





























































































































































































































































































































































































Автор: Крайнев А.
Теги: общее машиностроение технология машиностроения машиноведение конструкции машиностроение механика механизмы учебное пособие издательство машиностроение
ISBN: 5-217-03172-7
Год: 2003



ТРИ СОСТАВНЫЕ
СИСТЕМЫ ОБЪЕКТА
КОНСТРУИРОВАНИЯ
МЕХАНИКА
Воспроизведение процесса
(движения и/или состояния)
Восприятие
Управление (ощущение)
процессом характеристики
процесса
ЭЛЕКТРОНИКА
может потеснить механику
только в секторах
восприятия и управления.
Александр Крайнев
МЕХАНИЗМЫ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ
В ОБРАБАТЫВАЮЩЕМ СТАНКЕ
Двигатель '
в основном
для вертикальных
перемещений заготовки
Инструмент
Заготовка
Подвод воздуха
от компрессора
Двигатель
для вращения
инструмента
Двигатели
для поворота
заготовки
Двигатели
для перемещения
инструмента.
Пневмоцилиндр
для восприятия
сил тяжести звеньев
Двигатель
в основном
для продольных
перемещений
заготовки
В конструкции станка реализованы принципы
разделения функций воспроизведения движений;
многопоточности передачи энергии;
построения механизмов, воспроизводящих
сложные движения, на основе вращательных
кинематических пар;
постоянной разгрузки системы от сип тяжести;
размещения основных приводов на основании.
КОНСТРУИРОВАНИЯ
МУФТА СВОБОДНОГО ХОДА Внешнее кольцо - Лепесток
В ПЛАНЕТАРНОЙ ПЕРЕДАЧЕ
пружины
Внутреннее кольцо
Кулачок
КОНСТРУКЦИЯ
МАТЕРИАЛЫ
СТРУКТУРА ПРОЦЕССА КОНСТРУИРОВАНИЯ
ИЗГОТОВЛЕНИЕ
Сателлит
ИСПОЛЬЗОВАНИЕ
ПРОДУКЦИЯ
ИСПЫТАНИЯ
МОСКВА * 2003
ТЕХНОЛОГИЯ
ИЗГОТОВЛЕНИЯ
Направление
свободного >
вращения /
БАНК МОДЕЛЕЙ
И МЕТОДОВ
ИССЛЕДОВАНИЙ
КРИТЕРИИ СОВЕРШЕНСТВА
КОНСТРУКЦИИ
МЕСТО КОНСТРУИРОВАНИЯ
В СОЗДАНИИ ОБЪЕКТОВ
ТЕХНИКИ (МАШИН, АППАРАТОВ
ПРИБОРОВ И СООРУЖЕНИЙ)
Упорный
роликовый
подшипник
БАНК АНАЛОГОВ
И ТИПОВЫХ РЕШЕНИЙ
Штампованно-сварное
водило планетарной
передачи
Пластический
замок
Внутреннее
кольцо
Кулачок
благодаря \
силам X,
трения может
поворачиваться
и заклиниваться
между внутренним
и внешним кольцами
БАНК
МАТЕРИАЛОВ
Сварочный
шов
БАНК
ТЕХНОЛОГИЙ
Сепаратор
удерживает
соседние кулачки
на определенном
расстоянии
друг от друга.
Внешнее кольцо
(корпус муфты К
свободного хода) х.
неподвижно
соединено с водилом
планетарной передачи
Внешнее кольцо
корпус муфты
ФУНКЦИЯ
И ПОТРЕБИТЕЛЬСКИЕ
КАЧЕСТВА
Направление
вращающего момента
при заклинивании
кулачков
Лепесток пружины
стремится повернул»
кулачок и слегка
прижимает его
к поверхностям внешнего
и внутреннего колец.
Прижатие обеспечивает
начальное условие
заклинивания кулачка.
1. Функциональная целесообразность
2. Красота и удобство
3. Безопасность для чеповека
и окружающей среды
4. Технологичность
(промышленная воспроизводимость
современными средствами)
5. Патентная чистота
Шлицы I
Крышка-подшипник
из цветного сплава
обеспечивает относительное
центрирование внутреннего
и внешнего колец муфты
и сепаратора.
Пластический Ось
замок сателлита
КОНСТРУИРОВАНИЕ
(СОВЕРШЕНСТВОВАНИЕ
ПРОТОТИПА)
ill ни
Александр Крайнев
ИДЕОЛОГИЯ
КОНСТРУИРОВАНИЯ
Эй, читатель!
scaned by Миишка
http://www.djvu-soft.narod.ru
-инструкция по сканированию
и обработке;
Тут ждут ваши книги (тех.):
http://publ.Iib.ru
http://sci-lib.comhttp://chipmaker.ru
...может ещё где
Понравилась книжка
- купите её в магазине.
МОСКВА “МАШИНОСТРОЕНИЕ” 2003
“ИЗДАТЕЛЬСТВО МАШИНОСТРОЕНИЕ-1”
УДК 621.01(035)
ББК 34.4
К78
МНОГОСКОРОСТНАЯ ПЕРЕДАЧА В ВИДЕ ТРЕХ ПАРАЛЛЕЛЬНЫХ В этой многое корост ной передаче ыломобиля
КИНЕМАТИЧЕСКИХ ЦЕПЕЙ ИЗМЕНЯЕМОЙ (ПРИ ПЕРЕКЛЮЧЕНИИ) СТРУКТУРЫ Движение перелается по одной из трех параллельных
4 7 кинема! ическнх цепей. При переключении с режима
на режим сначала разъединяют общее сцепление,
поэтому происходит разрыв энергетического потока.
По сравнению с традиционными решениями здесь
валы выполнены короткими н более жесткими,
а в зацеплении участвует минимальное число пар.
Входной вал
Промежуточный
вал передачи
заднего хода
ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ
Промежуточный
вал 2
Выходной
вал
П ромежуточный
вал 1
Режим Включена сцепная муфта Зубчатые пары
! 1 а - р. m - s
II 2 Ь - g, m - s
III 3 с -k. n - s
IV 4 d-j. n-s
V 5 с - f, m - s
ЗаяниЙход 6 а-р-г, O-S
На схеме:
зубчатые колеса р. g. с. kJ, г
установлены свободно:
зубчатые колеса a, b, с, d, m, п, о, s
закреплены на валах;
- сцепные зубчатые муфты
с синхронизаторами
МНОГОСКОРОСТНАЯ ПЕРЕДАЧА С ДВУМЯ ПООЧЕРЕДНО ВКЛЮЧАЕМЫМИ СЦЕПЛЕНИЯМИ (НА ВХОДЕ)
И НЕРАЗРЫВНО ЧЕРЕДУЮЩИМИСЯ ПАРАЛЛЕЛЬНЫМИ ЭНЕРГЕТИЧЕСКИМИ ПОТОКАМИ
Муфта включения Vпередачи
Пр&ктавжнн&я здесь коробка передач автомобпля
содержит две многоскоростные передачи
с конструктивно совмешсннымн элементами.
Каждая из них поочередно включается в работу
своим сцеплением. В то время, когда одна передача
работает, в другой (на холостом ходу) автоматически
включается муфта следующего режима.
У передача
Сцепление В
(с 1 рубчатым
валом)
Задний
ход
Муфта включения--------
заднего хода или VI передачи jq л
Муфта включения II или IV передачи Муфта включения III или I передачи
II передача
Ведущее
звено
Переключение с одного
режима на другой
происходит без разрыва
энергетического
потока.
Г идроцил индры
вкл юче ния/вы кл юче ння
сцеплении
I передача
III передача
Ведущее звеио Трубчатый
Сцепление А
(с внутренним
валом)
Режим Включены сцепные муфт ы Зубчатые пары* Передаточное отношение
I А- 1 п г 3.45
II В-2 а - и 2,05
III А-3 m -q 1,45
IV В-4 k-p 1,08
V А-5 h-e 1.11
VI В-6 k-d 0,92
Задний ход B-R a - b - c -3,14
* В режимах 1.11 III и IVпередачи в кинематическую цепь входит также зубчатая пара f -w.
В режимах VI. V передачи п заднего хода
о кинематическую цепь входит также зубчатая пара g - w.
VI передача
Внутренний
3.14
Ведомый
вал
Под действием
пружин одно
из сцеплений (А)
разомкнуто,
а другое (В)
замкнуто.
Гидроцилиндры
способны изменить
режим работы
сцеплений.
+ i = 4,06
Крайнев А.Ф.
К78 Идеология конструирования. - М.: Машиностроение-1, 2003. - 384 с., ил.
Представляемая монография содержит систему принципов, тенденций и идей совершенствования
конструкций (структуры, геометрии) объектов искусственного мира. От известных аналогов она отличается
новой концепцией теории механизмов и машин. Суть новой концепции заключается в выборе или синтезе
структурной схемы, в которой закодированы (по аналогии с хромосомой) самые совершенные конструктивные
решения. Такой выбор или синтез обусловливает более точную и правильную взаимосвязь схемных
представлений, конструктивных решений (с учетом зазоров, погрешностей изготовления, деформаций, трения),
материалов и технологии изготовления. Используя данную систему, можно не только выбирать лучшие схемы
и конструкции из числа известных, но и создавать новые, более совершенные устройства.
Содержание основных разделов построено на примерах из компьютерного банка (схем и конструктивных
решений), составленного автором данной монографии. Приведена методология построения банка, и даны его
отдельные фрагменты.
Предназначена для студентов, инженеров, научных работников и преподавателей.
ISBN 5-217-03172-7
ISBN 5-94275-079-3
© А.Ф. Крайнев, 2003 г.
© Издательство “МАШИНОСТРОЕНИЕ”, 2003 г.
© “Издательство МАШИНОСТРОЕНИЕ-!”, 2003 г.
ОГЛАВЛЕНИЕ
Часть I. ОСНОВНЫЕ ПРИНЦИПЫ И ЗА-
КОНОМЕРНОСТИ (В КОНСТРУИРОВА-
НИИ) ................................... 5
Глава 1. КРИТЕРИИ СОВЕРШЕНСТВА
КОНСТРУКЦИИ............................. 5
1.1. Функциональная целесообразность и
конструктивная преемственность.. 5
1.2. Красота и удобство............. 8
1.3. Безопасность для здоровья и жизни
людей............................ 23
1.4. Технологичность конструктивных
решений.......................... 27
1.5. Патентная чистота............. 40
Глава 2. ПОСТРОЕНИЕ СТРУКТУРНЫХ,
КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВ-
НЫХ СХЕМ............................... 42
2.1. Систематизированный банк как осно-
ва для структурного синтеза..... 42
2.2. Структурные единицы и составляю-
щие их элементы.................. 46
2.3. Функциональный подход к выбору и
составлению схем (на примерах ре-
шения простейших задач воспроизве-
дения движения и ориентации тела в
пространстве).................... 52
2.4. Совмещение и разделение функций ... 57
2.5. Получение вариантов конструктивных
решений.......................... 66
Глава 3. МНОГОПОТОЧНОСТЬ ПЕРЕДА-
ЧИ ЭНЕРГИИ............................. 75
3.1. Общие положения и тенденции... 75
3.2. Приводные двухподвижные многопо-
точные [параллельной структуры] со-
единения ........................ 79
3.3. Приводные трех- и четырехподвиж-
ные многопоточные [параллельной
структуры] соединения............ 82
3.4. Приводные шестиподвижные много-
поточные (параллельной структуры)
соединения....................... 87
Глава 4. САМОПРИСПОСОБЛЯЕМОСТЬ
ИСКУССТВЕННОЙ СИСТЕМЫ.................. 94
4.1. Общие положения и тенденции... 94
4.2. Внутренняя самоустанавливаемость
(относительная самоустанавливае-
мость недеформируемых звеньев
внутри механизмов и сооружений).... 95
4.3. Внешняя самоустанавливаемость. 106
4.4. Деформативная приспособляемость ... 111
Глава 5. СОГЛАСОВАННОСТЬ НАПРАВ-
ЛЕНИЙ СИЛ И ПЕРЕМЕЩЕНИЙ............... 120
5.1. Общие положения и тенденции. Угол
давления и его значимость....... 120
5.2. Приемы уменьшения угла давления.
Устранение или использование осо-
бых положений....................... 122
5.3. Решения функциональных задач, од-
нозначно связанных с увеличением
углов давления...................... 125
5.4. Рациональное замыкание сил.. 130
Глава 6. УРАНОВЕШЕННОСТЬ И ВИБРО-
ЗАЩИЩЕННОСТЬ ........................ 133
6.1. Общие положения............. 133
6.2. Разгрузка привода и кинематических
пар................................. 133
6.3. Уравновешивание и восприятие
неуравновешенных сил и моментов .... 137
6.4. Конструктивные приемы смягчения
ударов, уменьшения динамических
нагрузок, уменьшения потерь энергии
при торможении и реверсировании .... 140
6.5. Основные виды виброзащиты. Динами-
ческое гашение вибраций. Активная
виброзащита......................... 144
6.6. Демпфирование вибраций...... 147
6.7. Нелинейные упругие элементы в
средствах виброзащиты............... 150
Глава 7. СОВОКУПНЫЕ РЕШЕНИЯ МНО-
ГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕ-
МЫХ, ВИБРОЗАЩИТНЫХ СИСТЕМ (НА
ПРИМЕРАХ ПОДВЕСОК МАШИН)............. 157
7.1. Общие положения. Элементы подве-
сок автомобилей..................... 157
7.2. Зависимые и полунезависимые под-
вески автомобилей................... 161
7.3. Независимые подвески автомобилей .. 164
7.4. Управляемые подвески транспортных
машин............................... 167
7.5. Нагружение, деформирование, само-
присобляемость подвесок. Обобщен-
ные схемы........................... 170
7.6. Подвески локомотивов........ 173
7.7. Подвески гусеничных машин... 175
7.8. Подвески вибростендов и виброкон-
вейеров ............................ 177
7.9. Виброзащитные подвески рабочих
сидений............................. 179
Часть II. МЕХАНИЧЕСКИЕ СОЕДИНЕ-
НИЯ, ПЕРЕДАЧИ И СИСТЕМЫ.............. 181
Глава 8. СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И
ДЕТАЛЕЙ.............................. 181
8.1. Место соединений в структуре машин.
Основные разновидности........ 181
8.2. Неподвижные разъемные болтовые и
кулачковые соединения............... 181
4
ОГЛАВЛЕНИЕ
8.3. Неподвижные неразъемные соедине-
ния (литьем, сваркой, клепаные, клее-
ные и скобочные), пластические со-
единения и замки.................... 186
8.4. Упругие замки и фиксаторы........... 191
8.5. Шпоночные, шлицевые, профильные
и неподвижные фрикционные соеди-
нения .............................. 194
8.6. Соединения стержней ферм............ 199
8.7. Соединения трубопроводов............ 200
8.8. Быстроразъемные, захватные и зажим-
ные соединения...................... 203
Глава 9. УПЛОТНЕНИЯ СОЕДИНЕНИЙ ... 210
9.1. Общие положения герметизации и уп-
лотнения соединений................. 210
9.2. Уплотнения неподвижных соединений 212
9.3. Разделительные уплотнения соединений 213
9.4. Уплотнения подвижных (вращатель-
ных и поступательных) соединений ... 216
Глава 10. ПОДШИПНИКОВЫЕ ОПОРЫ И
НАПРАВЛЯЮЩИЕ................................. 225
10.1. Функциональные задачи и качест-
венные показатели......................... 225
10.2. Подшипники скольжения и упругие
шарниры................................... 225
10.3. Подшипники качения................. 235
10.4. Совокупные исполнения опор и со-
единений ........................ 244
10.5. Круговые и линейные направляющие 253
Глава 11. СОЕДИНИТЕЛЬНЫЕ (КОМПЕН-
СИРУЮЩИЕ) МУФТЫ ВАЛОВ........................ 259
11.1. Функциональные задачи и принципы
конструирования........................... 259
11.2. Жесткие компенсирующие муфты ... 260
11.3. Упругие компенсирующие муфты ... 267
Глава 12. СЦЕПНЫЕ МУФТЫ, ТОРМОЗА
И СИСТЕМЫ.................................... 272
12.1. Функциональные задачи, принципы
конструирования.................. 272
12.2. Кулачковые и зубчатые сцепные
муфты............................ 273
12.3. Фрикционные муфты и тормоза. 275
12.4. Самоуправляемые сцепные муфты
и тормоза........................ 285
12.5. Сцепные и тормозные системы. 293
Глава 13. ЗУБЧАТЫЕ РЕДУКТОРЫ............. 301
13.1. Ременные, цепные и зубчатые пере-
дачи. Основные положения......... 301
13.2. Зубчатые (в том числе червячные)
редукторы. Выбор схемы и конструк-
тивных решений................... 305
13.3. Особенности планетарных и волно-
вых зубчатых передач................. 308
Глава 14. ВИНТОВЫЕ ПЕРЕДАЧИ (ВРА-
ЩАТЕЛЬНО-ПОСТУПАТЕЛЬНОГО ДВИ-
ЖЕНИЯ) .................................. 314
14.1. Функциональные возможности и
принципы конструирования........ 314
14.2. Винтовые (соосные) передачи
(скольжения и качения)........... 316
14.3. Несоосные (в том числе планетарные
и волновые) винтовые передачи 319
14.4. Фрикционные винтовые (соосные)
передачи............................. 322
Глава 15. МНОГОСКОРОСТНЫЕ ПЕРЕ-
ДАЧИ И ВАРИАТОРЫ (СКОРОСТИ).............. 323
15.1. Общие сведения................. 323
15.2. Многоскоростные зубчатые передачи
с неподвижными осями колес........... 323
15.3. Многоскоростные планетарные зуб-
чатые передачи................... 326
15.4. Замкнутые гидродинамические и
электромеханические передачи......... 335
15.5. Гидрообъемные регулируемые пере-
дачи ............................ 338
15.6. Механизмы свободного хода в мно
госкоростных передачах........... 340
15.7. Фрикционные вариаторы (скорости) и
вариаторы с элементами зацепления... 342
Глава 16. РАСПРЕДЕЛИТЕЛЬНЫЕ/СУМ-
МИРУЮЩИЕ МЕХАНИЗМЫ....................... 350
16.1. Дифференциальные механизмы ав-
томобилей ....................... 350
16.2. Зубчатые, рычажные и винтовые
распределительные/суммирующие
механизмы........................ 359
16.3. Гидравлические/пневматические рас-
пределительные и суммирующие
устройства....................... 362
Глава 17. МЕХАНИЗМЫ РУЛЕВОГО УП-
РАВЛЕНИЯ ................................ 366
17.1. Структурные элементы........... 366
17.2. Рулевое управление автомобилей. 366
17.3. Соединительные и поворотные уст-
ройства шарнирно-сочлененных ко-
лесных и гусеничных машин........ 371
17.4. Приводы рулевых устройств судов,
самолетов и вертолетов............... 374
Часть I. ОСНОВНЫЕ ПРИНЦИПЫ И
ЗАКОНОМЕРНОСТИ (В КОНСТРУИРОВАНИИ)
Глава 1. КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
1.1. ФУНКЦИОНАЛЬНАЯ
ЦЕЛЕСООБРАЗНОСТЬ И
КОНСТРУКТИВНАЯ
ПРЕЕМСТВЕННОСТЬ
Было бы наивно думать, что можно сформулировать
однозначные правила конструирования — решения на все
случаи жизни, не оставив места для творчества конструк-
тора. Последнее, пожалуй, самое важное: конструктор —
это художник, это композитор, это поэт в своей области.
Если он не обладает талантом, обширными и глубокими
знаниями, пространственным (многомерным) мышлени-
ем, то создать новую, совершенную конструкцию ему не
помогут никакие правила или принципы. Создание ис-
кусственного мира — это прежде всего искусство, а наука,
как совокупность знаний, только помогает интуиции и
таланту. Но это не означает, что при конструировании
можно пренебрегать теорией. Теория и конструкторский
опыт должны быть сбалансированы. Кстати, это важно
не только для конструктора, но и для научного работника.
В этой связи конструктор должен одинаково хорошо
знать физические процессы и современные технологии
независимо от того, какая перед ним стоит задача - раз-
работать конструкцию сложнейшей машины или бытово-
го прибора. "Мелочей", безразличных решений не долж-
но быть ни в том, ни в другом случае. Материалы и тех-
нологии следует применять одинаково совершенные,
если Вы конструируете водопроводный кран для дома
или управляющее устройство в системе гидрокоммуни-
каций самолета. Смазочный материал не должен подте-
кать ни в случае, когда это опасно для жизни, ни в слу-
чае, когда это просто неприятно для обслуживающего
персонала. "Общение" с созданным объектом должно
быть удобным и приятным независимо от того, что это за
объект - пульт управления атомной электростанцией или
обыкновенный пылесос.
Процесс конструирования многогранен. В самом его
начале нужно представлять, как разрабатываемый объект
можно изготовить и как он будет выглядеть в конце про-
цесса. Ведь недаром гениальный Леонардо да Винчи еще
только задумывал сюжет картины, а уже разрабатывал
лак, которым он намеревался покрыть полотно, когда
напишет картину, чтобы сохранить свое творение для
потомков.
Не углубляясь далее в философию конструирования,
остановлюсь на некоторых основополагающих, на мой
взгляд, положениях.
Функция - основа задачи конструирования. Цель
конструирования - наиболее полное решение поставлен-
ной функциональной задачи. Учебники и справочники
должны начинаться с классификации функций и соответ-
ствующих им структур и конструктивных решений, а не
наоборот. Приступать к разработке проекта нужно, толь-
ко поняв функцию будущего изделия и представив в про-
странстве возможное решение или путь решения. Здесь
идет речь о пространстве не только трехмерном (геомет-
рическом), но и многомерном (время, исторические тен-
денции, материалы и технологии). В этой связи, если Вы
обладаете линейным или плоским представлением ве-
щей, то конструирование не Ваша сфера деятельности, а
если вы мысленно можете представлять геометрию изде-
лия, то постарайтесь развить Ваше качество до много-
мерного понимания искусственного мира.
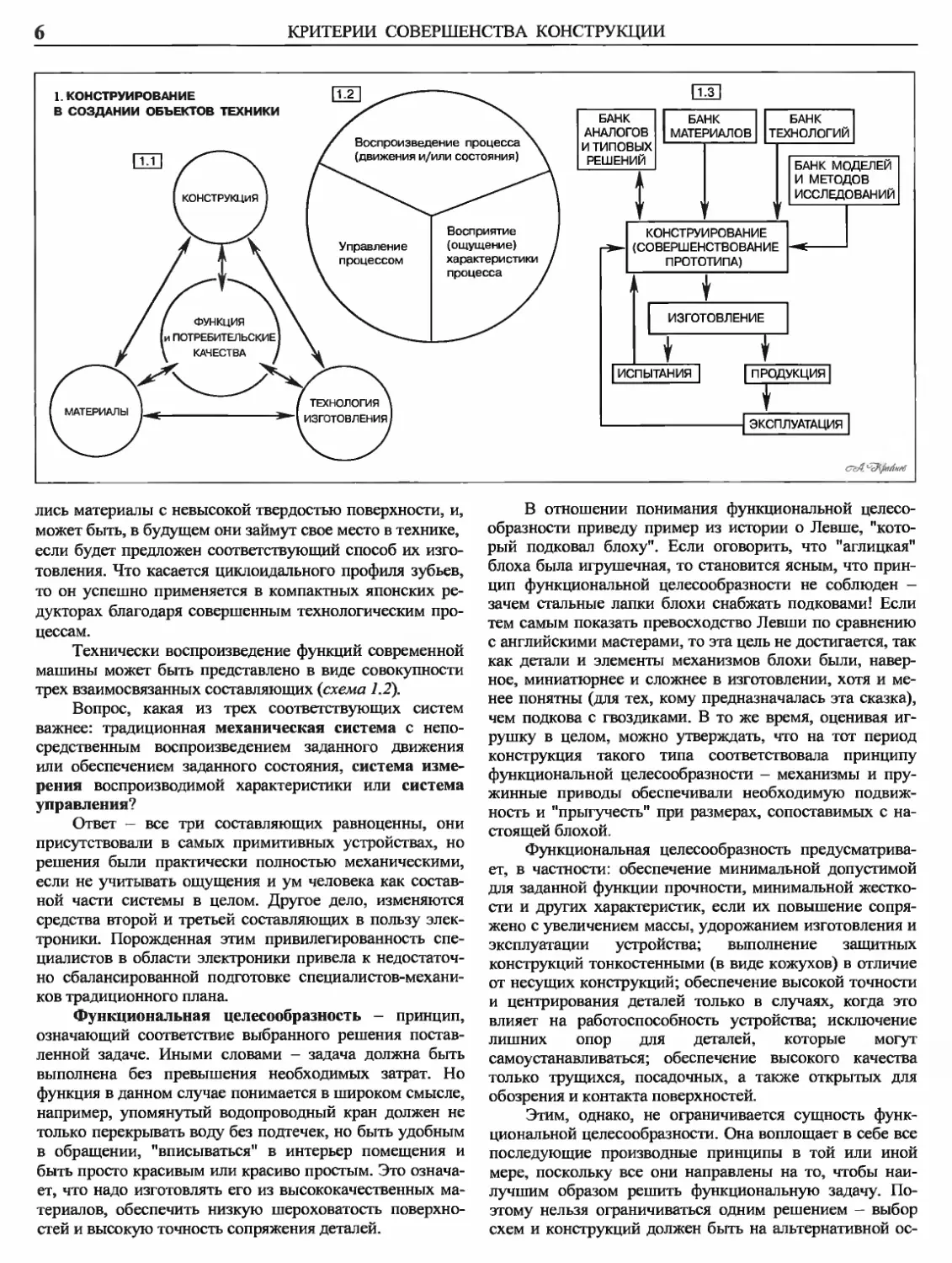
Для решения функциональной задачи одинаково
важны геометрическая форма (собственно конструк-
ция), материалы и технология (рис. 1, схема 1.1) -
структура многомерного представления изделия). Перед
преподавателями, авторами книг, пособий для конструк-
торов должна быть поставлена задача — увязать эти со-
ставляющие. Пока мне известна только одна книга, в ко-
торой наиболее полно даны возможные функции, вари-
анты структурных схем, конструктивных решений, физи-
ческих процессов взаимодействия звеньев, материалов и
технологий в их взаимообусловленности — это книга
К. Рота "Конструирование с помощью каталогов"
(Перевод с нем. В. И. Борзенко и др. М.: Машинострое-
ние, 1995. 420 с.). Но в ней материалы и технология вы-
ступают не на равных с конструкцией, к тому же чувст-
вуется привязанность автора к определенной области
конструкций управляющих устройств и ручного инстру-
мента, а также предпочтительность пластмасс другим
видам материалов.
История предопределяла распространение тех или
иных технических решений именно в соответствии с
взаимообусловленностью конструкции, материалов и
технологии. Например, циклоидальное зацепление, пред-
ложенное на 150 лет раньше, чем эвольвентное, обладает
многими наилучшими функциональными качествами
(КПД, сопротивление изнашиванию, контактная проч-
ность и др.) по сравнению с эвольвентным зацеплением.
Но потребовалось еще почти 150 лет, чтобы ситуация
изменилась в пользу эвольвентного зацепления после
того, как был предложен эффективный способ нарезания
эвольвентных зубьев инструментом реечного типа. Спра-
ведливости ради отметим также меньшую чувствитель-
ность эвольвентного зацепления к погрешностям изго-
товления и деформациям валов и опор, что было в прин-
ципе установлено еще Л. Эйлером. Эти качества и техно-
логичность шлифования эвольвентных зубьев плоскими
кругами также оказались определяющими в соперниче-
стве эвольвентного зацепления с передачами Новикова
при использовании закаленных материалов. Передачи
Новикова еще можно было применять, когда использова-
6
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
лись материалы с невысокой твердостью поверхности, и,
может быть, в будущем они займут свое место в технике,
если будет предложен соответствующий способ их изго-
товления. Что касается циклоидального профиля зубьев,
то он успешно применяется в компактных японских ре-
дукторах благодаря совершенным технологическим про-
цессам.
Технически воспроизведение функций современной
машины может быть представлено в виде совокупности
трех взаимосвязанных составляющих (схема 1.2).
Вопрос, какая из трех соответствующих систем
важнее: традиционная механическая система с непо-
средственным воспроизведением заданного движения
или обеспечением заданного состояния, система изме-
рения воспроизводимой характеристики или система
управления?
Ответ — все три составляющих равноценны, они
присутствовали в самых примитивных устройствах, но
решения были практически полностью механическими,
если не учитывать ощущения и ум человека как состав-
ной части системы в целом. Другое дело, изменяются
средства второй и третьей составляющих в пользу элек-
троники. Порожденная этим привилегированность спе-
циалистов в области электроники привела к недостаточ-
но сбалансированной подготовке специалистов-механи-
ков традиционного плана.
Функциональная целесообразность - принцип,
означающий соответствие выбранного решения постав-
ленной задаче. Иными словами - задача должна быть
выполнена без превышения необходимых затрат. Но
функция в данном случае понимается в широком смысле,
например, упомянутый водопроводный кран должен не
только перекрывать воду без подтечек, но быть удобным
в обращении, "вписываться" в интерьер помещения и
быть просто красивым или красиво простым. Это означа-
ет, что надо изготовлять его из высококачественных ма-
териалов, обеспечить низкую шероховатость поверхно-
стей и высокую точность сопряжения деталей.
В отношении понимания функциональной целесо-
образности приведу пример из истории о Левше, "кото-
рый подковал блоху". Если оговорить, что "аглицкая"
блоха была игрушечная, то становится ясным, что прин-
цип функциональной целесообразности не соблюден -
зачем стальные лапки блохи снабжать подковами! Если
тем самым показать превосходство Левши по сравнению
с английскими мастерами, то эта цель не достигается, так
как детали и элементы механизмов блохи были, навер-
ное, миниатюрнее и сложнее в изготовлении, хотя и ме-
нее понятны (для тех, кому предназначалась эта сказка),
чем подкова с гвоздиками. В то же время, оценивая иг-
рушку в целом, можно утверждать, что на тот период
конструкция такого типа соответствовала принципу
функциональной целесообразности - механизмы и пру-
жинные приводы обеспечивали необходимую подвиж-
ность и "прыгучесть" при размерах, сопоставимых с на-
стоящей блохой.
Функциональная целесообразность предусматрива-
ет, в частности: обеспечение минимальной допустимой
для заданной функции прочности, минимальной жестко-
сти и других характеристик, если их повышение сопря-
жено с увеличением массы, удорожанием изготовления и
эксплуатации устройства; выполнение защитных
конструкций тонкостенными (в виде кожухов) в отличие
от несущих конструкций; обеспечение высокой точности
и центрирования деталей только в случаях, когда это
влияет на работоспособность устройства; исключение
лишних опор для деталей, которые могут
самоустанавливаться; обеспечение высокого качества
только трущихся, посадочных, а также открытых для
обозрения и контакта поверхностей.
Этим, однако, не ограничивается сущность функ-
циональной целесообразности. Она воплощает в себе все
последующие производные принципы в той или иной
мере, поскольку все они направлены на то, чтобы наи-
лучшим образом решить функциональную задачу. По-
этому нельзя ограничиваться одним решением — выбор
схем и конструкций должен быть на альтернативной ос-
ФУНКЦИОНАЛЬНАЯ ЦЕЛЕСООБРАЗНОСТЬ И КОНСТРУКТИВНАЯ ПРЕЕМСТВЕННОСТЬ
7
нове. Составление возможных структурных, кинематиче-
ских и конструктивных схем многих машин и механиз-
мов приведено, например, в справочно-методологи-
ческом пособии во 2-м томе под общей ред. К. В. Фроло-
ва "Конструирование машин" (М.: Машиностроение,
1994), а также в других книгах.
Далее поговорим о тенденциях современного кон-
струирования, т.е. о том, какие решения предпочитают
использовать конструкторы, особенно зарубежные, при
возможности выбора, что, однако, не означает беспер-
спективности иных решений.
• Механизмы и приводы вращательного движения
предпочитают устройствам, в которых присутствует воз-
вратно-вращательное или возвратно-поступательное
движение.
• Собственный привод каждого исполнительного
звена (индивидуальный привод) или даже несколько
приводов одного звена предпочитают общему приводу с
разветвленной трансмиссией.
• Низшие кинематические пары (соприкосновение
по поверхности) предпочитают высшим парам (сопри-
косновение по линии или в точке) особенно при ударных
нагрузках. Имеются, однако, примеры ошибочных, на
взгляд автора, решений двигателя внутреннего сгорания
с высшими парами в основном механизме, в частности,
демонстрируемого на одной из выставок научных и тех-
нических достижений.
• Упругие кинематические пары, в том числе "пле-
ночные" шарниры (см. упомянутую выше книгу К. Рота),
в условиях ограниченных перемещений предпочитают
парам внешнего трения.
• В качестве материалов деталей, особенно "несило-
вых", там, где это возможно, предпочитают пластмассы и
композиты. Кроме кожухов, облицовочных панелей, это,
в частности, относится к деталям приборов, малонагру-
женным, но достаточно точным зубчатым колесам (на-
пример, любой современный принтер) и др.
• Блочную конструкцию, составленную из отдель-
ных автоматически собираемых, как правило, неразбор-
ных и практически перемонтируемых узлов, предпочи-
тают конструкции из отдельных последовательно при-
соединяемых деталей. При этом соединение между от-
дельными блоками предусматривают простейшее: сколь-
зящее или упругое.
• Штампованные и штампованно-сварные детали
предпочитают литым.
• Детали с местной поверхностной термической или
химико-термической обработкой, а также с местными
покрытиями предпочитают деталям со сплошной обра-
боткой.
• Неразъемные, автоматически осуществляемые со-
единения предпочитают разъемным соединениям. Речь
идет прежде всего о пластических соединениях в сравне-
нии, например, с болтовыми соединениями. Однако в
последнее время под давлением "зеленых" в некоторых
странах принимают законы, запрещающие применение
неразборных конструкций, особенно если в них имеются
неизвлекаемые пластмассовые детали.
• Уплотнение неподвижного стыка предпочитают
осуществлять с помощью специальных герметиков, а не с
помощью упругих прокладок.
• В качестве уплотнения подвижного соединения
предпочитают разделительное уплотнение при ограни-
ченных перемещениях или торцовое (осевое) при неогра-
ниченных перемещениях, чем соответственно скользя-
щее или окружное скользящее уплотнение.
• Быстроходные малогабаритные приводы и меха-
низмы из высококачественных материалов предпочитают
более громоздким и простым тихоходным приводам.
• Многопоточные системы с параллельным соеди-
нением приводов и механизмов предпочитают однопо-
точным последовательным системам.
• Цилиндрические зубчатые и, в частности, плане-
тарные передачи с высоким КПД предпочитают более
простым червячным передачам.
• Дисковые и многодисковые фрикционные тормоза
и муфты предпочитают колодочным и ленточным тормо-
зам и муфтам.
• Самоустанавливаемость предпочитают решать
прежде всего за счет конструкции механизма или фермы,
а не за счет системы управления.
• Статически определимые и достаточно деформа-
тивные системы звеньев, опор и подвески агрегатов,
обеспечивающие их самоустановку, предпочитают сис-
темам, требующим регулировки или подгонки взаимного
расположения звеньев.
• Компоновку и размещение деталей и узлов в про-
странстве с совмещением их функций предпочитают
компоновке с раздельной реализацией функций. Речь
идет о встраивании отдельных узлов в общий корпус или
об использовании свободного пространства внутри дру-
гих деталей или узлов, об использовании несущей детали
в качестве защитной, о восприятии нагрузок разных на-
правлений в одном соединении и т.п.
• Геометрические системы с короткой размерной
цепью предпочитают системам с длинной размерной цепью.
• Кинематические и динамические системы с разде-
лением функций предпочитают системам совместной
реализации различного вида движения и/или нагружения.
Речь идет о предпочтении схем с независимой передачей
движения или с определенным невзаимозависимым со-
отношением распределения нагрузки.
• Динамические и статические системы с кратчай-
шим путем замыкания силовых линий (по количеству
последовательно нагружаемых стыков, подвижных со-
единений и деформируемых звеньев) предпочитают сис-
темам с более длинным путем замыкания силовых линий.
• Системы с плавным изменением плотности сило-
вых линий или с плавным их искривлением предпочита-
ют системам с резким изменением плотности или с рез-
ким перегибом.
• Симметричные геометрические формы и симмет-
ричные системы замыкания сил предпочитают несим-
метричным формам и системам.
Разумеется, данный перечень нельзя считать исчер-
пывающим и уж, конечно, нельзя считать догмой. Общее
правило таково - любую рекомендацию надо проверить
на соответствие принципу функциональной целесообраз-
ности для заданных условий.
8
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
Одним из основополагающих аспектов современно-
го конструирования, особенно в зарубежной практике,
является преемственность решений. Это становится все
более рациональным благодаря тому, что компьютер по-
зволяет запомнить и записать каждый шаг конструктора,
его коллег и предшественников. Ничто не уходит бес-
следно в небытие. Конструктор уже может не вычерчи-
вать деталь или соединение от начала до конца и тем бо-
лее не делать это вручную. Обязательно используется
готовый прототип, который "извлекают" из компьютер-
ного банка. Укрупненно процесс конструирования пред-
ставлен на схеме 1.3 (рис. 1). Кроме банка конструкций и
комплексных решений, используются банки материалов
и технологий, а также банк информации об испытаниях и
эксплуатации предшествующих исполнений, а также об
исследовании новых моделей. Чем богаче, полнее банк
аналогов, чем лучше отработана система поиска, тем
больше возможностей создать качественную конструк-
цию. Процесс конструирования заключается в правиль-
ном выборе известной схемы (модели), подстановке в нее
известных решений (этот процесс сам по себе не так уж
прост, как кажется на первый взгляд) и, наконец, в со-
вершенствовании конструкции отдельных элементов и
системы в целом с учетом накопленного опыта эксплуа-
тации и испытаний прототипа и с учетом анализа других,
вновь появившихся решений (в данном случае использу-
ется банк изобретений). Каждый этап совершенствования
не должен быть кардинальным, чтобы не растерять все
полезное, что имелось в прежнем решении, и дополнить
новые положительные качества.
Самое ценное, чем обладают крупнейшие зарубежные
компании, — это интеллектуальная собственность, ко-
торая сосредоточена в закрытых частных компьютерных
банках. Поэтому эти компании способны быстро модер-
низировать продукцию и осваивать новые поколения
машин. Данное обстоятельство недооценивается в нашей
стране. Достаточно отметить утрату в последнее время
технических архивов многих отечественных предприятий
и КБ. Тем не менее начинать реанимировать отечествен-
ное машиностроение нужно с восстановления и создания
систематизированных банков конструкций, в основу ко-
торых может быть положена справочная и патентная ли-
тература. Только постепенное пополнение и сохранение
накопленного и овладение новой компьютерной техни-
кой позволит иметь равные возможности с зарубежными
конструкторами.
1.2. КРАСОТА И УДОБСТВО
В наше время такие качества, как красота и удобст-
во окружающей техники никого из нас не оставляют рав-
нодушным. Причем, чтобы судить об этих качествах из-
делий, с которыми имеешь дело, вовсе не надо быть спе-
циалистом. Если вам приятно смотреть на вещь, то она
красива, а если она вызывает хотя бы некоторое неудо-
вольствие - значит, с ее внешним видом не все в порядке.
Действительно, удовлетворить вкусам каждого очень
трудно, но существуют общие критерии красоты, кото-
рые одинаково понимает и подсознательно воспринимает
любой человек. Сравните два автомобиля с одинаковыми
внешними очертаниями, но один из них имеет неровные
стыки элементов и большие зазоры между ними. Никто в
этом случае не станет утверждать, что он так же красив,
как и другой. Что касается удобства, то понимание этого
качества доступно каждому, кто использует конкретное
изделие. Оглянитесь вокруг себя: вы можете стать экс-
пертом по любой вещи. Разумеется, лучше всего эти ка-
чества можно оценивать в сравнении.
Пока я не пересел на автомобиль ВАЗ-21083 с пре-
стижной "высокой панелью", я не обращал внимания,
удобно или неудобно мне следить за показаниями спи-
дометра. А в данном случае этот вопрос решился очень
просто: часть спидометра загораживается рулевым коле-
сом именно в зоне 50- 80 км/ч, и приходится изворачи-
ваться, заглядывать под обод рулевого колеса, чтобы не
нарушать правила дорожного движения (нарушение от
этого может быть более серьезным, чем превышение
скорости). Если продолжить описание претензий к моему
автомобилю, то при моем чуть выше среднего росте ост-
рый край открытой задней дверцы оказывался как раз на
уровне лба, что неоднократно приводило к легким травмам.
Другой пример: широко разрекламированный новый
моющий пылесос имеет два совершенно одинаковых вы-
ключателя, расположенных рядом. Может, это и красиво,
но неудобно. Почти каждый раз при сухой уборке я оши-
бочно нажимаю не на ту кнопку и начинает работать
гидравлический насос, хотя жидкость предварительно не
залита.
Убежден, что почти каждый потребитель мысленно
неоднократно произносит фразу: "Вот если бы я был
конструктором, то...". Справедливости ради отмечу, что
все не так просто, как кажется на первый взгляд, и далеко
не всегда так очевидно, как показано на приведенных
примерах.
Конструирование техники — это то же искусство,
что и живопись или создание модной одежды. А связь
между конструкцией и внешним видом, между техноло-
гией изготовления и удобством эксплуатации и тем более
между красотой и удобством еще более сложная, чем это
может представиться при самом сильном воображении
(примите во внимание разнообразие вкусов и традиций, а
также массовость производства). Процесс совершенство-
вания внешнего вида иногда кажется оторванным от со-
держания устройства. Как правило, форма отстает от со-
держания и имеется стремление достичь соответствия
формы содержанию. Принципиальная схема автомобиля
меняется намного реже, чем его внешний вид. А кроме
того, трудно определить, где кончается совершенствова-
ние содержания, а где начинается совершенствование
формы.
Если благодаря новым технологиям и материалам
вы улучшаете покрытия, уменьшаете зазоры между эле-
ментами, повышаете аэродинамические качества благо-
даря новым формам, то автомобиль сам по себе стано-
вится красивее и удобнее. Если вы исключаете лишние
элементы (молдинги и т.п.), делаете края закругленными,
убираете выступы и полости, то, соответственно, повы-
шаются его эксплуатационные качества.
КРАСОТА И УДОБСТВО
9
Тем не менее так же, как при конструировании от-
дельных деталей мы беспокоимся о технологичности,
прочности, износостойкости и т.п., так и при создании
изделия в целом мы должны специально работать над
красотой и удобством. Существуют даже отдельные нау-
ки (или учения), которые объединяют в себе критерии,
правила и рекомендации по созданию красивых изделий, -
это (техническая) эстетика, а удобных в эксплуатации
изделий - это эргономика. Конструктор любого уровня
должен быть хорошо знаком хотя бы с общими положе-
ниями эстетики и эргономики. Но. к сожалению, у нас в
стране этой стороне конструирования внимания уделя-
лось ничтожно мало. Результат: если наши тракторы экс-
портировались за рубеж, то цена их в два раза отличалась
от американских только по той причине, что в них даже
не было намека на элементарные условия для трактори-
ста. Вспомните металлические сиденья на ряде прицеп-
ных сельскохозяйственных машин. Мне пришлось слы-
шать такие рассуждения: "Будет жестко, подстелет тело-
грейку и о'кэй".
Кстати, красота и удобство - взаимосвязанные ве-
щи, поскольку если человек испытывает дискомфорт от
зрительного или оз тактильного восприятия вещи, то она
некрасива в первом случае и неудобна во втором, хотя в
обоих случаях имеет место определенное неудобство.
Красивая вещь успокаивает, умиротворяет и/или
вдохновляет на творчество, т.е. обеспечивает благопри-
ятные условия труда, а это уже сфера эргономики.
Главные критерии красоты:
1. Взаимосоответствие (неразрывная связь) фор-
мы, функций и содержания (внутреннего строения).
2. Единство и целостность композиции.
Чтобы в полной мере удовлетворять этим критери-
ям, нужно позаботиться о совершенстве как содержания,
так и формы. Здесь пойдет речь только о совершенстве
формы.
10
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
Итак, если какое-либо изделие в действительности
способно выполнять определенные функции и/или если
оно обладает достаточной прочностью и устойчивостью,
и если оно способно двигаться с большой скоростью и
т.д., то его форма должна выглядеть соответственно этим
функциям.
Теперь несколько слов о композиции вообще и о ее
единстве и целостности. Композиция — это своего рода
строение, структура, компоновка, система взаимосвя-
зей элементов. Человек чувствует неудобство:
когда ему непонятен замысел этого строения, на-
пример, когда имеет место бессистемное нагромождение
элементов (речь идет не о физических, а о зрительно вос-
принимаемых категориях);
когда рассеивается внимание и чувствуется подчи-
ненность элементов двум или более замыслам;
когда каждый из элементов выглядит изолирован-
ным, оторванным один от другого;
когда неясно, какой из элементов главный, а какие
находятся в подчинении, и т.п.
Иными словами, человеку не нравится отсутствие
логики и системы. Не всегда это можно понять, а тем
более создать систему, зрительно понятную и восприни-
маемую как единое целое. Не случайно работа дизайнера
высоко ценится за рубежом. В то же время изложенное
свидетельствует, что разрабатывать конструкцию от-
дельно от формирования внешнего вида - пустая затея,
так как никакое украшательство не исправит плохое со-
держание, так же, как и само содержание еше недоста-
точно, чтобы его однозначно воспринимать как красивую
вещь.
Далее остановимся на некоторых закономерностях и
правилах при решении задачи создания красивых вещей
(см. схемы на рис. 2.1 и 2.2).
Сначала поговорим о месте расположения предмета
(см. рис. над схемой 1.1). Представим себе 100 одинако-
вых элементов (квадратов), равномерно расположенных
в большом квадрате. В левом верхнем углу элементам
будет уделено 40 % внимания зрителя, а в правом ниж-
нем углу столько же элементов получат только 15 %
внимания. Мало того, что внимание рассеивается из-за
большого числа элементов, оно еще и распределяется
неравномерно.
Если вы создаете новую композицию, постарайтесь,
чтобы элементов формы было бы не больше, чем
5 ... 7, иначе их будет очень трудно объединить в единую
систему. Кроме того, следует позаботиться о соответст-
вующих размерах и взаимном расположении, чтобы каж-
дому элементу было уделено столько внимания, сколько
он заслуживает по своему содержанию.
Одним из направлений создания единой композиции
является соподчиненность. Главный элемент может,
действительно, восприниматься как главный, если его
сделать самым большим (схема 1.1), или если его размес-
тить в середине (схема 1.2), или выделить рельефом или
ярким цветом (схема 1.3). Менее ощутима или неощути-
ма соподчиненность, когда имеются одинаковые элемен-
ты (схема 1.1а, 1.2а) или когда цветом выделены край-
ние элементы (схема 1.3а). Лучше дополнять приемы
выделения главного, например, расположением и разме-
рами, но в любом случае соподчиненность должна легко
прослеживаться (см. пример на схеме 1.4 — ковш скрепе-
ра, основной тягач (слева) и вспомогательный тягач вос-
принимаются именно в данной последовательности (по
значимости), а не в иной другой).
Следующее, очень древнее правило - элементы
должны быть соразмерны и, в частности, подчинены
определенной пропорции. Речь идет в основном о раз-
мерах, но относится это также к другим средствам вы-
разительности, например, к геометрической форме,
рельефу, цвету и даже к светотени. Вы никогда не за-
думывались, почему высота и ширина страницы, карти-
ны, оконного проема очень часто соответствуют отноше-
нию 3/2 или 2/3, но почти никогда их не делают квадрат-
ными. Здесь не будем вдаваться в рассуждения, почему
такое соотношение, а его называют "золотым сечени-
ем", очень часто используют. Существует очень много
объяснений такого рода, отмечу только, что именно "зо-
лотое сечение" позволяет создавать предметы, воспри-
нимаемые как соразмерные. Кстати, "золотое сечение"
определяют таким образом: целое а относится к части Ь,
как часть относится к разности между целым и частью.
"Золотое сечение" характеризуется следующим ря-
дом величин: 0,382:0,618:1,000: 1,618:2,618 и т.д.
Вышеизложенное не нужно воспринимать как дог-
му, так как в отличие от архитектуры зданий в машинах
очень трудно форму подчинить данному ряду (как это
сделано, например, в мотор-барабане на схеме 2.1), но
обеспечить пропорциональность формы стоит в любом
случае (см. пример фронтального вида вагона поезда мет-
ро на схеме 2.2).
Следующее правило касается обеспечения мас-
штабности. Сравните соотношения размеров ребенка и
взрослого человека и вы убедитесь, насколько они раз-
ные (например, ребенок сложен более компактно, имеет
большего размера голову, толще и короче руки и ноги по
отношению к росту). Так и машины разных абсолютных
размеров не мотуг иметь одни и те же пропорции. Если
вы хотите сделать легковой автомобиль просторнее и
комфортабельнее, достаточно увеличить размеры кабины
(салона), но нет необходимости увеличивать подкапотное
пространство (оно продиктовано размерами двигателя),
а, может быть, и объем багажника (вспомните автомо-
биль "Чайка" или ЗИЛ-114 представительского класса с
большим багажником; непонятно, зачем он нужен был
министрам в служебных поездках по городу).
На схемах 3.1 и 3.2 приведены для сравнения карь-
ерный и "садовый" бульдозеры. Хотя они выполнены не
в одном масштабе, соотношения размеров позволяют
судить о масштабности, например, по отношению к раз-
мерам человека (сравните, в частности, соотношения
размеров отвала, двигателя и кабины или сиденья).
Далее остановимся на категории визуальной (вы-
разительности) устойчивости, прочности и равнове-
сия. Эти категории отличаются от физических категорий
тем, что они характеризуют субъективное, чисто зри-
тельное восприятие объекта в пространстве: объект мо-
жет казаться падающим (вспомните Пизанскую башню),
хотя простоит еще много лет или веков; объект может
казаться очень тяжелым, хотя на самом деле выполнен
пустотелым, и т.д.
КРАСОТА И УДОБСТВО
11
2.2. ВИЗУАЛЬНАЯ ВЫРАЗИТЕЛЬНОСТЬ ФОРМЫ
12
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
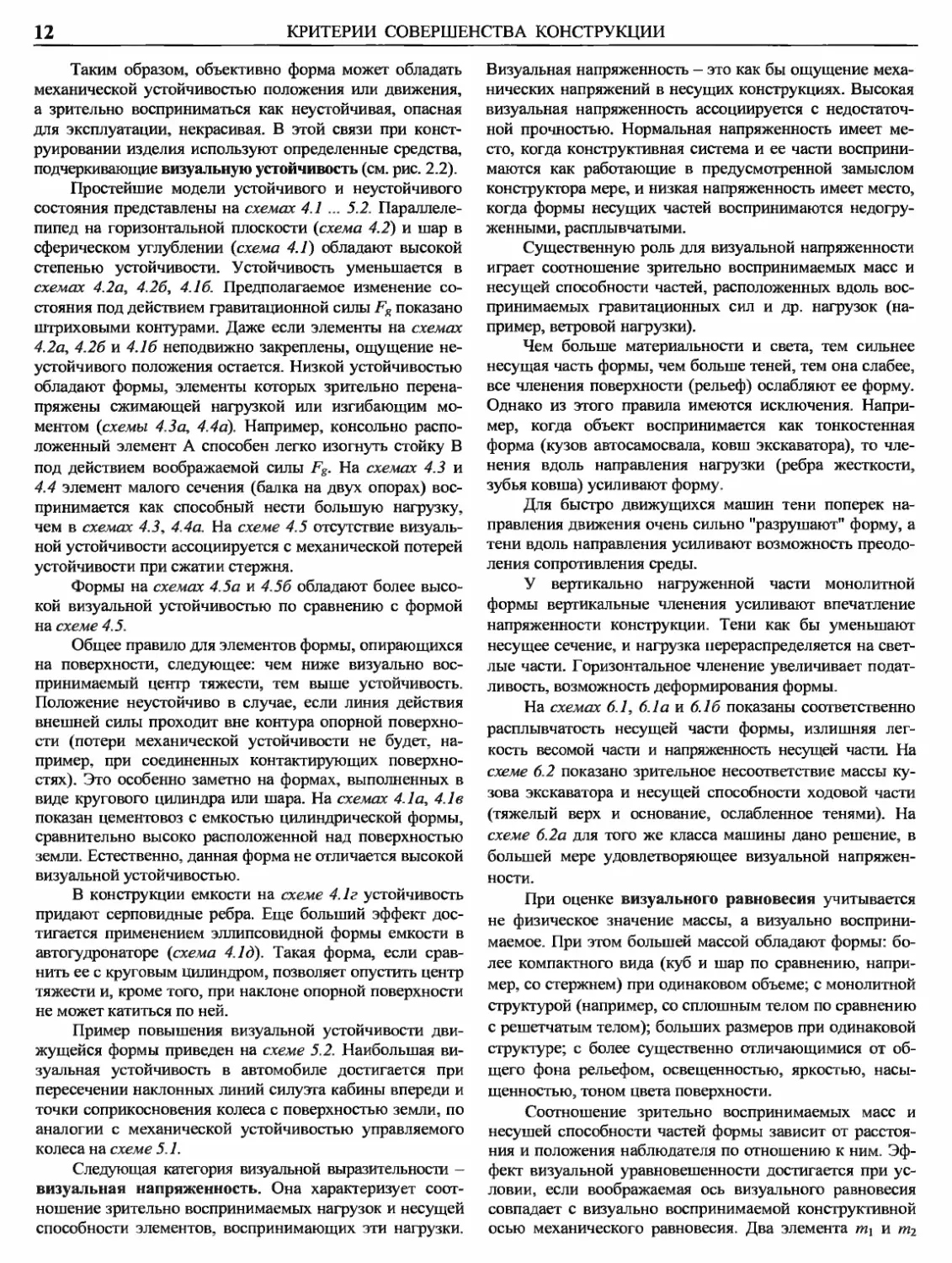
Таким образом, объективно форма может обладать
механической устойчивостью положения или движения,
а зрительно восприниматься как неустойчивая, опасная
для эксплуатации, некрасивая. В этой связи при конст-
руировании изделия используют определенные средства,
подчеркивающие визуальную устойчивость (см. рис. 2.2).
Простейшие модели устойчивого и неустойчивого
состояния представлены на схемах 4.1 ... 5.2. Параллеле-
пипед на горизонтальной плоскости (схема 4.2) и шар в
сферическом углублении (схема 4.1) обладают высокой
степенью устойчивости. Устойчивость уменьшается в
схемах 4.2а, 4.26, 4.16. Предполагаемое изменение со-
стояния под действием гравитационной силы Fg показано
штриховыми контурами. Даже если элементы на схемах
4.2а, 4.26 и 4.16 неподвижно закреплены, ощущение не-
устойчивого положения остается. Низкой устойчивостью
обладают формы, элементы которых зрительно перена-
пряжены сжимающей нагрузкой или изгибающим мо-
ментом (схемы 4.3 а, 4.4а). Например, консольно распо-
ложенный элемент А способен легко изогнуть стойку В
под действием воображаемой силы Fg. На схемах 4.3 и
4.4 элемент малого сечения (балка на двух опорах) вос-
принимается как способный нести большую нагрузку,
чем в схемах 4.3. 4.4а. На схеме 4.5 отсутствие визуаль-
ной устойчивости ассоциируется с механической потерей
устойчивости при сжатии стержня.
Формы на схемах 4.5а и 4.56 обладают более высо-
кой визуальной устойчивостью по сравнению с формой
на схеме 4.5.
Общее правило для элементов формы, опирающихся
на поверхности, следующее: чем ниже визуально вос-
принимаемый центр тяжести, тем выше устойчивость.
Положение неустойчиво в случае, если линия действия
внешней силы проходит вне контура опорной поверхно-
сти (потери механической устойчивости не будет, на-
пример. при соединенных контактирующих поверхно-
стях). Это особенно заметно на формах, выполненных в
виде кругового цилиндра или шара. На схемах 4.1а, 4.1 в
показан цементовоз с емкостью цилиндрической формы,
сравнительно высоко расположенной над поверхностью
земли. Естественно, данная форма не отличается высокой
визуальной устойчивостью.
В конструкции емкости на схеме 4.1г устойчивость
придают серповидные ребра. Еще больший эффект дос-
тигается применением эллипсовидной формы емкости в
автогудронаторе (схема 4.1д). Такая форма, если срав-
нить ее с круговым цилиндром, позволяет опустить центр
тяжести и, кроме того, при наклоне опорной поверхности
не может катиться по ней.
Пример повышения визуальной устойчивости дви-
жущейся формы приведен на схеме 5.2. Наибольшая ви-
зуальная устойчивость в автомобиле достигается при
пересечении наклонных линий силуэта кабины впереди и
точки соприкосновения колеса с поверхностью земли, по
аналогии с механической устойчивостью управляемого
колеса на схеме 5.1.
Следующая категория визуальной выразительности -
визуальная напряженность. Она характеризует соот-
ношение зрительно воспринимаемых нагрузок и несущей
способности элементов, воспринимающих эти нагрузки.
Визуальная напряженность - это как бы ощущение меха-
нических напряжений в несущих конструкциях. Высокая
визуальная напряженность ассоциируется с недостаточ-
ной прочностью. Нормальная напряженность имеет ме-
сто, когда конструктивная система и ее части восприни-
маются как работающие в предусмотренной замыслом
конструктора мере, и низкая напряженность имеет место,
когда формы несущих частей воспринимаются недогру-
женными, расплывчатыми.
Существенную роль для визуальной напряженности
играет соотношение зрительно воспринимаемых масс и
несущей способности частей, расположенных вдоль вос-
принимаемых гравитационных сил и др. нагрузок (на-
пример, ветровой нагрузки).
Чем больше материальности и света, тем сильнее
несущая часть формы, чем больше теней, тем она слабее,
все членения поверхности (рельеф) ослабляют ее форму.
Однако из этого правила имеются исключения. Напри-
мер, когда объект воспринимается как тонкостенная
форма (кузов автосамосвала, ковш экскаватора), то чле-
нения вдоль направления нагрузки (ребра жесткости,
зубья ковша) усиливают форму.
Для быстро движущихся машин тени поперек на-
правления движения очень сильно "разрушают" форму, а
тени вдоль направления усиливают возможность преодо-
ления сопротивления среды.
У вертикально нагруженной части монолитной
формы вертикальные членения усиливают впечатление
напряженности конструкции. Тени как бы уменьшают
несущее сечение, и нагрузка перераспределяется на свет-
лые части. Горизонтальное членение увеличивает подат-
ливость, возможность деформирования формы.
На схемах 6.1, 6.1а и 6.16 показаны соответственно
расплывчатость несущей части формы, излишняя лег-
кость весомой части и напряженность несущей части. На
схеме 6.2 показано зрительное несоответствие массы ку-
зова экскаватора и несущей способности ходовой части
(тяжелый верх и основание, ослабленное тенями). На
схеме 6.2а для того же класса машины дано решение, в
большей мере удовлетворяющее визуальной напряжен-
ности.
При оценке визуального равновесия учитывается
не физическое значение массы, а визуально восприни-
маемое. При этом большей массой обладают формы: бо-
лее компактного вида (куб и шар по сравнению, напри-
мер. со стержнем) при одинаковом объеме; с монолитной
структурой (например, со сплошным телом по сравнению
с решетчатым телом); больших размеров при одинаковой
структуре; с более существенно отличающимися от об-
щего фона рельефом, освещенностью, яркостью, насы-
щенностью, тоном цвета поверхности.
Соотношение зрительно воспринимаемых масс и
несущей способности частей формы зависит от расстоя-
ния и положения наблюдателя по отношению к ним. Эф-
фект визуальной уравновешенности достигается при ус-
ловии, если воображаемая ось визуального равновесия
совпадает с визуально воспринимаемой конструктивной
осью механического равновесия. Два элемента /И] и /иг
КРАСОТА И УДОБСТВО
13
{схема 7.1) имеют ось механического равновесия 1. Од-
нако в силу различия элементов и ассоциации с механи-
ческим равновесием мы мысленно проводим ось равно-
весия 2.
Ось визуального равновесия смещается еще больше,
если значимость левого элемента выражена активнее,
энергичнее (см. схему 7.16).
Чтобы совместить оси 1 и 2, требуется изменить
значимость элементов формы {схемы 7.1а). Если ось ме-
ханического равновесия активно выражена, то даже при
различии состояний свойств значимость элементов опре-
деляется положением оси механического равновесия
(вращения). Одно и то же физическое соотношение масс
может восприниматься по-разному при различном распо-
ложении объекта.
Понятие визуального равновесия, пожалуй, более
широкое, чем ассоциация с механическим равновесием.
Так можно говорить о визуальном равновесии по отно-
шению всего к одному элементу, каким-то образом рас-
положенному на основании, панели, экране и т.п. Так на
схеме 7.2, если черное пятно находится не в центре квад-
рата, создается ощущение его неуравновешенности. Два
одинаковых пятна на схеме 7.2а также не могут уравно-
весить друг друга в силу их смещения от центра квадра-
та. Пятна на схеме 7.26, симметрично размещенные на
диагонали квадрата, вызывают ощущение уравновешен-
ности. При рассмотрении пространственной формы {схе-
ма 7.4) устанавливаем различие значимости элементов
формы: монолитность противовеса; выступающие части
платформы и легкая листовая с поперечными связями
конструкция стрелы. Ось визуального равновесия совпа-
дает с осью вращения 1 (2).
Таким образом, чтобы обеспечить устойчивое визу-
альное равновесие (при ассоциации его с механическим
равновесием) при различии размеров и объемов элемен-
тов, требуется перераспределить значимость элементов
по другим свойствам, выразить структуру формы более
активно. Например, о коробчатом сечении стрелы (на
схеме 7.5) можно судить по отверстиям. Без этих отвер-
стий конструкция выглядит монолитной, тяжеловесной.
Монолитность противовеса на схеме 7.4 выражена
его плоскими очертаниями и выступающими по отноше-
нию к другим элементам формы частями. Визуальные
устойчивость, напряженность и уравновешенность легко
обеспечиваются в форме, обладающей тектоничностью.
Тектоничность - это своего рода наиболее полное
отражение функции, взаимодействия звеньев, механиче-
ской взаимосвязи элементов во внешней форме машины
или сооружения. Схема 73 и 7.4 обладают явно выра-
женной тектоничностью, и для обеспечения визуальной
уравновешенности практически нет необходимости при-
нимать дополнительные меры.
Как правило, удачная организация элементов конст-
рукции с точки зрения механики (например, равнопроч-
ность элементов) представляет собой внешне вырази-
тельную форму, удовлетворяющую зрителя эстетически.
В таких конструкциях наблюдается порядок, равновесие,
стабильность, напряженность (на схеме 7.3 — силуэт ро-
торного экскаватора). Так же, как любая конструкция,
внешняя форма характеризуется совокупностью свойств
и качеств, из которых визуальное равновесие присутст-
вует как в визуальной устойчивости, так и в визуальной
напряженности. По аналогии с механическим равновеси-
ем оно может быть устойчивым, неустойчивым и безраз-
личным.
Достижение наиболее полного и точного отражения
устойчивого равновесия в форме средствами композиции
называется визуальной уравновешенностью. Еще одна
важная характеристика формы - это динамичность. Она
выражает подвижность, изменяемость, направленность
движения и/или силового воздействия.
Средствами достижения динамичности являются
нюанс и контраст. Тождество придает зрительную не-
подвижность, статичность. Общие правила таковы: сим-
метричные формы - статичны, асимметричные - дина-
мичны. Когда речь идет о составлении формы из боль-
шого числа элементов, то говорят о ритмическом {схемы
8.4а, 8.45) или метрическом {схема 8.4) порядке, которые
соответственно выражают динамичность и статичность.
В принципе любая форма, в том числе и сплошная, очер-
ченная непрерывными линиями, может быть представле-
на в виде ритмического или метрического порядка (на
схемах 8.8 и 8.9 обозначено R и М соответственно) боль-
шого или даже бесконечно большого числа элементов.
В жизни понимание и восприятие динамичности
намного сложнее, чем это продиктовано общими прави-
лами. Как показывает опыт, абсолютно статичных форм
не существует или по крайней мере не существует форм,
статичных во всех направлениях.
Предметы на схемах 8.1 и 8.1а в силу перспективно-
го сокращения кажутся устремленными вдаль или ввысь,
а идеально симметричная фигура - шар на схеме 8.2 - не
кажется статичной из-за направленности света и соответ-
ствующей светотени. Светотень на схеме 8.3 придает
явно выраженную динамичность кубу. На схеме 8.5 при-
мер комплексного выражения статичности в камнедро-
билке за счет одинаковых форм и метрического порядка
расположения рельефа (ребер жесткости).
На схеме 8.6 показано, что даже одна линия, если
она расположена наклонно, уже выражает определенное
стремление к движению. Тем не менее дугу окружности
{схема 8.6а) или прямую линию все же чаще используют
для выражения статического состояния. Обратите вни-
мание, что дизайнеры стараются вообще избегать очер-
таний в виде прямой или дуги окружности, а используют
кривые более высокого порядка {схема 8.66).
Асимметрия формы придает динамичность только в
одном направлении — в направлении изменения размеров
или иных свойств {схемы 8.7, 8.7а, 8.76).
Главная задача при формировании объекта - это
правильное сочетание элементов формы, выражающих
динамичность или статичность, обеспечивающих дина-
мичность {схема 8.9а) или статичность {схема 8.8) в це-
лом. Пожалуй, это наиболее сложная задача из всех задач
придания форме определенной выразительности. Еще раз
подчеркивая, что все приведенные приемы могут быть
использованы в совокупности, т.е. объект одновременно
должен характеризоваться правильной соподчинен-
ностью и соразмерностью, высокой визуальной ус-
тойчивостью и соответствующей функциям (несущих
14
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
3. ОПТИЧЕСКИЕ ИЛЛЮЗИИ
ИЛЛЮЗИИ СООТНОШЕНИЯ РАЗМЕРОВ
Плошади белого Длины отрезков одинаковые
ИЛЛЮЗИИ
ОТНОСИТЕЛЬНЫХ
ПОЛОЖЕНИЙ
Параллельные прямые
ИЛЛЮЗИИ
ГЕОМЕТРИЧЕСКИХ
ФОРМ
9.7 Дуги одинаковой
ИЛЛЮЗИИ
ПЕРСПЕКТИВЫ
Линии
четырехугольника
прямые
частей) визуальной напряженностью, уравновешен-
ностью элементов и динамичностью или статично-
стью формы в зависимости от основной функции.
Средства достижения выразительности, как следует
из представленных примеров, разнообразны, но они мо-
гут быть сведены в основном к геометрической форме,
размерам, цвету, рельефу, световому излучению, осве-
щенности и светотени. Выразительность достигается за
счет совокупного использования соотношений и средств.
Соотношения сводятся к тождеству (равенству), нюансу
(например, плавному переходу или незначительному от-
личию) или к контрасту (резкому переходу, существен-
ному отличию, сочетанию элементов противоположных
визуальных характеристик).
Во всех приведенных примерах речь идет только о
визуальном восприятии, а не о физических (объективно
существующих) категориях, т.е. о том, какими мы видим
объекты, а не какие они есть на самом деле. Между тем
визуальное восприятие может существенно отличаться от
реального состояния. Кстати, есть даже такое понятие
оптические иллюзии, которое надо обязательно учиты-
вать при выборе геометрической формы, размеров, цвета
и других свойств. На рис. 3 показаны отдельные примеры
иллюзий:
на схеме 9.1 белый круг на черном фоне кажется
больше черного круга на белом фоне;
на схемах 9.2, 9.2а и 9.26 отрезки линий кажутся
разными по длине;
на схеме 9.3 площади центральных фигур кажутся
различными в окружении малых или больших перифе-
рийных фигур;
на схеме 9.4 вертикальные линии (полосы) делают
фигуру более стройной и высокой, а горизонтальные по-
лосы - расплывчатой и более широкой;
на схеме 9.5 длинные параллельные линии, пересе-
каемые короткими наклонными отрезками, кажутся не-
параллельными;
на схеме 9.6 фигуры на фоне сходящихся лучей ка-
жутся разными по величине и неравноудаленными от
зрителя;
на схеме 9.7 кажется, что короткие дуги одного ра-
диуса имеют большую кривизну, чем длинные дуги;
на схеме 9.8 прямые линии на фоне концентриче-
ских окружностей "искривляются";
на схеме 9.9 более светлые (или "холодного" тона
фигуры кажутся более удаленными и большего размера,
чем более темные (или "теплые" тона) фигуры;
на схеме 9. 10 — визуальная корректировка иллюзии
перспективы за счет противоположной последовательно-
сти расположения фигур по сравнению со схемой 9.9.
Существует много других примеров иллюзий, кото-
рые обязательно надо учитывать. Например, если буквы
в слове расположены на одинаковом расстоянии одна от
другой, то создается ощущение, что слово распадается на
отдельные части и кажется, что они удалены на разные
расстояния одна от другой. Если проведена соответст-
вующая корректировка (плошади пробелов между бук-
вами примерно одинаковые, а расстояния разные), то не
создается впечатления раздробленности. Это хорошо
известный прием обеспечения целостности графической
композиции. Аналогичным образом в ряде случаев ис-
кривляют линии, корректируют размеры, изменяют цве-
товые соотношения и т.д. Чтобы в полной мере ощутить
значение оптических иллюзий, обратимся к понятному
всем внешнему виду легкового автомобиля (см. схе-
му 5.2, рис. 2.2). Очертания его представляются в виде
пересечений линий (см., например, лучи, сходящиеся в
точке Р). Если не придать очертаниям соответствующий
прогиб в сторону точки Р, то может создаться ощущение
ослабленной, прогнутой в середине формы.
Далее остановимся на некоторых примерах и прие-
мах комплексных решений формы машин и даже не-
скольких машин (рис. 4.1).
КРАСОТА И УДОБСТВО
15
16
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
На схемах 10.1 ... 10.5 даны примеры кабин некото-
рых машин. Создание кабины, гармонично увязанной с
формой машины, — одна из сложнейших задач в силу
противоречивости требований эргономики и эстетики.
При проектировании кабины учитывают ряд требо-
ваний:
1. Размеры, внутренний объем кабины должны со-
ответствовать санитарно-гигиеническим нормам.
2. Остекленность кабины должна обеспечивать пол-
ный обзор рабочего участка, максимальное естественное
освещение пульта управления, но должна исключать ис-
кажение зрительной информации, ослепление лучами
солнца и искусственным освещением объекта.
3. Кабина должна быть по возможности приближена
к объекту управления.
4. Форма кабины должна соответствовать характеру
работы, положению оператора во время работы и не на-
рушать композиционного единства формы машины в
целом.
На схеме 10.1 — кабина карьерного экскаватора, на
схеме 10.2 — кабина универсального экскаватора, на схе-
ме 10.3 — кабина погрузчика, на схеме 10.4 - кабина тяга-
ча, а на схеме 10.5 — кабина автокрана.
На схеме 10.1 показано, что кабина несколько по-
вернута по отношению к основным осям экскаватора для
обеспечения удобного положения машиниста при на-
блюдении за ковшом.
На схемах 10.2 и 10.4 лобовое стекло перпендику-
лярно к оси зрения, что исключает искажение предметов,
блики. Кабина погрузчика (схема 10.3) имеет геометри-
ческую форму, гармонично сочетающуюся с другими его
частями. В схеме 10.5 предусмотрен круговой обзор, не-
обходимый для наблюдения за дорогой при передвиже-
нии машины и за грузом при осуществлении грузоподъ-
емных операций.
Приведенные примеры, как и многие кабины совре-
менных машин (в том числе легковых автомобилей), да-
леки от совершенства. Кабины по схеме 10.2 одно врл
стали использовать на башенных кранах. Машинч.|
кранов психологически не выдерживали открытого пц
странства под ногами и закрывали стекло картоном, хз
и были уверены в прочности прозрачного огражде «
В результате кабина была переделана в сторону ум-
шения фронтального остекления, хотя машинисту i э
ходится наклоняться, чтобы смотреть вниз.
Кабины по типу схем 10.3 и 10.5, особенно на без
ших машинах, не позволяют обозревать простраж
вблизи машины. Аналогично современные легковые ч
шины с малым аэродинамическим коэффициентом та 1
имеют ограниченный обзор через заднее стекло, а кя
капота и переднего бампера практически не видш
приходится маневрировать, полагаясь не только на □
ние, но и на опыт и другие ощущения.
Здесь специально приведены далеко не лучшие з
шения, чтобы показать направления поиска: сочета-j
внешнего вида и удобства. Видимо, стоит искать и;д
решения размещения и формы кабин в сочетании с 1
полнительными средствами информации: система зер
телевизионные установки и т.п.
На схемах 11.1 ... 11.5 приведены примеры совэ
менных решений формы технологического оборудов
ния, которые в какой-то мере иллюстрируют совокупи»
использование изложенных выше приемов.
Робот на схеме 11.1, несмотря на обилие разной
разных элементов механизмов и приводов, подчиш
единой идее — выражению пространственных движений
На токарном станке на схеме 11.2 все элемен^
формы взаимосвязаны, основные подвижные звенья а
ходятся за прозрачным ограждением (можно наблю,
за процессом, не опасаясь возможных травм). Если отд
ждение отодвинуть, то срабатывают блокировочные у з
ройства, отключающие приводы от электропитания. Р
положение пульта управления и основных узлов доен
точно компактно и доступно для обслуживания.
КРАСОТА И УДОБСТВО
17
Пример на схеме 11.3 демонстрирует возможность
получения красивых решений, собирая их из отдельных
(законченных) блоков. Естественно, здесь учитывается и
геометрическое подобие, соразмерность и соподчинен-
ность. Возможные движения звеньев на схеме обозначе-
ны стрелками.
На схеме 11.4 очень сложное комплексное решение,
на первый взгляд, создается некоторое ощущение раз-
дробленности формы. Но тем не менее сравнительно лег-
ко прослеживается логическая связь элементов и отдель-
ных блоков в единой системе.
В схеме 11.5 в отличие от схемы 11.4, несмотря на
кажущуюся тектоничность формы, основные функцио-
нальные элементы с целью обеспечения безопасности
закрыты, защищены от зрителя. На схеме они показаны
как бы внутри защитной оболочки. Хотя иногда и стоит
умышленно подчеркивать тектонику изделия, но в дан-
ном примере сочетание всего трех-четырех элементов
(консолей, стола и направляющей) создает впечатление
целостной формы и понятной конструктивной идеи.
Как уже было отмечено, чем больше составляющих
элементов, тем сложнее обеспечить визуальную целост-
ность композиции. В этом плане встроенные, закрытые
решения оказываются очень кстати. Но они, как правило,
менее технологичны и менее удобны в обслуживании.
Поэтому идет непрерывный поиск таких конструктивных
решений отдельных элементов, чтобы они не нарушали
целостность формы и не вызывали неудобств в обслужи-
вании.
Сравните, например, два варианта на рис 4.2. На
схеме 11.6а использованы болты и пробки с потайными
головками, благодаря чему исключено большое число
выступов (см. схему 11.6), которые не только "разрушали
форму", но и создавали определенные неудобства при
закручивании болтов и соприкосновении рук с внешней
поверхностью корпуса.
Отсюда, однако, не следует делать вывод, что всегда
нужно "приглаживать" или "скруглять" отдельные вы-
ступы на поверхности.
При выборе формы следует стремиться к обеспече-
нию баланса свойств.
* * *
Больший период своего развития человек стремился
приспособиться к технике и терпимо до поры до времени
относился к ее воздействиям на себя и окружающий его
мир. Управлять машиной и эксплуатировать ее станови-
лось все сложнее, и человек старался повысить квалифи-
кацию. Поточное производство потребовало от него еще
большего сосредоточения сил и нервной энергии, чтобы
приспособиться к все более возрастающему темпу техно-
логических процессов. Нынешняя концепция развития
техники принципиально меняет задачу приспособляемо-
сти: возможности человека исчерпаны и создатель ма-
шины должен заботиться о приспособленности машины
к человеку. Человек создан прежде всего для интеллекту-
ального труда. Труд его должен быть интересным, да и
сам конструктор должен быть избавлен от рутинного,
монотонного труда. В мире уже нет или почти нет бух-
галтеров, кассиров, расчетчиков, копировщиков, чертеж-
ников, землекопов и др. категорий работников. Управле-
ние автомобилем сделано настолько удобным и простым,
что оно стало под силу женщинам. Направленность раз-
вития техники такова, чтобы сделать машину не только
безвредной, но и максимально приспособить ее к потреб-
ностям человека. Комфорт и удовольствие от управления
техникой - вот символы машины будущего.
Ну а пока спустимся на землю и кратко охарактери-
зуем современные эргонометрические нормы и требова-
ния к технике. Помните, что приведенные ниже данные в
основном ориентировочные: в разных странах, регионах
и даже отраслях техники свои подходы и свои нормы. Да
это и не удивительно, поскольку средние антропометри-
ческие данные отдельных народов, их национальные
традиции, вкусы и приоритеты различаются. Негуманно
пренебрегать в этом плане интересами даже отдельных
групп людей, например, инвалидов или людей с отли-
чающимися от средних показателей данными (например,
дальтоников).
* * *
Итак, эргономика — это наука, возникшая на стыке
технических наук, психологии, физиологии и гигиены.
В ней используются данные анатомии, биомеханики, ток-
сикологии, антропометрии, биофизики. Эргономика изу-
чает функциональные возможности и особенности
человека в трудовых процессах с целью создания опти-
мальных условий, обеспечивающих высокую производи-
тельность и открывающих возможности для интеллекту-
ального и физического развития.
Эргономика занимается следующими проблемами:
1) оптимизацией физической среды на производстве;
2) конструированием средств индикации (световая,
цветовая, звуковая сигнализация; лицевые части прибо-
ров, шкал, символические изображения управляемых
объектов на панелях информации, например, в виде мне-
мосхем и т.п.);
3) конструированием органов управления;
4) компоновкой постов управления;
5) организацией рабочих мест.
Рассмотрим некоторые из основных положений эр-
гономики в приложении к данной теме.
Различные сочетания параметров окружающей сре-
ды, характеризующие гигиенические требования, пред-
ставлены на схеме 12.1 (рис. 5).
Невыносимая для человека зона имеет место, ес-
ли одно из условий выходит за физиологическую грани-
цу (работа допустима в скафандрах, герметизированных
костюмах и помещениях).
Некомфортная зона - одно из условий отклонений
от нормы (психологической границы). К этой зоне отно-
сятся горячие цехи, цехи лакокрасочных покрытий, неко-
торые дробильно-сортировочные установки.
Комфортная зона и зона высшего комфорта
представляют собой сочетание всех условий, находящих-
ся в достаточном или наилучшем сочетании.
Антропометрические требования определяют со-
ответствие изделия антропометрическим данным челове-
ка: типичным размерам и форме человеческого тела и его
отдельных частей (форма и размеры головы, рук и т.д.).
18
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
5. ВОЗДЕЙСТВИЯ СРЕДЫ И ЦВЕТА НА ЧЕЛОВЕКА
ЦВЕТ - ОЩУЩЕНИЯ И АССОЦИАЦИИ
|12 .11 ПАРАМЕТРЫ СРЕДЫ И КОМФОРТНОСТЬ
113.1 I -концентрирующий внимание
'-- । _ Топ Tkiii
Насыщенность
Физиологическая
граница
Психологическая
граница
- расслабляющий,
умиротворяющий
- легкий /
- светлый /
- теплый,
приближающий
- легкий 1
.- светлый /
Ускорение,'
м/с2
Желтый
-оживляющий
взбадривающий
- теплый,
приближающий
- светлый
10
Некомфортная зона
Холод,
°C -1
1
+18
Комфортная
\ зона
0
666
Тепло,|
+24
Г+43.5___
Шум, \
дб 120.
85
L>+1S
<+2?|
о\~~
\ /о
Зона '
высшего
комфорта
'iois.
0,5
60
зГ~
о\О5>
1
/Давление,/
ГПа /
350 /
Скорость
'л движения
\ _ воздуха,
|э м/с
Зеленый
Оранжевый
40
22
20
Влажность,
\°’i7
10\^
Концентрация^
0,01
/ 0,03
Концентра! щя
_>Г0.35
0,2 \ У
0,2
/8,5
Вентиляция на
1 человека,
-'‘4/ч
1,3 \ 1
Вибрация \
(амплитуда,/им)
Кол-во теплоты
па 1 человека,
ч Дж/(кг-с)
СООТНОШЕНИЯ
ЦВЕТОВ —
- отвлекающий
внимание „ , „
-холодный, ГолУбой
отдаляющий 1
- легкий ______' ft
Серый
Красный
Насыщенность
- возбуждающий
- теплый,
приближающий
- тяжелый
Синий
Пурпурный
Насыщенность^
- успокаивающий у
- холодный, /
отдаляющий /
- темный /
Цветовой
тон
Фиолетовый
- удручающий
- холодный,
отдаляющий
- тяжелый
- темный
- беспокоящий,
настораживающий
- тяжелый
- темный
Насыщенность
Они должны определять также физиологически рацио-
нальную позу, способствующую наиболее эффективному
выполнению человеком оперативной задачи и предохра-
няющую его от быстрого утомления.
В соответствии с размерами человека изготовляют
манекены, и на них осуществляют проверку формы изде-
лия (пульта управления, сиденья и т.п.) с последующей
ее отработкой.
Физиологические и, в частности, биомеханиче-
ские требования определяют соответствие изделия фи-
зиологическим свойствам человека, например, силовым и
скоростным характеристикам сгибания рук или ног.
Психофизиологические требования определяют
соответствие изделия особенностям функционирования
органов чувств человека (порогу слуха, зрения, осязания
и т.п.). Без реализации психофизиологических требова-
ний оперативная информация об объекте управления не
может быть получена оператором или в лучшем случае
может быть получена с искажениями.
Важнейшим психофизиологическим требованием
являются зрительные возможности человека. Человек,
взгляд которого направлен в неподвижную точку пред-
мета, находящуюся на уровне глаз, видит более или ме-
нее четко и другие предметы, расположенные в пределах
определенного пространства, названного зрительным
полем.
В зависимости от четкости восприятия предметов
оно подразделяется на три основные зоны, границы ко-
торых необходимо знать при проектировании органов
управления и контроля.
Зона центрального зрения (1,5 - 3°) - это часть
зрительного поля, где возможно четкое восприятие
предметов. Зона мгновенного зрения (около 18°) - это
часть поля, в пределах которого возможно зрительное
восприятие при ограниченном времени. Зона эффектив-
ной видимости (около 30°) — это пространство, в преде-
лах которого возможно достаточно четкое восприятие.
При движении глазного яблока и повороте головы про-
исходит перемещение зон, и поле обзора увеличивается.
Чувствительность глаза от центра к периферии рез-
ко изменяется. Так, если чувствительность зрения при 0°
принять за 1, то при 20° она составит 1/4, а при 80° -
1/36. Периферическое зрение является ахроматическим, в
то время как цвета воспринимаются центральными об-
ластями сетчатки. Области цветового зрения в пределах
зрительного поля для разных монохроматических цветов
неодинаковы: в вертикальной плоскости для белого цвета
оно примерно равно 120°, для желтого ~90°, для синего
-80°, для красного -45°, а для зеленого ~40°.
Следует также помнить, что определенные цвета по
мере приближения к границе зрительного поля воспри-
нимаются с искажениями, например, пурпурные синеют,
а красные и зеленые — желтеют.
Наша психика теснейшим образом связана с глаза-
ми, потому что через зрительную систему мы получаем
до 90 % информации из внешней среды.
В солнечном спектре человеческий глаз различает
более 120 градаций по цветовому тону, более 10 по на-
сыщенности и более 25 ступеней яркости, что в сумме
дает свыше 30 тысяч различных цветов и оттенков.
КРАСОТА И УДОБСТВО
19
В гамме ахроматических цветов (белый, серый, черный)
глаз различает до 300 оттенков.
Глаза человека меньше утомляются, если окружаю-
щая обстановка достаточно разнообразна по цвету. Од-
нообразие и резкие контрасты цветов отрицательно ска-
зываются на психике человека. Цвет может дать успо-
коение или вызвать возбуждение (потрясение), создать
гармонию или дисгармонию и даже привести к катастрофе.
Цвета, отличающиеся по цветовому тону, вызывают
различные эмоции и оказывают разное психологическое
воздействие на человека. На схеме 13.1 дана их краткая
характеристика. Обозначены лишь основные цвета (по
тону) в виде цветового круга. В дополнение отметим:
красный цвет - цвет раскаленного металла - воз-
буждающий, горячий, энергетичный, быстро утомляет
зрение;
коричневый цвет — теплый, создает мягкое, спо-
койное настроение, выражает крепость, устойчивость, но
способен располагать к мрачному настроению. Коричне-
вый цвет с серым оттенком угнетает, настораживает, вы-
зывает тревогу, ожидание неприятностей;
оранжевый цвет - воспринимается как раскален-
ный, горячий. Он согревает, бодрит, стимулирует к ак-
тивной деятельности;
желтый цвет - теплый, веселый, располагающий к
хорошему настроению, однако в избытке может вызвать
головокружение и тошноту;
зеленый цвет — символ покоя, свежести, полезен
для глаз, снижает внутриглазное давление, обостряет
слух, улучшает двигательную способность рук, успокаи-
вает, умиротворяет человека, снимает раздражение;
синий цвет - напоминает о воде, дали, о холоде. Он
свеж и прозрачен, кажется воздушным и легким. Под его
воздействием уменьшается физическое напряжение, ус-
покаивается дыхание, пульс;
фиолетовый - цвет утомленности и беспокойной
взволнованности;
белый - холодный, благородный;
черный - мрачный и тяжелый, резко снижает на-
строение.
При выборе сочетания цветов используют три вида
цветовой гармонии:
- контраст {схема 13.2) - цвета по тону расположе-
ны на противоположных сторонах цветового круга (см.
схему 13.1) или по насыщенности - один близко к цен-
тру, другой - далеко от центра, по яркости - один характе-
ризуется слабым излучением, другой - сильным излучением;
- нюанс {схема 13.3) - цвета близки по своим ха-
рактеристикам;
- цветовая триада {схема 13.4)- три цвета, равно-
удаленные на цветовом круге.
В восприятии человеком цветов важную роль играет
явление цветового контраста, т.е. преувеличение дейст-
вительной разницы между одновременными впечатле-
ниями. На красном фоне серый цвет кажется зеленова-
тым, а на синем отдает желтизной. Черный цвет на голу-
бом - почти оранжевый, на фиолетовом — желто-зеленый.
В зависимости от фона четкость восприятия цветов раз-
лична. Приведем основные четко воспринимаемые соче-
тания цветов по степени убывания:
1 - синий на белом; 2 — черный на желтом; 3 - зеле-
ный на белом; 4 - черный на белом; 5 - зеленый на крас-
ном; 6 - красный на желтом; 7 - красный на белом;
8 - оранжевый на черном; 9 - черный на пурпуровом;
10 - оранжевый на белом; 11 - красный на зеленом.
Контрасты цветов позволяют быстро воспринимать
нужную информацию (черные буквы на белой бумаге,
красный и зеленый цвета светофоров). Резкие контрасты
быстро утомляют и не представляют собой оптимального
варианта. Если рабочий должен один раз в минуту пере-
вести взгляд с темно-серого корпуса станка, отражающе-
го 5 % света, на блестящую деталь, отражающую 95 %
света, то он тратит на зрительное приспосабливание
примерно 5 с. Таким образом, резких контрастов следует
избегать там, где это возможно. Нюансные отношения
цветов в технологическом процессе могут вызвать пере-
напряжение. Так, например, черную нитку на темном
фоне заметить в 2000 раз труднее, чем на белом.
Цвет играет большую роль в жизни человека и при
выборе профессии: не каждый из нас может водить само-
леты, поезда, автомобили. Дело в том, что яркость и на-
сыщенность каждый воспринимает далеко не одинаково.
И дело тут не в остроте зрения, очень важно знать пороги
чувствительности, то есть различает ли человек все пере-
ходы радуги: чуть ли не каждый десятый мужчина стра-
дает врожденным расстройством цветового зрения, а
среди женщин таких всего полпроцента.
Цвет оказывает влияние на качественное восприятие
объекта. Далее приведем некоторые примеры сочетаний
цветов при окраске изделий и создания интерьеров.
Станки окрашивают в зеленый цвет разных оттен-
ков. Рабочую зону станка выделяют, например, зеленым
цветом меньшей насыщенности или желто-зеленым.
Стены цеха могут быть окрашены в тот же цвет, что
и станки, но отличаться по яркости (необходим хорошо
заметный яркостный контраст).
В горячих цехах целесообразны холодные цвета -
голубой, светло-синий.
Опасные зоны: вращающиеся детали, крюки кранов,
бамперы дорожных машин окрашиваются в оранжевый
цвет с белыми или черными полосами.
Приборы, сигнальные лампочки, элементы управле-
ния сочетают контрастные и нюансные отношения цве-
тов. Выбор окраски машин определяется конкретными
условиями применения, например: дорожные машины
(асфальтоукладчики, катки) имеют оранжевый, хорошо
заметный на расстоянии цвет; битумовозные машины -
серый цвет; цементовозы, цементопогрузчики - серебри-
стый цвет; экскаваторы окрашиваются в светло-
коричневый цвет.
Цвет и свет неразрывно связаны между собой. Ок-
ружающие человека предметы и цвета могут восприни-
маться лишь при достаточном освещении.
Световой поток, падая на поверхность, частично
отражается, частично пропускается телом, частично по-
глощается.
Белый цвет почти полностью отражает световой по-
ток, черный - почти полностью поглощает. Рекоменду-
ются поэтому светлые тона окраски.
20
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
В зависимости от характера отражения светового потока
различают виды направленного (зеркального), рассеян-
ного и смешанного отражения. Направленное отражение
получается при освещении гладких поверхностей. Реко-
мендуется исключать из поля зрения работающих источ-
ники направленного отражения (блестящие предметы).
Шероховатые поверхности вызывают совершенно
рассеянное отражение, а матовые - направленно-
рассеянное отражение.
Фарфоровая эмаль, молочное стекло вызывают
смешанное отражение. Таким образом, выбор материалов
обусловливается также требованиями освещения.
Для естественного освещения требуется максималь-
ная остекленность помещений.
При искусственном освещении нужно добиваться
следующего:
1) интенсивности освещения, соответствующей дан-
ному производству;
2) достаточной равномерности освещения;
3) отсутствия резких теней;
4) соответствия освещения цветовому решению объ-
екта (освещение не должно нарушать правильность вос-
приятия цветов);
5) отсутствия ослепления (следует так размешать
светильники и отражатели света, чтобы свет не попадал в
глаза).
При рассматривании объектов глаз движется скач-
кообразно - 3 % времени расходуется на движение, при-
чем продолжительность фиксационной паузы невелика и
составляет 0,2 ... 0,5 с, но и во время паузы глаз совер-
шает непроизвольные мелкие движения. В связи с этим
установлены следующие закономерности:
1. Горизонтальные движения глаз осуществляются
быстрее вертикальных, поэтому первые менее утоми-
тельны, и горизонтальные размеры и пропорции оцени-
ваются точнее вертикальных.
2. Прямолинейные контуры прослеживаются легче,
чем криволинейные, а плавные сопряжения - легче, чем
ломаные, так как глаз обладает инерционностью.
3. Ритмические композиции воспринимаются лучше
и быстрее, чем метрические.
4. Предшествующие образы оказывают влияние на
последующие в процессе быстрой смены объектов вос-
приятия. Например, если после продолжительного рас-
сматривания кривой перевести взгляд на прямую линию,
то прямая кажется изогнутой.
Высший уровень эргономических требований к из-
делию — психологические требования: особенности
восприятия, памяти, мышления, образования, закрепле-
ния навыков и др.
Далее на отдельных примерах покажем использова-
ние изложенных выше положений при проектировании
рабочего места и, в частности, пульта управления (схемы
14.1 ... 14.4, рис. 6); при выборе конструкции рычагов
управления и педалей (схемы 16.1 ... 17.4); при компо-
новке приборов на отдельной панели (схема 18.1) и при
выборе конфигурации кнопок и ручек управления (схемы
18.2 ... 19.5) и, наконец, при выборе конструкции и раз-
меров рабочих сидений (схемы 20.1... 20.3, рис. 7).
На схемах 14.1 (вид сбоку) и 14а (вид сверху) пока-
зано соответственно размещение панелей в поле зрения
оператора и зоны движения рук для управляющих дейст-
вий: А - зона легкой досягаемости, В - зона предельной
досягаемости. На схемах 14.2, 14.3, 14.3а - аналогичные
зоны показаны для определенных силовых действий за
столом сидя или при работе у станка стоя.
На схеме 14.4 — решение пульта управления: на па-
нелях 1, 2, 3, 6 размещают приборы, а на панелях 4, 5 -
кнопки и ручки управления. Последовательность чисел
свидетельствует о степени обозримости и досягаемости:
1 — наиболее легко считываются показания прибора,
4 — наиболее удобное расположение органов управления.
Общее правило обеспечения удобства считывания и
движения управления иллюстрирует схема 15.1. Считы-
вание, увеличение показателя и направление движения
органов управления должно совпадать с естественным
восприятием и движением человека (см. примеры на
схемах 16.2, 17.2, 19.1, 19.2,19.6). Не случайно представ-
ляется удобным для управления манипулятором специ-
альной системы управления (задающего манипулятора -
на схеме 16.1), повторяющего движения руки человека.
Оператор манипулирует тяжелым объектом путем есте-
ственных и легких перемещений руки и в том числе на-
жатием кнопки большим пальцем руки.
Надписи, знаки, схемы и индикаторы на панелях
должны не только информировать человека об опреде-
ленных процессах, но и подсказывать решения. На руко-
ятке переключения передач автомобиля (схема 16.3) дана
схема переключения. Причем во избежание случайного
включения передачи R или V требуется приложить опре-
деленное усилие.
Рядом с рукояткой могут быть размещены кнопки
второстепенного значения.
На схемах 16.2 показаны размеры и расположения
рычага управления, а на схемах 17.1 ... 17.4 даны приме-
ры размеров и расположения педалей. На схеме 17.1 по-
казана траектория естественного движения ноги при на-
жатии на педаль за счет разгибания коленного сустава, а
на схеме 17.2 - при работе голеностопного сустава. На
схеме 17.3 показаны пределы удаления одна от другой
педалей, предназначенных для одновременной работы
правой и левой ног. На схеме 17.4 педали для поочеред-
ного нажатия одной ногой должны быть достаточно уда-
лены одна от другой и находиться примерно на одном
уровне. На некоторых автомобилях при экстренном пе-
ребрасывании ноги с педали газа на педаль тормоза во-
дитель непроизвольно цепляет носком ноги за край педа-
ли тормоза, что увеличивает время нажатия, и даже на
некоторых престижных моделях стенка рядом с педалью
стесняет естественное движение.
Если говорить о других общих правилах, то можно
добавить следующее:
• при включении или выключении органов управле-
ния усилия должны быть оптимальными (при больших
усилиях наблюдается быстрая утомляемость, при малых —
меньшая чувствительность, случайность включений);
• форма рукояток должна соответствовать анатоми-
ческому строению руки, естественным направлениям
движения и усилию;
КРАСОТА И УДОБСТВО
21
6. ОРГАНИЗАЦИЯ РАБОЧЕГО ПРОСТРАНСТВА
22
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
• рычаги управления следует располагать так, чтобы
порядок действий не противоречил принципам экономии
движений: одновременности действия, симметричности,
ритмичности, привычке.
Приборы следует группировать и размещать таким
образом, чтобы у оператора не создавалось впечатления
хаоса, тесноты. Размещение и оформление приборов
должны способствовать быстрой ориентации оператора,
читаемости показаний, малой вероятности ошибки.
Существует еще целый ряд правил и рекомендаций,
помогающих добиваться тесной связи между человеком
и управляемой машиной.
1. Приборы располагаются в той последовательно-
сти, в которой их удобнее читать - слева направо или
сверху вниз, т.е. их расположение должно быть подчине-
но общей схеме 15.1.
2. Приборы в левом углу панели читаются лучше,
чем в правом.
3. Наиболее важные приборы располагают в середи-
не панели. На панели приборов автомобиля перед глаза-
ми водителя размещены основные приборы, причем спи-
дометр выполнен более крупно, ближе к центру и так,
чтобы он не загораживался ободом рулевого колеса. Для
еще большего выделения главного и точности считыва-
ния на спидометрах современных автомобилей делают
неравномерную шкалу: например, расстояния между по-
казаниями до 140 км/ч наибольшие, поэтому легче сле-
дить за скоростью при соответствующих ограничениях.
4. Контрольный прибор правильно располагать в
непосредственной близости от ручек управления, кото-
рые он контролирует: для левой руки (ручка слева и вни-
зу) и для правой руки (ручка справа и внизу) по отноше-
нию к прибору.
5. Точная регулировка осуществляется правой рукой.
6. Стрелка прибора не должна закрывать шкалу и
цифры, но и не должна быть слишком короткой.
7. При длительной экспозиции (оператор может чи-
тать показания более 0,5 с, поскольку они медленно из-
меняются) рекомендуются неподвижные шкалы с под-
вижной стрелкой. При малом времени экспозиции
(меньше 0,5 с) целесообразнее использовать приборы с
подвижной шкалой и неподвижной стрелкой.
8. При расположении приборов рядами лучше два
коротких ряда, чем один длинный.
9. При горизонтальном расположении рядов началь-
ное положение отсчета шкал соответствует 9 ч (на ци-
ферблате часов), при вертикальном положении - 12 ч. На
БЕЗОПАСНОСТЬ ДЛЯ ЗДОРОВЬЯ И ЖИЗНИ ЛЮДЕЙ
23
одной панели независимо от расположения начальные
положения стрелок всех приборов желательно иметь
одинаковыми (хотя на этот счет могут быть исключения,
особенно когда приборы имеют различную значимость).
10. Для лучшей ориентации, создания определенно-
го порядка группы приборов выделяются рамками, раз-
ным фоном, подчеркнутой симметрией.
11. Для выявления отдельных групп приборов при
их большом числе, при наличии экранов, индикаторов,
кнопок, рычажков, клавишей, микрофонов, динамиков их
располагают в разных плоскостях (схема 14.4).
12. Для управления сложными комплексами исполь-
зуют размещение приборов на большом числе панелей.
При таком оформлении наиболее оптимальное располо-
жение - 1 (схема 14.4), приемлемое - 2 и неудобное - 3.
13. При необходимости освободить пространство
перед оператором для лучшего наблюдения за рабочим
процессом допустимо размещение панелей приборов по
обе стороны от оператора.
14. Кнопки обозначают буквами (схема 18.2), сло-
вами или цветом. Зеленая кнопка - включение, красная -
выключение. Целесообразно световое оформление кно-
пок. При включении зеленой кнопки загорается красный
свет (осторожно, машина работает), и наоборот, при на-
жатии красной кнопки загорается зеленый свет.
15. Для предотвращения случайного включения
кнопки выполняются утопленными или с буртиками.
16. Главная выключающая кнопка "Стоп" отмечает-
ся красным цветом и располагается на панели внизу в
середине или с левой стороны.
17. Форма поворотного выключателя должна быть
простой и удобной для руки, как, например, на схеме 19.5
(и далее максимальные размеры).
18. Требуемые усилия определяют форму и размеры
вращающихся частей - головок (схема 19.2).
19. Включение (+), выключение (-), прибавление
(+), убавление (—) при различном положении головок,
рычажков должно обеспечиваться движением в направ-
лении стрелок, как показано на схемах 19.1... 19.6.
Можно было бы еще и еще продолжить список ре-
комендаций, но, полагаю, никогда нельзя учесть все со-
веты. Самое важное в данном деле (кстати, как и во мно-
гих других) — это создать систему (можно назвать ее так-
же композицией), понятную и доступную для человека,
требующую естественных действий, не монотонных, но и
не слишком разнообразных, не обременительных по рит-
му и не тяжелых по напряжению; но не настолько легких,
чтобы не ощущалась обратная связь (со стороны машины к
человеку).
И еще об одном элементе рабочего места — о рабо-
чем сиденье.
Правильно сконструированное сиденье облегает те-
ло человека так, что нагрузка от силы тяжести частей
тела распределяется на различные группы мыши, в ре-
зультате чего снижается усталость.
Конструирование сиденья ведется в соответствии со
среднестатистическими антропометрическими данными,
при этом предусматривается индивидуальная подгонка,
регулировка положения элементов сиденья, сиденье
можно поднимать и опускать, перемещать вперед и на-
зад, вращать на месте; спинку сиденья можно поднимать
и опускать, поворачивать. Форма, размеры сиденья зави-
сят от характера работы. Например, для большинства
сельскохозяйственных строительных и дорожных машин
целесообразна схема 20.1 (рис. 7) и приведенные разме-
ры сиденья; для стационарных пультов промышленных
предприятий рекомендуется поворотное рабочее кресло
(схема 20.3). На схеме 20.1 обозначено С - центр поворо-
та спинки.
Пример простейшего решения сиденья легкового
автомобиля представлен на схеме 20.2. Подголовник вы-
пускают регулируемым и даже принудительно выдви-
гаемым в аварийных ситуациях (схема 20.2а). Собствен-
но сиденье и спинку компонуют из нескольких подушек,
для которых тоже может быть предусмотрена регулиров-
ка. На отдельных автомобилях сиденье состоит из целого
ряда подушечек (схема 20.26), в которые подается под
давлением воздух до тех пор, пока сиденье не принимает
форму, полностью соответствующую форме тела человека.
Рабочее сиденье машин, подверженных вибрациям,
имеет специальную упругую подвеску, например, вы-
полненную по схеме 20.1. Подвеска должна иметь также
демпфирующее устройство (на схеме не показано). Под-
веска должна обеспечивать перераспределение сил F\ и
F2 от веса человека (схема 20.1а) в зависимости от поло-
жений 1, 2 и 3, а также переменную величину расстояния
от пола (см. hi и й2), позволяющую развивать наиболь-
шую силу давления F на педаль (схема 20.16). Подвеску
выполняют регулируемой. Направления регулировок
положения сиденья показаны стрелками. Некоторые ре-
шения обеспечивают перемещение сиденья по криволи-
нейной траектории. Используют также сиденья с регули-
рованием положения в нескольких направлениях. В со-
вокупности с регулировкой формы такие сиденья позво-
ляют обеспечить высокую степень удобства. Еще лучше
сиденья, самоприспосабливающиеся к размерам, поло-
жению и форме тела - в них все приведенные выше регу-
лировки выполняются автоматически.
1.3. БЕЗОПАСНОСТЬ ДЛЯ ЗДОРОВЬЯ
И ЖИЗНИ ЛЮДЕЙ
Обеспечение безопасности в современной технике -
исключительно важная проблема, и ее решения слишком
сложны, чтобы их можно было осветить на нескольких
страницах. Поэтому остановлюсь на некоторых концеп-
туальных моментах, которые необходимо принимать во
внимание при конструировании. Первое, что нужно уяс-
нить для себя, - при конструировании не должно быть
отступлений "в ущерб безопасности". Хотя, как и любая
характеристика или критерий, безопасность тоже имеет
меру. Невозможно создать абсолютно безопасную техни-
ку, в основном можно говорить о безопасности как о
сравнительной характеристике, и современном конст-
руировании она так же, как удобство пользования, долж-
на занимать отдельное место.
Очень часто слова "надежность" и "безопасность"
ставят рядом, но это разные понятия, хотя зачастую они
взаимосвязаны:
24
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
• если нарушения в функционировании машины не
приводят к нанесению вреда здоровью и жизни человека,
то даже при очень низкой надежности обеспечивается
высокая безопасность;
• если при высоком уровне надежности машины
(объект техники функционирует требуемый период без
отказов) сильно загрязняется среда или не предусмотрена
защита человека от механических, электрических, хими-
ческих, тепловых или иных воздействий, то уровень
безопасности низкий.
Безопасность конструктивных решений обеспечивается:
1) как следствие функциональной целесообразности
(например, обеспечение устойчивости не приводит к оп-
рокидыванию машины и к травмам или гибели людей);
2) путем специальных мер, в ущерб функциональ-
ной целесообразности (например, специальное уменьше-
ние жесткости передней части кузова автомобиля, чтобы
смягчить удар при столкновении и дополнительное уве-
личение жесткости кабины, чтобы ее деформирование
при аварии не навредило человеку);
3) путем дополнительных мер, не зависимых от
функциональной целесообразности (например, примене-
ние ремней безопасности, подушек безопасности).
Специфичными для безопасности считаются только
меры по второму и третьему пунктам, при этом различа-
ют конструктивные решения пассивной безопасности и
активной безопасности. Первые препятствуют разви-
тию внешнего воздействия (в случае аварий), защищая от
этого воздействия человека. Вторые отличаются автома-
тически включаемым действием (срабатыванием) в слу-
чае аварии, гасящим (смягчающим) внешнее воздействие.
Обеспечение безопасности конструктивных реше-
ний носит многоаспектный характер:
• кожухи и ограждения предохраняют от режущего
или ударного воздействия;
• качественные уплотнения и герметичные стыки
предотвращают вытекание вредных для здоровья жидко-
стей или газов;
• система активной вибрационной защиты гасит, на-
пример, колебания до 5 Гц, особенно опасные для здоро-
вья человека, а также "укачивающие" колебания, которые
могут привести к сонливости и уменьшению внимания
водителя машины;
• специальные устройства отключают электриче-
скую сеть автомобиля в случае аварии, чтобы исключить
пожар или взрыв;
БЕЗОПАСНОСТЬ ДЛЯ ЗДОРОВЬЯ И ЖИЗНИ ЛЮДЕЙ
25
• световые или звуковые сигналы предупреждают о
превышении допустимых характеристик функциониро-
вания машины, о физическом состоянии человека (на-
пример, засыпании), управляющего машиной;
• специальные устройства автоматически воздейст-
вуют на рулевую и/или тормозную систему в случае не-
штатных воздействий водителя на рулевое колесо или на
тормозную педаль, а также в зависимости от состояния
дорожного полотна, наличия препятствий и поведения
машины;
• герметичные створки, двери, перегородки автома-
тически перекрывают опасные зоны в преддверии аварии;
• устройства, очищающие среду и не допускающие
ее до состояния опасного для жизнедеятельности (на-
пример, нейтрализатор выпускных газов), а также авто-
матически включаемые вентиляционные системы;
• компенсационные (накопительные) емкости пре-
дохраняют гидравлические или пневматические системы
от недопустимого давления и возможного прорыва жид-
кости или газа, опасного для здоровья;
• устройства для передачи движения через герме-
тичную стенку и дистанционное управление позволяют
осуществлять манипуляционные операции с радиактив-
ными объектами при нахождении оператора вне опасной
для здоровья зоны;
• блокировки, в том числе многократные, позволяют
избежать ошибочного включения устройств, способных
принести вред человеку, или выбора недопустимых ре-
жимов;
• предохранительные устройства (например, ловите-
ли лифтов) плавно затормаживают выходные звенья,
способные причинить вред человеку в случае нештатных
ситуаций.
В жизни очень много решенных и нерешенных за-
дач обеспечения безопасности. Чтобы понять это, доста-
точно хотя бы осмотреть и осмыслить окружающие нас
вещи.
Тенденции совершенствования техники свидетель-
ствуют о стремлении возложить заботу о безопасности
человека-оператора на саму машину и в меньшей мере
ориентироваться на его физические и психологические
возможности. Речь идет прежде всего о распознавании
преддверия опасных ситуаций и автоматическом их пре-
дотвращении. Современные датчики за миллионные доли
секунды информируют систему управления о недопус-
тимом ускорении или иных параметрах, а система мгно-
венно реагирует на это. Естественно, человек не спосо-
бен сам заметить и предотвратить аварию такого типа.
По этой причине при создании машины особое вни-
мание следует уделять автоматической или автоматизи-
рованной (с участием человека) системе управления ма-
шиной.
Речь идет прежде всего как об основных системах
функционирования машины (обеспечения устойчивости
движения, торможения и т.п.), так и о резервных систе-
мах и системах, предназначенных только для обеспече-
ния безопасности (поддержания параметров среды в пре-
делах психологических и физиологических возможно-
стей человека). Можно привести очень много решений,
направленных на обеспечение безопасности, но считаю
необходимым отметить, что, по существу, излагаемые в
данном произведении общие принципы конструирования
приемлемы и для целей обеспечения безопасности.
Например, принцип деформативной приспособляе-
мости в данном случае сводится к следующему. При ло-
бовом столкновении автомобиля деформирование маши-
ны должно максимально поглощать энергию удара. По
существу, передняя часть машины конструируется как
эластичный мягкий буфер (рис. 8.1 схема 21.1). В то же
время кабина должна быть максимально жесткой. Для
этой цели ее выполняют в виде замкнутой оболочки, а в
наиболее слабых местах (дверных проемах) она усилена
жесткими порогами и боковыми балками безопасности
внутри дверей (для защиты от боковых ударов). Рама, на
которой монтируются агрегаты машины, имеет соедине-
ния или перемычки, которые обеспечивают ее складыва-
ние, изгиб перед кабиной (см. схемы 21.1 и 21.2). Жест-
кости замков, соединений и опор должны быть выбраны
из условия перемещения капота вверх (схема 21.2), а си-
лового агрегата — вниз, под днище кабины (схема 21.3 и
21.3а). Хотя кабина в аварийной ситуации и сравнима с
не очень жесткой и не очень прочной скорлупой, но тем
не менее из-за направленного деформирования буферных
частей она защищена от проникновения в нее твердых
предметов.
Безопасность во многих случаях напрямую зависит
от надежности машин. При определении этой взаимосвя-
зи также существует две крайности: ненадежная машина,
которая из-за поломки простаивает, может принести
меньше вреда здоровью, чем надежная, непрерывно ра-
ботающая машина; с другой стороны, именно в процессе
поломки, а особенно крупной аварии, очень часто стра-
дают люди.
Чтобы уменьшить вероятность поломки и принима-
ют ряд мер, одной из которых является уже упомянутое
резервирование (см. примеры на рис. 8.2).
С целью обеспечения безопасности предусматрива-
ют резервирование только тех функций деталей или со-
единений, утрата которых приведет к поломке машины и
нанесению существенного вреда человеку. При этом
возможно использование дешевых резервных элементов,
при введении в действие которых могут существенно
ухудшиться качественные показатели, напрямую не свя-
занные с безопасностью для жизни и здоровья человека.
В схеме 22.1 при нормальном функционировании
муфты вращающий момент передается через резиновую
оболочку, прижатую к деталям 1 и 2 накладками 1 и 2
соответственно. В случае выхода из строя оболочки или
ее соединений, детали 1 и 2 проворачиваются на угол <р
(схема 22.1а) и вращающий момент передается через
выступы на деталях. При этом соединение деталей ста-
новится жестким, т.е. утрачиваются определенные свой-
ства муфты, но исключается разрыв кинематической це-
пи (например, поднимаемый груз не может упасть при
поломке муфты).
В схеме 22.2 предусмотрено резервное уплотнение.
Оно не участвует в работе, пока нормально функциони-
рует основное уплотнение. В данной конструкции выход
из строя основного уплотнения может привести к быст-
26
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
27
рому загрязнению и утрате работоспособности подшип-
ника. Если бы не было установлено резервное уплотне-
ние, потребовалось бы разбирать подшипниковую опору,
а также сопряженные с ней узлы. В данном решении дос-
таточно удалить вышедшее из строя основное уплотне-
ние и на его место сдвинуть резервное уплотнение.
При проколе эластичной оболочки шины в обычном
исполнении (схема 22.3) резкое падение давления может
привести к качению на ободе колеса и даже к существен-
ной аварии. В схеме 22.3а внутрь камеры помещено уп-
ругое (пластмассовое) кольцо, которое при недопустимо
низком давлении позволяет машине продолжать движе-
ние, опираясь на это кольцо (схема 22.36). При этом пре-
дотвращается авария, но теряются упругие свойства
шины.
На схеме 22.4 пример использования параллельного
соединения для резервирования привода в механизме
открывания створки судового люка. Створка представля-
ет собой коромысло двухкоромыслового механизма и
приводится в движение гидроцилиндром, соединенным
шарнирно с ползуном самотормозящей винтовой передачи.
Ползун может приводиться в движение резервным
двигателем или вручную. При отказе (заклинивании) ос-
новного двигателя или отключении источника энергии
его корпус перемещается двигателем и створка открыва-
ется или закрывается. Для нормальной работы дубли-
рующего устройства основной двигатель должен быть
заблокирован (исключена свобода относительного дви-
жения его звеньев).
Современная тормозная система на схеме 22.4 отли-
чается от традиционной наличием электрической линии
управления, связывающей тормозную педаль с исполни-
тельным блоком управления тормозами. Такая линия
обладает намного более высоким быстродействием и уже
тем самым обеспечивает большую безопасность. Но раз-
работчики системы на случай обрыва электрической свя-
зи сохранили традиционную гидравлическую линию
управления, но уже не в качестве рабочей связи, а в каче-
стве резервной.
Кроме того, в данной системе проще решается, на-
пример, устройство экстренного торможения (по сравне-
нию, например, с вариантом, приведенным в параграфе 12.4
на рис. 117 - см. схему 19.1). С целью обеспечения безо-
пасности предусмотрено также автоматическое распре-
деление тормозных сил в зависимости от поперечного
ускорения машины, от характера деформирования каж-
дой из шин, а также от расстояния до находящегося впе-
реди препятствия и от других условий (подробнее см.
в параграфе 12.4).
1.4. ТЕХНОЛОГИЧНОСТЬ
КОНСТРУКТИВНЫХ РЕШЕНИЙ
В любую эпоху ремесленники, инженеры и ученые,
занимающиеся техникой (обобщенно — конструкторы),
замышляя новое изделие, в первую очередь думали о
том, из чего и каким образом оно будет изготовлено.
Кроме того, при наличии нескольких вариантов исполне-
ния, как правило, выбирался наиболее простой и деше-
вый. При этом конструкция всегда находилась в нераз-
рывной связи с материалами и технологией. Создавались
новые материалы, появлялись новые методы их обработ-
ки и в соответствии с этим изменялись конструктивные
исполнения. В то же время история знает примеры, когда
много лет некоторые идеи не имели материального во-
площения из-за отсутствия подходящих материалов и
технологии. Вспомните пример с эвольвентным зацепле-
нием, которое оттеснило все конкурирующие решения
благодаря простоте обработки материалов с твердой по-
верхностью (нарезание зубьев реечным инструментом и
шлифование после закалки плоскими кругами). Разуме-
ется, мысль конструктора может и должна опережать
имеющиеся возможности, но, когда речь идет о конкрет-
ной задаче, необходима полная гармония трех состав-
ляющих решения функциональной задачи (конструкции,
материалов и технологий) с учетом времени, требующе-
гося на разработку проекта (если за это время прогнози-
руется получение новых материалов и/или технологий).
Итак, речь пойдет о технологичности - совокупно-
сти свойств конструкции, характеризующих возможность
ее реализации, а также приспособленность к получению
минимальных затрат при производстве и эксплуатации
для заданных показателей качества, объема выпуска и
условий выполнения работ.
Условно различают технологичность (проявляемую
при изготовлении) и эксплуатационную технологич-
ность. К последней относят: ремонтопригодность; вос-
станавливаемость; приспособленность к человеку, в том
числе удобство и безопасность обслуживания и требуе-
мый уровень подготовки обслуживающего персонала;
дефицитность и нормы расходования эксплуатационных
материалов; степень воздействия объекта на окружаю-
щую среду; возможности консервации, хранения, транс-
портирования и др. Как видно, проблема технологично-
сти — обширна и трудоемка. Этой проблеме посвящено
большое число работ, в которых подробно описано целое
многообразие различных конструктивных приемов обес-
печения технологичности. Естественно, в данной ситуа-
ции автор не берется давать рекомендации на все случаи
жизни, а лишь постарается сосредоточить Ваше внима-
ние на общем подходе к поиску приемлемых конструк-
тивных решений.
Технологичность конструктивных решений
(проявляемую при изготовлении) условно разделяют
на технологичность детали и технологичность соедине-
ния, или сборочной единицы; "условно", потому что оба
этих вида находятся в неразрывной связи. Общий подход
к выбору конструктивных решений, исходя из данного
условия, независимо от функции, технологии и материа-
лов - это простота геометрической формы, плавные
переходы от одного элемента конструкции к другому
и унификация (повторяемость) элементов, деталей,
сборочных единиц и агрегатов.
Сначала пойдет речь о технологичности отдельных
элементов и деталей. Во всех дальнейших примерах под-
разумевается, что технологический процесс выбран в
соответствии с конструктивным решением. Само ре-
шение при этом можно совершенствовать с учетом воз-
можностей процесса, но без ущерба для функциональных
качеств.
При выборе конструктивных решений детали кон-
структор должен от начала до конца представлять про-
28
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
цесс ее изготовления. При этом нужно стремиться по
возможности предусматривать минимальный объем ме-
ханической обработки резанием. Лучше детали изготов-
лять достаточно точно литьем, а еще лучше штамповкой.
Зубья, резьбу и другие подобные элементы лучше полу-
чать накатыванием, а не резанием. Однако сколько бы не
агитировали за данные способы изготовления, на совре-
менном этапе механическая обработка резанием пока
остается преобладающей для металлических деталей,
особенно в случаях, когда требуется получить высокую точ-
ность в сочетании с малой шероховатостью поверхности.
Соответствие технологического процесса приня-
тому материалу обеспечивает возможность получения
заданных свойств материала (на этапе химико-терми-
ческой обработки) и других характеристик изделия, на-
пример, шероховатости поверхности (на этапе механиче-
ской обработки малую шероховатость можно получить
только на поверхности, обладающей высокой твердостью).
Рациональная последовательность технологиче-
ских процессов и операций обусловлена как конструк-
цией и материалами изделия, так и выбранными спосо-
бами изготовления. Целесообразно предусмотреть гео-
метрическую форму, для воспроизведения которой необ-
ходимо минимальное количество, минимальное разнооб-
разие процессов и операций, и нежелателен возврат к
предшествующим видам обработки. Следует, например,
помнить, что термическая или химико-термическая обра-
ботка, нанесение на поверхности покрытий, как правило,
приводят к снижению точности детали и требуют допол-
нительной обработки - шлифования, доводки и т.п.
Совмещение конструктивной, технологической и
измерительной баз позволяет упростить технологический
процесс и сравнительно легко обеспечить заданную точ-
ность исполнения. На чертеже все размеры проставляют-
ся от таких баз. При несоблюдении этого приходится
вводить дополнительные технологические размеры, уд-
линять размерные цепи и ужесточать допуски на состав-
ляющие размеры. В плане выбора технологической базы
следует иметь в виду, что она должна обеспечивать мак-
симально возможную точность и неизменность положе-
ния детали, а также неизменность формы от воздействия
нагрузки со стороны инструмента. В этом плане целесо-
образно обеспечить не только совмещение, но и единство
баз. Технологические или измерительные базы детали
должны выбираться таким образом, чтобы в процессе
обработки их не пришлось бы менять на другие. В край-
нем случае следует предусмотреть минимальное количе-
ство таких изменений.
Выбор сочетания технологических баз должен быть
продиктован принципом однозначности положения
заготовки в пространстве. Например, если заготовка
обладает достаточной жесткостью во всех направлениях,
то можно использовать, например, сочетание установоч-
ной базы (ограничивающей три из шести возможных пе-
ремещений: два угловых и одно линейное), направляю-
щей базы (ограничивающей два перемещения: угловое и
линейное) и опорной базы (ограничивающей одно ли-
нейное перемещение). Можно использовать и другие
сочетания, в которые входят также двойная опорная база
или двойная направляющая база. При этом может быть и
должно быть принято во внимание направление силы
резания, силы тяжести и/или силы трения, т.е. обеспече-
ние ими силового замыкания и однозначности положения
заготовки. В случае недостаточной жесткости в каком-
либо из направлений или на каком-либо участке детали
предусматривают избыточное базирование.
Выбор измерительной базы должен быть прежде
всего обусловлен удобством пользования измеритель-
ным инструментом и не должен приводить к дополни-
тельным погрешностям измерения, вызванным формой и
расположением базы. В качестве измерительной базы
используют как функциональные элементы, так и вводят
дополнительные элементы для контроля размеров. Об-
щее правило таково: нельзя использовать острые кромки,
легко сминаемые или неточно расположенные элементы.
Для облегчения контроля диаметра d (схема 1.1, см. рис. 9.1)
цилиндрической детали с выступами принимают четное
число выступов. Размер h канавки на схемах 1.2 и 1.2а
определяют относительно цилиндрической поверхности,
а не относительно острых кромок канавки. Для измере-
ния диаметра d конических и сферических поверхностей
вводят дополнительно цилиндрические пояски (схемы 1.3
и 1.4), а на острых кромках снимают фаски (см. разме-
ры d и h на схеме 1.5).
Выбор конструктивных решений, исходя из эконо-
мичности технологического процесса, предусматрива-
ет, в частности, вырезание удаляемых частей заготовки, а
не переработку их в стружку. На схеме 2.1 в качестве
примера показано нарезание крупномодульного зубчато-
го венца так называемой полуобкатной передачи на стан-
ке Г. А. Анопова. Зубья колеса имеют прямобочный про-
филь, а зубья шестерни — специальный профиль, полу-
чаемый из условия сопряжения с зубьями колеса. Наре-
зают зубья колеса дисковыми фрезами, удаленными одна
от другой на расстоянии, равном длине общей нормали
W. Фрезы образуют прорези при циклическом последова-
тельном повороте заготовки колеса. Часть металла, за-
ключенная между прорезями, выпадает, и получается
впадина. Только небольшое количество металла перера-
батывается в стружку (заштрихованные участки на
схеме 2.1а). В результате существенно повышается про-
изводительность нарезания зубьев.
Другой пример экономичности процесса обусловлен
выбором такой конфигурации детали, получаемой из
листового материала, при которой отсутствуют отходы
(сравни схемы 5.1 и 5.1а). При этом получается выигрыш
не только в виде сэкономленного металла, но и в произ-
водительности процесса и в энергозатратах. Общее пра-
вило данного направления таково: минимальная ширина
прорези и минимальное количество материала между
очертаниями соседних деталей или элементов (лучше -
вообще отсутствие промежуточной части материала).
Следующие приемы обеспечения технологичности
сопряжены с процессом обработки посадочных, центри-
рующих и других рабочих поверхностей резанием (схемы
3.1 ... 3.3а; 4.1 ... 4.2а; 6.1 и 7.1 ... 7.26). В частности, эти
приемы позволяют обеспечить более высокую точность
обработки при тех же технологических средствах и за-
тратах либо позволяют повысить производительность и
уменьшить общие затраты для достижения заданной точ-
ности. На схемах, иллюстрирующих обработку напро-
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
29
9.1. КОНСТРУКТИВНЫЕ РЕШЕНИЯ ОБЕСПЕЧЕНИЯ ТЕХНОЛОГИЧНОСТИ (ИЗГОТОВЛЕНИЯ) ДЕТАЛИ
ОБРАБОТКА С ОДНОГО УСТАНОВА
ЭКОНОМИЧНОСТЬ РАСКРОЯ
ЛИСТОВОГО МАТЕРИАЛА
Нерационально Рационально
ТЕХНОЛОГИЧЕСКИЕ ОТВЕРСТИЯ
ТЕХНОЛОГИЧНОСТЬ ЛИТЫХ ДЕТАЛЕЙ
30
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
ход, показано, что не следует предусматривать для опор-
ных поверхностей углубления (получаемые зенкеровани-
ем — схема 3.1) или выступы на разных уровнях (схема 3.2),
что затрудняет их обработку, вход и выход инструмента.
Лучше предусмотреть поверхности на одном уровне
(схема 3.156), которые легко обрабатываются фрезой или
шлифовальным кругом напроход. Здесь и далее обраба-
тываемые поверхности обозначены буквой М.
На схеме 3.2 показаны многоступенчатые отверстия,
и в них предусмотрены канавки для выхода шлифоваль-
ного круга. Конструкция при этом менее технологична,
чем на схеме 3.2а. где два сквозных отверстия могут быть
обработаны напроход. В варианте на схеме 3.2а функции
осевого ограничения деталей придаются, например,
крышкам, а не буртикам, как в схеме 3.2. Кстати, осуще-
ствлять сборку при этом проще.
На схеме 3.3 а по сравнению со схемой 3.3 центриро-
вание деталей осуществлено с помощью штифтов (не
менее двух), благодаря чему торцовую поверхность цен-
трирующих поясков можно обрабатывать напроход, а
обработка центрирующих поясков заменяется на обра-
ботку отверстий малого диаметра под штифты. В ряде
конструкций можно встретить исполнение по схеме 3.3
даже в тех случаях, когда функционально не требуется
точное расположение крышки и корпуса. При такой си-
туации не нужно вообще предусматривать центрирование.
Из соображений технологичности сборки все еще
довольно часто используют корпусы, в которых разъем
проходит через отверстия под подшипники, уплотнения
и маслопроводные каналы. В этих случаях целесообразно
осуществлять обработку в сборе (схема 4.1). Такая обра-
ботка, как правило, усложняет процесс изготовления и
исключает взаимозаменяемость деталей. Как избежать
такого положения, покажем ниже при обсуждении тех-
нологичности сборки. Здесь же отметим, что для обеспе-
чения точности относительного положения деталей при
сборке, обработке и последующих разборках и сборках
предусматривают штифтовое соединение или центри-
рующие сопрягаемые поверхности.
Высокой точности достигают при обработке целой
детали (схема 4.1а), которую только перед сборкой раз-
ламывают по специально ослабленному сечению. При
сборке части детали благодаря неровностям поверхно-
стей разлома занимают точно то же относительное поло-
жение, что и в процессе обработки.
Один из наиболее эффективных приемов получения
высокой точности взаимного расположения обрабаты-
ваемых поверхностей - обработка с одного установа
нескольких рабочих поверхностей. На схеме 4.2 пока-
зано такое расположение отверстий А и В, которое не
позволяет их обработать на координатно-расточном
станке, не переворачивая деталь. Чтобы обеспечить об-
работку с одного установа, в стене корпуса на схеме 4.2а
предусмотрено технологическое отверстие С. Кроме вы-
сокой точности изготовления, данный прием обеспечива-
ет и экономичность процесса.
Технологические отверстия выполняют не только из
условия возможности подвода инструмента с определен-
ной стороны. Они позволяют использовать двухопорную
оправку необходимой жесткости (схема 6.1) или делают
возможным размещать и закреплять также двухопорный
стержень в форме для выполнения литья (отверстия Ci и
С2 на схеме 6.2).
Существенного увеличения производительности
достигают, используя обработку в пакете, - обработку
напроход нескольких одинаковых деталей, установлен-
ных на одном станке или на одной оправке (схемы 7.1 ...
7.26). Качественная обработка невозможна при неточной
их установке (схема 7.2а) или при недостаточной жест-
кости деталей в направлении давления инструмента FM
(схема 7.26). Зубчатые колеса на схеме 7.2 должны иметь
торцовые поверхности, строго перпендикулярные осям
отверстий, а конструкцию зубчатых колес на схеме 7.26
лучше переработать, расположив торцы ступицы и обода
колеса в одной плоскости. Причем поверхность торцов с
обеих сторон является установочной базой, и точность ее
расположения должна быть высокой. Если это является
дополнительным технологическим, а не функциональ-
ным требованием, необходимо сопоставить дополни-
тельные расходы с преимуществом, получаемым в ре-
зультате обработки в пакете, а затем принимать соответ-
ствующее решение.
В дополнение к схеме 7.26 отметим, что не только
консольное расположение детали и/или инструмента
влияет на точность изготовления. Так, если сама по себе
деталь будет иметь переменное по длине сечение, то ре-
акция на режущий инструмент будет также переменной.
Например, не стоит изготовлять протягиванием канавки
на детали с переменной толщиной стенки (под канавкой).
Далее остановимся на некоторых специальных
приемах конструирования, обеспечивающих технологич-
ность отливок - деталей или заготовок, получаемых
литьем. При конструировании литых деталей (пока речь
пойдет о металлических отливках) целесообразно при-
держиваться следующих правил.
1. Не рекомендуются массивные детали. Лучше -
тонкостенные, развитые по периферии.
2. Отливка должна обеспечивать простое изготовле-
ние формы (меньше плоскостей разъема формы, возмож-
ность извлечения модели или стержней без разрушения и
т.п.). На схеме 8.1 показана деталь, имеющая так назы-
ваемые зоны подрезки (выделены горизонтальной штри-
ховкой). Форма такой детали должна иметь разъем РМ
вдоль оси. Рациональнее деталь, показанная на схеме
8.1а. Разъем РМ обеспечивает беспрепятственное извле-
чение модели из формы вдоль оси. При этом использует-
ся бесстержневая формовка.
3. Если возможно, то нужно избегать замкнутых
внутренних полостей, ступенчатых разъемов.
4. Крупные и сложные изделия целесообразно раз-
делить на простые детали, соединяемые в последующем
болтами или сваркой.
5. Для извлечения моделей из формы предусматри-
вают на отливках конусность - формовочный [литейный]
уклон (см. схему 8.1а), характеризуемую углом между
поверхностью модели и поверхностью, перпендикуляр-
ной к плоскости разъема формы. Чем меньше высота мо-
дели, тем больше должен быть угол конуса. Для деревян-
ных моделей требуются в 2 раза большие углы, чем для
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
31
металлических. Угол конуса зависит также от способа
литья. Например, при высоте модели 20 ... 500 мм при-
нимают соответственно для литья в песчаные формы
10 ... 5°, для литья под давлением 1° ... 0°15', для литья в
кокиль 7° ... 0°30', для литья по выплавляемым моделям
30 ... 15' и для литья в оболочковые формы ~20'.
6. Для обеспечения равномерного остывания и
уменьшения внутренних напряжений в результате нерав-
номерной усадки (с целью исключения раковин, трещин
и коробления отливки) стенки отливки должны по воз-
можности иметь равномерную толщину, переходы между
стенками различной толщины и сопряжения между стен-
ками, соединяемыми под углом, должны быть плавными.
Кроме того, при соединении стенок нужно избегать ско-
плений материала, массивов, а при соединении стенки с
массивом предусматривать плавное утолщение стенки по
направлению к массиву.
Внутренние стенки рекомендуется делать толщи-
ной, равной 0,8 толщины наружных стенок. Для умень-
шения массивов иногда выполняют на поверхности от-
ливки углубления, канавки. Рекомендуются конструкции
с минимальным количеством сопряжений, без разветвле-
ний контуров стенок (схему 8.2 сравни со схемой 8.2а).
На краях стенок оболочек, в том числе в отверстиях
оболочек, рекомендуется делать утолщения для придания
жесткости и обеспечения равномерного остывания при
литье. Минимальные толщины стенок для стальных от-
ливок 5 ... 20 мм при габаритных размерах 50 ... 2000 мм
соответственно, для чугунных отливок 4 ... 15 мм и для
отливок из алюминиевых сплавов 2,5 ... 10 мм.
7. Для обеспечения точности механической обра-
ботки необходимо предусмотреть черновую базу (напри-
мер, поверхность А на схеме 8.2а), достаточной протя-
женности, параллельную поверхности, обрабатываемой
при первой механической операции, или перпендикуляр-
ную к ней.
В общем случае нужно иметь три черновых базы
для ориентации детали в пространстве. Широко исполь-
зуют осевые базы - оси отверстий бобышек. Чаще фик-
сируют деталь по двум отверстиям и по одной плоскости.
Для тел вращения достаточно иметь две базы - ось от-
верстия и перпендикулярную к ней плоскость.
8. Механически обрабатываемые поверхности реко-
мендуется выполнять выступающими над необрабаты-
ваемыми, что обеспечит удобство подвода инструмента и
обработку напроход нескольких поверхностей (напри-
мер, торцов бобышек). В сопряжении поверхностей, ме-
ханически не обрабатываемой и обрабатываемой, следу-
ет предусмотреть влияние неточностей литья на оконча-
тельную толщину и расположение стенок (см., например,
схему 9.11).
Стыковые плоскости со смежными необработанны-
ми поверхностями рекомендуется сопрягать перпендику-
лярными к плоскости обработки поверхностями В (схе-
ма 8.3) для уменьшения возможного искажения контура
стыка.
Многие правила, характерные для конструирования
отливок, применимы и для конструирования деталей,
получаемых другими способами. Например, в штампо-
ванных деталях также следует избегать малых радиусов
скруглений, резких перегибов или переходов от одного
сечения к другому, существенных различий в толщине
стенок одной детали. В штампованных деталях также
предусматривают технологические уклоны и технологи-
ческие отверстия и другие технологические элементы.
Общими для деталей, получаемых любыми спо-
собами, являются рекомендации по размещению ин-
струмента в зоне обработки, входу и выходу инструмен-
та. Хотя, конечно, преобладают правила для механиче-
ской обработки резанием.
На схеме 9.1 для образования маслопроводного ка-
нала требуется использовать сверло большой длины,
вход и выход его осуществлять под углом. Такое реше-
ние сопряжено с большими боковыми нагрузками на
консольно закрепленный инструмент. Оно либо вообще
неосуществимо, либо сопряжено с большими затратами.
На схеме 9.1а показана более рациональная конструкция,
в которой предусмотрено технологическое отверстие для
входа сверла. В схемах 9.1а, 9.2 и 9.2а предусмотрен
вход сверла под прямым углом. Желательно иметь и со-
ответствующий прилив для выхода сверла под прямым
углом (см. схему 9.2а).
В конструкции детали должно быть предусмотрено
место для размещения инструмента (схемы 9.3 и 9.4).
Причем в схеме 9.3 выполнены приливы для образования
чистовой поверхности только на ограниченном участке
при предпочтительном движении врезания инструмента.
В схеме 9.5 торец ступицы шкива не должен препят-
ствовать движению шлифовального круга при обработке
внутренней цилиндрической поверхности. На схеме 9.6
зубчатые венцы размещают так, чтобы при нарезании
зубьев малого венца фреза не касалась других элементов
колеса. В схеме 9.6а образующая поверхности впадин
конического колеса не должна пересекать его элементы и
элементы крепления на станке. При долблении зубьев
малого венца двухвенцового колеса венцы на схеме 9.6 6
могут быть размещены намного ближе один к другому,
чем на схеме 9.6. Такое решение не позволяет шлифовать
зубья. По этой причине иногда приходится выполнять
деталь составной из нескольких частей.
Для выхода шлифовального круга в схемах 9.7 и 9.8
предусмотрена канавка регламентированной ширины А/.
На схеме 9.7 показана конструкция наружного кольца
(подшипника) с двухточечным контактом. Центр кривиз-
ны С желоба не совпадает с осью симметрии кольца.
Предусмотренная в середине канавка позволяет исполь-
зовать инструмент простой формы и обеспечить высокую
точность обработки.
Проверку на возможность выхода инструмента из
зоны обработки осуществляют при конструировании
шлицев, шпоночных канавок, резьбовых отверстий и т.п.
В схеме 9.9, например, ось фрезы при нарезании шлицев
должна переместиться за пределы буртика на величину
А/, чтобы рабочий профиль шлицев был полностью
сформирован. В схеме 9.10 при сверлении отверстия его
глубина должна быть больше на величину AZ, чем задан-
ная длина участка полнопрофильной резьбы. Причем А/
не должна быть меньше сбега резьбы. При определении
32
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
размеров прилива для размещения в нем отверстия за-
данной длины следует учесть влияние неточностей литья
на окончательную толщину стенки после сверления и
нарезания резьбы {схема 9.11).
На современном этапе развития технологий наблю-
дается тенденция совокупного использования различных
способов изготовления деталей. Это объясняется жела-
нием упростить и по возможности автоматизировать
процесс выполнения отдельных частей детали и соедине-
ния их в единую деталь сложной конфигурации.
На схеме 10.1 (рис. 9.2) показана конструкция води-
ла планетарной передачи современного автомобиля, со-
ставленная из двух частей: штампованной детали водила
и корпуса муфты. Составные части соединены с помо-
щью сварки, осуществляемой автоматически. Сварной
шов зачищен шлифовальным кругом.
Схема 10.2 иллюстрирует возможность получения
полости сложной конфигурации внутри тела литой дета-
ли. Стальной маслопровод, составленный из трубки и
штуцера, соединенных с помощью сварки, размещают в
литейной форме, а затем форму заполняют расплавлен-
ным металлом — в данном случае алюминиевым сплавом.
Если вместо такого решения сверлить отверстия непо-
средственно в корпусе, такой процесс будет сложным и
дорогим, а маслопровод будет иметь местные сопротив-
ления — пересечения отверстий.
Схема 10.3 иллюстрирует возможность совмещения
в одной детали элементов различного назначения (флан-
ца и винтовой поверхности), сформированных вальцева-
нием, аналогично схеме 9.4 (рис. 9.1).
Еще одно направление обеспечения технологично-
сти сопряжено с появлением новых материалов, обла-
дающих уникальными свойствами - речь идет о некото-
рых видах пластмасс и композиционных материалов.
Схемы 10.4 ... 10.8 иллюстрируют возможности вы-
полнения литьем из одного тела целых механизмов или
кинематических соединений. Бельевую прищепку на
схеме 10.4 отливают сначала в виде плети звеньев, со-
единенных между собой тонкими перемычками — упру-
гим и/или пленочными шарнирами. Затем шарнир С со-
бирают путем защелкивания его упругих элементов.
Плеть, по существу, превращается в четырехзвенный
механизм АСВЕ. Причем в шарнирах А и В совмещены
функции кинематических пар и пружин, а петля рядом с
шарниром Е выполняет роль соединительного элемента и
пружины.
На схемах 10.6 и 10.6а показаны примеры выполне-
ния двух сопряженных деталей, соединенных между со-
бой нитевидным элементом, который облегчает транс-
портировку в паре такого соединения, облегчает сборку,
особенно когда эта сборка автоматизированная и придает
соединению другие положительные качества.
На схеме 10.5 представлено простое и технологич-
ное соединение, эквивалентное универсальному шарни-
ру, а на схеме 10.7 - примерное исполнение и размеры
пленочного шарнира. На схеме 10.8 показано устройство,
также отлитое из пластмассы. На крышке имеется вы-
ступ-пробка, которым в рабочем положении закрывают
отверстие в корпусе. Исполнение устройства в виде шар-
нирного параллелограмма АСВЕ и с упругим шарниром
Е позволяет иметь два стабильных положения крышки:
открытое и закрытое.
Наиболее актуальным вопросом современного кон-
струирования является обеспечение технологичности
сборочной единицы. Как уже понятно из предыдущего
повествования, детали стремятся изготовлять простыми и
при минимальных затратах ручного труда. Сборку же
автоматизировать труднее всего, поэтому стоимость руч-
ных сборочных операций занимает все большую часть из
общей стоимости изделия. Не случайно промышленные
компании стремятся разместить сборочные предприятия
в районах с наиболее дешевой рабочей силой. В этой свя-
зи на всех этапах конструирования процесс сборки дол-
жен продумываться самым тщательным образом.
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
33
10.1. КОНСТРУКТИВНЫЕ ПРИЕМЫ ОБЕСПЕЧЕНИЯ СБОРКИ
БЛОЧНОСТЬ КОНСТРУКЦИИ И ТРАЕКТОРИЯ ДВИЖЕНИЯ ПРИ
2-я ступень 1 -я ступень
редуктора редуктора
СБОРКЕ
Одним из важнейших принципов технологичности
сборочной единицы является принцип кратчайшей
размерной цепи. Для его соблюдения целесообразно
выбирать конструкцию с минимальным числом деталей и
стыков в замкнутом контуре размерной цепи - это требо-
вание соответствует принципу кратчайшего замыкания
сил. В том же плане лучше всего выбирать конструктив-
ную схему, в которой звенья в процессе функционирова-
ния самоустанавливаются, и отпадает проблема компен-
сирующих элементов или регулировок, а следовательно,
упрощается сборка.
Основные приемы обеспечения рациональной
сборки - это блочность конструкции и простота тра-
ектории относительного движения и относительного
ориентирования в процессе соединения деталей или
сборочных единиц.
На схеме 11.1 (рис. 10.1) показана сборка мотор-
барабана. Предварительно соединяют 1-ю и 2-ю ступени
редуктора, затем вводят редуктор с одной стороны бара-
бана и закрепляют его, а с другой стороны вводят и за-
крепляют двигатель. Особенность такой сборки заключа-
ется в соединении двигателя и редуктора вне поля зрения
и без доступа к месту соединения. По этой причине при
разработке конструкции должно быть предусмотрено
самоцентрирование (например, в виде конических по-
верхностей) и должна быть обеспечена компенсация не-
соосностей и перекосов (в процессе функционирования
устройства) в месте соединения.
Хотя поперечные (по отношению к осям вращения
подшипников, валов, колес) разъемы и обеспечивают
доступ к местам соединений, и в ряде случаев облегчают
сборку и разборку, но все же в современных конструкци-
ях их стараются избегать, так как обычно не предполага-
ют разборку сборочной единицы в процессе ремонта, а
заменяют ее полностью. При этом выигрыш в качестве
изделия при использовании неразъемных (в поперечном
направлении) корпусов несоизмеримо выше, чем от
удобства сборки. В этой связи нужно таким образом
сконструировать сборочную единицу, чтобы ее можно
было бы ввести через имеющееся или специально вы-
полненное окно в корпусе.
На схеме 11.2 для обеспечения осевой сборки диа-
метр отверстия в корпусе должен быть больше диаметра
вводимой через него шестерни. Это в свою очередь по-
требовало установки дополнительной детали - втулки
для центрирования подшипника.
На схемах 11.3 и 11.4 показаны сравнительно про-
стые соединения нескольких деталей. В схеме 11.3 сател-
лит вводят между щек водила, не имеющего разъемов,
совмещают отверстие подшипника сателлита с отвер-
стиями в водиле, а затем вставляют в отверстия водила
втулку и ось сателлита и стопорят их в осевом направле-
нии. Для стопорения, в частности, используют пластиче-
ские замки (подробнее см. параграф 8.3) после чего кон-
струкция становится неразборной.
На схеме 11.4 крестовину универсального шарнира
заводят в отверстия вилки, перемещая и одновременно
поворачивая ее. После этого вставляют подшипники
(с противоположных сторон) и стопорят их упругими
кольцами.
На схеме 11.5 представлена более сложная конст-
рукция, выполненная без поперечных разъемов. Все де-
тали и сборочные единицы, кроме одной, устанавливают
34
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
10.2. КОНСТРУКТИВНЫЕ ПРИЕМЫ ОБЕСПЕЧЕНИЯ СБОРКИ
РАЗМЕЩЕНИЕ ДЕТАЛЕЙ
СОЕДИНЕНИЯ
РАЗМЕЩЕНИЕ СБОРОЧНОГО
ИНСТРУМЕНТА
ОРИЕНТИРОВАНИЕ
ПРИ ТРАНСПОРТИРОВКЕ [Тб?2П
[Тб?3~| |16.3а|
Места размещения захватного
устройства съемника
МОНТАЖНЫЕ ЭЛЕМЕНТЫ
Отверстия для губок инструмента
' яп
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
35
путем простых перемещений через окна в корпусе. Вы-
ходной вал в сборе вводят в полость корпуса со сложной
траектории. При этом зубчатое колесо вводят в зацепле-
ние с шестерней, а конический подшипник (без наружно-
го кольца) вставляют в кольцо, предварительно установ-
ленное в корпусе.
Возможность размещения деталей перед сборкой,
траектория перемещения и ориентирование при сборке —
вот те условия, которые предопределяют не только об-
щую компоновку, но и конструкцию отдельной детали
или соединения. На схеме 12.1 (рис. 10.2) детали 1 и 2
(резервуара, трубы или т.п. устройства) должны иметь
значительной величины углубления, чтобы можно было
завести в отверстие винт и закрутить гайку. Габаритные
размеры такого соединения велики, кроме того, имеет
* есто сложная конфигурация внутреннего рабочего про-
странства устройства в целом, в котором применено дан-
ное решение.
На схеме 12.2 показано альтернативное решение, в
котором использована шпилька с двумя гайками (в дан-
ном примере детали 7 и 2 выполнены из композиционно-
го материала, а одна из гаек выполнена в виде закладной
детали — резьбового вкладыша). Все шпильки предвари-
тельно вворачивают в деталь 7, затем осевым перемеще-
нием пристыковывают деталь 2, вставляют и закручива-
ют гайки. Ширина полости под гайку определяется раз-
мещением гаечного ключа (см. схему 13.2), а ее высота
должна быть достаточной для свободного размещения
гайки и рабочего участка резьбы шпильки.
В стесненных условиях для удобства сборки ис-
пользуют решение, представленное на схеме 12.3. Болт
(вместе с навернутой гайкой) закладывают в пазы соеди-
няемых деталей 7 и 2, после чего затягивают гайку. По-
лости А и В имеют размеры, необходимые для размеще-
ния ключей.
На схеме 13.1 показано, что между стенкой детали и
гайкой должно быть предусмотрено расстояние, доста-
точное, чтобы разместить и проворачивать торцовый га-
ечный ключ. При использовании ключа с открытым зе-
вом предусматривают возможность подвода его сбоку и
проворота на угол не менее 60° при шестигранной гайке
(схема 13.2). А вот для завинчивания болта (схема 13.3)
потайной головкой не требуется предусматривать рабо-
чее пространство для ключа рядом с головкой болта.
Следующие приемы (см. схемы 14.1 ... 16.2) больше
продиктованы требованиями автоматизированной сбор-
ки, нежели иными соображениями. В первую очередь
стремятся использовать детали простейшей формы с од-
носложным движением при сборке. При конструирова-
нии изделий, подлежащих автоматизированной сборке,
рекомендуется избегать применения гибких, сложно
распознаваемых деталей и соединений (проводов, кабелей,
f гмней). Целесообразно использовать армированные дета-
ли и жесткие разъемные соединения.
Автоматизированная сборка предполагает также
другие приемы совершенствования конструкции и тех-
нологии изготовления:
• совмещение процессов изготовления отдельных
деталей и сборки (например, штамповки шайбы и сборки
ее там же движением с валиком);
• предсборочное группирование деталей (штам-
повка деталей из ленты (схема 16.2) с разделением их
только в процессе сборки или специальное соединение
деталей перед сборкой в цепочку);
• оснащение детали вспомогательным ориенти-
рующим элементом (уступом, срезом), придающим оп-
ределенность ориентации, например, в процессе транс-
портировки и/или соединения (схема 15. Гу, явное выра-
жение асимметрии детали для легкого распознавания
ориентации или выполнение детали симметричной при
возможности произвольной ориентации (на схеме 15.6 -
деталь с неявно выраженной асимметрией, на схеме 15.6а —
симметричная деталь);
• выбор конфигурации детали, обеспечивающей
однозначные, простые, в том числе прямолинейные
движения (см. схемы 14.1, 14.2 и 14.2а, 14.3 и 14.3а,
14.4)-, лучше, когда перемещение ограничено упором;
• размещение центрирующих элементов, обеспе-
чивающих определенность ориентации в начальный мо-
мент соединения и последовательное сопряжение по-
верхностей (на схеме 15.2 — нерационально, на схеме
15.2а — рационально);
• выполнение направляющих элементов, фасок
(схема 15.3), скруглений (схема 15.5), конусов, канавок,
облегчающих начальную ориентацию деталей соедине-
ния (кольцевая проточка Д на схеме 15.4 позволяет избе-
жать заклинивания при сопряжении с малым зазором);
• выбор формы деталей, исключающей их закли-
нивание, запутывание, непредусмотренное сцепление (на
схемах 16.1 и 16.3 - нерациональные конструкции, на
схемах 16.1а, 16.3а и 16.36 — рациональные конструкции)
или опрокидывание в процессе транспортирования по
лотку (достаточная опорная поверхность, расположение
центра тяжести);
• уменьшение количества элементов соединений,
замена, где это возможно, резьбовых соединений клепа-
ными или упругими, а еще лучше сварными (например,
контактной сваркой), унификация элементов соединений,
выполнение их как одно целое с основной деталью. При
выборе вида соединений следует иметь в виду, что вин-
товое соединение с резьбовым отверстием в теле детали
проще для автоматизированной сборки, чем болтовое
соединение, т.к. в последнем больше деталей (гайки,
шайбы).
Неудобны при автоматизированной сборке валов
шпоночные соединения. Их желательно заменять шлице-
выми или неподвижными фрикционными соединениями.
Сборка упрощается при использовании разрезных
стопорных колец для фиксации подшипников качения и
других деталей в осевом направлении на шейках валов и
в расточках корпусных деталей вместо установки шайб с
винтами и фиксирующих гаек. Сборка соединений не
должна быть связана с продолжительными процессами
(охлаждением нагретых деталей, сушкой, полимеризаци-
ей клеев и пластмасс), т.к. они нарушают синхронизацию
переходов сборки и приводят к необходимости включать
в поток дополнительные участки конвейеров (сушильных
устройств).
36
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
37
Автоматизированное сборочное оборудование без
обратной связи требует по сравнению с ручной сборкой
более жестких допусков изготовления деталей.
При автоматизированной сборке используют мето-
ды полной, неполной или групповой взаимозаменяемо-
сти, пригонки и регулирования. Наиболее просто осуще-
ствима автоматизированная сборка при полной взаимо-
заменяемости, но при этом удорожается изготовление
деталей.
Неполная и групповая взаимозаменяемость требует
дополнительных устройств контроля, усложняет систему
управления и складирования.
Еще более сложно осуществить автоматизирован-
ную сборку, используя пригонку или регулирование.
Пригонка, в частности, приемлема при сборке прецизи-
онных пар. Регулирование обеспечивают подбором ком-
пенсационных (желательно деформируемых) элементов
или изменением силового замыкания с помощью винто-
вой пары.
Еще одна проблема технологичности при сборке —
это использование приспособлений. Для конструирова-
ния приспособлений существуют те же правила, что и
для устройств иного назначения. Единственное отличие
продиктовано функциональными признаками приспособ-
ления: оно должно выдерживать собственную много-
кратную сборку и разборку.
Что же касается качества сборки, то приспособление
не только не должно повреждать отдельные элементы
собираемого устройства, но более того, должно предот-
вращать такие повреждения собственными деталями уст-
ройств. Например, в качестве приспособлений использу-
ют защитные кожухи (на время транспортировки и сбор-
ки), жесткие контейнеры (для транспортировки и сборки
податливых, ажурных деталей и сборочных единиц).
Особое внимание уделяют установке в корпус и на
зал манжетных уплотнений. Не допускается сборка уп-
лотнения при протягивании его по шлицам, шпоночным
пазам, резьбе, которые могут иметь заусенцы или острые
кромки. Поэтому монтаж уплотнений целесообразно осу-
ществлять с помощью оправок (см. рис. 98 в параграфе 9.4).
При разработке конструкции деталей и соединений,
с собенно когда речь идет о тяжелых деталях или трудно-
собираемых/разбираемых соединениях, должны быть
"редусмотрены специальные монтажные элементы:
детали, поверхности, отверстия и т.п. части устройств, за
::эторые можно захватить деталь/сборочную единицу или
на которые можно нажимать, не боясь разрушения дета-
ли. или которые используются для облегчения направле-
ния. ориентации, центрирования, если рабочие элементы
этого не обеспечивают.
Для размещения элементов съемника предусматри-
вают специальные реборды (схема 17.2), гнезда
(схема 17.3), выполняют отверстия с резьбой. На
схеме 17.1 отжимной винт служит для разъединения де-
талей. На схемах 18.1, 18.2 показаны элементы для из-
влечения пружинного стопорного кольца. В схеме 18.2
для того, чтобы сжать кольцо, предусмотрены специаль-
ные пазы в корпусе. В схемах 18.1 и 18.1а на концах
кольца выполнены отверстия для захвата кольца щипца-
ми при его установке или при извлечении. В схеме 18.16
для той же цели концы кольца отогнуты.
Существенное значение для технологичности кон-
струкции имеют современные решения отдельных нераз-
борных узлов, агрегатов, приборов. И речь идет не про-
сто об использовании неразъемных соединений, а об уп-
рощении геометрии отдельных деталей, если не являет-
ся обязательным или возможным последующая разборка,
например, для обслуживания и ремонта. Уже никого не
удивляют неразборные шариковые подшипники, в такой
же мере могут быть неразборными электродвигатели,
насосы, клапаны, форсунки и др. узлы (см., например,
рис. 10.3).
Единственное условие для выбора подобных реше-
ний: замена узла в целом (при ремонте) должна быть де-
шевле его ремонта. Лучше все же использовать нераз-
борные узлы, рассчитанные на весь срок службы маши-
ны.
В современных машинах пока предусматривают ма-
логабаритные простые неразборные узлы при массовом и
автоматизированном их производстве.
На схемах 19.1, 19.2 показаны конструкции топлив-
ных насосов (для автомобилей) со встроенным в общий
корпус электродвигателем и обратным клапаном. Длина
таких агрегатов не более 200 мм, а диаметр корпуса
обычно 50 ... 60 мм.
Все детали насоса имеют простую конфигурацию,
обычно штампованные, собираются в единый блок авто-
матически осевым относительным перемещением. После
этого пластическим деформированием по краям корпуса
создаются замыкающие соединения. Топливо прокачива-
ется через зазор между статором и ротором электродви-
гателя, охлаждая их. Давление в таких насосах достигает
600 кПа.
Каждая ступень насоса состоит из двух-трех деталей
(см. схемы 19.1а, 19.2а, б). Обычно основная деталь - это
турбина с большим числом лопастей или зацепляющиеся
шестерни с разницей чисел зубьев в 1 зуб. При этом шес-
терня 1 установлена на эксцентриковом валу и совершает
планетарное движение.
Насос по схеме 19.3 также имеет простую конструк-
цию, хотя формально число деталей больше, чем в насо-
сах по схемам 19.1а и 19.2а, 6. Но эти детали (в частно-
сти, ролики) все одинаковые и также очень просты по
форме. Конечно, такие решения приемлемы только для
малогабаритных конструкций, так как простая форма
элементов не оптимальна по отношению к реализуемому
процессу, да и уплотнения между относительно подвиж-
ными деталями здесь недостаточно совершенны.
Регулятор давления топлива на схеме 20.1 составлен
в основном из штампованных тонкостенных и толсто-
стенных деталей, соединенных между собой пластиче-
скими замками (см. параграф 8.3). Внутрь тонкостенного
корпуса помещены клапан, мембрана, пружины и другие
детали, также имеющие пластические соединения. Регу-
лятор в целом отличается простотой и надежностью.
Уже была отмечена технологичность получения ка-
налов и полостей в литых корпусах использованием за-
38
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
кладных деталей (см. схему 10.2, рис. 9.2). Такой прием
находит все большее распространение, особенно для со-
четания металлических, пластмассовых и керамических
деталей. Соединяют такие разнородные материалы
обычно литьем, спеканием или (реже) пластическим де-
формированием.
Благодаря таким решениям удается сочетать изоля-
торы с электропроводниками, трущиеся и несущие дета-
ли, закладывать во внутренние полости и каналы пружи-
ны, клапаны, фильтры, подшипники, направляющие и
т.п. детали.
Наглядным примером такого исполнения является
управляемая топливная форсунка на схеме 20.2. Литой
пластмассовый корпус обеспечивает надежную защиту и
изоляцию элементов и деталей (в том числе электротех-
нических) от внешней среды. Внутрь корпуса перед
сборкой установлен ряд подвижных и неподвижных де-
талей, обозначенных на схеме.
Съемными здесь могут быть эластичные уплотнения
(кроме одного - внутреннего), фильтр и распылитель; вся
остальная конструкция неразборная.
Приведенные рекомендации - только небольшая
часть решения проблем технологичности конструкции.
В то же время наша цель была всего лишь показать, что
обеспечение технологичности, пожалуй, - одно из важ-
нейших сторон современного конструирования и требует
глубокой всесторонней проработки.
Как следует из рассмотренных примеров, одним из
принципов обеспечения технологичности является ис-
пользование одинаковых по форме и размерам элемен-
тов, деталей, соединений, блоков и агрегатов.
Этот принцип относится к унификации.
Под унификацией обычно понимают приведение к
единообразию технических характеристик изделий, тех-
нологичных процессов, документации и средств общения
(термины, обозначения и др.).
Для конструкции изделий унификация заключается
в рациональном сокращении числа объектов (размеров,
параметров, геометрических элементов, деталей, сбороч-
ных единиц, агрегатов, приборов, машин, их схем и т.п.)
одинакового назначения, которые можно многократно
применять [повторять] в разрабатываемой конструкции в
рамках завода, отрасли, страны. Такое условие в виде
ряда чисел, геометрических форм и т.п. определено стан-
дартом.
Унификация позволяет увеличить серийность и тем
самым снизить стоимость изготовления деталей. Она
облегчает обслуживание и ремонт за счет уменьшения
номенклатуры инструмента и запасных частей, позволяет
предприятию специализироваться на заготовлении огра-
ниченного числа деталей и соединений, а остальные по-
лучать в готовом виде. Унификация упрощает процесс
конструирования.
Унификацию применяют в ущерб равнопрочности.
Например, если в редукторе использовать подшипники
одного вида и размера, то диаметры отдельных валов
окажутся завышенными, окажется также завышенной и
долговечность отдельных подшипников. Равнопрочность
может быть обеспечена при одинаковости одних пара-
метров и варьировании других. Например, при одинако-
вом модуле и диаметре зубчатого колеса изменяют его
ширину, округляя до регламентированного значения.
Недостатки унификации могут быть смягчены за
счет рационального использования принципа многопо-
точности, о котором пойдет речь в дальнейшем. Напри-
мер, варьированием числа одинаковых болтов получают
различную несущую способность соединений, варьиро-
ванием числа сателлитов обеспечивают различную не-
сущую способность планетарной передачи. То же самое
относится к числу клиновых ремней ременной передачи,
к числу одинаковых подшипников в одной опоре (обыч-
но не более двух), к числу рабочих витков резьбы и т.п.
На схеме 21.1 (рис. 11) в качестве примера в одном
агрегате использованы:
- унифицированные детали: фрикционные диски,
пружины, штифты, сателлиты, корпусные детали;
- геометрические элементы: шлицы на дисках, зубья
зубчатых колес, отверстия;
- размеры: диаметры корпусных деталей и фланца
водила и др.
Характерным принципом унификации является со-
ставление машин, агрегатов, приборов или сооружений
из конструктивно завершенных унифицированных частей.
На станине агрегатного станка (схема 21.2) закреп-
лено несколько силовых головок (блоков: двигатель -
редуктор - шпиндель - инструмент). На поворотном сто-
ле имеется четыре зажимных устройства для установки
заготовок. Данная компоновка обеспечивает многопози-
ционное относительное положение и ориентирование
заготовки и инструмента. Станина в виде симметричной
замкнутой рамы обеспечивает как простоту присоедине-
ния к ней силовых головок, так и доступ в рабочую зону
для смены заготовок и/или инструмента.
В параметрическом ряду такого типа станков преду-
смотрено несколько типоразмеров рамы и несколько ти-
поразмеров силовых головок, что позволяет компоновать
различные варианты станков.
На схемах 21.3, 21.3а, 21.36 показано, как из целого
ряда отдельных модулей (унифицированных элементов,
деталей, блоков) можно составлять направляющие гид-
роаппараты с различным сочетанием свойств и парамет-
ров. В качестве модулей используют штекеры, соленои-
ды, дозаторы, гидрораспределители, редукционные кла-
паны. Каждый из модулей имеет свой ряд размеров, но
главное в них - это одинаковые стыковые элементы (по-
садочные поверхности отверстия, каналы и их размеры).
В случае, если их не удается сделать одинаковыми, то
используют переходные элементы. Соединительные бол-
ты имеют одинаковую резьбу, но их выполняют различ-
ной длины, и также подчиняют определенному парамет-
рическому ряду.
В различных областях техники много примеров по-
добного типа решений, в которых имеются одинаковые
платформы, например, в автомобилях, выпускаемых раз-
личными фирмами, и, уж конечно, одинаковые двигатели
и другие агрегаты и приборы. В строительных, дорож-
ных, сельскохозяйственных и др. машинах используют в
качестве основы базовый тягач и навешивают на него
различное унифицированное рабочее оборудование.
В свете интегрирования производства в рамках всего ми-
ра принцип унификации приобретает первостепенное
значение.
ТЕХНОЛОГИЧНОСТЬ КОНСТРУКТИВНЫХ РЕШЕНИИ
39
11. УНИФИКАЦИЯ И БЛОЧНОЕ [МОДУЛЬНОЕ] КОНСТРУИРОВАНИЕ
МНОГОКРАТНОЕ ПОВТОРЕНИЕ ДЕТАЛЕЙ И ЭЛЕМЕНТОВ
МНОГОКРАТНОЕ ПОВТОРЕНИЕ АГРЕГАТОВ
УНИФИЦИРОВАННЫЕ ЭЛЕМЕНТЫ,
ДЕТАЛИ И БЛОКИ
НАПРАВЛЯЮЩИХ ГИДРОАППАРАТОВ
Редукционный клапан
Основание
|21 .За | ПРИМЕРЫ КОМПОНОВОК
|21.361
40
КРИТЕРИИ СОВЕРШЕНСТВА КОНСТРУКЦИИ
1.5. ПАТЕНТНАЯ ЧИСТОТА
Ценную основу перспективного проекта составляет
интеллектуальная собственность разработчика, предпри-
нимателя или третьего лица. Она может продаваться и
покупаться, а при недостаточной осмотрительности ис-
тинного владельца может быть похищена, присвоена и
использована.
В этой связи особое значение приобретает эксперти-
за проекта на патентную чистоту и патентоспособность
предлагаемой к выпуску продукции, используемого ма-
териала или способа производства. Патентная чистота
предусматривает наличие в данном продукте только
своей интеллектуальной собственности (официально
признанной) или законно приобретенного права на
использование чужой собственности.
Патентоспособность характеризует наличие в дан-
ном продукте новых решений, которые могут быть офи-
циально признаны объектами интеллектуальной собст-
венности.
Интеллектуальная собственность — это мысли,
идеи, воплощенные в технические, организационные и
организационно-технические решения разнообразных
задач.
От посягательств конкурентов защитить можно
только те технические решения, факт использования ко-
торых может быть проверен и установлен доступными
государству средствами. В этой связи, например, невоз-
можно защитить опубликованный метод расчета, так как
его использование практически невозможно проконтро-
лировать, а полученные с помощью его результаты — не
основания для доказательства заимствования метода. Но
имеются средства (юридические и технические), хотя
пока не очень надежные, защиты компьютерных про-
грамм для расчета и конструирования, в которых вопло-
щены новые и известные методы. Невозможно защитить
техническое решение, если оно при этом не опубликова-
но — пользователю нельзя доказать, что это не он первым
придумал данное решение.
Не может быть защищен, например, прибор, обору-
дование, машина или сооружение в целом. Защите под-
лежит принципиальная структура, геометрия и/или связи
отдельных частей, визуально воспринимаемая характери-
стика объекта и т.д. Государственная защиза интеллекту-
альной собственности, кроме ее охраны, позволяет вла-
дельцу достичь и других целей.
Наилучшую рекламу Вашей* продукции может соз-
дать крупное запатентованное изобретение (оно свиде-
тельствует об оригинальности и высоком уровне реше-
ния, положенного в основу продукции) и/или промыш-
ленный образец (свидетельство эстетических качеств и
удобства использования).
Под словом "Вы" в этом параграфе имеется в виду об-
ращение только к юридическому лицу - разработчику-патенто-
обладателю. Взаимоотношения между конкретным исполните-
лем и патентообладателем здесь не рассматриваются и регла-
ментируются иными положениями.
Товарный знак своей визуальной выразительно-
стью и/или словесным звучанием, а также известностью
хорошо зарекомендовавшей себя ранее продукции свиде-
тельствует о том. что Вы дорожите именем фирмы, вы-
пускаете и/или продаете только продукцию отличного
качества.
Знак места происхождения продукции (особенно
касается потребительских предметов — произведений
искусства и ремесел) обычно свидетельствует об уни-
кальных способностях местных мастеров и уникальных
возможностях Вашей фирмы (если Вам в этом повезло).
Испрашивая патент у государства (содружества го-
сударств), Вы тем самым нанимаете государство для ох-
раны Ваших интересов в рамках существа предлагаемого
технического решения и только на территории данного
государства. Государство соглашается взять на себя ох-
рану Вашего исключительного права на использование
патентуемого решения только при определенных требо-
ваниях: не затрагивать интересы, обусловленные дейст-
вующими патентами; способствовать экономическому
развитию государства и не подрывать его международ-
ный престиж (конкретные критерии оговорены в законо-
дательствах и их комментарии в нашу задачу не входят).
Какие санкции и потери грозят тому, кто выпускает
или ввозит непатенточистую продукцию (подпадающую
под действие патентов иных владельцев)? Такую про-
дукцию могут (в разных странах предусмотрены различ-
ные санкции) арестовать, запретить дальнейший ее вы-
пуск, наложить штраф, приговорить владельца или по-
средника к тюремному заключению, обязать компенси-
ровать материальные потери патентообладателю при
действии патента на территории государства, где нахо-
дится предприятие, выпускающее продукцию и/или за-
претить ввоз продукции. Затраты на патентование за ру-
бежом довольно велики, особенно сильно они увеличи-
ваются с каждым годом срока действия патента. Интел-
лектуальная собственность, безусловно, дороже затрат на
патентование, а ее надежную охрану можно обеспечить
только при соответствующей оплате.
Все это не означает, что при освоении новой про-
дукции патентование обязательно. Возможны различные
варианты и рекомендации. Речь идет только о тех, при
которых не нарушаются действующие законы.
1. Общее правило для всех вариантов: продукция
должна быть патенточистой, по крайней мере в той
части, которая является доступной для ознакомления
потребителем и государственным экспертом (например,
назначаемым судом) на данной территории. При этом,
если Вы сами сможете надежно охранять секреты техно-
логии (ограничить круг лиц, допущенных к существу
способа производства, только теми людьми, которым
доверяете, хранить техдокументацию в недоступном для
посторонних лиц месте), то патентовать способ произ-
водства необязательно, а в некоторых случаях невыгод-
но. Защищая патентом способ производства или состав
вещества, Вы в то же время раскрываете свой секрет.
Потенциально это позволяет Вашему конкуренту исполь-
зовать Ваши достижения (проверить это в его частном
владении Вы не сможете) или учесть Ваши решения и
продвинуться вперед. Поэтому задача научно-техни-
ПАТЕНТНАЯ ЧИСТОТА
41
ческой экспертизы, проводимой в частном порядке, не
только помочь Вам правильно оформить заявку на па-
тент, но и предупредить Вас о нецелесообразности па-
тентования в конкретной ситуации.
Во всех случаях фактор времени подачи заявки иг-
рает важную роль. Иногда лучше подождать, пока Вы
полностью не осуществили подготовку к выпуску про-
екции. Но в этом случае Вы рискуете, что Ваша про-
дукция может оказаться непатенточистой. Чтобы выиг-
рать время, нужна своевременная и надежная экспертиза.
Наличие патента еще не гарантия патентной чистоты.
Достаточно примеров, когда патенты оспариваются и
аннулируются из-за некачественной государственной
экспертизы при выдаче патента. Патентные законода-
тельства не предусматривают компенсацию Ваших по-
терь, связанных с аннулированием патента по данной
причине.
2. Следует помнить, что охраняется государством
решение только в том объеме, в котором оно раскры-
то и опубликовано в патенте и в котором оно может
быть определено путем исследования физического объ-
екта патентования. Ошибочны рекомендации делать что-
то неясным и оставлять тем самым ноу-хау. Неясное или
нераскрытое содержание государством не защищается и
является Вашим секретом. Вы и только Вы можете поза-
ботиться, чтобы этот секрет не был раскрыт Вашими
конкурентами. Но если конкурент приходит к такому же
решению или патентует его, то Вы не можете препятст-
вовать реализации запатентованного решения.
Для Вас же может сохраниться право первопользо-
вания: продолжать выпускать продукцию, если подго-
товка к выпуску и/или выпуск начались раньше, чем Ваш
конкурент подал заявку на патент (на этот счет в разных
странах имеются различные условия).
Тем не менее разработчик выбирает и выдерживает
определенный баланс между гарантией и риском, соот-
ветственно между государственной и собственной охра-
ной, между раскрытой и секретной частью продукции.
Технические секреты важны для того, чтобы выиг-
рать у конкурента время поиска и освоения тех или иных
решений.
3. Патенточистой Ваша продукция может быть в
cj сдующих вариантах:
• все технические решения (общая схема, конст-
рукции частей, материалы и т.д.) оговорены в патентах,
срок действия которых уже истек, или являются общеиз-
вестными и не подлежащими патентованию - такой ва-
риант хотя и самый простой, но не позволяет создать
конкурентоспособную продукцию;
• все технические решения запатентованы разра-
ботчиком и производителем продукции - это наиболее
предпочтительный вариант, но требует больших интел-
лектуальных затрат;
• все технические решения выполнены в соответ-
ствии с лицензиями иных патентообладателей - такой
вариант сопряжен обычно с наибольшим первоначаль-
ным вкладом средств, но может позволить выиграть вре-
мя, затрачиваемое на разработку проекта;
• в продукции имеет место определенное соотно-
шение первых трех вариантов или каких-либо из них -
этот вариант используют чаще всего.
Кроме интуиции при решении данного вопроса не-
обходима всесторонняя экспертиза.
4. Экспертиза нужна и для того, чтобы ответить на
вопросы, нужно ли патентовать все новые решения, по-
лучаемые на Вашем предприятии или только те, что бу-
дут использованы в Вашей продукции, следует ли патен-
товать Ваше предложение в наиболее развитых странах
или только в тех, где будет продаваться Ваша продукция.
Кроме защиты интересов при реализации продукции па-
тентование преследует и другие цели.
Если фирма патентует и публикует интересные, хо-
тя и нереализованные решения, повышается престиж
фирмы. Но можно приобрести плохую репутацию, если
получать патенты на бесперспективные решения.
Патентование может проводиться с целью дезори-
ентации и/или создания дополнительных препятствий на
пути конкурентов, желающих создать продукцию на
иных принципах по сравнению с Вашей, а также с целью
продажи лицензии Вашим партнерам для продукции,
которая лежит вне Ваших интересов или продукции, по-
добной Вашей, на территориях, которые также не входят
в круг Ваших коммерческих интересов.
Что касается первой цели, то Вы ее достигнете даже
в результате публикаций заявки (если это предусмотрено
законодательством) или патента. Действие патента в
этом случае можно и не поддерживать уплатой ежегод-
ной пошлины.
В случаях со второй и третьей целями следует учи-
тывать, что в ряде стран, если Вы сами не реализуете
свое достижение в течение определенного времени и не
позволяете это делать другим, действие патента государ-
ством прекращается.
При оценке целесообразности патентования с целью
продажи лицензии следует иметь в виду, что очень редко
лицензию покупают только при наличии патента, суще-
ство которого не проверено и не реализовано на практи-
ке. Обычно лицензия - это сопутствующий товар новых
технологий, материалов и другой продукции. Только до-
казав выгоду Ваших предложений, Вы можете рассчиты-
вать на успех в этом деле.
Глава 2. ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ
И КОНСТРУКТИВНЫХ СХЕМ
2.1. СИСТЕМАТИЗИРОВАННЫЙ БАНК
КАК ОСНОВА ДЛЯ СТРУКТУРНОГО
СИНТЕЗА
Развитие техники (конструкций, материалов и тех-
нологий) предопределяет изменение подхода к структур-
ному синтезу по сравнению с тем, который изложен в
классических учебниках по теории механизмов и машин.
Конструктору и студенту до сих пор предлагают по
определенным правилам составлять возможные варианты
методами комбинаторики или путем присоединения к
какой-либо исходной схеме известных структурных
групп, а затем исследовать полученные варианты и вы-
бирать из них наиболее подходящее решение поставлен-
ной задачи.
Таким образом можно получить множество вариан-
тов структурных схем, не зная их функциональных воз-
можностей и свойств, после изучения которых отбрако-
вываются ненужные схемы, пока не останется одна
схема.
Процесс такого синтеза сложен и трудоемок. Не
вдаваясь в иные недостатки процесса, отметим лишь, что
данный подход как бы игнорирует миллионы созданных
и проверенных практикой решений в различных областях
техники (именно миллионами исчисляется количество
зарегистрированных изобретений в развитых странах).
А ведь каждый изобретатель прошел определенный путь,
чтобы получить и принять вариант, который позволил бы
осуществить заданную функцию и при этом удовлетво-
рить по критериям новизны, неочевидности исполнения
и возможности промышленного использования.
Жаль, что методология получения большинства
изобретений так и останется тайной, особенно изобрете-
ний тех времен, когда главной вычислительной системой
был только мозг индивидуума. Тем более очевидно, что
не следует каждый раз проходить весь путь своих пред-
шественников, а можно использовать известное решение,
дополнить и усовершенствовать его.
При наличии современной вычислительной техники
возможный путь напрашивается сам собой: создание сис-
тематизированного банка известных решений в
определенной области техники для решения перечня
функциональных задач. После формирования задачи дос-
таточно по определенной системе выбрать аналоги и
прототип, а затем работать с одним или несколькими
вариантами. Простота такого подхода только кажущаяся.
Трудность заключается не только в том, как создать и
иметь данный банк, но и как им пользоваться. Упомяну-
тое слово "систематизированный" не случайно: принци-
пы построения системы технических решений могут
быть так же многообразны, как и сами решения.
Как уже упоминалось, многие компании имеют
очень объемные банки схем и конструктивных решений,
но они представляют собой частную собственность и
недоступны для широкого использования. Кроме того,
они имеют направленный характер и касаются в основ-
ном продукции данной компании. Обычно они не позво-
ляют найти решение даже из смежной области техники,
не говоря уже об отдаленных областях. Поэтому теория
механизмов и машин должна располагать общим банком
принципиальных решений, методологией составления
частных банков и методологией синтеза новых решений
на основе известных достижений.
Далее постараемся кратко изложить опыт по созда-
нию такого общего банка и рассказать о некоторых
принципах, положенных в его основу.
Примерная возможная структура банка представле-
на на рис. 12.
Принципиальной особенностью приведенного при-
мера банка является наличие в нем большого числа (для
решения обобщенных функциональных задач) укрупнен-
ных [обобщенных] структурных схем, в которых пред-
ставлены блоки [структурные единицы], соединенные
определенным образом. В частности, данные схемы
представляют собой последовательное, параллельное или
смешанное соединение:
двигателей, сцепных муфт, тормозов, редукторов,
дифференциальных механизмов, многоскоростных пере-
дач, вариаторов [трансформаторов] параметров движения
и нагружения, аккумуляторов энергии, амортизаторов и
демпферов;
копирующих, распределительных, направляющих,
ориентирующих в пространстве, выравнивающих на-
грузку, уравновешивающих, периодически разгружаю-
щих приводы и кинематические пары, компенсирующих
погрешности, предохраняющих и защищающих от вред-
ных воздействий, управляющих и регулирующих уст-
ройств;
других подобных устройств, классифицированных
по функциональным признакам с указанием характерных
свойств, а в ряде случаев и возможных параметров и
возможных конструктивных решений.
Что касается конкретных конструктивных исполне-
ний, то в ряде разделов банка содержатся приводы, при-
водные соединения, кинематические соединения и эле-
ментарные механизмы, предназначенные для решения
частных функциональных задач, например таких, как
передача и преобразование движений, суммирование и
распределение нагрузки, воспроизведение простейшей
траектории или ориентации звена в пространстве, гаше-
ние или воспроизведение вибраций и т.п. Такие меха-
низмы можно подставлять в обобщенные структурные
схемы в качестве отдельных блоков.
СИСТЕМАТИЗИРОВАННЫЙ БАНК КАК ОСНОВА ДЛЯ СТРУКТУРНОГО СИНТЕЗА
43
12. ПРИМЕР СТРУКТУРЫ БАНКА СХЕМ И КОНСТРУКТИВНЫХ РЕШЕНИЙ
МАТЕРИАЛЫ ПО ФИЗИЧЕСКОМУ
СОСТОЯНИЮ, СТУКТУРНЫМ
И ФУНКЦИОНАЛЬНЫМ ПРИЗНАКАМ.
ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ
УЛУЧШЕНИЯ СВОЙСТВ МАТЕРИАЛОВ
СИСТЕМАТИЗИРОВАННЫЙ БАНК ПРИНЦИПИАЛЬНЫХ
СХЕМ И КОНСТРУКТИВНЫХ РЕШЕНИЙ МАШИН
ТЕХНОЛОГИЧЕСКИЕ ПРОЦЕССЫ
И ИНСТРУМЕНТЫ ДЛЯ
ИЗГОТОВЛЕНИЯ МАШИН.
ВЫПЛАВКА, РАЗЛИВКА, ЛИТЬЕ.
ОБРАБОТКА ДАВЛЕНИЕМ.
ОБРАБОТКА РЕЗАНИЕМ.
СВАРКА, ПАЙКА И СКЛЕИВАНИЕ.
СБОРКА.
НОРМЫ ТОЧНОСТИ,
ДОПУСКИ, ПОСАДКИ
И ОБЕСПЕЧЕНИЕ КОНТРОЛЯ
ТОЧНОСТИ ИЗГОТОВЛЕНИЯ
ПРОЦЕССЫ, СХЕМЫ И ОБЩИЕ
ПРИЕМЫ [ПРИНЦИПЫ]
КОНСТРУИРОВАНИЯ
ПРОЦЕССЫ, РЕЖИМЫ РАБОТЫ,
СИЛОВОЕ И ЭНЕРГЕТИЧЕСКОЕ
СОСТОЯНИЯ МАШИН, ИХ ДЕТАЛЕЙ,
СОЕДИНЕНИЙ И СИСТЕМ
МОДЕЛИ, СХЕМЫ,
ИХ ЭЛЕМЕНТЫ И ПАРАМЕТРЫ
ПСИХОЛОГИЧЕСКАЯ И ФИЗИОЛОГИЧЕСКАЯ
ПРИСПОСОБЛЕННОСТЬ К ЧЕЛОВЕКУ
(КРАСОТА, УДОБСТВО И БЕЗОПАСНОСТЬ).
СИСТЕМЫ ОБЕСПЕЧЕНИЯ
ЖИЗНЕДЕЯТЕЛЬНОСТИ
СИСТЕМЫ УПРАВЛЕНИЯ.
АВТОМАТИКА, ПРИЕМЫ
И ПРОЦЕССЫ САМОУПРАВЛЕНИЯ.
УПРАВЛЯЮЩИЕ, ИЗМЕРИТЕЛЬНЫЕ
И ИСПЫТАТЕЛЬНЫЕ УСТРОЙСТВА
СИСТЕМЫ ОБЕСПЕЧЕНИЯ
ФУНКЦИОНИРОВАНИЯ МАШИН
(ПИТАНИЯ, СМАЗЫВАНИЯ,
НАГРЕВА/ОХЛАЖДЕНИЯ)
КОНСТРУКТИВНЫЕ РЕШЕНИЯ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ
ЭНЕРГЕТИЧЕСКИЕ МАШИНЫ
И АППАРАТЫ. ПРИВОДЫ
ТРАНСПОРТНЫЕ, ПОГРУЗОЧНЫЕ,
ЗЕМЛЕРОЙНЫЕ МАШИНЫ
И ОБОРУДОВАНИЕ
ПЕРЕРАБАТЫВАЮЩИЕ
[ТЕХНОЛОГИЧЕСКИЕ]
МАШИНЫ, ОБОРУДОВАНИЕ
И ПРИСПОСОБЛЕНИЯ
ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ
И ТРАНСМИССИИ
МЕХАНИЧЕСКИЕ ОДНОРЕЖИМНЫЕ
ПЕРЕДАЧИ ВРАЩЕНИЯ,
РЕДУКТОРЫ
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ,
РЕДУКТОРЫ-РЕВЕРСЫ,ВАРИАТОРЫ
МЕХАНИЗМЫ ДЛЯ ПРЕОБРАЗОВАНИЯ
НЕПРЕРЫВНОГО ВРАЩЕНИЯ
В ВОЗВРАТНО-ПОСТУПАТЕЛЬНОЕ
ДВИЖЕНИЕ
МЕХАНИЗМЫ ДЛЯ ПРЕОБРАЗОВАНИЯ
НЕПРЕРЫВНОГО ДВИЖЕНИЯ
В ПРЕРЫВИСТОЕ (ШАГОВЫЕ
МЕХАНИЗМЫ)
ПРИВОДЫ И МЕХАНИЗМЫ
ДЛЯ ВОСПРОИЗВЕДЕНИЯ
ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ
(ГИДРОЦИЛИНДРЫ,
ВИНТОВЫЕ И РЕЕЧНЫЕ ПЕРЕДАЧИ)
СТРУКТУРНЫЕ ЕДИНИЦЫ
МЕХАНИЗМОВ И МАШИН
ЭЛЕМЕНТЫ, ДЕТАЛИ,
СОЕДИНЕНИЯ И ЗАМКИ.
ШАРНИРЫ, ПОДВИЖНЫЕ ОПОРЫ
И НАПРАВЛЯЮЩИЕ.
СОЕДИНИТЕЛЬНЫЕ МУФТЫ.
УСТРОЙСТВА ДЛЯ СМАЗЫВАНИЯ
И УПЛОТНЕНИЯ СОЕДИНЕНИЙ
МАНИПУЛИРУЮЩИЕ,
НАПРАВЛЯЮЩИЕ
И ОРИЕНТИРУЮЩИЕ МЕХАНИЗМЫ
ПРИВОДНЫЕ
МНОГОПОДВИЖНЫЕ СОЕДИНЕНИЯ.
МЕХАНИЗМЫ ДЛЯ ВОСПРОИЗВЕДЕНИЯ
КРИВЫХ ЛИНИЙ ,
ПОВЕРХНОСТЕЙ И ЛИНИЙ ПЕРЕСЕЧЕНИЯ
ПОВЕРХНОСТЕЙ.
МЕХАНИЗМЫ ОТНОСИТЕЛЬНОГО
МАНИПУЛИРОВАНИЯ
| НАГРУЗОЧНЫЕ МЕХАНИЗМЫ |
РАСПРЕДЕЛИТЕЛЬНЫЕ, УРАВНИТЕЛЬНЫЕ
И СУММИРУЮЩИЕ
МЕХАНИЗМЫ, ДИФФЕРЕНЦИАЛЫ.
РЕШЕНИЯ ЗАДАЧ УРАВНОВЕШИВАНИЯ,
ДИНАМИЧЕСКОЙ РАЗГРУЗКИ
И ВИБРОЗАЩИТЫ .
ПОДВЕСКИ МАШИН И АГРЕГАТОВ.
СКЛАДЫВАЕМЫЕ
И РАЗВОРАЧИВАЮЩИЕСЯ СИСТЕМЫ.
ЗАХВАТНЫЕ, ЗАЖИМНЫЕ
И СТЯГИВАЮЩИЕ УСТРОЙСТВА.
СЦЕПНЫЕ МУФТЫ И ТОРМОЗА
Приведены также современные конструктивные ис-
полнения элементов, деталей машин, механических со-
единений и передач (см., например, классификацию на
рис. 13):
различные виды неподвижных и подвижных, разъ-
емных и неразъемных соединений, замков и их элементов;
зубчатые, цепные и фрикционные передачи;
валы и оси;
соединительные и сцепные муфты;
различные виды опор, в том числе подшипники,
подпятники и линейные направляющие;
кронштейны, корпуса и станины;
подвески агрегатов;
устройства для смазывания;
уплотнения подвижных и неподвижных соединений;
другие детали и соединения общего назначения.
И наконец, приведены известные законченные ки-
нематические и конструктивные решения из различных
областей техники. Данные разделы должны постоянно
пополняться новыми исполнениями и могут содержать
максимально полную характеристику объекта.
Далее покажем на отдельных примерах получение
[выбор, составление, синтез] кинематических схем для
некоторых функциональных задач с использованием
обобщенных структурных схем, полученных при созда-
нии систематизированного банка схем и конструктивных
решений. Здесь поясним только взаимосвязь структурной
схемы с более конкретизированной кинематической схе-
мой. Для начала рассмотрим построение схем трансмис-
сии транспортной машины (базового тягача, трактора).
На первом этапе простейшая функциональная за-
дача - обеспечить разветвление кинематической цепи с
распределением энергетических потоков в задаваемом
соотношении.
Оказывается, для такой задачи можно построить ог-
раниченное число вариантов обобщенных структурных
схем 1.1... 2.3 (рис. 14). Обозначения составляющих схе-
44
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
13. ФУНКЦИОНАЛЬНО-СТРУКТУРНЫЕ ЧАСТИ МАШИНЫ
ЭЛЕМЕНТЫ ДЕТАЛИ Выступы, зубья, Корпуса, станины, витки резьбы, платформы, рамы, головки, ножки, кронштейны ребра, гребни, Резервуары, сосуды, рифли, бобышки, баллоны, поддоны, лапы, буртики, крышки, кожухи реборды Суппорты, ползуны Колеса, шкивы, Отверстия, окна, барабаны, роторы, шлицы, пазы, ролики, катки полости,канавки, Кулачки, кривошипы каналы, впадины, Валы,оси щели, проушины Винты, шпильки, шурупы, пробки Цапфы, шипы, Гайки шейки, пояски Заклепки, штифты Шпонки, сегменты Эксцентрики, Шайбы, шплинты, кулачки, фланцы кольца Прокладки, манжеты, Ступицы, ободы, сильфоны, мембраны диски, спицы Стержни, штанги, тяги, штыри Швы, петли Поршни, плунжеры Коромысла, шатуны Кромки, фаски, Ремни, ленты, керны, пяты канаты, струны Скобы, планки Лопасти, стенки, Круги, диски щеки, лепестки, Резцы, ножи, пилы, губки долота Ковши, лопатки Покрытия, слои, Коуши, анкеры, соты, ячейки, якоря, крюки, клинья перемычки, Обоймы, втулки, диафрагмы направляющие (детали), сепараторы, подушки, вкладыши Пружины НЕПОДВИЖНЫЕ СОЕДИНЕНИЯ ПОДВИЖНЫЕ (И ЗАМКИ) СОЕДИНЕНИЯ Резьбовые Шарниры (винтовые, болтовые) Направляющие (опоры) Литейные Клепаные Подшипники, Сварные подпятники Паяные Клееные Цепи шарнирные и зубчатые Пластические Упругие Уплотнительные соединения Клиновые (подвижные) Кулачковые Компенсирующие Шпоночные муфты Шлицевые и подвески Штифтовые (агрегатов) Профильные Соединительные Фрикционные узлы и подвижные (неподвижные) опоры подвесок Регулировочные и Компенсирующие быстроразъемные и поворотные соединения Соединительные трубопроводов узлы ферм Конструктивные Соединительные исполнения узлы пары "винт-гайка", трубопроводов зубчатого зацепления, Соединительные фрикционной пары муфты валов качения МЕХАНИЗМЫ ПЕРЕДАТОЧНЫЕ Зубчатые передачи (редукторы, редукторы-реверсы, многоскоростные передачи) Кулачковые механизмы Фрикционные передачи Ременные, ленточные, канатные передачи Шарнирные и рычажные механизмы Цепные передачи Винтовые передачи МЕХАНИЗМЫ МАНИПУЛИРУЮЩИЕ Направляющие и ориентирующие механизмы МЕХАНИЗМЫ НАГРУЗОЧНЫЕ Распределительные и уравнительные механизмы Сцепные муфты и тормоза Гидродинамические муфты и трансформаторы Захватные, зажимные и стягивающие устройства Упругие системы Демпферы ПРИВОДЫ Электромагнитные (электродвигатели) Тепловые (двигатели внутреннего или внешнего сгорания) Пьезоэлектрические Гидравлические Пневматические Пневмо- гидравлические (аккумуляторы) Инерционные (аккумуляторы) Пружинные (аккумуляторы) Термоупругие ( в т.ч. на основе термомеханической памяти формы) Приводные пары, многопоточные и многоподвижные приводные соединения
с^/1" Jtyafiufb
му элементов даны на рис. 14. При этом схемы 1.1, 1.3
применяются широко, схемы 2.1, 2.1а и 2.3 встречаются
реже, схема 2.2 материально не воспроизводилась, а схе-
ма 1.2 была получена в рамках данной системы.
Каждая схема не исключает любые преобразования
сил и скоростей в рамках каждой ветви за счет подста-
новки соответствующих структурных элементов, но в
схемах 1.1, 2.1, 2.1а распределение нагрузки между вет-
вями определяется параметрами дифференциала S.
Использование структурных схем для получения
кинематических схем проиллюстрировано на следующих
примерах. Все схемы обеспечивают распределение энер-
гетического потока между двумя ветвями.
Пример на схеме 3.1 иллюстрирует путь, который
был пройден разработчиками известной схемы колесного
тягача. В схему 1.1 вместо передачи G1 подставлена схе-
ма последовательно соединенных механизмов.
Коробка передач тягача состоит из четырех плане-
тарных механизмов, управляемых четырьмя тормозными
механизмами 2, 4, 5, 6 и двумя муфтами 1, 3. Первый
слева механизм М — блокируемый. Второй и третий ме-
ханизмы образуют двухскоростную передачу, третий и
четвертый — реверс.
Выходной вал коробки передач посредством зубча-
той передачи G и карданной передачи VI соединен с
дифференциалом S, через который энергетические пото-
ки разветвляются к приводным колесам W1 (на схеме не
показаны) и W2. В ступицу колеса W2 встроен планетар-
ный редуктор G2.
Схема 3.3 была получена М. К. Кристи около 60 лет
назад, и до сих пор она широко используется в отечест-
венных танках и гусеничных тягачах. Она подставляется
в схему 1.3 вместо каждой из структурных единиц G1 и
G2. В ряде трансмиссий используются и другие разно-
видности, обладающие аналогичными функциональными
признаками. Механизмы G1 и G2 имеют одинаковую
конструкцию и расположены симметрично относительно
оси машины.
Каждый механизм поворота обычно обеспечивает
две-три скорости вращения вала приводной звездочки W1
или W2. Так как эти скорости получаются независимо в
левой и правой ветвях, то ускоряется или замедляется
систематизированный банк как основа для структурного синтеза
45
14. РАЗВЕТВЛЕННЫЕ ТРАНСМИССИИ С ПРИВОДОМ ОДНОЙ ПАРЫ ВЫХОДНЫХ ЗВЕНЬЕВ ОТ ОДНОГО ДВИГАТЕЛЯ
W1— Выходнос/всдомое звено.
рабочий орган, в т.ч. с тормозом
Неподвижное соединение двух звеньев или передача
с постоянным передаточным отношением
Неподвижное соединение трех звеньев
Передача с постоянным или изменяемым
передаточным отношением,
в т.ч. с. разрывом кинематической цепи
и торможением
Несимметричный дифференциальный механизм
(дифференциал), в т.ч. с разрывом кинематической
и блокировкой
Симметричный дифференциальный механизм
(дифференциал)
D-
Привод, двигатель,
входное/ведущее звено,
в т.ч. с муфтой сцепления
ПРИМЕР ПЛАНЕТАРНОГО
МЕХАНИЗМА ПОВОРОТА,
ИСПОЛЬЗУЕМОГО
В
Рама машины
цепи
ПРИМЕР ТРАНСМИССИИ ПО СХЕМЕ 1.1
W14
ПРИМЕР СИНТЕЗА
ТРАНСМИССИИ ПО СХЕМЕ 1.2
GV
[з^Г]
MG
VI
'm S2
- S1
Г-е П 1
f<-5¥
, И
;к 6 -
W2
I. И,
1,2,
HV
В
M
- гидротрансформатор
- гидрозамедлитель
- мультипликатор с режимом
прямой передачи
PG - планетарная коробка передач
(многоскоростная передача)
a, b
g
h
e, d,
RG
I- сцепные элементы (муфты, тормоза) центральные колеса D
MG
RG
GV
- сателлит
- водило
-зубчатые колеса
без уточнения вида
- многоскоростная передача
- реверс
-замыкающая передача с изменяемым
передаточным отношением
СХЕМЕ 1.3
Режимы Включены сцепные элементы
Движение прямо Поворот - плавный - крутой * Движение прямо - замедленное I lOBOpOl - плавный - крутой ** Торможение 5-6 5 или 6 2-7-5 или 6-3-2 2-3-7 2-7 или 2-3 4- 7 или 7-3 1-8
* при снижении средней скорости ** без снижения средней скорости
46
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
движение одной гусеницы относительно другой или ос-
танавливается одна из гусениц при неизменной скорости
другой.
Каждый механизм содержит однорядную планетар-
ную передачу, входным звеном которой является цен-
тральное колесо Ь, выходным — водило h, а управляемым —
центральное колесо а. Между колесом а и водилом h ус-
тановлена фрикционная муфта 3, блокирующая передачу
при транспортном режиме движения. Остановка колеса а
тормозом 2 ведет к включению в кинематическую цепь
планетарной передачи с передаточным отношением
Zbh =1 + za/zb>
где za и zb - число зубьев соответственно колеса а и Ь.
Если выбрано отношение za/zb = 0,6, то ibb =1,6, и
соответственно скорость при этом уменьшается в 1,6
раза. Приводная звездочка останавливается тормозом 1.
На схеме 3.2 показана новая схема трансмиссии,
точнее, ее промежуточный вариант, полученный в про-
цессе синтеза. В схемах 1.2 и 2.2 может быть обеспечен
режим, который позволяет производить поворот машины
без снижения средней скорости движения по сравнению
со схемой 1.3. Это объясняется возможностью принуди-
тельного распределения энергетических потоков в задан-
ном соотношении. В отличие от схемы 1.3 такой режим
не предусматривает отключение и торможение одной из
гусениц.
На схеме 3.2 раскрыты кинематические схемы диф-
ференциалов Siu S2, а также замыкающей передачи GV,
остальные механизмы не раскрыты. Каждая из состав-
ляющих единиц сама по себе известна и применяется в
других машинах.
Следующий этап заключается в выборе параметров
каждого из механизмов, но эта задача выходит за рамки
данного предложения. Здесь приведено только условие
симметричности режимов замыкающей передачи GV:
/е-с — 1^'f-d
где ze.c и гм - передаточные отношения зубчатых пар е-с
и f-d.
В табл. 3.2а приведены возможные режимы при со-
ответственно включенных сцепных элементах.
2.2. СТРУКТУРНЫЕ ЕДИНИЦЫ И
СОСТАВЛЯЮЩИЕ ИХ ЭЛЕМЕНТЫ
Классификация элементных составляющих меха-
низмов с учетом геометрии (точности исполнения, вели-
чин регламентированных зазоров и видов регулировок) и
характеристик взаимодействия звеньев (трения, сил инер-
ции и деформирования) - основа общего банка схем и
конструктивных решений. Отдельные фрагменты клас-
сификации представлены на рис. 15 ... 18. В них приве-
дены обозначения и примеры конструктивных исполне-
ний кинематических пар и кинематических соединений.
Кроме класса кинематической пары, соответствую-
щего числу связей (ограничений возможных движений),
в обозначении приведены сведения о характере допусти-
мых движений: г — вращательное, t - поступательное,
s — сферическое, h - винтовое. В скобках дан класс кине-
матической пары при отсутствии приведенных для нее
допущений.
Принятые обозначения:
w - число, характеризующее подвижность, число
степеней свободы;
Vr- одноподвижная вращательная пара;
V* - одноподвижная винтовая пара;
Vrt - одноподвижная пара с зависимыми движения-
ми (вращательным и поступательным);
IVr, - двухподвижная вращательно-поступательная
пара;
IV, - двухподвижная сферическая пара;
III, - трехподвижная сферическая пара;
Шг, - трехподвижная вращательно-поступательная
пара;
III, - трехподвижная поступательная пара;
II и I - четырех- и пятиподвижные вращательно-
поступательные пары.
Если в обозначении индекс приведен из двух букв,
то либо они равноценны, либо и первом месте характери-
стика преимущественной возможности движения (на-
пример, полноповоротное движение), а на втором - огра-
ниченное некоторыми пределами (зазорами; упругим или
пластическим сопротивлением, трением).
Несмотря на кажущуюся однозначность кинемати-
ческой пары, в ряде случаев определение ее класса носит
субъективный характер. Но этого не стоит бояться, так
как поставленная задача учета реальных условий взаимо-
действия звеньев на самом начальном этапе (составления
схемы) не может быть решена каким-либо иным спосо-
бом. Общие правила приведены ниже.
1. Если зазор обеспечит возможность движения,
чтобы компенсировать погрешности изготовления и/или
деформации, то подвижность в пределах зазора следует
приплюсовать к основной функциональной подвижности.
2. Если упругое сопротивление в данном направле-
нии невелико по сравнению с движущей силой и значи-
тельно меньше упругого сопротивления в других направ-
лениях, подвижность может быть увеличена на единицу
(в данном направлении).
3. Если сопротивление сил трения в направлении
возможного движения превышает предусмотренную
движущую силу (особенно при самоторможении), то та-
кое ограничение следует считать эквивалентным твердо-
му упору.
Искусство конструктора заключается как раз не
только в том, чтобы выбрать необходимый класс кинема-
тической пары, но и в назначении рационального соот-
ношения зазоров и/или жесткостей в направлениях воз-
можного и невозможного движений.
Завышать величины зазоров нельзя, так как это при-
ведет к ударам, снижению точности функционирования
и/или к точечному [кромочному] контакту (например,
вместо требуемого поверхностного).
СТРУКТУРНЫЕ ЕДИНИЦЫ И СОСТАВЛЯЮЩИЕ ИХ ЭЛЕМЕНТЫ
47
15. КИНЕМАТИЧЕСКИЕ ПАРЫ И СОЕДИНЕНИЯ V КЛАССА (ОДНОПОДВИЖНЫЕ)
ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНЫЕ (С ЗАВИСИМЫМИ ДВИЖЕНИЯМИ) ОДНОПОДВИЖНЫЕ ПАРЫ И ЭКВИВАЛЕНТНЫЕ ИМ СОЕДИНЕНИЯ
Реакции
связей
Возможно
только одно
(винтовое)
движение
Тх
I
t F(Ty)
Винтовая
пара
Гайка
Винт
Винтовая пара Гайка
Винт
Винтовая Канал возврата шариков
шариковая
передача
Винт
Гайка
Винтовая фрикционная передача
с учетом трения
с учетом деформвций IIIrj ™
Винтовая несоосная
передача -
Сателлит
с кольцевой
резьбой
„ , ~ Водило
Центральный
винт
Винтовая несоосная
фрикционная передача
V/,
Центральный винт
Ролики
Сателлит
с винтовой
резьбой
Паз 1
Каретка
Vtr
Паз 2
Водило
Передача Новикова
при недопустимости
кромочного контакта
Vft
Криволинейная
направляющая (с учетом
боковых
ограничений)
Упругая гайка
—4 IfcNH
Гладкий вал
Волновая винтовая
(в том числе фрикционная) передача
Гибкая оболочка
"Ленточный шарнир"
Направляющая
Стержневое
соединение
для воспроизведения
винтового движения
FCW
Лента 1
Валик
Лента 2
Гайка
Глобоидная
передача
Гибкий винт
Червяк
Винтовой зуб
Генератор
волн
Червячное
колесо
Генератор
волн
Гайка
F(Tx)- осевая
сила, зависимая
от момента
Гибкий
ВИНТ гтт
F(TX)
18
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
16. КИНЕМАТИЧЕСКИЕ ПАРЫ И СОЕДИНЕНИЯ IV КЛАССА (ДВУХПОДВИЖНЫЕ)
СТРУКТУРНЫЕ ЕДИНИЦЫ И СОСТАВЛЯЮЩИЕ ИХ ЭЛЕМЕНТЫ
49
17. КИНЕМАТИЧЕСКИЕ ПАРЫ И СОЕДИНЕНИЯ III КЛАССА (ТРЕХПОДВИЖНЫЕ)
ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНЫЕ И ПОСТУПАТЕЛЬНЫЕ ТРЕХПОДВИЖНЫЕ ПАРЫ И ЭКВИВАЛЕНТНЫЕ ИМ СОЕДИНЕНИЯ =
Реакции
связей
Возможны только
два вращения
и одно линейное
движение
Упругие муфты без учета поперечных перемещений
Illrt
л
III,г
Зубчатое [шлицевое] соединение
с “короткими" зубьями (с учетом
бокового
__________________ зазора Л)
гм* h
IV.
шгг(1)
Illrf(I)
Многодисковая :|П
муфта (без учета ! Щ
трения) IHrt
-Ъ.
Vt
Шарнирные муфты с перекрещивающимися осями
соединенных валов у
Вал 2 /Ол ta\xS==l
Вал 1.
III
Ж
IH,t
rt
Шаровая муфта
компенсирующая перекосы
__и осевое
смещение
[ I П1\п вала
Вал 1
Вал 2
передача
Виброзащитная опора
A
e™=$=}lllrt
4
Ulrt
V,
III,г
V,
IIIrt^>
Упорный
роликовый
подшипник
Подпятник
скольжения
IVri
4
ЙИ
Упругие опоры без учета поперечных
перемещений
III, t
V,- VrJ
Звено 2
V*
Звено 2
Поступательное
трехподвижное
соединение
Звено 1
J
h 1V*
Внутреннее зацепление
при недопустимости
кромочного контакта
С UIrt(ll)<A '
Звено 1
Винтовая ленточная пара
с учетом возможных перекосов
в пределах зазоров Гайка
-Гайка Винт^н-^/
Винт
V,
x
P
0 |||А
CaAcKfariHrf
50
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
18. КИНЕМАТИЧЕСКИЕ ПАРЫ И СОЕДИНЕНИЯ II И I КЛАССОВ (ЧЕТЫРЕХ- И ПЯТИПОДВИЖНЫЕ)
ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНЫЕ ПЯТИПОДВИЖНЫЕ ПАРЫ И СОЕДИНЕНИЯ (w = 5)
Высшие пары
IIIS... IVS в пределах
Звено 1
Направляющее
Силовое
замыкание
Винтовая
зубчатая пара
в пределах
зазоров I
Звено
III
Зацепление
бочкообразных
зубьев
Муфты без дополнительного нагружения
внешних опор
Вал 2
Вал 1
Звено 1
Звено 2
IV„
III
Гайка(j(
IVrr
F(T)
Подушка
Звено 1
(винт)
Муфты с дополнительным нагружением
внешних опор
Относительное движение
невозможно только вдоль
линии действия сил,
проходящей через центр
сферического шарнира С
Звено 1
Vr
Вал 1 УпРУгие муфты
Эластичная оболочка
- реакция
связи
Геометрическое
замыкание
Ги дро статич ес кая
направляющая
с учетом
зазоров ( ~ 50 мкм) I
(без учета
зазоров Vf)
Упругие опоры
Тонкостенная консоль
Эластичный
слой с
Подшипник-1
Эластичный
крестообразный лист
Звено 1
Гидродинамический подпятник
с учетом поворотов
оси вала в пределах
осевого зазора
1(Ш„)
Подушка
Вал 1
Подшипники с учетом возможности
самоустановки в пределах зазоров 1 (1 Vr^)
Гидродинамический
подшипник
Звено 2
Без учета
боковых
ограничений
Сегментная
подушка
многоклинового
подшипника
Звено 2
№
Упругая
втулка
Г идростатический
подшипник
Vp
Магнитожидкостный
Звено 1
Шарнир
с учетом свободных
перемещений
в пределах зазоров
и при одноточечном
контакте I (Vr/IVr/>)
-Вал 2
гж
С зависимыми
движениями
1 F(T)
Звено 2 у
IVr,
СТРУКТУРНЫЕ ЕДИНИЦЫ И СОСТАВЛЯЮЩИЕ ИХ ЭЛЕМЕНТЫ
51
19. (ОДНОПОДВИЖНЫЕ) ПРИВОДНЫЕ ПАРЫ [СОЕДИНЕНИЯ]
Двигатель
Звено
Зубчатая
передача
Звено 1
Двигатель
2
Звездочка 2
Звено 1
Зубчатая передача
(редуктор)
Цепная передача
Звездочка 1
Гидроцилиндр
Звено 2
Vr - одноподвижная
вращательная пара
У - поступательная пара
¥й - винтовая пара
Звено 2
Звено 2
Канал А
Канал В
Поворотный гидродвигатель
IV, ПЕН
Гайка
Звено 1
Двигатель
III
Карданное соединение,
эквивалентное двухподвижной
сферической паре IV5
Звено 1 Звено 2
Звено 1
Подшипниковая
опора гайки (Vr)
Винт
Зубчатая
передача
Ш
Гидроцилиндр
Реечная
передача
Звено 2
Звено 1
1~2б~|
Звено 1
Звено 2
Зубчатая
передача
Двигатель
| 2г | ПРИВОДНОЕ СОЕДИНЕНИЕ
С ЗАВИСИМЫМИ
ДВИЖЕНИЯМИ
В МЕХАНИЗМЕ
ПРЕССА
Двигатель
с полым ротором
Звено 1
Звено 2
Ползун D
Основание
(звено 1)—
- движущая сила
Ту/ Fyj - момент и сила
внешнего
нагружения
IV,
Упор
Поступательная
одноподвижная
пара (7j.w-реактивный
момент)
KL.PR.EN
соединительные
звенья
Ползун W (звено 2)
Занижать жесткость также нельзя, поскольку это
сложно сделать ориентируясь только на одно направле-
ние, а кроме того, это может привести к снижению на-
грузочной способности и других показателей. Более под-
робно это рассматривается при освещении принципа са-
моприспособляемости, здесь же, останавливаясь на
рис. 15 ... 18, отметим, что для определения класса пар,
не представленных на рисунках, можно найти ближай-
шую пару по характеру возможных движений и анало-
гично ей подсчитать число связей. Кинематическая пара
может быть эквивалентна по своей функции соединению
нескольких кинематических пар, компенсирующей муф-
те и даже передаточному механизму. Конструктивные
исполнения кинематических пар весьма разнообразны.
Причем, однозначно отнести конкретное исполнение к
шределенному классу можно только при условии приня-
тых ограничений или допущений в отношении трения,
упругости элементов и зазоров, которыми в классической
теории механизмов и машин на этапе структурного син-
теза вообще пренебрегают. Современный уровень конст-
руирования требует учета данных характеристик как раз-
дельно, так и в совокупности.
Свойства каждой из приведенных пар и частные
свойства каждого из ее конструктивных исполнений —
неотъемлемая (описательная) часть банка, которая по-
зволяет сориентироваться при оценке того или иного ре-
шения.
Приведенные на рис. 15 ... 18 кинематические пары
и соединения способны выполнять только задачу пере-
дачи или восприятия (если одно из звеньев неподвиж-
но) сил в определенных направлениях, допуская свободу
относительных перемещений в других направлениях
(в зависимости от подвижности кинематической пары).
Усложняя функциональные задачи по сравнению с
задачами, решаемыми кинематическими парами и соеди-
нениями, рассмотрим такие простейшие устройства, как
приводные пары (рис. 19), способные не только переда-
вать или воспринимать силы, но и воспроизводить дви-
жение в определенном направлении.
В приводной паре между образующими ее звеньями
осуществлено управляемое силовое замыкание.
Относительное движение звеньев, образующих ки-
нематическую пару, осуществляется посредством приво-
да, смонтированного на них.
Во вращательной приводной паре (схема 1а) двига-
тель и передачу устанавливают на одном из сопряжен-
ных звеньев: 1 или 2, в частном случае одно из них не-
52
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
подвижно, а выходное звено передачи соединяют с дру-
гим звеном.
На схеме 16 показана вращательная приводная пара
в виде пластинчатого поворотного гидродвигателя. Жид-
кость по каналу А поступает в замкнутую полость между
звеньями 1 и 2, давит на лопатки С и Е, поворачивает
одно звено относительно другого и выходит по каналу В.
В качестве привода используют двигатель с винто-
вой парой {схема 1в), гидроцилиндр с цепной или лен-
точной передачей (схема 1г), гидроцилиндр с реечной
передачей (схема 1д) и другие сочетания.
В схеме 1в звенья 1 и 2, соединенные шарнирно (Vr),
приводятся в относительное движение при перемещении
винта. Достигается это вращением гайки. Звенья 1, 2 обра-
зуют замкнутый контур с несколькими вращательными
парами и одной винтовой парой.
В схеме 1г гибкий элемент, например цепь, переме-
щается с помощью гидроцилиндра. Цепь приводит во
вращение звездочку, закрепленную на звене 2. Звездочка
1 при этом вращается свободно.
В схеме 1д от гидроцилиндра с помощью реечной
передачи приводится во вращение шестерня с прикреп-
ленным к ней звеном 2.
Поступательную приводную пару выполняют в виде
сочетания поступательной кинематической пары V, с
винтовой парой V/, (схемы 26, 2в), реечной передачей
(схема 2а) и других сочетаний.
В схеме 2в винт размещен внутри ротора двигателя.
Благодаря такому решению приводная поступательная
пара выполнена соосной, без дополнительной механиче-
ской передачи.
В приводном одноподвижном соединении (схема 2г)
осуществляется преобразование поступательного движе-
ния ползуна D, например, с помощью гидроцилиндра во
вращательно-поступательное (винтовое) движение пол-
зуна W. Здесь использовано соединение в виде наклон-
ных стержней. Система может работать только при сило-
вом замыкании.
2.3. ФУНКЦИОНАЛЬНЫЙ ПОДХОД
К ВЫБОРУ И СОСТАВЛЕНИЮ СХЕМ
(НА ПРИМЕРАХ РЕШЕНИЯ ПРОСТЕЙШИХ
ЗАДАЧ ВОСПРОИЗВЕДЕНИЯ ДВИЖЕНИЯ И
ОРИЕНТАЦИИ ТЕЛА В ПРОСТРАНСТВЕ)
Начальные и все последующие этапы синтеза схем и
конструкций должны быть подчинены принципу нара-
щивания функциональных признаков и качествен-
ных показателей, которым должна удовлетворять ма-
шина или иная система в целом. Функциональные при-
знаки на любом предыдущем этапе должны быть общими
для любого последующего этапа или, по крайней мере,
не должны исключать введение дополнительных признаков.
Функциональный признак прежде всего характери-
зует, какое действие может выполнять или какое состоя-
ние осуществлять, а не как устроен рассматриваемый
объект. Для этой цели хотя бы для начальных этапов
нужно иметь запас составляющих единиц, классифици-
рованных по функциональным признакам, а кроме того,
представлять правила соединения единиц в более слож-
ные схемы, обладающие суммарными или преобразован-
ными функциональными признаками.
Покажем на отдельных примерах, как, соединяя
элементные составляющие схемы, можно получать ре-
шения отдельных функциональных задач. Первая зада-
ча - воспроизведение траектории, расположенной на
заданной поверхности, и воспроизведение самой по-
верхности как множества траекторий.
На схемах 1.1 ... 1.9 (рис. 20) несколько звеньев со-
единены между собой двумя приводными парами D1 и
D2, при этом образовано несколько неприводных (кине-
матических) пар.
Наиболее простая схема 1.1 имеет три звена, обра-
зующих две поступательных пары. Точка W выходного
звена воспроизводит плоскую кривую, а множество по-
ложений точек или множество траекторий представляют
плоскость.
Другие примеры соединений воспроизводят, в част-
ности:
круговой конус (схема 1.2);
сферу (схема 1.3)',
круговой цилиндр (схема 1.4);
эвольвентный цилиндр (схема 1.5);
тор (схема 1.6);
однополостный гиперболоид (схема 1.7);
эллипсоид (схема 1.8);
геликоид (схема 1.9).
Эквивалент схемы 1.1 представляет собой механизм,
построенный только на основе вращательных пар (схема
1.1а, в которой звенья образуют два шарнирных паралле-
лограмма). При этом обе схемы позволяют получать по-
ступательное движение выходного звена (либо, что то же
самое, иметь постоянную ориентацию).
Все приведенные схемы получены таким соедине-
нием звеньев поступательных и/или вращательных пар, в
результате которого обеспечивается геометрическое по-
строение направляющих линий поверхности при движе-
нии одного входного звена и образующих линий поверх-
ности - при движении другого входного звена. Направ-
ления движений входных звеньев обозначены стрелками,
а воспроизводимые поверхности — тонкими линиями.
Данные механизмы используют для формообразо-
вания обрабатываемых поверхностей деталей машин, для
манипулирования и для воспроизведения линий пере-
сечения поверхностей.
Линии пересечения поверхностей можно получить,
соединяя два механизма из числа механизмов, приведен-
ных на схемах 1.1... 1.9. Получаемые решения не следует
рассматривать как построение изображения какой-либо
типовой кривой на плоскости, так как такая задача давно
уже решена более современными и универсальными
средствами. Данные решения, как альтернативу управ-
ляемому приводу, используют в оборудовании для раз-
метки, раскроя, резки и сварки стыков труб и резервуа-
ров различной формы.
На схеме 2.1 представлен механизм для воспроизве-
дения линий пересечения конуса плоскостью. Он полу-
функциональный подход к выбору и составлению схем
53
20. РЕШЕНИЯ ЧАСТНЫХ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ ВОСПРОИЗВЕДЕНИЯ ПРОСТРАНСТВЕННОГО ДВИЖЕНИЯ ТОЧКИ
ВОСПРОИЗВЕДЕНИЕ ПОВЕРХНОСТЕЙ (МЕХАНИЗМАМИ С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ)
И ЛИНИЙ ПЕРЕСЕЧЕНИЯ ПОВЕРХНОСТЕЙ (МЕХАНИЗМАМИ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ)
Воспроизведение линии
пересечения сферы
Воспроизведение линии
пересечения
цилиндрических
поверхностей
Устройство для разметки линии
пересечения цилиндрических
поверхностей
ВОСПРОИЗВЕДЕНИЕ ТРАЕКТОРИЙ В ЗАДАННОМ ПРОСТРАНСТВЕ (МЕХАНИЗМАМИ
С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ НА ОСНОВЕ НЕЗАМКНУТЫХ КИНЕМАТИЧЕСКИХ ЦЕПЕЙ)
В ПРЯМОУГОЛЬНОЙ
СИСТЕМЕ КООРДИНАТ
В СФЕРИЧЕСКОЙ СИСТЕМЕ КООРДИНАТ
54
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
чен на основе соединения механизмов, воспроизводящих
поверхность конуса (схема 1.2) и плоскость (схема 1.1).
Кривошип с шатуном воспроизводят коническую
поверхность, а ползуны 1 и 2 - плоскость. Поскольку W-
центр сферического шарнира одновременно принадле-
жит обоим механизмам, он одновременно движется в
плоскости и по поверхности конуса, т.е. воспроизводит
линию конического сечения. Ось вращения кривошипа
совпадает с осью Xj воспроизводимой поверхности кону-
са, а оси Х3 и У3 движения ползунов соответственно па-
раллельны осям X и Y воспроизводимой кривой.
В частном случае (см. схему 1.1) оси У3 и Х3, опре-
деляющие движение ползуна 1 в плоскости, параллельны
соответственно оси Y и образующей Х2 воспроизводимой
конической поверхности. Линия Х2 параллельна оси X и
лежит в плоскости, перпендикулярной к оси Y. При этом
воспроизводится парабола. Изменив угол между плоско-
стью X3Y3 и осью Хь можно воспроизводить эллипс, ги-
перболу или параболу.
Механизмы для воспроизведения кривых пересече-
ния цилиндра и цилиндра (схема 2.2), сферы и цилиндра
(схема 2.3), сферы и конуса и т.п. получают аналогичным
образом.
На схеме 2.2 кривошипа 2 радиусом г ось вращения
параллельна оси воспроизводимой поверхности цилинд-
ра, у кривошипа 1 ось вращения совпадает с осью вос-
производимой поверхности цилиндра. Шатуны 1 и 2 со-
единены сферическим шарниром В. Шарнир В одновре-
менно перемещается по двум цилиндрическим поверхно-
стям, т.е. имитирует их пересечение. Точка W совершает
идентичное движение, но траектория ее смещена на ве-
личину ИСВ0.
На схеме 2.3 кривошип 1 длиной АВ соединен сфе-
рическим шарниром В с кривошипом 2, взаимодейст-
вующим со стойкой с помощью кинематической пары,
допускающей вращательное и поступательное движения.
Совместным движением звеньев имитируется пересече-
ние сферы радиусом R и цилиндра радиусом г. Центр
вращения кривошипа и центр воспроизводимой сферы
смещены относительно друг друга на величину АВ. Точ-
ка А повторяет движение шарнира В.
На схеме 2.4 — пример применения рассматривае-
мых механизмов для разметки линии пересечения труб;
причем здесь только один механизм, воспроизводящий
трубу и закрепленный на реальной трубе, на которой
требуется провести разметку.
Закрепление механизма осуществлено с помощью
центрирующего разжимного устройства.
С основанием шарнирно соединена кулиса. Ось ее
совмещают с осью врезаемой трубы. Положение кулисы
относительно основания регулируется посредством спе-
циального устройства. С кулисой связано двухподвиж-
ной парой звено 1 регулируемой длины, составленное из
двух частей с регулируемым относительным положени-
ем. Точку этого звена располагают от кулисы на расстоя-
нии, равном радиусу воспроизводимой трубы, пересе-
кающей реальную трубу. При перемещении шатуна от-
носительно кулисы при непрерывном соприкосновении с
трубой точка W воспроизводит на ее поверхности линию
пересечения.
Недостаток приведенных схем 2.1 ... 2.4 — непосто-
янство отношения линейной скорости точки W к скоро-
сти входного звена, что усложняет управление привода-
ми при резке или сварке, но не играет особой роли при
разметке.
Следующий шаг усложнения функциональной
задачи - воспроизведение траекторий в пространстве.
В схеме 3.1 использованы только поступательные
приводные пары. Звенья соединены последовательно и
перемещаются параллельно осям X, Y и Z. Рабочее про-
странство положений W представляет собой параллеле-
пипед (схема 3.1а) со сторонами х, у, z - предельными
перемещениями звеньев.
В схеме 3.2- одна пара Dr] из трех вращательная, а в
схеме 3.3 - две пары вращательные с параллельными
осями (Dr2 и Вгз). Рабочее пространство имеет цилиндри-
ческую форму, ограниченную предельными перемеще-
ниями х, у, ср (схема 3.2а).
В схеме 3.4 — две пары вращательные с перпендику-
лярными осями, а схема 3.5 имеет все пары вращатель-
ные. Эта схема является наиболее распространенной в
современных роботах. Рабочее пространство для обоих
вариантов представлено на схеме 3.4а и ограничено, в
частности, величинами rmax, rmin и ср.
Наиболее распространенной задачей воспроизведе-
ния движения является не только получение определен-
ной траектории, но и сохранение или изменение ориен-
тации тела в пространстве.
Рассмотрим простейшую функциональную задачу -
воспроизведение параллельной ориентации тела в про-
странстве и ее частный случай — воспроизведение посто-
янной ориентации (параллельной неподвижному звену).
Для решения данной задачи используют кинематическую
цепь, содержащую только поступательные пары (на схе-
ме 4.1, рис. 21 выделена жирными линиями), либо со-
ставленную из нескольких последовательно соединенных
шарнирных параллелограммов. Покажем, как получить
параллельную ориентацию при сочетании с различными
видами воспроизводимых или преобразуемых траекторий.
В общем случае параллельно-ориентирующий меха-
низм представляет собой кинематическую цепь, обеспе-
чивающую синхронный поворот ее входного и выходно-
го звеньев, по крайней мере одно из которых образует
кинематические пары только с подвижными звеньями
механизма.
Частные функции механизма:
1) синхронный поворот входного и выходного
звеньев, шарнирно соединенных с копирующим меха-
низмом в копирующей и воспроизводящих точках
(схемы 4.1 и 4.2);
2) синхронный поворот входного звена, шарнирно
соединенного со стойкой выходного звена, соединенного
с направляющим механизмом в воспроизводящей точке
(схемы 4.3, 4.4).
При остановке входного звена во втором случае ме-
ханизм превращается в поступательно-ориентирующую
кинематическую цепь.
На схемах 4.1 и 4.2 - примеры присоединения ори-
ентирующей цепи (жирные линии) к копирующему ме-
ханизму (тонкие линии), выполненному в виде пантогра-
функциональный подход к выбору и составлению схем
55
21. РЕШЕНИЯ ЧАСТНЫХ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ ВОСПРОИЗВЕДЕНИЯ ДВИЖЕНИЯ И ОРИЕНТАЦИИ ТЕЛА В ПРОСТРАНСТВЕ
ВОСПРОИЗВЕДЕНИЕ ПАРАЛЛЕЛЬНОЙ (НЕПОДВИЖНОМУ ИЛИ ПОДВИЖНОМУ ЗВЕНУ)
ОРИЕНТАЦИИ ТЕЛА В ПРОСТРАНСТВЕ
Звено 2
4.4
Цепная /ленточная
передача 1
Радиально-ориентирующие механизмы
с двумя степенями свободы
Привод 2
Звено 1
Звено 1
ABODEI
О
Звено 2
Радиально-ориентирующий
механизм с тремя степенями свободы
Привод 2
Привод 1
шк
ABOCDEI - копирующий механизм
на основе пантографа
IRQO - параллельно-
ориентирующая
кинематическая цепь
- копирующий механизм
на основе пантографа
IMLDKO - параллельно-ориентирующая
кинематическая цепь
I - задающая точка (кинематическая пара) ~нт0чная
. . передача
О - воспроизводящая точка (кинематическая пара)
4.5
Привод 1
Привод 4
Привод 3
Захватное
| устройство
Привод 2
ВОСПРОИЗВЕДЕНИЕ ПОСТОЯННОЙ
ОРИЕНТАЦИИ (ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ) ПРИ ПРЯМОЛИНЕЙНОЙ ТРАЕКТОРИИ
Привод
5.5
Выходное
звено
Захватное
Ползун 2 устройство
Г57ТТ
Зубчатые Выходное
секторы 3-4 звено
Положение 1
Положение
А
Ролик 1 Ролик 2
Зубчатые
секторы 1 -2
Коническая зубчатая
передача (i = 1)
Ползун 1
Гидроцилиндр
Выходное
звено
Силовое
замыкание
Траектория т. С
С' Захватное устройство
ВОСПРОИЗВЕДЕНИЕ ПОСТОЯННОЙ ОРИЕНТАЦИИ
ПРИ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ ТРАЕКТОРИИ
Воспроизводимая
траектория
Ползун :^Tq1 /
ВОСПРОИЗВЕДЕНИЕ ПОСТОЯННОЙ ОРИЕНТАЦИИ
ПРИ ПРОИЗВОЛЬНОЙ ПРОСТРАНСТВЕННОЙ ТРАЕКТОРИИ
6.1
6.3
Звено 2 Тяга 2
/ Тяга 1 /
Цепь 2
Звездочка 2
Цепь 1
Цепь 3
Кабина
С
-L. о
В
Е
р Выходное
р звено
[6Ja]
Ползун
/ Направляющая
Гидроцилиндр 3
Звено 3
звено
D
Задаваемая
траектория
Е
D
6.2
Гидроцилиндр
\ Рама
В
Звено 1 17-"
> 7г.
хЗвено 2
Тележка 1
1в)
й
Ковш
Платформа
D
Звездочка 1
Гидроцилиндр 2
Звено 1
Звездочка 3
Параллелограммный
механизм
-------- Гидроцилиндр 1
I \ Поворотная
/------\ платформа —ч
г
। / Тележка 2
6.3а|
Секция 2
Звездочка 5
Кабина
----А-,
Звездочка 4
W//7777//77s,
Рама ( А ) ( А } \ \
мвшины у \ Секция 1
Звездочка 3 'К
Г и дроцилиндр
Звездочка 2
Звездочка 1
Секция 1 Цепь \
Xvjy* Звездочка 6
Гидроцилиндр 1
Поворотная
платформа
56
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
фа. В основе пантографа - параллелограмм BCDE с опо-
рой А.
Звенья 7 и 2 шарнирно соединены с пантографом в
копирующей I и воспроизводящей О точках.
В схеме 4.1 эти звенья между собой соединены зве-
ном через две поступательные пары. В схеме 4.2 они со-
единены двумя параллелограммами IMLD и DLKO, в
которые входят как дополнительные звенья, так и звенья
пантографа.
Параллельно-ориентирующий механизм позволяет
не только воспроизводить заданную траекторию, но и
обеспечивает, например, заданное положение инстру-
мента при обработке деталей.
На схемах 4.3, 4.4 представлены механизмы для
воспроизведения вращательного (или даже сферическо-
го) движения относительно неподвижной точки звеном,
образующим кинематические пары только с подвижными
звеньями.
Такие механизмы применяют в случаях, когда не-
возможно, например, разместить неподвижную опору в
точке, вокруг которой требуется получить вращательное
движение звена. Примером использования их являются
сварочные головки.
Схема 4.3 представляет собой соединение двух па-
раллелограммов FGCE и ABCD, установленных на вра-
щающемся звене GK. Здесь поворот звена EF в точности
копируется звеном АО.
Аналогичное решение - схема 4.4а, но в ней роль
параллелограммов выполняют цепные передачи 7 и 2.
Звездочки цепных передач имеют центры вращения в
точках G, В (две звездочки), А, и каждая из них непод-
вижно соединена с одним из звеньев GK, BG, АВ и АО
незамкнутой кинематической цепи GBAO. (После при-
соединения цепных передач или установки приводов в
шарнирах G, В, А кинематическая цепь становится замк-
нутой многоконтурной.)
Схема 4.5 — пример использования радиально-
ориснтирующего механизма в подвесном манипуляторе.
Он выполнен в виде соединенных между собой общим
звеном PGR параллелограммов GBLP и RGJM. К звену
MJ присоединен еще один параллелограмм MNWV, сто-
роны которого параллельны сторонам параллелограмма
RGJM. К звену VW присоединено захватное устройство с
центром О.
В точке В установлены две приводные пары,
сообщающие движение звеньям BG и BL. Точка J
соединена тягой DJ с приводным звеном AD.
Совместные движения трех звеньев BG, BL и AD
позволяют перемещать точку О в плоскости и поворачи-
вать вокруг нее ось захвата OW. Возможны следующие
частные варианты движений.
Если звенья BG и BL неподвижны, то неподвижно и
звено PGR, а поворот звена AD приводит к повороту зве-
на GJ вокруг точки G, а звена RV - вокруг точки R. Звено
VW движется поступательно, а точка О — по дуге
окружности О" с центром в точке G.
Если неподвижно звено АВ, то точка J движется по
дуге окружности JJ', а точка О — по дуге окружности ОО'
с центром в точке С. Ось OW либо движется поступатель-
но при повороте звена BG и при неподвижном звене BL
(см. положение O'W'), либо дополнительно поворачивается
вокруг точки О, если подвижны оба звена BG и BL. При
этом линия OW все время ориентирована параллельно GR.
При повороте только одного звена BL звено RPG
повернется вокруг точки G, а ось захватного устройства
OW повернется вокруг неподвижной точки О. Точка W
будет двигаться по дуге окружности WW" с центром в
точке О. Здесь использовано свойство сдвоенного парал-
лелограмма ( см. схему 4.3) поворачивать звенья вокруг
неподвижной точки при отсутствии в ней шарнира.
Схемы 5.1 ... 5.5 — отдельные примеры решения за-
дачи воспроизведения поступательно-прямолинейного
движения.
На схеме 5.1 два зубчатых сектора 1 и 2 зацепляются
между собой и через рычаги ВС и DE шарнирно соеди-
нены с другой парой зубчатых секторов 3 и 4. Оси шар-
ниров последних размещены в выходном звене. При по-
вороте одного из секторов 1 или 2 выходное звено дви-
жется поступательно-прямолинейно.
На схеме 5.2 - поступательно-прямолинейный про-
странственный механизм. Выходное звено подвижно со-
единено со стойкой посредством двух одинаковых двух-
звенных кинематических цепей АВС и А'В'С', располо-
женных во взаимно перпендикулярных плоскостях.
При положениях звеньев, близких к предельным,
например, когда звенья вытягиваются в линию, имеют
место большие углы давления в кинематических парах.
Чтобы обеспечить передачу движения звеньям обеих
кинематических цепей параллельно и кратчайшим путем,
между звеньями АВ и А'В' установлена коническая зуб-
чатая передача с передаточным отношением i = 1.
При повороте одного из звеньев АВ или А'В' вы-
ходное звено движется прямолинейно-поступательно.
В схеме 5.3 прямолинейно-направляющий механизм
выполнен в виде параллелограмма АВВ'А' и зубчатого
механизма, один из зубчатых секторов которого соеди-
нен неподвижно со звеном АВ, в другой - со звеном DC,
причем DC = АВ. Точка С имеет прямолинейную траек-
торию. Присоединение звена D'C' позволяет образовать
параллелограмм DCC'D'.
При повороте звена АВ реализуется параллельное
положение прямых ВВ', АА' и DD', СС', а следовательно,
поступательное движение звена СС' и присоединенного к
нему захватного устройства.
В схеме 5.4 прямолинейное движение точки С за-
хватного устройства (см. положение 2) воспроизводится
благодаря использованию пантографов, приводимых в
движение ползуном 1.
Для обеспечения поступательного движения при-
соединена структурная группа II класса, содержащая за-
хватное устройство и ползун 2, образующие поступа-
тельную пару.
Выходное звено (сталкиватель груза в погрузчике)
на схеме 5.5 движется поступательно-прямолинейно бла-
годаря воздействию на него ролика 2, приводимого в
движение гидроцилиндром через рычажный (с равнопле-
чими рычагами) механизм. Прижатие роликов 7 и 2 (си-
ловое замыкание) к поверхностям качения обеспечивает-
ся силой сопротивления движению.
СОВМЕЩЕНИЕ И РАЗДЕЛЕНИЕ ФУНКЦИИ
57
На схемах 6.1 ... 6.3а представлены примеры обес-
печения поступательного движения выходного звена при
лобой заданной траектории его точки.
На схеме 6.1 пантограф в виде параллелограмма
CEDF с шарнирной опорой в точке А, копирующей т. I и
воспроизводящей т. В, расположенными на звеньях па-
раллелограмма и на прямой АВ.
К звену CF в т. В шарнирно присоединена поступа-
тельно-ориентирующая кинематическая цепь со стойкой
[основанием] (на схемах заштриховано). Механизм со-
держит выходное звено, которое движется поступательно
и воспроизводит заданную траекторию любой из точек,
например, т. О. Выходное звено соединено поступатель-
ной парой R с ползуном.
На схеме 6.1а дан вариант конструктивного испол-
нения схемы для воспроизведения траекторий с много-
кратным уменьшением перемещений выходного звена по
сравнению с перемещениями точки О. Малые расстояния
между осями шарниров А, С и В позволяют разместить
шарнир А внутри шарнира С. а шарнир С' внутри
шарнира В.
Аналогично этому шарнир В размещен в выходном
звене, которое в свою очередь расположено в ползуне,
перемещаемом в направляющей стойке (см. пару Q на
схеме 6.1).
Такое исполнение позволяет обеспечить компакт-
ность механизма, большую жесткость системы. Выбор
соотношений размеров и пар трения позволяет также
добиться самоторможения в отдельных кинематических
парах с целью исключения передачи движения от внешних
воздействий на звено IE (при установке на выходном звене
инструмента и обработке детали по заданному контуру).
Механизм на схеме 6.2 обеспечивает горизонтальное
положение сталеразливочного ковша, сохраняя постоян-
ной его ориентацию относительно звена DC тележки 2.
Ковш установлен на платформе, которая шарнирно
в т. В соединена с рамой. Рама опирается на тележки 7 и 2.
Относительно тележки рама может подниматься и опус-
каться гидроцилиндром. Тележка 7 соединена с рамой
двумя сочлененными звеньями 7 и 2, что не допускает
вращения тележки относительно оси гидроцилиндра.
При наклоне рамы платформа сохраняет свое гори-
зонтальное положение благодаря ее соединению тягой
AD с тележкой 2. Это условие соблюдается благодаря
размещению осей шарниров А, В, С и D в углах паралле-
лограмма.
На схемах 6.3 выходное звено - кабина, шарнирно
подвешенная к стреле машины, сохраняет положение
пола параллельным по отношению к поверхности плат-
формы.
Стрела выполнена на основе незамкнутой кинема-
тической цепи, содержащей шарнирно соединенные зве-
нья 7, 2 и 3. Звено 7 присоединено к поворотной плат-
форме, установленной на раме машины.
Между звеньями 7 и 2, 2 и 3, а также звеном 7 и
платформой установлены гидроцилиндры 3, 2 и 7, обес-
печивающие относительное движение звеньев. Звено, на
котором установлена кабина, соединено с платформой с
помощью системы передач, обеспечивающих заданную
ориентацию кабины.
В общем случае это последовательно соединенные
параллелограммы и эквивалентные им механизмы. Тяги
образуют три параллелограмма, присоединенные к пово-
ротной платформе. К одной из сторон параллелограмма
присоединена звездочка 1, которая огибается цепью 1 и
через тяги 7,2 и цепь 2 взаимодействует со звездочкой 2.
Звездочка 2 соединена со звездочкой 3 цепью 3. Цепные
передачи имеют передаточное число i = 1. К звездочке 3
неподвижно присоединено звено, на котором размещена
кабина.
Как бы ни двигались звенья 1-3, между платформой
и кабиной обеспечивается i = 1, т.е. не будет происходить
их относительный поворот (в плоскости схемы).
В схеме 6.3а стрела выполнена телескопической. Ее
составные звенья - секции 7 и 2 соединены поступатель-
ной парой. Изменение наклона стрелы осуществляется
гидроцилиндром 7, а выдвижение секции 2 — гидроци-
линдром 2. Через звездочку 3, установленную на штоке
гидроцилиндра 2, перекинута цепь, связывающая между
собой секции 7 и 2. Такое соединение позволяет иметь
удвоенный ход секции 2 по отношению к ходу штока
гидроцилиндра.
В данной схеме цепь выполнена замкнутой и осуще-
ствляет еще и ориентацию кабины относительно плат-
формы. Цепь огибает звездочки 1-5. Причем звездочка 7
неподвижно соединена с платформой, а звездочка 5 - с
кабиной. Числа зубьев звездочек одинаковые, передаточ-
ное число цепной передачи i = 1. Звездочка независимо
от перемещения ее оси не будет поворачиваться.
2.4. СОВМЕЩЕНИЕ И РАЗДЕЛЕНИЕ
ФУНКЦИЙ
Улучшить отдельные определенные свойства конст-
рукции можно, совмещая несколько функций, выполняе-
мых одной конструктивной единицей (элементом, дета-
лью, соединением, механизмом и т.п.) либо, наоборот,
придавая каждой единице выполнение только одной,
наиболее характерной для нее функции. Разумеется, в
том и другом случае речь идет о сравнении предлагаемо-
го решения с определенным прототипом, в котором
функции соответственно разделены или совмещены.
Как было отмечено, функция лежит в основе теории
конструирования. Охарактеризуем исключительное мно-
гообразие воспроизводимых в технике функций. Напри-
мер, в упомянутой книге К. Рота приведено 200 глаголов
для описания функций, но среди них отсутствуют, в ча-
стности, глаголы: вальцевать, воспроизводить, выходить,
демпфировать, зенковать, катить, манипулировать, при-
тирать, растачивать, реверсировать, сохранять, ударять,
шагать, хонинговать и др.
Возможное количество сочетаний глаголов с наиме-
нованиями конкретных объектов весьма велико, напри-
мер, воспроизводить прямую линию, окружность, по-
верхность, пересечение поверхностей и т.п. При этом
нужно отделить возможные функциональные признаки
58
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
22. СОВМЕЩЕНИЕ ФУНКЦИЙ ДЕТАЛЕЙ
И СОЕДИНЕНИЙ В МЕХАНИЗМАХ
Зубчатый
механизм 2 Обод колеса
ЕЕ]
Опора А
Барабан Корпус/рама
\ внутри барабана
Двигатель
Редуктор
Опора С
Подшипниковая
опора колеса /
Зубчатый
механизм 1
О
Двигатель
Опора В Подшипниковые
опоры барабана
Корпус/рама
Пружина
Поршень {j
гидроцилиндра А
Тормоз 2
Выходной
вал
Муфта 2
“2
Планетарный
механизм 2
Планетарный
механизм 1
Входной
вал
Муфта 1
'Муфта 1
Муфта 2
Центральные колеса Сателлит
Полость для размещения
устройства управления муфтой
Входной^
вал
Сателлит
FW11 |
> ГЯ11
Центральное
колесо
Водило
Y//A
Выходной
'вал
Муфта 1
Муфта 2
Тормоз 2
Ь е Выходной
Корпусная
деталь
Обозначения:
а, Ь, е - центральные
зубчатые колеса
g, f - сателлиты
h - водило
Двигатель
Диск 1
Механизм 3k
Кольцо 2 Крышка
Водило с опорными
поверхностями
для сателлитов
Поршень
гидроцилиндра
Механизм
2k-h
Механизм
2k-h
Входной вал
Диск 2
Кольцо 1
ЖДУ.
Подшипник
Водило
Водило
Ось сателлита
Центральное зубчатое
(с винтовыми зубьями)
колесо
Диски
тормоза tz
Диски
тормоза
Зубчатое
колесо
Сателлит
Вал
двигателя
Сателлит
c&l
СОВМЕЩЕНИЕ И РАЗДЕЛЕНИЕ ФУ НКЦИИ
59
от параметров и качественных показателей объекта, ко-
торые обычно могут быть представлены как составляю-
щие функции, например, воспроизвести требуемую тра-
екторию объекта с определенной скоростью, с заданной
точностью и при допустимом энергопотреблении.
Основная функциональная задача решается благо-
даря выполнению множества частных функций, таких,
как восприятие определенного вида нагрузки, изменение
определенного параметра движения, передача вращаю-
щего момента, центрование, компенсация определенной
погрешности, ограничение перемещений и т.п.
Из многообразия частных функций и их конструк-
тивных решений нужно определить ту единственную
совокупность, которая в полной мере соответствует по-
ставленной задаче. Излагаемые ниже приемы позволяют
составить варианты, из которых следует выбрать луч-
ший, т.е. получить исходный продукт для применения
известных методов оптимального проектирования.
Конструктор часто, выбирая то или иное конструк-
тивное решение, использует прием разделения или со-
вмещения функций, не акцентируя на этом внимания.
Например, характерны случаи совмещения функций:
восприятие поперечной (радиальной) и продольной
(осевой) нагрузки в радиально-упорном шарикопод-
шипнике;
передача выходным валом редуктора вращающего
момента и восприятие консольной нагрузки со стороны
исполнительного устройства;
передача вращающего момента и центрирование бо-
ковыми поверхностями выступов шлицевого соединения
ит.д.
При этом альтернативными вариантами соответст-
венно являются:
раздельное восприятие радиальной нагрузки ради-
альным подшипником, а осевой - упорным;
передача вращающего момента через соединитель-
ную компенсирующую муфту, а восприятие сил испол-
нительного устройства — его собственными опорами;
передача момента боковыми поверхностями, а цен-
трирование - по внутренним или внешним поверхностям
шлицев.
Анализируя опыт конструирования машин, можно
прийти к выводу, что рассматриваемые приемы не всегда
реализуются адекватно имеющимся возможностям, а в
литературе приведены лишь отдельные примеры приня-
тия тех или иных решений без каких-либо обобщений.
В результате проведенного анализа нельзя отдать одно-
значное предпочтение совмещению или разделению
функций, но можно определить их взаимосвязь с качест-
венными показателями машины.
Разделение функций означает специализацию кон-
кретных решений и, естественно, частную функцию
можно выполнить наилучшим образом, но это не означа-
ет, что в совокупности такие решения позволят наилуч-
шим образом выполнить общую функцию. Конечно,
удобнее всего собрать машину из отдельных унифициро-
ванных блоков, но отдельные качественные показатели
при этом будут невысокими.
Совмещение функций — своего рода универсализа-
ция со всеми вытекающими положительными и отрица-
тельными сторонами. Поэтому наиболее приемлемый
путь — получение и сравнение возможных вариантов с
учетом тенденций использования соответствующих
приемов и общих рекомендаций, которые постараюсь
представить во взаимосвязи с другими принципами кон-
струирования.
Наиболее характерной тенденцией, например, явля-
ется совмещение функций восприятия рабочих нагрузок
и защиты устройства от внешней среды.
В легковых автомобилях функции несущей и за-
щитной частей обычно совмещены в одном кузове, хотя
в ранних конструкциях, а также в современных легковых
автомобилях повышенной проходимости и во всех грузо-
вых автомобилях данные функции реализованы раздельно.
Не углубляясь в эту область техники, можно отме-
тить, что совмещение функций позволяет привести к
уменьшению габаритных размеров и массы (рис. 22, схе-
мы 1.1 и 1.2), к конструктивному упрощению исходной
схемы (схема 1.3а), к уменьшению количества деталей
(схемы 1.46 и 1.5а). В то же время разделение функций
(рис. 23 и 24) обеспечивает определенность схемы на-
гружения и лучшую взаимную приспособляемость звень-
ев системы, позволяет обеспечивать более высокую точ-
ность параметров воспроизводимого движения, приводит
к упрощению системы управления приводами, повыше-
нию КПД и др.
Большинство конструкций обычно создают на осно-
ве выборочного использования того или иного приема по
отношению к конструктивной единице или группе еди-
ниц, а не к объекту в целом.
Наиболее яркий пример совмещения функций -
встраивание элементов привода и механической переда-
чи в пустотелые выходные звенья, т.е. использование в
качестве несущей и/или защитной частей привода дета-
лей исполнительного устройства.
На рис. 22, схемы 1.1 и 1.2 - примеры встраивания
соответственно редуктора в барабан лебедки и многоско-
ростной планетарной передачи в ступицу колеса. Осо-
бенность схемы 1.1 заключается в размещении рамы (не-
сущей части) внутри барабана и совмещении ее с отдель-
ными деталями редуктора (с центральным колесом пер-
вого планетарного ряда и с водилом второго ряда). Рама
опирается на внешние опоры А, В, С и как бы пронизы-
вает насквозь редуктор. На раме установлены двигатель
и замыкающие элементы тормоза.
Особенность схемы 1.2 заключается в размещении
устройств управления фрикционной муфтой в полостях
водила планетарного механизма. От гидромотора движе-
ние передается через планетарные зубчатые механизмы 1
и 2 ободу колеса. При этом включение муфты 1 приводит
к блокировке первого механизма, а включение муфты 2 -
к последовательному соединению обоих механизмов.
Одновременное включение обеих муфт приводит к тор-
можению колеса, а одновременное их выключение — к
размыканию кинематической цепи и движению машины
накатом.
60
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
Устройства управления (гидроцилиндры и пружи-
ны) размещены в полостях между сателлитами (см. схему
1.2а). Как вариант часть устройств, например пружины,
могут быть размещены в полых осях сателлитов. Харак-
терно, что наличие этих устройств в данной схеме не
приводит к увеличению осевого размера передачи, полу-
ченного при их отсутствии. Нагрузки со стороны колеса
передаются на раму через подшипниковую опору.
Такое решение делает реальным создание гидромо-
тор-колеса малого диаметра.
Следует, однако, отметить отрицательные стороны
этих решений. Так, в компактных конструкциях плохой
теплоотвод, да и привычный для ответственных конст-
рукций доступ к деталям и узлам ограничен, что затруд-
няет их обслуживание.
В то же время конструкторы находят выход из дан-
ного положения: имеется ряд решений мотор-барабанов с
каналами для вентиляции, пронизывающими насквозь
конструкцию, а также удобных для сборки и разборки
блочных конструкций.
Следующую возможность совмещения функций -
конструктивное упрощение кинематической схемы - ил-
люстрирует схема 1.3а. Исходная схема 1.3 представляет
собой соединение двух планетарных механизмов: 1 с са-
теллитом, составленным из двух зацепляющихся колес, и
2 с одновенцовым сателлитом. Диаметры сателлитов g! и
g2 выбирают одинаковыми и совмещают. Также совме-
щают центральные колеса ai и а2 и водила ht и h2.
В результате получается механизм (схема 1.3а), ко-
торый ненамного сложнее каждого из исходных меха-
низмов. При синтезе такой схемы прием совмещения
функций использован неоднократно, но пока ограничим-
ся только одним из этапов.
Решение в целом представляет передача для полу-
чения нескольких скоростей, в том числе реверсирования
вращения выходного вала при вращении входного вала с
постоянной угловой скоростью. Соответствующие режи-
мы получаются при включении муфты 1 или 2 и включе-
нии тормоза 1 или 2; включение обеих муфт приводит к
блокировке передачи, а включение обоих тормозов — к
торможению выходного вала.
Многие решения, приведенные в справочной лите-
ратуре, уже получены с использованием приема совме-
щения функций, хотя мы их принимаем как неделимый
элемент. Например, схема 1.4а планетарной передачи
получена по аналогии со схемой 1.3а путем совмещения
функций двух планетарных механизмов более простого
вида (см. схему 1.4). Данная схема известна как передача
типа 3k (по числу центральных зубчатых колес а, Ь, е), а
исходные схемы - две передачи типа 2k-h (два централь-
ных колеса и водило).
Конструктивное совмещение привело к уменьше-
нию общего числа центральных колес (вместо четырех —
три); к объединению двух водил в одно водило h и сател-
литов двух видов в один вид (двухвенцовый сателлит с
венцами g и f).
Передача такого типа позволяет получать большое
передаточное отношение, но при сравнительно невысо-
ком КПД. Это ограничивает область применения переда-
чи маломощными, редко и кратковременно включаемы-
ми приводами, часто соответствует вышеизложенному
принципу функциональной целесообразности.
Схема 1.46 — дальнейший путь совмещения функ-
ций деталей передачи по схеме 1.4а.
В сателлите зубчатые венцы объединены в один ве-
нец g-f. Здесь всего один сателлит и разность чисел зубь-
ев колес Ь, е — всего один зуб, а условие соосности дос-
тигнуто за счет выбора соответствующих смещений ис-
ходного контура.
Функции водила выполняют торцовые диски в со-
вокупности с торцовыми поверхностями колеса b и
крышки с кольцами. При этом торцовые поверхности
воспринимают момент сил, действующих на сателлит, а
кольца - радиальные силы, возникающие во внутренних
зацеплениях, которые не могут быть уравновешены си-
лами внешнего зацепления, так как намного превышают
их по величине.
В корпусной детали совмещены функции выходного
звена и подшипника скольжения. Центральное колесо а
установлено на валу двигателя, корпус двигателя при-
фланцован к колесу Ь.
Как свидетельствует данный пример, совмещение
функций позволяет исключать полностью отдельные де-
тали, придавая их функции элементам деталей иного на-
значения.
Наиболее распространенный пример — возврат к бо-
лее ранним решениям подшипников качения без внешне-
го и/или внутреннего колец (схема 1.5). В ущерб унифи-
кации и блочности конструкции такие решения приме-
няют особенно в тех случаях, когда требуемая компакт-
ность играет определяющую роль, например, при встраи-
вании их в детали заведомо малых размеров. Ролики
подшипника имеют дорожки качения: внешнюю — по-
верхность оси сателлита, а внутреннюю — в теле самого
сателлита планетарной передачи.
Кроме того, на схемах 1.5 и 1.5а противопоставлены
два решения: раздельное и совмещенное исполнения
зубчатого колеса и тормоза. Так, в схеме 1.5а исключено
зубчатое колесо, а его функции переданы зубьям, наре-
занным на дисках тормоза. Такое решение оправдано еще
и тем, что внутреннее зацепление в планетарной переда-
че обычно нагружено по сравнению с внешним, и поэто-
му уменьшение длины контактной линии здесь целесо-
образно.
В схеме 1.6 самоблокирующего [повышенного тре-
ния] дифференциала сателлиты не имеют отдельно вы-
полненных осей и подшипников. Их функции совмещены
с поверхностью вершин винтовых зубьев и поверхностью
отверстия в водиле. Осевые перемещения сателлитов
ограничены торцовыми поверхностями полостей водил.
В данном примере совмещение функций сопровож-
дается увеличением сил трения (сопротивления относи-
тельному проворачиванию звеньев), что функционально
целесообразно для этого вида дифференциала.
СОВМЕЩЕНИЕ И РАЗДЕЛЕНИЕ ФУНКЦИИ
61
Разделение функций используют, когда выполне-
ние дополнительных функций не позволяет в полной ме-
ре использовать характерные свойства устройства или
снижает его качественные показатели, или конструкция
устройства для совместного выполнения функций слиш-
ком сложна и дорога и т.п. На схеме 2.1 (рис. 23) опора
вала выполнена в виде двух подшипников. Роликовый
подшипник воспринимает только радиальную нагрузку, а
шариковый радиальный подшипник только осевую на-
грузку. Такое решение характеризуется наибольшей про-
стотой в сравнении с другими решениями при одинако-
вой нагрузочной способности.
Наиболее распространенным (в точных приборах и
системах) примером разделения функций является вве-
дение в кинематическую цепь дополнительных устройств
для разгрузки приводов и основных кинематических пар
от силы тяжести выходного звена. На схеме 2.2 звено
перемещается по "точной" направляющей, которую тре-
буется разгрузить от силы тяжести Fg\. Для этой цели
установлена параллельно "грубая" направляющая, по
которой перемещается ползун, воспринимающий через
рычаг силы тяжести звена и его противовеса (Fg?).
На схемах 2.3 и 2.4 приведены традиционная (типа
Skara) и новая схемы плоского манипулирующего меха-
низма. Платформа ADM соединена с основанием тремя
кинематическими цепями: ABC, DEG и MLK. В обеих
схемах кинематические цепи воспринимают силу тяже-
сти платформы Fg.
В традиционной схеме они еще и передают движу-
щие силы со стороны приводов, а в новой - кинематиче-
ские цепи воспринимают силу тяжести платформы, при-
воды же передают движение непосредственно платформе.
Привод поворота стола в данном примере — коррек-
тирующий и обеспечивает постоянную ориентацию
платформы в плоскости. В принципе, обе системы функ-
ционально эквивалентны: они обладают тремя степенями
свободы, но приведенные конкретные решения продикто-
ваны различными параметрами и требуемыми качествами.
В схеме 2.5 ротор установлен консольно в опоре.
Чтобы разгрузить опору от силы тяжести ротора и обес-
печить его точное вращение, установлен рычаг с пружи-
ной и роликом. Это устройство воспринимает силу тяже-
сти ротора, а опора обеспечивает постоянное положение
его оси.
На схеме 2.6 показано разделение функций в меха-
низме соединения тягача с прицепом. Задача — передать
агрегатам прицепа вращающие моменты Т\, Т2 и обеспе-
чить пятиподвижное соединение тягача с прицепом для
восприятия осевых сил F\, F2 - могла бы быть решена
применением одной карданной передачи.
Для разделения функций применены параллельно
два механизма: один — для передачи вращающего момен-
та - карданная передача, а второй - для восприятия осе-
вой силы — такого же вида механизм, выполненный в
виде двух последовательно соединенных универсальных
шарниров.
Вилка второго шарнира жестко соединена с прице-
пом, а вилка первого - шарнирно с тягачом. Центры уни-
версальных шарниров совпадают с центрами шарниров
карданной передачи. Для центральной передачи осевой
силы промежуточное звено выполнено в виде двух сим-
метрично расположенных тяг 1 и 2 или в виде трубы с
проушинами для соединения с крестовинами шарниров.
Чтобы исключить вероятность восприятия осевой силы
карданной передачей, необходимо предусмотреть шли-
цевое подвижное соединение в промежуточном звене или
обеспечить свободу осевого перемещения в опоре вход-
ного или выходного звена. Несовпадение центров уни-
версальных шарниров из-за погрешностей изготовления
может привести к боковым нагрузкам на звенья кардан-
ной передачи, поэтому ее входное и выходное звенья
целесообразно установить в упругих опорах.
Рассмотренные примеры достаточно явно выражают
взаимосвязь между частными функциями и операцией их
совмещения или разделения, а также сопровождающими
ее достоинствами. В практике конструирования возмож-
ность и целесообразность совмещения или разделения
функций не всегда лежат на поверхности. Более того, в
одной и той же конструкции предусматривается как од-
на, так и другая операция, а встречаются ситуации, в
которых одни и те же детали представляются носителями
совмещенных функций одного вида и разделенных
функций другого вида. В этой связи при глубокой прора-
ботке возможных вариантов, используя предлагаемые
приемы, можно решать очень интересные задачи.
На схемах 2.7 и 2.7а показаны традиционный и но-
вый поступательно-ориентирующие механизмы. Приме-
чательно, что механизм на схеме 2.7а не имеет ни одной
поступательной пары, которые обычно менее техноло-
гичны в изготовлении, склонны к перекосам и имеют
более низкий КПД по сравнению с вращательными сфе-
рическими парами. В каждой поступательной паре (схе-
ма 2.7) совмещены функции постоянной ориентации и
прямолинейного (вдоль одной из осей координат X, Y, Z)
движения, осуществляемого линейным приводом (пока-
заны движущие силы Fi, F2 и F3).
В схеме 2.7а каждая из пар - вращательная, т.е.
функции существенно разделены, и требуемая ориента-
ция достигается как совокупность отдельных функций, а
прямолинейное движение получается как сумма трех
движений по дугам окружностей.
Еще несколько лет назад такое решение выглядело
бы неразумным, так как сопряжено с усложнением сис-
темы управления, в настоящее время это не является
препятствием, более того, в определенных условиях
можно получить более высокую точность ориентации и
перемещений по сравнению с достигаемой традицион-
ным решением.
Схема 2.7а построена следующим образом. К вы-
ходному звену (рабочем столу) присоединены поступа-
тельно-ориентирующие (не допускающие вращения во-
круг осей координат Z, Y и X кинематические цепи
DEGG'LK, MNSRP и PRUQHWV. В кинематических це-
пях с упомянутыми функциями ограничения вращений
совмещены функции линейных перемещений с помощью
приводов, вращающие моменты которых Т2 и Г3.
62
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
23. РАЗДЕЛЕНИЕ ФУНКЦИИ ВОСПРИЯТИЯ/ПЕРЕДАЧИ СИЛ
□И
Корпус
Роликовый
подшипник
воспринимает
только
радиальную
нагрузку FY.
Гайка
Шип вала
Упорный диск
Зазор
Шариковый
радиальный
подшипник
воспринимает
только осевую
нагрузку Fx.
Г^3~|
124 |
"Грубая" направляющая
воспринимает
силы Fg] и Fgi-
"Точная"
направляющая
разгружена от силы F^j.
Противовес
Ролик
Коромысло
Ползун
Г 2 5 I Подшипниковая опора
1—;। разгружена от силы
тяжести ротора
и обеспечивает его точное
центрирование.
Т2
Шарнирные механизмы
нагружены силой Fz
и моментами Tj, Т^, Т3.
Рабочий стол
В(
Привод
поворота
стола
Шарнирные
механизмы
нагружены
только
силой Fz.
К
Пружина
воспринимает
силу тяжести
ротора.
Ротор
Ось Ролик
ролика
'О Q1,
Z
С
1
I 2.7 |
А
7х
В х,
Рабочий
стол
Привод
перемещения стола
(в основном) вдоль оси Y
Привод ]
перемещения Ju
стола (в основном)
вдоль оси X
Карданное
соединение
нагружено
только осевой
силой.
Универсальный
шарнир
[шарнир Гука] 2
Рама
\прицепа^ у?
Рама тягача
Т1
Тяга 2
Универсальный
шарнир [шарнир Гука] 1
Карданная
передача
нагружена
только
вращающим
моментом.
г3
Все направляющие
и приводы
нагружены
силой Fz
и моментами Тх, Ту и Tz.
[гТТ]
G
С
Моменты воспринимаются
(в основном)
раздельно парами тяг,
замкнутыми общим
(приводным) звеном.
Моменты
Tz
Тх
Пары тяг
KL, DE
PR, VW
PR .MN
Ту
D
B(S
©N
Все приводы
разгружены
от силы
тяжести стола.
Силу
воспринимают
только тяги
VH.PRn MN.
2zK
Рабочий стол-
Противовес
гам
Привод
поступательного
движения
Разделительное
уплотнение
V, H,W, Q-
- упругие
сферические
шарниры
СОВМЕЩЕНИЕ И РАЗДЕЛЕНИЕ ФУНКЦИИ
63
Только четвертая кинематическая цепь АВС предна-
значена для воспроизведения одной функции - преобра-
зования вращательного движения привода, момент кото-
рого 7), в линейное перемещение выходного звена вдоль
оси Y. Звено PR - общее для второй и третьей кинемати-
ческих цепей. Эти же цепи одновременно выполняют
функцию передачи силы тяжести выходного звена, вос-
принимаемой противовесом, сила тяжести которого Fg.
По сравнению со схемой 2.7, в которой каждый при-
вод дополнительно нагружен силой тяжести и силами
инерции, последовательно присоединенных к нему при-
водов и/или выходного звена, в схеме 2.7а все приводы
размещены на основании и разгружены от силы тяжести
выходного звена.
Что касается сложности схемы, то следует преду-
предить, что не всегда можно оценить сложность конст-
рукции только по кинематической схеме. На схеме 2.76
дано довольно простое конструктивное исполнение ки-
нематической цепи с упругими парами, обозначенными
идентично парам на схеме 2.7а. Выходное звено отгоро-
жено от линейного двигателя, развивающего силу F3,
разделительным уплотнением - сильфоном. Такое испол-
нение позволяет воспроизводить поступательное движе-
ние в изолированной среде без единой трущейся пары.
Новая схема имеет определенную область примене-
ния — малые и точные перемещения, а традиционная —
пока незаменима для больших прямолинейных переме-
щений.
Приведенные примеры иллюстрируют в основном
совмещение и разделение функций только механической
системы машины. Однако, как сообщалось ранее, одно из
основных направлений современного конструирования —
это перераспределение функций между механической и
немеханической (электрической, электронной) частями:
между механизмами, приводами, системой измерения и
управления.
За последние 50 лет можно проследить однонаправ-
ленную тенденцию разделения функций: все вычисли-
тельные операции передаются электронной системе,
функция передачи энергии в большей мере осуществля-
ется электрической системой, а исполнительная функция
(выполнение заданной работы) отводится приводам и
механизмам.
Между приводами и механизмами также происхо-
дит перераспределение функций: изменение скоростного
диапазона привода приводит к изменению передаточного
отношения, количества необходимых режимов переклю-
чения передач и соответственно схемы механизма. Пре-
образуется и механизм, входящий в состав привода, или
механизм, включенный в единый блок с двигателем (на-
пример, в приводе типа мотор-редуктор).
Чтобы понять эти тенденции, достаточно проанали-
зировать литературные источники. Например, в широко
известных замечательных справочниках И. И. Артобо-
левского очень много внимания уделено однодвигатель-
ным механизмам для воспроизведения различных кри-
вых, для выполнения математических операций, для ре-
гулирования и управления движением и несоизмеримо
меньше содержится сведений о системах с большим чис-
лом степеней свободы (многоподвижных механизмах), с
большим числом двигателей (особенно с параллельным и
замкнутым их соединением - многопоточных механизмах).
Казалось бы, можно сделать вывод, что в прежних
механизмах совмещение функций было определяющим, а
в современных - определяющим является разделение
функций.
Но примеры свидетельствуют о еще не исчерпанных
возможностях совмещения функций исполнительной и
управляющей систем, что будет освещено в других раз-
делах.
В целом же использование приемов совмещения
и/или разделения функций позволяет получать новые
конструктивные варианты и более полно оценивать воз-
можные пути решения функциональных задач.
Рис. 24 иллюстрирует новое направление в конст-
руировании манипулирующих систем на основе
принципа разделения функций, которые получили, в
частности, название механизмов относительного мани-
пулирования.
Наиболее ранний и совершенный прототип меха-
низма [системы] относительного манипулирования -
система двух рук человека (вдевание нитки в ушко игол-
ки, натяжение тетивы лука и т.п.). Первым техническим
решением в дополнение к рукам человека был гончарный
круг. В современной технике простейшие механизмы
применяют в обрабатывающих станках (см. схему 3.6а), в
смесителях и др.
Системе на схеме 3.1 присущи минимальные энер-
гетические затраты и максимальная функциональная эф-
фективность (точность, быстродействие и др.) по сравне-
нию с одной рукой, совершающей движения относитель-
но неподвижного тела.
Общий структурный признак системы - наличие
двух выходных подвижных звеньев. Общий прием полу-
чения системы из механизма с одним выходным звеном
исходного механизма является инверсия неподвижного
звена на выходное звено, а промежуточного подвижного
звена - на неподвижное. Схема 3.2а получена из схе-
мы 3.2 инверсией звеньев 2 и 3. При этом возможность
воспроизведения траектории т. А в системе координат
звена 2 не изменилась.
На схеме 3.2а обозначены; 3 - основание [стойка];
1,2 — выходные звенья; дуговые стрелки на звеньях -
приводы или угловые перемещения.
Для структурного синтеза механизма могут быть
использованы и другие приемы функционального преоб-
разования схемы. Например, одни перемещения можно
воспроизводить в одном известном механизме, а другие -
в другом. На схемах 3.3, в частности, показаны два сфе-
рических манипулирующих механизма, которые способ-
ны воспроизводить относительные перемещения.
Синтез механизмов относительного манипулиро-
вания проводится с учетом следующих условий их су-
ществования и частных свойств.
1. Минимальное число степеней свободы механизма
равно двум, а минимальное число независимых относи-
тельных перемещений выходных звеньев равно единице.
Максимальное число степеней свободы механизма огра-
ничено лишь техническими возможностями, а макси-
мальное число независимых относительных перемеще-
ний равно шести.
64
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
СОВМЕЩЕНИЕ И РАЗДЕЛЕНИЕ ФУНКЦИИ
65
2. Число независимых относительных перемещений
выходных звеньев равно числу независимых перемеще-
ний в исходном механизме с одним выходным звеном
(см. схему 3.2).
3. Число независимых относительных перемещений
выходных звеньев равно сумме независимых перемеще-
ний обоих выходных звеньев за вычетом дублирующих
перемещений.
Например, на схеме 3.3 представлен механизм, у ко-
торого каждое из выходных звеньев 1 и 2 характеризует-
ся тремя независимыми угловыми перемещениями, но в
целом механизм имеет 5 независимых относительных
перемещений. Чтобы в этом убедиться, достаточно не
подсоединить между собой выходные звенья и прове-
рить. возможно ли при этом их совместное движение.
В данном примере оно возможно вокруг оси Z.
4. Кинематическая цепь выходного звена может
иметь всего одно подвижное звено, образующее со стой-
кой кинематическую пару. При этом, если пара однопод-
вижная, то механизм может иметь только одну такую
кинематическую цепь. Возможны различные варианты
сочетания двух выходных звеньев, каждое из которых
образует с основанием кинематическую пару или эквива-
лентное ей кинематическое соединение.
5. Выходные звенья могут иметь общую кинемати-
ческую пару. При этом если эта пара одноподвижная, то
число независимых относительных перемещений равно
единице, если пара двухподвижная, то это число равно
двум и т.д. Возможно также такое замыкание кинемати-
ческих цепей выходных звеньев, при котором имитиру-
ется их соединение через кинематическую пару, напри-
мер, при формообразовании зубьев методом обкатывания.
6. Выходные звенья по признаку воспроизводимого
относительного движения совершенно равноценны, хотя
по другим признакам, например, возможности размеще-
ния на выходном звене тяжелого оборудования, они мо-
гут быть существенно различны. Равноценность очевид-
на, например, из рассмотрения схемы 3.5а. Три подвиж-
ных звена 1, 2 и 4 образуют механизм, который воспро-
изводит траекторию точки и ориентацию линии (пово-
рот <р) в системе координат XY, неподвижно соединен-
ной со звеном 1 или со звеном 2.
7. Плоский механизм с двумя - тремя независимыми
относительными перемещениями может быть представ-
лен в виде системы двух плоских кинематических меха-
низмов в совпадающих или параллельных плоскостях, с
числом степеней свободы 1 + 1 или 1 + 2 (схема 3.7).
На схеме 3.5а одна из составляющих кинематиче-
ских цепей - замкнутая (звенья 3-6-4-5-2). По существу,
это плоский пятизвенный механизм с двумя степенями
свободы. Функциональные свойства схем 3.4 и 3.5а оди-
наковые.
8. Пространственный механизм с двумя — пятью не-
зависимыми перемещениями может быть представлен в
виде системы двух плоских механизмов в непараллель-
ных плоскостях V и W (схема 3.7), причем каждая из со-
ставляющих цепей обладает одной, двумя или тремя сте-
пенями свободы при выполнении условия по п. 3.
Независимое вращение вокруг линии пересечения V
и W не воспроизводится. На схеме 3.7 два плоских пяти-
звенных замкнутых механизма (каждый с двумя степе-
нями свободы) образуют систему с выходными звеньями
7 и 2. Можно представить следующие независимые пе-
ремещения: точка О звена 2 перемещается в системе ко-
ординат YZ, а звено 1 перемещается параллельно оси и
поворачивается (<pz) вокруг оси Z, что в соответствии с п.
3 позволяет иметь четыре независимых относительных
перемещения. Линейное перемещение точки звена 7 и его
поворот вокруг оси взаимозависимы, как и линейное
перемещение точки звена 2 и его поворот вокруг оси X.
Вращение вокруг оси Y в данном примере воспроизвести
невозможно.
9. Пространственный механизм с числом независи-
мых относительных перемещений, равным шести, может
быть представлен в виде системы двух механизмов, из
которых хотя бы один механизм пространственный (см.
схемы 3.6 и 3.8а).
10. Синтез механизмов [систем] относительного ма-
нипулирования наряду с приемами разделения функций
и инверсии подвижного и неподвижного звеньев может
быть осуществлен путем использования обобщенных
структурных схем (из систематизированного банка). На
схемах 3.5 и 3.8 представлены примеры таких систем.
Они представляют собой совокупность блоков D, S, G,
вместо каждого из которых может быть подставлен при-
вод (в том числе с передаточным механизмом), сумми-
рующий или передаточный механизм. Частные варианты,
построенные по схемам 3.5 и 3.8, даны на схемах 3.5а и
3.8а. Следует обратить внимание, что в приведенных
схемах все приводы (за исключением D1 в схеме 3.8) не-
посредственно замкнуты на основание.
11. При выборе схемы из числа возможных пред-
почтение следует отдавать решениям на основе замкну-
тых кинематических цепей с вращательными парами и с
приводами, расположенными на основании. По отноше-
нию к традиционным решениям (схемы 3.6 и 3.6а), по-
строенным на основе незамкнутых кинематических це-
пей, с использованием поступательных пар и приводов
на подвижных звеньях, рекомендуемые системы могут
иметь более широкие функциональные возможности и
характеризоваться меньшей массой и более высо-
ким КПД.
Механизмы относительного манипулирования могут
обеспечить высокую точность воспроизводимых движе-
ний и высокое быстродействие. Их можно использовать
для осуществления технологических процессов обработ-
ки или сборки изделий, обладающих небольшой массой.
На схеме 3.7а — один из вариантов механизма станка —
робота для шлифования лопатки газотурбинного двига-
теля. Механизм обладает 7-ю степенями свободы. Седь-
мая степень характеризует вращение шлифовального
круга. В основе механизма - две замкнутые кинематиче-
ские цепи (первая цепь 3-2-8-9-10 и цепь 3-4-1-5-6), рас-
положенные во взаимно перпендикулярных плоскостях.
Каждая из цепей имеет по два двигателя DI, D2 и D6, D7,
размещенных на основании 3.
66
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
Двигатели D3, D4, D5 размещены на подвижных
звеньях. Вторая кинематическая цепь позволяет захваты-
вать лопатку, размещенную в перемещаемой палете, и
манипулировать ею относительно перемещаемого шли-
фовального круга.
В данной схеме возможен вариант незамкнутого ис-
полнения первой кинематической цепи в виде звена 2 с
размещенным на нем приводом звена 8.
На схеме 3.7а вверху показана система независимых
компонентов воспроизводимого движения. Первая цепь
воспроизводит компоненты х и <pz, а вторая цепь — пере-
мещения в осях координат YZ и вращательные движения
<рх и <pY-
Схемы 3.5а и 3.8а также могут быть использованы в
технологическом оборудовании.
Как уже отмечалось, они получены из обобщенных
структурных схем 3.5 и 3.8.
На схеме 3.5а представлен плоский механизм с тре-
мя степенями свободы. В нем приводы размещены на
основании, инструмент размещен на подвижном звене 7,
а позиционирующий стол образует с основанием и под-
вижными звеньями 3, б, 4 и 5 пятизвенный механизм.
Здесь функция осуществляется за счет раздельной неза-
висимой реализации движения двух выходных звеньев —
стола и инструмента. По сравнению с прототипом — ши-
роко распространенной схемой типа Skara (см. схему 2.3
на рис. 23) - имеет место конструктивное упрощение: вме-
сто семи подвижных звеньев использовано только пять.
В отличие от традиционных механизмов с большим
числом степеней свободы и общей кинематической це-
пью в системе на схеме 3.8а имеется три сравнительно
простых кинематических цепи, каждая из которых вы-
полняет свою частную функцию. Пятизвенный механизм
KLOMN с приводами D2. D3 предназначен для переме-
щения объектива в горизонтальной плоскости, кинемати-
ческая цепь FVUQE ориентирует зеркала 7 и 2 таким об-
разом, чтобы луч все время проходил вдоль оси объекти-
ва, привод DI перемещает объектив вертикально, а сфе-
рический механизм ABCRST с приводами D4, D5 обес-
печивает поворот изделия вокруг горизонтальных осей
координат. Полученная система, например, может обес-
печить лазерную обработку изделия произвольной кон-
фигурации с направлением луча под любым углом по
отношению к изделию.
Преимущества очевидны:
более высокий КПД благодаря малому числу пере-
гибов (отражений) луча;
более высокая достигаемая точность позициониро-
вания благодаря простым и более жестким механизмам
параллельной структуры с приводами, расположенными
на основании (механизмы полностью разгружены от сил
тяжести, сил инерции приводов и реактивных моментов);
другие достоинства, продиктованные конкретным ее
применением.
2.5. ПОЛУЧЕНИЕ ВАРИАНТОВ
КОНСТРУКТИВНЫХ РЕШЕНИЙ
Современное конструирование немыслимо без со-
ставления и анализа альтернативных решений. Нельзя
останавливаться на варианте схемы, компоновки, гео-
метрии элементов, даже если на первый взгляд этот ва-
риант представляется лучшим.
Довольно просто получить варианты соединений и
компоновок методами комбинаторики из ограниченного
числа элементов, но при этом из-за большого числа вари-
антов их анализ очень сложен.
Более предпочтителен метод постепенного конст-
руктивного преобразования [совершенствования], при
котором каждый шаг изменения конструкции продикто-
ван закономерностями изменения одного из основных
качеств или заимствован из аналогичных решений.
Покажем возможность получения более совершен-
ных и простых конструктивных вариантов на примере
конструктивного преобразования разъемного сфериче-
ского шарнира с замком (рис. 25).
На схеме 7.7 — широко распространенное решение
шарнира, составленного из трех звеньев: сферической
головки (на конце стержня), чашки со сферическим гнез-
дом и крышки со сферическим пояском. Крышку при-
соединяют к чашке винтами после установки в гнездо
сферической головки. Выдернуть головку из внутренней
сферы можно, только открутив или разорвав винты.
Чашка на схеме 1.2 имеет упругие лепестки, кото-
рые при сборке отгибаются. Такой шарнир предназначен
для передачи нагрузки только в направлении прижатия
одного звена к другому.
Шарнир на схеме 1.3 состоит из трех деталей. Го-
ловка имеет прорезь, благодаря чему она упруго дефор-
мируется и вводится в отверстие сопряженной чашки с
внутренней сферой. Диаметр отверстия меньше наи-
большего диаметра сферы. После введения шара в отвер-
стие в него вворачивают винт, который фиксирует голов-
ку в разжатом состоянии. Головка таким образом удер-
живается в чашке.
Головка на схеме 2.1а имеет круговой цилиндриче-
ский поясок, диаметр которого d\ меньше диаметра <7;
отверстия во внутренней сфере чашки. Собирают шар-
нир, повернув головку относительно чашки таким обра-
зом, чтобы поясок свободно проходил в отверстие внут-
ренней сферы чашки. Для размещения стержня при сбор-
ке шарнира служит выемка в чашке (схема 2.1а). Схе-
ма 2.2 отличается от схемы 2.1 от схемы 2.1а тем, что
цилиндрический поясок на сферической головке имеет в
поперечном сечении форму эллипса или любого другого
замкнутого контура, например, имеющего размеры d и I.
Причем линия пересечения пояска со сферой на головке
повторяет линию среза внутренней сферы (см. контур 7 и
контур 2).
В реальной конструкции вносится корректировка на
очертание пояска с целью получения необходимых зазо-
ров. В этом случае шарнир можно собрать только при
определенном положении звеньев, показанном на схеме,
когда поясок свободно проходит через отверстие, очер-
ПОЛУЧЕНИЕ ВАРИАНТОВ КОНСТРУКТИВНЫХ РЕШЕНИИ
67
ченное контуром 2. Поворотом головки после этого
обеспечивают соединение звеньев шарнира. Разборку
осуществляют в обратном порядке.
На схеме 2.3 - аналогичная схеме 2.2 конструкция.
С целью технологичности на головке выполнены плоские
срезы. Контур 1 при этом представляет окружность. Пло-
ские срезы выполнены и на головке. Контур 2 - дуга ок-
ружности того же радиуса, что и контур 1. Вводят голов-
ку, как показано на схеме 2.3, перемещая ее поступатель-
но-прямолинейно так, чтобы контур 7 и 2 совместились,
а затем разворачивают детали в рабочее положение. Ра-
зобрать шарнир можно только при совмещении контуров.
На схеме 3.1 головку вводят по криволинейной тра-
ектории, например, по дуге окружности радиусом г. На
головке выполнен поясок в виде торовой поверхности,
образованной перемещением контура 2 отверстия по
данной траектории. Контуры 7 и 2 при сборке совпадают.
Разобрать шарнир можно, только совместив конту-
ры 7 и 2 и перемещая головку по данной траектории. Тем
самым достигается большая надежность в отношении
исключения самопроизвольного разъединения сопряжен-
ных деталей.
На схеме 3.2 при сборке головку без поворота пере-
мещают по дугам окружностей А] Аг, С[С2, В[В2 относи-
тельно гнезда. На головке выполнен срез, по которому
при сборке скользит всеми точками контур 2 отверстия.
Изготовлен срез может быть при таком же перемещении
инструмента, имеющего режущую кромку — контур 2.
Объем срезанного тела головки в этом случае мень-
ше, чем на схемах 2.1, 2.2, 2.3, 3.1 при той же удержи-
вающей силе деталей от их разъединения. Надежность от
самопроизвольного разъединения выше, чем в схеме 3.1,
так как разборка возможна только при поступательно-
криволинейном относительном перемещении деталей.
68
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
26. ПОЛУЧЕНИЕ АЛЬТЕРНАТИВНЫХ РЕШЕНИЙ МЕТОДОМ КОНСТРУКТИВНОЙ [ГЕОМЕТРИЧЕСКОЙ] ИНВЕРСИИ
ВСТРАИВАНИЕ РЕДУКТОРА В ШКИВ, БАРАБАН ИЛИ КОЛЕСО
КОНСОЛЬНОЕ
ИСПОЛНЕНИЕ
а, b - центральные колеса; g-f-сателлит
Рама
ОПОРНЫЙ/ПОДДЕРЖИВАЮЩИЙ РОЛИК (КАТОК)
СИММЕТРИЧНОЕ ДВУХОПОРНОЕ ИСПОЛНЕНИЕ
ДИСКОВЫЙ ФРИКЦИОННЫЙ ТОРМОЗ,
ВСТРОЕННЫЙ В КОЛЕСО
ПОЛУЧЕНИЕ ВАРИАНТОВ КОНСТРУКТИВНЫХ РЕШЕНИИ
69
Контур 2 отверстия чашки (схема 3.3) подобран та-
ким образом, что срез на головке имеет цилиндрическую
поверхность радиусом d/2 (центр кривизны С3 лежит на
одной прямой с точками Cj и В]), а контур среза - линия
пересечения цилиндра и сферы. Такая конструкция более
технологична.
Сферический шарнир с полученной конструкцией
замка можно применять в механизмах с самоустанавли-
вающимися звеньями, в незамкнутых кинематических
цепях антропоморфных механизмов и в протезах суставов.
Наряду с конструктивными вариантами деталей и
соединений существенное значение имеют варианты
компоновочных схем. При этом речь идет как о про-
стейшем размещении двух-трех элементов/деталей/сое-
динений/сборочных единиц, так и о компоновке меха-
низмов, агрегатов, блоков и иных систем.
На схемах 4.1 ... 4.5 (рис. 26) даны исчерпывающие
вариант ы размещения шкива/барабана/колеса относи-
тельно двух опор. В схемах 4.1 и 4.3 — симметричное
размещение, в схемах 4.4 и 4.5 - консольное размещение,
а вариант на схеме 4.2 - смешанный, в котором сочета-
ются свойства консольного и симметричного исполне-
ния. Примечательно, что в практике известны примеры
использования каждого из вариантов. Более того, про-
слеживается также взаимосвязь каждого из вариантов с
более сложными исполнениями механизмов. Некоторые
из примеров приведены на схемах 4.2а ... 4.4а с указани-
ем исходной компоновки. Интересно, что каждая из схем
имеет свои, присущие только ей качества.
Схема 4.2а позволяет встраивать в барабан лебедки
блочную конструкцию редуктора. Схема 4.3а имеет же-
сткую несущую раму внутри барабана. В схеме 4.4а роль
корпуса выполняет ступица шкива, а редуктор защищен
тонкостенным (легким) кожухом. Примечательно, что
схемы 4.5а и 4.56 хотя и имеют одну и ту же компоно-
вочную схему, но существенно отличаются по парамет-
рам. Достаточно отметить, что мощность электропривода
мотор-колеса по схеме 4.5а на порядок превышает мощ-
ность гидропривода мотор-колеса по схеме 4.56.
Аналогично решается задача получения компоно-
вочных решений опорного/поддерживающего ролика
(катка). В гусеничной машине он воспринимает вес базо-
вой части машины, перемещаемой по бесконечной на-
правляющей — гусеничной цепи или ограничивает прови-
сание верхней ветви цепи.
На схемах 5.1 ... 5.4 даны варианты исполнения ро-
лика вместе с осью, подшипниками и рамой машины.
Направление действия давления обозначено F. Ось мо-
жет быть неподвижно соединена с роликом (схемы 5.1 и
5.2) или с рамой (схема 5.3 и 5.4); ролик выполнен с од-
ной (схема 5.1) или двумя дорожками качения и соответ-
ственно в виде двух цилиндрических деталей
(схемы 5.2 ... 5.4).
В схеме 5.3 детали ролика неподвижно соединены
между собой перемычкой. На схеме 5.4а дано конструк-
тивное решение ролика по схеме 5.4. Роликовый под-
шипник (опора) защищен от внешней среды осевым тор-
цовым уплотнением.
Получение конструктивных вариантов, отличаю-
щихся от традиционных решении, иногда позволяет су-
щественно изменить функциональные качества устройства.
На схемах 6.1 и 6.2 представлены варианты диско-
вого тормоза, встроенного в обод колеса автомобиля.
В схеме 6.1 корпус гидропривода тормозных колодок
размещен с внешней стороны по отношению к диску, а в
схеме 6.2 - с внутренней стороны. Благодаря такому ре-
шению можно более рационально использовать про-
странство внутри обода колеса и, в частности, увеличить
средний радиус фрикционных элементов на Аг, что по-
зволяет увеличить, например, тормозной момент при од-
ном и том же давлении, но при этом немного усложняет-
ся конфигурация диска и обода колеса.
При получении вариантов и отборе для дальнейшей
проработки проводят всесторонний анализ получаемых
свойств. Здесь же даны лишь отдельные фрагменты анализа.
Конструктивные варианты для такого анализа могут
быть получены определенными приемами последова-
тельного преобразования одной схемы в другую. Многие
из них известны и широко используются, но данные пре-
образования позволяют привести в систему поиск тре-
буемого решения.
На рис. 27.1, 27.2, 27.3 (схемы 7.1 ... 12.2) приведе-
ны получаемые таким образом примеры, иллюстрирую-
щие конструктивное и функциональное разнообразие
нескольких простейших механизмов. В основу представ-
ленных преобразований положены:
изменения положений осей шарниров;
совмещение функций звеньев;
выполнение элементов шарниров большими разме-
рами, чем размеры звеньев;
размещение одних шарниров и звеньев в других
шарнирах и звеньях;
замена охватывающих элементов охватываемыми;
замена одних кинематических (высших или низших)
пар другими парами (низшими или высшими);
придание движения неподвижному звену и, наобо-
рот, остановка подвижного звена;
замена прямолинейной направляющей криволиней-
ной направляющей и т.д.
На схемах 7.1 ... 7.8а показаны отдельные решения
кривошипно-ползунного механизма. Буквами А, В, С
обозначены кинематические пары; А', В' — элементы од-
ноименных пар.
На схеме 7.1 - идеализированная кинематическая
схема.
Схема 7.2 отличается от схемы 7.1 тем, что оси шар-
ниров А и В в ней пересекаются между собой, а не па-
раллельны. Направляющая ползуна при этом параллель-
на оси шарнира А. Данная схема - это одна из наиболее
распространенных разновидностей пространственного
кривошипно-ползунного механизма.
Далее приведем примеры преобразований только
плоского механизма (схема 7.1). В схеме 7.3 вместо шар-
нира А выполнен круговой паз А', в котором размещен
кривошип в виде вкладыша.
В схеме 7.4 кривошип выполнен в виде эксцентрика
с круговым пазом В', взаимодействующим с совмещен-
70
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
27.1. КОНСТРУКТИВНЫЕ РАЗНОВИДНОСТИ ПРОСТЕЙШИХ МЕХАНИЗМОВ
КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ
МНОГОПОТОЧНОЕ
ным узлом "шатун + шарнир С". В схеме 7.5 кривошип
выполнен в виде эксцентрика и помещен внутрь шатуна.
В схеме 7.6 кривошип и шатун выполнены в виде
эксцентриков. Кривошип размещен внутри шатуна, а
шатун внутри ползуна. Каждое из представленных реше-
ний обладает своими особыми качествами. Например,
конструктивная разновидность по схеме 7.6 представляет
собой компактное решение, имеет большую жесткость в
направлении движения ползуна, но низкий КПД из-за
больших углов давления и скоростей скольжения по
сравнению с другими решениями.
В механизме ковочно-штамповочного пресса на
схеме 7.7. использован двухпоточный симметричный
кривошипно-ползунный механизм с общим ползуном, в
который встроены два шатуна. А внутри каждого из ша-
тунов размещены кривошипы - эксцентриковые валы.
На схеме 7.8 показано, каким образом можно ис-
пользовать кривошипно-ползунный механизм в многопо-
точном (параллельном) соединении. С учетом односто-
роннего направления давления на поршень осуществлено
силовое замыкание в паре шатун — эксцентриковый вал.
В радиально-поршневом гидромоторе симметрично раз-
мещены несколько цилиндров.
Поршни, перемещаемые в цилиндрах, воздействуют
на эксцентриковый вал, являющийся выходным звеном.
Жидкость под давлением подается в цилиндры пооче-
редно через гидрораспределитель, вращающийся вместе
с выходным звеном.
На схемах 8.1 ... 8.21 показаны примеры исполнения
кривошипно-кулисного механизма. Следует отметить,
что кулисный механизм может быть получен из криво-
шипно-ползунного механизма инверсией функций звень-
ев: стойке обеспечивают возможность поворота, а кри-
вошип останавливают.
Обратите внимание, что структура при этом остает-
ся неизменной, если считать подвижными все звенья.
На схеме 8.1 кулиса выполнена в виде охватываю-
щей детали, а шатун — в виде охватываемой детали. Из-
вестны схемы, в которых, наоборот, шатун охватывает
кулису (см. схемы 8.7; 8.8).
Схема 8.2 представляет собой пространственный
кулисный механизм, оси шарниров А и С которого не
параллельны, как на схеме 8.1, а пересекаются межд;
собой. Такая схема широко применяется в аксиально-
поршневых гидромоторах. Можно было бы и далее пре-
образовывать схемы в данном направлении, но пока ог-
раничимся только некоторыми преобразованиями плос-
кого механизма по схеме 8.2.
В схеме 8.3 функции кулисы совмещены с функ-
циями шарнира в соединении кулиса + шарнир С. По
существу, это механизм с высшей парой и геометриче-
ским замыканием.
В схеме 8.4 шатун и кулиса выполнены в виде
поршня и цилиндра, размещенного в шарнире С. Кстати,
данная схема может легко быть преобразована в схе-
му 8.19, в которой кривошип выполнен в виде эксцен-
трикового вала.
В схеме 8.5 на кривошипе, выполненном в виде экс-
центрика, установлен подшипник, к которому прижат-
пружиной кулиса. Это пример механизма с высшей па-
рой и силовым замыканием. Довольно часто такие меха-
низмы используют в качестве вибровозбудителей.
В схемах 8.6 и 8.7 использован тот же конструктив-
ный прием, что и в схеме 7.6 с теми же, присущими дан-
ному приему качествами.
Схема 8.8- частный случай кулисного механизма, у
которого кулиса так же, как и кривошип, может повора-
чиваться на полный оборот. При этом передаточное от-
ношение так же, как и в зубчатой передаче, постоянно и
равно двум (см. график на схеме 8.8а).
Схема 8.9 выполнена в полном соответствии со схе-
мой 8.8 и предназначена для передачи движения через
герметичную стенку. Входное звено - кривошип соеди-
нен вращательной парой с наконечником, который
скользит в пазу выходного звена — кулисы. Наконечни;,
соединен со стойкой сильфоном, обеспечивающим гер-
метичность стенки, разделяющей две среды. В такой схе-
ПОЛУЧЕНИЕ ВАРИАНТОВ КОНСТРУКТИВНЫХ РЕШЕНИИ
71
72
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
ме, как и в схеме 8.8 имеет место "мертвое" положение,
когда точки А и С совпадают и отсутствует возможность
передачи момента кулисе, так как плечо силы равно нулю.
Схема 8.10 лишена указанного недостатка. В ней
несколько неподвижно соединенных кривошипов взаи-
модействуют своими наконечниками (шарами) с не-
сколькими радиальными пазами выходного звена. По
существу, это частный случай мальтийского механизма,
обеспечивающий непрерывную передачу движения с
постоянным передаточным отношением.
На схеме 8.11 представлен пространственный кри-
вошипно-кулисный механизм, у которого ось входного
звена - кривошипа - расположена под углом к оси вы-
ходного звена - сферической кулисы. Пазы на выходном
звене радиальные. С ними взаимодействуют шары, рас-
положенные в спиральных пазах кривошипа. При
уменьшении угла S шары перемещаются по спиральным
пазам ближе к оси вращения кривошипа. При этом со-
храняется постоянное передаточное отношение, равное
двум. Обязательным условием этого является пересече-
ние траектории движения шара осью вращения кулисы.
Схемы 8.8 ... 8.11 иллюстрируют возможности, получае-
мые при определенном соотношении размеров звеньев.
Далее покажем преобразование кулисного механиз-
ма за счет изменения формы кулисы. На схеме 8.12 кули-
се придана криволинейная форма. По определению, при-
нятому в теории механизмов и машин, кулисный меха-
низм превратится в кулачковый, если кривизна кулисы
переменная. Кстати, на схеме 8.12 не уточнено, какое из
звеньев остановлено. Возможны два варианта остановки
одного из звеньев, образующих шарнир С. При этом из-
меняется и вид механизма.
Далее покажем наиболее интересное преобразова-
ние кулачкового механизма на схеме 8.12 в зубчатый ме-
ханизм на схеме 8.13 или, наоборот, из зубчатого - в ку-
лачковый.
На схеме 8.13 сателлит обкатывается по централь-
ному колесу при вращении водила АС. Точка В при этом
движется по гипоциклоиде. Если в соответствии с данной
траекторией выполнить кулачок, взаимодействующий со
звеном АВ, то, исключив при этом зубчатое зацепление,
получают кулачковый механизм на схеме 8.13.
При равенстве радиуса начальной окружности са-
теллита межосевому расстоянию АС траектории точек
Bi, В2, В3, расположенных на этой окружности, из гипо-
циклоид превращаются в прямые лучи, проходящие че-
рез точку С (схема 8.14). Если с лучом СВ совместить
направляющую или кулису (схема 8.15), а звено АВЬ
связать с ней вращательной и поступательной парами в
точке Вь то получится кривошипно-ползунный механизм
или кривошипно-кулисный механизм при соответственно
остановленном звене В]С или АС. Кривошипно-
кулисный механизм на схеме 8.15 относится к классу
прямолинейно направляющих механизмов: в точке В3
воспроизводит прямолинейную траекторию.
Схема 8.16 получена путем совмещения с лучами
В!Си В2С неподвижных направляющих. На них установ-
лены ползуны, шарнирно связанные с "сателлитом" в
точках В] и В3 соответственно. Получился двухползун-
ный механизм. Его точка А (центр "сателлита") воспро-
изводит дугу окружности радиусом СА, а точка В2 - лю-
бая точка на начальной окружности сателлита — воспро-
изводит прямую линию СВ2. "Сателлит" взят в кавычки,
так как в схемах 8.15 и 8.16 он преобразован в шатун, а
его образ использован для обеспечения соответствующе-
го соотношения размеров звеньев.
Из всех рассмотренных схем только схемы 8.2 и 8.11
представляют собой пространственный механизм. Може-
те себе представить, насколько увеличиваются возмож-
ности преобразования приведенных схем в пространст-
венные решения. На схеме 8.17 показан более общий ва-
риант схемы 8.11, обеспечивающий преобразование не-
прерывного движения в одностороннее прерывистое (ша-
говое) движение.
Применение приведенных схем проиллюстрируем
на отдельных примерах. На схеме 8.18 плунжер разме-
щен в цилиндре вращающегося выходного звена - кулисе -
и взаимодействует с цилиндрической поверхностью А
корпуса. Функции кривошипа и шарнира А совмещены в
элементе шарнира А, охватывающем все остальные дета-
ли. Центр кривизны поверхности А смещен по отноше-
нию к центру шарнира С. Плунжер с поверхностью А
образует высшую кинематическую пару. За счет давле-
ния жидкости внутри цилиндра или за счет пружины
обеспечивается силовое замыкание. Данная схема ис-
пользуется как в радиально-поршневых, так и в лопаст-
ных гидромашинах. В реальных конструкциях по схе-
ме 8.18 используют многопоточное соединение несколь-
ких механизмов по аналогии со схемой 7.7. В упомянутой
ранее схеме 8.19 опора С выполнена в виде цилиндриче-
ской вращательной пары. Эксцентриковый вал выполнен
цилиндрическим, а поршни прижимаются к нему кольцом.
Кольцо перемещает поршни при всасывании жидкости,
например, при работе механизма в режиме гидронасоса.
В схеме 8.20 кулиса опирается на сферическую по-
верхность, расположенную в корпусе, а поршень-шатун
взаимодействует со сферической поверхностью эксцен-
трикового вала. Поршень и кулиса образуют рабочую
камеру, в которую поступает жидкость. Поршень и кули-
са прижимаются к сферическим поверхностям пружиной.
На схеме 8.20а представлено конструктивное исполнение
радиально-поршневого гидромотора по схеме 8.20.
Схема 8.21 — частный случай схемы 8.14, характери-
зуемый числами зубьев сателлита g и b колеса, равными
1 и 2 соответственно. Зубья выполнены винтовыми. По
существу, из зубчатой передачи получена планетарная
винтовая передача, у которой ход винтовой линии звена g
(Phe) в Два раза меньше хода винтовой линии звена b
(РАЬ). Если сателлит представить в виде винтовой линии
g, то торцовый профиль звена b должен быть в виде ли-
нейной направляющего элемента/кулисы. При взаимном
перекатывании винтовых линий точка В перемещается в
направлении скорости vBC к центру С. Последовательным
положениям точек В', В", В'" соответствуют положения
направляющего элемента/кулисы. Если задать опреде-
ленную форму одного звена в точке контакта В, то ей
будет соответствовать взаимоогибаемая форма другого
звена. По данной схеме выполняют, в частности, винто-
ПОЛУЧЕНИЕ ВАРИАНТОВ КОНСТРУКТИВНЫХ РЕШЕНИИ
73
27.3. КОНСТРУКТИВНЫЕ РАЗНОВИДНОСТИ ПРОСТЕЙШИХ МЕХАНИЗМОВ
ТРЕХЗВЕННЫЙ ДВУХПОЛЗУННЫЙ
КЛИНОВОЙ МЕХАНИЗМ
9.1 | Сила сопротивления
ЧЕТЫРЕХЗВЕННЫЙ
КЛИНОВОЙ МЕХАНИЗМ
I 9-za | Движущая
ПппЗУН 1 ГИ-ia
сила
Шарик
- промежуточное
2
ПРЕОБРАЗОВАНИЕ ПЛОСКОГО ЧЕТЫРЕХЗВЕННОГО
КЛИНОВОГО МЕХАНИЗМА В ПРОСТРАНСТВЕННЫЙ
МЕХАНИЗМ ДЛЯ ВСЕСТОРОННЕГО ПРЕССОВАНИЯ
СИНУСНЫЙ МЕХАНИЗМ
-РАЗНОВИДНОСТЬ
КРИВОШИПНО-ПОЛЗУННОГО
МЕХАНИЗМА
|~| 0.21 Шатун
Ползун
ТАНГЕНСНЫЙ МЕХАНИЗМ
-РАЗНОВИДНОСТЬ
КУЛИСНОГО МЕХАНИЗМА
Шатун
ПАНТОГРАФ СИЛЬВЕСТРА
-РАЗНОВИДНОСТЬ ПЯТИЗВЕННОГО ШАРНИРНОГО МЕХНИЗМА
С ДВУМЯ СТЕПЕНЯМИ СВОБОДЫ
74
ПОСТРОЕНИЕ СТРУКТУРНЫХ, КИНЕМАТИЧЕСКИХ И КОНСТРУКТИВНЫХ СХЕМ
вой насос (схема 8.21а). В нем задается с помощью кар-
данной передачи движение червяку (звену g на схемах
8.14 и 8.21). Ось червяка смещена относительно оси кор-
пуса на величину е = АС. Между червяком и корпусом
образуются замкнутые полости Qb которые перемеща-
ются в осевом направлении от входа I вязкой среды к
выходу О.
Еще один прием получения конструктивных разно-
видностей проиллюстрируем на примере клинового ме-
ханизма. Обычно при использовании такого механизма
определяющим является клиновой эффект преобразова-
ния сил. А между тем под определение клинового меха-
низма (использование только поступательных пар) попа-
дает и частный случай, когда угол давления равен 0 (см.
схемы 9.4 ... 9.5 без учета приводов).
На схеме 9.1 - трехзвенный клиновой механизм, а на
схеме 9.1а - его исполнение в виде инструмента для про-
резания канавки при относительном вращении заготовки
и инструмента. При перемещении ползуна 1 вдоль на-
правляющей с помощью гайки (на схеме 9.1 см. "Движу-
щая сила") ползун 2 взаимодействует с направляющей и
резцу сообщается радиальное перемещение и преодоле-
вается сила сопротивления. Возвратное движение обес-
печивают пружины 7 и 2. Данный клиновой механизм
предназначен для изменения направления движения вы-
ходного звена относительно входного и преобразования
движущей силы.
На схеме 9.2 четырехзвенный клиновый механизм, а
на схеме 9.2а его конструктивное исполнение, исполь-
зуемое в прессе.
Входному звену-ползуну 1 сообщают поступатель-
ное движение в направлении стрелки. Оно преобразуется
в поступательное движение ползунов 1 и 2 относительно
основания. Причем ползун 2 движется навстречу ползу-
ну 1. Между ползунами 7 и 2 размещают заготовку.
На схеме 9.3 а представлено конструктивное испол-
нение четырехзвенного механизма по схеме 9.3, предна-
значенного для обеспечения нажатия, например, при пе-
реключении передач, включении муфты и т.п.
Особенности данного решения заключаются в ис-
пользовании высших (кинематических) пар и конусных
поверхностей в качестве направляющих. Шарик эквива-
лентен промежуточному звену на схеме 9.3, но он в силу
"лишней" степени свободы, местной подвижности само-
устанавливается из условия минимальных потерь энер-
гии на трение.
Ползун 2 - втулку с конусной внутренней поверхно-
стью перемещают в направлении движущей силы. Пол-
зун 2 вдавливает промежуточные звенья, например ша-
рики, между двумя конусами направляющей и ползуна 2.
Ползун 1 движется, преодолевая силу сопротивления,
значительно большую, чем движущая сила, благодаря
различию углов конусов взаимодействующих звеньев.
При полном "утапливании" шариков они контактируют с
цилиндрической поверхностью ползуна 2, обеспечивая
надежное запирание ползуна 1 в направлении силы со-
противления. Самоторможение ползуна 1 будет иметь
место также при условии, когда угол клина втулки (поло-
вина угла конуса) меньше угла трения.
На схемах 9.1, 9.2 и 9.3 — плоские механизмы для
принудительного сжатия (сближения стенок) вдоль двух
осей координат X и Y. Стенки, параллельные плоскости
схемы, могут быть неподвижно закреплены или поджаты
пружинами.
На схеме 9.4 — пространственный механизм для
принудительного сжатия вдоль трех осей координат X, Y
и Z. Стенки АВ, ВС, CG и AG соединены в замкнутую
кинематическую цепь посредством поступательных ки-
нематических пар А, В, С и G.
В схеме 9.4 корпус гидроцилиндра D1 неподвижен,
а его шток перемещает точку С по диагонали АС, стенки
ВС и CG перемещаются на одинаковые величины вдоль
осей Z и Y соответственно, независимо от сопротивления
сжимаемого тела.
В схеме 9.4а шарнирные соединения гидроцилиндра
D1 обеспечивают примерное равенство сил сопротивле-
ния Fy и Fz - реакций со стороны сжимаемого тела.
В схеме 9.46 гидроцилиндры D1 и D2 могут пере-
мещать соответственно стенки ВС и CG независимо один
от другого и независимо от величин сил Fy и Fz.
В схеме 9.5 обозначения и размещения стенок и
гидроцилиндров в сечении YZ те же, что и в схеме 9.4.
Показаны стенки 1 и 2, дополняющие грани (камеры)
ABCG, A'B'C'G'. Стенка 1 неподвижна, а стенка 2 может
перемещаться с помощью гидроцилиндра D3. Принуди-
тельно перемещают только три стенки, а стенка АВА'В'
образует с основанием поступательную пару N и поджата
пружиной Ех, стенка АОО'А' образует со стойкой двух-
подвижную плоскостную пару (см. элементы L и М) и
поджата к другим стенкам пружиной ЕХу. Данный меха-
низм позволяет иметь камеру в виде параллелепипеда с
различным соотношением размеров граней. Предельный
случай сближения граней - точка А. Это уникальная осо-
бенность такого механизма.
В том же аспекте получения отдельных разновидно-
стей показаны примеры преобразования других видов
механизмов (схемы 10.1 ... 12.2).
В схеме 10.2 кривошип 1 в виде эксцентрика поме-
щен внутрь шатуна 2, который расположен внутри пол-
зуна 3.
В схеме 11.2 кулиса 1 помещена внутрь шатуна 2,
который находится внутри шарнира В, установленного
внутри ползуна 3.
В схеме 12.2 шарнир М размещен внутри шарни-
ра С. Остальные шарниры N, К, L оставлены без измене-
ний по сравнению со схемой 12.1. Воспроизводящая точ-
ка О, лежащая на линии OCI, размещена на звене ML
внутри шарнира М. В такой схеме добиваются самотор-
можения звеньев при внешнем воздействии на звено ML,
приложенном в точке О. Исполнение по схеме 12.2 по-
зволяет осуществлять воспроизведение точкой О траек-
тории, подобной траектории точки I при многократном
уменьшении перемещений.
Приведенные приемы могут быть использованы по
отношению к другим механизмам. Они позволяют полу-
чать механизмы с различными габаритными размерами,
силовыми и энергетическими характеристиками.
Глава 3. МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
3.1. ОБЩИЕ ПОЛОЖЕНИЯ И
ТЕНДЕНЦИИ
Одна из самых старых задач конструирования - пе-
редача механической энергии от источника (привода) к
исполнительному устройству (рабочему органу, выход-
ному/ведомому звену).
Исторически системы передачи механической энер-
гии изменялись и совершенствовались во взаимосвязи с
появлением и развитием систем тепловой, электрической
и других видов энергии. Вначале стояла задача объеди-
нить и приумножить усилия нескольких человек или до-
машних животных для передвижения тяжеловесных
предметов, т.е. создавались системы с параллельной пе-
редачей и суммированием энергии.
Появление преобразуемых систем на основе рычага
(ворота, полиспаста) определило возможность создания
однопоточных систем, в которых роль привода отводи-
лась одному человеку. Практика однопоточных систем
укоренилась с появлением гидравлических и ветровых
источников энергии. Изобретения пароатмосферного
двигателя не изменило данную тенденцию.
Каждый из первых промышленных двигателей То-
маса Ньюкомена (начало XVIII века) был предназначен
для привода одного исполнительного устройства —
поршневого насоса для откачки воды из шахты. И только
в машине Ивана Ползунова от одного пароатмосферного
двигателя приводились два исполнительных устройства —
насос и воздуходувка, соединенные с двигателем про-
стейшими механическими передачами.
В то же время Иван Шлаттер предложил альтерна-
тивный проект многопоточного разветвленного привода
с гидравлическими передачами движения.
Хотя самые первые паровые машины Джеймса Уат-
та в основном использовались для привода одного ис-
полнительного устройства, тем не менее, начиная с эпохи
создания искусственных источников энергии, определи-
лась тенденция широкого применения группового (раз-
ветвленного) привода.
Объясняется это сложностью и высокой стоимостью
двигателей и простотой механических передач движения.
Данное соотношение не изменялось сравнительно долго
и после изобретения электрического двигателя.
Широкое применение получил привод большого
числа станков от одного двигателя, осуществляемый че-
рез ременную трансмиссию.
И, наконец, современный этап, когда двигатели ста-
ли компактными и относительно дешевыми, не только
характеризуется индивидуальным приводом (один двига-
тель для одного исполнительного устройства), но и на-
блюдается тенденция создания многодвигательных уст-
ройств. Данная тенденция обусловлена определенными
достоинствами многопоточных систем. Причем ниже
пойдет речь не только о много двигательных приводах, но
и о многопоточных механических передачах, которые
появились еще раньше, а также о принципах многопо-
точности передачи/восприятия нагрузки в механических
соединениях, история применения которых еще более
продолжительна.
Итак, многопоточная система в данном представ-
лении - это параллельное (в энергетическом, кинемати-
ческом или силовом/нагрузочном смысле) размещение
нескольких кинематических цепей/соединений или не-
скольких кинематических пар, или нескольких непод-
вижных соединений. К таким системам относятся (см.
отдельные примеры на рис. 28):
• планетарные многосателлитные передачи, в том
числе частные варианты с неподвижными осями колес,
передачи с многопарным зубчатым зацеплением (напри-
мер, волновые зубчатые передачи), многодисковые ва-
риаторы скорости, многоэлементные винтовые передачи,
многодисковые фрикционные сцепные муфты и т.п.;
• многоэлементные (например, шлицевое соеди-
нение в сравнении со шпоночным) и групповые непод-
вижные соединения, в том числе многоэлементные упру-
гие соединительные муфты и др.;
• многопоточные (замкнутые) механические пере-
дачи движения с постоянным передаточным отношением;
• многопоточные (замкнутые) комбинированные
передачи с изменяемым (регулируемым) передаточным
отношением одной из параллельных ветвей;
• многодвигательные приводы с неподвижным со-
единением выходных звеньев каждой из параллельных
ветвей с общим выходным звеном;
• многодвигательные приводы с дифференциаль-
ным соединением (через суммирующий механизм) вы-
ходных звеньев каждой из параллельных ветвей с общим
выходным звеном;
• многодвигательные приводы с двумя и более
выходными звеньями с соединением ветвей системы
через дифференциальный (разветвляющий, суммирую-
щий) механизм;
• разветвленные механические трансмиссии, при-
соединяющие одновременно или выборочно несколько
выходных звеньев к общему двигателю;
• многопоточные многоподвижные манипули-
рующие механизмы (новое направление в конструирова-
нии таких систем).
Что же дает многопоточность при одинаковой
функции сравниваемых устройств (характера воспроиз-
водимого движения, несущей/нагрузочной способности)?
1. Дробление энергетического потока приводит к
уменьшению размеров и массы каждого из элементов
или звеньев параллельных ветвей, но происходит это не
пропорционально уменьшению нагрузки, а в большей
мере, так как "срабатывает" масштабный эффект (size
effect) - влияние размеров объекта на изменение характе-
ристик сопротивления усталости, трения и изнашивания
и т.п.
76
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
28. МНОГОПОТОЧНЫЕ ПЕРЕДАЧИ ВРАЩЕНИЯ (ПРИНЦИПИАЛЬНЫЕ РЕШЕНИЯ)
h водило W - выходное звено,
D - двигатель G - механическая передача исполнительное устройство
Неподвижные соединения выходных звеньев приводов
Распределение нагрузки
между при водам и
с "жесткой"
характеристикой
Многодвигательный привод
вращения
платформы
зкекаватора
Соединения приводов через механизмы свободного хода (1,2),
соединения передач через уравнительные
устройства S (звенья 3,4,5)
g. f. с, к -промежуточные
колеса
а - центральное
колесо
W
f J [
1 S1 3
2
G
G3
а
G4
G4
Привод несущего винта вертолета
D1
Последовательное
соединение
Параллельное
соединение
Двухпоточные передачи
| Схема 21
/дифференциальный механизм
V- регулируемая ветвь (вариатор)
Трехпоточная передача с регулируемым
передаточным отношением zDW
Вариант 2
S2
SI -D
р
S2~l-W
SI
Pmy- мощность регулируемой ветви
у в долях общей мощности PD
*rnv\
(dw-A5
0,/7Pd
0,67Pd
_UIdw
п,т
и nV, mV- основные звенья и агрегаты регулируемой ветви
.1,2- сцепные управляемые муфты
Т - вращающий момент
со - угловая скорость
Многодвигательный разветвленный
ОБЩИЕ ПОЛОЖЕНИЯ
77
Чем меньше диаметр заготовки, тем выше достигае-
мые механические свойства материала, тем больше тех-
нологических возможностей совершенствования геомет-
рической формы и точности ее воспроизведения, а также
уменьшения шероховатости поверхности. Уменьшение
размеров приводит к снижению линейных скоростей
звеньев и скоростей скольжения, что позволяет умень-
шить виброактивность системы, легче решить проблемы
виброзащиты, снизить потери на трение, выбрать более
рациональные решения подшипников и уплотнений,
обеспечить герметичность соединений и т.п.
2. Уменьшение размеров детали может привести к
изменению схемы ее нагружения и возможности измене-
ния геометрической формы в сторону ее упрощения —
сравните, например, форму сателлита в виде кольца с
зубьями с формой обычного зубчатого колеса, содержа-
щего обод, диск и ступицу.
3. Чем меньше размеры деталей, тем легче осущест-
вить автоматизацию обработки и сборки. В конечном
итоге стоимость изготовления нескольких однотипных
деталей или элементов может быть уменьшена по срав-
нению со стоимостью изготовления одной крупной детали.
4. Варьированием количества двигателей, редукто-
ров, соединений в одной системе можно добиться рацио-
нального использования унифицированных, уже выпус-
каемых сборочных единиц, в том числе используемых в
других системах.
5. В многодвигательном приводе (приводе несущего
винта вертолета на рис. 28) обеспечивается его резерви-
рование на случай выхода из строя одной из ветвей сис-
темы.
6. В многопоточных передачах с регулируемым пе-
редаточным отношением (см. двух- и трехпоточные пе-
редачи на рис. 28) можно иметь регулируемую ветвь
меньшей установленной мощности, чем мощность при-
вода в целом. А поскольку регулируемое устройство
имеет более высокую стоимость и более низкий КПД,
чем зубчатые передачи, за счет этого общая стоимость
может быть уменьшена, а КПД увеличен.
7. В многопоточных манипулирующих системах
можно добиться размещения всех приводов на основа-
нии, т.е. разгрузить подвижные звенья от силы тяжести
приводов, из звеньев соорудить систему в виде жесткой
пространственной фермы (в фиксированном состоянии).
Благодаря этому, а также использованию других приемов
можно существенно повысить точность манипулирования.
Имеются и другие преимущества многопоточных
систем, но в то же время любое направление в конструи-
ровании не лишено недостатков, поэтому в каждом кон-
кретном случае многоступенчатую систему нужно рас-
сматривать как альтернативный вариант (или варианты)
однопоточной системе и выбирать из них наиболее под-
ходящий для решения поставленной задачи.
Далее охарактеризуем отдельные виды многопоточ-
ных передач вращения, приведенных на рис. 28, и кос-
немся проблем, которые возникают при их конструиро-
вании.
Кроме конкретных кинематических схем, приведе-
ны обобщенные структурные схемы, в которых одно-
именные блоки одинаково обозначены на всех схемах и
представляют собой двигатели/входные звенья D, меха-
нические передачи (редукторы, реже мультипликаторы)
G, суммирующие [распределительные, дифференциаль-
ные] механизмы S, выходные звенья/рабочие орга-
ны/исполнительные устройства W.
Подстановкой вместо блока предпочтительного
конструктивного решения можно получить, кроме при-
веденных, другие варианты. В практике конструирования
встречается очень много аналогичных вариантов, содер-
жащихся, в частности, в патентной литературе.
В планетарной многосателлитной зубчатой пере-
даче стремятся разместить из условия соседства как
можно больше сателлитов. Однако их число ограничено,
когда используют водило типа "беличьей клетки", из-за
размещения перемычек между сателлитами и необходи-
мого условия равномерного распределения нагрузки по
сателлитам.
При числе сателлитов более трех создать систему
без избыточных связей (см. параграф 4.2) сложно или
вообще невозможно, поэтому чаще используют передачи
с тремя сателлитами или добиваются равномерного на-
гружения за счет высокой точности изготовления передачи.
На рис. 28 показана схема, в которой использованы
сателлиты со смещенными в осевом направлении зубча-
тыми венцами g' и за счет этого число сателлитов увели-
чено в 2 раза по сравнению с традиционными решениями.
В системах с неподвижным соединением выход-
ных звеньев приводов возникает та же проблема рас-
пределения нагрузки, но уже между отдельными двига-
телями. Если использовать двигатели с "жесткой" меха-
нической характеристикой, то при незначительном раз-
личии характеристик и одинаковых угловых скоростях,
обусловленных неподвижным соединением, вращающие
моменты могут быть различными по значению (индексы
при обозначениях моментов и скоростей на схеме свиде-
тельствуют о принадлежности к соответствующему дви-
гателю).
Применение такой системы допустимо при последо-
вательном электрическом соединении двигателей (оди-
наковая сила тока обеспечивает равенство нагружения
двигателей) или при "мягкой" характеристике соединяе-
мых ветвей привода.
В примере привода несущего винта вертолета
аналогичная проблема дополнена очень важными требо-
ваниями: двигатели не должны мешать (создавать сопро-
тивление) друг другу (например, при их последователь-
ном запуске или при остановке вала одного из двигате-
лей); вращающий момент должен передаваться только в
одном направлении (от двигателя к несущему винту); в
случае отключения обоих двигателей винт должен про-
должать свободно вращаться и обеспечивать планирова-
ние вертолета.
Достигаются эти качества за счет введения в ветвь
каждого из двигателей механизма (муфты) свободного
хода 7 и 2. Для выравнивания нагрузки между отдельны-
ми ветвями зубчатых передач используют уравнительные
зубчатые муфты с общим звеном 3 и зацепляющимися с
ним зубчатыми венцами 4 и 5.
78
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
В группе двухпоточных передач показано, как од-
нопоточная передача при последовательном соединении
превращается в двухпоточную (замкнутую) при парал-
лельном соединении. Достаточно в первой схеме поме-
нять местами неподвижное звено 0 с выходным или
входным звеном. Передаточные отношения в этом случае
связаны зависимостями:
ZDW = 1 - Zoo; ZDW = 1/ZWD>
где порядок индексов обозначает, отношение скоростей
каких звеньев имеется в виду.
Функциональные особенности различных схем
двухпоточных и трехпоточных передач по сравнению
с однопоточной передачей следующие:
- получение большего передаточного отношения
(например, если в приведенных формулах задать zDo
близким к 1. то zDW приближается к 0, a zWD, соответст-
венно, очень велико) или диапазона регулирования при
соответствующем снижении КПД из-за циркуляции энер-
гетического потока внутри передачи;
- получение более высокого КПД и меньшей уста-
новленной мощности агрегатов регулируемой ветви при
соответствующем уменьшении передаточного отношения
и/или диапазона регулирования скорости.
Следующая особенность обусловлена параллельной
передачей энергии по двум или более ветвям и соответ-
ствующим уменьшением потерь энергии в регулируемой
ветви меньшей мощности, чем при последовательном
соединении.
Отсутствие циркуляции энергии в таких передачах
имеет место только при определенных параметрах.
В примере замкнутого редуктора по схеме 1 при неболь-
ших передаточных отношениях составляющих планетар-
ных механизмов можно получить общее передаточное
отношение, во много раз превышающее произведение
передаточных отношений, присущее последовательному
соединению передач. Например, при is = -4,118 (числа
зубьев колес а и b соответственно z„ = 17; zb = 70); zG = -4,0
(передаточные отношения приведены при остановленном
водиле), используя приведенные выше зависимости
можно получить zDW = -173. В данной схеме чем больше
величина общего передаточного отношения, тем ниже
КПД передачи из-за многократной циркуляции энергии.
В схеме 2 вариатор G(V) имеет диапазон изменения
передаточного отношения z'g(v) = —0,5 ...—2, механизм S
имеет zs = -3, а общее передаточное отношение получи-
лось zDW = —8,0 ... -0,8, т.е. диапазон регулирования j ве-
личился в 2,5 раза.
В схеме 3 в качестве дифференциального механизма
использован фрикционный вариатор S(V), который имеет
диапазон регулирования всего -0,25 ... -0,5, и если за-
дать zG = -5,0, то общий диапазон увеличивается в 3 раза,
причем в данной схеме вариатор нагружен так же, как и
при его последовательном соединении с зубчатой пере-
дачей.
Структурные схемы трехпоточных передач могут
быть всего двух видов (см. варианты 7 и 2), а кинемати-
ческих схем по ним можно составить множество, под-
ставляя вместо S1 и S2 различные варианты механизмов.
Приведенный пример кинематической схемы представ-
ляет собой систему с изменяемой структурой — электро-
механическую передачу непрерывно-ступенчатого регу-
лирования. При переключении сцепных муфт 7 и 2 пере-
дача преобразуется в трехпоточную (выключена муфта 2
и включена муфта 7). Это сделано для того, чтобы ис-
ключить циркуляцию энергии в диапазоне регулирования
передаточного отношения: 1/z'dw = 0 ... 0,75.
На диаграмме штриховыми линиями показано изме-
нение мощности в регулируемой ветви при отсутствии
переключения с одной схемы на другую. Значение im.
при котором желательно производить переключение,
характеризуется величиной PmV = 0. В диапазоне 1/z'dw =
= 0,75 ... 2,0 имеет место циркуляция энергии, но значе-
ние PmV не превышает значения PD. Как следует из пред-
ставленной диаграммы, в режиме трехпоточной передачи
мощность регулирования ветви во много раз меньше об-
щей мощности привода, но диапазон регулирования сис-
темы в целом меньше диапазона регулирования отдель-
ной ветви.
Группа схем разветвленных передач на рис. 28
представлена вариантами, в которых суммирование или
распределение энергетических потоков осуществляется
посредством дифференциального механизма S или меха-
низмов SI, S2.
Многодвигательный разветвленный привод
подъемного устройства имеет два двигателя D1 и D2
различные сочетания включения которых позволяют
иметь четыре скоростных режима однонаправленного
вращения выходных звеньев - барабанов W1 и W2 при
равенстве нагрузок на барабанах - моментов TWi и Ту,?-
При различии нагрузок будет вращаться только один,
менее нагруженный барабан.
Такая схема предпочтительна для многоканатной
подвески грузоподъемного устройства, поскольку она
позволяет упростить полиспастную систему и/или обес-
печить более точное выравнивание нагрузки между вет-
вями канатов.
Многодвигательный многоскоростной привод
позволяет за счет различных сочетаний включения, ре-
версирования и выключения двигателей DI, D2 и D3
иметь 13 режимов однонаправленного вращения выход-
ного звена W.
При использовании многодвигательных многоскс -
ростных приводов возникает проблема согласования по
времени включения и выключения двигателей. Напри-
мер, при переключении с рабочей скорости на "посадоч-
ную", если один двигатель уже выключен, а второй еш
не включен, то кинематическая цепь на какое-то мгнове-
ние разорвана и поднимаемый груз начинает падать. Ес-
ли при этом сделать наоборот: включить второй двиге -
тель, а затем выключить первый, то имеет место цирк, -
ляция энергии и непредсказуемое, хотя и менее опасное
суммирование скоростей. В этой связи использование
таких систем возможно только при хорошо отработанна
управлении двигателями и тормозами.
В автомобилях и тракторах разветвленные меха-
нические трансмиссии применяются практически с са-
мого начала производства этих машин. Для исключени |
ПРИВОДНЫЕ ДВУХПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
79
пробуксовки колес (при различии проходимости ими
пути) в кинематическую цепь установлен дифференци-
альный механизм. Несмотря на сохранение общей идеи,
схемы трансмиссий до сих пор продолжают совершенст-
воваться в следующих направлениях:
для многоосных автомобилей и базовых шасси с
приводом на каждую ось применяют многократно раз-
ветвленные трансмиссии, один из примеров которых
представлен на рис. 28;
предусматривают блокировку распределительного
механизма (включение муфты 7) и/или отключе-
ние/подключение группы выходных звеньев, осуществ-
ляемое, в частности, муфтами 2 и 3.
Для гусеничных машин предусматривают воз-
можность изменения режимов отдельно в каждой из вет-
вей, вплоть до ее отключения и торможения. За счет это-
го обеспечивается поворот транспортного средства.
Разветвленно-замкнутая трансмиссия позволяет по-
лучать как несколько общих режимов движения (напри-
мер, за счет многоскоростной передачи MG), так и не-
сколько режимов в каждой из ветвей, соединенных с вы-
ходными звеньями (за счет включения муфт 2, 6 или
тормозов 3, 5).
Поскольку возможных вариантов схем очень много,
задача выбора наиболее подходящей схемы очень слож-
ная. Имеются, например, схемы, в которых в одной из
общих разветвляющих точек установлен дифференци-
альный механизм. Известны схемы, в которых увеличе-
ние передаточного отношения в одной ветви приводит к
уменьшению передаточного отношения в другой ветви,
что позволяет сохранить среднюю скорость движения
машины при ее повороте. Естественно, в данном прило-
жении описать все варианты невозможно, а приведенные
сведения можно использовать при определении путей
поиска новых решений, в том числе не только для данно-
го типа машин.
Тенденции развития трансмиссий свидетельствуют
о том, что при сохранении многопоточности в качестве
ветвей системы используют электромеханические (осо-
бенно для большегрузных автомобилей) или гидравличе-
ские передачи. При этом привод выполняют в виде мо-
тор-редуктора и встраивают его в ступицу колеса или
звездочку гусеничного хода (примеры встраивания при-
вода в выходное звено см. рис. 22, 26).
Одним из новых направлений конструирования яв-
ляется использование принципа многопоточности в мно-
гоподвижных (с несколькими степенями свободы) мани-
пулирующих системах — механизмах, в которых выход-
ное звено образует кинематические пары только с под-
вижными звеньями или в частном случае - сферическую
пару с неподвижным звеном. Считается, что начало это-
му направлению положено в 60-х годах созданием так
называемой платформы Стюарта (подробно см. описание
рис. 34. 35) - механизма с шестью приводными кинема-
тическими цепями, параллельно (в энергетическом или
силовом смысле) присоединенными к выходному звену.
Подобные системы были известны и до публикации
Стюарта, а трех-, четырехподвижные многопоточные
соединения использовались, в частности, для изменения
общего и циклического шага несущего винта вертолета,
для манипулирования планировочным отвалом автогрей-
дера и для других функциональных задач. В первых кон-
струкциях шестиподвижных систем в качестве привод-
ных цепей использовали гидроцилиндры, образующие
сферические пары с неподвижным и выходным звеньями.
Главные особенности многоподвижной многопо-
точной системы по сравнению с манипуляторами, по-
добными по своей кинематической схеме руке человека,
следующие:
вместо податливой незамкнутой кинематической
цепи получается жесткая пространственная система в
виде фермы (при заторможенных приводах);
вместо последовательной передачи энергии через
всю цепь присоединенных приводов энергия передается
от каждого привода через собственную кинематическую
цепь кратчайшим путем;
вместо того, чтобы со всеми звеньями кинематиче-
ской цепи перемещать еще и приводы, смонтированные
на этих звеньях, приводятся в движение только звенья
кинематической цепи, а привод может быть размещен на
основании или в непосредственной близости от основания.
Данные особенности позволяют получать ряд поло-
жительных качеств, таких, как более высокие грузо-
подъемность или точность манипулирования, а также
более высокий КПД и меньшая установленная мощность
приводов.
Следует, однако, обратить внимание на возможное
уменьшение маневренности. Еще одно обстоятельство,
которое ранее препятствовало применению таких систем -
это усложнение системы управления (хотя и не во всех
случаях). Поскольку это усложнение обычно вычисли-
тельного плана, то при современной вычислительной и
приводной технике оно легко разрешается.
Все же данное направление следует развивать не
вместо традиционных решений, а в дополнение к ним.
Кроме того, представляются перспективными комбини-
рованные решения с применением как параллельного,
так и последовательного соединения кинематических
цепей.
Хотя каждый из видов многопоточных систем за-
служивает внимания, ниже остановимся лишь на прин-
ципах построения схем многоподвижных многопоточных
(в основном пространственных стержневых [рычажных])
механизмов.
3.2. ПРИВОДНЫЕ ДВУХПОДВИЖНЫЕ
МНОГОПОТОЧНЫЕ [ПАРАЛЛЕЛЬНОЙ
СТРУКТУРЫ] СОЕДИНЕНИЯ
По сравнению с последовательным соединением
двух и более приводных пар схем параллельного со-
единения может быть построено очень много, поэтому
ограничимся только обобщенными структурными схема-
ми и отдельными примерами исполнений кинематиче-
ских и конструктивных схем. Простейшие решения, ко-
торые могут быть использованы как завершенные мани-
пулирующие механизмы с числом степеней свободы две-
три, так и в качестве составляющих сложных систем,
представлены на рис. 29 ... 31.
80
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
29. ПРИВОДНЫЕ ДВУХПОДВИЖНЫЕ (ОДНОКОНТУРНЫЕ) СОЕДИНЕНИЯ
г D1
L D2
ВОСПРОИЗВЕДЕНИЕ ДВИЖЕНИЯ
В ПЛОСКОСТИ
S - суммирующее соединение
или дифференциальный
механизм
А, В, С,кинематические
пары
ABCMN-
IV.
Планетарная
коническая
зубчатая
передача
Поступательная
одноподвижная
пара
Гидроципиндр D1
разгружен
от поперечной
силы.
a,g- зубчатые
колеса
Звено 1 принято
за неподвижное
(основание),
звено 2 -
выходное звено
соединения.
Приводы D1 и D2
предназначены
для поворотов
Звена 2
(вокруг осей
шарниров А и С
соответственно).
Существенный изгиб штока
и перекос поршня
в гидроцилиндре
Карданная
передача
ВОСПРОИЗВЕДЕНИЕ
СФЕРИЧЕСКОГО
ДВИЖЕНИЯ
сферический механизм
IVr двухподвижная
сферическая
пара
V, - одноподвижная
поступательная
пара
Водило
Простейшая обобщенная структурная схема 1.1
(рис. 29) - два привода D1 и D2 соединены между собой
через дифференциальный механизм S. В любом приводе
имеются два основных звена: корпус и выходное (при-
водное) звено. В схеме 1.1 звено 1 (например, основание)
соединено неподвижно с каждым из приводов (например,
с корпусом), а движения двух других звеньев приводов
суммируются [преобразуются] в механизме S в движение
звена 2. Варианты механизмов, исполненных по данной
схеме, приведены на схемах 2.1 ... 3.4, причем приводы
поступательного движения даны на схемах 2.2 ... 2.2в, а
остальные схемы имеют приводы вращательного движения.
В простейшем пятизвенном двухкоромысловом
механизме (схема 2.1) двигатели D1 и D2 приводят в
движение коромысла АС и BL. Выходное звено — шатун 2
(звено 1 здесь и далее принято за основание, хотя можно
использовать механизм с неподвижным звеном 2 и под-
вижным звеном 1 или при обоих относительно подвиж-
ных звеньях 7 и 2 в более сложной схеме). Звено 2 со-
вершает сложное плоское движение, которое может быть
представлено в виде двух угловых перемещений (штри-
ховые стрелки).
В схеме 2.2 аналогичное движение может быть по-
лучено с помощью двух приводов поступательного дви-
жения - гидроцилиндров D1 и D2. Линия BL не обяза-
тельно должна лежать в плоскости с осью штока гидро-
цилиндра D1, т.е. механизмы по схемам 2.1 ... 2.2в в м
щем случае пространственные.
Шток гидроцилиндра D1 в схеме 2.2 воспринимая
консольную нагрузку со стороны звена 2, что приводит ь
его изгибу и перекосу поршня в гидроцилиндрв
(схема 2.2а). В схемах 2.26, 2.2в оба гидроцилиндра нг
гружены только осевыми силами. Для этой цели введет
дополнительные звенья: СР и АС (соответственно в сх.
мах 2.26 и 2.2в).
На схемах 3.1 ... 3.4 представлены варианты мех^
низмов, воспроизводящих с помощью двух приводов I
и D2 сферическое движение выходного звена 2.
В схеме 3.1 представлен классический пятизвенньЛ
сферический шарнирный механизм (он использован, н.
пример, в качестве структурной единицы в схеме 3.8а ц
рис. 24).
В схеме 3.2 звено 2 так же, как и в схеме 3.1, уст,
новлено с возможностью вращения в шарнире С. Пов,1
рот звена 2 вокруг оси шарнира А осуществляют неп,
средственно двигателем D1 через водило АС. Вращеня
звена 2 вокруг оси шарнира С осуществляют приводе I
D2, который соединен со звеном 2 с помощью двухпо,
вижного сферического шарнира IV5, (сферическую сь
хронную муфту).
Поскольку соединение IV5 может передавать вран I
ние при ограниченных углах поворота звена АС, друп J
вариантом, в котором снимается данное ограничен' I
ПРИВОДНЫЕ ДВУХПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
81
является схема 3.4, в основу которой положена планетар-
ная коническая зубчатая передача. Движения водила и
зубчатого колеса А взаимозависимы, поэтому, чтобы по-
ворачивать звено 2 вокруг оси шарнира А, двигатели D1
и D2 должны вращаться в одну сторону, а вращать зве-
но 2 вокруг оси шарнира С можно с помощью двигателя
D2 при остановленном двигателе D1.
Механизм на схеме 3.3 отличается от механизма на
схеме 3.2 только тем, что вместо муфты IV, в нем ис-
пользована карданная передача. Хотя в этом решении и
не требуется точного совмещения осей шарниров IV, и А,
но в системе управления должна быть учтена несинхрон-
ность вращения соединенных валов в кинематической
цепи привода D2 при повороте звена АС.
В схеме 4.1 (рис. 30) использован суммирующий
механизм с тремя степенями свободы, хотя приводное
соединение в целом двухподвижное, что несколько ус-
ложняет согласованное управление двигателями, но в то
же время позволяет "ужесточить" систему соединения
выходного звена 2 с основанием 1 - осуществить ее в
виде пространственной фермы (при остановленных дви-
гателях), содержащей три кинематических цепи, из кото-
рых две цепи приводные (CLK и CMN), а третья цепь
(СА) может иметь всего две кинематические однопод-
вижные пары. Возможен в данной системе тот частный
случай, упомянутый выше, когда третья цепь вырождает-
ся в одну сферическую пару IV5 (схема 4.2), расположен-
ную в центре сферического движения.
На всех структурных схемах ветвь соединения без
привода представлена в виде сплошной линии. Только
условно можно считать, что по такой ветви (или ветвям)
передается поток энергии, правильнее следует говорить
лишь о силовом взаимодействии (о восприятии нагруз-
ки). Несмотря на некоторые потери энергии на трение,
таким ветвям может быть придана очень важная функция
(см. описание схемы 6.2). Такого вида ветви следует вво-
дить в системы с небольшим числом степеней свободы,
когда приводные кинематические цепи не позволяют
создать достаточно жесткую конструкцию. Располагать
их надо в направлении кратчайшего замыкания сил на
основание (о принципах замыкания сил речь пойдет
ниже).
82
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
Все приведенные примеры, в основу которых поло-
жена структурная схема 4.1, предназначены для воспро-
изведения вращательных движений вокруг двух пересе-
кающихся в точке С осей (воспроизведения прецессии
выходного звена), но возможны исполнения и другого
типа.
В схеме 4.3 выходное звено 2 соединено с основани-
ем через звено С*А и два цилиндрических шарнира с
пересекающимися осями (эквивалент двухподвижной
сферической пары с центром в точке С), а с приводами
D1 и D2 - через коромысло LM. Шарниры, образуемые
приводами с основанием, обозначены К и N. Буквами С*
и С** обозначены дублирующие шарниры пары С.
Данная схема предусматривает совместную работу
гидроцилиндров: при движении штоков в одну сторону
звено 2 поворачивается вокруг оси Z; при движении их в
разные стороны — вокруг оси X. В принципе, можно
включать и один привод, но в этом случае вращение зве-
на 2 происходит вокруг подвижной оси (например, оси
СМ или CL), т.е осуществляется прецессия. В общем
случае заданное движение можно получить при совмест-
ной работе приводов, управляемых по определенной про-
грамме.
В варианте на схеме 4.4 сферический шарнир С вы-
полнен трехподвижным, а необходимая связь (чтобы
сделать соединение двухподвижным) выполнена в виде
стержня С*А с шарнирами на концах.
Схемы 4.2 ... 4.4 могут быть представлены в виде сфе-
рических механизмов. К выходному звену 2, имеющему
сферическую опору С, присоединены три кинематические
цепи, из которых две выполнены приводными (D1 и D2).
В схеме 4.6 точки С, А и L размещены на одной ли-
нии. Благодаря такому решению осуществлено разделе-
ние функций приводов. Привод D1 способен поворачи-
вать ось CL вокруг оси СС*, а привод D2 может повора-
чивать звено 2 вокруг оси CL (при остановленном приво-
де D1). Возможна также совместная работа приводов.
Схема 4.7 отличается от схемы 4.3 тем, что в ней
использованы приводы D1 и D2 вращательного типа.
Входные звенья соединены с выходным звеном через
шатуны LB и ME соответственно. При этом образованы
два шарнирных параллелограмма KLBC и NMEA, а оси
шарниров К и N пересекают линию, проходящую через
точку С.
Схема 4.5 характеризуется использованием плане-
тарной конической передачи. Функционально она не от-
личается от схемы 4.3: вращение входных звеньев - ро-
торов двигателей - в одну сторону приводит к вращению
зубчатого колеса f и соответственно звена 2; если при
этом реверсировать один из двигателей, то колесо пере-
станет вращаться, а начнет поворачиваться водило h.
Так же, как и в других схемах данного вида, задан-
ное движение может быть воспроизведено при совмест-
ном управляемом движении роторов обоих двигателей.
В структурной схеме 5.1 и в ее исполнении (схе-
ма 5.2) приводы расположены на обоих соединенных
звеньях 1, 2 и воздействуют на соединительное звено 3.
В конкретном варианте они выполнены в виде сильфо-
нов, а поступательное движение штоков преобразуется
во вращательное движение звена с помощью ленточных
передач. Данная схема характеризуется теми же функ-
циональными свойствами, что и схема 4.3, но уступает ей
по качеству, обусловленному местом размещения приво-
дов и числом кинематических цепей, соединяющих вы-
ходное звено с основанием.
Она может быть использована в определенной си-
туации разве что из-за привлекательности компоновки.
Что касается вида примененных в данном примере при-
водов и беззазорных передаточных механизмов, то они
могут быть иными, чем в данной структурной схеме, и
поэтому не отражают ее свойства.
Схема 6.1 уникальна тем, что из шести ветвей сис-
темы только две ветви содержат приводы. Суммирую-
щий механизм при этом должен обладать шестью степе-
нями свободы. В основу таких механизмов положена
структурная группа, класс которой определяют по числ\
кинематических пар, входящих в замкнутый жесткий
контур в качестве узловых точек.
Схема 6.2 представляет собой вариант из класса ква-
зиплоских механизмов. Все точки звеньев такого меха-
низма описывают траектории, несущественно отличаю-
щиеся от плоских траекторий и/или расположены в плос-
костях, близких к параллельным. В то же время такой
механизм по нагрузочной способности соизмерим с про-
странственной фермой. Выходное звено 2 может пере-
мещаться поступательно. Каждая из его точек Р, Е и К
описывает при этом траекторию, расположенную в сфере
с центром R, N и L соответственно, благодаря его соеди-
нению звеньями PR, EN и KL с основанием. При этом
PR = EN = KL и параллельны друг другу.
Выходное звено обладает двумя степенями свободы,
оно соединено со стойкой коромыслом СН и двумя при-
водными парами - гидроцилиндрами D1 и D2. Все шар-
ниры выполнены сферическими.
Данный механизм в отличие от плоского механизма
может воспринимать значительные боковые нагрузки в
направлении F, при этом отсутствуют неблагоприятные
явления, связанные с изгибом звеньев и перекосом эле-
ментов кинематических пар.
3.3. ПРИВОДНЫЕ ТРЕХ- И
ЧЕТЫРЕХПОДВИЖНЫЕ
МНОГОПОТОЧНЫЕ [ПАРАЛЛЕЛЬНОЙ
СТРУКТУРЫ] СОЕДИНЕНИЯ
Приводные трехподвижные соединения приме-
няют как самостоятельные механизмы, так и в состав-.]
четырех-, пяти- и шестиподвижных манипулирующие
устройств. Принципы их построения те же, что и двух
подвижных соединений, и могут быть сформулирован
следующим образом на примерах структурных схем 7.1 з
7.2 (рис. 31):
— к выходному звену присоединяют три кинемап -
ческих ветви, каждая из которых выполнена приводной
(с последовательным присоединением в данной ветв
одной приводной пары DI, D2 или D3, одно из звеньс.
которой обычно соединено с основанием);
ПРИВОДНЫЕ ТРЕХ- И ЧЕТЫРЕХПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
83
D2
7.1а
2
Звено 1 принято
за неподвижное
(основание),
звено 2 - выходное
звено соединения.
[$ - трехподвижная
сферическая пара
DI, D2, D3 - приводы
или приводные соединения
S - суммирующее соединение
или дифференциальный
механизм
А, В. С,... - кинематические пары
7
D3
D2
D1 А
N
О «
О'
ь
Общее выходное
звено манипулятора
Сферическая
втулка
Разделительное
уплотнение
Привод D3
предназначен
для перемещения
вдоль линии АС.
X,Y, Z - оси координат
4Pv.4)v.4>7'Vrjl0Bble
л 1 перемещения
(вокруг осей X,Y,Z )
Угловое перемещение Фх
возможно
при синхронном вращении
приводных звеньев
DI, D2, D3.
к_ X
. *
L ф.
7.4
D3
В
выходное
звено манипулятора
Параллельно-
последовательные
соединения приводов
(схемы 7.4 и 7.5)
Сферическая
головка
выходное
звено манипулятора
Привод D2
предназначен
в основном
для углового
перемещения
(вокруг линии АС).
Приводы D1 и D2
предназначены
в основном
для угловых
перемещений
(вокруг т.С).
Привод D3
предназначен
для углового
перемещения
(вокруг линии NP).
Параллельно-ориентирующая
кинематическая цепь
У, Z - линейные перемещения
(вдоль осей Y, Z)
84
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
- к выходному звену могут быть присоединены не-
управляемые кинематические ветви [цепи] (см. схему 7.2),
которые служат для ограничений движения выходного
звена, например, только для обеспечения сферического
(схема 7.2а) или поступательного движения (схемы 7.6 и
7.6а);
- все ветви, соединяющие выходное звено с основа-
нием, должны накладывать на выходное звено необхо-
димое число ограничений (в совокупности шесть - при
всех остановленных приводах или три, два, одно, ни од-
ного - при отсутствии приводных связей для соответст-
венно трех-, четырех-, пяти-, шестиподвижных механиз-
мов). Каждая ветвь должна обладать числом степеней
свободы (без учета приводных связей) не меньшим за-
данного числа степеней свободы выходного звена.
Схемы 7.1а и 7.16 сферических трехподвижных
механизмов имеют три ветви соединенных шарнирно
звеньев. Оси вращательных одноподвижных пар пересе-
каются в одной точке С*. При отключенных приводах
каждая ветвь допускает только три независимых враща-
тельных движения выходного звена. Поэтому механизм в
целом обладает тремя степенями свободы и способен
воспроизводить три независимых вращательных движе-
ния (вокруг одного центра С*).
Анализируя структуру механизмов по схемам 7.1а и
7.16, можно каждый из них представить в виде трех на-
чальных звеньев (кривошипов) и трехповодковой струк-
турной группы. Поводки АВ, KL и MN присоединены
посредством сферических шарниров А, К и М к выход-
ному звену 2. К поводкам присоединены кривошипы LE,
АВ и NR, приводимые во вращение двигателями DI, D2 и
D3. В схеме 7.16 оси вращения кривошипов совмещены
(совпадают). Вращение вокруг осей Z или X осуществ-
ляют двумя включенными двигателями D2, D3 или тремя
включенными двигателями. Вращение вокруг оси Y
(схема 7.16) возможно при синхронном вращении
двигателей DI, D2 и D3.
В схеме 7.2а имеется сферический шарнир со-
единяющий основание и выходное звено 2. Звено 2 при-
водится во вращение тремя гидроцилиндрами DI, D2 и
D3. Точки С, А, К расположены на одной прямой, а точка
М отстоит от этой прямой на некотором расстоянии. Бла-
годаря этому с помощью гидроцилиндров D1 и D2 мож-
но поворачивать звено 2 на углы срх и cpz, а с помощью
гидроцилиндра D3 можно вращать звено 2 вокруг оси СК
(угол поворота cpY). Наиболее целесообразно располагать
гидроцилиндры таким образом, чтобы при наибольших
рабочих нагрузках углы давления (угол между вектором
движущей силы и вектором скорости) были минималь-
ными. Это условие обеспечивается при углах, обозна-
ченных на схеме ~90°.
Механизм на схеме 7.2а относится к классу сфери-
ческих механизмов, представленных на схемах 7.1а и
7.16, но только в нем материализован центр сферическо-
го движения С в виде сферического шарнира, а приводы
выполнены поступательными (но могут быть и враща-
тельными, как это будет показано ниже).
Схема 7.4 может быть получена путем присоедине-
ния к варианту схемы 4.3 (см. рис. 30) еще одной при-
водной кинематической цепи с гидроцилиндром D3.
Присоединение осуществлено таким образом, что вы-
ходное звено превратилось в соединительное звено ALN
а звено 2 образовало с ним поступательную пару. При
включении гидроцилиндра D2 звено 2 поворачивается
вокруг оси X, а при включении гидроцилиндра D1 зве
но 2 поворачивается относительно подвижной оси Y
Гидроцилиндр D3 через сферический шарнир С сообщаем
звену 2 поступательное движение относительно звена ALN.
Схемы 7.4 и 7.5 представляют собой параллельно-
последовательное соединение приводов.
В обоих вариантах к исходной схеме последова-
тельно присоединен двигатель D3. Функционально полу-
ченные варианты эквивалентны схеме 7.3. Звено 2 може
поворачиваться вокруг двух осей X и Y и совершать по-
ступательное движение.
Кинематическая схема 7.4 характеризует вариант, з
котором использованы два двигателя D1 и D2 вращи
тельного движения, расположенные на основании 1, ;
гидроцилиндр D3, размещенный в соединительном звене
NCN'.
Ось гидроцилиндра пересекает оси X и Y в цент-
сферического механизма С, составленного из звеньев АР
BN, CL, LK и основания 1. Кроме двух независимых по-
воротов оси гидроцилиндра D3, его шток может перемс
щаться прямолинейно вдоль оси. При использовани:
данного приводного соединения в более сложных систе
мах шток можно соединить с внешним звеном сфериче-
ской парой О.
Схема 7.5 представляет аналогичное решение дл»
воспроизводства тех же движений, но при использован!
трех гидроцилиндров в качестве приводов DI, D2 и D?
Все шарниры выполнены сферическими. Сферически
опора С имеет сферическую втулку и сферическую гс-
ловку/цапфу. Сила давления в гидроцилиндре D1, дейст-
вуя на плече rY, обеспечивает поворот выходного зве,
вокруг оси Y, а сила давления в гидроцилиндре, дейсп _
на плече гх, — поворот выходного звена вокруг оси XJ
Разделительное уплотнение в виде сильфона позвол."
изолировать пространство размещения приводов от ра-
бочей среды.
Структура схем 7.6 и 7.6а отличается от схемы 7.2a
тем, что вместо сферического шарнира в соединении вы-
ходного звена с основанием установлена поступательн -
ориентирующая кинематическая цепь [механизм]. Е
ходное звено 2 способно вращаться (угловое псрсмсь
ние cpY) и совершать плоское движение (перемещения z, i,
при этом ось NP остается неизменно ориентирование!
[параллельной самой себе].
Гидроцилиндры D1 и D2 служат в основном д.~а
осуществления перемещений х, z, а двигатель D3 сое 3
щает вращательное движение вокруг оси NP. Необхо; -
мое условие присоединения приводных цепей - paci
ложение точек М, N, Р и А на одной прямой.
В схеме 7.6 двигатель D3 вращательного действ д
присоединен к выходному звену 2 с помощью карданн 4
передачи.
Гидроцилиндр D3 (схема 7.6а) присоединен к звею
таким образом, что имеется плечо КМ относительно оси NI
ПРИВОДНЫЕ ТРЕХ- И ЧЕТЫРЕХПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
85
для приложения движущейся силы и создания вращаю-
щего момента.
Как уже неоднократно упоминалось, при построе-
нии схем прослеживается тенденция придания отдель-
ным приводным или неприводным кинематическим це-
пям определенных функций: например, сообщение дви-
жения вдоль заданной оси. или обеспечение поступа-
тельной ориентации, или обеспечение сферического
движения. Такое разделение функций между звеньями,
кинематическими парами и приводами позволяет полу-
чать в определенных условиях положительные качества.
Наибольшее внимание уделено приводным трехпод-
вижным соединениям. Все изложенные для их построе-
ния принципы приемлемы и для механизмов с большим
числом степеней свободы. Покажем это на примере по-
строения схемы четырехподвижного многопоточного
приводного соединения (схема 7.7, рис. 31 1) В отличие
от схемы 7.2а выходное звено соединено с основанием не
трех-, а четырехподвижной парой и кроме движений,
показанных на схеме 7.2а, может перемещаться вдоль
направляющей четырехподвижной пары С. Приводы
[гидроцилиндры] DI, D2 и D3 выполняют аналогичные
функции, что и в схеме 7.2а, т.е. они способны поворачи-
вать звено 2 вокруг центра С.
Еще один привод [гидроцилиндр] D4 предназначен
в основном для сообщения движения вдоль оси АС зве-
на 2. В положениях, отличных от представленного на
схеме 7.7, функции приводов могут перераспределяться,
и движение звена 2 представляется как результат совме-
стного воздействия приводов.
В схеме 7.7а использовано четырехподвижное со-
единение, допускающее перемещение точки С звена 2
только по дуге окружности. Для этой же цели можно ис-
пользовать и другие виды четырехподвижных соединений.
Пятиподвижное приводное соединение [пятипод-
вижный манипулятор] можно построить, используя
пятиподвижную пару (или ее эквивалентный вариант) и
пять приводов. В шестиподвижном приводном соедине-
нии каждая из шести ветвей должна обладать шестью
степенями свободы, а общее число независимых приво-
дов также должно быть равно шести. Построение таких ме-
ханизмов изложено в параграфе 3.4.
Чтобы проиллюстрировать приемлемость приведен-
ных принципов как для анализа (рис. 32), гак и для син-
теза (рис. 33), приведем некоторые примеры схем реаль-
ных механизмов современных машин.
Схема 8.1а используется в вертолетах, схемы 8.2а и
8.3а — в автогрейдерах, а схемы 8.6а и 8.66 (см. рис. 33)
получены в соответствии с обобщенными в данном при-
ложении положениями.
Структурная схема 8.1 имеет большое число замк-
нутых контуров и суммирующих устройств, хотя конст-
руктивно она выполнена достаточно просто. Кроме ука-
занных на схеме разветвлений, имеется разветвление по-
токов энергии от звена 2 (схема 8.1а) к нескольким (пяти)
выходным звеним — тягам, поворачивающим лопасти
несущего винта в направлении <р.
Привод (вращения) винта в целом также разветв-
ленный многопоточный (см. рис. 28). Приводной вал (на
схеме не показан) винта размешен внутри звена 1 вдоль
оси Z. В процессе вращения винта лопасти должны иметь
три возможных составляющих режима поворота <р:
изменение общего шага винта - все лопасти повора-
чиваются на одинаковый угол (вертолет поднимается или
опускается);
изменение циклического шага винта - каждая ло-
пасть циклически, в процессе одного оборота изменяет
угол поворота в определенных пределах, достигая экс-
тремальных значений, когда ось лопасти параллельна оси Y;
то же, что и в предыдущей составляющей, когда ось
лопасти параллельна оси X.
Изменение общего шага осуществляют приводом
D3 (на схеме показан только шток гидроусилителя в сис-
теме управления). При этом поворачивают рычат HVM
вокруг оси опоры V. Опору V дополнительно можно
поднимать или опускать приводом D4, воздействуя на
нее через механизм S3 и смещая тем самым диапазон
регулирования общего шага.
Движение передается ползуну 3 и через сфериче-
ский (универсальный) шарнир С - кольцу 2, а затем кре-
стовине 4, соединенной стягами, поворачивающими ло-
пасти. Все тяги движутся вверх или вниз одновременно,
поворачивая лопасти вокруг своих осей.
При изменении циклического шага в продольном
сечении движение от штока гидроусилителя D1 переда-
ется через кинематическую цепь АВ кольцу 2, которое
наклоняется в продольном направлении Y. Крестовина 2
наклоняется в том же направлении и передает соответст-
вующее движение тягам.
При изменении циклического шага в поперечном
направлении движение от штока гидроусилителя D3 пе-
редается через кинематическую цепь KL кольцу 2. Коль-
цо 2 вместе с крестовиной 4 наклоняется в поперечном
направлении X и, соответственно, через тяги воздейству-
ет на лопасти.
Структурные схемы 8.2 и 8.3 представляют собой
некоторое развитие схемы 7.2 (см. рис. 31). В обеих схе-
мах имеются дополнительные, последовательно распо-
ложенные приводы, а в схеме 8.2. кроме того, имеется
замыкание одного из звеньев механизма S непосредст-
венно на основание. В схеме 8.2а такое решение обеспе-
чивает передачу основной нагрузки от планировочного
отвала на раму шасси 1 через звено 3 и сферическую па-
ру, а не через приводы, что выгодно отличает данную
схему от трехпоточных схем 7.1, 7.1а, 7.16 (рис. 31). От-
вал установлен на тяговой раме 3 с возможностью вра-
щения двигателем D4 (поворот <pz), а тяговая рама изме-
няет свое положение с помощью приводов DI, D2 и D3.
При различных сочетаниях включения приводов полу-
чают перемещения sx, Sz и <pY- В схеме 8.2 шатуны MN,
KL и АВ лишь приближенно расположены в плоскости.
В действительности, так же, как и в схеме 6.2 (рис. 30),
использован квазиплоский механизм, так как тяговая
рама совершает сферическое движение с центром в точ-
ке R. Самоустановка звеньев осуществляется благодаря
использованию сферических шарниров.
86
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
32. ПРИВОДНЫЕ МНОГОПОДВИЖНЫЕ СОЕДИНЕНИЯ, ПРИМЕНЯЕМЫЕ В СОВРЕМЕННЫХ МАШИНАХ
D1
Трехподвижное пятипоточное соединение
в системе управления вертолетом
[автомат перекоса]
Четырехподвижное соединение
в системе манипулирования отвалом автогрейдера
S1 -I
D*Z
Лопасть
винта
D4
Тяга
1- D2
Г
Карданное
[сферическое]
соединение S
А, В, С, ...-кинематические
пары
1,2- основные звенья
(1 - принято
за неподвижное)
3,4- соединительные
звенья
D* - приводное соединение
S, S1,... - суммирующие соединения
DI, D2,...- приводы или входные звенья
D3
D2
D3
[~8.3а | Трехпоточное соединение
Четырехпоточное соединение
1 - рама
самоходного
шасси
2 - планировочный
отвал
3 - тяговая
рама
4 - откосник
sY । sz - перемещения
(вдоль осей Y,Z)
х’ z перемещения
(вокруг осей X, Z)
D1
D3
2
33. ТРЕХПОДВИЖНЫЙ МАНИПУЛЯТОР С КОРРЕКТИРУЮЩИМИ ПРИВОДАМИ
D3*
D1 - привод основных
(грубых) перемещений
Dim - привод микроперемещений
S* - общий суммирующий механизм
Sm - суммирующий механизм
цепи микроперемещений
D1* приводное соединение
А, В, С,... - кинемвтические пары
W - выходное звено
ПРИВОДНЫЕ ШЕСТИПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
87
Схема 8.3 имеет гидроцилиндры DI, D2 и D3, штоки
которых соединены с рамой 3. Движения те же, что и в
схеме 10а, но задается еще дополнительное перемещение
откосника относительно отвала с помощью гидроцилин-
дра D4.
Используя приведенные выше схемы в качестве со-
ставляющих более сложных схем параллельного соеди-
нения, можно получать манипулирующие системы с
большой грузоподъемностью или обладающие высокой
точностью воспроизведения заданных движений по
сравнению с механизмами, созданными на основе не-
замкнутой кинематической цепи.
Одним из направлений конструирования многопод-
вижных систем является создание корректирующих ме-
ханизмов (уточняющих перемещения выходного звена)
внутри системы, воспроизводящей основные (грубые)
перемещения выходного звена. В известных ранее мани-
пуляторах на основе незамкнутой кинематической цепи
корректирующий одноподвижный привод устанавливали
либо в каждую пару кинематической цепи последова-
тельно или параллельно основному приводу. Использо-
вали также следующее решение: в конце кинематической
цепи между выходным звеном и рабочим органом уста-
навливали корректирующий механизм с тем же числом
степеней свободы, что и основной механизм.
Структурные схемы многопоточных многоподвиж-
ных механизмов также сводятся к трем возможным ва-
риантам (см. схемы 8.4~, 8.5; 8.6, рис. 33), если не рас-
сматривать системы смешанного соединения в отдель-
ных ветвях и в системе в целом.
В схеме 8.4 привод микроперемещений Dim (кор-
ректирующий привод) соединен последовательно с ос-
новным приводом D1 (приводом грубых перемещений),
образуя при этом приводное соединение D1. Такое реше-
ние отличается простотой устройства, но имеет более
низкий КПД по сравнению со схемой 8.6.
В схеме 8.5 последовательно соединены два мани-
пулятора: для грубых перемещений и для микропереме-
шений. Конструктивно такое решение может быть еще
более сложным и не позволяет получить высокий КПД.
Наиболее предпочтительна, на наш взгляд, схе-
ма 8.6, в которой каждая ветвь системы имеет парал-
лельно соединенные через суммирующий механизм S
основной привод D1 и привод микроперемещений Dim.
Конкретно такая ветвь может быть выполнена достаточ-
но просто — например, см. схему 8.66 — конструктивное
исполнение трехподвижного манипулятора, в котором
каждая ветвь выполнена по схеме 8.6а. В манипуляторе
двигатель через рычаг СВА и звенья АК и КО сообщает
движение рабочему столу W.
Здесь использованы упругие кинематические пары:
В, А и К эквивалентны одноподвижным вращательным
парам, а О, С и М эквивалентны двухподвижным сфери-
ческим парам.
В качестве приводов в кинематических цепях могут
быть использованы линейные двигатели D1 и Dim, уста-
новленные между рычагом СВА и основанием, звеньями
КО и АК. Упругость пар, кроме функций шарниров,
обеспечивает также силовое замыкание двигателей, ко-
торые могут, например, только раздвигать соединитель-
ные с ними звенья. Стягивают, возвращают звенья в ис-
ходное положение упругие пары.
Совместное или раздельное включение двигателей,
установленных в параллельных ветвях, обеспечивает пе-
ремещение sz стола W вдоль оси Z или его повороты <рх и
Фу вокруг осей X и Y соответственно. Корректирующее
движение сообщается двигателем Dim. Относительный
поворот звеньев АК и КО приводит к изменению дли-
ны АО на величину Az (см. схему 8.6а). На эту же вели-
чину изменяется перемещение центра пары О и соответ-
ственно перемещение стола.
Перемычка А и шейка О характеризуются одинако-
вой изгибной жесткостью, что позволяет исключить воз-
никновение поперечной сдвигающей силы в шейке О. От
внешней среды манипулятор защищен кожухом - разде-
лительным уплотнением.
3.4. ПРИВОДНЫЕ ШЕСТИПОДВИЖНЫЕ
МНОГОПОТОЧНЫЕ [ПАРАЛЛЕЛЬНОЙ
СТРУКТУРЫ] СОЕДИНЕНИЯ
Переходя к построению сложных многоподвижных
соединений, рассмотрим возможности механизмов на
основе "платформы Стюарта" (рис. 34, 35). За исходный
вариант принято соединение выходного звена (платфор-
мы/стола) с основанием посредством шести простейших
кинематических цепей. Каждая из кинематических це-
пей должна иметь шесть степеней свободы (без учета
"лишних" степеней — возможности вращения штока или
цилиндра вокруг собственной оси). Каждая из цепей
имеет одну приводную пару, изменяющую расстояние
между точками соединения (цепи) с платформой и с ос-
нованием.
Данная система представляет собой два относитель-
но подвижных тела, соединенных между собой стержня-
ми (нитями, линиями) изменяемой длины /. Фиксирован-
ные длины / определяют однозначное относительное по-
ложение тел. По существу, образована пространственная
ферма. Помимо устоявшегося названия "механизм па-
раллельной структуры", данное соединение называют
"I - координатной системой" (по А. Ш. Колискору). Из-
менением одной или нескольких длин I можно изменять
относительное положение соединенных тел, можно осу-
ществлять манипулирование выходным звеном в опреде-
ленном рабочем пространстве.
Нормальное функционирование такого механизма
возможно при условиях:
• из всех соединительных линий (нитей, стержней)
по крайней мере три не должны быть параллельны между
собой;
• все соединительные линии должны быть распо-
ложены не менее, чем в трех непараллельных (и несовпа-
дающих) плоскостях.
Эти условия определены из недопустимости так на-
зываемых "особых положений", при которых дальнейшее
движение либо неопределенно, либо невозможно. В дей-
ствительности не следует даже приближаться к такому
положению на некоторую величину, характеризуемую
недопустимыми силами трения (см. гл. 5). В то же время
при определенных условиях особое положение может
88
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
ПРИВОДНЫЕ ШЕСТИПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
89
быть пройдено по инерции подобно прохождению "мерт-
вой точки" в кривошипно-ползунном механизме.
Наиболее распространенные решения "платформы
Стюарта" даны на рис. 34. Их применяют, в частности, в
тренажерах для военных летчиков, а также в некоторых
видах технологического оборудования.
Приводы в виде гидроцилиндров или винтовых пе-
редач соединены с основанием и выходным звеном сфе-
рическими шарнирами. Здесь не должно быть связей
больше, чем это необходимо для нормального функцио-
нирования механизма:
• если приводная пара двухподвижная (допускает
независимые линейное перемещение и вращение), то обе
соединительные пары [шарниры] могут быть сфериче-
скими двухподвижными;
• если приводная пара одноподвижная (в частно-
сти, винтовая пара), то одна из соединительных пар
должна быть трехподвижной, а другая — двухподвижной.
В любом варианте допускается использование в ка-
честве обеих пар трехподвижных сферических шарниров,
но при этом следует позаботиться о восприятии [замыка-
нии] на основание реактивного момента гайки или винта
(в случае с винтовой парой - см. схемы 9.26, 9.2в). "Лиш-
ние" степени свободы в определенных пределах (напри-
мер, допустимых деформаций шлангов, подводящих
жидкость) с точки зрения энергетических затрат могут
быть даже полезными (см. параграф 1.1).
Еще одно соображение, которое принималось во
внимание при выборе варианта расположения и соедине-
ния звеньев, - это простота системы управления. С этих
позиций лучшей является схема 9.1, так как в ней поло-
жение выходного звена определено положением всего
трех точек (А, В и С). В любом из рассмотренных меха-
низмов выходное звено должно иметь не меньше трех
точек (центров сферических шарниров), определяющих
ориентацию (угловое положение) звена в пространстве.
Причем хотя бы одна из точек должна отстоять от общей
линии, которую можно провести через две-пять других
точек.
Чем большее число точек (сферических опор) обра-
зуют замкнутый контур выходного звена, тем более вы-
сокую жесткость можно получить, но при этом усложня-
ется управление системой.
Проще и быстрее можно осуществлять вычисления
для схемы с трехточечным опиранием выходного звена, в
которой положение одной точки определяется тремя
приводами, второй — двумя приводами и третьей — одним
приводом (см. рис. 36).
В настоящее время данный критерий (простота вы-
числений) все более утрачивает свое значение благодаря
непрерывно возрастающим возможностям компьютерной
техники. Объем и сложность вычислений (для осуществ-
ления манипулирования) в будущем не должны быть оп-
ределяющими при выборе или построении схемы много-
подвижного механизма.
Оценивая схемы на рис. 34 по конструктивным кри-
териям при одинаковых манипуляционных возможно-
стях, отметим, что в схеме 9.1 сложно осуществить двой-
ной сферический шарнир. Примеры возможных решений
такого шарнира даны на схемах 9.1а ... 9.1д.
Проще (по сравнению со схемой 9.1) конструктив-
ное исполнение схемы 9.2, в котором шарниры В и В',
К и К' расположены на некотором расстоянии один от
другого. Каждый из шарниров может быть решен в виде
шарового соединения или в виде карданного соединения,
показанного на схеме 9.2а.
Схема 9.3 сочетает в себе свойства схем 9.1 и 9.2, но
в ней штоки трех гидроцилиндров из шести подвержены
изгибу (и перекосам в направляющем соединении). Луч-
ше все же использовать схемы, в которых шток или винт
нагружен только силой вдоль оси. В этом плане специ-
альная конструкция опор в схеме 9.4 позволяет сочетать
свойства схем 9.1 и 9.2 без каких-либо выраженных не-
достатков: все штоки нагружены только осевой силой,
шарниры просты в исполнении.
Схемы 9.1 ...9.4 имеют приводы, установленные ме-
жду подвижными звеньями кинематической цепи. т.е. в
них не учтена тенденция размещения приводов на осно-
вании. Приводы удобнее размещать на основании с точки
зрения подвода к ним коммуникаций. Кроме того, не
нужно перемещать дополнительные массы, благодаря
чему уменьшаются нагрузки на звенья и соединения и
может быть снижена виброактивность системы. Возмож-
ные варианты таких систем представлены на рис. 35.
Причем в схеме 10.1 использованы приводы поступа-
тельного движения, а в схеме 11.1 — приводы вращатель-
ного движения.
В схеме 10.1 в приводе может иметь место изгиб
штока и перекос в поступательной паре, особенно суще-
ственный в положении, показанном на схеме 10.1а. Что-
бы уменьшить этот недостаток, в схеме 10.1 реализован
принцип разделения функции отдельных групп приво-
дов, благодаря чему система функционирует вдали от
особых положений, о которых пойдет речь в гл. 5.
Второй прием, позволяющий практически исклю-
чить данный недостаток, проиллюстрирован на схе-
мах 10.16 и 10.1в. В них введен дополнительно рычаг,
через который передается движущий момент от привода
поступательного движения. Но в этом случае привод все
же имеет подвижное соединение с основанием.
Наконец, от схемы 10.1 можно легко перейти к схе-
ме 11.1, в которой корпуса приводов закреплены на ос-
новании, а рычаг приводится от привода, выполненного,
например, в виде электродвигателя с редуктором. На
схеме 11.1 видна полная аналогия представленной систе-
мы с другими механизмами параллельной структуры.
Поворот рычага приводит к изменению расстояния I. Та-
ким же образом изменяются отрезки длины и в других
кинематических цепях.
Любая из рассмотренных схем шести подвижного
соединения может быть превращена в схему пяти-, четы-
рех-, трех- или двухподвижного соединения. Достаточно
для этого вместо привода, изменяющего длину I, устано-
вить стержень постоянной длины. Если при этом остает-
ся пять приводов, то механизм пятиподвижный, если —
четыре привода, то механизм четырехподвижный и т.д.
Обязательные условия такого преобразования сле-
дующие:
• каждый из стержней в совокупности с парами,
образуемыми с выходным звеном и основанием, должен
90
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
35. ВАРИАНТЫ МЕХАНИЗМОВ
НА ОСНОВЕ "ПЛАТФОРМЫ СТЮАРТА"
С ПРИВОДАМИ, РАЗМЕЩЕННЫМИ НА ОСНОВАНИИ
Сферический В
трехподвижный —
шарнир q
(шр X
В'
с
Выходное звено
(платформа/стол)
С /
А
А
Сферические I ю j I
трехподвижные :—
шарниры_______
(III? \
и
Z
\ ^Х^для воспроизведения
перемещений \
в основном \
вдоль оси X
и поворота Фг
в
U
к
D5
S
R
N
И’
Q Ч 9 Свободное
D3
D.1
D2 /
Приводы
для воспроизведения
перемещений
* в основном
вдоль оси Z
и поворотов И фу
Выходное звено
(платформа/стол)
Z D2
М
□) Р
D6
Одноподвижная
вращательная пара
(Vr)
Привод
для воспроизведения
перемещений
в основном
вдоль оси Y
DI, D2, D3, D4, D5, D6 - приводы
А, В, С,... - кинематические пары
|10.1а|
Шатун
Существенный изгиб штока
и перекос в поступательной паре
в положении, близком к особому
В
|10.1б|
Шатун
К
Зубчатая
передача
Выходное звено
,(платформа/стол)
Одноподвижная
вращательная пара
(Vr)
Двигатель
Основание
Двухподвижное
сферическое
(карданное)
соединение
Подшипниковая
опора гайки
Двухподвижное
сферическое
(карданное)
соединение
Одноподвижная
zF вращательная пара
(vr)
Редуктор
Двухподвижное
сферическое
(карданное)
соединение
Двигатель
Винт
Выходное звено
(платформа/стол
Шатун
, М’
Основание
Основание
Рычаг
-cKfafc 1 I
представлять собой кинематическую цепь, число степе-
ней которой (без учета "лишних" степеней) не должно
быть меньше заданной подвижности выходного звена;
• число приводов не может быть меньше заданной
подвижности;
• для обеспечения заданной ориентации выходного
звена необходимо такое приложение реакций и движу-
щихся сил, при котором возможно получение вращающе-
го момента; для этого, как уже отмечалось, опорные точ-
ки выходного звена не должны лежать на одной прямой.
В схемах 9.1 ... 10.1, а также в других, приведенных
ниже, в качестве приводов поступательного движения
показаны гидроцилиндры. Но под таким изображением
понимается обобщенное представление приводной пары.
Вместо гидроцилиндра может быть использовано любое
эквивалентное ему по кинематическим возможностям
решение, т.е. способное изменять расстояние I между
присоединительными узлами [шарнирами] - (см., напри-
мер, схему 11.1).
На схемах 9.2а, 9.26,10.16,10.1в представлены пр
меры приводов вращательного действия в совокупности
с винтовой передачей.
Приводные соединения на схемах 9.2а, 9.26 прим.-
нимы в схеме 9.2, а приводные соединения на схема
10.16,10.1в могут быть использованы в схеме 10.1.
В схемах 9.26, 10.26 винт выполнен невращаюши. -
ся, а гайка приводится во вращение от двигателя чер-с^
зубчатую передачу. В схемах 9.2в, 10.1 в невращающа!
гайка соединена с выходным звеном, а винту сообщает I
вращательное движение от двигателя с редуктором, с -
единенными с основанием. В схемах 10.16, 10.1в двих;
ние выходному звену передается от гайки через рычаг |
шатун. В схемах соединения опоры гайки (с выходнг I
звеном) или корпуса двигателя (с основанием) выпот
ны в виде двухподвижных шарниров, обеспечивают
самоустановку звеньев.
Далее рассмотрим некоторые частные решения пр -
веденных на рис. 34 и 35 схем.
ПРИВОДНЫЕ ШЕСТИПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
91
Обобщенная структурная схема 12.1 на рис. 36
представляет собой развитие рассмотренных выше схем.
В ней приводы объединены в три ветви: трехпоточную,
двухпоточную и однопоточную. Каждая из ветвей задает
определенные составляющие движения выходного зве-
на W. При этом данное исполнение может позволить
раздельно воспроизводить линейные перемещения и ори-
ентацию выходного звена.
Вместо каждой из ветвей [кинематических привод-
ных цепей] можно подставить конкретное исполнение
трехподвижного приводного соединения D1* (см., на-
пример, схему 12.2) или двухподвижного приводного
соединения D2*.
Схема 12.2а представляет собой пример системы, в
которой выходное звено CMN обладает шестью степеня-
ми свободы. Каждая из трех параллельных цепей также
имеет шесть степеней свободы. Приводы обозначены на
схеме стрелками с указанием движущей силы FA, FB и FL
(поступательные приводные пары) или вращающего мо-
мента Т]., Тдх и 7а y (вращательные приводные пары).
Кинематическое соединение АЕС обеспечивает переме-
щение точки О, в которой, например, расположен центр
масс перемещаемого звена т, вдоль любой из осей коор-
динат X, Y, Z.
Кинематическая цепь LN обеспечивает перемеще-
ние точки N по сферической поверхности с центром в
точке О (см. траектории NyNy, NzNz). Звено CMN можно
вращать вокруг оси CN (см. траекторию ММХ с радиусом г),
перемещая стержень МВ под действием силы FB. Конст-
руктивные решения приводных сферических соединений
А, В и L см. на рис. 31, в частности схему 7.5. Причем в
данном случае использованы соответственно трех-, двух-
и одноподвижное соединения.
В зависимости от заданных условий можно анало-
гично использовать, например, все три двухподвижных
соединения (при некотором усложнении управления и
снижении динамических качеств), можно также анало-
гично соединять две, четыре, пять или шесть кинемати-
ческих цепей. То, что в схеме 12.2а выходное звено со-
единено с основанием тремя кинематическими цепями,
обусловлено минимально возможным числом стержней
для пространственной стержневой конструкции, а выбор
составляющих соединений с тремя, двумя и одной степе-
нями свободы продиктован динамической согласованно-
стью работы приводов (приводы соединения А переме-
щают центр масс в пространстве, а другие приводы пово-
рачивают выходное звено с грузом вокруг центра масс).
В качестве примера иных решений в схеме 12.3 при
шести степенях свободы использовано пять кинематиче-
ских цепей, из которых только одна цепь АО имеет два
привода, в остальных цепях — по одному приводу. По
сравнению со схемой 12.2 добавлены цепи KN и RO, что-
бы повысить жесткость системы при восприятии внеш-
ней нагрузки на выходное звено, например, момента 7г и
сил, направленных вдоль стержней в кинематических
цепях KN и RO. При действии только моментов 7х, Ту и
Тг все стержни механизма работают в основном на сжа-
тие или растяжение.
Схема 11.1а представляет собой манипулирующую
систему, в которой все приводы DI, D2, ..., D6 враща-
тельного действия, каждый из приводов расположен на
основании и соединен с выходным звеном - рабочим
столом W индивидуальной кинематической цепью с ше-
стью степенями свободы (сравни со схемой 11.1 на
рис. 35).
Все кинематические цепи унифицированы — они
имеют одно и то же конструктивное исполнение в виде
кривошипа (например, АВ) и шатуна (например, ВС), все
шарниры сферические. При попарном размещении осей
приводов во взаимно перпендикулярных плоскостях
(в исходном положении), как показано на схеме, система
позволяет воспроизводить раздельно поступательные и
вращательные движения.
В данном примере, в частности, решалась задача
получения точных поступательных перемещений с кор-
рекцией угловой ориентации рабочего стола. Поступа-
тельные движения воспроизводятся только при попарной
(одновременное включение приводов D1 и D2, D3 и D4,
D5 и D6) и синхронной работе приводов. Причем прямо-
линейное поступательное движение обеспечивается при
попарной работе всех шести приводов. Если включить
один, два или три двигателя из разных пар, то можно по-
лучить заданное вращательное движение стола W.
На всех приведенных режимах предполагается, что
ротор двигателя не может свободно вращаться: он либо
заторможен, либо специально приводится во вращение.
Только при таком условии обеспечивается определен-
ность движения.
По структуре схема 12.46 соответствует рассмот-
ренному примеру на схеме 12.1 и примеру на схеме 12.2а.
Она позволяет проследить последовательность шагов при
построении конкретного решения, предназначенного для
воспроизведения очень малых (несколько мкм) и точных
перемещений при сравнительно больших перемещениях
приводов.
В рассматриваемой структурной схеме специально
выделены суммирующие устройства SI, S2 и S3, имею-
щие соединения с приводами, основанием и выходным
звеном. В основу каждой кинематической цепи положен
рычаг с шестью степенями свободы (см. схему 12.4в).
Каждый из трех рычагов соединен с выходным звеном
сферической парой О, а с основанием — тремя враща-
тельными одноподвижными парами А, В и С, оси кото-
рых перекрещиваются в пространстве. Последнее усло-
вие необходимо, чтобы получить систему с шестью сте-
пенями свободы и тремя приводными парами.
Каждая из осей этих пар соответственно X', У' и Z'
должна быть параллельна и не совпадать с осями коор-
динат X, Y и Z системы с началом в центре сферического
шарнира О (см. схему 12.4). При пересечении хотя бы
одной пары какой-либо из осей X', У' и Z' число степеней
свободы уменьшается. В частном варианте на схеме 12.4а
все три оси X', У' и Z' пересекаются в одной точке О', а
оси X и X' совпадают.
Такая кинематическая цепь хотя и имеет шесть сте-
пеней свободы, но одна из них "лишняя" - вращение со-
единительного звена вокруг оси ОО', которая не может
92
МНОГОПОТОЧНОСТЬ ПЕРЕДАЧИ ЭНЕРГИИ
36. ШЕСТИПОДВИЖНЫЕ МАНИПУЛЯТОРЫ
С ТРЕМЯ И БОЛЕЕ ПАРАЛЛЕЛЬНЫМИ ЦЕПЯМИ
|12.2а|
1ПО- масса выходного звена
Вариант с пятью приводами
поступательного движения и одним
приводом вращательного движения
DI*, D2* - приводные
соединения
S, SI, S2, S3 - суммирующие
соединения
А. В. С,... - кинематические пары
W - выходное (исполнительное) звено
движущая сила
или вращающий момент
приводной пары
ШЕСТИ ПОДВИЖНЫЙ МАНИПУЛЯТОР ДЛЯ МИКРОПЕРЕМЕЩЕНИЙ
НА ОСНОВЕ МНОГОПОДВИЖНЫХ УПРУГИХ СОЕДИНЕНИЙ
Общий и частный варианты
расположения осей/центров
кинематических пар
Конструктивное исполнение
шести подвижной
кинематической
Вариант с приводами вращательного движения
- разновидность схемы 11.1
|11.1а| (см. рис. 35)
Приводы предназначены
в основном для перемещения
выходного звена W
[воспроизведения/восприятия
соответствующих сил и моментов]
вдоль оси X и поворота Ф2~ D1,D2 ;
вдоль оси Z и поворота Фу "D3,D4;
вдоль оси Y и поворотаФх -D5.D6.
X, Y, Z -оси координат
О'- центр промежуточной сферической пары
X', Y1, Z’- оси промежуточных кинематических пар
£z - координаты осей/центров кинематических пар
^Z’^x^z^Wy^X -воспроизводимые линейные перемещения
точки выходного звена (центра сферического шарнира)
Фу» ^z - задаваемые угловые перемещения звеньев кинематической цепи
ПРИВОДНЫЕ ШЕСТИПОДВИЖНЫЕ МНОГОПОТОЧНЫЕ СОЕДИНЕНИЯ
93
влиять на движение выходного звена или допускать дви-
жение вдоль ОО'. В таком исполнении получается кине-
матическая цепь, фактически содержащая одно звено ОО'
и две сферические трехподвижные пары О и О'.
К каждой кинематической цепи достаточно присое-
динить не более трех приводов. Для передачи движения
использован рычаг, малое плечо которого - расстояние
(между осями) ех, и ez, а большое - расстояние rx, и
rz. Ввиду малости перемещения О по дугам окружности
при углах поворота срх> фу и <Pz рычага ЮА можно счи-
тать прямолинейными и равными соответственно ex<pY,
ez<pY и ev<Pz
Возможны следующие варианты последовательно-
сти чередования осей вращательных пар в кинематиче-
ской цепи по схеме 12.4: OX'Y'Z', OY'Z'X', OZ'X'Y',
OX'Z'Y', OY'X'Z' и OZ'Y'X'. Для получения шести сте-
пеней свободы выходного звена к нему подключают три
кинематических цепи с шестью степенями свободы каж-
дая. При этом одна цепь воспроизводит перемещения
вдоль осей Хь Y[ и Zi (схема 12.46}, другая - два пере-
мещения вдоль осей Y2 и Z2 и соответствующие этому
повороты выходного звена вокруг осей Z] и Хь а третья -
только одно перемещение вдоль оси Z3 и соответствую-
щий этому поворот вокруг оси Y,.
Таким образом, одна цепь может приводиться в
движение тремя двигателями, вторая — двумя двигателя-
ми, а третья - только одним двигателем. Поскольку дви-
гатель в кинематической цепи присоединен к среднему
звену, т.е. звену, обладающему тремя степенями свобо-
ды, то он должен задавать только соответствующее дви-
жение в одном направлении, не стесняя движения звена в
других направлениях или повторить свободные движе-
ния. Для этого двигатель может быть, например, соеди-
нен с основанием двухподвижной кинематической целью.
В данном примере использованы двигатели, способ-
ные развивать силовое воздействие только в одном на-
правлении (на основе пьезоэлектрика) - без реверсирова-
ния силы, но с реверсированием движения. В этом слу-
чае необходимо силовое замыкание кинематической цепи
в виде упругого звена или дополнительного двигателя.
Например, на схеме 12.46 показано воздействие на рычаг
четырех сил Fb F2, F3 и F4, которое обеспечивает необ-
ходимое число приводов (три) и силовое замыкание.
Для точных перемещений или для использования
манипулятора в вакууме целесообразно кинематические
пары выполнять в виде упругих перемычек, как показано
на схеме 12.4в. Сферическая пара О представлена в виде
двух перемычек, расположенных по оси, а каждая из ос-
тальных пар А, В, С - в виде перемычки, способной из-
гибаться и обеспечивать поворот образующих ее жестких
элементов вокруг осей X, Y, Z. На схеме 12.4е показаны
смещения осей перемычек ех, eY и ег соответственно.
Перемычка А раздвоена и ее элементы размещены сим-
метрично относительно осей Z и Y.
Глава 4. САМОПРИСПОСОБЛЯЕМОСТЬ
ИСКУССТВЕННОЙ СИСТЕМЫ
4.1. ОБЩИЕ ПОЛОЖЕНИЯ
И ТЕНДЕНЦИИ
Любая система, естественная или искусственная,
обладает свойством приспособляться к условиям ее фор-
мирования и к внешним условиям. Но здесь речь пойдет
о функциональной приспособляемости как о принципе
конструирования, под которым понимается обеспечение
возможности системы изменяться в зависимости от за-
данных условий и сохранять при этом работоспособность
(под работоспособностью понимается возможность вы-
полнения заданной функции при установленных пара-
метрах, качественных показателях и временном интервале).
В отличие от активной приспособляемости (ак-
тивной аккомодации) в данном случае не предусматри-
вается использование электронной системы управления,
хотя, в принципе, многие из поставленных ниже задач
могут быть решены и с помощью дополнительных
средств управления. Самоприспособляемость еще назы-
вают пассивной приспособляемостью (пассивной ак-
комодацией). Выбор подходящего варианта приспособ-
ляемости остается за функциональной целесообразно-
стью и, естественно, предпочтение отдают наиболее про-
стым решениям.
Конструктор, создавая систему с определенными
свойствами, должен представлять себе, как она себя по-
ведет в реальной обстановке. Это только для удобства
изучения подразделяют системы на изменяемые и неиз-
меняемые, а в жизни все системы изменяемые и их изме-
нение подчинено законам природы. Поскольку мы в ос-
новном будем иметь дело с объектами, обладающими
геометрической формой и массой, то их приспособляе-
мость подчинена принципу наименьшего действия
(принципу Гамильтона). Иными словами, сама система
выбирает вариант перехода из одного положения (со-
стояния) в другое в направлении уменьшения потенци-
альной энергии, причем на наименьшую величину и, со-
ответственно, при наименьших потерях энергии.
После такого заключения, казалось бы, ничего не
остается делать, но задача как раз и заключается в том,
чтобы создать такую систему, которая в своем измене-
нии, стремлении "самосовершенствоваться" не привела
бы себя к разрушению (разрушение — это тоже своего
рода результат приспособляемости) или к ухудшению
функциональных качеств. Аналог из нашей горькой дей-
ствительности: некоторые думали, что рынок сам по себе
будет развиваться в желательном для общества направ-
лении, а ведь для этого нужно создать его соответствую-
щую конфигурацию и управлять процессом его развития.
Самоприспособляемость - общее понятие и, в ча-
стности, оно предусматривает возможность и/или обес-
печение решений следующих частных задач:
са моустановки звеньев, отдельных блоков и/или
систем;
са моблокировки, самостопорения (в том числе са-
моторможения) подвижных соединений, механизмов и
приводов;
са мовключения или самовыключения сцепных
муфт, тормозов, отдельных ветвей кинематической цепи,
механизмов и приводов; самопереключения с одного
привода на другой, с одного режима на другой и т.д.;
самоуправления процессом потребления энергии
(например, самовозбуждение колебаний), направлением
энергетического потока (например, в процессе разгона и
торможения системы), величиной энергетического пото-
ка в процессе разгона (например, с помощью пусковой
муфты), распределением сил в заданном соотношении;
самозатягивания (например, в зону обработки) заго-
товки или иного предмета в виде прутка, ленты, полосы,
диска и т.п.; самозахватывания и/или самозажатия пред-
метов (может сопровождаться самоустановкой рабочих
элементов), самоприжатия звеньев фрикционного меха-
низма, самонажатия на внешний объект системы или са-
мопритягивания, самосцепления и самостыковки различ-
ных объектов; самозакручивания, самозатяжки резьбово-
го соединения и т.д.;
са моцентрирования (обычно исключает самоуста-
новку звеньев);
са мозапирания, самоуплотнения соединений трубо-
проводов;
са мосмазывания подвижных соединений;
са мосинхронизации периодических движений (виб-
раций, вращений);
са монастраивания на благоприятные состояния
и/или режимы;
са моформирования, саморазворачивания или само-
складывания (например, для удобства транспортировки
механической системы;
самосохранения, саморезервирования, самопере-
ключения на резервную систему, самопредохранения от
перегрузок и других недопустимых состояний и/или ре-
жимов.
Завершаю данный перечень без уверенности, что он
исчерпывающий - области распространения самоприспо-
собляемости разнообразны.
Самоустанавливаемость как составная часть самс-
приспособляемости в свою очередь подразделяется на
следующие виды.
1. Самоустанавливаемость недеформируемых звен: -
ев внутри механизма или фермы в зависимости от зазс -
ров и погрешностей изготовления (внутренняя самоуста-
навливаемость).
2. Самоустанавливаемость одного блока (сборочной
единицы, агрегата, станины, фундамента) относительш
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
95
другого блока и, в частности, при значительных относи-
тельных перемещениях в процессе сборки/стыковки или
в процессе функционирования (передача движения с
подрессоренной части машины на неподрессоренную);
3. Самоустанавливаемость выходных звеньев в за-
висимости от формы соприкасаемого с ними объекта
воздействия (заготовки, инструмента, изделия, захваты-
ваемого и перемещаемого груза и т.п.);
4. Самоустанавливаемость машины относительно
неподвижной, специально не подготовленной поверхно-
сти (например, дорожного полотна);
5. Самоустанавливаемость элементов кинематиче-
ских пар за счет деформирования (например, выравнива-
ние нагрузки по виткам резьбы, по длине контактной
линии зубьев, благоприятное распределение сил между
телами качения в подшипнике и т.п.).
Решения двух первых задач осуществляют подбо-
ром кинематических пар, третью и четвертую задачи ре-
шают в основном за счет дифференциальных систем, для
решения пятой задачи перераспределяют жесткости
звеньев и элементов.
Различают также статическую самоустанавливае-
мость (в процессе сборки, транспортировки и/или хране-
ния) и динамическую самоприспособляемость (в процес-
се функционирования, а возможно, и в процессе сбор-
ки/стыковки или транспортировки, с учетом сил трения,
инерции и рабочих нагрузок). Чаще всего приходится
обеспечивать комплексную самоустанавливаемость.
4.2. ВНУТРЕННЯЯ
САМОУСТАНАВЛИВАЕМОСТЬ
(ОТНОСИТЕЛЬНАЯ
САМОУСТАНАВЛИВАЕМОСТЬ
НЕДЕФОРМИРУЕМЫХ ЗВЕНЬЕВ
ВНУТРИ МЕХАНИЗМОВ И СООРУЖЕНИЙ)
В отличие от представлений традиционной теории
механизмов и машин все существующие механизмы —
пространственные, с учетом перекосов в пределах зазо-
ров и деформаций звеньев. В действительности, также
нет "лишних" степеней свободы и "пассивных" связей,
которые в той или иной мере не влияли бы на характер
выполнения функции и, соответственно, на работоспо-
собность системы; низшие пары существуют только при
условии деформирования элементов или после их прира-
ботки, а в исходном состоянии все пары высшие. Только
в некоторых ситуациях можно не учитывать данные об-
стоятельства, и уж очень рискованно при конструирова-
нии считать все звенья точно изготовленными и неде-
формируемыми. Кстати, с учетом возможных перемеще-
ний звеньев и элементов все фермы тоже пространствен-
ные и представляют собой разновидности механизмов,
т.е. систем с числом степеней свободы больше 0.
Наиболее полно и на хорошем инженерном уровне
принцип самоустанавливаемости разработан Л. Н. Реше-
товым (см. справочник "Самоустанавливающиеся меха-
низмы". М.: Машиностроение, 1991). Еще в 1953 г. он
ввел термин "рациональное конструирование", понимая
под этим создание механизмов без избыточных связей.
Придавая большое значение его рекомендациям, все же
отметим, что самоустанавливаемость, а тем более само-
приспособляемость, намного шире изложенных им пред-
ставлений, и, кроме того, она является только одним из
многих принципов рационального конструирования.
Кроме компенсации погрешностей изготовления и
исключения нежелательного деформирования звеньев,
самоустанавливаемость предусматривает получение мно-
гих других положительных качеств.
Тем не менее для предварительной оценки конст-
рукции можно использовать понятие избыточных связей
и осуществлять их подсчет, используя формулу опреде-
ления подвижности механизма или фермы. Поэтому сна-
чала поясним, что такое связи вообще и избыточные свя-
зи в частности. Связь сама по себе — это ограничение,
налагаемое на положение или движение механической
системы. Связь в кинематической паре - это ограничение
относительного перемещения образующих пару звеньев в
каком-либо направлении. На определенных этапах кон-
струирования звенья принимают абсолютно жесткими,
не учитывают зазоры и трение, магнитное поле и другие
факторы взаимодействия тел (см. классические курсы
"Теории механизмов и машин").
По существу, кинематическая пара в такой трактов-
ке представляет отдаленную модель подвижного соеди-
нения. В параграфе 2.1 при описании рис. 15 ... 18 в ка-
кой-то мере была предпринята попытка увязать класс
кинематической пары с реальными конструктивными
решениями соединений. Были приведены также вариан-
ты кинематических соединений нескольких пар, эквива-
лентные одной паре того или иного класса. Покажем, как
ведут себя соединения нескольких кинематических пар с
учетом деформаций, зазоров и трения (рис. 37). На осно-
ве анализа "поведения" определим, что такое избыточные
связи, "лишние" степени свободы.
Для начала сравним две схемы 7.7 и 1.2, в которых
тело соединено тремя кинематическими парами А, В и С
с основанием [стойкой]. В схеме 1.1 эксцентриситет е
обусловлен погрешностями изготовления, а в схеме 1.2
величина h выбрана из условия неподвижного соедине-
ния. В первом случае многоопорный вал может вращать-
ся, например, при его деформировании или при наличии
достаточно больших зазоров (схема 1. 1а). Здесь имеются
избыточные связи (по крайней мере, в радиальном на-
правлении). Во втором случае связи, ограничивающие
поворот тела вокруг оси АВ, — функциональные (необхо-
димые для решения функциональной задачи).
В обеих схемах присутствуют связи, накладываемые
из-за погрешностей расположения опор и длины зве-
на АВ (или АС, или АВ). Это обстоятельство иллюстри-
рует, в частности, схема 1.3.
Радиальный зазор в подшипниках на схеме 1.4 хотя
и устраняет отдельные избыточные связи, но приводит к
перекосу звеньев и к неблагоприятному кромочному
контакту. В схеме 1.5 осевой зазор служит компенсато-
ром погрешностей изготовления в осевом направлении
и/или теплового расширения. Такое соединение эквива-
лентно вращательно-поступательной кинематической
паре IVr/.
В схеме 1.6 показано, что подшипник с эластичной
втулкой при небольших перекосах может быть эквива-
лентен кинематической паре III, — трехподвижной
сферической (схема 1.6а); а с учетом допустимого осе-
96
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
37. ФУНКЦИОНАЛЬНЫЕ СВЯЗИ, ИЗБЫТОЧНЫЕ СВЯЗИ И
"ЛИШНИЕ" СТЕПЕНИ СВОБОДЫ
"j^j I Деформирование вала
——। из-за отклонений от соосности опор
Л L^l Ь^С
1.2
1.3
со
А
Возможность вращения вала
(без деформирования)
—I при достаточно больших зазорах
1.1а \ о
---- А £ X В
В k Отклонения
от соосности
из-за
неточности
изготовления
Невозможность вращения звена
вокруг оси АВ
при достаточно большой (конструктивно
предусмотренной) величине h
со
А,С, В - опоры
-опоры
4^4 ввла/балки
или рамы/фермы
Iz/w
Осевой
зазор
Деформирование стержня
из-за недостаточного
расстояния междуопорами
(в связи с неточностью изготовления
или тепловым расширением)
I 1 _4 I Перекос осей вала в опорах
'—;—I при его изгибе t
Деформирование звеньев
при сборке кривошипно-коромыслового
механизма (из-за отклонений
от параллельности сопрягаемых
поверхностей шарниров)
Самоустановкв шатуна
и дополнительное
нагружение при "лишней1
степени свободы
Деформирование
эластичной втулки
Возможность
перекосов
при поверхностном
контакте
(в пределах
деформаций)
□И
Возможность
перекосов
(в пределах
зазоров)
при кромочном
контакте
Деформирование общего
2.4 I звена в многопоточном
----1 мехвнизме
[Тбв]
IIIS с учетом только
угловых перемещений
1.7
Неподвижное
соединение
из-за самоторможения
угол трения
Кривошип
Самоустановка швтуна
и дополнительное
нагружение при "лишней"
степени свободы
Кривошип
Выходное
звено
Кривошип 1
Шатун
Коромысло
Входное
звено
3.2а
Барабан
Основание
Входной
вал
Барабан
Входной
вaл^
колесо Ь|
Центральное
колесо aj
Сателлит gj
Водило hj
Сателлит g2
Центральное
колесо а2
Деформирование
соединения звеньев
САМОУСТАНАВЛИВАЕМОСТЬ ЗВЕНЬЕВ В МЕХАНИЗМЕ ИЗМЕНЯЕМОЙ СТРУКТУРЫ
1,2, 3,..-фрикционные
муфты и тормоза □
н Выходной
5 j4 6 вал
3.4
Г идротрансформатор
Сцепная I
муфта |
Сателлит
4
Планетарные
механизмы
Входной
вал
[зЦ
Сферический
подшипник Барабан
В2
III
§>
II IV
Гх'чЧ
V
1
Входной
ВЭЛ Тв.ГВ,
а2 В3 а3|
Опоры и соединения валов h - водило
j - двухподвижное
а,Ь - центральные зубчатые колеса зубчатое соединение
С'сЛрг7ПН^
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
97
вого перемещения — четырехподвижной сферической
пареЩ,.
В схеме 1.7 изображена поступательная пара, кото-
рая практически не существует (звенья неподвижно со-
единены между собой из-за самоторможения) при дейст-
вии силы F в направлении, показанном на схеме. Если
силу направить вдоль направляющей, то движение воз-
можно.
Таким образом, класс кинематической пары опреде-
ляет и податливость взаимодействующих тел, и трение.
Рассмотрим поведение механизмов при наличии из-
быточных связей. Перекос осей шарниров, неизбежный
при изготовлении, в кривошипно-коромысловом меха-
низме (схема 2.1) приведет к изгибу коромысла и криво-
шипа и закручиванию шатуна, причем без деформирова-
ния и/или наличия зазоров невозможно собрать механизм.
В схеме 2.2 изгиб и закручивание звеньев происхо-
дят благодаря использованию "коротких" шарниров с
зазорами (схема 2.2а). Для анализа они могут считаться
сферическими трех- или даже четырехподвижными па-
рами, но при этом неблагоприятный кромочный контакт
может свести на нет преимущества исключения избы-
точных связей.
Использование в данной схеме двух полноценных
сферических шарниров приведет не только к устранению
избыточных связей (см. схему 2.3), но добавит к общей
подвижности еще одну степень свободы — возможность
вращения шатуна вокруг оси ВС.
Данная степень свободы "лишняя" - она не влияет
на выполнение функции механизма - передачи и преоб-
разования движения. Но она позволяет повысить КПД,
так звено АВ будет самоустанавливаться из условия наи-
меньших потерь на трение. В то же время, если шатун
имеет неуравновешенную массу, самоустановка может
привести к дополнительному нагружению силой F,.
Как следует из приведенных примеров, исключение
избыточных связей — тонкий процесс и требует всесто-
роннего анализа, особенно если это касается многопо-
точных систем. На схеме 2.4 механизм параллельных
кривошипов имеет два синхронно вращающихся звена
(входное и выходное), соединенных несколькими парал-
лельными звеньями (кривошипы 1, 2 и т.д.). Неточное
изготовление хотя бы одного из параллельных звеньев на
величину А приведет к дополнительному деформирова-
нию звеньев, неблагоприятному перераспределению на-
грузки, дополнительному трению и изнашиванию. Ис-
ключение трех из пяти кривошипов, казалось бы, не на-
рушит закономерности движения, но приведет к ухудше-
нию качеств, обусловленных многопоточностью переда-
чи энергии (с чем нам еще предстоит в будущем подроб-
но познакомиться). В данном примере много избыточных
связей - дублирующих ограничений одного и того же
возможного движения.
Число избыточных связей определяют по формуле
q = и> - би + 5рм + 4/>iv + Зрш + 2рп + Pi,
где w — число степеней свободы механизма или фермы;
и - число подвижных звеньев;
Р\, Piv, Pm, Рп, Pt ~ число кинематических пар соот-
ветственно V, IV, III, II, I классов (число соответственно
одно-, двух-, трех-, четырех- и пятиподвижных пар).
Трудности заключаются не в том, как подсчитать
число избыточных связей, а в том, как определить класс
каждой из пар и какие из пар заменить на другие. При
этом еще нужно увидеть "лишние" степени свободы и
оценить, как они влияют на работоспособность и качест-
венные показатели системы в целом.
В данном направлении предстоит глубокий субъек-
тивно творческий процесс. Для полноты решений нужны
объемная информация, большой банк данных о состав-
ных элементах конструируемой системы, т.е. нужно мак-
симально использовать то, что сделали до нас другие
конструкторы и исследователи. При этом лучше уже по-
добрать готовое проанализированное, апробированное
решение, чем придумывать новое, а синтез (составление)
новой схемы осуществлять только в случае, когда анализ
известных схем показывает, что ни одна из них вас не
устраивает. Но даже в этом случае постарайтесь внести
минимальные изменения в прототип, которые можно
легко оценить, естественно, соразмерив их с поставлен-
ной задачей.
Для приближенного определения классов кинемати-
ческих пар с учетом зазоров и деформаций на рис. 15 ... 18
приведены некоторые примеры эквивалентных схем и
конструктивных решений. При рассмотрении представ-
ленных схем и конструкций можно не обращать внима-
ния, что некоторые звенья обозначены неподвижными,
так как в данном случае важна относительная подвиж-
ность звеньев и любая опора эквивалентна кинематиче-
ской паре, также и кинематическое соединение несколь-
ких пар эквивалентно одной определенной паре или дру-
гому кинематическому соединению. Для определения
класса пар, не представленных рис. 15 ... 18, можно най-
ти ближайшую пару по характеру возможных движений
и аналогично ей подсчитать число связей.
При оценке самоустанавливаемости нужно еще раз-
личать характер допустимой подвижности: либо это ра-
бочая (функциональная) подвижность, либо это подвиж-
ность в пределах зазоров, допустимых деформаций, со-
пряженности звеньев (например, сферический подшип-
ник качения при перекосе, превышающем допустимую
величину, разбирается и просто перестает существовать).
В соответствии с этим рекомендуется оценить, достаточ-
но ли велики зазоры и сопряженные поверхности, чтобы
обеспечить самоустановку, и достаточно ли велики со-
прягаемые поверхности, чтобы не допустить самопроиз-
вольной разборки. Не следует забывать о жесткости и
трении: неправильно выбранное соотношение жестко-
стей приводит к деформированию в нежелательном на-
правлении, а такое, например, явление, как самотормо-
жение, может превратить подвижное соединение в непод-
вижное.
Число избыточных связей может быть уменьшено за
счет исключения отдельных кинематических пар и пере-
распределения их функций на другие пары, за счет заме-
ны (или преобразования путем увеличения зазоров или
изменения жесткости в определенном направлении) пар с
большим числом связей парами с меньшим числом свя-
зей, введением в систему дополнительных кинематиче-
ских соединений, например, компенсирующих несоосно-
98
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
сти и перекосы. Но при этом важно не перестараться: не
допустить увеличения общей подвижности, не ухудшить
функциональные качества подвижных соединений, не
допустить потери устойчивости звеньев и т.п.
Рациональность схемы после исключения избыточ-
ных связей может быть проверена путем моделирова-
ния процесса самоустановки, в том числе путем умозри-
тельного пространственного воспроизведения системы,
или прорисовкой наиболее характерных положений при
увеличенных погрешностях (см. рис. 37), или путем ап-
пликаций (динамичного изображения) функционирова-
ния механизма с помощью компьютера.
Проследим процесс исключения избыточных связей
на примерах. На схеме 3.1 в каждом ряду планетарной
передачи, встроенной в барабан лебедки, равномерно по
периметру расположены три сателлита. Общее число
подвижных звеньев при этом равно девяти: шесть сател-
литов, центральное колесо первого ряда, водило первого
ряда неподвижно соединенное с центральным колесом
второго ряда, и барабан. Классы кинематических пар I,
II,..., V обозначены без уточнения характера допустимых
движений.
В схеме 3.1
q= 1 -6 -9 + 5 -9 + 2 12= 16,
т.е. она изобилует избыточными связями.
В схеме 3.2 исключена радиальная опора водила
первого ряда, а центрирование осуществляется за счет
зацеплений центрального колеса с темя сателлитами.
Число избыточных связей при этом меньше, но все же не
равно 0:
g = 1-6 9 + 5 8+ 2 • 12+1 =12.
Схема 3.2а демонстрирует, что только при наличии
эксцентриситета Ее самоустановка в данном примере
вызывает деформирование звеньев и, соответственно,
неравномерность распределения нагрузки в зацеплениях.
Полное устранение избыточных связей осуществле-
но в схеме 3.3:
g=l—6-9 + 5- 2 + 3- 6 + 2- 12+1=0.
Сателлиты в обоих рядах установлены на сфериче-
ских подшипниках (предложение Л. Н. Решетова), благо-
даря чему создаются благоприятные условия для распре-
деления нагрузки, а самоустановка не сопровождается
деформированием водила.
Далее остановимся на одном очень важном аспекте
конструирования, не предусмотренном ни общей теорией
механизмов и машин, ни в рекомендациях Л. Н. Решето-
ва. Речь пойдет о схемах переменной (изменяемой)
структуры, в которых одни и те же звенья и структур-
ные группы в зависимости от режима функционирования
входят в состав различных кинематических схем.
На схеме 3.4 - гидромеханическая коробка передач
зарубежного транспортного средства, в которой обозна-
чены:
В], В2 и В3 - центральные подшипниковые опоры;
Я|, а2, а3 и а4 центральные колеса внешнего зацеп-
ления;
bi, b2, Ь3 и Ь4 - центральные колеса внутреннего за-
цепления;
ji> h< Гь j4 и j5 - соединительные компенсирующие
зубчатые муфты;
hi, h2, h3 и h4 — водила планетарных механизмов;
1, 2, 3, 4, 5 и б - сцепные управляемые муфты и
тормоза.
В приведенной схеме выделены базовые звенья, ко-
торые центрируются в корпусе — вращающиеся валы (см.
схемы 3.4а, 3.46). Валы имеют по две опоры III класса а
одну соединительную пару IV класса. Они не имеют из-
быточных связей, и движение их является определенны1'
при любом режиме. Самоустановку остальных звеньев
нужно рассматривать относительно этих валов и корпуса
На базовых звеньях закреплены одно-два звена пла-
нетарных механизмов, например, водила hb h2 и h4, цен-
тральные колеса ai и а3, остальные звенья выполнень
"плавающими" — самоустанавливающимися в радиал1--
ном направлении (например, звенья Ь2 и b4, ai и а4) ил
вокруг осей, перпендикулярных к оси базового звена
(звенья bi и hi).
Фрикционные диски сцепных муфт и тормозов до-
пускают радиальные движения "плавающих" звеньев,
одновременно ограничивают их осевые движения. Пр
замкнутом состоянии муфты или тормоза радиальные
движения соответствующего "плавающего" звена огра-
ничены силами трения, что служит для дополнительного
базирования других звеньев. Кроме того, демпфируют -
колебания самоустанавливающихся звеньев. Для каждого,
из звеньев предусмотрена осевая фиксация.
Анализ данной схемы показывает отсутствие иди
минимальное количество избыточных связей и отсутст-
вие произвольных движений, вызывающих вибрации, чт.
свидетельствует о том, что зарубежные конструкторы в
совершенстве владеют искусством создания сложных
самоустанавливающихся систем, в том числе с учето
трения. Это тем более поучительно, что вопреки доволь-
но распространенному мнению высокая точность изго-
товления не исключает целесообразности конструкц:
без избыточных связей.
Рассмотрение современных конструкций позволя.
сформулировать некоторые положения анализа и син-
теза сложных систем (соединений, блоков, агрегатов) по
критерию обеспечения самоустанавливаемости с це-
лью компенсации погрешностей изготовления и монтажа:
• в любой сложной механической системе можн?
выделить отдельные укрупненные блоки, например, прц
нятые за неизменяемые объекты и подвижные или не-
подвижные кинематические соединения между ними (см.
рис. 38);
• каждое из кинематических соединений можг
также представить в виде отдельных объектов и их со-
единений или кинематических пар;
• каждую из кинематических пар можно предста-
вить в виде сопряженных, в том числе многократно по-
вторенных элементов;
• желательно определить, какого класса должна
быть кинематическая пара, а затем при наличии доста-
точно полного банка схем и конструктивных решений;
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
99
38. АНАЛИЗ САМОУСТАНАВЛ И БАЮЩЕЙСЯ СИСТЕМЫ
ПУТЕМ РАЗДЕЛЕНИЯ ЕЕ НА ПОДСИСТЕМЫ
(МЕХАНИЗМЫ, КИНЕМАТИЧЕСКИЕ СОЕДИНЕНИЯ
[ПАРЫ] И ЗВЕНЬЯ)
Общая рама (тепловоза)
I-- Четырехподвижная упругая опора |
| (двухподвижная сферическая пара IV5 ।
' - без учета колебаний в пределах упругости
| пружин-см. сх. 9.1а на рис. 42)
Г Неподвижное П
| статически ।
определимое 1
соединение |
Блок
двигатель-редуктор
Рама тележки
Пятиподвижная пара
(требуемая подвижность
достигается в пределах
зазоров и деформаций
регулируемого
соединения)
п Двухстороннее
I четырехподвижное
| упругое соединение
1 Пятиподвижное1
-I упругое [
соединение
Рама тележки ^сь
колесной
пары
Опора выходного вала (одноподвижная
вращательная пара Vr)
Одноподвижная
вращательная
пара Vr
Кронштейн
подвески
привода
Пятиподвижное
упругое соединение
[шарнирная муфта]
Боковая составляющая
соединения
- упруго-демпфирующая опора
(по обе стороны тележки)
Выходной вал
Колесная-
пара
Зазор 35 мм
। Одноподвижная пара [
I качения колес ।
Колесная
пара
I Рама Четырехподвижное
। тележки^^ упругое соединение
Балансир I
I Направляющие (рельсы) I
Опора оси
HIs+V,
Четырехподвижное соединение
в виде совокупности
сферической трехподвижной
пары П15 и поступательной
одноподвижной парыУ^
Двигатель
Ч. Редуктор
V7////A
Упругий шарнир IHS.JVS
обеспечивает требуемые
перекосы осей в пределах
деформаций втулки
колесной пары
Демпфер
подобрать ее конструктивное исполнение или эквива-
лентное кинематическое соединение;
• обеспечивать самоустанавливаемость целесооб-
разно поэтапно по мере укрупнения или дробления рас-
сматриваемой подсистемы. Важно при этом иметь за-
вершенный вид каждой из подсистем: с определенной
заданной степенью самоустанавливаемости при сохране-
нии функциональных качеств.
На рис. 38 в общей системе подвески тепловоза по-
казаны отдельные ее составляющие. Каждая из колесных
пар соединена с двигателем и рамой тележки. Двигатель
в едином блоке с редуктором подвешен к раме тележки.
Обратите внимание на исполнение опоры, которая
должна быть пятиподвижной (I класса), но она мало на-
поминает собой соответствующее решение. Тем не менее
она ведет себя как пара I класса, хотя перемещения опре-
делены лишь зазорами и упругостью элементов. При
монтаже требуется регулировка за счет сменных прокладок.
В силу существенной подвижности колесной пары
относительно блока двигатель - редуктор его выходной
вал соединен с колесной парой компенсирующим несо-
осности и перекосы механизмом, который сам по себе
эквивалентен кинематической паре I класса. В данном
механизме присутствуют лишние степени свободы, если
считать все пары III класса. Имеются и вредные подвиж-
ности, но вследствие правильно подобранной упругости
элементов пары поведение звеньев представляется доста-
точно определенным.
Кстати, этот пример свидетельствует о том, что
идеализированное представление конструкции и подсчет
избыточных связей не дают однозначного ответа в отно-
шении рациональности конструкции. В данном случае
класс каждой из кинематических пар может быть проме-
жуточным между III и IV.
На рис. 38 показано также исполнение подвески ко-
лесной пары. В целом подвеска состоит из двух симмет-
рично расположенных боковых составляющих соедине-
ний, каждое из которых содержит направляющую опору,
упругие элементы и упругодемпфирующее устройство,
ограничивающее поперечные колебания тележки. На-
правляющая опора может быть представлена в виде од-
ной или двух кинематических пар. Кроме того, имеется
взаимосвязь с другой колесной парой, не рассматривае-
мая в рамках данного изложения, поскольку речь идет о
другой разновидности самоустанавливаемости.
На рис. 39.1, 39.2 приведены схемы подвесок агре-
гатов на базовом основании (платформе, раме, станине).
Общая теория механизмов и машин не признает такие
100
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
39.1. ПОДВЕСКИ АГРЕГАТОВ
4.1 I Нерациональная система-
неподвижные (жесткие)
соединения корпусов
с основанием и
собой
валов между
Вых./исполнит.
звено
Опора
вых.вала
редуктора
Основание
Корпус
редуктора
Опора
вх.вала
редуктора
Двигатель
4,3 | СОЕДИНЕНИЯ ВАЛОВ С ПОМОЩЬЮ КОМПЕНСИРУЮЩИХ МУФТ [ПЯТИПОДВИЖНЫХ ПАР]
Корпус
двигателя редуктора Компенсирующая
Корпус
Компенсирующая
муфта 1
муфта 2
/ Исполнит.
/ устр-во
С(П..)
Компенсирующая
муфта 1 (I)
Основание
(общая рама)
4.3а | Компенсирующая
муфта 2
(I)
Корпус
двигателя
Корпус
редуктора
Совокупность опор
С(П„) и С(Ш5)
эквивлентна
одноподвижной
вращательной паре.
IVv Вых. звено
СТАТИЧЕСКИ ОПРЕДЕЛИМЫЕ СИСТЕМЫ ОПОР КОРПУСА АГРЕГАТА
4.4
ь(шр
4.10
Подшипниковая
опора корпуса
Корпус 1
двигателя
или редуктора
Основание
редуктора
^Kdiij
/ус и FrK- реакции опор С и К,
воспринимающие
момент на плече h
Подвеска тягового электродвигателя
локомотива (см. также рис. 38)
Зубчатый
редуктор
М /
/ Подвеска
/ колесной
p-jA пары
Болт
Основание
fl
Турбовентиляторным
двигатель (самолета)
I - пятиподвижная пара
II - четырехподвижная пара
III s - трехподвижная сферическая пара
IVr/ - двухподвижная
вращательно-поступательная пара
Vr - одноподвижная
вращательная пара
-fZZZZZZZZ 1 о
й *гг
F - внешняя нагрузка
7], ?2" вращающие моменты,
воспринимаемые основанием
7^1. Л; 2 “ силы тяжести (двигателя и редуктора)
Fr - реакция опоры (основания)
h - плечо действия сил
Корпус
агрегата
^KUH.)
N(V
K(Vr)
Амортизационная
стойка
В
Трубчатый
стержень
Ось колесной пары
Подвеска Li
колесной (
пары
w2
Подвеска
колеса
вертолета
Подкос Консольная
ось
Компенсирующая
Вых. вал муфта
Конвертер
Тормоз
Колесо
Пространственная
трехповодковая
структурная группа,
присоединенная к основанию
Редуктор
несущего винта
вертолета
Шарнирное
соединение
стержней
|4.12б|
Кольцо
Рама
подвески
Ферма 1
Газотурбинный
двигатель
(вертолета)
М fgg ферма 2
Корпус двигателя
разгружен
от крутящего
момента.
G(I)
|4.12а|
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
101
системы механизмами, и потому игнорирует методы их
конструирования, а конструкторы ряда областей техники
вместо таких систем используют неподвижные группо-
вые соединения, не допускающие самоустанавливаемости.
В авиационной технике и железнодорожном транс-
порте рациональные конструкции подвесок достаточно
распространены, но качество их может быть еще более
высоким за счет более полного использования принципа
самоустанавливаемости.
Постепенно уходит в прошлое стремление присое-
динять редуктор к базовой части или основанию макси-
мальным количеством болтов и сделать такое соединение
настолько жестким, чтобы редуктор и основание пред-
ставляет собой единый блок (см. схему 4.1).
Подвеска агрегата выполняет в современных конст-
рукциях те же функции, что и компенсирующая муфта,
соединяющая валы, но может воспринимать и внешние
нагрузки со стороны выходного звена 1 исполнительного
устройства. Отличие подвески от муфты заключается
только в том, что подвеска соединяет невращающиеся
звенья, хотя относительная подвижность самих звеньев в
обоих случаях аналогична. В обоих случаях подвеска или
муфта должна передавать (воспринимать) вращающий
1 реактивный) момент и должна минимально сказываться
на независимости относительных перемещений соеди-
няемых звеньев.
В примере с муфтой не должно быть взаимозависи-
мого нагружения соединяемых валов и их опор, точно
так же в примере с подвеской деформирование одного
звена (станины, основания) не должно передаваться дру-
гому звену (корпусу редуктора). В обоих случаях долж-
ны компенсироваться погрешности монтажа и деформа-
ции, т.е. обеспечиваться допустимое их влияние на
функционирование агрегата (полностью исключить это
влияние невозможно даже в статически определимой
системе, так как есть еще силы трения и инерции, кото-
рыми не всегда можно пренебречь).
Рассмотрим схемы нагружения, деформирования
и самоустанавливаемость агрегатов в порядке разви-
тия систем соединения звеньев.
На схемах 4.1 и 4.2 - жесткое присоединение корпу-
са двигателя и корпуса редуктора к основанию. Кроме
сил тяжести Fg\ и F&, основанием воспринимаются реак-
тивные моменты 7\ и 7), равные по величине вращаю-
щим моментам.
На схеме 4.2 момент представлен в виде пары сил
Fr, приложенных в точках А, В на плече h. Внешняя сила
F через вал выходного звена передается на его опору и
через корпус редуктора - на основание.
Система на схеме 4.1 - статически неопределимая,
так как валы двигателя и редуктора соединены непод-
вижно (жестко). Следовательно, даже при очень точном
монтаже нагружение звеньев будет отличаться от той
схемы, которая здесь представлена, из-за деформаций
валов, опор, корпусов и соединений.
На схеме 4.3 для исключения функционально непре-
дусмотренного взаимного влияния между двигателем D,
редуктором G и исполнительным устройством W введе-
ны компенсирующие муфты 1 и 2.
На схеме 4.3а показано, что в идеальном случае та-
кие муфты должны представлять собой пятиподвижные
кинематические пары (см. рис. 18 в параграфе 2.2).
В частном примере они могут представлять собой соеди-
нения трех кинематических пар IV,, V, и IV, по типу кар-
данной передачи, хотя конструктивно спектр такой схе-
мы весьма широк.
Опоры выходного звена С и С' представляют собой
двух- и трехподвижные пары П„ и III,. В обозначениях
кинематических пар индекс s означает допустимость
сферического движения, t - прямолинейного движения,
г — вращательного движения.
На схемах 4.4 и 4.4а - простейшая, довольно широ-
ко используемая подвеска редуктора (здесь и далее во
всех схемах 4.5 ... 4.9 рассматривается единый блок дви-
гателя и редуктора с выходным звеном, нагруженным
силой F). Корпус агрегата установлен в подшипниковой
опоре. Для восприятия момента установлена тяга LK.
Она имеет трехподвижные пары III,. Даже при несоосном
исполнении агрегата момент характеризуется парой сил
Fr-h. Подшипниковая опора работает в условиях переко-
са, и ее лучше исполнить в виде двух шарниров Н и J
(схема 4.5). При этом размещение шарниров Н и J может
быть и несоосным по отношению к выходному звену.
Варианты подвесок на схемах 4.6, 4.9 аналогичны
схеме 4.5. Их объединяет опора корпуса в трех точках, не
лежащих на одной прямой. Уже давно известен такой
прием размещения опор, поскольку обычно считают его
достаточным для статической определимости. Но, к со-
жалению, если неправильно выбрать виды кинематиче-
ских пар и неверно их ориентировать (например, это ка-
сается направления оси вращательной или вращательно-
поступательной пары), то данный эффект не будет обес-
печен.
Для оценки приемлемости схемы можно проследить
возможность (логику) самоустанавливаемости звеньев
или подсчитать число избыточных связей. Последнее,
однако, не всегда достаточно. Для анализа схемы можно
мысленно представить тягу с опорами К и L (схема 4.5) в
виде пятиподвижной пары I (схемы 4.7 и 4.8) и далее
конструктивно осуществить данную пару. Пары L и М
могут быть выполнены в виде коротких шарниров, как на
схеме 4.7, и представлены в виде единой одноподвижной
вращательной пары V, или могут иметь собственные
подвески в виде ферм 1 и 2 (схема 4 9а), причем каждая
из ферм должна быть также статически определимой.
Корпус может опираться на четыре и большее число
точек. Иногда требуется распределить нагрузку на боль-
шее число точек, например, когда используется тонко-
стенный корпус.
В любом случае нужно соблюдать следующие пра-
вила.
1. Система не должна иметь избыточных связей.
Лучше обеспечить самоустанавливаемость, в том числе
за счет уменьшения жесткости элементов, введения до-
полнительных податливых элементов, чем предусматри-
вать регулировки (в реальной конструкции в схеме 4.7
пара I имеет набор регулировочных прокладок — см.
рис. 38).
102
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
2. Равнодействующая сил должна проходить как
можно ближе к середине контура точек опирания (на-
пример, MLI в схеме 4.9). При удалении от контура сис-
тема работает как защемленная опора консольной балки
(см., например, контур МАВ в схеме 4.10) с вытекающи-
ми отсюда значительными нагрузками на опоры и корпус.
3. Тяги KL, MN {схемы 4.6, 4.9) должны быть на-
гружены только продольной (осевой) силой, но не долж-
ны изгибаться. Последнее явление в схеме 4.6 возможно,
если сила F имеет осевую составляющую, причем в этом
случае опоры К и N работают в условиях перекоса. Луч-
ше во всех случаях избегать одноподвижных опор V,
(схема 4.12) и заменять их двумя эквивалентными опо-
рами (например, опоры S' и S" на схеме 4.12а).
4. "Лишние (местные)" степени свободы допустимы
(при условии уравновешенности относительно оси вра-
щения) и даже желательны, так как улучшают самоуста-
навливаемость при наличии трения.
5. Кинематические пары в пространстве должны
быть ориентированы таким образом, чтобы угол между
реакцией и допустимым линейным перемещением был
бы достаточно близким к 90°. Для обеспечения дополни-
тельной связи наряду с геометрическими связями можно
использовать и самоторможение. А в случае, когда тре-
буется высокая чувствительность к самоустанавливаемо-
сти, самоторможение недопустимо.
В развитие данной темы проанализируем несколько
примеров из практики машиностроения.
На схеме 4.7 представлена подвеска тягового элек-
тродвигателя локомотива. Соединения корпуса двигателя
с рамой колесной тележки в трех точках I, L, М, а его
вала с колесной парой обеспечивают их силовое взаимо-
действие, а также компенсацию погрешностей монтажа и
относительных рабочих перемещений.
Каждая из колесных пар соединена с двигателем и
рамой колесной тележки. Двигатель в едином блоке с
редуктором подвешен к раме тележки. Система подвески -
трехопорная (см. также схему 4.8). Одна из опор, которая
должна быть пятиподвижной (I класса), в конкретном
решении допускает необходимые движения только бла-
годаря зазорам и упругости ее элементов. При монтаже
требуется регулировка за счет сменных прокладок. Две
другие опоры могут быть представлены как однопод-
вижная вращательная опора Vs. В силу существенной
подвижности колесной пары относительно блока двига-
тель-редуктор его выходной вал связан с колесной парой
пятиподвижным упругим соединением по схеме 4.76 (см.
рис. 40) (разновидности такого соединения представлены
на схемах 4.7а, 4.7в, 4.7г, 4.7д), которое само по себе эк-
вивалентно кинематической паре I класса.
В данном механизме присутствуют лишние степени
свободы, если считать все составляющие пары III класса.
Имеются и вредные подвижности, но при правильно по-
добранной упругости элементов пары поведение звеньев
представляется достаточно определенным. На схеме 4.7
условно показано упругое соединение рамы тележки с
осью колесной пары (пример исполнения см. на рис. 38).
Двигатель передает вращательное движение через
редуктор на его выходной вал, а затем через пятипод-
вижное упругое соединение — колесной паре. Реактивн
момент двигателя воспринимает рама тележки череь
трехопорную подвеску. Ось колесной пары помимо вра-
щения перемещается в радиальном направлении в пре: .
лах зазора, предусмотренного внутри выходного вала.
На схеме 4.9а представлена подвеска газотурбин-
ного двигателя вертолета. За исходную здесь взята с.
ма 4.9, но опоры J и Q соединены с каркасом вертолета .
помощью ферм 1 и 2, каждая из которых представлю
собой, по существу, статически определимую подвес!
Кинематическое соединение KLMN - шарнирный четы-
рехзвенник, эквивалентный двухподвижной паре.
Особенностью конструкции турбореактивных
турбовентиляторных двигателей является тонкостеннь..
податливый корпус.
Причем, если сосредоточить его крепление к кры.
самолета в одном месте, то он будет нагружен крутящие
моментом (см. реактивные моменты 7\ и Т2) и изгибаю-
щим моментом от реактивной силы F. Для сведения, 4
минимуму деформации корпуса точки его крепления
должны быть разнесены, а число их должно быть дост 4
точно велико.
Кроме того, с этой же целью точки крепления выС
рают как можно ближе к месту приложения реактивны!
моментов Т\ и Тг. Тем самым реализуется принцип кра~-
чайшего пути замыкания сил (см. параграф 5.4).
Подвеска, представленная на схеме 4.96, выполне, .
в соответствии с данными соображениями. Два жесть
окружных пояса AD и ML передают через тяги АВ, CD я
KL, MN реактивные моменты 7) и Т2 на основание (кр
ло самолета), а звено QRR' передает продольную реаг -
тивную силу F. Пара G(I) ограничивает поперечные пе-
ремещения двигателя. В реальной конструкции шарнир
в основном короткие цилиндрические, а здесь они пре -
ставлены в виде сферических пар, чтобы можно был.
проследить возможность самоустановки звеньев и раз-
дельное восприятие реактивных моментов и силы. На. . -
чие избыточной связи (в месте крепления переднего поя-
са) при формальном подсчете для данной схемы не игр
ет существенной роли, если учесть принятые допущен,
при ее представлении.
На схеме 4.10 представлено исполнение подвеска
колеса вертолета. Консольная ось колеса приварена. я
трубчатому стержню. Стержень соединен с каркасе
вертолета шарнирно в точке А и имеет дополнительн
опирание через подкос СВ и через амортизационгг
стойку KN.
Отличие данной системы от фермы 1 и 2 на сх
ме 4.9а заключается только в податливости (в осев<
направлении) звена KN; на схеме 4.10 показаны реакп.
Fjv и FK при осевом сжатии эвена. Вместо сферически»
шарниров здесь использованы пары цилиндрическия
вращательных шарниров М и N, К и L с пересекающими-
ся на малом расстоянии осями. Хотя в данном примере >
прослеживается аналогия с фермой, тем не менее по су-
ществу — это механизм пространственный коромьк-
лово-кулисный.
Схема 4.10 иллюстрирует, насколько функционалы,
но близки решения подвесок в виде механизма и ферм
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
103
Разница только в величине деформирования (изменения
длины), по крайней мере, одного из звеньев.
На схеме 4.11 дана подвеска конвертера для вы-
плавки стали. Конвертер подвешен к кольцу на трех
тягах, воспринимающих силу тяжести. Вращение кон-
вертера относительно кольца ограничивает поступатель-
ная пара F. Кольцо имеет шипы Е и Е', установленные в
подшипниках, имеющих индивидуальные подвески от-
носительно основания. Рама каждой из таких подвесок
ЕК (Е'К') соединена с основанием тягами ВС и AD, до-
пускающими поступательное движение опор Е и Е' в
горизонтальной плоскости, а опоры К и К' обеспечивают
самоустановку рам подвески ЕК и Е'К'.
На схеме 4.11а дан пример конструктивного реше-
ния подвески опоры Е. Трехподвижные пары В, С и че-
тырехподвижное соединение К имеют неполные сфери-
ческие рабочие поверхности. От непредусмотренных
вертикальных перемещений рамы подвески относительно
основания предохраняют болты, установленные с зазором.
На схемах 4.12 и 4.12а дана подвеска редуктора
несущего винта вертолета. При этом схема 4.12 пред-
ставляет собой лишь возможную пространственную
трехповодковую структурную группу Ассура, присоеди-
ненную к основанию. Для восприятия силы F и вращаю-
щего момента (реактивного момента) Т каждый поводок
на концах должен иметь трехподвижную (М, К, Р) и од-
ноподвижную пары (N, S, Т). Полученная система стати-
чески определимая.
В развитие данной системы на схеме 4.12а редуктор
соединен с корпусом машины посредством регулируе-
мых амортизационных стержней S"K и подкосов S'R.
Соединение этих двух звеньев эквивалентно одному звену
KS на схеме 4.12, а пары S' и S" эквивалентны одной паре S.
Шарнирная подвеска агрегата в сочетании с подат-
ливостью подкосов уменьшает влияние деформаций аг-
регата и его вибраций на корпус машины.
Для статической определимости системы в схе-
ме 4.12а достаточно иметь шесть стержней со сфериче-
скими шарнирами на концах. На практике из компоно-
вочных соображений и, исходя из желания иметь более
распределенную нагрузку, на корпусе агрегата исполь-
зуют обычно восемь стержней, а погрешности монтажа
компенсируют за счет регулирования длины и податли-
вости стержней. Сферические движения обеспечиваются
благодаря использованию коротких шарниров и за счет
зазоров.
На схеме 4.13 показано присоединение кузова ав-
томобиля (повышенной проходимости) к его раме, ко-
торая опирается через упругие элементы подвесок и ко-
леса на дорожное полотно. Кузов соединен с поперечи-
нами рамы в четырех точках - вершинах ромба. Хотя при
определении классов кинематических пар учтены воз-
можности перекосов и перемещений за счет зазоров в
шарнирах, тем не менее имеются две избыточные связи.
Они могут быть скомпенсированы за счет введения упру-
гих прокладок, например, в неподвижных соединениях
опор К, N и кузова. Главная задача данной подвески ку-
зова - исключить влияние деформирования рамы на ку-
зов. На схеме 4.13а показано, что при "закручивании"
рамы ось KN остается на месте, а кузов поворачивается
вместе с линией LM без каких-либо деформаций (F\..
F4 - внешние воздействия на раму со стороны дорожного
полотна; FK, FL, FM, FN - реакции опор кузова).
Рассмотренные на схемах 4.4 ... 4.12а системы пред-
полагают подвеску агрегата как единого целого. Если и
имеются в нем соединения частей, то предполагается
использование компенсирующих муфт. Но может быть и
решение: выходные и входные валы двигателя, ре-
дуктора, исполнительного устройства соединены не-
подвижно (могут быть выполнены как одно целое), а
корпусы имеют индивидуальную подвеску (схемы 4.14
и 4.15, рис. 40).
Принципиальная схема 4.14 предусматривает уста-
новку вала исполнительного устройства как наиболее
нагруженного в опорах основания, на этом валу подве-
шен корпус редуктора, а на входном валу редуктора под-
вешен двигатель.
Задача конструирования такой системы заключается
в том, чтобы полностью разгрузить два вала от радиаль-
ных нагрузок, обусловленных силой тяжести и реактив-
ными моментами. С этой целью применяют компенси-
рующие подвески, способные передавать момент в виде
сил 77/ на плече / и уравновешивать силу тяжести Fg с
помощью противовеса или пружины.
На схеме 4.14а выходной вал имеет симметрично
расположенные опоры С и С' на основании (внешняя
104
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
|4.14б |
Г^П
40. ШАРНИРНЫЕ МЕХАНИЗМЫ [КОМПЕНСИРУЮЩИЕ МУФТЫ/ПОДВЕСКИ],
ЭКВИВАЛЕНТНЫЕ ПЯТИПОДВИЖНОЙ КИНЕМАТИЧЕСКОЙ ПАРЕ
Q О|
Опоры вала
исполн.устр-ва
ПЯТИПОДВИЖНЫЕ СОЕДИНЕНИЯ КОРПУСА С ОСНОВАНИЕМ .---,
(ПРИ НЕПОДВИЖНОМ СОЕДИНЕНИИ ВАЛОВ) 1414а
Опоры вала |4.14|
двигателя Опоры вх. вала
Неподвижное редуктора
у-хсоединение^Неподвижное
[Fol
14.15б|
W
W
Дорожное полотно (рельс)
5 7
1 - входное звено
(кривошип/коромысло)
4, 5 - рычаги
2,3, 6,7 - тяги
8 - промежуточное звено
W - выходное звено
(колесо, кривошип/коромысло)
Компенсирующая I ^Опоры вых. вала
подвеска 1 редуктора
Компенсирующая
подвеска 2
Реакции
опор
только в виде
пары сил т/1,
уравновеши-
вающей
момент Т
Противовес
СОЕДИНЕНИЯ ПРИВОДА (ВЫХОДНОГО ВАЛА РЕДУКТОРА)
С КОЛЕСНОЙ ПАРОЙ ЛОКОМОТИВА
ПОДВЕСКА ЛЕНТЫ ТОРМОЗА,
ОХВАТЫВАЮЩЕЙ "ПЛАВАЮЩИЙ" ШКИВ.
-ЗУБЧАТОЕ КОЛЕСО
ПЛАНЕТАРНОЙ ПЕРЕДАЧИ
сила сопротивления F и реакции в опорах F,)- Корпус
редуктора присоединен к основанию с помощью про-
странственного пятизвенного механизма, обладающа о
пятью степенями свободы. Момент передается через па-
раллельные стержни MN и LK на звено NJQK, работаю-
щее на кручение. Стержни могут свободно перемешаться
в трех направлениях, допускают свободный поворот кор-
пуса вокруг двух осей (кроме оси выходного вала).
В результате корпус может самоустанавливаться, и тем
самым компенсируются погрешности монтажа (несоос-
ности и перекосы).
Звено NJQK кроме кручения работает как рычаг, с
одной стороны которого действует сила тяжести корпуса,
а с другой - сила тяжести противовеса.
На схеме 4.15 аналогичная подвеска представлена в
плоском исходном исполнении, хотя, по существу, при
компенсации перекосов осей механизм превращается в
пространственный. Замыкание осевых сил нагружения
стержней 2 и 3 осуществлено через рычаги 4 и 5, а также
звено б, работающее на сжатие или растяжение. Вместо
замыкающего звена может быть введен торсион (в схе-
ме 4.14) или пружина (в схеме 4.15) с целью уменьшенш
переменных нагрузок.
Остается еще вопрос, какой из принципиальных
схем 4.3 или 4.13 отдавать предпочтение? По структуре :
конструктивному исполнению шарнирная муфта и под-
веска могут быть совершенно идентичны: каждая m
схем 4.7а ... 4.7д, 4.15 ... 4.15в и 4.14а может быть каЯ
муфтой, так и подвеской. В первом случае входное и вы-
ходное звенья синхронно вращаются, а во втором - не
вращаются. Но в обоих случаях они способны передави
вращающий момент и допускать (компенсировать) отно
сительные несоосности и перекосы. Инерционные на-
грузки в компенсирующей муфте могут быть значится:
ными по сравнению с нагрузками в подвеске, величин:
передаваемого момента, а следовательно, размеры звень-
ев в подвеске больше, чем в муфте. С точки зрения воз-
можности обеспечения эффективной виброзащиты под-
веска, несомненно, более пре. щочтительна.
Наряду с приведенными на рис. 40 механизмами
качестве подвесок могут быть использованы и други;
варианты компенсирующих муфт (карданные передачи
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
105
зубчатые муфты, упругие муфты и т.п.). Но схемы на
рис. 40 предпочтительны, когда требуется компенсиро-
вать значительные несоосности и перекосы. Кроме того,
они могут быть компактнее других схем, а их отдельные
звенья совмещаться с подвешенными звеньями (см. схему
4.15в).
Схемы 4.7а ... 4.7д широко применяют в железнодо-
рожном транспорте для передачи движения на привод-
ные колеса при значительных относительных перемеще-
ниях колесной пары и рамы тележки, на которой уста-
новлен двигатель.
Одно из условий конструирования приведенных ме-
ханизмов — исключение избыточных связей. Обычно в
них применяют шарниры с эластичной прослойкой (см.
рис. 38). Такие шарниры допускают сферические движе-
ния, и на схемах рис. 40 обозначены как сферические
пары. Для определенности положения звеньев некоторые
пары должны быть выполнены цилиндрическими враща-
тельными, но с учетом ограниченности движения в упру-
гих парах и с целью унификации они могут быть одина-
ковыми по конструкции, но отнесены различным классам
при анализе. Используют в таких подвесках и высшие
пары (схемы 4.15а-в).
На всех схемах рис. 40 показаны центры С и С,, не
совпадающие из-за погрешностей или функциональных
перемещений. Все схемы имеют симметричные взаимо-
связанные кинематические цели, чтобы передавать мо-
менты в виде пары сил.
В схеме 4.7а колесо W с центром Ci приводится во
вращение от кривошипа 1 с центром вращения С через
параллельные тяги 2 и 3, рычаги 4 и 5, замыкаемые тя-
гой 6. Звенья 4, 6 и 5 образуют шарнирный параллело-
грамм, рычаги 4 и 5 которого воспринимают пару сил со
стороны тяг 2 и 3. Число избыточных связей такого ме-
ханизма подсчитывается по формуле, использованной
уже ранее для анализа схем на рис. 37:
q = w - би + 5pv+ 4piv + Зрш + 2р>ц + pi,
где w — число степеней свободы; и - число подвижных
звеньев; pv, pIV, рш, ри, рх - соответственно число одно-,
двух-, трех-, четырех- и пятиподвижных пар.
Для данного примера
g = 1 — 6 • 7 + 5 • 4 + 3 6 = -3,
что означает наличие лишних степеней свободы. Дейст-
вительно, звенья 2, 3 и 6 могут вращаться вокруг оси, не
влияя на движения механизма в целом. Эти степени сво-
боды безвредны.
В схеме 4.76 колесо W приводится во вращение от
кривошипа 1 через параллельные тяги 2 и 3, промежу-
точное звено 8 и параллельные тяги 9, 7. Каждая из пар
тяг образует с присоединенными к ним звеньями антипа-
раллелограмм.
Схема 4.7в отличается от схемы 4.76 только тем, что
тяги 2, 3, 7 и 9 вместе с присоединенными к ним звенья-
ми образуют параллелограммы.
Структуры схем 4.7г, 4.15 аналогичны структуре
схемы 4.7а, а структура схемы 4.7д аналогична структуре
схемы 4.76. Различие заключается только в ориентации
тяг и рычагов. При этом тяги 2 и 3 параллельны между
собой, а тяги 7 и 9 параллельны между собой и перпен-
дикулярны тягам 2 и 3. Тяга 6 ориентирована так, что
замыкает силовой контур. Параллельные тяга передают
момент в виде пары сил, а тяга 6 нагружена осевыми си-
лами. В схемах 4.156, 4.15в вместо антипараллелограмма
(звенья 4, 6, 5 и W на схеме 4.15) применена пара зубча-
тых секторов 4, 5. Схема 4.15а еще проще, в ней исполь-
зована пятиподвижная пара А. Кстати, в схемах 4.156 и
4.15в зубчатые сектора должны иметь бочкообразные
зубья.
Схема 4.14а представляет собой наиболее простой
вариант. Замыкание сил, действующих вдоль тяг 2 и 3,
осуществлено рычагом 4.
Для этой схемы
g = 1 — 6 • 5 + 5 - 3 + 3 • 4 = —2,
т.е. имеются две лишние (безвредные) степени свободы -
вращение тяг 2 и 3 вокруг своих осей.
Общий принцип построения схем заключается в со-
единении входного и выходного звеньев посредством
двух параллельных тяг 2 и 3, замкнутых между собой
специальным механизмом или одним звеном.
Схема 4.15в иллюстрирует совмещение функций
рычажной системы управления тормозом и подвески
шкива тормоза. Шкив тормоза не имеет радиальной опо-
ры и неподвижно соединен с плавающим центральным
колесом b планетарной зубчатой передачи. На схеме обо-
значено также другое центральное колесо а. Шкив охва-
тывает лента тормоза, которая имеет подвеску, уравно-
вешивающую радиальные силы.
Подвеска ленты тормоза допускает радиальные пе-
ремещения шкива и обеспечивает самоустановку его в
процессе работы планетарной передачи, а также вырав-
нивание нагрузки по сателлитам g.
Тормозной момент (пара сил) через тяги замыкается
в зацеплении зубчатых секторов 4 и 5. Нормально тормоз
под действием пружины разомкнут. Затормаживание
осуществляется под действием силы F, направленной
параллельно оси шарниров секторов для уравновешива-
ния реакций в шарнирах.
Схема 4.146 соответствует схеме 4.14а, но здесь она
показана в функции муфты, а не подвески. Вращение
звена 1 передается звену W.
После выбора принципиальной схемы подбирают
конструктивные решения шарниров. Они могут в точно-
сти соответствовать классам, обозначенным на схемах, и
тогда обеспечивается определенная геометрическая са-
моустанавливаемость. В случае использования упругих
шарниров они могут быть применены только вместо
сферических пар или одноподвижных вращательных пар.
В последнем варианте функции самоустанавливаемости
перераспределяются в соответствии с жесткостью эле-
ментов и требуется тщательный силовой анализ, чтобы
не допустить излишнего нагружения элементов (из-за
стесненности движения) или неопределенности движе-
ния звеньев (из-за податливости элементов).
106
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
4.3. ВНЕШНЯЯ
САМОУСТАНАВЛИВАЕМОСТЬ
В практике конструирования нередки функциональ-
ные задачи, когда один объект должен приспособляться к
положению и/или неизменяемой геометрической форме
другого объекта. Если для решения задач по компенса-
ции погрешностей изготовления и монтажа (см. параграф 4.2)
требуемые перемещения невелики, то для решения дан-
ных задач перемещения соизмеримы с размерами самих
объектов или их звеньев. Решения этих задач прежде все-
го сводятся к организации такого внешнего сопряжения
между объектами, при котором один объект (в том числе
естественный, например, захватываемый камень или до-
рожное полотно) может не менять положение и форму, а
выходные звенья другого объекта - собственно разраба-
тываемой машины — "нащупывают" первый объект и
прилегают к нему своими рабочими поверхностями.
Приемы конструирования, используемые с этой целью,
могут быть приемлемы и в ряде других случаев - для
самопристыковки равнозначных объектов, для заданного
распределения нагрузки между звеньями системы и т.п.
Управляющим фактором при решении задачи само-
устанавливаемости относительно внешнего объекта яв-
ляются реакции в местах образуемых сопряжений. Ис-
пользуя данный фактор, вводят конструктивные элемен-
ты, обеспечивающие приведение реакций к заданному
соотношению, обычно к равенству. В качестве таких
конструктивных решений применяют специальные ки-
нематические соединения, отдельные примеры которых
представлены на рис. 41.
* Чтобы иметь определенное соотношение осевых сил
в стержнях 1 и 2 (схема 5.1) достаточно соединить их в
одной точке с третьим звеном — ползуном 3, а чтобы
иметь заданное соотношение нагрузок на ползуны или
валы, их соединяют с помощью рычага или его конструк-
тивной разновидности. На схемах 5.1 ... 5.9 обозначены:
1,2, 3 — соединяемые звенья; Fi, F2 и Ез - силы; Т\, Т2 и
7з — вращающие моменты.
Варианты исполнения рычагах даны в виде так на-
зываемого балансира 3 (схема 5.2), цилиндрической зуб-
чатой пары (схема 5.3), кулачкового дифференциала
(схема 5.5), конического зубчатого дифференциала (схе-
ма 5.4), реечного механизма (схема 5.6), канатного блока
(схема 5.7), гидравлической передачи (схема 5.8) ив виде
шлицевого соединения с короткими шлицами и доста-
точными для самоустановки зазорами) зубчатых венцов
центрального колеса планетарной передачи (схема 5.9). в
схеме показано также звено, соединяющее балансир 3 с
корпусом). Все исполнения содержат равноплечий рычаг,
но аналогично выполняют и рычаг с разной длиной плеч
(рычаг СКМ на схеме 6.4).
Покажем решения самоустанавливаемости в за-
хватных устройствах, их еще называют адаптивными
(схемы 6.1 ... 6.3), в стержневом замке (схема 6.4), в са-
мосвале (схема 7.1), тракторе, предназначенном для ра-
боты на крутых склонах (схемы 8.1, 8.2) и в локомотиве
(см. рис. 31).
Устройство на схеме 6.1а предназначено для ис-
пользования в ситуациях, когда нельзя сдвигать захваты-
ваемый объект, пока он не зажат обеими губками - вы-
ходными звеньями W1 и W2. В устройстве использован
ленточный дифференциальный механизм S. В нем роль
рычага выполняет ролик, перемещаемый поршнем гид-
роцилиндра D в одну сторону и пружиной в другую сто-
рону. Каждая губка соединена с соответствующим шки-
вом дифференциального механизма и корпусом с помо-
щью шарнирного параллелограмма G1 или G2, благодаря
чему обеспечивается ее поступательное движение. При
сближении губок та из них, которая первой коснется за-
хватываемого объекта, останавливается, а движение про-
должает только вторая губка до соприкосновения с объ-
ектом. Затем губки зажимают объект равномерно с обеих
сторон. Таким образом, происходит захватывание объек-
та, расположенного относительно оси симметрии корпу-
са на расстоянии е.
На схеме 6.2а представлено устройство, способнее
зажимать жесткий объект с четырех сторон при неточном
расположении его граней. Губки - выходные звенья W1
W2, W3 и W4 соединены так, что обеспечивается при-]
мерное равенство сил прижатия их к граням объект
Они попарно соединены между собой и с гидроцилиг
дром SD равноплечими рычагами АЕ и FC, на структуру
ной схеме — это элементы S1 и S2. Звенья EL и FK введе-
ны в кинематическую цепь для обеспечения подвижно-
сти выходных звеньев.
Гидроцилиндр SD самоустанавливается между ры-
чагами АЕ и FC. Для безопасной работы можно обесг е
чить замкнутое состояние зажимного устройства с пс
мощью пружины, установленной между корпусом
поршнем гидроцилиндра. При отсутствии давления i
гидроцилиндре губки зажимают объект.
В схеме 6.3а захватные элементы W1-W6 приспс
собляются к форме захватываемого объекта. УстройстЕЭ
содержит направляющие W* и W**, на которых смотгя
рованы уравнительные механизмы S* и S** соединен!
губок. Направляющие соединены с корпусом постуг
тельными парами с возможностью перемещения с пог. -
шью зубчатого колеса g, зацепляющегося с рейками а и
Данное соединение обеспечивает самоустанавливаемос
каждой из направляющих и, соответственно, комплект
губок в целом по аналогии со схемой 6.1а. Кроме toi
каждая из губок может приспосабливаться к форме ос -
екта, но при этом существенное изменение конфигураь
системы соединения губок приводит к неравномерном^
их нагружению. Для приведения губок в определенн I
равновесное состояние служат упругие элементы. Так I
захватное устройство может, например, равномерно за
жать тонкостенный хрупкий предмет, не определив его
Структурная схема устройства, представленного i
схеме 6.4. аналогична схеме 6.3, но она еще более рая
ветвлена и в ней использован неравноплечий ры1 а
СКМ, причем к малому плечу его через равноплечий р »
чаг ВСЕ присоединены два выходных звена Win W2, al
большому плечу — всего одно выходное звено W3. Два
жение от привода SD передается рычагу СКМ через зв4
ВНЕШНЯЯ САМОУСТАНАВЛИВАЕМОСТЬ
107
41. САМОУСТАНАВЛИВАЮЩИЕСЯ (ОТНОСИТЕЛЬНО ВНЕШНЕГО ОБЪЕКТА) МЕХАНИЗМЫ И СИСТЕМЫ
САМОУСТАНАВЛИВАЮЩИЕСЯ ЗАХВАТНЫЕ УСТРОЙСТВА
S - дифференциальный/суммирующий механизм
G - передаточный механизм
S* - обобщенный дифференциальный/суммирующий механизм
W- выходное звено
W* - обобщенное
выходное звено
САМОУСТАНАВЛИВАЮЩИЙСЯ
РЫЧАЖНЫЙ ЗАМОК
SD - дифференциальный привод
108
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
но KL, а штырю W3 от рычага - через звено MN. Оба
рычага выполняют роль разветвляющего дифференци-
ального устройства S1 и S2 соответственно. Аналогично
осуществлено соединение привода разветвляющих уст-
ройств S3, S4 и выходных звеньев W4-W6. Устройством
представляет собой механизм замка, соединяющего две
детали — корпус и основание.
На схемах 6.4а, б показаны исполнения узла соеди-
нения, а на схеме 6.4 - механизм в целом. Функциональ-
ная особенность его такова, что в первую очередь входит
в отверстие — гнездо основания — тот из штырей - выход-
ных звеньев, который встречает наименьшее сопротив-
ление (наиболее полное совпадение отверстия и штыря).
Штырь входит в гнездо до упора. Затем входит в соот-
ветствующее гнездо другой штырь, также встречающий
наименьшее сопротивление из оставшихся несочленен-
ными узлов, и т.д. Благодаря этому мощность привода и
движущие силы рассчитывают на введение только одно-
го штыря. Кроме того, можно добиться более плотного
соединения, так как одновременное введение штырей
потребовало бы больших зазоров.
На схеме 7.1 самоустанавливаемость автосамосвала
относительно дорожного полотна достигается за счет
шарнирного сочленения рам 1 и 2, а самоустанавливае-
мость кузова относительно сочлененной рамы — за счет
его соединения с рамами в трех точках и в том числе за
счет использования балансира. На схеме 7.1 обозначены
классы кинематических пар, определенные в соответст-
вии с рекомендациями, приведенными в параграфе 4.2.
В отсутствии избыточных связей можно убедиться так-
же, используя рекомендации и анализируя последова-
тельно самоустанавливаемость при следующих условиях:
при фиксированном относительном положении
рам 7 и 2 в процессе наклона кузова (схема 7.1а)',
при фиксированном относительном положении
рам 7 и 2 в транспортном положении кузова (схема 7.16);
при относительной подвижности рам 7 и 2 относи-
тельно дорожного полотна (схема 7.1в. г).
На схеме 7.1а показана возможность повышения ус-
тойчивости кузова (восприятия нагрузок приводом) за
счет использования двух гидроцилиндров D1 и D2,
соединенных разветвляющим гидравлическим устройст-
вом PS. На схеме 7.16 показано, что в транспортном по-
ложении привод полностью разгружен, а кузов подвешен
на специальной серьге. На схеме 7.1 в показан вид само-
свала сверху. Рама 7 поворачивается относительно ра-
мы 2 в шарнире С. При этом благодаря шарнирному со-
единению в точках В и Е с обеими рамами кузов занима-
ет положение, при котором его центр тяжести несущест-
венно смещается относительно опорного контура.
Схеме 8.1 подвески трактора спроектирована таким
образом, что при расположении гусеничных тележек на
поверхности крутого склона корпус не наклоняется -
остается практически в горизонтальном положении. От-
личие данной схемы от рассмотренных выше заключает-
ся в смешанном использовании активной приспособляе-
мости и самоприспособляемости. Сигнал отклонения от
горизонтального положения тележек обеспечивает соот-
ветствующее включение привода, корректирующего по-
ложение корпуса относительно тележек. В частности, это
может быть привод кривошипа, поворачивающего кор-
пус вокруг точки А на схеме 8.1 или гидроцилиндры D1 и
D2, соединенные с источником питания через разветв-
ляющее уравнительное устройство PS, на схеме 8.2.
В схеме 8.1 движение от кривошипа передается че-
рез звенья 7 и 2 одинаковой и неизменной длины, поэто-
му возможна приспособляемость только в поперечном
направлении. В схеме 8.2 корпус соединен шарнирно в
точке А с балансиром, который с помощью рычагов 1 и 2
и упругих элементов подвески соединен соответственно
с рамами 7 и 2 гусеничных тележек. Такое соединение в
совокупности с приводами D1 и D2 позволяет сохранять
приближенно горизонтальное положение корпуса как в
поперечном, так и в продольном направлениях. При фик-
сированном положении приводов в определенной степе-
ни сжатия упругих элементов полученная схема пред-
ставляет собой пространственную ферму без избыточных
связей, самоустанавливающуюся при различных положе-
ниях гусениц 7 и 2.
На рис. 42 представлены варианты решений четы-
рехосной тележки локомотива, в той или иной мере
обеспечивающие самоприспособляемость колес тележки
к направлению рельса при движении локомотива по кри-
волинейному участку пути. Наряду с этим подвеска те-
лежки обеспечивает равномерное распределение силы
тяжести (в данном случае сцепного веса) между отдель-
ными колесными парами (см. структурную схему 9.1 с
теми же обозначениями, что и на рис. 41, и кинематиче-
скую схему 9.1а).
Общая рама образует с рамой тележки двухподвиж-
ное сферическое соединение IVA. Оно позволяет повора-
чиваться тележке относительно общей рамы вокруг двух
осей (вертикальной и поперечной - см. схему 9.16) и не
позволяет поворачиваться вокруг продольной оси. Кон-
структивное исполнение такого соединения на рис. 38
где показано наличие четырехподвижной пары II, пру-
жин и демпферов, а также показаны силы, нагружающие
данное соединение F и Fr}.
В действительности подвижность вокруг продоль-
ной оси имеется, но она ограничена упругостью пружи [
Если при анализе это не учитывать, то получится "лиш-
няя" степень свободы общей рамы - возможность враще-
ния вокруг продольной оси, что делает данную схему
неработоспособной. Аналогичная схема соединения ра-
мы тележки с балансирами, которые, в свою очередь,
соединены с колесными парами с помощью сферических
пар, которые могут быть отнесены к трехподвижным
парам Ш5.
Особенность современной рациональной схемы 9.1а
заключается в начальном расположении осей всех шар-
ниров на одной прямой, а также в выполнении централь-
ных шарниров тележки и балансиров двухподвижными
сферическими IVS. Они допускают не только покачива-
ние в плоскости схемы, но и поворот тележки и/или ба-
лансира вокруг горизонтальной оси. Расположение осей
шарниров на одной прямой или расположение централь-
ВНЕШНЯЯ САМОУСТАНАВЛИВАЕМОСТЬ
109
42. МНОГОКАТКОВАЯ САМОУСТАНАВЛИВАЮЩАЯСЯ СИСТЕМА ТРАНСПОРТНОЙ МАШИНЫ
САМОУСТАНОВКА КОЛЕСНЫХ ПАР
НА КРИВОЛИНЕЙНОМ УЧАСТКЕ ПУТИ
ных шарниров даже ниже опор колесных пар существен-
но повышает поперечную устойчивость машины. Тем не
менее, боковые перемещения в любом случае нужно ог-
раничивать.
При качении балансиров будут иметь место неоди-
наковые реакции из-за неровностей дороги, так как плечи
действия сил все же меняются, хотя и в меньшей мере,
чем при расположении центрального шарнира выше опор
колесных пар.
Интересно, что отдельные решения многокатковых
систем существуют уже очень давно. Но в то же время
некоторые из них претерпели существенные изменения, в
частности касающиеся вида кинематических пар и соот-
ношения параметров.
Схема 9.1а имеет наиболее древний прототип, но
используется в самом современном тепловозе. В данной
схеме можно распределять нагрузку при числе катков
[колесных пар], равном 2, 4, 8, 16 и т.д. При других чис-
лах элементов используют неравноплечий рычаг или
иные (несимметричные) дифференциальные механизмы.
На схеме 9.1г показано нетрадиционное для желез-
нодорожного транспорта соединение рамы тележки с
балансирами при несовпадении оси кинематической па-
ры Ills с осью пружины или группы пружин. В представ-
ленной схеме силы F} и F2 характеризуют соответственно
воздействие общей рамы и балансиров. В реальных кон-
струкциях соединения выполнены, как показано на схе-
ме 9.1 в. Кажущееся возможным вращение балансира во-
круг собственной оси исключено за счет симметричного
расположения группы пружин вокруг оси пары II, а так-
же из-за того, что центры шарниров Ш5 и II в процессе
сжатия пружин не располагаются на одной прямой. Кро-
ме того, подшипники колесных пар выполнены с ограни-
ченной возможностью перекоса.
При прохождении криволинейного участка пути
(см. на схемах 9.1в ... 9.1д штриховые направляющие
линии) колесные пары самоустанавливаются относи-
тельно рельса, перемещаясь поступательно в поперечном
направлении. Балансир при этом поворачивается вокруг
точки С, а точки А и В занимают положения, при кото-
рых обеспечивается минимальная работа возможного
скольжения в паре рельс-колесо.
Уменьшить работу скольжения, а следовательно,
уменьшить износ рельса и повысить некоторые другие
эксплуатационные качества можно, обеспечив поворот
осей колесных пар, как это показано на схемах 9.1г, 9.1д.
Достигается это, в частности, смещением центра шарни-
ра С к оси тележки (схема 9.1г). Но в данном случае оси
двух колесных пар все же остаются параллельными меж-
ду собой.
Еще больший эффект можно получить, используя
неравноплечий рычат АВС (схема 9.1д). При определен-
ном соотношении каждая из осей колесных пар способна
занимать наиболее благоприятное положение (см. угол
между осями у). Но данный вариант вряд ли может быть
принят при оценке по другим критериям. Приведенные
рассуждения не следует воспринимать как руководство
по конструированию подвесок железнодорожного транс-
порта. Они даны лишь для освоения общих принципов
конструирования, связанных с самоприспособляемостью,
а для выбора рациональной конструкции требуется ком-
плексный подход.
110
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
На схеме 9.2 (рис. 43) всего шесть катков [колесных
пар], поэтому они не могут быть сгруппированы, как на
схеме 9.1а — попарно, а затем по четыре. Здесь пара кат-
ков, соединенная балансиром, соединена неравноплечим
рычагом АВС - рамой тележки 1 с отдельным катком.
Рычаг в точке В шарнирно соединен с платформой общей
рамой. Отдельный каток другой опорной тележки 2 рас-
положен на одинаковом расстоянии от смежных катков
тележки 1. Для равного нагружения катков (см. реакции
дорожного полотна F на пару катков из /72 на один ка-
ток) должно выполняться соотношение длин плеч рычага
АВС, показанное на схеме.
На схеме 9.3 — вариант шестикатковой тележки, в
которой катки [колесные пары] объединены попарно ба-
лансирами, а балансиры соединены между собой и с
платформой неравноплечими рычагами в точки К и М.
Для равенства реакций F на каждую из пар катков необ-
ходимо иметь соотношение плеч, показанное на схеме 9.3.
На схеме 9.4 катки [колесные пары] попарно соеди-
нены балансирами, балансиры шарнирно - с ползунами,
перемещаемыми относительно рамы. На каждом из пол-
зунов установлены блоки, через которые перекинут гиб-
кий элемент — трос. Трос огибает также блоки, установ-
ленные на раме. Концы троса закреплены на раме. Вве-
дено также натяжное устройство. При равенстве углов
наклона ветвей троса вертикальная нагрузка на каждую
из пар катков будет одинаковой. При неровностях до-
рожного полотна одни ползуны поднимаются, другие
опускаются, углы между ветвями троса несколько меня-
ются, что приводит к некоторой неравномерности рас-
пределения нагрузки.
На схеме 9.5 каждый каток [колесная пара] установ-
лен на балансире 1, обычно выполненном в виде рессо-
ры. Соседние балансиры 1 через тяги соединены между
собой балансиром 2. Крайние балансиры 1 шарнирно
присоединены к раме. Все балансиры 2 также шарнирно
соединены с рамой. Такое соединение обеспечивает рав-
номерное распределение нагрузки. В данной схеме воз-
можно размещение как четного, так и нечетного числа
катков. При числе колесных пар, равном трем, ее исполь-
зуют, в частности, в тележке локомотива.
На схеме 9.6 все балансиры, соединяющие попарно
колесные пары, соединены между собой и рамой. Край-
няя тележка присоединена через распорные звенья и
ползун к раме, а также к другой тележке. Распорные зве-
нья образуют равнобедренные треугольники. Ползун
имеет ролики, взаимодействующие с направляющей ра-
мы. При вертикальном перемещении одной из тележек
изменяется наклон распорных звеньев, а ролики движут-
ся вдоль направляющей, перемещаются также по гори-
зонтали другие тележки до тех пор, пока не будет при-
мерно одинаковой нагрузки на все тележки. Из-за разли-
чия наклона отдельных звеньев нагрузка будет распреде-
ляться несколько неравномерно.
Схемы 9.3 и 9.6 применяют для тяжелых тягачей,
большегрузных прицепов, косяковых силовых тележек и
т.п., а схему 9.4 использовали в гусеничных машинах.
Следует обратить внимание на полную аналогию
рычажных механизмов многокатковых систем и само-
приспособляемых зажимных устройств: сравни схе-
мы 6.3а (рис. 41) и 9.6 (рис. 43).
Что касается применения принципиальных схем 9.1 ...
9.6 в подвесках транспортных машин, то это сопряжено с
введением дополнительных элементов и использованием
различных вариантов уравнительных систем, в том числе
пространственных (см. схему 9.8а). Применение упругих
элементов (пружин) уже было проиллюстрировано на
рис. 38 в балансирной подвеске тележки локомотива.
Приведем некоторые примеры решений балансир-
ной подвески автомобилей.
Балансирная подвеска автомобиля (схемы 9.7)
связывает два моста (профессиональный термин) с рамой
и обеспечивает их зависимое качение относительно рамы.
Подвеску выполняют в виде двух симметрично рас-
положенных механизмов по разные стороны машины. На
балках 1 и 2 установлены колеса (центры W1 и W2). Ка-
ждая балка с помощью коромысел АВ и KL, CD и MN
шарнирно соединена с рамой. Рессора опирается конца-
ми на балки, а в средней части шарнирно соединена с
рамой. Коромысла при качении обеспечивают балкам
возможность перемещаться вертикально относительно
рамы. Вертикальные составляющие нагрузки в основном
воспринимаются рессорой, а горизонтальные и реактив-
ный момент ведущих мостов - полностью коромыслами.
Качение рессоры обеспечивает равенство вертикальных
составляющих нагрузки.
На схемах 9.8 и 9.8а представлена балансирная под-
веска, используемая, в частности, в базовом тягаче, на
котором смонтирован грузоподъемный кран. Балки 1 и 2
соединены балансирами 1 и 2, опирающимися на раму.
Такое соединение позволяет постоянно перераспределять
нагрузку между всеми колесами. Равновесие подвески
возможно только при равенстве всех реакций Fri, Fr2, Fr3
и Frn со стороны дорожного полотна. Обычно такие сис-
темы не имеют упругих элементов. В балках 1 и 2 раз-
мещены трансмиссии. Реактивные моменты (ограниче-
ние от вращения балки) воспринимают тяги 1 и 2.
На схемах 9.9 и 9.10 даны варианты рессорных под-
весок многоосного тягача, обеспечивающих равномерное
нагружение балок 1 и 2. Рессора 1 соединена с балкой 1,
а рессора 2 - с балкой 2 (рессоры размещены по краям
балки). Концы рессор 1 и 2 соединены между собой и с
рамой посредством рычагов и тяг, образующих замкну-
тую кинематическую цепь.
В схеме 9.9 при увеличении нагрузки на рессору 1
(наезд на камень) поворачивается рычаг 1 и через тягу
передает движение рычагу 2, и соответственно деформи-
руется рессора 2 до тех пор, пока нагрузка на обе рессо-
ры не будет примерно одинаковой. Серьги 1 и 2 установ-
лены для того, чтобы компенсировать продольные пере-
мещения одного конца рессоры относительно другого
конца.
В схеме 9.10 использована аналогичная система в
виде замкнутой кинематической цепи соединения рес-
сор 1 и 2. От схемы 9.9 она отличается иной конфигура-
цией рычагов 1 и 2, а также расположением тяги,
соединяющих их.
ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ
111
43. МНОГОКАТКОВЫЕ [МНОГООСНЫЕ] САМОУСТАНАВЛИВАЮЩИЕСЯ [УРАВНИТЕЛЬНЫЕ] СИСТЕМЫ
БАЛАНСИРНЫЕ ПОДВЕСКИ АВТОМОБИЛЕЙ
-упругие соединения
боковых рычажных систем , _
с-'ЬУфиЬиС
На схеме 9.10 показаны также присоединенные и
размещенные между рамой и балкой демпферы и стаби-
лизаторы поперечной устойчивости. Каждый стабилиза-
тор имеет торсион, размещенный параллельно балке и
соединенный с рамой рычагом QT и тягой QS с обеих
сторон рамы. Кроме рессор показаны также подрессор-
ники, которые вступают в действие при определенной
деформации рессоры, обеспечивая тем самым нелиней-
ную(ступенчатую) характеристику упругой системы.
4.4. ДЕФОРМАТИВНАЯ
ПРИСПОСОБЛЯЕМОСТЬ
Любые детали машин и сооружений под нагрузкой
деформируются. Мера деформирования - деформация —
может быть столь незначительной, что не будет оказы-
вать влияния на функционирование объекта, но, как пра-
вило, не считаться с деформированием нельзя, если оно
не грозит разрушением объекта, а только влияет на его
качественные характеристики. В этой связи один из ос-
новных принципов конструирования заключается в при-
дании детали такой геометрической формы, которая при
нагружении способствовала бы желательному функцио-
нированию данной и сопряженных с ней деталей. Речь
идет не об исключении деформации или не только о ее
уменьшении, а о направленности деформирования, о
компенсации за счет деформации погрешностей изготов-
ления, об уменьшении неравномерности распределения
нагрузки, об уменьшении нагрузки на сопряженные де-
тали и т.д.
Поскольку деформативность — это способность де-
формироваться, то деформативная приспособляемость —
это способность приспособляться к нагрузке или другим
воздействиям за счет направленного деформирования.
При этом деформативность детали и/или соединения —
это свойство материала и геометрической формы детали
и/или сопряжения деталей.
112
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
Поэтому задача обеспечения деформативной при-
способляемости сводится к выбору материала с соответ-
ствующими механическими характеристиками (в частно-
сти, модулем упругости) и к выбору геометрической
формы. В основном эта сторона в качественном виде бу-
дет освещена ниже. Еще для приспособляемости важно
возможное геометрическое и/или упругое скольжение в
местах сопряжений деталей, но об этом сказано в пара-
графе 3.5.
На рис. 44 (схема 10.1) представлен типичный для
справочников и учебников пример нагружения болтового
соединения, пожалуй, в более выразительном виде. Чем
больше сжимают стык, затягивая болт, тем больше растя-
гивается болт. Приложение рабочей нагрузки q приведет
к уменьшению сжатия стыка, к дополнительному растя-
жению, а может быть, и изгибу болта (схема 10.1а), на
что обычно не обращают внимания. При этом стык мо-
жет полностью раскрыться и/или прилегающие элементы
изогнутся так, что нарушится равномерность прилегания
поверхностей и герметичность стыка.
Напрашиваются два возможных решения, которые
способны как-то ослабить эти неблагоприятные явления:
постараться нагрузить болт и стык только центральной
(вдоль оси болта) силой Fq (схема 10.1в) или скорректи-
ровать форму прилегающих поверхностей так. что они
только после затяжки болта и приложения рабочей на-
грузки станут параллельными друг другу (схема 10.16).
Однако оба решения имеют существенные недос-
татки: в первом случае усложняется конструкция из-за
необходимости предусмотреть нишу для установки и
размещения болта и сужается поперечное сечение емко-
сти, а во втором - создается дополнительное нагружение
болта, а кроме того, стык будет сжат равномерно только
при одном расчетном уровне рабочей нагрузки.
На схеме 10.2 приведено современное решение
фланцевого болтового соединения замкнутой емкости,
работающей под внутренним давлением q и показана
модель (схема 10.2а), демонстрирующая нагружение и
деформирование фланцев и стержня болта - шпильки,
представленной в виде пружины.
Шпильки имеют гайки 1 и 2 малого диаметра, что
позволило разместить большое количество шпилек по
контуру соединения. Шпильки максимально приближены
к внутренней поверхности емкости (С < В/2), чтобы в
большей мере они могли препятствовать раскрытию сты-
ка, обусловленному поворотом сечений фланцев 1 и 2
относительно точки А под действием сил Fo, т.е. в этом
плане картина максимально приближена к центральному
нагружению болта (см. схему 10.1 в).
В то же время для уменьшения силы F, растяги-
вающей шпильку, увеличена ширина фланцев В и соот-
ветственно плечо (В-С) действия силы F, а значит,
уменьшена требуемая сила затяжки. Но при этом для
обеспечения необходимой жесткости фланца при его
осесимметричном деформировании требуется соответст-
венно увеличить высоту фланца Н.
Из приведенных примеров следует, что желательно
иметь максимальную жесткость стыка и минимальную
жесткость болта. Это особенно важно при переменной
рабочей нагрузке, когда определяющим фактором рабо-
тоспособности является усталость материала болта, а
уменьшение его жесткости приводит к уменьшению ам-
плитуды переменных напряжений в его элементах.
Ослабление сечения болта и увеличение длины
стержня ограничены его прочностью и размерами флан-
цев. В особо ответственных конструкциях в силовую цепь
болта вводят дополнительные упругие элементы, причем
располагают их таким образом, чтобы уменьшить приве-
денную жесткость силовой цепи болта, а не стыка. При
этом важно предусмотреть контроль силы затяжки болта
На схемах 10.3 представлена конструкция, иллюст-
рирующая размещение дополнительных упругих элемен-
тов, которые не приводили бы к уменьшению жесткости
стыка. При нагружении соединения рабочей силой Fo
сжимается пружина 1 и растягивается винт, как это сле-
дует из рассмотрения модели, представленной на
схеме 10.3а. В конкретном конструктивном решении
применена тарельчатая пружина 1 и винтовая пружина 2
регламентированной жесткости, служащая в основном
для контроля силы затяжки.
В начале сборки гайку наворачивают на винт до
упора и стопорят относительно винта. После этого вво-
рачивают винт в резьбовое отверстие детали 2 до тех пор.
пока пружина 2 не сжимается так, что ее витки будут
соприкасаться и при этом она поместится в коробке
(крышка закроет коробку, - см. схему 10.36). Сила сжатия
пружины строго определена, и таким образом она будет
определенной в целом для элементов силовой цепи болта.
Одним из важных направлений деформативной при-
способляемости является обеспечение равномерного рас-
пределения нагрузки между параллельно работающими
элементами, деталями соединений, когда средствами са-
моустанавливаемости (см. рис. 42) твердых тел осущест-
вить такое распределение сложно или невозможно.
В качестве примера приведем подшипниковую опору,
составленную из трех подшипников (рис. 45). Каждый из
подшипников (схема 11.1) имеет четырехточечный кон-
такт шарика с кольцами 1-3 в точках С\—Сц и может вос-
принимать значительную осевую нагрузку. Если не при-
нять мер по распределению нагрузки и установить под-
шипники последовательно (вплотную один к другому),
то из-за различия зазоров, при различной фактической
ширине колец 1-3 нормально функционировать может
только один из трех подшипников.
На схеме 12.1 показано, что каждый из подшипни-
ков установлен во втулке и наружные кольца застопоре-
ны в осевом направлении пластическим замком (под-
шипник может нормально работать только при соответ-
ствующем прижатии колец 2 и 3 одного к другому - см.
схему 11.1).
Сборку подшипников опоры осуществляют на стен-
де. При этом одинаково нагружают втулки 1-3 осевой
силой, после чего скрепляют их с помощью трех ради-
альных штифтов (см. схему 12.1а). Затем опору устанав-
ливают на вал и в корпус компрессора.
Жесткости втулок 1-3 различные. Их выбирают в
соответствии с моделью опоры (схема 12.1 в). Каждое из
параллельных соединений должно иметь одну и ту же
приведенную жесткость. Иными словами, суммарная
деформация звеньев и элементов в одной ветви силовых
линий (см. схему 12.16) должна быть такой же, как во
второй и в третьей ветвях.
ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ
113
44. ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ БОЛТОВЫХ СОЕДИНЕНИЙ
Рабочая нагрузка Fq
направлена
вдоль оси шпильки.
МОДЕЛЬ
СОЕДИНЕНИЯ
Жесткость
шпильки
110.2а |
I 102 I
А
45. РАВНОМЕРНОЕ РАСПРЕДЕЛЕНИЕ НАГРУЗКИ
МЕЖДУ ПОДШИПНИКАМИ ОПОРЫ
Параллельное соединение
трех подшипников в опоре
осевого компрессора
|12.1в|
12.1
Гайка
Модель опоры
Шплинт (распределение жесткостей)
СГ В1 С1
vwtoO
С2' В2 С2
СЗ' вз сз
Fi
Жесткости параллельных
соединений одинаковы.
Параллельные ветви силовых линий
при осевом нагружении опоры
|12.1а| Обработка отверстия и установка штифта
после устранения зазоров
. П и предварительного одинакового
Штифт сжатия соединений
кольца
|12.1б|
Cc/l
114
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
На схеме 12.1 в обозначены жесткости составных
звеньев и элементов параллельных соединений: С1-СЗ -
внутренних втулок и колец; В1-ВЗ — подшипников;
С2'-С3' - втулок 1—3 соответственно (см. схему 12.1а).
Требуемое соотношение жесткостей достигается за счет
выбора сечений втулок 1-3.
Еще одно из важнейших направлений реализации
деформативной приспособляемости - это компенсация
деформаций, возникающих при нагреве и охлаждении.
Примеры конструктивных решений, обеспечивающих
такую компенсацию, даны на рис. 46. В соединении па-
кета деталей (схема 13.1), если не предусмотреть упругие
компенсаторы (пружины 1 и 2), то при высокой рабочей
температуре в результате расширения деталей стяжной
стержень неминуемо порвется. Чем ниже жесткость пру-
жин 1 и 2 (конструктивное исполнение см. на схе-
ме 13.1а), тем в меньшей мере возрастает напряжение в
стержне при нагреве и расширении соединенных между
собой дисков.
Компенсация теплового расширения обычно осно-
вана на обеспечении свободного или относительно сво-
бодного увеличения размеров. Если зафиксировать опо-
ры вала, то при нагреве увеличиваются напряжения сжа-
тия и может наступить потеря устойчивости вала. Для
того чтобы не допустить такого явления, одну из опор
выполняют "плавающей". Правда, по условиям функцио-
нирования это не всегда возможно. Во многих случаях
между сопряженными поверхностями устанавливают
упругие прокладки, предусматривают необходимые зазо-
ры, устраняемые при рабочей температуре. В трубопро-
водах делают вставки в виде сильфонов (схема 13.2).
Во многих сопряжениях деталей имеет место нерав-
номерный нагрев. Это обусловлено как расстоянием от
источника тепла, так и переменным сечением деталей.
В этих случаях, чтобы получить поверхностное соприкос-
новение деталей, корректируют форму элементов соеди-
нения. Например, на схеме 13.3 шток, нагреваемый с од-
ной стороны (снизу), выполнен коническим. При нагреве
зазор по длине втулки становится постоянным и обеспечи-
вает нормальные условия движения штока вдоль втулки.
Аналогичное решение используют и в паре поршень -
цилиндр двигателя внутреннего сгорания (схема 13.4 .
Кроме коррекции образующей поршня изменяют также
контур его поперечного сечения таким образом, чтобы
при нагреве он стал круглым - эквидистантным контур.
сечения цилиндра.
Иногда аналогичными средствами приходится ре-
шать задачи компенсации изменения размера, обуслоь-
ленного существенным охлаждением, в том числе нераь-
номерным.
Аналогичные приемы деформативной приспособ-
ляемости используют для других деталей и соединений
(рис. 47.1).
Причем цели, достигаемые за счет этих приемов
весьма разнообразны, но в основном сводятся к следую-
щему:
• уменьшить степень нарушения взаимодействие
звеньев при изгибе вала или оси, в частности, уменьшит?
перекос зубьев в зацеплении или перекос шипа (шейки) в
подшипнике;
• перераспределить нагрузку на опоры вала для
единонаправленного их участия в восприятии внешнее
(рабочей) нагрузки;
• обеспечить синхронное вращение звеньев, при-
соединенных к двигателю валами или кинематическими
цепями разной длины;
ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ
115
• ослабить влияние изгиба рабочих валков на форму
деформируемой заготовки;
• уменьшить неравномерность распределения на-
грузки межу телами качения подшипников, между зубь-
ями в зубчатом зацеплении или соединении, между вит-
ками резьбового соединения или между иными элемен-
тами других соединений;
• уменьшить неравномерность распределения на-
грузки по длине контактной линии в паре: тело качения —
подшипник скольжения, зуб шестерни — зуб сопряженно-
го с ней колеса и т.п.;
• исключить или уменьшить напряжения растяже-
ния в материалах, плохо работающих на растяжение, на-
пример в бетоне или чугуне;
• повысить предел упругости материалов сопряжен-
ных деталей в неподвижном фрикционном соединении;
• перераспределить нагрузку между параллельными
элементами в соответствии с их прочностными характе-
ристиками;
• обеспечить более-менее равное участие в воспри-
ятии рабочей нагрузки отдельным слоями многослойной
конструкции или в соответствии с их прочностными ха-
рактеристиками .
Могут достигаться и другие цели, направленные на
повышение качественных показателей конструктивных
решений. Примеры отдельных решений, приведенные на
рис. 47.1, конечно, не исчерпывают все возможные пути
обеспечения деформативной приспособляемости, но тем
не менее помогут по аналогии решать и другие задачи.
Каждый прием характеризует только физическую сторо-
ну и может быть использован только в совокупности с
расчетом для конкретных материалов и размеров и толь-
ко для определенного уровня нагружения.
Хотя иллюстративный материал конструктору
обычно говорит сам за себя, тем не менее далее приведе-
ны некоторые пояснения.
В группе примеров валы, оси и валки (рис. 47.1)
показаны, в частности, варианты нагружения подшипников
в зависимости от жесткости шпиндельного вала станка.
В варианте I изгиб вала может привести к тому, что
подшипник А окажется почти ненагруженным, а реак-
ция Fc в опоре С равна сумме рабочей нагрузки F и реак-
ции FB в опоре В. Увеличение жесткости в варианте II
позволяет более рационально загрузить подшипники.
Реакция FA в опоре А направлена в ту же сторону, что и
сила F. При этом благодаря одностороннему восприятию
сил существенно уменьшится общая деформация под-
шипниковой опоры ВС. В этой схеме наряду с жестко-
стью играет роль также соотношение радиальных зазоров
в подшипниках А, В и С.
В следующем примере в приводе передвижения
мостового крана неодинаковая крутильная жесткость
валов приводит к разным углам их закручивания и вра-
щению опорных колес. Решение достаточно очевидно -
выбрать валы с соотношением жесткостей, приведенным
на рис. 47.1: Jp\Up2 = l2H\ (фг и Ф2 ~ углы поворота выход-
ных звеньев; 1\ и 12 — длины валов; Jp\ и Jp2 — полярные
моменты инерции сечений валов).
Если в каждой из кинематических ветвей преду-
смотрены зубчатые передачи и/или муфты, то следует
обеспечить равенство жесткостей ветвей в целом и ра-
венство приведенных зазоров.
В примерах с водилом планетарной зубчатой пере-
дачи показано, что диск с консольными осями сателлитов
существенно деформируется под действием силы FB ок-
ружном направлении. Чтобы уменьшить эту деформа-
цию, предусматривают ребро жесткости. Еще больший
эффект достигается при расположении осей в опорах,
размещенных в двух параллельных дисках, неподвижно
соединенных между собой перемычками. Направления
крутящих моментов здесь обозначены стрелками и бук-
вами Т. Деформирование кручения соответствует данным
направлениям. Такой прием, по существу, характеризует
использование симметричной балки вместо консольной.
В аналогичных случаях следует иметь в виду, что сим-
метричная балка, свободно опертая по краям, имеет мак-
симальный прогиб примерно в 4 раза больший, чем балка
такой же длины с жесткой заделкой (с защемляющей не-
подвижной опорой) обоих концов, и во много раз мень-
ший, чем консольная балка.
Недостаточная жесткость неблагоприятно сказыва-
ется на протекании процесса обработки материалов дав-
лением, особенно при больших силах, действующих на
рабочие элементы, направляющие устройства и опоры.
В прокатной клети изгиб валков приводит к разнотол-
щинности прокатываемой полосы.
На схеме обозначены: F\, F2 - реакции со стороны
полосы на валки; FD, F^, FK, FL — реакции в опорах вал-
ков. Для того чтобы компенсировать прогиб, валкам при-
дают бочкообразную форму, что, однако, не позволяет
получить соответствующий эффект при прокатке полос
различной толщины.
Применяют также тепловое расширение валка, на-
гревая его в середине. Наиболее целесообразным счита-
ется использование многовалковой прокатной клети с
дополнительными опорными валками, уменьшающими
прогибы рабочих валков благодаря совместной с ними
работе (схема 14.1 на рис. 47.2). Кроме того, опорным
валкам придают так называемый противоизгиб (схемы
14.1а и 14.16). Автоматическая система компенсационно-
го нагружения позволяет добиться эквидистантности
образующих (линий) в зазоре между рабочими валками
при обработке полос различной толщины (схема 14.2).
На схемах 14.2а и 14.26 показана возможность
управления межвалковым зазором (для обеспечения по-
стоянства толщины полосы по ее ширине) за счет пере-
мещения конусообразных рабочих валков (схемы 14.3).
При перемещении валков, показанном на схеме 14.2а,
толщина посередине полосы увеличивается, а при пере-
мещении на схеме 14.26 - уменьшается. При этом полу-
чают профиль полосы, показанный на схеме 14.4, ком-
пенсируя возможные отклонения профиля, показанные
на схемах 14.4а и 14.46.
116
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
47.1 ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ К НАГРУЗКЕ
ВАЛЫ, ОСИ И ВАЛКИ
Нарушения взаимодействия звеньев
Нагружение опор в зависимости
от жесткости вала
Выравнивание углов закручивания
валов различной длины
Уменьшение деформации оси
Деформирование валков
ПОДШИПНИКИ докальное
Распределение нагрузки уменьшение
Согласованное
соотношение
жесткостей гайки
и винта
Гайка
Гайка Винт
Пергменная жесткость
деталей по длине резьбы
НЕПОДВИЖНЫЕ СОЕДИНЕНИЯ
Распределение нагрузки в резьбовом
соединении поII Е. Жуковскому
Различные зазоры
в "елочном" замке
F
Винт
= 1
А
е т
ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ
117
В группе примеров подшипники (см. рис. 47.1)
приведено расчетное распределение нагрузки на тела
качения подшипника в предположении абсолютно жест-
ких колец при относительном их смешении на величину
8. Этот закон распределения достаточно близок к реаль-
ному, если в опорных элементах колец не приняты меры по
компенсационному распределению жесткости. Сила Fmax
наиболее нагруженного ролика или шарика может в не-
сколько раз превышать расчетную равномерную нагрузку.
Неравномерность распределения нагрузки можно
уменьшить, выбирая форму опоры с минимальной жест-
костью в направлении силы F,., предусматривая в месте
посадки серповидный зазор или располагая ребра жест-
кости на удалении от наиболее нагруженного тела каче-
ния. При локальном уменьшении жесткости корпуса
опоры и передаче силы на его боковые стенки макси-
мальная нагрузка на тела качения существенно уменьша-
ется (эпюры распределенной нагрузки q\,q2- соответст-
венно при жестком корпусе и при использовании данного
приема).
В роликовых подшипниках имеет место неравно-
мерное распределение нагрузки вдоль контактной линии.
Для уменьшения данной неравномерности корректируют
либо форму самих роликов (например, скругляют цилин-
дрическую поверхность по краям — см. эпюры распреде-
ленной нагрузки qh qu), либо форму дорожек качения.
Например, образующие дорожек качения выполняют
непараллельными (угол у на схеме). После приложения
силы F сечение кольца повернется в направлении стрел-
ки Г и рабочая поверхность кольца будет прилегать к
поверхности ролика по всей длине контактной линии.
Уменьшить неравномерность распределения нагруз-
ки и увеличить пятно контакта в шариковом подшипнике
можно за счет уменьшения жесткости непосредственно
под дорожкой качения. Например, среднюю часть кольца
выполняют тонкой, а жесткие периферийные опорные
части В и D отделяют от средней части прорезями, рас-
положенными в шахматном порядке. При уменьшении
жесткости в подшипнике следует помнить о точности
центрирования, так как центр оси вала при малой жест-
кости опоры смещается в радиальном направлении.
Можно скомпенсировать и данное смещение за счет
предварительного "нецентрального" расположения под-
шипника без нагрузки.
В подшипниках скольжения с целью уменьшения
влияния перекоса или изгиба шейки (шипа) образующую
втулки выполняют эквидистантной оси шейки вала, изо-
гнутой при нагружении.
В группе примеров неподвижные соединения (см.
рис. 47.1) показано, что классическое распределение на-
грузки в резьбовом соединении обусловливает нормаль-
ное участие в работе примерно 1/3 всех витков резьбово-
го соединения. Уменьшение неравномерности распреде-
ления нагрузки достигают, выбирая конструкцию винта s
и гайки п такими, чтобы гайка, как и болт, работала на
растяжение и имела бы минимальное поперечное сечение
в нижней части (при расположении, показанном на схе-
мах). Благодаря уменьшению концентрации нагрузки на
нижних витках винта его предел выносливости повыша-
ется примерно в 1,6 раза.
Для выравнивания нагрузки шаг винта Ps выполня-
ют меньшим шага гайки Рп или делают даже переменным
по длине; гайку изготовляют из материала с пониженным
модулем упругости (дюралумина, чугуна); выполняют
кольцевые выточки вокруг места ввинчивания шпилек и т.п.
В "елочном", а также "гребенчатом" соединениях по
аналогии предусматривают различные начальные зазоры
ht, h2, h3, чтобы после приложения силы F распределен-
ная нагрузка р была бы достаточно равномерной.
В группе примеров зубчатые зацепления (см.
рис. 47.1) показано, как закручивание шестерни ведет к
неравномерному распределению нагрузки (наибольшая
нагрузка ртах соответствует наибольшей деформации бгаах).
К этому можно добавить неравномерность распределе-
ния нагрузки, обусловленную прогибом валов, деформи-
рованием ободов колес, опор. Чтоб уменьшить неравно-
мерность, используют следующие приемы:
• повышают жесткость валов и опор;
• располагают симметрично зубчатые колеса отно-
сительно опор;
• уменьшают отношение ширины зубчатого колеса
к диаметру;
• согласовывают жесткость сопряженных элемен-
тов, уменьшая ее в местах концентрации нагрузки и уве-
личивая в местах наименьшей нагрузки.
Показанное на схеме переменное сечение тела шес-
терни приводит к более равномерному деформированию
зуба при кручении. Диски зубчатых колес располагают
так, что наибольшие деформации от кручения и изгиба
венца будут иметь место со стороны, противоположной
приложенному к колесу моменту 7) или Т2. Наибольшая
нагрузка <7тах (см. кривую <?ц) будет иметь место в сред-
ней части зуба и будет меньше, чем при расположении
дисков с одной стороны (см. кривую 91). Ребра жесткости
позволяют компенсировать возможные деформации по
краям зубчатой венца. Продольную модификацию зуба
рассчитывают таким образом, чтобы при приложении
нагрузки и деформировании зуба он контактировал бы с
сопряженным зубом по всей длине и равномерно приле-
гал к нему.
При правильно выбранных параметрах в волновой
зубчатой передаче образуется многопарное зацепление
на дуге \|/ь- Гибкое колесо, будучи расположенным между
жестким колесом и генератором волн, как бы само выби-
рает свою форму деформирования, прилегая к ним соот-
ветственно на участках \/ь и v|/h- На схеме обозначены: Ть,
Тъ и Ть — вращающие моменты на генераторе волн, на
гибком и жестком колесах; Fb - сила давления со сторо-
ны генератора волн; Vh - скорость точки генератора волн
и ah - угол давления генератора волн на гибкое колесо.
В группе примеров корпусные детали, сосуды, ма-
ховики (см. рис. 47.1) проиллюстрированы приемы так
называемого упругого упрочнения деталей. Оно, в част-
ности, предусматривает предварительное задание дефор-
мации, противоположной деформации при рабочей на-
грузке. Такой прием используют, например, в деталях из
материала, имеющего малый предел прочности на растя-
жение (в конструкциях из бетона или чугуна), а также в
118
САМОПРИСПОСОБЛЯЕМОСТЬ ИСКУССТВЕННОЙ СИСТЕМЫ
47.2. УПРАВЛЯЕМАЯ КОМПЕНСАЦИЯ ДЕФОРМАЦИЙ. ОТКЛОНЕНИЙ ФОРМЫ
И ИЗНОСА РАБОЧИХ ВАЛКОВ ПРИ ПРОКАТКЕ опорные сёдла и обеспечивают
ТОНКОЙ (0,01 ...0,09мм) ПОЛОСЫ противоизгиб оси опорных валков.
Ось
валка
Клиновой
механизм
1
J
Г"
Сменные регулировочные
Г отовая
полоса
Синхронизированный поворот
эксцентриковых осей позволяет,
одновременно перемещать
валки при настройке работы
прокатного стана.
Совокупность опорных
и промежуточных валков
компенсирует деформации
рабочих валков.
Расчётное положение
новых (неизношенных)
рабочих валков
Шток---------
гидроцилиндра
Клиновой
механизм-----
регулирования
нажатия
опорного валка
14.1
Прокатываемая
полоса
и
- и
Опорное
седло
Опорные
цилиндрические
валки
Рабочий валок
Заданный поперечный профиль полосы
Опорный
валок
- нажимная сила и направление
осевого перемещения рабочего валка
Приводной
промежуточный
валок
Возможные отклонения поперечного
профиля прокатанной полосы
Опорный валок
с регулируемым нажатием
Возможные предельные
положения рабочих валков
Внутренний
промежуточный
валок
Рабочие валки
(в деформированном
состоянии)
Шлифованные рабочие валки имеют специальное
осевое сечение. Они прижаты к формируемой
полосе опорными валками. Изгиб валков
из-за переменной толщины исходной заготовки
и переменных сил прижатия получается различным
в процессе прокатки. По этой причине, а также из-за
температурных деформаций и износа валков
толщина полосы может получаться различной
(по ширине). Для компенсации указанных отклонений
рабочие валки непрерывно (автоматически)
перемещают в осевом направлении, и при этом
получают полосу заданной толщины с отклонениями
в пределах допусков.
- нажимная радиальная сила опорного валка
Здесь показаны возможные варианты влияния
на профиль прокатываемой полосы
изменением положения рабочих валков.
В реальных условиях отслеживают
все отклонения, и если они приведут
к недопустимому утонению в середине,
то рабочие валки перемещают, как показано
на схеме 14.1 а, а если они приведут
к недопустимому утолщению полосы в середине,
то рабочие валки перемещают, как показано
на схеме 14.16.
ДЕФОРМАТИВНАЯ ПРИСПОСОБЛЯЕМОСТЬ
119
ответственных герметичных резервуарах, маховиках,
станинах станков и др. Принцип получаемого при этом
распределения напряжений одинаков, что в балках с
предварительным изгибом или корпусах машин, что в
многослойных оболочках: создаваемые предварительные
напряжения сжатия за счет приложенной силы Fs вычи-
таются из рабочих напряжений растяжения, возникаю-
щих при действии нагрузки F или р. В первом случае это
позволяет увеличить нагрузочную способность одной
детали, а во втором случае - равномерно распределить
напряжения между слоями конструкции.
Приложение нагрузки F приводит к еще большему
растяжению стержня, предварительно деформирующего
балку, но материал стержня обладает более высокой
прочностью, чем материал балки. В примерах с корпусом
(рамой, станиной) пресса или станка, а также с резервуа-
ром, обмотанным тонкой холоднотянутой проволокой
или лентой, материал проволоки или ленты характеризу-
ется прочностными свойствами, намного превышающи-
ми соответствующие свойства материала горячекатаных
и особенно литых монолитных деталей.
В примере двухслойной трубы внутренняя труба по-
сле сборки сжата, а наружная растянута. При наличии
внутри трубы давления р напряжение в каждой из труб
меньше, чем в трубе суммарного сплошного сечения.
Причем здесь материал внешней и внутренней труб мо-
жет быть одинаковым. Аналогично происходит распреде-
ление напряжений и в многослойных трубах и оболочках.
Маховики для большой частоты вращения навивают
из тонкой ленты. За счет натяжения Fs каждого после-
дующего витка предыдущий виток предварительно сжи-
мается. Предварительное напряжение в наружном витке
создают равным примерно 1/2 рабочего напряжения при
вращении маховика. В этом примере стремятся умень-
шить деформацию внешних витков по сравнению с внут-
ренними витками, возникающую от центробежных сил
при вращении маховика, чтобы исключить отслоение
витков. На схеме обозначен Т — вращающий момент, при-
ложенный при наматывании ленты.
По аналогичной схеме построено использование так
называемого пластического упрочнения, предусматри-
вающего предварительное пластическое деформирование
материала или отдельных его слоев. При пластическом
упрочнении создают остаточные напряжения, противо-
положные по знаку рабочим напряжениям. Достигают
это перегрузкой, обжатием деталей, неравномерным на-
гревом, а также использованием предварительно напря-
женных конструкций с напряжениями выше предела уп-
ругости. Например, при предварительном закручивании
стержня (вала, торсиона) в наружных его слоях происхо-
дит пластическое деформирование. Если после этого
приложить рабочую нагрузку в том же направлении, то
действительные напряжения в наружном слое упрочнен-
ного вала меньше из-за суммирования напряжений раз-
ных знаков. В частности, такому предварительному воз-
действию (заневоливанию) подвергают пружины сжатия.
Что же касается конструкций неподвижных фрик-
ционных соединений, то в них предварительно каждую
из сопрягаемых деталей или одну из них подвергают на-
гружению, при котором слой материала вблизи поверх-
ности сопряжения пластически деформируется. После
снятия данной нагрузки можно собрать детали с боль-
шим натягом, исходя из более высокого значения полу-
чаемого при этом предела упругости материала.
Глава 5. СОГЛАСОВАННОСТЬ НАПРАВЛЕНИИ СИЛ
И ПЕРЕМЕЩЕНИЙ
5.1. ОБЩИЕ ПОЛОЖЕНИЯ И
ТЕНДЕНЦИИ.
УГОЛ ДАВЛЕНИЯ И ЕГО ЗНАЧИМОСТЬ
В самом начале выбора схемы и конструктивных
решений можно предсказать получение тех или иных
качеств по тому, как предполагается направлять силы в
кинематических парах и соединениях и каким образам
предполагается их замыкать в пространстве. Речь идет о
направлении силы в месте сопряжения тел по отношению
к направлению перемещения (скорости), в том числе
обусловленного деформированием сопряженных тел, а
также о количестве и расположении кинематических пар,
соединений, деформируемых звеньев в контуре замыка-
ния сил — контуре, обеспечивающем равновесие рассмат-
риваемой системы.
В этой связи, пожалуй, одним из самых важных па-
раметров механического взаимодействия звеньев являет-
ся угол давления — угол между направлением силы дав-
ления на данное звено (для которого определяют угол
давления) со стороны другого звена и вектором скорости
точки (принадлежащей данному звену) приложения этой
силы. Другими словами, угол давления определяют меж-
ду движущей силой и направлением перемещения, вызы-
ваемого этой силой.
Чем меньше данный угол, тем меньше нагружены
подвижные соединения и меньше потери на трение, а чем
меньше нагружены подвижные и неподвижные соедине-
ния, а также образующие их звенья, тем более благопри-
ятны условия прочности, износостойкости и других кри-
териев работоспособности. В то же время при малых уг-
лах давления проблематично получить существенное
преобразование (увеличение) сил для преодоления рабо-
чего сопротивления.
При существенном увеличении угла давления КПД
уменьшается, а при определенном условии [угол давле-
ния а больше (90° - р), где р - угол трения, т.е. равен 90°
или близок к 90°] наступает самоторможение - сколько
бы мы ни увеличивали движущую силу — движение не-
возможно.
Вторая не менее важная характеристика - это сис-
тема замыкания сил — замкнутая цепь звеньев и соеди-
нений, нагруженных данной силой и силами, ее уравно-
вешивающими. Кстати, замыкание может осуществлять-
ся не только через твердые, но через жидкие и газообраз-
ные тела, а также через магнитное поле. Благоприятные
условия для конструкции создаются при кратчайшем
замыкании сил системы в целом либо каждой из ветвей
контура замыкания сил на практически недеформируе-
мое основание или фундамент. Это очевидно — чем
меньше соединений и деформируемых звеньев (при учете
их геометрической конфигурации), тем выше КПД, выше
точность воспроизводимых движений, меньше вибрации
и т.п.
Угол давления легко определить как в высших (схе-
мы 1.1; 1.2; 1.3), так и в низших (схема 1.4) парах
(рис. 48). В кулачковом механизме на схеме 1.1 угол а21
между вектором силы F21 (без учета трения сила F2i на-
правлена вдоль нормали NN) и вектором скорости
Vi — угол давления звена 1 на звено 2. С учетом трения
угол давления a2i, уменьшается или увеличивается на
угол трения - угол между вектором реальной (с учетом
трения) силы и нормалью в точке контакта взаимодейст-
вующих звеньев.
Вектор реальной силы давления (на данное звено)
отклоняется в сторону, противоположную вектору скоро-
сти скольжения точки, принадлежащей данному звену.
На схеме 1.2 проиллюстрировано влияние угла давления
на реакции в поступательных кинематических парах тол-
кателя 2.
Очевидно, что, чем больше угол давления а2), тем
больше реакции F„A, F„B в кинематических парах. С уче-
том трения реакции FA, FB (см. схему 1.2а) в опорах от-
клоняются на углы рА и рв, и даже при внешней нагрузке
Fw = 0 может отсутствовать движение, как бы мы ни уве-
личивали силу Fq, т.е. может иметь место самоторможение.
В зубчатой передаче (см. схему 1.3) угол давления
без учета трения равен углу зацепления а,„. Чем больше
угол зацепления, тем больше сила давления при одном и
том же вращающемся моменте и межосевом расстоянии,
тем больше сила трения и ниже КПД.
С учетом угла трения р (схема 1.3а) сила давления
F21 или F12 отклоняется от линии зацепления АВ в ту или
другую сторону в зависимости от направления скорости
скольжения. Только в полюсе Р сила направлена вдоль
линии зацепления.
В процессе зацепления одной пары зубьев сила пе-
ресекает линию С]С2 в разных точках Pi и Р2. В зависи-
мости от этого меняется соотношение вращающих мо-
ментов Т\/Т\ при a>i/co2 = const.
Отношение моментов с обратным знаком называют
силовым передаточным отношением i . С кинематиче-
ским передаточным отношением i оно связано зависимо-
стью i = г т], где т] - КПД. Его колебания (см. схему
1.36) приводят к повышению виброактивности.
Параметры зацепления рекомендуется выбирать с
учетом получения максимальной величины силового пе-
редаточного отношения 11 | и минимального ее колебания.
В шарнирных и рычажных механизмах величина уг-
ла давления играет не меньшую роль. На схеме 1.4 точка
контакта К перемещается со скоростью vK. Угол a2i ме-
жду силой F21 и вектором скорости vK — угол давления на
звено 2 со стороны звена 1 при показанных направлениях
момента 1\ и угловой скорости «ц.
ОБЩИЕ ПОЛОЖЕНИЯ И ТЕНДЕНЦИИ
121
48. ЗНАЧИМОСТЬ И ВЫБОР УГЛА ДАВЛЕНИЯ В МЕХАНИЗМАХ
122
СОГЛАСОВАННОСТЬ НАПРАВЛЕНИИ СИЛ И ПЕРЕМЕЩЕНИЙ
5.2. ПРИЕМЫ УМЕНЬШЕНИЯ
УГЛА ДАВЛЕНИЯ. УСТРАНЕНИЕ
ИЛИ ИСПОЛЬЗОВАНИЕ ОСОБЫХ
ПОЛОЖЕНИЙ
Во многих устройствах встречаются так называемые
особые положения механизма (при а = 90°) или их раз-
новидность - мертвое положение механизма (чаще упот-
ребляется выражение "мертвая точка"). Обеспечение
функционирования механизма как при а = 90°, так и в
зоне, близкой к этому значению (в зоне самоторможе-
ния), требует специальных решений, отдельные из кото-
рых приведены ниже. Кроме того, существуют специаль-
ные приемы как по уменьшению угла давления, так и по
уменьшению трения при больших углах давления.
Если, например, требуется обеспечить относитель-
ный поворот звеньев 1 и 2 (схема 2.1) с помощью гидро-
цилиндра D1, не следует устанавливать его между звень-
ями 1 и 2 непосредственно, а нужно ввести дополнитель-
ную группу звеньев 4, 5 с шарниром Е, образующую со
звеньями 1 и 2 замкнутый контур (схема 2.1а). Такое со-
единение позволяет получить малые значения угла дав-
ления а.43. Даже если звенья 1 и 2 вытянутся в одну ли-
нию, движение будет осуществляться при допустимом
угле давления. Другой вариант представлен на схеме
2.16. В нем изменена конфигурация звена 2. Оно допол-
нено плечом рычага АВ. В любом случае следует стре-
миться, чтобы плечо действия силы F23 относительно
центра шарнира В, соединяющего звенья 1 и 2, было
наибольшим.
Известны приемы уменьшения угла давления за счет
использования параллельных кинематических цепей при
одном приводе (схема 2.2) или за счет введения дополни-
тельного привода (схемы 2 3м 2.4).
В схеме 2.2 кривошип 1 соединен с ползуном двумя
параллельными кинематическими цепями. Шатуны 2 и 3
соединены между собой и с ползуном с помощью рыча-
га 4. По сравнению с широко распространенным криво-
шипно-ползунным механизмом здесь угол давления в
одной из кинематических цепей всегда меньше 45°. Ры-
чаг 4 необходим для перераспределения нагрузки между
кинематическими цепями.
В механизме поворота платформы 2 (схема 2.3) ис-
пользованы гидроцилиндры D1 и D2. установленные та-
ким образом, что центры шарниров А, В и Е расположе-
ны на окружности с центром в т. С, а центры шарниров
А, С и Е лежат на одной прямой. В этом механизме гид-
роцилиндр D1 работает при значениях угла давления <х2ь
не превышающих 45°. При достижении данного значения
включается в работу гидроцилиндр D2. При этом угол
давления также не превысит 45°.
В двухползунном механизме испытательного стенда
(схема 2.4) при показанных направлениях силы и скоро-
сти углы давления взаимозависимы: угол a2i изменяется
от 0 до 90°, в то же время угол а32 изменяется от 90 до 0°.
Даже при незначительной силе сопротивления звено 2
при большом угле а32 перекашивается и создается до-
полнительное сопротивление сил трения.
При использовании двух гидроцилиндров D1 и D2,
приводящих в движение звенья 1 и 2, в данном механиз-
ме можно так согласовать их работу, что углы давления
могут быть малы при нагрузке, приложенной к звену 2.
Особое положение механизма характеризует распо-
ложение звеньев, при котором нарушается структура,
предусмотренная функционированием механизма. Нару-
шение структуры заключается в исчезновении некоторых
степеней свободы (схема 2.5) или в появлении неуправ-
ляемой подвижности (схема 2.5а). В первом случае дви-
жение в направлении v невозможно, а во втором - нару-
шается определенность движения. Особое положение
обычно вредное явление, но иногда его используют для
придания системе в рабочем (статическом) положении
большей жесткости (схема 2.7).
Для незамкнутых кинематических цепей манипуля-
торов особое положение наступает, когда оси трех вра-
щательных пар А, В и С попадут в одну плоскость
(схема 2.5). Одноконтурный механизм (см. схему 2.5а)
попадает в особое положение, когда ось звена ВС пере-
сечет ось пары Е (см. т. Е')- При этом в парах В и С будет
иметь место мгновенная подвижность, а пара А будет
находиться в запертом состоянии.
Движение механизма с учетом трения невозможно и
вблизи особого положения, если не предусмотрено его
прохождения "сходу" за счет инерции звеньев (кстати
такой прием широко используют, например, в механиз-
мах двигателей внутреннего сгорания). Здесь же речь
идет о режимах функционирования, близких к статиче-
скому режиму, когда силы инерции не имеют решающего
значения.
На схемах 2.56. 2.5в показаны особые положения
трехподвижного сферического механизма, рассмотрен-
ного в § 3.3 (рис. 31. схема 7.2а) При расположении то-
чек R. М, С, А, К (схема 2 56) в одной плоскости невоз-
можно повернуть звено 1 в направлении <рх, воздействуя
на него силой F13. В то же время достаточно приложить к
звену 1 незначительную нагрузку (в направлении вектора v),
как это звено начнет двигаться, и гидроцилиндр D3 не мо-
жет его удержать в обозначенной плоскости.
На схеме 2.5в показано особое положение для гид-
роцилиндра D2, когда его ось совпадает с осью СК. Здесь
обозначена также зона положений, при которых как бы
ни велико было воздействие гидропривода D2, переме-
щения в направлении vK добиться невозможно.
В примере на схемах 2.6 м 2.6а платформа 2 удер-
живается или движется с помощью гидроцилиндров D1 и
D2. Пока угол давления а меньше 90°, силы со стороны
гидроцилиндров воспринимают силу сопротивления Fw.
Когда а = 90° (точки А, В, С и Е лежат на одной прямой),
движение возможно только вниз под действием силы Fw.
С помощью гидроцилиндров начать поднимать или
удерживать платформу невозможно даже в положениях,
близких к положению на схеме 2.6, поскольку силы, дей-
ствующие на гидроцилиндры, резко возрастут, а кроме
того, может наступить самоторможение (центры шарни-
ров А, В, С и Е еще не лежат на прямой линии АЕ, а силы
с учетом трения направлены горизонтально).
Для данного механизма существует еще множество
особых положений: в любом из положений, когда только
ПРИЕМЫ УМЕНЬШЕНИЯ УГЛА ДАВЛЕНИЯ
123
49. ОСОБЫЕ ПОЛОЖЕНИЯ В МЕХАНИЗМЕ ПАРАЛЛЕЛЬНЫХ КРИВОШИПОВ/КОРОМЫСЕЛ И СИСТЕМАХ НА ЕГО ОСНОВЕ
Варианты механизма в особом положении
Механизм невозможно
(с помощью привода)
вывести (повернуть кривошипы АВ и СЕ)
из положения,
при котором АВ II ST II СЕ
(без учета трения).
С
Привод
поступательного
движения
СКЛАДЫВАЕМЫЕ ПРОСТРАНСТВЕННЫЕ СТЕРЖНЕВЫЕ СИСТЕМЫ
СТАТИЧЕСКИ ОПРЕДЕЛИМАЯ СЕКЦИЯ
СКЛАДЫВАЕМОЙ ФЕРМЫ
Ферма в сложенном состоянии
(условно показаны только передний и верхний контуры)
Условия исключения самопроизвольного
раскрытия системы (без учета трения)
- АВ II ST II СЕ
Положение звеньев, при котором
возможно саморазворачивание системы
(за счет накопленной энергии пружины).
Упоры, Аккумулирующая
стопоры [замки], пружина
приводы,
подключаемые для складывания системы
или для выведения ее из
особого положения
F- сила натяжения пружины
v- направление скорости точки В
Рпр - приведенный
угол трения
Вариант фермы с аккумулирующей пружиной,
соединяющей звенья противолежащих контуров
(по диагонвли)
Секция способна воспринимать
(не складываясь) только силы Fz и/или Fy,
параллельные соответствующим ребрам
(при выключенных стопорах 1 и/или 2
и без учета трения).
пружина
Многосекционная система
(показаны только передние контуры)
50. УГЛЫ ДАВЛЕНИЯ В МЕХАНИЗМАХ ПЕРЕМЕННОЙ СТРУКТУРЫ
Звено 1 Пружина
| 2.11 | Положение 1
(крышка открыта)
vco
Штифт
Кривошип
Шип/ползун
VCD
Направляющий паз
VDO IIVCO
Fc - сила давления звена ВС на звено CD
VCD.VCO - скорость точки контакта сопряженных звеньев
(шатуна ВС-коромысла CD, шатуна ВС -ползуна СО)
сс। - угол давления в паре В
а 2 - угол давления в паре С в режиме
кривошипно-коромыслового механизма
аз - угол давления в паре С в режиме
кривошипно-ползунного механизма
ШИ]
Положение 2
(крышка закрыта)
Упор
Ползун
Угол давления 90
в шарнире С----
Пружина
Крышка
Ролик
Ползун
Вариант
конструктивного
исполнения
по схеме 2.12
Пружина
Ползун - _
Кривошип
Звено 1
Звено 2
Г-
Шарнир
D
124
СОГЛАСОВАННОСТЬ НАПРАВЛЕНИЙ СИЛ И ПЕРЕМЕЩЕНИЙ
точки А, В и С лежат на одной прямой, гидроцилиндр D1
выключается из работы. А на схеме 2.6 показан только
частный случай при горизонтальном расположении
платформы, из которого не способен вывести и гидроци-
линдр D2.
В схеме 2.6а предусмотрена пружина, которая мо-
жет сжиматься под действием силы Fw и ограничивает
перемещение платформы до положения, из которого гид-
роцилиндры D1 и D2 еще способны перемещать плат-
форму вверх. Может быть предусмотрено опускание
платформы и до особого положения или несколько ниже
его, но тогда пружина способна вывести механизм из
особого положения только при снятии нагрузки Fw.
Поступательно-прямолинейный направляющий ме-
ханизм на схеме 2.7 (предназначенный, например, для
выдвижения и удержания в определенном положении
антенны) составлен из нескольких параллельных кинема-
тических цепей, шарнирно присоединенных к выходному
звену в точках Е, G, К и L. Здесь рабочее положение яв-
ляется как раз особым положением, когда выходное зве-
но 3 находится в самом верху, а каждая из пар звеньев
1-2, Г-2' и 1"-2" вытянута в линию. В этом случае обра-
зована пространственная ферма — жесткая конст-
рукция для восприятия нагрузки на звено 3. Звенья по-
парно застопорены штифтами 4’ и 4".
Чтобы опустить платформу 3, необходимо иметь
синхронно работающие приводы во всех кинематических
цепях, иначе механизм не может быть выведен из особо-
го положения. Можно обойтись одним приводом (вра-
щающий момент Г]), но в этом случае должны быть пре-
дусмотрены меры по обеспечению начального движения
звеньев.
В данном примере предварительно растянутые пру-
жины 5' и 5" создают вращающий момент в парах Г-2' и
1"-2”, звенья перемещаются в направлении штриховых
стрелок. Перемещение выходного звена в верхнее поло-
жение и натяжение пружин осуществляется при реверси-
ровании момента 7) по сравнению с направлением, пока-
занным на схеме 2.7.
Выбор углов давления, наличие или отсутствие осо-
бых положений имеют существенное значение при кон-
струировании систем, в основе которых заложен меха-
низм параллельных кривошипов (рис. 49).
В классическом двухкривошипном механизме име-
ют место особые положения, которые не позволяют
обеспечить синхронное вращение обоих кривошипов.
В механизме на схеме 2.8, содержащем кривошипы
1 и 2 (контур АВСЕ). особое положение имеет место,
когда все звенья вытянуты в одну линию. В этом поло-
жении трудно задать движение в определенном направ-
лении вращением одного из кривошипов, так как углы
давления в шарнирах А и С равны 90°. Чтобы исключить
этот недостаток, соединяют несколько кривошипов 1, 2
и 3 общим шатуном и располагают кривошипы таким
образом, чтобы при их любом положении имелась пара
кривошипов, образующая углы давления с шатуном,
меньшие 90°.
Например, на схеме 2.8 кривошипы 1 и 2 находятся
на одной прямой АС. Заданное направление движения
кривошипа 2 при ведущем кривошипе 1 определяется
возможным движением кривошипа 3, а в положении,
показанном штриховыми линиями, направление движе-
ния определяется движением кривошипа 2.
В механизме, содержащем привод поступательного
движения, присоединенный к шатуну, особое положение
имеет место при условии АВ! II ST! II СЕ (схемы 2.8а и
2.86). В такой схеме увеличение движущей силы вдоль
линии ST приводит к увеличению реакций, направлен-
ных вдоль кривошипов АВ и СЕ. При этом отсутствуют
моменты, способные провернуть кривошипы.
Данное свойство используют в одной из разновид-
ностей трансформируемых ферм, построенной на основе
механизмов параллельных кривошипов, коромысел
(схема 2.9).
Речь идет о новом направлении создания само-
управляемых структур: самоскладывающихся или само-
раскрывающихся устройств.
Такую ферму (по аналогии, например, с шасси са-
молета) можно сложить так, что, по крайней мере, один
из габаритных размеров существенно уменьшается. Осо-
бенно это целесообразно для транспортирования ферм в
контейнерах летательных аппаратов. Используют их в
подвесках модулей-платформ, антенн аэрокосмической
техники (например, саморазворачиваемые подвески по-
сле их доставки в космос). Кроме того, их применяют в
креслах-колясках для инвалидов, в походных армейских
кроватях, в мягкой домашней мебели, в многоопорных
мобильных мостах, эстакадах, каркасах быстроразвора-
чиваемых палаток, ангаров и т.п.
Складываемые фермы выполняют в виде геометри-
чески изменяемой системы и снабжают стопорами или
замками, которые обеспечивают ее геометрическую не-
изменяемость в рабочем состоянии. Для складывания
фермы стопоры или замки выключают.
Данные системы, снабженные автономным приво-
дом, обеспечивающим раскрытие фермы (перевод систе-
мы из нерабочего состояния в рабочее), называют само-
формируемыми фермами. Системы, снабженные авто-
номным приводом, обеспечивающим складывание, назы-
вают складывающимися фермами Главный принцип
конструирования таких систем — исключение избыточ-
ных связей и выбор углов давления, обеспечивающих
отсутствие или, наоборот, наличие самоторможения в
зависимости от исходного состояния.
На схеме 2.9 простейшая пространственная ферма,
которая может быть использована в виде отдельного
блока самых разнообразных конфигураций стержневых
систем. Она представляет собой совокупность паралле-
лограммов, располагаемых на гранях куба (аналогично
можно выполнить такую схему и на гранях других гео-
метрических фигур).
В плоскости каждой из граней параллелограмм мо-
жет складываться, как показано на схеме 2.9а. В каждом
параллелограмме (схема 2.96) два шарнира (В и С; L и М
и др.) выполнены сферическими, благодаря чему система
не имеет избыточных связей и может складываться в
плоскостях любых двух граней. С учетом того, что при
неподвижном одном из звеньев имеется 11 подвижных
РЕШЕНИЯ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ
125
звеньев, 8 одноподвижных и 8 трехподвижных пар, по-
лучается две степени свободы; чтобы обеспечить скла-
дывание или раскрытие [самоформирование] фермы, ее
необходимо снабдить двумя приводами, располагаемы-
ми, например, в шарнирах А и К.
В примерах на схемах 2.9а, 2.96 и 2.9в использована
аккумулирующая пружина; при складывании фермы она
накапливает энергию, а при раскрытии [разворачивании]
фермы энергия возвращается. Пружина может быть ис-
пользована в качестве привода только из положения на
схеме 2.9в.
Рабочее состояние - особое положение фермы - на
схеме 2.9 предусматривает восприятие с Fz и FY, парал-
лельных, в частности, ребрам АВ и KL (по аналогии со
схемами 2.9а, 2.96). Для восприятия сил в других направ-
лениях необходимо включить стопоры в шарнирах кон-
туров АВСЕ и KLMN (не менее одного стопора в каждом
контуре).
Ферма в сложенном состоянии на схеме 2.9а не мо-
жет самопроизвольно раскрыться, даже если отсутствуют
стопоры. Кроме особого положения, при котором углы
давления равны 90°, гарантию запертого состояния здесь
обеспечивает трение.
Исходя из представленных на схемах 2.9а, 2.96 и
2.9в условий и в зависимости от поставленных задач вы-
бирают соотношения размеров, виды и расположения
приводов, упоров и стопоров [замков].
На схеме 2.9г дан пример того, как из отдельных
блоков сделать сложную систему. Приводы могут быть
выполнены в виде пружин, гидроцилиндров или двигате-
лей вращательного действия, встроенных в шарниры.
Покажем далее значимость углов давления и их вы-
бор на примерах механизмов переменной [изменяемой]
структуры (рис. 50).
Известны, например, рычажные механизмы самоиз-
меняемой структуры, преобразуемые из одного вида в
другой, например, из кривошипно-коромыслового меха-
низма — в кривошипно-ползунный механизм (схема 2.10),
из системы звеньев, соединенной с ползуном (схема 2.11 —
в двухползунный прижимной механизм (схема Па) или
из механизма с двумя степенями свободы в механизм с
одной степенью свободы (схема 2.12).
Преобразование механизма осуществляется благо-
даря специальным элементам кинематических пар, ис-
пользованию упоров фиксаторов и/или эффекта само-
торможения.
На схеме 2.10 кривошип АВ шарнирно соединен че-
рез шатун ВС с выходным звеном CD. Ползун, непод-
вижно соединенный с выходным звеном, имеет штифт,
размещенный в Г-образном направляющем пазу опоры.
При перемещении штифта по окружному участку паза
звено CD поворачивается, а при перемещении по про-
дольному участку звено CD вместе с ползуном движется
поступательно вдоль оси кинематической пары D.
Движение и переход из одного направления в дру-
гое возможны только при обеспечении углов давления в
парах В и С, исключающих самоторможение. Угол ai
между вектором окружной скорости vB и силой, направ-
ленной вдоль ВС, характеризует возможность поворота
кривошипа, угол аг между вектором окружной скорости
vck и силой Fc характеризует возможность поворота зве-
на CD, а угол аз между осевой скоростью Vco и силой Fc —
возможность движения звена CD вдоль оси пары D.
В схеме 2.11 крышка подвешена к ползуну с помо-
щью шатуна ВС и пружины, воспринимающей силу тя-
жести. При перемещении ползуна крышка перемещается
параллельно направлению движения ползуна, пока не
упрется в ролик. Дальнейшее движение ползуна приво-
дит к передаче силового воздействия вдоль шатуна ВС на
крышку, которая плотно прижимается к уплотняемой
поверхности и перекрывает отверстие.
В прессе С. А. Абдраимова (схема 2.12, 2.12а) пру-
жины удерживают ползун в положении, при котором он
выполняет роль элемента стоики четырехзвенного меха-
низма. Вращение кривошипа АВ приводит к возвратно-
вращательному движению коромысла CD.
Если ползун опустить в положение, показанное
штриховыми линиями, например, нажатием силой F], то
точка С переместится в точку С' и механизм займет осо-
бое положение, когда звенья вытянутся в одну линию.
Если при этом обеспечить фиксацию относительно-
го положения звеньев 1 и 2 в шарнире D (с помощью
фиксатора или за счет самоторможения), то ползун будет
перемещаться возвратно-поступательно под действием
привода кривошипа. Таким образом осуществляется ра-
бочий ход ползуна.
Для возврата механизма в положение холостого хо-
да, когда ползун неподвижен, нужно повернуть звено 1,
например, силой Fz так, чтобы выключился фиксатор
и/или было исключено самоторможение в паре D. В про-
цессе холостого хода осуществляют разгон инерционных
элементов и накопление энергии, а рабочий ход исполь-
зуют, например, для прессования. На схеме показан кон-
структивный вариант механизма, в котором элементы
шарниров и звенья размещены внутри ползуна, а шарнир
имеет наибольший диаметр поверхности трения, что по-
зволяет осуществить в нем самоторможение.
5.3. РЕШЕНИЯ ФУНКЦИОНАЛЬНЫХ
ЗАДАЧ, ОДНОЗНАЧНО СВЯЗАННЫХ
С УВЕЛИЧЕНИЕМ УГЛОВ ДАВЛЕНИЯ
Из приведенных в параграфе 5.2 примеров следует,
что приоритетным в современной технике является
уменьшение угла давления (и, соответственно, уменьше-
ние нагрузок и повышение КПД).
Некоторые примеры свидетельствуют об использо-
вании систем в особом положении, когда угол давления
равен 90°.
Можно констатировать также, что имеется ряд
функциональных задач, когда требуется увеличить угол
давления. Главная из этих задач - увеличение развивае-
мой силы (движущей силы или силы торможения) при
уменьшении перемещения за счет клинового эффекта
(альтернативный прием по сравнению с эффектом рыча-
га). Эта задача решается как при использовании клиновых
механизмов (см, например, схемы 3.1,3.1а, 3.2,3.3 и 3.5 на
126
СОГЛАСОВАННОСТЬ НАПРАВЛЕНИЙ СИЛ И ПЕРЕМЕЩЕНИЙ
51. УВЕЛИЧЕНИЕ УГЛА ДАВЛЕНИЯ, КЛИНОВОЙ [РАСПОРНЫЙ] ЭФФЕКТ И ПРИМЕРЫ ЕГО ИСПОЛЬЗОВАНИЯ
1,2, 3,... - взаимодействующие
Винтовая
звенья
“Ф - угол подъема
винтовой линии
Е^- внешняя нагрузка
Fr- реакция основания
- движущая сила
Клиновое взаимодействие
приводного ремня и шкива
(поперечное сечение)
Шкив
Прижимные устройства
3.3
Привод
'///////,
3.7
Ч> = 90°-а
* - 7k- движущий
момент
Ё
Борт формы
Механизм запирания
борта формы
С
Пусковая
фрикционная муфта
Пружина
2
/о
I KWA
3.8
W
Губцевый
инструмент
г
3.9
Упор
Упор
Входное
зввно
В
Привод
Замыкающий ------.
механизм |3.101
литейной формы
>ZZ/ZZZZZ,
Конечное
положение
Выходное
звено
fw
Стягивающее устройство
Механизм запирания
дверцы печи
рис. 51), так и при помощи шарнирных механизмов
(см. схемы 3.7 ... 3.11а), а также разновидностей тех и
других устройств.
При решении данной задачи попутно стремятся ли-
бо не доводить систему до самоторможения и обеспечить
максимальный КПД (см., например, схему 3.3), либо ис-
пользуют режимы самоторможения для самозапирания,
самозажатия или предохранения от самопроизвольного
разъединения деталей или от их относительного сколь-
жения.
В схеме 3.1 и винтовой паре (схема 3.1а) для отсут-
ствия самоторможения принимают угол большим, чем
угол трения р. При этом v - угол клина или угол подъема
винтовой линии во всех схемах связан с углом давления а
зависимостью у = 90° - а, угол трения р определяют как
arctg/ где/- коэффициент трения.
В клиноременной передаче (схема 3.2) решают за-
дачу повышения тяговой способности фрикционной па-
ры за счет увеличения реакций Fr, а следовательно, и
силы трения покоя (силы сцепления) при одинаковой
силе F„ прижатия ремня 1 к шкиву 2 в сравнении с плос-
коременной передачей.
В прижимном устройстве на схеме 3.3 между дета-
лями 2 и 3 создают значительное взаимное давление с
помощью клинового механизма, приводимого от гидро-
цилиндра DI. С целью уменьшения трения между взаи-
модействующими звеньями установлены тела качения 4 и 5.
В "эксцентриковом" прижимном устройстве на
схеме 3.4, поворачивая кулачок 1, прижимают деталь 2 к
основанию 3. В клиновом соединении на схеме 3.5 мак-
симально возможно стягивают детали 2 и 3 за счет по-
ступательного (поперечного) перемещения клина 1.
В обеих схемах самопроизвольное разъединение деталей
невозможно при соблюдении условий самоторможения
(90° - а) < р.
В схемах 3.6, 3.9 ... 3.11а использован эффект сто-
порения выходного звена в конечном положении, незави-
симо от величины внешнего воздействия на выходное
звено оно не может самопроизвольно перемещаться. При
этом во всех схемах, кроме схемы 3.10, это достигается за
счет перевода звеньев через "мертвую точку" (звенья АВ
и ВС вытянуты в одну линию) и прижатия их к упору по
другую сторону линии АС. Это делается для гарантии
стопорения, причем данные решения возможны при дос-
таточной упругости распорной кинематической цепи
(для этой цели вводят специальные упругие элементы -
СВ на схеме 3.6 или КС на схеме 3.9). Достаточно на-
дежное стопорение звеньев можно обеспечить в положе-
нии звеньев, показанном на схеме 3.10, и при этом будет
РЕШЕНИЯ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ
127
иметь место стопорение только за счет трения. Приве-
денные схемы используются:
• схема 3.6 для прижатия заготовки или стопорения
рабочего стола в обрабатывающих станках;
• схема 3.7 для включения и функционирования
пусковой фрикционной муфты (при вращении звена 1
диски Г и 1" прижимаются к шкиву 2 за счет центробеж-
ной силы, воздействующей от ползуна 5 через распорные
звенья 3 и 4);
• схема 3.8 для зажатия или разрушения детали или
заготовки в губцевом слесарном инструменте (в частно-
сти, в кусачках в паре W развивают значительные силы
сжатия при сближении рукояток АВ и ВС под действием
усилий Fd руки человека);
• схема 3.9 для перемещения и запирания борта
формы в установке для изготовления железобетонных
изделий;
• схема 3.10 для замыкания формы при изготовле-
нии пластмассовых изделий;
• схема 3.11 для стягивания и запирания фланцевых
соединений труб, соединений крышки и трубы и т.п.
Еще одно направление решений функциональных
задач за счет самоторможения представлено на рис. 52 в
схемах 4.1 ... 4.13. Оно заключается в обеспечении само-
торможения при одном направлении сил и обеспечении
свободного движения при реверсировании сил (речь
идет прежде всего об изменении направления нагрузки в
паре трения, а не о реверсировании движения, реверси-
рование движения здесь может быть следствием ревер-
сирования нагрузки). Принципиальная модель такого
решения в виде совокупности поступательных пар при-
ведена на схеме 4.1. В ней показано равновесие сил и
условие самоторможения при действии внешних сил F& и
Fw Сила трения в парах 1-2, 2-3 обозначена Ff. При не-
значительном начальном прижатии за счет пружины и
движения под действием сил Fp и Fw клин 2 втягивается
между звеньями 3 и 1, а сила трения возрастает до обес-
печения относительного покоя. В отличие от классиче-
ского идеального клинового механизма здесь меньше
основных звеньев, а функционирование и определен-
ность движения зависят от угла клина и обеспечения не-
обходимого трения между звеньями. При изменении на-
правления сил Fd и Fw клин 2 не прижат к звену 1 и зве-
нья 1, 3 могут свободно двигаться одно относительно
другого.
Аналогичное взаимодействие имеет место в меха-
низмах свободного хода (их еще называют обгонными
муфтами, сужая тем самым действительные функцио-
нальные возможности). В них в отличие от схемы 4.1
основные звенья могут вращаться и нагружены вращаю-
щими моментами 7Ь и Tw. Вместо клина здесь использу-
ют ролики 2 (схема 4.2) или кулачки 2 (схема 4.3). Ку-
лачки выполняют различной конфигурации, например, в
виде серповидных клиньев.
На схеме 4.3 кулачок чечевицеобразной формы со-
четает в себе два качества: большой радиус кривизны
(а следовательно, малые контактные напряжения) и воз-
можность (легкость) растормаживания за счет поворота
кулачка - относительного перекатывания звеньев.
В механизме самонажатия фрикционного вариатора
(схемы 4.4 и 4.4а) звенья / и J раздвигаются по мере уве-
личения прижимают фрикционные диски Г и 3' к дис-
ку 2. Сила прижатая возрастает по мере увеличения при-
лагаемой нагрузки. Для нормального функционирования
данного устройства и других подобных устройств необ-
ходимо начальное прижатие звеньев, чтобы за счет тре-
ния обеспечить самозатягивание клина или другого эле-
мента (соединение элементов). В противном случае ту же
функцию можно выполнить кинематическим путем клас-
сического клинового механизма, обладающего одной
степенью свободы.
В отличие от схемы 4.1 ... 4.3 в данной схеме при-
сутствует относительное движение — качение звеньев при
относительном покое в направлении возможного сколь-
жения (частный случай самоторможения).
В самозажимных устройствах, представленных на
схемах 4.5 ... 4.12, начальное прижатие звеньев осущест-
вляют либо вручную, либо за счет силы тяжести или си-
лы инерции звеньев при разгоне или торможении.
В накидном гаечном ключе (схема 4.5) скоба 2 охва-
тывает гайку 1, к которой прижимается кулачок 3' при
повороте рычага 3.
В схеме 4.5, хотя и используется эффект самозажа-
тия, вращающий момент TD передается не за счет сил
трения, а за счет давления на грани гайку 1.
В схеме 4.5а губки 2 и 3' зажимают цилиндр 1. При
достаточной силе трения между губками и цилиндром
обеспечивается равенство моментов 7Ь и 7w. Для обеспе-
чения самозатягивания необходимо, чтобы ц/ < р, где
р - угол трения между губками и цилиндром.
На схеме 4.6 лента 2 охватывает цилиндр 1. Рыча-
гом 3 затягивают ленту на цилиндре. Чем больше сила
Fq, приложенная к рычагу, тем больший момент трения
Tf развивается между лентой и цилиндром. Для того что-
бы лента не скользила по цилиндру, выполняют условие
F га
— < е,й, где Fj/F2 - отношение сил в ветвях ленты, обу-
F2
словленное соотношением плеч рычага 3; f- коэффици-
ент трения между лентой и цилиндром; 8 - угол охвата
лентой цилиндра.
Гибкий элемент — ленту (в схеме 4.6) можно выпол-
нить в виде цепи шарнирно соединенных звеньев. При-
чем число звеньев может быть равно двум или трем (схе-
ма 4.7). В этой схеме, положенной в основу шарнирного
ключа для обсадных труб, звенья 2, 2', 2" соединены
шарнирно между собой и с рычагом 3. Один из шарниров
выполнен разъемным, чтобы можно было надевать ключ
на трубу. Звенья 2 и 2' имеют на рабочих поверхностях
насечку для увеличения сил сцепления с трубой.
Схема 4.8 по своей функции эквивалентна схеме
4.4а, а по структуре — схеме 4.1. Вместо клинового меха-
низма здесь использован распорный шарнирно-
рычажный механизм. Тележка 3 перемещается относи-
тельно рельса 1. Рельс зажат между роликами 4 и коле-
сом 5. Колесо 5 вращается под действием момента 7Ь-
Чем больше внешняя сила Fw, тем в большей мере пово-
рачивается звено 2 и прижимает колесо 5 к рельсу. Здесь
128
СОГЛАСОВАННОСТЬ НАПРАВЛЕНИЙ СИЛ И ПЕРЕМЕЩЕНИЙ
52. САМОУПРАВЛЯЕМЫЕ (ЗА СЧЕТ СИЛ ТРЕНИЯ) ПРОЦЕССЫ В МЕХАНИЗМАХ И СОЕДИНЕНИЯХ
САМОЗАВИНЧИВАНИЕ (САМОЗАТЯЖКА ВИНТОВОГО СОЕДИНЕНИЯ) ЗА СЧЕТ КАЧЕНИЯ ТЕЛ
ПРЕДОХРАНЕНИЕ ОТ
САМОПРОИЗВОЛЬНОЙ
РАЗБОРКИ СОЕДИНЕНИЙ
РЕШЕНИЯ ФУНКЦИОНАЛЬНЫХ ЗАДАЧ
129
так же, как и в схеме 4.4а обеспечивается режим качения
колеса при исключении относительного скольжения.
На схеме 4.9 представлен ловитель лифта, в основу
функционирования которого положено явление самотор-
можения.
Кабина 3 подвешена на канатах посредством балан-
сирного шарнирного устройства 10. Кабина движется
вместе с гибким элементом 5 ограничителя скорости
центробежного тормоза. При превышении предельной
скорости движения кабины срабатывает ограничитель
скорости, гибкий элемент затормаживается и через звено
6 воздействует на тяги 4 и 7, к которым присоединены
соответственно клинья 2 и 2’. Клинья зажимают непод-
вижную направляющую 7, и кабина 3 останавливается.
Звено 6 через рычаг 8, шатун 12, рычаг 11 и тяги соеди-
нено с другой парой клиньев. Звенья 8, 12 и 11 образуют
антипараллелограмм, обеспечивающий синхронное дви-
жение обеих пар клиньев.
При обрыве каната подвески кабины пружина через
тягу 9 воздействует на рычаг 8, и происходит заклинива-
ние. как описано выше.
В схеме 4.10 ролики 4, установленные на звене 3,
сжимают через клинья 2 и 2' полосу 1. Самозатягивание
происходит при \|/ < р, если не учитывать момента трения
в шарнирах и силы сопротивления качения роликов.
В схеме 4.11 эксцентрики 2 и 2' зажимают полосу 1.
Эксцентрики приводятся в движение звеном 3. Если не
учитывать момент трения в шарнирах, соединяющих
звенья 2 и 3, то при условии у < р, обеспечивается само-
затягивание звеньев. Под действием силы Ff эксцентрики
поворачиваются и зажимают полосу 1 до тех пор, пока
сила сцепления эксцентриков с полосой не достигнет
силы сопротивления Fw, после чего начинается совмест-
ное движение звеньев 3.2 и полосы 1.
На схеме 4.12 изображен механизм самозажатия с
управляемым разжатием. По аналогии со схемой 4.9
лист 1 зажимается клиньями 2 и 2'. взаимодействующи-
ми с траверсой 3. При ослабленном канате 5 и подъеме
траверсы 3 в направлении силы FD клинья 2 и 2', подве-
шенные на тягах 4 и 7 к блоку 5, опускаются под дейст-
вием силы тяжести вниз, а при дальнейшем движении
траверсы зажимают лист 1. Сила зажатия возрастает до
тех пор, пока лист не повиснет в пространстве. Сила тре-
ния полностью воспринимает силу тяжести листа F.
После опускания листа натягивают канат 6, блок
5перемещается вверх, клинья поднимаются и освобож-
дают лист.
В схеме 4.13 траверса 3 перемещается по монорель-
су. К траверсе подвешены рычаги 4 и 4'. на концах кото-
рых установлены ролики 5 и 5', перекатывающиеся по
выступам кулачков 6 и 6', последний определяет про-
грамму раскрытия и закрытия механизма. Когда ролики 5
и 5' съезжают с выступов 6 и 6', рычаги 2 и 2' под дейст-
вием силы тяжести опускаются и зажимают груз 1. Рыча-
ги сжимают его до тех пор, пока силы трения не окажут-
ся достаточными для удержания груза.
Когда ролики наезжают снова на выступ, рычаги 4 и
4' поворачиваются вокруг т. С и поворачивают рычаги 2
и 2'. Последние расходятся в стороны и освобождают
груз.
Самоторможение используют в саморегулируемых
дисковых генераторах волн волновых зубчатых и фрик-
ционных передач. На эксцентриковом валу 1 (схема 4.14)
установлен эксцентрик 2 с подшипником 3. Сила Fw воз-
действия гибкого колеса на генератор волн направлена
вдоль линии центров АВ (без учета трения). Чем больше
момент на звене ВС. тем больше сила Fw-
На схеме 4.14а показан вариант с соотношением
эксцентриситетов АВ < ВС.
Применение таких механизмов позволяет исключать
радиальное отжатие и относительный поворот гибкого и
жесткого колес волновой передачи.
В стопорном тормозе - на схеме 4.15 к вращающе-
муся барабану 1 с по цилиндров D1 и D2 прижимаются
колодки 2 и 2'. Корпуса гидроцилиндров не закреплены,
при наличии трения между колодками и барабаном ко-
лодки начинают поворачиваться вместе с гидроцилинд-
рами. При этом поверхность кулачка 4 взаимодействует с
роликом 5, ось которого закреплена на раме. Колодка 2
все больше расклинивается между роликом и барабаном,
пока ролик не упрется в выступ, ограничивающий по-
верхность кулачка 4. Аналогично расклинивается другая
колодка 2'.
При отсутствии давления в гидроцилиндрах пружи-
ны 6, 7 и 8 вернут звенья в начальное положение.
С трением покоя, обеспечивающим относительное
перекатывание звеньев, сопряжены процесс самоотвин-
чивания, который обычно нельзя допускать, или самоза-
винчивания (самозатяжки винтового соединения)
(схемы 5.1... 5.5), который используют в ряде конструкций.
Чтобы обеспечить самозатяжку, нужно правильно
определить требуемое направление резьбы. Для этой це-
ли рассматривают цилиндрическое соединение с зазором
как планетарную передачу и определяют направление
относительного перемещения звеньев (схема 5.1). Водило
мысленно связывают с вектором силы Fag (линией, со-
единяющей центры звеньев С с точкой контакта). Сател-
лит обозначен буквой g, а центральное колесо а условно
остановлено. В схеме 5.1 направление вращения вектора
силы Fas совпадает с направлением вращения охваты-
вающей детали g относительно охватываемой. В схе-
ме 5.2 направление и направление вращения охваты-
ваемой детали относительно охватывающей соя — проти-
воположны.
В соответствии с рассмотренным вариантом для ко-
леса автомобиля (схема 5.3), чтобы обеспечить самоза-
тяжку. гайки должны завинчиваться в направлении вра-
щения колеса сла (для правого колеса нужно иметь пра-
вую резьбу, для левого - левую).
Для консольной оси педали велосипеда (схема 5.4)
ось правой педали должна иметь правую резьбу, а ось
левой педали - левую резьбу. Обоснование этого вытека-
ет из рассмотрения резьбового соединения в реакции FA
или FB. Реакция и относительно охватываемой детали g.
В схеме 5.5 точка А охватывающей детали переме-
щается по замкнутой траектории, вследствие чего гай-
ка g, за счет трения между ее торцом и торцом сопря-
женной детали, стремится повернуться в направлении cds
относительно вала а (вокруг точки С).
130
СОГЛАСОВАННОСТЬ НАПРАВЛЕНИЙ СИЛ И ПЕРЕМЕЩЕНИЙ
Самоторможение широко используют для предо-
хранения от самопроизвольной разборки неподвижных
соединений. Например, в штифтовом соединении (схе-
ма 6.1) при выполнении условия у < р, как ни велики
будут значения силы Fw> они не могут вызвать переме-
щение конического штифта в направлении v.
В большинстве крепежных винтовых соединений
(схема 6.2) обеспечивается самоторможение, которое
чаще всего бывает достаточным для предотвращения
самоотвинчивания.
5.4. РАЦИОНАЛЬНОЕ ЗАМЫКАНИЕ СИЛ
Переходя к рассмотрению рациональных систем за-
мыкания сил, отметим, что угол давления в них, по суще-
ству, играет роль лишь элемента системы, причем без
правильного замыкания сил ни одна из приведенных
выше схем не может функционировать. Далее проиллю-
стрируем некоторые принципы конструирования, ис-
пользуемые при создании данных систем. В частности,
принцип кратчайшего замыкания сил в первую очередь
предусматривает исключение из силового контура эле-
ментов, не участвующих в выполнении заданной функции.
На схемах 7.1, 8.1 (рис. 53) показаны два варианта
мотор-барабана. В первом варианте подшипники А и В
барабана W расположены на консольных элементах 7 и 2,
закрепленных на основании. Во втором варианте под-
шипники опираются на раму 3, составленную из корпу-
сов передачи G и двигателя D. Деформирование кон-
сольных элементов под действием сил FA, FB (схемы 8.1,
8.1а) в большей мере отразится на функционировании
привода, помещенного в барабан, чем деформирование
рамы 3. В варианте, показанном на схеме 8.1, кроме того,
проще осуществить необходимую точность расположе-
ния опорных элементов.
Другой принцип заключается в уменьшении или
устранении вредного влияния боковой составляющей в
поступательной паре, в уменьшении угла давления
вплоть до а = 0. Этот принцип осуществляется введени-
ем дополнительных элементов, позволяющих заменить
трение скольжения (схема 9.1) на трение качения (схе-
ме 9.1а, 9.16); выполнением определенной ориентации
упругих элементов (схема 9.2) и введением механизма,
дублирующего поступательную пару (схема 9.3).
На схеме 9.1 кулачкового механизма видно, что пол-
зун 2, нагруженный силой Fw, которая направлена вдоль
его хода, перекашивается под действием силы со сто-
роны кулачка 1. Перекос ползуна приводит к дополни-
тельным потерям на трение и изнашиванию взаимодей-
ствующих звеньев. Для уменьшения перекоса с одной
или с обеих сторон ползуна 2 (схемы 9.1а и 9.16) уста-
навливают ролики 4, поджатые пружинами 5. Трение
скольжения в этих схемах заменяется трением качения.
На схеме 9.2 изображен четырехзвенный кулисный
механизм, эквивалентный одному из вариантов подвески
автомобиля. В нем линия BR действия внешней силы Fw
не совпадает с осью поступательной пары Н. Чтобы раз-
грузить эту пару от момента силы Fw, пружина 5 распо-
ложена вдоль линии действия силы.
В схеме 9.3 поршень 2 и цилиндр 3 могут совершать
относительные поступательные движения без взаимного
контакта, т.е. без бокового давления. Это достигнуто бла-
годаря тому, что каждое из этих звеньев представляет
собой выходное звено поступательно-ориентирующего
механизма. Такими механизмами являются параллело-
граммы АВСЕ и KLMN. Для согласования движений
поршня и цилиндра использована зубчатая передача, замы-
кающая параллелограммы в единую кинематическую цепь.
Еще один важный принцип конструирования - сим-
метричное исполнение детали и взаимосвязанное с
ним симметричное нагружение благодаря симмет-
ричной схеме замыкания сил.
Примером такого исполнения является расположе-
ние зубчатого колеса относительно опор в месте, где угол
поворота поперечного сечения вала от нагрузки равен
нулю, в частном случае посередине между одинаковыми
опорами. Симметрично располагают венцы в шевронной
зубчатой передаче, сателлиты в окружном и осевом на-
правлениях.
При симметричном расположении элементов важно
еще обеспечить равномерное распределение нагрузки меж-
ду ними, сделать детали достаточно точными и жесткими
или компенсировать погрешности изготовления и установ-
ки деталей за счет специальной системы замыкания сил.
На схеме 10.1 дана конструкция волновой передачи,
элементы которой выполнены симметричными. С валом
двигателя D с помощью предохранительной фрикцион-
ной муфты 1 соединен симметричный генератор волн h,
установленный внутри гибкого колеса g, выполненного в
виде кольца. Гибкое колесо взаимодействует с ведомым
жестким колесом b и неподвижными элементами зубча-
той муфты е.
В этой передаче жесткое колесо поворачивается на
неполный оборот, после чего движение реверсируется.
В связи с этим элементы муфты имеют зацепление на
половине периметра.
Оба венца муфты е и е', неподвижно соединенные
элементом 2', нарезают с одного установа, благодаря че-
му обеспечивается высокая точность их взаимного рас-
положения. Радиальная нагрузка со стороны выходного
звена воспринимается через гибкое колесо и подшипники
генератора волн на элементы муфты.
На схеме 10.2 волновой зубчатой передачи (в меха-
низме вращения платформы грузоподъемного крана)
симметричное исполнение гибкого колеса и элементов
зубчатой муфты оказалось возможным лишь при условии
внешнего замыкания сил. Такое решение легко осущест-
вимо в неполноповоротных приводах (схема 10.1), но
может быть получено также в механизме с вращающимся
более чем на один оборот выходным звеном.
Механизм установлен н между поворотной плат-
формой 3 (схема 10.2) и рамой 2', которые соединены
между собой шарниром 2-3'. От двигателя D через зуб-
чатую пару G и волновую зубчатую передачу движение
передается на входные звенья е и е'.
Гибкое колесо g передачи выполнено симметрич-
ным относительно поперечной плоскости, проходящей
через середину генератора волн h и жесткого колеса Ь.
РАЦИОНАЛЬНОЕ ЗАМЫКАНИЕ СИЛ
131
УМЕНЬШЕНИЕ ИЛИ УСТРАНЕНИЕ БОКОВОЙ СОСТАВЛЯЮЩЕЙ СИЛЫ
В ПОСТУПАТЕЛЬНОЙ ПАРЕ
1 - кулачок
2 - толкатель или
ползун (поршень)
3 - направляющая
Fw - внешняя нагрузка
F23 - реакция
в кинематической паре
4 - ролик
5- пружина
[107Г|
D 2 е
10.3
Диски водила
Ъ - жесткое колесо
g - гибкое колесо
h - генератор волн
е-е* 1 2 3- зубчатая муфта
1- предохранительная
муфта
D - двигатель
2-корпус
G - зубчатая передача
СИММЕТРИЧНОЕ ЗАМЫКАНИЕ СИЛ
|Гб?2
Тормоз
В(
кв
2'(замыкающий
элемент)
Н, Iт, V - ненагруженные
кинематические пары
ABCEULh A'B'CF.'UL'
-симметричные
замкнутые контуры
Фланец вала
СЕМЕ'С
- замыкающая
рычажная
система
3- поворотная
платформа
|10.4
Поршень
Диск водила „ ®ил
Фланец вала
Штифт
Замыкающая
(синхронизирующая)
зубчатая передача
Поршень 2
132
СОГЛАСОВАННОСТЬ НАПРАВЛЕНИЙ СИЛ И ПЕРЕМЕЩЕНИЙ
Для выравнивания нагрузки на звеньях е и е' они со-
единены симметричной балочкой АВ с шаровыми шар-
нирами. Балочка шарнирно соединена с тягой СЕ.
Внутри редуктора предусмотрена труба для разме-
щения коммуникаций. Механизм останавливается тормо-
зом. Корпус 2 механизма установлен на раме 2'.
Тяги СЕ и С'Е' передают пару сил на платформу 3
через рычаг ЕЕ'. Звенья СЕ, С'Е', ЕЕ' и выходное звено
редуктора образуют компенсирующий механизм. Этот
механизм позволяет редуктору и платформе самоуста-
навливаться Ь процессе работы. Погрешности их уста-
новки не влияют на работоспособность устройства.
На схеме 10.3 благодаря симметричной схеме при-
соединения водила планетарной передачи к валу устра-
нен недостаток, обусловленный деформацией кручения
водила.
Конструкция водила типа "беличья клетка" позволя-
ет выполнять двухопорными оси сателлитов, но крепле-
ние вала к одной из щек водила приводит все же к его
закручиванию и перекосу осей. Нас схеме 10.3 водило
симметрично прикреплено тремя штифтами к фланцу
вала. Фланец вала нагружен моментом силы А со сторо-
ны водила и вращающим моментом Т. Реакция водила F
приложена симметрично к стенкам водила между его
дисков.
На схеме 10.4 — симметричное исполнение сдвоен-
ного кривошипно-ползунного механизма компрессора.
Кривошипы АВ и А'В' соединены неподвижно с ко-
лесами замыкающей (синхронизирующей) зубчатой пе-
редачи. При вращении одного кривошипа второй враща-
ется с равной угловой скоростью в обратную сторону.
Кривошипы посредством шатунов BL и B'L' соеди-
нены с поршнем 2, а посредством шатунов СЕ и С'Е' — с
поршнем 1.
При вращении кривошипов поршни 1 и 2 соверша-
ют встречные поступательные движения.
Симметричная схема соединения исключает боковую
составляющую реакции в поступательных парах Н, U, V.
Глава 6. УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
6.1. ОБЩИЕ ПОЛОЖЕНИЯ
Сбалансированность [уравновешенность] качеств,
характеристик, параметров желательна не только для
конкретного человека или общества, но и для любого
объекта творчества, будь то закон о налогах или новая
конструкция машины. Уравновешенность сил тяжести и
сил инерции, смягчение переменных силовых воздейст-
вий гарантирует обеспечение ряда положительных ка-
честв машины или сооружения. Переменные воздейст-
вия, как правило, обусловливают появление вибраций
(механических колебаний). Лучше их вообще не допус-
кать, чем пытаться защитить от них человека и оборудо-
вание. Выявление и исключение источников возбужде-
ния вибраций — одна из важнейших задач конструирова-
ния. Речь идет, конечно, о машинах, которые не предна-
значены для воспроизведения вибраций.
Вибрационные испытательные стенды, вибрацион-
ное технологическое оборудование и вибрационный
транспорт — это особая область, где не избегают вибра-
ций, а стремятся их получить. Основа таких устройств -
вибровозбудитель, воздействие которого должно быть
строго направлено только на объект обработки. В таких
устройствах наиболее остро стоит задача защиты челове-
ка и окружающей среды от распространяемых вибраций.
Нежелательные причины возбуждения колебаний в
основном могут быть сведены к следующим:
• погрешностям геометрической формы, шерохова-
тости и волнистости, сопряженным относительно под-
вижных поверхностей (например, отклонения от кругло-
сти подшипника скольжения);
• переменным деформациям, сопряженным относи-
тельно подвижных элементов (например, деформации
пары зубьев при их пересопряжении);
• нестабильному характеру трения и смазывания
трущихся поверхностей;
• неуравновешенным силам инерции при периоди-
ческом реверсировании движения звеньев;
• неуравновешенным центробежным силам вра-
щающихся тел.
Очевидно, что первые три источника нейтрализуют-
ся за счет правильно выбранных параметров формы, ка-
чества поверхностей и точности изготовления. Что каса-
ется двух последних источников, то они устраняются за
счет уравновешивания и/или балансировки. Принято к
уравновешиванию относить конструктивные приемы
исправления формы, добавления или исключения конст-
руктивных элементов, а к балансировке относят техноло-
гические приемы устранения неуравновешенности, обу-
словленной неточностью изготовления.
Уравновешенность имеет более широкое значение и
позволяет не только уменьшить или устранить вибрации,
но и получить другие очень ценные качества машины,
такие, как меньшая установленная мощность привода и
более высокий КПД (за счет более равномерной загрузки
привода), малые габаритные размеры и масса (за счет
уменьшения реакций в кинематических парах и соответ-
ствующего уменьшения размеров подшипников).
Учитывая актуальность данной темы, изложим не-
которые наиболее распространенные приемы обеспече-
ния уравновешенности и виброзащищенности.
6.2. РАЗГРУЗКА ПРИВОДА
И КИНЕМАТИЧЕСКИХ ПАР
Разгрузка привода от сил тяжести — сравнительно
простая и древняя задача. Еще в далеком прошлом чело-
век прикреплял к рычагу противовес (например, в колод-
це типа "журавль" по аналогии с современным устройст-
вом, схема 1.1 на рис. 54), чтобы облегчить свой труд при
подъеме груза. Правда, затем ему приходилось подни-
мать противовес, поэтому он подбирал его массу равной
примерно половине массы поднимаемого груза, и таким
образом требуемая мощность уменьшалась в два раза,
хотя общая работа при этом не менялась.
Такой прием используется в современных лифтах
(схема 1.2)'. сила тяжести Fgj противовеса обычно равна
половине силы тяжести Fg кабины лифта и поднимаемого
груза. Установленную мощность противовеса D рассчи-
тывают только на преодоление момента от 1/2 силы тя-
жести Fg.
На схеме 1.1 ъ манипуляторе, выполненном на осно-
ве пантографа, разгрузка привода D1 от силы тяжести Fg
может быть осуществлена двумя способами - противове-
сом (сила тяжести Fgi), прикрепленным к рычагу LR, или
упругим элементом — пружиной, которая расположена
между рычагом LR и поворотной платформой RN. Сле-
дует отметить, что в первом случае привод D2 дополни-
тельно нагружается моментом трения из-за возросшей
осевой реакции в опоре, а во втором случае степень раз-
грузки зависит от деформации пружины. Использование
упругого элемента для решения данной задачи практиче-
ски не приводит к увеличению общей массы устройства,
но вследствие определенной зависимости силы от пере-
мещения стремятся применить приемы, обеспечивающие
эффективную разгрузку. С этой целью, в частности, ис-
пользуют упругие элементы с нелинейной или управляе-
мой характеристикой, используют в одном устройстве
несколько упругих элементов (схема 1.3) или применяют
специальные механизмы, преобразующие упругую ха-
рактеристику по определенной программе (схемы 1.4, 1.5
и 1.6). Примером управляемого уравновешивающего
устройства может быть пневмоцилиндр с регулируемым
давлением подводимого к нему воздуха.
На схеме 1.3 в манипуляторе для перекладывания
листов бумаги использованы два пневмоцилиндра: Е1
134
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
РАЗГРУЗКА ПРИВОДА И КИНЕМАТИЧЕСКИХ ПАР
135
служит для восприятия силы тяжести всех подвижных
частей манипулятора и разгрузки привода DI; Е2 — для
разгрузки привода В2 от силы тяжести подвижных
звеньев, обеспечивающих горизонтальное перемещение
листа (параллелограмм ABCR и выходное звено W с
пневмозахватным устройством).
На схеме 1.4 в грузоподъемном устройстве, в основу
которого заложен рычаг BDW, момент от силы тяжести
Fg уравновешен упругим элементом с линейной характе-
ристикой. Благодаря расположению точек А, В, D на по-
луокружности с центром С при повороте рычага изменя-
ется плечо BD, а ось упругого элемента все время остает-
ся перпендикулярной по отношению к рычагу BDW. Та-
ким образом удается достаточно точно разгрузить привод
от момента силы Fg, изменяемого из-за переменности
плеча действия силы при наклоне рычага.
На стеле 7.5 та же задача решена благодаря исполь-
зованию кулачкового механизма. При повороте выходно-
го звена W и изменении плеча действия силы поворачи-
вается кулачок механизма и сжимается упругий элемент.
От степени сжатия зависит величина нагружающей силы.
Профиль кулачка подбирают таким образом, чтобы она
изменялась пропорционально изменяющемуся внешнему
моменту силы Fg.
На стеле 1.6 в задающем механизме манипулятора
упругий элемент Е1 воспринимает силу тяжести Fgi и F&
подвижных звеньев ML и LD, а упругий элемент Е2 вос-
принимает силу тяжести только звена LD. При этом пе-
ременный момент сил тяжести Fg\ и Fgz практически
полностью воспринимается упругим элементом Е1 бла-
годаря специальному профилю кулачка, через который
элемент Е1 соединен со звеном ML. При выборе профиля
кулачка учтена также зависимость силы растяжения уп-
ругого элемента от деформации. Момент от силы тяже-
сти звена LD относительно точки L воспринимается уп-
ругим элементом Е2. С ним неподвижно через коромыс-
ло МК соединена звездочка 1, которая через цепь взаи-
модействует со звездочкой 2, неподвижно прикреплен-
ной к звену LD. В данной схеме выходные сигналы -
углы поворота в шарнирах D и L задаются рукой опера-
тора, воздействующего LD на звено в точке М, и, естест-
венно, тяжесть перемещаемых звеньев снижала бы точ-
ность задаваемых перемещений и утомляла бы оператора.
Следующая задача, решаемая в рамках данной темы, —
это разгрузка кинематических пар от сил тяжести
звеньев. Эта задача решается также с помощью противо-
веса и/или с помощью упругого элемента. Причем, если
перемещения уравновешиваемого звена невелики, то
предпочтительнее применять упругий элемент.
На схеме 2.2 представлен пример разгрузки пар А и
В от силы тяжести промежуточного вала карданной пе-
редачи прокатной клети. Вал установлен в двух опорах С
и К, и его сила тяжести уравновешивается через рычаж-
ную подвеску противовесом. Подвеска допускает пере-
мещения вала при изменении положения выходного зве-
на W. При этом рама подвески NC'Q может поворачи-
ваться вокруг оси X, проходящей через центры опор А
и Q. Реакция в опоре воспринимается через рычаг QRP
упругим элементом, замыкаемым на основание системы.
В данной схеме подвеска вала отслеживает его движения
(кроме вращения), обусловленные в том числе погрешно-
стями изготовления и монтажа.
Интересным и полезным представляется разгрузка
центральной опоры С (схемы 2.3 и 2.4) самоустанавли-
вающегося звена и присоединенных к нему звеньев под-
вески от их сил тяжести. Здесь не требуется введения
дополнительной кинематической цепи, а достаточно ус-
тановить между относительно подвижными звеньями
упругий элемент или на одном из замыкающих звеньев
подвески установить противовес. Требуется некоторая
сообразительность в выборе места размещения упругого
элемента или противовеса. Можно испробовать возмож-
ные варианты и проверить, в какую сторону направлена
уравновешивающая сила и воспринимает ли она силу
тяжести упомянутых звеньев. В схеме 2.3 самоустанав-
ливающееся звено подвешено на двух тягах АВ и NM.
замкнутых между собой кинематической цепью
AQKLRM. Реактивный момент самоустанавливаюшегося
звена в виде пары сил воспринимается тягами АВ и NM,
а сила тяжести через эти же тяги и кинематическую цепь
AQKLRM воспринимается противовесом или упругим
элементом. В варианте на схеме 2.4 упругий элемент ус-
тановлен между одним из звеньев (KQ) замыкающей ки-
нематической цепи ALRQLN и основанием.
Одним из наиболее важных принципов конструиро-
вания машин является динамическая разгрузка, или
периодическая разгрузка привода от внешних пере-
менных воздействий (в т.ч. сил инерции) с возвратом
избыточной энергии за один период движения в процессе
другого периода. По существу этот принцип мало чем
отличается от разгрузки привода от сил тяжести (см. схе-
мы 1.1 ... 1.6), если рассматривать длительный промежу-
ток времени. Например, в лифте при движении кабины
вверх противовес возвращает приводу энергию, запасен-
ную при движении кабины вниз. Во всех механизмах на
схемах 3.1 ... 3.7 при движении выходного звена в одну
сторону (условно это холостой ход) сжимается упругий
элемент, поднимается противовес, расходятся грузы цен-
тробежного регулятора и/или раскручиваются маховые
массы, благодаря чему увеличивается момент сил сопро-
тивления (тормозящий момент), а при реверсировании
движения (рабочий ход) движущие силы, развиваемые
элементами разгрузки, прибавляются к движущимся си-
лам привода.
Поскольку приведенная нагрузка сопротивления (в
том числе и от сил инерции звеньев), действующая на
привод, переменная, то выравнивающая нагрузка со сто-
роны разгружателя также должна изменяться по опреде-
ленной программе, чтобы в сумме обеспечить равномер-
ную загрузку привода. Такого типа разгружатели назы-
вают программными (см. схемы 3.2; 3.3; 3.4).
Можно заодно разгрузить и кинематические пары
механизма от максимальных величин нагрузки внешнего
сопротивления, если разгружатель присоединить к вы-
ходному звену механизма. Что же касается силы инерции
136
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
какого-либо звена, то от нее можно разгрузить кинемати-
ческие пары, только присоединив соответствующий раз-
гружатель к данному звену, что не всегда осуществимо и
оправдано.
Но все же использование разгружателя в какой-то
мере уменьшает силы инерции, так как из-за выравнива-
ния нагрузки уменьшается неравномерность движения
всех звеньев механизма.
Простейший пример динамической разгрузки иллю-
стрирует схема 3.1. На станке-качалке (механизме неф-
тяной насосной установки) использовано два противове-
са. Противовес 2 размещен на коромысле ВС и частично
уравновешивает силу тяжести кулачка, штанги и насоса,
благодаря чему частично разгружается привод D от мо-
мента силы Fg относительно т. С, но при этом дополни-
тельно нагружается опора С. Момент от силы тяжести
противовеса 2 направлен постоянно в одну сторону, как и
во всех схемах 1.1 ... 1.6, роль противовеса 2 та же, что и
в этих схемах. Противовес 1 закреплен на кривошипе AD
и предназначен для периодической разгрузки привода от
рабочей нагрузки. В данном случае нагрузка, приведен-
ная к звену AD, переменна, при движении штанги вверх
к силе тяжести штанги и насоса добавляется сила тяже-
сти поднимаемого столба жидкости в скважине. При
движении штанги вниз противовес под действием силы
тяжести неуравновешенной части силы Fg поднимается и
тем самым аккумулирует энергию, которая добавляется к
энергии привода D при последующем подъеме штанги
вместе со столбом жидкости в скважине.
На схеме 3.2 программный упругоинерционный раз-
гружатель. Он содержит упругие элементы (торсионы)
El, Е2 и ЕЗ и звенья, обладающие моментами инерции
J2, J3, последовательно присоединенные к звену меха-
низма, совершающему вращательное или возвратно-
вращательное движение. Приведенные моменты инерции
и крутильная жесткость изменяются по заданной про-
грамме с помощью кулачкового механизма.
Звено присоединения разгружателя обозначено
D/W. Обычно это выходное звено основного (рабочего)
механизма, но оно может быть присоединено к промежу-
точному звену основного механизма или непосредствен-
но к валу двигателя параллельно входному звену. В по-
следнем варианте однозначно разгружается только дви-
гатель, но разгружатель может иметь меньшие размеры и
массу. В этой связи возможно решение, при котором ме-
жду разгружателем и двигателем вводится специальная
повышающая передача. В любом случае звено D/W пе-
риодически является ведущим (D) или ведомым (W), так
как момент сопротивления АГ разгружателя при одном и
том же направлении вращения реверсируется (становится
движущим моментом) благодаря кулачковому механизму.
На схеме 3.2 вариант разгружателя, соединенного с
основанием; на схеме 3.3 вариант разгружателя со сво-
бодно качающимися звеньями.
На схеме 3.4 разгружатель выходного звена, совер-
шающего возвратно-поступательное движение. Он по-
зволяет компенсировать в определенной мере влияние
силы инерции ползуна на кинематическую пару А (край-
ние положения обозначены А и А')- К т. А присоединен с
помощью гибкого элемента упругий элемент. Благодаря
огибанию гибким элементом ролика, получается малый
угол давления а и более эффективное использование уп-
ругого элемента с линейно изменяемой жесткостью.
На схеме 3.5 - программный инерционный разгру-
жатель. К вращающему звену D/W присоединено устрой-
ство, момент инерции которого изменяется в процессе
вращения с помощью кулачкового механизма. Вал D/W
соединен через зубчатую передачу с кулисой, на которой
расположены грузы массой т. Кулачковый механизм
сообщает возвратно-поступательное движение ползуну,
воздействующему через шатуны CL и MN на грузы. По-
следние периодически приближаются к оси вращения
кулисы и удаляются. В результате изменяется момент
инерции устройства по определенной программе.
Подбором масс, жесткостей и профиля кулачка
можно обеспечить эффективную разгрузку привода.
Динамический разгружатель используют в переда-
точных механизмах, которые обладают переменным пе-
редаточным отношением, в частности, в конвейерах, в
основу которых положена цепная передача.
На схеме 3.6 к звездочке через зубчатую передачу
присоединен кулачковый механизм. К поверхности ку-
лачка упругим элементом поджат ролик. Передаточное
отношение зубчатой передачи равно числу циклов изме-
нения передаточного отношения цепной передачи. В пе-
риоды, соответствующие наибольшей скорости цепи,
упругий элемент сжимается и создается дополнительное
сопротивление, вращение звездочки замедляется. Запа-
сенная энергия отдается в периоды, соответствующие
наименьшей скорости цепи.
На схеме 3.6 и 3.7а - соответственно принципиаль-
ное и конструктивное решения шагового конвейера.
Особенность нагружения привода заключается в перио-
дическом наличии груза на выходном звене и периодиче-
ском изменении направления силы инерции при его
подъеме и опускании.
Кривошипы AD1 и BD2 вращаются от двигателей
D1 и D2 и сообщают поступательное движение выход-
ному звену АВ. Выходное звено воздействует на упругий
элемент через ролик и толкатель.
При опускании и торможении выходного звена уп-
ругий элемент сжимается и накапливает энергию, а при
подъеме и разгоне возвращает энергию и тем самым раз-
гружает двигатели и уменьшает реакции в шарнирах.
Выходное звено (платформа) поднимается над осно-
ванием, перемещает предметы (прокат), затем опускает
их на основание и возвращает в начальное положение.
Привод осуществляется вращением двух кривошипов,
выполненных в виде эксцентриков 1 и 2 с подшипниками
большого диаметра. Платформа с грузом опирается через
ролики на поплавок, установленный в емкости с жидко-
стью. Изменяя уровень жидкости в емкости, регулируют
величину выталкивающей поплавок силы в процессе ра-
боты механизма. Выталкивающая сила изменяется анало-
гично силе упругости пружины.
УРАВНОВЕШИВАНИЕ И ВОСПРИЯТИЕ НЕУРАВНОВЕШЕННЫХ СИЛ И МОМЕНТОВ
137
6.3. УРАВНОВЕШИВАНИЕ И
ВОСПРИЯТИЕ НЕУРАВНОВЕШЕННЫХ
СИЛ И МОМЕНТОВ
Уравновешивание (сил инерции) имеет целью
уменьшить внешнюю виброактивностъ механизма. Урав-
новешивание заключается в таком распределении масс
звеньев, при котором главный вектор и главный момент
сил инерции, действующих на основание (фундамент),
равны нулю. При уравновешивании не ставится задача
уменьшения реакций в кинематических парах и выравни-
вания загрузки двигателя, так как в ряде случаев эти тре-
бования несовместимы с основной целью уравновешивания.
Не вдаваясь подробно в суть уравновешивания, от-
метим, что широко распространенный путь использова-
ния противовесов приводит к увеличению момента сил
инерции звеньев, а следовательно, к дополнительной на-
грузке двигателя при неустановившемся режиме и к уве-
личению реакций в кинематических парах. Для плоского
механизма на схеме 4.1 (рис. 55) массу звена 2 замещают
массами тв^ = т2 (CSj //вс > тс2 = т2 ~ тв2 • Далее
уравновесить силы инерции звеньев 1 и 3 можно, устано-
вив противовесы тЕ и тк, при этом тв lAB = т} /ASi +
+ wb2 (дв > Аж ~ Ads, + тс2 Аэс ’ гДе (— длины соот-
ветствующих звеньев.
Схема 4.1а иллюстрирует размещение противовесов
тЕ и тк на подвижных звеньях кривошипно-ползунного
механизма. Масса кривошипа АВ с центром Si уравно-
вешена противовесом тк таким образом, чтобы центр
масс кривошипа совместился с т. А. Центр масс шатуна
ВС с присоединенной массой в т. С размещают в т. В.
Динамическое уравновешивание обычно осуществ-
ляют приближенно - устраняют лишь первую гармонику
главного вектора и главного момента сил инерции (F, и
М, — обычно периодические функции вращения звена
приведения - в данных примерах кривошипа) либо пол-
ностью уравновешивают Ft и первую гармонику Л/,. При-
ближенное уравновешивание позволяет уменьшить в
4-11 раз F, и в десятки раз М,.
Приближенное уравновешивание F, осуществляют,
установив один противовес тЕ + (при точном стати-
ческом уравновешивании требуется два противовеса тЕ и
тк - см. на схеме 4.1а штриховые линии.
Составляющую массы противовеса тЕ определяют
как для схемы 4.1, а составляющую wiw - из условия при-
ближенного уравновешивания силы Fx - силы инерции
поступательно движущихся масс (направлена вдоль оси X)
Fx = wreo2 со5ф + »?гсо2Л2 cos2cp +
+ т г а2А4 cos 2ср +...,
где т = т3 + т21Ъс2 /(во ^2, А4 - коэффициенты, полу-
чаемые при разложении Fx в ряд; г = /АВ; со — угловая
скорость кривошипа. Уравновешивая гармонику
т г со2 cos ср. нужно добавить = гпгПае. При уравно-
вешивании гармоники момента Л/ используют две мас-
сы, но при этом ?nw =---. Их располагают, например,
2(aw
на зубчатых колесах, как показано на схеме 4.16. Рас-
стояние aw определим из условий уравновешивания пер-
вой гармоники М,:
(AW со2 aw sin ср = Мт sin ср,
M,osincp ..
откуда aw = —-------где Мт - амплитуда первой
гармоники М,.
В многоцилиндровых двигателях внутреннего сго-
рания коленчатый вал выполняют уравновешенным (его
подвергают балансировке) и в отдельных решениях уста-
навливают два уравновешивающих вала (с противовеса-
ми wiw), соединенных с коленчатым валом зубчатыми
передачами (схема 4.1в). Поскольку при этом используют
несколько кривошипно-ползунных механизмов (а не
один, как в схеме 4.16), то цикл уравновешивания равен
циклу поступательного движения поршней в одном на-
правлении (л в четырехцилиндровом двигателе и 2/Зл в
шестицилиндровом). В соответствии с этим, соотноше-
ния чисел зубьев в схеме 4.1в\
zi = 2z2 ; z3 = z4.
Уравновешивающие валы должны вращаться на-
встречу один другому с одинаковой частотой. Их распо-
лагают в корпусе двигателя параллельно коленчатому
валу по разные стороны от него.
На схеме 4.1г показан вариант привода уравновеши-
вающих валов с помощью зубчатого ремня, огибающего
колеса с числами зубьев, удовлетворяющими соотноше-
ниям: z4 = z2; z\ = 2z2, z3 — произвольное. Использование
схем 4.1г и 4.1д позволяет уменьшить вибрации и шум
двигателя.
Уравновешивание, повышая одни качественные по-
казатели, может ухудшить другие. Например, уменьшая
переменные составляющие сил, действующих на стойку,
оно может увеличить общую массу звеньев, суммарные
реакции в кинематических парах, увеличить время разго-
на и торможения из-за увеличения момента инерции или
обусловить повышение установленной мощности двига-
теля и тормозного устройства при сохранении времени
разгона и торможения и т.п.
Наиболее перспективный путь уравновешивания -
это параллельное соединение двух и более механизмов,
работающих в "противофазе". На схеме 4.2 два механиз-
ма (кинематические цепи DBCKRPL и DAVMQUN)
имеют общий симметричный кривошип АВ и общий
привод D. При непрерывном вращении кривошипа силы
инерции F, выходных звеньев 1 и 2 всегда направлены
навстречу одна другой.
В схеме 4.2а выходные звенья (сита) 1 и 2 подвеше-
ны на параллельных коромыслах (RK и PL, QM и UN)
одинаковой длины. Карательные движения ситам в про-
тивофазе сообщаются от кривошипа ADB через шатуны
ВС и AV.
138
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
55. УРАВНОВЕШИВАНИЕ И ВОСПРИЯТИЕ НЕУРАВНОВЕШЕННЫХ СИЛ И МОМЕНТОВ
| 4.1 | УРАВНОВЕШИВАНИЕ (СИЛ ИНЕРЦИИ) МЕХАНИЗМОВ
УРАВНОВЕШИВАНИЕ ПАРАЛЛЕЛЬНО СОЕДИНЕННЫХ МЕХАНИЗМОВ
ЗА СЧЕТ ВСТРЕЧНОГО НАПРАВЛЕНИЯ СИЛ ИНЕРЦИИ
Основание
Вращающийся
барабан
Корпус
Основание
Пружина 2
Направляющие
демпфирующие
опоры корпуса
Двигатель
Основание
Ременная
передача
Основание
Пружина 3
Подшипниковая
опора барабана
а корпусе
ГбТ|
Противовес I
Основание
Пружина 1
ВОСПРИЯТИЕ ЦЕНТРОБЕЖНЫХ СИЛ
И ДЕМПФИРОВАНИЕ ВИБРАЦИЙ
| 5.3а |
АВТОБАЛАНСИРОВКА
Dj.Dll - дисбалансы
Двигатель 1 управления
ПОВЫШЕНИЕ ПЛАВНОСТИ ХОДА
И ВОСПРИЯТИЕ РЕАКТИВНОГО МОМЕНТА
двигателя Передаточный механизм
।----1 Направления сил
I 5.36 | при повороте
АЛс барабана на 180°
Прети вовес-
Противовес
Вращающийся
барабан
Fb
Корпус
Двигатель
Подшипниковая
опора барабана
в корпусе
- центробежная сила барабана
Ременная
передача
Вращающийся
барабан
Подшипниковая
опора барабана
в корпусе
Корпус
Двигатель
Fb и Ть - сила и момент, действующие
на корпус со стороны барабана
(червз его опору)
Fic - сила инерции противовеса
Fjp - сила инерции двигателя
Fjd - сила инерции корпуса
УРАВНОВЕШИВАНИЕ И ВОСПРИЯТИЕ НЕУРАВНОВЕШЕННЫХ СИЛ И МОМЕНТОВ
139
Хотя данные механизмы предназначены для вос-
произведения вибраций выходных звеньев, вибрации,
передаваемые на основание, невелики. Полного уравно-
вешивания все же добиться не удается:
• в каждой из опор R, Р, Q и U имеют место локаль-
ные переменные реакции, замыкаемые через основания;
• главный момент (сил инерции) не равен нулю, так
как опоры разнесены в пространстве. В этой связи следу-
ет помнить, что использование того или иного приема не
всегда однозначно позволяет решить поставленную зада-
чу. В данном примере необходимо использование еще и
виброизолирующих опор или иных мер виброзащиты.
Каждому инженеру знакомо статическое уравно-
вешивание ротора (вращающегося тела). Процесс уст-
ранения неуравновешенности ротора называют баланси-
ровкой. Динамическое уравновешивание осуществля-
ют на специальных балансировочных станках, но далеко
не всегда можно добиться соответствующего результата
из-за неопределенных условий эксплуатации.
Поэтому применяют автобалансировку - автомати-
ческое компенсирующее изменение дисбалансов ротора в
эксплуатационных условиях.
Использование автобалансировки целесообразно
или необходимо, например, в случаях, когда имеет место
изменение дисбаланса и нарушение первоначальной ба-
лансировки в процессе эксплуатации из-за неравномер-
ного износа деталей, неравномерного налипания пыли
или распределения перерабатываемого материала, де-
формации деталей в результате нагрева и т.п. причин.
Автобалансировка позволяет уменьшить вибрации. Наи-
большее распространение автобалансирующие устройст-
ва получили в шлифовальных станках, центрифугах, се-
параторах, механизированно-ручном инструменте.
В общем виде автобалансирующее устройство со-
держит чувствительный элемент, воспринимающий сиг-
нал об изменении дисбаланса, усилитель сигнала и ис-
полнительное устройство, компенсирующее действие,
обусловленное изменением дисбаланса.
Автобалансирующее устройство прямого действия, в
котором чувствительный элемент совмещен с исполни-
тельным устройством, а для компенсирующего действия
используется энергия самого ротора, называют пассив-
ным автобалансирующим устройством (схема 5.1).
Автобалансирующее устройство, в котором для
усиления сигнала используют энергию дополнительного
источника, называют активным автобалансирующим
устройством (схема 5.16).
Функционирование автобалансирующего устройст-
ва заключается в перемещении, добавлении или удале-
нии корректирующих масс в соответствующих плоско-
стях I и II вращающегося ротора или в принудительном
совмещении главной центральной оси инерции - ротора - с
осью вращения.
При частоте вращения выше резонансных частот
шары перемещаются таким образом, что их дисбалансы
Бы и Dtn противоположно направлены дисбалансом ро-
тора Dj и Du, причем Г>ы и Dbn соответственно равны
геометрическим суммам Dm, Db2 и Db3, Db4- В соответст-
вии с условием равенства величин Dbi и Dj, Dhi и D„ оп-
ределяют массу шаров и радиус кольцевого канала. Для
эффективной работы автобалансирующих устройств не-
обходимо обеспечить соосность кольцевых каналов с
осью вращения, минимальные отклонения от круглости
их сечений плоскостями I и II и минимально возможную
шероховатость поверхностей качения.
После того как обеспечена автобалансировка, осу-
ществляют блокировку противовесов (фиксацию их в
определенном положении - см. схему 5.1а), чтобы можно
было использовать устройство при повторных разгонах
и/или в режимах, отличных от режима автобалансировки.
Помимо самоустанавливающихся шаров в пассив-
ных устройствах используют маятниковые элементы и
жидкость в специальных емкостях.
Пассивные устройства применяют также в качестве
чувствительных элементов — составных частей активных
устройств, когда непосредственное их действие недоста-
точно, чтобы устранить возникающую неуравновешен-
ность ротора. Основное достоинство пассивных уст-
ройств — их простота.
В активных автобалансирующих устройствах в ос-
новном используют те же принципы, что и в автоматиче-
ских балансировочных станках. В отличие от станка ав-
тобалансирующее устройство неразрывно связано с ба-
лансируемым ротором и функционирует в процессе ра-
боты машины.
На схеме 5.1 - пример принудительного центриро-
вания — совмещения главной центральной оси
инерции ротора с осью вращения XX. Для этого ротор
устанавливают на валу на подвижных эксцентриковых
втулках 1 и 2. Для передачи вращающего момента ротор
с валом соединяют компенсирующими муфтами 1 и 2.
При вращении вала сигналы от датчиков, изменяющих
реакции в опорах А и В, поступают в блок управления.
Если ось XjXi совпадает с осью XX, то двигатели 1 и 2
вращают втулки 1 и 2 со скоростью вращения вала. При
отклонениях оси X]Xi поступают соответствующие сиг-
налы из управляющего устройства к двигателям 1 и 2,
которые сообщают относительное движение втулкам 1 и
2 до совмещения осей Х,Х| и XX. Вместо двигателей в
данной схеме могут быть применены тормозные устрой-
ства. Используя самоторможение между втулками и ро-
тором, можно исключить муфты 7 и 2, а двигателями 1 и
2 осуществлять как рабочие, так и корректирующие дви-
жения. Вал при этом может выполнять роль неподвиж-
ной оси.
Повышение плавности хода, или, что то же,
уменьшение неравномерности движения - задача, ко-
торая решается при конструировании практически каж-
дой машины. Неравномерность хода в той или иной мере
характеризует любую машину с подвижными звеньями.
Она обусловлена изменением сил, масс и жесткостей в
процессе одного цикла установившегося движения. На-
пример, в геометрически точной зубчатой паре жесткость
в процессе зацепления изменяется примерно в 1,5 раза,
что приводит к ударному характеру пересопряжения
зубьев. Двигатель или генератор даже с хорошо сбалан-
140
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
сированным ротором характеризуется импульсным воз-
действием силового поля или рабочего тела на рабочие
элементы. А во всех рычажных механизмах даже при
постоянной нагрузке на выходное зерно приведенная
сила и приведенная масса изменяются в течение одного
цикла движения.
В механизмах добиваются уменьшения неравномер-
ности движения, в частности, увеличением постоянной
составляющей приведенного момента инерции, напри-
мер, за счет установки маховика {схема 5.2).
При конструировании такого механизма следует
учитывать положения, установленные М. 3. Коловским:
1. Увеличение приведенного момента инерции Jz
приводит к уменьшению углового ускорения е, но не
влияет на величину вращающего момента Jze (при разго-
не или торможении) и, соответственно, на величину ре-
акции опор двигателя. При этом Fh = — JZE', F = -2Fr.
2. Знак передаточного отношения I (отношения уг-
ловых скоростей входного и выходного звеньев) между
последовательно соединенными роторами влияет на ве-
личину реакции корпуса двигателя. Например, при со-
единении двух роторов с моментами инерции J\ и J2 пе-
редачей, если z > 0 (в схеме 5.2, i = 1), то
Fh = -Jisl -У2£1ф|, а если I < 0 {схема 5.2), то
Fh = -J[E] +J2£i ф | > т е- воздействие на корпус двига-
теля во втором варианте будет меньшим. В отличие от
этого, при определении момента инерции маховика с
целью снижения неравномерности вращения знак пере-
даточного отношения не играет роли.
При решении задач разгрузки, уравновешивания и
повышения плавности хода следует иметь в виду, что,
повышая одни качественные показатели, можно ухуд-
шить другие. Например, уменьшая переменные состав-
ляющие сил, действующих на основание, можно увели-
чить общую массу звеньев, суммарные реакции в кине-
матических парах, увеличить время разгона и торможе-
ния из-за увеличения момента инерции или обусловить
повышение установленной мощности двигателя и тор-
мозного устройства при сохранении времени разгона и
торможения и т.п.
Если не удается полностью исключить или нейтра-
лизовать источники вибрации изложенными выше прие-
мами, то используют решения виброзащиты. Виброзащи-
та включает в себя ряд приемов, построенных на исполь-
зовании различных физических явлений и процессов.
В современных технологических машинах встреча-
ются задачи еще более сложные, чем те, которые одно-
значно решаются уравновешиванием. В частности, речь
идет о быстровращающихся барабанах, распределение
рабочего материала в которых не может быть упорядоче-
но. Центр масс в таких устройствах непрерывно переме-
щается, а сама масса может изменяться по величине. Ти-
пичный пример таких условий - отжатие белья в сти-
ральной машине при вращении барабана {схема 5.3). По-
добные условия имеют место в сепараторах, смесителях,
мельницах, установках для центробежного литья и т.п.
устройствах.
Под действием центробежной силы Fa (через под-
шипниковую опору) корпус барабана раскачивается в
пространстве. Если его неподвижно закрепить на основа-
нии, то опора неминуемо разрушится (речь здесь идет о
реальных конструкциях) и/или произойдет расшатывание
и разрушение мест неподвижного крепления. Распро-
странено решение - подвеска корпуса на упругих эле-
ментах: чтобы воспринимать центробежную силу и не-
большой реактивный момент, достаточно иметь три пру-
жины {1, 2 и 3 на схеме 5.3). Чтобы еще более эффектив-
но упорядочить колебания, используют направляющие
демпфирующие опоры, которые ограничивают осевые
перемещения и рассеивают энергию поперечных и вра-
щательных колебаний корпуса.
О демпфировании вибраций речь пойдет ниже при
рассмотрении других примеров. Здесь же остановимся
еще на одном аспекте уравновешивания, обусловленном
консольным размещением опоры барабана и несиммет-
ричном (несоосном) присоединении привода.
Со стороны опоры на корпус действуют радиальная
сила Fb (практически равная силе Fa) и момент Ть ® Fa I,
где / - расстояние от линии действия силы Fa до середи-
ны опоры. Приведенную силу и момент уравновешивают
силы инерции корпуса Fld и двигателя Fip. Обычно этих
сил недостаточно, чтобы уравновесить силы со стороны
опоры, особенно это касается момента Ть. Поэтому на
корпусе устанавливают дополнительно противовес, сила
инерции которого обозначена Fic. На схеме 5.36 показано,
что соотношение сил практически не изменяется при по-
вороте барабана на 180°, хотя все направления изменя-
ются на противоположные.
6.4. КОНСТРУКТИВНЫЕ ПРИЕМЫ
СМЯГЧЕНИЯ УДАРОВ, УМЕНЬШЕНИЯ
ДИНАМИЧЕСКИХ НАГРУЗОК,
УМЕНЬШЕНИЯ ПОТЕРЬ ЭНЕРГИИ
ПРИ ТОРМОЖЕНИИ И РЕВЕРСИРОВАНИИ
Следующая задача, решаемая в машинах с одно-
кратно или многократно сопрягаемыми звеньями - это
смягчение удара в момент соприкосновения тел. Смяг-
чение удара требуется, например, при соединении ваго-
нов поезда, при остановке перемещаемого предмета, в
начале резания заготовки, при запуске двигателя, при
переключении с одного режима на другой в коробке пе-
редач и во многих других случаях. На величину удара
влияет масса соударяемых тел, их относительная ско-
рость и направление взаимодействия. Последнее обстоя-
тельство очень важно, так как удар возможен и при каса-
тельном взаимодействии за счет резкого возрастания си-
лы трения.
В этой связи смягчение удара можно получить сле-
дующим образом:
• растянуть процесс сопряжения во времени за счет
введения в систему упругого элемента {схемы 6.F, 6.2\
6.4\ 6.5 на рис. 56.1 и/или пары трения {схемы 6.8; 6.8а и
6.9; 6.10 на рис. 56.2);
• обеспечить плавное изменение угла давления (по-
нятие см. в параграфе 5.1) от 90° до 0° {схема 6.2)-,
КОНСТРУКТИВНЫЕ ПРИЕМЫ СМЯГЧЕНИЯ УДАРОВ
141
56.1. КОНСТРУКТИВНЫЕ ПРИЕМЫ УМЕНЬШЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК
| 6.1 | СМЯГЧЕНИЕ УДАРА „
И УМЕНЬШЕНИЕ СИЛЫ ОТДАЧИ
I 6.2 |
Подвижное
тело
Гё^~1
Варианты
направляющей
Fj - сила трения
Л - деформация пружины
Сила трения
покоя
Внешнее
кольцо
Внутренние
кольца
F - сила сжатия/растяжения пружины
[6J6]
Пружина
Гибкая
нить
Падающее
тело
Линейная
\ пружина
Fw - сила
сопротивления пружины
часть крыла
ПЛАВНОЕ ТОРМОЖЕНИЕ ПОРШНЯ
ПЛАВНОЕ ПОДКЛЮЧЕНИЕ
НАГРУЖАЮЩЕГО УСТРОЙСТВА
К ПРИВОДУ
142
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
• обеспечить плавное выравнивание скоростей дви-
жения сопрягаемых звеньев с момента соприкосновения
до их остановки за счет совместного движения в течение
некоторого отрезка времени (схема 6.3; 6.2г);
• обеспечить плавное увеличение давления в паре
трения фрикционного тормоза или фрикционной муфты
(схемы 6.8; 6.8а);
• обеспечить плавное торможение за счет измене-
ния сечения пропускаемой рабочей жидкости (схемы 6.6;
6.6а; 6.66);
• исключить свободное движение (падение) тела
при реверсировании нагрузки (схема 6.7).
В конечном итоге все приемы сводятся к увеличе-
нию времени соударения, чтобы за это время можно бы-
ло либо рассеять энергию удара (например, за счет внут-
реннего или внешнего трения), либо перераспределить
энергию на другие звенья. (Например, при соударении
поднимается груз, раскручивается маховик либо разгоня-
ется рабочее звено машины и т.п.). Если энергия недос-
таточно быстро рассеивается или перераспределяется, то
обязательно возникает обратное движение тел (отдача),
которое может перерасти в колебательный процесс (виб-
рацию).
На схеме 6.1 показано смягчающее удары устройст-
во в виде кольцевой пружины — набора взаимодейст-
вующих между собой конических колец. Элементы пру-
жины при нагружении силами F деформируются в ради-
альном направлении, а вдоль образующих конических
поверхностей действуют силы трения Ff (схема 6.1а).
При разгрузке пружины силы упругости преодолевают
силы трения покоя F^, а затеи силы трения скольжения
при относительном движении звеньев (см. характеристи-
ку на схеме 6.16, где X - осевая деформация пружины).
В результате за счет сил трения рассеивается значи-
тельная энергия удара.
На схеме 6.1 в представлен двухсторонний буфер с
гасителем энергии отдачи. При ударе звенья 1 и 2 сбли-
жаются и сжимается пружина 1, а шары перекатываются
по конусу в корпусе, будучи прижаты к нему пружиной 2
через толкатель. По окончании удара внешняя сила резко
уменьшается, а пружина 1 стремится резко разжаться. Но
при этом запасенная пружиной 1 энергия расходуется на
возврат шаров в начальное положение и сжатие пружи-
ны 2, и тем самым смягчается удар при возврате звеньев.
На схеме 6.2 показаны варианты направляющей для
подвижного тела. Вариант 1 обусловливает "жесткий"
удар за счет резкого изменения направления движения.
Вариант II способствует смягчению удара благодаря
плавному изменению направления движения.
Аналогию ударов на схеме 6.2 представляют удары
при свободном падении тела (Fg - сила тяжести), смяг-
чаемые пружиной (схемы 6.2а; 6.26; 6.2в: 6.2г).
На схемах 6.2а и 6.26 использована предварительно
напряженная пружина растяжения. Начальная реакция
пружины равна Ft, т.е. имеет место довольно "жесткий"
удар (см. характеристику пружины на схеме 6.26 справа).
Иначе себя ведет пружина сжатия: ее реакция плав-
но изменяется от нуля и до величины, обусловленной
смыканием витков. Если до этого момента скорость па-
дающего тела не погашена, то следует "жесткий" удар
(хотя и существенно ослабленный) в конце хода (см. схе-
му 6.2в).
Наиболее эффективно смягчает удары пружина с
нелинейной характеристикой. Ее жесткость [сопротивле-
ние сжатию] возрастает плавно (см. схему 6.2г).
В схеме 6.3 перемещаемый лист бумаги останавли-
вается с помощью подвижного упора, перемещаемого
вдоль кулисы АВ, с помощью кулачкового механизма и
привода D. При этом один из кулачков приводит в дви-
жение кулису, воздействуя на нее в т. А и тем самым из-
меняет направление движения листа; а второй кулачок
через кинематическую цепь постепенно замедляет дви-
жение листа (без потери его продольной устойчивости)
за счет запрограммированного движения упора.
В схеме 8.4 захватное устройство (звено 2) соедине-
но с выходным звеном 1 манипулятора упругим элемен-
том с регулируемой в процессе сопряжения жесткостью.
Жесткость выбирают минимальной в начале срабатыва-
ния захватного устройства, чтобы не повредить захваты-
ваемый предмет при соприкосновении с ним. Затем она
возрастает до полной блокировки упругого элемента.
С этой целью в цилиндр (схема 6.4а) по каналу L подают
под давлением воздух. Поршень перемещается на схеме
вправо, вытесняя воздух через канал К. Цилиндр, поло-
жение которого зафиксировано пружиной и шариком В,
смещается влево и зажимает блокирующие элементы.
При этом блокируется шарнир А и образуется неподвиж-
ное соединение между звеньями 1 и 2.
На схеме 6.5 показано устройство, служащее для ос-
тановки быстродвижущегося проката.
Положение каретки упора регулируется вращением
самотормозящего винта. Упор, останавливающий прокат
и воспринимающий силу F, связан поступательной па-
рой В с коромыслом. Удар проката передается через
пружину на коромысло, а затем через площадку, ролик и
направляющую ролика воспринимается кареткой. Только
один шарнир А воспринимает ударную нагрузку, все
другие шарниры механизма при этом не нагружаются.
Для пропуска проката коромысло поворачивают во-
круг т. А с помощью гидроцилиндра. Гидроцилиндр воз-
действует на коромысло через рычаг и тягу. Одновре-
менно выводится по направляющей из зоны контакта с
площадкой ролик.
В гидроцилиндре на схеме 6.6 жидкость в конце хо-
да вытесняется выступом из углубления — полости 2,
вследствие ее замедленного перетекания замедляется
движение поршня. Полость 2 сообщена с полостью 1 ци-
линдра двумя каналами: в одном из них установлен дрос-
селирующий гидрораспределитель, в другом — обратный
клапан (см. схему 6.6а). Регулировкой величины отвер-
стия, образуемого гидрораспределителем, добиваются
требуемого характера торможения. Для этой же цели на-
ряду с данным решением выступ выполняют переменно-
го сечения по длине (схема 6.66), благодаря чему сечение
отверстия изменяется в зависимости от перемещения s
плунжера и соответственно изменяется скорость v его
движения. Вытесняемая жидкость давит на поршень и
КОНСТРУКТИВНЫЕ ПРИЕМЫ СМЯГЧЕНИЯ УДАРОВ
143
56.2. УМЕНЬШЕНИЕ ДИНАМИЧЕСКОЙ НАГРУЗКИ ПРИ РЕВЕРСИРОВАНИИ ДВИЖЕНИЯ
РЕВЕРСИРОВАНИЕ I 6.10 ] ТОРМОЖЕНИЕ И РАЗГОН ЗВЕНЬЕВ
ВРАЩАЮЩЕГО МОМЕНТА TD '—:' МЕХАНИЗМА
Торможение JD+J\ от(Пс до 0 и Jw от 0,2(Вр до 0
Разгон JD+J| от 0 до-ГОр и Jw от 0 до -0,2 (Dp
Торможение от 0,3 (Dp до 0 и от 0,2 (Пр до 0
Разгон от 0 до -0,5(Пр и от 0 до -0,2(Пр
сжимает пружину. Поршень и пружина могут служить
для смягчения удара в конце хода.
На схеме 6.6в устройство торможения имеет встро-
енный в поршень толкатель и пружину. В конце хода
толкатель упирается в дросселирующий гидрораспреде-
литель, который автоматически изменяет сечение отвер-
стия для вытеснения жидкости из рабочей плоскости,
благодаря чему поршень плавно тормозится и останавли-
вается. В исходное положение гидрораспределитель воз-
вращается пружиной.
На схеме 6.7 приведен механизм для поворота хво-
стовой части крыла самолета относительно центральной
его части. Части крыла соединены шарнирно в точке С и
в совокупности со звеньями АВ и AQ образуют четырех-
звенный кривошипно-коромысловый механизм. В точ-
ке А на механизм воздействует гидроцилиндр, соединен-
ный шарнирно с центральной частью в точке Е. С помо-
щью гидроцилиндра коромысло АВ поворачивается и
через шатун AQ поворачивает кривошип и хвостовую
часть почти на 180°. Во всех положениях довольно не-
большие углы давления. При положении центра масс
хвостовой части в точке G момент силы сопротивления
направлен в одну сторону, а при положении в точке G" —
в другую сторону. В точке G' происходит реверсирова-
ние момента силы сопротивления. При перемещении
центра масс из точки G' в точку G" момент со стороны
хвостовой части будет уже движущим. Если вовремя не
переключить гидроцилиндр с движущегося режима на
режим сопротивления, дальнейшее движение хвостовой
части может привести к удару. Чтобы этого не произош-
ло, в кинематическую цепь введена пружина, которая
вступает в работу при реверсировании момента.
На схемах 6.8 и 6.8а представлены пусковые сцеп-
ные муфты с плавным увеличением вращающего момен-
та за счет постепенного прижатая колодок к звену 2 или
зажатия дисков. В схеме 6.8 управляющие элементы на-
жимают за счет центробежных сил на колодки и переме-
щают их в пазах звена 1. Чем больше центробежные си-
лы, тем сильнее прижимаются колодки к звену 2 и тем
больше на них воздействуют управляющие элементы.
В схеме 6.8а движение ведущего звена D передается
пружине кручения 1, которая в процессе разгона посте-
пенно раскручивает маховик, установленный на гайке
винтовой передачи. Гайка перемещается вправо на схеме,
сжимает пружины 2 и только после этого ведущие фрик-
ционные диски зажимают ведомый диск, соединенный с
выходным звеном W.
Процесс реверсирования, сопряженный с торможе-
нием и разгоном звеньев, обладающих большой массой,
сопровождается потерями энергии и времени на его осу-
ществление. Здесь также важна выбранная схема присое-
динения привода. Для систем циклического действия
можно установить, например, упругий или иной аккуму-
лятор энергии, накапливающий энергию при торможении
и возвращающий ее в данную систему при разгоне.
В ряде случаев приходится торможение осуществ-
лять с помощью фрикционных устройств, и выбор схемы
реверсивного механизма, последовательности управле-
ния им имеет первостепенное значение. Например, выби-
рают между реверсированием с помощью двигателя или
с помощью специального устройства - реверсивного ме-
ханизма, реверса, установленного между двигателем и
выходным звеном.
На схемах 6.9 и 6.10 (рис. 56.2) сопоставлены такие
устройства. В схеме 6.9 реверсируется ротор двигателя,
останавливается ротор тормозом, а в схеме 6.10- один из
тормозов 1 или 2 выключается, а другой включается. Ес-
ли включен тормоз 1, то движение передастся через пла-
нетарный механизм (правый на схеме 6.10) с положи-
тельным передаточным отношением; если включен тор-
моз 2, то движение передастся через механизм с отрица-
тельным передаточным отношением. Момент инерции
ротора двигателя JD, момент инерции исполнительного
устройства Jw> приведенный к звену W, и моменты инер-
ции элементов управления J\ и J2 находятся в соотноше-
144
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
нии: JD > Jw > Л(Л)- Передаточное отношение, например.
i = 5 для схемы 6.9 и i = ±5 для схемы 6.10. Сравним
представленные схемы по быстродействию. В схеме 6.10
последовательность такова: сначала отключают тормоз 1
и разгоняют его шкив (Jj), затем затормаживают шкив
тормоза 2 (J2). Эти операции могут быть совмещены по
времени, что, однако, сопряжено с лишними потерями
энергии.
Изменение скорости масс в схеме 6.10 значительно
меньше, чем в схеме 6.9 (см. планы угловых скоростей на
схемах 6.9а соответственно), а поскольку и перемещения
масс в в схеме 6.70 также меньше, то по быстродействию,
динамическим нагрузкам и расходу энергии
схема 8.10 лучше, чем схема 6.9.
6.5. ОСНОВНЫЕ ВИДЫ ВИБРОЗАЩИТЫ.
ДИНАМИЧЕСКОЕ ГАШЕНИЕ ВИБРАЦИЙ.
АКТИВНАЯ ВИБРОЗАЩИТА
Задача виброзащищенности - одна из наиболее важ-
ных задач, решаемых при создании современной маши-
ны. Потребитель в первую очередь оценивает качество и
совершенство машины по шуму и вибрациям. А кроме
того, на этот счет существуют еще и технологические
нормы (например, для обеспечения заданной шерохова-
тости при обработке материала), и санитарные нормы,
которые надо неукоснительно соблюдать, причем ориен-
тируясь уже не на ощущения, а на точные измерения.
В настоящее время существует несколько направле-
ний в обеспечении виброзащищенности при исчерпы-
вающем использовании путей по исключению или ней-
трализации источников вибраций. Наиболее распростра-
нены активная виброзащита и (пассивная) виброизоля-
ция. В них присутствуют явления или используются ре-
шения динамического гашения вибраций, смягчения уда-
ров и демпфирования вибраций. Конструктивные реше-
ния динамического гашения вибраций могут использо-
ваться как самостоятельно, так и в совокупности с систе-
мой управления или настройки. Конструктивные реше-
ния демпфирования — рассеяния энергии колебаний —
используются в основном в виброизолирующих устрой-
ствах, но они. как правило, присутствуют и в комплекс-
ных исполнениях любых видов виброзащиты.
Выбор того или иного решения виброзащиты опре-
деляется требованиями к допустимому уровню вибрации,
возможностями соответствующего присма и стоимостью
его реализации. Наиболее простые и дешевые - это (пас-
сивные) виброизолирующие устройства, наиболее эф-
фективна и универсальна активная виброзащита, но она
пока еще остается самой сложной и дорогой. Динамиче-
ское гашение вибрации основано на сравнительно про-
стых конструктивных решениях и при самостоятельном
использовании не требует специальной электронной сис-
темы управления (по сравнению с активной виброзащи-
той), но возможности ее довольно узки и ограничены
определенными параметрами вибрации. В ответственных
случаях нужно принимать комплексные решения. Далее
охарактеризуем каждое из направлений на отдельных
примерах.
Динамическое гашение вибраций представляет
способ виброзащиты посредством присоединения к за-
щищаемому объекту системы (виброгасителя), реакции
которого уменьшают размах вибрации объекта в точках
присоединения системы.
Динамическое гашение реализуют, настраивая виб-
рогаситель на частоту возбуждаемой вибрации. Его эле-
менты формируют силовое воздействие на объект, на-
правленное навстречу вынуждающей силе. Функциони-
рует виброгаситель либо за счет перераспределения
энергии возбуждаемой вибрации (схемы 7.1 ... 7.8 на
рис. 57), либо за счет дополнительного источника энер-
гии (активная виброзащита, схемы 8.1 ... 8.6 на рис. 58).
Простейший динамический виброгаситель выпол-
няют в виде инерционного элемента 1, связанного с за-
щищаемым объектом 2 упругими элементами (пружина-
ми) Е2 и ЕЗ. Объект соединен со стойкой упругим эле-
ментом Е1 и совершает колебательные движения под
действием вынуждающей силы F. Выбранная настройка
присоединения виброгасителя образует такую общую
систему с двумя степенями свободы, у которой на часто-
ту возбуждения приходится антирезонанс (схема 7.1а)
при п = пм, где п — частота вибрации объекта, nAV — час-
тота вибрации элемента 7 виброгасителя; вынуждающая
сила полностью компенсируется реакцией со стороны
виброгасителя, а амплитуда колебаний s = 0. Для сравне-
ния на схеме 7.1а дана амплитудно-частотная характе-
ристика объекта без виброгасителя (см. штриховые линии).
На схеме 7.16 представлен вариант исполнения виб-
рогасителя при использовании последовательно соеди-
ненных листовых пружин Е2 в виде двухопорной балки и
Е2' в виде консольных балок. Инерционные элементы
выполнены в виде грузов регулируемой массы.
Инерционный элемент 1 (схема 7.2) может быть ус-
тановлен в замкнутом пазу объекта 2 свободно таким
образом, что его воздействие на объект осуществляется в
виде ударов. Наряду с противодействием силы удара вы-
нуждающей силе, здесь имеет место рассеяние энергии
вибрации при соударении тел.
На схемах 7.3 и 7.4— катковые виброгасители. В них
каток 1 при определенных условиях катится по замкну-
той поверхности полости в объекте 2. Центробежная ре-
акция, передаваемая катком объекту, полностью уравно-
вешивает возмущающую силу. С увеличением частоты
вибрации растягивается пружина Е2 и каток перемещает-
ся на дорожку большего диаметра, соответственно уве-
личивается его компенсирующее воздействие на объект.
Использование одного катка приводит к возникно-
вению боковых составляющих реакции. Чтобы уравнове-
сить боковые составляющие, используют два катковых
виброгасителя, располагая их симметрично относительно
линии действия вынуждающей силы.
Для динамического гашения вращательных вибра-
ций используют маятниковые виброгасители (схемы 7.5.
7.5а). К диску 2 шарнирно присоединены элементы 1. Из-
за вращательной вибрации звена АВ (схема 7.5) маятник
качается относительно него. Момент реакций — пары
ОСНОВНЫЕ ВИДЫ ВИБРОЗАЩИТЫ
145
58. АКТИВНАЯ ВИБРОЗАЩИТА
D - исполнительное устройство
Р - внешний источник энергии
CS - блок управления
VG- вибровоэбудитель
VS - упругий
виброиэолятор
TS - виброметр
146
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
сил в шарнирах А и В (от центробежной силы F,) проти-
водействует вынуждающему моменту Т. При изменении
частоты колебаний диска 2 (схема 7.5а) автоматически
подстраивается частота колебаний маятника. Маятники
располагают симметрично, чтобы избежать нагружения
вала и центральных подшипников радиальной силой.
Широкими возможностями обладает планетарный
виброгаситель (схема 7.6). В нем, подбирая числа зубьев
неподвижного центрального колеса и сателлитов, а также
размещая определенным образом инерционные элемен-
ты, обладающие массой mj, пц, можно получить такое
движение инерционных элементов, которое обеспечивает
компенсацию как вращающего вынуждающего момента,
так и радиальной вынуждающей силы. На схеме 7.6 во-
дило в частном варианте соединено с кривошипом прес-
са. Fa, Fa - суммарные значения центробежных сил
за счет вращения сателлитов вместе с водилом и сателли-
тов вокруг собственных осей.
На схеме 7.7 маятниковый виброгаситель — гаситель
поперечных колебаний, предназначенный для попереч-
ной стабилизации платформы транспортного средства за
счет упругого присоединения к ней качающегося инер-
ционного элемента.
Криволинейная направляющая 2 прикреплена к
платформе транспортного средства. Инерционный эле-
мент 1 выполнен в виде катка и шарнирно соединен со
звеном 3, которое перемещается в кулисе. Кулиса шар-
нирно соединена с платформой в точке А. Каток I при-
жат к направляющей пружиной ЕЗ. На конце звена 3 ус-
тановлен противовес. При раскачивании платформы точ-
ка А перемещается, как показано штриховой стрелкой,
каток I стремится сохранить свое положение в простран-
стве и катится по направляющей. При увеличении часто-
ты колебаний максимальное сжатие пружины возрастает,
а реакция Fni - катка 2 на направляющую увеличивается
и противодействует в какой-то мере вынуждающей си-
ле F. Реакция Fni направлена навстречу скорости пере-
мещений точек платформы и стремится прижать плат-
форму к дорожному полотну. Маятниковый виброгаси-
тель за счет перемещения и подъема катка и сжатия пру-
жины аккумулирует энергию вибрации при удалении
платформы от среднего положения и возвращает ее при
приближении платформы к среднему положению. При
этом амплитуда колебаний уменьшается.
Направления действия сил виброгасителя могут
быть преобразованы требуемым образом с помощью пе-
редаточных механизмов. На схеме 7.8 маятниковый виб-
рогаситель выполнен в совокупности с упругой виброи-
золирующей опорой, воспринимающей вертикальные
вибрации. Упругий элемент опоры Е1 расположен между
станиной 2 и основанием. От боковых перемещений ста-
нина и основание зафиксированы направляющим соеди-
нением N. В станине установлен инерционный элемент-
маховик 1 на шариковых опорах. Маховик соединен с
основанием наклонными стрежнями, оси которых обра-
зуют поверхность двуполостного гиперболоида.
При цикле сжатия элемента Е1 под действием сил F
маховик раскручивается в одну сторону, преодолевая при
этом момент сил инерции Т„ при цикле расслабления
элемента Е1 вращение маховика реверсируется. Вра-
щающий момент маховика преобразуется с помощью
наклонных стержней и круговой направляющей в проти-
водействие вертикальным силам F. При этом амплитуда
колебаний и ускорения перемещений станины уменьша-
ются. Часть энергии колебаний перераспределяется на
раскручивание маховика, часть поглощается элементом
Е1 и расходуется на трение в опорах маховика и шарни-
рах звеньев.
Устройства на схемах 7.1 ... 7.8 все же обладают ог-
раниченными возможностями: они позволяют погасить
вибрации, характеризуемые определенной частотой, так
как характеристики этих устройств не изменяются в за-
висимости от изменяемых условий виброзащиты.
В этом плане предпочтительнее активная виброза-
щита, хотя ее реализация требует дополнительного ис-
точника энергии для гашения вибраций.
Активную виброзащиту осуществляют по сле-
дующей схеме (см. схемы 8.1... 8.6 на рис. 58):
• измеряют параметры вынуждающего воздействия;
• по результатам измерения вырабатывают сигналы
управления;
• в соответствии с сигналами управления воздейст-
вуют на защищаемый объект, либо его связь с источником
вибрации в направлении уменьшения вибраций объекта.
Указанные воздействия могут быть самыми разно-
образными. Они сводятся к следующему:
• изменение параметров самого объекта и/или пара-
метров его соединения с основанием;
• создание силового противодействия, компенси-
рующего перемещения объекта или отдельных его точек,
в том числе компенсация динамических реакций в опорах;
• изменение параметров элементов виброзащиты. На
схеме 8.1 объект I выполнен, например, в виде упругой
балки с опорами А и В. С помощью датчика измеряют
перемещения балки. Сигнал поступает в блок управления
CS, где вырабатывается соответствующая команда ис-
точнику энергии Р. От источника энергии приводится в
действие исполнительное устройство D, установленное
между балкой и основанием. Исполнительное устройство
сообщает точке С балки необходимое компенсационное
перемещение. В качестве измеряемых параметров вибра-
ций наряду с перемещениями могут быть скорости, уско-
рения, силы давления. Совместный учет нескольких па-
раметров позволяет обеспечить получение информации о
начальной стадии цикла колебания и быстро отреагиро-
вать на развитие процесса. Быстродействие обратной
связи определяет эффективность виброзащиты. В качест-
ве основания для перемещаемых в пространстве объектов
используют гироскоп или платформу, отслеживающую
положение гироскопа.
В схеме 8.2 опора В выполнена перемещаемой с по-
мощью исполнительного устройства D, управляемого
аналогично, как и в схеме 8.1. Перемещение опоры при-
водит к изменению жесткости балки в направлении, со-
ответствующем уменьшению вибрации.
На схеме 8.3 показано соединение труб 7 и 2 с ис-
пользованием упругих резинометаллических прокладок
VS1 и VS2. Вибрации, обусловленные пульсацией давле-
ния жидкости в трубе, регистрирует датчик силы. В каче-
ДЕМПФИРОВАНИЕ ВИБРАЦИИ
147
стве исполнительного устройства использован пьезо-
электрический вибровозбудитель VG. Воздействуя на
элементы соединения, он способствует уменьшению
вибраций и уменьшению их влияния на присоединенные
к трубам объекты.
В схеме 8.4 датчик измеряет в опоре силу между уп-
ругим виброизолятором VS и опорной плитой. Здесь в
качестве исполнительного устройства использован виб-
ровозбудитель VG, который противодействует измене-
нию реакций в опоре. Информацию о фактической вели-
чине реакции в опоре получают с помощью прибора TS.
На схеме 8.5 показано присоединение двигателя к
крылу самолета с помощью балки и звеньев подвески.
Параллельно балке, обладающей определенной упруго-
стью, установлен электрогидравлический демпфер.
Демпфер управляется от источника энергии Р в зависи-
мости от измеряемых силы (датчик 7) и перемещения
(датчик 2), обусловленных вибрациями двигателя и его
упругим соединением с крылом.
Пассивное виброзащитное устройство, основанное
на корректировке упруго-инерционных свойств системы, —
динамический виброгаситель - может быть превраще-
но в активное устройство, если у него автоматически ме-
нять параметры в зависимости от параметров возму-
щающего воздействия. Например, перемещая опоры уп-
ругих элементов, меняют жесткость соединения вибро-
защитного устройства с защищаемым объектом.
На схеме 8.6, чтобы поддерживать колебания уст-
ройства VG в антирезонансном состоянии (фазы колеба-
ний устройства и защищаемого объекта сдвинуты на л/2),
используют двигатель D автоматической подстройки.
Фазовый дискриминатор CS сравнивает сигналы от дат-
чиков 7 и 2 и при сдвиге фаз, отличающемся от л/2,
включает двигатель D. Двигатель перемещает тела т с
помощью винтовых пар G, изменяя длину, а следова-
тельно, жесткость консольных балок, и тем самым обеспе-
чивается устойчивое противодействие вибрациям объекта.
Обширная область использования активной вибро-
защиты — это управляемые регулируемые подвески агре-
гатов и транспортных средств. В них предусматривают
регулирование жесткости (например, изменением давле-
ния газа в пневматической упругой опоре), задание ком-
пенсирующих перемещений и/или активизацию демпфи-
рования (например, управляемым гидравлическим клапа-
ном). Этот вид виброзащиты будет рассмотрен в главе 7.
6.6. ДЕМПФИРОВАНИЕ ВИБРАЦИЙ
Демпфирование [рассеяние энергии] вибраций -
процесс, который характеризуется многократной повто-
ряемостью. Рассеяние энергии в той или иной мере про-
исходит во всех виброизоляторах, динамических вибро-
гасителях, буферах. Но к демпферам относят только те
устройства, которые специально предназначены для рас-
сеяния энергии вибрации. Принцип функционирования
обычно основан на преобразовании механической энер-
гии в тепловую энергию с последующей ее передачей
окружающей среде за счет движения тела в магнитном
поле, ударов твердых тел, внешнего трения при относи-
тельном скольжении звеньев (схемы 9.1, 9.2, 9.3 на
рис. 59.1, внутреннего трения при движении звеньев в
упругой (схемы 9.5, 9.6) или вязкой среде (схема 9.4) при
перетекании жидкости или газа через малое отверстие из
одной полости в другую (схема 9.7, 9.8, 9.9 на рис. 59.2).
148
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
|9.9а|
Прямой ход
(сжатие
газовой полости)
59.2. ГИДРАВЛИЧЕСКИЕ ДЕМПФЕРЫ
[эЦ
Стойка
11олостьI
Поршень
Клапан 2
Клапан 1
Полость I
[Ml
Поршень.
Гидравлическая
полость 1
Гидравлическая
полость 2
Мембрана
Гидроцилиа ip
Уплотнение Направляющая
Шток
Цилиндр
Гидравлическая
полость (
Клапан А открыт
Клапан В закрыт
Клапан А
Поршень
Пружина 2
Пружина 1
Клапан В
Гидравлическая
полость Н2
Разделительный
поршень
Корпус
Газовая полость
[~~j~9.8a| Прямой ход
| Канал А /Капал Б
Стакан^
Пружина
Клапан 1 Клапан 2
19.8б| Обратный ход
Канал А Канал Б
Стакан
Газовая полость
Пружина
Клапан 1 Клапан 2
И
Обратный ход
(отбой)
Скорость
поршня, м/с
-0,2
-0,4
Сопротивление
демпфера, кН
0,2 0,4
. Прямой ход
\ (сжатие)
При опускании штока
вниз газовая полость
сжимается, клапан
прямого хода
открывается
и жидкость перетекает
из нижней полости
в верхнюю, замедляя
тем самым движение
штока относительно
жидкости
|9.9б| Обратный ход
(расширение
газовой полости)
Клапан А закрыт
Клапан В открыт
Направление
сопротивления
жидкости
Клапан В
При движении штока
вверх газовая полость
расширяется, клапан
возвратного хода
открывается
и жидкость перетекает
из верхней полости
в нижнюю, замедляя
тем самым движение
штока относительно
цилиндра.
На схеме 9.1 выделен жирными линиями демпфер
подвески железнодорожного вагона. Фрикционный диск
демпфера неподвижно соединен с рычагом, а рычаг со-
единен с помощью тяги с буксой. Между буксой и рамой
установлены пружины 1. Колебания буксы относительно
рамы передаются диску. Рассеяние энергии происходит
при относительных вращательных колебаниях фрикци-
онных дисков {схема 9.1а), прижатых друг к другу пру-
жиной 2. Величина момента трения 7}, воспринимаемого
демпфером, определяется силой F упругости пружины 2.
На схемах 9.2, 9.3 демпфер также выполнен в виде
дискового фрикционного тормоза. Для прижатия дисков
друг к другу использована пружина упругой опоры.
Под действием вынуждающей силы F ползун
{схема 9.2) перемешается в направляющей, пружина
сжимается. При этом упругий стержень заставляет пово-
рачиваться один из дисков, зажатый с обеих сторон дру-
гими дисками. За счет момента трения 7} между дисками
энергия колебаний превращается в тепловую энергию.
В схеме 9.3 звенья 1 и 2, периодически нагружаемые
силами F, соединены между собой поступательной па-
рой, т.е. не могут поворачиваться друг относительно дру-
га. Между звеном 1 и фрикционным диском 2 располо-
жена винтовая пара, содержащая гайку и винт, а фрикци-
онные диски 7 и 2 соединены поступательной парой.
Благодаря несамотормозящей винтовой паре при дейст-
ДЕМПФИРОВАНИЕ ВИБРАЦИИ
149
59.3. РЕГУЛИРУЕМЫЕ ГИДРАВЛИЧЕСКИЕ ДЕМПФЕРЫ
Клапан В1
ГэТй]
Валик управления
^/золотником
Полость Н1
Полый шток
Цилиндр
Золотник
Клапан А2
Клапан А1
Клапан В2
Поршень
Гайка
|9.12а|
Гайка для
предварительного
сжатия пружины
клапана С
Головка винта —
для регулировки
пружины
клапана D
Головка винта
для регулировки
пружины
клапана С
Регулируемый
клапан D
Гидравлическая
полость НЗ
Регулируемый
клапан С
Полость Н2
Канал
из гидравлической
полости Н2------
Регулировочная —
винтовая пара
клапана D
Фиксатор
[9J2]
СЕО?
Газовая полость
ТГ_
Шток
Разделительный
поршень.
Выносная
компенсационная
камера
Присоединительная
проушина 1
Цилиндр
Н1
-! *у*г1н*
Пружина
клапана С
Пружина
клапана D
Гайка
регулировки
пружины
амортизатора
Присоединительная
проушина 2
Регулируемый
клапан С
/'""Регулируемый
клапан D
Клапан А
Поршень
Клапан В
Шланг
Пружина
амортизатора
условно
не показана.
вии сил F гайка и винт совершают относительное враща-
тельное движение. Пружина прижимает фрикционный
диск 1 к звену 1, а фрикционный диск 2 к звену 2. В ре-
зультате возникают моменты трения 7} и энергия колеба-
ний рассеивается.
На схемах 9.4, 9.5 демпфер встроен в динамический
виброгаситель вращательных колебаний. В схеме 9.5 до-
полнительная масса в виде массивного обода связана со
шкивом через упругое тело, а в схеме 9.4 обод помещен в
кольцевую полость маховика, заполненную вязкой средой.
Роль демпфера здесь выполняет упругое тело или
вязкая среда. В этих элементах при относительных дви-
жениях звеньев имеет место рассеяние энергии.
На схеме 9.6 представлено виброизолирующее со-
единение, выполненное в виде упругих прокладок, зажа-
тых между (звеньями 1 и 2). Демпфирование происходит
за счет внутреннего трения в материале прокладок. Вы-
бор конструкционных материалов с учетом их демпфи-
рующих свойств - один из наиболее эффективных путей
совершенствования машин, приборов и сооружений. Да-
же конструкционные стали разных марок обладают раз-
личными демпфирующими свойствами. Наиболее же
перспективно в этом плане использование композицион-
ных материалов.
На схеме 9.7 гидравлический демпфер предназначен
для демпфирования вращательных колебаний передней
стойки шасси самолета. Стойка через шатун ВС и рычаг
МС соединена с поршнем. Колебания стойки приводят к
возвратно-поступательному перемещению поршня. Жид-
кость из одной полости (например, полости I) перетекает
в другую полость (II) через отверстие L. При значитель-
ных нагрузках на поршень жидкость через зазоры и кла-
пан 2 проходит в полость II. Клапан I при этом закрыт.
Благе [аря гидравлическому сопротивлению происходит
рассеяние энергии колебаний.
150
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
В транспортных машинах (автомобилях и быстро-
ходных гусеничных машинах) широко распространены
гидравлические демпферы, установленные параллельно
или последовательно с упругим звеном (пружиной, лис-
товой рессорой, торсионом или пневмобаллоном). Прин-
цип действия демпфера тот же, что и в схеме 9.7, но кла-
паны имеют разные пропускные сечения при прямом
ходе (сжатии пружины) и обратном ходе. В первом слу-
чае сечение больше и процесс сжатия осуществляется
быстрее, чем процесс расширения. Демпфер растягивает
по времени процесс деформирования пружины и рассеи-
вает энергию вибраций. После продолжительного обрат-
ного хода колебание от одного возбуждающего воздейст-
вия практически прекращается. Важно при этом иметь
период получаемого колебания не больше периода по-
вторения характерных возбуждающих воздействий.
На схеме 9.8 представлена упругая пневмогидравли-
ческая опора подвески гусеничной машины. Она разме-
щена между относительно подвижными точками В и С.
При силовом воздействии вдоль штока жидкость перете-
кает по каналам клапана из полости 1 в полость 2 (схема
9.8а) или в обратном порядке (схема 9.86). Пневматиче-
ская подушка [газовая полость] смягчает удары, а пере-
мещение жидкости приводит к демпфированию вибрации.
На схеме 9.9 представлен амортизатор автомобиля
(термин амортизатор применен к устройству, содержа-
щему упругий элемент [газовую подушку] и гидравличе-
ский демпфер). В одном цилиндре размещены газовая и
гидравлические полости (другие варианты компоновки
будут даны в главе 7). Клапан А (большего сечения) от-
крывается при движении поршня вниз (схема 9.9а), а
клапан В открывается при движении поршня вверх (схе-
ма 9.96). При этом разделительный поршень соответст-
венно движется вниз или вверх, а газовая полость сжима-
ется или расширяется. В отличие от схемы 9.8 здесь в
верхней части цилиндра образуется пространство (раз-
ряженное или заполненное воздухом) между уплотнени-
ем и жидкостью (в том числе в виде пузырьков).
Силы сопротивления демпфера при прямом и об-
ратном ходах должны быть различными (схемы 9.10).
Это достигается выбором проходных отверстий (дроссе-
лей) и различной жесткостью пружин клапанов. В амор-
тизаторах некоторых современных автомобилей и гоноч-
ных машин клапаны выполняют переключаемыми (см.
рис. 59.3 схема 9.11 и на рис. 68 схема 7.5) регулируемы-
ми (схема 9.12).
В схеме 9.11 (рис. 59.3) наибольшее сопротивление
движению поршня в цилиндре достигается, когда золот-
ник перекрывает отверстие С и жидкость перетекает из
одной полости в другую через клапан А1 или клапан В1.
Эти клапаны имеют довольно жесткие упругие диски,
которые под давлением жидкости отгибаются и откры-
вают отверстия в поршне.
При повороте золотника с помощью валика, разме-
щенного внутри полого штока, открывается отверстие С
и жидкость перетекает из одной полости в другую через
более "мягкие" клапаны А2 или В2. При этом сопротив-
ление движению поршня получается минимальным. При
промежуточных положениях золотника могут изменяться
проходные отверстия обоих блоков клапанов и при этом
сопротивление движению будет определяться соотноше-
нием количества перетекаемой жидкости через блоки
"мягких" и "жестких" клапанов.
Характерная компоновка амортизатора гоночной
машины (схема 9.12) - в виде двух цилиндров, соединен-
ных шлангом. По структуре также амортизаторы анало-
гичны "двухтрубным" амортизаторам с соосным распо-
ложением цилиндров, используемым в легковых автомо-
билях, но здесь они имеют выносную компенсационную
камеру, содержащую газовую полость и гидравлическую
полость НЗ, а также клапаны С и D. Пружины клапанов
можно предварительно сжимать [регулировать] с помо-
щью винтовых пар (схема 9.12а).
Основной цилиндр имеет две гидравлические каме-
ры Н1 и Н2, разделенные поршнем с клапанами А и В.
Их тоже можно регулировать, то только в разобранном со-
стоянии. От обычных исполнений амортизатор отличается
большим диаметром штока, что способствует более интен-
сивному вытеснению жидкости из штоковой полости.
Размещение амортизаторов в подвеске гоночного
автомобиля будет показано в главе 7 (см. рис. 65). Уме-
стно отметить, что к решениям, используемым в гоноч-
ных машинах, следует относиться с особым вниманием,
потому что они со временем "перекочевывают" в маши-
ны массового производства.
Как уже отмечалось, демпфер способен рассеивать
энергию вибраций, характеризуемых определенным диа-
пазоном параметров. Для обеспечения повышенной ком-
фортабельности их выполняют автоматически переклю-
чаемыми в зависимости от режимов нагружения.
6.7. НЕЛИНЕЙНЫЕ УПРУГИЕ
ЭЛЕМЕНТЫ В СРЕДСТВАХ
ВИБРОЗАЩИТЫ
При рассмотрении предыдущих схем почти не ак-
центировалось внимание на характере зависимости меж-
ду силой упругости и относительным перемещением тел,
силой трения и относительной скоростью этих тел (ско-
ростью скольжения), силой инерции и ускорением.
А между тем эта зависимость, особенно если она нели-
нейная, играет определяющую роль в эффективности
виброзащиты.
В качестве структурной составляющей динамиче-
ских нелинейных систем, в том числе систем виброзащи-
ты, в механизмах широко применяют нелинейные упру-
гие элементы, а также нелинейные упругие элементы, в
которых перемещения сопровождаются трением. Ис-
пользование тех и других элементов позволяет снижать
динамические нагрузки. В частности, при приближении
частоты внешнего воздействия на систему к какой-либо
частоте ее собственных (свободных) колебаний не про-
исходит резкого возрастания амплитуды колебания, так
как с ростом амплитуды меняется жесткость системы и
соответственно частота собственных колебаний. По су-
ществу, нелинейные элементы позволяют автоматически
избегать резонансных явлений.
нелинейные упругие элементы в средствах виброзащиты
151
60. НЕЛИНЕЙНЫЕ УПРУГИЕ ЭЛЕМЕНТЫ И НЕЛИНЕЙНЫЕ СОЕДИНЕНИЯ
ГТо7Т| УПРУГИЕ СОЕДИНИТЕЛЬНЫЕ МУФТЫ (см. также рис. 107)
ОПОРЫ, БУФЕРНЫЕ УСТРОЙСТВА И ПОДВЕСКИ
РЕЗИНОМЕТАЛЛИЧЕСКИЕ ОПОРЫ
F
Двухступенчатые винтовые пружины Последовате ^ьное
Сферическая
А
В
2
Стальной
сферический
элемент
Полость
13
Резиновый 1F
слой Т
Резиновая втулка
Стальная
втулка 1
К
г Прокладка 2
Основание 1
Резиновый
слой
Резиновый
слой
-7,6
1,0
F,kH
3
2
Стальная
-10 -5 втУлка
/ ^2 I’
/ ММ
|13.3а|
5 10 Х?-1’
мм
-I
-2
F,kH
|13.3б|
2
2'
Опора с пневмодемпфером
Резиновый
Мембрана
Резиновый слой
152
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
Различие характеристик при увеличении и умень-
шении нагрузки (гистерезис) способствует эффективно-
му демпфированию вибраций. А в случае, если нелиней-
ность имеет место только при уменьшении нагрузки (см.
схему 6.1а на рис. 56.1), уменьшается или исключается
явление отдачи при ударах. (Схемы 10.1 ... 14.2 представ-
лены на рис. 60). Нелинейность характеристик и дефор-
мирования тела или соединения обеспечивается за счет:
1) выбора материала, обладающего нелинейной за-
висимостью между силой и деформацией (см. схем 10.16)-,
2) принятия такой формы элемента, которая сущест-
венно меняется в процессе деформирования и соответст-
венно существенно меняются перемещения точек прило-
жения силы, например, когда витки пружины сжатия со-
прикасаются между собой, ее жесткость резко возрастает
(см. схемы 12.3; 12.4);
3) обеспечения "стесненного" деформирования эле-
мента, например, путем постепенного или ступенчатого
прилегания его к твердому телу определенного профиля
(схемы 10.3 ... 10.5; 12.7; 13.1);
4) обеспечения совместного "стесненного" дефор-
мирования взаимно прилегающих нескольких листов
(схемы 10.3, 10.4; 11.2) или прядей, проволок (схемы
14.1; 14.2);
5) соединения нескольких упругих элементов, кото-
рые по мере изменения нагрузки включаются в совмест-
ную работу или исключаются из общей системы;
6) использования пары трения без смазывания (ко-
эффициент трения покоя существенно отличается от ко-
эффициента трения движения, а коэффициент трения
движения изменяется в зависимости от относительной
скорости — см., например, схему 12.3).
На схемах 10.1... 10.5 приведены примеры нелиней-
ных упругих элементов, используемые в муфтах и обес-
печивающие нелинейную зависимость между передавае-
мой нагрузкой (Т — вращающий момент, F — сила) и от-
носительным угловым перемещением фи звеньев 7 и 2.
На схеме 10.1 упругий элемент выполнен в виде
замкнутой петли, охватывающей выступы соединяемых
деталей 7 и 2. Петли работают только на растяжение. На
схеме 10.16 показано, что петли из нейлона имеют малую
жесткость, характеризуемую существенной нелиней-
ностью.
На схеме 10.1а дана конструкция совокупного ис-
пользования петель с эксцентриковыми резиновыми
втулками и стальными сегментами. Муфта с такими эле-
ментами обладает нелинейной характеристикой, которая
существенно различается при реверсировании нагруже-
ния (см. на схеме 10.16 и момент Т\ с обратным знаком).
В схеме 10.2 между звеньями муфты установлен па-
кет упругих телескопических незамкнутых колец. С уве-
личением моментов Т\ и Т2 пакет колец сжимается, зве-
нья 7 и 2 перемешаются одно относительно другого, по-
верхности соседних колец соприкасаются в направлении
действия сил F\ и F2, внутреннее кольцо огибает вкла-
дыш, а внешнее кольцо прилегает к поверхностям соеди-
ненных звеньев 7 и 2. С увеличением нагрузки увеличи-
вается площадь прилегания и соответственно увеличива-
ется жесткость (см. схему 10.2а). При уменьшении на-
грузки и соответственно при изменении направления
относительного перемещения звеньев меняется направ-
ление сил трения между соприкасающимися элементами
и характеристика системы будет иной. Площадь между
кривыми соответствует работе сил трения. От ее размера
зависят демпфирующие свойства системы. При знакопе-
ременной нагрузке имеет место гистерезис.
В схеме 10.3 при увеличении моментов 1\ и Т2 лис-
товой пакет изгибается. Листы прижимаются к поверхно-
сти звена 2, благодаря чему жесткость возрастает. При
изгибе между листами имеет место скольжение, что при-
водит к демпфированию колебаний.
В схеме 10.4 изменение жесткости от перемещения
достигается за счет переменного сечения пакета, состав-
ленного из листов разной длины.
В схеме 10.5 змеевидная ленточная пружина при
увеличении сил F\ и F2 все в большей мере прилегает к
зубьям звеньев 7 и 2 и жесткость муфты также увеличи-
вается.
В схеме 11.1 торсион выполнен в виде двух соосно
расположенных валов, причем один из них имеет форму
трубы. Соединения В и С обеспечивают ступенчатое из-
менение крутильной жесткости: после того как в резуль-
тате закручивания внутреннего вала выбирается угловой
зазор оба вала продолжают закручиваться совместно.
В схеме 11.2 торсион выполнен в виде пакета сталь-
ных листов. При повороте на достаточно большой угол
<Pi-2 листы не только закручиваются (характер закручива-
ния каждого из листов различен), но на средних участках
каждый из листов перемещается относительно соседнего.
При этом перемещение в зависимости от условий трения
между листами может быть ступенчатым.
В схеме 12.1 две пружины 7 и 2 с линейной характе-
ристикой соединены параллельно и установлены так, что
пружина 1 все время участвует в работе, а пружина 2
включается в действие после сближения звеньев 7 и 2 на
величину А. Характеристика совместной работы имеет
линейные участки (см. схему 12.1 справа). Жесткость
изменяется ступенчато: при перемещении, меньшем А,
имеем Cj, при перемещении, большем А, имеем
С* = СХ+С2,
где С\,С2- соответственно жесткость пружин 7 и 2.
На схеме 12.2 пружины 7 и 2 соединены последова-
тельно и деформируются одновременно до тех пор, пока
звено 2 не пройдет путь А и не соприкоснется со звеном 1
(жесткость системы С** =С]С2/(СХ+С2}), после чего
участвует в работе только пружина 1 (жесткость Cj).
В схеме 12.4 показана опора, глодающая высокими
демпфирующими свойствами благодаря трению без сма-
зочного материала (сила Ту) скользящих один относи-
тельно другого элементов, пластмассовой диафрагмы и
металлического корпуса. Диафрагма соединена с под-
вижным звеном 2 и с обеих сторон поджата коническими
пружинами, характеризуемыми нелинейной зависимо-
стью деформации от силы F. Упругая подушка, сплетен-
ная из проволоки, служит для защиты от ударных воз-
действий в конце хода звена 2. Корпус соединен с осно-
НЕЛИНЕЙНЫЕ УПРУГИЕ ЭЛЕМЕНТЫ В СРЕДСТВАХ ВИБРОЗАЩИТЫ
153
ванием 1 болтами. Эту опору применяют при силе F = 2 ...
200 Н в условиях вибрации с частотой до 300 Гц, пико-
вым значением ускорения до 5g, ударных импульсах
до 10g.
Коническая пружина, используемая в опоре, имеет
переменный ход винтовой линии Ph и постоянный угол
подъема винтовой линии. Витки большего диаметра об-
ладают меньшей жесткостью и деформируются в первую
очередь до их взаимного соприкосновения. С увеличени-
ем зоны соприкосновения витков жесткость возрастает.
Применяют также конические пружины с постоянной
величиной Р/, и переменным углом подъема винтовой
линии.
На схеме 12.3 - пневмоупругая опора, состоящая из
винтовой пружины и гибкой оболочки, заполненной га-
зом. Пружина, кроме обеспечения соответствующей уп-
ругости, задает определенную форму гибкой оболочки.
Хотя оба упругих элемента работают параллельно, изме-
нение формы оболочки зависит от изменения формы
пружины. Наибольшая нелинейность имеет место при
нецилиндрической (например бочкообразной) форме
пружины или переменном шаге ее витков. Особенность
представленного исполнения опоры заключается в воз-
можности изменения жесткости за счет давления газа р.
На схеме 12.5 показан сильфон, используемый в ка-
честве упругой, компенсирующей опоры. Выбор конфи-
гурации мембран, из которых сварен сильфон, позволяет
обеспечить желаемую характеристику жесткости в зави-
симости от назначения сильфона. Кстати, области при-
менения сильфонов разнообразны: от чувствительных
элементов и исполнительных устройств до компенси-
рующих муфт и опор. В первом случае стремятся до-
биться линейной характеристики жесткости или исполь-
зовать сильфон только на линейном участке, в муфтах и
опорах предпочитают нелинейную характеристику. Опо-
ра, заполненная газом, работает как две параллельно со-
единенных пружины. Давление газа может быть регули-
руемым. Используют сильфоны и при работе на растяже-
ние. Обычно при этом нелинейность более существенная,
а демпфирующие свойства более высокие.
На схеме 12.6 последовательно установлены пакеты
А, В, G тарельчатых пружин между звеньями 7 и 2. Каж-
дый последующий пакет имеет большую жесткость, чем
предыдущий благодаря совместному деформированию
большего количества элементов. В связи с этим при воз-
действии силы F сначала в основном сжимается пакет А,
затем пакет В и далее пакет G (см. кривую на схеме 12.7).
При уменьшении силы F величина X2-i вначале остается
неизменной, поскольку отсутствует относительное пере-
мещение элементов из-за силы трения, затем деформация
уменьшается. Площадь между кривыми соответствует
работе сил трения и характеризует демпфирующие свой-
ства системы.
Существенную нелинейность в систему вносят так-
же упругие элементы трубчатой формы из резины или
пластмассы, работающие на сжатие.
На схеме 12.7 показан такой элемент из полиурета-
на, используемый в амортизаторе автомобиля. Элемент
центрируется на штоке. В месте его перемещения отно-
сительно штока - центрирующие узкие пояски. Внешняя
поверхность имеет небольшую конусность и кольцевые
углубления. Такая форма способствует более полному
участию всего тела элемента в работе при сжатии. Эле-
мент может деформироваться более чем на две трети его
начальной длины. В конце сжатия элемента сила F во
много раз больше, чем в середине хода (см. кривую на
схеме 12.7).
Перспективным направлением в конструировании
виброизолирующих опор представляется использование
резинометаллических элементов в сочетании с другими
устройствами и приемами.
Сам по себе резинометаллический элемент пред-
ставляет собой последовательное соединение пружин с
различной жесткостью. Варьирование геометрии резино-
вого слоя позволяет легко изменять динамическую ха-
рактеристику устройства (схема 13.3). Определенной
ориентаций элемента в пространстве добиваются анизо-
тропии свойств устройства. Наиболее заметно это при
нагружении в направлении сдвиговых деформаций рези-
нового слоя.
На схеме 13.1 резинометаллический многослойный
элемент помещен в углубление опоры. Форма углубле-
ния предусматривает переменный зазор между его стен-
кой и боковой поверхностью элемента. Поэтому по мере
деформирования элемента все большее число нижних
слоев резины попадает в стесненные для их расширения
условия и соответственно возрастает жесткость. Данное
решение позволяет получить нелинейную зависимость
деформации Х2-1 от нагрузки F.
На схеме 13.2 в сферической опоре резиновые слои
разделены стальными сферическими элементами. Рези-
новый слой по мере нагружения силой F в большей мере
деформируется вблизи оси действия силы. Кроме того, на
периферии имеются большие сдвиговые деформации.
Вследствие этого по мере постепенного включения в ра-
боту все большей суммарной опорной поверхности рези-
новых слоев имеет место нелинейная характеристика
опоры в целом. При этом обеспечивается существенное
различие жесткости при различном угле действия силы F
относительно оси симметрии.
Выбирая определенную форму резинового слоя,
можно не только получать заданную характеристику его
жесткости, но и обеспечивать получение различной же-
сткости при реверсировании нагрузки или изменении
места приложения силы.
На схеме 13.3 показана резинометаллическая опора
подвески автомобиля. Она имеет стальные втулки 7 и 2,
привулканизированные к резиновому слою. В резиновом
слое имеются полости и выступы. Выступ А предвари-
тельно прижат к выступу В, а выступы К и L отдалены
один от другого. Внутри втулки 1 привулканизирован
резиновый слой, в который запрессовывается шип со-
пряженной детали.
Если неподвижно закрепить втулку 7, а силу F при-
кладывать слева или справа к втулке 2, то в силу несим-
метричной формы резинового слоя и наличия упоров
характеристики будут иметь различный вид (графики на
схеме 13.3) справа и слева соответственно.
154
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
61. НЕЛИНЕЙНЫЕ УПРУГИЕ СИСТЕМЫ, ОБЛАДАЮЩИЕ
КВАЗИНУЛЕВОЙ ЖЕСТКОСТЬЮ
115.1
п
Е,
Е2
g2
Квази нулевая жесткость
получается
при потере устойчивости
равновесия
упругой системы.
Варианты преобразующих соединений, в которых возможна
потеря устойчивости - приобретение дополнительной
подвижности в особом положении
данного соединения
(угол давления равен 90°
без учета трения).
Пружина [ 15.1г |
растяжения
\ А1
S
Упругий стержень I 15.1а
рл д
Е3
| 15.16
I Е.,Е2,Е, -пружины
[упругие элементы]
Gi G2 - преобразующие
_ механизмы/соединения
з - суммирующий
механизм/соединение
| 15.1в
сжатия Особое
положение
А2
г
С Особое
положение
АЛе
I 15.2 |
Е3
115.2а |
Распорное
звено
Пружина
сжатия
I 15.3 |
Особое
положение
Направляющий
шток
Упор 1
Упор 2
Фрикционная
самоустанавливающаяся
(в зависимости
от нагрузки F)
опора
Направляющая
Симметричная
распорная
система
Пружина
растяжения
а - угол давления
Пружина сжатия
в начальном
положении
'//////////////////Л
Основание
Перемычка 1
Платформа прибора
Винтовая
пружина
сжатия
Листовая
пружина
корректора
жесткости
Перемычка 2'
I 184 |
I 15-7 |
NM
N
К
L
Основание
Листовые
пружины <
Корпус
соосной
передачи
Пружина
сжатия Е
Пружина сжатия
в особом положении
наиболее сжата.
Пружина растяжения
в особом положении
наиболее растянута.
rLK
L
Пружина
сжатия Е3
Пружина
сжатия Е3
1158 I
Пружина
растяжения Е]
Пружина
3 сжатия Е]
Пружина
Кулачок рвстяжения Е|
Основание
I Сиденье
Ft /
Пружина сжатия
в особом
положении
N
Перемычка 2
Перемычка 1
Перемычка 2
р~5.5а |
Гибкий
элемент
В
N
М
I 15.8а |
Участок
квазинулевой
жесткости
115.56 |
| 15.5в |
Е,
Q
рГ5.5г ~|
нелинейные упругие элементы в средствах виброзащиты
155
При давлении на втулку 2 слева требуется опреде-
ленная начальная сила, а так как выступы А и В еще
больше будут прижиматься, то будет иметь место "жест-
кая" характеристика. При давлении на втулку 2 справа до
соприкосновения выступов К и L сила F увеличивается
незначительно, а затем резко возрастает, так как выступы
вступают во взаимодействие и могут сжиматься.
На схеме 13.4 между деталями 1 и 2 установлена
вибровизолирующая опора. Она содержит две полости В
и Н, заполненные жидкостью. Корпус опоры составлен
из двух стаканов 2' и Г, привулканизированных к рези-
новому слою. Полости В и Н разделены жесткой диа-
фрагмой Г', привулканизированной к нижнему стакану
слоем резины. Герметизирует полость Н податливая
мембрана. При относительных колебаниях звеньев 1 и 2
жидкость перетекает из одной полости в другую через
отверстие О. Вертикальные перемещения мембраны соз-
дают дополнительный демпфирующий эффект. Между
нижней стенкой корпуса и мембраной имеется камера Р,
сообщающаяся с атмосферой через отверстия. При коле-
баниях мембраны через эти отверстия проходит воздух.
Эффективную защиту от вибраций и ударных воз-
действий обеспечивают тросовые виброизолирующие
опоры (схема 14.1) и торсовые виброизолирующие под-
вески прибора к раме (схема 14.2).
На схеме 14.1 показана опора, в которой между па-
рой брусьев 2 и кронштейнами Г и Г' расположены уп-
ругие С-образные тросовые элементы из эластомерного
шнура круглого сечения. Концы каждого из элементов
закреплены в кронштейнах. Упругие элементы располо-
жены в виде двух симметрично расположенных групп 1 и 2.
Элементы групп наклонены к основанию под углом
35 ... 70°. В этих пределах можно регулировать угол за
счет относительного перемещения и закрепления крон-
штейнов на основании. За счет регулировки угла доби-
ваются получения требуемой динамической характери-
стики.
Тросовую подвеску корпуса 2 прибора (схема 14.2)
к основанию 1 осуществляют с помощью отдельных от-
резков троса или непрерывной намотки его витков.
Обычно используют 2 ... 4 сектора непрерывно намотан-
ного троса, обеспечивающих симметричную схему под-
вески.
К основанию 1 с помощью кронштейнов прикреп-
лен кольцевой брус 7', а к корпусу 2 прикреплены кольца
2' и 2". Трос огибает брус и кольца. Натяжение троса
осуществляют гайкой, размещенной на кронштейне. Ха-
рактеристика подвески зависит от предварительного на-
тяжения троса. Обычно жесткость возрастает с увеличе-
нием амплитуды колебаний. Подвеска обладает хорошей
демпфирующей способностью.
Еще один класс устройств с нелинейной жестко-
стью, сформированный сравнительно недавно, характе-
ризуется явно выраженной нелинейностью сопротивле-
ния деформированию (см. схемы 15.2а ... 15.8а на
рис. 61). Поскольку величина жесткости в определенном
интервале перемещений очень мала, то такие (конструк-
тивные) исполнения называют устройствами (элемента-
ми, системами) с квазинулевой жесткостью. В режиме
квазинулевой жесткости многократно увеличивается рас-
сеяние энергии деформации в упругой системе.
Особенно целесообразно использование этого об-
стоятельства в инфранизкочастотных системах.
Простейшие упругие элементы, рассмотренные вы-
ше, не обладают характеристикой, представленной на
схемах 15.2а, 15.8а (рис. 61). Если сжимать упругий
стержень на схеме 15.1а, то он после потери устойчиво-
сти практически не будет сопротивляться деформирова-
нию, т.е. будет обладать квазинулевой жесткостью, но
для средств виброзащиты необходимо этот участок де-
формации иметь между двумя участками с изменяемой
жесткостью. Без дополнительных соединений это прак-
тически недостижимо, если еще учесть и возможность
возвратного движения и повторного деформирования.
Нелинейная упругая система с любой заданной ха-
рактеристикой может быть получена путем параллельно-
го соединения упругих элементов и преобразующих ме-
ханизмов, например, по структурной схеме 15.1. В каче-
стве преобразующих механизмов могут быть использо-
ваны любые соединения, в которых возможны особые
положения (см. главу 5). Из-за появления дополнитель-
ной подвижности в особом положении наступает потеря
устойчивости и дальнейшее движение происходит прак-
тически без сопротивления (см. схемы 15.16 ... 15.1д).
Если такой механизм соединить с другим упругим эле-
ментом, вводимым в нужный момент (см., например,
схемы 15.1а и 15.5, в которых пружина Е3 начинает де-
формироваться после выборки зазора А), то обеспечива-
ется дальнейшая совместная работа пружин Е] и Е3. Бо-
лее того, совместная работа может характеризоваться
разностью жесткостей пружин Е3 и Е] из-за их разнона-
правленности. На этом принципе построены все приме-
ры, представленные на схемах 15.2... 15.5г.
Схема 15.2 характеризуется квазинулевой жеско-
стью в направлении ХЕ при начальном положении тела т,
находящегося в равновесии, когда оси пружин Ei и Е2
вытянуты в одну прямую. При этом тело связано с осно-
ванием несущей пружиной Е3. Представлена зависимость
реакции FE упругой системы от перемещений ХЕ. Пружи-
ны Е] и Е2 оказывают существенное сопротивление дви-
жению только при значительных величинах ХЕ. По суще-
ству, наличие пружин Е] и Е2 приводит к целенаправлен-
ному изменению характеристики системы. Поэтому та-
кое сочетание пружин Ej и Е2 называется корректором
жесткости. Благодаря квазинулевой жесткости система
или элемент совмещают в себе такие качества, как низкая
частота собственных колебаний (значительно ниже час-
тоты вынуждающей силы) и высокая несущая способ-
ность при статическом нагружении.
Результат от применения элементов с квазинулевой
жесткостью для виброизоляции может быть аналогич-
ным активной виброзащите, но устройство при этом кон-
структивно проще.
В схеме 15.3 совместная работа винтовой пружины
сжатия и листовой пружины корректора жесткости может
быть обеспечена при различной внешней нагрузке F. Ины-
ми словами, участок квазинулевой жесткости может сме-
щаться на статической характеристике (см. схему 15.8а).
156
УРАВНОВЕШЕННОСТЬ И ВИБРОЗАЩИЩЕННОСТЬ
При действии силы F и сжатии винтовой пружины
фрикционная опора совместно со штоком перемещается
до упора 2, а далее шток скользит относительно опоры.
Возвратное движение - совместное опоры и штока —
имеет место уже при смещенном участке квазинулевой
жесткости, т.е. при более сжатой винтовой пружине.
Наиболее эффективная виброзащита происходит
при колебаниях опоры между упорами 1 и 2. А более
существенное изменение возбуждающей силы F приво-
дит к соответствующему перенастраиванию системы.
На схеме 15.3 — пример элемента, предложенного
Г. С. Юрьевым, с квазинулевой жесткостью в виде
симметричной двухопорной балки MN, у которой
средняя перемычка 1 предварительно сжата в
направлении действия силы F благодаря деформи-
рованию крайних элементов силами FR регулируемой
величины. Если сила сжатия близка к критической (из
условия потери продольной устойчивости), то
достаточно приложить незначительную вертикальную
силу в точке А. чтобы перемычка 1 стала изгибаться, т.е.
она обладает квазинулевой жесткостью.
На схеме 15.4а данный элемент использован в виб-
роизолирующей подвеске платформы прибора. Здесь R -
устройство, регулирующее изгиб перемычки 2 относи-
тельно опор М и N; В — точка приложения силы FR,
А — опора, закрепленная на основании; Ез - несущая
пружина.
В этой системе балка выполняет роль упругой на-
правляющей и корректора жесткости несущих пружин.
Частота собственных колебаний балки может быть близ-
кой к нулю в определенном диапазоне перемещений.
Данная схема позволяет обеспечить эффективную
виброзащиту прецизионного технологического оборудо-
вания.
На схеме 15.5 представлено решение корректора
крутильной жесткости передачи вращения за счет введе-
ния пружины между основанием В и корпусом передачи
(точка А]). Пружина Е! обеспечивает получение квазину-
левой жесткости по аналогии со схемой 15.1е. В положе-
нии пружины А|В крутильная жесткость передачи нуле-
вая, а в положении А2В она достигает определенной ве-
личины.
На схеме 15.5а — пример соосной передачи, встро-
енными в корпус, имеющий возможность поворачивать-
ся. На схеме обозначены:
а, b — центральные колеса, g — сателлит, h - водило.
Момент силы упругости пружины Е| уравновешива-
ет сумму моментов Tv и 7w.
Чем больше угол а, тем больше плечо действия си-
лы и больше уравновешивающий момент силы. Такое
решение позволяет легко осуществлять регулировку кру-
тильной жесткости, например, за счет перемещения точки В.
Такую регулировку можно осуществлять в процессе
передачи вращения. Схема 15.5 иллюстрирует лишь
принципиальную возможность осуществления данной
задачи. Конструктивные исполнения могут быть разно-
образны.
Перспективным представляется аналогичное введе-
ние упругих элементов в подвески агрегатов - в кинема-
тическую цепь, воспринимающую реактивный момент
(схемы 15.56... 15.5г).
На схеме 15.56 несущая пружина Е3 и корректор же-
сткости Е] установлены между рычагами APN и BQL.
Обе - пружины сжатия. В схеме 15.5г в качестве коррек-
тора жесткости использована пружина растяжения.
В данных схемах пружины в качестве замыкающего зве-
на воспринимают момент 7с. Ранее была показана воз-
можность установки пружины для разгрузки от силы тя-
жести (см. схему 2.2 на рис. 42).
На схеме 15.7 представлена подвеска сиденья на
листовых упругих элементах и основной несущей пру-
жине Е3. Пружина корректора жесткости присоединена к
сиденью и основанию через кулачок и гибкий элемент.
Выбирая соответствующий профиль кулачка, можно
обеспечить квазинулевую составляющую жесткости в
направлении линии действия силы F. Данный пример
иллюстрирует возможность получения любой заданной
характеристики системы при линейной характеристике
пружины Ез.
На схеме 15.8 показан вариант подвески сиденья на
параллельных коромыслах КС и LM. Пружина растяже-
ния Е| присоединена так, что в положении, когда точки
А, В, С лежат на одной прямой, происходит смена знака
жесткости (момента силы сопротивления повороту коро-
мысла КС). Приведенная к звену KL жесткость пружи-
ны Ej вычитается из приведенной жесткости пружины Е3.
В результате получают участок квазинулевой жесткости
(см. схему 15.8а).
Глава 7. СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ
САМОПРИСПОСОБЛЯЕМЫХ, ВИБРОЗАЩИТНЫХ
СИСТЕМ (НА ПРИМЕРАХ ПОДВЕСОК МАШИН)
7.1. ОБЩИЕ ПОЛОЖЕНИЯ.
ЭЛЕМЕНТЫ ПОДВЕСОК
АВТОМОБИЛЕЙ
Подвеска - это не только система рычагов и амор-
тизаторов автомобиля, но и связующее устройство любой
машины с ее ходовой частью, и соединение корпуса агре-
гата (двигателя, редуктора, исполнительного устройства)
с базовой частью (основанием) машины, и система кана-
тов и балансиров лифта, и многое др.
Подвеска - разновидность опоры или совокупности
опор, содержащая направляющую и/или ориентирующую
систему (кинематическую пару, кинематическое соеди-
нение или ферму), а также упругие и демпфирующие
устройства.
Как следует из приведенного определения, подвеска —
ответственная структурная часть машины. Тем не менее
подвески практически не изучаются в классических кур-
сах теории механизмов и машин, хотя в этом плане по-
учительно, что в некоторых современных решениях ста-
ли применять механизмы, известные уже более 200 лет.
В мире уже известно столько схем и конструктив-
ных решений подвесок, что разобраться в них не так-то
просто. Фирмы-производители автомобилей весьма
охотно рекламируют внешние характеристики, но не-
охотно делятся секретами: за счет чего достигается тот
или иной показатель. На совершенствование подвесок бро-
шены большие интеллектуальные силы, но цели стоят того.
Ранее мы уже касались некоторых аспектов подве-
сок железнодорожного транспорта, а также агрегатов,
неподвижно соединенных с основанием некоторых ма-
шин типа самосвала, крутосклонного трактора (см. главу 4)
когда рассматривались вопросы самоприспособляемости.
О нелинейных упругих элементах подвесок и принципах
виброзащиты говорилось в параграфе 6.7. На многообра-
зии примеров подвесок машин осветим направления их
развития и совершенствования. С этой целью приведем
данные примеры в единой системе, подчиненной общим,
ранее освещенным принципам:
• самоприспособляемости к форме дорожного
полотна и другим условиям;
многопоточности передачи и преобразования
(в том числе рассеяния) энергии;
• рациональному направлению и замыканию
сил;
• разгрузки кинематических пар и виброзащи-
щенности (минимальные массы подвижных звеньев).
Характерно, что подвески - это та область, где клас-
сические допущения об абсолютно жестких рычагах, ко-
ромыслах и элементах кинематических пар не приемле-
мы для кинематического и динамического анализа. Не
приемлема и классификация кинематических пар, в кото-
рой не учитываются зазоры в них и упругость элементов.
Во всех примерах приведены кинематические пары трех
видов, хотя конструктивно вес они попадают под одно-
подвижные вращательные пары. Вид пары определяется
по ее возможному поведению:
• если кроме вращения она допускает еще и некото-
рое перемещение (в пределах зазоров и деформаций)
вдоль оси, то это двухподвижная пара;
• если кроме основного вращения она допускает
еще и перекосы, то это трехподвижная или двухпод-
вижная сферическая пара;
• если пара допускает перемещения, свойственные
уже названным видам, то это четырехподвижная пара.
В соответствии с общими тенденциями развития
машиностроения в подвесках все реже применяют посту-
пательные пары (за исключением железнодорожного
транспорта).
Прежде чем приступить к разбору непосредственно
схем подвесок, приведем некоторые примеры их элементов.
На рис. 62.1 и 62.2 представлены примеры, относя-
щиеся к подвескам автомобилей.
Рядом с некоторыми примерами конструкций даны
их условные обозначения (см. схемы 4.2 и 43).
Особенности элементов следующие. Многолистовая
рессора (схема 1.1) обладает хорошими демпфирующи-
ми свойствами. Листы в пакете имеют различную кри-
визну и касаются друг друга при сборке, как показано на
схеме 1.1а. Благодаря этому обеспечивается более менее
равномерное распределение нагрузки между листами и
получается нелинейная характеристика рессоры. Относи-
тельное движение и взаимное трение листов при дефор-
мировании рессоры приводит к эффективному демпфи-
рованию колебаний.
В современных автомобилях используют однолис-
товые рессоры (схема 1.2) из пластмассы, армированной
стекловолокном, и из других композиционных материа-
лов. Поперечное сечение рессоры имеет форму, очерчен-
ную кривыми: параболой, эллипсом. Армирование и
форма сечения листа придают рессоре нелинейную ха-
рактеристику и соответствующие ей виброзащитные
свойства. Параболической (в продольном сечении) фор-
мы рессора нагружается подобно параболической арке,
работающей в основном на сжатие, имеет высокую не-
сущую способность. Устанавливают рессору как в про-
дольном (в направлении движения), так и в поперечном
направлениях. Во втором случае она выполняет роль
стабилизатора поперечной устойчивости - упругого
элемента, связывающего подвески правого и левого бор-
та и придающего некоторую (упругую) зависимость их
перемещений. Рессоры в местах крепления имеют опору,
допускающую осевое перемещение [исполнения опор
158
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
62.1. ЭЛЕМЕНТЫ, ДЕТАЛИ И СОЕДИНЕНИЯ
ПОДВЕСОК АВТОМОБИЛЕЙ
1.1
РЕССОРЫ (ЛИСТОВЫЕ)
АОМуТ
Коренной(длинный)лист
Хомут
Короткий лист
Центральный болт
1.6
1.5
1.1а
1.2
Опора
Р
2.1
1.3
У
Зазор
Шток
Пружина
Буфер отбоя-
Резиновая
прокладка
Резиновый
буфер
□С □□
Шток— -
Цилиндр^__ „
демпфера^^к
в виде двух |
коаксивльных
труб
Поршень
Перетекание
жидкости при
обратном
ходе поршня
£
Пластины Коренной лист
Опорный лист
2.2
Резиновая
опора
Кронштейн,
присоединенный
к кузову
Ь-Верхняя
Г чашка
"Упругий
элемент
Колпачок
Нижняя
чашка
Поршень.
Дроссель-
Гидроцилиндр’
Уплотнение —
Направляющая
(втулка)
штока '
Защитный
стакан
Г идравлическая
полость Н1
Г идропневматическая
полость
между стенками
цилиндра
Клапан,
открывающийся
при прямом ходе
поршня
(вниз по отношению
к цилиндру)
Г идравлическая
полость Н2
Клапан,
открывающийся
при обратном
ходе поршня
(вверх по отношению
к цилиндру)
Н1
Параболическая
однолистовая
рессора
yr" Буфер
Канал
^Х-Упор
Резинокордная
оболочка
Буфер
отбоя
Каркас
Двухслойная
резинометаллическая
опора
Кронштейн,
, присоединенный
к кузову
ГИДРОПНЕВМАТИЧЕСКИЙ АККУМУЛЯТОР
Г идравлическая
полость /
2TI
Газовая
полость
Шарнирное
соединение
с рычагом
подвески
Шланг, соединяющий
\ гидропневматический
"Х. аккумулятор
с гидроцилиндром Н
подвески
—-- Упорный
буртик штока
ЧН2 Шток
От насоса
и регулятора
уровня (кузова)
Мембрана,
отделяющая
гидралическую полость
от газовой полости
Упругий
элемент
— Шаровая
опора
подвески
Поверхность
присоединения
к поперечному
рычагу подвески
УПРУГИЙ РЕЗИНОМЕТАЛЛИЧЕСКИЙ
СИММЕТРИЧНЫЙ ШАРНИР
УПРУГИЙ РЕЗИНОМЕТАЛЛИЧЕСКИЙ
НЕСИММЕТРИЧНЫЙ ШАРНИР
____ Внешняя
3.3 I металлическая
---- втулка \
Резиновая
несимметричная
Рычаг втУ™а
Кронштейн
Внутренняя
металлическая
втулка
044И4 KWMJNWJ j
ОБЩИЕ ПОЛОЖЕНИЯ. ЭЛЕМЕНТЫ ПОДВЕСОК АВТОМОБИЛЕЙ
159
даны на схеме 5.10 на рис. 63 - в виде серьги, на схе-
ме 1.2 — в виде четырехподвижной пары, на схеме 1.4 —
в виде упругого (резинового) слоя].
На схеме 1.3 представлена рессора, составленная из
двух тонких листов и опорного листа в виде коромысла
переменного сечения по длине. Она имеет существенно
нелинейную ("прогрессивную"), в том числе ступенчато
изменяемую характеристику. При вступлении в действие
опорного листа жесткость рессоры в конкретном реше-
нии возрастает в 4 раза. Поддерживающий лист имеет
контакт с коренным листом только под проушинами, что
обеспечивает их одновременное нагружение. Резиновые
прокладки и зазор между листами предотвращают скрип
при деформировании рессоры.
Наряду с рессорами самостоятельно или в совокуп-
ности с другими упругими элементами (например, в ка-
честве стабилизатора) используют торсионы - элементы,
работающие на кручение. Торсионы в виде сплошного
кругового вала применяют при их большой длине. По-
скольку чаще всего приходится располагать торсионы
поперек автомобиля, то их длина ограничена. Для увели-
чения податливости используют последовательное со-
единение валов, в том числе телескопических. Получило
распространение многолистовое решение торсиона (схе-
ма 11.2 на рис. 60). В нем периферийные листы имеют в
2 раза меньшее сечение, чем внутренние листы (в кон-
кретном варианте длина 625 мм, 4 внутренних листа се-
чением 65 х 7 мм, центральный лист сечением 65 х 6 мм
и 4 внешних листа сечением 32 х 7 мм). Многолистовой
торсион имеет нелинейную характеристику и хорошие
демпфирующие способности благодаря трению между
листами.
Подобно торсиону работают некоторые поперечные
балки подвески, особенно балки открытого профиля
(схемы 4.8 на рис. 62.2).
Витая пружина бочкообразной формы (схема 1.5).
так же, как и коническая пружина, обладает нелинейной
характеристикой, а в конкретном решении предельная
высота пружины при деформировании равна всего двум
диаметрам проволоки, из которой она свита.
Диафрагменный баллон на схеме 1.6 в конкретном
исполнении имеет грузоподъемность 5 ... 35 кН и воз-
можный ход до 300 мм. Ограничитель хода - буфер вы-
полнен из резины. По каналу внутрь баллона подается
воздух под давлением р. Подвеска с пневмобаллонами в
автомобиле создает ощущение наибольшего комфорта с
точки зрения восприятия толчков и мягкости хода.
Неотъемлемой частью подвески автомобиля являет-
ся демпфер, который профессионалы называют аморти-
затором. Если для некоторых устройств, выполняющих
чисто демпфирующие действия, это название недопусти-
мо, то для совокупности решений (вместе с пружиной —
схема 2.1) термин амортизатор вполне подходит. Авто-
мобилисты его называют также стойкой, хотя в теории
механизмов мы привыкли называть стойкой звено, при-
нятое за неподвижное. Поэтому далее будем придержи-
ваться все же терминологии теории механизмов и машин.
На схеме 2.1 соосно установлены: демпфер в виде
цилиндра и поршня с клапаном, перепускающим жид-
кость из одной полости в другую, витая пружина сжатия,
упругий элемент из полиуретана и шумоизолирующая
упругая опора кузова, эквивалентная двухподвижной
сферической паре.
Упругий элемент вступает в действие после опреде-
ленного хода штока и упора колпачка цилиндра в ниж-
ний торец элемента. Существенная нелинейность от-
дельного упругого элемента конкретного исполнения
иллюстрируется приведенной зависимостью деформации
Z. от силы сжатия F.
На схеме 2.2 несколько иное решение опоры кузова
(двухслойная резинометаллическая опора). Упругий
элемент служит только для восприятия ударов. В гидро-
цилиндре обе полости Н1 и Н2 заполнены жидкостью,
которая при возникновении колебаний перетекает из по-
лости в полость через дроссель в поршне. Тем самым
обеспечивается демпфирование. Канал Р полости Н1 со-
единен с гидропневматическим аккумулятором (схе-
ма 2.3) и регулятором давления (сжатия пневматической
камеры аккумулятора), благодаря чему можно управлять
характеристикой подвески.
Штоковая полость Н2 меньше по объему полости
Н1 (с присоединенной к ней гидравлической полостью
аккумулятора) и требует меньшего давления для ее со-
кращения (при обратном ходе поршня) из-за малой ак-
тивной площади поршня и большого диаметра штока.
Опора кузова по схеме 3.1 отличается от схемы 2.1
наличием подшипника и максимальным использованием
пространства для размещения пружины по высоте. До-
полнительные 2 — 3 витка позволяют существенно увели-
чить ход подвески и соответственно улучшить ее упругие
качества.
Схемы 3.1 ...3.3 представляют собой шарниры (опо-
ры), эквивалентные двух-, пятиподвижным кинематиче-
ским парам. В основном эти шарниры содержат упругие
резиновые или резинометаллические элементы. Хотя
большинство из шарниров не имеет сферических элемен-
тов, по характеру возможного движения это однозначно
сферические пары. Привулканизированный к металличе-
ским втулкам сплошной слой резины в так называемом
сайлент-блоке допускает угол закручивания до 20° в одну
сторону и углы перекоса до 10° и радиальные перемеще-
ния до 1,5 ... 2 мм (резину предварительно подвергают
отжатию до 500 %) для достижения эффекта упругого
упрочнения. Перемещения в различных направ-лениях
могут существенно отличаться по величине, более того,
шарниры выполняют несимметричными по жесткости
как при реверсировании направления радиальной силы
(см. схему 13.3 на рис. 60), так и при реверсировании пе-
рекоса (схема 3.3 на рис. 62.2). Все это используется для
самоприспособляемости подвески к определенным
внешним условиям, например к условиям поворота ма-
шины, когда подвески правого и левого борта должны
иметь различные упругие свойства.
На схеме 4.1 (рис. 62.2) дано конструктивное реше-
ние и компоновка деталей, которыми колесо присоеди-
нено к кузову и приводу автомобиля.
Схемы 4.2 и 4.2а представляют собой принципиаль-
ное и конструктивное исполнения одной и той же
160
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
ЗАВИСИМЫЕ И ПОЛУНЕЗАВИСИМЫЕ ПОДВЕСКИ АВТОМОБИЛЕЙ
161
подвески и приведены здесь, чтобы показать обозначения
основных звеньев и кинематических пар (А, В ... N) в
совокупности.
Схемы 4.2 ... 4.5 демонстрируют обозначение и ва-
рианты исполнения коромысла или рычага. На схеме 4.2 —
рычаг, соединенный с торсионом. Звено JRG в схемах 4.3
и 4.3а выполняет только направляющие функции, т.е. это
не рычаг, а коромысло, но, тем не менее, термины "коро-
мысло" и "рычаг" далее используются как эквивалентные.
На схеме 4.5 дан пример исполнения диска колеса,
его опоры и их компоновки с диском тормоза. Диск тор-
моза - вентилируемый, со сквозными внутренними по-
лостями. Опоры R и С формируют ось поворота колеса
относительно рычагов 1п2 подвески. Шарнир L, разме-
щенный на опоре колеса, — место присоединения звена,
обеспечивающего поворот управляемого колеса или под-
руливание неуправляемого (заднего) колеса. Буквой L в
последующих схемах подвесок автомобилей обозначен
шарнир, имеющий именно это значение.
Жесткие рычаги и балки имеют либо сплошное
сечение (схема 4.6), либо замкнутый (схема 4.7) или, по
крайней мере, двухтавровый профиль. Упругие балки,
для которых предусматривается некоторое закручивание,
выполняют тонкостенными с незамкнутым (открытым)
сечением (схемы 4.8).
Далее рассмотрим общие принципы построения
схем подвесок.
Хотя по условиям движения и нагружения автомо-
билей, тракторов и локомотивов их подвески и различа-
ются, тем не менее функциональные задачи и отдельные
их решения одинаковы. Принципы и опыт, накопленные
в одной области, могут быть использованы в другой об-
ласти. Конечно, по совершенству и многообразию подве-
сок автотранспорт ушел далеко вперед в силу массового
использования и рыночной системы выживания лучших
технических решений.
Функции подвесок:
1) распределение (желательно равномерное) нагруз-
ки между несколькими колесными парами (двумя коле-
сами на одной оси) колесами/катками;
2) сохранение или заданное изменение положения
и/или ориентации корпуса (кузова машины относительно
дорожного полотна при изменяемых условиях движения
и нагружения;
3) виброзащита от внешних воздействий со стороны
дорожного полотна и воздушных потоков;
4) восприятие реактивных сил и моментов;
5) компенсация погрешностей монтажа и деформаций.
Первая функциональная задача решается с помощью
многокатковых многоосных подвесок (см. рис. 43).
Данная задача является специфичной для локомоти-
ва, железнодорожных вагонов, подъемно-транспортных
машин, тракторов, быстроходных гусеничных машин и в
какой-то мере базовых колесных тягачей, грузовых авто-
мобилей и автобусов.
Вторая функциональная задача решается с помощью
направляющих и ориентирующих механизмов (прак-
тически все схемы), в том числе с изменяемыми парамет-
рами (управляемые подвески - см. рис. 67) и даже с из-
меняемой структурой (например, при движении по пло-
хой дороге в некоторых подвесках отключают стабилиза-
тор поперечной устойчивости для недопущения диаго-
нального вывешивания автомобиля, а в грузоподъемных
машинах в рабочем режиме отключают упругие элемен-
ты подвески и/или блокируют всю подвижную систему).
Третья задача решается во всех подвесках одинако-
во за счет введения упругих элементов и демпфирующих
устройств.
Четвертая и пятая задачи являются определяющими
в основном для подвесок агрегатов, в остальных подвес-
ках эти задачи также решаются, но являются, скорее, со-
путствующими по отношению к первым.
Для обеспечения лучшей приспособляемости к
внешним условиям в автомобилях прослеживается тен-
денция создания индивидуальной (независимой) подвес-
ки каждого из колес или, по крайней мере, только пары
колес, расположенных по разные стороны автомобиля
(зависимая подвеска). Это, однако, не означает, что неза-
висимые подвески не взаимосвязаны. Они, как правило,
имеют упругую связь в виде стабилизатора поперечной
устойчивости, а также могут управляться с помощью
гидро- или пневмосистемы.
7.2. ЗАВИСИМЫЕ И ПОЛУНЕЗАВИСИМЫЕ
ПОДВЕСКИ АВТОМОБИЛЕЙ
Зависимые подвески применяют в основном в гру-
зовых машинах и иногда для задних колес легковых ав-
томобилей. Кузов/рама машины (схема 5.1 на рис. 63)
опирается через пружины воспринимающие вертикаль-
ные нагрузки, на поперечную балку, на концах которой
шарнирно установлены колеса. Кроме пружин между
балкой и рамой установлены демпферы (на некоторых
схемах демпферы не показаны).
Как и в вышеприведенных схемах, так и в схемах
подвесок автомобилей, многие шарниры представлены
как сферические, хотя в действительности они могут
быть выполнены с цилиндрической рабочей поверхно-
стью и способными допускать относительные сфериче-
ские движения звеньев в небольших пределах (кроме
основного движения). Шарниры выполняют сфериче-
скими (схема 4.5 рис. 62.2) в основном только для обес-
печения значительных угловых перемещений (например,
для поворота колес - шарниры С, L, R на схемах 6.1; 6.2
рис. 64), в остальных случаях их снабжают резиновыми
или другими упругими элементами, допускающими тре-
буемые угловые и линейные компенсационные переме-
щения (см. схемы 3.1; 3.2; 3.3 на рис. 62.1).
В общем случае зависимая подвеска должна обла-
дать двумя степенями свободы: допускать относительные
вертикальные перемещения и перекосы (крен) кузова
(в пределах деформации пружин) в поперечной плоско-
сти. Такому условию отвечают пространственные со-
единения нескольких параллельных кинематических
цепей со сферическими шарнирами (схемы 5.2 ... 5.7).
Механизмы на схемах 5.2, 5.3 обладают только одной
степенью свободы, а при крене недостающая степень
свободы получается за счет деформирования упругих
162
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
ЗАВИСИМЫЕ И ПОЛУНЕЗАВИСИМЫЕ ПОДВЕСКИ АВТОМОБИЛЕЙ
163
деформирования упругих элементов шарниров. Боковые
поперечные силы в схемах 5.1 ... 5.3 передаются так на-
зываемой тягой Панара, шарнирно соединенной с кузо-
вом/рамой и балкой. Продольные силы воспринимают
звенья 1,2, 3, 4. Крайние точки балки на схеме 5.2 соеди-
нены с рамой посредством прямила Д. Уатта, а на
схеме 5.3 — посредством двухкоромыслового механизма.
Механизм на схеме 5.2 практически исключает раз-
ворот оси балки в плане при крене кузова, возникающем
из-за поворота машины, так как крайние точки балки
движутся вертикально и прямолинейно.
Механизм на схеме 5.3 при крене несколько разво-
рачивает балку в сторону недостаточной поворачивае-
мости (задние колеса поворачиваются на небольшой
угол в ту же сторону, что и передние). Несколько ниже
на этом эффекте остановимся более подробно. Здесь же
отметим только, что недостаточная поворачиваемость
при повороте положительно сказывается на устойчиво-
сти движения. При наклоне кузова относительно балки
один конец тяги Панара (см. схему 5.1) движется, по ду-
ге, смещаясь при этом на величину А. На такую же вели-
чину Ас смещается центр тяжести кузова относительно
балки, что неблагоприятно сказывается на устойчивости
автомобиля. При повороте направо или налево имеет
место смещение в одну сторону, что будет создавать не-
одинаковые условия поворота.
На схемах 5.6 ... 5.9 представлены решения, обеспе-
чивающие относительные перемещения без бокового
смещения. В частности в схеме 5.6 используют коромыс-
ло PRO, которое обеспечивает перемещение точки О в
вертикальном направлении. Относительный поворот
балки и рамы (при крене) происходит однозначно с цен-
тром в точке О. В схеме 5.7 боковые силы воспринима-
ются звеньями 3 и 4, установленными под углом к оси
автомобиля. Относительный поворот происходит вокруг
центра пересечения осей этих звеньев. В процессе дви-
жения этот центр может незначительно перемещаться в
поперечном направлении.
В схемах 5.8 и 5.9 для четкого разделения воспри-
нимаемых сил вместо тяги Панара применены прямоли-
нейно-направляющие приближенный (схема 5.9) и
точный (схема 5.8) механизмы. В этих схемах центр
тяжести кузова перемещается по прямой, перпендику-
лярной к оси балки. В большинстве схем при относи-
тельных перекосах крова и балки (в вертикальной плос-
кости) имеет место и относительный поворот в горизон-
тальной плоскости. Расположение и наклон продольных
тяг выбирают таким образом, чтобы обеспечить недоста-
точную поворачиваемость , как на схеме 5.3.
С целью экономии пространства внутри кузова, а
также увеличения плеча восприятия опрокидывающего
момента (при крене) пружину и демпфер располагают как
можно дальше от продольной оси автомобиля и опирают
при этом на звено 1 (схема 5.5). Звено 1 в данной схеме в
отличие от других схем работает на изгиб.
Роль пружин в рассмотренных подвесках могут вы-
полнять также пневмобаллоны или пневмоцилиндры,
рессоры или торсионные валы.
На схемах 5.11 дана торсионная подвеска.
Балка подвешена на рычагах, взаимодействующих с тор-
сионными валами, расположенными вдоль рамы.
На схеме 5.10 показана установка рессоры и демп-
фера между балкой и рамой.
На схеме 5.10а параллельно рессоре установлены
пневмобаллон и демпфер. Упругие элементы восприни-
мают только вертикальные силы и благодаря тяге раз-
гружены от продольных сил.
Для предупреждения свободного поперечного рас-
качивания кузова относительно балки зависимые или
независимые подвески, расположенные по разные сторо-
ны машины, соединены торсионом ТТ' (на схеме 5.6 не-
посредственно с рычагами QT и QT', а на схеме 5.12 с
помощью тяг). Это соединение называют стабилиза-
тором поперечной устойчивости. Оно обес-
печивает определенную взаимозависимость вертикаль-
ных перемещений колес и способствует уменьшению
крена машины при отслеживании колесами неровностей
дороги.
В подвеске автобуса на схеме 5.12 пневмобаллоны и
демпферы размещены между балкой и кузовом в четырех
местах, симметрично расположенных относительно ко-
лес. Продольные и поперечные силы воспринимает рес-
сора, закрепленная на картере дифференциала. Картер и
консоли, к которым присоединены пневмобаллоны и
демпферы, неподвижно соединены между собой и обо-
значены здесь как балка.
Как уже отмечалось, даже при наличии шарнирного
присоединения колес к поперечной балке между рычага-
ми подвески устанавливают упругую связь. Такую связь
осуществляют также между независимыми подвесками (в
виде упомянутого здесь стабилизатора поперечной ус-
тойчивости). Условно подвески, в которых сама балка
способна деформироваться при самоустановке колес,
называют подвесками со связанными (продольными) ры-
чагами или упруго соединенными (между собой) подвес-
ками (см. схемы 5.13; 5.14; 5.15).
Наличие деформируемой балки (обычно тонкостен-
ной с открытым профилем — сечением, показанным на
схемах 4.8 рис. 62) не исключает применение стабилиза-
тора поперечной устойчивости в виде более тонкого
стержня или трубки (схемы 5.13, 5.14) или сочетания не-
скольких соединенных между собой торсионов (схе-
ма 5.15).
Оси шарниров рычагов подвески выполняют с неко-
торым наклоном (угол 8 на схеме 5.14), чтобы обеспечить
более благоприятную ориентацию колеса при деформи-
ровании пружины и повороте рычага подвески.
Выбор схемы соединения упругих элементов под-
вески диктуется желанием получить нелинейную харак-
теристику системы при определенном соотношении
взаимовлияния перемещений рычагов подвески и при
минимальном изменении ориентации кузова относитель-
но дорожного полотна.
164
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
7.3. НЕЗАВИСИМЫЕ ПОДВЕСКИ
АВТОМОБИЛЕЙ
В независимых подвесках (рис. 64, 65, 66) каждое
из колес имеет свой направляющий и ориентирующий
механизм. Обе функции совмещены в одном механизме и
взаимозависимы. В схеме 6.1 колеса установлены на ры-
чагах / и 2, шарнирно соединенных с рамой и опорой.
Между рычагами установлена пружина. Каждый из ры-
чагов взаимодействует с рамой через шарнир и пружину.
Правая и левая подвески соединены между собой стаби-
лизатором поперечной устойчивости в виде кинематиче-
ской цепи SQTT'Q'S' с упругим звеном QTT'Q'.
На схемах 6.1 ... 6.26 показаны подвески передних
[поворотных] управляемых колес. Положение опоры
определяется положениями точек R и С и силовым замы-
канием благодаря специальной ориентации оси RC отно-
сительно пятна контакта колеса с дорожным полотном.
Принудительное изменение ориентации осуществляется
воздействием на опору в точке L. Сила вдоль тяги руле-
вого управления действует на определенном плече отно-
сительно оси RC и обеспечивает поворот колеса.
Схема 6.2 отличается от схемы 6.1 конструкцией
нижнего рычага АС и установкой пружины с демпфером
между ним и рамой. Растяжка BD прикреплена к рычагу
АС и воспринимает в основном продольные силы. Рычаг
при этом может поворачиваться вокруг оси АВ. Верхний
рычаг JRG имеет разнесенную по обе стороны относи-
тельно пружины опору JG.
На схеме 6.26 компоновка подвески в совокупности
с рулевым управлением, приводом колеса и тормозом.
Опора колеса соединена с кузовом через коромысло, со-
ставленное из двух звеньев BD и АС и через пружину.
Ось пружины расположена в соответствии с направлени-
ем воспринимаемой нагрузки. Пружина и шток демпфера
имеют на кузове опору R.
Механизм рулевого управления присоединен к ры-
чагу опоры через тягу LK. Воздействуя на рычаг, пово-
рачивают колесо вокруг оси RC. Привод колеса осущест-
вляется через карданную передачу, а торможение осуще-
ствляется с помощью тормоза.
Стабилизатор поперечной устойчивости QTT'Q’
устроен так же, как и в схеме 6.1.
Особенностью схемы б.2в по сравнению со схе-
мой 6.26 является конструкция рычага АС подвески. Ры-
чаг выполнен Г-образным с одноподвижной опорой А.
содержащей упругую резинометаллическую втулку и
расположенной за осью колеса по отношению к направ-
лению движения.
На схеме 6.2а — одна из самых современных подве-
сок управляемого [поворотного] колеса. Поворотная
опора соединена с кузовом четырьмя рычагами [стерж-
нями] JR, GR', АС, ВС, имеющими сферические
(R, R', С, С) и эквивалентные сферическим (упругие — А.
НЕЗАВИСИМЫЕ ПОДВЕСКИ АВТОМОБИЛЕЙ
165
65. ПОДВЕСКИ ГОНОЧНЫХ АВТОМОБИЛЕЙ
Тормоз
Амортизатор 3
Тормоз
Регулировочное соединение
ориентации заднего колеса
1, 2, 3 и 4-звенья
присоединения
амортизатора
к подвеске
1 - нагрузочный
стержень подвески
4 - дифференциальный
рычаг
ОМН - опора
заднего [приводного] колеса
PONM - верхний рычаг
подвески заднего колеса
WHV - нижний рычаг
подвески
заднего колеса
Амортизатор 2
Поворотная
опора
правого
колеса
АМОРТИЗАТОРЫ
И ЗВЕНЬЯ ПОДВЕСКИ
ПО СХЕМЕ 6.3а
(в скобках даны обозначения
звеньев подвески правого колеса)
Рулевой
привод
RCL
Амортизатор 1
Торсион
ЗВЕНЬЯ ПОДВЕСКИ
ПО СХЕМЕ 6.3а
(в скобках даны
обозначения
звеньев подвески
правого колеса)
АСВ (АСВ') - нижний рычаг
подвески
GRJ (G'RT) - верхний рычаг
[коромысло]
подвески
FU (FU') - нагрузочный
стержень
UTQ (UTQ) - рычаг
амортизатора
DI (D2) - боковой
амортизатор
подвески
- поворотная опора
переднего колеса
- ось поворота опоры
- нижний рычаг
подвески переднего колеса
GRJ - верхний рычаг [коромысло]
подвески переднего колеса
АВ, JG- оси поворота
[качания] рычагов
подвески переднего колеса
RC
АСВ
UTQ (UTQ’) - рычаг амортизатора
D1(D2) - боковой амортизатор
подвески
QS (Q’S') - боковая тяга стабилизатора
поперечной устойчивости
SES' - дифференциальный рычаг стабилизатора
ЕЕ’ - торсион стабилизатора
D - средний амортизатор (стабилизатора)
Тормоз
Торсион 2
Поворотная
опора
левого
колеса
q Стабилизатор
поперечной устойчивости
Торсион 1
етЬ’/ 'Jtyriwl
поперечная
рулевого управления
Тормоз
В, G, J) шарниры. Таким образом, получен двухподвиж-
ный шестизвенный (без учета рулевой тяги) механизм с
управляемым шатуном - поворотной опорой. Последняя
может перемещаться в пространстве и одновременно
поворачиваться вокруг осей RC и R'C. Движение пово-
рота задается рулевой тягой в точке L. Перемещение и
ориентация поворотной опоры обеспечивают более бла-
гоприятные условия поворота машины, хотя и рассчиты-
ваются по более сложным зависимостям по сравнению с
одной осью поворота RC.
Самые совершенные решения имеют гоночные ав-
томобили (см. рис. 65). Хотя принципиальная схема
практически не отличается от обычной независимой под-
вески, но имеются некоторые особенности. Рычаги
[стержни] большой длины и малого поперечного сечения
выполняют из легких сплавов. В качестве упругих эле-
ментов используют торсионы и винтовые пружины.
В схеме 6.3 передних колес подвеска двухрычажная
(сравни со схемой 6.1 на рис. 64). Амортизатор 1 (конст-
рукцию см. на рис. 59.2, схема 9.11) для левого и правого
колес общий, он соединен с каждой из подвесок звенья-
ми 1,2, 3 и общим дифференциальным рычагом 4. Кроме
того, обычно каждая из подвесок имеет свой упругий
элемент-торсион, например, соединенный с рычагом 2 и
кузовом.
Схема 6. За отличается только структурой соединил
между собой. Кроме упругого элемента-торсиона, в каж-
дой подвеске имеется свой амортизатор (демпфер) D1,
D2. Общий упругий элемент-стабилизатор поперечной ус-
тойчивости выполнен в виде торсиона с гибкой заделкой Е'.
Задняя подвеска приводных (неуправляемых) колес
на схеме 6.3 независимая двухрычажная. Верхний рычаг
состоит из трех стержней, неподвижно соединенных ме-
жду собой, и имеет шарниры О, М, Р, N. Нижний рычаг
V-образный, имеет шарниры W, V, Н и соединен через
звенья 1 и 2 с амортизатором (индивидуальным на каж-
дую подвеску).
166
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
66. НЕЗАВИСИМЫЕ ПОДВЕСКИ ЗАДНЕГО (НЕУПРАВЛЯЕМОГО) КОЛЕСА АВТОМОБИЛЯ | 6.6 |
6.4
Верхний поперечный
двойной рычаг/коромысло
Рама
Правый продольный
рычаг
Торсион 1
Торсион 2
Левый
продольный
рычаг
Опора
колеса
Рама
Торсион Нижний поперечный
двойной рычаг
Направление
движения
вперед
Рама^ Пружина Опора
колеса
Продольная ось /
4 ' Демпфер
Рама .
Р1 Демпфер
Стабилизатор
поперечной устойчивости
(соединен с подвеской
правого колеса).
Левый продольный
рычаг (неподвижно
соединен с опорой
колеса).
Привод
Стабилизатор
поперечной
устойчивости
Демпфер
Опора
колеса
3
g 5 Пружина
—-—1 с нелинейной
характи ри сти кой
6.7
Привод
Стабилизатор
поперечной
устойчивости
Я-s Демпфер
"Косой"рычаг
(неподвижно
соединен
с опорой колеса).
| 6.8 | Стабилизатор
поперечной
Поперечные Устойчивости
рычаги/коромысла
П родольный-----
рычаг (неподвижно
соединен с опорой
колеса). В
Демпфер
Стабилизатор
поперечной
устойчивости
R „ Пружина
Направляющая
стойка
Опора колеса
Пружина
Опора
колеса
Продольный
рычаг (шарнирно
соединен с опорой
колеса).
Демпфер
6.6а
Труба 2
Торсион 2
устойчивости
Труба 1
Правый
продольный
рычаг
X Амортизатор/демпфер д
Упругое (с резиновыми
втулками)
вращательно-поступательное
соединение (lVr,) Торсион 1
Демпфер
Опора
колеса
Пружина
Продольный
рычаг (неподвижно
соединен с опорой
колеса).
Возможность
деформирования
опоры N
6.12
JG - ось поворота
[качания]
рычага JGH
fG
Н
Опора
колеса
Ось
поворота
[качания]
рычага АВР
Пружина----др'
Демпфер Г» ар?
Рычаг АВР (шарнирно
соединен с опорой колеса в т. С).
L
Продольный------
рычаг (шарнирно
соединен с опорой
колеса).
Опора
колеса
N
Левый
продольный
рычаг
Стабилизатор
поперечной
устойчивости
D
Опора
колеса
Рычаг АВС
(неподвижно
соединен
с опорой
колеса).
Ось
поворота
[качания] “
рычага АВС
В
6.13,
Пружина
К
Демпфер jsj
Нижний поперечный
рычаг
Опора
колеса
K.L -"подруливающее"
звено
На схемах 6.11 ...6.14
стабилизатор
поперечной устойчивости
условно не показан.
СсД.бЭфмЬа
УПРАВЛЯЕМЫЕ ПОДВЕСКИ ТРАНСПОРТНЫХ МАШИН
167
На схемах 6.4... 6.14 (рис. 66) представлены подвес-
ки задних (неуправляемых) колес. Колесо в схемах 6.5',
6.7 выполнено приводным. Остальные подвески в основ-
ном используют для неприводных колес. В отличие от
схем 6.1\ 6.2 неуправляемые колеса должны иметь опре-
деленную заданную ориентацию при деформировании
пружины и перемещении колеса относительно кузова
(рамы). Поэтому опора в такой подвеске должна иметь,
по крайней мере, три точки соединения с рычагами или
один цилиндрический шарнир (см. схемы 6.4', 6.5', 6.6',
6.6а).
Простейшее смещение подвески - это размещение
опоры [шипа] колеса на одном продольном рычаге (схе-
мы 6.4', 6.6', 6.6а). Пружину и демпфер располагают меж-
ду рычагом и кузовом или деталью, соединенной с кузо-
вом через упругие прокладки. Цилиндрический шар-
нир А (схема 6.4) обычно выполняют с упругой резино-
металлической втулкой, а его ось ориентируют под неко-
торым углом к оси колес. К рычагу присоединяют также
стабилизатор поперечной устойчивости.
На схеме 6.5 так называемый косой рычаг имеет ось
АВ, наклонную относительно оси автомобиля. Положе-
ние АВ и размеры рычага в основном определяют ориен-
тацию колеса при деформировании пружины.
На схемах 6.6\ 6.6а; 6.66 показаны исполнения упру-
гих элементов в виде торсионов. На схеме 6.6 подвеска
имеет продольный рычаг (опору), соединенный с попе-
речно размещенным торсионом. На схеме 6.66 подвеска
выполнена в виде плоского четырехзвенного механизма,
к нижнему рычагу которого присоединен продольно раз-
мещенный торсион.
Подвеска на схеме 6.6а хотя и имеет внешнее сход-
ство с полунезависимой (см. рис. 63), тем не менее по
совокупности признаков она независимая.
Торсионы 1 и 2 соединяют левый и правый рычаги с
рамой независимо один от другого. Трубы 1 и 2 служат в
качестве элементов пары соединения левого и правого
рычагов и практически не служат в качестве упругой вязи.
В подвесках на схемах 6.7; 6.8 опора колеса непод-
вижно соединена с продольным рычагом и шарнирно — с
двумя поперечными рычагами АС и Ml-1
В подвеске на схеме 6.9 с точки зрения определен-
ности движения опоры колеса звеньев ВС, АС и KL дос-
таточно. Но тем не менее здесь имеется еще один попе-
речный рычаг (стержень) MN. Если не учитывать дефор-
мации опоры N, то это звено придает опоре колеса избы-
точную связь. При абсолютно жестких звеньях и кинема-
тических парах движение в такой системе было бы не-
возможным. Но здесь и далее (см. схемы 6.9 ... 6.14) пе-
ремещение и ориентация колеса изменяются по сложной
программе, обусловленной как размерами нескольких
рычагов, так и упругостью элементов шарниров. Такие
подвески применяют в современных легковых автомоби-
лях и называют эластокинематическими.
Условно на схеме 6.9 обозначено направление воз-
можной деформации (опоры N), без которой невозможна
самоустановка колеса. Рычаги MN и KL разгружают со-
единение звеньев АВС от поперечных нагрузок, а самое
главное, они обеспечивают более благоприятную ориен-
тацию колеса с точки зрения устойчивости движения
автомобиля.
Все остальные схемы 6.10 ... 6.14 имеют характер-
ную параллельную структуру. Опора колеса соединена с
кузовом несколькими рычагами [стержнями] с шарнира-
ми на концах. Шарниры обычно имеют упругие резино-
металлические втулки. На схемах они изображены в ос-
новном в виде наиболее близких по характеру движений
кинематических пар.
Все пары обычно вращательные сферические или
цилиндрические, и только в схеме 6.10 использована по-
ступательная пара (по аналогии со схемами 6.26; 6.2в)
внутри направляющей стойки. Во всех остальных схемах
на рис. 66 пружина и демпфер присоединены таким обра-
зом, что не влияют на общую подвижность подвески
(опоры колеса).
В представленных примерах на схемах 6.9 ... 6.14
можно выделить, по крайней мере, одно звено, которое
обеспечивает "подруливание" колеса при изменении на
него нагрузки. Это звено LK, как и в схеме управляемых
колес (см. рис. 64), задает ориентацию заднего колеса
при повороте передних колес. Отличие заключается в
том, что звено LK. замкнуто на раму и угол поворота опо-
ры зависит от плеча расположения т. L относительно оси
поворота опоры и координат т. К.
На схемах 6.8 ... 6.14 выполнены таким образом, что
в них нет избыточных связей (в том числе в схеме 6.9 с
учетом упругих деформаций), а выходное звено (опора)
обладает степенью свободы. Для большинства схем лиш-
няя степень свободы (вращение двумя сферическими
шарнирами вокруг своей оси в пределах упругости эле-
ментов) не влияет на кинематику подвески в целом.
7.4. УПРАВЛЯЕМЫЕ ПОДВЕСКИ
ТРАНСПОРТНЫХ МАШИН
Современные подвески имеют специальные нели-
нейные упругие элементы, пневматические, пневмо-
гидравлические системы и обладают соответственно вы-
сокими виброзащитными свойствами. Наряду с обычным
исполнением подвесок применяют управляемую под-
веску с целью обеспечения в процессе эксплуатации тре-
буемого расстояния от дорожного полотна до рамы или
определенной ориентации рамы (например, при движе-
нии по крутым склонам или при повороте), а также для
активной виброзащиты.
Управляемая подвеска автомобиля и особенно мно-
гоопорной машины позволяет повысить плавность хода,
курсовую устойчивость и курсовую управляемость и со-
ответственно достигать большей скорости движения. Она
уменьшает дисперсию вертикальных реакций, что улуч-
шает тяговые сцепные качества и снижает разрушающее
воздействие на почву.
Различают два вида управляемых подвесок:
• подвеска транспортного средства с регулируе-
мыми параметрами;
• активная подвеска транспортного средства.
Регулирование параметров подвески первого вида
осуществляют либо в темпе возмущений, либо в темпе-
168
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
67. УПРАВЛЯЕМЫЕ ПОДВЕСКИ МАШИН
ПНЕВМОГИДРАВЛИЧЕСКАЯ УПРАВЛЯЕМАЯ ПОДВЕСКА АВТОМОБИЛЯ
УПРАВЛЯЕМЫЙ СТАБИЛИЗАТОР
ПОПЕРЕЧНОЙ УСТОЙЧИВОСТИ АВТОМОБИЛЯ
7.1
Пневмогидроаккумулятор
-Н2-
Поршень.
Газовая подушка- =
Гидравлическая полость Н1
Гидроцилиндр
амортизатора Ау''
1 Газовая
? полость Р
Датчики ускорений
точек кузова
Блок
управления
Канал демпфера—
Гидрораспределитель
Внешнее
силовое
воздействие ггу
Гидронасос
Рычажная
система
подвески
Рычаг
подвески 1
Датчик ускорения
подвески
Датчик перемещения
подвески
7.2
Рама
Гидроцилиндр
управления
стабилизатором
поперечной
устойчивости
Г идронасос
Блок
управления
Рычаг 1
стабилизатора
Рычаг 2
стабилизатора
Рама
Торсион
стабилизатора
, FE2 - внешние силовые
воздействия
FEi . ^Е2 ’ реакции
амортизаторов
Г идрораспределитель
I Рама
Рычаг
подвески 2
СИСТЕМА СТАБИЛИЗАЦИИ ПОЛОЖЕНИЯ РАМЫ
ГУСЕНИЧНОЙ ТРАНСПОРТНОЙ МАШИНЫ
|7.4а
♦
изменения спектра возмущений. Предусматривают регу-
лирование жесткости (например, изменением массы газа
в упругом элементе) и/или демпфирования (например,
управлением гидравлическим клапаном).
Цели, достигаемые подвеской первого вида, — стаби-
лизация уровня кузова и/или компенсация возмущений.
Активная подвеска отличается от подвески с регу-
лируемыми параметрами введением дополнительного
источника энергии в колебательную систему (см. также
активную виброзащиту в параграфе 6.5).
Активная подвеска может быть выполнена без пас-
сивных элементов или в виде комбинации активных и
пассивных элементов. Активная подвеска управляется по
сигналам, получаемым датчиками перемещения, скоро-
сти, ускорения. При этом, например, с помощью допол-
нительного двигателя элемент принудительно сжимается
или растягивается, чем обеспечивается стабилизация сил
от подрессоренной части на корпус.
Одна из целей, достигаемых активной подвеской, —
удержание машины в горизонтальном положении при
повороте.
Управляемую подвеску выполняют гидропневмати-
ческой или пневматической. В ней предусматривают об-
ратную связь с использованием электрической цепи.
На схеме 7.1 (рис. 67) — пример подвески с дополни-
тельным управляемым источником энергии — гидронасо-
сом - и независимым управлением амортизаторами лево-
го и правого колес.
Внешнее воздействие Fr со стороны дорожного по-
лотна передается через рычажную систему подвески и
амортизатор на кузов автомобиля.
Гидроцилиндр амортизатора имеет газовую подуш-
ку, гидравлический демпфер. Гидроцилиндр соединен
каналами с гидропневмоаккумулятором и управляющим
гидрораспределителем. Перемещением плунжера управ-
ляющего гидрораспределителя добиваются изменения
объема жидкости в полостях Н2 и Н1, а также объема
газа в полости Р. Согласованное изменение объемов в
амортизаторах левого и правого колес приводит к под-
держанию уровня корпуса относительно неподрессорен-
ных частей. Управление гидрораспределителя осуществ-
ляется автоматически по сигналу, формируемому в блоке
управления. Блок концентрирует и перерабатывает ин-
формацию, получаемую с помощью датчиков, располо-
женных на корпусе, и датчиков, расположенных на опо-
рах колес. Датчик перемещения подвески формирует
сигнал обратной связи.
На схеме 7.2 управляемая подвеска автомобиля с
периодически изменяемым упругим соединением рыча-
УПРАВЛЯЕМЫЕ ПОДВЕСКИ ТРАНСПОРТНЫХ МАШИН
169
68. АКТИВНАЯ ВИБРОЗАЩИТА И СТАБИЛИЗАЦИЯ ПОЛОЖЕНИЯ КУЗОВА АВТОМОБИЛЯ
УПРАВЛЯЕМАЯ
ПНЕВМОГИДРАВЛИЧЕСКАЯ
АМОРТИЗАЦИОННАЯ
СТОЙКА
ПЕРЕДНЯЯ
Датчик перемещения
Шток
Кожух
Нижняя опора
Гидронасос
Тяга рулевого
управления
Газовая
полость
Управляющее
воздействие
Датчик перемещения
подвески
Управляемая
амортизационная
стойка
Гидравлическая
полость 1
- аккумулятор давления
-датчики ускорений точек кузова
-датчики перемещений подвесок
-датчики перемещений поршней
гидроцилиндров
Датчик перемещения
поршня 1
УПРАВЛЯЕМАЯ
.__ ГИДРОМЕХАНИЧЕСКАЯ
|7.б| АМОРТИЗАЦИОННАЯ
СТОЙКА
ПОДВЕСКА
-----Гидроцилиндр
| 7.6а| управления
жесткостью
Буферы
Тормоз
Газовая
полость
Нижнии
рычаг
подвески
Условное обозначение
рычажного механизма
подвески
Тяги
ориентации
колеса
Подшипник
колеса
Шток
Поршень
с клапанами 1 и 2
Гидроцилиндр
управления
жесткостью
Поршень 1
5Z. фх.фу-
корректируемые
вертикальные
и угловые перемещения
Кожух
Пружина
с нелинейной
[прогрессивной]
характеристикой
Верхняя упругая
опора
От насоса
|7.5
Верхняя От компрессора
опора
Пружина
Цилиндр
Упругий
элемент
Воздушная
полость
Исполнительное
клапанное
устройство
(управления
демпфером)
Резино-
корднвя
оболочка
Стакан
Гидравлическая
полость 2
Перегородка
с клапанами 3 и 4
подвески
Подшипник Нижние рычаги
колеса
Поршень
с клапанами 1 и 2
Г идравлическая
полость 1
Перегородка Нижняя опора
с клапанами 3 и 4
Г идравлическая
полость 2
Разделительный
Максимальный крен при повороте - 0,9,°
при движении "змейкой” - 3?
Активное подавление вибраций частотой до 5Гц.
Давление в гидросистеме - 200 атм.
HP - гидронасос
DP - демпфер пульсаций давления
HCV1, HCV2 -клапанно-распределительные
устройства (с частотой срабатывания 10 с-1)
НА
А1....А5
Т1,...Т4
Т5....Т8
Процессор
системы
Управляющее
воздействие
Датчик
перемещения
подвески
ЗАДНЯЯ ПОДВЕСКА
Датчик
перемещения
поршня 1
Г идроцилиндр
управления
жесткостью
Управляемая
амортизационная
стойка
Верхние рычаги
подвески
Приводной
вал колеса
170
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
гов 7 и 2 подвески. В кинематической цепи тяга VU —
рычаг стабилизатора 2 — тяга QS введен автоматически
управляемый привод - гидроцилиндр, который в зависи-
мости от реакций Frl и Fr2 и поперечных ускорений (кре-
на) изменяет соотношение жесткостей подвесок левого и
правого колес за счет дополнительного закручивания
торсиона. Такое решение позволяет иметь невысокую
жесткость амортизаторов (см. FE1 и FE2) и соответственно
плавный ход и малые поперечные колебания.
На схеме 7.3 рама машины может оставаться гори-
зонтальной благодаря автономному управлению гидро-
цилиндрами 7 и 2. Тележки 7 и 2 приспособляются к
рельефу дороги благодаря шарнирным соединениям А и В.
На схеме 7.4а показано опорно-соединительное
амортизационное устройство, используемое в скрепере
(см. схему 7.4), которое по своим функциональным при-
знакам также может быть отнесено к управляемым под-
вескам. В данном примере подвеска представляет собой
систему соединения секций шарнирно-сочлененной ма-
шины, которая наряду с обеспечением свободы [возмож-
ности] относительного поворота секций (вокруг одной
или двух осей) воспринимает и смягчает вертикальные
ударные нагрузки, обусловленные неровностями дорож-
ного полотна, и в какой-то мере демпфирует относитель-
ные колебания секций.
Подвеска имеет шарнир, соединяющий базовый од-
ноосный тягач и коромысло скрепера и позволяющий им
поворачиваться вокруг оси ZZ. Между тягачом и деталью
BE установлены шатуны АВ и СЕ, в результате чего об-
разован четырехзвенный механизм, допускающий верти-
кальные перемещения и передающий тяговую силу. Меж-
ду шарнирами В и С установлен гидроцилиндр, воспри-
нимающий вертикальные нагрузки. Смягчаются удары за
счет перемещения жидкости по каналам через гидрорас-
пределитель в гидропневматический аккумулятор. Верх-
няя полость заполнена инертным газом, а нижняя по-
лость - жидкостью. Разделены полости поршнем. Благо-
даря сжимаемости газа данное устройство выполняет
функции упругого звена. Рассеяние энергии происходит
благодаря перетеканию жидкости через конусное отвер-
стие D. Управление гидравлической системой (отключе-
ние аккумулятора, принудительное движение гидроци-
линдра, увеличение сопротивления) осуществляется
жидкостью, поступающей через гидрораспределитель от
насоса.
На рис. 68 представлены варианты решений систе-
мы активной виброзащиты и стабилизации положения
кузова современного автомобиля. Данные системы обес-
печивают управление дорожным просветом, повышают
плавность хода, устойчивость и управляемость автомо-
биля и, естественно, обеспечивают комфортные условия
для водителя и пассажиров.
Управление подвесками осуществляется (см. схему
7.6в) в соответствии с сигналами датчиков ускорений
кузова А1,..., А5, датчиков перемещений подвесок Т1, ...,
Т4 и датчиков перемещений (Т5, ..., Т8) поршней гидро-
цилиндров управляемых автоматизационных стоек (см.
схему 7.6). При использовании стойки по схеме 7.5 учи-
тывается также сигнал угла поворота рулевого колеса.
В схеме 7.5 в зависимости от информации о внеш-
них воздействиях повышается или понижается давление
в воздушной полости (воздух подается от компрессора
или стравливается из полости). В результате возрастает
или уменьшается сопротивление перемещению нижней
опоры и стакана относительно верхней опоры. Энергия
колебаний рассеивается при перетекании жидкости из
полости 7 в полость 2 или, наоборот, через клапаны 7 и 2
перегородки. Жидкость перетекает также через клапаны
поршня. В данной схеме демпфер выполнен управляе-
мым. Жидкость может перетекать также через исполни-
тельное клапанное устройство, обеспечивающее не-
сколько различных режимов работы демпфера.
В схеме 7.6 использован гидроцилиндр управления
упругим сопротивлением амортизатора. Благодаря этому
такая система обладает более высоким быстродействием
по сравнению с пневматической системой управления.
Пневматическое исполнительное устройство в силу сжи-
маемости воздушной подушки и инерционности нараста-
ния/падения давления не способно адекватно реагировать
на сигналы частотой порядка 2 ... 5 Гц. Поэтому система
по схеме 7.6 в этом плане более эффективна.
На схеме 7.6 показано также исполнение так назы-
ваемого двухтрубного демпфера, составные элементы
которого те же, что и в схеме 9.9 на рис. 47, но компо-
новка иная.
На схемах 7.6а и 7.66 показаны варианты передней и
задней многорычажных подвесок с управляемыми амор-
тизационными стойками. Даны также места подключения
датчиков перемещений. Изображение амортизационной
стойки упрощенное, но оно позволяет наглядно предста-
вить, как при заполнении полости гидроцилиндра сжима-
ется пружина и изменяется относительное положение
опор.
Импульсы подачи жидкости в гидроцилиндры про-
исходят с частотой срабатывания клапанно-распреде-
лительных устройств 10 Гц. Они противодействуют про-
дольным и поперечным кренам срх и фу, меняют уровень
пола, а периодически изменяя степень сжатия пружины,
гасят вибрации с частотой до 5 Гц. Защита от вибраций
более высокой частоты — пассивная и осуществляется
только за счет собственных свойств пружин и демпферов.
7.5. НАГРУЖЕНИЕ, ДЕФОРМИРОВАНИЕ,
САМОПРИСПОСОБЛЯЕМОСТЬ ПОДВЕСОК.
ОБОБЩЕННЫЕ СХЕМЫ
Как было проиллюстрировано на приведенных при-
мерах, любая подвеска, кроме предусмотренных кинема-
тической схемой движений, допускает и значительные
деформации. Причем эти деформации различны в разных
направлениях. Задача выбора схемы заключается в том.
чтобы предусмотреть величины и направления деформи-
рования и использовать их для обеспечения устойчиво-
сти положения и движения. На схемах 8.1 и 8.4 (рис. 69).
условно обозначена штриховой линией вся деформируе-
мая система подвеска (зависимая или независимая) и
присоединенные к ней элементы балки или кузова.
НАГРУЖЕНИЕ, ДЕФОРМИРОВАНИЕ, САМОПРИСПОСОБЛЯЕМОСТЬ ПОДВЕСОК
171
69. НАГРУЖЕНИЕ, ДЕФОРМИРОВАНИЕ И САМОПРИСПОСОБЛЯЕМОСТЬ ПОДВЕСОК АВТОМОБИЛЕЙ
Влияние совместного деформирования подвески, кузова/рамы/балки
на ориентацию колес при различных вариантах нагружения
Избыточная поворачиваемость
["ввинчивание" в поворот]
из-за деформирования подвески
при действии
движущей силы Fd
на подвеску
неприводных колес
Fry
8.1
Компенсация
изменения ориентации
колес за счет их схождения
Р - угол схождения
при действии
силы тяжести Fg
при торможении заднего
(наиболее удаленного
от центра поворота) колеса
'Fg
Ориентация приводного
переднего [управляемого] колеса
FrX'Fry- вертикальная,
продольная и боковая
реакции дорожного полотна
Силовые воздействия
на раму
при торможении
двигателем
заднеприводного
автомобиля
в процессе поворота
Fd
FrxA.
' FrT.
Подвеска
+ кузов/рама/балка
(условное
обозначение)
при действии продольной
силы сопротивления
на подвеску ведущих
[приводных] колес
I'd
I’d
Подвеска
+ кузов/рама/бвлка
(условное
обозначение)
Недостаточная поворачиваемость
из-за деформирования подвески
при ведущем режиме заднего
(наиболее удаленного
от центра поворота) колеса
Распределение реакций,
обусловленных силами инерции
в поперечном направлении
при повороте
Та - движущий
момент
Распределение реакций,
обусловленных силами инерции
в продольном направлении
при торможении
X2
*CA
A^.
К L -"подруливающий" стержень
Внешние воздействия
и реакции опор
подвески по схеме 6.11
Т7, lx. Ту - приведенные к опоре колеса
моменты внешних сил
СО- угловая скорость
v- линейная скорость
а -ускорение
или замедление
Перемещение
опоры колеса
при увеличении силы /у
- вертикальная, продольная
и боковая внешние силы
Та - движущий момент
Ть - тормозной момент
F- - сила инерции
/у - сила трения
г Адм Fi v . - реакции, направленные
са. mn. LK вдоль стержней AC, MN/LK,...
FD, Fs - силы сопротивления демпфера
и пружины
Компенсация изменения ориентации
колес за счет их развела
а - угол развела
Y - угол наклона
оси поворота
управляемого
колеса
Схемы нагружения колес
при ведущем
и тормозном режимах
|8.12а
Схема подвески заднего
колеса с нагружением
только адоль стержней
fMN
T.
Q
к
TMN - реактивный момент опоры М
[8J5]
Положение звеньев
и деформирование
опор подвески
при "подруливании"
неуправляемых колес
в процессе поворота
автомобиля
Колесо 2 |8.15а| ( Вид сверху )
V Q - продольная и поперечная плоскости
172
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
При воздействии на подвеску колес силы тяжести Fg
(схема 8.2) и движущей силы Fd (схема 8.1) возникают
реакции дорожного полотна соответственно FrX и и
происходит деформирование подвески неприводных ко-
лес. Вследствие этого векторы скорости расходятся, и
колеса стремятся катиться по расходящимся траекториям.
У переднеприводного автомобиля подвеска нагру-
жена силой сопротивления задних колес и силой инер-
ции. В сумме эти силы обозначены Fr на схеме 8.4. Мо-
мент Td — движущий момент, передаваемый на колеса.
Характер нагружения и деформирования приводит к раз-
вороту колес навстречу одно к другому.
При перемещении автомобиля в направлении v в
обеих схемах имеют место боковые реакции FY, которые
приводят к дополнительному сопротивлению движения,
изнашиванию шин, а различие реакций — к неустойчиво-
сти направления движения.
Компенсируют изменение ориентации колес их рас-
положением под небольшим углом а к вертикали (схе-
ма 8.5) — углом развала колес и под небольшим углом к
направлению движения Р (схема 8.3). Для неприводных
колес эти углы положительны " + ", а для приводных ко-
лес с учетом воздействия вращающего момента они мо-
гут быть близкими к нулю или даже отрицательными "
(схема 8.6).
На схеме 8.6 при увеличении нагрузки пружина
сжимается и углы а и Р изменяются. Соответственно
увеличивается способность восстанавливать заданное
направление при действии отклоняющих факторов. От-
клонение оси RD от вертикали в продольном направле-
нии обозначено у.
Устойчивость движения при повороте, в частности,
предусматривает воспроизведение задаваемой водителем
траектории движения при изменении скоростного режи-
ма, например, при переходе на тяговый или тормозной
режим двигателя. В этом смысле, различают нейтраль-
ную, недостаточную и избыточную поворачиваемость.
При недостаточной или избыточной поворачиваемости
требуются дополнительные ощутимые усилия водителя,
чтобы скорректировать направление движения, или дви-
жение осуществляется по нежелательной траектории.
На устойчивость при повороте влияют размещение
центра масс транспортного средства относительно точки
приложения приводных сил или сил торможения, кине-
матическая характеристика и деформативность подвески.
Устойчивость при повороте обеспечивается равно-
весием движущих сил и реакции дорожного полотна.
На схеме 8.7 показан вариант сочетаний сил инер-
ций F,- и тормозных сил Fb заднеприводного автомобиля
при торможении двух задних колес (например, с помо-
щью двигателя).
На схеме 8.7 обозначены F„], F„2 — боковая реакция
дорожного полотна на передние и задние колеса соответ-
ственно. В результате на автомобиль воздействует общая
боковая нагрузка и общий момент Т, разворачивающий
машину в плоскости дорожного полотна в направлении
поворота машины.
Боковую нагрузку и разворачивающий момент
уменьшают за счет движения с ускорением заднепривод-
ного или переднеприводного автомобиля. Движущая
[приводная] сила Fd и сила инерции F; уравновешивают-
ся реакцией дорожного полотна.
На поворачиваемость машины влияет изменение
положения колес относительно кузова в соответствии с
кинематической характеристикой подвески и/или дефор-
мативностью подвески. На схемах 8.8 и 8.9 показано из-
менение положения нагрузки колеса по отношению к
центру поворота при его торможении (нагружении силой
F42) или при его разгоне (нагружении силой Fd) соответ-
ственно.
Из-за деформирования подвески в схеме 8.8 колесо
выворачивается в сторону отрицательного схождения, а в
схеме 8.9 — в сторону положительного схождения. Из-за
изменения направления скорости v2 относительно скоро-
сти Vi в схеме 8.8 имеет место избыточная поворачивае-
мость, а в схеме 8.9 — недостаточная поворачиваемость.
Избыточная поворачиваемость приводит к неблагопри-
ятному так называемому эффекту ввинчивания в пово-
рот. Водитель вынужден разворачивать управляемое ко-
лесо в сторону, противоположную повороту, что умень-
шает устойчивость движения.
В случае недостаточной поворачиваемости коррек-
тировка положения управляемых колес совпадает с на-
правлением поворота, что оказывает положительное пси-
хологическое воздействие на во (ителя и соответственно
повышается устойчивость движения.
При повороте наружные колеса (относительно цен-
тра поворота) нагружаются больше, чем внутренние ко-
леса из-за момента центробежной силы Fin (схема 8.11).
Наличие дифференциала S может привести к проворачи-
ваемое™ внутреннего (ближайшего по отаошению к
центру поворота автомобиля) приводного колеса (см. <вг)
и к изменению соотношения действующих сил (см. реак-
ции FZ2 и F^2 ) При торможении автомобиля он накло-
няется вперед по ходу движения и происходит увеличе-
ние вертикальной нагрузки FZ1 (схема 8.10) на передние
колеса и уменьшение нагрузки FZ2 на задние колеса. Со-
ответственно увеличивается сила Fxi, а также сопротив-
ление боковой нагрузке передних колес и уменьшается
сила Fx2 и сопротивление боковой нагрузке задних колес.
Наличие момента сил повышает вероятность скольжения
задних колес и разворота машины в плоскости дорожно-
го полотна. При тяговом режиме увеличивается сопро-
тивление боковой нагрузке задних колес и соответствен-
но снижается возможность разворота машины в плоско-
сти дорожного полотна. В соответствии с кинематиче-
ской и упругой характеристиками подвески изменяется
угол схождения, причем у наружных (наиболее удален-
ных от центра поворота) колес в большей мере, чем у внут-
ренних.
В завершение рассмотрения возможных силовых
воздействий на схемах 8.12 и 8.12а даны два наиболее
характерных варианта нагружения колеса при ведущем и
тормозном режимах (еще возможны режимы: свободный,
нейтральный и ведомый, при которых отсутствуют неко-
торые составляющие сил, приведенных здесь). Основное
различие представленных схем — это смещение реакции
Fr в направлении движения v (схема 8.12) и в противопо-
ПОДВЕСКИ ЛОКОМОТИВА
173
ложном направлении (схема 8.12а). На схемах обозначе-
ны v, и - линейная и угловая скорости, а - ускорение или
замедление, Td, Tj, — движущий и тормозной моменты,
Fg — сила тяжести, Ff- сила трения.
Рассмотренные схемы 8.1 ... 8.12а позволяют пред-
ставить достаточно полную картину нагружения и на-
правленности деформирования подвески.
На схеме 8.13 дана система сил, действующих в
подвеске, выполненной по схеме 6.10. Показаны внешние
нагрузки Ff, Fz (вертикальная сила), F„ (боковая сила),
Ту - момент трения (в том числе торможения) колеса и
обозначены реакции опор стержней FLK, Fmn, Fac, FHb;
реакция пружины Fs и реакция опоры демпфера FD.
Далее можно уже перейти к принципам построения
схемы подвески (в данном примере независимой, заднего
неприводного колеса).
1. Полная совокупность внешних нагрузок Ff, Fz, F„
и Ту должна быть уравновешена реакциями опор стерж-
ней и пружины (демпфер, если это только демпфер, на
данном этапе может не приниматься во внимание).
2. С точки зрения минимизации размеров и массы
неподрессоренных звеньев лучше применять механизм
параллельной структуры (схема 8.14), в котором все зве-
нья должны работать на сжатие или растяжение, за ис-
ключением только одного звена - опоры колеса MCN.
3. Для получения минимальных углов давления
лучше располагать звенья в двух взаимно перпендику-
лярных плоскостях: продольной V и поперечной Q. (Этот
ответ на вопрос, какие подвески лучше: на продольных,
поперечных или косых рычагах).
4. Для получения минимальных поперечных и про-
дольных моментов (7х, 7z) плоскость действия сил Ff и
Fz должна быть максимально приближена к плоскости V
(см. /zw на схеме 8.14).
5. Продольные и поперечные рычаги могут быть
выполнены параллельными, либо близкими к параллель-
ным. В данном примере пара сил FHb и Fpr на плече
способна уравновешивать момент 7х, а пара сил Fmn и
Fac на плече /jq способна уравновешивать момент Ту.
При этом эти же силы уравновешивают продольную и
боковую нагрузки на колесо. Момент Tz уравновешива-
ется реакцией FLk "подруливающего" стержня. Плечо
LW' выбирают достаточным, чтобы обеспечить требуе-
мый поворот колеса вокруг оси МС.
6. Соотношения жесткостей и длины звеньев выби-
рают из соображений получения требуемой ориентации
колеса при различной нагрузке (вертикальных переме-
щениях колеса). В данном примере, если использовать
соотношения MN = АС, НВ = РВ и не учитывать дефор-
мации, то звено MCW'W будет перемещаться поступа-
тельно в вертикальном направлении, смещаясь при этом
в направлении sMc. Чтобы компенсировать деформирова-
ние опор и звена MCW'W, верхнее звено (MN или НВ) в
упомянутых парах звеньев должно быть длиннее нижне-
го и/или верхние опоры должны быть жестче нижних
опор. Уточнение размеров и жесткостей, естественно,
осуществляется при моделировании процессов движения
и деформирования.
В мировой практике моделированию и испытаниям
подвесок уделяется большое внимание, здесь же остано-
вимся только на некоторых подходах к начальному этапу
конструирования и выбора схем и параметров моделей.
Поскольку неоднократно упоминалось о кинемати-
ческом и силовом "подруливании" задних колес, то в за-
ключение темы автомобильных подвесок приведем об-
разное представление "подруливания" задних колес в
сторону предотвращения избыточной поворачиваемости
(схемы 8.15, 8.15а). За основу здесь принят один из вари-
антов подвески, наиболее близкий по структуре к схеме
6.14 (см. рис. 66), но в нем показаны только звенья АС и
LK. В поперечном сечении подвески задних колес дано
перераспределение реакций в опорах Fz' и Fz из-за силы
инерции Fin, возникающей при повороте автомобиля.
Соответственно перераспределяются боковые состав-
ляющие F'n и F„ (см. также описание схемы 8.11), пока-
занные при виде на подвеску сверху (схема 8.15а). На
схеме показано, что из-за перемещений звеньев и дефор-
мирования шарниров точки L' и С', а также точки L и С
смещаются одна относительно другой в левой и правой
подвесках в одну и ту же сторону на величину 8' и 8.
В соответствии с этим колеса 1 и 2 поворачиваются на
небольшой угол в сторону поворота автомобиля, что спо-
собствует устойчивости движения при повороте.
7.6. ПОДВЕСКИ ЛОКОМОТИВОВ
Подвеска локомотива представляет собой соедине-
ние рамы несущего кузова локомотива с подшипниковы-
ми опорами колесных пар, обеспечивающее смягчение
ударов при прохождении неровностей пути и равномер-
ное распределение нагрузок между колесными парами.
Специфичным является получение минимального сколь-
жения между колесом и рельсом, связанное с прохожде-
нием криволинейных участков пути (см. рис. 42).
Рама несущего кузова локомотива опирается на две
колесных тележки, как было показано на схеме 9.1а (см.
рис. 42). Колесная тележка имеет раму и соединенные с
ней с помощью специальной подвески две (схема 9.5 на
рис. 70), три (схемы 9.1; 9.2; 9.4 и 9.6) или четыре (схе-
мы 9.7 и 9.3) колесных пар и приводы колесных пар,
смонтированные на раме тележки. Тележки в зависимо-
сти от числа колесных пар называют двух-, трех- и четы-
рехосными. Соединение рамы несущего кузова с рамой
тележки может быть выполнено по схеме 9.6а, 9.66 (бо-
лее раннее решение) или по схеме 9.76 (современное
решение).
Буксы (подшипниковые опоры оси колесной пары)
на схеме 9.1 присоединены к раме с помощью совокуп-
ности рессор, тяг, балансиров и пружин. Такое соедине-
ние позволяет более менее равномерно распределить на-
грузку между отдельными колесными парами.
В схеме 9.4 в отличие от схемы 9.1 оси колесных пар
установлены в буксах, каждая из которых входит в каче-
стве шатуна в состав шарнирного антипараллелограмма —
буксового узла. Такое подвешивание позволяет исполь-
зовать только вращательные кинематические пары (см.
пример конструктивного решения на схеме 9.4а).
174
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
70. ПОДВЕСКИ ЛОКОМОТИВОВ
Рама тележки Рессора
Тяга Пружина
9.2
Балансир 2
Рессора 1
9.4а
Рама тележки Гу | Рычаг Рессора 2
Колесная пара Букса Балансир
Рама тележки
Рессора
Колесная пара
Хомут
В-В
Корпус
буксы
Балансир
Рама тележки
Винт
Хомут Рессора
9.5
Fv Рама тележки 2
Рама тележки
Буксовый узел
Колесная пара
Рессора Гу 1 Балансир 1
Колесная пара
Боковая Рама несущего
упруго-демпфирующая кузова
9.7
Рама тетежки
; ПруЖИНЫ
9.7в
Q М
Рама
несущего кузова
Рама несущего
кузова
Продольная'
тяга Колесная пара
Четырехподвижное
упругое соединение
Рама
тележки
1С
Колесная пара
Опора оси
колесной пары
Боковая
упруго-демпфирующая
опора
Балансир
Рама тележки
Опора локомотива
| 9.6 | Резиновый
амортизатор,
Рама тележки
Рама
несущего кузова
Пружина Рессора Рессорный Буксовый Буксовый
балансир балансир узел
< Д'
ПОДВЕСКИ ГУСЕНИЧНЫХ МАШИН
175
В схеме 9.2 две колесные пары соединены посредст-
вом тяг и балансира с рессорой 1. Третья колесная пара
подвешена на рессоре 2. Рессоры 7 и 2 соединены между
собой посредством разноплечевого рычага и тяги.
В схеме 9.3 четыре колесные пары соединены по-
парно балансиром 2, а рессоры соединены между собой
балансиром 1.
В схеме 9.5 тележки 1 и 2, попарно соединяющие
четыре колесные пары, установлены таким образом, что
колесная пара одной из тележек расположена между ко-
лесными парами другой тележки. Сила тяжести локомо-
тива передается через подвеску тележек в направлении
Еу. Продольные силы Ех воспринимаются продольной
тягой.
В трехосной тележке на схеме 9.6 каждая букса опи-
рается через буксовый балансир и пружины на раму не-
посредственно или через рессорный балансир.
Благодаря присоединению колесных тележек к раме
несущего кузова (схема 9.6) в той или иной мере обеспе-
чивается самоприспособляемость колес к рельефу прохо-
димого пути и при движении локомотива по криволи-
нейному участку пути. Наряду с этим подвеска тележки
обеспечивает равномерное распределение силы тяжести
(в данном случае сцепного веса) между отдельными ко-
лесными парами. Рама несущего кузова образует с рамой
тележки двухподвижное сферическое соединение IV,.
Оно позволяет поворачиваться тележке относительно
рамы несущего кузова вокруг двух осей (вертикальной и
поперечной) и не позволяет поворачиваться вокруг про-
дольной оси (допускает лишь небольшие покачивания в
пределах упругих перемещений боковых опор). Конст-
руктивные исполнения такого соединения даны на схе-
мах 9.6а и 9.76.
На схеме 9.6а представлена центральная представ-
лена центральная опора локомотива в виде сочетания
упругих элементов с кинематическими соединениями; на
схеме 9.66 - рама несущего кузова с указанием места
центральных опор Р и R и боковых опор К, L, М и N.
На кузове и на раме тележки закреплены жесткие
конические выступы. Между ними и жестким стаканом
размещены упругие резиновые прокладки, восприни-
мающие вертикальную силу. Для ограничения боковых
поперечных перемещений стакана он соединен шарни-
ром С(В) с упругим устройством CD, называемым воз-
вращаемым аппаратом, который воспринимает силу как
при сближении С и D, так и при их взаимном удалении.
Устройство CD присоединено к кузову в точке D. Глав-
ная опора сжимается под действием силы Fg, но разгру-
жена от боковых поперечных сил благодаря соединению
кузова с тележкой звеном TS. Это звено допускает верти-
кальные перемещения. Опрокидывающее воздействие
(момент Т) воспринимается боковыми опорами. Каждая
из боковых опор имеет шатун LE, ползун и пружину
сжатия. Рама тележки опирается на колесную пару через
упругую подвеску. Реакция со стороны оси колесной па-
ры - Fr.
На схеме 9.76 показано наличие четырехподвижной
пары И, пружин и демпферов, а также показаны силы,
нагружающие соединение: F и Fr\. В действительности
подвижность вокруг продольной оси имеется, но она ог-
раничена упругостью пружин. Если при анализе это не
учитывать, то получится лишняя степень свободы общей
рамы — возможность вращения вокруг продольной оси,
что делает данную схему неработоспособной.
Аналогичная схема 9.7в соединения рамы тележки с
балансирами, которые в свою очередь соединены с ко-
лесными парами с помощью сферических пар (см. также
схему 9.7а) они могут быть отнесены к трехподвижным
парам 1Щ. Соединение рамы тележки с балансиром осу-
ществлено при несовпадении оси кинематической
пары Ш5 с осью пружины или группы пружин. Кажущее-
ся возможным вращение балансира вокруг собственной
оси исключено за счет симметричного расположения
группы пружин вокруг оси пары II, а также из-за того,
что центры шарниров IIIS и 11 в процессе сжатия пружин
не располагаются на одной прямой, и, кроме того, под-
шипники колесных пар выполнены с ограниченной воз-
можностью перекоса.
7.7. ПОДВЕСКИ ГУСЕНИЧНЫХ МАШИН
Рассмотрим особенности подвесок гусеничных ма-
шин (рис. 71, схемы 10.1 ... 10.6). В них также имеется
общая рама и ходовые (гусеничные) тележки. В зависи-
мости от характера соединения рамы с тележками под-
веска может быть жесткой, полужесткой и упругой.
В жесткой и полужесткой подвеске опорные катки шар-
нирно соединены с рамой тележки рамы. В полужесткой
подвеске (схема 10.1) один конец тележки соединен с
общей рамой шарнирно, а второй - через пружину и по-
перечный (рессорный) балансир. Последний позволяет
приспособляться к неровностям поверхности, по которой
передвигается машина, и обеспечивать равномерную на-
грузку на тележки. Общая рама в такой схеме опирается
на три точки, расположенные в углах равнобедренного
треугольника. Такая система опор обеспечивает статиче-
скую определимость подвески.
В качестве упругого элемента используют также
торсион (схема 10.2). На его концах установлены развер-
нутые на 180° рычаги 7 и 2, соединенные с тележками
посредством коромысел. Схема 10.2 обеспечивает неза-
висимое качание обеих тележек относительно общей рамы.
Упругую подвеску опорных катков выполняют ба-
лансирной (схемы 10.3; 10.6) и индивидуальной (схемы
10.3а ... 10.Зв). В балансирной опоре на схеме 10.3 на
рычагах 7 и 2, соединенных шарнирно между собой и с
тележкой, установлены опорные катки 7 и 2. Рычаги со-
единены с пружиной.
В индивидуальных подвесках каток устанавливают
на ползуне, поджатом пружиной (схема 10.3а), или на
упругом консольном рычаге (схема Ю.Зв), или на жест-
ком рычаге, поджатом пружиной (схема 10.36).
На схеме 10.3г - балансирная подвеска трех катков.
Два катка 2 и 3 шарнирно соединены с рычагом 2, а ры-
чаг 2 и каток 1 шарнирно соединены с рычагом 1, кото-
рый также шарнирно соединен с рамой тележки. Соот-
ношения плеч рычагов выбраны из условия получения
требуемого распределения нагрузки на катки с учетом
направления движения.
176
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
71. ПОДВЕСКИ ГУСЕНИЧНЫХ МАШИН
1С 1
Приводная
звездочка
10.2
Звездочка
приводная
Звездочка
натяжная
Общая рама
(корпус)
Поперечный
балансир
Опорные катки
Рама
тележки
Пружины
Каток
Гусеница
10.3
Натяжное устройство Поддерживающие ролики
Рычаг 2
Рычаг 1
Гусеница
Каток 1
Каток 2
10.36
Направляющее
колесо
Рама тележки
Каток
10.4
Пружина
Ползун
Каток
Рама тележки
/ Пружина
Каток
Рама тележки
Рессора
Торсион
Рычаг 2
т. Рычаг 1
Коромысло
Общая
рама
10.3г
Рама
тележки 1
Рама
тележки 2
Демпфеп Рама Эластичный Рычаг подвески
\ '"х обод катка катка Тог
Натяжное---. - Л.......1_ V_____________X------/_
устройство /Ч
Демпфер
ли
Приводная
звездочка
Рама тележки
Гусеница
Рычаг
/// Яр// //^Я//.
Каток 1 Каток 2 Каток 3
полость
| Ослабление \ Натяжение
1 Рычаг Л \ГхНатяжное
устройство
I I □ Н —Рама
la: овая полоеть
10.46
Рычаг подвески
правого катка
Здесь к рычагу
прикреплён
упругий валик
(торсион).
Ра ш
каток
-Левый каток
(если смотреть
со стороны водителя)
Рычаг подвески
левого катка
Резиновый
обод катка
/ Внутри катка
t расположен подшипник
П ,(каток шарнирно соединён
| /с рычагом подвески).
Рычаг 2
Тяга 2
Рычаг 3
Торсион 1
Общая рама
Каток 1
Каток 2
Параллелограмм I ю.5
Упругий валик
I подвески
левого катка Шарнир
прикреплён Упругий валик Реакция
к раме. подвески правого дороги
катка
Для смягчения удара
служит подвеска
опорных катков на рычагах,
благодаря которой
каждый каток может
перемещаться вверх или вниз.
Во время удара каток поворачивает
рычаг и закручивает торсион.
То же самое происходит,
когда гусеница одним
из катков наезжает на камень
или бревно.
Резиновый обод смягчает
небольшие, но частые удары.
Торсионы
Рама
Рама
Рычаг
подвески
катка
Торсионы
ПОДВЕСКИ ВИБРОСТЕНДОВ И ВИБРОКОНВЕИЕГОВ
177
Катки подвешивают к тележке также с помощью
торсиона (схема 10.4). Торсион, с одной стороны, непод-
вижно закреплен на раме, с другой - имеет рычаг, на ко-
тором и установлен каток (см. схему 10.46).
Для увеличения хода катка последовательно соеди-
няют два торсиона через параллелограмм (схема 10.5)
или рычаг с опорой, размещенной на раме машины (схе-
ма 10.5а). Во втором варианте возможно получение не-
линейной характеристики, так как кроме кручения тор-
сион может изгибаться.
На схеме 10.4 условно показано размещение демп-
фера в подвеске быстроходной машины, а на схеме 10.4а
представлено управляемое натяжное устройство, содер-
жащее упругий элемент в виде газовой подушки.
На схеме 10.6 - балансирная подвеска четырех кат-
ков, расположенных попарно по разные стороны рамы.
Катки установлены попарно на балансирах. Эти баланси-
ры соединены замкнутой кинематической цепью: рычаг 1 —
торсион 1 - рычаг 3 — тяга 2- рычаг 4 — торсион 2, ры-
чаг 2 — тяга 1 — рычаг 1. Такая схема обеспечивает совме-
стную работу торсионов и равенство нагрузок на балан-
сиры, расположенные по разные стороны рамы. Если
мысленно остановить звенья с одной стороны рамы, то
такие же звенья с другой стороны образуют вместе с ра-
мой параллелограмм с упругим сопротивлением круче-
нию в двух шарнирах.
7.8. ПОДВЕСКИ ВИБРОСТЕНДОВ И
ВИБРОКОНВЕЙЕРОВ
Подвески вибрационной техники (рис. 72) должны
обеспечивать свободу перемещения рабочего стола или
лотка в пределах заданной амплитуды колебаний и ис-
ключать (максимально уменьшать) силовое влияние на
основание.
Основной конструктивный элемент таких устройств —
кинематическая или упругая направляющая (систе-
ма/подвеска/опора).
На схемах 11.1 ... 11.1е — варианты упругих направ-
ляющих.
Рабочий стол на схеме 11.1 присоединен к стойке
плоскими листовыми пружинами, допускающими не-
большие поступательные перемещения звена, как пока-
зано штриховыми линиями.
Увеличение хода стола достигается за счет умень-
шения жесткости пружин приданием им змеевидной
формы (схема 11.1а).
Поступательное прямолинейное движение стола
можно получить, присоединив его к стойке посредством
симметричных относительно стола пружин (схема 11.16)
или подобрав соответствующую форму и жесткость эле-
ментов составных пружин (схема 11.1 в), а также исполь-
зуя в качестве упругих элементов диафрагмы.
На схеме 11.1г показана упругая опора подвески оси
в виде гофрированной диафрагмы. Такая опора допуска-
ет упругие перемещения по трем осям и повороты вокруг
двух осей. Ограничен обычно только поворот вокруг оси,
присоединенной к диафрагме. Наибольшие перемещения
обычно вдоль оси (см. стрелки).
На схеме ll.ld показана опора в виде плоской диа-
фрагмы с прорезями. Наименьшая жесткость здесь вдоль
оси, перпендикулярной к плоскости диафрагмы. Данное
исполнение допускает также перекосы оси присоединен-
ной к ней детали. Прорези уменьшают жесткость и име-
ют форму, обеспечивающую равномерное и плавное де-
формирование диафрагмы.
При симметричном соединении стола/платформы с
основанием (схема ll.le) требуется компенсировать ра-
диальные перемещения А. Для этой цели листовые пру-
жины присоединяют к основанию через промежуточное
звено и компенсирующие упругие элементы [пружины] 2
на схеме 11.2а.
На схеме 11.2 представлен вибростенд для калиб-
ровки вибродатчиков.
Платформа выполнена за одно целое с подвижным
звеном в виде стола. Вибровозбудитель имеет неподвиж-
ную катушку магнита. Стол соединен с промежуточными
звеньями радиальными пружинами (по две пружины на
каждый элемент). Между промежуточными элементами
и корпусом установлены тангенциальные пружины, ком-
пенсирующие радиальные перемещения промежуточных
звеньев относительно корпуса. Отдельные из пружин
выполнены слоистыми (между стальными листами раз-
мещен упругий материал) и обладают высокими демп-
фирующими свойствами. В данной конструкции преду-
смотрен защитный магнитный экран.
На схеме 11.3 представлена вибрационная машина
(вибростенд), к колеблющейся платформе которой при-
крепляют испытываемые или калибруемые изделия.
Платформа непосредственно или через передаточ-
ное устройство (механизм или гидравлическую передачу)
соединена с вибровозбудителем.
Платформа связана с корпусом вибровозбудителя
упругим и кинематическим устройствами (схемы 11.3а и
11.36). В некоторых вибростендах элементы упругих и
кинематических устройств совмещены (схема Н.Зв).
Может быть предусмотрена возможность поворота плат-
формы вокруг горизонтальной оси X (схема 11.3) отно-
сительно основания станины. Предусматривается также
разгрузка вибровозбудителя от силы тяжести колеблю-
щихся частей, например с помощью специальной пнев-
матической подушки. Она же служит для демпфирования
колебаний.
Вибростенд на схеме 11.3 предназначен для возбуж-
дения вибраций частотой от нескольких единиц до 6300 Гц
и испытаний объектов, обладающих сравнительно боль-
шой массой. Электромагнит вибровозбудителя состоит
из магнитопровода (корпуса вибровозбудителя) и обмот-
ки возбуждения. Подвижный элемент, на котором закре-
плена платформа, изготовлен из легкого сплава, имеет
жесткую конструкцию, соединен с корпусом вибровоз-
будителя посредством упругих прокладок и направляю-
щего устройства. На подвижном элементе закреплена
обмотка возбуждения. Она выполнена без каркаса для
уменьшения бокового зазора. Между подвижным эле-
ментом и магнитопроводом установлено уплотнение.
178
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
72. УПРУГИЕ ПОДВЕСКИ [ОПОРЫ] ВИБРОСТЕНДОВ И ВИБРОКОНВЕЙЕРОВ
11.1b
Основание
Листовая
пружина
Ось
Основание
диафрагма
Прорезь
Вид В
Гофрированная
диафрагма
11.3b
11.3а
Платформа
[стол]
Корпус
Уплотнение
Основание
[станина]
Обмотка
возбуждения
Платформа
.. [стол]
Упругая
прокладка
Платформа
[стол]
Корпус
д
(Листовая)
- Стол пружин,а2
Корпус
Лента
ВИБРОСТЕНД
Обмотка 1
11.3г
Листовая
пружина 1
Промежуточное
звено
Чаша
Лоток
Основание
Вибровозбудитель
Листовая
пружина
Реактивное звено
tT Упругая опора
Пневматическая
подушка-------
Корпус-------------
Сечение А-А варианта стенда
с направляющей (подвеской)
по схеме 1 .Зв
Платформа
[стол]
Упругая I
Корпус эксцентриковая I
\ втулка \ -Ти—ч
Ось
е
Лента Ролик
ВИБРОКОНВЕЙЕРЫ
11.5
Лента
Ролик
прокладка
Платформа
[стол] !
Корпус
Упругая ।
Упругое звено Лоток Упругое звено
Коромысло \ / Пружина 2 / Коромысло
Листовая
Перемещаемый
объект
Листовая
пружина
Упругая опора Вибровозбудитель Рама
Основание
Основание
ПОДВЕСКИ ВИБРОСТЕНДОВ И ВИБРОКОНВЕИЕРОВ
179
Направляющее устройство (схема 11.36) обеспечи-
вает возможность перемещений платформы вдоль одной
из осей координат и не допускает ее перемещений вдоль
упругих осей и вращательных движений. Упругие про-
кладки по схеме 11.3а чередуются с роликами. Ролик
максимально облегченной конструкции соединен с не-
подвижным кронштейном корпуса и с подвижным зве-
ном — платформой гибкими лентами. При движении
платформы ролик перекатывается без скольжения по
лентам, прилегающим к сопряженным деталям, и удер-
живает подвижное звено на одном и том же расстоянии
от корпуса (соосно корпусу). Геометрические оси всех
роликов лежат в плоскости платформы.
На схеме 11.Зв ролик соединен с подвижным звеном
посредством цилиндрического шарнира, а с корпусом —
посредством упругой ленты, например из пропилена.
Цилиндрический шарнир выполнен в виде упругой втул-
ки между осью ролика и отверстием кронштейна, при-
крепленного к корпусу. Слой резины создает упругое
сопротивление повороту ролика и препятствует тем са-
мым осевому перемещению платформы в пределах мак-
симального ее хода s. Изменением эксцентриситета вы-
бирают зазоры в кинематических парах, обеспечивают
центрирование сопряженных звеньев и создают необхо-
димый поперечный натяг в соединении подвижного эле-
мента с корпусом. Лента осуществляет кинематическое
соединение звеньев.
Ролики на схеме 11.3г ориентированы относительно
оси подвижного звена так, что линии действия реакций в
направляющих устройствах проходят на некотором рас-
стоянии от оси. Такое расположение обеспечивает наря-
ду с высокой поперечной жесткостью системы еще и ее
высокую жесткость в окружном направлении.
На схеме 11.4 — бункерный питатель с винтовым
лотком, закрепленным в чаше. Чаша соединена листовы-
ми пружинами, образующими гиперболоид с реактивным
звеном, установленным на упругих опорах.
Здесь использованы два комплекта вибровозбудите-
лей, обеспечивающих независимое возбуждение враща-
тельных и осевых движений или один определенным об-
разом ориентированный вибровозбудитель (один ком-
плект параллельно установленных вибровозбудителей).
На схеме 11.4 показан электромагнитный вибровозбуди-
тель, расположенный между реактивным звеном и
чашей.
В виброконвейерах на схемах 11.5 и 11.6 упруго-
подвешенному лотку задают два независимых смещен-
ных по фазе колебания в несовпадающих направлениях.
Широко используют виброконвейеры с одним или не-
сколькими параллельно установленными вибровозбуди-
телями при специальной упругой подвеске лотка. На
схеме 11.5 лоток соединен с помощью пружин 1 с реак-
тивным звеном - рамой, которая установлена на упругих
опорах. Направляющая А обеспечивает строго прямоли-
нейное относительное движение звеньев. Вибровозбуди-
тель упруго соединен с лотком. В резонансном режиме
вертикальное движение звена относительно основания
суммируется с относительным движением лотка и рамы
и получается эллиптическая траектория перемещаемого
объекта.
На схеме 11.6 вариант резонансного уравновешен-
ного виброконвейера. В нем лоток и реактивное звено
(рама) кинематически соединены между собой и с осно-
ванием с помощью коромысел. Между ними установле-
ны упругие звенья, состоящие из листовых пружин и ре-
зиновых прокладок. Противоположно направленные си-
лы инерции лотка и рамы взаимоуравновешиваются.
7.9. ВИБРОЗАЩИТНЫЕ ПОДВЕСКИ
РАБОЧИХ СИДЕНИЙ
Одна из областей применения виброзащитных
подвесок — это рабочие сиденья машин (транспортных,
строительных, горных, дорожных, сельскохозяйствен-
ных), в которых подвеска кабины относительно колеб-
лющейся платформы или машины в целом не обладает
достаточными виброзащитными свойствами.
Общие принципы построения схем таких подвесок
следующие:
1. Схема механизма подвески должна обеспечивать
не просто поступательное движение, как это обычно счи-
тается, а еще и изменяемую ориентацию в соответствии с
удобством управления машиной при изменяемом поло-
жении тела оператора. Иными словами, должна обеспе-
чиваться самоприспособляемость сиденья при силовом
воздействии со стороны оператора.
2. Подвеска должна содержать необходимые регу-
лировки, чтобы можно было приспособить сиденье под
определенные антропологические данные и определен-
ные внешние условия.
3. Упругость подвески и ее демпфирующие способ-
ности должны обеспечивать защиту от вибраций широ-
кого спектра частот и амплитуд. В соответствии с этим
целесообразно применение подвески, содержащей нели-
нейные упругие элементы, а также гидравлические или
пневматические демпферы.
Некоторые варианты исполнений подвесок сидений
даны на рис. 73.
В подвесках (схема 12.1) использован двухкоромы-
словый механизм ABCD в сочетании с пружиной и регу-
лировочной гайкой. Сиденье неподвижно соединено с
шатуном ВС. Коромысла АВ и CD шарнирно соединены
со звеном AD, которое шарнирно соединение с основа-
нием (рамой машины). В зависимости от распределения
силы тяжести человека на сиденье и в зависимости от
колебаний рамы машины коромысла АВ и CD наклоня-
ются и взаимодействуют со звеном AD и пружиной.
В схемах 12.2,12.3 сиденье подвешено на листовых
пружинах (рессорах 1 и 2), соединенных между собой
каркасом сиденья. Для обеспечения требуемой нелиней-
ной характеристики жесткости в схеме 12.2 применен
кулачок в сочетании с пружиной 2, гибкой нитью и пру-
жиной 1. Пружина 1 поджата регулировочной гайкой.
Гибкая нить одним концом присоединена к основанию.
При нагружении сиденья оно опускается, сжимая
пружину 1, и через гибкую нить поворачивает кулачок,
растягивая пружину 2.
180
СОВОКУПНЫЕ РЕШЕНИЯ МНОГОПОТОЧНЫХ САМОПРИСПОСОБЛЯЕМЫХ СИСТЕМ
73. ВИБРОЗАЩИТНЫЕ ПОДВЕСКИ РАБОЧИХ СИДЕНИЙ
Спинка
12.1
Сиденье
Каркас
Гайка
12.2
Сиденье
Рессора 1
Основание
Каркас
\Пружина2
Кулачок
Винт \ Пружина
Основание
Каркас
Пружина
Пневмобаллон
Основание
— Пневмо-
р распределитель
Пружина^. Гибкий (
^3* элемент
Рессора 1
Шток
Винт
Сиденье
Винт 1
Винт
Пружина 2
Пружина 1
ВинтЗ
Демпфер Гидрозамедлитель
Ролик 1
Демпфер
Сиденье
Направляющая
Каретка
12.5а
Торсион М
Ролик 2 Винтовая пара
А
Ролик 1
D'
D Торсион 2
— Основание
Ролик 2
/ ДА...
В схеме 12.3 сиденье установлено на пружине, по-
следовательно соединенной с пневмобаллонном. Парал-
лельно установлен демпфер. Воздух подается в пневмо-
баллон или отводится из него в зависимости от положе-
ния сиденья. Управление производится посредством
пневмораспределителя, соединенного с гидрозамедлите-
лем и приводимого в движение от сиденья через шток.
В схеме 12.4 звенья подвески образуют два шарнир-
ных четырехзвенных механизма ABCD и ADLKc общим
звеном AD. Наклонные звенья АВ, CD, АК, DL имеют
одинаковую длину. В подвеске предусмотрено регулиро-
вание длины общего звена AD с помощью винтовой пары
(см. винт 3). Звенья CD и АК поджаты пружинами 1 и 2,
воспринимающими силы тяжести сиденья и оператора и
регулируемыми посредством винтов 1 и 2 соответственно.
Вращением винтов 1,2 иЗ перемещают сиденье по вер
тикали, горизонтали и изменяют его первоначальный наклон.
На схемах 12.5 и 12.5а представлена торсионна:
подвеска. Она обеспечивает регулирование и перемете
ние сиденья только по вертикали. Сиденье установленс
на каретке с роликами и перемещается вдоль вертикаль
ных направляющих. Опирается сиденье на ролики 1 и 2
установленные на раме ВСС'В'. Рама установлена на ры-
чагах BD и B'D', причем соединена с рычагом BD тор
сионом 1, а рычаг B'D' соединен торсионом 2 с основа-
нием. Закручивание торсиона 2 может регулироваться
поворотом рычага с помощью винтовой пары 1.
Между сиденьем и стойкой установлен демпфер. Тор-
сионная подвеска обеспечивает смягчение динамически?
нагрузок, а демпфер рассеивает энергию колебаний сиденья.
Часть II. МЕХАНИЧЕСКИЕ СОЕДИНЕНИЯ,
ПЕРЕДАЧИ И СИСТЕМЫ
Глава 8. СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
8.1. МЕСТО СОЕДИНЕНИЙ
В СТРУКТУРЕ МАШИН.
ОСНОВНЫЕ РАЗНОВИДНОСТИ
Анализ и систематизация известных конкретных
конструктивных решений наиболее распространенных
функциональных задач, предлагаемых в данной части,
важны, так как число таких решений непрерывно увели-
чивается, а традиционные решения видоизменяются и
совершенствуются.
В принципе, все машины, аппараты и сооружения
состоят из деталей и соединений (см. рис. 13). В основу
механизмов положены кинематические цепи, составлен-
ные из деталей и подвижных соединений, а в приводах
специфичным является только преобразователь одного
вида энергии в другой, все остальное то же, что и в меха-
низмах.
Рис. 13 демонстрирует, что в структуре любой ма-
шины соединения играют существенную роль. Выбор
соединений наряду с геометрией элементов и деталей
представляет одну из важнейших задач конструирования.
Конструктивные соединения (в отличие от кине-
матических соединений) - это в основном неподвижные
скрепления нескольких элементов в единую деталь или
нескольких деталей в сборочную единицу. К данной ка-
тегории относят и некоторые подвижные соединения, в
которых подвижность играет вспомогательную роль,
обычно заключающуюся в компенсировании отклонений
относительного расположения деталей. Например, со-
единения валов называют муфтами, хотя они, по суще-
ству, относятся к данной категории конструктивных со-
единений. Сцепные муфты - это уже существенно от-
личный класс соединений по сравнению с соединитель-
ными. Компенсирующие муфты, подвески, подшип-
ники, линейные направляющие опоры, фрикционные
пары и зубчатые зацепления - это конструктивная реа-
лизация кинематических пар или кинематических соеди-
нений и их обычно не называют соединениями.
Неподвижные неразъемные соединения приме-
няют, когда деталь или сборочную единицу нельзя изго-
товить из одной заготовки.
Неподвижные разъемные соединения применяют,
когда требуется разборка (разъединение) деталей с целью
реализации функционального процесса / обслуживания /
ремонта или при необходимости транспортировки изде-
лия в разобранном состоянии.
Арсенал средств решения задач соединений исклю-
чительно многообразен. Выбрать из этого многообразия
наиболее подходящее исполнение для конкретных усло-
вий - это начальная задача конструирования. Затем идет
выбор материалов, размеров, количества элементов в
соответствии с известными методами расчета. Данная
часть посвящена только первому этапу, заключающемуся
в формировании геометрии сопряженных элементов и
деталей соединения. Практически в этой области нет
систематизированных правил, приходится ориентиро-
ваться на опыт конструирования, традиции и тенденции
развития техники.
Соотношение свойств и возможностей соединений
непрерывно меняется. Если пока не касаться паяных со-
единений (используемых нс только для передачи меха-
нической нагрузки), то идет как бы обостренное сопер-
ничество между соединениями литьем (наиболее древ-
ними), клепаными, сварными и клееными. С появле-
нием новых материалов и технологий сварные, а в по-
следнее время и клееные соединения выходят на первое
место. Что касается разборных соединений, то пока вне
конкуренции остаются болтовые соединения, хотя в
некоторых случаях могут применяться и другие виды
соединений.
Только досконально изучив функциональные воз-
можности всех конструктивных разновидностей, можно с
уверенностью осуществлять выбор соединений.
8.2. НЕПОДВИЖНЫЕ РАЗЪЕМНЫЕ
БОЛТОВЫЕ И КУЛАЧКОВЫЕ
СОЕДИНЕНИЯ
Начнем с болтовых соединений В их основе зало-
женное резьбовое соединение в виде винтовых сопря-
женных поверхностей с одинаковым шагом. Развитие
резьбового соединения с уточнением конфигурации вин-
та и сопряженной детали — винтовое соединение, а его
разновидность при использовании отдельно выполнен-
ных (от скрепляемых деталей) винта и гайки представля-
ет собой болтовое соединение.
В болтовых соединениях обычно используют унифи-
цированные детали. В зависимости от направления и ха-
рактера воспринимаемых сил выбирают конструкцию и же-
сткость сопряженных элементов, чтобы обеспечить дефор-
мативную приспособляемость (см. параграф 4.4). Для вос-
приятия только осевых силЕ (схема 1.1 на рис. 74.1) под
182
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
гайку устанавливают сферическую шайбу, а гайку стопо-
рят от проворачивания относительно винта.
На схеме 1.2 винт шарнирно соединен с одной из де-
талей, а другая деталь имеет прорезь, позволяющую от-
кидывать винт после ослабления затяжки гайки. Так ис-
полняют часторазъемные соединения.
На схемах 1.3 и 1.5 представлены соединения при
действии сил в плоскости стыка. Функции соединений
одинаковые, а конструкции и принципы восприятия сил
различны.
В схеме 1.3 гайка и головка винта прижимают дета-
ли 1 и 2 одна к другой настолько сильно, что трение в
плоскости стыка не допускает относительного сдвига
деталей. Воспринимаемые при этом силы равны силе
трения Ff. В таком соединении поверхности стержня вин-
та и отверстий в деталях могут быть грубыми, и поэтому
между ними должен быть гарантированный зазор. Винт в
таком соединении подвержен растяжению, а резьба в
основном нагружена осевой силой.
В схеме 1.4 стержень винта и поверхности отвер-
стий имеют малую шероховатость и плотно (без зазора)
сопряжены между собой. Стержень непосредственно
воспринимает сдвигающую нагрузку Ff. Его сечение
(диаметр do) рассчитывают на сопротивление срезу, а
расстояние I выбирают из условия сопротивления смя-
тию. Гайка плотно, но не сильно закручена и резьба
практически не нагружена.
Один болт в схеме 1.4 по воспринимаемой нагрузке
равноценен нескольким болтам в схеме 1.3, но зато со-
единение по схеме 1.4 технологичнее и может оказаться
более дешевым в исполнении.
Соединения, выполняемые с учетом жесткости болта
и деталей стыка, рассмотрены в параграфе 4.4 (см. рис. 44).
Кстати, при разработке соединения необходимо про-
думывать не только технологичность деталей, но и техно-
логичность сборки. На схемах 1.5 и 1.8,1.8а показаны при-
меры выполнения специальных пазов для введения в них
элементов соединения (стержня, головки винта, гайки).
Схема 1.5 характеризует использование вспомога-
тельной детали (прижимной планки) в соединении, ко-
гда, например, сверлить одну из соединяемых деталей
недопустимо.
На схеме 1.6 в аналогичном соединении, что и на
схеме 1.5, использована закладная шайба в железобетон-
ной шпале, а для компенсации различия деформаций со-
единяемых деталей, прижимная планка выполнена в виде
листовой пружины и, кроме того, установлена упругая
текстолитовая втулка.
Часто используют болтовые соединения, содержа-
щие несколько болтов (групповые соединения). Нагруз-
ка может сводиться к силам произвольного направления
(в плоскости стыка и вдоль оси болта) и к моментам Т.
В схеме 1.7 чем больше расстояние I, тем больший мо-
мент Т могут воспринимать наиболее удаленные болты
одинакового сечения.
При конструировании элементов и деталей винтового
соединения целесообразно выполнять следующие правила.
1. Конструкция сопряженных элементов должна ис-
ключать нагружение винта изгибающим моментом (винт
должен работать только на растяжение, например, схе-
ма 1.1, на растяжение и кручение от затяжки - схема 1.3
или на смятие и срез - схема 1.4).
НЕПОДВИЖНЫЕ РАЗЪЕМНЫЕ БОЛТОВЫЕ И КУЛАЧКОВЫЕ СОЕДИНЕНИЯ
183
74.2. ВИНТОВЫЕ И КЛИНОВЫЕ СОЕДИНЕНИЯ
Корпус
ео |
Эксцентрик 1
к 2
Кольцо 1
Кольцо
Корпус
Отвертка
Пластина
I-
Объектив
[зТ]
Замыкающий
винт
Винт
Конусная гайка
Отверстие Основание
Призма
[зТ]
Пружина 1
Пружина 3
Корпус
Винт 6
Винт 5 Винт 4
Пружина? А-А
Винт 2 ВинтЗ
Пружина 4
а
И
2. Винт должен иметь плавные переходы от одного
сечения к другому и от сплошного тела к резьбе. Следует
стремиться, максимально устранить и другие причины
концентрации напряжения. При этом целесообразно ис-
пользовать накатанную резьбу вместо резьбы, получае-
мой резанием.
3. Расстояния между соседними болтами и соотно-
шения жесткости болта соединяемых деталей следует
выбирать прежде всего из условия деформативной при-
способляемости (см. параграф 4.4). Для уменьшения пе-
ременных нагрузок на болт его выполняют максимально
податливым.
4. В ответственных соединениях при действии сил в
плоскости стыка лучше использовать болты, устанавли-
ваемые без зазора.
5. Ответственные и труднодоступные соединения
(схема 1.8), а также соединения, подверженные вибраци-
ям, лучше снабжать стопорными устройствами от само-
отвинчивания (например, пластическими замками, о ко-
торых будут приведены сведения в следующем парагра-
фе) и элементами, ограничивающими болт от самовыпада-
ния - см. схему 1.6. Следует помнить, что упругие шайбы
не всегда надежно предохраняют от самоотвинчивания.
6. В ответственных соединениях по типу схемы 1.4
обязательно нужно предусмотреть регламентированную
затяжку. Такая затяжка необходима также в схеме 1.3,
особенно при использовании винта малого диаметра.
Наряду с основной задачей — однозначным скрепле-
нием деталей с помощью соединений, добиваются регу-
184
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
лируемого относительного положения деталей в одном
направлении (схемы 2.1 ... 2.3) или в нескольких направ-
лениях.
Для решения первой из этих задач используют сово-
купность трех деталей с двумя резьбовыми (схема 2.1)
или со шпоночными (схема 2.2), или со штифтовыми
соединениями (схем 2.3). В схеме 2.1 гайки 1 и 2 непод-
вижно соединены между собой, а винты 1 и 2 могут пе-
ремещаться относительно друг друга. Ход винта Ру,\ не-
значительно отличается от хода При одинаковом на-
правлении винтовых линий за один оборот гаек 1-2
винт 2 переместится относительно винта 1 на величину
Рh\ —Ph2-
В схеме 2.2 число шпоночных канавок на валу на
единицу отличается от числа канавок на ступице. Если
шпонку переставить в соседние канавки, то детали будут
повернуты на разность в угловых шагах канавок, т.е. на
небольшой угол. Аналогичный принцип заложен в со-
единении по схеме 2.3, и он много лет использовался, в
частности, в делительных головках.
Эти и другие решения используют для обеспечения
точных регулировок, например, для совмещения осей
стержней (светопроводов) 7 и 2 в схеме 3.1, для точной
установки оси объектива в схеме 3.2, для регулировки
положения оси призмы в схеме 3.3 и регулировки поло-
жения пластины в пространстве в схеме 3.4.
В схеме 3.1 вращение винта преобразуется в ради-
альное движение кулачков D и С, зажимающих один из
стержней. Перемещая оси стержней 7 и 2 во взаимно
перпендикулярных направлениях, добиваются их соосно-
го расположения.
В схеме 3.2 за счет поворота эксцентриков 7 и 2
обеспечивают суммирование векторов (эксцентрисите-
тов) ё| и ё2 таким образом, чтобы получить требуемый
эксцентриситет ёо объектива относительно корпуса, на-
пример, ёо = 0.
В схеме 3.3 использован аналогичный прием сумми-
рования углов наклона плоскостей скоса колец 7 и 2
(у каждого из колец угол скоса меняется от 0 до а). По-
ворачивая кольцо одно относительно другого, можно
изменять положения плоскости призмы Еа от 0 до 2а.
В схеме 3.4 использован регулировочный механизм
параллельной структуры (см. параграф 3.4), позволяю-
щий перемещать пластину вдоль осей координат и пово-
рачивать ее вокруг осей координат. Для этого требуется
не менее шести установочных винтов с точечным кон-
тактом (сферической пятиподвижной парой) между пла-
стиной и винтом. Силовое замыкание осуществлено с
помощью пружин 1 — 4. Деформацию пружины 4 изме-
няют с помощью замыкающего винта.
Если в каждой из параллельных цепей использовать
дифференциальное соединение (см. схему 2.1), то можно
обеспечить очень "тонкую" регулировку.
Задачи беззазорного соединения и соединения с на-
тягом обычно решаются с помощью клинового взаимо-
действия (обратите внимание, что само по себе резьбо-
вое соединение основано на клиновом взаимодействии —
см. на рис. 51 схему 3.1).
На схеме 4.1 для стопорения (соединения с корпу-
сом) диска вводят клин 2 в прорезь диска, а клин 1 прг
перемещении влево стопорит клин 2 в пазу корпуса.
На схеме 4.2 клин в виде двух элементов с гибкой
перемычкой при перемещении в направлении стрелкЕ
стопорит диск относительно корпуса.
На схемах 4.3 и 4.3а показано анкерное соедине-
ние, в котором конусная гайка при осевом перемещении
разжимает цангу и стопорится в отверстии основания
(например бетонной стены). Гайку перемещают с помо-
щью винта, который одновременно служит для прижатия
пластины к поверхности основания.
На схемах 4.4 и 4.5 даны клиновые соединения, ис-
пользуемые для быстрого стягивания соединяемых дета-
лей 7 и 2. Эти соединения называют также кулачковыми,
поскольку в них имеются криволинейные клиновые эле-
менты С.
В частном исполнении схему 4.4 используют для
стягивания деревянных деталей 7 и 2. Шуруп вворачива-
ют в деталь 2, а кулачок размещают в гнезде детали 7.
В отверстие В вставляют инструмент, которым повора-
чивают кулачок. При повороте кулачка по часовой
стрелке поверхность С взаимодействует с головкой А
шурупа и деталь 7 прижимается к детали 2.
Устройство на схеме 4.5 применяют для центрируе-
мых быстро соединяемых деталей 7 и 2. Цилиндрический
винт неподвижно соединен с деталью 2. Его вставляют в
отверстие детали 1, причем кулачок повернут лыской
вверх и не препятствует перемещению винта в отверстии.
При повороте кулачка он своей кромкой, а затем и по-
верхностью контактирует с поверхностью С головки
винта, благодаря чему детали 7 и 2 плотно притягивают-
ся одна к другой.
Общие правила для конструирования клиновых со-
единений следующие.
1. Угол клина выбирают из условий отсутствия са-
моторможения (см. параграф 5.1) при сборке соедине-
ния и наличия самоторможения, препятствующего само-
произвольной разборке.
2. В случае необходимости частой разборки соеди-
нения угол клина лучше делать заведомо больше угла
трения, но тогда следует дополнительно предусмотреть
разъемный замок соединения.
Кулачковые соединения (схемы 5.1 ... 5.8), в кото-
рых не предусмотрено клиновое взаимодействие, исполь-
зуют в основном для закрепления (в осевом направлении)
гайки (схема 5.1), головки винта (схема 5.2), элементов
цилиндрического шарнира (схема 5.3), элементов сфери-
ческого шарнира (схема 5.4) и других целей.
Закладную гайку (схема 5.1) устанавливают в
Т-образный паз (схема 5.1а) и поворачивают на 90° за
счет вращения винта. Кулачок гайки препятствует ее
дальнейшему повороту (схема 5.16), и винт можно затя-
гивать. Рифли на торцовой поверхности гайки препятст-
вуют ее самопроизвольному повороту.
В схеме 5.2 головку винта закладывают в
Т-образный паз, разворачивают ее на 90° и наворачивают
на него гайку. В данном соединении целесообразно пре-
дусмотреть элементы для поворота винта инструментом
(например, шлиц на торце стержня для отвертки) и для
НЕПОДВИЖНЫЕ РАЗЪЕМНЫЕ БОЛТОВЫЕ И КУЛАЧКОВЫЕ СОЕДИНЕНИЯ
185
75. КУЛАЧКОВЫЕ СОЕДИНЕНИЯ И ЗАМКИ
положение
| 5.8 | СИЛОВОЕ ЗАМЫКАНИЕ
удержания винта от самопроизвольного поворота (на-
пример, квадратный подголовник).
На схеме 5.3 деталь 1 имеет выступы, которые вво-
дят через отверстия в пазы детали 2. Предварительно в
пазы установлены вкладыши. Деталь 1 вместе с вклады-
шами разворачивают на 90° и соединяют с вкладышами
штифтом. Штифт вводят через отверстие в детали 2.
Отверстие после сборки закрывают винтом. Соединение
может передавать осевую нагрузку при возможности от-
носительного вращения деталей 1 и 2.
На схеме 5.4 разновидность замка со сферическими
деталями 1 и 2. Деталь 1 вставляют в паз детали 2 (на
схеме слева) и разворачивают на 90° вокруг оси Z, после
чего она будет зафиксирована в направлении Y (на схеме
справа).
Получение других вариантов замка сферического
шарнира подробно изложено в параграфе 2.5 (см. рис. 25).
В схеме 5.5 деталь 2 надевают на деталь 1 и пере-
мещают в осевом направлении до ввода выступов Ci во
впадины Сг- При этом шарики западают в канавку С и
удерживаются там надвигаемой деталью 3, поджатой
пружиной. Шарики предотвращают осевое перемещение
деталей. Шарики размещены в конусных отверстиях,
которые не допускают их выпадения при разъединении
деталей. В шлицевых соединениях для осевой фиксации
деталей 1 и 2 {схема 5.6) деталь 3 вводят в кольцевую
канавку детали 1 таким образом, чтобы ее выступы вста-
ли напротив выступов сопряженной детали, и стопорят в
этом положении с помощью фиксатора. Таким образом,
получено два осевых замка детали 3 с деталями 1 и 2 со-
ответственно.
На схеме 5.7 показано одно из решений замка типа
"молния", соединяющего гибкие звенья 1 и 2. К гибким
звеньям прикреплены планки с выступами и впадинами,
которые сопрягают с помощью специального замыкате-
ля. Обычно создают соединения впадин и выступов с
гарантированным натягом за счет упругости элементов
во избежание их самопроизвольного разъединения. Кро-
ме того, каждая последующая зацепляющая пара предо-
храняет от раскрытия предыдущую пару.
На схеме 5.8 показано соединение типа "байонет".
Деталь 2 имеет паз, взаимодействующий с выступом де-
тали 1. При сборке выступ перемещают вдоль паза.
В собранном состоянии детали удерживаются сжатой
пружиной.
Обобщая особенности кулачковых соединений,
можно рекомендовать следующее.
1. Для неподвижных силовых соединений предпоч-
тительно рабочие поверхности располагать перпендику-
лярно направлению сил или под углом, близким к 90°.
2. Для предохранительных соединений (замков)
вместо традиционных фиксаторов, поджатых пружиной,
или нескольких дополнительных вкладышей лучше на
соединяемых деталях выполнять геометрические элемен-
186
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
ты, допускающие сборку только в одном нерабочем
(наиболее удаленном от рабочего) положении деталей.
Еще лучше предусматривать сборку только по специаль-
ным траектории и ориентации в пространстве (см. схе-
му 5.6), вероятность повторения которых исключительно
мала.
8.3. НЕПОДВИЖНЫЕ НЕРАЗЪЕМНЫЕ
СОЕДИНЕНИЯ
Соединениям литьем, сваркой и клепаным (закле-
почным) соединениям (см. рис. 76) уделим немного вни-
мания, хотя они не менее значимы в машиностроении, но
достаточно подробно освещены в справочной литературе.
Соединения литьем наиболее целесообразно при-
менять для неподвижного неразъемного скрепления де-
талей из материалов, существенно различающихся по
свойствам, например: пластмасса-сталь, пластмасса-
цветной сплав, алюминиевый сплав-сталь, бетон-сталь и
др. Наиболее распространенное решение соединений
литьем - армирование. Его используют, когда требуют-
ся местная высокая контактная прочность, износостой-
кость, большое сопротивление сдвигу или срезу, высокая
электро- и теплопроводность, сопротивление ползучести
при длительных нагрузках или др. качества, которыми не
обладают легкие сплавы или пластмассы.
Армирование используют для перераспределения
напряжений в материалах типа чугун или бетон, имею-
щих высокий предел прочности при сжатии, но низкий
предел прочности при растяжении.
В качестве арматуры применяют элементы из стали,
латуни, бронзы, керамики, стекла и других материалов.
Примером армирования является выполнение ком-
позиционных материалов (композитов), содержащих в
качестве арматуры высокопрочные непрерывные волокна
или иные наполнители.
Здесь мы коснемся только конструирования соеди-
нений с использованием отдельных армирующих эле-
ментов определенной геометрической формы. Наряду с
литьем арматуру закрепляют запрессовкой в изготовлен-
ную деталь, опрессованием в процессе изготовления,
постановкой на резьбе с натягом, с помощью заклепок,
штифтов и т.п. Но такие исполнения здесь не будут рас-
смотрены.
На рис. 76 представлены следующие примеры: на
схеме 6.1 стальная направляющая втулка установлена в
корпусе из легкого сплава; на схеме 6.2 зубчатый венец
из антифрикционного материала сопряжен со ступицей
из стали; на схеме 6.3 винт закреплен одним концом в
пластмассовом корпусе; на схеме 6.4 стальная втулка с
резьбой установлена в пластмассовую деталь.
Аналогично выполняют армированные поршни,
клапаны, фрезы, крепление конца троса. Например, ко-
нец каната вставляют в отверстие наконечника втулки и
заливают пустоты цинковым сплавом (схема 6.7).
Другие задачи, решаемые таким же способом - точ-
ное закрепление на валу нескольких кулачков, закрепле-
ние стержней рамы в узлах, закрепление диска, маховика
или колеса на валу и др. В отливку могут быть заложен
относительно подвижные детали, соединение которь I
становится неразъемным после процесса литья, напри-
мер, так изготовляют отдельные виды цепей, ножни71
пряжки и т.п.
Принципы соединения литьем широко используь I
при формировании бетонных оснований, фундаменте I
стен. В них перед заливкой закладывают анкерные болтч
и другие крепежные детали (схемы 6.5 и 6.6). Соединена i
литьем используют для получения верхнего слоя с хоро-
шими антифрикционными свойствами или для защиты от
коррозии. При конструировании соединений литьем ре-
комендуется выполнять следующие общие правила.
1. Материалы соединяемых элементов должны бь i
способны к хорошей адгезии и обладать совместимость’ I
свойств. Например, различное тепловое расширение pi
должно приводить к раскрытию стыка, к растрескиванв
одной из деталей при сжатии или расширении друг.’Э
детали.
2. Поверхность сопряжения должна быть достатош
большой, а элементы поверхности должны быть орие
тированы различным образом. При значительной нагру -
ке целесообразно предусмотреть буртики, гребни, высг.
пы, рифли, чтобы обеспечить передачу сил путем давл_-
ния на площадку под прямым углом. Не следует расе
тывать на восприятие сил при их касательном направлю
нии в плоскости стыка.
Сварные соединения (соединения сваркой) пре_-
почитают использовать при изготовлении резервуаре^
бункеров, рамных конструкций, ферм, станин, корпусол
а также во всех случаях, когда выгодно сложные детхл
получать соединением из простых штампованных и.л
литых деталей.
Хорошей свариваемостью обладают низкоу inept,
стые стали и низколегированные стали с низким содер-
жанием углерода.
Сварной шов снижает прочность и особенно сопро-
тивление усталости при переменных напряжениях детал I
по сравнению с монолитной деталью (разрушение обы-I
но происходит не по самому шву, а в зоне, смежной .
сплошным материалом).
Выполнение сварного соединения сопряжено с ко-
роблением изделий. Чтобы уменьшить или исключили
данное явление, принимают соответствующие меры: че-
редование участков швов на разных сторонах дета,
использование оправок, осуществление отжига пос
сварки и т.п.
Наиболее распространены виды сварки: дугов'
ручная, автоматическая дуговая под слоем флюса, ко -
тактная (оплавлением, точечная, шовная, трением). То-
чечную и шовную сварку используют при соединен ।
тонких листов. Сваркой оплавлением и трением получи
ют соединения торцов валов, труб и т.п.
В зависимости от толщины свариваемых дуговс j
сваркой деталей предъявляются разные требования ж
форме кромок. Края тонких листов до 3 мм загибают, кал
на схеме 7.1. Кромки листов толщиной до 8 мм при руч-
ной сварке и до 20 мм при автоматической сварке вы-
полняют прямыми (схема 7.2). По мере увеличения тол-
НЕПОДВИЖНЫЕ НЕРАЗЪЕМНЫЕ СОЕДИНЕНИЯ
187
76. СОЕДИНЕНИЯ ЛИТЬЕМ, СВАРКОЙ, КЛЕЕНЫЕ, СКОБОЧНЫЕ И КЛЕПАНЫЕ
188
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
гцины используют разделку кромок, представленную на
схеме 7.2а.
При конструировании деталей, имеющих сварное
соединение, руководствуются следующими правилами.
1. Сварные швы располагают в доступных местах,
снизу или сбоку, по отношению к электроду при осуще-
ствлении сварки, если деталь нельзя перевернуть.
2. Смежные сварные швы по возможности отдаляют
друг от друга, чтобы сводить к минимуму сосредоточе-
ние наплавленного металла (расстояние I на схеме 7.6).
3. При соединении массивных деталей с тонкими
вводят клиновые участки (схема 7.3).
4. Для обеспечения точного относительного распо-
ложения соединяемых деталей предусматривают их вза-
имную фиксацию конструктивными элементами непо-
средственно на деталях, либо используют специальные
оправки. Например, вводят специальные выступы-упоры
(схема 7.4), центрирующие пояски (схема 7.9) и т.п.
5. Для исключения оплавления и деформирования
обработанных до сварки поверхностей их располагают
максимально отдаленными от шва.
6. Для компенсации уменьшения прочности сварно-
го шва по сравнению с монолитной деталью предусмат-
ривают меры разгрузки или упрочнения сварного шва.
Действие сил воспринимается не сварным швом, а спе-
циальными геометрическими элементами (например, на
схеме 7.8 буртки К воспринимают силу F). Выполнение
нахлесточного сварного соединения со скошенными
краями листа в 2,5 раза повышает прочность на растяже-
ние и в 5 раз - прочность на изгиб по сравнению со сты-
ковым соединением листов.
7. Сварные швы располагают в местах, отдаленных
от источников концентрации напряжений, поскольку
они вводят дополнительную концентрацию напряжений.
Для уменьшения концентрации напряжений швы выпол-
няют вогнутыми с глубоким проплавлением (схемы 7.5,
7.5а) или подвергают дополнительной механической об-
работке, снимая неоднородный неровный верхний слой.
Удалением наплавленного слоя шва зачисткой можно
повысить предел выносливости примерно на 60 ... 90 %,
аргонодуговой обработкой шва повышают предел вы-
носливости на 35 ... 90 %, высоким отпуском - на 30 ...
70 %, предварительной статической перегрузкой - на 50 %,
поверхностным наклепом - на 80 ... 105 %, пластическим
обжатием - на 40 %, ультразвуковой ударной обработкой —
на 85 %.
8. При соединении многослойной оболочки с моно-
литной (торцовой) частью резервуара разделку кромок
сопровождают предварительным наплавлением слоя ме-
талла на торцы соединяемых деталей (как показано на
схеме 7.7) и только затем формируют сварной шов.
Клееные соединения при использовании современ-
ных клеящих материалов превосходят клепаные и свар-
ные соединения при работе на срез, но обладают невысо-
кой теплостойкостью (обычно не выше 300°), и со вре-
менем их несущая способность уменьшается. Клееные
соединения используют, например, вместо неподвижных
фрикционных соединений. Их достаточно часто приме-
няют для скрепления неметаллических деталей или ме-
таллических с неметаллическими. Они наиболее просты
в исполнении, при необходимости обеспечивают герме-
тичность соединений или выполняют роль неразборныл
замков (например для предохранения резьбы от самоот-
винчивания - схема 8.5). Варианты исполнения клеено:
соединения выбирают в зависимости от характера era
нагружения. Наиболее распространено нахлесточное со-
единение. При нагружении такого соединения силами -
тонкостенные детали могут деформироваться, как пока-
зано на схеме 8.J. Соединение работает как на сдвиг, тэт
и на отрыв. На концах нахлеста возникает наиболыпа.
концентрация напряжений. Разрушение может произойт
в месте перегиба детали меньшего сечения. Во избежс -
ние или для уменьшения этого явления кромки склеены»
деталей могут быть отогнуты (схема 8.2). Для увеличе-
ния площади склеивания используют двухсторонню
нахлестку, шпунтованное и врезное соединения, соещ -
нение скошенных поверхностей с упорами, торцовое со-1
единение с увеличенной площадью склеивания (с.т -
ма 8.4), двухстороннюю врезную нахлестку с двумя на-
кладками (схема 8.3).
Скобочное соединение используют сравнится:
редко, в основном для оперативного скрепления неме-
таллических деталей. Иногда оно служит в качесгое
вспомогательного технологического или временного со-
единения для обеспечения, например, выдержки по вре-
мени после склеивания и в др. случаях.
Чаще используют неподвижное неразъемное ско-
бочное соединение, но оно может быть подвижным (со-
единение шарнирной скобой на схеме 9.2) или разъс -
ными (например, для удержания и прижатия каната плж
кабеля к плоскости - схема 9.1). С помощью скобы со-
единяют, в частности, ленты, пластины, стержни и деи-
ли другой конфигурации. Виды соприкосновения по-
верхностей: встык, внахлестку и др. По форме скоба м»-
жет иметь незамкнутый или замкнутый контур. Скобу .
незамкнутым контуром выполняют недеформируемд
(схема 9.3) и деформируемой (схема 9.4) в процесс
сборки. Скоба с незамкнутым контуром может иметь два
заостренных штыря или более двух штырей - многопп
ревая скоба на схеме 9.5. Скобу с замкнутым контуре
получают деформированием или соединением из отдель-
ных частей. Используют скобу также в сочетании с гаг -
кой и планками (схема 9.1).
Клепаные (заклепочные) соединения появилгч
намного раньше сварных соединений. Их использовг
при создании металлических мостов, резервуаров, коргв -
сов судов и т.н. В настоящее время они почти вытеснег
из этих областей. Но тем не менее сфера применения их
остается достаточно широкой. Особенно широко они
продолжают использоваться в авиационной технике, ко-
гда требуется скреплять тонкостенные элементы из лег-
ких сплавов. Клепаные соединения незаменимы, когда
требуется неподвижно соединить пару деталей из разно-
именных (металлических и пластмассовых) (схема 10.1 .
плохосвариваемых или несвариваемых материалов. Ши-
роко применяют заклепки при соединении гибких эле-
ментов.
Используют клепаные соединения и в подвижных
(шарнирных) соединениях деталей цепей. Они служат
НЕПОДВИЖНЫЕ НЕРАЗЪЕМНЫЕ СОЕДИНЕНИЯ
189
только для скрепления деталей в поперечном направле-
нии. А продольную нагрузку цепи воспринимают эле-
менты шарниров.
Различают силовое прочное и силовое плотное кле-
паные соединения. Последнее наряду с восприятием сил
обеспечивает герметичность. Для этого осуществляют
чеканку кромок соединяемых листов и окружности голо-
вок заклепок.
В настоящее время используют как традиционные
заклепки в виде стержня с двумя головками, так и новые
конструкции головок, в том числе с односторонней по-
становкой (схемы 10.6 ... 10.8) или постановкой в глухие
отверстия (схема 10.9), что существенно расширяет воз-
можности клепаных соединений. Появилась возможность
формировать сложные тонкостенные конструкции с
замкнутыми труднодоступными полостями.
Остановимся подробнее на некоторых современных
исполнениях заклепок.
На схеме 10.2 стержневую закаленную заклепку ус-
танавливают в отверстие с натягом. Замыкающую голов-
ку для нее формируют завальцовкой кольца из пластич-
ного металла, перемещая инструмент в направлении F.
Такое решение называют также болтозаклепкой. При
расположении инструмента с одной стороны заклепку
удерживают за стержень, который после постановки от-
крывают.
Трубчатую (полую) заклепку (схема 10.4) приме-
няют для соединений, несущих небольшие нагрузки.
Пистонную заклепку (схема 10.3) изготовляют из
тонкостенных трубок толщиной 0,2 ... 0,5 мм и исполь-
зуют для крепления кожи, ткани, пластмасс и т.п. мягких
материалов.
Закладную заклепку (схема 10.5) используют в
случаях, когда подвести клепальный инструмент с обеих
сторон невозможно. Дорн пробивает перегородку в заго-
товке и тем самым формирует головку с обратной стороны.
190
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
В вариантах односторонней постановки (на схемах
10.6 ... 10.8) заклепку вставляют в отверстие с одной сто-
роны вместе с инструментом.
В схеме 10.6, втягивая утолщенную часть инстру-
мента в направлении F в пустотелую заклепку, разваль-
цовывают ее.
В схеме 10.7 втягивают технологический сердечник,
который формирует головку, после чего его верхнюю
часть отрывают, а нижняя часть остается в теле заклепки.
В схеме 10.8 происходит аналогичный процесс, но
втягивание осуществляют ввинчиванием сердечника в
тело заклепки. После формирования головки гладкая
часть сердечника срезается при ее вращении моментом Т.
На схеме 10.9 показана постановка заклепки в глу-
хом отверстии. Заклепка имеет гребенчатый хвостовик.
При протягивании через отверстие инструмента заклепка
деформируется, а гребенки внедряются в материал со-
единяемой детали.
В схеме 10.10 соединяемые листы имеют отверстие
с переменным осевым сечением. При "осаживании" до-
вольно мягкой заклепки с обеих сторон ее тело заполняет
свободные полости в листах, и таким образом прикреп-
ляются листы один к другому.
В схеме 10.11 - аналогичное решение, но отверстие
в нижнем листе глухое, а сам лист выполнен из доста-
точно мягкого материала. "Осаживание" заклепки вы-
полняется специальным инструментом, сверху непосред-
ственным давлением, а снизу - через стенку листа. Из
приведенных примеров это — единственный, в котором
отсутствуют сквозные отверстия и стыки в одном из лис-
тов, благодаря чему обеспечивается исключительно на-
дежная герметизация.
Хотя этими вариантами и не ограничиваются совре-
менные конструкторы, тем не менее основные освещен-
ные здесь принципы создания клепаных соединений пока
остаются неизменными.
В современных машинах и приборах широко ис-
пользуют пластические (схемы 11.1 ... 11.14) и упругие
(схемы 12.1 ... 12.27) соединения (см. рис. 77 и 78). При
этом пластические соединения представляют собой фак-
тическое развитие клепаных (заклепочных) соединений.
Сравнительно давно начали применять проволочные
замки (замок — вспомогательное соединение, предохра-
няющее основное соединение от самопроизвольной раз-
борки при случайных - нерабочих нагрузках) и узлы
(схемы 11.15 и 11.14), а с тех пор, как был осуществлен
процесс получения тонколистового металла, применяют
фальцованное соединение листов. Также используют
замки с помощью отгибных лепестков (схемы 11.12).
Фальцованное соединение деталей типа оболочек
(схема 11.11) было осуществлено после появления про-
цесса глубокой вытяжки. Кстати, закатывание тонких
металлических крышек на банках - тоже пример пласти-
ческого соединения. Также сравнительно давно исполь-
зуют пластическое деформирование элементов резьбы,
чтобы предотвратить самопроизвольное самоотвинчива-
ние (схемы 11.5 и 11.10).
Пластические соединения и замки покоряют про-
стотой и технологичностью. Кроме того, бесспорна и
высокая надежность пластических замков (например, дл
предотвращения самоотвинчивания).
Высокую надежность можно обеспечить в нераз’ -
емном соединении, воспринимающем рабочие нагрузк
(схемы 11.1 ... 11.4, 11.9, 11.11, 11.11а). Многие из зам-
ков допускают разборку, например, путем отгибания ле-
пестков, но обычно после такой разборки или после не-
скольких отгибаний лепестков вкладыш (схема 11.7),
шайбу (схемы 11.12, 11.12а, 11.16) или шплинт лучше
заменить на новую деталь.
Пластические соединения гайки с корпусом исполь-
зуют при одностороннем подходе инструмента при за-
прессовке в корпус или панель. На схемах 11.1, 11.2
вверху (I) начальное положение — перед запрессовкой.
внизу (II) - после запрессовки. Отверстие с резьбой пр
этом принимает коническую форму или эллипсовидную,
цилиндрическую (при обжатии в двух диаметральн?
расположенных точках).
На схеме 11.1 при установке гайки в нее вворачива-
ют винт и тянут его влево, удерживая левый торец гай1
с помощью упора. Коническая часть гайки отрываете)
запрессовывается в цилиндрическую часть.
На схеме 11.2 показана гайка с двумя конусными
поверхностями и уступом для установки в отверстие с
отбортовкой тонкого листа. На торце уступа выполняют
насечку для предотвращения проворачивания гайки.
На схемах 11.3 и 11.4 современное решение закреп-
ления замыкающего звена в автоматической коробке пе-
редач автомобиля. Такое соединение исключает разборку
и ремонт данного устройства. На схеме 11.3 — осевой за-
мок, предназначенный для восприятия осевой силы. Н_
схеме 11.4 — окружной замок, предназначенный для вос-
приятия крутящего момента. Деформированием в на-
правлении G образуют кольцевой буртик D, удерживаю -
щий кольцо относительно корпуса. Чтобы кольцо не про-
ворачивалось относительно корпуса, частью буртика Е
заполняют специальный паз на кольце (см. выступ D' на
схеме 11.4).
На схеме 11.5 гайка имеет резьбу на поверхности,
эллиптического цилиндра. При навинчивании взаимоде-
формируется резьба гайки и в какой-то мере резьба вин-
та, в результате сопряженные элементы резьбы плотно
прижимаются другу к другу.
На схеме 11.6 — соединение внешнего кольца под-
шипника и шкива. Удерживается шкив на внешнем коль-
це подшипника с одной стороны буртиком, а с другой -
лепестками. Лепестки получают вырубкой из материала
шкива. Перед монтажом их отгибают, как показано на
схеме 11.6 слева, затем вставляют в шкив подшипника и
загибают лепестки (см. схему 11.6 справа), тем самым
фиксируя положение подшипника относительно шкива.
В соединении типа "ласточкин хвост" и в елочном
соединении лопатки с ротором (схемы 11.7 и 11.8), пред-
назначенных для восприятия значительных радиальных
сил. осевое стопорение деталей осуществляют с помо-
щью вкладыша (пластины) деформируемыми элементами.
На схеме 11.9 — соединение внутреннего кольп;
подшипника с валом. На валу выполнены кольцевые ка-
навки. В одной из них располагают упорное разрезнсе
УПРУГИЕ ЗАМКИ И ФИКСАТОРЫ
191
кольцо, которое поджимают к торцу подшипника. Раз-
резное кольцо удерживается обоймой, которую обжима-
ют в направлении стрелки таким образом, чтобы ее мате-
риал заполнил специальную канавку на валу. На схе-
ме 11.13 показана гайка с вкладышем из пластмассы, де-
формируемым при навинчивании на винт. Ее самоотвин-
чиванию препятствуют возникающие при этом силы сце-
пления.
В труднодоступных для контроля затяжки резьбо-
вых соединениях рекомендуются решения для стопоре-
ния, представленные на схемах 11.12, 11.14 ... 11.16.
В решении по схеме 11.15 следует обращать внимание на
соответствие формы образуемой петли направлению за-
тяжки соединения - рабочая ветвь петли должна работать
на растяжение при возможном самоотвин-чивании.
На схеме 11.11а — несколько пластических замков.
Пластический замок 1 отличается от замка на схеме 11.11
тем, что в нем не просто отгибается край листа, а смина-
ется гофр корпуса, и в нем зажимается гибкая мембрана.
Замки 2 и 3 такие же, как на схеме 13.3.
На схемах 11.17 и 11.18 показаны соединения лис-
тов образованием в них углублений путем совместного
деформирования. В схеме 11.17 пуансон имеет с двух
противолежащих сторон острые кромки, а с двух других
сторон — скругленные или тупые края. На первом этапе
формируется дугообразный прорезанный элемент, а в
последующем он осаживается со стороны сдвоенной
матрицы, так что обеспечивается всестороннее стопоре-
ние листов
В схеме 11.18 аналогичный процесс осуществляют
за один прием, но без прорезания соединяемых листов.
Благодаря этому образуется соединение, способное вос-
принимать значительные нагрузки в плоскости стыка, но
уступающее соединению на схеме 11.17 по восприни-
маемой нагрузке при отрыве одного листа от другого.
8.4. УПРУГИЕ ЗАМКИ И ФИКСАТОРЫ
Упругие замки и фиксаторы, используемые в ма-
шинах и приборах, весьма разнообразны по конструкции
и характеру восприятия сил. Для некоторых решений деле-
ние на упругие и пластические соединения условно и зави-
сит от величины рабочей деформации (сравни, например,
схемы 11.5 и 11.13 см. на рис. 77,12.3 ... 12.5 на рис. 78).
На схеме 12.1 показан зажим "лира" для быстрой
сборки и разборки соединения деталей, точность распо-
ложения которых невысокая. Зажим в виде тонкого упру-
гого элемента прикреплен к кронштейну. Закрепляемый
стержень (кабель, провод, трубу) опускают (см. положе-
ния I и II на схеме) между усиками зажима, и он фикси-
руется за счет упругости элемента.
В соединении на схеме 12.2 ось установлена в кор-
пусе. От вертикального перемещения она удерживается
упругим элементом, который вставляется нажатием
сверху в пазы, расположенные в корпусе.
На схемах 12.3, 12.4 и 12.5 - примеры решений для
предохранения от самоотвинчивания резьбы. Пружинные
шайбы (схемы 12.3, 12.5) устанавливают под гайку. Уп-
ругие элементы шайбы создают постоянные силы прижа-
тия сопряженных поверхностей резьб. Кроме того, ост-
рые кромки шайбы, врезаясь в контактирующие с ними
детали, дополнительно препятствуют самопроизвольно-
му вращению.
На схеме 12.4 гайка имеет прорезь, стягиваемую
винтом, благодаря чему на некотором участке витки
резьбового соединения прижаты друг к другу.
В упругих соединениях широко используют трубча-
тые детали с продольными прорезями. На схеме 12.6 ме-
жду ступицей и валом установлена такого типа соедини-
тельная втулка (из пластмассы), которая своими бурти-
ками заводится в канавки ступицы и вала.
На схеме 12.6 показано стопорение дифференциаль-
ной винтовой передачи (см., например, схему 2.1 на
рис. 7.2), служащей для продольного относительного
перемещения деталей 1 и 2. Чтобы можно было вращать
стяжной винт, в него вставляют специальный ключ, ко-
торый одновременно отгибает упругие лепестки и выво-
дит из зацепления зубья стопорного соединения. Чтобы
зубья снова обеспечили стопорение, достаточно вынуть
специальный ключ из гнезда. Упругие лепестки при этом
разожмутся и застопорят соединение.
Схему 12.7 используют при установке гайки в стен-
ку корпуса (положение I — перед началом сборки, поло-
жение II - окончание сборки, F— давление инструмента).
Инструмент подводится с одной стороны. Гайка удержи-
вается буртиком от осевых перемещений. В окружном
направлении ее вращению препятствует фрикционное
соединение (соединение с натягом) цилиндрической ее
части (без прорезей) с поверхностью отверстия.
На схеме 12.8 скобу 1 надевают на вал путем ради-
ального перемещения из положения I в положение II.
Она удерживается в кольцевом пазу вала и служит огра-
ничителем от осевых перемещений деталей на валу. На
схемах 12.9, 12.10 показаны варианты деталей того же
назначения, что и на схеме 12.8. Их называют стопорны-
ми кольцами. Устанавливают кольцо с помощью специ-
ального инструмента путем сближения концов кольца.
На схеме 12.11 стопорная упругая скоба служит для
обеспечения осевой неподвижности соединения труб.
Труба 1 имеет кольцевую канавку, а труба 2 - паз с ради-
альными отверстиями. После соединения труб вставляют
скобу так, что ее заплечики выступают за края внешней
поверхности трубы 2 и удерживают скобу от выпадания.
На схеме 12.12 показано соединение тонкостенных
деталей 1 и 2. Выступ детали 1 заводят за кромку отвер-
стия в детали 2, затем поворотом и нажатием детали 1
деформируют упругий элемент, пока он не зафиксирует
вместе с упором соединяемые детали. Высокой надежно-
стью обладают замки, в которых стопорное кольцо фор-
мируется из проволоки, вводимой через тангенциальное
окно в одной из деталей, а кольцевой канал для проволо-
ки образован канавками в обеих, сопряженных деталях
(схемы 12.13,12.13а, 12.14).
На схеме 12.13 показано осевое стопорение зубчатой
муфты. На схеме 12.13а показано, как вводится проволо-
ка для формирования такого замка, а на схеме 12.14
представлено аналогичное соединение гибкого колеса
192
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
УПРУГИЕ ЗАМКИ И ФИКСАТОРЫ
193
волновой зубчатой передачи с упругим кольцом, уста-
новленным внутри колеса.
На схеме 12.15 показано упругое соединение кольца
с колесом. При осевом относительном перемещении
кольцевой буртик продавливается под выступом и попа-
дает в кольцевую канавку.
На схеме 12.16 представлен замок сферического
шарнира в виде упругого кольца и монтажной направ-
ляющей втулки. В начале сборки устанавливают кольцо в
кольцевую проточку С корпуса. Затем вводят втулку,
которая, разжимая кольцо, удерживает его на осевой
кольцевой проточке А в полом пространстве, образован-
ном проточкой С. Далее перемещают сферическую го-
ловку (влево на схеме) вместе с втулкой. Кольцо при
этом остается в полости проточки С, а затем, сжимаясь,
западает в проточки В головки. Диаметр цилиндрическо-
го отверстия в корпусе меньше наружного диаметра
кольца, и поэтому перемещение головки вправо исклю-
чено. Представленный замок неразборный.
Следующая группа соединений — это фиксаторы с
упругими элементами (схемы 12.17 ... 12.25). Особен-
ность и отличие их от стопоров - возможность разборки
при небольшом рабочем усилии или при свободном ута-
пливании фиксирующего элемента. Такие соединения
используют в приборах, бытовых устройствах, выключа-
телях, одежде и т.п. системах, когда для разъединения
деталей требуется только усилие руки человека.
Конструкции фиксаторов разнообразны. Здесь оста-
новимся только на некоторых примерах. На схемах 12.17,
12.18, 12.20 представлены фиксаторы соединения труб,
выполненные в виде выступа, "западающего" в радиаль-
ное отверстие одной из труб под действием пружины.
Данные решения отличаются друг от друга только кон-
фигурацией пружины.
На схеме 12.19 показан фиксатор, совмещенный с
элементами шарнира. В корпусе установлен вкладыш с
упругими выступами, с которыми взаимодействует пово-
рачиваемый кулачок. Кулачок поворачивают в пределах
угла а, и он имеет два фиксированных положения: I и О.
На схемах 12.21 и 12.22 показано как элементы
шарнира удерживаются в соприкосновении упругими
пластинами. Пластина в одном случае ограничивает по-
перечные перемещения, в другом — осевые перемещения.
На схеме 12.23 представлена одна из разновидностей
штекерного соединения. Штырь удерживается внутри
отверстия за счет трения между его поверхностью и по-
верхностью упругого звена.
На схемах 12.24 и 12.25 - два варианта кнопочных
соединений. Относительная фиксация обеспечивается
при размещении упругого кольца или скобы в кольцевой
канавке на головке при введении ее в гнездо.
На схеме 12.26 показан вариант застежки типа "ли-
пучка" - современного соединения одежды. Очень мел-
кие крючки одной детали с достаточно упорядоченным
расположением взаимодействуют с беспорядочно пере-
плетающимся ворсом другой детали. Упругость крючков
позволяет многократно разъединить их с ворсом, не по-
вреждая петли и переплетения последнего. Такое соеди-
нение создано благодаря появлению новых пластических
материалов и технологий.
На схеме 12.27 - предохранительное соединение в
виде пластины, отгибаемой только внутрь крюка при
нажатии на нее петлей. Чтобы разобрать соединение,
нужно отжать пластину и вывести петлю.
Отдельную группу соединения представляют собой
заделки (крепления) концов гибких деталей типа
струн, лент, канатов (рис. 79). В предыдущем параграфе
уже была продемонстрирована заделка каната в коуш
заливкой расплетенных прядей легким сплавом. Здесь
приведем примеры разборных соединений, осуществляе-
мых в основном за счет трения. Такие соединения доста-
точно надежны благодаря значительному сжатию эле-
ментов за счет клинового взаимодействия и самозатяги-
вания, а также образования одного или нескольких вит-
ков вокруг сопряженной детали.
194
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
На схеме 13.1 показано устройство для соединения
конца арматуры (струны) железобетонного изделия со
стенкой формы и/или удержания арматуры в растянутом
состоянии.
Конец арматуры удерживается относительно стенки
формы в направлении натяжения F. Зажимные губки
шарнирно соединены между собой тягой. Губки зажима-
ют арматуру, а другими концами упираются в стенку.
После снятия устройства губки раздвигаются пружиной.
Для присоединения каната к крючку на его конце
образуют петлю и вставляют в нее коуш (схема 13.2,
13.3). Концы каната в образованной петле стянуты зажи-
мом в виде скобы с планкой и гайками, или концы петли
закреплены специальной оплеткой.
На схеме 13.4 конец каната прижат винтами через
призму к поверхности барабана. При наличии значитель-
ного огибания лентой или канатом барабана основная
доля реакции в заделке приходится на силы трения гиб-
кого тела относительно барабана (схема 13.5).
На схеме 13.6 представлено соединение ленты с
массивной опорой, в котором использован принцип са-
мозатягивания. В отверстие опоры вставлены цилиндри-
ческие сегменты, а в петлю, полученную загибанием
конца ленты, — клин. С увеличением силы натяжения F
увеличивается зажатие ленты между клином и сегмента-
ми. Аналогичное решение для крепления каната на бара-
бане дано на схеме 13.7. В специальном отверстии бара-
бана размещены перегнутый конец каната с клином. При
натяжении каната он удерживается благодаря самотор-
можению.
8.5. ШПОНОЧНЫЕ, ШЛИЦЕВЫЕ,
ПРОФИЛЬНЫЕ НЕПОДВИЖНЫЕ
И ФРИКЦИОННЫЕ СОЕДИНЕНИЯ
Далее рассмотрим способы и устройства соедине-
ний ступицы колеса/шкива/рычага и т.п. деталей на валу,
т.е. соединений, способных воспринимать крутящий мо-
мент. По существу - это уже "глухие" (неподвижные)
соединительные муфты. Представленные на рис. 80.1 и
80.2 соединения за некоторым исключением способны
воспринимать как окружную, так и осевую силу, т.е. мо-
гут быть использованы как для передачи вращающего
момента, так и для передачи сил в плоскости сдвига.
В соединении ступица-вал стремятся решить сле-
дующие задачи:
• обеспечить или сохранить точное относительное
центрирование сопряженных деталей;
• максимально уменьшить ослабление сечений (за
счет врезных элементов);
• максимально уменьшить концентрацию напряжений.
Наиболее ранним (в историческом смысле) обычно
считается шпоночное соединение (схемы 14.1 ... 14.5 на
рис. 80.1). Отдельные виды штифтового соединения при-
менялись еще раньше шпоночного. По конструкции в них
много общего, и одно из них может считаться разновидно-
стью другого (сравните, например, схемы 14.1... 15.4).
Шпоночное соединение имеет простую констрс
цию, но его выполнение связано с ослаблением сеченШ
вала, большой концентрацией напряжений из-за ре
переходов формы шпоночных пазов. По несущей с
собности оно существенно уступает шлицевому coq
нию (схемы 17.1 ... 17.5 на рис. 80.1). Шпоночные соей
нения целесообразно применять в малонагружег
мелкосерийных изделиях.
Шпоночное соединение может быть напряжен
при использовании клиновых шпонок и тангенцш
ных шпонок (схема 14.5) и ненапряженным при испс. -
зовании призматических (схема 14.1) и сегментньж
шпонок (схема 14.2).
В напряженном соединении клиновую шпонку й
бивают между охватывающей и охватываемой детеля я
прижимая их друг к другу (схема 14.4). Вращающий м
мент передается за счет трения (по аналогии функцио-ж
рования см. схемы 19.1... 19.6). Шпонка может иметь а
только в одной из сопряженных деталей, а вторая де’
имеет лыску или остается гладкой (см. на схеме 1-1
фрикционную шпонку).
Призматическую шпонку устанавливают в паз
натягом P9/h9 (врезная шпонка) или по переходной г -
садке JS9/h9 (закладная шпонка).
Посадки шпонки в пазу ступицы: для подвиж.
соединения D9/h9, для центрирующего соединенй
H9/h9; для неподвижного циклически нагруженного . -
единения JS9/h9, P9/h9.
Призматическая шпонка воспринимает окружг
нагрузку боковыми поверхностями (равнодействующ
давлений Fi и F2 направлены навстречу друг другу, кя
показано на схеме 14.1а справа). Условно считают дав.”
ние распределенным равномерно по боковым граня:
рассчитывают элементы соединения на смятие. На схе *
обозначены: / - рабочая длина шпонки; h2 = 0,4/г - глус -
на врезания шпонки в ступицу.
При расчете фрикционного взаимодействия дета.:;!
соединения используют схему 14.3а, на которой обоз:
чены: F- сила прижатия шпонки к валу,//7 - сила трен*ж
в паре вал-шпонка, q — распределенное давление (по к «
синусоидальному закону); Ifq - суммарная сила трения
паре вал-ступица. Силы Ff и Tfq - реакция вращающ.
момента Т в соединении.
На схеме 14.3а показано нарушение центрирован *
при наряженном соединении. В силу несимметричности
соединения практически любое шпоночное соединение
какой-то мере нарушает центрирование.
В этом плане более рациональным представляет, I
штифтовое соединение. Оно может быть выполнено ;
поперечным (радиальным) штифтом для тел вращений
(схема 15.1), с продольным штифтом, соединяющий
фланцы (схема 15.5) или вал со ступицей подобно шпе -
ке (схема 15.4). Применяют в основном цилиндриче-
ский штифт (схемы 15.1, 15.4, 15.5, 15.6) или конич.
ский штифт (схемы 15.2, 15.3). Для предотвращения cal
мовыпадания штифт обеспечивает насечку (см. схему 15. I
или рифленый пояс (см. схему 15.5). Конический шти<*
обеспечивает соединение с натягом за счет клиново э
взаимодействия и удерживается в отверстии за сч.
самоторможения. Штифт выполняют
ШПОНОЧНЫЕ, ШЛИЦЕВЫЕ, ПРОФИЛЬНЫЕ И ФРИКЦИОННЫЕ СОЕДИНЕНИЯ
195
ШТИФТОВЫЕ СОЕДИНЕНИЯ |15 2а|
1^5-1 I Д Цилиндрический
Насечка | штифт
Вал
Разводные
элементы
Конический (
штифт
|15.2б|
Резьба
15.5| Рифленый
Ступица
Вид А научна
RE3
Установочный
штифт
ПРОФИЛЬНЫЕ СОЕДИНЕНИЯ
|17.3| Торцовое
Цилиндрическое соединение
содинение
ШЛИЦЕВЫЕ [ЗУБЧАТЫЕ] СОЕДИНЕНИЯ
|17.2
17.1
Центрирование
Болт
Деталь 1
Стяжной винт
Тонкостенная
охватываемая
часть вала
Уплотнение
поступательного
соединения
|17-4| Ступица
Конические кольца
Гайка
Деталь 2
Телескопический вал
Центрирующее
кольцо
Деталь 1
Резьба
Деталь 2
Центрирование
С |17.2в|
Тонкостенная
охватывающая
часть вала
Вал
Подвижное
соединение
196
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
также разводным - с пластически деформируемыми эле-
ментами (схема 15.26), или пружинным — трубчатого се-
чения с продольным пазом по его длине, свернутым из
пружинной стали (пружинный штифт - схема 15.6). Для
удобства извлечения штифта, установленного в отвер-
стии с натягом, его выполняют с внутренней резьбой
(схема 15.26) или резьбовой цапфой.
В основном штифтовое соединение выполняет ту же
роль, что и шпоночное или шлицевое соединение (на
схемах показаны воспринимаемые нагрузки: F\ и F2 —
силы; Т\ и Т2 — моменты), но его применяют в менее на-
груженных устройствах. Рассчитывают штифт на смятие
и срез. Иногда устанавливают штифт, который заведомо
должен срезаться при предельной нагрузке (срезной
штифт).
Применяют также штифты для точной ориентации
одной детали относительно другой (установочный
штифт, см. схему 15.3). В нижнюю деталь штифт уста-
навливают с натягом, а выступающий конец, имеющий
заходную поверхность, входит в отверстие другой детали
по посадке H7(js6 и H7/h6.
Одним из совершенных решений и более прогрес-
сивным по сравнению со шпоночными, штифтовыми, а
может быть, и шлицевыми соединениями является про-
фильное соединение - сочленение вала и надетой на
него детали по поверхности, имеющей поперечный про-
филь, обеспечивающий передачу окружной силы. Со-
пряженные детали имеют плоские поверхности сопряже-
ния (призматическое соединение) или цилиндрические
поверхности с контуром в виде овала, эллипса или соче-
тания плавно сопряженных других кривых (схемы 16.1,
16.1а, 16.66). Наиболее технологичны циклоидальные
профили.
Профильное соединение имеет меньшую концен-
трацию напряжений по сравнению со шпоночным и
шлицевым соединениями. Сопряженные поверхности
подвергают термической обработке до высокой твердо-
сти и шлифуют. Рассчитывают соединения по напряже-
ниям смятия на сопряженных поверхностях.
Пожалуй, самое распространенное соединение рас-
сматриваемого класса — это шлицевое соединение. Оно
представляет собой сопряжение охватываемой и охваты-
вающей деталей с равномерно расположенными пазами и
выступами. Его называют также зубчатым соединением.
Оно обладает большей несущей способностью, чем шпо-
ночное соединение. По сравнению с профильным соеди-
нением в нем можно иметь меньшие радиальные силы
из-за малого угла давления в сопряжении. Выступы [зу-
бья] (схема 17.1) выполняют с прямобочным, эвольвент-
ным или треугольным профилями. Соединения бывают
неподвижными или подвижными в осевом направлении
(см. схему 17.5, где осевая подвижность выполняет не
основную функцию).
Центрирование соединяемых деталей выполняют
по одному из диаметров - внутреннему или наружному -
или по боковым поверхностям (схема 17.1), причем со-
единения с треугольным профилем центрируются только
по боковым поверхностям.
Соединения с прямобочным профилем применя-
ют для валов с диаметром 23 ... 125 мм.
Соединения с эвольвентным профилем применя-
ют при диаметрах d = 4 ... 500 мм, при числе шлипе,
z = 6 ... 82 и угле исходного контура а = 30°. Соединение
с эвольвентным профилем более технологично, имея
более высокую прочность (меньше концентрация нап;
жения благодаря скругленным впадинам).
Соединение с треугольным профилем имеет м -
дуль: m = 0,2 ... 1,6 мм, число зубьев z = 20 ... 70, и пр -
меняют его в основном в приборах.
Применяют также коническое соединение с тре-
угольным профилем с конусностью 1 : 16 по впадс
вала. При ограниченных осевых размерах используя
торцовое соединение с треугольным профилем (сх- -
ма 17.3). Для предотвращения разжатия деталей из-э
клинового взаимодействия предусмотрено их стягиван; е
трубчатым винтом. Для увеличения несущей способн -
сти перед сборкой стыкуемые детали подвергают вза!
ному обжатию, обеспечивающему за счет пластическо
деформирования более плотное прилегание поверхг
стей. Торцовое соединение самоцентрирующее.
При конструировании шлицевого соединения вы-
полняют следующие правила.
1. Диаметр dt (схема 17.2а) желательно иметь
15 ... 20 % больше диаметра вала d$, поскольку в сеченг
вала под шлицами имеет место большая концентраь.
напряжений, чем в сечении гладкого участка. Переход а
шлицев к сплошному валу должен быть плавным (радиус гЦ
Жесткость сопряжений детали выбирают уменьшающее-
ся к наиболее нагруженному сечению А-А, чтобы обес-
печить более равномерную нагрузку по длине шлицев.
2. Для удобства сборки следует предусмотреть фас
ки на входных кромках. Желательно иметь фаски по вс^-
му торцовому контуру шлицев.
3. Необходимо предусмотреть выход инструме;
(схема 17.2в) таким образом, чтобы рабочий участок /J
гарантированно имел полный профиль шлицев щен 17
фрезы С при нарезании шлицев перемещают за упор R на
величину 5). Между поверхностью, которой не должг
касаться фреза, и фрезой в крайнем положении необх^
димо предусмотреть зазор 8. Неполные цилиндрически
и торцовые поверхности, полученные при выход инстру
мента могут быть использованы для центрирования и д
упора сопряженных деталей.
4. Для исключения фреттинг-коррозии при дейсп
больших радиальных переменных нагрузок или опроки-
дывающих моментов центрирование по поверхностя
шлицев недостаточно, и дополнительно предусматрива
ют гладкие центрирующие пояски (схема 17.26). либо
используют специальные центрирующие кольца. Пояск
и кольца выполняют цилиндрическими или коническими
(схема 17.4). Для торцового соединения дополнительне е
центрирование применять нецелесообразно, поскольку
оно приводит к неравномерному прилеганию сопряже! i
ных поверхностей шлицев.
5. При выборе числа шлицев и модуля при одинакс
вом среднем диаметре d предпочтение должно отдавать
ся мелкомодульному соединению, как менее ослабляю
щему сечение вала и ступицы. Для повышения несущей
способности целесообразнее увеличивать средний диаметр.
ШПОНОЧНЫЕ, ШЛИЦЕВЫЕ, ПРОФИЛЬНЫЕ И ФРИКЦИОННЫЕ СОЕДИНЕНИЯ
197
80.2. НЕПОДВИЖНЫЕ ФРИКЦИОННЫЕ СОЕДИНЕНИЯ
|19.71 Сменный
рвбочий
валок
С
Г идравлическое
нажимное
устройство
РЕГУЛИРУЕМЫМ ТОРЦОВЫМ ЗАЖАТИЕМ
Гайка
Кольца
с торцовыми
клиновыми
поверхностями
Двухопорный
вал
Конусная Кулачковый Гидравлическое
втулка замок нажимное
устройство
Сменный
рабочий
F - зажатие, закрепление валок
L - разжатие, освобождение зажатия
Консольный
вал
Гайка
Кольца
с торцовыми
клиновыми
поверхностями
< ''
198
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
чем длину шлицев (схема 17.2). Соединение малой дли-
ны используют также, когда требуются компенсация пе-
рекосов и самоустановка сопряженных звеньев.
6. При соединении тонкостенных деталей шлицы
формируют выдавливанием продольных пазов на сопря-
женных деталях (схема 17.5).
К современным и прогрессивным решениям, без со-
мнения, относятся фрикционные неподвижные соеди-
нения деталей (рис. 80.2), способные удерживать их от
относительного перемещения за счет сил трения, обу-
словленных гарантированным натягом при сборке (схемы
18.1 ... 18.6 и 19.1 ... 19.6). Разновидностью таких соеди-
нений являются прессовые соединения, которые могут
быть получены продольной сборкой за счет осевой силы,
поперечной сборкой за счет нагрева (до 200 ... 400 °C)
или охлаждения (жидким азотом до -190 °C, сухим льдом
до -72 °C), а также за счет комбинации осевого усилия и
теплового воздействия. Основное применение имеют
посадки Н7/р6, H7/r6, H7/s6, H7/r7, Н7/и7.
Для повышения сил трения — а соответственно, не-
сущей способности - контактные поверхности перед
сборкой посыпают порошком корунда или применяют
оксидирование или гальваническое покрытие сопрягае-
мых поверхностей.
Регламентированное значение силы трения получа-
ют, обеспечивая минимальные отклонения формы (осо-
бенно конусности), минимальную шероховатость и вы-
сокую точность размеров. Кроме указанных мер при
конструировании таких соединений следует избегать
существенной концентрации напряжений из-за различия
радиальной жесткости сопряженных деталей по их длине
в месте сопряжения. Примеры рациональных сопряже-
ний и форм деталей даны на схемах 18.1 ...18.7. Основ-
ной принцип выбора геометрических форм — это плавное
уменьшение сечений по краям сопряжения, отсутствие
контакта кромки охватывающей детали с поверхностью
охватываемой детали. Не менее важны меры по выбору
форм и в соединениях с регулируемым натягом (схема
19.1 ... 19.6).
Клеммовое соединение (схема 19.2), в котором на-
тяг достигается за счет стягивания элементов одной из
деталей с помощью болтов или иных средств. Но в нем
не обеспечивается равномерное прижатие поверхностей
по периметру. Его можно применять в малонагруженных
устройствах и когда центрирование не играет особой роли.
Необходимый натяг в соединении может быть соз-
дан использованием посадки по конической поверхности
(схема 19.1) за счет осевого относительного перемещения
деталей. Чем меньше угол конуса, тем меньшая требует-
ся сила для осевого перемещения, но необходима боль-
шая длина посадочной поверхности. Соединение легко
разбирается, если угол между образующей рабочей
поверхности и осью меньше угла трения. В этом случае
гарантированный натяг может быть обеспечен при гаран-
тированном приложении осевой силы. Иногда с целью
безопасности данное соединение используют в совокуп-
ности со шпоночным соединением.
Для уменьшения концентрации напряжений конус-
ная часть охватывающей детали перекрывает по длине
конусную часть охватываемой детали, как показано на
схеме 19.1.
На схеме 19.5 показана разновидность соединения с
помощью пружинно-затяжных колец, устанавливаемых
цилиндрическими поверхностями охватываемой и охва-
тывающей деталей. При осевой затяжке внутреннее
кольцо сжимается, а внешнее кольцо разжимается, создавая
необходимый натяг. Угол у принимают равным 12 ... 14°.
Это позволяет неоднократно разбирать и собирать со-
единение и перемещать его по длине вала. Иногда кольца
выполняют разрезными, и работают они подобно цанге.
Места разреза соседних колец смещают относительно
друг друга.
На схемах 19.3, 19.6 приведены варианты прижим-
ных устройств для соединений, имеющих разрезные
кольца с конической и цилиндрической поверхностями.
Эти устройства в виде отдельно собранного узла уста-
навливают в месте соединения.
Разжимное устройство на схеме 19.3 имеет разрез-
ные упругие кольца с конической поверхностью. Кольца
подтягивают к пластине винтами, в результате чего они
прижимаются к внутренней поверхности колеса, а втулка
прижимается к валу. Колесо закреплено на валу за счет
прижатия к ним разрезных втулки и обоймы. Кольца де-
формируют, вводя между ними расклинивающие сплош-
ные кольца 1 и 2, каждое из которых имеет внешнюю и
внутреннюю коническую поверхности. Кольца 1 и 2 стя-
гивают винтами. Относительные осевые перемещения
втулки и обоймы ограничивает цилиндрическое коль-
цо 3. Его устанавливают в начале сборки, деформируя
разрезные кольца.
На схеме 19.4 представлено соединение с использо-
ванием материала, обладающего эффектом запомина-
ния (памятью) формы. В данном примере соединены
валы 1 и 2. Использован принцип разделения функций
деталей. Втулка служит для плотного прилегания и цен-
трирования сопряженных деталей. Обойму из материала
с эффектом памяти формы устанавливают с зазором при
низкой температуре (в жидком азоте), а при нормальной
температуре оно сжимает втулку, создавая соединение с
натягом. После этого одевают стальные конические
кольца. Конусность колец выбрана из условия обеспече-
ния самоторможения. Соединение в таком виде может
работать при температуре, отличающейся от нормальной,
так как независимо от процессов в обойме натяг обеспе-
чивают кольца, деформация которых, обусловленная из-
менением температуры и/или механическим воздействи-
ем на них обоймы, невелика.
Особый вид неподвижного фрикционного соедине-
ния на схемах 19.7 и 19.8 характеризуется регулируемым
зажатием сменного кольца или диска с обоих торцов.
В данных примерах сменные кольца - это рабочие валки
прокатного стана для изготовления проволоки.
Здесь используют в совокупности винтовое соеди-
нение (вала с нажимной гайкой), гидравлическое нажим-
ное устройство и клиновое нажимное устройство. Гайка
служит для предварительного перемещения пакета дета-
лей до их соприкосновения торцами.
СОЕДИНЕНИЯ СТЕРЖНЕЙ ФЕРМ
199
Гидравлическим устройством создают необходимое
зажатие, а с помощью колец с торцовыми клиновыми
поверхностями фиксируют данное зажатие. При этом из-
за самоторможения колец заданная сила зажатия сохра-
няется необходимый период времени. Если нужно заме-
нить валок, то создают дополнительное зажатие с помо-
щью гидравлического нажимного устройства, после чего
можно легко провернуть относительно друг друга кольца
с торцевыми клиновыми поверхностями и ослабить их
соединение. Затем уменьшают давление в гидравличе-
ском устройстве и свободно отворачивают гайку.
Особенность схемы 19.8 заключается в использова-
нии торцового зажатия в совокупности с созданием натя-
га при осевом перемещении конусной втулки, например,
по аналогии со схемой 19.3.
Фрикционное соединение можно выполнить с огра-
ничением передаваемой нагрузки. На схеме 20.1 фрик-
ционное неподвижное разъемное соединение с возмож-
ностью уменьшения или исключения прижатия охваты-
вающей детали к охватываемой при достижении допус-
тимой величины передаваемой силы — вращающего мо-
мента и/или осевой силы.
На валу с возможностью вращения установлена сту-
пица. Между ними размещена упругая втулка. При за-
полнении под давлением полости жидкостью или пла-
стичным материалом втулка разжимается и создает необ-
ходимое прижатие сопряженных поверхностей вала и
ступицы.
Если передаваемый момент превысит допустимую
ветчину, то заглушка - срезаемый элемент - разрушит-
ся срезающим звеном, неподвижно соединенным с ва-
юм. При этом полость открывается, жидкость или пластич-
ный материал выдавливается и прижатие ослабевает, ступи-
ла и вал могут проворачиваться относительно друг друга.
Другой пример (схема 20.2) — устройство, предна-
значенное для предохранения резьбового соединения от
нерегламентированного нагружения в процессе затяжки.
По существу, в нем фрикционная муфта встроена в гай-
ку. в головку винта или в инструмент, используемый при
. яжке.
В простейшем исполнении ограничитель затяжки
состоит из двух упругих втулок 1 и 2, взаимодействую-
щих между собой. Втулка 2 запрессована в охватываю-
щую деталь — головку, а втулка 1 напрессована на гайку.
Втулка имеет отогнутые лепестки-выступы, а втулка 1
имеет окна, разделенные перемычками {схема 20.2а).
В собранном виде лепестки расположены внутри окон.
При затяжке гайки лепестки зацепляются за пере-
“ычки и за счет трения передается вращающий момент.
Если момент превышает допустимое значение, лепестки
начинают проскальзывать относительно перемычек. При
отвинчивании гайки момент передается за счет упора
торцов лепестков в перемычки.
8.6. СОЕДИНЕНИЯ СТЕРЖНЕЙ ФЕРМ
Конструирование соединения, т.е. выбор его гео-
метрических и иных параметров определяет не только
принятый его вид, но и то место в общей компоновке
машины или сооружения, где оно помещено. Речь пойдет
о взаимосвязи конструкции деталей, узлов и соединений
их элементов. Такую взаимосвязь рассмотрим на приме-
рах узлов соединений стержней ферм и механизмов
(рис. 81).
Особенность соединений стержней ферм - пересе-
чение действующих сил практически в одной точке (см.
рис. 81 на схемах 21.1 ... 21.6 пересечение штрихпунк-
тирных линий). При выборе конструктивных решений
узла это условие обеспечивают центрированием стерж-
ней: относительным расположением осей/центров их
сечений и элементов соединения, по возможности ис-
ключающих возникновение момента сил. При расчетах
обычно принимают узел эквивалентным кинематической
паре, а стержни считают нагруженными только осевой
силой, хотя реальная конструкция существенно отлича-
ется от такой модели.
Конструкции узлов разнообразны. Они различаются:
• по расположению осей стержней: соответственно в
плоскости (схемы 21.1 ... 21.6) и в пространстве {схемы
21.7; 21.8);
• по виду [профилю] соединяемых стержней: угол-
ков (схема 21.1), швеллеров (схема 21.2), листов {схе-
ма 21.5), труб (схем 21.3; 21.4; 21.6; 21.9; 21.10), прессо-
ванного профиля (схемы 21.7; 21.8) и др.;
• по виду используемого соединения: клепаного
(схема 21.1), сварного (схемы 21.2 ... 21.7), винтового
{схемы 21.8 ... 21.10) и др.;
• по наличию дополнительных деталей: с листовой
накладкой (схема 21.1); с листовой вставкой {схемы 21.2;
21.3; 21.6); с поперечной листовой накладкой (фигурной
полкой) на схеме 21.4; с листовыми косынками (схе-
ма 21.7); с центральной деталью специальной конфигу-
рации (схема 21.8) и др.
На схеме 21.1 стержни из швеллера расположены
симметрично относительно плоскости вставки, на схе-
ме 21.3, вставка установлена в прорезь трубы, на схе-
ме 21.6 концам стрежней пластическим деформировани-
ем придана скругленная форма. Поперечная накладка на
схеме 21.4 обеспечивает возможность пристыковывать к
ней торцы труб. В центральную деталь на схеме 21.8 за-
кладывают до пяти винтов, которыми притягивают тор-
цы стержней до соприкосновения с гранями детали.
На схеме 21.9 - гребенчатое соединение двух труб-
чатых стержней с помощью двух болтов с параллельны-
ми осями. Данная система статически неопределимая.
Для сборки узла требуется предусмотреть зазоры или
обеспечить высокую точность размеров и расположения
сопряженных поверхностей.
На схеме 21.10 представлено шарнирное соединение
с помощью болтов, оси которых перекрещиваются в про-
странстве. Благодаря малому расстоянию между болтами
такое соединение можно отнести к сферической двух-
подвижной паре (исключающей только возможность
вращения стержня вокруг собственной оси), и оно с ус-
пехом может быть использовано в самоустанавливаю-
щихся системах (в частности в подвесках машин и
агрегатов.
200
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
8.7. СОЕДИНЕНИЯ ТРУБОПРОВОДОВ
Соединение трубопроводов - сложное и ответст-
венное конструктивное решение. Кроме прочности эле-
ментов, оно должно обеспечивать герметичность стыков,
а также необходимую подвижность либо за счет гибкости
самих трубопроводов (см., например, схемы 22.Г, 24.2',
26.1, представленные на рис. 82.1), либо за счет шарнир-
ного или иного подвижного соединения (схемы 27.1 ... 27.4).
Гибкий трубопровод — шланг (схема 22.7) сам по се-
бе может представлять совокупность ряда соединений.
Его обычно выполняют из многослойного материала
(различных сочетаний резины, ткани, пластмассы, метал-
лической арматуры и др.).
Наиболее распространены шланги из резины, арми-
рованной слоем ткани.
Для высоких давлений (например, 25 МПа и выше
при диаметре проходного сечения 16 мм) или высокого
вакуума используют металлические гофрированные
шланги, конструктивно выполняемые по аналогии с
сильфонами. Их изготовляют из высококачественной
стали, цветных металлов или специальных сплавов. Гоф-
рированный элемент помещают в проволочную оплетку
(схема 22.1).
Для больших диаметров гофрированный трубопро-
вод формируют из двух винтовых лент, сочленяя их с
помощью фальцованного соединения. На схемах 22.1а и
21.16 показаны отдельные операции процесса образова-
ния соединений конструктивных вариантов шланга,
представленного на схеме 22.1. Для обеспечения герме-
тичности между соединяемыми лентами 1 и 2 устанавли-
вают прокладку.
При соединении с ниппелем или фланцем стенку
трубопровода и оплетку припаивают к специальной
втулке.
Резиновые и пластмассовые шланги прикрепляют к
ниппелю, используя упругость самого шланга (см. схе-
мы 24.2 и 26.1).
Для трубопроводов большого диаметра применяют
фланцевое соединение.
На схеме 23.1 фланцы 1 и 2 выполнены как одно це-
лое с трубами 1 и 2 соответственно или жестко и герме-
тично присоединены к ним. В специальном гнезде распо-
ложено уплотнение в виде конической прокладки из
алюминиевого сплава, специальной стали или сплава.
Прокладку деформируют, стягивая фланцы с помощью
болтов. Замкнутое пространство, в котором размещена
СОЕДИНЕНИЯ ТРУБОПРОВОДОВ
201
82.1. СОЕДИНЕНИЯ ТРУБОПРОВОДОВ
прокладка, называется закрытым затвором. Такое соеди-
нение может работать при температурах —256 ... +1000 °C
в зависимости от материала прокладки и при давлениях
10 ... 40 МПа, если внутренний диаметр затвора состав-
.тяет соответственно 400 ... 65 мм (толщина уплотнитель-
ной прокладки 1 мм, угол наклона конуса 60°).
На схеме 23.2 трубы 1 и 2 имеют утолщения, а с ни-
ми контактируют соответственно кольца 7 и 2, стянутые
болтами.
В утолщениях могут быть выполнены проточки, с
помощью которых также формируется закрытый затвор и
зажимается прокладка. Данное решение более техноло-
гично, чем решение по схеме 23.1, так как имеет фланцы
(утолщения) небольшого диаметра по сравнению с диа-
метром трубы. Оно обладает и некоторыми другими, бо-
лее высокими качествами, обусловленными малым пере-
падом сечений стенки трубы и кольцевого выступа.
Известны и другие решения таких соединений, ко-
торые будут рассмотрены в главе 9, посвященной уплот-
нениям соединений.
Для трубопроводов (обычно малого диаметра) наи-
более распространено соединение с помощью штуцера —
патрубка, имеющего на концах винтовую резьбу.
При сборке такого соединения сопрягаемые уплот-
нительные поверхности могут стягиваться без взаимного
их поворота (стяжное штуцерное соединение) или с
относительным поворотом (ввертное штуцерное соеди-
нение).
Стяжное соединение обычно имеет гайку
(схемы 24.1; 24.5; 24.6) с цилиндрической внутренней
резьбой и бурт с плоской или конической поверхностью.
Ввертное соединение обычно характеризуется наличием
конической самоуплотняющейся резьбы на штуцере и
сопряженной с ним детали (схемы 24.1; 24.3; 24.4) и/или
гладкой конической поверхности (на штуцере зачастую
имеется и коническая резьба и гладкая коническая
поверхность).
На схеме 24.1 представлена совокупность ввертного
(слева) и стяжного (справа) соединений. Гайка стягивает
штуцер и ниппель, служащий для соединения с гибкой
202
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
82.2. СОЕДИНЕНИЯ ТРУБОПРОВОДОВ
БЫСТРОСОБИРАЕМЫЕ СОЕДИНЕНИЯ
Уплотнение
25.31 Соединение трубок
——1 в процессе сборки
Стопорение Стопорное
соединения пружинное
в конце сборки кольцо сжато
ПОДВИЖНЫЕ СОЕДИНЕНИЯ
Полость
Уплотнение
Штуцер
А, В, С - каналы
Уплотнение
Поворотный
патрубок
Поток
111туцер
11ов6ротный
патрубок
Отверстие
[28J] САМОЗАПИРАЮЩИЕ СОЕДИНЕНИЯ
27.3
Гайка
sSSssbs]
Уплотнение
27.4
Сильфон Втулка 2
Труба 1
Кольца
Втулка 1
Труба 2
Патрубок 1
297Т| БЫСТРОРАЗЪЕМНОЕ
СОЕДИНЕНИЕ
Уплотнение л
Углубление Фиксатор
Ниппель
Шланг
Патрубок
Выступ
^SSSSS^-Kopnyr
СЪ-/
БЫСТРОРАЗЪЕМНЫЕ, ЗАХВАТНЫЕ И ЗАЖИМНЫЕ СОЕДИНЕНИЯ
203
трубкой. Ниппель имеет выступы с различной конусно-
стью поверхностей, обеспечивающей легкую сборку и
препятствующей самопроизвольной разборке.
Уплотнение между ниппелем и штуцером обеспе-
чивается лишь за счет конической посадки.
Гибкий трубопровод (шланг в схеме 24.2) присоеди-
няют к штуцеру, зажимая стенку трубопровода между
конической поверхностью штуцера и внутренней по-
верхностью гайки. Трубопровод может быть привулка-
низирован к гайке или удерживаться внутри гайки за счет
упругой деформации гребешками на ее внутренней по-
верхности.
На схеме 24.3 показано соединение стальной тру-
бы 1 и пластмассовой трубы 2. Концы труб вставляют в
соединительный патрубок. Гайку навинчивают на патру-
бок. При этом конические поверхности гайки и патрубка
сжимают кольцо Г и уплотнение 1 в радиальном направ-
лении. Сначала сжимается упругое уплотнение 1, пока
патрубок не упрется в фиксирующее кольцо 1, благодаря
чему регламентируется деформация уплотнения. Затем
внутренняя коническая поверхность гайки 1 обжимает
замковое кольцо Г. Кольцо Г врезается своими "кольце-
выми гребешками в тело трубы и надежно удерживает ее
относительно соединенного патрубка. При соединении
пластмассовой трубы 2 вместо кольца Г используют
кольцо 2' с иным сечением. Затяжка гайки 1 или 2 завер-
шается после того, как ее торцовая поверхность упирает-
ся в кольцо 1 или 2. Тем самым предохраняются уплот-
нительные элементы от чрезмерного деформирования.
На схеме 24.4 представлено стяжное соединение со
штуцером тонкостенной металлической трубки без пред-
варительной ее развальцовки. На цилиндрическую труб-
ку надевают накидную гайку с зажимным кольцом, а
внутрь трубки вводят цилиндрическую часть ниппеля.
При ввертывании гайки на резьбовую часть штуцера ко-
нец трубки захватывается зубцами на кольце и, деформи-
руясь, втягивается на коническую часть ниппеля, а нип-
пель перемещается до упора в торец штуцера.
Стык между торцами ниппеля и штуцера уплотнен
резиновым кольцом.
На схеме 24.5 два соединения: слева - ввертное со-
единение, а справа показано стяжное соединение со шту-
цером - соединение тонкостенной металлической трубы
с предварительно развальцованным концом. Конец трубы
при стягивании втулки и штуцера вращением гайки за-
жимается между их коническими поверхностями.
В схеме 24.6 трубопроводы 1 и 2 имеют центри-
рующие пояски, сопряжения которых приводят к образо-
ванию замкнутой полости (закрытого затвора) для раз-
мещения уплотнительной прокладки. В данном примере
прокладка выполнена в виде конического металлическо-
го кольца толщиной 1 мм, с углом наклона сечения к оси
(в недеформируемом состоянии) 60°. Стягивая детали 1
и 2, деформируют прокладку и тем самым надежно уп-
лотняют соединение. При внутреннем диаметре затвора
менее 14 мм такое соединение (прокладка из алюминие-
вого сплава и стальные детали) способно работать при
давлении до 100 МПа. При большем внутреннем диамет-
ре допустимое давление снижается (например, при 22 мм
оно составляет 10 МПа).
8.8. БЫСТРОРАЗЪЕМНЫЕ, ЗАХВАТНЫЕ
И ЗАЖИМНЫЕ СОЕДИНЕНИЯ
Прогрессивным направлением является получение
решений быстрособираемых/быстроразъемных соеди-
нений трубопроводов (схемы 25.1; 25.2 и 29.1; 30.1; 30.2
на рис. 82.2).
На схемах 25.1 и 25.2 представлены варианты не-
подвижного герметичного быстрособираемого соедине-
ния гибкого трубопровода (трубки, шланга), зажимаемо-
го с помощью цанги (разрезной упругой втулки).
Уплотнение и цангу (см. схему 25.1, положение I) в
деформированном состоянии вставляют в отверстие кор-
пуса, затем перемещают трубку в направлении таким
образом, что она проходит через цанговую втулку и уп-
лотнение, разжимая его. При движении трубки по стрелке
В (положение II) цанга упирается в конусную поверхность
и зажимает трубку. Для удаления трубки из отверстия пред-
варительно утапливают цангу в направлении стрелки С.
На схеме 25.2, положение I цангу напрессовывают
на выступ корпуса, предварительно установив уплотне-
ние. После введения трубки в отверстие перемещают
втулку в направлении на утолщенную часть цанги. Втул-
ка сжимает цангу и удерживается на ее утолщенной час-
ти с помощью упругого звена (см. положение II). Извле-
кают трубку, предварительно переместив втулку влево.
На схеме 25.3 трубка 1 имеет на конце развальцо-
ванную часть, в которую вставляют трубку 2 с уплотни-
тельными кольцами и стопорным пружинным кольцом.
При движении трубки 1 в направлении А буртик сначала
растягивает стопорное кольцо настолько, чтобы перемес-
тится внутри его, а затем кольцо сжимается и стопорит
трубку 2 в направлении В. Разобрать такое соединение
без разрушения стопорного кольца довольно сложно.
Для гибких и/или тонкостенных трубопроводов
обычно большого диаметра используют соединение с
помощью хомута (схемы 26.1... 26.4). Хомут выполняют
в виде замкнутой ленты, упругого кольца, шарнирно или
упруго соединенных секторов для стягивания двух или
нескольких деталей.
На схеме 26.1 — ниппельное соединение шланга и
трубы дополнено хомутом, который деформирует охва-
тывающий трубу шланг и обеспечивает тем самым более
плотное прижатие его внутренней поверхности к трубе.
В схеме 26.2 лента выполнена в виде косозубого
венца, взаимодействующего с винтом. Вращением голов-
ки винта добиваются перемещения конца ленты и ее на-
тяжения. Зубья-выступы на ленте получены ее пластиче-
ским деформированием (см. углубления на внутренней
стороне ленты).
В схеме 26.3 к ленте приварены секторы. Вращени-
ем гайки добиваются сближения шарниров В и С и затя-
гивания хомута. Сечение секторов позволяет стягивать в
осевом направлении конические фланцы (см. схему 26.3).
В схеме 26.3а к тонкостенным трубам 1 и 2 приварены
фланцы с внешними коническими поверхностями, со-
пряженными с секторами хомута. Фланцы 1 и 2 сопряже-
ны между собой по конусным поверхностям, обеспечи-
вающим центрирование и уплотнение.
Функциональная группа подвижных соединений
трубопроводов включает в себя шарнирные (поворот-
ные) соединения (схемы 27.1 ... 27.3) и компенсирую-
щие (линейные перемещения) соединения - схема 27.4.
204
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
83.1. БЫСТРОРАЗЪЕМНЫЕ И БЫСТРОСТЯГИВАЕМЫЕ СОЕДИНЕНИЯ
БЫСТРОРАЗЪЕМНЫЕ
ПОДВИЖНЫЕ СОЕДИНЕНИЯ
ТРУБОПРОВОДОВ
Патрубок
Штуцер
L1
Шланг
S2
11атрубок
S4
Ниппель
Е, Е'- элементы замка
LI, L2 - стопорные
упругие скобы
SI, S2, S3, S4 - уплотнительные
(резиновые) кольца
БЫСТРОРАЗЪЕМНЫЕ СОЕДИНЕНИЯ ВАЛОВ
БЫСТРОСТЯГИВАЕМЫЕ
СОЕДИНЕНИЯ
|30.2|
Труба 1
-А
С-С Лепесток
Е' В Е \ Труба 2
Л,
Положение 1
Положение II
В 54
Замок
В-В Лспестог
F. Лепесток
Труба -
Винт
132.4
Гайка
Рычаг
Рычаг,
|32.3
Упругая
перемычка
Упругая
перемычка
Торцовые
шлицы
Звено 1
Звено 2
Гайка
Колпачок Ось
I j Пакетдеталей
Кулачок
Ось
Шайба
Рычаг
Кулачок
Охватываемая
деталь
Хомут
i.
За счет существенного усложнения шарнирные соедине-
ния позволяют передавать под давлением рабочую среду
между вращающимися относительно друг друга агрега-
тами, например с поворотной платформы экскаватора на
ходовую часть.
На схеме 27.2 соединение штуцера с патрубком вы-
полнено с возможностью поворота каналов, оси которых
пересекаются под прямым углом. Для обеспечения не-
прерывности потока в штуцере выполнены радиальные
каналы — отверстия, сообщающиеся с кольцевой поло-
стью, выполненной в патрубке. Между соединенными
деталями размещены уплотнения. Штуцер ввернут в
корпус (в данном примере в корпус коллектора, обеспе-
чивающего гидравлическое соединение гидронасосов,
гидроцилиндров, размещенных на относительно подвиж-
ных частях машины).
На схеме 27.3 соединение патрубков 1 и 2 в виде
сферического шарнира позволяет поворачивать ось одно-
го трубопровода относительно оси другого. Между со-
единяемыми элементами установлены уплотнения. Из
прижатие регулируется гайкой.
Решение на схеме 27.4 представлено в виде подвиж-
ного соединения толстостенных труб 1 и 2. Соединение
снабжено скользящим многоступенчатым уплотнением в
виде упругих разрезных колец и защищено разделитель-
ным уплотнением в виде сильфона. Данное соединение
служит для компенсации тепловых расширений вдоль
осей труб.
Чтобы охарактеризовать в полной мере функцио-
нальные возможности соединений трубопроводов, оста-
новимся на отдельных примерах самозапирающих со-
единений (схем 28.1) и быстроразъемных/быстрособи-
раемых соединений - схемы 29.1, 30.1 и 30.2, см. также
схемы 25.1 и 25.2.
Соединение на схеме 28.1 исключает вытекание
жидкости или проникновение воздуха в трубопроводы
системы, заполненной жидкостью при их разъединении.
БЫСТРОРАЗЪЕМНЫЕ, ЗАХВАТНЫЕ И ЗАЖИМНЫЕ СОЕДИНЕНИЯ
205
Данное соединение обеспечивает самозапирание
одного трубопровода - его называют быстроразъемным
соединением трубопроводов с одним перекрывающим
клапаном. Известны также соединения, обеспечивающие
самозапирание обоих разъединяемых трубопроводов —
быстроразъемные соединения трубопроводов с двумя
перекрывающими клапанами.
Трубы 1 и 2 соединены между собой. Между ними
установлено уплотнение. Для разъединения трубопрово-
дов сдвигают втулку 2 влево. сжимая пружину 2 и осво-
бождая фиксаторы. После этого разводят трубопроводы.
Клапан под действием пружины 1 плотно прижимается к
седлу втулки 1, герметично присоединенной к трубе 1.
Труба 1 при этом оказывается запертой. Для соединения
трубопроводов сдвигают втулку 2 влево и устанавливают
трубу 2 в рабочее положение, затем отпускают втулку.
Общее правило конструирования данного вида соедине-
ний: выбирают и устанавливают клапан в одном из со-
единяемых трубопроводов или в обоих трубопроводах.
Клапан выполняют автоматически срабатывающим при
осевом относительном перемещении трубопроводов.
Внешнее соединение трубопроводов при этом может
быть любым из числа рассмотренных, а не только быст-
роразъемным, как на схеме 28.1.
На схеме 29.1 представлен простейший пример бы-
строразъемного, быстрособираемого соединения. Данное
решение используют в трубопроводах малого давления и,
в частности, для бытовых и медицинских приборов.
Ниппель имеет углубление для размещения фиксатора в
собранном состоянии и уплотнение, деформируемое при
сборке выступом корпуса. Сопряженные детали обычно
выполняют из пластмасс с малым модулем упругости, а
фиксатор при этом выполняют за одно целое с корпусом
в виде кольцевого буртика.
К быстроразъемным соединениям трубопроводов
еще относят герметичные сочленения, сборку и разборку
которых осуществляют не только поступательным пере-
мещением соединяемых деталей, но и перемещениями
элементов замка (рис. 83.1, схемы 30.1; 30.2).
В отличие оз фиксатора замок не может открыться
самопроизвольно.
В таких решениях в качестве замка используют сто-
пор, который при сборке срабатывает автоматически, а
при разборке требуется принудительное его выключение.
В ряде решений предусматривают принудительное
включение и выключение стопора.
В примере шарнирного (поворотного) соединения
на схеме 30.1 ниппель вставляют в патрубок и переме-
щают до западания упругой стальной скобы L2 в кольце-
вую канавку ниппеля. Аналогично соединяют патрубок
со штуцером. Резиновые кольца SI, S2, S3 и S4 обеспе-
чивают уплотнение, а скобы или стопорные упругие
кольца удерживают соединенные детали от осевых пере-
мещений. Скоба до сборки удерживается в канавке дета-
ли за счет упругости. В сопряженной детали имеется
специальная выемка для захватывания скобы при ее из-
влечении из гнезда и, соответственно, при работе соеди-
нения. Данное соединение предназначено для использо-
вания в системе с высоким давлением.
На схеме 30.2 показано быстроразъемное/быстро-
собираемое соединение пневмотрубопровода пылесоса.
Труба 2 выполнена из пластмассы и имеет два лепестка с
выступами Е. При сборке трубу 2 вставляют в трубу 1 и
сближают их в направлении F2 (см. сечение СС выше
осевой линии), лепестки деформируются и выступы Е
западают в пазы Е, образуя упругий замок (в сечении
С- С ниже осевой линии). Чтобы разобрать соединение,
достаточно сжать лепестки в направлении Ft (в частном
случае — пальцами руки) и вытянуть трубу 2 из трубы 1.
Быстрораз оеиные соединения деталей использу-
ют для соединения валов, например в приводах инстру-
мента. На схеме 31.1 гибкий вал 2 соединяют с валом 1,
навинчивая гайку на выступ корпуса привода. Вал со-
единяется с заделкой вала 2 элементарной кулачковой
или шлицевой муфтой.
На схеме 31.2 показано соединение вала 1 с валом 2.
Хвостовик шарнирно соединен с валом 1, а втулка 2 име-
ет шлицевое соединение с валом 2. Обе сопрягаемые де-
тали: хвостовик и втулка 2 — имеют центрирующие кони-
ческие поверхности соответственно К и L. Хвостовик
вставляют внутрь втулки 2. Шарики сначала отжимаются
в радиальном направлении поверхностью К, а затем за-
падают в пазы С. Запирание их осуществляется переме-
щением втулки 1 влево. Шарики, сопряженные с поверх-
ностями пазов, удерживают детали от относительного
осевого перемещения и позволяют передавать вращаю-
щий момент. Для передачи большого момента использу-
ют зубчатое или кулачковое соединение в сочетании с
шариковым фиксатором или стопором осевых перемеще-
ний (см. на рис. 75 схемы 5.5 и 5.6).
Рассмотрим далее принципиальные решения, слу-
жащие для стягивания деталей и используемые обычно в
совокупности с другими видами соединений.
В схеме 32.1 для стягивания соединяемых деталей
перекидной рычаг при движении, показанном стрелкой, с
помощью петли AD притягивает крючок к основанию,
преодолевая силу сопротивления F.
Крайнее положение рычага (штриховые линии) ис-
ключает самопроизвольное открытие соединения, так как
ось D' смещена на величину е относительно центра шар-
нира В.
На схеме 32.1а показано применение одного из ва-
риантов данного устройства для стягивания соединяемых
труб 1 и 2 и зажатия кольцевого уплотнения. На трубе
смонтировано несколько стягивающих рычагов, симмет-
рично расположенных на внешней поверхности трубы
(в окружном направлении). Рычаг соединен с трубой 1
посредством звена BD. На концах труб выполнены флан-
цы, между которыми размещают кольцевое уплотнение.
При соединении труб захватывают фланец трубы 1
крючком, расположенным на рычаге, и нажатием на ры-
чаг стягивают трубы и зажимают уплотнение. Самопро-
извольное обратное движение рычага исключается при
расположении центра шарнира В выше линии AD'.
В этом случае сила упругости уплотнения и других эле-
ментов соединения, проходящая вдоль линии AD' созда-
ет момент относительно точки В, препятствующий само-
произвольному движению рычага. Основное условие
работоспособности данного устройства — достаточная
206
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
83.2. ЗАХВАТНЫЕ И ЗАЖИМНЫЕ (ФРИКЦИОННЫЕ) СОЕДИНЕНИЯ
Пакет Хвостовик
|Положсние11| Пружина
Заготовка/ипструмент
33.5
Панга Пружина 1 Ролик
Корпус Пружина 2
Тяга
Головка
Рычаг
Кольцевая Винт
полость
Положение I
Вид А
Положение II
Плунжер
Заготовка
Цанга 1 Цанга 2
Толкатель
Конус 2
Заготовка
Ы/А Шток Конус!
Втулка Пружина
Цанга
БЫСТРОРАЗЪЕМНЫЕ, ЗАХВАТНЫЕ И ЗАЖИМНЫЕ СОЕДИНЕНИЯ
207
упругость соединяемого пакета деталей, в частности,
достигаемая за счет наличия упругого уплотнения.
На схеме 32.2 представлен запираемый шарнир.
Звено 1 соединено со звеном 2 цилиндрической осью.
Элементы Г и 1" соединены со звеном гибкими пере-
мычками. Между этими элементами и звеном 2 преду-
смотрен осевой зазор, обеспечивающий свободу относи-
тельного поворота звеньев. Поворотом рычага вокруг его
оси стопорят шарнир. При этом выступ упирается в эле-
мент Г, и элементы 1' и 1" сближаются и зажимают зве-
но 2. Для надежности стопорения на взаимодействующих
элементах выполнены торцовые шлицы.
На схемах 32.3 и 32.4 даны разновидности кулач-
кового стягивающего устройства. В отличие от ры-
чажного устройства по схеме 32.1 здесь количество
звеньев на одно меньше, хотя при этом обычно ниже на-
грузочная способность. Такие решения часто используют
в конструкциях велосипедов и инвалидных колясок.
На схеме 32.3 пакет деталей, установленный на оси,
стягивается при повороте кулачка на 90° в направлении
стрелки. Кулачок установлен внутри отверстия оси и не-
подвижно соединен с рычагом. Валик кулачка и рычага
шарнирно соединен с кулачком, упирающимся в пакет
деталей. Образован замкнутый силовой контур, при ко-
тором ось растягивается, а пакет деталей сжимается.
Аналогичное устройство представлено на схе-
ме 32.4, но здесь стягиваются ветви хомута и образуется
фрикционное соединение с охватываемой деталью. По
существу, это разновидность клеммового соединения.
Остановимся еще на одной большой группе соеди-
нений - захватных и зажимных устройствах
(рис. 83.2), хотя их чаще всего изучают в разделах, не
относящихся к соединениям. Захватные соединения в
отличие от зажимных передают рабочую нагрузку за счет
давления, а зажимные в основном за счет трения.
На схеме 33.1 показано рабочее оборудование про-
тяжного пистолета, содержащее цангу, губки которой
имеют на внутренней поверхности выступы, а их ради-
альные перемещения достаточны для захватывания эле-
ментов с утолщениями на конце.
Устройство установлено в корпусе пистолета. При
сжатии пружины и выталкивании цанги силой F2 ее губ-
ки расходятся, и их располагают вокруг хвостовика
(утолщенной части) заготовки (например заклепки). На-
правление силы Fi, приложенной к корпусу, противопо-
ложно силе F2.
Далее под воздействием пружины цанга (схема
33.1а) втягивается в корпус, хвостовик заготовки захва-
тывается. Затем совместным движением звеньев захват-
ного устройства в направлении F заготовку протягивают
через отверстие в пакете деталей.
Еще один пример захватного устройства - быстро-
разъемное шарнирное соединение - представлено на схе-
ме 33.2. В данном примере шарнир сферический: одно из
его звеньев имеет шаровую головку, а другое выполнено
в виде управляемой цанги. Цанга в сжатом состоянии
удерживается внутри корпуса пружиной 1.
Разъем шарнира осуществляют нажатием на рычаг.
Преодолевая сопротивление пружины 2, рычаг воздейст-
вует на ролик и перемещает цангу влево до ее выхода из
корпуса. Цанга при этом разжимается, и элементы шар-
нира выводятся из соприкосновения.
Для сборки соединения головку тяги вставляют в
цангу при нажатом рычаге, затем отпускают рычаг и цан-
га вместе с тягой втягивается в корпус пружиной 1.
Обширная область использования зажимных
фрикционных соединений - это закрепление сменного
инструмента или заготовки.
В устройствах для смены инструмента без подна-
ладки предусматривают высокую точность такого соеди-
нения.
На схеме 33.3 пример крепления резцовой головки в
специальном патроне. В качестве базирующей поверхно-
сти выбран конус конусностью 1:5. Резцовая головка
имеет канавку D для захватывания автооператором. По-
сле размещения хвостовика в корпусе патрона по про-
грамме включается вращение гайки, которая передвигает
вправо винт. Винт имеет клиновые пазы, благодаря чему
шарики выталкиваются через радиальные цилиндриче-
ские отверстия обоймы в клиновидные пазы хвостовика
резцовой головки. Благодаря форме этих пазов, конус
перемещается вправо до замыкания по торцу С с регла-
ментированной силой 2500 Н. Такая затяжка конического
соединения позволяет передавать определенный вра-
щающий момент (в данном примере ~16 Нм).
В схеме 33.3 использовано соединение конических
деталей. Кстати, такое соединение для сменного инстру-
мента используется самостоятельно и давно. Причем в
таком соединении обеспечивают возможность передачи
момента (см. 7) и Т2 на схеме 33.4) только за счет трения.
Для этого нужно создать условия самоторможения (см.
соотношение угла конуса у и угла трения р на схеме). Это
соотношение исключает самопроизвольную осевую раз-
борку. Но несущая способность по моменту зависит, тем
не менее, от начальной или рабочей осевой силы. Данное
соединение обладает нестабильными свойствами и, в
частности, нерегламентированной несущей способно-
стью. Оно практически неприемлемо для закрепления
заготовок.
На схеме 33.5 дано устройство для зажима центри-
рования цилиндрических заготовок или хвостовиков ин-
струмента за счет деформирования охватывающей детали.
Диаметр зажимаемого предмета должен незначи-
тельно отличаться от диаметра отверстия патрона. В на-
чальном нерабочем положении винт и шток находятся
вверху (см. схему). При завинчивании винта и соответст-
венно при опускании плунжера увеличивается давление в
замкнутой кольцевой полости, заполненной жидкой или
пластичной средой. В результате внутренняя более тон-
кая стенка деформируется и зажимает предварительно
введенный в отверстие предмет. При этом образуется
управляемое [регулируемое] разъемное фрикционное
неподвижное соединение.
Для зажатия заготовок требуется более широкий
диапазон перемещения зажимающих элементов. В уст-
ройствах такого назначения используют цангу, способ-
ную деформироваться на значительную величину.
208
СОЕДИНЕНИЯ ЭЛЕМЕНТОВ И ДЕТАЛЕЙ
83.3. ЗАЖИМНЫЕ (ФРИКЦИОННЫЕ) СОЕДИНЕНИЯ ТОЧНОГО ЦЕНТРИРОВАНИЯ
Данное соединение
компенсирует уменьшение
зажатия инструмента
(от центробежных сил,
действующих на втулку)
при вращении шпиделя
и хорошо демпфирует
колебания инструмента.
Коническая упругая втулка
(например, с винтовыми прорезями)
при осевом перемещении обжимает
цилиндрическую втулку
и зажимает установленный
в ней с минимальным зазором
хвостовик инструмента.
Шпиндель имеет
конусное отверстие
(конусность 1:10)
для посадки
конической втулки.
Тарельчатая пружина
и торцовый стык обеспечивают
определённую осевую
силу воздействия на коническую
втулку и соответственно
регламентированные радиальные
силы зажатия цилиндрического
хвостовика инструмента.
133.12 |
Этот зажимной патрон нагревают
токами высокой частоты. Посадочное
отверстие увеличивается настолько,
что можно легко вставить в него хвостовик
инструмента. При остывании патрона
хвостовик сильно зажимается в отверстии.
При извлечении инструмента патрон
нагревают так быстро, что тепловое поле
не успевает распространиться на зажатый
хвостовик инструмента» При этом расширяется
только отверстие, а хвостовик остается
холодным, и его можно вынуть из патрона.
133.13 |
Упругий самоцентрирующий зажимной патрон.
Последовательность зажатия
Сжимая патрон в указанных направлениях,
добиваются превращения некруглого
центрального отверстия в круглое.
В него можно свободно вставить хвостовик
зажимаемого инструмента.
После снятия нагрузки на патрон
отверстие стремится принять
начальную форму, и хвостовик
инструмента зажимается.
—л
На схемах 33.6 ... 33.8 — некоторые принципиальные
решения цанговых зажимных устройств. У цанги име-
ются продольные прорези. Ее элементы упруго соедине-
ны с телом цанги. Заготовку вставляют в цангу. При осе-
вом перемещении цанги ее элементы сближаются и за-
жимают заготовку. Цанга в конкретном примере (схе-
ма 33.6) имеет конусность 1:5, а число прорезей 6 или 8.
Осевое перемещение осуществляют гайкой, а положение
хвостовика инструмента ограничено упором (с регули-
руемым положением).
Задача, которую обычно решают при разработке
конструкции цанги — это увеличение диапазона диамет-
ров зажимных изделий.
На схеме 33.7 показана цанга с клиновыми эле ив
тами Г и 7", имеющими упругие перемычки J' и J", соа
ветственно соединяющие их с телом цанги и раздс. з
ными между собой окнами S. Между элементами 7' н i
выполнены прорези. На виде А показаны предела I
положения элементов, при которых зазоры между д
ментами Г и 1" отсутствуют. Положение I соответс
зажатию изделия максимального диаметра. Элемент
и 7" прилегают к поверхности изделия. В положении
элементы Г сдвинуты элементами 7" к центу за «.д
клинового взаимодействия. На величину такого смед
ния элементов Г увеличивается диапазон диаметров 1
жимаемых изделий.
БЫСТРОРАЗЪЕМНЫЕ, ЗАХВАТНЫЕ И ЗАЖИМНЫЕ СОЕДИНЕНИЯ
209
Еще большее увеличение диапазона диаметров за-
жимаемой детали достигается в многослойном цанго-
вом зажиме {схема 33.8). Здесь две цанги 1 и 2, содер-
жащие клиновые элементы Г, 1" и 2', 2" соответственно,
размещены одна внутри другой. При перемещении втул-
ки (влево) сближаются элементы Г, 1", а те в свою оче-
редь зажимают элементы 2' и 2". Возврат элементов в
исходное положение осуществляется пружиной, переме-
щающей втулку вправо.
Аналогичные принципы используют в разжимных
оправках с радиально перемещаемыми элементами,
служащими для центрирования и закрепления заготовки
или инструмента путем прижатия к поверхности ее/его
посадочного отверстия.
В частности, оправка может иметь отдельные ку-
лачки, приводимые в движение клиновым механизмом
{схема 33.9) или содержать разжимающую цангу {схе-
ма 33.10).
В корпусе оправки {схема 33.9) размещены подвиж-
ные в радиальном направлении кулачки-ползуны 1 и 2 с
цилиндрической периферийной поверхностью. Кулачки
расположены симметрично в поперечном сечении (обыч-
но имеется три и более кулачка в одном сечении). Они
приводятся в движение клиньями 1 и 2.
При движении клина 2 вправо сперва прижимается
пружиной 3 правый комплект кулачков 2, который цен-
трирует заготовку или инструмент в данном сечении.
Затем левый комплект кулачков 1 выправляет положение
заготовки или инструмента во втором сечении и обеспе-
чивает необходимые силы разжатия и соответственно
силы трения. Такая последовательность передачи движе-
ния и увеличения силы прижатия обусловлена наличием
пружины 3 между клиньями 1 и 2.
Клинья несамотормозящие, и возврат кулачков
обеспечивают кольцевые пружины 1 и 2. Цилиндриче-
ская оболочка ограничивает радиальные перемещения
кулачков.
В схеме 33.10 цанга содержит две группы жестких
элементов Г и 2", упруго соединенных перемычками.
Эти элементы разжимаются конусами 1 и 2 соответст-
венно при их сближении. Конусы сближаются при осе-
вом движении штока относительно корпуса оправки. Для
возвратного движения элементов Г и 2" служат толкате-
ли, посредством которых разъединяют конусы корпуса и
цанги.
Оправки выполняют также в виде замкнутой упру-
гой оболочки, которую деформируют, подавая под дав-
лением жидкость. Конструкция ее аналогична упругому
патрону на схеме 33.5.
Цанговые устройства на схемах 33.6 предназначены
для зажатия деталей при достаточно большом ходе за-
жимающих кулачков. Диаметры деталей или отверстий в
деталях при этом могут быть существенно различными,
зажимные устройства могут быть универсальными, но
достигаемая точность центрирования все же невелика.
Кроме суммирования отклонений формы и размеров
элементов устройства, на точность центрирования и сте-
пень зажатия влияют центробежные силы и вызываемые
ими деформации и другие факторы. Некоторые решения,
обеспечивающие точное центрирование и регламентиро-
ванное зажатие цилиндрического хвостовика инструмен-
та, представлены на рис. 83.3.
Ход зажимных элементов в схемах 33.11 ... 33.13
определяется необходимым зазором, чтобы можно было
вставить инструмент, а зажатие создается управляемым
полем напряжений в теле охватывающей детали.
В схеме 33.11 поле напряжений создается за счет
регламентированного деформирования (обжатия) охва-
тывающей детали с помощью конического подвижного
соединения.
В схеме 33.12 за счет быстрого и локального нагрева
достигают расширения охватывающей детали в моменты
установки и извлечения инструмента. На схеме 33.12а
показано, как распределяются тепловые поля при нагреве
устройства. При этом важно, чтобы не нагревался весь
корпус патрона и не успевал нагреться хвостовик инст-
румента.
Схема 33.13 напоминает собой трехкулачковый па-
трон. Но он здесь выполнен в виде одной детали, а зажа-
тие осуществляется только за счет изменения формы не-
круглого отверстия.
Представленные примеры свидетельствуют о том,
насколько широки функциональные возможности соеди-
нений и насколько они конструктивно разнообразны.
Глава 9. УПЛОТНЕНИЯ СОЕДИНЕНИИ
9.1. ОБЩИЕ ПОЛОЖЕНИЯ
ГЕРМЕТИЗАЦИИ И УПЛОТНЕНИЯ
СОЕДИНЕНИЙ
Чем более совершенная конструкция машины отли-
чается от своих предшественников? На первый взгляд —
чистотой: отсутствуют углубления и декоративные эле-
менты, в которых бы скапливалась грязь; нет подтеков
смазочного или рабочего материала; все уплотнения не-
доступны для случайных механических повреждений.
Это только внешняя сторона значимости уплотнений
подвижных и неподвижных соединений. Не менее важ-
ным является обеспечение чистоты (регламентированно-
го состава и давления) рабочей среды внутри машины.
Техническими средствами обеспечения этих качеств
машин являются элементы герметизации и уплотнитель-
ные устройства. При этом под герметизацией понимают
обычно более полную изоляцию (отделение) одной среды
от другой, хотя по существу уплотнительные устройства
(неподвижных соединений и соединений ограничен-
ных/качательных перемещений) служат и для обеспече-
ния герметичности.
Герметизация представляет собой комплекс меро-
приятий по предотвращению проникновения газа, жид-
кости и/или твердых частиц через разграничивающую
различные среды стенку, а также через соединение в дру-
гую среду или к элементам, деталям и соединениям ме-
ханизмов и машин.
Герметичные разграничивающие стенки изготовля-
ют из специальных, не пропускающих жидкость или газ
материалов путем соединения сваркой, пайкой или кле-
ем. Кроме того, используют специальные материалы-
герметики для покрытий и прокладок (в стыках) и при-
меняют уплотнения соединений.
Герметизацией осуществляют защиту человека, ма-
шины или прибора от вредного влияния среды, удержи-
вают топливо, смазочный материал, охлаждающую жид-
кость и др. в замкнутом объеме для обеспечения особого
микроклимата или специальной технологической среды и
т.п. В летательных аппаратах, например, герметизируют
все места возможных утечек воздуха: соединения сило-
вых элементов кабины (фюзеляжа); остекление фонарей
и окон; двери и люки; вводы и выводы из кабины под-
вижных элементов управления (тяги, тросы), трубопро-
водов, электропроводов и др.
Основные правила осуществления герметизации:
• герметизирующие покрытия и/или прокладки
должны закрывать те зазоры, которые являются общими
для разделяемых сред. Например, на схеме 1.1 (рис. 84
для разделения сред 1 и 2 герметизирующее покрытие
наносят только на те заклепки, которые расположены на
разделяющей стенке, кроме того, герметизируют зазоры
болтового соединения и устанавливают уплотняющую
прокладку между соединяемыми деталями;
• для повышения надежности герметизации в ряд
мест дублируют покрытия, прокладки, уплотнения. На
пример, трубчатые уплотнения на схеме 1.2 и проклеив
герметизируют одно и то же соединение;
• плотное прижатие прокладки или уплотнения
поверхностям соединяемых деталей, особенно если :
верхности неровные или относительно подвижные, . у
ществляют благодаря упругости элементов герметиза-.
или специальных упругих устройств, а также за счет р _э
ности давлений разделяемых сред. На схеме 1.2 верхяд
трубчатое уплотнение расположено так, что оно прижа:
давлением р к стеклу; для прижатия упругого уплотне <
к соединяемым деталям ему придают специальную ( -
му, изменяющуюся под действием сил.
На схеме 1.3 между стеклом и балкой каркаса уста
новлено уплотнение. Под действием силы FK лепешц
уплотнения плотно прижимаются к поверхности кд
стекла, так и балки.
Но обычно форму уплотнения выбирают из услова
их прижатия винтами или иными устройствами:
• для обеспечения непроницаемости разъемного . I
единения при использовании жидкого герметика след} ?
учитывать, что с увеличением его вязкости требуете
меньшая сила прижатия поверхностей соединения. Ггр
метик должен обладать адгезионной способностью к уа
лотняемым поверхностям, сохранять заданную вязко,,
при рабочих температурах и быть нейтральным к рас
чей среде; при монтаже соединения герметик дол-1.
обладать достаточной текучестью, чтобы заполнять «а
пустоты, образованные микронеровностями;
• в герметизированных вводах (см. схемы 4.1 ... л'
на рис. 85) штоков, валов, тяг или канатов желатег~
использовать разделительное уплотнение, а в дру1Ш
случаях — принудительное поджатие уплотнения к глад
кой поверхности подвижного звена. Для этой цели осу
ществляют специальное покрытие каната и/или испо.ть
зуют обжатую втулку (см. схему 12.1 на рис. 89). Уплс-
няющий упругий элемент прижат к поверхности втулм
плотно обжатой вокруг каната. Прижатие осуществл'
ся стягиванием корпуса и крышки с помощью болт, i
Между корпусом и разделительной стенкой установи:
прокладка.
Особая и обширная область герметизации - зд
микроэлектронные устройства. Для них различают г I
метизацию:
корпусную, когда защищаемое устройство нахо.и ~
ся в изолированной замкнутой емкости;
бескорпусную, когда защита осуществляется покр
тием, обволакиванием, заливкой устройства герметике
Пластмассовые и металлополимерные корпуса ч
обеспечивают надежной защиты от проникновения в
ги, особенно в местах металлических выводов из-за р . *
личия коэффициентов теплового расширения conpt.
сающихся материалов.
Вакуум-плотную герметизацию обеспечивают : ?
таллические, керамические и стеклянные корпуса, дета
ОБЩИЕ ПОЛОЖЕН! Л ГЕРМЕТИЗАЦИИ
211
212
УПЛОТНЕНИЯ СОЕДИНЕНИИ
которых соединяют сваркой или пайкой. В ряде случаев
дополнительно герметизируют кристалл микросхемы,
нанося на его поверхность каплю полимерного гермети-
ка. Герметизацию выводов в металлических корпусах
осуществляют стеклянными бусами (каждый вывод в
отдельности) или стеклотаблетками (группа выводов).
Надежное соединение между металлом и стеклом возни-
кает в результате частичного растворения оксида металла
в стекле, для чего металлические поверхности предвари-
тельно оксидируют. При подборе материалов для герме-
тизации учитывают их сопротивление разрушению (тре-
щинообразованию) в результате совместного теплового
деформирования деталей соединения.
Для герметизации корпусов широко используют
сварку контактную, давлением, плавлением — аргоно-
дуговую, микроплазменную, электронно-лучевую, лазер-
ную и др. и пайки.
Выбор вида сварки или пайки зависит от сочетания
свариваемых материалов, толщины соединяемых дета-
лей, требуемой надежности соединения и др. Принятый
вид сварки обусловливает конструкцию элементов стыка
и деталей в целом. При сварке давлением предусматри-
вают элементы (схема 1.4) для возможности воздействия
инструмента и ограничитель развития пластических де-
формаций в зоне, в которой располагается полупровод-
никовый кристалл или подложка.
Классификация уплотнений. Все уплотнения де-
лятся на три основных вида:
- уплотнения неподвижных соединений;
- разделительные уплотнения соединений ограни-
ченных/качательных перемещений;
- уплотнения подвижных (вращательных и поступа-
тельных) соединений.
9.2. УПЛОТНЕНИЯ НЕПОДВИЖНЫХ
СОЕДИНЕНИЙ
Уплотнение неподвижного соединения представ-
ляет собой элемент или деталь, находящуюся в контакте
с сопрягаемыми деталями неподвижного соединения и
препятствующую перетеканию среды между ними.
При плотном прилегании поверхностей (во фланце-
вом соединении не менее 75 ... 90 % по окружности без
разрывов) необходимая герметичность может быть дос-
тигнута таким прижатием поверхностей друг к другу,
при котором напряжения смятия превысят разность дав-
лений разделяемых сред.
Необходимая сила прижатия уменьшается, если ме-
жду соединяемыми деталями поместить прокладку
(схема 1.5) из пластичного или эластичного материала:
меди, алюминия, фибры, паронита, картона со специаль-
ной пропиткой, армированного асбеста, пластмассы, ре-
зины и т.д.
Для предотвращения утечки газа при перепаде дав-
лений Др давление на поверхности прокладки в месте ее
контакта с деталями разъемного соединения должно быть
во много раз больше этого перепада, например, следую-
щим:
Материал прокладки
Давление на
поверхности прокладг
Медь........................ 100 Др
Алюминий.................... 70 Др
Фибра.......................... 40 Др
Свинец......................... 7 Др
Фторопласт (Др < 6 МПа)......... 7,5 + 1,5 Др
Паронит (Др < 10 МПа).......... 10 Др
Необходимое соотношение между давлением сл
тия прокладки и перепадом давлений разделяемых cpeq
фальцованном соединении (на схеме 1.5а показаны этзз
сборки I, II и III) может быть обеспечено благодаря да
лению рабочей среды в процессе эксплуатации шлая
или оболочки.
Герметизация может быть осуществлена также пл
этическим деформированием одной из деталей, наър
мер, выполненной из алюминиевого или магниеыя
сплава, другой деталью из стали, имеющей кольцев.
заостренный выступ типа "ножа" (схема 1.6). Если J
детали из относительно мягкого материала, то испо.тьз
ют закладную деталь из твердого материала (схема 1. ~
На схеме 1.7а уплотнение в виде конической
кладки (конусность ~60°) из алюминиевого сплава к.
специальной стали помещено в гнездо, образована
двумя стягиваемыми деталями: штуцером и трубой. Г|
относительном сближении деталей (с помощью винт*.
го соединения) прокладка, установленная в распор, л
формируется и образует плотные соединения, которj
могут функционировать при температуре -256 ... +1000
и давлении 10 ... 40 МПа (при диаметре прокла_|
400 ... 65 мм и толщине 1 мм).
На схеме 1.76 представлено уплотнение соедини
труб 1 и 2, стягиваемое гайкой, и содержащее одно _
лотнительное кольцо из эластичного материала и дефэ
мируемое кольцо, которое своими кромками врезает.,
трубу 1. Плотные соединения здесь также образую:,
взаимодействием колец с коническими поверхностям
деталей.
Прокладку выполняют также в виде эластична
кольца круглого сечения и закладывают ее в спецназ
ную кольцевую полость треугольного, прямоугольн;'
или иного сечения (схемы 1.76,1.8, 1.9). Для этой же щ
ли используют металлические упругие кольца с зам.1
тым (полые) или незамкнутым сечением (схемы У./
1.11). Кольца изготовляют из коррозионно-стойкой стл
с присадкой титана. Для лучшего прилегания и коррс-
стойкости их покрывают кадмием (используют при та
пературе до 1000 °C и давлении до 140 МПа) либо iltJ
кой из пластмассы или резины (используют при геми:
туре -230 ... +260 °C и давлении до 35 МПа).
РАЗДЕЛИТЕЛЬНЫЕ УПЛОТНЕНИЯ СОЕДИНЕНИИ
213
Поверхности, соприкасающиеся с кольцами, долж-
ны иметь параметр шероховатости Ra < 1 ... 6,3 мкм.
Для уплотнения соединений цилиндрических по-
верхностей используют круглые кольца (схема 1.9а). Для
монтажа такого соединения делают переходный конус.
Такие же кольца закладывают между торцовыми поверх-
ностями (схема 1.96).
Для уплотнения резьбовых соединений используют
стальное U-образное кольцо (схема 1.11) или кольцо в
виде гофра с осевой податливостью (схема 1.12). Его ус-
танавливают между специально выполненными торцо-
выми поверхностями.
На схеме 1.13 показано упругое уплотнение, также
установленное между торцовыми поверхностями. Оно
выполнено в виде кольца прямоугольного сечения, внут-
ри которого размещена тарельчатая пружина. Уплотне-
ние (эластомерный слой) привулканизировано к защит-
ному Г-образному стальному кольцу.
На схеме 1.14 показано уплотнение в виде металли-
“еского кольца соединения деталей: трубы и штуцера,
стягиваемых гайкой. Форма и материал сопряженных
еталей таковы, что при их стягивании кольцо врезается
со периметру кромкой С в трубе. В результате клинового
взаимодействия кольцо зажато между поверхностями
.еталей (направления действия давлений q\ и q2 отмече-
ны стрелками). С другой стороны оно прижато кониче-
огой поверхностью гайки (давление q-j). Кольцо опирает-
ся также на наружную поверхность трубы в местах А и В.
Плотное прижатие и деформирование элементов в
"снутом пространстве обеспечивает герметичность
V ютнения.
Аналогичные, но более простые решение соедине-
на штуцера с трубой представлены на схемах 1.14а,
1.146 и 1.14в. Их применяют в системах с меньшим пере-
адом давлений, чем в схеме 1.14. Главное во всех этих
велениях — обеспечение плотного конического соединения:
в схеме 1.14а резиновый шланг деформируется ме-
~жллическим коническим наконечником;
в схеме 1.146 тонкостенная металлическая труба
звальцовывается при зажатии ее конца между двумя
«дэическими поверхностями;
в схеме 1.14в еще более плотное соединение осуще-
ствлено втягиванием тонкостенной трубы на конический
лшель с помощью заклинивающего кольца и гайки.
Эффект плотного (с пластическим деформированн-
ое) прижатия конических поверхностей использован
кике в конических резьбах, которые, по существу, отно-
сятся к самоуплотняемым соединениям.
93. РАЗДЕЛИТЕЛЬНЫЕ УПЛОТНЕНИЯ
СОЕДИНЕНИЙ
Разделительное уплотнение - деталь в виде
о граны, сильфона, оболочки и т.п., плотно и
чы.эдвижно присоединенная к деталям относительно
гя эдвижным или с ограниченным/колебательным
___i .тигельным движением. Такое уплотнение наиболее
_г кно отделяет одну среду от другой или защищает
жтали от загрязнения.
Конструирование таких уплотнений подчинено сле-
дующим принципам.
1. Податливость уплотнения целесообразно дости-
гать за счет местных утонений в местах наибольших де-
формаций (по краям диафрагмы). Таким образом обеспе-
чивается прочность (и, может быть, и жесткость) диа-
фрагмы на большой площади рабочего давления (схе-
ма 2.1 на рис. 85).
2. В большинстве случаев в качестве разделительно-
го уплотнения желательно использовать композицион-
ный (в частности многослойный) материал, поскольку
слишком противоречивы требования к нему и конструк-
ции: с одной стороны, уплотнение должно быть податли-
вым, чтобы допускать большие деформации, а с другой —
поверхность, а возможно и стенка в целом, должна быть
твердой, если по ней предусмотрено качение деформи-
рующего звена. Дополнительным требованием, например
в вакуумных камерах, может быть минимальное газовы-
деление материала уплотнения, обусловленное площа-
дью поверхности и характером деформирования. Иногда
необходимо обеспечить сочетание уплотнительных
свойств и свойств, обусловленных технологическим про-
цессом или процессом передачи движения.
3. Для соединения диафрагмы/мембраны, оболочки,
сильфона используют плотные неподвижные соединения,
в том числе соединения с уплотнением.
4. В устройствах, в которых гибкая стенка служит
технологическим элементом (насосы, вибровозбудители),
уплотнение совмещают с этим элементом. На схеме 4.3 в
мембранном растворонасосе рабочая среда отделена от
атмосферы гибкой стенкой; перемещаемые полости с
раствором отделены одна от другой гибкой стенкой,
прижатой к плоской поверхности корпуса. На схеме 2.3
полости перестальтического насоса герметизированы
стенками шланга и контактом стенок при их прижатии
роликом.
5. Уплотнения в виде мембраны (схемы 2.1 ... 2.3)
используют для небольших поступательных и/или угло-
вых перемещений. Для значительных перемещений целе-
сообразно принять сильфоны (схемы 3.1 ... 4.4). Они спо-
собны деформироваться в осевом направлении (схе-
мы 3.1 и 4.4), а также в меньшей мере в поперечном на-
правлении; но особенно широко используют сильфоны
для обеспечения перекашивающихся звеньев (схемы 4.1
и 4.2).
В общем случае сильфон способен уплотнять трех-
подвижное соединение (схема 4.7). Сильфон лишь незна-
чительно деформируется на кручение, поэтому исключе-
но его применение для соединения даже ограниченного
вращения (вокруг оси сильфона).
При использовании сильфона следует помнить, что
для больших перемешений требуется сильфон с тонкой
стенкой, большим количеством секций или с гофриро-
ванной поверхностью (схема 2.2) и большого диаметра, а
это сопряжено с повышенным газовыделением, а может
быть, и газопроницаемостью.
На схеме 3.1 показано уплотнение в виде сильфона,
приваренного к деталям 1 и 2. Оно обеспечивает надеж-
ную герметичность соединения, компенсирующего теп-
ловые деформации деталей.
214
УПЛОТНЕНИЯ СОЕДИНЕНИИ
85. РАЗДЕЛИТЕЛЬНЫЕ УПЛОТНЕНИЯ СОЕДИНЕНИЙ ОГРАНИЧЕННОЙ ПОДВИЖНОСТИ И ГЕРМЕТИЗИРОВАННЫХ ВВОДОВ
Сильфон
перемычки
Водило
Деталь 2
Деталь 1
Хомут
Вход
Корпус
Звено 2
(вал)
Хомут
Звено 1
(вилка муфты) Ролик
Поводок
Ролик Шланг
/ Выход
4.1
Среда jT)
Сильфон
Выходное
Входное
звено / Шатун
Кривошип
Среда 2.
Стенка
СредаТ\ Водило
Входное
звено
4.2
Стенка
Сильфон
Среда 2
Сателлит
Центральное
колесо
Промежуточное
клиновидное тело
Выходное
звено
Гибкие стенки
Манжета
Оболочка
Сферический шарнир
Резиновый
сильфон
Металлический
кожух
Кожух | 3.3
Кольцевая
канавка
3.3а |
Пружинное
кольцо
Выходное
звено
Мембрана /
Кожух
Камера
С
Вход
Выход
Выход
Корпус Мембрана
Среда 1
Упругая
трубка '
Гибкая Стенка
оболочка
Сферическая
втулка
Волнооорат эва>ел|
Упругая
трубка
Ш^Х'Выходное
звено
Гидроцилиндр
Среда 1
Шаровая
головка
Чехол
Среда 2
Выходное
звено
Гайка
Вид А
Гибкая
оболочка
Волнообразователь
Гидроцилиндр
Сильфон
СредаТ)
О ПИ™1
Среда 2
Выходное
звено
Среда 1
Выходное
звено
Волнообразователь 2
Среда 2
Гибкая
заделка
ОУ
Стенка
Входное Волнообразователь 1
звено
Упругая
оболочка
4.9
Жесткое колесо
Электродвигатель
_____Гибкая
оболочка
Стенка Волнообразователь
Выходное
звено
РАЗДЕЛИТЕЛЬНЫЕ УПЛОТНЕНИЯ СОЕДИНЕНИИ
215
В уплотнении шарнирной муфты (схема 3.2) звенья
1 и 2 связаны между собой тонкостенным стальным ко-
жухом и резиновым сильфоном. Сильфон с одной сторо-
ны закреплен отогнутым краем кожуха, а с другой — при-
жат к звену 2 (валу) хомутом.
Уплотнение сферического шарнира (схемы 3.3 и
3.3а) выполнено в виде оболочки из эластичного мате-
риала и имеет по краям утолщенные кромки. Один край
уплотнения прижат к гладкой цилиндрической поверхно-
сти звена пружинным кольцом (схема 3.3а), которым
зажимают уплотнение после сборки. Сечение кромки
выбрано так, что она вместе с кольцом заполняет кольце-
вую канавку.
На схеме 3.4 уплотнение в виде оболочки прижато к
сопряженным деталям под действием сил упругости са-
мой оболочки.
Герметизированные вводы, приводы (схемы 4.1 ...
4.10 на рис. 85) обеспечивают передачу движения в изо-
л .фованное пространство через разделительное уплотне-
ние - герметичную стенку. Их используют при осущест-
влении технологических операций в вакуумной камере,
при манипулировании объектами в агрессивной среде и др.
Для осуществления герметизированных вводов ис-
зользуют:
— магнитное взаимодействие в передаче движения
здесь не приведено);
- соединение с помощью сильфона невращающего-
ся звена, совершающего прецессию, со стойкой, благода-
ря чему часть механизма вместе с приводом размещают
сне изолированного пространства, а другую часть с вы-
ходным звеном - в изолированном пространстве;
- волновую муфту (схема 4.8 на рис. 85), волновую
(зубчатую) передачу (схема 4.9) и волновую винтовую
передачу (схему 4.10)-,
- упругую приводную пару в манипуляторе.
На схеме 4.1 и 4.2 (рис. 85) - примеры использова-
ния сильфона в передачах вращения (хотя сильфон и не
чэжет деформироваться для обеспечения вращения, спе-
гиальная схема механизма обеспечивает непрерывное
ьращение), а на схеме 4.6 — привод поступательного дви-
жения на основе упругих приводных пар.
В схеме 4.1 синхронное вращение кривошипа к вы-
ходному звену передается через сферическую пару А,
промежуточное звено и цилиндрическую вращательную
лару В. Выходное звено соединено с сильфоном, разде-
ляющим среды 1 и 2. В данной схеме сильфон нагружен
только моментом от сил трения в кинематических парах
А и В.
В схеме 4.2 водило планетарной зубчатой передачи
жшводит в движение сателлит, который зацепляется с
ентральным колесом и передает ему вращение. Реак-
тивный момент воспринимает сильфон, разделяющий
феды 1 и 2.
В схеме 4.3 кривошип (водило), вращаясь, сообщает
прецессионное движение фланцу, соединенному с мем-
Граной. Если сравнить со схемой 4.2, то мембрана играет
роль одного из колес, сопряженного с корпусом. Факти-
чески здесь два разделительных уплотнения: одно — в
де кожуха защищает подшипниковые опоры, а второе
- в виде мембраны отделяет рабочую среду насоса от
окружающего пространства.
В схеме 4.4 поступательное движение из среды 1 в
среду 2 сообщается от гидроцилиндра, шток которого
герметично соединен с помощью сильфона с корпусом.
В схеме 4.5 осуществлена передача движения от
поршня выходному звену через две гибкие стенки
(в бесштоковом гидроцилиндре — через гибкие цилинд-
рические оболочки) и промежуточное тело клиновидной
формы. Главное в таком исполнении - избежать само-
торможения из-за малого угла клина. Поэтому иногда
осуществляют взаимодействие входного и выходного
звеньев через тела качения по аналогии со схемой 2.3
(только при поступательном движении).
В схеме 4.6 две упругие трубки соединены последо-
вательно каналом. По каналу подается под давлением р
газ или жидкость из источника, благодаря чему трубки
стремятся распрямиться и выходное звено перемещается
поступательно, как показано штриховыми линиями. Уп-
лотнение при этом совмещено с элементами привода.
Приводное трехподвижное соединение (схема 4.7)
осуществляет передачу движения через герметичную
стенку. Одно движение (вдоль оси выходного звена)
осуществляется гидроцилиндром, а два других (поворот-
ных) движения - вокруг осей X и У. Чехол в виде силь-
фона обеспечивает защиту соединения со стороны среды 2.
Волновая муфта (схема 4.8) - устройство, содер-
жащее гибкое звено в виде цилиндрической или иной
оболочки и обеспечивающее передачу движения благо-
даря его деформированию без преобразования частоты
вращения.
Волновую муфту применяют для передачи движе-
ния между входным и выходным валами через герметич-
ную стенку, разделяющую две среды 1 и 2. Гибкое звено
деформируется ведущим и ведомым волнообразователя-
ми 1 и 2 с некоторым отставанием по фазе вращения вы-
ходного вала.
Волновая зубчатая передача (см. параграф 13.3)
позволяет легко осуществить передачу движения через
герметичную перегородку (схема 4.9), отделяющую одну
среду 1 от другой среды 2. Гибкое колесо выполнено в
виде колоколообразной оболочки, плотно присоединен-
ной к перегородке.
На схеме 4.10 показано исполнение волновой винто-
вой передачи, в которой жесткое звено - гайка, охваты-
вает гибкое звено — винт. Винт при этом может иметь
небольшую длину. Генератор волн, охватывающий гиб-
кое звено, приводится во вращение от ведущего вала че-
рез зубчатую пару.
В данном исполнении жесткое звено (гайка) взаи-
модействует с гибким звеном в среде 2, отделенной са-
мим гибким звеном от среды 1. Гибкое звено имеет сим-
метричную форму в виде тонкостенной оболочки. Днище
оболочки должно быть гофрированным, иначе невоз-
можно собрать передачу, а кроме того, облегчается де-
формирование оболочки в процессе функционирования
передачи.
216
УПЛОТНЕНИЯ СОЕДИНЕНИИ
9.4. УПЛОТНЕНИЯ ПОДВИЖНЫХ
(ВРАЩАТЕЛЬНЫХ И ПОСТУПАТЕЛЬНЫХ)
СОЕДИНЕНИЙ
Уплотнения вращательных соединений (см.
рис. 86, 87.1, 87.2, 87.3) подразделяются на бесконтакт-
ные (схемы 5.1 ... 5.12) и контактные (схемы 6.1 ... 7.3).
Контактное уплотнение - обычно упругое уплотнение,
которое может быть радиальным (деформируется в ради-
альном направлении, см. схемы 6.1 ... 6.7) и аксиальным
(торцовым) уплотнением (деформируется в осевом на-
правлении, см. схемы 6.8, 6.8а, 7.1 ... 7.3а).
Бесконтактные уплотнения (схемы 5.1 ... 5.9) не
гарантируют герметичности и применяются для умень-
шения утечек жидкости или газа. По принципу действия
их разделяют на гидродинамические (схема 5.1), гидро-
статические (схема 5.9) и магнитные (схема 5.10).
Наиболее характерные правила конструирования
уплотнений — для вращательных и поступательных со-
единений - следующие.
1. Материал с твердой поверхностью и эластичный
материал уплотнения выбирают из соображений плотно-
го прилегания кромки уплотнения к поверхности детали
соединения. Для деталей торцового уплотнения исполь-
зуют материалы с твердой и мягкой сопряженными по-
верхностями, обеспечивающими их хорошую прираба-
тываемость. Одну из деталей выполняют пористой, на-
сыщенной смазочным материалом.
2. Твердость одной из деталей уплотнительного со-
пряжения должна быть высокой (45 ... 65 HRC), а шеро-
ховатость низкой (Ra < 0,32 мкм). К точности формы (от-
клонению от круглости) и расположению поверхностей
(к центрированию для радиальных и к торцовому биению
для аксиальных уплотнений) также предъявляются высо-
кие требования.
3. Прижатие кромки к сопряженной поверхности
должно быть строго регламентированным: при излишнем
прижатии имеют место дополнительные потери на тре-
ние, изнашивание и нагрев, а при недостаточном прижа-
тии не обеспечивается плотное сопряжение поверхно-
стей. Следует учитывать влияние перепада давлений на
величину прижатия при соответствующем расположении
уплотнения (например, манжета может быть установлена
так, что давление внутри уплотняемой полости увеличи-
вает силу прижатия кромки дополнительно к силе при-
жатия пружины).
4. Манжетные уплотнения стремятся располагать
выше уровня масла и на цилиндрических поверхностях
минимально возможного диаметра (сравни схемы 9.1 и
'9.1а) на рис. 88.
5. При конструировании и расположении уплотне-
ния обязательно учитываются и/или используются цен-
тробежные силы: могут увеличивать или уменьшать
прижатие кромки; могут удалять частицы износа из ра-
бочей зоны; могут не допускать загрязнения зоны сопря-
жения (см. схемы 6.6а, 6.66).
6. Для обеспечения направленного осевого переме-
щения частиц (удаление или возврат) через уплотнитель-
ное сопряжение организуют винтовое движение. Для
этой цели используют специальную винтовую резь"
(схема 5.4) или специальный рельеф твердой поверх
сти сопряжения (схема 6.5а).
7. Эластичные элементы (кромки) уплотнений сле-
дует предохранять от возможных механических повр е
дений как при эксплуатации, так и при сборке или (ес
необходимо) при разработке. Для этой цели предусы
ривают плавные переходные поверхности, скругленные
фаски и применяют специальные монтажные втулки (сч.
схему 9.4, 9.4а, 9.46 на рис. 88). Твердую сопряженную
поверхность также необходимо предохранять от царац.. -
ния, коррозии и иных разрушающих воздействий. С пе-
лью защиты уплотнения используют дополнительн . с
устройства.
Простейшее уплотнение вращательного соединения -
щелевое (схема 5.1). В нем радиальный или торцовое
зазор выполняют минимально возможным с учетом по-
грешностей изготовления и деформаций деталей.
Лабиринтное уплотнение (схема 5.2) дает меныь .
утечку, чем щелевое. Ширина рабочих зазоров в не
0,1 ... 0,5 мм. Сопряженные детали выполняют в виде
различного вида гребенок с выступами одной дета
расположенными во впадинах другой детали.
На схеме 5.3 показано маслоотражательное уплот-
нение. Масло благодаря центробежным силам отбраы -
вается на стенку корпуса, стекает по ней, не попадая а
зазор.
Из бесконтактных уплотнений широкое применяю:
маслоотгонные резьбы (схема 5.4): два участка резь:
направленных навстречу друг другу при достаточно вы-
сокой скорости, обеспечивают надежное двустороннее
уплотнение вследствие образования масляного "затвора
в месте стыка резьб. Рекомендуемый параметр шерохо-
ватости поверхности резьбы Ra = 1,25 ... 2,5 мкм.
На схеме 5.11 использована внутренняя многоза-
ходная резьба. В зазор между резьбой и гладкой поверх-
ностью подается воздух под давлением.
При окружных скоростях порядка 50 м/с использ -
ют гидродинамическое уплотнение, например в ви;е
диска с лопастями (схема 5.5). Под действием центре -
бежных сил создается вращающийся кольцевой защит-
ный слой жидкости и перепад давлений pi и р2- Зазор г
выбирают не более 1 мм, а высоту выступов сопряжения
лопастей (5 ... 20)5.
На схемах 5.6 и 5.7 приведены разновидности гид-
родинамического уплотнения с различной формой вы-
ступов и канавок. Направление скосов на схеме 5.6 и ка-
навок на схеме 5.7 выбирают в соответствии с направле-
нием окружной относительной скорости деталей уплот-
няемого соединения.
На схеме 5.9 показано гидростатическое уплотнение
в виде затвора, разделяющего две среды с давлениями
Pi и р2- Затворная жидкость или газ подается под давле-
нием рр в щель между относительно подвижными по-
верхностями. Такое уплотнение применяют, когда давле-
ние р} в процессе работы может быть больше или меньше р2.
Гидродинамическое и гидростатическое уплотнения
эксплуатируют при перепаде давлений до 28 МПа, ско-
рости скольжения до 185 м/с на валах диаметром до
1500 мм (насосы и турбины энергетических систем).
УПЛОТНЕНИЯ ПОДВИЖНЫХ (ВРАЩАТЕЛЬНЫХ И ПОСТУПАТЕЛЬНЫХ) СОЕДИНЕНИИ 217
86. БЕСКОНТАКТНЫЕ УПЛОТНЕНИЯ ВРАЩАТЕЛЬНЫХ СОЕДИНЕНИЙ
Х////////Л
Для вращательных пар, работающих в газовой среде
гри высоких температурах, применяют бесконтактное
оптовое уплотнение.
Для высокоскоростных малонагруженных враща-
тельных соединений (например подшипников магнитных
сков памяти ЭВМ) используют магнитные уплотнения.
В схеме 5.10 между валом и подшипником, изготовлен-
ы из магнитонепроницаемого материала (бронзы или
аломиния), выполнен зазор 8 = 2,5 ... 50 мкм, заполнен-
ий магнитопроницаемой смазочной жидкостью. Для
г-редотвращения вытекания жидкости, а также попадания
загрязнения и воздуха в зазор служит магнитное уплот-
нение, состоящее из кольцевого постоянного магнита и
шитного кольца из магнитопроницаемого материала.
Тжзор между валом и кольцом 50 ... 50 мкм.
Многоступенчатые уплотнительные устройства
: сржат несколько последовательно установленных
отнений, обеспечивающих ступенчатое изменение
крепада давлений разделяемых сред. Их применяют,
стример, в паровых турбинах (схема 5.2а и 5.72), в дви-
глях внутреннего сгорания (схема 10.7 для поступа-
чльного соединения) и в компрессорах.
На схеме 5.2а — вариант лабиринтного многоступен-
чатого уплотнения с чередующимися кольцевыми высту-
пами вала и гребешками охватывающей детали.
На схеме 5.3а — многоступенчатое уплотнение газо-
турбинного двигателя скомпоновано так, что все ступени
образованы концентрическими поверхностями и поэтому
имеют малый осевой размер.
На схеме 5.12 обозначены 1 ... 6 — группы лаби-
ринтных прямоточных уплотнений вала турбины. Данное
уплотнение разделяет паровую и воздушную среды. Ме-
жду группами уплотнений расположены камеры. В каме-
ру между уплотнениями 4 и 5 подается уплотняющий пар
под давлением несколько больше атмосферного, а из ка-
меры между уплотнениями 5 и 6 отсасывается воздух и
пар. Внизу схемы 5.12 показано падение давления (сту-
пенчатое) по длине уплотнительного устройства до атмо-
сферного давления.
Контактные радиальные и осевые уплотнения
(рис. 87.1, 87.2 и 87.3) применяют в основном для удер-
жания смазочного материала от вытекания, для защиты
подвижных соединений от проникновения грязи, а также
для разделения иных сред при небольшом перепаде дав-
ления.
218
УПЛОТНЕНИЯ СОЕДИНЕНИЙ
6.2г
Стальной корпус
Сплошное
уплотнительное
кольцо простого
сечения
Неподвижная
деталь
Неподвиж! ЕЯ
деталь
6
Стальной штампованный корпус может иметь
различную конфигурацию поперечного
сечения и обладать при этом различной жёсткостью.
Стальное
кольцо
Вращающаяся
деталь (вал или ось)
87.1. КОНТАКТНЫЕ РАДИАЛЬНЫЕ УПЛОТНЕНИЯ ВРАЩАТЕЛЬНЫХ СОЕДИНЕНИЙ
Эластомерный слой
плотно прилегает
к посадочной поверхности
(при установке уплотнения).
Защитная
Тело такого уплотнения
может иметь поперечный
разъём для возможности монтажа
на шейке вала (большого диаметра
- до 4600 мм) - см. также схему 9.5
на рис. 88.
Осевой
натяг
Уплотнительная кромка
Равномерное прижатие
уплотнительной кромки
к поверхности вала
возможно только при точном
центрировании корпуса
уплотнения (относительно
Стягивающая
пружина
плотно
прижимает
кромку
к поверхности вала, оси вала) и малых
отклонениях
от круглости вала.
Г рязь
Масло
Внеь।।
среда
Масло
Армирующее
кольцо
Направление
вращения
вала
Следы
износа
вала
кромка
^Сменную тонкостенную втулку
устанавливают при недопустимом
износе вала и замене уплотнения.
Чем сильнее кромка прижата
к поверхности вала, тем менее
вероятно вытекание смазочного
материала и проникновение
грязи или иных вредных частиц,
в том числе самых мелких.
Но при этом могут возрасти
потери на трение и износ
трущихся поверхностей.
Дополнительная
кромка
) торцового контакта
р>5 МПа
Синусоидальная кромка уплотнения „ „ .
при вращении вала раздвигает смазочный Регулярный винтовой микрорельеф на валу
материал и грязь в разные стороны. ПРИ определённом направлении вращения вая
может постоянно отодвигать жидкий смазочн л
Опорное кольцо материал, предотвращая его вытекание,
подпирает манжету но при этом может втягивать грязь
при существенном в зону контакта и рабочую полость.
перепаде давления.
Уплотнительная кромка
прижимается к поверхности
вала только за счет упругости
материала уплотнения.
Стальной корпус
с тонким покрытием герметика
(0,03...0,07 мм) обеспечивает
хорошее центрирование
и герметичное соединение
при малой шероховатости
поверхности и малых
отклонениях от круглости
посадочного отверстия.
Вращающееся
U-образное
уплотнение
с тремя кромками
обеспечивает
хорошую защиту
от загрязнённой
среды.
Вращающаяся
деталь
Шероховатость поверхности
посадочного отверстия
должна характеризоваться:
для стального корпуса
уплотнения (без покрытия)
Ra от 0,8 до 3,2 мкм;
Rz от6,3 до 10мкм;
R max 1 0 мкм.
для стального корпуса уплотнен
(с герметизирующим покрытие
или с эластомерным слоем)
Ra от1,6 до 6,3 мкм;
Rz от 10 до 25 мкм;
max 25 мкм.
Отклонения от круглости вад
и посадочного отверстия
не должны превышать
1/4 от допуска на диаметр
Бесконтактные кромки
защищают контактное
уплотнение от проникновен
крупных частиц грязи.
Контактная уплотнительная
кромка не пропускает
мелкие частицы,
не допускает перетекания
жидкости (при использовании
стягивающей пружины).
Шероховатость поверхности вала
при этом должна характеризоваться:
На от 0,2 до 0,8 мкм;
Rz от 1 до 4 мкм;
max 6,3 мкм.
[6
УПЛОТНЕНИЯ ПОДВИЖНЫХ (ВРАЩАТЕЛЬНЫХ И ПОСТУПАТЕЛЬНЫХ) СОЕДИНЕНИИ 219
Например, для манжетных уплотнений обычно ре-
комендуется перепад давления не более 0,63 МПа. При
большем перепаде давления снижаются показатели за-
щиты, в частности допустимая скорость скольжения
[увеличиваются потери на трение, износ и возрастает
температура в месте контакта), и требуются дополни-
тельные меры по уменьшению деформации манжеты.
Недопустимо слишком большое прижатие уплотни-
тельной кромки, и в то же время уменьшение прижатия
приводит к ослаблению уплотняющего эффекта (в зави-
симости от того, с какой стороны от уплотнения имеет
место наибольшее давление).
При малой скорости скольжения и для удержания
'ластичного смазочного материала применимы простей-
шие уплотнения в виде сплошного фетрового или рези-
нового кольца (схема 6.1).
Для всех других исполнений контактных уплотне-
ний допустимые скорости скольжения довольно высоки:
— для неразъемных манжетных уплотнений, стяги-
ваемых кольцевой винтовой пружиной (схемы 6.4, 6.5) -
12... 18 м/с;
- для разъемных (в поперечном сечении) уплотне-
ний (схема 6.3) — 8 ... 10 м/с;
- для осевых уплотнений (схемы 6.8 и 6.8а) —
до 20 м/с;
— для торцовых уплотнений (схема 7.3) - всего до
2 м/с (но при этом такое уплотнение можно применять
при довольно высоком давлении, сильном загрязнении
-реды и других тяжелых условиях эксплуатации).
Допустимая скорость зависит не только от конст-
рукции и материалов уплотнения, но и от условий его
] становки, от температуры окружающей среды, видов и
состояний разделяемых сред. При этом допустимая тем-
пература для некоторых видов каучука всего 100 °C, а
для политетрафторэтилена 250 °C.
При разности давлений разделяемых сред свыше
0.6 МПа нужно принимать меры для предотвращения
нежелательных деформаций манжеты.
Предъявляются высокие требования к шероховато-
сти поверхностей (см. рис. 87.1) и точности центрирова-
ния сопряженных деталей (отклонение от соосности
0.15 мм, радиальное биение 0,18 ... 0,3 мм при частоте
вращения более 1500 мин'1). Необходимо обеспечить
также гарантированный натяг в месте подвижного со-
пряжения (кромки с валом). При диаметре вала d до
20 мм натяг равен 1 мм, а при d > 20 мм натяг ~ 2 мм.
"валитет допуска вала Ь9, отверстия в корпусе — Н8. До-
пуск на отклонение от круглости при этом должен быть
на 1 — 2 квалитета выше. Материал вала, контактирую-
щего со скользящей кромкой уплотнения, должен обла-
дать хорошими антифрикционными свойствами и изно-
состойкостью. Твердость поверхности вала обычно при-
нимают не ниже 45HRC, а при скорости скольжения вы-
ше 4 м/с желательно иметь твердость выше 55HRC.
Уплотнительную манжету выполняют обычно из ре-
зины (эластомера - синтетической резиновой смеси),
армированной металлическим кольцом. Прижимается
поверхность уплотнения к валу кольцевой пружиной.
Для защиты уплотнения от пыли и грязи выполняют вы-
ступ с защитной кромкой (схема 6.3). Кромка защитного
бортика в отличие от основной кромки манжеты лишь
касается поверхности вала, но не прижимается к нему
или даже не контактирует с ним. Иногда на манжете вы-
полняют несколько защитных кромок, которые касаются
как цилиндрической, так и торцевой поверхности (схема
6.3а). Полости между бортиками заполняют смазочным
материалом, а бортики, касающиеся торцовой поверхно-
сти, расположены так, чтобы просочившаяся в полость
вода могла стекать под действием силы тяжести.
Для увеличения поверхности теплоотвода вала
кромку манжеты иногда выполняют волнообразной (схе-
му 6.56).
Устанавливают уплотнительную манжету так, что-
бы давление р было большим со стороны пружины (см.
схемы 6.2, 6.2а, 6.3). В этом случае будет обеспечиваться
дополнительное прижатие.
В случаях, когда важно не допустить повышения
давления в защищаемой полости (например при перегре-
ве), а кроме того, нежелательны дополнительное прижа-
тие кромки и излишние потери на трение скольжения,
манжету выполняют с двумя и более кромками без пру-
жины, а элементы располагают так, чтобы проходило
отжатие кромок при избыточном давлении (схема 6.2в).
Для предохранения манжеты от нежелательного де-
формирования при давлении свыше 5 МПа устанавлива-
ют опорное кольцо (схема 6.5а). Со стороны защитных
бортиков манжету закрывают металлическим кожухом,
образующим с валом щелевое уплотнение (зазор). По-
лость между кожухом и манжетой заполняют пластич-
ным смазочным материалом.
Эффективность уплотнения повышается при выпол-
нении на валу под кромкой манжеты специального мик-
рорельефа в виде винтовых канавок (схема б.5в). При
направлении вращения вала, показанном на схеме, сма-
зочный материал в месте контакта возвращается в защи-
щенную полость, но при этом туда могут втягиваться
частички пыли из внешней среды. Однако такое решение
недопустимо при реверсивном движении; более того,
нельзя допускать даже винтовых следов обработки вала,
если ставится задача исключения "насосного эффекта".
Одним из перспективных решений является уста-
новка манжеты непосредственно в подшипник качения
(схема 6.6), т.е. изготовление подшипника качения с за-
щищенной полостью качения шариков или роликов с
одной или с обеих сторон. Твердость кольца подшипника
обычно 60 HRC. К поверхности скольжения кромки уп-
лотнения также предъявляются высокие требования (см.
выше), либо уплотнение устанавливается в специальном
патроне, в котором скольжение происходит между внут-
ренними деталями (схема 6.7). На схеме 6.6а поверхность
скольжения образует стальное закаленное уголковое
кольцо, установленное с натягом на внутреннем кольце
подшипника, а манжета вставлена с натягом в наружное
кольцо подшипника.
На схемах 6.66 и 6. бв показаны уплотнительные
устройства подшипников, составленные из манжеты,
препятствующей вытеканию смазочного материала, и
центробежного уплотнения, защищающего подшипник
220
УПЛОТНЕНИЯ СОЕДИНЕНИИ
87.2. КОНТАКТНЫЕ РАДИАЛЬНЫЕ УПЛОТНЕНИЯ ВРАЩАТЕЛЬНЫХ СОЕДИНЕНИЙ
6.5г
Смазочный
материал-
Рабочая
смазочная
среда
Уплотнительная
прослойка
Загрязненная
среда
(повышенного
давления)
Подача смазочного
материала
к уплотнительным
кромкам
Защитное
уплотнение
Общий стальной
корпус
Внешняя
среда
Здесь все уплотнения
установлены
так, что кромки
дополнительно
прижимаются
за счет перепада
давления.
При одинаковом
давлении
(или при небольшом
перепаде давлении)
разделяемых сред
манжеты устанавливают,
развернув
в разные стороны.
Замкнутые полости между
контактными уплотнениями
заполняют смазочным материалом,
чтобы не допустить повышенных потерь
и износа при трении
без смазочного материала
дополнительных
(в том числе защитных) кромок.
Уплотнительная
прослойка
Рабочая среда
6.6
Уголковое
кольцо
Рабочая
смазочная
среда
Центробежный
отражатель
Загрязненная
среда
Рабочая
смазочная
среда
Загрязнен» ~
|Т5ж] среда
Метеллический
кожух
‘I
смазочным
материал
Сепаратор Центробежное
уплотнение
Уголковое
армирующее
кольцо
Манжета
Центробежное
резиновое
уплотнение
Защитные
кромки
Смазочный Защип ы
материал кромки
Частиць
грязи
Вращающееся Манжета
кольцо подшипника
При вулканизированное
покрытие
6.7
Корпус
Пружина
Уплотнительная
кромка
Привулканизированное
покрытие
Смазочн» и
материал
Ствльное
закалены
кольцо
Защитнас
кромка
от проникновения в него грязи и воды. Кромка манжеты
прижата к поверхности скольжения благодаря ее упругим
свойствам и установки с натягом. Кромка центробежного
уплотнения лишь касается поверхности наружного коль-
ца. При вращении внутреннего кольца она слегка при-
жимается к дорожке скольжения, а частицы грязи и кап-
ли воды перемещаются, как показано стрелками. Такая
защита осуществима лишь при вращающемся внутрен-
нем кольце. Если внутреннее кольцо неподвижно, а вра-
щается наружное кольцо, то такое решение малоэффек-
тивно.
Как уже отмечалось, уплотнение, содержащее ман-
жету, должно иметь армирующее кольцо, помещенное
внутри эластомерного слоя (схемы 6.2, 6.3), либо сама
манжета может быть присоединена к металлическому
корпусу, но только с одной стороны (схемы 6.4а, 6.4ж).
Причем в первом случае одновременно осуществляется
неподвижное уплотнение тонким эластомерным слоем
(покрытием).
В схеме 6.7 манжета заключена в металлический
штампованный корпус и имеет защитный элемент. Уп-
лотняющий элемент прижимается к сопряженной дета,
благодаря упругости материала.
Манжета может быть присоединена путем вулкаг.
зации к армирующему кольцу. На кольцо (армируюш
кольцо) напрессовывают уплотнительное кольцо из эл
стомера. Причем для лучшего сцепления соединяемь
элементов на поверхности армирующего кольца выпа
йены продольные канавки.
На схеме 6.7 уплотнение выполнено в виде ав~
номного блока - патрона. Три кромки (основная, приж
тая пружиной, и две защитные) скользят по твердой
гладкой поверхности стального кольца. Полости внут[
патрона заполнены пластичным смазочным материале
Поверхности, образующие неподвижные соединения
сопряженными деталями, имеют привулканизированнь
эластомерные покрытия. Требования к точности и шер
ховатости посадочных поверхностей (сопряженных дет
лей) для такого решения ниже, чем к исполнениям с в
посредственным контактом кромок с сопряженными д
талями.
УПЛОТНЕНИЯ ПОДВИЖНЫХ (ВРАЩАТЕЛЬНЫХ И ПОСТУПАТЕЛЬНЫХ) СОЕДИНЕНИИ 221
87.3. ОСЕВЫЕ, ТОРЦОВЫЕ И КОМБИНИРОВАННЫЕ [РАДИАЛЬНО-ОСЕВЫЕ] УПЛОТНЕНИЯ
Вращающееся осевое уплотнение
не допускает проникновения грязи
в защищаемую полость
благодаря центробежным силам
(см. схему 6.6в), но из-за них же
возможно вытекание смазочного материала
при ослаблении прижатия кромки.
Неподвижная
деталь
Рабочая
смазочная
среда
Вращающаяся
деталь
Прижатие уплотнительной кромки к
’орцу одной из деталей соединения
осуществляется за счет упругости
материала уплотнения. Сила прижатия
зависит от относительного
осевого положения уплотнения
и деталей соединения.
положение уплотнения на валу
фиксируют упирая его в выступ,
или за счет сил трения упругого
кольца самого уплотнения,
или с помощью стягивающего хомута.
Стягивающий хомут обычно
устанавливают на неподвижной
Вращающаяся
деталь
деталь
Вращающаяся
деталь
Кольцо 2
Уплотнение
неподвижного
соединения
Упругое Кольцо 1
кольцо
Сильфон
Неподвижная
деталь
Вращающаяся
деталь
Уплотнение
неподвижного
соединения
Уплотнение
неподвижного
соединения
Металлическое
кольцо
Неподвижный
диск
Валок
Подшипник
Корпус
опоры
V- образное
осевое
уплотнение
Радиальное
уплотнение
Шип
валка
Вода
с окалиной
Уплотнительные
кольца
Капли
масла
Насадка
Резиновое кольцо
7 3 I при вулканизировано или приклеено
—— к уплотнительному кольцу.
Резиновое кольцо 2
Привулканизированный
слой
Вал
Вращающаяся
деталь-------
зафиксирована
на валу.
Уплотнительное
стальное кольцо 1
Уплотнительное
стальное кольцо 2
Резиновое
кольцо 1
В торцовых уплотнениях
(схемы 7.2; 7.3 и 7.3а)
уплотнительные кольца
прижаты своими плоскими
и хорошо притертыми
торцовыми поверхностями
друг к другу. Благодаря
самоприспособляемости
такие уплотнения
могут обладать более
высокими качественными
показателями по сравнению с
радиальными уплотнениями.
| 7.3а | Прокладка 1
Деталь 1
Прокладка 2
Деталь 2
Скользящая
уплотнительная
кромка
Резиновое
кольцо 1
Корпус опоры
| 82 |
Осевое
Валок уплотнение Крышка
U-образная
радиальная
манжета
Центробежный 7
отражатель Цапфа
масла
Кольцевой карман
для оседания
продуктов износа
Уплотнительное
кольцо 1
Резиновое
кольцо 2
Уплотнительное
кольцо 2
Шип валка
C7^/l.CcK^inf6
222
УПЛОТНЕНИЯ СОЕДИНЕНИИ
Особой разновидностью контактных уплотнений
является осевое и торцовое уплотнение (схемы 7.1 ... 7.3
на рис. 87.3). Металлическое кольцо с привулканизиро-
ванным к нему слоем резины или другого антифрикци-
онного материла (см. схемы 7.1 и 7.1а) плотно соединено
посредством сильфона с вращающейся деталью и прижа-
то к торцу неподвижного диска пружиной. Обычно обес-
печивается давление прижатия 0,1 ... 0,5 МПа, соответ-
ственно для малых и больших перепадов давлений. До-
пускаемый параметр шероховатости торцовых поверхно-
стей Ra< 10 мкм.
Форму торцовой поверхности резинового слоя вы-
бирают из условия получения циркуляционного движе-
ния смазочного материала, показанного на схеме 7.1а
стрелками. Смазочный материал вблизи контакта пары
должен двигаться к оси вращения.
Особенностью схемы 7.2 является размещение па-
раллельно пружине упругого кольца, поджимающего
кольцо 1 из твердого порошкового материала к кольцу 2.
Упругое кольцо выполняет аналогичную роль, что и
сильфон в схеме 7. Г. является разделительным и предот-
вращает вращения рабочего кольца 1. Кольцо 2 соедине-
но с деталью прокладкой. Торцовые (аксиальные) уплот-
нения являются наиболее перспективным для вращатель-
ных соединений.
Уплотняющий эффект торцовых уплотнений по ме-
ре приработки (изнашивания) скользящих поверхностей
повышается в отличие от радиальных уплотнений, в ко-
торых изнашивание приводит к ослаблению прижатия и
ухудшению качества поверхностей. Прижатие в торцо-
вом уплотнении может быть небольшим и его легче рег-
ламентировать и/или контролировать. Потери на трение в
таком уплотнении невелики. Благодаря действию цен-
тробежных сил уплотнение защищено от попадания гря-
зи, но в то же время, если не приняты соответствующие
меры по обеспечению циркуляции смазочного материала,
они способствуют его протеканию через скользящее со-
пряжение.
Торцовое уплотнение на схеме 7.3 защищает рабо-
чее пространство с давлением р\ от внешней среды с дав-
лением р2- Контактные уплотнительные кольца 1 и 2
поджаты торцами друг к другу благодаря силам упруго-
сти резиновых колец 1 и 2 (уплотнения неподвижных
соединений), которые установлены в проточках деталей
1 и 2, вращающихся одна относительно другой. В про-
цессе монтажа на уплотнительные кольца 1 и 2 надевают
прокладки 1 и 2 прямоугольного сечения из эластомер-
ной невулканизированной смеси. После монтажа матери-
ал этих колец заполняет зазоры между уплотнительными
деталями. При эксплуатации вследствие выделения теп-
лоты трения материал прокладок 1 и 2 нагревается и под-
вергается вулканизации, благодаря чему он плотно со-
единяется с уплотняемыми деталями 1 и 2. Таким обра-
зом обеспечивается подвижное плотное прилегание ко-
лец друг к другу и, соответственно, дополнительное уп-
лотнение.
В случаях, когда нужно гарантированно отделить
одну среду от другой, используют совместно аксиальное
и радиальное уплотнения. На схемах 8.1 и 8.2 даны такие
решения для защиты подшипниковых опор валков про-
катного стана от воды с окалиной. В них манжет! > ля
янны прижаты к торцовым поверхностям за счет . i
венной упругости.
В схеме 8.2 радиальная манжета имеет центра!
ный отражатель масла. Предусмотрен также коль^
карман для оседания подшипниковых опор.
При выборе места размещения контактно о
лотнения стремятся получить минимально возмЦ
диаметр дорожки контакта и, соответственно, миниа
ную скорость скольжения. На схеме 9.1 и 9.1а (pi»=.
показаны два возможных варианта расположения уя
нения мотор-колеса. В первом варианте малые оа
размеры и более простое решение соединений вых(. т»
водила редуктора с ободом колеса достигаются пр?
мещении уплотнения на деталях большого ди-«
(речь идет об уплотнении полости редуктора). Во ггч
варианте введены дополнительные детали, позв<.
уменьшить диаметр уплотнения.
Как уже отмечалось, особое внимание следует <
лять правильному монтажу уплотнения - установ
в корпус и/или на вал, обеспечивая необходимый я
соединения без повреждения элементов уплотнения
В конструкции сопряженных деталей должны
предусмотрены заходные фаски, лучше скругленные,
допускается сборка уплощения при протягивании era
шлицам, шпоночным пазам, резьбе, которые могут к
заусенцы или острые кромки.
Поэтому уплотнение отделяют от шлицев спс
но предусмотренной втулкой (сравни схемы 9.2 и 9.1л
в иных случаях, чтобы не повредить кромку уплсг-я
шлицами, его монтаж осуществляют с помощью ..я
защитной втулки (схема 9.46).
В схемах 9.3 ... 9.36 на манжету воздействуют s ।
мощью оправки — специального толкателя, и в наьг Ц
нии F ее запрессовывают в отверстие корпуса. В я
мах 9.4 ... 9.46 на вал, имеющий буртик или шлиэкЦ
девают направляющую втулку, а затем по ней пере
щают манжету на место ее установки. Перед у стан.
манжета должна быть очищена и смазана.
Для валов большого диаметра применяют спе
ные разъемные уплотнения, которые можно уста]
вать или заменять без демонтажа всего соединения I
схему 9.5). Их применяют при установке на шейки в _л
когда невозможен монтаж в осевом направлении. II
жина в таком уплотнении имеет специальное винт»
соединение.
Осевые уплотнения закрепляют на неподвиж]
тали с помощью стягивающих хомутов (схема 9.6).
Уплотнения поступательного соединения - ос»
но контактные, с элементами в виде уплотнитель^
лец (см., например, поршневые уплотнения на □
ме 10.7), кольцевых уплотнительных манжет (схемы h .
10.6) или пластин (схемы 11.1,11.2).
Для уплотнений вращательно-поступате:
соединений (рис. 89) требования к шероховатость j
верхности скольжения еще выше, чем для уплоп е
вращательных соединений (Ra < 0,2 мкм, Rz < 0,8 мю
На схемах 10.1 ... 10.3 уплотнения для гидроны »
дров, на схемах 10.4 ... 10.6 — для пневмоцилиндров. 1
УПЛОТНЕНИЯ ПОДВИЖНЫХ (ВРАЩАТЕЛЬНЫХ И ПОСТУПАТЕЛЬНЫХ) СОЕДИНЕНИИ 223
88. РАЗМЕЩЕНИЕ И МОНТАЖ УПЛОТНЕНИЙ
ВАРИАНТЫ РАЗМЕЩЕНИЯ УПЛОТНЕНИЯ
Полость
опоры
Здесь уплотнение малого размера
и скорость скольжения его кромки
меньше, чем в схеме 9.1, но осевой
размер редуктора существенно больше.
9.3
Перемещение уплотнения
с помощью оправки
до упора в буртик корпуса
Толкатель
Уплотнение
Уплотнение
неподвижного
соединения-^.
Установка дополнительной (полированной)
втулки привело к сокращению осевого размера
соединения по сравнению со схемой 9.2.
МОНТАЖ УПЛОТНЕНИЯ
Конструкция деталей и качество поверхностей соединений должны исключать возможность
повреждения элементов уплотнения (особенно его скользящей кромки) как в процессе монтажа,
так и в процессе функционирования. Поэтому желательно предусмотреть плавные скруглённые
переходные поверхности, отсутствие прямых и острых углов, отсутствие заусенцев в местах
возможного соприкосновения с уплотнением. При монтаже следует избегать неравномерного
деформирования уплотнения и давить можно только на его жёсткий каркас(в том числе
через тонкий слой эластичного материала) по кольцевой поверхности или в равномерно
расположенных точках. Уплотнения большого диаметра (см. схему 9.5) забивают, чередуя удары
в диаметрально противоположных местах.
Т олкатель
Усиленный
стальной каркас
манжетного
уплотнения
Корпус Через эти отверстия можно вытолкнуть
у уплотнение при разборке соединения.
Перемещение уплотнения в заданное
положение без упора в корпусе
Оправка [толкатель] для передачи
давления при перемещении
Направляющая оправка
с гладкой поверхностью
и скруглённой
заходной фаской
| 9,6 | уплотнения с помощью
стягиваемого хомута
(см. также схему 6.8а).
_____ При монтаже стягиваемого уплотнения (разъёмного кольца без жёсткого каркаса)
' 9 5 | место соединения стягивающей пружины смещают относительно стыка эластичного кольца.
224
УПЛОТНЕНИЯ СОЕДИНЕНИЙ
89. УПЛОТНЕНИЯ ПОСТУПАТЕЛЬНЫХ СОЕДИНЕНИЙ
[ТоТЗа]
I Ю 4 | При вулканизирован
'—:—1 манжета
Шток
пневмоцилиндра
Канавка 1
Канавка 2
Карманы
Металл инее*1
диск
А-А
10.7
Цилиндр I р Поршень
0,1 мм
Кольцо 3
Кольцо 2
Кольцо 1
|10.7г
Каркас
Хромовое
покрытие
Пружинный
расширите]
Разрезное
кольцо
Хромовое
покрытие
Стальные
кольца
Хромовое
покрытие Стальное кольцо
Перемычка
Разделительная
перегородка
Прорезь
Чугунное
кольцо
Разделительное
уплотнение
Пластина 2
Пластина 1
Пружина Стенка
Корпус Крышка
Покрытие
Канат
Втулка
Упругий
уплотняющий
элемент
лотнительную манжету устанавливают так, чтобы давле-
ние р жидкости или газа обеспечивало дополнительное
прижатие сопряженных поверхностей (схемы 10.1,10.2 и
10.5,10.6).
Манжета на схеме 10.3 имеет коническую рабочую
поверхность и скругленные кромки. Манжету устанавли-
вают свободной в кольцевую канавку одной из сопря-
женных деталей. При возвратно-поступательном движе-
нии деталей кольцо плотно прижимается к боковой по-
верхности кольцевой канавки под давлением р (схе-
ма 10.3а), а при отсутствии, давления - благодаря силам
трения. Силы упругости прижимают кромки губки к бо-
ковым поверхностям канавки. Если рабочая жидкость
поступает в пространство между губками, то создается
дополнительная сила прижатия одной из кромок к по-
верхности кольцевой канавки. Перед монтажом манжеты
канавки 1 и 2 (схема 10.3) заполняют пластичным сма-
зочным материалом.
На схеме 10.7 — поршневое многоступенчатое уп-
лотнение в виде нескольких компрессионных колец 1,2 и
3 — разрезных упругих колец прямоугольного или трапе-
циевидного сечения с износостойким антифрикционным
покрытием трущихся поверхностей. Кольца установлены
в канавках поршня, за счет упругости плотно прижаты
стенке цилиндра, а при движении поршня — к стены
канавок.
Кольцу при изготовлении придают специальную ч
круглую форму, чтобы обеспечить равномерное его пр>
жатие к цилиндру и особенно - исключить концентр
цию нагрузки в месте разреза кольца. Для удаления сч
зочного материала с поверхности цилиндра дополг
тельно устанавливают маслосъемные кольца скребковс*
или коробчатого типа (схемы 10.76 ... 10.7г).
На схемах 11.1 и 11.2 — варианты продольного yi
лотнения в сопряжении тележек обжиговой машины <
стенками газовоздушной камеры. Чугунные пластины
образующие со стенкой поступательную пару, прижа*
верхней плоскостью к пластине 2, расположенной на л
лежке. В место контакта по схеме 11.1 подается смазс
ный материал под давлением р по каналу. Пластин
прижимаются с помощью эластичной камеры, в котор1.
подается вода под давлением.
В схеме 11.2 использовано разделительное уплотг.
ние между пластиной 1 и стенкой. Оно выполнено
нескольких слоев стеклоткани и листа теплостойкой р
зины. Прижатие пластины в направлении стрелки осуди
ствлено пружиной.
Глава 10. ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
10.1. ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ И
КАЧЕСТВЕННЫЕ ПОКАЗАТЕЛИ
Подшипниковые опоры (шарниры, вращательные
соединения) появились с момента изобретения рычага,
причем для ворота и колесницы использовались полно-
поворотные опоры. Одной из первых задач создания
опор было уменьшение трения между подвижными дета-
лями. На протяжении ряда столетий использовались опо-
ры скольжения, а также различные смазочные материа-
лы. Прообразом опоры качения были направляющие с
катками. На рисунках Леонардо да Винчи изображены
подшипники и подпятники качения с сепаратором в виде
катящихся элементов.
Наиболее широкое применение подшипников каче-
ния началось, когда удалось решить проблему их унифи-
кации и массового производства. Показательно, что, как
отмечалось ранее для зубчатого зацепления, определяю-
щим фактором является технологичность конструкции.
Современные подшипники скольжения могут пре-
восходить подшипники качения по всем показателям,
кроме одного — стоимости, что обусловлено более высо-
ким уровнем унификации подшипников качения и ис-
пользованием для их изготовления более дешевых мате-
риалов.
Подшипники скольжения практически незаменимы
при ударных нагрузках и больших относительных скоро-
стях вращения (при жидкостном трении). В кривошипно-
ползунном механизме большинства современных двига-
телей внутреннего сгорания (ДВС) используются только
подшипники скольжения. В рычажных системах управ-
ления, в подвесках и механизмах с ограниченными угла-
ми поворота широко применяют простые по конструк-
ции, в том числе самосмазывающиеся, подшипники
скольжения, а также упругие шарниры и шарниры, в ко-
торых скольжение сочетается с деформированием упру-
гих элементов.
Функциональные задачи подшипника:
• восприятие нагрузки (с учетом величины, направ-
ления и характера ее изменения) при соответствующей
частоте вращения в течение заданного времени;
• воспроизведение заданной точности центрирования;
• обеспечение заданного КПД;
• демпфирование вибрации, компенсация погреш-
ностей монтажа и деформаций при допустимом уровне
еамовозбуждаемой вибрации.
Качественные показатели подшипника: стабиль-
ность свойств, масса, габариты, стоимость, расходы на
эксплуатацию.
В зависимости от функциональных задач подшип-
ника выбираются три составляющих решения, которые
одинаково важны и взаимосвязаны между собой:
• антифрикционный материал (и в целом ма-
териалы пары трения);
• смазочный материал (и способ/режимы сма-
зывания);
• геометрия сопряженных элементов (и в це-
лом конструкция подшипника).
10.2. ПОДШИПНИКИ СКОЛЬЖЕНИЯ И
УПРУГИЕ ШАРНИРЫ
Общие требования к элементам, правила и тен-
денции.
1. В паре трения материал одной из деталей должен
обладать антифрикционными свойствами. Обычно это
довольно мягкий материал (без твердых включений),
поэтому его слой очень тонкий, а основание должно быть
жестким. Сопряженную деталь изготовляют из стали с
высокой твердостью поверхности (> 45 HRC) и малой
шероховатостью (Ra >0,16 мкм для шеек коленчатых
валов двигателей внутреннего сгорания).
2. Зазор между сопряженными поверхностями дол-
жен быть гарантированным на всех режимах функциони-
рования, в том числе при нагреве. В то же время он не
должен быть необоснованно большим. Иначе нарушается
центрирование и увеличиваются ударные нагрузки. Для
подшипников коленчатых валов двигателей легковых
автомобилей зазор принимают порядка 0,03 ... 0,08 мм.
В связи с этим предъявляются высокие требования к
точности формы и взаимному расположению поверхно-
стей, а также к жесткости сопряженных деталей, чтобы
не допускать неприемлемых перекосов и деформаций.
Это особенно важно для многоопорных валов при отсут-
ствии мер по самоустановке деталей. Ширину подшип-
ника в этом случае принимают обычно 0,4 ... 0,8 диамет-
ра, а края вкладышей делают тоньше на 0,002 ... 0,005 мм
при ширине утонения 5 ... 6 мм. Примеры аналогичных
решений см. на рис. 47.1 и схемы 1.3а и 8.1а (рис. 91).
Взаимное биение шеек вала не должно превышать 0,005 ...
0,008 мм, а перекос осей шатунных и коренных шеек не
должен быть более 0,03 ... 0,05 мм по длине вала; откло-
нение от окружности и цилиндричности — не более
0,005 мм.
3. Посадку втулки или вкладыша в корпусе следует
выбирать такой, чтобы деформирование при установке в
корпусе не привело к искажению формы и изменению
регламентированного зазора. В то же время нельзя до-
пускать относительной подвижности втулки/вкладыша и
корпуса. Разумеется, сам корпус должен обладать доста-
точной жесткостью, чтобы форма втулки/вкладыша не
менялась при нагружении, за исключением специально
предусмотренных случаев самоустановки корпуса или
элементов опоры, а также принятия мер по компенсации
деформаций корпуса.
226
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
ПОДШИПНИКИ СКОЛЬЖЕНИЯ И УПРУГИЕ ШАРНИРЫ
227
4. Подвод смазочного материала следует преду-
смотреть в ненагруженной зоне (см. схему 2.2 на
рис. 90.1) и с помощью специальных канавок (полостей)
карманов предусмотреть его распределение по всей ра-
бочей поверхности. С целью отвода теплоты и удаления
продуктов износа должна быть предусмотрена циркуля-
ция, охлаждение и очистка смазочного материала (пе-
риодическая или постоянная). Для поддержания необхо-
димого давления рабочие полости должны иметь уплот-
нения (при защищенном замкнутом пространстве часто
оказывается достаточно иметь торцовую щель между
втулкой и валом для регламентированного вытекания
смазочного материала).
5. С целью уменьшения самовозбуждаемых вибра-
ций (возникающих из-за отклонения реакции масляного
клина от линии действия нагрузки на вал) в высокоско-
ростных парах следует предусматривать многократное
образование масляного клина в процессе одного оборота
вала (многоклиновые подшипники - см. схемы 2.3 ... 2.6
на рис. 90.1).
Более простое решение - это увеличение зазора или
прерывание канавками масляного клина. Но эти решения
приводят к уменьшению точности центрирования и сни-
жению несущей способности. В такой ситуации предпоч-
тение следует отдать винтовым (схема 7.6 на рис. 91),
шевронным или перекрестным канавкам (по сравнению с
продольными канавками).
Каким образом общие принципы реализуются для
конкретных задач, рассмотрим на отдельных примерах
(см. рис. 90.1, 90.2 и 91).
На схеме 1.1 показана конструкция разъемного
вкладыша подшипника с антифрикционным слоем и с
элементами, обеспечивающими эффективное смазыва-
ние: холодильника и грязевика. Холодильник служит для
распределения смазочного материала по длине вклады-
ша, грязевик - для удаления попадающих в смазочный
материал инородных частиц. Размеры на схеме 1.1 опре-
деляют из примерных соотношения: / = (1,0 ... 0,5 )<7;
s = 0,005J + 1 мм; а = 0,1/; Ъ = 0,8/; с = 0,15d; h = 0,15J;
Л=0,035б/.
На схеме 1.1а показан процесс смазывания подшип-
ника при подаче смазочного материала по каналам и рас-
пределению его по зонам CD и NM холодильника.
В нагруженной зоне EG обычно образуется сплошной
слой смазочного материала, а ненагруженная зона — зона
разрежения CN обычно заполнена масляной пеной.
Жидкостное трение получают либо подачей жидко-
сти под давлением в место взаимодействия рабочих по-
верхностей (гидростатическая смазка), либо благодаря
наличию клиновидного зазора и относительного враще-
ния деталей (гидродинамическая смазка).
На схеме 2.1 показан гидростатический подшипник
скольжения. Жидкость под давлением р подается в спе-
циальные полости, размещенные между сопряженными
поверхностями. Вал под давлением жидкости всплывает.
При нагружении вала силой F он опускается, зазоры по
периферии нижней полости уменьшаются и в замкнутой
полости давление возрастает, уравновешивая силу F.
В гидростатическом подшипнике при большой угловой
скорости о вала может возникать также явление гидро-
динамической смазки - возрастание давления масляного
слоя за счет образования клиновидного зазора. При дос-
таточно большом давлении р оно может не приниматься
во внимание.
В гидродинамическом подшипнике (скольжения)
клиновидный зазор, а соответственно, избыточное давле-
ние при вращении цапфы относительно подшипника по-
лучают благодаря разности диаметров цапфы и подшип-
ника (схема 2.2), а также приданием втулке подшипника
специальной формы (схема 2.3; 2.4; 2.5).
На схеме 2.6 — сегментный многоклиновой под-
шипник паровой стационарной турбины. В корпусе ус-
тановлены специальные сегментные подушки (сегмен-
ты), каждая из которых имеет ассиметрично располо-
женную опору С. Опора ближе к выходному зазору, в
направлении угловой скорости to, выполнена в виде реб-
ра, опорной полоски или опорного пятна (точечная, пя-
тачковая опора) или в виде упругой перемычки (схема 8.2,
рис. 90.1). Равновесие подушки обеспечивается при сер-
повидном (клиновидном) зазоре между валом и поверх-
ностью подушки (см. аналогичное взаимодействие в
подпятнике на схеме 5.1). Подушку удерживает в окруж-
ном направлении штифт, который не препятствует пово-
роту подушки вокруг опоры С. Уплотнения с обоих тор-
цов препятствует торцовому истечению несущего слоя
масла. Температуру в зоне трения контролируют с по-
мощью термопары.
В схеме 2.4 упругую втулку с выступами устанавли-
вают в отверстие корпуса так, что она деформируется и
приобретает форму, необходимую для получения клино-
видного зазора. В схеме 2.5 форма опорной поверхности
задана установкой упругих листов.
По аналогии с гидростатическим и гидродинамиче-
ским подшипниками выполняют соответственно газоста-
тический и газодинамический подшипник (скольжения).
Смазочный слой газа обеспечивает минимальные потери
на трение, допускает высокие относительные скорости
элементов, но обладает меньшей несущей способностью,
чем слой жидкости.
При подведении смазочного материала принуди-
тельно под давлением место подвода располагают в зоне
максимального зазора (канал на схеме 2.2). Если смазоч-
ный материал поступает самотеком и должен самозатя-
гиваться, место повода выбирают в зоне расширения за-
зора там, где возникает разрежение.
Для распределения смазочного материала по длине
подшипника выполняют смазочную канавку обычно
вдоль образующей втулки. Канавку располагают только в
ненагруженной зоне (кроме специальных решений по
демпфированию самовозбуждающихся вибраций). Ка-
навка не доходит до края подшипника на 0,1 его длины.
Виды разрушения подшипника в зависимости от ус-
ловий работы: абразивное изнашивание, схватывание,
усталостное выкрашивание при переменной нагрузке.
Эти обстоятельства обусловливают соответствующий
подход к выбору геометрии и материалов.
Проектируют подшипники такими, чтобы масляный
слой воспринимал всю нагрузку, а его толщина была
228
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
больше суммы неровностей сопряженных поверхностей.
При проектировании подшипников используют услов-
ный расчет по допустимому давлению [р] и допустимому
произведению давления на скорость скольжения [pv],
причем
р = F / dl,
где dnl — диаметр и длина сопряженных поверхностей.
Для большинства машин принимаютр = 1 ... 4 МПа,
ру = 2 ... 10 МПа-м/с. В прокатных станах р достигает
50 МПа, а ру - до 200 МПа-м/с. Значения [р] и [pv] зави-
сят от применяемых материалов, режимов нагружения и
смазывания.
Для повышения несущей способности и уменьше-
ния стоимости тенденции в конструировании втулок
вкладышей (вкладыш используют для разъемного в по-
перечном направлении подшипника) предусматривают:
максимальное уменьшение антифрикционного слоя
и втулки или вкладыша в целом (схемы 1.2; 1.2а; 1.3);
выполнение вкладыша многослойным (см. схе-
мы 1.2; 1.2а).
Толщину и состав каждого слоя выбирают из усло-
вий их нагружения, антифрикционных свойств (верхний
слой) и адгезионных свойств слоев для сцепления их ме-
жду собой.
Чем тоньше вкладыш, тем плотнее он прилегает к
основанию (постели), тем лучше теплоотвод. Чем тоньше
антифрикционный слой, тем меньше он деформируется
под действием рабочей нагрузки.
Отклонения формы постели практически полностью
повторяются после прилегания тонкого вкладыша на ра-
бочей поверхности. Поэтому требования к точности по-
стели должны быть также высокими. Натяг при установ-
ке вкладыша обеспечивают благодаря его большой дли-
не, как показано на схеме 8.1а (рис. 91). Фиксацию от
проворачивания вкладыша обеспечивают за счет трения,
а также благодаря использованию выступов замка на на-
ружной поверхности (см. схемы 1.2в рис. 90.1 и 1.2д на
рис. 91). При выборе формы вкладыша учитывают его
совместную деформацию с корпусом и головкой (рычага,
шатуна), о чем будет сказано ниже при рассмотрении
схема 8.1а, 8.16.
Многослойный вкладыш с использованием только
металлов показан на схеме 1.2. В качестве основного слоя
применяют алюминиевые сплавы с содержанием олова
порядка 20 % (для них не требуется дополнительное ан-
тифрикционное покрытие), а также алюминиевые сплавы
с содержанием олова до 6 %, алюминиевые сплавы с
кадмием и никелем, свинцово-оловянные бронзы и др.
При этом если типичный баббит допускает давление не
более 16 МПа, то для алюминиевых сплавов и свинцово-
оловянных брон5 с покрытиями этот показатель достига-
ет 55 ... 78 МПа.
Биметаллические вкладыши получают, в частности,
плакированием — прокаткой лент из алюминиевого спла-
ва (~20 % олова, ~1 % меди) и стали. Толщина анти-
фрикционного слоя составляет 0,2 ... 0,3 мм, стальной ос-
новы — порядка 1,5 мм.
Для многослойных вкладышей особенно эффектив-
но применение композиционных материалов, в частности
металлофторопласта. Методами порошковой металлур-
гии изготовляют ленту (см. схему 1.2а), содержащую по-
ристый слой высокооловянной бронзы, поры которог I
заполнены смесью Фторопласта-4 с дисульфидом молиб-
дена. Между стальной основой и слоем бронзы располо-
жен слой меди. Толщина ленты 1,1; 1,6; 2,6 мм. Приме-
няют ленту в подшипниках с внутренним диаметрог
8 ... 66 мм и шириной 8 ... 75 мм. Рекомендуемый диа-
метральный зазор в подшипнике 30 ... 45 мкм. Таког
подшипник может хорошо работать без смазывания в
различных газовых средах (в том числе и химически ак-
тивных) и в вакууме, а также при недостаточном смазы-
вании в диапазоне температур -200 ... +300 °C (до +350 °C
при кратковременном режиме). Материал выдерживает
давление до 150 МПа, а в расчетах принимают [р] =
= 2... 10 МПа, [v] = 5 м/с; коэффициент трения f = 0,06... 0,3.
Подшипники из металлофторопласта применяют в
механических системах управления самолетов и вертоле-
тов, в гидромоторах и др. Их целесообразно использовать
вместо игольчатых подшипников, так как при тех же ус-
ловиях функционирования они имеют ~ в 10 раз мень-
шую массу. Одним из решений уменьшения силы трения
и повышения несущей способности является выполнение
кольцевых вставок из мягкого материала во вкладыше из
легкого сплава, обладающего высокой износостойкость»
(схема 1.3).
В дополнение к этому следует отметить, что для
приведенных примеров приемлемы самосмазывающиеся
полимерные материалы. Они имеют антифрикционные
добавки в виде твердого смазочного материала, а также
наполнители, обеспечивающие прочностные свойства
(волокнистые или дисперсные). Применяют материалы,
армированные металлической сеткой, тканью или иными
порообразующими элементами.
Из многослойной ленты можно формировать и
втулки (схема 1.26). В них концы ленты соединяют спе-
циальным (в частности фигурным) замком. Такие втулки
имеют толщину 1,5 ... 1,8 мм; их устанавливают в корпу-
се с натягом 0,02 ... 0,05 мм. Фигурный стык позволяет
избежать деформирования края ленты и утечек масла
через стык. Зазор в таком подшипнике выбирают порядка
0,05 ... 0,08 мм. В теле втулки иногда делают масляную
канавку, но этого стараются избежать, чтобы не увеличи-
вать требуемую толщину втулки.
Примеры многослойных композиционных подшип-
ников, применяемых в автомобильных двигателях внут-
реннего сгорания приведены на схемах 1.4 м 1.4а.
Одним из современных направлений является соз-
дание подшипников, в которых восприятие рабочей на-
грузки осуществляется в основном за счет магнитногс
силового поля.
Магнитный подшипник/подпятник может быть
двух видов:
• магнитостатический, в котором поверхности с
относительным движением разделены немагнитной сре-
дой, например, воздушной прослойкой или нематериаль-
ным пространством;
• магнитожидкостный, в котором поверхности с
относительным движением разделены слоем магнитной
жидкости (смазочного материала), который удерживает-
ся и восполняется с помощью магнитного поля.
ПОДШИПНИКИ СКОЛЬЖЕНИЯ И УПРУГИЕ ШАРНИРЫ
229
При создании магнитного поля с помощью постоян-
ного магнита подшипник называют магнитопассивным, а
с помощью электромагнита — магнитоактивным.
Конструкция магнитостатического магнитопассив-
ного подшипника или подпятника проста: на одном или
обоих звеньях располагают магнит, а на обоих звеньях
магнитопровод, разделенный зазором. Магнитостатиче-
ские подпятники способны работать при температурах,
близких к абсолютному нулю и до 550 ... 800 К, при на-
грузках до 0,5 ... 1 МПа, частота вращения до 104 с’1, в
вакууме или различных средах. Жесткость подшипника
достигает 20 ... 30 Н/мм. Магнитные подшипники ис-
пользуют в совокупности с основным подшипником
скольжения, что позволяет разгрузить подшипник, со-
храняя необходимую жесткость опоры. В совокупности с
гидродинамическим подшипником магнитный подшип-
ник позволяет поддерживать постоянным зазор в устано-
вившемся режиме, что обеспечивает высокую точность
параметров опоры (например, шпиндельной опоры в
станке).
Магнитожидкостный подшипник выполняют трех
видов:
• пьезомагнитожидкостный, в котором несущая
способность обеспечивается за счет магнитостатических
сил, действующих со стороны магнитной жидкости, на-
ходящейся в неоднородном магнитном поле, на пяту
(шип, шейку) из-за диа- или парамагнетика;
• магнитогидростатический, в котором восприятие
внешней осевой силы осуществляется за счет сопротив-
ления сдвигу магнитной жидкости и магнитного поля
при обеспечении механического центрирования звеньев;
• магнитожидкостный (самосмазывающийся, схе-
ма 3. /), в котором магнитное поле служит для удержания
магнитной жидкости в зазоре и дополнительного воспри-
ятия радиальной нагрузки.
Подшипник на схеме 3.1 имеет немагнитный кор-
пус, постоянный магнит, два осесимметричных магнито-
провода и две немагнитные втулки, в ненагруженной
зоне которых выполнены смазочные канавки.
Магнитожидкостный подшипник может работать
аналогично гидродинамическому, но магнитное поле
способствует получению более благоприятного переход-
ного режима и обеспечению условий жидкостной смазки
при низкой скорости и высоком давлении (например, при
скорости менее 10'1 м/с и отношения скорости к давле-
нию менее 10'8 м/(Па-с), хотя при этом и несколько сни-
жается коэффициент трения.
Все же магнитные подшипники пока представляют
собой довольно "экзотические" и еще недостаточно отра-
ботанные решения. Далее продолжим рассмотрение кон-
струкций традиционных направлений.
Особенность схемы 4.1 — использование так назы-
ваемого обращенного подшипника в сателлите плане-
тарной передачи. Антифрикционный слой нанесен на
ось. При таком решении повышается нагрузочная спо-
собность подшипника и обеспечивается возможность
подвода смазочного материала в ненагруженную зону
(направление действия нагрузки на ось примерно пер-
пендикулярно плоскости рисунка). Элементы, органи-
зующие распределение смазочного материала, преду-
сматривают в данном случае на оси. Смазочный матери-
ал подается под давлением р по входному каналу в теле
водила, затем — по осевому и радиальным каналам, вы-
полненным в оси.
При конструировании опор скольжения вала (схе-
ма 4.2) или оси в целом следует руководствоваться
следующими принципами:
- опоры целесообразно располагать как можно бли-
же к местам приложения рабочих нагрузок (чтобы иметь
минимальные деформации вала, влияющие на работо-
способность подшипников — посадочные отверстия
подшипников желательно обрабатывать с одного устано-
ва, чтобы гарантировать их соосность.
При этом должна быть обеспечена необходимая же-
сткость как самого вала, так и корпуса с подшипниками,
особенно для конструкций, где точность центрирования
является функциональным качеством (например, в
шпинделях обрабатывающих станков.
В иных случаях могут быть приняты меры по ком-
пенсации деформаций и отклонений формы за счет само-
установки подшипников (см., например, рис. 91 и 92).
Некоторую специфику в конструировании имеют
подпятники — устройства, воспринимающие только осе-
вую торцовую силу (см. схемы 5.1, 5.2), а также комби-
нированные решения (схемы 6.1 ... 6.5а).
На схеме 5.1 - исполнение гидродинамической
опоры паровой стационарной турбины. Упорный диск,
закрепленный на валу, опирается на подушки (сегменты) 2
при направлении осевой силы F или на подушки 1 при
реверсировании нагрузки. Смазочный материал (масло)
подводят от насоса через каналы п. На подушках образу-
ется масляная пленка. К подушкам 1 масло подается по
маслопроводу. Полости размещения подушек разделены
уплотнением. При направлении вращения вала со и ок-
ружной скорости v (схема 5.16) взаимодействие подушки
и диска вначале характеризуется неустойчивым положе-
нием I и в последующем - устойчивым положением II.
Подушка поворачивается вокруг ребра [опоры С] под
действием пары сил X q е, пока линия действия X q и
реакции Fr не совпадут. При это осуществляется рабочий
режим гидродинамической смазки. Ребро С размещают
ближе к выходному зазору взаимодействующих звеньев,
примерно на расстоянии 2/5 от его среднего окружного
размера. Обычно его выполняют параллельным кромке
подушки в месте выходного зазора.
При работе подпятника выделяемая теплота может
привести к деформированию подушки, что снижает не-
сущую способность. Чтобы уменьшить влияние нагрева,
применяют специальную слоеную конструкцию подушки
(схема 5.1а). К стальному основанию подушки с помо-
щью винта присоединена тонкая медная прокладка с на-
плавленным слоем баббита. По каналу р масло подается
к канавкам между основанием и прокладкой. Тем самым
медная прокладка интенсивно охлаждается и практиче-
ски не деформируется. Кромки слоя баббита скошены
(см. сечение Г-Г) или скруглены. Опора С подушки мо-
жет быть точечной пятачковой, что улучшает ее самоус-
танавливаемость. Число подушек с одной стороны под-
пятника обычно принимают от шести до восьми. Объем
полостей между отдельными подушками и другими дета-
230
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
ПОДШИПНИКИ СКОЛЬЖЕНИЯ И УПРУГИЕ ШАРНИРЫ
231
лями, а также контуры циркуляции масла выбирают из
условия требуемого теплообмена.
Подпятник на схеме 5.1 предназначен для воспри-
ятия значительных нагрузок при высокой частоте враще-
ния вала.
На схеме 5.2 показан более простой вариант подпят-
ника с гидродинамической смазкой, которая обеспечива-
ется при вращении вала относительно опоры, имеющей
скосы на торцовой поверхности.
На схемах 6.1 ... 6.5 представлены комбинирован-
ные решения опор - совокупности подшипника и под-
пятника. Они способны воспринимать преимущественно
радиальную нагрузку (схема 6.1, 6.5) или осевую нагруз-
ку (схемы 6.2 ... 6.4, 6.5а). В такой опоре главным прин-
ципом является разделение функций: подшипник вос-
принимает только радиальную нагрузку и/или обеспечи-
вает относительное центрирование, а подпятник воспри-
нимает только осевую нагрузку и не имеет связей, огра-
ничивающих относительные радиальные перемещения.
Опора на схеме 6.1 использована для валков прокат-
ного стана. Нагрузка в данном случае в основном ради-
альная переменная и даже носит ударный характер. На
конический шип вала запрессована втулка-цапфа. Соеди-
нение выполнено коническим с целью удобства осевой
сборки и разборки. От поворота втулка-цапфа удержива-
ется шпонкой. В осевом направлении она закреплена
гайкой через промежуточные детали.
В корпусе опоры установлена подшипниковая втул-
ка, имеющая слой баббита, нанесенного центробежным
литьем. Через втулку на корпус передается радиальная
нагрузка.
Втулка-цапфа имеет упорный диск, который торца-
ми взаимодействует с деталями подпятника — кольцами 1
и 2. Причем кольцо 2 из условий сборки выполнено разъ-
емным в виде двух полуколец. Осевые силы замыкаются
через втулку-цапфу, кольцо 1 и гайку на корпус - в одну
сторону и через кольцо 2, упорный диск на корпус — в
другую сторону.
Смазочный материал поступает по каналам и далее,
как это показано на схеме 7.1, в рабочую зону. Уплотне-
ния 7 и 2, а также торцовое уплотнение 3 предотвращают
вытекание смазочного материала и защищают рабочие
поверхности от внешней среды.
Корпус опирается на основание через подушку,
обеспечивающую самоустановку корпуса. Кроме того,
предусмотрены элементы замыкания на станину осевых
сил и момента трения (на схеме не показаны).
На схемах 6.2 комбинированная опора выполнена в
виде набора сегментных подушек. Вал опирается через
упорный диск на подушки с антифрикционным рабочим
покрытием. Подушки имеют закаленные вкладыши (см.
схему 6.2а), через которые они опираются на шарики,
установленные в кольце. При вращении вала и наличии
смазочного материала подушки поворачиваются и обра-
зуют клиновидный зазор (см. схему 6.25), благодаря чему
обеспечивается гидродинамическая смазка.
Скосы вкладышей подушек выполняют различны-
ми, чтобы переместить центр мгновенного поворота С
подушек на линию действия равнодействующей реакции
смазочного клина Fr. На схеме 6.26 q — распределенная
нагрузка на упорный диск. Углы скосов находят из при-
мерного соотношения tgcpi/tgcp2 = 0,72.
Каждая из подушек может находиться в равновесии
только при одинаковой нагрузке на остальные подушки,
что достигается их взаимодействием через шарики.
Возможность самоусгановки подушек обеспечивает
самоустановку вала.
На схеме 6.3 проиллюстрирован прием уменьшения
относительной скорости в подпятнике за счет введения
промежуточных самоустанавливающихся в окружном
направлении звеньев. При этом число пар трения увели-
чивается (в данном примере в 2 раза), а относительная
скорость соответственно уменьшается. Такое решение
приемлемо только для высокоскоростных подшипников,
для которых скорость скольжения должна быть ограни-
чена из соображений, продиктованных свойствами ис-
пользуемых антифрикционных и смазочных материалов.
На схеме 6.4 подпятник имеет полость, наполнен-
ную жидкостью, и торцовую шайбу, удерживающую вал
при остановке. Давление жидкости поддерживается ав-
томатически. Жидкость подается через каналы в под-
шипнике и в теле вала. При опускании вала из-за утечки
жидкости канала пит совмещаются и открывается дос-
туп жидкости.
На схеме 6.4а в пневматическом подпятнике для ги-
роскопа пята имеет на торцовой поверхности спиральные
углубления, которые увлекают за собой воздух (от пери-
ферии к центру) при высокой частоте вращения
(-30000 мин'1) и создают дополнительную подъемную силу.
На схеме 6.5 показан подпятник со сферической
опорой в виде шарика, установленного между вклады-
шами 1 и 2.
На схеме 6.5а подпятник имеет торцовые поверхно-
сти взаимодействия, причем промежуточная деталь опо-
ры выполнена самоустанавливающейся благодаря сфе-
рической поверхности. Гидродинамическая смазка обес-
печивается благодаря образованию масляного клина при
совершении промежуточной деталью прецизионного
движения.
Наиболее сложной задачей конструирования опор
скольжения является обеспечение совместной работы
подшипника и подпятника при их размещении в одном
узле (см. схему 6.1, 6.4 и 6.6). Особенно это важно, когда
приходится воспринимать опрокидывающий момент от
силы F, как это показано на схеме 6.6. Целесообразно
таким образом предусмотреть соотношение зазоров и
жесткости, чтобы момент воспринимался подпятниками
при большом плече (расстоянии между реакциями Fr\ и
Fri)- Функция подшипника здесь в основном — точное
центрирование при небольших радиальных нагрузках.
Чтобы уменьшить неблагоприятные явления перекоса
подшипника, его выполняют довольно коротким (по от-
ношению к диаметру) и размещают как можно ближе к
рабочей плоскости поворотного стола.
Как уже отмечалось, в подшипниках скольжения
важную роль играет подвод и распределение смазочного
материала. По ходу рассмотрения конструкций на схе-
мах 2.1,4.1 рис. 90.1 уже были представлены отдельные ре-
232
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
91. ЭЛЕМЕНТЫ СОПРЯЖЕНИЯ И СМАЗЫВАНИЯ ПОДШИПНИКОВ СКОЛЬЖЕНИЯ
Шейка вала
Болт
Зазор
Вкладыш/втулка
Пластический
замок
Вкладыш
Ж|'х
Вкладыш Fr
Корпус
Выступ
Вкладыш
Пластический
замок
Образование
зазора при
недостаточном
натяге
9.1
Подушка
Основание
Корпус
Шейка
вала
Компенсация отклонения
от круглости
за счет утонения вкладыша
Корпус
W
/ Втулка
Плавное скругление
8.1в
Сборочный
упор
0,3...0,8мм
Вкладыш
Корпус
Создание
натяга
9.2
Упорный
I*" торец
1^.0,2...0,5мм
9.2а
----1 Упорный
торец
Шип вала
Плавная
переходная
поверхность
Канал
Шип вала
ПОДШИПНИКИ СКОЛЬЖЕНИЯ И УПРУГИЕ ШАРНИРЫ
233
шения каналов, канавок и полостей для смазочного мате-
риала. Далее остановимся еще на некоторых исполнени-
ях (см. рис. 91).
На схемах 7.1, 7.1а, 7.16 показана организация под-
вода и отвода смазочного материала в подшипнике, вы-
полненном по схеме 1.1. Смазочный материал под давле-
нием р по осевому каналу 1 поступает в окружные сер-
повидные канавки, а затем по радиальному каналу в зону
холодильника. Отработанный смазочный материал выхо-
дит в торцовую зону подшипника и отводится по осево-
му каналу 2.
На схеме 7.2 подача смазочного материала осущест-
вляется с торца вала. Правильное решение предусматри-
вает подвод смазочного материала не к торцу подшипни-
ка, а в его середину. Для этого использован штуцер,
имеющий уплотнение с валом. Смазочный материал по-
дается по осевому, а затем по радиальным каналам в ра-
бочую зону.
На схеме 7.3 показано размещение каналов в колен-
чатом валу для подвода смазочного материала к подшип-
нику шатунной шейки. Наиболее распространена подача
смазочного материала по каналу в корпусе, далее его
распределение по кольцевой канавке во вкладыше 1
(верхнем) [вкладыш 2 (нижний), как более нагруженный,
стараются не ослаблять выполнением канавки], затем по
радиальному и диагональному каналам к рабочим по-
верхностям шатунного подшипника.
Смазочная канавка служит для подвода и равномер-
ного распределения смазочного материала по трущимся
поверхностям, для накопления и эвакуации продуктов
износа и улучшения условий охлаждения.
На схемах 7.4 ... 7.6 показаны смазочные канавки
подшипников скольжения: на схеме 7.4 продольная ка-
навка для распределения смазочного материала по длине
подшипника (см. также холодильник в схеме 7.7); на схе-
ме 7.4а - кольцевая маслозадерживающая канавка; на
схеме 7.4, продольная канавка в толстостенном (свыше
10 мм) резиновом вкладыше (со - направление вращения
вала); на схеме 7.4в - канавки в цельнопрессованном ре-
зиновом подшипнике; на схеме 7.5 - канавки в наборном
текстолитовом подшипнике. Размеры канавок обычно
определяют в зависимости от диаметра вала <7:
г = (0,03 ... 0,05)<7; h = (0,020 ... 0,025)с7; й, = (0,008 ...
0,025)<7.
На схеме 7.6 показана винтовая канавка на втулке
подшипника скольжения. Как уже отмечалось, такая ка-
навка препятствует самовозбуждению вибраций, а кроме
того, обеспечивает непрерывное перемещение смазочно-
го материала вдоль подшипника. При этом, однако, су-
щественно уменьшается его нагрузочная способность из-
за уменьшения площади рабочей поверхности.
Выполнение смазочных канавок (особенно кольце-
вых) в теле втулки или вкладыша, кроме уменьшения
площади рабочей поверхности, не позволяет существен-
но уменьшать толщину втулки или вкладыша.
На схеме 7.7 представлено решение подшипника в
совокупности с двусторонним подпятником в виде полу-
колец из антифрикционного материала. Полукольца
имеют смазочные канавки и выступ для фиксации от
проворота. Участки полукольца стыка выполнены с уто-
нением. Утонение, плавное уменьшение толщины вкла-
дышей (см. также схему 8.15) и втулок, позволяет избе-
жать кромочного контакта в сопряжении звеньев и обу-
словлено согласованием деформации при нагружении с
заданной геометрией элементов.
На схеме 1.3 показано изменение формы втулки в
соответствии с изогнутой осью шейки. На схеме 1.3а
(рис. 91) дан вариант утонения втулки по краям. Воз-
можность деформирования втулки в направлении стре-
лок снижает концентрацию нагрузки в этих местах (К)
при изгибе шейки. Кстати, в этих местах целесообразно
на втулке выполнить не фаску, а плавное скругление (см.
схему 9.1).
Эта же цель может быть достигнута согласованием
жесткости корпуса с характером деформирования шейки
или типа вала. На схеме 1.36 показано, что корпус де-
формируется в направлении деформирования оси шипа и
концентрация нагрузки в точке К уменьшается. Но такой
прием приводит к ухудшению центрирования и может
быть применен только в случае, когда данный показатель
функционально несущественен.
На схемах 8.1а и 8.16 показано изменение формы
втулки или вкладышей при действии радиальных сил Fr
со стороны вала и со стороны корпуса. Втулка/вкладыш
принимает эллиптическую форму. В данном случае вы-
полняют утонение вкладыша, компенсирующее в какой-
то мере эти отклонения. Обычно (для двигателей легко-
вых автомобилей) это утонение составляет 0,005 ... 0,010 мм
на ширине до 5 ... 6 мм от края вкладыша.
На схеме 8.16 показано, что за счет растяжения бол-
тов стык вкладышей может разойтись с образованием
зазора, что нарушит нормальную работу подшипника.
Чтобы этого не происходило, вкладыш устанавливают с
натягом (схема 8.1 в).
Для исключения проворота вкладыша его фиксиру-
ют относительно корпуса с помощью штифта или шпон-
ки. Лучшие и более простые решения элементов фикса-
ции даны на схемах 1.2г и 1.2д. Это пластически полу-
чаемые выступы, образующие с впадинами корпуса замки.
На схемах 8.2 и 8.3 показаны решения установки
подушки подшипника и подпятника соответственно в
корпусе. Подушка соединена с основанием упругой пе-
ремычкой, которая позволяет подушке самоустанавли-
ваться при нагружении подшипника и осуществлении
гидродинамической смазки.
Еще несколько решений элементов, позволяющих
повышать несущую способность подшипников и подпят-
ников, представлены на схемах 9.1 ... 9.3. Как уже отме-
чалось, следует стремиться избегать нескругленных уг-
лов. Это относится как к втулке/вкладышу на схеме 9.1,
так и к шейке вала (схемы 9.2 и 9.2а).
На схеме 9.2 — традиционное решение, обеспечи-
вающее возможность шлифования поверхностей цилинд-
рическим и плоским кругом. На схеме 9.2а более пред-
почтительное, но менее технологичное решение, имею-
щее плавную переходную поверхность. (Сопряженная
втулка при таком решении не должна контактировать с
данной переходной поверхностью). Приведенный прием
234
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
касается практически всех элементов конструкции. На
схеме 9.3 показаны скругленные края масляного канала,
которые также повышают качественные показатели под-
шипника в целом, особенно если этот канал выходит в
рабочую зону сопряжения деталей.
В современных машинах и механизмах все чаще ис-
пользуют сферические опоры скольжения, а также экви-
валентные им упругие опоры (рис. 92). Что касается сфе-
рических опор качения, то они будут рассмотрены в
параграфах 10.2, 10.3).
Раньше довольно часто корпус цилиндрического
подшипника устанавливали в сферическую опору (схе-
ма 10.1). Такое решение позволяло компенсировать пе-
рекосы осей и исключить неравномерность распределе-
ния нагрузки по длине подшипника, но было связано с
увеличением размеров опоры в целом. Так, целесообраз-
но размещать подшипник только тогда, когда сфериче-
ские перемещения незначительны и постоянны.
В практике конструирования имеется много задач,
когда необходимо обеспечить значительные повороты
вокруг любой из трех осей координат. Это, в частности,
относится к гидромоторам (см. параграф 2.5), манипуля-
торам параллельной структуры (см. главу 3), рулевым
системам, подвескам машин и агрегатам (см. параграф 4.3,
главы 7 и 17). Компенсировать перекосы осей сопряжен-
ных деталей можно также, размещая корпус в эластич-
ном податливом основании (схемы 11.2, 11.3). Но, кроме
того, за счет упругости можно осуществлять все три сфе-
ПОДШИПНИКИ КАЧЕНИЯ
235
рических движения в дополнение к одному из движений
скольжения (схемы 11.5 и 11.5а). Сферические опоры
скольжения используют также в соединениях агрегатов
только для компенсации перекосов (схема 10.7).
Сферический шарнир обычно состоит из трех ос-
новных деталей: шарового наконечника (сферическая
головка), сопряженного с ним сферического вкладыша из
антифрикционного материала и корпуса, в котором име-
ется полость для установки вкладыша. Вкладыш может
быть составлен из нескольких деталей. В схеме 10.2 сфе-
рическая головка, выполненная на конце стержня, удер-
живается в гнезде корпуса пластически деформирован-
ными краями гнезда (см. стрелки F).
В схеме 10.2а пластмассовый вкладыш до сборки
имеет цилиндрические боковые внутренние поверхности,
переходящие в сферические поверхности, благодаря чему
сферическая головка свободно в него вставляется.
В результате установки вкладыша в коническое от-
верстие он деформируется и боковая поверхность охва-
тывает сферическую поверхность корпуса. Вкладыш
поджимается пружиной, удерживаемой упругой крышкой.
На схемах 10.26, 10.2е — варианты сферических
шарниров, собираемых аналогично шарниру на схеме
10.2а. Сферическая головка на схеме 10.26 охватывается
цельным эластичным вкладышем. Крышка удерживается
закаткой - пластическим замком. Опорное кольцо из по-
лиуретана обеспечивает в собранном шарнире прижатие
уплотнительного чехла к рычагу, в проушину которого
вставляют палец со сферической головкой (на схеме не
показан).
В схеме 10.2в вкладыш так же, как и в схеме 10.2,
состоит из двух деталей, но в нем обеспечивается поджа-
тие подпятника пружиной. На подпятнике показана сма-
зочная канавка. В схемах 10.26 и 10.2в замкнутые полос-
ти заполнены пластическим смазочным материалом.
На схемах 10.3 ... 10.4 представлены сферические
шарниры гидромоторов. На схеме 10.3 показан подвод
смазочного материала под давлением из рабочей полости
гидроцилиндра. Здесь смазочный материал подается в
нагруженную зону. В отличие от этого решения в схе-
ме 10.3а имеется кольцевая канавка в менее нагруженной
зоне, в которую смазочный материал подается под дав-
лением по осевому и радиальному каналам.
На схеме 10.4 в радиально-поршневом гидромоторе
два шарнира с кольцевыми сферическими поверхностями
телескопических втулок 1 м2 сопряжены со сферическим
эксцентриком с одной стороны, и со сферической опорой -
с другой. Рабочая жидкость подается в зону сопряжения
под давлением. Примечательно, что жидкостное трение
имеет место только при установившемся движении гид-
ромотора. В момент пуска давление недостаточно и силы
трения из-за больших углов давления достигают значи-
тельных величин.
При отработке конструкции поперечные силы в паре
трения приводили к выходу гидромотора из строя. Толь-
ко выбор соответствующего антифрикционного покры-
тия сферического эксцентрика и качество сопряженных
поверхностей обеспечили работоспособность конструкции.
На схеме 10.5 - сферическая опора керна с подуш-
кой. При незначительной боковой нагрузке и небольшой
осевой силе в такой опоре нарушается центрирование.
Схема 10.6 представляет собой сферический шарнир
подвески автомобиля. Он допускает небольшие утлы по-
ворота вокруг трех осей. Для уменьшения трения сфери-
ческую поверхность головки охватывают пластмассовые
вкладыши, опирающиеся через упругие полиуретановые
подушки-кольца на корпусную деталь. Крышка прикреп-
лена к внутренней сферической детали закаткой - пла-
стическим деформированием. Уплотнительные чехлы 1 и
2 защищают рабочие поверхности от внешней среды.
На схеме 10.7 — сферические соединения для малых
относительных перемещений корпусов 1 и 2, а также ва-
лов 1 и 2 газотурбинного двигателя. Шарниры обеспечи-
вают необходимое центрирование деталей. Внутреннюю
сферическую поверхность первого соединения образуют
кольцо 1 и кольцо 2, прикрепленные винтами к корпу-
су 1. Детали другого соединения размещены внутри ва-
лов / и 2. Подпятник неподвижно соединен с валом 1, а
пята поджата к нему пружиной. Пята размещена в стака-
не, установленном внутри вала 2.
На схеме 11.1 между втулкой 1 подшипника и втул-
кой 2 размещен резиновый слой, который обеспечивает
компенсацию перекосов и смягчает ударные нагрузки.
Точность центрирования в такой опоре низкая.
На схеме 11.2 центрирующая опора, используемая в
упругой муфте, выполнена в виде консольной тонко-
стенной трубки, внутри которой имеется эластомерный
слой, удерживающий втулку из сополимерного ацетата.
Периферийная часть слоя имеет уплотнительную кром-
ку К, поджатую к сопряженной детали пружиной. Упру-
гость в направлении действия силы обеспечена благодаря
консольной конструкции опоры и подбора соответст-
вующих материалов.
Конструктивное исполнение упругих опор (шарни-
ров) весьма разнообразно как по используемым материа-
лам, так и по конфигурации. Главная задача при выборе
решений заключается в выборе регламентированной же-
сткости в направлениях заданных перемещений. Наибо-
лее перспективными решениями представляются много-
слойные опоры и другие исполнения с нелинейной упру-
гой характеристикой. За счет использования упругих
опор (в частности несимметричных) добиваются само-
управляемое™ механических систем и получения иных
новых качеств машин и механизмов (см., в частности,
параграфы 7.1 ... 7.5).
10.3. ПОДШИПНИКИ КАЧЕНИЯ
Массовое производство унифицированных подшип-
ников качения без преувеличения можно отнести к рево-
люционному явлению в развитии конструкций машин и
приборов. За сравнительно короткий период (не более
ста лет) никакие другие виды деталей и соединений не
доведены до такого совершенства, как подшипники ка-
чения. Целая армия конструкторов и технологов во всем
мире работала и работает над каждым элементом, над
236
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
ПОДШИПНИКИ КАЧЕНИЯ
237
каждой деталью, над каждым соединением (составными
частями подшипников), над выбором материалов, над
созданием новых технологических процессов. В резуль-
тате создана система унифицированных сборочных еди-
ниц (практически на все возможные случаи), которые
могут быть использованы в вашей конструкции. Казалось
бы, чего проще - выбирай желаемый подшипник и уста-
навливай его в нужном месте. На самом же деле, все да-
леко не так просто.
1. Многообразие решений оборачивается проблемой
выбора. Для одних и тех же условий может подойти
множество вариантов, из которых нужно выбрать всего
один.
2. Подшипник качения — сложный механизм, и его
функционирование зависит от большого числа внешних
факторов (характер нагружения, частота вращения, сма-
зывание, защита от агрессивной среды и т.п.). Поэтому
требуется позаботиться о "жизнеобеспечении" выбранно-
го и установленного подшипника.
3. Функционирование подшипников зависит от вы-
бранных не только типоразмеров, но и схемы их распо-
ложения, деформативности системы в процессе сборки,
нагружения и нагрева, характера закрепления, вида регу-
лировок, посадок, обеспечивающих соответствующие
зазоры/натяги, в том числе внутри самого подшипника и
др. Конструирование подшипниковых опор (узлов) в
этой связи представляет собой очень тонкий и сложный
процесс.
4. Встречаются условия (хотя и сравнительно ред-
ко), когда требуется либо доработать конструкцию уни-
фицированного подшипника, либо создать новую. В этом
случае нужно использовать весь накопленный опыт по
созданию унифицированных конструкций.
5. Унификация формы и размеров носит дискретный
характер, поэтому при уточненной оценке конструкции
всегда будут выявлены потери (в размерах, массе и дру-
гих качествах), если требуются промежуточные парамет-
ры между предусмотренными в параметрическом ряду.
6. Встречаются условия (стесненное пространство в
радиальном направлении, ударные нагрузки, необходи-
мость радиальной сборки и т.д.), для которых более при-
способлены подшипники скольжения (см. параграф 10.1).
Далее рассмотрим принципы выбора исполнений
подшипников качения и конструирования подшип-
никовых опор в целом. Для этого нужно в полной мере
ощутить те мысли конструктора, которые заложены в
готовые унифицированные подшипники и провести ло-
гическую связь между конструкциями подшипника и
подшипниковой опоры в целом.
Итак, устройство подшипника качения. Это —
сложный механизм, аналогичный по схеме фрикционной
планетарной передаче (см. схему 11.1 на рис. 93): две
дорожки качения - центральные колеса - контактируют с
телами качения (шариками/роликами) - сателлитами,
тела качения удерживаются на одинаковом расстоянии
одно от другого сепаратором - водилом. Разница только
в том, в подшипнике отсутствуют иные вращающие мо-
менты, кроме моментов трения. При этом практически в
любом подшипнике присутствуют явления качения,
геометрического и упругого скольжения и верчения.
Сепаратор с одним из колец или с каждым из тел
качения образует, по существу, подшипник скольжения,
нагруженный в основном центробежной силой (из-за не-
которого смещения центра массы) относительно оси
вращения.
В зависимости от направления воспринимаемой на-
грузки различают подшипники: радиальный (схе-
мы 11.2; 11.6; 11.7; 11.8); радиально-упорный (схемы
11.1; 11.3; 11.4; 11.5) и упорный (схемы 11.9; 11.10;
12.1), воспринимающие соответственно радиальную,
преимущественно только радиальную и осевую и только
осевую нагрузку. Подшипник, выполненный по схеме 11.1,
может воспринимать до 70 % осевой нагрузки от недоис-
пользованной радиальной нагрузочной способности, а
подшипник, выполненный по схеме 11.3, - соответствен-
но до 20 % осевой нагрузки. Подшипники по схе-
мам 11.2; 11.6; 11.7; 11.8 не могут воспринимать осевую
нагрузку.
По форме тел качения и рабочих поверхностей ко-
лец различают подшипники:
шариковый, шарикоподшипник (схемы 11.1; 11.5);
роликовый с цилиндрическими роликами, ци-
линдрический роликоподшипник (схема 11.2);
сферический с бочкообразными роликами, сфе-
рический самоустанавливающийся роликоподшип-
ник (схема 11.3);
роликовый с коническими роликами, кониче-
ский роликоподшипник, игольчатый (схема 11.6);
сферический самоустанавливающийся шарико-
вый (схема 11.3а);
роликовый с витыми роликами.
Конический роликовый подшипник по схеме 11.4а
может воспринимать осевую нагрузку Fa только в одном
направлении, а по схеме 11.46 способен воспринимать
меньшую по величине реверсивную нагрузку благодаря
наличию упорного кольца.
Роликовый подшипник по схеме 11.10 имеет ролики
с малой конусностью, расположенные в шахматном по-
рядке (схема 11.10а). Между роликами находятся разде-
лительные перегородки, либо такой подшипник выпол-
няется без сепаратора. Этот подшипник способен вос-
принимать значительные осевые, радиальные нагрузки и,
что особенно важно, опрокидывающий момент (в плос-
кости сечения схемы 11.10). Его применяют в качестве
круговой направляющей опоры, обычно большого диа-
метра, для грузоподъемных кранов, экскаваторов и др.
По числу рядов тел качения различают подшипники
однорядный, двухрядный и многорядный. Наиболее
распространены двухрядные радиальные роликоподшип-
ники (схемы 11.2а) с повышенной общей нагрузочной
способностью, радиально-упорные шарикоподшипни-
ки (схема 11.5а) и радиально-упорные роликопод-
шипники (схема 11.4в), воспринимающие реверсивную
осевую нагрузку.
Комбинированные подшипники (см. схему 11.6г)
способны независимо воспринимать как осевую, так и
радиальную нагрузки. Применяют также многократно-
повторенные последовательно установленные радиально-
упорные подшипники с целью повышения нагрузочной
238
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
способности и упорные подшипники для снижения ско-
рости качения шариков и угловой скорости сепараторов.
В подшипниках без колец или сепараторов (схе-
ма 11.6а) в качестве колец могут служить поверхности
вала, оси или другие детали.
Радиально-упорные шарикоподшипники имеют угол
расположения точки контакта 0=12°, 26° и 36°.
Радиальные шариковые подшипники допускается
использовать при перекосе осей внешней и внутренней
посадочных поверхностей до 30', а роликовые - не бо-
лее 3'. Самоустанавливающиеся сферические подшипни-
ки (схемы 11.3, 11.3а) обеспечивают нормальную работу
при перекосах осей 2 ... 3°. Для меньшей чувствительно-
сти к перекосам цилиндрические и конические ролики
выполняют комбинированными (схема 16.4а).
Возможность работы при перекосах осей роликовых
подшипников уменьшается с увеличением длины ролика
(по отношению к диаметру) и с повышением радиальной
жесткости колец подшипника. Роликовый подшипник с
витыми роликами (схема 11.7 и 11.7а) хотя и имеет более
длинные ролики, чем подшипник по схеме 11.2, но из-за
податливости роликов менее чувствителен к перекосам.
При исполнении колец подшипника тоже витыми и
упругими (схема 11.7а) можно за счет выбора посадок
колец в корпус и на валу получать начальный зазор или
натяг внутри подшипника в широких пределах.
А кроме того, такой подшипник с витыми упругими
деталями способен в какой-то мере противостоять удар-
ным нагрузкам. В то же время точность центрирования
сопряженных звеньев при его использовании невысока.
Роликовый упорный подшипник с короткими ци-
линдрическими роликами 2 (схема 11.6а слева) характе-
ризуется незначительным геометрическим скольжением.
Чтобы его исключить, на схеме 11.10 ролики выполнены
коническими (с центром конуса на оси вращения под-
шипника).
Игольчатый подпятник - упорный подшипник (схе-
ма 11.66) содержит тела качения в виде длинных (длина
превышает диаметр в 2 раза и более) цилиндрических
роликов с радиальным расположением осей. Он предна-
значен для ограничения осевого перемещения вращаю-
щихся деталей обычно при небольших нагрузках случай-
ного характера. Такой подшипник отличается простотой
решения, а его работа сопровождается более значитель-
ным, чем в схеме 11.6г, геометрическим скольжением.
Диски 1 и 2 подпятника взаимодействуют с роликами.
Ролики размещены в сепараторе, сепаратор обычно
штампованный и имеет пластический замок, который
образуется деформированием выступов сепаратора после
укладки в него роликов (см. схему П.бв).
По габаритным размерам при данном внутреннем
диаметре d подшипники делятся на серии (схема 13.1):
1 — сверхлегкая серия; 2 — особо легкая; 3 — легкая;
4 — легкая широкая; 5 - средняя; 6 — средняя широкая;
7 - тяжелая. Каждая более высокая серия имеет попереч-
ное сечение кольца больших размеров (наружного и
внутреннего) и более крупные тела качения. Благодаря
этому нагрузочная способность подшипников более вы-
сокой серии выше, чем у более низкой серии, а предель-
ная частота вращения ниже из-за увеличения массы се
ратора и, соответственно, возрастания центробежт j
сил. Различие допустимых экстремальных нагрузок п
одном и том же диаметре d может достигать 10... 100.
Различной нагрузочной способностью обладав*
подшипники одной и той же серии, но разных типов. Н>
пример, подшипник по схеме 11.2 имеет грузеподъе*
ность и долговечность соответственно в 1,5 и 3,5 рал
выше, чем подшипник по схеме 11.1, а подшипник i
схеме 11.4 — соответственно в 1,7 и 5 раз.
Подшипник по схеме 11.1 имеет коэффициент тре-
ния f= 0,001 ... 0,002 и допустимые окружные скорое-»
v= 10 ... 30 м/с; по схеме 11.2 -/=0,002 ... 0,003, v= 10 .
20 м/с; по схеме 11.3а—f= 0,003 ... 0,005, v = 10 ... 20 мв
по схеме 11.3 — f= 0,004 ... 0,008, v = 5 ... 15 м/с; по сев
ме 11.6-f= 0,005 ... 0,01, v = 5 ... 10 м/с.
Подшипники изготовляют различных классов т^ -
ности, характеризуемых совокупностью параметр.
регламентирующих отклонения присоединительных раз-
меров, формы и взаимного расположения поверхности!
колец подшипника и их шероховатость, а также вел.
ны радиального и осевого биения дорожек качения
торцов колец.
Предусмотрено пять классов точности, обозна1-.
мых в порядке повышения 0; 6; 5; 4; 2. Обычно при?.,
няют подшипники класса 0. Подшипники более высоких
классов используют для шпинделей прецизионных ста=
ков, в авиационных двигателях, приборах. Они позве.
ют обеспечить лучшее центрирование, повысить кине? •
тическую точность механизма в целом, обеспечить бо.
высокие частоты вращения и др. Подшипник класса 2
стоит в 10 раз дороже, чем подшипник того же типора^
мера класса 0, и в 5 раз дороже, чем класса 5. Допуски а
торцовое и радиальное биение для класса 2 прибли-
тельно в 5 раз меньше, чем для класса 0.
Кольца и тела качения изготовляют из высоко?--
леродистых хромистых сталей ШХ15 и ШХ15СГ, а тают,
цементуемых легированных сталей 18ХГТ, 20Х2Н4А
20 НМ. Твердость колец и роликов 61 ... 66 HRC, а ша
риков 63 ... 67 HRC. Предъявляются высокие требовал<<
к шероховатости поверхностей тел качения и дорож.-
качения: Ra = 0,04 ... 0,08 мкм.
Сепараторы изготовляют обычно штампованны?:
из мягкой углеродистой стали, а для высокоскоростны.
подшипников их выполняют массивными из бронзы, ла-
туни или текстолита.
Сепаратор выполняют в виде двух симметричнг
деталей, охватывающих шарики с обеих сторон и соедг?
ненных между собой заклепками (схема 11.1). Центрир;
ется такой сепаратор по боковым поверхностям шариков.
Массивный сепаратор на схеме 11.4а имеет консольнь е
выступы, отделяющие ролик от соседних роликов. Его
обычно центрируют по хорошо обработанной дорожк.
скольжения внутреннего кольца. Иногда сепаратор цен-
трируют по дорожке наружного кольца, но при этом
ухудшаются условия подвода смазочного материала и
увеличивается скорость скольжения. На схеме 11.7 пока-
зан сепаратор, выполненный в виде "беличьего колеса1.1
Оси, проходящие внутри роликов, неподвижно соедине-
ны (расклепаны) с боковыми кольцами сепаратора.
ПОДШИПНИКИ КАЧЕНИЯ
239
В сепараторах, показанных на схемах 11.5а и 11.66,
используют пластические замки. Замок образуется, на-
пример, путем выдавливания части металла из кольцевой
(схема 15.1) или поперечной (схема 15.1а) канавки.
Подшипники должны иметь частоту вращения ниже
предельной. С увеличением частоты вращения до пре-
дельной и выше существенно повышаются потери на
трение, инерционные нагрузки за счет вращения сепара-
тора и тел качения, температура смазочного материала.
В результате масло разжижается, выдавливается из мест
контакта, из-за чего возникает схватывание поверхно-
стей. Снижается сопротивляемость разрушению дорожек
качения, увеличивается число отказов, связанных с раз-
рушением сепаратора.
Оценивают подшипники через величину
где dm - диаметр окружности центров тел качения;
п - частота вращения.
Величина [dm п ] зависит от типа подшипника, точ-
ности конструкции сепаратора и вида смазочного мате-
риала. Наибольшее значение [dmn] имеет место при
использовании текстолитового или массивного металли-
ческого сепаратора, меньшее - при использовании штам-
пованного сепаратора, а еще меньше - без сепаратора.
При использовании пластичного смазочного мате-
риала игольчатые подшипник имеют [dm п ] = 10s, упор-
ные шариковые [dm п ] = 2 • 10s.
При использовании жидкого смазочного материала
значения [dmn] 10'5 для разных подшипников следую-
щие.
Сферические роликовые................ 3
Конические роликовые................. 3,5
Цилиндрические роликовые............. 5
Сферические шариковые................ 5,5
Радиальные шариковые................. 9
Наиболее часто подшипники разрушаются из-за ус-
талостного выкрашивания беговых дорожек и тел каче-
ния под действием переменных контактных напряжений.
Невращающиеся (или медленно вращающиеся) под-
шипники выбирают по статической грузоподъемности,
рассчитанной из условия контактной прочности. Харак-
теристики подшипников стандартизованы.
Вращающиеся подшипники выбирают по динамиче-
ской грузоподъемности, учитывающей соотношения уг-
ловых скоростей наружного и внутреннего колец, соот-
ношения радиальной и осевой нагрузок, наличие вибра-
ции и ударного характера нагружения, соотношения ве-
личин нагрузки и числа циклов нагружения на протяже-
нии всего времени эксплуатации, тепловой режим экс-
плуатации, характер смазывания и др.
По допустимой динамической грузоподъемности
существенно отличаются подшипники шариковые и ро-
ликовые, легкой и тяжелой серий. Она зависит также от
используемых материалов и термической обработки ко-
лец, конструкции и материала сепаратора и др.
По допустимой динамической грузоподъемности
существенно отличаются подшипники шариковые и ро-
ликовые, легкой и тяжелой серий. Она зависит также от
используемых материалов и термической обработки ко-
лец, конструкции и материала сепаратора и др.
Приемы и тенденции совершенствования конст-
рукций подшипников качения. Они направлены на
следующее:
• улучшение характера распределения нагрузки по
телам качения за счет изменения соотношения жестко-
стей в определенных направлениях;
• уменьшение концентрации нагрузки вдоль линии
контакта тела качения и кольца;
• увеличение суммарного пятна рабочего контакта,
в том числе увеличение приведенного радиуса кривизны
тела качения и дорожки качения;
• повышение твердости, уменьшение шероховато-
сти тел качения и дорожек качения и повышение прочно-
сти колец;
• уменьшение концентрации напряжения в местах
перехода от одной поверхности к другой;
• повышение точности изготовления основных де-
талей и обеспечение точного центрирования сепаратора;
• уменьшение геометрического скольжения в мес-
тах торцового сопряжения колец и роликов, в местах со-
пряжения сепаратора с телами качения и/или с центри-
рующими поверхностями колец;
• улучшение условий смазывания и защиты тру-
щихся пар от агрессивной среды;
• повышение технологичности конструкции деталей
и соединений как в самих подшипниках, так и при ис-
пользовании подшипников в опорах (поверхности со-
пряжений, монтажные элементы, возможность закрепле-
ния и т.п.);
• возможность демпфирования вибраций и смягче-
ния ударов вследствие применения упругих элементов;
• повышение точности центрирования в связи с
увеличением жесткости и уменьшением зазоров в на-
правлении возможного смещения оси вращения.
Из конструктивных элементов, направленных на
повышение технологичности, следует отметить выпол-
нение канавки для выхода инструмента (схема 14.1а).
Она присутствует практически всюду, где имеются пере-
секающиеся поверхности, одна из которых препятствует
перемещению инструмента для полной обработки другой
поверхности (см. схемы 11.4а, 11.46, 11.8, 11.10, 16.1,
16.1а). Выполнение канавки неминуемо приводит к более
значительной концентрации напряжений, по сравнению,
например, с плавной переходной поверхностью (см. схе-
му 14.1). Поэтому в подшипниках качения канавки вы-
полняют максимально плавной конфигурации (без пря-
мых и острых углов), как показано, например, на схе-
ме 14.1а. Фаски в местах пересечения рабочих (опорных)
поверхностей выполняют скругленными по схеме 14.1.
Из мероприятий по выравниванию распределения
нагрузки отметим сначала решения внутри самого под-
шипника (см. схемы 16.1,16.3,16.4а).
240
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
При радиальном нагружении подшипника на долю
самого нижнего ролика/шарика приходится нагрузка
примерно в 2 ... 2,5 раза больше, чем на остальные на-
груженные ролики/шарики. Уменьшают такую неравно-
мерность как выбором внутренних конструктивных ре-
шений подшипника, так и распределением жесткостей во
внешних элементах опоры.
Уменьшить неравномерность распределения нагруз-
ки между телами качения и увеличить пятно контакта в
шариковом подшипнике можно уменьшением жесткости
непосредственно под дорожкой качения. Например,
среднюю часть кольца А выполняют тонкой, а жесткие
периферийные опорные части В и D (см. схему 16.3) от-
деляют от средней части прорезями, расположенными в
шахматном порядке. При уменьшении жесткости в под-
шипнике следует помнить о точности центрирования, так
как центр оси вала при малой жесткости опоры смещает-
ся в радиальном направлении. Можно скомпенсировать и
данное смещение предварительным "нецентральным"
расположением подшипника без нагрузки. Но это недо-
пустимо при переменной нагрузке.
В роликовых подшипниках имеет место неравно-
мерное распределение нагрузки вдоль контактной линии.
Для уменьшения данной неравномерности корректируют
либо форму самих роликов (например, скругляют цилин-
дрическую поверхность по краям - см. эпюры распреде-
ленной нагрузки d\ и б/ц на схемах 16.4 и 16.4а, либо фор-
му дорожек качения. Например, образующие дорожек
качения выполняют непараллельным (угол у на схеме
16.2). После приложения силы F сечение кольца повер-
нется в направлении стрелки (приложенного момента) Т
и рабочая поверхность кольца будет прилегать к поверх-
ности ролика по всей длине контактной линии.
Увеличение площади суммарного пятна контакта
достигают за счет сопряжения внутренних колец 2 и 3
(схема 11.8) с шариком в двух точках С2 и С3. Это важно,
так как в контакте шарика с внутренним кольцом приве-
денный радиус кривизны меньше, чем в контакте шарика
с наружным кольцом. Если предусмотреть в сопряжении
шарика с наружным кольцом тоже две точки контакта Cj
и С4, то получается четырехточечный подшипник, спо-
собный работать как радиально-упорный в обоих на-
правлениях.
Внутреннее кольцо обычно состоит из двух частей
(колец 2 и 5), которые поджимаются в осевом направле-
нии силами Fa и тем самым выбирают зазоры, создают
необходимый натяг в подшипнике и обеспечивают высо-
кую точность центрирования. Точки контакта распола-
гают в сечении под углом Р к плоскости симметрии, ана-
логичному углу в радиально-упорном подшипнике.
Профиль дорожки качения очерчивают двумя пере-
секающимися дугами окружности или выполняют плав-
ным - эллиптическим.
Четырех-, трехточечный контакт позволяет умень-
шить контактные напряжения при работе подшипника,
но при нагружении радиальной силой связан с дополни-
тельными потерями на трение из-за невозможности иде-
ального качения шарика. КПД такого подшипника не-
сколько ниже, чем в исполнении по схеме 11.1. В таком
подшипнике уменьшается угловая скорость сепаратс,-1
вследствие меньшего отношения радиусов дорожек >
чения шарика (аналогично снижению передаточного от-
ношения в планетарной передаче при уменьшении ди*-
метра сателлита).
В схеме 11.3а четырехточечный контакт образовты
благодаря установке проволочных колец в канале д.тя
шариков. Проволочные кольца (схема 11.96) изготоьля-
из сравнительно мягкого материала. При сборке пс
шипника кольца 3 и 2 стягивают на величину, регламе
тированную толщиной прокладки, установленной меж.
ними (схема 11.9а). В результате проволочные колс
деформируются, заполняя углы сечения канала в кольг
1, 2 и 3, формируя дорожки качения для шариков. Пре
этом создается необходимый натяг в местах контакта
Уменьшение трения и износа достигают за счет выбск_
сечения ролика или его дорожки качения, при которс
практически отсутствует контакт его торца с дорожк^
качения. Изложенный ниже прием позволяет уменьши
трение скольжения в роликовых направляющих или
подшипниках по схемам 11.10,16.1,16.1а.
В схеме 11.10 подшипник имеет конические ролик..
1 и 2 (конусность менее 0°30'), установленные с чередо-
ванием расположения осей соседних роликов под ут-
лом 90° между кольцами 1, 2 и 3. При этом угол а при-
нимают больше угла между образующей и торцом роли-
ка на величину у, выбранного из условия минимального
касания торца ролика при нагружении и деформирова-
нии элементов. Из-за конусности роликов при нагруже-
нии между внутренними кольцами 2 и 3 и торцами роли-
ков образуется зазор.
На схеме 16.1 показано сечение внутреннего кольца
роликового подшипника, в котором образующие торцов
канавки качения расположены под углом у к торцам ци-
линдрических роликов. На схеме 16.1 показано сечение
внутреннего кольца роликового подшипника, в которс л
образующие торцов канавки качения расположены пот
углом у к торцам цилиндрических роликов. На схеме 16.1
ролик имеет сферический торец с плавной переходной
поверхностью. При выборе размеров следует помнить,
что с уменьшением расстояния Аг (см. схему 16.1а,
уменьшается геометрическое скольжение.
Важным фактором при конструировании подшип-
ника качения является выбор радиального и/или осевог
зазора в сопряженных парах. Даже если выполнить под-
шипник без зазора, то при нагружении односторонняя
деформация приводит к образованию зазора. Начальный
зазор необходим по следующим причинам:
нагрев подшипника может привести к неоправдан-
ному натягу и к повышенному трению, а возможно, и
заклиниванию;
при установке кольца подшипника на вал с натягом
кольцо деформируется, его диаметр увеличивается и за-
зор соответственно уменьшается (таким образом можно
совсем исключить зазор или даже обеспечить необходи-
мый натяг);
при выполнении подшипника без зазора уменьшает-
ся возможность компенсации несоосности (для много-
опорных валов) и перекосов.
ПОДШИПНИКИ КАЧЕНИЯ
241
Учитывая данные обстоятельства, для всех видов
подшипников, зазор является регламентированным. Ра-
диальный зазор представляет собой величину макси-
мально возможного относительного перемещения внут-
реннего и наружного колец в радиальном направлении
при реверсировании регламентированной радиальной
нагрузки.
Измерение начального зазора 8,. (схема 17.1 на
рис. 94) у подшипников с диаметром отверстия до 10 мм
производят под нагрузкой ±20 Н, с диаметром свыше
100 мм - под нагрузкой ±150 Н. Минимальный радиаль-
ный зазор у шарикоподшипника с диаметром отверстия
до 2,5 мм может быть 8, = 3 мкм, а у шарикоподшипника
с диаметром 400 мм 8Г = 10 мкм. Максимальный ради-
альный зазор может составить соответственно 25 мкм и
260 мкм. Выпускают также подшипник с нулевым ради-
альным зазором и с предварительным натягом. В роли-
коподшипниках с диаметром отверстия 1250 мм ради-
альный зазор достигает 8Г = 1540 мкм.
Наличие радиального зазора приводит к несоосно-
сги колец подшипника е = 8Г / 2.
Выбор радиального зазора зависит от вида требуе-
мой посадки колец подшипника. Минимальный рабочий
зазор (с учетом условий функционирования) выбирают
при высоких требованиях к центрированию вращающе-
гося звена. Более высокий КПД достигается при гаранти-
рованном рабочем зазоре. Для многих видов подшипни-
ков радиальный зазор взаимозависим с осевой "игрой"
(осевым зазором). Такая взаимозависимость обусловли-
вает возможность восприятия осевой нагрузки Fa ради-
альным шарикоподшипником (схема 17.1а). На схе-
ме 17.1а осевой зазор 8О определен при регламентиро-
ванной силе Fa.
На схеме 17.16 показана возможность относительно-
го перекоса колец на угол у под действием момента Т и
при наличии радиального зазора.
На схеме 17.1 в показан перекос колец под действием
момента T(F^) от нецентральной осевой силы Fa при на-
личии радиальной силы Fr. Угол перекоса yi здесь мень-
ше, чем угол у в схеме 17.16, но при этом появляется не-
соосносгь.
На схеме 17.2 показана однозначная зависимость 8а
и 8Г от угла а в коническом роликоподшипнике
8а =8r/tga.
При этом если величина Fa недостаточна велика, то
может иметь место зазор 8 и соответственно относитель-
ная несоосность е колец подшипника. Для исключения
несоосносги обычно регулируют относительное осевое
положение колец. На схеме 19.1 показана возможная ре-
гулировка радиального зазора за счет подачи жидкости
под давлением р в кольцевую полость наружного кольца
подшипника, благодаря чему кольцо равномерно дефор-
мируется, радиальный зазор выбирается и создается ре-
гулируемый натяг. Такое устройство применяют, в част-
ности, в опорах шпинделя станка.
На схемах 19.2 и 19.2а показано начальное и конеч-
ное положение элементов роликового подшипника с уп-
ругим гофрированным кольцом. Кольцо сжимают в осе-
вом направлении (см. стрелки на схеме 19.2а) и зазор
полностью исключается - ролики прижаты к поверхно-
сти шипа вала. В схеме 19.3 внутреннее кольцо подшип-
ника установлено на конусной втулке (кольцо имеет ко-
нусную посадочную поверхность - см. также схему
11.2а). Втулку с помощью гайки втягивают между ши-
пом вала и посадочной поверхностью кольца, растягивая
кольцо до тех пор, пока не будет установлен заданный
зазор (или исключен зазор).
Осевой зазор в подшипнике качения представляет
собой величину максимально возможного относительно-
го перемещения внутреннего и наружного колец в осевом
направлении при реверсировании регламентированной
осевой нагрузки. Начальный осевой зазор в сферическом
радиальном шарикоподшипнике с диаметром отверстия
до 10 мм и при нагрузке ±100 Н находится в пределах
15 ... 100 мкм в зависимости от серии подшипника и
формы отверстия (цилиндрической или конической).
Максимальный начальный осевой зазор в таком же под-
шипнике с диаметром отверстия ПО мм достигает
250 мкм. Осевой зазор без нагрузки примерно на 10 %
меньше, чем при регламентированных условиях его из-
мерения.
Осевой зазор принимают во внимание при расчете
размерных цепей, при оценке возможности компенсации
погрешностей изготовления и/или деформаций, вызван-
ных нагружением, изменением температуры в соответст-
вующем направлении.
Осевой зазор в радиально-упорном подшипнике
должен быть обязательно устранен, если вы хотите обес-
печить центрирование сопряженных звеньев (см. схему
17.2). Для этого используют регулировочные устройства,
например винтовую передачу. Наиболее эффективно си-
ловое замыкание радиально-упорного подшипника, при
котором соотношение осевой и радиальной сил должно
быть настолько большим, чтобы кольца не могли сме-
щаться одно относительно другого в радиальном
направлении.
В конструкции подшипника большое значение име-
ют элементы, воспринимающие и передающие осевые
силы в радиальных и радиально-упорных подшипниках.
Наряду с торцовыми поверхностями колец для этой цели
используют буртики (см. схему 11.4а), а также упругие
стопорные кольца (схема 14.2), устанавливаемые в спе-
циально предусмотренные канавки. Первый вариант бо-
лее предпочтителен с точки зрения точной установки
подшипника и нагрузочной способности соединения.
Второй вариант проще и дешевле.
Аналогично решают задачу восприятия осевых на-
грузок или ограничения осевых перемещений (практиче-
ски без нагрузки) в роликовых подшипниках. В схе-
ме 11.4а стопорное кольцо удерживает сепаратор от осе-
вых перемещений, а выступ на внутреннем кольце рег-
ламентирует относительное осевое перемещение кольца
и ролика (во избежание самозаклинивания).
В схеме 11.46 разжимное кольцо не только удержи-
вает от возможных перемещений упорное кольцо, но и
ограничивает перемещения сепаратора. Характеризуя
современные тенденции закрепления подшипников, от-
метим, что вместо резьбовых соединений (схема 19.3)
242
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
ПОДШИПНИКИ КАЧЕНИЯ
243
или стопорных колец (схема 14.2) используют непод-
вижные фрикционные соединения (см. рис. 2, схемы 22.1,
22.2). Напрессованное кольцо надежно удерживает коль-
цо подшипника от осевых перемещений без ослабления
сечения вала и при минимальной концентрации напря-
жений. Такое соединение технологично, если кольцо
подшипника прижато до упора вала. Но, в принципе, оно
может быть использовано даже для обеспечения регла-
ментированного осевого зазора/натяга в подшипнике
вместо регулировочного резьбового соединения. При
этом требуется точное осевое положение напрессованно-
го кольца, а соединение должно оставаться неразборным
в течение всего срока эксплуатации.
Посадки колец подшипника качения влияют на его
функционирование, поэтому изложим правила, касаю-
щиеся данного вопроса.
Посадки обеспечиваются за счет выбора поля до-
пуска на диаметры сопряженных деталей, поскольку
стандартные подшипники выпускают с верхним откло-
нением присоединительных диаметров, равным нулю, а
нижнее отклонение одинаково для подшипников одного
размера и класса точности. Причем поля допуска для
обоих колец (на схеме 18.1 обозначены ЬВ и КВ) распо-
ложены в "минус" от основного размера.
Посадки выбирают в зависимости от режима нагру-
жения (Л - легкий, С — средний, Т — тяжелый) и от под-
вижности колец относительно вектора нагружающей си-
лы Fr.
Обычно в передачах с неподвижными осями колес
Fr не меняет линию действия (при реверсировании на-
грузки Fr меняет направление на противоположное). На-
ружное кольцо испытывает местное нагружение и, чтобы
участие в работе элементов было равномерным, должно
проворачиваться (схема 18.1а). Это обусловливает выбор
посадки с небольшим натягом для внутреннего кольца и
переходной посадки ил посадки с небольшим зазором
для наружного кольца.
В деталях, установленных на осях (канатные блоки,
роликоопоры, промежуточные зубчатые колеса, сателли-
ты), вектор силы обычно неподвижен относительно
внутреннего кольца — циркуляционное нагружение, и,
чтобы внутреннее кольцо могло проворачиваться, его
устанавливают на ось переходной посадке или с зазором
(схема 18.1в).
На схеме 18.16 большие натяги в подшипниках ка-
чения не применяют, поскольку они не позволяют обес-
печить требуемые рабочие зазоры из-за деформации колец.
Функционирование подшипника зависит от распре-
деления жесткости основания, на котором этот под-
шипник установлен. Так, неравномерность распределе-
ния нагрузки между телами качения можно уменьшить,
выбирая форму опоры с минимальной жесткостью в на-
правлении действия силы Fr (см. параграф 4.4, рис. 47),
предусматривая в месте посадки серповидный зазор или
располагая ребра жесткости на удалении от наиболее
нагруженного тела качения. При локальном уменьшении
жесткости корпуса опоры и передаче силы на его боко-
вые стенки максимальная нагрузка на тела качения суще-
ственно уменьшается.
Распространенным приемом улучшения условий ра-
боты подшипника является его расположение в эластич-
ном (упругом) основании, выполненном в виде резино-
вой прокладки (схемы 20.1, 20.3, 20.4 на рис. 95) или
стальной тонкостенной оболочки с прорезями (схема 20.2).
В таких подшипниках обеспечивается:
• рациональное распределение нагрузки по телам
качения, обусловленное в основном зазорами в самом
подшипнике и жесткостью кольца, установленного в уп-
ругом основании;
• компенсация несоосностей (при наличии двух
центрируюших опор) или перекосов осей;
• смягчение ударов и демпфирование вибраций.
В то же время подшипник на упругом основании не
может обеспечить высокой точности центрирования и
способен передавать значительные нагрузки только при
существенных относительных перемещениях сопряжен-
ных звеньев. Тем не менее, такие опоры применяют для
поддержания вращающегося звена (восприятия силы тя-
жести); центрирования звеньев, имеющих основное эла-
стичное соединение; для небольших угловых перемеще-
ний при значительном осевом нагружении.
На схеме 20.1 радиальный подшипник использован
в качестве промежуточной опоры карданной передачи.
Подшипник на схеме 20.2 выполняет центрирующие
функции в упругой соединительной муфте.
На схеме 20.3 радиально-упорный подшипник имеет
тонкостенные штампованные кольца 1 и 2. Конус, при-
жатый к кольцу 1 пружиной, исключает начальные зазо-
ры в подшипнике. Данная опора используется для под-
держания вала рулевого колеса автомобиля.
На схеме 20.4 - упорный подшипник, используемый
в амортизаторе автомобиля. К обоим кольцам привулка-
низированы эластичные подушки, расположенные в тон-
костенных элементах каркаса.
Еще одним важным вопросом конструирования
подшипника является обеспечение смазывания и уп-
лотнения его рабочих поверхностей.
Смазывание подшипника осуществляют, например,
пластическим смазочным материалом при уплотнениях,
расположенных с обеих сторон подшипника (схема 23.1
на рис. 96). Распространенным является смазывание
жидким смазочным материалом (маслом) — см. схе-
мы 21.1 ... 21.3. Подшипник помещают в общую емкость
с зубчатой передачей или иным смазываемым устройст-
вом. Подшипник может смазываться благодаря образо-
ванию масляного тумана или брызг, образуемых зубча-
той передачей. Чтобы уменьшить потери на барботаж
(взбалтывание) масла, иногда отделяют подшипники от
зубчатой передачи маслоотбойным диском (схема 21.1)
или перегородкой. Погружение подшипника в масляную
ванну обычно не должно быть глубоким. Особенно это
касается высокоскоростных подшипников по той же
причине, связанной с излишними потерями на барботаж
масла. Уровень масла не должен превышать центра ниж-
него шарика или ролика.
В ответственных и высокоскоростных системах
масло подводят в каждый подшипник под давлением в
зону контакта тела качения с неподвижным кольцом
244
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
(схема 21.2) или с вращающимся кольцом (схема 21.3) по
каналу в теле кольца или струей, направленной из специ-
ального сопла.
Следует помнить, что наиболее эффективно смазы-
вание в зоне контакта тела качения с внутренним коль-
цом (схема 21.3), так как центробежные силы обеспечат
перемещение смазочного материала и в зону контакта
тела качения с наружным кольцом.
Надежное уплотнение подшипника особенно важно
для узлов, находящихся в агрессивной (загрязненной)
среде и/или для отде льно расположенных опор.
На схеме 23.1 манжетное уплотнение (универсаль-
ный патрон) встроено в гильзу с резьбой. На схеме также
показаны уплотнительные кольца неподвижных соеди-
нений, полностью отделяющих полость подшипника от
внешнего пространства.
Следующим шагом защиты подшипника от внешней
среды и удержания смазочного материала является
встраивание уплотнений непосредственно между коль-
цами подшипника (схема 23.2). Манжетное уплотнение
слева предупреждает смешивание масла со специальным
пластичным смазочным материалом в полости подшип-
ника, а уплотнение в виде армированной резиновой стен-
ки (шайбы) справа защищает подшипник от грязи.
В данном примере (опоры колеса грузового автомобиля)
на валу расположен центробежный отражатель, предот-
вращающий попадание в подшипник продуктов износа
тормозных колодок. Маслоулавливатель не допускает
попадания вытекающего смазочного материала в рабо-
чую зону тормоза. Следует отметить, что разделение
функций уплотнения — защита от вытекания смазочного
материала и от проникновения частиц грязи - широко
используется. При этом если для уплотнения первого
типа требуется плотное прижатие кромки (в условиях
смазывания), то для уплотнения второго типа достаточно
небольшого прижатия (трение без смазывания), а функ-
ция уплотнения выполняется за счет центробежных сил.
Благодаря этому, несмотря на повышение количества
скользящих кромок, потери на трение возрастают незна-
чительно. Скользящий контакт, как всегда, нужно выби-
рать на поверхности малого диаметра. При этом требова-
ния к шероховатости поверхностей контакта очень высо-
кие, а сила прижатия должна быть регламентированной.
Конструктивные исполнения уплотнений для защи-
ты подшипников см. также на рис. 87.1, 87.2, 87.3.
10.4. СОВОКУПНЫЕ ИСПОЛНЕНИЯ
ОПОР И СОЕДИНЕНИЙ
Как бы хорошо ни была отработана конструкция от-
дельно взятого подшипника (подобно отдельной фразе в
литературном произведении), конструкция изделия в це-
лом будет совершенной только при правильном совокуп-
ном исполнении опор и соединений. Подшипник должен
быть органически вписан в общую схему и нести именно
ту функциональную нагрузку, для которой он установлен.
При конструировании опор определяют:
ви д и место расположения (в том числе взаимного)
подшипников для воспроизведения заданных функций;
ви д посадок для передачи и/или восприятия оснот -
ных нагрузок;
ха рактер соединения [закрепления] подшипников с
сопряженными деталями;
ра спределение жесткости валов/осей и основания в
местах установки подшипников;
на личие зазоров и/или эластичных элементов в со-
единениях для компенсации несоосностей, перекосов иди
осевых перемещений;
вид и характер смазывания, уплотнения под-
шипников, защиты от агрессивной среды и теплоотвода
Могут возникать и другие частные задачи, но тольк
при их комплексном решении подшипниковые опорь
будут нормально функционировать.
Для валов/осей, для подвесок агрегатов, для ферм .
механизмов предпочтительно выбирать такие опорь (,
которые при определенной степени идеализации обеспе-
чивали бы статическую определимость системы. Под
идеализацией здесь понимается, например, пренебреже-
ние в некоторых направлениях трением или сопротивле-
нием деформированию и т.п.
Статическая определимость системы позволяет
знать достаточно точно, как будет нагружен и как пове-
дет себя в данных условиях тот или иной подшипник
Статическая определимость обеспечивает самоприспо-
собляемость (в частном случае, самоустанавливае-
мость) системы при изменяемых условиях нагружения
температуры среды и др. Более того, "лишние" - местные
подвижности позволяют самоустанавливаться звеньям,
обеспечивая минимум потерь на трение, исходя их из
принципа наименьшего действия [принципа Гамильто-
на]. Но при этом следует понимать, что почти все от-
дельно взятые подшипники сами по себе статически не-
определимы, и что при определенных условиях статиче-
ски неопределимая система может обладать более высо-
кой нагрузочной способностью, может обеспечивать бо-
лее высокую точность центрирования и т.п. Под опреде-
ленными условиями прежде всего понимаются точность
изготовления и целенаправленное распределение зазоров
и жесткостей.
На ряде примеров покажем, каким образом могут
быть решены опоры валов и осей (о решениях опор под-
весок машин и агрегатов см., например, параграф 4.3).
Сначала поговорим о том, что собой представляет
отдельно взятая опора и ее образное представление.
Примеры на рис. 97 (схемы 24.1 ... 24.5а) имеют два или
один подшипник в общем корпусе и на шейке/шипе ва-
ла/оси. Схемы 25.1 ... 25.4а характеризуют опоры, опре-
деляющие относительное положение зубчатого колеса и
его оси или корпуса.
Если провести связь между теорией механизмов и
строительной механикой [по существу теорией ферм,
рам, оболочек], то подшипниковые опоры можно клас-
сифицировать следующим образом.
1. Одноподвижная пара - цилиндрическая непод-
вижная (допускающая только одно вращение) опора - к
этому виду с достаточной уверенностью можно отнести
опоры на схемах 24.3', 25.4\ 25.4а.
СОВОКУПНЫЕ ИСПОЛНЕНИЯ ОПОР И СОЕДИНЕНИИ
245
97. ОДИНОЧНЫЕ ОПОРЫ ВАЛОВ, ОСЕЙ И ЗУБЧАТЫХ КОЛЕС
Радиальный
шариковый
подшипник
Корпус Кольцо 3 Крышка
Кольцо 1
24.2
Сферическая
втулка г- _
Гайка
Крышка
Подшипник 1 Подшипник 2
Корпус Втулка
|2^а)
Втулка 1
Крышка
Гайка
Шип вала
Z Гайка
Шип вала
Втулка 2
Кольцо 2
Шип вала
Сателлит
Гайка
Сателлит
втулка
Зубчатая
муфта
Радиальный
шариковый
подшипник
Двойной
радиально-упорный
роликовый
подшипник
Радиальный
роликовый
подшипник
Ось
сателлита
Ось
сателлита
с¥—
Радиальный
Втулка шариковый
подшипник
Дистанционная втулка 4Шип вала
Кольцо 4
С
Ролик
Сферическая подушка
Корпус
Вал
Зубчатое
колесо
Ролик.
Водило
Ролики
Упорный
роликовый
подшипник 1
Сателлит
25.1
Водило
Сферическая
пара
Сферический
шариковый
подшипник
Шестерня
Радиальный
роликовый
подшипник
Зубчатое
колесо
уД
Ось
сателлита
Шип вала
Сферическое
кольцо
Водило
Сателлит
Упорный
колесо подшипник 2
Т/////7///
98. УСЛОВНЫЕ ОБОЗНАЧЕНИЯ И РАСЧЕТНЫЕ СХЕМЫ ОПОР
Шаровая
подвижная
опора
с учетом зазоров
|26.1е|
Цилиндрическая
подвижная опора
Корпус
Упорное
кольцо —
Сферическая
подушка
Сферический
подшипник
Упорный
подшипник
246
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
2. Двухподвижная пара - цилиндрическая под-
вижная (допускающая вращение и линейное перемеще-
ние) опора - к этому виду можно отнести только опору
на схеме 25.2 в пределах ограничений осевых перемещений.
3. Трехподвижная сферическая пара - шаровая
неподвижная (допускающая только вращение вокруг
любой оси) опора - к этому виду однозначно относятся
схемы 24.Г, 24.2\ 24.5\ 24.5а-, 25.Г, 25.1а-, 25.3. С опреде-
ленной оговоркой можно считать такой опорой также
пример на схеме 24.3а (если пренебречь жесткостью опо-
ры в направлении момента М — в этом плане жесткость
опоры на схеме 24.3 намного больше), а также пример на
схеме 25.16 (если считать достаточными перекосы в пре-
делах зазоров).
4. Четырехподвижная сферическая пара - шаро-
вая линейно-подвижная (допускающая вращение во-
круг любой оси и линейное перемещение) опора. К такой
опоре может быть отнесена любая из представленных
шаровых неподвижных опор, если опору в целом помес-
тить в стакан, не закрепленный в осевом направлении
(см. схемы 26.1 в и 26.1г).
5. Пятиподвижный подпятник - шаровая плос-
коподвижная (допускающая линейные перемещения в
поперечной плоскости) опора обозначена на схеме 26.1в.
Условные обозначения опор даны на рис. 98 (см.
схемы 26.1а ... 26.1ж). Другие виды пар (в т.ч. опор) —
см., например, параграф 2.2.
Представление опор вала или агрегата в виде услов-
ных обозначений позволяет оценить рациональность вы-
бранной схемы. Каждый из приведенных примеров, хотя
и может быть отнесен к определенному виды па-
ры/опоры, тем не менее, имеет некоторые особенности.
Опора на схеме 24.1 составлена из двух радиально-
упорных сферических подшипников с бочкообразными
роликами. Чтобы выполнять функцию единой трехпод-
вижной пары, центры сфер наружных колец должны
быть в одной точке С. Из этих условий рассчитывают
длину дистанционной втулки. Необходимый зазор/натяг
определяет степень прижатия кольца 3 крышкой. Гайка
служит для удержания вала относительно внутренних
колец 2 и 4.
В схемах 24.2 и 25.3 имеется по два радиальных
подшипника, установленных во втулке, образующей с
корпусом сферическую пару.
В схемах 24.3 и 24.3а — сдвоенный конический ро-
ликоподшипник при расположении компонентов так, что
центры Ci и Сг находятся либо на значительном расстоя-
нии один от другого, либо совпадают и находятся в од-
ной точке С. Каждый однорядный конический подшип-
ник обладает наименьшей жесткостью в направлении
поворота вокруг точки С. Поэтому, чем дальше центры
отстоят один от другого, тем выше жесткость опоры, тем
больше оснований отнести ее к одноподвижной
вращательной паре.
Опора на схеме 24.4 содержит два подшипника с
четко распределенными функциями: роликоподшипник
воспринимает только радиальную нагрузку FY, а шари-
коподшипник установлен с зазором и воспринимает осе-
вую нагрузку Fx- Подшипники не мешают один другому
выполнять установленные для них функции. Это один из
принципов конструирования опор как отдельно взятых,
так и системы опор (см. схемы 30.2 и 30.3 на рис. 100.1).
Опоры на схеме 24.5 имеет упорный подшипник, ус-
тановленный на сферической подушке. Опора хотя и от-
носится к трехподвижной сферической паре, но в отли-
чие от других схем она может воспринимать силу Fa
вдоль оси вала или под небольшим углом к оси. В опоре
на схеме 24.5а добавлен радиальный сферический под-
шипник. В отличие от схемы 24.5 данная схема способна
раздельно воспринимать одностороннюю осевую нагруз-
ку Fa и радиальную нагрузку F, (в любую сторону). Она
эквивалентна сферической паре только при условии сов-
падения центров сфер в т. С обоих используемых в ней
подшипников.
Опора на схеме 25.1а — сферический подшипник,
встроенный в тело сателлита и установленный на оси,
закрепленной в водиле. Такое решение может быть ис-
пользовано только для прямозубой планетарной зубчатой
передачи (схема 25.1). Оно удовлетворяет условию ста-
тической определимости и возможности самоустановки
звеньев передачи. Еще более простое (дешевое) решение
при достаточно большом диаметре сателлита и малой его
ширине дано схеме 25.16. Радиальный шарикоподшип-
ник способен компенсировать в пределах собственных
зазоров те перекосы, которые необходимы для самоуста-
новки звеньев.
В сателлите малого диаметра косозубой передачи
размещают роликоподшипник (схема 25.2). При этом
дорожки качения выполняют непосредственно в теле
сателлита и на оси. Передача с такой опорой представля-
ет собой статически неопределимую систему, она обла-
дает высокой несущей способностью, но требует также
высокой точности изготовления для равномерного рас-
пределения нагрузки по сателлитам и по длине зуба.
Опора на схеме 25.3 эквивалентна сферической па-
ре. В ней использованы симметрично установленные
относительно шестерни два роликоподшипника. Шес-
терня соединена с ведущим валом через зубчатую муфту,
которая передает вращающий момент. Благодаря исполь-
зованию сферической втулки шестерня способна самоус-
танавливаться. Такое решение применимо только в пря-
мозубой передаче.
Опоры на схемах 25.4 и 25.4а предназначены для
центрирования и восприятия в основном радиальной на-
грузки на зубчатые колеса, свободно вращающиеся на
валах/осях коробки передач. В схеме 25.4 традиционное
решение использования двух шарикоподшипников. По-
скольку они расположены слишком близко один к дру-
гому, то такая опора способна воспринимать только не-
большой опрокидывающий момент (при косозубом заце-
плении). Если при этом имеются зазоры в подшипниках,
то неизбежен перекос зубчатого колеса и, соответствен-
но, неблагоприятные условия зацепления. Двухрядный
(широкий) роликовый подшипник (схема 25.4а) сводит к
минимуму данный недостаток. Причем осевые ограниче-
ния здесь обеспечиваются раздельно с помощью упор-
ных подшипников (о конструкции которых подробно было
сказано в параграфе 10.3, см. схему 11.66). На схеме 25.4а
СОВОКУПНЫЕ ИСПОЛНЕНИЯ ОПОР И СОЕДИНЕНИИ
247
показаны каналы для подвода к подшипнику смазочного
материала.
Решения на схемах 25.4, 25.4а вполне могут быть
отнесены к двухопорным системам, но они характеризу-
ются расстоянием между отдельными подшипниками и
попадают под определение одной вращательной пары.
Если не учитывать жесткость и деформацию вала и кор-
пуса. то к такой паре можно отнести любую двухопор-
ную соосную систему. Тем не менее конструирование
именно двухопорных систем представляет собой одну из
наиболее сложных и специфических задач. Прежде чем
судить о свойствах схем расположения опор, приведем
известные соображения о представлении конструктивной
схемы в виде условий или расчетной схемы в обозначе-
ниях, принятых в теории механизмов или строительной
механике (рис. 98).
На схемах 26.1а и 26.16 представлены обозначения
любой из опор, эквивалентной трехподвижной сфериче-
ской паре (в том числе радиальной шарикоподшипник,
допускающий перекосы в пределах зазоров). Если осво-
бодить подшипник от осевых ограничений или учесть
осевые зазоры {схема 26.1г), то получится четырехпод-
248
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
вижная пара (схема 26.16); а в целом вал/ось на двух
опорах (схема 26.4) может быть представлен в виде од-
ноподвижной пары (схемы 26.1 ж). Вал/ось с учетом осе-
вых зазоров в подшипниках может быть представлен в
виде двухподвижной вращательной пары (схема 26.1ё).
С учетом возможного упругого углового перемеще-
ния одиночные опоры в первом приближении могут быть
представлены в виде трехподвижной или двухподвижной
пары с центром поворота, показанном на схемах 26.2а;
26.26; 26.2в; 26.2г [для схемы 26.2в h = -^fe + tgp^;
для схемы 26.2г h = 0,31, но не более 0,5<7].
Пример расчетной схемы для определения реакций
в опорах приведен для вала с зубчатым колесом и муф-
той (см. схемы 26.3а и 26.36). Силы в зацеплении или в
муфте обычно представляют сосредоточенными и распо-
лагают посередине ступицы. На схеме 26.Зв обозначены
Ft, F,. и Fa — силы в зацеплении, Fc - консольная нагрузка
на конец вала со стороны присоединенного устройства,
Т - вращающий момент. Силу F, (схема 26.36) заменяют
эквивалентной силой, приложенной к оси вала, и момен-
том T(Ft). Далее определяют реакции в опоре A: Fax, Fay,
Faz и в опоре В: FBY и FBz- По величинам реакций в под-
шипниках можно подобрать соответствующие решения
опор. На рис. 99 и 100.1 приведены отдельные примеры
общих решений выбора расчетных и конструктивных
схем подшипниковых опор, на которых проиллюстриру-
ем следующие основные принципы конструирования.
1. Для длинных валов предпочтительно одну опору
закрепить относительно корпуса, а другую выполнить
подвижной в осевом направлении (схемы 26.4, 26.4а,
26.46). Такое исполнение приемлемо и для коротких ва-
лов (схем 26.4в). Обычно такая схема целесообразна в
основном при радиальных нагрузках или при значитель-
ных осевых нагрузках, которые можно не передавать че-
рез весь вал, а сосредоточить их восприятие закреплен-
ной опорой (схема 26.46)
2. Для жестких коротких валов при высоких требо-
ваниях к центрированию и к осевому положению прием-
лема установка радиально-упорных подшипников в рас-
пор (без осевого зазора). При этом, как уже упоминалось,
лучше применять схемы, в которых центры возможного
поворота подшипника Ci и С2 расположены как можно
дальше один от другого (сравни, например, схемы 27.3 и
27.4 - с точки зрения восприятия опрокидывающего мо-
мента схема 27.4 предпочтительнее).
3. Для сложной схемы нагружения (силы в зацепле-
нии и консольные внешние нагрузки в схеме 27.5) допус-
тимо в решении по п. 2 дополнить одну из опор еще од-
ним подшипником, но в этом случае совместная работа
подшипников такой опоры возможна лишь при правиль-
ном подборе зазоров. В осевом направлении при этом
остается силовое замыкание для радиально-упорных
подшипников (через прокладки, наружное кольцо сфери-
ческого подшипника, крышку и корпус).
4. Для коротких валов/осей при радиальном нагру-
жении и невысоких требованиях к осевому положению
можно принять схему, в которой вал или ось способны
перемещаться в осевом направлении в пределах осевых
зазоров в подшипниках (схема 28.3), либо в пределах
специально предусмотренного компенсационного зазора
(схема 27.1), либо в пределах упругих ограничений (сх-
ема 28.2).
5. Для валов типа шпинделей станков при высоких
требованиях к жесткости и точности центрирования ошг
из опор располагают в непосредственной близости от
места приложения рабочей нагрузки. Ее выполняют по
возможности более жесткой и беззазорной. Вал выпол-
няют достаточно жестким для обеспечения совместной
работы подшипников (сравни схемы 29.2а и 29.2). В та-
кого рода системах целесообразно раздельное воспри-
ятие радиальной нагрузки и обеспечение центрирования
(схема 29.4), но это возможно только при постоянной
радиальной нагрузке (например силе тяжести). Варианты
условных обозначений даны на схемах 29.1 и 29.1а.
6. Высокой точности центрирования, а также, на-
пример, обеспечения беззазорного зацепления в редукто-
ре достигают путем регулировок положения оси под-
шипника (см. схему 29.5).
7. При консольном вращательном соединении (за-
щемленной опоре с возможностью вращения стержня)
целесообразно разделить восприятие радиальных и осе-
вых нагрузок (схемы 30.1 ... 30.3). При этом подшипни-
ки, воспринимающие радиальную нагрузку (и, соответст-
венно, опрокидывающий момент), должны отстоять как
можно дальше один от другого, а упорный подшипник
располагают в любом месте в свободном промежутке
между радиальными подшипниками.
8. Короткие валы с двумя консолями, нагруженны-
ми осевыми и радиальными силами, располагают в под-
шипниках с минимально допустимыми зазорами. При
этом при высокой частоте вращения используют ради-
ально-упорные подшипники (в несколько рядов и ради-
альный подшипник (схема 32.1 на рис. 100.2), а при
средних и низких частотах используют конические роли-
коподшипники, установленные в распор (схема 32.2) и в
соответствии с рекомендациями п. 2.
9. Опоры поворотных столов должны иметь подпят-
ник максимально возможного диаметра, обладающий
большой жесткостью и способный воспринимать осевую
нагрузку нецентрального приложения (схема 31.1). Ради-
альную нагрузку воспринимает радиальный шарикопод-
шипник, плоскость симметрии которого не должна быть
слишком отдалена от плоскости подпятника. Чем больше
расстояние h, тем больше вероятность выхода линии дей-
ствия реакции Fa за пределы опорного контура подпят-
ника и, соответственно, нарушение устойчивости. Но
даже если не допускать такого условия, то чем дальше Fo
от центра, тем ниже жесткость и хуже центрирование.
Для восприятия значительных опрокидывающих момен-
тов данная схема приемлема только при использовании
подпятника двухстороннего действия. Кроме того, для
таких условий предпочитают обходиться без радиального
подшипника. Более компактное исполнение со свобод-
ным внутренним пространством имеют опорно-
поворотные круги или круговые направляющие, о
которых речь пойдет ниже.
СОВОКУПНЫЕ ИСПОЛНЕНИЯ ОПОР И СОЕДИНЕНИИ
249
250
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
10. "Разрезные валы", используемые, в частности, в
коробках передач, газотурбинных двигателях и др. сис-
темах, располагают обычно на двух крайних опорах, а
отрезки валов соединяют вращательной парой, которая
обеспечивает соосность отрезков валов (см. на рис. 37
схемы 3.4а и 3.46)
Вращательная пара не должна допускать перекосов
осей, и ее конструируют как обычную двухопорную сис-
тему. Крайние опоры вала в целом выбирают, исходя из
статической определимости балки.
Если крайние опоры трехподвижные сферические
(ПУ, то соединительная опора должна быть двухпод-
вижной цилиндрической IVrt (допускающей осевые пе-
ремещения).
Изложенные принципы более подробно рассмотрим
на некоторых примерах наиболее сложных решений.
На схемах 29.2 и 29.2а представлен типовой шпин-
дельный узел. Если вал сделать податливым, исходя, на-
пример, только из условия прочности, то он изогнется,
как показано на схеме 29.2. Опора А при этом почти не
будет нагружена, а момент от рабочей нагрузки F будут
воспринимать подшипники В и С. Реакции F& и Fc на-
правлены в разные стороны. Деформации опор способст-
вуют значительному перемещению вала в точке прило-
жения силы F. На схеме 29.2а жесткий вал практически
не изгибается, а его ось незначительно поворачивается
из-за деформирования опор. Опоры А и В согласованно
участвуют в восприятии рабочей нагрузки, а опора А
позволяет воспринимать момент силы F на большом плече.
На схеме 29.3 представлено конструктивное реше-
ние шпинделя токарного станка. Передняя опора имеет
двойной роликовый радиально-упорный конический
подшипник. Его внутренние кольца закреплены на валу.
Радиальные зазоры в подшипнике устраняются затяжкой
гайки 1. Силы затяжки гайки, а следовательно, и натяг в
подшипнике ограничены дистанционным кольцом, уста-
новленным между внутренними кольцами подшипника.
Передняя опора в основном воспринимает радиаль-
ную нагрузку Fr и полностью осевую Fa. Осевая нагрузка
замыкается на корпус по кратчайшему пути через бур-
тик К. Задняя опора А имеет роликовый радиально-
упорный конический подшипник. Внутреннее кольцо
подшипника поджато гайкой 2 в осевом направлении
через втулку к ступице зубчатого колеса, закрепленного
на валу. Начальный предварительный натяг в подшипни-
ке создается за счет сжатия пружин. Они обеспечивают
незначительное изменение натяга из-за погрешностей
установки подшипника и осевых (тепловых) деформаций
вала. Подшипник нагружен только радиальной силой,
которая обусловливает появление в подшипнике осевой
составляющей реакции и дополнительное нагружение ею
вала и подшипника.
СОВОКУПНЫЕ ИСПОЛНЕНИЯ ОПОР И СОЕДИНЕНИИ
251
101.1 ПОДШИПНИКОВЫЕ ОПОРЫ
И ОХЛАЖДЕНИЕ МОТОР-ШПИНДЕЛЯ
| 33.1а
Винтовой канал для циркуляции
охлаждающей жидкости сформирован
поверхностями винтовой канавки
на охватываемой детали и внутренней
цилиндрической поверхностью
охветывающей детали.
Подвод
жидкости
Отвод
жидкости
I зз.1 |
Винтовой канал
для охлаждения
электродвигателя
Охватваемая деталь
- корпусная втулка
электродвигателя
Привод
зажимного
устройства
Охватывающая деталь
-общий корпус электродвигателя
и подшипниковых опор шпинделя
Винтовой канал-----
для охлаждения
подшипниковых опор
шпинделя
Охватываемая деталь
- общая втулка
передней
и средней опор
Статор
электродвигателя
Ротор
электродвигателя
Вал привода
зажимного
устройства
Зажимное
устройство
Задняя опора
- роликовый
подшипник
Трехопорный
полый вал
шпинделя
Средняя опора
- роликовый
подшипник
Передняя опора,
составленная из трех
шариковых подшипников.
CTzd.
Приведенная схема и выбор конструкции подшип-
ников продиктованы прежде всего необходимостью по-
лучения точного центрирования вала и максимально воз-
можной жесткости опор.
На схеме 29.4 аналогичное размещение опор вра-
щающегося центра. Здесь опора В — конический ролико-
подшипник — в основном предназначен для восприятия
радиальной нагрузки, осевую нагрузку воспринимает
подпятник С. В опорах В и С осевые зазоры устранены с
помощью гайки. В опоре А использован игольчатый
подшипник.
При размещении в опоре нескольких подшипников
качения следует учитывать различие радиальных зазоров
даже у подшипников одного вида и размера, в результате
чего они не могут быть нагружены одинаково. Кроме
того, схема нагружения обычно предусматривает разли-
чие деформаций сопряженных с ними деталей.
Уменьшают неравномерность нагружения введени-
ем упругих элементов в местах наибольшего нагружения,
увеличением натяга в местах наименьшего нагружения.
Наилучшим решением является выбор схемы с чет-
ким разделением нагрузок на каждый из подшипников
(схема 30.1, где цифрами I и обозначены пяти- и че-
тырехподвижные пары).
На схеме 30.2 показана подшипниковая опора лопа-
сти винта вертолета. Осевая нагрузка F вдоль оси вос-
принимается только роликовым подшипником при на-
правлении, показанном на схеме. Подшипники А и С
воспринимают радиальные нагрузки Fri и Fr2, а кроме
того, подшипник А способен воспринимать небольшие
нагрузки вдоль оси в направлении, противоположном
показанному на схеме. Достигается раздельное воспри-
ятие нагрузок выбором соответствующей схемы замыка-
ния сил. Так, силы Fa замыкаются от оси через гайку 7,
252
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
КРУГОВЫЕ И ЛИНЕЙНЫЕ направляющие
253
внутреннее кольцо подшипника А, кольцо 1, ролики
подшипника В, кольцо 2, наружное кольцо подшипни-
ка С и гайку 2 на корпус опоры. Осевая сила противопо-
ложного направления (несоизмеримо меньшей величи-
ны) передается от оси через втулку 2, внутреннее кольцо
подшипника С, втулку 1, кольцо 1, подшипник А и пру-
жину на корпус опоры.
Пружина обеспечивает необходимый натяг в осевом
направлении. Полость расположения подшипников за-
щищена уплотнением подвижного соединения и не-
сколькими уплотнениями неподвижных соединений (на
схеме зачернены).
На схеме 30.3 показана подшипниковая опора пус-
тотелого вала, выполненного как единое целое с кониче-
ской шестерней. Радиальные реакции Fr] и Fr2 (возни-
кающие от действия радиальной Fr и окружной, перпен-
дикулярной плоскости рисунка — на схеме не показана —
составляющих силы в зацеплении) воспринимаются ро-
ликовыми подшипниками А и С. Одна из дорожек каче-
ния подшипника А выполнена непосредственно на валу.
Осевая составляющая силы в зацеплении Fa передается
через шариковый подшипник В с четырехточечным кон-
тактом и втулку на корпус редуктора.
Вал соединен муфтой с деталью (входное звено),
которая центрируется относительно вала с помощью ша-
риковых подшипников Е и D. Элементы опоры и муфты
защищены от внешней среды уплотнением.
Подшипниковые опоры аксиально-поршневых гид-
ромашин обычно, кроме внешней радиальной нагрузки,
испытывают существенную нагрузку со стороны плун-
жеров блока цилиндров (см. схемы 32.1 и 32.2 на
рис. 100.2). При выборе общей схемы опор обычно уда-
ется обеспечить такую самоустановку шатунов и
плунжеров, чтобы перекосы, в том числе из-за деформи-
рования опор, практически не отражались на работе пар:
шатуны — плунжеры, блок цилиндров — гидрораспреде-
литель. Тем не менее в данном случае из-за близкого рас-
положения опор друг к другу понятно стремление конст-
рукторов выполнять вал и подшипниковую опору макси-
мально жесткими и с минимальными зазорами.
В пластинчатом насосе на схеме 32.3 практически
отсутствуют внутренние нагрузки на вал и опоры, имеет-
ся только внешняя радиальная нагрузка. Тем не менее,
если допустить даже незначительный перекос вала, он
тут же скажется на взаимодействии рабочих элементов
насоса. В данном примере, чтобы уменьшить воздействие
внешней нагрузки на рабочие элементы, используют ша-
риковый подшипник, допускающий небольшие переко-
сы, и довольно удаленный от него центрирующий под-
шипник скольжения, не допускающий перекосов рабочих
элементов. Наиболее вероятное деформирование при
внешнем нагружении возможно в местах А и В, а весь
внутренний блок насоса (боковые стенки, ротор и кула-
чок) незначительно перекашивается как единое целое.
На схеме 33.1 (рис. 101.1) показан трехопорный
шпиндель со встроенным между двумя опорами высоко-
скоростным электродвигателем. Наиболее нагружена
силами со стороны зажимного потрона нижняя опора.
Она состоит из трех установленных рядом радиальных
шарикоподшипников. Роликовые подшипники размеще-
ны с разных сторон ротора электродвигателя, они менее
нагружены и в основном выполняют центрирующую
роль. По существу, вал многоопорный, всего подшипни-
ков пять, но три из них сгруппированы.
Подшипники выполнены беззазорными. Хотя и
обеспечена высокая точность взаиморасположения поса-
дочных поверхностей, тем не менее избыточные связи и
высокая скорость даже при небольших силах могут при-
вести к недопустимому нагреву и натягу в подшипниках.
Поддержание постоянной температуры подшипни-
ков, а также электродвигателя и других частей станка
осуществляется за счет циркуляции охлаждающей жид-
кости по винтовым каналам, образованным между кор-
пусом и установленной в нем втулкой (см. схемы 33.1 и
33.1а).
Данное решение обеспечивает высокую точность -
центрирования и высокую жесткость шпиндельного узла.
Для шпинделей, работающих в условиях радиально-
го и осевого нагружений, в том числе при их реверсиро-
вании, используют опоры, составленные из двух или че-
тырех радиально-упорных подшипников, размещенных в
едином блоке (схема 33.2). Требуется очень высокая точ-
ность исполнения таких подшипников и сопряженных с
ними деталей, чтобы обеспечить совместное восприятие
ими нагрузки. Даже небольшие отклонения в размерной
цепи приводят к работе только одного подшипника в
двухподшипниковой опоре (см. схемы 33.36, 33.Зв) или
только одной опоры в двухопорной системе при нагру-
жении в осевом направлении. При радиальном нагруже-
нии, а особенно при действии силы на большой консоли,
также будет неравномерное распределение, в том числе и
обусловленное взаимосвязью осевых и радиальных сил в
радиально-упорном подшипнике.
Если допустить для одной из опор свободу осевого
перемещения (как это выполнено на схеме 26.4 на
рис. 99), то тем самым она будет полностью исключена
из восприятия осевых сил.
На схеме 33.3 задняя опора шпинделя выполнена
"плавающей" в осевом направлении, и для этого между
нею и корпусом размещена шариковая направляющая.
А вот между задней и передней опорами установлена
пружина сжатия, которая обеспечивает рациональное
замыкание осевых сил (см. схему 33.3а). Следует все же
иметь в виду, что даже такое решение не избавляет от
необходимости точного исполнения подшипников и де-
талей каждой из опор. А кроме того, наличие шариковой
направляющей уменьшает радиальную жесткость задней
опоры.
10.5. КРУГОВЫЕ И ЛИНЕЙНЫЕ
НАПРАВЛЯЮЩИЕ
Еще одна наиболее распространенная категория
подвижных кинематических пар - это круговые и (пря-
молинейные направляющие (опоры). Последние на-
зываются еще подшипниками для линейных перемещений.
Примерно до 60-х годов были широко распростра-
нены круговые направляющие, взаимодействующие с
опорными катками (схема 35.1 на рис. 102). В настоящее
254
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
| 34.4 |
Кольцо 1 Ролики 1
102. КРУГОВЫЕ НАПРАВЛЯЮЩИЕ [ОПОРНО-ПОВОРОТНЫЕ КРУГИ]
[34^1
Кольцо 1
Г34Л~|
Кольцо 1
Привод
Каток 1
|11.10б|
Каток 2
Кронштейн
Ролик 3
А. Крайнев
SSSSSSSSSSSSS]
Опорные
поверхности
Зубчатый
венец
Кольцо
с зубчатым
венцом
Уплотнение 1
Ролики 1 (2) \ Кольцо 1
Ролик 2 Кольцо 2
Г~34^5~|
Ролик 1
Кольцо 2 Кольцо 1
Обойма
сепаратора
Круговая
направляющая
(деталь) Платформа
[~34?3~|
Отверстие Шарик 1
для соединения
с платформой Уплотнение
Кольцо 1
Кольцо 2
Шестерня с зубчатым
венцом
Шарик
Кольцо 1'
\ Уплотнение
Кольцо 2
Шарик 2 / Кольцо 2
Отверстие
для соединения
с рамой
Кольцо 2 Уплотнение 2
Ролик 2 Кольцо 1'
время их применяют только в опорных устройствах
большого диаметра (достигающего 20 м). Исполнение
такой опоры продиктовано технологическими соображе-
ниями. Направляющую деталь выполняют в виде отдель-
ных секций.
Круговая направляющая с центрирующей цапфой,
по существу, была рассмотрена на схемах 31.1 и 31.1а. Ее
целесообразно применять в металлообрабатывающих
станках, роторах производственных линий, где требуется
высокая точность центрирования.
В экскаваторах, кранах, смесительных устройствах
главное - восприятие большого опрокидывающего мо-
мента. Особенность опор такого назначения - свободное
пространство в центре (в основном для размещения ком-
муникаций), т.е. установка центрирующей цапфы неже-
лательна.
Круговые направляющие опоры или опорно-
поворотные круги в современном исполнении данного
назначения мало отличаются от подпятников подшипни-
ков качения (см. схемы 34.2... 34.5 и 11.106 на рис. 4) сверх-
легкой или особо легкой серии (сечения колец и диаметры
тел качения малы по сравнению с диаметрами колец).
Опорно-поворотное устройство в целом включает
в себя кольцо 1 (схема 34.1), соединенное с поворотной
платформой, кольцо 2 с зубчатым венцом и привод пово-
рота, взаимодействующий с зубчатым венцом через шес-
терню. Тела качения - шарики - располагают в один (схе-
ма 34.2) или два ряда (схема 34.3 - шарики 1 и 2); ролики
в один ряд располагают в шахматном порядке (см. схему
11.10а). В такой конструкции предусматривют исключе-
ние торцового контакта, а также обеспечивают
КРУГОВЫЕ И ЛИНЕЙНЫЕ НАПРАВЛЯЮЩИЕ
255
рациональное распределение нагрузки по длине контакт-
ной линии (см. схемы 11.10 и 16.1). Ролики располагают
в два ряда (схема 34.4 — ролики 1 и 2) или в три ряда
(схема 34.5 — ролики 7, 2 и 3). Наружное кольцо выпол-
нено из одной или двух деталей (кольца 7 и 7').
На схеме 35.1 круговая направляющая деталь при-
варена к поворотной платформе. Опорные катки разме-
щены в специальной обойме сепаратора и катятся по
кольцу. Для восприятия опрокидывающего момента в
дополнение к каткам 7 располагают катки 2, размещен-
ные на кронштейнах.
Основной принцип конструирования круговых
направляющих — максимально возможное расстояние
между поверхностями качения, воспринимающими оп-
рокидывающий момент (хотя это расстояние обычно
продиктовано условиями компоновки).
Второй принцип обусловлен применением тонких
(нежестких) колец. В этой связи следует стремиться к
согласованному соотношению геометрии сечений с де-
формациями. Крепление колец к платформе и к основа-
нию должно быть многоточечным распределенным, что-
бы не создавать существенной неравномерности распре-
деления нагрузки из-за неравномерной жесткости.
Линейные направляющие (опоры) имеют много
общего с подшипниковыми опорами и также обладают
длительной историей совершенствования конструкции.
В то же время решения проблемы точности, проблемы
потерь энергии на трение, проблемы несущей способно-
сти (допустимых нагрузок и скорости в пределах задан-
ного срока службы) в линейных направляющих решают-
ся намного сложнее, чем в подшипниковых опорах.
Взять хотя бы организацию процесса гидродинами-
ческой смазки: в подшипнике даже без специальных мер
образуется клиновидный зазор, а в направляющей необ-
ходимы "плавающие" подушки, да и скорость движения
может оказаться недостаточной. В подшипнике качения
тела качения в течение одного оборота возвращаются в
исходное положение, а в направляющих для этой цели
необходимо создание специального возвратного канала.
Имеются и другие причины считать подшипники более
"удобными" для конструирования и применения.
В этой связи принципы конструирования подшип-
ников и подшипниковых опор в большинстве своем рас-
пространяются на направляющие, но имеются также до-
полнительные (специфичные) приемы и тенденции.
1. Линейную направляющую опору следует приме-
нять только тогда, когда нет альтернативных решений.
Например, в свете развития приводов и систем управле-
ния во многих случаях оказывается более предпочти-
тельным применение направляющих стержневых подве-
сок с вращательными парами, а также подвесок с упру-
гими элементами и упругих направляющих опор. Моно-
польные области рассматриваемых здесь направляющих
с поступательными парами следующие:
• большие линейные перемещения;
• высокая жесткость в направлении, перпендикуляр-
ном перемещению.
2. Проще и легче получить высокую точность и же-
сткость в направляющих скольжения (схемы 36.1 ...
36.6 на рис. 103.1). При этом наибольшей жесткостью
обладают направляющие с параллельными дорожка-
ми скольжения (схема 36.5). Задача конструирования в
данной ситуации заключается в обеспечении совместной
работы параллельных пар. В схеме 36.5 клиновидная па-
ра обеспечивает однозначное поперечное относительное
положение звеньев, а другая пара допускает в этом на-
правлении перемещения самоустановки. Тем не менее
точность относительного положения поверхностей
должна быть высокой. Полная самоустанавливак. иость
достигается в направляющей в виде цилиндрической по-
ступательной пары и точечной (высшей) пары (схе-
ма 36.2а). Однако несущая способность такого исполне-
ния невысока.
При использовании цилиндрических направляющих
в ползуне устанавливают втулки из антифрикционного
материала. В качестве примера на схемах 36.26 и 36.2в,
пластмассовую упругую втулку устанавливают внутрь
жесткой самоустанавливающейся детали. При этом воз-
можна компенсация перекоса 0,5° и более.
3. Точность воспроизведения направления линейно-
го перемещения обеспечивается за счет:
• высокой точности рабочих поверхностей и их рас-
положения;
• минимальных зазоров взаимодействующих звеньев
(регулировку зазора см., например, в схеме 37.4);
• механической или тепловой корректировки по-
грешностей изготовления, неравномерной жесткости и
рабочих прогибов. Например, определенным расположе-
нием тепловых полей можно обеспечить направленное
деформирование взаимодействующих тел.
4. Высокий КПД можно получить в гидростатиче-
ской направляющей (схема 36.6) или в направляющей
с телами качения (схемы 37.1... 37.13 на рис. 103.2).
5. В направляющих скольжения и качения исполь-
зуют пары трения из материалов, обладающих высокой
твердостью поверхности. В современных конструкциях
корпус, раму, станину изготовляют из дешевого материа-
ла (чугуна, полимербетона), а дорожки скольжения фор-
мируют на неподвижно присоединенных накладках, бру-
сках из материала высокого качества (см. схемы 37.7,37.8).
6. В направляющих скольжения обеспечивают жид-
костное трение в основном за счет гидростатической
смазки. При этом создают конструкцию подушек и замк-
нутые опорные пространства, заполненные жидкостью
или газом, допускающие в определенных пределах само-
устанавливаемость сопряженных деталей (схема 36.6).
7. В направляющих качения обеспечивают в основ-
ном качение шариков или роликов за счет согласованно-
го принудительного движения сепаратора (схема 37.2)
или при свободном перемещении сепаратора (схе-
ма 37.6). Шариковые направляющие выполняют без се-
паратора, но с обязательным каналом возврата. Дорожки
качения холостой ветви (канала возврата) формируют из
антифрикционного материала (обычно пластмассы).
8. Для точных линейных направляющих применяют
специальные разгрузочные устройства, чтобы исключить
влияние силы тяжести на прогиб направляющей и на си-
256
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
103.2. ЛИНЕЙНЫЕ НАПРАВЛЯЮЩИЕ (ОПОРЫ) С ТЕЛАМИ КАЧЕНИЯ
Плоская
дорожка
качения
Зубчатая I 37.2 |
рейка 1 Шестерня w в
' • - А-А Зубчатая рейка 1
Ролик 2
Ролик 1
Ролик 3
Направляющая
Пружина
Канал
возврата Шарик Ползун
Sw
Зубчатая
рейка 2
Шарик
А-*-]
Шарик Направляющая Сепаратор
ЦП]
Шарик 1 Втулка
Шарик Г—\ \ /
Г идроцилиндр
Направляющая
В-В
Ж
Дорожка
Шарик Г Вкладыш
Втулка Ползун
Шарик 1 Направляющая
Канал-
возврата
Ползун
Направляющая
Шарик 1
137.3а |
Ползун Шарик
Камера
Направляющая
Пробка
I 37.4 |
Ползун
[372]
Гз7э~]
Каретка
Балка
[Ш
Лента
Труба
Ролик 2
Ролик 1
Канал
возврата
Каток
Направляющая
Накладка
L37.6J
Ролик Обойма
Направляющая
Канал
возврата
I 3 тТГ
Направляющее
колесо
Регулировочный
винт
_ Стол/суппорт
Ползун
Брусок 2
колесо
Каток 3
Тяга 2
Рычаг
В-В
В
Упор 1
Ролики
Ролик 2 \
Труба
Гидроцилиндр
Рычаг
D
Рычаг
G
Корпус
Труба^
Вид А
Траверса
Шарнир'
с гхрнтж
Труба 4^
Ролик 1
Шарнир С------
| 39.1 | Блок 2
Блоки 1
Зубчатая
пара
Поступательная
пара
Рама
। Гидро
ЦИЛИНДР I
|37.12|
Направляющая
Ролик 2
Шарнир С
Тяга 1
Упор 2
Брусок 1
Направляющая Ролик
'//////Л Опорное
V / Л-'- f > колесо
Эллиптическое Сепаратор
отверстие _
Ролик
Ползун
Накладка
|37.10|
Ролик 1'
Ролик 1
Ролик 2'
Ползун
Ролик
1,2,3 и 4-
- направляющие
элементы _
Ролики
| 38.2 |
Свая
Ось
Каток 1
Выемка 1
Криволинейная
направляющая
Кронштей!
Радиальнь й
Каретка
Каток 2
Выемка 2
Ролик 1 Рамка Ролик 2
Ветвь 1
Платформа
Ветвь 1
Блок 2 ’
КРУГОВЫЕ И ЛИНЕЙНЫЕ направляющие
257
лу трения (на схеме 37.10 силовая направляющая вос-
принимает на себя силу тяжести ролика, рычага, ползуна
и противовеса).
Другие особенности конструирования рассмотрим
на отдельных примерах. Прямолинейные направляющие
опоры содержат две основные части: направляющую (де-
таль большой протяженности или неподвижная опора) и
ползун.
По форме направляющие выполняют в виде: одного
цилиндрического стержня с канавкой под штифт (схе-
ма 36.1), предотвращающий проворачивание; двух ци-
линдрических стержней (схема 36.2); призмы с продоль-
ными пазами (шлицами) или выступами (схемы 36.3;
36.3а; 36.36) призмы со скосами типа "ласточкин хвост"
(схема 36.4); комбинации неравнобедренной призмы и
плоскости (схема 36.5).
На схеме 36.6 - гидростатическая направляющая.
Смазочный материал под давлением подают как на ниж-
нюю, так и на верхнюю грани во избежание "всплытия"
ползуна - стола или суппорта. На схеме 36.6 подушка -
нижняя опора ползуна выполнена "плавающей". Она мо-
жет самоустанавливаться, поворачиваясь в определенных
пределах в продольной и поперечной плоскостях. При-
меняют также пневмостатические направляющие с ко-
эффициентом трения до 0,0005 при зазоре 2 ... 4 мкм и
жесткости более 100 Н/мкм.
В направляющих с трением качения между сопря-
женными деталями установлены подшипники качения
(схеме 37.1) или тела качения, в частности шарики - ша-
риковая направляющая (схемы 37.1 ... 37.5) или ролики -
роликовая направляющая (схемы 37.6; 37.7).
Ползун по направляющей или направляющая отно-
сительно ползуна приводится в движение, например, с
помощью зубчатой передачи и гидроцилиндра (схе-
ма 37.2). В этом случае на перемещаемой направляющей
нарезаны зубья, образующие рейку. При перемещении
оси колеса гидроцилиндром оно взаимодействует с не-
подвижной зубчатой рейкой, соединенной со станиной, и
сообщает движение с удвоенной скоростью направляю-
щей. Сепаратор шариков неподвижно соединен со што-
ком гидроцилиндра, благодаря чему обеспечивается оп-
ределенность движения шариков при их качении.
В схеме 37.3 для тел качения между направляющей
и сопряженной с ней деталью - ползуном - организована
замкнутая траектория перемещения. Каналы возврата тел
качения в рабочее положение обычно размещены в со-
пряженной детали. В схемах 37.3 ... 37.5 охватываемое и
охватывающее звенья имеют продольные рабочие до-
рожки качения для шариков, а в охватывающем звене
размещены также каналы, по которым шарики возвра-
щаются в рабочее положение. В схеме 37.4 в охватывае-
мой детали размещен вкладыш из антифрикционного
материала (пластмассы), в которой и выполнены каналы
для перемещения шариков 1 и Г. Рабочая дорожка каче-
ния шариков 1 выполнена на вкладыше из материала,
имеющего высокую твердость поверхности. В схеме 37.4
рабочими дорожками качения шариков служат внутрен-
ние поверхности вкладыша, а каналы возврата шариков
выполнены в пластмассовой втулке из пластмассы.
На схеме 37.3 и показан пример создания натяга в
сочленении ползу на и направляющей. В ползуне выпол-
нена камера, заполненная жидкостью. Пробка закрывает
отверстие, по которому подается жидкость, а регулиро-
вочным винтом создают давление жидкости, которое
распирает камеру, в результате чего шарики 1 прижима-
ются к направляющей.
Направляющие опоры выполняют также с телами
качения в виде роликов. Ролики (схема 37.6) взаимодей-
ствуют с ползуном и поверхностью направляющей. Оси
роликов движутся по замкнутой траектории, определяе-
мой пазом в обойме. К ползуну присоединен стол или
суппорт.
На схеме 37.7 съемные элементы — бруски 7 и 2 с
дорожками качения — выполнены из высококачественно-
го материала и закреплены в ползуне и направляющей.
Оси соседних роликов перекрещиваются под прямым
углом (см. схема 37.7а). Сепаратор имеет отверстия с
эллиптическим контуром. В этих отверстиях размещены
ролики.
Критерием работоспособности направляющих явля-
ется износостойкость. Для направляющих большой про-
тяженности дорожки качения выполняют в виде специ-
альных накладок прямоугольного или круглого сечения
(схема 37.8). Накладки выполняют из более износостой-
кого материала, чем тело направляющей. Ползун пред-
ставляет собой каретку с четырьмя роликами/катками,
прижатыми к накладкам. Катки удерживаются от осевых
перемещений ребордами, проскальзывающими вдоль
накладок.
Направляющая на схеме 37.8 охватывается ползу-
ном или кареткой. Наряду с таким решением передви-
гаемые детали размещают внутри направляющей. Для
этого используют специальный профиль, например прес-
сованный.
В схеме 37.9 роликового конвейера на балке (из
алюминиевого профиля) размещена стальная накладка —
дорожка качения. По ней катятся опорные ролики I
замкнутой роликовой цепи. Передвигаемые предметы
(ползун) устанавливают на несущие ролики 2. На схеме
показаны соответственно элементы возвратной (холо-
стой) ветви цепи.
В схеме 36.3а на рис. 102 подвесного конвейера
также использован фасонный профиль, в пазу которого
размещен ползун с возможностью скольжения вдоль па-
за. К ползуну прикрепляют крюк (например карабин) для
подвешивания груза.
Направляющая опора движителя гусеничных транс-
портных машин представляет собой совокупность под-
держивающих и опорных роликов/катков. Пример такого
ролика дан на схеме 28.2 на рис. 100.1. Ролик состоит из
двух частей ободов 7 и 2, соединенных вращающейся
осью. На неподвижную ось, закрепленную в ходовой
раме непосредственно через роликовые подшипники,
опираются ободы 7 и 2. Ободы со встроенными в них
подшипниками вместе с вращающейся осью могут пере-
мещаться в осевом направлении в пределах упругих ог-
раничений пружин торцовых уплотнений. Внутри ролика
создано замкнутое пространство для помещения смазоч-
ного материала и защищенное от попадания грязи.
258
ПОДШИПНИКОВЫЕ ОПОРЫ И НАПРАВЛЯЮЩИЕ
На схеме 37.11 представлено решение направляю-
щей с роликом-катком, обеспечивающим качение по
двум взаимно перпендикулярным плоскостям (дорожкам
качения), рассчитанное на преимущественное восприятие
нагрузки со стороны одной из плоскостей.
Ролик катится по внутренней поверхности балки.
Особенностью этой конструкции является размещение
направляющего колеса внутри опорного колеса. Оси ко-
лес взаимно перпендикулярны. Опорное колесо распо-
ложено с возможностью вращения на кронштейне, при-
крепленному к перемещаемому агрегату (на схеме не
показан). Внутри кронштейна размещена ось, на которой
с возможностью вращения установлено направляющее
колесо.
Некоторые особенности имеет направляющая с кри-
волинейным участком (схема 37.13). Чтобы сохранить на
данном участке геометрическое замыкание (непрерыв-
ный контакт катков 1, 2 и 3 с дорожками качения), на
направляющей выполняют углубления специальной
формы. Каток 1 катится по дорожке в выемке 1, а каток 2 -
по дорожке в выемке 2. Формы выемок подобраны из
условия неизменности межосевых расстояний катков.
В практике конструирования встречается задача, ко-
гда, кроме поступательного движения, направляющая
опора должна обеспечить возможность периодического
вращательного движения цилиндрического длинномер-
ного предмета (трубы), например, в установке для сварки
труб. На схемах 38.1 и 38.1а даны примеры решений та-
кой задачи.
На рычаге установлены ролики 1, обеспечивающие
вращательное движение цилиндрической трубы, и роли-
ки 2, обеспечивающие ее осевое движение. Таких опор
несколько вдоль оси детали. Рычаги, на которых уста-
новлены ролики, соединены тягами 1, 2, благодаря чему
они могут синхронно поворачиваться с помощью гидро-
цилиндра. При повороте рычага до упора 1 ролики 2
опускаются, а ролики 1 поднимаются. При повороте ры-
чага до упора 2 ролики 2 поднимаются, а ролики 1 опус-
каются. Труба при этом лежит на поднятых роликах, ко-
торые и обеспечивают возможность его вращения или
осевого перемещения.
В опоре на схеме 38.1а ролики 1 и 2 в виде усечен-
ных шаров установлены во вращающейся рамке так, что
оси роликов перекрещиваются под прямым углом. При
вращении трубы вращается рамка вокруг своей оси, пер-
пендикулярной осям роликов. При осевом перемещении
трубы вращаются ролики 1 или 2. Перекрытие профилей
роликов 8 предусмотрено для непрерывного перекатыва-
ния детали с одного ролика на другой. Зазор б] преду-
смотрен для того, чтобы деталь не касалась рамки.
По существу, на схемах 38.1 и 38.1а двухрежимные
направляющие опоры, а на схеме 38.1 — управляемая
опора. Еще одна разновидность управляемой опоры — это
размыкаемая/замыкаемая вокруг направляемого предме-
та опора. Ее выполняют по типу захватного устройства, а
губки снабжают направляющими роликами (схема 38.2).
Корпус образует поступательную пару с рамой ма-
шины для забивки сваи. К корпусу симметрично присое-
динены два духкоромысловых механизма ABCD и GJKL.
Для синхронности движения звеньев коромысла АВ
и GJ соединены зубчатой парой. К шатунам ВС и KJ
прикреплены уголковые направляющие элементы 2 и 3.
Такие же элементы 1 и 4 прикреплены и к коромыслам
АВ и GJ. Направляющие элементы имеют ролики, кото-
рые контактируют с направляемым объектом.
Направляющие элементы 1 ... 4 с помощью гидро-
цилиндра шарнирно соединены с коромыслами в точках
Е и F, перемещаются относительно сваи и смыкаются до
контакта с ее гранями. При забивании сваи они обеспе-
чивают ее свободное продольное перемещение.
Еще один вид направляющей опоры для перемеще-
ния каната представлен на схеме 39.1. Она известна срав-
нительно давно и ее применяют для поддержания каната
при его движении в определенном направлении или при
изменении направления движения (например, в экскава-
торе типа драглайн, для обеспечения упорядоченного
движения в различных направлениях тягового каната:
для предотвращения задевания каната за поворотную
платформу и стрелу). Ветвь 1 каната направляется к ба-
рабану, а ветвь Г каната — к ковшу. В процессе работы
ветви отклоняются относительно друг друга в вертикаль-
ной и горизонтальной плоскостях. Канат удерживается и
направляется в вертикальной плоскости на входе блока-
ми 1, на выходе — роликами. Блоки 2 ограничивают его
вертикальные перемещения. Ролики и блоки размещены
на траверсе, шарнирно соединенной с поворотной
платформой экскаватора.
Глава 11. СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ)
МУФТЫ ВАЛОВ
11.1. ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ И
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ
В предыдущих главах в той или иной мере освеща-
лись конструкции муфт. В частности, когда речь шла о
классификации кинематических пар (параграф 2.2), были
приведены примеры компенсирующих муфт, эквива-
лентных вращательной двухподвижной сферической
паре или вращательно-поступательной трех-, четы-
рех- и питиподвижиой паре.
Нелинейные элементы упругих муфт были под-
робно рассмотрены в параграфе 6.7.
Шарнирными муфтами в виде механизмов было
уделено особое внимание в параграфе 4.3, когда речь шла
о подвесках агрегатов. Кстати, там же была показана
конструктивная индентичность механизмов муфт и под-
весок агрегатов. И в том и другом случаях функциониро-
вание механизма заключается в относительном движении
звеньев с целью компенсации несоосностей и перекосов
звеньев. И в том и другом случаях передается вращаю-
щий момент, но муфта в отличие от подвески вращается
в целом, а подвеска соединяет подвижный (но не вра-
щающийся) корпус с неподвижным основанием.
Следует отметить также довольно подробное рас-
смотрение видов и расчетов соединительных муфт в
учебной и справочной литературе. Тем не менее система-
тизация и обобщение принципов конструирования муфт
на примерах разнообразных решений с единых позиций,
в рамках всего одной статьи, думаю, будет уместным.
Функциональная задача, решаемая с помощью
компенсирующей муфты, характеризуется следующими
основными положениями.
1. Передача вращающего момента между валами,
оси которых пересекаются, несоосны или перекрещива-
ются в пространстве (общий случай) - основная функ-
ция любой компенсирующей муфты. В первом случае
требуется муфта, эквивалентная двухподвижной сфери-
ческой паре — схема 1.1 на рис 105.1 [в теории механиз-
мов ее еще называют сферической парой с пальцем
(штифтом), хотя конструктивно никакого пальца может и
не быть]; во втором случае может быть достаточно муф-
ты, эквивалентной двухкулисному механизму (муфта
Ольдхема - см. рис. 104 схемы 1а, 1в, 1г), но ее в совре-
менных конструкциях уже практически не применяют; в
третьем случае может быть использована четырех-, пя-
типодвижная муфта [пара] или кинематическое соедине-
ние двух сферических муфт (см. схемы 5.1, 5.2 на
рис. 105.2). Пятиподвижная муфта, кроме перекосов и
несоосностей, компенсирует еще и продольное переме-
щение валов.
2. Движение соединенных валов должно быть син-
хронным: передаточное отношение постоянно и равно
единице. Здесь следует отметить, что данное положение
обязательно при значительных и/или переменных пере-
косах и несоосностей, специально предусмотренных кон-
структивной схемой и/или функционированием машины.
Для компенсации погрешностей изготовления (в том
числе монтажа) данное требование выполнять желатель-
но, так как при этом обеспечивается плавность движения,
но не обязательно.
Для синхронной передачи значительных нагрузок
при значительных перекосах и несоосностях используют
муфты с жесткими звеньями (см. шарнирные муфты на
рис. 105.1 и 105.2, шаровые и зубчатые муфты на рис. 106.
3. Смягчение динамических нагрузок и демпфирова-
ние колебаний — дополнительные функции, которые
обеспечиваются при использовании существенно дефор-
мируемых элементов (см. упругие муфты на рис. 107).
Принципы конструирования муфт те же, что бы-
ли изложены нами ранее применительно к иным устрой-
ствам. По отношению к муфтам их можно прокомменти-
ровать следующим образом. Высокой несущей способно-
стью обладают муфты, в которых имеют место следую-
щие явления и процессы.
1. Самоприспособляемость муфты должна преду-
сматривать самоустанавливаемость звеньев при мини-
мальных потерях энергии и без нарушения предусмот-
ренного контакта звеньев. В шарнирных муфтах следует
избегать избыточных связей и не допускать кромочного
контакта (с этой целью шарниры выполняют симметрич-
ными, сдвоенными, с достаточно удаленными друг от
друга парами).
2. Многопоточность передачи энергии может быть
достигнута в муфтах за счет многократного повторения и
параллельного соединения рабочих элементов. Но при
этом нужно предусмотреть равномерность распределения
нагрузки по этим элементам. В шаровых и зубчатых
муфтах (рис. 105) обеспечивают это за счет точности из-
готовления, а в упругих муфтах (рис. 107) за счет исполь-
зования высокоэластичных материалов.
3. Минимальные углы давления обеспечиваются при
ограничении компенсируемых перекосов в двухподвиж-
ной паре за счет увеличения расстояния между последо-
вательно соединенными двухподвижными муфтами (см.
схемы 5.1,5.2 на рис. 105.2 и схему 7.4 на рис. 106).
4. Постоянство передаточного отношения (i = 1)
достигается за счет выбора схемы и геометрических па-
раметров элементов муфты. Важно не допустить, чтобы
муфта превратилась в дополнительный источник кру-
тильных вибраций из-за колебаний передаточного отно-
шения. К этому следует добавить, что муфта должна
быть симметричной и уравновешенной, что исключит
появление радиальных вибраций. Высокие виброзащит-
ные свойства обеспечиваются в муфтах с нелинейными
упругими элементами, а также за счет внутреннего тре-
ния материала и трения между элементами.
260
СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ) МУФТЫ ВАЛОВ
10- МУФТЫ НА ОСНОВЕ ПЛОСКИХ И ПРОСТРАНСТВЕННЫХ МЕХАНИЗМОВ
Двухкривошипный плоский механизм
Звено 3 , 126
2л
Звено 3
(шатун)
Звено 2
(кулиса)
1а | Двухкулисный
плоский
механизм
Ф
X
Звено 1
(кривошип)
Ф
2л
Звено 2
\ (кривошип)
Муфты на основе шарнирных
параллелограммных механизмов,
эквивалентные карданной передаче.
Пространственный механизм
Упругие шарниры
nis...ivs _______
ЕЕП
Вал 1
Звено 1
(кулиса)
Опора вала 1 Опора вала 2
Сателлит
Муфта Ольдгема
(в разобранном состоянии)
Зубчато-параллелограммный механизм
Зубчатое колесо
г-—। 1 z Звено 2
Ив I ♦ (кулиса)
Звено 3 (шатун)
Звено 1
(кулиса)
Выходное
звено
(самоустановка звеньев
при наличии осевых зазоров)
Звено 3
Вал 1
Плоский
механизм
4а | Звено 2
Ф
2л
0
Звено 3 „
Звено 1
Сателлит
\ С
77/.
Двухкривошипный
пространственный
механизм
Звено
Поводок
D
Вал 2
Вилка 2
|~5Тба~|
ЖЖ
Поводок
। Упругий шарнир
I Вилка
D,1 Муфта Зубчатое
/ колесо
Шип
вых. звена.
Ci
с/
Кривошип 1
\ Выходное
звено
Зг
Зубчатое
(цевочное)
колесо
Сателлит
Кривошип 2
Звено 3
(рычаг)
Кривошип 3
в сателлите
(муфта встроена в сателлит зубчатой передачи)
Поводок 1
_____, Звено 2
Вал 2
Т
Поводок 2
Звено 1
Все соединительные муфты делятся на две группы:
1. Муфты, в которых передача движения осуществ-
ляется за счет взаимодействия жестких (малодеформи-
руемых) звеньев и элементов.
2. Муфты, в которых относительные перемещения
двух соединенных звеньев осуществляются за счет де-
формирования соединительных (промежуточных) эле-
ментов.
11.2. ЖЕСТКИЕ КОМПЕНСИРУЮЩИЕ
МУФТЫ
К муфтам первой группы относят шарнирные муф-
ты, в основе которых использованы низшие вращатель-
ные пары, характеризуемые поверхностным взаимодей-
ствием элементов, а также поводковые, шаровые и зубча-
тые муфты, в основе которых использованы высшие па-
ры, характеризуемые точечным или линейным контак-
том. На рис. 104, 105.1 и 105.2 вращательные пары обо-
значены следующим образом: трехподвижная враща-
тельная (сферическая) пара Ш5; двухподвижная враща-
тельная (сферическая) пара IV5; двухподвижная враща-
тельно-поступательная (цилиндрическая) пара IVrt; одно-
подвижная вращательная (цилиндрическая) пара Vr.
Приведены примеры, в которых использованы наряду с
вращательными и одноподвижные поступательные (пло-
скостные) пары V, — схемы 2.1, 2.2 и 5.2. На схемах 3.1,
3.2 и 3.3а приведены поводковые муфты с высшими па-
рами: с точечным (пара I) или линейным (пара II) контак-
том. Кстати, даже если и предусмотрен поверхностный
контакт, то его может и не быть при наличии зазоров и
перекосе элементов - см. схемы 1.2а, 1.26,1.2в и 1.3а.
Муфты с жесткими звеньями и поверхностным
взаимодействием при достаточно точном изготовлении
могут иметь наименьшие габаритные размеры (и, как
правило, наименьшую массу при одинаковых нагрузке
(передаваемом моменте) и других условиях (частоте
вращения, величинах компенсируемых перекосов и несо-
осностей).
Если судить по происхождению и структуре муфт,
все они создавались на основе механизмов с жесткими
звеньями (рис. 104). Иногда бывает довольно сложно
увидеть в конструкции муфты ту или иную схему меха-
низма. Тем не менее провести связь между ними стоит
ЖЕСТКИЕ КОМПЕНСИРУЮЩИЕ МУФТЫ
261
хотя бы для того, чтобы понять и воспроизвести соответ-
ствующие компенсирующие свойства муфты.
На схеме 1а (рис. 104) представлен двухкулисный
механизм. При условии расположения направляющих
(выступов или пазов) звена 3 под прямым углом, звенья 1
и 2 могут вращаться синхронно (см. схему 16). Благодаря
этому свойству такой механизм может быть использован
в качестве муфты (схема 1в). На первый взгляд такая
муфта может компенсировать только несоосности (отно-
сительные перемещения в плоскости XZ). При наличии
осевых зазоров оси звеньев могут перекашиваться (при
самоустановке) в плоскостях YX и YZ, а с учетом воз-
можной компенсации перемещений еще и вдоль оси Y
муфта Ольдгема эквивалентна пятиподвижному соеди-
нению. Недостаток муфты, из-за которого ее уже почти
не применяют - большие потери на трение при самоуста-
новке звеньев и, соответственно, радиальные нагрузки на
опоры валов. Кроме того, поступательные пары по тех-
нологичности конструкции, несущей способности и дру-
гим качествам уступают вращательным парам. Самоус-
тановка звеньев муфты Ольдгема сопряжена с возникно-
вением неуравновешенных инерционных нагрузок. Все
последующие схемы муфт более предпочтительны осо-
бенно при высокой частоте вращения.
На схеме 2а представлен двухкривошипный меха-
низм. В общем случае его передаточное отношение пе-
ременно (см. схему 26), и, только если выполнены усло-
вия АВ = DC, ВС = AD, оно постоянно — такой механизм
называют шарнирным параллелограммом (см. схемы За,
36', на схеме 4а — два последовательно соединенных па-
раллелограмма ABCD и MLPN с входным валом I и вы-
ходным валом О).
На основе механизма по схеме 2е построено доволь-
но много схем шарнирных муфт (см. рис. 104, 105.1,
105.2), а также схем упругих муфт (см. рис. 106), в кото-
рых вместо звена 3 устанавливают упругий (гибкий, эла-
стичный) элемент в виде пластины, диафрагмы, оболоч-
ки, пружины и т.п. При больших перекосах и несоосно-
стях такие муфты характеризуются большими углами
давления и переменным передаточным отношением.
На схемах За ... Зг проиллюстрированы решения
двухподвижной муфты, компенсирующей только несо-
осности, причем значительные и постоянные (равные по
величине длине кривошипа АВ = С[С2 = е или эксцентри-
ситету эксцентрикового вала). Они созданы на основе
шарнирного параллелограмма, называемого также меха-
низмом параллельных кривошипов. Муфту такого вида
используют для передачи вращения от сателлита, обка-
тываемого по зубчатому колесу планетарной передачи
выходного звена.
Благодаря такому решению конструкция редуктора
при большом передаточном отношении исключительно
проста: всего одна пара зубчатых колес и муфта с переда-
точным отношением i = 1 между несоосными звеньями.
На схеме За входной вал — звено ВС, а выходное
звено — зубчатое колесо. Кривошип AD служит для ис-
ключения особых ("мертвых") положений, при которых
угол давления равен 90° и передача движения невозмож-
на. Обычно параллельных кривошипов должно быть не
менее трех.
На схеме 36 входное звено — кривошип С Юг, выход-
ное звено АС2 вращается синхронно с сателлитом, кото-
рый неподвижно соединен со звеном AQ.
Схемы За и 36 приведены здесь только для поясне-
ния принципа действия муфты. Конструктивное испол-
нение обычно предусматривает встраивание муфты
внутрь сателлита (схемы Зв и Зг). На эксцентриковом
валу С]С2 шарнирно установлен сателлит. В нем выпол-
нены отверстия, по боковым поверхностям которых об-
катываются шипы выходного звена. Отверстие и шип
представляют собой конструктивное исполнение криво-
шипа АВ, а выходное звено эквивалентно звену АС2 по
схеме 36. Диаметр отверстия на 2е больше диаметра ши-
па, где е — эксцентриситет звена CiC2. На схеме Зг пред-
ставлен вариант, в котором элементы муфты конструк-
тивно совмещены с ведущими кривошипами 1, 2 и 3.
Кривошипы имеют опоры в выходном звене. Они сооб-
щают плоскопараллельное движение сателлиту (функция
входного ведущего звена) и одновременно передают
синхронное вращение от сателлита выходному звену
(функция муфты).
На схеме 1.1 (рис. 105.1) дано условное обозначение
сферической муфты - двухподвижной кинематической
пары, а на схемах 1.2 ... 1.9 даны ее конструктивные раз-
новидности.
Соединенные муфтой IV, (схема 1.1) звенья (валы) 1
и 2 имеют опоры Vr и IV,.,. Поскольку сама муфта IV5 не
допускает осевых перемещений валов, то опора IV,.,
должна ограничивать осевое движение звена 2 (оно не
должно удерживаться и другими звеньями вне данной
схемы). Только при таком условии и только при пересе-
чении осей звеньев муфта IVS может нормально функ-
ционировать. Данную муфту нельзя использовать при
перекрещивании осей соединенных звеньев.
На схеме 1.2 дано конструктивное решение, эквива-
лентное схеме 1.1. Звенья 7 и 2 соединены промежуточ-
ным звеном 3 с помощью вращательных пар А и В.
При наличии зазоров кинематические пары А и В,
по существу, являются двухподвижными и передают
вращающий момент Т, как показано на схемах 1.2а, 1.26
или 1.2в. Силы F, уравновешивающие момент Т, воспри-
нимаются соприкасающимися цилиндрическими поверх-
ностями звеньев (см. схему 1.2а) или соприкасающимися
торцовыми поверхностями звеньев (см. схему 1.26). Чаще
имеет место более общий случай соприкосновения звень-
ев (схема 1.2в). Та или иная схема может иметь место
также при отсутствии зазоров, но при существенном раз-
личии жесткостей элементов (эквивалентна случаю, ко-
гда жесткость цилиндрического сочленения значительно
больше жесткости торцового сочленения). Чтобы умень-
шить неблагоприятные явления, обусловленные переко-
сом элементов, шарниры А и В выполняют раздвоенны-
ми в виде пар А, А' и В, В', размещенных симметрично
относительно точки пересечения осей С (схема 1.3). Ва-
риант взаимодействия элементов показан на схеме 1.3а.
Силы здесь намного меньше, чем в схеме 1.2а. Оси пар
А, А' и В, В' (схема 1.2) обычно выполняют пересекаю-
262
СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ) МУФТЫ ВАЛОВ
ЖЕСТКИЕ КОМПЕНСИРУЮЩИЕ МУФТЫ
263
щимися под прямым углом и соединенными с валами 1 и
2 с помощью вилок 7 и 2. Промежуточное звено 3 вы-
полнено в виде крестовины. Данное соединение называ-
ют универсальным шарниром.
Муфта на схемах 1.2 и 1.3 характеризуется перемен-
ным мгновенным передаточным отношением. Колебания
передаточного отношения и углов давления тем больше,
чем больше угол между осями соединенных валов.
Обычно такую муфту используют в качестве составляю-
щей в сдвоенном соединении (карданной передаче)
(см. схемы 5.1 ... 5.4), в котором обеспечивается посто-
янство передаточного отношения.
Здесь же рассмотрим некоторые конструктивные
варианты муфты.
На схеме 1.4 показано наиболее распространенное
конструктивное решение. Между шипами крестовины и
поверхностями вилок 1 и 2 размещены игольчатые под-
шипники, защищенные уплотнениями.
На схеме 1.5 - конструктивное решение универ-
сального шарнира, предназначенного для передачи зна-
чительного момента в приводе прокатного стана. В нем
использованы сферические роликовые подшипники в
совокупности с упорным шариковым подшипником. Ша-
риковый подшипник установлен на сферическом вкла-
дыше, компенсирующем несоосность шипа крестовины и
отверстия вилки.
Вилка 2 и ступица соединены с помощью клина.
Сегментные шпонки служат для передачи вращающего
момента между ступицей и валом.
Далее приведем некоторые конструктивные реше-
ния муфт, предназначенных для передачи небольших
моментов (схемы 1.6... 1.9) по сравнению со схемами 1.4
и 1.5.
На схеме 1.6 валы 7 и 2 соединены посредством
вкладышей. Вкладыш образует с валом 7 и валом 2 ци-
линдрические кинематические пары, оси которых пере-
секаются под прямым углом. Конструктивная особен-
ность муфты заключается в сочетании цапф малого диа-
метра и цапф большого диаметра d при размещении од-
них внутри других. Для удобства сборки и разборки слу-
жат крышки, которые имеют внутреннюю поверхность,
соприкасающуюся с поверхностью вкладыша. Для защи-
ты трущихся пар от пыли служит уплотнение (чехол).
На схеме 7.7 представлена другая конструктивная
разновидность схемы 1.3. Промежуточное звено 3 пред-
ставляет собой тело, образованное пересечением двух
цилиндров 7 и 2 - элементов кинематических пар А и В
на схеме 1.3. Промежуточное звено 3 может иметь пере-
мещения sz и jy относительно звеньев 7 и 2 соответст-
венно, благодаря чему возможна компенсация несоосно-
стей валов по аналогии с двухкулисным механизмом (см.
схему 1а на рис. 104). Передача сил соответствует схеме 1.2а.
На схемах 1.8 и 1.9 представлены исполнения муфт,
также выполненные по схеме 1.3 к используемые при
сравнительно небольших моментах и высокой частоте
вращения. Отдельные их элементы изготовляют из пла-
стмасс.
В схеме 1.8 промежуточное звено 3 имеет отверстия,
в которых размещены шипы пластин. Одна пара пластин
с помощью штифтов закреплена в продольных пазах од-
ного из соединяемых валов, другая пара закреплена на
другом валу. Пластины удерживаются в пазах соединяе-
мых деталей посредством обечаек. Вместе с соединен-
ными деталями пластины образуют вилки универсально-
го шарнира, а роль крестовины выполняет звено 3. Пере-
дача сил соответствует схема 7.26.
Муфта на схеме 1.9 имеет промежуточное звено 3 в
виде шара с пазами. Выступы соединяемых валов 7 и 2
взаимодействуют с поверхностями пазов торцовыми по-
верхностями.
В муфте по схеме 2.1 между валами 7 и 2 установ-
лены вкладыши с цилиндрической поверхностью. Они
образуют с вилкой вала 7 вращательную пару по схеме
1.2а. Ось второй пары установлена в пазу плоского хво-
стовика вала 7 с возможностью перемещения 5Х- Соот-
ношение зазоров обеспечивает передачу сил торцовыми
плоскими поверхностями (схема 1.26). Муфта допускает
относительные повороты звеньев \|/Y и xyz, применяется в
тяжелонагруженных машинах (например, в прокатных
станах). Ось (см. сечения Б-Б и А-А на схеме 2.1) служит
для восприятия силы тяжести вала 2 при использовании
муфты в пятиподвижном кинематическом соединении -
карданной передаче по схеме 2.1.
В схеме 2.2в отличие от схемы 2.1 ось отсутствует.
Вкладыши образуют с вилкой вала 2 цилиндрическую
одноподвижную пару, а с валом 7 - плоскостную двух-
подвижную пару. Муфта эквивалентна четырехподвиж-
ному вращательно-поступательному кинематическому
соединению: возможные перемещения обозначены \|/Y,
\gz и Jx- Перемещение sY не может быть реализовано при
вращении муфты. Хвостовик вала 7 имеет прорези, кото-
рые позволяют за счет упругости хвостовика более рав-
номерно распределять давление между взаимодейст-
вующими звеньями при передаче вращающего момента.
На схемах 3.1 ... 3.3 представлены так называемые
поводковые муфты. Муфты на схемах 3.1 и 3.2 имеют
точечный контакт звеньев (высшая пара I класса), а муф-
та на схеме 3.3 имеет линейный контакт (высшая пара II
класса). Возможности самоприспособляемости данных
муфт выше, чем муфт по схемам 7.7 ... 1.9 и 2.7, 2.2: они
способны передавать движение между валами с пере-
крещивающимися осями (кроме схемы 3.3) и способны
компенсировать осевые перемещения (кроме схемы 3.3а).
Но эти муфты обладают несравненно более низкой не-
сущей способностью из-за наличия высших пар и харак-
теризуются большой неравномерностью хода. При этом
чем больше перекосы и несоосности, тем значительнее
изменяется передаточное отношение (в пределах одного
оборота).
На схеме 3.1а представлено конструктивное испол-
нение муфты, у которой на поводке имеется сферический
ролик, размещенный в продольной прорези вилки. На
схеме показан эластичный упор, ограничивающий осе-
вые перемещения вала 2. Муфта полностью изолирована
от внешней среды с помощью разделительных уплотне-
ний, из которых кожух выполнен с возможностью де-
формирования.
264
СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ) МУФТЫ ВАЛОВ
На схеме 3.3 а конструктивное исполнение, в кото-
ром вилка имеет овальное коническое отверстие, а пово-
док имеет симметрично закрепленный цилиндрический
палец. В такой муфте вилка и палец могут иметь угловые
перемещения вокруг осей X и Y без нарушения взаимно-
го контакта по линии, а валы 1 и 2 могут передавать вра-
щающий момент Т (не иметь угловых перемещений во-
круг оси Y).
Поводковые муфты имеют простую конструкцию.
Их применяют в маломощных приводах (схема 1.3а), в
приборах (схема 3.2), в винтовых насосах (схема 3.3а).
На схеме 4.1 представлена муфта, особенностью ко-
торой является возможность передачи движения из од-
ной среды 1 в другую среду 2 через герметичную стенку -
сильфон. Это достигается тем, что промежуточному зве-
ну 3 сообщают только прецессионное движение без вра-
щения (сильфон не должен скручиваться). Пара Ills при
этом обеспечивает компенсацию перекоса валов / и 2, а
пары IVrt обеспечивают самоустановку вала 2 в осевом
направлении. Кинематические муфты по схеме 4.1 пол-
ностью соответствуют муфте по схеме 1.1, г. соединение,
включающее пары и IVrt эквивалентно паре IVS (сфе-
рическому шарниру с пальцем).
На схемах 5.1 ... 5.4 (рис. 105.2) даны варианты со-
единений двух сферических муфт. Соединение по схе-
ме 5.1 способно компенсировать только четыре относи-
тельных перемещения валов 1 и 3, а соединение по схе-
ме 5.2 дополнительно может компенсировать и пятое
перемещение (вдоль оси вала 2).
Как уже отмечалось, каждая из соединенных муфт
IVs характеризуется переменным мгновенным (в преде-
лах одного оборота) передаточным отношением.
Если соединить последовательно валы 1, 2 и 3 по-
средством двух универсальных шарниров так, что углы
между осями в каждом из соединений будут одинаковы-
ми, а вилки 2 и 3 будут расположены в одной плоскости,
то получится карданная передача с постоянным переда-
точным отношением. Этому условию удовлетворяют две
возможные схемы 5.1а и 5.16 соответственно для парал-
лельных и пересекающихся осей валов 1 и 3.
На схемах 5.3 и 5.3а представлены кинематическое
соединение и конструктивное исполнение карданной
передачи на основе схемы 5.16, у которой валы 1 и 2 со-
единены между собой шарниром II. Поскольку сфериче-
ский шарнир II при изменении угла между осями валов
перемещается еще вдоль шипа вала, то может быть обес-
печено лишь приближенное равенство углов 8, а следова-
тельно, и приближенное синхронное вращение валов.
Сферический шарнир II защищен разделительным уп-
лотнением S.
Схема 5.1а допускает поступательное (поперечное)
относительное перемещение осей валов 1 и 3, а при их
перекосе передаточное отношение будет колебаться от-
носительно значения i = 1. Схема 5.16 допускает измене-
ния угла между осями валов У и 2, но при условии пере-
сечения осей в одной точке, а при их перекрещивании
также будет изменяться передаточное отношение. Схе-
ма 5.3 не допускает перекрещивания осей валов 1 и 3 из-
ЖЕСТКИЕ КОМПЕНСИРУЮЩИЕ МУФТЫ
265
за их постоянного шарнирного соединения. На схеме 5.4 -
конструктивная разновидность карданной передачи, на-
зываемая шарнирной передачей [муфтой Кеннеди]. В ней
роль элементов крестовины выполняют сегменты 1 и 2
12'), допускающие относительный поворот осей звеньев:
вала 7 и вала 2, вала 2 и вала 3, а также их некоторое от-
носительное продольное перемещение.
На схеме 5.5 показано соединение двух универсаль-
ных шарниров (см. схему 1.2), в котором два соседних
промежуточных шарнира совмещены в одном среднем
шарнире Vr. При указанном на схеме 5.5 сочетании клас-
сов кинематических пар отсутствуют избыточные связи и
соединение функционально эквивалентно схеме 5.2, хотя
и имеет более ограниченные нагрузочные и компенсаци-
онные возможности.
Конструктивно муфта по схеме 5.5 исключительно
проста в исполнении. На схемах 5.5а и 5.56 она показана
в собранном и разобранном виде соответственно. Между
валами 1 и 2 установлены вкладыши 1 и 2 и цилиндр.
Вкладыши 1 и 2 образуют с валами 7 и 2, а также с ци-
линдром цилиндрические пары. Зазоры в парах вал-
вкладыш обеспечивают передачу сил цилиндрическими
поверхностями, а зазоры в парах вкладыш-цилиндр -
торцовыми плоскими поверхностями (см. схемы 1.2а и
7.26 соответственно).
Что касается муфт на схемах 5.6 и 5.7 (см. рис. 104),
в основе которых использованы шарнирные параллело-
граммы (см. на рис. 104, например, схему 4а и сравните
ее со схемой 5.6’, в схеме 5.7 к параллелограмму присое-
динен рычаг, шарнирно соединенный с валом 2). Они
широко используются, например, в локомотивах и в под-
весках агрегатов (см. параграф 4.3, где приведен целый
ряд аналогичных схем). Конструктивно муфта не отлича-
ется от подвески. Функции передачи момента и в муфте,
и в подвеске одинаковы. Одинаковы и компенсирующие
свойства. Но поскольку муфта еще и вращается, то в ней
важны такие качества, как уравновешенность звеньев
(осевая симметрия), особенно при больших скоростях
вращения.
В качестве трехподвижных и двухподвижных
IVj пар в таких муфтах используют упругие шарниры
(см., например, схема 5.66). Их свойства могут быть оце-
нены как промежуточное свойства кинематических пар
1Щ...1Ч.
Схема 5.7 обладает наиболее высокими компенси-
рующими возможностями. Ее очень удобно использовать
в качестве подвески, а при использовании в качестве
муфты возникают проблемы с уравновешиванием звень-
ев. На схеме 5.7 показано, что момент Т передается по-
водками 7 и 2 в виде пары сил F на плече I. Углы давле-
ния в такой схеме минимальны. Механизм в целом экви-
валентен пятиподвижной паре I.
Муфты по схемам 5.6 и 5.7 обладают теми же свой-
ствами, что и карданные передачи.
В современных машинах, особенно в автомобилях,
широко применяют разновидности карданной передачи с
шаровыми муфтами (рис. 106) Главной особенностью
таких муфт является постоянное передаточное отноше-
ние i = 1. Их еще называют синхронными шаровыми
муфтами, а профессионально - шаровыми муфтами
[универсальными шарнирами] равных угловых скоростей
(ШРУСами). Достоинство таких карданных передач по
сравнению со схемам 5.1 и 5.16 заключается в отсутствии
крутильных колебании вала 2, что позволяет использо-
вать их при высокой частоте вращения, хотя нагрузочной
способности они уступают схемам 5.1а и 5.16 (из-за ли-
нейного, а не поверхностного контакта).
Итак, шаровая синхронная муфта предназначена для
соединения валов с пересекающимися осями, способна
передавать вращающий момент посредством шаров, раз-
мещенных в желобах звеньев 7 и 2 и удаленных от осей
валов на одинаковые расстояния. Муфта представляет
собой четырехзвенный механизм с высшими кинемати-
ческими парами {схема 6.1). Шары размещены в пазах
соединяемых звеньев 7 и 2. Оси звеньев пересекаются
под углом р. Обычно этот угол не превышает 35 ... 40°.
Благодаря специальному профилю пазов {схема 6.1) или
с помощью сепаратора {схемы 6.2, 6.2а), перемещаемого
при изменении угла р, центры шаров ориентированы все
время в одной плоскости, удаленной от осей соединяе-
мых деталей на одинаковые расстояния. Эта плоскость
л-р
наклонена к каждой из осей под углом а =—-—. Такая
ориентация шаров обеспечивает приближенно синхрон-
ное вращение соединяемых валов в отличие, например,
от шарнирной муфты и других подобных устройств. Наи-
более раннее решение (муфта Рцеппа — схема 6.2) имело
специальный механизм для перемещения сепаратора в
среднее положение, хотя его структура та же, что и на
схеме 6.2а; сепаратор перемещает звено C1DC2, ки-
нематически соединенное со звеньями 7 и 2. Шарнир D в
схемах 6.2а и 6.26 совмещен с шаром.
На схеме 6.26 встроенное в корпус дифференциаль-
ного механизма звено 7 выполнено как единое целое с
коническим колесом. Звено 2 соединено с валом. В пазах
обоих звеньев установлены шары. Шары ориентируются
с помощью сепаратора, положение которого определяет-
ся его взаимодействием со сферическими поверхностями
обоих звеньев. Центры сферических поверхностей Q и
Сг расположены симметрично относительно точки С —
пересечения оси с плоскостью расположения центров
шаров. При относительном повороте осей звеньев 7 и 2
из-за клинового воздействия поверхностей пазов шары
перемещаются, увлекая за собой сепаратор. При этом
выполняется условие расположения шаров, показанное
на схеме 6.2а. Муфта защищена от внешней среды уп-
лотнением.
На схеме 6.2в показано аналогичное исполнение, но
в ней допускается осевое перемещение звена 2 относи-
тельно звена 1. С этой целью сепаратор может переме-
щаться вместе со звеном 2 и поворачиваться относитель-
но него. Пазы для шаров на звене 2 выполнены криволи-
нейными для обеспечения ориентации плоскости распо-
ложения шаров при перекосах. Защитное уплотнение
выполнено в виде эластичного кожуха.
Муфта на схемах 6.3 и 6. За имеет попарно симмет-
рично расположенные винтовые пазы на охватываемом 2
и охватывающем 1 звеньях. Перекрещивающиеся пазы
удерживают шары в положении, показанном на схеме 6.3
266
СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ) МУФТЫ ВАЛОВ
106. ШАРОВЫЕ И ЗУБЧАТЫЕ СОЕДИНИТЕЛЬНЫЕ МУФТЫ
УПРУГИЕ КОМПЕНСИРУЮЩИЕ МУФТЫ
267
при перекосах звеньев 1 и 2. Сепаратор центрируется
обычно в звене 1 и может перемещаться в осевом на-
правлении. Такая муфта допускает перекосы и осевые
перемещения соединяемых деталей. Данное сочетание
свойств получается при расположении шаров в пазах,
перекрещивающихся в окружном сечении (схема б.З).
Выполняют также муфты с пазами, перекрещивающими-
ся в осевом сечении (схема 6.1), но в них соединяемые
звенья не могут перемещаться относительно друг друга в
осевом направлении. Кроме того, схема 6.1 допускает
значительные перекосы лишь при расположении осей
звеньев 1 и 2 и центра шара в одной плоскости. При дру-
гих условиях угол перекоса ограничен нерегламентиро-
ванным контактом звеньев 1 и 2.
На схеме 6.4 приведен вариант широко распростра-
ненной в современных автомобилях муфты, у которой
ориентация шаров достигается благодаря переменному
по длине сечению желобов, выполненных на сфериче-
ской поверхности охватываемого 2 и охватывающего 1
звеньев. Сечение желоба переменное по длине. При пе-
рекосе деталей имеется только одно положение шара,
при коюром суммарное сечение желобов допускает его
размещение, соответствующее схеме 6.2. В процессе пе-
рекоса шар вытесняется из уменьшающегося суммарного
сечения в увеличивающееся сечение. В современных
конструкциях по схемам 6.4а и 6.26 угол 0 предельного
перекоса осей равен 40 ... 47°. Уплотнение выполнено в
виде сферической оболочки. Сепаратор в схеме 6.4 слу-
жит в качестве центрирующего элемента шарнира по
схеме 6.1.
На схеме 6.4а дано такое же, как и в схеме 6.4, ис-
полнение муфты, но в нем вал 2 при сборке вставляют в
звено 2 и закрепляют с помощью упругого замка.
В схеме 6.4 желоб охватывающего звена имеет пе-
ременный радиус кривизны в осевом сечении, а в схе-
ме 6.4а переменным выполнен радиус кривизны желоба
охватываемого звена.
Следующая разновидность двухподвижной сфери-
ческой пары - это зубчатая соединительная муфта
(схема 7.1). Зубчатая муфта состоит всего из двух дета-
лей: звено 1 — зубчатое колесо с внутренними зубьями и
звено 2 - зубчатое колесо с внешними зубьями. Внутрен-
ние и внешние зубья сопряжены между собой, образуя
шлицевое [зубчатое] соединение. Если обеспечено безза-
зорное центрирование деталей, то такое соединение не
может компенсировать ни перекосы, ни несоосности со-
единяемых валов. В компенсирующих муфтах зубья вы-
полняют короткими и обязательно с боковым и радиаль-
ными зазорами. Только в этом случае допускается пере-
кос соединяемых звеньев, который на порядок меньше,
чем в шарнирных и шаровых муфтах.
Чтобы исключить кромочный контакт, зубья выпол-
няют с продольной модификацией: с прямолинейной ло-
маной номинальной линией зуба (при постоянном угле
перекоса) — схемы 7.26 и 7.2в или бочкообразными зубь-
ями (при переменном угле перекоса) - схема 7.2. На схе-
мах 7.2, 7.26 и 7.2в показаны поперечные сечения сопря-
жений зубьев в плоскости перекоса осей. При одинако-
вом заданном угле перекоса у для цилиндрических зубьев
(схема 7.2) требуется больший боковой зазору jt, чем для
бочкообразных зубьев (схема 7.2а). В отличие от иногда
встречающихся утверждений одинарная муфта (схе-
ма 7.1) не может компенсировать несоосности. Хотя без
нагрузки и возможны небольшие радиальные перемеще-
ния звеньев (не более бокового зазора), но под действием
передаваемого момента происходит центрирование муф-
ты по боковым поверхностям зубьев. В связи с этим, по-
добно карданной передаче, последовательно соединяют
две зубчатые муфты (см. схемы 7.3 и 7.4). Такие соеди-
нения кроме перекосов компенсируют и несоосность,
причем чем больше расстояние I, тем большую несоос-
ность можно компенсировать.
На схеме 7.4 показана зубчатая муфта, соединяющая
звенья 1 и 4 с цилиндрическими внутренними зубьями.
На промежуточном валу закреплены звенья 2 и 3 с боч-
кообразными зубьями. Сопряженные звенья защищены
уплотнениями 1 и 2. Промежуточный вал выполнен са-
моустанавливающимся в осевом направлении. Его поло-
жение определяется с одной стороны сферическими эле-
ментами 1, с другой стороны сферическими элемента-
ми 2. Силовое замыкание осуществляется пружиной.
11.3. УПРУГИЕ КОМПЕНСИРУЮЩИЕ
МУФТЫ
Вторая группа соединительных муфт — это упругие
муфты, обеспечивающие соединение валов и передачу
вращающего момента между ними с помощью упругого
элемента (рис. 107).
Упругая муфта состоит из двух закрепленных на
концах валов звеньев 1 и 2 (схема 8.1) и упругого эле-
мента 3, установленного между звеньями. Упругий эле-
мент выполняют в виде гибкого диска 3, торовой резино-
вой оболочки — выпуклой или вогнутой (схема 8.2), рези-
новых втулок (схема 8.3), тангенциально расположенных
винтовых пружин (схема 8.4), стальной змеевидной пру-
жины (схема 8.11), эластичных вкладышей (схемы 8.5 и
8.6), работающих на сжатие, изгиб и др.
Упругая муфта, кроме компенсации погрешностей
установки валов, позволяет смягчать ударные нагрузки и
демпфировать колебания. Муфта со змеевидной пружи-
ной (схема 8.11) и муфта с телескопическими пружин-
ными элементами (схема 8.7) характеризуются нелиней-
ной зависимостью между вращающим моментом и углом
относительного поворота валов. Благодаря этому можно
избегать резонансных колебаний. В частности, при при-
ближении частоты внешнего воздействия на систему к
какой-либо частоте ее собственных свободных колебаний
не происходит резкого возрастания амплитуды колеба-
ний, так как с ростом амплитуды меняется жесткость
системы и, соответственно, частота собственных [сво-
бодных] колебаний. На схемах 8.7а, 8.8а, 8.9а приведены
примеры нелинейных упругих элементов, используемые
в муфтах и обеспечивающие нелинейную зависимость
между передаваемой нагрузкой (Т- вращающий момент,
F - сила) и относительным угловым перемещением cpi_2
звеньев 1 и 2.
268
СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ) МУФТЫ ВАЛОВ
УПРУГИЕ КОМПЕНСИРУЮЩИЕ МУФТЫ
269
В современных карданных передачах вместо одного
из универсальных шарниров используют упругую муфту
по схеме 8.16. В ней в качестве промежуточного звена 3
устанавливают эластичную оболочку в виде скрепленных
между собой тангенциально расположенных трубчатых
элементов (см. схему 8.1а). Такая муфта обладает хоро-
шими динамическими свойствами и возможностью ком-
пенсировать перекосы и осевые перемещения звеньев 1 и
2. Поскольку звено 2 в карданной передаче не имеет опор
и, по существу, "висит" на соединенных муфтах, то в
упругой муфте обычно предусматривают центрирование,
как это показано, например, на схеме 8.12. При наличии
опор у звеньев 1 и 2 дополнительное центрирование не-
допустимо.
Резиновые элементы в муфте по схеме 8.16 хорошо
работают только на сжатие, а в сплошной оболочке от-
дельные элементы могут быть подвержены растяжению.
Чтобы исключить нежелательные явления при растяже-
нии, а также уменьшить деформативность при включе-
нии привода и при реверсировании момента, элементы
оболочки перед сборкой подвергают предварительному
сжатию (в тангенциальном направлении). В этом случае
отсутствует "пологий" участок упругой характеристики,
при реверсировании момента близкий по своим послед-
ствиям к свободному ["мертвому"] ходу и приводящий к
неблагоприятному динамическому нагружению и "раз-
балтыванию" соединений.
В схеме 8.9а змеевидная пружина при увеличении
сил F\ и Fi все в большей мере прилегает к зубьям звень-
ев 7 и 2 и жесткость муфты также увеличивается.
В схеме 8.7 между звеньями муфты ("плавающего"
центрального колеса планетарной передачи) установлен
пакет упругих телескопических незамкнутых колец.
С увеличением моментов Т} и Тг (см. схему 10.2а на рис. 60)
пакет колец сжимается, звенья 1 и 2 перемещаются одно
относительно другого, поверхности соседних колец со-
прикасаются в направлении действия сил Fx и F2, внут-
реннее кольцо огибает вкладыш, а внешнее кольцо при-
легает к поверхностям соединенных звеньев 1 и 2. С уве-
личением нагрузки увеличивается площадь прилегания и
соответственно увеличивается жесткость (см. на рис. 60
кривую "увеличение нагрузки"). При уменьшении на-
грузки и, соответственно, при изменении направления
относительного перемещения звеньев меняется направ-
ление сил трения между соприкасающимися элементами
и характеристика системы будет иной (см. на рис. 60
кривую "уменьшение нагрузки"). Площадь между кри-
выми соответствует работе сил трения. От ее размера
зависят демпфирующие свойства системы. При знакопе-
ременной нагрузке приведенная зависимость имеет вид
петли гистерезиса. Площадь между кривыми характери-
зует энергию (трения), которая преобразуется в тепло и
демпфирует колебания.
Для увеличения крутильной жесткости и величины
передаваемого момента используют решения нелинейно-
го упругого элемента, работающего на растяжение. Уп-
ругий элемент на схеме 8.8 имеет петли (обычно их
шесть), каждая из которых охватывает выступы входного
1 и выходного 2 звеньев. Петли работают только на рас-
тяжение, как показано на схеме 8.8 (Fi и F2 - силы со
стороны соответствующих звеньев 1 и 2, 7] и Tj — момен-
ты на этих звеньях). В связи с этим при одном направле-
нии момента работают три петли, при реверсировании
момента - другие три петли. Характеристика - зависи-
мость угла относительного закручивания <pi.2 от момента
Т\ - для такой конструкции показана на рис. 60 (схе-
ма 10.16): для муфты с вискозными петлями и для муфты
с нейлоновыми петлями. По абсолютному значению <pi.2
не зависит от направления моментов. Упругие элементы
обычно закрывают резиновым кожухом (на схеме 8.8
показан штриховыми линиями).
На схеме 8.8а показано решение упругого элемента,
обеспечивающее еще в большей мере нелинейность ха-
рактеристики муфты (см. параграф 6.7) и различную же-
сткость при реверсировании момента. Достигается это за
счет встраивания упругих эксцентриковых втулок из ре-
зины в промежуточный диск. Одна из втулок соединена
со звеном 7, другая - со звеном 2. Эксцентричность вту-
лок уже придает различие характера жесткости из-за ве-
личины сжимаемого слоя резины при изменении направ-
ления нагрузки. Для увеличения жесткости в одном из
направлений в упругие втулки установлены жесткие сег-
менты, охваченные петлей из нейлона. При этом получа-
ется "жесткая" характеристика соединения "петля +
втулка" (см. на рис. 60 схему 10.16) при растяжении пет-
ли и "мягкая" характеристика при изменении направле-
ния сил [штриховая кривая при отрицательном значении
<Р1-2 (сближение осей 7 и 2) и при уменьшении или отсут-
ствии натяжения петли].
На схеме 8.10 упругий элемент выполнен в виде
эластичной крестообразной пластины, у которой проти-
волежащие концы загнуты и соединены со звеном 1.
Другие концы соединены со звеном 2. Конкретное ис-
полнение по схеме 8.12 позволяет передавать вращаю-
щий момент при перекосах осей соединяемых валов до
15° и несоосности до 0,1 от ее диаметрального размера.
Кроме того, допускаются перемещения вдоль осей со-
единяемых валов. Применяют такую муфту при сравни-
тельно небольшой мощности привода.
На схеме 8.11 показаны две одинаковые муфты А и
С, встроенные в тонкостенный вал 1, выполненный из
алюминиевого сплава. Решение муфты очень простое:
резиновый слой привулканизирован к деталям 7 и 2. Та-
кой вал используют в трансмиссии автомобиля.
На схеме 8.12 приведен пример конструктивного
решения упругой муфты с эксцентриковыми втулками,
встроенными в промежуточный диск. Использование
муфты при высокой частоте вращения потребовало вве-
дения центрирования соединяемых деталей. Шип вала,
на котором установлено звено 1, взаимодействует с упру-
гой центрирующей втулкой из полимерного материала.
При таком исполнении эластичные элементы муфты раз-
гружены от радиальных нагрузок (силы тяжести и цен-
тробежных сил). Для снижения и демпфирования кру-
тильных колебаний использован специальный гаситель в
виде обода, присоединенного к звену 2 посредством не-
линейного упругого элемента.
270
СОЕДИНИТЕЛЬНЫЕ (КОМПЕНСИРУЮЩИЕ) МУФТЫ ВАЛОВ
108. УПРУГО-ИНЕРЦИОННЫЕ СОЕДИНИТЕЛЬНЫЕ МУФТЫ
9.1
Инерционный
элемент
Упругая
втулка
2
Ч>2
9.2
Инерционный
элемент
Гибкое кольцо
9.3 | Инерционный
элемент
Гибкое
кольцо
Маятник
| 9,41
Гибкое /
кольцо [
Промежуточное
1 (эксцентрик) звено
Мембрана 1
Мембрана 2
Емкость
1 и2-
Инерционный
элемент (ролик)
Гибкая
балка
Ч>2
Среда 2
(Р|
Герметичная
стенка
1 (волнообразователь
9.6
Инерционный
элемент
Сателлит Пружина
2(центральное
зубчатое колесо)
1 (водило) \
1 (водило)
2 (волно-
обраэователь)
Гибкое
кольцо
соединенные
звенья
Среда 1
Гибкая
оболочка
На схемах 8.13 и 8.14 показаны упругие муфты,
предназначенные для передачи движения между валами
при сравнительно больших перекосах осей, причем их
крутильная жесткость практически не ниже, чем у
сплошного вала за счет выбора размеров сечений упру-
гих элементов. Звенья 7 и 2 закреплены на валах 1 и 2
посредством фрикционных соединений. Для этого в схе-
ме 8.13 звенья 1 и 2 имеют продольные прорези, а части
звеньев стянуты винтами. Упругий элемент в виде пру-
жины кручения неподвижно соединен со звеньями 1 и 2
или выполнен с ними как единое целое. В последнем
случае он образован винтовой прорезью в сплошной
стальной втулке.
В схеме 8.14 звено 1 имеет продольные прорези
(звено выполнено в виде цанги) и прижимается к валу 1 с
помощью хомута 1. Так же выполнено звено 2, стянутое
хомутом 2. Сильфон к звеньям 7 и 2 крепится с помощью
отгибных лепестков, через которые передается вращаю-
щий момент.
Разновидностью упругой муфты является упруго-
инерционная муфта (рис. 108), которая наряду с уже
изложенными свойствами предназначена для получения
характеристики, зависимой от частоты вращения и обу-
словленной инерционными нагрузками на звенья и
упругостью звеньев.
Упруго-инерционная муфта содержит вращающиеся
инерционные элементы в виде сосредоточенных масс
и/или распределенных масс. С увеличением частоты
вращения ведущего звена 1 увеличивается сила инерции,
действующая на указанные элементы, и вследствие этого
повышается жесткость соединения звеньев 1 и 2. Звенья
7 и 2 поворачиваются cooi ветственно на углы <pi и <р2.
При динамическом равновесии эти углы одинаковы.
При перегрузках звено 2 отстает от звена 7, звенья расхо-
дятся до определенного предела, а в схемах 9.6\ 9.7 и 9.9
могут проворачиваться друг относительно друга. Упруго-
инерционные муфты в основном имеют нелинейную ди-
намическую характеристику — зависимость передаваемо-
го момента от относительного положения звеньев 7 и 2.
Упруго-инерционные муфты позволяют предохра-
нять механизм от перегрузок, дают возможность полу-
чать заданные переходные процессы (разгона и тормо-
жения), а кроме того, позволяют компенсировать несоос-
ность и перекосы соединяемых валов.
Предохранение от перегрузок заключается либо в
замедлении их нарастания, либо в отключении механиз-
ма (относительном проворачивании звеньев).
В схеме 9.1 четырехзвенный шарнирный механизм
имеет упругий шарнир в виде упругой резиновой втулкд
и сосредоточенную в шарнире массу инерционного эле-
мента. Выполняют механизм симметричным или с раз-
ной длиной звеньев. В зависимости от этого получают
различные динамические характеристики. В схеме 9.1
звенья 7 и 2 соединены гибким кольцом, на котором
имеются сосредоточенные массы инерционных элемен-
тов. При вращении кольцо принимает эллиптическун
форму. Равновесие определяется силами инерции, упру-
гостью кольца и величиной вращающего момента.
В схеме 9.3 инерционные элементы шарнирно со-
единены со звеном 2 и посредством гибкого кольца - со
звеном 1. При вращении звена 7 по часовой стрелке
кольцо изменяет свою форму, а инерционные элементь’
стремятся приблизиться к оси вращения, в то время как
центробежные силы стремятся удалить их от центра
Расположение инерционных элементов и форма кольг^
стабилизируются при динамическом равновесии.
В схеме 9.4 при перегрузках промежуточное звен»
(эксцентриковая втулка) может провернуться относи-
тельно звена (эксцентрика) вследствие радиальной по-
датливости гибкого кольца.
В схеме 9.5 между звеньями 2 и 7 установлены ем-
кости с жидкостью. Эти емкости имеют упругие диа-
фрагмы [мембраны] 7 и 2. При вращении звена 2 центро-
бежная сила жидкости приводит к удалению стенки 2 от
УПРУГИЕ КОМПЕНСИРУЮЩИЕ МУФТЫ
271
оси вращения и дополнительному воздействию через
мембрану 1 на звено I. Перемещения и положения мем-
бран 1 и 2 зависят от вращающих моментов на звеньях 1
и 2 и от частоты вращения.
В схеме 9.6 звено 1 (водило) взаимодействует со
звеном 2 через пружины и зубчатые пары, содержащие
сателлит и центральное колесо. Сателлит имеет сосредо-
точенную массу — инерционный элемент. Такая муфта
при перегрузках может обеспечивать и относительный
поворот звеньев 7 и 2. При этом сателлит также вращает-
ся, а ось пружины совершает качательное движение от-
носительно звена 1. При установившемся режиме отно-
сительное положение звеньев 1 и 2 обусловлено равенст-
вом инерционных сил силам упругости и величиной
вращающего момента.
В схеме 9.7 ролики прижимаются к профилирован-
ной поверхности звена 2 благодаря упругости консоль-
ных пружин - гибких балок — и силам инерции при вра-
щении звена 1. Профиль поверхности звена 2 позволяет
получать заданную характеристику муфты. При перегруз-
ках муфта позволяет разобщать кинематическую цепь.
В схеме 9.8 гибкое кольцо установлено между
звеньями 1 и 2. При отсутствии нагрузок на звенья 1 и 2
гибкое кольцо имеет эллиптическую форму, при нагру-
жении звеньев 1 и 2 - асимметричную форму.
В заключение приведу еще один вариант решения
упруго-инерционной муфты — это волновая муфта на
схеме 9.9. Конструктивно она представляет собой про-
странственное развитие плоского решения, представлен-
ного на схеме 9.8.
Волновая муфта содержит гибкое звено в виде ци-
линдрической или иной оболочки и обеспечивает пере-
дачу движения благодаря его деформированию без пре-
образования частоты вращения.
Волновую муфту применяют, в частности, для пере-
дачи движения между валами 1 и 2, через герметичную
стенку, разделяющую две среды 1 и 2. Гибкая оболочка
деформируется ведущим 1 и ведомым 2 волнообразо-
вателями с некоторым отставанием по фазе вращения
звена 2. Муфта обычно обладает невысокой крутильной
жесткостью, позволяет компенсировать перекосы и не-
большие несоосности соединенных валов. Если обеспе-
чить свободу радиального перемещения роликам волно-
образователей, то помимо упомянутых уникальных
свойств волновая муфта может иметь и свойства, прису-
щие схемам 9.2, 9.3 и 9.7.
Глава 12. СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
12.1. ФУНКЦИОНАЛЬНЫЕ ЗАДАЧИ,
ПРИНЦИПЫ КОНСТРУИРОВАНИЯ
Сцепные муфты и тормоза распространены не ме-
нее широко, чем соединительные муфты, о которых речь
шла в предыдущей главе.
Наряду с некоторыми функциями соединительных
муфт сцепные муфты/тормоза обеспечивают решение
следующих функциональных задач.
1. Управляемое соединение или разъединение
звеньев кинематической цепи (муфта и тормоз выпол-
няют одну и ту же задачу, но в случае с муфтой оба звена
вращаются и после соединения скорости звеньев вырав-
ниваются, а в случае с тормозом одно из звеньев непод-
вижно, и после торможения скорости звеньев также оди-
наковы, но еще и равны нулю).
Тормоз обеспечивает только уменьшение скорости
подвижного звена, а муфта — увеличение скорости при-
соединяемого ведомого звена при уменьшении или неиз-
менной скорости ведущего звена. Это обстоятельство
обусловливает некоторое различие динамических про-
цессов, а кроме того в тормозе конструктивно более про-
сто решается подвод энергии к исполнительному устрой-
ству, так как его размещают обычно на неподвижном
звене (корпусе машины).
Функцию тормоза может выполнять сцепная муфта,
если ее установить с возможностью блокировки относи-
тельно подвижных звеньев кинематической пары или
любых двух относительно подвижных звеньев механиз-
ма, входящих в различные кинематические пары (при
наличии нескольких степеней свободы одна такая муфта
уменьшает их число на единицу).
Функцию сцепной муфты может выполнять тормоз
в механизмах с двумя и более степенями свободы - ки-
нематическая цепь замыкается при затормаживании од-
ного из входных звеньев многоскоростной планетарной
передачи (см. параграф 15.3).
2. Самоуправляемое соединение или разъедине-
ние звеньев кинематической цепи в зависимости от:
• направления внешних моментов, приложенных к
звеньям (при совпадении направлений муфта свободного
хода разъединяет звенья, при различном направлении
муфта соединяет звенья - такого типа муфты называют
еще обгонными муфтами, хотя увязка с направлениями и
величинами скоростей является лишь следствием, а оп-
ределяющим является соотношение направлений нагруз-
ки, обеспечивающее равновесное состояние муфты);
• величины угловой скорости одного из звеньев (при
достижении определенной скорости ведущего звена оно
соединяется с ведомым звеном);
• рассогласования скоростей разъединенных звеньев
(вместо межосевого дифференциала в полноприводных
автомобилях устанавливают сцепную муфту, которая
срабатывает в момент пробуксовки приводных колес и
автоматически подсоединяет к приводу вторую пару колес);
• величины вращающего момента (предохранитель-
ные муфты разъединяют кинематическую цепь при дос-
тижении моментов предельно допустимой величины или
передают только момент, ограниченный определенным
пределом при сохранении взаимодействия звеньев);
• заданного времени или характера нарастания вра-
щающего момента соединяемых звеньев (пусковые муф-
ты позволяют плавно подключать и/или отключать по-
требитель энергии от ее источника; противобуксовочное
сцепление автомобиля в случае резкого отпускания педа-
ли сцепления проскальзывает и плавно подключает к
двигателю трансмиссию, исключая тем самым пробук-
совку приводных колес, при этом противобуксовочная
система в целом предусматривает также изменение вра-
щающего момента двигателя).
К этому следует добавить, что все функции по п. 2
можно осуществить муфтами по п. 1, если использовать
для этой цели специальную (современную) систем}
управления. Особенность самоуправляемых муфт по
сравнению с автоматически управляемыми муфтами за-
ключается в механической природе управляющих уст-
ройств, которые обычно совмещены с рабочими элемен-
тами муфты. Пока в самых современных машинах пред-
почтение отдают простым самоуправляемым муфтам.
Далее мы будем освещать только механические ре-
шения и лишь вкратце коснемся элементов управления,
когда речь пойдет о системах муфт или тормозов. Зара-
нее оговорим также, что вопросы конструирования гид-
родинамических муфт и трансформаторов, а также
электромагнитных (в том числе порошковых)
муфт/тормозов скольжения, которые имеют отношение
к данной теме, в рамках данной книги не будут рассмот-
рены.
Общие принципы конструирования по отношению к
сцепным муфтам могут быть интерпретированы сле-
дующим образом:
1. Отсутствие избыточных связей в самой муфте и
в системе, в которой она применена, предусматривает, в
частности, отсутствие дополнительного центрирования
соединяемых звеньев, если муфта/тормоз может обеспе-
чить или позволить "плавание" (самоустанавливаемость
звеньев - см., например, на рис. 37 схему 3.4), или если
сама по себе муфта/тормоз такое центрирование обеспе-
чивает при ее нагружении. Этот тормоз предусматривает
также статическую определимость рабочих сопряжений,
прижатие дисков равномерно по всей плоскости и др.
2. Разделение функций передачи вращающего мо-
мента и восприятия силы тяжести и/или центробежных
сил. Например, не стоит ориентироваться на восприятие
упомянутых сил за счет трения, а лучше предусмотреть
для этой цели дополнительное центрирование.
3. Многопоточность передачи энергии и равно-
мерность ее распределения между отдельными сопряже-
КУЛАЧКОВЫЕ И ЗУБЧАТЫЕ СЦЕПНЫЕ МУФТЫ
273
ниями (в этом плане характерно предпочтение многодис-
ковым муфтам, схемы 5.2 ... 5.8, на рис. 111.1 схемы
5.10, 5.11 на рис. 112 по сравнению с барабанными, схе-
мы 2.1... 2.2 и 4.1 на рис. 110.1).
4. Согласованный с выполняемой функцией вы-
бор угла давления (обеспечение самоторможения при
плавном изменении угла давления в муфтах свободного
хода, исключающем ударные нагрузки при реверсирова-
нии вращающего момента; выбор формы кулачков или
зубьев, обеспечивающей безударный вход в зацепление и
возможность саморасцепления, см. схемы 1.1 и 1.2а на
рис. 109.
5. Кратчайшее замыкание сил (зажатие диска ко-
лодками с обеих сторон и расположение колодок в скобе,
охватывающей диск - см., например, дисковый тормоз
автомобиля - см. схемы 3.4; 3.5; 4.2 на рис. 110.2.
6. Сбалансированное соотношение работы сил
трения и отводимого тепла (например, использование в
тормозах вентилируемого диска — со сквозными пусто-
тами и перегородками, обеспечивающими перемещение
потоков воздуха при вращении диска (см. схемы 3.5а на
рис. 110.2 и 5.12а на рис. 112); использование смазыва-
ния трущихся поверхностей, обеспечивающего также
стабильность сил трения и удаление продуктов износа
фрикционного материала - см. схему 5.5 на рис. 111.1).
7. Согласованное соотношение нагрузок и жест-
костей звеньев (встраивание в звенья муфты упругих и
демпфирующих элементов - см. схемы 5.7 на рис. 111.1 и
5.76 на рис. 111.2).
8. Синхронное одновременное и гарантированное
разъединение трущихся пар многодисковых муфт дости-
гают за счет встроенных отжимных пружин, специальных
раздвигающих кулачков (схема 5.8 на рис. 111.1), а также
при использовании клапанов быстрого растормаживания
(схема 5.2) на рис. 111.1 и др.
9. Согласованное переключение с одного режима
на другой (размыкание одной цепи и одновременное
замыкание другой цепи — без "разрыва энергетического
потока") достигают с помощью дифференциальных уст-
ройств, введенных в систему управления.
10. Последовательное согласованное по времени
или выборочное включение муфт/тормозов в зависи-
мости от внешних условий осуществляют с помощью
классических систем "датчик — блок управления —
исполнительный привод — обратная связь".
И. Постоянство характеристики включения
фрикционной муфты/тормоза по мере изнашивания
трущихся элементов поддерживается специальной авто-
матической регулировкой зазора (схемы 2.6а, 3.1 на
рис. 110.1; 110.2).
12. Дублирующий, резервный, ручной, аварий-
ный привод включения/выключения муфты/тормоза
присоединяют через дифференциальный механизм, обес-
печивающий автономность его работы по отношению к
рабочему приводу (схемы 4.1 и 4.2 на рис. 110.1; 110.2).
13. Безопасность ряда систем обеспечивают путем
использования муфт/тормозов, замыкаемых за счет упру-
гости пружин или сил тяжести грузов и размыкаемых
специальным приводом. Отключение привода приводит к
автоматическому замыканию муфты/тормоза (схемы 2.2;
2.3; 2.7нарис. 110.1; схемы 5.10; 5.12 на рис. 112).
Данный перечень далеко не исчерпывает все прин-
ципы и приемы конструирования. По мере рассмотрения
приведенных ниже примеров они будут постепенно
пополняться.
Все сцепные муфты/тормоза взаимодействуют либо
за счет давления элементов (схемы 1.1 ... 1.4 на рис. 109),
либо за счет трения (см. рис. 110.1 ... 112), или в зависи-
мости от режима (за счет трения при включении и за счет
давления при рабочем режиме - схема 1.4 на рис. 109).
12.2. КУЛАЧКОВЫЕ И ЗУБЧАТЫЕ
СЦЕПНЫЕ МУФТЫ
Кулачковые и зубчатые муфты (рис. 109) приме-
няют все реже, при сравнительно небольших относи-
тельных скоростях вращения звеньев. Их достоинства —
простота и высокая нагрузочная способность. При конст-
руировании стремятся использовать элементы с мини-
мальными углами давления.
На схеме 1.1 — кулачковая сцепная муфта, имею-
щая взаимодействующие выступы на соединяемых дета-
лях. Обычно выступы выполняют на торцовых поверхно-
стях деталей и вводят их во взаимодействие осевым от-
носительным перемещением деталей. Для предотвраще-
ния самопроизвольного выключения рабочие участки
выступов делают наклонными к направлению передачи
силы. Для облегчения включения кулачки выполняют со
скосами.
На схеме 1.2 — зубчатая сцепная муфта, выполнен-
ная в виде зубчатой пары внутреннего зацепления с оди-
наковым числом зубьев обоих колес так, что создается
возможность относительного осевого перемещения
звеньев 1 и 2. Для облегчения включения зубья на коле-
сах выполняют выступающими через один или несколько
зубьев таким образом, что вероятность упора выступаю-
щих торцов зубьев мала (схема 1.2а). При первоначаль-
ном осевом перемещении ведущее звено увлекает ведо-
мое, после чего включают муфту. Зубчатые муфты при-
меняют, в частности, в многоскоростных передачах, пе-
реключаемых при небольших относительных скоростях
или при остановках (см. параграф 15.2).
На схеме 1.3 — муфта с торцовым зацеплением
зубчатых колец 1 и 2. Профиль зубьев треугольный.
Функциональная особенность на данной схеме — самовы-
ключение муфты (разъединение зубчатого зацепления)
при отсутствии силового воздействия со стороны поршня
гидроцилиндра. Конструктивная особенность — размеще-
ние управляющего элемента гидравлической полости в
неподвижном корпусе. Силовое осевое замыкание осу-
ществляется через следующую цепь звеньев: поршень-
подшипник 2 - кольцо 1 - кольцо 2 — звено 2 - подшип-
ник 1 - корпус. Возможность осевого перемещения коль-
ца 1 относительно звена / обусловлена наличием соеди-
нительной муфты с упругой промежуточной пластиной.
Упругость пластины способствует размыканию зубчатой
муфты наряду с осевой реакцией зубчатого зацепления.
274
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
109. КУЛАЧКОВЫЕ И ЗУБЧАТЫЕ СЦЕПНЫЕ (УПРАВЛЯЕМЫЕ)
В ТОМ ЧИСЛЕ МУФТЫ С ФРИКЦИОННЫМ
СИНХРОНИЗАТОРОМ СКОРОСТИ (ПРИ ВКЛЮЧЕНИИ)
Зубчатое
колесо 1
Венец Г Выступ 1
Зуб кольца 1 (на кольце1)
Выступ Г
(на кольце!)
'477777777777777^-
^7777777777/777,5^
а>
Е-эуб
р ступицы
--Ступица
муфты
I ^Зуб
Т „ втулки
Ту-Сухарь
га
'77777777/7777М'
•77777774ЫЯШШК№
1.4в
Зуб Зуб
кольца втулки
1.4г
Венец Г
I Зуб
\ кольца
На схеме 1.4 приведено одно из наиболее распро-
страненных решений зубчатой муфты, которая от схе-
мы 1.2 отличается наличием фрикционного синхрони-
затора угловых скоростей.
Синхронизатор служит для безударного и бесшум-
ного переключения сцепной муфты с одного режима на
другой. Применяют его обычно в коробках передач. Дей-
ствие его основано на предварительном уравнивании
угловых скоростей соединяемых деталей.
Зубчатые колеса 1 и 2 вращаются с разными скоро-
стями. С колесом 1 неподвижно соединен (выполнен как
единое целое) шлицевой венец Г, а с колесом 2 - шлице-
вой венец 2'. Ступица муфты, имеющая на наружной по-
верхности шлицы, неподвижно соединена с валом. На
ней установлена скользящая втулка с внутренними зубь-
ями. С помощью вилки переключения муфту можно
сдвинуть влево или вправо и соединить тем самым вал с
зубчатым колесом 1 или 2. В нейтральном положении
скользящая втулка удерживается шариком фиксатора,
поджатым пружиной и установленным в сухаре.
На схеме 1.4 показано начало включения муфты, на
схемах 1.4а ... 1.4в - процесс включения, на схемах 1.4г,
1.4д - муфта во включенном состоянии.
При перемещении втулки под действием силы F
шарик вместе с сухарем прижимает кольцо 1 к зубчатому
колесу 1. Кольца 1 и 2 имеют конусные поверхности,
ФРИКЦИОННЫЕ МУФТЫ И ТОРМОЗА
275
которыми они в процессе включения взаимодействуют за
счет трения с поверхностями зубчатых колес 7 и 2 соот-
ветственно. Кольца имеют на наружной поверхности зу-
бья и взаимодействуют со ступицей через выступы.
В начальный момент включения зубья скользящей
втулки упираются в зубья кольца 1 (см. схему 1.4в). По-
сле того как скорости звеньев за счет фрикционного
взаимодействия будут выравнены, сила трения фрикци-
онных конусов кольца 1 и колеса 1 исчезнет, вследствие
чего скошенные поверхности зубьев не будут прижи-
маться друг к другу. Сухарь, размешенный в пазу ступи-
цы, переместится в направлении стрелки (см. схему 1.46)
на величину А относительно выступа Г на кольце. При
этом зубья втулки окажутся напротив впадин между
зубьями венца Г, и втулка, вытолкнув шарик фиксатора
из паза, переместится в крайнее левое положение, а
кольцо 7 с элементами фиксатора вернется в нейтральное
положение (см. схему 1.4д). Зубья втулки будут контак-
тировать с зубьями венца Г, а вращающий момент через
них будет передаваться валу от зубчатого колеса 7 через
скользящую втулку и ступицу. Под действием вращаю-
щего момента зубья втулки своими выемками прижима-
ются к зубьям венца 1', благодаря чему предотвращается
самовыключение. Для выключения муфты нужно прило-
жить необходимую силу к втулке, чтобы вывести из за-
цепления зубья втулки и венца 1'. Соединение зубчатого
колеса 2 с валом осуществляется аналогично при пере-
мещении втулки вправо.
12.3. ФРИКЦИОННЫЕ МУФТЫ И
ТОРМОЗА
По существу, муфты с синхронизатором - комбини-
рованное решение фрикционной и зубчатой муфт. Тен-
денции совершенствования сцепных муфт/тормозов сви-
детельствуют о преимущественном использовании в них
только фрикционного взаимодействия. Например, в
автоматических коробках передач автомобиля применя-
ют фрикционные муфты в дополнение к гидротранс-
форматору. Удивительно, но факт, что в грузоподъемных
машинах применяют только фрикционные тормоза.
Более того, если раньше их использовали в дополнение к
самотормозящим передачам, то сейчас такое требование
отсутствует, поскольку современные тормоза сами по
себе обеспечивают необходимую безопасность.
По геометрии рабочих элементов фрикционные
муфты и тормоза выполняют колодочными барабан-
ными (рис. 110.1; схемы 2.1 ... 2.8, 4.1), колодочными
дисковыми (схемы 3.1 ... 4.2), многодисковыми (рис. 111.1
и рис. 112, схемы 5.1 ... 5.70 и 5.7).
Имеются отдельные примеры использования лен-
точных муфт/ тормозов (схемы 2.9 и 2.10), а также ко-
нусных муфт/тормозов (схемы 5.12 и 5.12a, рис. 112).
Колодки прижимают к барабану (схема 2.1) или к
диску (схемы 3.3 ... 3.5) симметрично с обеих сторон си-
лой F„!2, в результате обеспечивается за счет трения пе-
редача вращающего момента Т = f F„ г, где f — коэффи-
циент трения покоя. Современные фрикционные мате-
риалы по стальному барабану или диску обычно могут
иметь fo < 0,35. Проблема, которую решают при выборе
материала, конструкции и размеров — это обеспечение
стабильности фрикционных свойств при изнашивании и
нагреве. Важно не только преобразовать энергию отно-
сительного движения в энергию трения, но и своевре-
менно обеспечить рассеяние тепловой энергии, чтобы
муфту/тормоз подготовить к следующему циклу включе-
ния. При этом температура нагрева за каждый цикл не
должна превышать допустимую для конкретных мате-
риалов. Пары трения следует надежно защищать от гря-
зи, смазочного материала, агрессивных сред. Для нор-
мального функционирования муфты могут быть одина-
ково вредны и абразивные частицы, и жидкие или вязкие
среды, так как они нарушают стабильность свойств мате-
риалов, если наличие смазочного материала не было
предусмотрено заранее. Наиболее стабильную работу
муфт/тормозов обеспечивают в герметичном пространст-
ве при использовании жидкого смазочного материала
(схемы 5.2, 5.5, 5.7), хотя при этом коэффициент трения
существенно ниже, но лучше решаются вопросы охлаж-
дения, очистки трущихся поверхностей от продуктов
износа и т.д.
Конструирование фрикционных муфт/тормозов для
использования в вакууме имеет свои особенности, на
которых мы не будем останавливаться.
Важнейшими из областей применения фрикционных
тормозов являются грузоподъемные и транспортные ма-
шины.
Грузовой тормоз (тормоз подъемной машины) ус-
танавливают между рамой лебедки и ее входным валом
(валом двигателя) или непосредственно барабаном. Ме-
сто расположения тормоза определяет его размеры. На
входном валу тормоз получается меньших размеров, так
как меньше тормозной момент, хотя начальная скорость
скольжения в паре трения выше. Требование для боль-
шей безопасности устанавливать тормоз в конце кинема-
тической цепи привода лебедки в настоящее время от-
сутствует. В транспортных машинах пока тормоза (за
исключением стояночного) устанавливают в основном на
выходных звеньях. Особенность грузового тормоза —
включение (срабатывание) при отключении системы пи-
тания. Такой тормоз называют замкнутым в отличие от
замыкаемого (разомкнутого) тормоза, используемого,
например, в транспортных машинах и тяговых приводах.
Выключают тормоз (отводят от шкива ленту или колод-
ки) при включении системы питания привода. Вторая
особенность грузового тормоза — отсутствие реверсиро-
вания тормозного момента при реверсировании враще-
ния барабана лебедки. Разновидность грузового тормоза —
самоуправляемый тормоз.
Управление тормозом осуществляется с помощью
электромагнита, гидроцилиндра, центробежного толка-
теля и т.п. устройств.
Ленту или колодки замыкают обычно пружинами.
На схеме 2.2 колодки шарнирно соединены с коромысла-
ми АВ и RS. Коромысла соединены между собой пружи-
ной и звеньями KL и LMN. Регулируют пружину винто-
вой парой. Шарнирные соединения звеньев дают воз-
276
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
ФРИКЦИОННЫЕ МУФТЫ И ТОРМОЗА
277
можность колодкам самоустанавливаться в зависимости
от положения оси тормозного барабана. Управляют тор-
мозом от гидроцилиндра через пространственный меха-
низм (см. кинематическую цепь UVTNM). Воздействуя
на рычаг NML, раздвигают колодки.
На схеме 2.3 электромагнит установлен между ко-
ромыслами RS и PS. При включении электромагнита ко-
ромысло PS притягивается к коромыслу RS, через толка-
тель воздействует на пружину и раздвигает колодки 1 и 2.
Рычажные механизмы на схемах 2.2, 2.3 и 2.7 позво-
ляют прижимать колодки в двух точках. Нагрузка по
длине колодки распределяется неравномерно и неравно-
мерен ее износ. Увеличение числа колодок по периметру
требует иной системы их прижатия к барабану/шкиву.
Примеры решений с большим числом колодок на основе
пневматической камеры представлены на схемах 2.4 и
2.5. В отличие от схем 2.2 и 2.3 они представляют ра-
зомкнутые исполнения муфт/тормозов.
В колодочной шинно-пневматической муфте ко-
лодки неподвижно присоединены к шине. Шина привул-
канизирована к корпусу. Стенки шины выполнены доста-
точно толстыми и обычно армированными, способными
передавать вращающий момент (в отличие от пневмока-
мерной муфты на схеме 2.3, где камера разгружена от
вращающего момента). При подаче воздуха по каналу
шина деформируется и прижимает колодки к барабану.
Возврат колодок осуществляется за счет упругости ши-
ны. Такая муфта компенсирует небольшие перекосы и
несоосности звеньев, обладает высокими демпфирую-
щими свойствами. Пневматический привод может обес-
печить плавное включение/выключение муфты.
В пневмокамерной муфте на схеме 2.3 вращающий
момент между колодками и ступицей передается с по-
мощью подвижного соединения звеньев. Камера при
этом не нагружена вращающим моментом. Ступица сце-
пляется с барабаном путем прижатия к нему колодок.
В резиновую камеру подается воздух. Камера расширя-
ется и перемещает колодки. Колодки перемещаются ра-
диально вдоль выступов ступицы. Возвращаются колод-
ки листовой пружиной. Решения по схемам 2.2 и 2.3
применяются как в барабанах, так и в дисковых муф-
тах/тормозах.
Колодочные тормоза наибольшее распространение
получили в железнодорожном транспорте. Пример со-
временного тормоза локомотива дан на схеме 2.7. Колод-
ки 1 и 2 прижимаются непосредственно к ободу колеса.
Для растормаживания устройства пневмоцилиндр втяги-
вает шток, который через рычаг и тягу воздействует на
шатун PRL пятизвенного шарнирного механизма
ABKLRS и колодки отводятся от обода колеса. Особен-
ность механизма такова, что колодки 7 и 2 постоянно
самоустанавливаются относительно обода при верти-
кальных перемещениях колеса и рамы тележки. Недоста-
ток заключается в том, что колодки в расторможенном
состоянии продолжают контактировать с ободом без
прижатия. В отличие от тормозов по схемам 2.6,2.8, 3.1 в
данной схеме не поддерживается гарантированный зазор
по периметру фрикционной пары. Чтобы это осущест-
вить, надо весь привод тормоза монтировать на подвиж-
ной опоре подвески колеса, что при существующей тра-
диционной конструкции (см. главу 7) осуществить очень
сложно, тем более, что требуется еще передавать реак-
тивный момент между относительно подвижной опорой
и рамой. Более совершенными представляются колесные
тормоза автотранспорта, а также тормоза шасси вертоле-
тов (см., например, схему 2.8) и самолетов (см. схему 5.11
на рис. 112).
На схеме 2.8 и 2.8а (конструктивное решение) ко-
лодки 7 и 2 прижимаются к барабану, имеющему внут-
реннюю рабочую поверхность, с помощью пневмоци-
линдров / и 2. Колодки связаны со ступицей, а барабан
неподвижно присоединен к ободу колеса. Каждая из ко-
лодок входит в состав четырехзвенного механизма (см.
кинематическую цепь DBAKLS или PRSNMA), выполняя
роль коромысла. Возвратное движение колодки осущест-
вляется пружиной. Зазор между колодкой и барабаном
регулируют, изменяя длину шатуна MN или KL. Кон-
троль величины зазора осуществляют через люк с помо-
щью щупа.
Ленточные муфты/тормоза еще совсем недавно
были широко распространены в грузоподъемных и зем-
леройных машинах. Сейчас области применения их су-
жаются и ограничиваются рамками маломощных приво-
дов, протяжных устройств и приборов. Тем не менее они
обладают такими качествами, как простота устройства,
плавность включения и выключения и т.п.
Приведем всего два примера исполнений:
• ленточного реверсивного тормоза схема 2.9;
• двухленточной симметричной муфты - схема 2.10.
Тормоз на схеме 2.9 обеспечивает торможение при
вращении шкива в любом направлении. Лента охватыва-
ет шкив. Управляют лентой с помощью рычага, который
установлен в открытых с одной стороны опорах А и В.
При направлении момента Т, показанном стрелкой, в вет-
вях ленты будут возникать силы F и F2, причем F > F2.
Поворачиваясь, рычаг движется вокруг т. А, нагру-
женной большей силой. Если изменить направление мо-
мента Т, то рычаг будет поворачиваться вокруг т. В.
На схеме 2.10 показана муфта с двумя симметрично
расположенными лентами 7 и 2. Один конец ленты со-
единен с входным (или выходным) звеном-каркасом тя-
гой 2. Обычно это конец, воспринимающий наибольшую
силу. Второй конец, воспринимающий меньшую силу,
через тягу 7 соединен с рычагом. Для включения муфты
рычаг поворачивают с помощью пневмоцилиндра и при-
жимают ленту к внутренней поверхности шкива. Возни-
кающую при этом силу натяжения ветви ленты воспри-
нимает пружина. При отсутствии давления в пневмоци-
линдре рычаг повернется под действием пружины и от-
ведет ленту от шкива. Упоры служат в качестве ограни-
чителей отвода ленты от поверхности шкива. Симмет-
ричная схема расположения лент позволяет исключить
нагружение вала силами, возникающими при взаимодей-
ствии ленты и шкива. По структуре данное исполнение
аналогично схеме 2.8.
Как уже упоминалось выше, наличие равномерного
зазора между элементами фрикционной пары является
весьма важным обстоятельством. Но зазор должен быть
278
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
110.2. ФРИКЦИОННЫЕ ДИСКОВЫЕ (КОЛОДОЧНЫЕ) ТОРМОЗА
улиткообразные
каналы
Защитный
щиток
Гидроцилиндр
3.5а
Гидроцилиндр
Отверстия в диске
Вентилируемый
диск тормоза
□ ее
(й
С
о
©
э ©
о
о
Поток
воздуха
в канале
Ступица
колеса
Q
Суппорт
- корпус
с гидроцилиндрами
и тормозными
колодками
Направление г
движения
машины
4.2
Кулачок
пара толкатель 2
Винтовая
Пружина Толкатель 1
-ЕЕ
Рычаг
Диск
Поршень
-колодка! Вал
Гайка-ползун
Поршень-колодка 2
---Суппорт
Ступица
колеса
ОХЛАЖДЕНИЕ ТОРМОЗА
ГОНОЧНОГО АВТОМОБИЛЯ
ВИД СВЕРХУ
Верхний рычаг
подвески
Опора
колеса
Диск
тормоза
Рулевая
тяга
Лопатки
турбины
внутри диска
Воздухозаборник
для подачи воздуха
к суппорту
Датчик
температуры
Датчик
износа
диска
28 мм
Гайка
с самозатягивающейся
резьбой
/Ш
Воздухозаборник Ч-1
для подачи воздуха А
внутрь диска
СГ~-Ас
ФРИКЦИОННЫЕ МУФТЫ И ТОРМОЗА
279
не только равномерным по длине колодки, но по мере
изнашивания элементов не должен изменяться по вели-
чине. Для регулирования зазора применяют винтовые
пары, прокладки отдельно и в сочетании с пружинами,
клиновыми соединениями и др.
Для автоматического поддержания зазора посто-
янным используют фрикционные подвижные соедине-
ния. На схеме 2.6 показан регулятор в колодочном тор-
мозе, поддерживающий суммарный (с обеих сторон) за-
зор между колодками и барабаном тормоза А = Д] (зазор
Д/2 на схеме 2.6а между барабаном и колодкой 7) посто-
янным по мере изнашивания колодок.
Возврат колодки осуществляется пружиной 7 с на-
тяжением Ft. Перемещение колодки при этом ограничи-
вается пальцем, упирающимся в поверхность отверстия
втулки-винта. Втулка-винт удерживается относительно
неподвижной тяги за счет трения Ffi или Ед - она прижа-
та к тяге пружиной 2, регулируемой посредством гайки.
При перемещении колодки 7 в направлении силы F2
устраняется зазор 0,5Д с каждой из сторон; если Д > Дь
то под действием силы преодолевается сила трения меж-
ду втулкой и тягой и втулка перемещается вдоль паза
тяги в новое положение, при котором Д = Дь
Для такого функционирования выполняют условия
Fi <Ff-, F2> Ff+ Fi, где Ff=fF„ \f- коэффициент тре-
ния; Fn — сила прижатия, развиваемая пружиной 2.
На схеме 3.1 (рис. 110.2) - регулятор зазора диско-
вого колодочного тормоза. Поршень с тормозной ко-
лодкой прижимается к диску давлением жидкости. Шток,
прикрепленный к поршню, движется вместе с ним. Шток
имеет фрикционное соединение с гильзой благодаря ус-
тановке между ними с предварительным натягом упругой
разрезной втулки. Гильза поджата в осевом направлении
к неподвижной детали (стакану) пружиной. Если зазор
между колодкой и диском тормоза Д превышает зазор 8
между упорами гильзы и неподвижной детали, то после
сжатия пружины и выборки зазора 8 поршень продолжа-
ет двигаться, пока колодка не прижмется к диску. При
растормаживании поршень сдвинется вправо только на
величину 8, так как его шток соединен с гильзой и отсут-
ствуют причины для их относительного смещения.
В колодочном дисковом тормозе, как и в барабан-
ном, важно симметричное расположение колодок по раз-
ные стороны диска, при котором силы нормального дав-
ления взаимно уравновешиваются.
На схемах 3.2 ... 3.5 показаны четыре варианта
фрикционного тормоза. В первом, явно нерациональном
варианте диск прижат с одной стороны поршнем с ко-
лодкой, перемещаемым в гидроцилиндре. Сила прижатия
поршня к диску замыкается через рабочую жидкость в
цилиндре, цилиндр, корпус, подшипник и податливый
диск. Диск при этом деформируется, а подшипник за-
гружается в осевом направлении.
В схеме 3.3 в контуре замыкания сил исключены
подшипник и податливая часть диска. Диск не изгибает-
ся, а сжимается с обеих сторон, но при этом он должен
переместиться на величину зазора 8.
В схеме 3.4 поршни расположены с обеих сторон
диска, а контур замыкания сил следующий: колодка 1 —
рабочая жидкость в цилиндре — колодка 2 — диск. При
этом диск только сжимается, но не перемещается и не
деформируется. Несмотря на очевидные преимущества
такого решения, чаще применяют все же вариант с одним
гидроцилиндром и поршнем (см. схему 3.5). При этом
замыкание сил осуществляется через подвижную скобу, а
колодки 7 и 2 зажимают диск с обеих сторон. Скоба при
торможении самоустанавливается. Важно при этом по-
добрать пружины, отжимающие колодки такими, чтобы
при растормаживании зазоры с обеих сторон диска оста-
вались примерно одинаковыми.
На схеме 3.5а дан пример компоновки тормоза по
схеме 3.5 внутри обода колеса автомобиля. Диск выпол-
нен вентилируемым (с полостями внутри, обеспечиваю-
щими при вращении направленные потоки воздуха).
Проблеме охлаждения дисковых тормозов совре-
менных автомобилей уделяется большое внимание. Для
этой цели стремятся создать направленное движение воз-
духа как внутри диска (схема 3.56), так и направленный
подвод воздуха ко всем деталям тормоза и к центральной
(заборной) части диска (схема 3.5е).
На схеме 3.56 внутри диска, по существу, сформи-
рован центробежный вентилятор со спиральными кана-
лами. Наряду с охлаждением поток воздуха через отвер-
стия в диске уносит и продукты износа колодок тормоза.
На схеме 3.5в показаны воздухозаборники, позво-
ляющие на высокой скорости организовать эффективный
обдув тормоза гоночного автомобиля. Диск здесь выпол-
нен довольно широким, а внутри него размещены лопат-
ки центробежной турбины. Воздух из диска выходит с
большой скоростью через периферийные отверстия. Пре-
дусмотрено также измерение температуры и степени из-
носа диска.
При конструировании колесных тормозов автомо-
биля одной из решаемых задач является осуществление
дублируемого управления (основным рабочим тормо-
жением и удержанием машины на стоянке).
На схемах 4.1 (рис. 110.1) и 4.2 (рис. 110.2) - совме-
щенные тормоза с гидравлическим приводом от педали и
с ручным тросовым приводом.
Колодки 7 и 2 (схема 4.1), шарнирно соединенные с
основанием, приводятся в движение гидроцилиндром и
прижимаются к барабану — осуществляется торможение
во время движения машины. Возврат колодок выполня-
ется пружиной. Привод колодок во время стоянки осу-
ществляется натяжением троса в направлении F. При
этом поворачивается рычаг и воздействует в точке D на
колодку 2, а через толкатель в точке С - на колодку 1 и
прижимает их к барабану.
Диск тормоза (схема 4.2) установлен на вращаю-
щемся валу. С помощью гидроцилиндров к диску при-
жимаются с обеих сторон поршни-колодки 7 и 2 под дей-
ствием давления от источника энергии Р. Контур замы-
кания сил проходит через рабочую жидкость и непосред-
ственно через корпус. Второй контур осуществляется
через рычаг, толкатель 7 и гайку-ползун. Привод во вто-
ром контуре осуществляется через регулировочный винт,
толкатель 2 и кулачок (см. плечо е действия силы на тол-
катель со стороны кулачка), поворачиваемый силой F.
280
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
ФРИКЦИОННЫЕ МУФТЫ И ТОРМОЗА
281
Пружина служит для непрерывного прижатия взаимо-
действующих звеньев.
Представленные на схемах 2.1 ... 4.2 фрикционные
муфты/тормоза, несмотря на их широкое использование
по ряду свойств уступают многодисковым муф-
там/тормозам (см. рис. 111.1).
Простейший вариант на схеме 5.1, в котором всего
два диска 1 и 2 прижимают один к другому, обеспечивает
по сравнению с колодочными муфтами/тормозами более
равномерное по всей рабочей поверхности прижатие и
более полное использование рабочей поверхности. Вели-
чина допустимого передаваемого момента за счет сил
трения определяется площадью поверхности, ограничен-
ной двумя окружностями (см. радиусы и г2), и прибли-
женно считают силу трения, действующую на плече,
равном среднему радиусу г. Несущая способность муф-
ты/тормоза многократно возрастает при параллельном
нагружении нескольких пар трения (см. схемы 5.2 ... 5.11
на рис. 111.1 ... 112).
В многодисковой муфте на схеме 5.2 диски 1 сопря-
жены посредством шлицевого соединения с ведущим
звеном 1, установленным на валу, а диски 2 с ведомым
звеном 2 (здесь ведомое и ведущее звенья названы ус-
ловно, может быть наоборот: ведущее 2, а ведомое 1).
При подаче рабочей жидкости в полость гидроцилиндра,
образованную звеном 1 и поршнем, поршень сжимает
пакет дисков. Диски плотно зажимают диски 2. Крайний
диск прижимается к опорному диску. Благодаря фрикци-
онному взаимодействию дисков передается вращающий
момент. Диски размыкаются при падении давления и
отводе жидкости из полости гидроцилиндра через шари-
ковый клапан. При уменьшении давления на него со сто-
роны рабочей жидкости он под действием центробежных
сил перемещается в радиальном направлении и открыва-
ет отверстие для выхода рабочей жидкости. Поршень при
этом передвигается пружиной.
На схеме 5.2а представлено конструктивное реше-
ние многодисковой муфты современной автоматической
коробки передач легкового автомобиля. Таких муфт в
одной коробке передач шесть. Главная особенность кон-
струкции — тонкостенные штампованные детали из лег-
ких сплавов (см., в частности, штампованные шлицы на
схеме 5.2а, слева), благодаря чему пятиступенчатая
(+ задний ход) коробка передач в едином блоке с гидро-
трансформатором, главной передачей и дифференциалом
весит всего 68 кг при мощности привода 60 кВт и макси-
мальном моменте на входном звене 180 Н-м. Структур-
ная схема муфты та же, что и на схеме 5.2. Особенностью
муфты является использование тарельчатых тонкостен-
ных пружин. В этой связи особенностью такой муфты
является необходимость силового воздействия через
вращающиеся элементы.
Решение на схеме 5.3 отличается от схемы 5.2 тем,
что гидроцилиндр встроен в неподвижный корпус. На
схеме 5.3 силовое воздействие (стрелка) осуществляется
от поршня через нажимной подшипник на нажимной
диск, соединенный со звеном 1. Одни диски здесь сопря-
жены со звеном 2, другие со звеном 1.
На схеме 5.4 включение муфты осуществляют с по-
мощью электромагнита, также размещенного в непод-
вижном корпусе. Под действием магнитного поля ползун
смещается влево и с помощью штырей (см. схему 5.4а)
прижимает нажимной диск к пакету дисков 1 и 2 и к зве-
ну Г, соединенному со звеном 1.
На схеме 5.46 показаны варианты исполнений дис-
ков с внешними шлицами, а на схеме 5.4в- с внутренни-
ми шлицами. На дисках могут быть выполнены смазоч-
ные канавки и/или выполнены специальные пазы (см.
схемы 5.5 и 5.5а) для удаления продуктов износа, и цир-
куляции смазочного и/или охлаждающего материала сре-
ды. Для эффективного размыкания фрикционных дисков
их выполняют, в частности, в виде волнистой пружины
(см. схему 5.6).
Использование многодисковых муфт/тормозов в
планетарных многоскоростных передачах (схема 5.7)
предопределило особые принципы их конструирования.
1. Конструктивные формы звеньев муфты и тор-
моза одинаковы, а сами звенья унифицированы. Различие
передаваемого момента той или иной муфты (или тормо-
за) достигается количеством унифицированных дисков.
2. Некоторые звенья муфты совмещают со звенья-
ми планетарной передачи (наиболее полное совмещение
функций см. в параграфе 2.4, рис. 22, схема 1.5а). Более
того, отсутствие центрирования звеньев позволяет ис-
пользовать муфту/тормоз для самоустановки звеньев
планетарной передачи (см. в параграфе 4.2 рис. 37, схе-
ма 3.4а). Благодаря совместному решению упрощается
конструкция как муфты/тормоза, так и планетарной зуб-
чатой передачи.
Наиболее широко применяют дисковые фрикцион-
ные муфты в качестве сцепления трансмиссии транс-
портных машин. Особенности функционирования таких
муфт следующие:
муфта в рабочем состоянии замкнута и отключает
трансмиссию от привода лишь кратковременно;
размыкание кинематической цепи должно быть од-
нозначным (не допускается пробуксовка элементов);
замыкание муфты должно обеспечивать плавное на-
растание вращающего момента.
В связи с этими обстоятельствами обычно муфту
выполняют с двумя фрикционными парами - в виде од-
ного диска, зажатого с обеих сторон (схема 5.7, или в
виде двух дисков с четырьмя фрикционными парами
(схема 5.8). При этом обязательно предусматривается
принудительное размыкание всех фрикционных пар в
отличие от схемы 5.3 ... 5.6. Муфты сцепления обычно
"сухие", т.е. функционируют без подведения смазочного
материала. Диски имеют фрикционные накладки, в то
время как в муфтах по схемам 5.3 ... 5.6 используют
диски, полностью выполненные из фрикционного мате-
риала или имеющие специальное покрытие (см., напри-
мер, схему 5.5а).
На схеме 5.7 — управляемая сцепная муфта между
двигателем и коробкой передач автомобиля. Фрикцион-
ная поверхность маховика 2 взаимодействует с диском 1.
К диску 1 при включенном сцеплении прижат диафраг-
282
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
111.2. ДЕТАЛИ И СОЕДИНЕНИЯ МУФТЫ СЦЕПЛЕНИЯ
Вид В
ВидА
Кожух
Кожух
Нажимной диск
Палец
Кольцо
Кольцо
Заклепка соединения
тангециальной
упругой пластины
с нажимным диском
Вид D
<7c//L'ДА?//.
Упорный
палец
Фрикционнь
кольца
Многоступенчатый
демпфер
крутильных
колебаний
Ведомый
диск
сцепления
Сегментная упругая
пластина, соединяющая
фрикционные накладки
с ведомым диском.
Кожух
Нажимной
диск
Балансировочное
отверстие
Заклепка
Тангенцивльная
упругая пластина,
соединяющая
кожух
с нажимным диском.
Диафрагменная
пружина
Вид С
Диафрагменная
пружина
Фрикционные
накладки
Фрикционная
накладка
Сегментная упругая
пластина, соединяющая
фрикционные накладки
с ведомым диском.
Балансировочная
заклепка
Заклепка соединения
сегментной пластины
с ведомым диском
Тангециально
расположенная
винтовая
пружина
Диски
демпфера
Фланец
ступицы
Задний
диск
Ведомый
диск
сцепления
Ступица
Упорный
палец
Многоступенчатый
демпфер
крутильных
колебаний
Пружины,
расположенные
между ведомым диском
сцепления, дисками
демпфера
и фланцем ступицы.
ФРИКЦИОННЫЕ МУФТЫ И ТОРМОЗА
283
менной пружиной нажимной диск, вращающийся вместе
с маховиком 2.
Сцепление выключают, перемещая выжимной под-
шипник с помощью рычага. При этом диафрагменная
пружина отжимается от нажимного диска. Причем диа-
фрагменная пружина, соединенная с нажимным диском,
отводит его от промежуточного диска 7. Диск 7
отжимается от маховика 2, и сцепление выключается.
Диск 7 имеет шлицевое соединение с выходным валом 2
— входным звеном коробки передач — и не зафиксирован
в осевом направлении, поэтому самоустанавливается в
зависимости от осевых воздействий со стороны маховика
2 и нажимного диска.
Особенностью конструкции сцепления на схеме 5.7
является использование двух маховиков 7 и 2, последо-
вательно соединенных упругой муфтой, содержащей
винтовые тангенциально расположенные пружины. Та-
кое решение позволяет плавно включать и выключать
муфту (обеспечивать плавное изменение передаваемого
момента), а наличие в соединительной муфте трущихся
дисков приводит к демпфированию крутильных колебаний.
Детали и соединения муфт сцепления (см.
рис. 111.2) современных автомобилей выполняют по од-
ним и тем же хорошо отработанным схемам. Но тем не
менее имеются существенные различия в отдельных ре-
шениях. Присоединения кожуха сцепления к нажимному
диску по схеме 5.7а осуществляют с помощью трех тан-
генциальных упругих пластин. Благодаря этому компен-
сируются отклонения во взаимном положении соединен-
ных деталей. Соединение кожуха с маховиком — непод-
вижное, и его осуществляют с помощью винтов (см. так-
же схему 5.7).
Диафрагменная пружина имеет опоры на кожухе в
виде пальцев, зафиксированных от самопроизвольной
разборки в лепестках кожуха. Сам кожух — штампован-
ный из листа и имеет довольно сложную форму.
На схеме 5.76 дан пример присоединения фрикци-
онных накладок к диску сцепления и дано исполнение
многоступенчатого демпфера сцепления. Накладки при-
соединены к ведомому диску с помощью сегментных
упругих пластин. Такое решение допускает самоустанов-
ку (плотное прилегание) накладок по отношению к махо-
вику и нажимному диску, а кроме того, в какой-то мере
смягчает ударные нагрузки при включении муфты.
Многоступенчатый демпфер в отличие от схемы 5.7
имеет целый пакет дисков и фрикционных колец. Между
дисками последовательно и/или параллельно установле-
но несколько винтовых пружин. Благодаря такому реше-
нию и в зависимости от схемы расположения пружин
получают ту или иную нелинейную характеристику.
В результате эффективно демпфируются крутиль-
ные колебания, источником возбуждения которых явля-
ются как двигатель внутреннего сгорания, так и коробка
передач (например, зубчатая пара первой передачи).
На схеме 5.8 (рис. 111.1) показано сцепление грузо-
вого автомобиля с двумя ведомыми дисками 7 и 3. Веду-
щие звенья: маховик, диск 2 и нажимной диск соединены
между собой с возможностью относительного осевого
перемещения. Показан механизм установки диска 2 в
среднее положение при выключении муфты. При пере-
мещении нажимного диска на схему 5.8а на величину s
поворачивается кулачок и увлекает за собой диск 2 в ту
же сторону на величину s/2. Кулачок все время прижат к
маховику и нажимному диску под действием момента Т
(F — сила, действующая на кулачок со стороны этих
звеньев). Момент Т — результат преобразования силы
упругости пружины в винтовой паре кулачок — винт.
Представленное решение позволяет одновременно разъе-
динить взаимодействующие диски.
Особое место среди фрикционных дисковых муфт
занимают вязкостные муфты, или, как их еще называют,
вискомуфты. В них между дисками предусмотрен зазор и
диски не прижимаются один к другому. Зазор заполняет-
ся специальной высоковязкой жидкостью. Вращающий
момент передается за счет сцепления дисков с жидко-
стью и внутреннего трения жидкости. (Не следует путать
вискомуфту с фрикционными муфтами, работающими в
смазочном материале, который в отличие от рабочей
жидкости в вискомуфте уменьшает силы трения и слу-
жит для охлаждения и "вымывания" продуктов износа).
Обычно вискомуфты самоуправляемые или автома-
тически управляемые. В самоуправляемых [самоблоки-
рующих] муфтах рабочая жидкость меняет свои свойства
при относительном движении дисков. Возрастание отно-
сительной скорости приводит к увеличению вязкости
жидкости и в конечном итоге к полному сцеплению дис-
ков между собой (конструкцию такой муфты см. в пара-
графе 16.1 на рис. 114).
Другая разновидность вискомуфты (схема 5.9) по-
строена на принципе накопления жидкости в рабочей
камере, когда муфту нужно включить и удалить жид-
кость из рабочей камеры, если нужно разъединить звенья
муфты.
Муфта на схеме 5.9 управляется биметаллической
пластиной в зависимости от температуры среды.
Когда клапан открывает отверстие 7, то жидкость
заполняет через него рабочую камеру и муфта замыкает-
ся: вращающий момент передается от ведущего диска
ведомому звену. Если биметаллическая пластина рас-
правляется и воздействует через толкатель на клапан, то
он закрывает отверстие 7. Под действием центробежных
сил рабочая жидкость перетекает через отверстие 2 в на-
копительную камеру и муфта размыкается. Возможны и
другие решения вискомуфты в соответствии с приведен-
ным принципом.
Для тормозов, работаюших без подведения в пару
трения смазочного материала, наиболее перспективными
также представляются исполнения в виде прижимаемых
один к другому дисков. Причем, если требуется кратко-
временное торможение при остановке привода, исполь-
зуют исполнения с одним зажимаемым с обеих сторон
диском (рис. 112, схема 5.10).
На схеме 5.10 — замкнутый дисковый тормоз, встро-
енный в корпус электродвигателя. На валу двигателя ус-
тановлен диск с фрикционными накладками. При отсут-
ствии электрического тока в сети диск прижат к корпусу
электродвигателя нажимным диском под воздействием
284
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
пружины 2. При наличии электрического тока в цепи
срабатывает электромагнит. Магнитный силовой поток
замыкается через магнитопровод и нажимной диск, кото-
рый притягивается к магнитопроводу, и тормоз выклю-
чается. Диск охлаждается воздушным потоком, созда-
ваемым вентилятором.
Для тормозов, функционирующих в тяжелом режи-
ме длительного торможения (например, гашения скоро-
сти тяжелой транспортной машины), наиболее целесооб-
разно использование многодисковых исполнений.
На схеме 5.11 — тормоз, встроенный в колесо шасси
самолета. Биметаллические диски установлены на шли-
цах ступицы, неподвижно соединенной с осью колеса, а
металлокерамические диски установлены на шлицах
обода колеса. При включении тормоза диски сжимаются
благодаря воздействию на них тормозного цилиндра.
Растормаживание осуществляется пружиной. Ход на-
жимного диска ограничен регулятором зазора в тормозе.
Для автоматического управления торможением сущест-
вует обратная связь по скорости и ускорению, измеряе-
мых с помощью датчиков.
По аналогии со схемой 5.10 выполнен также конус-
ный тормоз, который ранее очень широко использовался.
По ряду качеств он уступает дисковому тормозу: обычнс
имеет одну пару трения без симметричного замыкания
сил; менее технологичен и имеет большие размеры; не
обеспечивает такой же четкости и плавности включения
и выключения, как дисковый тормоз. Ради системы при-
ведем один из вариантов конусного тормоза, используе-
мого в электротали (на схеме 5.12). Внутренний конус
прижат к внешнему конусу пружиной. При включении
электродвигателя конусный ротор втягивается в статор
(до упора на валу, обеспечивающего регламентирован-
ный зазор в двигателе), тормоз при этом размыкается.
Внутри тормозного шкива встроен вентилятор, обеспе-
чивающий охлаждение тормоза и двигателя.
На схеме 5.12а иной конструктивный вариант, отли-
чающийся только тем, что шкив с внутренним конусом
установлен на валу с ротором двигателя, а внешний ко-
нус выполнен на неподвижном корпусе. На шкиве с
внутренним конусом выполнены ребра — лопасти венти-
лятора.
Кроме приведенных схем выполняют сдвоенные ко-
нусные муфты/тормоза: на каждом из сцепных звеньев
имеются внешний и внутренний конусы. Такая муф-
та/тормоз может эффективно функционировать толькс
САМОУПРАВЛЯЕМЫЕ МУФТЫ И ТОРМОЗА
285
после приработки и плотного прилегания поверхностей в
обеих фрикционных парах. Предпочтение в большинстве
случаев все же следует отдавать многодисковым муф-
там/тормозам.
12.4. САМОУПРАВЛЯЕМЫЕ МУФТЫ И
ТОРМОЗА
Самоуправляемые сцепные муфты и тормоза до сих
пор занимают в технике особое место. Достаточно
вспомнить обычный велосипед, в котором кинематиче-
ская цепь размыкается, как только вы перестаете вращать
педали, а велосипед продолжает свободно двигаться (по
инерции).
Более серьезная задача, когда запущен один из двух
двигателей несущего винта вертолета, второй двигатель
отключен и не мешает первому двигателю работать.
А вот если уже в полете заглохнет один из двигателей, то
он тут же отключается от общей кинематической цепи и
не нагружает дополнительно другой двигатель, продол-
жающий работать.
Сцепные муфты, которые решают такие задачи, на-
зывают механизмами [муфтами] свободного хода. Они
известны также под названием обгонные муфты. Почти
во всех автоматических коробках передач и в каждом
гидродинамическом трансформаторе сеть такие муфты.
Причем они не требуют какой-либо специальной (авто-
матической) системы управления, а включаются или вы-
ключаются сами по себе в зависимости от направления
вращающих моментов на соединяемых звеньях.
В коробке передач они заменяют более сложные
управляемые муфты/тормоза, а в гидродинамическом
трансформаторе позволяют повысить КПД, на опреде-
ленных режимах последовательно отключают реакторы.
Кроме такого типа устройств, широко применяют
предохранительные муфты [муфты предельного мо-
мента], передающие момент, не превышающий допус-
тимой максимальной величины. Используют также пус-
ковые муфты, замыкающие кинематическую цепь при
достижении допустимой минимальной величины дви-
жущего момента. Еще одна разновидность — самоблоки-
рующие муфты, замыкающие кинематическую цепь при
недопустимом рассогласовании скоростей сопряженных
звеньев. В последнее время такие муфты широко распро-
странены в полноприводных автомобилях.
Общие принципы конструирования муфт/тормозов,
в том числе самоуправляемых, приведены в параграфе 12.1.
Здесь же остановимся на отдельных частных примерах,
наиболее полно отвечающих тем или иным сочетаниям
требований.
Самый древний и самый надежный механизм сво-
бодного хода - это храповой механизм. Его используют
прежде всего в грузоподъемных механизмах в качестве
предохранительного тормоза, удерживающего груз от
падения. Широко использовали такой механизм в шаго-
вых устройствах подачи станков. А в принципе, он спо-
собен преобразовывать качательное движение в односто-
роннее прерывистое движение. Правда, скорости враще-
ния, при которых используют храповой механизм, неве-
лики из-за наличия ударных воздействий. Различные ва-
рианты храпового механизма даны на рис. 113.1.
Па схеме 6.1 храповое колесо взаимодействует с со-
бачкой, шарнирно соединенной с коромыслом. Собачка
поджата пружиной. Размеры собачки выбирают так, что-
бы исключить самопроизвольный выход собачки из за-
цепления с зубьями храпового колеса. Обычно принима-
ют \|/ = 15 ... 20°. Другие углы показаны на схеме. Ис-
пользуют также разновидность собачки в виде крюка.
Храповое колесо может свободно вращаться относитель-
но коромысла по часовой стрелке и не может вращаться в
противоположном направлении. Каждое из этих звеньев
может выполнять роль входного, выходного или непод-
вижного звена.
В схеме 6.2 храповое колесо имеет внутренние зубья.
В схеме 6.5 зубья выполнены в виде цевок, а собачка -
в виде упора, поджатого листовой пружиной.
В схеме 6.6 зубья также выполнены в виде цевок, а
собачка - в виде вилки, охватывающей цевку и обеспе-
чивающей надежное ее стопорение.
В схеме 6.7 храповое колесо имеет торцовые зубья.
Собачка прижимается посредством пружины растяжения.
Недостаток всех храповых механизмов — удары при
реверсировании нагрузки. Для снижения негативности
данных явлений при конструировании принимают соот-
ветствующие меры:
храповое колесо выполняют с минимальным воз-
можным шагом зубьев (выступов), например, см. схе-
му 6.4-, используют несколько собачек, шаг расположения
которых отличается и некратен шагу зубьев, см. напри-
мер, схемы 6.8 и 6.9',
в кинематическую цепь вводят дополнительные уп-
ругие элементы или отдельные основные звенья, напри-
мер, собачки выполняют упругими.
На схеме 6.3 дан пример конструктивного решения,
в котором две собачки размещены так, что только одна
из них может находиться в зацеплении. При реверсиро-
вании нагрузки свободный ход получается примерно в
2 раза меньше шага зубьев. Между звеном 2, с которым
шарнирно соединены собачки, и звеном 1 (входным или
выходным) установлены пружины 2. Собачка поджата
пружиной 1.
На схеме 6.4 показан так называемый микрохрапо-
вой механизм, в котором собачки выполнены в виде
листовых пружин, взаимодействующих с храповым коле-
сом. При вращении колеса в одну сторону листовые пру-
жины отгибаются. Вращение колеса в другую сторону
исключено, так как листовые пружины, работая на про-
дольное сжатие, препятствуют такому движению.
В схеме 6.8 собачки выполнены в виде ползунов, ус-
тановленных в теле звена 1 и поджатых пружинами. Со-
бачки взаимодействуют с впадинами на храповом колесе.
Число впадин отличается на одну-две по сравнению с
числом ползунов. Поэтому в любой момент времени, по
крайней мере, один из ползунов полностью зацепляется с
храповым колесом и может передавать нагрузку. Про-
филь впадин специальный. Он обеспечивает плавный
непрерывный вход в зацепление ползунов. Угол распо-
286
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
А-^|
Пружина 2
Звено 2
Звено 1
Собачка
Шарнир
Звено 1
6-7 I Пружина
Собачка
Храповое
колесо
Храповое
колесо
Цевочное
колесо
113.1. САМОУПРАВЛЯЕМЫЕ (ПО НАПРАВЛЕНИЮ НАГРУЗКИ) МУФТЫ/ТОРМОЗА.
ХРАПОВЫЕ МЕХАНИЗМЫ
6.1
Собачка
Пружина/ ip р
Пружина 1
Собачка
Собачка в виде крюка
Храповое
колесо
Коромысло
6.2
Храповое
Собачка колесо
Коромысло
6-6 I Вилка
Цевка Упор
Пружина
Цевочное колесо
Звено 1
Храповое
колесо
Храповое
колесо
Собачка в виде
листовой пружины
Пружина
Собачка Пружина
Звено 1 Пружина Собачка
О
О
ложения ползуна выбирают таким, чтобы при вращении
звена 1 относительно храпового колеса в одном направ-
лении (против часовой стрелки) было самоторможение, а
при вращении звена 1 в противоположном направлении -
самоторможение отсутствовало. В последнем случае
обеспечивается возможность утапливания ползунов.
Такое устройство позволяет при реверсировании
одного из звеньев вводить в зацепление ползуны с храпо-
вым колесом без ударов.
Схема 6.9 отличается от схемы 6.8 тем, что ползуны-
собачки расположены параллельно оси вращения звень-
ев. Они перемещаются внутри звена 1 и взаимодейству-
ют с торцовыми зубьями храпового колеса. Здесь разли-
чаются числа ползунов и зубьев. Скос зубьев и ползунов
в данном случае прямолинейный. Угол скоса выбирают
таким, чтобы отсутствовало самоторможение ползунов и
была возможность их утапливания.
В современных машинах все же чаще применяют
фрикционные механизмы свободного хода. Они не
гарантируют точную величину шага (рабочего хода), но
достаточно надежно обеспечивают режим замыкания (за
счет трения) и режим размыкания кинематической цепи.
При этом процессы более плавные, чем в храповых ме-
ханизмах. В фрикционных механизмах намного проще
осуществить принцип многопоточности передачи энер-
гии. Решения фрикционных механизмов свободного хода
весьма разнообразны (схемы 7.1... 7.9 на рис. 113.2).
Во всех фрикционных механизмах свободного хсл
различают режим самоторможения [самозаклинивания'_ -
стопорения звеньев одного относительно другого и ре
жим размыкания кинематической цепи. Режим само;
можения продемонстрирован на схемах 7.1а и 7.3 пр«
различных вариантах промежуточных - расклиниваю: g
элементов. Режимы по схеме 7.1а характерны д.1
схем 7.1, 7.2, 7.6 и 7.7. Что касается схем 7.4, 7.5, 7.3 i
7.9, то в них процессы самоторможения несколько иные
и они будут рассмотрены вместе с конструктивными : .
полнениями.
При наличии момента 7) (см. схемы 7.1а и 7.3) про
межуточное твердое тело (ролик или кулачок) за счг
фрикционного взаимодействия, обусловленного дог
нительным силовым замыканием, втягивается межД
двумя пересекающимися поверхностями относител
подвижных звеньев.
В начальный момент ролик (схема 7.1а) перека.тл
вается и/или скользит по поверхностям звеньев в пред
лах зазоров и возможных деформаций. Самоторможс
наступает, если у < р, где р — угол трения, и относите,
ное движение звездочки и обоймы становится невозмоя
ным в направлении .7), а реакции Ест = -Тчз имеют .4
щую линию действия. Далее, как бы ни увеличив-
момент Tlt относительного движения не будет, но рея
ции будут расти пропорционально моменту и согласно 3aj
САМОУПРАВЛЯЕМЫЕ МУФТЫ И ТОРМОЗА
287
Т
симости FB1 = —. При реверсировании момента Т\ начи-
h
нается качение и/или скольжение ролика, что приводит к
расклиниванию и возможности относительного переме-
щения звездочки и обоймы.
Схемы 7.1а и 7.3 отличаются формой взаимодейст-
вующих тел: в схеме 7.1а клин образован круговой ци-
линдрической поверхностью ролика и скоса на звездочке,
а в схеме 7.3 расклиниваются соосные круговые цилинд-
рические поверхности звеньев 1 и 2 при повороте за счет
сил трения кулачка. Кулачок имеет переменный радиус
кривизны. При заклинивании и соответствующем пово-
роте кулачка его диаметральный размер (между противо-
лежащими точками контакта) увеличивается до тех пор,
пока линия действия реакций не отклонится на угол тре-
ния р. Далее относительное движение тел при показан-
ных на схеме направлениях моментов невозможно.
Условием расклинивания является возможность
преодоления сопротивления упругого элемента (в данном
примере — лепестка на пружине) при повороте кулачка
относительно точки С за счет сил трения при реверсиро-
вании направлений моментов.
Роликовый механизм свободного хода на схе-
ме 7.1 имеет звездочку, обойму, ролики и пружины. При
нагружении звездочки в направлении 7) и обоймы в на-
правлении Т2 ролики заклиниваются между обоймой и
288
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
скосом на звездочке, звездочка увлекает обойму в на-
правлении вращающего момента 7), или обойма увлекает
звездочку в направлении вращающего момента ТУ При
изменении направлений моментов пружина отгибается,
ролики утапливаются под действием сил трения и звез-
дочка свободно вращается относительно обоймы. Чтобы
произошло заклинивание звеньев в режиме передачи
движения, угол скоса выбирают из условия 2\|/ < 2р, где
р — угол трения. Однако 2у ограничен возможностью
расклинивания. Обычно принимают 2у = 4°30'... 6°30'.
Особенностью схемы 7.2 по сравнению со схе-
мой 7.1 является наличие сепаратора и осевой пружины
сжатия. Пружина через кольцо 1 прижимает ролики к
кольцу. Оба кольца прикреплены к обойме. Благодаря
этому ролики вместе с сепаратором удерживаются отно-
сительно обоймы и при вращении звездочки по часовой
стрелке происходит их заклинивание; а при вращении
против часовой стрелки они разъединяют основные зве-
нья. Передача движения возможна только при направле-
ниях вращающих моментов 7) и Т2, показанных на схе-
ме 7.2. Поскольку на обойму действуют значительные
разжимные усилия, то ее осевое сечение выбрано из ус-
ловия обеспечения необходимой жесткости.
В кулачковом механизме свободного хода на схе-
ме 7.3 использованы пары трения с большим приведен-
ным радиусом кривизны в зоне контакта (по сравнению
со схемами 7.1 и 7.2), что позволяет иметь высокую не-
сущую способность по контактной прочности взаимо-
действующих тел. На схеме 7.3 показан сепаратор в виде
двух обечаек с прорезями для кулачков. Сепаратор цен-
трируется в стенке, выполненной из антифрикционного
материала.
На схеме 7.4 — червячный механизм свободного
хода. В зависимости от направления вращения червячно-
го колеса червяк либо прижимается к подпятнику каче-
ния, либо замыкает фрикционную муфту. Хотя сама пе-
редача несамотормозящая, в первом режиме червяк про-
ворачивается - обеспечивается свободный ход, а во вто-
ром режиме происходит относительная блокировка всех
звеньев.
На схеме 7.5 показана ленточная муфта свободно-
го хода. Лента охватывает шкив и ее концы соединены
рычагом KLM с кривошипом МС. При движении криво-
шипа в направлении соА рычаг KLM создает необходи-
мые натяжения F и F2 в ветвях ленты, геометрическая
сумма F которых равна реакции в т. М. Лента самозатя-
гивается на шкиве и передает за счет трения вращающий
момент. При вращении кривошипа в направлении гов ры-
чаг KLM поворачивается настолько, что ветви ленты ос-
лабевают и она свободно скользит по шкиву.
В колодочном механизме свободного хода на схе-
ме 7.8 качестве заклинивающего звена использована сер-
повидная колодка. Колодка размещена между роликом,
свободно установленным на эксцентриковом валу, и
обоймой. Ролик соединен с обоймой муфтой, которая
допускает плоскопараллельное его движение и препятст-
вует вращению относительно обоймы. Между водилом,
неподвижно соединенным с валом, и колодкой размеще-
на пружина. Совместное вращение звеньев возможя
только при направлении моментов 7) и Т2, показанном
схеме. При изменении направления моментов кинема)
ческая цепь разъединяется и звенья 1, 2 могут враща
относительно друг друга. Данное исполнение обладав
высокой несущей способностью благодаря поверхн,
ному контакту взаимодействующих звеньев.
Когда колодка находится в заклиненном состояв ।
нагрузка передается благодаря давлению звеньев в в»
правлении F. Для нормального функционирования уст-
ройства целесообразно иметь минимальные возможнъв
силы трения в паре вал - ролик и в соединительной муфт е
Рассмотренные примеры на схемах 7.1 ... 7.5, 7.8 d
7.9 представляют собой однопарные муфты одност ►
роннего действия. Есть еще двойные муфты односз*-
роннсго (схема 7.6) и двустороннего (схема 7.7) действ > .
Муфта на схеме 7.6 имеет три основных звевх
входное, выходное и звено управления - водило. Таке
муфта кроме режимов одинарного одностороннего де
ствия позволяет осуществлять с помощью звена упра,
ния свободное вращение входного звена в обоих наир
лениях относительно выходного звена. Водило можл
быть соединено с дополнительным приводом и выг
нять роль ведущего звена.
Муфта на схеме 7.7 также имеет три звена, но по-
зволяет обеспечивать в обоих направлениях режимы и»
редачи момента и режимы свободного вращения. В н
водило может утопить ролики в клиновые пазы, врашз!
ясь в ту пли иную сторону относительно звездочки.
Многодисковая фрикционная муфта свободного х -
да (схема 7.9) способна передавать вращающий моме
при направлениях моментов Т} и Т2, показанных на cxJ
ме. Предварительно диски незначительно зажаты пру;,
ной. С увеличением нагрузки гайка перемещается :
винтовым шлицам выходного вала и фрикционные дин
все сильнее прижимаются нажимным диском в напрг -
лении, показанном стрелкой. Чем больше вращаю
момент, тем сильнее ведущие диски прижаты к ведомый
дискам и вращаются совместно.
Изменения направления моментов 7) и Т2 на проти-
воположные приводит к перемещению гайки влево (с
схему 7.9) и к относительному проскальзыванию диск<
Данную муфту используют в стартерах грузовых авто? -
билей.
Из всех рассмотренных схем 7.1 ... 7.9 все же саме
предпочтительной и самой распространенной в совр
менных машинах (автоматических коробках переда
является схема 7.3. Схема 7.2 применяется в вертолетах
также хорошо себя зарекомендовала. Остальные схемы
могут рассматриваться как возможные варианты для оп-
ределенных условий применения.
Особую группу самоуправляемых механизмов пред
ставляют так называемые грузоупорные тормоза
(рис. 114.1). Наиболее широкое применение они получа-
ли в начальных этапах развития грузоподъемньи.
средств, особенно в ручных устройствах, например
приводах с "безопасной рукояткой" и др. Хотя актуа.
ность таких решений в наше время уменьшилась в сил?
использования совершенных приводов, работающих
САМОУПРАВЛЯЕМЫЕ МУФТЫ И ТОРМОЗА
289
114.1. ГРУЗОУПОРНЫЕ ТОРМОЗА
Фрикционный диск
Пружина
8.4
Колодка 1
8Л
8.2
Вх. вал
Кулачак 1
Кулачок
Рычаг 2
Фрикционный диск
Колодка 2
Диск
I - входное звено
О - выходное звено
Т - вращающий момент
со - угловая скорость
Тормозной шкив
л
Собачка
Вых. вал
Колодка 1
Вид А
Барабан
Колодка 2
Пружина
Винтовая пара
Храповое
колесо
< Кулачок
114.2. УПРАВЛЯЕМЫЕ САМОТОРМОЗЯЩИЕ МЕХАНИЗМЫ
9.1
Управляющий
привод
Основной
привод
Тормозной
барабан/диск
Рабочее
[выходное]
звено
10.1
Управляемое звено
*4 / Основной
Y////A/ привод
Ролик /
Y//A
V V77A
Тс
~Е— Растормаживание
| ]— Управляющий привод
/ Самоторможение
Основание
А—I
А п
Ролик
77///////
' Выходное звено
Основание
Управляющий
привод
Тс
Водило
w
Червяк
Общий вал
основного привода
и рабочего
устройства
115.1. САМОУПРАВЛЯЕМЫЕ СЦЕПНЫЕ МУФТЫ/ТОРМОЗА
ПРЕДОХРАНИТЕЛЬНЫЕ МУФТЫ.
САМОУПРАВЛЯЕМОЕ ОТКЛЮЧЕНИЕ ПО ВЕЛИЧИНЕ НАГРУЗКИ
112.11
Кулачок
Звено 2
Звено 1
Пружина
Пружина
Рычаги
Звено 2
Ролик
|12.4а|
12.4
Звено 1 Диск 1
Диск 2
F
Шарик
Звено 2
Торцовое
шлицевое
соединение
Пружина
Звездочка
|12.3б|
Шарик
I Пружина
Т,
|12.3а|
Вал 2
Диски 2
Стержень
Вал 1 Пружина
кручения
Звено 1
Звено 2
Выступ 2
Звено 2
Пружина
Зввно 1
Выступ
Пружина
сжатия
12.6
Промежуточное
звено Звено 2
59999(]
Пружина Упругие Звено 1
фрикционные диски
Промежуточное
звено
Звено 1
Диски 1
Толкатель
290
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
режиме торможения, тем не менее принципы, заложен-
ные в грузоупорных тормозах, полезны для общего под-
хода к конструированию самоуправляемых муфт/тормозов.
Итак, грузоупорный фрикционный тормоз управля-
ется автоматически в зависимости от вращающего мо-
мента на входном звене. Он выключается только при на-
личии вращающего момента на входном звене, достаточ-
ного для преодоления сил сопротивления, приведенных к
входному звену. Тормоз включается при отсутствии
вращающего момента на входном звене.
На схеме 8.1 при наличии вращающего момента Ту и
момента сил сопротивления То вал I начинает провора-
чиваться в направлении угловой скорости coj, кулачок 1
раздвигает упругие пластины рычагов 7 и 2, а вместе с
ними отводит колодки 7, 2 от неподвижного диска тор-
моза. Пластины рычагов 7 и 2 при этом зажимают кула-
чок 2 и поворачиваются далее вместе с кулачком 1. Раз-
меры кулачка 1 выбраны такими, чтобы он мог повер-
нуться относительно пластин на ограниченный угол.
Если момент 7[ недостаточно велик, чтобы преодо-
леть момент сил сопротивления То, то кулачок 7 раздви-
гает пластины рычагов 7 и 2, а колодки 7 и 2 прижима-
ются к диску, вал О при этом останавливается. При от-
сутствии момента Ту колодки прижаты к диску благодаря
упругости пластин. Вращение звена О в направлении со0
под действием То невозможно в этом случае.
На схеме 8.2 аналогичное взаимодействие звеньев
достигается путем скосов на валах I и О и на кулачке,
соединенном с подвижным фрикционным диском тормо-
за. Здесь показано упругое прижатие звеньев посредст-
вом пружины. Относительный поворот кулачка под дей-
ствием момента Ту или То приводит к его осевому пере-
мещению в ту или иную сторону и, соответственно, к
выключению или включению тормоза.
На схеме 8.3 входное звено I через зубчатую пару
приводит во вращение выходной вал О, соединенный с
барабаном лебедки. При подъеме и опускании груза на-
правления моментов 7] и То не меняются.
При подъеме груза Ту - движущий момент, То — мо-
мент сил сопротивления. Под действием этих моментов
проворачивается гайка винтовой пары и перемещает
фрикционный диск так, что зажимается храповое колесо.
Собачка установлена таким образом, что при подъеме
возможен поворот храпового колеса, при опускании оно
стопорится.
При выключении двигателя тормоз удерживается во
включенном состоянии благодаря самоторможению вин-
товой пары, а собачка не позволяет проворачиваться хра-
повому колесу.
При спуске достаточно приложения небольшого
момента, чтобы провернуть гайку и освободить тормоз,
но он тут же зажимается снова под действием момен-
та То- Непрерывно освобождая тормоз, можно опускать
груз. При этом моментом сил сопротивления в основном
будет момент трения поверхностей.
Грузоупорный тормоз может быть установлен не
только между входным и выходным звеньями, но и меж-
ду стойкой и выходным звеном.
На схеме 8.4 вал двигателя I соединен с барабане* <
посредством планетарного механизма S, содержал. *
центральные колеса а и Ь и водило h, выполняющее р т
стойки. С водилом неподвижно соединен кулачок. Пи
наличии момента на водиле кулачок поворачивает^
раздвигает колодки 7 и 2, освобождая тормозной шктв
При отсутствии момента кулачок свободно провора
ется под действием пружины и колодки 1, 2 зажимам
шкив. Момент на водиле из условия равновесия передав
равен сумме моментов на центральных колесах пр
включенном двигателе. Момент на водиле отсутстъ_. I
при выключенном двигателе. Следовательно, при вы
ключении двигателя тормоз автоматически включается
Еще одна разновидность самоуправляемых сцепны
устройств представляет собой некоторое развитие ф;
ционных муфт/тормозов свободного хода - это управ
ляемый самотормозящий механизм (см. рис. 114.2). л
выполнен с возможностью приниудительного исклю ш
ния самоторможения.
По аналогии с гидро/пневмоусилителем такой ме. .
низм используют в качестве механического усилит
подключающего в нужный момент основной приво.
помощью управляющего привода, выключающего той
моз. Его особенностью является возможность непоср;!
ственного замыкания движущей силы и силы сопро
ления на основание и исключение движения вне зав::_
мости от соотношения этих сил. С помощью допели^
тельного (управляющего) воздействия данное состоя
можно устранить и обеспечить возможность движе
В принципиальной схеме 9.1 представлено устройств, 1
виде тормоза, установленного между основным прим
дом и исполнительным [рабочим, выходным] звен
Замыкание тормоза автоматическое - самоторможе; •
размыкание принудительное - растормаживание.
В схеме 10.1 в качестве самотормозящего механи «
использован двойной механизм свободного хода двус~ •
роннего действия. Его выходное звено соединено с вал «
двигателя (основной привод) и нагружено моментом с
сопротивления Тт и моментом движущих сил Td. Раз:
чие в моментах компенсируется моментом, обусловлю»
ным заклиниванием роликов в неподвижной обойме (ов
нование). Заклинивающая сила на схеме обозначена F,.
Если к входному - управляемому звену механи^ I
свободного хода приложить момент 7с, реек (иниваю
ролики, то станет возможным движение выходного зав
на. Расклинивающая сила обозначена Fk. Ее избыточ1 4
значение, приведенное к выходному звену, суммируе
со значением силы сопротивления или движущей силы 1
зависимости от направления вращения управляемся
звена.
В качестве управляемого самотормозящего ме. •
низма используют также винтовые и клиновые пары.
На схеме 11.1 представлен пример использован»
для данной цели самотормозящей червячной перед
Какое бы ни было соотношение моментов привода 7j
рабочего устройства 7w на валу червячного колеса (::?•
неподвижном водиле) его вращение невозможно, ес. ?
момент Тс на червяке равен нулю или недостаточен, чго|
бы исключить самоторможение.
САМОУПРАВЛЯЕМЫЕ МУФТЫ И ТОРМОЗА
291
При наличии на червяке управляющего момента Тс,
который превышает значение, необходимое для преодо-
ления сил трения в червячной передаче (для проворачи-
вания звеньев), самотормозящий механизм отключается.
Избыточная часть момента Тс, приведенная к червячному
колесу, при этом суммируется с моментом от движущих
сил или сил сопротивления (в зависимости от направле-
ния вращения червяка).
В червячной передаче Тс выбирают из условия
т >^tg(p-v)
с *tgy
где i — передаточное отношение; у — угол винтовой линии
червяка; р - угол трения; Те — момент, приведенный к
червячному колесу и обусловленный величинами TD,
7w и Тс.
При rw = 0 значение Тс выбирают из условия пре-
одоления постоянной составляющей сил трения нена-
груженной передачи.
Если общий вал присоединить к водилу, а червячное
колесо сделать неподвижным, то включением управ-
ляющего привода достигается тот же эффект, что и в
примере с остановленным водилом, но передача стано-
вится планетарной.
Самоуправление по величине вращающего мо-
мента (рис. 115.1) обеспечивает предохранительная
муфта, которая может в одном исполнении при пере-
грузке разомкнуть кинематическую цепь, а в другом ис-
полнении муфта начинает проскальзывать, обеспечивая
передачу вращающего момента допустимой величины.
Второй вариант особенно важен, когда размыкание ки-
нематической цепи может привести к нежелательным
явлениям.
Размыкание цепи проще всего осуществляется раз-
рушаемым элементом или фиксатором, утапливаемым
при перегрузках. По существу, приведенные на схемах
12.1 ... 12.5 и 12.7 муфты при перегрузках размыкают
цепь, но при уменьшении нагрузки снова ее замыкают.
Только схема 12.6 позволяет непрерывно поддерживать
определенную предельную величину момента, но при
этом ведомое звено может остановиться или даже начать
вращаться в противоположном направлении.
В схеме 12.1 звено имеет выступы, взаимодейст-
вующие с кулачками, соединенными посредством листо-
вых пружин со звеном 2. При превышении вращающим
моментом допустимой величины выступы отжимают
кулачки и звено 1 поворачивается относительно звена 2.
В схеме 12.2 ролики установлены на рычагах, шар-
нирно соединенных со звеном 1. Рычаги поджаты пру-
жиной, благодаря чему ролики расположены во впадинах
звена 2 и при допустимом вращающем моменте осущест-
вляют связь звеньев 1 и 2. При перегрузке ролики отжи-
маются внутрь звена 2 и муфта выключается.
В схеме 12.3 звено I имеет углубления, с которыми
взаимодействуют шарики, поджатые пружиной. Вра-
щающий момент передается благодаря взаимодействию
шариков и углублений. При перегрузке шарики утапли-
ваются и звенья проворачиваются. Используют в анало-
гичных муфтах звенья с шаровыми выступами 1 и 2, рас-
положенными на обоих звеньях (схема 12.3а). В этом
случае по мере увеличения нагрузки изменяется угол
давления и отжимающая сила F возрастает пропорцио-
нально произведению момента на tga. У такой муфты
выше чувствительность к перегрузкам и точность сраба-
тывания.
На схеме 12.36 — конструктивное решение муфты,
выполненное по схеме 12.3 и предназначенное для пере-
дачи вращающего момента от вала к звездочке, установ-
ленной на валу с возможностью вращения. При пере-
грузке шарики выдавливаются из углублений звездочки,
деформируя тарельчатую пружину. Деформация пружи-
ны ограничена упором В.
Представленные на схемах 12.1 ... 12.3 муфты могут
передавать сравнительно небольшие моменты, поскольку
в них элементы управления совмещены с силовыми эле-
ментами.
В схеме 12.4 и 12.4а вращающий момент передается
посредством фрикционных дисков 1 и 2, прижатых пру-
жиной. При перегрузке диски начинают пробуксовывать.
Это относительное перемещение приводит к отжатию
дисков шариками.
В схеме 12.5 звенья 1 и 2 имеют торцовые зубья
треугольного профиля. Звено 1 установлено на валу так,
что может перемещаться в осевом направлении и поджа-
то к звену 2 пружиной. При перегрузке звено 1 отжима-
ется и звенья проворачиваются одно относительно другого.
На схеме 12.6 — вариант конструктивного решения, в
котором использовано торцовое шлицевое соединение со
скошенными зубьями. Звенья 1 и 2 взаимодействуют че-
рез фрикционные диски в виде волнистых пружин, кото-
рые прижимаются все сильнее по мере возрастания пере-
даваемого момента, пока зубья не начнут проскакивать,
но при этом фрикционные диски, пробуксовывая, под-
держивают момент не ниже допустимого значения,
демпфируют колебания угловой скорости.
В схеме 12.7 вал 1 соединен с фрикционными дис-
ками 1 пружиной кручения, а вал 2 непосредственно со-
единен с фрикционными дисками 2. Диски поджаты по-
средством пружин сжатия. При перегрузках вал 1 дейст-
вует на промежуточное звено и на стержни, расположен-
ные в окружной поверхности под углом у к образующей.
Стержни перемещают толкатели в осевом направлении.
Пружины сжимаются, а диски 1 и 2 разъединяются, и
кинематическая цепь размыкается. Такая муфта характе-
ризуется высокой точностью срабатывания. Функци-
ональная задача самоуправления в зависимости от
скорости решается в основном центробежными муф-
тами/тормозами (рис. 115.2). Центробежный регулятор
Уатта известен как один из первых регуляторов в техни-
ке. Регулятор изменял проходное сечение канала подачи
пара. В случае с муфтой/тормозом он соединяет звенья
кинематической цепи при достижении или превышении
допустимой величины скорости. Многие из современных
пифтов имеют такого типа устройство, как элемент лови-
теля лифта (см. рис. 52 схему 4.9).
В современной технике центробежные муф-
ты/тормоза хотя несколько и утратили свои позиции, но
292
СЦЕПНЫЕ МУФГ1>1. ТОРМОЗА И СИСТЕМЫ
еще продолжают применяться в качестве ограничителей
скорости перемещаемых устройств (см. схему 13.4), а
также в качестве пусковых муфт (см. схему 13.6).
Применяют центробежные устройства и для разъе-
динения кинематической цепи (например после пуска
двигателя - см. схемы 13.7 и 13.8).
Центробежные муфты/тормоза могут иметь про-
стейшую конструкцию, когда колодки представляют со-
бой груз, замыкающий фрикционную пару (см. схемы
13.1 ... 13.3). Но в них может использоваться механизм,
усиливающий или определенным образом преобразую-
щий сигнал от центробежного регулятора. Его выполня-
ют в виде винтовой пары (схема 13.4), кулачка (схема
13.8), рычага (схема 13.5), гидравлической передачи и т.д.
На схеме 13.1 колодка соединена пружиной с веду-
щим звеном. При достижении этим звеном определенной
угловой скорости колодка под действием центробежной
силы Fj движется в радиальном направлении и вступает в
контакт с барабаном. Благодаря силам трения барабан
начинает вращаться вместе с ведущим звеном. Если ба-
рабан неподвижен, то угловая скорость ведущего звена
снижается до тех пор, пока колодка под действием пру-
жины не перестает контактировать с барабаном.
На схеме 3.2 две колодки шарнирно соединены с ве-
дущим звеном. Между собой колодки соединены пружи-
нами. Принцип действия тот же, что и на схеме 13.1, но
колодки под действием центробежных сил поворачива-
ются относительно ведущего звена, в то время как в схе-
ме 13.1 колодка движется поступательно. Нагружение
барабана здесь симметричное, но колодки изнашиваются
неравномерно по длине.
В схеме 13.3 к ведущему звену спиральной пружи-
ной присоединено подвижное звено 1. К этим звеньям с
помощью тяг присоединены колодки 1 и 2. В отличие от
схемы 13.2 колодки под действием центробежных сил
движутся поступательно.
Приведенные решения, как правило, не предусмат-
ривают передачу больших моментов. Их используют в
качестве управляющего устройства в дисковых и много-
дисковых фрикционных тормозах и муфтах.
На относительно подвижных объектах (схема 13.4)
расположены шестерня и зацепляющаяся с ней рейка.
Вращение от шестерни передается на вал и далее управ-
ляющей центробежной муфте. Если скорость превышает
допустимую, то колодки 1 и 2 за счет центробежных сил
растягивают пружину 1 и раздвигаются настолько, что
начинают вращать барабан. Вместе с барабаном враща-
ется винт, который заставляет двигаться поступательно
гайку-ползун. Гайка-ползун воздействует через пружи-
ну 2 на диск 1 рабочего тормоза, который притормажива-
ет вращающийся диск 2, установленный на валу, прижи-
мая его к неподвижному диску 3. При снижении скоро-
сти до заданного значения колодки 1 и 2 перестают воз-
действовать на барабан, гайка-ползун под действием
пружины возвращается в прежнее положение, если резь-
ба выполнена несамотормозящей.
Соединение управляющей центробежной муфты и
рабочего тормоза позволяет увеличивать тормозной мо-
мент, а введение в кинематическую цепь упругого зва
обеспечивает плавность нарастания момента.
В центробежном тормозе на схеме 13.5 сочетаютс!
самоуправляемое устройство TS и управляемое ycrpoif-
ство В. При вращении вала грузы расходятся и через ры-
чаги прижимают диск 2 к диску 1. Замкнуть диски можш
также управляющим воздействием F.
В пусковых фрикционных муфтах центробежные
устройства служат для плавного нарастания вращающего
момента и замыкания кинематической цепи при дости-
жении определенной скорости ведущего звена.
На схеме 13.6 - пусковая центробежная муфта с ог-
раничителем пусковых нагрузок. Ведущее звено соеди-
нено с валом двигателя. Оно, разгоняясь, увлекает свои-
ми поверхностями шары в планетарное движение. Поко
угловая скорость звена не достигает определенной вели-
чины, шары удерживаются в радиальном направлени
ограничительным кольцом, поджатым пружинами 2. За-
тем центробежные силы преодолевают сопротивление
пружин 2 и шары начинают отдаляться от оси. Они воз-
действуют на криволинейную поверхность кулачка на-
жимного диска, который прижимает ведущий фрикцион-
ный диск к ведомому диску 1. Диски 7 и 2 передают
вращающий момент ведомому валу.
При остановке двигателя пружина 1 отодвигаем
диск 2 вправо. Воздействие диска криволинейной по-
верхностью кулачка на шары приближает их к оси муфты.
На схеме 13.7 представлен механизм пускового
привода, который служит для управляемого подключе-
ния к основному двигателю (дизелю) и самоуправляемо-
го отключения пускового привода после пуска дизеля.
Пусковой привод приводит во вращение ведушн
диск фрикционной муфты. В момент пуска дизеля вводя:
шестерню 2 в зацепление с зубчатым колесом-маховиком
дизеля нажатием на торец толкателя в направлении F я
поворачивают рукоятку. Косозубая шестерня благодаря
осевой составляющей силы в зацеплении перемещав
зубчатый сектор вправо. Сектор через упорный подшит-
ник зажимает ведущий диск ведомыми дисками. Пружи-
на 1 при этом сжимается. Вращение передается от пуско-
вого привода через диски фрикционной муфты и дале;
через муфту свободного хода на вал. Вал, вращаясь в
опорах А и В, передает движение шестерне 2, зацепляю-
щейся с зубчатым колесом-маховиком дизеля. Если дви-
гатель пущен, то вал начинает вращаться быстрее и муф-
та свободного хода разобщает кинематическую цепь
При достижении определенной частоты вращения грузь
центробежного выключателя расходятся, его рычаги воз-
действуют на толкатель и пружину 2. При достижени
силой нажатия на пружину величины осевой составляю-
щей силы трения в зацеплении шестерни 2 с зубчаты**
колесом-маховиком шестерня перемещается под дейст-
вием пружины вправо и выходит из зацепления.
На схеме 13.8 представлена сцепная самоуправляе-
мая муфта стартера грузового автомобиля. Ее особен-
ность — сцепление звеньев мелкопрофильными торцовь -
ми зубьями. Выходное звено-шестерню вводят в зацеп-
ление с зубчатым венцом маховика дизельного двигатель,
принудительным осевым перемещением ведущей втулки
СЦЕПНЫЕ И ТОРМОЗНЫЕ СИСТЕМЫ
293
вдоль шлицев ведущего вала пускового электродвигате-
ля. При наличии вращающего момента на ведущей втул-
ке она через винтовые шлицы передает движение гайке.
Гайка, перемещаясь в осевом направлении ио винтовым
шлицам, вводит в зацепление свои торцовые зубья с
зубьями выходного звена. После запуска дизельного дви-
гателя меняются направления вращающих моментов и
гайка, навертываясь на винтовые шлицы втулки, сжимает
пружину и выводит из зацепления зубья.
В разъединенном положении муфта удерживается
коническим кольцом, поджимаемым за счет центробеж-
ных сил грузами. Масса грузов рассчитана из условия
поддержания в разомкнутом состоянии муфты при ско-
рости вращения дизельного двигателя, но центробежные
силы не способны разъединить муфту при сравнительно
небольшой скорости пускового электродвигателя.
Еще одна задача самоуправляемых муфт/тормозов -
это соединение звеньев кинематической цепи при рас-
согласовании угловых скоростей вращения звеньев.
Например, если переднее приводное колесо автомобиля
пробуксовывает, а все остальные колеса неподвижны или
вращаются медленнее, то кинематическая цепь привода
задних колес присоединяется к приводу передних колес.
В современных полноприводных легковых автомобилях
вместо мсжосевого самоблокируемого дифференциала
часто используют межосевую блокируемую муфту. Ши-
роко распространена так называемая вискомуфта (см.
параграф 16.1 рис. 138). Она имеет элементы (с пазами,
выступами, отверстиями и т.п.), вращающиеся в специ-
альной силиконовой (кремний-органической) среде. При
относительном перемещении элементов муфты вязкость
среды повышается и передаваемый муфтой момент воз-
растает. Используют также различные приемы воздейст-
вия на среду и блокировки муфты в зависимости от раз-
ности угловых скоростей.
Другие принципиальные решения самоблокировки
подвижного соединения кинематической цепи см. также
в параграфе 16.1.
12.5. СЦЕПНЫЕ И ТОРМОЗНЫЕ
СИСТЕМЫ
Приведенные примеры характеризуют основные на-
правления конструирования сцепных муфт/тормозов.
Одним из важных вопросов является использование их в
общей системе агрегатов и в общей системе управления.
Далее рассмотрим структуру сцепных и тормозных сис-
тем (рис. 116.1 и 116.2) в последовательности от простых
к сложным и наиболее совершенным, а также некоторые
из структурных элементов систем (рис. 117).
Тормозная система в общем случае должна обес-
печивать следующие функции:
• рабочее [эксплуатационное] торможение;
• аварийное [экстренное] торможение;
• вспомогательное (резервное) торможение, напри-
мер предусматривающее использование специальных
гидрозамедлителей (по аналогии с гидродинамической
муфтой) на пологих длительных спусках большегрузных
автомобилей или торможение двигателем;
• удержание транспортного средства (на наклонной
поверхности).
При рабочем торможении транспортного средства с
прицепом обеспечивают согласованное по времени (че-
рез определенный интервал) торможение тягача и прице-
па (см. тормозной кран на схеме 19.1). Дуя исключения
юза (скольжения колеса по дорожному полотну без про-
ворачивания) используют противогазовую тормозную
систему и ее составляющую - анти[противо]блокиро-
вочную систему.
Тормозная система может быть разветвленной од-
ноконтурной, предусматривающей управление несколь-
кими тормозами от одного органа управления по сооб-
щаемым между собой каналам.
В транспортных средствах наиболее широко ис-
пользуют многокотурную систему, представляющую
собой совокупность одного или нескольких органов
управления и несколько тормозов или групп тормозов,
управляемых по несообщаемым между собой каналам.
Многоконтурная система транспортной машины может
содержать, например, контуры управления каждым из
рабочих тормозов или контуры управления раздельно
передних и задних колес или диагонально расположен-
ных у колес (см. схему 15.4 на рис. 116.1), а также содер-
жать системы для аварийного, вспомогательного и дру-
гих торможений.
В зависимости от устройства, передающего управ-
ляющее воздействие тормозам, различают:
• рычажную систему управления тормозами (сх-
ема 15. Гу,
• рычажно-тросовую систему управления тормо-
зами (схема 15.2)-,
• электрическую тормозную систему управления
тормозами;
• гидравлическую тормозную систему (схемы 15.4
и 75.5);
• пневматическую тормозную систему (схемы
15.3 и 15.6).
На одной машине может быть несколько тормозных
систем различного вида или сочетание (совмещение) раз-
личных видов управления в одной системе, например,
пневмогидравлическая тормозная система.
Управляющее воздействие может передаваться тор-
мозам без усиления или с усилением. Для усиления
управляющего воздействия используют дополнительный
источник энергии (см., например, вакуумным усилитель
тормозной системы на схемах 17.1 и 17.2).
В соответствии с этим используют, например, гид-
равлическую тормозную систему с вакуумным усили-
телем.
В пневматическом тормозной системе для усиления
управляющего воздействия используют энергию сжатого
воздуха.
Вакуумный усилитель может быть использован в
сочетании с рычажной системой (схема 15.3).
В схеме 15.1 колеса локомотива охватываются ко-
лодками, связанными между собой и с колодками других
294
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
116.1. ТОРМОЗНЫЕ СИСТЕМЫ ТРАНСПОРТНЫХ МАШИН
|15.2| РЫЧАЖНО-ТРОСОВАЯ СИСТЕМА
ПЕРЕДАЧИ ТОРМОЗНЫХ СИГ
Дифференциальный
РЫЧАЖНАЯ СИСТЕМА ПЕРЕДАЧИ ТОРМОЗНЫХ СИЛ
„ рычаг
Педаль
(ножной тормоз)
Тяга 1
Кулачок!
Пружина-^
Передний \\
тормоз
ТягаЗ
Рукоятка (ручной тормоз
Трос 2
Задний тормоз
LP°n , Тяга 4
Рычаг 1
\ Рычаг 2
' Тормозной
Колодки барабан
ГИДРАВЛИЧЕСКАЯ ДИАГОНАЛЬНАЯ ТОРМОЗНАЯ
СИСТЕМА ЛЕГКОВОГО АВТОМОБИЛЯ
ВАКУУМНАЯ
ТОРМОЗНАЯ СИСТЕМА Пневмораспределитель
ГИДРАВЛИЧЕСКИЕ СИСТЕМЫ СЦЕПЛЕНИЯ
И ТОРМОЖЕНИЯ ЛЕГКОВОГО АВТОМОБИЛЯ
LI, L2,13, L4, LB1, LB2, LB3, LB4 - гидравлические трубопроводы
ПНЕВМАТИЧЕСКАЯ СИСТЕМА ТОРМОЖЕНИЯ
КОЛЕСНОГО ТЯГАЧА С ПРИЦЕПОМ
К модулям управления
пневмосистемой трейлера
Т1.Т2, ТЗ,Т4 - датчики угловых скоростей колес
Т11,Т10,Т5 - датчики перемещений
педалей газа, сцепления, тормоза
А6, А7, А8, А9 - датчики ускорений кузова
R12 - датчик расстояния до впереди
идущего автомобиля
D1 - привод системы
экстренного торможения
D2, D3 - приводы
противобуксовочной системы
15.6
К пневмосистеме
трейлера
TR-датчик включения передачи заднего хода (отключения
системы торможения на уклоне)
SL - датчик нагружения
задней оси
Ml. М2, М3, М4 - модули управления
пневмокамерными приводами KI. К2, КЗ. К4
тормозов
PR - рессивер компрессора
PV1.PV2 - тормозные краны
СЦЕПНЫЕ И ТОРМОЗНЫЕ СИСТЕМЫ
295
колес пневмоцилиндром. От пневмоцилиндра через ры-
чаг АВС, балансир 1, тягу 1, балансир 2 движение пере-
дается рычагу 1, а через тягу 5 - рычагу 2. Рычаг 1 связан
с системой звеньев: LK - LP - тяга 2 - NM - MQ - тяга 4,
образующих со стойкой семизвенный механизм. Со
звеньями LK, MN шарнирно соединены колодки, кото-
рые при соответствующем положении звеньев прижима-
ются к колесу или удаляются от него. Семизвенный ме-
ханизм обеспечивает самоустановку колодок в зависимо-
сти от положения оси колеса. Аналогично выполнено
соединение между рычагом 2 и колодками другого тор-
моза (на схеме справа).
На схеме 15.2 — тормозная система автомобиля,
управляемая раздельно педалью и рукояткой. Педаль
через систему тяг и рычагов посредством тросов 1 и 2
соединена с кулачками 1 и 2 управления колодками. Ко-
лодки стянуты пружиной, а при повороте кулачка раз-
жимаются и контактируют с тормозным барабаном. Сис-
тема управления связана рычагом и тягой 4 с рукояткой.
Поворот рукоятки можно зафиксировать в определенном
положении, воздействуя при этом на кулачки 1 и 2. Тя-
га 4 соединена с рукояткой так, что при перемещении ее
педалью она не взаимодействует с рукояткой.
На схеме 15.3 — вакуумная тормозная система.
При нажатии на педаль поворачивается рычаг 1 и через
тягу 1 поворачивает рычаг 2, который перемещает пнев-
мораспределитель. Последний соединяет полость цилин-
дра с всасывающим трубопроводом. Поршень под дейст-
вием атмосферного давления перемещается, поворачива-
ет рычаг 1 и через тягу 2 поворачивает кулачок. Кулачок
раздвигает колодки и прижимает их к тормозному бара-
бану. При отпускании педали она возвращается в на-
чальное положение, пневмораспределитель соединяет
полость цилиндра с атмосферой, и тормозная система вы-
ключается.
На схеме 15.4 представлена структура диагональ-
ной системы соединения тормозов легкового автомо-
биля. Усилие FP, развиваемое водителем на педаль, пре-
образуется в вакуумном усилителе и главном тормозном
цилиндре в давление р жидкости в магистралях L1 и L2.
Магистраль L1 связывает каналами LB1 и L4 гидроци-
линдры тормозов 1 и 4, а магистраль L2 связывает кана-
лами LB2 и L3 гидроцилиндры тормозов 2 и 3. К тормо-
зам задних колес рабочая жидкость подводится через
регулятор силы торможения, изменяющий соотноше-
ния давлении в каналах LB3 и LB4 по сравнению с дав-
лением в каналах L3 и L4 в зависимости от силы Fbv,
пропорциональной нагрузке на задние колеса. Каждая из
магистралей может функционировать во взаимосвязи с
другими или независимо от других; например, при паде-
нии давления в одной из магистралей главный цилиндр и
регулятор обеспечивают функционирование других ма-
гистралей и работу одной пары тормозов, расположен-
ных по диагонали.
Известны также тормозные системы, в которых
сгруппированы тормоза передних и задних колес или
тормоза левого и правого борта (в частности, это отно-
сится к многоосным колесным и гусеничным машинам,
способным разворачиваться на месте за счет торможения
колес/приводных звездочек одного борта).
Современные автомобили имеют тормозную сис-
тему с избирательным автоматическим торможением
каждого из колес (схема 15.5). В данной системе преду-
смотрено наряду с обычными функциями обеспечение
устойчивости движения (такую систему называют стаби-
лизирующей). Она включает в себя, например:
• анти[противо]блокировочную систему;
• систему экстренного торможения;
• систему стабилизации направления движения (за
счет избирательного торможения одного или нескольких
колес);
• систему удержания автомобиля на откосе [про-
дольном уклоне].
Кроме того, данная система имеет непосредствен-
ную связь с противобуксовочной системой.
Особенность схемы 15.5 заключается в параллель-
ном подключении каждого из исполнительных устройств
тормозов 1, 2, 3 и 4 к гидронасосу через гидрораспреде-
литель HCV, управляемый от главного тормозного ци-
линдра и от электронного блока управления.
Блок управления анализирует сигналы от датчиков
Tl, Т2, ТЗ, Т4 — скорости вращения каждого из колес;
датчиков ускорения педали тормоза Т5, положения педа-
лей газа Т11 и сцепления Т10, от датчиков боковых про-
дольных ускорений кузова, вращения вокруг вертикаль-
ной оси и т.п. (см. обозначения А6 ... А9), а также от ра-
дара R12 - датчика расстояния до впереди идущего авто-
мобиля или иного препятствия.
При сигналах от датчиков Т1 ... Т4, свидетельст-
вующих о приближении блокировки тормозов, автомати-
чески осуществляется прерывистое торможение, частота
которого возрастает по мере увеличения усилия FP -
нажатия на педаль.
Антиблокировочную систему используют с целью
обеспечения более высокого коэффициента сцепления
колеса с дорожным полотном при его качении по сравне-
нию с коэффициентом сцепления при скольжении коле-
са. Она предусматривает уменьшение силы прижатия
тормозных элементов при недопустимо малой угловой
скорости затормаживаемого колеса и последующее уве-
личение силы прижатия при увеличении скорости. Тор-
можение тем более эффективно, чем ближе условия сра-
батывания (включения и выключения) системы к услови-
ям блокировки тормозов (естественно, без достижения
этих условий). Большая инерционность системы может
существенно снизить эффективность торможения. Часто-
ту срабатывания согласовывают с допустимыми характе-
ристиками виброактивности.
Частное исполнение гидрораспределителя HCV
(с насосом) или, как его еще называют, гидравлического
модулятора для антиблокировочной системы представ-
лено на схеме 15.5а (рис. 116.2).
Здесь имеются простейшие выключаемые с помо-
щью магнитов входные клапаны I и включаемые с помо-
щью магнитов выходные клапаны О. Обратный
клапан CV обеспечивает более быстрое падение давления
в гидравлической линии тормоза при прекращении рабо-
ты тормоза.
При нажатии на педаль тормоза тормозная жидкость
подается в систему по гидравлическим линиям / и 2.
296
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
116.2. ТОРМОЗНЫЕ СИСТЕМЫ ТРАНСПОРТНЫХ МАШИН
|15.5а|
Вакуумный
усилитель
Педаль
тормоза
Гидравлическая
линия 6
ГИДРАВЛИЧЕСКИЙ МОДУЛЯТОР
ТОРМОЗНОЙ СИСТЕМЫ
Главный
тормозной
цилиндр
Гидравлическая
Тормоз 4
Тормоз 1
Фактическое
направление
при заносе
задней оси
Заданное
направление
Гидравлическая
линия 3
НР - гидронасос;
HD - демпферная камера;
НА - гидроаккумулятор;
I - впускной клапан;
О - выпускной клапан;
CV - обратный клапан
Тормоз 2
Гидравлическая
линия 4
Гидравлическая
линия 2
Тормоз 3
Гидравлическая
линия 5
|15.5в|
СТАБИЛИЗАЦИЯ НАПРАВЛЕНИЯ ДВИЖЕНИЯ
.----. ЗА СЧЕТ ПОДТОРМАЖИВАНИЯ ОДНОГО ИЗ КОЛЕС
|15.5б|
Фактическое .
направление 'd*
при скольжении I
передних /
колес
F..2
Ть- восстанавливающий момент (от силы Г,,)
Fh - сила подтормаживания одного колеса
Пока педаль нажата, давление в системе поддерживается
насосами НР и гидроаккумуляторами НА. Жидкость под
давлением подается через открытые клапаны I и гидрав-
лические линии 3, 4, 5, 6 к тормозам 4, 2, 1,3 соответст-
венно. При сигнале о приближающейся блокировке тор-
моза открывается клапан О и закрывается клапан I. После
уменьшения прижатия тормозных колодок, исключаю-
щего блокировку, клапан О закрывается, а клапан I вновь
открывается. Циклы увеличения и уменьшения момента
тормозных сил могут многократно повторяться. Для
уменьшения пульсации давления служит демпферная
камера.
В схеме 15.5а, как и в схеме 15.4, использована диа-
гональная система присоединения тормозов к главному
тормозному цилиндру.
Переходя далее к вопросу избирательного индиви-
дуального подтормаживания колес для обеспечения ус-
тойчивости движения при повороте, отметим, что со-
четание различных факторов может привести к трем во_
можным вариантам ее нарушения:
• скольжению передних колес (например, при рас-
положении центра тяжести ближе к задним колесам, пр
изношенном проекте передних колес, при резком увел -
чении скорости движения и/или резком повороте рулев< г
го колеса);
• заносу (боковое скольжение) задней оси (напри-
мер, при расположении центра тяжести ближе к пере.-
ним колесам, изношенном протекторе задних колес, ре-
ком торможении и/или повороте рулевого колеса);
• одновременному скольжению всех колес.
В первом случае (схема 15.56) автомобиль разворь
чивается в направлении со и, вместо заданного направле-
ния поворота, он стремится двигаться прямолинейно.
Во втором случае (схема 15.5в) автомобиль начина
ет вращаться в направлении со радиус его поворота
уменьшается.
СЦЕПНЫЕ И ТОРМОЗНЫЕ СИСТЕМЫ
297
Стабилизирующая движение система (см. схема 5.5)
обеспечивает создание восстанавливающего противодей-
ствующего момента Tj за счет дополнительного подтор-
маживания одного из колес (правого заднего - сила F/, на
схеме 15.56 левого переднего - сила Fb на схеме 15.5е при
повороте направо). Кроме того, определенным образом из-
меняется подача топлива в камеру сгорания двигателя.
В третьем случае при определенном сочетании пер-
вых двух ситуаций автоматически осуществляется диф-
ференцированное управление всеми тормозами и заслон-
кой подачи топлива.
При резком нажатии на педаль тормоза, о чем сооб-
щает отслеживающий ускорение педали [или диафрагмы
вакуумного усилителя (тормозной системы)] датчик Т5
(схема 15.5 на рис. 116.1) по команде блока управления
магнит (см. также схему 17.2 на рис. 117) быстро втяги-
вает шток главного цилиндра и осуществляется режим
экстренного торможения.
При определенных сигналах от датчиков А6 ... А9, а
также Т11 на схеме 15.5 начинается подтормаживание
одного или нескольких колес, препятствующее сколь-
жению передних колес или заносу задних колес (см.
схемы 15.5а и 15.56 на рис. 116.2) и осуществляется из-
менение подачи топлива (привод заслонки D2).
При определенных сигналах от датчика R12 всту-
пают в действие все исполнительные устройства тормо-
зов и/или привод заслонки D2.
Противобуксовочная система обеспечивает согла-
сованное действие приводов педали сцепления D3 и за-
слонки D2. Эта система поддерживает величину движу-
щей силы (вращающего момента) в соотношении, при
котором она не может превышать возможную силу сцеп-
ления приводных колес с дорожным полотном.
При достижении условия пробуксовки (ускорение
автомобиля уменьшается при увеличении углового уско-
рения приводного колеса) автоматически замедляется
включение сцепления или обеспечивается режим его
пробуксовки и уменьшается вращающий момент двига-
теля за счет уменьшения подачи топливной смеси в ка-
меру сгорания двигателя.
Удержание или трогание автомобиля на откосе
осуществляется соответствующим торможением колес
при наличии сигнала о выключенной передаче заднего
хода (датчик TR) или растормаживанием, согласованным
с действием приводов D2 и D3.
Современные автопоезда (тягач с трейлером) имеют
обычно пневматическую систему управления тормозами.
Чтобы обеспечить согласованное по времени и зависимое
от нагрузки торможение всех колес, используют, в част-
ности, тормозной пневматический кран (схема 19.1 на
рис. 117). Тем не менее из-за различия длин магистралей
трудно добиться синхронного срабатывания тормозов и
предотвращения блокировки каждого из них.
В этом плане более эффективна система с электронным
управлением (схема 15.6 на рис. 116.1).
При нажатии на педаль силой Ff сигнал от тормоз-
ного крана PVI поступает в блок управления, который
анализирует также информацию от датчика нагрузки SL
на пневмоподвеску, а затем практически мгновенно по-
сылает команды всем модулям управления пневмосисте-
мой (Ml, М2,...) на включение в работу пневмокамер К1,
К2,..., приводящих в действие дисковые тормоза 1,2, 3, 4
тягача и трейлера. Камеры КЗ и К4 выполняют обычно с
пружинными аккумуляторами.
Синхронное срабатывание тормозов обеспечивается
тем, что каждый из модулей подключен к ресиверу PR и
во всех магистралях поддерживается постоянное давле-
ние. В случае отказа электронной системы торможение
осуществляется с помощью резервной традиционной
системы (см. штриховые линии, соединяющие основной
тормозной кран PVI с распределительным краном трей-
лера PV2). Усилие Ff при этом требуется значительное, а
тормозной путь несколько увеличивается. Антиблокиро-
вочная система данной схемы отличается от схемы 15.5
тем, что сигнал от датчиков скорости Т1 ... Т4, поступает
не в центральный блок управления, а непосредственно в
модуль управления соответственно Ml, М2, ... каждого
из тормозов. Индивидуальное управление тормозами
обеспечивает необходимую устойчивость направления
движения.
Далее поясним на отдельных примерах (рис. 117)
устройства структурных элементов управления муф-
тами и тормозами в рассматриваемых системах. Напри-
мер, сцеплением управляют, воздействуя на него от пе-
дали через рычажную, тросовую или гидравлическую
систему.
На схеме 16.1 — пневмоусилитель в системе
управления сцеплением. Нажатием на педаль приводят
рычаг JKL в движение через систему звеньев АВ, ВС,
CDE, EJ. Рычаг JKL через шатун LM и рычаг MSP воз-
действует на клапаны пневмораспределителя, который
открывает доступ сжатому воздуху в полость пневмоци-
линдра. Шток NS перемещается, поворачивает рычаг RO
и сцепление размыкается. Одновременно перемещается
рычаг JKL, который воздействует на пневмораспредели-
тель, тем самым осуществляя обратную связь в системе
управления. При прекращении нажатия на педаль она
возвращается в исходное положение пружиной, пневмо-
распределитель выпускает воздух из пневмоцилиндра в
атмосферу и сцепление замыкается.
На схеме 16.2 - простейшая гидравлическая сис-
тема управления сцеплением. При нажатии на педаль
движение передается поршню гидроцилиндра 1. Пор-
шень перемещает жидкость по каналу через демпфер и
сообщает движение поршню кольцевого рабочего гидро-
цилиндра 2, который непосредственно через выжимной
подшипник размыкает сцепление. При возвращении пе-
дали в исходное положение жидкость из-за противодей-
ствия пружин сцепления вытесняется из гидроцилиндра 2.
Для облегчения управления тормозами служит ва-
куумный усилитель (тормозной системы), способный
уменьшить необходимое давление на педаль управления
тормозной системой при торможении за счет разрежения
во впускной трубе работающего двигателя внутреннего
сгорания.
На схеме 17.1 - исходное положение элементов при
отпущенной педали, на схеме 17.1а - положение в про-
цессе нажатия на педаль и движения толкателя 1 в на-
298
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
117. СТРУКТУРНЫЕ КОМПОНЕНТЫ СЦЕПНЫХ И ТОРМОЗНЫХ СИСТЕМ
СИСТЕМЫ УПРАВЛЕНИЯ МУФТОЙ СЦЕПЛЕНИЯ
ВАКУУМНЫЙ УСИЛИТЕЛЬ
СЦЕПНЫЕ И ТОРМОЗНЫЕ СИСТЕМЫ
299
правлении FP, на схеме 17.16— положение, когда движе-
ние прекращено, а также в процессе возврата педали в
исходное положение. Возврат педали возможен как при
уменьшении нажатия, так и при его исключении.
На схемах обозначено: рА, Рв, Ро ~ атмосферное дав-
ление и давление в камерах В и D соответственно;
FP - направление силы воздействия на педаль; Fs - на-
правление силы упругости пружин.
При работающем двигателе и отпущенной педали
впускная труба сообщается через патрубок с камерой D и
с камерой В через каналы Е и С. При нажатии на педаль
толкатель 1 перемещает плунжер влево. Канал Е пере-
крывается клапаном 1. Камера В сообщается с атмосфе-
рой А, а в камере D создается разрежение за счет отсасы-
вания воздуха через обратный клапан 2. За счет разности
давления, обозначенного стрелками рв - Ро, корпус пере-
мещается влево, преодолевая сопротивление пружины 3.
Герметичность камеры D обеспечивается мембраной.
Камера В образована мембраной и разделительным
уплотнением. Корпус воздействует своим толкателем 2
на поршень 2 управления одной парой тормозов и пере-
мещает его влево. Через пружину 2 движение сообщается
поршню 1 другой пары тормозов. При этом сначала пере-
крывается канал 12 и жидкость поршнем 2 подается по
каналу L2 в полости одной пары тормозов, затем пере-
крывается канал Пи жидкость поршнем 1 подается по
каналу L1 в полости другой пары тормозов.
При остановке педали (схема 17.16) камеры В и D
сообщаются между собой через каналы С и Е, давление в
камерах выравнивается, а поршни 1 и 2 сохраняют свое
положение и сохраняется, соответственно, степень тор-
можения.
Педаль возвращается в начальное положение пру-
жиной 4. При этом камеры В и D также сообщаются ме-
жду собой через каналы С и Е, выравнивается давление
на корпус и под действием пружины он перемещается
вправо. Возврат поршней 7 и 2 осуществляется пружи-
нами 1 и 2. Движение поршней ограничено упорами.
На схеме 17.2 в вакуумный усилитель встроен дат-
чик перемещения мембраны. При экстренном торможе-
нии от него поступает сигнал в блок управления ESP, из
которого подается ток в катушку электромагнита, встро-
енного внутрь подвижного корпуса. Сердечник электро-
магнита дополнительно воздействует на толкатель 2 и
ускоряет срабатывание системы торможения (см. также
схему 15.5).
Как уже отмечалось при рассмотрении схемы 15.4, в
тормозных системах используют регулятор силы тор-
можения. Регулятор предназначен для автоматической
реализации определенного закона распределения и изме-
нения сил торможения автомобиля в зависимости от на-
груженности колес, силы сцепления с дорогой и других
условий.
Одна из разновидностей регулятора - устройство с
двумя поршнями 1 и 2 (схема 18.1) и клапаном, распре-
деляющими и управляющими давлением жидкости, ко-
торая подается от главного цилиндра (канал I, дав-
ление pi) к тормозам передних (канал OI) и задних
(канал 02) колес.
Изменение нагруженности автомобиля приводит к
изменению прогиба рессоры. Движение от рессоры через
тягу 2, рычаг 1, тягу 1 и кулису передается ползуну. Пол-
зун поджат пружиной 3. Его положение определяет по-
ложение опоры дифференциального рычага и соотноше-
ние плеч рычага. Поршни 7 и 2 поджаты к рычагу соот-
ветственно пружинами 1 и 2. Перемещение рычага опре-
деляет расположение и ход поршней 1 и 2. В зависимо-
сти от нагрузки на рессору поршень 2 при торможении в
определенный момент опускается вниз, и клапан закры-
вает доступ жидкости к тормозу задних колес. При уве-
личении давления жидкости в главном цилиндре начина-
ет опускаться поршень 1 и через дифференциальный ры-
чаг открывается клапан. Давление рт в системе тормо-
жения задних колес снова повышается, но повышение
давления будет замедленным по сравнению с повышени-
ем давления ро2 ~ Рт в тормозной системе передних ко-
лес. Затем под действием давления на поршень 2 клапан
снова закрывается и цикл повторяется до тех пор, пока в
главном цилиндре возрастает давление. Этим обеспечи-
ваются определенное соотношение и характер изменения
давления в тормозных системах передних и задних колес.
На схеме 18.2 - регулятор силы торможения, ус-
тановленный в гидросистеме между главным тормозным
цилиндром и тормозными цилиндрами задних колес лег-
кового автомобиля. При резком торможении нагрузка на
колеса перераспределяется, задняя часть кузова припод-
нимается, задние колеса разгружаются и уменьшается их
сцепление с дорожным полотном. Чтобы исключить бло-
кировку тормозов задних колес и обеспечить равномер-
ное торможение всех колес, в этом случае регулятор пе-
рекрывает подачу тормозной жидкости к цилиндрам зад-
них колес.
Рычаг на схеме 18.2 связан с балкой заднего моста,
а корпус регулятора соединен с кузовом. За счет силы F,
пропорциональной вертикальной нагрузке на задние ко-
леса, рычаг поджимает клапан вверх, обеспечивая обыч-
ный режим торможения. Когда кузов приподнимается,
рычаг поворачивается и клапан закрывается благодаря
разности давлений на поверхности А, (большей площа-
ди) и Аг. При закрывании клапан опускается на уплотне-
ние, поджатое пружиной.
На схеме 18.3 решение, аналогичное схеме 18.2, но
приспособленное для диагональной тормозной системы
(см. схему 15.4), в которой каналы L3 и LB3 связывают
соответственно тормоза переднего левого и заднего пра-
вого колес, а каналы L4 и LB4 — соответственно тормоза
переднего правого и заднего левого. В каналах L3 и L4
давление соответствует давлению, развиваемому глав-
ным тормозным цилиндром.
Сила FBv, обусловленная степенью нагружения зад-
них колес, приводит в движение толкатель и клапан.
Процесс здесь аналогичен процессу в схеме 18.2. Кроме
того, клапан 1 взаимодействует с плунжером, располо-
женным в подвижной втулке и далее со штоком клапа-
на 2. Втулка поджимается вместе с плунжером к клапа-
ну 1 пружиной 2, а клапан 2 поджимается к седлу пру-
жиной 3.
300
СЦЕПНЫЕ МУФТЫ, ТОРМОЗА И СИСТЕМЫ
Данная схема позволяет при определенной величине
давлений pLj и />l4 обеспечивать определенные зазоры в
парах "клапан 1 — перегородка" и "клапан 2 - седло" и
соответственно определенную величину давлений рвз и
/>В4 по сравнению с р^ и pL4- В процессе торможения
осуществляется самоустановка клапанов 1 и 2 под дейст-
вием силы FBV, давлений в каналах и с учетом сопротив-
ления пружин. Данная схема позволяет также обеспечи-
вать функционирование тормозов одной диагонали при
падении давления (нарушении работоспособности) в ка-
налах другой диагонали.
В такой ситуации процесс самоустановки любого из
клапанов в точности такой же, как в схеме 18.2.
На схеме 19.1 представлен тормозной кран для
управления тормозами автопоезда, обеспечивающий
согласованность по времени торможения тягача и прице-
па (его место в общей тормозной системе - см. схему 15.6).
Управление краном осуществляется перемещением
тяги 1, которая поворачивает дифференциальный рычаг и
кулису. Поворот рычага вокруг т. С приводит к переме-
щению т. В толкателя 1. При движении толкателя 1 влево
сжимается пружина 1, деформируется мембрана 1, а кла-
пан 1 перекрывает доступ воздуха из ресивера (канал Р\)
к тормозной магистрали прицепа (канал L). Перемещение
мембраны 1 приводит к сообщению тормозной магистра-
ли с атмосферой (канал Qi). В тормозной магистра^
срабатывает клапан, открывая доступ сжатого воздл
тормозам прицепа.
Удерживать в таком состоянии систему можнс
помощью рычага 1. При дальнейшем перемещении з
ги 1 дифференциальный рычаг начинает поворачива_ I
вокруг т. В и кулиса поворачивается вокруг т. D, воз_
ствуя через толкатель 2, пружину 2 на мембрану 2 и г.1
пан 2.
Клапан 2 открывает доступ воздуха из ресивера а
нал Р2) в тормозную систему тягача (канал М), одноетш
менно перекрывается сообщение тормозной систем
атмосферой (канал Q2) и воздух подается к указате
торможения (канал N).
Последовательность включения тормозных систа
при различии времени их срабатывания обеспечивав
синхронность подачи воздуха к тормозам тягача и пре
цепа.
В качестве устройства, обеспечивающего после. •
вательность включения, применен двухползунный меха
низм с двумя степенями свободы. Так как сопротивле- «
движению ползунов - толкателей 1 и 2 - различно, з
сначала перемещается один толкатель 1. пока не ежи
ется пружина 2, а затем изменяется соотношение сил га
противления и перемещается толкатель 2.
Глава 13. ЗУБЧАТЫЕ РЕДУКТОРЫ
13.1. РЕМЕННЫЕ, ЦЕПНЫЕ
И ЗУБЧАТЫЕ ПЕРЕДАЧИ.
ОСНОВНЫЕ ПОЛОЖЕНИЯ
Редукторы, и в частности зубчатые, занимают такое
место в конструировании машин, что без краткого экс-
курса в историю, думаю, здесь не обойтись.
По крайней мере 24 века назад человек превратил
рычаг (или ворот) в зубчатую передачу, которая могла
непрерывно преобразовывать малый вращающий момент
в большой момент при незначительных потерях мощно-
сти. Первая зубчатая передача имела шестерню (несколь-
ко стержней, связанных крестообразно), взаимодейст-
вующую с колесом в виде диска с выступающими шты-
рями. Во втором веке до новой эры появились первые
описания зубчатых и червячных редукторов (Папп Алек-
сандрийский). Следующее достижение в этом направле-
нии принадлежит Леонардо да Винчи, который предло-
жил зацепление с вращающимися цевками. А в трудах
Лагира и Дезарга (XVII в.) появилось теоретически пра-
вильное циклоидальное зацепление, позволяющее осу-
ществлять передачу движения при постоянстве переда-
точного отношения. Л. Эйлер в XVIII в. предложил
эвольвентное зацепление. Виллис в 1841 г. сформулиро-
вал основную теорему зацепления.
В 50-е годы прошлого столетия Л. Новиков предло-
жил новый вид зацепления, допускающий использование
профилей зубьев шестерни и колеса с малой разницей
кривизны. В настоящее время преимущественно исполь-
зуется эвольвентное зацепление благодаря его техноло-
гичности (подробнее см. параграф 1.4). Таковы отдель-
ные вехи развития только одной стороны проектирова-
ния зубчатых передач, т.е. самого зубчатого зацепления.
В действительности, редуктор — это система колес, валов,
подшипников, соединений, корпуса, внешней подвески
или иного крепления.
Функции редуктора: увеличивать вращающий мо-
мент при соответствующем уменьшении частоты враще-
ния, а также передавать движение между параллельными,
пересекающимися или перекрещивающимися валами.
Качество редуктора определяют выбор схемы, па-
раметров, материалов, технологий изготовления, систе-
мы смазывания.
Критерии качества (при одних и тех же несущей
способности и передаточном отношении): КПД, габарит-
ные размеры и масса, плавность работы (виброактив-
ность и уровень воспроизводимого шума).
Применение редукторов настолько широкое, что
трудно представить себе какую-либо машину без них.
Функциональные возможности (передаточное от-
ношение и несущая способность) редуктора зависят от
принятой схемы. Довольно часто возможности путают с
качественными показателями. Например, приходится
слышать: "Волновая зубчатая передача имеет следующие
преимущества: большое передаточное отношение, высо-
кую несущую способность и т.д." - это упрощенный
взгляд, так как волновая передача просто занимает свою
функциональную нишу, тем более, что весь диапазон
передаточных отношений, присущий ей, может быть ус-
пешно реализован и с помощью других передач.
Теперь о главном: что дает правильное конструиро-
вание редуктора. Представьте себе, что снижение КПД
всех существующих в мире редукторов всего на 1 % оз-
начает, что в год только для того, чтобы передавать и
преобразовывать движение, потребуется дополнительно
не менее 10 млн. тонн жидкого топлива. Что касается
габаритных размеров и массы редуктора, то зачастую они
превышают соответствующие показатели двигателя. При
этом оказывается до определенного предела целесооб-
разно повышать частоту вращения двигателя и использо-
вать редуктор с большим передаточным отношением.
Двигатель, в котором используют дорогие материалы,
становится меньше, а привод в целом дешевле.
Приведенное выше свидетельствует, что редуктор
выполняет одну из важнейших функций в машине, хотя
на первый взгляд его задача выглядит весьма скромно.
Наряду с зубчатыми редукторами для передачи и преоб-
разования вращающего момента используют ременные
передачи (с зубчатым ремнем), фрикционные передачи (в
том числе ременные с гладким ремнем) и цепные переда-
чи в основном с малошумными зубчатыми цепями. Но,
конечно же, по диапазону параметров и количеству про-
изводимых единиц зубчатые передачи имеют преобла-
дающее значение по сравнению с другими передачами,
вместе взятыми.
Освещая общие принципы конструирования редук-
торов, в первую очередь остановлюсь на выборе кине-
матической схемы.
Выбор схемы зависит от требуемых габаритных
размеров, массы, КПД, кинематической точности, кру-
тильной жесткости, инерционности.
Для передачи движения между валами с большим
межосевым расстоянием при передаточном отношении i
до 5 используют плоскоременные передачи. Клиноре-
менные передачи позволяют иметь в 2—3 раза меньшие
габаритные размеры и применяют их при i до 6 ... 8. Если
требуется высокая кинематическая точность и жесткость,
то в быстроходных передачах используют передачи с
зубчатым ремнем.
Цепная передача позволяет иметь еще меньшие
размеры, работает без относительного скольжения звень-
ев, может применяться при i до 10. В сравнении с ремен-
ной она имеет больший шум и циклически измеряемое
передаточное отношение. КПД при максимальной на-
грузке ременных и цепных передач около 0,96 и 0,95 со-
ответственно.
Клиноременную передачу часто используют в каче-
стве первой ступени редуктора в металлорежущих стан-
302
ЗУБЧАТЫЕ РЕДУКТОРЫ
118. ЗУБЧАТЫЕ РЕДУКТОРЫ ДЛЯ МАЛЫХ И СРЕДНИХ ПЕРЕДАТОЧНЫХ ОТНОШЕНИЙ
|~ТТ~|| Макс. КПД 0,97...~0Д8~|
Уплотнение Вх. вал-шестерня
BB1 RB1
Муфта
Корпус
Установочная
планка
Зубчатое
колесо
Крышка
-|а || а!
Опора
ВВ2
| Макс. КПД 0,97-0,98.
Рама
7/7//////Л-
|Макс. КПД 0,93...0,95 |
Ступица
колеса
Крышка 2
RB2
7ТТ72
А-А
Установочная
планка Зубчатое
колесо
Уплотнение
Каток
Вых. вал
RB2
Цилиндрическое
колвсо
Шестерня Крышка 1|^
RB1
Вх. вал
|Тб~|| Макс. КПД 0,95-0~Зг
|Т4~|| Макс. КПД 0,97...Д98~|
Вых. ва
Корпус
Крышка
b
/ .Звено 1
Коническая
зубчатая пара
Канатоведущий
шкив
Коническое Промежуточный Вых. вал
колесо вал
Цилиндрическая
зубчатая пара q
Звено 2
Б
g
sssssss^s&sssssss&\
ВВ2
RB1
ВВЗ
ь,.
RB2
Крышка 3
Уплотнение2
ВВЗ
стг 1. ’'cKfaiv
Уплотнение!
Опора
Подшипник
Подшипники шкива Вх. вал Ступица шкива
| 1.5 || Макс. КПД 0,95-0,971
Кожух
Сателлит
ВВ1
Крышка 1
Крышка 2
Водило Обозначения:
а,b-центральные колеса
g,f-сателлиты
xi h-водило
Вх. вал
ВВ -шарикоподшипник
RB -роликоподшипник
I - входное звено
О- выходное звено
Корпус
Цилиндрическое колесо
Коническое
колесо
а2
Труба
h.
а2
Вх. вал
Вых. вал
Вх. вал
ю:
Го
Ю
QJBB2
0FRB1
РЕМЕННЫЕ, ЦЕПНЫЕ И ЗУБЧАТЫЕ ПЕРЕДАЧИ
303
ках, станках-качалках (нефтяное оборудование), в насо-
сах и др. и в этом случае обходятся без упругих соедини-
тельных муфт. Практически монопольное применение
получили клиноременные передачи во вспомогательных
приводах двигателей внутреннего сгорания (привод ге-
нератора, вентилятора, водяного насоса и др.). Ременные
передачи с зубчатым ремнем применяют в роботах
(применяют также неполноповоротные передачи со
стальной лентой, взаимодействующей со шкивами без
проскальзывания). Монопольное применение передачи с
зубчатой цепью или зубчатым ремнем — клапанно-
распределительный механизм двигателя внутреннего
сгорания. В трансмиссиях полноприводных автомобилей
между гидротрансформатором и автоматической короб-
кой передач используют передачу с зубчатой цепью (см.
рис. 140).
Во всех этих примерах передаточное отношение ма-
ло (1 ... 3), а главная причина выбора данных передач —
это большое межосевое расстояние.
Если вы все же пришли к выводу, что вас устраивает
только зубчатый редуктор, то далее следует руково-
дствоваться правилами:
1. Постарайтесь использовать передачу только с
цилиндрическими колесами. Конические и гипоид-
ные передачи используйте, если нельзя обойтись без
пересечения или перекрещивания осей. Винтовую зуб-
чатую, червячную, глобоидную или спироидную пере-
дачу используйте только в крайнем случае (подробно об
этом будет сказано ниже).
2. При выборе передачи с цилиндрическими колеса-
ми для передаточного отношения до 5 (в отдельных си-
туациях до 10) принимайте редуктор в виде одной пары
зубчатых колес внешнего зацепления. Помните, что чем
меньше передаточное отношение и чем меньше момент
на выходном валу, тем меньше размеры и масса редукто-
ра. Если приходится принимать схему редуктора, состав-
ленного из двух-трех последовательно соединенных пар,
то каждая последующая пара должна иметь в 1,6 раза
меньшее передаточное отношение, чем предыдущая. Ис-
пользуйте преимущественно косозубые колеса.
3. Если исчерпаны возможности обычной цилинд-
рической передачи в плане размеров, массы, а может
быть, и КПД, используйте принцип многопоточности
(см. параграф 3.1) и, в частности, выбирайте планетар-
ную передачу. Но по количеству схем и диапазону ка-
честв планетарные передачи превышают все остальные
вместе взятые, поэтому выбор соответствующего вариан-
та в данной ситуации приобретает первостепенное значение.
4. При выборе многопоточной передачи предпочте-
ние следует отдавать передачам с внутренним зацеплени-
ем. Помните - потери на трение в передаче с внутренним
зацеплением в 2-3 раза меньше, чем потери в передаче с
внешним зацеплением.
5. Преимущественно используйте косозубое зацеп-
ление. Неудобство, связанное с осевой силой и неболь-
шими дополнительными потерями, с лихвой окупается
плавностью работы и высокой несущей способностью.
6. Используйте для зубчатых колес только высоко-
качественные материалы, с высокой твердостью по-
верхности зубьев (и желательно, вязкой сердцевиной).
После термической обработки необходимо шлифование
зубьев.
7. При выборе параметров зацепления максимально
используйте оптимальное соотношение коэффициен-
тов смещения исходного контура, модификацию про-
филя зуба и продольную модификацию.
8. При выборе формы зуба и технологического про-
цесса стремитесь исключить концентрацию напряже-
ний в зоне переходной поверхности.
9. Валы и опоры валов должны быть достаточно же-
сткими и, желательно, представлять собой симметрич-
ную схему нагружения.
10. В планетарной многосателлитной передаче не-
обходимо по возможности обходиться без избыточных
связей (см. параграф 4.2).
Разумеется, эти правила не исчерпывают всех воз-
можных ситуаций. Поэтому постараюсь их восполнить
при рассмотрении отдельных конкретных примеров (см.
рис. 118,119).
Зубчатые одноступечатые цилиндрические пере-
дачи (схема 1.1), имеют в 2—3 раза меньшие размеры,
чем цепная передача, и КПД 0,97 ... 0,98.
Планетарная зубчатая передача (схема 1.3, 1.4,1.5)
имеет в 1,5 ... 2 раза меньшие размеры и массу, чем одно-
ступенчатая цилиндрическая, и КПД 0,97 ... 0,985.
При передаточных отношениях свыше 6,3 ... 12,5
целесообразно использовать многоступенчатые пере-
дачи (схемы 1.2, 1.6, 1.7, 2.1). Преимущества по габарит-
ным размерам и КПД здесь также имеют планетарные
зубчатые передачи (сравнение по массе редукторов дано
на схеме 2.8, и сравнение по габаритным размерам — на
схеме 2.8, и сравнение по КПД - на схеме 2.9).
На схеме 2.4 дано сравнение различных видов ре-
дукторов по массе в зависимости от вращающего момен-
та Т на выходном звене. Кинематические схемы и соот-
ветствующие им зависимости обозначены: CG — редук-
тор, состоящий из одной цилиндрической зубчатой пары
с неподвижными осями колес; 2k — h — планетарная одно-
ступенчатая передача с одновенцовыми сателлитами;
(2k - h) + (2k - h) - двухступенчатая планетарная переда-
ча, составленная из механизме с одновенцовыми сател-
литами при i = 20 ... 60; 3k — планетарная передача с
двухвенцовым сателлитом и тремя центральными коле-
сами при | i | = 50 ... 300; планетарная передача типа k - h -
v с цевочным зацеплением при | i | = 10 ... 180; (ID — вол-
новая зубчатая передача при | i | = 100 ... 250 и планетар-
ная передача типа 2к — v с цевочным зацеплением.
Червячная передача (схема 2.2) имеет также малые
размеры массу, но низкий КПД (0,85 ... 0,65 при i = 10 ... 50
соответственно). Ее можно применять только в мало-
мощных и кратковременно работающих приводах. При
передаточных отношениях свыше 80 ... 100 можно при-
меняться волновая зубчатая передача, но также при
условии кратковременной работы. Требованиям ком-
пактности, высокой кинематической точности и жестко-
сти, малой инерционности удовлетворяет редуктор по
схеме 2k - v (схемы 2.3,2.3а).
304
ЗУБЧАТЫЕ РЕДУКТОРЫ
Корпус —
Крышка
Вх. вал
и
— КоРпУс
Рама
Подшипник
Подшипник
1000
-ть
- Червяк —
119. РЕДУКТОРЫ ДЛЯ БОЛЬШИХ ПЕРЕДАТОЧНЫХ ОТНОШЕНИЙ
Гидромотор (кроме схем 1.1а, 1.36 и 1.66)
2.1 | Макс.
КПД 0,92
1 = 80
Корпус
О
Вых. вал
г «о
2k-h
k-h-v
500
200
I Гибкая
J оболочка
4 '
100
^O
2k-v
50
HD
0,8
Ж
0,6
0,4
|2.10a|
Червячное
колесо
h (кулачок)
,b
Генератор волн ।———।
b Корпус I 2.76 |
Зубчатая муфта
(2k-h)+(2k-h)
Волновая
передача
20 Т.кНм
Момент на вых. валу
Крышка 1 п
Масса
редуктора
2000кг
Крышка 2
Обозначения:
а. b - центральные колеса
g, f - сателлиты
h - водило
I - входное звено
О - выходное звено
(2k-h)+(2k-h)
Вых. вал
4Зубчатая
муфта 1
Вх. вал
Эксцентриковая
втулка
Звездочка Макс.
КПД 0,85 -fc
h*-гибкий подшипник
g - гибкое колесо____
|_----------------!
[2.10 | ь.
Гибкое 77;
КОЛЬЦО
С одновенцовым
сателлитом ।
С двухвенцовым
. сателлитом
2k-h 2k-h
«2 -
'О й -
.я Й
>- °- при одинаковом моменте на вых. валу
| 2.7а | g'-
Уп ругая
муфта
Ступица
£l
Прототип
схемы 2.10a I
h* 0.8
h
b
g
h*
| 2.7b | Соединительное
звено муфты
3 45 10 20 50 100 200 300
Л | 2.9 | ОБЩИЕ ЗАКОНОМЕРНОС
]0 k-h-v ИЗМЕНЕНИЯ КПД
Для схемы 2.10
2k-v
HD
0.6
0,4
0,2
П
1,0
50 100 150 200 П‘
0.5
0.1
У-0,2-
Пример для передачи
типа 2k-v(схема 2.3)__
,5 To.kH
ЗУБЧАТЫЕ РЕДУКТОРЫ. ВЫБОР СХЕМЫ И КОНСТРУК ГИВНЫХ РЕШЕНИИ
305
В промышленности наиболее распространены (око-
ло 85 %) редукторы с передаточным отношением от 10
до 100, причем наиболее часто используются | i | = 25 ... 40.
Передаточное отношение до 10 используется примерно в
10 % случаев.
Наибольшая потребность в редукторах имеет место
для момента на выходном звене: 250 Н-м — около 30 %,
500 Н-м - около 20 %, 1000 Н-м — около 15 %, 2000 Н-м -
около 15 %, 12,5 Н-м - около 14 %.
При проектировании редукторов рекомендуется из
условий унификации передаточное отношение выбирать
из ряда предпочтительных чисел. То же относится к пе-
редаточному числу каждой зубчатой пары, величине мо-
мента на выходном звене и к межосевому расстоянию.
13.2. ЗУБЧАТЫЕ (В ТОМ ЧИСЛЕ
ЧЕРВЯЧНЫЕ) РЕДУКТОРЫ.
ВЫБОР СХЕМЫ И КОНСТРУКТИВНЫХ
РЕШЕНИЙ
Зубчатые редукторы выпускают в виде отдельных
унифицированных агрегатов, которые присоединяют к
другим агрегатам машины. Традиционное решение —
разъемный корпус с плоскостью разъема, совпадающей с
осями валов. Чтобы получить меньшие размеры и массу,
конструируют специальные редукторы конкретно для
соответствующих машин. На схемах 1.1 ... 1.6, 2.1, 23
примеры таких решений.
Прежде чем рассмотреть первую простейшую схе-
му 1.1, приведу еще одно правило: если требуется скон-
струировать целую разветвленную трансмиссию (напри-
мер автомобиля), предусмотрите увеличение переда-
точного отношения в самом конце кинематической
цепи. В этом случае все промежуточные валы, диффе-
ренциалы, коробки передач, муфты будут менее нагру-
жены.
Введение в трансмиссию конечной передачи приво-
дит к уменьшению размеров и массы отдельных компо-
нентов трансмиссии при существенном увеличении кру-
тящего момента в самом конце кинематической цепи, что
позволяет рассчитывать все ее компоненты, кроме самой
конечной передачи, на восприятие малого крутящего
момента. Кроме того, обычно используется свободное
пространство внутри ступицы колеса или звездочки (см.
схемы 1.1,13).
В качестве конечной передачи используют обычно
цилиндрическую зубчатую пару (схема 1.1). Широко
применяют планетарную зубчатую передачу, встроенную
в колесо машины (схема 13).
На схеме 1.1 - простейшая конечная передача авто-
мобиля. Корпус с помощью поворотной опоры шарнирно
присоединен к подвеске машины. На выходном валу ус-
тановлено приводное колесо. Входное звено вал-
шестерня неподвижно соединено с вилкой шарнирной
муфты карданной передачи. Шестерня установлена в
подшипниках ВВ1 и RB1, шариковом и роликовом соот-
ветственно. Зубчатое колесо неподвижно соединено с
выходным валом и установлено в подшипниках ВВ2 и
RB2. Особенность конструкции заключается в простоте
корпусных деталей. По сравнению с распространенным
поперечным разъемом корпусных деталей, здесь крышка
и корпус имеют разъем, не пересекающий посадочных
поверхностей подшипников. Подшипник ВВ2 выходного
вала удерживается от осевого перемещения планкой, ко-
торую при сборке вставляют вместе с зубчатым колесом
и подшипником. Крышкой планку прижимают к корпусу.
Уплотнения защищают зубчатую пару и подшипники от
внешней среды.
На схеме 13 в качестве конечной передачи автомо-
биля использован соосный зубчатый редуктор - частный
вариант планетарной передачи с неподвижным води-
лом h. Входной вал (полуось) соединен с центральным
колесом а, которое зацепляется с несколькими промежу-
точными колесами g, а другое сопряженное с ними
колесо Ь — неподвижно соединено со ступицей колеса —
выходным звеном. Водило h неподвижно соединено с
рамой машины. Данную передачу называют также пла-
нетарным бортовым редуктором.
На схеме 1.2 — редуктор, у которого оси входного и
выходного звеньев пересекаются, он составлен из двух
зубчатых пар: конической и цилиндрической, и в нем нет
разъемов в плоскости осей валов.
К входному звену — конической шестерне - присое-
динен входной вал — вал гидромотора, а на выходном
валу установлен опорный приводной каток машины.
Сборку редуктора проводят, используя отверстия в кор-
пусе. Через верхнее отверстие опускают колесо, а через
боковое отверстие заводят выходной вал и стопорят на
нем цилиндрическое колесо с помощью упругого кольца;
аналогично опускают коническое колесо и вставляют в
него вал-шестерню. Боковые отверстия закрывают
крышками 1 та 2. Закрывают и верхнее отверстие. Такая
конструкция имеет меньше уплотняемых стыков, чем
традиционные конструкции с поперечным разъемом и
характеризуется меньшими габаритными размерами и
массой.
Особенностью конструкции редуктора является ис-
полнение подшипниковых опор. Исполнение опоры RB2
выходного вала требует тщательного подбора подшип-
ников по жесткости и радиальным зазорам, а конструк-
ция опоры RB1 входного вала может быть отработана
только при рассмотрении ее нагружения вместе с опорой
вала гидромотора. Редуктор поданной схеме используют
в горных машинах.
На схеме 1.4 тяжелонагруженный планетарный ре-
дуктор, используемый в зарубежных и отечественных
судовых приводах мощностью свыше 10 тыс. л.с. В дан-
ной схеме максимально использованы принципы много-
поточности, симметрии и самоустановки звеньев при
нагружении.
Центральное колесо а соединено с входным валом
звеном 1 и двойной зубчатой муфтой. Центральное коле-
со а и сателлиты g имеют шевронные зубья, а венцы Ь и
Ь' — косозубые, выполнены отдельно друг от друга для
независимой самоустановки. Они связаны между собой
симметричной уравнительной подвеской (звено 2), кото-
306
ЗУБЧАТЫЕ РЕДУКТОРЫ
рая соединена с корпусом звена двойной зубчатой муф-
той (звено 3). Венцы Ь и Ь' самоустанавливаются под
действием сил в зацеплении с сателлитами, благодаря
чему выравнивается нагрузка как между сателлитами, так
и между венцами. Сателлиты установлены с возможно-
стью осевого перемещения на осях в водиле, которое
центрируется на подшипниках относительно корпуса.
На схеме 1.6 показан планетарный редуктор несуще-
го винта вертолета, в основу которого положена замкну-
тая передача, составленная из двух планетарных зубча-
тых механизмов {схема 1.6а). Требования к габаритным
размерам и массе обусловили его сравнительно сложную
конструкцию.
Входной вал соединен с центральным колесом aj
первого механизма. Центральное колесо с внутренними
зубьями bi этого механизма соединено с центральным
колесом с внешними зубьями а2 второго механизма, а
водило hi с колесом Ь2 и выходным валом. Водило h2
соединено с корпусом.
Передаточное отношение редуктора
где z - число зубьев колес с соответствующими индексами.
Входной вал установлен на подшипниках RB1 и
ВВЗ, расположенных в деталях корпуса. Выходной вал
установлен на подшипниках ВВ1 и RB2, расположенных
в корпусных деталях. Подшипник BBI наряду с радиаль-
ной нагрузкой полностью воспринимает внешнюю осе-
вую нагрузку.
Центральное колесо а2 установлено на подшипнике
ВВ2. Второй опорой ему служат сателлиты второго ме-
ханизма, а с колесом Ь] соединено зубчатой муфтой. Са-
моустановка колес Ь> и Ь2 осуществляется за счет дефор-
мирования тонкостенных упругих элементов и их соеди-
нений с другими звеньями. Водила имеют консольные
оси сателлитов. В сателлиты встроены роликовые под-
шипники. Водила имеют повышенную жесткость в осно-
вании консольных осей благодаря выполнению ребер
таврового сечения.
В лебедке грузового лифта {схема 1.5) нагрузка от
канатов передается на опору через обод и диск канатове-
дущего шкива, его ступицу и подшипники. Все эти дета-
ли и элементы выполняют функцию несущей конструк-
ции и достаточно жесткие, чтобы их деформация не ока-
зывала существенного влияния на взаимодействие звень-
ев встроенной планетарной передачи.
Кожух выполняет лишь защитную функцию и вы-
полнен тонкостенным. Он пристыкован к ободу по плос-
кости без центрирующего пояска. В отличие от него
крышки 1, 2 и 3 имеют центрирующие пояски. Необхо-
димость такого решения обусловлена тем, что в них ус-
тановлен подшипник и встроено уплотнение. В данных
случаях требуется центрирование этих деталей.
Центральное зубчатое колесо а {схема 1.5а), выпол-
ненное как единое целое с входным валом, имеет всего
одну подшипниковую опору, поскольку роль второй
опоры выполняют три сателлита планетарной передачи, с
которыми взаимодействует центральное колесо.
Данное исполнение имеет меньшие габаритные раз-
меры, и массу, и более высокий КПД по сравнению с
традиционным решением, имеющим червячный редуктор.
На примере схемы 1.7 проиллюстрированы возмож-
ности использования принципа совмещения функций:
здесь шкив, кроме своей основной функции, является и
водилом и корпусом (кожухом) редуктора.
На схеме 2.1 (рис. 119) показан редуктор, содержа-
щий две цилиндрические зубчатые пары и планетарную
зубчатую передачу. При последовательном соединении
обычно планетарную передачу используют в качестве
последней ступени редуктора, нагруженной наибольшим
моментом. В этом случае получаются меньшие габарит-
ные размеры.
Схема 2.1 рассчитана на меньшую мощность приво-
да и меньший момент на выходном валу в сравнении со
схемами 1.4 и 1.6, что и предопределило более простые
очертания сечений ее деталей. Редуктор использован в
приводе гусеничного хода экскаватора.
Особенностью этой конструкции является блоч-
ность компоновки.
В виде отдельных блоков выполнены, в частности,
редуктор, составленный из цилиндрических зубчатых
пар c-d, ni n; планетарная зубчатая передача, содержа-
щая основные звенья а, b и h. Гидромотор прифланцован
к крышке 1 корпуса. Корпус первой и второй зубчатых
пар присоединен к центральному колесу b планетарной
передачи. На валу гидромотора на шлицах установлена
шестерня с, зацепляющаяся с колесом d. Зубчатые колеса
с, d, п имеют симметричные опоры в виде двух подшип-
ников, и только шестерня m расположена консольно.
Центральное колесо а планетарной передачи соеди-
нено с ведомым колесом п второй зубчатой пары, а води-
ло h соединено с выходным валом, на котором установ-
лена звездочка гусеничного хода. Центральное колесо b
использовано в качестве корпусной детали.
Звездочка опирается на симметрично расположен-
ные подшипники. Корпус планетарной передачи присое-
динен к раме гусеничного хода.
На схеме 2.2 приведен пример конструктивного ис-
полнения червячной передачи. Червяк установлен в кор-
пусе на радиально-упорных шариковых подшипниках.
Червячное колесо выполнено как единое целое с полым
валом и установлено в корпусе на радиально-упорных
роликовых подшипниках. Червяк и червячное колесо
могут быть присоединены к другим устройствам с любой
стороны корпуса. Корпус выполнен неразъемным и за-
крыт крышкой, которая центрируется по наружной по-
верхности подшипника. Отверстия под подшипники та-
ковы, что допускают установку через них в неразъемный
корпус червяка и червячного колеса.
В маломощных и кратковременно включаемых при-
водах применение такой схемы вполне уместно, а вот то,
что во всем мире в приводах лифтов используют червяч-
ные передачи - это, видимо, уже только дань традициям
и монополии производства.
Кстати, одна из разновидностей червячной передачи -
глобоидная передача — в теоретическом и практическом
планах получила наибольшее развитие именно в нашей
стране. Ее достоинство - высокая несущая способность и
ЗУБЧАТЫЕ РЕДУКТОРЫ. ВЫБОР СХЕМЫ И КОНСТРУКТИВНЫХ РЕШЕНИЙ
более высокий КПД. Если в червячной передаче практи-
чески отсутствуют условия для гидродинамической
смазки, то в глобоидной такая смазка образуется благо-
даря тому, что вектор скорости скольжения практиче-
ски перпендикулярен линии контакта.
Но все же и о глобоидной передаче можно забыть,
так как она уступает червячной передаче и другим пере-
дачам по технологичности конструкции. Здесь, видимо,
произойдет то же, что произошло в состязании эволь-
вентного зацепления, циклоидального зацепления и пе-
редачи Новикова.
Прежде чем перейти к схеме 2.3, считаю необходи-
мым еще раз вернуться к особенностям планетарных пе-
редач, поскольку для основных диапазонов передаточ-
ных отношений и моментов будущее, видимо, за ними.
Как уже отмечалось выше, планетарная передача
содержит центральные колеса а, Ь, е; сателлиды g, f - и
водило h. В частном варианте (схема 1.3) водило непод-
вижно, хотя схема осталась неизменной.
Особенность данных решений - многопоточность
передачи энергии несколькими зубчатыми парами парал-
лельно. Поэтому у них малые габаритные размеры и масса.
Свойства планетарной передачи в основном харак-
теризует передаточное отношение /h) при мысленно ос-
тановленном водиле.
Это отношение определяют как отношение чисел
зубьев z взаимодействующих колес:
1) при входном а и выходном b звеньях для схе-
мы 1.36 для схемы 1.7а
za za zf
2) при входном b и выходном е звеньях для схе-
мы 2.10
zb zf
3) при входном g и выходном b звеньях для схе-
мы 2.6 = гъ/гъ.
Для схем 1.36 и 1.7а i(h) отрицательно, а для схем
2.10 и 2.6 z® положительно.
Используют схемы 1.36 и 1.7а обычно при выход-
ном водиле и остановленном колесе Ь, при этом
z-(b) = i-z-(h)
‘ah 1 ‘ab ’
В схеме 1.36 можно получить i^clO, а в
схеме 1.7а < 45 Передачи по этим схемам имеют вы-
сокий КПД (г] = 0,97 ... 0,98).
Схемы 2.10 и 2.6 используют при входном водиле,
при этом для схемы 2.10
ft)____L_
*hb 7—(hj
1 'be
для схемы 2.6
,(ь) = 1, Так кя„ ,(h) „ .-(h)
zhg 1 _ -(h) ' 1ак как ibe и Zgb
1 Zgb
могут быть близки к 1,
то | 1^ | и | | могут быть очень большими. КПД при
этом значительно ниже, чем КПД в схемах 1.36; 1.7а.
Для схемы 2.10'.
i$ ... 30 50 100 200 500 1000
q .... 0,9 0,75 0,60 0,45 0,25 0,12
Известна также передача с дву мя внешн ч: ~ ст-
лениями (передача Давида). Для нее передатсчв зе ия -
шение определяется как и для схемы 2.10. во КПД ье
значительно ниже, и применять ее не следует
Для схемы 2.6 при = 10 ... 180 г] = 0.95 „ О 45 зфм
высокой степени точности и номинальной нату. -
В схеме 2.6 сателлит g обычно соединяют с мощ-
ным валом посредством механизма параллелью х г -
вошипов v (см. схему 2.6). Эту передачу серий1 ус-
пешно выпускают только в Японии и ФРГ.
Для получения больших передаточных отв, ь.
при высоком КПД обычно соединяют схемы 1.36 г-эслг-
довательно (см. например, схему 1.6).
Соединяя различные схемы, можно получать н ожые
передачи, обладающие качествами входящих в их . оспа
механизмов. Например, соединяя механизмы, вы, s--
ные по схемам 1.36 и 2.10, получают передачу, орг;.*_з-
ленную на схеме 2.5.
Выполнив числа зубьев венцов g в обоих
мах одинаковыми и совместив оси сателлитов. -
конструктивно упростить передачу, объединив g i
колеса b (схема 2.5а). Получается передача, хдя г
;(b) _ ,-(b) -(b) -(b) _ । _^b_ . -(b) _ I j-r—
'ае “'ah 'he ’ гДе 'ah “1 + ’ 'be “ _ _ 1Ч’И
Za 1 — — —
-e -g
общий КПД = q^ q^J.
Например, требуется получить передачу с = 5
Для этой цели может подойти схема 2.10, но ее КПД w-
зок (q « 0,25). Если же соединить схемы 1.36 и 2 10 к. г
это сделано на схеме 2.5 при = 5 и = -100. т<
лучается q 0,97, q 0,6, а общий КПД опре з -
как произведение 0,97 • 0,6 = 0,582. Таким образ1 КПД
выше, чем в схеме 2.10 при том же передаточном jhf
шении.
Для схемы 2.5а:
'| •• .. 50 100 200 300 500 1000
q .. .. 0,90 0,85 0,75 0,65 0.6 0.45
Еще выше можно получить КПД, если послелщ-
тельно соединить, например, несколько мехачнг “
схеме 1.3а (см. схему 1.66).
Из схем последовательного соединения могут Сыть
получены схемы замкнутых передач вращения. Дм •* "
цели достаточно поменять функции ведомого и непод-
вижного звеньев. Например, из схемы 1.66 при ведущем
звене I получим схему 1.6в, если сделаем неподвяжт м
звено h2, а ведомым - звено О.
Рассматривая полученную схему как механти г
тремя основными звеньями, определим передах ж
отношение i zhQ — 1 - i j°^.
Так как обычно сложные схемы используют для
больших передаточных отношений, то изменена е ; _ к-
ции ведомого и остановленного звеньев пр.гв лит к ₽-
значительному изменению | i | и КПД.
308
ЗУБЧАТЫЕ РЕДУКТОРЫ
Например, из схемы 2.5 с /^=-500 можно полу-
чить схему с i -501.
Передаточное отношение схемы 1.66 (см. обозн. на
схеме 1.6 в) i = i J i (bjJ , например i\°) = 7 • 4 = 28 ,
передаточное отношение схемы 1.6в i ^_q= 1 - 28 = -27.
Абсолютная величина передаточного отношения в
схеме 1.6в несколько уменьшилась, КПД изменился не-
значительно, для схемы 1.66 т] = 0,940, для схемы 1.6в
т] = 0,938. С учетом этого целесообразнее применять
схему последовательного соединения. Схему 1.6в приме-
няют из компоновочных соображений. При встраивании
в барабан или колесо машины она более проста по кон-
струкции.
Из передач с аналогичными свойствами уже рас-
смотрена схема 1.6а. В ней водило первого механизма
вращается медленно (инерционные нагрузки малы). Та-
кого вида схемы предпочтительно применять в высоко-
скоростных приводах.
С увеличением 1i1 при неизменном моменте на вы-
ходном звене габаритные размеры передачи увеличива-
ются. Для схемы 1.7а минимальные размеры получаются
при наибольшей разности в диаметрах венцов g и f.
В схемах 1.6а, 1.66 и 1.6в целесообразно выполнять |z|
первого механизма в 1,5 ... 2,5 раза большим, чем |z|
второго механизма, так как второй механизм нагружен
большим моментом и его размеры определяют размеры
передачи в целом.
На схеме 2.8 примерная зависимость диаметрально-
го размера D - в относительных единицах от передаточ-
ного отношения при одинаковом моменте на ведомом
звене. Показано, что с увеличением передаточного отно-
шения размеры увеличиваются у различных передач по-
разному. Штриховая линия дана для сравнения и харак-
теризует габаритные размеры волновой зубчатой переда-
чи, о которой речь пойдет в следующем параграфе.
На схеме 2.3 показано исполнение передачи, состав-
ленной из механизмов по схемам 1.36 и 2.6. Сателлиты g,
равномерно размещенные в окружном направлении
(обычно их три), приводят во вращение эксцентриковые
валы hj, а те, в свою очередь, сообщают плоскопарал-
лельное движение сателлитам f и f'. Сателлиты f и Г
обкатываются по зубьям (цевкам Ь') центрального коле-
са Ь. Если неподвижно водило h, то
,(ь) = .
“Ь za(l-zf/zb)’
при неподвижном колесе b и выходном водиле h
/ь) _ t ।
lab~1+ZB(l-Zi/Zby
Применяют эту схему при = 57 ... 192 и моменте
на выходном звене до 3800 Н-м в основном в зарубежных
роботах. Если эксцентриковые валы соединить непосред-
ственно с двигателями и расположить двигатели на води-
ле, то угловые скорости со связаны зависимостью
юь, ~юь 1
“h zt/zb~l'
Особенностью конструктивной схемы является рас-
положение сателлитов f и f' в параллельных плоскостях.
Диски водила h неподвижно соединены между собой
перемычкой h ', проходящей через отверстия сателлитов.
Водило присоединяют к ведомому звену, которое имеет
свои подшипниковые опоры (на схеме не показаны). Са-
теллит f с центральным колесом b имеет внецентроидное
(цевочное) зацепление. Передача обладает высокой кру-
тильной жесткостью, малой инерционностью, имеет
КПД 0,75 ... 0,94 (в зависимости от параметров).
Кстати, как уже отмечалось, КПД является одним из
определяющих критериев при выборе схемы большинст-
ва механизмов и в том числе зубчатой передачи.
На схеме 2.9 даны общие закономерности изменения
КПД в зависимости от передаточного отношения. Оче-
видно, что чем больше передаточное отношение, тем ни-
же КПД. Существенное различие в КПД имеет место у
различных схем планетарных и волновых передач. Но
передача 2k—v может иметь более высокий КПД, чем у
обычной передачи с неподвижными осями колес. Приве-
денные данные касаются лишь КПД при установившейся
номинальной нагрузке.
Обычно КПД не постоянен и зависит от режима на-
гружения, длительности непрерывной работы, длитель-
ности эксплуатации и др.
Например, КПД возрастает при увеличении момента Т
на выходном звене (см. на схеме 2.11 планетарной зубча-
той передачи 2k-v по схеме 2.3). Кривые на схеме соот-
ветствуют указанной частоте вращения выходного звена.
При недостаточном нагружении преобладает доля
постоянных потерь энергии и поэтому КПД ниже, чем
при номинальном режиме. При перегрузках возникают до-
полнительные потери из-за перегрева смазочного материа-
ла, изменения зазоров и других отрицательных факторов.
Пока привод-механизм не вышел на установивший-
ся номинальный тепловой режим, КПД не достигает мак-
симального значения из-за неэффективности смазывания.
При длительной эксплуатации и изнашивании дета-
лей механизма КПД уменьшается из-за увеличения зазоров
в подшипниках, ухудшения уплотнения соединений и др.
13.3. ОСОБЕННОСТИ ПЛАНЕТАРНЫХ И
ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧ
Далее осветим некоторые особенности геометрии
планетарных зубчатых передач. Выбор числа сателли-
тов числа зубьев колес и геометрический расчет плане-
тарных передач проводят в соответствии с условиями
соосности, соседства и сборки. На первый взгляд, это
довольно простые условия и достаточно полно опубли-
кованы. Но здесь считаю уместным обратить внимание
на некоторые особенности, позволяющие создавать пере-
дачи с высокими показателями качества.
ОСОБЕННОСТИ ПЛАНЕТАРНЫХ И ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧ
309
120. УСЛОВИЯ СООСНОСТИ И СОСЕДСТВА В ПЛАНЕТАРНОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕ
Сателлит е
колесо а
EZE
Центральное
колесо b
I з.з |
Центральное Центральное
колесо Ь колесо е
Сателлит g-f
22Н Центральное
колесо а
- межосевое расстояние зубчатой пары a-g (g-b на схеме 3.3)
- межосевое рвсстояние зубчатой пары f-b (g-b на схеме 3.2 и f-e на схеме 3.3)
Отношение чисел
зубьев
центральных колес
^ь/=а 3,5...10
2,5...3,5
2,0...2,5
меньше 2,0
Рекомендуемое
число
сателлитов
3
4
5
6
Сателлит
[ЕЕ
Диск 1
Перемычка
водила
Диск 2
121. СИЛЫ В ПЛАНЕТАРНОЙ
ЗУБЧАТОЙ ПЕРЕДАЧЕ
I 5-1 |
Сателлит g'
Сателлит g"
ZE]
I (центральное
колесо а)
4(центральное
х колесо Ь)
1 (центральное
колесо а)
Сателлит g'"
I 4-6 |
Водило h
| 5.3 | 4 (центральное
колесо Ь)
Сателлит
Перемычка
водила
,b J [Т5~|
о/ Jfyirtilti
[(центральное
колесо а)
/~2 (сателлит g)
Водило h
3 (венец f
сателлита)
2 (венец g
сателлита)
- вращающий
Fc~ реакция опоры С момент
Водило h
А и В - опоры сателлита
2 (венец g I ^-За |
сателлита)
С - Z TfkrfA.
Fl2 3 (венецf
< сателлита)
122. ВЗАИМОДЕЙСТВИЕ ЗВЕНЬЕВ
[ЕЕ
Ь (жесткое g (гибкое
колесо) колесо)
В
Ролик
Вых. вал
Вх. вал
ВОЛНОВОЙ ЗУБЧАТОЙ ПЕРЕДАЧЕ
Ролик
Гибкая оболочка
b (жесткое
колесо)
g (гибкое
колесо)
| 6.3
Кулачок h
Гибкий подшипник
g (гибкое
колесо)
| 6.4
Диск
h - водило/кривошип/кулачок/волнообразователь (генератор волн)
Т- вращающий момент
<о- угловая скорость
F- сила давления
V - окружная
скорость
ah- угол давления
- зона зацепления
m п - зона давления
310
ЗУБЧАТЫЕ РЕДУКТОРЫ
На самом деле данные условия взаимозависимы и
обусловлены конструктивными решениями, и тот упро-
щенный подход, который обычно принят в литературе,
не всегда приемлем.
Условие соосности предусматривает равенство ме-
жосевых расстояний зубчатых пар, благодаря чему обес-
печивается совпадение осей центральных колес и сател-
литов.
Это условие записывают так: awi = aw2, где awl, aw2 —
межосевое расстояние соответственно первой и второй
зубчатых пар (см. на рис. 120 схемы З.Г, 3.2', 3.3).
При выполнении этого условия следует учитывать,
что внутреннее зацепление практически не осуществимо
без смещений исходного контура. Выполняют условие
соосности, варьируя величинами коэффициентов смеще-
ний, а также, например, углов наклона зубьев Pi и р2
(схема 3.]). Коэффициент смещения для сателлита в
схеме 3.2 один и тот же при расчетах внутреннего и
внешнего зацеплений. Путем выбора коэффициентов
смещений можно обеспечить соосность звеньев в схе-
ме 3.3 при изготовлении сателлита с одним общим вен-
цом для обоих зацеплений. При этом числа зубьев цен-
тральных колес могут отличаться на 1, 2, 3 (обычно не
более 3). Разность чисел зубьев выбирают совпадающей с
числом сателлитов или кратной этому числу.
Условие соседства предусматривает установку са-
теллитов в водиле без соприкосновения вершин зубьев
соседних сателлитов.
Если сателлиты располагать на одинаковом рас-
стоянии один от другого, то это условие запишется из
рассмотрения схемы 4.1.
Угол v = 2л пт где п„ - число сателлитов. Расстоя-
2л
ние АВ = awsin-----катет треугольника АВС. Расстоя-
ние АВ должно быть больше радиуса окружности вершин
сателлита:
Это предельное условие соседства сателлитов. Оно
зависит от соотношения диаметров окружностей цен-
тральных колес. Например, на схеме 4.1 нельзя размес-
тить более трех сателлитов, а на схеме 4.2 предельное
число сателлитов может быть значительно большим.
Однако часто число сателлитов принимают меньше
предельного, но не меньше трех. Это объясняется усло-
вием размещения элементов водила между сателлитами.
Водило имеет обычно форму, представленную на схе-
ме 4.3. Перемычки водила особенно трудно разместить
при малом отношении диаметров центральных колес
(схема 4.4). Кроме того, значительное увеличение числа
сателлитов приводит к усложнению передачи. При числе
сателлитов меньше трех эффект от применения плане-
тарной передачи заметно снижается. Наиболее употреби-
Zh
тельны числа сателлитов = 3 при — < 10, nw = 4 при
za
— < 3,5; = 5 при — < 2,5; = 6 при — < 2 , где zb,
Za Za za
za - числа зубьев соответственно центральных колес b и а
(схема 4.2). Для передач с двухвенцовыми сателлитами
(см. схему 1.7а) число сателлитов выбирают из условия
размещения без соприкосновения венцов с большим
диаметром. Чтобы расположить как можно больше са-
теллитов, иногда эти венцы соседних сателлитов смеща-
ют в осевом направлении (схема 4.5).
Для передачи по схеме 2.5 (на рис. 119) число сател-
литов, зацепляющихся с зубчатыми колесами b и е может
быть больше, чем число сателлитов, зацепляющихся с
колесом а (схемы 4.6). Сателлиты g зацепляются со все-
ми тремя центральными колесами, а в свободных местах
между ними размещены сателлиты Ь, зацепляющиеся
только с двумя колесами. Несущая способность внутрен-
них зацеплений определяет несущую способность пере-
дачи по данной схеме.
В схеме 4.6 сателлиты f так же, как и сателлиты g,
выполнены с общим венцом, как и в схеме 3.3.
Условие сборки предусматривает определенное со-
отношение между числами зубьев колес. Обычно имеет
смысл условие сборки при симметричном расположении
сателлитов. Очевидно, что установить сателлит между
центральными колесами можно, повернув их относи-
тельно друг друга так, чтобы зубья сателлита оказались
напротив впадин центральных колес. Последующая ус-
тановка второго и всех других сателлитов может быть
обеспечена только при соблюдении условия сборки. Оно
обеспечивается при следующем соотношении чисел
зубьев: для схем 4. Г, 4.2 Za + Zb = С, где С — любое целое
число; nw — число сателлитов; za, zb — числа зубьев цен-
zazf + z„zb
тральных колес; для схемы 3.1 -------=— = С, где
Bgf _ наибольший общий делитель чисел зубьев венцов
zbzf _ zgze
сателлитов z„ и zb для схемы 2.10 -----5— = С, для
«„Bgf
схемы 2.6 zb/n^ = С.
Для передач с двухвенцовым сателлитом необходи-
мо обеспечить точное относительное расположение зуб-
чатых венцов и отметить зуб одного венца, точно распо-
ложенный напротив зуба второго венца. Поворачивая
сателлит на соответствующий угол, можно собрать пере-
дачу.
При выполнении в схеме 2.6 сателлита с общим
венцом принимают
|zb-ze| = «w
Особенности расчета на прочность элементов мно-
госателлитных передач, выбор или конструирование
подшипниковых опор обусловливает параллельное рас-
пределение нагрузки между несколькими зубчатыми па-
рами. На рис. 121 даны некоторые пояснения, позволяю-
щие понять характер нагружения звеньев. На схеме 5.1
центральное колесо зацепляется с тремя сателлитами.
Момент Т\ на центральном колесе уравновешивается си-
лами Ff, F", F” в зацеплениях, т.е. F(rb} +F"rbl +
+ F" rbl = 7], где rbi - радиус основной окружности цен-
ОСОБЕННОСТИ ПЛАНЕТАРНЫХ И ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧ
311
трального колеса. Если предположить, что силы в зацеп-
Т
лениях одинаковы, то Fx = —!—, где — число сател-
гь\ nw
литов. В действительности из-за неточностей изготовле-
ния и возникающего из-за этого различия зазоров в заце-
плении, нагрузка распределяется неравномерно (см. план
сил на схеме 5.1а). Равновесие при этом не нарушается
из-за реакции в центральной опоре Fq. Так как приведен-
ные силы не могут быть однозначно определены с помо-
щью уравнений статики, то получается статически неоп-
ределимая система. В такой системе значения сил в заце-
плениях могут существенно различаться. Чтобы систему
сделать статистически определимой, достаточно в этом
примере исключить опору - сделать центральное колесо
"плавающим". Равенство сил при этом будет обеспечено
только в трехсателлитной передаче. При числе сателли-
тов больше трех можно уменьшить неравномерность за
счет этого, но исключить полностью нельзя. Изложенное
выше касалось статического распределения сил. Наличие
сил инерции при вращении звеньев также приводит к
неравномерности распределения нагрузки по сателлитам.
Неравномерность учитывают коэффициентом - отноше-
нием максимальной силы в зацеплении к средней силе,
определяемой зависимостью Кн = 1гпах . Коэффициент
Ъ
неравномерности К„ принимают в зависимости от точно-
сти изготовления и мероприятий по выравниванию на-
грузки. При 7-й степени точности и "плавающем" централь-
ном колесе в трехсателлитной передаче Кк = 1,10 ... 1,15;
при тех же условиях, но при расположении центральных
звеньев в опорах Кн = 1,35 ... 1,50.
Нагрузки на подшипники сателлитов и оси опреде-
ляют в соответствии со схемами 5.2 ... 5.3а. Одновенцо-
вый сателлит {схема 5.2) совмещает зубчатые венцы 2 и 3
(сравни со схемой 5.3) в одном венце 2. Момента он не
передает и находится в равновесии под действием сил
F21, Fi4, F2b со стороны центральных колес 1, 4 и водила h
{схема 5.2). Силу F2b можно определить, решив вектор-
ное уравнение F2i + F24 + F2b = 0 или из равенства проек-
ций на горизонтальную ось: F21 cosalvl + F24 cosalv2 = F2h.
Если полагать, что углы зацеплений alvl и alv2 примерно
одинаковы, а также, что моменты сил F2, и F24 относи-
тельно сателлита равны по величине и противоположно
направлены, то получим F2b = —2/72i cosa,v|. При этом
надо учитывать также КИ
В передаче с двухвенцовым сателлитом (см. схе-
му 5.3) рассматривают равновесие каждого из сателли-
тов. Как для обычной косозубой передачи, определяют
окружные Fa и Fa, радиальные Fr2 и Fr3 и осевые состав-
ляющие Fa2 и Fa3.
Чтобы осевые составляющие Fa2 и Fa3 уравновеши-
вали друг друга, наклон зубьев венцов выбирают в одну
сторону. Чтобы Fa2 ~ -Fa3, нужно подобрать углы накло-
на зубьев р2 и Рз, удовлетворяющие условию
tgP2 dw3 ,
*g Рз dw2
где dW2, — начальные диаметры зубчатых венцов са-
теллита. Реакции в опорах А и В сателлита определяют
из условия равновесия его оси или двухвенцового колеса,
когда опоры расположены внутри него {схема 5.3а).
Все характеристики приводят к одной зубчатой па-
ре. При этом учитывают, что число циклов напряжений в
зубьях центрального колеса а за время t
=ww(wa-wh)60r;
для зубьев сателлита
где nw - число сателлитов; пл, пе, пь - частота вращения
колес а, g и водила h.
За один оборот одновенцового сателлита при нере-
версивной нагрузке зуб испытывает симметричный цикл
напряжений изгиба.
Модуль зубьев внутреннего зацепления для схе-
мы 3.1 рекомендуется принимать в 1,5 ... 2 раза большим
модуля внешнего зацепления. Для второго механизма в
схемах 1.6а, 1.66, 1.6в также модуль принимают в
1,5 ... 2 раза больше, чем для первого механизма.
В заключение остановимся на волновой зубчатой
передаче, к которой зачастую проявляется особый, по-
рой неоправданный интерес.
Волновая зубчатая передача содержит зацепляю-
щиеся между собой гибкое и жесткое зубчатые колеса и
обеспечивает передачу и преобразование движения бла-
годаря деформированию гибкого колеса.
Она может быть представлена как конструктивная
разновидность планетарной передачи с внутренним заце-
плением, характерной особенностью которой является
использование сателлита, деформируемого в процессе
передачи движения.
Образование волновой передачи иллюстрируют на
примере планетарной передачи (см. планетарную пере-
дачу типа k-h-v на схеме 2.6). При входном звене h эта
передача позволяет получать большие передаточные от-
ношения (см. выше описание схемы 2.6).
При малой разности zb - zg, например при zg = 100.
zb = 101, получается ^- = -100. Если выполнить соеди-
“g
некие с выходным валом как единое целое с сателлитом
в виде тонкостенной гибкой оболочки, как показано на
схеме 6.1 (рис. 122), то получится волновая передача.
Гибкое колесо g при этом поджато к жесткому колесу b
роликом, расположенным на водиле h. Гибкость обо точ-
ки позволяет обеспечивать передачу движения с сателли-
та на выходной вал и приспосабливаться к взаимодейст-
вию с жестким колесом при использовании зубьев с ма-
лыми углами давления. Гибкость оболочки позволяет
также иметь две зоны зацепления {схемы 6.2, 6.3, 6.4).
В этом случае обеспечивается симметрия нагружения
генератора волн. Он нагружен со стороны вала моментом
Ть (см. схему 6.3), а со стороны гибкого колеса - силами
Fbg, которые образуют пару сил, уравновешивающую
момент Th. Водило с роликами или иное устройство,
312
ЗУБЧАТЫЕ РЕДУКТОРЫ
обеспечивающее деформирование гибкого колеса, назы-
вается генератором волн (реже — волнообразователем).
Чтобы задать гибкому колесу определенную начальную
форму, генератор волн выполняют в виде симметричного
кулачка специального профиля (см. схему 6.3). Такой
генератор называют кулачковым. На кулачок надевают
специальный гибкий подшипник, чтобы уменьшить тре-
ние между гибким колесом и генератором волн (см. так-
же схему 2.7а, где гибкий подшипник обозначен h*).
На схеме 6.3 показаны зоны нагружения mn кулач-
кового генератора со стороны гибкого колеса и равно-
действующие сил Fhg, которые отклоняются от нормали
NN на угол трения р в сторону, противоположную отно-
сительной скорости звеньев h и g. Пара сил Fhg с плечом /
уравновешена моментом.
Роликовый генератор волн (см. схему 6.2) может
быть преобразован в дисковый генератор волн (см. схе-
му 6.4) при значительном увеличении диаметров роликов
и расположении роликов (дисков) в параллельных плос-
костях. Такое исполнение применяют в высоконагружен-
ных передачах.
Для обеспечения симметрии нагружения обычно
используют четные числа зубьев колес. Разность чисел
зубьев сопряженных колес для схем 6.2, 6.3 и 6.4 равна 2.
Независимо от конструкции генератора волн гибкое
колесо при его нагружении в той или иной мере изменяет
свою начальную форму (см. схему 6.4). Это происходит
из-за наличия зазоров и упругости элементов, взаимодей-
ствующих с гибким колесом. Если свободно располо-
женное гибкое колесо нагрузить с одного торца момен-
том Тъ, а с другого торца силами в зацеплении зубчатых
колес, то при закручивании оно на переднем торце будет
выпучиваться в сторону действия сил (см. схему 6.4).
Такое изменение формы колеса g, ограничено с внешней
стороны жестким колесом Ь, а с внутренней стороны ге-
нератором волн h. Гибкое колесо стремится при этом
принять форму жесткого колес на участке уь и форму
генератора волн на участке yh. С увеличением момента,
закручивающего гибкое колесо, указанные зоны увели-
чиваются. В соответствии с этим увеличивается число
пар зубьев в зацеплении и уменьшается угол давления ah
в генераторе волн (угол между вектором силы Fhg и век-
тором скорости Vh). Благодаря многопарности зацепления
(нагрузку могут передавать до 50 % всех пар зубьев),
нагрузочная способность волновой передачи выше, чем
планетарной передачи k—h—v упомянутой выше схеме 2.6.
КПД волновой передачи также выше, потому что в заце-
плении зубья почти не перемещаются при прилегании
гибкого колеса к жесткому, а в генераторе волн угол ah
меньше соответствующего угла давления, чем в передаче
с жесткими звеньями. При этом потери в зацеплении на-
много меньше, чем потери в генераторе волн, так как
перемещения в зацеплении несоизмеримо малы по срав-
нению с перемещениями в генераторе волн при суммар-
ном силовом воздействии одного порядка.
Волновая передача позволяет получать передаточ-
ные отношения 80 ... 400 (хотя рекомендуемый диапазон
несколько уже - см. выше) при стальных гибких колесах.
По сравнению с планетарной передачей k-h-v. вол-
новая передача характеризуется малыми габаритными
размерами и массой при одинаковой несущей способно-
сти. При передаточных отношениях 100 ... 400 КПД вол-
новой передачи достигает 0,8 ... 0,9. При определенных
параметрах волновая передача может работать в режиме
мультипликатора.
В режиме мультипликатора КПД ниже, чем в режи-
ме редуктора, так как силы Fhg отклоняются на угол р в
сторону уменьшения плеча I (см. схему 6.3) и соответст-
венно уменьшения отношения момента 7h к моменту Тъ.
Волновые передачи применяют в приводах мощно-
стью до 30 ... 40 кВт, с моментом на выходном звене
100... 150 кН-м.
Наиболее ответственные детали передачи - гибкий
подшипник (h* см. схему 2.7а) и гибкое колесо g. Гибкое
колесо имеет тонкое днище g', допускающее осевые пе-
ремещения торца цилиндрической оболочки при ее ради-
альном деформировании с другого края. Длину гибкого
колеса выбирают от 0,5<7 до d, где d — диаметр его сре-
динной поверхности до деформирования. Толщину стен-
ки колеса выбирают примерно равной J/100. Зубья —
эвольвентные с углом профиля исходного контура 20 или
30°. Для гибкого колеса используют стали 30ХГСНА,
35ХГСА, 50ХГ, 60С2 и т.п., закаленные с высоким от-
пуском до HRC 32 ... 36. Основными критериями работо-
способности и расчета волновой передачи являются
прочность гибкого колеса в местах концентрации напря-
жений, обычно под впадиной зуба, а также статическая и
динамическая грузоподъемность гибкого подшипника.
Внутренний диаметр гибкого колеса в первом приближе-
нии может быть определен в зависимости от вращающе-
го момента Т на выходном валу:
de, мм ... 62 80 100
Т^Н-м ... 45...63 90... 140 180... 280
de, мм ... 120 160 200
Tg, Нм ... 355...560 710... 1000 1400...2000
(нижние пределы Tg меньших передаточных отношениях
| i | = 80, а верхние при больших | i | = 200 ... 250).
В зависимости от параметров зацепления (угла про-
филя и смещений исходного контура), размеров и поса-
док в соединениях звеньев получают передачи с различ-
ной несущей способностью, кинематической точностью
и крутильной жесткостью.
При конструировании волновой передачи преду-
сматривают возможность самоустановки генератора волн
с целью выравнивания нагрузки в противолежащих зонах
его взаимодействия с гибким колесом и в противолежа-
щих зонах зацепления колес, а также с целью повышения
кинематической точности. Для этого в схеме 2.7а непод-
вижно установленная на входном валу ступица соедине-
ОСОБЕННОСТИ ПЛАНЕТАРНЫХ И ВОЛНОВЫХ ЗУБЧАТЫХ ПЕРЕДАЧ
313
на с кулачком h с помощью упругой муфты, допускаю-
щей относительные радиальные перемещения.
В схеме 2.76 входной вал двигателя соединен с ге-
нератором волн h с помощью зубчатой муфты. Генератор
волн двухдисковый и имеет одну подшипниковую опо-
ру В. Покачиваясь относительно центра опоры, он может
в какой-то мере самоустанавливаться. Гибкое колесо g
соединено с выходным валом зубчатой муфтой. Непод-
вижно с корпусом соединено жесткое колесо Ь.
Гибкое колесо g в силовых передачах может быть
выполнено в виде кольца (схема 2.7в) и соединено с вы-
ходным валом зубчатой муфтой и тонкой оболочкой — со-
единительным звеном. В этом случае будет иметь место
меньший перекос образующих поверхностей зубьев и более
благоприятное распределение нагрузки на гибкое колесо.
Гибкое колесо может быть выполнено в виде кольца
и взаимодействовать при этом с двумя жесткими звенья-
ми b и е (схема 2.10а). Если при этом в зацеплении со
звеном е разницы чисел зубьев нет, то получается пере-
даточное отношение то же, что и в схеме 2.7в. КПД при
этом получается более низкий. Если же гибкое колесо
имеет два венца g и f, а число зубьев звена е отличается
от числа зубьев венца Ь, то передаточное отношение по-
лучается намного больше, чем в других схемах (оно оп-
ределяется так же, как для схемы 2.10), а КПД сущест-
венно ниже, чем в схеме 2.7а.
Известны и другие схемы редукторов, в частности
для передачи движения через герметичную стенку (см.,
например, параграф 9, рис. 85).
Глава 14. ВИНТОВЫЕ ПЕРЕДАЧИ
(ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ)
14.1. ФУНКЦИОНАЛЬНЫЕ
ВОЗМОЖНОСТИ И ПРИНЦИПЫ
КОНСТРУИРОВАНИЯ
Одна из важнейших функций в ряде современных
машин — преобразование вращательного движения в по-
ступательное при совпадении или параллельности линий
действия векторов угловой и линейной скоростей. Эту
функцию выполняет винтовая передача, или, как ее еще
называют, передача винт-гайка. Винтовые передачи иг-
рают не менее значимую роль в технике, чем зубчатые
передачи. Хотя их функции и различны, но в развитии их
конструкций и способов изготовления можно найти мно-
го общего. Достаточно отметить, что зубчатые передачи
с винтовым зубом, в том числе червячные передачи,
представляют собой, по существу, преобразованную оп-
ределенным образом винтовую передачу.
Что касается способов изготовления, то впервые
было предложено (Леонардо да Винчи) нарезание винта
путем имитации воспроизводимого передачей движения.
Подобный способ для зубчатых передач (способ обкатки)
появился лишь в конце XIX века.
Намного позже планетарных зубчатых передач были
изобретены и изучены винтовые несоосные [планетар-
ные] передачи. Практически одновременно появилась
волновая зубчатая и волновая винтовая передачи.
У винтовых передач имеются альтернативные ре-
шения (по основной функции воспроизведения поступа-
тельного движения) в виде зубчатых реечных передач,
гидроцилиндров и пневмоцилиндров. Тем не менее
остаются области предпочтительного или даже моно-
польного применения винтовых передач с учетом всей
совокупности качеств и возможного совмещения функ-
ций. В частности, они применяются для обеспечения:
• большого передаточного отношения в одной пере-
даче (быстрое вращение двигателя преобразуется в мед-
ленное поступательное движение винта или гайки);
• самоторможения (движение может передаваться
только от двигателя, а внешняя нагрузка не способна
сдвинуть с места выходное звено-винт или гайку). Дан-
ное качество все реже оказывается востребованным, так
как сопряжено с пониженным КПД в "прямом" направ-
лении передачи движения. Предпочитают, в частности,
решения с фрикционным тормозом или с запираемой
полостью гидроцилиндра;
• высокой жесткости и кинематической точности
передачи движения. Эти взаимосвязанные качества дос-
тигаются, в частности, в некоторых разновидностях пла-
нетарных винтовых передач, а также в обычных (соос-
ных) передачах при использовании приемов исключения
зазоров. На протяжении многих лет оставались незаме-
нимыми микрометрические винтовые передачи в измери-
тельных приборах;
• возможности совмещения функций передачи дви-
жения и направляющего устройства (винт может служить
в качестве направляющей детали или опоры при центри-
ровании гайки по поверхностям резьбы или при исполь-
зовании дополнительных элементов центрирования);
• возможности совмещения функций преобразова-
ния движения и передачи его через герметичную стенку
(волновая винтовая передача);
• возможности совмещения функций преобразова-
ния движения и предохранение от перегрузки (винтовая
фрикционная передача);
• возможности суммирования двух движений, обыч-
но вращательного и поступательного (дифференциаль-
ный винтовой механизм), или, как частный случай, -
вычитания скоростей двух поступательных движений и
получение очень малых линейных перемещений (диф-
ференциальная винтовая передача).
Прежде чем перейти к принципам конструирования
винтовых передач, напомню некоторые особенности
винтовой пары, которая составляет основу многих меха-
низмов. Сама по себе винтовая пара (схема 1.1 на
рис. 123) - одноподвижная (V класса, так же, как и одно-
подвижная вращательная пара), так как возможные вра-
щательное и поступательное движения в ней взаимосвя-
заны (взаимозависимы). Винтовую пару образуют винто-
вые поверхности винта и гайки.
Винтовые поверхности образованы на резьбе, харак-
теризуемой: профилем (треугольным, прямоугольным,
трапецеидальным и др.); шагом резьбы Р - расстоянием
между ближайшими боковыми сторонами профиля в на-
правлении оси; ходом резьбы Р/, — расстоянием между
ближайшими сторонами профиля одной и той же винто-
вой поверхности и углом подъема резьбы у (углом вин-
товой линии), образованным касательной к винтовой ли-
нии точки профиля, лежащей на окружности среднего
диаметра d, и плоскостью, перпендикулярной к оси. За
один оборот винта или гайки относительное перемеще-
ние звеньев равно Р/,. Резьба может быть однозаходной
или многозаходной (ход больше шага в и раз, где
п - число заходов). Винтовая пара позволяет так же, как
и клин, получать выигрыш в силе. Суммарную окружную
силу F определяют, как и для клина, по формулам F = Fa
tg(vj/ + р) и F = Fa tg(y - р), где р - угол трения при дви-
жении винта соответственно навстречу вектору Fa в од-
ном направлении с ним. При этом вращающий момент
Т = Fd!2, а КПД т] = —, и т] = , соответст-
tg(v+p) tg(v-p)
венно для упомянутых направлений движения.
Рассчитывают элементы и звенья винтовой пары на
износостойкость, а также на прочность и устойчивость
винта. Расчет на износостойкость условный - по средне-
му давлению на рабочих поверхностях витков.
ФУНКЦИОНАЛЬНЫЕ ВОЗМОЖНОСТИ И ПРИНЦИПЫ КОНСТРУИРОВАНИЯ
315
316
ВИНТОВЫЕ ПЕРЕДАЧИ (ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ)
Сама по себе винтовая пара даже в простейшем ме-
ханизме может быть использована только в совокупности
с другими парами, по крайней мере, одной вращательной
и одной поступательной (см. схемы 1.2 ... 2.5). При этом
механизм, содержащий хотя бы одну винтовую пару,
называют винтовым механизмом. Если же он обладает
всего одной степенью свободы (одно входное звено, одно
выходное звено и неподвижное звено), то его называют
винтовой передачей.
На схемах 1.2 ... 1.5 показаны варианты винтовых
передач, а на схемах 2.1 ... 2.5 - дифференциальные
винтовые механизмы.
При составлении схемы и конструирования винто-
вой передачи руководствуются следующими общими
правилами'.
1. С целью обеспечения технологичности обычно
длину винта (рабочего участка с внешней резьбой) при-
нимают значительно большей длины гайки (рабочего
участка с внутренней резьбой). Для малых перемещений
при использовании коротких многозаходных резьб (вин-
товых шлицев) выполняют также иное соотношение: ра-
бочий участок винта короче рабочего участка гайки.
2. Для получения значительных линейных переме-
щений винт и направляющую поступательной пары вы-
полняют примерно одинаковой протяженности и распо-
лагают взаимопараллельно, а привод присоединяют со-
осно к винту {схема 1.2).
3. Для повышения КПД и обеспечения технологич-
ности конструкции функции поступательной пары при-
дают кинематической цепи, содержащей только враща-
тельные пары {схемы 1.4 и 1.4а).
4. Для обеспечения центрального (вдоль оси) при-
ложения нагрузки и исключения перекоса поступатель-
ной пары выполняют гайку вращающейся, а винт посту-
пательно перемещаемым. Передачу вращающего момен-
та от двигателя осуществляют с помощью зубчатой или
любой другой передачи {схема 1.3) или используют для
этой цели двигатель с полым ротором {схема 1.3а).
5. Для обеспечения самоустанавливаемости и
уменьшения нежелательных нагрузок и деформирования
звеньев схему соединения винтовой и поступательной
пар, а также соединения винта с неподвижным звеном
выполняют без избыточных связей {схемы 1.5', 1.5а).
6. Для обеспечения работоспособности по критерию
устойчивости длинного винта расположение опор выби-
рают таким, что исключается нагружение винта продоль-
ными силами в направлении сжатия {схемы 1.2г, 1.2д).
7. Высокий КПД получают при использовании ан-
тифрикционного материала для одного из звеньев (обыч-
но гайки) винтовой пары, при малой шероховатости и
высокой точности поверхностей резьбы, при использова-
нии промежуточных тел качения {схема 3.1 на рис. 124) и
особенно при обеспечении жидкостной смазки {схе-
ма 5.1).
8. Относительное центрирование звеньев винтовой
пары обеспечивают по боковым поверхностям резьбы.
Более точное центрирование обеспечивают по круговым
цилиндрическим поверхностям резьбы или дополнитель-
но устанавливают центрирующие втулки.
9. В механизмах высокой кинематической точности
устраняют зазоры в осевом направлении упругим замы-
канием частей одного из звеньев винтовой пары {схе-
мы 4.1 ... 4.4 на рис. 124).
10. Высокую жесткость и беззазорность при достаточ-
но высоком КПД можно получить при использовании несо-
осных [планетарных] винтовых передач {схемы 6.1... 6.5 на
рис. 125) и при использовании их разновидностей - вол-
новых винтовых передач {схемы 7.1 и 7.2 на рис. 126).
Волновые винтовые передачи могут быть использованы
при небольшом изменении конструкции для передачи
движения через герметичную стенку (см. параграф 9.3,
рис. 85).
11. При небольших нагрузках и невысоких требова-
ниях к кинематической точности используют фрикцион-
ные винтовые передачи с цилиндрической поверхностью
винта без резьбы {схемы 8.1 ... 8.3 на рис. 126), обладаю-
щие хорошими предохранительными свойствами (воз-
можностью проскальзывания при перегрузках).
Примечание', фрикционными могут быть и плане-
тарные и винтовые волновые передачи (с резьбой на обо-
их звеньях винтовой пары), но они обладают высокой
нагрузочной способностью.
14.2. ВИНТОВЫЕ (СООСНЫЕ) ПЕРЕДАЧИ
(СКОЛЬЖЕНИЯ И КАЧЕНИЯ)
Приведенные правила более подробно проиллюст-
рируем на разнообразных примерах. На схемах 1.2 и 1.4а
простейшие наиболее распространенные винтовые меха-
низмы с вращающимся винтом и вращающейся гайкой
соответственно. В схеме 1.2 гайка неподвижно соединена
с выходным звеном-ползуном, который образует со стой-
кой поступательную пару. В схеме 1.4а винт соединен со
стойкой звеньями, которые в совокупности называют
шлиц-шарниром. Движение входного звена обозначено
сплошной дуговой стрелкой, а выходного звена - штри-
ховой стрелкой.
На схеме 1.4 - конструктивное решение винтового
механизма по схеме 1.4а. Корпус выполнен в виде стака-
на и прикрепляется к основанию через шарниры Е и J.
Гайка установлена внутри корпуса на подшипниках D и
С и с помощью проушины В соединена с валом двигате-
ля. Винт соединен с выходным звеном через проушину F.
Винт не может двигаться только поступательно и не мо-
жет вращаться благодаря соединению с корпусом с по-
мощью шлиц-шарнира.
На схемах 1.2а и 1.26 даны исполнения параллель-
ного расположения винта и направляющей. При тради-
ционном подходе к конструированию в схеме 1.2а неиз-
бежны избыточные связи и сопряженные с этим нерав-
номерное распределение нагрузки между элементами
направляющих, повышенные трение и износ. Чтобы ис-
ключить вредные явления, повышают точность размеще-
ния рабочих поверхностей, а также принимают меры
конструктивного характера. При этом нужно так распре-
делить нагрузку, чтобы направляющая воспринимал
только поперечные силы, а винт воспринимал только
ВИНТОВЫЕ (СООСНЫЕ) ПЕРЕДАЧИ (СКОЛЬЖЕНИЯ И КАЧЕНИЯ)
317
осевую силу. С этой целью винт может быть размещен в
самоустанавливающихся опорах С, В (см., например,
сферическую опору на схеме 1.2а справа).
Проще подобный эффект достигают, выполнив гай-
ку отдельно от ползуна и соединив ее с ползуном четы-
рехподвижным кинематическим соединением, допус-
кающим поперечные поступательные и возвратно-
вращательные перемещения {схема 1.5). Такое соедине-
ние можно выполнить упругим. Чтобы обеспечить цен-
тральное приложение осевой силы, необходимую жест-
кость в осевом направлении и восприятие значительного
крутящего момента, гайку выполняют симметричной, а
упругое соединение с ползуном обеспечивают, например,
с помощью оболочки {схема 1.5а).
При конструировании винтовых механизмов с
длинным винтом может возникнуть проблема устойчи-
вости его при продольном сжатии.
На схемах 1.2в, 1.2г и 1.2д проиллюстрировано, что
можно избежать сжатия винта за счет выбора конструк-
ции опор на концах винта. На схеме 1.2в упоры в опорах
А и В размещены так, что винт сжимается при действии
силы F вдоль оси вправо или влево (реакция Fx направ-
лена навстречу силе F). В схеме 1.2в при реверсировании
нагрузки винт в любом случае работает только на растя-
жение. В схеме 1.2г предусмотрены осевые зазоры 8 ме-
жду упорами и буртиками винта, необходимые для сбор-
ки без деформации винта и для компенсации удлинения
винта при нагреве. В схеме 1.2д одна из опор (В) "пла-
вающая", не воспринимающая осевую нагрузку. В этом
случае винт работает на растяжение, а при реверсирова-
нии нагрузки - на сжатие. Нагружен в обоих режимах
участок винта между опорой А и гайкой.
На схемах 2.1; 2.4; 2.5 принципиальные решения
пятизвенных дифференциальных механизмов. Все они
имеют подвижные звенья 1 ... 4 и стойку. На схеме 2.2 -
четырехзвенный механизм и в нем гайка 1 неподвижна.
Угловые перемещения обозначены <рь <р2, <Рз> а линейные
перемещения s2, 5з. Поскольку в механизмах имеются
винтовые пары, то они обусловливают зависимые со-
ставляющие перемещений (обозначены штриховыми
стрелками).
Винт 3 образует с сопряженными звеньями 1 и 2 ки-
нематические пары, либо только винтовые пары {схе-
мы 2.3 и 2.4), либо одна из пар вращательная {2-3 на схе-
ме 2.1) или поступательная {1 -3 на схеме 2.5).
Схема 2.1 может быть преобразована в обычную
винтовую передачу, если в ней остановить звено 4 или 2.
Варианты такой передачи можно также получить, непод-
вижно соединив звенья одной из кинематических пар 1—4
или 2-3.
В четырехзвенном механизме на схеме 2.2 винт 3
имеет два участка резьбы с разным ходом РЛ] и РЛ2, гайка
2 образует со стойкой вращательную пару, а винт может
двигаться вдоль своей оси, совершая при этом враща-
тельное движение. Данная схема положена в основу ме-
ханизма малых перемещений, и его называют дифферен-
циальной винтовой передачей {схема 2.3).
Схемы 2.4 и 2.5 могут быть использованы в качестве
суммирующих механизмов. Из них можно также полу-
чить варианты передач, преобразуя их по аналогии со
схемой 2.
На схеме 3.1 (рис. 124) представлена шариковая
винтовая передача, основу которой составляет винтовая
пара с промежуточными телами качения (шариками) ме-
жду винтовыми желобами гайки и винта. При относи-
тельном движении гайки и винта шарики катятся по же-
лобам и передают нагрузку при малых потерях на трение.
После того как шарик доходит до конца рабочего желоба
гайки, он возвращается по каналу возврага в начальное
положение, и его цикл движения повторяется. КПД пере-
дачи достигает 0,9.
Отношение радиусов поперечного сечения полу-
круглых канавок и шариков принимают г2/п = 1,03 {схе-
ма 3.1а). Для повышения несущей способности и жест-
кости шариковой винтовой передачи используют профи-
ли канавок, обеспечивающие четырехточечный контакт с
шариком (Ki и К2 - точки контакта шарика с гайкой; К3 и
Кд - точки контакта шарика с винтом — схема 3.16). От-
ношение радиусов принимают г2/п = 1,05. Угол контакта
выбирают равным 45°.
Создание натяга при полукруглом профиле обеспе-
чивают осевым смещением или поворотом двух гаек (см.
схемы 4.1 и 4.4). При использовании схемы 3.16 натяг
обеспечивают подбором комплекта шариков по диаметру.
Допустимые контактные напряжения (2,5 ... 3,0)-103 МПа
при твердости контактирующих поверхностей 60HRC.
На схеме 3.2 — конструктивное решение использова-
ния шариковой винтовой передачи в механизме подачи
станка. Винт установлен на подшипниках В и С в стани-
не станка, а гайка неподвижно соединена с суппортом.
Винту сообщают вращательное движение от двигателя,
соединенного с шипом вала-винта. Гайка движется по-
ступательно вдоль оси винта. Винт и винтовая пара за-
щищены от внешней среды разделительными уплотне-
ниями - чехлами 1 и 2.
На схемах 4.1.. .4.4 иллюстрируются принципы соз-
дания беззазорных винтовых пар. В них исключен "мерт-
вый ход" — свободное перемещение в некоторых преде-
лах входного звена при неподвижном выходном звене.
Причина "мертвого хода" — зазоры в кинематиче-
ских парах, причем играют роль лишь зазоры по линии
действия силы при изменении направления силы на про-
тивоположное.
Отсутствие "мертвого хода" приводит к уменьше-
нию динамических нагрузок, повышению точности дви-
жения звеньев. Достигается это обычно упругим замыка-
нием звеньев, т.е. соединением звеньев с предваритель-
ным упругим нагружением или регулировкой положения
звеньев.
В беззазорных винтовых передачах гайка состоит из
двух частей - гаек 1 и 2, установленных на винте. Устра-
нить зазоры можно, либо сдвинув, либо раздвинув эти
гайки, либо провернув их относительно друг друга до
контакта противоположными сторонами витков с витка-
ми винта. На схеме 4.3 части гаек стянуты винтами и
пружинами, а на схеме 4.1 — раздвинуты с помощью та-
318
ВИНТОВЫЕ ПЕРЕДАЧИ (ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ)
УСТРАНЕНИЕ ЗАЗОРОВ
В ВИНТОВОЙ ПЕРЕДАЧЕ
НЕСООСНЫЕ (В ТОМ ЧИСЛЕ ПЛАНЕТАРНЫЕ И ВОЛНОВЫЕ) ВИНТОВЫЕ ПЕРЕДАЧИ
319
рельчатой пружины. Чтобы обеспечить постоянным
прижим поверхностей между гайками, в схеме 4.2 уста-
новлена пружина, а относительный поворот гаек не до-
пускает головка штифта, размешенная в продольном пазу.
На схеме 4.4 показана беззазорная винтовая переда-
ча, в которой устранение зазора достигают относитель-
ным дискретным поворотом гаек 1 и 2, используя при
этом дифференциальное шлицевое [зубчатое] соедине-
ние. Гайки 1 и 2 образуют зубчатые соединения zi и z2 с
общим звеном. Благодаря разнице числа зубчатых пар
z2 - z, = 1 можно получить минимальный поворот на раз-
ность шагов Ат = Ti - т2, пересопрягая каждое из соеди-
нений на один шаг в одном и том же направлении. Пере-
сопряжение производят на специальной оправке, а затем
собранную гайку навертывают на винт.
Из-за погрешностей изготовления зазоры при раз-
ных относительных положениях сопряженных звеньев
различны, поэтому их полное устранение возможно толь-
ко при использовании упругих элементов. В схеме 4.4 же-
лательно выполнить общее звено, обладающее малой
жесткостью на кручение.
На схеме 5.1 представлена винтовая передача, пред-
назначенная для работы в режиме гидростатической
смазки. В гайке выполняют каналы, по которым подается
под давлением смазочный материал к поверхности резь-
бы. Гайка имеет корпус и неподвижно соединенные с
ним резьбовые втулки 1 и 2, которые разделены дистан-
ционным кольцом.- Втулки имеют рабочие поверхности
резьбы, расположенные с противоположных сторон.
Смазочную жидкость подают по каналам под давлением
Рг в зазор между рабочими поверхностями втулок и вин-
та 1. Каналы расположены в осевых сечениях, равномер-
но распределенных в окружном направлении.
На пути смазочной жидкости создается дополни-
тельное самоуправляемое сопротивление с помощью
"плавающего" кольца. Для обеспечения гидростатиче-
ской смазки при самоустановке кольца подводится сма-
зочная жидкость под давлением р\. При внешних сило-
вых воздействиях на гайку и винт (наличие реверсирова-
ние осевой или радиальной нагрузки, пары сил в плоско-
сти схемы) изменяются зазоры между поверхностями
винта и втулок в осевом или в окружном направлении.
Различие расхода между рабочими поверхностями
приводит к перемещению "плавающего" кольца таким
образом, что гидравлическое сопротивление в каналах
перераспределяется. В результате обеспечивается мини-
мальное изменение зазоров между рабочими поверхно-
стями при изменении внешних силовых воздействий, т.е.
максимальные осевая и радиальная жесткости винтовой
пары. Используют также другие системы управления
подачей смазочной жидкости.
Гидростатическая винтовая передача обладает свой-
ствами беззазорного механизма, имеет КПД = 0,99, вос-
принимает ударные нагрузки, практически не изнашивается.
14.3. НЕСООСНЫЕ (В ТОМ ЧИСЛЕ
ПЛАНЕТАРНЫЕ И ВОЛНОВЫЕ)
ВИНТОВЫЕ ПЕРЕДАЧИ
На схемах 6.1 ... 6.5 рис. 125 представлены некото-
рые варианты механизмов сравнительно нового класса:
несоосные [планетарные] передачи. Планетарная пере-
дача содержит винтовую пару с подвижной осью одного
из звеньев. Оси взаимодействующих звеньев передачи не
совпадают. Планетарная передача может быть преобра-
зована в несоосную с неподвижными осями инверсией
вращающегося и неврашающегося звеньев. Планетарную
винтовую передачу выполняют по схемам, аналогичным
планетарным зубчатым передачам, но ее свойства более
разнообразны.
В планетарной винтовой передаче используют свой-
ства фрикционной передачи или обычного соосного вин-
тового механизма.
Во фрикционной передаче (см. схему 6.1) сателлит-
гайка расположена несоосно винту. Она приводится в
движение относительно оси винта посредством эксцен-
трика-водила. Ось гайки перемешается. Движение осу-
ществляется благодаря перекатыванию витков гайки по
виткам винта и скольжения их в радиальном направле-
нии. При недостаточном сцеплении вдоль витка движе-
ние передаваться не будет.
Перемещение винта или гайки обусловлено разно-
стью длин контактирующих винтовых линий. Без учета
проскальзывания перемещение равно произведению этой
разности на sim/ (у - угол подъема резьбы). Канавки на
одном из звеньев могут быть кольцевыми. В этом случае
за один оборот выходное звено смещается на ход резьбы.
В схеме 6.2 сателлиты могут иметь винтовую резьбу
или кольцевые канавки (схема 6.2а). В первом случае
получается фрикционная передача, а во втором — соосная
передача с телами качения, работающая без проскальзы-
вания. Сателлиты размещены в водиле. В осевом направ-
лении сателлит смещен по отношению к соседнему на
Р
величину А = —, при числе заходов резьбы винта п = 1,
«w
где Р - шаг резьбы, а и„ - количество сателлитов; А = 0
при п = п„. Если остановить водило и вращать винт, то
он будет вворачиваться как в обычную гайку, перемеща-
ясь за один оборот на величину хода резьбы. Если вра-
щать гайку, т.е. водило с сателлитами, то винт будет пе-
ремещаться за один оборот водила на величину хода
резьбы.
На схеме 6.3 — конструктивное решение передачи по
схеме 6.2. Сателлит-винт имеет винтовую резьбу и уста-
новлен на оси в водиле с возможностью вращения: меж-
ду осью и роликом размещен радиальный подшипник
сателлита. Осевое положение каждого из роликов регу-
лируется винтами с целью уменьшения разнозазорности.
Осевая сила воспринимается подпятниками.
На схеме 6.4 представлена передача, в которой са-
теллит одновременно взаимодействует с винтом и гай-
320
ВИНТОВЫЕ ПЕРЕДАЧИ (ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ)
125. НЕСООСНЫЕ [ПЛАНЕТАРНЫЕ] ВИНТОВЫЕ ПЕРЕДАЧИ
126. ВОЛНОВЫЕ ВИНТОВЫЕ И ФРИКЦИОННЫЕ ВИНТОВЫЕ ПЕРЕДАЧИ (С ТЕЛАМИ КАЧЕНИЯ)
ВОЛНОВЫЕ ВИНТОВЫЕ ПЕРЕДАЧИ
Гайка
А
Г ибкая
оболочка
Гибкий
фланец
ВидА
Гибкая
оболочка
Гайка
Волнообразователь
Гибкий
подшипник
Кулачок
ФРИКЦИОННЫЕ ВИНТОВЫЕ
ПЕРЕДАЧИ
(С ТЕЛАМИ КАЧЕНИЯ)
Ролик
Ось
ролика
Канал возврата
Винтовая
прорезь
Регулировочный
фланец
Вал
Гайка a а а Винтовое
II Н \ II II соединение
н
8.3
Зубчатая
передача
Гибкий
подшипник
Кулачок
Цилиндрическая
оболочка
Гибкая хВинт
оболочка
Т77Х
Вал
v Пружина
(01
Наружное
кольцо
Внутреннее
кольцо
Ползун
Зубчатая передача
НЕСООСНЫЕ (В ТОМ ЧИСЛЕ ПЛАНЕТАРНЫЕ И ВОЛНОВЫЕ) ВИНТОВЫЕ ПЕРЕДАЧИ
321
кой. Гайка в данной схеме служит для придания передаче
необходимой радиальной жесткости: радиальные силы на
сателлит практически уравновешены. Из-за погрешно-
стей изготовления сателлиты могут быть смещены один
относительно другого в осевом направлении в водиле.
Для ограничения осевых перемещений служат шарико-
вые упоры. Водило выполнено в виде двух колец, жестко
соединенных стержнями. Для обеспечения беззазорности
гайка выполнена в виде двух частей (на схеме — гайка 7 и
гайка 2). Их осевое относительное положение устанавли-
вают с помощью дистанционного кольца, а в окружном
направлении они застопорены одна относительно другой
с помощью шпонки. Углы винтовой линии на гайке и на
роликах одинаковы. Для этого резьба гайки должна
иметь число заходов, равное отношению средних диа-
метров резьбы гайки и ролика. Это обеспечивает отсут-
ствие проскальзывания и осевого перемещения сателли-
тов. Угол винтовой линии винта должен быть иным, чем
у гайки и сателлита.
Количество сателлитов-винтов обычно принимают
максимальным из условия сборки и равным сумме чисел
заходов резьб гайки и винта при различном их направле-
нии.
Водило в этой схеме совершает в 1 + и раз больше
оборотов, чем гайка при неврашающемся винте или в
1 1 .
1+— раз больше, чем винт при невращающеися гайке,
и
где и - отношение средних диаметров резьб винта и гай-
ки. Осевое перемещение винта относительно гайки опре-
деляют, как и в схеме 6.2, с учетом углового перемеще-
ния водила.
Передача по схеме 6.3 имеет высокие показатели
жесткости, кинематической точности и КПД.
Схема 6.5 по сравнению со схемой 6.2 имеет внут-
реннее касание резьб гайки и сателлитов-винтов (f). При-
чем в данной передаче имеются зубчатые колеса:
а - центральное с внешними зубьями, g - венец сателли-
та и b - центральное с внутренними зубьями. Эта сово-
купность предназначена для сообщения планетарного
синфазного движения сателлитам-винтам (f). Параллель-
но планетарному ряду имеется ряд катящихся поверхно-
стей a', g', b' с (кольцевой) резьбой, воспринимающей
осевую нагрузку (см. на схеме - осевая опора) и не
влияющей на передаточное отношение. Центральное
(цилиндрическое) звено (радиальная опора) служит для
разгрузки сателлитов-винтов (f) от отжимающих сил со
стороны их зацепления с гайкой (е). В соответствии с
принципом симметрии планетарная зубчатая передача и
ряд катящихся поверхностей повторен с другого конца
сателлитов-винтов (на схеме 6.5 - справа). В данной пе-
редаче конструктивно отсутствует водило, хотя кинема-
тически его роль выполняют зубчатые колеса и звенья,
воспринимающие радиальные и осевые нагрузки.
Передаточное отношение между условным водилом
и гайкой подсчитывается так же, как и в схеме 6.2, если
витки одного из звеньев винтовой пары кольцевые, или
как в схеме 6.3, если винтовая пара фрикционная. Кроме
I zh I
того, воображаемое водило имеет в 1 + — раз мень-
I Za J
21 - 9092
шую угловую скорость, чем входное звено в схеме 6.2,
где zb и zB - числа зубьев центральных колес b и а. При
этом она обладает более высокой несущей способностью
и КПД благодаря внутреннему взаимодействию элемен-
тов винтовой пары и многопоточному симметричному
исполнению с внутренней разгрузкой от радиальных сил.
Как уже отмечалось ранее, разновидностью плане-
тарной винтовой передачи является волновая винтовая
передача, которая обладает лучшими свойствами само-
приспособляемости к нагрузке и еще более высоким
КПД. В волновой винтовой передаче гайка или винт
представляет собой гибкое звено, а преобразование дви-
жения осуществляется за счет его деформирования.
На схеме 7.1 (рис. 126) жесткое звено - гайка — име-
ет цилиндрическое отверстие с резьбой, а гибкое звено -
винт - представляет собой гибкую оболочку с резьбой на
наружной поверхности. Гибкое звено имеет средний
диаметр резьбы, меньший примерно на две высоты про-
филя резьбы, чем средний диаметр резьбы жесткого зве-
на. Резьба гибкого звена вводится во взаимодействие с
резьбой жесткого звена путем деформирования гибкого
звена генератором волн (волнообразователем). Обычно
его выполняют в виде кулачка и гибкого подшипника,
надетого на кулачок. Для симметрии нагружения звеньев
передачи выполняют с двумя противолежащими зонами
контакта. Такую передачу называют двухволновой.
Ведущим обычно является генератор волн (на
схеме 7.1 он соединен с ведущим валом). Генератор волн,
вращаясь, перемещает зоны контакта резьб по окружно-
сти, и за счет различия параметров резьб осуществляется
преобразование движения. В данном примере гибкое
звено (винт) неподвижно, и относительно него поступа-
тельно перемещается жесткое звено (гайка).
Возможны два варианта сочетания параметров резьб
и, соответственно, два вида преобразования движения.
В волновой винтовой фрикционной передаче вы-
полняется условие равенства числа заходов резьб гибкого
и жесткого звеньев, а также имеет место равенство шагов
и одно и то же направление резьб. Углы подъема резьб
звеньев в недеформированном состоянии неодинаковы,
длины винтовых витков разные. При вращении генерато-
ра волн жесткое звено поворачивается за счет разности
длин винтовых линий, по которым осуществляется контакт,
на угол у, соответствующий этой разности, и перемещается
уР
вдоль оси на величину —- за один оборот генератора
2л
волн, где Ph - ход резьбы. Обычно у = (1/40 ... 1/150)л, по-
этому поступательное перемещение очень мало.
В другом варианте волновой винтовой передачи, ко-
гда разность чисел заходов резьб кратна числу волн, а
направления винтовых линий могут не совпадать, проис-
ходит передача движения за счет перекатывания профи-
лей, как в зубчатом зацеплении, и за счет разности длин
винтовых линий, как в рассмотренном выше варианте.
Оба движения суммируются с учетом направления.
Поступательное перемещение, обусловленное толь-
ко обкатыванием профилей, для двухволновой передачи
за один оборот генератора волн равно двум шагам при
разности чисел заходов, равной двум.
322
ВИНТОВЫЕ ПЕРЕДАЧИ (ВРАЩАТЕЛЬНО-ПОСТУПАТЕЛЬНОГО ДВИЖЕНИЯ)
Одно из звеньев может иметь вместо винтовой на-
резки кольцевые канавки. В этом случае обычно другое
звено имеет двухзаходную резьбу, и за один оборот гене-
ратора волн жесткое звено переместится поступательно
относительно гибкого звена на два шага, но дополнитель-
ного перемещения, обусловленного трением, не будет.
На схеме 7.2 показано исполнение волновой винто-
вой передачи, в которой гибкое звено — гайка — охватыва-
ет жесткое звено - винт. Винт при этом может иметь
большую длину. Генератор волн охватывает гибкое звено
и приводится во вращение от ведущего вала через зубча-
тую пару.
Волновая винтовая передача обладает высоким КПД
из-за малых перемещений трущихся поверхностей (в ос-
новном только радиальные перемещения). Она позволяет
получать перемещения в широком диапазоне, обладает
высокими кинематической точностью и жесткостью. Ее
применяют в механизмах подачи станков, в манипулято-
рах и приборах.
При конструировании волновых винтовых передач
следует руководствоваться следующими соображениями'.
1. Если требуется получить высокую жесткость, то
нужно обеспечить максимально возможное ограничение
деформирования звеньев в радиашной цепи генератор
волн — гибкое звено — жесткое звено и ограничение за-
кручивания гибкого звена. Иными словами, нужно задать
натяг при сборке передачи.
2. Если требуется получить высокий КПД, то лучше
иметь небольшую жесткость в радиальной цепи (но без
зазоров), а гибкое звено выполнить тонкостенным и с
податливой заделкой в виде тонкостенного дна или гоф-
рированной перегородки.
К сожалению, жесткость и КПД - взаимосвязанные
показатели и их практически нельзя изменять одновре-
менно. Что касается обеспечения прочности наиболее
специфичного гибкого звена, то малая толщина стенки
(по отношению к диаметру) и податливая заделка долж-
ны присутствовать в любом случае. Чем больше значение
имеет крутящий момент, тем в большей мере изменяется
первоначально заданная форма гибкого колеса. Степень
ограничения изменения формы как раз и определяет со-
отношение указанных показателей.
14.4. ФРИКЦИОННЫЕ ВИНТОВЫЕ
(СООСНЫЕ) ПЕРЕДАЧИ
Еще одна конструктивная разновидность - фрикци-
онная винтовая передача, в которой основу взаимодей-
ствия составляет качение круглых тел, - хотя и не имеет
такого распространения, как резьбовые передачи, тем не
менее не должна быть оставлена без внимания при выбо-
ре схемы.
Особенность данной передачи в сравнении с други-
ми фрикционными (планетарными и волновыми) винто-
выми передачами - это исполнение взаимодействующих
звеньев гладкими (без резьбы). Преобразование движе-
ния в ней осуществляется при перемещении точки кон-
такта по винтовой линии в координатах одного из основ-
ных звеньев.
Исполнения фрикционной передачи разнообразны.
К ним, в частности, относятся шариковая соосная винтовая
передача (схеме 8.1), роликовая передача (схемы 8.2 и 8.3).
Гайка (схема 8.1) имеет на своей внутренней по-
верхности винтовую канавку, в которую уложены шари-
ки, плотно прижатые с поверхности вала. Шарики катят-
ся по поверхности вала и за счет осевой составляющей
силы трения обеспечивают относительное перемещение
сопряженных деталей вдоль оси вала. В конце рабочего
пути шарики попадают в канал возврата и перемещаются
по нему в начальное положение. Гайка в промежутках
между витками имеет винтовую прорезь, что придает ей
упругость.
Гайка соединена резьбой с регулировочным флан-
цем. Можно регулировать силу прижатия шариков к ва-
лу, растягивая упругую часть гайки. Для этого сообщают
относительное вращение ганке и фланцу при постоянной
длине установленной между ними цилиндрической обо-
лочки. Затем детали стопорят относительно оболочки.
При перегрузке шарики могут проскальзывать по
гладкой поверхности вала. Изменением силы прижатия
шариков к поверхности качения можно регулировать
предельный момент, при котором наступит проскальзы-
вание. Данную схему, в частности, применяют в приво-
дах стеклоподъемников автомобилей.
В передаче по схеме 8.2 ролик контактирует с валом
в точке Р. Ось ролика расположена в ползуне. Оси роли-
ка и вала перекрещиваются. При вращении вала с угло-
вой скоростью <£>1 ролик вследствие сил трения также
вращается. Если ползун закреплен неподвижно, то, кроме
перекатывания ролика, его точка контакта Р будет сколь-
зить вдоль вала. Если ползун освободить, то он начнет
перемещаться вдоль вала.
Без учета проскальзывания скорость ползуна v2 рав-
на составляющей скорости точки Р ролика вдоль оси ва-
ла, причем v2 = Vj + v2_[, где vt — окружная скорость
точки вала; v2.i - окружная скорость точки Р ролика. Из
плана скоростей видно, что чем больше наклон оси роли-
ка, тем больше v2.
На схеме 8.2 - роликовая передача внешнего кон-
такта ролика и вала, а на схеме 8.3 — передача внутренне-
го контакта звеньев. В качестве роликов использованы
внутренние кольца шарикоподшипников. Наружные
кольца поджаты пружинами и могут быть повернуты (см.
угол <р относительно ползуна). Для синхронного поворо-
та колеи служит зубчатая передача. На данной схеме -
одна из немногих винтовых передач, в которых можно
регулировать передаточное отношение (за счет поворота
колец) в довольно широких пределах.
Глава 15. МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ
И ВАРИАТОРЫ (СКОРОСТИ)
15.1. ОБЩИЕ СВЕДЕНИЯ
Необходимость получения нескольких режимов ра-
боты привода (за счет ступенчатого или непрерывного
изменения передаточного отношения механизма) возни-
кает в процессе согласования характеристик двигателя и
нагружающей системы. Современные двигатели обеспе-
чивают возможность изменения частоты вращения в ши-
роком диапазоне, но вращающий момент, КПД и другие
параметры в совокупности имеют наиболее приемлемые
соотношения на сравнительно небольшом участке этого
диапазона. Поэтому важно обеспечить работу двигателя
именно при таких соотношениях и при широком скоро-
стном диапазоне выходного звена передаточного меха-
низма, присоединенного к двигателю.
Известно довольно много разновидностей много-
скоростных приводов, а также передач с непрерывным и
непрерывно-ступенчатым изменением передаточного
отношения. Здесь же приводятся только принципы кон-
струирования многоскоростных зубчатых передач, обес-
печивающих ступенчатое изменение передаточного от-
ношения (их называют также многоступенчатыми короб-
ками передач), и некоторых видов фрикционных вариа-
торов (скорости). Электромеханические и гидравличе-
ские передаточные системы представлены в основном в
виде отдельных блоков (без раскрытия их внутреннего
строения).
Наиболее технически совершенны в настоящее вре-
мя коробки передач автомобилей. Это объясняется тяже-
лыми и сложными условиями эксплуатации (по сравне-
нию, например, с металлообрабатывающими станками) и
острой конкурентной борьбой на потребительском
рынке.
Особенно сложны и совершенны автоматические
коробки передач, обеспечивающие обычно 4 ... 6 режи-
мов изменения скорости. От механических коробок с
ручным управлением они отличаются, как правило, на-
личием гидродинамического трансформатора и гидрав-
лической системы управления сцепными фрикционными
муфтами и/или тормозами (при использовании планетар-
ных передач). По существу, они представляют собой пе-
редачи с непрерывно-ступенчатым изменением переда-
точного отношения. Гидрораспределитель направляет
поток рабочей жидкости к соответствующей муфте в за-
висимости, например, от положения педали подачи топ-
лива автомобиля, частоты вращения двигателя и даже в
зависимости от ускорения перемещения педали (интен-
сивности нажатия на нее). В последнем случае речь идет
о приспосабливании к манере вождения индивидуума:
передачи при разгоне могут переключаться последова-
тельно с различными интервалами задержки или "пере-
скакивать" через одну-две ступени.
15.2. МНОГОСКОРОСТНЫЕ ЗУБЧАТЫЕ
ПЕРЕДАЧИ С НЕПОДВИЖНЫМИ
ОСЯМИ КОЛЕС
Наиболее простыми являются многоскоростные
зубчатые передачи с неподвижными осями колес с
разрывом энергетического потока при переключении.
Переключение в них осуществляют, например, переме-
щением блока зубчатых венцов z= 19 и z = 24 в положе-
ния 3 или 4 (см. рис. 127 схему 1.1) или соединением зуб-
чатого колеса с валом, на котором оно установлено с
возможностью свободного вращения (перемещение зуб-
чатой муфты в положения 1 или 2 и соответствующее
соединение колес z = 33 или z = 25 с валом 1 на схеме 1.16).
Более совершенны передачи, в которых переключе-
ние осуществляют без разрыва энергетического потока с
помощью фрикционных муфт. В быстроходных машинах
переключение осуществляют на ходу. В интервале вре-
мени, когда выключена одна передача, но еще не вклю-
чена другая, движение осуществляется по инерции.
Анализируя развитие конструкций многоскорост-
ных зубчатых передач с неподвижными осями колес,
отметим следующие основные тенденции:
• зубчатые зацепления — обычно неразмыкаемые,
сдвигаемые колеса или блоки венцов применяют лишь
для редко используемых режимов или при переходе с
одного диапазона на другой при остановке машины;
• сцепные муфты - многодисковые фрикционные
или зубчатые с фрикционными синхронизаторами,
зубчатые или кулачковые муфты (без синхронизаторов)
используют только для редких переключений, обычно
при остановке машины;
• валы — предпочтительно короткие и жесткие
устанавливают в корпусе на подшипниках качения (см.
схему 1.26 на рис. 127);
• подшипники, встроенные в зубчатые колеса -
предпочтительно роликовые без колец, в качестве до-
рожек качения роликов используют поверхности в теле
колеса и на валу (сравни решения на схемах 2.1а
рис. 128.1 и 1.16)’,
• шлицы па деталях, соединенных с фрикцион-
ными муфтами, формируют штамповкой (выдавлива-
нием впадин); соединения деталей довольно часто вы-
полняют неразборными в виде пластических замков (см.
схему 2.1а, а также рис. 111.1 схему 5.2);
• упругие элементы, используемые для выключе-
ния муфт (размыкания дисков), выполняют тарельча-
тыми с центральным [соосным] расположением по
отношению к кольцевому поршню (см. схему 2.1а);
• подвод рабочей жидкости к цилиндрам и сма-
зочного материала к трущимся парам осуществляют
324
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
Режимы Включены Задействованы
движения муфты зубчатые
вперед зацепления
I 1-3-5 f-g, k-m,o-p
II 1-4-5 f-g-n, о-p
III 1-3-5' f-g, k-m-s
IV 1-4-5' f-g-n, m-s
Режимы движения назад
I 2-3-5 d-r-c,e-f-g, k-m,o-p
II 2-4-5 d-г-с, e-f-g-n, о -p
III 2-3-5’ d-r-c, e-f-g, k-m-s
IV 2-4-5' d-r-c,e-f-g-n, m-s
Режимы Включены Звдействованы
движения муфты зубчатые
вперед I 1 зацепления а-p, m-s
II 2 b-g. m-s
III 3 c-k, n-s
IV 4 d-j, n-s
V 5 e-f, m-s
Режим движения назад 6 a-p-г, o-s
МНОГОСКОРОСТНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ С НЕПОДВИЖНЫМИ ОСЯМИ КОЛЕС
325
по осевым и радиальным каналам внутри валов и
через кольцевые соединения; в качестве рабочей жид-
кости и смазочного материала используют один и тот же
вид масла, что позволяет иметь общую систему управле-
ния муфтами и смазывания подшипников; фрикционные
диски муфт охлаждаются и очищаются от продуктов из-
носа благодаря циркуляционной системе смазывания.
На рис. 127 даны некоторые решения, в которых в
той или иной мере отражены данные тенденции. В отече-
ственном исполнении коробки передач трактора (схемы
1.1, 1.1а, 1.16) использованы различные виды переклю-
чения: с помощью зубчатой муфты (положения 1 и 2),
перемещением блока венцов (положения 3 и 4) и с по-
мощью фрикционных многодисковых муфт 5, 6, 7. На
каждом режиме обеспечивается последовательное соеди-
нение двух пар зубчатых колес, и только в режиме задне-
го хода задействованы три пары (см. схему 1.1а).
В схеме 1.16 перемещением зубчатого звена b со-
единяют ступицу муфты с венцом Г или венцом 2' (на
рис. показано нейтральное положение). Таким образом
вал 1 (входной) соединяют с зубчатым колесом z = 33
или зубчатым колесом z = 25.
326
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
Схемы 1.2,1.2а, 1.26 отражают сравнительно давнее
решение коробки передач колесного тягача с двигателем
большой мощности. Тем не менее оно является весьма
показательным для современного конструирования. Схе-
ма 1.2 иллюстрирует, насколько компактно можно рас-
положить зубчатые колеса и муфты в пространстве, хотя
изображение кинематической схемы 1.26 не позволяет
однозначно это представить.
Как уже отмечалось, возможность получения корот-
ких и жестких валов создает благоприятные условия для
зубчатых зацеплений и для подшипников (незначитель-
ные прогибы и перекосы). Что же касается недостатков,
то они выявляются из анализа табл. 1.2а: на каждом ре-
жиме включено три муфты и последовательно соединено
большое число зубчатых зацеплений, особенно в режи-
мах движения назад. Если считать, что потери энергии в
одном зацеплении составляют 1 ... 3 %, то общие потери
только в зубчатой передаче (без учета пары а-b и других
элементов трансмиссии) могут составлять 3 ... 18 %, что,
по современным представлениям, не всегда считается
позволительным. В то же время, если учитывать пре-
имущественное движение вперед, то общие потери могут
составить около 3 ... 9 %.
Аналогичное решение коробки передач легкового
автомобиля дано на схеме 1. Здесь тоже пять параллель-
ных валов, но на каждом из валов расположено от двух
до пяти зубчатых колес и одна-две муфты (зубчатых с
фрикционным синхронизатором). Зубчатые венцы о и г,
тир, си а, кип объединены в отдельный блок, причем
венцы о, m, п зацепляются с общим выходным зубчатым
колесом s (см. схему 1.3а). Такое решение позволило
иметь на каждом режиме всего одну включенную муфту
и два последовательно соединенных зубчатых зацепле-
ния (в режиме движения назад задействовано дополни-
тельно промежуточное зубчатое колесо). КПД такой ко-
робки передач высокий на всех режимах, и управление
простое, но все же схема 1.3 уступает схеме 1.2 по коли-
честву режимов: она позволяет получать шесть режимов
движения (см. табл. 1.36), а схема 1.2 обеспечивает по-
лучение восьми режимов.
Сопоставление этих схем свидетельствует о различ-
ных подходах к конструированию в зависимости от
функциональных задач.
На рис. 128.1 дан пример автоматической коробки
передач легкового автомобиля - схемы 2.1, 2.1а, 2.16,
2.1 в (мощность привода 66 кВт (90 л.с.), максимальный
вращающий момент на входном валу 180 Н-м при часто-
те вращения 3200 мин1, наибольший размер корпуса
315 мм, масса коробки передач в сборе с гидротрансфор-
матором и дифференциалом 68 кг) — и автобуса - схемы
2.2, 2.2а, 2.26 и 2.2в, приведенные на рис. 128.2 (мощ-
ность привода 205 кВт (275 л.с), максимальный вращаю-
щий момент на входном валу 1207 Н-м при 2600 мин'1,
наибольший размер (длина) 1179 мм и масса 425 кг).
Коробка передач на схеме 2.1а в едином корпусе
объединяет гидротрансформатор с блокирующей сцеп-
ной муфтой, многоскоростную передачу и дифференциал
(см. структурную схему 2.1). Здесь также расположены
гидронасосы, фильтр, гидрораспределители, радиатор
для охлаждения рабочей жидкости. Предусмотрена раз-
ветвленная система каналов в литом корпусе и внутри
валов для подвода рабочей жидкости к управляемым
сцепным муфтам, общее число которых семь (с учетом
муфты, блокирующей гидротрансформатор). Имеется
всего три скользящих манжетных уплотнения. Три вала
многоскоростной передачи опираются на цилиндриче-
ские роликоподшипники в корпусе, а водило дифферен-
циала имеет две опоры в корпусе (конические роликовые
подшипники). Описание конструкции фрикционной
муфты в совокупности с зубчатым колесом было приве-
дено выше при рассмотрении рис. 111.1— см. схему 5.2.
Пример на схеме 2.1а позволяет сделать вывод о
тенденции возврата к передачам с неподвижными осями
колес при создании автоматических коробок передач, по
крайней мере, для приводов сравнительно небольшой
мощности. До недавнего времени в основном для этой
цели применяли обычно планетарные зубчатые передачи,
которым посвящен следующий параграф. Здесь же отме-
тим еще два положения, учитываемых при составлении
схемы 2.1 в.
• на каждом режиме включена всего одна сцеп-
ная фрикционная муфта (см. табл. 2.16), и как резуль-
тат - простота и совершенство системы управления;
• на наиболее длительно работающих режимах
задействована всего одна зубчатая пара (см. режимы
включения муфт 3, 4, 5 в табл. 2.16), и как следствие —
минимальные потери на трение, хотя следует заметить,
что КПД гидротрансформатора, особенно на переходных
режимах, существенно ниже зубчатых передач.
15.3. МНОГОСКОРОСТНЫЕ
ПЛАНЕТАРНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
Планетарные зубчатые передачи в автомобилях и
тракторах наиболее часто стали применять, начиная с
50-х годов XX столетия. В основном их применяли и
применяют в автоматических трансмиссиях легковых
автомобилей, автобусов и тягачей с двигателями боль-
шой мощности.
Двухскоростную планетарную передачу поворота
широко использовали еще в 40-х годах прошлого века, и
практически без изменений используют до сих пор в бы-
строходных гусеничных машинах (танках, артиллерий-
ских тягачах и др. — см. в параграфе 2.1 рис. 14, схему 3.1).
Схемы многоскоростных планетарных передач на-
столько разнообразны, что их полное описание невоз-
можно привести в рамках одной монографии, поэтому
ограничусь только отдельными примерами, характери-
зующими основные направления их конструирования
(схемы 2.2,2.2а, на рис. 128.2 и рис. 129 ... 134).
Наиболее характерные принципы и тенденции кон-
струирования многоскоростных планетарных передач
следующие:
• в качестве структурных единиц используют пре-
имущественно планетарные механизмы с одновенцо-
вым сателлитом (см. схемы 2.2,2.2а- механизмы G1 и G2
МНОГОСКОРОСТНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
327
Включены Передаточное
элементы отношение
управления
1-4 2,01
1-3 1,38
1-2 1,00
2-4 -1,66
на рис. 128.2, схемы 3.1, 3.1а на рис. 129 и рис. 130.1);
реже применяют планетарные механизмы с "парным"
сателлитом (см. схемы 4.1, 4.2 и 4.3 на рис. 131), еще
реже используют планетарные механизмы с двухвен-
цовым сателлитом (во втором и третьем случаях обяза-
тельно в полной мере реализуется принцип совмещения
функции - (см. в параграфе 2.4 рис. 22, схему 1.3d), и как
результат -конструктивное упрощение схемы;
• в качестве управляющих элементов наиболее ши-
роко используют фрикционные многодисковые тормо-
за и сцепные муфты, причем к тормозам удобнее под-
водить рабочую жидкость (при гидравлическом управле-
нии в транспортных машинах) или электрический ток
(при электромагнитном управлении в стационарном обо-
рудовании); сцепные муфты используют только для бло-
кировки механизмов (передаточное отношение равно 1);
применение тормозов возможно благодаря свойствам
планетарных механизмов (для сравнения - в передачах с
неподвижными осями колес применяют только сцепные
муфты); в качестве самоуправляемых элементов исполь-
зуют механизмы свободного хода;
• многоскоростные передачи в целом выполняют в
виде последовательного соединения гидротрансформа-
тора (или иной непрерывно регулируемой системы), бло-
328
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
129. ГИДРОМЕХАНИЧЕСКАЯ МНОГОСКОРОСТНАЯ ПЕРЕДАЧА ОДНООСНОГО ТЯГАЧА (СКРЕПЕРА)
Четырехскоростная
Двухскоростная передача (с учетом реверсирования
движения)
планетарная передача
(с блокируемым
планетарным механизмом)
Гидрозамедлитель ( Л
1,3- сцепные управляемые (фрикционные
многодисковые) муфты
2, 4, 5, 6 - управляемые (фрикционные
многодисковые) тормоза
аиа2- центральные колеса с внешними зубьями
Ь[, Ь2 " центральные колеса с внутренними зубьями
h15h2,... - водила
J[, J2- зубчатые (с узкими венцами) соединения
g- сателлит
Включены Передаточные
элементы отношения
управления
1-5 4,04
2-5 2,72
1-4 2,02
2-4 1,36
1-3 1,00
2-3 0,672
1-6 -5,25
3.1в
От гидрораспределителя
к фрикционному тормозу 2
Канал подвода/отвода
рабочей жидкости
к гидрозамедлителю
Муфта сцепления,
блокирующая
ги дротран сформато р
СИСТЕМА ПОДВОДА И ОТВОДА РАБОЧЕЙ ЖИДКОСТИ ДЛЯ СМАЗЫВАНИЯ И УПРАВЛЕНИЯ
Г идротрансформатор
Зубчатая передача
привода насоса
Ltk
Система откачки масла
из картера в поддон
Подвод
рабочей
жидкости
от насоса
От гидрораспределителя
к фрикционному
тормозу 6
Система подпитки
гидротрансформатора,
циркуляции
и охлаждения
рабочей жидкости
К фрикционному
тормозу 5
К фрикционной
К сцепной муфте, муфте 3
блокирующей К фрикционной
гидротрансформатор муфте 1
Каналы подвода
смазочного материала
к трущимся парам
От гидрораспределителя
От гидрораспределителя
к фрикционному
тормозу 4
МНОГОСКОРОСТНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
329
кируемого (двухскоростного) планетарного механизма
или реверсивного механизма и многоскоростной замк-
нутой передачи (см. схему 3.1 на рис. 129 и схему 4.3 на
рис. 4.3); многоскоростная передача в виде отдельной
структурной составляющей обычно обеспечивает полу-
чение трех-шести режимов изменения передаточного
отношения; для передачи в целом используют также па-
раллельное соединение структурных единиц (см. замк-
нутые двух- и трехпоточные передачи на рис. 132);
• в многоскоростных передачах стремятся полно-
стью или частично исключить избыточные связи; по-
скольку передачи имеют изменяемую (в зависимости от
режима) структуру, то данный процесс довольно сложен;
наиболее характерными решениями для этой цели явля-
ются двухопорные валы, "короткие" шлицевые [зубча-
тые] соединения звеньев, "плавающие" центральные зуб-
чатые колеса с внутренними зубьями, не имеющие цен-
тральных опор и самоустанавливающиеся только за счет
взаимодействия с сателлитами и дисками тормоза (см.
схемы 3.1 и 3.1а на рис. 129);
• опоры центральных звеньев и сателлитов в основ-
ном выполняют в виде подшипников качения, причем
встроенные в сателлиты роликовые подшипники не име-
ют колец, а дорожками качения служат поверхности в
теле сателлита и на его оси; оси сателлита имеют два со-
единения в теле водила, а водило выполняют в виде "бе-
личьего" колеса (см. схему 3.1а на рис. 129);
• подвод рабочей жидкости к гидроцилиндрам муфт
и смазочного материала к подшипникам и зацеплениям
осуществляют по продольным и радиальным каналам в
подвижных звеньях и через кольцевые полости в под-
вижных соединениях; подвод рабочей жидкости к гидро-
цилиндрам тормозов осуществляют по каналам в корпу-
се; обычно рабочая и смазочная жидкости одного и того
же вида (масло), а фрикционные пары муфт и тормозов
работают в масле и не отделены от подшипников и заце-
плений; обеспечивается общая система циркуляции, очи-
стки и охлаждения масла.
Применение основных принципов и тенденций в со-
вокупности проиллюстрируем на отдельных примерах.
На схемах 2.26, 2.2 и 2.2а (рис. 128.2) представлены
структурная, кинематическая и конструктивная схемы
автоматической коробки передач автобуса. Ось входного
вала (двигателя D) и ось гидротрансформатора HV пере-
секаются. Вал двигателя с помощью конической переда-
чи соединен с насосным колесом гидротрансформатора.
Турбинное колесо соединено с входным валом 3 много-
скоростной планетарной передачи MG. Звенья гидро-
трансформатора можно заблокировать (соединить) с по-
мощью сцепной дисковой муфты. Реактор через меха-
низм свободного хода соединен с основанием. Для за-
медления и остановки выходным валом служит гидрав-
лический тормоз - гидрозамедлитель НВ.
Многоскоростная передача обладает тремя степеня-
ми свободы (на каждом режиме включаются два элемен-
та управления, из обозначенных 1 ... 4). В конкретном
варианте получают режимы, представленные в таблице 2.2в.
В режиме 1-4 образуется планетарная замкнутая пе-
редача, составленная из двух планетарных механизмов
G1 и G2 (механизм G1 замкнут на выходное звено).
В режиме 1-3 используется механизм G2, а в режиме 1-2
механизм G2 блокируется и вращается вместе с выход-
ным звеном.
Режим заднего хода 2-4 предусматривает остановку
водила механизма G1.
Механизм G2 при остановленном водиле имеет пе-
редаточное отношение - 2,7.
Многоскоростная передача обеспечивает разгон ав-
тобуса на соответствующем режиме гидротрансформато-
ра и использование его рационального режима (режима
гидромуфты при разомкнутом механизме свободного
хода) при рабочем движении.
На схеме 3.1 (рис. 129) - многоскоростная гидроме-
ханическая передача колесного тягача с двигателем
мощностью 248 кВт (336 л.с.). Она составлена из гидро-
трансформатора, двух- и четырехскоростной (с учетом
режима реверсирования выходного вала) передач, соеди-
ненных последовательно. На схеме 3.1а дано конструк-
тивное исполнение двухскоростной передачи.
Вал 1 с помощью шлицев соединен с водилом h( и с
входным звеном многодисковой муфты 1. Выходное зве-
но муфты 1, общее с вращающимся звеном тормоза 2
соединено с центральным зубчатым колесом однорядно-
го планетарного зубчатого механизма (с одновенцовым
сателлитом). Центральное зубчатое колесо bi передачи
соединено через зубчатую муфту j с валом. Сателлиты gi
установлены на осях в водиле hj. К роликовым подшип-
никам сателлитов по каналам подводится смазочный ма-
териал (см. также схему 3.1а).
Диски управляемой муфты 1 и тормоза 2 унифици-
рованы. Они управляются гидроцилиндрами, в которых
размещены кольцевые поршни 1 и 2. Выключение муфты
или тормоза при отсутствии давления р осуществляется
пружинами 1 или 2 соответственно.
Передаточное отношение определяют как произве-
дение передаточных отношений составляющих механиз-
мов. Двухскоростная передача позволяет получать два
режима изменения скорости, трехскоростная передача -
четыре режима, в том числе режим реверсирования дви-
жения. Одновременно включается один из элементов
управления в первом механизме и один — во втором ме-
ханизме.
Включением муфты 1 осуществляют блокировку
первого механизма. При этом все звенья вращаются как
одно целое. Включением тормоза 2 останавливают цен-
тральное колесо а1; движение передается от водила hi к
центральному колесу bi, и далее через зубчатую муфту j
приводится входное звено второго механизма — вал 2.
Таким образом, получаются передаточные отноше-
ния первого механизма на указанных режимах:
где аЯ| и zbi — числа зубьев колеса ai и bj.
Включением тормоза 5 осуществляют передачу
движения от центрального колеса аз водилу Ьз при не-
подвижном колесе Ьз.
330
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
130.1. МНОГОСКОРОСТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА
Гидротрансформатор
Гидрозамедлитель
Планетарный
механизм 3
Планетарный
механизм 2
3 фрикционный
тормоз 4
Фрикционный
тормоз 6
Механизм
свободного
хода
Выходной
вал
Сцепные Планетарный Фрикционный
фрикционные механизм 1 тормоз 5
муфты
Сцепная
фрикционная
муфта 7
Входной
вал
Вал 1
Вал 2
Сцепные
управляемые
тормоза
Сцепные
управляемые
Г идрозамедлитель муфты
Вал 1
передача
Г идронасос
Планетарный
механизм 3
Планетарный
механизм 2
I 3.26 |
А, В - опоры входного вала
К, L - опоры (промежуточного) вала 1
M,N - опоры (промежуточного) вала 2
Р, R опоры выходного ввла
Г идротрансформатор
Сцепная
Входной
вал
Механизм
свободного
хода
ь3 >
Входной
вал
Выходной
вал
/уА »^гМ > ^rN “ реакции промежуточных опор
F-j, F,, Fа2, Fa3- поперечные силы, действующие на валы
со стороны муфт и тормозов
1,2,3 - сцепные управляемые (фрикционные
многодисковые) муфты
4, 5, 6 - управляемые (фрикционные
многодисковые) тормоза
а1эа2 ,а3- центральные колеса с внешними зубьями
Ь|> b2,b3- центральные колеса с внутренними зубьями
hj« h2>h3- водила
J|, ^2 Зз_ зубчатые (с узкими венцами) соединения
МНОГОСКОРОСТНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
331
Включением тормоза 4 к данному механизму под-
соединяют механизм, содержащий звенья а2, h2 и Ь2. Об-
разуется замкнутая передача с замыканием звена а2 и а3
на входной вал.
Включением муфты 3 осуществляют блокировку
передачи.
Включением тормоза б осуществляют реверсирова-
ние передачи. При этом два крайних справа на схеме 3.1
планетарных механизма соединяют в замкнутую переда-
чу звеньев h3 и h4 на выходной вал. Колесо Ь4 неподвиж-
но, а звенья Ь3 и а4 соединены между собой.
Передаточные отношения четырехскоростной пере-
дачи в порядке упомянутых режимов и с обозначением
соответствующих элементов управления следующие:
i5=l + zb3/za3;
1
14 =------------------’
!fb3 гь2
Zb3 + *., zb2 +za2
i3 = 1. Передаточное отношение при реверсировании
вращения выходного вала
z6 -1
Z- 2Я
а3 а4
Хотя в данном исполнении при совокупном исполь-
зовании обоих составляющих механизмов можно полу-
чить 8 режимов, на практике используется всего 7 режи-
мов: для заднего хода сочетание включения элементов
2-6 не предусмотрено.
Построение и выбор схемы многоскоростной плане-
тарной передачи, пожалуй, одна из сложнейших задач
конструирования. В мировой практике известно большое
количество разнообразных решений планетарных коро-
бок передач. Первоначально они привлекали внимание
малыми габаритными размерами и возможностью ис-
пользования тормозов вместо сцепных муфт, благодаря
чему управляющие гидравлические цилиндры выполня-
лись невращающимися и проще осуществлялся подвод
рабочей жидкости.
Большое распространение получили многоскорост-
ные передачи, составленные из последовательно соеди-
ненных простейших многоскоростных механизмов. Так
проектировали передачи с двумя-, тремя степенями сво-
боды, с большим числом режимов движения. Видимо,
основная причина распространения таких схем кроется в
простоте их проектирования (получения схемы и выбора
параметров структурных единиц) по сравнению со схе-
мами параллельного соединения.
Постепенно эти причины отодвигались на второй
план. Конструкторы научились делать малогабаритными
и передачи с неподвижными осями колес (см. схему
2.1а), и осуществлять вращающиеся сцепные муфты со-
поставимыми по сложности с невращающимися тормо-
зами, а самое главное, были построены схемы планетар-
ных передач с минимальным количеством структурных
единиц на основе их параллельного (замкнутого) соеди-
нения. Такие схемы выгодно отличаются от последова-
тельного соединения по КПД и габаритным размерам.
Пример такого решения и его силовой анализ на
всех режимах представлен на рис. 130.1 ... 130.3. По
сравнению со схемой 3.1 (рис. 129) здесь на один плане-
тарный механизм меньше. При одинаковом общем числе
сцепных муфт и тормозов вращающихся муфт здесь на
одну больше. Хотя в схеме 3.2 (рис. 130.1) не удалось
добиться такой унификации элементов муфт и тормозов,
как в схеме 3.1 (рис. 129), но по компактности компонов-
ки трудно даже представить ее возможное дальнейшее
совершенствование, достаточно обратить внимание на
малый объем свободных полостей.
Самоустановка звеньев обеспечивается благодаря
самому минимуму центральных опор и "коротким" шли-
цевым [зубчатым] соединениям звеньев между собой (см.
обозначения на схеме 3.2а).
Все центральные валы (входной вал, валы 1 и 2, вы-
ходной вал) имеют по две опоры (см. схему 3.26), а води-
ла h] и h2, центральные колеса аь bt, b2, Ь3 не имеют
опор и самоцентрируются благодаря силам в зацеплениях
зубчатых колес.
В табл. 3.2 в (рис. 103.2) даны режимы, получаемые
при включении элементов и использовании механизмов,
обозначенных на схемах 3.2г ... 3.2з и 3.2и, 3.2к
(рис. 103.3). Нагруженные звенья, участвующие в пере-
даче движения, выделены жирными линиями. Рядом со
схемами 3.2г ... 3.2к приведены зависимости вращающих
моментов от передаточных чисел механизмов. Причем
данные зависимости получены из условия равновесия
отдельных механизмов. Наибольшую трудность для си-
лового анализа составляют замкнутые схемы 3.2д, 3.2е,
3.2з, 3.2и и 3.2к. Начинать такой анализ следует с рас-
смотрения равновесия механизма, для которого известны
нагрузки двух звеньев из трех или нагрузка одного звена,
имеющего только одно соединение с другими механизмами.
Данный анализ нужен не только для расчета и вы-
бора параметров зубчатых зацеплений, подшипников
сателлитов и фрикционных элементов муфт и тормозов, а
прежде всего для оценки рациональности схемы по на-
груженности звеньев и КПД. Полностью такую оценку
можно представить только с учетом скоростей звеньев,
которые достаточно просто определить с помощью мето-
дов кинематического анализа.
Применение планетарных механизмов с "пар-
ным" сателлитом (сателлитом, составленным из двух
зацепляющихся между собой колес), как было отмечено
ранее, позволяет получать довольно простые и компакт-
ные конструктивные решения. Их применяли и до сих
пор применяют довольно широко, особенно, когда требу-
ется режим реверсирования — такой планетарный меха-
низм позволяет получить отрицательное передаточное
отношение при остановке одного из центральных колес.
Тем не менее на любом режиме участвует в передаче
движения одна "лишняя" зубчатая пара, что, естественно,
сказывается на КПД. Кроме того, конструкция водила
обычно менее технологична, чем в механизме с одновен-
цовым сателлитом.
Аналогичное упрощение конструктивной схемы по-
зволяет получить механизм с двухвенцовым сателлитом.
332
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
130.2. МНОГОСКОРОСТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА (РЕЖИМЫ ДВИЖЕНИЯ И НАГРУЖЕНИЯ)
Пример отношений
чисел зубьев
*ь. гь, *ь3
^ = 2,50; -^=^=2,65
Ха1 *-а2 *-а3
| Первая (понижающая) передача |
Выходной
Входной В работе участвуют вал
вал гидротрансформатор, муфта 1, тормоз 6 и механизм 3.
3-2в 1
Включены Передаточные
элементы отношения
управления
1-6 3,65
1-5 2,08
1-4 1,46
1-2 1,00
2-4 0,83
2-5 0,58
3-6 -4,83
Za ,га - числа зубьев центральных колес
2 3 с внешними зубчатыми венцами
Zb ^Ъ7^ъ- числа зубьев центральных клолес
1 с внутренними зубчатыми венцами
Т Ту 1 Ту Те. - вращающие моменты на выходном валу
и’ 1 2 и управляемых звеньях
| Вторая (понижающая) передача |
гв2
Zb
Tt=-
Za
Zb
Ь2
Ti=
Выходной
3.2з |
I Пятвя (повышающая) передача
Выходной
вал
Выходной
вал
Входной
вал в работе участвуют
муфты 7 и 1, тормоз 4, механизмы 1,2 и 3.
т
----------
Выходной
вал
Входной В работе участвуют
ввл гидротрансформатор, муфта 1, тормоз 5, механизмы 2 и 3.
| Третья (понижающая) передача |
Уравнение
равновесия вала 2
Т4=-То-7’1
Ч
Za
<ь:
^а-,
|_3.2ж
Четвёртая (прямая) передача
Входной
вал Муфты 7 и 1 соединяют валы, а муфта 2 блокирует механизм 3.
Входной
вал В работе участвуют муфты 7 и 2, тормоз 4, механизмы 1,2 и 3.
ЧЧ.
> а2уа3
МНОГОСКОРОСТНЫЕ ЗУБЧАТЫЕ ПЕРЕДАЧИ
333
130.3. МНОГОСКОРОСТНАЯ ПЛАНЕТАРНАЯ ПЕРЕДАЧА (РЕЖИМЫ ДВИЖЕНИЯ И НАГРУЖЕНИЯ)
При этом по КПД он эквивалентен механизму с одновен-
цовым сателлитом, а конструкция сателлита менее тех-
нологична, чем в других механизмах: при нарезании зуб-
чатых венцов требуется их точное относительное распо-
ложение, а при сборке все сателлиты должны быть раз-
мещены однозначно (только при определенном положе-
нии), введены в зацепление с центральными колесами.
На рис. 131 приведены примеры многоскоростных
передач с парными сателлитами:
- схема 4.1 характеризует самое простое решение
передачи, обеспечивающей получение четырех режимов
(см. таблицу 4.1а);
— схема 4.2 эквивалентна по функциональным воз-
можностям шестискоростной (с учетом реверсирования)
передаче, составленной еще М.С. Розовским из трех од-
норядных (с одновенцовым сателлитом) механизмов и
конструктивно упрощенной мною благодаря замене двух
механизмов одним механизмом с "парными" сателлитами
и тремя центральными колесами; схема 4.3 использована
в гидромеханической трансмиссии гусеничного про-
мышленного трактора [с мощностью двигателя 331 кВт
(450 л.с.)].
В схеме 4.1 в режиме 2-4 (включенные элементы
управления) использован однорядный механизм при
входном колесе а, выходном - водиле h и неподвижном
колесе Ь. В режиме 1-4 использован механизм с тремя
зацеплениями b]-f, f-g, g-Ьг. В режиме 1-2 весь меха-
низм вращается как одно целое. В режиме 2—4 заднего
хода движение передается через механизм с "парным"
сателлитом и выходным водилом. Передаточное отноше-
ние при этом определяют так:
Возможное сочетание включенных элементов 3-4 не
допускает передачу движения, так как кинематическая
цепь при этом разомкнута, а водило — выходное звено —
заторможено.
В схеме 4.2 в режиме 3—4 в передаче движения уча-
ствует только один планетарный механизм с одновенцо-
вым механизмом (выходное - водило Ьг и неподвижное
колесо Ь3). В режиме 1-2 передача блокируется и все
звенья вращаются как одно целое. Во всех остальных
режимах получаются замкнутые передачи. При этом ис-
пользован дифференциальный механизм, содержащий
звенья а3, Ь3, Ьг, а в качестве замыкающей ветви служит
механизм, содержащий звенья аг, bb hi (при включении
тормоза 3), или механизм с "парным" сателлитом g-f,
содержащий три центральных колеса аь Ьь аг, свободно
вращающееся водило hi (по аналогии с механизмом типа
3k по классификации В.Н. Кудрявцева). В режимах 1-3 и
2-4 имеет место циркуляция энергии, но она сопровож-
дается незначительным дополнительным нагружением и
небольшими дополнительными потерями энергии (при
сравнении с параллельным распределением энергии).
Оценочный минимальный КПД на этих режимах 0,90.
На схеме 4.3 многоскоростная передача составлена
из реверса [реверсивной передачи (с блокируемым пла-
нетарным механизмом)] и трехскоростной передачи.
Движение от входного вала передается входному звену
реверса через передачу G. Реверс имеет два режима
включения: муфта 5 блокирует {схемы 4.3, 4. Зв, 4.3г), а
тормоз 1 включает в кинематическую цепь механизма с
отрицательным передаточным отношением - планетар-
ную передачу с "парным" сателлитом (см. схему 4.3д).
Схемы 4.36, 4.Зв, 4.3г характеризуют режимы при
включении тормозов 4,2 и 3 соответственно.
334
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
131. МНОГОСКОРОСТНЫЕ ПЛАНЕТАРНЫЕ ПЕРЕДАЧИ, СОДЕРЖАЩИЕ МЕХАНИЗМЫ С "ПАРНЫМИ" САТЕЛЛИТАМИ
4.1а
Промежуточный вал
вал
Включены Передаточные
элементы отношения
управления
2-4 3,10
1-4 1,70
1-2 1,00
2-3 -2,00
(3-4) - торможение
выходного вала
| 4.3 |
Отношения
чисел
зубьев
Реверсивная передача Трехскоростная
(с блокируемым планетарная
планетарным механизмом) передача
zb,
5-1 = 2,03
<а.
2аз
^=1,15
Za2
*b,
^ = 2,5
Za2
|^ = 2,15
za.
* Режимы, сопровождаемые
циркуляцией энергии
Выходной
вал
Входной
вал
2,20
Za2
Планетарный
механизм
с одновенцовым
сателлитом
—Z-— J.O6
"Парный"
сателлит
а1эа2 »••• - центральные колеса
с внешними зубьями
Ь|, Ь2" центральные колеса
с внутренними зубьями
14.2а |
Включены Передаточные
элементы отношения
управления
2-3 6,32
3-4 4,66
2-4 2,89*
1-4 1,68
1-2 1,00
1-3 -7,03*
4.3a
Включены Передаточные
элементы отношения
управления
5-4 -2,56
5-2 -1,15
5-3 -0,478
1-4 2,48
Возможные режимы включения
1-2 и 1-3 не используются.
1,2,... - управляемые
(фрикционные
многодисковые)
муфты и тормоза
h|»h2- водила
g, f - зацепляющиеся
между собой колеса
"парного" сателлита
|4.3б| | Первая передача |
S - дифференциальный
|4.3в | | Вторая передача| механизм
V - замыкающий
4.3г
|Третья передача^
Исходная схема
Сателлиты g2,g3
и колеса b2,b3
совмещены.
[4^д]
| Передача заднего хода |
ЗАМКНУТЫЕ ГИДРОДИНАМИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
335
Схема 4.36 представляет собой замкнутую передачу
на основе дифференциального S с тремя последовательно
расположенными внешними зацеплениями. Замыкающая
ветвь V представляет собой передачу с парным сателли-
том, входным звеном — водилом h2 и неподвижным цен-
тральным колесом с внутренними зубьями 64. Замыкание
осуществляется на выходное звено - вал 3.
На следующем режиме (схема 4. Зв) включен тормоз 2.
В кинематическую цепь введен механизм с тремя внеш-
ними зацеплениями и остановленным водилом h2.
На режиме, представленном на схеме 4.3г, включен
тормоз 3. В передаче движения участвует четырехзвен-
ный механизм с тремя центральными колесами и "пар-
ным" сателлитом. Данный механизм — конструктивно
упрощенное решение последовательного соединения
двух планетарных передач (исходная схема), централь-
ные колеса которых Ь2 и Ьз совмещены в одном колесе.
Режим на схеме 4.3д при включенном реверсе пре-
дусматривает включение тормоза 4. Передаточное отно-
шение равно произведению передаточных отношений
составляющих механизмов.
Возможные сочетания включенных элементов
управления 1-2, 1-3 могли бы позволить получить еще
два режима заднего хода, но в реальном решении их не
используют.
15.4. ЗАМКНУТЫЕ
ГИДРОДИНАМИЧЕСКИЕ И
ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
Особое направление в конструировании занимают
замкнутые передачи с регулируемой замыкающей
ветвью или с дифференциальным механизмом с изме-
няемыми кинематическими параметрами. В качестве
таких механизмов используют гидротрансформатор
(рис. 132, схемы 5.4, 5.5, 5.6), фрикционный вариатор
(скорости) схема 5.2, гидрообъемную или электромеха-
ническую передачу (схема 5.10).
Замкнутая передача содержит по крайней мере один
замкнутый контур, образованный только подвижными
звеньями.
Одноконтурная замкнутая передача (схема 5.1а)
может быть получена кинематической инверсией из пе-
редачи, содержащей последовательно соединенные ме-
ханизмы (схема 5.1).
Оба механизма могут иметь неизменяемые кинема-
тические параметры, или один из механизмов может по-
зволять регулировать скорость.
Функциональные особенности замкнутых передач
по сравнению со схемами последовательного соединения
следующие:
получение большего передаточного отношения или
диапазона регулирования при соответствующем сниже-
нии КПД из-за циркуляции (энергетического потока);
получение более высокого КПД и меньшей установ-
ленной мощности агрегатов регулируемой ветви при со-
ответствующем уменьшении передаточного отношения
и/или диапазона регулирования скорости.
Вторая особенность обусловлена параллельной пе-
редачей энергетического потока по двум или более вет-
вям и соответствующим уменьшением потерь шергии в
регулируемой ветви меньшей мощности, чем при после-
довательном соединении. Отсутствие циркуляции энер-
гетического потока в таких передачах имеет место только
при определенных параметрах.
По количеству энергетических потоков различают:
двухпоточную замкнутую передачу, структура ко-
торой может быть сведена к схеме 5.1а, например, объе-
динение нескольких механизмов в один механизм;
трехпоточную замкнутую передачу, в которой мож-
но выделить ветвь (обычно это регулируемая ветвь), со-
единенную с входным и выходным звеньями только че-
рез дифференциалы (один из режимов схемы 5.10 —
см. схему 5.10а).
По виду регулируемой ветви различают:
гидромеханическую замкнутую передачу (см., на-
пример, схемы 5.4, 5.5, 5.6)',
электромеханическую замкнутую передачу (см.
схему 5.10).
По характеру регулирования скорости различают:
непрерывного регулирования скорости (схемы 5.2... 5.6)',
- непрерывно-ступенчатого регулирования скорости
(схема 5.10).
На схеме 5.1 два механизма G1 и G2 соединены по-
следовательно. При этом передаточное отношение уст-
ройства при входном звене I и выходном звене II:
. (о) _ -(о) .(о)
‘ I-ц - 1 G1 ' G2 ’
(1)
где i и z — передаточные отношения соответствен-
но механизмов G1 и G2 при остановленном звене О.
При остановке звена 11 и выходном звене О получи-
лась замкнутая передача с замыканием на выходное зве-
но, причем передаточное отношение
г(п)
1 1-0 _ 1 1 1-П
(2)
Если задать входным звено О, а выходным - звено 1,
то получается передача с замыканием на входное звено
(схема 5.1а), хотя структура при этом не изменилась. Для
этого варианта
;(п) - *
г1-о-Т(Щ--
* 1-0
(3)
В примере на схеме 5.2 принято zb / za = 3 (где zb и
za - числа зубьев колес b и а), а передаточные отношения
вариатора z^v) = -0,5...-2,0. Если для кинематическо-
го анализа использовать инверсию звеньев (обращение
движения), то получается, что вариатор G1(V) имеет
диапазон изменения передаточного отношения
i^(v)=l,5 ... 3, а передача по схеме 5.1 имеет i^.n =
= 1,125 ... 2,25. В схеме 5.2 при этом получается, соглас-
но (2) и (3), z = — 8 ... -0,8, т.е. диапазон регулирова-
ния скорости выходного звена увеличился в несколько
раз.
336
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
ЗАМКНУТЫЕ ГИДРОДИНАМИЧЕСКИЕ И ЭЛЕКТРОМЕХАНИЧЕСКИЕ ПЕРЕДАЧИ
337
В схеме 5.3 вариатор S1 (V) имеет диапазон z =
= -0,25 ... -0,5, а передача в целом имеет тот же диапа-
зон, что и передача по схеме 5.2.
Гидродинамическая передача может выполнять роль
замыкающей ветви V, у которой одно из трех звеньев
неподвижно (схемы 5.4, 5.5) или разветвляющего диффе-
ренциального механизма S, у которого все звенья под-
вижны (схема 5.6).
При наличии у гидродинамической передачи числа
лопастных колес более трех она может входить одновре-
менно в два механических контура и выполнять в них
различные роли.
Замкнутая передача позволяет получить иную
внешнюю характеристику, чем у (незамкнутой) гидроди-
намической передачи, и более высокие качественные по-
казатели, благодаря перераспределению энергетического
потока между зубчатыми передачами с высоким КПД и
гидродинамической передачей с более низким КПД.
Замкнутая передача может обеспечивать непрерыв-
ное автоматическое регулирование угловой скорости
выходного звена (схемы 5.4, 5.5) или непрерывно-
ступенчатое регулирование (схема 5.6). Схемы 5.4, 5.6
используются в автомобилях и тракторах, схема 5.5 — в
тепловозе. Обозначения: I и О — входное и выходное зве-
нья соответственно, насосное лопастное колесо р. тур-
бинное лопастное колесо t и реактор г. Обычно колесо р
является входным звеном, а колесо t — выходным. Мо-
менты на насосном Тр и турбинном Д колесах зависят от
передаточного отношения zv ~nv/ Пъ где ир и и, - частота
вращения соответственно колес р и t. Возможны режимы
работы: TMV - тяговый режим гидродинамической пере-
дачи, ORV - обгонный режим и AMV - режим противовк-
лючения; TMvs, ORVs, AMVs - те же режимы замкнутой
(двухпоточной гидромеханической) передачи.
В схеме 5.4 гидротрансформатор установлен в одной
из параллельных ветвей гидромеханической двухпоточ-
ной передачи. Его турбинное колесо соединено со зве-
ном Ь, а насосное колесо - со звеном а механизма.
Водило механизма соединено с выходным звеном О.
Насосное колесо и звено а соединены с входным звеном I.
Из условия равновесия дифференциального меха-
низма момент на звене а:
(b) Ша-ШЬ
где г ' =—2где со - угловые скорости звеньев с
го0-®ь
соответствующими индексами.
Момент на звене О:
^0 =
Д z(b)
Момент на звене I:
С учетом полученных зависимостей, а также связи i
с z'v на схеме 5.4 а представлены штриховыми линиями
зависимости моментов Д и То от 1/1 и 1/z'v-
Представленное на схеме 5.4 соединение гидро-
трансформатора с дифференциалом позволяет увеличить
коэффициент трансформации - Д/7Ь- При этом смести-
лись границы тягового режима TMvs и режима проти-
вовключения AMvs- и увеличился коэффициент прозрач-
ности (отношение максимального и минимального зна-
чений Д в режиме TMVs)-
В схеме 5.5 роль дифференциального механизма S
выполняют соединенные определенным образом гидро-
муфты VI и V2, а в замыкающей ветви — гидротранс-
форматор V.
Входное звено I через зубчатую передачу G1 соеди-
нено с трубчатым валом 3, с которым неподвижно соеди-
нены насосные колеса pi и рг гидромуфт VI и V2 соот-
ветственно, а через трубчатый вал 3 также соединено
насосное колесо гидротрансформатора. Турбинные коле-
са ti и t неподвижно соединены с валом 4 и через зубча-
тую передачу G3 соединены с валом S — выходном зве-
ном О. Реактор г гидротрансформатора соединен с кор-
пусом. Турбинное колесо t2 установлено на валу 4 и со-
единено с выходным звеном О через зубчатую передачу
G2. На схеме 5.5 показано также размещение подшипни-
ков качения.
При разгоне с помощью управляемой гидросистемы
в работу поочередно включают гидротрансформатор V,
гидромуфты VI и V2. Они используются на режимах,
обеспечивающих наиболее высокий КПД. На схеме 5.5а
даны зависимости отношения моментов То и 7) соответ-
ственно на выходном и входном звеньях и КПД т] от от-
ношения частоты вращения выходного звена «о к его
наибольшей частоте «отах-
В режиме (V) в работе в основном участвует гидро-
трансформатор V, в режимах (VI) и (V2) — соответствен-
но гидромуфты VI и V2. Данная схема позволяет исполь-
зовать гидромуфты и гидротрансформатор при их наибо-
лее высоком КПД.
В схеме 5.6 дифференциальный механизм S выпол-
нен в виде гидротрансформатора с тремя подвижными
звеньями. Входное звено соединено с насосным колесом
р гидротрансформатора V. Турбинное колесо t соединено
с выходным звеном О, а между реактором г и выходным
звеном О установлена передача G. В период разгона во-
дило механизма заторможено тормозом 3. Момент на
выходном звене равен сумме моментов на турбинном
колесе Tt и реакторе Тт с учетом передаточного отноше-
ния:
То=Тх+Тт — . (4)
za
Энергетический поток, проходящий через передачу
G, составляет около 1/3 от общего потока, а момент Т в
8 раз превышает номинальный момент. Скорость, разви-
ваемая при таком моменте и заданной мощности, огра-
ничена. Для увеличения скорости тормоз 3 размыкается,
а реактор г останавливается тормозом 2.
338
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
На схеме 5.66 штриховой линией показано измене-
ние момента 7) в зависимости от cot—<£)[ при отсутствии
связи между звеньями г и Ь. Если в данном примере за-
дать 7Ь = 87), а гидротрансформатор имеет 7) = -3,37),
7) = 2,37) при (0О = 0, то из выражения (4) можно полу-
чить zb / za = 2.
Относительная скорость (ot — ю, при включенном
тормозе 2 достигнет значения (Oj, как видно из плана уг-
ловых скоростей на схеме 5.6а при i = 3. При i = 4, когда
То = Д, целесообразно включением тормоза 1 переклю-
чить гидротрансформатор на обычный режим. Графики
изменения моментов и КПД на обоих режимах, представ-
ленные на схемах 5.66, 5.6в, свидетельствуют о возможно-
сти существенного влияния на характеристику передачи
при изменении параметров замыкающего механизма.
Передача в зоне от - » 0...— работает при более вы-
i 4
соком КПД - л'2’ по сравнению с КПД - т](3) отдельного
гидротрансформатора, хотя наибольшие величины т],^
связаны соотношением т]^х > т]^ (см. схему 5.6 в).
На схеме 5.10 - электрическая замкнутая передача
непрерывно-ступенчатого регулирования. Структура
данной передачи изменяемая. При переключении эле-
ментов управления она преобразуется из двухпоточной в
трехпоточную. В ее основе положена схема с передаточ-
ными отношениями механизмов S1 и S2 (при останов-
ленном водиле) в порядке их расположения на схеме
zsi = -4, isi= —2-
Входное звено на схеме обозначено I. Звено п регу-
лируемой ветви V соединено с выходным звеном О при
помощи муфты 2 или с центральным колесом а механиз-
ма при помощи муфты 1. В первом случае получается
передача с замыканием на выходное звено, с диапазоном
регулирования от <d0 = 0 до «о = <Oi/l,5. Во втором случае
получается трехпоточная передача с основным диапазо-
ном регулирования от <do = coj/1,5 до (0о = СО]/0,75. При
этом в обеих передачах на основных диапазонах регули-
рования отсутствует циркуляция энергетического потока.
На схеме 5.10а показан план угловых скоростей
звеньев передачи, а на схемах 5.106, в приведены графи-
ки изменения мощности PmV, Pnv и моментов Тт, Тп. Лучи
угловых скоростей обозначены соответственно
<от/ (О], (on / coj. Переключение передачи с одного режима
на другой осуществляется при Тп = 0 и гоп - (0о = 1,39сог и
обозначено на плане угловых скоростей. Мощность в
регулируемой ветви на всем диапазоне регулирования не
превышает момент Тт = 0,57), а примерный характер из-
менения момента Тп при учете потерь в передаче в пери-
од разгона показан штриховкой.
Момент То = 0 при too = 0 можно определить при
заданных силовых параметрах вариатора, исходя из ус-
ловий равновесия дифференциала, потери в котором
практически могут не учитываться. Если, например, при
йо = 0и(вп = 0 заданы моменты Тт и Тп = ЗТт т.е. сило-
вое передаточное отношение
ГЛ
где индексы тип обозначают звенья регулируемой вет-
ви, тогда из условия равновесия второго планетарного
механизма следует 7) = ~2Тт.
Момент на выходном звене по абсолютной величи-
не равен сумме моментов на звене п и моменту на водиле
второго механизма, обусловленному наличием Тт и Тп:
То = Tn-TJte -1) = ЗТт -Гт(-2-1) = 6Тт
или
Го=—37), 7 = 3.
Аналогично определяют i при использовании ре-
гулируемой ветви с другими параметрами zv:
Т
-1,5 -2 -2,5 -3,5 -4 -5 -7
* п
~ то
' =-^ 2,25 2>5 2,75 3,25 3,5 4 5
h
Приведенный ряд значений i представляет собой
силовую характеристику данной схемы в режиме работы
передачи с замыканием на выходное звено при <во 0 в
зависимости от изменения передаточного отношения
регулируемой ветви V.
15.5. ГИДРООБЪЕМНЫЕ
РЕГУЛИРУЕМЫЕ ПЕРЕДАЧИ
Рассмотренные гидродинамические передачи позво-
ляют автоматически изменять передаточное отношение в
зависимости от величины (и направления) внешней на-
грузки. При этом осуществляется непропорциональная
связь между силой и скоростью или, как ее обычно назы-
вают, нелинейная связь.
Гидрообъемные передачи типа "насос-гидро-
мотор" так же, как и электромеханические передачи типа
"генератор-двигатель", имеют линейную характеристику
или близкую к линейной. Аналогичными свойствами
обладают фрикционные механизмы и, в частности, ва-
риаторы (скорости). В них, как правило, требуется при-
нудительное изменение передаточного отношения, хотя
они и не лишены свойства в какой-то мере самоприспо-
сабливаться к внешним условиям.
В отношении гидрообъемных передач отметим сле-
дующие предпочтительные решения:
• передачи типа "насос-гидромотор" выполняют в
виде единого блока с общим корпусом, общими гидро-
распределителями и взаимосвязанным регулированием
(см. схемы 6.1 и 6.1а на рис. 133);
• для непрерывно-ступенчатого регулирования пе-
редаточного отношения используют передачу с последо-
вательным или параллельным присоединением много-
скоростной зубчатой передачи (см. схему 6.2).
Отдельные частные решения рассмотрим на примерах.
ГИДРООБЪЕМНЫЕ И РЕГУЛИРУЕМЫЕ ПЕРЕДАЧИ
339
6.1а
133. ГИДРООБЪЕМНЫЕ РЕГУЛИРУЕМЫЕ ПЕРЕДАЧИ
W/Ш/
Подшипник 1
Наклонный (поворотный)
диск насоса
Канал 1
Блок цилиндров мотора
Наклонный
(поворотный)
диск насоса
Подшипник 2
Блок цилиндров \ Подшипник 5
насоса \
Подшипник 4
Подшипник 2 Поршни насоса
' Гидрораспределитель 1
Цилиндрический
кулачок Наклонный (поворотный)
\ Поршни мотора Диск мотора
Неподвижный
вал
Выходное звено
(шестерня)
Подшипник 3
Рычаг 1
Входной
вал
’uinut/U.
Рукоятка-
Рычаг 2
Гидрораспределитель 2
Канал 2
Канал 3
t/ZZj
Паз кулачка
аР
Управляющий
гидроцилиндр
Наклонный
(поворотный)
диск мотора
Цилиндрический
кулачок
Выходное
звено
(шестерня)
S1 - дифференциальный а, b - центральные зубчатые колеса
механизм h - водило
Gl, G2, G3 - зубчатые передачи
п - кпд
Yp,YD - коэффициенты , характеризующие
углы наклона дисков
(насоса и мотора)
_tgCtP tgctp
Р *8 °- Ртах D а Dmax Выходное
звено
T^/TJy - отношение вращающих моментов
на валах мотора и насоса
MD/Z?p - отношение частот вращения
валов мотора и насоса
1,2,3 - сцепные управляемые муфты
На схеме 6.1 - гидропривод с изменяющимися па-
раметрами движения выходного звена. Наибольший диа-
пазон регулирования параметров достигают при управ-
лении двумя гидромашинами: насосом и мотором. В ак-
сиально-поршневых гидромашинах это достигается из-
менением наклона диска или блока цилиндров.
Входное звено - вал насоса — приводится от двига-
теля внутреннего сгорания. Вал соединен с блоком ци-
линдров, внутри которого установлены поршни. Блок
цилиндров опирается через подшипник 4 на выходное
звено. Жидкость из рабочих полостей насоса подается
через гидрораспределитель в рабочие полости мотора.
В блоке цилиндров мотора расположены поршни. Блок
цилиндров мотора неподвижно соединен с неподвижным
валом и опирается через подшипники 5 на выходное зве-
но. Под действием поршней вращается наклонный диск
мотора, увлекая за собой выходное звено и диск насоса.
Диски шарнирно соединены с выходным звеном
(см. схему 6.1а). Относительное движение диска и блока
цилиндров насоса обусловлено вращением вала и выход-
ного звена. Выходное звено опирается на корпус через
подшипник 1 и 3. Через отверстие в неподвижном валу
по каналу 1 подводится жидкость для смазывания эле-
ментов привода и для компенсации утечек рабочей жид-
кости.
Наклон дисков изменяют путем осевого перемеще-
ния цилиндрического кулачка с пазом на его внутренней
поверхности.
Кулачок перемещают рукояткой управления (см.
схему 6.1а). При движении рукоятки вправо вращение
выходного звена ускоряется, а при движении влево - за-
медляется, но увеличивается вращающий момент на вы-
ходном звене. От рукоятки через тягу и рычаг перемеща-
ется гидрораспределитель 2. Гидрораспределитель 2 от-
крывает доступ жидкости под давлением в управляющий
гидроцилиндр, поршень которого перемешает кулачок
через рычаг и подшипник 2. Через рычаг осуществляется
обратная связь между исполнительным устройством и
устройством управления.
В зависимости от угла наклона диска насоса аР и
диска мотора aD изменяются характеристики привода
(см. схему 6.16). В обозначениях на схеме 6.16 индекс Р
относится к насосу, D - к мотору. Коэффициенты уР и yD
характеризуют изменения угла наклона дисков:
Yp - ~ » Yd _ ~ ’
tgaP tgaD
где в формуле и на схеме а и атах - соответственно фак-
тический и наибольший возможный угол наклона диска;
340
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
«ц/ир ~ передаточное отношение — отношение частоты
вращения выходного звена к частоте вращения вала;
7Ь/7р — отношение вращающего момента выходного зве-
на к вращающему моменту входного вала; р!рй — отноше-
ние давления р рабочей жидкости к минимальному дав-
лению р$, т] — КПД привода. Как следует из схемы 6.16,
привод позволяет осуществлять регулирование в широ-
ком диапазоне, включающем реверсирование движения
выходного звена.
На схеме 6.1 в привод "насос-гидромотор" дан в со-
ставе гидромеханической двухпоточной передачи. Такое
решение используют для уменьшения установленной
мощности, повышения КПД и увеличения диапазона ре-
гулирования. В этой передаче на всех режимах работы
часть энергии проходит через неуправляемую механиче-
скую ветвь (практически без потерь), а часть - через па-
раллельную управляемую гидравлическую ветвь. Разде-
ление движений и распределение энергетических пото-
ков осуществляется при помощи дифференциального
механизма. С уменьшением доли энергии в управляемой
ветви уменьшается общий диапазон регулирования, по-
этому в качестве механической ветви используют много-
скоростную передачу для получения нескольких диапа-
зонов регулирования.
В схеме 6.2 звено соединено с центральным колесом
а механизма S, водило h соединено с насосом (Р), цен-
тральное колесо b соединено с гидромотором (D). Энер-
гия в этой трансмиссии передается через две ветви вы-
ходному звену (О).
Регулируемая ветвь включает в себя звенья а - h - Р -
D - ...- О, механическую ветвь а - b - ... - О. Энергия
распределяется по ветвям в соответствии с условием
равновесия механизма. Моменты на его звеньях при ус-
тановившемся режиме однозначно определены:
Ть = —7^(1 + Zb/za), где Ть и Та — моменты соответственно
на звеньях h и a; z, и zb - числа зубьев соответствующих
колес. Моменты на выходном звене замкнутой передачи
zh — ~
То =Т’а —+ 7Ь zv, где zv - силовое передаточное отно-
са
шение (отношение моментов, взятое с обратным знаком)
управляемой ветви.
Последовательно к замкнутой передаче присоеди-
нена трехскоростная передача, содержащая передачи
переднего хода Gl, G2 и заднего хода G3, включаемые
муфтами 1,2 и 3 соответственно.
15.6. МЕХАНИЗМЫ СВОБОДНОГО ХОДА
В МНОГОСКОРОСТНЫХ ПЕРЕДАЧАХ
Наряду с гидромеханическими передачами в совре-
менных трансмиссиях транспортных машинах наблюда-
ется тенденция использования фрикционных механиз-
мов. При этом следует отметить два направления:
— использование фрикционных самоуправляемых
механизмов в системе управления многоскоростными
передачами;
— использование фрикционных передач непрерыв-
ного регулирования - вариаторов скорости.
Самоуправляемые механизмы свободного хода
(рис. 134) упрощают систему управления, хотя все в
большей мере уступают управляемым многодисковым
муфтам и тормозам по несущей способности (при одина-
ковых размерах). При этом современные конструкции
механизмов свободного хода (см., например, схему 7.10а)
существенно отличаются от традиционных решений ро-
ликовых обгонных муфт.
Механизмы свободного хода применяют практиче-
ски во всех гидродинамических трансформаторах. Благо-
даря им гидротрансформатор на определенном режиме
превращается в гидромуфту с высоким КПД. В схемах 7.1 и
7.2 механизмы свободного хода служат для несколько
иной цели. Передачи по этим схемам имеют высокие ка-
чественные показатели в широком диапазоне передаточ-
ных отношений, благодаря использованию в замыкаю-
щей ветви ступенчатого изменения передаточного отно-
шения. В них Gl, G2, G3, G4 — зубчатые передачи; 1,2, 3,
4 — элементы управления: сцепные муфты, тормоза.
В схеме 7.1 разветвление осуществляется в диффе-
ренциальном механизме S, соединенном с входным ва-
лом муфтой 1.
Механизм свободного хода 2 служит для автомати-
ческого размыкания замыкающей ветви. Соотношение
моментов для звеньев дифференциального механизма
здесь постоянно, но так как соотношение скоростей
звеньев при разгоне машины меняется — увеличивается
скорость турбинного колеса и изменяется в соответствии
с характеристикой момент на этом колесе, то изменяется
и доля энергии, проходящей через гидротрансформатор,
повышается КПД передачи.
В передачу на схеме 7.2 входят планетарный одно-
рядный дифференциальный механизм S и гидротранс-
форматор V. Возможны три режима включения передачи.
В начале вращения вала I автоматически замыкается
механизм свободного хода 3 и образуется передача с за-
мыканием гидротрансформатора на выходное звено О.
Следующий режим в процессе разгона - блокировка
дифференциального механизма с помощью управляемой
муфты 1. При этом механизм свободного хода автомати-
чески отключает турбинное колесо t гидротрансформа-
тора от выходного звена.
Третий режим осуществляется при включении тор-
моза 2. Центральное колесо а, дифференциальный меха-
низм и насосное колесо р остановлены. Вся энергия пе-
редается через механическую ветвь. Скорость звена О
увеличивается по сравнению со скоростью вала I.
Включение в работу того или иного агрегата зависит
от соотношения угловых скоростей насосных и турбин-
ных колес. Это соотношение определяется передаточны-
ми отношениями зубчатых механизмов G2 и G3.
Следующие примеры использования механизмов
свободного хода касаются сочетания самоуправляемых и
управляемых муфт/тормозов с дифференциальными ме-
ханизмами.
На схеме 7.3 - двухскоростная планетарная зубчатая
передача. При наличии на выходном звене О момента
сопротивления и движущего момента на входном звене I
заклинивается механизм свободного хода 2 (мех), оста-
МЕХАНИЗМЫ СВОБОДНОГО ХОДА В МНОГОСКОРОСТНЫХ ПЕРЕДАЧАХ
341
134. МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ С МЕХАНИЗМАМИ СВОБОДНОГО ХОДА
Gl, G2 передаточные механизмы S - дифференциальный механизм V - гидротрансформатор I - входное звено О - выходное звено 1, 2,... - сцепные управляемые или самоуправляемые (свободного хода) муфты и тормоза а, b, е - центральные зубчатые колеса h - водило р, t, г - насосное и турбинное колеса и реактор гидротрансформатора
(мех) - механизм (муфта
или тормоз) свободного хода
342
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
навливаются звенья Ьь h2 и движение передается последова-
тельно через звенья ab hb b2, а2. При этом получается переда-
точное отношение i ^о= (1 + zbi / )(- za21 zb2), где z —
числа зубьев зубчатых колес, обозначенных на схеме.
При включении тормоза 1 механизм свободного хода 2
(мех) выключается и движение от вала 1 передается по-
следовательно через звенья аь bb h2, а2. Передаточное
отношение
Применение механизма свободного хода возможно
лишь при определенных сочетаниях передаточных отно-
шений, направлений скоростей и сил. В данном примере
i ['20 и i £9О отрицательны, причем | i {*2О | < i ^)о.
Механизм свободного хода обычно можно устанав-
ливать в многоскоростной передаче только при i одного
знака и на режиме, при котором получается наибольшее
значение I z| (см. планы отношений угловых скоростей на
схеме 7.3а).
Но при этом можно составить такую схему, в кото-
рой данное условие достаточно выполнять только для
отдельной [частной] структурной единицы. Например,
можно последовательно соединить несколько схем, ана-
логичных схеме 7.3, и тогда число режимов включе-
ния/выключения механизмов свободного хода увеличит-
ся в соответствующее число раз.
Возможен еще более эффективный путь: поочеред-
ное подключение к входному звену нескольких конст-
руктивно совмещенных передач (схема 7.4), в каждой из
которых используется один и тот же механизм свободно-
го хода. В данном примере при включении муфты 1 ав-
томатически получается передача с двухвенцовым сател-
литом [тормоз 4 (мех) замкнут]. Тормоз 4 (мех) автома-
тически размыкается, если принудительно включить
тормоз 3. Включение муфты 2 (при выключенной муфте 1)
приводит к замыканию тормоза 4 (мех) и образованию
передачи с одновенцовым сателлитом. Все возможные
режимы работы передачи по схеме 7.4 даны в таблице 7.4а.
В схеме 7.5 механизм свободного хода обеспечивает
автоматическое включение в кинематическую цепь по-
нижающей передачи (ведущее звено Ь, ведомое - h, не-
подвижное — а). При включении муфты I механизм сво-
бодного хода 2 (мех) автоматически отключается и осу-
ществляется блокировка передачи - все звенья вращают-
ся как одно целое (соответствующие режимы см. на пла-
не угловых скоростей - схема 7.5а).
В схеме 7.6 вращение входного звена I с угловой
скоростью он в одну сторону приводит к включению ме-
ханизма свободного хода С1, а вращение в другую сто-
рону - к включению механизма свободного хода С2. Та-
ким образом, при реверсировании входного звена 1 вы-
ходное звено О вращается в одну и ту же сторону, но с
разной угловой скоростью.
В схеме 7.7 при вращении входного звена I выход-
ное звено О вращается в ту же сторону с меньшей угло-
вой скоростью, а реверсирование движения входного
звена I приводит к размыканию кинематической цепи.
В схемах 7.8 и 7.9 входное звено I является веду-
щим, а выходное звено О - ведомым. На практике встре-
чаются случаи, когда роли звеньев меняются, например,
в лебедке при опускании груза F-± (схема 7.8). При подъе-
ме № > Z1), где — передаточные отношения меха-
низма при включенных соответственно элементах 2 (мех)
и/, а при опускании, наоборот, №> z®, поэтому две уг-
ловые скорости барабана могут быть получены лишь при
опускании груза. При подъеме муфта 1 замкнута, а вклю-
чение тормоза 2 (мех) может привести лишь к остановке
всего механизма, так как размыкание (выключение) ме-
ханизма свободного хода при этом не произойдет. При
опускании рабочая скорость а>0 получается благодаря
замыканию механизма свободного хода, а при включе-
нии тормоза 2 (мех) осуществляется плавное опускание
груза. Данная схема применялась много лет назад, но из-
за несовершенства конструкции механизма свободного
хода не получила широкого распространения.
Аналогично, как и в схеме 7.8, изменяются функции
ведущего и ведомого звеньев в тягачах при спуске по
наклонной поверхности или при пуске двигателя букси-
ровкой машины. В схеме 7.9 два режима можно получить
при направлении моментов Д, То и скоростей оэ[, о>о по-
казанных на схемах 7.9а и 7.96. При буксировке машины
в том же направлении механизм свободного хода размы-
кается и кинематическое соединение может быть осуще-
ствлено лишь при включении тормоза 2 (мех)
(схема 7.96). При буксировке машины в другом направ-
лении или движении назад под уклон механизм свобод-
ного хода замыкается и происходит реверсирование дви-
жения звена О (схема 7.96). Такой режим в ряде случаев
является недопустимым для транспортной машины.
На схемах 7.10, 7.10а приведен неразборный узел
автоматической коробки передач автомобиля. В нем име-
ется встроенная муфта свободного хода, блокирующая
планетарную передачу. В кулачковом механизме свобод-
ного хода на схеме 7.10а использованы пары трения с
большим приведенным радиусом кривизны в зоне кон-
такта (по сравнению с традиционными роликовыми об-
гонными муфтами), что позволяет иметь высокую несу-
щую способность по контактной прочности взаимодей-
ствующих тел. На схеме 7.10а показан сепаратор в виде
двух обечаек с прорезями для кулачков. Сепаратор цен-
трируется в стенке, выполненной из антифрикционного
материала.
15.7. ФРИКЦИОННЫЕ ВАРИАТОРЫ
(СКОРОСТИ) И ВАРИАТОРЫ С
ЭЛЕМЕНТАМИ ЗАЦЕПЛЕНИЯ
Вариаторы (скорости) и, в частности, фрикционные
вариаторы (рис. 135), пожалуй, самые древние из всех
передач с непрерывным регулированием передаточного
отношения. Одно время казалось, что эпоха их примене-
ния постепенно завершается в связи с появлением более
совершенных многоскоростных передач с плавным пере-
ключением с одного режима на другой, и особенно в свя-
зи с развитием гидромеханических и электромеханичес-
ФРИКЦИОННЫЕ ВАРИАТОРЫ (СКОРОСТИ) И ВАРИАТОРЫ С ЭЛЕМЕНТАМИ ЗАЦЕПЛЕНИЯ 343
135. ФРИКЦИОННЫЕ ВАРИАТОРЫ (СКОРОСТИ)
Г^2~1
Вал 1
Диски
тарельчатые
I 8 1 I
1—-—। Диски конические
Зубчатая Промежуточный
передача
Диск конический
Вид А л л
Зубчатое
колесо 3
Звено 2 Звено 1
Вал 2 .
Звено 2
Звено 1
Планетарный механизм типа Зк
Входной
вал
Ь Выходной
W7X
Зубчатое Зубчатое
колесо 2 колесо 1
Нажимное Диск тарельчатый
устройство
Нажимное
самозатягивающееся
Коромысло 1 устройство
ЕП Уо^есТь/
Торовое \,
колесо а
| 8.1а | Диски конические
Диски
тарельчатые
Нажимное
самозатягивающееся
устройство
при нагружении
гп
□г
Кулачок 1 \ Кулачок 2
Разжимной
элемент
(шарик/ролик)
Ролик u /
(промежуточное
колесо)
7ь
Входной
вал
У/А
Коромысло 2
Выходной
вал
№
Г1‘ О>1
ff Ъ
| 8.2т
Направляющая
g
bj
Входной
вал
Нажимное Ползун
самозатягивающееся Выходной
устройство вал
Коромысло 1 Управляющие Коромысло 2
воздействия
| 8.56 I
/у
“I
______ .. Коромысло 2
о 4 Направления .
I—:1 самоустановки роликов /
Коромысло 1
Устройство
для регулировки
Торовое
колесо
Гидроцилиндр
Управляющий
(гидравлический)
механизм _______
Гидроцилиндр 2
Вариатор 1
Вариатор 2
/5Я
Входной
вал
Выходное
звено
lyj - передаточное
отношение вариатора
(замыкающей ветви)
S - суммирующий механизм
а,Ь - центральные
зубчатые колеса
h - водило
Za>^b - числа зубьев колес аиЬ
Зубчатая передача <
(<G1— “D
-т0(1+^ь)
ГЬТО-вращающие моменты
входного и выходного
звеньев
цепная передача
(fG2= 1)
344
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
ких передач с широким диапазоном регулирования ско-
рости выходного звена.
Последние годы некоторые зарубежные фирмы (ав-
томобильной промышленности) усиленно работали над
созданием автоматических коробок передач на основе
фрикционных вариаторов. Благодаря применению новых
фрикционных и антифрикционных материалов (фрикци-
онные пары работают в условиях непрерывного смазы-
вания), а также благодаря новым конструктивным реше-
ниям удалось получить конкурентоспособные вариаторы
высокой надежности (гарантийный пробег порядка
200 тыс. км). По отдельным показателям вариаторы уже
превосходят гидромеханические непрерывно-ступен-
чатые передачи того же назначения.
Различают вариаторы фрикционные (схемы 8.1 ...
8.7, 9.1 ... 9.4 на рис. 135 ... 136), пластинчатые (схе-
ма 10. Г) и импульсные.
На схеме 8.1 показан дисковый фрикционный вариа-
тор. Тарельчатые диски (см. схему 8.1а) с неизменным
радиусом r2(const) дорожки взаимодействия прижаты к ко-
ническим дискам пружиной или иным нажимным уст-
ройством (см. силы F„). При изменении межосевого рас-
стояния дисков изменяется радиус дорожки конического
диска (rifvari)» по которой происходит контакт с тарельча-
тым диском.
Соответственно этому изменяется передаточное от-
ношение. Входной вал выполнен соосно с выходным ва-
лом, а промежуточный вал связан с входным валом по-
средством зубчатой передачи, с выходным валом посред-
ством дисков. Оси зубчатых колес установлены в шарни-
рах звеньев 1 и 2. Длина каждого из этих звеньев обеспе-
чивает постоянство межосевого расстояния зубчатых пар
(колес 1 и 2, 2 и 3). В то же время относительный пово-
рот звеньев обеспечивает изменение межосевого расстоя-
ния дисков. Обычно в одном ряду устанавливают 3 ... 12
дисков. Кроме того, конические диски размещают сим-
метрично вокруг оси механизма.
Вариаторы по схеме 8.1 имеют отношение наиболь-
шего достижимого передаточного отношения к наи-
меньшему, равное 4 ... 4,8, и применяются в приводах
мощностью до 55 кВт.
Характерный недостаток дискового вариатора -
значительное геометрическое скольжение, особенно в
вариаторе с внешним касанием дисков (схема 8.1а).
А вариаторы с внутренним касанием дисков (здесь не
приведены) сложнее в исполнении.
Любой соосный вариатор может быть преобразован
в планетарный фрикционный вариатор. Достаточно сде-
лать подвижными оси звеньев, например, в схеме 8.1
можно обеспечить возможность перемещения оси про-
межуточного вала вокруг оси валов 1 и 2. В основу схем
фрикционных планетарных вариаторов может быть по-
ложен любой из планетарных зубчатых механизмов.
В этом механизме задают форму звеньев (обычно сател-
литов), которая позволяла бы менять соотношение ра-
диусов взаимодействующих поверхностей.
В основу схемы 8.2а положен планетарный меха-
низм, который содержит три центральных колеса а, Ь, е и
сателлиты f с рабочими поверхностями с, g, f (см.
схему 8.2). Звенья Ь, е и а взаимодействуют с
поверхностями сателлита вследствие трения. Сателлит f
выполнен конусным и имеет образующую, параллельную
оси механизма. Благодаря этому звено е, установленное
на ползуне, может перемещаться по направляющей вдоль
оси. При его перемещении изменяется радиус rf, и
поэтому меняется передаточное отношение. Входным
обычно выполняют звено Ь, невращающимся — звено е, а
выходным — звено а. В этом случае передаточное
Г г
। 'с е
где Гь, ге - постоянные радиусы рабочих поверхностей
колес a, b, е; rc, re, rt - изменяемые радиусы рабочих по-
верхностей сателлита с, g, f; С, - коэффициент относи-
тельного скольжения взаимодействующих звеньев. Под-
бирая параметры в приведенной формуле, можно осуще-
ствлять регулирование в широких пределах, вплоть до
реверсирования движения. Достаточно высокий КПД
(0,9 ... 0,5) при этом будет иметь место в сравнительно
небольшом диапазоне изменения частоты вращения ве-
домого звена от итах до 0,1итах, где итах — наибольшая
частота вращения.
Планетарный фрикционный вариатор по схеме 8.1
предназначен для применения в сравнительно маломощ-
ных вспомогательных приводах.
Во всех фрикционных вариаторах существенное
значение имеет решение прижатия звеньев в рабочей па-
ре. Если это действие осуществлять пружиной, то при
малой нагрузке сила прижатия будет завышенной и, со-
ответственно, будут иметь место неоправданные потери
на трение. В связи с этим используют устройство, обес-
печивающее автоматическое регулирование силы взаим-
ного давления сопряженных элементов за счет самозатя-
гивания (в механизме).
Обычно параметры устройства выбирают такими,
чтобы сила давления звеньев возрастала пропорциональ-
но рабочей нагрузке. Это позволяет избежать дополни-
тельных потерь при неполном нагружении по сравнению
с вариантом, при котором давление постоянно и соответ-
ствует максимальной нагрузке.
В отличие от фрикционного механизма свободного
хода в данном устройстве возможен относительный по-
ворот звеньев в заданных пределах. Для начального при-
жатия звеньев применяют пружины, создают предвари-
тельный натяг при сборке, используют упругость основ-
ных звеньев передачи или обеспечивают минимальное
трение в кинематической паре, элементы которой долж-
ны совершать первоочередное движение.
На схеме 8.3 - пример устройства для осевого нажа-
тия во фрикционных передачах. Под действием моментов
7) и 7г цилиндрические кулачки 1 и 2 стремятся повер-
нуться относительно друг друга. Скосы, имеющиеся на
звеньях, взаимодействуют через шарик или ролик и при-
водят к относительному осевому перемещению звеньев
до тех пор, пока не уравняются моменты Т\ и 7г на ку-
лачках 7, 2 и, соответственно, не будет обеспечена необ-
ФРИКЦИОННЫЕ ВАРИАТОРЫ (СКОРОСТИ) И ВАРИАТОРЫ С ЭЛЕМЕНТАМИ ЗАЦЕПЛЕНИЯ 345
ходимая сила прижатия рабочих звеньев. Осевая сила Fn
в схеме 8.2а воспринимается подшипником входного
вала и замыкается в паре Ь—с. Угол скоса а определяет
соотношение между окружной силой F„ приведенной к
точке касания шарика и скоса, и осевой силой Fa = P/tga.
Угол скоса и условия контакта в паре кулачок-
шарик(или ролик) выбирают такими, чтобы было обес-
печено качение шарика по поверхности кулачка (практи-
чески без скольжения).
Нажимное устройство может быть установлено и со
стороны выходного звена, особенно если схема симмет-
ричная (см., например, схему 8.4).
Вариатор может иметь звенья с криволинейной об-
разующей: например, на схеме 3.4 - торовый фрикцион-
ный вариатор.
Соосные звенья - колеса а и b - имеют торовые по-
верхности и взаимодействуют с роликами (промежуточ-
ными колесами), которые могут вращаться на коромыс-
лах 1 и 2; коромысла можно поворачивать. При этом со-
ответственно изменяется соотношение радиусов га и гь,
определяющее передаточное отношение. На входном
звене или выходном звене установлено нажимное уст-
ройство.
Одновременно (синхронно, навстречу друг другу)
поворачивают коромысла 7 и 2. В ранних конструкциях
для обеспечения встречного синхронного движения ис-
пользовали зацепляющиеся между собой зубчатые секто-
ры, неподвижно соединенные с коромыслами. В совре-
менных решениях в качестве синхронизирующего меха-
низма применяют передачу с гибким элементом (сталь-
ным тросиком или стальной лентой) — см. схему 8.4а.
При этом точное относительное положение роликов 7 и 2
очень важно, так как самые незначительные отклонения
приводят к циркуляции энергии и резко увеличивают
потери из-за геометрического скольжения.
В новых конструкциях вариаторов (на японских ав-
томобилях) используется иной принцип поворота коро-
мысел и самоустановки роликов 7 и 2 (схемы 8.46 и 8.4в).
Достаточно сместить коромысло (на доли мм) в тан-
генциальном направлении (схема 8.46), как появляется
дополнительная сила осевая составляющая силы Ft, ко-
торая приводит к повороту и самоустановке ролика. Рав-
новесие наступает при равенстве моментов Т = Fth. Син-
хронизация движения обеспечивается тросовым меха-
низмом. Управляющее воздействие осуществляется с
помощью дифференциального гидравлического меха-
низма (схема 8.4в). Гидравлический механизм может
обеспечить равенство сил, развиваемых гидроцилиндра-
ми 7 и 2, но не равенство перемещений. По этой причине,
видимо, японские инженеры считают необходимым в
дополнение к данной конструкции (схема 8.4в) парал-
лельно использовать дублирующий тросовый механизм
(схема 8.46).
И еще о степени прижатия роликов к торовым коле-
сам: предусматривается выбор зазоров и начальное при-
жатие путем ручной регулировки, например, как показа-
но на схеме 8.4в. По мере нагружения прижатие увеличи-
вается автоматически с помощью устройства по схеме 8.3
в равной мере для обоих роликов. Возможны решения с
тремя и даже четырьмя роликами, но на практике прин-
цип многопоточности реализуется пока только в схемах с
двумя роликами, а также при параллельном соединении
механизмов или прижатия (см. схему 8.6).
Сила прижатия роликов к торовым колесам достига-
ет нескольких сотен кН. При таком условии обеспечива-
ется работоспособность пары трения только благодаря
использованию специальных материалов твердых тел и
специального жидкого смазочного материала (масла).
Масло обладает такими свойствами, что даже при боль-
шой силе прижатия тел в зоне контакта оно не выдавли-
вается полностью, а образует тонкую и исключительно
прочную пленку, в которой все молекулы ориентируются
одинаково (вдоль направления качения тел) и как бы
спрессованы в поперечном направлении.
В торовом вариаторе получают диапазон регулиро-
вания передаточного отношения 0,4 ... 2,5 при макси-
мальном КПД 0, 92 ... 0,96.
При параллельном соединении двух торовых вариа-
торов (см. схему 8.6) наибольшая мощность подключен-
ного привода составляет 175 кВт, а наибольший момент
310 Н-м (на входном валу коробки передач).
Попытки получать широкий диапазон регулирова-
ния вариатора при его высокой несущей способности и
высоком КПД велись на протяжении многих лет. Одна из
зарубежных фирм, специализирующаяся на создании
перспективной автоматической коробки передач автомо-
биля, приняла за основу и успешно совершенствует из-
вестную ранее схема 8.5. В ней более полная поверхность
торовых колес а и b по сравнению со схемой 8.4 позволя-
ет получать диапазон регулирования ~ в 1,5 раза боль-
ший. Несущая способность повышена за счет примене-
ния трех роликов (а не двух, как в схеме 8.4), располо-
женных под углом 120° один к другому. Наклон роликов
осуществляется так же, как в схеме 8.46, за счет их само-
установки, но здесь управляющее воздействие направле-
но под некоторым углом к оси вариатора (отличным от
90° - сравни со схемой 8.46).
Еще одна задача, которую решают разработчики —
это уменьшение энергетического потока, проходящего
через вариатор. В замкнутой передаче по схеме 8.56 кро-
ме параллельного соединения двух торовых вариаторов,
имеется еще и параллельное соединение регулируемой
ветви с зубчатой передачей. Движение от входного вала
разветвляется, а затем суммируется через механизм S на
выходном звене. Вращающий момент на входном звене
вариатора может быть уменьшен в 2 ... 3 раза по сравне-
нию с моментом на выходном звене О передачи в целом,
а угловая скорость равна скорости сот входного звена.
Этот вариант соединения лучше, чем уменьшение мо-
мента при последовательном соединении повышающей
передачи с вариатором, так как не приводит к увеличе-
нию угловой скорости звеньев вариатора. Тем не менее
повышение несущей способности передачи в целом по
схеме 8.56 сопряжено с уменьшением диапазона регули-
т, z 2 . 1
рования. В примере, когда — = —, a iv =—... —3, по-
zb 5 3
лучается диапазон регулирования =
1 19
5 15’
т.е. мо-
346
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
мент уменьшен в 2,5 раза, а диапазон сократился ® в 1,4
раза. Уменьшение момента в 3 раза уже приводит к со-
кращению диапазона в 2,45 раза. В обоих примерах КПД
передачи в целом несколько выше, чем КПД отдельно
взятого вариатора.
Приведенный подход иллюстрирует поиск решения,
в котором функциональные свойства и качественные по-
казатели были бы сбалансированы.
Прежде чем перейти к описанию комплексных ре-
шений, представленных на рис. 136, остановимся еще на
некоторых разновидностях вариаторов (рис. 137).
На схеме 9.1 в волновом фрикционном вариаторе
гибкое колесо g конусное, а ролик генератора волн h
ориентирует образующую гибкого колеса параллельно
оси вариатора. Перемещают в осевом направлении толь-
ко жесткое колесо b с помощью ползуна. Передаточное
отношение i = —-—, где Zg и 1Ь — длины взаимодейст-
lS~lh
вующих фрикционных дорожек.
Волновой фрикционный вариатор позволяет полу-
чать большие передаточные отношения. Его применение
ограничивается вспомогательными приводами сравни-
тельно небольшой мощности.
На схеме 9.2 показан клиноременный вариатор тра-
диционного исполнения (современные решения - см.
схемы 9.3, 9.4 на рис. 137.2). На входном валу установле-
ны конические шкивы 1 и Г, а на выходном валу - дру-
гая пара шкивов 2 и 2’. Со шкивами взаимодействует
замкнутый гибкий клиновой ремень. Синхронное пере-
мещение шкивов осуществляют с помощью винта, гаек 1
и 2 и рычагов 1 и 2. В то время, как шкивы на одном валу
сдвигаются, шкивы на другом валу раздвигаются. При
этом изменяется соотношение радиусов и и ъ и, соответ-
ственно, передаточное отношение
где се»! и а>2 — угловые скорости входного и выходного
валов. £ — коэффициент относительного скольжения
(обычно £ = 1,01 ... 1,02). По сравнению с ранее извест-
ными решениями по схеме 9.2, в современных вариато-
рах выше КПД при более широком диапазоне регулиро-
вания.
В схемах 8.1 ... 8.7, 9.1, 9.2 обязательно имеется от-
носительное скольжение звеньев. Известен вариатор без
скольжения — пластинчатый. Он имеет промежуточное
звено в виде набора относительно перемещаемых пла-
стин (см. схему 10. /). Пластины взаимодействуют с вы-
ступами и впадинами на сопряженных звеньях - шкивах
с рифленой конической поверхностью. При выполнении
механизма по схеме клиноременного в качестве гибкого
элемента используют цепь, в звенья которой устанавлива-
ют пластины. Такой механизм называют также цепным.
Несмотря на высокую нагрузочную способность и
промышленное освоение цепной (пластинчатый) вариа-
тор с зацеплением уступает по всем остальным парамет-
рам фрикционным вариаторам. Он не допускает передачи
движения с высокой скоростью и характеризуется высо-
ким уровнем шума при работе.
Комплексные решения конструирования механиз-
мов с вариаторами скорости рассмотрим на примерах
автоматических коробок передач легковых автомобилей.
Общие принципы составления схем следующие.
• Наибольшей несущей способности передачи мож-
но добиться при параллельном соединении двух вариан-
тов (схема 8.6 на рис. 136).
• Наибольший диапазон непрерывного регулирова-
ния получают при последовательном соединении двух
вариаторов и ступенчатом переключении с одного режи-
ма на другой с помощью сцепных муфт (схема 8.7).
• В автоматических коробках передач используют
фрикционные вариаторы двух видов: торовый вариатор
(схемы 8.6 и 8.7) и вариатор с гибким элементом [клино-
ременный — схема 9.3 (Япония) или цепной — схема 9.4 на
рис. 137.2]. Наиболее высокие качественные показатели
получены в вариаторе по схеме 9.4 (Германия), которая
применяется без гидротрансформатора - тора в отличие
от схемы 8.6 (Япония).
• Для получения передачи заднего хода в кинемати-
ческой цепи устанавливают планетарный реверс. Пред-
почитают его располагать перед входным валом вариато-
ра, так как передаваемый при этом момент минималь-
ный, хотя сам вариатор на режиме заднего хода почти не
нужен и служит в качестве передачи с фиксированным
(наибольшим) передаточным отношением.
• В случае использования в качестве сцепления бло-
кирующей муфты 1 реверса обязательным является вве-
дение в самом начале кинематической цепи демпфера
крутильных колебаний (см. схему 9.4а).
• Последовательно, обычно в одном корпусе с ва-
риатором, размещают конический дифференциал с вы-
ходными валами 1 и 2, соединенными с приводными ко-
лесами (см. схемы 8.7, 9.3, 9.4а).
• Гибкий элемент выполняют в виде соединения
стальных деталей: замкнутых лент и набора тонких пла-
стин (схема 9.3а) или пластинчатой шарнирной цепи с
подпружиненными опорными плунжерами (схемы 9.46 и
9.4е). Решение в виде цепи обладает более высокими ка-
чественными показателями.
• В схемах с принудительным управлением звенья-
ми (в том числе прижатием звеньев) вариатора силу при-
жатия на ведущем и ведомом звеньях можно выбирать
дифференцированно из условия отсутствия скольжения.
В качестве дополнительной (дублирующей)системы ис-
пользуют нажимное самозатягивающееся устройство
(схема 9.4а). Перспективным все же представляется ре-
шение полного выполнения данной функции только за
счет гидравлической системы управления, в том числе в
зависимости от величины нагрузки (если считать нажим-
ное устройство датчиком нагрузки, то структура схе-
мы 9.4а остается неизменной).
На всех схемах 8.6, 8.7, 9.3, 9.4 показаны реверсы
одного типа — планетарный механизм с "парным" сател-
литом. При включении сцепной муфты 1 механизм бло-
кируется и все его звенья вращаются как единое целое.
Передаточное отношение при этом i = 1, а КПД т] ® 1.
Данный режим используется при движении вперед. При
включении тормоза 2 останавливается центральное коле-
ФРИКЦИОННЫЕ ВАРИАТОРЫ (СКОРОСТИ) И ВАРИАТОРЫ С ЭЛЕМЕНТАМИ ЗАЦЕПЛЕНИЯ 347
136. ФРИКЦИОННЫЕ ВАРИАТОРЫ (СКОРОСТИ)
В АВТОМАТИЧЕСКИХ КОРОБКАХ ПЕРЕДАЧ АВТОМОБИЛЕЙ
ПОСЛЕДОВАТЕЛЬНОЕ СОЕДИНЕНИЕ ТОРОВЫХ ВАРИАТОРОВ
Нажимное
самозатягивающееся
устройство
|8.6 | ПАРАЛЛЕЛЬНОЕ СОЕДИНЕНИЕ ТОРОВЫХ ВАРИАТОРОВ
Реверс - планетарная
блокируемая передача
с "парным" сателлитом _
\ Синхронизирующим механизм
Гидротрансформатор \ _
' Варивтор 1 Вариатор 2
Выходной
Нажимное
самозатягиаающееся
устройство
Сцепная муфта
(блокирующая
гидротрансформатор)
V/A
Масляный
насос
Синхронизирующий механизм
8.
Вариатор 1 \ Вариатор 2
Г5Я
Зубчатая
передача 2
Выходной
вал 2
Входной
вал
Зубчатая
передача
Выходной
вал
1 и 3 - сцепные муфты
понижающей
и повышающей передач
2 - тормоз включения
заднего хода
137.1. ВАРИАТОРЫ (СКОРОСТИ) С ГИБКИМ ЭЛЕМЕНТОМ
КЛИНОРЕМЕННЫИ ВАРИАТОР
I 9-1 I ВОЛНОВОЙ
ФРИКЦИОННЫЙ
ВАРИАТОР
ЦЕПНОЙ (ПЛАСТИНЧАТЫЙ)
ВАРИАТОР
со Ь, водило h вращается в направлении, противополож-
ном направлению вращения зубчатого колеса а. Переда-
точное отношение i 1 - —, а КПД т] » 0,97. Приве-
ла
денную схему используют, чтобы иметь высокий КПД
при движении вперед и чтобы получать передаточное
отношение реверса | i |, близкое к 1 (обычно 1 ... 2, не
более) при движении назад. Можно использовать и дру-
гие, более простые схемы реверса (например с одновен-
цовым сателлитом), но в них сочетание параметров менее
подходит для данных условий.
Собственно вариатор в схеме 8.6 четырехпоточный.
Энергетические потоки разветвляются между двумя то-
ровыми вариаторами и между промежуточными колеса-
ми [роликами]. Суммарный поток передается через зуб-
чатую передачу на выходной вал (далее через еще одну
зубчатую передачу и дифференциал к приводным коле-
сам — по аналогии со схемой 8.7 - на схеме 8.6 эта часть
трансмиссии не показана).
Для равномерного распределения энергетических
потоков необходимо обеспечить одинаковое прижатие
звеньев контактирующих пар и синхронный поворот всех
четырех роликов. Встречное синхронное движение роли-
ков двух вариаторов осуществляется, например, с помо-
щью механизма по схеме 8.6, а встречное синхронное
движение роликов в каждом вариаторе было рассмотрено
ранее в схеме 8.4a (здесь на схемах 8.6 и 8.7 данный ме-
ханизм не показан). Более менее одинаковое прижатие
достигается с помощью нажимного самозатягивающего-
ся устройства.
В схеме 8.7 режим понижающей передачи при дви-
жении вперед осуществляется включением муфты 1
(блокировки реверса). Когда передаточное отношение
последовательно соединенных вариаторов близко к еди-
нице (оси роликов перпендикулярны к оси вариатора),
выключают муфту 1 и включают муфту 3. Далее регули-
ровку передаточного отношения обеспечивают только в
вариаторе 1. Вариатор 2 при этом в работе не участвует.
Режим заднего хода осуществляют при включении тор-
моза 2 (обе муфты 1 и 3 выключены). В передаче движе-
348
МНОГОСКОРОСТНЫЕ ПЕРЕДАЧИ И ВАРИАТОРЫ (СКОРОСТИ)
137.2. РЕМЕННЫЕ И ЦЕПНЫЕ ФРИКЦИОННЫЕ
ВАРИАТОРЫ (СКОРОСТИ) В АВТОМАТИЧЕСКИХ КОРОБКАХ ПЕРЕДАЧ АВТОМОБИЛЕЙ
КЛИНОРЕМЕННЫЙ ФРИКЦИОННЫЙ ВАРИАТОР
Обозначения на схемах 9.3 и 9.4а
| 9.4а |
Входной
вал
Нажимное
самозатяги вающееся
устройство
Маховик
со встроенной
демпфирующей
муфтой
Реверс - планетарная
блокируемая передача
с "парным" сателлитом
МЕТАЛЛИЧЕСКИЙ
РЕМЕНЬ
Пластины
Лента
а, b - центральные колеса
редуктора-реверса
f, g - "парные" сателлиты
1 и 2 (см. Реверс)
- фрикционная блокирующая
муфта (включения переднего хода
и фрикционный тормоз (включения
зеднего хода)
ЦЕПНОЙ ФРИКЦИОННЫЙ ВАРИАТОР
Гидроцилиндр 1 Полость 1
Датчик угловой скорости 1
Г идрораспределитель
От рукоятки
управления
Дифференциал
Пружина
Выходной вал 2
Шкив 2
Шкив 2'
Гидроцилиндр 2
Масляный
насос
Поршень Датчик
угловой
скорости 2
Полость 1
Пластинчатая шарнирная цепь
Шкив 1 Шкив Г
Выходной
| 9.4 I ЦЕПНОЙ ФРИКЦИОННЫЙ ВАРИАТОР
; 'л ‘‘
Г идрораспределиталь
'"'а
Фрикционный многодисковый
тормоз 2 включения заднего хода
/ Реверс
4ч Зубчатая передача
\ Нажимное самозатягивающееся устройство
4 лк ‘ Полость Г Гидроцилиндр 1
J X 1 , / Полость 1
/ /шкив 1
3 \’S Л, Г\| -/ г» Пластинчатая шарнирная цепь
Шкиа Г
Ч Масляный насос
\ П-в------— От рукоятки
управления
хГ Вал2
Шкив 2' Гидроцилиндр 2 Пружина 2 Поршень 2
Выходной вал 1 /'ч- ' л.
Дифференциал /
Главная (зубчатая) передача
Шкив 2
Корпус
коробки
передач
Корпус
муфты 1
Электронный
блок управления
От центрального
блока
управления
I V Электронный
блок
управления
К реверсу
| 9.46 |
Подвижное шлицевое
соединение / шариковые
направлющие
9.4в
Опорный
плунжер
ФРИКЦИОННЫЕ ВАРИАТОРЫ (СКОРОСТИ) И ВАРИАТОРЫ С ЭЛЕМЕНТАМИ ЗАЦЕПЛЕНИЯ 349
ния участвуют оба вариатора (обычно при максимально
возможном передаточном отношении).
В отличие от схемы 8.6 синхронизирующий меха-
низм в схеме 8.7 обеспечивает синфазный поворот роли-
ков в одном направлении. Данная схема работоспособна
только при установке двух нажимных устройств.
Вариаторы в схемах 9.3 и 9.4, 9.4а - клиноременные
фрикционные, и по принципу действия они не отличают-
ся от вариатора на схеме 9.2. Но в них в каждой паре
шкивов 1 и Г, 2 и 2' сдвигается в осевом направлении
только один шкив (7 и 2'), таким образом, чтобы плос-
кость симметрии для обоих пар шкивов оставалась об-
щей. Осевое перемещение шкивов обеспечивается с по-
мощью гидроцилиндров. Кроме того, существенные из-
менения (по сравнению со схемой 9.2) претерпела конст-
рукция гибкого элемента (см. схемы 9.3а и 9.46, 9.4в).
Благодаря новым конструктивным решениям и материа-
лам удалось существенно повысить качественные пока-
затели вариатора.
Диапазон регулирования в более ранних конструк-
циях обычно не превышал 3,5, а в конструкциях по схе-
мам 9.3 и 9.4, 9.4а он достигает 6. Максимальный КПД -
0,97. А самое главное - обеспечена требуемая надеж-
ность при заданной несущей способности вариатора.
Вариатор по схеме 9.3 в современной конструкции
автомобиля присоединен к двигателю мощностью
103 кВт (140 л.с.) при максимально достижимом моменте
181 Н-м, вариатор по схеме 9.4 присоединен к двигателю
мощностью 142 кВт (193 л.с.) и при максимальном мо-
менте 280 Н-м. Автоматическая коробка по схеме 9.4
превосходит (по "разгонной" характеристике и по КПД)
автоматическую гидромеханическую передачу, выпол-
ненную по традиционной схеме.
Схема 9.4а отличается от схемы 9.3 конструкцией
гибкого элемента, а также системой управления. Шкивы
2 и 2' прижаты к элементам цепи пружиной, сдвигаются
и раздвигаются гидроцилиндром 2 так же, как и в
схеме 9.3. Шкивы 1 и Г прижимаются и перемещаются за
счет давления жидкости в полости 7, а также в зависимо-
сти от давления в полости Г, определяемого осевым пе-
ремещением нажимного элемента в самозатягивающемся
устройстве. Соотношение угловых скоростей, а также
наличие проскальзывания (с учетом показаний тахометра
двигателя) непрерывно измеряется с помощью датчи-
ков 1 и 2. Управление гидроцилиндрами 7 и 2 осуществ-
ляется гидрораспределителем, перемещаемым в зависи-
мости от воздействий рукоятки управления и/или по сиг-
налам от электронного блока управления, в котором об-
рабатываются также сигналы от других систем автомо-
биля. Реверс, вариатор, главная (зубчатая) передача,
дифференциал, а также масляный насос и блок управле-
ния заключены в единый корпус. Предусмотрена также
автономная система охлаждения масла.
Анализируя приведенные схемы и конструкции,
можно констатировать, что совершенствование вариато-
ров в ближайшие годы будет продолжено.
Глава 16. РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ
МЕХАНИЗМЫ
16.1. ДИФФЕРЕНЦИАЛЬНЫЕ
МЕХАНИЗМЫ АВТОМОБИЛЕЙ
В технике довольно часто приходится распределять
энергетические потоки по кинематическим ветвям или
суммировать их определенным образом. При направле-
нии энергетического потока от одного входного звена к
нескольким выходным звеньям используемый разветв-
ляющий узел называют распределительным механиз-
мом. Такой же (конструктивный) узел, используемый
при направлении потоков от нескольких входных звеньев
к одному выходному звену, называют суммирующим
механизмом.
В действительности направления потоков могут ре-
версироваться (входное звено из ведущего может стать
ведомым, а выходное звено из ведомого превратится в
ведущее), поэтому приведенное разграничение этих ме-
ханизмов носит лишь функциональный или режимный
характер, а конструктивные решения в обоих случаях
обычно одинаковые. Тем не менее имеются некоторые
конструктивные особенности, связанные с дополнитель-
ными функциями, которые требуется решать в конкрет-
ных машинах. Это обстоятельство предопределяет кон-
структивное разнообразие механизмов данного класса.
Наиболее знаком и близок для многих из нас (осо-
бенно для автомобилистов) дифференциальный меха-
низм, дифференциал. Обычно термин дифференциал (от
лат. differentia - разность, различие) в технике вызывает
определенные ассоциации с обеспечением различных
скоростей вращения колес автомобиля при повороте
(схема 1.1 на рис. 138) и в то же время с неприятными
явлениями, связанными с пробуксовкой одного из колес
при существенном различии их сцепления с дорожным
полотном.
Из известных дифференциальных механизмов ино-
гда вспоминают еще и "дифференциальный винт",
который способен получать малые перемещения, как
разность движений, воспроизводимых с помощью двух
винтовых пар.
Причем в первом случае речь идет о механизме с
двумя степенями свободы, а во втором — о механизме с
одной степенью свободы (передаточном механизме —
дифференциальной передаче - см. схемы 9.1 ... 9.4 на
рис. 145). Это различие так же может носить условный
характер, так как зависит от того, каким образом мы
мысленно выделяем механизм из общей системы (содер-
жащей, например, неподвижные звенья, приводы, замы-
кающую ветвь "фрикционные пары: движители - дорож-
ное полотно" и др.).
В принципе, в каждом дифференциальном механиз-
ме можно выделить суммирующий узел (например дву-
плечий рычаг), равновесие которого обеспечивает опре-
деленное соотношение сил и суммирование (в том числе
разделение) движений. Несколько соединенных между
собой узлов или механизмов (с двумя степенями свобо-
ды) образуют систему с тремя и более степенями свобо-
ды (см. схему 3.1 на рис. 142).
Спектр функции дифференциальных механизмов
весьма широк, он не ограничивается двумя изложенными
выше примерами. Достаточно вспомнить еще многопод-
вижные, самоприспосабливающиеся системы (см. § 4.3),
где в качестве суммирующего узла в основном использо-
ван равноплечий рычаг. Ряд примеров, характеризующих
разнообразие рассматриваемых механизмов, будет пред-
ставлен ниже (см. рис. 145). Функции их сводятся, в ча-
стности:
• к равномерному распределению нагрузки между
приводными барабанами ленточного конвейера и сведе-
ния к минимуму проскальзывания ленты относительно
барабанов (схема 6.1а);
• к равномерному натяжению двух ветвей канатов в
двухбарабанной лебедке (схема 6.15), когда по каким-
либо условиям невозможно соединить обе ветви через
выравнивающий [дифференциальный] блок;
• к одновременному выравниванию нагрузки между
двумя ветвями канатов и двумя приводами (схема 6.2а);
• к возможности корректировать параметры движе-
ния в процессе функционирования системы без остано-
вок (на схемах 7.1 ... 7.3 предусмотрено суммирование
корректирующего перемещения с основным перемеще-
нием, а в схемах 8.1, 8.2, 8.2а осуществляется изменение
относительного положения двух звеньев за счет сумми-
рования основного и дополнительного движений);
• к внутреннему преобразованию движения (вычи-
танию одного перемещения из другого) с целью получе-
ния малых перемещений (схемы 9.1 ... 9.4), о чем уже
упоминалось выше.
Более подробно на этих примерах остановимся да-
лее, а здесь приведем основные правила и тенденции
конструирования дифференциалов и других распредели-
тельных узлов транспортных машин.
1. Для быстроходных колесных машин [автомоби-
лей] предпочтение отдается зубчатым коническим
дифференциалам (см. схемы 1.1 ... 1.3 на рис. 138). Ре-
же используют зубчатые цилиндрические
дифференциалы с "парными" сателлитами (см. рис.
2. Простейший путь достижения противобуксовоч-
ного эффекта — это увеличение трения внутри диффе-
ренциала. Если сопротивление относительному провора-
чиванию звеньев постоянно на всех режимах, то чем оно
больше, тем ниже КПД и больше скольжение шин из-за
различия проходимого пути при обычном транспортном
режиме по неровной дороге и особенно на поворотах.
3. Наиболее приемлемое решение блокирующего
дифференциала — это отдельное выполнение блокирующего
ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ АВТОМОБИЛЕЙ
351
138. СИММЕТРИЧНЫЕ КОНИЧЕСКИЕ (ЗУБЧАТЫЕ) ДИФФЕРЕНЦИАЛЫ
Симметричный межколесный
дифференциальный механизм
[дифференциал]
След колеса 2
s, След колеса 1
Колесо 1
При повороте машины колесо 2
проходит больший путь,
и вращается быстрее, чем колесо 1
(wb> wa)
a,b - центральные зубчатые колеса
g - сателлит
h - водило
Нажимная
поверхность
сателлита
Ось-------
сателлита
ЕйИ
Клиновое
нажимное
устройство-
i
Сателлит g Зубчатый
венец
Нажимной
диск
муфты
Ось сателлита
Детали водила h
Нажимной
диск
муфты
-центральное
колесо Ь
Многодисковая
фрикционная
муфта
Выходов звено 1
-центральное___
колесо а_______
Упорный
Детали водила h диск
________I Выходов звено 2
Входной вал
(от двигателя)
Выходов звено 1 - шестерня
цилиндрической зубчатой передачи
Выходов звено 2
-центральное
колесо b
g
Сателлит g
К переднему
межколесному
дифференциалу
К переднему
межколесному
дифференциалу
(Самоблокирующая)
сцепная муфта
[вискомуфта]
Q
От двигателя
Центральное! ’
колесо а
К заднему
межколесному
диффе ренциалу
О
Q
(Самоблокирующая)
сцепная муфта
[вискомуфта]
Выходов звено 1
-центральное
колесо а
Коническая
шестерня
Водило
Сателлит
Толкатель
Датчик
угловой скорости
водила
Входной вал
(от двигателя)
Коническое
зубчатое колесо
Нажимной
диск
Промежуточный
(вращающийся)
диск
-центральное колесо Ь
Упорный (роликовый)
подшипник
Поршень
Выходов звено 2
Подача рабочей
жидкости от насоса
Выходов звено 1
-центральное
колесо а .
h
Входной вал
(от двигаталя)
Многодисковая
фрикционная
муфта
g
Кольцевой
гидроцилиндр
Отдатчиков
угловой
скорости
выходных
звеньев
Блок
управления
Датчик
угловой скорости
водила
Выходов звено 2 Гидрораспределитель
-центральное
колесо Ь
c.jJ
352
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
устройства, включаемого только при рассогласовании
скоростей звеньев при явной пробуксовке одного из ве-
дущих колес (представьте себе, если блокировка про-
изойдет на крутом повороте, да еще и при высокой ско-
рости — на первое место уже выходит не изнашивание
шин и перегрузка звеньев, а устойчивость и управляе-
мость машины). В этой связи предпочтение отдают са-
мовключаемым вязкостным муфтам, вискомуфтам
(см. схему 1.2) или автоматически включаемым (с помо-
щью специальной системы управления) фрикционным
многодисковым муфтам.
4. В качестве межосевого дифференциала исполь-
зуют обычно симметричный конический дифференци-
ал (схема 3.2 на рис. 142), симметричный цилиндриче-
ский дифференциал (схема 1.6 на рис. 140) или несим-
метричный цилиндрический дифференциал (схема 3.4
на рис. 142). В последнем случае обеспечивается задан-
ное распределение вращающих моментов (например, при
различных нагрузках на оси) либо равенство моментов за
счет подбора передаточных отношений в кинематиче-
ских ветвях (в том числе с учетом направления момента).
5. С целью уменьшения нагрузки на дифференциал
(и блокирующее устройство) в кинематическую цепь вводят
конечные [бортовые] передачи (см. схему 3.3 на рис. 142).
6. Для обеспечения динамического режима (на вы-
сокой скорости) поворота быстроходных гусеничных
машин представляется перспективным использование
несимметричного дифференциала (схемы 4.1 и 4.1а на
рис. 143). При этом происходит самоприспособляемость
системы в зависимости от сцепления с дорожным полот-
ном (при высоком КПД и без уменьшения скорости дви-
жения машины).
7. Обеспечение высокой устойчивости движения по
неоднородному покрытию дорожного полотна и особен-
но при повороте полноприводного скоростного автомо-
биля достигается при установке заднего межколесного
дифференциала с автоматически изменяемыми парамет-
рами (см. схему 4.2 на рис. 143).
На схеме 1.1а (рис. 138) представлен конический
дифференциал, в котором сжатие дисков фрикционной
муфты зависит от величины механического воздействия
деталей водила на ось сателлита. Чем больше нагрузка,
тем в большей мере (в пределах зазоров зубчатых зацеп-
лений) смешается ось (вправо на схеме). Сателлит воз-
действует на нажимной диск, а тот в свою очередь - на
диски муфты.
По существу, данная конструкция представляет со-
бой дифференциал с повышенным трением, величина
которого определяется величиной внешнего нагружения.
При высокой скорости и малом моменте выходные зве-
нья 1 и 2 легко проворачиваются одно относительно дру-
гого (например, при плавном повороте). При трогании с
места, при низкой скорости и большом моменте (при
движении по бездорожью, когда возможно буксование)
относительное проворачивание звеньев дифференциала
из-за повышенного внутреннего трения затруднительно,
поэтому возможность пробуксовки колес сводится к ми-
нимуму. Межколесные дифференциалы аналогичного
типа на некоторых машинах имеют две симметрично
расположенные муфты, но противобуксовочный эффект
в этом случае тот же, а конструкция сложнее, чем на схе-
ме 1.1а.
Более прогрессивным представляется использование
для блокировки дифференциала самоблокирующей сцеп-
ной муфты [вискомуфты]. Она может быть установлена
между двумя любыми подвижными звеньями дифферен-
циала (лучше между двумя центральными колесами а и
Ь, как показано на схеме 1.2). Муфта имеет большое чис-
ло пар фрикционных дисков с прорезями и канавками
для размещения и циркуляции вязкой среды [силиконо-
вой жидкости]. При увеличении относительной скорости
(пробуксовке одного из колес или пары колес) скольже-
ние дисков приводит к увеличению вязкости жидкости.
В соответствии с этим повышается момент трения и в
конечном итоге наступает блокировка муфты: диффе-
ренциал вращается как одно целое.
На схемах 1.2 и 1.2а даны конструкция и условное
обозначение межосевого дифференциала автомобиля
высокой проходимости. Вискомуфта в данном примере
при блокировке соединяет центральные колеса а и Ь.
Можно было бы обеспечить повышение трения и блоки-
ровку, соединив муфтой одно из центральных колес и
водило (см., например, схему 3.2 на рис. 142). Это иногда
удобнее осуществить, но для достижения эффекта, ана-
логичного схеме 1.3, вискомуфта должна быть рассчита-
на на срабатывание при меньшей относительной угловой
скорости звеньев, а следовательно, должна иметь боль-
ший диаметральный размер.
Более четкая блокировка дифференциала осуществ-
ляется принудительным включением сцепной конструк-
цией муфты или автоматическим включением в зависи-
мости от соотношения угловых скоростей основных
звеньев механизма.
На схеме 1.3 дана конструкция такого дифферен-
циала. От схем 1.1а и 1.2 она отличается только способом
замыкания многодисковой фрикционной муфты. Муфта
установлена между водилом и одним из центральных
колес дифференциала. При замыкании муфты рабочая
жидкость воздействует на поршень, размещенный в ци-
линдре, выполненном непосредственно в корпусе диф-
ференциала. Поскольку поршень не вращается, то он да-
вит на промежуточный вращающийся диск через упор-
ный (роликовый) подшипник. Далее давление через тол-
катели передается нажимному диску муфты.
Включение муфты осуществляется гидрораспреде-
лителем по сигналу от блока управления (см. схему 1.3а).
Блок управления не реагирует на различие угловых ско-
ростей выходных звеньев 7 и 2, обусловленных различи-
ем давления в шинах, различием проходимого пути коле-
сами при повороте или перекатыванию по неровностям
дороги. Для более точной оценки буксования колес про-
водят сравнения скоростей вращения приводных и не-
приводных колес, а также угла поворота рулевого колеса.
На схеме 1.4 (рис. 139) показано простейшее реше-
ние зубчатого симметричного дифференциала - в виде
пары зубчатых колес - сателлитов g и f. Сателлиты раз-
мещены в теле водила точно так же, как в шестеренчатом
насосе. Жидкость при относительном движении колес
ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ АВТОМОБИЛЕЙ
353
354
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
прокачивается по замкнутому контуру через дроссели-
рующий клапан (см. схему 1.4а). За счет сопротивления
циркуляции жидкости обеспечивается противобуксовоч-
ный эффект. Для блокировки дифференциала достаточно
полностью перекрыть замыкающий канал.
Хотя данное решение в самой основе отличается ис-
ключительной простотой, тем не менее следует учиты-
вать, что оно не может существовать без двухподвижных
сферических соединений В и С. Даже если такие соеди-
нения присутствуют в других исполнениях машин, в
данном решении в них имеют место значительные пере-
мещения не только при повороте и при вертикальных
колебаниях кузова, но и при прямолинейно-посту-
пательном движении машины.
Симметричный дифференциал на схеме 1.5 (рис. 139)
кроме внешнего зацепления между сателлитами g и f
имеет внешние зацепления сателлитов с центральными
колесами а и b или внешнее зацепление с колесом ai и
внутреннее — с колесом bi (см. схему 1.6). При этом для
симметричного подсоединения во второй схеме входным
звеном является центральное колесо Ьь а выходными —
водило hj и центральное колесо а]. Кроме того, должно
Zbi о
выполняться условие —- = 2, где zb и гя - числа
Za,
зубьев колес bi и ар Исходя из этого соотношения вра-
Гь. О
щающих моментов на центральных колесах —- = -2, а
момент на водиле ГЬ1 = -Гь /2.
На схемах 1.5а, 1.5г, 1.5д проиллюстрировано кон-
структивное исполнение дифференциала по схеме 1.5, а
на схеме 1.6а на рис. 140 показано решение дифферен-
циала по схеме 1.6 (в составе раздаточной коробки авто-
мобиля).
Схема 1.5а имеет следующие конструктивные осо-
бенности:
• зубья зацепляющихся колес выполнены винтовыми;
• сателлиты g и f не имеют подшипников, а опира-
ются непосредственно на поверхности выемок в теле во-
дила (использование в данном решении принципа со-
вмещения функций см. параграф 2.4).
Кроме конструктивной простоты и компактности
дифференциал обладает определенными самоблокирую-
щими свойствами. При равенстве внешних нагрузок на
центральные колеса а и b пружина воспринимает осевые
силы со стороны центральных колес, а сателлиты нахо-
дятся в равновесии в основном за счет сил в зацеплениях
и контакта цилиндрических опорных поверхностей (см.
схему 1.56). Таким образом, центральные колеса и сател-
литы практически не трутся своими торцовыми поверх-
ностями о поверхности водила. При отсутствии внешнего
момента на одном из колес (например, на колесе а) пру-
жина прижимает центральные колеса к фрикционным
дискам - торцам водила, а за счет сил в зацеплении толь-
ко с одним из колес сателлит также прижимается своим
торцом к фрикционному диску. В результате обеспечива-
ется момент трения, достаточный для вращения диффе-
ренциала как одного целого за счет приводных сил, если
сопротивление на одном из колес не превышает указан-
ный момент трения.
Дифференциал по схеме 1.6а не обладает такими
свойствами, но в нем также использованы достаточно
простые решения сателлитов и центральных колес. Раз-
меры дифференциала меньше, чем планетарной пони-
жающей передачи (см. на схеме 1.6а слева), а в качестве
подшипников сателлитов использованы простые втулки.
Это обусловлено тем, что хотя оба механизма при после-
довательном соединении практически одинаково нагру-
жены, но относительные перемещения в дифференциале
несоизмеримо малы по сравнению с понижающей пере-
дачей (т.е. мало число циклов нагружения, да и относи-
тельные скорости в зацеплениях также невелики).
Функционирование дифференциалов по схемам 2.1
и 2.2 (рис. 141) основано на принципе свободного хода
звена, вращающегося с большей скоростью (например,
при повороте транспортной машины ведущим является
только колесо, катящееся по дуге малого радиуса, а дру-
гое колесо катится свободно). При движении по неров-
ной дороге ведущим является попеременно правое и ле-
вое колесо, а в схеме с межосевым дифференциалом один
из движителей периодически подключается к приводу
или отключается от него. Это приводит к резким измене-
ниям нагрузки на звенья и к неравномерности хода. По-
этому данные решения применимы только для тихоход-
ных машин, например для колесных тракторов.
В схеме 2.1 при забегании вперед одного из колес
под действием кулачков на внутреннем кулачковом
кольце сдвигается, например, разрезное стопорное коль-
цо 2 (при забегании вперед правого колеса) и разъединя-
ет полумуфту 2 с ведущим диском, имеющим торцовые
кулачки. Шпонка удерживает стопорное кольцо от отно-
сительного вращения и тем самым не позволяет кулачкам
вернуться в зацепление, пока одно из колес забегает впе-
ред по отношению к другому колесу. В данном решении
трапецеидальные кулачки (с наклоненными поверхно-
стями) служат только для разъединения звеньев, а пере-
дача момента осуществляется при угле давления ~0° ку-
лачками, имеющими прямоугольное сечение. Из-за по-
вышенного трения при переключениях с одно1-о режима
на другой такой дифференциал обладает удовлетвори-
тельными противобуксовочными свойствами.
Дифференциалы с фрикционными механизмами
свободного хода (схемы 2.2, 2.2а, 2.26) способны более
плавно переключаться с ведущего режима на обгонный
режим и наоборот, но они при традиционном исполнении
обычно уступают по нагрузочной способности и КПД
дифференциалу по схеме 2.1. Наиболее приемлема
схема 2.26 с чечевицеобразными кулачками: при соот-
ветствующем (условиям работы) выборе параметров (со-
отношений радиусов кривизны кулачков и звеньев 1, 2;
жесткости пружины) можно обеспечить плавное нарас-
тание момента трения и достижение блокировки и такое
же плавное растормаживание. Для этого нужно, чтобы
угол полного заклинивания был близок к углу трения (с
учетом деформаций расклиниваемых звеньев).
На схеме 2.3 продемонстрирован принцип действий
кулачкового дифференциала по схеме 2.3а. Движение в
таком дифференциале передается только за счет давле-
ния, и в отличие от схемы 2.1 здесь контакт звеньев не
прерывается. Работает дифференциал так же, как зубча-
ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ АВТОМОБИЛЕЙ
355
140. РАЗДАТОЧНАЯ КОРОБКА С МЕЖОСЕВЫМ СИММЕТРИЧНЫМ ДИФФЕРЕНЦИАЛОМ,
ПОНИЖАЮЩЕЙ ПЛАНЕТАРНОЙ ПЕРЕДАЧЕЙ И ЦЕПНОЙ ПЕРЕДАЧЕЙ
I 16 |
Вал 2
Сцепная
зубчатая
муфта
Цепная
передача
Понижающая / Межосевой
передача / дифференциал
Звездочка 2
Входной вал
(от двигателя)
Выходной вал 1
(к переднему
межколесному
дифференциалу)
Зубчатая
[ цепь
ВалЗ
С
ГТбГ|
Вал 2
Корпус
Входной вал
(от двигателя)
Понижающая
передача
Сцепная
зубчатая
муфта
Насос
Цепная
передача
Звездочка 1
а, b и h - центральные зубчатые колеса
и водило понижающей
планетарной передачи
Нр Ь| и h| - центральные зубчатые колеса
и водило межосевого
дифференциала
(с "парным" сателлитом)
g, f - зацепляющиеся шестерни
"парного"сателлита
Межосевой
Вал
I Звездочка 1
Звездочка 2
Зубчатая
цепь
Рычаг
переключения
муфты
Выходной вал 2
(к заднему
межколесному
дифференциалу)
1 - положение муфты
для режима прямой передачи
2 - положение муфты
для включения в кинематическую
цепь понижающей передачи
В ,С- соединительные муфты
[сферические двухподвижные
шарниры]
Z6 В
О
о
Ввл 3
И)
тый, но в нем можно обеспечить значительное внутрен-
нее трение из-за больших углов трения. Естественно, в
этом случае дифференциал уступает зубчатому по несу-
щей способности и КПД в штатном режиме.
В полноприводных автомобилях, в многоосных ма-
шинах устанавливают межосевой дифференциал между
отдельными ветвями кинематической цепи, т.е. в каждой
точке разветвления (см. схемы 3.1, 3.2, 3.4 на рис. 142)
или устанавливают межосевую муфту, которая способна
подключать дополнительный движитель, например при
режиме буксования основного движителя (см. рис. 144).
Конструкция межосевого дифференциала может
быть аналогичной конструкции межколесного диффе-
ренциала (схема 3.2а на рис. 142) или в качестве межосе-
вого дифференциала используют зубчатый цилиндриче-
ский дифференциал (схема 3.4 на рис. 142 и схема 1.6 на
рис. 140). На схеме 3.2а (см. конструкцию на схеме 3.2)
показана вискомуфта, установленная между водилом и
одним из центральных колес, а также зубчатая сцепная
муфта, позволяющая принудительно (только при оста-
новке) подключать или отключать привод от задних ко-
лес автомобиля.
В схемах 3.4 (рис. 142) и 1.6 (рис. 140) в кинемати-
ческой цепи между межосевым и передним межколес-
ным дифференциалами установлена цепная передача.
Сцепная зубчатая муфта обеспечивает возможность вве-
дения в кинематическую цепь понижающей передачи, а
зубчатые муфты 2 и 3 позволяют получать различные
схемы подсоединения к приводу передних и задних колес
автомобиля.
На схеме 4.1 (рис. 143.1) представлено соединение
двух несимметричных дифференциалов 1 и 2, включае-
мых в кинематическую цепь быстроходной гусеничной
машины с помощью сцепных муфт 1 и 2 соответственно.
На схеме 4.1а показан получаемый распределительный
механизм. Неизменность возможного соотношения мо-
ментов, подводимых к левой и правой приводным звез-
дочкам из условия равновесия дифференциала 1, обеспе-
чивает получение режима, при котором звездочка левой
гусеницы вращается быстрее (чем при прямолинейном
движении вперед), а правая гусеница замедляется из-за
356
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
реверсирования момента на правой звездочке. Получае-
мое при этом соотношение определяется геометрически-
ми параметрами дифференциала:
Гь/Г. = -(1+2ь/^.
Достигаемый при этом режим поворота обеспечива-
ет более высокую маневренность машины (без снижения
средней скорости движения) в сравнении с режимами,
получаемыми в машинах традиционного исполнения.
В развитие данного решения применяют распреде-
лительный механизм с изменяемыми параметрами в
легковом полноприводном автомобиле (рис. 143.2).
В схеме 4.2 в дополнение к переднему и межосевому диф-
ференциалам, аналогичным схеме 3.2а, присоединен зад-
ний дифференциал (выделен штриховыми линиями) с до-
полнительно подключаемой замыкающей зубчатой пере-
дачей. Включение в кинематическую цепь замыкающей
ветви G1 или G2 осуществляется муфтой 1 или 2 автомати-
чески в зависимости от характера движения автомобиля.
Особенность данной системы такова, что в замкну-
той передаче обеспечивается определенное (неизменное)
соотношение угловых скоростей выходных звеньев (см.
схему 4.2а) по аналогии с блокировкой дифференциала,
но здесь скорости coW3 и cow4 неодинаковые. При этом в
зависимости от характера взаимодействия колес с до-
рожным полотном перераспределяются моменты на вы-
ходных звеньях в соответствии с принципом минималь-
ного действия (сравни со схемой 4.1а, в которой соотно-
шение моментов неизменно, а соотношение скоростей
получается в результате самоприспособляемости систе-
мы к внешним условиям). Соотношение моментов опре-
деляется из условия равновесия схемы 4.26 и выглядит
таким образом:
Луз(2'о -1)+ ^W4 = _^d zg-
Максимальный момент на левом колесе Тт можно
получить при iGi < 1, а на правом колесе при iC2 > 1.
ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ АВТОМОБИЛЕЙ
357
142. ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ В ТРАНСМИССИЯХ ТРАНСПОРТНЫХ МАШИН
РАЗВЕТВЛЕННАЯ СТРУКТУРНАЯ СХЕМА
ТРАНСПОРТНОЙ (МНОГООСНОЙ) МАШИНЫ
I 3.2а |
Цилиндрическая
зубчатая
передача 1
От двигателя
и коробки передач .
Корпус - ВОДИЛО llj
Передний
межколесный
дифференциал
ь2
2^ Выходной
С вал 2
S, S1, S2 - межосевые S3, S4, S5, S6 - межколесные
дифференциалы дифференциалы
Выходной
вал 1
Клевому —
переднему
колесу
(Самоблокирующая)
сцепная муфта
[вискомуфта]
Корпус - водило h j
Межосевой
дифференциал
ai
Зубчатая
сцепная
муфта
1 Q
Коническая зубчатая передача i ТТ7
1/0
1\0 о/к
Выходной' вал 3
Подшипниковая
опора конической
q К правому
7Z переднему
колесу
Цилиндрическая
зубчатая передача 2
К заднему
межколесному
дифференциалу
шестерни
Колесо 1
Конечная передача
[бортовой редуктор] 1
Главная
зубчатая Входной
ow передача вал
s' - - £ Симметричный
межколесный
дифференциал
Колесо 2
Конечная передача
[бортовой редуктор] 2
Выходной вал 1
Выходной вал 2
Карданная
передача 2
Сцепная
зубчатая
муфта 3.
Выходной
вал 3
Сцепная зубчатая
муфта 1
Сцепная зубчатая
муфта 2
Вал 1
К\\\1
Карданная
передача 1
Межосевой
дифференциал
Выходной
вал 4
Задний
межколесный
дифференциал
Передний
межколесный 4.
дифференциал
к\\м
-L Понижающая
передача
(Самоблокирующая)
сцепная муфта
[вискомуфта]
Цепная
передача
358
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
143.1. НЕСИММЕТРИЧНЫЙ УПРАВЛЯЕМЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ
МЕХАНИЗМ ТРАНСПОРТНОЙ ГУСЕНИЧНОЙ МАШИНЫ
Тормоз 1
Дифференциал 2
143.2. РАСПРЕДЕЛИТЕЛЬНЫЙ МЕХАНИЗМ С ИЗМЕНЯЕМЫМИ
ПАРАМЕТРАМИ
IZE
Цилиндрическая
зубчатая
передача 1
Выходной
вал 1
К левому
переднему
колесу
Межосевой
дифференциал
Выходной
вал 2
От двигателя
и коробки передач
□
Передний
межколесный
дифференциал
К правому
переднему
колесу
wlo\f
Карданная
передача
(Самоблокирующая)
сцепная муфта
[вискомуфта]
Коническая
зубчатая
передача 1
СОХРАНЕНИЕ СКОРОСТИ
И НАПРАВЛЕНИЯ ДВИЖЕНИЯ
ПРИ РАЗЛИЧНОМ СЦЕПЛЕНИИ
ЛЕВЫХ И ПРАВЫХ КОЛЕС
С ДОРОЖНЫМ ПОЛОТНОМ
[±2в]
?W1
Сользкое
покрытие
От привода
[£2Г1
Условия
симметрии
J-+U-=
[G1 £G2
От насоса Слив
i |
‘G2 >1
К левому
заднему
колесу
S - симметричный
дифференциал
Gl, G2 - замыкающие
передачи
12“сцепные
(автоматически)
управляемые муфты
W1.W2 - выходные звенья
[приводные колеса]
От датчика
продольного ускорения
От датчика
поперечного ускорения
От двтчика угла поворота
рулевого колеса
От датчика открытия
дроссельной заслонки
При автоматическом
включении
звмыкающей
передачи G1
Блок
управления
От датчиков
угловых
скоростей колес
Гг..Г4 - тяговые
силы колес
W1...W4
“W3
Пробуксовка колес W2 и W4
Гидрораспределитель
---------------------------1
К правому
заднему
колесу
Выходной
вал 4
О
Зубчатая
передача
Выходной
вал 3
Муфта 2 Муфта 1
Зубчатая
Коническая ч. передача
зубчатая
передача 2
а
Задний
межколесный
L дифференциал
Т- вращающий момент
СО - угловая скорость
14.26 |
"Л
тй
Луз Л
—Ts|—
Тъ
Тъ
Та=Ть
^djG
1 Лис
Лл/4
Условия равновесия
Л1 (* G " 1) = “ + Лу 3+ Лу4 )
Г<1-7Ь+2ГТО
^d!G= Луз" Ли
ОБЕСПЕЧЕНИЕ УСТОЙЧИВОСТИ ПОВОРОТА
ЗА СЧЕТ РАЗЛИЧНЫХ РЕЖИМОВ
ПРИВОДА ЛЕВОГО И ПРАВОГО
ЗАДНИХ КОЛЕС
Ду1. “wi
IZEl
Дополнительный
поворачивающий
момент
при автоматическом
включении
замыкающей
передачи G1
Ду2
W2
W4 Лу4
wW3<cu
Пробуксовка колеса W4
ДИФФЕРЕНЦИАЛЬНЫЕ МЕХАНИЗМЫ АВТОМОБИЛЕЙ
359
144. СИСТЕМЫ АВТОМАТИЧЕСКОГО ПРИСОЕДИНЕНИЯ
К ПРИВОДУ ДОПОЛНИТЕЛЬНОГО ДВИЖИТЕЛЯ
5.1
Соединительная
муфта 1
Входной вал
(от двигателя
и переднего
межколесного
дифференциала)
£
Самоуправляемая
вязкостная
муфта [вискомуфта]
ЗвеноЛзвено2 Звено3
Муфта
свободного хода
/ Звено 4
Выходной
вал 1
Соединительная а -4-
муфта 2
5.1а
Пружина
Т!
Самоуправляемая
вязкостная
муфта [вискомуфта]
Звено 2
Муфта
свободного хода Звено 3
Фиксатор Звено 4
Центробежный
выключатель
фиксатора
Звено1
Центробежный
выключатель
фиксатора
Задний |
межколесный
дифференциал
Выходной
вал 2
Пружина
Вал II
Вал I
Выходной
Гидронасос 2
Входной вал
(от двигателя
и переднего
межколесного
дифференциала)
Дифференциальный
механизм
Управляемое Самоуправляемый
звено тормоз
О
Q
С
“1
Вал II
Выходной
вал 2
Задний
межколесный
дифференциал
j____Замыкающая фрикционная система _
"движители-дорожное полотно" (i«1)
Г идронасос
с рабочей'
жидкостью
Сцепная многодисковая Управляющий
фрикционная муфта гидроцилиндр
Вал I
к 4g I Эквивалентная
——I рычажная
Замыкающая
фрикционная система
"даижители-дорожное
полотно" (/ ~ 1)
D- привод
В - тормоз
G.l, G2 - передаточные
механизмы
Wl, W2 - выходные звенья
[приводные колеса]
S - дифференциальный механизм
S*= обобщенный распределительный узел
а, Ь, с... - зубчатые колеса
rwl
coWi = WW2
система
Различие скоростей и моментов тем существеннее,
чем больше разница между передаточными отношениями
z’gi и iC2 - следует здесь учитывать также "условие сим-
метрии" (не путать с симметрией дифференциала), при
котором включение муфты 1 или 2 приводит к зеркаль-
ной кинематической (и силовой) картине для левого и
правого колес. Данное решение позволяет обеспечить
разнообразные режимы по стабилизации движения (на-
пример, при движении прямо по неоднородному покры-
тию - схема 4.2в - или при повороте машины в условиях
недостаточного сцепления передних ведущих колес -
схема 4.2г и др.).
В схеме 4.2в, если пробуксовывают колеса правого
борта, то без блокировки межколесных дифференциалов
360
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
скорость движения может нарастать медленно (напри-
мер, при трогании с места) или снижаться, если данные
условия сцепления наступают в процессе движения. Если
включить передачу G1, то момент на заднем левом коле-
се резко возрастает, что обеспечивает ускоренный разгон
или небольшое уменьшение прежней скорости машины.
В схеме 4.2г при скольжении передних колесе пер-
воначальном направлении подключение передачи G1
приводит к возникновению дополнительного момента,
который обеспечивает устойчивый поворот машины в
заданном направлении.
Продолжая тему обеспечения высокой проходимо-
сти колесных машин, вернемся к вопросу автоматиче-
ского подключения дополнительного движителя при
пробуксовке основного движителя (рис. 144). Упоми-
наемая самовключаемая вязкостная муфта [вискомуфта]
(схемы 5.1, 5.1а) не заменяет дифференциал, а лишь свя-
зывает передний и задний межколесные дифференциалы
с единым приводом. При этом если и допускается не-
большое относительное рассогласование угловых скоро-
стей (например, для обеспечения поворота), то это про-
исходит в условиях повышенного трения скольжения
муфты.
Простота решения в данном примере только кажу-
щаяся, так как, во-первых, нужно подобрать параметры
такими, чтобы муфта срабатывала только при опреде-
ленном рассогласовании угловых скоростей, а поскольку
условия не могут быть неизменными, то неизбежно бук-
сование колес или пробуксовка муфты; во-вторых, тре-
буется обеспечить режимы, при которых муфта должна
быть заведомо включена (при трогании с места назад;
после того, как вискомуфта подключила дополнительный
движитель) или заведомо отключена (при штатном дви-
жении назад, а также при срабатывании антиблокировоч-
ной системы торможения). Для обеспечения таких режи-
мов служат, в частности, муфта свободного хода, размы-
кающая кинематическую цепь при реверсировании со-
противления, и фиксатор, блокирующий муфту свобод-
ного хода при малой скорости движения и выключаемый
с помощью центробежного устройства при большой ско-
рости движения. Данных механических усложнений
можно избежать, используя электронную систему авто-
матического управления (см. схему 5.4а).
Наряду с самоуправляемой вискомуфтой использу-
ют и другие механические системы, срабатывающие при
рассогласовании скоростей движения основного и до-
полнительного движителей.
На схеме 5.2 гидронасос 1 приводится от вала I ос-
новного движителя, а гидронасос 2 - от вала II дополни-
тельного движителя. Они включены в замкнутую систе-
му, и в обычном режиме при разомкнутой сцепной муфте
и равных скоростях вращения валов I и П жидкость цир-
кулирует по замкнутому контуру, в который включены
гидронасосы равной производительности. При рассогла-
совании скоростей создается избыточное давление в сис-
теме и жидкость воздействует через гидроцилиндр на
сцепную муфту, которая соединяет валы I и II.
В схеме 5.3 использован дифференциальный меха-
низм, который способен замкнуть кинематическую цепь
при торможении управляемого звена. Тормоз может сра-
батывать либо непосредственно от центробежного дат-
чика скорости (при использовании маломощного приво-
да), либо от специальной системы управления, показан-
ной, например, на схеме 5.4а. С учетом того, что при со-
единении кинематической цепи образуется замкнутая
схема, включающая в себя фрикционную систему движи-
тели — дорожное полотно, требуется выполнить условие
i = 1 при одинаковом распределении нагрузки на движи-
тели. Для этого вводят в кинематическую цепь дополни-
тельную передачу G (см. схему 5.3) или передачи G1 и
G2 (см. структурную схему 5.4, кинематический вариант
которой дан на схеме 5.4а). На схеме 5.4а эти передачи
выполнены в виде ряда зубчатых пар, а на схеме 5.46
приведена эквивалентная рычажная передача, иллюстри-
рующая условие равновесия системы при указанных на-
правлениях моментов 7Ь, Twi и Кроме того, данная
система показывает возможность представления кинема-
тической цепи в виде соединения ряда дифференциаль-
ных элементов.
16.2. ЗУБЧАТЫЕ, РЫЧАЖНЫЕ И ВИН-
ТОВЫЕ РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИ-
РУЮЩИЕ МЕХАНИЗМЫ
Как уже было отмечено выше, функции распредели-
тельных и суммирующих механизмов разнообразны, а по
конструктивному исполнению механизмы могут быть
зубчатыми (схемы 6.1 ... 6.2а на рис. 145), винтовыми
(схемы 7.2, 7.2а, 9.4, 9.4а, 9.46), цепными (схема 7.3),
рычажными (схема 8.2, 8.2а), реечными (схема 9.2), лен-
точными (схема 9.3). Принципиальных структурных схем
не так уж и много.
Структура двухбарабанного привода конвейера
(схема 6.1а) аналогична структуре межколесного диффе-
ренциала автомобиля, и она представлена на рис. 5 в виде
замкнутой системы (схема 6.1).
Особенности структуры с двумя приводами и двумя
выходными звеньями (схема 6.2) заключается в исполь-
зовании двух дифференциальных механизмов, соединен-
ных между собой передаточным механизмом (с внешней
опорой). Схема 7.1 — классическая для суммирующего
механизма: она имеет два входных звена, движения ко-
торых преобразуются в движение одного выходного зве-
на. В схеме 8.1 два передаточных механизма G1 и G2
соединены между собой через двигатель D1 (без внешней
опоры) и имеется другой (управляющий) привод D2.
Особенность схемы 9.1 по сравнению с обычными
последовательно соединенными механизмами G1 и G2
заключается в совмещении выходного или входного зве-
на механизма G2 с промежуточным (соединительным)
звеном, которое выполняет роль общего выходного (или
входного) звена. По существу, часть энергетического
потока от первого механизма преобразуется во втором
механизме и суммируется с другой его частью на проме-
жуточном звене (см. штриховые стрелки на
схеме 9.1).
Примеры конструктивных исполнений по представ-
ленным структурным схемам даны на рис. 145.
ЗУБЧАТЫЕ, РЫЧАЖНЫЕ И ВИНТОВЫЕ МЕХАНИЗМЫ
361
В схеме 6.1а от двигателя D через зубчатую пару
c-d движение передается водилу h дифференциала S.
Далее силовой поток разветвляется на два равновеликих
потока: через передачу m-n к барабану Win через пере-
дачу p-r-s к барабану W2. Так же, как и в межколесном
дифференциале, имеется фрикционное замыкание, но
здесь оно имеет явно выраженное конструктивное ис-
полнение в виде огибающей барабаны ленты. Данная
схема позволяет обеспечивать максимальную тяговую спо-
собность двух приводных барабанов при высоком КПД.
Схема 6.16 по структуре аналогична схеме 6.1а, а
конструктивно выглядит иначе: дифференциал выполнен
в виде соединения двух планетарных механизмов, встро-
енных внутрь одного из барабанов (центральные колеса
362
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
146. ДИФФЕРЕНЦИАЛЬНЫЕ ПЕРЕДАЧИ [МЕХАНИЗМЫ С ОДНОЙ СТЕПЕНЬЮ СВОБОДЫ
И ВНУТРЕННИМ СУММИРОВАНИЕМ ДВИЖЕНИЙ]
(см. также рис. 123)
Г~9?2~|
Рейка 4
Рейка 3
Шестерня
Ползун 1
Зубчатый
венец 1
Зубчатый
венец 2
Винт 2
Гайка 3 Корпус
Винт!
Ползун 4
Лента 3 Лента 2'
Каток 1 Лента 3
Канал А
[9Ла~|
КаналD
Канал В
Выходной
вал
Канал С
Рабочая
камера 1
Рабочая
камера Г
Рабочая
камера 2
Подшипниковая Поршень
опора
Поршень
F- давление жидкости на поршень
$ - перемещение поршня
$2-1 - перемещение винта 2 относительно винта 1
Реверсирование
движения
выходного вала —
Р'~
РЛ1 - ход винта 1; Ph2 - ход винта 2
Ь] и Ь2 соединены с барабаном W1), а водило h2 второго
механизма через передачу G соединено с барабаном W2.
Выбирая параметры механизмов S и G, можно получить
требуемое соотношение (в том числе направления) мо-
ментов Т^\ и Т\у2-
В схеме 6.2а применены одинаковые зеркально рас-
положенные дифференциалы S1 и S2, центральные коле-
са (Ь) которых соединены зубчатой передачей с переда-
точным отношением, равным -1. На схеме показаны
также дополнительные передачи G1h G2, каждая из ко-
торых между водилом дифференциала и барабаном. Эти
передачи нужны только для получения требуемого пере-
даточного отношения в каждой из ветвей кинематиче-
ской цепи. Данная схема обеспечивает равенство и оди-
наковые направления моментов на барабанах W1 и W2
при одинаковых приводных моментах (воспроизводимых
двигателями D1 и D2).
В механизме привода распределительного кулачко-
вого вала двигателя внутреннего сгорания на схеме 7.2а
(см. также кинематическую схему 7.2} основное движе-
ние сообщается через звездочку цепной передачи, а до-
полнительное (для сдвига фаз) получается с помощью
специального гидропривода поступательного действия
(силы F). Поступательное движение преобразуется во
вращательное с помощью винтовой пары (схема 7.2} или
ее конструктивного эквивалента в виде соединения вин-
товых шлицев (схема 7.2а}. В результате суммирования
движений обеспечивается сдвиг фазы, т.е. дополнитель-
ный поворот кулачка на угол Аф (»25 ... 30°) по отноше-
нию к повороту ведущей звездочки.
В схеме 7.3 решается та же задача, что и в схеме 7.2
за счет изменения соотношения натяжений ветвей цепи
или зубчатого ремня. В данном варианте, перемещая
ползун вверх, натягивают верхнюю ветвь цепи (и, соот-
ветственно, ослабляют нижнюю ветвь), в результате чего
звездочка 2 кулачкового вала дополнительно поворачи-
вается на угол Аф.
На схемах 8.2 и 8.2а представлены кинематическое
и конструктивное исполнения двигателя внутреннего
сгорания (современного легкового автомобиля) с изме-
няемой степенью сжатия. Традиционное исполнение
кривошипно-ползунной группы АВС дополнено подвиж-
ным блоком цилиндров. Блок цилиндров выполнен как
одно целое с коромыслом кривошипно-коромыслового
четырехзвенного механизма KLMN. Дополнительный
наклон оси блока цилиндров сообщается от управляюще-
го привода, присоединенного к кривошипу 2. При накло-
не блока цилиндров объем камеры сгорания (в верхней
мертвой точке) изменяется, соответственно изменяется
степень сжатия. Отметим, что суммирование движений
происходит автоматически привращении кривошипа 1
(коленчатого вала). Управление приводом изменения
степени сжатия осуществляется в зависимости от часто-
ты вращения коленчатого вала (в конкретном примере —
от 8 до 14 при соответственно минимальной и макси-
мальной частотах).
Для демонстрации принципов конструирования
дифференциальных передач [механизмов с одной степе-
нью свободы] приведу только три примера. На схеме 9.2
рис. 146 - дифференциальная реечная передача, обеспе-
чивающая преобразование вращения шестерни в посту-
пательное перемещение в виде разности перемещений
зацепляющихся с ней зубчатых реек. Шестерня двумя
венцами 1 и 2 зацепляется соответственно с выходным
звеном - рейкой 4 и неподвижной рейкой 3. Двухвенцо-
вая шестерня шарнирно соединена с ползуном 1.
ГИДРАВЛИЧЕСКИЕ/ПНЕВМАТИЧЕСКИЕ РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА
363
При повороте шестерни на угол cpi выходное звено 4
переместится на величину s4 = cpi (r2 — и), где Г| и г2 —
радиусы начальных окружностей зубчатых венцов 7 и 2.
При этом водило h и ось шестерни переместятся на вели-
чину 5] = и ф]. При малой величине г2 — и можно полу-
чить малое перемещение 54.
На схеме 9.3 представлена дифференциальная лен-
точная передача для точного поступательного перемеще-
ния за счет разности перемещения лент, наматываемых
на цилиндр в два слоя.
Ленты 2 и 3 непосредственно огибают приводной
каток 7, а ленты 3' и 2' расположены во втором слое.
Первая пара лент соединена со стойкой, а вторая — с пол-
зуном 4.
Звено 4 при повороте звена 7 на угол ф1 переместит-
ся на величину s4 = cpi (r2 - и). При этом звено 7 перемес-
тится на величину S] = и фь За счет малой разности г2 и и
(толщины ленты 2) можно получить малое переме-
щение s4. Передача характеризуется беззазорностью и
отсутствием относительного скольжения.
На схеме 9.4 дано конструктивное решение диффе-
ренциальной винтовой передачи поворотного гидродви-
гателя. С помощью данной передачи поступательное
движение поршня преобразуется во вращательное дви-
жение выходного вала. На выходном валу выполнена
многозаходная резьба (винт 7), взаимодействующая с
внутренней резьбой поршня (гайка 2'). Поршень имеет
еще и внешнюю резьбу (винт 2), взаимодействующую с
гайкой 3, закрепленной в корпусе двигателя. Движения
выходного вала в разных направлениях продемонстриро-
ваны на кинематических схемах 9.4а и 9.46. Приведен-
ный на схемах механизм позволяет получать требуемое
соотношение между перемещением s поршня и углом <р
2га
поворота выходного вала: ф =----, где Ри\ и Р*2 -
?h\ + Ph2
ходы винтов 7 и 2. Например, можно получить очень ма-
лый угол <р при сравнительно большом перемещении s.
Резьба обеих пар должна быть несамотормозящей.
Рабочие камеры 7 (7') и 2 сообщены с входными ка-
налами С и D и разделены между собой уплотнением.
16.3. ГИДРАВЛИЧЕСКИЕ/ПНЕВМАТИЧЕС-
КИЕ РАСПРЕДЕЛИТЕЛЬНЫЕ И СУММИ-
РУЮЩИЕ УСТРОЙСТВА
Появление гидравлических распределительных/
суммирующих устройств - логическое совершенствова-
ние решений аналогичных функциональных задач с по-
мощью только твердых тел. Гидравлическое звено или
гидравлическая цепь звеньев обладает несравненно
большими регулировочными возможностями по сравне-
нию с твердыми звеньями, а пневматическое звено к то-
му же обладает высокой (упругой) податливостью и мо-
жет использоваться для смягчения ударных нагрузок.
Можно было бы полностью проследить аналогию между
механизмами только с твердыми звеньями, гидравличе-
ским или пневматическими, а также электрическими це-
пями. Но здесь не ставится цель рассмотреть данные сис-
темы, а речь пойдет только об особенностях конструиро-
вания твердых звеньев, которые применяют, чтобы
управлять (распределять или суммировать, изменять па-
раметры), потоками жидкости или газа.
В частности, можно отметить следующие особенно-
сти и принципы конструирования.
1. Главное в относительно подвижных парах гид-
равлических или пневматических устройств - это уплот-
нения (см. главу 9). Характерно, что если для пневмати-
ческих устройств применяют в основном упругие сколь-
зящие уплотнения (схема 10.2 на рис. 147) или раздели-
тельные уплотнения в виде диафрагм (см. схему 12.3), то
для гидравлических устройств все чаще используют
твердые звенья, плотно прилегающие друг к другу свои-
ми трущимися поверхностями (без специальных уплот-
нений). Такие решения широко используются в гидро-
распределителях (см. схему 10.4), а также гидромоторах.
При этом возможные утечки жидкости отводятся по спе-
циальным дренажным каналам. В силовых гидроцилинд-
рах, расположенных в открытых средах, используют
скользящие упругие или реже - разделительные уплотнения.
2. Рабочие поверхности гидравлических устройств
выполняют достаточно гладкими. Так, для конкретных
типов гидрораспределителей посадочные плоскости име-
ют шероховатость Ra = 0,8 мкм, посадочные цилиндриче-
ские поверхности (цилиндры и плунжеры) - Ra = 1,6 мм,
поверхности цилиндрических каналов - Ra = 5 мкм.
Высокие требования предъявляются также к распо-
ложению и форме рабочих поверхностей, особенно при
использовании длинных плунжеров (например, для схе-
мы 10.4).
3. Для обеспечения технологичности конструкции
распределительных систем с лабиринтным характером
каналов детали выполняют разъемными с продольными
стыками (в основном вдоль каналов).
Такие решения применяют, в частности, в автомати-
ческих коробках передач со сложной системой разветв-
ления гидравлических линий. В типовых конструкциях
гидрораспределителей выполняют каналы различной
конфигурации, используя, в частности, современные спо-
собы литья. При литье используют также закладные
трубки (см. в параграфе 1.4 на рис. 9.2 схему 10.2). Разъ-
емы деталей корпуса делают в местах при которых поса-
дочные отверстия для плунжеров получаются сквозными,
чтобы можно было осуществить высококачественную
механическую обработку. Криволинейные каналы малого
поперечного сечения получают электроискровой обра-
боткой, но при этом трудно получить малую шерохова-
тость поверхности.
4. Для управления мощными потоками жидкости
используют многоступенчатые многоконтурные гидрав-
лические аппараты и системы с последовательным уве-
личением управляющих сил.
Например, в схеме 10.4 первая ступень (гидрорас-
пределителя) управляется соленоидами, а вторая ступень -
с помощью потоков, направляемых первой ступенью.
364
РАСПРЕДЕЛИТЕЛЬНЫЕ/СУММИРУЮЩИЕ МЕХАНИЗМЫ
ГИДРАВЛИЧЕСКИЕ/ПНЕВМАТИЧЕСКИЕ РАСПРЕДЕЛИТЕЛЬНЫЕ УСТРОЙСТВА
365
5. Для гидромоторов и гидроаппаратов широко ис-
пользуются принципы унификации. Для различных задач
распределения потоков и управления ими компонуют,
например, направляющие аппараты из отдельных моду-
лей (см. параграф 1.4 рис И). Основные параметры гид-
ромоторов и гидроаппаратов подчиняют рядам пред-
почтительных чисел.
В первую очередь стремятся унифицировать привя-
зочные размеры и элементы соединений с другими агре-
гатами.
6. В гидроаппаратах с плунжерами, имеющими
большое количество цилиндрических рабочих поверхно-
стей, обеспечивают обязательное центрирование плун-
жера по крайней мере в двух удаленных друг от друга
опорах при любом положении плунжера.
Центрирующие пояски при этом должны быть ко-
роткими для лучшей самоустановки, но в то же время
ширина их должна быть достаточной для обеспечения
необходимого уплотнения. Не следует ограничивать воз-
можность свободного вращения плунжера. Данная "лиш-
няя" степень свободы допускает самоустановку (враще-
ние) плунжера из условия наименьшего действия (прин-
цип Гамильтона). На рабочих поверхностях плунжера
могут быть выполнены фаски, канавки и карманы для
удержания смазки. Форму карманов выбирают также из
условия более плавного перекрытия проходного сечения
(см. схему 10.4).
В предохранительном клапане на схеме 10.1 (по
аналогии с дифференциальным механизмом) поршень
поддерживается в равновесном состоянии благодаря ра-
венству давлений в полости D и канале А из-за того, что
полость D сообщается через канал X с каналом А. Если
давление в канале А достигнет предельно допустимого
значения, то жидкость через жиклер 2 и канал X воздей-
ствует на управляющий плунжер и открывает управляю-
щий клапан, соединяя при этом канал X с каналом Y.
В результате полость D через жиклер I и канал Y
сообщается со сливным каналом В, в котором давление
намного ниже, чем в полости D и канале А. Из-за этого
получается разность давлений в полости D и канале А,
поршень сжимает пружину 2 и сдвигается вверх, соеди-
няя напрямую каналы А и В. Падение давления в кана-
ле А приводит к закрытию управляющего клапана под
воздействием пружины 1 и опусканию поршня под воз-
действием пружины 2.
Предельно допустимое давление, при котором от-
крывается управляющий клапан, устанавливается степе-
нью сжатия пружины 1 с помощью регулировочного
винта. В корпусных деталях предусмотрена возможность
установки жиклера в канале Y и подключение внешнего
управляющего канала.
Принципиальное обозначение клапана в общей гид-
равлической системе дано на схеме 10.1а.
В пневмораспределителе на схеме 10.2 поток из ка-
нала F может быть направлен в канал А или в канал В в
зависимости от положения клапана. Клапан поджат пру-
жиной и может перемещаться штоком, на котором закре-
плен поршень. При управляющем давлении в пневмоли-
нии X на поршень шток смещается вправо вместе с кла-
паном. При этом клапан открывает полость, соединяю-
щую каналы Р и В. В крайнем правом положении пере-
крывается соединение каналов Р и А. В данном примере
поршень имеет привулканизированный слой эластичного
материала, а клапан полностью выполнен из эластичного
материала и имеет торцовые уплотняющие поверхности.
На схеме 10.3 представлен вариант пневмораспреде-
лителя, который так же, как и в схеме 10.2, может соеди-
нять канал с каналами А или В (шток в правом или левом
положении), Р, а кроме того, может соединять каналы А
или В с каналами Т1 или Т2 (шток в левом или правом
положении) соответственно. Шток смещается при воз-
действии на диафрагмы 1 или 2 управляющего потока,
подаваемого по каналам X или Y.
Диафрагмы — разделительные уплотнения — имеют
кольцевые утонения для большей податливости. Клапа-
ны 1 и 2 выполнены в виде торцовых поверхностей, кон-
структивно совмещенных с диафрагмой. Из условия тех-
нологичности корпусные детали должны иметь разъемы,
показанные на схемах 10.2 и 10.3.
На схеме 10.4 направляющий аппарат составлен из
управляющего гидрораспределителя и рабочего гидро-
распределителя. Гидрораспределители пристыкованы
один к другому, так что одноименные их каналы соеди-
нены между собой. Функциональная задача рабочего
гидрораспределителя та же, что и для схемы 10.3 - со-
единение канала Р с каналом А или В, а также соедине-
ние канала А или В с каналом Т (сливом). Принципиаль-
ное обозначение системы дано на схеме 12.4а.
При отсутствии управляющих воздействий управ-
ляющий и распределительный плунжеры находятся в
нейтральных (средних) положениях. При этом каналы Р,
А, В и Т не сообщаются между собой.
Управляющий плунжер перемещается влево (см.
схему 10.46) соленоидом Ь, а вправо — соленоидом а.
В положении на схеме 10.4 поток жидкости направ-
ляется по управляющему каналу а в камеру а, перемеща-
ет распределительный плунжер вправо, сжимая при этом
пружину 2 (см. схему 10.4в). Канал Р соединен с кана-
лом В, а канал А — с каналом Т.
Если управляющий плунжер переместить вправо, то
жидкость из управляющего канала b будет поступать в
камеру b и давить на торцовую поверхность распредели-
тельного плунжера, смещая его влево и сжимая пружину 1.
В крайнем левом положении плунжера соединяются
каналы Р с А и В с Т.
В данном гидроаппарате предусмотрена ручная ре-
гулировка пружин, поджимающих с обеих сторон управ-
ляющий плунжер. Предусмотрена также возможность
подключения внешних управляющих каналов X и Y -
(см. схему 10.4а) или ответвления управляющих каналов
через жиклеры от рабочих каналов Р и Т.
Глава 17. МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
17.1. СТРУКТУРНЫЕ ЭЛЕМЕНТЫ
Изменение и/или поддержание [стабилизация] опре-
деленного направления движения - одна из важнейших
функций системы управления современной машины,
будь то наземный, водный или воздушный транспорт.
В основном данная функция сводится либо к повороту
направляющих элементов: управляемых колес, поворот-
ной части шарнирно-сочлененного шасси, элементов ру-
лей глубины и поворота, рулей высоты, направления и
поперечной ориентации (элеронов, интерцепторов); либо
к раздельному торможению и/или ускоренному движе-
нию параллельных движителей: гусеничных тележек,
приводных колес одного борта и т.п.
Наиболее ранние решения - шарнирное сочленение
передней пары колес с рамой телеги или кареты, а также
поворотное [рулевое] весло лодки. Использовался в
древности и способ поворота путем поочередной или
раздельной гребли по разным бортам судна, а также за
счет притормаживания телеги с одной из сторон (совре-
менный аналог-торможение и/или ускоренное движение
колес одного борта или одной из гусениц транспортной
машины - см. рис. 14 и рис. 143).
Современная система рулевого управления - слож-
ная совокупность компонентов, содержащая, в частности:
• задающее устройство с системой приспосаблива-
ния к оператору (например, речь идет о возможности
изменения положения рулевого колеса) и устройством
безопасности, обеспечивающим, например, складывание
(разрушение) рулевой колонки при столкновении маши-
ны с препятствием;
• механизм, передающий и преобразующий дви-
жение задающего устройства в движение воспроизводя-
щего [исполнительного] устройства;
• усиливающее устройство [гидро-, пневмо- и/или
электропривод, подключаемый автоматически и отсле-
живающий манипуляции рук (или ног) оператора];
• загрузочное устройство, имитирующее опреде-
ленное сопротивление на управляющих элементах, в том
числе автоматически устанавливающее и изменяющее
сопротивление в зависимости от условий и стадии пово-
рота машины;
• обратную связь, уменьшающую или исключаю-
щую влияние инерционности системы и обеспечиваю-
щую синхронность движения задающих и воспроизво-
дящих устройств;
• демпфирующее устройство, уменьшающее виб-
рации, исключающее их передачу на управляющие зве-
нья (со стороны воспроизводящих устройств или движи-
телей).
Кроме перечисленных структурных компонентов
собственно системы рулевого управления, в изменении,
поддержании или восстановлении направления движения
участвуют также устройства самоуправления: например,
восстановление направления движения за счет энергии,
запасенной при повороте, или, наоборот, использование
запасенной энергии потока воды для облегчения поворота.
Современная система рулевого управления — одна
из наиболее совершенных структурных частей машины.
Она обязательно имеет механическую связь с подвеской
машины (если речь идет об автомобиле) и электронную
связь с системами торможения, изменения положения
корпуса кузова/фюзеляжа, питания двигателя и др.
17.2. РУЛЕВОЕ УПРАВЛЕНИЕ
АВТОМОБИЛЕЙ
Далее рассмотрим основные принципы и тенденции
конструирования систем рулевого управления, в частно-
сти, на примерах из практики конструирования автомо-
билей (см. рис. 148.1... 148.3), и отдельные специфичные
элементы конструкций других машин.
В общих, чертах эти принципы сводятся к следующему.
1. Исполнительный механизм выбирают из условия
обеспечения поворота каждого из управляемых колес на
разные углы, при которых оси вращения колес пересека-
ются в центре поворота (см., например, схему 4.1); это
общее правило далее будет несколько скорректировано.
2. Оси поворота колес наклонены таким образом,
что по окончании поворота происходит самовосстанов-
ление движения (схема 1.1).
3. Рулевое колесо соединено с передаточными уст-
ройствами карданной передачей для обеспечения воз-
можности регулирования его положения.
4. Передаточный механизм и конструкцию усилите-
ля выбирают из условия обеспечения непропорциональ-
ной связи между углом поворота рулевого колеса. (При
прямолинейном движении небольшие повороты рулевого
колеса не должны влиять на устойчивость направления, а
при парковке увеличение угла поворота рулевого колеса
сопровождается значительными углами поворота управ-
ляемых колес. Сопротивление повороту рулевого колеса
в первом режиме должно быть большим, чем во втором).
Примеры решений, отвечающих этому требованию, даны
на схемах 2.4а, 2.46, а также на схеме 3.2 (рис. 148.2).
5. Для обеспечения высокой маневренности выби-
рают кинематическое соединение, обеспечивающее од-
новременный поворот (на разные углы) всех или не-
скольких пар колес (см. схемы 4.1 ... 4.4 на рис. 148.3).
В современных легковых автомобилях, чтобы не услож-
нять конструкцию рулевого устройства, выполняют са-
моподруливающими задние колеса за счет направленного
деформирования подвески (см. параграф 7.5).
6. Для обеспечения безопасности предусматривают
дублирование управления и, в частности, предусматри-
вают возможность замыкания кинематической цепи в
случае отказа отдельных компонентов системы (напри-
мер, если гидроусилитель по какой-либо причине не дей-
РУЛЕВОЕ УПРАВЛЕНИЕ АВТОМОБИЛЕЙ
367
ствует, то управлять машиной возможно, хотя и прикла-
дывая большие усилия).
На схеме 1.1 представлена физическая картина по-
ворота колеса и самовосстановления прямолинейного
движения и соответствующего возврата рулевого колеса
в среднее положение после того, как водитель отпустил
рулевое колесо. Наименьшие затраты энергии имеют ме-
сто, если управляемое колесо поворачивать вокруг наи-
более нагруженной точки качения (точки контакта Т с
дорожным полотном). Это удается конструктивно ре-
шить, только наклонив ось поворота Z. А для устойчиво-
сти движения важно, чтобы ось поворота была наклонена
в плоскости движения и имела бы точку встречи Zo, не
совпадающую с точкой контакта Т.
Наклон оси поворота колеса конструктивно решают
соответствующим наклоном шкворня (шипа шарнира N).
Осуществляют обычно поперечный {схема 1.1) и про-
дольный наклон {схема 1.1а). Вращение вокруг оси при-
водит к подъему рамы h машины относительно дорожно-
го полотна на величину А. Сила тяжести (ее состав-
ляющая плоскости дорожного полотна) стремится воз-
вратить повернутое колесо в исходное положение. Точка
встречи Zo оси Z (Z' - промежуточное положение оси) с
дорожным полотном при продольном наклоне отстоит от
точки Т на плече е, что обусловливает возникновение
момента от реакции Fr дороги на центробежную силу при
повороте машины. Такое воздействие способствует ус-
тойчивости движения по кривой.
На схемах 1.2 ... 1.6 представлены системы рулевого
управления автомобиля с одной парой управляемых ко-
лес, на схемах 4.1 ... 4.4 - с двумя парами, а на схемах
2.1 ... 3.2- примеры отдельных механизмов.
Колесо {схема 1.2) установлено на поворотной опо-
ре, шарнирно соединенной через рычаг подвески с рамой
автомобиля. Поворотная опора соединена тягой (AL -
для левого управляемого колеса, ВК — для правого управ-
ляемого колеса) с рычагом ВА. Поворот рычага ВА
приводит к повороту опор.
Шарниры N и Р только раньше выполняли в виде
одноподвижной вращательной пары, как показано на
схеме 1.2. Конструктивно такую пару выполняют в виде
сферической трехподвижной пары (шаровой опоры) вни-
368
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
148.2. РУЛЕВОЕ УПРАВЛЕНИЕ (НАПРАВЛЕНИЕМ ДВИЖЕНИЯ) АВТОМОБИЛЯ
От рулевого—
колеса r 2/
Червяк S
Золотник
Насос
Поршень
Сошка
Г идроцилиндр I
——П i
Корпус
гидрораспределителя
Шток _
Полость 2
Полость 1 \
2.3
Поворотный
рычаг
Дозирующая
гидромашина
Винт 1
Рулевой
вал
X Гидроцилиндр
Канал 4
Канал 3 х Ч о
\ Втулка
Движения х.
втулки
Канал 6
Винт 2
Корпус
Канал 1
Гидрораспределитель А
\ I р1 Винт
Рулевое |
колесо .
| Гайка
Вал сошки
Насос
о
Зубчатый
сектор
Рейка
Шестерня
Полость рп Полость Р]
Насос
Канал
2.4
Гидрораспределитель
Вал
От рулевого
колеса
Шестерня
Рейка
Полость ро
Полость Р]
2.5
Зацепление
при крутом
повороте
Fr А
Рейка
Зацепление
при движении прямо
(в середине рейки)
Электропривод
Рейка
----,— -------------- . , . Шестерня
Из гидроцилиндра
(полость р )
От насоса
2.6
От датчика углового
От датчика угла поворота ускорения автомобиля
рулевого колеса (вокруг вертикальной оси)
От датчиков
угловых
скоростей и
углов поворота
управляемых колес
Слив
К гидроцилиндру
(полость ро)
С амотормозя щая
винтовая зубчатая
передача
СИСТЕМА АВТОМАТИЧЕСКОГО ПОДРУЛИВАНИЯ
3.2
Штифт |
1
Гидрораспределитель
Центральное зубчатое
колесо а соединено
с валом рулевого
колеса.
От рулевого
колеса
Центральное зубчатое
колесо b соединено
с шестерней реечного
механизма.
Блок
управления
Двухвенцовый
сателлит
От насоса Слиа
*
Управление
сервоприводом
Торсион "Гидрораспределитель
Из полости р
— —Г- '
Слив
В полость р.
Шестерня
Полость pQ
Рейка
Шестерня
Суммирующий механизм
Полость ?!
Вал
сервопривода
Водило
Рулевой вал
^Торси он
Ротор
Статор
-Магнит
СГ&1.СсК/н6н<4
РУЛЕВОЕ УПРАВЛЕНИЕ АВТОМОБИЛЕЙ
369
зу и четырехподвижной вверху, если подвеска одноры-
чажная, или в виде двух сферических трехподвижных
пар, если подвеска двухрычажная или многорычажная.
На схеме 1.3 и на ее упрощенном представлении —
схеме 1.3а показано, что поворотная опора образует с
кузовом четырехподвижное соединение N(II), эквива-
лентное сферическому шарниру N в совокупности с по-
ступательной парой амортизатора/демпфера. Ось поворо-
та опоры представляет собой линию NN'. При изменении
положения рычага подвески JN' меняется длина и угол
наклона линии NN'.
На схеме 1.36 поворотная опора соединена шарни-
рами N и N' верхним и нижним рычагами [коромыслами]
соответственно. Поворот колеса осуществляется вокруг
оси NN' и задается тягой AL (схема 1.3).
При относительном движении опоры и кузова ось
поворачивается вокруг линии шарниров рычага, разме-
щенных на кузове, или совершает сложное движение.
На схеме 1.3в - одно из самых современных реше-
ний подвески управляемого колеса. Рычаги MN и M'N" —
соединены с поворотной опорой в сферических шарни-
рах N и N", а рычаги JN' и J'N'" - в сферических шарни-
рах N' и N'". Таким образом получен шестизвенный про-
странственный механизм с ведущим [управляемым] ша-
туном - поворотной опорой. Последняя может переме-
щаться в пространстве и одновременно вращаться вокруг
осей NN' и N"N"'. Механизм обладает одной степенью
свободы, а движение поворота задается в точке L так же,
как и в схеме 1.36. Перемещение и ориентация поворот-
ной опоры в этой схеме обеспечивают более благоприят-
ные условия поворота колеса, хотя и рассчитываются по
сложным зависимостям.
Чтобы в полной мере оценить замысел современных
конструкций, остановимся на некоторых традиционных
решениях и закономерностях их развития.
На схеме 1.4 тяги AL и В К соединены с перемещае-
мым поступательно поперек движения машины звеном
АВ. Звено АВ соединено с рамой машины с помощью
двух параллельных коромысел, одно из которых является
рычагом управления. Его поворот приводит к смещению
звена АВ в сторону и, следовательно, к повороту опор.
На схеме 1.5 рулевой механизм выполнен в виде
трапеции, составленной из поворотных опор NL и КР,
поперечной рулевой тяги KL и рамы машины. Одна из
опор неподвижно соединена с рычагом LNC, который
шарнирно соединен с продольной рулевой тягой CD.
Движение продольной рулевой тяге CD сообщается от
рулевого колеса через карданную передачу RS, червяк и
червячный сектор. На схеме показано, как одно из колес
поворачивается на больший угол, чем другое колесо. Это
обязательное условие качения обоих колес без скольже-
ния при повороте.
Приведенные схемы лишь приближенно удовлетво-
ряют требованию ориентации колес с пересечением осей
в центре поворота во всем диапазоне угла поворота колеса.
Более точные решения могут быть осуществлены,
например, при изменении в процессе поворота соотно-
шения длин (проекций на горизонтальную плоскость тяг
AL, ВК). На схеме 1.6 изменение ориентации поворотных
опор в процессе поворота обеспечивается за счет движе-
ния шарнира А, соединяющего тяги AL и АК по дуге
окружности. Такое движение задается кривошипом АС,
приводимым в движение от вала рулевого колеса. Но при
этом, если не использовать дополнительные устройства,
то соотношение требуемого усилия при повороте колеса
и угла поворота неблагоприятное.
На схемах 1.4; 1.5; 4.1 и 4.2 оси шарниров поворот-
ных опор условно изображены без наклона в отличие от
реального исполнения, а проекции осей колес приняты
совпадающими с осями мгновенного вращения при их
качении по дорожному полотну.
На схемах 1.3 и 1.5 представлены примеры рулевого
управления прямого действия (приводимого человеком).
Современные системы функционируют с помощью до-
полнительного источника энергии (например, гид-
ро/пневмоусилителя - схемы 2.1 ... 2.4 на рис. 148.2). Та-
кого вида рулевое управление выполняют с обратной
связью, практически обеспечивающей синхронность (бе-
зынерционность) поворота машины и рулевого колеса.
На схеме 2.1 в кинематическую цепь (см. схему 1.5)
между червячным сектором и продольной рулевой тягой
DC установлен гидрораспределитель поступательного
действия, корпус которого соединен с гидроцилиндром, а
золотник приводится в движение сошкой, неподвижно
соединенной с червячным сектором. При движении зо-
лотника вправо или влево от нейтрального положения
открывается канал и жидкость от насоса поступает в по-
лость соответственно 1 или 2, а из другой полости 2
или 1 она вытесняется в сливную емкость. Поршень под
давлением жидкости перемещается соответственно впра-
во или влево и через тягу GY и поворотный рычаг пере-
мещает тягу.
Если по какой-либо причине гидрораспределитель
не работает, то золотник упирается своим торцом в торец
корпуса и движение передается непосредственно от точ-
ки F к точке G, но усилие на рулевом колесе потребуется
большее, чем при нормальной работе. Таким образом
осуществляется функциональное резервирование.
Широко распространена схема, в которой рулевое
колесо приводит в движение зубчатую рейку, соединен-
ную шарнирно с тягами и, соответственно, с поворотны-
ми опорами). Такое решение называется реечным управ-
лением. Так же выполняют рулевое управление с шари-
ковинтовой передачей (схема 2.3).
В схемах 2.3 и 2.4 от вала рулевого колеса приво-
дится гидрораспределитель вращательного действия. Его
принципиальное решение дано на схеме 3.1, а вариант
конструктивного исполнения - на схеме 3.2. При поворо-
те рулевого колеса на небольшой угол закручивается
торсион, звенья 1 и 2 смещаются одно относительно дру-
гого и гидрораспределитель открывает доступ жидкости
от насоса в гидроцилиндр. Поршень в схеме 2.3 через
зубчатый сектор приводит в движение вал сошки-рычага
управления, например, СВА в схеме 1.2 или АС в схеме 1.6.
На схеме 2.2 представлен гидроусилитель в системе
рулевого управления колесной машины. При вращении
рулевого колеса винт поворачивается внутри золотника
370
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
гидрораспределителя и перемещает его в осевом направ-
лении. Пазы золотника и корпуса расположены таким
образом, что при вращении рулевого колеса в ту или
иную сторону они соединяют внешние каналы опреде-
ленным образом. В положении, показанном на схеме,
поток жидкости от гидронасоса передается по каналам /
и б в дозирующую роторную гидромашину, далее по ка-
налам 5 и 4 - в правую полость гидроцилиндра. По кана-
лам 3 и 2 из левой полости осуществляется слив жидко-
сти. При этом совершается определенная работа цилинд-
ра. Дозирующая гидромашина приводится от винта при
осевом перемещении золотника. При неподвижном руле-
вом колесе поворот винта 2 приводит к остановке золот-
ника, а при отсутствии внешнего воздействия на рулевое
колесо золотнику сообщается движение в противопо-
ложном направлении, в результате чего звенья гидрорас-
пределителя и рулевое колесо возвращаются в нейтраль-
ное положение.
Непрерывного изменения кинематического и/или
силового передаточного отношения пытаются достичь
следующими путями:
• непосредственно механически с помощью специ-
альной реечной передачи (схемы 2.4а и 2.46);
• за счет суммирования управляющего движения с
дополнительным корректирующим движением и/или
дополнительным сопротивлением движению (схема 2.5).
На схеме 2.4а рейка имеет криволинейные зубья с
малым углом наклона зуба в середине и большим углом -
по краям. В соответствии с этим изменяется и тангенци-
альный шаг зубьев. Шестерня имеет винтовые зубья, об-
разующие точечный контакт с зубьями рейки. Взаимо-
действие шестерни и рейки может быть осуществлено
только при дополнительном осевом перемещении шес-
терни и соответствующем дискретном перемещении точ-
ки контакта.
На схеме 2.46 зубья в середине рейки имеют намно-
го больший угол профиля, чем по краям. Из-за различия
углов давления (см. направления силы Fj) при прямоли-
нейном движении машины требуется большое усилие,
чтобы повернуть рулевое колесо, а при значительном
повороте машины усилие уменьшается.
Плавность работы зацепления в схемах 2.4а и 2.46
обеспечивается благодаря значительному осевому пере-
крытию при использовании винтовых зубьев. Несмотря
на то, что данные исполнения нетехнологичны и проти-
воречат отдельным положениям теории механизмов, их
применяют на некоторых японских автомобилях.
Более предпочтительное (на мой взгляд) решение
представлено на схеме 2.5: между входным звеном -
шестерней и выходным звеном — винтом имеется допол-
нительный электропривод, который может увеличить
перемещение точек А и В по сравнению с тем. которое
задает реечная передача. Это дополнительное движение
используют, например, при маневрировании автомобиля
в стесненных условиях. Более того, его можно выполнить
регулируемым в зависимости от угла поворота рулевого
колеса и/или от скорости движения (и других условий).
В данной схеме для суммирования двух движений ис-
пользован один из вариантов дифференциального винто-
вого механизма (см. параграф 16.2).
Схема 2.6 отличается от схемы 2.5 тем, что сумми-
рование управляющего и корректирующего перемеще-
ний осуществляется в кинематической цепи до реечного
механизма. В качестве суммирующего механизма ис-
пользована планетарная зубчатая передача. Благодаря
такому исполнению суммируются небольшие усилия со
СОЕДИНИТЕЛЬНЫЕ И ПОВОРОТНЫЕ УСТРОЙСТВА МАШИН
371
стороны рулевого колеса и от сервопривода, управляемо-
го автоматически.
Далее общий сигнал управления усиливается с по-
мощью гидроцилиндра так же, как и в схеме 2.4. При
этом получается изменение "чувствительности" руля в
зависимости от скорости движения машины, радиуса
поворота, начала и окончания поворота. При большой
скорости движения обеспечивается высокая устойчи-
вость направления движения, а небольшие (непроизволь-
ные) повороты рулевого колеса не изменяют ориентацию
управляемых колес. А вот при маневрировании можно
легко и быстро повернуть управляемые колеса. Более
того, автоматическая система может реагировать на раз-
личные нарушения устойчивости направления движения
(в том числе и при повороте). Например, она может вы-
вести автомобиль из заноса и не допустить другие ава-
рийные ситуации. При этом система выполняет функции
управления, характер которых зависит от подключенных
датчиков и программного управления.
В случае выхода из строя автоматической системы
(например, при обесточивании) она отключается, но бла-
годаря самотормозящей передаче механическая цепь
управления не размыкается.
По существу, подключение гидро/пневмоусилителя
(схема 2.4) предполагает суммирование энергетических
потоков через упругое соединение (см. схему 3.2) или
через дифференциальный механизм (см. схему 2.5).
Схемы 2.1 ... 2.5 построены таким образом, что при отка-
зе гидравлической или электрической системы рулевое
управление может функционировать как обычная меха-
ническая система без усиления сигнала управления. Че-
рез эту же систему осуществляется и обратная связь.
Включение дополнительного привода в схемах 2.5 и
2.6 или изменение сопротивления закручиванию в схе-
ме 3.2 осуществляется автоматически при переходе от
одного режима к другому.
Схемы 4.1 ... 4.4 на рис. 148.3 демонстрируют воз-
можности одновременного поворота двух пар колес.
Здесь речь пойдет о двух вариантах поворота передних и
задних колес:
• в разные стороны, чтобы приблизить к машине
центр поворота и соответственно уменьшить радиус по-
ворота;
• в одну сторону, чтобы исключить избыточную по-
ворачиваемость ("ввинчивание" в поворот) или даже
обеспечить недостаточную поворачиваемость машины,
что особенно важно при крутых поворотах и при пере-
строении машины в параллельный ряд.
В схеме 4.1 от вала рулевого колеса движение пере-
дается на коромысло, от которого приводятся продоль-
ные рулевые тяги (тяга 1) передних и задних колес. Оси
всех четырех колес при этом пересекаются в центре по-
ворота. Каждая пара колес, как и в схемах 1.2 ... 1.6, име-
ет поворотные опоры, поперечные тяги 2 и 3 и рычаг
управления. Рама машины принята за стойку (обозначена
штриховкой).
В схеме 4.2 автоматически реализуются два режима
поворота задних колес: при малой скорости движения
колеса поворачиваются так же, как и в схеме 4.1, а при
большой скорости задние колеса поворачиваются в ту же
сторону, что и передние, но на меньший угол. На схе-
ме 4.2 показано, в частности, два реечных рулевых меха-
низма 1 и 2, соединенных валом 2 через редуктор-реверс,
способный обеспечить указанные два режима. Привод от
рулевого колеса осуществляется через вал 1, например,
по схеме 2.5.
На схемах 4.3 и 4.4 даны два варианта рулевого
управления грузового автомобиля с гидроусилителем в
виде гидроцилиндра. В отличие от рассмотренных выше
схем здесь две пары колес (см. на схеме опоры 1 и 2) со-
единены с помощью кинематической цепи, обеспечи-
вающей поворот пар колес почти на один и тот же угол
(различие обусловлено расположением общего центра
поворота и достигается некоторым различием длин рыча-
гов JU и QHU')- Гидроцилиндр в схеме 4.3 воздействует
на рычаг JU, а в схеме 4.4 — на рычаг QHU'. Между ры-
чагами связь осуществляется посредством тяги GH (схе-
ма 4.3) или кинематической цепи JPVOH (схема 4.4).
На схеме 4.3 показана также обратная связь в виде
кинематической цепи GPD. На схеме 4.4 такая связь не
показана — она может быть электрической или гидравли-
ческой, особенно при значительном удалении поворот-
ных колес от рулевого колеса, например, в автопоезде с
поворотным прицепом или дополнительным тягачом -
см., например, схемы 6.1, 6.1а, 6.16 на рис. 149.
В рулевом управлении используют и другие элемен-
ты и системы, повышающие его функциональные воз-
можности и качественные показатели. В частности, в
кинематическую цепь вводят виброзащитные устройства,
в результате чего получается рулевое управление, нечув-
ствительное к неровностям дорожного полотна.
17.3. СОЕДИНИТЕЛЬНЫЕ
И ПОВОРОТНЫЕ УСТРОЙСТВА
ШАРНИРНО-СОЧЛЕНЕННЫХ
КОЛЕСНЫХ И ГУСЕНИЧНЫХ МАШИН
Тяжелые колесные машины (рис. 149 схемы 5.1,
5.2), автопоезда, прицепы (схемы 7.1, 7.3) и некоторые
гусеничные машины (схема 8.1) выполняют шарнирно-
сочлененными. В них по крайней мере одна колесная
тележка (два колеса с общей осью) или гусеничная те-
лежка присоединена шарнирно к общей раме машины
или другой тележке.
Общие принципы конструирования таких соедине-
ний и устройств управления ими следующие.
1. Для обеспечения самоприспособляемости к до-
рожному полотну шарнирное соединение выполняют с
двумя или тремя степенями свободы. Одну из осей шар-
нира выполняют наклонной (близкой к вертикали) для
самовосстановления прямолинейного направления. Гори-
зонтальная продольная ось служит для независимой уг-
ловой самоустановки в поперечной плоскости (схе-
ма 5.3). В длинных автопоездах обеспечивают также
возможность третьего углового перемещения в продоль-
ной вертикальной плоскости (схема 6.1).
372
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
149. МЕХАНИЗМЫ ПОВОРОТА ШАРНИРНО-СОЧЛЕНЕННЫХ МАШИН, ПОЛУПРИЦЕПОВ И ПРИЦЕПОВ
СОЕДИНИТЕЛЬНЫЕ И ПОВОРОТНЫЕ УСТРОЙСТВА МАШИН
373
2. Принудительный поворот (вокруг вертикальной
оси) осуществляют с помощью специального привода
системы рулевого управления. При гидравлическом при-
воде силовые гидроцилиндры располагают таким обра-
зом, чтобы обеспечивалось максимально возможное пле-
чо h приложения движущей силы F (схема 5.1а).
3. В системе рулевого управления необходимо пре-
дусмотреть автоматическое ограничение угла поворота в
зависимости от поперечного уклона дорожного полотна
и из условия поперечной устойчивости. Имеются приме-
ры опрокидывания машины при крутом повороте и не-
значительном уклоне из-за перемещения центра тяжести
за пределы опорного контура.
4. В многоосных автопоездах и прицепах вместо
вертикального шарнира или в дополнение к нему исполь-
зуют специальные соединительные механизмы, обеспе-
чивающие смещение оси относительного поворота теле-
жек ближе к центру поворота (схема 6.1) или расположе-
ние осей колес пересекающимися в центре поворота
(схемы 7.1 ... 7.3).
5. В машинах с общей платформой большой длины
используют шарнирное присоединение нескольких теле-
жек (к платформе) и обеспечивают их зависимый пово-
рот (например, для движения под углом к продольной
оси для разворота на месте или даже в поперечном на-
правлении) - схема 8.1.
6. В быстроходных машинах, чтобы не допускать
потери средней скорости при повороте притормаживание
одной гусеницы (тележки или колес одного борта) долж-
но сопровождаться ускорением другой гусеницы (тележ-
ки или колес другого борта). Данный принцип относится
к конструированию машин с неподвижным присоеди-
нением гусеничных тележек к раме, и в какой-то мере он
был освещен в параграфе 2.1 (рис. 13), но заслуживает
более подробного рассмотрения в дальнейшем.
Далее остановимся на конкретных примерах, иллю-
стрирующих основные принципы конструирования по-
воротных приводов в совокупности с тягово-
соединительными устройствами.
На схеме 5.2 — погрузчик с вертикальной осью Z
шарнира. На одной из частей рамы смонтированы двига-
тель и кабина, на другой — рабочее оборудование.
Передняя пара колес самоустанавливается относи-
тельно задней (приводной) пары колес благодаря специ-
альной подвеске, соединяющей ее с поворотной частью.
Подвеска в данном случае выполняет функцию шарнира
с продольной осью.
На схеме 5.1а дан пример системы поворота шар-
нирно-сочлененной машины. Поворот вокруг оси части
рамы относительно другой части осуществляется гидро-
цилиндрами 7 и 2. Приводятся гидроцилиндры от источ-
ника энергии — насоса, подключаемого с помощью гид-
рораспределителя 1 при вращении рулевого колеса. Ру-
левое колесо соединено с гидрораспределителем 1 по-
средством винтовой А и вращательной В кинематических
пар. В гидросистеме использована также обратная связь,
подключаемая вручную перемещением гидрораспреде-
лителя 2. Жидкость, вытесняемая из полостей гидроци-
линдров в зависимости от перемещения их штоков, по-
ступает в гидромотор (обратной связи). Вращение вала
гидромотора через поступательную пару С передается
гайке. Гайка навинчивается на винт рулевого колеса и
перемещает гидрораспределитель 7, и тем самым вносят-
ся коррективы в поступление жидкости из источника
энергии, обусловленные функционированием обратной
связи.
По схеме шарнирно-сочлененной машины с поворо-
том с помощью гидроцилиндров исполняют современные
большегрузные автомобили, самосвалы и скреперы. Так,
на схеме 5.2 к тягачу 7 шарнирно-присоединен ковш
скрепера (см. управляемую подвеску — схема 7.4 на
рис. 67), неподвижно связанный с тягачом 2. На схеме
обозначены DI, D2 - двигатели тягачей 7 и 2; V, G и S -
гидротрансформатор, коробка передач и дифференциал.
Гидроцилиндры приводятся в движение от насоса, раз-
мещенного на тягаче 7.
На схеме 5.3 шарнирно соединены рамы 7 и 2 само-
свала. Кузов самосвала также шарнирно соединен с
обеими рамами в точках В и Е таким образом, что он
может самоустанавливаться при повороте машины (см.
параграф 4.3). Поворот вокруг точки С осуществляется с
помощью привода, размещенного на тягаче (раме 7).
Дальнейшее совершенствование шарнирно-сочле-
ненных машин представляет собой решение соедини-
тельного устройства, обеспечивающего автономную са-
моустановку частей машин или соединительных машин,
а также их относительный поворот не вокруг фиксиро-
ванной оси (точки в горизонтальной проекции), а по бо-
лее сложной программе.
Тягово-соединительное устройство на схеме 6.1 вы-
полнено в виде многозвенного симметричного относи-
тельно продольной оси механизма. Секции, в данном
примере — тягач и прицеп, имеют возможность самоуста-
навливаться в зависимости от профиля дорожного по-
лотна благодаря их соединению с помощью шарниров А,
В и С. Наличие двух шарниров В и С с параллельными
осями позволяет разгрузить другие шарниры от силы
тяжести секций при расположении их на разных уровнях.
Между звеньями 14 и 7 расположен шарнирный
двенадцатизвенный механизм с одной степенью свободы.
Относительный поворот или перемещение звеньев 14 и 7
однозначно определяет положение остальных звеньев.
В основе устройства четыре четырехзвенных двух-
коромысловых механизма. Например, если принять за
стойку звено 14, то к нему присоединены коромысла 2 и
77, связанные шатуном 3 (один механизм); коромысла 13
и 77, связанные шатуном 72 (другой механизм). Здесь
общие звенья — стойка 14 и коромысло 77. Аналогично,
если принять за стойку звено 7, то к нему с одной сторо-
ны присоединены коромысла 8 и 4, соединенные шату-
ном 5, а с другой стороны — коромысла 8 и 10, соединен-
ные шатуном 9.
Механизмы также соединены между собой попарно.
Звено 2 шарнирно соединено в точке D со звеном 4, зве-
но 73 в точке Е — со звеном 10.
Каждый из механизмов из положения, когда одно из
коромысел и шатун вытянуты в прямую линию (мертвая
точка), имеет два варианта перемещения звеньев. При
314
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
этом механизмы с общими звеньями одновременно могут
иметь только разные варианты перемещения звеньев. Так
как мертвые точки не совпадают, движение звеньев в
любом случае является определенным.
Упомянутое свойство, а также симметрия соедине-
ния механизмов позволяют иметь два варианта переме-
щения звеньев замкнутого контура (звенья 14, 2, 4, 7, 10
и 13), представленные на схемах 6.1а и 6.16.
В первом случае положение звеньев четырехзвен-
ных механизмов симметрично относительно линии DE.
Во втором случае механизм, содержащий коромысло 2,
имеет такое же положение звеньев, что и механизм, со-
держащий коромысло 10; другой вариант положения
звеньев имеют механизмы, содержащие коромысла 4 и 13.
Расположение звеньев на схемах 6.1а и 6.16 полу-
чают, поворачивая секции (тягач и прицеп) в направле-
нии стрелок. При этом, так как относительный поворот
секций ограничен минимально допустимым расстоянием
MN, то тягово-соединительное устройство позволяет
круче развернуть секции, чем при шарнирном их сочле-
нении по схемам 5.1 ... 5.3 и при таком же расстоянии
между секциями.
При расположении звеньев по схеме 6.16 обеспечи-
вается перестроение транспортного средства из одного
ряда в другой на малом участке дороги.
Схема 6.1в отличается от схемы 6.1 лишь иным
конструктивным исполнением звеньев, обозначенных так
же, как и на схеме 6.1.
Положение звеньев на схеме 6.1в соответствует по-
вороту секций навстречу друг другу, как на схеме 6.1а.
Устройство на схеме 6.1 в более компактно в поперечном
направлении. Использование схем 6.1 и 6.1 в предполага-
ет наличие, по крайней мере, двух пар колес (или двух
гусеничных тележек) в каждой секции и наличие авто-
номного рулевого управления в одном тягаче — при воз-
можном режиме только по схеме 6.1 или в обеих секциях
(тягачах).
На схемах 7.1, 7.2 и 7.3 даны устройства, связываю-
щие тележки прицепа и обеспечивающие поворот задней
тележки при повороте передней тележки, присоединен-
ной к тягачу.
Одновременный поворот обеих тележек позволяет
уменьшить радиус поворота. Тележки 1 и 2 соединены с
рамой прицепа шарнирно, а между собой — тягами 1 и 2.
Тележки и тяги образуют антипараллелограмм. При по-
вороте тележки 1 тележка 2 поворачивается в противопо-
ложную сторону. Для исключения избыточных связей
тяги соединены со звеньями тележек сферическими шар-
нирами А, В. Для того чтобы тяги работали только на
растяжение, между ними и тележкой введены промежу-
точные звенья 7 и 2. Каждое из этих звеньев может сво-
бодно поворачиваться в одну сторону, поворот же в дру-
гую сторону ограничен упором С. Только при неподвиж-
ном звене 1 или 2 относительно тележки 2 тяга передает
нагрузку. Аналогичный эффект получается, если вместо
тяг использовать гибкие нити, например тросы, присое-
диненные непосредственно к тележке 2.
В схеме 7.2 вторая тележка прицепа двухосная. Ее
рама шарнирно соединена с рамой прицепа в т. F. Оси
второй тележки между собой связаны кулисным меха-
низмом. Кулиса неподвижно соединена с тележкой 2, а
коромысло — с тележкой 3. Кинематическая пара D наря-
ду с поступательным и вращательным движением в
плоскости схемы допускает относительное покачивание
(вокруг оси CD) тележек 2 и 3 в плоскости, перпендику-
лярной к схеме. Такой же парой Е кулиса соединена с
рамой 1. При наличии момента силы со стороны тележ-
ки 1 относительно т. F рама 1 поворачивается и через т. Е
поворачивает кулису, которая в свою очередь заставляет
поворачиваться обе тележки 2 и 3 в плоскости схемы.
В схеме 7.3 платформа прицепа соединена с рамой
тягача. Через опорно-сцепное устройство она опирается
на раму двухосной тележки. Передняя ось тележки пово-
ротная. На ней установлен блок 5. Движение блоку 5 пе-
редается от блока 4, связанного с рамой тягача через гиб-
кую нить (трос 1), отводные блоки 7, 3, 2 и гибкую нить
(трос 2). При повороте тягача тут же начинает поворачи-
ваться передняя ось тележки.
Вариант механического соединения тележек 7 и 2,
обеспечивающего зависимый (согласованный) поворот
тележек, представлен на схеме 8.1. Соединительное уст-
ройство представляет собой шарнирный механизм
встречного вращения гусеничных тележек 7 и 2. В отли-
чие от механизма на схеме 6.1а он не предназначен для
передачи тяговой силы, и для этой цели необходимо до-
полнительное соединение (на схеме не показано). Тележ-
ки могут независимо подниматься и опускаться относи-
тельно рамы машины с помощью гидроцилиндров 7 и 2
(см. рис. 67). Поворот тележек осуществляется приводом
вращения вокруг оси шарниров А или К. Выходные зве-
нья приводов обозначены как: поворотные звенья 7 и 2.
Они соединены между собой пространственным меха-
низмом. При повороте одной из тележек движение пере-
дается через тягу ВС, рычаг CFED и тягу DG другой те-
лежке. Вторая тележка поворачивается относительно
рамы в противоположную сторону примерно на тот же
угол, что и первая. При этом существенно уменьшается
радиус поворота машины в целом, по сравнению с ис-
полнением, в котором поворачивается одна тележка. При
наличии двух приводов поворота их механическое со-
единение может быть заменено электрическим или гид-
равлическим соединением. При этом возможны два ре-
жима перемещения тележек (по схемам 6.1а и 6.16). Тем
не менее механическое соединение тележек по схеме 8.1
привлекает своей простотой исполнения и позволяет
иметь только один привод поворота.
17.4. ПРИВОДЫ РУЛЕВЫХ УСТРОЙСТВ
СУДОВ, САМОЛЕТОВ И ВЕРТОЛЕТОВ
Системы рулевого управления водного и воздушно-
го транспорта по структуре во многих случаях аналогич-
ны рассмотренным системам. В развитие общих принци-
пов конструирования отметим некоторые характерные
для данных систем (без учета реактивных двигателей
поворота) приемы и решения:
ПРИВОДЫ РУЛЕВЫХ устройств судов, самолетов и вертолетов
375
150. МЕХАНИЗМЫ СУДОВЫХ РУЛЕВЫХ ПРИВОДОВ
9.2
9.1
Тяга 1
Руль Г-
Направляющая 1
rz/zi
Г7771
Гайка 2
О Привод
“f руля
Винт
/ Тяга 2 _ / —Г \ V
Рычаг Гайка 1 \
(румпель) Направляющая 2
Ползун 1
Рычаг 1
(румпель)^/
Поршень 1-Zq
Поршень г'д
В-^
Ползун 2
Коромысло 1
/ Гидроцилиндр 1
Pi/
Пневмо-
гидроаккумулятор
Гидроцилиндр 2
* Коромысло 2
£72
151. ЗАДАЮЩИЕ И ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ
В СИСТЕМАХ УПРАВЛЕНИЯ САМОЛЕТОВ И
ПоТ~|
х-
Штурвал
Качалка 1
Шестерня
Рейка
ТягаЗ
Колонка
Качалка 3 Тяга 2
Качалка 2
К элеронам
Тяга 4
-Тяга 1
110.1а |
ВЕРТОЛЕТОВ
Педаль 1
Тяга 1
Z
Качалка
Тяга2
Тяга 4
ТягаЗ
Тормозная
гашетка
Подножка
педали
Педаль 2
Тяга 1
От ручного
привода
— F
—Рычаг 1
Г
& К рулям высоты
I Ю.2 |
Электромеханический
привод
\ Тяга 2
Рычаг 1
Шатун 2
Шатун 1
Рычаг 2
Тяга 1
Ручной
привод
Шатун 3
Рычаг 3
fi
Передача
движения
закрылку Д
ТягаЗ |
К секциям руля
направления
К педалям,
расположенным
слева
1 К задатчикам Пружина— давления Рычаг 2 в тормозной системе - -
с
110.2а |
Электромеханический Передача
привод | движения
Тяга2 /закрылку
Ручной
привод
Тяга 1 Рычаг 1
ТягаЗ
Рычаг 2
Шатун 2
Шатун 1
Коромысло
Шатун 3
-Тяга 2
К гидроусилителю
Электромагнитный
тормоз
К исполнительному
устройству
| 10.3а |
Тяга Тяга
от штурвала к элерону
Упор 4
Центрирующая
пружина
Карданная передача 1 Карданная передача 2
Электропривод Винтовая
триммирования передача 2
110.36 I
Качалка 1
Пружина 1
§-^AAAAAS~b§
К колонке 1
штурвала 1"
Тяга 2
Тяга 1
Винтовая
передача 1
Качалка 2
'///////г.
Пружина 2
ОН DWWV
Винт Гайка
Шлиц-шарнир
Электропривод
изменения Карданная передача 4
==” 5— 4
Дифференциальная
качалка 1
Карданная передача 3
Винтовая
передача 3
ЙШЖ
'///////,.
К правым
рулям высоты
Клевым
рулям высоты
Дифференциальная
качалка 2
, К колонке
5 штурвала 2
376
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
1. Принцип многопоточности передачи энергии реа-
лизуется (для получения заданных характеристик
функционирования, для повышения надежности
системы, для обеспечения безопасности) следующими
• параллельным соединением дублирующих управ-
ляющих звеньев задающих устройств (штурвалов, руко-
яток, педалей), управляющих каналов, в том числе кине-
матических цепей (см. рис. 151, схему 10.36)-,
• выполнением задающего устройства с нескольки-
ми степенями свободы и присоединением к нему не-
скольких передаточных кинематических цепей (см. схе-
мы 10.1 и 10.1а)-,
• параллельным присоединением к выходному звену
(для суммирования энергии) нескольких передаточных
механизмов (см. рис. 153, схему 10.9), или нескольких
приводов (см. рис. 152, схему 10.5а), или к одной управ-
ляющей системе нескольких выходных звеньев одинако-
вого назначения. В соединениях таких выходных звеньев
устанавливают развязывающую пружину, позволяющую
передать управляющие воздействия исправным приводам
при отказе (заклинивании штока в гидроцилиндре) одно-
го из приводов;
• параллельным соединением через дифференциаль-
ный механизм нескольких передаточных систем или не-
скольких приводов (см. рис. 152, схему 10.56 и 10.4в)-,
• параллельным подключением автоматических за-
дающих устройств, например активной виброзащиты или
устройств, поддерживающих заданное направление и
заданные режимы движения.
Для обеспечения возможности независимого ис-
пользования каждой из параллельных ветвей проводки
управления примерно для половины из всех исполни-
тельных механизмов предусматривают установку быст-
родействующего разъединительного устройства.
2. Принцип самоприспособляемости [отсутствия из-
быточных связей в кинематических цепях] реализуется за
счет использования следующих конструктивных решений:
• коротких цилиндрических шарниров (с регламен-
тированным зазором), эквивалентных трехподвижным
кинематическим парам;
• карданных соединений, эквивалентных двухпод-
вижным сферическим парам, и карданных передач (см.
рис. 152, схемы 10.4; 10.4в; 10.4г);
• сферических самоустанавливающнхся подшипни-
ков (качения или скольжения) в карданных соединениях,
в опорах длинных валов и др.
3. Для уменьшения требуемого управляющего воз-
действия между задающим устройством и рабочим зве-
ном устанавливают управляемый электропривод, гидро-
усилитель (управляемый гидропривод, действующий от
общего насоса) или пневмогидроаккумулятор (заряжае-
мый, например, под давлением потока воды на плоскость
руля — см. рис. 150 схему 9.2);
4. Для создания на управляющих звеньях необходи-
мого сопротивления (в системах с электро- или гидро-
усилителем) используют специально запрограммирован-
ные загрузочные устройства (см. рис. 151 схему 10.3).
Натяжение (сопротивление управляющему воздей-
ствию) регулируется в зависимости от температуры ок-
ружающей среды и режима движения с помощью вклю-
ченных в кинематическую цепь проводки автоматиче-
ских устройств.
5. Для согласованного управления приводами и син-
хронного движения выходных звеньев передаточные раз-
ветвленные системы выполняют в виде длинных валов,
соединенных карданными передачами, с ответвляющи-
мися коническими передачами. В передаточных системах
используют также рычажные механизмы и тяги, а также
канаты в совокупности с секторами или барабанами (см.
рис. 154 схему 11.2).
6. Для передачи движения из одной среды в другую
используют в основном поступательные или вращатель-
ные пары со скользящим (см. рис. 152), а также с разде-
лительным уплотнением (см. рис. 154, схему 11.2а).
7. Для обеспечения гарантированного выключения
привода или передаточного устройства (в конце хода)
наряду с концевыми выключателями предусматривают
специальные упоры в сочетании с механическим предо-
хранительным устройством (например муфтой предель-
ной нагрузки), отключающим привод.
8. Для возврата в нейтральное положение выходного
звена или управляющего звена привода (например, при
аварийном отключении задающего устройства) в переда-
точную систему вводят центрирующую пружину (см.
рис. 151, схему 10.3 а).
9. Для демпфирования крутильных колебаний в
синхронизирующую распределительную систему уста-
навливают (на одном из общих валов) многодисковый
тормоз с механизмом свободного хода. Прямое управ-
ляемое движение передается свободно, возвратное — при
преодолении трения в тормозе. Тормоз также может
удерживать в определенном положении выходные звенья
при обрыве проводки управления.
10. Устройства передачи движения, управляемого
гидро- или электропривода, а также суммирующих меха-
низмов в системе подключения дополнительных (автома-
тических) приводов выбирают из условия необратимой
передачи управляющего воздействия только в направле-
нии к выходному звену. Воздействие выходного звена на
управляющую передаточную систему должно быть ис-
ключено или сведено к минимуму за счет использования
элементов гидрораспределителя (см. рис. 152, схе-
му 10.5), электрорегулятора и т.п. или самотормозящего
механизма в приводе (винтовой передачи) и/или управ-
ляемых тормозов, автоматически срабатывающих пои
отключении привода (см. рис. 152, схему 10.56). Переда-
ча сил в дифференциальном рычажном механизме со
стороны автоматической задающей системы в направле-
нии ручной системы практически предотвращается за
счет выбора определенного соотношения углов давления
(см. рис. 151 схему 10.2).
11. Для получения заданной траектории ориентации
входное (исполнительное, управляемое) звено (руль, ло-
пасть, стабилизатор, часть крыла) соединяют с неуправ-
ляемым звеном (основанием) с помощью вращательной
(реже поступательной) пары (см. рис. 153 схемы 10.6,
10.7а, 10.9 и др.). Для осуществления сложного закона
изменения положения и ориентации рабочее звено при-
ПРИВОДЫ РУЛЕВЫХ устройств судов, самолетов и вертолетов
377
152. ПРИВОДЫ И ПЕРЕДАТОЧНЫЕ МЕХАНИЗМЫ В СИСТЕМАХ УПРАВЛЕНИЯ САМОЛЕТОВ
I I упор I—
Двухподвижное
(сферическое)
соединение В хНсГ
Гайка-"И^
Винт т
,, _ Тяга 1
Упор 2
Редуктор
Двухподвижное
(сферическое)
соединение А
Двигатель
Концевые
выключатели
Датчик обратной связи
110.46 |
Упор 3
Винт
-Ч
| 10.4а |
Рычаг
Тяга 2
Привод 1
Рычаг С
110.5а |
Тяга ВС
Рычаг В
Рычаг А
Управляющее
воздействие
Карданное соединение
с основанием (килем)
Стяжной
стержень
Радиальный
подшипник 2
Подшипниковая
опора гайки
Винт
Уплотнение
Ролики каретки
для предотвращения
вращения винта
| 10.4b |
Шатун
К
Привод 2
Карданное
соединение В
Упор 2
Упор 1
Стабилизатор Направляющая
Гайка-
Рычаг 2
Дифференциальный
рычаг
Гидроцилиндр
Шток
Соединено
с элероном
'Выходное
Рычаг 3 звено (качалка)
ТЛ Зубчатое
110.4г |
Электродвигатель
Винт
Шестерня Зубчатое
колесо
Гайка
Стабилизатор
Шлиц-шарнир
Рычаг
Винт
Карданное
соединение А
Тяга АВ
Рычаг 1
Тяга 1
Рычаг 2 'Ч
Пружинная тяга
Гидрораспределитель
Соединено
с элероном
Гидромотор 2
Гидроцилиндр
Передача движения
управляемому объекту
Тяга 2
Управляющее—. ___
воздействие /
Тяга 1
Рычаг 1
П05~1
Слив
Йп
| Слив Гидрораспределитель 1 Слив |
Подвод жидкости Подвод жидкости
от насоса от насоса
Электромагнитный Электромагнитный
коан 1 кран 2
От насоса Гидрораспределитель
378
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
соединяют к шатуну плоского или пространственного
рычажного механизма (см. рис. 153 схемы 10.8а, 10.86}.
12. Принцип унификации в системах управления
реализуется за счет многократного повторения качалок
(рычагов), шарниров, тяг, пружин, винтовых передач,
гидрораспределителей, гидроцилиндров и др. (см.
рис. 151,153, схемы 10.36, 10.9; рис. 152, схема 10.5а);
Рассмотрим некоторые принципиальные исполнения.
На схемах 9.1; 9.2 (рис. 150) представлены приводы
поворота судового руля, а на схемах 10.1 ... 10.9, 11.1 ...
11.3 - отдельные механизмы рулевого управления и сис-
тем стабилизации напралл гния полета самолетов и вер-
толетов.
Руль на схеме 9.1 установлен на рычаге (румпеле),
шарнирно соединенном с корпусом судна. Рычаг тягами
7 и 2 соединен соответственно с гайками 7 и 2. Гайки
перемещаются вдоль направляющих 7 и 2 посредством
винта. Винт имеет участки с правой и левой резьбой, со-
ответствующие резьбе гаек 7 и 2. При вращении винта
гайки сближаются или отдаляются по отношению друг к
другу. Движение гаек через тяги 7 и 2 преобразуется в
поворот рычага и руля.
Рычаг (румпель) в схеме 9.2 приводится в движение
вокруг центра опоры С двумя гидроцилиндрами 7 и 2.
Шток гидроцилиндра 7 шарнирно связан с коромыс-
лом 7. В результате образован кулисно-коромысловый
механизм. Такой же механизм, образованный гидроци-
линдром 2 и коромыслом 2, расположен симметрично
относительно рычага.
В точках А и В шарнирно соединены с данными ме-
ханизмами ползуны 7 и 2. Пара сил со стороны гидроци-
линдров на стенки направляющей ползунов 7 и 2 застав-
ляет поворачиваться рычаг.
В точках А и В шарнирно присоединены также
поршни 7 и 2, которые образуют замкнутую полость в
рычаге, связанную с пневмо-гидроаккумулятором. Бла-
годаря такому исполнению обеспечивается дополнитель-
ное воздействие от аккумулятора при повороте звена.
При его возвращении в положение, данное на схеме,
поршни 7 и 2 сближаются и в аккумуляторе накапливает-
ся энергия, которая возвращается при повороте судна.
В задающем механизме на схеме 10.1 (рис. 151)
управляющие воздействия передаются по двум ветвям:
• вращение штурвала преобразуется через реечную
передачу (шестерня-рейка), качалку (рычаг) 1, тягу 7,
качалку 2, тягу 2, качалку 3 в движение тяги 3, связанную
через другие устройства (на схеме не показаны) с элеро-
нами;
• наклон колонки передается через тягу 4 и другие
устройства рулям высоты.
Независимость (отсутствие взаимовлияния) переда-
чи двух движений обеспечивается при расположении
центров шарниров А и В на оси Y (в действительности
центры шарниров незначительно перемещаются относи-
тельно оси Y).
В задающем механизме на схеме 10.1а нажатием на
одну из педалей 1 или 2 через тяги 1 или 2 поворачивают
качалку и сообщают через проводку управления движе-
ние секциям руля направления. При этом педаль 2 или 1
под действием качалки перемещается в направлении к
пилоту. Нажатием носка ступни (поворотом в голено-
стопном суставе) перемещают тормозную гашетку и че-
рез тяги 3 или 4 воздействуют на задатчики давления в
тормозной системе.
Схемы 10.1 и 10.1а иллюстрируют возможность со-
вмещения в одном устройстве задания и передачи двух
управляющих воздействий. Эти устройства по существу
представляют собой пространственные дифференциаль-
ные рычажные механизмы.
На схеме 10.2 дано решение дифференциальной ка-
чалки, широко используемой в системах управления са-
молетов и вертолетов. Она представляет собой шарнир-
ный механизм с двумя степенями свободы в виде трех
кинематических цепей, параллельно присоединенных к
коромыслу (собственно качалке), причем две кинемати-
ческих цепи служат для передачи движения коромыслу, а
третья цепь передает движение коромысла рабочему зве-
ну. По существу дифференциальная качалка относится к
функциональному классу суммирующих механизмов.
В совокупности с системой управления она позволяет
усиливать сигналы управления за счет согласованного
подключения электропривода.
В качестве передаточного механизма она может ис-
пользоваться при неподвижной тяге 2. Но при этом с по-
мощью электропривода можно изменить положение точки
С и тем самым изменить передаточное отношение качал-
ки — соотношение сил, приложенных к тягам 3 и 1. Качал-
ку применяют также для подключения автопилота, ком-
пенсатора температуры, рулевых приводов, демпфера и др.
В данном примере коромысло — выходное звено
шестизвенного механизма, шатун 3 - общее звено для
кинематических цепей, соединенных с приводами: руч-
ным и электромеханическим. Движение от руки пилота
через тягу 1, рычаг 1 шатуны 1 и 3 передается коромыс-
лу, движение от электропривода передается коромыслу
через тягу 2, рычаг 2, шатуны 2 и 3. Движение рабочему
звену - закрылку — передается от коромысла через тягу 3.
Соотношение длин и расположение звеньев позволяет
свести к минимуму силовое воздействие со стороны элек-
тропривода на элементы ручного управления и максиму-
му — на коромысло. Это достигается соответственно благо-
даря углу давления в паре шатун 7 - рычаг 1, близкому к
90°, а в паре шатун 3 - коромысло, близкому к 0°.
Данный механизм плоский, и его звенья размещены
в параллельных плоскостях (конструктивное исполнение
показано на схеме 10.2а). Уменьшение избыточных свя-
зей достигают за счет коротких цилиндрических шарни-
ров, а также введением дополнительного шарнира А.
На схеме 10.3 представлено устройство в системе
рулевого управления, имитирующее нагрузку на руч-
ке/педали управления.
Рулевые приводы, например, в авиационной технике
работают по необратимой схеме, т.е. воспринимают
внешние нагрузки, не передавая их на ручки управления,
поэтому необходимо иметь в кинематической цепи за-
грузочное устройство, улучшающее процесс управления.
Тяга 7 соединена через систему рычагов и других
тяг или канатов с ручкой управления, а тяга 2 аналогии-
ПРИВОДЫ РУЛЕВЫХ устройств судов, самолетов и вертолетов
ним образом — с исполнительным устройством рулевого
управления. Рычаг 1, установленный между этими тяга-
ми, соединен через пружину с рычагом 2, а тот, в свою
очередь, - с электромагнитным тормозом. Пружина и
тормоз создают требуемую нагрузку F на ручке управле-
ния, и у летчика появляется ощущение реального сопро-
тивления перемещению объектов управления, хотя дан-
ное сопротивление несоизмеримо мало по сравнению с
действительным.
На схеме 10.36 представлена система изменения за-
грузки в ветвях проводки управления (от левой и правой
колонок 7 и 2 штурвалов) с помощью электропривода
триммирования и электропривода изменения передаточ-
ного отношения дифференциальных качалок 1 и 2. По-
следнее осуществляется перемещением точки С (см. так-
же схему 10.2), благодаря чему изменяется соотношение
сил в ветвях к задающему устройству (колонке штурва-
ла) и воспроизводящему устройству - приводам рулей
высоты.
На схеме 10.3а представлен пример включения в
проводку управления центрирующей пружины. При воз-
действии на качалку со стороны штурвала она поворачи-
вается и через упоры 1 или 2 сообщает движение рычагу
1 или 2. Относительное угловое перемещение рычагов
приводит к растяжению пружины. При прекращении
управляющего воздействия качалка возвращается в по-
ложение, при котором упоры 3 и 4 будут контактировать
с основанием.
Переходя далее непосредственно к приводам и ме-
ханизмам, воспроизводящим заданные положение и ори-
ентацию звеньев, отметим, что все они не имеют каких-
либо качественных особенностей по сравнению с общи-
ми решениями, используемыми в других машинах. Хотя
в авиации отдельно определена система рулевого управ-
ления в виде элеронов, рулей высоты и направления, но
для полноты картины следует рассмотреть и другие уст-
ройства, очень близкие по функции (например стабили-
зации направления движения и ориентации самолета,
снижения скорости, улучшение маневренности и др.).
Это тем более целесообразно, что у них много общего и в
конструкции. По этой причине далее показаны примеры
поворота стабилизатора (схема 10.4), выдвижения пред-
крылка (схемы 10.7, 10.7а, 10.76), выдвижения закрылка
(схемы 10.8, 10.8а, 10.86)', поворота интерцептора
(схемы 10.9,10.9а).
На схеме 10.4 (рис. 152) движение от высокоскоро-
стного и малогабаритного гидродвигателя через плане-
тарный (также малогабаритный) редуктор передается
винту. Гайка, перемещаясь по винту, передает движение
стабилизатору. Особенность данного устройства — ис-
пользование двухподвижных (сферических) кинематиче-
ских пар А и В по обоим концам передаточного меха-
низма. В качестве таких пар использованы карданные
двухподвижные соединения [универсальные шарниры,
шарниры Гука]. Данное решение позволяет исключить
избыточные связи и компенсировать погрешность отно-
сительного положения оси поворотной части и основания.
В схеме 10.4в осуществлено также резервирование
привода. При неработающем одном из приводов движе-
379
ние с меньшей (в 2 раза) скоростью будет передаваться
от другого привода.
В варианте на схеме 10.4а задают движение гайке
(например, так же, как на схеме 10.4а). Причем на конце
он имеет каретку с роликами, выполняющую совместно с
направляющими роль одноподвижной поступательной
пары.
На схемах 10.4 и 10.4г подшипниковая опора гайки
имеет карданное двухподвижное соединение с основани-
ем (или выходным звеном), благодаря чему ее ось может
самоустанавливаться в процессе передачи движения.
Вращение гайке сообщается через зубчатую передачу
(шестерня - зубчатое колесо). Корпус двигателя непод-
вижно прикреплен к корпусу подшипниковой опоры.
В конструктивном варианте на схеме 10.46 упорные
подшипники воспринимают значительные осевые на-
грузки и самоустанавливаются при незначительных ра-
диальных перемещениях. Центрирование гайки и вос-
приятие радиальных нагрузок обеспечивают радиальные
подшипники 7 и 2.
Особенность решения на схеме 10.46 - использова-
ние дублирующих бронзовых гаек 7 и 2. При недопусти-
мом износе обеих гаек нагрузка будет передаваться на
стальной стакан, имеющий несколько витков внутренней
резьбы, которые при нормальной работе не взаимодейст-
вуют с винтом. Хотя при этом КПД будет низким, однако
катастрофического отказа не произойдет.
Вторая особенность - установка внутри винта стяж-
ного стержня. Стержень обеспечивает благоприятное
распределение напряжений в винте и также дублирует
его функцию в части передачи осевых нагрузок.
На схеме 10.4 показано также подключение конце-
вых выключателей и датчика обратной связи с помощью
тяг 7 и 2.
На схеме 10.5 приведен гидроусилитель, используе-
мый в механической системе управления самолета или
вертолета.
Входное звено-тяга 1 соединено с ручкой управле-
ния, выходное звено-тяга 2 — с управляемым объектом.
Движение тяги 7 передается рычагу 7 и через дифферен-
циальный рычаг и тягу на шток гидрораспределителя.
Перемещение штока приводит к подаче жидкости в соот-
ветствующую полость гидроцилиндра. При этом шток
гидроцилиндра воздействует на рычаг 2 и перемещает
выходное звено. Одновременно осуществляется обрат-
ная связь: дифференциальный рычаг поворачивается
под действием рычага 2 и перемещает шток гидрорас-
пределителя, перекрывая подачу жидкости.
Гидроусилитель обеспечивает перемещение входно-
го и выходного звеньев в одну сторону с запаздыванием,
обусловленным срабатыванием гидропривода. Силы со
стороны управляемого объекта не передаются на входное
звено, а воспринимаются жидкостью в гидроцилиндре.
На схеме 10.5а показано параллельное соединение
трех приводов в системе управления движением одного
элерона. Принципиальное решение каждого из приводов
(в совокупности с гидрораспределителем) аналогично
схеме 10.5. Управляющее воздействие F передается ры-
чагу В, а через тяги АВ и ВС - рычагам А и С соответст-
380
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
153. МЕХАНИЗМЫ, ВОСПРОИЗВОДЯЩИЕ ДВИЖЕНИЯ ИСПОЛНИТЕЛЬНЫХ ЗВЕНЬЕВ
В СИСТЕМАХ УПРАВЛЕНИЯ САМОЛЕТОВ I 10 7а I
П5б~1
Шатун
Коромысло 1 Коромысло 2
I 107 |
Предкрылок Штанга
Винтовая пара
Предкрылок Шатун
Коромысло 2
Руль высоты
110.86
Закрылок
ПРИВОДЫ РУЛЕВЫХ устройств судов, самолетов и вертолетов
381
венно. Рычаг А (В или С) воздействует через тягу 1 и
рычаги 1, пружинную тягу и рычаг 3 на гидрораспреде-
литель, управляющий подачей жидкости в полости гид-
роцилиндра. Шток гидроцилиндра через качалку переда-
ет движение элерону. Обратная связь осуществляется
через соединение штока с рычагом 1.
На схеме 10.56 приведен один из приводов враща-
тельного действия, содержащий два гидромотора 1 и 2 и
передающих суммарную энергию через дифференциаль-
ный механизм выходному звену. Жидкость под давлени-
ем подводится одновременно по двум каналам через па-
рораспределитель 1 и гидрораспределитель 2 к гидромо-
торам 7 и 2 соответственно. При неработающем одном
гидромоторе движение выходному звену может переда-
ваться от другого гидромотора. При этом частота враще-
ния из-за дифференциального механизма, превративше-
гося в редуктор, уменьшается в 2 раза. При недопусти-
мой частоте вращения вала гидромотора 1 или 2 автома-
тически может сработать электромагнитный кран 1 или 2
и перекрыть канал. Краны 1 и 2 могут быть включены
также принудительно. Тормоза 1 и 2 срабатывают авто-
матически при соответствующих положениях гидрорас-
пределителей 1 и 2. Обратная связь — единая для обоих
параллельных ветвей и осуществляется через зубчатую
передачу, винтовую передачу (см. на схеме гайку и винт)
и гидрораспределители 1 и 2.
Примеры механизмов, размещенных в конце цепи
управления и предназначенных для воспроизведения за-
данных движений, даны на рис. 153.
Простейшие решения - реализация поворота выход-
ного звена вокруг фиксированной оси даны на схемах
10.6, 10.6а, 10.7а и 10.9. На схеме 10.6 использован при-
вод в виде кулисного механизма, в котором функцию
кулисы выполняет звено гидроцилиндра или винтовой
передачи.
На схеме 10.6а оси поворота рулей высоты распо-
ложены под углом к продольной оси самолета. От рычага
движение рулям высоты передается через карданные со-
единения В и С. Момент сил тяжести рулей высоты от-
носительно оси шарнира А уравновешен моментом силы
тяжести противовеса.
На схемах 10.7, 10.7а и 10.76 представлены вариан-
ты механизмов предкрылка-профилированной выдвиж-
ной скользящей или неподвижной части крыла, обеспе-
чивающей при безотрывном обтекании изменение (уве-
личение) угла атаки, реализацию высокой подъемной
силы, улучшение устойчивости и управляемости самолета.
В схеме 10.7а предкрылок установлен на криволи-
нейной штанге, перемещаемой в пазу крыла. Привод
штанги осуществляется через винтовую пару.
В схеме 10.7а предкрылок присоединен к коромыс-
лу двухкоромыслового механизма. Приводным звеном
является коромысло 2.
На схеме 10.76 предкрылок установлен на двух па-
раллельно-размещенных вдоль крыла двухкоромысло-
вых механизмах (коромысла 7 и 2 и шатун). Он присое-
динен к шатуну посредством шарнира. Приводится в
движение предкрылок тягой.
Закрылок на схеме 10.8 подвешен на направляющей
посредством роликовой каретки. Направляющая закреп-
лена на крыле. Выдвигается закрылок при повороте ры-
чага гидроцилиндром. Движение передается закрылку
через тягу. Звенья - рычаг, тяга, каретка и направляющая -
образуют пространственный четырехзвенный механизм.
Для синхронного управления закрылками они связаны
между собой тросовой системой, состоящей из тросов и
огибаемых ими секторов, закрепленных на рычаге. Пово-
рот сектора приводит к перемещению ветвей троса и к
повороту сектора на другом закрылке.
На схеме 10.8а закрылок перемещают относительно
крыла с помощью гидроцилиндра. Траектория и ориен-
тация закрылка задаются соответственно благодаря от-
слеживанию точки I профиля направляющей и копирова-
нию поворота звена АВ с помощью пантографа CBDEOI.
Линия С'Е (закрылка) поворачивается на тот же угол, что
и параллельная ей линия CD (коромысла ACD).
На схеме 10.86 элементы закрылка (дефлектор,
средняя часть и хвостовик) соединены между собой ки-
нематической цепью HJKLMN. Средняя часть закрепле-
на на круговой (или винтовой - для внешних закрылок)
направляющей 1. Направляющая 1 перемещается по ро-
ликам Р и R, установленным на крыле. Направляющая 2
дефлектора прикреплена к направляющей 1. С опорой А
дефлектор соединен кинематической цепью ABEFG, а с
направляющей 1 - кинематической цепью АВС. Благода-
ря кинематическому соединению элементов закрылка с
крылом и с помощью подъемника они совершают слож-
ное движение и ориентируются определенным образом.
На схеме 10.9 представлен механизм интерцептора -
внешнего элемента управления самолетом по крену. Его
выполняют поворотным или выдвижным. Интерцептор
поворачивают вокруг оси гидроцилиндром. Движение
передается через тяги 1, 4, рычаги 7,2 и тяги 3 и 2.
На схеме 10.9а — вариант подвески и механизма пе-
ремещения интерцептора с помощью тяги 7, располо-
женной вдоль крыла. Тяга 1 взаимодействует через ролик
с кулисой. При повороте кулисы движение через тягу 2,
рычаг и тягу 3 передается кронштейну, прикрепленному
к интерцептору. Интерцептор прикреплен к скобам,
обеспечивающим возможность его поворота вокруг оси
опор, размещенных внутри крыла. Примерно в середине
лонжерона интерцептора размещен ролик, катающийся
по направляющей. Данное решение позволяет разгрузить
интерцептор от изгиба.
Довольно сложные задачи решаются при конструи-
ровании специфичных узлов управления в вертолетах.
Это, в частности, автомат перекоса, с помощью которого
осуществляют изменение общего и циклического шага
несущего винта (см., например, параграф 3.3); система,
обеспечивающая изменение общего шага в рулевом вин-
те (рис. 154, схема 11.1)', система, связывающая автомат
перекоса с другими управляемыми устройствами (схе-
ма 11.2); и, наконец, система согласованного изменения
общих и циклических шагов в вертолетах с двумя соосно
расположенными несущими винтами (схема 11.3).
382
МЕХАНИЗМЫ РУЛЕВОГО УПРАВЛЕНИЯ
На схеме 11.1 представлен лопастной винт для соз-
дания момента, противодействующего вращающему мо-
менту несущего винта и обеспечивающий целенаправ-
ленный поворот корпуса вертолета вокруг оси несущего
винта.
Лопасти присоединены к валу посредством двух
шарниров В и А с пересекающимися осями. На валу ус-
тановлено колесо конической зубчатой пары, через кото-
рую передается вращение.
Управление лопастями — поворот вокруг продоль-
ных осей — осуществляют перемещением тяги 1, соеди-
ненной с крестовиной. Движение крестовины через тя-
гу 2 передается рычагу, с которым неподвижно соедине-
на лопасть. Все лопасти винта (в данном примере их
четыре) поворачиваются при этом на одинаковый угол,
вследствие чего меняется общий шаг винта и соответст-
венно величина противодействующего момента.
Чтобы крестовина вращалась вместе с валом, между
валом и тягой 1 выполнено шлицевое соединение, допус-
кающее только продольное относительное движение со-
единенных звеньев.
На схеме 11.2 представлена проводка управления
стабилизатором вертолета. Ползун автомата перекоса
при перемещении вдоль направляющей сообщает враща-
тельное движение сектору. Передача движения осущест-
вляется посредством шестизвенного шарнирного меха-
низма. Сектор при повороте через канаты [тросы] пере-
дает движение барабану. Вращение барабана посредст-
вом винтовой пары преобразуется в поступательное дви-
жение винта, которое далее передается через тягу
стабилизатору.
На схеме 11.2а отдельно представлен канатно-
винтовой механизм. В нем движение натянутого каната
за счет фрикционного взаимодействия передается бара-
бану с винтовыми канавками. Барабан имеет внутрен-
ПРИВОДЫ РУЛЕВЫХ устройств судов, самолетов и вертолетов
383
нюю резьбу, сопряженную с винтом. Барабан вращается
в опорах корпуса и сообщает осевое движение винту.
Винт неподвижно соединен с выходным звеном и удер-
живается от проворачивания с помощью шлиц-шарнира
плоской кинематической цепи, связывающей выходное
звено с корпусом. Щлиц-шарнир не препятствует посту-
пательному перемещению винта.
На схеме 11.3 представлено совокупное устройство
для привода воздушных винтов, расположенных соосно,
и для управления их лопастями.
Лопасти верхнего винта посредством звеньев СВ и
ВА шарнирно присоединены к валу 1. Лопасти нижнего
винта через звенья FG и GE присоединены шарнирно к
валу 2. На валах 1 и 2 (вал 1 расположен внутри вала 2)
установлены соответственно конические зубчатые коле-
са 1 и 2, вращаемые конической шестерней, установлен-
ной на приводном валу. При вращении приводного вала
винты вращаются в разные стороны.
Для управления общим и циклическим шагом вин-
тов служит система тяг и рычагов.
Общий шаг изменяют, перемещая ползуны 1 и 2.
Эти ползуны можно перемещать одновременно на оди-
наковое расстояние с помощью канатной передачи 2 или
на разное расстояние с помощью канатной передачи 1.
При повороте барабана с помощью канатной передачи 2
посредством винтовой пары 2 вращение барабана 2 пре-
образуется в поступательное движение обоих ползунов.
От ползуна 1 через рычаг 1 передается движение лопасти
верхнего винта. Одновременно поворачиваются все ло-
пасти верхнего винта на одинаковый угол. От ползуна 2
движение через рычаг 2 и тягу 6 передается лопасти
нижнего винта.
Одновременно поворачиваются все лопасти нижне-
го винта на одинаковый угол. При повороте барабана 1 с
помощью канатной передачи 1 движение ползуну 1 пере-
дается через винтовую пару 1, а ползуну 2 - через винто-
вую пару 3. Далее движение передается так, как описано
выше, но происходит различное изменение общего шага
верхнего и нижнего винтов.
Для изменения циклического шага винтов служит
тяга 3. При ее перемещении перекашивается кольцо, ус-
тановленное на сферической опоре. Вместе с ним пере-
кашивается крестовина 3. Через тягу 5, рычаг 2 и тягу б
передается движение лопасти нижнего винта. Через тя-
гу 4, крестовины 2 и 1, тягу 2, рычаг 1 и тягу 1 движение
передается также лопасти верхнего винта. Угол поворота
лопасти вокруг ее продольной оси при вращении винта
изменяется от максимума до минимума в зависимости от
расположения оси лопасти в пространстве.
Для исключения относительного поворота звеньев
при их относительном продольном перемещении служат
шлиц-шарниры 1, 2, 3, составленные из двух шарнирно
соединенных звеньев.
Альтернативными вариантами решений, показанных
на схеме 11.3, могут быть следующие:
1. Соединения СВА и FGE выполнены в виде упру-
гих перемычек из композиционного материала.
2. Сферические опоры 1 и 2 конструктивно испол-
нены в виде универсального шарнира (шарнира Гука,
карданного соединения).
3. Приводы вала 1 и 2 осуществлены от индивиду-
альных источников с согласованным по угловой скоро-
сти и по направлению (в разные стороны) движением.
4. Для перемещения ползунов 1 и 2 использованы
механизмы с индивидуальными приводами с согласован-
ным управляемым изменением параметров движения.
Таким образом, при единой структуре может быть
достаточное для выбора число кинематических схем.
Что касается реактивных рулевых и/или стабилизи-
рующих систем, то в них для поворота двигателей, сопел,
направляющих струю аппаратов могут быть использова-
ны принципы конструирования, приведенные выше.
Уважаемый читатель!
На этом «ИДЕОЛОГИЯ КОНСТРУИРОВАНИЯ»
еще не завершена:
ПРОДОЛЖЕНИЕ,
РАЗВИТИЕ
И РАЗЪЯСНЕНИЯ
(в популярной форме)
публикуются на цветной вкладке
«УЧИМСЯ КОНСТРУИРОВАТЬ»
в ежемесячном журнале
«СПРАВОЧНИК. Инженерный журнал»
ЩИТОВАЯ ОПАЛУБКА С ИЗМЕНЯЕМЫМ РАБОЧИМ СЕЧЕНИЕМ (ДЛЯ ФОРМОВАНИЯ ЖЕЛЕЗОБЕТОННЫХ КОЛОНН)
Переставной крепежный болт
Гилрой илиндр
Рабочая
площадка
Ограждение
рабочей
площадки
Боковой
шит.
? Направляющие
п~ балки
Гидроцилиндр 1
Гидрош1линдр2
G.
Гидронилиндр 2
Неподвижны
шит I
Прямолиие?
перемешаем
ПИГГ
A, B.C,G.... -
поступательные па pi
Щиты, l_L<
поступательно
перемещаемые
в пространстве
Боковые
шиты
Направляющие
балки
Рао оч а Я''
площадка
НАУЧНО-ТЕХНИЧЕСКОЕ ИЗДАНИЕ
Александр Филиппович КРАЙНЕВ
ПРЕОБРАЗОВАНИЕ ПЛОСКОГО ЧЕТЫРЕХЗВЕНПОГО
КЛИНОВОГО МЕХАНИЗМА (ПРИ РАСПОЛОЖЕНИИ
НАПРАВЛЯЮЩИХ ПОСТУПАТЕЛЬНЫХ ПАР ПОД ПРЯМЫМ
УГЛОМ) В ПРОСТРАНСТВЕННЫЙ МЕХАНИЗМ
ДЛЯ ВСЕСТОРОННЕЙ ТРАНСФОРМАЦИИ РАБОЧЕЙ КАМЕРЫ
Сжимаемое тело
Гидроиилинлр
Пример
трансформации
рабочего сечения
опалубки
Боковые
рабочие
шиты
Еху Е х элементы
силового замыкания
Шиты,
поступательно
подвижные
в плоскости
ИДЕОЛОГИЯ
КОНСТРУИРОВАНИЯ
Гидронилиндр
Г ядро цилиндр 1
Рабочая
камера
(замкнутая
полость)
Лицензия ИД № 02651 от 28.08.00
Ответственный за выпуск П.Е. Клсйзер
Редакторы: С.М. Макеева и А. А. Куликова
Компьтерная графика А.Ф. Крайнева
Корректор М.С. Рослякова
Инженер по компьютерному
макстироанию Г.Ю. Корабельникова
Сдано в набор 10.07.03. Подписано в печать 30.10.03. Формат 60x90 1/8
Бумага офсетная. Гарнитура Times. Печать офсетная
Усл. печ. л. 48.0. Уч.-изд. л. 47,07. Тираж 2000 экз. Заказ 9092
Издательство "МАШИНОСТРОЕНИЕ Г
107076, Москва, Стромынский пер., 4
Оригинал-макет подготовлен в ООО “Издательство МАШИНОСТРОЕНИИ
Отпечатано в ГУП ППП “Типография "Наука” РАН
121099, Москва, Шубинский пер., 6
Александр Крайнев
ИДЕОЛОГИЯ
КОНСТРУИРОВАНИЯ
Общие принципы и тенденции совершенствования
конструкций
Структура и построение компьютерного банка схем
и конструктивных решений
Внешний вид, композиционные решения,
организация рабочего пространства, безопасность
и технологичность конструкции
Структурные элементы, составление вариантов,
конструктивные преобразования, совмещение
и разделение функций
Обеспечение самоприспособляемости к внешним
воздействиям. Самоустанавливаемость звеньев
Синтез схем с рациональными углами давления
Конструирование средств виброзащиты
и вибровозбуждения
отверстие увеличивается настолько,
что можно легко вставить в него хвостовик
инструмента. При остывании патрона
хвостовик сильно зажимается в отверстии.
При извлечении инструмента патрон
нагревают так быстро, что тепловое поле
не успевает распространиться на зажатый
хвостовик инструмента. При этом расширяется
только отверстие, а хвостовик остается
холодным, и его можно вынуть из патрона.
Начальная форма
поперечного сечения
зажимного патрона
Отверстие,
в которое
вставляют
Многообразие схем и конструктивных решений
механических соединений, подшипников,
сцепных муфт, тормозов, зубчатых редукторов,
многоскоростных передач и вариаторов
Механические элементы и системы управления
Хвостовик
Упругий самоцентрирующий зажимной патрон.
Последовательность зажатия
После снятия нагрузки на патрон
отверстие стремится принять
начальную форму, и хвостовик
инструмента зажимается.
МОСКВА* 2003
Сжимая патрон е указанных направлениях,
добиваются превращения некруглого
центрального отверствия в круглое.
В него можно свободно вставить хвостовик
зажимаемого инструмента.
механизм
Рабочий
валок
Опорные
валки
Несколько гидроцилиндров с помощью клиновых механизмов перемещают
опорные седла и обеспечивают противоизгиб оси опорных валкса.
Опорное Клиновой
седло
УПРАВЛЯЕМАЯ КОМПЕНСАЦИЯ ДЕФОРМАЦИЙ, ОТКЛОНЕНИЙ ФОРМЫ
И ИЗНОСА ВАЛКОВ ПРИ ПРОКАТКЕ ТОНКОЙ (0,01 ...0,9 мм) ПОЛОСЫ
Приводной валок
Сменные
регулировочные
прокладки
Ось
опорного
валка
Клиновой
механизм
регулирования
нажатия
опорного валка
Шток
гцдроцилиндра
Опорные
цилиндрические
валки
— Рабочие валки
в деформированном
состоянии
Синхронизированный
поворот
эксцентриковых
осей позволяет
одновременно
перемещать
валки при настройке
работы
прокатного стана
Прокатываемая
полоса
Готовая
полоса
Возможное предельное положение рабочих валков
Fy ' нажимная радиальная сила опорного ватка
Шлифованные рабочие валки имеют
специальное осевое сечение. Они
прижаты к прокатываемой полосе
опорными валками. Изгиб валков
из-за переменной толщины исходной
заготовки и переменных сип прижатия
изменяется в процессе прокатки.
По этой причине, а также из-за тепловых
деформаций и износа валкое толщина
полосы может получаться различной
(по ширине). Для компенсации указанных
отклонений рабочие валки непрерывно
(автоматически) перемещают в осевом
направлении и при этом получают полосу
заданной толщины с отклонениями
в пределах допусков.
Fy - нажимная сила и направление
осевого перемещения рабочего валка
Прокатываемая полоса