/














































































































































































































































































































































Автор: Бакулин П.И. Блинов Н.С.
Теги: астрономия астрофизика исследование космического пространства геодезия математика
Год: 1977




Текст
П. И. БАКУЛИН, Н. С. БЛИНОВ
СЛУЖБА
ТОЧНОГО ВРЕМЕНИ
ИЗДАНИЕ ВТОРОЕ,
ПЕРЕРАБОТАННОЕ
ИЗДАТЕЛЬСТВО «НАУКА»
ГЛАВНАЯ РЕДАКЦИЯ
ФИЗИКО-МАТЕМАТИЧЕСКОЙ ЛИТЕРАТУРЫ
Москва 1977
529
Б19
УДК 529.781
Служба точного времени. Бакулин П. И., Бли¬
нов Н. С., Главная редакция физико-математической литературы
издательства «Наука», М., 1977, 352 стр.
В книге дается систематическое изложение способов определе¬
ния, хранения и передачи точного времени. Наиболее детально
рассматриваются вопросы, связанные с определением точного вре¬
мени из астрономических наблюдений, астрономические инстру¬
менты и методика наблюдений на них.
Дано подробное описание приборов — хранителей точного
времени, начиная от астрономических маятниковых часов и до атом¬
ных стандартов частоты различных типов. Приводится описание
современных методов передачи и приема сигналов точного вре¬
мени.
Основная задача книги — познакомить читателя с принци¬
пами хронометрии. Более кратко изложены научные задачи, свя¬
занные с определением времени, такие, как изучение неравномер¬
ности вращения Земли, движения материков, приливы и т. д.
Одна глава книги посвящена новым методам служб времени —
радиоинтерферометрии и лазерной локации.
Книга рассчитана на читателей, знакомых с основами астро¬
номии и радиоэлектроники.
Табл. 23, илл. 141, библ. 12.
Павел Иванович Бакулин, Николай Сергеевич Блинов
ф1УШБА ТОЧНОГО ВРЕМЕНИ
М., 1977 г., 352 стр. с илл.
Редактор Г. С. Куликов
Технический редактор В. Я. Кондакова
Корректоры Е. А. Белицкая, JI. С. Сомова
Сдано в набор 23/VIII 1977 г. Подписано к печати 9/XII 1977 г.
Бумага 84х108!/з2, тип. № 1. Физ. печ. л. 111-Ь 1 вкл. Условн. печ. л. 18,9.
Уч.-и8д. л. 18,16. Тираж 2950 экз. Т-20775. Цена 2 р. 20 к.
Заказ. № 680
Издательство «Наука*
Главная редакция физико-математической литературы
117071, Москва, В-71, Ленинский проспект, 15
1-я тип. издательства «Наука»
199034, Ленинград, В-34, 9 линия, д. 12
^ 20602—180 ^ © Главная редакция
" ntv-wrm 77 1о6-7о физико-математической литературы
/ издательства «Наука*,
с изменениями, 1977 г.
ОГЛАВЛЕНИЕ
Предисловие ко 2-му изданию 6
Введение 7
Глава /. Единицы меры и системы счета времени 10
§ 1.*3вездные сутки;‘звездное время (10). § 2.* Равномерное
(среднее), истинное и квазиистинное звездное время (И). § 3.
сИстинные солнечные сутки; 'истинное солнечное время (14).
§ 4. Среднее эклиптическое и среднее экваториальное солнце
(16). § 5.#Средние солнечные сутки; •"среднее солнечное время
(18). § & Связь истинного солнечного времени со средним (урав¬
нение времени) (18). § 7. Относительная продолжительность
средних солнечных и звездных суток (21). § 8. Связь среднего
солнечного времени со звездным (23). § 9. ^Системы счета вре¬
мени (26). § 10.• Продолжительность тропического года. Бес¬
селев год (31). § 114 Календари юлианский и григорианский (32)
§ 12. Линия перемены даты (36). § 13. Астрономический и исто¬
рический счет времени (37). § 14. Юлианские дни (38). § 15.
Неравномерность вращения Земли (39). § 16. Влияние колеба¬
ний полюса на измерение времени (41). § 17. Квазиравномерное
время (44). § 18.J Эфемеридное время (46). § 19. Определение
разности между эфемеридным временем и всемирным (50).
§ 20. Эфемеридная секунда (57). § 21. Связь эфемеридного вре¬
мени с атомным (57).
Глава II. Приборы для измерения времени 60
§ 22. Общие замечания (60). § 23. Поправка и ход часов (61).
§ 24. Систематические и случайные изменения хода часов; оценка
качества часов (62). § 25. Маятник астрономических часов (65).
§ 26. Подвесное приспособление (69). § 27. Маятниковые часы
Шорта (71). § 28. Часы Федченко (75). § 29. Кварцевые часы.
Ламповые генераторы (77). § 30. Кварцевые разонаторы (81).
§ 31. Генераторы с кварцевой стабилизацией (85). § 32. Блок-
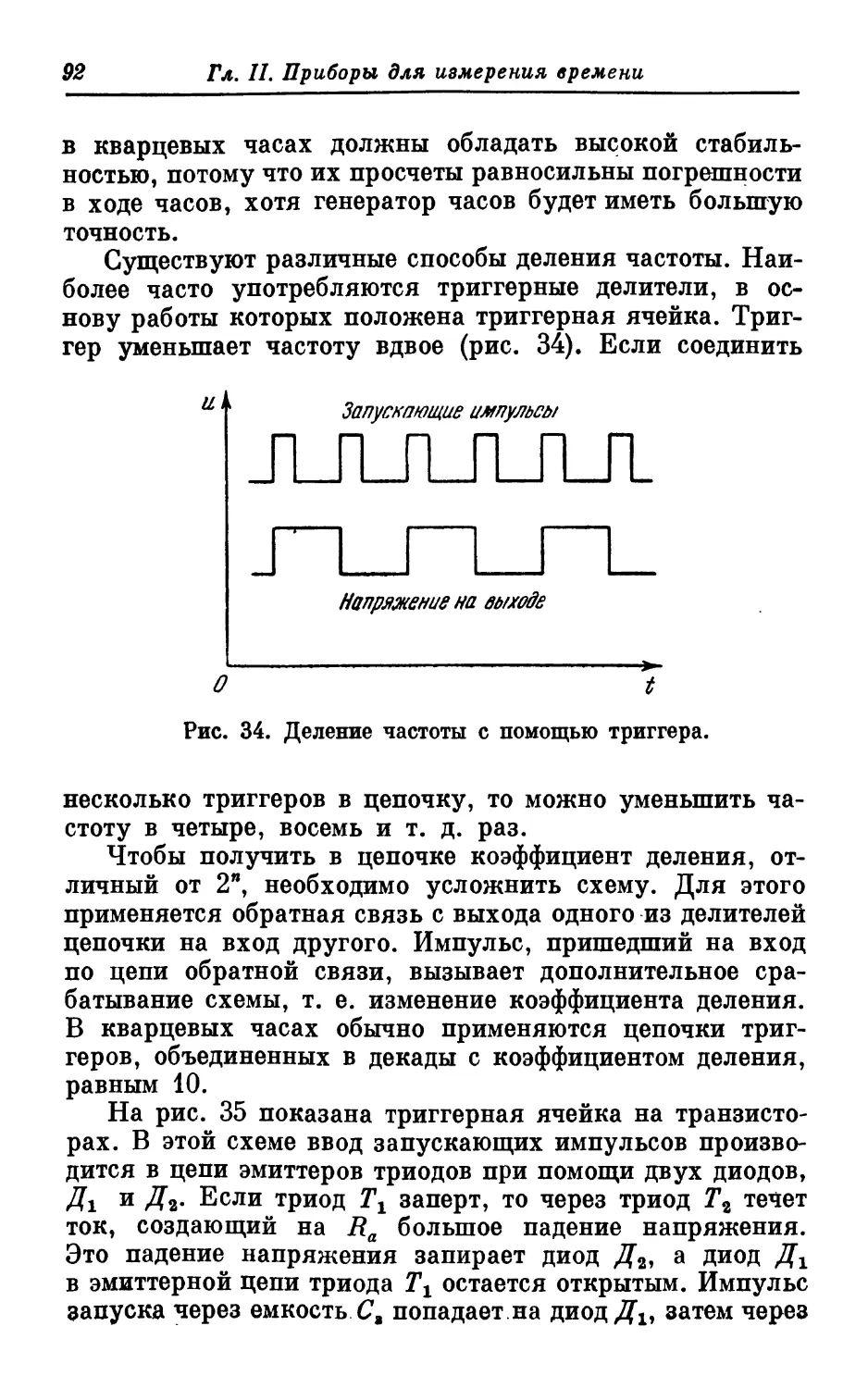
схема кварцевых часов (87). § 33. Триггерные делители частоты
(91). § 34. Фазовращатели (94). § 35. Точность кварцевых ча¬
сов (98). § 36. Атомные и молекулярные часы. Возникновение
спектров атомов и молекул (99). § 37. Спектры щелочных ме¬
таллов. Атомные пучки (102). § 38. Атомно-лучевой радиоспек-
троскоп (105). .§ 39. Атомно-лучевые часы (107). § 40. Моле¬
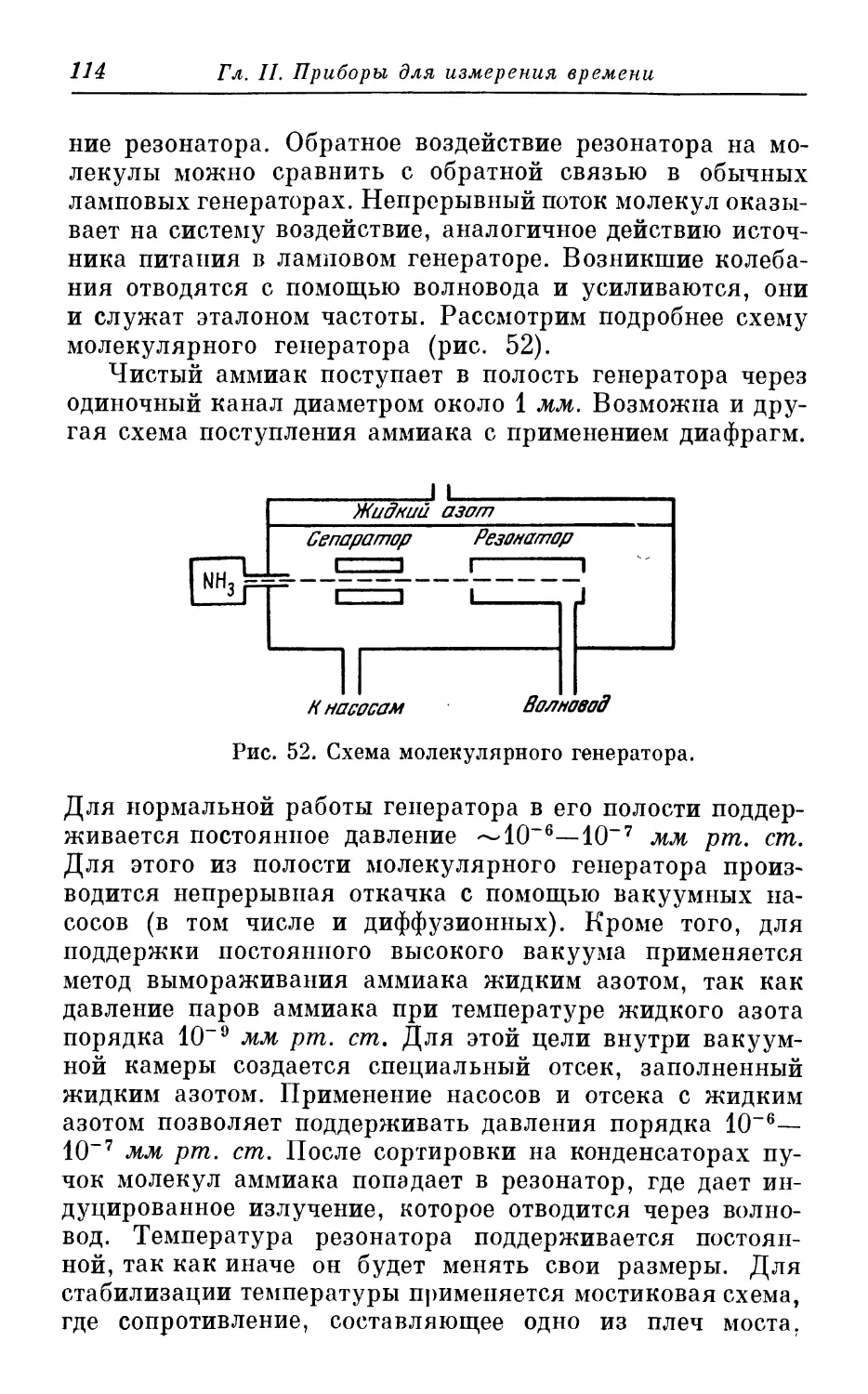
кулярные генераторы (li2). § 41,.Использование модекудяр-
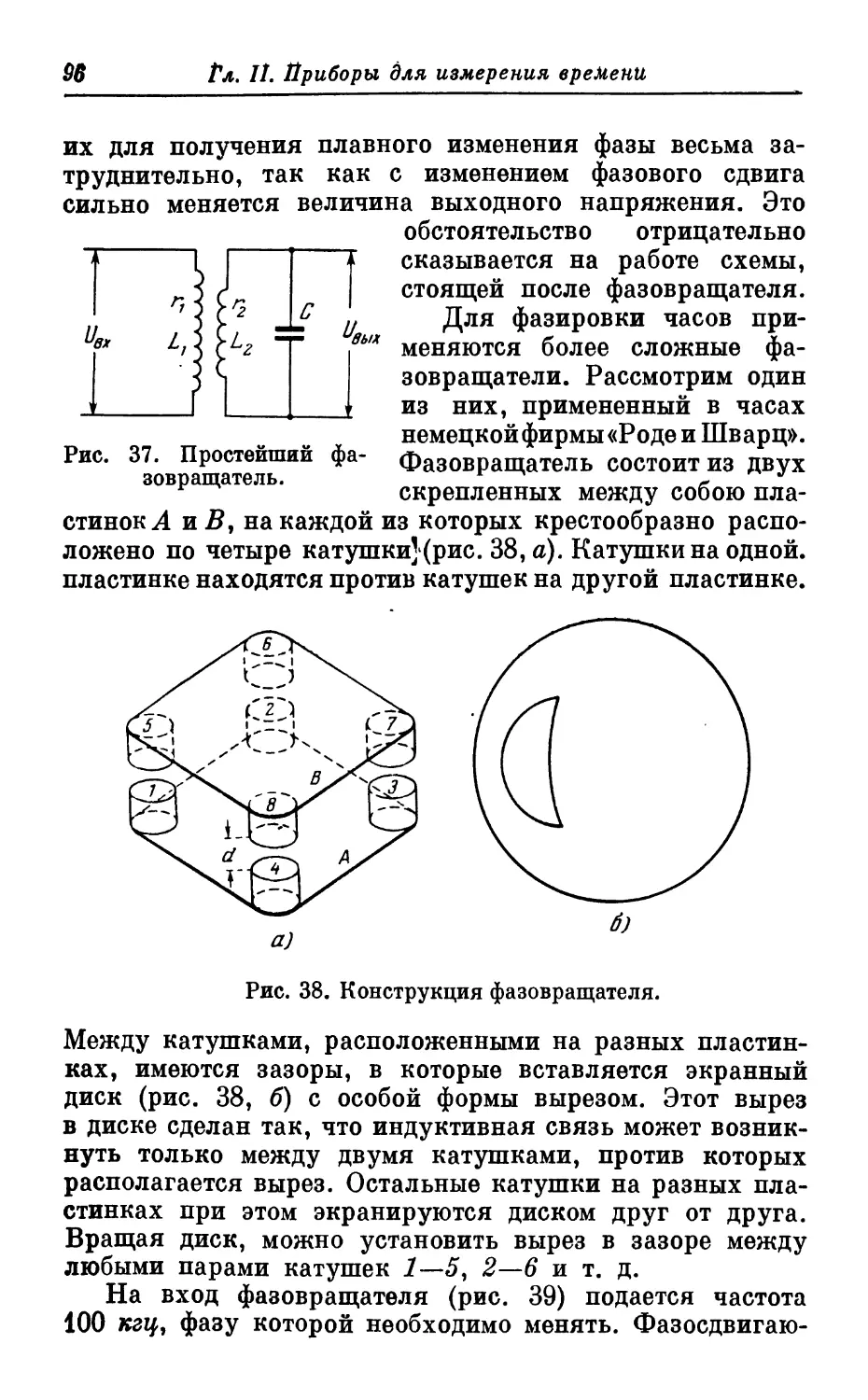
4
Оглавление
ных генераторов для создания высокоточных хранителей вре¬
мени (115). § 42. Водородный генератор (117). § 43. Точность
атомных часов (119) § 44. Измерительная аппаратура. Хро¬
носкоп (121). § 45. Электронные счетчики и частотомеры (122).
§ 46. Хронографы. Шлейфовый осциллограф (126). § 43. Сум¬
мирующие хронографы (129).
Глава III. Астрономические инструменты для определения
точного времени 135
§ 48. Основы определения поправки часов (135). § 49. Пас¬
сажный инструмент. Общее описание (136). § 50. Пассажный
инструмент в меридиане. Его основные ошибки (141). § 51.
Основная формула пассажного инструмента в меридиане (143).
§ 52. Определение числовых значений ошибок i, с и к (147).
§ 53. Неравенство и неправильности цапф (150). § 54. Визуаль¬
ная регистрация моментов прохождения звезд; контактный мик¬
рометр (151). § 55. Вычисление поправки часов. Программы
наблюдений (155). § 56. Заключение о визуальных наблюде¬
ниях на пассажном инструменте (158). § 57. Фотоэлектрический
метод регистрации прохождений звезд (159). § 58. Фотоумно¬
жители и фотоэлектрические установки (162). § 59. Фотоэлек¬
трическая установка с усилителем переменного тока (166).
§ 60. Фотоэлектрическая установка Н. Н. Павлова с зеркаль¬
ной визирной решеткой (169). § 61. Запаздывание фотоэлектри¬
ческой установки (171). § 62. Определение запаздывания для
сигналов трапециевидной формы с синусоидальными сторонами
(178). § 63. Определение запаздывания фотоэлектрической уста¬
новки при наблюдениях (182). § 64. Определение диаметра
изображений звезд (183). § 65. Новые методы фотоэлектрической
регистрации звезд (185). §66. Преимущества фотоэлектрических
пассажных инструментов перед визуальными (190). § 67. Фото¬
графическая зенитная труба (191). § 68. Определение моментов
кульминаций звезд на фотографической зенитной трубе (194).
§ 69. Измерение фотографических пластинок зенитной трубы
(197). § 70. Регистрация моментов времени на фотографической
зенитной трубе (202). § 71. Ротор зенитной трубы (205). § 72.
Труба инструмента. Ртутный горизонт (208). § 73. Програм¬
мные автоматы для наблюдений на фотографической зенитной
трубе (210). § 74. Влияние инструментальных ошибок фото¬
графической зенитной трубы на определение поправок часов
(212). § 75. Основные достоинства и недостатки фотографической
зенитной трубы (216). § 76. Призменная астролябия (218).
§ 77. Призма Волластона (221). § 78. Принцип действия безлич¬
ного микрометра А. Данжона (223). * § 79. Призменная астроля¬
бия А. Данжона (225). § 80. Вывод рабочих формул для обра¬
ботки наблюдений на астролябии А. Данжона (231). § 81.
Основные особенности астролябии (234). § 82. Приборы*для опре¬
деления эфемеридного времени (234). § 83. Измерение фотопла¬
стинок и вычисление поправки ДГ (238). § 84/ПавильоньГдля
астрономических** инструментов. Влияние внешней среды на
точность наблюдений (242).
Оглавление
5
Глава IV. Новые способы астрономических наблюдений
в службах времени 249
§ 85. Использование радиоинтерферометров для целей службы
времени (249). § 86. Использование <лазерной локации ИСЗ и
Луны для определения всемирного времени и уточнения коор¬
динат пунктов наблюдений (262). § 87. г Лазерный гироскоп и
возможность его применения в службах времени (268).
Глава V. Служба времени 272
§ 88. Международная Служба времени (272). § ^89. Служба
времени СССР (274). § 90. Определение и хранение точного
времени (276). § 91. Атомное время (278). § 92. Распростране¬
ние точного вреаЙЙи (281). § 93. Прием сигналов точного вре¬
мени (290). § 94. Определение запаздывания (298). § 95. Вы¬
числение сводных моментов приема сигналов точного времени
(301). § 96. Бюллетени Международного Бюро времени (BIH)
(308). § 97. Получение шкалы атомного времени TAI в системе
BIH (310). § 98. Геофизические задачи, решаемые службами
времени (313). § 99. Определение долгот (317). § 100. Изменяе¬
мость долгот в результате смещения материков (321).
Глава VI. Улучшение прямых восхождений звезд, использу¬
емых для определения времени 326
§ 101. Общие соображения (326). § 102. Определение случайных
ошибок исходного каталога (327). §’103.* Определение система¬
тических ошибок вида Даа исходного каталога)? (328). § 104.
Определение систематических ошибок вида Да8 исходного ка¬
талога (335). § 105. Определение систематических ошибок вида
Аат исходного каталога (338). § 106. Сводный каталог служб
U времени Советского Союза (339).
Приложения 343
Таблица. 1. Перевод промежутков среднего времени в промежут¬
ки звездногоУвремени (343). Таблица 2. Перевод] промежутков
звездного времени в промежутки среднего времени (344).
Таблица 3. Моменты^ начала тропического года (345).
Таблица^. Поправка звездного ^времени для * разных дол¬
гот (346). Таблица 5. Юлианскии период (347).
Литература 352
ПРЕДИСЛОВИЕ КО 2-МУ ИЗДАНИЮ
Предлагаемое вниманию читателей 2-е издание пред¬
ставляет собой систематическое изложение современных
основ теории и практики определения точного времени.
В основу книги положен спецкурс «Служба времени»,
много лет читаемый на астрономическом отделении физи¬
ческого факультета МГУ. Большая часть книги посвя¬
щена астрономическим методам определения времени и
другим связанным с этим вопросом проблемам.
Во втором издании добавлена глава, в которой рас¬
сматриваются методы определения времени с помощью
радиоинтерферометров и лазерных установок. Перера¬
ботаны с учетом современных достижений разделы, по¬
священные^ хранению времени, передаче и приему сигна¬
лов точного времени, и ряд других параграфов.
Основная цель книги — познакомить читателя с мето¬
дикой определения, хранения и передачи точного вре¬
мени и с задачами практического и научного характера,
возникающими при этом.
Книга рассчитана на читателей, знакомых с основами
астрометрии и радиоэлектроники. Она будет полезна
астрономам, начинающим специализироваться в области
службы времени (особенно студентам и аспирантам),
геодезистам, геофизикам, а также всем, кого интересуют
вопросы определения точного времени.
Введение и параграфы 1—28, 48—56 и 88—89 напи¬
саны П. И. Бакулиным, все остальные параграфы напи¬
саны Н. С. Блиновым.
Авторы
ВВЕДЕНИЕ
Измерение времени является одной из важнейших
задач астрометрии и современной физики. Для ее реше¬
ния необходимо:
1) установить единицы меры и системы счета времени,
2) иметь целесообразно устроенные счетчики единиц
времени,
3) периодически или непрерывно контролировать ра¬
боту этих счетчиков.
Первая часть задачи — теоретическая и решается мето¬
дами сферической астрономии, небесной механики и фи¬
зики.
Вторая часть решается с помощью точной механики,
радиотехники и электроники путем создания соответ¬
ствующих приборов времени и различной измерительной
аппаратуры.
Третья часть задачи решается специальными лабора¬
ториями, носящими название «служб времени», путем
целесообразно поставленных астрономических наблюде¬
ний и исследований.
Измерение какой-либо величины, вообще, сводится
к сравнению ее с другой величиной, принятой за еди¬
ницу меры. Единица меры может быть выбрана произ¬
вольно, но она должна быть: а) однородной с измеряе¬
мой величиной, б) удобной для практического применения
и в) по возможности постоянной. (Если единица меры —
величина непостоянная, то при измерениях должны учи¬
тываться ее изменения, для чего необходимо знать законо¬
мерность, с которой она меняется.)
Из этих условий вытекает, что за единицу меры вре¬
мени может быть выбран любой промежуток времени,
который был бы постоянным и удобным для практичес¬
кого использования. Для установления такого проме¬
жутка необходимо иметь какой-либо, лучше всего пери¬
8
Введение
одический, процесс; тогда продолжительность одного
или некоторого числа периодов этого процесса может
быть принята за эталонную единицу для измерения вре¬
мени.
Для получения эталонных единиц времени использу¬
ются следующие периодические процессы:
1) вращение Земли вокруг своей оси,
2) обращение Земли вокруг Солнца,
3) излучение (поглощение) электромагнитных boj i
атомами или молекулами некоторых веществ при опреде¬
ленных условиях.
Жизненная деятельность людей теснейшим образом
связана со сменой дня и ночи, т. е. с вращением Земли
вокруг своей оси. Поэтому именно этот процесс и исполь¬
зуется в большинстве случаев для получения основной
эталонной единицы времени.
Вращение Земли непрерывно и достаточно равномерно.
Неравномерность вращения Земли (см. § 15), открытая
сравнительно недавно, не имеет существенного значения
при решении очень многих задач и поэтому можно уста*
новить вполне удовлетворительные единицы меры вре¬
мени, основанные на вращении Земли вокруг своей оси,
Промежуток времени, в течение кото
рого Земля делает один оборот вокруг
своей оси относительно какой-нибудь
точки на небе, называется сутками.
Точками, определяющими продолжительность суток,
могут быть
~~ 1) точка весеннего равноденствия,
2) центр видимого диска Солнца, смещенный годич¬
ной аберрацией («истинное СЬлнце»),
3) «среднее солнце» — фиктивная точка, положение
которой на небе может быть вычислено теоретически для
любого момента времени.
Определяемые этими точками три различных проме¬
жутка времени, т. е. три различные единицы меры, на¬
зываются соответственно звездными, истинными солнеч¬
ными и средними солнечными сутками.
Поскольку вращение Земли вокруг оси проявляется
в видимом суточном движении небесного свода, сутки
могут быть определены и как промежуток вре¬
мени между двумя последователь¬
Введение
9
ными одноименными кульминациями
соответствующей точки на небе, от¬
считанный на одном и том же геогра¬
фическом меридиане.
Различная продолжительность суток зависит от види¬
мых движений избранных точек, которые, в сущности,
являются отражением вращения Земли вокруг оси и ее
движения вокруг Солнца.
Сутки являются основной единицей меры времени;
для измерения более коротких промежутков сутки де¬
лятся на 24 часа (h), час — на 60 минут (т), минута —
на 60 секунд (s), секунда — на десятые, сотые и т. д.
доли.
Для измерения больших промежутков времени основ¬
ной единицей меры служит тропический год, продолжи¬
тельность которого устанавливается по движению Земли
вокруг Солнца.
Глава 1
ЕДИНИЦЫ МЕРЫ И СИСТЕМЫ
СЧЕТА ВРЕМЕНИ
§ 1. Звездные сутки; звездное время
Промежуток времени между двумя последователь¬
ными одноименными кульминациями точки весеннего
равноденствия, отсчитанный на одном и том же географи¬
ческом меридиане, называется звездными сутками.
За начало звездных суток на любом меридиане прини¬
мается момент верхней кульминации точки весеннего
равноденствия.
Время, протекшее от верхней кульминации точки
весеннего равноденствия до какого-нибудь другого ее
положения, выраженное в долях звездных суток (т. е.
в звездных часах, минутах и се¬
кундах), называется звездным вре¬
менем s.
Часовой угол точки весеннего
равноденствия в течение звездных
суток непрерывно меняется в пре¬
делах от 0 до 360° (от 0Ь до 24h). По¬
этому звездное время s в любой мо¬
мент на данном меридиане численно
равно часовому углу точки весен¬
него равноденствия ty, выраженному
в часовой мере, т. е.
s = thr. (1.1)
Измерить часовой угол точки весеннего равноденствия
непосредственно нельзя и практически звездное время
определяется путем измерения часового угла t кдкогр-
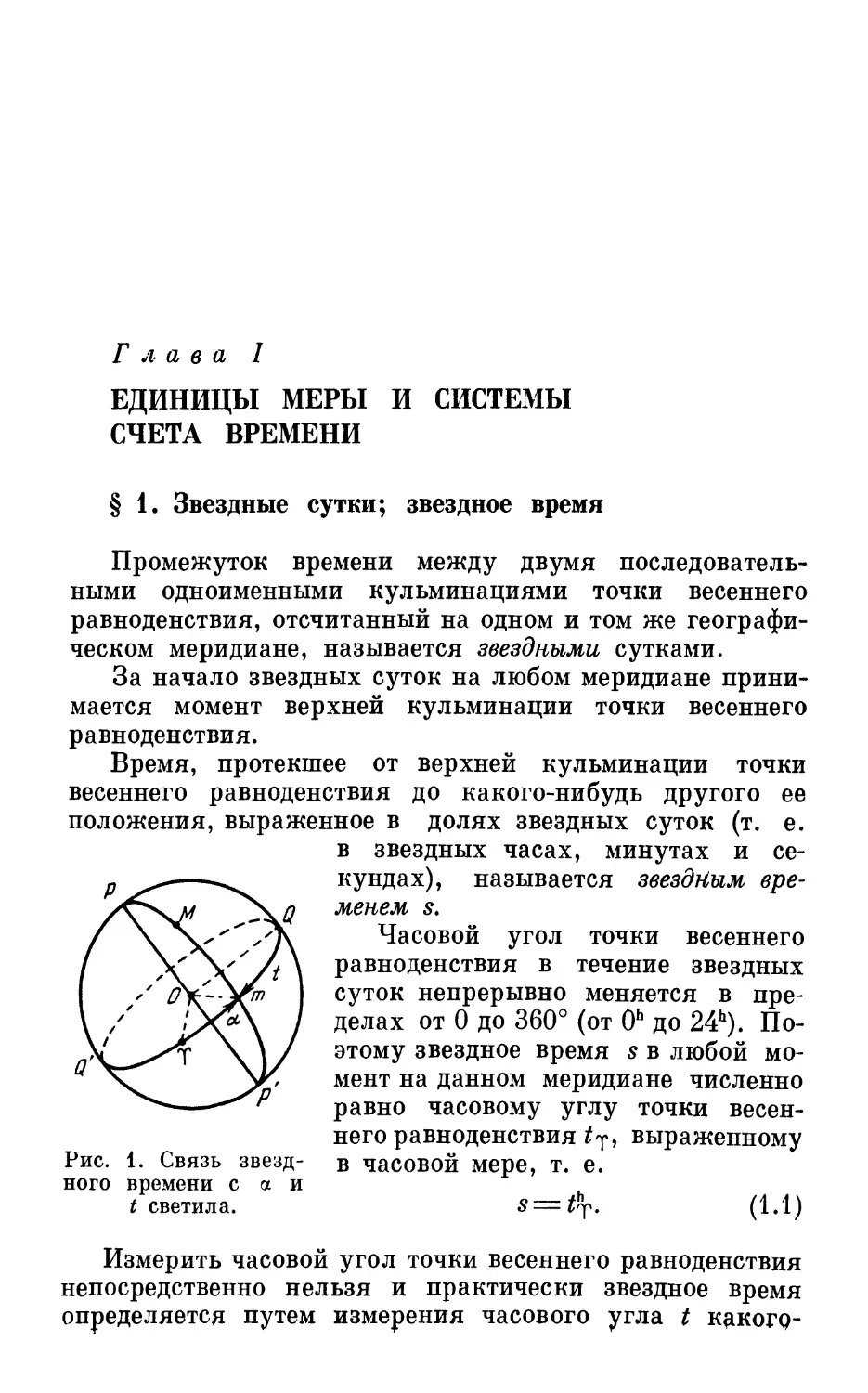
Рис. 1. Связь звезд¬
ного времени с а и
t светила.
Равномерное, истинное и квазиистинное время
11
нибудь светила М с известным прямым восхождением а.
Тогда, как это легко видеть на рис. 1,
s = ^ = <*-]-£, (1.2)
т. е. звездное время в любой момент
равно прямому восхождению светила
плюс его часовой угол.
Если a-f t > 24ь, то в правой части формулы (1.2)
следует еще добавить — 24ь.
В момент верхней кульминации светила его часовой
угол £=0h и тогда
s = a. (1.3)
В момент нижней кульминации, когда часовой угол
светила t=12\ звездное время
5 = a-j- 12h. (1.4)
§ 2. Равномерное (среднее), истинное
и квазиистинное звездное время
Вследствие прецессионных движений и нутационных
колебаний оси вращения Земли и других причин небес¬
ный экватор и эклиптика не занимают неизменного по¬
ложения в пространстве. Точка весеннего равноденствия,
как одна из точек пересечения этих кругов, также не яв¬
ляется неподвижной на небесной сфере. Ее прецессион¬
ное и нутационное движение достаточно хорошо изучено.
В курсах сферической астрономии различают три
точки весеннего равноденствия:
1) среднюю, движущуюся только вследствие прецес¬
сии,
2) истинную, смещающуюся от прецессии и нутации,
3) квазиистинную, обладающую прецессионным дви¬
жением и нутационными колебаниями только долго-
периодического характера.
Средняя точка весеннего равноденствия вследствие
прецессии перемещается по небесному экватору все время
в одну сторону, противоположную суточному вращению
небесной сферы, с годичной скоростью, равной общей
прецессии по прямому восхождению т. Численное значе¬
12
Гл. I. Единицы меры и системы счета времени
ние величины пг, с точностью до членов второго порядка,
выражается формулой
m = 3s,07234 + 08,001863Г -f 08,000008Г2, (1.5)
где Т — число тропических столетий после 1900,0.
Из формулы (1.5) следует, что годичная скорость пре¬
цессионного движения по экватору средней точки весен¬
него равноденствия изменится за 100 лет на величину
меньшую, чем 0s,002.
Этим ускорением практически можно пренебречь и
считать, что средняя точка весеннего равноденствия дви¬
жется по экватору равномерно и что ее часовые углы
вследствие вращения Земли вокруг своей оси изменя¬
ются пропорционально времени.
Если в определениях, данных в § 1, мы будем иметь
в виду именно эту точку, то мы получим средние звездные
сутки и равномерное (среднее) звездное время. В формулах
(1.2)—(1.4) мы должны брать тогда истинное прямое
восхождение светила, исключив из него полную нутацию
по прямому восхождению точки весеннего равноденствия
осД. [См. ниже формулы (1.6) и (1.7).]
Истинная точка весеннего равноденствия вследствие
нутации колеблется около средней. Если в определениях
§ 1 иметь в виду эту точку, а в формулах (1.2)—(1.4) —
истинное прямое восхождение, то мы получим истинные
звездные сутки и истинное звездное время.
Продолжительность истинных звездных суток неоди¬
накова, следовательно, истинное звездное время неравно¬
мерно. Это есть следствие нутационного движения точки
весеннего равноденствия по экватору, называемого нута¬
цией по прямому восхождению
дос = Дс|> cose, (1.6)
где е — угол наклона эклиптики к экватору, а Дф — нута¬
ция по долготе, представляемая совокупностью периоди¬
ческих членов.
Если за начало счета прямых восхождений принять
среднюю точку весеннего равноденствия, то истинная
точка весеннего равноденствия будет иметь прямое вос¬
хождение, равное — Да= — Дф cos е. Разность часовых
углов средней и истинной точек весеннего равноденствия
в данный момент будет также равна —Дф cos е. Отсюда
§ 2. Равномерное, истинное и квазиистинНое вреМЛ
13
следует, что разность истинного звездного времени и сред¬
него звездного времени равна нутации по прямому вос¬
хождению или, иными словами, 1 среднее звездное время
плюс нутация по прямому восхождению есть истинное,
звездное время. ~
Нутация по долготе Аф может быть представлена эмпи¬
рической формулой, полученной из наблюдений*):
Дф = —17",233 sin Q + 0",209 sin 2Q —
—1",272 sin 2Lq + 0",126 sin gQ —
— 0",050 sin (2Lq -|- go) -j- 0",021 sin (2Lq — g@) —
- 0",204 sin 2Lt -f 0",068 sin gt — 0",034 sin (2L€ — Q) —
— 0",026sin(2Lc+*c), (1.7)
где Q — дЪлгота восходящего узла лунной орбиты, Lq —
средняя долгота Солнца, L^ — средняя долгота Луны,
Si — средняя аномалия Луны, g0 — средняя аномалия
Солнца.
Члены, содержащиеся в формуле (1.7), разделяются
на две группы: долгопериодические и короткопериоди¬
ческие. Первые зависят от долготы восходящего узла
лунной орбиты Q, от средней долготы Солнца Lq и от сред¬
ней аномалии Солнца g0. Наибольший из долгопериоди¬
ческих членов нутации имеет величину 17",233 sin Q;
он дает нутацию по прямому восхождению, или раз¬
ность между равномерным и истинным временем, равную
—17",233 sin Q cos е
или, если принять е=23°27',
—15",810 sin Q = —Is,054 sin Q. (1.8)
Из формулы (1.8) видно, что разность между равномер¬
ным и истинным звездным временем только от пер¬
вого долгопериодического члена меняется в пределах
от +18,054 до —Is,054 с периодом 18,6 года (период из¬
менения долготы лунного узла). Остальные долгопериоди¬
ческие члены увеличивают предел до ±18,2.
*) В формулу (1.7) включены только те члены, числовые коэф¬
фициенты которых больше 0",02. Их значения относятся к эпохе
1900,0.
14
Гл. I. Единицы меры и системы счета времени
Короткопериодические члены нутации оказывают на
разность равномерного и истинного времени весьма ма¬
лое влияние, изменяя ее значение не более, чем на + 0S,02.
Наибольший из короткопериодических членов имеет
период всего около 15 суток.
Если в определениях § 1 иметь в виду квазиистинную
точку весеннего равноденствия, т. е. точку, обладающую
прецессионным движением и нутационными колебаниями
только долгопериодического характера, то мы получим
квазиистпинные (почти истинные) звездные сутки и из¬
меренное ими квазиистинное звездное время.
§ 3. Истинные солнечные сутки;
истинное солнечное время
Промежуток времени между двумя последовательными
одноименными кульминациями истинного Солнца, от¬
считанный на одном и том же географическом меридиане,
называется истинными солнечными сутками.
За начало истинных солнечных суток на любом мери¬
диане принимается момент нижней кульминации истин¬
ного Солнца*). Время, протекшее от нижней кульмина¬
ции истинного Солнца до любого другого его положения,
выраженное в долях истинных солнечных суток (т. е.
в истинных солнечных часах, минутах и секундах), на¬
зывается истинным солнечным временем Г0.
Истинное солнечное время Г0 в любой момент на дан¬
ном меридиане численно равно геоцентрическому часо¬
вому углу истинного Солнца, выраженному в часовой
мере, плюс 12h, т. е.
Г0 = &+12\ (1.9)
Часовой угол истинного Солнца можно получить не¬
посредственно из астрономических наблюдений. Однако
часовой угол Солнца изменяется не пропорционально
углу поворота Земли вокруг ее оси, потому что:
1) Солнце движется по эклиптике, а не по экватору и
2) движение Солнца по эклиптике неравномерно.
Видимое годичное движение Солнца по эклиптике —
это отражение действительного движения центра тяжести
*) За начало истинных солнечных суток можно принять и истин¬
ный полдень, т. е. момент верхней кульминации истинного Солнца,
что и сделано в некоторых учебниках астрономии.
§ 3. Истинное солнечное время
1S
системы «Земля+Луна» вокруг Солнца. Движение же
центра тяжести происходит неравномерно. Быстрее всего
центр тяжести движется тогда, когда он проходит через
ближайшую к Солнцу точку своей орбиты (перигелий).
В это время (около 3 января) и видимое движение Солнца
по эклиптике тоже совершается с наибольшей скоро¬
стью — долгота Солнца возрастает за сутки на Ill'll".
Когда центр тяжести проходит через наиболее удален¬
ную от Солнца точку своей орбиты (афелий), скорость
движения центра тяжести системы наименьшая. Поэтому
и скорость видимого движения Солнца по эклиптике в это
время (около 2 июля) также наименьшая — его долгота
возрастает за сутки только на 57'11". Вследствие этого
продолжительность истинных солнечных суток в тече¬
ние года неодинакова — зимой истинные солнечные сутки
длиннее, чем летом.
Видимое годичное движение Солнца по эклиптике со¬
вершается в направлении, противоположном суточному
вращению небесной сферы. Этим объясняется запаздыва¬
ние его кульминаций относительно звездного времени,
так как с увеличением долготы Солнца увеличивается и
его прямое восхождение.
Пусть, например, верхняя кульминация Солнца на
каком-нибудь меридиане произошла в момент s± по звезд¬
ному времени. Его прямое восхождение согласно (1.3)
в этот момент было равно звездному времени s±J т. е.
Aq = sv
Следующая верхняя кульминация Солнца на этом же
меридиане произойдет через одни истинные солнечные
сутки в момент s2 по звездному времени. При этом s2 будет
больше sv так как прямое восхождение Солнца будет уже
больше, т. е.
^0"Ь^0 = 52*
Следовательно, истинные солнечные сутки длиннее звезд¬
ных и не имеют постоянной продолжительности, так как
увеличение прямого восхождения Солнца происходит
неравномерно.
Из-за непостоянства истинных солнечных суток они
как единица меры времени неудобны,
IS
Гл. I. Единицы меры и системы счета времени
§ 4. Среднее эклиптическое
и среднее экваториальное солнце
Фиктивная точка, равномерно движущаяся по эклип¬
тике со скоростью, равной средней скорости движения
истинного Солнца за год, называется средним эклипти¬
ческим солнцем.
Среднее эклиптическое солнце совпадает с истинным
Солнцем в момент их прохождения через перигей. После
прохождения через перигей среднее эклиптическое солнце
сначала отстает от истинного
Солнца, так как скорость
движения последнего хотя
и начинает уменьшаться, но
все же продолжает оставать¬
ся больше средней скорости;
затем среднее эклиптическое
солнце догоняет истинное
Солнце, когда его скорость
меньше средней, и снова сов¬
падает с ним в апогее.
После прохождения через
апогей впереди (до следую¬
щего совпадения в перигее)
движется среднее эклипти¬
ческое солнце, так как скорость истинного Солнца хотя и
возрастает, но в начале все еще остается меньше средней.
Скорость истинного Солнца колеблется в небольших
пределах (см. § 3).
* J Долгота среднего эклиптического солнца всегда воз¬
растает равномерно. Однако его прямое восхождение
вследствие наклона эклиптики к экватору возрастает
неравномерно. Следовательно, и для этого солнца вели¬
чина А А будет непостоянна.
Действительно, пусть на рис. 2 среднее эклиптическое
солнце находится в точке С; тогда из прямоугольного
сферического треугольника 'УС'С будем иметь
tgA = tgL cos е, (1.10)
где А — прямое восхождение среднего эклиптического
солнца, L — его долгота, е — угол наклона эклиптики
к кватору.
Рис. 2. К неравномерно¬
сти истинного солнечного
времени.
§ 4. Среднеесолнце
17
Дифференцируя формулу (1.10) по времени t и счи¬
тая е постоянной величиной, получим
Из того же треугольника 'YsCrC следует, что
где D — склонение среднего эклиптического солнца. Под¬
ставляя последнее в формулу (1.11), получим
Величина dLldt есть скорость изменения долготы
среднего эклиптического солнца; при его равномерном
движении по эклиптике она постоянна. Скорость же из¬
менения прямого восхождения dAldt зависит от склоне¬
ния D, которое меняется в течение года в пределах от +в
до —-е, т. е. dAldt является величиной непостоянной.
Фиктивная точка, равномерно движущаяся по эква¬
тору со средней скоростью движения истинного Солнца
за год по эклиптике, называется средним экваториаль¬
ным солнцем или просто средним солнцем.
Среднее экваториальное солнце и среднее эклиптиче¬
ское солнце проходят через точку весеннего равноден¬
ствия одновременно. В этот момент долгота среднего
эклиптического солнца L и прямое восхождение среднего
экваториального солнца Ад равны нулю.
После прохождения точки весеннего равноденствия
долгота L и прямое восхождение убудут возрастать
с одинаковой и постоянной скоростью!dL/dt=dAJdt.
Следовательно, прямое восхождение среднего экватори¬
ального солнца всегда равно долготе^среднего эклипти¬
ческого солнца:
cos L = cos A cos D
или
(1.12)
(1.13)
18
Гл. I. Единицы меры и системы счета времени
§ 5. Средние солнечные сутки;
среднее солнечное время
Промежуток времени между двумя последовательными,
одноименными кульминациями среднего экваториаль¬
ного солнца, отсчитанный на одном и том же географиче¬
ском меридиане, называется средними солнечными сутками.
За начало средних солнечных суток на любом мери¬
диане принимается момент нижней кульминации среднего
солнца.
Время, протекшее от нижней кульминации среднего
солнца до любого другого его положения, выраженное
в долях средних солнечных суток (т. е. в средних солнеч¬
ных часах, минутах и секундах), называется средним
солнечным временем или просто средним временем Тт.
Среднее время Тт в любой момент на данном мериди¬
ане численно равно часовому углу среднего солнца tm,
выраженному в часовой мере, плюс 12hf т. е.
Тя = *я +12\ (1.14)
Часовой угол среднего солнца, а следовательно, и сред¬
нее время, непосредственно из наблюдений получить
нельзя. Среднее солнечное время вычисляется по полу¬
ченным из наблюдений истинному солнечному или звезд¬
ному времени.
До 1 января 1925 г. в астрономической практике и
в астрономических ежегодниках за начало средних сол¬
нечных суток принимался момент верхней кульмина¬
ции среднего солнца (средний полдень), и время, считае¬
мое таким образом, называли средним «астрономическим».
Поэтому среднее солнечное время в том определении, ко¬
торое дано в этом параграфе, в отличие от «астрономи¬
ческого» времени, называли средним «гражданским». В на¬
стоящее время термины «гражданское время» и «астроно¬
мическое время» употреблять не следует.
§ 6. Связь истинного солнечного времени
со средним (уравнение времени)
Разность часовых углов истинного Солнца и среднего
экваториального солнца называется уравнением времени
т|, т. е.
Т| = *ф —(1.15)
§ 6. Связь истинного времени со средним
Очевидно, что разность истинного солнечного и сред¬
него солнечного времени в один и тот же момент на одном
и том же меридиане также равна уравнению времени tj.
Вычитая из формулы (1.9) формулу (1.14), получаем
Если а© — прямое восхождение истинного Солнца в ка¬
кой-нибудь момент, А9 — прямое восхождение среднего
экваториального солнца в этот же момент, то согласно
формуле (1.2)
т. е. уравнение времени равно разности прямых восхожде¬
ний среднего экваториального солнца и истинного Солнца.
Эта разность на основании многолетних наблюдений
может быть вычислена по законам небесной механики для
любого момента времени с необходимой степенью точ¬
ности. До 1960 г. уравнение времени вычислялось и публи¬
ковалось в астрономических ежегодниках для начала
каждых средних солнечных суток на гринвичском мери¬
диане, т. е. для 0h всемирного времени (см. § 9). Начиная
с 1960 г. астрономические ежегодники публикуют урав¬
нение времени для 0h эфемеридного времени (см. § 17)
на меридиане Гринвича. Для других меридианов и для мо¬
ментов, отличных от 0 часов, уравнение времени нахо¬
дится путем интерполяции.
Зная уравнение времени tj, легко перейти от истинного
солнечного времени к среднему солнечному времени и
наоборот по следующим формулам:
В некоторых учебниках астрономии уравнение вре¬
мени дается в смысле «среднее солнечное время минус ис¬
тинное солнечное время».
С 1943 г. Астрономический ежегодник СССР вместо
уравнения времени публикует часовой угол истинного
Солнца — до 1960 г. для 0h всемирного времени, с 1960
То Tm — tq tm — к].
(1.16)
s = a0-f*0, s = Aa-\-tm.
Отсюда
*0— *т = Ц = Ал — a©,
(1.17)
(1.18)
20
Гл. 1. Единицы меры и системы счета времени
года — для 0h эфемеридного времени. Вычитанием часо¬
вого угла из 12ь или вычитанием из него двенадцати часов
можно получить уравнение времени в том или ином смысле.
Приближенная величина уравнения времени т\ с воз-
можной ошибкой в 0m,l-0m,2 может быть вычислена
по формуле
i, = -f-9m,5 sin 2L - 7т,7 sin (L + 78°), (1.19)
где L — средняя долгота Солнца (см. § 8).
Из формулы (1.19), а также из рис. 3, видно:
Месяцы года
| [ Рис. 3. График уравнения времени.
1. Приближенная величина уравнения времени (сплош¬
ная кривая) слагается из двух синусоид — одной с перио¬
дом в полгода (штрих с точкой) и другой с годичным перио¬
дом (прерывистая кривая). Г
Первая кривая есть разность между истинным и сред¬
ним солнечным временем, вызванная наклоном эклиптики
к экватору, и называется поэтому «уравнением от пакло-
пения эклиптики».
Разность истинного и среднего солнечного времени,
обусловленная неравномерным движением истинного
Солнца по эклиптике, называется «уравнением от эксцент¬
риситетег». Эта разность изображена на рис. 3 преры¬
вистой кривой. 1
2. Четыре раза в году (около 15 апреля, 15 июня,
1 сентября и 25 декабря) уравнение времени обращается
§ 7. Относительная продолжительность суток 21
в нуль, изменяясь в пределах приблизительно от 14т
около 11 февраля до +16т около 3 ноября.
Величина уравнения времени не повторяется в точ¬
ности из года в год.
§ 7. Относительная продолжительность средних
солнечных и звездных суток
Промежуток времени между двумя последовательными
прохождениями среднего экваториального солнца через
среднюю точку весеннего рав¬
ноденствия называется пгро-
пическим годом.
Из многочисленных наб-
людений установлено, ^что < \ #
в тропическом году содержит¬
ся 365,2421988 средних сол¬
нечных суток. Нетрудно по¬
казать, что звездных суток
в тропическом году ровно
на одни больше.
Пусть на рис. 4 среднее
экваториальное солнце перед¬
няя точка весеннего равно¬
денствия в момент начала тро¬
пического года одновременно
проходят через некоторый
круг PQ. Спустя одни звезд¬
ные сутки после начала тропи¬
ческого года точка весеннего равноденствия возвратится
на этот же круг в точку Q, среднее же солнце окажется
в точке В, так как оно в своем видимом годичном движе¬
нии навстречу суточному вращению светил сместится
за одни звездные сутки по экватору на дугу QB. Поэтому
в своем видимом суточном движении среднее солнце вто¬
рично пройдет через точку Q позднее точки весеннего
равноденствия и, следовательно, средние солнечные сутки
длиннее звездных.
Щ Среднее экваториальное солнце, смещаясь по эква¬
тору за каждые звездные сутки на дугу QB, снова совпа¬
дает с точкой весеннего равноденствия, описав полную
окружность, и в момент конца тропического года одно¬
Рис. 4. К определению числа
звездных суток в тропическом
году.
22
Гл. /. Единицы меры и системы счета времени
временно с ней пройдет уже через некоторый круг PC.
Если бы тропический год содержал целое число звезд¬
ных, а следовательно, и целое число средних солнечных
суток, то среднее экваториальное солнце и средняя точка
весеннего равноденствия прошли бы через тот же круг
PQ, что и в начале тропического года, одновременно.
Но какова бы ни была продолжительность тропического
года, число суточных оборотов точки весеннего равно¬
денствия за этот промежуток времени будет ровно на еди¬
ницу больше числа суточных оборотов среднего эквато¬
риального солнца. Действительно, пусть число звездных
суток в тропическом году будет х. В течение года, т. е.
в течение х звездных суток, среднее экваториальное
солнце отступает от точки весеннего равноденствия на пол¬
ную окружность, а за одни звездные сутки на дугу QB,
равную 1 !х части окружности. Так как в своем суточном
движении среднее солнце описывает полную окружность
за одни средние солнечные сутки, то Их часть окружности
оно опишет за время mix, где m — продолжительность
средних солнечных суток. Отсюда продолжительность
звездных суток короче продолжительности средних сол¬
нечных суток на величину mix и, следовательно, равна
m—m/x. Тогда, если число средних солнечных суток
в тропическом году обозначить через п, можно написать,
что продолжительность тропического года равна
т. е. в тропическом году звездных суток на одни больше,
чем средних солнечных.
Таким образом,
365,2421988 ср. солн. сут. =366,2421988 зв. сут.
Отсюда:
(
откуда находим
х — 1% —|— 1,
1 ср. солн. сут.
366.2421988
365.2421988 ЗВ‘ СуТ-’
ср. солн. сут.
§ 8. Связь солнечного времени со звездным
23
Коэффициент
h —
365,2421988
= 002737909 (1.20)
служит для перевода промежутков времени, выраженных
в среднем солнечном времени Тт, в промежутки, выра¬
женные в звездном времени s, а коэффициент
к'= 30^2421988 == °,997269566 (1.21)
— для перевода промежутка, выраженных в звездном
времени s, в промежутки, выраженные в среднем солнеч¬
ном времени Тт. Следовательно,
\s = k\Tm, (1.22)
&Tm = kfbs. (1.23)
Из формул (1.20)—(1.23) следует:
одни ср. солн. сут.=24ь03т568, 555363 звездного времени,
1Ь ср. солн. вр. = 1 00 09, 856475 » э
1т » » » = 01 00, 164275 » »
Is » » » = 01,002738 » »
одни звездные сут.=23 56 04, 090537 средн. солн. вр.,
1Ъ звездного вр. = 59 50, 170438 » » »
1т » » = 59,836174 » » »
1« » » = 0,997270 » » »
На основании соотношений (1.22) и (1.23) обычно вычис¬
ляются подробные таблицы, которыми и пользуются
при переходе от одних единиц времени к другим (см. табл. 1
и 2 в приложении).
§ 8. Связь среднего солнечного времени
со звездным
Из наблюдений Солнца и планет по законам небесной
механики можно вычислить среднее увеличение долготы
Солнца п (за сутки, за год или за столетие). Кроме того,
можно найти долготу среднего эклиптического солнца L0
для определенного момента времени t0. Зная п, L0 и t0,
легко вычислить долготу среднего эклиптического солнца
L для любого другого момента времени t по формуле
Ь = Ь q + я (* — tQ), (1.24)
24
Гл. I. Единицы меры и системы счета времени
где t—10 выражено в сутках, годах или столетиях, в зави¬
симости от п.
На основании соотношений (1.13) и (1.24) имеем
At = L0+ n(t-t0). (1.25)
Следовательно, прямое восхождение среднего экваториаль¬
ного солнца А9 также может быть вычислено для каких
угодно моментов времени £, в частности, и для моментов
нижних кульминаций среднего экваториального Солнца
на любом меридиане, т. е. для начала каждых средних
солнечных суток. Но в момент нижней кульминации сред¬
него экваториального солнца звездное время равно его
прямому восхождению плюс 12 часов (см. формулу (1.4)).
Следовательно, по формулам (1.25) и (1.4) можно вычис¬
лить звездное время s0 для 0 часов любых средних солнеч¬
ных суток.
Зная Sq, легко перейти от звездного" времени к сред¬
нему солнечному и наоборот.
1. Пусть среднее звездное время в некоторый момент
на каком-нибудь меридиане равно s, а среднее звездное
время на этом же меридиане в ближайшую среднюю пол¬
ночь, вычисленное по формулам (1.25) и (1.4), равно s0.
Тогда разность
Д s = s — 50
есть число звездных часов, минут, секунд и их долей,
прошедших от начала средних солнечных суток до мо¬
мента s. Умножив Дs на коэффициент /с', мы получим число
минут, секунд и их долей среднего солнечного времени,
прошедших от начала средних солнечных суток. Иными
словами, мы получим среднее солнечное время на этом же
меридиане в момент, когда звездное время было s, т. е.
тт = ЬТт = k'bs = k'(s- s0). (1.26)
2. Пусть среднее солнечное время в некоторый мо¬
мент на каком-либо меридиане равно Тт=Ь.Тт. Умно¬
жая Д Тт на коэффициент к, мы найдем, сколько часов,
минут,секунд и их долей звездного времени прошло
от начала средних солнечных суток до момента Тт, т. е.
найдем Д s:
ДГт* k = bs = s — s0.
Прибавив Да к звездному времени s0 в среднюю полночь,
вычисленному по формулам (1.25) и (1.4), мы получим эвезд-
§ 8. Связь солнечного времени со звезВным
25
ное время s в момент, когда среднее солнечное время было
тт, т. е.
s = s0-\-As=s0+ATm*k. (1.27)
На практике звездное время в среднюю полночь вы¬
числять по формулам (1.25) и (1.4) нет необходимости.
Астрономические ежегодники публикуют звездное время
S0 на каждую среднюю полночь на меридиане Гринвича.
По таблицам движения Солнца, составленным С. Ньюко-
мом в конце XIX в., числовое выражение формулы (1.25),
уточненной квадратичным членом по времени, записы¬
вается следующим образом:
Ав = 18h38m45e,836 + 8640184е,542Г + 0е,093Г2
или
Ав = 18h38m45*,836 + 236e,55536049d + 0%093Г2, (1.28)
где Т — число юлианских столетий (см. § И), начиная
с 1900 г. января 0, средний гринвичский полдень, a d —
число средних солнечных суток, прошедших с того же
момента.
По формулам (1.28) можно вычислить прямое восхожде¬
ние Ав на любой момент, в частности, для любой грин¬
вичской полночи, т. е. для нижних кульминаций Солнца
на меридиане Гринвича, а затем по формуле (1.4) вычис¬
лить звездное время. При этом получается среднее звезд¬
ное время, так как Ав отсчитывается от средней точки
весеннего равноденствия. Если к этому времени приба¬
вить нутацию в прямом восхождении Дф cos е, то получим
истинное звездное время; если прибавить только долго¬
периодические члены нутации, то получим квазиистин-
ное звездное время (см. § 2).
В астрономических ежегодниках для каждой гринвич¬
ской полуночи дается среднее и истинное звездное время,
а также нутация по прямому восхождению, как коротко-
лериодическая, так и долгопериодическая.
Зная SQ} легко вычислить звездное время s0 в среднюю
полночь на любом другом меридиане, если известна гео¬
графическая долгота этого меридиана от Гринвича X,
выраженная в часовой мере. Действительно, S0 — это
ярямое восхождение среднего экваториального солнца
) гринвичскую полночь; оно возрастает за средние сутки
26
Гл. I. Единицы меры и системы счета времени
на 236е,5554=3Ш568,5554 (см. формулу (1.28)). На мери¬
диане с долготой X средняя полночь наступает раньше
гринвичской полуночи (если меридиан лежит к востоку)
либо позже гринвичской (если меридиан лежит к западу
от Гринвича) на X часов. Следовательно, звездное время
в среднюю полночь на этом меридиане будет либо меньше,
либо больше, чем на гринвичском меридиане, на величину
3-56- 5554 х>
х 24ь
Отсюда звездное время в среднюю полночь на любом мери¬
диане
s0=S0 ± 4 = ^0 ± -3m5^h5554 Х\ (1.29)
Здесь знак «минус» для восточных, а знак «плюс» — для
западных долгот от Гринвича. Величину Asx можно вы¬
числить для любого меридиана заранее (см. табл. 4 в
Приложениях).
Имея в виду (1.29), перепишем формулы (1.26) и (1.27)
следующим образом:
тя = W [s (S0 + As*)] =
= 0,99727 ^ — ($0 ± —-У^554 Xhj’, (1.30)
s — S0± Asx-j-kATm =
= S0± 236^5h554 Xh+l,00274A7’m. (1.31)
§ 9. Системы счета времени
В соответствии с выбранным меридианом, мы будем
иметь ту или иную систему счета времени.
а) Местное вр е м я. Время, относящееся к ка¬
кому-либо меридиану, называется местным временем
этого меридиана. Местное время может быть звездным,
истинным солнечным и средним солнечным.
Для всех точек, лежащих на одном географическом
меридиане, любое местное время в один и тот же момент
одинаково.
§ 9. Системы счета времени
27
Для двух точек, лежащих на разных меридианах, раз¬
ность их местных времен (безразлично, звездных s, истин¬
ных солнечных Т@ или средних солнечных Тт) в один и
тот же момент численно равна разности их географи¬
ческих долгот, выраженных в часовой мере и считаемых
положительными к востоку от Гринвича, т. е.
Соотношения (1.32) лежат в основе методов определе¬
ния разности географических долгот пунктов на земной
поверхности.
Непосредственно из астрономических наблюдений по¬
лучается местное время для того меридиана, на котором
произведены наблюдения.
Систем счета местного времени в принципе столько же,
сколько и географических меридианов, т. е. бесчислен¬
ное множество, и для установления последовательности
событий или явлений, отмеченных по местным временам,
совершенно необходимо, кроме моментов, знать также
и разность долгот тех меридианов, на которых эти собы¬
тия или явления имели место. Эти обстоятельства приводят
к ряду неудобств при счете времени для практических
целей. Поэтому при счете времени средними солнечными
сутками (и только этими единицами меры) моменты при¬
нято отмечать в одной из следующих систем счета.
б) Мировое, или всемирное, время.
Местное среднее солнечное время на меридиане Грин¬
вича называется мировым, или всемирным, временем TU.
С местным средним солнечным временем Тт любого
другого меридиана всемирное время связано соотноше¬
нием, вытекающим из последнего уравнения (1.32):
где Xh — географическая долгота данного меридиана
от Гринвича, выраженная в часовой мере и считаемая
положительной к востоку.
Последовательность событий, отмеченных по всемир¬
ному времени, устанавливается легко, и всемирным вре¬
менем щироко пользуются при международных, сноще-
s2 — s1 = XJ— XJ,
Tqi = Xj — X J,
T m2 Tml = Xj XJ.
(1.32)
(1.33)
28 Гл. I. Единицы меры и системы счета времени
ниях, для публикации большинства астрономических
явлений (в астрономических ежегодниках) и во многих
других вопросах научных исследований. Однако возмож¬
ная большая разница между всемирным временем и мест¬
ным временем на меридианах, удаленных от гринвич¬
ского на значительные расстояния, создает неудобства
при использовании этой системы в повседневной жизни.
в) Поясное время. В 1878 г. канадский инже¬
нер Флеминг предложил систему счета среднего солнеч¬
ного времени, основанную на условном разделении всей
поверхности Земли на 24 часовых пояса. Так
были названы участки поверхности Земли, образованные
линиями, идущими от ее Северного полюса к Южному.
Эти линии, или границы часовых поясов, только в откры¬
тых морях и в малонаселенных местах точно следуют
по меридианам; в остальных случаях они согласуются
с государственными, административно-хозяйственными и
географическими границами, отступая от соответствую¬
щих меридианов в ту или другую сторону.
Приблизительно посередине каждого часового пояса,
но точно через 15° (lh) по долготе, проходят основные ме¬
ридианы часовых поясов.
Часовые пояса занумерованы от 0 до 23. За основной
меридиан нулевого пояса принят гринвичский. Основ¬
ной меридиан первого часового пояса расположен от грин¬
вичского точно на 15° (lh) к востоку, второго —* на 30° (2Ь),
третьего — на 45° (Зь) и т. д. до 23-го часового пояса, ос¬
новной меридиан которого имеет восточную долготу
от Гринвича 345° (23h). Поясным временем Тп какого-либо
пункта называется местное среднее солнечное время основ¬
ного меридиана того часового пояса, в котором данный
пункт находится.
Так как границы часовых поясов удаленьГот основных
меридианов приблизительно на 7°,5 к востоку или к за¬
паду, то разность между местным временем какого-либо
пункта вблизи границы и его поясным временем может
составлять около 30ш. Эта разность на основании послед¬
него уравнения (1.32) равна
rw-rn = Xh-Ah, (1.34)
где V1 — восточная долгота пункта от Гринвича, а № —
чнСД0~целЬЁЁЗД^оВ; равноащамеру часовогю пояса (долгота
§ 9. Системы счета времени
29
основного меридиана часового пояса, в котором данный
пункт находится).
Из (1.34) и последнего уравнения (1.32) следует
т. е. разность поясного времени одного пункта Тномер
часового пояса которого N2, и поясного времени другого
пункта Гп1 с номером часового пояса Nlt есть целое число
часов, равное разности номеров часовых поясов этих
пунктов.
Из соотношений (1.33)—(1.35) легко получить связь
поясного времени какого-либо пункта Тв с его местным
средним солнечным временем Ты и с всемирным време¬
нем TU:
Совершенно очевидно, что поясным временем пунктов,
расположенных в пределах нулевого пояса, является все¬
мирное время TU.
Из сказанного выше нетрудно видеть, что система
поясного счета времени устраняет неудобства, возникаю¬
щие при использовании в обыденной жизни как местного,
так и всемирного времени.
Поясное время впервые было введено в США в 1883 г.
В нашей стране поясное время введено после Великой
Октябрьской социалистической революции, с 1 июля
1919 г. Территория СССР была разделена соответствую¬
щими границами на 11 часовых поясов от 2-го до 12-го
пояса включительно. В 1956 г. в связи с существенно
изменившимися экономическими связями в стране ранее
установленные границы часовых поясов на территории
СССР были пересмотрены и с 1 декабря 1956 г. установ¬
лены новые (см. приложение).
Поясное время некоторых часовых поясов получило
особые названия. Так, например, время нулевого пояса
(Англия, Франция и др.) называется западноевропейским
временем, время 1-го пояса (ФРГ,ГДР, Польша, Чехосло¬
вакия, Италия и др.) — среднеевропейским. а время 2-го
пояса (проходящего также по территории СССР) в зару¬
бежных'странах (Финляндия, Румыния, Болгария и др.)
называют восточноевропейским временем....
T^-Tvl=m-N\,
(1.35)
(1.36)
so
Гл. I. Единицы меры и системы счета времени
В США время 16, 17, 18, 19 и 20-го поясов называют
тихоокеанским, горным, центральным, восточным и атлан¬
тическим соответственно.
г) Декретное время. В целях экономии и
более рационального распределения электроэнергии в те¬
чение суток в некоторых странах весной переводят часо¬
вые стрелки часов, идущих по поясному времени, на один
час вперед, а осенью часы снова ставят по поясному вре¬
мени. Дни перевода часовой стрелки в разных странах
различны и устанавливаются обычно специальными пра¬
вительственными распоряжениями.
Поясное время какого-либо пункта, увеличенное на
один час, за рубежом называют «летним временем».
Летнее время вводилось неоднократно и в СССР.
В последний раз, 16 июня 1930 г., декретом правительства
СССР стрелки часов во всех часовых поясах СССР (за не¬
которыми исключениями) были переведены на один час
вперед против поясного времени. Срок действия этого де¬
крета был продлен 9 февраля 1931 г. впредь до от¬
мены.
Поясное время какого-либо пункта, увеличенное на
один час, в нашей стране получило название декретного.
Связь декретного времени какого-либо пункта ТА с его
поясным временем Гп, со всемирным временем TU и, нако¬
нец, с местным средним солнечным временем Тт этого
пункта дается очевидными соотношениями:
Гд = 7\, + 1\
ТЛ = Т\] + Nb+1\
7,J. = 7\B-^ + Wh+11\
(1.37)
Декретное время Москвы (Москва находится во вто¬
ром часовом поясе) называется московским временем.
По московскому времени в СССР составляются расписа¬
ния движения поездов, пароходов, самолетов, отмечается
время на телеграммах и т. д.
С октября 1967 г. Англия перешла на систему, анало¬
гичную нашему декретному времени. Это время в Англии
называют «лондонским», и оно отличается от среднего
гринвичского (всемирного) времени в большую сторону
ровно на один час.
§ 10. Продолжительность тропического года 31
§ 10. Продолжительность тропического года.
Бесселев год
Сутки как единица меры удобны при измерении лишь
небольших промежутков времени. Для счета же больших
промежутков удобнее другая единица, установление кото¬
рой связано со вторым движением Земли, с ее обращением
вокруг Солнца, т. е. тропический год (см. § 7).
По исследованиям С. Ньюкома продолжительность
тропического года в средних солнечных сутках равна
Т = 365,2421988 — 0,0000000614 (t — 1900), (1.38)
где (£ — 1900) — время, протекшее от (или до) 1900 г.
и выраженное в годах и долях года.
Формула (1.38) — приближенная; точный закон изме¬
нения продолжительности тропического года неизвестен.
Уменьшение продолжительности тропического года
весьма мало и практически это не создает неудобств.
За начало тропического года по предложению Ф. Бес¬
селя принимается момент, когда долгота среднего эклип¬
тического солнца, уменьшенная на величину годичной
аберрации, т. е. на 20",50 по Ньюкому, равна 280°
(18ь40т). Год, началом которого считается этот момент,
называется бесселевым годом или annus fictus (фиктивным
годом). Начало бесселева года не зависит от способов
и приемов измерения времени и на всех меридианах
наступает в один и тот же момент. Кроме того, начало
выбрано Бесселем так, что оно близко по времени к началу
календарного года на любом меридиане.
Число суток от начала календарного года до начала
бесселева года называется приведением к тропическому
году (dies reductus — d. г.). Приведение к тропическому
году легко вычислить по формуле
18h40m — А9 qqv
d-f-= 236',5554 > . (1’39)
где Ад — прямое восхождение среднего экваториального
солнца для начала календарного года (0Ь местного вре¬
мени, янв.) на каком-либо меридиане, вычисленное
по формулам (1.28), а величина в знаменателе — измене¬
ние А9 за одни сутки.
Гл. I. Единицы меры и системы счета времени
Начало каждого тропического года (бесселева года)
обычно публикуется в астрономических ежегодниках или
для ряда календарных лет, в виде таблиц в специаль¬
ных астрономических сборниках (см. табл. 3 в прило¬
жении).
Моменты времени в бесселевом году отмечаются числом
суток и их долей, прошедших от его начала, или долями
тропического года.
В астрономических ежегодниках даются таблицы для
выражения моментов времени в бесселевом году по момен¬
там, отмеченным календарными датами.
Бесселевым годом пользуются при вычислении различ¬
ных астрономических редукций (годичной аберрации,
прецессии, нутации и т. п.).
В повседневной жизни вести счет тропическими годами
не очен£ удобно, так как в таком году не содержится целого
числа средних солнечных суток и начало года приходится
на различные моменты суток. Поэтому были разработаны
различные системы счета длительных промежутков вре¬
мени — календари. Из всех многочисленных систем мы
рассмотрим только две; в основе их лежит продолжитель¬
ность тропического года.
§ 11. Календари юлианский и григорианский
Если в основу календаря положен тропический год как
единица меры времени, то календарь называется солнеч¬
ным.
При составлении солнечного календаря необходимо
выполнить два условия:
1) продолжительность календарного года в среднем
за несколько лет должна быть как можно ближе к про¬
должительности тропического года.
2) календарный год должен содержать целое число
средних солнечных суток.
В юлианском календаре (старый стиль),
разработанном александрийским астрономом Созигеном
и введенном Юлием Цезарем в 46 г. до н. э., эти условия
выполняются соблюдением следующего простого пра¬
вила: продолжительность календарного
года считается равной 365 средним
солнечным суткам три календарных
§ 11. Календари юлианский и григорианский
33
года подряд, а каждый четвертый год
содержит 366 суток.
Год продолжительностью в 365 суток называется
простым, а в 366 суток — високосным. Високосными го¬
дами в юлианском календаре являются те годы, номера
которых делятся на четыре без остатка. В високосном
году в феврале 29 дней, в простом году — 28.
Таким образом, продолжительность года в юлианском
календаре в среднем за четыре года равна 365,25 средних
солнечных суток, т. е. календарный год длиннее тропи¬
ческого всего лишь на 0,0078 суток. Счет времени юлиан¬
скими годами за 128 лет даст расхождение со счетом тропи¬
ческими годами приблизительно в одни сутки, а за 400
лет — около 3 суток. (Например, день весеннего равно¬
денствия через 400 лет по юлианскому календарю насту¬
пит на три дня раньше.)
Промежуток времени в 36 525 средних солнечных суток
называется юлианским столетием и этой единицей поль¬
зуются в некоторых областях астрономии и до сих пор.
Григорианский календарь (новый
стиль) возник в результате реформы юлианского кален¬
даря, произведенной в 1582 г. римским папой Григо¬
рием XIII. Поводом к реформе послужили некоторые ре¬
лигиозные соображения.
Дело в том, что указанное выше небольшое расхожде¬
ние юлианского календаря со счетом тропическими годами
оказалось неудобным для церковного летосчисления.
По правилам христианской церкви праздник Пасхи должен
был наступать в первое воскресенье после первого весен¬
него полнолуния, т. е. первого полнолуния после дня ве¬
сеннего равноденствия. В год, когда было установлено это
правило на так называемом Никейском Соборе (325 г. н. э.),
день весеннего равноденствия по юлианскому календарю
приходился на 21 марта. В 1582 г., т. е. через 1257 лет,
он стал приходиться уже на 11 марта. Этот переход дня
весеннего равноденствия (за 128 лет на одни сутки) на бо¬
лее ранние даты вносил путаницу и неопределенность
в определение дня Пасхи и других христианских праздни¬
ков. Реформа календаря, произведенная по проекту
итальянского математика и врача Лилио, предусматри¬
вала, во-первых, возвращение календарной даты 21 марта
на день весеннего равноденствия и, во-вторых, изменение
3 П. И. Бакулин, Н. С. Блинов
34
Гл. I. Единицы меры и системы счета времени
в правиле счета простых и високосных лет с целью умень¬
шения расхождения со счетом тропическими годами.
Поэтому в булле папы Григория XIII имелись два прин¬
ципиальных пункта:
1. После 4 октября 1582 г. был*о пред¬
писано считать не 5-е, а 15-е октября.
2. Не считать в дальнейшем високосными столетние
годы (1700, 1800, 1900, 2100 и т. д.), число сотен
которых не делится на четыре без
остатка.
Первым пунктом этого постановления устранялось
расхождение в 10 суток юлианского календаря со счетом
тропическими годами, накопившееся с 325 года, и день
весеннего равноденствия в следующем 1583 г. наступил
снова 21 марта.
Вторым пунктом продолжительность календарного года
в среднем за 400 лет устанавливалась равной 365,2425
средних солнечных суток. Таким образом, календарный
год в среднем стал длиннее тропического всего на 0,0003 су¬
ток и счет времени по григорианскому календарю и тро¬
пическими годами даст расхождение в одни сутки только
лишь через 3333 года. Такое расхождение никакого прак¬
тического значения не имеет. Поэтому дальнейшее совер¬
шенствование григорианского календаря в этом направ¬
лении нецелесообразно.
Григорианский календарь был введен в большинстве
западных стран в течение XVI—XVII вв. В России на но¬
вый стиль перешли только в 1918 г. В этом году, по декрету
Советского правительства, вместо 1 февраля стали считать
14 февраля, так как расхождение юлианского календаря
со счетом тропическими годами к 1918 г. составило уже
13 суток. Это различие в 13 суток будет сохраняться
до 15 февраля 2100 г. по старому стилю, или до 28 февраля
2100 г. по новому стилю. После этой даты оно станет рав¬
ным 14 суткам.
За начало календарного года (и в старом и в новом стиле)
теперь принято 1 января. Однако в прошлом в некото¬
рых странах год начинался и в другие дни (25 марта,
25 декабря). В России, например, до 1700 г. первым днем
года считали 1 сентября.
Также условным является и счет годов, т. е. установле¬
ние эры. Существовало около двухсот различных эр, свя¬
§ 11. Календари юлианский и григорианский
35
занных либо с реальными событиями (возведением на пре¬
стол монархов, войнами, олимпиада'ми), либо с легендар¬
ными, главным образом религиозными событиями («со¬
творение мира», «всемирный потоп», основание Рима
и т. п.). Начало счета годов от «рождества Христова»
было предложено ученым монахом Дионисием в VI в. н. э.
При вычислении «пасхалии», т. е. ^расписания христиан¬
ской пасхи, Дионисий пользовался числом 532=4x7 Х19,
где 4 — период чередования високосных годов, 7 — число
дней в неделе, 19 — период в годах (метонов цикл), через
который повторяется распределение фаз Луны по дням
года.
Не желая вести счет годам от «языческого» и «нечести¬
вого» императора Диоклетиана, Дионисий объявил, что
Христос родился 532 года назад и назвал 284 г. «от Дио¬
клетиана» (1284 г. «от основания Рима») — 532 годом
«от рождества Христова». Поэтому следующие годы стали
нумеровать как 533, 534, 535 и т. д. Постепенно этот счет
годов вошел во всеобщее употребление и продолжается
до сих пор.
Совершенно случайно получилось так, что в новом
летосчислении високосные годы пришлись как раз на те
номера годов, которые без остатка делятся на четыре.
Установление двенадцати месяцев в году и семи дней
в неделе хотя и имело астрономическое основание, но
по сути дела является условным и сохраняется до сих пор
по традиции.
Недостатком григорианского календаря является не¬
равная длина месяцев — 28 (29), 30 и 31 день, различ¬
ная длина кварталов — 90, 91, 92 дня и отсутствие со¬
гласованности между числами месяцев и днями недели.
Вопрос о реформе григорианского календаря обсуж¬
дается с середины XIX в. После второй мировой войны
этой проблемой занимается «Международная ассоциа¬
ция всемирного календаря» при Экономическом и Соци¬
альном Совете ООН, так как введение нового календаря
должно быть универсальным, т. е. повсеместным. В 1954
и 1965 гг., по инициативе Индии, обсуждался и был одоб¬
рен многими странами, в том числе и СССР, проект ре¬
формы григорианского календаря, предложенный Фран¬
цией. Согласно этому проекту в новом календаре пред¬
полагалось уравнять полугодия (по 182 дня), кварталы.
3*
36
Гл. I. Единицы меры и системы счета времени
(по 91 дню), упорядочить и сделать постоянным соотно¬
шение между числами месяцев и днями недели. Год дол¬
жен был начинаться с воскресения, а заканчиваться суб¬
ботой. Предлагалось упорядочить чередование месяцев
по их продолжительности: .первый месяц квартала — 31
день, остальные два по 30 дней. Начало каждого первого
месяца квартала — воскресенье, второго месяца — среда,
третьего — пятница. После 30 декабря должен был быть
день без числа и дня недели — Международный праздник
мира и дружбы, а раз в 4 года, после 30 июня, еще
один день без числа и дня недели — День високосного
года.
Выпадение одного дня (или двух) из счета дней недели
неприемлемо для религиозных людей, которые еще со¬
ставляют значительную долю населения Земли. Поэтому
вопрос о реформе современного календаря до сих .пор ос¬
тается нерешенным. Существенным препятствием на пути
реформы встает также консерватизм человеческого мышле¬
ния, сопротивление новому, если оно не диктуется оче¬
видной необходимостью.
§ 12. Линия перемены даты
При счете времени календарными сутками необходимо
условиться о том, где (на каком меридиане) начинается
новая дата (число месяца).
Это условие совершенно необходимо для правильного
счета дней месяца при кругосветных путешествиях. Дви¬
гаясь на восток, путешественник проходит пункты, где
часы, идущие по местному (или поясному) времени, имеют
все большие показания по сравнению с местным (пояс¬
ным) временем пункта отправления путешественника.
Постепенно, переводя стрелки своих часов вперед, к концу
кругосветного путешествия путешественник насчитает
лишние сутки. При кругосветном путешествии с востока
на запад, наоборот, он потеряет одни сутки. Во избежа¬
ние связанных с этим ошибок в счете дней установлена
линия перемены даты (демаркационная линия), которая
по международному соглашению проходит в большей
своей части по меридиану, отстоящему от гринвичского
на 180°, отступая от него к западу у острова Вран¬
геля и Алеутских островов, к востоку — у побережья
§ 13. Астрономический и исторический счет времени 37
Азии, островов Фиджи, Самоа, Тонгатабу, Кермадек и
Чатам.
К западу от линии перемены даты число месяца всегда
на единицу больше, чем к востоку от нее. Поэтойу после
пересечения этой линии с запада на восток необходимо
уменьшить число месяца на единицу, а после пересечения
ее с востока йа запад — увеличить на единицу. Такое из¬
менение даты обычно производится в ближайшую пол¬
ночь после пересечения демаркационной линии.
Совершенно очевидно, что новый календарный месяц
и новый год начинаются на линии перемены дат.
§ 13. Астрономический
и исторический счет времени
Счет времени теми или иными единицами можно вести
порядковыми числительными и количественными числи¬
тельными. Первыми пользуются в повседневной жизни
и в истории, вторыми — в астрономии.
В обыденной жизни мы говорим: «В 1968-м году, 22 ав¬
густа, в двадцать минут девятого. . .», т. е. указываем,
который год, месяц, число и час идут в момент события.
Астрономическая запись этой фразы: «1968 г., август
22, 8 час. 20 мин.» указывает, сколько лет, месяцев, суток,
часов и минут прошло от условного начала счета до дан¬
ного явления или события.
Аналогично тому, как 20 минут первого часа астроном
запишет как 0 ч. 20 м., так и 48 минут пятого часа 1 ян¬
варя он должен записать как январь 1,4 ч. 48 м. или ян¬
варь 1,2. Начало счета суток в январе необходимо отме¬
тить как январь 0,0, что тождественно с моментом декабрь
31,0. Аналогично, февраль, 0,0 тождествен с датой январь
31,0 и т. д.
Точно так же и при счете годов астрономическая запись
момента времени «1968,0» означает, что с начала счета
уже прошло 1968 лет. Следовательно, в астрономии за на—
чало счета принимается не начало первого года нашей
эры, а начало первого года до нашей эры, которое и обоз¬
начается нулем (рис. 5). От нуля вперед (вправо) идет,
счет положительных, а назад (влево) отрицательных
годов. Счет же времени н пределах одного года-ведете»~
38
Гл. I. Единицы меры и системы счета времени
по месяцам, начиная с января, как в астрономии, так и
в истории, независимо от номера года. Поэтому истори-
-2 -7 О +7 +2 +S
•
Янв. -Дек.
Янв. -Ден.
Яне-Ден.
Янв.-Ден.
Яне-Ден.
3 й г. до н.э
2“г. до.н.э.
Iй г. до н.э.
7йг.н.з.
2*г.н.э.
Рис. 5. Астрономический и исторический счет годов.
ческую запись: «в 4-м году до н. э. октября 17-го» астро¬
ном запишет так: «—3 г., октябрь 17».
§ 14. Юлианские дни
Астрономическая и историческая запись моментов по¬
зволяет вычитанием более ранней даты из более поздней
вычислить число дней, прошедших между ними. При этом
необходимо учитывать число високосных годов и при боль¬
ших промежутках вычисления могут представить некото¬
рое неудобство и неуверенность в результатах. Поэтому
задача о числе суток, прошедших между двумя заданными
датами, удобнее решается с помощью юлианских дней.
Так называются дни, считаемые непрерывно с 1 января
4713 г. до н. э. (—4712 г., январь 1,0). Началом каждого
юлианского дня считается средний гринвичский пол¬
день.
В астрономических ежегодниках или в специальных
таблицах даются целые числа юлианских дней, прошед¬
ших с начала счета до среднего гринвичского полудня
оцределенной даты. Чтобы получить число юлианских
дцей до средней гринвичской полуночи данной даты,
соответствующее число в таблице надо уменьшить на 0,5
(см. табл. 5 в Приложениях).
Начало счета юлианских дней условное и предло¬
жено в XVI в. нашей эры Скалигером как начало боль¬
шого периода в 7980 лет, названного им юлианским
в честь своего отца Юлия и являющегося произведением
трех меньших периодов:
1) периода в 28 лет, через который повторяется рас¬
пределение дней семидневной недели до дням года;
§ 15. Неравномерность вращения Земли
89
2) периода в 19 лет, через который повторяется рас¬
пределение фаз Луны по дням года (метонов цикл), и
3) периода в 15 лет, употреблявшегося в римской на¬
логовой системе.
Скалигер, исходя из принятых в то время номеров лет
в этих трех периодах, рассчитал, что первые номера
всех трех циклов приходились на 1 января в 4713 г.
до н. э.
§ 15. Неравномерность вращения Земли
До сих пор мы считали вращение Земли вокруг своей
оси вполне равномерным, а сутки, определяемые по одному
ее обороту (средние звездные или средние солнечные),
величиной постоянной. В действительности это не так.
Результаты многочисленных исследований движения
Луны и планет, с одной стороны, и использование более
точных приборов для измерения времени, с другой сторо-
роны, убедительно показали, что угловая скорость враще¬
ния Земли непостоянна. Изменения в скорости враще¬
ния Земли по своему характеру делятся на три типа:
а) вековые,
б) нерегулярные и
в) периодические.
Следствием неравномерности вращения Земли вокруг
своей оси является то, что сутки, определенные непос¬
редственно из астрономических наблюдений, непостоянны,
а наблюденное время неравномерно.
а) Вековые изменения скорости
вращения Земли. В результате этих изменений
продолжительность суток увеличивалась за последние
две тысячи лет в среднем на 0s,0023 в столетие. По на¬
блюдениям за последние 250 лет сутки увеличивались
на 0s,0014 в столетие. Это удлинение суток складывается
из векового замедления скорости вращения Земли, вы¬
званного тормозящим действием лунных и солнечных
приливов, и собственного ускорения вращения Земли.
Собственное ускорение, по .исследованиям Н. Н. Па-
рийского, уменьшает продолжительность суток на 0%001
за 100 лет. Следовательно, если бы его не было, то сутки
увеличивались бы на + 0s,0033 за столетие или, по послед¬
ним наблюдениям, на -f 0s,0024.
40
Гл. 1. Единицы меры и системы счета времени
Причиной собственного ускорения может быть изме¬
нение момента инерции Земли, вызываемое медленными
перемещениями материи внутри Земли и на ее поверх¬
ности.
б) Нерегулярные изменения ско¬
рости вращения Земли. В результате этих
изменений продолжительность суток увеличивается или
уменьшается на несколько тысячных долей секунды.
Резкие изменения в скорости происходят через разные
промежутки времени и сравнительно быстро. Пока не из¬
вестно, меняется ли скорость вращения Земли в этих слу¬
чаях мгновенно или в результате постепенного (в тече¬
ние одного — трех лет) накопления большого числа не¬
больших изменений случайного характера. Изменения
скорости этого типа происходили в 1667, 1758, 1784,
1864, 1876 гг. и особенно заметные в 1897 и 1920 гг.
Нерегулярные флуктуации угловой скорости вращения
Земли согласно гипотезе Брауна объясняются пере¬
кристаллизацией (изменяющей момент инерации) неко¬
торых пород внутри Земли.
Никакими процессами, происходящими на поверх¬
ности Земли, или космическими причинами (например,
падением метеоритов) их, по-видимому, объяснить, нельзя.
в) Периодические изменения ско¬
рости вращения Земли. В результате этих
изменений продолжительность суток в течение года может
отличаться от их средней продолжительности за год на
+ 0s,001. При этом самые короткие сутки приходятся на
июль-август, а самые длинные — на март. Вследствие
накопления отклонений длины суток от их среднего зна¬
чения время, определенное из астрономических наблюде¬
ний, может отличаться от равномерно аекущего времени
на +0S,05.
Периодические изменения продолжительности суток
Ad обычно представляют синусоидальными членами с го¬
дичным и Полугодичным периодами:
Ad = a sin (t -f- <pr) -f- b sin (21 -f- <p2). (1.4o)
Здесь t=2ntdIT, td — время в сутках, T — продолжи¬
тельность года в сутках.
. Амплитуда годичного члена а согласно исследованиям
последних лет составляет около 0s,0005, а амплитуда
§ 16. Влияние колебаний полюса на измерение времени 41
полугодичного члена Ъ—около 0s,0003. Фазы срх и ср2
дают экстремальные значения A d, приходящиеся на
июль — август и на март. Следует заметить, что а, Ь,
срг и ср2 не являются постоянными величинами, так как
для различных лет они получаются неодинаковыми.
Иначе говоря, термин «периодические изменения скорости
вращения Земли» условен.
Наиболее вероятной причиной периодических изме¬
нений скорости вращения Земли согласно исследованиям
Н. Н. Парийского и др. являются сезонные изменения
момента количества движения атмосферы. Однако считать
этот вопрос окончательно решенным нельзя. Из исследо¬
ваний, например, Андерсона, Стойко, Минца и Манка
следует, что полугодичный член, по крайней мере час¬
тично, а может быть, и целиком, обязан своим появле¬
нием действию приливов в твердой оболочке Земли. Если
это так, то должны существовать изменения в продолжи¬
тельности суток и с более короткими периодами,
соответствующие лунному месяцу и двухнедельным при¬
ливам. Такие изменения в последнее время были обнару¬
жены и были найдены их амплитуды. Они оказались при¬
мерно того же порядка, что и для годичных и полугодич¬
ных изменений, а именно: около 0s,00023 для месячного
и 0s,00043 для двухнедельного периода.
§ 16. Влияние колебаний полюса
на измерение времени
Определение времени из астрономических наблюде¬
ний производится на географических меридианах, положе¬
ние которых фиксируется полюсами Земли. Вследствие
перемещений тела Земли относительно оси вращения по¬
люсы Земли все время меняют свое положение на ее по¬
верхности. Перемещение полюсов невелико. Северный
полюс Земли, описывая на ее поверхности сложную кри¬
вую, не выходит из квадрата со сторонами около 30 м.
При этом.движение происходит против часовой стрелки
(рис. 6), если смотреть на Северный полюс извне.
Из наблюдений установлено, что движение полюсов
имеет периодический характер. Основными периодами
являются: 14-месячный (чандлеров период), 12-месячный
(годовой) и 6-месячный (полугодовой).
42
Гл. I. Единицы меры и системы счета времени
Положение полюса, соответствующее моменту на¬
блюдений, называется мгновенным полюсом. Если положе¬
ние мгновенного полюса исправить за периодические
+0*40 +0"30 +0"20 +0"Ю -х -O'jO -0"20 -0"30 -0"40
Рис. 6. Движение Северного полюса Земли по ее поверхности
с 1952 по 1957 г.
колебания, то мы получим так называемый средний
полюс.
С колебанием полюсов связаны периодические изме¬
нения географических широт ср и долгот X. Влияние дви¬
жения полюса на широту выражается формулой
ср — <р0 = я cos X — у sin X, (1.41)
где хжу — координаты мгновенного полюса относительно
среднего, ср — широта места относительно мгновенного
полюса (мгновенная широта), ср0 — широта места относи¬
тельно среднего полюса (средняя широта), X — восточ¬
ная долгота места от Гринвича.
§ 16. Влияние колебаний полюса на измерение времени 43
Формула (1.41) легко получается из рис. 7, на кото¬
ром Р0 — средний полюс, Р — мгновенный полюс, ось
х — гринвичский меридиан, а ось у — меридиан, лежа¬
щий от гринвичского к западу на 90°.
Чтобы получить влияние колебаний полюса на долготу,
рассмотрим рис. 8, где Р0 — средний полюс, Р — мгно¬
венный полюс, ср0 — сред¬
няя широта точки М, ср —
мгновенная широта той *
ро
Рис. 7. Влияние движения
полюса на широту.
Рис. 8. Влияние движения
полюса на долготу.
же точки, Х0 — ее средняя долгота, X — ее мгно¬
венная долгота, G1 — точка пересечения гринвич¬
ского меридиана с экватором, PqG^QO0, a PGX=90°—
—Дср1? где Дер! — разность гринвичских широт, мгновен¬
ной и средней.
Для сферических треугольников МР0G± и MPGX на¬
пишем следующие формулы:
cos MGX = cos <р0 cos X0,
cos MG1 = sin <f> sin A<px -|- cos <p cos A<px cos X.
Приравняв правые части и заменив во второй из них
ср на ср0+Дср и X на Х0+ДХ, получим
cos <f>0 cos Х0 = sin (<р0 -f- Дер) sin Д<рх +
c°s (сро + Аер) c°s Acf>i cos (Х0 -f- АХ). (1.42)
Полагая cos Acp=cos Acp1==cos ДХ=1, sinAcp=Acp, sin
Дср1=Дср1 и пренебрегая произведениями малых ве¬
личин Дер, Дер! и ДХ, раскрыв скобки в формуле (1.42),
получим
ДХ sin Х0 cos <р0 = Дер! sin ?0 — Дер sin ер0 cos Х0, (1.43)
44
Гл. 1. Единицы меры и системы счета времени
где на основании формулы (1.41)
Дер = х cos Х0 — у sin Х0,
A<Pi = х.
Поэтому из формулы (1.43) получаем
AX sin Х0 cos ср0=
= х sin ср0 — х cos2 х0 sin ср0 у sin <р0 sin Х0 cos Х0
или, окончательно,
AX = 1L(xSmX0+ycosX0)tgTo. (1-^)
Формула (1.44) выражает изменение долготы данной
точки М относительно гринвичского меридиана вслед¬
ствие колебаний полюса Земли.
Разности географических координат в формулах
(1.41) и (1.44) — достаточно заметные величины по срав¬
нению с точностью современных наблюдений, и их необ¬
ходимо учитывать.
Обычно из специальных наблюдений станций Службы
широты по формуле (1.41) вычисляют координаты мгно¬
венного полюса х и у, которые и используют затем при об¬
работке всех других астрономических наблюдений, где
влиянием колебаний полюса пренебречь нельзя.
При определении времени это влияние вычисляется
по формуле (1.44).
§ 17. Квазиравномерное время
Из астрономических наблюдений определяется мест¬
ное звездное время данного меридиана. По местному
звездному времени вычисляется (см. § 7) местное сред¬
нее солнечное время, а по последнему, если известна
долгота места наблюдения от Гринвича, — всемирное
время, обозначаемое обычно TU0.
Из-за движения полюса, независимо от ошибок астро¬
номических наблюдений и ошибок принятых долгот, по¬
лученное из наблюдений в различных точках Земли все¬
мирное время TU0 будет неодинаковым.
Всемирное время
TUl = TUO-f-AX, (1.45)
§ 17. Квазиравномерное время
43
т. е. время TUO, исправленное поправками АX, вычислен¬
ными для каждого места наблюдения по формуле (1.44),
будет различаться теперь только из-за ошибок наблюде¬
ний и принятых долгот. Но вследствие неравномерности
вращения Земли всемирное время TU1 будет также и
неравномерным.
Вековые и нерегулярные изменения скорости враще¬
ния Земли учесть заранее невозможно (см. § 15). Кроме
того, их влияние на небольших интервалах времени не¬
значительно и не приводит к искажению шкалы вре¬
мени.
Что же касается периодических изменений скорости
вращения Земли, то они искажают шкалу времени на
небольших (порядка одного года) интервалах времени
и при точных определениях их влияние необходимо учи¬
тывать. Периодические изменения от года к году неоди¬
наковы. Однако благодаря незначительности колебаний
их значений по исследованиям за предыдущие годы
можно вычислить поправки А Т8 к всемирному времени
TU1 за периодические изменения скорости вращения
Земли и получить всемирное время TU2, которое полу¬
чило название предварительного равномерного (квази¬
равномерного). всемирного времени и которое вычисля¬
ется по формуле
TU2 = TU1 + ДГ, = TU0 + АХ + Д77,. (1.46)
С 1 января 1956 г. по решению съезда Международ¬
ного астрономического союза (MAC), состоявшегося в Дуб¬
лине в 1955 г., при точных определениях всемирного
времени должны учитываться поправки АХ и АТ8, вы¬
числение и публикация которых возложены на Между¬
народное бюро времени (МБВ) в Париже (см. § 88).
Поправки АХ вычисляются МБВ для каждой Службы
времени по формуле (1.44) с координатами мгновенного
полюса х и у.
Для текущей работы с экстраполированными значе¬
ниями хну вычисляются предварительные поправки
АХ на несколько месяцев вперед.
Поправка АТ8, одинаковая для всех точек земной
поверхности, вычисляется МБВ для каждого года на
основании результатов исследований, произведенных
46
Гл. I. Единицы меры и системы счета времени
в предыдущие годы. Например, формула, по которой вы¬
числялась поправка AТ8 на 1966 г., имела вид
ATS z= -[-0s,022 sin 2izt — 0s,012 cos 2nt —
— 0s,006 sin 4nt 0s,007 cos Ant, (1.47)
где £=0 для начала года и измеряется в долях года.
Поправки АХ вычисляются и публикуются МБВ через
10 суток, поправка АТ8 — через 5 суток.
§ 18. Эфемеридное время
Всемирное время TU2 для практических целей можно
считать достаточно равномерным на протяжении года
или нескольких лет. Если же рассматривать шкалу вре¬
мени, определяемую им, на интервале в несколько деся¬
тилетий или столетий, то равномерность (масштаб) этой
шкалы будет нарушена. Причиной этого являются мед¬
ленные вековые и нерегулярные изменения скорости
вращения Земли. Действительно, всемирное время из¬
меряется часовым углом среднего экваториального солнца
(см. § 4) на меридиане Гринвича. Этот меридиан в силу
неравномерности вращения Земли будет опережать равно¬
мерно вращающийся меридиан (если скорость вращения
Земли увеличивается) или отставать от него (если скорость
уменьшается).
Периодические отставания и опережения, вызывае¬
мые периодическими изменениями скорости вращения
Земли, искажают шкалу времени и с той или иной сте¬
пенью точности могли быть обнаружены из наблюдений,
производившихся при измерении времени. Отставание
или опережение, вызываемое вековыми и нерегулярными
изменениями скорости вращения Земли, удлиняет (или
укорачивает) шкалу времени, т. е. меняет масштаб шкалы
и из прежних наблюдений, производившихся при опре¬
делении времени, при недостаточной их точности, обна¬
ружить их было нельзя. Тем не менее вековые и «скачко¬
образные» изменения скорости вращения Земли были,
по сути дела, выявлены значительно раньше, чем перио¬
дические изменения. Еще в XVIII в. Галлей, а затем
в XIX в. Ганзен обнаружили значительные отклонения
от теории в движении спутника Земли — Луны. Даль-
§ 18. Эфемеридное время
47
нейшие исследования Ньюкома, Брауна, де Ситтера,
Спенсера Джонса и других подтвердили результаты Гал¬
лея и Ганзена.
Заметные разности между наблюденными и эфемерид-
ными положениями (координатами) Луны были сначала
приписаны несовершенству теории и заставили Ньюкома
дополнить ее так называемым «большим эмпирическим
членом»
10",71 sin (240°,7 -f 140°,0 Г), (1.48)
где Т — число юлианских столетий, протекших от сред¬
него гринвичского полдня 1900, январь 0.
В таблицах движения Луны, составленных Брауном,
«большой эмпирический член» (1.48) был включен в сред¬
нюю долготу Луны, получаемую из гравитационной
теории. Дальнейшие исследования Фозерингама, де Сит¬
тера и Спенсера Джонса показали, что в движении Луны
имеется вековое ускорение и к долготе Луны, получаемой
из гравитационной теории, надо прибавить вместо «боль¬
шого эмпирического члена» поправку, равную
+4",65 -f 12",96Г + 5",22Г2. (1.49)
Таким образом, согласно строгой современной теории
средняя долгота Луны может быть определена следую¬
щим выражением:
= £Вр — Ю",71 sin (240°,7 -f140°,ОТ) +4",65 +
+ 12",96Г +5",22Г2. (1.50)
Однако долгота Луны, вычисленная по формуле (1.50),
все же не будет совпадать с наблюденной долготой Ьнабл>
Разность
Я = £на6л-££ (1.51)
получила название «флуктуации Луны по долготе».
Из формул (1.50) и (1.51) следует, что поправка, которую
надо придать к средней долготе Луны, даваемой табли¬
цами Брауна, будет иметь вид
= £Вабл - £вр = +4",65 + 12", 96 Г + 5",22Г2 -
— 10",71 sin (240°,7 -f-140°,ОГ) + В. (1.52)
48
Гл. I. Единицы меры и системы счета времени
В 1905 г. Коуэлл обнаружил вековое ускорение в дви¬
жении Солнца; аналогичные ускорения были найдены
позднее и в движениях Меркурия и Венеры.
Согласно детальным исследованиям Спенсера Джонса
средняя долгота Солнца, полученная по таблицам Нью-
кома, требует поправки
Д Lq = +1",00 + 2",97 Т + 1",23Г2 + 0,07485, (1.53)
а эфемеридные долготы Меркурия и Венеры поправок
щ — +4",96 + 13",08Г + 5",\0Т2 + 0,3105, (1.54)
Д5$ = +2", 26 + 5",39Г + 2//,00Г2 + 0,1225. (1.55)
В формулах (1.53), (1.54) и (1.55) величина 5 — флук¬
туация Луны по долготе, а коэффициенты при 5 равны
отношениям средних суточных движений Солнца, Мерку¬
рия и Венеры (соответственно) к среднему суточному
движению Луны. Произведения этих коэффйциентов и
величины 5 можно было бы назвать по аналогии «флук¬
туациями по долготе» Солнца, Меркурия и Венеры. Раз¬
ности наблюденных долгот и эфемеридных Спенсер Джонс
представлял в следующей форме:
№ = a + bT + cT2 + Q — B, (1.56)
па
где п — среднее суточное движение Солнца, Меркурия
или Венеры, а — среднее движение Луны. (Величина
Q предусматривала возможную нестрогую пропорцио¬
нальность «флуктуаций» этих тел их средним суточным
движениям. Вычисления показали, что в пределах оши¬
бок <?=1.)
Аналогичные расхождения долгот принципиально
должны иметь место и для остальных планет и их спут¬
ников. Но для других больших планет влияние рассмат¬
риваемого явления практически ничтожно.
Несовершенством гравитационной теории (возможной
переменностью гравитационной постоянной, игнорирова¬
нием деформации планет и приливного трения, ошиб¬
ками численного интегрирования) нельзя объяснить на¬
блюдаемые расхождения долгот. Значит, вековые ускоре¬
ния в движениях Солнца, Луны и планет объясняются
§ 18. Эфемеридное время
49
одной общей причиной — неравномерностью вращения
Земли.
Орбитальные движения планет вокруг Солнца и спут¬
ников вокруг планет вычисляются на основании класси¬
ческой гравитационной теории и являются функциями
равномерного ньютонианского времени. Это время, т. е.
аргумент, являющийся' независимой переменной диффе¬
ренциальных уравнений движения небесных тел, полу¬
чило название эфемеридного времени ТЕ.
Наблюденные же’положения тел Солнечной системы
относятся к всемирному времени, полученному из на¬
блюдений, т. е. к неравномерному аргументу. Тогда, если
имеется вековое замедление скорости вращения Земли,
то в движениях Луны, Солнца, планет и их спутников
должны наблюдаться вековые ускорения, пропорцио¬
нальные отношениям их средних суточных движений
к среднему суточному движению Земли (Солнца). При этом
разности теоретических и наблюденных координат дол¬
жны увеличиваться с течением времени.
Анализ формул (1.53), (1.54) и (1.55) подтверждает
сделанное выше заключение.
Действительно, если мы сравним отношения коэффи¬
циентов при Т2 в формулах (1.54) и (1.55) к такому же
коэффициенту в формуле (1.53) с отношениями средних
суточных движений Меркурия (лг^ = 14732") и Венеры
(w$=5768") к среднему суточному движению Солнца
(тг0=3548"), то получим
is—. A_ = 1 - Г’°°
nQ — , n^ lfid— r,23 ,
т. e. полное совпадение.
И только отношение среднего суточного движения
Луны (лг^ =47435") к среднему суточному движению
Солнца, равное
-^ = 13,368,
не совпадает с ее вековым ускорением, полученным из на¬
блюдений (5,22/1,23=4,24). Дело здесь в том, что веко¬
вое замедление скорости вращения Земли вызывается
тормозящим действием лунных и солнечных приливов *
50
Гл. I. Единицы меры и системы счета времени
Но приливные волны, возникающие в водной оболочке
Земли, сами влияют на движение Луны. По закону со¬
хранения момента количества движения эти волны уда¬
ляют Луну от Земли и замедляют ее видимое движение.
Поэтому наблюдаемое вековое ускорение в движении
Луны и оказывается меньше того, которое должно было
бы быть от замедления скорости вращения Земли.
Аналогичное «обратное» влияние приливных волн на
видимое движение Солнца принципиально тоже существует.
Но оно неощутимо мало и поэтому вековое ускорение
в движении Солнца практически полностью отражает
вековое земедление скорости вращения Земли.
Таким образом, чтобы согласовать теорию с наблюде¬
ниями, необходимо либо изменить эфемеридные долготы
Луны, Солнца, Меркурия и Венеры соответствующими
поправками AL из формул (1.52)—(1.55), либо наблюден¬
ные координаты по всемирному времени отнести к соот¬
ветствующим моментам равномерного эфемеридного вре¬
мени ТЕ. В последнем случае надо найти изменение коор¬
динат светила за интервал времени, равный разности между
эфемеридным временем ТЕ и всемирным временем TU.
§ 19. Определение разности между
эфемеридным временем и всемирным
Согласно рекомендации VIII съезда Международного
астрономического союза (MAC), начиная с 1960 г. в астро¬
номических ежегодниках взамен ранее употреблявшегося
в таблицах движений небесных тел аргумента «всемир¬
ное время» введено «эфемеридное время». Введение
эфемеридного времени для таблиц Солнца и планет носит
чисто формальный характер, так как теории их движе¬
ний остались неизменными. Что же касается Луны, то ее
эфемерида дается с 1960 г. по строгой гравитационной
теории (из таблиц Брауна исключен «большой эмпириче¬
ский член» и введена поправка за вековое ускорение в дви¬
жении Луны).
При сравнении эфемеридных координат с наблюден¬
ными последние рекомендуется относить к эфемеридному
времени. Для этого в моменты наблюдений, отмеченные
по всемирному времени, следует вводить поправку
ДГ = ТЕ — TU. (1.57)
§ 19. Разность эфемеридного и всемирного времени &1
Поправку АТ можно получить из следующих сообра¬
жений: средняя долгота Солнца изменяется на 1" за про-
„ 365,2422 • 86400
межуток времени, в среднем равный —go—60~ ~
=24s,3495; следовательно, изменение долготы Солнца на
AL0 произойдет за время
Л* = 248,3495Л L0.
Подставляя в последнее выражение AL0, найденную
Спенсером Джонсом (формула (1.53)), получим разность
между эфемеридным временем и всемирным, т. е.
АТ = ТЕ—TU =
= 24s,3495 + 728,3180Г + 29%950Г2 +1,821445. (1.58)
Точное значение величины АТ может быть получено
только на основании наблюдений Луны, т. е. после того
как будет определена флуктуация Луны 5.
Международный астрономический союз рекомендовал
брать для прошлых лет флуктуации Луны, полученные
Спенсером Джонсом на основании обработки многочис¬
ленных наблюдений Луны, Солнца, Меркурия и Венеры.
Значения 5, взятые из работы Спенсера Джонса, даны
в таблице 1.
Таблица 1
Дата
в
Дата
в
Дата
в
1681,0
—12/72
1837,4
+ <91
1900,5
—15*87
1710,0
— 3,92
43,1
+ 4,31
03,5
—14,50
27,0
+ 2,15
48,8
+ 3,97
06,5
—13,43
37,0
+ 5,97
52,5
+ 3,37
09,5
—12,78
47,0
+ 8,49
57,5
+ 2,40
12,5
—11,62
55,0
+10,34
62,5
+ 0,91
15,5
—10,35
71,0
+13,54
67,5
— 1,57
18,5
-10,20
85,0
+14,84
72,5
— 6,38
21,5
-10,18
1792,0
+14,53
77,5
— 9,38
24,5
—11,82
1801,5
• +13,09
82,5
—11,31
26,5
-12,11
09,5
+11,80
87,5
—13,05
28,5
—12,90
13,0
+11,28
91,5
-14,34
30,5
—13,83
21,8
—10,02
94,5
—15,23
32,5
-14,81
1831,5
+ 6,85
1897,5
-15,99
34,5
—15,98
1936,5
—16,48
4*
5й
Ёл. /. Ёдиницы меры и системы счета вреМенй
Таблица 2
Дата
дг
Дата
дг
Дата
дг
1681,0
—13?53
1843,1
+0?75
*1906,5
+ 4®71
1710,0
-12,07
48,8
+2,40
09,5
+ В,22
27,0
— 7,21
52,5
+2,90
12,5
+12,71
37,0
— 3,08
57,5
+3,40
15,5
+17,43
47,4
— 0,72
62,5
+3,11
18,5
+20,17
55,0
+ 1,27
67,5
+1,16
21,5
+22,74
71,0
+ 5,55
72,5
-4,88
24,5
+22,34
85,0
+ 7,80
77,5
—7,48
26,5
+23,56
1792,0
+ 7,63
82,5
—7,97
28,5
+23,89
1801,5
+ 6,00
87,5
—7,98
30,5
+24,01
09,5
+ 4,92
91,5
—7,70
32,5
+24,06
13,0
+ 4,65 •
94,5
—7,27
34,5
+23,76
21,8
+ 4,37
1897,5
—6,55
1936,5
+24,72
31,5
+ 1,23
1900,5
-4,19
1837,4
— 0,24
1903,5
+0,51
Подставив из таблицы 1 в формулу (1.58) значение В,
мы получим приведенные в таблице 2 разности между
эфемеридным временем и всемирным.
Рис. 9. Флуктуации Луны и разности между эфемеридным и все¬
мирным временем.
Для наглядности данные таблиц 1 и 2 представлены
графически на рис. 9.
Дальнейшие исследования различных авторов, опре¬
делявших величину В, позволили продолжить таб¬
лицу 2.
$ 19. Разность эфемеридного и всемирного времени
Соответствующие таблицы печатались ежегодно как
в Астрономическом Ежегоднике СССР, так и в Astrono¬
mical Ephemeris. Разности АТ вычислялись по формуле
(1.58), и только для нескольких последних лет в каждой
таблице приводились экстраполированные значения,
обычно с меньшим числом десятичных знаков. В послед¬
ний раз Астрономический Ежегодник СССР опубликовал
такую таблицу в выпуске на 1971 г. Редукции АТ в таб¬
лице 3 мы и заимствуем из этого выпуска.
Таблица 3
Дата
АГ
Дата
АГ
Дата
АГ
1937,5
+23,63
1949,5
+28,94
1961,5
+33,61
38,5
23,76
50,5
29,42
62,5
33,95
39,5
23,99
51,5
29,66
63,5
34,35
40,5
24,30
52,5
30,29
64,5
34,91
41,5.
24,71
53,5
30,96
• 65,5
35,56
42,5
25,15
54,5
31,09
66,5
36,32
43,5
25,61
55,5
31,65
67,5
37,2
44,5
26,08
56,5
31,81
68,5
38,0
45,5
26,57
57,5
32,13
69,5
38,8
46,5
27,08
58,5
32,55
70,5
39,7
47,5
27,61
59,5
32,92
1971,5
+40,5
1948,5
+28,15
1960,5
+33,29
В 1967 г. на XIII Генеральной ассамблее MAC комис¬
сия 4 (эфемериды) приняла решение обозначать каждую,
различаемую в смысле ее теоретической основы, эфеме¬
риду Луны специальным номером j.
Улучшенная эфемерида Луны (Improved Lunar Ephe¬
meris, ILE), т. e. вычисленная по строгой гравитацион¬
ной теории, опубликованная в Астрономическом Ежегод¬
нике СССР на 1960—1971 гг., обозначается номером
j=0.
Улучшенная эфемерида Луны (ILE), исправленная
за переход на новую систему астрономических постоян¬
ных MAC и за ошибку в коэффициенте члена № 182 лун¬
ной теории Брауна, обозначена номером j=l.
В соответствии с этими номерами эфемеридное время,
определяемое сравнением наблюденных положений Луны
54
Гл. I. Единицы меры и системы счета времени
отнесенных к равноденствию каталога FK4, с эфемерид-
ными положениями из Improved Lunar Ephemeris (j=0),
обозначается через ТЕО, а разность ТЕО—TU2 через
АТ0. Сравнение наблюденных положений Луны, отнесен¬
ных к равноденствию FK4, с эфемеридой Луны j = l дает
ТЕ1 и АГ1=ТЕ1—TU2.
Астрономический Ежегодник СССР (с выпуска на
1972 г.) публиковал (до выпуска на 1978 г. включительно)
редукции ДГ0 и Д 7\ для середины каждого года, начиная
с 1900,5. Таблица 4редукций ДГ0и АТг заимствована нами
из Астрономического Ежегодника СССР на 1978 г. В объ¬
яснении к этой таблице сказано, что редукции взяты
из работы А. М. Стойко (Парижская обсерватория) «Temps
des ephemerides, temps atomique, temps rotationnel et leur
comparaison» (Bull. Acad. r. Belgique, 5e Serie, Tome LV,
№ 4, 1969) и получены на основании соотношения. . .
(2), т. е. по формуле (1.58). Последнее замечание следо¬
вало бы уточнить, так как редукции Д Т только для пери¬
ода 1900,5—1966,5 вычислены по наблюденным цоложе-
ниям Луны. Для периода 1967,5—1977,5 редукции ДТ
экстраполированы по формуле, которую А. М. Стойко
получила, исследуя около 1000 наблюдений покрытий
звезд Луной, выполненных с 1955 г. по 1966 г. на 100
станциях наблюдений различных стран мира. Экстраполи¬
рованные значения ДГ0 и АТг вычислялись до тысячной
доли секунды, чтобы избежать возможного накопления
ошибок. Но, как замечает А. М. Стойко, для экстраполи¬
рованных значений ДГ0 и АТг можно брать результаты,
округленные до 0s,1.
Таким образом, точные значения Д Т могут быть по¬
лучены лишь для прошедших моментов времени и со зна¬
чительным опозданием.
Для тех целей, для которых вполне достаточно знать
приближенное значение А Г, астрономические ежегод¬
ники на каждый год публикуют экстраполированные зна¬
чения А Гэкс.
Приближенное значение А Гэкс можно получить из сле¬
дующих соображений: долгота Луны, вычисленная по таб¬
лицам Брауна, как уже было выяснено в § 18 [формула
(1.52)], нуждается в поправке:
£вр “Ь AL<i = ЬВЛбл.
(1.59)
§ 19. Разность эфемеридного и всемирного времени 55
Таблица 4
Год
А Го
А7\
Год
А Го
АТ,
1900,5
01.5
02.5
03.5
04.5
- 3*662
- 2,359
- 0,801
+ 0,434
1,800
- 4*228
- 2,869
- 1,385
+ 0,121
1,600
1940,5
41.5
42.5
43.5
44.5
+24!371
24,889
25,126
25,561
26,152
+24^027
24,502
25,018
25,540
26,045
1905,5
6.5
7.5
8.5
•9,5
+ 3,288
4,455
5,820
7,397
8,691
+ 3,036
4,459
5,886
7,330
8,773
1945,5
46.5
47.5
48.5
49.5
+26,449
26,969
27,690
28,112
28,704
+26,546
27,055
27.580
28,097
28.580
1910,5
11.5
12.5
13.5
14.5
+10,137
11,690
12,827
14,046
15,350
+10,174
11,487
12,685
13,787
14,817
1950,5
51.5
52.5
53.5
54.5
+29,409
29,758
30,259
30,874
31,116
+29,015
29,418
29,805
30,183
30,545
1915,5
16.5
17.5
18.5
19.5
+16,266
17,256
18,287
18,878
19,578
+15,799
16,711
17,542
18,296
19,027
1955,5
56.5
57.5
58.5
59.5
+31,506
31,899
32,084
32,527
33,042
+30,912
31,177
31,591
32,115
32,584
1920,5
21.5
22.5
23.5
24.5
+20,397
20,847
21,385
21,979
22,162
+19,756
20,468
21,112
21,661
22,114
1960,5
61.5
62.5
63.5
64.5
+33,227
33,543
34,057
34,316
34,980
+33,053
33,463
33,910
34,397
35,609
1925,5
26.5
27.5
28.5
29.5
+22,433
22,776
22,724
22,823
23,095
+22,461
22,691
22,824
22,891
22,944
1965,5
66.5
67.5
68.5
69.5
-35,897
36,836
37,619
38,747
39,647
+35,817
36,071
37,552
38,424
39,379
1930,5
31.5
32.5
33.5
34.5
+23,082
23,254
23,557
23,492
23,564
+23,007
23,063
23,093
23,085
23,058
1970,5
71.5
72.5
73.5
74.5
+40,774
42,002
43,011
44,052
45,358.
+40,379
41,357
42,168
43,498
44,615
1935.5
36.5
37.5
38.5
1939.5
+23,762
23,645
23,734
24,030
24,073
+23,037
23,061
23,155
23,343
23,634
1975,5
76.5
77.5
+46,417
47,753
49,288
+45,886
47,281
48,762
56
Гл. I. Единицы меры и системы счета времени
Если наблюдения Луны отнести к эфемеридному вре¬
мени, то наблюденную долготу Ь'пШ следует исправить
на величину
Д£эф = -^Д£0 = 13,368Л£0. (1.60)
Тогда выражение (1.59) примет вид
£бР + Д£(С = £иабд + Д£эф
ИЛИ
£бр + = £'абл.
Следовательно, для получения координат Луны, от¬
несенных к эфемеридному времени, необходимо к сред¬
ней долготе Луны, полученной по таблицам Брауна,
прибавить поправку
Д//с = Д£с-Д£эф. (1.61)
Далее, подставляя в формулу (1.60) значение AЬ@ из
(1.53), получим
Д£эф = 13",368 + 39",703Г + 16",443Г2 + В.
Вычитая последнее выражение из (1.52), находим
Д//с == —8", 718 — 26",743 Т — И",223Т2 —
—10",71 sin (240°,7 -f140°,0 Т). (1.62)
Долгота Луны изменяется на 1" за интервал времени,
в среднем равный 86400747435"=Is,82144. Умножив
на него Д//<£, мы получим интервал времени
Д*=18,82144Д//С, (1.63)
на который надо проинтерполировать брауновскую эфе¬
мериду Луны, чтобы привести ее к эфемеридному времени.
Этот интервал At дает приближенную разность между
всемирным временем TU и эфемеридным временем ТЕ,
т. е. —ДТ. Поэтому для вычисления приближенных
(экстраполированных) значений разности АГЭКС на ос¬
новании формул (1.62) и (1.63) можно пользоваться сле¬
дующим выражением:
Д T9KG = Is,82144 [8",718 + 26",743Т + 11",223772 +
10VI sin (240°,7 +140°,ОТ)] (1.64)
§ 21. Связь эфемеридного времени с йтомНыМ
57
или
А ТдКС = 15s,879 + 48s,71 IT + 205,442 Г2 +
+ 19s,508 sin (240°,7 +140°,0Г).
§ 20. Эфемеридная секунда
До открытия неравномерности вращения Земли про¬
изводная единица меры времени — секунда — определя¬
лась как 1/86400 доля средних солнечных суток.
Непостоянство средних солнечных суток вследствие
неравномерного вращения Земли заставило отказаться
от такого определения секунды.
В октябре 1956 г. Международное Бюро мер и весов
постановило дать следующее определение фундаменталь¬
ной единицы времени — секунде:
«Секунда есть 1/31556925,9747 доля тро¬
пического года для 1900 г., январь 0,
в 12 часов эфемеридного времени».
Так определяемая секунда получила название «эфе-
меридной». Число 31556925,9747=86400x365,2421988 —
есть число секунд в тропическом году, продолжительность
которого для 1900 г., январь 0, в 12 часов эфемеридного
времени согласно формуле (1.38) равнялась 365,2421988
средних солнечных суток.
Иными словами, эфемеридная секунда есть промежу¬
ток времени, равный 1/86400 доле средней продолжитель¬
ности средних солнечных суток, которую они имели
в 1900 г., в январе 0, в 12 часов эфемеридного времени.
Таким образом, новое определение секунды связано
также и со вторым движением Земли — с ее движением
вокруг Солнца, тогда как старое определение основыва¬
лось только на ее вращении вокруг своей оси.
§ 21. Связь эфемеридного времени
с атомным
Создание атомных стандартов частоты, и на их основе
атомных часов, позволило получить принципиально но¬
вую шкалу времени, получившую название атомного вре¬
мени (см. § 91).
58
Гл. I. Единицы меры и системы счета времени
Таблица 5
Дата
АТ (А)
ATU1
Дата
АТ (А)
ATU1
1956 Янв. 1
Апр. 1
Июль1
Окт. 1
+31?34
31,43
31,52
31,56
—0f08
—0,04
-0,07
-0,01
1965 Фев.28
Апр. 1
Июль1
Окт. 1
+35;73
35,94
36,14
36,31
-0?06
0,00
+0,02
+0,06
1957 Янв. 1
Апр. 1
Июль1
Окт. 1
+31,67
31,79
31,92
32,00
-0,04
-0,06
-0,07
-0,02
1966 Янв. 1
Апр. 1
Июль1
Окт. 1
+36,54 %
36,76
36,99
37,18
-0,05
-0,03
-0,02
+0,02
1958 Янв. 1
Апр. 1
Июль1
Окт. 1
+32,17
32,32
32,45
32,52
-0,04
-0,05
-0,06
-0,01
1967 Янв. 1
Апр. 1
Июль1
Окт. 1
+34,43
37,65
37,87
38,04
+0,01
+0,02
+0,04
+0,10
1959 Янв. 1
Апр. 1
Июль1
Окт. 1
+32,67
32,80
32,91
33,00
-0,03
-0,03
-0,06
0,00
1968 Янв. 1
Апр. 1
Июль1
Окт. 1
+38,29
38,52
38,75
38,95
+0,09
0,00
+0,01
+0,04
1960 Янв. 1
Апр. 1
Июль1
Окт. 1
+33,15
33,28
33,39
33,45
-0,01
-0,03
-0,02
+0,03
1969 Янв. 1
Апр. 1
Июль1
Окт. 1
+39,20
39,45
39,70
39,91
+0,03
+0,02
+0,01
+0,03
1961 Янв. 1
Апр. 1
Июль1
Окт. 1
+33,58
33,70
33,80
33,86
+0,02
+0,02
+0,04
+0,04
1970 Янв. 1
Апр. 1
Июль1
Окт. 1
+40,18
40,15
40,70
40,89
0,00
-0,03
-0,05
-0,01
1962 Янв. 1
Апр. 1
Июль1
Окт. 1
+33,99
34,12
34,23
34,31
+0,04
+0,01
0,00
+0,02
1971 Янв. 1
Апр. 1
Июль1
Окт. 1
+41,16
41,41
41,68
41,92
-0,04
-0,05
-0,08
-0,09
1963 Янв. 1
Апр. 1
Июль1
Окт. 1
+34,47
34,58
34,73
34,83
-0,03
—0,05
-0,09
-0,09
1972 Янв. 1
Апр. 1
Июль1
Окт. 1
+42,22
42,52
42,82
43,07
-0,04
—0,35
+0,36
+0,11
1964 Янв. 1
Апр. 1
Июль1
Окт. 1
+35,03
35,22
35,40
35,52
-0,08
-0,05
-0,11
-0,02
1973 Янв. 1
Апр. 1
Июль1
Окт. 1
1974 Янв. 1
+43,37
43,67
43,96
44,19
+44,48
+0,81
+0,51
+0,22
—0,01
+0,70
§ 21. Связь эфемеридного времени с атомным
59
Атомное время не зависит от особенностей вращения
Земли, а его шкала обладает исключительно высокой
равномерностью. Международное атомное время (см. § 97)
получается на основании показаний атомных часов раз¬
личных обсерваторий и обозначается через TAI. Существо¬
вание шкалы атомного времени позволило определять
все виды неравномерностей во вращении Земли относи¬
тельно этой шкалы, не прибегая к эфемеридному времени.
Для связи шкал атомного и эфемеридного времен произ¬
водилось их сравнение и был приблизительно определен
относительный сдвиг нуль-пунктов этих шкал, равный
ТЕ—TAI = 32S,18.
Учет этого сдвига дает возможность производить опре¬
деление поправок А Г с использованием уже шкалы атом¬
ного, а не эфемеридного времени по формуле
AT7 (А) = TAI + 32s,18 — TU1
В таблице 5, данные которой заимствованы из Астроно¬
мического Ежегодника СССР на 1979 г., приведены зна¬
чения АГ (А), а также разности -ATU1=TU1—TUC
с января 1956 г. по январь 1972 г., где TUC — всемирное
координированное время (см. § 91).
Глава 11
ПРИБОРЫ ДЛЯ ИЗМЕРЕНИЯ ВРЕМЕНИ
§ 22. Общие замечания
Основные приборы для измерения времени называются
часами.
Устройство всех часов, так же как и установление
единиц меры времени, основано на использовании ка¬
кого-либо, по возможности постоянного, периодического
процесса.
В современных высокоточных приборах такими про¬
цессами являются: 1) механические колебания физиче¬
ского маятника (маятниковые часы), 2) электромагнитные
колебания в ламповом генераторе, стабилизированном
кварцем (кварцевые часы), и 3) излучение или поглощение
электромагнитных волн атомами и молекулами (атомные и
молекулярные стандарты).
Зная период каких-либо колебаний или их частоту / и
сосчитав число колебаний от одного какого-либо момента
до другого, можно определять отрезки времени, т. е. изме¬
рять время. Счет числа совершенных колебаний ведется
с помощью специальных устройств (часовых механизмов
с циферблатами, хронографов, электронных счетчиков,
частотомеров и т. п.). Надежность и точность работы часов
зависит от стабильности периодического процесса, поло¬
женного в их основу (от постоянства частоты колебаний
в этом процессе).
Из перечисленных процессов наибольшим постоян¬
ством частоты обладают колебания в атомных и молеку¬
лярных генераторах, наименьшим — колебания физичес-
кого~маятника. Частота колебаний 'атомных и молеку¬
лярных'генераторов используется для контроля и кор¬
ректировки кварцевых часов. Часы, представляющие
§ 23. Поправка и ход часов
61
комбинацию кварцевых часов с атомными или моле¬
кулярными генераторами, называются атомными или
молекулярными часами.
Прежде чем переходить к описанию устройства отдель¬
ных астрономических часов, необходимо познакомиться
с некоторыми понятиями и терминами, приложимыми
ко всем часам вообще, независимо от их конструкции.
§ 23. Поправка и ход часов
Разность между точным временем Т в какой-либо мо¬
мент и показаниями часов Т' в этот же момент называется
поправкой часов и, т. е.
Иными словами, поправка часов и есть та величина, кото¬
рую следует алгебраически прибавить к показаниям ча¬
сов Г', чтобы получить точное время Т.
Определение точного времени сво¬
дится, таким образом, к определению
поправки часов.
Поправка часов и может быть положительной (показа¬
ния часов Т' меньше точного времени Т — «часы отстали»),
отрицательной (показания часов Т' больше точного вре¬
мени Т — «часы ушли вперед») и равняться нулю, если
Г' = 7\ т. е. если часы показывают точное время, что,
вообще говоря, бывает очень редко и только в один ка¬
кой-то момент, так как поправка часов не остается по¬
стоянной, а непрерывно меняется.
Изменение поправки часов за определенный промежу¬
ток времени (минута, час, сутки и т. д.) называется ходом
часов со (минутным, часовым, суточным и т. д. соответ¬
ственно).
Если показания часов в некоторый момент были Т\,
а их поправка иг, в последующий момент — Г' и и2, то ход
часов будет
Отсюда
и = Т — Т.
Т = Г +и.
(2.1)
(2.2)
(О
и2 — и,
(2.3)
где промежуток времени Т'2—Т[, может быть выражен
в минутах, часах, сутках и т. Д. _ - --
62
Гл. II. Приборы для измерения времени
Ход часов положителен, если поправка часов с тече¬
нием времени алгебраически увеличивается, т. е. если
и2 > их (часы «отстают»), и отрицателен, если поправка
с течением времени алгебраически уменьшается, т. е. если
и2 < щ (часы «спешат»). Из соотношения (2.3) следует,
что если известны ход часов ш и поправка часов иг для мо¬
мента Т\ (или и2 для момента Т2), то поправка часов и
для любого другого момента Т' может быть вычислена
по формулам
и = и1-{-а>(Т/ — Т[) (2.4)
или
и=и2 — и(Т2 — Т1). (2.5)
Если момент Т' лежит внутри промежутка времени
(Т2—Т'^), то поправка часов и, вычисленная по форму¬
лам (2.4) и (2.5), называется интерполированной, если
Т' < Т[ или Т' > Т2, — экстраполированной.
§ 24. Систематические и случайные изменения
хода часов; оценка качества часов
При измерении времени часами величина их поправки
и хода принципиального значения не имеет. Практически,
конечно, удобно пользоваться часами с небольшой поправ¬
кой и с небольшим ходом, однако более существенное
значение имеет постоянство величины хода часов. Вели¬
чина хода, даже у наиболее совершенных современных
маятниковых и кварцевых часов, с течением времени
не остается постоянной, подвергаясь изменениям как слу¬
чайного, так и систематического характера.
Изменения хода часов могут быть прогрессивными,
периодическими и внезапными (скачкообразными).
Причины систематических изменений хода часов часто
оказываются невыясненными и трудно устранимыми.
Путем непрерывного изучения ходов каждых данных
часов можно установить закономерность систематических
изменений, иногда найти причину, их порождающую, и
в целом ряде случаев устранить эту причину.
Прогрессивные систематические изменения хода часов
обычно представляются линейной функцией времени или
квадратичной параболой.
§ 24. Йзменения хода часов
63
Периодические изменения хода представляются каким-
либо синусоидальным законом, где аргументом служат
время, температура, амплитуда колебаний и т. п.
Скачкообразные изменения хода также могут быть
определены, но лишь в очень редких случаях удается
установить причину их появления.
Все систематические изменения хода с той или иной
степенью точности можно определить и учесть. Случай¬
ные же колебания хода учету не поддаются. Порядок
их величины служит количественной оценкой качества
часов. Чем меньше случайные колебания хода часов,
тем часы лучше, и наоборот.
Пусть для ряда равных последовательных промежут¬
ков времени п найдены величины ходов часов Wj, ш2,. . .
. . ., шя (систематические изменения будем считать из
них исключенными.) Средняя величина хода ш за весь
промежуток времени будет
Разность каждого хода со средним ходом ш обозначим
через До\., т. е.
Величины Aw,, условно можно рассматривать как слу¬
чайные колебания хода часов и, применяя к ним теорию
случайных ошибок, характеризовать качество часов сред¬
ним квадратическим уклонением v отдельных ходов от их
общего среднего, т. е.
п
t=i
(2.6)
П
П
До^. = о){ — о).
(2.7)
Если имеется ряд часов
к19к2,...9кя
и для них известны средние квадратичные уклонения
vv v2, ..ия,
64 Рл. 11. Приборы для измерения врёменй
то относительные качества часов оцениваются их относи¬
тельными весами:
— hL —JL — h2
Pi — V2 > Р*— V2 ’ • • •’ Pn— V2 •
При этом h — величина произвольная. Ее можно считать
равной квадратическому уклонению одних каких-нибудь
часов, вес которых принимается за единицу. Пусть это
будут часы Kv Тогда h=uly а относительные веса часов
А = 1. А = £. А = 4*--- А = 4-
Способ оценки качества часов величиной v имеет два
существенных недостатка, на которые указал Тиле еще
в 1880 г.:
1) величины А0)^=0),.— ш не ведут себя как случай¬
ные величины и, следовательно, теория случайных ошибок
к ним неприменима;
2) само понятие «среднего квадратического уклоне¬
ния» является неопределенным, так как число значений
ходов, из которого оно выводится, может быть различным
и, следовательно, v для одних и тех же часов будет зави¬
сеть от числа ходов.
Следует заметить, что второй недостаток не может быть
отнесен только к данному способу оценки, так как в лю¬
бом случае оценка качества часов будет зависеть от числа
значений ходов.
В 1912 г. Б. Ванах предложил другой способ оценки
качества часов. Этот способ, развитый в дальнейшем
Н. М. Ляпиным и Н. X. Прейпичем, в большинстве слу¬
чаев и применяется в настоящее время. Суть его заклю¬
чается в следующем: если ходы часов освободить от систе¬
матических изменений и образовать разности смежных
ходов, то эти разности должны подчиняться законам слу¬
чайных ошибок, а их среднее квадратическое значение бу¬
дет характеризовать качество часов.
Разности смежных ходов (освобожденных от система¬
тических влияний) называются случайными вариациями.
ходов А, а среднее квадратическое из них — средней ва¬
риацией хода, или просто вариацией 8.
§ 25. Маятник астрономических часов
65
Пусть для ряда равных последовательных промежут¬
ков времени я+1 найдены величины ходов, освобожден¬
ных от систематических влияний:
^2» • • •> °Vi+le
Случайные вариации ходов тогда будут Д1=ш2— ш1г
A2=w3—w2>. . А^=а)м—ш{>. . ,,АЯ= шя+1—шя, а сред¬
няя вариация
/2 д< 1 f 2 (“<+i
-щ?
. (2.9)
Качество часов и характеризуется величиной 8 или сред¬
ним квадратическим колебанием одного хода е, которое
равно
•=£. (2.Ю)
Если имеется несколько часов
и для них известны вариации
Pv ---IV
то относительные качества часов оцениваются их относи¬
тельными весами
_ h2 _ h2 _ h2
Яг — g| 9 Яч — ц > • • • > Яп — §2 $
где h — величина произвольная. Ее можно считать рав¬
ной вариации одних каких-либо часов, вес которых прини¬
мается за единицу. Пусть это будут часы Кг. Тогда h~ 81?
а относительные веса часов
Л Ч Ч Ч /0/1 /14
Ях Яч— §2 » Яг— *2 > • • •> Яп— §2 • (2.11)
2 3 я
§ 25. Маятник астрономических часов
Во всех маятниковых часах имеются следующие глав¬
ные части: 1) регулятор, 2) подвесное приспособление,
3) передаточный механизм, 4) счетчик и 5) двигатель.
66
Гл. II. Приборы для измерения времени
Регулятором астрономических часов является физи¬
ческий маятник.
Физическим маятником называется твердое тело, спо¬
собное совершать колебания вокруг неподвижной точки
3 (точки подвеса), не совпадающей с центром тя¬
жести тела. Если начальная скорость движения
маятника лежит в начальной плоскости его от¬
клонения от положения покоя, то движение
маятника является плоским. В этом случае
колебания маятника происходят вокруг непод¬
вижной горизонтальной оси (оси вращения),
не [проходящей через центр тяжести тела,
Плоские колебания физического маятника и
П используются при устройстве часов.
Маятником астрономических часов (рис. 10)
обычно служит тяжелое тело (около 10—12 кг)
чечевицеобразной, цилиндрической или иной
формы, укрепленное на конце тонкого стержня
(длиной около 1 м) и подвешенное таким обра¬
зом, что оно может совершать колебания лишь
в определенной вертикальной плоскости.
Период колебаний такого маятника Т под
действием одной только силы тяжести выра¬
жается следующей формулой;
Рис. 10.
Маятник
астроно¬
мических
часов.
+(т*т) sin*T+ •••]’
(2.12)
где 2шт2 — момент инерции маятника отно¬
сительно его оси вращения, g — ускорение
силы тяжести, М — масса маятника, а —
расстояние центра тяжести маятника от оси
вращения, а — амплитуда маятника (угол отклонения
маятника от положения покоя).
Для малых амплитуд в формуле (2.12) можно ограни¬
читься членами второго порядка и написать ее в следую¬
щем виде:
§ 25. Маятник астрономических часов
67
Момент инерции маятника относительно оси вращения,
как учит механика, равен
2 пгг2 = Ма2 -f- 2
где р — расстояние элемента массы от оси, параллельной
оси вращения маятника и проходящей через его центр
тяжести. Подставив последнее соотношение в формулу
(2.13), получим
^/^З^О+тИ (2.«)
ИЛИ
где величина
r=2"l/|(i+ тН' (2Л5)
«=.+-%£ (2.16,
называется приведенной длиной маятника.
Очевидно, что I > а, так как
2^1>о.
Ма
Точка маятника, находящаяся на расстоянии I от оси
вращения, называется центром качания. Центр качания
и его проекция на ось вращения маятника — две сопря¬
женные точки, т. е. если подвесить маятник на оси, про¬
ходящей через центр качания, то его проекция на преж¬
нюю ось станет новым центром качания.
Величина К2 = ^ называется радиусом вращения
или радиусом инерции, и формула (2.15) может быть запи¬
сана также и в следующем виде:
j’ = 2"I/2|2!(i+tV“s). <2л7>
Все приведенные выше формулы дают продолжитель¬
ность колебания маятника в пустоте. В воздухе или в
5*
68
Гл. II. Приборы для измерения времени
другой какой-либо среде, оказывающей сопротивление
движению, продолжительность колебания будет больше.
Кроме того, из выражения (2.15) видно, что период
колебания маятника Т зависит также: 1) от ускорения
силы тяжести g, 2) от приведенной длины маятника I и
3) от амплитуды колебаний а. Для постоянства хода часов
необходимо, чтобы период колебаний маятника не менялся.
Следовательно, необходимо, чтобы не менялись сопротив¬
ление воздуха и величины g, I и а. Чтобы устранить влия¬
ние изменений атмосферного давления на ход часов, их
помещают в герметически закрытый резервуар (баро¬
камеру), из которого воздух откачивается до 3—5 мм
ртутного столба.
Для устранения влияния изменений силы тяжести g
на ход маятниковых часов мы не располагаем никакими
средствами и это является одним из существеннейших не¬
удобств при высокоточных измерениях времени такими
часами.
Изменения приведенной длины маятника I вызываются
главным образом изменениями температуры окружающей
среды. Чтобы устранить влияние этих изменений на ход
часов, принимаются следующие меры: 1) материал для
изготовления маятника и его подвеса выбирается с малым
коэффициентом термического расширения; 2) устраи¬
ваются специальные приспособления, компенсирующие
влияние изменений температуры; 3) часы помещаются
в такое место, где температура по возможности постоянна.
Чтобы учесть влияние изменений амплитуды на ход
часов, они снабжаются приспособлениями для точного
отсчета амплитуды или для непрерывной регистрации ее.
Однако проще и надежнее это влияние устраняется путем
соответствующего устройства подвесного приспособле¬
ния. С его помощью можно добиться осуществления изо¬
хронизма для значений амплитуд, заключенных в доста¬
точно широком интервале (см. § 26).
Маятник астрономических часов регулируется так,
чтобы продолжительность одного полного колебания (т. е.
его период Т) равнялась двум секундам звездного или
среднего солнечного времени. В первом случае часы будут
идти по звездному времени, во втором — по среднему
солнечному. Следовательно, маятник звездных часов дол¬
жен совершать 43 200 полных колебаний за одни звезд¬
§ 26. Подвесное приспособление
69
ные сутки, а маятник средних часов — 43 200 полных
колебаний за одни средние солнечные сутки. Начальная
(гру.бая) регулировка маятника осуществляется переме¬
щением по стержню его груза. Для точной регулировки
применяются добавочные грузики, помещаемые на полочке
«п» (рис. 10) между осью вращения и центром тяжести
маятника. Добавлением или снятием добавочных грузиков
можно менять положение центра тяжести и, следовательно,
изменять период колебаний маятника (в довольно узких
пределах). Точная регулировка маятника, помещенного
в барокамеру, осуществляется также изменением давле¬
ния в барокамере.
§ 26* Подвесное приспособление
Как известно, плоскость качания свободного маят¬
ника (маятник Фуко) с течением времени перемещается
относительно окружающих предметов. Это перемещение
зависит от широты и равно 15°coscp, что в умеренных
широтах составляет около 12° в час, или 12" за время
одного колебания секундного маятника.
Маятник часов подвешивается так, чтобы он мог совер¬
шать колебания лишь в одной определенной (относительно
окружающих предметов) вертикальной плоскости. По¬
этому подвесное приспособление, или пендель-федер,
играет очень большую роль в часах и является весьма
ответственной их частью. Его основные назначения:
а) поддерживать маятник, позволяя ему качаться с воз¬
можно меньшим трением и б) сохранять плоскость его
колебаний неизменной относительно окружающих пред¬
метов.
В астрономических маятниковых часах применяются
исключительно пружинные подвесы. Идея пружинного
подвеса была предложена Клементом в XVII в. и заклю¬
чается в следующем. Две плоские пружины Рг и Р2 шири¬
ной около 4—5 мм и толщиной в их рабочей части R
(рис. И) около 0,05 мм зажаты параллельно друг другу
двумя оправами 01 и 02 так, что длина свободной части
каждой пружины около 10 мм. Оправы состоят из двух
половинок, скрепленных между собой винтами. Через
верхнюю оправу 02 проходит шпилька ЪЪУ через ниж¬
нюю Ох — шпилька пп. На шпильку нижней оправы
70
Гл. II. Приборы для измерения времени
подвешивается маятник (крючком, которым оканчи¬
вается верхняя часть его стержня), а шпилька верхней
оправы кладется в вырез крепкого кронштейна, укреп¬
ленного на барокамере или на задней стенке футляра
часов. Никакие смещения в местах соединения пружин
и шпилек с оправами или шпилек с кронштейном и с маят¬
ником не должны иметь места — маятник при движении
должен только изгибать пружины. При этом пружинный
подвес рассчитывается так, чтобы ось вращения маятника
0 •
0
0
0
Pi
0 0
0 • 0
Ot
Рис. 11. Пружинный подвес.
I Р3
0 р2 О
0
Рис. 12. Пру¬
жинный подвес
Федченко.
лежала на расстоянии, равном 1/3 длины пружин, от ниж¬
него края верхней оправы.
С помощью пружинного подвеса можно добиться изо¬
хронизма колебаний маятника при изменениях его ампли¬
туды в довольно широких пределах. Однако, как показал
советский инженер Ф. М. Федченко, обычные двухпружин¬
ные подвесы недостаточно компенсируют изменения ампли¬
туды. Он предложил оригинальную конструкцию подвеса,
состоящего из трех пружин Р±, Р2 и Р3 (рис. 12). Все три
пружины представляют собой как бы отдельные подвесы.
Боковые пружины Рг и Р3 одинаковых размеров, сред¬
няя Р2 — несколько толще, шире и длиннее боковых; ее
рабочая часть смещена относительно них вверх. Кроме
того, для достижения нужной степени изохронизации
третью пружину можно перемещать вверх или вниз.
Изохронность такого подвеса значительно выше, чем
у двухпружинного, и обусловлена наличием третьей бо¬
§ 27. Маятниковые части Шорта
лее длинной пружины, добавочная деформация которой
вносит дополнительный упругий момент, восполняющий
недостаточность восстанавливающего момента двух
пружин.
Таким образом, соответствующими расчетами подвес¬
ного приспособления можно добиться почти полного изо¬
хронизма колебаний маятника, по крайней мере для тех
значений амплитуд, которые могут иметь маятники астро¬
номических часов (70'—100'). Нам нет необходимости рас¬
сматривать весьма многочисленные конструкции осталь¬
ных частей маятниковых часов (передаточный механизм,
счетчик, двигатель, контактные приспособления и т. п.),
так как в современных высокоточных службах времени
маятниковые часы практически не используются. Они
могут быть полезны теперь только при изучении некото¬
рых геофизических явлений, например, при исследова¬
нии влияния Луны и Солнца на ускорение силы тяжести.
Имея это в виду, мы ниже даем краткое описание конст¬
рукции только двух, наиболее совершенных маятниковых
часов.
§ 27. Маятниковые часы Шорта
Часы Шорта состоят из двух маятников. Один йз них,
называемый свободным (free pendulum) (рис. 13), заклю¬
чен в барокамеру и помещается в часовом подвале или
в изотермическом помещении. Второй маятник (рис. 14)
называется вторичным, или рабочим (slave pendulum),
и в деревянном футляре со стеклянной передней дверкой
может быть подвешен там, где это удобно для работы
с часами. Оба маятника инварные и компенсированы
от изменения температуры.
Часы Шорта работают от батареи постоянного тока на¬
пряжением 8 в. Принципиальная схема включения часов
в цепь батареи представлена на рис. 15. Рабочий маятник
S при каждом своем отклонении вправо при помощи
пальца р передвигает на один зубец колесо с, которое
при движении маятника влево удерживается неподвиж¬
ной защелкой I. Колесо с имеет 15 зубцов и выступ d.
Таким образом, оно совершает полный оборот за 30 сек
и в конце каждого такого периода, в тот момент, когда маят¬
ник S проходит положение равновесия, двигаясь вправо,
t2 Гл. If. Приборы для измерения времени
выступ d отводит защелку к и она освобождает рычаг g.
Рычаг g, вращаясь вокруг оси О, падает, и его ролик г
скользит по скошенному краю кронштейна /, скреплен¬
ному с маятником S, и тем самым сообщает последнему
Рис. 13. Часы Шорта (свобод- Рис. 14. Часы Шорта (вторич¬
ный маятник). ный маятник).
импульс. Вращаясь дальше, рычаг g своим вертикальным
плечом коснется контактного винта на якоре а электро¬
магнита М и замкнет ток в цепи МаОЕ. В этот момент
§ 27. Маятниковые части Шорта
73
сработает электромагнит контрольного циферблата рабо¬
чего маятника S и его минутная стрелка сделает полу¬
минутный скачок. Затем якорь а притянется электромаг¬
нитом М и подбросит левый конец рычага g на защелку к,
которая задержит его на 30 сек, пока снова ее не отведет
вправо выступ d.
В момент замыкания тока в цепи МаОЕ электромагнит
Е притянет защелку к', которая освободит импульсный ры¬
чаг g' свободного маятника F. Рычаг g', вращаясь вокруг
оси О', падает, и его ролик г' скользит по скошенному
краю кронштейна скрепленного с маятником F. Таким
74
Гл. II. Приборы для измерения времени
образом, маятник F получает легкий заводной импульс,
аналогично маятнику S. Продолжая вращаться, рычаг g'
нижним концом своего вертикального плеча коснется
контактного винта на якоре а' электромагнита М' и замк¬
нет ток в цепи М'а'О'Н. Якорь а' притянется электро¬
магнитом М' и забросит рычаг g' на защелку к', которая
будет удерживать его в течение 30 сек. Кроме того, в мо¬
мент замыкания тока в цепи М'а'О'Н сработает электро¬
магнит контрольного циферблата свободного маятника F
и минутная стрелка циферблата сделает полуминутный
скачок.
Описанный процесс будет повторяться каждые 30 сек,
если колебания маятников F и S синхронны. Поддержа¬
ние синхронизма колебаний маятников осуществляется
следующим образом. В момент замыкания тока в цепи
М'а'О'Н электромагнит Я, укрепленный вблизи маят¬
ника S, притягивает горизонтально расположенный якорь
/г, который может упереться в верхний конец упругой
пластинки т, скрепленной с маятником S, в момент про¬
хождения последнего через положение покоя при движе¬
нии справа налево. Зацепление якоря п с пластинкой т
произойдет в том случае, если колебания маятника S
отстанут по фазе от колебаний маятника F приблизи¬
тельно на 0s,004. Тогда при дальнейшем движении маят¬
ника S влево пластинка т согнется, в ней появится упру¬
гая сила, направленная к положению покоя маятника S.
Эта сила, слагаясь с действием силы тяжести на маятник,
вызовет уменьшение периода его колебаний и приведет их
в синхронизм с колебаниями маятника F. Упругость
пластинки т рассчитывается так, чтобы величина ускоре¬
ния вдвое превышала величину отставания. Тогда, при сле¬
дующем действии электромагнита Н, которое произойдет
через 30 сек после зацепления пластинки т с якорем п,
маятник S не успеет отстать на 0s,004 и действия синхро¬
низирующего приспособления не будет. Оно наступит
через следующие 30 сек, когда маятник S отстанет на
0s,004 и тогда якорь п снова войдет в зацепление с пластин¬
кой т. и сообщит маятнику S очередной корректирующий
импульс. Нормальная работа синхронизирующего при¬
способления обеспечивается тем, что маятник S регули¬
руется на отставание от F приблизительно на 6 сек в сутки,
или на 0s,004 в минуту.
§ 28. Часы Федченко
75
Таким образом, свободный маятник F только изме¬
ряет время, колеблясь совершенно свободно, за исключе¬
нием тех коротких промежутков времени, когда он полу¬
чает заводной импульс. Все функции счетчика и передаточ¬
ного механизма выполняет вто¬
ричный маятник S.
ский инженер Ф. М. Федченко
сконструировал маятниковые Рис. 16. Часы Федченко.
часы (АЧФ), точность кото¬
рых оказалась на порядок выше, чем точность часов Шорта.
Среднеквадратическая вариация суточного хода послед¬
них экземпляров маятниковых часов Федченко (АЧФ-3)
находится в пределах 0s,0002—0s,0003. Такая точность
достигнута в основном благодаря применению трехпружин¬
Часы Шорта впервые стали
применяться в астрономической
практике в 1925 г. и быстро
завоевали всеобщее признание,
благодаря тому, что средне¬
квадратическая вариация их
суточного хода, равная 0s,002—
0s,003, а у отдельных экзем¬
пляров 0s,001, была на поря¬
док меньше, чем у применяв¬
шихся в то время часов Риф-
лера, Jlepya и др.
Многочисленные попытки
улучшить часы Шорта, предпри¬
нятые в разное время и раз¬
ными лицами, оказались безу¬
спешными. В результате воз¬
никло ошибочное представле¬
ние о том, что повышение точ¬
ности хода маятниковых часов
вообще невозможно и что часы
Шорта являются «последним
словом» точной механики в этой
области.
§ 28. Часы Федченко
Однако в 1954 г. совет-
76
Гл. II. Приборы для измерения времени
ного, изохронизирующего подвеса (см. § 26), бесконтакт¬
ного импульсного механизма электромагнитного действия
и более совершенной термокомпенсации маятника.
Часы Федченко АЧФ-3 (рис. 16) состоят из двухсекунд¬
ного инварного маятника, подвешенного на кронштейне
в стальной барокамере, закрывающейся сверху и снизу
Рис. 17. Электромагнитный импульсный механизм
часов Федченко
стеклянными колпаками. Источником питания часов слу¬
жит окиснортутный элемент ОР-4 (диаметром 30 мм и
высотой 14 мм), который, при емкости 2,5 а*ч и напряже¬
нии 1,4 в обеспечивает непрерывную работу часов на про¬
тяжении трех лет. Для поддержания колебаний маят¬
ника ему подаются импульсы продолжительностью О8,02
один раз за период, т. е. через каждые 2 сек.
Бесконтактный импульсный механизм электромагнит¬
ного действия состоит из двух частей: подвижной и непод¬
вижной (рис. 17). Подвижная часть крепится к нижнему
концу стержня маятника и состоит из замкнутого симмет¬
ричного магнитопровода и двух постоянных магнитов
призматической формы. Неподвижная часть импульс¬
ного механизма крепится на нижнем конце инварной
штанги такого же размера, как и стержень маятника,
которая верхним своим концом неподвижно укреплена
на кронштейне. Неподвижная часть механизма состоит
§ 29. Кварцевые часы. Ламповые генераторы 77
из прямоугольной катушки и электронной схемы. Ка¬
тушка имеет две обмотки, расположенные одна на другой.
Нижняя обмотка — возбуждающая, верхняя — импульсная.
Магнитопровод подвижной части импульсного меха¬
низма разборный — его нижняя часть заводится в не¬
подвижную катушку и затем соединяется с верхней
частью. Открытая часть катушки устанавливается при не¬
подвижном маятнике между полюсами магнитов с одинако¬
вым зазором. Когда маятник колеблется, то взаимо¬
действие магнитного поля катушки с полем постоянных
магнитов создает необходимый подталкивающий импульс.
Сначала появляется импульс в нижней, возбуждающей,
обмотке, который подается на вход усилителя, а с выхода
последнего усиленный импульс подается в верхнюю,
импульсную обмотку катушки. Оба импульса заканчи¬
ваются одновременно. Механизм срабатывает только
при движении маятника в одном направлении, т. е. завод¬
ные импульсы односторонние.
Основной принцип термокомпенсации, примененной
Ф. М. Федченко, заключается в следующем: каждый,
нуждающийся в термокомпенсации элемент маятника
компенсируется в том месте, где он находится.
Контактное устройство часов АЧФ-3 предназначено
для выдачи секундных сигналов при сравнении часов или,
если это необходимо, для срабатывания контактов реле
часового механизма. Неподвижная часть контактного
устройства находится на кронштейне, а подвижная —
в верхней части изохронизирующего подвеса. Для устра¬
нения трения между подвижной и неподвижной частями
контактного устройства оси вращения контакта и маят¬
ника совмещены. Во время работы часов контакт пол¬
периода (1 сек) разомкнут, полпериода (1 сек) замкнут.
§ 29. Кварцевые часы. Ламповые генераторы
Развитие радиотехники и электроники привело к созда¬
нию колебательных систем, стабильность которых оказа¬
лась при определенных условиях выше, чем у механиче¬
ских маятниковых часов.
IP? Простейшей колебательной системой является идеаль¬
ный контур (рис. 18), состоящий из катушки самоиндук¬
ции L и конденсатора С. Если зарядить конденсатор, то
78
Гл. II. Приборы для измерения времени
в контуре возникнут свободные электрические колеба¬
ния, причем колебательный процесс пойдет самостоя¬
тельно, без воздействия внешних электродвижущих сил,
только благодаря первоначальному заряду конденсатора.
Особенностью свободных колебаний в контуре яв¬
ляется равенство величин индуктивного сопротивления
катушки гь и емкостного сопротивления конденсатора гс.
Емкостное или индуктивное сопротивление, которое имеют
элементы контура на частоте собственных колебаний,
Рис. 18. Колеба¬
тельный контур.
Рис. 19. Колебатель¬
ный контур с актив¬
ным сопротивлением.
называется характеристическим сопротивлением р. Его
величина бывает порядка нескольких сотен ом.
Каждый контур имеет определенную частоту происхо¬
дящих в нем свободных колебаний, называемую собствен¬
ной частотой контура /0. Эта частота зависит от емкости С
и индуктивности L контура и связана с этими величинами
соотношением
/ =_ j_.
0 2ку/ЬС '
В идеальном контуре отсутствует активное сопротивление,
поэтому амплитуда колебаний в нем будет неизменной и
они могут продолжаться бесконечно долго.
Реальный колебательный контур обладает активным
сопротивлением; оно распределено главным образом в ка¬
тушке индуктивности, соединительных проводах и частично
в конденсаторе. Активное сопротивление называют также
сопротивлением потерь. В реальном колебательном кон¬
туре имеют место различные виды потерь энергии: потери
на нагрев проводов, на ток утечки и вихревые токи, потери
на излучение контуром электромагнитных волн и другие.
§ 29. Кварцевые часы. Ламповые генераторы 79
Все их можно считать эквивалентными потерям на некото¬
ром активном сопротивлении R. Поэтому реальный кон¬
тур можно представить состоящим из трех элементов:
емкости С, индуктивности L и сопротивления R (рис. 19).
Активное сопротивление вызывает затухание колебаний и
поэтому свободные колебания в реальном контуре всегда
затухающие. Величина затухания контура 8 определяется
значениями активного сопротивления R и характеристи¬
ческого сопротивления р. Чем быстрее затухают колеба¬
ния в контуре, тем хуже его качество. Для характери¬
стики качества контуров обычно используется величина,
обратная затуханию, которая называется добротностью
контура:
Чтобы колебания в контуре не затухали, к нему надо
периодически подключать источник электродвижущей
силы.
Колебания, которые, в отличие от свободных, совер¬
шаются не самостоятельно, а под действием периодиче¬
ской внешней силы, называются вынужденными.
Вынужденные колебания имеют свойства, отличные
от свойств свободных колебаний:
1) они являются незатухающими,
2) могут иметь различную форму в зависимости от ха¬
рактера изменения электродвижущей силы (э.д.с.),
3) амплитуда вынужденных колебаний зависит не
только от величины и частоты изменения э.д.с., но и
от собственной частоты контура, т. е. от величины его
емкости и индуктивности.
Последняя особенность вынужденных колебаний пред¬
ставляет большой интерес.
Если частота изменений внешней э.д.с. приблизи¬
тельно равна частоте свободных колебаний контура, то
амплитуда колебаний становится максимальной. Это явле¬
ние называется резонансом, а частота /реа, при которой
получается резонанс, резонансной. На явление резонанса
сильно влияет добротность контура: чем выше доброт¬
ность Q, тем острее резонанс (рис. 20).
Явление резонанса широко используется при создании
генераторов. Простейший генератор незатухающих колеба¬
80
Гл. II. Приборы для измерения времени
ний (рис. 21) состоит из триода Лг, колебательного кон¬
тура LC, индуктивности Lc и источника питания. Колеба¬
тельный контур LC включен в анодную цепь лампы Лг,
индуктивность Lg подключена к сетке лампы. Через L0
осуществляется индуктивная связь сетки с анодным кон¬
туром. Такая связь называется обратной связью.
При замыкании ключа К в анодной цепи генератора
возникает ток, заряжающий конденсатор С. В контуре
при этом начнутся колебания. Переменный ток, проходя¬
щий через индуктивность L контура, индуцирует перемен¬
ное напряжение в Lc и, следовательно, на сетке лампы.
Изменение напряжения на сетке лампы вызовет в свою
очередь переменную составляющую в анодном токе.
Генератором этого переменного тока будет сама лампа.
Переменная составляющая анодного тока, проходя через
контур LC, создает на нем переменное напряжение. Это
напряжение представляет собой переменное напряжение
на сетке, но уже усиленное лампой, так как контур LC
является нагрузочным сопротивлением для лампы Лг.
Частота переменного напряжения сетки будет равна
частоте собственных колебаний контура, следовательно,
переменная составляющая анодного тока тоже будет иметь
точно такую же частоту. Поэтому в анодном контуре всегда
будет резонанс токов и контур для переменной составляю¬
щей анодного тока представляет большое сопротивление.
fpes Частота
Qi>Sz>Q3
Рис. 20. Резонансные кривые
контуров с различной доброт¬
ностью.
Рис. 21. Схема лампового
генератора.
§ 30. Кварцевые равонаторы
81
Чтобы колебания, начавшиеся в контуре, не затухали,
а все время поддерживались переменной составляющей
анодного тока, необходимо совпадение по фазе напряже¬
ния свободных колебаний с напряжением, созданным
на контуре LC переменной составляющей анодного тока.
Если это условие не выполнено, колебания быстро затух¬
нут, так же как затухнут колебания механического маят¬
ника, если его подталкивать с частотой, равной его
собственной частоте, но в сторону, обратную его дви¬
жению.
Ламповый генератор является источником незатухаю¬
щих колебаний определенной, заданной параметрами кон¬
тура частоты. Такой генератор можно использовать в ка¬
честве часов, если знать число его колебаний в секунду
и иметь механизм, отсчитывающий эти колебания. Однако
точность такого генератора невелика, она меньше точ¬
ности маятниковых часов и сильно зависит от постоянства
параметров]лампы и контура в анодной цепи.
Для получения высокостабильной частоты исполь¬
зуются генераторы с кварцевой стабилизацией.
§ 30. Кварцевые резонаторы
Молекулы диэлектрических веществ содержат в себе
парные электрические заряды и являются своеобразными
электрическими диполями. Ориентировка этих диполей
п) б)
Рис. 22. Расположение молекул в диэлектрике: а) — в нормальном
состоянии, б) — под действием электрического поля.
произвольна и поэтому диэлектрик не обнаруживает за¬
метной электризации (рис. 22, а). Если же к диэлектрику
приблизить наэлектризованное тело, то все'противополож-
ные ему по знаку заряды диполей в диэлектрике при¬
82
Гл. II. Приборы для измерения времени
тянутся, а одноименные оттолкнутся (рис. 22, б). Заряд,
противоположный по знаку заряду наэлектризованного
тела, станет немного ближе к этому телу. Одноименный
заряд несколько отдалится от влияющего тела. Такое
смещение зарядов приводит диэлектрик в состояние,
которое называется поляризацией диэлектрика.
Для некоторых кристаллических диэлектриков поляри¬
зация может происходить не только под действием.элек¬
тричества, но и под действием
механических сил.
Поляризация кристалла, выз¬
ванная механическими воздейст¬
виями (растяжением или сжа¬
тием), называется пьезоэлектри¬
ческим эффектом. Пьезоэлектри¬
ческими свойствами обладают
кристаллы турмалина, кварца,
сахара, сегнетовой соли и др. Наи¬
больший эффект дают кристаллы
сегнетовой соли. На практике
для использования пьезоэффек¬
та применяется кварц, который обладает большой
прочностью.
Если пластину, определенным образом вырезанную
из кристалла кварца, деформировать, например, сжать,
то на ее поверхностях появятся разноименные электриче¬
ские заряды. Пьезоэффект обратим, поэтому при подаче
на поверхность кварцевой пластины электрических заря¬
дов она будет деформироваться. Если кварцевую пластину
поместить между электродами, а к электродам подвести
переменное напряжение, в кварцевой пластине возбу¬
дятся механические колебания. Когда частота подводи¬
мого к электродам переменного напряжения совпадает
с резонансной частотой кварцевой пластины как механиче¬
ской системы, амплитуда колебаний последней резко
возрастает, в пластине кварца возникнут стоячие упругие
волны. Упругость и плотность кварца таковы, что линей¬
ные размеры пластин, настроенных на радиочастоты, из¬
меряются в миллиметрах, поэтому их легко вырезать
из кристаллов.
Кварцевая пластина, помещенная между электродами
и закрепленная в специальном держателе, называется
Рис. 23. Эквивалент¬
ная схема кварцевого
резонатора.
§ 30. Кварцевые резонаторы
кварцевым резонатором. При резонансе, когда деформации
кварца очень велики, пьезоэлектрическая составляющая
переменного тока, проходящего через кварц, возрастет.
Таким образом, кварцевый резонатор можно рассматривать
как обычный колебательный контур (рис. 23), за-
шунтированный емкостью С0 электродов, кварцедержа-
теля и монтажа. Величины LKB, Скв и i?KB — соответственно
индуктивность, емкость и соп¬
ротивление возбужденного квар¬
цевого резонатора.
Благодаря малым потерям энер¬
гии в кварцевом резонаторе он эк¬
вивалентен контуру с очень высо¬
кой добротностью, т. е. с очень ма¬
лым затуханием. Если добротность
обычных контуров, состоящих из
емкости, индуктивности и сопро¬
тивления, имеет величину 100—300,
то у кварцевых резонаторов она
может быть порядка 107. Это ис¬
ключительно ценное качество
кварца. Чем меньше затухание
колебаний кварцевого резонатора,
чем меньше потери энергии в нем,
тем меньше должны быть порции
энергии, восполняющие эти по¬
тери, тем меньше они возмущают
колебательную систему и тем она
стабильнее.
В зависимости от размеров и
формы пластин кварца в резона¬
торах могут использоваться либо
поперечные колебания пласти¬
ны, называемые еще колебаниями по толщине,
либо продольные колебания, называемые колеба¬
ниями по длине. Колебания по толщине используются
обычно на частотах в несколько сотен килогерц, а коле¬
бания по длине на более низких частотах. Использовать
поперечные колебания на частотах ниже 300 кгц невыгодно,
так как на этих частотах размеры пластин, колеблю¬
щихся по толщине, будут очень велики. Продольные ко¬
лебания неудобно использовать на высоких частотах,
Z1
Рис. 24. Кристалл
кварца.
64
Гл. 11. Приборы для измерения времени
так как размеры пластин, колеблющихся по длине, на этих
частотах очень малы.
Чтобы правильно вырезать из кристалла кварца пла¬
стину для резонатора, необходимо знать особенности
структуры кристалла. На рис. 24 показан вид кристалла
и его разрез плоскостью, перпендикулярной к оси Z.
Оси X перпендикулярны к оси Z и носят название элек¬
трических осей. При деформации кри¬
сталла (растяжении или сжатий) в нап¬
равлении этих осей получается макси¬
мальный пьезоэффект. Таких осей у кри¬
сталла кварца бывает несколько.
Оси Y называются механическими
осями кристалла. Кварцевые пластины
вырезаются под различными углами по
отношению к осям кристалла. В боль¬
шинстве срезов ширина пластины де¬
лается параллельной электрической оси.
Кварцевые элементы, предназначенные для
поперечных колебаний, иногда изготов¬
ляются в виде чечевицы или бруска.
После обработки поверхности кварца
он закрепляется в специальных кварцедер-
жателях. Первоначально кварцевую плас¬
тину зажимали между двумя электродами;
подобный способ крепления сильно увеличивал затуха¬
ние резонатора и влиял на его частоту.
Современные кварцевые резонаторы не имеют наклад¬
ных электродов: их роль выполняет металлическое покры¬
тие, нанесенное непосредственно на поверхность кварца.
Крепится кварцевая пластина (брусок) при помощи про¬
волочек, припаянных к вожженным в кварц серебряным
контактам (рис. 25).
Если кварцевый элемент изготовлен в виде чечевицы,
он закрепляется в трех точках по ребру. От качества обра¬
ботки кварца, от качества его крепления зависит доброт¬
ность резонатора. Поэтому шлифовка кварцевого эле¬
мента и его закрепление должны выполняться со строгим
соблюдением специальных технологических требований.
Для уменьшения влияния внешней среды на работу
резонатора его помещают в стеклянный вакуумированный
баллон. Этим практически исключается вредное влияние
Рис. 25. Одна
из конструк¬
ций кварце дер¬
жателя.
§ 31. РенераторЫ с кварцевой стабилизацией
86
изменения атмосферного давления и влажности на стабиль¬
ность частоты резонатора.
Весьма важной характеристикой резонатора является
его температурный коэффициент, характеризующий зави¬
симость частоты резонатора от температуры. Величина
температурного коэффици¬
ента частоты определяется
целым рядом факторов: f
степенью однородности
кристалла кварца, углом,
под которым пластина вы¬
резана из кристалла,
формой пластины и др.
Температурный коэф¬
фициент частоты можно из¬
менить, проведя дополни¬
тельную шлифовку квар¬
цевой пластины.
На рис. 26 приведены
кривые, выражающие зави¬
симость частоты различных кварцевых пластин]от темпера¬
туры. Температурные кривые для различных пластин
имеют в большинстве случаев участок, почти параллель¬
ный оси t. На этом участке зависимость частоты от темпе¬
ратуры минимальна. Поэтому температуру на середине
этого участка выбирают за рабочую. Для сохранения
температуры кварцевой пластины резонатор помещается
в термостат, где и поддерживается постоянная рабочая
температура.
§ 31. Генераторы с кварцевой стабилизацией
Рассмотрим теперь ламповый генератор, частота коле¬
баний которого стабилизирована с помощью кварцевого
резонатора. Поскольку кварцевый элемент выполняет
в ламповом генераторе роль колебательной системы, нет
принципиальной разницы между кварцевым генератором
и обычным генератором с колебательным контуром.
Существуют два режима работы генераторов с кварце¬
вой стабилизацией: осцилляторный режим и режим затя¬
гивания. В кварцевых часах применяются схемы с осцил-
ляторным режимом. При работе в этом режиме резонатор
+70
О
-70
-20
-30
-40
70 20 30 40 50 60 70 ВО г
Рис. 26. Температурные кривые
различных пластин кварца.
86
Гл. //. Приборы для измерения времени
играет роль первичной колебательной системы генератора.
Выключение кварцевого резонатора из схемы приводит
к прекращению генерации.
Генератор, работающий в осцилляторном режиме,
можно рассматривать как обычный ламповый генератор
с двумя колебательными контурами. Поэтому к нему
полностью применима теория самовозбуждения и устано¬
вившихся колебаний, справедливая для генераторов с
обычными колебательными контурами.
Простейшие варианты схем генераторов, работающих
в осцилляторном режиме, приведены на рис. 27. Схема
Рис. 27. Различные способы включения кварцевого резонатора
в схему лампового генератора.
генератора, в котором кварц включается между сеткой
и катодом лампы, является одной из первых схем генера¬
торов с кварцевой стабилизацией (рис. 27, а). В этой схеме
обратная связь осуществляется через емкость между ано¬
дом и сеткой. Емкость состоит из емкости лампы и емкости
монтажа. Если генераторной лампой является не триод,
а пентод, то емкость анод—сетка приходится иногда
несколько увеличивать, подключая на участке анод-
сетка дополнительную емкость в несколько пикофарад.
На рис. 27, б приведена другая схема, с кварцевым
резонатором, включенным между анодом и сеткой.
Интересна схема кварцевого генератора, выполненная
на пентоде с электронной связью (рис. 28). Контур, опре¬
деляющий частоту колебаний, состоит из кварцевого резо¬
натора и емкостного делителя из емкостей Сх и С2. Под¬
ключение контура к лампе осуществляется в трех точках.
Достоинством схемы является слабое влияние внешней
нагрузки. Существует большое количество схем кварце¬
х
§ 32. Блок-схема кварцевых часов
87
вых генераторов; они различаются как способами включе¬
ния кварцевого резонатора, так и другими характери¬
стиками, например, различными генераторными лампами,
различными нагрузками и т. д.
Рис. 28. Стабилизированный кварцем ламповый
генератор.
При выборе схемы кварцевого генератора для астроно¬
мических кварцевых часов надо учитывать, что срок ра¬
боты таких часов должен быть максимальным, а вариа¬
ции их хода по возможности минимальными. В астрономи¬
ческих часах генератор должен работать непрерывно
в течение многих месяцев, обеспечивая при этом высокую
стабильность частоты.
§ 32. Блок-схема кварцевых часов
Кварцевые часы (рис. 29) состоят из следующих основ¬
ных блоков (рис. 30): 1) генератора с термостатом, 2) де¬
лителей частоты с усилителями и выходными каскадами,
3) блоков питания, 4) электромеханической системы для
движения стрелок на циферблате часов.
Генераторы кварцевых часов собираются по схеме
с параллельным резонансом и имеют в контуре переменную
подстроенную емкость, с помощью которой можно плавно
изменять частоту генератора в небольших пределах.
Такое устройство позволяет регулировать ход кварцевых
часов.
Вопрос термостатирования резонатора является одним
из важнейших вопросов при конструировании кварцевых
часов,
88
Гл. II. Приборы для измерения времени
Обычно резонатор помещается во внутреннем термо¬
стате, который в свою очередь заключается во второй,
наружный термостат. В некоторых конструкциях часов
термостатируется не только резонатор, но и все остальные
Рио. 29. Кварцевые Часы.
детали генератора, так как их параметры тоже немного
изменяются с изменением температуры.
Внешний термостат (рис. 31) состоит из слоя тепло¬
изолирующего вещества i, например, пенопласта, метал¬
лического цилиндра 2, на который наматывается прово¬
лока обогревателями регулятора температуры 3. Внутри
Рис. 30. Блок-схема кварцевых часов.
цилиндра помещается второй термостат, по конструкции
аналогичный первому. Во внутреннем термостате темпе¬
ратура поддерживается несколько большей, чем во внеш¬
нем. Иногда резонатор, находящийся во внутреннем термо¬
стате, заключают еще дополнительно в массивный метал¬
§ 32. Ёлок-схема кварцевых чйсдв
82
лический цилиндр. Такой цилиндр, обладая большой теп¬
лоемкостью, сглаживает колебания температуры и слу¬
жит дополнительным стабилизатором. Для поддержания
в термостатах постоянной заданной температуры в на¬
стоящее время используются либо кон¬
тактные термометры, помещенные в тер¬
мостаты, либо мостиковые схемы. Принцип
действия контактного термометра пока¬
зан на рис. 32. К термометру, наполнен¬
ному ртутью, подводятся два контакта,
соединенные с источником питания и об¬
моткой управляющего реле. Когда темпе¬
ратура в термостете ниже заданной, в об¬
мотке управляющего реле ток не] течет,
контакты его остаются замкнутыми и че¬
рез них течет ток, питающий обогревате¬
ли термостатов. Как только температура в
термостате достигает заданного значения t0,
ртуть в термометре, поднимаясь вверх, за¬
мыкает цепь. В обмотке реле появляется ток, реле размы¬
кается и обогреватели отключаются.С помощью такой схемы
можно поддерживать температуру внутреннего термо¬
стата с точностью до 0,01—0,02°.
Следует отметить, что в рабо¬
чих схемах реле, как правило,
управляется контактным термо¬
метром через дополнительный
усилитель. Это необходимо для
уменьшения тока, идущего че¬
рез термометр, jaK как силь¬
ный ток может вызвать быст¬
рое обгорание контактов тер¬
мометра. В этом заключается
один из недостатков контакт¬
ных термометров, от которого
при длительной работе трудно
избавиться даже при слабых токах через термометр.
Другим недостатком является старение стекла, в силу
которого происходит изменение толщины капилляра тер¬
мометра.
Эти недостатки приводят к тому, что рабочая темпе¬
ратура обогревателя может постепеппо отступать отрасчет-
г^ррмостата
Рис/32. Контактный термо¬
метр для регулирования
температуры в термостате.
Рис. 31. Тер¬
мостат квар¬
цевых часов.
Рл. II. Приборы для измерения времени,
ного значения. Имеют также место случаи, когда ртуть
в капилляре термометра разрывается и обогреватель
перестает работать.
Другая схема терморегуляторов представляет собой
мост, одно плечо которого состоит из проволоки, сопротив¬
ление которой Rx сильно меняется с температурой
(рис. 33). При рабочей температуре в термостате мост ба¬
лансируется так, что ток, идущий через оба плеча моста,
Рис. 33. Мостиковая схема терморегуляции кварца в термостате.
бывает одинаков из-за равенства сопротивлений Вг, /?2,
Д3, #4- Следовательно, напряжения в точках А и В равны
и через входное сопротивление усилителя, включенное
на участке АВ, ток не течет. При изменении температуры
в термостате меняется величина В±1 наступает разбаланси-
ровка моста и через входное сопротивление усилителя
течет ток.
При определенной силе тока усилителя срабатывает
выходное реле, пуская тем самым ток в обмотку обогрева¬
теля. Обогреватель при этом имеет обычно свой источник
питания.
Обмотка обогревателя может питаться и непосредственно
током с усилителя, без выходного реле. В этом случае
будет происходить более тонкая и плавная регулировка
температуры внутри термостата, так как усилитель реа¬
гирует на все токи разбаланса, в то время как реле сра¬
батывает лишь при определенной силе тока.
Усилитель, включенный в диагональ моста, должен об¬
ладать высокой стабильностью и значительным коэффици¬
ентом усиления.
Мостиковые схемы позволяют поддерживать темпера¬
туру в термостатах с точностью до +0,001 градуса и более
высокой.
§ 33. Триггерные делители частоты
91
Высокое требование предъявляется в астрономических
кварцевых часах к источникам питания. Источники пита¬
ния термостата, делителей и генератора должны быть не¬
зависимыми, при этом питание отдельных блоков должно
обладать высокой стабильностью. Особенно это относится
к генератору, так как стабильность его частоты может за¬
висеть от качества источника питания. Стабилизация на¬
пряжения в современных кварцевых часах осуществляется
путем применения специальных электронных стабилиза¬
торов. Стабилизация позволяет поддерживать напряже¬
ние питания с постоянством до долей процента.
На случай выключения сети, питающей кварцевые
часы, они должны иметь быстродействующее реле. Это
реле обеспечивает быстрое (в тысячные доли секунды) пере¬
ключение часов на резервную сеть или аккумуляторную
батарею. Кроме того, в блоках питания должна находиться
батарея конденсаторов, задача которой — снять (сгла¬
дить) скачок напряжения в момент переключения сети.
На случай длительного выхода из строя питающей сети
кварцевые часы должны иметь в качестве запасного источ¬
ника питания аккумуляторные батареи, заряжаемые от соб¬
ственной динамомашины.
Постоянство температуры и стабильность напряжения
питания — два важнейших условия для нормальной ра¬
боты кварцевого генератора.
Чтобы кварцевый генератор не подвергался механиче¬
ским воздействиям (вибрации, толчкам), термостаты
обычно подвешиваются к основному каркасу часов на пру¬
жинах-амортизаторах. В особо точных часах кварцевые
генераторы помещаются в специальных подвалах на мас¬
сивных столбах. Если подвалы глубоки, они играют
еще и роль дополнительных термостатов.
§ 33. Триггерные делители частоты
Использовать один период колебаний кварцевого гене¬
ратора как единицу для измерения времени неудобно, по¬
скольку такая единица слишком мала. Чтобы получить
более крупную единицу, частоту кварцевых генераторов
делят до одного герца. Делители частоты работают как
своеобразные счетчики, которые, отсчитав сто тысяч или
миллион колебаний, выдают один импульс. Делители
92
Гл. II. Приборы для измерения времени
в кварцевых часах должны обладать высокой стабиль¬
ностью, потому что их просчеты равносильны погрешности
в ходе часов, хотя генератор часов будет иметь большую
точность.
Существуют различные способы деления частоты. Наи¬
более часто употребляются триггерные делители, в ос¬
нову работы которых положена триггерная ячейка. Триг¬
гер уменьшает частоту вдвое (рис. 34). Если соединить
Запускающие итульсы
JUUUUUl
Напряжение на выходе
О t
Рис. 34. Деление частоты с помощью триггера.
несколько триггеров в цепочку, то можно уменьшить ча¬
стоту в четыре, восемь и т. д. раз.
Чтобы получить в цепочке коэффициент деления, от¬
личный от 2я, необходимо усложнить схему. Для этого
применяется обратная связь с выхода одного из делителей
цепочки на вход другого. Импульс, пришедший на вход
по цепи обратной связи, вызывает дополнительное сра¬
батывание схемы, т. е. изменение коэффициента деления.
В кварцевых часах обычно применяются цепочки триг¬
геров, объединенных в декады с коэффициентом деления,
равным 10.
На рис. 35 показана триггерная ячейка на транзисто¬
рах. В этой схеме ввод запускающих импульсов произво¬
дится в цепи эмиттеров триодов при помощи двух диодов,
Дх и Д2. Если триод Тх заперт, то через триод Т2 течет
ток, создающий на Ra большое падение напряжения.
Это падение напряжения запирает диод Д2, а диод Дх
в эмиттерной цепи триода Тх остается открытым. Импульс
запуска через емкость Сж попадает.на диод Дх, затем через
§ 33. Триггерные делители частоты
93
сопротивление г на базу триода Т2, Если импульс отри¬
цательный, триод Т2 окажется запертым, а Тг откроется.
Такая схема обеспечивает, во-первых, прохождение
запускающего импульса только на базу открытого триода,
во-вторых, как только произойдет опрокидывание, соответ¬
ствующий диод запирается, отключая тем самым источник
запускающих импульсов от схемы триггера. Этим ослаб¬
ляется вредное влияние внутреннего сопротивления источ¬
ника на процесс опрокидывания триггера.
Триггеры, используемые для деления частоты, выпол¬
няются в настоящее время на микросхемах, представля¬
ющих собой один корпус, в котором, на специальном обра¬
зом обработанном кристалле, нанесены все элементы триг¬
герной ячейки. Монтаж триггерных цепочек с использо¬
ванием микросхем весьма прост: он сводится к соединению
нескольких корпусов с помощью печатного монтажа и вве¬
дению обратных связей.
В более современных часах используются микросхемы,
уже имеющие коэффициент деления, равный 10. В этом
случае в одном корпусе объединяется четыре триггера
вместе с линиями обратной связи. Все элементы такой
декады наносятся на кристалл. Технология изготовления
подобного рода схем достаточно сложна, зато их монтаж
предельно прост, размеры малы и степень надежности
весьма высока. Делитель на декадных микросхемах (без
источника питания), делящий частоту генератора 100 кгц
до 1 гц, может быть размещен в объеме около 1 см?.
Помимо триггеров, в качестве делителей частоты могут
быть использованы ферриттранзисторные ячейки, реге*
94
Гл. II. Приборы для измерения времени
неративные делители частоты. В более старых экземпля¬
рах часов встречаются делители, выполненные на дека¬
тронах и триггерных ячейках на электронных лампах.
Там, где требуется повышенная надежность, часы
снабжаются двумя и даже тремя параллельно работаю¬
щими 'делителями. Логическая схема на выходе авто¬
матически отключает тот из делителей, который дает
сбой.
После деления частоты генератора каким-либо спо¬
собом до 1 гц секундные импульсы поступают на выход
часов. На выходе, как правило, ставится схема формиро¬
вания выходного импульса и устройство, позволяющее
сохранить нормальную работу часов в случае короткого
замыкания во внешней цепи секундных импульсов.
Секундные импульсы поступают также на электромехани¬
ческое устройство, снабженное циферблатом, и двигают
секундную стрелку часов. Движение часовой и минутной
стрелок осуществляется через обычный механический ре¬
дуктор, как и в любых часах.
В более современных часах применяется цифровая си¬
стема показаний часов, минут, секунд, а иногда и долей
секунд. Для этих целей используются индикаторные лампы
различных типов и другие устройства для световой инди¬
кации.
Помимо секундных импульсов кварцевые часы имеют
обычно выходы синусоидальных и прямоугольных сигна¬
лов с частотами от 1 Мгц до 100 гц. Эти частоты исполь¬
зуются для аппаратуры сравнения часов и формируются
на промежуточных ступенях деления частоты. Некоторые
кварцевые часы снабжаются также умножителями частоты,
позволяющими получать частоты порядка 5—10 Мгц.
§ 34. Фазовращатели
Для установки часов на точное время, чтобы их по¬
правка была равна нулю, применяются специальные уста¬
новочные механизмы — фазовращатели. Фазовращатели
представляют собой устройства, позволяющие изменять
фазу частоты, подаваемой на вход делителя часов. Про¬
стейшей схемой, с помощью которой можно осуществить
поворот фазы некоторого заданного напряжения на любой
угол ср в пределах от 0 до 90°, является схема, изображен-
§ 34. Фазовращатели
65
на я на рис. 36, а. На рис. 36, б показана векторная диа¬
грамма, соответствующая этой схеме, причем Uad=IlifC>
Udb=IR = UBUX, где / — ток через цепочку RC, а / —
частота колебаний, подаваемых на ДС-цепочку. Из век¬
торной диаграммы на рис. 36, б следует, что напряжение
f/вых окажется повернутым относительно напряжения IJBX
Рис. 36. К теории фазовращателей.
на угол cp = arctg (1 /fCR) в сторону опережения. Величина
вектора UBUX будет определяться соотношением
П —П —TR— U*x R
вых и db 111 1
где
z=y&+1II
Если емкость С сделать переменной, то геометрическим
местом точек d на рис. 36, б будет полуокружность, опи¬
санная на векторе Uab=UBX как на диаметре. Изменяя С
от нуля до оо, можно менять угол ср от 0 до +90°, при этом
величина UBUX будет изменяться от UBX до 0.
Поворот фазы на 90° можно получить и другим путем,
используя резонансный трансформатор, т. е. настраиваю¬
щийся в резонанс колебательный контур, индуктивно свя¬
занный с источником напряжения, фазу которого надо
повернуть (рис. 37). Если связь между первичной и вто¬
ричной обмотками очень слаба иг^ /Z1? то при настройке
колебательного контура в резонанс с частотой питаю¬
щего тока напряжение UBUX1 снимаемое с конденсатора С,
будет сдвинуто по фазе относительно UBX на 90°. Рассмот¬
ренные простейшие фазовращатели целесообразно приме¬
нять только для случая, когда необходимо осуществить
поворот фазы на определенную величину. Использование
96
Рл. //. Приборы для измерения времени
их для получения плавного изменения фазы весьма за¬
труднительно, так как с изменением фазового сдвига
сильно меняется величина выходного напряжения. Это
обстоятельство отрицательно
сказывается на работе схемы,
стоящей после фазовращателя.
Для фазировки часов при¬
меняются более сложные фа¬
зовращатели. Рассмотрим один
из них, примененный в часах
немецкой фирмы «Роде и Шварц».
Рис. 37. Простейший фа- фазовращатель состоит из двух
зовращатель. г ^ *
г скрепленных между собою пла¬
стинок Л и Вл на каждой из которых крестообразно распо¬
ложено по четыре катушки}(рис. 38, а). Катушки на одной,
пластинке находятся против катушек на другой пластинке.
Рис. 38. Конструкция фазовращателя.
Между катушками, расположенными на разных пластин¬
ках, имеются зазоры, в которые вставляется экранный
диск (рис. 38, б) с особой формы вырезом. Этот вырез
в диске сделан так, что индуктивная связь может возник¬
нуть только между двумя катушками, против которых
располагается вырез. Остальные катушки на разных пла¬
стинках при этом экранируются диском друг от друга.
Вращая диск, можно установить вырез в зазоре между
любыми парами катушек 1—-5, 2—6 и т. д.
На вход фазовращателя (рис. 39) подается частота
100 кгц, фазу которой необходимо менять. Фазосдвигаю¬
§ 34. Фазовращатели
97
щие цепочки R1C1 и R2C2 обеспечивают фазовый сдвиг
тока на 90° в паре катушек 1—3 по отношению к паре
катушек 2—4. Так как эти пары катушек расположены
друг относительно друга под углом в 90°, в первичной
системе из четырех катушек 1—4 образуется своего рода
вращающееся поле с частотой 100 кгц. Если экранный
диск находится в таком положении, что его вырез обеспе¬
чивает связь между катушками 1 и 5, то напряжение
на выходе фазовращателя будет иметь ту же фазу, что
и напряжение на катушках 1 hl 3. Если диск с вырезом
повернуть так, чтобы связь обеспечивалась между ка¬
тушками 2 и 6, то напряжение на выходе сдвинется впе¬
ред по фазе на 90°. Катушка 3 имеет противоположное
катушке 1 направление витков. Поэтому осуществление
связи между катушками 3 и 7 повернет фазу выходного
напряжения еще на 90°, т. е. на 180° от начального по¬
ложения. При дальнейшем вращении экранного диска
фаза выходного напряжения будет поворачиваться далее
через 270° на 360° и более.
Если на вход фазовращателя подается частота 100 кгц,
то повороту фазы на 360° соответствует сдвиг секундного
импульса на выходе делителя на 0s,00001. Поэтому ста¬
вить часы на точное время при помощи фазовращателя
можно с высокой точностью. Чтобы изменить показание
часов на значительную величину, требуется большое
98
Гл. II. Приборы для измерения времени
число поворотов экранного диска. Так, например, чтобы
изменить показание часов на 0s,5, необходимо повернуть
диск на 50 ООО оборотов, поэтому для вращения диска
ставят мотор. Направление вращения мотора можно из¬
менять; это позволяет как увеличивать, так и уменьшать
показания часов.
Фазовращатели могут быть изготовлены на различные
частоты: 1, 10, 100 кгц; это зависит от числа витков в ка¬
тушках и значений RC входных цепочек.
§ 35. Точность кварцевых часов
При рассмотрении хода кварцевых часов речь идет
практически об изменении частоты их генератора. Ста¬
бильность делителей кварцевых часов при современном
их исполнении, как правило, на порядок, а иногда и на
три порядка выше, чем стабильность генератора. Для
оценки качества кварцевых часов служат следующие
характеристики:
1) ход кварцевых часов со, вызываемый отклонением
частоты их генератора от номинала, например, от 100 кгц.
Ход часов легко регулируется и обычно поддерживается
в таких пределах, что изменение поправки часов не пре¬
вышает нескольких тысячных долей секунды в сутки;
2) случайные вариации хода 8и>. Эта величина различна
в зависимости от качества часов. Наилучшие экземпляры
кварцевых часов дают вариацию суточного хода около
+ 1-10'7 сек. Однако в ряде служб времени употребляются
часы с суточной вариацией хода около десятитысячной
доли секунды;
3) плавное изменение хода часов со временем, назы¬
ваемое старением кварца.
Старение кварца вызывается в основном процессами,
происходящими со временем в кварцевом элементе. Не¬
которые авторы пытаются связать старение кварца с из¬
менением его кристаллической структуры. Часть старе¬
ния, вероятно, обусловлена изменением параметров гене¬
раторной лампы.
Ход часов с учетом старения кварца обычно представ¬
ляют с помощью параболы:
о)^ — g)q —J- at -j—
§ 36. Атомные и молекулярные часы
99
где t — время в месяцах или долях года, отсчитываемое
от начала исследуемого интервала.
Отметим еще возможные изменения хода часов под
действием внешних факторов. К их числу относятся:
остаточные (неисключенные стабилизацией) колебания
напряжения питающей сети и остаточные колебания тем¬
пературы в термостатах часов. Влияние этих факторов
может исказить процесс старения кварца и тогда его пред¬
ставление с помощью параболы может быть недостаточно
правильным.
Старение кварца является основным недостатком квар¬
цевых часов, не позволяющим использовать их в каче¬
стве эталона времени.
§ 36. Атомные и молекулярные часы.
Возникновение спектров атомов и молекул
Настоящую революцию в вопросах хранения времени
произвело использование в качестве эталонов времени
приборов, в основу работы которых положены процессы,
связанные с некоторыми свойствами атомов и молекул.
Атомы и молекулы могут длительное время находиться
только в определенных энергетических состояниях. Это
означает, что их энергия может принимать лишь дискрет¬
ный ряд значений. Находясь в стационарных состояниях,
атомы не излучают и не поглощают электромагнитных
волн.
Переходить из одного стационарного состояния в дру¬
гое атомы могут только скачком, при этом происходит
поглощение или излучение энергии. Это поглощение или
излучение при переходе атома из одного стационарного
состояния с энергией Е2 в другое с энергией Ег всегда со¬
провождается излучением или поглощением электромаг¬
нитных волн, причем их частота определяется уравнением
hf = Е 2 Ev
где h — постоянная Планка, равная 1,054-10-27 эрг/сек.
Если Е2 > Ег, то происходит излучение электромагнит¬
ных волн атомами данного вещества. В случае, когда
Е2 Ег, происходит поглощение электромагнитных волн.
Чем больше разность энергий у состояний Е2 и Ег,
тем выше частота излучаемых или поглощаемых электро¬
100 Гл. II. Приборы для измерения времени
магнитных волн при переходе атома из одного состояния
в другое. В зависимости от величины разности Е2—Ех
излучаемые или поглощаемые атомом электромагнитные
волны имеют разные частоты, в том числе и частоты ра¬
диодиапазона. Значения частот электромагнитных волн,
соответствующие определенным переходам, представляют
собой отдельные спектральные линии. В случае перехо¬
дов атома из состояний с более высокой энергией в состоя¬
ние с меньшей энергией можно
получить спектральные линии
излучения.
Чтобы получить спектраль¬
ные линии поглощения, необ¬
ходимо возбуждать атомы элек¬
тромагнитными волнами раз¬
личной частоты. Интенсивное
поглощение электромагнитных
волн на определенных частотах,
вызванное переходом атомов
из состояний с меньшей энер¬
гией, дает возможность полу¬
чить спектральные линии по¬
глощения.
Спектральные линии характеризуются шириной и ин¬
тенсивностью. На практике не удается получить идеально
тонкой линии. Спектральные линии искажаются (уширя¬
ются) вследствие столкновений между атомами, эффекта
Доплера и ряда других причин, т. е. происходит излуче¬
ние (поглощение) в некотором узком интервале частот,
а не строго на определенной частоте.
Рассмотрим с точки зрения теории Бора происхожде¬
ние спектра излучения простейшего атома — атома водо¬
рода, состоящего из положительно заряженного ядра и
одного электрона.
На рис. 40 изображено несколько возможных орбит
электрона. Когда электрон переходит с некоторой внеш¬
ней орбиты на более внутреннюю, сила притяжения к ядру
совершает работу, так же как сила притяжения Земли
совершает работу при падении камня. Часть работы идет
на увеличение кинетической энергии электрона, поэтому
его скорость на внутренней орбите больше, чем на внеш¬
ней. Другая часть энергии превращается в энергию излу-
Рис. 40. Схема энергети¬
ческих уровней атома во¬
дорода.
§ 36. Атомные и молекулярные часы
101
чения, испускаемую атомом в виде электромагнитных ко¬
лебаний строго определенной частоты. Если электрон
находится на самой внутренней орбите, он уже не может
излучать. Эта ^орбита представляет состояние равнове¬
сия — основное состояние атома. Все остальные орбиты
соответствуют состояниям возбуждения атома. Электрон
может быть переведен с основной внутренней орбиты
на другие внешние, лишь если он поглотит достаточное
количество энергии.
Таким образом, атом водорода будет излучать при пе¬
реходе электрона с внешних орбит на орбиты с меньшими
значениями энергии. Аналогичным образом происходит
излучение и других атомов, у которых, однако, электроны
в нормальном состоянии, когда энергия атома минимальна,
движутся вокруг ядра по орбитам, расположенным на
различных расстояниях от ядра. Каково бы ни было число
электронов в атоме, атом не излучает до тех пор, пока он
не будет приведен в состояние возбуждения внешними
причинами.
В элементах с высокими атомными номерами заряд
ядра во много раз превосходит заряд электрона, но дей¬
ствие ядра на внешние электроны ослабляется внутрен¬
ними электронами. Влияние внутренних электронов и
взаимодействие внешних электронов между собой вызы¬
вает усложнение спектров атомов с большими атомными
числами.
Помимо спектров, соответствующих излучению отдель¬
ных атомов, наблюдаются еще спектры, излучаемые от¬
дельными молекулами. Эти спектры гораздо разнообраз¬
нее и сложнее по своей структуре, чем спектры атомов.
Так же как и в атомных спектрах, каждая линия мо¬
лекулярного спектра излучается при переходе моле¬
кулы с одного стационарного энергетического уровня на
другой.
Однако в случае молекулы существует гораздо больше
факторов, от которых зависит энергия стационарного
состояния.
Даже для самой простой двухатомной молекулы энер¬
гия слагается из трех частей:
JI) энергии электронной оболочки молекулы, образо¬
вавшейся в результате слияния электронных оболочец
атомов, входящих в состав мддекулзд|
102
Гл. II. Приборы для измерения времени
2) энергии колебания ядер атомов вдоль прямой, их
соединяющей. Эта энергия представляет сравнительно
небольшую добавку к энергии электронов;
3) энергии вращения ядер вокруг общего центра масс.
Это самая малая составляющая молекулярной энергии.
Все три вида энергии могут принимать только ряд
дискретных значений.
§ 37, Спектры щелочных металлов. Атомные пучки
Особый интерес для нас будут представлять спектры
щелочных металлов. Некоторые из этих металлов (цезий,
рубидий) используются в атомных часах. Система энер¬
гетических уровней у атомов щелочных металлов значи¬
тельно сложнее, чем у водорода. Это объясняется более
сложной структурой атомов: в состав электронных оболо¬
чек у них входит не один (как у водорода), а несколько
электронов: у лития 3, натрия И, калия 19, рубидия 37,
цезия 55.
Задача о движении нескольких электронов вокруг
ядра есть частный случай задачи движения многих тел.
Строгого решения этой задачи не существует ни в класси¬
ческой, ни в волновой механике. Для приближенного
решения этой задачи полагают, что при большом числе
электронов можно рассматривать электронную оболочку
как своеобразную газовую атмосферу, газовое облако,
окутывающее ядро атома.
В случае щелочных металлов дело упрощается тем,
что все электронное облако распадается на один валент¬
ный электрон и плотный атомный остаток, состоящий из
остальных электронов и ядра. Схема энергетических уров¬
ней атома щелочного металла может быть объяснена, если
предположить, что при переходах в оптическом диапа¬
зоне изменяется движение только валентного электрона,
т. е. что только один валентный электрон может перехо¬
дить с одной орбиты на другую, а остальные электроны,
принадлежащие атомному остатку, движутся по неизмен¬
ным орбитам.
При движении внешнего электрона по орбите на него
действуют две силы: кулонова сила и сила притяжения
электрическим диполем, возникающим в атомном остатке,
так как атомный остаток не только действует на внешний
§ 37. Спектры щелочных металлов
103
электрон, но и сам находится в электрическом поле этого
электрона. Поскольку атомный остаток состоит из тяже¬
лого положительного ядра и легкого облака электронов,
то под действием поля внешнего электрона это облако
сдвигается; центр положительного заряда ядра уже не
совпадает с центром отрицательных зарядов электронов.
Атомный остаток приобретает дипольный момент
(рис. 41). Возникает дополнительная сила притяжения,
действующая на внешний
электрон в атомах щелочных
металлов и вызванная поля¬
ризацией атомного остатка.
Рис. 41. Дипольный момент
атомного остатка.
Рис. 42. Вращение орбиты
электрона.
Эта дополнительная сила вызывает прецессию электрон¬
ной орбиты, что, безусловно, влияет на энергию атома.
Орбита электрона вращается в своей плоскости вокруг
атомного остатка как центра (рис. 42).
Спектры щелочных металлов имеют одну интересную
для нас особенность: линии этого спектра при определен¬
ных условиях разделяются на две или на три. Спектраль¬
ные линии, состоящие из двух компонент, носят название
дублетов.
Поскольку всякие особенности спектров тесно связаны
с энергетическими состояниями атомов, следует сделать
вывод, что две составляющие одного дублета соответ¬
ствуют различной паре энергетических уровней, весьма
близких между собой. Можно сказать, что вместо простых
уровней здесь имеют место комбинации раздвоенных энер¬
гетических уровней атома, дающих раздвоенные спектраль¬
ные линии.
104
Гл. II. Приборы для измерения времени
N
N
S
а)
Рис. 43.
Атом в
поле.
магнитном
Полученный эффект раздвоения линий легко объяс¬
няется, если допустить существование магнитного момента
электрона, связанного с его механическим моментом
(спином). Магнитный момент, грубо говоря, возникает
вследствие вращения электрона вокруг своей оси.
При движении электрона по орбите энергия атома за¬
висит от того, совпадает ли направление магнитного мо¬
мента электрона с направлением магнитного момента ор¬
биты или они направлены в разные стороны. В первом
случае магнитные моменты
орбиты и электрона склады¬
ваются, а во втором вычитают¬
ся. Этим и обусловливается
разность энергий атома, соот¬
ветствующих одной и той же
орбите электрона. Из-за
малости магнитного момента
электрона разность энергий
двух таких уровней будет
невелика. Очевидно, что дуб¬
летные линии в спектре ще¬
лочных металлов соответствуют двум переходам — или
с двух уровней на один общий, или с одного на два. Отме¬
тим одно важное обстоятельство: в нормальном состоянии
атомы щелочных металлов находятся на так называемом
«S'-уровне, где их орбитальный момент равен нулю. Следо¬
вательно, результирующий момент атомов равен спину
электрона, а магнитный момент атома равен магнитному
моменту электрона. Если такой атом попадет в магнитное
поле, то его магнитный момент будет ориентирован либо
по направлению магнитного поля, либо противоположно
ему.
Этот атом можно сравнить с вращающимся магнитом,
причем ось магнита и ось вращения совпадают. В одно¬
родном магнитном поле такой магнитный волчок будет
испытывать только прецессию, так как на оба его полюса
будут действовать равные и противоположно направлен¬
ные силы (рис. 43, а). В неоднородном магнитном поле,
напряженность которого различна в точках N и S
(рис. 43, б), силы, действующие на полюсы магнита, будут
неодинаковы и магнит начнет двигаться в направлении
большей силы.
§ 38. Атомно-лучевой радиоспектроскоп
105
Это обстоятельство используется при создании управ¬
ляемых атомных пучков. Для получения таких пучков
пары вещества выбрасываются из маленькой электропечки
в вакуум в виде потока атомов. Чтобы пучки атомов
получились достаточно узкими, их пропускают через диа¬
фрагмы и обязательно поддерживают в рабочей полости
постоянный высокий вакуум.
Если атомный пучок на своем пути попадет в постоян¬
ное магнитное поле, одна часть атомов, обладающая энер¬
гией Ev станет магнитным моментом по полю, а другая
часть атомов, находящаяся в состоянии Е2, станет магнит¬
ным моментом навстречу полю. Напомним, что энергети¬
ческие уровни Е2 и Ег очень близки и определяются ори¬
ентировкой магнитного момента атома, причем Е2 > Ег.
Если поток атомов попадает в неоднородное магнитное
поле, то под действием его сил часть атомов, которая об¬
ладает энергией Еъ будет отклонена в одну сторону,
а часть атомов с энергией Е2 в другую сторону. Пучок
атомов раздвоится. Часть пучка, в которую входят атомы
с меньшей энергией Е19 пропускают через установку,
состоящую из резонатора, возбуждаемого генератором
сверхвысокой частоты, и электромагнита, создающего
однородное магнитное поле. При резонансе под действием
радиочастотного поля в этой части пучка начнутся пере¬
ходы атомов с состоянием Ег в состояние Е2 (Ег -> Е2) и
пучок станет неоднородным по своему составу. Он может
быть снова разделен с помощью неоднородного магнит¬
ного поля. Наблюдение за изменением интенсивности
пучка даст возможность установить, происходит ли по¬
глощение радиоволн.
§ 38. Атомно-лучевой радиоспектроскоп
Управляемые атомные пучки позволили создать атомно¬
лучевые спектроскопы. Один из них, разработанный
Раби, имеет следующую конструкцию (рис. 44). Для по¬
лучения атомного пучка в небольшой электрической печи
А происходит испарение вещества; парьг вещества выбра¬
сываются в трубку, в которой путем откачки поддержи¬
вается постоянный вакуум. Чтобы пучок атомов был
достаточно узким, на его пути ставятся специальные диа¬
фрагмы d с рядом каналов, направляющих поток атомов из
106
Гл. II. Приборы для измерения времени
печи. На участке В в постоянном неоднородном магнит¬
ном поле пучок делится на два, содержащие атомы в близ¬
ких энергетических состояниях, Ег и Е2. Часть пучка
с атомами в состоянии Е2 отклоняется в сторону, а вторая
часть пучка направляется на участок С, где создано по¬
стоянное однородное магнитное поле и расположен резо¬
натор Л, соединенный с генератором сверхвысокой частоты.
В этой части трубки происходит поглощение энергии
11 '
К насосу
Рис. 44. Атомно-лучевая трубка.
атомами и, следовательно, переход части атомов из со¬
стояния Ег в состояние Е2. Пучок атомов опять становится
неоднородным; он снова содержит атомы в состояниях
Ег и Е2. На участке D происходит вторичное разделение
пучка, как и на участке В. При определенной ориентации
неоднородных магнитных полей на участках В и D интен¬
сивность пучка, проходящего через трубку, при отсут¬
ствии переменного поля можно свести к минимуму.
При включении генератора сверхвысокой частоты из-за
переходов вида Ег -> Е21 индуцированных магнитны*
полем, интенсивность атомного пучка начнет резко воз¬
растать.
Такая схема наиболее удобна, так как регистрировать
минимальное значение пучка трудно из-за наличия шумов
установки, создающих определенный фон. В качастве при¬
емника атомного пучка служит ионный детектор F, пре¬
вращающий нейтральные атомы в заряженные частицы —
ионы. В ионном детекторе атомы, попадая в накаленный
электрод, ионизуются, а затем фокусируются на электрод,
подключенный к усилителю. В качестве усилителей ис¬
пользуются обычно ионные или электронные умножители,
работающие на принципе вторичной эмиссии. После уси¬
ления ток, являющийся функцией числа падающих на
ионный детектор атомов, можно регистрировать любым
§ 39. Атомно-лучевые часы
107
измерительным прибором. Следует помнить, что атомно¬
лучевой радиоспектроскоп может давать искаженные ре¬
зультаты. Причиной этого является уширение спектраль¬
ных линий, происходящее из-за различных факторов.
Такое уширение вызывается, например, неоднородностью
магнитного поля, так как для достижения большей разре¬
шающей способности трубки необходима большая длина
пробега атомов в высокочастотном поле, наложенном на
постоянное поле. Последнее, однако, затруднительно
сделать однородным на большом протяжении. Искажение
резонансных линий происходит также и под влиянием
подводящих проводников.
§ 39, Атомно-лучевые часы
Атомно-лучевые часы представляют собой комбина¬
цию кварцевых часов и атомно-лучевой трубки. В каче¬
стве атомно-лучевой трубки может быть использована
установка Раби, работающая на одном из щелочных ме¬
таллов, например, цезии. Линии поглощения щелочных
металлов представляют особый интерес, так как они при¬
надлежат к числу так называемых линий сверхтонкой
структуры. Эти линии обусловлены взаимодействием
между спинами ядра и электрона. Состояние атомов при
одинаковых (параллельных) и различных спинах соот¬
ветствует различным, но близким энергетическим уровням.
Переход от одного состояния энергии к другому вызы¬
вается радиочастотным полем, полученным путем подве¬
дения к резонатору атомно-лучевой трубки умноженной
частоты кварцевого генератора. Если применяется атомно¬
лучевая трубка с цезием, то к резонатору обычно подво¬
дятся колебания, частота которых соответствует линии
поглощения цезия /0=9 192 631 700 гц.
На рис. 45 представлена блок-схема атомно-лучевых
часов. Электромагнитные колебания с кварцевого генера¬
тора поступают на умножитель, где их частота умно¬
жается до частоты спектральной линии цезия, выбранной
за рабочую. В качестве рабочей выбирают одну из наибо¬
лее интенсивных спектральных линий в радиодиапазоне.
С умножителя высокочастотные колебания поступают
в атомно-лучевую трубку, где под их действием происхо¬
дит переход атомов цезия из состояния с меньшей энергией
108
Гл. II. Приборы для измерения времени
Ег в состояние с большей энергией Е2. Это в свою очередь
вызывает изменение интенсивности потока атомов на
ионном детекторе. В случае ухода частоты кварцевого
генератора от номинального значения интенсивных пе¬
реходов вида Ег -> Е2 не будет, так как умноженная ча¬
стота генератора кварцевых часов перестанет соответство¬
вать значению, необходимому для переходов Ег -> Е2.
Плотность атомного пучка, попадающего на ионный де¬
тектор, резко уменьшится. Связанный с атомно-лучевой
Рис. 45. Блок-схема кварцевых часов, стабилизированных с по¬
мощью атомно-лучевой трубки.
трубкой блок автоподстройки начнет вырабатывать сиг¬
нал ошибки, который поступит на кварцевый генератор и
вернет его частоту к номинальному значению. Величина,
на которую частота кварцевого генератора отклонилась
от номинала, обычно записывается в специальном устрой¬
стве индикатора.
Если в атомно-лучевой трубке поддерживать постоян¬
ный вакуум, работа атомно-лучевых часов будет непре¬
рывной в течение нескольких сотен часов. При наличии
хороших кварцевых часов атомно-лучевые трубки исполь¬
зуются обычно лишь для периодического (раз в день)
контроля хода кварцевых часов. В этом случае изменение
частоты кварцевых часов определяется с помощью инди¬
катора. Блок автоподстройки отсутствует, а учет измене¬
ния хода часов производится на основании отдельных
сравнений с атомно-лучевой трубкой. Остановимся более
подробно на оценке точности атомно-лучевых часов.
Если частоту подаваемых на атомно-лучевую трубку
электромагнитных колебаний немного варьировать, то
можно получить профиль спектральной линии поглоще¬
ния цезия. Для этого частота изменяется в небольших пре¬
§ 39. Атомно-лучевые часы
109
делах от ее значения, которому соответствует максимум
интенсивности пучка атомов цезия на детекторе.
Сопоставляя изменение частоты с изменением плот¬
ности пучка атомов цезия на детекторе, получим профиль
спектральной линии цезия.
Возможна обратная задача — по измерению профиля
спектральной линии обнаружить уход частоты от ее номи¬
нального значения, при котором был достигнут резонанс.
Уход частоты на величину, большую ширины спек¬
тральной линии, конечно, сразу заметен, так как сигнал
в индикаторе упадет до минимального значения, обуслов¬
ленного шумами; резонанса не будет. Но если спектраль¬
ная линия имеет четкий профиль, то, наблюдая изменения
этого профиля, можно отметить весьма незначительный
уход частоты от номинала.
На спектральной линии выбирают некоторую часть
в виде опорного элемента и производят измерения этого
участка линии. Для наиболее четких линий можно произ¬
водить измерения, используя участок, который составляет
около одного процента от полуширины данной спектраль¬
ной линии. Добротность Q, характеризующая ширину ли¬
нии, для атомных пучков составляет величину порядка
108. Она определяется соотношением
1 = 2Д/о
Q /рез 9
гДе /рез — резонансная частота, а Д/0 — полуширина
спектральной линии (рис. 46).
110
Гл. II. Приборы для измерения времени
Если производить измерение на спектральной линии
с точностью до 1 % от ее ширины, то можно оценить уход
частоты кварцевого генератора с точностью до 10~10, так
как нестабильность будет оцениваться как 1/100 Q.
Такая нестабильность даст случайную вариацию в ходе
атомно-лучевых часов порядка одной стотысячной доли
секунды в сутки.
Еще более высокая точность получается при исполь-
трубки, собранной по методу
Рамзея. Этот метод отличается
от метода Раби тем, что в нем
для получения более узких
спектральных линий исполь¬
зуется трубка с двумя участ¬
ками, к которым подводится
переменное электромагнитное
поле (рис. 47; обозначения
здесь аналогичны обозначениям
на рис. 44). Эти участки раз¬
делены значительным проме¬
жутком и, следовательно, атом¬
ный пучок проходит их один за
другим. Иными словами, в этом
методе используются два наст¬
роенных резонатора вместе.
На этих участках возникает обнаруженное Рамзеем
явление образования микроструктуры спектральных ли¬
ний. На профиле спектральной линии поглощения, какая
имела бы место при методе Раби, появляются более узкие
максимумы и минимумы, занимающие небольшую часть
зовании атомно-лучевой
Рис. 48. Микроструктура
спектральных линий.
§ 39. Атомно-лучевые часы
111
профиля (рис. 48). Фиксировать эти образования можно
с большой точностью, поэтому атомно-лучевые часы,
основанные на трубке Рамзея, позволяют получать время
с нестабильностью около 5-10-13 на суточном интервале.
4
f
Рис. 49. Схема атомных часов, работающих на парах рубидия.
Атомно-лучевые часы с использованием цезия явля¬
ются сейчас основным эталоном времени.
Большой интерес представляют атомные часы на па¬
рах рубидия. В них используется атомный переход
F=2, mF=0 о F=1, mF=0 в сверхтонкой структуре
основного состояния атома руби¬
дия Rb87 на частоте 6834,68 Мгц.
Световой луч от лампы i,
являющейся источником Rb87,
после дополнительной фильт¬
рации 2 (рис. 49) обедняет
один из двух сверхтонких уров¬
ней атомов Rb87, находящихся
в ячейке 5, которая помещена
в резонатор 4. Электромагнит¬
ные колебания, полученные
путем умножения частоты квар¬
цевого генератора, изменяют
населенность на этих сверхтон¬
ких уровнях. Это в свою очередь
вызывает изменение поглощения света, т. е. излучения
накачки. Интенсивность света регистрирует фотоприем¬
ник 5, а изменение интенсивности происходит в момент,
когда умноженная частота кварцевого генератора после
подстройки достигает резонансного значения. Таким обра¬
зом, свет от лампы 1 вызывает переход типа Ег -> Е3
(рис. 50). Эта накачка уменьшает населенность уровня Ег.
Электромагнитные колебания от часов (в радиодиапазоне)
ЛJ It'
Рис. 50. Энергетические
переходы в оптическом
и радиодиапазонах.
112 Гл. II. Приборы для измерения времени
вызывают переходы типа Е2 -> Ev что и приводит к по¬
глощению света при новых дополнительных переходах
Е1 —► Е3.
Рубидиевые часы представляют собой наиболее про¬
стые по конструкции атомные часы. Часто, снабдив эти
часы автономным питанием, их делают переносными (во¬
зимыми) хранителями времени. Точность рубидиевых
часов составляет около 5-10"12 на суточном интервале.
§ 40. Молекулярные генераторы
Наряду с атомно-лучевыми часами в настоящее время
применяются молекулярные генераторы, часто называемые
мазерами.
Если в атомно-лучевых трубках происходит погло¬
щение радиоволн, частота которых соответствует частоте
определенной спектральной ли¬
нии цезия или рубидия, то в мо¬
лекулярных генераторах исполь¬
зуется обратный процесс — про¬
цесс излучения электромагнитных
волн молекулами вещества.
Излучение происходит при
переходе молекул из некоторого
энергетического состояния Е2 в дру¬
гое состояние, Ev причем Е2 > Ег.
Излучение может быть самопро¬
извольным (спонтанным) и инду¬
цированным, т. е. вызванным дей¬
ствием внешнего электромагнит¬
ного поля. Нас будет интересовать
только индуцированное излучение,
так как самопроизвольное излучение для радиочастот ма¬
ловероятно. Поскольку в обычных условиях число моле¬
кул на низших энергетических уровнях всегда больше,
чем на высоких, процесс испускания будет незаметен на
фоне процесса поглощения. Поэтому возникает необхо¬
димость создать пучок молекул, находящихся в одном,
более высоком энергетическом состоянии.
Впервые радиолинии испускания были получены
Н. Г. Басовым и А. М. Прохоровым (СССР), Цейгером и
Таунсом (США) в 1954—1955 гг. В качестве рабочего
Рис. 51. Модель моле¬
кулы аммиака.
§ 40. Молекулярные генераторы
из
вещества в молекулярных генераторах использовался
аммиак.
Молекулу аммиака NH3, состоящую из трех атомов во¬
дорода и одного атома азота, можно с некоторой степенью
точности рассматривать как пирамиду, в вершинах кото¬
рой находятся атомы азота и водорода (рис. 51). Атом
азота может переходить на другую сторону плоскости,
проходящей через три атома водорода, и занимать поло¬
жение, указанное прерывистыми линиями. Эти два со¬
стояния молекулы отличаются знаком проекции электри¬
ческого момента диполя на ось вращения молекулы, на¬
ходящейся в магнитном поле.
При переходе молекулы из состояния с энергией Е2
в состояние с энергией Ег испускается радиоволна. При об¬
ратном переходе происходит процесс поглощения волны.
Состояния молекулы с энергиями Е2 и Ег практически
равновероятны, но в состоянии Е2 молекул несколько
меньше. Поэтому чтобы поглощение не забивало нужный
нам процесс испускания, следует разделить пучок моле¬
кул, оставив в нем только молекулы с энергетическим
состоянием Е2. Это возможно сделать, используя различ¬
ное направление электрического дипольного момента мо¬
лекул. На пути пучка молекул аммиака создается неодно¬
родное электрическое поле. Для этой цели используются
специальные конденсаторы, состоящие из четырех элек¬
тродов цилиндрической формы.
Созданное на пути молекул неоднородное электриче¬
ское поле рассеивает молекулы с одним знаком проекции
электрического дипольного момента, а молекулы с дру¬
гим знаком проекции, соответствующим энергетическому
состоянию Е2, отклоняет к оси симметрии системы. Пучок
молекул становится однородным по своему составу. Затем
молекулы аммиака попадают в полый резонатор (обычно
в виде прямоугольной трубки), рассчитанный на частоту
одной из спектральных линий аммиака. В радиочастотном
спектре аммиака содержится очень много спектральных
линий, поэтому выбирается та из них, которая является
наиболее интенсивной.
Когда молекулы аммиака попадают в возбужденный
резонатор, он, действуя на них своим электромагнитным
полем, индуцирует излучение. Излученная молекулами
волна в свою очередь производит дальнейшее возбужде¬
114
Гл. II. Приборы для измерения времени
ние резонатора. Обратное воздействие резонатора на мо¬
лекулы можно сравнить с обратной связью в обычных
ламповых генераторах. Непрерывный поток молекул оказы¬
вает на систему воздействие, аналогичное действию источ¬
ника питания в ламповом генераторе. Возникшие колеба¬
ния отводятся с помощью волновода и усиливаются, они
и служат эталоном частоты. Рассмотрим подробнее схему
молекулярного генератора (рис. 52).
Чистый аммиак поступает в полость генератора через
одиночный канал диаметром около 1 мм. Возможна и дру¬
гая схема поступления аммиака с применением диафрагм.
Для нормальной работы генератора в его полости поддер¬
живается постоянное давление ~ 10~6—10~7 мм рт. ст.
Для этого из полости молекулярного генератора произ¬
водится непрерывная откачка с помощью вакуумных на¬
сосов (в том числе и диффузионных). Кроме того, для
поддержки постоянного высокого вакуума применяется
метод вымораживания аммиака жидким азотом, так как
давление паров аммиака при температуре жидкого азота
порядка 10"9 мм рт. ст. Для этой цели внутри вакуум¬
ной камеры создается специальный отсек, заполненный
жидким азотом. Применение насосов и отсека с жидким
азотом позволяет поддерживать давления порядка 10~6—
10~7 мм рт. ст. После сортировки на конденсаторах пу¬
чок молекул аммиака попадает в резонатор, где дает ин¬
дуцированное излучение, которое отводится через волно¬
вод. Температура резонатора поддерживается постоян¬
ной, так как иначе он будет менять свои размеры. Для
стабилизации температуры применяется мостиковая схема,
где сопротивление, составляющее одно из плеч моста.
Жидкий азот
Сепаратор Резонатор
J
Ннасосам
Волновод
Рис. 52. Схема молекулярного генератора.
§ 41. Использование молекулярных генераторов 115
наматывается непосредственно на резонатор. Такой тер¬
мостат обеспечивает постоянство температуры резонатора
с точностью до нескольких тысячных долей градуса.
§ 41. Использование молекулярных генераторов
для создания высокоточных хранителей времени
Молекулярные генераторы, так же как и атомно-луче¬
вые трубки, используются в комбинации с кварцевыми
часами.
Частота генератора кварцевых часов умножается до
значения, близкого к частоте некоторой спектральной
Рис. 53. Блок-схема кварцевых часов, контролируемых молекуляр¬
ным генератором.
линии излучения аммиака (например, /=23 870 129 кгц).
Сравнение частоты молекулярного генератора с умножен¬
ной частотой кварцевого генератора позволяет определять
изменения частоты последнего. Работа кварцевых часов
с молекулярным генератором мало отличается от их ра¬
боты с атомно-лучевой трубкой. Принципиальное различие
состоит лишь в том, что атомно-лучевая трубка играет
роль своеобразного индикатора, который реагирует лишь
на одну, строго определенную частоту, а молекулярный
генератор сам служит источником такой эталонной частоты.
Для определения разности умноженной частоты квар¬
цевого генератора и частоты молекулярного генератора
применяется специальная система сравнения (рис. 53).
116 Гл. II. Приборы для измерения времени
Эта система состоит из ряда смесителей, усилителей, де¬
тектора, дополнительного генератора (звуковой частоты),
осциллографа и счетчика-частотомера.
На смесители поступают электромагнитные колебания
с частотой f1 от молекулярного генератора и с частотой /2
с умножителя кварцевых часов.
В смесителях происходит выделение электромагнитных
колебаний с разностной частотой
Д/ = /1-/а.
После усиления и детектирования электромагнитных
колебаний с частотой А/ они поступают на одну из пар
пластин осциллографа. На другую пару пластин осцилло¬
графа поступают электромагнитные колебания от лабора¬
торного звукового генератора. По методу фигур Лиссажу
определяется значение А/. Осциллограф играет обычно
роль настроечного индикатора. Частота звукового генера¬
тора изменяется до тех пор, пока на экране осциллографа
не будет виден четкий эллипс. Это означает, что частота
А/ равна частоте звукового генератора. Вращение эллипса
будет говорить о том, что частота А/ меняет свое значение,
т. е. умноженная частота кварцевого генератора уходит
от частоты молекулярного генератора. Чтобы точно
определить значение А/ и, самое главное, его изменение
во времени, применяются специальные счетчики-часто¬
томеры (см. § 45), с помощью которых величина А/ обычно
определяется с точностью до 0,1 гц.
Стабильность работы молекулярного генератора очень
велика. Если продолжительность определенного коли¬
чества колебаний такого генератора принять за секунду,
то ошибка, с которой эта секунда воспроизводится генера¬
тором, будет порядка 1 -10“10-f-5-КГ11. Необходимо отме¬
тить, что хорошие результаты при работе с молекуляр¬
ными генераторами можно получить лишь при надежной
системе сравнения, высоком постоянстве размеров резо¬
натора, постоянном вакууме в рабочей камере генератора
и хорошо стабилизированном напряжении источников пи¬
тания.
Молекулярные генераторы, как правило, не работают
непрерывно. Они включаются только при сравнении их
с кварцевыми часами. Такое сравнение производится
обычно раз в песколько дней, иногда раз в день. Резуль¬
§ 42. Водородный генератор
117
таты сравнения, так же как и в случае атомно-лучевых
трубок, позволяют контролировать изменение частоты ге¬
нератора кварцевых часов. Оценка стабильности работы
молекулярного генератора производится путем его срав¬
нения с другим молекулярным генератором или цезиевым
стандартом. В работающих установках обычно бывает по
несколько молекулярных генераторов или атомно-луче¬
вых трубок.
§ 42. Водородный генератор
Особый интерес представляет создание водородного
генератора. Данные о нем появились впервые в печати
в 1960 г. (Рамзей).
Создать такой генератор по принципу аммиачного
весьма трудно. Если связь между электрическим диполь-
ным моментом молекулы аммиака и электромагнитным
Рис. 54. Схема водородного генератора.
полем достаточна для получения индуцированного излу¬
чения, то связь между магнитным моментом атома водо¬
рода и полем во много раз слабее. Поэтому для создания
водородного генератора понадобилась особая конструк¬
ция полости, где происходит индуцированное излучение
атомов водорода.
Водородный генератор состоит из источника атомар¬
ного водорода (рис. 54), специальной трубки — сепара¬
тора, роль которой аналогична роли разделительного кон¬
денсатора, и резонатора. Атом водорода имеет эффектив¬
ный магнитный момент, проекция которого может иметь
только два противоположных знака в зависимости от
энергетического состояния атома. Эти состояния атомов
118 Гл. II. Приборы для измерения времени
водорода схожи с рассмотренными состояниями атома це¬
зия, поэтому нет необходимости останавливаться на этом
вопросе. Водородный генератор работает на сверхтонкой
линии с частотой 1 420 405,77 кгц. После разделения по
состояниям энергии в сепараторе атомы водорода по¬
падают в резонатор, где и дают индуцированное излу¬
чение.
В объемном цилиндрическом резонаторе помещена
колба из плавленого кварца. Внутренние стенки колбы
покрыты парафином, а горлышко соединено с магнитной
трубкой. В трубке и колбе поддерживается высокий ва¬
куум. Отметим одно важное обстоятельство: колба не
влияет на взаимодействие атомов водорода и резонатора,
так как она сделана из материала, проницаемого для
электромагнитного поля.
При попадании атомов водорода на стенки колбы про¬
исходит упругое отражение, причем энергетическое со¬
стояние атомов при этом не изменяется. Каждый атом
будет испытывать множество столкновений, пока не вы¬
летит из горлышка колбы обратно. Легко видеть, что
вероятность такого вылета определяется отношением пло¬
щади сечения горлышка колбы к площади всей ее внут¬
ренней поверхности.
Так как вероятность вылета очень мала, время на¬
хождения атома в колбе велико. Оно в тысячи раз пре¬
вышает время пролета молекулы аммиака в резонаторе
аммиачного генератора. Поскольку время пролета ча¬
стицы в резонаторе т связано с шириной спектральной
линии соотношением 2Д/0да1/2т, линии водородного ге¬
нератора будут на три порядка уже, чем у аммиачного
генератора. Наличие в резонаторе колбы, удлиняющей
время пролета атомов через резонатор, позволяет полу¬
чить индуцированное излучение атомов водорода, не¬
смотря на слабое взаимодействие их магнитных моментов
с полем радиоволн. Связь усиливается, так как в каждый
момент времени она обусловливается большим количест¬
вом атомов в колбе резонатора.
Точность водородного генератора на три-четыре по¬
рядка выше точности молекулярных генераторов. Вместе
с тем надо отметить, что техническое выполнение водо¬
родного генератора значительно сложнее, чем аммиач¬
ного, так как генерируемые им колебания обладают зна¬
§ 43. Точность атомных часов
119
чительно меньшей интенсивностью. Так же как аммиач¬
ный генератор, водородный генератор используется обычно
как своеобразный репер частоты. С ним производится
сравнение высокоточных кварцевых часов. Поскольку ча¬
стота водородного генератора не может измениться (она
определяется стационарностью перехода атомов из одного
состояния в другое), обнаруженный при сравнении с квар¬
цевым генератором уход частоты определяет старение
кварца и случайные флуктуации кварцевых часов. Срав¬
нения позволяют контролировать ход кварцевых часов
с точностью лучше 10~7 сек в сутки.
§ 43. Точность атомных часов
Основным преимуществом различного рода атомных
часов, основанных на использовании атомно-лучевых тру¬
бок и генераторов, является отсутствие какого-либо за¬
метного изменения их хода, носящего систематический
характер. Этим атомные часы выгодно отличаются от
кварцевых. Шкалы времени, получаемые в отдельных ла¬
бораториях с использованием цезиевых стандартов, от¬
личаются не более чем на 10—20 микросекунд за год.
Расхождение шкал времени, как правило, вызывается
накоплением ошибок в блоках сравнения и эффектами
второго порядка. Для цезиевых часов к ним следует от¬
нести резонаторный сдвиг фазы, доплеровское смещение
второго порядка, вызывающие уширение спектральной
линии, спектры возбуждения. Для водородных генера¬
торов это сдвиг из-за столкновений со стенками и резо-
наторное затягивание. Эти и другие чисто конструктив¬
ные сложности не позволяют получить идеальный стан¬
дарт, приводят к некоторому расхождению в показаниях
отдельных экземпляров и даже одного экземпляра от
включения к включению (если он работает не непрерывно).
Сложность оценки качества отдельных экземпляров ча¬
сов состоит еще и в том, что такая оценка возможна лишь
путем непосредственного сравнения таких часов между
собой. Другого эталона, с которым сейчас можно сравнить
атомные часы хотя бы на годичном интервале, к сожале¬
нию, нет. Даже сравнение отдельных часов различных
лабораторий возможно проводить лишь на больших, по¬
рядка десятков дней, интервалах времени, тек как точ¬
120
Гл. II. Приборы для измерения времени
ность сличения невелика по сравнению со стабильностью
сравниваемых эталонов. Для оценки точности отдельных
экземпляров атомных часов применяется целый ряд кри¬
териев. Основными из них следует считать такие:
1) кратковременная относительная нестабильность ча¬
стоты (на интервале от нескольких секунд до нескольких
сотен секунд),
2) долговременная относительная нестабильность ча¬
стоты (на интервале в сутки или несколько суток),
3) изменения частоты на больших, в несколько лет,
интервалах времени,
4) воспроизводимость частоты от экземпляра к эк¬
земпляру,
5) воспроизводимость частоты от включения к вклю¬
чению.
В таблице 6 приведены три основные характеристики
атомных часов, необходимые при их использовании в служ¬
бах времени.
Таблица 6
Критерии
Относительная нестабильность
частоты
водородный
мазер
цезиевый
стандарт
рубидиевый
стандарт
Воспроизводимость от эк¬
5.10-13
5 *10"13
0
1
О
тН
земпляра к экземпляру
Изменение частоты от года
МО"12
З-Ю"12
МО-10
к году
Суточная нестабильность
2-10"14
МО"13
5.10-:12
К сожалению, сложности в определении качества от¬
дельных часов не всегда позволяют достаточно объек¬
тивно оценить достоинства и недостатки различных моде¬
лей. Особенно это относится к водородным мазерам и це¬
зиевым стандартам, т. е. двум группам часов, дающим
наибольшую точность. В большинстве случаев в лабора¬
ториях разрабатывается лишь один из этих видов,
и оценка производится, как было сказано, по внутрен¬
нему сравнению между собой нескольких экземпляров
§ 44. Измерительная аппаратура. Хроноскоп 121
одного типа часов. Кроме того, данные, представленные
самими авторами разработок, как правило, характери¬
зуют часы лучше, чем это имеет место в промышленных
экземплярах.
§ 44. Измерительная аппаратура. Хроноскоп
Для сравнения показаний нескольких часов, а также
для регистрации моментов возникновения каких-либо со¬
бытий, например, прохождений звезд через меридиан, ис¬
пользуется специальная
измерительная аппарату¬
ра. Конструкция этой ап¬
паратуры весьма разнооб¬
разна и сильно зависит
от точности измерений,
которые должны произво¬
диться с ее помощью. По
характеру своего приме¬
нения все приборы изме¬
рительной аппаратуры
можно разделить на две
группы: на приборы для
регистрации моментов вре¬
мени, необходимые при астрономических наблюде¬
ниях, и на приборы для сравнения показаний часов.
К первой группе относятся все типы хронографов и
шлейфовые осциллографы. Ко второй группе следует от¬
нести хроноскопы всех систем, электронные счетчики,
частотомеры и осциллографы.
Простейшим прибором для сравнения показаний ча¬
сов является хроноскоп (рис. 55). Он состоит из синхрон¬
ного мотора 1 с редуктором 2, двух дисков 3 и 4, неоновой
лампочки 5 с блоком питания 6 и оптической системы 7,
состоящей из наклоненного зеркала и линзы. Диски, из¬
готовленные из прозрачного пластика, покрыты слоем
темной краски. По краям дисков прорезаны цифры.
По окружности диска 3 нанесены числа от 0 до 99, а по
окружности диска 4 от 0 до 9. Диск 3 совершает десять
оборотов в секунду, а диск 4 один оборот. Вращение дис¬
ков производится синхронным мотором 1 через редук¬
тор 2. Под дисками расположена неоновая лампочка, ко¬
№
Гл. II. Приборы для измерения времени
торая дает кратковременную, меньше тысячной доли се¬
кунды, вспышку. Вспышка происходит в момент прихода
на блок питания неоновой лампочки импульса от часов.
Цифры, находящиеся над лампочкой в момент вспышки,
пропускают свет в оптическую систему 7.
С помощью этой системы легко прочитать число, кото¬
рое соответствует на дисках хроноскопа моменту вспышки
неоновой лампочки. Светлые цифры на фоне темных дис¬
ков хорошо видны.
Три «вспыхивающие» в окошке хроноскопа цифры
дают отсчет с точностью до одной тысячной доли секунды.
Если в оптической системе хроноскопа поместить индекс,
то по расположению цифр относительно этого индекса
можно получить отсчет хроноскопа с точностью до двух¬
трех десятитысячных долей секунды.
Большую точность хроноскоп, как и любая другая
электромеханическая система, обеспечить не может.
Несмотря на кратковременность вспышки неоновой
лампочки, отсчеты хроноскопа благодаря инерции чело¬
веческого глаза легко читаются. Если на хроноскоп пода¬
вать импульсы сначала от одних часов, а затем от других,
то по разности показаний хроноскопа мы получим разность
показаний часов. Эта разность будет фактически выражена
в долях оборотов дисков хроноскопа. Если мотор вращает
диски недостаточно равномерно, разность показаний ча¬
сов будет искажена. Поэтому мотор хроноскопа должен
получать ток от кварцевого генератора. Механическая си¬
стема хроноскопа должна выполняться очень тщательно,
так как биение дисков будет при сравнении часов искажать
результаты так же, как и их неравномерное вращение.
§ 45. Электронные счетчики и частотомеры
В случае, когда сравнения часов необходимо произво¬
дить с очень высокой точностью, применяются электрон¬
ные счетчики (рис. 56). Эти счетчики дают сразу разность
показаний двух часов с точностью от 0s,0001 до 0s,00000001,
в зависимости от их конструкции. На рис. 57 приведена
блок-схема электронного счетчика. Высокостабильная ча¬
стота, обычно 100 кгц или 1 Мгц, с кварцевых часов или
от собственного генератора счетчика непрерывно посту¬
пает в электронном счетчике на ключевую схему. Когда
§ 45. Электронные счетчики и частотомеры
123
на эту же схему приходит секундный импульс от первых
из сравниваемых часов, происходит отпирание ключевой
Рис. 56. Электронный счетчик.
схемы и частота с генератора проходит на счетное устрой¬
ство. Секундный импульс от вторых часов запирает клю¬
чевую схему и прекращает прохождение частоты на счет¬
чик. Задача счетного устройства состоит в определении
Рис. 57. Блок-схема электронного счетчика.
количества периодов частоты между секундными импуль¬
сами двух сравниваемых часов. Поскольку продолжитель¬
ность одного периода известна, счетчик, определив число
периодов между секундными импульсами часов, тем са¬
124 Гл. II. Приборы для измерения времени
мым определяет разность показаний двух сравниваемых
часов с точностью до одной стотысячной или миллионной
доли секунды. Эта точность будет зависеть от частоты
и стабильности кварцевого генератора. Поскольку срав¬
нение производится на интервале, не превышающем одной
секунды, точность в миллионную долю секунды может
обеспечить хороший термостатированный кварцевый ге¬
нератор.
Результат счетчика передается на специальные инди¬
каторы, по которым можно отсчитать разности показаний
двух часов в долях секунды.
В качестве ключевой схемы электронного счетчика
обычно используется триггерная ячейка. Триггеры часто
используются и в счетных устройствах. Их работа совер¬
шенно аналогична работе триггерных делителей частоты
в кварцевых часах. В качестве счетчиков могут использо¬
ваться не только триггерные цепочки, возможны и дру¬
гие конструкции.
После получения разности между секундными импуль¬
сами сравниваемых часов счетчик должен устанавливаться
в первоначальное, нулевое положение. Для этого в элек¬
тронных счетчиках служит система установки счетчика
на нуль.
Электронные счетчики дают возможность сравнивать
только секундные импульсы часов. При таком способе
сравнения нельзя отделить погрешности генератора от
ошибок делителей. Для контроля хода генераторов квар¬
цевых часов используются счетчики-частотомеры. Схема
одного из таких счетчиков приведена на рис. 58.
Частота с генераторов двух кварцевых часов или дру¬
гих источников, подлежащих сравнению, поступает на
входы / и II усилителей, собранных на транзисторах Тг
и Т2. С помощью индуктивной связи через контуры Ьг,
Ь2, Ь3 и Z/4 на базе транзистора Т3 происходит выделение
разностной частоты А/, которая после усиления на тран¬
зисторе Г4 будет регистрироваться с помощью частото¬
мера или просто реле-счетчика, считающего количество
биений.
При использовании реле-счетчика, т. е. реле, снабжен¬
ного циферблатом или другой механической системой,
можно регистрировать количество периодов разностной
цастртдо р единицу времени с точностью до одного не-
§ 45. Электронные счетчики и частотомеры
125
риода. Если вместо реле поставить записывающее устрой¬
ство, появится возможность регистрировать разностную
частоту уже до долей периода, и тогда точность сравнения
возрастает. Разность отсчетов, взятых через сутки, дает
суточный ход одного генератора относительно второго.
Рассмотрим простейший пример работы счетчика-ча¬
стотомера. Пусть частоты генераторов равны соответ¬
ственно 100 кгц и 100 кг^+Д/. За сутки реле-счетчик на¬
считал 1000 биений. Ход второго генератора относи¬
тельно первого будет равен 1000 <2, где d — период одного
колебания, равный 0s,00001. Это означает, что второй
генератор имеет относительно первого ход в 0s,01 в сутки.
Частотомер позволяет определить только величину
(но не знак) хода одного генератора относительно другого
с известным ходом. Поскольку сравнение ведется непре¬
рывно, полученный ход генератора будет интегральным
за промежуток времени, в течение которого производи¬
лось сравнение генераторов,
126
Гл. II. Приборы для измерения времени
Счетчики-частотомеры разных типов весьма широко
применяются в практике служб времени как для срав¬
нения генераторов часов, так и для приема сигналов точ¬
ного времени с использованием эталонных частот. Чем
выше частота, на которой производится сравнение, тем
выше точность измерения на данном интервале. Поэтому
в большинстве случаев в качестве элемента частотомера
используют умножители, на которых частота кварцевых
генераторов умножается до 10 и даже до 100 Мгц.
§ 46. Хронографы. Шлейфовый осциллограф
Для регистрации моментов какого-либо события, ча¬
сто необходимой в практике астрономических наблюде¬
ний, применяются различные типы хронографов.
Хронографы бывают пишущие, колющие и печатаю¬
щие. В пишущих и колющих хронографах лента, на ко¬
торой происходит хронологическая запись, равномерно
движется под специальными индикаторами, оставляю¬
щими на ней отметку о времени возникновения того или
иного события. В качестве индикаторов обычно исполь¬
зуются перья с чернилами или специальные колющие
иглы, соединенные с электромагнитами. При замыкании
цепи электромагнита игла прокалывает ленту. Если хро¬
нограф имеет перья, то замыкание электромагнита при¬
водит к излому прямой линии, которую чертит перо на
ленте. При размыкании контактов в цепи электромагнита
перо возвращается в первоначальное положение. В пи¬
шущих хронографах имеется обычно по нескольку перьев:
на одно из них поступают импульсы от часов, обеспечи¬
вающие нуль-пункт отсчета, другие перья служат для
записи моментов времени, соответствующих каким-либо
событиям.
Сейчас в астрономической практике пишущие хроно¬
графы применяются очень редко. Это объясняется их
сравнительно невысокой точностью и, главное, трудоем¬
костью обработки ленты, связанной с ее измерениями.
Поэтому сейчас наиболее часто применяются печатающие
хронографы (рис. 59).
В этих хронографах синхронный мотор, получающий
ток от кварцевого генератора, вращает через редуктор
три диска (минут, секунд и долей секунд). Диски связаны
§ 46. Хронографы. Шлейфовый осциллограф
127
между собой передачей, обеспечивающей разную ско¬
рость вращения (рис. 60).
Диск минут делает один оборот в час, диск секунд
один оборот в минуту, диск долей секунд делает один
Рис. 59. Печатающий хронограф.
оборот в секунду. Диски минут и секунд имеют по окруж¬
ности выпуклые цифры, соответствующие числам от 0
до 59, а диск долей секунды оцифрован от 0 до 99. Против
каждого числа на диске долей секунд имеется индекс,
с помощью которого можно интерполировать до тысяч¬
ных долей секунды отпечаток хронографа относительно
неподвижной отметки на основании прибора. Под вра¬
щающимися дисками натянута красящая лента 1 от пи¬
шущей машинки, а под ней бумажная лента 2. Ниже,
под бумажной лентой, расположен ударный механизм
с молоточком 3 и электромагнитом 4. При поступлении
импульса на электромагнит ударного механизма рычаг
с молоточком поворачивается и молоточек 3 резким уда¬
ром прижимает бумажную ленту 2 и ленту с краской 1
к колесам. На бумажной ленте остаются отпечатки ми¬
нут, секунд и долей секунд, соответствующих положению
128 Гл. II. Приборы для измерения времени
дисков в момент прихода импульса на магнит ударного
механизма. Удар молоточка настолько кратковремен, что
не нарушает равномерности вращения дисков. При сра¬
батывании молоточка приходит в действие лентопротяж¬
ный механизм, передвигающий бумажную ленту для сле¬
дующего отпечатка.
Средняя квадратическая ошибка регистрируемых мо¬
ментов составляет около +0S,0015. Тысячные доли се¬
кунды берутся приближенно по положению неподвижного
Мотор Редунтор Диспи
Рис. GO. Принцип работы печатающего хронографа. Справа — вид
сбоку.
индекса, закрепленного под дисками на основании хро¬
нографа.
Наряду с печатающими хронографами иногда приме¬
няются фотохронографы. Этот прибор представляет со¬
бой хроноскоп, показания которого не считываются ви¬
зуально, а фиксируются на фотопленку. Специальное про¬
тяжное устройство передвигает фотопленку после каждой
вспышки неоновой лампочки. Точность фотохронографа
из-за отсутствия электромеханических реле выше, чем
у печатающего хронографа. Средняя квадратическая
ошибка отсчета фотохронографа составляет несколько де¬
сятитысячных долей секунды.
Как в печатающем, так и в фотохронографе в качестве
нуль-пунктов системы отсчетов впечатываются показания
кварцевых часов.
В случае, когда требуется исключительно высокая точ¬
ность регистрации моментов времени, применяется шлей¬
ШШШШз
§ 47. Суммирующие хронографъЬ 129
фовый осциллограф. Он позволяет регистрировать мо¬
менты с точностью до одной десятитысячной доли секунды*
В шлейфовом осциллографе импульс тока, возникаю¬
щий в момент регистрации какого-либо события, постук
пает на вибратор. Подвижная часть вибратора представ¬
ляет собой легкую рамку с зеркалом посредине, натянутую
в поле постоянного магнита. При изменении проте¬
кающего по рамке тока, т. е. при возникновении импульса
тока, зеркало поворачивается и отклоняет падающий на
него световой луч. Световой луч, отразившись от зеркала
вибратора, после прохождения фокусировочной оптиче¬
ской системы попадает на подвижную фотопленку. Все
колебания зеркала вибратора с помощью этого луча за¬
писываются на фотопленке. Скорость движения фото¬
пленки может изменяться от нескольких миллиметров до
нескольких метров в секунду. Чувствительность шлей¬
фового осциллографа и точность регистрации на нем опре¬
деляются подбором вибраторов. Существуют типы вибра¬
торов, позволяющие регистрировать колебания с частотой
до 10 кгц. При большой скорости движения фотопленки
запись события на ней происходит в крупном масштабе.
Так, при скорости 5 м/сек одному миллиметру на пленке
будут соответствовать 0s,0002. Измерения пленки можно
производить с точностью до долей миллиметра. В шлей¬
фовом осциллографе обычно бывает несколько вибраторов;
это позволяет вести одновременную запись моментов це¬
лого ряда различных событий. Для установления нуль-
пункта в шлейфовом осциллографе на один из вибраторов
подаются импульсы от кварцевых часов.
Применение шлейфового осциллографа целесообразно
в случаях, когда надо записать немного моментов с боль¬
шой точностью. В массовых наблюдениях шлейфовый ос¬
циллограф неудобен из-за трудоемкости измерения его
пленки; в таких случаях предпочтителен печатающий
хронограф или фотохронограф.
§ 47. Суммирующие хронографы
При наблюдениях служб времени, производимых на
пассажных инструментах и призменных астролябиях (см.
гл. III), регистрируется большое число отдельных мо¬
ментов времени, которые потом надо осреднять. Так,
130
Гл. 11. Приборы для измерения времени
например, на пассажном инструменте при наблюдениях
каждой звезды регистрируется до 40 моментов, соответ¬
ствующих симметричным положениям звезды до и после
меридиана. Если в течение вечера наблюдается 50 звезд,
то на ленте хронографа фиксируется 2000 моментов, из
которых затем надо получить средние по каждой звезде.
Обработка такой ленты достаточно трудоемка. Поэтому
за последние годы появились специализированные счет¬
ные устройства, суммирующие отдельные моменты и вы¬
дающие их средние значения по каждой звезде либо по¬
лучающие отдельные моменты, записанные в виде пер¬
форированной ленты, которая затем обрабатывается на
ЭВМ.
Сложность регистрации моментов времени, получае¬
мых по наблюдениям на фотоэлектрическом пассажном
инструменте, состоит в том, что сигнал от звезды, изобра¬
жение которой движется по щелям визирной решетки,
не представляет собой правильную синусоиду и сильно
искажен за счет дрожания (рис. 61). Поэтому, если ре¬
гистрировать некоторые моменты, соответствующие зна¬
чению напряжения и01 такая регистрация не будет одно¬
значной. Так, вместо одного момента имевшего бы ме¬
сто при «чистой» синусоиде, будут зарегистрированы сразу
два близких момента, суммировать которые как незави¬
симые нельзя, так как они вызваны помехами и нарушают
временную последовательность t0, t±1 . . . , 14. Учет помех
в суммирующих хронографах ведут отдельные блоки.
Именно задача учета помех сильно осложняет изготовле¬
ние и конструкции перфорирующих и суммирующих хро_
нографов.
§ 47. Суммирующие хронографы
131
Рассмотрим два наиболее характерных примера таких
хронографов: суммирующий хронограф Огриныпа (Лат¬
вийский государственный университет) и перфорирующий
хронограф Федосеева (Московский государственный уни¬
верситет).
Принципы их работы состоят в счете импульсов эта¬
лонной частоты, обычно 1000 гц, в интервалах между
некоторыми опорными сигналами и сигналами с пассаж¬
ного инструмента. Таким образом измеряются проме¬
жутки времени от фиксированного момента (метки от
часов) до момента наблюдения. Затем отдельные измерения
суммируются.
Принцип работы установки Огриныпа заключается
в использовании специальных меток времени М, период
повторения которых выбирается так, чтобы он был макси¬
мально близок к полупериоду сигнала, получаемого от
звезды. Поскольку скорость движения изображения звезды
в поле зрения различна для звезд с разными склоне¬
ниями, для получения меток времени разной частоты надо
было сделать генератор меток времени с набором частот,
соответствующих различным склонениям наблюдаемых
звезд. Установка частоты для каждой звезды может про¬
изводиться вручную либо автоматически по углу пово¬
рота трубы пассажного инструмента. Хронограф снаб¬
жается двумя счетчиками. Первый из них измеряет
количество опорных импульсов в интервале между момен¬
том, когда сигнал от звезды превышает порог срабатыва¬
ния специального порогового устройства, и ближайшей
меткой времени. Такая система позволяет учитывать все
дрожание изображения звезды и не требует большого
объема памяти, так как измеряемые интервалы невелики.
На рис. 62 изображен сигнал от звезды, искаженный
132
Гл. II. Приборы для измерения времени
помехам0» метки времени М\ и0 — уровень срабатывания
порогового устройства показан прерывистой линией.
Сигнал из-за шумов может несколько раз пересекать уро¬
вень регистрации. Метки задаются так, чтобы между со¬
седними метками находилось только одно, не искаженное
шумами, пересечение сигнала от звезды с уровнем сра¬
батывания. Интервалы времени, измеряемые первым счет¬
чиком от момента запуска порогового устройства до бли¬
жайшей метки, показаны на оси u0t0 сплошной чертой.
Рис. 63. Схема установки Огринына.
Средний момент наблюдений определяется на первом счет¬
чике путем осреднения всех измеренных интервалов между
соседними метками с учетом момента времени Ж, соответ¬
ствующего середине меток. Момент М определяется от¬
дельно на втором счетчике, который суммирует моменты
отдельных меток и находит расстояние М от середины ме¬
ток до опорной секунды. Сильно упрощенная схема уста¬
новки Огринына приведена на рис. 63.
Цифрами 1 и 2 обозначены электронные счетчики, че¬
рез ЭК1 и ЭК2 — электронные ключи. Логическая часть
схемы управляет электронными ключами и обеспечивает
выдачу результатов со счетчиков на цифропечатающее
устройство.
Основное преимущество установки Огринына состоит
в малом объеме счета, который достигается введением ме¬
ток времени. Это преимущество позволяет надежно, по
сравнительно несложной схеме, получать средние мо¬
менты прохождения звезд. Некоторым неудобством ме¬
тода следует, i ероятно, считать необходимость установки
(ручной или автоматической) периода меток М для каж¬
дого скл*>нения или группы близких склонений.
§ 47. Суммирующие хронографы
133
Установка Федосеева не требует введения меток вре¬
мени; она обладает значительно большим объемом счета
и требует для обработки результатов наличия ЭВМ. Прин¬
цип ее устройства состоит в следующем.
Двадцатипятиразрядный счетчик в двоичном коде ве¬
дет непрерывный счет опорной частоты 1 кгц, представляю¬
щей собой импульсы длительностью около 3 микросе¬
кунд. Поскольку время непосредственного счета, т. е.
перехода счетчика из одного состояния в другое, состав¬
ляет несколько микросекунд за каждую миллисекунду,
большую часть времени счетчик стоит. Это позволяет
произвести считывание показаний счетчика в момент при¬
хода сигнала с усилителя фотоэлектрической установки
пассажного инструмента. Считывание происходит сна¬
чала в блоки памяти, а затем результат пробивается пер¬
форатором на бумажную ленту. Таким образом, элек¬
тронный счетчик задает непрерывную шкалу времени,
на которой отмечаются моменты появления всех сигналов
с пассажного инструмента, а также секундный импульс
с часов службы времени.
Время, за которое перфорируется одно показание
счетчика, составляет около 0,3 секунды. На этот период
блокируется вход, по которому считываются показания
счетчика, т. е., иными словами, он не будет реагировать
на новый сигнал с пассажного инструмента. Поскольку
расстояние между соседними сигналами, приходящими
на счетчик с пассажного инструмента, всегда больше
0,5 секунды, перфорирующий хронограф может регистри¬
ровать все эти сигналы при отсутствии дрожания изобра¬
жений звезды и других причин, приводящих к дроблению
сигнала.
Для учета дробных контактов (помех) вводится блок
счета помех. Он состоит из отдельного суммирующего
счетчика и генератора кратных импульсов, необходимого
для счета помех. Блок счета помех запускается первым
импульсом с фотоэлектрической установки в момент t0
(рис. 64) и ведет счет от этого импульса последовательно
до второго импульса, затем от второго до третьего импульса
помех и т. д., если помех много. Получаемые последо¬
вательно величины —£0, Д2—Ч—h и т. д* сумми¬
руются, и значение, соответствующее их середине, перфо¬
рируется на ленте после первого отсчета, соответствую¬
134 Гл. II. Приборы для измерения времени
щего моменту t0. Таким образом, на перфоленте, помимо
отсчетов, соответствующих моментам первого срабаты¬
вания порогового устройства t0, t3, £4, г7, будут также
Д . 4- Длг
регистрироваться Ееличины вида ———^— > соответ¬
ствующие среднему моменту дробных контактов, отсчи-
и*,
V.
Jif
г
V. t
Рис. 64. К вопросу учета помех в установке Федосеева.
тываемых от первого контакта. Максимальное число
дробных контактов, которое может быть зарегистриро¬
вано, равно 7.
Обработка перфоленты производится на ЭВМ по про¬
грамме, вычисляющей средние моменты времени, соот¬
ветствующие прохождению звезды через меридиан с уче¬
том помех. В программе для контроля предусмотрена
также выдача отдельных моментов и помех для каждой
звезды.
Установка Федосеева с успехом может быть приме¬
нена для регистрации моментов времени при наблюдениях
на любом астрометрическом инструменте (меридианном
круге, астролябии и т. д.). Ее использование возможно
лишь при наличии ЭВМ,
Глава III
АСТРОНОМИЧЕСКИЕ ИНСТРУМЕНТЫ
ДЛЯ ОПРЕДЕЛЕНИЯ ТОЧНОГО ВРЕМЕНИ
§ 48. Основы определения поправки часов
Определение точного времени, как уже было сказано
в § 23, сводится к определению поправки часов и. Совре¬
менные методы определения поправки часов из астро¬
номических наблюдений основаны на регистрации мо¬
ментов прохождений звезд через небесный меридиан
либо через некоторый альмукантарат (круг равных высот).
В момент прохождения звезды через меридиан звезд¬
ное время
s = a
или
5 = <х-|-12\
где а — прямое восхождение звезды (см. § 1). Но, на осно¬
вании сказанного в § 23,
s = Гм-|- и>
где Гм — показания часов в момент прохождения звезды
через меридиан, а и — поправка часов в этот же момент.
Следовательно,
и = а — Гм, (3.1)
если звезда наблюдается в верхней кульминации, или
и = а-Тя+12\ (3.2)
если звезда наблюдается в нижней кульминации.
Таким образом, чтобы определить поправку часов и
из наблюдений звезд в меридиане, необходимо знать
13б Гл. Ш. Инструменты для определения еремёна
прямое восхождение звезды а и записать показания часов
Тх в момент ее прохождения через меридиан.
Эти соображения лежат в основе методов определения
точного времени из наблюдений звезд с помощью пассаж-
йы* инструментов и зенитных труб.
Из основной формулы параллактического треугольника
cos z = sin f sin 8 -f- cos <p cos 8 cos t, (3.3)
где
t — s — ol = T -\-a — a, (3.4)
следует, что если известны прямое восхождение а и скло¬
нение 8 звезды, а также географическая широта <р места
наблюдения, то, измерив зенитное расстояние z этой
звезды и отметив в момент измерения показания часов Г,
можно сначала по уравнению (3.3) вычислить часовой
угол t звезды, а затем по уравнению (3.4) найти поправку
часов
U=t-\-CIL — Г.
Поправку часов и можно получить и не измеряя зенитных
расстояний звезд, если записать показания часов Tt в мо¬
менты прохождений нескольких звезд в разных азимутах,
но через один и тот же альмукантарат. В этом случае
решается система из нескольких уравнений с двумя неиз¬
вестными и и ср, получаемая из основного уравнения (3.3).
Этим методом «равных высот» точное время определяется
с помощью призменных астролябий.
§ 49. Пассажный инструмент.
Общее описание
Идея пассажного инструмента проста и заключается
в следующем. Астрономическая труба с сеткой нитей,
расположенной в фокальной плоскости объектива, скреп¬
лена с горизонтальной осью так, чтобы визирная линия
трубы (прямая линия, соединяющая вторую главную
точку объектива с центром сетки нитей) была всегда
перпендикулярна к оси и могла свободно вращаться
вокруг нее. Тогда при вращении трубы продолжение
визирной линии будет описывать на небесной сфере
большой круг, а вертикальная нить, проходящая через
центр сетки, будет находиться в плоскости этого круга.
§ 49. Пассажный инструмент. Общее описание
137
Следовательно, момент пересечения изображением светила
этой нити и будет моментом пересечения светилом данного
вертикального круга. Если горизонтальная ось вращения
инструмента расположена точно в плоскости первого
вертикала, то визирная линия трубы и средняя вертикаль¬
ная нить сетки будут расположены в плоскости небесного
меридиана и дадут возможность определить момент про¬
хождения светилом его плоскости.
Пассажный инструмент был изобретен датским астро¬
номом Олафом Рёмером в конце шестидесятых годов
XVII в. За прошедшие три столетия пассажный инстру¬
мент претерпел ряд существенных конструктивных изме¬
нений и усовершенствований и в настоящее время явля¬
ется одним из наиболее точных астрометрических инстру¬
ментов.
Здесь нет необходимости подробно описывать техни¬
ческие детали устройства пассажного инструмента и рас¬
сматривать все его конструкции, особенно старые. Чита¬
тели могут найти их в книге П. Н. Долгова [2]. Мы дадим
лишь общее описание пассажного инструмента АПМ-10
отечественного производства, который, наряду с пассаж¬
ным инструментом немецкой фирмы Цейсса, используется
в современных службах времени.
Основными частями АПМ-10 являются: астроно¬
мическая труба, горизонтальная ось, основание инстру¬
мента с двумя лагерными стойками, подвесной уровень,
два небольших вертикальных круга, контактный микро¬
метр и приспособление для перекладки горизонтальной
оси в лагерах.
Астрономическая труба (рис. 65) имеет объектив 1
с диаметром отверстия 100 мм и фокусным расстоянием
1000 мм. Набор окуляров позволяет вести наблюдения
с увеличениями в 100, 140 и в 200 раз. Труба ломаная —
одна ее половина (объективная) скреплена с шаровой
частью 2 полой горизонтальной оси, а второй половиной
трубы (окулярной) является полуось инструмента 5,
на конце которой укрепляется контактный микрометр 4
для визуальных наблюдений или фотоэлектрическая при¬
ставка (см. § 57).
Гопизонтальная ось состоит из средней шарообразной
части 2 и соединенных с ней наглухо двух полых полу¬
осей 3. В шаровой части, также полой, помещена прямо¬
138 Гл. 111. Инструменты для определения времени
угольная призма 5, отражающая лучи света, прошедшие
через объективную половину трубы, в полуось инстру¬
мента, несущую контактный микрометр или фотоэлек¬
трическую приставку. На полуосях [насажены [цапфы,
которыми горизонтальная ось лежит на прямоугольных
вырезах (лагерах) двух лагерных стоек 6. Последние жест¬
ко скреплены с основанием инструмента 7. Основание ин¬
струмента тремя установочными винтами опирается на
§ 49. Пассажный инструмент. Общее описание
139
массивные пяты, устанавливаемые на горизонтальной по¬
верхности столба. Один винт опирается на гладкую пло¬
щадку пяты, второй винт входит в коническое углубление
пяты #, а третий — в продольную канавку стальной
пластинки пяты 9. Эту стальную пластинку можно пере¬
двигать винтом относительно пяты 9 и тем самым пере¬
мещать основание инструмента в горизонтальном на¬
правлении и менять азимут горизонтальной оси в преде¬
лах нескольких градусов. Установочными винтами можно
также поднимать и опускать основание инструмента с ла¬
герными стойками, т. е. изменять наклон оси к горизонту.
Нивелирование и измерение малых углов наклона гори¬
зонтальной оси производится с помощью чувствитель¬
ного уровня 10, цена одного деления которого равна Г\
Оправа уровня заключена в стальную трубку, соединен¬
ную с двумя крюками, которые ложатся на цапфы оси
своими прямоугольными вырезами, подобными лагерам
стоек.
Горизонтальная ось вместе с уровнем, обычно посто¬
янно висящем на цапфах, может быть повернута на 180°
вокруг отвесной линии с помощью специального механизма
для перекладки, вмонтированного в основание инстру¬
мента. Этот механизм имеет две стойки, заканчивающиеся
так называемыми псевдолагерами. Когда горизонтальная
ось лежит в лагерах, то псевдолагеры берут на себя основ¬
ную часть ее веса и давление оси на каждый лагер состав¬
ляет только около 2 кг. При вращении рукоятки меха¬
низма 11 стойки с псевдолагерами поднимаются вверх,
горизонтальная ось ложится целиком на псевдолагеры
и выходит из лагеров. После этого она может быть повер¬
нута на 180°, а затем вращением рукоятки в обратном
направлении снова опущена на лагеры. Перекладка
инструмента осуществляется легко и удобно за несколько
секунд.
В отличие от обычной конструкции пассажных инстру¬
ментов, все устройства АПМ-10, служащие для установки
трубы на заданное зенитное расстояние, выполнены
в двойном комплекте и расположены симметрично отно¬
сительно трубы на обеих полуосях. Грубая наводка
трубы по зенитному расстоянию осуществляется одним
из больших маховиков (рис. 66). Закрепление трубы
по высоте и более точная ее установка на наблюдаемый
140
Гл. 111. Инструменты для определения времени
объект производится с помощью соответствующих закре¬
пительных и микрометрических* винтов. На горизонталь-
ную_ось инструмента насажены два небольших разделен¬
ных круга, позволяющих установить трубу по высоте
Рис. 66. Пассажный инструмент АМП-10 с фотоэлектрической на¬
садкой.
с точностью до Г. При визуальных наблюдениях исполь¬
зуются круг и устройства наводки, расположенные на по¬
луоси с микрометром. При фотоэлектрических наблюде¬
ниях микрометр заменяется насадкой с фотоумножителем,
§ 50. Пассажный инструмент в меридиане
141
а на противоположном конце оси устанавливается труба-
искатель. В этом случае используются второй круг
и устройства наводки, расположенные на второй полуоси.
Контактный микрометр 4 (рис. 65) вставляется в от¬
верстие полуоси так, чтобы сетка горизонтальных и вер¬
тикальных неподвижных нитей (рис. 67), а также подвиж¬
ные вертикальные нити (рис. 68), находились в фокальной
Рис. 67. Сетка непод- Рис. 68. Сетка подвиж-
вижных вертикальных ных вертикальных ни-
нитей АПМ-10. тей АПМ-10.
плоскости объектива трубы. Движение измерительного
винта микрометра и каретки с подвижными нитями осу¬
ществляется двумя рукоятками. Барабан микрометра
разделен на 100 частей, цена одного оборота винта
5s,5.
Электрическая схема АПМ-10, питаемая постоянным
током напряжением 6,3 в, обеспечивает работу контакт¬
ного микрометра, подсветку поля зрения трубы и освеще¬
ние шкал подвесного уровня и установочных кругов.
§ 50. Пассажный инструмент в меридиане.
Его основные ошибки
Пассажный инструмент при определении поправок ча¬
сов из наблюдений звезд вблизи меридиана устанавли¬
вается так, чтобы его горизонтальная ось располагалась
в плоскости первого вертикала.
В идеальном инструменте сечения цапф, которыми ось
лежит в лагерах, должны быть точными кругами равного
диаметра. Тогда прямая, соединяющая центры этих сече¬
ний, и будет являться осью вращения трубы пассажного
инструмента. Кроме того, в идеальном инструменте
142 Гл. ill. Инструменты для определения времени
визирная линия должна быть перпендикулярна к оси вра¬
щения, а последняя в точности горизонтальной.
Визирная линия точно установленного в меридиане
идеального пассажного инструмента будет описывать
на небесной сфере большой круг — небесный меридиан
при вращении трубы около горизонтальной оси, а средняя
вертикальная нить будет располагаться в плоскости
небесного меридиана. В этом идеальном случае момент
прохождения изображения какой-либо звезды через сред¬
нюю вертикальную нить трубы будет и моментом прохож¬
дения звезды через плоскость небесного меридиана.
В действительности идеальных инструментов не бывает
и точная установка их практически невозможна. В реаль¬
ном пассажном инструменте визирная линия не перпен¬
дикулярна к горизонтальной оси, сама ось наклонена
к плоскости математического горизонта и не лежит в пло¬
скости первого вертикала, диаметры сечений цапф, хотя
и незначительно, отличаются друг от друга и не имеют
формы правильного круга. Все это вызывает отклонение
визирной линии от плоскости небесного меридиана, и ее
продолжение описывает на небесной сфере сложную кри¬
вую. Хотя эта кривая мало отличается от большого
круга и близка к меридиану, тем не менее наблюдаемый
момент прохождения изображения звезды через среднюю
вертикальную нить реального инструмента уже не будет
моментом ее прохождения через меридиан.
Чтобы получить последний, необходимо момент про¬
хождения звезды через среднюю вертикальную нить
инструмента исправить прежде всего за ошибки в наклон¬
ности и в азимуте горизонтальной оси и за коллимацион¬
ную ошибку, т. е. за неперпендикулярность визирной
линии к горизонтальной оси.
Рассмотрим часть небесной сферы изнутри (рис. 69)
вблизи точки запада W. Пусть горизонтальная ось пас¬
сажного инструмента пересекает сферу в точке W', очень
близко от W. Если SN — часть математического гори¬
зонта, ZW — часть первого вертикала, W'H — часть
круга высоты, проходящего через точку И7', то высота
точки W' есть наклонность i — HW' оси пассажного ин¬
струмента к плоскости горизонта. Наклонность считается
положительной, если западный конец оси выше восточ¬
ного, как на рис. 69.
§ 51. Основная формула пассажного инструмента
143
Z,
W*
I
11
! к
W
N
S н
Рис. 69. Ошибки пас¬
сажного инструмента.
Расстояние по горизонту от точки запада W до круга
высоты точки W\ т. е. до точки Н, обозначается через
k~WH и называется азимутом оси или азимутом инстру¬
мента. Азимут инструмента считается положительным,
если Н лежит к югу от W, и отрицательным, если к се¬
веру от W. Совершенно очевидно,
что (90°—к) есть астрономический
азимут западного конца оси ин¬
струмента, отсчитанный, как обыч¬
но, от точки юга на запад.
Если угол между объективной
частью визирной линии и запад¬
ной половиной оси больше 90°,
то коллимация с считается положи¬
тельной, если меньше 90° — отри¬
цательной. После перекладки
пассажного инструмента кол¬
лимация меняет свой знак, так как если до перекладки
угол между визирной линией и направлением оси восток—
запад был 90+с, то после перекладки он становится
90—с.
В самом общем случае, когда i, i и с не равны нулю,
визирная линия описывает на сфере некоторый малый
круг, который может располагаться и к востоку и к за¬
паду от плоскости небесного меридиана.
Наблюдаемый момент Т прохождения звездой средней
вертикальной нити сетки и есть момент ее прохождения
через этот малый круг. Тогда, следовательно, момент
ее прохождения через меридиан
ГМ = Г +АГ, (3.5)
где А Г может быть и положительной и отрицательной
величиной и называется приведением на меридиан.
§ 51. Основная формула пассажного
инструмента в меридиане
Если точно известны числовые значения ошибок ин¬
струмента с, i и к, то приведение на меридиан А Т можно
вычислить с любой степенью точности. Надлежащая уста¬
новка пассажного инструмента и ее периодический кон¬
троль позволяют сделать ошибки с, i и к настолько
144 Гл. 111. Инструменты для определения времени
малыми, что при обработке наблюдений вычисление АТ
производится по формулам, содержащим только первые
степени этих величин.
Представим приведение на меридиан суммой трех
поправок:
Д7’ = Д7’С + ДГ< + АГЛ, (3.6)
т.™ \т дт лт _ поправки за ошибки в коллимации,
наклонности и в азимуте инстру¬
мента соответственно.
Пусть £=0, к=0, а коллимация
сф 0. Тогда при вращении трубы
вокруг горизонтальной оси визир¬
ная линии будет описывать на не¬
бесной сфере малый круг, парал¬
лельный плоскости небесного мери¬
диана либо к востоку (с ^> 0), либо
к западу (с < 0) от него на угловом
расстоянии, равном с (рис. 70).
Если коллимация положи¬
тельна, то звезда М в верх¬
ней кульминации пройдет через среднюю вертикальную
нить инструмента раньше, чем через меридиан. Чтобы
звезда пришла на меридиан, небесной сфере необходимо
повернуться на угол ДГС= LMPS. Из прямоугольного
треугольника ММ' Р имеем
sin &ТС sin (90° — 8) = sin с
или, по малости с и А Тс,
&Т0 = с sec 8. (3.7)
Если звезда наблюдается в нижней кульминации, то она
проходит через меридиан позже, чем через среднюю вер¬
тикальную нить инструмента, и в этом случае
АТ с ——с sec 8. (3.7а)
Пусть теперь к=0, с=0, а наклонение i 0. В этом
случае, при вращении трубы ее визирная линия будет
описывать на сфере большой круг, проходящий через
точки севера N и юга S и наклоненный либо к востоку
(i > 0) либо к западу (i <] 0) от меридиана на угол,
с? *-»х *> к
S
Рис. 70. Влияние кол¬
лимации.
§ 51. Основная формула пассажного инструмента
145
равный i (рис. 71). При положительной наклонности
звезда М в верхней кульминации пройдет через среднюю
вертикальную нить инструмента раньше, чем через ме¬
ридиан. Обозначив теперь угол MPS
через А Г,., из прямоугольных тре¬
угольников ММ'Р и MM'S получим
sin ММ1 = sin (90° — 8) sin А Г. =
= sin MS sin i. ^
Так как угол i мал, можно при¬
нять, что \^MS равна высоте звезды
в меридиане й=90°—z и тогда, до N
малых первого порядка, Рис. 71. Влияние на-
Д7\ = i cos z sec 8. клонения.
В верхней кульминации к югу от зенита z= ср— 8,
а к северу от зенита S— ср, следовательно,
Д7\ = i cos (<р — 8) sec 8 = i cos (8 — <p) sec 8. (3.8)
Если звезда наблюдается в нижней кульминации (z=
= 180°— <р— 8), то она проходит сначала через меридиан,
а потом через среднюю нить инструмента, и тогда
Д7\ = —i cos z sec 8= —i cos (180° — cp — 8) sec 8
или
AT. = i cos (<p -f- 8) sec 8. (3.8a)
Наконец, если г=0, c=0, а азимут к =4= 0, то визирная
линия при вращении трубы описывает на сфере большие
вертикальные круги, пересекающие математический гори¬
зонт либо к востоку от точки юга S и к западу от точки
севера N (к >0), либо к западу от S и к востоку от N
(к < 0). При этом азимуты точек пересечения в первом
случае равны 360° — к и 180° — к, во втором случае —к
и 180° — к (рис. 72).
При положительном значении азимута к звезда М
в верхней кульминации к югу от зенита пройдет среднюю
вертикальную нить инструмента раньше пересечения
плоскости меридиана. Обозначая угол MPS через АТк,
из прямоугольных треугольников ММ'Р и MM'Z имеем
sin ММ1 = sin (90° — 8) sin АТк = sin z sin к
146 Гл. III. Инструменты для определения времени
Рис.
72. Влияние
азимута.
или, по малости к,
Для верхней кульминации к югу от зенита (z= ср— 8)
получим
ДТк = к sin (<р — 8) sec 8. (3.9)
В верхней кульминации к северу от зенита (z=8—f)
звезда сначала пройдет через меридиан, а потом пересечет
среднюю вертикальную нить ин¬
струмента, поэтому
АТк == —к sin (8 — <р) sec 8. (3.9а)
В нижней кульминации (z=180°—
— <р—18) звезда раньше пройдет через
среднюю вертикальную нить инстру¬
мента, а затем через плоскость мери¬
диана. В этом случае
AjСк = к sin (189° — <р — 8) sec 8
или
t\Tk = к sin (<р -f- 8) sec 8. (3.96)
Имея в виду формулы (3.7)—(3.96), приведение на ме¬
ридиан (3.6) с точностью до малых первого порядка можно
представить следующим выражением:
AT7 = ±с sec8 -j- i cos (<p + 8) sec 8 -(- к sin (<p + 8) sec 8. (3.10)
Это формула Т. Майера. Здесь верхние знаки относятся
к верхней кульминации, нижние — к нижней.
Принимая во внимание равенства (3.5) и (3.10), урав¬
нение (3.1) можно записать так:
и = а — |Т -f- с sec 8 -j- i cos (<p — 8) sec 8 -|-
-j-fcsin (<p — 8)sec8j. (3.11)
Коэффициенты при с, i и к обычно обозначаются
буквами С, I, К соответственно и называются коэффи¬
циентами Майера. Полагая <р—8=zM, где zM — зенитное
расстояние в меридиане, будем иметь
C=sec8, 7=coszMS3c8, К = sin zusec 8,
и тогда уравнение (3.11) примет вид
и = а — (Т 4- сС + И + кК).
(3.12)
§ 52. Определение числовых значений ошибок /, с и к 147
§ 52. Определение числовых значений
ошибок i, с и к
Установка пассажного инструмента в меридиане про¬
изводится путем последовательных приближений.
Сначала нивелируется основание инструмента в на¬
правлении «север—юг» с помощью уровня при алидаде
вертикального круга и двух винтов основания инстру¬
мента, расположенных перпендикулярно к горизонталь¬
ной оси. Затем нивелируется горизонтальная ось с по¬
мощью подвесного уровня и третьего винта основания.
После этого устанавливается вертикальный круг-иска¬
тель так, чтобы он указывал зенитное расстояние визир¬
ной линии без всяких поправок с точностью до 1'. Для
этого труба наводится на звезду, лучше всего на Поляр¬
ную, зенитное расстояние которой для момента наблюде¬
ния заранее вычисляется также с точностью до 1'. Наведя
крест нитей или биссектор средних горизонтальных нитей
на изображение Полярной, вращают вертикальный круг
на горизонтальной осп и устанавливают его так, чтобы
отсчет на круге равнялся вычисленному зенитному рас¬
стоянию Полярной. В этом положении и закрепляют
круг на горизонтальной оси.
Определив коллимационную ошибку по земному пред¬
мету и исправив (уменьшив) ее передвижением сетки
неподвижных нитей, устанавливают (приближенно) визир¬
ную линию в плоскости меридиана. Это можно сделать,
например, следующим простым путем. Наведя трубу
на какую-либо звезду близ зенита с известным прямым
восхождением и заметив по звездным часам момент Тх
прохождения ее изображения через среднюю вертикаль¬
ную нить, находят приближенную поправку часов м1==
= —Тг. Затем, наведя трубу на экваториальную звезду
с известным прямым восхождением а2, определяют для
нее Т2 и находят приближенную поправку и2=а2—Т2.
Поправки иг и и2 не будут совпадать из-за ошибки ази¬
мута к. Поворотом основания инструментов по азимуту
и повторными наблюдениями звезд (зенитной и эквато¬
риальной) добиваются того, чтобы разница между иг и и2
была как можно меньше.
Однако даже самая тщательная установка пассажного
инструмента не может обеспечить постоянства его ошибок.
id8 Гл. III. Инструменты для определения времени
В силу целого ряда причин числовые значения ошибок
меняются с течением времени и их принято считать посто¬
янными за время наблюдения либо только одной звезды
(наклонность i и коллимацию с), либо за время наблю¬
дения одной поправки часов из 10—12 звезд (азимут к).
Поэтому при первоначальной установке инструмента стре¬
мятся только лишь к уменьшению их величин. При опре¬
делении же точного времени используют те значения г,
которые измеряются в процессе наблюдения каждой
звезды, а значение азимута к получают в результате вы¬
числения поправки часов и. (Коллимация с считается
исключенной, так как наблюдения каждой звезды произ¬
водятся с перекладкой горизонтальной оси.)
Измерение наклонности горизонтальной оси i произво¬
дится с помощью подвесного уровня. Подвесной уровень
должен иметь крюки, которыми он подвешивается на
цапфы, одинаковой длины, и кроме того, что более важно,
ось уровня должна быть параллельна горизонтальной
оси инструмента. В каждом подвесном уровне есть при¬
способление, позволяющее удлинить или укоротить один
из крюков и добиться почти полного равенства их длины.
Влияние остающегося неравенства существенного значе¬
ния не имеет, так как при определении наклонности
с перекладкой оси оно исключается подобно неравенству
цапф (см. § 53). Непараллельность оси уровня горизон¬
тальной оси инструмента обнаруживается покачиванием
висящего уровня около горизонтальной оси. Если при
этом пузырек уровня будет передвигаться вдоль трубки
уровня, то оси параллельны. Специальными винтами
в оправе уровня непараллельность осей можно свести
к минимуму. Также к минимуму можно свести и влияние
остаточной непараллельности осей, если производить
отсчеты шкалы уровня всегда в отвесном его положении
на горизонтальной оси инструмента.
Для определения наклонности горизонтальной оси
инструмента i отсчитывают концы пузырька подвесного
уровня с точностью до десятой доли деления его шкалы
при двух положениях оси — до перекладки и после
перекладки (перед наблюдением и после наблюдения про¬
хождения каждой звездой плоскости небесного мери¬
диана). Пусть нуль шкалы уровня до перекладки оси
находится на востоке, после перекладки, естественно,
§ 52. Определение числовых значений ошибок i, с и k ld9
он будет на западе. Обозначим отсчеты концов пузырька
уровня до перекладки оси через ав и aw (ав < aw),
а после перекладки через ав и aw (ав > aw). Наклон¬
ность оси i получаются по формуле
i* = у Ps [(аЕ + aw) — (а'в -f- a'w)], (3.13)
где 6s — цена полуделения шкалы уровня в секундах
часовой меры.
Если при записи отсчетов шкалы уровня всегда указы¬
вать, к какому концу пузырька, восточному или запад¬
ному, они относятся, то недоразумений со знаком наклон¬
ности не возникнет. Действительно, если западный конец
оси выше восточного, то (ав+aw) > (яя+aw) и наклон¬
ность i по формуле (3.13) получается положительной
и, наоборот, отрицательной, если восточный конец оси
выше западного, так как в этом случае(ав+aw) < (ав+aw).
Для определения коллимационной ошибки с имеются
различные способы, требующие вспомогательных прибо¬
ров (коллиматоров, ртутного горизонта и пр.). Но мы
не будем на них останавливаться, отсылая читателей
к курсам практической астрономии, поскольку наблю¬
дения каждой звезды при определении поправки часов
всегда производятся с перекладкой трубы, что, как уже
было сказано, исключает влияние коллимационной ошибки
на результаты наблюдений.
При вычислении поправки часов и из ежегодников
берется видимое прямое восхождение звезды а. Поэтому
из момента прохождения через бесколлимационную ли¬
нию инструмента надо вычесть поправку за суточную
аберрацию Aa=0s,021 cos ср sec 8. Если обозначить
Т0 = Гср — 0*021 cos <р sec 8 -f И, (3.14)
то основное уравнение пассажного инструмента для опре¬
деления поправки часов из наблюдений звезд с переклад¬
кой инструмента на каждой звезде кратко запишется так:
и+кК = <х — Т0. (3.15)
Азимут инструмента к принципиально можно опреде¬
лить из комбинации наблюдений двух звезд, у которых
150 Гл. III. Инструменты для определения времени
коэффициенты К значительно разнятся, например, из наблкг
дений южной звезды и околополярной, или из наблюдений
одной звезды в верхней кульминации, а другой — в ниж¬
ней. Допуская, что за время наблюдения звезд поправка
часов и и азимут к остаются неизменными, и наблюдая
каждую звезду с перекладкой инструмента и определе¬
нием наклонности оси, будем иметь
a -f кКх = d1— Tov
U —j— kK-2 ^2 ^ 02*
Вычитая первое уравнение из второго, получим
("а ~~ T-f-~ . (3.16)
§ 53. Неравенство и неправильности цапф
В идеальном инструменте цапфы должны быть круг¬
лыми цилиндрами одинакового диаметра, оси которых
должны лежать на одной прямой. В реальном инстру¬
менте диаметр одной цапфы может отличаться от диаметра
другой (неравенство цапф), а их рабочие сечения не быть
точными кругами (неправильности цапф). Эти несовер¬
шенства цапф изменяют наклонность и азимут горизон¬
тальной оси при ее вращении.
Влияние неравенства цапф полностью исключается,
если определение наклонности горизонтальной оси про¬
изводится с перекладкой ее на лагерах. Действительно,
пусть нуль шкалы уровня находится на стороне круга,
а сам круг на востоке. Если бы цапфы были одинакового
диаметра, то отсчеты концов пузырька уровня в этом по¬
ложении инструмента «восток—запад» были бы аЕ и
aw (яе < aw), а после перекладки инструмента, в поло¬
жении «запад—восток», аЕ и aw (аЕ > aw). Пусть теперь
цапфа при круге стала толще второй. Тогда отсчеты
шкалы уровня в первом положении инструмента стали бы
такими:
аЕ= аЕ — х и aw aw — х,
а при втором положении инструмента:
аЕ = ciE — х и aw7=1 cl'w —
где х — влияние неравенства цапф.
§ 54. Визуальная регистрация моментов
151
Если вычислить по новым отсчетам наклонность i
по формуле (3.13), то получим
— [(#я -f- &w) — (р'Е -f- aw)]
— у Р8[(йя {(i'eayf)],
т. е. наклонность, свободную от неравенства цапф.
Значительно сложнее вопрос об исключении ошибок,
вызываемых неправильностью цапф. Вследствие непра¬
вильностей цапф продолжение визирной линии будет опи¬
сывать на небесной сфере не геометрически правильный
круг, а некоторую сложную кривую. Существует очень
много различных способов определения истинной фигуры
цапф. Мы не будем их рассматривать, отсылая интересую¬
щихся к специальной литературе, и ограничимся лишь
следующим замечанием. Хотя изготовить правильные
цапфы технически очень трудно, тем не менее отклонения
фигуры цапфы от окружности у современных пассажных
инструментов редко превосходят 0,1 мк. Такое отклонение
вызывает смещение визирной линии около 0s,0014 при
длине оси в 100 см. При определении поправок часов
этим смещением обычно пренебрегают, так как его влия¬
ние на окончательный результат значительно меньше,
чем других факторов.
§ 54. Визуальная регистрация моментов
прохождения звезд; контактный микрометр
Старые методы регистрации моментов прохождений
звезд через неподвижные нити (способ «глаз—ухо», «кла¬
вишный» и т. п.) в современных службах времени не при¬
меняются. Поэтому мы рассмотрим лишь один визуаль¬
ный метод — метод контактного микрометра. Так как
и он постепенно вытесняется более совершенным фото¬
электрическим методом, мы рассмотрим его кратко.
Контактный микрометр (рис. 73) — это обыкновенный
окулярный микрометр с вертикальной нитью, движимой
винтом. Но параллельно с разделенным барабаном на ось
винта насажен еще один контактный барабан. На окруж¬
ности последнего металлические части чередуются с
152 Гл. 111. Инструменты для определения времени
частями, не проводящими электрического тока, или име¬
ются выступы (зубцы) одинаковой величины и формы.
Рис. 73. Контактный микрометр,
В первом случае к окружности контактного барабана
прижимается легкая плоская пружинка, к которой под¬
водится один конец электрической
цепи регистрирующего прибора,
а второй конец цепи подводится
к металлическим частям барабана.
При вращении барабана пластинка
то замыкает, то размыкает ток
в цепи.
Во втором случае (рис. 74)
ток электрической цепи подво¬
дится к двум плоским пружинам,
два конца которых изолированы
друг от друга, а два других
конца через контактный выступ
на одной из них прикасаются
друг к другу и замыкают ток
в цепи. При вращении барабана
его зубцы, прикасаясь к штифту
на одной из пластин, изгибают
ее конец, контакт между пластинами нарушается,
и ток в цепи сначала размыкается, а затем, когда штифт
дойдет с зубца, снова замыкается,
Рис. 74. Контактный ба¬
рабан микрометра.
§ 5d. Ёизуальная регистрация мйментоз lSS
Метод регистрации прохождений звезд с контактным
микрометром заключается в следующем. Наблюдатель
устанавливает трубу на должное зенитное расстояние
и отсчитывает показания подвесного уровня. Приводной
рукояткой микрометра подвижная вертикальная нить
отводится от средней неподвижной нити в ту сторону
поля зрения, где должно появиться изображение звезды.
После того как изображение звезды появится в поле
зрения, наблюдатель микрометрическим винтом устанав¬
ливает трубу так, чтобы изображение двигалось между
двумя горизонтальными неподвижными нитями. Послед¬
нее необходимо для исключения влияния возможного
наклона вертикальной подвижной нити. Когда изобра¬
жение звезды дойдет до подвижной вертикальной нити,
наблюдатель вращает винт микрометра с такой скоростью,
чтобы подвижная нить все время проходила через середину
движущегося изображения звезды. При этом вращении
контактный барабан микрометра размыкает и замыкает
контакт в цепи, посылая импульсы на регистрирующий
прибор. Сделав 2—3 оборота барабана, но не доведя
нить до середины поля зрения (средней неподвижной
нити), наблюдатель перекладывает трубу на лагерах,
устанавливает изображение звезды в биссектор гори¬
зонтальных нитей и ждет, когда оно подойдет к подвиж¬
ной нити, которая теперь будет располагаться по другую
сторону меридиана. Как только подвижная нить ока¬
жется посередине изображения звезды, наблюдатель вра¬
щает винт микрометра, удерживая подвижную нить
в этом положении на тех же самых оборотах винта. При
этом вращении контактный барабан микрометра будет
замыкать и размыкать контакты в обратном порядке,
так как винт будет вращаться в противоположном направ¬
лении. Сделав те же 2—3 оборота барабана, наблюдатель
заканчивает наблюдения звезды вторым отсчетом концов
пузырька подвесного уровня.
На рис. 75 схематически показана часть записи кон¬
тактов микрометра на ленте пишущего хронографа вблизи
момента перекладки инструмента. Только в действитель¬
ности промежуток между обоими положениями девятого
контакта бывает значительно больше, чем на рисунке.
Так как бесколлимационная визирная линия после пере¬
кладки сохраняет свое прежнее положение в простран¬
154 Гл. III. Инструменты для определения времени
стве, то положения подвижной нити в моменты размыка¬
ния (или замыкания) контактов до перекладки и в мо¬
менты замыкания (или размыкания) тех же контактов
после перекладки будут симметричны относительно вообра¬
жаемой бесколлимационной нити АА'. Следовательно,
/I
Секунды ] часов
47s 4д5 49s \5д5 51ь 52s 53%
П П П ф___П__Л__П__
} I ! 2 2
Л П I п п_
8 р 9 р | 9 р 8 р
Контакты | микрометра
I
А'
Рис. 75. Запись контактов микрометра на ленте пишущего хроно¬
графа (р — цепь разомкнута, з — цепь замкнута).
полусумма моментов размыкания (замыкания) и замыка¬
ния (размыкания) тока одним и тем же контактом до пере¬
кладки и после перекладки трубы есть момент прохожде¬
ния звездой бесколлимационной нити.
На практике используют либо только моменты размы¬
кания либо только моменты замыкания тока.
Полусумма моментов размыкания тока одним и тем же
контактом до перекладки и после перекладки инстру¬
мента больше или меньше момента прохождения через
бесколлимационную нить, полусумма замыканий — мень¬
ше или больше этого момента на одну и ту же вели¬
чину -^-sec8, где Xs — ширина контакта, т. е. промежуток
времени, за который звезда перемещается в поле зрения
между двумя положениями подвижной нити, соответ¬
ствующими моментам размыкания и замыкания тока кон¬
тактом. Следовательно, величина sec 8 должна вычи¬
таться из полусуммы моментов размыканий и прибав¬
ляться к полусумме моментов замыканий (первый тип
контактного устройства), или, наоборот, прибавляться
к полусумме моментов размыканий и вычитаться из полу¬
§ 55. Вычисление поправки часов
155
суммы моментов замыканий тока (второй тип контактного
устройства). Для определения ширины каждого контакта
параллельно цепи микрометра к выходу его контактов
подключается низкоомная телефонная трубка (адаптер)
последовательно с конденсатором. При замыканиях и раз¬
мыканиях электрической цепи микрометра в адаптере
будут слышны щелчки. Наблюдатель, очень медленно
вращая винт микрометра, прислушивается к щелчкам
адаптера, записывая отсчет на барабане винта при каж¬
дом щелчке. Из этих отсчетов получается ширина каждого
контакта в долях оборота винта. Чтобы получить ши¬
рину контактов в секундах часовой меры, надо знать
значение оборота винта в этих единицах. Это значение
определяется по моментам прохождения звезд через по¬
ложения подвижной нити, разнящиеся друг от друга
на целое число оборотов барабана.
Контактов на окружности барабана (металлических
частей или зубцов) обычно бывает 9—10, одинаковых
размеров и формы. Момент прохождения звездой бескол-
лимационной нити вычисляется по 10 парам контактов
(редко по 20), со средней шириной использованных кон¬
тактов.
Ведение подвижной нити микрометра иногда осущест¬
вляется с помощью электромотора, питаемого током от спе¬
циального генератора переменной частоты. В этом слу¬
чае наблюдатель устанавливает подвижную нить на сере¬
дину изображения звезды и придает ей соответствующую
скорость движения, изменяя частоту тока генератора.
Из-за сложности устройства и не очень существенных
выгод этот способ ведения нити не нашел широкого при¬
менения.
§ 55. Вычисление поправки часов.
Программы наблюдений
Определение точного времени пассажным инструмен¬
том в меридиане с перекладкой горизонтальной оси при
наблюдении каждой звезды сводится к решению системы
п уравнений (п равно числу наблюдавшихся звезд)
с двумя неизвестными — поправкой часов и и азимутом
инструмента к<
156 Гл. III. Инструменты для определения времени
На основании уравнения (3.15) составляется система
уравнений
которая решается по способу наименьших квадратов. В ре¬
зультате решения системы уравнений (3.17) получаются
значения неизвестных и и к и остаточные уклонения vv
позволяющие вычислить среднюю квадратическую ошибку
наблюдения одной звезды по формуле
где [vv] — сумма квадратов остаточных уклонений v4,
а также среднюю квадратическую ошибку поправки часов
и по формуле
и среднюю квадратическую ошибку азимута инстру¬
мента к по формуле
где [КК] — сумма квадратов азимутальных коэффициен-
Средняя квадратическая ошибка наблюдения одной
звезды при определении поправки часов с помощью ви¬
зуального пассажного инструмента в настоящее время со¬
ставляет около +0S,015, следовательно, поправка часов и,
определенная по 10—12 звездам, получается со средней
квадратической ошибкой 0s,005—0s,006.
Теоретические исследования уравнений (3.17), выпол¬
ненные Нитхаммером, Норлундом, М. С. Зверевым,
В. Э. Брандтом и др. позволяют сделать следующие три
основных вывода: 1) поправка часов получится с мини¬
мальной ошибкой (с максимальным весом) в том случае,
если наблюдаются звезды вблизи зенита с соблюдением
условия 27^=0, т. е. по разные стороны от зенита;
2) азимут инструмента к получится с минимальной ошиб¬
кой (с максимальным весом) в том случае, если наблю-
и -f кК. — (а. — Т0<) = 0,
(3.17)
4= + 7==,
* - ^[КК\ ’
тов
К( = sin z{ S3c8,..
§ 55. Вычисление поправки часов
157
даются звезды в верхних и нижних кульминациях с со¬
блюдением условия 27^=0; 3) близполюсные звезды
(8 > 83°) с очень медленным движением не играют осо¬
бой роли при определении поправки часов и их нецелесо¬
образно использовать для определения времени в средних
широтах.
На основании этих соображений программа наблюде¬
ний для определения поправки часов может быть состав¬
лена в различных вариантах.
При определении фундаментальных долгот в программу
наблюдений включаются 20—25 звезд, которые служат
для определения поправки часов, и 4—6 близполюсных
звезд, используемых только для вычисления азимута ин¬
струмента и наблюдаемых в верхней и нижней куль¬
минации.
В последние годы большинство Служб времени Совет¬
ского Союза определяют поправки часов по следующей
программе. Для вычисления одной поправки часов ис¬
пользуются наблюдения 10—12 близзенитных звезд вре¬
мени, 2—3 «экваториальных» звезд и одной близзенитной
звезды в нижней кульминации. Ширина зенитной зоны
около 40° и распространяется на 15—16° к северу и при¬
мерно на 25° к югу от зенита места наблюдения. «Эквато¬
риальными» звездами считаются те, у которых азимуталь¬
ные коэффициенты К > 0,5. Азимут инструмента к и
поправка часов и определяются раздельно.
Для вычисления азимута к из наблюдений «звезд вре¬
мени» находят среднее значение (ol.— Toi)cv=2 (<*4—Т0г)/п
и среднее значение азимутальных коэффициентов этих
звезд (К{)ср = 2К.In, где п — число звезд времени.
С этими средними значениями и со свободными членами
уравнений для «экваториальных» звезд и звезды, наблю¬
давшейся в нижней кульминации, и с их азимутальными
коэффициентами по формуле (3.16) вычисляется азимут
инструмента к по каждой из этих звезд отдельно. Из по¬
лученных значений к образуется среднее значение ази¬
мута инструмента kcv, с которым затем и вычисляются
поправки часов и4 из уравнений (3.17) по всем звездам вре¬
мени и «экваториальным» звездам. Среднее значение по¬
правки часов ис?=и./т, где т — общее число звезд вре¬
мени и экваториальных, принимается за окончательное
и относится к среднему моменту наблюдения этих звезд.
158 Гл. III. Инструменты для определения времени
Наблюдения нижних кульминаций звезд в вычислении
поправки часов не участвуют; они используются в даль¬
нейшем для получения систематических поправок вида
каь к прямым восхождениям исходного каталога.
§ 56. Заключение о визуальных наблюдениях
на пассажном инструменте
Ошибки цапф и ошибки установки инструмента (кол¬
лимацию, наклонность, азимут) хотя и можно определить
или исключить целесообразно выбранным методом наблю¬
дений, но полностью освободиться от их влияния на окон¬
чательный результат наблюдений невозможно из-за не¬
уверенности определения и непостоянства самих ошибок.
Очень трудным является учет влияния ошибок, вызыва¬
емых изменением внешних условий (изменением темпе¬
ратуры и давления окружающего инструмент воздуха,
силы и направления ветра и т. п.). Кроме того, на резуль¬
таты наблюдений влияет сам наблюдатель, внося в них
личные ошибки, которые являются следствием его физио¬
логических и психологических свойств. Личные ошибки
наблюдателей могут достигать нескольких сотых, а иногда
и десятых долей секунды. Известно, например, что при
регистрации моментов по способу «глаз — ухо» личная
разность двух наблюдателей (разность их личных ошибок)
достигала даже Is. Установлено, что личные ошибки на¬
блюдателя зависят от направления и скорости движения
звезд, от их звездной величины, от освещения поля зре¬
ния и т. д.
Личные ошибки наблюдателя могут быть случайного
и систематического характера. Первые ошибки у опытных
наблюдателей обычно невелики и их влияние на резуль¬
таты наблюдений можно ослабить увеличением числа
наблюдений. Систематические личные ошибки иногда до¬
стигают весьма заметной величины и непостоянны даже
у одного и того же наблюдателя. Они изменяются со вре¬
менем, зависят от пассажного инструмента, на котором
производятся наблюдения.
Были изобретены различные приборы для определения
личных ошибок (личных разностей) наблюдателей, но
они не вошли во всеобщее употребление вследствие слож¬
ности их устройства и невозможности исследовать ошибки
§ 57. Фотоэлектрический метод регистраций
159
при разнообразных условиях наблюдения. Наиболее эф¬
фективный путь к ослаблению или даже к полному исклю¬
чению влияния личных ошибок на результаты наблюде¬
ний — это автоматизация всех процессов наблюдения и
в первую очередь регистрации моментов прохождений
звезд. Одним из современных методов регистрации при
наблюдениях на пассажных инструментах является фото¬
электрический метод. Замена глаза наблюдателя фото¬
элементом выгодна по следующим причинам:
1) полностью исключается личная ошибка наблюда¬
теля,
2) уменьшается влияние наблюдателя на инструмент,
3) улучшается конструкция пассажного инструмента,
так как визирную решетку (заменяющую сетку нитей;
см. § 57) можно закрепить в горизонтальной оси инстру¬
мента гораздо надежнее, чем крепится рамка с подвижными
нитями в окулярном микрометре.
Попытки применить при наблюдениях на пассажных
инструментах фотографический метод регистрации про¬
хождений звезд не дали удовлетворительных результатов.
Этот метод, также исключающий личную ошибку наблю¬
дателя, успешно применяется при наблюдениях на зенит¬
ных трубах (см. дальше).
§ 57. Фотоэлектрический метод регистрации
прохождений звезд
Впервые фотоэлектрический метод был разработан
в 1933 г. в Пулкове проф. Н. Н. Павловым. В 1937 г.
Н. Н. Павлов получил на фотоэлектрическом пассажном
инструменте первую поправку часов, а с 1939 г. в Пулкове
начались систематические определения поправок часов
фотоэлектрическим методом. В 1947 г. фотоэлектрическая
регистрация звезд была начата в Центральном научно-
исследовательском институте геодезии, аэросъемки и кар¬
тографии (ЦНИИГАиК) под руководством В. Э. Брандта.
В настоящее время фотоэлектрические пассажные ин¬
струменты имеются на большей части советских обсерва¬
торий, определяющих поправки своих часов. При фото¬
электрической регистрации прохождений звезд в фокаль¬
ной плоскости объектива пассажного инструмента вместо
сетки нитей устанавливается визирная решетка. Она
1&0 Гл. 111. Инструменты для определения epeMetiil
представляет собой непрозрачную пластинку с рядом па¬
раллельных щелей, поставленную так, что изображение
звезды движется перпендикулярно к этим щелям. Позади
решетки располагается фотоумножитель, на который через
щели визирной решетки попадает свет при прохождении
изображения звезды. Под действием света в анодной цепи
фотоумножителя возникает фототок, момент появления
которого после усиления может
быть зарегистрирован на хроно¬
графе.
Для наведения трубы на звезду
фотоэлектрический пассажный ин¬
струмент снабжается дополнитель¬
ной трубой-искателем.
Искатель обычно представляет со¬
бой небольшую астрономическую
трубу с фокусным расстоянием около
полуметра и диаметром объектива
40—60 мм. Эта труба жестко
крепится к горизонтальной оси
со стороны, противоположной ви-
Для удобства наблюдений перед
фокальной плоскостью искателя ставится призма полного
внутреннего отражения, поворачивающая пучок лучей
на 90°. В фокальной плоскости искателя помещается сетка
нитей, состоящая обычно из пяти вертикальных и двух
горизонтальных нитей. Вертикальные нити натянуты так,
что когда изображение звезды проходит по участкам поля
зрения, ограниченного нитями 1, 2 и 4, 5 (рис. 76), это
соответствует движению изображения звезды по щелям
решетки в фокальной плоскости главной трубы. Верти¬
кальная нить 3 натянута в середине поля зрения искателя.
Две горизонтальные нити ограничивают по высоте уча¬
сток поля зрения искателя, соответствующий рабочей
части визирной решетки. Поэтому при наблюдениях изоб¬
ражение звезды помещается между двумя горизонталь¬
ными нитями. Поле зрения искателя освещается электри¬
ческой лампочкой.
У некоторых фотоэлектрических пассажных инстру¬
ментов роль искателя выполняет сама главная труба.
В этом случае на центральную часть гипотенузной пло¬
скости призмы полного внутреннего отражения канад¬
2 3 1
Рис. 76. Поле зре¬
ния трубы-искателя.
зирной решетке.
§ 57. Фотоэлектрический метод регистрации
161
ским бальзамом приклеивается дополнительная приз-
мочка (рис. 77), отражающая часть лучей, идущих от
объектива, в сторону, противоположную фотоэлектри¬
ческой насадке. Размеры дополнительной призмы должны
быть такими, чтобы она перехватывала не более 15-
Рис. 77. Фотоэлектрический пассажный инструмент с дополнитель¬
ной призмой.
25% света. Это понижает чувствительность фотоэлектри¬
ческой установки менее, чем на 0,5 звездной величины.
Чтобы улучшить видимость изображений слабых звезд
в искатель, его нити освещают иногда сбоку и тогда наблю¬
дения производятся на темном фоне при светлых нитях.
111111111 |Ц 11 ■ I * I * ■ 11
Рис. 78. Визирная решетка.
Визирные решетки бывают различными. В качестве ви¬
зирной решетки может быть использована обычная пло¬
скопараллельная посеребренная или алюминированная
пластинка, на которой делительной машиной нанесены вы¬
резы. Применяются также решетки, выполненные на
стекле фотографическим способом. На рис. 78 показана
одна из визирных решеток. Высота щелей визирной ре¬
шетки составляет 0,2—0,3 мм. Ширина щелей и проме¬
жутков между ними около 0,12 мм. Для удобства оты¬
скания звезд при юстировке инструмента в средней части
11 П. И. Бакулин, Н. С. Блинов
162 Гл. 111. Инструменты для определения времени
визирной решетки может быть сделано большое окно раз¬
мером 1,5 X 3,0 мм.
Поскольку максимумы спектральной чувствительности
человеческого глаза и сурьмяно-цезиевого катода фото¬
электрического приемника света различны, визирную ре¬
шетку, если пассажный инструмент имеет визуальный
объектив, смещают из фокальной плоскости. Для этого
фотоэлектрический приемник света заменяется окуляром
и производится фокусировка так, чтобы изображение
звезды было четко видно в окне визирной решетки. Сама
визирная решетка тоже должна при этом четко рассма¬
триваться в окуляр.
Затем визирная решетка передвигается вдоль визир¬
ной оси в сторону окуляра примерно на 1,5 мм и закреп¬
ляется в таком положении.
Между визирной решеткой и фотоэлектрическим при¬
емником света ставится линза Фабри. Она сделана таким
образом, что свет от любой из щелей решетки попадает
всегда на одну и ту же часть поверхности фотокатода,
иными словами, линза строит изображение объектива
в плоскости катода фотоумножителя. Этим исключается
влияние неравномерной чувствительности поверхности
фотокатода на моменты прохождения изображения
звезды по щелям визирной решетки.
§ 58. Фотоумножители
и фотоэлектрические установки
Исключительно большое внимание должно уделяться
выбору фотоэлектрического приемника света. Он должен
обладать очень высокой чувствительностью, быть ста¬
бильным в работе и иметь по возможности небольшие раз¬
меры. Громоздкая и тяжелая насадка может вызвать не¬
желательные деформации пассажного инструмента. В пер¬
вых фотоэлектрических пассажных инструментах применя¬
лись газонаполненные фотоэлементы с сурьмяно-цезие¬
вым катодом. Их чувствительность составляла несколько
миллиампер фототока на люмен.
В настоящее время фотоэлементы полностью вытес¬
нены фотоумножителями (рис. 79), в работе которых ис¬
пользуется принцип вторичной электронной эмиссии.
§ 58. Фотоумножители и фотоэлектрические установки 163
Электроны, выбитые под действием света с фотокатода К,
фокусируются электростатически или каким-либо другим
путем на динод 1 (рис. 80). Вторичные электроны, выбитые
Рис. 79. Фотоэлектрические умножители ФЭУ-04 и EMI 5311
(справа).
из динода 1, фокусируются на динод 2 и так далее, пока
они не собираются на аноде А.
В каждом последующем каскаде происходит увеличе¬
ние числа летящих электронов за счет тех электронов, ко¬
торые выбиваются из динодов. Коэффициент усиления
каждого каскада зависит от свойств поверхности динодов,
ИХ формы и разности напряжений между динодами.
И*
164 Гл. III. Инструменты для определения времени
Чувствительность хороших фотоумножителей может дости¬
гать 100 а/лм, т. е. в сотни тысяч раз превосходит чув¬
ствительность фотоэлементов. Однако было бы ошибочно
думать, что их применение увеличило чувствительность
фотоэлектрического метода в сто тысяч раз. Фотоумножи¬
тели имеют порог чувствительности, который определя¬
ется флуктуациями темнового тока. Темновой ток возни¬
кает в неосвещенном фотоумножителе вследствие паразит¬
ных токов, текущих по стеклу и цоколю фотоумножителя.
Свет
Рис. 80. Принцип действия фотоумножителя.
Его флуктуации практически и определяют чувствитель¬
ность фотоэлектрического метода, так как фототок, выз¬
ванный светом звезды, не может быть зарегистрирован,
если его величина меньше флуктуаций темнового тока.
Следует помнить, что флуктуации темнового тока значи¬
тельно меньше значения самого тока. В табл. 7 приведены
характеристики некоторых современных фотоумножите¬
лей.
Оценим величину светового потока от звезд разной
величины. Световой поток F в люменах от звезды со звезд¬
ной величиной т может быть выражен формулой
lg F = —9,68 -J- lg р. -|- 2 lg d — 0,4/n,
где [х — коэффициент пропускания лучей оптической
системой инструмента, a d — диаметр объектива в санти¬
метрах. Для трубы с объективом в 10 см, принимая
§ 58. Фотоумножители и фотоэлектрические установки 165
Таблица 7
Фотоумножители
ФЭУ-17А
ФЭУ-19А
ФЭУ-20
Рабочее напряжение, в
900
Не более 1400
900
Интегральная анодная чув¬
ствительность, а/лм
10
100
1
Наибольший темновой ток, а
3.10'9
5.10-8
а
1
О
ттН
ОО
Фотоумножители
ФЭУ-35А
ФЭУ-39
ФЭУ-64
ФЭУ-79
Рабочее напряжение, в
1750
Не более 1200
1300
2100
Интегральная анод¬
ная чувствитель¬
ность, а/лм
Наибольший темно¬
вой ток, а
30
10
1000
1000
МО'8
со
о
1
со
1.10-8
6.10-9
(по Н. Н. Павлову) р.=0,6, получим
lg F = —7,89 — 0,4m.
Ток гф в анодной цепи фотоумножителя связан со свето¬
вым потоком, падающим на фотокатод, соотношением
где х — чувствительность фотоумножителя.
От звезды Ът световой поток будет составлять примерно
1-10-10 лм. Для фотоэлектрической регистрации моментов
прохождения звезд необходимо выбирать лучшие экзем¬
пляры фотоумножителей. Дело в том, что характеристики
фотоумножителей, даже если они выпущены одной серией,
очень сильно отличаются друг от друга у отдельных эк¬
земпляров. Можно, например, путем выбора отыскать
фотоумножители с темновым током на два порядка мень¬
шим тех значений, которые приведены в табл. 7. Данные
этой таблицы составлены на основании изучения многих
фотоумножителей каждой марки и, следовательно, отно¬
сятся к некоторому среднему статистическому экзем¬
пляру.
Благодаря выбору лучших фотоумножителей совре¬
менные фотоэлектрические установки могут надежно ре¬
гистрировать Моменты прохождения звезд до 7т.
166 Гл. III. Инструменты для определения времени
Чувствительность отдельных установок позволяет регистри¬
ровать и более слабые звезды, что не имеет, однако, осо¬
бого интереса, так как для определения поправок часов
обычно берутся звезды не слабее 6W,5.
Серьезной помехой при фотоэлектрических наблюде¬
ниях является фон неба. Ночное небо, особенно в лунные
ночи и в городских условиях, служит источником допол¬
нительного освещения фотоумножителя.
Поскольку засветка фотоумножителя фоном неба про¬
изводится сразу через все щели визирной решетки, ве¬
личина фототока от фона неба может быть значительной и
иногда даже превышать фототок от света слабой' звез¬
ды. Поэтому конструкции фотоэлектрических установок
должны обеспечивать возможность исключения вредного
влияния фона неба. В разных фотоэлектрических установ¬
ках этот вопрос решается разными методами. Рассмотрим
две наиболее характерные конструкции фотоэлектрических
установок: фотоэлектрическую установку Н. Н. Павлова
в Пулкове и фотоэлектрическую установку В. Э. Брандта,
впервые примененную им в ЦНИИГАиК.
§ 59. Фотоэлектрическая установка с усилителем
переменного тока
В установке В. Э. Брандта (рис. 81) использован уси¬
литель переменного тока, выгодно отличающийся от уси¬
лителей постоянного тока малым дрейфом рабочей точки.
Фототок, возникающий в анодной цепи фотоумножи¬
теля ФЭУ-17 при прохождении изображения звезды через
щели визирной решетки, создает на нагрузочном сопро¬
тивлении лампы Лг падение напряжения. Сопротивле¬
ние i?! выбирается большим, порядка 100—200 Мом,
поэтому даже очень слабый ток от фотоумножителя вы¬
зывает значительное изменение напряжения па управляю¬
щей сетке лампы Лг. Лампы Лг и Л2 представляют собой
модулятор, принцип работы которого заключается в сле¬
дующем. Экранирующие сетки этих ламп соединены с квар¬
цевым генератором. Высокочастотные (порядка 100 кгц)
колебания с кварцевого генератора поступают в противо-
фазе на экранирующие сетки ламп Лг и Л2. При отсутствии
сигнала на управляющих сетках ламп Лг и Л2 и при оди¬
наковых характеристиках этих ламп в их анодной на¬
§ 59. Фотоэлектрическая установка с усилителем 167
грузке — контуре Кг — колебаний тока не будет, так как
сигналы с кварцевого генератора приходят на экрани¬
рующие сетки ламп в противоположной фазе. Модулятор
Рис. 81. Схема фотоэлектрической установки Бранда (изображена
только одна ступень усилителя).
будет находиться в сбалансированном состоянии. По¬
скольку нельзя подобрать две лампы с совершенно оди¬
наковыми характеристиками, для баланса модулятора
в катодные цепи ламп Лг и Л2 ставятся переменные со¬
противления R3 и R4. С их помощью можно регулировать
Время
Рис. 82. Изменепие напряжения на входе усилителя.
усиление ламп Лг и Л2 и тем самым балансировать мо¬
дулятор.
При появлениях импульсов фототока, соответствующих
прохождениям изображения звезды по щелям визирной
решетки, на управляющей сетке лампы Лг возникают им¬
пульсы напряжения. Баланс модулятора нарушается и
в контуре Кг возникают колебания с несущей частотой /,
равной частоте кварцевого генератора (рис. 82). Огибаю¬
168 Гл. 111. Инструменты для определения времени
щая этих колебаний будет определяться изменением на¬
пряжения на управляющей сетке лампы JIV Появление
изображения звезды в щелях визирной решетки будет вы¬
зывать появление несущей частоты в анодной цепи моду¬
лятора. Через контуры К± и К21 настроенные на частоту
/, эта частота поступает через емкость С2 на управляю¬
щую сетку лампы Л3, которая является первой лампой ре¬
зонансного усилителя.
Весь усилитель состоит из трех каскадов усиления пе¬
ременного тока, выпрямителя и выходной лампы. В анод¬
ную цепь выходной лампы включена обмотка реле. Кон¬
такты реле соединяются с фотохронографом, на котором
регистрируются моменты появления и исчезновения им¬
пульсов на входе усилителя. Поскольку резонансный уси¬
литель настраивается на частоту /, он мало чувствителен
к наводкам и не требует высококачественных источников
питания. Питание его выпрямителя может производиться
от сети через типовой стабилизатор напряжения. Некото¬
рым недостатком резонансного усилителя можно считать
сложность его выполнения, вызванную необходимостью
намотки большого числа катушек индуктивности для ре¬
зонансных контуров К. Отметим одно важное обстоятель¬
ство: чувствительность фотоумножителя сильно зависит
от величины поданного на него напряжения. Это исполь¬
зуется в установке В. Э. Брандта для исключения уравне¬
ния яркости, которое вызывается тем, что импульсы фото¬
тока от звезд разной звездной величины имеют разную
амплитуду и вызывают срабатывание выходного реле в раз¬
ные моменты. В установке В. Э. Брандта напряжение на
фотоумножителе регулируется переменным сопротивле¬
нием R2 таким образом, что при прохождении звезд раз¬
ной величины амплитуда сигналов на входе усилителя
всегда остается постоянной. С помощью вольтметра Vx
производится контроль напряжения на фотоумножителе.
Для устранения темнового тока и фототока, вызванного
влиянием фона неба, используется сопротивление R3.
С его помощью производится баланс модулятора перед
наблюдением каждой звезды. Регулировка баланса произ¬
водится по вольтметру F2, подключенному к анодной цепи
лампы JI3.
Перед наблюдением очередной звезды устанавливается
необходимое (зависящее от звездной величины) напряже¬
§ 60. Фотоэлектрическая установка Н. Н. Павлова
169
ние на фотоумножителе и только после этого производится
балансировка модулятора. Такая очередность необхо¬
дима, так как с изменением напряжения на фотоумножи¬
теле меняются темновые токи, а также ток от фона неба,
и происходит разбалансировка модулятора.
§ 60. Фотоэлектрическая установка Н. Н. Павлова
с зеркальной визирной решеткой
В фотоэлектрической установке Н. Н. Павлова исполь¬
зуется зеркальная визирная решетка. На зеркальной
поверхности маленькой прямоугольной пластинки прореза¬
ются щели так, чтобы ширина зеркальных полос и проме¬
жутков между ними соответствовала их размерам в обыч¬
ной визирной решетке. Зеркальная пластинка поставлена
в фокальной плоскости пассажного инструмента своей
зеркальной поверхностью к объективу и наклонена по
отношению к фокальной плоскости под углом 45° по на¬
правлению щелей (рис. 83). Для регистрации светового
потока от звезды используются два фотоумножителя.
Изображение звезды, попавшее на прозрачную часть ре¬
шетки, будет освещать фотокатод одного фотоумножителя.
Когда же изображение звезды попадает на зеркальную
полоску, ее свет отразится на фотокатод другого умножи¬
теля. Применение зеркальной решетки и двух фотоумно¬
жителей позволяет в значительной мере уничтожить вред¬
ное влияние фона неба. Для этой цели оба фотоумножителя
соединяются с сеткой входной лампы усилителя постоян¬
ного тока, причем у одного фотоумножителя с этой сеткой
соединяется анод, а у другого — последний из динодов.
Такое включение фотоумножителей является противо¬
фазным. Одновременное и одинаковое изменение освещен¬
ности катодов умножителей не вызывает изменения на¬
пряжения на сетке лампы, так как сигналы от обоих фото¬
умножителей приходят на сетку лампы в противофазе.
При этом, конечно, чувствительность фотоумножителей
должна быть подобрана соответствующим образом.
Лампа поставлена в электрометрический режим. Этот
режим заключается в понижении накала примерно на
30% и уменьшении анодного и экранного напряжений до
6—8 в. Этим достигается резкое понижение сеточных то¬
170 Гл. III. Инструменты для определения времени
ков лампы, вследствие чего допустимо применение в цепи
сетки больших сопротивлений.
При движении изображения звезды по визирной ре¬
шетке на сетке лампы возникают колебания напряжения,
обусловленные появлением фототока от каждого из двух
фотоумножителей. Картина изменения напряжения на
сетке лампы будет при этом иметь вид, показанный на
рис. 84. Моменты, когда напряжение на сетке лампы ста¬
новится равным нулю, регистрируются на хронографе.
Эти моменты соответствуют положению изображения
звезды, когда его диск делится пополам краем щели зер¬
кальной визирной решетки.
При наблюдениях с такой установкой нет необходи¬
мости регулировать усилитель перед прохождением каж¬
дой звезды. Это упрощает работу наблюдателя.
Некоторым, правда, весьма несущественным, недо¬
статком фотоэлектрической установки, применяемой на
Пулковской обсерватории, является использование уси¬
лителя постоянного тока. Такой усилитель имеет значи-
§ 61. Запаздывание фотоэлектрической установки
171
тельный по сравнению с усилителем переменного тока
дрейф рабочей точки. Это вынуждает наблюдателя вклю¬
чать установку примерно за час до начала наблюдений и
Рис. 84. Изменение напряжения на входе первой лампы.
контролировать работу усилителя в процессе наблюде¬
ний. Питание усилителя постоянного тока должно про¬
изводиться от выпрямителя с хорошей электронной ста¬
билизацией.
§ 61. Запаздывание фотоэлектрической установки
Фотоэлектрические установки для регистрации звезд¬
ных прохождений имеют довольно значительное время за¬
паздывания. Это означает, что моменты прохождения изо¬
бражения звезды по щелям визирной решетки регистри¬
руются на хронографе с некоторой задержкой, которую
необходимо учитывать. Запаздывание фотоэлектрической
установки слагается из запаздывания входа и запаздыва¬
ния усилителя; последнее по крайней мере раз в 10 меньше
чем запаздывание входа.
При освещении фотоумножителя, например, вспыш¬
кой неоновой лампочки, в его анодной цепи возникает
прямоугольный импульс фототока, что приводит к из¬
менению напряжения на сетке входной лампы. Однако это
изменение напряжения произойдет не мгновенно (рис. 85).
Разность по времени между передними фронтами двух
импульсов, тока и напряжения, на высоте 2/3 от полной
их амплитуды есть постоянная времени 0 входа усилителя.
Постоянная времени определяется соотношением 0=Д«Сг,
где R — входное сопротивление, а С — емкость входа.
Так, при входном сопротивлении R = 100 Мом и входной
емкости С=10“9 фарады постоянная времени 0=О8,1.
Следует помнить, что постоянную времени входа фото¬
172 Гл. III. Инструменты для определения времени
электрической установки нельзя делать очень малой.
Дело в том, что входное сопротивление и емкость играют
роль фильтра, не пропускающего на усилитель помехи.
Чем больше постоянная времени, тем уже спектр помех,
которые пропускаются. В дальнейшем, излагая теорию
запаздывания фотоэлектрической установки, мы подробно
рассмотрим условия, оп-
Фототон 1Ф ределяющие величину 0.
— Напряжение и Хотя запаздывание фо¬
тоэлектрической установки
и характеризуется посто¬
янной времени 0, однако
само значение запаздыва¬
ния имеет величину, от¬
личную от 0. Запаздыва-
ние фотоэлектрической
Время установки зависит от фор¬
мы импульса тока на сетке
Рис. 85. К теории запаздывания входной лампы и от того,
сигналов на входе усилителя, какая часть усиленного им¬
пульса напряжения вызо¬
вет срабатывание выходного реле. Если, например, реле сра¬
батывает от нижней части импульса, мы будем иметь ма¬
ленькое запаздывание при появлении изображения звезды
в щели визирной решетки и большое запаздывание при
исчезновении изображения звезды из щели. Если же от¬
регулировать усилитель так, чтобы реле срабатывало от
верхней части сигнала, то будет иметь место обратная
картина.
Усилители должны работать в режиме, при котором
запаздывания начала и конца импульсов напряжения
имеют одинаковое значение. Такой режим получил назва¬
ние нормального режима. Чтобы определить условия ра¬
боты в нормальном режиме, сделаем некоторые допу¬
щения:
1) фотоумножитель не имеет инерции, а форма кривой
фототока полностью совпадает с кривой изменения силы
светового потока от звезды,
2) в качестве входной лампы используется триод, се¬
точным током которого можно пренебречь,
3) изоляция лампы не шунтирует нагрузку фотоумно¬
жителя, а ее анодная цепь не имеет инерции,
§ 61. Запаздывание фотоэлектрической установки
173
4) при наблюдениях звезды изменения напряжений и
токов в цепях лампы настолько малы, что все ее параметры
строго постоянны.
Эти упрощения возможно сделать, не внося в теорию
запаздывания заметных погрешностей, так как мы имеем
дело со слабыми токами. После упрощений можно
рассмотреть эквивалентную схему входа усилителя
(рис. 86). Она будет состоять
из источника фототока (фотоумно¬
жителя), сопротивления входа R
и емкости С. Ток фотоумножителя
обозначим через $ф, а токи, теку¬
щие через сопротивление и емкость,
соответственно через (r и ic. Тог¬
да на основании законов Ома и
Кирхгофа можно написать
= ic ifo
\icdt | (3.18)
Ряс. 86. Эквивалентная
схема входа усилителя.
v — R'iR-
С
Обозначая произведение Я на С через 0 (постоянная вре¬
мени) и заменяя ic на £ф — получим
iR = (гф — h)di. (3.19)
Полагая х=-|~, будем иметь
dh
(3.20)
Ik—1*
Разрешив последнее из уравнений (3.20) относительно £д,
мы найдем зависимость составляющей фототока, проте¬
кающего через нагрузочное сопротивление /?, от самого
фототока и постоянной времени
(3.21)
где L — произвольная постоянная, зависящая от началь¬
ных условий.
1?4 Гл. 111. Инструменты для определения времени
Предположим сначала, что изображение звезды в пло¬
скости решетки имеет вид геометрической точки. Это озна¬
чает, что ее появление в щели и ее исчезновение будут
происходить мгновенно, а импульсы фототока будут иметь
прямоугольную форму.
Довольно точную имитацию этого можно получить
с помощью неоновой лампы, вспыхивающей через равные
промежутки времени.
Положим, что щели и промежутки между ними у ви¬
зирной решетки равны, а время прохождения изображе¬
ния звезды через щель или промежуток есть Т*. Величина
Т8 в единицах постоянной времени 0 будет
Т = Г/Ь.
Рассмотрим теперь изменение величин iR и при про¬
хождении изображения звезды по решетке. Когда звезда
идет через щель, ц будет сохранять постоянное значение,
равное i0, a iR благодаря наличию запаздывания будет
меняться согласно уравнению (3.21) по закону
iR=i0 + Lce-\ (3.22)
При прохождении изображения звезды через промежуток
между щелями гф=0, а
iR = Lme~x. (3.23)
Величины Lc и Lm меняются от одной щели к другой,
стремясь к предельным своим значениям, характеризую¬
щим установившийся режим работы усилителя.
При прохождении изображения звезды через первую
щель в момент т=0 будет iR=0 и Lx=—i0. Тогда в мо¬
мент исчезновения звезды значение iR будет
iR = i0 — i0e~T или iR = i0 (1 — е~т). (3.24)
Уравнение (3.24) является исходным для определения
величины Ь2 при прохождении изображения звезды через
первый промежуток между щелями:
L2=h(l — е~т)-
Время Т отсчитывается от момента появления изображе¬
ния звезды в щели решетки.
Рассуждая последовательно таким же образом, можно
получить значения всех следующих произвольных по-
§ 61. Запаздывание фотоэлектрической установки
175
стоянных. Значения iR для первых двух щелей решетки
и промежутка между ними будут:
I щель iR = i0 (1 — е_т)>
промежуток iR = i0 (1 — е~т) e~z,
II щель iR = i0[ 1 — (1 — -f е~2У)<ГТ].
Тогда лг-й член этой последовательности примет вид
iR = С1 + (~1Г11 + (~<>У”7 , (3-25)
где нечетное п относится к щелям, а четное к промежут¬
кам. Если п стремится к бесконечности, то значения iR
будут соответствовать установившемуся режиму.
При появлении звезды в тг-й щели значение тока iR
будет
i„=i0( l-jf-.y (3.26)
Для исчезновения звезды из щели (прохождения через
промежуток между щелями)
(3-27)
1 — е
По формулам (3.26) и (3.27) можно определить время т
запаздывания сигнала при появлении и исчезновении изо¬
бражения звезды, соответствующее любым значениям iR.
тт 1 •
Легко видеть, что при ir = ^iq запаздывания при появле¬
нии ъ8 и исчезновении тя изображения звезды будут оди¬
наковыми: т. е. мы получим нормальный режим.
Это означает, что при нормальном режиме выходное
реле фотоэлектрической установки должно срабатывать
от середины импульса напряжения на сетке входной лампы.
Среднее запаздывание сигнала, равное х = -т* ? на
основании формул (3.26) и (3.27) будет иметь вид
_2_
\+е~
:=ln—(3.28)
Разлагая уравнение (3.28) в ряд, получим
т = 0,693 — е-г + 4-е-2Т — ~ er'iT... (3.29)
176
Гл. III. Инструменты для определения времени
Если Т > 1, ряд быстро сходится. Значения запаздыва¬
ния х при разных Т будут:
Г1 23456 7 8 9
х 0,380 0,566 0,644 0,675 0,686 0,691 0,692 0,693 0,693
Уже при Т=8 запаздывание достигает стабильного зна¬
чения. Очевидно, что если постоянная времени 0 в 8 раз
меньше, чем величина Т% можно положить запаздывание
прямоугольных сигналов постоянным и равным, если его
выражать в секундах,
t = 0,6930. (3.29а)
Для получения установившегося режима визирная ре¬
шетка должна быть рассчитана так, чтобы время прохож¬
дения изображения звезды по щели (или промежутку)
было бы больше постоянной времени 0 по крайней мере
в 8 раз. Формула (3.28) выражает величину запаздывания
х для п-й щели при п -> оо. Запаздывание для первых ще¬
лей решетки будет другим. Основываясь на формуле (3. 25)
и помня, что запаздывание т— , можно получить
значение запаздывания для первой и второй щелей ви¬
зирной решетки:
xi = In J ; Х2= In - - . (3.30)
1-уе-2, 1_е-г + е-2Г_1е-з:г
Разности между х1? т2 и т будут иметь вид
X, — X = In [l + J е-т (1 — <rr)] ;
т2 —т=1п^1 +уе_зг(1 —
(3.31)
Вычисляя значения двух первых разностей для Т, равного
соответственно 1, 2, 3, найдем:
Т Xj — х х2 — х
1 0,110 0,015
2 0,056 0,001
3 0,023 0,000
Процесс можно считать быстро устанавливающимся, так
как при Т > 2 ошибкой второго контакта уже можно пре¬
§ 61. Запаздывание фотоэлектрической установки
177
небречь. При выводе формулы (3.28) было положено, что
в момент регистрации ток через сопротивление входа уси-
D 1 .
лителя л имеет значение iR = —i0.
Интересно рассмотреть случай, когда iiilio^k^1^,
где 0 < k < 1. Тогда из формул (3.26) и (3.27) получим
*;=-in [(1-*) (1+*-*)],
x;=-in[ft(i+0]. (3.32)
х' = = — У In [ft (1 — ft)] — In (1+0.
Разность между запаздыванием в нормальном режиме т
и запаздыванием т' будет
Дт = т' — х= — yln[ft(l — ft)] — In 2. (3.33)
При к—г/2 величина Ат обращается в нуль, т. е. для нор¬
мального режима запаздывание фотоэлектрической уста¬
новки минимально. Величину Ат можно получить и дру¬
гим путем. Пусть гя=(1/2+Д) £0, где А — малая величина,
тогда согласно формулам (3.26) и (3.27)
%=—'"[(4-—4)<1
После простых преобразований найдем
2
т'= In*
1 — е
-т
т' — In ■
1-е
■In (1 — 2Д),
__1п(1+2Д).
(3.34)
(3.35)
Первый член правой части уравнений (3.35) есть не что
иное, как запаздывание т при нормальном режиме уси¬
лителя. Разлагая вторые члены правой части уравне¬
ний (3.35) в ряд и ограничиваясь вторым порядком
178 Гл. III. Инструменты для определения времени
величины А, получим
т; = т8 + 2Д + 2Л2, < = хя-2Д-Ь2Д2, |
Х,=1Ц^1=Х_|_2Д2, т. е. Дт = 2Д2. j (3,36^
В табл. 8 приведены значения Дт для некоторых величин к.
Таблица 8
к
0,50
0,40
0,30
0,20
0,10
Дт
0,000
+0,020
+0,087
+0,223
+0,511
§ 62. Определение запаздывания для сигналов
трапециевидной формы
с синусоидальными сторонами
Поскольку изображение звезды не является точечным,
как мы допускали раньше, изменение фототока при про¬
хождении изображения звезды по щелям визирной ре¬
шетки не имеет формы прямоугольных импульсов. В дей¬
ствительности оно происходит по закону, весьма близ¬
кому к синусоидальному.
Процесс прохождения изображения звезды по решетке
можно рассматривать состоящим из ряда этапов:
1. Сначала изображение звезды постепенно появляется
из-за края щели и фототок £ф нарастает, меняясь по си¬
нусоидальному закону от нуля до максимального значе¬
ния i0. Максимальное значение фототока будет соответ¬
ствовать моменту, когда все изображение звезды ока¬
жется в щели визирной решетки.
2. Изображение звезды движется по щели, оставаясь
целиком внутри нее. Фототок постоянен и равен i0.
3. Изображение звезды начинает скрываться за краем
щели и фототок, изменяясь по синусоидальному закону,
станет убывать до нуля.
4. Изображение звезды закрыто промежутком между
щелями, фототок равен нулю.
Будем для простоты отсчитывать время t в первом и
втором периодах от момента прохождения центра диска
§ 62. Определение запаздывания
№
звезды через первый край щели, а в третьем и четвертом —
от момента его прохождения через второй край щели.
В таком случае из полученных формул будет определяться
сразу время запаздывания, поскольку наблюденные мо¬
менты прохождений будут относиться к центру диска
звезды и краям щелей. Обозначая через S диаметр диска
изображения звезды, выраженный во времени его прохож¬
дения через край щели, и через Т3 время прохождения
центра диска звезды через щель, получим:
1. Появление диска звезды
2 2 ’ l$~~2l°\ Sln Ту*
II. Прохождение диска звезды
~2<^t<^Ts—^ > ^<f> = io*
III. Исчезновение диска звезды
S ^ S . 1 . Л .тit\
IV. Диск звезды полностью закрыт
г<‘<т3-1
гф = 0.
(3.37)
Примем за единицу измерения времени величину 0 —
постоянную времени входа усилителя. Тогда можно на¬
писать:
* = т0, 5 = о0, Т8 = П.
Уравнения (3.37) в новых обозначениях примут такой
вид:
I. -у<*<у, *ф=у*„(l + siny).
И. y<x<T~T' *Ф = г'о-
ш- -т<х<т> i*=Ti»(1-sinT)-
IV- -2<С'с<7’ у. *ф = 0.
Подставляя значения £ф из уравнения (3.38) в уравнение
(3.38)
180
Гл. III. Инструменты для определения времени
(3.21) и обозначая через а величину £Ы) = о/«, получим
законы изменения величины Ir во всех четырех случаях:
I. ia = |i0[l+T^(«2sini-acos|-
— a — а-Т
1 + е-'1'
п. (.+
III. ^ = 4-^0[l—(a2sin^— <*cos +
a -~T
e 2 -e2
e
1+e
-T
и.
IV. iR =
К
ch -гг a
l+a*i + e-T *
Полагая
'c<-o“ И lR = —h
1_
2 ‘'О»
(3.39)
из формул I и HI -уравнений (3.39), получим соотноше¬
ние, связывающее величину запаздывания т с постоян¬
ной времени 0 и диаметром изображения звезды S:
or sm a cos
a a
-<x—T
т e 2 — e2 _T
1+e
-Г
(3.40)
Если положить Т=ка (синусоидальные сигналы), то
уравнение (3.40) легко разрешается относительно т:
x = aarctg —, ос>0.
(3.41)
Это случай, когда диаметр изображения звезды равен ши¬
рине щели визирной решетки. Запаздывание синусоидаль¬
§ 62. Определение запаздывания
181
ных сигналов At будет иметь вид
At = 0а arctg , (3.^2)
где а = S/ 710. Постоянная времени 0 определяется экспе¬
риментальным путем по запаздыванию прямоугольных сиг¬
налов с помощью формулы 0 = 1,443 At' (см. формулу
(3.29а)). Полное запаздывание фотоэлектрической уста¬
новки будет
Д£ = 0а arctg + Т» (3.43)
где у — запаздывание усилителя без запаздывания вход¬
ного каскада (входа усилителя). Формулу (3.43) можно
представить в виде
Д^ = (0 -j— у) — 0&,
где
к = 1 — a arctg . (3.43а)
Сумма 0+y принимается постоянной для всего вечера на¬
блюдений. В табл. 9 приведены значения а и соответствую¬
щие им величины к.
Таблица 9
а
1,00
1.50
2,00
2,50
3,00
4,00
5,00
10,00
15,00
25,00
к
0,215
0,118
0,073
0,049
0,035
0,020
0,013
0,003
0,001
0,001
Согласно формуле (3.43) полное запаздывание фото¬
электрической установки будет определяться величиной
постоянной времени 0, запаздыванием у и диаметром изоб¬
ражения звезды S, выраженным во времени его прохожде¬
ния через край щели решетки. Вместо величины S можно
употребить выражение S0 sec 8, где S0 — диаметр изобра¬
жения, выраженный во времени прохождения экватори¬
альной звезды; тогда становится ясным, что полное за¬
паздывание зависит и от скорости движения изображения
звезды.
182 Гл. 111. Инструменты для определения времени
§ 63. Определение запаздывания фотоэлектрической
установки при наблюдениях
Определение запаздывания фотоэлектрической уста¬
новки начинается с определения запаздывания прямо¬
угольных сигналов, по которому вычисляется постоянная
времени 0. Для определения запаздывания прямоуголь¬
ных сигналов перед объективом пассажного инструмента
помещают неоновую лампочку (1 на рис. 87). Эта лампочка
зажигается через равные промежутки времени при по¬
мощи специального устройства, замыкающего цепь ее
источника питания через переключатель К. В установке
В. Э. Брандта для этого используется контактное колесо 2,
делающее один оборот за четыре секунды. В течение двух
секунд контакты, расположенные над этим колесом, оста¬
ются замкнутыми и неоновая лампочка горит, затем она
гаснет на две секунды, так как контактная система раз¬
мыкается, затем снова горит и т. д. Вращение контакт¬
ного колеса производится через редуктор синхронным мо¬
тором. 1
Вспышки неоновой лампочки вызывают в анодной
цепи фотоумножителя импульсы фототока, которые после
усиления регистрируются на хронографе. Затем переклю¬
§ 64. Определение диаметра изображений звезд 183
чатель К ставится в положение, при котором он соеди¬
няет контактное устройство непосредственно с хропогра-
фом. Таким образом, на ленте хронографа получаются
отпечатки, соответствующие сначала моментам срабаты¬
вания выходпого реле усилителя фотоэлектрической уста¬
новки, а затем моментам замыкания цепи хропографа
контактным устройством. Разность между этими момен¬
тами позволяет определить запаздывание прямоугольных
сигналов при условии, что усилитель работает в нормаль¬
ном режиме. Определение запаздывания прямоугольных
сигналов производится в каждый вечер наблюдений
дважды, перед началом наблюдений и после их окончания.
Для определения величины у большое входное сопро¬
тивление фотоэлектрической установки шунтируется со¬
противлением в несколько сотен килоом. В этом случае
запаздывание прямоугольных сигналов на входе установки
будет меньше тысячной доли секунды и практически не
окажет влияния на точность определения у. Затем зажи¬
гается неоновая лампочка и совершенно аналогичным ме¬
тодом определяется запаздывание прямоугольных сигна¬
лов в усилителе. Это запаздывание имеет обычно очень
стабильное-значение и определяется не чаще одного раза
в месяц.
§ 64. Определение диаметра изображений звезд
Диаметр изображения звезды является одним из ос¬
новных параметров, необходимых для определения пол¬
ного запаздывания фотоэлектрической установки. Для
определения диаметра изображения звезды в большинстве
случаев применяется метод записи прохождения звезд вне
нормального режима при ку^г/2- Рассмотрим, как это де¬
лается применительно к установке с ламповым вольт¬
метром на входе усилителя. При напряжении на фото¬
умножителе FJ, когда диск изображения звезды пол¬
ностью выходит из-за* края щели визирной решетки,
напряжение сигнала по вольтметру будет иметь некоторую
величину U0. Если усилитель работает в нормальном ре¬
жиме, его выходное реле сработает в момент, когда напря-
жение на входе будет равно у U0. При другом напряже¬
нии на фотоумножителе, равном Рф и большем, чем FJ’
184 Гл. 111. Инструменты для определения времени
кривая изменения напряжения сигнала при прохождении
диска той же звезды по щелям решетки будет круче, а ее
амплитуда больше. При напряжении 7ф на фотоумножи¬
теле максимальное напряжение сигнала на входе усили¬
теля будет U. Появление сигнала на выходе усилителя и
при новом напряжении на фотоумножителе произойдет
при том же напряжении сигнала как и в пеРВ0М
случае. Разность
будет характеризовать относительное уклонение напря¬
жения на входе усилителя от нормального режима.
Определение максимального напряжения U и напряжения
тг- U0 производится по отсчетам лампового вольтметра.
Обозначим через Т0 истинную ширину щели визирной
решетки, выраженную во времени прохождения центра
изображения экваториальной звезды. Через Т обозначим
измеренное на хронографе значение продолжительности
сигнала при прохождении изображения звезды со склоне¬
нием 8 по щелям визирной решетки при работе усилителя
вне нормального режима. Разность D = T—T0 sec 8 бу¬
дет зависеть от напряжения на фотоумножителе. При
7ф > VI D >0 и при 7ф < V\ D< 0. Зная Т0, напри-
мер, из исследований визирной решетки на микроскопе, и
имея Т из наблюдений звезд, находим D.
Величину диаметра звездного изображения S находят
методом последовательных приближений по формуле
S= nD —. (3.44)
2 arcsin (-2Д 1 + ^ J j
Формула (3.44) может быть выведена из уравнений (3.39)
при условии работы усилителя вне нормального режима.
На практике диаметр изображений определяется сле¬
дующим образом. Напряжение на фотоумножителе для
данной звезды задают так, чтобы А равнялось примерно
+0,25. При прохождении изображения звезды по щелям
первой половины визирной решетки берут отсчеты лам¬
пового вольтметра п[, п'2, . . ., n'j и п], п2, га*, . . ., га".,
§ 65. Методы фотоэлектрической регистрации 185
соответствующие моментам полного исчезновения и пол¬
ного выхода диска изображения звезды из-за краев щелей
визирной решетки.
После прохождения изображения звезды через пер¬
вую половину визирной решетки напряжение на фото¬
умножителе меняется так, чтобы А было равным —0,25.
Затем вновь берут отсчеты лампового вольтметра, как и
в первом случае. После этого находят средние по всем ще¬
лям значения отсчетов вольтметра п' и п" и по ним на¬
ходят
^ = — пг и U = n" — /V, (3.45)
где п0 — отсчет вольтметра при появлении сигнала на
выходе усилителя (точка срабатывания усилителя). За¬
тем по формуле
находят А, а из измерений ленты определяют D. Вычисле¬
ние диаметра звезды St производится по формуле (3.44).
Таким же образом вычисляют S2 по наблюдениям на вто¬
рой половине решетки. Затем берут средние значения
§ I $
—-• Величина 0 определяется по запаздыванию
прямоугольных сигналов.
§ 65. Новые методы фотоэлектрической
регистрации звезд
За последние два десятилетия было разработано зна¬
чительное количество новых фотоэлектрических установок.
Условно их можно разделить на две категории: двух¬
лучевые с разделением светового потока с помощью зер¬
кальной визирной решетки и однолучевые с обычной ре¬
шеткой.
Новые установки были созданы в службах времени
Риги, Иркутска, Николаева, Харькова и ряда других
служб времени.
Часть из этих установок представляет собой различ¬
ные модификации методов Н. Н. Павлова и В. Э. Брандта,
часть же можно рассматривать как практически новые,
основанные на других принципах. Наиболее интересными
186 Гл. 111. Инструменты для определения времени
из них представляются фазовые фотоэлектрические уста¬
новки и установки, основанные на счете фотонов. Рас¬
смотрим две из них: фазовую фотоэлектрическую уста¬
новку Брандта—Малышева (Московская объединенная
служба времени) и установку, работающую в режиме
счета фотонов, разработанную А. И. Язевым в Иркутске.
В фазовой фотоэлектрической установке, созданной
по идее Брандта, производится противофазная модуляция
/-—I ~"0~
7
N
ч
Рис. 88. Фазовая фотоэлектрическая установка.
двух световых потоков с последующим сведением их на
катоде^одного фотоумножителя.
Функциональная схема установки состоит из следую¬
щих элементов (рис. 88): зеркальной визирной решетки
(2), дискового модулятора, представляющего собой диск
с несколькими зубьями, вращающийся синхронным мо¬
тором (2), фотоумножителя, на катод которого оптическая
система сводит два световых потока А и В (5), усилителя
с емкостным входом (4), фазового детектора (5), регистри¬
рующего устройства (6).
Возникающие при равномерном освещении решетки
световые потоки, попадающие на катод фотоумножителя
по каналам А и 2?, должны обладать строго одинаковой
интенсивностью и модулироваться диском модулятора
в противофазе. Фокусировка пассажного инструмента
производится так, чтобы размеры изображения звезды
были близки к размерам щелей и зеркальных промежутков
визирной решетки. Тогда при движении изображения
звезды по решетке на катоде фотоумножителя при снятии
диска модулятора будет освещенность, получаемая в ре¬
зультате сложения двух световых потоков по каналам А
§ 65. Методы фотоэлектрической регистрации звезд 187
и В (рис. 89, а). Эти световые потоки изменяются по за¬
кону, близкому к синусоидальному со смещением на 180°.
При включенном диске модулятора обе составляющие
модулируются *в противофазе и возникает картина, пред¬
ставленная на рис. 89, б. iTok^b цепи фотоумножителя
£
Рис.89. Изменение сигнала на фазовой фотоэлектрической установке.
будет носить такой же характер, что и изменение осве¬
щенности на рис. 89, б.
В нем присутствует низкочастотная составляющая с ча¬
стотой от 1 гц и ниже, вызванная движением изображения
звезды по щелям решетки и показанная на рисунке сплош¬
ным черным цветом, и более высокочастотная составляю¬
щая, задаваемая частотой модуляции. Низкочастотная
составляющая не проходит через усилитель. Усиливается
только частота модуляции, представленная на рис. 89, в.
В момент t4 деления изображения звезды пополам
краями щелей визирной решетки амплитуда модулирован¬
ного сигнала становится равной нулю, а фаза частоты
188 Гл. III. Инструменты для определения времени
модуляции скачком изменяется на 180°. Эти моменты ре¬
гистрируются после усилителя при помощи фазового де¬
тектора и специального регистрирующего устройства.
В таком способе информация о положении звезды "на ре¬
шетке не связана с величиной сигнала и уровнем сраба¬
тывания регистрирующей системы. Регистрируется по¬
ворот фазы на 180°.
Фазовая фотоэлектрическая установка обладает за¬
метными преимуществами перед рядом других. Основ¬
ными из них надо считать следующие:
1) темновой ток фотоумножителя не модулируется и
поэтому его постоянная составляющая не проходит на
усилитель,
2) освещение фотоумножителя от фона неба дает лишь
постоянный ток, который не проходит через емкостный
вход усилителя,
3) применение одного фотоумножителя позволяет из¬
бавиться от подборки одинаковых экземпляров и их ба¬
лансировки, необходимой при наличии системы из двух
фотоумножителей,
4) усилитель переменного тока исключает влияние
дрейфа и зависимости моментов регистрации от изменения
рабочих характеристик элементов схемы;
5) установка удобна в наблюдениях, так как нет не¬
обходимости регулировать рабочую точку усилителя.
Регистрируется момент поворота фазы на 180°.
Фазовая фотоэлектрическая установка позволяет на¬
дежно регистрировать звезды в сумерки и даже при лег¬
кой облачности.
К числу недостатков установки следует отнести до¬
вольно сложную оптико-механическую схему, наличие
мотора на оси пассажного инструмента и высокие требо¬
вания, предъявляемые к стабильности узкополосного
усилителя, особенно в части поддержания постоянства его
запаздывания.
Большой интерес представляет фотоэлектрическая уста¬
новка, работающая в режиме счета фотонов. В ней реги¬
стрируются отдельные фотоэлектроны, возникающие в фо¬
тоумножителе под действием отдельных фотонов света.
Частота следования импульсов, возникающих в анодной
нагрузке фотоумножителя, будет пропорциональна ве¬
личине светового потока. Поэтому можно оценивать ве¬
§ 65. Методы фотоэлектрической регистрации звезд 189
личину светового потока от звезды, а следовательно, и ее
положение на визирной решетке по частоте анодных им¬
пульсов фотоумножителя. Предел чувствительности такой
установки будет ограничиваться шумами умножителя.
Принцип работы фотоэлектрической установки в ре¬
жиме счета фотонов состоит в следующем:
Два фотоумножителя 1 регистрируют световые потоки
от зеркальной визирной решетки (рис. 90). Сигналы с фото¬
умножителей после их стандартизации и идентичного уси¬
ления в блоках 2—3 формируются в виде счетных им¬
пульсов и поступают на частотомеры 4. Дискриминатор 5
Рис. 90. Фотоэлектрическая установка, работающая в режиме счета
фотонов.
и выходной каскад 6 формируют импульс на выходе уста¬
новки в тот момент, когда показания обоих частотомеров
становятся одинаковыми, т. е. когда потоки света, па¬
дающие на фотоумножители, равны, и следовательно,
изображение звезды делится краем щели решетки
пополам.
В такой схеме постоянная времени установки будет
определяться практически только постоянными времени
частотомеров. Фотоумножители должны подбираться, по
возможности, с одинаковыми характеристиками.
Схема, работающая в режиме счета фотонов, не обя¬
зательно должна иметь два фотоумножителя. В принципе
в этот режим можно поставить большинство существую¬
щих сейчас установок после их переделок.
Основными достоинствами установки, работающей в ре¬
жиме счета фотонов, надо считать следующие:
1) использование широкополосного импульсного уси¬
лителя и стандартных частотомеров делает установку ста¬
бильной и надежной,
2) счетная схема, не проигрывая другим схемам в чув¬
ствительности, обладает меньшей постоянной времени,
3) оценка получаемой информации весьма проста,
190 Гл. III. Инструменты для определения времени
4) начиная с некоторого напряжения на фотоумножи¬
теле, число регистрируемых импульсов не зависит от этого
напряжения.
К числу недостатков этого метода следует отнести слож¬
ность электронной аппаратуры и невозможность наблю¬
дений звезд в большом диапазоне звездных величин. Ре¬
гистрация звезд возможна лишь в интервале 4—5 звездных
величин. При больших диапазонах установка не сможет
реагировать на изменение числа импульсов в единицу вре¬
мени, скажем, от звезд 0 и 7-й звездных величин. Необ¬
ходимо изменение методов ослабляющих блеск ярких
звезд.
Фотоэлектрическая установка, работающая в режиме
счета фотонов, была бы крайне полезна на зенитных тру¬
бах, на которых наблюдают слабые звезды со сравнительно
небольшим диапазоном звездных величин.
§ 66. Преимущества фотоэлектрических пассажных
инструментов перед визуальными
Основная ценность фотоэлектрического метода состоит
в исключении влияния на результаты наблюдений личного
уравнения наблюдателя. Это преимущество стало особенно
заметно в последние годы, когда были созданы более со¬
вершенные пассажные инструменты. Улучшение кон¬
струкции пассажных инструментов уменьшило влияние
инструментальных погрешностей на точность опреде¬
ления времени. Личная ошибка наблюдателя стала играть
все большую роль в точности определения поправок ча¬
сов. Поэтому замена глаза наблюдателя фотоумножителем
начала давать большой эффект. Разумеется, сказанное
выще справедливо лишь для первоклассных пассажных
инструментов. Замена контактного микрометра фото¬
электрической насадкой не даст ощутимого результата,
если пассажный инструмент имеет большие дефекты
в своей конструкции. В этом случае инструментальные по¬
грешности будут велики и сведут на нет преимущество
фотоэлектрического метода.
Заметим еще, что фотоэлектрическая установка
должна быть тщательно изготовлена и определение ее
запаздывания должно производиться весьма аккуратно,
р соблюдением всех правил, В противном случае ошибки
§ 67. Фотографическая зенитная труба
191
определения запаздывания целиком войдут в наблюденные
поправки часов и исказят их.
Замена окулярного микрометра фотоэлектрической на¬
садкой приводит к ослаблению влияния наблюдателя на
инструмент. Наблюдатель меньше находится в непосред¬
ственной близости от инструмента, поэтому его вредное
тепловое влияние оказывается незначительным. Уве¬
личивается жесткость конструкции инструмента, так как
визирную решетку легче закрепить на инструменте, чем
микрометр.
На фотоэлектрическом пассажном инструменте можно
проводить более продолжительные ряды наблюдений, чем
на визуальных инструментах. При длительных визуаль¬
ных наблюдениях глаз наблюдателя устает и это иногда
служит источником дополнительных ошибок.
§ 67. Фотографическая зенитная труба
Наряду с пассажными инструментами для определе¬
ния поправок часов широко применяются зенитные трубы
(рис. 91). Впервые идея этого инструмента была выдвинута
астрономом Эри в Гринвиче в 1848 г. В 1851 г. под его ру¬
ководством была сконструирована первая отражательная
зенитная труба. Наблюдения на этом инструменте про¬
изводились визуально. В 1911 г. американский астроном
Росс создал первую фотографическую зенитную трубу,
ставшую прототипом современных зенитных труб.
Принципиальное устройство фотографической зенит¬
ной трубы несложно. Двухлинзовый объектив (1 на
рис. 92, а) инструмента расположен в вертикальной трубе,
установленной на массивном каменном основании. Объек¬
тив вместе с верхней частью трубы, называемой ротором,
может вращаться в горизонтальной плоскости на под¬
шипниках 2, соединяющих ротор с неподвижной частью
трубы 3.
Конструкция объектива такова, что его вторая главная
точка расположена вне объектива, на удалении в один —
три сантиметра от нижней его поверхности. В нижней части
трубы на отдельном основании находится ртутный го¬
ризонт 4, помещенный на таком расстоянии от объектива,
чтобы лучи света, прошедшие через объектив и отражен¬
ные от ртути, собирались в плоскости, проходящей через
192 Гл. 111. Инструменты для определения времени
вторую главную точку объектива. В этой плоскости рас
положена кассета с фотографической пластинкой 5
(рис. 92, а и б), повернутой эмульсией в сторону ртутного
горизонта. Размеры пластинки невелики, поэтому она
закрывает лишь небольшую часть объектива. С помощью
направляющих кассета с фотографической пластинкой
Рис. 91. Фотографическая зенитная труба.
крепится к корпусу ротора. Помещение фотографической
пластинки в плоскости второй главной точки приводит
к тому, что наклон ротора вместе с объективом и фото¬
пластинкой не изменяет положения изображения звезды
на фотопластинке. Это весьма существенная особенность,
§ 67. Фотографическая зенитная труба
193
благодаря которой наблюдения на фотографической зе¬
нитной трубе освобождены от ошибок, вызванных накло¬
ном трубы. Допустим, что лучи, идущие от бесконечно
удаленного объекта (звезды), находящегося в зените,
проходят через объектив, отражаются от поверхности
ртути и попадают на пластинку в точке F (рис. 93, а).
Рис. 92. Принципиальное устройство фотографической зенитной
трубы.
Нг и #2 — соответственно первая и вторая главные точки
объектива, расположенные на рис. 93, а и б внутри объек¬
тива. В этом случае фотографическая пластинка будет
удалена от второй главной точки Н2. Поэтому при не¬
котором наклоне объектива (рис. 93, б) изображение
звезды сместится на пластинке из точки F в точку С, по¬
ложение которой можно определить осевым лучом
пучка S'H2. Этот луч согласно законам оптики должен
быть параллелен лучу SHlt В случае, когда фотографи¬
ческая пластинка находится во второй главной точке
194 Гл. 111. Инструменты для определения времени
объектива (рис. 93, в), в силу параллельности осевых лу¬
чей SH1 и S'H2 изображение зенитной звезды попадет
в точку F, как бы мы ни наклоняли объектив. При этом,
конечно, подразумевается, что пластинка жестко связана
с объективом. Легко видеть, что поступательное перемеще¬
ние объектива вместе с фотографической пластинкой также
Рис. 93. Влияние наклона объектива на положение изображения
звезды на фотопластинке.
не изменяет положение изображения звезды на фото¬
пластинке.
§ 68. Определение моментов кульминаций звезд
на фотографической зенитной трубе
При прохождении звезды через зенит или вблизи зе¬
нита на фотографической пластинке получается ее изобра¬
жение. Существуют два способа фотографирования
прохождений звезд. В первом способе фотографическая пла¬
стинка остается неподвижной, а изображение звезды остав¬
ляет на пластинке след. В определенные моменты, зада¬
ваемые контактами часов, особое электромеханическое
устройство прерывает след. Зная эти моменты, масштаб
пластинки и измеряя положения точек разрыва следа,
§ 68. Определение моментов кульминаций звезд
195
можно вычислить момент прохождения звезды через мери¬
диан.
В настоящее время способ неподвижной пластинки не
употребляется. Дело в том, что след на фотопластинке
могут оставлять только очень яркие звезды, которых в зе¬
ните явно недостаточно для регулярных наблюдений.
Во втором способе пластинка движется в направлении
первого вертикала со скоростью, равной скорости движе¬
ния изображения зенитной звезды в фокальной плоскости
инструмента. Движение пластинки осуществляется при
помощи синхронного мотора. На пластинке получается
точечное изображение звезды, аналогичное изображениям,
получаемым на астрографах. Наблюдения с подвижной
пластинкой ведутся при двух положениях ротора. До про¬
хождения звезды через меридиан, при первой экспозиции,
ротор занимает одно положение, после прохождения звез¬
дой меридиана он поворачивается на 180° и начинается
вторая экспозиция. При второй экспозиции направление
движения каретки относительно ротора меняется на об¬
ратное. На практике обычно производится по четыре экс¬
позиции с поворотом ротора на 180° после каждой из них.
Две экспозиции производятся до момента кульмина¬
ции звезды и две после этого момента.
Положим для простоты, что моменты начала и конца
экспозиций строго совпадают с моментами начала и оста¬
новки движения каретки, которые отмечаются на хроно¬
графе.
Из измерений положений четырех изображений звезды
на фотографической пластинке, зная средние моменты
четырех экспозиций Т19 Т2, Т3, Т±, можно получить мо¬
мент прохождения звезды через меридиан.
Если бы ротор не поворачивался между экспозициями,
а пластинка только останавливалась на несколько се¬
кунд, четыре изображения звезды расположились бы на
кривой, служащей отображением суточной параллели
звезды на фотопластинке (рис. 94, а). Линии NS и OW
являются проекциями на фотографическую пластинку
части меридиана и части первого вертикала. Если же после
каждой экспозиции ротор поворачивается на 180°, то пер¬
вое и третье изображения звезды останутся па пластинке
на своих местах, а второе и четвертое изображения ока¬
жутся в положениях, симметричных относительно точки Z
196 Гл. III. Инструменты для определения времени
(рис. 94, б). В случае, когда середины четырех экспози¬
ций строго симметричны относительно момента прохож¬
дения звезды через меридиан, ее изображения на пластинке
S
(f
1-L
1
1
•
W
1
о- <"*
\
3
Z
YV
>
оГ
*
ч
~\>
Z
N
а)
б)
Рис. 94. Изображения звезды на фотопластинке при различных по¬
ложениях ротора.
расположатся в вершинах трапеции, основания которой
будут параллельны меридиану.
В этом случае момент прохождения звезды через мери-
Т -4- Т -4- Т -4- Т
диан Т0 будет определяться как Г0— 1 3
а поправка часов и будет равна а — Г0.
Рис. 95. Определение времени на фотографической зенитной трубе.
Однако на практике невозможно добиться полной сим¬
метрии моментов экспозиций относительно момента куль¬
минации. Это приводит к тому, что изображения звезды
2 и 4 смещаются относительно изображений 1 и 3 на не¬
которую величину АI (рис. 95). Если обозначить расстоя¬
ния точек 2, 2, 5, 4 от линии меридиана SN через 11% /2Л
§ 69. Измерение фотографических пластинок 197
/3, /4, то для момента прохождения звезды через мери¬
диан Т0 можно написать следующие четыре выражения:
TJL.ll Т Т Т
1Т у > 12 “Гр> *3 у 9 4
где F — скорость движения кассеты с фотопластинкой.
Образовав средние из выражений первого и четвертого,
второго и третьего, получим
То = т (Тг + Тд +:j (Т* + Т9) +
Поскольку /4=/2—13= А/,
7,o = |(7’i + 7,2 + 7,3 + 7,4) + #.
Скорость кассеты V определяется из измерений расстояний
между изображениями 1, 3 и 2, 4:
J/ ^1 Н“ *3 ^2 4“ ^4
— Тъ-Тг — Ть-Т2-
Таким образом, производя измерения координат то¬
чек i, 2, 3, ^ на фотопластинке с помощью измерительной
машины, можно получить все необходимые величины для
определения момента прохождения звезды через меридиан.
Моменты Тъ Г2, Г3, Г4 регистрируются, например, яя
хронографе.
§ 69. Измерение фотографических пластинок
зенитной трубы
Чтобы получить связь между измеренными на фото¬
графической пластинке координатами изображений
звезд и поправкой часов, удобно воспользоваться системой
идеальных координат. Это промежуточная система ко¬
ординат, широко применяемая в фотографической астро¬
метрии для связи экваториальных координат звезд с из¬
меренными координатами их изображений ' на * фотопла¬
стинке.
Пластинка фотографической зенитной трубы своей
плоскостью параллельна" плоскости, касающейся небес¬
ной сферы в точке зенита Z (рис. 96). Расстояние от зе¬
нита до изображения звезды о с зенитным расстоянием ъ
198 Гл. III. Инструменты для определения времени
будет, очевидно, пропорционально tg z. Угол r\Zo есть
азимут звезды А. Формулы для идеальных координат
будут иметь следующий вид:
£ = p"tgz sin Л,
7] = p"tgZ cos Л,
li
1.1
(3.46)
где p" =206 264",806. При сопоставлении идеальных и
измеренных координат масштаб является определяемой
величиной, поэтому выбор масштаба идеальных координат
у6
-WZ
N
Рис. 96. К теории измерения пластинок.
может быть произвольным. Воспользовавшись известными
формулами сферической тригонометрии
sin z sin Л = cos 8 sin t,
sin z cos Л = —cos cp sin 8 -}- sin cp cos 8 cos t, [ (3.47)
cos z = sin cp sin 8 -{- cos <p cos 8 cos t,
можно получить значения £ и тр
<. р" cos 5 sin t
(3.48)
sin sin 5 -j- cos ? cos 5 cos t *
p" (—cos ? sin 5 + sin 'f cos 5 cos 0
^ sin ? sin 5 + cos ? cos 5 cos t
Для наблюдения в меридиане идеальные координаты при¬
мут следующие значения:
So = °> tg z = p" tg (? — 8)-
(3.49)
Поскольку часовые углы t при наблюдениях на фотогра¬
фической зенитной трубе очень невелики (/шах ^ 1ш),
можно, разложив правые части уравнений (3.48) в ряд и
§ 69. Измерение фотографических пластинок
199
ограничиваясь членами с третьей степенью t, получить
значения £ и ч\:
Легко показать, что последними членами в правых частях
уравнений (5) можно пренебречь. Их величина при tmXL=
=lm и т|0=ЮОО" меньше 0",01. Тогда, вводя обозначения
можно получить окончательные выражения для идеаль¬
ных координат:
l = at\ irj= 7]0 — b(tm)2. (3.52)
Для случая, когда направления осей £ и т| совпадают при
пер пой экспозиции с направлениями OW и NS, можно на¬
писать формулы связи идеальных и сферических коорди¬
нат для всех четырех изображений. Они будут иметь вид
Измерения фотографической пластинки дают коорди¬
наты изображений звезды. Эти координаты получаются
в некоторой системе, задаваемой измерительным прибором.
Поэтому прибор, на котором производятся измерения пла¬
стинок, должен тщательно исследоваться.
Должны быть изучены ошибки шкал (винтов), кри¬
визна направляющих, отличие угла между направляю¬
щими от 90° — все те погрешности, которые влияют на
прямоугольность и равномасштабность системы координат.
Связь между системой измеренных координат х, у
и идеальных координат £, т| задается в общем виде фор¬
мулами
(3cos2cp—1)(Г)3,
(3.50)
% — ~ atl, т)2 = —h0 — b (<”)2].
= dtl, т)3 = т)„ b (i™ )2,
k==—atl тц=— К — Ь(*?)2].
(3.53)
Я = Р + -g (I cos ф + 7) sin ф),
y = Q + -fii—E Sin ф 4-7) cos Ф),
(3.54)
200 Гл. III. Инструменты для определения времени
где (Р, Q) — начало системы координат £, -т] в системе х,
у, М — масштаб, а ф — наклон координатных осей одной
системы относительно другой.
Обычно в измерительном приборе пластинка ориенти¬
руется так, чтобы системы х, у и £, т] были по возможности
параллельны. Тогда угол ф будет мал и формулы (3.54)
примут более простой вид
(3.55)
где угол ф выражен в радианах.
Различная комбинация измеренных координат х и у
дает возможность получить величины М и ф, а по ним иско¬
мую поправку часов и.
Для определения М составляется комбинация иксов.
Согласно уравнениям (3.53) и (3.55), учитывая, что t=
=s— а=Т-\-и— а, можно написать
xi х2 — хг ~\~х*г^~м (^i— — "1“ ^
-\-~м (^1— ^2 — Ъ "I” ^ д/ (fi “Mi — Й — й) +
фб I
Д/ V '<1 42 '13 I '14/ Д/ '
+§ [-(^Г)2 - №+№ + (if)2]=
=£(П + Т1-П-rj)+g[-(<D* - (t?f+(*3? + (t?n
^_д(-У|-П+П + У1) .
—-f- x3 — Xi '
Ф6 [(<H2 + W - Ш t /о rR4
+ I3'56)
Вторым членом уравнения (3.56) можно пренебречь, так
как стоящая в числителе сумма (£f)2+(£2)2—(*з )2—(й1)2
мала. Это объясняется тем, что при наблюдениях четыре
экспозиции делаются по возможности симметричными
относительно меридиана, т. е. часовые углы t близки
между собой по величине, причем tx и t2 имеют разные
знаки с t3 и /4. Кроме того, ф тоже малб.
§ 69. Измерение фотографических пластинок 201
Для определения наклона осей ф составляется комби¬
нация игреков:
Ух — г/2 — Уг + У4=-Д (% — Ъ — % + Ъ) —
~Т1 & ~ Ъ - Ъ + U = i [-(С)2 - (*2Ш)2 + («?) + (<4Ш)2]-
-Цт w + « - « - «Я=i Г-(^Г)2 - № + (t?)° + (if п +
+ (~71 71) = ф(—xt -\-х2 -f-a-j — xt) +
+i [-(tfr - (t?r+m+дел
ф У\—У-2—Уз Ч~ Уа I ^ f(+)~ 4~ (ffiV №)2 /3 574
* —xx X£ -J” Xq — #4 ' M (—xx + ^2 + ^3 — ^4) *
Вторым членом уравнения (3.57), очевидно, тоже можно
пренебречь. Для определения поправки часов и составим
следующую комбинацию иксов:
Х1 Х2~\~Х'3 ХЬ=~М (^1 ^2 “F" ^3 £4) “f”
tl4) = '3j/(*'-M2 + *8-M!) +
+Ti{4-b Г(<")а + (t?f + (tff + (г?)]2} =
=£ (71 + Ti + n + 71) + i (4ц ■- 4a) +
к*”)2+(^)2+(^m)2+m=
=±(7’?+7’; + 7’5 + 7’I) + ^u-5a + 2^1o-
-§[(*?)2 + (*2m)2+(*§?+№
т f + T1 4- Ц + Ti . M , . . Ф
и — a g 1 H /ia (xx x2 -f- x3 xt)—— 7|0 -f-
+ fa W? + <*?)’ + (*“)2 + (№ (3‘58)
202 Гл. III. Инструменты для определения времени
Пренебрегая последним членом уравнения (3.58), получим
для поправки часов
T\+T\ + T\+Tl . М, , V Ф /оггоч
ц_а 1-г 2-г 3-Г * + -(Xl — х2 + ж3 — ж4)— 17)0. (3.59)
В качестве т]0 обычно достаточно взять (ср — о)".
§ 70. Регистрация моментов времени
на фотографической зенитной трубе
На практике для получения изображения звезды на
пластинке фотографической зенитной трубы необходимы
экспозиции продолжительностью от 10s до 30s. Фотогра¬
фическая пластинка при этом движется относительно не¬
подвижных направляющих со скоростью, равной скорости
движения изображения звезды в фокальной плоскости.
В качестве моментов 7\, Г2, Тг и Г4 регистрируются мо¬
менты прохождения кареткой с пластинкой одних и тех же
точек на ее направляющих. Если в пассажном инстру¬
менте регистрируется непосредственно момент прохожде¬
ния изображения звезды через нить или щель визирной
решетки, то на фотографической зенитной трубе регистри¬
руется момент прохождения пластинки через фиксиро¬
ванные неподвижные точки. Легко сообразить, что если
моменты начала и конца движения каретки с пластинкой
строго симметричны относительно момента кульминации
звезды, мы получим картину, приведенную на рис. 94, б,
когда прямые, соединяющие точки 7, 4 и 2, 3 будут па¬
раллельны. Если же симметрия нарушена, то изображе¬
ния 2 ж 4 сместятся относительно изображений 1 ж 3 ж
мы получим случай, изображенный на рис. 95.
При наблюдениях полной симметрии в моментах пуска
каретки с фотопластинкой достигнуть не удается, поэтому
изображения звезд дают картину, приведенную на рис. 95.
Одним из самых ответственных механизмов фотогра¬
фической зенитной трубы является механизм регистра¬
ции моментов Т.
Самым простым решением этой проблемы была бы
система контактов, нанесенных на направляющих каретки
с фотопластинкой.
'Каретка в своем движении замыкала бы эти контакты
специальным выступом, отмечая тем самым на печатаю-
§ 70. Регистрация моментов времени
203
щем хронографе моменты своего прохождения через кон¬
такты. К сожалению, осуществить такую систему на прак¬
тике невозможно, так как скорость движения каретки
очень невелика (около 0,2 мм!сек), и поэтому моменты
замыкания контактов будут неуверенными. Ошибка кон¬
такта окажется очень большой.
Для регистрации моментов времени Т на зенитных
трубах применяются два способа: 1) способ «впечатывания»
на свободную от изображений звезд часть фотопластинки
марок времени и 2) способ замыкания цепи хронографа
контактом, расположенным на винте,
двигающем каретку с фотопластинкой.
В первом способе на фотографи¬
ческую пластинку через оптическую
систему проектируется изображение
узкой щели. Эта щель освещается
кратковременными, порядка несколь¬
ких миллисекунд, вспышками неоно¬
вой лампочки. В цепь неоновой лам¬
почки включены контакты часов, за¬
мыкание которых вызывает вспышку.
Проектор марок времени жестко
закреплен на роторе, и его щель
ориентирована приблизительно пер¬
пендикулярно к направляющим
каретки с фотопластинкой. Чтобы марки времени
четырех экспозиций не накладывались друг на друга, при
различных экспозициях освещаются поочередно разные
участки щели. Для этой цели на щели находится диафрагма,
сдвигающаяся вдоль щели после каждой экспозиции.
Щель проектора играет роль неподвижных меток на
направляющих, относительно которых можно фиксиро¬
вать положение каретки в моменты 71. Пусть в момент Тг,
соответствующий какой-то секунде часов, изображение
щели «впечаталось» на фотопластинку в точке А (рис. 97).
Это означает, что в момент Тг точка А была расположена
над щелью проектора. При обратном движении каретки,
в момент Т2, соответствующий началу другой секунды
часов, над щелью оказалась точка В фотографической
пластинки и на нее впечаталась другая марка времени.
Легко сообразить, что точка А фотографической пластинки
снова окажется над щелью проектора через интервал
11Прямое движение
Обратное движение
Рис. 97. Определение
моментов экспозиций
с помощью марок вре¬
мени.
904 Гл. III. Инструменты для определения времени
времени Д7\ который нужен пластинке, чтобы переме¬
ститься на расстояние, равное расстоянию от точки А
до точки В.
Момент, когда точка А вновь окажется над щелью,
будет равен Т2+ЬТ. Величину Д71 легко получить, изме¬
рив расстояние между марками на фотографической пла¬
стинке.
Средний момент Тср, соответствующий прохождению
точки А пластинки над щелью проектора при прямом и
обратном движении каретки, будет тогда равен
Для большей точности на фотографическую пластинку
при каждой экспозиции «впечатывается» по нескольку
марок времени.
Существенным недостатком этого способа является
большая трудоемкость обработки результатов наблюдений,
связанная с измерением значительного количества рядов
марок времени. Менее трудоемок способ регистрации
моментов Т с помощью механического контакта. Движе¬
ние каретки с фотопластинкой, так же как движение под¬
вижной нити в окулярном микрометре, осуществляется
вращением винта. Гайка, сидящая на винте, но не имею¬
щая возможности вращаться вместе с винтом, сообщает
каретке поступательное движение. На головке винта де¬
лается выступ, который при вращении винта размыкает
или замыкает систему контактов, включенную в цепь
печатающего хронографа. Легко сообразить, что разным
положениям выступа на головке винта относительно кон¬
тактов будут соответствовать разные положения каретки
на направляющих. Каждый раз, когда замыкается цепь
печатающего хронографа, каретка с фотопластинкой будет
занимать на направляющих строго фиксированное поло¬
жение. Таким образом, ряду моментов, зафиксированных
на хронографе, будут соответствовать строго определенные
положения каретки. После поворота ротора винт будет
вращаться в обратном направлении. На хронографе заре¬
гистрируется новая серия моментов, которая будет соот¬
ветствовать, если учесть ширину выступа на головке
винта и мертвый ход винта, тем же самым фиксированным
положениям каретки относительно ее направляющих.
§ 71. Ротор зенитной трубы
205
В этом случае мы имеем полную аналогию с окулярным
микрометром пассажного инструмента. Различие состоит
лишь в том, что с помощью микрометра регистрируются
моменты прохождения изображения звезды, а не каретки
с фотопластинкой.
Остроумное усовершенствование контактного способа
регистрации моментов времени осуществлено в Пулкове
астрономом В. А. Наумовым. В этом способе запуск ка¬
ретки синхронизируется с контактом часов. Он произво¬
дится строго в определенные относительно контакта часов
доли секунды. Поэтому при наблюдении различных звезд
в отпечатках хронографа меняются только целые секунды,
а доли секунд остаются одними и теми же. Такое усовер¬
шенствование сильно упрощает обработку ленты хроно¬
графа, сводя ее до минимума.
Недостатком контактного метода является необходи¬
мость учитывать мертвый ход винта, с помощью которого
осуществляется движение каретки с фотопластинкой.
Определение мертвого хода может производиться с при¬
менением дополнительной оптической системы, которая
фиксирует положение какой-либо точки на каретке при
ввинчивании и вывинчивании винта. На головке винта
должен находиться барабан с делениями. В этом случае
определение мертвого хода в принципе не отличается
от его определения у винта окулярного микрометра пас¬
сажного инструмента. В тех случаях, когда зенитная
труба имеет две системы для определения моментов вре¬
мени, проектор марок времени обычно используется только
при определении мертвого хода винта. Мертвый ход тогда
легко получается из сопоставления моментов, получен¬
ных с помощью проектора марок времени и контактным
методом.
Рассмотрим более подробно конструкцию отдельных
узлов фотографической зенитной трубы и требования,
предъявляемые к точности их изготовления.
§ 71. Ротор зенитной ~трубы
Ротор зенитной трубы состоит из четырех основных
деталей: объектива, каретки с механизмом ее движения,
механизма поворота ротора на 180° и корпуса ротора.
Объектив фотографической зенитной трубы — двух-
линзовый. В отличие от обычных астрономических объек¬
206 Гл. Ш. Инструменты для определения времени
тивов, из флинта выполнена верхняя линза объектива,
а из крона — нижняя. Между линзами имеется воздуш¬
ный зазор в несколько десятков миллиметров. Такая
конструкция объектива приводит к тому, что его вторая
главная точка оказывается вне объектива на удалении
1—3 см от его нижней поверхности. Оправа объектива
жестко крепится к корпусу ротора. Диаметр объектива
около 20—30 см, фокусное расстояние 4—6 м.
Под объективом расположена каретка 2, в которую
вставляется кассета 1 с фотографической пластинкой,
(рис. 98). Кассета крепится в каретке с помощью пружи¬
нок 3. Эти пружины в отпущенном состоянии прижимают
4
Рис. 98. Схема движения каретки с фотопластинкой.
кассету к каретке, обеспечивая их взаимную неподвижность
Каретка может перемещаться по направляющим 4, же¬
стко скрепленным с корпусом ротора. Движение каретки
обеспечивается синхронным мотором, который через ре¬
дуктор вращает винт 5. На винте находится гайка б.
Эта гайка не может вращаться вместе с винтом, так как
ее выступ 7 заходит в паз, параллельный направляющим
каретки. В своем поступательном движении гайка переме¬
щает каретку по направляющим. В направляющих каретки
имеются пазы, по которым каретка на калиброванных ша¬
риках движется вдоль них. Пружины 8 прижимают ка¬
ретку 2 и гайку 6 к винту 5, выбирая мертвый ход и со¬
общая каретке обратное движение. Принципиально воз¬
можна другая конструкция, в которой гайка на винте
вращается, не имея поступательного движения, а винт,
толкающий каретку, имеет только поступательное дви¬
жение и не вращается.
При своем движении по направляющим каретка с кас¬
сетой должна перемещаться так, чтобы плоскость фото¬
§ 71. Ротор зенитной трубы
207
пластинки, покрытая эмульсией, по возможности совпа¬
дала со второй главной плоскостью объектива.
Поворотный механизм зенитной трубы состоит из мо¬
тора, который через систему передачи поворачивает ро¬
тор на 180°, демпфирующих пружин, упоров фиксаторов
и системы оптического контроля.
Мотор поворотного механизма помещается отдельно
от трубы на специальном основании. Это необходимо,
чтобы избежать вибраций
инструмента, возникающих
при поворотах ротора.
Чтобы ротор останавли¬
вался в заданном положе¬
нии после его поворота, два
диаметрально противополож¬
ных выступа ротора прижи¬
маются к двум упорам на верх¬
ней части колонны. Эти упоры
можно немного смещать, про¬
изводя тем самым регули¬
ровку положений ротора, ана¬
логичную исправлению азимута пассажного инструмента.
Поскольку вес ротора составляет несколько десятков ки¬
лограммов и его инерция велика, поворот ротора должен
производиться очень плавно, с торможением в момент
подхода выступов ротора к упорам. В противном случае
могут происходить резкие удары, способные нарушить
точность поворота ротора на 180°. Для ослабления ударов
применяются демпфирующие пружины и системы плавного
замедления скорости ротора при его подходе к упорам.
Контроль за точностью поворота ротора на 180° осуще¬
ствляется при помощи оптической системы (рис. 99),
состоящей из коллиматора с микрометром 2 и плоскопа¬
раллельного двухстороннего зеркала 2. Это зеркало по¬
мещается в оправе объектива. Коллиматор крепится к не¬
подвижному кожуху 5, внутри которого вращается ротор.
Кожух жестко соединен с верхней частью трубы. Колли¬
матор снабжен автоколлимационным окуляром Гаусса.
Поэтому наблюдатель видит в поле зрения не только нити,
натянутые в фокальной плоскости коллиматора, но и
их изображение, отраженное зеркалом 2. Измеряя оку¬
лярным микрометром расстояние между нитями и их
Рис. 99. Контроль поворота
ротора.
208 Гл. III. Инструменты для определения времени
отражением от зеркала при двух положениях ротора,
можно точно контролировать угол поворота ротора зе¬
нитной трубы.
Корпус ротора своим основанием опирается на ко¬
лонну зенитной трубы через шарикоподшипники 4. От бо¬
кового смещения корпус ротора удерживается центри¬
рующими шариками. К корпусу ротора крепится оправа
объектива, направляющие каретки, механизм движения
каретки и часть механизма поворота ротора.
Вертикальность оси вращения ротора контролируется
при помощи двух взаимно-перпендикулярных уровней,
установленных на роторе. Высокой точности от этих
уровней не требуется, так как небольшой наклон ротора
не влияет, как это было показано выше, на точность ре¬
зультатов.
Объектив зенитной трубы закрывается сверху затво¬
ром. Затвор представляет собой диск, с отверстием, рав¬
ным диаметру объектива. Диск вращается с помощью
мотора, который вместе с диском крепится к отдельной
стойке сбоку трубы. Стойка во избежание дрожания ин¬
струмента изолируется от главной трубы. На этой же
стойке закрепляется мотор поворотного механизма.
§ 72.. Труба инструмента. Ртутный горизонт
Основная труба инструмента представляет массивную
металлическую колонну, опирающуюся своим основанием
через три установочных винта на пятачки или кольцо,
вцементированное в фундамент.
У некоторых инструментов для удобства регулировки
труба сделана составной. Верхняя ее часть, несущая ро¬
тор, опирается на нижнюю тремя регулировочными вин¬
тами. С помощью этих винтов можно менять наклон оси
вращения ротора, не трогая массивного основания.
Для контроля правильности фокусировки служит фо-
кусировочный стержень, изготовленный из стали или ин¬
вара. Стержень подвешивается вблизи ротора на верхней
части неподвижной трубы. Конец стержня находится
в нескольких миллиметрах от поверхности ртути. Через
оптическую систему, закрепленную на трубе, можно опре¬
делять расстояние между концом фокусировочного стержня
и его отражением от поверхности ртути и тем самым
§ 72. Труба инструмента. Ртутный горизонт
209
контролировать правильность фокусировки зенитной
трубы.
В некоторых зарубежных конструкциях фотографиче¬
ской зенитной трубы ротор и верхняя часть трубы кре¬
пятся на металлической ферме, лежащей наподобие моста
на двух каменных опорах.
Ртутный горизонт представляет собой плоский сосуд
с тонким слоем ртути. К ртутному горизонту в фотографи¬
ческой зенитной трубе предъявляются высокие требования.
Он должен обладать очень высокой чувствительностью,
т. е. сохранять свою горизон- ^
тальность при малейших на-
жна испытывать минимальные “
возмущения при колебаниях Рис. 100. Ртутный гори-
кими дрожаниями почвы.
Многочисленными опытами установлено, что наилуч¬
шим резервуаром для ртути служит плоская тарелочка
с краями, приподнятыми под углом в 10—15°. Толщина
слоя ртути в тарелочке обычно составляет 1—2 мм.
Малый наклон краев тарелочки способствует быстрому
затуханию колебаний ртути. Диаметр тарелочки должен
быть несколько больше диаметра объектива, так как на
краях поверхность ртути не горизонтальна.
Для ослабления дрожания поверхности ртути, вызван¬
ного колебаниями почвы, тарелочка с ртутью помещается
на поплавке 1 (рис. 100), плавающем в резервуаре 2,
тоже наполненном ртутью. Благодаря поверхностному
натяжению мениска, образующегося между поплавком
и близкими к нему стенками резервуара, поплавок само-
центрируется в резервуаре, т. е. не касается его краев.
Прикосновение поплавка к стенкам резервуара сразу
повысило бы чувствительность ртути в тарелочке к ме¬
ханическим колебаниям. Вторичный резервуар 2 устанав¬
ливается в основании трубы на специальном фундаменте,
который не соприкасается с фундаментом трубы. Основа¬
ние резервуара ставится на массивную (несколько сотен
килограммов) чугунную плиту 3. Между плитой и фунда¬
ментом прокладывается песчаная подушка, которая
клонах резервуара, в который
налита ртуть. С другой сто¬
роны, поверхность ртути дол-
3
резервуара, вызванных мел-
зонт.
210
Гл. III. Инструменты для определения времени
вместе с плитой играет роль демпфера. Чтобы песок
не отсыревал, он покрывается влагонепроницаемой
пленкой.
Для фокусировки инструмента сделан дополнитель¬
ный резервуар со ртутью. Из него по шлангу ртуть может
поступать в резервуар 2, поднимая поплавок 1 на необ¬
ходимую высоту. В случае, когда необходимо опустить
поплавок 2, ртуть из резервуара 2 сливается через спе¬
циальный кран. Перед наблюдениями поверхность ртути
в тарелочке тщательным образом очищается. Это улуч¬
шает ее отражательные свойства, делает поверхностное
натяжение равномерным. Последнее весьма важно, так
как плохо очищенная поверхность ртути может оказаться
негоризонтальной на некоторых участках. Очистка ртути
производится с помощью стеклянной палочки, которой
несколько раз проводят по поверхности ртути в тарелочке.
§ 73. Программные автоматы для наблюдений
на фотографической зенитной трубе
Наблюдения на фотографической зенитной трубе не
требуют постоянного присутствия наблюдателя. Его роль
выполняют программные механизмы. Это весьма суще¬
ственно упрощает труд наблюдателя и полностью исклю¬
чает вредное тепловое влияние наблюдателя на инстру¬
мент.
Обычно применяются два типа программных автоматов.
Для автоматического цикла наблюдения одной звезды
применяется механизм, на котором запрограммировано
несколько операций, производящихся при наблюдениях
каждой звезды:
1) включение движения каретки с фотопластинкой,
2) открывание затвора,
3) закрывание затвора,
4) выключение движения каретки,
5) поворот ротора на 180°.
Затем цикл повторяется снова и т. д. до конца четырех
экспозиций.
Момент запуска программного механизма определяется
так, чтобы средние моменты четырех экспозиций были
по возможности симметричны относительно момента куль¬
минации звезды. Поскольку продолжительности экспо¬
§ 73. Программные автоматы для наблюдений
211
зиций зависят от яркости звезд, программный механизм
должен обеспечивать несколько вариантов автоматиче¬
ского цикла в зависимости от того, какова звездная вели¬
чина регистрируемой звезды.
Программные механизмы автоматического цикла могут
быть выполнены в виде ряда дисков, с несколькими ку¬
лачками на каждом, и системы контактов. В момент за¬
пуска диски начинают вращаться от синхронного мотора
и замыкают своими кулачками систему
контактов, обеспечивая последователь¬
ность операций. Разная скорость дис¬
ков дает разную продолжительность экспо¬
зиций звезды при включении различных
дисков. После наблюдения каждой звезды
диски ставятся в нулевое положение.
Применяются и другие системы автома¬
тического цикла наблюдений. В Пулкове
в основу системы автоматического цикла
положен принцип автомата на шаговых
искателях. Шаговый искатель представ¬
ляет собой электромагнитное реле на Рис. lOl.JIpira-
несколько положений (рис. 101). Якорь Ц™ действия
г» шагового иска-
реле R при каждом импульсе от часов тет1Я
перемещается на одно положение. Таким
образом, если, скажем, в первую се¬
кунду соединены (замкнуты) первые контакты, то через
четыре секунды шаговый искатель замкнет пятую линию.
Шаговые искатели могут иметь по нескольку десятков
положений и механизм установки на нуль. Запуская ша¬
говый искатель, можно произвести коммутацию его кон¬
тактов так, что в заданные моменты он будет включать
механизмы затвора, движение каретки и поворота ротора,
т. е. обеспечивать автоматический цикл наблюдений.
Обычно применяется комбинация из нескольких шаговых
искателей.
Кроме механизма автоматического цикла, на зенитных
трубах используются автоматы, включающие в заданный
момент Т = а механизм автоматического цикла. Конст¬
рукция этих автоматов весьма различна.
В Оттавской обсерватории роль такого механизма
играет перфорированная лента, которая с постоянной
скоростью протягивается между электрическими контак¬
212 Гл. III. Инструменты для определения времени
тами. На ленте вырезаны отверстия, через которые в за¬
данный момент замыкаются контакты, включая механизм
автоматического цикла. Недостатком такого механизма
является неудобство работы с лентой в несколько десят¬
ков метров. При изменении программы наблюдений при¬
ходится перфорировать новую ленту. В Пулковской обсер¬
ватории и в Государственном астрономическом институте
им. Штернберга в Москве применяются программные
механизмы на системе шаговых искателей.
Программный механизм пулковской зенитной трубы
состоит из трех частей:
1) счетчика времени, образованного двумя искателями,
2) «памяти», состоящей из коммутационной доски,
3) счетчика звезд, состоящего из четырех искателей и
выбирающего из памяти нужную коммутацию.
Необходимо учитывать, что программный механизм
должен не только задать момент Г, но и указать необхо¬
димую для данной звезды продолжительность экспозиции.
§ 74. Влияние инструментальных ошибок
фотографической зенитной
трубы на определение поправок часов
При выводе теории наблюдений на фотографической
зенитной трубе сделан ряд допущений. Так, полагалось,
что поворот ротора производится строго на 180°, плоскость
эмульсии фотопластинки совпадает со второй главной
плоскостью объектива, скорость движения каретки строго
равна скорости движения изображения звезды в фокаль¬
ной плоскости и т. д. Рассмотрим, каковы будут ошибки
определения поправок часов при несоблюдении этих
условий.
а) Поворот ротора на угол 180°+р.
Рассмотрим два изображения звезды, полученные при
первой и четвертой экспозициях в моменты, симметричные
моменту кульминации. На фотопластинке этим моментам
соответствуют изображения а4 и а4 (рис. 102). В случае,
когда поворот ротора будет произведен на угол 180°+ р,
изображение звезды из точки а4 переместится в точку а'.
Угол a4Za4 будет равен р, а
c4Z = a4Z = v^o + t2 cos2 cp,
§ 74. Влияние инструментальных ошибок
тогда
= Hi + f2 cos2 f ^ = 2r sin ,
причем угол a4Z?] равен азимуту А в момент четвертой
экспозиции. Влияние смещения изображения на поправку
часов можно определить из формулы
1 р".
Дм COS <р - 2 ' j 5 р»
Если принять во внимание, что
г sin А.
COS Л :
sin Л :
то можно получить
А о + cos “ ? 1
£ COS ?
COS- 'f
(3.69)
(3.61)
Л 1 S3"
Ди = Та?Ъ-
Если положить, что величина Ли должна быть меньше
0s,001, то можно, придавая г\0 определенное значение, по¬
лучить допустимую величину угла [3. Полагая ^о=^{тйХ=
= 1000", найдем Ртах=±4"
для <р=60°. Это означает, что
ошибка угла поворота ротора
не должна превышать ±4".
В этом случае ошибка в оп¬
ределении поправки часов не
превысит 0s,001. Изменяя по¬
ложение упоров фиксаторов,
можно получить требуемую
точность в повороте ротора.
б) Наклон фото¬
графической пла¬
ст и н к и. Фотографичес¬
кая пластинка может быть
наклонена относительно второй главной плоскости объек¬
тива, которая рассматривается как горизонтальная. На¬
клон пластинки на угол i приводит к искажению расстоя¬
ний на пластинке в cos i раз. Однако на поправку часов
наклон пластинки практически не влияет, так как измеряе¬
бГ
Рис. 102. К теории ошибок
фотографической зенитной
трубы.
214 Гл. Ш. Инструменты для определения времени
К
мые на пластинке отрезки, необходимые для определения
поправок часов, очень малы. Вполне достаточно принять
за допустимое значение i = 10/.
в) Наклон оси вращения ротора. Если
плоскость эмульсии фотопластинки совпадает со второй
главной плоскостью объектива, то наклон оси вращения
ротора не влияет на положение изображения звезды.
На практике невозможно добиться пол¬
ного совпадения этих плоскостей.
Обозначим через а угол между верти¬
калью и осью вращения ротора, прохо¬
дящей через главные точки объ¬
ектива Нг и #2 (рис. 103). Расстояние
от второй главной плоскости объектива
до плоскости эмульсии фотопластинки
обозначим через d. Расстояние от изо¬
бражения зенитной звезды L до точки
F будет меняться в зависимости от ве¬
личин d и а. Легко показать, что при
d^ 0,5 мм и а = 30" ошибки в опреде¬
лении м, вызванные наличием наклона а
и смещением эмульсионного ^слоя из
плоскости #2, будут меньше 0s,001. Рас¬
положенные на роторе уровни дают воз¬
можность отнивелировать его с точ¬
ностью, большей, чем 30". Совместить плоскость эмуль¬
сии и плоскость Н2 с точностью до 0,5 мм также техни¬
чески возможно.
г) Деформация изображения звезды
на фотопластинке. При наблюдениях звезд
на фотографической зенитной трубе каретка с фотопла¬
стинкой должна перемещаться в направлении первого
вертикала. Если между направлением движения фото¬
пластинки и первым вертикалом существует некоторый
угол, то это приводит к удлинению изображения звезды
в направлении меридиана. Угол этот обычно называют
азимутом инструмента. Поскольку удлинение изображе¬
ния происходит вдоль меридиана, это не сказывается на
точности результатов.
Однако слишком большой азимут может растянуть изо¬
бражение звезды настолько, что его трудно будет изме¬
рять. Заметим, что кривизна параллели, по которой дви¬
Рис. 103. К тео¬
рии ошибок фото¬
графической зе¬
нитной трубы.
§ 74. Влияние инструментальных ошибок
215
жется звезда, при экспозиции в 308 и часовом угле в 1т
(для ср=60°) приводит к удлинению изображения звезды
на 0,017 мм. Эта величина, по сути дела, и определяет
точность установки азимута, так как при той же экспози¬
ции азимут в 3' приводит к удлинению изображения всего
на 0,004 мм. Очевидно, что такая величина азимута не
вносит существенных добавлений в искажение изображе¬
ний звезд из-за кривизны параллели.
Искажение изображения звезды происходит также
из-за ошибок направляющих, однако при современной
точности их изготовления оно невелико и не имеет суще¬
ственного значения. Легко видеть, что при четырех экс¬
позициях с последующими поворотами ротора после
каждой экспозиции ошибки направляющих не будут
влиять на точность результатов.
Деформация изображений звезд может быть вызвана и
отличием скорости движения каретки от скорости движе¬
ния изображения звезды в фокальной плоскости.
Для получения хорошего изображения звезды на фото¬
пластинке скорость движения каретки должна по возмож¬
ности равняться скорости движения изображения звезды.
Отклонение скорости каретки от заданного значения вы¬
зывает удлинение изображения в направлении первого
вертикала. Незначительное удлинение изображения на
0,01 —0,02 мм не оказывает влияния на точность измере¬
ний пластинки. Центр изображения определяется доста¬
точно уверенно.
Однако может оказаться, что центр измеренного изо¬
бражения не соответствует положению изображения звезды
на пластинке в средний момент регистрации времени.
В этом случае центр вытянутого изображения звезды бу¬
дет соответствовать положению изображения звезды в мо¬
мент середины экспозиции, а не в средний момент контак¬
тов, зарегистрированных хронографом. Оценим ошибку
определения времени, возникающую при этом. Пусть V3 —
скорость движения изображения звезды в фокальной
плоскости, a VK — скорость движения каретки; Т* —
момент середины экспозиции, а Т — средний момент по
хронографу. За время, равное Т* — 7\ изображение
звезды сместится на фотопластинке на величину dx:
Лх = (Г-Т)(У9-Уж).
(Я.В2)
216
Гл. III. Инструменты для определения времени
Дифференцируя формулу (3.59) для определения поправки
часов, найдем
du = ^ (dxx — dx2 -[- dx4 — dx±). (3.63)
Подставляя значения dx (3.62) в последнюю формулу, по¬
лучим для четырех экспозиций
da = g (П + П + п + п - Тг - Т2 - Т5 - Г4) (V, - VK) =
= *L(r0-T0)(V,-VJ, (3.64)
где Т*0 — средний момент четырех экспозиций, который
можно определить по моментам открывания и закрывания
затвора, Т0 — средний момент, зарегистрированный хроно¬
графом при движении каретки.
Учитывая, что величину Т*0 — Т0 можно сделать по¬
рядка 0s, 1 и что du должно быть меньше 0s,001, получаем
|F3-Fk| <0,001 мм/сек.
д) Симметрия экспозиций. При выводе
формул (3.56) и (3.57) мы полагали, что суммы t, стоящие
в числителях вторых членов правой части, малы, и прене¬
брегали вторыми членами. Для того чтобы это можно было
сделать на практике, необходима симметрия экспозиций
относительно момента кульминации. Можно показать,
что интервалы между соседними экспозициями должны
сохраняться с точностью до 0s,5. Средний момент экспози¬
ции не должен отличаться от момента кульминации более,
чем на 2s. При этих условиях влияние несимметрии экс¬
позиций на поправку часов будет меньше 0s,001. Если же
условия симметрии не соблюдены с необходимой точно¬
стью, вторые члены следует учитывать.
§ 75. Основные достоинства и недостатки
фотографической зенитной трубы
Фотографическая зенитная труба имеет ряд преиму¬
ществ перед пассажными инструментами:
1. При наблюдениях на фотографической зенитной
трубе отсутствуют ошибки, вызванные неточностью опре¬
деления наклонности и азимута.
§ 75. Достоинства и недостатки зенитной трубы
217
2. Фотографическая зенитная труба более устойчива,
в ее узлах отсутствует боковое гнутие, часто искажающее
результаты наблюдений на пассажных инструментах.
3. Применение фотографического метода регистра¬
ции и полная автоматизация исключают как личную
ошибку наблюдателя, так и его температурное влияние на
инструмент.
4. Большое фокусное расстояние инструмента увели¬
чивает точность наблюдений.
5. Наблюдения производятся в зените, т. е. при макси¬
мальной прозрачности воздуха и наименьшей рефракции.
Вместе с тем фотографическая зенитная труба имеет
и ряд недостатков:
1. Ей доступна очень узкая, меньше 1°, зенитная зона,
поэтому наблюдается лишь ограниченное число слабых
(до 1СГ) звезд.
2. Основание инструмента со ртутным горизонтом на¬
ходится вблизи от грунта, а ротор с объективом поднят на
2—2,5 м над землей. Разности температур у грунта и на
высоте объектива могут создавать вихревые токи возду¬
ха, искажающие результаты наблюдений. Чтобы избе¬
жать этого, необходима мощная вентиляционная уста¬
новка.
3. Ротор зенитной трубы по сложности своей конструк¬
ции значительно превосходит любой узел пассажного
инструмента, поэтому необходим контроль за устойчи¬
востью и стабильностью его работы (поворот ротора, мерт¬
вый ход винта каретки и т. д.).
4. Измерения фотографической пластинки на измери¬
тельной машине трудоемки и вносят дополнительные
ошибки в поправки часов.
Большой интерес представляло бы создание зенитной
трубы с фотоэлектрической регистрацией прохождения
звезд. В таком инструменте вместо подвижной кассеты на
направляющих жестко закрепляется неподвижная визир¬
ная решетка со щелями длиной в несколько сантиметров
(рис. 104). Над визирной решеткой помещается призма,
направляющая свет через линзу Фабри на катод фото¬
умножителя. Чтобы свет от фона неба не попадал через
все щели на фотоумножитель, часть решетки можно за¬
крыть подвижной диафрагмой, которая будет оставлять
открытой только узкую часть решетки.
218 Гл. III. Инструменты для определения времени
=d=x
ФЭУ
Перемещение диафрагмы по визирной решетке при на¬
блюдениях различных звезд можно запрограммировать
в специальном автомате.
К числу преимуществ фотоэлектрической зенитной
трубы следует отнести отсутствие подвижной каретки
с фотопластинкой и максимальную
простоту обработки наблюдений. Мо¬
менты прохождения звезды, как и
на фотоэлектрическом пассажном
инструменте, будут регистрироваться
с помощью хронографа. Для ис¬
ключения вредных токов воздуха
внутри трубы она может быть за¬
полнена инертным газом или ваку-
умировапа.
Проект создания фотоэлектриче¬
ской зенитной трубы встречает две
существенные трудности. Звезды,
наблюдаемые на зенитных тру¬
бах, очень слабы, поэтому чув¬
ствительность фотоэлектрической установки должна быть
очень большой. При объективе в 20—30 см диаметром
должны уверенно регистрироваться звезды до 10w.
Неучтенный наклон щелей визирной решетки приво¬
дит к ошибкам в определении времени, аналогичным ошиб¬
кам азимута в пассажном инструменте. Наклон щелей
необходимо учитывать или устранять — это встречает
некоторые технические трудности.
Рис. 104. Фотоэлек¬
трическая зенитная
труба.
§ 76. Призменная астролябия
Наиболее рациональным современным инструментом
для наблюдения методом равных высот (см. § 48) явля¬
ется призменная астролябия конструкции французского
астронома А. Данжона, созданная им в 1951—1953 гг.
В основу конструкции этого инструмента положен прин¬
цип обычной призменной астролябии, состоящей из гори¬
зонтальной трубы, призмы и ртутного горизонта (рис. 105).
Перед горизонтальной трубой помещается стеклянная
равносторонняя призма, плоскость которой, обращенная
к объективу трубы, поставлена вертикально. Перед приз¬
мой несколько ниже и впереди нее находится ванна со
§ 76. Призменная астролябия
219
ртутью (ртутный горизонт). Свет от звезды с зенитным
расстоянием в 30° попадает в зрительную трубу двумя
путями: как путем полного внутреннего отражения лучей
от боковой плоскости призмы АВ, так и путем полного
внутреннего отражения от боковой плоскости АС, кото¬
рому предшествует отражение лучей света от ртутного
горизонта. Так как и те и другие лучи идут перпендику¬
лярно к вертикальной грани призмы ВС, то они представ¬
ляют собой две половины одного и того же пучка парал¬
лельных лучей. Поэтому от них в фокальной плоскости
/ /
/ /
объектива трубы получается одно изображение звезды.
Легко сообразить, что в случае, когда зенитное расстоя¬
ние звезды будет немного отличаться от 30°, в фокальной
плоскости объектива окажется два изображения звезды.
Эти изображения, находясь на одной вертикали, будут
постепенно сближаться, перемещаясь в те же время слева
направо или справа налево вследствие движения звезды
по азимуту. Пути обоих изображений пересекутся и после
совпадения изображений вновь разойдутся. Совпадение
изображений произойдет как раз в тот момент, когда зе¬
нитное расстояние звезды окажется равным 30°. Момент
совпадения изображений должен регистрироваться при
помощи хронографа или другим способом.
Основные преимущества призменной астролябии та¬
ковы:
1. Видимое зенитное расстояние звезды определяется
углом между гранями призмы, стабильность которого
значительно выше, чем, например, стабильность визирной
линии пассажного инструмента, зависящая от механи*
220
Гл. III. Инструменты для определения времени
ческих деформаций трубы, оправы объектива и окулярной
части.
2. Отвесная линия у призменной астролябии задается
оптическим путем — отражением света звезды от ртутного
горизонта. Точность при работе с хорошо выполненной
ртутной ванной выше, чем с уровнем на пассажном ин¬
струменте.
3. Если угол призмы из-за несовершенства его изго¬
товления отличается от 60°, это приводит только к изме¬
нению видимого зенитного расстояния у всех наблюдае¬
мых звезд. Такое явление имеет лишь то неудобство, что
при вычислениях придется рассматривать зенитное рас¬
стояние в качестве вспомогательного неизвестного. На точ¬
ность определения поправок часов постоянное отличие
угла призмы от 60° не будет оказывать влияния.
4. Всякие смещения призмы и объектива, вызванные
деформациями их креплений, равно как и большинство
оптических погрешностей объектива, не оказывают влия¬
ния на точность результатов наблюдений, так как они
смещают сразу оба изображения звезды.
Наряду с очевидными достоинствами призменная аст¬
ролябия имеет два существенных недостатка:
а) Определяется всего один момент — момент совпаде¬
ний изображений звезды, в то время как при наблюдениях
на пассажном инструменте регистрируется от двадцати
до сорока симметричных относительно кульминации звезды
моментов времени. Поэтому при наблюдениях с призмен¬
ной астролябией атмосферные флуктуации оказывают
большее влияние на точность определения поправки
часов.
б) Оценка момента совпадения изображений звезд
сильно зависит от личных особенностей наблюдателей.
Главные оптические оси двух пучков света, соответствую¬
щих двум изображениям звезды в фокальной плоскости
объектива (рис. 106), образуют между собой угол в не¬
сколько градусов. Это приводит к тому, что совпадение
изображений звезды в фокальной плоскости F и совпаде¬
ние псевдоизображений звезды в некоторой плоскости F'
будут регистрироваться наблюдателем в различные мо¬
менты времени. Нет никакой гарантии, что наблюдатель
всегда станет наблюдать совпадение изображений строго
в плоскости F. Переместив немного (на доли миллиметра)
§ 77. Призма Волластона
221
окуляр при фокусировке, наблюдатель зарегистрирует
совпадение изображений в плоскости F' и тем самым до¬
пустит ошибку в определении момента совпадений. Утом¬
ление глаза наблюдателя, изменение его аккомодации за
время наблюдений даст ана¬
логичную ошибку.
Оба недостатка обычной
призменной астролябии устра¬
нены в астролябии А. Дан-
жона благодаря применению
специального микрометра,
который А. Данжон называет
безличным.
Одной из основных дета¬
лей этого микрометра являет¬
ся призма Волластона, раз¬
дваивающая падающие на нее
лучи света на две компоненты. Рассмотрим подробнее
принцип работы этой важной детали призменной астро¬
лябии А. Данжона.
§ 77. Призма Волластона
При прохождении света через допогие прозрачные
кристаллы имеет место двойное лучепреломление. Если
исландский шпат разрезать по определенным плоскостям
так, чтобы образовался ромбоэдр, то узкий пучок света,
преломляясь в таком кристалле, даст два пучка, идущих
по различным направлениям. При выходе из кристалла
оба пучка имеют направления, параллельные первона¬
чальному, и если пучки узкие, а кристалл достаточно
толст, то они пространственно разделены.
При рассматривании глазом через такой кристалл
какого-нибудь объекта он двоится. Если вырезать из кри¬
сталла плоскопараллельную пластинку и провести иссле¬
дование направлений обоих лучей, возникающих внутри
пластинки при двойном лучепреломлении, можно сделать
следующие выводы:
1. Один из лучей удовлетворяет обычному закону пре¬
ломления. Для него отношение синуса угла падения
и синуса угла преломления sin ij/sin i2 есть величина по¬
стоянная для данных сред. Луч лежит в одной плоскости
F' F
Рис. 106. Возможные ошибки
при оценке моментов совпаде¬
ния двух изображений в аст¬
ролябии.
222
Гл. 111. Инструменты для определения времени
с падающим лучом и нормалью к поверхности пластинки
в точке падения. Этот луч называется обыкновенным.
2. Для второго луча отношение sin ijsin i2 не оста¬
ется постоянным при изменении угла падения луча на по¬
верхность пластинки. Этот луч получил название необык¬
новенного. Необыкновенный луч не лежит в одной пло¬
скости с падающим лучом и нормалью в точке падения.
Угол преломления этого луча, а также угол между ним
и плоскостью падения зависят не только от угла падения
исходного луча, но и от определенной ориентации пре¬
ломляющей поверхности пластины и плоскости падения.
Оба луча, обыкновенный и необыкновенный, полностью
поляризованы во взаимно-перпендикулярных плоскостях.
Внутри кристалла существуют направления, вдоль кото¬
рых луч распространяется, не разбиваясь на два.
Прямая, проведенная через любую точку кристалла
в направлении, для которого не происходит двойного
лучепреломления, называется оптической осью.
При двойном лучепреломлении, если толщина кри¬
сталла не очень велика, расхождение обоих лучей неве¬
лико. Чтобы увеличить расхождение лучей, использу¬
ются специальные системы из кристаллов. Одна из них
называется призмой Волластона. Эта призма состоит
из двух призм исландского шпата, склеенных по гипоте¬
нузам (рис. 107). В призме АБС оптическая ось парал¬
лельна катету АВ, а в призме A DC оптическая ось парал¬
лельна ребру С и перпендикулярна к плоскости рисунка.
Так как оптические оси в обеих призмах взаимно перпен¬
дикулярны, то обыкновенный луч в первой призме превра¬
Рис. 107. Призма Вол¬
ластона.
Рис. 108. К теории построения
изображения с применением
призмы Волластона.
§ 78. Принцип действия микрометра А. Данжона
223
тится в необыкновенный во второй призме, и наоборот.
Этим будет достигнуто значительное расхождение лучей,
выходящих из призмы.
Однако простая призма Волластона еще не пригодна для
безличного микрометра А. Данжона по следующей причине.
Если на переднюю входную грань призмы падает
пучок параллельных лучей (рис. 108), то точки пересече¬
ния продолженных в обратную сто¬
рону раздвоенных лучей получаются
не в одной вертикальной плоскости,
а на наклонной плоскости FF'. Исхо¬
дя из этого, можно заметить, что два
изображения одного и того же
поля зрения, видимые через про¬
стую призму Волластона, не будут
идентичными. Чтобы избежать этого,
применяется двойная симметричная
призма Волластона (рис. 109), поляризованные поля
которой свободны от дисперсии лучей, а угол раздваи¬
вания изображений является постоянным для нормально
падающих лучей.
§ 78. Принцип действия безличного
микрометра А. Данжона
Призма Волластона помещается между объективом
и окуляром на пути лучей так, чтобы оба луча света —
I
\ %В
а) б)
Рис. 110. Раздвоение изображения звезды с помощью призмы
Волластона.
отраженный от ртутной поверхности и не отраженный —
после прохождения через призму раздваивались.
Пусть А я В (рис. 110, а) есть два изображения звез¬
ды в фокальной плоскости объектива для некоторого
. . А
А
А
ж
Ы
Рис. 109. Двойная
призма Волластона.
224 Гл. 111. Инструменты для определения времени
момента Т. После введения на пути лучей призмы Вол¬
ластона каждое из изображений звезды раздвоится
(рис. 110, б) и получатся четыре изображения звезды Av
А2, Вг, В2. Перемещая призму Волластона вдоль визир¬
ной линии, можно добиться совмещения изображений
звезды А2 и Вг. Изображения звезды А и В вследствие
суточного движения звезды перемещаются, и расстояние
между ними изменяется. Чтобы удерживать эти изобра¬
жения в совмещенном положении, необходимо придать
Рис. 111. Принцип действия микрометра Данжона.
призме Волластона перемещение вдоль визирной линии
со скоростью V. Если угол раздвоения призмы Волластона
достаточно близок к углу между осями световых пучков,
образующих изображения А и В, то пучки лучей, соответ¬
ствующих изображениям А2 и Вг, выходят из призмы
Волластона, имея почти параллельные оси. Два других
изображения звезды, Аг и В21 отсекаются с помощью
диафрагмы и в окуляр не видны. Призма Волластона
крепится к гайке винта микрометра. Вращение винта про¬
изводится мотором от специального генератора. Наблю¬
датель только корректирует скорость движения гайки
с призмой Волластона. С помощью контактного колеса,
связанного с винтом микрометра, на хронографе регистри¬
руется серия моментов времени, по которым определяется
момент прохождения звезды через один и тот же альму¬
кантарат. Если на обычной призменной астролябии на¬
блюдатель регистрирует только один момент совпадения
двух изображений (рис. 111, а), то на астролябии
Данжона наблюдатель, двигая призму Волластона, ре¬
гистрирует целую серию моментов (рис. 111, б), до и после
действительного совпадения изображений. Для этого на¬
блюдатель сводит, перемещая призму Волластона, два
изображения звезды А2 и Вг так, чтобы они находились
§ 79. Призменная астролябия А. Данжона
225
рядом, на расстоянии, в два-три раза превосходящем
их диаметр. Двигая призму Волластона с помощью син¬
хронного мотора, наблюдатель удерживает центры изо¬
бражений на одной горизонтальной линии. Для этого
он слегка изменяет скорость движения каретки, сообщая
винту через дифференциал дополнительное вращение
в нужном направлении.
Две параллельные горизонтальные нити в поле зрения
окуляра определяют направление, которое надо придать
движению центров изображений звезд. Полное совмеще¬
ние двух изображений не производится, так как это может
вызвать значительную ошибку в определении направле¬
ния движения центров двух изображений звезд.
§ 79. Призменная астролябия А. Данжона
Рассмотрим подробнее конструкцию призменной астро¬
лябии Данжона (рис. 112). Фокусное расстояние объектива
Рис. 112. Призменная астролябия Данжона.
астролябии около 100 см, а диаметр объектива 12 см.
Для уменьшения размеров инструмента в нем применена
система из двух взаимно параллельных зеркал 4, 5, кото¬
226 Гл. III. Инструменты для определения времени
рые меняют направление пучков света (рис. 113). Неболь¬
шие смещения зеркал одинаково влияют на оба изображе¬
ния звезды и, следовательно, не сказываются на точности
результатов. Применение зеркал не только уменьшает
Гис. 113. Призменная астролябия Данжона.
1 — призма перед объективом, 2 — ртутный горизонт, 3 — объек¬
тив, 4—5 — зеркала, 6 — окуляр, 7 — коленчатая трубка и диаф¬
рагма, 8 — двойная призма Волластона, 9 — гайка на микрометри¬
ческом винте, 10 — микрометрический винт, 11 — кулачок для
отключения приводного колесика, 12 — приводное колесико, 13 —
фрикционный диск, 14 — азимутальный круг, 15 — конусообраз¬
ное основание астролябии, 16 — регулировочный винт, 17 — ма¬
ховик с ободом для ручной корректировки скорости движения
призмы Волластона, 18 — дифференциал скоростей.
размеры инструмента, но и позволяет поместить ртутный
горизонт 2 как можно ближе к вертикальной оси вращения
инструмента. Это делается для того, чтобы ртуть не сильно
колебалась при переводе астролябии из одного азимута
в другой.
§ 79. Призменная астролябия А. Данжона 227
После отражения от двух зеркал и прохождения через
призму Волластона лучи света от звезды попадают в ко¬
ленчатую трубку 7 с двумя линзами и призмой. Эта
трубка увеличивает изображения, даваемые объективом,
в несколько раз. Затем лучи света, пройдя через диа¬
фрагму, отсекающую два лишних луча, попадают в оку¬
ляр 6.
Для установки призмы Волластона в заданном поло¬
жении, она снабжена устройством, позволяющим с по¬
мощью микрометрических винтов поворачивать ее отно¬
сительно оптической оси инструмента. Корпус астролябии
установлен на вращающемся азимутальном круге 14,
который через подшипники опирается на усеченный ко¬
нус 15, служащий основанием инструмента. Верхняя
часть азимутального круга снабжена двумя выступами
и регулировочным винтом 16. Острие этого винта и два
выступа образуют три точки соприкосновения, на кото¬
рых покоится корпус инструмента. Вращая регулировоч¬
ный винт, можно поворачивать астролябию вокруг гори¬
зонтальной оси, которая определяется положением двух
выступов. Таким образом можно поместить изображение
звезды между двумя горизонтальными нитями в фокаль¬
ной плоскости окуляра.
Азимутальный круг можно закреплять с помощью за¬
жимного винта и придавать ему небольшие перемещения
движением микрометрического винта так же, как это де¬
лается в универсальных инструментах.
Чтобы ориентировать инструмент по азимуту, постав¬
лен дополнительный окуляр, через который наблюдатель
видит деление круга, закрепленного на верхней части
неподвижной конусообразной подставки астролябии. Эта
подставка на трех регулировочных винтах установлена
на вцементированные в столб подпятники.
В передней части корпуса астролябии находится пло¬
щадка, снабженная подъемными винтами и предназначен¬
ная для установки ртутной ванны. Тарелочка для ртути
представляет собой диск из электролитической красной
меди. В диске выточено углубление порядка 1 — 1,5 мм.
Плоская часть дна углубления постепенно переходит
в наклонные края с очень небольшим углом наклона.
Перед каждым вечером наблюдений ванна заполняется
чистой ртутью. Форма ртутной ванны призменной астро¬
228 Гл. III. Инструменты для определения времени
лябии такова, чтобы максимально препятствовать возник¬
новению на поверхности ртути колебаний, искажающих
изображение звезды. Для защиты ртути от воздействия
ветра ртутная ванна закрывается специальным футляром,
в верхней стенке которого проделаны отверстия, про¬
пускающие свет, идущий от звезды. Когда астролябия
переводится после наблюдения одной звезды в положе¬
ние, необходимое для наблюдения следующей звезды,
поверхность ртути деформируется. Однако уже через не¬
сколько секунд изображение звезды в поле зрения ин¬
струмента принимает свой нормальный вид.
Обращает на себя внимание то любопытное обстоятель¬
ство, что в отличие от ртутного горизонта фотографичес¬
кой зенитной трубы ртутный горизонт у астролябии
не имеет под собой никаких демпфирующих устройств.
В астролябии нет ни второй ванны, ни подушки из песка,
ни массивных плит, и тем не менее результаты наблюдений
практически не страдают от дрожания поверхности ртути.
Это объясняется, вероятно, во-первых, значительно мень¬
шим фокусным расстоянием астролябии и, во-вторых, тем,
что наблюдения на ней производятся визуальным спосо¬
бом. Мелкие вибрации поверхности ртути, вызывающие
дрожание изображения, не играют большой роли, так как
такое дрожание осредняется глазом наблюдателя.
Одним из наиболее важных узлов призменной астро¬
лябии является механизм вращения микрометрического
винта с призмой Волластона. Поскольку наблюдения
звезд производятся в разных азимутах, скорость движе¬
ния гайки с призмой Волластона должна быть различной
и, по возможности, строго пропорциональной скорости
изменения зенитного расстояния звезды. Синхронный
мотор, помещенный у основания столба астролябии или
внутри столба, вращается всегда с постоянной скоростью.
Источником питания мотора служит специальный гене¬
ратор. В центральном вырезе конусообразной подставки 15
помещается вращающийся диск 13, вертикальная ось
вращения которого через систему шестеренок соединена
с синхронным мотором. Таким образом, скорость враще¬
ния диска остается всегда постоянной величиной. С верх¬
ней плоскостью диска соприкасается приводное коле¬
сико 12. Вращение диска 13 через приводное колесико 12
и систему шестеренок передается винту микрометра.
§ 79. Призменная астролябия А. Данжона 229
Чтобы винт микрометра вращался только при наблюде¬
ниях звезд, приводное колесико можно опускать на диск
или поднимать над ним при помощи упорного кулачка 11,
который позволяет по желанию поднимать или опускать
приводное колесико. Связь между приводным колесиком 12
и диском 13 происходит благодаря трению.
Основная задача механизма движения микрометра
состоит в том, чтобы автоматически передать винту микро¬
метра скорость, пропорциональную синусу азимута на¬
блюдаемой звезды. Это
возможно сделать, если
при повороте астролябии
автоматически изменять
расстояние от центра вра¬
щающегося диска 13 до
точки касания плоскости
диска приводным колеси¬
ком, т. е. изменять ско¬
рость вращения приводного
колесика. Для этой цели
служит механическая сис¬
тема, автоматически пере¬
мещающая ось вращения
диска 13 в вырезе конусообразной подставки при
повороте астролябии по азимуту. Пусть О—
точка (рис. 114) соприкосновения приводного колесика 12
и вращающегося диска 13. Точка С — центр вращения
диска. Ось вращения диска, расположенная в вертикаль¬
ной плоскости, должна занимать в пространстве такое
положение, чтобы расстояние от точки С до точки О
было пропорционально синусу азимута, в котором ве¬
дутся наблюдения. Это означает, что при вращении
астролябии по азимуту вследствие перемещения оси
вращения диска точка О опишет окружность с диамет¬
ром 00', проходящую через центр диска С. На рис. 115
представлены последовательные изменения во взаимо-
положении приводного колесика и диска в зависимости
от последовательных изменений в ориентировке инстру¬
мента по четырем основным точкам горизонта. Как видно
из рисунка, скорость вращения приводного колесика авто¬
матически изменяет свое направление при прохождении
инструмента через меридиан, где она равна нулю, так как
Рис. 114. Принцип действия ме¬
ханизма изменения скорости дви¬
жения призмы Волластона.
230 Гл. III. Инструменты для определения времени
точка соприкоснования диска и приводного колесика
оказывается в центре вращения диска. Механизм враще¬
ния винта микрометра имеет микрометрическое приспо¬
собление, которое позволяет наблюдателю от руки кор¬
ректировать движение призмы Волластона и тем самым
Рис. 115. Различные взаимоположсния фрикционного диска и
приводного колесика.
удерживать в совмещенном положении два изображения
звезды в поле зрения трубы. Для этой цели дифференциал
скоростей 18 (рис. ИЗ) мотора заключен в цилиндри¬
ческую коробку, имеющую снаружи зубцы. Эти зубцы
сцепляются с зубцами обода 17, охватывающего конусо¬
образную подставку инструмента. Обод можно поворачи¬
вать с помощью надетого на него маховика, имеющего
диаметр около полуметра. Двигая этот маховик, наблю¬
датель сообщает дифференциалу дополнительное враще¬
ние, корректируя тем самым скорость вращения винта.
Большие размеры обода с маховиком дают возможность
точно удерживать изображение звезд на одной прямой..
Север А~0° Восток А=30°
Шг А~18д°
Запад А =270°
§ 80. Вывод рабочих формул
281
§ 80. Вывод рабочих формул для обработки
наблюдений на астролябии А. Данжона
Исходным уравнением для обработки наблюдений слу¬
жит формула (3.3). Дифференцирование этой формулы
дает
dz = —cos A dy — 15 sin A cos cp dt, (3.65)
где dz и dcp выражены в секундах дуги, a dt — в секундах
времени. Азимут А отсчитывается от точки севера через
восток от 0 до 360°. Обозначим через zf измеренное зенит¬
ное расстояние звезды, а через z — истинное. Для наблю¬
дений каждой звезды можно написать уравнение вида
z1 — z = v, (3.66)
в котором и — остаточная погрешность.
Поскольку астролябия Данжона рассчитана на наблю¬
дения звезд в альмукантарате с зенитным расстоянием
в 30°, измеренное зенитное расстояние zf можно предста¬
вить в таком виде:
zf = 30° — Az -|- г, (3.67)
где Az — искомая поправка к измерениям, обусловленная
главным образом неточностью изготовления призмы,
т. е.отличием ее угла от 60°. Эта величина принимается по¬
стоянной для всего вечера наблюдений. Величина г есть
поправка за рефракцию, ее можно представить в виде
г=30"+Аг. Тогда уравнение (3.67) примет вид
= 30°00'30" — A z + Аг. (3.68)
Величину z можно представить в виде приближенного зна¬
чения z0=30°00'30" и некоторой поправки dz0; тогда
z — z0-\-dz0. (3.69)
Подставим значения z и z' из уравнений (3.68), (3.69)
в уравнение (3.66) и получим
Аг — A z — dzQ — v (3.70)
или, учитывая, что величину dzQ можно получить из урав¬
нения (3.65),
—Az -}- cos A -}- 15 sin A cos <р0 dt0 -f- Аг = v. (3.71)
232 Гл. III. Инструменты для определения времени
В формуле (3.71) 90 есть некоторое приближенное зна¬
чение ср, а t0 — часовой угол, вычисленный по формуле
(3.3) с приближенными значениями с0 и z0. Обозначим
через и0 приближенное значение поправки часов, а через
Т — показания часов в средний момент наблюдения звезды.
Точное значение поправки и можно записать как u0-\-du0.
Тогда dt0 можно представить в виде
dt^ Т —|— и0 —|— diiQ — ос — —
= du0-{-(T 4-н0) — (a-f-Z0). (3-72)
Введем следующие обозначения: х=15 cos y0du0, y = dyQ
и Г= [(Т+и0)—(a+t0) 1 • 15 sin A cos <р0+Дг. Тогда урав¬
нение (3.71) примет вид
—Az -f- х sin А 4- у cos A -f- V = v. (3.73)
Обычно в свободный член уравнения (3.73) дополнительно
вводят еще несколько поправок, а затем решают получен¬
ную по всем звездам систему уравнений способом наи¬
меньших квадратов. Уравнение (3.73) в окончательном
виде будет таким:
—Az -\-х sin А -\-у cos A-\-l = v, (3.74)
где Z=Z'+2AZ. Рассмотрим поправки AZ к свободному
члену.
1. Поправка за изменение фокуса.
В начале и в конце наблюдений определяется отсчет
барабана винта микрометра F0, соответствующий нулевому
раздвоению изображения. При этом отсчете звезда дости¬
гает инструментального зенитного расстояния. Значение
V0 несколько меняется за вечер наблюдений в основном
из-за изменения температуры. Определяется V0 с по¬
мощью дополнительного плоского зеркала, помещаемого
перед объективом, и автоколлимационного окуляра, ко¬
торым заменяется окуляр, применяемый при наблюдениях
звезд. Совмещая прямое и отраженное от зеркала изобра¬
жения одной и той же горизонтальной нити, наблюдатель
находит значение VQ. Отсчет по барабану винта микро¬
метра, соответствующий среднему значению из всех кон¬
тактов, регистрируемых на хронографе, обозначим
через Vm. Обычно разность V0—Vm не равна нулю. Иначе
говоря, среднее значение из зарегистрированных на хро¬
§ 80. Вывод рабочих формул
233
нографе моментов времени не дает действительного мо¬
мента совмещения двух изображений звезды. Поэтому
необходимо приводить наблюдения звезд к отсчету V0.
Формула поправки за изменение фокуса имеет вид
где R — цепа оборота винта микрометра в секундах дуги.
2. Поправка за ускорение движения
звезды.
Вследствие кривизны параллели вертикальная сла¬
гающая скорости движения звезды меняется, поэтому
среднее из зарегистрированных моментов наблюдения
не соответствует наблюденному зенитному расстоянию
в то время, когда отсчет по микрометру равен Vт. Поэтому
возникает необходимость введения поправки в зенитное
расстояние звезды. Эта поправка Д/2 определяется по фор¬
муле *)
где Тг — время начала наблюдений звезды, а Тп — время
окончания наблюдений, п — число контактов (отпечатков
моментов времени на хронографе), Q=—cos A cos2 срX
X(tg ср — cos A ctg z).
3. Поправка за кривизну альмукан¬
тарата.
Погрешность за кривизну альмукантарата возникает
при несимметричных наблюдениях относительно сере¬
дины" сетки нитей в фокальной плоскости окуляра. Дело
в том, что наблюдатель, удерживает два изображения
звезды параллельно горизонтальным нитям сетки, а не па¬
раллельно дуге альмукантарата.
Поскольку обычно наблюдения на астролябии Данжона
ведутся симметрично относительно середины сетки нитей,
пет необходимости подробно рассматривать влияние этой
поправки.
4. Поправки за рефракцию, короткопериодические
члены нутации и суточную аберрацию рассчитываются
по известным формулам, поэтому мы не будем останавли¬
ваться на их выводе.
*)' Вывод формулы (3.76) приведен в учебнике К. Л. Цветкова
«Практическая астрономия», 1951, стр. 403.
^R(V0-VJ,
(3.75)
(3.76)
234
Гл. III. Инструменты для определения времени
§ 81. Основные особенности астролябии
Призменная астролябия представляет собой надежный
и удобный инструмент для определения широты и по¬
правки часов. Для наблюдений используются яркие
(до 6?п) звезды. Поэтому в наблюдениях па астролябиях
применяются программы, состоящие в основном из тех же
звезд, которые наблюдаются на пассажных инструментах.
Этим астролябия выгодно отличается от фотографической
зенитной трубы. Анализ результатов наблюдений па приз¬
менных астролябиях показывает, что лучшие экземпляры
этих инструментов практически не уступают по точности
лучшим фотографическим зенитным трубам и фотоэлектри¬
ческим пассажным инструментам. Основным недостатком
призменной астролябии Данжона можно считать зависи¬
мость результатов наблюдений от точности совмещения
двух изображений звезды. Точность таких совмещений
хотя и незначительно, но зависит от индивидуальных осо¬
бенностей наблюдателя и от степени его тренированности.
Поэтому отдельным наблюдателям на призменных астро¬
лябиях может быть присуща своя личная ошибка, анало¬
гичная ошибке у наблюдателей на визуальных пассажных
инструментах. Величина личной ошибки у отдельных
наблюдателей на призменной астролябии не превышает
нескольких тысячных долей секунды времени.
§ 82. Приборы для определения
эфемеридного времени
Эфемеридное время (см. § 18) является математическим
понятием и не может быть получено на практике; вместо
него применяется эквивалент, получаемый путем прибав¬
ления ко времени TU поправки ДГ, найденной из сопо¬
ставления наблюденных и вычисленных на основе теории
координат тел Солнечной системы. Новая астрономическая
система времени ЕТ —TU+A77 является наилучшим при¬
ближением к равномерному времени. Часто эту систему
тоже называют эфемеридным временем, что вызывает
некоторую путаницу. Правильнее называть это время
наблюденным эфемеридным временем. Следует помнить,
что в силу ошибок наблюдений и неточностей эфемерид
время ЕТ не будет идеально равномерным.
§ 82. Приборы для определения времени
235
На практике для определения поправки А Г исполь¬
зуются наблюдения Луны, поскольку ее координаты
очень быстро изменяются.
Большой интерес представляло бы применение для
определения ЕТ фотографий искусственных спутников
Земли, находящихся на большой высоте, однако пока
величина А Т получается фотографическим способом
только из наблюдений Луны.
Фотографирование Луны среди окружающих ее звезд
производится на астрографах с фокусом в два метра
и более. Получение хорошей фотографии Луны среди
звезд сильно осложняется двумя обстоятельствами: во-
первых, Луна является очень ярким по сравнению со звез¬
дами объектом и, во-вторых, Луна движется среди звезд.
Она перемещается собственным движением примерно
на 0",5 за секунду. Поэтому экспозиция Луны для полу¬
чения четкого изображения не должна превышать Is,
но такой экспозиции явно недостаточно для получения
минимального числа опорных звезд, необходимых для вы¬
числения координат Луны. Чтобы устранить это затруд¬
нение, А. А. Михайлов в Пулкове для фотографирования
Луны на астрографе предложил специальную кассету
с экраном. Конструкция этой кассеты такова, что в начале
и в конце экспозиции звезд Луна остается закрытой
экраном. Лишь в середине экспозиции на короткий интер¬
вал времени экран открывается и Луна экспонируется
среди звезд. Основным недостатком такого метода явля¬
ется разновременность экспозиций Луны и звезд. Вслед¬
ствие атмосферной турбулентности и неправильностей
в ходе часового механизма изображения звезд колеб¬
лются; на фотографической пластинке фиксируются не¬
которые средние положения изображений звезд за время
экспозиции. Изображение же Луны среди изображений
звезд относится к некоторому случайному положению
астрографа и некоторому случайному состоянию атмо¬
сферы. Кроме того, в момент открытия экрана возможны
вибрации трубы астрографа, которые могут вызывать сме¬
щение изображения Луны на фотографической пластинке.
В 1954 г. Марковиц предложил оригинальный прибор
для фотографирования Луны с окружающими ее звездами.
Прибор позволяет сделать одинаковыми экспозиции Луны
и звезд. Для этого перед изображением Луны помещается
236
Гл. III. Инструменты для определения времени
медленно вращающийся светофильтр, который ослабляет
яркость Луны и делает благодаря своему вращению изо¬
бражение Луны неподвижным относительно изображений
звезд. Этот нейтральный светофильтр представляет со¬
бой плоскопараллельную пластинку в оправе (рис. 116).
Вращение пластинки происходит через специальную ку-
Фогропластинка '
Рис. 116. Принцип действия при¬
бора Марковица.
лачковую систему от синхронного мотора, скорость кото¬
рого может плавно меняться при изменении частоты пода¬
ваемого на вход мотора напряжения. Кулачковая система
выполняет в приборе Мар¬
ковица сразу две функ¬
ции: во-первых, она позво¬
ляет осуществлять враще¬
ние светофильтра как в
одну, так и в другую сто¬
роны, не изменяя направ¬
ления вращения мотора.
Во-вторых, форма кулачка
выбирается так, чтобы
движение светофильтра
происходило не совсем рав¬
номерно, а по определен¬
ному закону. Это необхо¬
димо, чтобы скомпенсиро¬
вать нелинейные члены
уравнения, выражающего
закон смещения луча
плоскопараллельным рав¬
номерно вращающимся
фильтром. Е сли с ветофильтр
толщиной d (рис. 117) по¬
вернут на угол г, то sin V-
преломления фильтра. То]
Фотопластинка
Рис. 117. Смещение изображения
плоскопараллельной пластинкой.
sin г//г, где п — коэффициент
щ расстояние р, на которое
§ 82. Приборы для определения времени 237
сместится изображение на фотопластинке, определится
по формуле
/> = Zsin(t-f) = d(sin^--£2J^^), (3.77)
\ \п2 — sin- i J
где l=AB — путь луча в фильтре. При фокусном расстоя¬
нии объектива астрографа, равном F, угловое смещение
изображения ^ на фотопластинке будет
, р d ( . . sin i cos i \ /0 n0\
1‘=F=f(s‘"—<M8>
Если выражение (3.78) разложить в ряд, то, кроме линей¬
ного члена, возникнут члены высших порядков, влияние
которых на р/ и приходится компенсировать неравно¬
мерным вращением фильтра.
При фотографировании Луны направление оси враще¬
ния светофильтра должно быть перпендикулярным к дви¬
жению изображения Луны на фотопластинке, поэтому
прибор Марковица должен иметь позиционное вращение
на трубе астрографа. Чтобы фокусировка астрографа
для Луны и звезд была одинаковой, в приборе Марковица
перед фотопластинкой параллельно слою фотографической
эмульсии помещается прозрачная плоскопараллельная
пластинка. Толщина и показатель преломления этой
пластинки должны быть такими же, как у светофильтра.
В центре пластинки имеется вырез, под которым находится
светофильтр. Таким образом, звездное поле проектиру¬
ется на фотоэмульсию через прозрачную плоскопарал¬
лельную пластинку, а Луна — через вращающийся свето¬
фильтр. Фокусировка астрографа с прибором Марковица
определяется обычно расчетным путем и проверяется
по звездам.
Положение изображения Луны на фотографической
пластинке относится к моменту времени, в который плос¬
кость светофильтра располагается параллельно плоскости
прозрачной пластинки. В течение экспозиции некоторые
моменты времени отмечаются на хронографе с помощью
специальной контактной системы. Эта система состоит
из рычага 1 с зубчатой гребенкой 2 на конце (рис. 118).
При вращении светофильтра рычаг 1 колеблется и гре¬
бенка 2 через систему контактов 3 замыкает и размыкает
238 Гл. III. Инструменты для определения времени
цепь печатающего хронографа, вызывая его срабатывание.
Обычно средний момент, полученный по ленте хронографа,
отличается от момента, когда фильтр и пластинка парал¬
лельны друг другу. Это вызывает ошиб¬
ку, аналогичную коллимации у пассаж¬
ного инструмента. Для ее исключения
производится второй снимок после пово¬
рота прибора Марковица по позиционному
углу на 180°.
Заметим, что фотографирование Луны
с прибором Марковица требует предва¬
рительных расчетов скорости и направ¬
ления движения Луны среди звезд для
моментов ее экспозиции. По этим данным
определяется необходимая скорость вра¬
щения светофильтра и позиционный угол.
Ошибка в позиционном угле и в скоро¬
сти вращения светофильтра приводит к
ухудшению четкости края изображения
Луны.
Если пластинка, через которую экспонируются звезды,
не плоскопараллельна, то возникнут дополнительные
ошибки, искажающие положение звезд на фотографи¬
ческой пластинке.
§ 83. Измерение фотопластинок
и вычисление поправки АТ
Для измерения на фотографической пластинке выби¬
раются изображения звезд, по возможности равномерно
распределенные по полю пластинки. Поскольку процесс
измерения лунного края отличается от измерения изобра¬
жений звезд, работа разбивается на два этапа. Сначала
измеряются изображения звезд и метка, нанесенная с по¬
мощью специального шаблона около центра изображения
Луны. Затем определяется положение центра Луны
относительно этой метки. Для этого производится изме¬
рение координат нескольких десятков точек края лунного
диска. Измерение края изображения Луны может произ¬
водиться как в прямоугольных, так и в полярных коор¬
динатах. При измерениях края лунного изображения
в полярных координатах фотопластинка вставляется в из¬
рЛААЛД^
О
Рис. 118. Кон¬
тактное устрой¬
ство в приборе
Марковица.
§ 83. Измерение фотопластинок
239
мерительный прибор, снабженный поворотным кругом.
Этот круг позволяет отсчитывать поворот фотопластинки
по позиционному углу с точностью до нескольких минут
дуги. Вращение фотопластинки должно осуществляться
практически около метки. Всякий раз после установки
нового отсчета по позиционному кругу делается сначала
наведение на метку, а потом на край изображения Луны.
Пусть точка М (рис. 119) представляет метку вблизи
центра изображения Луны, обозначенного точкой С.
Точка К есть одна из точек края изображения Луны.
Поместим в точку М начало системы прямоугольных
координат х, у; координаты точки С
будут х0, у{), а точки К — х, у. Если
исправить измеренные расстояния
между точкой М и точками края изо¬
бражения Луны за влияние диффе¬
ренциальной рефракции, то можно
написать
X2 у2 — р2,
(.X — х0)2 -f- (у — у0)2 = R2, (3.79)
где R — радиус изображения Луны.
Беря разность между вторым и пер¬
вым уравнениями, (3.79), найдем
х1 + у1~ 2ххо — 2УУо = R2 — Р2. (3.80)
Путем несложных преобразований, учитывая, что х—
= psin р, у=р cos р, получим следующее соотношение
с точностью до членов второго порядка:
р = R -f ж0 sin р -f у0 со? р — sin2 (р — р0), (3.81)
где р — позиционный угол точки края изображения
Луны, отсчитываемый от направления на полюс против
часовой стрелки, р0 — позиционный угол направления
МС. Для удобства вычислений формула (3.81) несколько
преобразуется. Практически координаты х0у0 определя¬
ются из следующего уравнения:
и — R0 — А/?0 -f- х0 sin р -[- у0 cos р. (3.82)
В атом уравнении р-—р'+Дрг+Др2, где о —измерен¬
ный радиус, Ap^frp' [i-\-lg2z cos2 (р—д) ] — поправка
за влияние дифференциальной рефракции, Др2 —
Рис. 119. К теории
измерений изобра¬
жения Луны.
240 Гл. III. Инструменты для определения времени
— — Х{) sin 2 (р — р0) — поправка за несовпадение на
фотопластинке метки с центром изображения Луны.
Вычисление Др2 требует предварительного определения
с небольшой точностью х0, у0. Это делается из уравнения
р — R0 = Д/?0 + sin р -f у0 cos р (3.83)
по измерениям пяти точек края изображения Луны.
R0 — приближенное значение радиуса изображения Луны,
а ДR0 — поправка к R0, q — параллактический угол
Луны.
Надо отметить, что визуальные измерения края изо¬
бражения Лупы очень трудоемки, утомительны и могут
вносить значительные ошибки как
случайного, так и систематиче¬
ского характера. Поэтому для из¬
мерения снимков Луны весьма це¬
лесообразно применять автомати¬
ческие измерительные машины.
В Пулкове, например, для этой
цели применяется фотоэлектриче¬
ский измерительный прибор, скон¬
струированный Н. Ф. Быстровым.
В этом приборе производится
автоматическое измерение рас¬
стояний от края изображения
Луны 1 до внутреннего края
кольцеобразного шаблона 2 (рис. 120). Этот край шаблона
представляет собой окружность с ошибками диаметров
около +0,2 мк. Шаблон сделан на фотопластинке. Фото¬
пластинка с шаблоном накладывается слой к слою эмуль¬
сии на измеряемую фотопластинку с изображением Луны.
Шаблон делается таким, чтобы зазор между изображением
Луны и внутренним краем окружности шаблона был
0,2—0,5 мм. Роль метки играет центр внутренней окруж¬
ности шаблона.
При автоматических измерениях число измеряемых
точек края изображения Лупы можно увеличить в не¬
сколько раз.
Опорные звезды и метка измеряются в системе прямо¬
угольных координат. Связь идеальных координат £, ?]
с измеренными .г, у производится по обычным для фото-
Рис. 120. Измерение
изображения Луны с по¬
мощью шаблона.
§ 83. Измерение фотопластинок
241
графической астрометрии формулам, например
Е &х —{— by —j— с —[- hx* —j— Ixy -f- тпу*, ]
Tj = dx+ey + j -^gx^ + qxy + ry1. j
(3.84)
Идеальные координаты E, вычисляются по сферическим
координатам звезд, взятым из звездного каталога.
Полученные после обработки фотопластинки топоцент-
рические координаты Луны относятся к равноденствию
звездного каталога, из которого были взяты координаты
а и 8 опорных звезд. Чтобы сравнить вычисленные по
измерениям пластинок координаты Луны с ее видимыми
координатами, взятыми из ежегодника на момент наблю¬
дения, необходимо проделать следующее:
1) привести координаты Луны на видимое место,
2) произвести учет параллакса Луны.
В ежегодниках, начиная с 1960 г., координаты Луны
даются на каждый час эфемеридного времени *).
Обозначим через а® и 8® координаты Луны, взятые
из ежегодника, для начала часа, в течение которого про¬
изводились фотографии Луны с прибором Марковица.
Связь этих координат Луны с координатами, получен¬
ными из наблюдений, будет определяться соотношениями
Величины Д1? Д2, Д{, Д2 представляют собой первые
и вторые интерполяционные разности, вычисляемые по
часовым значениям а® и 8®. Разрешив уравнение (3.85)
относительно п, находят доли часа по эфемеридному вре¬
мени, а следовательно, и само значение эфемеридного
времени ЕТ, которому соответствуют полученные из
наблюдений координаты Луны а и 8. Момент по всемир¬
ному времени, в который производились наблюдения
Луны, тоже известен, так как время экспозиции регистри¬
руется на хронографе, на который впечатываются пока¬
зания часов с известной поправкой. Разность ЕТ — TU
и дает поправку ДГ, которую необходимо прибавить ко
а — а® -f- п\ -f--^п{п — 1) Д2,
8 = 82 -f- п (п — 1) Д2.
(3.85)
*) До 1960 г. координаты Луны давались в астрономических
ежегодниках для всемирного времени.
242 Гл. III. Инструменты для определения времени
всемирному времени TU, чтобы получить наблюденное
эфемеридное время.
К сожалению, точность определения поправки ДГ
невелика. По паре пластинок она составляет около +0S,2.
Такие ошибки ие дают возможности определить ДГ па
небольших, в несколько месяцев, интервалах времени
с высокой степенью достоверности. Поэтому поправка
ДГ определяется обычно как средняя за год и публику¬
ется с точностью до сотых долей секунды лишь по про¬
шествии данного года. На следующий год величина ДГ
экстраполируется. Совершенно ясно, что такой метод
позволяет улучшить равномерность системы времени TU
лишь от года к году, не изменяя качество TU внутри года.
Большая трудоемкость обработки фотографических на¬
блюдений Луны приводит к тому, что окончательное
значение ДГ за данный год публикуется с задержкой в год
и более. Большие ошибки в определении ДГ делают на¬
блюденное эфемеридное время мало пригодным для тех
случаев, когда надо иметь высокоточную шкалу времени
на небольшом (меньше года) интервале. Однако при ана¬
лизе больших (в несколько лет) интервалов времени наблю¬
денное эфемеридное время имеет преимущество перед TU,
так как оно меньше искажено флуктуациями скорости вра¬
щения Земли. Если, например, вследствие флуктуаций
скорость вращения Земли плавно увеличивалась или
уменьшалась в течение года (такие флуктуации имели
место), то в системе времени TU это изменение не может
быть зарегистрировано без атомных эталонов, так как
такой же эффект дает процесс старения кварцевых часов.
Наблюденное эфемеридное время позволяет заметить и
учесть такие флуктуации.
§ 84. Павильоны для астрономических инструментов.
Влияние внешней среды на точность наблюдений
При организации астрономических наблюдений боль¬
шое внимание должно уделяться выбору рационального
типа павильона и места его расположения. Решение этого
вопроса тесно связано с изучением влияния внешней среды
на астрономический инструмент. Это влияние носит ха¬
рактер механических воздействий, вызванных колебани¬
ями почвы и ветром, а также характер различных терми¬
§ 84. Йавилъоны
243
ческих деформаций. Точность наблюдений понижается
также из-за наличия разного рода рефракционных анома¬
лий в павильоне (зальная рефракция) и над павильоном.
Конструкция павильона должна обеспечить макси¬
мальное ослабление действия этих вредных факторов.
Стены павильона делаются такой высоты, чтобы исклю¬
чить непосредственное действие ветра на инструмент.
Столб, на котором устанавливается инструмент, должен
обладать большой устойчивостью и малой чувствитель¬
ностью к вибрациям почвы. Поэтому столб делается доста¬
точно массивным и тщательно изолируется от фундамента
павильона и верхнего слоя почвы. Площадь основания
столба имеет размеры от 2,5 м2 до 10 ж2, в зависимости от
типа установленного на нем инструмента. Под основание
столба на грунт закладывается бетонная подушка. Чтобы
предотвратить сезонные колебания столба, его основание
должно располагаться на метр ниже уровня промерзания
почвы. Для ускорения просыхания столба в нем проделы¬
ваются сквозные каналы, проводящие воздух к внутрен¬
ним частям столба. Для уменьшения температурных
деформаций столба очень важна равномерная кладка
с тонкими одинаковыми швами. Чтобы предохранить от
неравномерного нагревания надземную часть столба, ее
закрывают деревянной обшивкой. От соприкосновения
с почвой боковые поверхности столба защищаются до¬
полнительными кирпичными или бетонными стенками.
Расстояние между этими стенками и столбом (порядка
нескольких десятков сантиметров) заполняется шлаком.
Следует также тщательно защитить столб от сырости. Для
этого применяются слои гидроизоляции. На рис. 121 изо¬
бражен разрез столба, предназначенного для установки
пассажного инструмента. Высота столба должна быть та¬
кой, чтобы инструмент был поднят над уровнем почвы
на 3—4 м, так как в близпочвенном слое имеют место
максимальные турбуленции воздуха, вызывающие дро¬
жание изображений и различного рода рефракционные
аномалии. По мнению Н. Н. Павлова, следует поднимать
инструмент по возможности выше над почвой. Он считает,
что наблюдения будут обладать более высокой точностью,
если пассажный инструмент находится на высоте в 40—
60 м, где турбуленция воздуха значительно меньше, чем
в близпочвенном слое.
244 Гл. III. Инструменты для определения времени
Надо, однако, отметить, что создание такого высокого
столба, обладающего большой устойчивостью, в астро¬
метрической практике не осуществлялось.
Большое внимание должно уделяться защите инстру¬
мента от разного рода термических воздействий, которые
Рис. 121. Столб для пассажного инструмента.
могут быть причиной возникновения разности температур
в отдельных частях инструмента. Эта разность температур
в свою очередь может вызвать нежелательные деформации
инструмента, приводящие к снижению точности наблюде¬
ний. Разность температур отдельных частей инструмента
может вызываться различными причинами. К их числу
относятся: тепловое излучение окружающих инструмент
предметов и стен павильона; тепловое влияние наблюдателя
на инструмент; изменение температуры воздуха в па¬
§ 84. Павильоны
245
вильоне; воздушные токи внутри павильона, если они дей¬
ствуют только на одну часть инструмента; неравномер¬
ное охлаждение инструмента, вызванное экранирующим
действием окружающих его предметов и различными ра¬
диационными свойствами отдельных узлов инструмента.
Резкое изменение температуры воздуха в павильоне, вы¬
званное, например, вторжением холодных масс воздуха,
приводит к возникновению температурных разностей в тех
частях инструмента, которые обладают разными способно¬
стями к теплоотдаче.
Неоднородность температурного поля внутри павиль¬
она может вызывать рефракционные аномалии. Источни¬
ком рефракционных аномалий может быть также ветер,
вызывающий турбулентные завихрения между трубой ин¬
струмента и верхней частью павильона. Однако было бы
ошибочным считать, что ветер является только источни¬
ком рефракционных аномалий. Ветер приводит к неравно¬
мерному охлаждению стенок павильона, проникая в па¬
вильон через крышу, он может вызвать и неравномерное
охлаждение инструмента, приводящее к термическим де¬
формациям. Одностороннее охлаждение стен павильона
ветром нарушает термическую картину внутри павильона,
что в свою очередь может привести как к рефракционным
аномалиям, так и к дополнительному термическому воз¬
действию на инструмент. В настоящее время исследова¬
ниями многих специалистов твердо установлено, что ре¬
зультаты астрономических наблюдений на пассажных
инструментах зависят от направления и скорости ветра.
Этот эффект получил название «эффекта ветра». Величина
поправок за эффект ветра зависит от конструкции павиль¬
она и тех мер, которые принимаются на данной обсерва¬
тории для борьбы с термическими воздействиями на
инструмент и зальной рефракцией. Максимальное значе¬
ние этих поправок имеет величину около +0S,01. Однако
при удачной конструкции павильона и дополнительной
защите инструмента от термических влияний величина
поправки за эффект ветра уменьшается в несколько раз
и практически не оказывает воздействия на точность
астрономических наблюдений.
Борьба с термическими и рефракционными эффектами
по сути дела и определяет конструкцию современного
астрономического павильона. Массивная кирпичная
246 Гл. III. Инструменты для определения времени
кладка стен, например, защитит инструмент и столб от
сильного дневного нагревания. Такая кладка не будет
чувствительна к охлаждающим одну часть павильона
порывам ветра, но благодаря большой теплоемкости стены
такого павильона будут источником значительного тепло¬
вого излучения. Разность температур южной и северной
стен окажется велика, и для полного выравнивания темпе¬
ратуры внутри павильона потребуется очень много вре¬
мени.
Стены железного павильона быстро принимают темпе¬
ратуру окружающего воздуха и не являются существен¬
ным источником тепловых излучений, но такие стены
вследствие большой теплопроводности не могут полностью
защитить инструмент от термического действия ветра.
Кроме того, в железном павильоне происходит очень силь¬
ный нагрев инструмента и столба в теплые солнечные дни.
Наиболее целесообразными в настоящее время следует
считать деревянные павильоны или павильоны из несколь¬
ких слоев различных материалов, например, из железа и
дерева. Большой интерес представляет использование для
строительства павильона разного рода современных пла¬
стиковых материалов. Поверхность павильона покрыва¬
ется обычно краской с максимальным коэффициентом
отражения.
Расстояние между объективом направленного в зенит
инструмента и верхним краем павильона не должно
быть очень большим, так как это может привести к появ¬
лению значительной зальной рефракции. Павильон обяза¬
тельно снабжается вентиляционными каналами, предо¬
храняющими внутренность павильона от перегрева в днев¬
ное время.
По форме современные павильоны разделяются в ос¬
новном на два типа: прямоугольные (рис. 122), у которых
раздвигается только одна крыша, и павильоны в форме
лежачего полуцилиндра (рис. 123). У павильонов второго
типа раздвигается весь полуцилиндрический шатер, не¬
подвижными остаются лишь торцовые полукруглые стены.
Для защиты от ветра в таком павильоне применяются
подъемные брезентовые шторы.
Чтобы защитить инструмент от действия неравномер¬
ного поля теплового излучения, имеет смысл покрывать
инструмент тонким слоем хорошего отражателя тепловой
§ 84. Павильоны
247
Рис. 123. Цилиндрический павильон.
248 Гл. III. Инструменты для определения времени
радиации. Рационально алюминировать, хромировать или
никелировать поверхность инструмента. Часто на инстру¬
мент надеваются экраны, покрытые высококачественным
отражателем теплового излучения.
Другим способом улучшения термической устойчивости
инструмента является применение вентиляторов. Они
создают равномерный поток воздуха, который, обвевая
весь инструмент, способствует более быстрому выравни¬
ванию температуры отдельных его частей и уменьшает
влияние на инструмент термического излучения окружа¬
ющих его предметов. Равномерный поток воздуха, созда¬
ваемый вентиляторами, очевидно, будет препятствовать
и возникновению рефракционных аномалий в павильоне.
Весьма важным является вопрос о выборе места для
астрономического павильона.
Очень нежелательна постройка павильона вблизи зда¬
ний и водоемов, так как они часто служат источниками
местных рефракционных аномалий над павильоном. Такие
аномалии могут иметь место в слое воздуха на высоте от
нескольких десятков до нескольких сотен метров над по¬
верхностью Земли. Нежелательна постройка павильонов
в непосредственной близости от крупных населенных пунк¬
тов, которые не только являются источниками рефракци¬
онных аномалий, но и засоряют воздух, а также сильно
подсвечивают небо в вечерние часы. Наиболее удобным
местом для постройки павильонов в средней полосе нашей
страны представляются ровные или слегка возвышенные
участки, покрытые однородной невысокой растительностью.
Для изучения влияния ветра на точность наблюдений
около павильона целесообразно поставить небольшую
метеорологическую станцию, на которой производилась бы
автоматическая запись направления ветра, его скорости,
температуры воздуха и его давления.
Неудачно построенный павильон или неудачно выбран¬
ное место для его строительства могут ограничить точность
наблюдений даже на самом совершенном астрометриче¬
ском инструменте.
Глава IV
НОВЫЕ СПОСОБЫ АСТРОНОМИЧЕСКИХ
НАБЛЮДЕНИЙ В СЛУЖБАХ ВРЕМЕНИ
§ 85. Использование радиоинтерферометров
для целей службы времени
Принципиально новая возможность определения все¬
мирного времени открылась с созданием радиоинтерферо¬
метров со сверхдлинной базой (РСДБ). Такие радиоинтер¬
ферометры представляют собой два радиотелескопа
(рис. 124), разнесенные на несколько тысяч километров.
Один из наиболее распространенных способов наблюдения
состоит в синхронной регистрации сигналов точечного
радиоисточника независимо в каждом из пунктов наблю¬
дений. Запись наблюдений в каждом пункте производится
на магнитную ленту с одновременной записью меток
времени и частоты от цезиевых или водородных стан¬
дартов, которые должны находиться на пунктах наблю¬
дений и должны быть синхронизованы между собой
с максимально возможной степенью точности. Поскольку
при приеме сигналов от радиоисточника используются
широкополосные усилители, на ленте записывается слож¬
ный спектр сигналов. Магнитные ленты с записью сиг¬
налов и метками времени сравнивают в специализирован¬
ной вычислительной машине и получают временную за¬
держку, т. е. выраженный во времени сдвиг записей,
вызванный тем, что пункты наблюдений не лежат в одной
плоскости, перпендикулярной к направлению на источ¬
ник. Иными словами, определяют время, необходимое,
чтобы сигнал от радиоисточника прошел путь I — тс,
где с — скорость распространения электромагнитных волн.
Можно показать, что задержка т будет связана с ко¬
ординатами радиоисточника а и В, параметрами базы, ее
Гл. IV. Новые способы наблюдений
длиной S и углом наклона к плоскости экватора ф, а
также звездным временем Г* таким соотношением:
l = xc = S cos ф cos 8 sin t -J- S sin ф sin 8, (4.1)
где t — часовой угол радиоисточника на меридиане,
проходящем через середину базы, t=T*—a.
Можно также показать, что для решения системы из
ряда уравнений (4.1) недостаточно наблюдать несколько
/ /
Рис. 124. Блок-схема радиоинтерферометра с большой базой.
раз только один радиоисточник, а необходимо наблюдение
по крайней мере трех радиоисточников. Иначе в общем
случае неизвестные не разрешатся. На практике при
наблюдении появляются еще две неизвестные инструмен¬
тального характера: ошибка синхронизации шкал времени
на пунктах наблюдений ДГ, отнесенная к начальному
моменту Г0, и расхождение этих шкал за время наблюде¬
ния на величину к (Т— Т0).
§ 85. Использование радиоинтерферометров 251
Коэффициент к характеризует относительный уход
частоты стандартов на пунктах наблюдений. Тогда урав¬
нение (4.1) примет вид
lz=-xc = S cos ф cos 8 sin t -f- S sin ф sin 8 -f-
+ c-bT+c-k(T-T0). (4.2)
Наблюдая три радиоисточника в четырех положениях
каждый, получают систему из 12 уравнений с 10 неизвест¬
ными: шесть координат радиоисточников, S, ф, ДГ и к.
Такая система может быть решена способом наименьших
квадратов. Для практического решения систему (4.2)
линеаризуют, полагая, что все неизвестные заранее
определены с некоторой степенью точности, и ищут только
небольшие поправки к ним.
Дифференцируя уравнение (4.2), получают:
-тг=с —s*u Ф cos^ s*n cos^ sin 8) dty -f-
-f- (cos-ф cos 8 sin t -[- sin ф sin 8) -)-
+ ( — cos ф sin 8 sin t -f- sin ф cos 8) db -f-
4* cos ф cos 8 cos t dt -f - dkT -f- {T — T0) dk.
(4.3)
Решение системы из 12 уравнений (4.3) позволяет уточ¬
нить координаты радиоисточников, параметры базы и полу¬
чить поправки dДГ и dt, которые и представляют интерес
для служб времени. Величина ЙДГ уточняет синхрониза¬
цию шкал времени двух пунктов на земной поверхности,
а величина dt=dT*—da дает поправку к звездному вре¬
мени среднего меридиана, если известна величина da с
достаточной точностью. Разделить величины dT* и da
невозможно. Если же значение da неизвестно, то, проводя
наблюдение одних и тех же радиоисточников ежедневно
и образуя разности вида dt2—dtx по каждому из источников,
получим изменения в скорости вращения Земли за сутки
или любой другой интервал, кратный суткам. Таким об¬
разом, можно получать все изменения в скорости вращения
Земли, но без нуль-пункта отсчета.
252
Гл. IV. Новые способы наблюдений
Большой интерес представляет оценка точности, с ко¬
торой могут быть получены значения ЙДГ и dt. Точность
измерения должна линейно увеличиваться с увеличением
размеров базы. На практике это происходит лишь до
определенной длины базы, так как при больших базах
ухудшаются условия видимости, источники можно на¬
блюдать лишь в малых часовых углах, а это приводит
к тому, что в уравнениях (4.3) коэффициенты при неиз¬
вестных становятся близкими, определитель системы ока¬
зывается малым, точность определения неизвестных па¬
дает. На точность определения неизвестных оказывает
свое влияние и подбор радиоисточников по склонению,
так как склонения радиоисточников, как и часовые углы,
в которых они наблюдаются, определяют коэффициенты
при неизвестных в уравнениях (4.3).
Большую роль в точности определения неизвестных
играет и расположение базы радиоинтерферометра, т. е.
угол ф. Таким образом, точность определения неизвестных
существенно зависит от целого ряда параметров: условий
видимости источников, их высоты над горизонтом, их
склонений, расположения базы на Земле. Более того,
эти параметры не являются независимыми. Так, например,
подбор источников на большей дуге по склонению может
сильно ограничить часовые углы, в которых они наблю¬
даются. Поэтому вычисление оптимальных условий яв¬
ляется важной задачей при организации радиоинтерферо-
метрических наблюдений. Для оптимизации условий на¬
блюдений применяются современные математические ме¬
тоды, которые позволяют при использовании достаточно
мощных ЭВМ и наложении некоторых допущений полу¬
чить наилучшие значения исходных параметров.
Приведем один из примеров такой оптимизации. Наблю¬
даются три радиоисточника по четыре раза каждый.
Ищется наилучшее расположение источников на небе
по склонению и наилучшие часовые углы, в которых
они должны наблюдаться, чтобы получить с наибольшим
весом значения dt- и -^-с£Д7\ При этом предпотагается,
что все радиоисточники наблюдаются на одинаковых ду¬
гах М от среднего меридиана. Зенитные расстояния источ¬
ников не должны превышать 70°, а их склонения нахо¬
дятся в пределах от +10° до +80°. Тогда, решая систему
§ 85. Использование радиоинтерферометров 253
(4.3) методом обратных матриц, получим значения неиз¬
вестных в таком виде:
(4.4)
— d ЛТ — Altldx1 -(- A12dx2 Altl2dx12,
dtx = A21dxx -(- A22dx2 -[- ... -(- A212dx12y
dt2 = AZtldx1-\- A^ 2dx2-\- ... -f-^43,i2^xi2>
dt% = A/kldx1 A^i2dx2 ^4,i2^Ti2>
где коэффициенты A{j могут быть вычислены заранее,
так как их значения зависят лишь от условий наблюдений,
т. е. от значений t, а, 8 и ф. Таким образом, варьируя эти
значения, можно определить наилучшие условия опреде¬
ления dt и <2ДГ.
Положив для этого, что ошибки величин dx носят слу¬
чайный характер и одинаковы для всех уравнений, и счи¬
тая, что все ошибки искомых величин пропорциональны
евклидовой норме совокупности коэффициентов, входя¬
щих в выражение для этого параметра, получим
в (d ДТ) = в (dx). В (d ДГ), в (dt.) = в (dx). В (dt.), (4.5)
где
В,
■=У,!Л'
Величины В. характеризуют изменение точности при
определении данного неизвестного относительно точно¬
сти определения dx. Задавшись ошибкой dx и вычислив
Bip можно прогнозировать ошибку величин dLT и dt.
Варьируя значения ф и Ы, определим потери точности,
т. е. В. для dM и dt при условиях
/х
к=1
B2(dtk) — min и В dilT^j = m\n.
Результаты оптимизации даны в таблице 10, где при¬
ведена потеря точности В для определения <2ДГ, а также
максимальная и минимальная потери точности при опре¬
делении dt.
Проведенная при заданных условиях оптимизация
показывает, цто наилучшим образом величины dt, а
254
Гл. IV. Новые способы наблюдений
Таблица 10
min В (dt) и шах В (di)
\ А*
ф\
±90°
75°
60°
45°
30°
5°
1,0
1,4
2,1
3,5
7,8
1,1
1,5
2,2
3,8
8,4
15
1,1
1,4
2,1
3,6
8,1
14
1,5
2,3
3,9
8,7
25
1,1
1,5
2,3
3,9
8,6
1,2
1,6
2,4
4,2
9,3
35
1,2
1,7
2,5
4,3
9,5
1,3
1,8
2,7
4,6
10,3
45
1,4
1,9
2,9
5,0
11,0
1,7
2,1
3,1
5,4
11,9
55
1,8
2,4
3,6
6,1
13,6
1,9
2,6
3,8
6,6
14,7
65
2,4
3,3
4,8
8,3
18,5
2,6
3,5
5,2
9,0
19,9
75
3,9
5,3
7,9
13,6
30,1
4,2
5,7
8,5
14,6
32,5
\ А*
ф\
±90°
75°
60°
45°
30°
5
3,0
4,5
7,7
15,9
44,8
15
3,6
4,9
8,3
16,9
47,7
25
4,1
5,7
9,1
18,1
48,0
35
5,1
6,8
10,3
19,6
48,5
45
6,2
8,4
12,1
21,8
49,5
55
8,0
10,6
14,8
25,2
53,5
65
11,0
13,9
19,7
31,6
65,5
75
17,7
21,5
29,8
46,1
100,0
§ 85. Использование радиоиптерферометров
255
следовательно, и всемирное время, определяются на интер¬
ферометрах, база которых вытянута по параллели (Д?=0).
С увеличением 0 точность определения dt падает в 3—
4 раза. Ошибка синхронизации также зависит от ф и бы¬
вает наименьшей при тех же условиях. Если положить,
что ошибка в определении dz составляет около 1 нсек,
то можно синхронизовать часы с ошибкой в несколько
наносекунд.
Подобная оптимизация позволяет также оценить
ошибки склонений и других параметров. Ее недостатком
является большое количество допущений. Некоторые из
них весьма искусственны.
Так, например, не всегда можно полагать все ошибки
величин dz одинаковыми хотя бы потому, что ошибки dz
заметно зависят от зенитного расстояния. В радиодиапа¬
зоне есть эффекты, аналогичные астрономической рефрак¬
ции.
Нельзя также строго полагать, что максимальные ча¬
совые углы у всех радиоисточников одинаковы; это про¬
тиворечит реальным условиям видимости. Поэтому такая
оценка носит скорее качественный, чем количественный
характер.
Возможна и более строгая оценка с введением весовой
функции для ошибок Лис вычислением условий види¬
мости (т. е. £тах) для каждого радиоисточника. Подобная
оптимизация требует сложных программ и сотен часов
счета на машинах типа БЭСМ-4М. Полную оптимизацию
целесообразно проводить для конкретных баз и конкрет¬
ных радиоисточников.
Несколько иной путь представляет создание интер¬
ферометров специализированного типа, рассчитанных на
решение одпой-двух задач.
Покажем, что для случая радиоинтерферометра, вы¬
тянутого строго по меридиану или по параллели, воз¬
можно решение задачи определения всемирного времени
и колебаний широты даже при условии наблюдений одной
пары и даже одного радиоисточника. Для этого выразим
параметры базы S и ф через координаты точек наблюдений
и их радиусы-векторы.
Обозначим через <р1? Х1? и ср2, Х2, Н2 геоцентрические
координаты радиотелескопов 1 и 2 в пунктах А и В, а
через zl9 tx и z2l t2 соответственно зенитные расстояния
256
Гл. IV. Новые способы наблюдений
и часовые углы радиоисточника в этих пунктах на момент
наблюдения (рис. 125). Координаты источника а и 8.
Из треугольников О АС и OLB получим соотношение
l=R2 cos z2—Rx cos zv
Зенитные расстояния объекта по формулам сфериче¬
ской астрономии будут
cos zx = sin 8 sin срх -f- cos 8 cos срх cos tv
cos z2 = sin 8 sin cp2 -f- cos 8 cos <p2 cos t2.
(4.6)
Тогда l=(R2 sin cp2—i?1sin sin 8-f(i?2 cos <p2 cos
—Rx cos cpx cos Zx) cos 8.
Если произвести два наблюдения одного и того же
источника и взять разность вида l2—Z1? то ее, после не¬
сложных преобразований, можно привести к виду
/2 — 1Х = —2 cos 8 sin -у- i?2 cos ср2 sin -f- у)—
— ft, cop sin (ltl — (4.7)
/ * /
где ДХ — разность долгот пунктов 4 и В, М — разность
звездных времен моментов наблюдений, a t0 — среднее
арифметическое из четы¬
рех часовых углов, в ко¬
торых произведено два
наблюдения на каждом
пункте, т. е.
*0={№) + 41) +
-Н2)+*£2)).
В разности Z2—Zi ис¬
ключается ошибка син¬
хронизации часов ДТ и,
если величина Д£ <[ 12h,
можно полагать, что раз¬
ность ходов стандартов
к (Т — Т0) будет невелика
и не окажет заметного влияния на точность результатов
для случая, когда предельная точность метода еще не
нужна.
Рис. 125. К теории радиоинтер¬
ферометра.
§ 85. Использование радиоинтерферометров 25h
Полагая, как и ранее, приближенно известными все
величины в формуле (4.7), будем искать к ним небольшие
поправки. Дифференцируя выражение (4.7), получим
d (12 — 1г) = 2 sin 8 sin "Y" j^2 cos ¥2 s'm (fo “f~ —
— cos sin (t0 — y^J db —
— 2 cos 8 sin у j^cos <p.2 sin (t0 -f- -y-)] dR2 +
-f- 2 cos 8 sin у £cos <px sin (t0 —~^~)\ ^1
2 cos 8 sin -y j^sin <p2 sin -f- y)] T?2d<p2 —
— 2 cos 8 sin у sin <px sin — y~)] #i^¥i —
— cos 8 cos у #2 cos <p2 sin 4^—
— i?x cos cpx sin
— cos 8 sin 4p J^i?2 cos cp2 cos -f- 4r~) +
-f- Hi COS cp! cos (f0 — 44)J d (ДХ) —
— 2 cos 8 sin 4p14?2 cos ®2 cos -f- -^-)—
— cos tpx cos —Y~j\ dtQ. (4.8)
Если база интерферометра вытянута по меридиану,
т. е. ДХ=0 или очень мало, и если наблюдения ведутся
симметрично относительно среднего меридиана, долгота
которого Х0=у —|— Х2), т. е. £о = 0, то уравнение (4.8)
будет иметь такой вид:
^ (^2 — h) — —cos 8 sin у [(Я2 cos <р2 -f~ ^1 cos срх) d (ДХ) -ф-
+ (Я2 cos <р2 — R1 cos <рА) 2 dt0].
В этом уравнении содержатся только две неизвестные
величины: dt0 и d (ДХ). Первая при проведении регуляр¬
258
Гл. IV. Новые способы наблюдений
ных наблюдений дает информацию о вращении Земли,
а вторая об изменении со временем разности долгот пунк¬
тов наблюдений. Изменение долгот происходит в силу
двух причин: из-за движения полюса и из-за смещения
блоков земной коры; последнее весьма мало и на ин¬
тервале порядка года им можно пренебречь. Что же ка¬
сается изменения d (ДА) из-за движения полюса, то для
его определения и отделения от изменений dt0 необхо¬
димо вести наблюдения сразу на трех радиоинтерферо¬
метрах, базы которых вытянуты по трем меридианам
с сильно различающимися долготами. Решая тогда урав¬
нение вида /*=а*-£+Ь*г7+/^£гр, можно определить не¬
известные нам прямоугольные координаты полюса (см.
формулу (1.44)) и dtrp — поправку к вычисленному зна¬
чению часового угла радиоисточпика относительно грин¬
вичского меридиана. При длине базы в несколько тысяч
километров точность определения dt0 будет около 0s,001
при условии определения задержки т с ошибкой не бо¬
лее 1 нсек. Оценку точности для любого конкретного слу¬
чая можно произвести, используя формулу (4.8).
Определение величины dt0 выгодно производить так¬
же на радиоинтерферометре с базой, вытянутой вдоль
по параллели, при условиях cpj = ср2, £0 = 90оэ -^-=90°
и R1=R2.
Это соответствует наблюдению источника в двух
кульминациях относительно среднего меридиана базы.
Используя формулу (4.8), получим
d (12 — Zi) = 2 cos 8 cos -4р [Л sin <р (df2 — dfx) —
— cos f • (dR2 — d^)] -f- 4 cos 8 sin 44 cos <p dt0. (4.9)
Из этой формулы также можно получить dt0l при ус¬
ловии, что члены (dy2—dyi) и (dR2—dRl) будут учтены.
Изменения разности поправок к широте dy2—dyi
происходят в основном из-за движения полюса и, следо¬
вательно, могут быть учтены из тех же радиоастрономи¬
ческих наблюдений. Разность dR2—dRx постоянна, ее
изменениями из-за приливов в теле Земли на первом этапе
исследований можно пренебречь.
§ 85. Использование радиоинтерферометров
259
Преимущество наблюдений одного радиоисточника
в двух положениях состоит в том, что на небе всегда можно
отыскать один достаточно мощный источник и, следова¬
тельно, нет необходимости в использовании очень боль¬
ших антенн.
К числу недостатков этого метода следует отнести
разновременность наблюдений, в силу которой могут
измениться атмосферные условия, что приведет к измене¬
нию пути луча в атмосфере, а также и то, что источник
при наблюдениях в двух кульминациях наблюдается на
разных зенитных расстояниях. Препятствием к повыше¬
нию точности будет и относительный уход частот генера¬
торов в перерыве между наблюдениями.
Все эти недостатки устраняются в способе, который
можно назвать аналогом метода Цингера в практической
астрометрии.
В этом способе наблюдаются два радиоисточника
с очень близкими склонениями в симметричных часовых
углах относительно меридиана, вдоль которого вытянута
база. Разность прямых восхождений подбирают примерно
равной 12 часам.
Источники наблюдаются сразу один за другим: сна¬
чала первый источник в часовом угле затем второй
в часовом угле t2=—t1.
Используя формулу (4.8) для разности наблюдений,
при ДХ=0, ^=90°, Z2=270°, R1=R2, можно написать
соотношение
~^d(l2 — Zx) = cos 8 [(sin cp2 — sin ft) (db2 — dSJ —
— (cos <p2 -f cos ft) d (ДХ) -f- (cos <p2 — cos ft) (dt2 -f- dt±)\ e
Входящая в это уравнение величина разности ошибок
склонений может быть большой, скажем, ±1", но она
постоянна и не оказывает влияния при изучении измене¬
ния со временем суммы dt2-{‘dt1, которая характеризует
изменение звездного времени на меридиане базы. Точ¬
ность такого способа существенно выше, чем при на¬
блюдении одного радиоисточника, так как оба источника
наблюдаются без большого временного перерыва и на
одинаковых зенитных расстояниях, что сильно умень¬
шает влияние атмосферы.
260
Гл. IV. Новые способы наблюдений
С помощью наблюдений двух радиоисточников в сим¬
метричных часовых углах можно получить изменение dt
от суток к суткам с ошибкой не более нескольких десяти¬
тысячных секунды времени. Сложность метода состоит
в подборе пар радиоисточников с близкими склонениями,
прямыми восхождениями, различающимися на 12ь и
одинаковыми частотными характеристиками.
Группа из трех специализированных интерферомет¬
ров, вытянутых по меридианам, разнесенным по долготе
на несколько десятков градусов, позволяет создать не¬
зависимую службу времени и широты, в которой измене¬
ния всемирного времени (без нуль-пункта) и координат
полюса будут определяться по одной серии наблюдений
с точностью выше 0s,001. Такая точность выше, чем
у международных^служб времени и широты, использую¬
щих для получения своих результатов данные несколь¬
ких десятков служб, ведущих оптические наблюдения.
При этом точность в 0s,001 нельзя считать предельной,
так как она пока лимитируется аппаратурой, которая
еще далека от совершенства.
Есть все основания полагать, что использование РСДБ
для создания служб точного времени и движения полюса
позволят получить в дальнейшем информацию о вращении
Земли с ошибкой не более ±0s,0001. Эта информация прак¬
тически не будет зависеть от погоды, т. е. будет почти не¬
прерывной. При этом в качестве «побочного» материала
можно будет получать данные о приливах в твердом теле
Земли, о движении материков, уточнять долготы и с вы¬
сокой степенью точности синхронизовать часы в пунктах
наблюдений. Наблюдение группы радиоисточников дает
возможность вычислить и их координаты, что, впрочем,
не входит в число задач, рассматриваемых в данной
книге.
Внедрение РСДБ в астрометрическую практику, к со¬
жалению, происходит крайне медленно. К настоящему
моменту имеется лишь небольшой список радиоисточни¬
ков, координаты которых определены методом радио¬
интерферометрии. Можно указать всего 2—3 работы по оп¬
ределению продолжительности суток на РСДБ с точностью
в пределах от ±0\001 до ±0\0001.
Основным препятствием к использованию РСДБ
в астрометрии следует считать их высокую стоимость и
§ 85. Использование радиоинтерферометров 261
практически полное отсутствие у астрометристов кадров,
способных работать на радиоинтерферометрах. Техни¬
чески проблема использования РСДБ достаточно сложна
и требует привлечения многих высококвалифицирован¬
ных специалистов в области электроники и математики.
Большинство радиоисточников обладает весьма малыми,
порядка нескольких единиц, потоками (единица потока
равна 10_2G em/м2). Поэтому чтобы произвести запись
сигнала от такого источника, необходимы антенны, диа¬
метр которых должен превышать 20 м. Оптимальными
следует, вероятно, считать антенны с диаметром в 30—
60 м, так как дальнейшее увеличение диаметра антенн
приведет к их резкому удорожанию.
Регистрация сигнала производится с применением
сложной, а зачастую и уникальной аппаратуры: усили¬
телей параметрического и мазерного типа, магнитофонов,
способных осуществлять записи с полосой в несколько
мегагерц, высокоточных стандартов частоты со стабиль¬
ностью около 1-10"13, приемной аппаратуры, обеспечи¬
вающей синхронизацию шкал времени пунктов наблюде¬
ний с точностью в несколько микросекунд. Для корреляции
записей от источника, проведенных в пунктах наблю¬
дений, необходима специализированная ЭВМ. Если стоит
задача оперативного получения информаций, возникает
потребность в срочной перевозке записей одного пункта
в другой или создания особого канала связи.
Эти трудности тормозят внедрение РСДБ и в какой-то
степени ограничивают сейчас их точности. Так, сличение
двух записей до 1 нсек является сейчас почти предель¬
ным по точности, хотя для целого ряда задач этой точности
недостаточно.
Повышение точности определения временной задержки,
доведение ее ошибки до ±0,1 нсек, а если возможно, и
до меньшей величины — одна из основных инструменталь¬
ных задач, возникающих при использовании РСДБ
в астрометрии.
Другой важной задачей надо считать детальное, про¬
веденное на больших рядах наблюдений, изучение влия¬
ния атмосферы на точность определения временной за=-
держки. Когда точность Корреляции будет выше одной
наносекунды,- это влияние, будет заметно, особенно на
больших зенитных расстояниях. • .. . .
262
Гл. IV. Новые способы наблюдений
Проблема использования РСДБ в астрометрии и гео¬
физике, безусловно, выходит за рамки задач служб вре¬
мени. Рассмотренные задачи есть лишь часть большой и
сложной проблемы. В качестве примера отметим, что на¬
блюдения на РСДБ могут быть основаны, скажем, не на-
определении временной задержки х, а на определении
доплеровского сдвига частот источника относительно
частот стандартов на пунктах наблюдений. Можно про-
о dz
вести вычисления, оперируя не с т, а с величиной ,
пользуясь методикой, аналогичной приведенной. Суще¬
ствуют проекты создания каталогов радиоисточников и
получения информаций о вращении Земли с использова¬
нием сложных комплексов, состоящих из нескольких син¬
хронно работающих антенн. Сложность задачи задержи¬
вает ее осуществление, но, безусловно, это одна из наи¬
более перспективных проблем современной астрометрии.
§ 86. Использование лазерной локации ИСЗ
и Луны для определения всемирного времени
и уточнения координат пунктов наблюдений
Лазерные наблюдения ИСЗ и Луны могут быть исполь¬
зованы для определения поправок к всемирному времени.
Методика получения этих поправок существенно отли¬
чается от методики получения поправок часов из наблю¬
дения звезд или радиоисточников. Дело в том, что ИСЗ
и Луна не представляют на небе таких «неподвижных»
реперов как, скажем, радиоисточники. Теории движения
ИСЗ и Луны достаточно сложны и использовать их как
реперы, по двум наблюдениям которых можно сразу
определить период обращения Земли вокруг оси, не пред¬
ставляется целесообразным. Однако сопоставление тео¬
рии движения Луны и ИСЗ с лазерными наблюдениями
этих тел позволяет получить поправки к всемирному вре¬
мени. Эти поправки можно получить при построении тео¬
рии движения ИСЗ, основанной на большом числе на¬
блюдений, производимых во всемирном времени. От¬
метим сразу, что отделение поправок к скорости вращения
Земли от возмущений во вращении ИСЗ — задача весьма
сложная, трудно разрешимая. Это обстоятельство при¬
вело к тому, что использование лазерных наблюдений
§ 86. Использование лазерной локации ИСЗ и Луны 268
в практике служб времени пока еще не нашло сколько-
нибудь заметного применения. Значительно более эффек¬
тивна лазерная локация при уточнении теорий движения
Луны и ИСЗ, координат пунктов наблюдений, при опре¬
делении расстояний между пунктами наблюдений и движе¬
ния полюсов Земли.
Принцип решения этих задач состоит в следующем.
Рассмотрим прямоугольную систему координат XYZ,
связанную с Землей, с началом в центре масс Земли.
Ось Z направлена по оси вращения
Земли, а оси XY расположены
в плоскости земного экватора так,
что ось X параллельна плоскости
гринвичского меридиана (рис. 126).
Точка М — пункт наблюдений на
поверхности Земли. Спутник нахо¬
дится в точке С. It — радиус-вектор,
задающий положение точки на Земле,
а г — радиус-вектор, определяющий
геоцентрическое положение спут¬
ника на некоторый момент звезд¬
ного гринвичского времени Т*. Век¬
тор р задает топоцентрическое поло¬
жение ИСЗ в момент Т*. Эти три вектора связаны соотно¬
шением
R -j-p = r.
Обозначим через а, 8 и а', 8' соответственно геоцен¬
трические и топоцентрические экваториальные коорди¬
наты спутника, а через tut' его часовые углы. Проекти¬
руя векторы р, г, R на оси XYZ, получим соотношения
Х— г cos8 cos t — р cos Ь1 cos tr,
У = r cos 8 sin £— p cos 8' sin t1, * (4.10)
Z = r sin 8 — psinS'.
Эти соотношения позволяют получить прямоугольные
координаты точки М по известным из теории значениям
а, 8, г и наблюденным величинам а', 8' и р, т. е. при ус¬
ловии, что совместно и синхронно с лазерным определе¬
нием р ведутся астрометрические определения а' и 8'.
Если же координаты пункта наблюдений известны, так же
Рис. 126. К теории
наблюдения ИСЗ.
264
Гл. IV. Новые способы наблюдений
как известны а, 8, г, то можно ставить вопрос об уточне¬
нии шкалы времени, в системе которого ведутся наблю¬
дения. В случае только локационных наблюдений, когда
определяется только величина р, уравнения (4.10) надо
преобразовать таким образом, чтобы исключить члены,
содержащие 8' и t'. Для этого достаточно сложить их
после возведения в квадрат. Тогда получим:
р2 = (г cos 8 cos t — Xf -J- (r cos 8 sin t — Yf -(-
-f (r sin 8 — Z)2. (4.11)
Решая линеаризованную систему уравнений (4.10),
полученную по лазерным наблюдениям ИСЗ с разных
точек земной поверхности, можно получить любой из ин¬
тересующих нас параметров, т. е. либо уточнять коорди¬
наты пунктов, либо уточнять теорию движения ИСЗ,
либо производить совместное вычисление всех этих ве¬
личин. В космической геодезии эту задачу разбивают,
как правило, на прямую и обратную.
В прямой задаче предполагается, что координаты пунк¬
тов известны с достаточной точностью, и ищется вектор г.
Вектор р получают из измерений, причем, если измеря¬
ется только модуль вектора р, то необходимо наблюде¬
ние с трех пунктов, а при измерении только разностей
дальностей до двух положений ИСЗ необходимо наблюде¬
ние с шести пунктов.
В обратной задаче считается, что вектор г известен
из теории, и ищется вектор 2?, т. е. положение пунктов
на земной поверхности, причем при измерении только
дальностей до спутника требуется также три наблюде¬
ния. Если возникает необходимость построения геодези¬
ческой сети только по наблюдениям ИСЗ, необходимо
производить совместное решение целого ряда прямых и
обратных задач. При этом возможны два метода: орби¬
тальный и метод синхронных наблюдений. В первом ме¬
тоде объединение прямой и обратной задачи производится
через определение изменений вектора г. В этом случае
не требуется совмещения по времени наблюдений, выпол¬
ненных для решения прямых и обратных задач. Второй
метод — метод синхронных наблюдений, когда наблюде¬
ния спутника производятся синхронно с целого ряда
пунктов. Такие наблюдения позволяют получить мгно¬
венные значения вектора г, при условии, что координаты
§ 86. Использование лазерной локации ИСЗ и Луны 265
ряда пунктов, называемых опорными, известны с высокой
степенью точности. Этот метод называют методом кос¬
мической триангуляции.
Метод космической триангуляции можно считать
чисто геометрическим; он требует большей строгости
в организации, и временнбй синхронизации с ошибкой
не хуже 0s,0001. В орбитальном методе используется тео¬
рия движения ИСЗ. Для получения данных этого метода
применяется динамический способ обработки резуль¬
татов, сущность которого заключается в сопоставлении
предвычислениых положений спутника с наблюденными.
Поскольку при вычислении координат спутника при¬
ходится учитывать большое количество факторов, в част¬
ности, влияние гравитационного поля Земли и его особен¬
ностей, сопротивление атмосферы, световое давление и
т. д., в обработку наблюдений необходимо включать очень
большое количество материала. Наблюдения должны
производиться по возможности на большей части траек¬
тории спутника и с нескольких пунктов. Должно быть
достаточно много наблюдений, равномерно распределен¬
ных также и по времени. С точки зрения вычислительной
математики эта задача тоже достаточно сложна и требует
применения мощных ЭВМ.
Эти обстоятельства при определении координат пунк¬
тов на Земле заставляют отдавать предпочтение синх¬
ронному методу наблюдений спутников.
Рассмотрим теперь принцип работы лазерной уста¬
новки для определения расстояния до ИСЗ или Луны
(рис. 127).
Лазерная установка состоит из передающей и при¬
нимающей частей. В состав передающей части входит не¬
посредственно лазерная головка, телескоп, через который
луч лазера направляется на объект, и гид, позволяющий
производить визуальное наведение на объект, если он
достаточно ярок. Если объекты наблюдения слабы, уста¬
новка должна снабжаться программным устройством,
которое позволяет отслеживать объект по его предвари¬
тельной эфемериде. Наиболее часто применяемыми ла¬
зерами бывают рубиновые лазеры, в которых активной
средой служит кристалл окиси алюминия А1203 с неболь¬
шой примесью ионов хрома Gr3+. Оптическая накачка
лазера, работающего в импульсном режиме, производится
266
Гл. IV. Новые способы наблюдений
мощной импульсной лампой. Длина рабочей волны
0,694 мкм. Лазерные установки используются для опре¬
деления расстояния до спутника и значительно реже
для освещения спутника с целью получения его фотогра¬
фий. В последнем случае нужна исключительно мощная
установка. В лазерных дальномерах выходная мощность
Рис. 127. Лазерная дальномерная установка Смитсоновской астро¬
физической обсерватории.
лазера составляет обычно от нескольких десятков до со¬
тен мегаватт, а длительность импульса колеблется от еди¬
ниц до десятков наносекунд.
Приемная часть лазерной установки состоит из теле¬
скопа-приемника (для удаленных объектов передача
и прием лазерных импульсов иногда осуществляется
с одного телескопа с временной селекцией), фотоумножи¬
теля с узкополосным фильтром и электронного счетчика
с точностью от 10 до 1 нсек.
В момент выхода лазерного импульса (рис. 128) про¬
исходит запуск электронного счетчика, который останав¬
ливается отраженным от спутника или Луны сигналом,
принятым через приемный телескоп на фотоумножитель.
Чтобы уменьшить возможность ложных, вызванных
§ 86. Йсполъзование лазерной локации ИСЗ и Луны 267
помехами, остановок счетчика, применяется временнбе
стробирование, сущность которого состоит в следующем.
Время прихода отраженного импульса бывает прибли¬
женно известно, поэтому канал счетчика, по которому
производится остановка счета, остается запертым все
время, за исключением короткого интервала, немного
перекрывающего расчетный момент
прихода отраженного импульса.
Измеренный на счетчике интер¬
вал времени AZ позволяет, зная ско¬
рость света с, определить дальность
до объекта по формуле
1
Точность, с которой определяется
дальность, зависит в основном от
трех факторов:
1) разрешающей способности счет¬
чика, измеряющего время Д£;
2) рефракционных аномалий, вы¬
зывающих изменения пути света
в атмосфере и составляющих вели¬
чину около 20 см;
3) крутизны фронта сигнала и
его длительности.
Последнее обстоятельство играет
роль в тех случаях, когда мощ¬
ность принятого сигнала настолько
мала, что удается зарегистрировать
лишь его наличие, а не какую-либо точку на его фронте.
В этом случае возникает необходимость использова¬
ния больших телескопов, способных собрать значитель¬
ное количество света.
Для приема слабого отраженного сигнала нет необ¬
ходимости в телескопах высокого качества. Вполне до¬
статочно, чтобы весь свет от главного зеркала был собран
на катод фотоумножителя, размеры которого обычно пре¬
вышают 10 мм. Поэтому для нужд лазерной локации
иногда используют установки из группы больших зеркал,
вообще говоря, невысокого качества, но зато собирающих
много света.
Рис. 128. Блок-схема
лазерной установки.
1 — передающий те¬
лескоп, 2 — лазер,
8 — принимающий те¬
лескоп, 4 — ФЭУ
с фильтром, 5 — блок
стробирования, 6 —
электронный счетчик.
268
Гл. IV. Новые способы наблюдений
Учитывая основные источники ошибок, можно утверж¬
дать, что точность одного определения расстояния по од¬
ному лазерному «выстрелу» будет составлять несколько
десятков сантиметров. Если сигнал достаточно силен и
если за время сеанса проведено несколько десятков опре¬
делений дальности (что уменьшает влияние атмосферы),
можно полагать, что точность определения дальности
будет задаваться в основном разрешающей способностью
счетчика. При частоте счета 109 гц она составит +15 см.
Моменты наблюдения, т. е. моменты определения даль¬
ности, регистрируются на хронографе с последующей
привязкой к шкале, задаваемой сигналами точного вре¬
мени. Это необходимо для приведения всех наблюдений
различных пунктов к единой системе времени.
Чтобы получить достаточно мощный отраженный си¬
гнал, на спутнике или Луне устанавливается специальный
уголковый отражатель, представляющий, в простейшем
случае, внутреннюю часть трехгранного угла из квар¬
цевых зеркал. Свет, попадая внутрь такого угла, отра¬
жается обратно в том же направлении. Уголковые отра¬
жатели составляют обычно из целой группы подобных
зеркал.
§ 87. Лазерный гироскоп и возможность
его применения в службах времени
Большой интерес для изучения вращения Земли пред¬
ставляет использование оптического квантового гиро¬
скопа как прибора, позволяющего непосредственно ре¬
гистрировать все нерегулярности во вращении земного
шара.
Необходимо сразу оговориться, что пока точность
лазерных гироскопов явно недостаточна для определения
флуктуаций в скорости вращения Земли, однако быстрый
прогресс техники в этой области делает эту проблему
весьма и весьма заманчивой.
Принципиальное устройство лазерного гироскопа до¬
вольно просто. Лазер, излучающий в обе стороны, со¬
здает два луча, которые при помощи системы четырех
зеркал (рис. 129) направляются навстречу друг другу.
Благодаря дополнительному зеркалу и тому, что одно
из зеркал сделано полупрозрачным, оба луча попадают
§ 87. Лазерный гироскоп
269
на регистрирующее устройство, которым служит фото¬
умножитель.
Такую систему можно рассматривать как замкнутый
резонатор, в котором меж¬
ду зеркалами расположе¬
но активное вещество.
В системе возникает опти¬
ческая генерация. Два све¬
товых потока циркулируют
в оптическом гироскопе
по и против часовой стрел¬
ки. Когда эти потоки по¬
падают на фотоумножи¬
тель, они образуют ин¬
терференционную картину
из светлых и темных полос.
Если оптическому гиро¬
скопу задать некоторую
скорость вращения, прои¬
зойдет изменение интерфе¬
ренционной картины, воз¬
никнет чередование свет¬
лых и темных полос, фиксируемое фотоумножителем.
Скорость изменения этой картины будет зависеть
от скорости вращения гироскопа и от его размеров. Та¬
ким образом, частота электрических колебаний, возника¬
ющих на фотоумножителе, будет функцией скорости вра¬
щения гироскопа. Если бы удалось создать лазерный гиро¬
скоп, способный чувствовать неравномерности во враще¬
нии Земли и достаточно стабильный, чтобы отделить его
собственные шумы от этих неравномерностей, можно
было бы получить прибор, дающий полную, непосред¬
ственную информацию о вращении земного шара. Для
этого достаточно сравнить частоту, генерируемую таким
гироскопом, с частотой атомного стандарта. Сравнитель¬
ная простота и информативность такого прибора, при до¬
статочной его точности, безусловно, привели бы к тому,
что все остальные методы определения скорости вращения
Земли утратили бы свое значение.
Однако при этом следует учитывать, что стабильность
такой установки должна быть не хуже 10“9 от периода
вращения земного шара вокруг его оси.
Рис. 129. Лазерный гироскоп.
270
Гл. IV. Новые способы наблюдений
Точность лазерного гироскопа может быть оценена
из следующих простых соотношений. Обозначим через L
сторону квадрата, по которому идут лучи лазера, через
v — линейную скорость точки, находящейся посередине
одной из сторон, так что ее угловая скорость 2, задавае¬
мая вращением гироскопа, будет разна и: (-у).
Легко показать, что разность времен, необходимая
лучам света, чтобы обежать контур в направлениях про¬
тив и по его вращению, будет представлена соотношением
"=*[4(‘+т)Ч(‘-т)].
откуда, переходя к угловой скорости, получим
АТ = — Q,
с-
где S — площадь, ограниченная сторонами резонатора.
Согласно теории стимулированного излучения, раз¬
меры резонатора влияют на частоту излучения. Можно
считать, что в оптическом гироскопе имеют место два
гармонических колебания с очень близкими частотами.
Тогда разностная частота Av=v2—vx может быть
представлена как
л 4*S о
Av = voT7-T2>
где
с
vo — у,
X — длина волны лазера. Угловая скорость вращения
гироскопа тогда будет
п _ Av . L • X
* — 45“•
Таким образом, точность определения 2 на лазерном
гироскопе будет увеличиваться с увеличением его разме¬
ров и уменьшением длины волны, на которой он работает.
К числу недостатков подобных гироскопов следует
отнести полную потерю чувствительности при очень ма¬
лых 2.
§ 87. Лазерный гироскоп
271
Скорость вращения Земли лазерные гироскопы «чув¬
ствуют» вполне надежно, генерируя частоту от нескольких
десятков до сотен герц, в зависимости от их параметров.
Конструктивно современные лазерные гироскопы пред¬
ставляют собой небольшие, иногда даже монолитные
блоки из кварца, у которых часть поверхности играет роль
зеркал. Такие гироскопы хороши в самолетах, на кораб¬
лях, ракетах. Для лазерного гироскопа, используемого
в целях изучения вращения Земли, вероятно, целесооб¬
разнее использовать стабильные установки больших раз¬
меров, помещенные в термостатированные камеры. Поиск
оптимальных размеров астрометрических лазерных гиро¬
скопов пока еще дело будущего. Можно лишь надеяться,
что применение новых видов лазеров, работающих на
более коротких волнах, приведет к созданию гироскопа,
надежно и с большой точностью определяющего многие
виды неравномерностей во вращении Земли.
Глава V
СЛУЖБА ВРЕМЕНИ
§ 88. Международная Служба времени
Термин «служба времени» имеет два значения: во-пер¬
вых, это совокупность всех работ, связанных с определе¬
нием, хранением и распространением точного времени-
во-вторых, так называются специальные лаборатории;
которые практически выполняют эти работы. Службы
времени являются научными лабораториями астрономи¬
ческих обсерваторий, высших учебных заведений и на¬
учно-исследовательских институтов. Поэтому наряду с вы¬
полнением программных работ службы времени ведут ис¬
следования методов и инструментов, используемых для
определения, хранения и распространения точного вре¬
мени, а также занимаются изучением актуальных науч¬
ных проблем, связанных с измерением времени. К послед¬
ним прежде всего относятся: вопрос о неравномерности
вращения Земли вокруг оси, вопрос о стабильности гео¬
графических долгот точек земной поверхности и опреде¬
ление скорости распространения радиоволн. Необходимо
только заметить, что решение этих проблем стало воз¬
можным лишь в последние годы, после того как резуль¬
таты работ служб времени приобрели высокую точность.
Необходимость измерения времени, как известно,
была одной из причин, которые привели к возникновению
и развитию астрономии как науки. Поэтому служба вре¬
мени в первом значении этих слов возникла еще в глубо¬
кой древности и история ее развития неразрывно связана
с развитием практической астрономии.
Службы времени как специальные научные лаборато¬
рии стали создаваться сравнительно недавно. Организа¬
ция их началась, по сути дела, лишь после изобретения
§ 88. Международная Служба времени
273
русским ученым А. С. Поповым радио (1895 г.). До этого
изобретения развитие и прогресс службы времени были
медленными и. незначительными. Существовавшие службы
времени занимались главным образом разработкой раз¬
личных способов астрономических определений времени,
улучшением качества часов и приборов для сравнения их
показаний. Методы распространения времени были при¬
митивными и недостаточно точными. Отдельные службы
времени фактически не имели возможности сравнивать
результаты "своей работы с другими.
Изобретение радио коренным образом изменило ха¬
рактер и методы работ служб времени. Практическое при¬
менение радио для передачи сигналов времени на любые
расстояния и с весьма высокой степенью точности по¬
зволило каждой службе времени легко и просто сравни¬
вать свои результаты с другими, выявлять и устранять
различные недостатки в работе.
Совершенный метод распространения времени по
радио коренным образом изменил и упростил использование
результатов работ служб времени для практических и
научных целей (определения долгот, измерения силы тя¬
жести и т. п.), что в свою очередь привело к развитию
новых методов работы самих служб времени. Все это ока¬
залось мощным стимулирующим фактором для бурного
развития как отдельных лабораторий, так и всей службы
времени. Радио позволило связать работу отдельных
служб времени в единое целое, в одну систему. Уже пер¬
вые опыты по передаче сигналов точного времени по радио,
произведенные в начале XX в., показали необходимость
создания международной организации, которая коорди¬
нировала бы подачи радиосигналов времени и опреде¬
ляла их погрешности. В 1912 г. по предложению Бюро
долгот в Париже была созвана Международная конфе¬
ренция, целью которой было изучение возможности об¬
разования единой системы времени. На конференции при¬
сутствовали астрономы, геодезисты, представители транс¬
порта и связи из шестнадцати стран. Конференция
избрала специальный комитет под председательством ди¬
ректора Пулковской обсерватории академика О. А. Бак-
лунда. В задачу этого комитета входило выполнение всех
необходимых формальностей по организации Междуна¬
родной комиссии времени и Международного Бюро вре^
274
Гл. V. Служба времени
мени. Комитет должен был также разработать программы
подач радиосигналов точного времени и добиться их ут¬
верждения всеми государствами. Мировая война 1914 г.
прервала деятельность комитета и создание Международ¬
ного Бюро времени не было осуществлено.
В 1919 г. в Брюсселе на специальной конференции был
создан Международный астрономический союз (MAC).
Обычно с интервалом в три года созываются съезды MAC,
но основная научнооргапизационная деятельность MAC
сосредоточена в 48 комиссиях по разным разделам и фун¬
даментальным вопросам астрономии. Комиссия № 31
занимается вопросами времени. Одним из первых реше¬
ний этой комиссии было учреждение постоянно действу¬
ющего Международного Бюро времени (МБВ) с местом
пребывания в Париже. Деятельность МБВ началась
с 1 января 1920 г. Первым директором МБВ был избран
Байярд. С 1924 по 1964 г. директором МБВ был Стойко,
а с 1964 г. стал Гино (все — представители Франции).
Основной задачей МБВ является координация работ и
обобщение результатов всех служб времени мира. Обоб¬
щение результатов предполагалось публиковать в специ¬
альных бюллетенях. Однако первые «сводные моменты»
МБВ были опубликованы только в 1931 г.
§ 89. Служба времени СССР
В нашей стране организация служб времени началась,
по сути дела, только после Великой Октябрьской соци¬
алистической революции. 1 декабря 1920 г. Главная
астрономическая обсерватория АН СССР в Пулкове, после
предварительных опытных передач, приступила к регу¬
лярной трансляции радиосигналов точного времени через
Петроградскую радиостанцию «Новая Голландия». Сиг¬
налы времени передавались ежедневно, сначала в 19 часов
30 минут, а с июля 1921 г. — в 19 часов по всемирному
времени.
С 25 мая 1921 г. Служба времени Пулковской обсерва¬
тории стала передавать сигналы точного времени и через
Московскую Октябрьскую радиостанцию на Ходынке,
ежедневно в 22 часа по всемирному времени.
Деятельное участие в этих работах принимала также и
лаборатория времени Главной палаты мер и весов в Пет¬
§ 89. Служба времени СССР
275
рограде, ныне Служба времени Всесоюзного научно-иссле¬
довательского института метрологии (ВНИИМ) в Ленин¬
граде.
В 1924 г. при Пулковской обсерватории и под предсе¬
дательством ее директора А. А. Иванова был учрежден
Междуведомственный комитет Службы времени, в кото¬
рый вошли представители различных ведомств и учрежде¬
ний. Задачей Междуведомственного комитета была разра¬
ботка и осуществление всех мероприятий по обеспечению
нужд различных областей народного хозяйства и науки
СССР в знании точного времени. Комитет способствовал
организации новых служб времени и развитию их работ.
Так, в 1928 г. была организована Служба времени Таш¬
кентской астрономической обсерватории, которая с 1929 г.
стала транслировать сигналы точного времени через мест¬
ный радиопередатчик. С начала 1931 г. стала передавать
сигналы точного времени Служба времени Государствен¬
ного астрономического института им. П. К. Штернберга
(ГАИШ), созданная в 1929 г. на базе оборудования, имев¬
шегося в Астрономической обсерватории Московского уни¬
верситета. В 1931 г. в Москве была организована вторая
служба времени — при Центральном научно-исследова¬
тельском институте геодезии, аэросъемки и картографии
(ЦНИИГАиК). В дальнейшем были созданы еще две
службы времени: объединенная Служба времени Харьков¬
ской астрономической обсерватории и Харьковского ин¬
ститута метрологии и стандартизации (1935 г.) и Служба
времени Астрономической обсерватории в г. Николаеве
(1938 г.).
В 1941 г., в связи с начавшейся Великой Отечественной
войной Советского Союза, четыре службы времени СССР
(Пулковская, ВНИИМ, Харьковская и Николаевская)
прекратили свою работу, а две Московские службы вре¬
мени вынуждены были эвакуироваться: служба времени
ГАИШ — в Свердловск, а служба времени ЦНИИГАиК —
в Джамбул. Эти две службы времени и не прекращавшая
своей деятельности Служба времени Ташкентской астро¬
номической обсерватории вели всю работу по обеспече¬
нию точным временем всех нужд страны в военные годы.
После окончания Великой Отечественной войны Совет¬
ского Союза были восстановлены и возобновили свою ра¬
боту все прежде существовавшие службы времени и
276
Гл. V. Служба времени
созданы новые: при Центральном научно-исследователь¬
ском бюро единой службы времени (ЦНИБ) в Москве
(1947 г.) и в Иркутске (1948 г.), при университете в Иркут¬
ске (1953 г.), при Государственном институте мер и изме¬
рительных приборов в Новосибирске (1957 г.), при Ленин¬
градском университете (1947 г.) и при Латвийском уни¬
верситете в Риге (1951 г.).
В 1964 г. лаборатории времени ГАИШ и ЦНИИГАиК
соединились и образовали одну Объединенную службу
времени.
В 1948 г. была учреждена Междуведомственная комис¬
сия единой Службы времени СССР при Комитете по де¬
лам мер и измерительных приборов, к которой перешли
функции ликвидированного Междуведомственного коми¬
тета времени.
Основными задачами Междуведомственной комиссии
являются:
1. Решение вопросов, связанных с передачей сигналов
точного времени.
2. Координация работ различных ведомств в области
службы времени.
3. Решение вопросов, связанных с поясной системой
счета времени (пересмотр и установление новых границ
часовых поясов на территории СССР).
Подготовка вопросов и выполнение решений Междуве¬
домственной комиссии возложены на Всесоюзный научно-
исследовательский институт физико-технических и радио¬
технических измерений.
§ 90. Определение и хранение точного времени
Первым эталоном, с которым сравнивали показания
своих часов службы времени, был период обращения
Земли вокруг своей оси относительно звезд, т. е. звездные
сутки. Определение точного времени сводилось к регуляр¬
ному получению поправок часов из астрономических на¬
блюдений и вычислению всемирного времени.
Хранение времени производилось с помощью различ¬
ных типов маятниковых часов. Большие (до +0\005) су¬
точные и прогрессивные вариации хода маятниковых ча¬
сов приводили к тому, что в период между астрономиче¬
скими наблюдениями шкала времени сильно искажалась.
$ 90. Определение и хранение точного времени
Поэтому астрономические наблюдения были важнейшей
задачей служб времени: от частоты и точности этих на¬
блюдений фактически зависела равномерность шкалы вре¬
мени. Для повышения точности поправки часов, получен¬
ные из астрономических наблюдений за 1—2 месяца, вы¬
равнивались графически или аналитически. В результате
выравнивания получались вероятнейшие значения попра¬
вок часов для определенного момента каждой календарной
даты и значения суточных ходов часов, с помощью кото¬
рых точное время можно было интерполировать и экстра¬
полировать на другие моменты.
С изобретением в 1931 г. кварцевых часов и использо¬
ванием их в службах времени появилась возможность бо¬
лее надежно хранить время в перерывах между наблюде¬
ниями.
Кварцевые часы быстро совершенствовались. Уже во
второй половине пятидесятых годов шкала времени, за¬
даваемая хорошо исследованными кварцевыми часами,
была настолько равномерной, что кварцевые часы можно
было использовать как независимый эталон времени.
Правда, это было возможно только для небольших,
в несколько месяцев, отрезков времени; на больших интер¬
валах сказывалось старение кварца, заметно изменяющее
ход часов.
Использование кварцевых часов дало в свою очередь
возможность обнаружить сезонную неравномерность во
вращении Земли. Раньше большие флуктуации в ходе
маятниковых часов и низкая точность наблюдений не по¬
зволяли выявить этот эффект.
Стало очевидно, что шкала времени TU0 не отвечает
по своей равномерности возросшим требованиям науки и
техники. Поэтому с 1956 г. поправки часов стали вычис¬
ляться в системе времени TU2, а в качестве эталона вре¬
мени была принята эфемеридная секунда.
Шкала времени TU2 более равномерна, чем TU0, но и
она обладает двумя существенными недостатками.
1. Поправка за сезонную неравномерность для каждого
года, представляемая обычно аналитически, может быть
уверенно вычислена только в следующем году, т. е. со зна¬
чительным опозданием. Поэтому для текущих задач бе¬
рутся экстраполированные значения этой поправки, кото¬
рые могут иметь большие ошибки, так как сезонная не¬
Гл. V. Служба времени
равномерность вращения Земли из года в год непостоянна
по амплитуде и, главное, по фазе (период изменяется от 10
до 14 месяцев).
2. Неправильные изменения в скорости вращения
Земли, если они происходят в течение года и более, не
могут быть точно учтены с помощью кварцевых часов, так
как их невозможно отличить от изменения хода часов
из-за старения кварца.
Второе обстоятельство сильно снижало равномерность
шкалы времени TU2 на больших интервалах. Чтобы полу¬
чить лучшее приближение к равномерному времени,
в астрономических ежегодниках, начиная с 1960 г., вве¬
дено эфемеридное время ЕТ, которое должно быть свобод¬
ным от всех неравномерностей вращения Земли.
К сожалению, низкая точность определения эфемерид-
ного времени не дает возможность использовать все его
преимущества на коротких, меньше года, отрезках вре¬
мени. Поправка ДГ=ЕТ — TU обычно вычисляется сред¬
ней за год, на основании наблюдений покрытий звезд Лу¬
ной, а также на основании меридианных и фотографиче¬
ских наблюдений Луны.
Полученное таким образом наблюденное эфемеридное
время тоже нельзя считать идеально равномерным из-за
ошибок наблюдений и неточности теории движения Луны.
Коренной перелом в вопросах хранения времени про¬
изошел с изобретением атомных и молекулярных стандар¬
тов частоты, с помощью которых физикам удалось создать
независимые от вращения Земли эталоны времени исклю¬
чительно высокой стабильности.
§ 91. Атомное время
Шкала времени, задаваемая с помощью атомных стан¬
дартов частоты и независимая от вращения Земли, полу¬
чила название атомного времени и условно обозначена
через TAI (международное атомное время). В качестве
единицы для измерения атомного времени принята атом¬
ная секунда, определяемая как «время, равное 9 192 631 770
периодам излучения, соответствующего переходу между
двумя сверхтонкими уровнями основного состояния атома
цезия 133». Это определение принято в 1967 г. на XIII
Генеральной конференции по мерам и весам. Атомная
§ 91. Атомное время
279
секунда является одной из семи основных единиц Между¬
народной системы единиц (СИ). Продолжительность атом¬
ной секунды выбиралась таким образом, чтобы она была
максимально близка к продолжительности эфемеридной
секунды, полученной из наблюдений на некотором ин¬
тервале времени. Из наблюдений Луны согласно формуле
(1.58) можно получить значение эфемеридного времени
ТЕ==Ти+АГ. Сравнение всемирного времени с атомным
дает соотношение ЬА= TU — TAI, тогда ТЕ — ТА1 =
= ДГ-|-Д А, где ДГ и ДА — величины, полученные непо¬
средственно из наблюдений и приема сигналов точного
времени. Шкала атомного времени TAI основана па
показаниях цезиевых стандартов частоты ряда обсервато¬
рий и лабораторий.
Количество колебаний, принятое за атомную секунду,
было получено на основании работ Марковица, Холла,
Эссена, Парри, где анализировались разности ТЕ—TAI.
Первые опыты по созданию шкалы атомного времени
относятся к 1955 году. С увеличением числа атомных стан¬
дартов Международная шкала атомного времени стала
выводиться путем усреднения их показаний. К 1970 г.
Международная шкала атомного времени реализовыва¬
лась посредством усреднения семи независимых шкал
следующих обсерваторий и лабораторий:
1) Национального бюро стандартов США,
2) Национального научно-исследовательского совета
Канады,
3) Военно-морской обсерватории США,
4) Невшательской обсерватории в Швейцарии,
5) Национального физико-технического института
в ФРГ,
6) Гринвичской обсерватории в Англии,
7) Парижской обсерватории Национального иссле¬
довательского центра дальней связи и Национального
центра космических исследований во Франции.
Точность этой шкалы оказалась весьма высокой. От¬
клонения шкал отдельных обсерваторий от Международ¬
ной атомной шкалы за 1970—1971 гг. не превышали
50 микросекунд.
Современная методика вычисления шкалы Международ¬
ного атомного времени, которая принята в Международном
рюро времени (BIH), приведена в § 97.
280
Гл. V. Служба времени
Введение атомного времени существенно изменило
структуру и задачи служб времени. Равномерность атом¬
ной шкалы времени нельзя контролировать с помощью
астрономических наблюдений, так как их точность суще¬
ственно ниже за счет систематических ошибок наблю¬
дений и неучтенных флуктуаций в скорости вращения
Земли.
Единственная задача, которая остается астрономам
в вопросе хранения времени — это определение разности
между всемирным и атомным временами. Наша жизнь
и многие процессы, происходящие в природе, теснейшим
образом связаны с вращением Земли, т. е. с течением
всемирного времени. Знание всемирного времени необ¬
ходимо при определении долгот точек на земной поверх¬
ности, при работах, связанных с космосом, при решении
целого ряда задач геодезии, геофизики, астрономии.
Поэтому значительное расхождение атомного времени
со всемирным, астрономическим, вызываемое неучтенными
неравномерностями во вращении Земли, может привести
к целому ряду затруднений. Это обстоятельство заста¬
вило использовать при передаче сигналов точного време¬
ни некоторую компромиссную шкалу времени, полу¬
чившую название TUG — всемирное координированное
время.
В основу времени TUG положена атомная секунда,
а его отличие от атомного времени состоит лишь в том, что
когда различие между шкалами всемирного времени и
TUG достигает ±0,7 сек, часы, с которых передаются
сигналы времени в шкале TUC, переводятся на 1 секунду
вперед или назад, в зависимости от знака разности. Таким
образом, уклонение системы TUC от всемирного времени,
как правило, не должно превышать 0,7 секунды. Коррек¬
ции часов производятся в последнюю секунду месяца пред¬
почтительно 31 декабря и 30 июня по рекомендации Между¬
народного Бюро времени (см. § 96). Шкала координиро¬
ванного времени, удовлетворяющая этим условиям, была
введена с 1 января 1972 г.
Использование атомных эталонов привело к разделе¬
нию служб времени на лаборатории, хранящие шкалу
атомного времени, передающие сигналы точного времени,
и на астрономические службы, занимающиеся получением
всемирного времени, изучением особенностей вращения
§ 92. Распространение точного времени
281
Земли и решением ряда задач геофизического характера.
Наличие равномерной и высокостабилыюй шкалы атом¬
ного времени позволяет астрономам решать эти задачи
на принципиально новом, высоком уровне.
§ 92. Распространение точного времени
Точное время подается в эфир в виде различных ра¬
диосигналов, передаваемых через радиостанции со спе¬
циальных часов-датчиков, заранее синхронизованных с ос¬
новными эталонами подающей станции. Передача сигналов
точного времени производится по определенным програм¬
мам, причем крупные государства с развитой промышлен¬
ностью осуществляют передачу сигналов различных ти¬
пов сразу по нескольким программам. Разнообразие
передач обусловлено требованиями промышленности, на¬
вигации, науки и техники.
Основные сигналы времени обычно делят на несколько
типов. Вот те типы сигналов, которые передаются в СССР:
1. тип АО — смодулированные синусоидальные ко¬
лебания, т. е. эталонная частота, передаваемая в эфир,
2. тип А1 — несущая частота, модулированная по
амплитуде прямоугольными импульсами.
Эти сигналы используются для передачи шкал вре¬
мени наиболее часто. Они представляют собой пачки не¬
сущей частоты длительностью в 0,1 сек (минутный сигнал
удлиняется до 0,5 секунды) с частотой повторения в 1 гц.
За начало отсчета обычно принимается начало сигнала
или какая-нибудь точка его переднего фронта.
Кроме секундных сигналов в системе А1 передаются
также сигналы с частотой повторения 10 гц и длительно¬
стью в 0,02 сек. Сигналы, приходящиеся на начало се¬
кунды, удлиняются до 0,04 сек. Сигналы типа АО и А1
используются большинством советских и зарубежных
радиостанций. В СССР эти сигналы подаются через радио¬
станции РВУ, РТЗ, РВМ, РИД, РТА, РЦХ, РИМ.
3. Сигналы времени и частоты, передавемые на очень
низких частотах в пределах от 10 до 30 кгц радиостан¬
циями УТРЗ и УЩЦЗ, представляют собой комбинацию
двух программ. Одна программа включает в себя передачу
сигналов типа А1 с несущей частотой 25 кгц; другая про¬
грамма, передаваемая последовательно с первой, вклю¬
Гл. V. Служба времени
чает передачу сигналов типа АО с частотами 25,0; 25,1;
25,5; 23,0; 20,5 кгц, фазы которых согласованы с времен¬
ными метками шкалы, передаваемой по программе А1.
Такая комбинация близких частот позволяет осущест¬
влять фазовый прием сигналов (см. § 93) с высокой точ¬
ностью и достаточно однозначно. Эта система является
аналогом американской системы «Омега».
4. Сигналы времени и частоты, передаваемые через
радионавигационные станции типа РНС на частоте 100 кгц.
Рис. 130. Сигналы станций типа РНС.
Система аналогична американской радионавигационной
системе Лоран. Сигналы этого типа передаются несколь¬
кими радиостанциями и представляют группы радиоим¬
пульсов с несущей частотой 100 кгц, следующие с периодом
в 0,08 секунды для РНС-Е(А), РНС-Е(Д) и с периодом
0,05 секунды для РНС-В(А). Каждая группа состоит
из восьми импульсов, следующих один за другим с интер¬
валом в 0,001 сек (рис. 130).
Сигналы станций РНС-Е(А) и РНС-В(А) имеют в каж¬
дой группе дополнительный девятый импульс. В каж¬
дую группу импульсов РНС, совпадающую с секундой
шкалы TUC, добавляют еще один, десятый импульс.
Отсчет сигналов времени в системе РНС производится
по точке, расположенной на переднем фронте восьмого
импульса секундной группы, и определяется на уровне
0,6 от максимального значения сигнала.
Система РНС позволяет осуществлять прием сигналов
с высокой степенью точности и на больших расстояниях;
она удобна при определении положения кораблей и само¬
летов методом временных засечек по нескольким передаю¬
щим сигналы радиостанциям. В то же время это наиболее
сложная система, требующая для приема сигналов спе¬
циализированной аппаратуры.
§ 92. Распространение точного времени
283
5. Сигналы проверки времени (шесть точек), передавае¬
мые через сеть радиовещания и предназначенные для син¬
хронизации и проверки часов технического и бытового
характера. Сигналы передаются в конце каждого часа
и представляют собой шесть импульсов длительностью
в 0,1 сек каждый, следующих через секунду. Начало ше¬
стого импульса соответствует началу часа. Несущая ча¬
стота импульсов 1000 гц. Точность этих сигналов ниже,
чем у всех остальных, за счет того, что при их передаче
не учитываются запаздывания в радиолиниях и ретранс¬
ляторах, поэтому эти сигналы согласуются со шкалой
времени с погрешностью, достигающей для удаленных
точек нескольких сотых долей секунды. Точность передачи
остальных сигналов определяется практически качеством
основных эталонов и датчиков. Среднесуточные значения
несущих частот эталонных сигналов, получаемых боль¬
шинством радиостанций, согласуются с эталонами с от¬
носительной погрешностью порядка +1-1СГ11.
6. Помимо сигналов точного времени, передаваемых
в шкале TUC, советские и зарубежные радиостанции при
передаче сигналов типа А1 передают специальным кодом
значения разности вида TUI—TUC, которые содержат
информацию о различии астрономического и атомного вре¬
мени. Разность TUI—TUC обозначается через DTU1
и округляется по международному соглашению до 0s,1,
т. е. она может принимать значения +0,1, 0,2,. . .
..., 0,7 сек. Когда различие TUI—TUC превышает 0,7 сек,
производится коррекция часов на +1 сек. Эта коррекция
производится в начале и в середине года, т. е. 31 декабря
или 30 июня по предварительной рекомендации МБВ
всеми странами.
Радиостанции СССР, кроме значений DTU1, передают
еще дополнительную информацию, обозначаемую через
dTUl, которая уточняет значения DTU1, давая их с точ¬
ностью до +0,02 сек.
На практике передача информации о величине DTU1
и dTUl выглядит следующим образом. Если величина
DTU1 положительна и равна 0,1 секунды, первый секунд¬
ный сигнал, идущий в А1 после минутного сигнала, раз¬
дваивается (рис. 131). Если разность равна 0,2 сек, раз¬
дваиваются последовательно первый и второй секундные
сигналы и т. д. Таким образом, положительная величина
284
Гл. V. Служба времени
DTU1 определяется путем подсчета числа п раздвоенных
секундных сигналов в интервале между 1-й и 8-й секун¬
дами, т. е. DTUl=0,lrc сек. Отрицательное значение
DTU1 передается таким же способом, но подсчет раздвоен¬
ных сигналов т ведется в интервале от 9-й до 16-й се¬
кунды, так что DTU1 = —0,1 т сек. Таким образом, если
первый раздвоенный сигнал окажется девятым по счету
это означает, что DTU1 = — 0,1 сек. Отсутствие раздвоен-
Рис. 131. Способ подачи информации о разности TUI—TUC.
ных сигналов в интервале между 1-й и 16-й секундами
означает, что разность DTU1 меньше 0,1 сек.
Совершенно аналогичным способом производится уточ¬
нение величины DTU1 по сигналам советских радиостан¬
ций до +0,02 сек. Положительное значение dTUl опреде¬
ляется путем подсчета числа р раздвоенных сигналов в ин¬
тервале от 21-й до 24-й секунды, так что dTUl=0,02p сек,
а отрицательное значение dTUl определяется путем под¬
счета числа q раздвоенных секундных сигналов в интер¬
вале от 31-й до 34-й секунды по формуле dTUl = —0,02 qceK.
Часть радиостанций дополнительно передает инфор¬
мацию о разности TUI—TUC с помощью кода Морзе
каждый час по 1 минуте после позывных. Информация
передается с помощью трех цифр. Первая означает знак
числа (1 — положительный и*0 — отрицательный), а две
последующие — его абсолютное значение. Каждая
группа из трех цифр отделяется друг от друга знаком раз¬
дела (точка — тире — точка), а цифры передаются с ин¬
тервалом, соответствующим длительности трех тире.
7. Сигналы точного времени, передаваемые в составе
телевизионных сигналов. Эти сигналы передаются в ин¬
тервале шестой строки каждого кадра во время передачи
изображения циферблата часов. Они представляют собой
прямоугольные импульсы длительностью в 2 мксек с ча¬
стотой 25 гц< Импульсы, приходящиеся на начало секундьц
удлиняются до \Ъ мксек. Импульсы изменяются от уровня
§ 92. Распространение точного времени
285
черного в сторону белого с амплитудой, равной 20% от
полного телевизионного сигнала (рис. 132).
При студийных передачах, которые синхронизованы
стандартом времени, в качестве меток времени исполь¬
зуются также задние фронты первых кадровых синхрони¬
зующих импульсов полного телевизионного сигнала. Эти
фронты опережают ближайший сигнал времени на вели¬
чину в 326 мксек. Поскольку в секунде бывает 50 групп
Рис. 132. Телевизионные сигналы времени.
1 — кадровый гасящий интервал, 2 — импульсы кадровой син¬
хронизации, 3 — уравнивающие импульсы, 4 — строчные синхро¬
низующие импульсы, 5 — конец первого кадрового синхроимпульса,
используемый как метка времени, 6 — специальная метка времени.
импульсов кадровой синхронизации, при приеме этих
импульсов в качестве меток времени возникает неопреде¬
ленность вида 0,02/г сек, где п=0, 1, 2,. . ., 49. Однако
технически прием и передача специальных телевизионных
импульсов времени сложнее, чем импульсов кадровой
синхронизации, поэтому последним часто отдается пред¬
почтение. Возникающую неопределенность обычно разре¬
шают с помощью другого, более простого метода приема
сигналов.
Передача телевизионных сигналов точного времени
производится Общесоюзной радиотелевизионной станцией
286
Гл. V. Служба времени
в Москве и ретранслируется на всю территорию стра¬
ны, охваченную сетью телевидения. Передачи остальных
сигналов точного времени и эталонных частот осуществля¬
ются через сеть радиостанций.
Характеристики радиостанций, излучающих эталон¬
ные сигналы времени и частоты, приведены в таблицах
И и 12.
Таблица 11
Название
Местополо¬
Излу¬
чаемая
Несущая
Продолжи¬
тельность
работы
Номер
часо¬
вой
станции
жение
мощ¬
ность,
кет
частота, кгц
дней
в не¬
делю
часов
в сут¬
ки
про¬
грам¬
мы
РБУ
Москва
10
66,6
7
24
I
РТЗ
Иркутск
10
50
7
23
I
РВ-166
Иркутск
40
200
7
23
VI
РВМ
Москва
5
4996
7
24
II
РИД
Иркутск
1
5 004—15 004
7
24
III
РТА
Новосибирск
5
10 000-15 000
7
20,5
IV
РИМ
Ташкент
1
5 000-10 000
7
20,5
V
РЦХ
Ташкент
1
2500
7
21,5
V
УТРЗ
Горький
300
20,54-25,5
7
2
VII
УЩЦЗ
Хабаровск
300
20,54-25,5
7
2,7
VII
РНС-Е (А)
Карачев
800
100
6
7
VIII
РНС-Е (Д)
Сызрань
800
100
6
7
VIII
РНС-В (А)
Александ-
ровск-Саха-
линский
400
100
6
12
VIII
Все радиостанции, ведущие передачи ежедневно, на
один—четыре дня в месяц останавливаются на профи¬
лактический осмотр. Эти дни обычно указываются в про¬
грамме их работ. В последней графе таблицы И указан
номер часовой программы, показывающий по какой из
восьми специальных программ ведет данная радиостан¬
ция передачи внутри каждого часа времени. Часовые про¬
граммы работ различных радиостанций на 1977 г. при¬
ведены в таблице 12. Изменения этих программ от года
к году сравнительно невелики. Подробная информация
о программах передач содержится в ежегодных бюллете¬
нях серии «В» Междуведомственной комиссии единой
службы времени при Госстандарте СССР.
§ 92. Распространение точного времени
287
Таблица 12
П р о до л ж и те л I»н ость
передачи
Вид передачи
начало
конец
I программа (РБУ, РТЗ)
00m00s
05 00
06 00
59 00
04m55s
06 00
58 55
59 55
Сигналы А1 и информация о DTU1 и dTUl
Позывные радиостанций
Сигналы АО
Сигналы А1 с частотой 10 гц
II программа (РВМ)
0га008
05 00
35 00
45 00
04m55s
09 55
39 55
49 55
Сигналы А1 с частотой 10
10 00
40 00
И 00
11 00
41 00
12 00
Позывные радиостанций
Информация о DTU1 и dTUl (азбукой
Морзе)
30 00
41 00
50 00
34 55
44 55
59 55
Сигналы А1 и информация oDTUlndTUl
III программа (РИД)
00m00s
04m55s
10 00
14 55
Сигналы А1 с частотой 10 гц
21 00
24 55
45 00
48 55
05 00
09 55
15 00
19 55
Сигналы А1 и информация о DTU1 и dTUl
25 00
29 55
52 00
59 55
20 00
21 00
Позывные радиостанции
50 00
51 00
30 00
44 55
Сигналы АО
48 55
50 00
Передатчик выключен
51 00
52 00
Информация о DTU1 и dTUl (азбукой
Морзе)
т
Рл. V. Служба времени
Таблица 12 (продолжение)
Продолжительность
передачи
Вид передачи
начало
конец
IV программа (РТА)
00m00s
04m55s
10 00
14 00
Сигналы А1 с частотой 10 гц
20 00
24 55
30 00
31 55
40 00
44 00
05 00
09 55
15 00
19 55
Сигналы А1 п информация о DTU1 и dTU 1
25 00
29 00
35 00
39 00
14 00
15 00
29 00
30 00
Позывные радиостанции
44 00
45 00
59 00
60 00
39 00
40 00
Передатчик выключен
45 00
46 00
Информация о DTU1 и TU1 (азбукой
Морзе)
46 00
59 00
Сигналы АО
V программа (РИМ, РЦХ)
00m00s
10m00s
Сигналы АО
52 00
60 00
10 00
14 55
21 00
24 55
30 00
34 00
Сигналы А1 с частотой 10
40 00
44 55
15 00
19 55
25 00
29 55
Сигналы А1 и информация о DTU1 и dTUl
35 00
39 55
45 00
49 55
20 00
21 00
Позывные радиостанций
50 00
51 00
34 00
35 00
Передатчик выключен
51 00
52 00
Информация о DTU1 и dTUl (азбукой
Морзе)
§ 92. Распространение точного времени
289
Таблица 12 (продолжение)
Продолжительность
передачи
Вид передачи
начало
конец
VI программа (РВ-166)
00т008
60т008
Несущая, модулированная по амплитуде
звуковыми сигналами телефонии или
радиовещания
VII программа (УТРЗ, УЩЦЗ)
36m00s
37m008
Позывные радиостанции
37 00
40 00
Сигналы АО
40 00
43 00
Сигналы А1. Манипуляция
40 гц
Несущая
43 00
52 00
Сигналы А1. Импульсы
с частотами 10; 1; 0,1 и
1/60 гц
частота
25 кгц
52 00
55 00
Сигналы А1. Манипуляция
40 гц
55 00
57 00
Передатчик выключен
57 00
60 00
Сигналы АО с частотой 25,1 кгц
00 00
02 00
Передатчик выключен
02 00
05 00
Сигналы АО с частотой 25,5 кги
05 00
08 00
Передатчик выключен
08 00
11 00
Сигналы АО с частотой 23,0 кгц
11 00
14 00
Передатчик выключен
14 00
17 00
Сигналы АО с частотой 20,5
кгц
VIII программа (РНС) см. рис. 130.
В таблице 13 приведены программы передач сигналов
времени и частоты, передаваемые советскими радиостан¬
циями в пределах суток.
Программы передач сигналов точного времени и эта¬
лонных частот зарубежными радиостанциями публикуются
в специальных изданиях Международного Бюро времени
ежегодно. Сигналы времени передаются через несколько
десятков радиостанций большинством промышленно раз¬
витых стран мира.
290
Гл. V. Служба времени
Таблица 13
Время передачи
Время передачи
Радио¬
(Моск.)
Радио¬
(Моск.)
станция
станция
начало
конец
начало
конец
РБУ
00h00m
15Jl07m
РЦХ
00h00m
071,00т
17 00
22 07
08 30
12 30
22 20
24 00
13 00
17 00
16 30
24 00
РТЗ
01 00
24 00
РВ-166
01 00
24 00
РВМ
00 00
24 00
УТРЗ
08 36
09 17
РИД
00 00
24 00
17 36
18 17
21 36
22 17
РТА
00 00
04 30
05 00
08 00
УЩЦЗ
03 36
04 17
+
09 30
12 30
06 36
07 17
13 00
16 30
09 36
10 17
17 00
20 30
20 36
21 17
21 00
24 00
РНС-Е (А)
10 00
13 00
РИМ
00 00
04 30
17 00
21 00
05 00
07 00
РНС-Е (Д)
10 00
13 00
08 30
12 30
17 00
21 00
13 00
16 30
РНС-В (А)
02 00
14 00
17 00
20 30
21 00
24 00
•«Чу '"~Ч
§ 93. Прием сигналов точного времени
Принять сигналы точного времени — значит, опреде¬
лить показания часов в средний момент подачи этих сиг¬
налов. Для приема сигналов существует различная радио¬
электронная аппаратура. Сложность этой аппаратуры
определяется той точностью, с которой необходимо про¬
извести прием сигналов времени. Рассмотрим несколько
способов приема сигналов точного времени.
1. Импульсный метод пр'иема сигналов
Это наиболее распространенный и давно используемый
метод. В его основу положен принцип регистрации начала
секундного сигнала, приходящего в момент Т0, или мо*
мента, когда амплитуда сигнала достигает некоторого
§ 93. Прием сигналов точного времени
291
уровня £70, при котором срабатывает регистрирующая
аппаратура.
Простейшая установка состоит из приемника, согла¬
сующей приставки и электронного счетчика (рис. 133).
Запуск счетчика производится импульсом от часов, а его
Сриемик
4Л/1/1/И
Согласующая
JL
Злетрст/й
JL
Часы
т.*
пристает
счетчик
Рис. 133. Простейшая установка для приема сигналов времени.
остановка сигналом точного времени, преобразованным
в согласующей приставке в прямоугольный импульс.
Показания счетчика дают разность между часами и
сигналом времени с точностью не хуже + 0,001-^0S,003.
Рис. 134. К вопросу приема сигналов времени.
Сравнительно невысокая точность приема объясняется
следующим обстоятельством.
Согласующая приставка срабатывает от определенного
напряжения U0 (рис. 134); крутизна переднего фронта
сигнала, приходящего с приемника, зависит от несущей
частоты сигнала и от точности настройки приемника.
Поэтому в зависимости от настройки приемника согла¬
сующая приставка будет выдавать прямоугольный импульс,
запускающий счетчик, в разные моменты — в Тх либо
в Г2, в то время как действительное начало сигнала при¬
водится на момецт Г0.
292
Гл. V. Служба времени
Эта схема является простейшей, не требующей спе¬
циальной аппаратуры, но и точность ее сравнительно
невысока.
Приблизительно такую же точность дает специализи¬
рованная установка, позволяющая принимать сигналы
J LJ~L [ijl TL
*•1 i-*>
j t
Рис. 135. Установка для приема сигналов «на слух».
точного времени «на слух». Она удобна в полевых условиях
при высоком уровне помех, когда установки с пороговым
уровнем срабатывания оказываются малопригодными.
Сигнал с приемника проходит в динамик через спе¬
циальное электронное окно (рис. 135), которое открыва¬
ется лишь на короткий отрезок времени. Момент откры¬
тия окна может изменяться (перемещаться во времени)
в пределах одной секунды и с шагом в одну тысячную долю
секунды и грубее. Интервал времени между секундным
сигналом часов и моментом закрытия окна измеряется с по¬
мощью счетчика, находящегося в блоке сравнения. Мо¬
мент открытия окна изменяется до тех пор, пока в нем
не появится начало сигнала времени, появление которого
будет слышно в динамике. Этот момент регистрируется
как разность показаний «часы-сигналы».
2. Осциллографический способ
приема сигналов времени
Значительно большую точность позволяют получить
осциллографические способы приема сигналов точного
времени.
Простейший из них состоит в регистрации момента
начала сигнала. Этот момент не зависит от настройки при¬
емника и может быть определен с точностью около+0%0001.
Точность приема будет зависеть от уровня шумов, в кото¬
рых «тонет» начало сигнала, и, конечно, от несущей ча¬
стоты, определяющей длину фронта сигнала. Сигналы,
передаваемые с несущими частотами порядка нескольки*
§ 93. Прием сигналов точного времени
293
мегагерц, уверенно регистрируются на экране осцил¬
лографа, но, к сожалению, время их распространения
сильно зависит от состояния ионосферы, а слышимость
не всегда удовлетворительная.
Время распространения сигналов на частотах в не¬
сколько десятков килогерц меньше зависит от состояния
атмосферы и других внешних условий, но зато фронт та-
ких секундных сигналов обычно бывает сильно растянут.
Время нарастания сигнала может достигать 1—2 мсек,
Рис. 136. Установка для приема сигналов на осциллограф.
что существенно затрудняет определение его начала и сни¬
жает точность отсчета.
Точность приема сигналов осциллографическим мето¬
дом может быть повышена и доведена до величины по¬
рядка нескольких микросекунд путем использования
специальной аппаратуры, позволяющей уверенно осу¬
ществлять наведение не на начало сигнала, а на определен¬
ный период несущей частоты, т. е. на некоторую точку
огибающей. Так, например, в навигационной системе
Лоран-С за такую точку принимают третий период несу¬
щей частоты (100 кгц). При этом необходим автоматический
контроль соотношения сигнал—шум, в противном случае
нельзя быть уверенным, что наведение произведено на тре¬
тий, а, скажем, не на четвертый период несущей частоты.
Рассмотрим теперь одну из простейших установок для
осциллографического приема сигналов точного времени.
Сигналы точного времени с приемника (рис. 136) че¬
рез переключатель 1 поступают на пару горизонтальных
294
Гл. V. Служба времени
пластин осциллографа 2. Запуск развертки (движения по
экрану) луча осциллографа производится раз в секунду
импульсом фазирующего устройства. Задача этого устрой¬
ства — запускать развертку луча осциллографа в любой
заданный момент времени в пределах одной секунды.
Фазирующее устройство состоит из фазовращателя 3 и
делителя. На делитель через фазовращатель поступает
частота с кварцевых часов (10 или 100 кгц). Рассмотрим
подробнее, для чего необходимо применение фазирующего
устройства. Скорость движения луча по экрану осцилло-
Рис. 137. К вопросу приема сиг- МЫх для приема сигналов,
налов на осциллограф. имеют диаметр порядка 10
пробегает весь экран за время от 0s,01 до 0s,001. Вероят¬
ность того, что момент начала движения луча совпадает
с приходом сигнала с радиоприемника и этот сигнал бу¬
дет виден на экране, ничтожно мала.
Если даже сигнал и попадает'на экран осциллографа,
то за счет хода часов, питающих своей частотой делитель,
сигнал постепенно, от приема к приему, будет уходить
с экрана, так как момент начала развертки будет сме¬
щаться относительно сигналов. На рис. 137 показано"воз-
можное взаимное расположение сигнала времени и моментов
начала и конца развертки (движения) луча осцилло¬
графа. Пусть Т0 — момент начала движения луча по эк¬
рану, а Тг — момент, когда луч прошел через весь экран.
Момент Т2 соответствует началу сигнала точного вре¬
мени. Чтобы увидеть начало сигнала на середине экрана ос¬
циллографа, необходимо изменить момент начала раз-
Т -X- Т
вертки во времени на величину Г2 Цр—- , тогда начало
сигнала попадает на середину экрана. Это достигается
То Г,
графа ’должна -быть от 1
до 10 см в тысячную до¬
лю секунды. В противном
случае масштаб на экране
осциллографа окажется
слишком грубым и [будет
трудно точно определить,
где находится начало ‘сиг¬
нала времени. Экраны ос-
цил л огр афов, применяв-
см. Это означает, что луч
§ 93. Прием сигналов точного времени
295
с помощью фазовращателя, один оборот которого, если на
нзго поступает частота 10 кгц, смещает начало развертки
на 0s,0001.
Фазовращатель снабжается счетчиком числа оборотов,
по которому можно определить, насколько в долях се¬
кунды перемещено начало развертки луча осциллографа.
Прием сигналов на осциллограф производится следую¬
щим образом. Оператор включает мотор фазовращателя
и держит его включенным до тех пор, пока начало сигнала
точного времени не совпадает с вертикальным штрихом,
нанесенным на стекле экрана осциллографа. Поскольку
совмещается начало сигнала, точность настройки прием¬
ника почти не играет роли. Чтобы «отыскать» сигнал точ¬
ного времени и знать, в какую сторону удобнее крутить
диск фазовращателя, используют грубые, поисковые раз¬
вертки, при которых луч пробегает экран за Is и за 0s,1.
Совместив начало сигнала с вертикальным штрихом, опе¬
ратор записывает показание счетчика фазовращателя и
с помощью переключателя 1 (см. рис. 136) подает на
пластины осциллографа импульс от часов. Подведя с по¬
мощью фазовращателя этот импульс к вертикальной черте,
оператор берет второй отсчет по счетчику фазовращателя.
Разность этих отсчетов дает разность во времени между
сигналами и импульсом часов, т. е. показание часов в мо¬
мент подачи сигналов точного времени.
3. Прием сигналов с использованием
фазынесущейчастоты L
В основу метода положен принцип сравнения двух
часов по частоте их генераторов (см. § 45), только роль
одного из генераторов выполняет приемник, настроенный
на эталонную частоту передающей'радиостанции (рис. 138).
ХПриемнак
длон сравнения
по vac/ло/ле
Часы
Рис. 138. Прием сигналов с использованием фазы несущей частоты*
Принимая эталонную частоту радиостанции и смеши¬
вая ее с такой же частотой часов, получают разностную
частоту, которая характеризует уклонение частоты часов
от эталонной частоты. Метод весьма прост и полностью
296
Гл. V. Служба времени
автоматизирован, дает непрерывную информацию о ходе
часов относительно эталона. Основной трудностью исполь¬
зования фазового метода является его неоднозначность,
так как он не позволяет установить разность нуль-пунк¬
тов шкал системы. Действительно, включив приемник,
оператор через некоторое время может получить данные
о ходе своих часов, но он не может получить информации
о разности показаний своих часов с часами передающей
радиостанции. Возникающая неопределенность будет за¬
висеть от значения эталонной частоты. Так, например,
при частоте 10 кгц одно биение сравниваемых частот будет
соответствовать расхождению шкал времени эталонной
частоты и часов на 0s,0001. Можно производить измерение
с точностью до долей периода и получать точность порядка
нескольких микросекунд. Но при этом нельзя определить
расхождение пуль-пунктов в десятых, сотых, тысячных
долях секунды.
Для уточнения нуль-пункта в таких случаях исполь¬
зуют дополнительно один из импульсных способов приема
или же прием на нескольких близких частотах. По¬
следний способ позволяет устранить или уменьшить
неоднозначность. Специализированные системы типа
«Омега», работающие на очень низких частотах, пере¬
дают одновременно эталонные частоты в интервале
lO-f-ЗО кгц, причем три близкие частоты в интервале
10-f-14 кгц.
Разности этих частот, которые составляют около 1 кгц,
дают низкочастотные биения, позволяющие устранить
неопределенность приема, т. е. получить тысячные, со¬
тые и т. д. доли секунды в расхождениях показаний часов
и эталонного времени.
Недостатком фазового метода является зависимость
от помех. Если при импульсном приеме оператор видит
помехи и может селекционировать их, то в фазовом ме¬
тоде помехи могут привести к сбоям аппаратуры сравне¬
ния, причем, если эти сбои будут незначительны, их весьма
трудно отделить от хода часов.
Современные первоклассные службы времени, как
правило, бывают оборудованы аппаратурой, позволяю¬
щей вести приемы сигналов как в импульсном режиме,
так и методом сравнения по частоте. Оба способа допол¬
няют друг друга, дают взаимный контроль.
§ 93. Прием сигналов точного времени
297
Точность современных частотных методов составляет
от десятков до единиц микросекунд в зависимости от со¬
вершенства приемной аппаратуры.
4. Прием телевизионных сигналов
точного времени. Другие способы
синхронизации часов
Основным препятствием в повышении точности приема
сигналов времени является нестабильность внешней
среды, которая приводит к изменению времени прохо¬
ждения сигнала от антенны до приемника. Этот недоста-
Рис. 139. Телевизионный прием сигналов.
ток в значительной степени отсутствует при телевизионном
способе передачи сигналов времени. Передача в условиях
прямой видимости и высокая, порядка десятков и сотен
мегагерц, частота позволяют осуществлять прием сиг¬
налов с точностями от нескольких сотых долей микросе¬
кунды до единиц микросекунд, в зависимости от расстоя¬
ния, количества и типов ретрансляторов.
Приемная установка состоит из телевизора, электрон¬
ного счетчика и приставки, позволяющей выделить из
полного телевизионного сигнала специальную секундную
метку времени или первый из импульсов кадровой син¬
хронизации (рис. 139).
Запуск счетчика производится сигналом с телевизора,
а его остановка импульсом от часов. Если в качестве метки
времени используется первый импульс кадровой син¬
хронизации, идущий с частотой 50 гц, возникает неопре¬
деленность +08,02 п.
Телевизионный прием крайне прост как с точки зре¬
ния аппаратуры, так как вся она, кроме приставки, се¬
рийная, так и с точки зрения методики приема. От опе¬
ратора не требуется специальных навыков. Недостатком
телевизионного приема следует считать привязанность
к телевизионной сети, а также кратковременность появ¬
ления секундной марки при телевизионных . передачах.
298
Гл. V. Служба времени
Для передачи сигналов точного времени могут быть
использованы искусственные спутники Земли или Луна,
которые пграют роль ретрансляторов или носителей источ¬
ников сигналов точного времени, т. е. атомных стандар¬
тов частоты. Получаемая при этом точность сравнима
с точностью телевизионных приемов времени.
В отдельных случаях для синхронизации шкал вре¬
мени двух обсерваторий используется метод перевозки
атомных стандартов времени и частоты. Перевозимый
вместе с источником питания цезиевый или рубидиевый
стандарт позволяет передавать время одной обсерватории
на другую. При стабильности возимого стандарта 10~12
и времени перевозки 105 сек можно произвести сравнение
двух шкал времени с ошибкой около 0,1 мксек.
Существует несколько чисто астрономических способов
синхронизации часов. Для этих целей предлагается, на¬
пример, использовать оптический пульсар, играющий
роль космического источника сигналов времени, прием
которых производится двумя станциями для синхрониза¬
ции их часов.
Использование радиоинтерферометров со сверхдлин-
ной базой (см. § 85) тоже позволяет определять разность
показаний атомных часов, стоящих на пунктах наблюде¬
ний, и их относительный ход. При оптимальном выборе
точечных радиоисточников часы на пунктах наблюдений
могут быть синхронизованы с ошибкой около 0,01 мксек.
Это, вероятно, предельная точность, которая может
быть использована для решения практических задач.
Дальнейшее повышение точности синхронизации часов,
наверное, будет связано с вопросами общей и специаль¬
ной теории относительности.
§ 94. Определение запаздывания
Физический момент времени, когда сигнал выходит
с антенны передающей радиостанции, отличается от мо¬
мента, когда он регистрируется в приемном устройстве.
Регистрация сигнала происходит с запаздыванием, выз¬
ванным конечной скоростью радиоволн и инерцией прием¬
ной аппаратуры (запаздыванием в приемнике). Для оп¬
ределения задержки сигнала в приемнике наУвход^при-
емника подается сигнал от кварцевых часов. Обычно для
§ 94. Определение запаздывания
299
этой цели используется секундный импульс, модулирую¬
щий частоту какого-либо генератора. Получается не просто
прямоугольный импульс, а сигнал, состоящий из пачки
высокочастотных колебаний, аналогичный сигналу точ¬
ного времени. Этот импульс от часов регистрируется
на осциллографе. Затем он же подается непосредственно
на осциллограф, минуя приемник. Разность отсчетов фа¬
зовращателя при регистрации на осциллографе сигнала,
прошедшего через приемник и поступившего непосредст¬
венно на осциллограф, дает запаздывание сигнала в при¬
емнике. Обычно величина этого запаздывания меньше
0s,0001.
Поправка за время, необходимое радиоволне, чтобы
пройти путь от передающей станции до приемника, мо¬
жет быть приблизительно вычислена, если известно рас¬
стояние между приемником и передатчиком и скорость
распространения радиоволн. К сожалению, точное реше¬
ние этой задачи весьма затруднительно, так как свойства
земной атмосферы, влияющие на распространение радио¬
волн, изменяются по очень сложным законам. В зависи¬
мости от состояния ионосферы, от высоты слоев, отра¬
жающих радиоволны, и от длины этих волн, им прихо¬
дится пробегать в разное время суток и года различное
расстояние между приемной и передающей станциями.
В атмосфере непрерывно происходят и беспорядочные из¬
менения ионизации, предусмотреть которые невозможно.
Наибольшее влияние такие явления оказывают на рас¬
пространение коротких волн.
Атмосферные процессы сильно ограничивают точ¬
ность приема, особенно если расстояние между передат¬
чиком и приемником очень велико. Погрешности приема
сигналов, вызванные процессами, происходящими в ат¬
мосфере, естественно, являются функцией расстояния.
Рассмотрим подробнее причины, вызывающие изме¬
нения запаздывания радиоволн для разных диапазонов.
1. Диапазон низких и очень низких
частот, 10-1-100 кгц. Сигналы времени этого диапа¬
зона распространяются волнами, идущими в пространстве
между поверхностью Земли и ионосферным слоем D и
носящими название поверхностных волн. Эти волны сле¬
дуют вдоль земной поверхности, огибая ее, и распростра¬
няются на большие расстояния с малым затуханием и вы¬
300
Гл. V. Служба времени
сокой стабильностью. На характер распространения наи¬
большее влияние оказывают такие факторы, как время
суток, особенности поверхности Земли, по которой рас¬
пространяются волны (вода или суша, проводимость
почвы), солнечная активность, атмосферные возму¬
щения.
2. Диапазон высокихчастот, 2—20Мгц.
Прием сигналов в этом диапазоне производится на про¬
странственных волнах, т. е. волнах, отраженных от ионо¬
сферы. Прием на поверхностной волне возможен на рас¬
стоянии всего в несколько десятков километров. Прием
на пространственных волнах, благодаря малости их по¬
глощения в ионосфере, возможен на большие расстояния.
Движения отражающих слоев приводят к доплеровским
сдвигам частоты и флуктуациям амплитуды сигнала. От¬
ражение от разных ионосферных слоев Е, Ег, Е2 в зави¬
симости от дальности приема и времени суток, рабочей
частоты и состояния ионосферы, снижает точность при¬
ема, изменяя время запаздывания. На точность приема
влияют также солнечная активность и промышленные
помехи.
3. Диапазон очень высоких и у л ь-
травысоких частот, 50-7-500 Мгц. Прием сиг¬
налов возможен только в зоне прямой видимости. Передача
на большие расстояния осуществляется с помощью раз¬
ного рода ретрансляторов как наземного типа, так и типа
ИСЗ.
Прием сигналов времени в этом диапазоне осуществля¬
ется в основном телевизионным методом. Возможно силь¬
ное искажение сигнала из-за дифракции. Несколько мень¬
шую роль играют неоднородности в атмосфере, зависящие
от влажности, давления, температуры в различных точках
на пути луча.
На трассе Земля—спутники наибольшее влияние
оказывает участок в 20 км от приемной антенны.
Большое количество ретрансляторов вносит дополни¬
тельное запаздывание, которое необходимо контролиро¬
вать путем перевозки часов либо путем «закорачивания
линии», т. е. двукратным прохождением сигнала по пути
передатчик—потребитель и обратно.
Для тех случаев, когда точность приема невелика и
не превышает десятитысячных долей секунды, можно
§ 95. Вычисление сводных моментов приема сигналов 301
ограничиться простым расчетом запаздывания по какой-
либо формуле.
Пусть d — расстояние по поверхности Земли между
двумя службами времени; d0 — то же расстояние в пред¬
положении, что Земля имеет сферическую форму. Широты
и долготы двух служб времени будут соответственно
ср, ср' и X, X'.
Тогда, производя расчет по формулам Андуайе, по¬
лучим
7 7 I 7 . О 2 ^ J 2*2 ~1
a = d0-{-<xd0 stn fi cos>2 —— <xd0cos^sin2^ --^r- ,
где
5 = sin2cp2 cos21 -f- cos2 cpx sin2 / = sin2-^-,
С = cos2 cp2 cos21 -f- sin2 cpx sin2 Z = cos2-^-,
R = sJSC
_ ¥ + ¥>' _ ? ~
ft—2“. ft — —2~
Принимая экваториальный радиус Земли a=
=6378,388 «л* и сжатие у полюсов а=1/297, зная рас¬
стояние d и скорости F радиоволн различной длины,
легко получить поправку за время распространения ра¬
диоволн:
АТ = —
ш — у •
§ 95. Вычисление сводных моментов приема
сигналов точного времени
Астрономические определения времени, производимые
на отдельных обсерваториях, искажены разного рода слу¬
чайными и систематическими ошибками. Поэтому шкала
времени TU, полученная на основании наблюдений только
одной обсерватории, не может достаточно точно отра¬
жать вращение Земли. Для получения более надежной
информации о вращении Земли и более равномерной
302
Гл. V. Служба времени
%
шкалы времени необходимо использовать наблюдения не¬
скольких обсерваторий, предварительно приведя эти на¬
блюдения к единой системе и осреднив их. Объединение
результатов наблюдений различных обсерваторий воз¬
можно только в том случае, когда службы времени
этих обсерваторий принимают общие сигналы точного
времени.
Принимая эти сигналы, службы времени вычисляют
моменты подачи сигналов. На основании изменения этих
моментов можно определить различие между шкалой вре¬
мени, задаваемой сигналами, и шкалой времени, полу¬
чаемой с помощью астрономических наблюдений. Для
этого моменты подач сигналов, вычисленные на разных
обсерваториях, объединяют в «сводные моменты».
В Советском Союзе вычисление сводных моментов пе¬
редач радиосигналов было начато в 1928 г. на Пулков¬
ской обсерватории. Первые два года сводные моменты,
публиковавшиеся в «Бюллетенях ГАО», представляли
собой среднее арифметическое из моментов, полученных
на пяти обсерваториях (в Пулкове, Ленинграде, Париже,
Потсдаме и Гринвиче). С 1930 по 1941 гг. вычисление
сводных моментов производилось в Пулкове. За это время
в составлении сводных моментов принимали участие вновь
организованные московские Службы времени ГАИШ и
ЦНИИГАиК, Службы времени Ташкента, Харькова,
Николаева и ВНИИМ в Ленинграде.
К 1941 г. система сводных моментов основывалась уже
на результатах семи служб времени СССР и обсерваторий
Гринвича, Парижа, Потсдама и Гамбурга.
Во время Великой Отечественной войны Советского
Союза большинство служб времени СССР вышло из строя.
Сводные моменты вычислялись по данным только трех
советских служб времени — ГАИШ, ЦНИИГАиК и Таш¬
кента. Вычисление сводных моментов производилось
в службах времени ГАИШ и ЦНИИГАиК с 1941 г. по
1948 гг. С 1948 г. вычисление сводных моментов произво¬
дится в Службе времени ВНИИФТРИ в Москве.
С 1975 г. сводные моменты наблюдений ряда советских
и зарубежных служб времени вычисляются по методу
М. Б. Кауфмана и публикуются в специальных бюллетенях,
называемых «Всемирное время». Суть метода кратко со¬
стоит в следующем.
§ 95. Вычисление сводных моментов приема сигналов 303
После того как поправки часов, полученные по резуль¬
татам наблюдений отдельных обсерваторий с помощью
приемов сигналов времени, переведены на часы, задаю¬
щие шкалу времени TUC, начинается их осреднение. Оно
сводится к объединению результатов отдельных наблюде¬
ний с учетом их систематических ошибок и весов, назна¬
чаемых обычно в зависимости от числа наблюдений, их
точности в случайном и систематическом отношении. После
осреднения всех наблюдений получается одно значение
поправки часов, содержащее несколько десятков попра¬
вок часов, полученных на разных обсерваториях. Затем
систему этих поправок выравнивают и получают выравнен¬
ные поправки часов. При этом происходит не только выгла¬
живание полученного материала и уменьшение его оши¬
бок, но и, к сожалению, потеря некоторого количества
информации о короткопериодических нерегулярностях и
флуктуациях в скорости вращения Земли.
Поэтому методика получения осредненных поправок
часов и их последующего выравнивания существенным
образом сказывается на информативности полученной
шкалы TU1.
При вычислении «Всемирного времени» за основу взят
метод Уиттекера, состоящий в линейном преобразовании
полученных поправок часов при помощи оператора,
обеспечивающего совместное выполнение следующих двух
условий: суммы квадратов уклонений отдельных наблю¬
дений от выравненных и суммы квадратов третьих раз¬
ностей выравненных поправок часов должны быть мини¬
мальными.
Исходным материалом для вычисления «Всемирного
времени» служат средние за вечер наблюдений значения
поправок часов u*^=TUl*y — TUG, где индекс j означает
номер вечера (дату), а индекс i принадлежит некоторому
наблюдателю на некотором инструменте.
Каждая серия наблюдений охватывает период в одну
неделю, причем для совместной обработки привлекаются
еще наблюдения за три дня до этой недели и за три дня
после нее, так что полный интервал обработки составляет
13 дней. Предполагается, что на протяжении 13-суточ-
ного интервала систематические ошибки наблюдений на
каждом инструменте (обозначаемые через S.) остаются
постоянными. Вся совокупность изменении^ — S'. между
304
Гл. V. Служба времени
двумя соседними интервалами для всех наблюдателей на
всех инструментах рассматривается как комбинация слу¬
чайных величин. Совместная обработка результатов на¬
блюдений заключается в отыскании Wy==TUl — TUC и
S4 при условии
р22(ДЧ)2 + 2^-я;)2 +
j *
+ 2 Pij Kj—si—s)2=min- (5.i)
где kn,Uj — третьи разности последовательности {uj};
p.j — веса значений и\\j, характеризующие их точность
только в случайном отношении; Ц — коэффициент, ха¬
рактеризующий степень устойчивости системы данного
наблюдателя на данном инструменте. В известной степени
величину Ц можно рассматривать как вес в систематиче¬
ском отношении, £х2— параметр, определяющий степень
сглаживания последовательности {uj}.
Величины ц2 и Ц вычисляются на основе анализа ряда
предыдущих наблюдений. Веса вычисляются по формуле
Рц=Щ^’ (5-2)
где т0 — средняя квадратическая погрешность единицы
веса, т. е. одной поправки часов, п.— количество по¬
правок часов, полученных на данном инструменте за ве¬
чер (из расчета, что одна поправка составляет около 12
звезд), т. — средняя квадратическая ошибка одного опре¬
деления времени на данном инструменте данным наблю¬
дателем.
Для вычисления Ц принята формула
х'=чтЬ' <5-3>
где rrtSi — средняя квадратическая ошибка Sполучен¬
ная по данным предыдущего интервала обработки; о. —
среднее квадратическое значение изменений S{ между
соседними интервалами для данной комбинации инстру¬
мент-наблюдатель. Значения величин т. и а. получаются
на основании анализа результатов за предшествующий
год и принимаются постоянными на следующий год.
§ 95. Вычисление сводных моментов приема сигналов 305
Параметр р2 выбирается так, чтобы частотная характе¬
ристика сглаживающего оператора оставалась, по воз¬
можности, неизменной на всех интервалах обработки.
Для этого фиксируют отношение (где р — среднее
значение полного веса 2 Л/ 38 °ДИН вечер наблюдений),
♦
полагая это отношение равным 2. Это условие обеспечи¬
вает сохранение в значениях Uj всех колебаний в скорости
вращения Земли с периодами длиннее недели.
Таким образом, для 13-суточного интервала для ^
получается:
(5,4)
Используя соотношения (5.1)—(5.4), получают рабочие
формулы для определения искомых значений u4j и S4:
13 N N
2 Pkjuj -Ь (^1 + 2 — 2 Pkjulj
j=i \ j—i / j=i
где N — число комбинаций инструмент—наблюдатель, q —
= 1, 2, ...,13, к = 1, 2,..., N, с,= 2Лу. если / = ?»
1=1
13—?
и Cj = 0, если J=£q, bqJ— 2 ai'ai4-p Ч = ~l> «1 =
/=4—q
= 3, а2 = —3, az = 1, al = 0 при Z<0 и l^> 3.
Помимо значений и,. вычисляются еще и сглаженные
значения Uj = TUI—TUG. Они вычисляются посредством
применения к значениям Uj линейного оператора вида
29
aj=T0 2 (1+С08ж)а^‘ (5-5)
/=—29
Полученные таким образом значения всемирного вре¬
мени публикуются в бюллетенях «Всемирное время»,
выходящих раз в три месяца в СССР. В этих бюллетенях
в таблице 1 на ноль часов всемирного времени для каж¬
дых суток приводятся разности TUl(SU) — TUC (SU).
306
Гл. V. Служба времени
Индекс (SU) означает, что это разности всемирного
и координированного времен, шкалы которых получены
Государственной службой времени и частоты СССР.
В таблице 1 приводятся также координаты полюса I и Y
в системе условного международного начала (OCI) по
данным Международного Бюро времени (BIH).
В таблице 2 содержатся сглаженные по формуле (5. 5)
значения TUI (SU) - TUC (SU) и TUI (SU) - ТА (SU)
для каждых пятых суток, а также величины разностей
TUI (SU) — TUI (BIH), т. е. разности шкал всемирного
времени Советского Союза и Международного Бюро
времени.
В таблице 3 приводятся среднемесячные систематиче¬
ские отклонения фактического времени передач сигналов
отдельными радиостанциями от шкалы TUC (SU).
В таблице 4 указывается всемирное время в моменты
передач сигналов радиостанции БПЖ (КНР).
В таблице 5 приведены результаты отдельных астро¬
номических наблюдений служб времени, использованные
для вычисления TUI (SU). В этой таблице приведены
следующие величины: дата, температура воздуха, индексы
инструмента и наблюдателя, число звезд, отнаблюденных
за вечер, средняя квадратическая ошибка определения
времени (по внутренней сходимости), систематическая
лично-инструментальная ошибка, £7* — U — уклонение
данного результата определения всемирного времени от
TU (SU).
По данным 1976 г. в создапии шкалы времени TUI (SU)
принимают участие такие службы времени:
1. Институт геодезии и картографии ПНР в Боровой
Гуре — фотоэлектрический пассажный инструмент;
2. Белградская астрономическая обсерватория СФРЮ
— пассажный инструмент;
3. Астрономическая широтная станция АН ПНР в Бо¬
ровце — пассажный инструмент;
4. Бухарестская астрономическая обсерватория СРР—
пассажный инструмент;
5. Сибирский филиал Всесоюзного научно-исследо¬
вательского института физико-технических и радиотех¬
нических измерений и Иркутский государственный уни¬
верситет — фотоэлектрический пассажный инструмент и
две призменные астролябии;
§ 95. Вычисление сводных моментов приема сигналов 307
6. Государственный университет им. А. А. Жданова
в Ленинграде — фотоэлектрический пассажный инструмент;
7. Всесоюзный научно-исследовательский институт
метрологии им. Менделеева в Ленинграде — пассажный
инструмент;
8. Всесоюзный научно-исследовательский институт
физико-технических и радиотехнических измерений в пос.
Менделеево — фотоэлектрический пассажный инстру¬
мент;
9. Государственный астрономический институт
им. П. К. Штернберга и Центральный научно-исследова¬
тельский институт геодезии, аэросъемки и картографии
в Москве — фотоэлектрический пассажный инструмент
и фотографическая зенитная труба;
10. Отделение Главной астрономической обсерватории
АН СССР в г. Николаеве — фотоэлектрический пассаж¬
ный инструмент;
11. Сибирский государственный научно-исследова¬
тельский институт метрологии в Новосибирске — фото¬
электрический пассажный инструмент и две призменные
астролябии;
12. Главная астрономическая обсерватория АН СССР
в Пулкове — два фотоэлектрических пассажных инстру¬
мента и призменная астролябия;
13. Геофизическая обсерватория Пецны исследова¬
тельского института геодезии, топографии и картографии
в Праге — циркумзенитал;
14. Астрономическая и геофизическая обсерватория
политехнического института в Праге — циркумзенитал;
15. Астрономический институт Чехословацкой Ака¬
демии наук в Праге — пассажный инструмент, фотогра¬
фическая зенитная труба;
16. Центральный институт физики Земли АН ГДР
в Потсдаме — призменная астролябия, фотографическая
зенитная труба;
17. Латвийский государственный университет им. Сту-
чки в Риге — фотоэлектрический пассажный инструмент;
18. Центральная лаборатория высшей геодезии
АН JHPB в Софии — пассажный инструмент;
19. Астрономический институт АН Узбекской ССР
в Ташкенте — два пассажных инструмента (один из них
фотоэлектрический);
ж
Гл. V. Служба времени
20. Улан-Баторская астрономическая обсерватория
АН МНР — пассажный инструмент;
21. Харьковский государственный научно-исследова¬
тельский институт метрологии и Астрономическая обсер¬
ватория Государственного университета им. Горького
в Харькове — фотоэлектрический пассажный инструмент.
§ 96. Бюллетени Международного Бюро
времени (BIH)
Международное Бюро времени получает данные о
всемирном времени несколько иным способом, чем
в СССР.
При обработке материалов в BIH используются не толь¬
ко наблюдения времени, но и наблюдения широты, которые
производятся широтными станциями. Производится сов¬
местное определение координат полюса X, Y в системе
условного международного начала и разности АГ^ТШ —
-тис.
Исходные уравнения для определения этих величин
в некоторый момент t по данным обсерватории с индексом i
имеют такой вид:
6. =Ь — $=Х cos XJ + У sin XJ-f-Z,
4< = TU0<-TUC = -(X.sinX;+ (5.6)
-f- Y cos X®) tg <p® -|- ДГ, J
где — наблюденное значение мгновенной широты на
данной обсерватории, ~ начальное значение широты.
TU0,.— значение всемирного времени, полученное на
данной обсерватории с начальной долготой XJ, Z — услов¬
ный компонент, включающий в себя некоторое неполярное
колебание широты, присущее всем обсерваториям и вы¬
зываемое, например, ошибками координат звезд.
После того как получены значения ^ и TU0, — TUC
для каждой ночи наблюдений, вычисляются равновесные
средние значения из cpt. и TUCK — TUC, причем полный
вес каждой точки подбирается так, чтобы в году получи¬
лось около 20 точек. Затем берутся «стандартные значе¬
ния», определяемые для каждой двадцатой доли года ин¬
терполированием между двумя соседними средними зна¬
чениями.
§ 96. Бюллетени Международного бюро времени (BIH) 309
(5.8)
Решение системы (5.6) способом наименьших квадра¬
тов по наблюдениям всех обсерваторий дает величины
X, У и TUI — TUC и позволяет также вычислить веса
отдельных обсерваторий раздельно для определения ши¬
роты и времени. Для вычисления весов каждой обсерва¬
тории в течение года вычисляются разности вида
R4 = $. — X cos Х° — У sin Ц — Z, \
S. = т\. -{- (X sin XJ — Y cos XJ) tg <p°. — AT7, j
и предполагается, что величины R., *3^ можно достаточно
хорошо представить с помощью двух первых членов ряда
Фурье:
R4 = а. -|-b. sin 2nt -f-с. cos 2nt -f-
-f- d. sin hizt -f- e. cos 4tc£,
= a\ -|- h\ sin 2ttt -|-c. cos 2nt -j-
-f- d\ sin 4nt -f- e. cos 4nt,
где t — время, отсчитываемое в долях года. Коэффициенты
а, Ь, с,. . ., получаемые из решения уравнения (5.8), и
служат для определения весов отдельных обсерваторий.
Вычисления, выполненные в BIH, показали, что при
большом количестве инструментов (а их в BIH несколько
десятков) эти коэффициенты подчиняются нормальному
закону и потому могут служить характеристиками точ¬
ности отдельных обсерваторий.
Для каждой обсерватории вычисляется величина
п п
<?!■>=2<‘*;--а;>,+1
+(c;-«;V+<<*;-<o!+(e;-os]. м
где а',. . ., е'п — средние за п лет значения коэффициентов
для i-й обсерватории, взятые из ежегодных а^,. . ., e'j,
где / = 1, 2,. . ., п.
Затем вычисляют величины
ц2 = _21!!_ и =_Wi_
•' га — 1 •' га (га — 1) ’
которые и служат критериями точности наблюдений от¬
дельных обсерваторий.
310
Гл. V. Служба времени
Окончательное вычисление значений всемирного вре¬
мени производится с учетом весов для каждого инстру¬
мента различных обсерваторий.
Всего по данным на 1975 г. для получения всемирного
времени в системе BIH принимали участие 60 служб вре¬
мени и широты. Наблюдения производились на 82 ин¬
струментах: зенитных трубах, астролябиях, зенит-те¬
лескопах и пассажных инструментах.
Учитывались также данные службы широты, осно¬
ванные на радионаблюдениях искусственных спутников
Земли (доплеровский метод).
В бюллетенях BIH и их приложениях приводятся
данные об отдельных наблюдениях всех служб времени,
а также ежегодная оценка их точности — веса и коэф¬
фициенты а, Ь, с,. . . (табл. 1—3). В таблице 4 даются
разности TU2 — TU1 через пять дней. Затем приводится
группа таблиц, содержащих вычисленные координаты
полюса X, У, величину Z (см. уравнение (5.6)) и разности
TU2 — TUC и TUI — TUC, даваемые через пять дней,
а также их сглаженные значения. В таблице 8 приводится
продолжительность суток и угловая скорость вращения
Земли, даваемые тоже через пять суток.
Затем следует большая группа таблиц, в которых при¬
водятся разности вида TAI — TUC, ТА,. — TUC;, TAI —
— ТА;, TUC — TUC;, где индекс i принадлежит некото¬
рой службе времени или лаборатории, располагающей
атомными стандартами. В последних таблицах приво¬
дятся данные, связанные с передачей сигналов точного вре¬
мени — координаты передающих станций, частоты, про¬
граммы передач, данные о коррекциях TUC, о сравнении
часов отдельных лабораторий путем перевозки, веса,
приписываемые хранителям отдельных служб времени
и т. д.
§ 97. Получение шкалы атомного времени TAI
в системе BIH
До июля 1973 г. шкала времени TAI вычислялась
в системе BIH как среднее из семи местных шкал времени
ТА;, которые в свою очередь получались на основании
осреднения показаний целой группы атомных часов каж¬
дой лаборатории.
§ 97. Получение шкалы атомного времени
311
После июля 1973 г. вычисление TAI производится но¬
вым способом, в основу которого положено непосредствен¬
ное вычисление TAI по данным отдельных атомных часов.
Преимуществом нового метода являются:
1) возможность использования единого критерия при
оценке ходов часов,
2) возможность привлечения всех хороших атомных
часов, которые раньше не участвовали в формировании
атомного времени.
Сущность нового метода состоит в следующем.
Обозначим через «с» некоторые часы обсерватории
с индексом X, полагая, что с=1, 2, 3,. . ., С и что Х=1, 2,
3,. . ., L, т. е., иными словами, полагая, что на L обсерва¬
ториях имеется С атомных часов.
Тогда время Т' по часам «с» обсерватории X для момента t
можно представить с помощью следующего соотношения:
T'e = Te + Ac + Bc(t-t0),
где t выражено в днях, t0 — начало отсчета, В0 — пред¬
варительный ход часов относительно TAI, Ас — некото¬
рая поправка, удовлетворяющая соотношению Ас =
=ТА1 — Те при t=t0.
Каждым часам приписывается вес рс, который связан
с вероятной разностью между прогнозируемым и наблю¬
даемым значениями Вс.
В течение некоторого интервала времени I, выбирае¬
мого заранее, веса и величины Ас и Вс остаются постоян¬
ными. Часы, вводимые или исключенные по тем или иным
причинам на этом интервале, получают вес, равный нулю.
Продолжительность интервала I берется постоянной
и достаточно большой, чтобы ошибки сравнения часов
между отдельными удаленными лабораториями не оказы¬
вали заметного влияния на точность оценки ходов часов.
Последнее легко понять, если учесть, что ошибки сравне¬
ний остаются постоянными, а ошибки в определении
ходов часов накапливаются. На современном этапе ин¬
тервал I принят равным двум месяцам.
Каждая лаборатория X может иметь в своем распоряже¬
нии следующие шкалы времени: 1) время TUCX — ко¬
ординированное время, получаемое на данной обсерватории
и хранимое на ней, 2) атомное время данной лабора¬
тории ТАХ — время, получаемое из вычислений по показа-
312
Гл. V. Служба времени
ниям группы атомных часов данной лаборатории, 3) время,
задаваемое приемом сигналов других станций Ms, где S =
= 1, 2, 3,. . ., S.
Для простоты вычислений полагается, что разность
между TAI и TUC не содержит скачков на секунду, вы¬
зываемых коррекциями TUC относительно всемирного
астрономического времени TU1, и, следовательно, пре¬
небрежимо мала.
Через х обозначаются неизвестные величины, опреде¬
ляемые из вычислений, а через Е известные численные
значения *). Неизвестными величинами являются раз¬
ности вида:
ТСС — ТиСх = я(Х), Х = 1, 2
TUC — ТАх = я(£ + Х),
TUC-rc = z(2L+c), с= 1, 2,..„С,
TUC — Ms = x(2L + C-\-S\ 5 = 1, 2,...,5,
представляющие собой комбинации разностей шкал лабо¬
ратории и времени TUC, которое, вообще говоря, не¬
известно.
В каждой лаборатории можно получить соотношения
вида
тисх-Гс = Е(Х, 2L+C), (5.11)
TUCX —ТАх = Е(Х, L + \), (5.12)
TUCх-М* = Е(Х, 2L + С + 5)-т(Х, 5), (5.13)
где т (X, 5) — поправка за запаздывание сигналов между
лабораториями, определяемая, например, методом пере¬
возки часов. Результаты сравнений осредняются на деся¬
тидневном интервале с тем, чтобы ошибки приема были
меньше вариаций в ходе часов, что необходимо для полу¬
чения надежных значений в уравнениях (5.13). Уравне¬
ния (5.11) и (5.12) могут быть получены с высокой точ¬
ностью, так как сравнение часов внутри данной лабора¬
тории не представляет проблемы и может быть произведено
(5.10)
*) В уравнениях (5.10) —(5.15) приняты обозначения, упо¬
требляющиеся в В1Н.
§ 98. Геофизические задачи времени
313
с достаточным количеством знаков. Помимо соотношений
(5.11)—(5.13) можно написать еще
тис =2 Ре [Тв+Ae+Be(t- 01/2/V (5.14)
«=1
Используя соотношения (5.10)—(5.14), начальные
уравнения можно переписать в следующем виде: jj
x(2L + c) — х(Х) = |(Х, 2L+c),
x(L-\-\) — x(l) = l(k, L + X),
x (2L + С -f S) - x (X) = 5 (X, 2L + C+S)-т (X, S), (5.15)
С с
2 pcx (2L + c) = 2 Pc [A. + Be (t - Ql
C—1 C—1
Решая эту систему по способу наименьших квадратов,
определяют неизвестные и по ним время TUC.
Значение Вс при решении системы (5.15) вначале бе¬
рется равным Вс предыдущего двухмесячного интервала,
а рс определяется по изменению величин Вс на пяти пре¬
дыдущих интервалах плюс интервал, на котором ведутся
вычисления.
Определение веса, таким образом, включает в себя
все новые данные и производится методом итерации. Для
первой итерации веса рс берутся равными весам предыду¬
щего интервала. Максимальный вес принимается рав¬
ным 100. Если изменение частоты тех или иных часов на двух
интервалах, предыдущем и рассматриваемом, превышает
6-10-13, этим часам дается вес, равный нулю.
Большинство атомных часов, принимающих участие
в получении TAI, — это промышленные цезиевые часы.
Всего, по данным за 1975 г., при вычислении атомного
времени учитывались показания более чем 60 атомных
часов.
§ 98. Геофизические задачи, решаемые
службами времени
Основными геофизическими задачами служб времени
сейчас являются:’
1) изучение разного рода неравномерностей во вра¬
щении Земли и их интерпретация,
314
Гл. V. Служба времени
2) изучение движений земной коры по специальным
долготным работам и изменению долгот отдельных служб
времени относительно системы Международного Бюро
времени.
Ценный материал для решения этих задач дают много¬
численные астрономические наблюдения служб времени.
Сравнения шкал времени, получаемые астрономическими
способами, с атомным временем дают возможность про¬
изводить анализ всех видов неравномерностей во вра¬
щении земного шара.
Надо, однако, отметить, что этот анализ сильно за¬
труднен ошибками астрономических наблюдений, вызван¬
ными несовершенством инструментов, неточностью ката¬
логов, влиянием атмосферы.
Большие затруднения при обработке материалов вы¬
зывает также неравномерность определения поправок ча¬
сов внутри года из-за плохой погоды.
Условно неравномерности во вращении Земли делят
на такие виды:
1) сезонная неравномерность с периодами, близкими
к году и полугоду,
2) неравномерность вращения Земли приливного ха¬
рактера с периодами от нескольких дней до нескольких
лет,
3) непериодические изменения в скорости вращения
Земли, имеющие место в интервалах от нескольких де¬
сятков дней до нескольких десятков лет,
4) вековое замедление в скорости вращения Земли.
Наибольшую величину из всех видов неравномерно¬
сти имеют сезонные волны. Их полная амплитуда дости¬
гает +08, 04.
Основной причиной годичной неравномерности во
вращении Земли является перераспределение момента коли¬
чества движения между Землей и окружающей ее атмо¬
сферой. Изменение момента количества движения атмо¬
сферы вызывает, по закону сохранения момента коли¬
чества движения, обратное по знаку изменение момента
количества движения земного шара, т. е. изменение в ско¬
рости вращения Земли. Иными словами, сезонная не¬
равномерность вращения Земли обусловлена главным об¬
разом сезонными изменениями момента количества дви¬
жения атмосферы. Неравномерность вращения Земли
§ 98. Геофизические задачи служб времени
315
с полугодичным периодом объясняется атмосферными про¬
цессами лишь наполовину. До 50% этого явления можно
объяснить приливными эффектами.
Надо помнить, что разделение периодических неравно¬
мерностей на полугодовые и годовые периоды является
в известной степени условным, так как на эти периоды
накладываются и другие. Можно считать установленным,
что как амплитуда, так и фаза этих неравномерностей
не остаются постоянными от года к году, что хорошо
объясняется нестабильностью атмосферных процессов.
Во вращении Земли согласно теоретическим расчетам
существуют неравномерности приливного характера.
При деформации земного шара, вызванной лунно-сол¬
нечными приливами, изменяется момент инерции Земли,-
Вследствие этого возникают периодические вариации
в скорости вращения Земли. Уменьшение скорости вра¬
щения Земли за сутки на величину Д а> приводит к увели¬
чению продолжительности суток на величину М. Е. Ву-
лард произвел теоретический расчет приливных неравно¬
мерностей во вращении Земли с амплитудами до 0s,0001.
Суммарное влияние всех неравномерностей с периодом
до месяца можно представить следующей формулой:
Период
= к [0s,00032 sin (2 С + jr) +
9\1
+0S,00013 sin (2С +£-£)) +
9,1
+0S,00247 sin 2 С + 0s,00102 sin (2 С — Q) +
13,7
+0S,00010 sin (2 С — 2&) +
13,7
+0S,00011 sin 2^ +
13,8
-j-08,00023 sin (2 C — 2Q) +
14,8
-{-0s,00263 sin g — 0s,00017 sin (£ + £>) —
27,6
—0s,00263 sin g — 0s,00017 sin (g + Q) -
27,6
—0s,00014 sin (2 С — g) — 0s,00006 sin (2 С —
27,1
s— Q) +
-(-0s,00058 sin (2 С — g — 2Q)]>
31,8
где С — средняя долгота Луны, Q — средняя долгота
Солнца, g — средняя аномалия Луны, Q — средняя дол¬
гота лунного узла, к — постоянная Лява, представляю¬
щая отношение дополнительного потенциала, возникаю¬
316
Гл. V. Служба времени
щего из-за приливных деформаций Земли, к потенциалу
сил, вызывающих эту деформацию.
Первые попытки обнаружения неравномерностей при¬
ливного характера во вращении Земли предпринял Мар¬
ковиц в 1950—1955 гг. В дальнейшем этим вопросом за¬
нимался ряд авторов, в том числе А. Стойко и Г. П. Пиль¬
няк; эти авторы, используя результаты астрономических
наблюдений, получили величину числа Лява к.
Большой интерес представляет выявление непериоди¬
ческих изменений (флуктуаций) в скорости вращения
Земли. Ускорения, возникающие при некоторых флук¬
туациях, во много раз превышают те ускорения, которые
связаны, например, с сезонной неравномерностью вра¬
щения Земли.
Изучение флуктуаций в скорости вращения Земли яв¬
ляется очень сложной задачей. Еще не существует еди¬
ного мнения о природе этих флуктуаций, а зачастую дис¬
куссионным становится и вопрос об их продолжительно¬
сти и величине.
По мнению А. Данжона, флуктуации в скорости вра¬
щения Земли связаны с солнечными вспышками и вы¬
зываются взаимодействием магнитного поля Земли с мощ¬
ным потоком частиц, выбрасываемых Солнцем.
По мнению Н. II. Парийского и других авторов, флук¬
туации в скорости вращения Земли вызываются процес¬
сами, происходящими внутри земного шара и приводя¬
щими к изменению момента инерции Земли. В этом случае
продолжительность флуктуаций должна составлять ме¬
сяцы, так как трудно допустить наличие слишком быст¬
рых процессов внутри Земли, приводящих к наблюдае¬
мым величинам флуктуаций.
К сожалению, неравномерность астрономических наб¬
людений и их ошибки не дают возможности получать
удовлетворительные данные о вращении Земли на корот¬
ких, в несколько дней, отрезках времени. Что же ка¬
сается флуктуаций, продолжающихся в течение несколь¬
ких месяцев, то их трудно отделить от аномалий в сезон¬
ной неравномерности вращения Земли. Наблюдаемое при
этом изменение скорости вращения Земли с равной сте¬
пенью вероятности может быть приписано и аномалии
в сезонной неравномерности, и наличию флуктуаций во
вращении Земли.
§ 99. Определение долгот
317
Окончательное решение этого вопроса, вероятно, будет
возможно лишь после выяснения физического механизма
этих явлений.
Значительно легче обнаружить наличие флуктуаций,
продолжающихся несколько лет (рис. 140).
Рис. 140. Изменение скорости вращения Земли на большом интер¬
вале.
Для этого используются как наблюдения Луны, так
и сравнения TU2 с TAI. Так, например, результаты срав¬
нения TU2 с TAI, произведенные А. и Н. Стойко за пе¬
риод с 1962 по 1965 г., показывают изменение (замедле¬
ние) в скорости вращения Земли примерно раз в 20 боль¬
шее, чем вековое замедление.
Для успешного решения задач по изучению неравно¬
мерностей вращения Земли абсолютно необходимо даль¬
нейшее совершенствование инструментов и методов, при¬
меняемых в лабораториях времени. Только повышение
точности астрономических наблюдений может дать ис¬
черпывающие данные для изучения всех видов неравно¬
мерностей во вращении Земли.
§ 99. Определение долгот
Разность долгот двух точек на земной поверхности
равна разности местных времен в этих точках для одного
д того же физического момента.
318
Гл. V. Служба времени
Таким образом, задача определения долготы сводится
к получению в некоторый момент разности местных вре¬
мен определяемого пункта и пункта с известной долготой.
Для решения этой задачи необходимо производить опре¬
деления местного времени в обоих пунктах и каким-либо
способом передавать местное время пункта с известной
долготой на пункт с определяемой долготой.
Вопросу определения долгот уделялось и уделяется
большое внимание, поскольку задача определения коор¬
динат на поверхности Земли (и особенно на море) всегда
была весьма актуальной. Существует много различных
способов определения долгот. В далеком прошлом рас¬
пространенным был способ определения долготы по по¬
ложению Луны среди звезд.
Зная экваториальные координаты Луны и окружаю¬
щих ее звезд для ряда последовательных моментов, можно
заранее вычислить угловые расстояния между Луной и
звездами как функции гринвичского времени, т. е. для
нулевого меридиана, и составить таблицы.
Измерив угловое расстояние между Луной и некото¬
рой звездой на другом меридиане, по таблице определяют,
какому моменту по гринвичскому времени оно соответ¬
ствует. Иными словами, узнают гринвичское время.
Широко был распространен и другой способ определе¬
ния долгот — по наблюдениям затмений спутников Юпи¬
тера. Этот способ впервые предложен Галилеем. Идея
метода заключалась в том, что моменты затмения спут¬
ников Юпитера, полученные по местному времени в точке
с определяемой долготой, сравнивались с моментами за¬
тмений, вычисленными для гринвичского меридиана.
С изобретением в 1765 г. морского хронометра появи¬
лась возможность перевозки часов из одной обсерватории
в Другую, не нарушая существенно их хода. Хронометр,
поправка которого была определена в пункте с известной
долготой, можно было перевезти в место с определяемой
долготой и там определить его поправку по местному вре¬
мени. Тогда разность поправок, полученных по мест¬
ным временам исходного и определяемого пунктов, да¬
вала, с учетом хода хронометра, разность долгот этих
пунктов.
с Изобретение .морского хронометра упростило задачу
определения долготы. Интересно отметить, что опосаб
§ 99. Определение долгот
319
определения долгот с перевозкой хронометров приме¬
нялся не только в полевых условиях и на море, но и для
определения долгот обсерваторий. В середине прошлого
века для определения разности долгот между обсервато¬
риями устраивались «хронометрические экспедиции».
Во время этих экспедиций по несколько десятков хроно¬
метров перевозилось из пункта с известной долготой
в пункт с определяемой долготой. Так, например, в 1843 г.
была определена разность долгот между Пулковом, Аль-
тоной и Гринвичем. В 1845 г. определялась разность
долгот Пулкова и Москвы (обсерватория на Красной
Пресне). При определении разности долгот Пулково—
Москва перевозилось 40 хронометров.
Такое большое количество хронометров было необхо¬
димо, чтобы скомпенсировать возможные вариации хода
отдельных экземпляров, так как во время перевозки
нельзя контролировать ход хронометров с помощью аст¬
рономических наблюдений.
Изобретение проволочного телеграфа положило конец
«хронометрическим экспедициям». Для определения раз¬
ности долгот стала использоваться линия связи. Сигнал,
передаваемый из опорной (с известной долготой) обсер¬
ватории в некоторый момент по местному времени, при¬
нимался в определяемом пункте. Зная момент подачи сиг¬
нала и показания своих часов в этот момент, получаем
поправку часов относительно местного времени опорной
обсерватории.
Астрономические наблюдения дают поправку часов по
местному времени определяемого пункта. Разность этих
поправок, приведенных за счет хода часов на один и
тот же физический момент, есть разность долгот. Ход
часов предполагается известным из наблюдений.
Сейчас для определения разности долгот используются
сигналы точного времени.
Пусть наблюдатель определил поправку иг своих ча¬
сов по местному времени определяемого пункта в мо¬
мент Тг. Суточный ход часов а> заранее известен из приема
сигналов. Приняв сигналы времени по радио в момент Т2
по своим часам и зная программный момент подачи сигна¬
лов, наблюдатель получает поправку часов и2 относи¬
тельно Гринвича. Приведя эти поправки часов за счет
хода на некоторый момент Т и считая долготу положи¬
320
Гл. V. Служба времени
тельной к востоку, будем иметь
„=[„,+£ (Г - !■,)]-[», + £(Г - Л)]=
= и1-и2 — -^(Т1 — Т2).
На точность определения долгот влияет целый ряд
факторов:
1) инструментальные и личные (при визуальной ре¬
гистрации) ошибки наблюдений и местные рефракцион¬
ные аномалии,
2) систематические ошибки координат звезд, если
наблюдения на каждом из пунктов разновременны, или
если пункты сильно отличаются по широте,
3) ошибки подач сигналов времени,
4) ошибки приема сигналов, вызванные неучтенным
запаздыванием в приемной аппаратуре и неточным зна¬
нием поправки за время распространения радиоволн,
5) возможные вариации хода часов в перерывах между
приемами сигналов.
Наиболее существенными являются ошибки, связан¬
ные с астрономическими наблюдениями. Поэтому долгот¬
ные определения строятся таким образом, чтобы свести
действие этих ошибок к минимуму.
Определение долгот может производиться как односто¬
ронним, так и двухсторонним методом.
При одностороннем методе наблюдения на пассажном
инструменте сначала производятся в пункте с известными
координатами. Из этих наблюдений определяется лично¬
инструментальная ошибка. Затем наблюдения ведутся на
определяемом пункте для получения искомой долготы.
Заключительный этап составляют повторные наблюдения
на пункте с известными координатами для контроля по¬
стоянства лично-инструментальной ошибки. Полученное
изменение значения лично-инструментальной ошибки учи¬
тывается при выводе долготы. Недостатком односторон¬
него способа является разновременность наблюдений на
опорном и определяемом пунктах.
При двухстороннем методе определения долгот произ¬
водятся одновременные наблюдения на двух пунктах —
опорном и определяемом; в наблюдениях используются
сразу два пассажных инструмента. После серии наблюде-
§ 100. Изменяемость долгот
321
ний, состоящей обычно из 10—15 вечеров, производится
смена пассажных инструментов на пунктах и повторная
серия наблюдений. Легко сообразить, что разность лично¬
инструментальных ошибок, при условии их постоянства,
не оказывает влияния на результат. Ошибки прямых
восхождений Даа не будут искажать разности долгот,
так как на пунктах наблюдаются одни и те же звезды.
Двухсторонний способ позволяет определять разность
долгот с ошибкой около +0s,001-t-0s,003.
При высокоточных долготных работах часто приме¬
няются так называемые долготные треугольники. В этом
случае двухсторонним способом определяется разность
долгот трех точек А, В и С. Разности долгот А— В, В-—С,
С—А должны в сумме давать нуль. Отличие этой суммы
от нуля (невязка) служит в известной степени критерием
точности проделанной работы.
В работах большого масштаба иногда определяются
долготы сразу многих пунктов. Тогда составляются дол¬
готные кольца, включающие обычно несколько основных
точек, к которым затем привязывают долготы промежу¬
точных пунктов.
В практике служб времени периодически производятся
уточнения долгот обсерваторий, имеющих службы вре¬
мени. Поправки к принятым долготам выводятся на осно¬
вании систематических уклонений результатов астрономи¬
ческих наблюдений отдельных обсерваторий от системы
фиктивной средней обсерватории. Полученные Междуна¬
родным Бюро времени поправки к долготам публикуются
в бюллетенях МБВ. Следует отметить, что эти поправки
не всегда точно отражают существо дела: они могут быть
вызваны инструментальными ошибками, рефракционными
аномалиями и ошибками индивидуальных каталогов ко¬
ординат звезд отдельных служб времени.
§ 100. Изменяемость долгот в результате
смещения материков
Вопрос о движении материков привлекал внимание
ученых еще в 18 в. Однако первая попытка создания науч¬
ной теории движения материков была сделана лишь
в 1912 г. А. Вегенером. В своей работе «Возникновение ма¬
териков и океанов» Вегенер пришел к выводу, что Грен¬
322
Г л, V. Служба времени
ландия удаляется от Европы со скоростью в несколько
десятков метров за год. Точно так же он рассчитал, что
расстояние между Европой и Америкой увеличивается
приблизительно на один метр за год. Вегенер указал на
большое сходство в очертаниях береговых линий Африки
и Южной Америки и на основании этого сходства сделал
вывод о возможном образовании материков из единого
блока, который был затем разорван на части. Для дока¬
зательства своей гипотезы Вегенер привлек ряд долготных
определений конца прошлого века и нашел, что измене¬
ния долготы острова Сабин (Гренландия) действительно
наблюдаются и находятся в согласии с его теорией.
Выводы Вегенера вызвали оживленную дискуссию
среди астрономов и послужили толчком для проведения
целого ряда долготных работ. Наиболее крупными из
них были международные долготные определения в 1926
и 1933 гг. Эти определения имели своей целью проверку
гипотезы Вегенера и создание единой долготной сети,
охватывающей весь земной шар.
В Первой Международной долготной работе прини¬
мали участие 42 обсерватории тридцати различных госу¬
дарств и девять мощных радиостанций, передававших
ежесуточно 45 сеансов сигналов точного времени.
Все обсерватории были разделены на две группы.
В первую группу входили первоклассные обсерватории,
образовавшие вокруг земного шара два основных долгот¬
ных полигона. Вершинами первого полигона были обсер¬
ватории Алжира, Зи-Ка-Вей и Сан-Диего.
Второй полигон составляли обсерватории в Гринвиче,
Токио, Ванкувере и Оттаве. Все остальные обсерватории
привязывали свои наблюдения к долготной сети, зада¬
ваемой этими двумя полигонами. Наблюдения на основ¬
ных полигонах производились в октябре-ноябре 1926 г.,
а в 1928 г. была закончена вся обработка полученных ма¬
териалов. Точность определения одной стороны основного
треугольника Алжир, Сан-Диего, Зи-Ка-Вей составляла
±0s,002-f-0s,006. Ошибка замыкания (невязка) была равна
0s,007.
В октябре-ноябре 1933 г. была проведена Вторая Меж¬
дународная долготная работа. В ней приняла участие
71 обсерватория, в том числе и обсерватории Советского
Союза.
§ 100. Изменяемость долгот
323
Обсерватории, участвовавшие в Первой Международ¬
ной долготной работе, производили наблюдения теми же
методами, на тех же инструментах, что и в 1926 г.
В табл. 14 приведены разности долгот между верши¬
нами двух основных полигонов для 1933 и 1926 гг. и из¬
менения этих величин за 7 лет.
Таблица 14
Вершины полигонов
1933 г.
1926 r.
1933—
1926 гг.
Алжир — Сан-Диего
Сан-Диего — Зи-Ка-Вей
Зи-Ка-Вей — Алжир
8h 0m 56s, 886
8 5 28, 682
7 53 34, 432
56s, 900
28, 734
34, 366
-0s, 014
-0, 052
+0, 066
Гринвич— Оттава
Оттава — Ванкувер
Ванкувер — Токио
Токио — Гринвич
5h 2m 51s, 910
3 9 36, 364
6 29 21, 515
9 18 10, 111
51s, 929
36, 413
21, 449
10, 109
-0s, 019
-0, 049
+0, 066
+0, 002
На основании изменений разностей долгот можно за¬
ключить, что Америка не удаляется от Европы, как это
полагал Вегенер, а, наоборот, сближается с Европой на
0,6 м за год. Заметим, что интервал в 7 лет, безусловно,
мал для выявления столь тонких эффектов. К получен¬
ным в 1926—1933 гг. изменениям долгот следует отно¬
ситься с известной осторожностью, так как наблюдения
того времени из-за неучтенных систематических ошибок
были не всегда надежными.
За последние годы вопросу изменения долгот был по¬
священ целый ряд работ. А. и Н. Стойко в одной из своих
работ приводят таблицу изменений долгот между Япо¬
нией, Северной Америкой и Европой (табл. 15). В этой
таблице даны годичные изменения долгот по материалам
наблюдений за последние 25—40 лет. В первом столбце
таблицы содержатся результаты, полученные И Шу-хуа
(Китай), во втором столбце — данные по работе Торао и
Окацаки из Токио и в третьем столбце — данные А. и
Н. Стойко, полученные из анализа бюллетеней МБВ.
А. и Н. Стойко пришли к следующим выводам:
1) существует взаимное удаление Японии и восточ¬
ного побережья Северной Амер^кт*;
324
Гл. У. Служба времени
Таблица 15
I
II
Ш
Токио — Сев. Америка
+о:оои1
+0*00143
+0!00046
Сев. Америка — Европа
- 68
- 61
- 35
Европа — Токио
- 43
- 82
- И
2) Северная Америка сближается с Европой;
3) Европа сближается с Японией.
Результаты, приведенные А. и Н. Стойко, нельзя, ко¬
нечно, назвать противоречивыми, однако их трудно счи¬
тать и абсолютно надежными, так как расхождения в ве¬
личинах полученных эффектов весьма значительны.
Можно лишь с уверенностью сказать, что повышение
точности наблюдений, переход на новый, более совершен¬
ный каталог координат звезд и по¬
становка новых долготных работ да¬
дут материал для уверенных суж¬
дений о движении материков. Повы¬
шение точности долготных работ по¬
зволит судить и о перемещениях от¬
дельных участков суши в горизон¬
тальном направлении. Решение по¬
добных задач представляет большой
интерес для геофизики.
Большие возможности для изу¬
чения движения материков и бло¬
ков земной коры открывает исполь¬
зование радиоинтерферометров и лазерных наблюдений
исз.
Точность, с которой с их помощью может быть опре¬
делена хорда земной поверхности, составляет десятки
сантиметров. Методика этих наблюдений такова, что их
результаты практически не отягощены значительными си¬
стематическими ошибками.
Особый интерес ввиду своей простоты и оперативности
представляет синхронное наблюдение ИСЗ с двух точек,
расстояние между которыми подлежит определению.
Если в некоторый момент (строго одновременно) с обоих
концов А и В хорды АВ произвести с помощью лазерного
С
Рис. 141. К вопросу
измерения хорды зем¬
ной поверхности.
§ 100. Изменяемость долгот
825
дальномера определение расстояний р до спутника
в точке С и сфотографировать его среди звезд из пунктов
А и J5, можно по одному замеру вычислить хорду А В
(рис. 141) по формуле
(А В)2 = pi -f- pi — 2рЛ • рв • cos С.
Угол С определяется по измерению астронегативов.
В принципе возможны и другие, более сложные, варианты
определения хорды АВ по группе наблюдений ИСЗ с не¬
скольких станций (см. § 86).
Для определения системы из нескольких хорд с по¬
мощью радиоинтерферометров одна из его антенн должна
быть мобильной. Такая задача технически вполне воз¬
можна. Сейчас ведутся разработки передвижных антенн
с диаметром зеркала, превышающим десять метров.
Глава VI
УЛУЧШЕНИЕ ПРЯМЫХ ВОСХОЖДЕНИЙ
ЗВЕЗД, ИСПОЛЬЗУЕМЫХ ДЛЯ
ОПРЕДЕЛЕНИЯ ВРЕМЕНИ
§ 101. Общие соображения
На точность определения времени из астрономических
наблюдений оказывают влияние ошибки прямых восхож¬
дений звезд каталога, в системе которого производится
обработка наблюдений. Чем совершеннее астрономиче¬
ские инструменты, тем больше влияние случайных и си¬
стематических ошибок исходного каталога на точность
поправок часов. Поэтому возникает необходимость улуч¬
шения прямых восхождений звезд, наблюдаемых в лабо¬
раториях времени. Наиболее остро эта задача стоит перед
наблюдателями на фотографических зенитных трубах, так
как слабые звезды их программ не имеют точных коор¬
динат. Для наблюдений на пассажных инструментах и
призменных астролябиях используются в большинстве
случаев звезды из каталога FK4, который в настоящее
время является паилучшим фундаментальным каталогом.
Однако даже этот каталог далек от совершенства.
Наблюдения на ряде фотоэлектрических пассажных
инструментов и астролябий убедительно показали, что
прямые восхождения звезд каталога FK4 имеют в север¬
ной зоне значительные систематические ошибки вида Даа,
особенно около 16ь прямого восхождения. Поэтому неко¬
торые службы времени производят сейчас обработку своих
наблюдений в системе собственных каталогов, получен¬
ных на основе своих астрономических наблюдений.
Рассмотрим вопрос о выводе собственного каталога
службой времени из наблюдений, производимых на пас¬
сажном инструменте. При этом мы мало нарушим общ-
§ 102. Определение случайных ошибок
327
ность рассуждений, так как проблема получения ката¬
лога из наблюдений на зенитной трубе или призменной
астролябии мало отличается от решения этой задачи на
пассажном инструменте.
На практике вывод собственного каталога из наблюде¬
ний службы времени сводится к определению различных
поправок исходного каталога, в системе которого произ¬
водится обработка наблюдений. Возможны три варианта
улучшения исходного каталога:
1) производится улучшение только путем уменьшения
его случайных ошибок,
2) определяются не только случайные ошибки, но и
систематические ошибки вида Доса в зенитной зоне,
3) определяются случайные ошибки и систематические
ошибки вида Даа и Да8.
Остановимся подробнее на каждом из трех вариантов.
§ 102. Определение случайных ошибок
исходного каталога
При таком способе улучшения исходного каталога его
систематические ошибки полностью переходят в новую
систему координат звезд. Поэтому данный метод улучше¬
ния координат, хотя он и является самым простым, не
может считаться полностью удовлетворительным. Для
определения случайных ошибок прямых восхождений
звезд исходного каталога обычно используются уклонения
поправок часов и-, полученных по отдельным звездам,
п
от средней поправки за вечер наблюдений й —— • Однако
такое решение нельзя считать полностью строгим, так
как эти уклонения могут содержать некоторую система¬
тическую составляющую, вызванную наличием инстру¬
ментальных погрешностей и систематическими ошибками
исходного каталога. Так, например, дефекты цапф могут
привести к тому, что наблюдения целой группы звезд на
определенном зенитном расстоянии дадут ошибочную по¬
правку часов, хотя координаты этих звезд и не будут
иметь в действительности ощутимых случайных ошибок.
Поэтому сначала разности и4—й анализируются как
функции прямого восхождения, склонения и яркости
328 Гл. VI. Улучшение прямых восхождений звезд
звезд. Если между разностями и.—й и, например, скло¬
нением существует зависимость, уклонения поправок по
отдельным звездам от й уже нельзя рассматривать как
случайные. В этом случае надо освободить разности и{—й
от систематической составляющей.
Случайные ошибки прямых восхождений звезд исход¬
ного каталога оказывают свое влияние лишь на согласие
определений поправки часов по отдельным звездам в дан¬
ный вечер. При достаточно большом количестве звезд
(20 и более) они практически не влияют на точность сред¬
ней за вечер поправки часов. Гораздо важнее учет систе¬
матических ошибок вида Доса исходного каталога.
§ 103. Определение систематических ошибок
вида Ааа исходного каталога
Систематические ошибки вида Даа исходного каталога
являются одним из источников погрешностей сезонного
характера в астрономических наблюдениях. Такие волны
искажают шкалу времени TU2. Поэтому изучение ошибок
вида Даа и их учет представляет важнейшую задачу при
каталожных работах в службах времени. Поскольку для
получения поправок часов на большинстве обсерваторий
используются наблюдения зенитной группы звезд, опре¬
деление ошибок Даа производится для зенитной зоны,
т. е. для звезд с зенитными расстояниями, не превышаю¬
щими +15°. Полученные значения ошибок Даа являются
практически независимыми от исходного каталога. Об¬
щим с исходным каталогом остается только нуль-пункт
системы ошибок вида Даа. Рассмотрим этот вопрос под¬
робнее. При вычислении поправки часов искажать ее
будут ошибки вида Даа, а также ошибочность азимута
инструмента. Для случая, когда поправка часов опреде¬
лена из наблюдений группы зенитных звезд и нескольких
экваториальных звезд, необходимых для надежного опре¬
деления азимута, можно написать такие выражения:
«о 0^а)о = и “Ь кК0, | (6 1)
— (ДЙ)8 — Тш = и-\-кК9. J
В формулах (6.1) зенитная и южная группы для про¬
стоты рассуждений заменены двумя звездами: зенитной
§ 103. Определение систематических ошибок 329
с индексом «О» и экваториальной с индексом «s». (Да)о -
ошибка зенитной зоны, a (Да)8 — ошибка экваториаль¬
ной зоны.
Сравнение большинства абсолютных каталогов пока¬
зывает, что эти каталоги хорошо сходятся в отношении
ошибок вида Даа в экваториальной зоне. Это означает,
что ошибки (Aa)s малы и поэтому можно положить для
простоты рассуждений (Aa)s=0. Образуя разность между
вторым и первым из уравнений (6.1), найдем азимут ин¬
струмента
7- 5s — — й0 + Т0 + (Ла)0
*- к^Т. ■ М
Полученный азимут будет искажен ошибками (Да)0.
Подставив* найденное значение азимута в первое уравне¬
ние формулы (6.1), получим
.=^-(5\-т,-*■>• (в.з)
Легко видеть, что поправки, вычисленные по зенитным
звездам, для которых К0 очень мало, практически не за¬
висят от неточности азимута, вызванной влиянием на
него ошибок (Дос)0. Это означает, что разность поправок
часов, вычисленная по двум зенитным звездам в системе
исходного каталога, при предположении, что ошибки наб¬
людений отсутствуют, будет равна разности определяе¬
мых поправок к прямым восхождениям звезд в исходном
каталоге, взятой с обратным знаком. Пусть и. и и.+1 —
поправки часов, определенные по двум звездам зенитной
зоны. Прямые восхождения этих звезд неточны и нуж¬
даются в поправках, которые мы обозначим первоначально
через Да, и Да';+1. Тогда можно написать так:
»«— им = А<+1 — д<- (6.4)
Для сокращения записи положим
Щ — »м = *»<+!,<• (6.5)
Затем, составляя разности поправок часов для ряда звезд
зенитной группы уже по многим вечерам наблюдений,
330 Гл. VI. Улучшение прямых восхождений звезд
получим
Щ. Щ = ^а2, I» 112 Щ == ^аз, 25 * • •» Вя_1 ип=' ^aw, я-1» *^)
Поскольку каждая пара звезд наблюдается обычно много
раз, из всех полученных для этой пары разностей обра¬
зуется среднее значение. Затем производится циклическая
обработка средних разностей. В табл. 16 приводится
порядок проведения циклической обработки.
Таблица 16
1
2
3
4
5
6
да; = о
Ааг
п
М, 1
и
п
А<*2 = Aa2, 1
SAaJ
п
Да2
Дя3, 2
V
А< 2
Ая3 == Аа2, 1 + Аа3, 2
SAa;
Аа3
~~ п
п
Дя?, >1-1
V
А< я-1
Аам = Аа2, 1 + Аа3, 2 +
2Аа'.
Да„
п
п
+ • • • + Аан, м-1
ДяЬ „
и
п
к»
V
ZAaJ
В первом столбце выписаны значения всех средних разно¬
стей Да"+1 Алгебраическая сумма всех разностей дол¬
жна быть ’равна нулю, так как каждое значение Да'!
входит в эту сумму два раза с различными знаками. Од¬
нако в силу ошибок наблюдений сумма всех Да'!+1 i
отличается от нуля и имеет какое-то значение z>, называе¬
мое невязкой. Невязка равномерно распределяется между
всеми разностями. Для этого из каждой средней разности
Да"+1 t. вычитается величина vln (второй столбец). По¬
§ 103. Определение систематических ошибок
331
лученные при этом величины обозначаются через Аа<+1 4
и выписываются в третий столбец. Для решения полу¬
ченной системы достаточно положить, например, Аа{=0,
т. е. считать прямое восхождение первой звезды безоши¬
бочным. Затем простым суммированием получаются по¬
правки к прямым восхождениям всех остальных звезд
(четвертый столбец).
Чтобы не изменить нуль-пункта системы прямых вос¬
хождений для данной зоны склонений, надо наложить
условие, по которому сумма всех поправок прямых вос¬
хождений звезд относительно исходной системы равня¬
лась бы нулю. Для этого суммируются все Аа'., полу¬
ченная сумма делится на число звезд п и из каждой по¬
правки вычитается величина 2 Аа'Jn (пятый столбец).
Найденная система поправок к прямым восхожде¬
ниям звезд Аа,. приводится в шестом столбце таблицы 16.
Эта система поправок к прямым восхождениям может
считаться независимой лишь для звезд с азимутальным
коэффициентом К, близким к нулю. Однако для крайних
звезд зенитной группы с 10° могут сказываться си¬
стематические ошибки в определении азимута, так как
его вычисленное значение обременено ошибками Aaa ис¬
ходного каталога. Чтобы система поправок Аа,. была
практически независимой, вычисления производятся в два
приближения. Во втором приближении координаты всех
зенитных звезд исправляются поправками Аа,., найден¬
ными в первом приближении, и производится повторное
вычисление азимутов по зенитной группе звезд и южным
звездам. Поскольку координаты зенитных звезд уже ис¬
правлены за ошибки Аа^, новый азимут не будет содер¬
жать составляющей, вызванной этими ошибками. Вы¬
численные с новым азимутом поправки часов по зенитной
группе вновь подвергаются циклическому выравнива¬
нию. Когда окончательные поправки к прямым восхож¬
дениям звезд зенитной группы получены, по отношению
к ним дифференциальным методом определяются поправки
к координатам всех остальных звезд. Иногда, правда
в весьма редких случаях, вычисление поправок к коор¬
динатам звезд приходится производить в три прибли¬
жения.
Циклический метод уравнивания имеет два существен¬
ных недостатка:
332 Гл. VI. Улучшение прямых восхождений звезд
1. Для уравнивания можно использовать только не¬
большую часть зенитных звезд. Если использовать все
зенитные звезды, то увеличение их числа может привести
к накоплению погрешностей в определении ошибок вида
Даа за счет большого числа звеньев в последовательной
цепочке. Случайные ошибки разностей поправок в це¬
почках будут накапливаться и исказят систему поправок
вида Даа зенитной зоны.
2. Для уравнивания нельзя использовать те ночи, ко¬
торые сопровождались большими перерывами в наблюде¬
ниях. В таких ночах может не оказаться общих звезд,
подлежащих уравниванию, и цепочка разорвется. Ко¬
нечно, можно заменить уравнивание циклическим мето¬
дом на другой способ, в котором уравнивались бы все
возможные сочетания наблюденных пар звезд. Однако
такая работа требует огромного объема вычислений и
практически неприемлема.
Для вычисления ошибок вида Даа в зенитной зоне по¬
следнее время применяется чаще всего метод, получив¬
ший название свободного цепного метода. Впервые в прак¬
тике служб времени он был применен Н. Н. Павловым
в Пулкове при составлении каталога Ф6', основанного
на наблюдениях за период с 1957 по 1959 г.
Исходным материалом в этом методе также служат
наблюдения звезд зенитной группы. Метод заключается
в следующем.
Пусть й есть средняя за данный вечер наблюдений по¬
правка часов по зенитным звездам
п
(6.7)
1=1
где и4 — поправка часов по одной звезде, а п —- число зе¬
нитных звезд, наблюденных за вечер. Разности вида
й—и{ для данного вечера обозначим через Да, и будем
считать, что они являются поправками прямых восхожде¬
ний отдельных звезд относительно системы поправки й.
Значение й само искажено влиянием ошибок Даа и по¬
этому должно иметь свою систематическую поправку, ко¬
торую мы будем называть системой вечера и обозначим
через Да у, где j — номер вечера наблюдений.
§ 103. Определение систематических ошибок
333
Для определения поправок прямых восхождений от¬
дельных звезд свободным цепным методом выбирается
самый продолжительный вечер (назовем его вечером номер
1). На систему этого вечера, определяемую величиной
Да2, редуцируются поправки Да, из всех других вечеров.
Из величин Да,, полученных для отдельных звезд в раз¬
ные вечера и приведенных на одну систему, берется сред¬
нее значение. Приведение разных вечеров наблюдений
на систему первого вечера производится следующим об¬
разом. Выбирают две наиболее продолжительные ночи,
в которые наблюдалось максимальное число общих звезд.
Затем по общим звездам находят разности поправок Да,
между первым и вторым вечером и из этих разностей бе¬
рут среднее значение, которое мы обозначим через Д1>2.
Легко видеть, что величина Д1>2 равна разности си¬
стем этих двух вечеров, т. е.
Если теперь ко всем поправкам Да, второго вечера при¬
бавить hlt 2, то они будут переведены на систему первого ве¬
чера. Теперь для каждой общей звезды в первом и вто¬
ром вечерах будем иметь уже по две поправки к прямым
восхождениям Да,д и Да*,2 (второй индекс означает
номер вечера наблюдений) и можем образовать из них
среднее значение
Таким средним значениям приписывается вес 2. Поправки
к прямым восхождениям звезд, наблюдавшихся только
в один вечер, получают вес 1. Таким образом получается
первый объединенный вечер наблюдений. Затем выби¬
рается третий вечер, имеющий максимальное число об¬
щих звезд с первым объединенным вечером. Наблюдения
третьего вечера редуцируются на систему объединенного
вечера и снова производится осреднение поправок Да, по
общим звездам. Теперь это осреднение производится уже
с учетом весов.
Так образуются две цепочки (ветви) поправок, реду¬
цированных на систему первого вечера, одна со стороны
Д1>2 = Даг — Да2
(6.8)
[Да4] = у (Да;>1 -(-Да<>2).
(6.9)
334 Гл. VI. Улучшение прямых восхождений звезд
убывания, а другая со стороны возрастания прямых вос¬
хождений их звезд.
Участок, на котором обе ветви смыкаются, т. е. в обеих
ветвях используются одни и те же поправки, называется
участком перекрытия.
Таким образом, получим замкнутую систему попра¬
вок Даа к прямым восхождениям звезд. Отметим одно важ¬
ное обстоятельство: по мере удаления от середины пер¬
вого вечера наблюдений точность определения величин А а.
будет постепенно уменьшаться из-за накопления ошибок
редукций на систему первого вечера. Эти ошибки
вызываются погрешностями астрономических наблю¬
дений.
Для получения по возможности равноточных величин
Да,, надо, чтобы середина участка перекрытия отстояла
от середины первого вечера наблюдений на 12ь. Получен¬
ная при замыкании системы невязка равномерно распре¬
деляется между всеми значениями поправок к прямым
восхождениям звезд, за исключением звезд перекрытия
двух ветвей, для которых берется среднее арифметическое
из двух значений. Затем из полученных поправок исклю¬
чается постоянная составляющая, чтобы нуль-пункт си¬
стемы поправок не отличался от нуль-пункта системы
опорного каталога. Исключение постоянной составляю¬
щей производится, как обычно, наложением условия, по
которому сумма всех поправок Да^ должна быть равна
нулю.
Для определения поправок вида Даа исходного ката¬
лога может применяться групповой способ уравнивания
поправок часов. Для этого вся программа наблюдений
разбивается на определенное число зенитных групп звезд;
обычно их бывает 12 или 24. В каждой группе наблю¬
дается строго одно число фиксированных звезд; в
большинстве случаев группы состоят из 10—20 звезд
каждая.
Сначала координаты звезд улучшаются внутри группы.
Для этой цели определяются разности между поправками
часов по отдельным звездам и поправкой, полученной по
всем звездам данной группы. Найденные разности, ос-
редненные по всем вечерам наблюдений, рассматриваются
как поправки к прямым восхождениям отдельных звезд.
После исправления прямых восхождений звезд этими
§ 104. Определение систематических ошибок
385
поправками образуются разности вида
ui — и2= Да2 — Аа1»
ип-1~ ип = Ь*п — Да»-1.
и„ ~ «1 = Да1 — Дан,
(6.10)
где величины и{—иш есть осредненные за весь период
наблюдений разности между поправками часов, получен¬
ными по i-й и (£+1)-й группам звезд.
В этом случае искомые поправки Да, относятся не
к координатам отдельных звезд, а к среднему прямому
восхождению группы. Находятся величины Да, обычным
циклическим уравниванием по схеме, приведенной в
табл. 12. В качестве окончательной поправки прямого
восхождения какой-либо звезды берется сумма ее инди¬
видуальной поправки и групповой поправки для группы,
в которой наблюдалась эта звезда.
Вычисления производятся как в одно, так и в два при¬
ближения в зависимости от точности наблюдений.
Преимуществом группового метода определения по¬
правок вида Даа исходного каталога является меньшее
влияние случайных ошибок наблюдений отдельных звезд.
Большим недостатком метода служит фиксированная про¬
грамма наблюдений. Для получения надежной связи
между группами каждый вечер надо наблюдать по не¬
скольку групп, не пропуская по возможности ни одной
звезды в группе. Такие наблюдения осуществимы лишь
на обсерваториях, расположенных в районах с большим
количеством ясных ночей.
§ 104. Определение систематических ошибок
вида Аа8 исходного каталога
После того как исходный каталог улучшен в отноше¬
нии ошибок вида Даа, можно переходить к его улучше¬
нию в отношении ошибок вида Да8. Эти ошибки не со¬
здают ошибок сезонного характера в астрономических
наблюдениях, но зато они очень опасны при долготных
определениях и затрудняют связь наблюдений, произве¬
денных на обсерваториях с разными широтами. Зенит¬
336 Гл. VI. Улучшение прямых восхождений звезд
ные программы обсерваторий, расположенных на различ¬
ных широтах, содержат звезды с различными склоне¬
ниями. Если исходный каталог имеет большие ошибки
вида Даб, то это приводит к систематическому расхожде¬
нию на постоянную величину результатов наблюдений
на разных обсерваториях.
Рассмотрим, при каких условиях из наблюдений на
пассажном инструменте может быть определена система
поправок вида Aag (в дальнейшем для краткости будем
обозначать их просто А а).
Положим, что азимут инструмента определяется по
двум группам звезд, зенитной и экваториальной, со сред¬
ними прямыми восхождениями а0 и а8 и поправками к ним
Аа^ и Аа8.
Азимут инструмента будет определяться из уравнения
где К — средний азимутальный коэффициент группы,
а Т — средний момент наблюдений.
По наблюдениям каждой звезды вечера получим
Наблюдая для поправки часов группу из п звезд с раз¬
личными склонениями, будем иметь систему п уравнений
(6.11), в которой подлежат определению п величин Aaf.,
поправка часов и величина
Решение такой системы требует наложения некоторых
условий и привлечения дополнительных наблюдений, так
как в этой системе число неизвестных превышает число
уравнений.
Получить значение А к можно только привлекая наб¬
людения в нижней кульминации звезд со склонениями,
равными склонениям звезд зенитной группы. Комбини¬
руя наблюдения зенитных звезд со звездами в нижней
(а f\ in т \ дп дг,
к = —
а. Да,. Т{ —
.. I («S Тш) (®0 Го)
—и “I ъ ъ
§ 104. Определение систематических ошибок
337
кульминации, получим два уравнения:
К0+МсК0,
(6.12)
К — т*) — («о — т0)
Ks-K0
£Н-К + ДА;£НК.
Из разности между первым и вторым уравнением (6.12)
определяется величина А к. Для определения поправки
часов обычно полагают Aocs=0. Такое предположение
обычно бывает достаточным и оправданным, так как боль¬
шинство современных каталогов удовлетворительно схо¬
дится в экваториальной зоне как в отношении ошибок А«а,
так и в отношении ошибок Дос8.
Надо отметить, что при определении величины А к
образуется разность прямых восхождений звезд в верх¬
ней и нижней кульминации (см. уравнение (6.12)). Эта
разность может быть искажена ошибками вида Ааа, если
последние определены недостаточно хорошо. Поэтому
если в величинах А к обнаружена зависимость от прямого
восхождения, то величины А к следует подвергнуть до¬
полнительному выравниванию.
После того как определены значения А к и поправка
часов w, можно получить поправки А«, для прямых вос¬
хождений всех наблюдавшихся звезд.
На практике вычисление поправок вида Аа8 произво¬
дится следующим образом. После улучшения в первом
приближении каталога в зенитной зоне относительно оши¬
бок вида Ааа находится средняя по всему материалу си¬
стематическая разность между азимутами, определенны¬
ми по комбинациям «зенитная группа—экваториальные
звезды» и «зенитная группа—звезды в нижней кульмина¬
ции». Затем азимуты, полученные по комбинации зенитной
группы с экваториальными звездами, исправляются най¬
денной систематической поправкой, общей для всего ма¬
териала наблюдений. С этими исправленными азимутами
вычисляются поправки часов по всем звездам. Затем про¬
изводится окончательное циклическое выравнивание пря¬
мых восхождений близзенитных звезд и относительно
этих- звезд дифференциальным методом находятся поправки
к прямым восхождениям всех остальных звезд.
338 Гл. VI. Улучшение прямых восхождений звезд
При определении ошибок вида Да8 исходного ката¬
лога особое внимание должно уделяться качеству цапф
пассажного инструмента, так как большие дефекты цапф
сильно исказят полученную систему поправок. Для
уменьшения влияния ошибок цапф желательно составить
программу наблюдений так, чтобы выполнялись следую¬
щие два условия:
1. Среднее склонение звезд, наблюдавшихся в нижней
кульминации, должно быть по возможности близко к ши¬
роте места наблюдений.
2. Экваториальные звезды, необходимые для опреде¬
ления азимута, должны быть подобраны так, чтобы их
среднее зенитное расстояние мало отличалось от среднего
зенитного расстояния звезд, наблюдающихся в нижней
кульминации.
Если эти условия выполнены, то полное влияние по¬
грешностей цапф для перекладывающегося пассажного
инструмента на азимуты, вычисленные по комбинации
зенитной группы звезд с экваториальными звездами и
звездами в нижней кульминации, будет совершенно оди¬
наково и в разности этих азимутов исключится. Доказа¬
тельство этого положения можно легко получить, рас¬
сматривая формулу Майера с дополнительным членом,
представляющим собой поправку за погрешности цапф.
§ 105. Определение систематических ошибок
* вида Алт исходного каталога
Систематические ошибки вида Даот или, как их еще
называют, уравнения яркости, не оказывают существен¬
ного влияния на точность определения времени. Они мо¬
гут лишь несколько увеличить случайные ошибки наб¬
людений отдельных звезд и очень незначительно ухуд¬
шить сходимость поправок внутри вечера наблюдений.
Однако если следовать классической методике определе¬
ния всех систематических поправок исходного каталога,
необходимо определить и поправки вида Дат. Очень
удобно производить определение этих поправок из наб¬
людений на фотоэлектрических пассажных инструмен¬
тах, которые являются практически полностью объектив¬
ными при определении уравнения яркости каталога.
§ 106. Сводный каталог сЛужб времени СССР
339
Исходным материалом для определения уравнения
яркости служат разности между средней за вечер поправ¬
кой часов й и поправками по отдельным звездам и{.
После того как эти разности исправлены за система¬
тические ошибки вида А аа и Аа8, их разбивают на отдель¬
ные группы в зависимости от величин звезд. В зависи¬
мости от количества звезд в программе наблюдений в каж¬
дой группе объединяются звезды в пределах от одной до
трех звездных величин. Полученная зависимость между и.
и звездными величинами т. звезд представляет собой урав¬
нение яркости исходного каталога, обычно выражаемое
формулой
A (5.13)
где qji I — постоянные величины, лг — звездная величина.
§ 106. Сводный каталог служб времени
Советского Союза
На основании отдельных каталогов ряда служб вре¬
мени СССР в Пулкове был создан сводный каталог служб
времени (КСВ).
Необходимым условием создания хорошего сводного
каталога являются наблюдения ряда служб времени по
общей программе с использованием единой методики об¬
работки результатов. Поэтому во время Международного
геофизического года в 1957—1958 гг. по инициативе Пул¬
ковской обсерватории службами времени СССР была про¬
ведена большая совместная работа по наблюдению звезд
общего списка. Работа была продолжена и после МГГ.
В результате ее опубликованы каталоги целого ряда об¬
серваторий. Эти каталоги послужили материалом для
создания КСВ. Всего было использовано 20 каталогов,
полученных на 18 пассажных инструментах в службах
времени: Пулкова (каталоги с Ф2 по Ф7), Ленинград¬
ского университета (Ла), Института метрологии в Ле¬
нинграде (В1—ВЗ), Московского университета (М3),
ЦНИИГАиК (Ml-М2), Николаева (Н1-Н2), Иркут¬
ского университета (И1—И2), Ташкентского астрономи¬
ческого института (Т1—Т2).
КСВ содержит прямые восхождения и собственные
движения 687 основных и 120 дополнительных звезд
340 Гл. VI. Улучшение прямых восхождений звезд
Таблица 17
Систематические разности вида в 0*001
8°
ФЗ — ксв
Ла — КСВ
В2 — КСВ
М2 — КСВ
М3 —КСВ
я
и
й
JI
§
Н1 —ксв
75-65
0
+7
-и
-17
-и
—29
-9
65-55
+ 2
+i
+ 1
— 7
- 1
—11
—9
55-45
+ 2
-1
+ 2
+ 2
+ 3
+ 5
—2
СП
1
СО
СП
+ 5
+4
+ 8
+ 2
+ з
+ 7
+4
35-25
+ 4
+1
— 6
+ 4
+ 7
+ 5
+8
25—15
+ 6
+4
0
+ 7
+ 4
+ 2
+7
15—5
— 7
—7
+ 1
+ 9
+ з
0
+з
5 5
-И
-2
+ 1
+10
- 5
- 6
+5
-5 15
—
-9
—
+13
-10
—
+7
Таблица 18
Систематические разности вида Даа в 0®001, сглаженные скользящим
сглаживанием по четырехчасовым зонам
«ь
ФЗ — ксв
и
0
й
1
а
Ч
m
0
S
1
<м
И
М2 — КСВ
И1 —КСВ
Н1 —ксв
Т2 — КСВ
0
-И
0
-2
— 1
—1
-5
+ 7
2
- 1
+1
-2
-2
+3
0
+ з
4
+ 8
+1
0
-5
+6
+4
— 1
6
+ з
0
+2
—7
+3
+1
- 4
8
— 1
—3
—1
—6
-3
—2
— 5
10
— 2
—2
—2
—4
-4
0
— 7
12
0
— 1
—1
0
-2
+3
— 6
14
+ 2
+1
0
—1
—1
+2
— 6
16
+ 8
+2
+2
+2
+2
—1
— 5
18
+ 1
+1
+4
+8
+2
—1
+ 5
20
— 3
—1
—1
+8
—2
+1
+12
22
- 8
0
—2
+4
—4
-4
+10
§ 106. Сводный каталог служб времени СССР
341
до 7-й звездной величины на эпоху и равноденствие
1950,0 и 1975,0.
В качестве опорного каталога при вычислении КСВ
был использован каталог Ф678, полученный на основа¬
нии трех пулковских фотоэлектрических каталогов Ф6,
Ф7 и Ф8. Для вывода собственных движений звезд ка¬
талога КСВ использованы значения прямых восхождений
звезд в средние эпохи их наблюдений, приведенные в ка¬
талогах КСВ, GC, FK4, N30, FK3. Разности эпох при
этом были таковы:
КСВ — FK3 = 56 лет, КСВ —FK4 = 36 лет,
КСВ — GC =56 лет, КСВ —N30 =28 лет.
Средняя квадратическая ошибка определения прямых
восхождений на эпоху наблюдений для подавляющего
большинства звезд КСВ составляет 2—3 тысячных се¬
кунды. Число отдельных наблюдений каждой звезды
весьма различно и колеблется от нескольких десятков
до нескольких сотен. У большинства звезд число наблю¬
дений превышает 200.
О точности каталога КСВ по внутренней сходимости
можно судить из таблиц 17 и 18, в которых приведены
сравнения этого каталога с несколькими каталогами, ис¬
пользованными для вывода КСВ.
В таблицах 19 и 20 приводятся аналогичные сравне¬
ния КСВ с каталогами FK4 и N30.
Таблица 19
Систематические разности вида Д«$
^средн.
ксв-
■FK4
^средн.
КСВ-
N30
Число звезд
Д«$
Число звезд
Д«8
77°
6
+0?023
77°
7
—0?001
69
32
+
6
68
42
— 15
60
50
+
4
60
75
— 17
49
60
+
1
50
85
— 12
40
42
+
2
40
61
- И
30
49
2
30
57
— 8
19
43
—
5
20
52
— 10
10
39
—
5
10
54
— 10
0
41
+
2
0
52
— 8
—9°
20
+
7
—9°
22
— 9
342 Гл. VI. Улучшение прямых восхождений звезд
Таблица 20
Систематические разности вида Даа в 0*001, сглаженные скользящим
сглаживанием по четырехчасовым зонам
h
а
—1G° < 5 < 20°
20° < 5 < 50°
50° < 5 < 80°
KCB-FK4
КСВ—N30
КСВ—FK4
КСВ—N30
KCB-FK4
КСВ—N30
0
-1
+ 1
— 5
4-3
4- 1
4- й
2
+1
- 1
— 1
+1
- 4
- 5
4
0
—2
4-2
—3
— 7
— 10
6
4-з
0
4-2
—1
— 2
— 6
8
+3
+1
0
-1
- 1
- 6
10
+1
+1
0
-5
- 3
-12
12
0
-1
0
-2
- 3
- 6
14
-2
-1
0
+2
+ 5
0
16
0
+2
+з
+2
+11
4- 3
18
+1
0
+1
+2
+ 8
+10
20
-3
—2
-2
+3
- 3
+ 9
22
-4
0
-5
+2
- 4
+10
Окончательное суждение о качестве каталога КСВ,
вероятно, можно будет получить лишь с выходом FK5,
но уже сейчас можно отметить, что этот каталог является
одним из лучших в случайном отношении и в отношении
ошибок Дай. С помощью КСВ удалось обнаружить зна¬
чительное уравнение яркости в каталогах FK4 и N30.
Высокая точность КСВ может быть объяснена массо¬
востью наблюдений, их спецификой и использованием
фотоэлектрических пассажных инструментов.
К недостатку КСВ следует отнести излишне большой
вес, приписанный пулковским каталогам; это привело
к тому, что система КСВ фактически определяется ката¬
логами Ф6, Ф7 и Ф8; большое количество остальных ка¬
талогов практически привлекалось лишь для улучшения
КСВ только в случайном отношении.
С 1970 г. наблюдения всех служб времени СССР на
пассажных инструментах ведутся в каталоге КСВ.
ПРИЛОЖЕНИЯ
Таблица 1
Перевод промежутков среднего времени в промежутки
звездного времени
Часы, мину¬
ты, секунды
среднего
времени
Часы
звездного
времени
Минуты
звездного
времени
Секунды
звездного
времени
Минуты, се¬
кунды сред¬
него времени
Минуты
звездного
времени
Секунды
звездного
времени
1
lh0m 9*856
1т0*164
1*003
31
31т5*093
31*085
2
2 0 19,713
2 0,329
2,005
32
32 5,257
32,088
3
3 0 29,569
3 0,493
3,008
33
33 5,421
33,090
4
4 0 39,426
4 0,657
4,011
34
34 5,585
34,093
5
5 0 49,282
5 0,821
5,014
35
35 5,750
35,096
6
6 0 59,139
6 0,986
6,016
36
36 5,914
36,099
7
7 1 8,995
7 1,150
7,019
37
37 6,078
37,101
8
8 1 18,852
8 1,314
8,022
38
38 6,242
38,104
9
9 1 28,708
9 1,478
9,025
39
39 6,407
39,107
10
10 1 38,565
10 1,643
10,027
40
40 6,571
40,110
11
И 1 48,421
И 1,807
11,030
41
41 6,735
41,112
12
12 1 58,278
12 1,971
12,033
42
42 6,900
42,115
13
13 2 8,134
13 2,136
13,036
43
43 7,064
43,118
14
14 2 17,991
14 2,300
14,038
44
44 7,228
44,120
15
15 2 27,847
15 2,464
15,041
45
45 7,392
45,123
16
16 2 37,704
16 2,628
16,044
46
46 7,557
46,126
17
17 2 47,560
17 2,793
17,047
47
47 7,721
47,129
18
18 2 57,417
18 2,957
18,049
48
48 7,885
48,131
19
19 3 7,273
19 3,121
19,052
49
49 8,049
49,134
20
20 3 17,129
20 3,285
20,055
50
50 8,214
50,137
21
21 3 26,986
21 3,450
21,057
51
51 8,378
51,140
22
22 3 36,842
22 3,614
22,060
52
52 8,542
52,142
23
23 3 46,699
23 3,778
23,063
53
53 8,707
53,145
24
24 3 56,555
24 3,943
24,066
54
54 8,871
54,148
25
25 4,107
25,068
55
55 9,035
55,151
26
26 4,271
26,071
56
56 9,199
56,153
27
27 4,435
27,074
57
57 9,364
57,156
28
28 4,600
28,077
58
58 9,528
58,159
29
29 4,764
29,079
59
59 9,692
59,162
30
30 4,928
30,082
60
60 9,856
60,164
344
Приложения
Таблица 2
Перевод промежутков звездного времени в промежутки
среднего времени
Часы, мину¬
ты, секунды
звездного
времени
Часы
среднего
времени
Минуты
среднего
времени
Секунды
среднего
времени
Минуты, се¬
кунды звезд¬
ного времени
Минуты
среднего
времени
Секунды
среднего
времени
1
h m s
0 59 50,170
0 59^836
о',997
31
30 54,921
30,915
2
1 59 40,341
1 59,672
1,995
32
31 54,758
31,913
3
2 59 30,511
2 59,509
2,992
33
32 54,594
32,910
4
3 59 20,682
3 59,345
3,989
34
33 54,430
33,907
5
4 59 10,852
4 59,181
4,986
35
34 54,266
34,904
6
5 59 1,023
5 59,017
5,984
36
35 54,102
35,902
7
6 58 51,193
6 58,853
6,981
37
36 53,938
36,899
8
7 58 41,364
7 58,689
7,978
38
37 53,775
37,896
9
8 58 31,534
8 58,526
8,975
39
38 53,611
38,894
10
9 58 21,704
9 58,362
9,973
40
39 53,447
39,891
И
10 58 11,875
10 58,198
10,970
41
40 53,283
40,888
12
11 58 2,045
И 58,034
11,967
42
41 53,119
41,885
13
12 57 52,216
12 57,870
12,964
43
42 52,956
42,883
14
13 57 42,386
13 57,706
13,962
44
43 52,792
43,880
15
14 57 32,557
14 57,543
14,959
45
44 52,628
44,877
16
15 57 22,727
15 57,379
15,956
46
45 52,464
45,874
17
16 57 12,898
16 57,215
16,954
47
46 52,300
46,872
18
17 57 3,068
17 57,051
17,951
48
47 52,136
47,869
19
18 56 53,238
18 56,887
18,948
49
48 51,973
48,866
20
19 56 43,409
19 56,723
19,945
50
49 51,809
49,863
21
20 56 33,579
20 56,560
20,943
51
50 51,645
50,861
22
21 56 23,750
21 56,396
21,940
52
51 51,481
51,858
23
22 56 13,920
22 56,232
22,937
53
52 51,317
52,855
24
23 56 4,091
23 56,068
23,934
54
53 51,153
53,853
25
24 55,904
24,932
55
54 50,990
54,850
26
25 55,741
25,929
56
55 50,826
55,847
27
26 55,577
26,926
57
56 50,662
56,844
28
27 55,413
27,924
58
57 50,498
57,842
29
28 55,249
28,921
59
58 50,334
58,839
30
29 55,085
29,918
60
59 50,170
59,836
U риложения
345
Таблица 3
Моменты начала тропического года
Год
Начало
тропиче¬
ского года,
январь
Год
Начало
тропиче¬
ского года,
январь
Год
Начало
тропиче¬
ского года,
январь
Год
Начало
тропиче¬
ского года,
январь
1960
1,3453
1970
0,7673
1980
1,1892
1990
0,6112
1961
0,5875
1971
1,0095
1981
0,4314
1991
0,8534
1962
0,8297
1972
1,2516
1982
0,6736
1992
1,0955
1963
1,0719
1973
0,4938
1983
0,9158
1993
0,3377
1964
1,3141
1974
0,7360
1984
1,1580
1994
0,5799
1965
0,5563
1975
0,9782
1985
0,4002
1995
0,8221
1966
0,7985
1976
1,2204
1986
0,6424
1996
1,0643
1967
1,0407
1977
0,4626
1987
0,8846
1997
0,3065
1968
1,2829
1978
0,7048
1988
1,1268
1998
0,5487
1969
0,5251
1979
0,9470
1989
0,3690
1999
2000
0,7909
1,0331
Приложения
Таблица 4
Поправка звездного времени для разных долгот *)
Ср.
или
X
в
Поправка
Ср.
или
X
в
По¬
правка
Ср.
или
X
в
По¬
правка
Ср.
или
X
в
По¬
правка
Ср.
или
X
в
По¬
правка
h
m s
ш
S
m
S
S
S
S
S
1
0 09,856
1
0,161
31
5,093
1
0,003
31
0,085
2
0 19,713
2
0,329
32
5,257
2
0,005
32
0,088
3
0 29,569
3
0,493
33
5,421
3
0,008
33
0,090
4
0 39,426
4
0,657
34
5,585
4
0,011
34
0,093
5
0 49,282
5
0,821
35
5,750
5
0,014
35
0,096
6
0 59,139
6
0,986
36
5,914
6
0,016
36
0,099
7
1 08,995
7
1,150
37
6,078
7
0,019
37
0,101
8
1 18,852
8
1,314
38
6,242
8
0,022
38
0,104
9
1 28,708
9
1,478
39
6,407
9
0,025
39
0,107
10
1 38,565
10
1,643
40
6,571
10
0,027
40
0,110
И
1 48,421
11
1,807
41
6,735
И
0,030
41
0,112
12
1 58,278
12
1,971
42
6,900
12
0,033
42
0,115
13
2 08,134
13
2,136
43
7,064
13
0,036
43
0,118
14
2 17,991
14
2,300
44
1,22%
14
0,038
44
0,120
15
2 27,847
15
2,464
45
7,392
15
0,041
45
0,123
16
2 37,704
16
2,628
46
7,557
16
0,044
46
0,126
17
2 47,560
17
2,793
47
7,721
17
0,047
47
0,129
18
2 57,417
18
2,957
48
7,885
18
0,049
48
0,131
19
3 06,273
19
3,121
49
8,049
19
0,052
49
0,134
20
3 17,129
20
3,285
50
8,214
20
0,055
50
0,137
21
3 26,986
21
3,450
51
8,378
21
0,057
51
0,140
22
3 36,842
22
3,614
52
8,542
22
0,060
52
0,142
23
3 46,699
23
3,778
53
8,707
23
0,063
53
0,145
24
3 56,555
24
3,943
54
8,871
24
0,066
54
0,148
25
4,107
55
9,035
25
0,068
55
0,151
26
4,271
56
9,199
26
0,071
56
0,153
27
4,435
57
9,364
27
0,074
57
0,156
28
4,600
58
9,528
28
0,077
58
0,159
29
4,764
59
9,692
29
0,079
59
0,162
30
4,928
60
9,856
30
0,082 |
60
0,164
*) Ио аргументу восточной долготы даны поправки, которые надо
отнять от звездного времени в среднюю полночь в Гринвиче, чтобы получить
звездное время в местную среднюю полночь.
Число дней, протекших к нулевому числу каждого месяца с 1900 по 2000
Счет ведется от среднего гринвичского полудня
в
»
а
VO
Й
0 чбрнон
О ‘idQBlHQ
О чИдвхнээ
О хо Л jay
О ‘илни
О чнсни
О ТОМ
О чкоИпу
О XClGIM
о Ч1ГВ(1яЭф
О чЙванн
roj
^ 05 05 Ю ОЮО0^н СО чтч t"* CM t'- СМ 00 СО 00 СО
Ю -^н С» vf ^ч 00 ^ t*. vf О С*- СО О СО СО 05 CD СМ 05
СО О* О ^ 00 Ю 05 CM СО ОСО 00 ^ч Ю 05 CM
* * * * * * *
Vf05vf05l0 ОЮООгН СО 'Н О* СМ О* СМ 00 СО 00 со
СМ 00 Ю-гН 00 Ю 00 ^ -^Н t'^OhCO О СО СО 05 СО
СО СО О С" ю 00 СМ СО 05 СО О X* 00 ^ Ю 00 см
* * * * * *
COOOCOOOvf 05 vf 05 Ю О Ю О СО СО -^ч [>■ СМ [>■ СМ
05 Ю СМ 00 *-0 00 vf -тн 00 ^-гн ^ О СО О СО СО
СМ СО О СО С" ^HSf 00С1Ю 05 СО СО О ^ t^-гнЮООС!
* * * * * *
СО 00 СО 00 05 ^ 05 Ю О Ю О СО гч СО
СО СМ 05 Ю СМ 00 Ю-гч 00 Ю ^ч 00 ^'гн
СМ СО 05 СО Г'- О N* 00 ^ч Ю 05 СМ СО О СО
чН 1>» СМ 1>» СМ
^ О h1 СОО
^ч ^ 00 СМ
* *
СМ Г'- СМ Г'- СО 00 СО 00 ^ 05 ^оюою
СО 05 СО см 05 Ю СМ 00 Ю ^Ч 00 ^ -гч 00 ^
СМ Ю 05 СО СО Osft4T4lO 00 СМ СО 05 СО
О СО чН СО -
ГЧ bsf^o t
Г" О ^ 00
^ч СО ^ч СО СМ !>■ СМ !>• СО 00 СО 00 чР 05 05ЮОЮО
О СО СО 05 СО СМ 05 Ю СМ 00 Ю^чОО^^н
СМ Ю 05 CM СО OCOt^T4sr 00 СМ Ю 05 СО СО О ^ t> тч
* * * *
чН СО ^ч CD CM С'-СМГ^СООО С000^05^ 05 Ю О Ю О
СО О СО СО 05 СО СМ 05 Ю СМ 00 Ю-гч 00 ^ чН 00 ^ ч-ч
чН Ю 05 СМ СО 05 СО Г'- О ^ 00 чН Ю 05 СМ СО О СО гч
* * *
О Ю О Ю ч-н СО-^Ч СО СМ СМ СО 00 СО 00^05^05
^ОГ'СОО СО СО 05 СО СМ 05 Ю СМ 00 >£> ^ 00 ^ -^ч t'-
чН Ю 00 СМ СО 05 СО СО О ^ чН Ю 00 СМ СО 05 СО О
ОЮОЮгч
тч^^ОЬ
чН 00 СМ Ю
СО чН СО СМ !>•
СО О СО СО 05
05 СО СО О со
СМГ^СОООСО 00^05^05
СО СМ 05 Ю СМ ООЮ-ГЧОО^
^-^Ч^ООСМ Ю 05 СО СО (О
*
05 ^ 05 ^ О
t^srOt^vf
О ^ 00 -г-н Ю
ЮОЮтчО
О со о со
05 СМ СО о со
ч-н сО СМ Г'-СМ Г'- СО 00 СО 00
СО 05 СО СМ 05 ЮСЧООЮтЧ
С—О^ООчН Ю 05 СМ СО о
^■ч СО тч СО тч
Ю -гч 00 ^ ^Ч
О sf f** гч Ю
t''» CM t''» СМ 00
^ О со
00 СМ СО 05 СО
СО 00 СО 05 ^ 05 sf О Ю О
О СО СО 05 СО СМ 05 СО СМ 05
!>• О ^ чН Ю 00 СМ СО 05
о ю о ю о
СО ^Ч
СО тч
г>»
см СМ 00 со
СМ 00 Ю ^Ч оо
*<Г ч-ч 1>» NT О
Г'- СО О со со
о
СО О ^Ч
00 см
Ю 05
со
СО о
^ !>•
ю
СО
Г'-
00
05
о
тН
см
vf
vf<
см
см
СМ
см
см
см
^ 00 СМ ю 05
СМ
СМ
О чН СМ СО ^ Ю СО 00 с
ооооо о о о о с
05 05 05 05 05 05 05 05 05 С
О ^ч СМ СО ^ Ю СО t"* 00 05
тНтЧтНтЧН тЧтЧтЧтЧН
05 05 05 05 05 05 05 05 05 05
Таблица 5 (продолжение)
0 чАдвяэЦ
659
*024
389
754
*120
00 Ю ^ 00 ^
^ 00 СМ ю 05
*
^Ч СО см с** см
^ч t'» ^ О !>■
со со о ^
* *
СО 00 СО 00
СО О со СО 05
гЧЩООМЮ
* *
0 чйовон
05*tf 05vF о
см 05 ю см 05
со 05 со о
*
юою^нф
Ю СМ 00 Ю гн
vf 00 ^Ч ю 05
*
^Ч СО см см
00 ^ ^Ч 1^ ^
см со о со
* *
СО 00 СО 00
о со о со
^Ч vfH 00 СМ ю
* *
0 чйдвхио
00 СО 00 СО 05
05 СО СМ 05 ю
Ю 05 СО СО О
*
vf 05 vf о Ю
СМ 00 ю см 00
sf D^^HinOO
*
ОЮгЧСОгЧ
Ю -гН 00 Vf -^ч
СМ СО 05 СО
*
со см см
Г" ^ о С" со
О ^ 00 ^Ч Ю
* *
0 чйдвхнээ
00 СО 00 СО 05
СО СО 05 со см
ю 05 см со о
*
Sf05^0in
05 Ю CM 05 Ю
СО С" 00
*
ОЮчЧСОгн
СМ 00 Ю ^ч 00
СМ ю 05 СО СО
*
со см Г" см Г"
# #
0 юАаяу
см см со
СО О со СО 05
Ю 05 СМ СО 05
СО 00 СО 05 ^
СО СМ 05 ю см
СО С" О ^ 00
*
05^0100
00 Ю СМ 00 ю
-ГН Ю 05 СМ СО
*
ю -*-■ со ^ч со
'ГН 00 ^ ^ч С"
О СО С" ^Ч vf
# *
0 Ч1г(ни
CO^H<£>^Ht^
О t" со о со
ю 00 СМ СО 05
см см оо со
СО 05 СО СМ 05
СО СО О Vf
*
00 СО 05 Xt< 05
ю см 00 Ю ^ч
^ч т оо см со
*
^ о ю о ю
00 ю ^Ч 00 Xt<
05 СО О VJH
*
0 чнсни
СО СО ^ч с*-
VF о f- СО
VJH 00 СМ Ю 05
CM CM 00 со
О СО СО 05 со
со со о со
*
00 00 05 vf 05
СМ 05 Ю СМ 00
VJH 00 СМ Ю
*
^оюою
ЮСЮОЮтн
05 СО СО О
*
0 ИВД
юоюосо
^00тнЮО5
^ч СО ^ч С""* СМ
о со О со со
СМ СО О СО
*
С" СМ 00 СО 00
05 СО СМ 05 ю
О Xt< 00 ^Ч ю
*
СО 05 05
CM 00 Ю ^Ч 00
05 СМ СО о со
*
0 чивйпу
юоюосо
^ч 00 »гЧ
vF ["• ^ч Ю 00
^ч СО ^ч о- СМ
Xt< О СО О
СМ СО 05 СО о
Г" СМ 00 СО 00
СО СО 05 со см
О'^Ь'ччЮ
*
СО 05 ^ 05 ^
05 ю см 00 Ю
00 СМ СО 05 со
0 хйед
05^ 05 ю
00 ^ ^ч !>. vf
СО Vf 00
ОЮОСО^ч
^ч ["■ ^ О
СМ ю 05 СО СО
СО ^ч СМ t>
СО О СО СО 05
О VF 1>» ^ч xt<
*
СМ 00 СО 00 со
СО СМ 05 ю см
00 СМ Ю 05 со
0 ЯГГВйЯЭф
ю со -^Н со
ЮСМСОЮ^н
СО 1> Oxt< 00
CM Г" СМ О СО
00 ^ ^ч Г'- ^
-^ч ю 05 СМ со
00 СО 00 ^ 05
ot^cooco
О СО Is- ^ч М*
*
^05 1ЛОЮ
СО 05 СО СО 05
00 ^Ч ю 05 см
0 чйвянн
2422 324
690
2423 055
420
785
2424 151
516
881
2425 246
612
977
2426 342
707
2427 073
438
803
2428 168
534
899
2429 264
WOJ
О-гЧ CM СО vjH
см см см СМ см
05 05 05 05 05
"чН ^ч ^ч ^ч ^ч
Ю СО 00 05
см см см см см
05 05 05 05 05
^ч ^Ч ^ч ^гЧ ^ч
О ^Ч СМ СО ^
СО со со со со
05 05 05 05 05
«ИтНгЧтЧтЧ
Ю СО 00 05
со со со со со
05 05 05 05 05
чНчЧчЧгЧчЧ
Звездочка означает, что первые четыре цифры нужно взять из второго столбца следующей строки.
Таблица 5 (продолжение)
0 adgmretf
vf 05 Vf 05 Ю
С0М05ЮМ
05 00 со О Vf
* *
ОЮОСОН
05 ю СМ 00 ю
t''» чч LO 00 см
* *
СО t> СМ 1>
чн СО ^ чч 1>*
СО 05 СО О
*
СМ 00 СО 00 со
о i> со о
Nt 00 ^ Ю 05
*
чйдвон
Vf 05 Vf 05 LO
CO 05 CO CM 05
05 CM СО О CO
* *
ОЛОсОгч
СО см 05 Ю СМ
^ ^ 00 см
* *
СО чЧ [>• СМ 1>*
00 Ю ^ 00 vf
Ю 05 СО СО О
*
СМ 00 СО 00 со
^ч st< о
4t< чч LO 00
*
0 чйдвхно
CO 00 CO 00 vf
О CO CO 05 CO
05 CM CO 05 CO
*
05 vf 05 Ю О
СМ 05 Ю СМ 05
О 00 чч
* *
Ю О СО чч сО
Ю СМ 00 Ю чч
Ю 05 СМ СО о
*
ЧЧ |> CM СМ
00 4t< *гч 4t<
СО чЧ vf 00
*
0 4dgBiH8o
CO 00 CO 00 ^
|>. со О CO CO
00 CM CO 05 CO
*
05 vf 05 Ю О
05 СО СМ 05 СО
cOOsf t^TH
* *
Ю О СО -н СО
СМ 05 Ю СМ 00
Ю 00 СМ СО 05
чч см см
Ю чЧ 00 vf чЧ
СО О 4t< 00
*
0 io A jay
CM CM CO
^ Ot'COO
00 CM Ю 05 CO
*
00 СО 00 Xt< 05
СО СО 05 со см
СО О со тН
* *
*^05 1ЛОЮ
05 Ю СМ 05 Ю
4t< 00 СМ Ю 05
О СО чЧ СО ЧЧ
СМ 00 Ю чч оо
СО со О vf |>»
*
0 члени
со 'ГН CO CM
THh^Ob
00 ^ Ю 05 CM
*
СМ СО 00
СО О СО СО 05
со о со о
* *
СО 00 чР 05 4t<
СО СМ 05 Ю СМ
Vf 00 ^гЧ Ю 05
05 1ЛОЮО
00 Ю СМ 00 ю
СМ СО О со
*
0 чнсни
th cO th cO CM
00 ^ ^ ^
^•тнЮООСМ
*
СМ СО 00
О СО О СО
СО 05 СО О
*
СО 00 xt< 05 4t<
СО 05 СО CM 05
4t< 'ГН Ю 00
С5ЮОЮО
Ю СМ 05 ю см
СМ СО 05 СО
0
О Ю О Ю чч
Ю чН 00 vF чч
!>• -гн ^ 00 СМ
*
СО СО СМ !>•
^ О СО
Ю 05 СО со О
*
СМ СО 00 со
О СО СО 05 СО
4t< 4t< 00
00 vf 05 vf 05
CM 05 Ю CM 00
CM Ю 05 со со
0 airodiry
О Ю О Ю чч
СМ 00 Ю чЧ 00
С" О Vf 00 чЧ
*
СО чч СО СМ С"
vf 1> St< О
Ю 05 СМ СО о
*
CM СО 00 со
!>• СО О со СО
СО ^ 4t< 00
00 vf 05 Vf 05
а со см 05 ю
чЧ LO 05 CM СО
0 idisj\[
05 v4 05 о
ООЮтчООЮ
СО О С"* чч
*
ЮОЮтЧСО
00 ^ ^
Ю 00 СМ СО 05
чч со СМ !>• СМ
4t< О СО О
СО О 4t< 00
!>• СО 00 СО 00
СО СО 05 СО CM
^-1 Ю 00 СМ СО
0 чк^яэф
О СО чч СО чч
СО СМ 05 ю см
СООСОЬ-тН
*
СМ СМ 00
00 Ю 'ГН 00 vf
^ 00 СМ Ю 05
СО 00 СО 05 4t<
СО СО О 4t<
05 4t< О Ю О
СО О !>• СО О
чЧ ю 00 СМ СО
0 4daaHK
05ЮОЮО
СМ 05 СО СМ 05
СО 05 СО С" О
05 О чч
см со со
^ vf
см см см
СО <*4 СО чЧ О»
ЮСМООЮтН
чР 00 чч ю 05
см
см
2433 282
647
2434 012
378
743
2435 108
473
839
2436 204
569
tfoj
Q чч СМ СО ^
V? Xt< Xt< чН
05 05 05 05 05
чЧ чЧ чЧ ч-Ч чч
Ю СО 00 05
Ntfl stf VjH
05 05 05 05 05
^гЧ чч чч чч чч
О -ГН CM СО 4t<
ю ю ю ю ю
05 05 05 05 05
гН тН тн чЧ чЧ
Ю СО 00 05
ю ю ю ю ю
05 05 05 05 05
чЧ чЧ чч чЧ чЧ
Таблица 5 (продолжение)
0 чйдшэН
© vf С5 sf О
CD СО 05 CD СО
CM CD 05 CO t'»
*
ЮОЮгнсО
05 CD CM 05 Ю
О 00 ^ LO
* *
тн © CM t-* CM
CM 00 LO чч 00
© CM © © ©
* *
!>• CO 00 CO 00
^ *r4 Vt1 ©
^ ^ 00 CM
* *
0 ч(1дьон
05 ^ 05 vf О
СО О CD СО О
CM CD 05 CO !>•
*
inOiOncD
CD CO 05 CD CM
© ^ t"» LO
* *
чтЧ © CM t"» CM
© LO CM 00 LO
00 CM © © CO
*
©^ 00 -ГЧ
* *
0 чйднхно
00 CO 00 CO 05
О t*» со О CD
CM LO © CO ©
*
^ © ^ © LO
CO © © CO ©
О CO !>• ЧН ^
* *
© LO ^4 © -ЧН
© см © lo см
00 CM LO © ©
*
© CM t"» CM t"»
00 Ю ^4 00 ^
© © ^
* *
0 чбднхнээ
00 CO 00 CO 05
t^^Ot^CO
LO © CM ©
*
^ © vf © Ю
© © CO © ©
© CO l>* ^ vf1
* *
©lOri©T4
© © © CM ©
OQ чн LO © CM
*
© CM t'- CM t>-
LO CM 00 LO
© © CO Г" ч-ч
* *
0 хэАхау
t"» CM t''- CM 00
гн LO 00 CM CD
*
CO 00 CO © vf
CO © © ©
© CO ^
*
© vf © LO ©
© © CO © ©
lo 00 CM
*
LO ЧТН © ЧТН ©
CM © LO CM 00
© © CO ©
*
0 <шсни
CD CD
thOO^th^
rHSf 00С1Ю
*
CM t''- CM 00 CO
vf © Г" CO ©
05 CO © © vF
*
00 CO © ^ ©
© CO © © CM
*
Vf © LO © LO
© © CM © LO
LO © © © ©
*
0 чнощ
CD CD I>*
00 Ю -гн 00 ^
О^ООтнЮ
*
CM t''- CM OQ CO
TH h- \H о h-
© CM © © ©
*
00 CO © ^ ©
со © © © ©
-гч vf 00 <гч
*
Vf © LO © LO
© CO © © CM
LO © CM © ©
*
0 ивд
lO © lO © ©
lO CM 00 Ю th
© vf1 t"» '«h LO
*
-r4 © <ч-н CM
00 VH
© CM © © ©
t''» CM 00 CO OQ
© CO © ©
t*- © vF 00 ^
*
CO © vf1 © vfi
CO © © CM ©
lo oo cm © ©
0 чп*0(1пу
lOOiOOcD
CM 05 LO CM 00
OCOt^-HVf
*
© <*h t'- CM
LO 00 vf ^4
© CM LO © ©
CM 00 CO 00
VF © I— CO
© © Vf
*
CO © vf1 © vf1
© © © © ©
LO © CM LO ©
0 хйвд
vf1 © vf1 © LO
05 LO CM 00 LO
05 CO !>• О Vf1
© LO © ©
CM 00 lO ^ 00
oo lo © cm
©TH^dt^
vf ^4 vf ©
© © CO t>* тч
*
CM 00 © 00 ©
!>• CO © © CO
vf OO CM LO ©
0 aifisd яэф
LO CD CD
CD CO 05 CD CM
05 CO CD О vf
CM t"» CM t''- CO
© LO CM © LO
!>. ^ч LO 00 CM
00 CO 00 vf ©
T4O0vf<^t^
© © СО Г'- ©
vf © LO © LO
vf ©
^ OQ th LO ©
0 qdaaHK
934
2437 300
665
2438 030
395
761
2439 126
491
856
2440 222
587
952
2441 317
683
2442 048
413
778
2443 144
509
2443 874
l'oj
O ^ CM CO vf
CD CD CD CD CD
05 05 05 05 05
«м ^
LO © t"» 00 ©
CD © © © ©
© © © © ©
'H'HTirH'ri
С тн CM CO vt1
t>* t>* t>* t"*» t>*
© © © © ©
LO © l>. 00 ©
t— Г— Г—
© © © © ©
ЧГН «Ч-Ч чЧ чгЧ чгЧ
Таблица 5 (продолжение)
0 чйдвнэй
vt< 05 vt< 05 lo
со О CD СО
Ю 05 СО CD О
ОЮОсОгн
О CD СО 05 CD
^ t>» ч-н vF 00
*
CD чН С"» CM С"»
CM 05 LO CM 00
CM LO 05 CO CD
* *
CM 00 CO 00 CO
LO чгн 00 vF чтн
Osft>-4Hio
* *
879
0 чйднон
^ 05 05 LO
^Ot>COO
LO 05 CM CD О
ОЮОсОтн
СО О CD СО
СО !>• чтн ч^н 00
*
CD -H t>. CM О»
05 CD CM 05 LO
чтн LO 05 CM CD
* *
CM 00 CO 00 CO
CM 00 LQ чН
ОСОГ^чнч^
* *
849
0 чйднхно
СО 00 СО 00 vt<
о Г"
LO 00 CM CD 05
05 05 Ю О
СО О CD СО О
СО !>• О Vt< 00
*
LO О CD чН CD
CD CO 05 CD CM
чН LO 00 CM CD
* *
чтн t4» CM !>• CM
05 LO CM 00 LO
05 CO о ^
*
00
00
0 чЯднхнээ
СО 00 СО 00
00 *«3! ч-н о.
Vt< 00 СМ Ю 05
05 sf 05 Ю О
OD'COOt^
СО CD О Vt< !>•
*
Ю О CD чН CD
СО О CD CO 05
чН LO 00 CM LO
* *
чН t>. CM !>• CM
CD CM 05 LO CM
05 CO CD О vt<
*
788
0 хэ^лау
СМ !>• СМ !>• СО
LO ч-н 00 *<Р ч-н
vt< 00 ч-н LO 05
00 СО 00 Vt< 05
[>. Vt< О !>• СО
CM CD О СО [>.
*
ч(<ОЮОЮ
О CD СО О CD
чН vF 00 CM LO
* *
ОСОчНОтЧ
CO 05 CD CM 05
05 CM CD О CO
*
757
0 Ч1Г01И
чтн CD ч-н CD СМ
СМ 00 LO чН 00
vt< !>• ч-н LO 00
!>• CM Г”» СО 00
vt< чн Г'- vt< О
см CD 05 СО О-
CO 00 Vt< 05 Vt<
!>. СО О CD CO
О'ФООгнЮ
* *
05 LO О LO О
05 CD CO 05 CD
00 CM CD 05 CO
726
0 чнощ
чН CD чН CD СМ
05 LO СМ 00 LO
СО !>• ч-н Vt< 00
СМ СО 00
’гн 00 ^ ^
CM LO 05 СО CD
CO 00 ЧР 05 Vt<
vfOt^cOO
О I>* rH lO
* *
05 LO О LO О
CD СО О CD CO
00 CM CD 05 CO
969
0 иан
ОЮОЮ-н
CD СМ 05 LO СМ
СО Г'- О Vt< 00
CD ч-н CD CM t>-
00 LO ч-н 00 ЧР
чН LO 05 CM CD
CM !>• CO 00 CO
ЧГН t>. о f»
O 00 t'» тн чф
* *
00 Vt< 05 Vt< 05
СО О CD CO 05
00 CM LO 05 CM
665
0 airaduy
О LO О LO чН
СО 05 CD СМ 05
СО CD О Vt< Г*»
CD '«н CD CM t4»
Ю CM 00 Ю тН
тН LO 00 CM CD
см со oo со
00 sf чтн !>. vji
05 CO !>• О VF
*
00 stf 05 Vt< 05
Oh-COOCD
00 чН LO 05 CM
635 1
0 xdaiM
05 ^ 05 ^ О
05 CD СМ 05 CD
CM CD О СО f»
ЮОЮтнсО
CM 05 LO CM 00
^ 00 СМ Ю
чН CD CM !>• CM
LO чН 00 чН
05 *0 CD О
*
CO 00 CO 00
t" st1 О CO
!>• чН LO 00 CM
о
CD
0 чшгйаэф
О CD ч-н CD чтн
!>. СО О CD СО
CM CD О СО !>•
[>. CM !>• CM 00
05 CD CM 05 LO
OvfOO-HlO
CO 00 CO 05
CM 00 LO чгн CO
05 CM CD О CO
*
05 О LO О
^ чгн 00 ^ чгн
^чН^ООСМ
LO
LO
0 чЯяанн
2444 239
605
970
2445 335
700
2446 066
431
796
2447 161
527
892
2448 257
622
988
2449 353
718
2450 083
449
814
2451 179
| 2451 544 1
ttoj
О «чН СМ СО
00 00 00 00 00
05 05 05 05 05
чН чН чН чН чН
LO CD !>• 00 05
00 00 00 00 00
05 05 05 05 05
гНгНгНгНгН
О чН CM CO ^
05 05 05 05 05
05 05 05 05 05
чН тН tH чН
LO CD C*» 00 05
05 05 05 05 05
05 05 05 05 05
чтН чН чгН чН чН
8
8
ЛИТЕРАТУРА
1. Блажко С. Я., Курс сферической астрономии, Гостехиздат,
1954.
2. Долгов Я. Я., Определение времени пассажным инструментом
в меридиане, Гостехиздат, 1952.
3. Джесперсен Дж. и др., Время и частота, «Мир», 1973.
4. Загребин Д. В., Введение в астрометрию, «Наука», 1966.
5. Манк У. и Макдональд Г., Вращение Земли, «Мир», 1964.
6. Мясников Л. Я., Атомные часы, Ленинград, 1962.
7. Павлов Я. Я., Труды ГАО, т. LIX, серия II, 1946.
8. Павлов Я. Я. и др., Труды ГАО, т. LXXVIII, серия II, 1971.
9. Подобед В. В. и Нестеров В. Б., Общая астрометрия, «Наука»,
1975.
10. Поттер X. Я. и Наумов В. А. Предварительные результаты
исследований колебаний широт и движения полюсов Земли,
Изд-во АН СССР, 1960.
11. Cj/яов В. Я. и Платонов Ю. Я., Изв. ГАО, т. XXI, вып. 2, 1958.
12. Spencer Jones, Monthly Not. R. A. S. 99, 541, 1939.
I СОВЕТСКОГО СОЮЗА