційно-розрахункову підсистему, яка забезпечує командування та штаби на етапах підготовки бойових дій та відновлен-
ня порушеної бойової готовності в ході бойових дій.
Система управління включає органи управління, пункти управління та засоби управління.
274
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Органи управління - передбачені штатом колективи посадових осіб та структури, організаційно об’єднані для виконання пе-
вних функцій з управління підлеглими силами і засобами. В своїй сукупності та взаємозв’язку вони утворюють систему органів
управління.
Органи управління призначені для виконання функцій з управління військами в різноманітних ланках. В усіх випадках вони за-
ймають центральне і визначальне місце в системі управління.
Вимоги до органів управління: знаходитись у постійній готовності до керівництва підлеглими; бути здатними виконати за
короткі терміни завдання, що покладаються на них; мати кількість підпорядкованих (посадових осіб, органів управління, підрозді-
лів), що відповідає нормам керованості; бути малочисельними та простими за структурою; мати у своєму складі різноманітних
фахівців; зберігати певне співвідношення кількості офіцерів та сержантів (солдат).
Підтримка органів управління у постійній готовності до керівництва підлеглими.
Готовність органів управління і всієї системи управління повинна бути вище бойової готовності підрозділів. Тільки при додер-
жанні даної умови командир та штаб у змозі вчасно та якісно організувати наступні дії підлеглих.
Заходи з підтримки органів управління у постійній готовності: забезпечення високого морально-психологічного стану осо-
бового складу; укомплектованість органів управління підготовленими офіцерами та оснащення їх сучасними технічними засобами
управління; натренованість органів управління у виконанні функціональних обов’язків; наукова організація роботи штабів та інших
органів управління.
Здатність органів управління виконати за короткі терміни завдання, що покладаються на них.
У зв’язку зі збільшенням розмаху та динамічності бойових дій різко зросли обсяг та зміст завдань управління при скороченні
наявних термінів їх виконання. Тому органи управління повинні бути здатні вирішувати всі завдання за короткі терміни, що для сил
та засобів ППО можуть бути у межах кількох хвилин, а у ряді випадків і секунд. В рішенні цієї проблеми, поряд з високою підгото-
вкою офіцерів, важливе значення набуває науково обґрунтоване визначення складу та організаційно-штатної структури органів
управління.
Відповідність кількості підпорядкованих нормам керованості.
При розрахунку кількості підпорядкованих враховуються норми керованості, тобто допустиме максимальне число підпоряд-
кованих (посадових осіб, органів управління, підрозділів, частин), якими у стані ефективно керувати командир та штаб. Норма не є
єдиною для всіх інстанцій. Вона залежить від змісту та складності завдань, що виконуються підпорядкованими, міри надання їм
самостійності, місця та ролі цих осіб при бойовому застосуванні і т.ін.
Встановлено, що у будь-якій сфері управління один начальник може ефективно направляти діяльність у середньому 5 - 10-ти
безпосередньо підпорядкованих йому осіб. Надлишок збільшення чисельності підпорядкованих одній особі створює ситуацію
“некерованості”. Підпорядкований не одержує вчасно завдань та вказівок про зміст роботи і залишається поза полем зору команди-
ра.
Обґрунтоване визначення норми керованості витікає із розрахунку можливостей органів управління. Порушення цієї вимоги
веде до зниження ефективності управління.
Малочисельність та простота структури органів управління
У теорії та на практиці деякі посадові особи вважають, що основним шляхом підвищення оперативності управління є збіль-
шення чисельності органів управління. Досвід переконує в тому, що чим більше склад органу управління, тим складніше стає орга-
нізація діяльності людей, тим більше часу займають різноманітні узгодження, обговорення та взаємна інформація, тим складніше
структура органу управління. У кінцевому підсумку збільшення чисельності органів управління веде до запізнення виконання захо-
дів з управління, перевантаження одних та недонавантаження інших виконавців. Тому краще мати малочисельні органи управління
з простою структурою. Це дозволить чітко організувати роботу всіх виконавців, особливо при оснащенні органів управління персо-
нальними ЕОМ, включеними у єдину інформаційну мережу.
Важливе значення має забезпечення високої економічності, що досягається спрощенням структури, зменшенням чисельності
органів управління та максимальним скороченням обслуговуючого персоналу. Такі заходи можуть привести до скорочення видат-
ків на безпосереднє утримання керівницького апарату, на його підготовку, обслуговування, зменшення витрат транспортних засо-
бів, засобів зв’язку та АСУ.
Але скорочення органів управління, що проводиться без науково обґрунтованих розрахунків, нічого, крім шкоди, принести не
може. Склад їх залежить від складу, масштабу військового формування та об’ємів роботи. Ці положення з урахуванням інших ви-
мог покладено в основу визначення складу органів управління. Для цього визначається об’єм роботи, що підлягає виконанню в
різних умовах обстановки, беруться перевірені норми витрат часу на виконання кожної роботи з використанням передових методів
та ПЕОМ або інших технічних засобів і внаслідок багаторазових розрахунків за різноманітними варіантами визначається склад
органів управління. Рішення цього завдання виконується за допомогою математичних методів аналізу та моделювання.
Об’єктивний підхід до визначення чисельності апарату та структури органів управління - одна з умов, що забезпечують ефектив-
ність управління.
Органи управління повинні мали у своєму складі різноманітних фахівців.
Склад та структура органів управління повинні забезпечувати чітке, безупинне, кваліфіковане управління силами та засобами у
будь-яких умовах обстановки. При цьому в основу визначення структури береться принцип, що виправдав себе - розподіл праці за
видами робіт (спеціальностями) при точному розподілі функцій та заходів (завдань) між посадовими особами. Такий підхід до по-
будови органів управління дозволяє виключити паралелізм та дублювання у роботі, чітко розмежувати сфери дії та разом із тим
полегшує організацію управління військами, сприяє підвищенню оперативності у роботі. Наявність різних органів управління, що
відповідають за певний вид роботи, позитивно впливає на швидкості проходження інформації. Великий потік інформації*, що над-
ходить до системи управління, немов розчленовується по рукавах і тим самим забезпечує за короткі терміни його переробку. Зви-
275
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
чайно, таке рішення за відсутності належної організованості у роботі може призвести до паралелізму, особливо у збиранні даних
обстановки, млявості та затримки у виконанні тих робіт, у яких беруть участь виконавці від різних органів управління. Але наяв-
ність у кожного органу управління своїх специфічних задач та у кожної посадової особи певних функціональних обов’язків не ста-
вить нездоланної стіни у взаємовідносинах всередині органів управління та доповнюється готовністю офіцерів виконувати
обов’язки інших виконавців у порядку взаємозамінності.
Зберігання певного співвідношення кількості офіцерів та сержантів (солдат).
Писар, кресляр, програміст - це незамінні помічники офіцерів органів управління. Від якості їх роботи залежить також рівень
культури в оформленні бойової документації та її відображення на різних носіях (табло, екранах моніторів та ін.), скорочення тер-
мінів на планування бойового застосування та документування інформації. У тих органах управління, де порушена пропорція між
офіцерами та сержантами (солдатами) (недостатня кількість обслуговуючого персоналу), офіцери вимушені значну частину часу
витрачати на технічну роботу - підготовку для передачі телеграм, склеювання топографічних карт, перенесення обстановки з однієї
карти на іншу, зчитування друкованого тексту, підготовку схем, розробку та реалізацію програм для ПЕОМ і т.ін. Ці роботи можуть
бути з успіхом виконані сержантами та солдатами зі спеціальною підготовкою (середньо-технічною та вищою освітою). Тому не
можна розглядати всяке скорочення обслуговуючого персоналу як новий крок на шляху до утворення невеликих штатів та не бачи-
ти тих негативних наслідків, до яких воно призводить.
До органів управління відносять: командування (військ в цілому, об’єднань, з’єднань, частин, підрозділів); штаб (крім ротної
(батарейної) і взводної ланок управління), в тому числі штаби родів військ, озброєння і тилу; управління, відділи, служби родів
військ і спеціальних військ (для стратегічного і оперативного рівнів управління); управління, відділи, відділення і служби, що за-
ймаються питаннями тилового і технічного забезпечення, кадрової роботи, бойовою підготовкою, соціально-психологічною робо-
тою та іншими загальними питаннями управління військами; відділи, служби та інші підрозділи, що забезпечують діяльність само-
го апарату управління (господарські, фінансові та інші органи).
Командування - група керівного складу, до якої входять командир та його заступники, а також тимчасово створені (нештатні)
органи, призначені для виконання функцій управління частинами (підрозділами) у різних ланках.
Командир несе повну і особисту відповідальність за бойову й мобілізаційну готовність та підготовку підпорядкованих частин
(підрозділів), правильне їх застосування та успішне виконання поставлених перед з’єднанням (частиною) завдань за встановлені
строки у будь-яких умовах обстановки.
Командир керує підлеглими особисто та через штаб, а також через своїх заступників, начальників відділів та служб. Він зо-
бов’язаний вчасно прийняти рішення на бойові дії (бойове застосування), організувати його планування та підготовку, поставити
завдання підпорядкованим підрозділам, організовувати взаємодію та всі види забезпечення, твердо керувати підлеглими при вико-
нанні поставлених завдань.
Заступники командира з тилу, озброєння, начальники відділів та служб згідно з рішенням командира і вказівками начальника
штабу організують застосування (дії) підпорядкованих підрозділів та служб, несуть відповідальність за їх бойову та мобілізаційну
готовність, успішне виконання покладених на них завдань.
Основним органом управління є штаб. Штаб об’єднує та спрямовує зусилля всіх інших органів управління на забезпечення
своєчасного і повного виконання військами поставлених завдань.
Завдання штабу: забезпечення високої постійної бойової готовності; організація бойового чергування, бойової підготовки та
системи управління, забезпечення її безперебійної роботи; здійснення безперервного добування, збору, обробки та вивчення даних
обстановки; проведення необхідних розрахунків, оцінка противника, своїх підрозділів, системи управління, всіх видів бойового
забезпечення, радіоелектронної обстановки та інших умов бойових дій (бойового застосування); підготовка пропозицій командиру
для прийняття рішень; планування бойових дій (бойового застосування) та відпрацювання бойових документів; доведення завдань
до підрозділів, організація їх підготовки до бойових дій (бойового застосування); здійснення розробки та керування виконанням
заходів щодо запобігання видаванню хибної інформації, підтримання бойової готовності, взаємодії та всіх видів бойового забезпе-
чення; ведення обліку особового складу, озброєння, техніки, боєприпасів, пального та інших матеріальних засобів, радіоактивного
опромінення особового складу; контроль виконання поставлених командиром завдань та відданих розпоряджень; доповідь вищому
штабу про обстановку та прийняті рішення; інформування підпорядкованих та взаємодіючих штабів про зміни в обстановці; орга-
нізація та контроль забезпечення прихованості управління та збереження у таємниці заходів, що плануються; вивчення та узагаль-
нення досвіду бойових дій (бойового застосування) та доведення його до підрозділів.
Для безпосереднього управління несенням бойового чергування, бойового управління військами і бойовими засобами в ході
воєнних дій в органах управління у відповідності з бойовим розрахунком виділяються функціональні групи, для розміщення і за-
безпечення діяльності яких призначені пункти управління.
Пункти управління - спеціально обладнані й оснащені технічними засобами місця, з яких командири через свої штаби здійс-
нюють управління військами під час підготовки та ведення бойових дій (під час несення бойового чергування).
Для управління військами створюються: командні пункти, рухомі командні пункти (РКП), запасні командні пункти (ЗКП), ти-
лові пункти управління (ТНУ), пункти наведення винищувальної авіації (ПН ВА), допоміжні та інші пункти управління. Пункти
управління, як правило, оснащуються комплексами засобів автоматизації управління (КЗА).
Стаціонарні КП розгортаються у спеціально обладнаних, технічно оснащених і захищених спорудах. На стаціонарних КП в
мирний час організується і здійснюється бойове чергування черговими бойовими обслугами (черговими змінами).
Рухомі КП розгортаються у спеціально обладнаних машинах, як правило, при переведенні у вищі ступені бойової готовності
або з початком бойових дій.
Запасні КП створюються на випадок виходу із ладу основного КП або неможливості управління з нього військами. Запасний
КП повинен мати необхідну кількість каналів зв’язку, які забезпечують стійке управління. Запасний КП в ході бойових дій утриму-
ється в готовності до негайного прийому управління.
276
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
З тилового пункту управління здійснюється управління тиловими частинами і підрозділами. На ньому розмішуються і пра-
цюють заступник командира з тилу та офіцери тилу.
Пункти наведення винищувальної авіації створюються для підвищення можливостей з наведення винищувачів і збільшення
поля наведення. З ПН ВА здійснюється наведення винищувачів на повітряні цілі, управління винищувачами в повітряному бою і
контроль за польотом своїх літаків, особливо в зонах поразки ЗРВ.
Допоміжні ПУ створюються для управління угрупованнями військ, які діють на ізольованих або віддалених напрямках (райо-
нах). Для нього виділяються відповідні оперативні групи, закріпляються за ними підрозділи зв’язку і частини (підрозділи) забез-
печення.
Засоби управління (засоби зв’язку, засоби автоматизації управління військами, а також спеціальні засоби, що забезпечують
збір, обробку і передачу інформації) представляють собою організаційно-технічне об’єднання засобів, розгорнутих відповідно із
завданнями, які вирішуються військами і створеною системою управління. Це технічна основа системи управління, яка забезпечує
обмін всіма видами інформації між пунктами управління і між елементами пунктів управління.
Вимоги до систем управління протиповітряною обороною: безперервність функціонування в мирний час для забезпечення
роботи штабів та виконання завдань управління черговими силами і засобами ППО (зокрема і тих, які входять і до інших видів
збройних сил), взаємодія з органами управління повітряним рухом і оповіщення органів державного і воєнного управління про
загрозу повітряного нападу; функціонування в реальному масштабі часу для управління діями чергових сил, бойовими засобами
(зброєю) ППО при відбитті ударів (нальотів) противника з повітря; випереджаюча готовність системи управління у порівнянні з
готовністю військ (сил) ППО; адаптованість структури системи, тобто можливість її реконфігурацїі (нарощування) залежно від
завдань, що вирішуються в мирний час, при переході на воєнний стан і в ході ведення бойових дій.
Характерні особливості систем управління протиповітряною обороною: велика кількість багатофункціональних об’єктів,
що управляються (або сукупність підсистем, що управляються), що породжує, в свою чергу, інтенсивні потоки інформації, різно-
манітної та неоднорідної за складом, призначенням, засобами кодування і т.ін.; висока швидкодія систем, особливо на тактичному
рівні, яка обумовлена характером дій військ (сил) ППО при відбитті раптових, масованих ударів повітряного противника в склад-
них умовах обстановки; широкий діапазон зміни стану системи (при збереженні або перебудові структури) та висока динамічність і
темп зміни стану; функціонування системи на великих відстанях простору і в реальному масштабі часу; прийняття рішень коман-
дирами всіх ступенів за обмежені строки та при недостатній інформації про обстановку, що вимагає високої професійної підготов-
ки, вмінь і навичок у прийнятті рішень із високим ступенем ризику.
7.2.2. Структура системи управління
Структура системи управління - склад, порядок розташування елементів (підсистем) один відносно одного і сукупність стій-
ких зв’язків між усіма її елементами (підсистемами), що забезпечують цілісність системи при зміні внутрішніх і зовнішніх
чинників.
Структура системи - прояв форми її існування. Структура сама по собі виражає лише те, що залишається стійким, незмінним
при різноманітних перетвореннях у системі.
З одного боку, структура відбиває організаційну форму, з іншого боку - залежить значною мірою від тієї сукупності функцій,
що повинні бути реалізовані в процесі управління. При визначенні структури системи воєдино об’єднуються принципи управління,
технічні засоби, люди з їхніми методами і прийомами роботи в ході прийняття рішень на конкретному рівні управління і відповідно
до поставленої перед системою управління мети. Важливість зберігання структури системи управління військами підкреслює той
факт, що в збройній боротьбі протиборчі сторони намагаються в першу чергу порушити структуру систем управління.
Структура системи управління військ (сил) ППО, як і інших систем військового призначення, визначається організаційно-
штатною структурою частин і підрозділів родів військ, а також особливостями і характером вирішуваних бойових завдань.
На структури систем управління протиповітряною обороною впливають: очікуваний характер і способи дій повітряного
противника при подоланні системи ППО; загальна кількість однотипних (різнотипних) елементів (підсистем) і їх кількісні та якісні
характеристики з погляду цільового призначення; необхідність організації і здійснення взаємодії між елементами (підсистемами) як
усередині системи, так і поза нею в процесі функціонування; відносна відособленість (самостійність) окремих елементів (підсистем)
і різноманітний їх вплив на загальну ефективність системи; забезпечення постійної високої готовності до рішення раптово виника-
ючих задач, особливо при веденні бойових дій; необхідність рішення задач управління в реальному масштабі часу, в умовах його
гострого дефіциту, при недостатності інформації про дії повітряного противника; необхідність механізації й автоматизації вирішен-
ня завдань і процесів управління з метою підвищення якості й ефективності управління; достатньо велике взаємне просторове роз-
ташування елементів (підсистем) з урахуванням їх внутрішніх і зовнішніх зв’язків.
До типових структур систем управління відносяться: патріархальна, лінійна, функціональна, та лінійно-штабна (лінійно-
функціональна).
Структури патріархальна, лінійна і функціональна частіше усього застосовуються на нижчих рівнях управління, де загальна кі-
лькість елементів і об’єм вирішуваних завдань ще невеликі.
Найбільше поширення в системах управління одержала лінійно-штабна структура Вона представляє собою сполучення елеме-
нтів лінійної і функціональної структур, при якому все управління здійснюється лінійним (командир, начальник) і штабним апара-
том (штаб, функціональні відділи, служби) паралельно при пріоритеті першого.
Різновиди лінійно-штабної структури систем управління: лінійно-штабна з централізованим керівництвом, при якій віддача
всіх команд і розпоряджень керованим об’єктам по будь-яких каналах зв’язку здійснюється в системі тільки через лінійних керів-
ників, а функціональні спеціалісти органу управління є помічниками (експертами) лінійного керівника з відповідної функції управ-
ління; лінійно-штабна структура з обмеженим функціоналізмом, при якій окремим функціональним спеціалістам (групам) дається
право віддавати розпорядження керованим об’єктам з деяких функцій управління, минаючи лінійне керівництво.
277
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
7.3. Організація зв’язку і АСУ ППО
7.3.1. Організація зв’язку
Зв’язок у військах ППО базується на орендованих каналах зв’язку мережі Держкомзв’язку, опорній мережі зв’язку МО і при-
значений для управління військами (силами) ППО та організації взаємодії з вадами Збройних Сил та державними відомствами в
інтересах ППО країни. Зв’язок здійснюється засобами радіо, радіорелейного, тропосферного, супутникового, проводового зв’язку,
як із застосуванням засобів засекречення, так і без них.
Для організації та здійснення зв’язку можуть створюватися: управління зв’язку і АСУ; з’єднання, частини та підрозділи зв’язку;
вузли та станції фельд’єгерсько-поштового зв’язку; склад засобів зв’язку.
Управління зв’язку і АСУ призначене для планування та організації зв’язку, бойового застосування КЗА, технічного забезпе-
чення, експлуатації засобів зв’язку та автоматизованих систем управління військами.
З’єднання, частини та підрозділи зв’язку призначені для розгортання і експлуатаційного обслуговування стаціонарних вузлів
зв’язку стаціонарних пунктів управління, розгортання і обслуговування вузлів зв’язку пунктів управління на рухомій базі, а також
для розгортання опорних вузлів зв’язку і ліній (напрямків) прямого зв’язку до підлеглих.
Вузли та станції фельд’єгерсько-поштового зв’язку (ФПЗ) забезпечують доставку у війська таємних і службових докумен-
тів, періодичних видань, а також поштове обслуговування особового складу.
Склад засобів зв’язку здійснює забезпечення військ засобами зв’язку, витратними, експлуатаційними матеріалами та іншим
майном зв’язку, а також відновлення (ремонт) і повернення до строю засобів зв’язку при їх пошкодженні.
Основу системи зв’язку військ (сил) ППО складає мережа зв’язку загального користування.
До мережі зв’язку у військах (силах) ППО входять: стаціонарні вузли зв’язку; передавальні та приймальні радіоцентри; ста-
нції супутникового зв’язку, проводові (кабельні), радіорелейні та тропосферні лінії зв’язку; сили і засоби зв’язку пунктів управління
на рухомій базі.
Проводовий зв’язок в мирний час є основним вадом зв’язку, він організований та здійснюється в основному по каналах мере-
жі зв’язку Держкомзв’язку.
Радіозв’язок забезпечує управління військами в складних умовах обстановки, а при забезпеченні зв’язку з літаками - це єдиний
вад зв’язку. Радіозв’язок організується в КХ радіомережах та радіонапрямках: прийому сигналів бойового управління; командного
радіозв’язку; оповіщення та взаємооповіщення; взаємодії; в режимах слухового телеграфу, радіотелеграфу або радіотелефону.
Стаціонарна тропосферна мережа використовується для нарощування системи зв’язку та резервування проводових каналів
зв’язку і розгорнута на базі тропосферних станцій.
Радіорелейний зв’язок відіграє головну роль у забезпеченні управління. В ЗРВ він здійснюється на спеціалізованих радіоре-
лейних станціях, що дозволяє організувати зв’язок між всіма підрозділами як по колу, так і між собою за напрямками.
Супутниковий зв’язок дозволяє організувати зв’язок у реальному масштабі часу за різними напрямками у довільному поряд-
ку (подробиці у розділі 2 Довідника).
Фельд’єгерсько-поштовий зв’язок забезпечується вузлами та станціями ФПЗ. Вузли і станції ФПЗ забезпечують доставку у
війська бойових документів, таємних і поштових відправлень, пакунків із технікою.
7.3.2. Автоматизована система управління ППО
7,3.2.1. Призначення, завдання та принципи побудови АСУ ППО
Автоматизована система управління ППО - інтегрована автоматизована система, яка об’єднує в своєму складі на єдиних
оперативно-стратегічних і системотехнічних принципах автоматизовані підсистеми управління різних рівнів та функціонального
призначення. Її функціонування організується на основі єдиного інформаційного середовища та інформаційно-розрахункового
процесу із застосуванням єдиних форм і методів управління.
АСУ ППО призначена для вироблення рішень на операції (бойові дп), забезпечення оперативного і надійного доведення до ор-
ганів управління військ (сил) наказів бойового управління, бойових завдань, контролю за їх одержанням, збору, обробки і видачі
посадовим особам інформації щодо оперативної обстановки; математичного моделювання операцій (бойових дій) і проведення
оперативно-тактичних розрахунків; відображення інформації, що надходить і передається.
Основні завдання АСУ ППО: управління повсякденною діяльністю військ і підготовкою їх до бойових дій; управління в ми-
рний час черговими силами і засобами ППО, підтримання військ у встановлених ступенях бойової готовності; планування і підго-
товка бойових дій, розробка плануючих документів на періоди розгортання і бойових дій військ; управління розвідкою і контроль
повітряного простору, оповіщення органів державного і військового управління про загрозу та початок повітряного нападу; бойове
управління військами бойовими засобами ППО при переводі їх до стану воєнного часу і в ході ведення бойових дій.
Основні принципи побудови АСУ ППО: адаптованості; військово-економічної ефективності; стандартизації й уніфікації;
еволюційної побудови (розвитку) системи; інтеграції різнорідних засобів.
Принцип адаптованості означає можливість АСУ змінювати або перебудовувати свою структуру в процесі функціонування
при зміні умов її застосування. Така зміна обумовлена об’єктивно існуючою частковою невизначеністю бойової обстановки. При-
кладом адаптованості є поєднання в АСУ ППО централізованого управління з наданням права самостійності ведення бойових дій
з’єднанням, частинам і підрозділам родів військ ППО.
278
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Принцип стандартизації й уніфікації вимагає установлення відповідних сучасному рівню розвитку науки і техніки оптима-
льних норм, вимог і правил побудови АСУ, призначених до використання при-проектуванні, виробництві, випробуваннях, прийн-
ятті до експлуатації, експлуатації та ремонті засобів АСУ. Стандартизація АСУ повинна проводитись на всіх рівнях. Усі технічні та
програмні засоби АСУ повинні будуватись відповідно до діючих державних стандартів, які встановлюють загальні вимоги як до
АСУ в цілому, так і до її підсистем та програмного забезпечення.
Принцип військово-економічної ефективності вимагає раціоналізувати капіталовкладення в засоби автоматизації, прогнозу-
вати витрати і тривалість розроблення, науково планувати створення і виробництво АСУ в планах військового будівництва. Вияв-
лення призначення об’єктів, якості, реальної ефективності застосування комплексів автоматизації в різних ланках військ та інших
узагальнених характеристик АСУ і технологій її створення дозволить мати базу для цілеспрямованого раціонального розподілу
коштів на розробку і виробництво.
Принцип еволюційної побудови (розвитку) системи вимагає при створенні складних систем автоматизованого управління
даного класу орієнтуватися на поступове вдосконалення та підвищення їх якісних характеристик шляхом послідовної інтеграції
існуючих систем і засобів автоматизації та впровадження нових засобів і знань на основі нових інформаційних технологій.
Принцип інтеграції різнорідних засобів, що виконують самостійні функції в єдиному процесі управління, спрямований на
підвищення ефективності застосування сил і засобів ППО шляхом скорочення часу між оцінкою обстановки (виявлення цілі) та
використанням бойових засобів (ураженням цілі).
АСУ ППО повинна будуватись на основі комплексного і системного підходів при автоматизації процесів управління різнорі-
дними силами і засобами, а також грунтуватись на створенні та використанні цілісних (системних) технологічних схем збору, аналі-
зу, зберігання, обробки, передачі інформації й управління військами та бойовими засобами.
Комплексна автоматизація повинна охоплювати як основні, так і допоміжні інформаційні процеси, забезпечуючи зручність до-
ступу кінцевого користувача до інформаційних, обчислювальних та інших ресурсів системи управління.
Для вирішення оперативно-тактичних завдань, що покладаються на органи управління всіх рівнів, в АСУ ППО необхідно реа-
лізувати наступні комплекси функціональних завдань:
перший комплекс повинен забезпечити оперативне і достовірне доведення до військ команд, розпоряджень, в тому числі сигна-
лів переводу військ у вищі ступені бойової готовності, а також отримання підтверджень про їх доведення;
другий комплекс повинен забезпечити бойове управління військами і бойовими засобами ППО при їх розгортанні в загрозли-
вий період, при веденні операцій (бойових дій) за воєнного часу, а також у процесі несення бойового чергування за мирного часу;
третій комплекс повинен забезпечити постійне ведення розвідки повітряного противника і контроль повітряного простору, ви-
криття загрози і початку повітряного нападу, оповіщення військ і органів державного управління про повітряну обстановку, забез-
печення військ та бойових засобів ППО розвідувальною і бойовою інформацією про повітряну обстановку;
четвертий комплекс повинен забезпечити управління повсякденною діяльністю військ, планування і підготовку заходів з розго-
ртання військ в загрозливий період, планування і підготовку операцій (бойових дій), планування і організацію бойового чергування.
Відповідно до переліку комплексів функціональних завдань, які потрібно реалізувати, в АСУ ППО слід виділити чотири
основні функціональні підсистеми: командно-сигнальну систему (КСС); автоматизовану систему бойового управління військами
і бойовими засобами ППО (АСБУ В і БЗ); автоматизовану систему розвідки, контролю повітряного простору і оповіщення військ
(АСРК); інформаційно-розрахункову систему (ІРС).
Командно-сигнальна система представляє собою сукупність засобів автоматизації, що призначені для оперативного і досто-
вірного доведення команд, розпоряджень, сигналів бойового управління, текстових і графічних документів, а також для доповідей
про їх одержання.
Функції командно-сигнальної системи: введення і передача команд, розпоряджень і сигналів бойового управління по кана-
лах оперативно-командного зв’язку і по каналах передачі даних; прийом і виведення інформації, що приймається, на засоби відо-
браження, засоби світлової і звукової сигналізації, засоби реєстрації та документування; введення і передача донесень (квитанцій)
про одержання і виконання команд, розпоряджень, сигналів бойового управління.
Автоматизована система бойового управління військами і бойовими засобами повинна функціонувати в процесі управ-
ління черговими силами і засобами ППО за мирного часу, в загрозливий період при розгортанні військ і при управлінні військами
та бойовими засобами ППО за воєнного часу.
Завдання АСБУ В і БЗ: одержання, відображення і аналіз інформації про бойовий склад, місцезнаходження і дії угруповань
засобів повітряного нападу; збір, обробка, відображення і аналіз інформації про бойовий склад, бойову готовність та дії підлеглих і
взаємодіючих сил та засобів ППО; збір, обробка, відображення і аналіз інформації про повітряну, наземну (морську), радіаційну,
хімічну, бактеріологічну, радіоелектронну, метеорологічну, орнітологічну обстановки, наслідки руйнування радіаційно і хімічно
небезпечних об’єктів; видачу інформації на вищестоящі КП та КТІ інших видів ЗС України, міністерств і відомств; управління пе-
реводом сил і засобів ППО у вищі ступені бойової готовності і контроль відмобілізування; оцінка обстановки і підготовка даних для
прийняття рішень командувачем (командиром); виробка (уточнення) рішення командувачем (командиром) на проведення операцій
(бойових дій); підтримання в ході операцій (бойових дій) потрібного співвідношення сил ППО за напрямками і рубежами оборони,
організація маневру сил і засобів ППО з метою підсилення окремих напрямків і нарощування зусиль по наступних ешелонах засо-
бів повітряного нападу (ЗПН) противника; постановка і уточнення бойових завдань підлеглим військам і контроль за їх виконан-
ням; організація і підтримання взаємодії; управління всебічним забезпеченням операцій (бойових дій), відновленням порушеної
бойової готовності угруповань військ і системи ППО в цілому; оцінка результатів операцій (бойових дій), вивчення і узагальнення
досвіду бойових дій; збір, обробка, відображення і аналіз інформації про бойовий склад, стан бойової готовності і дії чергових сил і
засобів ППО; управління черговими силами і засобами ППО в процесі безперервного ведення розвідки і контролю повітряного
простору, виявлення і припинення порушень Державного кордону України і порушень режиму польотів повітряних суден; управ-
ління черговими силами і засобами ППО в процесі відбиття перших ударів ЗПН противника при раптовому нападі; управління
станом бойової готовності чергових сил. і засобів ППО.
279
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Автоматизована система розвідки, контролю повітряного простору і оповіщення військ повинна функціонувати за мир-
ного часу, в загрозливий період і за воєнного часу, забезпечуючи реалізацію таких основних інформаційних функцій: добування і
збір інформації про повітряну обстановку від різних джерел (засобів розвідки), в першу чергу - від засобів радіолокаційної та радіо-
і радіотехнічної розвідки; обробку і узагальнення інформації про повітряну обстановку на різних рівнях системи управління; вида-
чу, прийом і відображення інформації про повітряну обстановку; контроль за дотриманням порядку використання повітряного
простору літальними апаратами усіх відомств; оповіщення органів державного і військового управління про загрозу та початок
повітряного нападу; управління засобами розвідки.
Завдання АСРК: збір і обробка даних радіолокаційної, радіо- і радіотехнічної розвідки, що надходять від своїх і взаємодіючих
підрозділів; визначення координатних і некоординатних параметрів повітряних об’єктів, в тому числі групового складу, ознак дер-
жавної належності та індексів належності; видача розвідувальної і бойової інформації про повітряну обстановку на вищі і забезпе-
чувані пункти управління; видача інформації оповіщення про повітряну обстановку на пункти управління інших видів збройних
сил; обмін інформацією про повітряну обстановку шляхом взаємодії з ПУ Українського центру планування використання повітря-
ного простору та регулювання повітряного руху, авіаційно-диспетчерськими пунктами районних центрів управління повітряним
рухом, авіаційно-диспетчерськими пунктами аеродромів цивільної авіації; викриття загрози і початку повітряного нападу, опові-
щення органів державного і військового управління; управління режимами функціонування засобів розвідки і потоком інформації
про повітряну обстановку, що циркулює в автоматизованій системі; контроль повітряного простору держави та дотримання режи-
му його використання; виявлення порушень державного кордону літальними апаратами іноземних держав і порушень встановле-
ного режиму польотів; надання допомоги органам системи управління повітряним рухом щодо контролю за дотриманням порядку
використання повітряного простору; контроль за перельотами державного кордону і за польотами повітряних суден в прикордон-
них (приморських) районах.
Інформаційно-розрахункова система на кожному з рівнів управління представляє собою локальну мережу ЕОМ, засобів вве-
дення, зберігання, забезпечення доступу до даних і відображення даних. Математичне і програмне забезпечення ГРС повинно скла-
датись з комплексу математичних моделей, інформаційно-розрахункових та інформаційно-довідкових задач, об’єднаних на основі
єдиної бази даних і єдиної бази знань.
Основні функції інформаційно-розрахункової системи: збір і зберігання даних, організація доступу користувачів до баз да-
них; вирішення інформаційних, інформаційно-розрахункових та інформаційно-довідкових задач; моделювання операцій (бойових
дій) з використанням математичних моделей; розробка і виконання плануючих та звітних документів.
7,3,2.2, Види забезпечення АСУ ППО
До видів забезпечення АСУ ППО відносяться: технічне, організаційне, інформаційне, лінгвістичне, математичне, програмне,
правове і ергономічне забезпечення.
Технічне забезпечення АСУ ППО
Технічне забезпечення АСУ ППО - комплекс заходів і технічних засобів для забезпечення діяльності оперативного та техніч-
ного складу і виконання ними своїх функціональних завдань.
Основні завдання технічного забезпечення: визначення потреб військ у засобах автоматизації’ та зв’язку; прогнозування мо-
жливої величини відносних втрат; своєчасне забезпечення військ необхідною кількістю засобів автоматизації; підтримання засобів
автоматизації у готовності до використання за призначенням, їх зберігання, обслуговування, своєчасний ремонт і т.ін.; своєчасне
приведення до установленого ступеня готовності; технічна підготовка особового складу органів і пунктів управління; створення
необхідної величини резерву і організація його використання; застосування засобів автоматизації в польових умовах, у тому числі
організація їх захисту, охорони і оборони; своєчасне відновлення боєздатності; забезпечення безпечної експлуатації.
Технічне забезпечення АСУ ППО потребує обгрунтованого вибору: програмно-апаратних засобів; засобів отримання, фор-
мування і передавання інформації; засобів представлення і відображення інформації; засобів оргтехніки і оперативного зв’язку;
допоміжного і сервісного обладнання; монтажних матеріалів і кабельної продукції тощо.
АСУ ППО та її основні елементи - комплекси засобів автоматизації - повинні забезпечувати можливість створення необхідної
структури управління, реалізувати нові принципи технічних рішень. Основною проблемою побудови АСУ є забезпечення високого
рівня стандартизації, сумісності, багатофункціональності та уніфікації’ технічних засобів.
Інформаційне і лінгвістичне забезпечення
Інформаційне забезпечення - сукупність рішень щодо об’єму, розміщення і форм організації інформації, яка циркулює в АСУ
при її функціонуванні.
Заходи інформаційного забезпечення: збір, накопичення, збереження та обробка воєнно-політичної, військово-
адміністративної, воєнно-стратегічної (оперативної) інформації для забезпечення органів та пунктів управління з метою оцінки
обстановки, її прогнозування, прийняття рішень, планування, постановки завдань і контролю за їх виконанням; захист інформації,
що включає управління доступом до ресурсів, реєстрацію та облік дій користувачів (процесів), забезпечення цілісності інформацій-
них ресурсів.
Основу інформаційного забезпечення функціонування АСУ ППО та її підсистем, які базуються на інтегрованому банку даних,
складають: уніфіїсована система документів; система класифікації та кодування; інформаційний ресурс.
Інтегрований банк даних представляє собою комплекс інформаційних, програмних, мовних і організаційно-методичних засо-
бів, що забезпечують можливість збирання, зберігання, пошуку і оброблення даних в інтересах органів та пунктів управління всіх
рівнів військ (сил) ППО.
280
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Уніфікована система документів - раціонально організований комплекс взаємопов’язаних документів, що відповідають єди-
ним правилам і вимогам та містять інформацію, необхідну для управління військами із застосуванням засобів автоматизації та
зв’язку.
Система класифікації і кодування (СКК) воєнно-технічної інформації - сукупність прийнятих засобів і результатів класи-
фікації та кодування у вигляді комплексу взаємопов’язаних класифікаторів. Єдина СКК застосовується для однозначного і компак-
тного опису великих об’ємів інформації з метою уніфікації і полегшення узгодження різних засобів автоматизації та АСУ між со-
бою, створення більш простих умов практичного використання АСУ і підготовки фахівців для їх експлуатації.
Інформаційна база АСУ ППО повинна бути сформована в межах організації єдиного інформаційного середовища збройних
сил, військової і державної систем управління та включати в себе як машинну, так і позамашинну інформаційні бази.
Машинна інформаційна база повинна представляти собою розподілену базу даних, яка включає до себе необхідні центральні
та локальні (територіально рознесені) бази даних структурних підрозділів штабів.
Позамашинна інформаційна база повинна представляти собою сукупність інформації, необхідної для роботи посадових осіб
штабів, представлятись на паперових та інших носіях.
Лінгвістичне забезпечення функціонування АСУ ППО - тезауруси і мовні засоби опису та маніпулювання даними, сукуп-
ність засобів і правил формалізації державної мови, що використовується при спілкуванні посадових осіб органів управління.
Лінгвістичне забезпечення АСУ ППО (складових підсистем) представляє собою комплекс заходів, які спрямовані на розроб-
ку і впровадження мовних засобів опису і маніпулювання даними, сукупності засобів та правил формалізації державної мови, що
використовується при спілкуванні посадових осіб органів управління.
Основу лінгвістичного забезпечення АСУ складають: сукупність військово-політичних, оперативно-стратегічних (операти-
вно-тактичних), військово-технічних та інших термінів, зведених у термінологічні словники; правила формалізації даних; методи
стиснення та розгортання текстів; засоби діалогової взаємодії посадових осіб із засобами автоматизації; методи та засоби оброблен-
ня текстової інформації.
Організаційне забезпечення
Організаційне забезпечення АСУ - сукупність документів, які регламентують порядок і зміст роботи щодо створення, впро-
вадження і організації функціонування АСУ.
Зміст організаційного забезпечення АСУ: загальне організаційне забезпечення (керівні та правові документи, що регламен-
тують загальні питання створення, впровадження і застосування АСУ); спеціальне організаційне забезпечення (методики, технічні
керівництва, статутні документи, інструкції та ін.); забезпечення організації функціонування (комплекс заходів щодо організації і
підтримання функціонування АСУ, організації інформаційно-обчислювального процесу, забезпечення стійкості системи і т.ін.).
Система організаційного забезпечення - сукупність технічних і програмних засобів, що забезпечують вирішення таких за-
вдань: збір, документування, аналіз даних про наявність і технічний стан засобів автоматизації, про укомплектованість органів
управління оперативним складом і рівень його підготовки; виробка рекомендацій щодо вибору способів управління військами і
бойовими засобами в конкретних умовах обстановки і щодо розробки схеми управління; виробка рекомендацій щодо організації
інформаційно-обчислювального процесу, зокрема, щодо реалізації технічної конфігурації АСУ, щодо визначення переліку вирішу-
ваних оперативно-тактичних задач; автоматична або автоматизована зміна конфігурації АСУ і окремих КЗА на основі зміненої
схеми управління; організація і підтримка захисту інформації в системі, регламентація доступу до баз даних, реєстрація спроб неса-
нкціонованого доступу до інформації; контроль стану технічних засобів КЗА і каналів обміну.
Захист інформації - сукупність організаційно-технічних заходів і правових норм для запобігання шкоди інтересам власника
інформації або автоматизованій системі та особам, які користуються інформацією.
Захист інформації в АСУ спрямований на запобігання порушень цілісності інформації з обмеженим доступом та її витоку,
які здійснюються шляхом: несанкціонованого доступу; приймання й аналізу побічних електромагнітних випромінювань і наводок;
використання закладених пристроїв; впровадження комп’ютерних вірусів та іншого впливу.
Основні методи та засоби захисту інформації в АСУ: використання технічно захищених засобів; регламентування роботи
користувачів, технічного персоналу, програмних засобів, елементів баз даних і носіїв інформації з розмежуванням доступу; регла-
ментування архітектури АСУ; інженерно-технічне обладнання споруд і комунікацій, призначених для експлуатації АСУ; пошук,
виявлення і блокування закладених пристроїв.
Контроль технічного стану засобів АСУ повинен забезпечувати: автоматизоване визначення працездатності АСУ і її елемен-
тів; формування узагальнюючих показників, характеризуючих їх стан; локалізацію місць відмови із точністю до приладу, що підля-
гає заміні; відображення результатів контролю і автоматизованого пошуку несправностей.
Основні завдання контролю стану технічних засобів: визначення міри готовності засобів АСУ до бойового застосування (до
використання за призначенням); оцінка організації технічного забезпечення зв’язку та АСУ у з’єднанні (частині); своєчасне вжиття
заходів щодо усунення виявлених недоліків.
Правове забезпечення АСУ ППО - сукупність нормативних актів, що визначають організацію системи, цілі, задачі, структу-
ру і функції АСУ, регламентацію і функціонування АСУ.
Ергономічне забезпечення АСУ ППО - сукупність методів і засобів, призначених для вибору проектних рішень, що забезпе-
чують оптимальні умови для високоефективної і безпомилкової діяльності людини-оператора в АСУ.
Спеціальні види забезпечення АСУ ППО
До спеціальних видів з абезпечення АСУ ППО відносяться: метрологічне, інженерне, опогеодезичне і навігаційне забез-
печення.
Метрологічне забезпечення функціонування АСУ ППО організується і здійснюється з метою: своєчасного забезпечення її си-
стем, підсистем та елементів необхідною кількістю засобів вимірювання військового призначення та відповідним майном; дотри-
281
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
мання єдності та необхідної точності вимірювання; своєчасного і достовірного контролю параметрів програмно-апаратних засобів
автоматизації та зв’язку. Воно включає накопичення даних засобів вимірювання і майна до установлених норм; їх збереження,
обслуговування і ремонт; забезпечення їх безпечної експлуатації; своєчасну підготовку до використання за призначенням, а також
своєчасне відновлення при пошкодженнях; поставку цих матеріальних засобів у війська для поповнення.
Інженерне забезпечення функціонування АСУ ППО організується і здійснюється з метою створення необхідних умов для
своєчасного і прихованого розгортання та інженерного захисту пунктів управління, засобів автоматизації та зв’язку всіх підсистем і
елементів АСУ ППО, що сприяє виконанню поставлених їм завдань в операціях збройних сил, підвищує їх захист від усіх засобів
ураження.
Топогеодезичне забезпечення функціонування АСУ ППО організується і здійснюється з метою підготовки та своєчасного до-
ведення до органів управління всіх підсистем і елементів АСУ ППО топогеодезичної інформації’ (топографічні, цифрові (електро-
нні) карти, плани міст, каталоги (списки) координат геодезичних і гравіметричних пунктів, спеціальні карти, фотодокументи про
місцевість, графічні документ і інші відомості та довідки про місцевість). Така інформація необхідна для вивчення місцевості під
час оцінки і прогнозування обстановки, прийняття рішень, планування та проведення операцій (бойових дій), організації взаємодії
та управління з метою ефективного застосування сучасної зброї і бойової техніки.
Навігаційне забезпечення функціонування підсистем і елементів АСУ ППО організується і здійснюється з метою постійного
та об’єктивного визначення місця розташування військ (сил) і об’єктів для більш ефективного планування і ведення операцій (бо-
йових дій), застосування засобів розвідки, РЕБ, ураження, створення сприятливих у навігаційному відношенні умов для точного та
безпечного переміщення наземних об’єктів, плавання кораблів (суден), польотів літаків.
Навігаційне забезпечення включає: формування широкозонного диференційного навігаційного поля із заданими характеристи-
ками щодо точності, безперервності та просторового охоплення; створення геоінформаційної системи військ (сил) ППО, оснащен-
ня військ (сил) апаратурою споживання навігаційної інформації’; підготовку навігаційного поля для використання військами за ми-
рного та воєнного часу.
Комплекс засобів автоматизації
Для ефективного вирішення покладених на командні пункти завдань вони оснащуються КЗА.
Комплекс засобів автоматизації (КЗА) - сукупність технічних засобів і програмного забезпечення для автоматизації процесів
управління на пунктах і центрах різного функціонального призначення (рис. 7.1).
ПСз АД
Мережевий
комутатор
Принтер
Рис. 7.1. Варіант побудови комплексу засобів автоматизації
Комплекси засобів автоматизації будуються на основі об’єднання необхідних функціональних модулів, що забезпечують у су-
купності реалізацію з потрібними характеристиками всіх функціональних завдань, що вирішуються на КП.
До складу КЗА входять наступні функціональні групи (підсистеми): обчислювальний комплекс, комплекс технічних засобів ві-
дображення, комплекс технічних засобів передачі даних, комплекс технічних засобів документування, комплекс технічних засобів
зв’язку, комплекс технічних засобів енергозабезпечення та ін.
Обчислювальний комплекс призначений для реалізації алгоритмів математичного і програмного забезпечення і відповідності
із задачами, що вирішує КЗА.
Комплекс технічних засобів відображення містить засоби відображення колективного (групового) та індивідуального
користування.
282
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Засоби відображення колективного (групового) користування забезпечують подання інформації’ загальної для декількох
груп бойової обслуги. Вони складаються з великого екрану та колективних табло. Інформація для колективних засобів готується і
відображається автоматично.
Великі екрани призначені для відображення статичної і динамічної інформації про загальну обстановку, характер і напрямки
дій повітряного противника та дислокацію своїх військ. Уся ця інформація відтворюється на фоні карти місцевості або географіч-
них орієнтирів.
Електронне табло призначене для відображення інформації про бойовий стан військ, їх бойові можливості та результати бойо-
вих дій і т.ін.
Засоби відображення індивідуального користування є складовими елементами автоматизованих робочих місць. На АРМ,
крім засобів відображення, повинні бути засоби уведення команд операторів, пульти телефонного та гучномовного зв’язку.
Якість засобів відображення оцінюється інформаційними і технічними показниками. До інформаційних показників можна від-
нести інформаційну ємність, швидкість відображення, час повного поновлення і достовірність відображення інформації
До технічних характеристик засобів відображення відносяться розділювальна здатність, скравість, контрастність, розмір
екрана, експлуатаційна надійність та ін.
Комплекс технічних засобів зв’язку та передачі даних.
Мережа зв’язку призначена для забезпечення обміну дальньою таємною та нетаємною телефонною, телеграфною, факсиміль-
ною інформацією та передачі даних.
Стійкість мережі зв’язку забезпечується комплексним використанням усіх видів зв’язку (провідного, радіорелейного, тропос-
ферного, космічного (супутникового)).
В основі перспективної мережі може бути використана гнучка динамічна структура, яка адаптується до оперативної обстановки
шляхом забезпечення доступу до декількох вузлів зв'язку. При побудові такої структури можуть бути використані станції’, що пра-
цюють у радіорелейному та тропосферному режимі.
Апаратура передачі даних (АПД) забезпечує автоматичну передачу по каналах передачі даних між елементами АСУ (КЗА різ-
них пунктів (центрів) управління) інформації, що забезпечує функціонування АСУ.
Комплекс технічних засобів документування.
Засоби реєстрації та документування в АСУ ППО призначені для здійснення об’єктивного контролю дій (бойової роботи) під-
розділів, частин, бойових обслуг КП і ПУ і забезпечення підготовки звітних документів.
Об’єктивний контроль дій військ представляє собою комплекс організаційних і технічних заходів, що дозволяють одержувати
вірогідні відомості про дії своїх підрозділів (частин, бойових обслуг КП і ПУ), а також про дії повітряного противника.
Документування в АСУ здійснюється з метою аналізу і оцінки результатів бойових дій військ, рівня злагодженості та підготов-
ки бойових обслуг щодо бойового застосування АСУ, оцінки якості функціонування засобів автоматизації, роботи осіб бойової
обслуги або оперативної групи в ході бойових дій та інформаційної підтримки процесу підготовки звітних документів.
Системи контролю функціонування, тренажу, життєзабезпечення і енергопостачання
Контроль функціонування АСУ представляє собою сукупність перевірок правильності функціонування АСУ в цілому і
окремих її елементів і підсистем з метою підтримання АСУ у постійній готовності до автоматизованого управління силами і засо-
бами ППО.
Показники якості контролю функціонування АСУ: вірогідність контролю; повнота охоплення контролем всіх складових і
АСУ в цілому; тривалість контролю; ступінь автоматизації контролю.
Комплекс технічних і програмних засобів навчання та тренувань призначений для вироблення навичок і вмінь осіб бойо-
вих обслугу застосуванні засобів автоматизації для управління силами та засобами ППО у будь-яких умовах.
Апаратура життєзабезпечення призначена для забезпечення якісного виконання своїх функціональних обов'язків особами
бойових обслуг КП (ПУ) і обслуговуючого персоналу апаратури АСУ.
Апаратура життєзабезпечення: система вентиляції та кондиціювання повітря; фільтровентиляційний пристрій.
Засоби енергопостачання призначені для забезпечення електроживлення КЗА. Забезпечення електроенергією здійснюється
від промислової мережі або від штатних дизельно-електричних станцій (ДЕС).
Математичне і програмне забезпечення
Математичне і програмне забезпечення (МПЗ) АСУ ППО, її підсистем включає сукупність взаємопов’язаних програмних ком-
поненгта модулів реалізації математичних методів, моделей та алгоритмів.
З точки зору вирішуваних задач, програмне забезпечення розділяють на. загальне програмне забезпечення і спеціальне програ-
мне забезпечення.
Загальне програмне забезпечення представляє собою сукупність програм, що призначені для організації обчислювального
процесу та рішення загальносистемних задач обробки інформації’.
Загальне програмне забезпечення включає: операційні системи; програмне забезпечення міжмережної взаємодії; стандартні
пакети програм для обробки неформалізованої інформації, системи управління базами даних (СУБД).
Вибір загального МПЗ обумовлюється, як правило, типом використовуваних ЕОМ та вимогами, що висуваються до автомати-
зації та інформатизації діяльності органів військового управління.
Спеціальне програмне забезпечення представляє собою сукупність прикладних програм для автоматизації задач управління
відповідно до призначення КЗА. До їх складу входять програми, що реалізують алгоритми збору та обробки даних, виконання роз-
рахунків і моделювання в інтересах процесу прийняття рішень і забезпечення діяльності осіб бойової обслуги по управлінню війсь-
ками та бойовими засобами (зброєю).
283
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Спеціальне МПЗ повинне забезпечувати кригггозахист, тобто: кодування інформації локального і міжлокального зв’язку; конт-
роль доступу до програмного, інформаційного і лінгвістичного забезпечення; контроль зовнішніх носіїв інформації; контроль за
корегуванням бази даних; контроль за появою вірусів.
7.3.2.3, Показники ефективності роботи АСУ
Основні властивості АСУ: бойова готовність, ємність, пропускна спроможність, оперативність, якість рішення завдань управ-
ління, завадостійкість, живучість, мобільність, ефективність.
Бойова готовність - ступінь відповідності АСУ рішенню завдань управління військами (бойовими засобами) на будь-який
момент часу. Кількісно цей показник оцінюється часом переводу апаратури АСУ з одного ступеня бойової готовності до іншого,
більш високого.
Оскільки АСУВ і АСУ БЗ призначені для підвищення ефективності бойового застосування військ і зброї, то час переводу АСУ
в бойовий режим не повинен перевищувати часу переводу бойових засобів (ЗРК, АРКП та ін.) військ (ЗРВ, ВА, РТВ та ін.) у бойову
готовність.
Ємність характеризує граничні можливості АСУ щодо вирішення завдань управління військами або бойовими засобами. Вона
може оцінюватись різноманітними показниками за конкретними завданнями управління.
Так, наприклад, ємність АСУ з обробки інформації характеризується максимальною кількістю цілей, по яких одночасно може
проводитися прийом, обробка і видача інформації. Ємність АСУ може оцінюватись максимальною кількістю каналів одночасного
наведення ВА або кількістю батарей, дивізіонів ЗКР (ЗРВ), що можуть управлятись автоматизовано (або автоматично). Вимоги до
ємності АСУ в основному визначаються організаційно-штатною структурою військ і очікуваним характером дій повітряного про-
тивника.
Пропускна спроможність характеризує граничні інформаційні можливості АСУ при рішенні завдань управління із заданою
якістю. Кількісно пропускна спроможність може бути оцінена циклом рішення конкретних задач в АСУ за одиницю часу з визна-
ченою дискретністю і точністю.
Так, АСУ може характеризуватись кількістю одночасно оброблюваних цілей, кількістю цілевказань, що видаються ЗРК, або
наведень ВА за одиницю часу. Висока пропускна спроможність АСУ досягається застосуванням швидкодіючих ЕОМ, широкосму-
гових ліній зв’язку і організацією раціональних процесів бойової роботи та обробки інформації’.
Оперативність АСУ характеризує її швидкодія, тобто можливість системи реагувати на зміни бойової обстановки. Кількісно
оперативність системи може бути оцінена часовими витратами бойової обслуги органу управління при рішенні задач у процесі
управління (робітний час). Чим менше робітний час, тим вище швидкодія системи, тим вище її оперативність. Зменшення складо-
вих робітного часу без зниження якості рішення задач є одним із найважливіших напрямків щодо підвищення оперативності
управління. Швидкодія системи залежить від ступеня автоматизації, рівня підготовки особового складу і злагодженості органів
управління.
Якість рішення завдань управління в АСУ характеризує її можливості з необхідною повнотою, достовірністю і точністю
вирішувати поставлені завдання. Кількісно цей показник може виражатись значеннями помилок рішення визначеного завдання і
можливістю правильного його рішення. Наприклад, якість обробки радіолокаційної інформації в АСУ оцінюється середньоквадра-
тичними помилками супроводження повітряних цілей, коефіцієнтом помилкових трас та ін., а якість рішення завдань видачі цілев-
казання зенітним засобам ППО (наведення - для ВА) може оцінюватись можливістю безпошукового цілевказання станціям наве-
дення ЗКР (можливістю точного наведення ВА).
Завадостійкість - спроможність АСУ виконувати свої функції в умовах впливу завад. Завадостійкість АСУ залежить від зава-
дозахищеності джерел інформації, системи зв’язку АСУ й особливостей побудови алгоритмів обробки інформації і бойового
управління в КЗА системи. Основний показник завадостійкості - задана імовірність виконання поставлених задач управління з
використанням АСУ при впливі завад визначеної інтенсивності.
Живучість - властивість АСУ зберігати або швидко відновлювати свою боєздатність при рішенні завдань управління в склад-
них умовах бойової обстановки. Вона складається з бойової стійкості й експлуатаційної надійності.
Бойова стійкість характеризується спроможністю АСУ протистояти вогневому впливу противника й оцінюється кількісною
можливістю функціонування при виході з ладу окремих її елементів та елементів системи управління. Найбільш уразливими еле-
ментами є пункти управління і всі елементи системи зв’язку.
Експлуатаційна надійність АСУ оцінюється можливістю безвідмовної роботи протягом визначеного часу, а також можливіс-
тю її відновлення протягом заданого проміжку часу.
До поняття живучість можуть входити такі властивості АСУ, як її спроможність одержувати інформацію від джерел за різно-
манітними, заздалегідь передбаченими варіантами, а також зберігати можливість управління об’єктами в ході бойових дій при зміні
ними свого місця розташування (маневр у ході бою).
У цілому живучість АСУ буде визначатись живучістю найбільш уразливих елементів із погляду спроможності їх протистояти
впливу противника, а також ступенем резервування найбільш складних елементів АСУ в процесі її функціонування.
Мобільність АСУ характеризується спроможністю до пересування у складі військ як у період підготовки, так і в ході бойових
дій. З урахуванням свого призначення АСУ можуть бути стаціонарними, рухомими (на механічній тязі) і самохідними. Мобільність
АСУ оцінюється можливістю транспортувань залізничним, повітряним (річковим) транспортом, а також можливістю здійснювати
пересування автомобільним транспортом у похідних порядках військ.
Ефективність АСУ оцінюється приростом АЕдсу ефективності бойових дій військ (бойового застосування) при застосуванні
даної АСУ. У загальному вигляді це буде визначатись виразом
284
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
ДЕ асу = А"—— 100% , (7.2)
Басу
де ЕАсу, Е* - показники ефективності, що характеризують реалізацію бойових можливостей військ (бойових засобів) при вико-
ристанні та відсутності даної АСУ відповідно.
За допомогою показників можна дати порівняльну оцінку АСУ для будь-якої командної інстанції з урахуванням її призначення.
7.4. Перспективи розвитку АСУ
Існуючі АСУ повторюють організаційно-штатну структуру військ, проте перспективні АСУ повинні бути пристосовані до
створення гнучкої (змінної) структури системи управління.
Комплекси засобів автоматизації пунктів управління, система передачі даних і зв’язку повинні будуватись з урахуванням нових
досягнень в галузі побудови комплексів технічних засобів, математичного та програмного забезпечення, з урахуванням нових ін-
формаційних технологій.
Перспективна АСУ ППО та її основні складові елементи - КЗА пунктів управління повинні забезпечувати: можливість вне-
сення змін до організаційно-штатної структури системи управління озброєння і військ у цілому; сумісність з існуючими засобами
автоматизації; реалізувати нові принципи технічних рішень, нові принципи побудови математичного, програмного та інформацій-
ного забезпечення.
Перспективні засоби АСУ ППО повинні створюватись за такими напрямками: розширення складу вирішуваних в АСУ
завдань і підвищення автоматизації рівня їх вирішення; удосконалення системотехнічних принципів розробки, побудови, впрова-
дження та використання АСУ; розвиток і удосконалення математичного та програмного забезпечення; розвиток і вдосконалення
технічного забезпечення АСУ.
Розширення складу вирішуваних в АСУ завдань і підвищення рівня їх автоматизації слід здійснювати на основі нових інфор-
маційних технологій.
Оперативно-тактичні завдання, що потрібно автоматизувати додатково до існуючих: розкриття замислу противника, ви-
значення напрямків його головного і допоміжних ударів; оцінка співвідношення сил протидіючих сторін; прогнозування варіантів
дій засобів повітряного нападу; вироблення можливих варіантів рішень на ведення бойових дій та їх обґрунтування; вибір найкра-
щого варіанта рішення; контроль виконання рішення і його корегування з урахуванням реально існуючої обстановки.
Стосовно підсистеми розвідки на основі нових інформаційних технологій слід на більш високому рівні автоматизувати вирі-
шення таких завдань: об’єднання й узагальнення різнорідних даних від джерел інформації, що реалізують різні принципи і фізич-
ні методи її одержання; розпізнавання типів (класів) і дій об’єктів, що спостерігаються, на основі об'єднання різнорід ної інформації;
узагальнення інформації про комплексні (групові) об’єкти і виявлення їхнього бойового складу та призначення; формування зага-
льної “картини” повітряної обстановки в динаміці її розвитку; управління джерелами інформації’, потоками інформації в системі та
її системною обробкою.
Розвиток і вдосконалення технічного забезпечення АСУ містить в собі: розвиток елементної бази засобів автоматизації;
розробку засобів розвідки на нових принципах функціонування; удосконалення засобів колективного використання і відображення
інформації; удосконалення архітектури і підвищення потужності ЕОМ; створення високопотужних цифрових систем передачі да-
них і зв’язку.
Удосконалення системотехнічних принципів розробки, побудови, впровадження та використання АСУ містить в собі:
інтеграцію інформаційних потоків органів планування і бойового управління; об’єднання в АСУ інформації від різнорідних дже-
рел; реалізацію мережного принципу побудови АСУ; забезпечення сумісності АСУ різних видів і родів військ; реалізацію принци-
пів розподіленої обробки і зберігання інформації; підвищення мобільності АСУ; забезпечення стандартизації, сумісності, багатофу-
нкціональності та уніфікації елементів АСУ.
Розвиток і вдосконалення математичного та програмного забезпечення АСУ передбачає: удосконалення технології роз-
робки математичного і програмного забезпечення; модифікація існуючого і розробка нового математичного та програмного забез-
печення; розробка й використання в АСУ інтелектуальних систем підтримки прийняття рішень з управління військами та бойови-
ми засобами ППО; розробка систем підтримки прийняття рішень для планування бойових дій.
Реалізація зазначених напрямків розвитку систем і засобів автоматизації повинна здійснюватись у межах створення та удоско-
налення єдиної АСУ ППО, що є підсистемою єдиної АСУ Збройних Сил, з урахуванням комплексного розвитку систем і засобів
зв’язку, розвідки, РЕБ і вогневого ураження в інтересах побудови ефективної системи ППО.
Розробка і введення в дію єдиної АСУ ППО в повному обсязі потребує значних економічних і часових витрат. Для вирішення
розглянутих проблем необхідна широка кооперація науково-дослідних установ і підприємств промисловості та використання най-
новітніших досягнень у галузі інформаційних технологій.
7.5. Робота командира та штабу при організації управління з'єднаннями (частинами)
Основою організації управління є рішення командира на бойові дії (бойове застосування). Визначаючи в своєму рішенні основи
організації управління, командир вказує: командні пункти, запасні командні пункти, пункти наведення ВА; де, до якого строку роз-
горнути допоміжні ПН ВА; організацію зв’язку; порядок управління з’єднаннями (частинами) при виході із ладу КП і ЗКП.
Штаб на основі рішення командира і розпоряджень старшого штабу визначає об’єм робіт, їх послідовність та строки завершен-
ня кожним виконавцем, узгоджує роботу заступників командира, начальників відділів і служб.
285
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
При визначенні заходів з організації управління в інтересах ефективного знищення повітряного противника на дальніх підсту-
пах до об’єктів необхідно передбачити: своєчасне виявлення повітряного противника, порядок оповіщення та приведення в бойову
готовність з’єднань (частин); порядок застосування літаків та кораблів РЛД з метою отримання інформації про дальню повітряну
обстановку, управління та безпосереднього наведення винищувачів на повітряні цілі; порядок дій ВА на повну дальність з манев-
ром на передові аеродроми; порядок передачі управління і наведення В А з наземних, повітряних і корабельних пунктів наведення;
способи дій винищувачів поза меж радіолокаційного поля і заходи з підтримання стійкого зв’язку в умовах інтенсивних завад; спо-
соби взаємодії ЗРВ і ВА в зоні поразки ЗРК дальньої дії.
При визначенні заходів з організації управління в інтересах ефективного знищення повітряного противника на великих висотах
і в стратосфері передбачаються: порядок розвідки повітряного противника та варіанти видачі радіолокаційної інформації
з’єднанням (частинам) ЗРВ і ВА при знищенні висотних цілей; порядок здійснення маневру і перенацілювання висотних швидкіс-
них винищувачів ППО, а також передачі управління ними при діях на повну дальність; порядок витрати бойових ресурсів в ході
відбиття удару противника.
При визначенні заходів з організації управління з метою ефективного знищення повітряного противника на малих висотах не-
обхідно врахувати, що: приведення частин та підрозділів в готовність до відбиття ударів ЗПН противника, діючих на малих висо-
тах, буде здійснюватись за даними радіо- і радіотехнічної розвідки; оцінку обстановки, прийняття (уточнення) рішення і постановку
бойових завдань з’єднанням (частинам) командир повинен здійснювати в обмежений час, звідси - необхідність зниження централі-
зації управління; можливості комплексного використання АСУ в таких умовах обмежені; здійснення взаємодії ЗРВ і ВА ускладне-
не.
Особливості організації розвідки в інтересах боротьби з маловисотними цілями: підвищення значення радіотехнічної роз-
відки (силами частин РЕБ) і радіорозвідки (силами частин особливого призначення); підвищення ролі радіолокаційної розвідки
силами підрозділів ЗРВ та повітряної розвідки винищувачами в інтересах виявлення, супроводження та цілерозподілу; підвищення
значення системи візуального спостереження.
Штаб повинен організувати: отримання інформації від засобів радіо- і радіотехнічної розвідки про стан угруповань ЗПН про-
тивника, які мають можливість нанесення раптового удару на малих висотах, з метою своєчасного визначення їх зльоту; розробити
і провести заходи з поліпшення розвідки маловисотних цілей; спланувати систему візуального спостереження і визначати порядок
її розгортання та використання; організували спеціальну підготовку обслуг та екіпажів з ведення розвідки маловисотних цілей; уза-
гальнювати та розповсюджували передовий досвід ведення розвідки повітряного противника на малих висотах.
При організації оповіщення КП з’єднань (частин, підрозділів) ЗРВ і ВА про маловисотні цілі необхідно виходити із того, що ос-
новним слід вважали спосіб децентралізованої передачі їм інформації від підрозділів РТВ, що розташовані спереду, і постів візуаль-
ного спостереження.
Основні заходи з підготовки системи зв’язку в інтересах стійкого і безперервного управління з’єднаннями (частинами) при
знищенні маловисотних цілей: організація прямого телефонного (телекодового) зв’язку між КП підрозділів РТВ і КП з’єднань (час-
тин, підрозділів) ЗРВ та ВА; забезпечення постів візуального спостереження засобами зв’язку та підготовка особового складу до
роботи на них; організація прямих каналів зв’язку між КП з’єднань (частин, підрозділів) РТВ з сусідніми, з підрозділами прикор-
донних військ, постами спостереження та зв’язку ВМС; прийом інформації про маловисотні цілі на КП частин і ПН ВА від літаків,
що ведуть повітряну розвідку, винищувачів, які знаходяться в повітрі, і, крім того, на КП з’єднань (частин, підрозділів) ЗРВ - від
кораблів РЛД.
Важливим елементом в роботі командира та штабу ППО при організації управління є раціональний розподіл завдань та функ-
цій управління між командними інстанціями. При цьому враховуються фактори: загальний об’єм завдань, що вирішуються, частота
їх виникнення або повторення; тактична важливість завдання в загальному потоці завдань управління, що виникають; відведений
час і наявність необхідної інформації* для рішення завдання управління; ергономічні показники трудової діяльності осіб бойових
обслуг, їх компетентність та повноваження в рішенні тих або інших завдань управління.
Завершується робота з організації управління оцінкою системи управління з частковими або узагальненими показниками.
7.6. Основи підготовки бойових дій (бойового застосування)
7.6.1. Суть підготовки бойових дій (бойового застосування)
Як показує досвід багатовікової історії* війн, успішне проведення бою, битви та операції залежить насамперед від умілої і рете-
льноїїх підготовки.
Заходи підготовки бойових дій (бойового застосування): вироблення та прийняття рішення на бойові дії* (бойове застосування);
планування бойових дій (бойового застосування); постановка бойових завдань підрозділам; організація та удосконалення системи
управління; організація взаємодії зі з’єднаннями та частинами інших родів військ; підготовка підрозділів до виконання поставлених
бойових завдань та організація бойової підготовки; організація бойового чергування, підтримування сил та засобів у постійній бо-
йовій готовності; організація всебічного забезпечення бойових дій (бойового застосування); здійснення контролю за підготовкою та
готовністю підрозділів до виконання бойових завдань.
Порядок виконання зазначених заходів залежить від умов конкретної обстановки, поставленого бойового завдання та наявності
часу.
Підготовка до бойових дій (бойового застосування) іде за кількома напрямками: підготовка даних, необхідних для прийн-
яття рішення; вироблення рішення на бойові дії (бойове застосування); підготовка особового складу, бойової обслуги, озброєння,
засобів управління, зв’язку та ін.
286
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
7.6.2. Зміст рішення на бойові дії (бойове застосування)
Елементи рішення на бойові дії (бойове застосування): замисел бойових дій (бойового застосування); бойові завдання під-
порядкованим підрозділам та основи організації взаємодії; заходи організації управління та усіх видів забезпечення бойових дій
(бойового застосування); строки готовності.
Замисел бойових дій (бойового застосування) виражає живу керівну ідею командира.
У замислі необхідно чітко та конкретно визначити: райони, об’єкти і напрямки, на яких повинні бути зосереджені основні зу-
силля; варіанти ведення бойових дій, послідовність знищення повітряного противника у кожному варіанті; розподіл виділеного
ресурсу; заходи з введення противника в оману; бойовий порядок.
Бойові завдання підпорядкованим частинам (підрозділам) визначаються у рішенні у точній відповідності з наміченим замис-
лом. Суть терміна “бойове завдання” складається передусім у визначенні, які ЗПН слід виявити та знищити. Але оскільки ці бойові
дії (бойове застосування) завжди ведеться у рамках часу та простору, то іншим складником поняття “бойове завдання” завжди є
визначення термінів готовності, початку та кінця його виконання, а також місця (району або напрямку) бойових дій (бойового за-
стосування).
З бойовими завданнями нерозривно пов’язаний такий елемент рішення як порядок взаємодії або основи взаємодії. Розділення
цих двох елементів рішення носить надто умовний характер. Визначаючи бойові завдання підпорядкованим силам та засобам, ко-
мандир тим самим вже закладає основи їх взаємодії, суть якого складається в узгодженні зусиль та дій військ за метою (завданням),
часом та місцем (районом, межами, напрямками). Крім них необхідно визначити, а то і вказати засоби виконання підлеглими під-
розділами своїх особистих завдань при рішенні загального завдання, з тим, щоб забезпечувалася взаємна допомога та чітка пого-
дженість уїх діях.
Заходи організації управління бойових дій розглянуті у розділі 7 цього Довідника.
Основи організації взаємодії розглянуті у розділі 8 цього Довідника.
Заходи усіх видів забезпечення бойових дій розглянуті у розділі 9 цього Довідника.
Строки готовності визначаються старшим начальником, виходячи з рівня підготовки військ та умов обстановки, що склалися.
7.6.3. Методика прийняття рішення на бойові дії (бойове застосування)
Процес мислення командира при прийнятті рішення нерідко ділиться на три самостійних та послідовно здійснюваних етапи:
насамперед усвідомлюється завдання, після цього оцінюється обстановка і приймається рішення.
Але природа процесу усвідомлення завдання така, що командир при її здійсненні вимушений у тій чи іншій мірі втручатись в
область оцінки обстановки. Не знаючи цілком обстановки, правильно усвідомити одержане завдання неможливо.
Під усвідомленням бойового завдання розуміється процес мислення командира, спрямований на з’ясування та глибоке осми-
слення замислу старшого начальника й на вивчення змісту свого бойового завдання і встановлення місця і ролі, що займає його
з’єднання (частина) у виконанні завдання вищої інстанції.
Складові частини усвідомлення бойового завдання: мета очікуваних бойових дій; замисел старшого начальника; завдання,
місце та роль свого з’єднання (частини); завдання сусідів, порядок взаємодії з ними; строки готовності до бойових дій.
Правильне розуміння замислу старшого начальника, а також бойового завдання дозволяє командиру чітко уявити мету бойово-
го застосування з’єднання (частини), з’ясувати вимоги до свого власного рішення та дій підлеглих.
Оцінка обстановки полягає у пізнанні об’єктивних умов виконання бойового завдання. Внаслідок такого пізнання з’являються
чинники, що сприяють або ускладнюють виконання бойового завдання за обмежений час.
У навчальній практиці добре зарекомендувала себе методика, при якій спочатку усвідомлюється завдання та оцінюється, зок-
рема, кожен елемент обстановки, спостерігається їх вплив на відповідний елемент рішення, а лише потім робляться висновки. Таку
методику інколи умовно називають прийняттям рішення за елементами обстановки. II позитивність полягає в тому, що вона
дає командиру повне та конкретне коло питань, на які він повинен послідовно знайти обгрунтовані відповіді при прийнятті рішення
на бойові дії (бойове застосування). Особливо цінна вона, як показала практика, при початковому навчанні молодих офіцерів мето-
диці прийняття рішення у військово-навчальних закладах та у системі командирської підготовки у військах, коли їм надається за-
вдання з новою, складною та цілком незнайомою до цього обстановкою. У цьому випадку офіцер, що навчається, керуючись даною
методикою ще при підготовці до заняття, ретельно аналізує кожен елемент обстановки, а у ході заняття його керівник підводить до
доцільного рішення поступово, крок за кроком, при цьому в процесі навчання бере участь увесь колектив навчальної групи.
Але дана методика має й істотні недоліки. Основний з них полягає у тому, що на прийняття рішення з її допомогою вимагається
дуже багато часу, якого, командир при бойових діях (бойовому застосуванні), як правило, не буде мали. Крім того, вона штучно
відділяє усвідомлення бойового завдання від оцінки обстановки у цілому та кожного її елемента, недостатньо повно розкриває діа-
лектику мислення командира, не зовсім чітко показує йому, як підійти до рішення.
Другим важливим шляхом прискорення процесу підготовки рішення та підвищення його обгрунтованості є уміле поєднання
(але не заміна) командиром зазначеної вище послідовності прийняття рішення за елементами обстановки з деяким іншим поряд-
ком, що умовно можна назвати прийняттям рішення за елементами рішення. Принципової різниці між обома прийомами не-
має. Різниця між ними полягає лише у послідовності мислення командира.
При прийнятті рішення на бойові дії* (бойове застосування) за елементами цього рішення командир усвідомлює одержане за-
вдання і оцінює кожен елемент обстановки у тісному взаємозв’язку та під кутом їх комплексного впливу на відповідний елемент
свого рішення.
287
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Приступаючи до вироблення рішення, командир зразу ставить перед собою конкретні питання (де зосередити основні зусилля,
як організувати бойові дії (бойове застосування) та ін.) і тут же шукає на нього відповідь з урахуванням вимог задуму старшого
начальника, можливостей противника, бойових можливостей своїх сил та засобів і усіх інших умов обстановки, від яких залежить
відповідь. Тим самим його мислення з самого початку набуває більш цілеспрямованого характеру, іде більш коротким шляхом, а
тому, і швидше до своєї кінцевої мети - визначення замислу, бойових завдань підлеглим та їх взаємодію.
Така методика зумовлена наявністю зазначеного вище діалектичного зв’язку між процесом усвідомлення бойового завдання,
оцінкою обстановки та між елементами обстановки, а також тією обстановкою, яку командир вивчає завчасно, тобто ще до одер-
жання нового завдання. З одержанням завдання командиру під час бойових дій (бойового застосування) немає необхідності почи-
нати “з нуля” і послідовно перебирати у пам’яті кожен елемент обстановки, оскільки така робота ним уже пророблена. Він має по-
вну можливість зразу розпочати справу - визначення елементів рішення.
Не можна вважати якимось самостійним етапом і останню заключну операцію у мисленні командира - визначення доцільного
варіанта рішення та його формулювання. Самій природі даного процесу притаманний пошуковий характер, оскільки у ході його у
командира в силу суперечливого впливу різних елементів обстановки неминуче виникає у вигляді гіпотез декілька альтернативних
варіантів рішення. Командир із декількох варіантів вибирає один, який за тим чи іншим критерієм (показниками) він вважає най-
кращим, оптимальним або найбільш доцільним, тобто близьким до оптимального.
Пошук такого варіанта починається з самого початку процесу прийняття рішення. У ході цього процесу командир з безлічі мо-
жливих варіантів повинен “відсіяти” явно помилкові. Потім із тих декількох доцільних або раціональних варіантів, які залишились,
командир, у кінці процесу прийняття рішення, на основі порівняння їх між собою за показниками бойових можливостей з’єднання
остаточно вибирає найкращий. Саме на момент вибору найкращого варіанта рішення велике значення набуває не тільки розум, але
і воля командира. Остаточний вибір з усіх можливих варіантів рішення найкращого, а після цього формулювання його і складає
сутгєвість заключної операції в усьому процесі мислення командира при прийнятті рішення на бойові дії' (бойове застосування).
Обравши найкращий варіант, командир формулює та оголошує своє рішення підлеглим.
7.6.4. Методика оцінки противника
Оцінка противника проводиться з метою отримання кількісних характеристик та розробки висновків, необхідних для прове-
дення оцінки своїх військ та прийняття рішення на бойові дії (бойове застосування).
Оцінка противника на етапі підготовки бойових дій (бойового застосування) проводиться до початку повітряного нападу про-
тивника, результати, одержані при цьому, носять імовірнісний характер і базуються на прогнозі наступних подій та їх апріорних
оцінок. Тому вірогідність висновків з оцінки противника принципово не може бути вище вірогідності оцінок, одержаних у ході
розвитку повітряного удару противника.
Командир, як правило, не має у своєму розпорядженні всіх даних про противника, не знає, а тільки намагається викрити зами-
сел його можливих дій. Противнику належить пріоритет у виборі варіанта удару. Тому висновки з оцінки противника являються
імовірнісними, а точність прогнозування визначається повнотою та достовірністю вихідних даних, правильністю методів, що засто-
совуються під час оцінки та врахуванням всіх чинників, які впливають надії противника.
Елементи оцінки противника: угруповання, бойовий склад, бойова готовність засобів повітряного нападу противника, їх мо-
жливості, варіанти нанесення удару, можлива тактика дій противника у межах відповідальності з’єднання (частини); можливі мар-
шрути та профілі польоту крилатих ракет; очікувана кількість літаків (крилатих ракет), яку може застосувати противник на контро-
льованому напрямку (наряд сил для удару по об’єктах оборони); рубежі досяжності засобів повітряного нападу та пуску ракет
“повітря-поверхня” по об’єктах оборони; можлива кількість радіолокаційних цілей у зоні огляду засобів та побудова схеми удару;
можливі цілі першого масованого удару та завдання, які при цьому вирішуватиме противник; можливість противника з протидії;
сильні та слабкі сторони повітряного противника; можливий характер дій наземного (морського) противника.
Вихідні дані для оцінки противника: бойове завдання; висновки з оцінки противника, що надходять з вищого штабу; дані про
угруповання, стан бойової та технічної готовності ЗПН противника на контрольованому напрямку; матеріали узагальнення досвіду
застосування ЗПН у локальних конфліктах; можливі варіанти побудови удару противника; тактико-технічні характеристики та
способи бойового застосування ЗПН противника; склад та тактико-технічні характеристики засобів радіоелектронного заглушу-
вання противника та способи їх бойового застосування; тактико-технічні характеристики та можливий характер дій наземного
(морського) противника у районі дислокації з’єднання (частини).
Для оцінки противника можуть застосовуватись різноманітні методи. На практиці найбільш часто використовують такі методи:
графоаналітичний метод; метод моделювання на ЕОМ.
При графоаналітичному методі використовуються для оцінки противника аналітичні вирази різної складності, схеми, карти та
графіки. При цьому графіки можуть бути одержані з використанням методу моделювання на ЕОМ.
Метод математичного моделювання на ЕОМ дозволяє з певною точністю відтворити процес нанесення ракетно-авіаційного
удару противника та оцінити його характеристики.
Оцінка можливостей противника з протидії радіоелектронним засобам (РЕЗ) з’єднання (частини) проводиться з метою
прийняття своєчасних ефективних заходів з недопущення зниження бойових можливостей нижче допустимих значень.
Для заглушування РЕЗ противник може використати такі засоби РЕБ: активні та пасивні завади, що застосовуються з бо-
рту аеродинамічних носіїв, активні завади з наземних та корабельних пунктів, передавачі завад одноразового використання, що
закидаються; подавлення випромінюючих засобів шляхом застосування самонавідного на випромінювання озброєння.
Оцінка можливостей противника з подавлення РЕЗ з’єднання (частини) повинна включати: оцінку засобів радіоелект-
ронного заглушування противника, їх можливостей та способів бойового застосування; оцінку можливостей противника з вогнево-
го подавлення РЕЗ самонавідною на випромінювання зброєю.
288
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Вихідні дані для оцінки радіоелектронної обстановки: дані про стан бойової готовності та угруповання ЗПН противника;
дані про можливі варіанти нанесення удару ЗПН та засоби подавлення РЕЗ; довідкові матеріали за технічними характеристиками
засобів радіоелектронного заглушування; бойове завдання з’єднання (частини); висновки з оцінки радіоелектронної обстановки, що
надходять з вищого штабу; дані про можливі об’єкти удару наданому напрямку та їх важливості.
Оцінка можливості РЕП з засобів повітряного нападу, корабельних та наземних засобів: можливий наряд засобів повіт-
ряного нападу у межах відповідальності з’єднання (частини), типи літаків та обладнання їх засобами РЕБ; дислокування та можлива
тактика застосування спеціальних літаків РЕБ, безпілотних літаків постановників завад; місцезнаходження корабельних та назем-
них засобів РЕБ противника, їх можливості у постановці завад РЕЗ; наявність та можлива тактика застосування передавачів завад
одноразової дії, що закидаються; межі (райони) постановки завад та тимчасові межі дії завад для різних варіантів нанесення удару;
очікувані спектральні щільності потужності завад для різних варіантів удару.
У висновках з оцінки радіоелектронної обстановки відображаються: очікувана кількість аеродинамічних постановників
завад та їх можливості з заглушування РЕЗ з’єднання (частини); можливі тактичні способи застосування противником аеродинамі-
чних, корабельних та наземних засобів РЕП та очікувані спектральні щільності потужності завад; імовірність застосування против-
ником передавачів завад, що закидаються, очікувана їх кількість та очікувані спектральні щільності потужності завад, що створю-
ються ними; очікувана кількість та можливі межі запуску самонавідної на випромінювання зброї.
Оцінка можливого характеру дій наземного (морського) противника по бойовому порядку проводиться з метою вияв-
лення найбільш імовірних способів його впливу на з’єднання (частину).
Під час оцінки проводиться аналіз наземного противника з врахуванням усіх існуючих даних про десантно-диверсійні групи, їх
склад, озброєння та способи дій, визначаються об’єкти, по яких можна очікувати удари десантно-диверсійних груп, імовірні шляхи
їх підходу та місця скупчення, уточнюються небезпечні сектори для найбільш вразливих об’єктів.
Загальні висновки з оцінки противника: базування, бойовий склад та стан бойової готовності ЗПН противника; способи бо-
йового застосування ЗПН противника, які необхідно врахувати при підготовці бойових дій (бойового застосування); імовірні спо-
соби протидії противника, місце, час їх реалізації, що необхідно врахувати при організації РЕБ, а також при аналізі радіоелектронної
обстановки у ході виконання бойового завдання; можливий характер та варіанти дій наземного (морського) противника, що необ-
хідно врахувати при організації взаємодії та забезпечення.
7.6.5. Оцінка своїх військ
Оцінка своїх військ носить комплексний характер та включає оцінку: бойового складу, бойових можливостей з’єднання (части-
ни); системи управління; стану бойової готовності з’єднання (частини); усіх видів забезпечення; політико-морального стану особо-
вого складу; взаємодіючих з’єднань (частин).
Оцінка бойових можливостей з’єднання (частини) є одним з найбільш складних елементів оцінки своїх військ. Методика
оцінки бойових можливостей розглянута нижче. Оцінка системи управління полягає у вивченні та аналізі стану елементів
системи управління її структури та живучості, бойової готовності та злагодженості органів управління. Оцінка стану бойової
готовності з’єднання (частини) здійснюється з метою визначення ступеня підготовленості з’єднання (частини) до виконання по-
ставленого бойового завдання. Вона включає оцінку укомплектованості з’єднання (частини) особовим складом, технікою та озбро-
єнням, технічного стану засобів, рівня бойового уміння (бойової кваліфікації) особового складу, організації та несення бойового
чергування.
Оцінка усіх видів забезпечення бойових дій (бойового застосування) з’єднання (частини) полягає у вивченні та аналізі стану
та можливостей кожного із видів забезпечення, спрямувати зусилля на підтримку з’єднання (частини) у постійній бойовій готовно-
сті до негайного виконання бойового завдання та до проведення тривалих бойових дій. Оцінка виробляється окремо для кожного із
видів забезпечення.
Оцінка політико-морального стану особового складу здійснюється з метою визначення його відповідності вимогам, що
пред’являються до особового складу умовами війни та включає оцінку стану військової дисципліни, організованості, морально-
психологічної підготовки особового складу.
Оцінка взаємодіючих з’єднань (частин) полягає у вивченні та аналізі їх складу, стану, можливостей відносно сумісного рі-
шення завдань та їх впливу на організацію бойових дій (бойового застосування) і виконання бойового завдання, а також можливості
усунення взаємних завад.
7.6.6. Методика оцінки бойових можливостей
Бойові можливості - можливості підрозділів, частин, з’єднань з виконання певних бойових завдань в конкретних умовах. За-
лежать від кількості особового складу, рівня його підготовки і морального стану, наявності та стану зброї і техніки, мистецтва ко-
мандного складу в управлінні військами, організаційної структури військ, їх забезпеченості матеріально-технічними засобами, а
також сили і характеру протидії противника та ін.
Етапи оцінки бойових можливостей: усвідомлення бойового завдання з’єднання (частини); визначення (уточнення) мети
оцінки бойових можливостей; вибір показників бойових можливостей (ПБМ), які повинні бути визначені відповідно до бойових
завдань та мети оцінки; визначення усіх необхідних вихідних даних (чинників або умов виконання бойового завдання) для оцінки
бойових можливостей; визначення (вибір) методів оцінки ПБМ для обраних вихідних даних; розробка (вибір) математичних моде-
лей оцінки ПБМ; визначення залежності ПБМ від параметрів з’єднання (частини) та умови виконання бойового завдання; оцінка
(розрахунок) ПБМ з’єднання (частини); проведення оперативно-тактичного аналізу одержаних результатів оцінки з урахуванням
289
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
заданих вимог до ПБМ (визначення міри відповідності ПБМ вимогам, що пред’являються до них, виявлення причин невідповідно-
сті, розробка заходів (пропозицій) усунення причин невідповідності); проведення заходів з усунення причин невідповідності ПБМ
вимогам; додаткова (повторна) оцінка ПБМ для нових умов з наступним оперативно-тактичним аналізом; формулювання виснов-
ків та пропозицій за результатами оцінки ПБМ з’єднання (частини).
Показники бойових можливостей - кількісні та якісні, а також критерії. Вони повинні відповідали таким вимогам: відобра-
жати суть бойового завдання, що виконується, або окремих його частин; враховувати основні чинники (умови), від яких залежить
виконання бойового завдання; бути критичними до параметрів озброєння з’єднання (частини); бути практично доступними для
визначення (обчислення) та аналізу; вибиратись з урахуванням структури та динаміки функціонування засобів.
Оцінка бойових можливостей з’єднання (частини) може проводитись за загальним (глобальним) ПБМ або частковими по-
казниками.
Визначити загальний (глобальний) ПБМ з’єднання (частини) ППО на цей час є неможливим, тому що для його визначення не-
обхідно знали велику кількість параметрів та умов виконання завдання, а також мати потужні обчислювальні комплекси. Тому
бойові можливості з’єднання (частини) оцінюються частковими ПБМ, що відображають різноманітні сторони та очікувані резуль-
тати виконання бойового завдання. Кількість часткових ПБМ вибирається такою, щоб вони у сукупності досить повно характери-
зували бойові можливості з’єднання (частини).
Класифікація показників бойових можливостей: просторові; часові; імовірнісні; інформаційні; з бойової готовності.
Комплексні ПБМ поєднують два або більше показників, наприклад, просторово-часові.
Бойові можливості з’єднання (частини) можуть бути прогнозовані для найбільш несприятливих та сприятливих умов виконан-
ня бойового завдання, тобто обмеженими знизу та згори і поточними. Для оцінки поточних бойових можливостей беруться не
усі можливі варіанти нанесення удару, а тільки фіксований варіант.
Методи оцінки бойових можливостей: натурні випробування; дослідно-теоретичний метод; графоаналітичний метод; метод
моделювання на ЕОМ.
Метод натурних випробувань дозволяє одержали необхідні оцінки для реальних умов обстановки. При цьому повністю ви-
користовуються усі сили та засоби з’єднання (частини) і вірогідність оцінок стає досить високою. Проте цей метод має істотне об-
меження: не можна створити реальну обстановку для прогнозованих умов виконання бойового завдання (складна повітряна та ра-
діоелектронна обстановка, масоване застосування крилатих ракет та завад противника тощо). Тому метод натурних випробувань
застосовується, в основному, для одержання окремих характеристик або окремих показників складної системи, а також
“калібровочних” (опорних) даних для інших методів оцінки. Дослідно-теоретичний метод заснований на методі математичного
моделювання з використанням елементів реальних засобів з’єднання (частини) або імітаторів, а також з використанням вихідних
даних, одержаних при налурних випробуваннях. Шляхом обробки даних, одержаних за певну кількість реалізацій, можна оцінити
необхідні можливості з’єднання (частини) для заданих умов функціонування.
При графоаналітичному методі для оцінки бойових можливостей використовуються аналітичні вирази різноманітної склад-
ності та графіки. При цьому графіки можуть бути одержані з використанням інших методів оцінки (моделюванням на ЕОМ, натур-
ними випробуваннями, експериментальним шляхом). Цей метод застосовують, в основному, для приблизних (орієнтовних) оцінок
та з навчальною метою.
Метод математичного моделювання на ЕОМ дозволяє з певною точністю відтворити процес функціонування засобів
з’єднання за допомогою математичних моделей та оцінити необхідні бойові можливості. За допомогою цього методу можуть бути
визначені прогнозовані та поточні бойові можливості з’єднання. З урахуванням переваг та недоліків кожного з методів оцінки та
умов, у яких вони проводяться на практиці, застосовується поєднання цих методів для оцінки бойових можливостей.
7.7. Основи планування бойових дій (бойового застосування)
Прийняте командиром рішення не може у повному обсязі охоплювати усі без винятку сторони підготовки та бойового застосу-
вання з’єднання. Тому рішення потребує детальної розробки та документального оформлення.
Ця робота і складає зміст процесу завершення планування.
Перша частина цього процесу - деталізація рішення полягає у докладному визначенні: способів та строків виконання бойових
завдань; розподілу сил та засобів за завданнями та напрямками дій; порядку взаємодії; заходів із усіх видів забезпечення; організації
й здійснення управління на одну інстанцію нижче та контролю.
Друга частина процесу планування - документальне оформлення рішення на бойові дії (бойове застосування), необхідне для
того, щоб це рішення було доступно іншим відповідальним особам та одержало юридично завершений та узаконений вигляд. При
плануванні відпрацьовуються оперативні (бойові), мобілізаційні, адміністративно-організаційні та інші документи. Оперативні
(бойові) документи - документи, що відносяться до бойової діяльності військ, підготовки та бойового застосування з’єднання та
його розташування на місцевості.
Оперативні (бойові) документи за своїм призначенням поділяються на документи щодо управління військами (оперативні ди-
рективи, плани, бойові накази та розпорядження, робочі карти та ін.); звітно-інформаційні документи (донесення, зведення, інфор-
мації та повідомлення, звіти, журнали бойового застосування, звітні карти та ін.); довідкові документи (розрахунки, таблиці, схеми,
графіки, довідки, описи та ін.).
При розробці оперативних (бойових) документів необхідно дотримуватись встановлених вимог та правил розробки й оформ-
лення. Мобілізаційні документи - документи, що відносяться до планування та проведення мобілізаційної роботи. Вони відпра-
цьовуються відповідно до настанов з мобілізації.
Адміністративно-організаційні документи - документи, що стосуються повсякденної організаторської, адміністративної та
господарської діяльності штабів, використання особового складу та ін.
290
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Планування звичайно починається у період підготовки бойових дій (бойового застосування) з’єднання (частини) після затвер-
дження рішення старшим командиром і закінчується розробкою та підписанням командиром та начальником штабу бойових до-
кументів. У ході бойових дій (бойового застосування) з’єднання (частини) планування триває. Відповідно до змін обстановки коре-
гуються та уточнюються раніше розроблені бойові документи, а при істотних змінах обстановки або одержанні нового завдання
планування проводиться заново.
7.8. Доведення бойових завдань до підлеглих
Вимоги щодо доведення бонових завдань до підлеглих: вчасне доведення до виконавця, тобто за термін, достатній підлеглим
для підготовки до їх виконання; точне та зрозуміле доведення, без викривлення змісту; зберігання у таємниці від противника замис-
лу та характеру своїх дій; забезпечення підлеглих усіма вихідними даними для прийняття своїх рішень.
При постановці бойових завдань підлеглим зазначаються такі дані: висновки з оцінки противника, зроблені вищим коман-
диром з тим, щоб підлеглі змогли з’ясувати угруповання сил та засобів противника; бойове завдання та замисел дії вищої інстанції з
тим, щоб підлеглі могли зрозуміти своє місце та роль у виконанні загального бойового завдання; бойові завдання підлеглим підроз-
ділам; основні дані про завдання взаємодіючих військ; час готовності до виконання бойового завдання; хто призначається заступ-
ником командира для прийому управління у разі виходу з ладу пунктів управління старшого начальника, а також місце дислокації
цих пунктів управління.
Завдання підлеглим доводяться у бойовому наказі, бойовому розпорядженні, розпорядженнях з видів забезпечення та інших
документах.
7.9. Основи інформаційної боротьби
7.9.1. Мета, зміст та основні характеристики інформаційної боротьби
У сучасних війнах (збройних конфліктах) неможливо досягти поставленої мети без здійснення заходів інформаційної боротьби.
Поняття інформаційна боротьба, інформаційне протиборство та інформаційна війна часто вживаються як синоніми. Пробле-
ма ускладнюється тим, що на сьогодні немає загальноприйнятого визначення жодного з цих понять.
Інформація - знання про людей, факти, події, явища і процеси. Вона повинна бути своєчасною, корисною, достовірною,
об’єктивною, повною, точною і достатньо деталізованою.
Інформація існує і циркулює в інформаційному середовищі, до якого відносяться: свідомість людини і суспільства; художні
твори і друковані видання; магнітні записи, кіно- і фото-вироби; програмне забезпечення; апаратне обладнання; телерадіокомуніка-
ції; матеріально-технічні засоби.
Інформаційні системи поділяються на (рис. 72): системи з незмінним внутрішнім станом; системи зі змінним внутрішнім
станом.
Рис. 7.2. Класифікація інформаційних систем
291
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Системи зі змінним внутрішнім станом в свою чергу поділяються на* системи з незмінним алгоритмом обробки, але зі змінни-
ми вхідними даними (бази даних, окремі масиви і т.д) які використовуються в процесі обробки вхідної інформації; системи з адап-
тивним алгоритмом обробки, тобто алгоритм налагоджується на умови застосування, налагодження здійснюється шляхом або змі-
ни управляючих коефіцієнтів, або автоматичним вибором алгоритму із великої кількості існуючих рівносильних алгоритмів; сис-
теми з самодиференціюючою метою і повністю самодиференціюючим алгоритмом, що виходить за межі великої кількості існую-
чих рівносильних алгоритмів.
Будь-яка інформаційна система потенційно є об’єктом інформаційної боротьби (або втручання, або впливу) чи інформаційної
війни.
Інформаційна боротьба - комплекс заходів інформаційного характеру, які проводяться органами державного і військового
управління з метою дезорганізації державного управління та управління збройними силами противника, підриву морально-
психологічної стійкості особового складу, населення противника, забезпечення позитивного іміджу, створення сприятливого між-
народного клімату навколо держави.
Інформаційне протиборство - дії, що проводяться для досягнення інформаційної переваги способом впливу на інформацію
противника, на його інформаційні системи і процеси з одночасним захистом власної інформації, інформаційних процесів та систем.
Інформаційне протиборство і раніше було присутнє практично у всіх війнах в таких основних формах, як ведення розвідки і проти-
дія їй, розповсюдження дезінформації, чуток і боротьба з ними (у т.ч. через цензуру).
Війна виступає крайньою формою протиборства. Такий підхід дає змогу визначити інформаційну війну, як крайню форму
протиборства держав та уповноважених на те органів на інформаційному рівні.
Вона характеризується використанням спеціальних способів і засобів впливу на інформаційне середовище протидіючої сторо-
ни та захисту власного інформаційного середовища в інтересах досягнення політичних і економічних та воєнних цілей.
Інформаційна боротьба включає:
радіоелектронну боротьбу, стратегічне (оперативне) маскування, порушення нормального функціонування або повне знищення
інформаційних систем противника, інформаційно-комп’ютерну боротьбу.
Вона здійснюється шляхом впливу на інформаційне середовище (інформацію, технічні засоби добування, обробки і передачі
інформації, органи управління, військовослужбовців і населення противника) при одночасному захисті свого інформаційного сере-
довища від аналогічного впливу противника.
Інформаційна зброя - це устаткування, прилади, технології та інші засоби, що використовуються для широкомасштабного,
цілеспрямованого, прихованого інформаційного втручання в поняття і настрій людей, інформаційні та телекомунікаційні системи
(рис. 7.3).
Рис. 7.3. Вплив інформаційної зброї
292
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Інформаційна зброя представляє собою засоби: знищення, викривлення або викрадання інформаційних масивів; подолання си-
стем захисту; обмеження доступу до інформації законних користувачів; дезорганізації роботи технічних засобів, комп'ютерних
систем.
Атакуючою інформаційною зброєю є: комп'ютерні віруси; логічні бомби (програмні закладки); засоби подавлення інформа-
ційного обміну в телекомунікаційних мережах, фальсифікації інформації в каналах державного і воєнного управління; засоби нейт-
ралізації тестових програм; різного роду помилки, які свідомо вводяться до програмного забезпечення об’єкта
Технологія застосування інформаційної зброї включає: аналіз способів і механізмів активізації у конкретній системі противни-
ка закладених до неї програм; пошук програми самознищення; розробку конкретної інформаційної зброї та алгоритму її викорис-
тання; застосування інформаційної зброї щодо визначеного об'єкта
Інформаційна зброя спрямована безпосередньо на зміну поведінки інформаційних систем, а у випадку застосування проти лю-
дей - на зміну їх мислення і, в подальшому, поведінки без попереднього військового “залякування”.
Основні ознаки ураження інформаційною зброєю: включення частини структури ураженої системи в структуру системи-
переможця (еміграція, вивіз в першу чергу більш цінного людського матеріалу); повне порушення тіа частини структури, яка від-
повідає за безпеку системи (армії переможеної країни та її спецслужб); повне руйнування тіа частини структури, яка відповідає за
відновлення елементів і структур підсистеми безпеки (руйнування виробництва, в першу чергу науковоємного, а також наукових
центрів і всієї системи освіти та припинення або заборона розробок і виробництва найбільш перспективних видів озброєння та тех-
нологій); руйнування і знищення тієї частини структури, яка не може бути використана переможцем в своїх цілях (не піддається
перенавчанню, перепрограмуванню); скорочення функціональних можливостей переможеної системи за рахунок скорочення її
інформаційної ємності (відділення частини території, знищення частини населення).
Основні особливості ведення інформаційної боротьби у загрозливий період: гранична обмеженість у використанні сил,
способів і засобів інформаційного впливу на противника; дотримання існуючих норм міжнародного права на обмеження радіоелек-
тронного заглушування певних частот і систем; тісна взаємодія силових відомств та інших структур при проведенні заходів інфор-
маційної боротьби.
Основні завдання інформаційної боротьби з початком воєнних (бойових) дій: масований вплив на інформаційне середо-
вище противника; запобігання зниження бойових можливостей своїх військ (сил), ефективності застосування ними озброєння і
військової техніки через використання противником аналогічних способів і засобів; проведення заходів щодо зниження рівня мора-
льно-психологічної стійкості військ противника; забезпечення нейтралізації інформації, яка впливає на морально-психологічний
стан свого особового складу; посилення інформаційно-розвідувальної діяльності; забезпечення прихованості найважливіших захо-
дів своїх військ у ході підготовки та проведення операцій (бойових дій).
7.9.2. Основні принципи і форми інформаційної боротьби
Принципи організації та ведення інформаційної боротьби: завчасна всебічна підготовка сил і засобів інформаційної бороть-
би; постійна готовність до захисту власного інформаційного середовища; постійна готовність до впливу на інформаційне середо-
вище протидіючої сторони; висока активність і рішучість інформаційної боротьби; узгоджене сумісне використання усіх сил і засо-
бів інформаційної боротьби, у тому числі із іншими засобами боротьби з противником; раптовість дій; використання несподіваних
для противника способів виконання завдань; прихованість заходів, які плануються та проводяться.
Форми інформаційної боротьби: інформаційна операція; інформаційні дії (акції); інформаційний удар.
Інформаційна операція - сукупність узгоджених і взаємопов’язаних за метою, завданнями, місцем і часом інформаційних дій
(акцій), ударів, що здійснюються одночасно і послідовно за єдиними замислом і планом для завоювання та утримання інформацій-
ної переваги над противником або зниження його інформаційної переваги.
Інформаційна операція проводиться у рамках відповідної загальновійськової або спеціальної операції на стратегічному рівні.
Мета інформаційної операції досягається вирішенням наступних завдань: інформаційним впливом на противника; інформацій-
ним захистом угруповань своїх військ; ефективним використанням інформаційних ресурсів угруповань своїх військ.
Інформаційні дії (акції) - сукупність узгоджених за метою, завданнями, простором і часом заходів, що здійснюються для ве-
дення інформаційної боротьби силами та засобами, які залучаються протягом певного часу у заданому районі (напрямі).
У рамках інформаційних дій (акцій) можуть проводитись інформаційні удари й атаки.
Для ефективного проведення заходів з інформаційної боротьби інформаційні впливи на противника необхідно починати ще за
мирного часу (до початку воєнних (бойових) дій). Такі інформаційні дії називаються акціями.
Інформаційний удар - короткочасний потужний та узгоджений інформаційний вплив сил і засобів інформаційної боротьби на
найбільш важливий елемент (елементи) системи управління противника для досягнення рішучих цілей щодо завоювання інформа-
ційної переваги своїх військ або зниження інформаційної переваги противника.
Мета інформаційної боротьби досягається скоординованим виконанням комплексу заходів радіоелектронної і психологічної
боротьби та стратегічного (оперативного) маскування.
7.10. Повітряна операція
Повітряна оборонна операція - сукупність узгоджених та взаємопов’язаних за метою, завданнями, місцем та часом ударів і
бойових дій авіаційних об’єднань і частин, з’єднань і частин ППО, ракетних військ, оперативних командувань, з’єднань і частин
інших родів військ збройних сил при вирішальній ролі ВПС, які проводяться за єдиним замислом і планом для вирішення протягом
певного часу оперативних завдань під загальним керівництвом головнокомандувача ЗС.
293
РОЗДІЛ 7. ОСНОВИ УПРАВЛІННЯ ТА ПІДГОТОВКИ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
Повітряні операції проводяться з метою зриву повітряної наступальної операції противника, утримання панування у повітрі;
руйнування військово-економічного потенціалу країни агресора; порушення державного та військового управління противника;
зриву його мобілізаційного розгортання; боротьби з резервами. Ця мета досягається нанесенням поразки важливим ракетно-
авіаційним угрупованням противника в районах їх базування, знищенням основних сил ударної авіації та крилатих ракету польоті,
виводом з ладу промислово-економічних і енергетичних центрів, подавленням об’єктів управління засобами нападу.
До виконання завдань повітряної операції залучаються: авіаційні об’єднання і частини, з’єднання і частини ППО; з’єднання і
частини ракетних військ і артилерії; з’єднання і частини армійської авіації; з’єднання і частини аеромобільних військ; об’єднання
ВМС; частини радіоелектронної боротьби.
Оскільки до повітряної операції залучаються об’єднання, з’єднання та частини декількох видів збройних сил, родів військ та
спеціальних військ, повітряна операція є спільною і являється складовою частиною загальновійськової операції.
У ході повітряної операції з’єднання і частини ППО прикривають від ударів з повітря угруповання оперативних командувань,
позиційні райони ракетних з’єднань та частин; райони розташування арсеналів, складів, баз оперативно-тактичних і тактичних ра-
кет, аеродроми базування ВПС; військово-морські бази; райони розосередження ВМС; важливі адміністративно-політичні та про-
мислово-економічні центри; об’єкти тилу та комунікації.
Основні принципи ведення повітряної операції: рішуче масування авіації, ракетних військ і артилерії, сил і засобів ППО для
розгрому основних угруповань противника за короткі терміни в місцях базування та у повітрі; тісна взаємодія між частинами,
з’єднаннями та об’єднаннями різних видів збройних сил; одночасне нанесення ударів по угрупованням збройних сил і об’єктах
противника на всю глибину їх оперативної побудови; поєднання раптовості і безперервності дій щодо розгрому ракетно-
авіаційного угруповання противника у повітрі і на землі.
Зміст повітряної операції: комплексне ведення розвідки противника на землі (морі) і у повітрі; загальновійськові, вогневі, по-
вітряні, протиповітряні та морські битви, які представляють собою сукупність найважливіших боїв, ударів, які проводяться за єди-
ним замислом певними угрупованнями військ (сил); маневрування залученими до операції силами та засобами з метою посилення
окремих напрямків для створення переваги над противником; всебічне забезпечення битв, окремих боїв та ударів і операції в ціло-
му, підтримання безперервного стійкого управління, своєчасне відновлення боєздатності військ (сил) та їх бойових порядків.
Залучені до повітряної операції війська, сили і засоби повинні виконувати наступні завдання:
сили і засоби розвідки розкривають підготовку противника до повітряної наступальної операції, її початок, склад і можливі
напрямки дій ЗПН, їх характеристики, забезпечують розвідувальною та бойовою інформацією пункти управління сил та засобів
ППО та ВПС;
ударна авіація, ракетні війська та артилерія з метою зриву повітряної наступальної операції противника знищують його
авіацію на аеродромах базування, наземні елементи розвідувально-ударних комплексів, ракетні комплекси, пункти управління,
наносять удари по об’єктах військово-економічного потенціалу;
з’єднання і частини ППО прикривають від ударів повітряного противника угруповання військ, сили флоту, пункти управлін-
ня і резерви головного командування збройних сил, об’єкти тилу, адміністративно-політичні, енергетичні центри на території дер-
жави;
винищувальна авіація здійснює прикриття військ (сил), аеродромів, пунктів базування ВМС та інших об’єктів, веде боротьбу
з повітряним противником у повітряних боях на підступах до об’єктів, а також і з його літаками ДРЛВ і повітряними елементами
РУК;
війська ППО СВ знищують засоби повітряного нападу противника в польоті і прикривають від ударів із повітря угруповання
військ (сил) і військові об’єкти в установлених межах відповідальності;
сили ППО ВМС здійснюють прикриття кораблів у морі, підсилюють протиповітряну оборону районів базування флоту. Вони
можуть також нарощувати своїми засобами поля радіолокаційного виявлення і наведення над акваторією моря за рахунок викорис-
тання кораблів радіолокаційного дозору;
сили і засоби РЕБ забезпечують радіоелектронну безпеку своїх об’єктів і радіоелектронне заглушування об’єктів і систем
противника
294
РОЗДІЛ 8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
Взаємодія - узгодження завдань, напрямків, рубежів та часу спільних дій частин, з’єднань родів військ та спеціальних військ,
сип та засобів ППО сусідів в інтересах виконання бойового завдання - досягнення загальної цілі бойових дій. Тобто, суть взаємодії
полягає в узгоджених та взаємопов’язаних діях всіх військ та сил, які приймають участь у бойових діях.
Взаємодія - один з основних принципів воєнного мистецтва. Він відображає об’єктивну закономірність взаємного впливу всіх
військ та сил, які приймають участь в операції (бойових діях, бою).
Головна мета взаємодії полягає у найбільш ефективному використанні бойової потужності сил та засобів в інтересах розгрому
повітряного противника та забезпечення взаємної безпеки.
Взаємодію з’єднань (частин) родів військ та спеціальних військ в з’єднанні (об’єднанні) ППО організує командир (командувач)
сумісно зі штабом та начальниками родів військ на підставі оперативної директиви (бойового наказу), вказівок з взаємодії’ вищого
штабу та рішення командира (командувача) на бойові дії’ (бойове застосування).
8.1. Завдання взаємодії
При організації взаємодії різнорідних сил вирішуються дві групи завдань: забезпечення єдності дії для рішення загальних
питань; усунення взаємного впливу, що заважає рішенню особистих питань.
Основні завдання взаємодії: узгодження зусиль сил та засобів розвідки свого з’єднання і сусідів щодо виявлення повітряного
противника та своєчасний обмін інформацією про нього; досягнення безперервної та узгодженої вогневої дії’ по повітряному про-
тивнику для безумовного його знищення, у першу чергу - на далеких підступах до об’єктів оборони; надання взаємодопомоги в
інтересах виконання бойового завдання та своєчасного відновлення порушеної внаслідок ударів противника системи ППО; при-
криття бойових порядків з’єднань і частин від ударів повітряного противника та першочергове знищення його аеродинамічних
засобів постановки завад засобами ППО взаємодіючих військ; усунення впливу завад від РЕЗ взаємодіючих військ на стійке вияв-
лення та супроводження цілей засобами з’єднань і частин; оповіщення про засоби повітряного нападу противника, діючих у на-
прямі бойових порядків з’єднань і частин; забезпечення безпеки польотів своєї авіації’ при веденні бойових дій.
Успішне рішення завдань взаємодії’ вимагає всебічної та детальної оцінки усіх чинників та умов обстановки, які впливають на
виконання бойових завдань.
Питання оцінки противника при організації взаємодії: варіанти дій засобів повітряного нападу та РЕП противника по бойо-
вих порядках з’єднань (частин) та радіоелектронному придушенню їх РЕЗ; очікуваний характер дій наземного противника у районі
бойових порядків та комунікацій з’єднань (частин).При оцінці варіантів дій противника по бойових порядках з’єднань (частин)
визначаються: полігонний наряд засобів повітряного нападу для виведення з ладу елементів з’єднання (частини) із заданою
імовірністю; бойовий наряд авіації, оснащеної різноманітними засобами ураження, по бойових порядках з’єднань (частин). При
оцінці характеру дій наземного противника визначаються: склад, озброєння, можливі райони викидання (висадки) диверсантів,
диверсійно-розвідувальних груп противника, маршрути їх руху, об’єкти нападу з урахуванням тактики та наслідків їх дій.При
оцінці варіантів та засобів радіоелектронного придушення противником РЕЗ з’єднань (частин): враховуються характеристи-
ки та можливості засобів постановки завад, їх носіїв; визначаються можливі варіанти використання засобів постановки завад; роз-
раховуються межі початку впливу завад на засоби з’єднання (частини), можливого їх придушення.
У процесі оцінки взаємодіючих з’єднань і частин визначаються завдання взаємодії’, способи їх виконання, відповідальні за
взаємодію, сигнали, склад, угруповання, стан бойової готовності, бойові можливості, система управління, оцінюються їх можли-
вості з надання допомоги у забезпеченні умов бойових дій (бойового застосування) з’єднання (частини).При оцінці впливу дій
взаємодіючих з’єднань (частин) на виконання бойового завдання проводиться аналіз складу, дислокації’, характеристик оз-
броєння, режимів роботи РЕЗ, визначаються РЕЗ - потенційні джерела завад своїм засобам, райони можливих падінь прискорю-
вачів зенітних ракет. Внаслідок оцінки противника та взаємодіючих з’єднань і частин штаб виявляє чинники, спроможні впливати
на ефективність виконання бойового завдання з’єднання (частини), визначає заходи щодо зниження або усунення впливу негатив-
них чинників та підсилення впливу позитивних чинників на ефективність виконання з’єднанням (частиною) поставленого бойового
завдання.
Під час узгодження сумісних дій, направлених на прикриття бойового порядку з’єднання (частини) від ударів
повітряного противника при наявності у з’єднанні (частині) зенітних комплексів ближньої дії визначаються напрямки та рубежі їх
розгортання, з урахуванням створеного угруповання сил та засобів взаємодіючих з’єднань і частин, визначається час приведення
комплексів у бойову готовність, межі видавання цілевказань (оповіщення) з’єднання (частини) про маловисотні цілі, склад
інформації оповіщення (координати, склад, державна належність, висота, швидкість та напрям польоту, тип літака та ін.) і порядок її
видавання.Для рішення завдання з визначення координат та державної належності аеродинамічних засобів постановки завад
враховуються, які засоби з’єднання (частини) та взаємодіючих військ можуть використовуватись з цією метою, їх місцезнаходжен-
ня для одержання заданої точності пеленгації’, необхідної межі видавання інформації цілевказання активним засобам взаємодіючих
військ, склад інформації’ взаємодії, порядок обміну та обробки, періодичність її обновлення.
З метою своєчасного знищення аеродинамічних постановників завад, діючих на засоби з’єднання (частини), визначаються
межі їх знищення. Основною вимогою при ріїпенні завдання взаємодії є знищення аеродинамічних постановників завад до повного
придушення засобів з’єднання (частини).
В інтересах рішення завдання забезпечення безпеки елементів бойового порядку узгоджуються сектори використання ЗУР з
метою виключення падіння прискорювачів на елементи бойового порядку та комунікації з’єднання (частини).
295
РОЗДІЛ 8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
Для якісного рішення завдання усунення дії завад від РЕЗ взаємодіючих військ (потенційних джерел завад) на засоби
з’єднання (частини) погоджуються їх частотні діапазони роботи. У тих випадках, коли неможливо зробити частотно-
територіальний розподіл, виключення дії завад може бути забезпечено встановленням заборони на роботу окремих РЕЗ на визначе-
ний період часу. Крім того, для рішення цього завдання узгоджуються склад засобів пеленгації, що виділяються з’єднанням (части-
ною) та взаємодіючими з’єднаннями (частинами) для визначення джерел взаємних завад, варіанти їх використання, порядок та час
розгортання, способи управління, склад інформації взаємодії, порядок обміну нею, заходи із оперативного усунення (зниження)
впливу джерел взаємних завад.
З метою високої злагодженості дій з’єднання (частини) та взаємодіючих з’єднань (частин) при сумісних діях при обороні
бойових порядків від наземного противника, ліквідації передавачів завад, що закидаються, та наслідків застосування
ЗМУ узгоджуються: райони проведення розвідки наземного противника на місцевості, що прилягає до бойових порядків та ко-
мунікацій з’єднань (частин), сили та засоби, що виділяються для цього, маршрути руху, порядок зв’язку та час підсилення розвідки;
сили та засоби, що виділяються для боротьби з наземним противником, порядок їх надання, способи та час доставки, в оточення
та управління ними, послідовність обміну даними про результати бойових дій та втрати; сили та засоби аварійно-рятувальних ко-
манд, що виділяються для надання взаємної допомоги, способи доставки, маршрути руху, час прибуття та способи обміну
інформацією про результати надання взаємної допомоги, маршрути та пункти евакуації поранених та хворих із районів ураження;
райони пошуку передавачів завад, що закидуються, варіанти використання засобів пеленгації джерел завад, порядок їх розгор-
тання, засоби обміну та обробки інформації, сили, що виділяються для безпосереднього пошуку передавачів завад, їх оснащення,
озброєння, порядок доставки та способи управління.
Особливу увагу при узгодженні слід приділяти координації зусиль між підрозділами, діючими у різноманітних напрямках на-
зустріч один одному. Для цього повинні узгоджуватися час, рубежі або райони зустрічі цих підрозділів за добре помітними
місцевими предметами, маршрути та напрямки їх руху, час та сигнали цілевказання, відкриття та припинення вогню.
8.2. Організація взаємодії
Організація взаємодії полягає у розробці та проведенні командирами, штабами та військами комплексу заходів, направлених
на узгодження дій всіх сил та засобів у цілях досягнення успіху у бойових діях. У всіх випадках взаємодія організується в інтересах
тих частин, які у ході бойових дій виконують головне завдання.
Суть організації взаємодії полягає у цілеспрямованій діяльності командирів, штабів та інших органів управління по узгоджен-
ню та взаємній ув’язці дій військ та сил при підготовці бойових дій.
Заходи із організації взаємодії: встановлення основних питань узгодженого застосування взаємодіючих військ (сил) у рішенні
командира на бойові дії (бойове застосування); планування (детальна розробка) питань узгодженого застосування взаємодіючих
військ та сил (їх сумісних дій в одних і тих же районах, на загальних рубежах); доведення до військ положень щодо їх узгодженого
використання в бойових діях; визначення, планування та практичне відпрацювання командиром та штабом спеціальних заходів, що
забезпечують узгоджені дії військ (сил); систематичне уточнення раніше узгоджених завдань взаємодії згідно зі зміною обстановки;
здійснення контролю за точним виконанням відпрацьованого порядку узгоджених дій військ (сил).
Часткові принципи організації та підтримки взаємодії в бойових діях: дотримання інтересів об’єднань, з’єднань, які на да-
ному етапі боротьби з повітряним противником вирішують головні завдання; завчасна організація і практичне відпрацювання пи-
тань взаємодії’, що обумовлюється її складністю, швидкоплинністю боротьби з повітряним противником; безперервна підтримка
взаємодії; відповідність функцій, завдань та методів організації і підтримки взаємодії командній інстанції.
Методи організації взаємодії - певний порядок та прийоми роботи командування і штабів при узгодженні та взаємній ув’язці
зусиль та способів дій військ (сил) у бойових діях з метою забезпечення максимальної ефективності при сумісному виконанні по-
ставлених завдань.
Методи роботи командирів та штабів з організації взаємодії військ (сил) визначаються конкретними умовами підготовки бойо-
вих дій та, у першу чергу, характером поставлених перед ними завдань, складом військ, які залучаються до їх рішення, їх бойовими
властивостями, положенням та станом угруповань військ, умовами початку та ведення бойових дій, а також наявністю часу, який
відводиться на організацію взаємодії'.
Способи взаємодії в боротьбі з повітряним противником (розподіл зусиль): по завданнях; по простору (по напрямках, ру-
бежах, районах, смугах, секторах, зонах, висотах); по часу; по способах виконання завдань.
Способи взаємодії можуть застосовуватись самостійно, а також у поєднанні один з одним.
8.2.1. Організація взаємодії з’єднань (частин) ЗРВ з частинами В А
Основою тактичної взаємодії, найважливішою і найскладнішою її частиною є взаємодія з’єднань (частин) ЗРВ та ВА.
Організація взаємодії з’єднань (частин) ЗРВ з частинами ВА полягає у завчасному плануванні, розробці та проведенні ком-
плексу заходів, спрямованих науспппне виконання бойових завдань зі знищення повітряного противника сумісними зусиллями.
При організації’ взаємодії з’єднань (частин) ЗРВ з частинами ВА: визначення взаємодіючих з’єднань (частин)та призначення
командирів, відповідальних за здійснення взаємодії; визначення способів взаємодії, порядку управління та здійснення взаємодії за
варіантами бойових дій з врахуванням призначених рубежів знищення противника, зон чергування винищувачів у повітрі, районів
самостійного пошуку та знищення повітряного противника; визначення сигналів взаємодії, заходів безпеки польотів, коридорів
польоту та заходу винищувачів на посадку, порядку їх дій в зонах вогню з’єднань (частин) ЗРВ та проходу через ці зони пошкодже-
них у бою та тих, що зазнали лиха, винищувачів; встановлення порядку організації зв’язку взаємодії, створення додаткових пунктів
наведення на КП з’єднань (частин) ЗРВ, обміну взаємною інформацією про дії з’єднань (частин) у ході бою.
296
РОЗДІЛ 8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
Основні завдання взаємодії з’єднань (частин) ЗРВ з частинами ВА полягають у нанесенні максимальної поразки
повітряному противнику, забезпеченні безперервності вогневої дії по ньому, наданні взаємної допомоги в інтересах виконання бой-
ового завдання та забезпеченні безпеки польотів своєї авіації під час ведення бойових дій. Кожне із завдань повинно бути
пов’язаним з конкретними умовами обстановки, варіантом дій противника та своїх військ.
Взаємодія ЗРВ та ВА організується по зонах та в одній (загальній) зоні.
Зона бойових дій ВА - область повітряного простору від зовнішньої межі області бойових дій ВА до дальньої межі зон пораз-
ки з’єднань (частин) ЗРВ з врахуванням виводу з бою винищувачів.
Зона бойових дій ЗРВ - область повітряного простору, яка знаходиться всередині обвідної зон вогню ЗРВ та обмежена даль-
ньою межею зон поразки ЗРК.
Одна (загальна) зона бойових дій ЗРВ та ВА - зона бойових дій ЗРВ, у якій ЗРВ ведуть узгоджені сумісні бойові дії з В А.
У разі здійснення взаємодії по зонах з’єднання (частини) ЗРВ та ВА діють без обмежень. Завдання взаємодії у цьому разі поля-
гає у забезпеченні безпеки прольоту своєї авіації через зону вогню ЗРВ, взаємному обміну інформацією про повітряного противни-
ка, бойових завдань, що виконуються, та результати бойових дій.
Коли вогневі можливості ЗРВ не забезпечують знищення всіх цілей, організується взаємодія в одній (загальній) зоні. Для цього
командир у своєму рішенні визначає порядок дій частин ЗРВ та ВА в одній (загальній) зоні, тобто встановлює способи взаємодії
Однією з умов, яка забезпечує безпеку своєї авіації від вогню зенітних засобів, повинна бути та, що бойова задача зі знищення
повітряного противника повинна ставитись до певного рубежу, який називається кінцевою межою постановки задач, віддалення
якого визначається за формулою:
Дк рПЗ = гід + Уц (2ТЦ + ікп),
де сід - горизонтальна дальність до дальньої межі зони поразки; Уц - швидкість польоту цілей, що очікується; Тц - час циклу
стрільби, 2ТЦ використовується тому, що в АСУ обробка інформації по конкретній цілі починається з відстані, яка відповідає двом
циклам стрільби; - робітний час командного пункту зрбр (зрп).
В рішенні на бойові дії ЗРВ та ВА в одній (загальній) зоні командир визначає порядок дій частин ЗРВ та ВА, тобто встановлює
способи взаємодії. При цьому зусилля ЗРВ та ВА розподіляються за цілями, напрямками, секторами (смугами), рубежами, висота-
ми та часом.
Спосіб взаємодії частин (підрозділів) ЗРВ та ВА - завчасно встановлений порядок знищення повітряного противника
сумісними зусиллями в одній (загальній) зоні, який передбачає певне обмеження дій взаємодіючих сторін у часі чи у просторі.
Основним способом взаємодії в одній (загальній) зоні є розподіл зусиль ВА та ЗРВ за вистами, часом та цілями. Цей
спосіб застосовується при стійкому спостереженні на екранах СНР та СРЦ роздільно цілей та своїх винищувачів з дистанціями, що
забезпечують безпеку своєї авіації.
Розподіл зусиль за цілями полягає у призначенні для знищення ЗРВ та В А різних груп або окремих повітряних цілей. ЗРВ при
цьому призначаються у першу чергу швидкісні, висотні, малорозмірні, а також прикриті завадами цілі для авіації.
Винищувальній авіації для знищення плануються у першу чергу: замикаючи літаки зі складу груп, ешелонованих у глибину -
при наведенні винищувачів у задню півсферу, та головні літаки - при наведенні у передню півсферу; флангові літаки з складу груп,
ешелонованих по фронту, цілі на великих та середніх висотах, постановники завад для ЗРВ.
При розподілі зусиль за цілями управління винищувачами повинно плануватись з пункту управління винищувальною авіацією,
розташованого спільно з командним пунктом ЗРВ, або з того, який має з ним прямий стійкий зв’язок. Повітряні цілі та свої вини-
щувачі на екранах радіолокаторів при цьому повинні спостерігатись роздільно і дистанція зближення винищувачів з повітряною
ціллю, яка обстрілюється ЗРВ, витримується не менше 5 км.
Напрямки, сектори (смуги), рубежі, висоти та час дії ЗРВ та ВА призначаються завчасно або у ході відбиття ударів повітряного
противника
Розподіл зусиль за напрямками (секторами) та висотами полягає у призначенні ЗРВ напрямків, секторів (смуг) та висот, де
вони ведуть необмежені бойові дії Винищувальна авіація у цих випадках діє за цілями за межами цих напрямків, секторів (смуг).
Висот, завершуючи атаку цілей на відстані не менше радіуса розвороту винищувача від встановлених меж.
Сектори взаємодії призначаються в об’єкговому угрупованні ЗРВ, а смуги - в об’єктово-зональному. Сектори взаємодії ви-
значаються відносно центру об’єкта. Розміри секторів та смуг взаємодії повинні бути такими, щоб не сковувати маневр винищу-
вачів у ході бою та бути у межах не менше 40 - 60 км для смуги та 609 для сектора. Сектори (смуги) за дальністю обмежуються
дальніми межами зон поразки ЗРК середньої та малої дальності. При їх визначенні враховуються: очікувані напрямки дій
повітряного противника, побудова бойових порядків частин ЗРВ та їх бойові можливості, розміщення аеродромів базування ВА,
можливості системи управління, а також можливість використання добре видимих з повітря орієнтирів (русла рік, дороги і т.ін.).
Коридори для заходу на посадку для кожного аеродрому та порядок їх використання визначає командир. У всіх випадках, коли
це можливо, напрямок заходу на посадку повинен вибиратись з умов мінімального часу перебування літаків у зоні вогню ЗРВ.
Межі коридорів для заходу на посадку своєї авіації у зонах поразки ЗРК середньої та малої дальності встановлюються за напрямком
ВПС шириною ЗО - 40 км та довжиною до межі зон поразки.
Розподіл зусиль за висотами застосовується у першу чергу в зонах поразки зенітних ракетних комплексів дальньої дії, над
районами розташування (бойових дій) механізованих дивізій, аеромобільних з’єднань (частин), кораблів та конвоїв, озброєних
зенітними комплексами ближньої дії, а також у інших районах, де не забезпечується розподіл зусиль за цілями.
Розподіл зусиль за часом полягає у встановленні визначеної послідовності у бойових діях ЗРВ та ВА, коли більша частина
зенітних засобів та винищувальної авіації за певний період не може використовуватись одночасно.
Розподіл зусиль за рубежами полягає у знищенні однією взаємодіючою стороною повітряного противника у просторі, обме-
женому певним (призначеним) рубежем, до (після) якого інша взаємодіюча сторона діє без обмежень.
Розподіл зусиль за часом та рубежами застосовується при сумісному знищенні повітряного противника на малих висотах, у за-
вадах, а також при обмежених бойових можливостях як ЗРВ, так і ВА.
297
РОЗДІЛ 8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
В зони поразки багатоканальних ЗРК винищувачі можуть вводитись, як правило, тільки у випадку втрати боєздатності ЗРК
(витрата боєзапасу ракет, зруйнування або вихід із ладу техніки).
Командир керує організацією та проведенням заходів з забезпечення безпеки польотів своєї авіації. Ці заходи проводяться на
всіх командних пунктах, пунктах управління, наведення, у підрозділах ЗРВ, а також з екіпажами В А.
Особлива увага надається забезпеченню безпеки дій своєї' авіації при поверненні її після виконання бойового завдання, коли ви-
нищувачі слідують зі сторони противника найкоротшим шляхом, часом поза встановленими маршрутами, з пошкодженнями, у
тому числі апаратури розпізнавання (впізнавання).
При організації взаємодії між пунктами управління встановлюються єдині сигнали взаємодії.
Сигнали на відкриття (закриття) коридорів прольоту авіації через зони ЗРВ, заборона (зняття заборони) та зміна порядку веден-
ня вогню ЗРВ, рубежів, висот дій ЗРВ і В А та інші розробляються штабом, який організує взаємодію.
При розробці порядку застосування системи розпізнавання (впізнавання) здійснюється розподіл кодів індивідуального
розпізнавання (впізнавання) між винищувальними авіаційними полками з урахуванням типів винищувачів, а також доводиться
порядок зміни кодів розпізнавання (впізнавання), який доводиться до частин ЗРВ, ВА, РТВ та підрозділів РЕБ вищими штабом.
8.2.2. Організація взаємодії між з’єднаннями (частинами) ЗРВ
Взаємодія між з’єднаннями (частинами) ЗРВ полягає у сумісних узгоджених діях зі знищення повітряного противника, який
діє в областях перекриття (на стику) зон вогню, а також послідовно входять в зони поразки ЗРК з’єднань (частин), розташованих на
різних за глибиною рубежах.
При організації взаємодії між з’єднаннями (частинами) ЗРВ передбачається: визначення взаємодіючих з’єднань (частин);
визначення районів взаємного перекриття зон поразки, зосередження вогню; визначення положення кінцевих рубежів постановки
завдань; призначення командирів, відповідальних за знищення повітряного противника; організація зв’язку взаємодії, уточнення
порядку обміну інформацією; порядок проведення групового пошуку повітряного противника станціями наведення ракет; визна-
чення порядку сумісних дій; доведення завдань до взаємодіючих військ та їх практичне відпрацювання.
Взаємодіючими по фронту є частини ЗРВ, взаємне розміщення яких визначає перекриття або стик зон зенітного ракетного во-
гню на основних напрямках удару повітряного противника.
При розташуванні декількох частин ЗРВ в глибину у смузі очікуваного прольоту повітряного противника взаємодіючими є такі,
рубежі постановки завдань яких знаходяться у зоні вогню спереду розташованої частини ЗРВ.
Відповідальним за узгодження сумісних дій при знищенні повітряного противника в областях взаємного перекриття (на стиках)
зон вогню призначається той командир, умови управління з КП якого є кращими. При розташуванні частин в глибину - командир
спереду розташованої відносно основного напрямку дій противника зрбр (зрп).
8.2.3. Організація взаємодії між частинами винищувальної авіації
Взаємодія між частинами винищувальної авіації полягає у сумісних узгоджених діях зі знищення повітряного противника
за напрямками, рубежами, повітряними цілями, висотами та часом дії.
При організації взаємодії між частинами винищувальної авіації передбачається: визначення взаємодіючих частин на
кожному напрямку дій повітряного противника; рубежі знищення, кількість винищувачів, що залучаються, та порядок управління
ними; визначення способів та порядку послідовних і одночасних дій по одній груповій цілі; визначення порядку та рубежів передачі
управління винищувачами; визначення аеродромів посадки та підготовки до бойових дій на них, порядку та складу сил для
взаємного деблокування аеродромів; організація зв’язку взаємодії та взаємного обміну інформацією.
Взаємодіючими частинами ВА є такі частини, взаємне розміщення яких визначає перекриття або стик зон бойових дій винищу-
вальних авіаційних крил для умов реалізації максимальних можливостей зп дальністю наведення.
Відповідальними за узгодження сумісних зусиль при знищенні повітряного противника у районах взаємного перекриття або на
стиках зон бойових дій при децентралізованому управлінні призначається, як правило, командир тієї частини ВА, на озброєнні якої
знаходяться АКРП, які мають кращі бойові можливості та умови управління з КП якої є кращими.
При організації взаємодії між частинами ВА необхідно виходити з вимоги, щоб кожен аеродром був підготовлений для прийо-
му та підготовки до бойового вильоту винищувачів будь-якого типу.
8.2.4. Організація взаємодії між з’єднаннями (частинами) РТВ
Взаємодія між з’єднаннями (частинами) РТВ полягає у сумісних узгоджених діях з виявлення повітряного противника,
особливо на стиках та малих висотах і видачі інформації для ЗРВ та ВА з встановлених рубежів.
При організації взаємодії між з’єднаннями та частинами РТВ передбачається: визначення взаємодіючих з’єднань (частин),
районів взаємного перекриття зон виявлення; призначення командирів, відповідальних за видачу розвідувальної і бойової
інформації у районах взаємного перекриття їх зон виявлення; узгодження дій при радіолокаційному супроводі повітряних цілей на
стиках, особливо групових та маловисотних цілей, КР та цілей, які діють під прикриттям радіозавад; організація зв’язку між
взаємодіючими з’єднаннями (частинами); порядок взаємного обміну інформацією між КП взаємодіючих з’єднань (частин), дове-
дення завдань з взаємодії та організації їх практичного відпрацювання.
Взаємодіючими частинами РТВ є такі, зони виявлення яких перекриваються або стикуються. Області взаємного перекриття зон
виявлення визначаються графічно на карті для малих та великих висот.
298
РОЗДІЛ 8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
Відповідальним за узгодження зусиль частин РТВ при видачі бойової інформації у областях взаємного перекриття (на стиках)
зон виявлення призначається командир, в розпорядженні якого кращі умови для управління, а при розташуванні частин РТВ в гли-
бину - командир попереду розташованої частини.
При визначенні порядку взаємного обміну інформацією про повітряну та інші види обстановки встановлюється: склад
інформації, що передається, ступінь її обробки, порядок кодування, рубежі початку видачі, дискретність, канали передачі
інформації’, посадові особи, відповідальні за якість, зміст та строки надходження інформації.
8.2.5. Організація взаємодії з’єднань (частин) РТВ з частинами інших родів військ та РЕБ
Взаємодія з’єднань (частин) РТВ з частинами інших родів військ та РЕБ полягає у розробці та проведенні заходів, які за-
безпечують узгодження їх сумісних зусиль щодо взаємного обміну інформацією про поточну обстановку з метою розширення
складу та вірогідності відомостей про повітряного противника.
При організації взаємодії з’єднань та частин РТВ з частинами інших родів військ та РЕБ передбачається: взаємний обмін
інформацією про повітряного противника, радіаційну, хімічну та бактеріологічну (біологічну) обстановку, про стан та дії
взаємодіючих з’єднань та частин; узгоджене використання радіолокаційних засобів для розвідки повітряного противника, особливо
на малих висотах в умовах радіозавад та бойових втрат від ударів противника; узгодження місць розгортання та режимів роботи
радіоелектронних засобів для забезпечення електромагнітної сумісності; узгодження дій та взаємна допомога при ліквідації
наслідків застосування противником ЗМУ та при захисті аеродромів (позицій) від повітряного та наземного противника; забезпе-
чення безпеки польотів своїх винищувачів у зонах дій переносних ЗРК та зенітних установок (гармат).
8.2.6. Організація взаємодії частин (підрозділів) РЕБ зі з’єднаннями та частинами ЗРВ, ВА, РТВ
Суть взаємодії частин (підрозділів) РЕБ зі з’єднаннями та частинами ЗРВ, ВА, РТВ полягає в узгодженні їх сумісних дій з
виявлення, придушення і знищення повітряного противника в областях взаємного перекриття (на стиках) зон виявлення, приду-
шення, вогню та областей бойових дій, взаємодіючих з метою виключення взаємних завад і підвищення ефективності бойових дій
об’єднання (з’єднання).
При організації взаємодії частин (підрозділів) РЕБ зі з’єднаннями (частинами) ЗРВ, ВА та РТВ передбачається: узгод-
ження дій шляхом розподілу їх зусиль за впливом на противника згідно з можливостями сил та засобів, з урахуванням електро-
магнітної сумісності; взаємний обмін інформацією про противника та про свої війська.
Взаємодіючими з частинами РЕБ є ті частини ЗРВ, ВА та РТВ зони вогню, області бойової дії та зони виявлення яких перекри-
ваються із зоною радіоелектронного придушення, зоною радіотехнічної розвідки.
Відповідальними за узгодження сумісних зусиль призначаються командири частин ЗРВ або В А, у залежності від конкретних
умов обстановки, вони ж, як правило, забезпечують зв’язок взаємодії.
При організації зв’язку взаємодії необхідно передбачити, окрім зв’язку взаємодії між КП, розміщення на КП частин РЕБ прий-
мача для прийому сигналів про припинення постановки завад безпосередньо з винищувачів та ПН ВА.
8.3. Робота командира і штабу під час організації взаємодії
Керівна роль в організації та підтримці взаємодії військ належить командиру. Він особисто організує взаємодію та несе
відповідальність за її безперервність. Штаб забезпечує роботу командира з організації взаємодії та контроль за заходами по
підтриманню її у ході бойових дій. На штаб покладається відпрацювання всіх питань взаємодії у бойових документах, забезпечення
єдиного розуміння сумісних завдань та способів їх виконання.Важливим етапом в організації взаємодії’ є розробка варіантів
здійснення взаємодії (питань взаємодії. Найбільш доцільним треба вважати варіанти, в основу яких покладений критерій можли-
вості обміну інформацією взаємодії між КП взаємодіючих з’єднань і частин та рішення завдань взаємодії у різноманітних умовах
обстановки.
Питання взаємодії: склад взаємодіючих сил і засобів та їх бойові завдання; порядок взаємного обміну даними про склад, стан і
дії противника та своїх військ; порядок розподілу зусиль за напрямками, рубежами та зонами на кожному етапі бойових дій; маневр
авіацією, частинами (підрозділами), озброєними рухомими ЗРК, вогнем ЗРВ та підрозділами РТВ у цілях нарощування зусиль на
напрямках дій крилатих ракет, головних сил авіації противника чи повітряних елементів систем ДРЛВ та управління; порядок
управління винищувачами при діях їх на повну дальність в межах району бойових дій з’єднання (частини); заходи із забезпечення
безпеки; заходи із забезпечення електромагнітної сумісності РЕЗ; відповідальні за стики між з’єднаннями (частинами).
Уточнюється порядок взаємного обміну розвідувальною інформацією з метою максимально знизити ефект раптовості та забез-
печити своєчасне прийняття заходів з приведення військ у вищі ступені бойової готовності. Більш детально визначаються рубежі
початку видачі інформації та канали, по яких вона буде передаватись, заходи зі скорочення часу та потоку інформації про цілі; по-
рядок обміну інформацією про дії своїх військ та метеорологічну обстановку.
Після узгодження порядку виконання завдань взаємодії за розробленими варіантами начальник штабу доповідає командиру
пропозиції щодо організації взаємодії. У цих пропозиціях він викладає висновки з оцінки обстановки, що стосуються взаємодії,
порядок рішення завдань взаємодії за варіантами та необхідний для цього склад інформації, порядок обміну нею, сигнали взаємодії,
пропонує систему заходів на відновлення порушеної взаємодії.
299
РОЗДІЛ 8. ОСНОВИ ОРГАНІЗАЦІЇ ВЗАЄМОДІЇ
Командир, заслухавши пропозиції начальника штабу відносно організації взаємодії, приймає рішення на взаємодію, при не-
обхідності уточнює його та віддає вказівки, у відповідності з якими штаб відпрацьовує план взаємодії, а також відображає питання
взаємодії в інших бойових документах.
Командир вказує: взаємодіючі з’єднання (частини) родів військ; порядок дії оперативно підпорядкованої та взаємодіючої
авіації; аеродроми маневру; порядок управління винищувачами при їх діях на повну дальність, при сумісному виконанні завдань;
способи взаємодії винищувальних авіаційних частин (підрозділів) зі з’єднаннями (частинами) ЗРВ та РТВ, частинами
(підрозділами) РЕБ; порядок сумісних дій з’єднань (частин) ЗРА у районах перекриття (стику) зон вогню; завдання сусідів та роз-
межувальні лінії з ними; відповідальних за здійснення взаємодії на стиках; які засоби зв’язку виділити для забезпечення
взаємодІЇ.Після відпрацювання плану взаємодії ставляться завдання та доводиться порядок здійснення взаємодії до підлеглих. При
організації практичного відпрацювання взаємодії та сумісної підготовки взаємодіючих сил та засобів треба враховувати різницю за
тематикою, видами, термінами проведення навчальних занять, що плануються, у кожному із взаємодіючих з’єднань (частин). У
зв’язку з цим штабами повинні бути узгоджені та сплановані заходи як з окремої, так і спільної підготовки сил та засобів, що залу-
чаються до сумісного рішення завдань взаємодії. З метою спільного практичного відпрацювання питань взаємодії узгоджуються
тематика, терміни та порядок проведення занять, порядок взаємного забезпечення та надання допомоги у підготовці та проведенні
навчальних занять, порядок взаємного представництва на окремих заняттях, що проводяться, реалізації підсумкових занять.
Спільна підготовка має на меті добитися необхідної злагодженості дій у роботі органів управління взаємодіючих з’єднань (час-
тин), особового складу при проведенні сумісних дій, а також перевірити їх ефективність.
У ході окремої підготовки у з’єднанні (частині) формуються та оснащаються необхідними засобами обслуги, команди, призна-
чені для проведення сумісних дій з силами та засобами взаємодіючих з’єднань (частин), відпрацьовуються та вивчаються
функціональні обов’язки, порядок дій особового складу у різних умовах обстановки при рішенні завдань взаємодії Для здійснення
практичної підготовки з питань взаємодії розробляються спеціальні тактичні задачі за кожним способом взаємодії. Задача пред-
ставляє собою тактичний епізод, у ході якого відпрацьовуються один або декілька способів взаємодії стосовно можливої обстанов-
ки. Вона оформляється на карті з додатком текстової частини (пояснювальної записки).
Графічно відображаються: бойові порядки взаємодіючих частин; зони вогню ЗРВ; рубежі постановки завдань; рубежі зни-
щення противника за різних умов; варіант удару противника; зони виявлення і радіоелектронного придушення; пункти наведення
ВА.
У текстовій частини вказується: назва задачі, навчальні цілі, замисел дій сторін; вихідні дані для відпрацювання задачі;
потрібні ресурси; порядок проведення; параметри, що контролюються; обгрунтування вибору способу взаємодії.
Відпрацювання типових задач може здійснюватись на штабних тренуваннях, групових вправах, летучках. Тренування повинні
проводитись під керівництвом командирів, які організують та будуть здійснювати взаємодію з’єднань (частин). Кількість тренувань
залежить від рівня підготовки командирів, складності завдань, що вирішуються, характеру очікуваних дій противника. Після
відпрацювання всіх способів взаємодії на тренуваннях проводиться їх комплексне відпрацювання на тактичних навчаннях.
Важливе місце в роботі командира та начальника штабу займає робота з контролю за виконанням спланованих заходів з ор-
ганізації взаємодії. Здійснюється дієвий контроль за правильним з’ясуванням, своєчасним та точним виконанням відданих розпо-
ряджень. Як правило, контроль повинен носити попереджувальний характер. В ході бесіди з підлеглими командир особисто пе-
ресвідчується у тому, що вони правильно зрозуміли бойове завдання, замисел бойових дій та завдання взаємодії, знають шляхи та
способи їх реалізації. Поряд зі здійсненням контролю повинна надаватись безпосередня допомога підлеглим командирам на місцях
у виконанні спланованих заходів.
За підсумками проведених занять, контролю виконання плану взаємодії командири, штаби зобов’язані систематично вносити
до розроблених документів корективи та нові дані, у відповідності зі змінами у складі, угрупованні взаємодіючих з’єднань (частин),
уточненням завдань, а також визначати заходи та способи їх виконання. Своєчасне уточнення порядку сумісних дій взаємодіючих
з’єднань і частин при підготовці і особливо при проведенні бойових дій є необхідною умовою підтримки безперервної та тісної
взаємодії.
Організація взаємодії з’єднання (частини) одного роду військ зі з’єднаннями (частинами) інших родів військ - неодноразовий
акт у діяльності командира та штабу. Вона пронизує всю роботу, спрямовану на підготовку до бойових дій (бойового застосування)
з’єднання (частини) та його всебічне забезпечення, вимагає від них глибокого знання характеру бойових дій, бойового завдання,
складу, можливостей взаємодіючих з’єднань (частин), їх ролі та місця у сумісних діях.
300
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ)
ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Для безперервної підтримки високої бойової готовності сил та засобів, забезпечення виконання бойових завдань у будь-яких
умовах обстановки завчасно організується, постійно проводиться та удосконалюється забезпечення бойових дій (бойового застосу-
вання).
Забезпечення бойових дій (бойового застосування) є системою заходів, спрямованих на підтримання з’єднань (частин) у го-
товності до ведення бойових дій (бойового застосування), збереження їх боєздатності, створення сприятливих умов для ор-
ганізованого та своєчасного вступу у бій та посиленого проведення бойових дій, а також на заборону або попередження раптового
нападу противника, зниження ефективності його ударів по військах (силах) та об’єктах.
Забезпечення організується та здійснюється на підставі рішення командира та вказівок вищого штабу силами та засобами
з’єднання (частини), а також спеціально виділеними рішенням старшого командира силами та засобами.
Види забезпечення бойових дій (бойового застосування): бойове (оперативне) забезпечення; технічне забезпечення; тилове
забезпечення; морально-психологічне забезпечення; медичне забезпечення.
9.1. Бойове (оперативне) забезпечення
Бойове (оперативне) забезпечення організується та здійснюється з метою виключення раптовості нападу противника, підви-
щення ефективності бойових дій (бойового застосування) своїх сил та зниження ефективності впливу противника. Бойове забезпе-
чення організується начальниками штабів, відповідними начальниками родів військ та служб.
Види бойового забезпечення: розвідка; радіоелектронна боротьба; оперативне маскування; інженерне забезпечення; забезпе-
чення радіаційного, хімічного, біологічного захисту; захист від зброї масового ураження; топогеодезичне забезпечення; метеоро-
логічне забезпечення; штурманське забезечення; радіотехнічне забезпечення; пошуково-рятувальне забезпечення; безпосереднє
прикриття та наземна оборона.
9.1.1. Розвідка
Розвідка - організується та ведеться безперервно з метою своєчасного викриття безпосередньої підготовки противника до на-
паду і часу його початку, своєчасного виявлення повітряного противника, викриття його бойових порядків, замислу та напрямків
дій головних сил. Крім того, добуваються та аналізуються дані про можливий характер дій наземного (морського) противника, ди-
версійно-розвідувальних груп та повітряних десантів по елементах бойового порядку, виявляються та визначаються параметри
ядерних вибухів, визначення хімічного, бактеріологічного (біологічного) зараження місцевості.
Дані про противника, ядерні вибухи та зараження місцевості можуть бути одержані від вищого штабу, штабів взаємодіючих
військ та частин (підрозділів) МНС.
Частини і підрозділи розвідки здійснюють добування, збір, вивчення, аналіз, обробку, відображення, документування і доставку
користувачам розвідувальних даних.
Технічні види розвідки виконують ці операції шляхом приймання й обробки основних і супутніх радіовипромінювань, фізич-
них полів і середовищ, що є результатом діяльності противника.
Технічні види розвідки (за типом технічних засобів, що застосовуються): радіоелектронна; оптико-електронна; оптична;
звукова (акустична, гідроакустична) та інші види розвідок.
Радіоелектронна розвідка (РЕР) включає: радіорозвідку (РР); радіотехнічну розвідку (РТР); радіолокаційну розвідку (РЛР) та
інші види розвідок (електрофізичну, радіотеплову розвідку тощо).
Перші два види РЕР стосовно до сучасних радіоелектронних систем зв’язку, управління і радіотехнічного забезпечення евенту-
ального противника організаційно і технічно часто розглядають спільно як радіо- і радіотехнічну розвідку.
Радіо- і радіотехнічна розвідка (РРТР) виконує завдання щодо розкриття угруповання, складу, приналежності, характеру дій і
намірів військ закордонних держав шляхом виявлення працюючих засобів радіозв’язку, радіолокації, радіонавігації та інших радіо-
технічних засобів і систем, які застосовуються для управління військами і зброєю.
Радіолокаційна розвідка призначена для добування інформації про супротивну сторону за допомогою радіолокаційних за-
собів і систем.
Оптико-електронна розвідка за своїми властивостями близька до РЕР і іноді розглядається як її елемент. Оптико-електронна
розвідка включає: телевізійну, лазерну, інфрачервону розвідку, їх комбінації та інші види розвідок (у мікрохвильових діапазонах
частот).
Телевізійна розвідка - од ин з пасивних видів РЕР. Вона призначена для одержання відомостей про противника за допомогою
телевізійної розвідувальної апаратури. Телевізійна розвідувальна апаратура, яка установлена на автомобілях, літаках, кораблях і
супутниках, може д іяти як самостійно, так і у взаємодії з приладами інфрачервоної розвідки та фоторозвідки.
Лазерна розвідка - добуває інформацію за допомогою лазерних локаторів. Лазерні локаційні системи використовують оптичні
сигнали. їхнім достоїнством є можливість високоточного виміру кутових координат і дальності до цілі при порівняно невеликих
власних габаритних розмірах і масі. Лазерні пристрої дозволяють виявляти і прослухувати на відстані переговори, що ведуться в
приміщеннях.
ЗОЇ
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Інфрачервона розвідка добуває відомості про об’єкти противника за їх інфрачервоним (ІЧ) випромінюванням за допомогою
ІЧ приладів. У залежності від апаратури, що застосовується, вона може мати пасивний або активний характер. При активному виді
розвідки інфрачервоні випромінювання використовуються для підсвічування об’єктів, що розвідуються. Пасивні ІЧ розвідувальні
прилади приймають власні теплові випромінювання об'єктів, що спостерігаються. Інфрачервоні прилади (теплолокатори) дозволя-
ють виявляти і розпізнавати цілі, що мають теплову контрастність, на поверхні Землі, у повітряному і водному просторах на будь-
який час доби. Різновидом ІЧ розвідки є радіотеплова розвідка, що добуває відомості за радіотепловим випромінюванням.
Фоторозвідка використовується для одержання розвідувальних даних про об’єкти противника шляхом фотографування. Ос-
новний її недолік - складність ведення в темний час доби.
Звукова (акустична, гідроакустична) розвідка подібна радіолокаційної і може носити як пасивний, так і активний характер.
Розвідка фізичних полів і середовищ включає розвідку акустичну, сейсмічну, магнітометричну, радіаційну, хімічну, бактеріо-
логічну та ін.
Радіоелектронна розвідка - це велика і багатогранна область розвідки, що добуває інформацію про противника за допомогою
радіоелектронних засобів. На думку закордонних фахівців, РЕР представляє собою основний і в багатьох випадках єдиний спосіб
добування розвідувальної інформації. Радіоелектронна розвідка, як складова частина військової розвідки, є одним зі способів забез-
печення бойової діяльності військ. Вона спрямована на встановлення дислокації і чисельності військ противника, своєчасне роз-
криття його задумів і характеру діяльності. РЕР ведеться постійно і безупинно незалежно від часу доби, метеорологічних умов та
інших факторів.
При веденні РЕР застосовуються пасивні (невипромінюючі) і активні засоби. У першому випадку інформація добувається шля-
хом виявлення, приймання й аналізу випромінювань радіоелектронних засобів і систем (РЕС). У другому випадку розвідка ведеться
шляхом випромінювання сигналів, приймання й аналізу результатів їхнього відбиття від об’єктів, що розвідуються.
Радіоелектронна розвідка класифікується за декількох ознаках: за рівнем розв'язуваних задач, за місцем базування (за місцезна-
ходженням) засобів розвідки, за характером інформації, що добувається, за використаними джерелами розвідувальних відомостей
(ДРВ) і принципами добування інформації та ін.
За рівнем розв’язуваних задач розрізняють стратегічну, оперативно-тактичну і тактичну розвідку.
За місцем базування засобів розвідки радіоелектронна розвідка підрозділяється на наземну, повітряну, морську і космічну.
За характером інформації, що добувається - на оперативну і технічну розвідку.
Проти сил ППО закордонні держави можуть вести усі види розвідки. Основними видами розвідки, що ведуться силами ППО, є
радіолокаційна, радіо- і радіотехнічна розвідки. Радіолокаційна розвідка в основному ведеться частинами і з’єднаннями радіотехні-
чних військ з використанням радіолокаційних засобів. Радіо- і радіотехнічна розвідка ведеться частинами РРТР. За джерелами і
принципами добування інформації у РРТР часто розглядають окремо радіорозвідку і радіотехнічну розвідку.
Радіорозвідка ведеться в інтересах добування відомостей про противника шляхом перехоплення й аналізу його радіопередач і
радіопеленгування працюючих радіостанцій. Це один з найбільш розповсюджених видів пасивної РЕР. Вона ведеться з викори-
станням радіосигналів систем зв’язку супротивної сторони (КХ, УКХ радіозв’язку, радіорелейного, тропосферного, супутникового
та інших видів зв’язку). Основна задача радіорозвідки - обробка й аналіз перехопленої інформації з метою розкриття її змісту.
Радіорозвідка може дати важливі відомості про системи управління закордонних держав, пунктах розгортання, призначенні і струк-
турі органів управління, передислокаціях військ (сил).
Радіотехнічна розвідка ведеться за допомогою спеціальних радіотехнічних станцій з метою добування відомостей про тип,
призначення і місцеположення працюючих РЕС противника (радіолокаційних, радіонавігаційних, радіотелеуправління). Пошук,
прийом і аналіз сигналів, які випромінюють РЕС противника, дозволяє визначити їх параметри, вид модуляції, просторові характе-
ристики і режими роботи РЕС. Радіотехнічна розвідка також є видом пасивної РЕР. Вона використовує специфічні методи
радіоприймання, аналізу сигналів і пеленгування джерел радіовипромінювання.
На даний час характерна тенденція застосування в системах зв’язку і передачі даних завадостійкого кодування, широкосмуго-
вих сигналів, режимів адаптивної (АПРЧ) і програмної (ППРЧ) перебудови робочої частоти й інших складних видів модуляції. Це
утрудняє одержання значеннєвої інформації з прийнятих радіосигналів. Тому при веденні радіорозвідки систем радіозв’язку і пере-
дачі даних зі складними видами модуляції часто застосовуються методи радіотехнічної розвідки. Ці методи передбачають пошук
радіосигналів у широкій смузі частот, пеленгування (визначення місцеположення) їх джерел, проріджування потоку
радіовипромінювань (селекцію і режекцію сигналів), автоматизоване розпізнавання сигналів, ДРВ і об’єктів розвідки. Така розвідка,
залишаючись за видом джерел розвідувальних відомостей радіорозвідкою, за принципами добування інформації є радіотехнічною
розвідкою. Фактична грань між радіо- і радіотехнічною розвідками стирається.
У ході РРТР виміряються й аналізуються наступні основні групи параметрів сигналів та їх джерел. До сигналів, що прийма-
ються, відносяться несуча частота Гс, тривалість тс, амплітуда ІІС, потужність випромінювання Рс. Вид і параметри модуляції
(маніпуляції) сигналів характеризують структуру сигналів. Модуляція несучих коливань може бути амплітудною, частотною і
фазовою. При амплітудноімпульсній модуляції засоби РРТР дозволяють визначити частоту повторення Гп і тривалість імпульсів
(посилань телеграфних сигналів і елементів сигналів у радіорозвідці), структуру пачки імпульсів та їх форму. У випадку
амплітудної модуляції гармонійними коливаннями може бути визначений закон зміни сигналів, що модулюють. При частотній і
фазовій модуляції несучих коливань визначається частота Гм і форма коливань, що модулюють, девіація АРМ несучої частоти. До
просторових характеристик джерел радіовипромінювань відносять напрямок розповсюдження і поляризацію радіохвиль, фор-
му і ширину діаграми спрямованості передавальної антени, спосіб огляду простору. Режими роботи РЕЗ характеризуються видом
несучих коливань, тривалістю роботи в часі та ін. параметрами. При цьому в радіорозвідці основу відомостей, що добуваються, як і
раніше, складає значеннєва інформація, яка виділяється з перехоплених повідомлень.
Основними вимогами, що пред’являються до радіо- і радіотехнічної розвідки, є: безперервність, активність, цілеспрямованість,
своєчасність, вірогідність даних, що представляються, і точність визначення місцеположення об’єктів, що розвідуються.
302
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Безперервність РРТР полягає в тому, що розвідка повинна вестись у всіх видах бойової діяльності військ, у будь-яких умовах
обстановки, місцевості та погоди.
Активність РРТР полягає в наполегливому прагненні командирів усіма силами, засобами і способами добувати розвідувальні
відомості.
Цілеспрямованість РРТР полягає в строгому підпорядкуванні основних заходів щодо організації і ведення розвідки інтересам
виконання головних розвідувальних завдань.
Своєчасність РРТР полягає в добуванні необхідних розвідувальних даних до встановленого терміну.
Вірогідність даних радіо- і радіотехнічної розвідки полягає в об’єктивності висновків про склад, угруповання, дії і наміри військ
супротивної сторони, зроблених на основі аналізу добутих розвідувальних відомостей.
Добування розвідувальних відомостей - цілеспрямовані дії сил і засобів радіо- і радіотехнічної розвідки щодо виявлення пра-
цюючих радіоелектронних засобів, визначенню їх часових, частотних і просторових характеристик, режимів роботи і перехоплення
змісту переданої інформації’.
Основними методами добування розвідувальних відомостей є пошук і спостереження.
Пошук-дії’ сил і засобів щодо добування розвідувальних відомостей про нові або раніше виявлені джерела шляхом виявлення
їх роботи, визначення їх часових, частотних і просторових параметрів і визначення характеру переданої інформації.
Спостереження - дії сил і засобів РРТР щодо систематичного добування розвідувальних відомостей від виявлених джерел
шляхом перехоплення і реєстрації переданої інформації, визначення їх частотно-часових і просторових характеристик та режимів
роботи. Спостереження може бути безперервним, періодичним і контрольним.
Безперервне спостереження організується і ведеться за роботою РЕС, що у даній обстановці є найбільш важливими або
інформативними джерелами відомостей для виконання головних розвідувальних завдань.
Періодичне спостереження організується і ведеться за роботою радіоелектронних засобів, що у даній обстановці є важливими
або інформативними джерелами відомостей для виконання поставлених завдань.
Контрольне спостереження організується і ведеться за роботою радіоелектронних засобів, розвідувальна цінність яких не-
постійна і які в даній обстановці не є основними джерелами відомостей для виконання поставлених завдань.
У майбутньому розвідка з традиційного виду забезпечення може перетворитись на активно діючий рід військ.
Серед систем збору розвідувальної інформації важлива роль у майбутньому належатиме засобам космічної розвідки. Основним
напрямком розвитку систем космічної розвідки є розробка космічних засобів та розгортання на їх основі орбітальних угруповань,
які будуть безперервно, цілодобово та за будь-яких погодних умов у районі розвідки виявляти та розпізнавати на великих площах
земної поверхні усі типи цілей, у тому числі й замасковані та заглиблені. Космічні засоби розвідки стануть основним постачальни-
ком розвідувальної інформації для командирів не тільки стратегічного та оперативного, але й тактичного рівня.
У майбутньому збереже своє значення і повітряна розвідка. На теперішній час основним напрямком розвитку повітряної
розвідки слід вважати широке застосування розвідувальних безпілотних літальних апаратів з поступовою відмовою у подальшому
від застосування пілотованих засобів повітряної розвідки. Значними темпами ведуться роботи щодо створення нових поколінь
розвідувальних безпілотних літальних апаратів, у тому числі стратегічного призначення, які забезпечать ведення розвідки на всю
глибину театру війни. Слід очікувати, що розвідувальний потенціал більшості держав буде суттєво підвищуватися саме за рахунок
значного збільшення кількості безпілотних літальних апаратів з великою тривалістю польоту.
9.1.2. Радіоелектронна боротьба
Радіоелектронна боротьба (РЕБ) - комплекс погоджених за метою, завданнями, місцем і часом заходів і дій щодо виявлення
систем і засобів управління військами (силами) і зброєю, розвідки і РЕБ противника, їх радіоелектронного подавлення, радіоелект-
ронного захисту своїх систем і засобів управління військами (силами) і зброї, а також щодо протидії технічним засобам розвідки.
Радіоелектронна боротьба є важливим видом бойового забезпечення. Заходи РЕБ проводяться в сполученні з поразкою
радіоелектронних засобів і систем (РЕЗ і С) противника Мета РЕБ досягається створенням активних і пасивних завад, застосуван-
ням хибних цілей і уловлювачів, зміною властивостей середовища поширення електромагнітних хвиль, зменшенням
радіолокаційної, оптичної і теплової контрастності військової техніки й об’єктів, радіодезінформацією та іншими організаційними і
технічними заходами за допомогою технічних засобів. Виявлення радіоелектронних засобів і систем противника вирішується усіма
видами і технічними засобами розвідки. Однак найбільш інформативними для цілей РЕБ є радіо- і радіотехнічна розвідки.
Необхідно відзначити двосторонній характер радіоелектронної боротьби в ході операцій (бойових дій): РЕБ ведеться як силами
ППО, так і супротивною стороною проти сил ППО.
РЕБ включає: радіоелектронне подавлення РЕЗ і С противника; радіоелектронний захист своїх засобів; протидію технічним
засобам розвідки противника.
Радіоелектронне подавлення (РЕП) проводиться з метою порушення управління військами (силами), зниження ефективності
зброї і розвідки шляхом впливу на радіоелектронні системи і засоби навмисними завадами, відведення ракет, авіабомб та інших
самонавідних і керованих засобів поразки від об’єктів, що захищаються.
Радіоелектронне подавлення включає: радіоподавлення; оптико-електронне подавлення; гідроакустичне подавлення.
Радіоподавлення (РП) полягає в зриві або порушенні роботи засобів і систем радіо-, радіорелейного, тропосферного, космічно-
го (супутникового) та інших видів зв’язку, радіонавігації, радіолокаційних засобів виявлення і управління зброєю шляхом викорис-
тання засобів активних і пасивних завад різного базування і способів доставки.
Оптико-електронне подавлення представляє собою створення завад тепловим, оптичним, телевізійним системам спостере-
ження, управління, зв’язку і наведення зброї шляхом застосування ракет, снарядів і передавачів інфрачервоних завад, лазерних пе-
редавачів завад, лазерних й інфрачервоних відбивачів і димів (аерозолів).
303
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Гідроакустичне подавлення полягає в створенні завад засобам гідроакустичного виявлення, а також гідроакустичним систе-
мам самонаведення зброї шляхом застосування гідроакустичних імітаторів і завад.
Радіоелектронний захист (РЕЗ) є складовою частиною РЕБ, проводиться з метою забезпечення стійкої роботи
радіоелектронних систем і засобів управління військами (силами) і зброєю в умовах ведення радіоелектронної боротьби і взаємного
впливу РЕЗ і С.
Заходи радіоелектронного захисту: встановлення часових, частотних, просторових та енергетичних обмежень у роботі РЕС;
захист від радіоелектронного подавлення, від ураження самонавідною зброєю, від впливу іонізуючих і електромагнітних ви-
промінювань; виявлення джерел ненавмисних (взаємних) завад та прийняття заходів для зняття (зниження) їх впливу; здійснення
взаємодії з питань забезпечення електромагнітної сумісності (ЕМС) радіоелектронних засобів (захист від взаємних завад); викори-
стання організаційних і технічних заходів захисту.
Протидія технічним засобам розвідки (ПДТЗР) полягає в усуненні (ослабленні) або відтворенні демаскуючих ознак військ
(сил), об’єктів і зброї шляхом проведення організаційних і технічних заходів за допомогою технічних засобів.
Досвід останніх локальних війн і збройних конфліктів показав, що РЕБ стала невід’ємною складовою частиною усіх видів бо-
йових дій і поширюється на усі види радіоелектронних систем і засобів - радіозв’язку, радіолокації, радіотелеуправління, радіонаві-
гації, інфрачервоних, лазерних, гідроакустичних та інших РЕЗ і С. У більшості бойових ситуацій для дезорганізації управління вій-
ськами (силами) і зброєю економічно і тактично більш вигідне залучення частин РЕБ, чим підвищення ступеня вогневої поразки.
Радіоелектронна боротьба неухильно перетворюється з виду забезпечення на активний, швидкодіючий компонент боротьби за
перевагу в повітрі та на полі бою. Радіоелектронна боротьба здобуває риси специфічного виду бойових дій: зростає ступінь впливу
РЕБ на хід і результати бойових дій; змінюються мета і рівні завдань, які вирішуються засобами РЕБ; з’вляється об’єктивна не-
обхідність створення і застосування нових форм ведення РЕБ, здатних гарантувати повний зрив управління військами і зброєю
противника в найбільш відповідальні періоди операцій (бойових дій).
Комплекс заходів з РЕБ включає у себе тактичні, організаційні, алгоритмічні та технічні заходи.
Технічні та алгоритмічні заходи РЕБ: доробки на апаратурі або у бойовій програмі з метою збільшення відношення сигналу
до завади; автоматичне вмикання засобів захисту.
Тактичні та організаційні заходи РЕБ: легендування об’єктів; оповіщення підрозділів про перемішування засобів розвідки
противника, прольоти розвідувальних ШСЗ; заходи для дезінформації противника; заходи із додержання режиму таємності, охоро-
ни та оборони об’єктів; організація радіотехнічного контролю та додержання режиму роботи засобів радіозв’язку.
Тактичні та організаційні заходи підвищення завадозахищеності засобів: удосконалення засобів пошуку джерел завад; за-
стосування різноманітних режимів роботи засобів, що забезпечують роботу в умовах завад; обладнання рухомих та стаціонарних
постів радіотехнічного контролю (РТК); утворення обхідних каналів, що дублюють передачу інформації та оперативно-командний
зв’язок; удосконалення організації взаємодії зі з’єднаннями інших родів військ з питань боротьби з носіями джерел завад та само-
навідної на випромінювання зброї противника; удосконалення методів боротьби з закинутими передавачами завад (ЗПП) против-
ника; удосконалення підготовки штабів та бойової обслуги КП в управлінні підрозділами та засобами у складній радіоелектронній
обстановці (РЕО); удосконалення засобів розпізнавання характеристик завад (навмисних та ненавмисних, тип, інтенсивність та ін.).
Одночасно з проведенням заходів для захисту своїх РЕЗ і С від засобів радіоелектронного подавлення (РЕП) противника не-
обхідно вживати заходів щодо усунення та послаблення взаємних завад від сусідніх РЛС інших родів військ та відомств, а також
захисту РЕЗ і С від впливу завад природного походження. З цією ж метою необхідно передбачати та проводити заходи з виявлення
усіх можливих (у тому числі й прихованих) джерел взаємних завад, проводити набір статистики впливу різноманітних завад на
РЛС, прогнозувати можливу завадову обстановку з переходом на частоти воєнного часу, погоджувати усі питання усунення
взаємного впливу сусідніх РЛС, уточнити графіки роботи, сигнали, за якими необхідно вимикати засоби, погоджувати роботу ок-
ремих РЕЗ і С за секторами, часом роботи, діапазонами дозволених частот та ін.
На рубежі 2010 - 2015 рр. РЕБ може перейти від забезпечення бойових дій до самостійних дій та мати при цьому свою форму
застосування - спеціальну операцію РЕБ. Під такою операцією мається на увазі комплекс заходів і дій щодо радіоелектронного
подавлення противника та захисту своїх військ (сил) і систем зброї від радіоелектронних дій (впливу) противника.
Складовими частинами спеціальної операції РЕБ будуть: радіоелектронні удари з метою подавлення всієї системи
радіоелектронних засобів противника; радіоелектронна оборона (захист) об’єктів і засобів; заходи щодо забезпечення засобів РЕБ.
У зв’язку з різким збільшенням масштабів застосування високоточних засобів поразки операція РЕБ буде починатись за
декілька діб або годин до початку проведення наступальної операції радіоелектронними ударами з метою подавлення
радіозаводами систем попередження про ракетний напад, повітряної розвідки, каналів державного і військового управління про-
тивника. Потім міць ударів буде нарощуватись шляхом застосування засобів постановки завад, розташованих на спеціальних
космічних апаратах, багаточисельних групах літаків та безпілотних літальних апаратів РЕБ, що діють із зон баражування.
9.1.3 Оперативне маскування
Оперативне маскування організується та здійснюється з метою підвищення живучості військ шляхом приховування від
противника розміщення елементів бойового порядку, стану бойової готовності та боєздатності сил та засобів, дій підрозділів та
тактико-технічних характеристик комплексу озброєння, введення противника в оману щодо істинних намірів, характеру та замислу
своїх дій.
Основними завданнями оперативного маскування є забезпечення прихованості діяльності і уведення противника в оману
відносно діяльності з’єднань (частин).
304
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Прихованість полягає в проведенні комплексу заходів, спрямованих на попередження або виключення витоку інформації, що
складає державну та військову таємницю, усунення або ослаблення демаскуючих ознак усіх видів діяльності з’єднань (частин)
ППО за мирного та воєнного часу.
Основні способи забезпечення прихованості: захист державних і військових таємниць; маскування військ і об’єктів; протидія
засобам розвідки противника.
Маскування проводиться з урахуванням комплексного застосування противником оптико-електронних, радіо- і радіотехнічних,
радіолокаційних, теплових та інших технічних засобів розвідки.
Маскування від оптичних (оптико-електронних) засобів розвідки здійснюється: використанням маскуючих властивостей
місцевості, темного часу доби, а також метеорологічних умов, що обмежують можливості цих засобів; проведенням заходів щодо
світломаскування; використанням для маскування техніки і позицій табельних та підручних засобів маскування; фарбуванням
техніки під фон місцевості; ретельним маскуванням слідів з’їзду техніки з доріг, слідів роботи газотурбінних двигунів, пусків ракет.
Маскування від засобів радіорозвідки забезпечується: дотриманням встановлених режимів роботи радіо-, радіорелейних та
тропосферних засобів зв’язку; дотриманням правил прихованого управління військами і розміщенням радіопередавачів середньої
та великої потужності за межами районів розташування командних пунктів (пунктів управління).
Маскування від засобів радіотехнічної розвідки забезпечується обмеженням роботи радіолокаційних станцій.
Маскування від засобів радіолокаційної розвідки здійснюється використанням маскуючих властивостей місцевості, масок-
екранів, імітацією радіолокаційних та демаскуючих ознак на хибних позиціях.
Маскування від засобів теплової розвідки здійснюється створенням димових та аерозольних завіс, застосуванням екранів
для зменшення теплового випромінювання техніки, потужних хибних теплових цілей, а також використанням маскуючих власти-
востей місцевості.
Введення противника в оману досягається комплексом заходів з нав’язування противнику хибної уяви про стан та побудову
протиповітряної оборони і способи від биття його ударів.
Способи введення противника в оману: дезінформація; демонстративні дії; імітація в поєднанні із застосуванням невідомих
противнику способів і форм ведення бойових дій та нових засобів поразки.
Поряд з проведенням загальних заходів слід передбачити створення хибних позицій ЗРВ, РТВ, аеродромів, пунктів управління,
вузлів зв’язку, інших об’єктів, а також імітацію їх життєд іяльності, деформацію (навмисно викривлену конфігурацію) військової
техніки та об’єктів, легендування дійсного характеру дій військ і об’єктів, радіолокаційне викривлення та аерозольне маскування
місцевості районів базування винищувальної авіації, позиційних районів з’єднань (частин) РТВ, ЗРВ. Найважливіше значення має
проведення демонстративних і відволікаючих дій, імітація перебазування авіації на інші аеродроми з наступним прихованим виво-
дом її на оперативні аеродроми.
Організація оперативного маскування: планування заходів щодо маскування; постановка завдань виконавцям; підготовка
виділених сил та засобів до виконання поставлених завдань; організація взаємодії щодо маскування; організація та здійснення кон-
тролю за підготовкою та проведенням заходів щодо маскування.
9.1.4. Інженерне забезпечення
Інженерне забезпечення організується і здійснюється з метою створення необхідних умов для підтримання військ та об’єктів в
постійній бойовій готовності, їх прихованого розташування, розгортання і успішного здійснення маневру, виконання поставленого
бойового завдання, підвищення живучості та захисту від усіх засобів ураження противника, посилення надійності охорони і стійко-
сті оборони, відновлення їх боєздатності й ліквідування наслідків нападу противника.
Інженерне забезпечення включає: інженерну розвідку місцевості і об’єктів; фортифікаційне обладнання районів розгортання
командних пунктів (пунктів управління), позицій, основних і запасних, позиційних районів, аеродромів; виконання інженерних
заходів з маскування військ і об’єктів; підготовку та утримання шляхів маневру, підвозу, евакуації і внутрішньо-позиційних шляхів;
добування та очистку води, обладнання і утримання пунктів польового водопостачання; виконання інженерних заходів щодо захи-
сту військ від високоточної зброї противника; обладнання і утримання інженерних загороджень, зведення оборонних споруд; захо-
ди з ліквідації наслідків застосування противником сучасних засобів поразки і відновлення боєздатності військ.
Інженерна розвідка місцевості і об’єктів здійснюється інженерними підрозділами і підрозділами родів військ для своєчасного
добування даних про місцевість і наслідки застосування противником зброї масового ураження.
При проведенні інженерної розвідки за мирного часу визначаються: захисні та маскуючі особливості місцевості, їх вплив
на виконання заходів інженерного забезпечення; характер та особливості рельєфу, глибина залягання грунтових вод та категорія
грунтів, можливості використання інженерної техніки; наявність, стан та пропускна здатність доріг, шляхопроводів, постійних мос-
тів та інших переправ і можливість використання на основних, запасних маршрутах маневру, підвіз та евакуації; місцезнаходження
і стан джерел води, умови із забезпечення військ водою; характер і стан водних та інших природних завад, наявність гідротехнічних
споруд, атомних електростанцій та інших потенційно небезпечних об’єктів, які можуть впливати на хід ведення бойових дій; про-
ходимість місцевості для бойової, спеціальної техніки, транспортних засобів та шляхів обходу важкопроходимих ділянок при вини-
кненні можливих руйнувань, зон затоплення; наявність місцевих будівельних матеріалів, які можна використати в ході бойових дій.
При веденні інженерної розвідки у ході бойових дій особлива увага звертається на виявлення: ступені і характеру пошко-
джень фортифікаційних споруд та інших елементів інженерного обладнання на позиціях і об’єктах; стану доріг і переправ на марш-
рутах маневру, підвозу та евакуації і можливостей їх використання; характеру та меж руйнувань, завалів, затоплень, пожеж і шляхів
їх обходу або подолання; місць для обладнання нових позицій та розташування підрозділів, наявності і характеру мінно-вибухових
загороджень, а також встановлених засобів дистанційного мінування противника на шляхах маневру, підвозу, евакуації та в райо-
нах розгортання підрозділів.
305
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Фортифікаційне обладнання районів розгортання командних пунктів (пунктів управління), позицій, основних і запасних, пози-
ційних районів, аеродромів передбачає зведення різних фортифікаційних споруд для найбільш ефективного та повного викорис-
тання бойових можливостей зброї та бойової техніки, підвищення захисту військ від усіх засобів ураження противника та забезпе-
чення їх живучості.
Фортифікаційне обладнання проводиться у послідовності, яка забезпечує постійну готовність військ до виконання поставлено-
го бойового завдання та безперервне нарощення ступені захисту від усіх засобів ураження з максимальним використанням захис-
них і маскуючих особливостей місцевості, збірних фортифікаційних споруд, місцевих будівельних матеріалів, інженерної техніки,
вибухових речовин.
Інженерні заходи з маскування військ і об’єктів (в комплексі з іншими заходами) виконуються для забезпечення приховано-
сті розташування (переміщення) та підвищення живучості своїх військ, а також введення противника в оману відносно їх складу,
стану бойової готовності і характеру щоденної діяльності, намірів та планів командування щодо їх бойового застосування і досяг-
нення раптовості їх дій. Вони включають роботи з прихованості військ і об’єктів з використанням різних інженерно-технічних за-
собів маскування; інженерне устаткування і утримання несправжніх районів і об’єктів; застосування інженерних сил і засобів для
забезпечення демонстративних дій військ.
Інженерні заходи з маскування військ та об’єктів здійснюються безперервно силами військ з максимальним використанням ма-
скуючих особливостей місцевості, застосування табельних засобів, місцевих матеріалів, штучних масок, макетів та інших засобів
оптичного, радіолокаційного, теплового, звукового маскувань та імітації, зведення хибних споруд, проведення маскувального фар-
бування техніки, споруд
Підготовка та утримання шляхів маневру, підвозу, евакуації та внутрішньо-позиційних шляхів здійснюється силами
з’єднань та частин родів військ, інженерних частин і підрозділів. При утриманні шляхів здійснюється постійний контроль за їх ста-
ном, проводиться ремонт окремих ділянок шляхів і штучних споруд.
Для інженерного забезпечення маневру при підготовці до бойових дій рішенням командира створюються загони забезпечення
руху, які забезпечують безпосереднє переміщення підрозділів за маршрутом. Загони забезпечення руху проводять інженерну
розвідку шляхів, забезпечують пропуск колон маневруючих підрозділів через важкопроходимі ділянки, а при неможливості обходу
улаштовуються переходи, відновлюються та ремонтуються шляхові споруди.
У ході бойових дій для обходу районів руйнувань, завалів, пожеж, затоплень, заражень, мінних полів на маршрутах маневру,
підвозу та евакуації силами інженерних частин і підрозділів можуть прокладатись колонні шляхи.
Добування та очистка води, обладнання і утримання пунктів польового водозабезпечення є одним із важливих завдань
інженерного забезпечення.
Командир несе особисту відповідальність за забезпечення з’єднань (частин) водою. Керівництво забезпеченням водою він
здійснює через свого заступника з тилу та начальників служб, які безпосередньо організують водозабезпечення.
При організації водозабезпечення заступник командира з тилу організує тилову розвідку джерел води, забезпечення водою час-
тин та підрозділів, своєчасний її підвіз на водозбірні пункти і безпосередньо до частин (підрозділів), узгоджуючи ці заходи з началь-
ником штабу.
Начальник інженерної служби організує інженерну розвідку джерел води, обладнання пунктів водозабезпечення з використан-
ням табельних засобів добування та очищення води, постачання до з’єднань (частин) табельних засобів польового водозабезпечен-
ня.
Начальник хімічної служби організує хімічну і радіаційну розвідку місцевості в районах пунктів водозабезпечення, дозимет-
ричний контроль за станом джерел води, проведення дезактивації та дегазації технічних засобів водозабезпечення.
Начальник медичної служби організує розвідку районів добування води та оцінює їх санітарний стан, видає дозвіл на користу-
вання водою з джерел, проводить заходи з їх очищення.
Обладнання і утримання пунктів польового водозабезпечення здійснюється силами з’єднань (частин) родів військ та
інженерних частин (підрозділів) з використанням табельних засобів, а також конструкцій із місцевих матеріалів.
Польові пункти водозабезпечення обладнуються із розрахунку один пункт на батальйон (дивізіон, роту), а за несприятливих
умов - один пункт на частину роду військ (позиційний район).
Обладнання і утримання інженерних загороджень, зведення оборонних споруд призначаються для підсилення охорони і
підвищення надійності оборони елементів бойового порядку. Вони створюються при підготовці і в ході бойових дій із застосуван-
ням мінно-вибухових, невибухових і комбінованих загороджень разом з обладнанням вогневих та інших споруд наземної оборони.
Основу інженерних загороджень складають мінно-вибухові загородження.
Інженерними загородженнями прикриваються командні пункти (пункти управління), позиції та інші важливі об’єкти. Вони по-
винні застосовуватись відповідно до замислу бойових дій, з урахуванням маневру своїх військ, можливих дій противника, наявності
природних завад.
Інженерні заходи з ліквідації наслідків застосування противником сучасних засобів поразки і відновлення боєздатності
військ включають проведення в бойових порядках з’єднань (частин) інженерних заходів з ліквідації наслідків застосування про-
тивником сучасних засобів ураження та ліквідації наслідків руйнувань потенційно небезпечних об’єктів.
Інженерні заходи з ліквідації застосування противником сучасних засобів поразки включають: інженерну розвідку рай-
онів ураження; відновлення ушкоджених та побудова нових фортифікаційних споруд на позиціях, пунктах управління та інших
об’єктах; відновлення і обладнання інженерних загороджень споруд наземної оборони; відновлення ушкоджених ділянок шляхів
маневру, підвозу, евакуації і внутрішньо-позиційних шляхів; обладнання колонних шляхів в обхід районів ушкоджень, зон завалів,
пожеж, заражень та мінних полів; відновлення ушкоджених і устаткування нових пунктів польового водозабезпечення; виконання
рятувальних робіт та локалізація пожеж.
До виконання вказаних інженерних заходів залучаються частини і підрозділи родів військ, спеціальних військ та тилу.
306
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
9.1.5. Забезпечення радіаційного, хімічного і біологічного захисту
Забезпечення радіаційного, хімічного і біологічного захисту організуються і здійснюються з метою максимального змен-
шення втрат військ, посилення їх захисту від високоточної та інших видів зброї з використанням аерозолів (димів). Крім того, ком-
плекс заходів забезпечення РХБ захисту може використовуватись для запобігання та ліквідації наслідків надзвичайних ситуацій та
аварій, пов’язаних з розповсюдженням радіоактивних речовин та сильнодіючих отруйних речовин, а також контролю екологічного
стану в інтересах військ.
Основні заходи забезпечення РХБ захисту: виявлення та оцінка радіаційної, хімічної і біологічної (бактеріологічної) обстано-
вки; ліквідація наслідків РХБ зараження (забруднення); підтримання безпеки військ за умов РХБ зараження; аерозольна (димова)
протидія технічним системам розвідки та ураження противника; забезпечення військ озброєнням РХБ захисту.
Крім того, на війська РХБ захисту покладене застосування запалювальної зброї.
Виявлення та оцінка РХБ обстановки включає: проведення РХБ розвідки, радіаційного і хімічного контролю; збирання та
обробку інформації про параметри ядерні вибухи радіаційну, хімічну, біологічну обстановку.
Ліквідація наслідків РХБ зараження включає: проведення спеціальної обробки військ, військової техніки і матеріальних за-
собів; дезактивація, дегазація і дезінфекція ділянок місцевості, доріг і споруд; пилоподавлення на радіаційно забрудненій місцевості.
Підтримання безпеки військ за умов РХБ зараження включає: сповіщення військ про РХБ зараження; застосування засобів
індивідуального і колективного захисту; виконання режимно-обмежувальних заходів.
Аерозольна (димова) протидія технічним системам розвідки та ураження противника включає: засліплення противника
аерозолями (димами); маскування військ та об’єктів аерозолями (димами), радіапоглинаючими покриттями і пінами; екранування
об’єктів аерозольними (димовими) захисними завісами.
Заходи забезпечення РХБ захисту виконуються силами самих військ. Найбільш складні та специфічні завдання, які вимагають
спеціальної підготовки особового складу і застосування спеціальної техніки, виконуються підрозділами РХБ захисту.
У відповідності з рішенням і вказівками командира штаб частини визначає завдання забезпечення РХБ захисту і терміни їх ви-
конання. Безпосереднім організатором забезпечення РХБ захисту є начальник служби. Він відпрацьовує план забезпечення РХБ
захисту (графічну і текстову частину). Завдання частинам та підрозділам з забезпечення РХБ захисту визначаються у бойових нака-
зах і бойових розпорядженнях.
Екологічне забезпечення - комплекс організаційно-технічних заходів, які здійснюються військами і спрямовані на охорону та
відновлення навколишнього природного середовища в процесі діяльності військ за мирного і воєнного часу.
Метою екологічного забезпечення є дослідження екологічної безпеки усіх вцдів діяльності військ та захист особового складу,
озброєння і військової техніки в умовах впливу екологічно несприятливих антропогенних і природних факторів, а також охорона
навколишнього природного середовища у місцях дислокації та розташування військ і об’єктів.
Командири (начальники) всіх рівнів несуть відповідальність за своєчасне виконання природоохоронних заходів та суворе до-
тримання вимог щодо забезпечення екологічної безпеки у підпорядкованих військових частинах та навчальних закладах. Посадові
особи військових частин повинні суворо виконувати вимоги природоохоронного законодавства України, норми і правила охорони
природного середовища, раціонального використання природних ресурсів та вимагати цього від під леглих.
9.1.6. Захист від зброї масового ураження
Захист від зброї масового ураження здійснюються з метою максимального ослаблення ураження підрозділів і частин ядер-
ною, хімічною і бактеорологічною (біологічною) зброєю противника і результатів зруйнування об’єктів атомної енергетики та під-
приємств хімічної промисловості, збереження боєздатності особового складу та успішного виконання поставлених йому бойових
завдань.
Захист від зброї масового ураження організується штабом у повному обсязі при підготовці і в ході виконання завдань як з засто-
суванням, так і без застосування ЗМУ. Штаб готує командиру дані і пропозиції з захисту від ЗМУ на базі рішення командира та
його вказівок, а також розпоряджень вищого штабу. Штаб також організує виконання заходів з захисту і контроль їх виконання
підрозділами і частинами.
Заходи захисту від зброї масового ураження: розосередження військ та матеріальних засобів; фортифікаційне обладнання ра-
йонів розташування військ; використання захисних і маскуючих властивостей місцевості та військової техніки; попередження осо-
бового складу встановленими сигналами про безпосередню загрозу і початок застосування противником ЗМУ, а також оповіщення
про радіаційне, хімічне та бактеріологічне (біологічне) зараження, про зруйнування об’єктів атомної енергетики і підприємств хімі-
чної промисловості; протиепідемічні, санітарно-гігієнічні та спеціальні профілактичні медичні заходи; виявлення і ліквідація нас-
лідків застосування противником зброї масового ураження; забезпечення безпеки та захисту особового складу при діях у зонах
зараження, районах руйнувань, пожежі і затоплень.
Зміст і порядок виконання заходів захисту військ залежить від конкретної обстановки, можливостей противника з застосування
ЗМУ, наявності часу, сил і засобів для організації захисту та інших факторів.
У залежності від характеру дій військ і обстановки, а також від того, на якій ланці організується захист від ЗМУ, вищезазначені
заходи можуть проводитись повністю або частково.
Заходи із захисту від ЗМУ відображаються у планах з видів забезпечення і на робочих картах.
Завдання із захисту від ЗМУ ставляться: з питань, які стосуються побудови, дій та забезпечення живучості військ - у бойових
наказах; з інших питань - у розпорядженнях з розвідки, інженерного, медичного забезпечення і забезпечення РХБ захисту.
307
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
9.1.7. Топогеодезичне забезпечення
Топогеодезичне забезпечення організується з метою підготовки та своєчасного доведення до військ топогеодезичних даних,
які необхідні командирам і штабам для вивчення характеру та властивостей місцевості, її оцінки для ефективного використання
озброєння та військової техніки, а також для виконання розрахунків при плануванні, організації та веденні бойових дій.
Основні задачі топогеодезичного забезпечення: підготовка території у топогеодезичному відношенні в інтересах військ; за-
безпечення топографічними, цифровими та спеціальними каргами, каталогами координат геодезичних пунктів та іншими топогео-
дезичними документами; підготовка вихідних астрономо-геодезичних та гравіметричних даних у районах передбачуваного розгор-
тання військ; топогеодезична підготовка позицій і прив’язка елементів бойових порядків родів військ та частин спеціального при-
значення.
З метою кращого використання сил та засобів ППО і здійснення централізованого управління ними підготовка вихідних топо-
геодезичних даних, прив’язка та орієнтування елементів бойових порядків повинні виконуватись в єдиній системі: координати - в
системі координат 1942 р.; висоти - в Балтійській системі висот.
Топографічні карти, які використовуються, складені у рівнокутній поперечно-циліндричній проекції Гауса та за масштабом по-
діляються на: дрібномасштабні (1:1 000 000 і 1 : 500 000); середньомасштабні (1 : 200 000 і 1 : 100 000); великомасштабні
(1:50 00011:25 000).
На окремі листи топографічні карти діляться лініями меридіанів і паралелей, причому кожен лист карти точно вказує положен-
ня на земному еліпсоїді зображеної ділянки місцевості і його орієнтування щодо сторін світу. Система розподілу карти на окремі
листи називається разграфкою карти, а система позначення листів - номенклатурою (рис. 9.1). Знання номенклатури карт забез-
печує швидкий і точний вибір потрібних для роботи листів карти.
N-36
75І7І
1:200 000
(М-36-ХН)
1:100 000
(N-36-66)
1:600 000
(N-36-0
К60 000
(N-36-12-5)
Рис. 9.1. Розгафлення і номенклатура листів карт масштабів 1 : 500 000, 1 : 200 000 і 1 : 100 000 на листі карти
масштабу 1 : 1 000 000
ХМ
99- -1ОО- -Кл- ДО2-
XXVI
XXXI
Номенклатура топографічних карт має у своїй основі номенклатуру карти 1 : 1 000 000, що складається з великої літери
латинського алфавіту (від А до V) і арабської цифри (від 1 до 60). Наприклад, N-36, К-52 і т.ін. Буква позначає пояс висотою 4°,
рахунок якого ведеться від екватора до полюсів, а цифра - номер колони шириною 6°, що відраховується від меридіана 180° із захо-
ду на схід (зліва направо). Листу карти 1 : 1 000 000 відповідає ціла кількість листів карт інших масштабів, кратне чотирьом: 4 листи
карти масштабу 1 : 500 000,36 листів карти масштабу 1 : 200 000, 144 листи карти масштабу 1 : 100 000 і т.д. Рахунок усіх листів
карт масштабів 1 : 500 000, 1 : 200 000 і 1 : 100 000 ведеться в межах карти масштабу 1 : 1 000 000 зліва направо і зверху униз
(рис. 9.1). Листи карти масштабу 1 : 500 000 додатково позначаються великими літерами А, Б, В і Г, масштабу 1 : 200000 - римсь-
кими цифрами від І до XXXVI, масштабу 1 : 100 000 - арабськими цифрами від 1 до 144, а до номенклатури листа карти масштабу
1 :1 000 000 добавляється відповідна літера або цифра. Так, позначені на рис. 9.1 листи карт масштабу 1 :500 000 мають номенкла-
туру Н-36-Г, масштабу 1:200000-^36-ХІІ і масштабу 1 :100 000-N-36-65.
308
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Листу карти масштабу 1 : 100 000 відповідають чотири листи карти масштабу 1 : 50 000, що позначаються великими літерами
А, Б, В, Г. Кожен лист карти масштабу 1 : 50 000 (рис. 9.2) у свою чергу розбивається на чотирьох листа карти масштабу 1 :25 000,
що позначаються малими літерами (а, б, в, г). До номенклатури листа карти масштабу 1:100 000 відповідно додаються одна або дві
букви, наприклад N-36-65-5 і М-Зб-65-Г-г. Номенклатура кожного листа вказується над північною (верхньою) стороною рамки
(справа або посередині). Справа від номенклатури вказується назва найбільш значного з розташованих на ньому населених пунктів,
а посередині зовнішньої рамки з усіх боків вказується номенклатура сусідніх листів.
Після виписки номенклатури необхідних листів карт їх склеюють, для чого стичні листи обрізають точно за східною (правою) і
південною (нижньою) внутрішніми рамками листа (крім правих і нижніх крайніх листів склейки). Склеюють карти спочатку в ко-
лони (знизу угору), а потім колони між собою (справа наліво), домагаючись суміщення кілометрових ліній і відповідних контурів.
Карту складають гармошкою за розмірами папки або польової сумки зі зберіганням орієнтування за сторонами світу. Важливі для
роботи з картою об’єкти місцевості піднімають.
Рис. 9.2. Розгафлення і номенклатура листів карт масштабів 1 : 50 000 і 1 : 25 000
на листі карти масштабу 1 : 100 000
На картах масштабів 1 : 500 000 і 1 : 1 000 000 нанесені лінії меридіанів і паралелей, що утворюють сітку географічних коорди-
нат. Більш великомасштабні карти мають на рамці кожного листа шкали географічних координат із ціною розподілу 1 кут.хв на
карті масштабу 1: 200 000 і 10 кут.сек-на картах масштабів 1:100000,1 :50 000,1:25 000. Для зручності роботи на склеєній карті
усередині рамки кожного листа проставляють короткі рисочки, що показують виходи меридіанів і паралелей усередину листа з
інтервалом 1 кут.хв.
При відліку або нанесенні точок за географічними координатами (широтою В і довготою Ь) через точку, з якої знімають коор-
динати для визначення широти, проводять лінію, паралельну верхньому або нижньому краю рамки, а для визначення довготи пе-
репендикулярну верхньому або нижньому краю рамки та знімають відмітки по відповідних сторонах рамки по лівій або правій -
широту, по нижній або верхній - довготу.
Для визначення прямокутних координат (X та ¥) на всіх листах карт, крім масштабу 1 : 1 000 000, наноситься прямокутна ко-
ординатна (кілометрова) сітка, вертикальні лінії якої паралельні напрямку осьового меридіана координатної зони (рис. 9.3), гори-
зонтальні - екватору. За позитивний напрямок осей приймають напрямок на північ - для осі X і на схід - для осі ¥. Щоб не мати
справу з негативними ординатами, значення ординати осьового меридіана кожної зони приймають рівною 500 км. Тому що в
кожній зоні числові значення координат X і ¥ повторюються, то при визначенні місця розташування точок до значення їхньої ор-
динати приписують номер зони. Рахунок зон ведеться від Грінвічського (нульового) меридіана.
Осьові меридіани сусідніх зон непаралельні, то на їх стику лінії сіток сходяться під кутом один до одного.
Лінії сітки проведені паралельно осям координат через 2 см (на картах масштабів 1 : 500 000 - 1 : 50 000), що
відповідає цілій кількості кілометрів на місцевості (10, 4, 2 і 1 км). Лінії кілометрової сітки, найближчі до кутів
рамки листа, підписані повною кількістю кілометрів, інші - скорочено, останніми двома цифрами. Якщо,
наприклад, у крайньої нижньої горизонтальної лінії проставлено 5 580, це означає, що вона на 5 580 км відстоїть від
екватора до півночі. Підпис, наприклад, 6 394 у крайньої зліва вертикальної кілометрової лінії вказує, що вона
знаходиться в шостій зоні і проходить у 394 км від початку відліку координат (у 106 км на захід від її осьового
меридіана).
Орієнтування по карті про положення пунктів, висот та ін. проводиться вказівкою квадрата, наприклад, усно:
“Квадрат десять, чотирнадцять, висота 270,6”, письмово: “Висота 270,6 (1014)”.
Місце розташування точок визначають скороченими або повними координатами (записують повну оцифровку
кілометрових ліній). їхнє застосування обумовлюється необхідністю однозначного визначення точки на карті. Для
одержання координат X та ¥ до оцифровки нижньої і лівої вертикальної сторін квадрата, у якому знаходиться
309
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
обумовлена точка, додають відміряне від цих сторін значення абсциси й ординати даної точки, виміри проводять по
лініях, перпендикулярних до ліній координатної сітки.
Визначення напрямків
У залежності від того, який напрямок прийнято за початковий, розрізняють три види кутів, що визначають
напрямок на точки: дирекційний кут а, істіний азимут А і магнітний азимут Ам (рис. 9.4).
Дирекційний кут і істіний (географічний) азимут вимірюють на карті, а магнітний азимут - на місцевості за допомогою при-
ладів, у яких є магнітна стрілка (бусолі та ін.).
Д ирекційний кут - кут, що вимірюється за рухом годинникової стрілки від 0 до 360е між північним напрямком вертикальної
кілометрової лінії і напрямком на обумовлену точку.
Істиний азимут - кут, що вимірюється за рухом годинникової стрілки від 0 до 360е між північним напрямком географічного
меридіана і напрямком на обумовлену точку.
Магнітний азимут - кут, що вимірюється за рухом годинникової стрілки від 0 до 360е між північним напрямком магнітного
меридіана (північним кінцем магнітної стрілки) і напрямком на обумовлену точку.
Для переходу від д ирекційного кута до азимутів і обернено необхідно ввод или відповідні кутові поправки.
Кут між істиним меридіаном точки і вертикальною кілометровою лінією - зближення меридіанів у - залежить від відстані да-
ної точки від осьового меридіана зони і може мати значення від 0 до ± 3е. При необхідності величину зближення меридіанів визна-
чають за формулою
310
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
у = (Ь - Ьо) 8ІП В,
де Ь - довгота даної точки; Ьо - довгота осьового меридіана зони, в якій знаходиться точка; В - широта даної точки.
Кут між істиним і магнітним меридіанами - магнітне схилення 6 - проставляється на рік відновлення карти з вказівкою на-
прямку і розміру річної зміни магнітного схилення.
Відхилення магнітного меридіана даної точки від вертикальної кілометрової лінії називають поправкою напрямку
ПН = (± 8)-(±у).
Щоб запобігти помилок при визначенні величини та знаку поправки напрямку, потрібно користувались схемою, яка вказана на
нижньому краю карти.
Перехід від одного виду кута до іншого здійснюється по формулах:
А = Ам + (± 5),
Ам = а-(± ПН);
а = Ам + (± ПН);
де східне зближення меридіанів (у), магнітне схилення (5) і поправку напрямку (ПН) враховують зі знаком “плюс”, західне - зі
знаком “мінус”.
Суть топогеодезичної прив’язки. Під топогеодезичною прив’язкою розуміють визначення планових координат і висот то-
чок місцевості (позицій, пунктів управління і т.ін.), дирекційних кутів і азимутів орієнтирних напрямків.
При топогеодезичній прив’язці по карті координати визначають за допомогою контурних точок карти.
Для топогеодезичного забезпечення маневру підрозділів ППО при веденні бойових дій широко використовують спеціальні
машини з розміщеною на них апаратурою наземної навігації (топоприв’язчики).
Робота навігаційної апаратури зводиться до безперервного виміру шляху, що проходиться, і дирекційного кута (дійсного ази-
муту) напрямку руху й обчисленню на цій основі поточних координат автомобіля, що рухається. Поточні координати (рис. 9.5)
дорівнюють алгебраїчній сумі координат початкової точки (Хо, у0) і прирощення Ах, і Ауь обчислених апаратурою в процесі руху
автомобіля. Основними приладами навігаційної апаратури є: колійний пристрій, курсова система, обчислювальний пристрій,
планшет, прилади електроустаткування і джерела живлення. До складу топоприв’язчика також входять засоби орієнтування (бу-
соль, гірокомпас), дальномір і допоміжні прилади. Інформація про поточні координати (х, у) і дирекційний кут курсу (а) видається
як у числовому, так і в графічному вигляді (прокреслюється на карті шлях, що проходиться машиною).
Перед початком руху готуються вихідні дані, що включають: вибір вихідної точки і визначення її координат; визначення
вихідного дирекційного кута подовжньої осі машини і коефіцієнта коректури шляху; вивчення маршруту руху і визначення коор-
динат орієнтирів, що знаходяться на шляху руху.
Рис. 9.5. До визначення координат топоприв’язчиком
Точність визначення координат топоприв’язчиком щодо вихідних точок характеризується середніми квадратичними помилка-
ми порядку 1,5 % від пройденого шляху.
Топогеодезична підготовка управління і стрільби зенітних підрозділів.
Виконання комплексу топогеодезичних робіт і заходів, що забезпечують бойове застосування і реалізацію можливостей систем
управління зенітних комплексів, а також засобів розвідки і цілевказання, прийнято називати топогеодезичною підготовкою
управління і стрільби.
Основним її змістом є: геодезична прив’язка та орієнтування елементів бойових порядків; розрахунок геодезичних констант
для автоматизованих систем і пристроїв управління, обчислювальних машин і лічильно-вирішувальних пристроїв зенітних ком-
плексів; контроль орієнтування і юстировочних робіт, топографічна підготовка позицій.
Заходи топогеодезичної підготовки, що провадяться в інтересах управління, спрямовані на забезпечення ідентичності
відображення і розуміння повітряної обстановки на КП частин (підрозділів), однозначності рішення задач целерозподілу, видачі
точного цілевказання, а також на створення умов для здійснення взаємодії з іншими силами і засобами ППО й одержання даних для
запровадження геодезичних констант у блоки АСУ для перерахунку координат цілей до положення на місцевості споживачів
інформації. Все це необхідно для реалізації централізованого управління силами і засобами ППО і здійснення їх взаємодії.
311
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Заходи топогеодезичної підготовки, що провадяться в інтересах стрільби ЗРК (ЗАК), спрямовані на одержання геодезич-
них даних для взаємного орієнтування елементів комплексу і визначення геодезичних констант, що характеризують взаємне поло-
ження елементів бойового порядку зенітного підрозділу. Константи вводяться у відповідні пристрої зенітного комплексу для забез-
печення вистрілювання ракет у заданий об’єм простору (область захоплення), захоплення цілей ракетою і т.ін. Якщо геодезичні
роботи з прив’язки елементів бойового порядку зенітного підрозділу виконані в місцевій системі координат, це забезпечує їм ве-
дення тільки автономних бойових дій.
Вихідними даними для геодезичної прив’язки елементів бойового порядку зенітних підрозділів і об’єктів АСУ є, як правило,
дані пунктів геодезичної мережі. При відсутності поблизу позиційного району пунктів геодезичної мережі на їх основі створюється
система додаткових вихідних точок. Припускається за обстановкою також використання координат і висот контурних точок, обу-
мовлених по топографічних картах більшого масштабу. При цьому орієнтирні напрямки визначаються астрономічним або
гіроскопічним способом, тому що їх визначення по карті не забезпечує необхідної точності.
Заходи топографічні* підготовки позиції включають: визначення кутів закриття РЛС і ПУ; побудова профілів місцевості по
азимутальних напрямках для аналізу областей радіотіні та інші роботи.
Конкретний зміст робіт топогеодезичної підготовки управління і стрільби визначається особливостями і принципами роботи
систем озброєння і управління.
9.1.8. Метеорологічне забезпечення
Метеорологічне забезпечення організується і здійснюється з метою правильної оцінки та обліку метеорологічних умов при
підготовці та веденні бойових дій (бойовому застосуванні сил та засобів), проведення заходів радіаційного, хімічного і біологічного
захисту.
Метеорологічні умови - один з найважливіших елементів повітряної обстановки. Вони суттєво впливають на безпеку польотів
і ведення бойових дій, ефективне застосування зброї, на стан аеродромів, кораблів в морі, експлуатацію авіаційної техніки, засобів
забезпечення польотів, роботу особового складу.
Заходи метеорологічного забезпечення: організація метеорологічних спостережень за станом атмосфери біля поверхні Землі
та орнітологічних спостережень за перельотами птахів в районах аеродромів; збір та аналіз метеоінформації та аеросиногтгичних
матеріалів; доповідь командуванню, обслугам КП (ПУ) та льотному складу даних про фактичні та очікувані умови погоди,
своєчасне попередження їх про небезпечні явища та різкі зміни погоди в районах базування, на маршрутах польотів та в районах
бойових дій; підготовка метео- та аерологічних даних в інтересах захисту військ від зброї масового ураження.
9.1.9. Штурманське забезпечення
Штурманське забезпечення полягає в організації* і проведенні заходів, нспрямованих на досягнення точного та надійного лі-
таководіння, наведення винищувачів на повітряні цілі, забезпечення безпеки польотів, а також на своєчасне подання командиру
довідкових даних, штурманських розрахунків і пропозицій, необхідних для прийняття рішення.
Завдання штурманського забезпечення: підготовка даних командиру для прийняття рішення; штурманські розрахунки на
виконання бойових завдань; визначення і розрахунок маршрутів, режимів та профілів польоту до зон чергування та зворотно, мож-
ливостей винищувачів з тривалості чергування у повітрі; встановлення порядку застосування технічних засобів літаководіння при
польотах за маршрутом в зоні чергування та виходу на аеродром посадки після бою; проведення розрахунків з організації самостій-
ного пошуку та знищення противника; визначення засобів безпеки при польотах; організація і підготовка до проведення маневру на
інші аеродроми.
Розрахунки, що виконуються після підйому винищувачів у повітря, називаються безпосередніми і служать для забезпечення
наведення поточними даними.
При виконанні безпосередніх штурманських розрахунків враховуються: взаємне положення цілі та винищувача в
просторі і їх положення відносно зон виявлення РЛС; напівсфера атаки і режим польоту цілі та винищувача; характер можливого
маневру цілі.
Основні елементи, що визначаються при виконанні безпосередніх штурманських розрахунків: траєкторія польоту ви-
нищувача до рубежу перехвату; положення точки початку маневру винищувача; час баражування до початку маневру і мінімаль-
ний запас палива для виконання завдання перехвату; запас палива і профіль польоту до аеродрому.
9.1.10. Радіотехнічне забезпечення
Радіотехнічне забезпечення організується і здійснюється з метою рішення завдань управління авіацією, літаководіння, зльоту
та посадки літаків, контролю та регулювання польотів в районі аеродрому.
Радіотехнічне забезпечення включає обладнання аеродромів технікою радіонавігації та інструментальної посадки радіолока-
ційними системами, світлотехнічними засобами та організацією їх роботи.
Радіотехнічне забезпечення організується та здійснюється частинами і підрозділами зв’язку та радіотехнічного забезпечення
польотів.
Радіолокаційне забезпечення призначається для вирішення завдань виявлення, впізнавання і перевірки повітряних цілей, ви-
дачі даних повітряної обстановки на ПУ наведення літаків на повітряні цілі, наземні цілі, морські цілі; здійснення контролю за
польотами своєї* авіації*.
312
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Радіосвітлотехнічне забезпечення призначене для вирішення завдань управління авіацією, літаководіння, цілевказання, взає-
много визначення авіації і СВ, зльоту і посадки, контролю і регулювання польотів в районах аеродромних вузлів і аеродромів.
9.1.11. Пошуково-рятувальне забезпечення
Пошуково-рятувальне забезпечення полягає у здійсненні допомоги екіпажам, які покинули пошкоджений літак або здійсни-
ли вимушену посадку як на своїх територіях, так і на території, яку займає противник шляхом організації їх пошуку і евакуації.
Заходи пошуково-рятувального забезпечення: організація чергування пошуково-рятувальних сил і засобів та органів управ-
ління польотами; організація прийому і передачі сигналів біди, а також організація оповіщення державних органів про повітряні
судна, що зазнали біду; організація і здійснення пошуково-рятувальних робіт; прикриття з повітря пошуково-рятувальних підрозді-
лів; парашутно-рятувальна і десантна підготовка екіпажів повітряних суден, що мають парашутні системи; забезпечення екіпажів
груповим і індивідуальними аварійно-рятувальними засобами і спорядженням; спеціальна підготовка льотного складу до виживан-
ня в умовах автономного існування; підготовка льотного складу, особового складу рятувальних парашутно-десантних груп, назем-
них пошуково-рятувальних команд до проведення пошуково-рятувальних робіт; здійснення управління виділеними силами та за-
собами, взаємодія між з’єднаннями ППО та інших видів ЗС при проведенні пошуково-рятувальних робіт.
Оперативним органом єдиної державної системи пошуку і рятування є Головний центр координації авіаційних робіт з пошу-
ку і рятування МНС, який організовує, координує і спрямовує пошуково-рятувальні роботи з використанням авіаційних та аеромо-
більних сил і засобів, що залучаються за його рішенням для проведення пошукових та аварійно-рятувальних робіт.
Для забезпечення пошуку та рятування екіпажів і пасажирів повітряних суден, що зазнають чи зазнали лиха в районі відпо-
відальності здійснюється чергування:
наземних пошуково-рятувальних команд на всіх аеродромах видів збройних сил, МНС, МВС, Держкомкордону, а також на
авіаційних полігонах і навчальних авіаційних центрах під час проведення своїх польотів;
радіотехнічних та радіоелектронних засобів на міжнародній аварійній частоті ультракороткохвильового діапазону 121,5 МГц на
аеродромах збройних сил, МНС, МВС, у цивільній авіації України (у районних диспетчерських пунктах аеропортів 1 - 2 класів і
аеродромах класів А, Б, В, Г), у всіх пунктах управління польотами (при обслуговуванні хоча б одного повітряного судна).
Пошуково-рятувальні роботи організовуються у таких випадках: при отриманні сигналу' лиха з борту7 повітряного судна
(ПС); при отриманні доповіді від екіпажу ПС, який спостерігав лихо; при прийманні сигналів аварійних радіостанцій; при отриман-
ні повідомлень від очевидців лиха; якщо при польоті повітряною трасою (поза трасою) втрачено радіозв’язок з екіпажем ПС і його
місцезнаходження протягом 20 хвилин не вдалося встановити; якщо протягом 10 хвилин після розрахункового часу прильоту ПС
не прибуло в пункт призначення і радіозв’язок з ним відсутній більше 5 хвилин; якщо екіпаж ПС, отримавши дозвіл на посадку, не
здійснив її, а радіозв’язок з ним припинився; при втраті радіозв’язку з одночасною втратою відмітки радіолокаційної проводки або
втраті радіозв’язку більше ніж на 5 хвилин, якщо радіолокаційна проводка не велася; при отриманні та підтвердженні інформації
від пункту приймання інформації супутникової системи для визначення місцезнаходження повітряних суден, які зазнають аварії; за
розпорядженням Головного центру під час виникнення інших надзвичайних ситуацій техногенного та природного характеру.
9.1.12. Безпосереднє прикриття та наземна оборона
Охорона та наземна оборона бойового порядку організується з метою своєчасного попередження та захисту від нападу пові-
тряного, наземного (морського) противника (диверсійно-розвідувальних груп, повітряних та морських десантів) і здійснюється у
залежності від обстановки вартами (патрулями) та додатково виділеними підрозділами.
Завдання охорони та наземної оборони: запобігти раптовому нападу противника на елементи бойового порядку; визначити чи-
сельний склад противника, місця його скупчення та маршрути руху; захистити основні елементи бойового порядку від ударів назе-
много противника, повітряних (морських) десантів, диверсійно-розвідувальних груп; сумісними діями з силами та засобами взає-
модіючих військ знищити нападаючого противника.
Охорона військ на марші називається похідною, при розташуванні на місці - сторожовою, у бою - бойовою. Крім того, в усіх
випадках організується безпосередня охорона. Сили і засоби, що виділяються на охорону, визначаються обстановкою.
Охорона підрозділів ППО здійснюється в загальній системі охорони загальновійськових частин (з’єднань), у районі
розташування яких вони виконують бойові завдання. Незалежно від цього при розташуванні підрозділів на позиціях організується
безпосередня охорона дозорами, що ведуть спостереження шляхом огляду місцевості, патрулюють або діють із засідок. В умовах
загрози нападу наземного противника виставляють і окремі сторожові пости.
Наземна оборона позиції здійснюється, як правило, силами особового складу підрозділів. Вона організується відповідно до
рішення командира підрозділу7 на організацію наземної оборони і вказівками вищого штабу. Завдання з наземної оборони позиції
ставиться начальнику штабу підрозділу, що безпосередньо організує оборону позиції і відповідає за її готовність.
Організація охорони та наземної оборони включає: з’ясування завдань охорони та оборони; оцінка обстановки; розробка пропо-
зицій з організації і здійснення охорони та оборони; доповідь командиру пропозицій з організації та проведення охорони та оборо-
ни; прийняття командиром рішення на охорону та оборону; розробка плану охорони та оборони; доведення завдань охорони та
оборони до підпорядкованих підрозділів, проведення організаційно-тактичних та інженерно-технічних заходів; контроль, практич-
не відпрацювання і удосконалення плану охорони та оборони з’єднання (частини).
Рішення приймається на основі з’ясування завдання, оцінки можливих дій наземного і морського противника, десантів і
диверсійних груп, а також своїх підрозділів і сусід, позиційного району, місцевості. Основу рішення складає замисел наземної
оборони, яким визначаються сили і засоби, що залучаються для оборони, напрямки (сектори) зосередження зусиль і варіант (у
головних рисах) побудови системи вогню та інженерних загороджень.
313
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Заходи з оборони бойового порядку: призначення секторів оборони, орієнтирів на місцевості; визначення відстаней до них та
підготовка особового складу до проведення вогню із зенітних установок та стрілецької зброї; обладнання окопів, ходів сполучення,
сховищ, завад та загороджень; призначення бойових обслуг та розподіл їх за секторами оборони; визначення порядку ведіння вог-
ню та сигналів управління; організація зв’язку пунктів управління з елементами оборони.
При розташуванні елементів наземної оборони враховуються напрямки найбільш імовірної появи противника, характер місце-
вості, характер очікуваного озброєння противника.
Найбільше небезпечними вважаються напрямки, що дозволяють противнику приховано, з найменшими витратами часу
наблизитися до позиції, у тому числі з застосуванням механізованих підрозділів, а також напрямки, з яких противник може вести
прицільний вогонь по позиції з максимальних дальностей.
Оборона позиції створююєгься круговою із зосередженням зусиль у найбільш небезпечних секторах.
Розташування сторожових застав повинно перекривати імовірні напрямки дій противника. Сторожові пости виставляються в
проміжках між ними і на підступах до бойового порядку. Секрети (2-3 чоловіки) здійснюють спостереження за прихованими під-
ходами. У межах бойового порядку організується безпосередня охорона і пункти спостереження. Крім того, для рішення раптово
виникаючих завдань призначається черговий підрозділ.
Пункти спостереження та вогневі позиції вибираються з таким розрахунком, щоб ними забезпечувавсь добрий огляд та об-
стріл противника на максимальних дальностях; проведення перехресного та зосередженого вогню; маневр вогневих засобів на за-
пасні позиції, а також хороше маскування від спостереження противника. Усі вогневі позиції повинні бути пристосовані для прове-
дення вогню не тільки вдень, але і вночі. Вдалий вибір позицій вогневих засобів, розчищення секторів обстрілу, підготовлений ма-
невр на тимчасові і запасні позиції, підготовка даних для стрільби вночі підвищують ефективність системи вогню.
При організації системи вогню указуються смуги вогню, основні і додаткові сектори обстрілу, ділянки зосередженого вогню.
Маневр вогнем включає його зосередження на загрозливу ділянку, розподіл вогню по цілях, перенос його на найбільш важливі з
них. Проміжки між опорними пунктами взводів повинні прострелюватись на всю глибіну перехресним вогнем. Перед переднім
краєм готується суцільний багатошаровий вогонь з усіх видів зброї. Для введення противника в оману щодо системи вогню і
розташування вогневих засобів, а також прикриття небезпечних напрямків готуються 3-4 вогневі позиції БМП та БТР. Черговому
підрозділу призначається один із секторів оборони. Дані для стрільби вночі і в умовах обмеженої видимості складаються з відстаней
до орієнтирів, меж секторів обстрілу, ділянок зосередженого вогню і напрямків на них, установок прицілів, допоміжних точок
прицілювання і заносяться до картки вогню. Місцевість, що прилягає до позиції, розбивається на ряд секторів, межі яких
визначаються видимими орієнтирами (рис. 9.6). Кожному сектору присвоюється порядковий номер. Визначається місце
розташування вогневих точок, що при необхідності виносяться за межі позиційної території на вигідні в тактичному відношенні
висоти і рубежі. Розчищаються сектори і готуються вихідні дані для стрільби по напрямках і рубежах імовірної появи противника. З
кожної вогневої точки вибирається система орієнтирів, визначаються дальності до них. Особлива увага приділяється вибору позиції
зенітних кулеметних установок (зенітних кулеметів), що повинні забезпечувати ведення вогню як по наземних цілях у найбільше
небезпечних секторах, так і по повітряних цілях із будь-яких напрямків.
При організації системи вогню кожній бойовій обслузі ставиться бойове завдання, вказуються основна і запасні позиції,
орієнтири. Для кожної вогневої точки оформляється картка вогню - стрілецька картка (рис. 9.7), у якій вказуються межі
відповідального сектора, орієнтири і найбільш характерні місцеві предмети, дальності до них, склад бойової обслуги, сигнали
управління та інші дані, що визначають дії особового складу.
Позиції наземної оборони обладнуються у фортифікаційному відношенні як споруди відкритого або закритого типу. Крутості
окопів і траншей, що відриваються у повний профіль, зміцнюють одягом із різноманітних місцевих матеріалів. Споруди закритого
типу для ведення вогню вбудовуються у схили висот, крутості ярів і маскуються. Окопи і траншеї наземної оборони з’єднують
ходами сполучення з укриттями для особового складу.
Система вогню наземної оборони позиції доповнюється інженерними загородженнями, тобто штучними завадами і спорудами,
що встановлюються або влаштовуються на місцевості з метою завдати противнику шкоди та утруднити його просування і маневр.
За характером впливу загородження поділяються на вибухові (мінно-вибухові), невибухові та комбіновані. При організації наземної
оборони позицій підрозділів і командних пунктів застосовуються як невибухві (головним чином), так і мінно-вибухові
загородження. Місця їх розташування вибираються з таким розрахунком, щоб усі підступи до загороджень і вони самі
прострілювались вогнем кулеметів, автоматів та іншої стрілецької зброї.
Кількість елементів наземної оборони залежить від протяжності межі оборони, характеру місцевості та існуючих на озброєнні
засобів.
Для боротьби з ДРГ та десантами противника на підступах до бойового порядку для підсилення оборони доцільно створити
пошукову ударну групу на автомобілях.
З межами оборони та рухомими патрульними групами налагоджується надійний зв’язок. Як правило, з обладнаними межами
оборони організується телефонний зв’язок, а з рухомими групами - радіозв’язок.
Під час ведення бою необхідно керуватися Бойовим статутом сухопутних військ.
Після відбиття атаки відновлюються система вогню, інженерні загородження, поповнюються запаси боєприпасів. Озброєння і
бойова техніка, що вийшли з ладу, ремонтуються, евакуюються поранені та хворі. У напрямку дій противника висувається додат-
кова розвідка, уточнюються завдання підрозділам. У випадку успішного розгрому противника організується прочісування місцево-
сті поблизу бойового порядку, виявляються і знищуються дрібні групи, що залишились, закинуті передавачі завад і маркери (радіо-
локаційні (лазерні, інфрачервоні) пасивні або активні пристрої, що забезпечують наведення боєприпасів навіть при відсутності без-
посереднього електромагнітного контакту).
314
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Рис. 9.6. Схема наземної оборони позиції (варіант)
Рис. 9.7. Картка вогню окопу №2
9.2. Технічне забезпечення бойових дій (бойового застосування)
Технічне забезпечення організується з метою підтримання бойової готовності і боєздатності військ шляхом забезпечення їх
озброєнням, військовою технікою, ракетами, боєприпасами і військово-технічним майном, підтримання їх в постійній готовності до
застосування, відновлення (ремонту) озброєння і військової техніки в разі пошкоджень (поломок) і повернення їх до строю.
Основні заходи технічного забезпечення: забезпечення військ озброєнням і військовою технікою (ОВТ), ракетами, боєприпа-
сами і військово-технічним майном; зосередження основних зусиль на забезпеченні угруповань військ, які виконують основні за-
вдання; своєчасне і безперебійне поповнення запасів матеріальних засобів, у першу чергу - військових запасів до встановлених
норм; проведення технічного обслуговування та заміна блоків, агрегатів, вузлів ОВТ, які відпрацювали встановлений ресурс, безпо-
середньо у бойових порядках; першочергове комплексне відновлення та повернення до строю ОВТ, що потребують найменшого
обсягу робіт, переважно безпосередньо в районі виходу зі строю; нарощення зусиль частин технічного забезпечення та поповнення
втрат матеріальних засобів за рахунок резерву, а у разі необхідності - за рахунок перерозподілу їх; максимальне використання міс-
цевої промислової бази для ремонту ОВТ та задоволення потреб військ у промисловому обладнанні та матеріалах.
Основою організації технічного забезпечення є рішення командира та вказівки і розпорядження старших начальників з відпові-
дної служби.
Основним організатором технічного забезпечення є заступник командира з озброєння.
315
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Види технічного забезпечення: ракетно-технічне забезпечення; інженерно-ракетне забезпечення; інженерно-радіоелектронне
забезпечення; інженерно-артилерійське забезпечення; інженерно-технічне забезпечення; автотехнічне забезпечення; танкотехнічне
забезпечення; технічне забезпечення радіаційного, хімічного і біологічного захисту; технічне забезпечення зв’язку і АСУ; технічне
забезпечення по службах тилу; метрологічне забезпечення.
Завдання технічного забезпечення виконуються силами і засобами військ, частинами і установами технічного забезпечення, а
також відповідними силами і засобами тилу.
Основу технічного забезпечення складають планово-попереджувальна система технічного обслуговування техніки і ремонтно-
відновлювальні роботи.
9.2.1. Ракетно-технічне забезпечення
Ракетно-технічне забезпечення організується і здійснюється з метою своєчасної підготовки і доставки зенітних ракет та ком-
плектуючих елементів для їх утримання в установленій ступені готовності, проведення технічного обслуговування, забезпечення
справності.
Заходи ракетно-технічного забезпечення: накопичення і раціональне ешелонування військових і оперативних запасів зеніт-
них ракет, зберігання (утримання), розосередження, укриття і забезпечення збереженя; своєчасне переведення ракет в установлені
ступені готовності, проведення їх технічного обслуговування, ремонту і відновлення технічного ресурсу; контроль за виконанням
правил поводження з ракетами при їх зберіганні, транспортуванні та підготовці до бойового застосування в з’єднаннях і частинах;
виконання робіт щодо ліквідації наслідків аварій з ракетами і бойовими частинами; евакуація або знищення ракет і бойових частин
у випадку загрози захоплення їх противником; забезпечення військ військово-технічним майном та документацією, необхідними
для експлуатації, бойового застосування і ремонту ракет, забезпечення живучості й постійної готовності частин і підрозділів до
виконання завдань, організація управління ними.
Ракетно-технічне забезпечення здійснюють зенітні ракетно-технічні бази, бази ремонту і зберігання озброєння, технічні дивізіо-
ни і батареї.
9.2.2. Інженерно-ракетне забезпечення
Інженерно-ракетне забезпечення організується і здійснюється з метою підтримання зенітних ракетних пускових установок
(систем і комплексів), спеціальних машин ППО в бойовій готовності до застосування, забезпечення ними військ, ремонту при по-
шкодженні та поверненні до строю.
Заходи інженерно-ракетного забезпечення: технічне обслуговування засобів стартових позицій; організація безперебійного їх
енергопостачання; ремонт і відновлення ресурсів технологічного обладнання і інженерних комплексів; своєчасне укомплектування
і підтримання у працездатному стані усіх видів ЗІП; ведення технічної розвідки з метою використання місцевої промисловості для
ремонту обладнання стартових позицій і відновлення їх енергопостачання.
Технічне обслуговування умовно можна розділити на контроль технічного стану, профілактичне обслуговування, постачання
ЗІП і експлуатаційними матеріалами, збір і обробку даних результатів експлуатації.
Контроль технічного стану призначений для оцінки працездатності апаратури і відповідності її параметрів значенням,
заданим нормативно-технічною документацією, проводиться як при використанні озброєння за призначенням, так і при
профілактичному обслуговуванні та ремонті.
Профілактичне обслуговування спрямоване на підтримку озброєння у справному стані, попередження відмов у роботі його
елементів, продовження термінів експлуатації. У ході профілактичного обслуговування проводяться огляд і чистка апаратури та
обладнання, контрольно-регулювальні операції, прогнозування відмов і їхнє попередження, сезонні змазувальні та кріпильні
роботи, а також усунення несправностей в обсязі поточного ремонту. Види і періодичність технічного обслуговування
(регламенту), обсяги робіт при кожному з видів, вказівки про порядок проведення цих робіт містяться в експлуатаційній
документації (інструкціях, керівництвах) на конкретний тип озброєння і бойової техніки.
Ремонт військової техніки в залежності від особливостей, ступеня ушкодження і спрацювання її зразків (комплексів)
поділяється на поточний, середній і капітальний.
Поточний ремонт полягає в усуненні несправностей шляхом заміни або відновлення окремих складових частин зразка
(комплексу) військової техніки й у проведенні регулювальних робіт силами обслуговуючого персоналу, а також ремонтних
підрозділів частини в місцях експлуатації озброєння і техніки.
Середній ремонт полягає у відновленні експлуатаційних характеристик комплексу (зразка техніки) шляхом заміни або
ремонту ушкоджених (зношених) складових частин, блоків, агрегатів і в обов’язковій перевірці технічного стану окремих частин з
усуненням несправностей силами ремонтних органів із притягненням експлуатаційного персоналу.
Капітальний ремонт передбачає повне розбирання і дефектацію зразків техніки (комплексів), заміну або ремонт усіх
несправних складових частин, складання, комплексну перевірку, регулювання і випробування.
Ступінь ушкодження кожного зразка озброєння і військової техніки визначається в основному за двома критеріями -
характером ушкоджень і працевитратам, необхідним для його відновлення.
Ступінь ушкодження:
слабкий, якщо даний зразок озброєння може бути відновлений силами особового складу підрозділу (самостійно або із
залученням ремонтної майстерні частини) і потрібні витрати при цьому не перевищують граничного значення працевіпрат,
необхідних для виконання поточного ремонту даного зразка;
316
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
середній, якщо, по-перше, ушкодження можуть бути усунуті силами і засобами частини самостійно, але потрібні працевитрати
перевищують граничне значення працевитрат на поточний ремонт, і, по-друге, коли потрібні для відновлення працевитрати
виявляться менше припустимого значення працевитрат на виконання як поточного, так і середнього ремонту, але усунення
нанесених ушкоджень можливо лише з використанням сил і засобів ремонтних органів (виїзних ремонтних бригад).
Безповоротні втрати озброєння і військової техніки визначаються характером ушкоджень, що не можуть бути усунуті жодним
із видів ремонту, включаючи капітальний.
Технічне обслуговування, поточний і середній ремонт ракетного озброєння здійснюється силами військ, групами регламентно-
налагоджувальних робіт, ремонтними частинами і підрозділами з’єднань (частин). Капітальний ремонт ракетного озброєння здійс-
нюється ремонтними підприємствами військ ППО і підприємствами промисловості.
9.2.3. Інженерно-радіоелектронне забезпечення
Інженерно-радіоелектронне забезпечення має за мету підтримання радіоелектронної техніки РТВ, ЗРВ, авіації, РЕБ та інших
засобів ППО в готовності до застосування за призначенням, забезпечення їх безвідказності й максимальної ефективності, укомпле-
ктування ними військ, ремонт при пошкодженні та повернення до строю.
Технічне обслуговування, поточний і середній ремонт радіоелектронної техніки здійснюється силами військ, групами регламе-
нтно-налагоджувальних робіт, ремонтними підрозділами і частинами, капітальний ремонт - ремонтними військовими підприємст-
вами і підприємствами промисловості.
9.2.4. Інженерно-артилерійське забезпечення
Інженерно-артилерійське забезпечення організується і здійснюється з метою забезпечення бойової готовності й безвідмовно-
сті артилерійського озброєння, стрілецької зброї, боєприпасів до них, приладів постерігання і управління вогнем та забезпечення
ними військ.
Завдання інженерно-артилерійського забезпечення: забезпечення військ необхідною кількістю артилерійського озброєння,
стрілецької зброї, боєприпасів; організація їх технічного обслуговування, зберігання, транспортування, поточного і планового ремо-
нту; своєчасне відновлення та повернення до строю при пошкодженні, облік наявності та стану, контроль за технічним станом,
витратами ресурсу, умовами зберігання артилерійського озброєння, стрілецької зброї, боєприпасів.
Технічне обслуговування і поточний ремонт артилерійського озброєння та стрілецької зброї проводиться силами і засобами
військ із залученням ремонтних органів Центру.
9.2.5. Інженерно-технічне забезпечення
Інженерно-технічне забезпечення організується і здійснюється з метою забезпечення військ засобами інженерного озброєння,
підтримання їх в справному стані та готовності до використання, забезпечення їх надійної роботи, швидкого відновлення при вихо-
ді з ладу.
Завдання інженерно-технічного забезпечення: забезпечення військ засобами інженерного озброєння; підтримання засобів
інженерного озброєння у справному стані і готовності до використання; організація їх експлуатації та надійної роботи; відновлення
засобів інженерного озброєння при виході з ладу; управління силами і засобами інженерно-технічного забезпечення.
9.2.6. Автотехнічне забезпечення
Автотехнічне забезпечення організується і здійснюється з метою забезпечення військ автомобільною технікою загального
призначення, засобами пересування озброєння, автомобільним майном, підтримання автомобільної техніки і засобів пересування в
стані, який забезпечує постійну бойову готовність і високу мобільність, відновлення пошкождених машин та повернення їх до
строю.
Завдання автотехнічного забезпечення: забезпечення військ автомобільної технікою і майном; підтримання сил і засобів ав-
тотехнічного забезпечення в постійній готовності до використання; зберігання і транспортування, технічне обслуговування, евакуа-
ція і ремонгтехніки; розробка і здійснення заходів щодо запобігання подій з автотехнікою; організація технічної і спеціальної підго-
товки особового складу військ; підтримання у працездатному стані парків і їх елементів.
9.2.7. Танкотехнічне забезпечення
Танкотехнічне забезпечення забезпечення організується і здійснюється з метою забезпечення бойової готовності й безвідказ-
ності бронетанкової техніки та озброєння.
Завдання танкотехнічного забезпечення: укомплектування військ необхідною кількістю бронетанкової техніки та озброєн-
ням; організація їх технічного обслуговування, зберігання, транспортування, поточного і планового ремонту; своєчасне відновлення
та повернення до строю при пожкожденні, перелік наявності та стану, конторль за технічним станом, витратами ресурсу, умовами
зберігання бронетанкової техніки та озброєння.
Технічне обслуговування і поточний ремонт бронетанкової техніки та озброєння проводиться силами і засобами військ із залу-
ченням ремонтних органів Центру.
317
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
9.2.8. Технічне забезпечення радіаційного, хімічного і біологічного захисту
Технічне забезпечення радіаційного, хімічного і біологічного захисту має метою забезпечення підрозділів засобами захисту,
підтримку спеціальних машин та засобів захисту у справному стані і постійній бойовій готовності їх до бойового застосування,
забезпечення надійної роботи, швидкого відновлення озброєння, техніки, засобів захисту та повернення їх у стрій при по-
шкодженні.
Завдання технічного забезпечення радіаційного, хімічного і біологічного захисту: забезпечення військ озброєнням та засо-
бами РХБЗ (задоволеняя штатно-табельні потреби військ, накопичення та ешелонування запасів, відновлення втрат); підтримання
працездатності зоброєння (підтримання у справному стані, організація техобслуговування).
9.2.9. Технічне забезпечення зв’язку і АСУ
Технічне забезпечення зв’язку і АСУ організується і здійснюється з метою підтримання техніки зв’язку і АСУ в справному
стані й постійній готовності до використання, забезпечення їх надійної роботи, відновлення та ремонту засобів зв’язку, автоматизо-
ваних систем управління зв’язком, комплексних засобів автоматизації, апаратури командних пунктів.
Завдання технічного забезпечення зв’язку: прийом, доставка та введення до строю техніки зв’язку; проведення її технічного
обслуговування та ремонту; накопичення встановлених запасів техніки і майна зв’язку, їх зберігання; транспортування і підготовка
їх до використання; своєчасне відновлення втрат, евакуація і ремонт тих, які вийшли з ладу.
Завдання технічного забезпечення АСУ: введення до строю засобів АСУ та обчислювальної техніки; проведення їх техніч-
ного обслуговування; поповнення засобів АСУ запасними елементами і промисловою продукцією виробничого призначення; про-
ведення ремонту засобів АСУ і обчислювальної техніки, повернення їх до строю; виключення несанкціонованого допуску до таєм-
ної інформації при її обробці, зберіганні та відображенні на засобах автоматизації.
9.2.10. Технічне забезпечення по службах тилу
Технічне забезпечення по службах тилу організується та здійснюється з метою своєчасного укомплектування технікою тилу і
забезпечення технічним майном; підтримання в справному стані, постійної готовності до використання і забезпечення надійної
роботи шляхом технічно грамотної експлуатації, обслуговування, утримання (збереження), своєчасного ремонту і евакуації
Завдання технічного забезпечення по службах тилу: забезпечення частин (підрозділів) відповідною технікою та спеціальним
обладнанням; організація їх експлуатації, обслуговування, утримання (збереження), ремонту і евакуації.
9.2.11. Метрологічне забезпечення
Метрологічне забезпечення - комплекс заходів, що мають на меті підтримання потрібної точності та достовірності контролю
параметрів озброєння і ефективності його бойового застосування, забезпечення граничних можливостей озброєння і його операти-
вного відновлення, а також визначення і застосування наукових, нормативних, технічних та організаційних основ, необхідних для
досягнення єдності вимірювань, своєчасності та достовірності контролю параметрів об’єктів вимірювань.
Завдання метрологічного забезпечення: досягнення високої ефективності застосування озброєння та військової техніки, під-
тримання їх бойових та експлуатаційних властивостей; забезпечення єдності вимірювань; здійснення метрологічного контролю і
нагляду; забезпечення достовірності вимірювань під час лікування та діагностики особового складу, визначення рівнів радіоактив-
ного забруднення й опромінення; організації контролю за витратами матеріальних засобів, дотриманням вимог техніки безпеки та
встановлених норм забезпечення особового складу; підготовка та підвищення кваліфікації фахівців у галузі метрологічного забез-
печення.
Експлуатація вимірювальної техніки - комплекс заходів з її постачання, обліке, зберігання, транспортування, технічного об-
слуговування, застосування, ремонте, списання і метрологічного забезпечення.
Військові засоби вимірювальної техніки (ВЗВТ) повинні використовуватись тільки за призначенням і утримуватись у готовнос-
ті до застосування, за виключенням випадків знаходження на зберіганні.
Військові засоби вимірювальної техніки, які не задовольняють встановленим вимогам, з закінченими термінами калібрування,
не опломбовані встановленим чином, а також ті, що викликають сумніви у правильності своїх показань, вважаються до застосуван-
ня не придатними і підлягають вилученню із експлуатації
Повірка - встановлення придатності вихідних і робочих еталонів військового призначення до застосування на підставі резуль-
татів контролю їх метрологічних характеристик.
Калібрування військових засобів вимірювальної техніки - визначення в певних умовах, або контроль їх метрологічних ха-
рактеристик.
Подання військовими частинами ВЗВТ на калібрування до військових метрологічних лабораторій (ВМЛ) (виїзних метрологіч-
них груп - ВМГ) здійснюється у терміни, що визначені Графіком подання ВЗВТ на калібрування та витягами з Графіку роботи
виїзних метрологічних груп ВМЛ.
Транспортування ВЗВТ на калібрування до ВМЛ чи місць роботи ВМГ і назад організується силами і засобами військових час-
тин - власниками приладів.
Метрологічне обслуговування ОВТ - комплекс робіт з вимірювання та контролю параметрів (характеристик) виробів ОВТ,
апаратури та пристроїв і встановлення необхідності їх настроювання, регулювання або ремонту.
318
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Метрологічне обслуговування здійснюється, як правило, силами особового складу, що експлуатує техніку, з періодичністю, яка
вказана в експлуатаційній документації, або інших нормативних документах, що регламентують порядок і терміни технічного об-
слуговування ОВТ.
Технічний стан вимірювальноїтехніки обліковується за категоріями.
Категорування полягає у встановленні технічного стану вимірювальної техніки з метою визначення її придатності до застосу-
вання за призначенням, необхідності ремонту чи списання.
У залежності від технічного стану, виду ремонту, напрацювання, гарантійного та міжремонтного строку вимірювальна техніка
поділяється на п’ять категорій:
1-а категорія - нова вимірювальна техніка, що не була у використанні, технічно справна і з невичерпаними строками гарантії;
2-а категорія - технічно справна, що була чи знаходиться у використанні або нова, але з вичерпаними строками гарантії;
3-я категорія - технічно несправна, що потребує відновлення у військових ремонтних органах, чи військових метрологічних
лабораторіях;
4-а категорія - технічно несправна, що потребує капітального ремонту на ремонтних підприємствах Міністерства оборони;
5-а категорія - непридатна до експлуатації та ремонту, що відпрацювала встановлений ресурс (термін служби), відновлення
якої неможливо або недоцільно.
Підставою для переводу вимірювальної техніки до іншої категорії є: закінчення гарантійного терміну; введення в експлуа-
тацію; висновок (сповіщення про непридатність) відповідної військової метрологічної лабораторії або ремонтного підприємства
Міністерства оборони про можливість (або неможливість) подальшого використання; висновок комісії військової частини, про
несправність (пошкодження) вимірювальної техніки.
Висновок комісії військової частини (при переведенні в четверту чи п'яту категорію) викладається в акті технічного стану, як
правило, на підставі висновку військової метрологічної лабораторії або ремонтного підприємства Міністерства оборони.
На підставі затвердженого акту технічного стану робиться запис про зміну категорії у формулярі (паспорті) на вимірювальну
техніку. У випадках, коли на вимірювальну техніку формуляр (паспорт) не передбачений, необхідний запис робиться у книзі обліку
технічного стану, калібрування (повірки) та ремонту.
9.3. Тилове забезпечення бойових дій (бойового застосування)
Тилове забезпечення - комплекс заходів, спрямованих на задоволення матеріальних, транспортних, побутових та інших по-
треб військ з метою підтримання їх у бойовій готовності для ведення бойових дій або виконання повсякденних завдань.
Види тилового забезпечення: матеріальне забезпечення; торговельно-побутове забезпечення; квартирно-експлуатаційне за-
безпечення; фінансове забезпечення.
Для тилового забезпечення характерна безперервність процесу задоволення потреб військ. Воно організується і здійснюється
під час підготовки і в ході бою, при пересуванні військ і розташуванні їх на місці, а також в інших умовах бойової і повсякденної
діяльності.
Організація тилового забезпечення полягає у: проведенні комплексу заходів щодо підготовки тилу; визначенні порядку роз-
міщення і переміщення всіх його сил та засобів; виборі, обладнанні, підтриманні у проїжджому стані шляхів підвезення та евакуа-
ції; підготовці та організації централізованого використання транспортних засобів для забезпечення всіх видів військових переве-
зень; організації узгоджених дій сил і засобів тилу та інших родів військ і служб щодо тилового забезпечення частин (підрозділів);
організації взаємодії тилу; підготовці і здійсненні захисту, охорони та оборони тилових об’єктів; розгортанні централізованої систе-
ми управління тилом; організації використання місцевої військово-економічної бази (ресурсів) та вирішенні інших завдань.
9.3.1. Матеріальне забезпечення
Матеріальне забезпечення у з'єднаннях і частинах організовується та здійснюється з метою своєчасного і повного задоволен-
ня потреб частин (підрозділів) у матеріальних засобах - усіх видах озброєння, бойової та іншої техніки, ракетах, боєприпасах, раке-
тному паливі, пальному, продовольстві, речовому, інженерному, хімічному, квартирному та іншому майні, матеріалах та спеціаль-
них рідинах різного призначення, а також у воді.
Організація матеріального забезпечення у з’єднаннях, частинах і підрозділах полягає: у прийнятті рішення на матеріальне
забезпечення і його планування; у визначенні порядку і черговості забезпечення частин і підрозділів матеріальними засобами та їх
підвезення; у постановці завдань на підвезення, виділенні транспортних засобів і засобів механізації вантажно-розвантажувальних
робіт; у підготовці складів до приймання і видачі вантажів, призначенні маршрутів транспортних засобів та їх супроводженні; у
встановленні порядку передачі матеріальних засобів споживачам; у призначенні і підготовці районів приймання - передачі матеріа-
льних засобів та вирішенні інших організаційних питань.
Успіх матеріального забезпечення частин і підрозділів у ході бойових дій досягається завчасним створенням та правильним
ешелонуванням необхідних запасів матеріальних засобів, безперебійним поповненням їх витрати і втрат.
9.3.2. Торговельно-побутове, квартирно-експлуатаційне та фінансове забезпечення
Торговельно-побутове, квартирно-експлуатаційне та фінансове забезпечення полягають у задоволенні потреб особового
складу призначеними видами постачання та утворення нормальних побутових умов відповідно до вимог військових статутів та
наказів.
319
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Заходи торговельно-побутового забезпечення: військова торгівля; громадське харчування; побутове обслуговування війсь-
ковослужбовців.
Заходи квартирно-експлуатаційного забезпечення: надання підрозділам казармено-житлового фонду, комунальних споруд
та усіх видів комунальних послуг; технічна експлуатація і ремонт казармено-житлового фонду і комунальних споруд
Заходи фінансового забезпечення: фінансове планування і фінансування; отримання, зберігання, економічна і цілеспрямована
витрата грошових коштів; фінансовий контроль, облік і звітність.
9.4. Морально-психологічне забезпечення
Морально-психологічне забезпечення - комплекс організаційних, духовних і спеціальних заходів щодо формування у особо-
вого складу високих морально-психологічних і бойових якостей, підтримання високого рівня морально-психологічного стану, до-
сягнення і утримання морально-психологічної переваги над противником з метою ефективного виконання бойових завдань.
Заходи морально-психологічного забезпечення: мобілізація військовослужбовців на виконання конкретних бойових завдань,
формування свідомого ставлення до них, прогнозування динаміки морально-психологічного стану військ, збереження його стійкос-
ті та керованості; досягнення високої бойової активності особового складу, його спроможності витримувати нервово-психологічні
навантаження і зберігати боєздатність в умовах дій психотравмуючих факторів сучасного бою на різних етапах його підготовки і
ведення; зрив психологічних акцій противника, прогнозування та профілактика негативного інформаційно-психологічного впливу;
організація комплексного захисту психологічних (психофізіологічних) властивостей військовослужбовців, реабілітації психотрав-
мованих.
Принципи морально-психологічного забезпечення: об’єктивна оцінка умов виконання покладених завдань, рівня морально-
психологічного стану особового складу; цілеспрямованість морально-психологічного забезпечення на вирішення конкретних бойо-
вих завдань, формування необхідного морально-психологічного стану військ; тісний та нерозривний зв’язок із іншими видами за-
безпечення; безперервність керованого впливу на свідомість і поведінку військовослужбовців, їх психологічний стан; визначеність
змісту, форм та способів реалізації’ заходів морально-психологічного забезпечення з урахуванням національних, етнічних, культур-
них, мовних, релігійних та інших особливостей військовослужбовців.
Складові морально-психологічного забезпечення: інформаційно-пропагандистське забезпечення; психологічне забезпечен-
ня; військово-соціальна та правова робота; культурно-виховна робота.
9.4.1. Інформаційно-пропагандистське забезпечення
Інформаційно-пропагандистське забезпечення - система цілеспрямованих заходів щодо формування стійкого і керованого
морально-психологічного стану на підставі своєчасного інформування особового складу про воєнно-політичну та бойову обстанов-
ку, покладені на війська завдання та умови їх виконання.
Завдання інформаційно-пропагандистського забезпечення: вивчення, аналіз і оцінка військово-політичної обстановки та
соціально-політичних умов у регіонах дислокації військ, їх вплив на виконання бойових завдань і підготовку пропозицій команду-
вачу (командиру) для прийняття обгрунтованих рішень; своєчасне роз’яснення особовому складу причин, характеру і мети війни,
показ міжнародного і внутрішнього положення країни, завдань збройних сил, військ ППО щодо протидії агресії, зміцнення у осо-
бового складу віри у перемогу над ворогом; мобілізація зусиль військовослужбовців на пильне несення вартової служби і бойового
чергування, зберігання воєнної і державної таємниці, безумовне виконання поставлених завдань; розвиток у особового складу впе-
вненості в силі та могутності зброї, прагнення майстерно володіти нею і підтримувати в постійній бойовій готовності; виховання
військовослужбовців на національно-історичних і воєнних традиціях українського народу, його збройних сил; розповсюдження
бойового досвіду, пропаганда героїчних подвигів українських воїнів; взаємодія з органами державної влади і самоуправління, спі-
льне використання органів і засобів масової інформації, поліграфічної бази для впливу на війська з метою успішного виконання
поставлених завдань, військово-патріотичного виховання; забезпечення центральними і військовими періодичними виданнями.
9.4.2. Психологічне забезпечення
Психологічне забезпечення - комплекс заходів щодо формування, підтримання та відновлення у військовослужбовців психо-
логічних якостей, які забезпечують їх високу психологічну стійкість, готовність виконувати бойові завдання в будь-яких умовах
обстановки.
Завдання психологічного забезпечення: аналіз психофізіологічних особливостей військовослужбовців та психологічна підго-
товка до бойових дій; психологічне супроводження бойових дій; психологічна реабілітація психотравмованих під час бою військо-
вослужбовців.
Психологічна підготовка поділяється на загальну, спеціальну і цільову.
Загальна психологічна підготовка передбачає підтримку особистих якостей, які повинен мати кожен військовослужбовець.
Спеціальна психологічна підготовка організовується з метою розвитку специфічних військово-професійних якостей.
Цільова психологічна підготовка проводиться в інтересах адаптації психіки воїна до умов виконання конкретного бойового
завдання.
Психологічне супроводження бойових дій - комплекс специфічних заходів з підтримки високої бойової активності військо-
вослужбовців, їх стійкості до бойових стрес-факторів і психологічного впливу противника, запобігання негативних індивідуальних
та групових психічних станів.
320
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Заходи психологічного супроводження бойових дій: безперервне вивчення та аналіз динаміки морально-психологічного стану
своїх військ і військ противника, прогнозування розвитку морально-психологічних процесів і на цих засадах опрацювання пропо-
зицій для прийняття рішень; підтримка і розвиток у військовослужбовців установок і настроїв на безумовне виконання бойових
завдань; оцінка динаміки розвитку бойових дій, розрахунок психічних втрат, визначення рівня бойової готовності військ; здійснен-
ня контролю за ступенем втомленості та психологічної пригніченості особового складу; вживання заходів щодо забезпечення необ-
хідних умов життєдіяльності військовослужбовців.
Заходи психологічної реабілітації психотравмованих під час бою військовослужбовців: надання військовослужбовцям першої
психологічної допомоги під час бою; поновлення психологічної стійкості особового складу деморалізованих або дезорганізованих
підрозділів; створення умов, що сприяють швидкому поверненню у підрозділи військовослужбовців, які не потребують госпіталі-
зації за характером бойових психічних травм.
Інформаційно-психологічна протидія - комплекс заходів стосовно прогнозування, профілактики та зриву інформаційно-
психологічного впливу противника, нейтралізації його намагань дезінформувати та деморалізувати особовий склад наших військ,
дезорганізувати його бойову діяльність.
Завдання інформаційно-психологічної протидії: оперативне інформування особового складу; виявлення каналів проникнен-
ня пропаганди противника, їх перекриття (якщо це можливо), або нейтралізація; визначення морально-ціннісних установок війсь-
ковослужбовців і чинників, які можуть бути: використані противником для інформаційно-психологічного впливу, організація робо-
ти щодо керування ними; виявлення сил і засобів психологічних операцій противника, їх можливостей, порядку застосування, ха-
рактеру і спрямованості інформаційного впливу, його мети та імовірних наслідків; прогнозування психогенних втрат, викликаних
впливом засобів психологічної боротьби противника; розробка пропозицій командиру (начальнику) щодо організації протидії ін-
формаційно-психологічному впливу противника; організація взаємодії для вирішення завдань протидії інформаційно-
психологічному впливу противника з органами державної влади, Міністерства внутрішніх справ, Служби безпеки, Міністерства з
питань надзвичайних ситуацій та у справах з ахисту населення від наслідків Чорнобильської катастрофи, засобами масової
інформації
9.4.3. Військово-соціальна та правова робота
Військово-соціальна та правова робота - діяльність щодо створення і забезпечення необхідних соціально-правових умов для
ефективного та успішного виконання бойових завдань особовим складом військ.
Завдання військово-соціальної та правової роботи: роз’яснення військовослужбовцям законів та інших правових актів воєн-
ного часу, забезпечення глибокого розуміння необхідності безумовного і точного їх виконання; всебічне зміцнення єдиноначально-
сті; зміцнення правопорядку, організованості, дисципліни, дотримання принципу соціальної справедливості; мобілізація внутрішніх
сил військовослужбовців через мотивацію їх діяльності, турботу про задоволення їх потреб і інтересів; втілення у життя встановле-
них законом прав і пільг військовослужбовців та членів їх сімей; вивчення і роз’яснення військовослужбовцям норм міжнародного
гуманітарного права та правил ведення війни; підтримка взаємодії з органами державної влади та управління з метою ефективного
вирішення соціальних проблем військовослужбовців і членів їх сімей, забезпечення військ усім необхідним для бойових дій; піклу-
вання про організацію поховання загиблих.
9.4.4. Культурно-виховна робота
Культурно-виховна робота - діяльність, яка спрямована на відновлення моральних, психічних та фізичних сил особового
складу, його мобілізацію на виконання бойових завдань, задоволення духовних (культурних) потреб військовослужбовців.
Завдання культурно-виховної роботи: зняття стресових станів, морально-психологічна реабілітація, організація повноцінно-
го відпочинку і дозвілля, культурно-художнє обслуговування; виховання у військовослужбовців морально-духовних, патріотичних,
інтелектуальних і фізичних якостей, почуття любові до Батьківщини, її народу, історичних традицій і святинь, постійної психологі-
чної готовності до захисту Батьківщини зі зброєю в руках; взаємодія з органами державної влади, громадськими організаціями,
установами культури та релігійними конфесіями для проведення культурно-виховних і морально-духовних заходів, релігійної під-
тримки особового складу; своєчасне забезпечення військ технічними засобами виховання та періодичними виданнями.
9.5. Медичне забезпечення
Медичне забезпечення - комплекс заходів, спрямованих на збереження боєздатності та зміцнення здоров’я особового складу,
своєчасного надання медичної допомоги пораненим та хворим і скорішого повернення їх у стрій, а також попередження виникнен-
ня та розповсюдження захворювань у військах.
Медичне забезпечення у воєнний час включає: систему лікувально-евакуаційних заходів; систему лікувально-
профілактичних, санітарно-гігієнічних і протиепідемічних заходів; заходи медичної служби із захисту особового складу від зброї
масового ураження; заходи із забезпечення медичним майном.
Система лікувально-евакуаційних заходів об’єднує в єдиний комплекс розшук, збір і евакуацію поранених та хворих, своє-
часне надання їм медичної допомоги і лікування. Вона здійснюється з метою збереження життя максимальноій кількості поранених
і хворих, забезпечення скорішого відновлення їх боєздатності.
Система лікувально-профілактичних, санітарно-гігієнічних і протиепідемічних заходів призначена для збереження боєздатності
особового складу, зміцнення здоров’я вояків, попередження захворюваності у військах, ліквідації епідемічних спалахів при їх
виникненні.
321
РОЗДІЛ 9. ЗАБЕЗПЕЧЕННЯ БОЙОВИХ ДІЙ (БОЙОВОГО ЗАСТОСУВАННЯ) ТА ПОВСЯКДЕННОЇ ДІЯЛЬНОСТІ
Лікувально-профілактичні, санітарно-гігієнічні та протиепідемічні заходи: санітарний нагляд за умовами військової праці,
утриманням території, виконанням санітарно-гігієнічних норм і правил розміщення, харчування, водопостачання, лазне-прального
обслуговування особового складу і дотримання особовим складом особистої і загальної гігієни; санітарно-епідеміологічна розвідка;
заходи щодо підвищення несприйнятливості особового складу до інфекцій; локалізація і ліквідація осередків інфекційних за-
хворювань.
Заходи медичної служби із захисту особового складу від зброї масового ураження направлені на попередження або послаблен-
ня дії на особовий склад вражаючих факторів ядерної, хімічної і бактеріологічної зброї.
Заходи медичної служби із РХБ захисту: навчання особового складу прийомам надання першої медичної допомоги при пора-
зці ЗМУ; проведення специфічної індикації бактеріальних біологічних засобів, лікувально-евакуаційних заходів і участь у прове-
денні ізоляційно-обмежувальних та інших заходів під час ліквідації наслідків застосування ЗМУ; медичний контроль за якістю
санітарної обробки особового складу, а також військовослужбовців, що підпали під дію ЗМУ, але зберегли боєздатність.
Заходи із забезпечення медичним майном включають заготівлю, збереження і забезпечення медичних підрозділів, частин і за-
кладів спеціальними матеріальними засобами, необхідними для успішного медичного забезпечення (медикаменти, перев’язувальні
матеріали, медичний інструментарій, обладнання і медична техніка і т.ін.), а також забезпечення особового складу індивідуальними
засобами надання першої медичної допомоги.
Медичне забезпечення військ в мирний час включає комплекс заходів, які проводяться з метою збереження та зміцнення здо-
ров’я особового складу, надання медичної допомоги військовослужбовцям, їх лікування і якнайшвидше відновлення праце- і боє-
здатності після захворювань і травм. До цих заходів відносяться санітарно-гігієнічні, протиепідемічні та лікувально-профілактичні
заходи, забезпечення медичним майном.
Основні завдання медичної служби: медичне забезпечення навчально-бойової підготовки військ; забезпечення високої бойо-
вої і мобілізаційної готовності сил і засобів медичної служби; участь в комплектуванні збройних сил здоровим поповненням; орга-
нізація і проведення заходів щодо збереження і зміцнення здоров’я особового складу; забезпечення санітарно-епідемічного благо-
получчя військ; надання медичної допомоги хворим військовослужбовцям та їх лікування; організація бойової підготовки і підви-
щення кваліфікації особового складу медичної служби; забезпечення військ медичним майном; військово-медична підготовка,
пропаганда гігієнічних знань, здорового способу життя.
Піклування командира (начальника) про здоров’я підлеглих є одним з основних його обов’язків у діяльності щодо забезпечення
постійної бойової готовності військової частини (підрозділу).
Збереження і зміцнення здоров’я військовослужбовців досягається шляхом: проведення командирами (начальниками) заходів,
спрямованих на створення здорових умов служби і побуту; систематичного загартовування і фізичного розвитку; виконання сані-
тарно-гігієнічних, протиепідемічних і лікувально-профілактичних заходів.
322
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
10.1. Система заходів безпеки, яких необхідно дотримуватися у ході бойової підготовки
Заходи безпеки - комплекс заходів життєдіяльності людини або групи людей, направлених на дотримання та особливого від-
ношення до виконання ряду робіт, які пов’язані з його функціональними обов’язками під час повсякденної та службової діяльності.
Заходи безпеки проводиться з метою попередження: виникнення загрози життю та здоров’ю людей; пошкодження бойової
та іншої техніки; нанесення матеріальних втрат та збитків.
Дотримання заходів безпеки досягається якісним та повним знанням, чітким та безумовним виконанням вимог керівних до-
кументів (Статутів Збройних Сил України, Інструкцій щодо технічного обслуговування виробів, техніки та озброєння, Інструкцій
щодо експлуатації та ремонту виробів, бойових машин, Курсів стрільб зенітних ракетних військ, Курсу стрільб стрілецької зброї,
Курсу водіння бойових машин) щодо дій військовослужбовців під час виконання функціональних обов’язків у повсякденній жит-
тєдіяльності, практичних дій військовослужбовців під час організації, підготовки та проведення занять з бойової підготовки,
тактико-спеціальних занять, тактичних навчань з бойовою стрільбою.
Безпека під час проведення навчань, стрільб і занять на полігоні забезпечується: правильною організацією полігонної
служби; дотриманням вимог курсів підготовки, стрільб та водіння; бездоганним виконанням правил і заходів безпеки, які
встановлені.
За доведення заходів безпеки до підлеглого особового складу та контроль за їх дотриманням несуть відповідальність ко-
мандувачі, командири з’єднань, частин, підрозділів, а також начальники родів військ та служб, які організовують та проводять ро-
боту з озброєнням, бойовою та іншою технікою та приладами, при здійсненні маршу, проведення навчань, бойових стрільб, спеціа-
льних занять при несенні вартової та внутрішньої служби.
Заходи безпеки доводяться до початку проведення робіт, занять та навчань у відведений розкладом занять час (у ході планових
теоретичних занять з предметів навчання, в години самостійної підготовки). На осіб, які вивчили відповідні заходи безпеки склада-
ють списки, один екземпляр яких зберігається в штабі частини, а інший - у командира підрозділу. Додатково заходи безпеки мо-
жуть доводитись до особового складу безпосередньо на місці проведення робіт, занять, навчань з урахуванням їх особливостей та
місцевих умов. Перед початком робіт, занять, навчань їх керівник зобов’язаний перевірити та освідчитись у знанні особовим скла-
дом заходів безпеки.
Особовий склад, який не засвоїв заходи безпеки, до роботи на техніці та озброєнні, занять з бойової підготовки, навчань, бойо-
вих стрільб не допускається. Командири частин (підрозділів), а також начальники родів військ і служб, керівники робіт, занять,
навчань, у чиє розпорядження розподілений особовий склад, несуть персональну відповідальність за точне дотримання їх підлег-
лими заходів безпеки. У разі невиконання заходів безпеки, подальше виконання робіт, відпрацювання питань занять, етапів навчань
зупиняться до повного усунення виявлених недоліків та додаткового вивчення з особовим складом заходів безпеки.
Заходи запобігання нещасним випадкам з особовим складом, псуванню озброєння, техніки, військового майна, загибелі
тварин та іншим подіям на полігоні: організація та забезпечення заходів безпеки під час підготовки та проведення навчань,
стрільб, водіння бойових машин та інших занять; оточення території полігона (навчального об’єкта); організація спостереження та
облік снарядів, ракет, мін, авіабомб, інших вибухонебезпечних предметів, що не вибухнули; очищення території полігона від вибу-
хонебезпечних предметів та їх знищення; забезпечення захисту особового складу від ураження електричним струмом і дотримання
правил електробезпеки; протипожежні заходи; медичне забезпечення; роз’яснювальна робота серед місцевого населення щодо
дотримання заходів безпеки на території полігона.
Крім того, повинні виконуватися заходи безпеки, що передбачені курсами стрільб, водіння, підготовки, настановами та інстру-
кціями для кожного виду зброї (озброєння).
Бойові пуски ракет повинні виконуватись тільки у дозволених секторах стрільби.
10.2. Обов’язки посадових осіб з організації заходів безпеки
Командир з’єднання, частини відповідає за організацію та проведення заходів безпеки.
Він зобов’язаний:
систематично вивчати з особовим складом заходи безпеки при проведенні занять з бойової підготовки, при експлуатації озбро-
єння та бойової техніки, проведенні будівельних та господарчих робіт, у побуті, мобілізовувати особовий склад на суворе та точне
їх виконання;
проводити системну профілактичну роботу щодо забезпечення безпеки військової праці, недопущення фактів загибелі та трав-
матизму людей, а також аналізу причин одиночних нещасних випадків, відпрацюванні дійсних методів їх попередження. Операти-
вно вирішувати питання про притягнення до відповідальності осіб, які винні в загибелі військовослужбовців, каліцтві або іншому
пошкодженню здоров’я;
досконало знати обстановку в частинах та підрозділах, чітко визначати обов’язки всіх посадових осіб, від яких залежить безпека
військової праці в процесі навчально-бойової діяльності: коли, що і як повинен робити кожний з них;
постійно доводити до командирів та особового складу вимоги законів України, Верховного Головнокомандувача Збройних Сил
України, Міністра оборони та Начальника Генерального штабу України, головнокомандувачів та начальників головних штабів
видів ЗС України, командувачів родів військ щодо зміцнення правового захисту військовослужбовців, збереженню їх життя та
323
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
здоров’я. Забезпечувати глибоке знання командним складом їх відповідальності за безпеку особового складу, посилення їх право-
вого та соціального захисту.
виробляти та реалізовувати ефективні заходи щодо правового забезпечення статутних умов життя підрозділів та частин, підви-
щення виховного впливу бойової підготовки;
підгримувати високу вимогливість та постійну увагу до вирішення соціальних проблем, матеріально-побутових потреб
офіцерів, прапорщиків, членів їх сімей;
мати широко розгалужену мережу низового акту' про попередження пригод із загибеллю та травматизмом особового складу;
знали ділові, моральні якості своїх підлеглих, їх імена та прізвища, сімейний стан;
знати матеріальну частину, правила використання, збереження зброї, бойової та іншої техніки, яка знаходиться на озброєнні
частини (з’єднання), та передавати їх підлеглим;
забезпечувати глибокі знання командним складом частин та підрозділів законів про їх кримінальну відповідальність за дії або
бездіяльність, що призвели до фатальних наслідків чи каліцтва підлеглого особового складу, а також знищення або поломки війсь-
кової техніки та обладнання, при проведенні технічного обслуговування військової техніки та обладнання, а також при проведенні
тактичних навчань;
прививати підлеглим любов до служби, а також бережливе відношення до своєї зброї, бойової та іншої техніки, боєприпасів,
періодично перевіряти їх наявність, стан та бойову готовність;
слідкувати за якістю та повнотою видачі їжі, періодично особисто перевіряти якість її приготування;
доводити заходи безпеки та здійснювати контроль за їх виконанням при роботі зі зброєю, бойовою та іншою технікою та
боєприпасами, при проведенні занять, стрільб та навчань;
турбуватись про підлеглих, знати їх потреби;
вимагати дотримання підлеглими військової дисципліни;
слідкувати за дотриманням розпорядку дня, чистотою та внутрішнім порядком в розташуванні, охайністю, справністю обмун-
дирування та взуття підлеглих, правильною підгонкою спорядження, дотриманням ними правил особистої гігієни та носіння війсь-
кової форми одягу, а також за зовнішнім виглядом;
перевірити по закінченню стрільб, щоб боєприпаси та гільзи були здані всіма військовослужбовцями;
постійно знати, де знаходяться та що роблять підлеглі.
Заступник командира з’єднання, частини відповідає за організацію робіт комісії частини по попередженню загибелі та трав-
матизму особового складу, протипожежний захист частини, розробку планів та організацію виконання заходів безпеки при вико-
нанні плану бойової підготовки.
Він зобов’язаний:
розробляти та провадити заходи, спрямовані на забезпечення безпеки навчань, занять, робіт з удосконалення навчально-
матеріальної бази;
керувати розробкою інструкцій щодо заходів безпеки на навчальних об’єктах, місцях (стрільбищах, вогневих містечках тощо);
провадити інструктажі керівника стрільб та інших посадових осіб, призначених на стрільби;
планувати та вживати заходів комісії щодо попередження загибелі та травматизму людей;
контролювати виконання підрозділами вимог щодо впровадження та постійного проведення інструктажів із заходів безпеки та
їх обліку;
розробляти план протипожежного захисту з’єднання, частини і контролювати його виконання.
Заступник командира з’єднання, частини з озброєння відповідає за організацію, розробку та виконання заходів безпеки при
експлуатації, ремонті та збереженні машин.
Він зобов’язаний:
керувати розробкою та плануванням в з’єднанні, частині заходів з забезпечення безпеки робіт при технічному обслуговуванні,
ремонті та збереженні машин;
організовували розробку інструкцій щодо заходів безпеки на робочих місцях, при технічному обслуговуванні та ремонті
машин;
контролювати проведення інструктажів, проводити показові заняття з інструктування;
розробляти конкретні оганізаційно-технічні заходи щодо створення умов, які забезпечують безпеку виконання робіт,
аналізувати причини нещасних випадків, що мали місце при роботі на озброєнні та військовій техніці, доповідати про них
командиру.
Заступник командира з’єднання, частини з тилу відповідає за попередження загибелі і травматизму особового складу та
протипожежний захист безпосередньо підпорядкованих йому підрозділів і служб, дотримання в частині правил охорони навколи-
шнього середовища.
Він зобов’язаний:
керувати роботою щодо виконання безпосередньо підлеглими службами та підрозділами заходів безпеки;
організовували розробку інструкцій щодо заходів безпеки на об’єктах матеріально-побутового забезпечення та контролювати їх
виконання;
вести попереджувальну роботу, спрямовану на виключення випадків травматизму особового складу в ході робіт на об’єктах
тилу;
здійснювати контроль за якістю і правильністю застосування спеціальних рідин та дотримання вимог безпеки під час їх вико-
ристання;
розробляти і перевіряти виконання заходів з охорони навколишнього середовища.
324
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
Начальники служб зобов’язані:
своєчасно доводити до підлеглих заходи безпеки та вимагати суворого їх виконання під час проведення стрільб, навчань, занять
та робіт з технікою, приладами, ракетами, різними боєприпасами, вибуховими речовинами, вибухівкою, а також при поводженні з
отруйними технічними рід инами;
здійснювати контроль за дотриманням правил пожежної безпеки при збереженні озброєння, боєприпасів та військового майна;
розслідувати та брати участь в розслідуванні випадків травматизму та аналізі їх причин.
Командир підрозділу відповідає за організацію та здійснення заходів безпеки в умовах навчального та бойового застосування
машин.
Він зобов’язаний:
проводити інструктаж всього особового складу перед початком занять та робіт у складі підрозділу;
особисто перевіряти знання правил та заходів безпеки та виконання їх особовим складом підрозділу;
вимагати та забезпечувати виконання особовим складом заходів безпеки при проведенні занять та робіт з озброєнням та
технікою;
своєчасно вимагати засоби захисту, спецодяг, організовувати їх збереження та ремонт,
розслідувати нещасні випадки, аналізувати причини їх виникнення, доповідати командиру частини;
особисто щомісяця проводити інструктивно-методичні заняття (ІМЗ) з заходів безпеки при виконанні робіт з підвищеною не-
безпекою;
особисто перевіряти знання особовим складом заходів безпеки і організацію проведення їх перед початком робіт, пов’язаних з
підвищеною небезпекою.
Командир відділення (екіпажу, обслуги) відповідає за виконання заходів безпеки особовим складом відділення (екіпажу, об-
слуги) під час проведення занять та робіт.
Він зобов’язаний:
знати правила та заходи безпеки, перевіряти їх знання підлеглими;
слідкувати за тим, щоб після закінчення стрільб та занять у підлеглих не залишилось бойових та холостих патронів, гранат,
запалів та вибухових речовин;
організовувати надання першої медичної допомоги потерпілим.
10.3. Діяльність командирів (начальників) щодо забезпечення заходів безпеки при проведенні
навчань, стрільб, пусків ракет та інших заходів бойової підготовки
Керівник навчання відповідає за організацію та забезпечення безпеки дій військ та запобігання порушень і зменшення нега-
тивного впливу військ на природне середовище.
В ході організації бойової підготовки, навчань, стрільб, пусків ракет керівник навчання: розробляє заходи безпеки на наступ-
ному навчанні, виходячи з місцевих умов та задуму навчання, доводить їх до командирів, посередників, імітаційних команд та ор-
ганізовує їх вивчення з усіма учасниками навчань; приймає заліки із знання заходів безпеки від кожного військовослужбовця та
вимагати їх виконання в ході проведення навчання; вивчає умови місцевості та їх вплив на виконання заходів безпеки; визначає
кількість залізничних переїздів, нафто- та газопроводів, систем меліорації, тіснин, перевалів, проходів, тунелів та інших споруд,
перешкод та порядок пропуску по них військ; організовує комендантську службу в місцях, небезпечних для пересування військ,
загородження небезпечних ділянок місцевості (боліт, озер, урвищ), очищення районів від снарядів, мін, фугасів, бомб, вибухонебез-
печних предметів та імітаційних засобів, які не вибухнули, а також рятувально-евакуаційну службу на водних перешкодах; визна-
чає ділянки місцевості та порядок імітації’ на них вогню, вибухів та застосування навчальних рецептур імітації отруйних речовин
противника, а також ділянки, на яких забороняється ведення вогню з усіх видів зброї, організувати загородження (оточення) цих
ділянок; організовує збір або підрив невикористаних імітаційних засобів після закінчення навчання; вирішує питання охорони нав-
колишнього середовища ще на стадії розробки задуму навчань. З цією метою необхідно вибрати такі райони навчань, де б виклю-
чались або до мінімуму зменшувались збитки природному середовищу під час виконання військами навчально-бойових завдань.
Ретельно розвідати шляхи руху, особливо автомобільних колон, райони зосередження і активних “бойових дій” військ. В плані
проведення навчань по можливості уникати відпрацювання питань зосередження військ у лісі в темний час доби, коли
“маскування” за допомогою темряви приводить до масового знищення дерев, кущів та лісонасаджень; заздалегідь відправляє від
підрозділів (військових частин), що беруть участь в навчаннях, посилені групи в райони зосередження військ. Вони повинні не
тільки забезпечити зручність розміщення та швидкість заняття цих районів у ході навчань, але й не допустити нанесення пошкод-
жень лісним, сільськогосподарським угіддям, насамперед бойовою та іншою технікою; при постановці завдань на ведення
“бойових дій” доводить до командирів (начальників) і усього особового складу вимоги з охорони навколишнього природного сере-
довища під час “бойових дій”; при виявленні пожеж, що виникли під час стрільб і тактичних навчань з бойових стрільб, терміново
припиняє стрільби (навчання), мобілізує весь особовий склад і техніку для їх гасіння і повідомити місцеві пожежні команди; до
початку навчань проводить інструктаж особового складу та відповідні бесіди щодо дотримання вимог природоохоронного законо-
давства. При розробці пам’яток учасникам навчань відобразити в них і питання з охорони навколишнього середовища.
Після закінчення навчань, спеціально створеними комісіями організує обстеження району проведення навчань, визначає нане-
сені військами збитки та заходи щодо усунення природопорушень (збирання і вивезення з районів навчань побутових відходів,
засипку окопів, ремонт ушкодженню; ділянок доріг тощо). Узгоджує з відповідними інстанціями включення до складу комісій
представників адміністрацій, лісництв, господарств, на території яких провадились навчання. Результати обстеження району нав-
чань і засоби з усунення нанесених природному середовищу збитків оформити відповідними актами.
Командири, війська яких проводять навчання, несуть відповідальність за дотримання особовим складом заходів безпеки.
325
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
В ході відпрацювання питань підготовки частин та підрозділів до навчань з бойовою стрільбою вони зобов’язані: вивчити з
усім особовим складом заходи безпеки на наступному навчанні і слідкувати в ході навчань за суворим їх виконанням; з усіма
водіями (механіками-водіями) ретельно відпрацювати прийоми водіння машин шляхами та поза ними, в колонах та бойових по-
рядках. Особливу увагу звернути на підготовку водіїв до перевезення особового складу, вибухонебезпечних вантажів; до наванта-
ження машин на залізничний, водний та повітряний транспорт, перевезення ним та вивантаження з нього; до водіння на плаву; при
розгортанні та згортанні озброєння і техніки; вивчити з усім особовим складом порядок позначення небезпечних напрямків
стрільби, ділянок полів імітації та інших небезпечних місць; організувати видачу особовому складу справних боєприпасів,
імітаційних засобів і перевірити, щоб серед холостих патронів не було бойових; перевірити справність озброєння, бойової та іншої
техніки, яка виводиться на навчання, та організувати підготовку озброєння до стрільби; особливу увагу звернути на знання особо-
вим складом правил поводження зі зброєю та технікою; перевірити справність та підгонку засобів індивідуального захисту, обмун-
дирування та спорядження особового складу з урахуванням кліматичних умов; перед початком навчань перевірити засвоєння осо-
бовим складом правил та заходів безпеки на навчанні шляхом прийому заліків з виставленням оцінки (“засвоїв” або “не засвоїв”);
результати заліків (оцінки) під розпис довести до кожного військовослужбовця та доповісти старшому начальнику.
На навчаннях забороняється: перевозити особовий склад на необладнаних автомобілях; наїжджати технікою на поля імітації,
окопи та інші споруди, зайняті особовим складом; вести вогонь холостими патронами із стрілецької зброї по особовому складу,
розташованому ближче 100 м; посилювати заряди холостих патронів, вибух-пакетів, освітлювальних та сигнальних патронів, кида-
ти їх в розташування підрозділів, на інші об’єкти, а також поблизу легкозаймистих предметів; чіпати та підбирати снаряди, міни,
гранати, вибух-пакети, які не розірвалися, запали та заряди вибухових речовин; підбирати предмети, заражені учбовими рецепту-
рами імітації отруйних речовин противника; розташовувати та підривати імітаційні поля вогневих фугасів ближче 500 м, провадити
імітацію ядерного вибуху табельними засобами ближче 250 м, спалювати учбові отруйно-димові суміші та підривати імітаційні
фугаси ближче 100 м, а вибух-пакети та імітаційні пакети - ближче 25 м від особового складу, легкозаймистих матеріалів, населе-
них пунктів, а також на ріках та водоймах; провадити польоти літаків та гелікоптерів з підвішеними бомбами, бойовими ракетами
та зарядженими гарматами і кулеметами в районі навчань поза встановленими коридорами та напрямами, а також скидати підвісні
баки в невказаних районах; пересуватися на машинах з високо піднятими антенами по населених пунктах та під лініями електроме-
реж; розгортати радіо- та радіорелейні станції ближче 100 м від високовольтних ліній; розташовувати особовий склад, розмішувати
техніку та укладати проводи електровибухової мережі ближче 300 м від електростанцій (підстанцій), високовольтних ліній,
залізниць та потужних радіостанцій; проводити роботи з радіоактивним пилом, учбовими рецептурами імітаційних отруйних речо-
вин противника без засобів індивідуального захисту, поза учбовими центрами (полігонами) та спеціально відведеними майданчи-
ками; проводити отруєння учбовими радіоактивними речовинами та рецептурами імітаційних отруйних речовин противника
ділянок місцевості, розташованих ближче 3 км від населених пунктів, кидати їх в річки та водойми, викидати тару з-під учбових
рецептур імітаційних засобів вогневих сумішей в полі, закопувати в землю та залишати без охорони; рух підрозділів та техніки, а
також виконання інженерних робіт в районах посівів, городів, садів; залишати в районах навчань вибухові пакети, невикористані
димові шашки та інші засоби імітації; застосовувати технічні рідини для миття рук, прання одягу, палити та вживати їжу під час
роботи з технічними рідинами; знаходитись поблизу траси при буксуванні машин, виведених з ладу, та машин, що застряли;
здійснювати ремонт двигунів, силових агрегатів під час їх роботи; використовувати водоймища для миття техніки та пити сиру
воду з неперевірених джерел; провадити незаконну вирубку й пошкодження дерев, кущів та лісонасаджень при перебуванні військ
у лісі, обладнанні оборонних позицій та інших інженерних споруд; розводити вогонь без дозволу та здійснювати заправку техніки в
лісі без дотримання заходів пожежної безпеки; забруднювати грунт нафтопродуктами та побутовими відходами; прокладати колоні
шлях на маршрутах руху в лісних масивах і нанесення потрав сільгоспугіддям; знищувати й пошкоджувати лісні культури, сіянці
(саджанці) у лісових розсадниках і на площах, а також молодняк природного походження (самосіву) на площах, призначених для
лісовідновлення; розводити вогонь у хвойних молодняках, на ділянках пошкодженого лісу, торф’яниках, лісосіках, у місцях з ви-
сушеною травою, а також під кронами дерев (розводити багаття дозволяється на майданчиках, оточених мінералізованою смугою,
де знятий верхній шар грунту завширшки не менше 50 см); заправляти пальним в лісі паливні баки двигунів внутрішнього згорання
під час роботи двигуна, палити або користуватись відкритим вогнем поблизу техніки, що заправляється пальним; залишати в лісі
промаслені обтиральні матеріали, цигарки, сірники, оскільки червоний фосфор, нанесений на сірники, при нагріванні перетво-
рюється на білий з отруйною парою і схильністю до самозаймання.
Випадково пролиті нафтопродукти необхідно негайно зібрати разом з забрудненим грунтом і вивезти для знешкодження
(утилізації).
Під час навчань із бойовою стрільбою (стрільб) забороняється: заряджати зброю бойовими та холостими набоями, а також
бойовими та інертними гранатами до сигналу “вогонь” (команди керівника, командира); направляти зброю на людей, в сторону або
у тил стрільбища незалежно від того, заряджена вона чи ні; вести вогонь з несправної зброї, несправними боєприпасами або
боєприпасами, які не передбачені для даної системи, а також заборонені для використання спеціальними переліками; вести вогонь
за межі напрямків стрільби, що небезпечні; вести вогонь при піднятому білому прапорі (світлі ліхтаря) на командному
(дільничному) пункті, пунктах управління та на укриттях (бліндажах); вести вогонь по бліндажах, незалежно від того, знаходяться в
них люди чи ні, а також по інших спорудах (вишках, тригонометричних пунктах і декоративному обладнанню); вести вогонь у разі
знаходження людей бойових машинах або попереду них; при незачинених люках на них; вести вогонь у разі втрати зв’язку з
керівником стрільби;. вести вогонь при кутах підвищення, менших найменшого та більших найбільшого, що передбачено для да-
ної системи; вести вогонь по населених пунктах, магістралях електромереж високої напруги, а також через залізничні, шосейні,
гр\ нтові дороги, які не закриваються для руху під час стрільби; вести вогонь із зенітних гармат без установки обмежувачів небез-
печних напрямків і дальностей стрільби, а також без позначення рубежів безпечного віддалення від цілей (ділянок, районів) для
стрільби; вести вогонь по цілях, ділянках (рубежах), що розташовані ближче ніж 500 м від військ, які знаходяться поза укриттям, під
час стрільби на дальностях до 10 км і ближче 700 м - на дальностях більше 10 км, а від військ, які знаходяться в укриттях (броньо-
ваних машинах), відповідно - 300 і 500 м; використовувати боєприпаси (ЗКР), що мають поверхневі пошкодження; стріляти з
326
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
ПЗРК із лівого плеча без залізного шолома; знаходитися особовому складу і розмішувати боєприпаси, вибухонебезпечні речі та
легкозаймисті речовини позаду ЗРК ближче 100 м; упирати ПЗРК у будь-які предмети або грунт.
Під час позначення вогню холостими артилерійськими пострілами заборонено: стріляти холостими артилерійськими
пострілами у разі розташування особового складу військ та техніки перед гарматами ближче ніж 100 м; посилювати холості арти-
лерійські постріли сторонніми речами; вести вогонь із ЗСУ-23-4 “Шилка”, ЗГРК 2С6 ‘Тунгуска” холостими пострілами у разі наяв-
ності на них особового складу (десанту).
Загальний сигнал припинення вогню (піднятий білий прапор або білий ліхтар на флагштоці КП та звуковий сигнал) подається:
у разі падіння снарядів (ЗКР) на небезпечній відстані від військ та в захисних зонах; у разі появи літаків, що буксируються, і
гелікоптерів у площині стрільбі наземної артилерії або у секторі стрільби зенітної артилерії (пусків ЗКР); у разі виникнення пожежі
на мішеневому полі (районі цілей) та у разі отримання з постів оточення сигналу про небезпеку продовження стрільби.
Загальний сигнал припинення вогню терміново виконується всіма учасниками навчань (стрільб).
Ведення вогню також терміново припиняється у випадках: втрати орієнтації тими, хто стріляє; відставання бойових машин від
сусідніх більше, ніж на 100 м, або появи в полі зору прицілу людей, бойової техніки, транспорту і тварин.
Вогонь поновлюється з дозволу керівника навчань (стрільб) після усунення небезпеки і доповіді про це начальнику полігона
(навчального об’єкта).
Якщо у ході навчань із бойовою стрільбою військам необхідно зайняти райони цілей, по яких вівся артилерійський і
мінометний вогонь, то командири підрозділів зобов’язані попередити підлеглий особовий склад про дотримання заходів безпеки і
правил поведінки у цих районах. У разі виявлення бомб, снарядів, мін, що не вибухнули, та інших вибухонебезпечних предметів,
той, хто їх знайшов, зобов’язаний доповісти про це своєму командиру, який організовує їх позначення і доповідає по команді
керівнику навчань.
Категорично забороняється: торкатися до знайдених снарядів, мін, авіабомб, ЗКР, підривників, трубок, зарядів, засобів
імітації та інших вибухонебезпечних предметів тощо, що не вибухнули; користуватись позаштатними засобами освітлення під час
роботи з боєприпасами; розводити багаття на території навчальних об’єктів; спалювати на вогневих позиціях пучки (заряди) поро-
ху, що залишились, упаковку від боєприпасів.
Під час проведення навчань із бойовою стрільбою (стрільб) у нічних умовах начальник полігона і керівник навчань із бойовою
стрільбою (стрільб) зобов’язані вжити заходів щодо загородження зон, які заборонені, районів установки фугасів, криниць без на-
земних зрубів, мостів без перил та інших споруд, позначити їх добре видимими вночі знаками (світловими сигналами), а також
позначення бойових машин (особового складу) вогнями червоного кольору.
Після закінчення навчань за загальним сигналом керівника навчань (стрільб) усі підрозділи негайно розряджають зброю
(озброєння).
Якщо гармата (установка) може бути розряджена тільки пострілом, то командир підрозділу негайно доповідає про це по ко-
манді керівнику навчань (стрільб), який вживає заходів безпеки, що визначені інструкцією, та дозволяє провести розрядження гар-
мати пострілом у безпечному секторі.
Командири підрозділів зобов’язані здійснити контроль та особисто перевірити здачу стріляних гільз, бойових набоїв,
стріляних контейнерів від ЗКР та блоків живлення, у тому числі і невикористані, на пункт боєпостачання.
Переконавшись через командирів підрозділів та посередників, що вся зброя (озброєння) розряджена, керівник навчань (стрільб)
повідомляє начальника полігона про закінчення навчань (стрільб), тільки після чого надає дозвіл на зняття оточення.
10.4. Організаторська діяльність командирів, штабів щодо розробки заходів безпеки під час
бойової підготовки
Організація, керівництво і контроль за проведенням заходів безпеки у військових частинах і підрозділах покладається на
відповідних командирів та інших посадових осіб відповідно до вимог нормативно-правових документів, Військових статутів
Збройних Сил України, наказів МО України, настанов, курсів, керівництв.
Командири (начальники) особисто відповідають за своєчасну розробку, організацію і дотримання заходів безпеки та зо-
бов’язані:
Під час підготовки до конкретного заходу бойової підготовки: визначити і встановити необхідні науково обгрунтовані заходи
безпеки для конкретних видів діяльності військових частин, підрозділів; вивчити і глибоко усвідомити, які навчання за масштабом,
які бойові стрільби, пуски ракет та інші заходи будуть проводитись; визначити, яка техніка, озброєння залучається до проведення
заходів, їх стан та можливий вплив на життя і здоров’я людей, їх відповідність технічним і бойовим нормам експлуатації та бойово-
го застосування; визначити, які заходи необхідно провести щодо підготовки техніки і озброєння до навчань (занять) відповідно до їх
технічного стану і необхідного ресурсу; визначити район (акваторію, простір, місце) проведення навчань, занять, бойових стрільб,
пусків ракет та їх можливості щодо застосування тієї чи іншої зброї, наявність маршрутів проїзду автотранспорту, проходу суден і
прольоту цивільної авіації; встановити на підставі проведених розрахунків безпечних рубежів, напрямків, зон бокових (кругових)
захисних зон максимального злітного простору (відхилення траєкторій, міста падіння боєприпасів); визначити вплив на виконання
заходів безпеки фізико-географічних умов, часу до пори року, метеорологічної та гідрографічної обстановки; врахувати рівень ви-
школу та морально-психологічного стану особового складу; встановити строки і порядок проведення контрольних занять з особо-
вим складом, офіцерами, їх допуску до заходів оперативної та бойової підготовки, пусків, стрільб тощо; визначити кількість і склад
груп контролю, груп спостереження за виконанням заходів, безпеки; визначити сили і засоби, які необхідно залучити для
об’єктивного контролю; визначити наявність сторонніх джерел електромагнітного випромінювання та інших можливих факторів, їх
можливий вплив на зміну траєкторії польоту ракети, цілі, систему управління в цілому; визначити наявність найближчих небезпеч-
них об’єктів (атомної та хімічної промисловості тощо) та ступінь їх захищеності; визначити порядок ліквідації ракет, цілей, які втра-
тили керованість і вийшли за межі безпечних напрямків, рубежів; визначити порядок і строки оповіщення місцевого населення,
327
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
повідомлення місцевих органів самоврядування про проведення заходів оперативної та бойової підготовки, стрільб, пусків ракет і
порядок організації взаємодії та зв’язку з ними; здійснити моделювання навчальних процесів, бойових стрільб, пусків ракет;
організувати розробку плану забезпечення заходів безпеки, проведення теоретичних і практичних занять з підлеглими; встановити
єдині команди і сигнали на негайне припинення дій, стрільб, пусків тощо; визначити алгоритм дій командирів (начальників), посе-
редників з дотримання заходів безпеки під час проведення навчань, бойових стрільб, пусків ракет тощо несанкціонованих дій осо-
бового складу, застосування зброї.
Під час проведення навчань, бойових стрільб, пусків ракет і проведення заходів бойової підготовки, робіт з розмінування то-
що: здійснювати особисто, через своїх помічників, посередників, групи контролю спостереження, засобів об’єктивного контролю
щодо безумовного дотримання і виконання встановлених заходів безпеки; припиняти будь-які дії військових частин, підрозділів,
бойових обслуг при виникненні небезпечних ситуацій, які можуть призвести до загибелі або травмування людей аварій і катастроф,
забруднення навколишнього середовища; постійно підгримувати зв'язок з місцевими органами самоврядування щодо недопущення
появи місцевих жителів, машин, літаків в районі, зоні, акваторії проведення навчань, бойових стрільб, пусків ракет тощо; негайно
повідомляти місцеві органи самоврядування в разі зміни термінів застосування бойової зброї, пуску ракет, польоту літаків і виходу
кораблів у бойовий похід щодо недопущення появи людей, тварин, машин, літаків, цивільних суден в забороненій зоні, районі,
просторі, акваторії; у разі втрати керованості ракетою, повітряною або морською ціллю віддавати розпорядження на їх са-
моліквідацію і знищення іншими засобами (силами винищувальної авіації, засобами ППО наземного і морського базування).
Після завершення проведення навчань, бойових стрільб, пусків ракет, інших видів занять, робіт керівник зобов’язаний: осо-
бисто впевнитись щодо розрядження зброц здачі невиграчених боєприпасів на пункти боєпостачання; організувати очищення
полігонів, районів, акваторій від вибухонебезпечних предметів та їх ліквідацію; ретельно проаналізувати стан виконання заходів
безпеки під час проведення навчань, бойових стрільб, пусків ракет і порівняти результати об’єктивного контролю із відповідними
спостереженнями; визначити додаткові заходи безпеки для недопущення їх порушення в бойовій підготовці, бойових стрілках,
пусках ракет та врахування виявлених порушень правил безпеки, у відповідних планах, інструкціях, пам’ятках; за кожним фактом
порушень заходів безпеки провести розслідування з визначенням об’єктивних передумов і причин відмови зброї, техніки, по-
ведінки особового складу, результати цих розслідувань врахувати в подальшій практичній діяльності; сповістити місцеві органи
самоврядування, зацікавлені служби, відомства про завершення проведення навчань, бойових стрільб, пусків ракет тощо; доповісти
старшому начальнику (командиру) про завершення проведення заходів, виявлені порушення заходів безпеки і прийняті рішення.
10.5. Відповідальність та організація контролю під час проведення навчань
Відповідальність за дотриманням заходів безпеки покладається на командирів з’єднань, частин і підрозділів, що беруть
участь у навчанні.
Персонально кожний військовий відповідає за своєчасне і точне виконання правил і всіх заходів безпеки.
Контроль за дотриманням заходів безпеки на навчанні покладається на штаб керівництва, військових, дільничних посеред-
ників і начальника навчального центру.
Всьому особовому складу військ, що беруть участь у навчанні, вказівки і сигнали щодо заходів безпеки генералів і офіцерів
штабу керівництва, начальника навчального центру (полігона), а також військових і вогневих посередників виконувати негайно.
Відповідальність за підготовку та проведення заходів безпеки, у тому числі при роботі з отруйними технічними рідинами,
радіоактивними речовинами, джерелами іонізуючих, неіонізуючих (електромагнітних) і лазерних випромінювань і точне виконан-
ня установлених на полігоні правил несуть: керівник бойових стрільб; старші технічні (технічні) керівники; командири частин і
підрозділів, які виконують бойові стрільби; начальник полігона
Керівник бойових стрільб, старший технічний керівник зобов'язані терміново заборонити виконання бойової стрільби:
при досягненні мішенню межі сектора стрільби; при порушенні або нестійкому двосторонньому зв’язку з підрозділами, при знахо-
дженні в зоні стрільби сторонніх літальних апаратів; при виявленні поблизу стартових позицій та плавзасобів людей або транспорт-
них засобів, при відмовах або несправності техніки, які можуть призвести до небезпечних наслідків для особового складу, АВТ та
цивільних об’єктів.
Керівник стрільб є прямим начальником всього особового складу, який бере участь у бойових стрільбах та несе особи-
сту відповідальність за: організацію бойових стрільб та дотримання заходів безпеки; стан засобів зв’язку; достовірність результа-
тів аналізу матеріалів об’єктивного контролю дій повітряних цілей та станційних вимірювань циклів бойової роботи. Дозвіл на
бойову стрільбу на полігоні надається керівником бойових стрільб через начальника полігона. Начальник полігона зобов’язаний:
забезпечити підготовку полігона до проведення стрільб; забезпечити безпеку проведення стрільб для місцевого населення та війсь-
ковослужбовців на території полігона; організувати об’єктивний контроль дій повітряних цілей та станційні вимірювання циклів
бойової роботи при проведенні стрільб.
Старший технічний керівник (технічний керівник) стрільби зобов’язаний: проводити заняття з особовим складом частин
з методики ведення бойової роботи щодо окремих видів стрільб та заходів безпеки при їх проведенні в умовах полігона, перевіряти
готовність особового складу до виконання бойових стрільб; контролювати виконання заходів безпеки при проведенні стрільб, забо-
роняти стрільбу (бойову роботу) у випадку, якщо порушення можуть призвести до загибелі (травматизму) особового складу, місце-
вого населення, виводу з ладу техніки або озброєння; брати участь в дешифруванні та аналізі матеріалів об’єктивного контролю,
аналізувати дії бойових обслуг, позитивний досвід і недоліки.
Начальник оточення зобов’язаний: представити у час, який визначений, начальнику полігона (начальнику штабу полігона)
особовий склад оточення для перевірки готовності до несення служби та проведення інструктажу; знати вимоги інструкції
щодо заходів безпеки, схему розташування постів оточення, маршрути висування, схему зв’язку та порядок підтримання зв’язку з
постами, обов’язки кожного посту; особисто виставити пости оточення, забезпечити їх сигнальними засобами, установити і
328
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
підгримувати безперервний зв’язок із ними; при виставленні постів оточення провести огляд території, що оточується, у разі вияв-
лення на ній людей або тварин, вивести їх за межі полігона (території, що оточується); не пізніше ніж за ЗО хвилин до початку стрі-
льби доповісти старшому керівнику стрільби про виставлення постів оточення та їх готовність до несення служби; під час стрільби,
з дозволу начальника старшого керівника стрільби, періодично перевіряти несення служби постами оточення, а решту часу знахо-
дитись на місці, яке встановлене інструкцією; про результати несення служби, про всі випадки порушення заходів безпеки, негайно
доповідати старшому керівнику стрільби.
Оточення закінчує несення служби тільки з дозволу старшого керівника стрільби. На кожному посту оточення несуть службу
не менш ніж два солдати, один із них призначається старшим. Вони підпорядковані начальнику оточення і зобов’язані: твердо зна-
ти і бездоганно виконувати свої обов’язки, які визначені інструкцією; уважно спостерігати за ділянкою, що доручена, не допускати
без дозволу начальника оточення прохід (проїзд) на територію полігона людей, тварин і транспортних засобів; не залишати пост,
доки не будуть змінені або зняті начальником оточення; у випадку порушення заходів безпеки, що вказані в інструкції, негайно
доповісти начальнику оточення та подати сигнал на припинення вогню.
Начальник полігона організує контроль виконання заходів безпеки при проведенні бойової підготовки, навчань, стрільб, пус-
ків ракет в межах полігона і несе відповідальність: за стан полігона в цілому і за відповідність мішенної та імітаційної обстановки
на полігоні учбовим цілям; за своєчасну готовність полігона до початку скидання бомб, пусків ракет, стрільб; за своєчасне видален-
ня з робочого поля полігона людей, технічних засобів обслуговування перед початком скидання бомб, пусків ракет, стрільб; за за-
безпечення безпеки особового складу полігона під час виконання ним службових обов’язків на території полігона; за точне та безу-
мовне виконання особовим складом полігона заходів безпеки; за своєчасне виявлення та знищення боєприпасів, які не підірвалися,
збір металевих осколків, гільз та стабілізаторів; за безпеку пересування технічних засобів, автотранспорту та пішоходів.
Начальник полігона зобов’язаний: контролювати правильність розбивки площі полігона на поля та за розміщенням на них
мішенного обладнання; визначати місця розташування спостережних пунктів, директрис стрільби і технічних засобів забезпечення
польотів на скидання бомб, пуск ракет і стрільби; організовувати підготовку полігона до скидання бомб, пуску ракет і стрільби у
відповідності з керівними документами і особисто перевіряти його готовність; забезпечувати безпеку скидання бомб, пусків ракет і
стрільб для місцевого населення і військовослужбовців на території полігона; організовувати нагляд за підривами бомб, ракет, сна-
рядів і обробку результатів скидання бомб, пусків ракет, стрільб; зберігати і утримувати у технічній справності всі полігонні спору-
ди та обладнання; забезпечувати ретельну очистку території полігона від боєприпасів, які не підірвалися, особисто керувати загаль-
ною очисткою території полігона; організовувати охорону об’єктів полігона на його території.
10.6. Заходи безпеки при діях особового складу за сигналами оповіщення та під час привдення
у вищі ступені бойової готовності
Відповідальність за організацію та практичне здійснення заходів безпеки під час приведення частин, підрозділів у різні ступені
бойової готовності покладається на командирів усіх рівнів, старших команд.
Персонально кожний військовослужбовець несе відповідальність за своєчасне і точне виконання правил і заходів безпеки.
Командир підрозділу зобов’язаний:
В період підготовки до проведення занять з бойової готовності організувати вивчення з особовим складом заходів і правил
безпеки з таких питань: порядок поводження зі зброєю і боєприпасами; відповідальність військовослужбовців за втрату, викрадан-
ня, псування, халатне поводження зі зброєю і боєприпасами; заходи безпеки під час підготовки техніки до маршу; порядок виводу
техніки і озброєння з парків; заходи безпеки під час проведення вантажно-розвантажувальних робіт, правила перевезення особово-
го складу на машинах. Ці заходи безпеки доводяться до особового складу під розпис в журналі інструктажу.
Під час проведення занять з бойової готовності практично відпрацьовувати з особовим складом послідовність заходів при
приведенні частини, підрозділу в різні ступені бойової готовності, особливу увагу звернути на дотримання всіх заходів і правил
безпеки.
З оголошенням тривоги (збору) забезпечити виконання особовим складом заходів безпеки.
Особливу увагу звернути:
при отриманні особовим складом зброї, боєприпасів, майна, спорядження: на дотримання послідовності їх отримання; на поря-
док поводження зі зброєю і боєприпасами; на їх наявність під час шикування після виходу з казарми;
при виході з казарм: на дотримання встановленого порядку виходу; на недопущення штовханини по сходових переходах, для
чого на кожному сходовому переході виставляти днювального для керування організованим виходом;
при підготовці до виходу: на правильне поводження з акумуляторними батареями; на дотримання заходів безпеки під час при-
ведення техніки і озброєння в похідне положення; на правильність зчеплення агрегатів живлення, що буксуються, і причепів; на
дотримання заходів маскування;
під час підготовки техніки до виходу - на заборону: заводити автомобілі і базові машини з буксиру; знімати автомобілі з коло-
док за допомогою буксування; розпочинати рух без команди; користування відкритим вогнем для прогрівання двигуна.
Під час виконання вантажно-розвантажувальних робіт: на відсутність на місці, де проводяться роботи, осіб, які не мають
прямого відношення до цих робіт, на управління засобами малої механізації, вантажно-розвантажувальними механізмами
спеціально підготовленими людьми.
Забороняється: піднімати вантаж, вага якого перевищує вантажопідйомність механізму; знаходитись під вантажем,
підтримувати вантаж руками під час його переміщення вантажопідйомним механізмом; вивільнювати вантажопідйомною маши-
ною затиснуті вантажем стропи, канати; піднімати вантаж, що закріплений за один ріг дворогого крюка; піднімати спеціальні ван-
тажі без використання штатних траверз і такелажні пристрої.
Роботу з вантажопідйомними механізмами повинні виконувати не менше двох осіб.
329
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
В пункті збору необхідно: перевіриш наявність особового складу, з’ясувати, хто і з яких причин відсутній; поставиш завдання
на здійснення маршу в район зосередження; провести інструктаж старших команд, виділених для виконання заходів, за ступенями
бойової готовності; проінструктувати особовий склад з правил безпеки під час пересування на машинах; в зимовий час прийняти
заходи по запобіганню обморожування особового складу; постійно здійснювати контроль за дотриманням заходів безпеки
підлеглими, завчасно попереджувати їхні помилки, промахи та інші порушення, які можуть загрожувати безпеці людей, псуванню
техніки, зброї, майна
Старший команди, який виконує завдання щодо приведення у вищі ступені бойової готовності, зобов’язаний забезпечиш не-
ухильне дотримання заходів безпеки на місці проведення робіт.
10.7. Заходи безпеки під час технічного обслуговування та перевірки готовності
озброєння, військової техніки, ракет і боєприпасів до бойового застосування
До проведення робіт щодо технічного обслуговування виробу допускають осіб, які пройшли спеціальну підготовку з устрою і
практичного обслуговування виробу та ознайомлені з вимогами техніки безпеки і мають кваліфікаційну групу щодо роботи з елек-
троустановками. Крім того, необхідно знати і виконувати спеціальні правила, які пов’язані з особливостями будови виробу. Неви-
конання цих правил може спричиниш за собою вихід із ладу агрегатів, апаратури і систем, а також призвести до нещасних випад-
ків. Під час проведення робіт повинно працювати не менше двох чоловік. Обслуговуючий персонал, який не засвоїв своїх
обов’язків щодо виконання заходів техніки безпеки та протипожежної безпеки, до роботи не допускається. Усі роботи з обслугову-
вання виробу повинні проводитись під керівництвом командира і здійснюватись у відповідності до інструкції щодо експлуатації на
конкретний зразок техніки.
Особливу увагу необхідно звертати на виконання наступних вимог: роботи щодо пуску двигуна, включенню апаратури і
початку прямування здійснювати тільки за командою командира; при прямуванні вся апаратура та обладнання повинні бути надій-
но закріплені по-похідному; перед вмиканням системи електроживлення необхідно заземлювати корпус виробу, при огляді апара-
тури у включеному стані з метою виявлення несправностей, дотримуватись обережності, робити операції одною рукою при наяв-
ності другого члена обслуги і користуватись тільки проводами, що мають спеціальні щупи і наконечники. Під час підключення
вимірювальних приладів не торкатися руками металевих предметів; стежити за станом трубопроводів і ущільнень агрегатів і меха-
нізмів систем мастила, охолодження і живлення паливом, не припускати скупчення мастила і палива на днищі виробу. Витікання
палива, мастила, охолоджуючої рідини на поверхні (у середині) виробу усувати негайно за допомогою ганчірок. Використані ганчі-
рки у виробі не залишати; пам’ятати, що в блоках високовольтних випрямлячів і передавачів, а так саме в блоках, що мають елект-
рострумові прилади, є високі напруги небезпечні для життя; стежити за справністю ізоляції електроприводів, не допускати іскріння
і замикання проводів; у випадку користування нагрівальними приладами (паяльника ми, паяльними лампами і т.ін.) при обслугову-
ванні або ремонті додержуватись заходив пожежної безпеки. Всі пожежонебезпечні місця повинні бути очищені від палива, масти-
ла та ізольовані азбестом або іншими матеріалами, що вогнебезпечні; при знятті акумуляторних батарей, ізолювати наконечники
сполучних кабелів. Перевіряти рівень електроліту в АКБ при літній експлуатації через 30-35 днів, а в жаркий час року не рідше,
чим раз у 10-15 днів; при всіх перевірках і оглядах користуватись тільки інструментами, пристроями і вимірювальними прилада-
ми, які передбачені інструкцією з експлуатації; мати уніфіковану апаратуру протипожежного обладнання, а також вуглекислотні
вогнегасники в постійній готовності.
Забороняється: витрачати паливо з баків нижче однієї чверті їх ємності, а при заправці; бензобаків заливати бензин у кожний
бак більше кількості, зазначеної в інструкції щодо обслуговування, при цьому проконтролювати рівень бензину в баках механічни-
ми покажчиками-шупами; лишати відкритими люки обслуговування і кришки блоків генератора при запуску і роботі агрегату жи-
влення; покидати виріб при працюючому двигуні, підігрівачі; знаходитись на відстані ближче 10 м від вихлопного патрубка при
роботі газотурбінного двигуна, доторкатись до камери згорання і вихлопного патрубка до їх охолодження; робити зміну ламп, роз-
рядників, імпульсних панелей в блоках, які є струмонесучими; заміняти встановлені запобіжники запобіжниками інших типів, а
також такими, номінали яких не відповідають необхідним. При зміні запобіжників варто користуватись спеціальними щипцями;
робити будь-які зміни в схемах блокування блоків, що мають високу напругу, з метою огляду їх під напругою; виконувати елект-
ромонтажні роботи безпосередньо на частинах блока, які є струмонесучі; відключати і підключати кабелі, що знаходяться під стру-
мом, а також виймати блоки при включених джерелах живлення; знаходитись перед дзеркалами антен і виходити з операторського
відділення під час роботи передавачів на випромінювання; знаходитись в радіусі 50 м при роботі в любому із режимів; знаходитись
на даху під час роботи як на ходу, так і на стоянці; знаходитись в моторному відділенні при прямуванні і включеній апаратурі; ро-
бити ремонт повітряних систем і відчиняти кришки відсіків, що знаходяться під тиском; проводиш обслуговування і ремонт агре-
гатів при включеному вмикачі акумуляторних батарей, за винятком робіт, що потребують вмикання електроживлення; експлуату-
вати силовий двигун при наявності витікання мастила або палива, що перевищують припустиме значення, зазначене в інструкції
щодо технічного обслуговування; робити регулювання та обслуговування силового відділення при працюючому двигуні; тримати
стартер включеним більше ніж 5 секунд. Повторне вмикання стартера можливе тільки через 15 секунд; відвертали пробку заливної
горловини розширювального бачка системи охолодження під час роботи двигуна Відвертати її можна після припинення двигуна і
зниження температури охолодної рідини нижче + 70° С; курити, користуватись відкритим вогнем на виробі та поблизу них.
Категорично забороняється: прямування на спуску з виключеною передачею, зчепленням або із непрацюючим двигуном;
при температурі навколишнього повітря нижче +5° С провертали колінчатий вал і запускали двигун без його попереднього підігрі-
ву; спали у кабіні (відсіку управління виробу) при включеному опалювачі.
330
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
При проведенні робіт з розконсервації озброєння необхідно дотримуватися таких заходів безпеки: роботи провадити при
працюючій припливно-витяжній вентиляції у фартухах, халатах або комбінезонах і бавовняних чи гумових рукавицях; відходи
інгібітированого паперу, обтирочні матеріали, забруднені інгібітором, прибирати в металеві ящики, що закриваються, для подаль-
шого спалювання; знімання базових машин з колодок провадити за допомогою спеціального пристосування; всі роботи з акумуля-
торами провадити у суворій відповідності з заходами безпеки, вказаними в інструкції щодо заходів безпеки при роботах з отруйни-
ми технічними рідинами; заливку акумуляторів провадити через гумовий шланг, при цьому бак з електролітом повинен знаходи-
тись вище акумуляторів, які заливаються; запускати двигун, вмикати СЕП і починати рух тільки за командою командира (началь-
ника обслуги); під час огляду апаратури у ввімкненому стані з метою виявлення несправностей дотримуватись обережності, прово-
дити операції однією рукою в присутності другого члена обслуги, користуватись тільки справним інструментом. Під час підклю-
чення вимірювальних приладів не торкатись руками металевих предметів; вставляти і виймати блоки на штатні місця, вставляти
рознімання при вимкненій апаратурі; при приведенні озброєння в бойовий стан всі роботи виконувати в суворій відповідності з
карткою по розконсервації.
Забороняється: замикати блокування, яке є у виробі; залучати до роботи осіб, схильних до захворювань шкіри; зберігали інгібі-
тирований папір у відкритому вигляді; проводити роботи з інгібітированим папером без рукавиць; вмикати апаратуру без зазем-
лення; підключати і відключати кабелі, які знаходяться під напругою; палити і користуватись відкритим вогнем під час заправки
машин; при поданій високій напрузі знімати обшивки шаф передавачів, замикати дверне блокування; торкатись неізольованих
струмоведучих частин під час роботи апаратури; замінювати перегорілі запобіжники без зняття напруга; порушувати встановлений
інструкцією порядок вмикання і вимикання апаратури.
10.8. Заходи безпеки при прямуванні в призначені райони
Відповідальність за організацію виходу з парків і військових містечок, безпеку пересування в призначені райони і розташування
в них покладається на командирів підрозділів, за організацію комендантської служби на маршрутах висування - на коменданта
гарнізону.
Командир підрозділу зобов’язаний:
Перед виходом з парку: перевірити ступінь готовності кожного водія до водіння машини у складних дорожніх умовах; у всіх
машин ретельно перевірити справність гальмівного пристрою, обладнання техніки засобами підвищеної прохідності, правильність
завантаження і закріплення майна і обладнання, надійність зчеплення машин з причепами, що буксуються; проінструктувати водіїв
з питань здійснення маршу (маршрут і його особливості, швидкість руху, дистанція); перед посадкою особового складу на машини
перевірити наявність і справність обладнання для перевезення людей; перевірити, чи розряджена зброя у особового складу, який
перевозиться; на кожну бойову і транспортну машину призначити старшого з числа офіцерів, прапорщиків, а при їх нестачі - з
найбільш дисциплінованих сержантів; на кожну машину призначити спостерігачів за машинами, що йдуть позаду, і технікою, що
буксується, для подачі сигналів по колоні, а також “бортових” для нагляду за кріпленням боргових запорів.
При виході з парку: особисто керувати виходом техніки з парку; не допускати зустрічного руху техніки при виході з парку;
чітко виконувати вимоги регулювальників.
Під час пересування в призначений район: суворо дотримуватись дисципліни маршу, погоджуючи швидкість руху із станом
дороги і зустрічного руху; в колонах витримувати дистанції між машинами і підрозділами, не допускали перевищення швидкостей і
сну водіїв за кермом, тримали ліве бокове скло кабіни водія кожної машини відкритим; не дозволяти обгону колон вантажними
машинами. Машини, які відстали, повинні пристроюватись до колони, а займати своє місце в колоні - на зупинках з дозволу на-
чальника колони; під час руху вночі передбачити встановлення і безвідмовну дію сигналів, що світяться, на техніці, яка буксується
(не порушуючи світломаскування); мости проходити на низькій передачі, не допускаючи різких поворотів, різкого гальмування і
перемикання передач на мостах. Під час проходження особливо вузьких мостів старші колон (підрозділів) повинні проводити ма-
шини по мосту, подаючи сигнал водію (механіку-водію) з протилежної сторони мосту. Якщо біля мосту є крутий спуск або підйом
з високим насипом, необхідно спішити особовий склад перед спуском (підйомом) до мосту; не допускати сну і паління особовим
складом у кузовах машин; не дозволяти користуватись обігрівачами кузовів під час руху; зупинку машин дозволяти лише на узбіччі
правої сторони дороги, дотримуючись дистанції між машинами 15 м. Вихід особового складу з машин під час зупинок на дорозі
дозволяти тільки через передній та задній борти, не допускати виходу особового складу на середину і на ліву сторону дороги; при
вимушеній зупинці машин, з метою запобігання наїзду або застопорювання руху колон, вимагати виставляти в 15 метрах позаду
машин, що зупинилися, знак, який дозволяє їх обгін; не допускати при проходженні колонами неурегульованого перехрестя вели-
кого розриву між машинами. Водій машини, яка їде позаду, повинен ясно бачити напрямок руху попередньої машини. У випадку
вимушеного відриву машин, що їдуть попереду, від машин, які їдуть за ними, водії зобов’язані зупинитись на нерегульованому
перехресті і почекати машину, що їде позаду, після чого продовжити рух, показуючи напрямок руху.
Під час розташування в районі зосередження (відмобілізування): особисто керувати розташуванням техніки і особового
складу в районі зосередження; попередити особовий склад про заборону будь-кому виходити за межі району, вживання спиртних
напоїв, наркотичних речовин та отруйних рідин; заборонити особовому складу спати в бойовій техніці з включеними обігрівачами і
працюючими двигунами; в зимовий час організувати пункти обігріву особового складу; організувати охорону і оборону району
розташування підрозділу; заборонити особовому складу користувались водою з неперевірених джерел; перевірити наявність зброї,
боєприпасів, майна, спорядження; не допускати безконтрольного перебування військовослужбовців в населених пунктах без служ-
бової потреби.
331
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
10.9. Заходи безпеки на стрільбах по повітряних цілях
Безпека при проведенні бойових стрільб на полігоні забезпечується правильною організацією полігонної служби, знанням та
суворим виконанням посадовими особами полігона та прибуваючих частин вимог наказів, директив та інструкцій.
Загальними умовами забезпечення безпеки цивільних і військових об’єктів є: правильний вибір мішеней та траєкторій їх
польоту; проведення робіт в суворій відповідності з затвердженою інструктивно-методичною документацією; своєчасний огляд зон
безпосередньої небезпеки перед проведенням бойових стрільб і вилучення з них людей, техніки, кораблів; чіткий контроль за
польотом мішеней і ракет по трасі; відсутність під час бойових стрільб у зонах безпосередньої небезпеки людей, техніки, кораблів;
охорона морського району від проникнення до зони безпосередньої небезпеки плавзасобів (кораблів, сейнерів, пасажирських, тури-
стичних суден і т.ін.); запобігання проникнення до зон безпосередньої небезпеки, до сухопутних ділянок техніки і людей після ви-
конання огляду зон до закінчення бойових стрільб.
В’їзд (вхід, виліт) будь-кого на територію полігона без дозволу начальника полігона або керівника бойових стрільб
заборонено.
За всі нещасні випадки з причин недодержання встановлених правил поведінки на полігоні (самовільне проникнення на тери-
торію полігона, робота на полігоні в незазначений час, будь-які дії з боєприпасами, що не вибухнули) відповідальність несуть
безпосередні порушники.
Огляд зон безпосередньої небезпеки здійснюється, як правило, обльотом гелікоптера або літака. Огляд зон безпосередньої не-
безпеки і доповідь керівнику стрільб повинні закінчуватися не пізніше, як за ЗО хвилин до запуску мішеней. Звільнення зон безпо-
середньої небезпеки від техніки, людей, кораблів повинно бути виконано не пізніше, як за ЗО хвилин до пуску мішеней.
Для забезпечення безпеки цивільних об’єктів в районі проведення бойових стрільб зенітними ракетними військами на
війська ППО покладається: доведення плану стрільб до взаємодіючих органів ВПС і ВМС; розробка обмежень на роботу
зенітних комплексів під час виконання бойових стрільб; виконання встановлених заходів безпеки обслугами частин і підрозділів
ЗРВ, що виконують бойові стрільби; здійснення радіолокаційного контролю повітряного простору району бойових стрільб
засобами РТВ;
подання заявок до ВПС на: закриття повітряного простору для проведення бойових стрільб; виділення літака (гелікоптера)
для обльоту району бойових стрільб та при необхідності гелікоптера для евакуації літака ВР-3 “Рейс” після виконання програми
польоту; керівництво повітряним рухом у повітряному просторі ДАНДЦ (крім польотів літаків ВР-3 “Рейс”); забезпечення
вимірювань, обробки і видачі матеріалів об’єктивного контролю бойових стрільб;
подання заявок до ВМС на: закриття морського району та виділення кораблів охорони на період бойових стрільб; залучення
зенітних засобів кораблів охорони для знищення літаків ВР-3 “Рейс” у випадку невиконання встановленої програми польоту
оповіщення цивільних закладів та установ про закриття морського району на період проведення бойових стрільб.
Для забезпечення заходів безпеки в ході підготовки і проведення стрільб організується: оточення полігона; полігонне спо-
стереження; очистка території полігона від боєприпасів (боєчастин), які не вибухнули; виконання правил техніки безпеки; медичне
(санітарно-епідеміологічне) забезпечення.
Бойові пуски ракет виконуються тільки у дозволених секторах стрільби. За пуск ракет не по заданій мішені або за межами
полігона відповідальність несе командир підрозділу і технічний (старший технічний) керівник.
Відповідальність за підготовку та проведення заходів з виконання правил безпеки, в тому числі при роботі з компонентами ра-
кетного палива, отруйними технічними рідинами, радіоактивними речовинами, джерелами іонізуючих, неіонізуючих (електро-
магнітних) і лазерних випромінювань і точне виконання установлених на полігоні правил несуть керівник бойових стрільб, старші
технічні керівники та командири частин і підрозділів, які виконують бойові стрільби.
Дозвіл на бойову стрільбу на полігоні надається тільки керівником бойових стрільб.
Вся територія полігона та повітряний простір над ним є забороненою зоною. На дорогах та видимих місцях по межах полігона з
інтервалом не менше 5 км установлюються покажчики з надписами “Заборонена зона, прохід (проїзд) заборонений (закритий)”.
Шляхи, які пересікають територію полігона, перекриваються шлагбаумами з попереджувальними надписами “Стій! Стріляють”. В
найближчих до полігона населених пунктах установлюються покажчики, які забороняють на території полігона полювати, пасти
худобу, ловити рибу, косити сіно, збирати ягоди та гриби. Всі надписи на попереджувальних знаках та покажчиках робляться дер-
жавною мовою та мовою місцевого населення.
З метою заборони проникнення на територію полігона зайвих осіб в дні проведення стрільб виставляється оточення на дорогах
та в інших місцях, найбільш вірогідних для проходу людей та проїзду транспорту. Для своєчасного попередження про появу лю-
дей, транспорту та тварин на території полігона, а також фіксації розривів і місць падіння ЗУР, які не вибухнули, снарядів та інших
вибухонебезпечних предметів організується полігонне спостереження. В день проведення стрільб організується контрольний обліт
території полігона з метою перевірки відсутності в межах полігона людей, транспорту тощо. Про всі випадки падіння мішеней,
зенітних ракет чи їх складових частин поза зоною падіння ракет або посадки мішеней робиться аналіз польоту мішеней, ракет і
складається акт.
До затверд ження акту запуски мішеней і пуски ракет ЗАБОРОНЯЮТЬСЯ.
Безпека польотних завдань у повітрі при проведенні бойових стрільб забезпечується: виконанням вимог керівних доку-
ментів щодо здійснення польотів і чіткими, грамотними діями обслуг командних пунктів по управлінню екіпажами і повітрі; пра-
вильним вибором маршрутів, траєкторій польоту мішеней; грамотним відпрацюванням методичної документації на проведення
бойових стрільб і польових стрільб особами, які беруть участь в проведенні бойових стрільб; наявністю стійкого двостороннього
зв’язку між взаємодіючими командними пунктами і повітряними суднами; встановленням тимчасового режиму польотів і заборон
на роботу радіотехнічних засобів; безперервним контролем за місцеположенням мішеней і ракет на трасі польоту у реальному
масштабі часу; відсутністю торонніх повітряних суден, кораблів у зонах, знаходження у яких заборонено картою-схемою і
332
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
методичними вказівками на проведення бойових стрільб; можливістю ліквідації ракет за допомогою бортової апаратури ліквідації;
можливістю знищення несправних мішеней кораблями з зенітними ракетними комплексами, які спеціально виділені для цього;
безперервним керівництвом ходом бойових стрільб, повітряними суднами і безпілотними мішенями, які беруть участь в бойових
стрільбах; контролем на полігоні за результатами бойового застосування зенітних ракетних комплексів.
Безпека у акваторії моря при проведенні бойових стрільб забезпечується: правильним вибором маршрутів, траєкторій
польоту мішеней; закриттям визначених морських районів згідно з планом стрільб; своєчасним попередженням цивільних морсь-
ких підприємств і установ про закриття відповідних морських районів на період виконання бойових стрільб; охороною морського
району від проникнення до зони безпосередньої небезпеки плавзасобів (кораблів, сейнерів, пасажирських, туристських суден то-
що); постійним контролем за морською обстановкою з боку радіолокаційних засобів полігона, засобами ЧФ, ВМС, Прикордонних
військ.
До початку навчань з бойовою стрільбою (стрільб) організовується: перевірка готовності частин та підрозділів до тактич-
ного навчання з бойовою стрільбою (до виходу на полігон); перевірка частин та підрозділів на допуск до бойових стрільб;
оповіщення командирів військових частин та місцевих органів влади населених пунктів про час заборони проходу та проїзду тери-
торією полігона; огляд місцевості з метою видалення людей, тварин та транспорту з районів, секторів (директрис) стрільби (не
пізніше як за 2 години до початку бойових стрільб); спостереження з метою своєчасного оповіщення про появу людей, тварин та
транспорту в районах, що небезпечні, сторонніх літаків у секторі стрільби по повітряних цілях (мінімально безпечна висота польоту
повітряних суден над районом полігона під час проведення стрільб - 10 000 метрів), про виникнення пожежі та своєчасного прийо-
му сигналів з постів оточення, а також для за січки місць падіння снарядів і ракет, що не вибухнули; вивчення з особовим складом,
що залучається до тактичного навчання з бойовою стрільбою, інструкції щодо заходів безпеки на період навчань, враховуючи кон-
кретні умови району дій військ; підготовка та інструктаж осіб, що керують та обслуговують навчання (стрільби).
Організовується проведення занять з учасниками навчань (стрільб), під час яких: визначаються рубежі відкриття та при-
пинення вогню з урахуванням дій підрозділів, що залучаються; вказуються безпосередньо на місцевості сектори стрільби, основний
та небезпечні напрямки стрільби, межі захисних зон; призначаються основні та запасні вогневі (стартові) позиції’, з яких буде
здійснюватись бойова стрільба, вирішуються питання організації їх охорони.
Перед проведенням бойових стрільб на полігоні командири частин повинні: організувати з підлеглим особовим складом
вивчення вимог Курсу стрільб, Положення, обов’язків посадових осіб під час проведення стрільб, заходів безпеки; провести
інструкторсько-методичні (показові) заняття з особовим складом частин та підрозділів щодо порядку проведення навчань з бойо-
вою стрільбою (пусків, стрільб); доповісти рапортом начальнику полігона про готовність частини до проведення тактичного нав-
чання з бойовою стрільбою (пусків, стрільб).
На інструкторсько-методичні (показові) заняття залучається весь особовий склад частини (підрозділу, посадові особи, які керу-
ють та обслуговують навчання (пуски, стрільби).
До особового складу доводяться і вказуються на місцевості: рубежі заряджання (розряджання); вогневі рубежі (позиції);
сектори стрільби; кути підвищення; азимути та дальності, на яких стрільба заборонена; порядок заїзду на вогневі (стартові) позиції
та виїзду з них; послідовність зміни рубежів ведення стрільби; місця розташування командних пунктів частин, батарейні (взводні)
командні пункти; місця розташування відділення тяги (транспортування); пункти спостереження та зони, що небезпечні для пере-
бування особового складу.
Особовий склад, який не засвоїв вимог заходів безпеки, до навчань з бойовою стрільбою (пусків, стрільб, занять) НЕ
ДОПУСКАЄТЬСЯ.
Напередодні проведення стрільб керівник навчань (стрільб) уточнює у начальника полігона порядок стрільб і, за необхідністю,
подає уточнену заявку.
Уточнивши порядок стрільб, керівник навчань (стрільб) повинен зробити розрахунок часу, поставити задачу командиру
підрозділу, що стріляє, та не пізніше ніж:
за 2 години до початку стрільб доповісти на командний пункт полігона про готовність підрозділів до виконання стрільб
(пусків);
за 1,5 години до початку стрільб доповісти на командний пункт полігона про готовність до виконання своїх обов'язків поса-
довими особами, які керують навчаннями (пусками, стрільбами) та їх обслуговують, вогневими посередниками, а також тими, хто
страхує;
за 1 годину до початку стрільб на командному пункті полігона начальник полігона або його заступник, переконавшись, що
сектори (директриси) стрільби готові до забезпечення та контролю стрільб, наказує підняти на сигнальних щоглах білі прапори
(вночі - ввімкнути білі вогні). Ця команда передається на контрольну пару радіолокаторів, пости спостереження, вогневі (стартові)
позиції, командні та спостережні пункти командирів частин та начальників ППО;
за ЗО хвилин до початку стрільб начальник полігона наказує замінити білі прапори (вогні) червоними прапорами (вогнями),
що означає відкриття сектора (директриси) стрільби для проведення стрільб і заборону руху на ньому.
Дозвіл на зайняття та залишення вогневих (стартових) позицій, вихід підрозділів на рубежі заряд жання, відкриття вогню в сек-
торі (директрисі) стрільби має право дати тільки начальник полігона Йому ж належить право особисто або через свого посередника
на вогневій (стартовій) позиції припиняти стрільбу у разі порушення підрозділами, що стріляють, заходів безпеки. Управління
підрозділами, що стріляють, здійснюють командири частин з обладнаних рухомих пунктів управління (командних пунктів). Уста-
новки (бойові машини) представляє керівник стрільби і разом з представником полігона розписується в журналі встановленої
форми.
Для виключення випадків обстрілу літаків, начальник полігона у присутності начальників ППО та командирів частин, що
стріляють, організовує та проводить перевірку підготовки батарей (взводів) до стрільби. При цьому перевіряються: орієнтування,
облік бази, узгодження синхронної передачі, точність визначення поправок стрільби, нанесення на планшетах та індикаторах кру-
гового огляду дзеркальної площини (сектора стрільби) та небезпечної зони для польотів авіації.
333
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
Під час проведення тактичних навчань та бойових стрільб.
Під час проведення залікових навчальних та бойових стрільб призначаються технічні керівники стрільби, до обов’язків яких
належить контроль та забезпечення дотримання заходів безпеки під час виконання пусків (стрільб). Контроль за виконанням
підрозділами, що стріляють, умов Курсу стрільб, заходів безпеки здійснюється начальником полігона особисто та через начальника
штабу, начальника командного пункту, начальників навчальних об’єктів та груп контролю полігона. У разі наявності помилок у
підготовці матеріальної частини підрозділи до стрільби допускаються лише після усунення помилок та повторної перевірки. На
вогневому рубежі можуть знаходитись лише стріляючі підрозділи. Розгортання на вогневому рубежі інших підрозділів з метою
тренування (перевірки) під час проведення бойових стрільб забороняється. Після виходу (появлення) мішені (літака) на бойовому
курсі начальник полігона (сектора стрільби) оголошує: номер заходу, підрозділ, що стріляє, номер задачі. Після цього керівник
стрільби ставить вогневу задачу. Видача цілевказівок підрозділу, що стріляє, а також пошук та супровід ним цілі до постановки
керівником стрільби вогневої задачі забороняється.
Під час виконання бойових стрільб з короткої зупинки заряджання (подача патрона на лінію досилання, перезарядка) гармат
(установок) здійснюється тільки після зупинки для стрільби. Обстріл цілей ведеться тільки в секторі стрільби.
Під час проведення стрільб забороняється: супровід цілі РЛС (СРЦ, СНЦ, РПК, СОН, ГГУАЗО) батареї, що стріляє, до ого-
лошення з КП номера зальоту; включення приводів гармат (установок) у разі відсутності стійкого автосупроводу ціпі РПК (РЛС);
залишати гармати та установки зарядженими у перервах під час виконання бойових стрільб.
Стрільба припиняється негайно у випадках: наближення літака до дзеркальної площини (кордонів сектора стрільби); при
виході цілі за межі сектора стрільби; після проходження мішенню параметра; у разі втрати (зриву супроводу) повітряної цілі;
падіння снарядів (ракет, мішеней) у небезпечній близькості до військ та населених пунктів, а також за межами сектора (директриси)
стрільби; проходження трас або розривів снарядів поблизу літаків (вертольотів); появи людей, машин або тварин у секторі (дирек-
трисі) стрільби; появи сторонніх літаків (вертольотів) в межах сектора (директриси) стрільби; виникнення пожежі; втрати зв’язку
КП полігона із частиною (підрозділом), що стріляє, екіпажем літака (гелікоптера), контролюючою обслугою або оточенням.
Для негайного припинення стрільби з КП полігона подається звуковий сигнал, на флагштоках КП та контролюючого розрахун-
ку піднімається білий прапор (вночі вмикаються білі вогні). Команда на припинення вогню передається по всіх лініях зв’язі^.
За сигналом (командою) з КП полігона керівники стрільби вживають заходів щодо припинення вогню та супроводу цілі. У ви-
падках, якщо дальність до цілі не дозволяє підрозділам, що стріляють, продовжувати виконання вогневої задачі, керівник стрільби
повинен доповісти на КП полігона дальність до цілі та її азимут.
Під час проведення пусків ракет категорично забороняється: знаходження особового складу, який забезпечує та контролює
пуски, ближче ніж 100 м від стартової позиції та поза укриттями (окопами); проведення стрільби при наявності в секторі стрільби
фотоконтрастних предметів (кутових відбивачів), джерел теплового випромінювання; розміщення агрегатів живлення, БТР, БМП
ближче 100 м від стартової позиції.
Під час стрільб на КП полігона знаходяться: начальник полігона; начальник штабу полігона, керівник польотів (при стрільбі
з використанням літаків); начальник пункту управління з підпорядкованою йому обслугою, а також особи, які призначені началь-
ником полігона для забезпечення роботи КП.
На КП можуть знаходитись: начальники, яким підпорядкований полігон, а також особи, які інспектують частину (підрозділ),
що виконує стрільбу.
Перебування інших осіб на КП полігона під час проведення стрільб не допускається.
Керівник стрільби після завершення стрільб (пусків) з дозволу з КП після перевірки розряд жання гармат та установок подає ко-
манду на зняття з вогневої (стартової) позиції та здійснення маневру або на переведення техніки в похідне положення, прибуває на
КП полігона, доповідає про час виконання та результати спостереження стрільб, представляє картку обліку використаних снарядів
(ракет), та що не вибухнули, схему проведення повітряних цілей на батарейному планшеті, письмовий рапорт про розряджання
установок.
10.10. Заходи безпеки при стрільбі (пусках) засобів ППО безпосереднього прикриття
При проведення бойових стрільб матеріальна частина, КП, страхуючи та групи контролю стрільб повинні знаходитись в спеці-
ально обладнаних окопах, укриттях, особовий склад підрозділів, що не бере участі у виконанні бойових стрільб, повинен бути в
укриттях, які обладнуються в тилу вогневих позицій на віддаленні 100 - 200 м.
Керівник стрільб повинен довести до підлеглих місцезнаходження сектора стрільби, межі заборонених зон ведення вогню та
вимоги їх дотримання, проінструктувати вогневих посередників та страхуючих, організувати виконання заходів безпеки.
При стрільбі по повітряних цілях відвернутим способом курс цілі та дзеркальна площина не повинні перехрещуватись. При
цьому курсовий параметр для установок ЗСУ-23-4 повинен бути не менше 500 м. Ретельно перевіряється матеріальна частина
При стрільбі по імітатору повітряних цілей (ШЦ) М-13УК забороняється: розташовувати вогневу позицію БМ-13Н всере-
дині сектора стрільби зенітних ракетних комплексів; розташовувати людей, техніку, паливні матеріали ближче 50 м від бойової
машини; наводити бойову машину БМ-13Н в бік вогневих позицій стріляючих підрозділів; пересувати заряджену бойову машину;
проводити стрільбу при відсутності зв’язку з КП; допускати на вогневу позицію сторонніх осіб; пускати через голови військ
імітатор повітряних цілей М-1ЗУК. Перед пуском ІПЦ обслуга відводиться в укриття.
В ході стрільби забороняється вести вогонь: бойовими снарядами з гармат, установок з встановленими пристроями для
стрільби холостими пострілами; в небезпечних напрямках стрільби; через населені пункти, електричні мережі, залізниці, шосейні та
грунтові дороги, які не закриваються для пересування під час стрільби.
334
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
Стрільба припиняється негайно: при наближенні літака до дзеркальної площини на відстань меншу 1 500 м для 100-мм, 1
000 м - для 57-мм комплексів та 500 м - для установок ЗСУ-23-4,2С6; при виході цілі з сектора стрільби; після проходження бук-
сированою мішенню параметра; при втраті повітряної цілі; при попаданні снарядів ракет, мішеней за межі стрільби; при вибусі
снарядів при проходженні їх трас поблизу літаків, гелікоптерів; при появі сторонніх літаків, гелікоптерів, людей, машин або тварин
в межах секторів стрільби; при виникненні пожежі; при втраті зв’язку КП навчального центру з екіпажем літака, гелікоптера.
10.11. Заходи безпеки при експлуатації ракет та боєприпасів
Роботи з ракетами та боєприпасами повинні проводитись під постійним контролем керівника, який добре знає їх будову та дію,
а також вимоги технічної документації. Перед початком роботи керівник зобов’язаний інструктувати виконавців про заходи
безпеки.
Під час проведення робіт з боєприпасами забороняється: установлювати вертикально постріли унітарного заряджання,
снаряди, міни, заряди в гільзах, а також перекочувати їх по столу паралельно один до одного; бити по вибухівниках, засобах спала-
хування, а також ударяти боєприпаси один об одного; кернити вибухівники в снарядах ударом молотка по керну; розкривати ло-
пасті блока стабілізатора реактивних снарядів; переносити вручну більше одного незакупореного пострілу снаряда або міни калібру
більше 57 мм; переносити незакупорені остаточно споряджені снаряди (міни) калібру 152 мм і вище без підгримуючих застосувань;
переносити боєприпаси на спині, плечі в несправній тарі або кришкою тари донизу; укладати тару з боєприпасами догори дном або
на бокові стінки; кантувати, волочити, випускати, кидати тару з боєприпасами; провадити розбір і охолодження боєприпасів, а та-
кож виготовлення учбових боєприпасів з бойових; застосовувати боєприпаси та їх елементи в бойовому спорядженні як учбові
експонати.
При проведенні регламентних робіт з ЗКР повинні виконуватися наступні вимоги: всі огляди і перевірки снарядів та їх
елементів проводяться на спеціальних пунктах, обладнаних необхідними приладами, інструментом та апаратурою і віддалених від
ближніх споруд не менше ніж на 25 м; при проведенні робіт користуються тільки інструментом або електровимірювальними при-
ладами, передбаченими технічною документацією, що мають паспорти (формуляри), які засвідчують їх придатність; встановлюва-
ти ракети на підставки, що не передбачені технічною документацією.
Під час робіт з ракетами забороняється:
торкатися за кінці крил, стабілізатори, трасер та гумовий кожух розетки бортового роз’єму при вилученні ракет з тари; встанов-
лювати ракети на підставки, не передбачені технічною документацією; проводити розбирання ракет і виготовлення учбових експо-
натів з бойових.
При організації робіт з боєприпасами та ЗКР не допускається їх падіння.
Не дозволяється використання ЗКР якщо: ЗКР некомплектна; технічні параметри не відповідають вимогам експлуатаційної
документації; не проведені окремі регламентні роботи; використаний ресурс їх зберігання; відсутній формуляр; ЗКР, що отримала
пошкодження після ударів, падіння, прострілів кулями чи осколками.
Заборонено проводити роботи, що не обумовлені Інструкцією щодо експлуатації для відповідної ЗКР; знаходитись на майдан-
чику іншим особам, що не задіяні до робіт із ЗКР; використовувати вогонь ближче 25 м від ЗКР; використовувати не штатне облад-
нання та інструменти у роботах із ЗКР; знаходитись під ЗКР під час її перевантаження.
Під час зберігання і перевезення ракет і боєприпасів забороняється: перевозити в кузовах автомобілів та причепів разом з
ракетами і боєприпасами пальне і мастильні матеріали; застосовувати відкритий вогонь для полегшення запуску двигуна; палити і
розпалювати багаття ближче 40 м від транспортних засобів; провадити заправку шляхом переливання пального з баків одного ав-
томобіля в баки іншого; зупиняти автомобілі в населених пунктах; використовувати несправні автомобілі та автомобілі, що не ма-
ють засобів пожежогасіння.
При транспортуванні ракет і боєприпасів повітряним і водним транспортом керуватися вимогами діючих інструкцій щодо пові-
тряних перевезень особового складу і вантажів у Збройних Силах і Правил перевезення вантажів повітряним транспортом. Дозво-
ляється транспортування ЗКР після її падіння з висоти не більше 5 м на будь-яку відстань д ля подальшого її знищення.
З боєприпасами, небезпечними при використанні, забороняється проводити будь-які роботи. Дозволяється перемішувати їх
тільки на носилках або підресорених візках, на дно яких укладається тирса чи м’яка підстилка. Небезпечними при використанні є
боєприпаси зі слідами ударів і закопченості.
Про всі виявлені небезпечні боєприпаси негайно доповідається вищестоящому начальнику.
Заправлення (дозаправлений) пальним і мастильними матеріалами бойових машин і транспортних засобів, завантажених ра-
кетами і боєприпасами, проводиться з дотриманням таких заходів безпеки: заправна машина встановлюється не ближче 2 м від
бензозаправника (заправної колонки); чергова машина розташовується не ближче 10 м від машини, що заправляється; під час масо-
вого заправлення виставляється протипожежний пост із засобами пожежогасіння; двигуни машин, що заправляються, повинні бути
зупинені; в разі обливання пальним машини, що заправляється, вона відводиться на буксирі від місця заправлення.
10.12. Заходи безпеки при роботі з джерелами надвисокої частоти
Для зниження впливу випромінювання надвисокої частоти (НВЧ) необхідно виконувати такі вимоги: ремонт і настро-
ювання апаратури, по можливості, проводити при роботах на еквівалент антени; екранувати джерела випромінювання із заземле-
ними металевими кожухами або стінками, екранувати отворами в захисних екранах; використовувати індивідуальні засоби захисту
(захисні костюми, окуляри і таке інше).
335
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
При роботі з джерелами НВЧ забороняється: оглядати відкриті кінці хвилеводів і опромінювачів на ввімкнених передавачах;
вмикати передавальну апаратуру при знятих захисних кожухах, відкритих оглядових люках, дверцятах, а також при несправності їх
блокування; знаходитись поблизу блоків з електровакуумними приладами, що працюють під напругою 1 кВ і більше, при відкри-
тих дверцятах і кришках у шаф, знятих кожухах і таке інше; залишати нещільно засунутими в ніші шаф блоки передавальної апара-
тури і блоки живлення; провадити роботу з антенними установками при увімкнених передавачах і передавати у зоні випроміню-
вання антен; перебувати у приміщеннях з ввімкненою високочастотною апаратурою стороннім особам; знаходитись у процесі ро-
боти апаратури на відстані від неї ближчій, ніж це встановлено інструкцією з експлуатації.
10.13. Заходи безпеки при обслуговуванні електрообладнання
Перед тим, як приступити до робіт з радіоапаратурою, електро- та радіоприладами, необхідно уважно вивчити заходи безпеки
під час роботи з ними: не можна приступати до робіт без посвідчення про перевірку знань правил техніки безпеки та технічної
експлуатації; перед подачею напруги на тимчасово підключені згідно з заявкою струмоприймачі потрібно переконатися у їх готов-
ності до прийому напруги та попередити працюючий на них особовий склад про включення; при оглядах електроустановок напру-
гою до 1000 В забороняється знімати попереджувальні плакати та огорожу, проникати за них, торкатися струмоведучих частин і
проводити їх обтирання або чищення, усувати виявлені несправності; під час огляду дозволяється відкривати дверцята щитів, шаф і
т.ін.; при виявленні замикання струмоведучих частин електроустановок на землю не наближатись до місця замикання на відстань
меншу 5 і меншу 10 м у відкритих розподільних пристроях і на лініях електропередачі.
Треба слідкувати за зовнішньою справністю заземлюючих пристроїв електроустановок, пам’ятати, що несправності, виявлені в
захисних заземлюючих пристроях, необхідно негайно усунути встановленим порядком. Неізольовані струмоведучі частини елек-
троустановок (проводи, шини, рубильники, контакти та зажими апаратів і електричних машин і т.ін.), що знаходяться поза електро-
приміщенням, повинні бути з усіх боків огороджені або знаходитись на висоті, недосяжній для торкання їх особовим складом.
Забороняється: вставляти дріт, викрутку в гнізда запобіжників; торкатись струмоведучих частин антенного пристрою, особли-
во антенного вводу; встановлювати та змінювати антену при роботі на передачу.
Забороняється чергування особового складу з другою кваліфікаційною групою з техніки безпеки в електроустановках напру-
гою до 1 000 В, з третьою та нижчою групою - в електроустановках напругою більше 1 000 В.
При зніманні та установленні акумуляторних батарей (АКБ) в бойовій машині необхідно: виключити вимикач акумуля-
торних батарей; не допускати одночасного торкання ключем ввідних зажимів АКБ та корпусу машини; ізолювати кінці (зажими)
перемичок, якщо інші кінці цих перемичок з’єднані або з’єднуються із зажимами АКБ. Слідкувати за справністю ізоляції електро-
проводки та контактних з’єднань, не допускати іскріння та коротких замикань.
10.14. Заходи безпеки при обслуговуванні електроагрегатів
До експлуатації систем електропостачання допускається особовий склад, який вивчив їх побудову, правила безпечної експлу-
атації та склав залік комісії частини на право самостійної роботи.
При експлуатації систем електропостачання слід твердо виконувати такі правила техніки безпеки: не вмикати систему без по-
переднього її заземлення, без перевірки з’єднання кузовів та рам причепів із загальним контуром заземлення і перевірки величин
опору заземлювачів. Опір заземлюючого пристрою кожного причепа не повинен бути більше 25 Ом.
Експлуатація незаземленої електроустановки, а також вмикання кабелів і вимикання їх під напругою категорично заборо-
няється.
Під час роботи електроустановки не торкатись струмоведучих провідників.
Систематично слід перевіряти стан ізоляції електромонтажу за допомогою переносного мегометра при вимкнених джерелах
струму. У випадку зниження опору ізоляції нижче допустимої норми (сигнал приладу Ф-419) під час роботи споживачів оператор
центрального розподільчого пункту (ЦРП) повинен негайно доповісти про це відповідальній особі. Подальша робота зі зниженим
опором ізоляції забороняється.
В особливих випадках з дозволу відповідальної особи можлива робота системи електроживлення при зниженні опору ізоляції
нижче допустимого рівня з дотриманням заходів безпеки. При цьому особовий склад повинен бути оповіщений про небезпечність
ураження електричним струмом.
Для запобігання коротких замикань, іскріння і загоряння апаратури необхідно ретельно перевіряти стан ізоляції проводів і на-
дійність контактів у місцях з’єднання силових кабелів. Підгоряння ізоляції свідчить про збільшення перехідного опору контактів.
Нейтралі і фази генераторів агрегатів АД-200 і АД-30 електростанції 5Е97 з’єднані між собою через фільтри радіозавад. Тому
під час роботи одного з агрегатів категорично забороняється торкатись нейтралей і струмоведучих частин електростанції.
Слідкувати за справністю огорож вентиляторів і не торкатись частин вентиляторів, що обертаються, приводних ременів, шківів,
зарядних генераторів.
Для запобігання опіку, в зв’язку з можливістю викидання пари або гарячої води, забороняється відкривати кришку заливної
горловини радіатора на працюючому або перегрітому двигуні.
Необхідно слідкувати за тим, щоб не було витікання палива з баків і паливопроводів, щоб під час роботи агрегатів поблизу ви-
хлопних труб не було легкозаймистих речовин.
Забороняється: змащувати працюючий двигун; зберігати в електростанції сторонні предмети та легкозаймисті речовини; за-
пускати підігрівник ПЖД при неповному заправленні системи охолодження та залишати його працюючим без нагляду.
336
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
Через кожні 15-20 годин роботи агрегатів для запобігання загоряння необхідно заливати конденсат з відстійників глушителів.
При загорянні підігрівника перекрити кран підведення палива, вимкнути його і загасити полум’я. При спалахуванні палива або
масла полум’я необхідно гасити вогнегасниками, піском або накрити азбестовою ковдрою. Заливали водою масло або паливо, що
горить, категорично забороняється. Необхідно слідкувати за справністю вогнегасників і утримували їх в готовності до застосування.
Для запобігання накопиченню вихлопних газів слідкували, щоб у зимовий час, особливо під час снігопадів і снігових заносів,
вентиляційні відводи і виводи вихлопних труб із укрить розташовувались по висоті так, щоб їх не заносило снігом. Систематично
слідкувати за провітрюванням причепів, не допускали накопичення вихлопних газів, які викликають отруєння людини.
Під час роботи з акумуляторами запобігати потрапляння електроліту на тіло, одяг та взуття, тому що сірчана кислота руйнує
шкіряний покрив, виводить з ладу обмундирування.
Під час роботи електростанцій особовому складу, який їх обслуговує, рекомендується користуватись протишумними
навушниками.
Для роботи в зимових умовах системи охолодження двигунів заповнюються незамерзаючою рідиною, що містить етиленглі-
коль (антифризом марки 40 або марки 65). Це отруйна рідина, яка, потрапляючи всередину організму, викликає тяжке отруєння і
смерть.
Під час роботи з антифризом необхідно: заливання в систему охолодження провадити безпосередньо із ємності, в якій
зберігається антифриз; після роботи з антифризом ретельно мити руки водою з милом; не засмоктувати антифриз ротом через
шланги; при попаданні антифризу всередину організму негайно викликати блювання (зробити промивання шлунку і звернутися до
медпункту. Несвоєчасне надання кваліфікованої медичної допомоги при водить до смертельного випадку.
10.15. Заходи безпеки при перевезенні особового складу на машинах
Обов’язки старшого машини
Старший машини призначається із числа офіцерів, прапорщиків, надстрокових або сержантів. Йому підпорядковується водій
і весь особовий склад цієї машини. Він несе повну відповідальність за правильне використання машини, збереження вантажу, а
також за дотримання дисципліни всім особовим складом, який прямує машиною.
Старший машини зобов’язаний: отримавши завдання на перевезення, ознайомитись з особливостями маршруту руху і оз-
найомити водія; знати Правила дорожнього руху та забезпечити їх виконання водієм; при перевезенні людей знати та точно вико-
нувати норми помадки та правила перевезення; знати та дотримуватись норм навантажень машини та правила кріплення вантажу;
вміти користуватись картою, схемою маршруту та орієнтуватись на місцевості; перевірити у водія посвідчення на право управління
автомобілем і пересвідчитись в готовності до виконання завдання; провести зовнішній огляд машини і пересвідчитись в тому, що
технічний стан машини перевірено і в потрібному місці є запис (підпис) начальника КТП; забезпечити своєчасність доставки і збе-
реження вантажу, що перевозиться; знаходитись в машині поряд з водієм під час руху; надавати водію відпочинок тривалістю 20
хвилин через кожні 3 години руху; усувати від управління машиною водія, який знаходиться у хворобливому стані, або при такій
втомі, яка може вплинути на безпеку руху, а також у випадку його алкогольного або наркотичного сп’яніння, та приймати необхідні
заходи; забезпечити повернення машини в парк не пізніше часу, вказаного в шляховому листі; прибувши до парку, організувати
розвантаження вантажів з дотриманням заходів безпеки, здати машину черговому парку і доповісти черговому частини про вико-
нання завдання і про всі зауваження, що були отримані під час рейсу; розписатись в шляховому листі за кожен виконаний рейс із
зазначенням місця, часу здачі машини і показань спідометра, забезпечити виконання Правил дорожнього руху.
Старшому машини категорично забороняється: брати на себе управління машиною або змушували водія передавали його
будь-кому крім змінного водія, зазначеного в шляховому листі; вимагали водія порушували Правила дорожнього руху та встанов-
лену швидкість руху; ухилятись від зазначеного маршруту; використовували автомобіль в особистих цілях; перевозили в машинах
сторонніх осіб.
Обов’язки військового водія
Водій відповідає за збереження закріпленої за ним машини, постійну її справність і готовність до негайного використання.
Він зобов’язаний: добре знали матеріальну частину, технічні можливості та правила експлуатації закріпленої за ним машини;
вміти особисто водити машину вдень, вночі, в різних дорожніх умовах, в будь-яку погоду; тримали машину справною і постійно
головою до дії; знали і точно виконували Правила дорожнього руху, сигнали регулювання і управління; уважно слідкували за ко-
мандами і сигналами свого командира, швидко і чітко їх виконували; знали норми виграли пального і мастильних матеріалів і не
допускали їх перевитрачення; запобігали поламкам і несправності машини, доповідали про них командиру і негайно їх усували; при
використанні машини мати при собі посвідчення на право управління машиною, військовий квиток і шляховий лист.
Водій транспортного автомобіля, крім того, повинен: мали талон на право експлуатації транспортного автомобіля; знати
норми, правила посадки і перевезення людей, розміщення, укладання і закріплення вантажів у кузові машини, не допускали їх
перевантаження; своєчасно в цілості доставляти вантаж у вказане місце; вміти користувались картою, схемою маршруту і
орієнтуватись на місцевості; безвідлучно знаходитись при машині і не змінювали місце її розташування для проведення огляду та
обслуговування; укривати і маскували машину в бойових умовах.
Основні причини дорожньо-транспортних пригод: управління транспортом в нетверезому стані; перевищення допустимих
швидкостей руху; порушення Правил дорожнього руху, недостатня кваліфікація та неуважність водія; технічні несправності, а та-
кож неправильне розташування та закріплення вантажів.
Безпека руху військових машин забезпечується: чітким знанням, безумовним і суворим виконанням водіями і старшими ма-
шин Правил дорожнього руху, правил і прийомів водіння машини в різних дорожніх (кліматичних) умовах, вміння водіїв застосо-
вувати ці правила на практиці; вміння водіїв миттєво оцінювати дорожню обстановку, що склалась, застосовувати і виконували
337
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
рішення, які забезпечують повну безпеку в особливих умовах; підгримувати машини в постійній справності, що гарантує їх безпеч-
не використання згідно з характером роботи; точним дотриманням водіями і старшими машин вказаних маршрутів руху та інших
вказівок, отриманих під час інструктажу; ретельною підготовкою машин, водіїв і старших машин, а також решти особового складу,
який бере участь у виконанні завдання; високою відповідальністю водіїв, старших машин, командирів і начальників усіх ступенів,
усього особового складу за виконання поставленого завдання та безаварійну експлуатацію машин.
10.16. Заходи безпеки при перевезенні залізничним транспортом
Особовий склад зобов’язаний дотримуватись високої військової дисципліни, вимоги військових статутів і розпоряджень ко-
мандирів і начальників, знати і виконувати правила поведінки та заходи безпеки під час перевезення.
Особовий склад повинен знати номер ешелону, військове звання і прізвище начальника ешелону.
Військовослужбовець, який відстав від ешелону, зобов’язаний негайно прибути до військового коменданта, а при його
відсутності - до начальника станції, доповісти про причину відставання, назвати номер ешелону й діяти за вказівкою військового
коменданта або начальника станції.
Особовому складу забороняється: втручатись в роботу посадових осіб органів військового сполучення й транспорту; затри-
мували поїзд; робити посадку та висадку до подачі встановленої команди або сигналу, стрибати у вагони або зістрибували з них під
час руху поїзда; зупиняти поїзд стоп-краном, крім випадків, коли виникає загроза безпеці руху поїзда або житло людей; відчиняти
двері і верхні люки вагонів під час руху поїзда; робити на вагонах надписи, наклеювали й вивішували плакали, гасла, прапорці; вка-
зували в листах і телеграмах найменування військової частини і згадували про перевезення, а також вести розмови про це зі сто-
ронніми особами; залишали на місцях навантаження та у вагонах листи, газети, папери; перебували на дахах вагонів, платформах,
гальмівних майданчиках, у кабінах, бойових відділеннях, кузовах машин, баштах танків і інших броньованих машин, крім випадків,
вказаних начальником ешелону; висовувались з дверей і люків вагонів; застосовували у вагонах не встановлені види освітлення і
опалювання; купались у водоймах під час зупинки поїзда; ходити без потреби залізничними коліями, засмічували територію й роз-
водити багаття в межах станцій; без дозволу брали майно та користувались гідравлічними колонками (кранами) для набирання
води; викидали будь-що з вагонів під час руху і стоянок, а також справляти природні потреби в невідведених для цього місцях.
10.17. Заходи пожежної безпеки
Загальні протипожежні заходи у військових частинах і підрозділах.
Територію військової частини слід постійно очищали від сміття й сухої трави. Усі сховища, накриття, майданчики з
боєприпасами, цехи основного й допоміжного виробництва, лабораторії, лінії високої напруги, електростанції й трансформаторні
підстанції, димарі котелень, водонапірні башти, склади пального й мастильних матеріалів та інших матеріальних засобів повинні
бути обладнані громовідводами та іншими інженерними системами, що забезпечують їх пожежо- та вибухобезпечність. Під’їзд до
джерел пожежного водозабезпечення, до будівель та усі проїзди на території мають бути завжди вільними для проїзду пожежних
машин.
З метою пожежної безпеки заборонено: розпалювали вогонь ближче 40 м від будівель, майданчиків із майном і машинами, а
також палити і застосовувати приладдя з відкритим вогнем у парках, сховищах, ангарах та подібних приміщеннях; користуватись
несправними печами, застосовували для розведення вогню запальні рідини; залишали матеріали, що можуть горіти, й майно побли-
зу печей та самі печі без нагляду; сушити одяг на печах, димарях протипічних отворів; топити в печах у години відпочинку (сну)
особового складу. Якщо опалення пічне, димарі необхідно очищати від сажі не менш одного разу на два місяці; відігрівати замерзлі
водогінні та інші труби в будинках відкритим вогнем (факелами, паяльними лампами); відігрівати труби і конструкції будинків
можна лише парою, гарячою водою та іншими безпечними засобами; влаштовували в підвальних приміщеннях будинків і під схо-
дами майстерні та склади, пов’язані з обробкою чи зберіганням вогненебезпечних рідин і матеріалів; захаращували доступ до за-
собів пожежогасіння, електрощитів та електрорубильників, зберігали на горищах, сходах і в коридорах запальні матеріали й майно,
робити перегородки, розмішували підсобні майстерні й лабораторії, а також влаштовували у тих приміщеннях житло; використову-
вали не за призначенням засоби пожежогасіння; перекривали запасні виходи з приміщень; користувались зіпсованою електромере-
жею та обладнанням, застосовували побутові електроопалювальні прилади без вогнетривких підставок, а також заміняти в роз-
подільних щитках перегорілі запобіжники дротом та іншими предметами; обгортали електролампи папером і тканиною, заклеюва-
ти чи закривали електричний провід шпалерами, плакатами, застосовувати для влаштування освітлювальної електромережі теле-
фонні проводи; покривати стіни приміщень тканинами, не обробленими вогнезахисними сполуками; здавати під охорону
приміщення (сховища), не перевірені в протипожежному відношенні.
Дезінфекцію й сушіння обмундирування здійснюють в обладнаних типових дезінфекційних камерах (сушарнях) під постійним
наглядом. Перед завантаженням у камери вивертають кишені обмундирування.
Під час дезінфекції й сушіння обмундирування заборонено: збільшували в середині камери температуру вищевстановлених
норм; перевантажували камери й сушарні обмундируванням; завантажувати в камери одяг, просякнутий маслом і запальними
рідинами; укладали обмундирування на запобіжні сітки камер.
У штабах, казармах, клубах і вартових приміщеннях палити дозволяється лише в спеціально виділених протипожежобезпечних
та обладнаних витяжною вентиляцією місцях. Для розігрівання сургучу застосовують електросургучоварки з електролампою по-
тужністю не більше 2 000 Вт. На випадок пожежі розробляють і вивішують план евакуації*. Щоденно, після закінчення роботи,
сміття, що може горіти, й папір із приміщень прибирають.
338
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
Коридори, проходи, основні й запасні виходи, сходи мають бути постійно вільними і не захаращеними. Двері виходів із штабів,
казарм, майстерень, клубів та інших приміщень слід відчиняти назовні. Забивати запасні виходи й облицьовувати стіни й стелі схо-
дових кліток і коридорів матеріалами, що можуть горіти, заборонено.
Засоби пожежогасіння, пожежні гідранти й крани мають бути справними, а їх місце позначене стандартними покажчиками.
Кількість засобів пожежогасіння в будівлях і на об’єктах визначають спеціальними нормами. На території складів, парків, в ангарах
і виробничих приміщеннях засоби пожежогасіння тримають на щитах.
Біля телефонних апаратів мають бути написи із зазначенням номера телефону найближчої пожежної команди, а на території
військової частини д ля подання сигналу пожежної тривоги - засоби звукової сигналізації.
Щоденно, в установлений командиром частини час, усі майстерні, сховища, склади, парки, ангари та інші пожежонебезпечні
виробничі приміщення перед зачиненням перевіряють начальники складів, сховищ, цехів, чергові парку й особи пожежного наряду
частини; усі помічені недоліки усувають до зачинення приміщень (сховищ), а електричні мережі відключають за допомогою
зовнішніх рубильників.
Підтвердженням виконання вимог пожежної безпеки в таких випадках вважають пожежний жетон, який вручається пожежним
нарядом особі, яка зачиняє об’єкт. Начальники сховищ, складів і черговий парку під час здачі об’єкта під охорону передають жетон
начальнику варти. У встановлений командиром час начальник пожежного наряду одержує пожежний жетон від начальника варти.
Додаткові протипожежні заходи у військових частинах проводять згідно зі спеціальними положеннями, посібниками, порадни-
ками та інструкціями.
10.18. Заходи безпеки під час гасіння пожежі
Особовий склад пожежних та позаштатних пожежних команд для роботи безпосередньо в зоні пожежі без бойового одягу та
спорядження не допускається.
Робота особового складу пожежних команд в місцях з наявністю газів та парів рідин допускається лише в спеціальних гермети-
зованих захисних комплектах та ізолюючих або фільтруючих протигазах. Для зниження концентрації газів та парів об’єкти не-
обхідно зрошувати розпиленою водою.
При сильному тепловому випромінюванні особовий склад, який працює зі стволами, повинен забезпечуватись теп-
ловідбиваючими костюмами, захисники екранами і виконувати роботу під захистом водяних струменів.
При явній загрозі обвалу або вибуху особовий склад виводиться в безпечне місце за раніше встановленим сигналом керівника
гасіння пожежі.
При роботі на висотах слід застосовувати страхуючі застосування, які виключають падіння працюючих. Види застосувань ви-
значаються в кожному конкретному випадку. Робота на драбині зі стволом, ножицями допускається тільки при закріпленні ка-
рабіном. Для роботи зі стволом на висотах виділяється не менше двох чоловік. Залишати ствол без догляду навіть після припинення
подачі води не дозволяється.
До початку гасіння і розбирання об’єкта необхідно знеструмити усі розташовані на ділянці роботи електромережі, відключити
газові мережі та прилади. Відключення електропроводів шляхом їх розрізання дозволяється при напрузі в мережі 220 В і тільки у
випадку, коли іншими способами знеструмити мережу неможливо. Ця робота повинна виконуватись під наглядом начальника
пожежної команди (командира відділення) в гумових діелектричних рукавицях, калошах (ботах) і тільки особами, які пройшли
раніше практичне навчання. Не виявивши, що знайдений провід знеструмлений, необхідно вважати його під напругою та приймати
необхідні заходи безпеки.
Забороняється скидання з поверхів та даху об’єкта предметів без попереднього попередження про це працюючих поблизу
об’єкта. При скиданні предметів необхідно слідкувати, щоб вони не впали на електропроводи, балкони, дахи споруд, пожежну
техніку.
Працюючи з піною, розчинами піноутворювачів, необхідно уникати попадання їх на шкіру та особливо в очі. У випадку попа-
дання піноутворювача ПО-1 промити очі двопроцентним розчином борної кислоти або фізіологічним розчином; при попаданні
піноутворювачів ПО-1 А6 та ПО-ІД очі промити водою. Промивати необхідно і шкіру, якщо на неї потрапили піноутворювачі або
їх розчини.
Не допускати застосування пінних вогнегасників для гасіння обладнання, яке знаходиться під напругою електричного струму
вище 36 В.
При гасінні пожежі в приміщеннях з наявністю хімічних речовин необхідно з'ясували у начальника об'єкта їх характер і не до-
пускали застосування речовин, які вступають в реакцію з цими хімічними речовинами. Гасіння пожежі всередині приміщення з
використанням брометилових установок вогнегасіння (стаціонарних та переносних) дозволяється лише в протигазах.
При розбиранні конструкцій споруд вживати заходів, щоб не ослаблювати несучі конструкції та не викликали обвалів, по мож-
ливості не пошкоджували електромережі та електроустановки.
В результаті розбирання конструкції, матеріали, які ускладнюють дії при гасінні пожежі, своєчасно видаляються. При
їх видаленні необхідно: не допускати перевантаження перекрить; складати розібраний матеріал так, щоб він не заважав діям по-
жежної команди; не допускати пошкодження майна
При розбиранні конструкцій, які загрожують падінням, місце їх приблизного падіння оточується складом наряду, який виси-
пається на пожежу від військової частини, а особовий склад, що працює поруч, попереджується або виводиться.
Робота на пожежі в диму дозволяється лише в ізолюючих або у фільтруючих протигазах з приєднанням гопкалигового
патрону.
339
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
При гасінні пожежі взимку необхідно вживати заходів до попередження переохолодження та обмороження працюючих. Робо-
ти на висотах та спускання або піднімання по пожежних драбинах в обмерзлому бойовому одязі повинні проводитись лише при
страховці особового складу рятувальними мотузками. При гасінні пожежі взимку пересуватись на дахах необхідно обережно, не
ходити по обвислому даху та на ділянках перекриття з ознаками горіння. На тривалих пожежах взимку керівник гасіння пожежі
зобов’язаний передбачити регулярну зміну та відпочинок особового складу в теплих приміщеннях, організовувати медичне обслу-
говування.
При гасінні лісових та степових пожеж необхідно: огородити місця відпочинку особового складу від раптового наближення
та прориву вогню пристроєм загороджувальної смуги та забезпечити їх шляхами відходу в безпечні місця; мати на місцях робіт
аптечку з комплектом засобів надання допомога при опіках, отруєнні димом; організувати та безперервно підгримувати зв’язок між
працюючими на окремих ділянках пожежі; по закінченні гасіння пожежі слідкувати за підгорілими стовбурами, особливо сушня-
ком, спилюючи та підрубуючи їх з метою попередження раптового падіння дерев.
При гасінні пожежі в місцях збереження боєприпасів необхідно місця захисту особового складу та пожежної техніки вибирати
в укриттях, урвищах, заглибинах, обвалинах, розташованих в зонах послабленої дії ударної хвилі.
При гасінні штабелів з патронами до стрілецької зброї захищати ствольники легкими щитами; при гасінні штабелів зі
снарядами - захист посилювати.
При гасінні пожежі в парках бойових машин негайно евакуювати палаючу техніку; одночасно з евакуацією техніки охолоджу-
вати несучі конструкції споруди.
Категорично забороняється гасити пожежі одній особі. При гасінні пожеж обов’язково всі особи повинні бути під нагля-
дом одна одної.
10.19. Проведення інструктажу з техніки і засобів безпеки
З техніки і заходів безпеки з особовим складом проводиться: вступний інструктаж; первинний інструктаж на робочому (уч-
бовому місці); поточний інструктаж; періодичний (повторний) інструктаж; позаплановий інструктаж.
Заходи безпеки повинні виконуватись за будь-яких умов, незалежно від терміновості та тривалості робіт. Нестача матеріальних
засобів або робочої сили не можуть бути підставою для порушення заходів безпеки.
Кожний військовослужбовець повинен чітко і безперечно виконувати заходи безпеки. Особовий склад, який не засвоїв правил і
заходів безпеки, до експлуатації озброєння та техніки, стрільб і обслуговування стрільб, а також до інших занять і будівельно-
господарських робіт не допускається.
Вступний інструктаж проводиться командирами підрозділів за планм-конспекгом, що затверджується командиром частини, із
новоприбулими в частину військовослужбовцями з метою ознайомлення їх з особливостями проведення занять з бойової підготов-
ки, експлуатації озброєння та техніки в даній частині незалежно від їх кваліфікації та стажу служби.
В ході інструктажу військовослужбовці вивчають: вимога розпорядку дня; особливості розміщення об’єктів навчальної, ма-
теріально-технічної бази, порядок занять на її об’єктах; особливості експлуатації та ремонту машин, паркових приміщень та облад-
нання; загальні правила безпеки, прийняті в даній частині; вимога з охорони навколишнього природного середовища
Первинний інструктаж на робочому (учбовому) місці проводиться командиром підрозділу, керівником занять або робіт при
призначенні військовослужбовця на даний вид техніки або озброєння (робоче місце), а також у випадку прибуття в підрозділ, при
переведенні з однієї’ роботи на іншу, після переозброєння, при використанні нових удосконалень до озброєння та техніки, при зміні
змісту роботи. Інструктаж проводиться незалежно від кваліфікації та стажу служби або роботи військовослужбовців та супрово-
джується показом прийомів виконання робіт.
В ході інструктажу військовослужбовці повинні вивчити: обов’язки на даному робочому (учбовому) місці за даною
спеціальністю або технологічною картою; порядок утримання робочого (учбового) місця; упорядкування, обслуговування, правила
безпечного експлуатування; інструмент та правила поводження з ним; правила поводження з електроустаткуванням на даному
робочому (учбовому) місці, з матеріалами та готовими виробами; правила користування захисними пристроями та спецодягом; дії
при виникненні небезпечної обстановки; інструкцію щодо заходів безпеки наданому робочому (учбовому) місці.
Інструктаж на робочому (учбовому) місці супроводжу вати показом безпечних прийомів виконання роботи. Командир, пе-
ресвідчившись, що інструктаж та заходи безпеки військовослужбовцем засвоєні, дозволяє йому приступити до самостійної роботи.
Інструктаж на робочому місці проводиться командиром підрозділу або керівником занять за план-конспекгом, затвердженим за-
ступником командира частини (заступником командира частини з озброєння).
Поточний інструктаж проводиться командиром підрозділу, заступником командира підрозділу з технічної частини,
керівником (старшим) робіт перед початком кожного заняття або роботи та в ході їх у випадку: зміни умов проведення занять,
технічного процесу, в результаті чого змінюються умови безпеки особового складу; порушення військовослужбовцями заходів
безпеки в ході занять або робіт; виконання особливо небезпечних робіт, необхідності вдосконалення прийомів та методів, які
забезпечують безпеку на заняттях та при роботах.
Періодичний (повторний) інструктаж проводиться з метою підвищення рівня знань з засобів безпеки, попередження повто-
рення раніше виявлених порушень правил безпеки.
Повторний інструктаж провадиться не рідше одного разу на 6 місяців, а на роботах з підвищеною небезпекою - один раз на
квартал. Він може проводитись з групою військовослужбовців, яка не повинна перевищувати 15 чоловік.
Повторний інструктаж проводиться за програмою інструктажу на робочому (навчальному) місці командиром підрозділу або
заступником командира підрозділу з технічної частини.
340
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
Позаплановий інструктаж можуть проводити всі прямі начальники або інші начальники за їх дорученням у разі порушення
військовослужбовцями інструкцій щодо заходів безпеки або у разі нещасного випадку, пов’язаного з бойовим навчанням і експлуа-
тацією техніки, а також за наказом командира або його заступників.
Військовослужбовець, з яким трапився нещасний випадок в результаті порушення ним заходів безпеки, не допускається до ро-
боти без проходження позапланового інструктажу та здачі заліку р техніки безпеки.
Проведення вступного, первинного, періодичного та позапланового інструктажів оформлюється у журналі проведення інструк-
тажів щодо заходів безпеки.
10.20. Забезпечення екологічної безпеки повсякденної діяльності військ
Для реалізації державної політики у галузі охорони природного середовища та забезпечення раціонального використання при-
родних ресурсів наказом Міністра оборони України від 04.07.95 р. №171 введено “Положення про організацію екологічної безпеки
Збройних Сил України”.
Заходи щодо забезпечення екологічної безпеки повсякденної діяльності військ мають здійснюватись у кожній військовій час-
тині, установі, військовому навчальному закладі, організації та на підприємстві Міністерства оборони України (далі - у військовій
частині).
Командир (начальник) військової частини несе відповідальність за дотримання на території військової частини (районі дисло-
кації, навчань, маневрів чи на маршрутах переміщення) вимог природоохоронного законодавства України для запобігання негатив-
ного впливу військ на навколишнє природне середовище в ході бойової підготовки і у повсякденній діяльності.
У військових частинах (на підприємствах), виходячи з конкретних умов екологічного стану об’єктів (джерел забруднення) або
екологічно небезпечної діяльності (виробництва), для забезпечення екологічної безпеки повинні здійснюватись заходи щодо
запобігання забрудненню водоймищ, грунту, атмосферного повітря та збереження рослинного і тваринного світу. Для цього пови-
нні: виконуватись вимоги водного, земельного та лісового Кодексів України; дотримуватись вимоги Законів України: “Про охоро-
ну навколишнього природного середовища”, “Про охорону атмосферного повітря”, “Про рослинний світ”, “Про відходи”, “Про
екологічну експертизу” та інші; дотримуватись норми і правила водокористування (наявність дозволу на спеціальне водокористу-
вання, дотримання норм і правил скидання стічних вод); забезпечуватись охорона від забруднення водних джерел і виснаження
запасів підземних вод (дотримання санітарних зон охорони, огородження водозабірних споруд, обмеження доступу до них сторон-
ніх осіб, тампонаж або консервація артезіанських свердловин, що не експлуатуються); удосконалюватись технологічні лінії, вироб-
ничі ділянки з метою скорочення споживання води і зменшення її забруднення (створення систем очищення і оборотного (повтор-
ного) використання води на пунктах миття техніки; обладнуватись збірниками нафтопродуктів склади (бази) ПММ, парки та коте-
льні, що працюють на рідкому паливі); проводитись своєчасне будівництво, реконструкція та ремонт каналізаційних мереж, колек-
торів, насосних станцій і очисних споруд для прийняття та обробки господарсько-побутових, виробничих, дощових (зливних) та
інших забруднених стічних вод; нейтралізуватись виробничі стічні води на гальванічних дільницях та акумуляторних станціях;
підтримуватись порядок зберігання й утилізації гальвановідходів, непридатних ртутних ламп (приладів), акумуляторів (шкідливі
речовини (відходи) повинні зберігатись у герметичних ємностях, виготовлених з інертних матеріалів, та знаходитись у місцях за-
хищених від атмосферних опадів); водопровідні системи, для обліку водокористування, обладнуватись контрольно-
вимірювальними приладами; своєчасно проводитись біологічні і фізико-хімічні лабораторні аналізи води та каналізаційних стоків
(при наявності очисних споруд); здійснюватись заходи щодо скорочення шкідливих викидів в атмосферу (встановлюватись пило-
вловлювачі і газоочисні установки та контролюватись їх робота з метою забезпечення безперебійної та ефективної експлуатації,
вживатись заходи щодо зниження токсичності вихлопних газів бойової та іншої техніки (контролюватись токсичність вихлопних
газів автотранспорту)); проводитись заходи для запобігання забруднення земель нафтопродуктами, стічними водами, отру-
тохімікатами, виробничими та іншими відходами, недопущення їх водної (вітрової) ерозії ґрунтів, засолення і заболочення земель;
створюватись санітарно-захисні зони для тваринницьких підсобних господарств, забезпечуватись їх обладнання системами
утилізації та знезараження відходів (рідинозбірниками, майданчиками біотермічної обробки відходів); утримуватись в чистоті та у
відповідності до санітарних норм території військових містечок (гарнізонних звалищ сміття); проводитись заходи щодо рекульти-
вації земель (відтворення родючості грушу) при проведенні будівельних, ремонтних та інших робіт, пов'язаних з порушенням вер-
хнього шару ґрунту; проводитись озеленення і впорядкування санітарно-захисних зон, території військових частин (військових
містечок), охорона лісових масивів (лісонасаджень) від самовільних вирубок і пожеж, раціональне використання і своєчасне
відтворення їх; виконуватись заходи для зменшення негативного впливу на стан лісів (лісонасаджень) при проведенні будівельних
робіт, занять, навчань, стрільб тощо; захищатись ліси (лісонасадження) від шкідників (хвороб), здійснюватись заходи щодо за-
побігання їх пошкодження стічними водами, хімічними речовинами, виробничими комунально-побутовими відходами і сміттям;
здійснюватись заходи щодо зменшення негативного впливу навчально-бойової і господарської діяльності військ на тваринний світ і
середовище його мешкання; дотримуватись правил риболовства, полювання на диких тварин (птахів); викорінюватись випадки
браконьєрства, встановлення на водозабірних спорудах рибозахисних пристроїв; дотримуватись правил перевезення, зберігання і
застосування засобів захисту рослин, отрутохімікатів, пестицидів, мінеральних добрив та інших речовин, які відносяться до катего-
рії токсичних.
У кожній військовій частині (підприємстві) щороку повинні здійснюватись наступні заходи:
наказом командира військової частини (підприємства) призначається посадова особа, відповідальна за контроль виконання
вимог природоохоронного законодавства (там, де відсутня штатна посада начальника служби РХБ захисту - екологічної безпеки);
проводитись підсумкові перевірки (заняття) за кожний період навчання з особовим складом військової частини з основ екологі-
чної безпеки військ із обов’язковим прийняттям заліку (згідно з вимогами наказу Міністра оборони України 1999 року №278);
341
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
не рідше одного разу на навчальний період проводитись аналіз виконання природоохоронних заходів та плануватись заходи
щодо усунення виявлених порушень;
проводитись інвентаризація всіх потенційних джерел забруднення навколишнього природного середовища та подавались доне-
сення “Про стан екологічної безпеки джерел забруднення довкілля” за формою 8.2 (згідно з вимогами директиви від 09.09.98
№ДГШ-013);
розроблятись “План заходів щодо охорони довкілля та раціонального використання природних ресурсів”;
планувались та проводитись підготовка особового складу з дисципліни “Основи екологічної безпеки військ” (згідно з вимога-
ми наказу Міністра оборони України 1996 р. № 65);
планувались та проводитись “День довкілля” - третя субота квітня (згідно вимог Указу Президента України від 08.08.98
№855/98);
планувались та проводитись дні захисту природного середовища - друга та четверта субота кожного місяця (згідно з вимога-
ми наказу Міністра оборони України 1996 р. № 65).
Перевірка стану екологічної безпеки військової частини (підприємства) здійснюється відповідно з Інструкцією про порядок пе-
ревірки (інспектування) та оцінки стану екологічної безпеки у Збройних Силах України (згідно з вимогами наказу Міністра
оборони України 1999 року № 279).
10.21. Надання першої допомоги постраждалим
Забиті місця. Необхідно до забитого місця прикласти холодну примочку (лід, ємність з холодною водою), накласти тугу здав-
люючу пов’язку. Якщо є подряпини, то шкіру треба змазати розчином йоду та накласти пов’язку зі стерильного бинта.
Ознаками травми голови, грудної клітини та живота є головний біль, запаморочення, нудота, блювання, кровохаркання, втрата
свідомості, біль в грудях та животі. В цих випадках постраждалого треба покласти і забезпечити йому повний спокій та викликати
лікаря для надання допомоги і доставки постраждалого у лікувальний заклад.
Поранення. Під час надання першої допомоги необхідно: оголити місце поранення; змазати краї' рани розчином йоду, при
цьому слідкувати, щоб йод не потрапив в рану; накласти пов’язку зі стерильного бинта; не торкатись рани руками, нічим не проми-
вати, нічого з неї не видаляти.
При значній кровотечі з рани накласти на кінцівку спеціальний джгут або джгут-закрутку з підручних матеріалів: брючний
ремінь, носовичок тощо.
При накладанні джгута дотримуватись правил: джгут накладати зверху одягу вище місця поранення; не дуже перетягувати
кінцівку, мірою здавлювання є припинення кровотечі; після накладання джгута накласти на рану стерильну пов’язку; під джгутом
залишити записку із зазначенням часу накладання джгута; не залишати джгут на кінцівці більше 2 годин (взимку - не більше 0,5
години).
Після надання першої допомоги постраждалого негайно відправити в медичний пункт.
Переломи. Переломи можуть бути закриті та відкриті. В усіх випадках необхідно забезпечити нерухомість кісток в місці пере-
лому за допомогою фіксуючих пов’язок та шин. Застосовуються спеціальні шини та шини з підручних засобів: саперна лопата,
дошка, палка, фанера тощо.
При закритому переломі необхідно: при переломі фаланг пальців шину з вузької тріски, обгорнутою ватою або бинтом, на-
класти на тильну або долонну поверхню пальця так, щоб вона йшла по всій довжині і далі до променезап’яткового суглобу; шину
закріпити бинтом; при переломі кісток кисті шину завширшки з долоню накласти на кисть і передпліччя від основи пальців до
ліктьового суглоба, потім прибинтувати її; при переломі кісток передпліччя накласти шину від кінців пальців до ліктьового суглобу
включно, руку зігнути в лікті і підвісити на косинку, ремінь, відрізок бинта; при переломі плеча руку зігнути в лікті і накласти дві
шини: одну на зовнішню, а другу - на внутрішню поверхню плеча, руку підвісити на ремінь або відрізок бинта; при переломі стегна
одну шину довжиною від пахви до п’яти накласти зовні, а другу - від паху до п’яти - з внутрішньої поверхні стегна і гомілки; при
переломах кісток гомілки дві шини довжиною від середини стегна до п’яти накласти на зовнішню і внутрішню поверхні ноги; при
переломі ключиці прибинтувати руку, зігнуту в ліктьовому суглобі, до торсу; при переломі ребер туго забинтувати груди в поло-
женні видиху; при переломі кісток тазу і хребта постраждалого покласти на жорсткий щит спиною донизу, злегенька зігнути ноги в
колінах, покласти під коліна шинель або плащ-намет, туго забинтувати таз. Шини накладаються на обмундирування.
Коли немає шин, при переломах кінцівок необхідно: при переломах рук прибинтувати зігнуту в лікті руку до торсу; при пере-
ломах ніг прибинтувати пошкоджену ногу до здорової.
При відкритому переломі необхідно: накласти кровозупиняючий джгут на кінцівку вище місця перелому; дати постраждалому
знеболюючий засіб; оголити місце перелому; змазати краї’ рани в місці перелому розчином йоду; накласти на рану пов’язку зі сте-
рильного бинта з ватою або малу асептичну пов’язку; забезпечити нерухомість кісток в місці перелому за допомогою шин та
пов’язок; тепло вкрити постраждалого (в холодний час). В усіх випадках переломів негайно направити постраждалого в медичний
пункт.
Опіки. Опіки можуть бути теплові, хімічні та електричні.
При тепловому опіку необхідно: охолодити місце опіку холодною водою, льодом; обережно оголити місце опіку, нічого не
видаляти з його поверхні; накласти пов’язку зі стерильного бинта або малу асептичну пов’язку; тепло вкрити постраждалого; не
змащували місце опіку вазеліном, жирами, не розрізали пухирі, дали знеболюючий засіб.
При хімічному опіку необхідно: добре промити місце опіку водою; накласти стерильну пов’язку; не торкатись руками обпе-
ченої ділянки, не змащували місце опіку вазеліном, жирами, не розрізали пухирі; при опіках кислотою обпечену поверхню шкіри
промити 2 %-им розчином борної кислоти.
342
РОЗДІЛ 10. ОСНОВИ ЗАБЕЗПЕЧЕННЯ БЕЗПЕКИ ПІД ЧАС БОЙОВОЇ ПІДГОТОВКИ
При електричному опіку необхідно: оголити місце опіку, нічого не видаляти з його поверхні; накласти стерильну пов’язку.
Після надання першої допомоги постраждалого необхідно відправити до медичного пункту.
Ураження електричним струмом. Ознаки ураження електричним струмом такі: постраждалий втрачає свідомість, спо-
стерігається затримка серцевої діяльності та дихання, судоми, опіки в місці ураження.
Спочатку необхідно звільнити постраждалого від дії струму. Для цього слід перерубати провід сокирою або лопатою, які мають
сухі держаки; обгорнувши руки сухою тканиною, відкинути від постраждалого провід держаком лопати або дошкою. При можли-
вості користуватись гумовими рукавицями та гумовими чобітьми.
Якщо постраждалий не дихає, застосувати штучне дихання та не зупиняти його до відновлення дихання. При опіках накласти
стерильну пов’язку.
Тепловий та сонячний удар. Ознаки теплового удару: головний біль, потемніння в очах, нудота, блювання, підвищена
пітливість, поверхневе дихання, біль у спині та ногах, втрата свідомості. При сонячному ударі можуть бути судоми та втрата
свідомості.
При наданні першої допомоги необхідно: перенести постраждалого в тінь; надати йому напівсидяче положення; розстебнути
комір, ремінь, зняти стискаючий одяг; змочити груди та голову холодною водою; дати пити холодну воду; при відсутності дихання
застосовували штучне дихання.
Обморожування. Ознаки обморожування: почуття холоду, біль, поколювання, поступове побіління шкіри та втрата нею чут-
ливості.
Необхідно відігріти та розтерти побілілу ділянку шкіри долонею чистої руки або шматочком бинта, поки не з’явиться почерво-
ніння та не відновиться чутливість.
Не треба розтирали шкіру снігом, брудними рукавицями, жорсткими речами.
Якщо з’явилися пухирі або ділянки омертвіння, треба накласти стерильну пов’язку.
Кожен військовослужбовець повинен вміти надавали першу допомогу постраждалому.
343
ПІСЛЯМОВА
ПІСЛЯМОВА
Розвиток засобів нападу діалектично незмінно пов’язаний з розвитком теорії, техніки та способів застосування засобів захисту
від них.
Особливо швидкі зміни відбуваються у високотехнологічних видах озброєння і військової техніки, до яких відносяться засоби
повітряно-космічного нападу і засоби протиповітряної оборони.
Зважаючи на складність протиповітряної оборони, як єдиного цілого з системотехнічних і організаційних засад та відсутність
інтегрованого джерела знань з цієї тематики у 80-ті роки минулого століття було зроблено декілька видань Справочника офицера
противовоздушной обороньї. З часу виходу останнього з них минуло більше 16 років, за які відбулись значні зміни в теорії та прак-
тиці побудови і застосування як засобів повітряного нападу, так і засобів протиповітряної оборони. Значного розвитку набули
безпілотні та малопомітні ЗПН, використання яких, а також ВТЗ, стало характерною рисою сучасних війн і військових конфліктів.
Відповідно до цього розвинулись підходи до виявлення і знищення таких засобів і т.ін.
Все це обумовило необхідність підготовки нового Довідника з протиповітряної оборони, у якому з єдиних позицій розгляда-
ються основні елементи структурного поняття протиповітряної оборони з урахуванням найбільш важливих змін, які відбулися.
Підготовлений Довідник грунтується, як на класичних, фундаментальних науково-практичних і науково-теоретичних
матеріалах, так і на найсучасніших надбаннях, отриманих у галузях, на яких базується ППО. При підготовці Довідника автори
врахували досвід своїх попередників і використали з розробленого ними довідника ряд фундаментальних, класичних матеріалів, які
на погляд авторів були подані в ньому найбільш вдало. Цим же шляхом, при підборі матеріалів до Довідника, автори йшли і щодо
використання інших джерел, вибираючи і використовуючи найкращі і найсучасніші, або такі, які стали класичними. Список вико-
ристаної і рекомендованої літератури наведений за розділами.
При підготовці Довідника використовувались наступні словники:
Новий російсько-український словник-довідник / С.Я. Єрмоленко, В.І Єрмоленко, К.В. Лепець, Л.О. Пустовіт. - К.: “Довіра”,
1996.-797 с.
Російсько-український словник / Уклад.: Д.І. Ганич, І.С. Олійник.. - К.: Головна редакція української радянської енциклопедії,
1980.-1012 с.
Російсько-український математичний словник / Уклад.: ВЛ. Карачун, О.О. Карачун, Г.Г. Гульчук. - К.: Вища шк.., 1995. -258 с.
Російсько-український словник наукової термінології: Математика Фізика Техніка Науки про Землю та Космос / В.В. Гейчен-
ко, В.М. Завірюхіна, В.Г. Коломієць та ін.. - К.: Наукова думка, 1998. -892 с.
Російсько-український технічний словник / Уклад.: Д. Коновалюк. - Луцьк: ВІЗОР, 1993. -1047 с.
Словник воєнної термінології. - К.: ЦНДІМО України, 1998. -239 с.
Словник воєнних термінів / За ред. І.С. Руснака - К.: ЦНДІ ЗС України, 2003. -274 с.
Безумовно, що об’ємна робота, якою є підготовка Довідника, не могла бути виконана без допомоги багатьох і багатьох людей.
Під час роботи над Довідником з його змістом були ознайомлені і прийняли участь в обговоренні матеріалів найбільш відомі і ав-
торитетні фахівці з протиповітряної оборони. Всім їм автори висловлюють свою щиру вдячність.
Серед тих, кому хотілося б подякувати, у числі перших: А.В. Полярус, О.Г. Сирота, О.М. Шмаков, які взяли на себе труд
ознайомитись з проектом Довідника у повному обсязі і виказали цінні зауваження і рекомендації, що, на погляд авторів, дозволило
поліпшити Довідник
Автори висловлюють свою вдячність співробітникам Головного штабу Військ Протиповітряної оборони Збройних Сил
України, ХВУ і наукового центра Військ Протиповітряної оборони: О.О. Авраменку, М.Р. Арасланову, ВД. Ашкеназе,
В.П. Бодашку, М.Ф. Ботову, П.Ф. Буданову, О.Ю. Бурківському, С.І. Бурковському, О.М. Ваську, В.І. Войтовичу, І.О. Гапотченку,
В.І. Джуню, В.В. Доброноженку, В.М. Добудьку, В.М. Закорюкіну, І.А. Зарудняку, В.П. Зубкову, Г.Г. Каматгинову,
С.Б. Клімову, І.Й. Кикені, В.М. Коробову, П.М. Крикуну, Ю.П. Кудрявцеву, В.В. Літвінову, В.А. Лозі, А.В. Луценку,
О.С. Маляренку, В.В. Манакову, О.І. Марчуку, О.М. Моісєєнку, О.С. Мукогоренку, М.В. Назарку, Б.І. Нізієнку, М.В. Остріжному,
І.В. Панаріну, І.Д Пашкевічу, В.Л. Петрову, С.І. Полянському, В.Л. Руських, Б.Є. Савруну, О.Е. Скібі, О.М. Соколову,
О.Л. Сгоцькому, О.А. Сухому, В.М. Хіжему, С.М. Хімченку, В.М. Хомінічу, О.М. Хрусу, Г.В. Чернікову, ЛЛ. Шиманському,
О. А. Штуці, О.М. Шульєву, С.О. Яровчіку за участь в обговоренні матеріалів, корисні зауваження і допомогу в роботі.
Сама щира вдячність авторів І.С. Руснаку і С.А. Жукову за час, витрачений на всебічне вивчення цього труда, і викладення
своїх міркувань в д оброзичливих, але принципових рецензіях.
Особливу вдячність автори висловлюють ЗАТ “Військово-страхова компанія” і особисто її керівнику В.В. Ткачову, без
підтримки яких видання цього Довідника могло не відбутися.
344
ЛІТЕРАТУРА
ЛІТЕРАТУРА
ЛІТЕРАТУРА ДО РОЗДІЛУ 1
Вахрушев В.А. Локальньїе войньї и вооруженньїе конфликгьі: характер и влияние на воєннеє искусство // Воєнная мьісль. -1999. -
№4.-0.20 - 29.
Военньїй знциклопедический словарь. - М.: Военизддг, 1983.
Кочерга Л. Війська ППО у роки війни // Вартові неба. 1999. №№ 137-142 (8985 - 8990).
Машовець К. Віхи становлення // Вартові неба. 1999. №№ 81-85 (8929 - 8933).
Справочник офицера противовоздушной оборони / Г.В. Зимин, С.К. Бурмистров, Б.М. Букин и др. - М.: Воениздат, 1987. - 512 с.
Сгеценко О.О. Протиповітряна оборона: еволюція розвитку // Збірник наукових праць. - Харків: ХВУ. - 2001. - Випуск 4(34). -
С.5-14.
ЛІТЕРАТУРА ДО РОЗДІЛУ 2
Александров А. Применение космических систем стран НАТО в ходе боевьіх действий против Югославии // Зарубеж. воєн,
обозрение. - 1999. -№5. - С. 26 - 28.
Алексеев А. Американская программа созддния управляемьіх авиационньїх боеприпасов нового поколения // Зарубеж. воєн,
обозрение. - 2001. - № 10. - С. 54.
Алексеев А. Рабстві в США по создднию боевьіх БЛА // Зарубеж. воєн, обозрение. - 2001. - №7. - С. 13-15.
Анцев Г. Радиоолекіронньїе комплекси високоточного оружия пятого поколения // Военньїй парад. - 2001. - №4. -С. 102-106.
Белов А., Валентинов А. Совершенствование крьілатой ракети ‘Томахок” // Зарубеж. воєн, обозрение. -1996. - №11. - С. 44-49.
Варченко Л.Г., Судима О.П., Колесник Н.А., Русанов М.Г. Дистанционно пилотируемьіе летагельньїе аппаратьі, их характеристи-
ки и особенности применения // Збірник наукових праць ХВУ. Випуск 7 (37). - Харків: ХВУ. - 2001. - С. 24 - 34.
Глобальна система визначення місцеположення (ОР8). Теорія і практика/ Б.Гофманн-Велленгоф, Г. Ліхтенеггер, Д Коллінз: Пер. з
англ. третього вид. під ред. Я.С. Яцківа. - К.: Наук, думка, 1995.
Горелов А. БЛА “Предаггор” поступают на вооружение ВВС США // Зарубеж. воєн, обозрение. 1999. №10. - С. 39.
Горелов А.Усовершенствованньїй вариант крьілатой ракети АСМ 86С САЬСМ //Зарубеж. воєн, обозрение.-1998.-№12.-
С.34.
Григорьев А. Зарубежньїе управляемьіе ракети класса “воздух-земля” большой дальносте // Зарубеж. воєн, обозрение. - 1998. -
№11.-С. 33-37.
Григорьев А. Современное состояние и перспективи развития авиационньїх противорадиолокационньїх ракет стран НАТО //
Зарубеж. воєн, обозрение. - 2000. - №3. - С. 33 - 36.
Даник Ю.Г., Заславская О.Ю. Системи спутниковой связи. Аспекти развития отрасли//МоЬіІе Кагііо. -1999.-№ І.-С. 68 - 72.
Даник Ю.Г, Заславская О.Ю. Системи спутниковой связи. Основи и принципи построения, тенденции развития // МоЬіІе Радіо. -
1999.-№2.-С. 36 -43.
Даник Ю.Г, Заславская О.Ю. Системи спутниковой связи. Системи настоящего и будущего: структура, возможности,
особенности П МоЬіІе Радіо. -1999. - №3. - С. 34 - 45.
Даник Ю.Г., Ткаченко Н.Н. Аналіз застосування і перспективи використання безпілотних літальних апаратів // Збірник наукових
праць. - Харків: ХВУ. - 2001. — Випуск 4(34). - С.66-71.
Дмиїриев В., Михайлов Б. Системи наведення тактического управляемого оружия класса “воздух-поверхность” // Зарубеж. воєн,
обозрение. 1983.№1.-С. 57-63.
Егоров К. Американская управляемая ракета АОМ-158 класса “воадух-земля”//Зарубеж. воєн.обозрение.-2000.-№10.-С. 34.
Защита от оружия массового пораження / Под ред. В.В. Мясникова. - М.: Воениддат, 1989. - 398 с.
Капустин А. Разведивательньїе беспилотньїе летагельньїе аппаратьі стран НАТО // Зарубеж. воєн, обозрение. -1995.-№10-
С.23-28,№11.-С. 19-25.
Карпенко В.І., Даник Ю.Г. Супутниковий зв'язок: минуле, справжнє та перспективи //Наука і оборона -2001.-№1. -С. 38 -43.
Кобрусев С. Преимуіцества беспилогньїх авиационньїх комплексов І І Военньїй парад - 2002. - №4. - С. 20-24.
Коцдральев А. Спутниковая навигационная система НАВСТАР І І Зарубеж. воєн, обозрение. -1981- №4. - С. 23 - 28.
Корнуков А. Российская боевая авиация XXI века Направлення развития // Военньїй парад - 2001. - № 4. - С. 32 - 33.
Краснов А. Боевое применение крьілагьіх ракет воадушного базирования //Зарубеж. воєн, обозрение. -2001-№2.-С. 23-38.
Краснов А. Тактика авиации и високоточнеє оружие // Зарубеж. воєн, обозрение- 1999 - №7. - С. 27 - 31.
Кузьмин А. Изменения в концепции еоадания боевьіх БЛА // Зарубеж. воєн, обозрение. - 1999. - № 11. - С. 40 - 42.
Кузьмин А. Совершенствование стратегических БЛА-разведчиков “Глоубал Хок” // Зарубеж. воєн, обозрение. - 2000. - №2. -
С.57-58.
Кутовий О.П. Тенденції розвитку безпілотних літальних апаратів // Наука і оборона - 2000. - №4. - С. 39 - 47.
345
ЛІТЕРАТУРА
Мосапев В. Подразделение БЛА “Феникс” сухопутньк войск Великобритании // Зарубеж. воєн, обозрение. - 2000. - №8.- С. 18 -19.
Платунов В. Вертолетьі XXI века: стратегия создания, концепции, боевьіе свойства, технические облики // Военньїй парад. - 2002.
- №4.-С. 32-34.
Романенко В. Безпілотні літальні апарати: “бойова колісниця” майбутніх війн // Народна армія. 2001. №5.
Соловьев Ю.А. Системи спутниковой навигации. - М.: Зко-Трендз, 2000.
Справочник офицера противовоздушной оборони / Г.В. Зимин, С.К. Бурмистров, Б.М. Букин и др. - М.: Воениздат, 1987.-512 с.
Сгрелецкий А. Беспилотная авиация сухопутньк войск Франции // Зарубеж. воєн, обозрение. 2000. №9. - С. 24 - 28.
Теорія і техніка протидії безпілотним засобам повітряного нападу / В.І. Ткаченко, Ю.Г. Даник, Г.А. Дробаха та ін. - Харків: ХВУ,
2002.-220 с.
Яблонский Л., Воронин Е., Кашин В. Зарубежньїе военньїе программьі космической видовой разведки // Зарубеж. воєн, обозрение.
2002. №7.-С. 26-28.
ЛІТЕРАТУРА ДО РОЗДІЛУ З
Авиационная злектросвязь. Приложение 10 к конвенции о межлународной гражданской авиации. - Т.4. - Системи обзорной
радиолокации и предупреждсния столкновений. Изд. 2: ІСАО, 1998.
Азов В. Батальоньї разведки и РЗБ дивизий сухопутньк войск США // Зарубеж. воєн, обозрение. -1998. - №2. - С. 20 - 24.
Алмазов А. Американские загоризонтнью РЛС системьі 414Ь // Зарубеж. воєн, обозрение. 1989. №7. - С. 42 - 44.
Апорович А.Ф. Проектирование радиотехнических систем. - Минск.: «Вьішейшая школа». 1988,221 с.
Астаржев М.П., Ильин В. А., Марьин Н.П. Борьба с радиозлекгронньїми средствами. - М.: Воениздат, 1972. - 272 с.
Афинов В. Направлення совершенствования средств РЗП индивидуальной защитьі самолетов // Зарубеж. воєн, обозрение. -1998.
-№7. -С. 33-42;-1998. -№9. - С. 35-42.
Афинов В. Новое направление развития западньк средств РЗП индивидуальной защитьі самолетов // Зарубеж. воєн, обозрение. -
1999.-№7. - С. 37 - 39; -1999. - №8. - С. 39 - 42; -1999.-№9. - С. 34 - 38.
Афинов В. Сганции РЗП индивидуальной защитьі американских боевьк самолетов // Зарубеж. воєн, обозрение. - 1999. - №2. -
С. 34-41.
Афинов В. Тенденции развития средств РЗП авиации вооруженньк сил США на пороге XXI века // Зарубеж. воєн, обозрение. -
1998.-№6.-С. 28-35.
Бакулев П.А., Басистов Ю.А., Тугуши В.Г. Обработка сигналов с постоянньїм уровнем ложньк тревог (обзор) // Радиоелектроника
-1989, т. 32, №4, С. 4 -15. (Изв. вьісш. учеб. заведений).
Бакулев П.А., Сгепин В.М. Метода и устройства селекции движущихся обьекгов. - М.: Радио и связь, 1986. - 288 с.
Баранов Н. Перспективи развития оптических и оптико-злектронньк средств Сухопутньк войск // Военньїй парад. - 2001. - №3. -
С. 48-50.
Боков А. Проблема обнаружения летагельньк аппарагов типа “Стеле” // Зарубеж. воєн, обозрение. -1989. - №7. - С. 37 - 42.
БьїковВ.В. Зффективность радиозлекгронньк систем при оптимальном противодействии с использованием заградительньк
помех // Радиотехника. -1992. - №7/8. - С. 20 - 23.
Вакин С.А., Шустов Л.Н. Основи радиопротиводействия и радистехнической разведки. - М.: Сов. радио, 1968. - 448 с.
Вартанесян В.А. Радиозлектронная разведка. - М.: Воениздат, 1991. -254 с.
Васильєв В.И. Распознающие системи: Справочник. - К.: Наукова думка, 1983. -422 с.
ВикуловО.В., ДобьжинВД, ДрогалинВВ. и др. Современное состояние и перспективи развития авиационньк средств
радиоолекіронной борьбьі // Зарубежная радиоолекгроника. -1998. -№12. -С. З -16.
Вишин Г.М. Селекция движущихся обьекгов. М.: Воениздат, 1966.
Ворошилов В.А., Лянин И.С. Защига радиолокационньк станций от преднамеренньк помех // Зарубежная радиозлектроника. -
1990.-№5.-СЗ.
Горелик А Л., Скрипкин В.А. Метода распознавания. - М.: Вьюшая школа, 1989. - 232 с.
Давьщрв П.С., Сосновский А А., Хаймович ИА. Авиационная радислокация: Справочник - М.: Транспорт, 1984. - 224 с.
Даник Ю.Г. Фрактальное обнаружение обьекгов // Збірник наукових праць ХВУ. Випуск 4 (26). - Харків: ХВУ. -1998. - С. 31 - 34.
Даник Ю.Г., Маляров М.В., Баранов В.В., Пакшин М.Ю. Фракгальная модель подстилающей поверхности в оптическом /діапазо-
не волн//Збірник наукових праць ХВУ.- Вип 4(20), Харків: ХВУ-2002. С. 209-213.
Даник Ю.Г, Маляров М.В., Тслстая А А. Методика локализации фрактально-однородньк участков в результатах наблюдений //
Збірник наукових працьХВУ.- Вип 2 (18), Харків: ХВУ-2002.-С. 120-125.
Даник Ю.Г., Маляров М.В., Толстая А.А. Фракгальная размерность природньк структур и способи ее определения // Збірник нау-
кових праць ХНУ «Радиофизика и злектроника». - Вьш. 1, Харьков: ХНУ. - 2002. - С. 173 -178.
Даник Ю.Г., Пащенко Р.З., Кучук Г.А., Маляров М.В. Обнаружение малозаметньїх обьекгов на фоне морской поверхности фрак-
тальньїм методом // Системи обробки інформації. - Харків: НАНУ, ПАНМ, ХВУ. - 2002. - Випуск 6(22). - С. 56- 67.
Даник Ю.Г. Адаптивная фильтрация ложньїх изображений в результатах оптико-злектронной регистрации сюжетов // Вестник
СевГТУ. - Севастополь: СевГТУ. - 2000. - №27. - С. 88 - 97.
346
ЛІТЕРАТУРА
Даник Ю.Г. Вьщеление результате регистрации световьіх потоков различной интенсивности на фоне шумовьіх изображений при
наблюденииточечньїх источников излучения //Радиофизикаизлекгроника - Харьков: ИРЗ НАНУ.-1999. -Том 4. -№1С.125-128.
Даник Ю.Г. Метод високоточного измерения положений случайного изображения // Український метрологічний журнал. - 1999-
Вип.З.- С.57-60.
Даник Ю.Г. Оценка зффекгивности обнаружения обьекгов комплексами наблюддгельньїх средств с большим базовим расстояни-
ем // Радиофизика и астрономия. - 1998. - Том 3. - №4. - С. 423 - 432.
Даник Ю.Г. Фракгальньїй прогноз изменений параметров турбулентньїх сред // Інформаційно-керуючі системи на залізничному
транспорті.-1999. - №5. - С.31-34.
Даник Ю.Г, Кондрат В.В. Перспективи развития средств информационного мониторинга воздушно - космического пространства
по опьпу военньк действий последних лет П Арсенал XXI века - 2000. - №2. - С. 16 -19.
Даник Ю.Г., Сгеценко О.О., Ткаченко В.І., Карпенко В.І. Виявлення аеродинамічних об’єктів, виготовлених за технологіями зни-
ження їх помггності у різних діапазонах хвиль // Збірник наукових праць. - Харків: ХВУ.- 2001.- Випуск 7(37).-С.35-37.
Даник Ю.Г., Ткаченко Н.Н., Трикоз М.В. Комплексная модель формирования изображения обьекгов при оптико-злекгронньїх
наблюдениях в инфракрасной обпасти спектра // Авіаційно-космічна техніка і технологія: Збірник наукових праць. - Харків:
Державний аерокосмічний університет "ХАГ. - 1999. - Випуск 14. - С. 123-126.
Даник Ю.Г., Трикоз М.В., Карпенко О.В. Обнаружение малозаметньїх обьекгов оптико-злектронньїми системами // Інформацій-
но-керуючі системи на залізничному транспорті. - 2001. - №6. - С.45-47.
Демин В.П., Куприянов А.И., Сахаров А.В. Радиозлектронная разведка и радиомаскировка. - М.: Изд-во МАЙ, 1997. -156 с.
Дружинин В.В., Коигоров ДС., Конторов МД. Введение в теорию конфликга - М.: Радио и связь, 1989. - 288 с.
Дуда Р., Харт П. Распознавание образов и анализ сцен. - М.: Мир, 1976.
Захаров В.М. и др. Лцдарьі и исследование климата. - Л.: Гидрометеоиздат, 1990.
Защита от радиопомех / Под ред М.В. Максимова. - М.: Сов. радио, 1976. - 496 с.
Казаков ЕЛ. Радиолокационное распознавание космических обьекгов по поляризационньїм признакам. - Одесса Одесский инс-
тиіут управлення и менеджмент, 1999, - 230 с.
Климович Е.С. Радиопомехи зенитньїм комплексам. - М.: Воениздаг, 1973. -104 с.
Колобородов В.Г., Шустер Н. Тепловізійні системи (фізичні основи, методи проектування і контролю, застосування). - К.: НТУ
"КГП”, 1999.-340 с.
Комиссаров Ю.А., Родионов С.С. Помехоустойчивость и злектромагнитная совместимость радиозлекгронньїх средств. - Киев:
Техника, 1978. - 208 с.
Криксунов Л.З. Справочник по основам инфракрасной техники. - М.: Советское радио, 1978. - 400с.
Крьілов В.В., Никашов К.Ю. Перспективьі развития технологій систем радиозлектронной борьбьі // Зарубежная
радиозлектроника -1988. -№6. -С. 3-12.
Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - К.: КВіЦ, 2000. - 428 с.
Маргьінов В.А., Селихов Ю.И. Панорамньїе приемники и анализаторьі спектра / Под ред ГД. Заварила - М.: Сов. радио, 1980. -
352 с.
Межерис Р. Лазерное дистанционное зондирование. - М.: Мир, 1987.
Москвигин С.В., Сгрелков А.И. Теоретические основьі оптической локации. - X.: ВИРТА ПВО, 1992. - 370 с.
Небабин В.Г.Средства постановки акгивньїх шумовьіх помех ВВССША // Зарубежная радиозлектроника- 1985.- №4.-
С.71-75.
Небабин В.Г., Белоус О.И. Методьі и техника противодействия радиолокационному распознаванию // Зарубежная
радиозлектроника -1987. - №2. - С. 38 - 47.
Ольїин С. Многофункциональная оптозлекгронная система наблюдения для ВМС Израиля // Зарубеж. воєн, обозрение. - 2002. -
№6.-С. 49-50.
Ольгин С. Проблеми огтгозлекгронного противодействия (по взглядам зарубежньїх военньїх специалистов) // Зарубеж. воєн,
обозрение.-2002.-№9.- С.35 - 41.
Палий А.И. Радиозлектронная борьба (средства и способи подавлення и защитьі радиозлекгронньїх систем). - М.: Воениздаг,
1989.-350 с.
ПевцовГ.В. РазрешающаяспособностьпочастотедисперсионногоФурье-процессора // Радиотехника-1994-№7.-С. 39-43.
Певцов Г.В. Синтез алгоритмов распознавания образов, заданньїх сложньїми зталонньїми описаннями в метрике азимутов на
источники радиоизлучений // Известия вузов. Радиозлектроника - 2000. -Т.43, №4. - С. 38 - 45.
Певцов Г.В., Галкин С.А. Синтез алгоритмов селекции радиоизлучений на основе огттимальной по кригерию максимума апосте-
риорной вероятности проверки статистических сложньїх гипотез // Известия вузов. Радиозлектроника - 2001. - Т. 44, №8. - С. 30 - 37.
Петровский Г. Оптика и оборона І І Военньїй парад - 2001. - №4. -С. 24-27.
Помехоустойчивость и зффективность систем передали информации / Под ред А.ГЗюко. - М.: Радио и связь. -1985. - 272 с.
Потапов А. А., Галкина Т.В., Орлова Т.И., Хлявич ЯЛ. Метод вьщеления контуров протяженньїх детерминированньїх обьекгов в
стохастических полях // Радиотехника и злекгроника, 1991, т. 36, №11.
347
ЛІТЕРАТУРА
Погапов А.А., Герман В.А., Соколов В.М. Радиолокационное обнаружение цепи на фоне земной поверхности фракгальньїм
методом // Радиотехника, 2000, №8, С. 57 - 63.
Прзтг У.К. Цифровая обработка изображений. Т. 1,2. - М.: Мир, 1982.
Радзиевский В.Г., Сирота А. А. Базовьіе модели процесса радиотехнической разведки в ходе противодействия радиолокационньїм
средствам // Радиотехника -1992 - №1/2. - С. 24 - 31.
Радиолокационньїе характеристики летательньїх аппаратов / Под ред Л .Т. Тучкова - М.: Радио и связь, 1985. - 236 с.
Радиотехнические системні / Ю.П. Гришин, В.П. Ипатов, Ю.М. Казаринов и др.; Под ред Ю.М. Казаринова - М.: Висш.шк,
1990.-496 с.
Реконструкция изображений / Под редакцией Старка Г. - М.: Мир, 1982.
Саати Томас, Керис Кевин. Аналитическое планирование; Организация систем / Пер. с. англ. - М.: Радио и связь, 1991.- 224 с.
СаблинВ.Н., ВикуловО.В., МеркуловВ.И. Авиационньїе многопозиционньїе радиолокационньїе системи многоканального
наведення. Разведьівательно-ударньїе комплекси // Зарубежная радиозлектроника -1998. -№9. - С. З - ЗО.
Сархан А.Е., Гринберг Б.Г. Введение в теорию порядковьіх статистик / Пер. с англ. под ред. АЛ. Боярского. - М.: Статистика, 1970.
Свиридов К. Лазерно-оптические технологій как основа создания техники нового поколения // Военньїй парад. - 2001. - №6. -
С. 24-25.
Селекция и распознавание на основе локационной информации / АЛ. Горелик, ЮЛ. Барабаш, О.В. Кривошеев, С.С. Зпштейн І
Под ред АЛ. Горелика - М.: Радио и связь, 1990. - 240 с.
Сень І.В. Радіоелектронна боротьба: сучасний стан та перспектива // Військо України. -1997. - №9 - 12. - С. 12 -13.
Сколник М. Введение в технику радиолокационньїх систем. - М.: Мир, 1965. - 747 с.
Сколник М. Справочник по радиолокации в 4-х т.: Пер. с англ. / Под ред. К.Н. Трофимова - М.: Сов. радио, 1976 -1979.
Введение в технику радиолокационньїх систем. - М.: Мир, 1965. - 747 с.
Современная радиолокация / Пер. с англ. под ред. Ю.Б. Кобзарева.- М.: Сов. радио, 1969.
Современное состояние проблеми распознавания / АЛ. Горелик, И.Б. Гуревич, В.А. Скрипник / Под ред. АЛ. Горелика - М.: Ра-
дио и связь, 1985. -160 с.
Справочник офицера противовоздушной оборони / Г.В. Зимин, С.К. Бурмистров, Б.М. Букин и др. - М.: Военизддг, 1987. -512 с.
Справочник по лазерам / Под ред А. М. Прохорова В 2-х томах. Т. 2. - М.: Сов. радио, 1978. - 400 с.
Справочник по приемникам оптического излучения / В.А. Волков, В.К. Вялов, Л.Г. Гассанов и др. / Под ред Л.З. Криксунова,
Л.С. Кременчугского - К.:Техніка, 1985. -216 с.
Справочник по радиоконтролю / В. Ваккани, Ж. Мори, У. Лютер и др.; Под ред. Ж. Жоржена - Женева: МСЗ, 1995. - 442 с.
Справочник по радиозлектронньїм системам: В 2-х томах? И.А. Болошин, В.В. Бьїков., В.В. Васин и др.; Под ред. Б.Х. Кривицкого.
-М.: Знергия, 1979.
Справочник. Радиозлекгронньїе системи. Основи построения и теория /Подред Я.Д.Ширмана-М.:ЗАО“Маквис”, 1998.-
828 с.
Сгеценко О.О., Ковтуненко О.П., Цибулько І.С. Методологічні аспекти формування оперативно-стратегічних та оперативно-
тактичних вимог до перспективних систем озброєння Збройних Сил України // Наука і оборона - 2001. - №4. - С. 46 - 54.
Теоретические основи радиолокации / Под ред. Я Д. Ширмана - М.: Сов. радио. - 1970. - 560 с.
Теорія і техніка протидії безпілотним засобам повітряного нападу / В.І. Ткаченко, Ю.Г. Даник, Г.А. Дробаха та ін. - Харків: ХВУ,
2002.-220 с.
Технические средства разведки / В.И. Мухин, А. А. Хорев, М.И. Паншин и др - Под ред. В.И. Мухина - М.: РВСН, 1992. - 335 с.
Федер Е. Фрактали. - М.: Мир, 1991.
Физический знцикдрпедический словарь / Гл. ред А.М. Прохоров. Ред кал. Д.М. Алексеев, А.М. Бонч-Бруевич, А.С. Боровик-
Романов и др.— М.: Сов. знциклопедия, 1983.— 928 с., ил., 2 л. цв. ил.
Фиолентов А. Состояние и перспективи развития французских авиационньїх средств радиозлектронной борьби // Зарубеж. воєн,
обозрение. - 1999.-№10. -С. 32-39.
Фомин Я. А., Тарловский Г.Р. Сгатистическая теория распознавания образов. - М.: Радио и связь, 1986. - 264 с.
Ширман ЯД., Горшков С.А., Лещенко С.П., Бралченко ГД., Орленко В.М. Методи радиолокационного распознавания и их моде-
лирование// Зарубежная радиозлектроника Успехи современной злекгроники. - 1996. - №11. - С. З - 64.
Злектромагнитная совместимость радиозлекгронньїх средств / Под ред Н.М. Царькова - М.: Радио и связь, 1985. - 272 с.
Сотриіег Зітиіаїіоп оГ Аегіаі Таг§е( Касіаг 8саДегіп§, Кесо§піДоп, ОеГесДоп, алеї Тгаскіп^ / У.О. БЬіітоап, 8А. ОогзЬкоу, 8.Р.
ЕезЬсЬепко, У.М. Огіепко, 8.У. БесіузИеу, О.І. 8икЬагеузкіу/¥.О.8кігтап ебіїот. - Возіоп- Гопсіоп: Аііеск Иоизе, 2002. - 294 с.
Оапік У.6., Каїрепко V.!., Різаіуопок О.О., Тороіпіскіу Р.Р. МаФетагісаІ тосіеі оГ зі^паї оГієієуізіоп сНаппеі Гог орбсаі-еіесігопіс де-
Уісе//8РІЕ. -1995. - Уоіите 2647. - Р. 508 - 512.
МапдегЬгоі В.В. ТЬе Егакіаі (Зеотейу ОШаіиге-Х.У.: Егеетап, 1982.
ХаФапзоп Е.Е. Касіаг Г)езі§п Ргіпсіріез; зі§па1 ргосеззіт* апсі Фе епуігоптепі - №\у Уогк: МсСга\у-Ні11 Воок Со, 1969. - 626 р.
КоЬІіп^Н. КасіагСЕАК ФгезЬо1сііп§ іп СІиДегапсі Миіііріе іаг^еі зіШаііопз//1ЕЕЕІгапз.: УАЕ8-19.- 1983.-№4.-р.601 -621.
8ТАХАС 4193 ЕЬ (Есіігіоп 2) - ТесИпісаІ сНагасІегізйсз оГ ІЕЕ Мк-ХА апсі Мк-ХІІ іпіегго§аІогз апсі йапзропсіега. - РаП І: Сепегаї сіе-
зсгірЬоп оГ Фе зузТет. - Вгиззеіез: Мііііагу А§епсу Еог 8іапсіагс1іхагіоп, 1990.
Уап Вгипі Е.В. Аррііесі ЕСМ. - Е\¥ Еп£Іпеегіп§, 1978.-973 р.
348
ЛІТЕРАТУРА
ЛІТЕРАТУРА ДО РОЗДІЛУ 4
Воронин А.А., Свистунов Д.Ю. Метод вьібора точек стояння станций конгроля воздушного пространства с использованием циф-
ровьіх карт местности // Системи обробки інформації’.. - X: НАНУ, ПАНМ, ХВУ. - 2002. Вип. 6(22). - С. 174 -180.
Даник Ю.Г, Карпенко В.І., Сгеценко О.О. Погляди на формування інформаційного поля для розвідки повітряного простору у
заданих напрямках// Наука і оборона. -2001. -№3. -С. 11 -14.
Даник Ю.Г., Кондрат В.В. Перспективьі развития средств информационного монигоринга воздушно-космического пространства
по опьпу военньк действий последних лет // Арсенал XXI века. - 2000 .-№2. - С. 16 -19.
Даник Ю.Г., Топсльницький П.П., Кулагин К.К. Особенности совместной обработки информации от оптических и радиотехниче-
ских средств Н Сб. научньїх трудов "Обработка информации". - Харьков: НАНУ, ПАНИ, ХВУ. -1996 - С. 5 - 9.
Камалтьінов Г.Г., Колодей О.П., Свистунов ДЮ. Автоматизированное вьіявление участков рельефа местности, пригодньк для ра-
змещения позиций радиолокационньк средств РТВ // Збірник науковх праць. - X.: ХВУ. - 2002. Вип. 1 (39), - С. 95 - 96.
Корниенко Л.Г. Теория и техника излучающих и направляющих систем. - X.. ХВУ, 1994. - 626 с.
Маляренко О.С. Системи вторинної радіолокації для управління повітряним рухом і радіолокаційного розпізнавання. Інформацій-
ний огляд. - Харків: ХВУ, 2002,31 с.
Методичні рекомендації щодо проведення тренувань з черговими бойовими обслугами радіотехнічних підрозділів (КП рт частин).
К.:МО.-2001.
Неупокоев Ф.К. Противовоздушньтй бой. -М.: Воениздат, 1989.
Справочник офицера противовоздушной обороньї / Г.В. Зимин, С.К. Бурмистров, Б.М. Букин и др. - М.: Воениздат, 1987.
Теорія і техніка протидії’ безпілотним засобам повітряного нападу / В.І. Ткаченко, Ю.Г. Даник, ГА. Дробаха та ін. - Харків: ХВУ,
2002.-220 с.
Указания РТВ ПВО. Вьібор позиции радиотехнического подразделения. - М.: Воєннеє изддгельегво МО СССР 1982. - 80 с.
Черньтй Ф.Б., Бахвалов Б.Н. Методе учета влияния подстилающей* поверхности на радиолокацию обьекгов: Конспект лекций. -
X: ВИРТА ПВО, 1975.-88 с.
ЛІТЕРАТУРА ДО РОЗДІЛУ 5
«Аигей-2500» - новое слово российского ВПК // Военно-техническое сотрудничество. - 1998. - №23. - С. 46 - 48.
«Триумф» вьіходиг налинию огня // Военньїй парад. -1999. - №3. - С. 12 -13.
«Фаворит» оборонительньк систем // Военньїй парад. -1997. - №6. - С.88 -91.
Ангельский РД., Шестов И.В. Огечественньїе зенитньїе ракетньїе комплексьі: Иллюстрированньїй справочник / Р.Д Ангельский-
М.: ООО «Издательство АСТ». - 2002. - 256 с.
Бабич В. Действительньїе результате войньї в Персидском заливе // Зарубеж. воєн, обозрение. - 1996. - № 9. - С. ЗО - 34.
Батехин С. Ракетньїй комплекс и РЛС "Оборонительньк систем" // Военньїй парад. - 2002. - №2. - С. 50.
Бурцев В.В., Кузь М.Я. Основи побудови багатоканальних зенітних ракетних систем середньої дальності: Навчальний посібник-
Харків: ХВУ, 2002,87 с.
Василин НЛ., Гуринович АЛ. Зенитньїе ракетньїе комплексе / Мн: ООО «Попури», 2002 - 464с.
Волковский Н. Л. «Знциклопедия современного оружия и боевой техники» Т. 2. - С.-Питербурп Полигон, АСТ, 1997. - 584 с.
Голоятенко В.Я. Основи построения радиозлектронньїх устройств зенитньк ракетньк систем. - Харьков: ХВУ, 1997. - 279 с.
Даник Ю.Г, Кондрат В.В. Перспективе развития средств информационного монигоринга воздушно-космического пространства
по опьпу военньк действий последних лет // Арсенал XXI века. - 2000. - №2. - С. 16 - 19.
Демцдов В.П., Кутьіев Н.Ш. Управление зенитньїми ракетами. - Изд. 2-е перераб. и доп. - М.: Воениздат, 1991.
Дьяков В.В., Дейнега О.В., Загорка О.М. Зенітний ракетний комплекс для протиракетної оборони об’єктів і військ: універсальний
чи спеціалізований? // Наука і оборона -1999. - №2. - С. 44 - 50.
Ефремов В. Многоканальная мобильная зенитно-ракетная система С-ЗООВ // Воєн, парад. - 1996. - Янв. - февр. - С. 80- 82.
Ефремов В., Свирин Ю." Антей-2500" - нет равньк // Воєн, парад. - 1998. - Янв.-февр. - С. 34- 36.
Закорюкин В.М., Зулий Г.В. Основи построения зенитньїх ракетньк комплексов и зенитньк артиллерийских комплексов: Учеб-
ное пособие / Под ред Г.В. Зулия - Харьков: ХВУ. -1996 - 356 с.
Зенитная ракетная система С-300 / С.М. Ганин, А.В. Карпенко, В.И. Жизневский, Г.В. Федотов // Невский бастион. - 1997. -
Вьт.З.-С. 18-62.
Зенитньїе ракетьі поражают наземнеє цели // НВО. -1999. -3-9 сеиг.
Зенитньїе ракети против баллистических // Вестник ПВО. -1991, -№10. - С. 62 - 65
Испьпания российского ЗРК дальнего действия С-400 «Триумф» // Иностр. печать. Сер. Вооруженньїе сильї и военно-
промьішленньїйпотенциал.-1999.- №10.-С. 17-18.
349
ЛІТЕРАТУРА
Ковтуненко А.П., Шершнев Н.А. Основи теории гюстроения и моделирования функционирования сложньїх систем вооружения
(системні зенитного управляемого ракетного оружия). -Харьков: ВИРТА, 1992.-233 с.
Космонавтика: Знциклопедия / Гл. ред. В.П. Глушко; Редколлегия: В.П. Бармин, КД Бушуев, В.С. Верешетин и др.—М.: Сов. зн-
циклопедия, 1985. - 528 с.
Многоканальная мобильная ЗРС С-300ПМУ //ТИ ЦАГИ. Сер. Авиационная и ракетная техника -1994. - №2-3. - С. 35 - 36.
Мьюякин В. Развитие ЗРК сухопуїньїх войск зарубежньїх войск // Зарубеж. воєн, обозрение. -1997. - № 1. - С. 26- 28.
Неупокоев Ф. К. Сгрельба зенитньїми ракетами - 3-є изд. перераб. и доп. - М.: Воениздаг, 1991.- 343 с.
Неупокоев Ф.К. Принципьі воєнного искусства и тактика ЗРВ // Воєнная мькль. 1990. №3. - С. 32 - 37.
Неупокоев Ф.К. Прстивовоздушньїй бой. - М.: Воениздаг, 1989.
Новьіе ракетні для ЗРК С-300 // Иностр.печать. Сер. Вооруженньїе сильї и военно-промьішленньїй потенциал. -1999. -№4, -С. 19-20.
О модернизации военной техники в стравах СНГ // Иностр.печать. Сер. Вооруженньїе сильї и военно-промьішленньїй потенциал.
-1999.-№11,-С. 14-21.
Озброєння військ Протиповітряної оборони Сухопутних військ Збройних Сил України: Порадник / М.П. Деменко, В.В. Кондрат,
ОА. Наконечний та ін.- Харків, ХВУ, 2003. - 180 с.
Пересада С. А. «Зенитньїе ракетньїе комплексьі» М.: Воениздаг, 1973. - 271 с.
Пеіухов С. И., Сгеланов А. Н. Зффективность ракетних средств ПВО. - М.: Воениздаг, 1976. -150 с.
Пеіухов С., Шестов И., Ангельский Р. Зенитньїе ракетньїе комплекси Противовоздушной оборони сухопуїньїх войск //Техника и
вооружение. -1999. - № 5-6. -С.І- 80.
Пигин Е., Кауфман Г. ЗРК 'Бук-М1-2". Нет равньїх по возможностям боевого применения // Воєн, парад. -1998. - Сент.-окг. -
С. 70-71.
Разрабстка ЗРК «Триумф»//Иностр. печать.Сер. Вооруженньїе сильї и военно-промьішленньїй потенциал.-1999.- №4.-
С. 20-21.
Рудов В. Американский противоракетньїй комплекс ТНААО // Зарубеж. воєн, обозрение. -1998. - № 9. - С. 21 - 25.
С-300 пролив американских «Пзтриотов» // Военно-техническое сотрудничество. -1998. - №31. - С. 5 - 6.
Современньїе российские средства ПВО / Воєн, акад. Республики Беларусь. - Минск, 1996. -140 с.
Справочник офицера противовоздушной оборони / Г.В. Зимин, С.К. Бурмистров, Б.М. Букин и др. - М.: Воениздаг, 1987. -512 с.
Сгрельба зенитной аргиллерии: В 2 кн. / Под ред А.Ф. Горохова - М.: Военное издагельство МО СССР, 1958.
Такгико-технічні характеристики ЗРК ППО // Вартові неба. 1999. -№№ 121-123 (8969 - 8971). -С.8.
Такгическая система ПРО С-300ПМУ-1 // Иностр.печать. Сер. Вооруженньїе сильї и военно-промьішленньїй потенциал. -1994. -
№7-029-32.
Терещенко Ю.М., Лапицький С.В., Випирайло В.І. Зенітний артилерійський комплекс: перспективи розвитку // Наука і оборона. -
2001.-№3.-С.64 - 66.
Универсальная зенитная ракетная система С-300В // Техника и вооружение. -1999. -№ 5-6, -С. 15-27.
ФилиновВ. Создание средств борьби с такгическимибаллистическимиракетами//Зарубеж. воєн, обозрение- 1991- № 12-
С. 19- 24.
Шипунов А., Образумов В., Зюзьков И. Применение зенитного ракетно-пушечного комплекса "Панцирь-СГ в группировках
ПВО // Военньїй парад. - 2001. - №4. - С. 96 -100.
Шипунов А., Образумов В., Слугин В., Зюзьков И. Зенитньїй ракетний комплекс «Панцирь-СІ» с оптико-елекгронной системой
управлення // Военньїй парад. - 2001. - №6. - С. 38 - 41.
Шунков В.Н. Ракетное оружие / Мн: ООО «Попури», 2001. - 528 с.
ЛІТЕРАТУРА ДО РОЗДІЛУ 6
Алексеев А. Анализ применения авиации США в ходе операции "Решительная сила" // Зарубеж. воєн, обозрение. - 2001. - №1. -
С.20 - 26.
Булакевич Е. Демонстрация авиационной мощи // Военньїй парад. - 2001. - №6. - С. 52 - 53.
Ващихин И. Взглядьі США наразвитие ВВС в начале XXI века// Зарубеж. воєн, обозрение. -1998. - № 1. - С. 17 - 25.
Краснов А., Бессарабов Н. Взгляди на ведение воздушного боя обьічньїх истребителей с самолетами «Сгелт» // Зарубеж. воєн,
обозрение. - 2002. №7. - С. 26- 28.
Краснов А.Б. Авиация в югославском конфликге // Воєнная мисль -1999. №5. - С. 71 - 74.
Краснов А.Б. О повьішении живучести авиации в воздухе // Воєнная мькль. -1990. - №3 - С. 38 - 45.
Мигунов В.Ф., Горячев А.А. О нексторьіх проблемах контроля за соблюдением порадка использования воздушного пространства
//Воєнная мькль. 1997.№3.-С. 50-53.
Мутних В.А., Ватан М.І. Бойові авіаційні комплекси ВПС. - К.: НАО України, 2002.
Положення з організації об'єктивного контролю польотів в авіації ЗС України. (Введено в дію наказом Заступника МО України-
Комацдувача ВПС України від 18.11.92. № 58).
350
ЛІТЕРАТУРА
Положення про запобігання авіаційних подій у Військово-повітряних силах України (ПЗАП - 2000) (Введено в дію наказом Засту-
пника Міністра оборони України - Командувача ВПС України від 29.10.99 № 210).
Положення про органи безпеки польотів в ВПС України. (Введено в дію наказом Заступника МО України - Командувача ВПС
України від 31.12.99. № 274).
Такгико-технічні характеристики бойових літаків ВПС //Вартові неба.-1999. №№ 121-123(8969 - 8971).- С. 8.
Федосеев Е. Воєнная авиация в началеXXI века//Миравионики.-1999.-№6.-С. 6-8.
Фінадорін Г.О., Кудрицький В Д, Самков О.В. Можливі шляхи модернізації’ бойової авіаційної техніки України // Наука і оборона.
-2001. - №4.-С. 54-58.
ЛІТЕРАТУРА ДО РОЗДІЛУ 7
Барвиненко В.В.,.Евменчик Е.Г. О совершенствовании подготовки органов управления войсками (силами) ПВО // Воєнная мькль.
-1997.-№2.-С. 50-53.
Барьінькин В.М. Проблеми развития системи управления на современном зтапе // Воєнная мисль. -1996. -№4. - С. 29 - 32.
Военньїй знциклопедический словарь / Пред гл. ред. комиссии С.Ф. Ахромеев. М.: Воениздат, 1986.863 с.
Духов Б.И. Войсковая ПВО: проблеми реформирования // Воєнная мисль. -1998. - №6. - С. 23 -26.
Кежаев В.А. Совершенствование управления войсками: аспект информатизации // Воєнная мисль. -1996. №4. - С. 42 - 45.
Комов С.А. О способах и формах ведення информационной борьбьі // Воєнная мисль. -1997. №4. - С. 18 - 22.
Котлер Ф. Маркетинг менеджмент. - СПб: Пигер Ком, 1998. - 896 с.
КругловВ.В, СосновскийМ.Е. Отенденциях развития современной вооруженной борьбьі // Воєнная мисль.-1998.- №2.-
С. 39 -43.
Мескон М.Х., Альберт М., Хедоури Ф. Основи менеджмент: Пер. с англ. М.: Дело, 1992. 702 с.
Основи теории управления войсками / Под ред. П.К. Алтухова. - М: Военное издательство, 1984.
Полікашин В.С., Явтушенко А.М. Основи управління та прийняття рішень у військовій справі. - X.: ХВУ, 2001.-332 с.
Руснак І.С., Телелим В.М. Розвиток форм і способів ведення інформаційної боротьби на сучасному етапі // Наука і оборона. - 2000.
-№2.-С. 18-23
Самохвалов В.В., Плотников В.А. Проблеми использования нових информационньїх технологий в управлений войсками //
Воєнная мькль-1996. №4. - С. 39 - 41.
Советская воєнная знциклопедия: [в 8 томах] / Пред Гл. ред комиссии М.А. Моисеев. - 2-е изд. - М.: Воениздат, 1990.
Справочник офицера противовоздушной оборони / Г.В. Зимин, С.К. Бурмистров, Б.М. Букин и др. - М.: Воениздат, 1987. -512 с.
Теорія і техніка протидії безпілотним засобам повітряного нападу / В.І. Ткаченко, Ю.Г. Даник, Г.А. Дробаха та ін. - Харків: ХВУ,
2002.-220 с.
Управление: искусство, наука, практика: Учеб.пособие / С.Н. Князев.- Мн.: Армита- Маркетинг, Менеджмент, 2002. -512 с.
Управление войсками ПВО СВ: Учебник. - К.: ВА ПВО, 1990.-437 с.
ЛІТЕРАТУРА ДО РОЗДІЛУ 8
Кашицьін Е.Н., Харигонов В. А. К вопросу о взаимодействии соединений и мастей Сухопутньк войск с авиацией в общевойсковом
бою//Воєнная мисль.- 1996.№4-С. 21-24.
Колибаба В.Г. О природе взаимодействия в вооруженной борьбе // Воєнная мькль. 1992. №6. - С. 28 - 34.
Колибаба В.Г. О содержании взаимодействия в операции и бою // Воєнная мисль. 1993. №3. - С. 39 - 46.
Колибаба В.Г. О цикличности взаимодействия в операции (бою) // Воєнная мисль. 1994. - №9. - С. 16 - 20.
Неупокоев Ф.К. Противовоздушньїй бой. - М.: Воениздат, 1989.
ЛІТЕРАТУРА ДО РОЗДІЛУ 9
Воєнная топография / А. А. Псарев, А.Н. Коваленко, А.М. Куприн, Б.И. Пирнак. - М.: Воениздат, 1986. - 384с.
Ісенко Г.Г., Химченко С.М. Настанова методичних рекомендацій інженерної служби з’єднань, частин Військ ППО. - Одеса: Оде-
ський військовий інститут, 2000. -126 с.
Защита от оружия массового пораження / Под ред. В.В. Мясникова-М.: Воениздат, 1989. - 398 с.
Керівництво з радіолокаційного забезпечення польотів авіації України.
Мураховский В. Охрана и оборона обьекгов // Вестник ПВО, 1990, № 1, С.25-28.
Положення про запобігання авіаційних подій у Військово-повітряних силах України (ПЗАП—2000) (Введено в дію наказом Засту-
пника Міністра оборони України-Командувача ВПС України 29.10.99 р. № 210).
Положення про органи безпеки польотів в ВПС України. (Введено в дію наказом Заступника МО України-Командувача ВПС
України № 274 від 31.12.99 р.).
351
ЛІТЕРАТУРА
ПомбрикИД, Шевченко Н.А. Карта офицера-М.: Военщдаг, 1985.- 176с.
Порядок проведення авіаційних операцій (робіт) з пошуку і рятування у разі авіаційної події в районі відповідальності України за
пошук і рятування. (Введено в дію сумісним наказом МНС, МВС, МО, Мін.транспорлу України № 333/863/467/708 від 15.12.2000 р.).
Справочник войскового врача / под ред Ф.И. Комарова. - М.: Воениздаг, 1983.
Шмаль С.Г. Військова топографія. - К.: Військ, інст. КНУ, 1998. - 232 с.
ЛІТЕРАТУРА ДО РОЗДІЛУ 10
Безпека життєдіяльності: Навчальний посібник для студентів вищих навчальних закладів освіти України І - IV акредитації / За ред
Е.П. Желібо, В.М. Пічі. -Львів: Піча Ю.В., К.: “Каравела”, Львів:”Новий світ-2000”, 2002.-328 с.
Інструкція по виконанню заходів забезпечення безпеки при проведенні бойових стрільб на полігоні бойового застосування ЗРВ
Військ ППО.
Інструкція щодо забезпечення заходів безпеки при виконанні бойових стрільб з’єднань та частин Військ Протиповітряної оборони
Збройних Сил України, військ Протиповітряної оборони Сухопутних військ Збройних Сил України.
Статути Збройних Сил України.
Сгеценко О.О. Повсякденна діяльність військ Частина II. Техніка безпеки. Навчальний посібник.
Тимчасова Інструкція щодо виконання бойових стрільб зенітними ракетними військами Військ Протиповітряної оборони України.
352
ДОДАТКИ
ДОДАТКИ
Додаток А
Відповідність довжини хвиль частотам коливань радіохвиль
Довжина хвилі, см 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 2 3 4
Частота, ГГ ц 300 150 100 75 60 50 42,9 37,5 33,3 зо 15 10 7,5
Довжина хвилі, см 5 6 7 8 9 10 20 зо 40 50 60 70 80
Частота, ГГц 6 5 4,29 3,75 3,33 3 1,5 1 0,75 0,6 0,5 0,4286 0,375
Довжина хвилі, см 90 100 1 000 2000 3000 4000 5000 6 000
Частота, ГГц 0,333 0,3 0,03 0,015 0,01 0,0075 0,006 0,005
Додаток Б
Переведення відношення потужностей (Р2/Р1) і напруг (ІІг/Пі) з децибел на безрозмірні одиниці
А,дБ ХА = Р2/Р1 хА=и2/иІ
0 1,000000 1,000000
0,1 1,023293 1,011579
0,2 1,047129 1,023293
о,3 1,071519 1,035142
0,4 1,096478 1,047129
0,5 1,122018 1,059254
0,6 1,148154 1,071519
0,7 1,174898 1,083927
0,8 1,202264 1,096478
0,9 1,230269 1,109175
1,0 1,258925 1,122018
2,0 1,584893 1,258925
3,0 1,995262 1,412538
4,0 2,511886 1,584893
5,0 3,162278 1,778279
6,0 3,981072 1,995262
7,0 5,011872 2,238721
8,0 6,309573 2,511886
9,0 7,943282 2,818383
10 10і 3,162278
20 102 10,000000
зо 103 31,622780
40 і о4 і о2
50 105 316,2278
60 106 і о3
70 107 3162,278
80 10’ 104
90 109 31622,78
100 10'° ю5
Примітка: А = 10 (Р2/Рі) = 20 (Ог/и,); А + В = ХА*ХВ.
Приклад: 5 + 0,5 = 5,5 дБ = 3,162278*1,122018 = 3,548133 (за потужністю); 5 + 0,5 = 5,5 дБ = 1,778279*1,059254 =
1,883649 (за напругою).
353
ДОДАТКИ
Додаток В
Умовні позначення у закордонній радіоелектронній апаратурі
Умовні позначення радіоелектронних засобів збройних сил США
Радіоелектронне обладнання, як правило, позначається з п’яти букв і цифрами, наприклад, АМ/8КГ-23.
Перші дві букви (АК - абревіатура слів Агту-№уу) позначають належність до видів збройних сил США, число
- номер моделі. Значення трьох букв, що стоять після косої риски, наведені у табл. В.І.
Таблиця В.І.
Умовні позначення радіоелектронного озброєння
Бук- ва Перша буква - місце встановлення або спосіб транспортування Друга буква - вид обладнання Третя буква - призначення
А Пілотовані літаки, вертольоти Інфрачервоне Допоміжне
В Підводні човни і апарати - Бомбардування
С Транспортується по повітрю Ущільнення каналів зв’язку Зв’язок
0 Безпілотні носії Дозиметричне Пеленгування або розвідка
Е — Атомне Створення пасивних завад
Р Стаціонарні споруди Фотографічне —
6 Різні наземні об’єкти Телеграфне (телетайпне) Управління зброєю
Н — — Запис, відтворення
І - Переговорне (гучномовного зв’язку) -
3 — Електромеханічне -
К Амфібійні засоби Телеметричне Обчислення
Ь — Радіоелектронної боротьби Управління прожекторами
М Причепи, наземні засоби, що транспортуються Метрологічне Обслуговування, перевірка
N — Акустичне Навігація
Р Переносна (ранцева або портативна) апаратура Радіолокаційне Відтворення
- Гідроакустичне Спеціальне або багатоцільове
к - Радіозв’язне Приймання
8 Надводні кораблі Спеціальне або комбіноване Виявлення, визначення дальності і напрямку
Т Транспортування по землі Телефонне (дротяне) Передавання
и Рухомі засоби і нерухомі об’єкти - -
V Рухомі наземні засоби Візуального спостереження і світлового зв’язку -
XV Надводні кораблі, підводні човни Відносяться до озброєння і військової техніки Управління
X — Факсимільне або телевізійне Розпізнавання
¥ - Обробки даних -
Радіоелектронний засіб АМ/8КТ-23 є корабельним (8) радіозв’язним (К) передавачем (Т) моделі 23.
За номером моделі може бути додаткове позначення: (.) - загальне позначення апаратури, що має ряд
модифікацій; А - перша модифікація; В - чергова модифікація; Т - для навчальних цілей; (V) - є варіанти складу
апаратури; X - змінено живлення (напруга, частота, фаза); У - змінена питома потужність; (ХТЧ-1) - дослідницька.
Умовні позначення діапазону частот
Спектр частот від 0 до 100 ГГц розподілений на 13 діапазонів, кожний з яких має буквене позначення (табл. В.2).
Таблиця В.2.
Умовні позначення діапазонів частот, що використовуються у військовій радіоелектронній апаратурі США
Позначення Діапазон частот, ГГц Діапазон довжини хвиль, см
А 0,1 - 0,25 300- 120
В 0,25 - 0,5 120-60
С 0,5- 1,0 60-30
0 1,0-2,0 30-15
Е 2,0-3,0 15-10
Е 3,0 - 4,0 10-7,5
0 4,0 - 6,0 7,5-5
Н 6,0 - 8,0 5-3,75
354
ДОДАТКИ
Закінчення табл. В.2.
Позначення Діапазон частот, ГГц Діапазон довжини хвиль, см
І 8,0-10 3,75-3
1 10-20 3-1,5
К 20-40 1,5-0,75
Ь 40-60 0,75 - 0,5
м 60-100 0,5 - 0,3
Умовні позначення видів випромінювання
Позначення видів випромінювання складається з двох букв і цифри, що розмішується між ними.
Перша буква позначає вид модуляції основної робочої (несучої) частоти (X - немодульована несуча частота).
Випромінювання основної несучої частоти, що модульована за амплітудою (у тому числі, коли піднесуча
частота модульована за фазою): А - дві бокові смуги; Н - одна бокова смуга з повною несучою частотою; К - одна
бокова смуга з слабким або змінним рівнем несучої частоти; З - одна бокова смуга з придушеною несучою
частотою; В - незалежна бокова смуга; С - залишкова бокова смуга.
Випромінювання основної несучої частоти, що модульована за частотою (фазою): Р - частотна модуляція;
6 - фазова модуляція; О - основна несуча частота, модульована за амплітудою і частотою одночасно або у
встановленій послідовності.
Випромінювання послідовності імпульсів: Р - немодульовані; К - модульовані за амплітудою; Ь - модульовані за
шириною (тривалістю); М - модульовані за положенням (фазою); 9 - несуча частота, модульована за частотою у
період слідування імпульсу; V - модульовані комбінацією з вище перерахованих способів або будь-яким іншим;
XV - основна несуча частота модульована одночасно або у встановленій послідовності комбінацією з двох або
більше видів модуляції (амплітудної, частотної, імпульсної); X - модульовані способом, що відрізняються від
перерахованих (вид модуляції не встановлений).
Цифра позначає характер сигналу, що модулює основну несучу частоту: 0 - немодульований; 1 - один канал для
передачі інформації у цифровій формі без використання піднесучої частоти, що модулюється; 2 - один канап для
передачі інформації у цифровій формі з використання піднесучої частоти, що модулюється; 3 - один канал для
передачі інформації в аналоговій формі; 7 - два або більше каналів для передачі інформації у цифровій формі; 8 -
два або більше каналів для передачі інформації в аналоговій формі; 9 - канали з ущільненням для передачі
інформації у цифровій або аналоговій формі; X - характер сигналу, що модулює, не встановлений.
Друга буква позначає вид інформації, яка буде передаватись: N - інформація не передається; А - телеграфія
(приймання на слух); В - букводрукування; С - факсиміле (фототелеграф); О - передача даних, телеметрія,
телекоманди; Е - телефонія; XV - комбінація будь-яких видів з вищеперерахованих; X - вид інформації не
встановлений.
Наприклад: А2А позначає: дві бокові смуги (А), один канал для передачі у цифровій формі з використанням
піднесучої частоти, що модулює, (2), телеграфія (А)Ж; В8Е позначає: незалежна бокова смуга (В), два і більше
каналів для передачі інформації в аналоговій формі (8), телефонія (Е); РЗС позначає: частотна модуляція (Г), один
канал для передачі інформації в аналоговій формі (3), фототелеграф (С).
Позначення ширини смуги частот.
Позначається трьома цифрами (вказують величину ширини смуги) і однією буквою (одиницею її вимірювання).
Найбільшим трьохзначним числом, яким можна представити величину ширини смуги частот у вибраній одиниці
вимірювання є 999. Якщо вона буде більше, то величину смуги записують меншим трьохзначним числом, але у
наступній більш великій одиниці вимірювання (наприклад, 2481 кГц = 2,48 МГц).
Для різних одиниць вимірювання встановлені наступні числові межі запису величини ширини смуги частот і їх
буквені позначення: 0,001 - 999 Гц (міжнародне Нх, умовне Н); 1 - 999 кГц (кНх - К); 1 - 999 МГц (МНх - М);
1 - 999 ГГц (СНх - С).
При запису величини ширини смуги одиниця вимірювання, що позначається буквою Н, К, М або 6, ставиться на
місце коми у десятковому дробі. У табл. В.З наведені старе і нове позначення ширини смуги частот.
Таблиця В.З
Старе і нове позначення ширини смуги частот
Старе позначення Нове позначення
0,4 Гц Н400
45,3 Гц 45НЗ
300 Гц 300Н
1,5 кГц 1К50
2 кГц 2К00
2кГц 2К00
384 кГц 384К
2,6 МГц 2М60
32 МГц 32М0
645 МГц 645М
1 ГГц 1С00
355
ДОДАТКИ
Додаток Г
Позначення закордонної військової авіаційної техніки
В Сполучених Штатах Америки існують дві єдині для всіх видів збройних сил системи буквено-цифрових
позначень авіаційної і ракетної техніки: одна - для літаків і вертольотів, друга - для ракет і безпілотних літальних
апаратів. Кожен зразок позначається за схемою: клас (основне призначення) - типовий номер (місце у хронологічній
послідовності створення того або іншого зразка даного призначення) - варіант або модифікація. Крім того,
більшість з них отримують ще і найменування, що відповідає назвам птахів, звірів, природних явищ і т.ін.
(наприклад, “Ігл” - орел, “Хорнет” - шершень, “Фантом” - привиддя, ‘Телексі” - галактика, “Томкет” - кіт).
Система позначення літаків і вертольотів
Клас або основне призначення ЛА позначається однією великою літерою англійського алфавіту (табл. Г.1).
Таблиця Г.1
Позначення літаків і вертольотів США
Буква Клас (призначення літального апарату)
А Штурмовик
В Бомбардувальник
С Військово-транспортний
Е Літак (вертольот), що обладнаний спеціальною електронною апаратурою (літак ДРЛВ і У, повітряний КП)
Р Винищувач
Н Вертольот
К Заправник
0 Спостереження і цілевказання, корегування
р Базовий патрульний
к Розвідувальний
8 Протичовновий
Т Учбово-тренувальний
и Загального призначення (багатоцільовий)
V Літак з вертикальним зльотом або скороченим зльотом і посадкою
X Дослідницький
Таблиця Г.2
Позначення перших букв модифікованих літаків
Буква Клас (призначення літального апарата)
А Ударний, пристосований для дій по наземних цілях
С Військово-транспортний, транспортно-десантний
0 Носій безпілотних літальних апаратів
Е Обладнаний спеціальною електронною апаратурою (радіоелектронної розвідки, РЕБ)
Н Пошуково-рятувальний
К Заправник
ь Арктичний (пристосований для дій в умовах Арктики)
м Літак для тралення мін (обладнаний устаткуванням для тралення морських мін та їх знищення)
0 Спостереження і цілевказання
р Базовий патрульний
Безпілотний
к Розвідувальний
8 Протичовновий (у ВПС - стратегічний)
Т Учбово-бойовий, учбово-тренувальний (може позначати і тактичний)
И Загального або допоміжного призначення
V Штабний
Метеорологічний (метеорозвідки)
Іноді додаткові букви вказують, на якій стадії знаходиться створення літального апарата: О - польоти на апараті
заборонені; 1 - літак (вертольот) проходить тимчасові спеціальні випробування; N - постійні спеціальні
випробування; X - дослідницький зразок; ¥ - досвіднийзразок; X - що планується до розробки.
Наприклад, ¥С-14 - досвідний зразок військово-транспортного літака.
Типовий номер складається з однієї, двох або трьох цифр (В-2, А-10, Р-117). Він надається літаку і вертольоту
під час розробки. Модифікацію або варіант характеризує, як правило, одна буква, що ставиться за типовим номером.
Наприклад:
Р-15А “Ігл” (Р- винищувач, 15 - типовий номер, А - модифікація, “Ігл” - найменування);
356
ДОДАТКИ
СН-470 “Чінук” (Н - вертольот, С - транспортно-десантний, 47 - типовий номер, О - модифікація, “Чінук” -
найменування);
Р-ЗС “Оріон” (Р - базовий патрульний літак, 3 - типовий номер, С - модифікація, “Оріон” - найменування).
Система позначення ракет і безпілотних літальних апаратів.
Позначення кожного зразка складається з трьох-чотирьох великих літер англійського алфавіту, типового номера і модифікації.
Кожна буква вказує при читанні справа наліво: тип зразка, його призначення, спосіб пуску або взльолу, стан розробки.
Тип зразка: М - керована ракета або БПЛА; N - дослідницька ракета; Я - некерована ракета.
Призначення: О - оманна ціль; Е - зразок зі спеціальною електронною апаратурою; 6- для поразки наземних
цілей; І - для дії по повітряних цілях; 9 - безпілотний літальний апарат; Т - для тренування у стрільбі або запуску;
V або І) - для поразки підводних цілей; XV - метеорологічні.
Спосіб пуску або зльоту: А - у повітрі (з літака або вертольота); В - з різних носіїв; С - з контейнера; Е -
індивідуальний пуск; О - зліт із злітно-посадкової смуги; Н - з положення базування у шахті; Ь - старт із шахти; М
- з наземної мобільної пускової установки; Р - з незахищеної пускової установки; К. - з корабельної пускової
установки; 8 або ІЗ - з під води.
Стан розробки: 1 - проходить тимчасові спеціальні випробування; N - постійні спеціальні випробування;
X - дослідницький зразок; ¥ - досвідний зразок; X - що планується до розробки.
Наприклад: АІМ-9Е “Сайдвіндер” (М - керована ракета, І - для поразки повітряних цілей, А - запуск з повітря, 9
-типовий номер, Ь - модифікація, “Сайдвіндер” - найменування);
ІЗСМ-93А “Трайдент” (М - керована ракета, 6 - для поразки наземних цілей, І) - запуск з-під води, 93 - типовий
номер, А - модифікація, “Трайдент” - найменування).
У Великобританії позначення літаків і вертольотів складається з найменування, буквеного позначення класу
літального апарата або його призначення і модифікації.
Найменування відповідають назвам птахів, звірів, природних явищ і т.ін. (наприклад, “Харріер” - лунь,
“Лінкс” - рись, “Скаут” - розвідник, “Хок” - яструб.
Клас або призначення літака (вертольота) позначається великими літерами англійського алфавіту (табл. Г.З).
Модифікації літаків і вертольотів позначаються цифрами, а іноді цифрами і великими літерами англійського
алфавіту.
Таблиця Г.З
Позначення літаків і вертольотів Великобританії
Буква Клас (призначення літального апарата)
АЕ\У Літак (вертольот) дальнього радіолокаційного виявлення і управління
АН Вертольот армійської авіації
АЬ Літак (вертольот) зв’язку
А8 Протичовновий
В Бомбардувальник
В (І) Бомбардувальник, що призначений для виконання завдань з ізоляції району бойових дій
с Військово-транспортний літак
сс Літак (вертольот) для організації радіозв’язку, ретрансляції команд і т.ін., що створений на базі військово-транспортного
о Безпілотний літальний аппарат
Е Літак (вертольот), що обладнаний спеціальною електронною апаратурою
Е Винищувач, винищувач-перехоплювач
ЕСА (ЕС) Тактичний винищувач, винищувач-бомбардувальник
ЕСК Багатоцільовий тактичний винищувач, який спроможний наносити удари по наземних цілях і вести розвідку
ЕК Літак-розвідник, який створений на базі винищувача
ЕК8 Літак-розвідник, який спроможний наносити удари по наземних цілях
СК Нанесення ударів по наземних цілях і ведення розвідки
НАК (НК) Вертольот пошуку і рятування
НА8 Протичовновий вертольот
не Військово-транспортний або транспортно-десантний вертольот
НТ Учбово-тренувальний вертольот
ни Вертольот загального призначення
к Заправник
мк Морський розвідувальний
РК Фоторозвідувальний
8 Ударний
8К Стратегічний розвідник
т Учбово-бойовий, учбово-тренувальний
тт Що буксирує мішені
XV Метеорологічний
357
ДОДАТКИ
Наприклад: “Німрод-АЕ\У.З” (“Німрод” - найменування, АЕ\¥ - літак ДРЛВ і У, 3 - модифікація); “Хок-Т.1”
(“Хок” - найменування, Т - учбово-бойовий літак, 1 - модифікація).
У Канаді позначення літаків і вертольотів складається з класу або основного призначення (великі літери
англійського алфавіту), типового номеру (як правило, більше 100, за виключенням позначення тактичних
винищувачів), модифікації і найменування (табл. Г.4).
Таблиця Г.4
Позначення літаків і вертольотів Канади
Буква Клас (призначення літального апарата)
СА Штурмовик
СВ Бомбардувальник
СС Військово-транспортний
СЕ Літак (вертольот), що обладнаний спеціальною електронною апаратурою (ДРЛВ і У, повітряний КП)
СР Винищувач
СН Вертольот
СК Заправник
СР Базовий патрульний
СК Розвідувальний
С8 Протичовновий
С8В. Пошуку і рятування
ст Учбово-тренувальний
сп Загального призначення (багатоцільовий)
Наприклад:
СС-130 “Геркулес” (С - канадський варіант, С - військово-транспортний літак, 130 - типовий номер, “Геркулес”
- найменування);
СН-147С“Чінук”(С-канадський варіант, Н-вертольот, 147-типовий номер, С-модифікація, “Чінук”-найменування).
У Швеції поряд з фірмовим позначенням літаків (наприклад, СААБ-105) існує система позначень, що
складається з класу літака, типового номера і модифікації (табл. Г.5).
Таблиця Г.5
Позначення літаків Швеції
Буква Клас (призначення літального апарата)
А Штурмовик
АЗ Винищувач-бомбардувальник
ЗА Винищувач-перехоплювач
8 Розвідувальний
8Н Розвідувальний літак, який призначений для розвідки морських цілей
8Р Для розвідки наземних цілей
8К Учбово-тренувальний літак
У Франції в фірмові найменування літаків іноді вводяться буквені позначення, що вказують на їх призначення:
Е - тактичний винищувач, винищувач-бомбардувальник (“Міраж-Р.ІЕ”); С - винищувач-перехоплювач
(“Міраж-ЗС”); В або П - учбово-бойовий (“Міраж-Р.ІВ”); К - розвідувальний (“Міраж-5В”).
Додаток Д
Таблиці до 5 розділу
Таблиця Д.1
Імовірність влучення ракети в коло заданого радіуса
а Ь
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
0,1 0,0023 0,0023 0,0023 0,0024 0,0025 0,0026 0,0029 0,0032 0,0038 0,0052 0,0538
0,2 0,0091 0,0091 0,0092 0,0095 0,0099 0,0105 0,0113 0,0127 0,0150 0,0205 0,1073
0,3 0,0203 0,0204 0,0207 0,0212 0,0221 0,0234 0,0253 0,0283 0,0334 0,0455 0,1604
0,4 0,0357 0,0359 0,0365 0,0374 0,0389 0,0412 0,0444 0,0496 0,0586 0,0790 0,2127
0,5 0,0553 0,0556 0,0564 0,0579 0,0602 0,0635 0,0686 0,0764 0,0899 0,1196 0,2641
0,6 0,0786 0,0790 0,0802 0,0823 0,0855 0,0902 0,0972 0,1080 0,1265 0,1661 0,3143
0,7 0,1055 0,1060 0,1075 0,1103 0,1144 0,1207 0,1298 0,1439 0,1676 0,2168 0,3632
358
ДОДАТКИ
Закінчення табл. Д.1
а Ь
0 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0
0,8 0,1355 0,1361 0,1381 0,1415 0,1468 0,1546 0,1660 0,1835 0,2124 0,2701 0,4105
0,9 0,1683 0,1690 0,1714 0,1756 0,1820 0,1911 0,2052 0,2260 0,2599 0,3247 0,4532
1,0 0,2034 0,2044 0,2072 0,2121 0,2197 0,2307 0,2467 0,2707 0,3091 0,3794 0,5000
1,1 0,2406 0,2417 0,2449 0,2506 0,2593 0,2119 0,2900 0,3170 0,3593 0,4329 0,5419
1,2 0,2793 0,2805 0,2842 0,2906 0,3003 0,3145 0,3346 0,3641 0,4095 0,4946 0,5817
1,3 0,3192 0,3205 0,3245 0,3316 0,3424 0,3578 0,3798 0,4115 0,4592 0,5338 0,6194
1,4 0,3597 0,3612 0,3656 0,3733 0,3849 0,4016 0,4250 0,4585 0,5075 0,5802 0,6550
1,5 0,4006 0,4021 0,4068 0,4151 0,4276 0,4452 0,4399 0,5046 0,5541 0,6234 0,6883
1,6 0,4414 0,4430 0,4480 0,4568 0,4698 0,4883 0,5139 0,5493 0,5984 0,6634 0,7195
1,7 0,4819 0,4835 0,4888 0,4978 0,5114 0,5305 0,5566 0,5922 0,6403 0,7002 0,7485
1,8 0,5215 0,5232 0,5287 0,5380 0,5520 0,5714 0,5978 0,6331 0,6794 0,7338 0,7753
1,9 0,5601 0,5619 0,5674 0,5770 0,5912 0,6108 0,6370 0,6716 0,7156 0,7645 0,8000
2,0 0,5975 0,5993 0,6049 0,6145 0,6288 0,6483 0,6742 0,7077 0,7488 0,7923 0,8227
2,1 0,6333 0 6331 0,6408 0,6504 0,6645 0,6838 0,7091 0,7410 0,7792 0,8174 0,8434
2,2 0,6675 0,6693 0,6749 0,6844 0,6984 0,7172 0,7415 0,7718 0,8068 0,8400 0,8622
2,3 0,6998 0,7016 0,7071 0,7165 0,7301 0,7483 0,7716 0,7999 0,8316 0,8602 0,8792
2,4 0,7303 0,7320 0,7374 0,7465 0,7596 0,7771 0 7991 0,8254 0,8538 0,8784 0,8945
2,5 0,7587 0,7604 0,7656 0,7744 0,7880 0,8036 0,8243 0,8484 0,8736 0,8945 0,9082
2,6 0,7852 0,7868 0,7918 0,8002 0,8122 0,8279 0,8470 0,8689 0,8910 0,9088 0,9205
2,7 0,8096 0,8111 0,8159 0,8239 0,8352 0,8498 0 8675 0,8872 0,9095 0,9215 0,9314
2,8 0,8320 0,8334 0,8380 0,8455 0,8561 0,8697 0,8858 0,9034 0,9201 0,9327 0,9410
2,9 0,8524 0,8538 0,8580 0,8651 0,8750 0,8874 0,9020 0,9176 0,9320 0,9425 0,9495
3,0 0,8709 0,8722 0,8762 0,8828 0,8918 0,9032 0,9164 0,9300 0,9423 0,9510 0,9570
3,2 0,9026 0,9038 0,9072 0,9127 0,9203 0,9296 0,9399 0,9502 0,9589 0,9645 0,9691
3,4 0,9279 0,9288 0,9316 0,9362 0,9424 0,9497 0,9576 0,9652 0,9712 0,9753 0,9782
3,6 0,9476 0,9483 0,9506 0,9543 0,9591 0,9648 0,9707 0,9760 0,9801 0,9828 0,9848
3,8 0,9626 0,9632 0,9650 0,9678 0,9716 0,9758 0,9800 0,9838 0,9865 0,9883 0,9896
4,0 0,9737 0,9742 0,9756 0,9778 0,9806 0,9837 0,9867 0,9892 0,9909 0,9921 0,9930
4,2 0,9819 0,9823 0,9833 0,9850 0,9870 0,9892 0,9912 0,9929 0,9940 0,9948 0,9954
4,4 0,9878 0,9880 0,9888 0,9900 0,9914 0,9930 0,9944 0,9954 0,9961 0,9966 0,9970
4,6 0,9919 0,9921 0,9926 0,9935 0,9945 0,9955 0 9964 0,9971 0,9975 0,9978 0,9981
4,8 0,9947 0,9948 0,9952 0,9958 0,9965 0,9972 0,9978 0,9982 0,9985 0,9987 0,9988
5,0 0,9966 0,9967 0,9970 0,9974 0,9978 0,9983 0,9986 0,9989 0,9991 0,9992 0,9993
Таблиця Д.2
Основні технічні характеристики ракет зенітних ракетних комплексів С-ЗООП і С-ЗООВ
Характеристики ракет 5В55К 5В55Р 48Н6Е 9М82 9М83
Максим, дальність, км 47 75-90 150 100 75
Максим, швидкість ракети, м/хв до 2 000 до 2 000 1 900-2 100 2 500 1 700
Маса ракети, кг 1480-1500 1664- 1665 1 800-1 900 4 600 2 501
Маса бойової частини ракети, кг 133 130- 133 143-145 150 150
Тип бойової частини Оскол.-фугасна Спрямована оскол.-фугасна
Система керування Радіокомандна Комбінована Інерц. з напівакт. РЛГСН
Довжина ракети, м 7,25 7,25 7,5 10 7,5
Діаметр корпуса ракети, м 0,508 0,508 0,519 до 0,85 До 0,85
Розмах оперення, м 1,124 1,124 1,134
Число ступенів 1 1 1 2 2
Тип двигуна РДТП РДТП РДТП РДТП ЛТРД РДТП ЛТРД
Час роботи двигуна, хв 8-10 8-10 10(до12) 5
Можливе перевантаження, од. 15 15 25 7-8 (20) 7-8 (20)
Гарантований термін збереження в ТПК, років 10 10 10 10 10
359
ДОДАТКИ
Таблиця Д.З
Технічні характеристики ЗРК систем С-ЗООПМ (ПМУ 1,2) і С300В
Характеристики комплексів С-ЗООПМ (С-300 ПМУ 1) С-ЗОО ПМУ 2 Система С-ЗООВ ЗРК С-ЗООВ 1
Сектор огляду (за азимутом), град. 90 90 90
Межа зони поразки, км: дальня (аеродинамічна ціль) дальня (балістична ціль) ближня до 150 до 40 200 до 40 до 100/до 75 до 40 /- 13/6
Висота цілі, км: мінімальна (аеродинамічна ціль) мінімальна (балістична ціль) максимальна (аеродинамічна ціль) максимальна (балістична ціль) 0,01 27 0,01 27 1 / 0,025 2/- 25/30 25/-
Максимальна швидкість ЗКР, м/с до 2 100 до 2 100 2 400/ 1 700
Швидкість цілі, м/с мінімальна максимальна при стрільбі за целевказанням 1 800 до 2 800 1 800 до 2800 0/0 3 200/3 200
Кількість обстрілюваних цілей Кількість одночасно наведених ракет до 6 до 12 до 6 до 12 до 6 до 12
Темп стрільби, с 3 3 1-2
Час розгортання/згортання, хв 5/5 5/5 5/5
Кількість ракет в комплексі до 32 (48) до 32 (48) до 24 / до 48
Таблиця Д.4
Технічні характеристики ЗРК систем С-ЗООПТ (ПС, ПМУ)
Характеристики комплексів Система С-ЗООП
С-ЗООПТ (С-ЗООПТ-1) С-ЗООПС (С-ЗООПМУ)
Сектор огляду (за азимутом), град. 60 90
Межа зони поразки, км: дальня (аеродинамічна ціль) дальня (балістична ціль) ближня 47/75 -/- 5/5 47 / 75 (90) -/(25) 5/5
Висота цілі, км: мінімальна (аеродинамічна ціль) мінімальна (балістична ціль) максимальна (аеродинамічна ціль) максимальна (балістична ціль) 0,025 / 0,025 практична стеля 0,025 / 0,025 (0,01) 25/27 -/
Максимальна швидкість ЗКР, м/с до 2 000 до 2 000
Швидкість цілі, м/с 1 300 1 300
Кількість обстрілюваних цілей до 6 до 6
Темп стрільби (мінімальний), с 5 3-5
Час розгортання/згортання, хв до 90 / до 90 5/5
Кількість ракет у комплексі до 48 до 48
360
ДОДАТКИ
Таблиця Д.5
Технічні характеристики ЗРК малої дальності
Характеристики ЗРК С-125 “БУК-МГ “БУК-М2”
Система керування Комбінована РЛ СН Комбінована
Дальність поразки цілей, км: 3,5...25 3,32...35 50
Висота поразки цілей, км: мінімальна максимальна 0,02 18 0,015 22 0,015 25
Граничний курсовий параметр, км 16 22 45
Граничні швидкості обстрілу, м/с назустріч навздогін 700 300 830 380 1 000 720
Кількість одночасно супроводжуваних цілей 1 6 12...24
Кількість одночасно обстрілюваних цілей 1 3 12...24
Кількість ракет, що наведені на одну ціль 2 2 2
Цикл стрільби, с мінімальний максимальний зо 60 зо 90 зо 100
Час приведення у бойову готовність, хв 4...6 5...6 5...6
Час приведення у бойове/похідне положення,хв. 60...240 5/6 5/6
Час реакції, с 10...20 20...30
Темп стрільби (інтервал пуску), с 5 2-4 4
Боєкомплект 16 48 36...96
Маса ЗКР 1000 685 720
Тип двигуна РДТТ РДТТ РДТТ
Час підготовки до пуску, с зо 20 20
Максимальна швидкість ракети, м/с 840 1 200 1 200
Мінімальна ЕПР цілей, м2 0,5 0,2 0,02
Дальність виявлення цілей при ЕПР = 1 м2, км 40 100 100
Імовірність поразки цілі однією ракетою аеродинамічної цілі вертольота КР 0,87 0,7..0,85 0,6..0,7 0,4..0,45 0,8...0,85
Таблиця Д.6
Основні технічні технічні характеристики ЗРК ближньої дії
Характеристики ЗРК “ОСА”АКМ Стріла-10МЗ ТОР МІ
Система керування Радіокомандна Пасивна СН Комбінована
Дальність поразки цілей, км: 1,5... 10,3 0,5...5 1,5...12
Висота цілей, км: мінімальна максимальна 0,01 5 0,025 3.5 0,01 6
Граничний курсовий параметр, км 4 3 5
Граничні швидкості обстрілу, м/с назустріч навздогін 500 300 400 300 700 420
Кількість одночасно супроводжуваних цілей 1 1 2
Кількість одночасно обстрілюваних цілей 1 1 2
Кількість ракет, що наведені на одну ціль 2 2 4
Цикл стрільби, с мінімальний максимальний 10 20 10 20-15 10 20
Час приведення у бойову готовність, хв. 5 0,2 3
Час приведення у бойове/похідне положення, хв. 4/5 0,5/5 3/4
Темп стрільби (інтервал пуску), с 4 2 2...4
Час підготовки до пуску, с 10 * 5 10
Максимальна швидкість ракети, м/с 800 700 850
Мінімальна ЕПР цілей, м2 0,3 0,02
Дальність виявлення цілей при ЕПР = 1 м2, км 40 45
Імовірність поразки ціли однією ракетою 0,4...0,96 0,5...0,8 0,7
361
ДОДАТКИ
Таблиця Д.7
Тактико-технічні характеристики ПЗРК “Ігла”
Шифр та назва ПЗРК “Ігла-1” “Ігла” “Ігла-Д” “Ігла-Н”
Склад ПЗРК: боєкомплект 2 2 2 2
тип ГСН ІЧ ІЧ ІЧ ІЧ
діапазон, мкм 3,5-5/ 1,8-3 3,5-5 3,5-5/1,8-3 3,5-5/1,8-
пускова труба 9П322 9П322 9П322 3
пусковий механізм 9П519-1 9П519-1 9П519-1 9П322
наземний р/л запитувач 1Л14-1 1Л14-1 9П519-1
дальність, км / висота, км / год 8,5/3 8,5/3 1Л14-1
автоблокування пуску / відключаються є/так є/так є/так 8,5/3
переносний електронний планшет 1Л15-1 1Л15-1 є /так
радіус, км / кількість цілей 12,8/4 12,8/4 1Л15-1
зв’язок - радіостанція р-157 р-157 р-157 12,8/4
р-157
Засоби завдозахисту Наявність двох діапазонів ГСН немає є є є
Адаптація характеристик немає немає немає немає
Мозаїчна ГСН немає немає немає немає
Додаткове обладнання Польовий тренажер 9Ф634 9Ф634 9Ф634 9Ф634
Тренувальний-практичний комплект 9Ф635 9Ф635 9Ф635 9Ф635
Комплект контролю пуску 9Ф636 9Ф636 9Ф636 9Ф636
Контрольно-перевірочна апаратура 9Ф387 9Ф387 9Ф387 9Ф387
Дальність поразки, км:
максимальна 5 5 5,5 5
мінімальна 0,5 0,5 0,5 0,5
Висота поразки, км:
максимальна 3,5 3,5 3,5 3,0
мінімальна 0,01 0,01 0,01 0,01
Імовірність поразки: літака 0,4-0,5 0,4-0,5 0,4-0,5 0,5-0,6
вертольота 0,3-0,4 0,3-0,4 0,45-0,6
крилатої ракети 0,3 0,3 0,6-0,7
в умовах перешкод 0,37 0,37
Максимальна швидкість цілей, м/с: назустріч 360 360 360 340
навздогін 320 320 320 280
Максимальна швидкість ракети, м/с 700 700 700 700
Маса, кг: бойових засобів у бойовому положенні 17 17 17,3 19,5
бойової частини 1,27 1,27 1,27 3,5
ракети 10,8 10,8 Н,1 13,3
Довжина ПЗРК, м: у бойовому положенні 1,7 1,7 1,75 1,87
у похідному положенні 1,7 1,7 1,1 1,1
Час переведення ПЗРК у бойове / похідне положення, с 13/20 13/20 60/60 60/60
Час реакції, с 5 5 5 5
Бойова обслуга ПЗРК, чол. 1 1 1 1
Таблиця Д.8
Тактико-технічні характеристики ПЗРК “Стріла”
Шифр та назва ПЗРК “Стріла-2” “Стріла-2М” “Стріла-3”
Склад ПЗРК: боєкомплект 2 2 2
тип ГСН ІЧ ІЧ ІЧ
діапазон, мкм * 3,5-5 3,5-5 3,5-5
пускова труба /максимальна кількість пусків 9П54/ 9П54М / 9П59 / 5
пусковий механізм 9П53 9П58 9П58М
пасивний радіопеленгатор сектор, град / дальність, км наземний р/л запитувач немає немає 9С13 50x45/ 12 1РЛ247
362
ДОДАТКИ
Закінчення табл. Д.8
Шифр та назва ПЗРК “Стріла-2” “Стріла-2М” “Стріла-3”
дальність, км / висота, км /час, із автоблокування пуску зв’язок: радіостанція / приймач частотний діапазон дальність зв’язку, км немає р-147/П 44-52 МГц 1 немає р-147/П 44-52 МГц 1 8/5/3 немає р-147/П 44-52 МГц 1
Засоби завадозахисту Наявність двох діапазонів ГСН Адаптація характеристик немає немає немає немає немає немає
Дальність поразки, км: максимальна мінімальна 3,6 0,8 4,2 0,8 4,5 0,5
Висота поразки, км: максимальна мінімальна 2,0 0,05 2,3 0,05 3,0 0,015
Імовірність поразки ПО всіх типів 0,11-0,24 0,31-0,33
Максимальна швидкість цілей, м/с: назустріч навздогін 220 260 150 310 260
Максимальна швидкість ракети, м/с Середня маршова швидкість ракети, м/с 430 430 470
Маса, кг: бойових засобів у бойовому положенні бойової частини ракети 15 1,17 9,15 1,17 9,6 16 1,17 10,3
Довжина ПЗРК, м: у бойовому положенні у похідному положенні ракети 1,49 1,44 1,49 1,43 1,5 1,47
Час переведення ПЗРК у бойове/похідне положення, с 12/20
Час реакції, с 5 5 5
Діапазон робочих температур, °С -38 - +50
Бойова обслуга ПЗРК, чол. 1 1 1
Таблиця Д.9
Тактико-технічні характеристики ПЗРК “Стінгер”
Шифр та назва ПЗРК “Стінгер” РІМ-92 (А) “Стінгер” РІМ-92 (В) “Стінгер” РІМ-92 (С) “Стінгер” РІМ-92 (О)
Склад ПЗРК: ЗКР / боєкомплект Тип ГСН Діапазон, мкм Пасивний радіопеленгатор наземний р/л запитувач дальність, км / висота, км /год автоблокування пуску / відключаються /6 ІЧ 4,1-4,4 б / оповіщ. і відображ. АЬІ|РРХ-1 8,5/3 є / так /6 ІЧ +УФ 4,1- 4,4 + б / оповіщ. і відображ А1Ч|РРХ-1 8,5/3 є/так /6 ІЧ+УФ 4,1- 4,4 + б / оповіщ. і відображ АЬІ|РРХ-1 8,5/3 є/так /6 ІЧ+УФ 4,1- 4,4 + б/оповіщ. і відображ АЬІ|РРХ-1 8,5/3 є/так
Засоби завдозахисту Наявність двох діапазонів ГСН Адаптація характеристик Мозаїчна ГСН немає немає немає є немає немає є є немає є є є
Імовірність поразки ПО всіх типів 0,5 - 0,6 0,6 - 0,7 0,7 - 0,8 0,8 - 0,85
Максимальна швидкість цілей, м/с: назустріч навздогін 370 330 370 330 370 330 370 330
Максимальна швидкість ракети, м/с 720 720 720 720
363
ДОДАТКИ
Закінчення табл. Д.9
Шифр та назва ПЗРК “Стінгер” РІМ-92 (А) “Стінгер” РІМ-92 (В) “Стінгер” РІМ-92 (С) “Стінгер” РІМ-92 (О)
Маса, кг: бойових засобів у бойовому положенні 15,7 15,7 15,7 15,7
бойової частини 3 3 3 3
ракети 10,1 10,1 10,1 10,1
Довжина ПЗРК, м: у бойовому положенні 1,6 1,6 1,5 1,6
у похідному положенні ракети 1,52 1,52 1,52 1,52
Час переведення ПЗРК у бойове/похідне положення, с 15/30 15/30 15/30 15/30
Час реакції, с 5 5 5 5
Бойова обслуга ПЗРК, чол. 2 2 2 2
Таблиця Д.10
Основні характеристики деяких самохідних ЗГРК
Характеристики ЗГРК (ЗАК, ЗРК) "Тунгуска" "Панцир" "Донець" “Панцир-СІ”
Система керування Командна Командна Радіокомандна, оптична Радіокомандна, ІЧ
Дальність поразки цілей, км: Г арматами Ракетами 0,2...4 2,5...8 0,2...4 1...12 4 0,8...5 0,2...4 1,0... 18
Висота цілей, км: Гарматами Ракетами до 3 0,015...3,5 до 3 0.005...8 3 0,025...3,5 0...3 0,05... 10
Граничний курсовий параметр, км 4/8 4/12 3/4
Граничні швидкості обстрілу, м/с: назустріч навздогін 500 700 417 306 до 1 000
Кількість одночасно супроводжуваних цілей 1 2 1
Кількість одночасно обстрілюваних цілей 1 2 1
Кількість ракет, що наводяться на одну ціль 1 2 2
Цикл стрільби, с мінімальний максимальний 20 40 20 50 10 зо
Час приведення у бойову готовність, хв 5 5 5
Час приведення у бойове/похідне положення, хв 5/5 5/5 5/5
Час реакції, с 8...10 5...6 20...30 4...6
Темп стрільби(інтервал пуску), с 3 3 3
Боєкомплект зрдн (зрабтр) 8 ракет 1 904 снар. 12 ракет 750 снар. 4 ракети 8-12 ЗУР 1400 снар.
Маса ЗКР 42 65 41 71
Тип двигуна ЗКР РДТТ РДТТ РДТТ РДТТ
Час підготовки до пуску, с 5 5 5
Максимальна швидкість ракети, м/с 910 1100 700 1300
Мінімальна ЕПР цілей, що вражаються, м2 0,2 0,02 0,3
Кількість і калібр гармат, шт/мм 2/30 2/30 4/23 2 х 2 ств х 30 2А38
Дальність виявлення цілей при ЕПР = 1 м2, км 18 18...20 15...18 36...38
Імовірність поразки цілі: аеродинамічної гарматою ракетою вертольота КР 0,3..0,5 0,5..0,6 0,7...0,75 0,75...0,8 0,7...0,95 0,6 0,85..0,95
364
ДОДАТКИ
Таблиця Д. 11
Середня дальність виявлення КР, км
Засоби розвідки Значення дальності виявлення (км) в залежності від висоти польоту КР
ЗО... 60м 100 м 300 м 10 000 м
РЛС П-40 18... 25 44... 63 110... 120
РЛС П-18 22 ... 25 31 ...36 125 ... 150
РЛС П-19 24... 27 39 ...45 120
РЛС 19Ж6 (35Д6) 5 ЗО 50 120
РРВ-16 21 ...27 50 ... 70 ПО... 120
СНР ЗРК “Круг” 12 ... 15 14... 18 23 ... 50 36...60
СВЦ ЗРК “Оса” 14... 19 17... 22 20... 25
СВЦ ЗРК “Бук-МІ” 40 (32) 100 (84)
СВЦ ЗРК “Тор-МІ” 9 15
НВВ 5Н66 ЗРК С-300П з підйомом на вишку 40В6М (МД) радіогоризонт 90 120
НВВ 76Н6 ЗРК С-300П з підйомом на вишку 40В6М (МД) радіогоризонт 90 120
РЛВ 4Н6Е ЗРК С-300П радіогоризонт 60 >300
РПН ЗРК С-300П з підйомом на вишку 40В6М (МД) радіогоризонт 90 120
Таблиця Д.12
Характеристики БР та ЗРК (ЗРС), які спроможні боротися з ними
Зенітний ракетний комплекс або система (тип ЗКР) Характеристики БР, що уражаються Характеристики ЗРК (ЗРС) Наявні у комплексі (системі) спеціалізовані засоби боротьби з БР
Типи Максимальна дальність польоту, км Максимальна швидкість, м/с Максимальна дальність перехоплення БР, км Висота перехоплення БР, км Маса ЗКР, кг
ЗРК "Петріот" РАС-2 ТБР, ОТБР 600* 2 200 20 3...12 906 -
ЗРК "Петріот" РАС-3 ТБР, ОТБР 1 000 3 000 40 до 20 300 ЗКР ЕКПЧТ
ЗРС С-ЗООПТ-1 (ПС) ТБР — 1 300 25 25** 1 665 -
ЗРС с-зоопм (ПМУ1)(48Н6) ТБР, ОТБР — 2 800 40 25** 1 900 -
ЗРС С-ЗООПМУ2 "Фаворит" ТБР, ОТБР 3 000 2 800 40 25** 1 900 —
ЗРС С-ЗООВ1 (ЗКР9М83) ТБР 150 ...200*** 1 200 40 25 2 290 -
ЗРК"Бук-М1-2" (ЗКР 9М317) ТБР — 1 200 20 16 685 -
ЗРС С-ЗООВ (ЗКР 9М82 / 9М83) ТБР, ОТБР 1 100 3 200 40 25 4500** / 2290 РЛС "Імбир" ЗКР 9М82
ЗРС "Антей-2500" (ЗКР 9М82М / 9М83М) ТБР, ОТБР, СБР 2 500 4 500 40 зо 4500** / 2290 РЛС "Імбир" ЗКР 9М82М
С-400 "Триумф" ТБР, ОТБР, 3000 4800 2100
ПРК з ракетою "Егго\у" ТБР, ОТБР 1 000 3 000 90 10...40 1 350 Всі засоби спеціалізовані
ПРК ТНААП БР, ОТР, СБР 3 500 3 000 ... 4 000** 200 40 ... 150 900 Те саме
365
ДОДАТКИ
Інформація табл.Д.12 підготовлена за результатами роботи ЗРК "Петріот" по іракських ракетах "Аль-Аббас" і
"Аль-Хусейн" під час війни в зоні Перської затоки (1991); ** оцінювальні значення; *** оцінювальні значення для
БР типу "Лане".
Таблиця Д.13
Основні тактико-технічні характеристики ЗРС для боротьби з БР
Характеристика С-300В Антей-2500 С-300ПМУ-1 С-300ПМУ-2 "Фаворит" С-400 "Триумф"
Кількість цілей, що одночасно обстрілюються 6 24АДЦ, 16 БЦ 6 36 >6(8)
Кількість ЗКР, що одночасно наводяться 12 70 12 72 ~40
Час переводу ЗРС з похідного положення в бойове, хв 5 5 5 5 5
Час підготовки ЗКР до пуску, с 15 7 5 5 8
Темп стрільби, с 1-2 1,5 3 3 2
Межа зони ефективної дії, км: дальня ближня верхня нижня до 150 6 ЗО 0,025 до 200 13 зо 0,025 150 5 27 0,010 200 3 27 0,010 до 400 1 50 0,003
366
ш
ВІЙСЬКОВО-СТРАХОВА КОМПАНІЯ МІНТАНУ ІМ5ЦНАИСЕ СОМРАИУ
Закрите акціонерне товариство “Військово - страхова компанія” засновано 29 січня 2001 р.
ЗАТ "Військово-страхова компанія" створене при активній участі
Міністерства оборони та Міністерства промислової політики України.
ЗАТ "Військово-страхова компанія" є членом Ліги страхових організацій України.
основні принципи діяльності
Індивідуальний підхід до кожного клієнта і висока якість обслуговування, використання
найновіших технологій страхування, комплексне вирішення потреб клієнта в страхуванні,
постійне вдосконалення методів роботи у поєднанні з кращими традиціями класичного
страхування.
забезпечення надійності
Розмір статутного фонду складає 6,025 млн. гри. На загальних зборах акціонерів, які
відбулися 14 травня 2003р., прийнято рішення про збільшення статутного фонду до
10,025 мл. грн.
ліцензії
ЗАТ "Військово-страхова компанія" має діючі ліцензії практично на усі види страхування
(29 видів): обов’язкові та добровільні.
пріоритетні напрями діяльності
• Страхування від нещасних випадків.
• Страхування військовослужбовців, призовників строкової військової служби та допризовників
за пільговими тарифами. Спеціальні програми страхування з урахуванням професійних ризиків
(для охоронців, інкасаторів, учасників спортивних змагань тощо).
• Страхування майна.
• Індивідуальні проекти страхування щодо забезпечення страхових потреб великих підприємств та
цілісних майнових комплексів. Опрацьовані програми страхування орендованого майна; майна,
яке передано під заставу. Доступні страхові продукти по страхуванню майна фізичних осіб.
• Страхування автотранспортних ризиків.
• Комплексне страхування автомобілів вітчизняного та зарубіжного виробництва за програмою
"автоКАСКО", страхування цивільної відповідальності власників транспортних засобів перед
третіми особами. Система пільгових тарифів для підприємств та організацій.
• Страхування вантажів
• Внутрішні та міжнародні перевезення. Забезпечення страхового захисту у відповідності з умова-
ми продажу (СІР, СІР).
• Страхування спеціальних та небезпечних вантажів.
• Медичне страхування.
• Програми комплексного страхування працівників підприємств та членів їх сімей, у тому числі
страхування здоров’я на випадок хвороби, безперервного медичного страхування, страхування
від нещасного випадку, програми соціального страхування та матеріальної допомоги.
• Забезпечення страховим захистом виїжджаючих за кордон.
банківські реквизити
Р/рахунок 265060155100
в АБ "Брокбізнесбанк”, м. Київ
МФО 300249, ЄДРПОУ 31304718
ЗАТ "ВСК" є платником податку на прибуток на загаль-
них умовах згідно п.7.2 ст.7 Закону України "Про опода-
ткування прибутку підприємств"
адреса
Юридична адреса:
Україна, 01010, м. Київ, вул. Московська, 7.
Поштова адреса: Україна, 01032, м. Київ,
вул. Саксаганського, 115, оф. 800
Тел. 246-74-44, тел/факс 246-70-64
Торопчин А.Я., Романенко І.О., Даник Ю.Г., Пащенко Р.Е.
ДОВІДНИК З ПРОТИПОВІТРЯНОЇ ОБОРОНИ
Підп. до друку 04.06.03. Папір офсетний. Друк офсетний. Зам. 3-241. Тир. 8 000.
Надруковано у ВАТ «Видавництві «Харків»
м. Харків, Московський просп., 247